tese de doutorado - puc-rio internos, de maneira direta e sem a utiliza˘c~ao de qualquer integral...
TRANSCRIPT
Carlos Andres Aguilar Maron
Proposta de Tese
Metodo dos Elementos de Contorno
CIV 3007: Proposta de Tese
Proposta de Tese apresentada ao Programa de Pos–graduacaoem Engenharia Civil do Departamento de Engenharia Civil daPUC–Rio como requisito parcial para obtencao do tıtulo deDoutor em Engenharia Civil.
Orientador: Prof. Ney Augusto Dumont
Rio de JaneiroFevereiro de 2011
Carlos Andres Aguilar Maron
Uma implementacao expedita do metodohıbrido dos elementos de contorno para
problemas de potencial e elasticidade
Tese de Doutorado
Tese apresentada ao Programa de Pos–graduacao em EngenhariaCivil do Departamento de Engenharia Civil da PUC–Rio como re-quisito parcial para obtencao do tıtulo de Doutor em EngenhariaCivil
Orientador: Prof. Ney Augusto Dumont
Rio de JaneiroMaio de 2013
Carlos Andres Aguilar Maron
Proposta de Tese
Metodo dos Elementos de Contorno
CIV 3007: Proposta de Tese
Proposta de Tese apresentada ao Programa de Pos–graduacaoem Engenharia Civil do Departamento de Engenharia Civil daPUC–Rio como requisito parcial para obtencao do tıtulo deDoutor em Engenharia Civil.
Orientador: Prof. Ney Augusto Dumont
Rio de JaneiroFevereiro de 2011
Carlos Andres Aguilar Maron
Uma implementacao expedita do metodohıbrido dos elementos de contorno para
problemas de potencial e elasticidade
Tese apresentada como requisito parcial para obtencao do graude Doutor pelo programa de Pos-graduacao em EngenhariaCivil do Departamento de Engenharia Civil do Centro TecnicoCientıfico da PUC–Rio. Aprovada pela Comissao Examinadoraabaixo assinadaAprovada pela Comissao Examinadora abaixoassinada.
Prof. Ney Augusto DumontOrientador
Departamento de Engenharia Civil — PUC–Rio
Prof. Raul Rosas e SilvaDepartamento de Engenharia Civil — PUC–Rio
Dr. Alexandre Antonio de Oliveira LopesTECGRAF — PUC–Rio
Prof. Jose Claudio de Faria TellesUniversidade Federal do Rio de Janeiro
Prof. Rodrigo Bird BurgosUniversidade do Estado do Rio de Janeiro
Prof. Volodomyr Vasilievich ZozulyaCentro de Investigacao Cientıfica de Yucatan
Prof. Jose Eugenio LealCoordenador Setorial do Centro Tecnico Cientıfico — PUC–Rio
Rio de Janeiro, 14 de Maio de 2013

Todos os direitos reservados. E proibida a reproducao totalou parcial do trabalho sem autorizacao da universidade, doautor e do orientador.
Carlos Andres Aguilar Maron
Graduou-se em Engenharia Civil, pela Universidad NacionalSan Antonio Abad del Cusco – Peru. Em 2006 iniciou o cursode mestrado em Engenharia Civil na PUC–Rio e titulou-se em 2008, na area de estruturas, atuando na linha depesquisa de Metodos dos Elementos de Contorno e Dinamicadas Estruturas.
Ficha CatalograficaAguilar Maron, Carlos A.
Uma implementacao expedita do metodo hıbrido dos ele-mentos de contorno para problemas de potencial e elasticid-ade / Carlos Andres Aguilar Maron; orientador: Ney AugustoDumont. — Rio de Janeiro : PUC–Rio, Departamento de En-genharia Civil, 2013.
v., 87 f: il. ; 29,7 cm
1. Tese (doutorado) - Pontifıcia Universidade Catolica doRio de Janeiro, Departamento de Engenharia Civil.
Inclui referencias bibliograficas.
1. Engenharia Civil – Tese. 2. Elementos hıbridos decontorno;. 3. Metodos variacionais;. 4. Metodos numericos;.5. Elementos de contorno;. 6. Problemas de grande escala.. I.Dumont, Ney Augusto. II. Pontifıcia Universidade Catolica doRio de Janeiro. Departamento de Engenharia Civil. III. Tıtulo.
CDD: 624

Agradecimentos
Ao Prof. Ney Augusto Dumont, pela orientacao, paciencia, apoio e
incentivo na realizacao deste trabalho. Obrigado professor.
Ao CNPq/CAPES e a PUC–Rio, pelos auxılios concedidos, sem os quais
este trabalho nao poderia ter sido realizado, nem minha estada no Brasil teria
sido possıvel.
Aos professores do departamento de Engenharia Civil da PUC-Rio.
Ao pessoal administrativo do programa de pos-graduacao em engenharia
civil da PUC-Rio.
Aos membros da banca, pelas diversas sugestoes feitas na redacao final
da dissertacao.
A minha famılia no Peru, pelo apoio incondicional em todos esses anos,
meu Pai Carlos Aguilar e irmaos.
Finalmente, dedico este trabalho a memoria da minha mae: Alejandrina.

Resumo
Aguilar Maron, Carlos A.; Dumont, Ney Augusto. Uma imple-mentacao expedita do metodo hıbrido dos elementos decontorno para problemas de potencial e elasticidade. Riode Janeiro, 2013. 87p. Tese de Doutorado — Departamento de En-genharia Civil, Pontifıcia Universidade Catolica do Rio de Janeiro.
O desenvolvimento consistente do metodo convencional dos elementos
de contorno (CBEM), com a adicao de conceitos da versao simplificada do
metodo hıbrido dos elementos de contorno (HBEM), proveniente do po-
tencial variacional de Hellinger-Reissner, conduz-se a um processo com-
putacionalmente mais economico, sem a necessidade de ter sua precisao
numerica reduzida para problemas de grande escala, podendo ser bidimen-
sional ou tridimensional, de potencial ou elasticidade. Conseguiu-se mostrar
que as matrizes de potencial duplo e simples do CBEM, H e G, respectiva-
mente, cuja avaliacao numerica requer a manipulacao de integrais singulares
e improprias, podem ser obtidas de maneira expedita, eliminando-se quase
toda a integracao numerica, com excecao de algumas integrais regulares.
Uma importante caracterıstica da formulacao proposta, que advem da base
variacional do HBEM, e a facilidade da obtencao de resultados em pontos
internos, de maneira direta e sem a utilizacao de qualquer integral de con-
torno, ja que a solucao fundamental e a propria solucao do problema. O
presente trabalho pertence a um projeto cujo resultado final deve ser um
codigo computacional para problemas de grande escala (milhoes de graus
de liberdade). Nesta fase, alguns exemplos numericos foram testados para
avaliar a aplicabilidade do metodo expedito, o seu esforco computacional e
a convergencia do resultado para as variaveis envolvidas no metodo. Para
isso, foram implementados algoritmos para problemas bidimensionais de po-
tencial e elasticidade – usando elementos lineares, quadraticos e cubicos – e
tridimensionais – usando elementos triangulares e quadrilaterais, lineares e
quadraticos nos dois casos. Os codigos computacionais foram implementa-
dos focando na solucao de problemas de grande escala. Espera-se que numa
etapa final o projeto possa ser bem mais eficaz, com a incorporacao de
procedimentos do metodo “fast multipole”.
Palavras–chaveElementos hıbridos de contorno; Metodos variacionais; Metodos
numericos; Elementos de contorno; Problemas de grande escala.

Abstract
Aguilar Maron, Carlos A.; Dumont, Ney Augusto (advisor). Anexpedite implementation of the hybrid boundary elementmethod for potential and elasticity problems. Rio de Janeiro,2013. 87p. PhD Thesis — Departamento de Engenharia Civil,Pontifıcia Universidade Catolica do Rio de Janeiro.
The consistent development of the conventional boundary elements
method (CBEM) by adding the concepts of the hybrid boundary element
simplified method (HBEM) , from the Hellinger-Reissner variational poten-
tial leads to a computationally less intensive procedure, although not ne-
cessarily less accurate for large scale, two-dimensional or three-dimensional
problems of potential and elasticity. It was shown that both single-layer
and double-layer potential matrices, G and H, respectively, are obtained
in an expeditious way that vanish almost any numerical integration, except
for a few regular integrals, even G and H evaluation requires the hand-
ling of singular and improper integrals. The proposed formulation comes
from the HBEM variational base and its evaluation at internal points is
straightforward without the application of any boundary integral, since the
fundamental solution is the analytical one. This work belongs to a project
that aims a computer code for large-scale problems (millions of degrees of
freedom). At this stage, some numerical examples were analyzed to eval-
uate the applicability of the method expeditious its computational effort
and convergence of the results for the variables involved in the method. It
was developed by the algorithms implementation for potential and elasticity
problems. In the case of two-dimensional were employed linear, quadratic
and cubic elements and to the three-dimensional case were employed tri-
angular, quadrilateral, linear and quadratic elements in both cases. The
computational codes were always implemented focused on solving large-
scale problems. It is expected that in a final stage of the project with the
incorporation procedure of the method ”fast multipole”, it can be more
efficiently.
KeywordsHybrid boundary elements; Variational methods; Numerical methods;
Boundary elements; Large-scale problems.

Sumario
1 Introducao 121.1 Colocacao do problema 121.2 Objetivos 141.3 Organizacao do texto 15
2 Consideracoes Teoricas Importantes 162.1 Conceitos basicos da teoria de elasticidade linear 162.2 Conceitos basicos da teoria de potencial em regime permanente. 182.3 Discretizacao dos deslocamentos, das tensoes e das forcas de superfıcie 202.4 Aproximacao da solucao particular no contorno 222.5 Solucao Fundamental. 23
3 Metodos de elementos de contorno 273.1 O Metodo convencional dos elementos de contorno 273.2 O metodo hıbrido dos elementos de contorno 333.3 O Metodo Hıbrido Simplificado dos Elementos de Contorno 35
4 O Metodo Expedito dos Elementos de Contorno 384.1 Enunciados a partir do Princıpio dos trabalhos virtuais 384.2 Aproximacao dos deslocamentos e das forcas de superfıcie no contorno 424.3 Expressoes do Metodo Expedito dos Elementos de Contorno 434.4 Solucao da equacao matricial do problema e avaliacao de resultados
em pontos internos 48
5 Aplicacoes Numericas 515.1 Estudos de convergencia em problemas de potencial 2D 515.2 Verificacao da relacao HDa≈U∗TPa em problemas de potencial 3D 555.3 Problema de elasticidade 2D 585.4 Convergencia para problemas de potencial 2D com fonte interna e
condicao de contorno mista 635.5 Convergencia para problemas de elasticidade 2D com forcas de massa
e condicao de contorno mista 70
6 Conclusoes e sugestoes de trabalhos futuros 766.1 Conclusoes 766.2 Sugestoes de trabalhos futuros 78
Referencias Bibliograficas 79
A Potencial de Hellinger-Reissner 83
B Matriz Lbl 86
Lista de figuras
2.1 Corpo elastico equilibrado submetido a acao de forcas externas, bi e ti, e
deslocamentos prescritos ui. 162.2 Corpo homogeneo submetido a acoes de fontes externas de energia, Q e qn,
e potencial prescrito u. 19
4.1 Estrutura formada por seis nos e tres elementos quadraticos para ilustracao
na construcao das matrizes. 45
5.1 Discretizacao do contorno com uma malha de 124 nos para o domınio ir-
regular. Para o estudo de convergencia foram utilizados elementos lineares,
quadraticos e cubicos. A, B e C sao pontos fonte. 525.2 Avaliacao da convergencia da equacao (5-2), para os campos potenciais
da Tabela 5.2, com a finalidade de estabelecer um ponto de erro como
referencia de convergencia. 535.3 Normas de erro das matrizes, aproximadas, H e U∗TLT de acordo com as
equacoes equacoes (5-3) e (5-4), respectivamente, para elementos lineares,
quadraticos e cubicos. 545.4 Erros em escala logarıtmica calculados com a norma euclidiana para testar
a convergencia dos metodos de elementos de contorno estudados. Resulta-
dos gerados por uma fonte potencial aplicada no ponto C da Figura 5.1.
Esquerda: Piores resultados. Direita: Melhores Resultados. 555.5 Hexaedro distorcido (a esquerda) e corpo multiplamente conectado feito
de um cubo (a direita) para um estudo de convergencia com elementos
quadrilaterais lineares. 565.6 norma de erro do sistema de matrizes da equacao (4-24), que aproxima
as matrizes H e U∗ no metodo expedito dos elementos de contorno, para
diferentes discretizacoes da malha e o campo potencial aplicado aos corpos
representados na figura 5.5. 575.7 Discretizacao inicial do domınio irregular (62 nos) para o estudo de
convergencia e calculo de tensoes no domınio, utilizando elementos
quadraticos. A e B sao pontos fonte. 585.8 Comparacao do vetor p∗, avaliada na equacao (4-1) para forcas nodais
equivalente do contorno correspondente a um estado de tensao constante
σx, com seus valores correspondentes do vetor p∗. 605.9 Erros das tensoes, avaliados no segmento de reta (40 nos) entre os nos de
coordenadas (11,26) e (20,7), ver Figura 5.7, para uma forca horizontal
aplicada no ponto A. 615.10 Comparacao das tensoes ao longo do segmento de reta entre os nos 18 e 34
que coincidem com o contorno Γ, ver figura 5.7, para uma forca vertical
aplicada no no A. 625.11 Normas de erro, Equacao (5-8), da equacao matricial do metodo expedito,
Equacao (4-24), para elementos lineares, quadraticos e cubicos. Os campos
analıticos usados nas comparacoes correspondem a uma forca horizontal
(grafico a esquerda) e uma vertical (grafico a direita) aplicadas no ponto
B da Figura 5.7. 63

5.12 Ilustracao 3D da solucao particular up, gerado pela fonte interna da
equacao (5-9), que atua sobre o domınio irregular da figura 5.7. 655.13 Domınio irregular da Figura 5.7, submetido ao campo potencial dado pela
equacao (5-9) e ilustrado na Figura 5.12. O contorno correspondente aos
nos 31− 39 esta: isolado qn = 0 com potencial prescrito u = 0 no resto do
contorno (a esquerda), com potencial prescrito u = 0 e isolado qn = 0 no
resto do contorno (a direita). 655.14 Convergencia dos potenciais u para diferentes malhas do domınio da Figura
5.13, grafico da esquerda. Usando elementos quadraticos. 665.15 Convergencia dos gradientes qn para diferentes malhas do domınio da
Figura 5.13, grafico da direita. Usando elementos quadraticos. 665.16 Malha inicial do domınio discretizado com 40 elementos quadraticos, uti-
lizado para o calculo de potencias e gradientes no contorno ao longo do
segmento entre os nos 19 ao 25. 675.17 Convergencia dos potenciais u para diferentes malhas do domınio da Figura
5.16, do segmento entre os nos 19− 25. Usando elementos quadraticos. 685.18 Convergencia dos gradientes qn para diferentes malhas do domınio da
Figura 5.16, do segmento entre os nos 19−25. Usando elementos quadraticos. 695.19 Potenciais u para a malha5 da Tabela 5.10 do domınio da Figura 5.16, a
esquerda. Resultados dos gradientes qn no segmento entre os nos 19 − 25,
a direita. Usando elementos quadraticos. 705.20 Domınio irregular da Figura 5.16, submetido a forcas de massa dado pela
equacao (5-12). O contorno correspondente aos nos 19−25 esta: engastado
u = 0 com forcas de superfıcie prescrito t = 0 no resto do contorno (a
esquerda), com forcas de superfıcie prescritas t = 0 e engastado u = 0 no
resto do contorno (a direita). 725.21 Convergencia das Forcas de superfıcie t na direcao x para as discretizacoes
mostradas na Tabela 5.11 do domınio da Figura 5.16. Resultados do
segmento entre os nos 19− 25. Usando elementos quadraticos. 725.22 Convergencia das Forcas de superfıcie t na direcao y para as discretizacoes
mostradas na Tabela 5.11 do domınio da Figura 5.16. Resultados do
segmento entre os nos 19− 25. Usando elementos quadraticos. 735.23 Convergencia dos deslocamentos u na direcao x para as discretizacoes
mostradas na Tabela 5.11 do domınio da Figura 5.16. Resultados do
segmento entre os nos 19− 25. Usando elementos quadraticos. 735.24 Convergencia dos deslocamentos u na direcao y para as discretizacoes
mostradas na Tabela 5.11 do domınio da Figura 5.16. Resultados do
segmento entre os nos 19− 25. Usando elementos quadraticos. 745.25 Deslocamentos u na direcao x e y para a malha5 da Tabela 5.11 do domınio
da Figura 5.16, a esquerda. Resultados das forcas de superfıcie t na direcao
x e y segmento entre os nos 19−25, a direita. Usando elementos quadraticos. 75
A.1 Grafico da energia interna de deformacao. 84

Lista de tabelas
4.1 Numero de incognitas e de solucoes disponıveis (deslocamento de corpo
rıgido ou solucao simples) e tipo de avaliacao de coeficientes indefinidas
(exato ou mınimos quadrados – m.q.) para cada fila da matriz, seja para
problemas de potencial e elasticidade, 2D ou 3D. 48
5.1 Numero total de nos utilizados nas diferentes malhas testadas para cada
tipo de elemento (linear, quadratico ou cubico). 525.2 Campos potenciais, obtidos analiticamente, aplicados para testar a con-
vergencia das equacoes matriciais do modelo numerico da Figura 5.1. 535.3 Dados das malhas discretizadas, para um estudo de convergencia, corres-
pondentes ao hexaedro distorcido (a esquerda da Figura 5.5). 565.4 Dados das malhas discretizadas, para um estudo de convergencia, corres-
pondentes ao corpo multiplamente conectado (a direita da Figura 5.5). 575.5 Campos potenciais, obtidos analiticamente, aplicados para testar a con-
vergencia das equacoes do modelo numerico da Figura 5.5. 575.6 Coordenadas (x, y) dos nos localizados nos cantos do domınio irregular da
Figura 5.7. 595.7 Discretizacao das malhas utilizadas para o calculo da convergencia das
tensoes em pontos internos para o domınio da Figura 5.7. 605.8 Discretizacao das 6 malhas utilizadas para o teste de convergencia do sis-
tema de equacoes matriciais do metodo expedito dos elementos de contorno
para a estrutura da Figura 5.7. 635.9 Discretizacao das malhas utilizadas para o calculo da convergencia do pro-
blema de potencial em regime permanente e contorno misto, com elementos
quadraticos, para o domınio da Figura 5.13. 645.10 Discretizacao das malhas utilizadas para o calculo da convergencia do pro-
blema de potencial em regime permanente e contorno misto, com elementos
quadraticos, para o domınio da Figura 5.16. 675.11 Malhas utilizadas para o calculo da convergencia do problema de elastici-
dade linear e contorno misto, com elementos quadraticos, para o domınio
da Figura 5.16. 71

A mente que se abre a uma nova ideia jamaisvoltara ao seu tamanho original.
Albert Einstein.

1Introducao
1.1Colocacao do problema
Muitos problemas da engenharia, ao serem formulados matematicamente,
conduzem a ter que resolver equacoes diferenciais que envolvem uma ou mais
funcoes incognitas sob certas condicoes iniciais e de contorno. Com o advento
da computacao, diversos metodos numericos tem sido desenvolvidos.
Um poderoso metodo desenvolvido para resolver diversos problemas da
engenharia e o chamado metodo dos elementos finitos. Esse metodo baseia-se
em subdividir a geometria ou estrutura de um corpo em elementos menores,
chamados elementos finitos (discretizacao em uma malha com nos). Desse
modo, a geometria da estrutura torna-se mais simples, possibilitando resol-
ver diversos problemas mediante calculos numericos aproximados. Entre os
diferentes metodos de elementos finitos, destacamos o metodo formulado por
Theodore H. H. Pian e Pin Tong [28], baseado em princıpios variacionais.
Uma outra tecnica bem sucedida na solucao das equacoes diferenciais e
o metodo dos elementos de contorno [2, 3]. O metodo consiste essencialmente
em discretizar o contorno (fronteira ou bordo) da estrutura, permitindo tratar
com sucesso os mesmos problemas resolvidos pelo metodo dos elementos finitos.
Convencionalmente, o metodo de elementos de contorno nao possui uma base
variacional. Pois, suas equacoes sao deduzidas a partir de uma formulacao em
resıduos ponderados.
Nesse sentido, em 1987, com o intuito de dar uma base variacional ao
metodo dos elementos de contorno, N. Dumont formula o metodo hıbrido dos
elementos de contorno [7] —inspirado particularmente nos trabalhos de Hel-
linger [24], Reissner [30] e Pian [29]. A partir desse trabalho, Dumont e cola-
boradores desenvolveram ferramentas matematicas e generalizacoes que pos-
sibilitaram a resolucao, com sucesso, de diversos problemas da engenharia.
Destacam-se: a tecnica de superposicao modal avancada para problemas de-
pendentes do tempo; o estudo de inversas generalizadas e diversas tecnicas de
integracao numerica, entre outros.

Capıtulo 1. Introducao 13
Em 1999, apos diversos trabalhos que possibilitaram um adequado en-
tendimento das propriedades espectrais das matrizes do metodo hıbrido dos
elementos de contorno, e proposta uma versao simplificada do metodo, cha-
mada metodo hıbrido simplificado dos elementos de contorno [5, 6]. A principal
vantagem, dessa versao, e que os coeficientes da matriz U* de deslocamentos
nodais (vide equacao (3-47)) sao calculados de forma direta, dispensando qual-
quer tipo de integracao, o que faz sua implementacao e seu esforco computaci-
onal simples e rapido. Alem disso, nao e menos preciso, resolvendo os mesmos
problemas, que os metodos citados nos paragrafos anteriores.
Paralelamente as pesquisas do metodo hıbrido dos elementos de contorno
e sua versao simplificada, um estudo das propriedades espectrais da matriz G
(vide equacao (3-24)), levou a uma formulacao consistente do metodo, baseada
na adequada consideracao das constantes de corpo rıgido associadas a solucao
fundamental [9, 13]. Esta abordagem consistente do metodo e importante para
uma adequada compreensao e interpretacao de algumas questoes teoricas e
conceituais que em geral sao ignoradas pelo metodo convencional de elementos
de contorno.
Forma expedita do metodo hıbrido dos elementos de contorno
A contribuicao do presente trabalho nasce nesse cenario. Como sendo,
mais uma variacao do metodo hıbrido dos elementos de contorno. O metodo,
basicamente, combina dois metodos de elementos de contorno: o desenvolvi-
mento consistente do metodo convencional e os conceitos do metodo hıbrido
simplificado (com base variacional no potencial de Hellinger-Reissner). O
metodo proposto e chamado metodo expedito dos elementos de contorno, cuja
formulacao e simples e computacionalmente menos dispendiosa. Diversos arti-
gos, relacionados com a formulacao e diversas aplicacoes do metodo, ja fo-
ram publicados paralelamente ao desenvolvimento desta tese. Inicialmente
por Dumont em 2010 [12] e posteriormente por N. Dumont e C. Aguilar em
[18, 19, 20, 21, 22, 23].
No metodo expedito as matrizes H e G, obtidas pelo metodo convencio-
nal, sao obtidas de modo simples e agil eliminando-se quase toda a integracao
numerica (integracao que faz-se necessaria no metodo convencional). Embora,
ambas as matrizes, H e G, sejam cheias, esquemas especiais de solucao po-
dem ser implementados para diminuir drasticamente a alocacao de memoria
e o tempo computacional requerido em uma analise numerica, simplificando
bastante o problema. A equacao matricial do metodo convencional dos elemen-
tos de contorno (Hd = Gt sem considerar forcas de massa), e substituıda no

Capıtulo 1. Introducao 14
metodo expedito, por qualquer uma das seguintes equacoes
Hd = U∗TLTt ou Hd = U∗Tp
onde, H ≡ T∗TL e uma aproximacao da matriz H. Em uma formulacao
de elasticidade, U∗ e T∗ sao matrizes de deslocamentos nodais d e forcas
de superfıcie t da solucao fundamental, respectivamente, obtidas para cada
grau de liberdade do problema idealizado matematicamente. Da forma como a
formulacao e apresentada, sempre e possıvel usar o conceito de carregamento
nodal equivalente p = LTt, onde L e uma matriz que depende apenas das
funcoes de interpolacao do contorno e pode ser avaliada de forma analıtica.
Uma caracterıstica importante da formulacao proposta e a facilidade na
obtencao de resultados em pontos internos. Em uma implementacao compu-
tacional, para problemas mistos de condicao de contorno, a equacao anterior
Hd = U∗TLTt (ou Hd = U∗Tp) e substituıda pelas equacoes
HTp∗ = p, U*p∗ = d.
A partir dessas equacoes, e possıvel montar um unico sistema de equacoes
lineares. A incognita desse sistema e o vetor de parametros p*. Calculado
este vetor p*, resultados em pontos internos sao obtidos diretamente, sem a
utilizacao de qualquer integral de contorno.
A formulacao expedita e especialmente vantajosa para problemas de
topologia complicada ou que requeiram solucoes fundamentais complicadas.
Por exemplo: problemas de dinamica (no domınio do tempo ou da frequencia);
problemas axissimetricos; problemas de mecanica da fratura; problemas com
gradacao funcional ou de elasticidade gradiente e outros.
1.2Objetivos
Os objetivos principais sao:
1. Implementacao de algoritmos computacionais para resolver problemas
de elasticidade e potencial aplicando o metodo expedito de elementos de
contorno. No desenvolvimento desses algoritmos, serao considerados:
– Domınios bidimensionais: discretizacao do contorno com elementos
lineares, quadraticos e cubicos.
– Domınio tridimensionais: discretizacao do contorno com elementos
triangulares (T3 e T6) e elementos quadrilaterais (Q4 e Q8).

Capıtulo 1. Introducao 15
2. Testar os algoritmos implementados com a finalidade de avaliar a aplica-
bilidade do metodo, o esforco computacional, a convergencia das variaveis
envolvidas nas equacoes matriciais e a coerencia dos resultados em di-
versos problemas da engenharia.
1.3Organizacao do texto
A tese esta dividida em seis capıtulos.
O Capıtulo 1 faz uma breve introducao e os objetivos da tese. No capıtulo
2, apresenta-se algumas consideracoes teoricas necessarias na compreensao
dos capıtulos subsequentes. O capıtulo 3, apresenta a formulacao teorica dos
metodos de elementos de contorno: a forma consistente do metodo convencio-
nal; a formulacao hıbrida e sua versao simplificada. O capıtulo 4, apresenta o
metodo expedito dos elementos de contorno que e uma das partes principais
da tese. O capıtulo 5, aplica o metodo expedito dos elementos de contorno em
diversos problemas numericos de elasticidade linear e potencial. Os resultados
sao comparados com solucoes analıticas, caso existam, com o intuito de va-
lida-los. Finalmente, no capıtulo 6, sao apresentadas as conclusoes e sugestoes
para trabalhos futuros.

2Consideracoes Teoricas Importantes
2.1Conceitos basicos da teoria de elasticidade linear
Seja um corpo elastico, com interior Ω e contorno Γ (figura 2.1), sujeito
a pequenos deslocamentos. Os deslocamentos de um elemento infinitesimal dΩ
desse corpo sao descritos pela teoria da elasticidade segundo dois sistemas de
coordenadas:
• Um sistema global ou externo, onde se tem deslocamentos absolutos ui,
sobre os quais realizam trabalho duas forcas externas: as forcas de massa
bi (que agem no domınio Ω) e as forcas de superfıcie ti (que agem no
contorno Γ).
• Um sistema local ou interno, onde se tem deformacoes εij (deslocamentos
relativos), num elemento infinitesimal do domınio dΩ, gerados pelas
tensoes σij.
Figura 2.1: Corpo elastico equilibrado submetido a acao de forcas externas, bi e ti, edeslocamentos prescritos ui.
Decompondo o contorno Γ em Γσ e Γu(isto e, Γ = Γσ + Γu). Em Γσ agem
as forcas prescritas ti e em Γu os deslocamentos prescritos ui.

Capıtulo 2. Consideracoes Teoricas Importantes 17
Formulamos o problema de elasticidade linear como segue.
Seja um conjunto de forcas externas prescritas aplicadas sobre o corpo
elastico, descritas no sistema global pelas forcas bi agindo em Ω e as forcas ti
agindo em Γσ. Uma analise desse corpo consiste em determinar: os desloca-
mentos ui que ocorrem em Ω e Γσ; as reacoes de apoio ti que surgem em Γu e
as tensoes σij em Ω provocados pela influencia das solicitacoes externas.
Para determinar os valores nao prescritos e necessario estabelecer relacoes
de transformacao entre forcas e deslocamentos, relacionados com os sistemas
interno e externo. Essas relacoes de transformacao sao descritas como segue.
As relacoes de equilıbrio de forcas, que relacionam as forcas descritas no
sistema externo com as tensoes do sistema interno, sao dadas pela equacao
diferencial que governa o problema
σji,j + bi = 0 em Ω (2-1)
e a relacao
σjiηj = ti em Γ. (2-2)
Considerando as condicoes de contorno, temos a relacao de equilıbrio das forcas
de superfıcie
ti = ti em Γσ, (2-3)
onde ηj sao os cossenos diretores do vetor ~η normal ao contorno dΓ. Os ındices
i e j, associados as direcoes das coordenadas do sistema, assumem valores 1, 2
e 3 para problemas tridimensionais.
A propriedade de simetria do tensor de tensoes, relacionado com o
equilıbrio de momentos, e
σij = σji em Ω. (2-4)
As relacoes de compatibilidade entre as deformacoes no sistema interno e
os deslocamentos no sistema externo, sao chamadas relacoes de transformacao
cinematica. Para pequenos deslocamentos a relacao e dada por
εij =1
2(ui,j + uj,i) em Ω, (2-5)
onde εij e o tensor de deformacoes e ui e o campo de deslocamentos. Alem disso,
levando em conta as condicoes de contorno, tem-se a relacao de compatibilidade
de deslocamentos

Capıtulo 2. Consideracoes Teoricas Importantes 18
ui = ui em Γu. (2-6)
Finalmente, as relacoes constitutivas que representam as relacoes que
existem entre o tensor de tensoes σij e o tensor de deformacoes εij em qualquer
ponto do corpo elastico. Essas relacoes podem ser simples ou complexas,
dependendo do material e as condicoes a que e submetido o corpo. Para um
material linearmente elastico, isotropico e homogeneo, a relacao constitutiva e
expressa por
σij = Dijklεkl, (2-7)
onde Dijkl e o tensor de constantes elasticas dado por
Dijkl =2Gv
1− 2vδijδkl +G(δikδjl + δilδjk) (2-8)
sendo v o coeficiente de Poisson, G o coeficiente de elasticidade transversal ou
de cisalhamento e δij e o delta de Kronecker definido por
δij =
1 se i = j,
0 se i 6= j.(2-9)
Considerando as equacoes (2-4) e (2-5), reescreve-se a equacao (2-7) como
σij = Dijkluk,l. (2-10)
Substituindo a equacao (2-8) e considerando a condicao de simetria da matriz
constitutiva Dijkl, a equacao (2-10) e expressa na como
σij = G(ui,j + uj,i) +2Gv
1− 2vuk,kδij. (2-11)
Utilizando a equacao (2-11), tambem e possıvel expressar a equacao (2-1) em
termos do campo de deslocamentos ui, resultando na equacao de Navier
Gui,kk +G
1− 2vuk,ki + bi = 0 em Ω. (2-12)
2.2Conceitos basicos da teoria de potencial em regime permanente.
Seja um corpo homogeneo qualquer, com interior Ω e contorno Γ (figura
2.2). Considere ainda a decomposicao do contorno Γ em Γq e Γu. O corpo
homogeneo e submetido a uma fonte interna de energia Q em seu domınio Ω

Capıtulo 2. Consideracoes Teoricas Importantes 19
e a fontes prescritas de energia qn ao longo de Γq. O potencial u e prescrito na
parte do contorno complementar Γu.
Figura 2.2: Corpo homogeneo submetido a acoes de fontes externas de energia, Q e qn, epotencial prescrito u.
Geralmente, a taxa do fluxo qi na direcao i, e relacionada com o gradiente
de certo potencial ui. Essa relacao e expressada como
qi = −knu,i em Ω, (2-13)
onde kn e a condutividade do material.
A partir do equilıbrio entre a taxa gerada pela fonte Q por unidade de
volume com a taxa de fluxo qi em estado permanente tem-se
qi,i +Q = 0 em Ω. (2-14)
Substituindo a equacao (2-13) em (2-14), considerando o material sendo
isotropico, chega-se a equacao diferencial que governa o problema de potencial
knu,ii −Q = 0 em Ω. (2-15)
A equacao acima pode-se reescrever na forma da equacao de Poisson
u,ii −Q
k= 0 em Ω, (2-16)
onde kn = kx = ky = kz. No caso de problemas de potencial sem fonte interna
Q, a equacao de governo se torna a equacao de Laplace, ou seja,
u,ii = 0 em Ω. (2-17)

Capıtulo 2. Consideracoes Teoricas Importantes 20
No contorno Γ = Γu + Γq, o fluxo qn, normal a superfıcie, e expresso por
qn = −qiηi em Γ, (2-18)
onde ηj sao os cossenos diretores do vetor ~η que e normal a superfıcie
dΓ. Alem disso, considerando as condicoes de contorno, temos a relacao de
compatibilidade de potencial
u = u em Γu (2-19)
e a relacao de equilıbrio de fluxo normal
qn = qn em Γq. (2-20)
2.3Discretizacao dos deslocamentos, das tensoes e das forcas de superfıcie
Tres campos independentes sao necessarios para o desenvolvimento do
presente trabalho. O campo de deslocamentos no contorno udi , o campo de
tensoes no domınio σsij e o campo das forcas de superfıcie no contorno tti.
2.3.1Discretizacao dos deslocamentos no contorno
O campo de deslocamentos ui ao longo do contorno Γ e, explicitamente,
aproximado por udi . Onde udi indica a discretizacao do deslocamento ui no
contorno, em termos das funcoes de interpolacao polinomiais uim com suporte
compacto e parametros de deslocamentos nodais d = [dm] ∈ Rnd , para nd
graus de liberdade do modelo discretizado. Isto e,
udi = uimdm em Γ, (2-21)
de tal forma que
udi = ui em Γu. (2-22)
2.3.2Discretizacao das tensoes no domınio
O campo de tensoes σij no domınio Ω, e aproximado por σsij. Onde σsij de-
nota as tensoes no domınio Ω como uma soma de uma solucao fundamental σ∗ijm
com suporte global, multiplicado pelos parametros de forca p∗ = [p∗m] ∈ Rn∗,

Capıtulo 2. Consideracoes Teoricas Importantes 21
aplicados nos mesmos pontos nodais m do contorno aos quais os deslocamentos
nodais dm estao associados (n∗ = nd) e uma solucao particular arbitraria σpij
σsij = σ∗ij + σpij = σ∗ijmp∗m + σpij em Ω (2-23)
de tal forma que a equacao (2-1) reescrevesse como
σ∗jim,j = 0 e σpji,j + bi = 0 em Ω. (2-24)
A partir do campo de tensoes σsij da equacao (2-23), obtem-se desloca-
mentos
usi = u∗i + uri + upi = (u∗im + urisCsm) p∗m + upi em Ω, (2-25)
onde u∗im sao os deslocamentos da solucao fundamental correspondente a
σ∗ijm e o deslocamento upi e a parcela que corresponde a solucao particular
σpij. Deslocamentos de corpo rıgido sao incluıdos em termos de funcoes uris
multiplicados por constantes (em princıpio) arbitrarias Csm ∈ Rnr×n∗, onde
nr e o numero de deslocamentos de corpo rıgido do problema discretizado.
Os ındices ()∗ e ()r denotam, respectivamente, a solucao fundamental e os
deslocamentos de corpo rıgido. As solucoes fundamentais sao utilizadas como
funcoes de ponderacao no metodo dos elementos de contorno convencional. Em
metodos de elementos de contorno variacionais (caso do metodo hıbrido dos
elementos de contorno), em particular, representam funcoes de interpolacao do
domınio.
2.3.3Discretizacao das forcas de superfıcie no contorno
O campo de forcas de superfıcie ti ao longo do contorno Γ, e aproximado
por tti, onde ()t esta associado as forcas de superfıcie, como requerido no metodo
dos elementos de contorno convencional e e dado por
tti = ui`t` discretizacao convencional (2-26)
No entanto, no metodo expedito dos elementos de contorno a discretizacao
utilizada sera uma versao proposta por Dumont [13], modificacao que traz
vantagens quando tratamos com contornos curvos e e dado por
tti = ti`t` ≡|J |(at`)|J |
ui`t` discretizacao modificada. (2-27)

Capıtulo 2. Consideracoes Teoricas Importantes 22
Ao longo de Γσ, de acordo com a equacao (2-3), a equacao mantem-se como
tti = ti`t`.
Na equacao (2-27), ui` denotam as funcoes de interpolacao polinomiais
com suporte compacto e t = [t`] ∈ Rnt sao parametros de forcas de superfıcie.
O ındice i refere-se as direcoes das coordenadas do sistema e o ındice `
a qualquer um dos nt graus de liberdade relacionados com as forcas de
superfıcie do problema (denotando tanto a localizacao e orientacao) para nos
adequadamente distribuıdos ao longo do segmento de contorno Γ. As funcoes
de interpolacao ui` tem as mesmas propriedades das funcoes de interpolacao
uim apresentadas na equacao (2-21).
Na equacao (2-27), |J |(at`) e o valor do Jacobiano das coordenadas globais
(x, y, z) em funcao das coordenadas naturais (ξ, η) nos pontos nodais `. A
expressao |J |(at`)/|J | apresenta um termo no denominador que cancela-se
com o termo Jacobiano do segmento de contorno infinitesimal dΓ = |J |dξdηna expressao integral das equacoes (3-25), (3-26) e (4-5). Isto, nao apenas
melhora a capacidade de tti para representar as forcas de superfıcie ao longo de
segmentos de contornos curvos, tambem simplifica a integracao numerica dos
termos relacionados [13].
O numero de graus de liberdade para as forcas de superfıcie nt e
deslocamentos nd nao sao necessariamente os mesmos, desde que mais de
um parametro de forca de superfıcie seja associado com uma descontinuidade
num no do contorno, onde os segmentos adjacentes apresentam diferentes
normais exteriores [13]. Como consequencia temos que nt ≥ nd. E importante
ressaltar que t`, na equacao (2-27), tem atributos de forcas de superfıcie nas
extremidades do segmento de contorno. Enquanto uim, na equacao (2-21), tem
atributos de deslocamento em pontos nodais.
2.4Aproximacao da solucao particular no contorno
Dada uma malha, suficientemente refinada no contorno Γ, os deslocamen-
tos upi e as forcas de superfıcie tpi relacionados com uma solucao particular arbi-
traria da parcela nao homogenea da equacao (2-1) podem ser aproximadas com
precisao suficiente por parametros de deslocamentos nodais dp = [dpm] ∈ Rnd e
parametros de forcas de superfıcie tp = [tp` ] ∈ Rnt , respectivamente, em termos
das funcoes de interpolacao das equacoes (2-21) e (2-27) da seguinte maneira
upi ≈ uimdpm, tpi = σpijηj ≈ ti`t
p` em Γ, (2-28)
sempre que uma solucao particular arbitraria para as forcas de massa bi seja
conhecida em termos de deslocamentos upi e tensoes σpij. Esta aproximacao pode

Capıtulo 2. Consideracoes Teoricas Importantes 23
tornar as equacoes subsequentes em simples, elegantes e de facil manipulacao
[10].
2.5Solucao Fundamental.
Consideramos como solucao fundamental o campo de deslocamentos
u∗i , calculado para cada direcao coordenada i gerado pela acao de uma
forca concentrada arbitraria p∗m com um determinado grau de liberdade m
do contorno discretizado (no do contorno), obtidos a menos de constantes
relacionadas com os movimentos de corpo rıgido [10].
Essa solucao fundamental e expressa por
u∗i = u∗imp∗m + cri ≡ (u∗im + urisCsm) p∗m em Ω, (2-29)
onde cri e Csm sao, em princıpio, constantes arbitrarias; u∗im funcoes de
interpolacao singulares e uris funcoes de interpolacao referentes ao deslocamento
de corpo rıgido. O procedimento para calcular as funcoes u∗im e uris sao
apresentadas nas secoes 2.5.1 e 2.5.2.
Considerando a equacao (2-10), as tensoes σ∗ij associadas a solucao
fundamental em termos de deslocamentos u∗i sao expressas por
σ∗ij = σ∗ijmp∗m = Dijklu
∗km,lp
∗m em Ω. (2-30)
Na equacao (2-2), as forcas de superfıcie t∗i associadas a solucao fundamental
em termos de tensoes σ∗ijm sao
t∗i = t∗imp∗m = σ∗ijmηjp
∗m em Γ. (2-31)
No metodo dos elementos de contorno convencional, a forca concentrada
p∗m e considerada com intensidade unitaria e as constantes, referentes a
deslocamento de corpo rıgido cri , nao sao consideradas. No metodo convencional
dos elementos de contorno, a solucao fundamental e utilizada como fator de
ponderacao e nos metodos hıbridos dos elementos de contorno, como funcao
de interpolacao.
2.5.1Funcoes de Interpolacao Singulares.
As funcoes de interpolacao singulares u∗im sao obtidas de modo que a
solucao fundamental u∗i satisfaca a parte homogenea da equacao diferencial
que governa o problema de um corpo submetido a uma forca concentrada
arbitraria p∗m [3, 2]. Da primeira equacao de (2-24) obtemos

Capıtulo 2. Consideracoes Teoricas Importantes 24
(σ∗jim,j + ∆im)p∗m = 0 em Ω (2-32)
onde ∆im e a funcao singular delta de Dirac, definida por
∆im =
∞ se i = m (mesmo no)
0 se i 6= m.(2-33)
A funcao ∆im tem a seguinte propriedade∫Ω
∆imdΩ = δim, (2-34)
onde δim e o delta de Kronecker, isto e,
δim =
1 se i = m,
0 se i 6= m.(2-35)
Na equacao (2-32) observamos que para qualquer valor de p∗m, tem-se
σ∗jim,j + ∆im = 0. (2-36)
Integrando no domınio Ω, obtemos∫Ω
σ∗jim,jdΩ + δim = 0. (2-37)
Aplicando o teorema da divergencia e considerando a equacao (2-31), apos a
integracao para um contorno Γ que circunscreva o ponto de aplicacao da forca
p∗m, tem-se∫Γ
t∗imdΓ + δim = 0. (2-38)
Expressoes para as solucoes fundamentais, em termos de deslocamentos, sao
obtidos partir da equacao de Navier, equacao (2-12). Para problemas tridimen-
sionais de elasticidade linear, considerando material isotropico e homogeneo,
temos
u∗im =1
16π(1− ν)Gr[(3− 4ν)δim + r,ir,m]. (2-39)
Para problemas em estado plano de deformacoes obtemos a conhecida funcao
chamada, solucao fundamental de Kelvin
u∗im =1
8π(1− ν)G[(3− 4ν) ln(r)δim + r,ir,m], (2-40)

Capıtulo 2. Consideracoes Teoricas Importantes 25
onde
ri = xi − xmi e r = (riri)12 (2-41)
sendo r a distancia entre o ponto de aplicacao xmi da forca concentrada p∗m
(ponto fonte) e o ponto xi onde queremos medir o valor da funcao (ponto
campo). O termo r,i denota a derivada de r na direcao i.
A expressao da solucao fundamental em termos de tensoes correspon-
dente a funcao da equacao (2-40) e dada por
σ∗ijm =−1
4π(1− ν)r[(1− 2ν)(r,iδjm + r,jδim + r,mδij) + 2rirjrm]. (2-42)
A expressao de p∗im correspondente a funcao do campo de tensoes da
equacao (2-42) e
p∗im =−1
4π(1− ν)r
[(1− 2ν)δim + 2r,ir,m]
∂r
∂η− (1− 2ν)(r,iηm + r,mηi)
].
(2-43)
Para problemas de potencial tridimensionais, considerando material ho-
mogeneo e isotropico em regime permanente, tem-se
u∗im =1
4kπr(2-44)
com fluxos
q∗x =−x
4kπr3, q∗y =
−x4kπr3
e q∗z =−x
4kπr3. (2-45)
Para problemas de potencial bidimensionais, considerando material homogeneo
e isotropico em regime permanente, temos
u∗im = − ln(r)
2kπ, (2-46)
com fluxos
q∗x =x
2πr2e q∗y =
y
2πr2. (2-47)
2.5.2Funcoes de interpolacao referentes aos deslocamentos de corpo rıgido
E conveniente considerar funcoes de interpolacao normalizadas uris de
modo que, quando avaliadas no contorno Γ para cada grau de liberdade s,
resultem em uma base ortonormal de deslocamentos de corpo rıgido Wms ≡W.

Capıtulo 2. Consideracoes Teoricas Importantes 26
Supondo que essas funcoes normalizadas uris ≡ ur possam ser obtidas a
partir de funcoes arbitrarias de deslocamentos de corpo rıgido uris ≡ ur pela
expressao
uris = urinTns ou u = urT. (2-48)
Para cada grau de liberdade m do contorno chega-se a
W rms = U r
mnTns ou W = UrT. (2-49)
Pre-multiplicando por WT e sabendo que WTW = I, sendo I a matriz de
identidade, chegamos a
T = (WTUr)−1. (2-50)
Conhecidas as funcoes arbitrarias uris e a base ortonormal Wmr, obtemos Tss e
uris.
Para problemas de elasticidade, em estado plano de deformacoes, pode-se
utilizar como funcoes arbitrarias de deslocamentos de corpo rıgido
uris ≡ ur =
[1 0 −x2
0 1 x1
](2-51)
e para problemas bidimensionais de potencial
uris ≡ ur =[
1]. (2-52)

3Metodos de elementos de contorno
Dos diversos metodos de elementos de contorno que vem sendo utilizados
com sucesso em diferentes aplicacoes numericas, tres sao de nosso interesse. No
decorrer do presente capıtulo serao apresentados em forma breve a formulacao
e os principais conceitos de cada um desses metodos.
– O metodo convencional dos elementos de contorno.
– O metodo hıbrido dos elementos de contorno.
– O metodo hıbrido simplificado dos elementos de contorno.
3.1O Metodo convencional dos elementos de contorno
O metodo convencional dos elementos de contorno e obtido a partir
de uma formulacao em resıduos ponderados. Sempre que aplicavel, e uma
ferramenta simples e poderosa de analise numerica [1, 2, 3]. Em [9, 13, 26]
se mostra uma formulacao consistente do metodo, baseada em uma adequada
consideracao das constantes de corpo rıgido associadas a solucao fundamental
em termos de deslocamentos.
3.1.1Formulacao consistente do metodo convencional dos elementos de con-torno
Assumimos que σij e um tensor simetrico que satisfaz a equacao consti-
tutiva σij = Dijkluk,l, equacao (2-10). O problema pode ser formulado, na sua
forma forte, utilizando o princıpio de energia potencial total estacionaria [8],
para uma variacao δui de ui, estendendo o contorno do segundo integrando de
Γσ para Γ, uma vez que, de acordo com a equacao (2-3) e (2-6), δui = 0 em Γu
δΠ = −∫
Ω
(σji,j + bi)δuidΩ +
∫Γ
(σijηj − ti)δuidΓ = 0. (3-1)
Para uma formulacao nao-variacional em termos de resıduos ponderados,
que e menos restritiva que a equacao (3-1), recorre-se a um campo de solucoes
fundamentais. Isto e, tensoes σ∗ij e deslocamentos u∗i do mesmo problema de

Capıtulo 3. Metodos de elementos de contorno 28
elasticidade, δσ∗ij = Cijklδu∗k,l, que satisfaz a parte homogenea σji,j = 0 da
equacao (2-1), porem, nao satisfaz as condicoes de contorno das equacoes (2-3)
e (2-6):
−∫
Ω
(σji,j + bi)δu∗i dΩ +
∫Γ
(σijηj − ti)δu∗i dΓ = 0. (3-2)
Integrando por partes. Aplicando o teorema de Green e a identidade
σijδu∗i,j ≡ uk,lCijklδu
∗i,j ≡ uk,lδσ
∗kl obtemos∫
Γ
δσ∗ijηjuidΓ−∫
Ω
δσ∗ji,juidΩ =
∫Γ
tiδu∗i dΓ +
∫Ω
biδu∗i dΩ. (3-3)
A formulacao consistente, do metodo convencional dos elementos de
contorno, obtem-se a partir da equacao (3-3). As solucoes fundamentais δσ∗ij e
δu∗i sao discretizadas adequadamente segundo as equacoes (2-30) e (2-29) em
termos de parametros de forcas arbitrarias δp∗m dados como
δσ∗ij ≡ σ∗ijmδp∗m e (3-4)
δu∗i = (u∗im + urisCsm)δp∗m (3-5)
onde uris (para s = 1 . . . nr) sao os nr deslocamentos de corpo rıgido mul-
tiplicados pelas constantes arbitrarias Csm; m indica a localizacao e direcao
da aplicacao de parametros de forcas arbitrarias δp∗m. Tambem, δσ∗ijm e δu∗im
denotam funcoes, com suporte global, das coordenadas e direcoes de δp∗m de-
signado por m (ponto origem), assim como das coordenadas e direcoes i (ponto
campo), onde os efeitos de δp∗m sao medidos.
A robustez do metodo dos elementos de contorno resulta do fato de os
parametros de forcas arbitrarias δp∗m serem aplicados nos nos ao longo do
contorno Γ, do lado de fora do domınio Ω, infinitamente fechado. Embora,
δσ∗ijm e δu∗im tendam ao infinito (no ponto de aplicacao de δp∗m) sao analıticos
em Ω. Por conveniencia, as funcoes δσ∗ijm sao normalizadas de modo que para
um domınio Ω0 que contem δp∗m com o contorno fechado Γ0 temos∫Ω0
σ∗jim,jdΩ =
∫Γ0
σ∗ijmηjdΓ ≡ −δim, (3-6)
onde δim e o delta de Kronecker generalizado (igual a 1, se i e m referem-se ao
mesmo grau de liberdade, ou 0, caso contrario).
De acordo com a definicao associada a solucao fundamental da equacao
(3-6), a integral de domınio do lado esquerdo da equacao (3-3) e, na verdade,
avaliada como∫
Ωδσ∗ji,juidΩ = −δimuiδp∗m ≡ −umδp∗m.

Capıtulo 3. Metodos de elementos de contorno 29
Substituindo δσ∗ij e δu∗i na equacao (3-3), de acordo com as suas ex-
pressoes dadas nas equacoes (3-4) e (3-5). Obtem-se a expressao modificada
da identidade de Somigliana
um =
∫Γ
tiu∗imdΓ−
∫Γ
σ∗ijmηjuidΓ+
∫Ω
biu∗imdΩ+Csm
(∫Γ
tiurisdΓ +
∫Ω
biurisdΩ
).
(3-7)
Essa identidade e utilizada para avaliar os deslocamentos um (e consequen-
temente, as tensoes) num ponto m do domınio Ω, sempre que, as forcas de
massa bi, forcas de superfıcie ti sejam prescritas e deslocamentos no contorno
ui sejam conhecidos. O termo entre parenteses desaparece quando as forcas
de superfıcie ti e as forcas de massa bi estao em equilıbrio, o que nao neces-
sariamente e atingido quando se esta lidando com aproximacoes. Observa-se
tambem que, os resultados sao, em princıpio, influenciados pelas constantes
arbitrarias Csm [1].
3.1.2Discretizacao numerica
A equacao (3-7) tambem e utilizada para avaliar os deslocamentos ui e as
forcas de superfıcie ti como incognitas do problema ao longo das partes Γσ e Γu
do contorno Γ, respectivamente. De fato, aproximam-se segundo as equacoes
(2-21) e (2-27) ao longo do contorno Γ como
udi = uindn e tti = ti`t` (3-8)
onde dn, para n = 1 . . . nd, e um vetor de nd deslocamentos nodais e uin sao
funcoes de interpolacao com suporte local, geralmente polinomios escolhidos
de tal maneira que, nos pontos nodais, uin ≡ δin. Uma vez que o campo de
forcas de superfıcie ti tem atributos de superfıcie, os nt parametros t` os tem,
mas dependem do vetor normal externo ~ηi dos nos do contorno aos quais t`
esta fisicamente associado. Geralmente, nt > nd, devido a que o contorno Γ
nem sempre e completamente contınuo e alguns nos podem ter duas normais.
A geometria do contorno e aproximada a partir dos atributos nodais
usando as mesmas funcoes de interpolacao uin da equacao (3-8) (representacao
isoparametrica), exatamente como no metodo dos elementos finitos,.
Substituindo as aproximacoes udi e tti na identidade de Somigliana, dada
pela equacao (3-7), e aplicando δp∗m em nos sucessivos do contorno de forma
que δp∗mdm tenha significado de trabalho virtual, chega-se a equacao basica do
metodo convencional dos elementos de contorno na sua forma consistente, que

Capıtulo 3. Metodos de elementos de contorno 30
considera o termo de erro relacionado com a constante Csm,(∫Γ
σ∗ijmηjuindΓ + δmn
)dn =
(∫Γ
ti`u∗imdΓ
)t` +
∫Ω
biu∗imdΩ +
Csm
(∫Γ
ti`urisdΓ +
∫Ω
biurisdΩ
). (3-9)
Escrevendo na forma matricial, temos
Hd = Gt + b + ε, (3-10)
onde H = [Hmn] ∈ Rnd×nd e uma matriz de transformacao cinematica [8, 10],
G = [Gm`] ∈ Rnd×nt e uma matriz do tipo flexibilidade (geralmente retangular)
e b = [bm] ∈ Rnd e um vetor de deslocamentos nodais equivalente as forcas
de massa. As matrizes de potencial duplo e simples, H e G, compreendem
em sua definicao integrais singulares e improprias, respectivamente, quando o
ponto fonte (ındice m) e o ponto campo (ındice n ou `) referem-se aos mesmos
pontos nodais. Entao, cuidados especiais devem ser tomados nas integracoes
numericas. As integrais singulares podem, sempre, ser avaliadas matematica-
mente, levando em conta os correspondentes significados mecanicos.
O termo de erro ε na equacao (3-10) corresponde a resıduos cujas
magnitudes dependem dos deslocamentos de corpo rıgido que estao implıcitos
na solucao fundamental, da forma como a malha e refinada, ou seja, como
exatamente as forcas de superfıcie discretizadas estao em equilıbrio com as
forcas de massa aplicadas no domınio. Este vetor de resıduos e geralmente
ignorado nas implementacoes mostradas na literatura [1, 3], ou as vezes
utilizado como uma medida da convergencia do modelo numerico. Um modelo
numerico consistente deve considerar este termo explicitamente e ter uma
formulacao que seja independente de Csm, e nao simplesmente ignora-lo.
Esta questao especıfica ja foi assunto de uma investigacao teorica em [9].
Tambem e importante a introducao de uma simplificacao conveniente relaci-
onada com a solucao particular (termo b) da equacao (3-10). Os principais
resultados obtidos sao resumidos a seguir.
O vetor de resıduos ε da equacao (3-10) pode ser escrito como
ε = CTRT(t− tp) (3-11)
onde R = [R`s] ∈ Rnt×nd e definido como
R`s =
∫Γ
ti`urisdΓ (3-12)

Capıtulo 3. Metodos de elementos de contorno 31
e o produto RTtp vem da aproximacao∫Ω
biurisdΩ = −
∫Γ
σpjiηjurisdΓ ≈ −
(∫Γ
ti`urisdΓ
)tp` (3-13)
presente sempre que uma solucao particular relacionada com as forcas de massa
estiver disponıvel. Do mesmo modo, o vetor b = [bm] de deslocamentos nodais
equivalentes, introduzido na equacao (3-10), e aproximado do seguinte modo∫Ω
biu∗imdΩ = −
∫Γ
σpjiηju∗imdΓ +
∫Γ
σ∗jimηjupi dΓ + δimu
pi
⇒ bi ≈ −Gm`tp` +Hmnd
pn. (3-14)
Considerando uma malha suficientemente refinada no contorno. Os desloca-
mentos upi e as forcas de superfıcie tpi = σpjiηj, relacionados com uma solucao
particular arbitraria (parte nao-homogenea) do problema governado pela
equacao (2-1), podem-se aproximar por deslocamentos nodais dpn e parametros
de forcas de superfıcie tp` , com precisao suficiente em termos das funcoes de
interpolacao da equacao (2-28)
upi ≈ uindpn e tpi = σpjiηj ≈ ti`t
p` em Γ (3-15)
Seguidamente, usando as equacoes (3-11) e (3-14), reescrevendo, de forma
conveniente, a expressao da equacao (3-10) como
H(d− dp) =(G + CTRT
)(t− tp). (3-16)
Identifica-se na equacao (3-11), com o apoio da algebra linear [9], que as colunas
da matriz R da equacao (3-16) abrangem o espaco das forcas de superfıcie
(t − tp) que nao podem ser transformadas em deslocamento (nao estao em
equilıbrio). Portanto,(G + CTRT
)R = 0 ⇒ CT = −GR
(RTR
)−1. (3-17)
O que leva a uma equacao de elementos de contorno consistente
H(d− dp) = Ga(t− tp), (3-18)
onde Ga ≡ GP⊥R e a parte admissıvel de G e
P⊥R = I−RR = I−R(RTR
)−1RT (3-19)

Capıtulo 3. Metodos de elementos de contorno 32
e o projetor ortogonal para o espaco admissıvel das forcas de superfıcie, que
compreende a parte de forcas de superfıcie que estao em equilıbrio e podem,
portanto, ser transformadas em deslocamentos nodais equivalentes atraves da
matriz de flexibilidade Ga.
3.1.3Avaliacao espectral das matrizes envolvidas
Seja W = [Wns] ∈ Rnd×nr uma matriz cujas colunas formam uma
base ortogonal de deslocamentos nodais d da equacao (3-16), relacionados
aos deslocamentos de corpo rıgido, de tal forma que WTW = I. Entao, os
deslocamentos de corpo rıgido uris introduzidos na equacao (3-5) podem ser
normalizados de modo que os seus valores nodais coincidam com Wns nos
pontos nodais. Apos isso temos que
uris = uinWns em Γ (3-20)
Alem disso, e aconselhavel pensar o vetor de forcas de superfıcie t
expresso em termos de forcas nodais equivalentes p = [pn] ∈ Rnd que surgem
a partir de demonstracoes do princıpio dos trabalhos virtuais
δdmpm = δdm
∫Γ
uimti`dΓ t` ⇒ pm = L`mt` ou
p = LTt, (3-21)
onde LT e uma matriz de transformacao de equilıbrio, ja que transforma forcas
de superfıcie em carregamento nodal equivalente.
Com as definicoes de W e LT, dadas acima, verifica-se a equivalencia
R ≡ LW (3-22)
para R, como definido na equacao (3-12), o que significa que, para um domınio
finito,
WT(p− pp) = 0 ⇔ RT(t− tp) = 0. (3-23)
As relacoes anteriores ajudam a entender as propriedades espectrais das
matrizes H e Ga da equacao (3-18). W = N(H) e GaR = 0 sao verificacoes
parciais da consistencia. Definindo V como o espaco nulo de V = N(HT),
verificamos que |VTGa| ≈ 0 e nao |VTGa| = 0, o que significa que a
equacao (3-18), nao e completamente consistente. O que era esperado, ja que a

Capıtulo 3. Metodos de elementos de contorno 33
equacao (3-2) foi obtida de uma formulacao em resıduos ponderados, que nao
e variacionalmente consistente, se for comparada com a equacao (3-1).
3.1.4Formulacao nao consistente do metodo convencional dos elementos decontorno
A versao inconsistente da equacao (3-18) e a formulacao do metodo
convencional dos elementos de contorno, apresentada em [1, 2, 3] como
H(d− dp) = G(t− tp) (3-24)
pode-se obter diretamente considerando nulo o erro ε da equacao (3-10) ou a
matriz CT da equacao (3-16). A definicao formal das matrizes envolvidas, cuja
avaliacao conceitual e dada por Dumont [9,13], e
H ≡ Hmn =
∫Γ
σ∗jimηjuindΓ (3-25)
G ≡ Gm` =
∫Γ
ti`u∗imdΓ (3-26)
3.2O metodo hıbrido dos elementos de contorno
A formulacao do metodo hıbrido dos elementos de contorno, que tem
uma base variacional, foi proposto em 1987 por Dumont [7], origina-se da
variacao do potencial de Hellinger-Reissner. O metodo baseia-se nas hipoteses
de aproximacoes de tensoes σij no domınio Ω e de deslocamentos ui no contorno
Γ. Desde que foi proposto, mostrou-se como um metodo robusto na solucao de
diversos problemas da engenharia.
3.2.1O potencial de Hellinger–Reissner
O potencial de Hellinger–Reissner e obtido de uma generalizacao da
expressao da energia potencial total de um corpo elastico sujeito a pequenos
deslocamentos (maiores detalhes no Apendice A).
−ΠR(σij, ui)=
∫Ω
[UC
0 (σij) + (σij,j + bi)ui]dΩ−
∫Γ
σijηjuidΓ +
∫Γσ
tiuidΓ (3-27)
onde UC0 (σij) e a energia interna de deformacao complementar. Observa-se na
Figura A.1 que

Capıtulo 3. Metodos de elementos de contorno 34
UC0 (σij) = σijεij − U0(εij) (3-28)
onde U0(εij) e a energia interna de deformacao.
3.2.2Formulacao do metodo hıbrido dos elementos de contorno
Considerando que a parte do contorno Γu sera levada em conta somente
apos a formulacao matricial do problema, ou seja, Γσ ≡ Γ e ti ≡ ti na equacao
(3-27), pode-se obter a forma estacionaria do potencial:
− δΠR(σij, ui)=
∫Ω
δUC0 (σij)dΩ +
∫Ω
[(σij,j + bi)δui + δσij,jui ]dΩ +∫Γ
tiδuidΓ−∫
Γ
[δσijηjui − σijηjδui ] dΓ (3-29)
onde a variacao da energia interna de deformacao complementar δUC0 (σij),
segundo a Figura A.1 do Apendice A, e
δUC0 (σsij) = δσsijεij = δσsijui,j. (3-30)
Substituindo na equacao (3-29) a discretizacao das tensoes σsij expressa
na equacao (2-23) de acordo com as tensoes referentes a solucao fundamental
σ∗ij e t∗i , ou seja, equacoes (2-30) e (2-31), a discretizacao dos deslocamentos
udi de acordo com a equacao (2-21) e considerando a equacao (3-30), chega-se
a expressao
−δΠR=δp∗m[Fmnp
∗n−Hmn(dn− dbn)
]+δdm
[−Hnmp
∗n+(pm− pbm)
]=0. (3-31)
Para quaisquer valor de δp∗m e δdn, a equacao (3-31) resulta no sistema de
equacoes matriciais que governam o problema no metodo hıbrido dos elementos
de contorno,
F p∗ = H (d− dp) (3-32)
HTp∗ = (p− pp) (3-33)
onde
F ≡ Fmn =
∫Γ
t∗imu∗indΓ + δmn =
∫Γ
σ∗jimηju∗indΓ + δmn (3-34)
H ≡ Hmn =
∫Γ
t∗imuindΓ + δmn =
∫Γ
σ∗jimηjuindΓ + δmn (3-35)
Capıtulo 3. Metodos de elementos de contorno 35
F e a matriz de flexibilidade simetrica e H e uma matriz de transformacao
cinematica.
3.2.3Matriz de rigidez
Da equacao (3-32) e obtida a expressao p∗ que apos ser substituıda na
equacao (3-33), resulta em uma outra equacao que e
K (d− dp) = p− pp (3-36)
onde
K = HTF(−1)H (3-37)
K e a matriz de rigidez simetrica que transforma deslocamentos em forcas.
Sendo a matriz de flexibilidade F singular, precisa-se utilizar para sua inversao
a tecnica de inversa generalizada, que considera uma base ortonormal V ≡ Vmr
do espaco das forcas p∗ do sistema interno
F(−1) = F + VVT. (3-38)
3.3O Metodo Hıbrido Simplificado dos Elementos de Contorno
Como consequencia das investigacoes das propriedades das equacoes
matriciais do metodo hıbrido dos elementos de contorno, foi proposto o metodo
hıbrido simplificado dos elementos de contorno em [5]. O metodo baseia-se nas
mesmas hipoteses do metodo hıbrido dos elementos de contorno (aproximacoes
de tensoes σij no domınio Ω e deslocamentos ui no contorno Γ) e na suposicao
de que a solucao fundamental em termos de deslocamentos u∗i tambem e valida
no contorno Γ.
3.3.1Formulacao do metodo
Considerando que a parte do contorno Γu sera levada em conta somente
apos a formulacao matricial do problema, ou seja, Γσ ≡ Γ e ti ≡ ti,∫Ω
σijδεijdΩ =
∫Ω
biuidΩ +
∫Γ
tidΓ. (3-39)
Substituindo δεij = δui,j (obtida considerando das equacoes (2-4) e (2-5)).
Integrando por partes e aplicando o teorema da divergencia resulta

Capıtulo 3. Metodos de elementos de contorno 36
∫Γ
tsiδuidΓ−∫
Ω
σsij,jδuidΩ =
∫Ω
biuidΩ +
∫Γ
tidΓ. (3-40)
Realizando a discretizacao dos integrandos pelas equacoes [3-12] e [3-13]
no contorno e pelas equacoes [4-6] e [4-7] no domınio, considerando as equacoes
[2-27] e [2-28], obtemos
δdn
[(∫Γ
tsiδuidΓ− δimuin)p∗m −
∫Γ
tiuindΓ +
∫Γ
σpijηjuindΓ
]= 0 (3-41)
ou
δdn [Hmnp∗m − pn + ppn] = 0 (3-42)
onde, para qualquer valor de δn, resulta na equacao matricial de equilıbrio
HTp∗ = (p− pp) . (3-43)
Observamos que a equacao (2-25), onde o campo de deslocamentos usi
do corpo elastico e expresso a partir do campo de tensoes σsij definido pelas
equacoes (2-23) e (2-30), em principio valida para o domınio pode ser estendida
para ser utilizada no contorno e reescrita em forma conveniente como
u∗imp∗m + urisCsmp
∗m = usi − u
pi em Γ. (3-44)
Avaliando a equacao (3-44) nos pontos nodais ao longo do contorno Γ
e escolhendo um conjunto de funcoes de deslocamentos de corpo rıgido uris
de forma que, quando medida nos pontos nodais do contorno, resulte na base
ortonormal W, obtem-se a equacao matricial
U*p∗ + WCp∗ = d− dp. (3-45)
Pre-multiplicando a equacao acima pelo projetor ortonormal aos deslo-
camentos de corpo rıgido P⊥W = I−WWT, temos
P⊥WU*p∗ = P⊥W(d− dp), (3-46)
ja que P⊥WW = 0. Esta equacao de compatibilidade nodal de deslocamentos
juntamente com a equacao de equilıbrio nodal de forcas dada pela equacao (3-
43), formam o sistema de equacoes matriciais do metodo hıbrido simplificado
dos elementos de contorno.

Capıtulo 3. Metodos de elementos de contorno 37
U*p∗ = (d− dp)
HTp∗ = (p− pp)
(3-47)
A matriz U* requer somente a avaliacao da solucao fundamental em
termos de deslocamentos diretamente nos pontos nodais. A matriz H e a matriz
de transformacao cinematica ja estudada nos metodos anteriores.

4O Metodo Expedito dos Elementos de Contorno
Neste capıtulo e apresentado o desenvolvimento da formulacao do metodo
expedito dos elementos de contorno. Apresenta-se os principais conceitos
e definicoes para obter as equacoes matriciais de equilıbrio. A formulacao
apresentada e desenvolvida para problemas de elasticidade linear, caso mais
geral. No entanto, pode-se migrar facilmente e aplica-lo em problemas de
potencial, desde que sejam bem entendidos os parametros de equivalencia
entre ambos tipos de problemas. Exemplos de aplicacao serao apresentados
no proximo capıtulo.
4.1Enunciados a partir do Princıpio dos trabalhos virtuais
Enunciados do princıpio dos trabalhos virtuais sao incondicionalmente
necessarios na justificativa do metodo expedito dos elementos de contorno
[12, 19]. Sao teoremas que devem ser provados a partir de alguns axiomas
mecanicos. Alguns deles ja foram tratados de forma abrangente em estudos
associados com o metodo hıbrido dos elementos de contorno em [8, 10, 12, 13].
A definicao 1 e importante para manter coerencia total das equacoes e
tambem facilita o entendimento. Alguns enunciados sobre o trabalho virtual
sao descritos a seguir.
Definicao 1 Seja nr o numero de deslocamentos de corpo rıgido independen-
tes de um problema de elasticidade em geral. Em seguida, nr = 3 ou nr = 6 para
problemas 2D ou 3D (e nr = 1 para problemas de potencial). Problemas que
envolvem simetria apresentam diferentes valores de nr. Pode-se eventualmente
ter nr = 0 como no caso de domınios infinitos. Os deslocamentos de corpo
rıgido W ∈ Rnd sao medidos atraves das colunas de uma matriz W ∈ Rnd×nr
que e ortogonal por conveniencia.
4.1.1Enunciado associado com o deslocamento
Partindo do potencial de Hellinger-Reissner [8, 15] chega-se a seguinte
equacao de equilıbrio

Capıtulo 4. O Metodo Expedito dos Elementos de Contorno 39
Hmnp∗m = pn − ppn ou HTp∗ = p− pp, (4-1)
onde H = [Hmn] ∈ Rnd×n∗e a mesma matriz de potencial duplo do metodo
dos elementos de contorno convencional [3], ja introduzida em (3-24). Alem
disso, p = [pn] ∈ Rnd e pp = [ppn] ∈ Rnd sao definidas como
pn =
∫Γ
σjiηjuindΓ, ppn =
∫Γ
σpjiηjuindΓ (4-2)
onde, pn e pdn, sao vetores de carregamento nodal equivalente correspondentes
as forcas de superfıcie aplicadas, conforme indicado na equacao (2-2) e equacao
(2-24), no caso da solucao particular, respectivamente.
4.1.2Relacoes entre os campos aproximados fornecidos por d e t
Pode ser conveniente expressar as forcas de superfıcie aproximadas tti da
equacao (2-27), em termos de carregamentos nodais equivalentes pm, a partir
do princıpio dos trabalhos virtuais
δdmpm(t) = δdm
∫Γ
uimti`dΓt` (4-3)
⇒ pm(t) = L`mt` ou p(t) = LTt (4-4)
onde as funcoes de interpolacao das equacoes (2-21) e (2-27) foram usadas,
definindo assim
L = [L`m] ∈ Rnt×nd =
∫Γ
ti`uimdΓ. (4-5)
Como dado na equacao (4-4), LT executa uma transformacao de
equilıbrio dos parametros de forcas de superfıcie t para carregamentos nodais
equivalentes p(t). A notacao p(t) significa que as forcas nodais equivalentes
p sao apresentadas como funcoes das forcas de superfıcie t. Observe-se que,
de acordo com Definicao 1, WT(p(t) − pp) = WTLT(t − tp) = 0 para um
problema formulado de forma consistente.
Expressando as relacoes de contragradiencia
p(t) = LTt ⇒ dt(d) = Ld, (4-6)
onde dt(d) sao deslocamentos nodais equivalentes definidos de tal modo que
δtTdt(d) tem o significado de trabalho virtual. Esta relacao de contragradiencia

Capıtulo 4. O Metodo Expedito dos Elementos de Contorno 40
faz parte do metodo hıbrido dos elementos de contorno de deslocamento, que
pode ser derivado a partir do potencial Hu [10, 26].
4.1.3Relacoes entre os campos aproximados fornecidos por d e p∗
Obtem-se a partir da equacao (4-1), a relacao de contragradiencia
p(p∗) = HTp∗ ⇒ d∗(d) = Hd (4-7)
onde d∗(d) sao deslocamentos nodais equivalentes definidos de tal modo que
δp∗Td∗(d) tem o significado de trabalho virtual.
4.1.4Subespacos de forcas admissıveis para os campos de aproximacoes
A matriz W de deslocamentos de corpo rıgido nodais, foi introduzido na
Definicao 1, sendo que e tambem o sub-espaco das forcas p desequilibradas.
Como foi mostrado no paragrafo apos a equacao (4-5), as colunas de WTLT
abrangem o subespaco das forcas t desequilibradas [9]. Para um domınio
finito, as colunas de W sao os espacos nulos de H. Em seguida obtem-se
dada a consistencia da equacao (4-1), que as forcas equilibradas p∗ devem ser
ortogonais ao espaco nulo V de HT [8]. Estas conclusoes sao formalizadas no
seguinte teorema.
Teorema 1 As colunas das matrizes W,WL e V abrangem os subespacos de
deslocamentos de corpo rıgido dos campos aproximados, representados pelos
parametros d ,dt e d∗, respectivamente. Cada um dos vetores p, t e p∗,
representam as forcas nodais que estao em equilıbrio se e somente se WTp = 0,
WTLTt = 0 e VTp∗ = 0, respectivamente.
4.1.5Aproximacao da matriz de potencial duplo H
A equacao (2-25), em princıpio, valida no domınio Ω, e aplicada aos nos
do contorno Γ [10, 15]. Assim, udi (da equacao (2-21)) e usi devem coincidir ao
longo do contorno Γ,
U∗p∗ + WCp∗ = (d− dp) , (4-8)
onde WCp∗ representa uma quantidade de deslocamento de corpo rıgido que
nao pode ser transformado entre os campos de aproximacao cujos parametros
sao p∗ e d. A equacao acima e um enunciado muito simples, exceto que ha uma

Capıtulo 4. O Metodo Expedito dos Elementos de Contorno 41
quantidade incorporada de deslocamento de corpo rıgido e - o mais importante
- que os termos de U∗ = [U∗ns] ∈ Rnd×nd para m e n referentes ao mesmo no,
nao podem ser avaliados diretamente.
Afirmamos pelo Teorema 1 que, se o conjunto de parametros de forca p∗
na equacao (4-8), corresponde as forcas de equilıbrio, entao VTp∗= 0 ⇒WCp∗= 0 [15] e o seguinte enunciado de contragradiencia
U∗p∗ = d(p∗)⇒ U∗Tp = d∗(p) desde que VTp∗ = 0, WTp = 0 (4-9)
Seguidamente, se utiliza a equacao (4-4) para definir um conjunto de
carregamentos nodais equivalentes p(t) e a equacao (4-7) para definir um
conjunto de deslocamentos nodais equivalentes d∗(d). Assim, o lado direito
da equacao acima torna-se
U∗TLTt = Hd (4-10)
Comparando esta equacao com a equacao (3-24), obtemos
U∗TLT ≈ G (4-11)
que pode-se obter formalmente no quadro de um teorema de energia [15, 16].
4.1.6Aproximacao da matriz de potencial simples G
A equacao (4-8) foi obtida atraves da simples afirmacao de que a equacao
(2-21) deve manter-se para os pontos nodais ao longo do contorno Γ (na verdade
tem uma base variacional [8, 10, 15]). Uma afirmacao semelhante pode ser feita
para as forcas de superfıcie ao longo do contorno Γ,
T∗p∗ = t(p∗) (4-12)
com a introducao da matriz T∗ = [T ∗`m] ∈ Rnt×n∗das forcas de superfıcie,
obtida atraves da medicao do efeito σ∗ijmηj em um no do contorno e sua
direcao caracterizada por ` causada por uma forca unitaria p∗m, de acordo
com a equacao (2-24). A aplicacao de uma instrucao de contragradiencia [16]
leva a
T∗p∗ = t(p∗) ⇒ T∗Tdt = d∗(dt) (4-13)
onde a parte de deslocamento de corpo rıgido e excluıda.

Capıtulo 4. O Metodo Expedito dos Elementos de Contorno 42
A expressao do lado direito equacao da 4-13, pode ser escrita num formato
amigavel, para isso se recorre as expressoes de dt e d∗ nas equacoes (4-6) e
(4-7)
T∗TLd = Hd (4-14)
que envolvem apenas deslocamentos nodais d. Desde que HW = 0 para
um domınio finito Ω, deslocamentos nodais equivalentes sao automaticamente
excluıdos.
Entao, pode-se concluir que
T∗TL ≈ H (4-15)
desde que, as condicoes de T∗ = T ∗`m para m e ` referindo-se ao mesmo ponto
nodal, sejam de alguma forma avaliadas e que pelo menos uma garanta que
T∗TLW = 0 para um Ω finito. (4-16)
4.2Aproximacao dos deslocamentos e das forcas de superfıcie no contorno
No metodo expedito dos elementos de contorno, resultados de tensoes σsij
e deslocamentos usi em pontos internos sao dados diretamente pelas equacoes
(2-23) e (2-25) em termos de parametros de forcas p∗m avaliados apos a solucao
da equacao (3-24). Esta forma de representacao de resultados no domınio Ω
que contorna o uso computacional intensivo da identidade de Somigliana, no
metodo convencional dos elementos de contorno, e proprio do metodo hıbrido
dos elementos de contorno [9, 10, 12, 15]. De acordo com isso, as equacoes
(2-23) e (2-25) sao aplicadas aos nos do contorno [10, 15]
U∗p∗ = d(p∗), (4-17)
T∗p∗ = t(p∗). (4-18)
Na equacao (4-17) sao excluıdas as partes de deslocamento de corpo rıgido
e forcas desequilibradas. Na equacao (4-18) e excluıda a parte das forcas
desequilibradas que nao podem tomar parte nas transformacoes lineares. A
definicao de deslocamento de corpo rıgido e simples e intuitiva. A definicao
de forcas desequilibradas nao e intuitiva em termos de parametros de forcas
internas p∗. Entretanto, e simples por meio de algebra linear. Nas equacoes
acima o argumento (p∗) indica que os atributos de deslocamentos nodal e

Capıtulo 4. O Metodo Expedito dos Elementos de Contorno 43
forca de superfıcie sao funcoes dos parametros de forcas pontuais da solucao
fundamental.
As duas ultimas equacoes sao obtidas de modo muito simples (nao
sao incorporadas as partes de deslocamento de corpo rıgido e as das forcas
desequilibradas que nao podem ser transformadas). Alem disso, os coeficientes
da matriz de deslocamentos U∗ = [U∗mn] ∈ Rnd×nd e da matriz de forcas de
superfıcie T∗ = [T ∗`m] ∈ Rnt×n∗sao indefinidos (e nao infinitas) quando seus
ındices referem-se ao mesmo ponto nodal [16].
4.3Expressoes do Metodo Expedito dos Elementos de Contorno
A equacao (3-24) escrita em forma matricial e repetida em notacao
indicial com a finalidade de clareza[∫Γ
σ∗ijmηjuindΓ
](dn − dpn) ∼=
[∫Γ
ti`u∗imdΓ
](t` − tp`) (4-19)
onde ∼= significa congruencia em termos de resıduos ponderados ja que existe
um erro de aproximacao inerente [9, 13]. Utilizando as funcoes de interpolacao
do contorno das equacoes (2-21) e (2-27) nas solucoes fundamentais proprias,
a equacao acima pode ser aproximada como
T ∗`m
[∫Γ
ti`uindΓ
](dn − dpn) ≈ U∗nm
[∫Γ
ti`uindΓ
](t` − tp`) (4-20)
Esta e a primeira vista uma iniciativa ousada que exige uma justificativa
adequada.
A aproximacao envolvendo U∗nm resulta do metodo hıbrido dos elementos
de contorno atraves da aplicacao do principio dos trabalhos virtuais [10]. Uma
questao importante a ter em conta, neste caso, e a avaliacao adequada dos
coeficientes quando m e n referem-se ao mesmo ponto nodal, questao que e
abordada com mais detalhe na secao 4.3.3.
A aproximacao envolvendo T ∗`m e mais difıcil de justificar e e em princıpio
questionavel, embora se possa usar o principio dos trabalhos virtuais e recorrer
a [16, 19] para um melhor entendimento.
E importante no desenvolvimento do metodo proposto admitir que a
aproximacao nao pode ser aplicada diretamente numa integral de contorno
onde existe uma singularidade forte, o que acontece quando m e n, equacao
(4-19), pertencem ao mesmo elemento de contorno. O raciocınio por tras disso
e que nao e possıvel aproximar forcas de superfıcie σ∗ijmηj quando σ∗ijm →∞ no
intervalo do contorno considerado, mesmo no caso em que o produto σ∗ijmηjuin

Capıtulo 4. O Metodo Expedito dos Elementos de Contorno 44
fosse finito. Uma forma consistente de lidar com esta questao e proposto na
proxima secao.
Usando as definicoes das matrizes U∗nm, T ∗`m e L`m nas equacoes (4-17),
(4-18) e (4-5) e substituindo = por ≈ na equacao (4-20), pode-se reescrever a
equacao matricial como
T∗TL(d− dp) = U∗TLT(t− tp) (4-21)
Observa-se que substituindo as aproximacoes das matrizes G e H, obtidas
nas equacoes (4-11) e (4-15), respectivamente, na equacao (3-24) do metodo
convencional dos elementos de contorno, obtem-se a equacao (4-21).
Substituindo, na equacao (4-21), a notacao
H ≡ T∗TL (4-22)
com a finalidade de simplifica-la, obtemos finalmente a equacao do metodo
expedito dos elementos de contorno na sua forma matricial
H(d− dp) = U∗TLT(t− tp) (4-23)
A equacao (4-23) e uma aproximacao razoavel da equacao (3-24), do
metodo convencional dos elementos de contorno, desde que os coeficientes
indefinidos das matrizes U∗ e T∗ sejam resolvidos adequadamente. A equacao
(4-23) pode ser escrita de forma alternativa de acordo com a equacao (4-4)
em termos do vetor de carregamento nodal equivalente p como no metodo de
elementos Finitos
H(d− dp) = U∗T(p− pp) (4-24)
o que representa uma vantagem operativa adicional do metodo proposto.
4.3.1Avaliacao dos coeficientes da matriz Lbl
A matriz L da equacao (4-5), foi definida como
L = [L`m] ∈ Rnt×nd =
∫Γ
ti`uimdΓ (4-25)
De acordo com a equacao (2-27), o Jacobiano de dΓ = |J |dξdη, tambem
valido para problemas em tres dimensoes, cancela-se com o denominador de
ti` de tal modo que os coeficientes de L`m sejam numeros pre-definidos e
independentes da geometria do problema. Uma caracterıstica importante da

Capıtulo 4. O Metodo Expedito dos Elementos de Contorno 45
matriz L`m e ser uma matriz em banda cujos coeficientes se referem apenas
as funcoes de interpolacao do contorno Γ, de suporte local, e podem ser
avaliadas analiticamente e independentemente [13], o que mostra que a matriz
L na verdade esta formada por pequenos blocos de matrizes iguais Lbl e nao
precisa ser montada numa implementacao adequada. As matrizes Lbl podem
ser utilizadas como dados de entrada basicos numa implementacao de codigo
de programacao computacional sao previamente calculadas para cada tipo de
elemento utilizado nas implementacoes bidimensionais ou tridimensionais (ver
Apendice B).
4.3.2
Avaliacao dos coeficientes indefinidos de H
A matriz de forcas de superfıcie T∗ e retangular. No entanto, os coefici-
entes indefinidos da matriz quadrada H ≡ T∗TL na equacao (4-23) sao o tema
atual de interesse. A matriz L, como definida na equacao (4-5), tem o mesmo
numero de linhas e colunas que T∗, mas os coeficientes diferentes de zero da
matriz L`m estao agrupados se o deslocamento nodal δdm e os atributos de
forcas de superfıcie t` referem-se ao mesmo segmento do contorno (elemento).
Figura 4.1: Estrutura formada por seis nos e tres elementos quadraticos para ilustracaona construcao das matrizes.
A Figura (4.1) mostra um triangulo com seis nos para uma discretizacao
em termos de tres elementos quadraticos. Um ou dois graus de liberdade sao
associados por no dependendo do tipo de problema (potencial ou elasticidade
em duas dimensoes). As duas matrizes correspondentes T∗ e L necessarias para
o calculo de H sao dadas esquematicamente em forma de submatrizes a seguir

Capıtulo 4. O Metodo Expedito dos Elementos de Contorno 46
T∗=
1 2 3 4 5 6
1
2
3
4
5
6
7
8
9
u ∼ ∼ × × ×∼ u ∼ × × ×∼ ∼ u × × ×× × u ∼ ∼ ×× × ∼ u ∼ ×× × ∼ ∼ u ×∼ × × × u ∼∼ × × × ∼ u
u × × × ∼ ∼
(4-26)
L =
1 2 3 4 5 6
1
2
3
4
5
6
7
8
9
× × × 0 0 0
× × × 0 0 0
× × × 0 0 0
0 0 × × × 0
0 0 × × × 0
0 0 × × × 0
× 0 0 0 × ×× 0 0 0 × ×× 0 0 0 × ×
(4-27)
em que os sımbolos “×”representam os coeficientes que sao gerados direta-
mente nas matrizes e os sımbolos “u”representam coeficientes indefinidos. Os
coeficientes representados como “∼”sao atualmente conhecidos, mas eles cor-
respondem aos nos que estao adjacentes aos coeficientes indefinidas e, no pro-
duto H ≡ T∗TL, levam a resultados de coeficientes que envolvem uma inde-
finicao, consequentemente correspondem ao caso em que a aproximacao em
termos de ti` na equacao (4-20) nao se aplica. A solucao para contornar a inde-
finicao consiste em atribuir a estes coeficientes os valores correspondentes da
matriz original H da equacao (3-25) o que leva a
H =
1 2 3 4 5 6
1
2
3
4
5
6
u H1,2 H1,3 × H1,5 H1,6
H2,1 u H2,3 × × ×H3,1 H3,2 u H3,4 H3,5 ×× × H4,3 u H4,5 ×H5,1 × H5,3 H5,4 u H5,6
H6,1 × × × H6,5 u
(4-28)

Capıtulo 4. O Metodo Expedito dos Elementos de Contorno 47
Os coeficientes indicados com H sao avaliados usando quadratura de
Gauss-Legendre na integracao desde que nao haja singularidades envolvidas.
A forma mais simples de se obter os coeficientes desconhecidos “u”e aplicando
algumas propriedades de deslocamentos de corpo rıgido, como as vezes e imple-
mentado no metodo convencional de elementos de contorno. O procedimento
e resumida em [16, 19, 20].
Algoritmo para a avaliacao dos coeficientes indefinidos de H ≡ T∗TL.
1. Se os ındices (m,n) da matriz H referem-se a um segmento do contorno
nao adjacente a uma singularidade, entao basta avaliar o coeficiente como
o produto T∗TL.
2. Se os ındices (m,n) referem-se a um no, que fica adjacente a uma sin-
gularidade, entao o coeficiente deve ser substituıdo com o valor corres-
pondente de H, equacao (3-25), que requer a avaliacao de uma integral
regular por quadratura de Gauss (uin = 0 no ponto de singularidade).
3. Se os ındices (m,n) referem-se a um no afetado diretamente por uma
singularidade, basta avaliar os coeficientes forcando a matriz ser orto-
gonal ao deslocamento de corpo rıgido (para domınios infinitos, usar o
domınio complementar limitado. No caso de simetria, quando o numero
de deslocamentos de corpo rıgido nao e suficiente, adicionalmente aplicar
uma solucao analıtica simples ao problema.)
Para problemas de potencial, ha apenas uma constante potencial e
tambem apenas um valor desconhecido por no, tanto para problemas 2D ou
3D, e uma avaliacao exata dos coeficientes indefinidos sempre e possıvel. Para
problemas de elasticidade em geral, existem tres ou seis estados de tensao
constante, para problemas 2D ou 3D, e duas ou tres incognitas, que devem ser
avaliados utilizando a teoria de mınimos quadrados. Os problemas relacionados
com a avaliacao dos coeficientes indeterminados da matriz H estao resumidos
na tabela 4.1.
4.3.3Avaliacao dos Coeficientes Indefinidos de U∗
Uma vez que os coeficientes indefinidos de H sao avaliados, podem ser
utilizados na avaliacao dos coeficientes indefinidos “u”da matriz U∗ como
ilustrado na equacao (4-30) para o exemplo da Figura (4.1), aplicando um
numero necessario de solucoes analıticas, (Da,Ta) ou (Da,Pa) e uma solucao
por mınimos quadrados
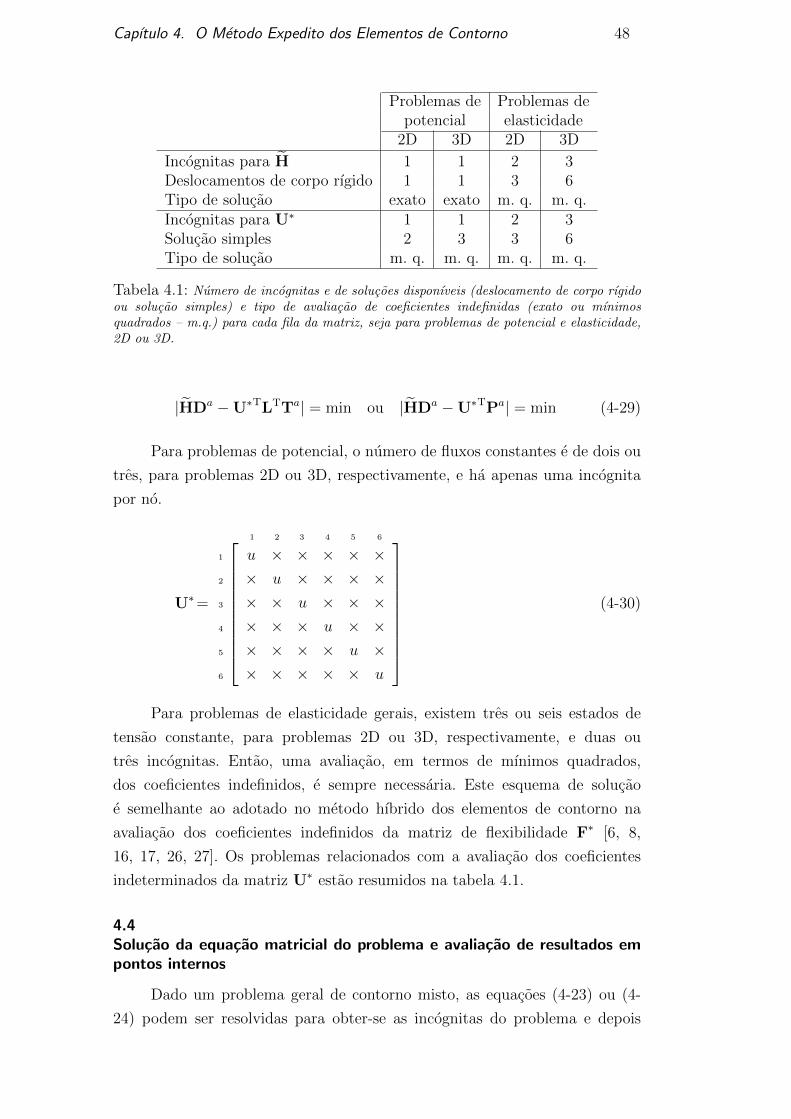
Capıtulo 4. O Metodo Expedito dos Elementos de Contorno 48
Problemas de Problemas depotencial elasticidade
2D 3D 2D 3D
Incognitas para H 1 1 2 3Deslocamentos de corpo rıgido 1 1 3 6Tipo de solucao exato exato m. q. m. q.Incognitas para U∗ 1 1 2 3Solucao simples 2 3 3 6Tipo de solucao m. q. m. q. m. q. m. q.
Tabela 4.1: Numero de incognitas e de solucoes disponıveis (deslocamento de corpo rıgidoou solucao simples) e tipo de avaliacao de coeficientes indefinidas (exato ou mınimosquadrados – m.q.) para cada fila da matriz, seja para problemas de potencial e elasticidade,2D ou 3D.
|HDa −U∗TLTTa| = min ou |HDa −U∗TPa| = min (4-29)
Para problemas de potencial, o numero de fluxos constantes e de dois ou
tres, para problemas 2D ou 3D, respectivamente, e ha apenas uma incognita
por no.
U∗=
1 2 3 4 5 6
1
2
3
4
5
6
u × × × × ×× u × × × ×× × u × × ×× × × u × ×× × × × u ×× × × × × u
(4-30)
Para problemas de elasticidade gerais, existem tres ou seis estados de
tensao constante, para problemas 2D ou 3D, respectivamente, e duas ou
tres incognitas. Entao, uma avaliacao, em termos de mınimos quadrados,
dos coeficientes indefinidos, e sempre necessaria. Este esquema de solucao
e semelhante ao adotado no metodo hıbrido dos elementos de contorno na
avaliacao dos coeficientes indefinidos da matriz de flexibilidade F∗ [6, 8,
16, 17, 26, 27]. Os problemas relacionados com a avaliacao dos coeficientes
indeterminados da matriz U∗ estao resumidos na tabela 4.1.
4.4Solucao da equacao matricial do problema e avaliacao de resultados empontos internos
Dado um problema geral de contorno misto, as equacoes (4-23) ou (4-
24) podem ser resolvidas para obter-se as incognitas do problema e depois

Capıtulo 4. O Metodo Expedito dos Elementos de Contorno 49
os resultados em pontos internos podem ser obtidos usando a Identidade de
Somigliana como e feito no metodo convencional dos elementos de contorno.
No entanto, no quadro atual, os resultados podem ser obtidos diretamente
utilizando o vetor de parametros de forcas p∗, segundo as equacoes (2-23) e
(2-25), o que dispensa as integracoes adicionais.
A avaliacao do vetor p∗ pode ser realizada atraves da resolucao da
equacao (4-1) e a singularidade presente em termos de algebra linear, nao
apresenta maiores dificuldades reais [6, 15, 16, 17, 26, 27].
Uma forma mais eficiente de tratar o problema colocado no paragrafo
anterior consiste na avaliacao de todas as incognitas nodais - deslocamentos
e forcas nodais, alem do parametro de forcas nodais p∗ - por resolucao de
um sistema de equacoes matriciais simples. A ideia basica e comecar com as
equacoes (4-17) e (4-1), aqui repetidas para maior clareza incluindo tambem
os vetores da solucao particular
U∗p∗ = d− dp, HTp∗ = p− pp (4-31)
A atribuicao aos sub vetores d e p de subscritos D ou N e para caracterizar
se as condicoes de contorno sao do tipo Dirichlet ou Neumann, as equacoes
acima podem ainda ser representadas como[U∗N
U∗D
]p∗ =
dN − dpNdD − dpD
,
[H
T
N
HT
D
]p∗ =
pN − ppNpD − ppD
(4-32)
Em seguida, o sistema de equacoes pode ser resolvido em primeiro lugar para
p∗, desde que o problema esteja bem colocado[H
T
N
U∗D
]p∗ =
pN − ppNdD − dpD
(4-33)
com uma posterior avaliacao das forcas de superfıcie e os parametros de
deslocamento[dN
pD
]=
dpNppD
+
[U∗N
HT
D
]p∗ (4-34)
As tensoes e os deslocamento em qualquer ponto do domınio sao obtidos
em termos de p∗ diretamente por meio das equacoes (2-23) e (2-25). O
deslocamento de corpo rıgido implıcito na equacao (2-25) e uma questao
que pode ser tratada de forma direta, da mesma forma como e avaliado no
ambito do metodo hıbrido dos elementos de contorno. E importante ressaltar
que as caracterısticas em questao de algebra linear da equacao (4-33) e

Capıtulo 4. O Metodo Expedito dos Elementos de Contorno 50
fundamentalmente diferente do sistema de equacoes normalmente representado
no metodo de elementos de contorno convencional [3].

5Aplicacoes Numericas
Neste capıtulo apresentam-se exemplos numericos que permitem avaliar
a eficiencia da formulacao do metodo expedito dos elementos de contorno.
Diversas aplicacoes, para problemas de elastostatica linear e problemas de
potencial em regime permanente, sao apresentadas. Solucoes particulares
arbitrarias da parte nao homogenea, σpji,j + bi = 0 ou up,ii + Q/k = 0,
das equacoes diferenciais que governam os problemas, equacoes (2-1) e (2-
16), resolvidas numericamente usando uma formulacao com funcoes wavelet
de Daubechies e interpolets de Deslauriers-Dubuc [4] sao fornecidas para
serem utilizados de forma conjunta com o metodo expedito dos elementos
de contorno. Com o intuito de validar os resultados das solucoes, estas sao
comparados com resultados de solucoes analıticas quando esta existe. Todos
os algoritmos foram gerados em codigo Fortran com precisao dupla (16 dıgitos
decimais).
5.1Estudos de convergencia em problemas de potencial 2D
A Figura 5.1 mostra um domınio de forma irregular, discretizado com
124 nos, para a qual algumas das equacoes e conceitos expostos em capıtulos
anteriores serao avaliados numericamente. Como o objetivo, por enquanto, e
avaliar a convergencia das matrizes U∗TLT e T∗TL do metodo expedito dos
elementos de contorno em comparacao com as matrizes G e H, respectiva-
mente, do metodo convencional dos elementos de contorno. Foi utilizado para
o teste de convergencia a equacao de Laplace em duas dimensoes
∇2u = 0 (5-1)
sem levar em conta as condiciones de contorno prescritas.
A Figura 5.1 tem como coordenadas os pontos 1(0, 0), 17(10, 20),
33(20, 0), 61(15, 35), 77(0, 20), 93(17, 19), 101(16, 22), 109(21, 24) e 117(22, 20).
Os quatro segmentos curvos do contorno tem raios de curvatura 20, 15, 4 e −4.
O problema e modelado utilizando elementos lineares, quadraticos e cubicos

Capıtulo 5. Aplicacoes Numericas 52
como funcoes de interpolacao, com malhas cada vez mais refinadas (ver a Ta-
bela 5.1 para mais detalhes).
−5 0 5 10 15 20 25 30
0
5
10
15
20
25
30
35
101
109
117
12493
C
BA
921 33
61
1777
Figura 5.1: Discretizacao do contorno com uma malha de 124 nos para o domınio irregular.Para o estudo de convergencia foram utilizados elementos lineares, quadraticos e cubicos. A,B e C sao pontos fonte.
Tipo de elemento Numero total de nosLinearQuadratico
31 62 124 248 496 992 1984 –– 62 124 248 496 992 1984 3968
Cubico – 93 186 372 774 1488 2976 –
Tabela 5.1: Numero total de nos utilizados nas diferentes malhas testadas para cada tipode elemento (linear, quadratico ou cubico).
5.1.1Convergencia do metodo convencional dos elementos de contorno
A fim de estimar a maior precisao numerica que se possa esperar nos
testes, avaliamos primeiro a convergencia do metodo convencional dos elemen-
tos de contorno, equacao (3-24), utilizando na interpolacao dos gradientes de
superfıcie a equacao (2-27). Os resultados sao expressos em termos da norma
de erro
ε (Hd−Gt) =‖ Hd−Gt ‖‖ Hd ‖
(5-2)
para o conjunto de solucoes analıticas de contorno (d, t) correspondentes
aos campos potenciais da Tabela 5.2. Os resultados de convergencia obtidos
utilizando elementos cubicos sao mostrados na Figura 5.2. Os resultados sao
quase indistinguıveis entre os diferentes campos potenciais, exceto quando
campos lineares, S1a ou S1b, sao aplicados. Isto acontece porque a norma de erro
da equacao (5-2) e igual a zero (sem erros de integracao numerica), quando

Capıtulo 5. Aplicacoes Numericas 53
se utiliza o metodo convencional dos elementos de contorno modificado em
contornos curvos, o que nao acontece no metodo convencional.
102
103
10−8
10−6
10−4
10−2
Número de pontos nodais
err
o
s2a
s3b
s2b
s3a
s4a
s4b
s1b
s1a
sLgA
sLgB
Figura 5.2: Avaliacao da convergencia da equacao (5-2), para os campos potenciais daTabela 5.2, com a finalidade de estabelecer um ponto de erro como referencia de convergencia.
A Figura 5.2 mostra o padrao de convergencia esperado de um metodo
numerico consistente, com normas de erro de ε ≈ 10−7, ponto no qual os erros
de integracao numerica tendem a prevalecer e a precisao dificilmente melhora,
quando o refinamento da malha e aumentando.
Nome Campo potencialS1a xS1b yS2a xyS2b x2 − y2
S3a x3 − 3xy2
S3b y3 − 3x2yS4a x4 + y4 − 6x2y2
S4b x3y − xy3
Sln ln r2π
Tabela 5.2: Campos potenciais, obtidos analiticamente, aplicados para testar a con-vergencia das equacoes matriciais do modelo numerico da Figura 5.1.
5.1.2
Convergencia das matrizes H e U∗TLT
A Figura 5.3 mostra a representacao da convergencia dos erros em termos
das normas euclidianas
ε(H)
=‖ H−H ‖‖ H ‖
e (5-3)
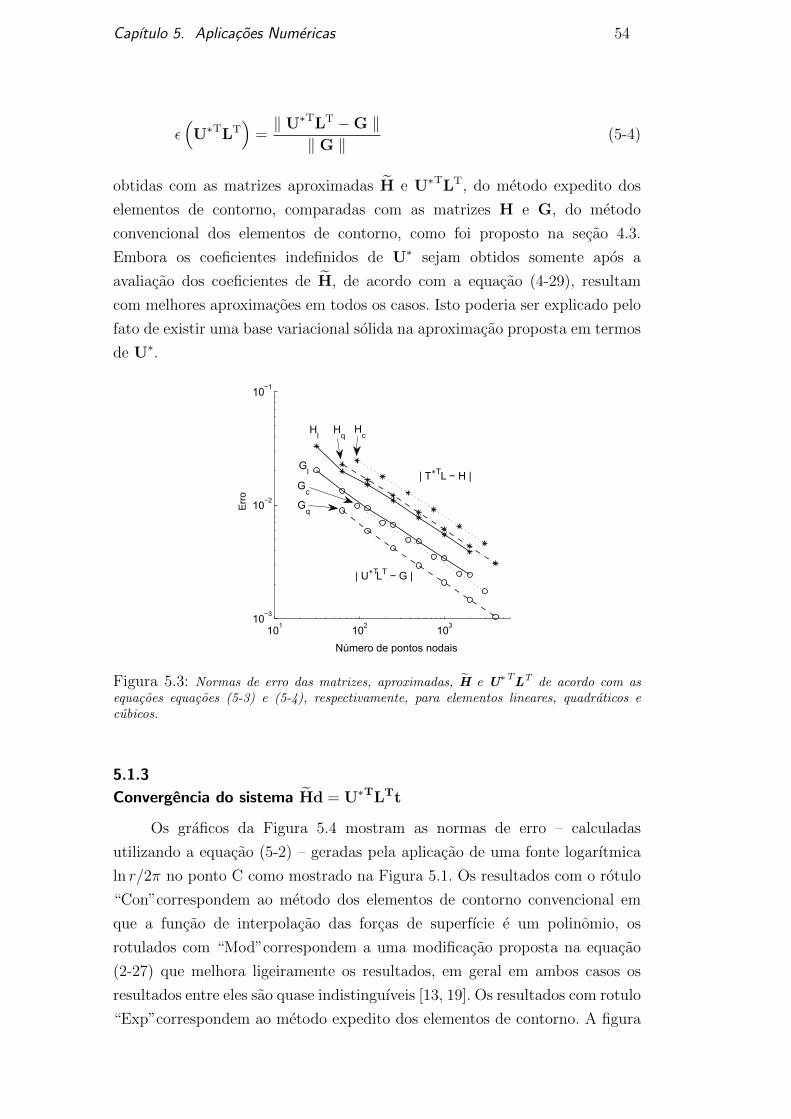
Capıtulo 5. Aplicacoes Numericas 54
ε(U∗TLT
)=‖ U∗TLT −G ‖
‖ G ‖(5-4)
obtidas com as matrizes aproximadas H e U∗TLT, do metodo expedito dos
elementos de contorno, comparadas com as matrizes H e G, do metodo
convencional dos elementos de contorno, como foi proposto na secao 4.3.
Embora os coeficientes indefinidos de U∗ sejam obtidos somente apos a
avaliacao dos coeficientes de H, de acordo com a equacao (4-29), resultam
com melhores aproximacoes em todos os casos. Isto poderia ser explicado pelo
fato de existir uma base variacional solida na aproximacao proposta em termos
de U∗.
101
102
103
10−3
10−2
10−1
Número de pontos nodais
Err
o
Hl
Hq
Hc
Gl
Gq
Gc
| T∗TL − H |
| U∗TLT − G |
Figura 5.3: Normas de erro das matrizes, aproximadas, H e U∗TLT de acordo com asequacoes equacoes (5-3) e (5-4), respectivamente, para elementos lineares, quadraticos ecubicos.
5.1.3
Convergencia do sistema Hd = U∗TLTt
Os graficos da Figura 5.4 mostram as normas de erro – calculadas
utilizando a equacao (5-2) – geradas pela aplicacao de uma fonte logarıtmica
ln r/2π no ponto C como mostrado na Figura 5.1. Os resultados com o rotulo
“Con”correspondem ao metodo dos elementos de contorno convencional em
que a funcao de interpolacao das forcas de superfıcie e um polinomio, os
rotulados com “Mod”correspondem a uma modificacao proposta na equacao
(2-27) que melhora ligeiramente os resultados, em geral em ambos casos os
resultados entre eles sao quase indistinguıveis [13, 19]. Os resultados com rotulo
“Exp”correspondem ao metodo expedito dos elementos de contorno. A figura

Capıtulo 5. Aplicacoes Numericas 55
mostra o padrao de convergencia esperado de um metodo numerico formulado
de forma consistente, com erros em ordem de ε ≈ 10−6.
102
103
104
10−8
10−6
10−4
10−2
100
Número de pontos nodais
Err
o
Conq≈Mod
q
Conc≈Mod
c
Expc
Expq
Conl≡Mod
l
Expl
102
103
104
10−8
10−6
10−4
10−2
100
Número de pontos nodaisE
rro
Conl≡Mod
l
Expq
ExplCon
c
Conq
Modq
Modc
Expc
Figura 5.4: Erros em escala logarıtmica calculados com a norma euclidiana para testar aconvergencia dos metodos de elementos de contorno estudados. Resultados gerados por umafonte potencial aplicada no ponto C da Figura 5.1. Esquerda: Piores resultados. Direita:Melhores Resultados.
No grafico da esquerda “Piores resultados”os resultados do metodo
expedito dos elementos de contorno sao inicialmente comparaveis com os
resultados do metodo convencional. No entanto, a taxa de convergencia e
menor para o Metodo expedito comparado com o metodo convencional. No
grafico da direita “Melhores resultados”os resultados do metodo convencional
sao melhores. No entanto, observa-se que o metodo expedito com uma maior
discretizacao deve dar resultados proximos. Os resultados do metodo expedito
sao consistentemente mais precisos do que as implementacoes do metodo
convencional usando elementos lineares, um padrao que e tambem observado
em outros exemplos numericos.
Vale observar a partir dos valores dos erros nos graficos das Figuras 5.3
e 5.4, que o metodo expedito conduz a matrizes que nao sao necessariamente
aproximacoes das matrizes do metodo convencional, como em geral mostram
os resultados numericos. O mesmo padrao de resultados tem sido observado
em outros exemplos numericos [16].
5.2
Verificacao da relacao HDa≈U∗TPa em problemas de potencial 3D
Dois testes de convergencia das matrizes aproximadas H e U∗T utili-
zando a relacao HDa ≈ U∗TPa para problemas de potencial 3D em regime
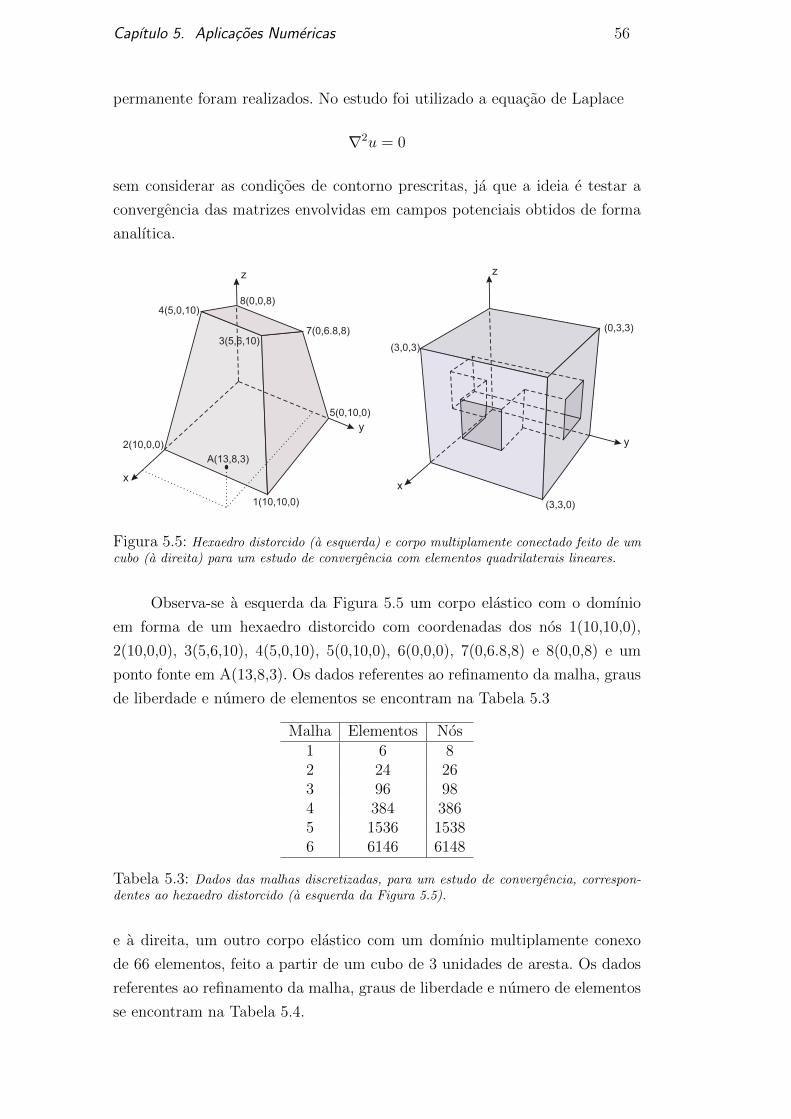
Capıtulo 5. Aplicacoes Numericas 56
permanente foram realizados. No estudo foi utilizado a equacao de Laplace
∇2u = 0
sem considerar as condicoes de contorno prescritas, ja que a ideia e testar a
convergencia das matrizes envolvidas em campos potenciais obtidos de forma
analıtica.
x
y
z
A(13,8,3)
1(10,10,0)
7(0,6.8,8)
8(0,0,8)
5(0,10,0)
2(10,0,0)
4(5,0,10)
3(5,6,10)
x
y
z
(0,3,3)
(3,3,0)
(3,0,3)
Figura 5.5: Hexaedro distorcido (a esquerda) e corpo multiplamente conectado feito de umcubo (a direita) para um estudo de convergencia com elementos quadrilaterais lineares.
Observa-se a esquerda da Figura 5.5 um corpo elastico com o domınio
em forma de um hexaedro distorcido com coordenadas dos nos 1(10,10,0),
2(10,0,0), 3(5,6,10), 4(5,0,10), 5(0,10,0), 6(0,0,0), 7(0,6.8,8) e 8(0,0,8) e um
ponto fonte em A(13,8,3). Os dados referentes ao refinamento da malha, graus
de liberdade e numero de elementos se encontram na Tabela 5.3
Malha Elementos Nos1 6 82 24 263 96 984 384 3865 1536 15386 6146 6148
Tabela 5.3: Dados das malhas discretizadas, para um estudo de convergencia, correspon-dentes ao hexaedro distorcido (a esquerda da Figura 5.5).
e a direita, um outro corpo elastico com um domınio multiplamente conexo
de 66 elementos, feito a partir de um cubo de 3 unidades de aresta. Os dados
referentes ao refinamento da malha, graus de liberdade e numero de elementos
se encontram na Tabela 5.4.
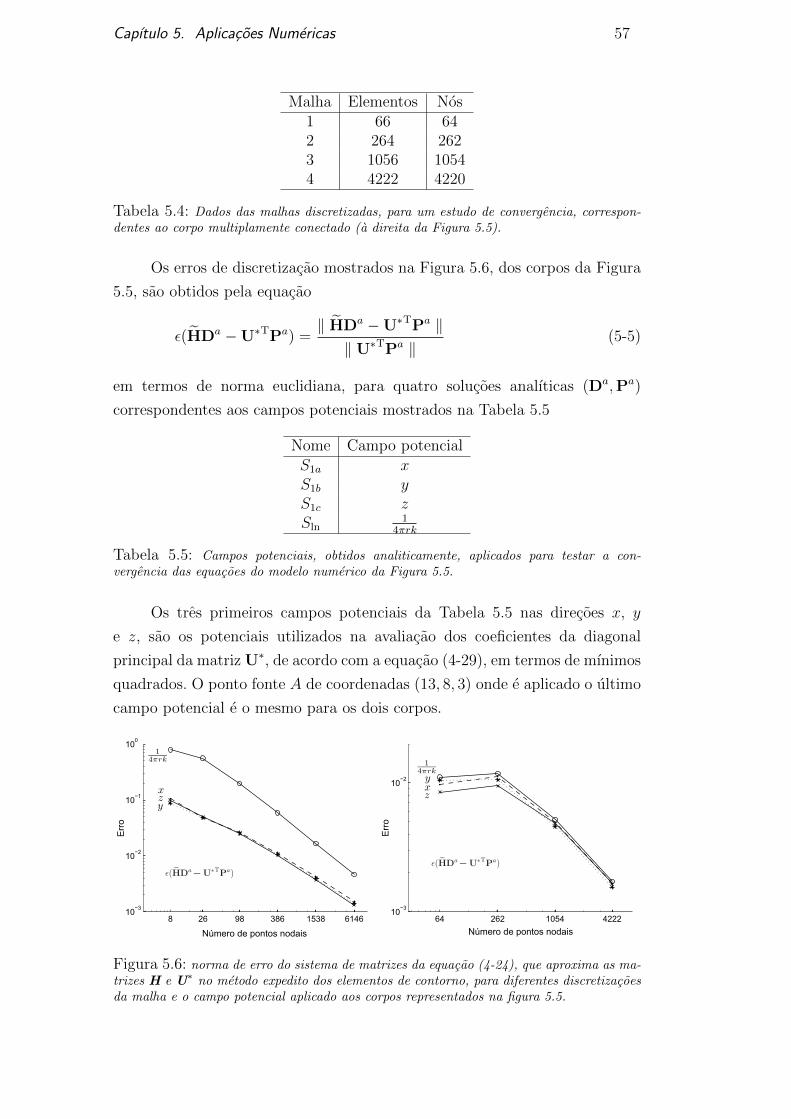
Capıtulo 5. Aplicacoes Numericas 57
Malha Elementos Nos1 66 642 264 2623 1056 10544 4222 4220
Tabela 5.4: Dados das malhas discretizadas, para um estudo de convergencia, correspon-dentes ao corpo multiplamente conectado (a direita da Figura 5.5).
Os erros de discretizacao mostrados na Figura 5.6, dos corpos da Figura
5.5, sao obtidos pela equacao
ε(HDa −U∗TPa) =‖ HDa −U∗TPa ‖‖ U∗TPa ‖
(5-5)
em termos de norma euclidiana, para quatro solucoes analıticas (Da,Pa)
correspondentes aos campos potenciais mostrados na Tabela 5.5
Nome Campo potencialS1a xS1b yS1c zSln
14πrk
Tabela 5.5: Campos potenciais, obtidos analiticamente, aplicados para testar a con-vergencia das equacoes do modelo numerico da Figura 5.5.
Os tres primeiros campos potenciais da Tabela 5.5 nas direcoes x, y
e z, sao os potenciais utilizados na avaliacao dos coeficientes da diagonal
principal da matriz U∗, de acordo com a equacao (4-29), em termos de mınimos
quadrados. O ponto fonte A de coordenadas (13, 8, 3) onde e aplicado o ultimo
campo potencial e o mesmo para os dois corpos.
8 26 98 386 1538 614610
−3
10−2
10−1
100
Número de pontos nodais
Err
o
64 262 1054 422210
−3
10−2
Número de pontos nodais
Err
o
Figura 5.6: norma de erro do sistema de matrizes da equacao (4-24), que aproxima as ma-trizes H e U∗ no metodo expedito dos elementos de contorno, para diferentes discretizacoesda malha e o campo potencial aplicado aos corpos representados na figura 5.5.

Capıtulo 5. Aplicacoes Numericas 58
Em ambos graficos em escala logarıtmica da Figura (5.6), observa-se
uma convergencia linear o que mostra que o metodo expedito com uma
maior discretizacao deve os diminuirao ainda mais. As figuras mostram o
padrao de convergencia esperado de um metodo numerico formulado de forma
consistente.
5.3Problema de elasticidade 2D
Observa-se na Figura 5.7 um domınio de forma irregular que apresenta
um furo, discretizado no contorno com 62 nos, algumas das equacoes e
conceitos expostos em capıtulos anteriores serao numericamente avaliados em
um problema de elasticidade sem a presenca de forcas de massa
σji,j = 0 (5-6)
em que o valor do coeficiente de Poisson utilizado e de v = 0.3
−5 0 5 10 15 20 25 30
0
5
10
15
20
25
30
3531
17
9
146
47
51
55
59
62
39
18
34
A B
(20,7)
(11,26)
Figura 5.7: Discretizacao inicial do domınio irregular (62 nos) para o estudo de con-vergencia e calculo de tensoes no domınio, utilizando elementos quadraticos. A e B saopontos fonte.
A malha da Figura 5.7 e a discretizacao inicial, diferentes refinamentos
da malha sao usados para testar os desenvolvimentos. A estrutura tem como
coordenadas nos seus nos os dados da Tabela 5.6.
O domınio da estrutura apresenta um furo (entre os nos 47 e 62) que
coloca dificuldades topologicas cuja solucao pode nao ser trivial. Os pontos A
e B, indicados com coordenadas (−5, 2) e (10, 2) sao utilizados como pontos
fontes.

Capıtulo 5. Aplicacoes Numericas 59
No Coordenada1 (0, 0)9 (10, 20)17 (20, 0)31 (15, 35)39 (0, 20)47 (17, 19)51 (16, 22)55 (21, 24)59 (22, 20)
Tabela 5.6: Coordenadas (x, y) dos nos localizados nos cantos do domınio irregular daFigura 5.7.
5.3.1Avaliacao da consistencia de p∗
Neste analise, o corpo da Figura 5.7 e modelado com 31 elementos
quadraticos isoparametricos (ou seja 62 nos e 124 graus de liberdade). Um
vetor de carregamentos nodais equivalentes p, correspondentes a um campo
de tensoes constante σx = 2, aplicado no contorno da estrutura e gerado
para a construcao de um problema de contorno de Neumann (um campo de
tensao constante e requisito para a avaliacao dos coeficientes indefinidos de
U∗). Este vetor p pode-se determinar com a equacao (4-1) ou em termos de
forcas de superfıcie t, segundo a equacao (4-4), uma vez que as integrais sao
exatamente avaliadas quando a funcao ti` da equacao (2-27) e usada, mesmo
ao longo de contornos curvos (que nao e o caso de ti` da forma como e avaliado
numa formulacao do metodo convencional dos elementos de contorno, onde o
jacobiano de transformacao de coordenadas e aproximado). Seguidamente, a
equacao (4-1) e resolvida para
(a) p∗ usando a matriz H de acordo com a definicao na equacao (3-25) e
(b) p∗ usando a versao expedita H, como definida na equacao (4-22).
Os coeficientes dos vetores p∗ e p∗ obtidos usando H e H, respectiva-
mente, sao apresentados na Figura 5.8. Observa-se que mesmo sendo a malha
a mais grossa (a de menor discretizacao), os resultados sao quase coincidentes
visualmente.
Embora os resultados mais precisos devam corresponder a p∗, p∗ passa
perto de zero nos graus de liberdade 93 − 124 (pertencentes a cavidade) e
tambem nos graus de liberdade 1−34 (pertencentes a concavidade). O aspecto
de ambos graficos e consistente como e mostrado no metodo hıbrido dos
elementos de contorno [15, 14], onde se indica que os parametros do campo de
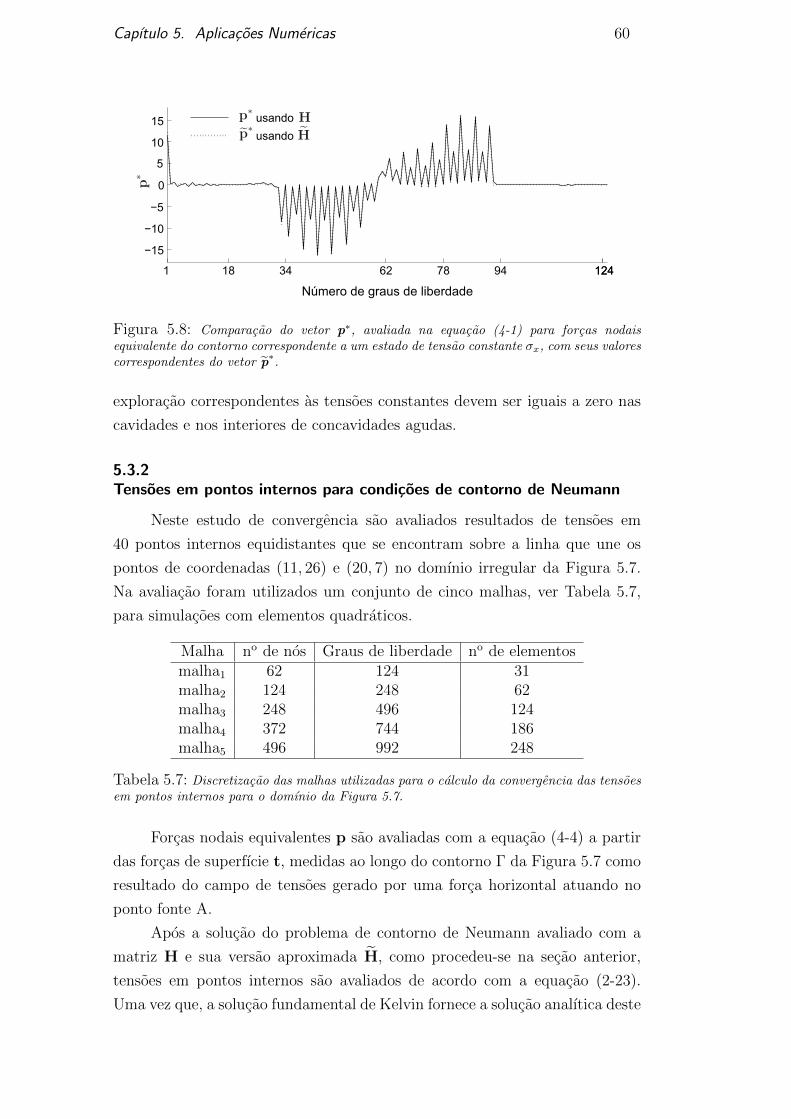
Capıtulo 5. Aplicacoes Numericas 60
12412494786234181
−15
−10
−5
0
5
10
15
Número de graus de liberdade
usando
usando
Figura 5.8: Comparacao do vetor p∗, avaliada na equacao (4-1) para forcas nodaisequivalente do contorno correspondente a um estado de tensao constante σx, com seus valorescorrespondentes do vetor p∗.
exploracao correspondentes as tensoes constantes devem ser iguais a zero nas
cavidades e nos interiores de concavidades agudas.
5.3.2Tensoes em pontos internos para condicoes de contorno de Neumann
Neste estudo de convergencia sao avaliados resultados de tensoes em
40 pontos internos equidistantes que se encontram sobre a linha que une os
pontos de coordenadas (11, 26) e (20, 7) no domınio irregular da Figura 5.7.
Na avaliacao foram utilizados um conjunto de cinco malhas, ver Tabela 5.7,
para simulacoes com elementos quadraticos.
Malha no de nos Graus de liberdade no de elementosmalha1 62 124 31malha2 124 248 62malha3 248 496 124malha4 372 744 186malha5 496 992 248
Tabela 5.7: Discretizacao das malhas utilizadas para o calculo da convergencia das tensoesem pontos internos para o domınio da Figura 5.7.
Forcas nodais equivalentes p sao avaliadas com a equacao (4-4) a partir
das forcas de superfıcie t, medidas ao longo do contorno Γ da Figura 5.7 como
resultado do campo de tensoes gerado por uma forca horizontal atuando no
ponto fonte A.
Apos a solucao do problema de contorno de Neumann avaliado com a
matriz H e sua versao aproximada H, como procedeu-se na secao anterior,
tensoes em pontos internos sao avaliados de acordo com a equacao (2-23).
Uma vez que, a solucao fundamental de Kelvin fornece a solucao analıtica deste

Capıtulo 5. Aplicacoes Numericas 61
problema. A norma de erro dos resultados numericos podem ser avaliados de
acordo com a equacao
ε (σa − σn) =‖ σa − σn ‖‖ σa ‖
(5-7)
que confronta os resultados numericos das tensoes σn com os seus correspon-
dentes resultados analıticos σa. A Figura 5.9 apresenta a convergencia do erro
para σxx, σxy e σyy obtidos em termos de H e de H.
Observa-se na Figura 5.9 que a malha menos refinada e afetada pelo con-
torno. No entanto, a precisao melhora drasticamente com o maior refinamento
da malha discretizada chegando ate aproximacoes de ε ≈ 10−8. Erros de in-
tegracao numerica ocorrem principalmente por causa das singularidades perto
dos elementos localizados nos cantos.
As tensoes foram avaliadas em pontos do domınio Ω que estao a uma
distancia razoavel do contorno Γ de modo que nao sejam afetados pelas
singularidades da solucao fundamental. No entanto, resultados em pontos
proximos de nos do contorno Γ ou mesmo coincidentes com eles podem ser,
em geral, razoavelmente aproximados recorrendo as propriedades espectrais da
matriz H, [9, 15].
62 124 248 372 49610
−1010
−1010
−10
10−8
10−6
10−4
10−2
100
102
Número de nós no contorno
err
o
σxx
(H)σxx
(H)
σyy
(H)
σxy
(H)
= kva−v nkkvak
σyy
(H)~
σxy
(H)
~
~
Figura 5.9: Erros das tensoes, avaliados no segmento de reta (40 nos) entre os nos decoordenadas (11,26) e (20,7), ver Figura 5.7, para uma forca horizontal aplicada no pontoA.
A Figura 5.10 apresenta resultados obtidos ao longo de 40 pontos nodais,
distribuıdos como na figura 5.7, os pontos das extremidades coincidem com
os nos 18 e 34 do contorno Γ. As tensoes foram avaliadas com uma malha
discretizada com 124 elementos quadraticos (248 nos, 496 graus de liberdade)
que correspondem a campos de tensoes gerados por uma forca vertical atuando
no ponto fonte A. Observa-se que a diferenca entre as tensoes avaliadas com H

Capıtulo 5. Aplicacoes Numericas 62
e H e visualmente indistinguıvel. Em pontos distantes do contorno a precisao e
muito alta. No entanto, algumas oscilacoes sao observadas em pontos proximos
a extremidade esquerda (no 18 na figura 5.7).
1 10 20 30 40−7
−6
−5
−4
−3
−2
−1
0x 10
−3
Número de nós internos
Te
nsõ
es
σxx
σxy
σyy
∗ ∗ ∗
° ° °Solução Analítica
σ usando H ~
σ usando H
Figura 5.10: Comparacao das tensoes ao longo do segmento de reta entre os nos 18 e 34que coincidem com o contorno Γ, ver figura 5.7, para uma forca vertical aplicada no no A.
5.3.3
Avaliacao da convergencia da equacao Hd = U∗Tp
A convergencia da equacao (4-24) e testada para o campo de tensoes
correspondente as forcas aplicadas no ponto fonte B da Figura 5.7. As normas
de erro sao calculadas com a equacao
ε(Hd−U∗Tp
)=‖ Hd−U∗Tp ‖‖ Hd ‖
(5-8)
A Figura 5.11 mostra resultados correspondentes a duas forcas aplicadas
no ponto B – uma horizontal (grafico da esquerda) e uma vertical (grafico da
direita) – para as 6 malhas refinadas segundo a Tabela 5.8 e discretizadas com
elementos lineares, quadraticos e cubicos.
A norma de erro calculada com a equacao (5-8) e para testar o vetor
de carregamento nodal equivalente p avaliado partindo da expressao analıtica
das forcas de superfıcie como mostrado na equacao (4-2) e compara-lo com o
carregamento nodal equivalente p obtido em termos de interpolacao das forcas
de superfıcie como mostra a equacao (4-4). Estas duas expressoes alternativas
sao caracterizadas na Figura 5.11 com subındices que se referem as malhas
com as quais foram discretizadas, no caso ()l para elementos lineares, ()q para
elementos quadraticos ou ()c para elementos cubicos.

Capıtulo 5. Aplicacoes Numericas 63
Malha no de nos Graus de liberdademalha1 186 372malha2 372 744malha3 744 1488malha4 1488 2976malha5 2976 4092malha6 4092 8184
Tabela 5.8: Discretizacao das 6 malhas utilizadas para o teste de convergencia do sistemade equacoes matriciais do metodo expedito dos elementos de contorno para a estrutura daFigura 5.7.
8184818459522976148874437210
−5
10−4
10−3
10−2
10−1
Número de graus de liberdade
Err
o
pl
pl
~
pq ≈ p
q~
pc ≈ p
c~
8184818459522976148874437210
−5
10−4
10−3
10−2
Número de graus de liberdade
Err
o
pl
~
pl
pc ≈ p
c~
pq ≈ p
q~
Figura 5.11: Normas de erro, Equacao (5-8), da equacao matricial do metodo expedito,Equacao (4-24), para elementos lineares, quadraticos e cubicos. Os campos analıticos usadosnas comparacoes correspondem a uma forca horizontal (grafico a esquerda) e uma vertical(grafico a direita) aplicadas no ponto B da Figura 5.7.
Observa-se na Figura 5.11 que os resultados dos vetores p e p podem
ser considerados coincidentes, exceto no caso dos resultados avaliados com
elementos lineares. No entanto, observa-se que as malhas com elementos
quadraticos levam a resultados melhores que as malhas com elementos cubicos.
5.4Convergencia para problemas de potencial 2D com fonte interna econdicao de contorno mista
5.4.1Exemplo: Domınio irregular com 1 furo
O problema de potencial em regime permanente, expresso pela equacao
(2-16), com uma fonte interna trigonometrica (Q) e constante de condutividade
do material (k = 1), e modelado pela equacao de Poisson
∇2u = cosx
3cos
y
4(5-9)

Capıtulo 5. Aplicacoes Numericas 64
as condicoes de contorno misto para o problema sao
u = 0 em Γu e qn =∂u
∂n= 0 em Γq (5-10)
O problema pode ser resolvido utilizando o metodo expedito dos elemen-
tos de contorno de duas maneiras, uma e utilizando a equacao (4-24) de forma
direta (da mesma forma como se trabalha no metodo de elementos de contorno
convencional) e a outra que e propria do metodo hıbrido, utilizando a equacao
(4-31), que precisa do calculo previo do vetor p∗ com a vantagem posterior da
facilidade no calculo de resultados em pontos internos.
O domınio de referencia utilizado para a avaliacao da convergencia
numerica e o da Figura 5.7 (domınio irregular com a presenca de um furo
e discretizado com 62 nos). O problema e resolvido aumentando o refinamento
gradualmente para 7 malhas como mostra a Tabela 5.9 e discretizando o
contorno com elementos quadraticos.
Malha no de nos Graus de liberdade no de elementosmalha1 62 62 32malha2 124 124 62malha3 248 248 124malha4 496 496 248malha5 992 992 496malha6 1984 1984 992malha7 3968 3968 1984
Tabela 5.9: Discretizacao das malhas utilizadas para o calculo da convergencia do problemade potencial em regime permanente e contorno misto, com elementos quadraticos, para odomınio da Figura 5.13.
Para um adequado estudo de convergencia temos a dificuldade de nao
contar com a existencia de uma solucao analıtica com a qual se possa comparar
os resultados, outra dificuldade e a presenca de descontinuidades no contorno
Γ, como mostra a Figura 5.13, o que faz o problema difıcil de resolver. No
entanto, e possıvel de realizar um estudo de convergencia.
Uma solucao particular arbitraria da parcela nao homogenea produzida
pela fonte trigonometrica da equacao (5-9), sem considerar as condicoes de
contorno e necessario para a solucao do problema. Essa solucao pode ser
calculada analiticamente
up = −72
25
[cos(x
3− y
4
)+ cos
(x3
+y
4
)](5-11)
e ser representada graficamente (ver a Figura 5.12), para o domınio irregular
da Figura 5.7.

Capıtulo 5. Aplicacoes Numericas 65
510
15
2015
20
250
25
30
350
5
10
0
5
-5
Figura 5.12: Ilustracao 3D da solucao particular up, gerado pela fonte interna da equacao(5-9), que atua sobre o domınio irregular da figura 5.7.
Na Figura 5.13 (a esquerda), observa-se as condicoes de contorno pres-
critas do problema de acordo com a equacao (5-10), em que o sub-contorno Γq
com gradiente qn igual a zero compreende o segmento entre os nos 31 ao 39.
Enquanto que na parte complementar (contorno Γu) o potencial u e igual a
zero.
39
31
171
46
51
55
5947
62
9
31
39
46
1 17
951
55
4759
62
Figura 5.13: Domınio irregular da Figura 5.7, submetido ao campo potencial dado pelaequacao (5-9) e ilustrado na Figura 5.12. O contorno correspondente aos nos 31− 39 esta:isolado qn = 0 com potencial prescrito u = 0 no resto do contorno (a esquerda), compotencial prescrito u = 0 e isolado qn = 0 no resto do contorno (a direita).
Os resultados dos potenciais u ao longo do segmento de contorno Γq
da Figura 5.13 sao apresentados na Figura 5.14, no eixo horizontal estao
representados os nos 31 ao 39 que correspondem a discretizacao da malha1 na
Tabela 5.9, no caso dos resultados das outras malhas mais refinadas somente
foram plotados os resultados coincidentes com os nos da malha1, a linha
continua corresponde aos resultados da malha mais fina (no caso 3968 nos).
Observa-se que os resultados mostram uma adequada convergencia, sendo
quase coincidentes visualmente com a excecao da malha1. A norma de erro da
equacao (5-7) e utilizada para o calculo de convergencia mostrada na Figura

Capıtulo 5. Aplicacoes Numericas 66
5.14, no caso por nao termos uma solucao analıtica o parametro de comparacao
foram os resultados da malha mais fina (no caso a malha7).
31 32 33 34 35 36 37 38 390
0.2
0.4
0.6
0.8
1
1.2
1.4x 10
−3
Pontos nodais ao longo do segmento de contorno
Pote
ncia
l
124 nós
248 nós
496 nós
992 nós
1984 nós
3968 nós
64 nós
64 124 248 496 992 1984
10-2
10-1
10-3
10-4
Número de graus de liberdade
Err
o
Figura 5.14: Convergencia dos potenciais u para diferentes malhas do domınio da Figura5.13, grafico da esquerda. Usando elementos quadraticos.
Os dados do mesmo exemplo, descrito acima, sao utilizados como um
outro problema. Desta vez, as condicoes de contorno prescritas sao invertidas,
isto e, o sub-contorno Γu (com potencial u = 0) compreende agora o segmento
ao longo de contorno entre os nos 31 ao 39 e a parte complementar do contorno
Γq (incluindo o furo dado entre os nos 47 ao 62, conforme mostrado na Figura
5.13, a direita) com gradiente qn = 0 aplicado. A Figura 5.15 mostra os valores
dos gradientes, nos pontos meios entre dois nos, obtidos ao longo do segmento
que corresponde ao contorno Γu (nos 31 ao 39) e discrepancias sao observadas
na extremidade direita do segmento avaliado (no 39 da Figura 5.13, a direita).
A norma de erro do problema mostrou altas taxas de convergencia como mostra
a Figura 5.15, o resultado da malha mais fina (3968 nos) foi utilizado como
alvo para avaliar o gradiente total medida ao longo do segmento entre os nos
31 ao 39.
31 32 33 34 35 36 37 38 39−8
−6
−4
−2
0
2x 10
−4
Pontos nodais ao longo do segmento de contorno
Gra
die
nte
124 nós
248 nós
496 nós
992 nós
1984 nós
3968 nós
64 nós
64 124 248 496 992 1984Número de graus de liberdade
10-2
Err
o
10-4
10-6
10-8
Figura 5.15: Convergencia dos gradientes qn para diferentes malhas do domınio da Figura5.13, grafico da direita. Usando elementos quadraticos.

Capıtulo 5. Aplicacoes Numericas 67
5.4.2Exemplo: Domınio irregular com 2 furos
O problema tem o mesmo enunciado do problema da secao 5.4.1, a dife-
renca e o domınio onde e aplicado a equacao de Poisson. No caso um domınio
com 80 nos com 2 furos (entre os nos 53 ao 68 e 69 ao 80, respectivamente),
como se mostra na Figura 5.16,
0 5 10 15 20 25
0
5
10
15
20
25
163
61 55
53
47
7 9
19
25
27
29
11
69
75
80
45
41 37
33
Figura 5.16: Malha inicial do domınio discretizado com 40 elementos quadraticos, utilizadopara o calculo de potencias e gradientes no contorno ao longo do segmento entre os nos 19ao 25.
O problema e resolvido utilizando o metodo expedito dos elementos de
contorno da mesma forma ao da secao 5.4.1, para 6 malhas discretizadas
duplicando o numero de elementos em cada caso partindo da malha inicial
de 40 elementos quadraticos como se mostra na Tabela 5.10.
Malha no de nos Graus de liberdade no de elementosmalha1 80 80 40malha2 160 160 80malha3 320 320 160malha4 640 640 320malha5 1280 1280 640malha6 2560 2560 1280
Tabela 5.10: Discretizacao das malhas utilizadas para o calculo da convergencia doproblema de potencial em regime permanente e contorno misto, com elementos quadraticos,para o domınio da Figura 5.16.
Como temos um problema de contorno misto de acordo a equacao (5-10),
na Figura 5.16 consideramos a parcela do contorno entre os nos 19 ao 25 como
sendo Γq com gradientes prescritos qn igual a zero e a parcela complementar
do contorno como sendo Γu com potencial prescrito u igual a zero.

Capıtulo 5. Aplicacoes Numericas 68
Os resultados dos potenciais u ao longo do segmento de contorno Γq
(incognitas nessa parcela do contorno) sao apresentados na Figura 5.17, no eixo
horizontal esta representado o segmento de contorno ao longo dos nos 19 ao 25
que correspondem a discretizacao da malha1 na Tabela 5.10, nas outras malhas
mais refinadas somente foram plotados os resultados dos nos coincidentes com
os nos da malha1, a linha continua corresponde aos resultados da malha mais
fina (no caso 2560 nos).
Os resultados confirmam a rapida convergencia do metodo expedito, sendo
quase coincidentes visualmente para todas as malhas com a excecao da malha1.
A norma de erro da equacao (5-7) e utilizada para o calculo da convergencia
mostrada no Figura 5.17, no caso por nao termos uma solucao analıtica o
parametro de comparacao foram os resultados da malha mais fina (no caso a
malha6).
19 20 21 22 23 24 25
−0.4
−0.2
0
0.2
0.4
0.6
Pontos nodais ao longo do segmento de contorno
Pote
nci
al
160 nós
320 nós
640 nós
1280 nós
2560 nós
80 nós80 160 320 640 1280
Número de graus de liberdade
10-1
10-2
10-3
Err
o
19
25
Figura 5.17: Convergencia dos potenciais u para diferentes malhas do domınio da Figura5.16, do segmento entre os nos 19− 25. Usando elementos quadraticos.
O mesmo problema pode ser utilizado para ter gradientes como incognitas
do problema na parcela do contorno entre os nos 19 ao 25 da Figura 5.16. Para
isso, as condicoes de contorno prescritas sao invertidas, isto e, o sub-contorno
Γu (com potencial u = 0) compreende agora o segmento ao longo do contorno
entre os nos 19 ao 25 e a parte complementar do contorno Γq com gradiente
qn = 0.
A Figura 5.18 mostra os valores dos gradientes, nos pontos meios entre
dois nos, obtidos ao longo do segmento que corresponde ao contorno Γu (nos
19 ao 25) e discrepancias sao observadas nas duas extremidades do segmento
avaliado. A norma de erro do problema mostrou altas taxas de convergencia
como se mostra no grafico menor da mesma figura, o resultado da malha mais
fina (2560 nos) foi utilizado como alvo para avaliar o gradiente total medida
ao longo do segmento entre os nos 19 ao 25.

Capıtulo 5. Aplicacoes Numericas 69
19 20 21 22 23 24 25
−1.5
−1
−0.5
0
0.5
Pontos nodais ao longo do segmento de contorno
Gra
die
nte
160 nós
320 nós
640 nós
1280 nós
2560 nós
80 nós
80 160 320 640 1280
Número de graus de liberdade
10-2
10-4
10-6
Err
o
10-8
19
25
Figura 5.18: Convergencia dos gradientes qn para diferentes malhas do domınio da Figura5.16, do segmento entre os nos 19− 25. Usando elementos quadraticos.
5.4.3Comparacao dos resultados de duas solucoes particulares arbitrarias(analıtica e numerica)
O problema de potencial e o mesmo da secao 5.4.1, consiste na solucao da
equacao de Poisson com fonte interna trigonometrica e condicoes de contorno
mistas dadas pela equacao (5-10). O domınio utilizado para a solucao do
problema e o da Figura 5.16. O contorno do corpo sera discretizado com 640
elementos quadraticos (1280 nos) e corresponde e a malha5 da Tabela 5.10.
A ideia e comparar resultados, de potenciais u e do fluxo qn em um
segmento do contorno, gerados usando duas solucoes particulares arbitrarias
up quaisquer.
As duas solucoes particulares arbitrarias up correspondentes a parcela
nao homogenea da equacao de Poisson com fonte interna, sao:
• A solucao particular up arbitraria analıtica, da equacao (5-11), reescrita
por conveniencia
up = −72
25
[cos(x
3− y
4
)+ cos
(x3
+y
4
)]• A solucao particular upi arbitraria resolvida numericamente usando
uma formulacao com funcoes wavelet de Daubechies e interpolets de
Deslauriers-Dubuc [4], resultados que foram fornecidos por R. Burgos
e usados como dados do problema.
A avaliacao do potencial u e fluxo qn, foi em um segmento do contorno
Γ entre os nos 19 ao 25 da Figura 5.16. Levando em conta as condicoes de
contorno do problema, para obter o potencial e fluxo potencial u e fluxo qn,
temos:

Capıtulo 5. Aplicacoes Numericas 70
a) Para ter potenciais u como incognitas do problema. O fluxo no sub-
contorno Γq deve ser zero no segmento entre os nos 19 ao 25 e na parte
complementar do contorno Γu o potencial e u = 0.
b) Para ter fluxos qn como incognitas do problema. O potencial u no sub-
contorno Γq deve ser zero no segmento entre os nos 19 ao 25 e na parte
complementar do contorno Γq o fluxo e qn = 0.
Os resultados dos potenciais u (caso a) ao longo do sub-contorno Γq, sao
apresentados a esquerda na Figura 5.19 e os resultados dos fluxos qn (caso
b) ao longo do sub-contorno Γu, sao apresentados a direita na Figura 5.19.
Observa-se nos resultados a coincidencia entre eles usando as duas solucoes
particulares arbitrarias, a analıtica e a numerica. No entanto, na avaliacao da
norma de erro tem-se para o fluxo ε = 4.13 × 10−5 e no caso do potencial
ε = 3.07× 10−5.
1 20 40 60 80 97−4
−3
−2
−1
0
1
2
3
4
5
6
Pontos nodais ao longo do segmento de contorno
Pote
ncia
l
x 10−1
usando analítico
usando numérico
1 20 40 60 80 97−2
−1.5
−1
−0.5
0
0.5
1
1.5
2
Gra
die
nte
Pontos nodais ao longo do segmento de contorno
usando analítico
usando numérico
Figura 5.19: Potenciais u para a malha5 da Tabela 5.10 do domınio da Figura 5.16, aesquerda. Resultados dos gradientes qn no segmento entre os nos 19− 25, a direita. Usandoelementos quadraticos.
5.5Convergencia para problemas de elasticidade 2D com forcas de massa econdicao de contorno mista
O problema bidimensional de elasticidade linear, expressa pela equacao
(2-1), com forca de massa aplicada b = [x y], coeficiente de Poisson v = 0.3 e
coeficiente de elasticidade transversal G = 10000 e modelado pela equacao
σji,j + b = 0 (5-12)
e resolvido para um problema com condicoes de contorno misto com

Capıtulo 5. Aplicacoes Numericas 71
un = 0 em Γu e tn = 0 em Γq (5-13)
O problema de elasticidade e resolvido utilizando o metodo expedito
dos elementos de contorno segundo as equacoes da secao 4.4, o contorno da
estrutura e discretizada com elementos quadraticos refinando a malha com
o dobro de nos em cada caso como se observa na Tabela 5.11. A estrutura
utilizada para o estudo de convergencia e o domınio da Figura 5.16 com as
condicoes de contorno prescritas da equacao (5-13).
Malha no de nos Graus de liberdade no de elementosmalha1 80 160 40malha2 160 320 80malha3 320 640 160malha4 640 1280 320malha5 1280 2560 640malha6 2560 5120 1280
Tabela 5.11: Malhas utilizadas para o calculo da convergencia do problema de elasticidadelinear e contorno misto, com elementos quadraticos, para o domınio da Figura 5.16.
Uma solucao particular arbitraria da parcela nao homogenea σpji,j+b = 0,
da equacao equacao (5-12), produzida pelas forcas de massa sem considerar as
condicoes de contorno e necessaria para a solucao do problema. Essa solucao
pode ser calculada analiticamente
σpij =
xy
2(1−v)(1−2v)(x2+y2)
4(1−v)
(1−2v)(x2+y2)4(1−v)
xy2(1−v)
(5-14)
upi =[
(1−2v)(3x2+y2)y24G(1−v)
(1−2v)(x2+3y2)x24G(1−v)
](5-15)
Neste exemplo, para avaliar a convergencia sera utilizado o resultado da
malha mais fina (malha6 da Tabela 5.11) ja que nao teremos uma solucao
analıtica como parametro de comparacao na norma de erro.
5.5.1Estudo de convergencia das forcas de superfıcie
Segundo as condicoes de contorno na Figura 5.20 (a esquerda), de acordo
com as condicoes de contorno da equacao (5-13), o sub-contorno Γu com
deslocamentos u igual a zero, compreende o segmento entre os nos 19 ao 25.

Capıtulo 5. Aplicacoes Numericas 72
19
25
19
25
Figura 5.20: Domınio irregular da Figura 5.16, submetido a forcas de massa dado pelaequacao (5-12). O contorno correspondente aos nos 19−25 esta: engastado u = 0 com forcasde superfıcie prescrito t = 0 no resto do contorno (a esquerda), com forcas de superfıcieprescritas t = 0 e engastado u = 0 no resto do contorno (a direita).
Enquanto que, na parte complementar do contorno Γσ as forcas de superfıcie
sao zero. As forcas de superfıcie tx e ty sao as incognitas do problema no
segmento avaliado entre os nos 19 ao 25.
Os resultados das forcas de superfıcie, tx e ty, ao longo do contorno Γu,
sao apresentados nas Figuras 5.21 e 5.22, respectivamente.
Observa-se resultados quase coincidentes visualmente para todas as ma-
lhas com excecao da malha1 que e a menos refinada e os nos que correspondem
as extremidades (no 19 e 25), sendo mostrados nas figuras, somente os valores
dos pontos meios entre dois nos da malha inicial, a linha continua corresponde
aos resultados da malha mais refinada.
19 20 21 22 23 24 25
Pontos nodais ao longo do segmento de contorno
x 10−1
1
2
3
0
-1
-2
160 nós
320 nós
640 nós
1280 nós
2560 nós
80 nós
19
25
80 160 320 640 1280
Número de nós
10-5
10-2
10-3
10-4E
rro
Figura 5.21: Convergencia das Forcas de superfıcie t na direcao x para as discretizacoesmostradas na Tabela 5.11 do domınio da Figura 5.16. Resultados do segmento entre os nos19− 25. Usando elementos quadraticos.
5.5.2

Capıtulo 5. Aplicacoes Numericas 73
19 20 21 22 23 24 25
Pontos nodais ao longo do segmento de contorno
x 10−2
5
6
7
4
3
160 nós
320 nós
640 nós
1280 nós
2560 nós
80 nós
19
25
80 160 320 640 1280
Número de nós
10-2
10-3
10-4
Err
o
Figura 5.22: Convergencia das Forcas de superfıcie t na direcao y para as discretizacoesmostradas na Tabela 5.11 do domınio da Figura 5.16. Resultados do segmento entre os nos19− 25. Usando elementos quadraticos.
Estudo de convergencia dos deslocamentos
Para ter os deslocamentos como incognitas do problema no segmento
entre os nos 19 ao 25 as condicoes de contorno Γ prescritas sao invertidas
como se mostra na Figura 5.20 (a direita), isto e, o sub-contorno Γσ (com
forcas de superfıcie t = 0) compreende agora o segmento entre os nos 19 ao 25
e a parte complementar do contorno Γu tem os deslocamentos u = 0 prescritos.
As Figuras 5.23 e 5.24 mostram os valores dos deslocamentos ux e uy,
respectivamente. Observa-se que os resultados sao coincidentes para todas
as malhas o que mostra a rapida convergencia do metodo expedito. A linha
continua corresponde a malha mais refinada.
19 20 21 22 23 24 25
Pontos nodais ao longo do segmento de contorno
-6
-4
-2
0160 nós
320 nós
640 nós
1280 nós
2560 nós
80 nósx 10
−3
19
25
80 160 320 640 1280
Número de nós
10-1
10-2
10-3
Err
o
Figura 5.23: Convergencia dos deslocamentos u na direcao x para as discretizacoesmostradas na Tabela 5.11 do domınio da Figura 5.16. Resultados do segmento entre osnos 19− 25. Usando elementos quadraticos.
5.5.3

Capıtulo 5. Aplicacoes Numericas 74
19 20 21 22 23 24 25
Pontos nodais ao longo do segmento de contorno
x 10−3
-6
-4
-2
0
-8
-10
160 nós
320 nós
640 nós
1280 nós
2560 nós
80 nós
19
25
80 160 320 640 1280
Número de nós
10-1
10-2
10-3
Err
o
Figura 5.24: Convergencia dos deslocamentos u na direcao y para as discretizacoesmostradas na Tabela 5.11 do domınio da Figura 5.16. Resultados do segmento entre osnos 19− 25. Usando elementos quadraticos.
Comparacao dos resultados de duas solucoes particulares arbitrarias(analıtica e numerica)
Para a solucao deste problema usou-se a malha5, da Tabela 5.11, com
1280 nos, 2560 graus de liberdade e esta discretizada com 640 elementos
quadraticos.
A ideia e comparar os resultados dos deslocamentos (ux e uy) e das forcas
de superfıcie (tx e ty), gerados apos a solucao do problema de elasticidade linear
com condicao de contorno misto, segundo as equacoes (5-12) e (5-13), usando
duas solucoes particulares arbitrarias quaisquer da parcela nao homogenea
geradas pelas forcas de massa, as duas solucoes sao
• Uma solucao particular arbitraria analıtica, equacoes (5-14) e (5-15),
reescrita por conveniencia
σpij =
xy
2(1−v)(1−2v)(x2+y2)
4(1−v)
(1−2v)(x2+y2)4(1−v)
xy2(1−v)
upi =
[(1−2v)(3x2+y2)y
24G(1−v)(1−2v)(x2+3y2)x
24G(1−v)
]• Uma solucao particular, σpij e upi , arbitraria geradas numericamente
usando uma formulacao com funcoes wavelet de Daubechies e interpolets
de Deslauriers-Dubuc [4], resultados que foram fornecidos por R. Burgos
e usados como dados do problema.
O segmento do contorno Γ escolhido para avaliar os resultados (forcas de
superfıcie t e deslocamentos u) foi o segmento compreendido entre os nos 19

Capıtulo 5. Aplicacoes Numericas 75
e 25 da Figura 5.16. Levando em conta as condicoes de contorno do problema
na equacao (5-13). usou-se, respectivamente, dois casos
a) Para ter como incognitas ux e uy no segmento entre os nos 19 −25 do contorno da estrutura. A condicao de contorno prescrita nesse
segmento deve ser o sub-contorno Γσ com forcas de superfıcie igual a
zero. Enquanto que, na parte complementar do contorno Γu deve ser
prescrito, no caso u = 0.
b) Para ter como incognitas tx e ty no segmentos entre os nos 19 − 25 do
contorno da estrutura. A condicao de contorno prescrita nesse segmento
deve ser o sub-contorno Γu com deslocamentos iguais a zero. Enquanto
que, na parte complementar do contorno Γσ as forcas de superfıcie sao
prescritas como sendo zero.
1 20 40 60 80 97
−10
−8
−6
−4
−2
0
x 10−3
Pontos nodais ao longo do segmento de contorno
Deslo
cam
ento
usando analítico
usando numérico
1 20 40 60 80 97
−0.4
−0.2
0
0.2
0.4
0.6
Pontos nodais ao longo do segmento de contorno
Forç
as d
e s
uperf
ície
usando analítico
usando numérico
Figura 5.25: Deslocamentos u na direcao x e y para a malha5 da Tabela 5.11 do domınioda Figura 5.16, a esquerda. Resultados das forcas de superfıcie t na direcao x e y segmentoentre os nos 19− 25, a direita. Usando elementos quadraticos.
Os resultados dos deslocamentos ux e uy (caso a) ao longo do sub-
contorno entre os nos 19 ao 25, sao apresentados a esquerda na Figura 5.25.
Os resultados das forcas de superfıcie tx e ty (caso b) ao longo do sub-contorno
entre os nos 19 ao 25, sao apresentados a direita na Figura 5.25. Observa-
se nos resultados a coincidencia nos dois casos, mesmo usando duas solucoes
particulares arbitrarias calculadas diferentes, no caso uma analıtica e a outra
numerica.
Referencias Bibliograficas
[1] Banerjee, P.K.; Butterfield, R.; 1981; Boundary Element Methods in
Engineering Sciense., McGraw-Hill: London.
[2] Brebbia, C.A.; 1978, The Boundary element method for engineers., Pen-
tech Press, Londres.
[3] Brebbia, C.A.; Telles,J.F.C.; Wrobel, L.C.; 1984, Boundary element tech-
niques., Springer-Verlag, Berlin and New York.
[4] Burgos, R.B.; 2009; Analise de Estruturas Utilizando Wavelets de Daube-
chies e Interpolets de Deslauriers-Dubuc., Tese de Doutorado - Programa
de Pos-graduacao em Engenharia Civil, Pontificia Univerdade Catolica do
Rio de Janeiro, Rio de Janeiro, 185 f.
[5] Chaves, R.A.P.; 1999; Estudo do metodo hıbrido dos elementos de con-
torno e proposta de uma formulacao simplificada., Dissertacao de Mes-
trado - Programa de Pos-graduacao em Engenharia Civil, Pontificia Uni-
verdade Catolica do Rio de Janeiro, Rio de Janeiro, 169 f.
[6] Chaves, R.A.P.; 2003, The simplified hybrid boundary element method ap-
plied to time-dependent problems.,(in Portuguese), Ph.D. thesis, Pontifical
Catholic University of Rio de Janeiro.
[7] Dumont, N.A.; 1987; The hybrid boundary element method., In: C. Breb-
bia, W. Wendland, G. Kuhn (Eds.), Boundary Elements IX: Mathema-
tical and computational aspects, number 3 in computational Mechanics
Publication, Springer-Verlag, pp. 125-138.
[8] Dumont, N.A.; 1989 The hybrid boundary element method: an alliance
betwen mechanical consistency and simplicity, Applied Mechanics Revi-
ews, 42(11), Part 2, pp. S54-S63.
[9] Dumont, N.A.; 1998, An assessment of the spectral properties of the matrix
G used in the boundary element methods., Computational Mechanics 22,
pp. 32-41.

Referencias Bibliograficas 80
[10] Dumont, N.A.; 2003, Variationally-based, hybrid boundary element
methods., Computer Assisted Mechanics and Engineering Sciences (CA-
MES) 10, pp. 407-430.
[11] Dumont, N.A.; 2003; Variationally-based, hybrid boundary element
methods., In: E.A.W. Maunder, A.A. Javadi (Eds.), Proceedings 3er Inter-
national Conference Trefftz Methods, Developments and Applications in
Computational Mechanics (EuroConference ECONF CM4, IACM Special
Interest Conference), Exeter, England, pp. 25 on CD.
[12] Dumont, N.A.; 2010, From the collocation boundary element methods
to a meshless formulation., in: E.N. Dvorkin, M.B. Goldschmit, M.A.
Storti(Eds), Mecanica Computacional, MECOM 2010 - IX Argentinean
congress on Computational Mechanics and II South American congress
on Computational Mechanics, XXXI CILAMCE Iberian Latin-American
Congress of Computational Methods in Engineering, Buenos Aires, Ar-
gentina. pp. 4635-4659.
[13] Dumont, N.A.; 2010; The boundary element method revisited., In: BEM
- MRM 32 - Boundary Elements and Other Mesh Reduction Methods
XXXII, 2010, Inglaterra. WIT Transactions on Modelling and Simulation.
Southampton, Inglaterra: WIT Press. v.50. pp. 227-238.
[14] Dumont, N.A.; 2010; On the spectral properties of the double layer po-
tential matrix H of the boundary element methods. In 11th Pan-American
Congress of Applied Mechanics - PACAM XI, page 6pp. Foz de Iguacu,
Brazil.
[15] Dumont, N.A.; 2013; The hybrid boundary element method - fundamen-
tals.(to be submitted). Engineering Analysis with Boundary Elements.
[16] Dumont, N.A.; 2013, Toward a meshless formulation of the simplified
hybrid boundary element method., (to be submitted).
[17] Dumont, N.A.; Chaves, R.A.P.; 2003, General time-dependent analysis
with the frequency-domain hybrid boundary element method., Computer
assisted Mechanics and Engineering Sciences, pp. 431-452.
[18] Dumont, N.A.; Aguilar, C.A.; 2011, The best of two worlds: The expe-
dite boundary element method.,in: Y.Y.-B.L.J. Leu, C.S.D. Chen (Eds.),
Extended Abstracts of ISCMIII/CSEII-3rd International Symposium on
Computational Mechanics, 2nd Symposium on Computational Structural
Engineering, Taipei, Taiwan, pp. 46-47.

Referencias Bibliograficas 81
[19] Dumont, N.A.; Aguilar, C.A.; 2011, The expedite boundary element
method., in: C.A. Brebbia, V. Popov (Eds.), Boundary Elements and
Other Mesh Reduction Methods XXXII, WITPress, Southampton, pp.
179-190.
[20] Dumont, N.A.; Aguilar, C.A.; 2011, Expedite implementation of the boun-
dary element method., in: E.L. Albuquerque, M.H. Aliabadi (Eds), Ad-
vances in Boundary Element Techniques XII, EC, Ltd, UK, pp. 162-179.
[21] Dumont, N.A.; Aguilar, C.A.; 2011, Expedite implementation of the boun-
dary element method for elasticity problems., in: Proceed-ings CILAMCE
- XXXII Iberian Latin-American Congress on Computational Methods in
Engineering, Ouro Preto, Brazil, p.16 (on CD).
[22] Dumont, N.A.; Aguilar, C.A.; 2011, Three-dimensional implementation
of the expedite boundary element method., in: Extended Abstract of the
IABEM2011, Symposium of the International Association for Boundary
Element Methods, Brescia, Italy, pp. 113-118.
[23] Dumont, N.A.; Aguilar, C.A.; 2012, The best of two worlds: The expedite
boundary element method. Engineering Structures, v.43, p.235-244.
[24] Hellinger, E.; 1914; Die allgemeinen Ansatze der Mechanik der Kontinua.,
Enz. Math. Wis.; 4, 602-694.
[25] Liu, Y.; 2009; Fast Multipole Boundary Element Method, Theory and
applications in Engineering., Cambridge.
[26] Oliveira, M.F.F.; 2004, Conventional, hybrid and simplified boundary
element methods.,(in Portuguese), Master’s thesis, Pontifical Catholic
University of Rio de Janeiro.
[27] Oliveira, M.F.F.; Dumont, N.A.; 2009, Conceptual completion of the
simplified hybrid boundary element method., in: E.J. Sapountzakis, M.H.
Aliabadi (Eds.), Beteq 2009 - International Conference on Boundary
Element Techniques, Athens, Greece, pp. 49-54.
[28] Pian, T.H.H.; Tong, P.; 1969; Basis of Finite Element Methods for Solid
Continua., Int. J. Numer. Meth. Engrg. 1, pp. 3-28.
[29] Pian, T.H.H.; 1983; Reflections and remarks on hybrid and mixed finite
element method., In. S.N. Atluri, R.H. Gallagher, O.C. Zienkiewickz; (eds)
Hybrid and Mixed Finite Element Methods. Wiley, New York, NY. pp.
565-570.

Referencias Bibliograficas 82
[30] Reissner, E.; 1950; On a variational theorem in elasticity., In. J. Math.
Phys., 29, pp. 90-95.
[31] Saad, Y.; 1981; Krylov subespace methods for solving large unymmetric
linear systems. Math Comput. 37, pp. 203-228.
[32] Saad, Y.; Schultz, M.H.; 1986; GMRES: A generalized minimal residual
algorithm for solving nonsymmetric linear systems. Siam J. Sci. Stat.
Comput.; pp. 856-869.

APotencial de Hellinger-Reissner
A expressao da energia potencial total de um corpo elastico sujeito a
pequenos deslocamentos e dada por
Π =
∫Ω
U0(εij)dΩ−∫
Ω
bjuidΩ−∫
Γσ
tiuidΓ (A-1)
a menos de uma constante. Neste funcional, o primeiro termo corresponde a
energia total interna de deformacao, onde
U0(εij) =1
2σijεij (A-2)
e os outros termos referem-se ao potencial das forcas externas bi e ti que
atuam no corpo. Este potencial foi estabelecido sob as condicoes restritivas
de compatibilidade geometrica dadas pelas equacoes (2-5) e (2-6).
Pode-se, no entanto, formular um potencial de forma independente destas
restricoes, de forma que estas nao sejam atendidas previamente. Isto pode
ser proporcionado atraves do acrescimo, no funcional, destas condicoes de
restricao por intermedio de multiplicadores de Lagrange. O novo funcional
resulta, entao, como uma forma generalizada da energia potencial total:
Πg =
∫Ω
U0(εij)dΩ−∫
Ω
bjuidΩ +
∫Ω
[1
2(ui,j − uj,i)− εij
]λijdΩ−∫
Γσ
tiuidΓ +
∫Γσ
(ui − ui)λidΓ (A-3)
onde λij e λi sao os multiplicadores de Lagrange. Os novos termos que
surgem nesta equacao compensam a eliminacao feita previamente das condicoes
restritivas.
Este novo potencial e funcao das variaveis εij, ui, λij e λi, completa-
mente independentes entre si, a princıpio, sem qualquer relacao com as forcas
prescritas bi e ti, e com os deslocamentos prescritos ui.
Pode-se nos multiplicadores de Lagrange um sentido mecanico: a variavel
λij corresponde as tensoes no domınio, enquanto λi refere-se a forcas no
contorno. Alem disto, observa-se que a imposicao de estacionariedade do

Apendice A. Potencial de Hellinger-Reissner 84
potencial da equacao (A-3) estabelece que as variaveis presentes devem ser
relacionadas entre si atraves das equacoes (2-1) a (2-6) e (2-10).
Figura A.1: Grafico da energia interna de deformacao.
A expressao Πg na equacao (A-3) e, para finalidades praticas, excessi-
vamente geral. Pode-se supor que o tensor das tensoes seja simetrico, como
na equacao (2-4), que as condicoes de contorno em termos de deslocamentos
estejam previamente satisfeitas, como na equacao (2-6), e que a densidade de
energia interna seja expressa em termos de tensoes, isto e, define-se
UC0 (σij) = σijεij − U0(εij) (A-4)
Para materiais linearmente elasticos, os valores dos termos UC0 (σij) e
U0(εij) sao iguais. A diferenca existente consiste na forma como estas duas
parcelas sao descritas, conforme representado na figura 2.2.
Alem disso, a partir da consideracao da simetria de σij, pode-se escrever
um dos integrandos da equacao (A-3) na forma∫Ω
1
2(ui,j + uj,i) =
∫Ω
ui,jσijdΩ (A-5)
que, apos a aplicacao do teorema de Green e posterior integracao por partes,
pode ser reescrito como∫Ω
1
2(ui,j + uj,i) =
∫Γ
uiσijηjdΓ−∫
Ω
uiσij,jdΩ (A-6)
Com isto, recai-se, a partir da equacao (A-3), no potencial de Hellinger-
Reissner:
−ΠR(σsij, udi )=
∫Ω
[UC
0 (σsij) + (σsij,j + bi)udi
]dΩ−
∫Γ
σsijηjudi dΓ +
∫Γσ
tiudi dΓ (A-7)

Apendice A. Potencial de Hellinger-Reissner 85
que depende unicamente dos deslocamentos ui e das tensoes σij, independentes
entre si.

BMatriz Lbl
Matrizes Lbl previamente calculadas para elementos em duas e tres
dimensoes.
Matrizes Lbl para elementos 2D
Elemento linear:
Lbl =1
3
[2 1
1 2
](B-1)
Elemento quadratico:
Lbl =1
15
4 2 −1
4 16 2
−1 2 4
(B-2)
Elemento cubico:
Lbl =1
840
128 99 −36 19
99 648 −81 −36
−36 −81 648 99
19 −36 99 128
(B-3)
Matrizes Lbl para elementos 3D
Elemento triangular linear T3:
Lbl =1
24
2 1 1
1 2 1
1 1 2
(B-4)

Apendice B. Matriz Lbl 87
Elemento quadrangular linear Q4:
Lbl =1
9
4 2 1 2
2 4 2 1
1 2 4 2
2 1 2 4
(B-5)
Elemento triangular quadratico T6:
Lbl =1
360
6 −1 −1 0 −4 0
−1 6 −1 0 0 −4
−1 −1 6 −4 0 0
0 0 −4 32 16 16
−4 0 0 16 32 16
0 −4 0 16 16 32
(B-6)
Elemento quadrangular quadratico Q8:
Lbl =1
45
6 2 3 2 −6 −8 −8 −6
2 6 2 3 −6 −6 −8 −8
3 2 6 2 −8 −6 −6 −8
2 3 2 6 −8 −8 −6 −6
−6 −6 −8 −8 32 20 16 20
−8 −6 −6 −8 20 32 20 16
−8 −8 −6 −6 16 20 32 20
−6 −8 −8 −6 20 16 20 32
(B-7)

Referencias Bibliograficas
[1] Banerjee, P.K.; Butterfield, R.; 1981; Boundary Element Methods in
Engineering Sciense., McGraw-Hill: London.
[2] Brebbia, C.A.; 1978, The Boundary element method for engineers., Pen-
tech Press, Londres.
[3] Brebbia, C.A.; Telles,J.F.C.; Wrobel, L.C.; 1984, Boundary element tech-
niques., Springer-Verlag, Berlin and New York.
[4] Burgos, R.B.; 2009; Analise de Estruturas Utilizando Wavelets de Daube-
chies e Interpolets de Deslauriers-Dubuc., Tese de Doutorado - Programa
de Pos-graduacao em Engenharia Civil, Pontificia Univerdade Catolica do
Rio de Janeiro, Rio de Janeiro, 185 f.
[5] Chaves, R.A.P.; 1999; Estudo do metodo hıbrido dos elementos de con-
torno e proposta de uma formulacao simplificada., Dissertacao de Mes-
trado - Programa de Pos-graduacao em Engenharia Civil, Pontificia Uni-
verdade Catolica do Rio de Janeiro, Rio de Janeiro, 169 f.
[6] Chaves, R.A.P.; 2003, The simplified hybrid boundary element method ap-
plied to time-dependent problems.,(in Portuguese), Ph.D. thesis, Pontifical
Catholic University of Rio de Janeiro.
[7] Dumont, N.A.; 1987; The hybrid boundary element method., In: C. Breb-
bia, W. Wendland, G. Kuhn (Eds.), Boundary Elements IX: Mathema-
tical and computational aspects, number 3 in computational Mechanics
Publication, Springer-Verlag, pp. 125-138.
[8] Dumont, N.A.; 1989 The hybrid boundary element method: an alliance
betwen mechanical consistency and simplicity, Applied Mechanics Revi-
ews, 42(11), Part 2, pp. S54-S63.
[9] Dumont, N.A.; 1998, An assessment of the spectral properties of the matrix
G used in the boundary element methods., Computational Mechanics 22,
pp. 32-41.
Referencias Bibliograficas 80
[10] Dumont, N.A.; 2003, Variationally-based, hybrid boundary element
methods., Computer Assisted Mechanics and Engineering Sciences (CA-
MES) 10, pp. 407-430.
[11] Dumont, N.A.; 2003; Variationally-based, hybrid boundary element
methods., In: E.A.W. Maunder, A.A. Javadi (Eds.), Proceedings 3er Inter-
national Conference Trefftz Methods, Developments and Applications in
Computational Mechanics (EuroConference ECONF CM4, IACM Special
Interest Conference), Exeter, England, pp. 25 on CD.
[12] Dumont, N.A.; 2010, From the collocation boundary element methods
to a meshless formulation., in: E.N. Dvorkin, M.B. Goldschmit, M.A.
Storti(Eds), Mecanica Computacional, MECOM 2010 - IX Argentinean
congress on Computational Mechanics and II South American congress
on Computational Mechanics, XXXI CILAMCE Iberian Latin-American
Congress of Computational Methods in Engineering, Buenos Aires, Ar-
gentina. pp. 4635-4659.
[13] Dumont, N.A.; 2010; The boundary element method revisited., In: BEM
- MRM 32 - Boundary Elements and Other Mesh Reduction Methods
XXXII, 2010, Inglaterra. WIT Transactions on Modelling and Simulation.
Southampton, Inglaterra: WIT Press. v.50. pp. 227-238.
[14] Dumont, N.A.; 2010; On the spectral properties of the double layer po-
tential matrix H of the boundary element methods. In 11th Pan-American
Congress of Applied Mechanics - PACAM XI, page 6pp. Foz de Iguacu,
Brazil.
[15] Dumont, N.A.; 2013; The hybrid boundary element method - fundamen-
tals.(to be submitted). Engineering Analysis with Boundary Elements.
[16] Dumont, N.A.; 2013, Toward a meshless formulation of the simplified
hybrid boundary element method., (to be submitted).
[17] Dumont, N.A.; Chaves, R.A.P.; 2003, General time-dependent analysis
with the frequency-domain hybrid boundary element method., Computer
assisted Mechanics and Engineering Sciences, pp. 431-452.
[18] Dumont, N.A.; Aguilar, C.A.; 2011, The best of two worlds: The expe-
dite boundary element method.,in: Y.Y.-B.L.J. Leu, C.S.D. Chen (Eds.),
Extended Abstracts of ISCMIII/CSEII-3rd International Symposium on
Computational Mechanics, 2nd Symposium on Computational Structural
Engineering, Taipei, Taiwan, pp. 46-47.

Referencias Bibliograficas 81
[19] Dumont, N.A.; Aguilar, C.A.; 2011, The expedite boundary element
method., in: C.A. Brebbia, V. Popov (Eds.), Boundary Elements and
Other Mesh Reduction Methods XXXII, WITPress, Southampton, pp.
179-190.
[20] Dumont, N.A.; Aguilar, C.A.; 2011, Expedite implementation of the boun-
dary element method., in: E.L. Albuquerque, M.H. Aliabadi (Eds), Ad-
vances in Boundary Element Techniques XII, EC, Ltd, UK, pp. 162-179.
[21] Dumont, N.A.; Aguilar, C.A.; 2011, Expedite implementation of the boun-
dary element method for elasticity problems., in: Proceed-ings CILAMCE
- XXXII Iberian Latin-American Congress on Computational Methods in
Engineering, Ouro Preto, Brazil, p.16 (on CD).
[22] Dumont, N.A.; Aguilar, C.A.; 2011, Three-dimensional implementation
of the expedite boundary element method., in: Extended Abstract of the
IABEM2011, Symposium of the International Association for Boundary
Element Methods, Brescia, Italy, pp. 113-118.
[23] Dumont, N.A.; Aguilar, C.A.; 2012, The best of two worlds: The expedite
boundary element method. Engineering Structures, v.43, p.235-244.
[24] Hellinger, E.; 1914; Die allgemeinen Ansatze der Mechanik der Kontinua.,
Enz. Math. Wis.; 4, 602-694.
[25] Liu, Y.; 2009; Fast Multipole Boundary Element Method, Theory and
applications in Engineering., Cambridge.
[26] Oliveira, M.F.F.; 2004, Conventional, hybrid and simplified boundary
element methods.,(in Portuguese), Master’s thesis, Pontifical Catholic
University of Rio de Janeiro.
[27] Oliveira, M.F.F.; Dumont, N.A.; 2009, Conceptual completion of the
simplified hybrid boundary element method., in: E.J. Sapountzakis, M.H.
Aliabadi (Eds.), Beteq 2009 - International Conference on Boundary
Element Techniques, Athens, Greece, pp. 49-54.
[28] Pian, T.H.H.; Tong, P.; 1969; Basis of Finite Element Methods for Solid
Continua., Int. J. Numer. Meth. Engrg. 1, pp. 3-28.
[29] Pian, T.H.H.; 1983; Reflections and remarks on hybrid and mixed finite
element method., In. S.N. Atluri, R.H. Gallagher, O.C. Zienkiewickz; (eds)
Hybrid and Mixed Finite Element Methods. Wiley, New York, NY. pp.
565-570.

Referencias Bibliograficas 82
[30] Reissner, E.; 1950; On a variational theorem in elasticity., In. J. Math.
Phys., 29, pp. 90-95.
[31] Saad, Y.; 1981; Krylov subespace methods for solving large unymmetric
linear systems. Math Comput. 37, pp. 203-228.
[32] Saad, Y.; Schultz, M.H.; 1986; GMRES: A generalized minimal residual
algorithm for solving nonsymmetric linear systems. Siam J. Sci. Stat.
Comput.; pp. 856-869.

APotencial de Hellinger-Reissner
A expressao da energia potencial total de um corpo elastico sujeito a
pequenos deslocamentos e dada por
Π =
∫Ω
U0(εij)dΩ−∫
Ω
bjuidΩ−∫
Γσ
tiuidΓ (A-1)
a menos de uma constante. Neste funcional, o primeiro termo corresponde a
energia total interna de deformacao, onde
U0(εij) =1
2σijεij (A-2)
e os outros termos referem-se ao potencial das forcas externas bi e ti que
atuam no corpo. Este potencial foi estabelecido sob as condicoes restritivas
de compatibilidade geometrica dadas pelas equacoes (2-5) e (2-6).
Pode-se, no entanto, formular um potencial de forma independente destas
restricoes, de forma que estas nao sejam atendidas previamente. Isto pode
ser proporcionado atraves do acrescimo, no funcional, destas condicoes de
restricao por intermedio de multiplicadores de Lagrange. O novo funcional
resulta, entao, como uma forma generalizada da energia potencial total:
Πg =
∫Ω
U0(εij)dΩ−∫
Ω
bjuidΩ +
∫Ω
[1
2(ui,j − uj,i)− εij
]λijdΩ−∫
Γσ
tiuidΓ +
∫Γσ
(ui − ui)λidΓ (A-3)
onde λij e λi sao os multiplicadores de Lagrange. Os novos termos que
surgem nesta equacao compensam a eliminacao feita previamente das condicoes
restritivas.
Este novo potencial e funcao das variaveis εij, ui, λij e λi, completa-
mente independentes entre si, a princıpio, sem qualquer relacao com as forcas
prescritas bi e ti, e com os deslocamentos prescritos ui.
Pode-se nos multiplicadores de Lagrange um sentido mecanico: a variavel
λij corresponde as tensoes no domınio, enquanto λi refere-se a forcas no
contorno. Alem disto, observa-se que a imposicao de estacionariedade do
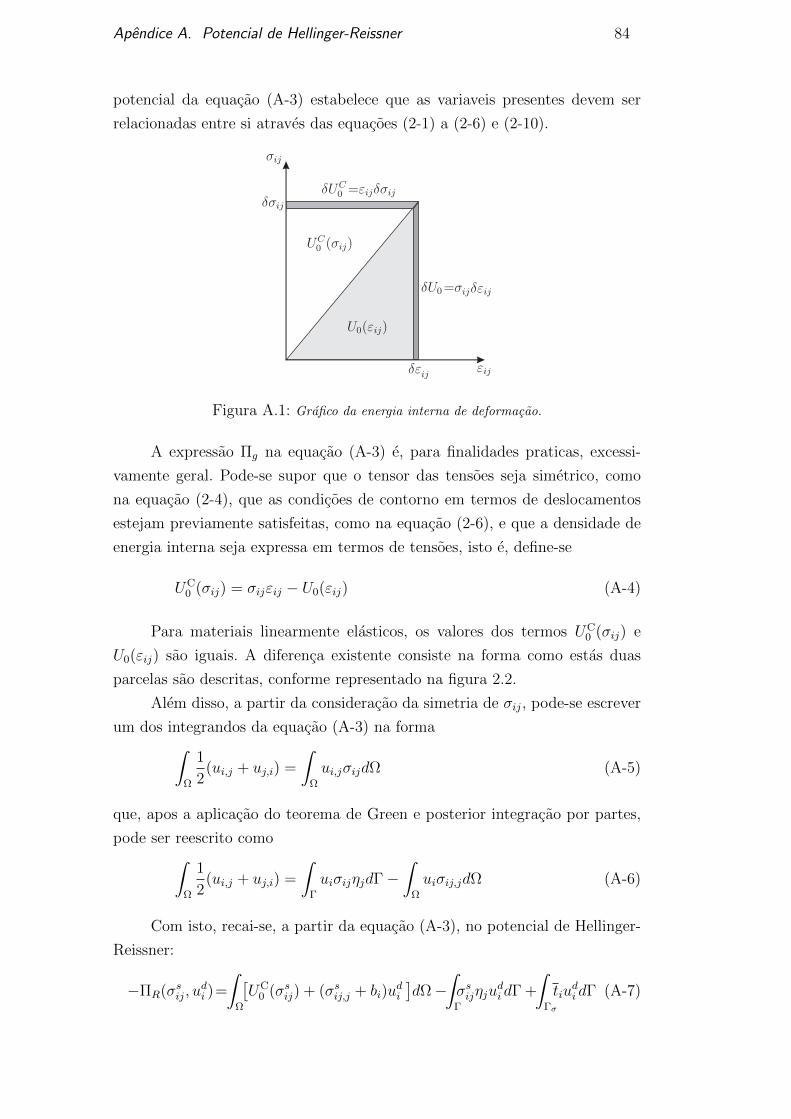
Apendice A. Potencial de Hellinger-Reissner 84
potencial da equacao (A-3) estabelece que as variaveis presentes devem ser
relacionadas entre si atraves das equacoes (2-1) a (2-6) e (2-10).
Figura A.1: Grafico da energia interna de deformacao.
A expressao Πg na equacao (A-3) e, para finalidades praticas, excessi-
vamente geral. Pode-se supor que o tensor das tensoes seja simetrico, como
na equacao (2-4), que as condicoes de contorno em termos de deslocamentos
estejam previamente satisfeitas, como na equacao (2-6), e que a densidade de
energia interna seja expressa em termos de tensoes, isto e, define-se
UC0 (σij) = σijεij − U0(εij) (A-4)
Para materiais linearmente elasticos, os valores dos termos UC0 (σij) e
U0(εij) sao iguais. A diferenca existente consiste na forma como estas duas
parcelas sao descritas, conforme representado na figura 2.2.
Alem disso, a partir da consideracao da simetria de σij, pode-se escrever
um dos integrandos da equacao (A-3) na forma∫Ω
1
2(ui,j + uj,i) =
∫Ω
ui,jσijdΩ (A-5)
que, apos a aplicacao do teorema de Green e posterior integracao por partes,
pode ser reescrito como∫Ω
1
2(ui,j + uj,i) =
∫Γ
uiσijηjdΓ−∫
Ω
uiσij,jdΩ (A-6)
Com isto, recai-se, a partir da equacao (A-3), no potencial de Hellinger-
Reissner:
−ΠR(σsij, udi )=
∫Ω
[UC
0 (σsij) + (σsij,j + bi)udi
]dΩ−
∫Γ
σsijηjudi dΓ +
∫Γσ
tiudi dΓ (A-7)

Apendice A. Potencial de Hellinger-Reissner 85
que depende unicamente dos deslocamentos ui e das tensoes σij, independentes
entre si.

BMatriz Lbl
Matrizes Lbl previamente calculadas para elementos em duas e tres
dimensoes.
Matrizes Lbl para elementos 2D
Elemento linear:
Lbl =1
3
[2 1
1 2
](B-1)
Elemento quadratico:
Lbl =1
15
4 2 −1
4 16 2
−1 2 4
(B-2)
Elemento cubico:
Lbl =1
840
128 99 −36 19
99 648 −81 −36
−36 −81 648 99
19 −36 99 128
(B-3)
Matrizes Lbl para elementos 3D
Elemento triangular linear T3:
Lbl =1
24
2 1 1
1 2 1
1 1 2
(B-4)
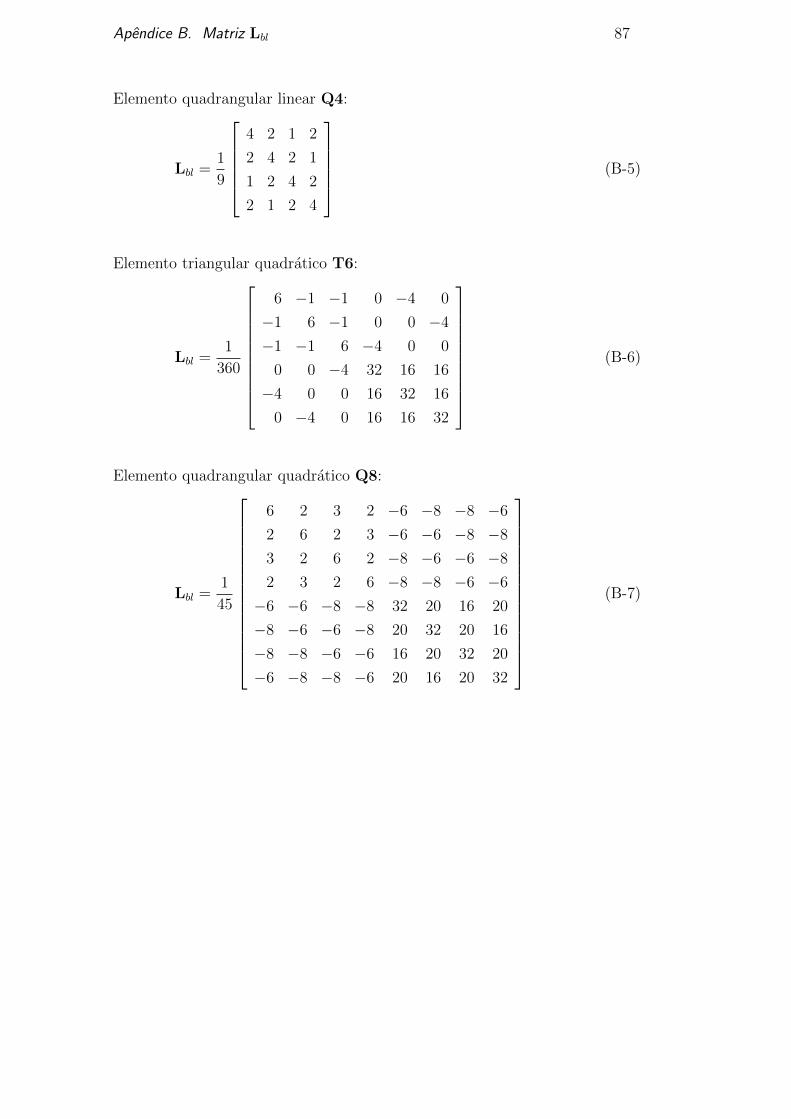
Apendice B. Matriz Lbl 87
Elemento quadrangular linear Q4:
Lbl =1
9
4 2 1 2
2 4 2 1
1 2 4 2
2 1 2 4
(B-5)
Elemento triangular quadratico T6:
Lbl =1
360
6 −1 −1 0 −4 0
−1 6 −1 0 0 −4
−1 −1 6 −4 0 0
0 0 −4 32 16 16
−4 0 0 16 32 16
0 −4 0 16 16 32
(B-6)
Elemento quadrangular quadratico Q8:
Lbl =1
45
6 2 3 2 −6 −8 −8 −6
2 6 2 3 −6 −6 −8 −8
3 2 6 2 −8 −6 −6 −8
2 3 2 6 −8 −8 −6 −6
−6 −6 −8 −8 32 20 16 20
−8 −6 −6 −8 20 32 20 16
−8 −8 −6 −6 16 20 32 20
−6 −8 −8 −6 20 16 20 32
(B-7)