teee i – projetos de robôs móveis - feis.unesp.br · em 2011, as vendas de robôs aumentaram em...
TRANSCRIPT

TEEE I – Projetos de Robôs Móveis
Professores Responsáveis:Profa. Suely Cunha Amaro Mantovani
Prof. Nobuo OkiDepartamento de Engenharia Elétrica
Faculdade de Engenharia de Ilha Solteira - UNESP

Introdução a Robótica
Histórico
Em uma peça teatral o autor Karel Capek (1890-1938) fez uso pela primeira vez do termo robot, que em tcheco significa trabalho forçado ou servo.
O uso da palavra robot foi introduzida em sua peça intitulada R.U.R. (Rossum’s Universal Robots) que foi apresentada em Janeiro de 1921.
Ficção Científica
Isaac Asimov (1920-1992) utilizou o termorobótica em seu livro Eu, robô. O livro é composto de 9 contos que, de forma sucessiva, discorrem sobre a evolução dos robôs através do tempo.
Fritz Lang (1890-1976) com seu filme Metrópolis(1927) apresenta uma obra sobre a relação entre as máquinas e os trabalhadores nas grandes cidades, com ênfase para o sentimento de humanidade perdido no processo.
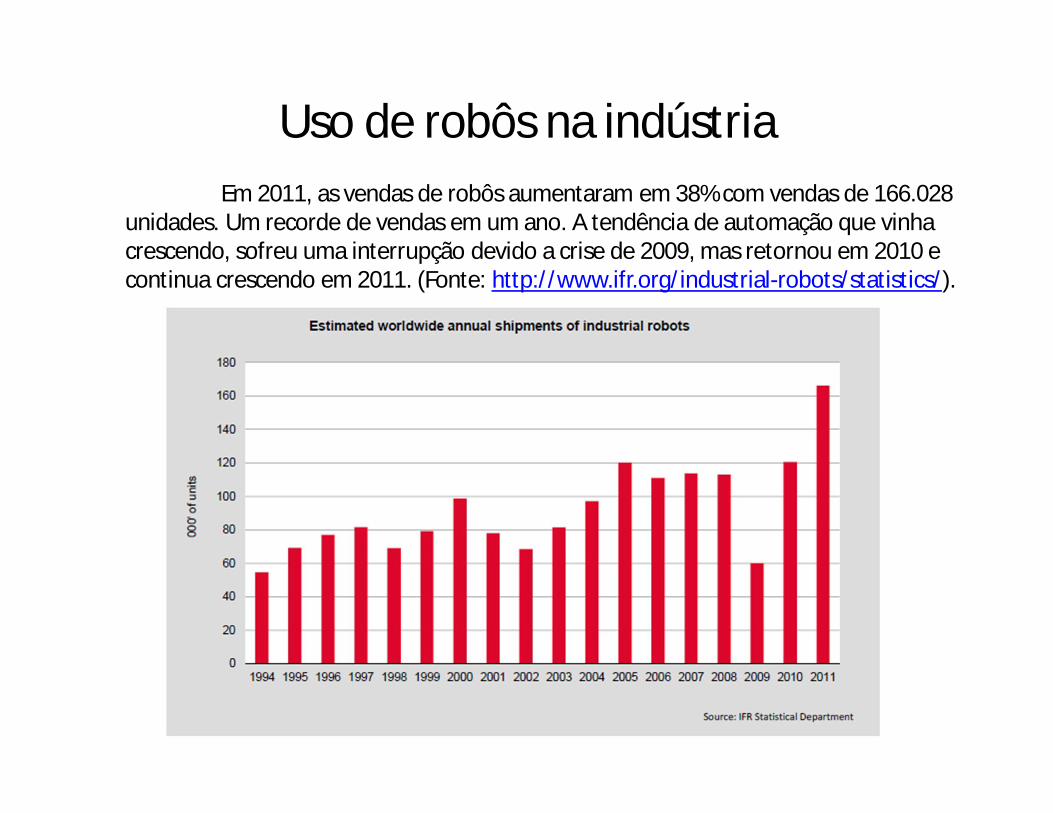
Uso de robôs na indústriaEm 2011, as vendas de robôs aumentaram em 38% com vendas de 166.028
unidades. Um recorde de vendas em um ano. A tendência de automação que vinhacrescendo, sofreu uma interrupção devido a crise de 2009, mas retornou em 2010 e continua crescendo em 2011. (Fonte: http://www.ifr.org/industrial-robots/statistics/).


Aplicações Comuns dos RobôsIndustriaisAgriculturaExploraçãoMédicaMilitarEducação
EntretenimentoTarefas Domésticas

Aplicações IndustriaisIndustrial
Montagens usando robôs, transporte, etc…

Agricultura

ExploraçãoExploração
Submarina;Espacial;Ambientes perigosos.
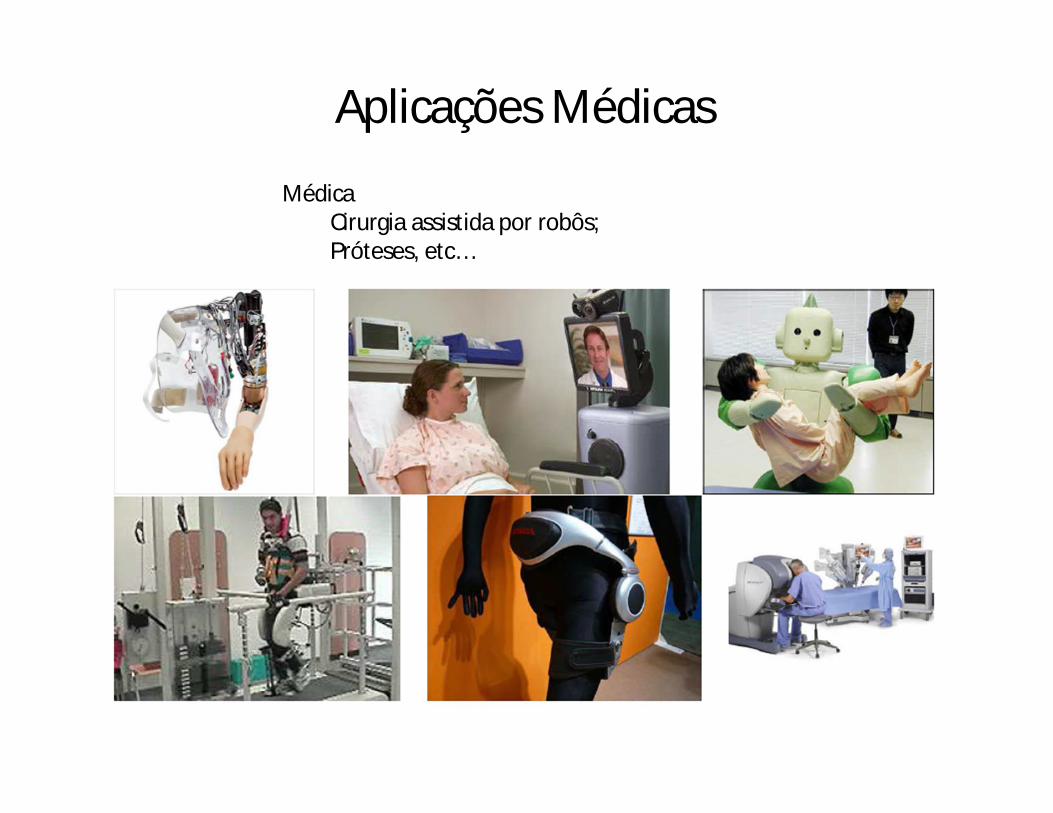
Aplicações Médicas
MédicaCirurgia assistida por robôs;Próteses, etc…

Militar
http://science.howstuffworks.com/military-robot2.htm http://dronewarsuk.wordpress.
com/aboutdrone/
http://www.militaryengineering.org/

Educacional

Entretenimento

Tarefas Domésticas

Últimas Novidades

Elementos de um Sistema RobóticoEstrutura mecânica compreendida de elos de um
manipulador e corpo e rodas em um robô móvel. Os elos sãoconectados através de juntas, que definem o grau de liberdade que umrobô possui.
Os atuadores que movem o robô. Motores elétricos,atuadores hidráulicos ou pneumáticos são as formas mais comuns dese mover as juntas.
Sensores medem o movimento do robô e permitem que orobô sinta o ambiente onde está inserido. Sensores de posição e detorque podem ser colocados nas juntas , e câmeras em robôs móveis.
Um computador controla a leitura dos sensores, envia sinaisde controle aos atuadores e interage sob comando de um operador epode exibir graus de autonomia.

Configurações Comuns: Braço de Stanford (RRP)
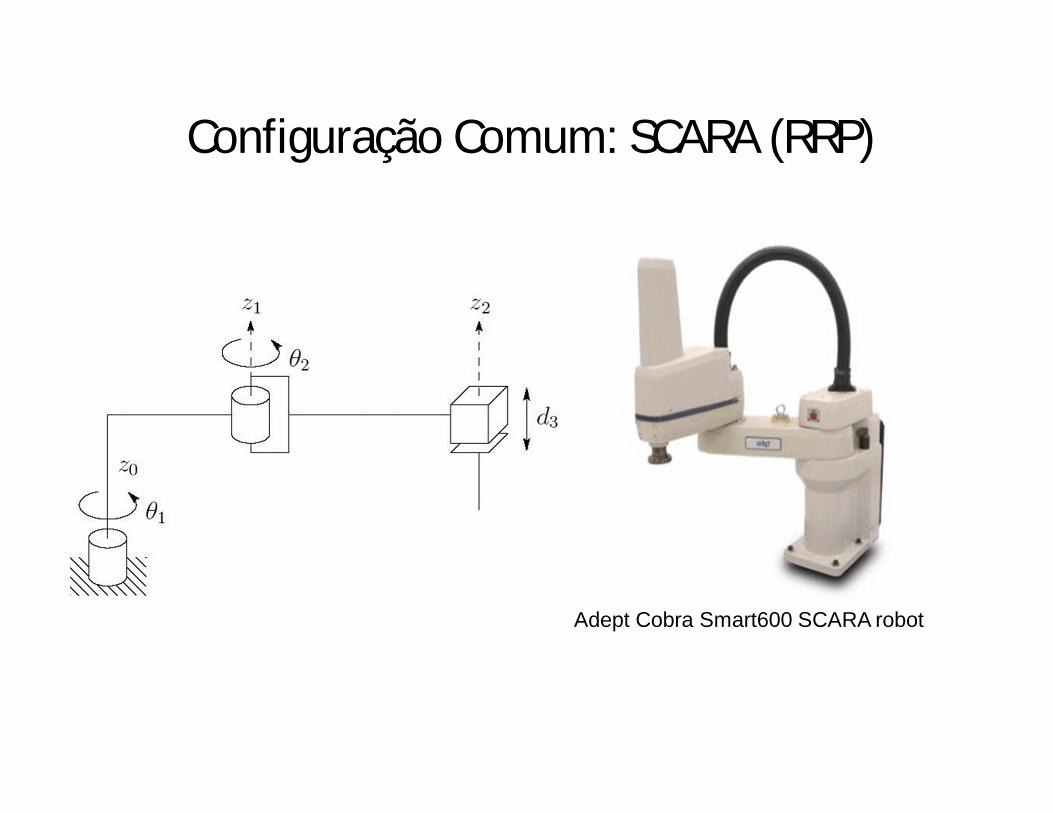
Configuração Comum: SCARA (RRP)
Adept Cobra Smart600 SCARA robot
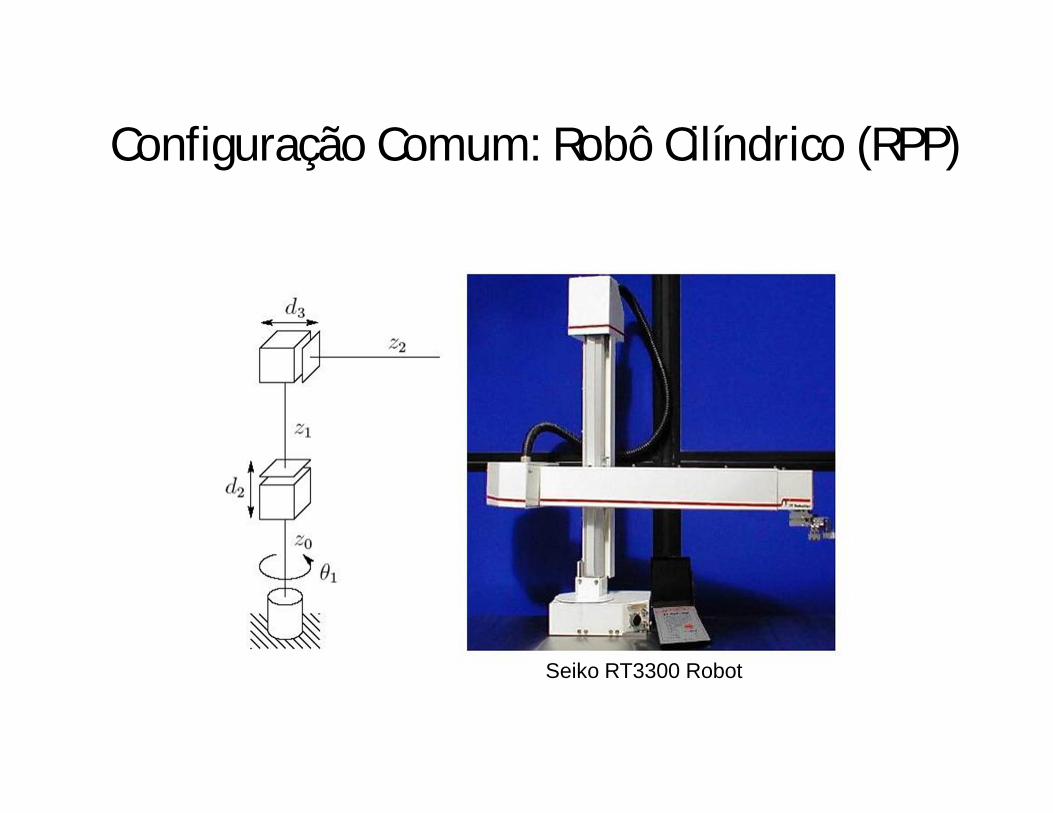
Configuração Comum: Robô Cilíndrico (RPP)
Seiko RT3300 Robot
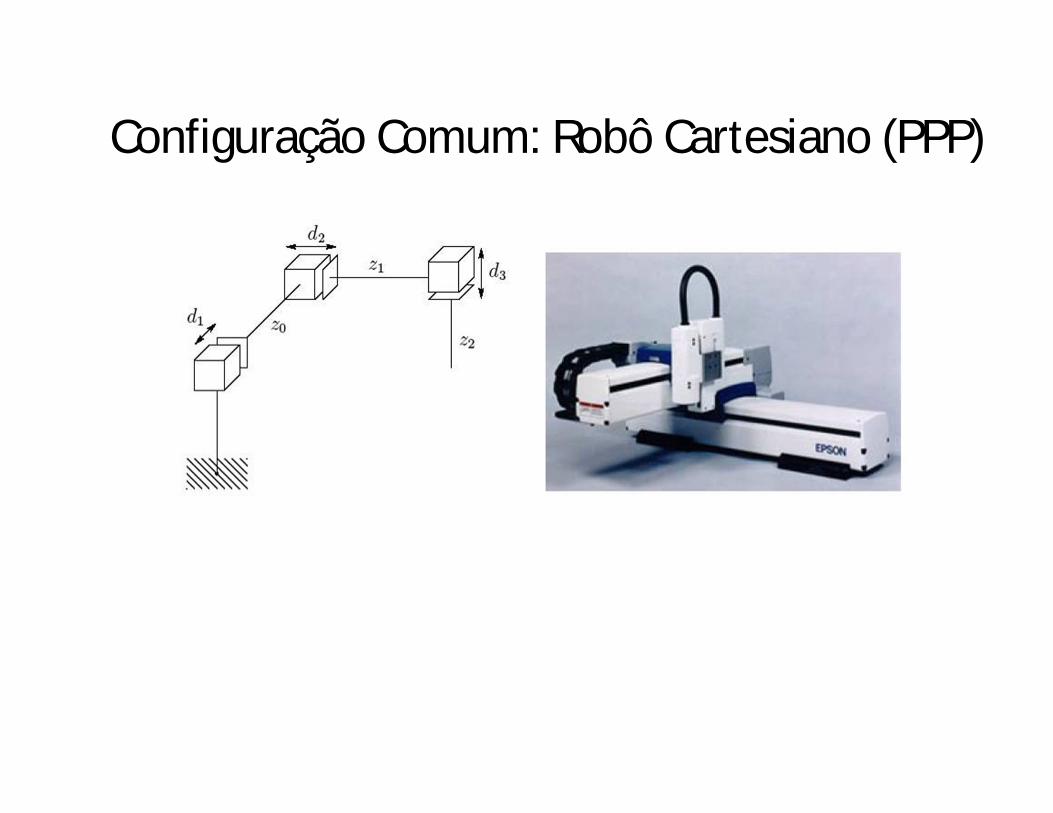
Configuração Comum: Robô Cartesiano (PPP)

Comparação das espaço de trabalho(Workspace)
(a) Esférica(b) SCARA(c) Cilíndrica(d) Cartesiano

Manipuladores Paralelos• Vantagens:
– Motores podem estar próximos: menos potência; fácilde controlar
• Desvantagens:– Generalmente possuem menos movimento (menor
workplace) e cinemática complexa
6DOF Stewart platformABB IRB6400 ABB IRB940 Tricept

Robôs made in Brasil (1)Paula Ferreira, da Revista Inovação em Pauta, da Finep

Robôs made in Brasil (2)
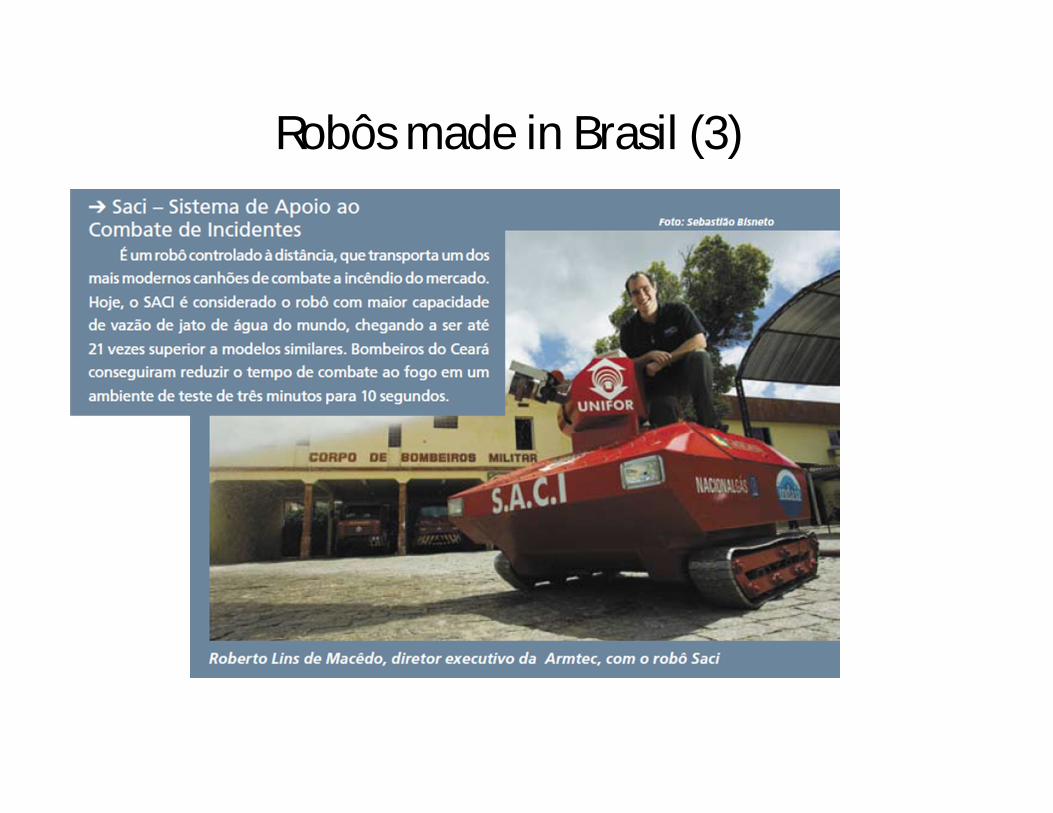
Robôs made in Brasil (3)
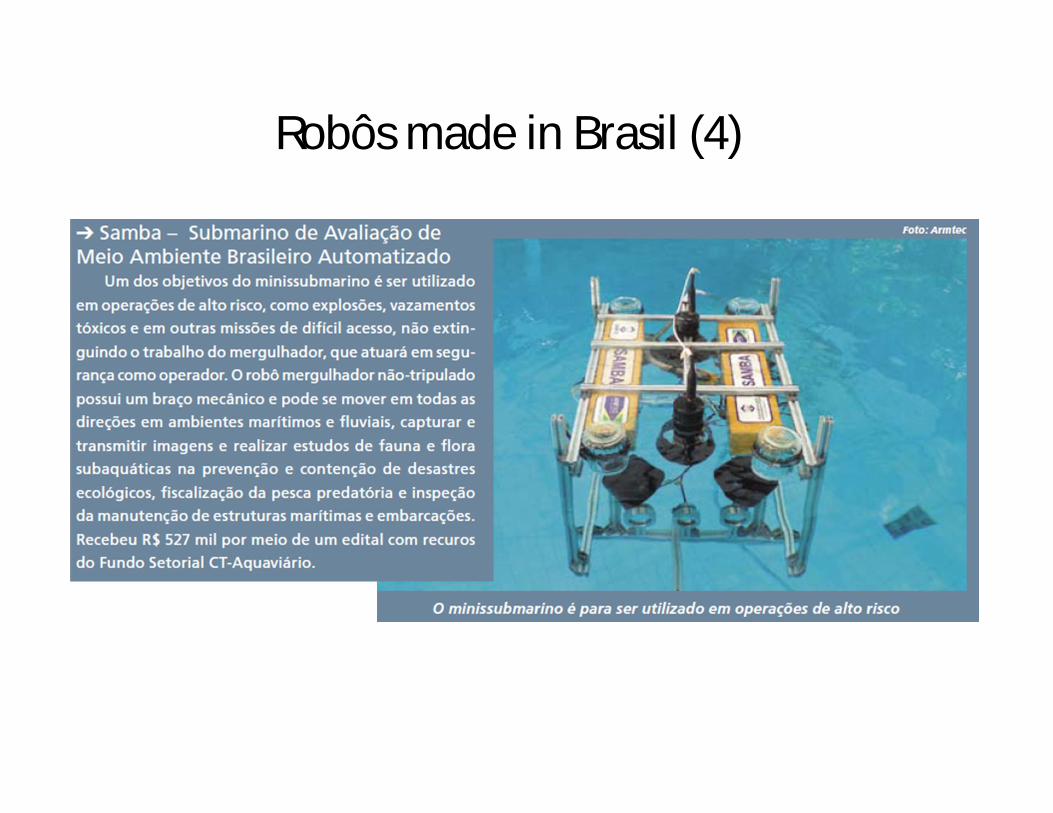
Robôs made in Brasil (4)