sistema eletrÔnico para processamento de energia …
TRANSCRIPT

.
DOUGLAS PEREIRA DA SILVA
SISTEMA ELETRÔNICO PARA PROCESSAMENTO
DE ENERGIA SOLAR FOTOVOLTAICA,
OPERANDO NA MÁXIMA TRANSFERÊNCIA DE
POTÊNCIA, COM APLICAÇÃO NA ALIMENTAÇÃO
DE REFRIGERADORES CONVENCIONAIS
FLORIANÓPOLIS
2003

ii
UNIVERSIDADE FEDERAL DE SANTA CATARINA
PROGRAMA DE PÓS-GRADUAÇÃO
EM ENGENHARIA ELÉTRICA
SISTEMA ELETRÔNICO PARA PROCESSAMENTO
DE ENERGIA SOLAR FOTOVOLTAICA,
OPERANDO NA MÁXIMA TRANSFERÊNCIA DE
POTÊNCIA, COM APLICAÇÃO NA ALIMENTAÇÃO
DE REFRIGERADORES CONVENCIONAIS
Dissertação submetida à
Universidade Federal de Santa Catarina
como parte dos requisitos para a
obtenção do grau de Mestre em Engenharia Elétrica.
DOUGLAS PEREIRA DA SILVA
Florianópolis, Março de 2003.

iii
SISTEMA ELETRÔNICO PARA PROCESSAMENTO DE
ENERGIA SOLAR FOTOVOLTAICA, OPERANDO NA
MÁXIMA TRANSFERÊNCIA DE POTÊNCIA, COM
APLICAÇÃO NA ALIMENTAÇÃO DE REFRIGERADORES
CONVENCIONAIS
Douglas Pereira da Silva
‘Esta Dissertação foi julgada adequada para obtenção do Título de Mestre
em Engenharia Elétrica, Área de Concentração em Eletrônica de Potência e Acionamento
Elétrico e aprovada em sua forma final pelo Programa de Pós-Graduação em Engenharia
Elétrica da Universidade Federal de Santa Catarina.’
______________________________________
Prof. Denizar Cruz Martins, Dr.
Orientador
______________________________________
Prof. Edson Roberto de Pieri, Dr.
Coordenador do Programa de Pós-Graduação em Engenharia Elétrica
Banca Examinadora:
______________________________________
Prof. Enio Valmor Kassick, Dr.
______________________________________
Prof. Hans Helmut Zürn, PhD
______________________________________
Prof. João Carlos dos Santos Fagundes, Dr.

iv
Aos meus pais,
Nair e Nelson

v
AGRADECIMENTOS
Ao Prof. Denizar Cruz Martins, pela orientação e oportunidade do trabalho.
Aos membros da banca, Prof. Fagundes, Prof. Kassick e Prof. Hans, pela atenta
leitura e valiosas contribuições.
A todos os professores do INEP, por seus ensinamentos, por contribuírem para
minha formação em Eletrônica de Potência e pela solícita ajuda nos momentos difíceis.
A todos os amigos do INEP que sempre estiveram ao meu lado nos bons e maus
momentos e que também muito contribuíram para este trabalho. Prefiro não citar nomes
aqui para não cometer a injustiça de deixar alguém de fora.
Aos funcionários técnico-administrativos que, com sua cordialidade e competência,
viabilizaram a execução deste trabalho, em especial à Dulcemar, Rafaell e Coelho.
Ao André Andrade e Jean Farley pela substancial ajuda na reta final.
À Luciana por seu amor, compreensão e apoio.
Aos meus pais, Nair e Nelson, que com seu suporte propiciaram-me a tranqüilidade
necessária para dedicação única e exclusiva aos estudos, e que sem os quais nada disso
teria sido realizado.

vi
Resumo da Dissertação apresentada à UFSC como parte dos requisitos necessários
para a obtenção do grau de Mestre em Engenharia Elétrica.
SISTEMA ELETRÔNICO PARA PROCESSAMENTO DE
ENERGIA SOLAR FOTOVOLTAICA, OPERANDO NA
MÁXIMA TRANSFERÊNCIA DE POTÊNCIA, COM
APLICAÇÃO NA ALIMENTAÇÃO DE REFRIGERADORES
CONVENCIONAIS
DOUGLAS PEREIRA DA SILVA
Março de 2003
Orientador: Prof. Denizar Cruz Martins, Dr.
Área de Concentração: Eletrônica de Potência e Acionamento Elétrico
Palavras-chave: Sistema fotovoltaico isolado, rastreamento do ponto de máxima potência,
alimentação de refrigeradores, energia solar, fontes não-convencionais de energia.
Número de Páginas: 225.
O presente trabalho apresenta o estudo, projeto e implementação prática de um sistema
isolado de processamento de energia solar fotovoltaica, operando na máxima transferência
de potência, de forma a se maximizar a eficiência de conversão desta forma de energia,
aplicado na alimentação de refrigeradores comerciais. A operação no ponto de máxima
transferência de potência é implementada analógica e digitalmente, sendo os resultados
comparativos apresentados. Por se tratar de um sistema isolado, há necessidade de
armazenamento do excedente da energia processada. Dessa forma, o sistema compreende a
utilização de um banco de baterias. A alimentação do refrigerador é feita a partir do
barramento do banco de baterias e de dois outros estágios: um estágio elevador, regulador
da carga e responsável pelas dinâmicas do refrigerador, e um estágio inversor com
modulação PWM senoidal a três níveis, para acionamento com tensão senoidal de
baixíssima distorção harmônica.

vii
Abstract of Dissertation presented to UFSC as a partial fulfillment of the
requirements for the degree of Master in Electrical Engineering.
PHOTOVOLTAIC SOLAR ENERGY PROCESSING SYSTEM,
WITH MAXIMUM POWER POINT TRACKING, APPLIED IN
ORDINARY REFRIGERATORS POWER SUPPLYING
DOUGLAS PEREIRA DA SILVA
March / 2003
Advisor: Prof. Denizar Cruz Martins, Dr.
Area of Concentration: Power Electronics and Electrical
Drives.
Keywords: Photovoltaic power systems, non-grid connected,
maximum power point tracking, refrigerators power supplying,
alternative energy sources
Number of Pages: 225.
This work presents the study, design and assembly of a non-grid connected photovoltaic
processing system, working with maximum power point tracking in order to maximize the
photovoltaic conversion rate, applied in ordinary refrigerator power supply. The maximum
power point tracking is analogically and digitally implemented with comparative results
presented. As the system is non-grid connected, batteries are need for storage of the excess
of processed energy. Power supplying of the refrigerator is done from these batteries in
two stages: a step-up, load regulator stage concerned with the refrigerator dynamics, and a
sinusoidal three-level PWM modulated inverter for low distortion voltage driving.

viii
SUMÁRIO
SIMBOLOGIA...................................................................................................................xiii
INTRODUÇÃO GERAL ...................................................................................................... 1
CAPÍTULO 1 ........................................................................................................................ 5
SISTEMAS FOTOVOLTAICOS APLICADOS EM REFRIGERAÇÃO .......................... 5
1.1 Introdução ............................................................................................................ 5
1.2 Os painéis ............................................................................................................. 6 1.2.1 Tecnologias de fabricação ............................................................................. 7 1.2.2 Características elétricas ................................................................................. 8
1.3 Sistemas isolados e sistemas interligados ........................................................ 11
1.4 Aplicação em refrigeração ................................................................................ 12
1.5 Conclusão ........................................................................................................... 15
CAPÍTULO 2 ...................................................................................................................... 17
DEFINIÇÃO, ANÁLISE DA ESTRATÉGIA E PROJETO DO SISTEMA DE RASTREAMENTO DO MPP ............................................................................................ 17
2.1 Introdução .......................................................................................................... 17
2.2 Modelagem da fonte de alimentação................................................................ 17 2.2.1 Arranjo de painéis fotovoltaicos.................................................................. 20
2.3 Definição do conversor CC-CC para rastreamento do MPP e carga das baterias ........................................................................................................................... 21
2.3.1 Conversor Buck ........................................................................................... 22 2.3.2 Conversor Forward...................................................................................... 22 2.3.3 Conversor Boost .......................................................................................... 22 2.3.4 Conversor Flyback....................................................................................... 22 2.3.5 Conversor Buck com filtro de entrada......................................................... 23
2.4 Metodologia de projeto do conversor Buck com filtro de entrada para operação no MPP ........................................................................................................... 23
2.4.1 Especificações e definições preliminares .................................................... 24 2.4.2 Filtro de saída .............................................................................................. 25 2.4.3 Filtro de entrada........................................................................................... 27 2.4.4 Interruptor principal..................................................................................... 28 2.4.5 Diodos.......................................................................................................... 29 2.4.6 Cálculo de perdas ........................................................................................ 30 2.4.7 Cálculo do dissipador .................................................................................. 30
2.5 Revisão das estratégias de operação no MPP.................................................. 31 2.5.1 Controle da tensão de entrada de um conversor CC-CC com referência fixa. ..................................................................................................................... 31

ix
2.5.2 Controle da tensão de entrada de um conversor CC-CC com amostragem periódica da tensão de circuito aberto do painel.......................................................... 32 2.5.3 Controle da potência de entrada a partir de sua derivada em função da tensão ..................................................................................................................... 33 2.5.4 Controle da tensão de entrada de um conversor CC-CC através de algoritmo auto-adaptivo e autoperturbado ................................................................................... 33
2.6 Análise das estratégias de operação no MPP adotadas .................................. 36 2.6.1 Controle analógico da tensão de entrada com referência fixa ..................... 36
2.6.1.1 Circuito de controle e comando............................................................... 37 2.6.1.2 Estudo por simulação .............................................................................. 38
2.6.2 Controle digital da potência de entrada a partir de sua derivada................. 40 2.6.2.1 Algoritmo de controle.............................................................................. 41 2.6.2.2 Implementação com microcontrolador.................................................... 43
2.7 Conclusão ........................................................................................................... 47
CAPÍTULO 3 ...................................................................................................................... 48
DEFINIÇÃO DA TOPOLOGIA DO ESTÁGIO DE POTÊNCIA PARA APLICAÇÃO EM REFRIGERAÇÃO....................................................................................................... 48
3.1 Introdução .......................................................................................................... 48
3.2 Característica da carga ..................................................................................... 48 3.2.1 Modelo do compressor para tensão nominal ............................................... 49
3.2.1.1 Ensaio: Tensão nominal de 220 V, sem capacitor de partida.................. 49 3.2.1.2 Ensaio: Tensão nominal de 220 V, com capacitor de partida ................. 52
3.2.2 Modelo do compressor para subtensão........................................................ 53 3.2.2.1 Ensaio: Subtensão de 130 V, sem capacitor de partida ........................... 54 3.2.2.2 Ensaio: Subtensão de 130 V com capacitor de partida............................ 54
3.3 Definição da topologia do estágio de potência ................................................ 57 3.3.1 Topologias para estágio de potência único entre baterias e refrigerador .... 57
3.3.1.1 Inversor Full-Bridge bidirecional em corrente com modulação PWM senoidal isolado ....................................................................................................... 57 3.3.1.2 Inversor Push-Pull alimentado em tensão, com modulação PWM senoidal ................................................................................................................. 58 3.3.1.3 Inversor alimentado em corrente “avançado” ......................................... 59
3.3.2 Topologias para dois estágios de potência entre baterias e refrigerador ..... 61 3.3.2.1 Conversor Flyback de 350 W em Modo de Condução Contínua ............ 62 3.3.2.2 Conversor Push-Pull de 350 W em Modo de Condução Contínua ......... 68 3.3.2.3 Conversor Push-Pull com saída em ponte completa ............................... 75 3.3.2.4 Análise comparativa dos conversores CC-CC analisados....................... 76 3.3.2.5 Inversor Full-Bridge PWM senoidal ....................................................... 77
3.4 Sistema proposto................................................................................................ 80
3.5 Princípio de funcionamento do segundo e terceiro estágios .......................... 81 3.5.1 Etapas de operação do conversor Push-Pull ................................................ 81 3.5.2 Formas de onda do conversor Push-Pull ..................................................... 82 3.5.3 Etapas de operação do Inversor Full-Bridge PWM Senoidal a três níveis alimentando carga RL.................................................................................................. 84 3.5.4 Formas de onda do Inversor Full-Bridge PWM Senoidal a três níveis ....... 88

x
3.6 Conclusão ........................................................................................................... 90
CAPÍTULO 4 ...................................................................................................................... 91
PROJETO E SIMULAÇÃO DOS ESTÁGIOS APLICADOS EM REFRIGERAÇÃO .. 91
4.1 Introdução .......................................................................................................... 91
4.2 Conversor CC-CC Push-Pull............................................................................ 92 4.2.1 Especificações gerais................................................................................... 93 4.2.2 Dimensionamento dos esforços ................................................................... 93
4.2.2.1 Corrente no interruptor principal e nos enrolamentos primários............ 94 4.2.2.2 Corrente no enrolamento secundário....................................................... 94 4.2.2.3 Corrente no indutor de saída.................................................................... 95 4.2.2.4 Corrente nos diodos retificadores ............................................................ 95 4.2.2.5 Tensão nos interruptores principais......................................................... 95 4.2.2.6 Tensão nos diodos retificadores .............................................................. 96
4.2.3 Projeto do transformador ............................................................................. 96 4.2.3.1 Cálculo do produto de áreas .................................................................... 96 4.2.3.2 Cálculo dos números de espiras dos enrolamentos ................................. 97 4.2.3.3 Razão cíclica de partida........................................................................... 97 4.2.3.4 Cálculo da bitola ideal para minimizar o efeito pelicular........................ 97 4.2.3.5 Cálculo dos condutores para cada enrolamento ...................................... 98 4.2.3.6 Cálculo de perdas .................................................................................... 99
4.2.4 Especificação dos interruptores principais ................................................ 102 4.2.5 Especificação dos diodos retificadores...................................................... 102 4.2.6 Dimensionamento e projeto do indutor de saída ....................................... 103
4.2.6.1 Cálculo do produto de áreas .................................................................. 103 4.2.6.2 Cálculo do número de espiras................................................................ 104 4.2.6.3 Cálculo do entreferro ............................................................................. 104 4.2.6.4 Cálculo da bitola do condutor................................................................ 104 4.2.6.5 Cálculo de perdas .................................................................................. 105
4.2.7 Dimensionamento dos capacitores de saída .............................................. 106 4.2.8 Influência do inversor sobre o conversor Push-Pull.................................. 106 4.2.9 Dimensionamento e especificação dos capacitores de saída considerando a influência do inversor ................................................................................................ 108 4.2.10 Avaliação do projeto do indutor de saída considerando a influência do inversor ................................................................................................................... 109 4.2.11 Projeto dos circuitos de ajuda à comutação............................................... 110
4.2.11.1 Circuito “snubber” dos interruptores principais ................................ 110 4.2.11.2 Circuito de grampeamento dos diodos retificadores ......................... 114
4.2.12 Projeto de controle..................................................................................... 117 4.2.12.1 Malha de controle da tensão de saída ................................................ 117 4.2.12.2 Malha de controle da corrente de entrada.......................................... 127
4.2.13 Implementação prática do circuito de controle e comando ....................... 130
4.3 Inversor Full-Bridge PWM Senoidal............................................................. 133 4.3.1 Filtro LC .................................................................................................... 133 4.3.2 Projeto do indutor de filtragem.................................................................. 135
4.3.2.1 Cálculo do produto de áreas .................................................................. 135 4.3.2.2 Cálculo do número de espiras, do entreferro e da bitola do condutor ... 136
4.3.3 Dimensionamento dos esforços nos interruptores principais .................... 136

xi
4.3.4 Especificação dos interruptores principais ................................................ 137 4.3.5 Capacitores de grampeamento................................................................... 138 4.3.6 Circuito de comando e geração de sinais................................................... 138
4.4 Simulações ........................................................................................................ 140 4.4.1 Conversor Push-Pull alimentando carga resistiva com ‘snubber’ nos interruptores............................................................................................................... 141 4.4.2 Conversor Push-Pull alimentando carga resistiva com grampeador nos diodos retificadores ................................................................................................... 142 4.4.3 Conversor Push-Pull alimentando carga resistiva com controle da tensão de saída ................................................................................................................... 143 4.4.4 Conversor Push-Pull alimentando carga resistiva com controle da tensão de saída e da corrente de entrada.................................................................................... 145 4.4.5 Inversor Full-Bridge PWM Senoidal alimentando refrigerador na partida147 4.4.6 Conversor Push-Pull conectado ao Inversor Full-Bridge PWM Senoidal alimentando o refrigerador na partida ....................................................................... 150 4.4.7 Conversor Push-Pull conectado ao Inversor Full-Bridge PWM Senoidal alimentando o refrigerador na partida com controle da tensão de saída e da corrente de entrada ................................................................................................................... 153
4.5 Conclusão ......................................................................................................... 156
CAPÍTULO 5 .................................................................................................................... 157
RESULTADOS EXPERIMENTAIS ............................................................................... 157
5.1 Introdução ........................................................................................................ 157
5.2 Primeiro estágio: Carregador do banco de baterias e controlador do MPP Conversor Buck com filtro de entrada ...................................................................... 157
5.2.1 Formas de onda do sistema de rastreamento do MPP com controle digital da potência de entrada .................................................................................................... 158 5.2.2 Comparação entre o sistema de rastreamento analógico e o digital .......... 160 5.2.3 Avaliação do sistema de rastreamento do MPP ........................................ 162
5.3 Segundo estágio: Estágio elevador de tensão, isolador e regulador Conversor CC-CC Push-Pull...................................................................................... 165
5.4 Terceiro estágio: Estágio inversor – Inversor Full-Bridge PWM Senoidal com modulação a três níveis ....................................................................................... 168
5.5 Sistema interligado .......................................................................................... 169 5.5.1 Formas de onda.......................................................................................... 169 5.5.2 Rendimento................................................................................................ 174
5.6 Conclusão ......................................................................................................... 176
CONCLUSÃO GERAL..................................................................................................... 177
APÊNDICE A ................................................................................................................... 179
CÓDIGO-FONTE DO PROGRAMA DE RASTREAMENTO DO MPP ...................... 179
APÊNDICE B ................................................................................................................... 185
PROJETO DE UMA FONTE AUXILIAR PARA O SISTEMA PROPOSTO .............. 185
B.1 Especificações................................................................................................... 185

xii
B.2 Projeto do estágio de potência ........................................................................ 186 B.2.1 Corrente no interruptor principal............................................................... 186 B.2.2 Corrente nos diodos de saída..................................................................... 187 B.2.3 Tensão reversa no interruptor principal..................................................... 188 B.2.4 Tensão reversa nos diodos de saída........................................................... 188 B.2.5 Capacitância de saída................................................................................. 188
B.3 Projeto do transformador............................................................................... 189 B.3.1 Cálculo do entreferro ................................................................................. 190 B.3.2 Correntes no primário e secundários ......................................................... 190 B.3.3 Cálculo do número de espiras.................................................................... 191 B.3.4 Cálculo da bitola dos condutores............................................................... 191 B.3.5 Cálculo térmico do transformador............................................................. 192
B.4 Projeto do estágio de controle e comando ..................................................... 193 B.4.1 Modelo do conversor Flyback operando em condução descontínua......... 193 B.4.2 Cálculo do compensador ........................................................................... 195 B.4.3 Sistema em laço aberto.............................................................................. 197
B.5 Circuitos auxiliares.......................................................................................... 198 B.5.1 Circuito de ajuda à comutação................................................................... 199 B.5.2 Circuitos externos ao UC3844................................................................... 199
B.6 Resultados de simulação ................................................................................. 201
B.7 Conclusão ......................................................................................................... 205
REFERÊNCIAS BIBLIOGRÁFICAS ............................................................................ 206

xiii
SIMBOLOGIA
Símbolo Significado Unidade
Ae Área da perna central de um núcleo magnético E cm2
Aw Área da janela de um núcleo magnético E cm2
AeAw Produto de áreas de um núcleo magnético E cm4
B Densidade de fluxo magnético T
CDr Capacitância de junção de um diodo retificador de saída F
Cf Capacitor de filtragem da componente fundamental da tensão de
saída do inversor
F
Cgramp Capacitor do grampeador do conversor Push-Pull F
Cin Capacitor do filtro de entrada de um conversor F
Cout Capacitor do filtro de saída de um conversor F
Csnubber Capacitor do snubber do conversor Push-Pull F
D Razão cíclica
dmax Diâmetro máximo do condutor para a profundidade de penetração
da corrente
cm
Dr Diodo retificador de saída de um conversor
DRL Diodo de roda livre
Dsnubber Diodo do snubber do conversor Push-Pull
( )^sd
Perturbação na razão cíclica do conversor no modelo de pequenos
sinais
f0 Freqüência de corte de um filtro, planta ou compensador Hz
fc Freqüência de cruzamento Hz
fs Freqüência de comutação de um conversor Hz
FTat(s) Função de transferência do compensador atraso de fase
FTav(s) Função de transferência do compensador avanço de fase
FTavt(s) Função de transferência do compensador avanço-atraso de fase
FTci(s) Função de transferência do compensador de corrente
FTid(s) Função de transferência da corrente média de entrada pelo razão
cíclica

xiv
FTvd(s) Função de transferência da tensão de saída pela razão cíclica
FTLAavt(s) Função de transferência de laço aberto compensado da malha de
controle da tensão
FTLAci(s) Função de transferência de laço aberto compensado da malha de
controle da corrente
FTLAi(s) Função de transferência de laço aberto não-compensado da malha
de controle da corrente
FTLAv(s) Função de transferência de laço aberto não-compensado da malha
de controle da tensão
G0 Ganho estático de um compensador
H Ganho do sensor de tensão de saída do conversor Push-Pull
Hi Ganho do sensor da corrente de entrada do conversor Push-Pull Ω
I120 Componente de 120 Hz drenada pelo inversor A
ICout Corrente por um capacitor de saída de um conversor A
IDr Corrente por um diodo retificador de saída A
ILdis Corrente pela indutância de dispersão do transformador Push-Pull A
Iin Corrente de entrada de um conversor A
ILin Corrente por um indutor de filtragem de entrada A
ILout Corrente por um indutor de filtragem de saída A
Impp Corrente do painel fotovoltaico no ponto de máxima potência A
Iout Corrente de saída de um conversor A
IS Corrente por um interruptor principal A
Isc Corrente de curto-circuito A
( )^siin Perturbação na corrente média de entrada do conversor Push-Pull no
modelo de pequenos sinais
A
J Densidade de corrente A/cm2
KPri Fator de utilização do primário do transformador
KPWM Ganho do modulador PWM V-1
Ku Fator de utilização da janela do transformador
Ldis Indutância de dispersão do transformador Push-Pull H
Lf Indutor do filtro da componente fundamental da corrente de saída
do inversor

xv
lg Comprimento do entreferro mecânico de um indutor mm
Lin Indutor do filtro de entrada de um conversor H
Lout Indutor do filtro de saída de um conversor H
MLT Comprimento da espira média de um núcleo magnético E cm
Nesp Número de espiras de um indutor
Npar Número de condutores em paralelo em um determinado condutor
NPri Número de espiras do enrolamento primário do transformador Push-
Pull
NSec Número de espiras do enrolamento secundário do transformador
Push-Pull
Pgramp Potência dissipada no resistor do grampeador do conversor Push-
Pull
W
Pin Potência de entrada de um conversor W
Pout Potência de saída de um conversor
PJ Perdas Joule W
Pmag Perdas magnéticas W
Qc Fator de qualidade do sistema em laço aberto compensado da malha
de controle da tensão
Rcd Resistência térmica entre cápsula e dissipador ºC/W
RDS Resistência de condução de um interruptor principal Ω
Rgramp Resistor do grampeador do conversor Push-Pull Ω
Rjc Resistência térmica entre junção e cápsula ºC/W
RSE Resistência série equivalente de um capacitor Ω
Rsnubber Resistência do snubber do conversor Push-Pull Ω
Rth Resistência térmica de um núcleo magnético ºC/W
V1 Amplitude da tensão fundamental de saída do inversor V
Scm Área da seção de um condutor de determinado enrolamento cm2
VCgramp Tensão sobre o capacitor de grampeamento V
VCin Tensão sobre um capacitor de filtragem de entrada V
VDr Tensão reversa sobre um diodo retificador de saída V
Vin Tensão de entrada de um conversor V
VM Valor de pico do sinal dente-de-serra do modulador PWM V

xvi
Vmpp Tensão dos painéis fotovoltaicos no ponto de máxima potência V
Voc Tensão de circuito aberto V
Vout Tensão de saída de um conversor V
VR Valor de pico da senóide de referência do inversor V
Vref Tensão de referência de um compensador V
VS Tensão sobre um interruptor principal V
VSAT Tensão de saturação de um amplificador operacional V
VT Valor de pico de um sinal triangular V
VTH Tensão de limiar de um comparador com histerese V
( )^
svout Perturbação na tensão de saída do conversor Push-Pull no modelo
de pequenos sinais
V
WCsnubber Energia armazenada no capacitor do snubber J
WLdis Energia armazenada na indutância de dispersão do transformador
Push-Pull
J
δ Comprimento do entreferro elétrico de um indutor mm
∆ Profundidade de penetração da corrente em um condutor cm
∆X Ondulação ou variação sobre a grandeza X
∆T Elevação de temperatura ºC
Ωx_100ºC Resistividade elétrica de um condutor de determinada bitola AWG a
100 ºC
Ω.m
η Rendimento de um conversor
ξ Coeficiente de amortecimento de um filtro
Φ Fluxo magnético Wb
Ψ Fase desejada para o sistema em laço aberto compensado da malha
de controle da tensão de saída na freqüência de cruzamento
º
ψav Fase do compensador avanço de fase na freqüência de cruzamento º
ΨFTLA Fase do sistema em laço aberto não-compensado da malha de
controle da tensão na freqüência de cruzamento
º
ω120 Freqüência angular da componente de 120 Hz rad/s

xvii
Índices e sub-índices:
Símbolo Significado
_ Separador entre um índice e um sub-índice ou entre dois sub_índices
av Grandeza do compensador avanço de fase
ef Valor eficaz de uma grandeza
i Grandeza sobre o compensador de corrente
in Grandeza sobre ou por um elemento de entrada
k Amostra digital de uma grandeza
max Máximo valor de uma grandeza
med Valor médio de uma grandeza
mín Mínimo valor de uma grandeza
out Grandeza sobre ou por um elemento de saída
P Grandeza sobre ou por um elemento no instante da partida do compressor
pico Valor de pico de uma grandeza
pp Valor de pico a pico de uma grandeza
Pri Enrolamento primário de um transformador
RP Grandeza sobre ou por um elemento em regime permanente
Sec Enrolamento secundário de um transformador
sub Grandeza ou valor sobre ou por um elemento na condição de subtensão
do compressor
vd Tensão de saída pela razão cíclica
120 Componente de 120 Hz sobre uma grandeza

xviii
Símbolos utilizados nos diagramas esquemáticos:
Símbolo Significado
C Capacitor
D Diodo
E Fonte de tensão controlada por tensão
I Fonte de corrente
L Indutor
Q Transistor de junção bipolar
R Resistor
S Interruptor principal
U Circuito integrado
V Fonte de tensão
Acrônimos e abreviaturas:
Símbolo Significado
A/D Analógico para digital
AWG Bitola de um fio na American Wire Gauge
BJT Transistor de junção bipolar (Bipolar Junction Transistor)
CA Corrente alternada
CC Corrente contínua
CI Circuito integrado
DSP Processador digital de sinais (Digital Signal Processor)
IGBT Transistor bipolar de gatilho isolado (Insulated Gate Bipolar Transistor)
INEP Instituto de Eletrônica de Potência da Universidade Federal de Santa Catarina
MPP Ponto de máxima potência (Maximum power point)
MPPT Rastreador do ponto de máxima potência (Maximum Power Point Tracker)
MPR Razão de máxima potência (Maximum Power Rate)
TDH Taxa de distorção harmônica

.
INTRODUÇÃO GERAL
O Sol é e sempre foi a fonte de energia primária deste planeta. A partir da energia
irradiada por este astro tiveram início todos os processos orgânicos e inorgânicos que
deram origem à matéria e à vida tal qual se conhece.
Todas as fontes energéticas naturais existentes no planeta Terra são formas diversas
da energia irradiada pelo Sol e absorvida por seres vivos ou não, desta ou de outras eras.
Dessa forma, não se pode ignorar tamanha fonte energética no seu estado puro.
Como o Sol é uma fonte de energia altamente potente, mas na superfície da Terra é
extremamente variável devido às variações climáticas e aos movimentos de rotação e
translação do planeta, os potenciais consumidores desta fonte de energia tiveram que
desenvolver meios de armazenar parte dela para utilização nos momentos em que a mesma
não estivesse disponível, ou não fosse possível seu uso de forma direta.
As plantas, por exemplo, através da fotossíntese sintetizam açúcares que são
substâncias altamente energéticas e que provêm energia por meio de reações químicas em
qualquer instante. Este processo tem um custo, ou seja, demandou à planta um mecanismo
complexo de conversão de energia, todavia forneceu a ela energia abundante e estável.
Fitoplânctons e algas também realizam o mesmo processo e junto com as plantas
terrestres formam a base da conhecida cadeia alimentar.
Todos os seres vivos de alguma forma obtêm proveito deste mecanismo de
conversão de energia, sendo consumidores primários ou não. O interessante é que o
excedente de energia armazenado nunca é perdido, está sempre havendo alguma forma de
conversão da energia armazenada de uma forma para outra.
Devido a algumas condições especiais acontecidas na história geológica, a matéria
orgânica das plantas que converteram a energia solar em energia química e dos seres vivos
que se beneficiaram deste processo foi convertida em um material altamente energético e
que é uma das bases energéticas atuais, o petróleo.
Dessa forma, em última instância pode-se afirmar que o petróleo nada mais é que
energia solar armazenada. Ou seja, de uma forma ou de outra sempre se está processando
energia solar, o meio pela qual ela foi convertida é que varia.

Douglas Pereira da Silva, M. Eng.
2
Na segunda metade do século XX começaram a surgir alguns materiais para a
conversão fotovoltaica da energia solar; um processo já conhecido anteriormente, mas que
até então era inviável tecnologicamente.
A conversão fotovoltaica se propõe, portanto, a fornecer um mecanismo para se
converter diretamente a energia solar em energia elétrica. Contudo, como já foi dito, a
energia solar é altamente variável e a energia elétrica não pode ser armazenada em sua
forma pura.
Sendo assim, este fato costuma ser apontado como o “calcanhar de Aquiles” quando
se trata de energia solar fotovoltaica. Porém, reportando-se ao texto até aqui, que forma de
conversão de energia não utilizou processos de armazenamento?
Portanto, é totalmente justificável a utilização de alguma forma de estocagem da
energia captada do sol e convertida pelo processo fotovoltaico, seja ela mecânica, química
ou biológica. É o ônus que a natureza sempre pagou, cabendo à humanidade desenvolver
materiais ou métodos para uma eficiente forma de armazenamento.
Os processos de conversão da energia solar da natureza são altamente ineficientes se
comparados à conversão de outras formas de energia. Na fotossíntese, por exemplo,
estima-se, segundo [1], que apenas 0,2% da energia irradiada sobre as folhas de uma planta
seja convertida e absorvida. Os painéis fotovoltaicos, entretanto, são muito melhores na
conversão da energia solar e contam com uma taxa de conversão na faixa de 10 a 15%.
Motores à combustão comuns têm taxa de conversão de aproximadamente 20%.
Por ser uma fonte de energia não-poluente e modular a conversão fotovoltaica tem
recebido apoio de políticas públicas de muitos governos pelo mundo, sendo considerada
muito promissora. Em países como a Alemanha e Japão, o governo investiu pesado no
desenvolvimento da tecnologia, e lá a energia solar fotovoltaica já faz parte do dia-a-dia.
No Brasil, onde a energia elétrica sempre foi um artigo barato, pouco se preocupou e
se desenvolveu na área de conversão fotovoltaica. Com usinas hidrelétricas administradas
pelo Estado e amortizadas, o custo desta energia não incentivava a pesquisa por formas
alternativas.
No entanto, com a crescente globalização da economia brasileira e com a venda de
muitas empresas estatais do setor elétrico, a energia elétrica neste país passou a ser uma
fonte de investimento. Como os investidores, muitos internacionais, não investem para ter
prejuízos, a energia elétrica no Brasil começou a se tornar um artigo caro, tornando, dessa
forma, outras fontes de energia aptas a concorrer com a conversão hidráulica.

Douglas Pereira da Silva, M. Eng.
3
Por sua modularidade, a conversão de energia solar fotovoltaica adquiriu caráter
social. No Brasil, algumas vilas carentes e isoladas da rede elétrica já receberam painéis
fotovoltaicos, em caráter experimental, para alimentar pouco mais de uma lâmpada.
Este tipo de aplicação da energia solar fotovoltaica é chamado de sistema isolado. Ao
contrário de um outro tipo chamado sistema interligado onde a energia elétrica é
processada e injetada na rede elétrica, os sistemas isolados têm como função alimentar
cargas específicas em regiões onde não seja viável a extensão da rede elétrica pública, seja
por motivos de ordem econômica ou ambiental, como por exemplo numa reserva indígena
por onde não se pode passar linhas de distribuição.
É neste contexto, portanto, que se apresenta este trabalho, o estudo e implementação
de um sistema eletrônico para processamento da energia solar fotovoltaica para aplicação
na alimentação de uma carga específica e especial, um refrigerador residencial comum
num sistema isolado da rede elétrica.
Há muitas motivações que levam a este trabalho, dentre elas contribuições sociais no
sentido de propiciar melhor qualidade de vida a populações que vivem isoladas da rede
pública de energia elétrica, bem como contribuições tecnológicas, por se tratar da
alimentação de uma carga especial, um compressor acoplado a um motor de indução
monofásico.
Tanto é fato que se trata de uma carga especial, que o custo de um inversor para um
motor de indução monofásico é o mesmo que para um inversor trifásico de mesma
potência. Isto se deve à característica que apresenta o motor de indução monofásico na
partida.
Este trabalho visa, portanto, oferecer uma solução para a alimentação de um
refrigerador comum, a partir da energia solar fotovoltaica, explorando características do
motor e propondo uma estratégia de partida que torne tecnicamente viável este sistema.
A estrutura deste trabalho é formada por cinco capítulos e dois apêndices. O primeiro
capítulo faz uma abordagem das características de um sistema fotovoltaico aplicado em
refrigeração. Para tanto é feita uma pequena revisão sobre os painéis fotovoltaicos, suas
características e tecnologias de fabricação e o que são sistemas isolados e interligados, bem
como sobre a aplicação em refrigeração.
No segundo capítulo são abordados os sistemas de rastreamento do ponto de máxima
potência de painéis fotovoltaicos. Uma revisão dos métodos de rastreamento é feita, sendo
proposta a implementação de dois deles, um analógico, extremamente simples, e outro

Douglas Pereira da Silva, M. Eng.
4
digital mais elaborado. A definição e o projeto do estágio de potência deste conversor, bem
como dos métodos de controle são aí apresentados.
O terceiro capítulo apresenta um pequeno estudo da carga baseado em ensaios, de
forma a gerar um modelo para projeto e simulação. Uma revisão sobre conversores para
aplicação em refrigeração é feita, bem como um estudo comparativo entre duas topologias.
Neste capítulo é proposto o sistema completo a ser implementado.
O quarto capítulo é dedicado ao projeto completo do sistema aplicado em
refrigeração, baseado nas considerações feitas sobre a carga no terceiro capítulo. A
estratégia de controle utilizada, bem como um projeto detalhado deste item é realizado.
No quinto capítulo são apresentados os resultados experimentais dos conversores
isolados e do sistema interligado. Uma análise da eficácia dos sistemas de rastreamento do
ponto de máxima potência, bem como considerações sobre este tipo de sistema baseado na
experiência adquirida é feita.
No apêndice A é apresentado o código-fonte do controle digital implementado para o
sistema de rastreamento do ponto de máxima potência e no apêndice B é apresentado o
projeto de uma fonte auxiliar para incorporação ao sistema proposto.

.
CAPÍTULO 1
SISTEMAS FOTOVOLTAICOS APLICADOS EM REFRIGERAÇÃO
1.1 INTRODUÇÃO
Num mundo com escassez de recursos naturais, é interessante a utilização de fontes
de energia renováveis, sobretudo as não-poluentes. A energia solar, dentre outras, encaixa-
se nesse perfil, além de estar disponível em grande quantidade e gratuitamente.
A conversão da energia solar, realizada pelos painéis fotovoltaicos, é silenciosa e não
requer elementos mecânicos móveis, necessitando, portanto, de pouca ou nenhuma
manutenção.
Os painéis fotovoltaicos são o meio pelo qual se faz atualmente a conversão da
energia irradiada pelo Sol em energia elétrica, através do efeito fotovoltaico, e constituem-
se num arranjo de células fotovoltaicas. Este tipo de célula consiste em uma junção PN
semicondutora.
A incidência de fótons sobre esta junção provê energia para que os elétrons das
camadas mais externas libertem-se e na existência de um circuito fechado circulem.
O custo de implantação de um sistema fotovoltaico tem como fator relevante o preço
dos painéis, que embora tenha caído sensivelmente nos últimos anos, atualmente ainda é
elevado. A Fig. 1.1 apresenta a evolução do custo específico do painel.

Douglas Pereira da Silva, M. Eng.
6
Fig. 1.1 – Evolução do custo específico dos painéis fotovoltaicos [1].
É neste contexto que este capítulo faz uma breve abordagem sobre os painéis
fotovoltaicos: analisando as tecnologias existentes e as características elétricas.
1.2 OS PAINÉIS
Segundo [1], dentre as diversas tecnologias de semicondutores utilizadas para a
produção de células solares fotovoltaicas destacam-se, por ordem decrescente de
maturidade e utilização, a do silício cristalino (c-Si); a do silício amorfo hidrogenado (a-
Si:H ou simplesmente a-Si); o telureto de cádmio (CdTe) e as dos compostos relacionados
ao dissulfeto de cobre e índio (CuInSe2 ou CIS).
O silício cristalino é a tecnologia mais tradicional dentre as citadas e é a única que
faz uso de lâminas cristalinas, com diâmetro aproximado de 10 cm, relativamente espessas
(300 a 400 µm), representando uma limitação nos custos de produção. As outras
tecnologias utilizam filmes delgados (ordem de 1 µm) de semicondutor, residindo aí o
potencial de redução nos custos.

Douglas Pereira da Silva, M. Eng.
7
1.2.1 TECNOLOGIAS DE FABRICAÇÃO
Silício cristalino
Os painéis fotovoltaicos produzidos com silício cristalino são os que apresentam
maior escala de produção industrial, entretanto seu custo é bem elevado e as possibilidades
de reduzi-lo já estão praticamente esgotadas.
Há dois tipos de silício cristalino utilizados, o monocristalino e o policristalino. O
primeiro possui custo elevado de fabricação, porém com rendimento maior na conversão.
O segundo é um pouco menos eficiente, entretanto o seu custo é mais atraente.
Silício amorfo hidrogenado
Foi a primeira tecnologia empregada em películas delgadas no início dos anos 80,
despontando como tecnologia ideal para aplicação em calculadoras, relógios e dispositivos
de baixo consumo. Por terem resposta espectral voltada mais para o azul mostram-se mais
eficientes sob iluminação artificial, principalmente sob iluminação fluorescente.
Os filmes de silício amorfo podem ser depositados sobre substratos de baixo custo,
como vidro, aço inox e alguns plásticos. Com aparência estética melhor que os de silício
cristalino e com possibilidade de aplicação em substratos flexíveis, o silício amorfo pode
ser integrado na construção civil, como pode-se ver na Fig. 1.2.
De acordo com [1], o silício amorfo apresenta uma característica que a princípio se
mostrou uma limitação para esta tecnologia. Painéis de silício amorfo sofrem um
decréscimo intrínseco, mas reversível, em seu desempenho que se estabiliza após um
declínio em eficiência de aproximadamente 15 a 20%. É o chamado efeito Staebler-
Wronski.

Douglas Pereira da Silva, M. Eng.
8
Fig. 1.2 – Aplicação dos painéis de silício amorfo na construção civil [1].
Telureto de cádmio
É o mais recente competidor dos painéis de silício, estando disponível em filmes
delgados. Já vem sendo utilizado há cerca de uma década em calculadoras, mas somente
agora é que começam a ser comercializados painéis de grandes áreas. Possuem boa
aparência estética.
Os baixos custos de produção, assim como o do silício amorfo, são atraentes, embora
devido à disponibilidade dos elementos envolvidos e a toxicidade dos mesmos devam ser
considerados se esta tecnologia atingir grande escala de produção.
Disseleneto de cobre e índio
Outro sério competidor a entrar no mercado fotovoltaico. Os painéis comercializados
constituídos destes elementos terão eficiência entre 9 e 10 % . Assim como os painéis de
telureto de cádmio, a boa aparência estética deve favorecer as aplicações arquitetônicas.
Assim como o anterior, os elementos envolvidos são tóxicos e não são abundantes.
1.2.2 CARACTERÍSTICAS ELÉTRICAS
O modelo elétrico equivalente mais comum para uma célula fotovoltaica é o
apresentado na Fig. 1.3, onde se tem uma fonte de corrente que gera a corrente IPh
proveniente da excitação luminosa e um diodo D que representa a junção PN existente no
painel e a característica I x V da célula. O resistor RS representa a queda de tensão
existente nos terminais da célula com o aumento da corrente, tendo ordem de grandeza de
décimos de ohm, e o resistor RP representa um caminho para correntes de fuga, com ordem
de grandeza de centenas de ohms.

Douglas Pereira da Silva, M. Eng.
9
Fig. 1.3 – Modelo usual da célula fotovoltaica [2].
Em um painel fotovoltaico, tem-se um arranjo destas células, conectadas tanto em
série como em paralelo, resultando em uma determinada característica terminal. Um
exemplo de conexão série das células fotovoltaicas e seu efeito na característica terminal
do painel é apresentado, respectivamente, nas Fig. 1.4 e 1.5.
Fig. 1.4 – Associação série de células fotovoltaicas [2].
Fig. 1.5 – Efeito da associação série de células fotovoltaicas [2].
Percebe-se pela Fig. 1.5 que a associação série das células resulta numa tensão
terminal maior e mesma corrente. Para aumentar a capacidade de corrente faz-se
necessário, portanto, a associação destas células em paralelo. Por meio de um arranjo
adequado, pode-se obter a característica I x V final desejada.

Douglas Pereira da Silva, M. Eng.
10
Na Fig. 1.6 estão apresentadas algumas curvas típicas de um painel fotovoltaico para
alguns níveis de insolação e temperatura. De acordo com [3], tem-se que a insolação afeta
principalmente a corrente de saída do painel, enquanto a temperatura afeta principalmente
a tensão de saída.
Fig. 1.6 – Característica I x V de um painel fotovoltaico em função da temperatura e da
irradiação [4].
A operação no ponto de máxima transferência de potência de um painel fotovoltaico
consiste em trabalhar com tensão e corrente tais que a potência seja máxima. A
importância de se operar neste ponto é devida ao máximo aproveitamento da energia solar
incidente sobre as células, o que será destacado posteriormente na seção 1.4.
Para curvas do tipo apresentado na Fig. 1.6 existe um único ponto de máximo para o
produto I x V, como se pode verificar na Fig. 1.7, e a tarefa de um rastreador do ponto de
máxima potência, MPPT do inglês Maximum Power Point Tracker, é determinar este
ponto.

Douglas Pereira da Silva, M. Eng.
11
Fig. 1.7 – Corrente e potência versus tensão numa célula fotovoltaica.
Para todas as condições de operação do painel pode-se determinar uma grandeza que
é chamada de razão de máxima potência, MPR do inglês Maximum Power Rate. Ela é
definida como sendo a razão entre a tensão de máxima potência e a tensão de circuito
aberto numa mesma condição. Com algumas considerações teóricas, feitas em [5], sobre o
modelo do painel chega-se a um valor igual a 0,86. Entretanto, o próprio autor admite que
devido às resistências série e paralela do modelo esse valor prático fica na faixa de 0,74 a
0,79.
1.3 SISTEMAS ISOLADOS E SISTEMAS INTERLIGADOS
A energia solar fotovoltaica é normalmente utilizada em sistemas isolados, na
alimentação de equipamentos onde não seja viável economicamente ou mesmo
tecnicamente a chegada de energia elétrica convencional, ou em sistemas interligados à
rede elétrica, em regime de geração distribuída.
Embora haja os mais diversos propósitos para a utilização da energia solar
fotovoltaica, em todos os casos há a dependência de um conversor estático, como interface
entre a célula fotovoltaica e a carga, já que a energia produzida pela primeira é instável e
variável.
Existem diversas topologias apropriadas de conversores para o processamento da
energia solar fotovoltaica, tendo cada uma vantagens e desvantagens que devem ser
levadas em consideração do ponto de vista da sua complexidade, do seu volume e do seu
custo e também da carga a ser alimentada.

Douglas Pereira da Silva, M. Eng.
12
Tratando-se dos sistemas isolados, é imperativo o uso de baterias acumuladoras, para
os períodos em que não haja insolação. Dessa forma, uma aplicação da célula fotovoltaica
será a de carregador de baterias, exigindo ou não um conversor CC-CC. Dependendo da
carga, faz-se necessário o uso de conversores CC-CA, seja na conversão de energia da
bateria para a carga ou diretamente da célula fotovoltaica para a carga.
Os sistemas interligados à rede elétrica não dependem do uso de baterias
acumuladoras, atuando como usinas geradoras. Os sistemas interligados podem ser de dois
tipos, conforme [1]: central fotovoltaica ou integrada a prédio urbano.
No primeiro tipo, normalmente os painéis estão instalados em regiões distantes dos
centros urbanos, onde o preço do terreno seja baixo, pois há necessidade de grandes áreas.
O segundo tipo é incorporado à arquitetura do prédio, suprindo-o totalmente ou
parcialmente durante o período de insolação.
A energia solar e a geração de energia elétrica pelo processo fotovoltaico vêm tendo
um destaque relevante nos programas públicos nacionais. O Ministério de Minas e Energia,
em dezembro de 1994, instituiu um programa para desenvolvimento auto-sustentável,
social e econômico, de localidades isoladas não atendidas pela rede de energia elétrica
pública, obtendo energia de fontes renováveis locais, o PRODEEM – Programa de
Desenvolvimento Energético dos Estados e Municípios.
Segundo estimativas do PRODEEM para propostas de projetos de sistemas
fotovoltaicos, sistemas isolados são normalmente viáveis técnica e economicamente em
projetos onde a distância da rede elétrica mais próxima seja igual ou superior a 5 km.
1.4 APLICAÇÃO EM REFRIGERAÇÃO
Há vários fatores que motivam o uso da energia solar em aplicações de refrigeração,
sobretudo em aplicações situadas em locais isolados. No Brasil, ainda há muitas
comunidades vivendo em áreas desprovidas de rede elétrica e de recursos energéticos
convencionais, tais como sistemas hidráulicos ou a combustível fóssil ou vegetal.
Estas áreas que, na sua grande parte localizam-se nas regiões Norte e Nordeste do
Brasil, recebem intensa irradiação solar, sendo naturalmente propícias para a implantação
de sistemas fotovoltaicos isolados.
Através do PRODEEM, conforme já mencionado, estas regiões vêm recebendo
recursos para projetos utilizando fontes renováveis, incluindo a energia solar fotovoltaica.

Douglas Pereira da Silva, M. Eng.
13
A importância de sistemas de refrigeração nestas localidades é tão grande quanto à da
iluminação e de aplicações em outros equipamentos eletrodomésticos.
Os sistemas de refrigeração para estas localidades não necessitam de grande
capacidade. Como o próprio PRODEEM estipula em um de seus formulários de proposta,
um sistema de refrigeração deve ter capacidade de alimentar um refrigerador de baixa
potência (do tipo frigobar) durante dez horas intermitentes.
Mesmo com a preocupação atual com a universalização do fornecimento de energia
elétrica, que se torna presente na legislação e em contratos de concessão, há motivação
para o investimento em sistemas como este, haja vista a também crescente preocupação
com a preservação do meio-ambiente.
No aspecto de saúde pública, a possibilidade de se ter um sistema de refrigeração
autônomo em áreas isoladas é fundamental. Refrigeradores de pequeno porte podem ser
usados de forma viável, alimentado por um sistema fotovoltaico, para o armazenamento de
vacinas, remédios e materiais para exames clínicos.
Comunidades indígenas também podem tirar proveito desta tecnologia para o seu
desenvolvimento sem agressão ao meio-ambiente em que estão inseridos e sem a
necessidade de deslocamento para regiões adjacentes às que possuem rede elétrica. Com
sistemas fotovoltaicos modulares, pode-se obter energia elétrica no próprio local de
consumo para aplicação em vários setores, sobretudo no de refrigeração, o que proveria um
ganho significativo de qualidade de vida.
Para a aplicação da energia solar fotovoltaica em um sistema de refrigeração é
necessário um conveniente processamento da energia elétrica. Através de conversores
estáticos é possível disponibilizar a energia elétrica gerada pelos painéis fotovoltaicos em
níveis de tensão e qualidade apropriados para a alimentação da carga.
Por se tratar de uma aplicação isolada, há necessidade de armazenamento da energia
solar excedente. Como já mencionado na seção 1.3, o armazenamento de energia em
sistemas isolados normalmente é feito em baterias acumuladoras. Dentre estas, as mais
utilizadas são as de chumbo-ácido, principalmente as automotivas, por serem mais baratas,
pela sua grande capacidade de armazenamento, pela sua robustez e por sua versatilidade.
A utilização de baterias acumuladoras requer certos cuidados. A tensão terminal das
baterias de chumbo-ácido automotivas atuais é de 12 Volts, podendo flutuar, sem risco de
danificação e com manutenção de sua vida últil, entre 10,5 V e 14,4 V. Nota-se, portanto,
que as baterias num sistema isolado, além de ser um ponto vital, é um ponto crítico.

Douglas Pereira da Silva, M. Eng.
14
Num sistema como este, há três elementos críticos que podem se tornar sérias
restrições à aplicação que se deseja, são eles:
Custo dos painéis fotovoltaicos;
Custo das baterias acumuladoras e utilização sob certos cuitados;
Intermitência da energia solar.
A utilização de sistemas que operam no Ponto de Máxima Potência (MPP), pode
minimizar, ou pelo menos reduzir, a influência destas restrições.
O ganho em termos de energia drenada dos painéis, com um sistema operando no
MPP, pode vir a reduzir o número de painéis, diminuindo os custos associados ao arranjo
de painéis necessários. A operação no MPP pode favorecer uma carga mais rápida do
banco de baterias do sistema, minimizando o efeito da intermitência da energia solar.
Juntamente com um sistema que rastreie o MPP de um arranjo de painéis fotovoltaicos
pode-se associar um controlador de carga para as baterias, aumentando dessa forma sua
vida útil e minimizando também a segunda restrição.
Os níveis de tensão envolvidos tanto no arranjo de painéis fotovoltaicos quanto nas
baterias são baixos, fazendo-se necessária, então, a elevação deste nível de tensão. Isolação
galvânica entre entrada e saída também é desejável, como forma de segurança.
Um refrigerador comercial pode ser encarado, do ponto de vista de carga, como um
motor de indução monofásico acoplado a um compressor mecânico acionado por um
pistão. Por se tratar de um motor de indução, é interessante alimentá-lo com corrente
senoidal ou muito próxima desta (baixa distorção harmônica) , para que se tenha longa
vida útil do mesmo, baixo aquecimento e baixa fadiga gerada por torques pulsantes.
Pelas considerações realizadas, pode-se destacar como características desejáveis do
sistema os seguintes itens.
Controle de carga da bateria;
Operação constante no MPP;
Elevação dos níveis de tensão;
Saída em corrente alternada senoidal com baixa distorção harmônica;
Isolação galvânica;
Simplicidade e robustez.

Douglas Pereira da Silva, M. Eng.
15
Diante dos requisitos mencionados, é possível avaliar uma estrutura de refrigeração
alimentada por energia solar fotovoltaica. A Fig. 1.8 apresenta em diagrama de blocos uma
estrutura baseada nestes requisitos.
- Isolação galvânica- Controle de carga
- Operação no MPP
- Saída em correntealternada senoidal
- Elevação dos níveis de tensão- Saída regulada
da bateria
MóduloFotovoltaico Baterias Refrigerador
Fig. 1.8 – Estrutura de um sistema fotovoltaico isolado para aplicação em refrigeração.
A conexão entre o módulo de painéis fotovoltaicos e as baterias acumuladoras exige
um controle de carga destas e a operação dos painéis no ponto de máxima potência. Estes
requisitos caracterizam o primeiro estágio da estrutura, que deve se tratar de um conversor
CC-CC controlado por alguma técnica para operação no MPP.
O terceiro bloco apresentado na Fig. 1.8 representa a conexão entre as baterias e o
refrigerador, agregando vários requisitos. Estes requisitos podem ser realizados
diretamente em um único estágio inversor ou indiretamente em dois estágios constituídos
por um conversor CC-CC elevador e um inversor.
Há também outras possibilidades de estruturas fotovoltaicas aplicadas em
refrigeração. A estrutura apresentada é a que mais se adapta aos requisitos exigidos e é
sobre ela que são desenvolvidos os próximos capítulos.
1.5 CONCLUSÃO
O presente capítulo apresentou um pequeno panorama dos sistemas fotovoltaicos,
focalizando-se nas características tecnológicas de fabricação e características elétricas dos
painéis. Estas características são novamente abordadas no desenvolvimento do sistema de
MPP.
Tratando-se de sistemas fotovoltaicos, deve-se ter sempre em mente qual o regime de
operação, se num sistema isolado ou de geração distribuída. Para a proposta em questão,

Douglas Pereira da Silva, M. Eng.
16
que é de um sistema isolado de alimentação, é imprescindível o uso de baterias para
armazenamento de energia nos períodos em que não houver insolação.
Como tratado na seção 1.3, a distância em relação à rede elétrica de um sistema deve
ser levada em consideração, do ponto de vista da viabilidade econômica, na implantação de
um sistema fotovoltaico. Entretanto, este trabalho não tem como objetivo analisar tal
viabilidade dos sistemas isolados, mas como já dito, propor uma alternativa viável para a
alimentação de refrigeradores em locais isolados e com insolação abundante.

.
CAPÍTULO 2
DEFINIÇÃO, ANÁLISE DA ESTRATÉGIA E PROJETO DO
SISTEMA DE RASTREAMENTO DO MPP
2.1 INTRODUÇÃO
Este capítulo trata do sistema responsável pela operação no MPP e pelo controle de
carga do banco de baterias, conforme Fig. 1.8.
De acordo com as características elétricas das células fotovoltaicas vistas no Capítulo
1, tem-se que para a potência fornecida em função da tensão de operação há um único
ponto de máximo no intervalo de operação.
Sendo os painéis fotovoltaicos um ponto crítico do sistema, devido ao seu elevado
custo e também pelo fato de que um painel fotovoltaico fornece uma quantidade de energia
limitada, é interessante que se possa sempre operá-lo neste ponto de máxima potência, de
forma a se minimizar o número de painéis para uma determinada demanda.
A função deste sistema é, portanto, operar como um rastreador do ponto de máxima
potência, visando entregar sempre o máximo de energia disponível, independentemente da
carga que esteja conectada em seus terminais de saída, suprindo os estágios posteriores
durante o período de insolação e usando o excedente de energia para carregar o banco de
baterias acumuladoras.
A implementação deste sistema requer a consideração de vários fatores relevantes,
sendo eles: a característica da alimentação; o projeto do conversor CC-CC; e as técnicas de
operação no MPP. Cada um destes itens é abordado detalhadamente nas seções posteriores.
2.2 MODELAGEM DA FONTE DE ALIMENTAÇÃO
As células fotovoltaicas têm comportamento muito peculiar com relação a sua curva
I x V, além do fato de que se tratam de geradores de energia elétrica sensíveis às condições
atmosféricas, tais como irradiação luminosa e temperatura. Dessa forma, para a realização

Douglas Pereira da Silva, M. Eng.
18
de um projeto consistente, tanto do conversor CC-CC quanto do sistema de controle, é
necessária uma boa modelagem do painel fotovoltaico para análise.
No capítulo 1 foram feitas considerações sobre o modelo mais utilizado para uma
célula fotovoltaica e que é bem representativo da sua característica I x V, e sobre os
arranjos série e paralelo destas células. O modelo elétrico equivalente mais comum para se
representar uma célula fotovoltaica apresentado na Fig. 1.3 é repetido aqui na Fig. 2.1, por
comodidade.
Fig. 2.1 – Modelo de uma célula fotovoltaica
A associação série do modelo da célula da Fig. 2.1 resulta no modelo de um painel
como um todo. Este modelo é equivalente a se associar em série, o mesmo número de
vezes que se associaria o modelo completo, apenas os diodos D deste circuito. Para a
determinação deste número de diodos associados em série e dos valores das resistências
série e paralela valeu-se de medições utilizando-se um equipamento sofisticado chamado
analisador de curvas fotovoltaicas (Mini-KLA – Ingenieurbüro, Mencke & Tegtmeyer),
donde pôde-se extrair parâmetros para aplicação no modelo apresentado neste item.
Na Fig 2.2 são apresentados os valores obtidos a partir da medição de um painel
fotovoltaico no dia 04/09/2002 às 13:00 h, aproximadamente.
Fig. 2.2 – Parâmetros extraídos de um painel fotovoltaico Kyocera KC50.

Douglas Pereira da Silva, M. Eng.
19
Para os parâmetros apresentados na Fig. 2.2, o número de diodos D associados em
série é 18 e os valores de RP e RS são, respectivamente, 220 Ω e 0,12 Ω. De acordo com o
modelo da Fig. 2.1, e com os parâmetros aqui citados, modelou-se um painel fotovoltaico
conforme mostrado na Fig. 2.3.
R12202,57A
Isc
R2
0,12
Fig. 2.3 – Modelo proposto para o painel fotovoltaico Kyocera KC50.
O resistor R1 representa um caminho para fuga de corrente. Quanto maior o valor
deste resistor, maior característica de fonte de corrente o painel apresenta nas baixas
tensões. Já o resistor R2 representa a queda de tensão nos terminais do painel. Quanto
maior o seu valor menor a característica de fonte de tensão nas tensões próximas à tensão
de circuito aberto. O conjunto de diodos em paralelo com a fonte de corrente representa o
painel todo como uma um arranjo de junções P-N. Para esta modelagem foi utilizado o
modelo existente do diodo 1N4001.
Simulando-se o modelo da Fig. 2.3 obtiveram-se as características I x V e P x V
apresentadas na Fig. 2.4.
V0V 5V 10V 15V 20V
I
P/20
0
0.5
1.0
1.5
2.0
2.5
3.0
Fig. 2.4 – Característica I x V do modelo do painel apresentado na Fig. 2.3.

Douglas Pereira da Silva, M. Eng.
20
A Tabela 2.1 apresenta as características principais extraídas da curva apresentada na
Fig. 2.4.
Tabela 2.1 – Parâmetros extraídos do modelo proposto para o painel Kyocera KC50.
Parâmetro Valor
Corrente de curto circuito 2,57 A
Tensão de circuito aberto 19,06 V
Corrente no MPP 2,34 A
Tensão no MPP 14,80 V
Potência no MPP 34,69 W
Relacionando-se a Tabela 2.1 e os dados da Fig. 2.2 verifica-se que o modelo
proposto para o painel fotovoltaico em questão o representa fielmente nos termos das
características principais.
2.2.1 ARRANJO DE PAINÉIS FOTOVOLTAICOS
A conexão série-paralela do modelo de um painel fotovoltaico permite reproduzir o
arranjo equivalente real com boa precisão. Para o projeto em questão foram
disponibilizados 6 painéis num arranjo do tipo matriz 3 x 2, como apresentado na Fig. 2.5.
As características I x V e P x V deste arranjo em questão, baseadas no modelo da Fig. 2.3,
são apresentadas na Fig. 2.6.
Negativo
Positivo
Cd
Fig. 2.5 – Arranjo dos painéis fotovoltaicos para alimentação do sistema.

Douglas Pereira da Silva, M. Eng.
21
Cada bloco da Fig. 2.5 representa o modelo de um painel proposto pela Fig. 2.3,
sendo este arranjo, portanto, a fonte de alimentação do sistema de rastreamento do MPP.
V0V 10.0V 20.0V 30.0V 40.0V 50.0V 57.9V
I
P/50
0A
1.0A
2.0A
3.0A
4.0A
5.0A
Fig. 2.6 – Características I x V e P x V do arranjo de painéis apresentado na Fig. 2.5.
Tabela 2.3 – Parâmetros extraídos do modelo do arranjo de painéis Kyocera KC50.
Parâmetro Valor
Corrente de curto circuito 12,68 A
Tensão de circuito aberto 57 V
Corrente no MPP 4,67 A
Tensão no MPP 44,8 V
Potência no MPP 210 W
2.3 DEFINIÇÃO DO CONVERSOR CC-CC PARA RASTREAMENTO DO MPP E
CARGA DAS BATERIAS
Nesta seção é feita uma avaliação de alguns conversores CC-CC para aplicação no
processamento da energia solar fotovoltaica, sobretudo quanto à viabilidade de operação
constante no MPP no que diz respeito à carga do banco de baterias.
Para este estágio surgem, a priori, quatro topologias a serem analisadas pela sua
simplicidade e robustez, características muito desejáveis nesta aplicação.

Douglas Pereira da Silva, M. Eng.
22
2.3.1 CONVERSOR BUCK
O conversor Buck é uma topologia clássica da eletrônica de potência. Sua
simplicidade, o reduzido número de componentes, sua função de transferência estática
linear e a característica de saída em fonte de corrente o tornam extremamente propício para
carga de baterias.
Como desvantagens, possui corrente pulsada na entrada e é somente abaixador de
tensão, o que pode, em certos casos, tornar-se crítico. Em algumas aplicações pode ser
interessante a adição de um capacitor na saída para filtrar a tensão.
2.3.2 CONVERSOR FORWARD
Possui o ganho estático do Buck, entretanto a relação de transformação pode
compensar este fato indesejado. Necessita de uma etapa de desmagnetização do
transformador que, se não for respeitada, o leva à saturação. Devido a este inconveniente
não é viável para a presente aplicação.
2.3.3 CONVERSOR BOOST
Possui entrada em fonte de corrente, o que é interessante do ponto de vista do painel
fotovoltaico. Contudo sua saída em fonte de tensão não é muito apropriada para a carga das
baterias. Por se tratar de um conversor elevador, este conversor não poderia atua nos níveis
de tensão desejados, inviabilizando sua aplicação, além do fato de não poder ser operado
livremente a vazio.
2.3.4 CONVERSOR FLYBACK
Atua tanto como elevador quanto abaixador de tensão, variando-se o ganho estático,
sendo que o transformador ainda pode contribuir para dar maior flexibilidade à
característica abaixadora ou elevadora da tensão de saída.
É isolado, assim como o Forward. Entretanto é de transferência indireta, gerando
uma corrente de saída pulsada, o que é extremamente indesejável na carga de baterias. Por
ter entrada em fonte de tensão sua corrente de entrada é pulsada.
Como pôde ser visto, todos estes conversores têm vantagens e desvantagens,
necessitando-se escolher uma topologia que agregue as melhores características e que
tenha o menor número de desvantagens. Dessa forma, propõe-se como topologia o Buck
com filtro de entrada e filtragem da tensão de saída.

Douglas Pereira da Silva, M. Eng.
23
2.3.5 CONVERSOR BUCK COM FILTRO DE ENTRADA
O filtro de entrada elimina um dos principais problemas do conversor Buck, que é a
corrente pulsada na entrada, havendo então uma corrente com um nível CC mais uma
ondulação. O capacitor de saída, além de filtrar a tensão que é aplicada às baterias, também
permite ao conversor operar a vazio. A topologia deste conversor é apresentada na Fig. 2.7.
Lin
Cin Drl
Lout
Cout
S Db
Cd
MóduloFotovoltaico Baterias
Fig. 2.7 – Conversor Buck com filtro de entrada.
Além dos componentes integrantes da topologia proposta, verifica-se a inclusão de
um capacitor Cd, que tem função de desacoplar a cablagem dos painéis fotovoltaicos, e de
um diodo Db, para bloquear a circulação de corrente no sentido inverso, quando não houver
energia nos painéis fotovoltaicos.
2.4 METODOLOGIA DE PROJETO DO CONVERSOR BUCK COM FILTRO DE
ENTRADA PARA OPERAÇÃO NO MPP
Com respeito à topologia apresentada na Fig. 2.7, tem-se que a tensão do barramento
de saída do conversor é fixada por um banco de baterias, já que o mesmo tem uma
constante de tempo de carga e descarga muito maior que o capacitor Cout.
Este banco de baterias é formado por duas baterias automotivas de 12 V, de chumbo-
ácido, com capacidade de 100 Ah, ligadas em série.
Em tese, o capacitor Cout seria irrelevante, já que a tensão é fixada pelo banco de
baterias. Contudo, este capacitor está presente para o caso de uma desconexão acidental da
carga, fornecendo um caminho para a corrente circulante pelo indutor, além de fornecer
uma resistência série menor que a da bateria, sendo um caminho preferencial para a
ondulação de corrente.

Douglas Pereira da Silva, M. Eng.
24
Partindo do princípio de que a tensão de saída do conversor é fixa para os propósitos
de projeto, tem-se que uma variação na razão cíclica afeta a tensão de entrada do conversor
inversamente ao que aconteceria na operação tradicional. Um aumento na razão cíclica do
conversor drena maior corrente dos painéis fotovoltaicos, forçando a tensão terminal deste
a diminuir, de acordo com a curva apresentada na Fig. 2.6 e vice-versa.
A metodologia de projeto do conversor é baseada numa aproximação linear da curva
I x V no ponto de operação que se deseja, no caso o MPP, de forma que se possam utilizar
algumas equações clássicas para o projeto do conversor Buck. A Fig. 2.8 ilustra esta
aproximação.
V
MPP
Vmpp
Impp
Fig. 2.8 – Aproximação linear da curva I x V do arranjo de painéis no ponto de operação.
2.4.1 ESPECIFICAÇÕES E DEFINIÇÕES PRELIMINARES
A Tabela 2.4 apresenta as especificações básicas de projeto do conversor.
Tabela 2.4 – Especificações básicas de projeto do conversor Buck.
Parâmetro Valor
Tensão de saída mínima 21 V
Tensão de saída máxima 28.8 V
Tensão de entrada no MPP 44,8 V
Tensão de circuito aberto 60 V
Corrente de entrada no MPP 4,67 A

Douglas Pereira da Silva, M. Eng.
25
Ondulação de corrente no indutor de saída 9 %
Ondulação de corrente de entrada 0,5 %
Ondulação de tensão de entrada 1 %
Freqüência de comutação 25 kHz
A partir da Tabela 2.4, pode-se definir alguns parâmetros que servirão de base e
especificação para o projeto dos elementos do conversor e cálculo de esforços. A eq. (2.1)
define a razão cíclica mínima operando no MPP. A partir desta é calculada a corrente
máxima de saída do conversor, que é expressa na eq. (2.2).
469,0V8,44
V21min_min ===
mpp
out
VV
D (2.1)
A 17,9469,0
A67,492,0min
max_ ===DI
I mppout η (2.2)
As eq. (2.3), (2.4) e (2.5) refletem as especificações de ondulação de corrente e de
tensão do conversor, de acordo com a Tabela 3.1.
A 82,0A17,9.09,009,0 max_max_ ===∆ outLout II (2.3)
A 023,0A67,4.005,0005,0max_ ===∆ mppLin II (2.4)
V 45,0V8,44.01,001,0max_ ===∆ mppCin VV (2.5)
2.4.2 FILTRO DE SAÍDA
O elemento principal do filtro de saída do conversor, para esta aplicação, é o indutor.
A expressão que define o valor da indutância é apresentada na eq. (2.6).
µH 1,543A82,0.kHz25.4
V8,444 max_
==∆
=Louts
mppout If
VL
(2.6)
As especificações para projeto deste indutor são apresentadas na Tabela 2.5

Douglas Pereira da Silva, M. Eng.
26
Tabela 2.5 – Especificações básicas para projeto do indutor do filtro de saída.
Parâmetro Valor
Densidade de fluxo máxima 0,3 T
Densidade de corrente máxima 550 A/cm2
Fator de utilização 0,75
O projeto do indutor é feito através do tradicional método de produto de áreas, cujo
valor é apresentado na eq. (2.7).
4
cmA
maxmax
2max_ cm 69,3
550.T30750µH.9,17A 1,543
2
===,.,JBk
ILAA
u
outoutwe
(2.7)
De acordo com a eq. (2.7), o núcleo escolhido é o E42/20 da Thornton. Os
parâmetros do indutor são apresentados na Tabela 2.6.
Como a componente alternada da corrente é muito pequena comparada à componente
contínua, tem-se que as perdas magnéticas no indutor são desprezíveis. Dessa forma as
perdas totais se resumem àquelas decorrentes do efeito Joule, conforme eq. (2.8)
( ) W43,700140,0.cm157,9.A17,9.69 cmΩ2
_
º100_1520/422
max__
==
Ω=
LoutJ
CEoutespLoutJ
P
MLTINP (2.8)
Tabela 2.6 – Resultados para o indutor do filtro de saída.
Parâmetro Valor
Núcleo E42/20
Fabricante / Material magnético Thornton / IP12
Número de espiras 69
Entreferro mecânico 1,35 mm
Tipo do condutor Cilíndrico de cobre
Bitola do condutor 15 AWG
O valor do capacitor de saída é arbitrado como 2200 µF / 35 V, da série B41857, do
fabricante Epcos.

Douglas Pereira da Silva, M. Eng.
27
2.4.3 FILTRO DE ENTRADA
O filtro de entrada, conforme apresentado na Fig. 2.7, é constituído por um indutor e
um capacitor, que são calculados de acordo com (2.9) e (2.10), [15].
µF 59,204V448,0.kHz25.4
A17,94 max_
max_ ==∆
=ins
outfin Vf
IC (2.9)
Ficaram definidos como valor de capacitância 1500 µF pela disponibilidade.
Adotando este valor para o capacitor, o indutor é calculado.
( )µH 51,13
A023,0.µF1500.kHz25.31A17,9
31 2max_
2max_ ==∆
=Linfins
outin ICf
IL (2.10)
Da mesma forma que para o capacitor, definiu-se como indutância 25 µH, pela
disponibilidade de um núcleo compatível. Para o projeto deste indutor valem as
especificações básicas apresentadas na Tabela 2.7
.
Tabela 2.7 – Especificações básicas para projeto do indutor do filtro de entrada.
Parâmetro Valor
Densidade de fluxo máxima 0,3 T
Densidade de corrente máxima 450 A/cm2
Fator de utilização 0,75
Resultando, portanto, num produto de áreas expresso por (2.11).
( ) 4
cmA
2
maxmax
2
cm 058,0450.T3,0.75,0
A67,4.H252
===µ
JBkIL
AAu
mppfinwe (2.11)
Os resultados para o indutor em questão são apresentados na Tabela 2.8.

Douglas Pereira da Silva, M. Eng.
28
Tabela 2.8 – Resultados para o indutor do filtro de entrada.
Parâmetro Valor
Núcleo E25
Fabricante / Material magnético Thornton / IP12
Número de espiras 10
Entreferro mecânico 0,1 mm
Tipo do condutor Cilíndrico de cobre
Bitola do condutor 2 x 19 AWG
Da mesma forma que para o indutor do filtro de saída, a eq. (2.12) fornece as
perdas Joule no indutor do filtro de entrada. As considerações feitas naquela oportunidade
também valem aqui.
( ) W17,02
000353,0.cm5,4A67,4.10 cmΩ2
_
º100_19252
_
==
Ω=
LinJ
par
CEmppespLinJ
P
NMLTIN
P (2.12)
2.4.4 INTERRUPTOR PRINCIPAL
A corrente média que circula pelo interruptor principal é igual à corrente média que
circula pelos painéis fotovoltaicos. Dessa forma a corrente média máxima no interruptor é
igual a Impp.
Considerando a corrente no indutor de saída com pequena ondulação tem-se que o
valor de pico é igual ao valor médio e que o valor de pico de corrente no interruptor é igual
ao valor de pico da corrente de saída. Sendo assim, o valor eficaz da corrente neste
elemento é dado pela eq. (2.13).
A 28,6469,0.A17,9minmax_max__ === DII outefS (2.13)
A tensão de pico no interruptor é igual à tensão de entrada, sendo no pior caso igual à
tensão de circuito aberto dos painéis, que é 60 V. Deseja-se também que as perdas por

Douglas Pereira da Silva, M. Eng.
29
condução sejam reduzidas. Pelo apresentado neste item, as características do interruptor
escolhido são apresentadas na Tabela 2.9.
Tabela 2.9 – Características do interruptor
Parâmetro Valor
Tipo / Modelo MOSFET / IRF2807
Corrente média a 100 ºC 58 A
Tensão reversa máxima 75 V
Resistência de condução a 100 ºC 20,8 mΩ
As perdas por condução e por comutação no interruptor selecionado são expressas
pelas eq. (2.14) e (2.15), e a soma das duas expressa as perdas totais, que é apresentada na
eq. (2.16), de acordo com [11].
( ) W82,0A275,6.mΩ8,20 22max___ === SefonDScondS IRP (2.14)
( )
( ) W28,1A67,4.V60.ηs166ηs2002kHz25
2
_
__
=+=
+=
comS
mpppicoSfrs
comS
P
IVttf
P (2.15)
W10,2W28,1W82,0___ =+=+= comScondStotalS PPP (2.16)
2.4.5 DIODOS
A corrente média máxima no diodo de roda livre pode ser expressa pela eq. (2.17) e
a tensão de pico é igual à máxima tensão de entrada, que no pior caso é 60 V.
( ) ( ) A 87,4A17,9.469,011 max_min_ =−=−= outmedDRL IDI (2.17)
O diodo de bloqueio conduz a corrente de carga, portanto sua corrente média é
igual à corrente média de saída que é expressa pela eq. (2.2). A tensão reversa a que vai
estar submetido o diodo também é baixa e é no máximo igual à tensão máxima do banco
de baterias que é de 30 V.
As características dos diodos selecionados são apresentadas na Tabela 2.9.

Douglas Pereira da Silva, M. Eng.
30
Tabela 2.9 – Especificações dos diodos.
Diodo de roda livre Diodo de bloqueio
Tipo / Modelo Ultrarápido / MUR460 Ultrarápido / MUR1510
Corrente média 4 A 15 A
Tensão reversa máxima 600 V 100 V
Perdas aproximadas 5 W @ 4 A 6 W @ 9 A CC
2.4.6 CÁLCULO DE PERDAS
A eq. (2.18) expressa uma estimativa de perdas do conversor operando no MPP
como sendo a soma de todas as perdas apresentadas nesta seção.
W71,20W0,6W0,5W101,2W432,7W173,01510460___
=++++=
++++=
total
MURMURtotalSLfoutJLfinJtotal
P
PPPPPP (2.18)
2.4.7 CÁLCULO DO DISSIPADOR
A escolha do dissipador é feita com base na Fig. 2.9, associando em paralelo as
diversas resistências dissipador-ambiente necessárias para não elevar em mais que 80 ºC
acima da temperatura ambiente, estimada em 40 ºC, a temperatura da junção do
semicondutor.
IRF2807
MUR1510
Dis1
TambDis2
Rjc Rcd Rda
Rjc Rcd Rda
Tjunc
Tjunc 2,1W
6W
Fig. 2.9 – Circuito térmico para cálculo do dissipador
De acordo com as perdas estimadas, o dissipador deve ter resistência dissipador-
ambiente máxima de 8,5 ºC/W.

Douglas Pereira da Silva, M. Eng.
31
2.5 REVISÃO DAS ESTRATÉGIAS DE OPERAÇÃO NO MPP
Nesta seção serão investigadas algumas técnicas de operação do sistema fotovoltaico
no MPP. Para tal podem ser usadas tanto técnicas analógicas quanto digitais. Entretanto, a
maior flexibilidade será conseguida usando-se microcontroladores ou DSP’s, pois neste
caso tensão e corrente instantâneas podem ser amostradas e usadas no algoritmo de
máxima potência.
Em [6] é feita a ressalva de que se deve levar em conta que a conversão A/D, nos
sistemas digitais, pode ser perturbada pela operação do conversor CC-CC, sendo talvez
necessário levar em consideração a realização de uma média das aquisições.
2.5.1 CONTROLE DA TENSÃO DE ENTRADA DE UM CONVERSOR CC-CC COM
REFERÊNCIA FIXA
Essa técnica é a mais simples dentre todas e consiste no controle da tensão de entrada
através da razão cíclica de um conversor CC-CC PWM. Ela se baseia no fato de que a
insolação tem pouca influência na tensão de máxima potência, conforme Fig. 1.6, portanto
tem sua validade em situações onde a insolação varie dentro de uma faixa ampla, mas que
a temperatura mantenha-se razoavelmente constante.
Uma estrutura possível é apresentada na Fig. 2.10. O controle da tensão de entrada é
feito através de um compensador clássico com tensão de referência fixa, e com o conceito
de realimentação positiva. Um aumento da tensão de saída dos painéis provoca um sinal de
erro positivo aumentando a razão cíclica do conversor, logo drenando mais corrente e
diminuindo a tensão sobre o capacitor. Já uma queda na tensão do capacitor diminui a
razão cíclica diminuindo a corrente de entrada do conversor e, conseqüentemente,
aumentando a tensão do capacitor.

Douglas Pereira da Silva, M. Eng.
32
PainéisFotovoltaicos
Sinal de Erro
Cd
Modulador PWM
Drl
DbL
+
-Comando
Vref
Sinal dentedente de serra
+-Compensador
Fig. 2.10 – Controle da tensão de entrada de um conversor CC-CC Buck.
2.5.2 CONTROLE DA TENSÃO DE ENTRADA DE UM CONVERSOR CC-CC COM
AMOSTRAGEM PERIÓDICA DA TENSÃO DE CIRCUITO ABERTO DO PAINEL
Esta técnica é uma evolução em relação à anterior no sentido em que a tensão de
referência não é mais fixa, mas sim função da tensão de circuito aberto do painel
fotovoltaico e atualizada constantemente. Este procedimento é feito desconectando-se o
painel periodicamente do sistema e amostrando a tensão de circuito aberto, sendo que a
tensão de referência é dada pela eq. (2.19)
_ _*MPP k OC kV MPR V= (2.19)
Verifica-se pela eq. (2.19) que nesta técnica é utilizado o conceito de razão de
máxima potência apresentado na seção 1.2.2, que, conforme mencionado, é fixa para todas
as condições de operação.
Este controle pode ser realizado tanto analogicamente quanto digitalmente, porém a
opção por microcontroladores ou DSP’s é mais flexível e viável de implementar, no
entanto mais caro. Uma vez definida a tensão de referência através da eq. (2.19),
implementa-se um compensador e um modulador PWM como apresentado na Fig. 2.10.

Douglas Pereira da Silva, M. Eng.
33
2.5.3 CONTROLE DA POTÊNCIA DE ENTRADA A PARTIR DE SUA DERIVADA EM
FUNÇÃO DA TENSÃO
Este tipo de controle é muito favorável nas aplicações digitais. Trata-se de acomodar
o sistema em um determinado ponto de operação e verificar as perturbações através da
amostragem da corrente e da tensão de entrada. A estratégia básica de controle pode ser
resumida no seguinte algoritmo.
Passo 1: Amostrar V(k) e I(k);
Passo 2: P(k) = V(k)*I(k);
Passo 3: Se P(k) = P(k-1); D(k) = D(k-1); Voltar ao Passo 1 – Senão ir ao
Passo 4;
Passo 4: Para P(k) ≠ P(k-1); Verificar D(k) - D(k-1) e atuar em D(k+1);
Voltar ao Passo 1.
Neste tipo de controle, dificilmente o Passo 3 será alcançado, pelo fato da
amostragem interferir no sistema e também porque um sistema desse tipo não ficará em
repouso, mas sim oscilando em torno do ponto de máxima potência.
2.5.4 CONTROLE DA TENSÃO DE ENTRADA DE UM CONVERSOR CC-CC ATRAVÉS DE
ALGORITMO AUTO-ADAPTIVO E AUTOPERTURBADO
Este algoritmo de controle é baseado na característica I x V de um painel
fotovoltaico. É muito simples e como se baseia na própria planta responde bem às
variações da planta. Na Fig. 2.11 é apresentada a característica de um painel fotovoltaico
realçando o ponto de máxima potência que é onde se quer operar.
Fig. 2.11 – Ponto de máxima potência de um painel fotovoltaico.

Douglas Pereira da Silva, M. Eng.
34
Novamente, utilizar-se-á um algoritmo para explicar a estratégia de controle auto-
adaptativa. Remarca-se aqui que as amostragens de tensão e corrente são alternadas e o
sistema está operando num determinado ponto de operação.
Passo 1: Definir uma constante de ganho G (menor que 1);
Passo 2: Amostrar V(k-1);
Passo 3: V(k) = G*V(k-1);
Passo 4: Ajustar a razão cíclica para que a tensão de entrada chegue a
V(k);
Passo 5: Amostrar I(k);
Passo 6: I(k+1) = G*I(k);
Passo 7: Ajustar a razão cíclica para que a corrente de entrada chegue a
I(k+1).
Após alguns ciclos, devido à característica I x V do painel, o sistema estará oscilando
em torno do MPP. Tem-se que a amplitude da oscilação é controlada pelo ganho G.
Quanto mais próximo de 1 menor será a amplitude, porém mais lenta será a acomodação
em torno do ponto de operação.
É importante também que os parâmetros tensão e corrente cheguem ao ponto
calculado antes da nova amostragem, para que o sistema não tenha divergência. Numa
mudança de condição (alteração da irradiação ou temperatura) não há problema, desde que
os parâmetros não permaneçam fora dos valores calculados por muito tempo.
Para avaliar este algoritmo, uma simulação numérica foi realizada no Matlab.
Considerou-se que o ajuste da razão cíclica era capaz de levar o sistema às posições pré-
calculadas. Foi utilizada uma função de segundo grau como suposta função I x V do painel
fotovoltaico, cujas propriedades básicas são as mesmas de uma curva real. Para verificar o
desempenho numa mudança de condições foi aplicado um degrau nos parâmetros. As duas
curvas utilizadas são regidas pela eq. (2.20), cujos parâmetros estão na Tabela 2.10. A Fig.
2.12 (a) e (b) ilustra esse exemplo.
22
SCSC
OC
II V IV
= − + (2.20)

Douglas Pereira da Silva, M. Eng.
35
Tabela 2.10 – Parâmetros de simulação.
Condição Corrente de curto circuito [A] Tensão de circuito aberto [V]
1 4 20
2 2.5 15
0 2 4 6 8 10 12 14 16 18 200
0.5
1
1.5
2
2.5
3
3.5
4
0 5 10 150
0.5
1
1.5
2
2.5
(a) (b)
[I]
[V]
[I]
[V]
FiFig. 2.12 - Curva I x V hipotética de um painel para (a) Condição 1 e (b) Condição 2
indicando os pontos de máxima potência.
Os resultados da simulação para dois ganhos G distintos são apresentados na Fig.
2.13 e 2.14.
50 100 150 200 250 3004
5
6
7
8
9
10
11
12
50 100 150 200 250 300
1.5
2
2.5
3
3.5
(a) (b)Número de ciclos Número de ciclos
Ganho G = 0,8
Fig. 2.13 – (a) Tensão e (b) corrente na saída do painel fotovoltaico versus número de
ciclos para G = 0,8.

Douglas Pereira da Silva, M. Eng.
36
50 100 150 200 250 300
5
6
7
8
9
10
11
50 100 150 200 250 300
1.5
2
2.5
3
3.5
Ganho G = 0,95
(a) (b) Fig. 2.14 – (a) Tensão e (b) corrente na saída do painel fotovoltaico versus número de
ciclos para G = 0,95.
Analisando-se as Fig. 2.13 e 2.14 verifica-se que a amplitude de oscilação diminui
sensivelmente com um ganho maior, entretanto a resposta do sistema ao degrau de
condições torna-se notadamente mais lenta. Contudo, não há necessidade de um sistema
rápido, já que as condições dinâmicas que regem o painel fotovoltaico são lentas.
Confrontando as Fig. 2.12, 2.13 e 2.14 verifica-se claramente que o sistema tende,
em regime, a oscilar em torno dos valores de máxima potência de tensão e corrente
assinalados na Fig. 2.12, confirmando sua eficiência.
2.6 ANÁLISE DAS ESTRATÉGIAS DE OPERAÇÃO NO MPP ADOTADAS
Das estratégias apresentadas na seção 2.5, foram implementadas neste trabalho duas
delas, o controle da tensão de entrada do conversor Buck com referência fixa,
implementado analogicamente, e o controle da potência de entrada deste conversor a partir
de sua derivada, implementado digitalmente. Nas seções 2.6.1 e 2.6.2 são abordados os
dois casos, respectivamente.
2.6.1 CONTROLE ANALÓGICO DA TENSÃO DE ENTRADA COM REFERÊNCIA FIXA
A partir da Fig. 1.6, e conforme já mencionado, verifica-se que a variação da tensão
de MPP do painel fotovoltaico não é muito sensível à variação na insolação. Dessa forma é
possível ajustar uma referência fixa para a compensação da tensão de entrada para uma

Douglas Pereira da Silva, M. Eng.
37
determinada condição atmosférica. Como ao longo do dia a temperatura varia, em geral,
muito menos que a insolação, tem-se que o rastreador estará operando próximo do MPP.
Este método é muito simples, envolvendo apenas um circuito integrado e elementos
periféricos para fazer o controle, entretanto como ele não busca automaticamente o MPP,
deve-se conhecer de antemão as características do arranjo utilizado para alimentar o
sistema.
2.6.1.1 CIRCUITO DE CONTROLE E COMANDO
O compensador utilizado é do tipo proporcional com filtro passa baixas, oferecendo
um ganho elevado nas baixas freqüências e uma atenuação de 20 dB / década nas altas
freqüências, necessária para a atenuação dos ruídos existentes.
O ganho do compensador proporcional não deve ser nem muito baixo, ocasionando
um erro estático elevado, nem muito alto, de forma a levar o sistema à instabilidade. Dessa
forma, determinou-se um ganho em torno de 50. O capacitor de filtragem é de valor
pequeno, atenuando apenas ruídos.
As expressões para determinação dos elementos deste compensador são apresentadas
nas eq. (2.21) e (2.22). Os parâmetros do compensador são apresentados na Tabela 2.11.
i
f
RR
G =0 (2.21)
ff CRf
π21
0 = (2.22)
Tabela 2.11 – Parâmetros do compensador analógico
Parâmetro Valor
Resistência de entrada (Ri) 2,2 kΩ
Resistência de realimentação (Rf) 100 kΩ
Capacitância de filtragem (Cf) 0,56 ηF
Ganho em baixas freqüências (G0) 45,45
Freqüência de corte (f0) 2,84 kHz
O circuito integrado utilizado para fazer o controle do conversor é o SG3527. Ele é
similar ao SG3525, circuito integrado do tipo modulador PWM muito popular, mas com

Douglas Pereira da Silva, M. Eng.
38
lógica inversa na saída. Em uma realimentação negativa, uma tensão de controle crescente
na saída do compensador produz uma variação decrescente na razão cíclica do conversor.
A inversão na lógica, neste caso, é imprescindível para o controle da tensão de entrada do
conversor.
Se a lógica fosse direta, um aumento do sinal de erro positivo (indicando que a
tensão de entrada está mais baixa que a tensão de referência) provocaria um aumento da
razão cíclica. Pelas características dos painéis, um aumento na razão cíclica drenaria mais
corrente da entrada, baixando ainda mais a tensão de entrada. Na lógica inversa, um sinal
de erro positivo provoca a variação negativa da razão cíclica, drenando menos corrente e
elevando a tensão dos painéis.
O diagrama esquemático completo do circuito de controle analógico é apresentado na
Fig. 2.15. O capacitor CT e o resistor RT são responsáveis pela freqüência do sinal de
comando e ajustados para uma freqüência de comutação de 25 kHz. O conjunto formado
pelos diodos D1 e D2 e pelo resistor R3 é o responsável por interligar ambas as saídas do CI
e permitir uma excursão de razão cíclica de 0 a aproximadamente 1.
Para o comando do interruptor é utilizado o driver IR2111 com bootstrap. O
bootstrap é responsável pelo deslocamento do sinal de comando em relação à fonte do
interruptor, que no caso do conversor Buck é um ponto flutuante e não a massa.
U1
SG3527
15
1
2 16
129 10
11
14
13
4
8
5
3
6
7
VIN
ERR-
ERR+VREF
GNDCOMP SHUT
OUTA
OUTB
Vc
OSC
START
CT
SYNC
RT
DIS
100k
+15V
R
C
Rref10k
18n
10k
Vin
+15V
IR2111
D3
C1
SR4
Ri
RfCf0,56n
2,2k
R1
R3
R2
100k
10k
56kD1
D2
T
T
Fig. 2.15 – Circuito de controle e comando analógico.
2.6.1.2 ESTUDO POR SIMULAÇÃO
Para verificação da previsão teórica realizada na seção 2.6.1.1, e de forma a avaliar a
operação no MPP, foi realizada simulação com o controle analógico proposto, para uma

Douglas Pereira da Silva, M. Eng.
39
tensão de barramento de saída de 21 V e como alimentação o arranjo de painéis modelado.
Os resultados estão apresentados nas Fig. 2.16, 2.17 e 2.18.
Tempo0s 4.0ms 8.0ms 12.0ms 16.0ms 20.0ms 24.0ms 28.0ms 32.0ms
I(Lin)
I(Lout)
V(Cin)
0
10
20
30
40
46[V,A]
Fig. 2.16 Transitório inicial do conversor.
Tempo31.70ms 31.75ms 31.80ms 31.85ms 31.90ms 31.95ms 32.00ms 32.05ms
I(Lout)
8.00A
8.25A
8.50A
8.75A
I(Lin)
4.5A
4.6A
4.7A
V(Cin)45.300V
45.325V
45.350V
(a)
(b)
(c)
Fig. 2.17 – Detalhe da (a) tensão de entrada do conversor da (b) corrente de entrada do
conversor e (c) corrente no indutor do filtro de saída

Douglas Pereira da Silva, M. Eng.
40
Tempo26.60ms 26.80ms 27.00ms 27.20ms 27.40ms
Vcomando
-10V
0V
10V
V(Cin)44.4V
44.8V
45.2V
45.6V
(a)
(b)
Fig. 2.18 – Detalhe da (a) tensão de entrada do conversor e (b) do sinal de comando.
A Fig. 2.16 apresenta o transitório inicial do conversor, enquanto a tensão no
capacitor de desacoplamento Cd da Fig. 2.7 é inferior à tensão de referência, a razão cíclica
é nula e toda a corrente do painel é utilizada para a carga deste capacitor. À medida que a
tensão deste capacitor aproxima-se do valor de referência a razão cíclica aumenta. Uma
vez que esta tensão ultrapassou a tensão de referência a razão cíclica é aumentada de forma
a drenar mais corrente e diminuir a tensão do painel, como já foi explicado. O
comportamento da razão cíclica em relação à tensão de entrada é apresentado em detalhe
na Fig. 2.18.
Quanto aos valores previstos teoricamente, pode-se notar pela Fig. 2.17 que a
corrente de entrada está muito próxima da corrente de MPP do modelo. A tensão não é
exatamente a de MPP já que o compensador proporcional tem um erro estático não-nulo
com relação à referência imposta. A corrente de saída também tem um valor médio um
pouco abaixo do seu valor máximo esperado, já que foi considerada a resistência série da
bateria, sendo que o produto entre a corrente de carga e o valor da resistência eleva a
tensão do barramento um pouco acima dos 21 V mínimos estipulados.
2.6.2 CONTROLE DIGITAL DA POTÊNCIA DE ENTRADA A PARTIR DE SUA DERIVADA
Como mencionado na seção 2.5.3, esta estratégia é especialmente voltada para
aplicações digitais que possuam memória, que é o caso dos microcontroladores e
processadores digitais de sinais, os DSPs.

Douglas Pereira da Silva, M. Eng.
41
Em comparação com o controle analógico este método é mais complexo, já que
exige um certo condicionamento do sinal, além da programação, normalmente em
Assembly – linguagem de baixo nível específica de cada microprocessador. Contudo, este
controle digital pode trazer melhores resultados que o analógico, por ser mais flexível
quanto a uma variação no arranjo de painéis que alimentam o sistema e por rastrear o real
MPP.
Outra vantagem sobre o controle analógico é que se podem integrar ao
microcontrolador ou ao DSP funções de supervisão da bateria, como por exemplo, o
desligamento automático do sistema por sobretensão ou sobrecorrente na bateria.
2.6.2.1 ALGORITMO DE CONTROLE
O objetivo do algoritmo de controle desta estratégia é tentar satisfazer a eq. (2.23)
0=in
in
dVdP (2.23)
Pela Fig. 2.4 nota-se que no intervalo considerado [tensão de curto circuito , tensão
de circuito aberto], há um único ponto de máximo para a potência de entrada, sendo que
neste ponto de máximo absoluto a eq. (2.23) é satisfeita.
Como a razão cíclica é a variável de controle do conversor, é interessante reescrever
a eq. 2.23 em termos da variável de controle, que é apresentada na eq. (2.24) e válida para
o MPP.
0==in
in
in
in
dVdD
dDdP
dVdP (2.24)
Considerando-se um intervalo de tempo pequeno, em função da variação das
grandezas envolvidas, é possível realizar as seguintes aproximações apresentadas nas eq.
(2.25) a (2.27).
( ) ( )1−−≅ kPkPdP ininin (2.25)
( ) ( )1−−≅ kVkVdV ininin (2.26)
( ) ( )1−−≅ kDkDdD (2.27)

Douglas Pereira da Silva, M. Eng.
42
Com base nas eq. (2.24) a (2.27) é possível montar uma estratégia de atuação no
conversor para o rastreamento do MPP. Esta estratégia é apresentada na Tabela 2.12, onde
“d” representa a variação da razão cíclica.
Tabela 2.12 – Estratégia de atuação no controle da potência de entrada.
Condição Atuação
Pin(k) ≥ Pin(k-1) D(k) > D(k-1) D(k+1) = D(k) + d Vin(k+1) < Vin(k)
Pin(k) ≥ Pin(k-1) D(k) < D(k-1) D(k+1) = D(k) - d Vin(k+1) > Vin(k)
Pin(k) < Pin(k-1) D(k) > D(k-1) D(k+1) = D(k) - d Vin(k+1) > Vin(k)
Pin(k) < Pin(k-1) D(k) < D(k-1) D(k+1) = D(k) + d Vin(k+1) < Vin(k)
Além do controle do MPP, o controlador deve ser responsável pela partida do
conversor, verificando se há energia no painel. A condição de sobretensão da bateria
também foi implementada no algoritmo de controle como uma das supervisões possíveis.
O algoritmo do programa é descrito detalhadamente no fluxograma apresentado na
Fig. 2.19.

Douglas Pereira da Silva, M. Eng.
43
Início
Aciona PW MD = 0
D = D + dD
Pin(k-1) = Vin(k-1)*Iin(k-1)
dD > 0
Vout > Vout_m ax?
D < Dm ax?
Iin > Iin_m in?
D = Dm in
D = D + dD
dD > 0
Atraso
Vout > Vout_m ax?
Vout > Vout_m ax?
Pin(k) >= Pin(k-1)?
D > Dm in?
Lê VinVin = Vin(k-1)
Lê IinIin = Iin(k)
Lê VinVin = Vin(k)
Lê Vout
D = D - dD
dD < 0
Lê Vout
Lê Iin
Salva IinIin = Iin(k-1)
Lê Vout
Pin(k) = Vin(k)*Iin(k)
dD > 0?
dD > 0?
NÃO
SIMNÃO
SIM
SIM
SIM
NÃO
1
D < Dm ax?1
SIM
NÃO
2
SIM
NÃO
NÃO
SIM SIM
1
NÃO
NÃO
1SIM
3
ConfiguraçõesIniciais
3
NÃO
SIM
2
NÃO
T odas as le ituras correspondem àm édia de 32 aquisições analógicas
Fig. 2.19 – Fluxograma do algoritmo de rastreamento do MPP
2.6.2.2 IMPLEMENTAÇÃO COM MICROCONTROLADOR
Para a implementação do algoritmo de controle proposto na Fig. 2.19 foi escolhido o
microcontrolador da família PIC, modelo PIC17C756, com as seguintes características
principais envolvidas na implementação: Conversor A/D de 10 bits com 12 entradas
analógicas multiplexadas; 03 módulos PWM independentes e multiplicador de hardware.

Douglas Pereira da Silva, M. Eng.
44
As variáveis para o controle digital proposto são três: tensão de entrada; corrente de
entrada e tensão de saída. As tensões são amostradas com divisores resistivos, e a corrente
é amostrada através de um resistor shunt de 10 mΩ. Para garantir uma boa conversão A/D
é interessante condicionar os sinais amostrados. Este condicionamento pode ser feito em
hardware por um filtro anti-aliasing que é um filtro passa-baixas destinado a eliminar não
só ruídos mas também componentes harmônicas do sinal.
A Fig. 2.20 apresenta o diagrama esquemático do circuito implementado para o
controle digital incluindo a parte de potência e excetuando-se o microcontrolador.
Lout
707uH
Arranjo de painéis
Negativo
Positivo
Cd1500uF
Dbloq
MUR1510
Lin
20uH
DrlMUR460Cin
1500uF
S
Cfout2200uF
Vg
IR2111
+Vcc
VgIR2111
100k
VinR2
R1
10kRshunt
Vsh- Vsh+
U1
LF351
3
2
7
6+
-
V+V-
R5a
1k C14.7nF
R6b 39k
4
Vsh+
IinVsh-
C2 0.27n
+Vcc
-Vcc
R5b
1k
R6a39k
A/D PIC
100k
VoutR4
R3
10k
U3
LM324
12
13
4
14+
-
V+V-
+Vcc
Vin
RgRgs
U4
D1
C3
Rs
U2
LM311
3
2
7
6+
-
V+V-
100k
1Meg
4
PWM PIC
IR2111
+Vcc
-Vcc47k
10k
A/D PIC
U5
LM324
5
6
4
7+
-
V+V-
+Vcc
Iin
A/D PIC
U6
LM324
10
9
4
8+
-
V+V-
+Vcc
Vout
56k
82n
56k
82n
56k
82n
1111
11
C4 1u
C5 0.1u
0.1u
1N4007
Fig. 2.20 – Estágio de potência, condicionamento de sinais e comando para controle
digital.
A corrente de entrada, como já mencionado, é amostrada por um resistor shunt
colocado diretamente em contato com o arranjo de painéis fotovoltaicos. Um amplificador
diferencial ou subtrator com filtro passa-baixas, conforme Fig. 2.20, é utilizado para a
obtenção do valor da corrente num valor apropriado para a aquisição pelo
microcontrolador.

Douglas Pereira da Silva, M. Eng.
45
O filtro anti-aliasing pode ser identificado pelos três filtros passa-baixas seguidos de
buffer. A freqüência de corte destes filtros é dada pela eq. (2.22), apenas com parâmetros
diferentes, e é de aproximadamente 34,7 Hz, o que não interfere na amostragem, já que
estas grandezas são praticamente constantes.
Na Fig. 2.20 também se identifica um comparador com histerese, formado pelos
elementos U2 e adjacentes. Este comparador tem a função de adaptar o nível do sinal de
comando do microcontrolador, que é de 5 V para 15 V. A histerese é adicionada de forma
a garantir imunidade a ruídos. O comando é feito através do driver IR2111, pelo mesmo
motivo citado na seção 2.6.1.1.
O condicionamento dos sinais analógicos adquiridos também pode ser feito por
software. Em sistemas chaveados, os ruídos existentes, devido ao efeito da comutação nas
indutâncias e capacitâncias parasitas da placa e dos cabos, propagam-se por todas as partes,
inclusive pelo terra, sobretudo nas transições do interruptor.
O ideal seria que se estabelecesse uma janela de amostragem do microcontrolador
que garantisse que a aquisição não fosse feita nos instantes de transição. Entretanto, como
a conversão A/D no microcontrolador é muito lenta, torna-se inviável definir-se esta janela.
Uma das formas mais simples de se eliminar ruídos numa aquisição é realizar um
filtro por software, cuja saída seja a média de um determinado número de aquisições. Visto
que as constantes de tempo das grandezas envolvidas na energia solar são lentas (o dia não
escurece de repente ou uma nuvem não obscurece totalmente o sol), esta filtragem não
prejudica o controle, apenas o deixa lento como o próprio sistema. Foi o realizado aqui,
onde o número de aquisições escolhido para a média foi de 32.
Outro elemento utilizado para minimizar o efeito dos ruídos na aquisição foi a
implementação de um atraso de alguns milisegundos na atualização e cálculo da razão
cíclica, de forma a tornar o sistema mais lento e estável.
A variável de atuação neste sistema é a razão cíclica, implementada no módulo
PWM por contadores e registradores. O período e a largura dos pulsos são definidos por
meio de registradores específicos. Um contador é incrementado linearmente de acordo com
o clock interno (este contador é análogo ao sinal dente-de-serra do caso analógico), durante
o intervalo em que a contagem é menor do que o valor do registrador de razão cíclica (que
pode ser equiparado ao sinal de comparação do caso analógico) o pulso é alto, ao
ultrapassar este valor o pulso é baixo. Quando o contador chega ao valor contido no

Douglas Pereira da Silva, M. Eng.
46
registrador de período (valor de pico do sinal dente-de-serra, no caso analógico), o
contador é zerado e o pulso é alto novamente.
Nota-se que se não houver um controle de como é incrementado ou decrementado o
registrador de razão cíclica pode-se ultrapassar o valor máximo (que é o valor contido no
registrador de período) ou o mínimo do registrador. No caso de se ultrapassar o valor
máximo, obter-se-ia razão cíclica unitária, mesmo decrementando por um certo instante de
tempo até o valor do registrador ser compatível com o do período. Se isto acontecesse, o
controle estaria prejudicado, já que uma alteração na variável de atuação não produziria
resposta física.
Se o registrador ultrapassasse o valor mínimo, o valor contido no registrador iria para
o extremo positivo do registrador. Por exemplo, num registrador de 8 bits em hexadecimal,
de #00h para #FFh, #FEh e assim por diante, o que geraria razão cíclica unitária também.
É por esse motivo que há no algoritmo de controle, como se pode verificar no
fluxograma da Fig. 2.19, tomadas de decisão quanto ao valor da razão cíclica, limitando o
registrador num intervalo mínimo (Dmin = 0) e máximo (Dmax = 0,97).
A Fig. 2.21 apresenta um diagrama ilustrativo do controle digital implementado com
o microcontrolador PIC17C756.
+5V
+5V
Ref. A/D
A/D
Vin
Iin
Vout
Temporizadores
Memória
Multiplicador
RegistradoresCPU
PWM
PIC17C756
Fig. 2.21 – Diagrama ilustrativo do microcontrolador PIC71C756.

Douglas Pereira da Silva, M. Eng.
47
2.7 CONCLUSÃO
Neste capítulo o sistema de rastreamento do MPP foi abordado de forma global,
desde a modelagem dos painéis fotovoltaicos até a análise das estratégias de operação
implementadas. A partir de algumas considerações quanto à fonte de alimentação e da
carga, foi possível determinar o conversor que se pensa ser o mais adequado a esta
situação, o conversor Buck com filtro de entrada.
Baseado no modelo do arranjo de painéis fotovoltaicos definiu-se uma metodologia
de projeto para o conversor operando no MPP, a partir das equações clássicas do
conversor. Duas estratégias de operação no MPP foram estudadas e implementadas para
comparação, uma digital e outra analógica, sendo que a alternativa digital mostrou-se
bastante interessante pela precisão e pela sua flexibilidade. Resultados individuais e
comparativos destas duas estratégias são apresentados no capítulo 5.

.
CAPÍTULO 3
DEFINIÇÃO DA TOPOLOGIA DO ESTÁGIO DE POTÊNCIA PARA
APLICAÇÃO EM REFRIGERAÇÃO
3.1 INTRODUÇÃO
Este capítulo tem por objetivo definir, com base em considerações sobre a carga a ser
alimentada e nos requisitos expostos na Fig. 1.8, a topologia do estágio de potência que irá
conectar o banco de baterias ao refrigerador.
A conexão entre o banco de baterias e o refrigerador exige uma adaptação do nível
de tensão e inversão da mesma. Conforme já mencionado na seção 1.4, estas funções
podem ser realizadas em um ou dois estágios. Dessa forma, a definição do número de
estágios e de quais estruturas serão empregadas é aqui discutido.
3.2 CARACTERÍSTICA DA CARGA
Para melhor avaliar a topologia de potência é interessante analisar a característica da
carga. Para tanto foram realizados alguns ensaios com o compressor, de forma a gerar um
modelo simples, mas funcional.
Sabe-se que o compressor em questão é composto de um motor de indução acoplado
a um compressor de gás propriamente dito, isto é, uma carga fortemente indutiva. Os
motores de indução monofásicos convencionais têm um sério fator agravante no seu
funcionamento, que é a sua corrente de partida.
Como o objetivo deste trabalho é a alimentação destes refrigeradores convencionais,
buscou-se nesta seção avaliar o comportamento do compressor para algumas situações de
partida, visando encontrar aquela que apresentasse menor corrente de partida.
O compressor em questão é fabricado pela Embraco, modelo EM 30 HNR, cujas
informações estão contidas na Tabela 3.1. Este compressor equipa o modelo de
refrigerador que se utiliza como carga. Originalmente ele é operado sem capacitor de
partida, todavia, a inclusão de um capacitor de partida em série com o enrolamento auxiliar

Douglas Pereira da Silva, M. Eng.
49
(que é desconectado por um relé após a partida do motor) reduz a amplitude da corrente de
partida e pode ser interessante nesta aplicação. Sendo assim, ensaios com e sem este
capacitor foram realizados.
Tabela 3.1 – Informações sobre o compressor EM 30 HNR da Embraco
Parâmetro Valor
Capacidade 30 BTU/h
Sistema de partida Relé
Corrente de rotor travado 6,5 A
Freqüência de operação 50 – 60 Hz
Capacitância opcional de partida 38 a 46 µF
3.2.1 MODELO DO COMPRESSOR PARA TENSÃO NOMINAL
Nesta seção, apresentam-se os resultados dos ensaios realizados com uma tensão
eficaz nominal de 220 V. Do ensaio realizado sem capacitor de partida é obtido um modelo
equivalente do compressor para a partida e para o regime permanente, de forma a se avaliar
melhor a carga a ser alimentada.
3.2.1.1 ENSAIO: TENSÃO NOMINAL DE 220 V, SEM CAPACITOR DE PARTIDA
A Fig. 3.1 apresenta uma aquisição do transitório de partida do compressor e as Fig.
3.2 e 3.3, apresentam, respectivamente, o detalhe da tensão e da corrente na partida e em
regime permanente.
Com os dados colhidos no ensaio apresentado na Fig. 3.1, verificou-se que a corrente
eficaz de partida é de aproximadamente 5,3 A e o tempo de partida gira em torno de 500
ms. Percebe-se na Fig 3.1 uma mudança brusca de estado em torno de 500ms, a qual se
trata da desconexão do enrolamento auxiliar que atua somente na partida do motor.

Douglas Pereira da Silva, M. Eng.
50
Ch1: 2 A/divBase de tempo: 100 ms/div
Fig. 3.1 – Corrente de partida do compressor em tensão nominal e sem capacitor de
partida.
Ch1: 100 V/div Ch2: 2 A/divBase de tempo: 5 ms/div
Ch2Ch1
Fig. 3.2 – Detalhe da tensão e da corrente na partida.
Os dados deste ensaio são apresentados, resumidamente, na Tabela 3.2.
Tabela 3.2 – Dados do ensaio do compressor com tensão nominal e sem capacitor de
partida.
Condição Corrente de pico [A] Defasagem em relação à tensão [º]
Partida 7,5 21,2
Regime Permanente 0,8 64,0

Douglas Pereira da Silva, M. Eng.
51
Ch1: 100 V/div Ch2: 500 mA/divBase de tempo: 100 ms/div
Ch2
Ch1
Fig. 3.3 – Detalhe da tensão e corrente em regime permanente
Baseado neste ensaio e com o objetivo de se fazer uma modelagem simples,
modelar-se-á a carga, nestas condições, por um circuito RL série, sendo um conjunto de
valores para a partida e outro para o regime permanente, já que o compressor apresenta
comportamento bem distinto nestes dois intervalos.
Considerando-se o modelo RL série mostrado na Fig. 3.4, os parâmetros do mesmo
são dados pelas eq. (3.1) a (3.4)
Rc
Lc
Fig. 3.4 – Modelo simplificado do motor.
Partida
Ω=== 7,38A5,7
º2,21cos.V311cos
__
PC
PpPC I
VR
φ (3.1)

Douglas Pereira da Silva, M. Eng.
52
mH 8,39A5,7377
º2,21senV311sen
srad
__ ===
PC
PpPC I
VL
ωφ
(3.2)
Regime permanente
Ω=== 4,170A8,0
º64cos.V311cos
__
RPC
RPpRPC I
VR
φ (3.3)
mH 927A8,0377
º64senV311sen
srad
__ ===
RPC
RPpRPC I
VL
ωφ
(3.4)
3.2.1.2 ENSAIO: TENSÃO NOMINAL DE 220 V, COM CAPACITOR DE PARTIDA
Nesta seção, um ensaio com tensão nominal e com este capacitor é apresentado, para
se avaliar a redução da referida corrente que se obtém com a adição deste capacitor. A Fig.
3.5 apresenta uma aquisição do transitório de partida nestas condições.
Ch1: 2 A/divBase de tempo: 50 ms/div
Fig. 3.5 – Corrente de partida do compressor em tensão nominal e com capacitor de
partida.
Constata-se pelos dados colhidos no ensaio apresentado pela Fig. 3.5 que a corrente
eficaz de partida fica em torno de 3,9 A, com um tempo de partida de aproximados 300 ms.
A adição do capacitor de partida significou uma redução de aproximadamente 26,5 % na
corrente exigida pelo motor durante a partida, entretanto esta ainda é uma corrente elevada,
já que ela significa uma potência processada de 860 VA.

Douglas Pereira da Silva, M. Eng.
53
Vislumbrando-se a possibilidade de partir o compressor com subtensão para se
reduzir a corrente de partida demandada, alguns ensaios foram realizados para se avaliar a
exigência da carga nessas condições.
3.2.2 MODELO DO COMPRESSOR PARA SUBTENSÃO
Experimentalmente, submeteu-se o compressor a partidas com várias tensões abaixo
da nominal, para avaliar seu comportamento e verificar a viabilidade da partida com
subtensão e, conseqüente corrente de partida reduzida.
A Fig. 3.6 apresenta, como resultado deste ensaio, o tempo de partida versus tensão
terminal do compressor. A partir deste ensaio observou-se que para uma tensão menor que
130 V os tempos de partida tornam-se elevados e muitas vezes o enrolamento auxiliar nem
chega a ser desconectado, não caracterizando a partida efetiva do compressor e acionando
a proteção térmica do compressor.
Fig. 3.6 – Gráfico mostrando o tempo de partida versus tensão de entrada do compressor
sem capacitor de partida.
Conforme verificado pela Fig. 3.6, 130 V é a mínima tensão de entrada que se
verificou uma partida efetiva do compressor. Portanto, o modelo para subtensão será
considerado para este nível de tensão.

Douglas Pereira da Silva, M. Eng.
54
3.2.2.1 ENSAIO: SUBTENSÃO DE 130 V, SEM CAPACITOR DE PARTIDA
Na Fig. 3.7 é mostrado o transitório de partida do compressor para estas condições.
Verifica-se que este transitório, da ordem de 2,5 segundos, é mais longo que os
anteriormente apresentados, e cinco vezes maior que para condições nominais.
Ch1: 2 A/divBase de tempo: 500 ms/div
Fig. 3.7 – Corrente de partida do compressor em subtensão e sem capacitor de partida.
A corrente eficaz de partida para este caso é de aproximadamente 3,1 A, o que
significa, em relação ao caso com tensão nominal e sem capacitor de partida, uma redução
de cerca de 41,5%, que é bastante significativa. Seguindo a mesma linha de raciocínio,
espera-se que a adição do capacitor de partida nestas condições reduza a corrente de
partida nas mesmas proporções, em relação ao caso com tensão nominal e com capacitor
de partida.
3.2.2.2 ENSAIO: SUBTENSÃO DE 130 V COM CAPACITOR DE PARTIDA
A Fig. 3.8 apresenta o resultado deste ensaio. Novamente, com os dados obtidos
deste ensaio apresentado, constata-se que tanto a corrente quanto o tempo de partida
baixaram. O tempo de partida está em aproximadamente 1,2 segundos e a corrente eficaz
de partida em torno de 2,4 A.
Comparada com o caso em que a tensão é nominal e há capacitor de partida a
redução da corrente foi de aproximadamente 38,5%. Este resultado é extremamente

Douglas Pereira da Silva, M. Eng.
55
importante, pois indica que se pode partir o compressor numa condição de subtensão com
aproximadamente 310 VA.
Ch1: 1 A/divBase de tempo: 250 ms/div
Fig. 3.8 – Corrente de partida do compressor em subtensão e com capacitor de partida.
A partir dos resultados aqui obtidos, verifica-se que é interessante a utilização do
capacitor de partida e, portanto, é conveniente uma modelagem do compressor nestas
condições.
Na seção 3.2.1, foi considerado um modelo simplificado, representado por um
circuito RL série, com valores de parâmetros distintos para a partida e para o regime
permanente. Com a inclusão do capacitor, não é mais possível considerar estes valores
diferentes para o compressor como um todo, mas sim um modelo com dois ramos RL
série, um para cada enrolamento. A Fig. 3.9 ilustra o modelo utilizado, indicando os
parâmetros a serem determinados.
Cc_p_sub
Rc_rp_sub
Lc_p_sub
Lc_rp_sub
Rc_p_sub
Fig. 3.9 – Modelo simplificado do compressor para subtensão com capacitor de partida.

Douglas Pereira da Silva, M. Eng.
56
Como base para o levantamento dos parâmetros da Fig. 3.9, serão utilizados os dados
obtidos no ensaio do compressor com subtensão e sem capacitor de partida, que são
apresentados na Tabela 3.3.
Tabela 3.3 – Dados do ensaio do compressor com subtensão e sem capacitor de partida
Condição Corrente de pico [A] Defasagem em relação à tensão [º]
Partida 4,4 26,0
Regime Permanente 1,9 41,2
Considerando-se o circuito equivalente apresentado na Fig. 3.9, na partida do
compressor sem o capacitor de partida (capacitor curto-circuitado) têm-se dois ramos RL
série em paralelo e no regime permanente apenas um ramo RL série. Utilizando-se as eq.
3.1 a 3.4, é possível determinar a resistência e a indutância do enrolamento principal
(regime permanente) e as resistências e indutâncias equivalentes do enrolamento auxiliar
em paralelo com o principal. Estes valores são apresentados na Tabela 3.4.
Tabela 3.4 – Parâmetros do compressor em subtensão com capacitor de partida.
Parâmetro Valor
RC_RP_SUB 71,3 Ω
LC_RP_SUB 189 mH
RC_RP_SUB // RC_P_SUB 36,8 Ω
LC_RP_SUB // LC_P_SUB 47,6 mH
Sabendo-se que a partir do equivalente paralelo das grandezas apresentadas na
Tabela 3.4, com uma pequena manipulação, chega-se aos parâmetros do enrolamento
auxiliar, estes são apresentados nas eq. (3.5) e (3.6)
( )( )
Ω=Ω−ΩΩΩ
=
−=
1,768,363,71
3,71.8,36//
//
__
______
________
SUBPC
SUBPCSUBRPCSUBRPC
SUBRPCSUBPCSUBRPCSUBPC
R
RRRRRR
R (3.5)

Douglas Pereira da Silva, M. Eng.
57
( )( )
mH 6,63mH6,47mH189
mH189.mH6,47
////
__
______
________
=−
=
−=
SUBPC
SUBPCSUBRPCSUBRPC
SUBRPCSUBPCSUBRPCSUBPC
L
LLLLLL
L (3.6)
3.3 DEFINIÇÃO DA TOPOLOGIA DO ESTÁGIO DE POTÊNCIA
A conexão entre o banco de baterias e o refrigerador, num único estágio, exige
elevação de tensão, conversão CC-CA, isolamento galvânico e regulação de carga, numa
única estrutura. A seção 3.3.1 apresenta alguns conversores interessantes para aplicação em
refrigeração, conectando um banco de baterias ao refrigerador num único estágio.
3.3.1 TOPOLOGIAS PARA ESTÁGIO DE POTÊNCIA ÚNICO ENTRE BATERIAS E
REFRIGERADOR
Dentre as inúmeras topologias de inversores existentes, tanto inversores de corrente
como de tensão, são aqui apresentadas algumas consideradas interessantes ao
processamento da energia solar fotovoltaica para o acionamento de refrigeradores
convencionais.
3.3.1.1 INVERSOR FULL-BRIDGE BIDIRECIONAL EM CORRENTE COM MODULAÇÃO PWM
SENOIDAL ISOLADO
Esse inversor tem a mesma topologia básica do conversor CC-CC Full-Bridge,
apresentando quatro interruptores em ponte. A sua modulação, entretanto, é do tipo PWM
senoidal, o que propicia obter na saída do inversor uma forma de onda cuja fundamental é
uma senóide, normalmente de freqüência 60 Hz, modulada por uma portadora na
freqüência de comutação, acima de 20 kHz. Através de um simples filtro LC pode-se
eliminar a portadora, resultando em uma forma de onda senoidal para a carga.
A modulação PWM senoidal tem como principais vantagens a redução do volume do
filtro de saída bem, como uma forma de onda de saída com baixíssima distorção
harmônica. A topologia isolada, com filtro, deste conversor é apresentada na Fig. 3.10.

Douglas Pereira da Silva, M. Eng.
58
Vin
D1 D3
D2 D4
Cf
LfS1 S3
S2 S4
Fig. 3.10 – Conversor CC-CA Full-Bridge com modulação PWM senoidal.
O transformador tem a função de isolar e elevar a tensão através de sua relação de
transformação, já que a característica deste inversor é abaixadora. Entretanto, pelo fato de
se utilizar modulação PWM senoidal, este transformador precisa ser projetado para a
freqüência da fundamental, que é baixa, já que o fluxo no transformador tem uma
componente em baixa freqüência significativa. Um transformador de baixa freqüência é
relativamente volumoso e pesado, sendo uma característica indesejável para o sistema.
3.3.1.2 INVERSOR PUSH-PULL ALIMENTADO EM TENSÃO, COM MODULAÇÃO PWM
SENOIDAL
O inversor Push-Pull alimentado em tensão é uma estrutura que se mostra muito
interessante para a aplicação desejada, já que é uma estrutura relativamente simples, possui
apenas dois interruptores, é robusta, já que o transformador evita um curto-circuito franco
na fonte, e é de fácil comando, pelo fato de os dois interruptores estarem na mesma massa.
Assim como o inversor Full-Bridge, ele pode ser operado com modulação PWM
senoidal, com todas as vantagens já descritas. Por ter entrada em tensão, deve-se garantir
um tempo morto entre os sinais de comando para razão cíclica máxima, de forma a evitar
um curto-circuito no primário do transformador. A topologia deste conversor é apresentada
na Fig. 3.11.

Douglas Pereira da Silva, M. Eng.
59
Lf
Cf
D2
D1
Vin
S1
S2
Fig. 3.11 – Conversor CC-CA Push-Pull alimentado em tensão com modulação PWM
senoidal
No inversor Push-Pull o transformador é parte integrante da estrutura, mas tem a
mesma função que no Full-Bridge, elevação de tensão e isolamento galvânico, sendo
necessário projetá-lo para a freqüência fundamental da modulação.
3.3.1.3 INVERSOR ALIMENTADO EM CORRENTE “AVANÇADO”
Esta topologia é proposta em [14] e é assim chamada pelo seu autor. Trata-se de uma
derivação do inversor Push-Pull alimentado em corrente.
Este conversor se contextualiza na tentativa de aumentar a eficiência em relação a
uma estrutura inversora de dois estágios, sendo o primeiro deles constituído por um
conversor CC-CC Buck com corrente de saída do tipo senoidal retificada e o segundo por
um Inversor Push-Pull alimentado em corrente comutando em baixa freqüência.
Neste tipo de estrutura há sempre dois interruptores no caminho da corrente o que
aumenta as perdas e diminui a confiabilidade. Nesse sentido, surge a estrutura apresentada
na Fig. 3.12.

Douglas Pereira da Silva, M. Eng.
60
2
Vin
D2
Lb
D1
La
S1 S2
Fig. 3.12 – Conversor CC-CA Push-Pull alimentado em corrente “avançado”
As etapas de operação deste conversor estão apresentadas na Fig. 3.13.
Vin
D2
Lb
D1
La
Vin
D2
Lb
D1
La
Vin
D2
Lb
D1
La
Vin
D2
Lb
D1
La
a) b)
c)
c)
d)
S1
S1 S1
S1
S2 S2
S2 S2
Fig. 3.13 – Etapas de operação do inversor alimentado em corrente “avançado”
1ª etapa: Interruptor S1 fechado e S2 aberto: A corrente em La cresce
linearmente e energiza o enrolamento esquerdo do transformador.
2ª etapa: Interruptor S1 aberto e S2 comandado a conduzir: Devido ao
acoplamento entre La e Lb, e com a interrupção da corrente em La, S2 é

Douglas Pereira da Silva, M. Eng.
61
forçado a conduzir. A corrente em Lb parte do valor da corrente em La no
momento da abertura de S1 e decresce linearmente, fluindo através do
diodo D2. O enrolamento direito do transformador é energizado.
3ª etapa: Interruptor S1 aberto e S2 fechado: A corrente em Lb cresce
linearmente e energiza o enrolamento direito do transformador.
4ª etapa: Interruptor S1 aberto e S2 aberto: A corrente em La decresce a
partir do valor máximo da corrente em Lb, linearmente, fluindo através do
diodo D1. O enrolamento esquerdo do transformador é energizado.
Nesta estrutura as etapas 1 e 2 são responsáveis pelo semiciclo positivo da tensão de
saída e as etapas 3 e 4 pelo semiciclo negativo.
Como vantagens para esta estrutura tem-se o reduzido número de componentes e o
fato de obter-se uma tensão de saída senoidal em um único estágio de processamento de
energia.
Como desvantagens tem-se a complexidade do controle, o elevado volume do
transformador já que o mesmo opera na freqüência da rede, e a necessidade de alto
acoplamento entre os indutores La e Lb, para evitar elevadas sobretensões sobre os
interruptores.
3.3.2 TOPOLOGIAS PARA DOIS ESTÁGIOS DE POTÊNCIA ENTRE BATERIAS E
REFRIGERADOR
Verificou-se na seção 3.3.1 que as três topologias apresentadas apresentavam o
inconveniente de possuir transformadores volumosos, já que o projeto dos mesmos nestas
estruturas deve ser feito para a freqüência fundamental da tensão de saída.
A realização da conexão entre o banco de baterias e o refrigerador em dois estágios
pode contornar este inconveniente, utilizando um conversor CC-CC para elevar a tensão e
um transformador para prover o isolamento galvânico, projetado este para operar em alta
freqüência, o que implicará num reduzido volume.
É possível utilizar-se da modulação PWM senoidal num inversor não-isolado, que é
bastante compacto. A regulação da tensão na carga pode ser realizada pelo conversor CC-
CC através de uma malha de tensão e o inversor pode operar, portanto, em malha aberta.
Pelo fato de neste caso se ter mais estágios, é fundamental empregar topologias
simples e robustas em cada um deles. Para o conversor CC-CC surgem como topologias

Douglas Pereira da Silva, M. Eng.
62
interessantes o conversor Flyback e o conversor Push-Pull. Estas estruturas são analisadas
em detalhes nas seções 3.3.2.1 e 3.3.2.2, para verificação da viabilidade de seu emprego
através de um projeto tradicional para ambos os conversores, bem como estudo de
simulação de circuitos idealizados.
3.3.2.1 CONVERSOR FLYBACK DE 350 W EM MODO DE CONDUÇÃO CONTÍNUA
A operação do conversor Flyback no modo de condução contínua deve-se ao fato de
que os valores eficazes das correntes nos componentes são menores nesse modo, já que os
valores de pico dessas correntes também são menores.
Especificações
Têm-se como especificações básicas para o projeto deste conversor as apresentadas
na Tabela 3.5.
Tabela 3.5 – Especificações básicas do conversor Flyback.
Parâmetro Valor
Potência de saída 350 W
Tensão de saída 400 V
Freqüência de comutação 50 kHz
Tensão mínima de entrada 21 V
Tensão máxima de entrada 28,8 V
Razão cíclica máxima 0,5
Rendimento esperado do conversor 80%
É importante remarcar que se limitou a razão cíclica máxima em 0,5 devido ao fato
de que valores maiores implicavam num volume do transformador muito elevado. Por
outro lado, diminuiria a relação de espiras entre o primário e o secundário, porém
implicando numa maior corrente no secundário do transformador.
Projeto do transformador
As especificações básicas do transformador são apresentadas nas Tabela 3.6.

Douglas Pereira da Silva, M. Eng.
63
Tabela 3.6 – Especificações básicas do transformador Flyback.
Parâmetro Valor
Densidade de fluxo máxima 0,2 T
Densidade de corrente máxima 350 A.cm-2
Fator de utilização da janela 0,4
Fator de utilização do primário 0,5
A partir das especificações apresentadas na Tabela 3.5 e 3.6 projetou-se o
transformador, obtendo-se como resultado os parâmetros apresentados na Tabela 3.7.
Tabela 3.7 – Resultados de projeto do transformador Flyback.
Parâmetro Valor
Produto de áreas calculado 8,84 cm4
Núcleo escolhido E55 - Thornton
Número de espiras do primário 12
Número de espiras do secundário 229
Comprimento do entreferro mecânico 1,31 mm
Bitola do fio 18 AWG
Número de condutores em paralelo do primário 11
Número de condutores em paralelo do secundário 01
Projeto do circuito de potência
Na Fig. 3.14 é apresentado o circuito básico do conversor Flyback
0
0
Vin
S
Dr
Cout Rout
+
-
Fig. 3.14. Conversor CC-CC Flyback básico

Douglas Pereira da Silva, M. Eng.
64
Como única especificação nesta seção fica estabelecida uma ondulação máxima na
tensão de saída de 10 V. Através dessa especificação calcula-se, pela eq. 3.7 [11], a
mínima capacitância possível.
max outout
s Cout
D ICf V
=∆
(3.7)
Deve-se levar em consideração o efeito da resistência série equivalente do capacitor
na ondulação da tensão de saída. Este efeito é levado em conta por meio da eq. (3.8),
considerando-se que toda a componente alternada da corrente passa pelo capacitor, de
acordo com [11].
No conversor Flyback, como não há indutor no estágio de saída, a componente
alternada corresponde ao pico da corrente no secundário, o que leva à necessidade de uma
resistência série equivalente muito baixa.
_ max_ max
_
Coutout
Cout pk pk
VRSE
I −
∆= (3.8)
Com base nas eq. (3.7) e (3.8), o capacitor de saída deve satisfazer as restrições
apresentadas na Tabela 3.8.
Tabela 3.8 – Especificações do capacitor de saída.
Capacitância mínima RSE máxima
1,75 µF 5,71 Ω
Os esforços de tensão no interruptor principal e no diodo retificador, de acordo com
[11] são dados pelas eq. (3.9) e (3.10), respectivamente.
outSec
iPrmax_inpico_S V
NNVV += (3.9)
max_iniPr
Secoutpico_Dr V
NNVV += (3.10)

Douglas Pereira da Silva, M. Eng.
65
Para o cálculo dos esforços de corrente nos componentes assumiu-se, de forma a
facilitar os cálculos, que além de condução contínua ter-se-ia pouca ondulação de corrente.
Sendo assim, admitiram-se formas de onda retangulares para as correntes nos ramos onde
estivessem os interruptores. Sendo assim, verifica-se que os esforços de corrente no
interruptor principal são dados pelas eq. (3.11) a (3.13).
maxmax_in
outpico_S DV
PIη
= (3.11)
pico_Smaxmed_S IDI = (3.12)
pico_Smaxef_S IDI = (3.13)
Na determinação das expressões para os esforços de corrente nos interruptores,
assumiu-se que, como a corrente no primário é muito elevada, o rendimento do conversor
estaria prejudicado, principalmente pelas perdas no interruptor principal. Logo se
considerou que as perdas do conversor estão concentradas nesse elemento. Os esforços de
corrente no diodo retificador são dados pelas eq. (3.14) a (3.16).
max
outpico_Dr D
II−
=1
(3.14)
( ) pico_Drmaxmed_Dr IDI −= 1 (3.15)
pico_Drmaxef_Dr IDI −= 1 (3.16)
A Tabela 3.9 apresenta os resultados para os esforços de tensão e corrente nos
interruptores.
Tabela 3.9 – Esforços nos interruptores.
Interruptor principal Diodo retificador
Tensão de pico 49,76 V 950 V
Corrente de pico 41,67 A 1,75 A
Corrente média 20,83 A 0,88 A
Corrente eficaz 29,46 A 1,24 A

Douglas Pereira da Silva, M. Eng.
66
Estudo por simulação
Nesta seção são apresentados os resultados de um estudo de simulação com a
utilização do programa Orcad Pspice, de um conversor Flyback operando em regime
permanente, cuja única idealidade considerada é a RSE do capacitor de saída Cout da Fig.
3.14.
Na Fig. 3.15 são apresentadas as correntes no interruptor principal e no diodo
retificador. Nota-se claramente que o conversor opera em condução contínua.
Tempo14.800ms 14.840ms 14.880ms 14.920ms 14.960ms 15.000ms 15.040ms
I(Dout)
0A
1.0A
2.0A
I(MOS)0A
12.5A
25.0A
37.5A
(a)
(b)
Fig. 3.15 – Corrente no (a) interruptor principal e (b) no diodo retificador
Na Fig. 3.16 são apresentadas as tensões de bloqueio no interruptor principal e
reversa no diodo retificador. Nota-se que elas estão dentro dos valores esperados para o
projeto.

Douglas Pereira da Silva, M. Eng.
67
Tempo14.35ms 14.40ms 14.45ms 14.50ms 14.55msV(Dout)
0V
250V
500V
750V
950VV(MOS)0V
25V
50V
(a)
(b)
Fig. 3.16 – Tensão reversa no (a) interruptor principal e (b) no diodo retificador
A comutação no conversor é dissipativa, entretanto com tempos de comutação muito
pequenos. Desse modo, o detalhe da comutação não é relevante já que se trata de um
circuito idealizado.
O detalhe da tensão de saída é apresentado na Fig 3.17. Verifica-se uma ondulação
um pouco maior que 10 V, devido ao fato da corrente nos interruptores ter sido
considerada retangular, ou seja, com pouca ondulação. Este fato não é verdadeiro, já que a
corrente é trapezoidal. Entretanto o erro cometido por esta consideração é insignificante se
considerado o ganho de simplicidade no projeto.
Tempo16.44ms 16.48ms 16.52ms 16.56ms 16.60ms
Vout
380.0V
385.0V
390.0V
395.0V
Fig. 3.17 – Detalhe da tensão de saída
Os esforços nos interruptores obtidos pelo estudo de simulação estão apresentados na
Tabela 3.10.

Douglas Pereira da Silva, M. Eng.
68
Tabela 3.10 – Esforços nos interruptores do conversor Flyback obtidos por simulação para
tensão de entrada mínima.
Interruptor principal Diodo retificador
Tensão de pico @ Vin = 28,8V 49,5 V 934 V
Corrente média @ Vin = 21V 16,25 A 0,85 A
Corrente eficaz @ Vin = 21V 23,30 A 1,22 A
Observando-se a Tabela 3.10 verifica-se que os valores das tensões estão de acordo
com os valores previstos em projeto. Os valores de pico das corrente são próximos dos
calculados. Todavia, como a corrente na realidade é trapezoidal, eles deveriam ser mais
elevados. Isso não acontece, pois como o circuito é idealizado as perdas são pequenas e,
portanto, não é drenada uma corrente maior para supri-las.
Isto pode ser confirmado pelo valor da corrente eficaz do primário, bem abaixo do
previsto, já que no cálculo do projeto consideraram-se concentradas no interruptor
principal as perdas do conversor. Os valores obtidos para os esforços no diodo retificador
são mais próximos aos de projeto, pelo mesmo motivo exposto.
3.3.2.2 CONVERSOR PUSH-PULL DE 350 W EM MODO DE CONDUÇÃO CONTÍNUA
A operação do converor Push-Pull no modo de condução contínua se dá pelo mesmo
motivo que para o Flyback. O conversor Push-Pull é um conversor naturalmente isolado,
possuindo a mesma referência de comando para os dois interruptores principais.
Especificações
As especificações desse projeto são basicamente as mesmas do projeto anterior, uma
vez que a finalidade é a mesma e se deseja comparar o desempenho dos dois conversores
sob iguais condições. As especificações básicas são apresentadas na Tabela 3.11.
Tabela 3.11 – Especificações básicas do conversor Push-Pull.
Parâmetro Valor
Potência de saída 350 W
Tensão de saída 400 V
Freqüência de comutação 25 kHz
Tensão mínima de entrada 21 V

Douglas Pereira da Silva, M. Eng.
69
Tensão máxima de entrada 28,8 V
Razão cíclica máxima 0,8
Rendimento esperado do conversor 85%
Com relação ao conversor Flyback, mudam-se os valores da razão cíclica máxima e
do rendimento esperado do conversor. Como o conversor Push-Pull possui dois
interruptores, a corrente eficaz em cada um deles é sensivelmente reduzida, levando a uma
expectativa de rendimento mais elevado. O fato de operar em dois quadrantes da curva B x
H do transformador diminui o volume do transformador, permitindo aumentar o valor da
razão cíclica máxima.
Projeto do transformador
As especificações para o projeto do Transformador Push-Pull são as mesmas da
Tabela 3.6 resultando nos parâmetros apresentados na Tabela 3.12.
Tabela 3.12 – Resultados de projeto do transformador Push-Pull
Parâmetro Valor
Produto de áreas calculado 1,32 cm4
Núcleo escolhido E42/15 - Thornton
Número de espiras do primário 03
Número de espiras do secundário 79
Bitola do fio 18 AWG
Número de condutores em paralelo do primário 06
Número de condutores em paralelo do secundário 01
Projeto do circuito de potência
A topologia básica do conversor Push-Pull é apresentada na Fig 3.18.

Douglas Pereira da Silva, M. Eng.
70
Cout
S1
Dr2
Dr1
R
D1
Vin
LoutS2
D2
Fig. 3.18. Conversor CC-CC Push-Pull básico.
Nesta seção tem-se como especificações a máxima ondulação na corrente do indutor
de saída e a máxima ondulação da tensão de saída. A especificação de ondulação de tensão
é a mesma considerada para o conversor Flyback, sendo que o valor da capacitância é dado
pela eq. (3.17) [10].
Coutouts
max_in
iPr
Secout VLf
VNNC
∆= 264
(3.17)
Deve-se remarcar que a freqüência obtida na entrada do filtro LC é o dobro da
freqüência de comutação, o que permite reduzir ainda mais o filtro de saída.
Diferentemente do Flyback, a componente de corrente alternada que passa pelo capacitor é
a ondulação de corrente sobre o indutor, dessa forma a expressão para determinar a
máxima RSE é apresentada na eq. (3.18).
Lout
Coutmax_SE I
VR∆∆
= (3.18)
Tabela 3.13 – Especificações do capacitor de saída.
Capacitância mínima RSE máxima
240,6 ηF 20,78 Ω

Douglas Pereira da Silva, M. Eng.
71
Para determinação da ondulação de corrente no indutor deve-se novamente
considerar que a freqüência na entrada do filtro é o dobro da freqüência de comutação.
Portanto, a expressão que determina o valor da indutância de saída é dada pela eq. 3.19
[10].
_ max
8inS
outP s Lout
VNLN f I
=∆
(3.19)
A ondulação de corrente admitida é de 10% da corrente nominal de carga.
Os esforços de tensão no interruptor principal e nos diodos retificadores são dados
pela eq. 3.20 e 3.21, respectivamente.
max_inpico_S VV 2= (3.20)
max_iniPr
Secpico_Dr V
NNV 2= (3.21)
Para o cálculo dos esforços de corrente nos interruptores do Push-Pull foram feitas as
mesmas considerações quanto a perdas da seção 3.3.2.1, resultando nas eq. (3.22) a (3.24).
maxmax_in
outpico_S DV
PIη
= (3.22)
pico_Smax
med_S ID
I2
= (3.23)
pico_Smax
ef_S ID
I2
= (3.24)
Da mesma forma, as expressões para os esforços de corrente estão apresentadas nas
eq. (3.25) e (3.26).
2out
med_DrII = (3.25)
813 +
= maxpico_Secef_Dr
DII (3.26)

Douglas Pereira da Silva, M. Eng.
72
Na Tabela 3.14 são apresentados os resultados obtidos para os esforços de tensão e
corrente nos interruptores.
Tabela 3.14 – Esforços nos interruptores.
Interruptor principal Diodo retificador
Tensão de pico 57,6 V 1517 V
Corrente média 9,80 A 0,44 A
Corrente eficaz 15,50 A 0,71 A
Estudo por simulação
São apresentados os resultados de um estudo por simulação de uma estrutura cuja
única não idealidade assumida é a presença da RSE do capacitor de saída.
Na Fig 3.19 são apresentadas as formas de onda de corrente e de tensão nos dois
interruptores principais.
Tempo17.280ms 17.300ms 17.320ms 17.340ms 17.360ms 17.380ms
I(S2)
V(S2)
0
12.5
25.0
37.5
50.0
I(S1)
V(S1)
0
12.5
25.0
37.5
50.0
(a)
(b)
[V,A]
Fig. 3.19 – (a) Corrente e tensão em S1; (b) Corrente e tensão em S2.
Na Fig. 3.20 são apresentadas as formas de onda da corrente e tensão em um dos
diodos retificadores.

Douglas Pereira da Silva, M. Eng.
73
Tempo17.320ms 17.340ms 17.360ms 17.380ms 17.400ms 17.420ms
V(Dr2)
0V
0.5kV
1.0kV
I(Dr1)
250mA
500mA
750mA
0A
946mA
(a)
(b)
Fig. 3.20 – (a) Corrente e (b) tensão reversa no diodo retificador Dr1.
Nota-se sobre o diodo uma tensão reversa menor que a máxima prevista, devido ao
fato do conversor ter sido simulado com a tensão mínima de entrada. Para a tensão máxima
de entrada, prevista em 28,8 V, a tensão reversa máxima é apresentada na Fig. 3.21.
Time17.40ms 17.42ms 17.44ms 17.46ms 17.48ms 17.50ms 17.52ms
V(Dr1)
0
0.500kV
1.000kV
1.463kV
Fig. 3.21 – Tensão reversa para o caso de máxima tensão de entrada
Na Fig. 3.22 são apresentados os detalhes da tensão de saída e da corrente no indutor

Douglas Pereira da Silva, M. Eng.
74
Tempo18.43ms 18.44ms 18.45ms 18.46ms 18.47ms 18.48ms 18.49ms 18.50ms
I(Lout)
820mA
840mA
860mA
Vout
384.50V
384.75V
385.00V
385.25V
(a)
(b)
Fig. 3.22 – Detalhe da (a) tensão de saída e (b) corrente no indutor de saída
Pela análise da Fig. 3.22 percebe-se que a ondulação de tensão de saída é unicamente
devida a RSE do capacitor, já que a ondulação de tensão tem a mesma forma da ondulação
de corrente.
Para a tensão de entrada máxima de 28,8 V, obteve-se como resultado de simulação
uma ondulação de tensão de saída de 0,9 V e uma ondulação de corrente no indutor de 45,6
mA.
Os esforços de corrente e de tensão obtidos por simulação são apresentados na
Tabela 3.15.
Tabela 3.15 – Esforços nos interruptores do conversor Push-Pull, obtidos por simulação.
Interruptor principal Diodo retificador
Tensão de pico @ Vin = 28,8V 56,2 V 1448 V
Corrente média @ Vin = 21V 9,52 A 0,45 A
Corrente eficaz @ Vin = 21V 15,07 A 0,61 A
Verifica-se que os valores obtidos por simulação para o conversor Push-Pull são
mais próximos dos calculados do que ocorreu com o conversor Flyback. Isto se deve ao
fato de que as formas de onda de corrente obtidas para o conversor Push-Pull são muito
mais próximas da corrente idealizada, de onde se baseou o cálculo, do que no caso do
conversor Flyback.

Douglas Pereira da Silva, M. Eng.
75
3.3.2.3 CONVERSOR PUSH-PULL COM SAÍDA EM PONTE COMPLETA
O valor da tensão de pico no diodo retificador de saída é elevado para a atual
tecnologia de semicondutores, sendo raro encontrar diodos ultra-rápidos para tal tensão
reversa. Assim sendo, a implementação do retificador de saída em ponte completa reduz
pela metade a tensão reversa sobre cada diodo, pelo fato de o secundário possuir agora
apenas um enrolamento. Esta topologia é apresentada na Fig. 3.23.
Lout
Dr1
V1
S1
Dr4
D1
Dr3
Rout
D2
Cout
Dr2
S2
Fig. 3.23 – Conversor Push-Pull com retificador de saída em ponte completa.
Como resultado de simulação da estrutura apresentada na Fig. 3.23 apresenta-se na
Fig. 3.24 a tensão reversa sobre um dos diodos da ponte retificadora.
Tempo6.45ms 6.50ms 6.55ms 6.60ms 6.65ms 6.70ms
V(Dr1)0V
200V
400V
600V
734V
Fig. 3.24 – Tensão reversa sobre Dr1.
A tensão reversa sobre o diodo, para a entrada máxima de 28,8 V, foi reduzida de
1438 V para 725 V.

Douglas Pereira da Silva, M. Eng.
76
3.3.2.4 ANÁLISE COMPARATIVA DOS CONVERSORES CC-CC ANALISADOS
Com a finalidade de estabelecer uma comparação entre as estruturas vistas nesta
seção, são apresentadas na Tabela 3.16 as vantagens e desvantagens de cada uma.
Tabela 3.16 – Comparativo entre o conversor Flyback e o Push-Pull alimentado em tensão
Flyback Push-Pull
Vantagens Estrutura simples;
Apenas 1 transistor, 1 diodo
e 1 elemento magnético na
estrutura principal;
Apenas 1 circuito de
comando.
Perdas reduzidas, se
comparadas as do Flyback;
Baixa ondulação de tensão
na saída;
Filtro de 2ª ordem permite
reduzir consideravelmente o
capacitor de saída;
Grande excursão da razão
cíclica.
Desvantagens Perdas elevadas para o nível
de potência requerido;
Pequena excursão da razão
cíclica, devido à limitação
do tamanho do
transformador;
Transformador de volume
elevado.
Tensão reversa elevada no
diodo retificador de saída,
na configuração com ponto
médio, inviabilizando esta
configuração;
Elevado número de
componentes na
configuração em ponte
completa;
Dois elementos magnéticos
na estrutura.
A elevada tensão no diodo retificador do Push-Pull, como visto, pode ser reduzida
pela metade com a implementação da saída em ponte completa. Contudo, tem-se o
aumento de dois para quatro no número de diodos de saída, aumentando as perdas em
condução.

Douglas Pereira da Silva, M. Eng.
77
O volume total de magnéticos do conversor Push-Pull pode ser comparável ao do
conversor Flyback, que possui um volumoso transformador, pelo fato do primeiro possuir
dois elementos magnéticos, mas que isoladamente são menores.
A elevada corrente eficaz no primário do Flyback é um dos principais responsáveis
pelas perdas deste conversor. Porém é possível encontrar transistores com baixíssima
resistência de condução, já que a tensão máxima a qual o interruptor está submetido não é
elevada.
Entretanto, outras fontes de perdas são importantes no conversor Flyback operando
nesta potência, como por exemplo o transformador que com uma corrente elevada
acarretaria importantes perdas Joule. Como o Flyback não possui indutor, toda a ondulação
de corrente passaria pelo capacitor, sendo que esta ondulação, igual a corrente de pico no
secundário do transformador, representa uma considerável fonte de perdas.
Por estas considerações, e pela análise realizada, verifica-se que o conversor Push-
Pull é o mais indicado dentre os dois.
3.3.2.5 INVERSOR FULL-BRIDGE PWM SENOIDAL
Esta topologia surge como proposta natural para a conversão CC-CA numa aplicação
com acionamento de um motor. A despeito de sua versão isolada, apresentada na Fig. 3.10,
a versão aqui proposta não dispõe do transformador. A isolação galvânica é realizada,
como já dito, pelo conversor CC-CC.
Sua estrutura de potência básica é apresentada na Fig. 3.25, com diodos em
antiparalelo aos interruptores, como na Fig. 3.10, para dar característica de
bidirecionalidade de corrente.
Vin
D1 D3
D2 D4
Cf
LfS1 S3
S2 S4
A
B
Fig. 3.25 – Estrutura do inversor Full-Bridge.

Douglas Pereira da Silva, M. Eng.
78
Modulação PWM senoidal
Este tipo de modulação visa reduzir a distorção harmônica da tensão de saída do
inversor e é especialmente interessante quando associada a um filtro passa-baixas. Os
instantes de disparo e bloqueio do inversor são obtidos através da comparação de uma onda
triangular com uma onda senoidal de referência.
A freqüência da onda senoidal impõe a freqüência da componente fundamental do
sinal modulado. A freqüência da onda triangular está associada com o número de pulsos da
tensão de saída. Quanto maior a freqüência, mais deslocado está o espectro das harmônicas
da tensão de saída.
O valor que relaciona a amplitude da fundamental e o valor de pico da tensão de
saída é chamado de índice de modulação e é dado pela eq. (3.27).
T
R
P VV
VVM == 1 (3.27)
Onde: V1 é a amplitude da tensão fundamental, VP é o valor de pico da tensão de
saída do inversor (tomada antes do filtro), VR é a amplitude da onda senoidal de referência
e VT o valor de pico da onda triangular.
Modulação PWM senoidal a dois níveis
O esquema da modulação a dois níveis é apresentado na Fig. 3.26. Ela tem por
característica apresentar um único comando para cada dois interruptores em diagonal, que
idealmente podem ser complementares. Na prática, devido aos tempos de comutação dos
interruptores, é necessário um tempo morto.
A lei de variação da razão cíclica neste tipo de modulação é dada pela eq. (3.28).
( ) 5,0sin2
)( += tV
VtDT
R ω (3.28)

Douglas Pereira da Silva, M. Eng.
79
Vout
Vt Vr-Vt
0
+Vt
(a)
(b)
-E
0
+E
Fig. 3.26 – Esquema de modulação PWM senoidal a dois níveis.
Modulação PWM senoidal a três níveis
A modulação a três níveis difere da primeira, como o próprio nome diz, por
apresentar três níveis na tensão de saída (-E, 0, +E). Isto é obtido através da comparação de
duas ondas senoidais de referência defasadas de 180 º, cada uma para o comando de um
braço.
Observa-se que na forma de onda da tensão de saída há um número de pulsos duas
vezes maior que o obtido para a modulação a dois níveis, ou seja, o espectro harmônico da
tensão de saída está numa freqüência duas vezes superior, o que numa aplicação com filtro
permite obter uma redução importante no seu volume.
O esquema da modulação a três níveis é apresentado na Fig. 3.27.
0sVout
-E
0
+EV(S1)
V(S3)
Vt Vsen-Vt
0
+Vt
(a)
(b)
(c)
(d)
Fig. 3.27 – Esquema de modulação PWM senoidal a três níveis.

Douglas Pereira da Silva, M. Eng.
80
O conjunto de expressões que define a variação da razão cíclica nesta estrutura é
dado pelas eq. 3.29 e 3.30.
( ) 5,0sin2
)( += tV
VtDT
R ω (3.29)
( ) 5,0º1802
)( +−= tsinV
VtDT
R ω (3.30)
Verifica-se que a lei que define a variação da razão cíclica é similar a da modulação
a dois níveis, exceto que neste caso a eq. 3.29 define a razão cíclica de um interruptor de
um braço e a eq. 3.30 do interruptor equivalente do outro braço. No mesmo braço, o outro
interruptor tem razão cíclica complementar.
Devido às vantagens da modulação a três níveis sobre modulação a dois níveis,
define-se portanto como estágio de conversão CC-CA o inversor Full-Bridge com
modulação PWM senoidal a três níveis bidirecional em corrente.
3.4 SISTEMA PROPOSTO
Após a avaliação feita nas seções 3.2 e 3.3 e no capítulo 02 chega-se à estrutura
completa do sistema proposto, visando atender às características expostas no capítulo 01. A
estrutura é composta por três estágios, já que pela análise feita na seção 3.3 verificou-se ser
mais vantajoso realizar a interface entre o banco de baterias e o refrigerador em duas
etapas. A função e a correspondente topologia de cada estágio são:
1º estágio – Carregador do banco de baterias e controlador do MPP:
Conversor Buck com filtro de entrada;
2º estágio – Estágio elevador da tensão, isolador e regulador: Conversor
Push-Pull;
3º estágio – Estágio inversor: Inversor Full-Bridge PWM Senoidal com
modulação a três níveis.
A Fig. 3.28 apresenta a estrutura de potência completa do sistema proposto.

Douglas Pereira da Silva, M. Eng.
81
D8
S2
S6
L2
C2V1
D2
S7
C3
L6S1
D1
S5
C4C1
L1
S4
MóduloFotovoltaico
Refrigerador
BateriasAcumuladoras
S3 Fig. 3.28 – Estrutura completa do sistema proposto.
3.5 PRINCÍPIO DE FUNCIONAMENTO DO SEGUNDO E TERCEIRO ESTÁGIOS
Como o banco de baterias tem constante de tempo muito lenta em relação aos
conversores do primeiro e segundo estágios, pode-se dizer que o funcionamento do
primeiro estágio não interfere no segundo estágio.
O terceiro estágio drena uma corrente pulsada na freqüência de comutação do
inversor, modulada por uma fundamental retificada de 120 Hz, que é resultado da filtragem
da corrente de carga pela indutância da carga. Como o estágio de saída do conversor Push-
Pull é constituído de um filtro LC, a componente na freqüência de comutação da corrente
de entrada do inversor circula pelo capacitor de saída, e a componente média e uma parte
da componente em 120 Hz circulam pelo indutor.
Sendo assim, para a descrição do princípio de funcionamento destes dois estágios
considerar-se-á o Push-Pull alimentando carga resistiva e o inversor alimentando carga RL,
similar ao modelo de um motor, de modo a simplificar a análise.
3.5.1 ETAPAS DE OPERAÇÃO DO CONVERSOR PUSH-PULL
A Fig. 3.29 apresenta as etapas de operação do conversor Push-Pull com estágio de
saída em ponte completa.

Douglas Pereira da Silva, M. Eng.
82
Lout
Dr1
V1
S1
Dr4
D1
Dr3
Rout
D2
Cout
Dr2
S2
Lout
Dr1
V1
S1
Dr4
D1
Dr3
Rout
D2
Cout
Dr2
S2
Lout
Dr1
V1
S1
Dr4
D1
Dr3
Rout
D2
Cout
Dr2
S2
Lout
Dr1
V1
S1
Dr4
D1
Dr3
Rout
D2
Cout
Dr2
S2
1ª Etapa 2ª Etapa
3ª Etapa 4ª EtapaFig. 3.29 – Etapas de operação do conversor Push-Pull idealizado.
Na primeira etapa ocorre transferência de energia da fonte para a carga. Um dos
primários do transformador é magnetizado pelo fechamento do interruptor S1. A corrente
no secundário entra pelo ponto e é conduzida pelos diodos Dr2 e Dr3.
A segunda etapa é uma etapa de roda livre, ocorrendo a desmagnetização do indutor
do filtro em torno do seu ponto de operação. Não há tensão sobre o transformador, estando
os quatro diodos de saída conduzindo a corrente do indutor do filtro.
A terceira etapa é similar à primeira, e se inicia quando o interruptor S2 é fechado,
magnetizando o outro enrolamento primário. Há transferência de energia para a carga e a
corrente é conduzida pelos diodos Dr1 e Dr4.
A quarta etapa é igual a terceira, ocorrendo a roda livre pelos dois braços do
retificador.
3.5.2 FORMAS DE ONDA DO CONVERSOR PUSH-PULL
Na Fig. 3.30 estão apresentadas as formas de onda principais relativas às etapas de
operação apresentadas na Fig. 3.29, descritas na seção 3.5.1.

Douglas Pereira da Silva, M. Eng.
83
I(S1)
I(S2)
V(S1)
V(S2)
V(Sec)
I(Lout)
I(Dr1)
Ip
Ip
Vin
2*Vin
Vin
2*Vin
(Ns/Np)*Vin
-(Ns/Np)*Vin
IDp
IDp/2
Iout
1ª Etapa 2ª Etapa 3ª Etapa 4ª Etapa Fig. 3.30 – Formas de onda principais do conversor Push-Pull.
As formas de onda da Fig. 3.30 representam um circuito idealizado. Para o sistema
em questão, no qual o conversor Push-Pull não alimenta uma carga resistiva, mas sim um
inversor de tensão, estas formas de onda também são muito semelhantes. O que muda da
abordagem com carga resistiva para o inversor de tensão é a corrente drenada de saída e a
ondulação de tensão no capacitor, conforme pode ser verificado na Fig. 3.31.
Vout
Iout
Fig. 3.31 – Formas de onda relevantes do conversor Push-Pull alimentando inversor.

Douglas Pereira da Silva, M. Eng.
84
A ondulação na tensão de saída é resultado dos efeitos da composição entre a
ondulação de corrente no indutor do Push-Pull, da corrente pulsada na freqüência de
comutação do inversor e, sobretudo, pela ondulação em 120 Hz da corrente drenada, sendo
que este efeito deve ser levado em consideração no projeto dos capacitores do Push-Pull.
3.5.3 ETAPAS DE OPERAÇÃO DO INVERSOR FULL-BRIDGE PWM SENOIDAL A TRÊS
NÍVEIS ALIMENTANDO CARGA RL
Diversas configurações topológicas podem ser formadas de acordo com a
fundamental de tensão entre os pontos A e B da Fig. 3.25. A Tabela 3.17 apresenta os
estados topológicos para a estrutura em questão alimentando carga RL
Tabela 3.17 – Estados topológicos possíveis para o inversor Full-Bridge PWM senoidal
com modulação a três níveis.
Estado Corrente fundamental
no indutor Ondulação no indutor Ordem de comando
01 Positiva Não passando por zero Positiva
02 Negativa Não passando por zero Negativa
03 Positiva Passando por zero Positiva
04 Negativa Passando por zero Negativa
05 Positiva Não passando por zero Negativa
06 Negativa Não passando por zero Positiva
05 Positiva Passando por zero Negativa
06 Negativa Passando por zero Positiva
07 Nula Passando por zero Positiva
08 Nula Passando por zero Negativa
Os estados topológicos configuram-se pela seqüência cíclica de etapas de operação,
para uma determinada condição da estrutura. Ordem de comando positiva significa um
estado do conversor no qual, de acordo com a Fig. 3.25, os interruptores são modulados de
tal forma que há sobreposição dos ângulos de condução dos interruptores S1 e S4 gerando
dois níveis de tensão entre os pontos A e B, a dizer positiva e nula. A seguir são
apresentadas as etapas de funcionamentos dos quatro estados mais representativos.

Douglas Pereira da Silva, M. Eng.
85
A Fig. 3.32 ilustra o estado topológico 01, cujas etapas de funcionamento da
estrutura são para o caso em que a corrente no indutor do filtro tem sua componente
fundamental no semiciclo positivo com ondulação não chegando a zero e ordem de
comando positiva.
D1
D2
D3
D4
E
S1
S2
S3
S4
D1
D2
D3
D4
E
S1
S2
S3
S4
D1
D2
D3
D4
E
S1
S2
S3
S4
D1
D2
D3
D4
E
S1
S2
S3
S4
(a) (b)
(c) (d) Fig. 3.32 – Etapas de funcionamento para estado topológico 01.
Tabela 3.18 – Perfil de comando dos interruptores para o estado 01.
S1 S2 S1
S4 S3 S4
Similarmente, para o caso onde a corrente no indutor do filtro está no semiciclo
negativo, a ondulação não chega a zero e a ordem de comando é negativa. Tem-se um
estado topológico complementar ao apresentado na Fig. 3.32 que é o estado 02, e que é
apresentado nas etapas de funcionamento da Fig. 3.33.

Douglas Pereira da Silva, M. Eng.
86
D1
D2
D3
D4
E
S1
S2
S3
S4
D1
D2
D3
D4
E
S1
S2
S3
S4
D1
D2
D3
D4
E
S1
S2
S3
S4
D1
D2
D3
D4
E
S1
S2
S3
S4
(a) (b)
(c) (d) Fig. 3.33 – Etapas de funcionamento para estado topológico 02.
Tabela 3.19 – Perfil de comando dos interruptores para o estado 02.
S3 S4 S3
S2 S1 S2
A Fig. 3.34 mostra etapas de funcionamento para o estado topológico 03 no qual
tem-se corrente positiva, ordem de comando positiva e ondulação passando por zero. O
perfil de comando das chaves é apresentado na Tabela 3.20. Nota-se a princípio que há
menos seqüência de comandos que etapas de funcionamento. Isto se deve ao fato de que a
oscilação em torno de zero muda a configuração do inversor tendo, portanto, duas etapas
de funcionamento para cada combinação de comando.

Douglas Pereira da Silva, M. Eng.
87
(a) (b)
(c) (d)
D1
D2
D3
D4
E
S1
S2
S3
S4
D1
D2
D3
D4
E
S1
S2
S3
S4
D1
D2
D3
D4
E
S1
S2
S3
S4
D1
D2
D3
D4
E
S1
S2
S3
S4
D1
D2
D3
D4
E
S1
S2
S3
S4
D1
D2
D3
D4
E
S1
S2
S3
S4
D1
D2
D3
D4
E
S1
S2
S3
S4
D1
D2
D3
D4
E
S1
S2
S3
S4
(e) (f)
(g) (h) Fig. 3.34 – Etapas de funcionamento para estado topológico 03.
Tabela 3.20 – Perfil de comando dos interruptores para o estado 03.
S1 S2 S1
S4 S3 S4

Douglas Pereira da Silva, M. Eng.
88
Na Fig. 3.35 é apresentado o estado topológico 05, no qual tem-se corrente
fundamental positiva e ondulação não passante por zero, entretanto com ordem de
comando negativa.
D1
D2
D3
D4
E
S1
S2
S3
S4
D1
D2
D3
D4
E
S1
S2
S3
S4
(a) (b)
(c) (d)
D1
D2
D3
D4
E
S1
S2
S3
S4
D1
D2
D3
D4
E
S1
S2
S3
S4
Fig. 3.35 – Etapas de funcionamento para estado topológico 05.
Tabela 3.21 – Perfil de comando dos interruptores para o estado 05.
S3 S4 S3
S2 S1 S2
3.5.4 FORMAS DE ONDA DO INVERSOR FULL-BRIDGE PWM SENOIDAL A TRÊS
NÍVEIS
A Fig. 3.36 apresenta a corrente no interruptor S1 para os quatro estados topológicos
ilustrados pelas Fig. 3.33 a 3.36. O objetivo desta figura é ilustrar o comportamento do
inversor “visto” por um interruptor e comprovar os estados descritos.

Douglas Pereira da Silva, M. Eng.
89
I(S1)
(a)
(b)
(c)
(d)
Fig. 3.36 – Corrente no interruptor S1 para os estados topológicos (a) 01; (b) 02 (c) 03; (d)
05.
Na Fig. 3.36 as correntes que se apresentam negativas são conduzidas pelo diodo em
antiparalelo com o interruptor, intrínseco no MOSFET. Somente há tensão sobre o
interruptor nos momentos em que a corrente circulante por ele é nula.
A tensão e corrente de saída (após o filtro) para o inversor alimentando uma carga
RL são apresentadas na Fig. 3.37
Iout*k
Vout
-200
0
200
-320
322
Fig. 3.37 – (a) Tensão e (b) corrente de saída do inversor PWM Senoidal modulado a três
níveis
Verifica-se, na Fig. 3.37, claramente o efeito da indutância de carga atrasando a
corrente em relação à tensão de saída do inversor, sendo as formas de onda de tensão e
corrente praticamente isentas de harmônicas.

Douglas Pereira da Silva, M. Eng.
90
3.6 CONCLUSÃO
Com este capítulo fica definida a estrutura de potência completa do sistema proposto,
realizada em três estágios, desde os painéis fotovoltaicos até o acionamento do compressor.
A decisão por realizar em dois estágios a conexão entre o banco de baterias e o compressor
deve-se, sobretudo, à redução do volume do transformador, devido a sua inserção num
conversor CC-CC operando em alta freqüência.
A regulação de carga, bem como a elevação do nível de tensão da entrada fica a
cargo do conversor CC-CC, sendo que o inversor Full-Bridge PWM senoidal opera em
malha aberta. Um estudo de projeto e simulação entre duas estruturas clássicas e robustas,
o conversor Flyback e o conversor Push-Pull, definiu o segundo como melhor alternativa
na aplicação.
O inversor Full-Bridge, com modulação PWM senoidal recai como opção natural
para o acionamento de um motor de indução, sendo que a modulação a três níveis se
mostra mais vantajosa sobre a dois níveis, principalmente pela característica de o espectro
de freqüência ser deslocado para o dobro da freqüência de comutação, obtendo-se
melhores resultados na filtragem das harmônicas de tensão e de corrente.

.
CAPÍTULO 4
PROJETO E SIMULAÇÃO DOS ESTÁGIOS APLICADOS EM
REFRIGERAÇÃO
4.1 INTRODUÇÃO
A partir dos ensaios realizados na seção 3.2, verificou-se a possibilidade de se fazer a
partida em subtensão e evitar o grande problema dos motores de indução monofásicos que
é a elevada corrente de partida em relação à corrente de regime.
Como o sistema eletrônico envolvido no acionamento de um motor de indução
monofásico deve ser dimensionado para a potência de partida do compressor, verifica-se
que sem uma estratégia adequada de partida, tem-se um conversor maior, mais caro para
suportar o esforço inicial e na maior parte do tempo ele estará operando com uma demanda
muito abaixo de sua capacidade.
Pelo fato de se tratar de um sistema cuja entrada é em baixa tensão, a operação na
partida com tensão nominal drenaria uma corrente muito elevada do barramento do banco
de baterias, causando sobreaquecimento nos condutores e provocando sobretensões
elevadas sobre os interruptores do conversor Push-Pull devido à indutância de dispersão do
transformador deste conversor.
Dessa forma, torna-se imprescindível a aplicação de uma estratégia de controle
adequada para a partida do compressor. A estratégia a ser utilizada é justamente a partida
em subtensão.
Através da limitação da corrente média de entrada do conversor Push-Pull é possível
limitar a tensão de saída do inversor. Com base nos ensaios apresentados na seção 3.2,
verifica-se que a potência demandada no instante da partida em subtensão e com a
utilização do capacitor de partida é de cerca de 310 VA. Considerando cerca de 10 % de
perdas no estágio inversor como estimativa inicial, tem-se que o conversor Push-Pull deve
fornecer ao estágio inversor cerca de 350 VA.

Douglas Pereira da Silva, M. Eng.
92
Sendo assim, o inversor pode ser dimensionado para a potência de 350 VA e o
conversor Push-Pull para esta potência acrescida de suas próprias perdas. Neste momento,
ambos os conversores estarão operando na potência nominal, mas com tensão abaixo da
nominal e este fato deve ser considerado no momento do projeto.
Uma vez feita a partida do compressor e o enrolamento auxiliar de partida estiver
desconectado, o compressor estará operando em regime permanente com uma potência
bem abaixo da nominal dos conversores, cerca de 125 VA, e ambos conversores estarão
operando com tensão nominal.
Para a regulação da tensão operando em regime permanente e para as dinâmicas
geradas por perturbações na carga, tais como variação da pressão no gás do refrigerador ou
mesmo a abertura da porta do refrigerador acendendo a lâmpada, e para perturbações na
entrada, isto é, aumento ou queda do estado de carga do banco de baterias há uma malha de
tensão.
Para a partida com corrente limitada há uma malha de corrente que atua sobrepondo-
se à de tensão, mantendo a corrente média de entrada do conversor Push-Pull limitada e
constante. Isto faz com que a tensão de saída deste conversor caia para um patamar
estipulado de tensão de partida. Uma vez que a corrente média de entrada caia após a
partida, a malha de tensão sobrepõe-se sobre a malha de corrente e regula a tensão
nominal.
Como se pode ver, o projeto da estrutura de potência bem como das malhas de
controle devem ser feitos considerando a estratégia de operação escolhida. Baseado em
todas estas considerações é que este capítulo trata do dimensionamento dos componentes,
dos esforços na estrutura e dos compensadores.
Simulações foram realizadas e são apresentadas neste capítulo com o intuito de
verificar os cálculos teóricos e mesmo predizer alguns esforços em componentes, além de
fenômenos relacionados à não-idealidades.
4.2 CONVERSOR CC-CC PUSH-PULL
Esta seção trata do projeto do circuito de potência e das malha de controle. Cabe aqui
ressaltar que o inversor opera em malha aberta, dessa forma, as malhas de controle de
tensão e corrente estão associadas ao conversor Push-Pull.

Douglas Pereira da Silva, M. Eng.
93
4.2.1 ESPECIFICAÇÕES GERAIS
São apresentadas na Tabela 4.1 as especificações gerais de projeto do conversor
Push-Pull.
Tabela 4.1 – Especificações gerais para projeto do conversor Push-Pull.
Parâmetro Valor
Potência de saída 350 W
Tensão de saída em regime 400 V
Tensão de saída na partida 250 V
Freqüência de comutação 25 kHz
Tensão de entrada nominal 24 V
Tensão de entrada mínima 21 V
Tensão de entrada máxima 28,8 V
Razão cíclica máxima 0,8
Rendimento estimado 85 %
Ondulação de tensão 10 Vpp
Ondulação de corrente 11 %
Como o refrigerador em questão é para uma rede de 220 V, o pico da tensão no
refrigerador é da ordem de 311 V, portanto, o conversor Push-Pull deve entregar uma
tensão constante para o inversor maior que o valor do pico que este fornecerá ao
compressor. O valor de 400 V foi escolhido arbitrariamente de forma a dar uma boa
margem de segurança.
A tensão de entrada varia de acordo com o estado de carga das baterias, como são
duas em série e cada uma pode variar com segurança entre 10,5 V e 14,4 V têm-se os
valores expostos na Tabela 4.1.
4.2.2 DIMENSIONAMENTO DOS ESFORÇOS
Nesta seção são calculados os esforços sobre os diversos elementos do conversor de
forma a se poder especificá-los. Muitas das expressões apresentadas nesta seção já foram
apresentadas no Capítulo 03, entretanto serão novamente repetidas, pois as condições aqui
são outras, isto é, está se levando em consideração as características especiais da carga.

Douglas Pereira da Silva, M. Eng.
94
Para todos os esforços de corrente aqui dimensionados, a situação crítica é a partida
com tensão no banco de baterias mínima, sendo portanto estes os valores apresentados. Já
os esforços de tensão têm como condição crítica a tensão de saída em regime permanente
associada à tensão máxima no banco de baterias.
4.2.2.1 CORRENTE NO INTERRUPTOR PRINCIPAL E NOS ENROLAMENTOS PRIMÁRIOS
A corrente no interruptor principal deste conversor é igual a corrente de um dos
enrolamentos primários do transformador, e ela é máxima no momento da partida. A eq.
(4.1) expressa o seu valor de pico.
A 31,395,0.V21.85,0
W350
max_min__ ===
Pin
outpicoS DV
PI
η (4.1)
As correntes média e eficaz são expressas pelas eq. (4.2) e (4.3), respectivamente.
A 80,9A51,2428,0
2 _max_
_ === picoSP
medS ID
I (4.2)
A 63,19A51,2428,0
2 _max_
_ === picoSP
efS ID
I (4.3)
4.2.2.2 CORRENTE NO ENROLAMENTO SECUNDÁRIO
Considerando-se, para simplificar, que as perdas estão concentradas sobretudo no
circuito de entrada do conversor Push-Pull, a corrente de pico no enrolamento secundário é
expressa pela eq. (4.4).
A 81,25,0.V250
W350
max___ ===
PPout
outpicoSec DV
PI (4.4)
Como o estágio de saída deste conversor é em ponte completa de diodos há apenas
um enrolamento, sendo a corrente média neste nula. A corrente eficaz, entretanto, não pode
ser nula e é apresentada na eq. (4.5).

Douglas Pereira da Silva, M. Eng.
95
A 98,1A81,2.5,0_max__ === picoSecPefSec IDI (4.5)
4.2.2.3 CORRENTE NO INDUTOR DE SAÍDA
A corrente média que circula pelo indutor flui toda pela carga e é expressa pela eq.
(4.6).
A 40,1V250W350
_
===Pout
outLout V
PI (4.6)
4.2.2.4 CORRENTE NOS DIODOS RETIFICADORES
Por se tratar de uma estrutura em ponte completa, cada diodo da ponte conduz
metade do valor médio da corrente de saída, sendo que durante o tempo de condução do
interruptor principal associado, ele conduz plenamente a corrente instantânea de saída.
Dessa forma, a corrente de pico dos diodos é igual à corrente de pico do secundário do
transformador, que é expressa pela eq (4.4). As expressões para a corrente média e eficaz
são apresentadas pelas eq. (4.7) e (4.8), respectivamente.
A 70,02
A40,12_ === Lout
medDI
I (4.7)
A 57,1A81,28
15,0.38
13_
max__ =
+=
+= picoSec
PefD I
DI (4.8)
4.2.2.5 TENSÃO NOS INTERRUPTORES PRINCIPAIS
A tensão máxima sobre o interruptor principal é dada pela eq. (3.20) que é aqui
repetida na eq. (4.9).
max_inpico_S VV 2= (4.9)

Douglas Pereira da Silva, M. Eng.
96
Por acoplamento magnético, tem-se sobre o interruptor principal a tensão máxima de
entrada acrescida da tensão sobre um dos enrolamentos primários, o que foi traduzido na
eq. (4.9).
4.2.2.6 TENSÃO NOS DIODOS RETIFICADORES
A máxima tensão sobre os diodos retificadores do estágio de saída do conversor
Push-Pull ocorre quando a tensão de entrada é máxima. Esta expressão é dada pela eq.
(3.20) e repetida aqui na eq. (4.10).
V 756V8,284
105max_
Pr_ === in
i
SecpicoDr V
NN
V (4.10)
4.2.3 PROJETO DO TRANSFORMADOR
As especificações para o projeto do transformador são basicamente as mesmas do
estudo comparativo realizado na seção 3.3.2, com a diferença que se decidiu aumentar um
pouco a densidade de fluxo. Estas especificações são apresentadas na Tabela 4.2.
Tabela 4.2 – Especificações básicas para projeto do transformador Push-Pull.
Parâmetro Valor
Densidade de fluxo máxima 0,25 T
Densidade de corrente máxima 350 A.cm-2
Fator de utilização da janela 0,4
Fator de utilização do primário 0,5
4.2.3.1 CÁLCULO DO PRODUTO DE ÁREAS
O transformador é normalmente dimensionado pela potência máxima processada.
Neste caso, a potência processada é máxima na partida do refrigerador. Entretanto, neste
momento, a razão cíclica ainda não é máxima, mas como garantia, considerar-se-á para o
cálculo do produto de áreas a razão cíclica máxima estipulada. A eq. (4.11) apresenta a
expressão para o produto de áreas do transformador Push-Pull

Douglas Pereira da Silva, M. Eng.
97
4
cmA
maxmaxPr
max cm 10,285,0.T25,0.350.4,0.5,0.4
8,0W3504 2
===ηBJKK
DPAA
ui
outwe (4.11)
De acordo com o produto de áreas expresso pela eq. (4.11), e pelas especificações de
densidade de fluxo apresentadas na Tabela 4.2 o núcleo selecionado é o E42/15 – IP12 da
Thornton.
4.2.3.2 CÁLCULO DOS NÚMEROS DE ESPIRAS DOS ENROLAMENTOS
Os valores dos números de espiras são calculados utilizando as eq. (4.12) e (4.13),
respectivamente. É usual arredondar-se para o número inteiro superior os valores destas
expressões, sendo que os valores apresentados já estão arredondados.
4T25,0.kHz25.cm89,1.4
8,0.V214 2
max15/42
maxmin_Pr ≅==
BfADV
Nse
ini (4.12)
1058,0.V21
V400.4.1,11,1maxmin_
Pr ≅==DV
VNN
in
outiSec (4.13)
4.2.3.3 RAZÃO CÍCLICA DE PARTIDA
Uma vez definidos os valores dos números de espiras dos enrolamentos do
transformador é possível calcular a razão cíclica de partida deste conversor. A tensão de
saída na partida foi definida na Tabela 4.1 e é a partir dela que se calcula a razão cíclica de
partida.
O valor máximo da razão cíclica de partida é expresso pela eq. (4.14), considerando-
se a tensão mínima no banco de baterias.
50,0V21.105V250.41,11.1
min_
_Prmax_ ===
inSec
PoutiP VN
VND (4.14)
4.2.3.4 CÁLCULO DA BITOLA IDEAL PARA MINIMIZAR O EFEITO PELICULAR
O efeito pelicular é responsável pelo aumento das perdas por efeito Joule devido à
elevação da resistência efetiva do cobre, já que a corrente concentra-se próxima à

Douglas Pereira da Silva, M. Eng.
98
superfície do condutor. Sendo assim, é necessário levar em consideração o cálculo da
profundidade de penetração para se determinar o diâmetro mais adequado a ser utilizado,
de forma a se minimizar estas perdas.
A profundidade de penetração é função da freqüência da corrente circulante, da
permeabilidade magnética, resistividade elétrica e temperatura do condutor. A eq. (4.15)
apresenta uma versão simplificada da expressão para o cálculo da profundidade de
penetração considerando-se um condutor cilíndrico de cobre a 100 ºC.
mm 47,0kHz25
Hzcm5,7===∆
s
T
fC
(4.15)
CT é uma constante que resume as características expressas no parágrafo acima, de
valor aproximado a 7,5 cm Hz . Uma vez calculada a profundidade de penetração, o
diâmetro do condutor para minimizar o efeito pelicular é portanto dado pela eq. (4.16).
mm 95,0mm47,0.22max ==∆=d (4.16)
A bitola, portanto, para minimizar o efeito pelicular é a AWG 19.
4.2.3.5 CÁLCULO DOS CONDUTORES PARA CADA ENROLAMENTO
Como a partida do refrigerador é um fenômeno rápido em relação às constantes de
tempo térmicas, a bitola dos condutores de cada enrolamento pode ser subdimensionada
sem prejuízos. Para a especificação dos condutores uma estimativa inicial da bitola é feita
a partir da corrente de partida conforme segue.
2
cmA
max
__PrPr_ cm 056,0
350A63,19
2
===J
IS Pefi
icm (4.17)
2
cmA
max
___ cm 0057,0
350A98,1
2
===J
IS PefSec
Seccm (4.18)
De forma a melhorar o acoplamento magnético do transformador e devido à elevada
corrente no primário, definiu-se que os enrolamentos primários sejam laminares. O

Douglas Pereira da Silva, M. Eng.
99
enrolamento secundário está submetido a uma corrente muito inferior a do primário,
entretanto possui um número muito maior de espiras. Dessa forma, para esse enrolamento
foi escolhido um condutor cilíndrico de cobre.
A Tabela 4.3 apresenta as especificações destes condutores e a especificação se o
objetivo fosse atender plenamente os requisitos de partida.
Tabela 4.3 – Especificação dos condutores do transformador Push-Pull.
Enrolamento Condutor Especificação
definida
Especificação para
partida
Espessura Largura Espessura Largura Primário Laminar
0,15 mm 2,6 cm 0,15 mm 3,7 cm
Secundário Cilíndrico de cobre 22 AWG 19 AWG
Verifica-se que a especificação para a partida contempla exatamente a bitola ideal
para minimização do efeito pelicular, entretanto pela facilidade do enrolamento de um
condutor mais fino e por este não se desviar tanto da bitola ideal, decidiu-se pela bitola 22
AWG, já que o 19 AWG em regime ficaria subutilizado.
A espessura da lâmina é fixa e definida pela Tabela 4.3. Definiu-se como largura
para implementação o valor da largura do carretel, já que são apenas quatro espiras em
cada enrolamento primário. O valor da largura para suprir a especificação de área de
condutor para a partida é maior, mas deve-se dizer novamente que em regime este
enrolamento estaria subutilizado.
4.2.3.6 CÁLCULO DE PERDAS
Nesta seção é feito um cálculo aproximado das perdas no transformador, que
consistem nas perdas Joule (ou no cobre) e nas perdas magnéticas (ou no núcleo), de forma
a estimar a elevação de temperatura que haverá na realidade.
Para esta estimativa de elevação de temperatura, o importante é a operação em
regime permanente, dessa forma faz-se necessário determinar a corrente eficaz nos
enrolamentos nesta condição.
Sabendo que o refrigerador consome 125 VA em operação normal, pode-se supor
que o conversor Push-Pull deve fornecer esta potência para o estágio inversor mais uma

Douglas Pereira da Silva, M. Eng.
100
parcela de perdas. Estimando este valor em 150 VA, pode-se determinar o valor eficaz das
correntes circulantes pelos enrolamentos do transformador.
Corrente nos enrolamentos em regime permanente
Antes de se determinar o valor eficaz destas correntes é necessário se conhecer o
valor de pico, como feito na seção 4.2.2. As eq. (4.19) e (4.20) traduzem o valor de pico
das correntes nos primários e no secundário em regime permanente, respectivamente.
A 50,108,0.V21.85,0
W150
max_min_
___Pr ===
RPin
RPoutRPpicoi DV
PI
η (4.19)
A 47,08,0.V400
W150
max_
___ ===
RPout
RPoutRPpicoSec DV
PI (4.20)
A partir das eq. (4.19) e (4.20) deriva-se o valor eficaz das correntes dos
enrolamentos primários e do enrolamento secundário, respectivamente apresentados nas
eq. (4.21) e (4.22).
A 64,6A50,1028,0
2 __Prmax_
__Pr === RPpicoiRP
RPefi ID
I (4.21)
A 42,0A47,0.8,0__max___ === RPpicoSecRPRPefSec IDI (4.22)
Determinação das perdas
Com os valores das correntes eficazes em regime, as perdas Joule podem ser
expressas de forma aproximada pela eq. (4.23).
( )( ) ( )( ) W27,0m083,0.0708,0.A42,0.1050055,0.A64,6.4.2
2
mΩ2
mΩ2
_
15/42º100_222
__º100_112
__PrPr_
=+=
Ω+Ω=
RPJ
CRPefSecSecCRPefiiRPJ
P
MLTININP (4.23)
Na eq. (4.23) verifica-se a utilização da resistividade do condutor cilíndrico de cobre
de bitola 11 AWG para a composição das perdas dos primários. Isso se deve ao fato de a
área deste condutor ser semelhante à área do condutor laminar.

Douglas Pereira da Silva, M. Eng.
101
As perdas magnéticas foram obtidas através de curva do catálogo do fabricante que é
apresentada na Fig. 4.1. A partir dela retira-se que para a máxima densidade de fluxo
considerada de 0,25 T, há uma perda específica no material de cerca de 35 mW/g. Como a
massa do núcleo é de aproximadamente 45 g, obtém-se o valor da perda em Watts
multiplicando-se estes dois valores. O valor das perdas é então apresentado pela eq. (4.24).
W581,P RP_mag = (4.24)
Fig. 4.1 – Perda específica no material IP12 – Thornton em função da freqüência.
As perdas totais são dadas pela soma das eq. (4.23) e (4.24) e são apresentadas na eq.
(4.25).
W1,85 W58,1W27,0___ =+=+= RPmagRPJRPTot PPP (4.25)
Para a estimativa da elevação de temperatura deve-se conhecer a resistividade
térmica do núcleo escolhido. Este parâmetro e a expressão que determina a elevação de
temperatura aproximada são apresentados, respectivamente, nas eq. (4.26) e (4.27).
( ) ( ) C/Wº 35,15cm97,2.2323 37,0437,015/42_ ===
−−weth AAR (4.26)

Douglas Pereira da Silva, M. Eng.
102
Cº 40,28W85,135,15 º_15/42_ ===∆ W
CRPTotth PRT (4.27)
4.2.4 ESPECIFICAÇÃO DOS INTERRUPTORES PRINCIPAIS
Os interruptores principais foram especificados levando-se em conta principalmente
a característica de baixa resistência de condução. Em um transistor MOSFET de potência,
esta característica é degradada principalmente pelo aumento da tensão de bloqueio. Já uma
maior capacidade de corrente favorece esta característica.
A tensão de bloqueio teórica máxima é de 57,6 V, entretanto, pelo fato de se estar
chaveando um circuito com transformador, os elementos parasitas, tais como indutâncias
de dispersão do transformador e indutâncias parasitas do circuito provocam sobretensões
no bloqueio do interruptor.
Dessa forma, o interruptor especificado possui tensão de bloqueio mais elevada para
dar margem de segurança ao circuito de ajuda à comutação empregado, e capacidade de
corrente sobredimensionada de forma a garantir a baixa resistência de condução. As
especificações do interruptor estão expostas na Tabela 4.4.
Tabela 4.4 – Especificação dos interruptores principais do conversor Push-Pull.
Parâmetro Valor
Tipo / Modelo do interruptor MOSFET / APT10M11LVR
Fabricante Advanced Power Technology
Corrente média @ 25 – 100 ºC 100 A
Tensão de bloqueio 100 V
Resistência de condução @ 100 ºC 16 mΩ
Resistência térmica junção-cápsula 0,24 ºC/W
4.2.5 ESPECIFICAÇÃO DOS DIODOS RETIFICADORES
Para a especificação dos diodos de saída, decidiu-se pelo superdimensionamento em
corrente, adotando diodos ultrarápidos de 8 A pela possibilidade de acomodação destes
diodos em dissipador. No quesito tensão, devido a sobretensões geradas por oscilações
entre a capacitância de junção do diodo e pela indutância de dispersão do transformador,
foram necessários diodos com tensão de bloqueio de 1000 V.

Douglas Pereira da Silva, M. Eng.
103
A especificação dos diodos escolhidos é apresentada na Tabela 4.5.
Tabela 4.5 – Especificação dos diodos retificadores do conversor Push-Pull.
Parâmetro Valor
Tipo / Modelo Ultrarápido / MUR8100
Fabricante Motorola
Corrente média 8 A
Tensão reversa máxima 1000 V
4.2.6 DIMENSIONAMENTO E PROJETO DO INDUTOR DE SAÍDA
O dimensionamento do indutor é realizado pela ondulação de corrente, como na
seção 3.3.2, sendo o valor da indutância determinado pela eq. (3.19), repetida aqui pela eq.
(4.28).
mH 27,39A096,0.kHz25.8
V8,284
1058
max_
Pr
==∆
=Louts
in
i
Secout If
VNN
L (4.28)
O projeto deste indutor será apresentado mais detalhadamente que os projetos dos
indutores do conversor Buck, de forma a explicitar a metodologia utilizada. A Tabela 4.6
apresenta as especificações para o projeto do indutor.
Tabela 4.6 – Especificações básicas para projeto do indutor do filtro de saída.
Parâmetro Valor
Densidade de fluxo máxima 0,3 T
Densidade de corrente máxima 450 A/cm2
Fator de utilização 0,75
4.2.6.1 CÁLCULO DO PRODUTO DE ÁREAS
O núcleo do indutor, assim como o do transformador, também é determinado através
do cálculo do produto de áreas, que para este caso é expresso pela eq. (4.29).

Douglas Pereira da Silva, M. Eng.
104
( ) 4
cmA
2
maxmax
2
cm 97,2450.T3,0.75,0
A875,0.mH27,392
===JBk
ILAA
u
outoutwe
(4.29)
Conforme eq. (4.29) e especificações de densidade de fluxo, o núcleo selecionado é o
E42/20 – IP12 da Thornton.
4.2.6.2 CÁLCULO DO NÚMERO DE ESPIRAS
Assim como para o transformador, é usual arredondar-se para o inteiro superior o
número de espiras do indutor, que é dado pela eq. (4.30).
470cm44,2.T3,0
A875,0.mH27,392
20/42max
≅==e
outoutesp AB
ILN (4.30)
Para a eq. (4.30) é feita a simplificação de que a ondulação de corrente é desprezível,
sendo, portanto, a corrente no indutor considerada constante.
4.2.6.3 CÁLCULO DO ENTREFERRO
Considerando um núcleo E, o caminho percorrido por uma linha de fluxo passa por
duas zonas de entreferro, o entreferro magnético total é a soma do comprimento destes dois
entreferros, que aqui são chamados de mecânicos. Assim sendo, a expressão que define o
entreferro mecânico do indutor é apresentada na eq. (4.31).
mm 86,039,27mH
cm44,2.104.47021
21
2lg
27220/420
2
====−
mH
out
eesp
LAN πµδ
(4.31)
4.2.6.4 CÁLCULO DA BITOLA DO CONDUTOR
A expressão para a determinação da bitola do condutor é similar à expressão para o
transformador, contudo para o indutor não é necessário se preocupar com o efeito pelicular
já que a componente alternada da corrente é desprezível.
Assim como no caso do transformador, o indutor estará submetido a uma corrente de
partida por um tempo pequeno e inferior às constantes de tempo térmicas envolvidas.

Douglas Pereira da Silva, M. Eng.
105
Portanto, não é necessário que o condutor utilizado no indutor satisfaça plenamente as
condições de densidade de corrente máxima na partida.
Para o dimensionamento deste condutor foi usado um critério intermediário em
termos de corrente circulante pelo indutor. Não se considerou no projeto a corrente de
partida, mas também não se considerou uma corrente baixa como a de regime.
O critério foi considerar que o conversor processa a potência nominal na tensão
nominal, assim tem-se no indutor um valor de corrente intermediário entre estes dois para
projeto.
A eq. (4.32) apresenta o valor da área do condutor para satisfazer a densidade de
corrente máxima, utilizando-se o critério apresentado.
2
cmA
max
cm 0019,0450.V400
W3502
===JV
PS
out
outcm (4.32)
A bitola que satisfaz a eq. (4.32) é a 24 AWG.
4.2.6.5 CÁLCULO DE PERDAS
Como a componente alternada da corrente é muito pequena, as perdas magnéticas
são desprezíveis, sendo, portanto, relevantes apenas as Perdas Joule. Apesar de a bitola do
indutor ter sido especificada por um critério de corrente intermediária entre a partida e o
regime, deve-se considerar para a estimativa de perdas a corrente de regime.
A corrente média de regime no indutor pode ser calculada, de acordo com as mesmas
considerações feitas na seção 4.2.3.6, pela eq. (4.33).
A 38,0V400W150_
_ ===out
RPoutRPLout V
PI (4.33)
A eq. (4.34) apresenta, dessa forma, a estimativa de perdas para o indutor de saída.
( ) W68,0cm16,9.1125,0.A38,0.470 mΩ2
20/42º100_242
_
==
Ω=
J
CRPLoutespJ
P
MLTINP (4.34)

Douglas Pereira da Silva, M. Eng.
106
4.2.7 DIMENSIONAMENTO DOS CAPACITORES DE SAÍDA
Considera-se que toda a ondulação de corrente proveniente do indutor circule pelo
capacitor. Vale lembrar que a freqüência da componente alternada desta corrente é o dobro
da freqüência de comutação, sendo o valor da capacitância, para que esta corrente não
provoque ondulação superior à desejada, descrito pela eq. (4.35).
ηF 12,48V2.mH27,39.kHz25.64
V8,284
10564 2
max_
Pr
==∆
=Coutouts
in
i
Secout VLf
VNN
C (4.35)
4.2.8 INFLUÊNCIA DO INVERSOR SOBRE O CONVERSOR PUSH-PULL
Todo o projeto do conversor Push-Pull tem sido feito considerando-se a alimentação
de uma carga resistiva, por simplicidade. Como este capítulo não visa estabelecer um
estudo teórico aprofundado da interação entre o conversor CC-CC Push-Pull e o inversor
Full-Bridge PWM senoidal, mas sim uma metodologia de projeto simples, facilmente
aplicável e coerente, a hipótese simplificativa é em muitos casos válida.
Esta seção tem, portanto, como finalidade discutir a validade desta hipótese nas
considerações feitas para o dimensionamento dos esforços e dos diversos elementos do
conversor Push-Pull.
Como principal influência do inversor sobre o conversor Push-Pull tem-se a
componente de 120 Hz drenada pelo inversor. Para analisar esta influência sobre a tensão
no capacitor de saída e a corrente no indutor, um circuito linear simplificado formado por
estes elementos é proposto e apresentado na Fig. 4.2.
CoutLout I120HzCout_120ILout_120I
I120
CoutV
+
-
Fig. 4.2 – Circuito proposto para análise da influência do inversor sobre o filtro de saída.

Douglas Pereira da Silva, M. Eng.
107
Na realidade, a corrente drenada em 120 Hz pelo inversor é retificada, entretanto,
considerar-se-á sua componente fundamental nesta análise. Nesse sentido, as eq. (4.36),
(4.37) e (4.38) são válidas e descrevem as correntes no circuito.
out
CoutLout Lj
VI
120
120_120_ ω
••
−= (4.36)
••
−= 120_120120_ CoutoutCout VCjI ω (4.37)
•••
+= 120120120 _Cout_Lout III (4.38)
Substituindo (4.36) e (4.37) em (4.38), obtém-se uma expressão analítica para a
componente em 120 Hz drenada pelo inversor, apresentada na eq. (4.39).
••
•
−= 120_120120
120_120 Coutout
out
Cout VCjL
VjI ωω
(4.39)
Pelo princípio da superposição, esta componente em 120 Hz compõe a corrente total
circulante pelo capacitor e pelo indutor de saída, propagando-se por todo o conversor,
inclusive pelos elementos semicondutores.
Na partida esta componente poderia vir a ser preocupante, já que é o momento mais
crítico de operação do conversor. Contudo, neste momento a malha de corrente está
atuando e controlando a corrente média de entrada, e como o sistema planta mais
compensador em laço aberto tem freqüência de cruzamento relativamente elevada, isto é,
trata-se de um sistema razoavelmente rápido, ele atua sobre a ondulação.
Com a corrente de entrada limitada e constante, a corrente na indutância também
permanece limitada e constante, não sendo observada a interferência da componente em
120 Hz. Por esta característica, os semicondutores, se projetados para suportarem a partida
também estarão garantidos para a ondulação de 120 Hz em regime.
A ondulação de 120 Hz na corrente também não traz prejuízos ao transformador, tais
como leva-lo à saturação, já que o fluxo neste elemento pode ser traduzido pela eq. (4.40).

Douglas Pereira da Silva, M. Eng.
108
s
max_in
fDV
=Φ (4.40)
A eq. (4.40) mostra que o fluxo no transformador não depende da corrente de carga,
mas sim da tensão e tempo que esta está aplicada sobre a magnetizante.
No caso do capacitor e do indutor, os elementos diretamente afetados pela
componente de 120 Hz, as seções 4.2.9 e 4.2.10 avaliam o projeto e especificação dos
mesmos.
4.2.9 DIMENSIONAMENTO E ESPECIFICAÇÃO DOS CAPACITORES DE SAÍDA
CONSIDERANDO A INFLUÊNCIA DO INVERSOR
A partir da eq. (4.39) pode-se derivar uma expressão para o dimensionamento da
capacitância de saída em função da ondulação de 120 Hz. Após algumas manipulações
chega-se a uma expressão para o valor da capacitância em função dos parâmetros do
conversor, apresentada na eq. (4.41).
outCoutout LV
IC 2120120
120 1ωω
+∆
−= (4.41)
Para uma potência de 150 VA drenada pelo conversor em regime e admitindo, por
hipótese simplificativa, que o valor de pico da corrente retificada drenada seja igual ao
valor da componente fundamental, o valor de I120 é de aproximadamente 1 A de pico.
Como esta expressão advém da análise do circuito da Fig. 4.2, ∆VCout é igual à
componente de 120 Hz daquele circuito. Dessa forma para a aplicação da especificação de
tensão na eq. (4.41) deve-se considerar o valor de pico da ondulação que é igual a 5 V.
Substituindo, portanto, todos os parâmetros na eq. (4.41) chega-se ao valor de
capacitância, que é de 310 µF, para se atender a especificação de ondulação de tensão,
considerando-se a principal influência do inversor sobre o capacitor. A Tabela 4.7
apresenta a especificação dos capacitores de saída

Douglas Pereira da Silva, M. Eng.
109
Tabela 4.7 – Especificações básicas para projeto do indutor do filtro de saída.
Parâmetro Valor
Tipo / Série Eletrolítico / B43821
Fabricante Epcos
Capacitância 6 x 100 µF
Tensão 450 V
RSE máxima por capacitor 3,3 Ω
Na Tabela 4.7 pode-se verificar que a especificação da capacitância é maior do que a
calculada. Decidiu-se por sobredimensionar este elemento assim como se tem feito com
todos os outros para se ter uma margem de segurança confortável.
Esta seção evidencia claramente que, para o dimensionamento do capacitor de saída,
a consideração de uma carga resistiva não é uma hipótese válida, devendo-se portanto,
dimensionar o capacitor pela eq. (4.41) e não pela eq. (4.35).
4.2.10 AVALIAÇÃO DO PROJETO DO INDUTOR DE SAÍDA CONSIDERANDO A
INFLUÊNCIA DO INVERSOR
A partir das eq. (4.36) a (4.38) chega-se facilmente às eq. (4.42) e (4.43).
out
CoutLoutoutCout C
IjILjV
120
120_120_120120_ ω
ω
•••
=−= (4.42)
•••
−= 120120120 _Lout_Cout III (4.43)
Substituindo (4.43) em (4.42) chega-se à eq. (4.44)
−=
•••
120_120120
120_ Loutout
Cout IICjV
ω (4.44)
Substituindo (4.42) em (4.44) e manipulando:
•••
−= 1201201202
120 IIICL _Lout_Loutoutoutω (4.45)

Douglas Pereira da Silva, M. Eng.
110
Manipulando-se a eq. (4.45) obtém-se a expressão para a componente em 120 Hz da
corrente no indutor de saída, que é apresentada na eq. (4.46).
outout_Lout CL
II 2120
120 1 ω−=
••
(4.44)
A partir das mesmas considerações feitas na seção 4.2.9 e dos parâmetros
especificados para o conversor, pode-se verificar o valor da ondulação em 120 Hz no
indutor, que é em regime igual a 0,34 App.
Em regime, a corrente eficaz no indutor, levando-se em consideração a ondulação de
120 Hz e desprezando-se a ondulação na freqüência de comutação, que é muito pequena,
pode ser calculada pela eq. (4.47)
( ) A 40,02A17,0A38,0
222
120_2
___ =
+=+= LoutefCCLoutefLout III (4.47)
Como se pode ver, a corrente eficaz no indutor considerando-se a ondulação é mais
baixa do que a considerada em projeto, dessa forma, a influência do inversor não traz
nenhum prejuízo ao projeto, sendo válida a hipótese simplificativa aplicada naquela
oportunidade.
4.2.11 PROJETO DOS CIRCUITOS DE AJUDA À COMUTAÇÃO
Neste conversor utilizaram-se dois circuitos clássicos de ajuda à comutação, um para
o controle da derivada de subida da tensão nos interruptores principais e outro para o
grampeamento da tensão reversa sobre os diodos retificadores. Estes circuitos já foram
mencionados no momento da especificação dos elementos aqui citados, dessa forma, as
seções 4.2.11.1 e 4.2.11.2 abordam o dimensionamento dos seus elementos.
4.2.11.1 CIRCUITO “SNUBBER” DOS INTERRUPTORES PRINCIPAIS
Um dos principais problemas da comutação dissipativa é a abertura de circuitos
indutivos. Todo circuito prático possui elementos parasitas lineares, sendo a indutância
parasita um dos elementos que traz mais problemas no momento da comutação,

Douglas Pereira da Silva, M. Eng.
111
provocando sobretensões que podem ficar fora de controle no momento da abertura do
interruptor principal.
Nos conversores isolados, esta componente é ainda mais grave, pois além das
indutâncias parasitas das trilhas e cabos, há a indutância de dispersão do transformador que
é, sem dúvida, superior às demais parasitas.
O conversor Push-Pull, por ser um conversor naturalmente isolado, impõe a
indutância de dispersão no caminho do interruptor, sendo, portanto, imperativo o uso de
um circuito de ajuda à comutação.
Os circuitos de ajuda à comutação classificam-se genericamente em circuitos para
controle de derivada, circuitos de grampeamento e circuitos amortecedores. É de certa
forma comum utilizar-se até mais de um tipo destes circuitos num interruptor, entretanto,
optou-se por utilizar-se apenas um circuito de controle da derivada de subida da tensão, o
chamado snubber, como circuito de ajuda à comutação.
A estrutura do snubber escolhido é o tradicional RCD dissipativo. Este circuito é
apresentado junto à célula de comutação na Fig. 4.3.
Csnubber
RsnubberDsnubber
Ldis
S
Fig. 4.3 – Snubber RCD dissipativo associado à célula de comutação do conversor Push-
Pull.
O funcionamento deste circuito é muito simples. Enquanto o interruptor é
comandado a conduzir, a corrente circulante pela indutância de dispersão flui toda por ele.
No momento em que o interruptor abre, a corrente é desviada para o circuito snubber

Douglas Pereira da Silva, M. Eng.
112
circulando pelo capacitor e pelo diodo, transferindo a energia acumulada na indutância de
dispersão para o capacitor.
Até que o interruptor seja novamente comandado a conduzir, o capacitor permanece
carregado com a tensão de bloqueio do interruptor. No momento em que o interruptor entra
em condução, o capacitor se descarrega com uma corrente circulante pelo interruptor e
pelo resistor. O circuito deve ser dimensionado para que o capacitor esteja completamente
descarregado no momento em que o interruptor bloquear-se novamente.
A Fig. 4.4 apresenta as etapas de funcionamento deste circuito nos instantes de
bloqueio e condução do interruptor.
Csnubber
RsnubberDsnubber
Ldis
S
Condução plena Durante bloqueio Bloqueio pleno Entrada em condução
Csnubber
RsnubberDsnubber
Ldis
S
Csnubber
RsnubberDsnubber
Ldis
S
Csnubber
RsnubberDsnubber
Ldis
S
Fig. 4.4 – Etapas de funcionamento do circuito snubber dos interruptores principais.
Verifica-se que durante o bloqueio, forma-se um circuito oscilante entre a indutância
de dispersão e o capacitor do snubber. As expressões que regem este circuito estão
apresentadas nas eq. (4.48) e (4.49).
( )2
0 snubberdis
snubberdispico_SLdis
CLt
CLtcosItI
π≤≤
= (4.48)
( )2
0 snubberdis
snubberdispico_S
snubber
disCsnubber
CLt
CLtsenI
CLtV
π≤≤
= (4.49)
A eq. (4.49) prediz o valor de pico da tensão no capacitor com a utilização do
circuito snubber. Quanto maior o capacitor menor a sobretensão, entretanto menor deve ser
o valor de resistência para a descarga, aumentando-se as perdas neste elemento.

Douglas Pereira da Silva, M. Eng.
113
Ao contrário do bloqueio do interruptor, no qual a carga do capacitor é feita por um
circuito de segunda ordem, a descarga do capacitor na entrada em condução é feita por um
circuito de primeira ordem. A expressão que descreve a tensão no capacitor durante a
descarga é apresentada na eq. (4.50).
( ) snubbersnubberCRt
pico_SCsnubber eVtV−
= (4.50)
Dimensionamento dos elementos do circuito snubber
Para o dimensionamento destes elementos foi utilizado o critério da conservação de
energia, que neste caso quer dizer que toda energia armazenada na indutância de dispersão
do transformador, no momento do bloqueio do interruptor, é transferida ao capacitor.
Medidas realizadas no transformador indicaram uma indutância magnetizante dos
enrolamentos primários de aproximadamente 1 µH, com este dado e aplicando a eq. (4.51)
determina-se a energia armazenada na indutância de dispersão.
( ) mJ 77,0A30,39.µH121
21 22
_ === picoSdisdis ILW (4.51)
A energia num capacitor pode ser definida pela eq. (4.52).
2
21
CsnubbersnubberCsnubber VCW = (4.52)
Igualando-se (4.51) e (4.52) e realizando um pequeno algebrismo chega-se a uma
expressão para o valor da capacitância do snubber, que é apresentada na eq. (4.53). O valor
da tensão máxima sobre o capacitor é admitido como 85 V.
F 214V85
mJ77,0.2222 η===
Csnubber
dissnubber V
WC (4.53)
Realizando-se a prova real e substituindo-se os valores encontrados para a indutância
de dispersão e a capacitância na eq. (4.49), chega-se a um valor de pico igual a 85 V.

Douglas Pereira da Silva, M. Eng.
114
O resistor de descarga é dimensionado, como já mencionado, para que no instante do
bloqueio o capacitor esteja completamente descarregado. Para tanto, no cálculo do valor da
resistência, admitiu-se que para a descarga completa seria necessário um intervalo mínimo
igual a 10 constantes de tempo. A eq. (4.54) demonstra este cálculo.
Ω=== 34,9ηF214.kHz25.10
5,010
max_
snubbers
Psnubber Cf
DR (4.54)
A despeito do estudo teórico realizado aqui, a implementação prática demonstrou
que o emprego de uma capacitância de 68 ηF e uma resistência de 34 Ω apresenta bons
resultados. Isto se deve à própria inexatidão da medida da indutância de dispersão e da
presença de elementos parasitas amortecedores, elementos parasitas estes que neste caso
vêm em beneficio do conversor.
Na Tabela 4.8 estão apresentadas as especificações de cada componente que compõe
o circuito snubber utilizado, um para cada interruptor.
Tabela 4.8 – Especificações básicas para projeto do indutor do filtro de saída.
Elemento Valor Especificação
Resistor 2 x 68 Ω em paralelo Resistor de fio de 5 W cada
Capacitor 68 ηF Polipropileno de 400 V
Diodo 4 A / 600 V MUR 460 - Motorola
4.2.11.2 CIRCUITO DE GRAMPEAMENTO DOS DIODOS RETIFICADORES
A comutação com corrente não nula em diodos também se torna um problema a ser
contornado, principalmente se esta comutação ocorre em alta freqüência, o que exige
diodos ultrarápidos.
A elevada derivada de corrente associada à relativa alta corrente reversa nestes
elementos, bem como interações entre a capacitância de junção dos diodos e a indutância
de dispersão do enrolamento secundário provocam sobretensões elevadas nestes elementos
levando-os à destruição.

Douglas Pereira da Silva, M. Eng.
115
Das técnicas de ajuda à comutação, o mais comum em conversores CC-CC isolados
é o emprego de circuitos de grampeamento, sejam eles passivos ou ativos, regenerativos ou
não.
Dessa forma, para o grampeamento dos diodos deste conversor, definiu-se um
circuito de grampeamento passivo semi-regenerativo do tipo RCD, facilmente
implementável e que ao invés de grampear cada diodo individualmente, grampeia o
retificador em ponte completa como um todo. O circuito do grampeador aplicado no
estágio de saída do conversor é apresentado na Fig. 4.5.
Dr1
Dr4Dr3
Dr2
Lout
Cout
Dgramp
Rgramp
Cgramp
Fig. 4.5 – Circuito de grampeamento semi-regenerativo associado ao estágio de saída.
Como se pode ver na Fig. 4.5 a característica de semi-regenerabilidade é dada pela
forma como é feita a descarga do capacitor sobre a saída do conversor, parte da energia é
entregue à saída e parte dissipada sobre o resistor de grampeamento.
O funcionamento deste circuito também é muito simples, sendo que aqui o objetivo é
manter o capacitor com uma carga relativamente constante e igual à tensão de
grampeamento. Dessa forma, o resistor é dimensionado de forma a manter uma tensão de
grampeamento da ordem da tensão reversa dos diodos.
No momento em que um conjunto de diodos se bloqueia, ocorre uma sobretensão na
ponte, quando esta chega ao valor da tensão do capacitor de grampeamento, o diodo entra
em condução fazendo com que o capacitor de grampeamento imponha sua tensão no
barramento da ponte.
A energia proveniente dos elementos parasitas é armazenada no capacitor e entregue
à saída, dissipando-se pelo resistor. No restante do tempo, o capacitor fica em lenta
descarga pelo resistor e pela saída. A potência dissipada no resistor nesta configuração é

Douglas Pereira da Silva, M. Eng.
116
proporcional à diferença de potencial entre o capacitor de grampeamento e a tensão de
saída.
O procedimento aqui utilizado para determinação dos elementos do grampeador é
baseado em [7]. Estipulou-se uma tensão de grampeamento da ordem de 900 V de forma a
garantir integridade dos diodos. A capacitância de junção também é informação relevante
neste procedimento sendo igual a 70 pF para o diodo especificado.
Nessa metodologia de projeto, inicialmente, é definida uma variável auxiliar na eq.
(4.55) que é função da tensão de grampeamento e da tensão de saída, para então se
determinar a potência processada pelo circuito de grampeamento, expressa pela eq. (4.56).
19,0V756
V756V900
_
_ =−
=−
=picoDr
picoDrCgramp
VVV
aux (4.55)
( ) ( )
( ) ( ) W02,619,0
19,0119,01V756.pF70.kHz25
11
2
22
_
=−+
=
−+=
gramp
picoDrDrsgramp
P
auxauxauxVCfP
(4.56)
A partir da potência processada, o resistor de grampeamento pode ser determinado
pela eq. (4.57).
( ) ( )Ω=
−=
−= k 50,41
W02,6V400V900
2
gramp
outCgrampgramp P
VVR (4.57)
O valor adotado para o resistor de grampeamento foi de 30 kΩ. A partir deste valor e
com a eq. (4.58) chega-se ao valor da capacitância de grampeamento. A condição para a
determinação do capacitor é que ele forme com o resistor um conjunto com constante de
tempo dez vezes maior que o período de comutação, de forma a garantir uma tensão quase
constante sobre o capacitor.
ηF 33,13kHz25.kΩ50,41
1010===
sgrampgramp fR
C (4.58)

Douglas Pereira da Silva, M. Eng.
117
O valor adotado para o capacitor de grampeamento foi de 15 ηF. A Tabela 4.9
apresenta a especificação dos elementos do circuito grampeador
Tabela 4.8 – Especificações básicas para projeto do indutor do filtro de saída.
Elemento Valor Especificação
Resistor 3 x 10 kΩ em série Resistor de fio de 5 W cada
Capacitor 15 ηF Polipropileno de 1500 V
Diodo 1 A / 1000 V MUR 1100 - Motorola
4.2.12 PROJETO DE CONTROLE
O conversor Push-Pull em questão naturalmente exige uma malha de controle da
tensão, de acordo com a seção 3.4. A estratégia de partida, por sua vez, impôs a
necessidade de mais uma malha de controle, a da corrente de entrada. Sendo assim, esta
seção tem por finalidade descrever detalhadamente o procedimento de projeto utilizado
para determinação dos compensadores e respectivas atuações.
4.2.12.1 MALHA DE CONTROLE DA TENSÃO DE SAÍDA
O projeto da malha de controle de tensão consiste no cálculo de um compensador
que garanta ao sistema realimentado erro nulo ao degrau e estabilidade. Esses dois
requisitos podem ser alcançados através de um elevado ganho em baixas freqüências e uma
margem de fase adequada. A escolha adequada de uma freqüência de cruzamento da planta
em laço aberto determina a rapidez de resposta da planta, enquanto a margem de fase
determina a dinâmica desta resposta.
A metodologia de projeto do compensador de tensão aqui empregada baseia-se na
metodologia apresentada em [8]. Esta metodologia prevê o projeto de dois compensadores,
um do tipo avanço de fase que determina a dinâmica do sistema e outro do tipo atraso de
fase que garante erro estático nulo. A síntese de um único compensador PID que reúne
estas duas características a partir do cascateamento dos dois compensadores também é
contemplada nesta seção.

Douglas Pereira da Silva, M. Eng.
118
Modelo da planta
O controle clássico empregado nos conversores CC-CC pressupõe a existência de
uma planta a ser controlada, linearizada ao redor do ponto de operação. O conversor Push-
Pull e outros conversores CC-CC com estágio de saída em filtro LC possuem modelos
similares, derivados do modelo do conversor Buck.
Em [9] o autor deriva o modelo de um conversor CC-CC Full-Bridge-PWM-ZVS
chegando a um modelo simplificado que se trata de nada mais que uma fonte de tensão que
agrega a relação de transformação do transformador, o filtro LC e a carga, tomada como
resistiva. Para o Push-Pull as simplificações e linearizacões feitas em [9] também são
válidas, resultando na função de transferência expressa pela eq. (4.59).
( ) ( )( ) 11
12 +
++
+
+==
outSEout
out
out
SEoutout
outSE
iPr
nom_inSec^
^
outvd
CRRLs
RRCLs
CsRNVN
sd
svsFT (4.59)
Da eq. (4.59) pode-se extrair a freqüência de ressonância aproximada e a freqüência
do zero da planta cujas expressões são apresentadas nas eq. (4.60) e (4.61). Estas
informações são importantes para a determinação do compensador avanço de fase.
Hz 90,32µF600.mH392
12
1_0 ===
ππ outoutvd CL
f (4.60)
Hz 52,530µF600.5,0.2
12
1_ =
Ω==
ππ outSEvdz CR
f (4.61)
Para a modelagem da planta e, conseqüente aplicação no projeto dos compensadores,
definiu-se Rout como a razão entre o quadrado da tensão de saída em regime (Vout) e a
potência de saída na partida (Pout).
Sistema em laço aberto não-compensado
O diagrama de blocos do sistema controlado por realimentação negativa da saída é
apresentado na Fig. 4.6.

Douglas Pereira da Silva, M. Eng.
119
+-Vref VoutCompensador PlantaModulador
Sensor
Gc(s) Kpwm FTvd(s)
H
Fig. 4.6 – Diagrama de blocos do sistema de controle.
A função de transferência do sistema em laço aberto é obtida abrindo-se a
realimentação e multiplicando-se as funções de transferência e ganhos de cada bloco. O
sistema em laço aberto não-compensado é obtido eliminando-se deste produto a função de
transferência do compensador.
Para um projeto de compensador realizado no domínio da freqüência, a função de
transferência de laço aberto é extremamente importante para se verificar as margens de
estabilidade, que são a margem de fase e a margem de ganho.
A partir da função de transferência em laço aberto não-compensado, define-se
também onde posicionar a freqüência de cruzamento do sistema compensado, grandeza
esta que traduz a rapidez de resposta para perturbações na grandeza controlada.
Portanto, para a determinação desta função de transferência deve-se determinar os
ganhos de cada um dos blocos, exceto do compensador, apresentados na Fig. 4.6.
O sensor deve ser um elemento que tenha um ganho tal que, quando a tensão de saída
alcance o valor desejado, ele produza um sinal de tensão de valor igual ao da referência.
Para tanto, o valor do ganho deste sensor é dado pela eq. (4.62).
01275,0V400V1,5
===out
ref
VV
H (4.62)
O valor da referência é igual a 5,1 V. Mais detalhes são dados na seção 4.2.13 onde é
feita a descrição da implementação prática do circuito de controle e comando.
O ganho do modulador PWM é dado pelo inverso do pico do sinal dente-de-serra
gerado pelo próprio integrado PWM, com a qual é feita a comparação do sinal de erro
compensado. Sendo assim, o ganho do modulador (KPWM) é igual a 0,30 V-1.

Douglas Pereira da Silva, M. Eng.
120
Estando determinados os ganhos do sensor e do modulador PWM, a função de
transferência de laço aberto é dada pela eq. (4.63). Os diagramas de Bode são apresentados
na Fig. 4.7.
( ) ( ) HKsFTsFTLA PWMvdv = (4.63)
1 10 100 1 .103 1 .104 1 .105100
62.5
25
12.5
50
|FTLAv(s)|
f(Hz)1 10 100 1 .103 1 .104 1 .105
200
150
100
50
0
f(Hz)
dB FTLA(s)
(a) (b) Fig. 4.7 – Diagramas de Bode de (a) ganho e (b) fase do sistema em laço aberto não-
compensado.
Verifica-se pelos diagramas de Bode que se trata de um sistema de segunda ordem,
com seu comportamento peculiar. O nível de amplificação na freqüência de ressonância
pode ser determinado através do levantamento do fator de qualidade da planta.
Projeto de um compensador avanço de fase
O compensador avanço de fase vem satisfazer os requisitos de margem de fase da
planta. O projeto apresentado neste item visa calcular um compensador que possua
máximo avanço na freqüência de cruzamento desejada. A freqüência de cruzamento é
definida para este caso pela eq. (4.64).
Hz 62540kHz25
40=== s
cf
f (4.64)
O ganho em dB a ser compensado na freqüência de cruzamento desejada é igual a
39,62 dB. Conforme já mencionado, a margem de fase determina a dinâmica do sistema
compensado. Dessa forma, deseja-se obter do sistema um comportamento de primeira

Douglas Pereira da Silva, M. Eng.
121
ordem, sendo estipulado um fator de qualidade resultante no sistema (Qc) de 0,01 para
obtenção de margem de fase aproximadamente igual a 90º conforme eq. (4.65).
º99,8901,0.2
01,0.411tan
2411
tan 4
41
4
41 =
++=
++= −−
c
c
Ψ (4.65)
O compensador avanço de fase “adiciona” fase ao sistema na freqüência de
cruzamento desejada através da alocação estratégica de um zero e um pólo. Para saber
quanto de fase ele deve “adicionar” é necessário se conhecer a margem de fase do sistema
em laço aberto que é dada pela eq. (4.66).
( ) º 88492180 ,fjFTLAºΨ cFTLA =+∠= π (4.66)
Assim sendo, a fase que o compensador avanço de fase deve proporcionar é
apresentada na eq. (4.67).
º 11,40º88,49º99,89 =−=−= FTLAav ΨΨψ (4.67)
A alocação do zero e do pólo deste compensador são feitas, portanto, em função da
fase calculada na eq. (4.67). As eq. (4.68) e (4.69) determinam as freqüências do pólo e do
zero, respectivamente.
( )( )
( )( ) Hz 7,290
º11,40sen1º11,40sen1
sen1sen1
_ =+−
=+−
= cav
avcavz fff
ψψ
(4.68)
( )( )
( )( ) Hz 7,1343
º11,40sen1º11,40sen1
sen1sen1
_ =−+
=−+
= cav
avcavp fff
ψψ
(4.69)
O ganho estático do compensador avanço de fase é calculado para que o ganho da
planta em laço aberto seja unitário e é expresso pela eq. (4.70).

Douglas Pereira da Silva, M. Eng.
122
( )53,58
Hz7,1343Hz7,290
0128,0.V630.105V3,3.4
Hz90,32Hz625.Hz52,530
2_0
Pr2
0
__0
==
=
av
p
z
inSec
Micvdzav
G
ff
HVNVN
f
ffG
(4.70)
Uma vez definidos o valor do ganho estático do compensador, as freqüências do pólo
e do zero, pode-se escrever a função de transferência do compensador avanço de fase de
acordo com a eq. (4.71).
( )1
2
12
0
+
+=
av_p
av_zav_av
fsfs
GsFT
π
π (4.71)
Os diagramas de Bode da função de transferência do compensador avanço de fase
são apresentadas na Fig. 4.8. Verifica-se claramente o efeito do zero e do pólo, provocando
um crescimento de 20 dB/década nas freqüências intermediárias a eles. A fase é máxima
na freqüência de corte estipulada.
1 10 100 1 .103 1 .104 1 .10535
38.75
42.5
46.25
50
1 10 100 1 .103 1 .104 1 .1050
12.5
25
37.5
50
f(Hz)
|FTav(s)|dB FTav(s)
(a) (b)f(Hz)
Fig. 4.8 – Diagramas de Bode de (a) ganho e (b) fase do compensador avanço de fase.
Projeto de um compensador atraso de fase
O projeto do compensador atraso de fase na malha em questão consiste na alocação
de um pólo na origem e um zero numa freqüência abaixo do zero do compensador avanço

Douglas Pereira da Silva, M. Eng.
123
de fase, de tal forma que este não interfira na margem de fase. O ganho em médias
freqüências do compensador resultante deve ser o mesmo do avanço de fase para que a
freqüência de cruzamento não seja alterada.
A função de transferência deste compensador é realizada através de um chamado
zero invertido. Esta função de transferência tem por característica um zero na freqüência
desejada e um pólo na origem. O zero do compensador atraso de fase é alocado uma
década abaixo da freqüência de cruzamento. A eq. (4.72) apresenta a função de
transferência do compensador atraso de fase.
( ) 12
+=sf
sFT at_zat
π (4.72)
Na Fig. 4.9 estão apresentados os diagramas de Bode referentes ao compensador
atraso de fase. Verifica-se que o ganho do compensador próximo à freqüência de
cruzamento é de praticamente 0 dB e a fase zero, não interferindo, portanto, no
compensador avanço de fase.
1 10 100 1 .103 1 .104 1 .1050
10
20
30
40
f(Hz)1 10 100 1 .103 1 .104 1 .105
100
75
50
25
0
f(Hz)
|FTat(s)|dB FTat(s)
(a) (b) Fig. 4.9 – Diagramas de Bode de (a) ganho e (b) fase do compensador atraso de fase.
Sistema em laço aberto compensado
O compensador de tensão completo é obtido através do cascateamento dos
compensadores avanço e atraso de fase aqui calculados. Dessa forma, o sistema em laço
aberto compensado pode ser obtido através do produto da função de transferência em laço
aberto não compensado e do compensador avanço-atraso de fase resultante.

Douglas Pereira da Silva, M. Eng.
124
As eq. (4.73) e (4.74) apresentam, respectivamente, a função de transferência do
compensador avanço-atraso de fase resultante e do sistema em laço aberto compensado.
( ) ( ) ( )sFTsFTsFT atavavt = (4.73)
( ) ( ) ( )sFTLAsFTsFTLA vavtavt = (4.74)
A Fig. 4.10 apresenta os diagramas de Bode do sistema em laço aberto compensado,
representado pela eq. (4.74).
1 10 100 1 .103 1 .104 1 .10550
12.5
25
62.5
100
|FTLAavt(s)|
f(Hz)1 10 100 1 .103 1 .104 1 .105
200
100
0
100
200
f(Hz)
dB FTLAavt(s)
(a) (b) Fig. 4.10 – Diagramas de Bode de (a) ganho e (b) fase do sistema em laço aberto.
A Fig. 4.10 ilustra o comportamento do sistema em função da freqüência. Constata-
se que o erro estático é nulo devido ao pólo na origem. A freqüência de cruzamento real
para esta planta ficou em torno de 910 Hz com margem de fase de aproximadamente 90º.
A descontinuidade verificada no diagrama de Bode de fase deve-se ao fato de que o
programa utilizado para traçar este diagrama considera para a fase o intervalo entre –180º e
+180º. Entre 30 e 100 Hz a fase ultrapassa os –180º o que equivale a dizer que ela está no
segundo quadrante, conseqüentemente pode ser representada no intervalo entre +90º e
+180º.
Implementação prática do compensador avanço-atraso de fase
O compensador avanço-atraso de fase matemático calculado nesta seção pode ser
implementado através do clássico circuito do compensador PID, que é apresentado na Fig.
4.10.

Douglas Pereira da Silva, M. Eng.
125
+
-Ravt1 Ravt2
Ravt3Cavt1
Cavt2
Vref
Vo
Vc
Fig. 4.11 – Estrutura do compensador PID para implementação prática do compensador
avanço-atraso de fase
O ganho do compensador avanço de fase pode ser escrito em função dos elementos
dos circuitos da Fig. 4.11, de acordo com a eq. (4.75).
21
3_0
avtavt
avtav RR
RG+
= (4.75)
Analisando-se o circuito da Fig. 4.11 e o confrontando com o funcionamento do
compensador avanço-atraso de fase, chega-se às equações para projeto. Para o circuito em
questão há mais equações do que incógnitas. Dessa forma, arbitrando-se o valor do
capacitor Cavt1 em 33 ηF determina-se o valor do resistor Ravt2 pela eq. (4.76).
Ω=== k 59,16Hz7,290.ηF33.2
12
1
_12 ππ avzavt
avt fCR (4.76)
O valor assumido para Ravt2 foi de 15 kΩ. Com estes dois parâmetros definidos,
determina-se o valor do resistor Ravt1 pela eq. (4.77).
Ω=−
=−
= k 71,41ηF33.kΩ59,16.Hz7,1343.2
kΩ59,1612 12_
21 ππ avtavtavp
avtavt CRf
RR (4.77)
O valor comercial para Ravt1 adotado foi de 4,7 kΩ. Manipulando-se a eq. (4.75),
determina-se o valor de Ravt3, já que foram determinados os valores dos outros dois
resistores. A eq. (4.78) apresenta a expressão para Ravt3.
( ) ( ) Ω=+=+= M 15,1kΩ15kΩ7,453.5821_03 avtavtavavt RRGR (4.78)

Douglas Pereira da Silva, M. Eng.
126
Adotou-se o valor de 1,2 MΩ para o resistor Ravt3. Este elemento em conjunto com o
capacitor Cavt2 forma o zero do compensador atraso de fase. A eq. (4.79) expressa o valor
do capacitor Cavt2 em função da freqüência deste zero e de Ravt3.
ηF 12,2Hz5,62.M15,12
12
1
_32 =
Ω==
ππ atzavtavt fR
C (4.79)
Para o capacitor Cavt2 foi adotado o valor de 2,2 ηF. Com todos os elementos
calculados pode-se traçar os diagramas de Bode do compensador prático, cuja função de
transferência é expressa pela eq. (4.80).
( ) ( )( )
( )
+
++
++=
1
11
121
21221
1223
avtavtavt
avtavtavtavtavt
avtavtavtavtprat_avt
CRR
RRsCRRs
CsRCsRsFT (4.80)
Na Fig. 4.12 estão apresentados os diagramas de Bode do compensador avanço-
atraso de fase matemático e prático para ilustrar sua resposta em freqüência, e de forma a
se verificar que a adoção de valores comerciais praticamente não influencia na sua
resposta.
1 10 100 1 .103 1 .104 1 .10530
42.5
55
67.5
80
f(Hz)1 10 100 1 .103 1 .104 1 .105
100
62.5
25
12.5
50
f(Hz)
|FTavt(s)|dB
|FTavt_prat(s)|dB
FTavt(s)
FTavt_prat(s)
(a) (b)Fig. 4.12 – Superposição dos diagramas de Bode de (a) ganho e (b) fase dos
compensadores avanço-atraso matemático e prático.
Com o compensador prático, o sistema em laço aberto apresentou freqüência de
cruzamento em torno de 860 Hz com margem de fase de aproximadamente 90º.

Douglas Pereira da Silva, M. Eng.
127
A implementação prática demonstrou ainda a necessidade da adição de um capacitor
em paralelo com o ramo de realimentação para filtragem de ruídos e componentes na
freqüência de comutação amostrados. O valor do capacitor utilizado é de 100 pF.
4.2.12.2 MALHA DE CONTROLE DA CORRENTE DE ENTRADA
A malha de controle da corrente de entrada tem como função limitar a potência
drenada pelo refrigerador no momento da partida, de forma a viabilizar a estratégia de
partida do refrigerador em subtensão.
A atuação desta malha de controle ocorre apenas no instante em que a corrente de
entrada chega ao valor estipulado de limitação. Neste instante é o compensador de corrente
que determina o valor da razão cíclica do conversor. Uma vez ocorrida a partida e a
corrente de entrada volte a patamares abaixo do estipulado para a limitação, é a malha de
tensão que controla o conversor. Este processo é explicado mais detalhadamente na seção
4.2.13
Modelo da planta
Considerando-se a tensão de saída livre de ondulação, pode-se derivar um modelo da
planta mais simples que relaciona a corrente de entrada com a razão cíclica. A função de
transferência para esta situação é apresentada na eq. (4.81).
( ) ( )( ) out
P_out
iPr
Sec^
^
inid sL
VNN
sd
sisFT == (4.81)
A planta em questão apresenta apenas um pólo na origem, tendo comportamento de
um integrador.
Sistema em laço aberto não-compensado
As considerações feitas para o sistema em laço-aberto não-compensado de tensão são
válidas aqui. O diagrama de blocos da Fig. 4.5 representa fielmente o sistema de controle
de corrente a despeito da planta e da grandeza controlada.
O ganho do modulador PWM é o mesmo daquela ocasião já que o integrado é o
mesmo, já o sensor tem um ganho diferente e foi fixado em 0,082 Ω. Como se pode

Douglas Pereira da Silva, M. Eng.
128
perceber, o sensor amostra uma corrente mas fornece um sinal de tensão para a malha de
controle. Mais detalhes da implementação são apresentados na seção 4.2.13.
A função de transferência de laço-aberto não-compensado é apresentada na eq. (4.82)
e os diagramas de Bode traçados para o sistema em laço aberto não-compensado são
apresentados na Fig.4.13.
( ) ( ) iPWMidi HKsFTsFTLA = (4.82)
1 10 100 1 .103 1 .104 1 .10550
12.5
25
62.5
100
f(Hz)1 10 100 1 .103 1 .104 1 .105
90.1
90.05
90
89.95
89.9
f(Hz)
|FTLAi(s)|dBFTLAi(s)
(a) (b) Fig. 4.13 – Diagramas de Bode de (a) ganho e (b) fase do sistema em laço aberto não-
compensado.
Projeto do compensador
Um compensador proporcional com filtro foi o adotado para a malha de controle da
corrente de entrada, já que a planta exibe uma característica que é de certa forma desejável:
é estável e não possui sobressinal. O filtro é obtido adicionando-se um capacitor na
realimentação em paralelo com o resistor, gerando um pólo numa freqüência desejada. A
estrutura do compensador é apresentada na Fig. 4.14.
+
-Rci1
Rci2
Cci
Vref
Vci
H Iin_medx
Fig. 4.14 – Estrutura do compensador proporcional com filtro.

Douglas Pereira da Silva, M. Eng.
129
Este compensador deve ser projetado para fornecer um ganho estático de forma a
compensar o ganho da planta na freqüência de cruzamento desejada e também o
decaimento provocado pelo filtro se a freqüência de corte deste for inferior à freqüência de
cruzamento.
O compensador em questão deve ser mais rápido que a malha de tensão, de forma a
garantir uma limitação eficaz da potência de entrada, evitando que o conversor processe
uma potência para que não foi projetada.
Neste tipo de compensador há apenas dois parâmetros de dimensionamento, são eles
o ganho e a freqüência do pólo de filtragem. Para o dimensionamento destes parâmetros é
necessária a determinação da freqüência de cruzamento que a partir da prática foi
estipulada em 7 kHz.
A expressão que determina o ganho do compensador levando em consideração o
efeito do filtro é apresentada na eq. (4.83).
( ) 41,18519,10.kHz4kHz7
21
__0
__0 ===
icii
ici fFTLAf
fG
π (4.83)
A prática também mostrou que a freqüência de corte do filtro deveria ser de 4 kHz.
Admitindo-se o resistor de realimentação Rci2 igual a 120 kΩ, a eq. (4.84) e (4.85)
definem, respectivamente, o valor do capacitor Cci e do resistor Rci.
nF 33,0kΩ120.kHz4.2
12
1
2_0
===ππ cii
ci RfC (4.84)
Ω=== k 52,641,18kΩ120
_0
21
i
cici G
RR (4.85)
Foi adotado o valor comercial de 6,8 kΩ para o resistor Rci1.
A função de transferência em função dos elementos calculados para o compensador
em questão é apresentada na eq. (4.86).
( )1
1
21
2
+=
cicici
cici CsRR
RsFT (4.86)

Douglas Pereira da Silva, M. Eng.
130
Sistema em laço aberto compensado
O sistema em laço aberto compensado de corrente é obtido multiplicando-se a função
de transferência em laço aberto compensado pela função de transferência do compensador.
A função de transferência e os diagramas de Bode do sistema em laço aberto compensado
são apresentados, respectivamente, na eq. (4.87) e na Fig. 4.15.
( ) ( ) ( )sFTLAsFTsFTLA icici = (4.87)
1 10 100 1 .103 1 .104 1 .10550
12.5
25
62.5
100
f(Hz)1 10 100 1 .103 1 .104 1 .105
200
162.5
125
87.5
50
f(Hz)
|FTLAci(s)|dB FTLAci(s)
(a) (b) Fig. 4.15 – Diagramas de Bode de (a) ganho e (b) fase do sistema em laço aberto
compensado.
O sistema em laço aberto compensado apresenta uma freqüência de cruzamento
aproximada de 6,3 kHz e margem de fase de cerca de 35º.
4.2.13 IMPLEMENTAÇÃO PRÁTICA DO CIRCUITO DE CONTROLE E COMANDO
O circuito de controle e geração dos pulsos de comando do conversor Push-Pull tem
como base o integrado modulador PWM SG3525A. Este integrado, tradicional em
aplicações desta natureza, possui saída regulada de +5,1 V própria para utilização como
referência, amplificador de erro para implementação do compensador, geração interna do
sinal dente-de-serra para comparação com o sinal compensado e circuito lógico para
geração de dois pulsos de igual largura e defasados de 180º.
Assim como explicado na seção 2.6.1.1 para o integrado SG3527, a determinação da
freqüência de oscilação para geração do sinal dente-de-serra é feita apenas empregando um
resistor e um capacitor. Com o auxílio do catálogo do fabricante foram determinados,

Douglas Pereira da Silva, M. Eng.
131
portanto, o resistor RT e o capacitor CT para uma freqüência do sinal de comando de 25
kHz, o que implica numa freqüência de oscilação de 50 kHz.
O integrado em questão permite a configuração de um tempo morto pela adição de
um resistor de descarga do capacitor CT, optou-se pela imposição de um tempo morto de
1,5 µs adicionando-se um resistor Rdis de 1,2 Ω.
O circuito de controle foi concebido tanto para a operação em malha aberta como em
malha fechada. Para a operação em malha aberta, a variação da razão cíclica é feita
ajustando-se um micropotenciômetro que está ligado entre o pino 16 do integrado e o terra,
conforme Fig. 4.15. Através de uma combinação de jumpers a realimentação do
compensador é curto-circuitada, criando-se um seguidor de tensão para a referência, sendo
ela comparada com o sinal dente-de-serra na geração dos pulsos.
Na operação em malha fechada, a referência é a própria tensão do pino 16 que é a
saída regulada de 5,1 V. Como o sensoreamento da tensão de saída é feito através de
divisor resistivo, é preciso calcular os valores de dois resistores para que uma tensão de
400 V na saída implique em 5,1 V na entrada do compensador. Fixando-se o resistor Rdiv1
em 100 kΩ, conforme a Fig. 4.15, o resistor Rdiv2 é obtido pela eq. (4.88).
Ω=−
= k 2911 12 ,R
HHR divdiv (4.88)
O resistor Rdiv2 é realizado através de um micropotenciômetro de precisão. Verifica-
se na Fig. 4.16 que tanto os sinais do sensor de corrente quanto do divisor resistivo,
responsável pelo sensoreamento da tensão, possuem buffers, isto é, amplificadores
operacionais na configuração seguidor de tensão, de forma a isolar estes sinais e, pela
própria característica do amplificador operacional fornecer um pólo em altas freqüências,
eliminando ruídos.
A Fig. 4.16 apresenta o diagrama esquemático completo do conversor Push-Pull
implementado.

Douglas Pereira da Silva, M. Eng.
132
Dr2MUR8100
Vin
S1APT10M11LVR
Dr1MUR8100
Cgr15n
Cfout600u
S2APT10M11LVR
MUR460Ds1
MUR460Ds2
Cs168n
Dgr
P110k
Cs268n
Rs12 x 68/5W
Dr3MUR8100
Rgr
3 x 10k/5W
Dr4MUR8100
Lfout
39mH
R1100k
Rs2
Rc38.2M
U1
SG3525
15
1
2 16
129 10
1114
13
4
8
5
3
6
7
VIN
ERR-
ERR+VREF
GNDCOMP SHUT
OUTAOUTB
Vc
OSC
START
CT
SYNC
RT
DIS
Rc2
1k
Rc1
6.8kCc1
33nCc239p
J2
J3
HP2211
HP2211
VS1
Q2
+15V
Q1Rb1
560
VS2
Q4BD136
+15V
Q3BD135Rb2
560
+15V
+15V
Vp1
Inversor
VS1
VS2
MUR1100
Rgs1
Rgs2
22k
22k
12
12
Rg1
Rg2
R
C Rd
P3100k R3
R4
C1
+15V
C2
C3
18n
10k
6.8k
6.8k
0.1u
0.1u
1.2
22u
LM3183
2
4
76
+
-
V+
V-
Rf_i 15M
+15V
Rin_i
10k
LF34712
13
4
1114
+
-
V+
V-
+15VRdiv218k
+15V Rdiv1
100k
1N4148
Di
LF3473
2
11
41
+
-
V+
V-
+15V
Vp1
+15V
-15V
Iin
paralelo
2 x 68/5Wparalelo
Cd 2200u
Dg1
Dg2
série
Cf_i 15n
Iin
Ri82
J1
BD136
BD135
-15V-15V
-15V T
T
Dz
Placa de controle
R10
C10120k
2.2n
Fig. 4.16 – Esquemático completo do conversor Push-Pull implementado.
A amostragem de corrente é realizada através de um sensor de corrente de efeito
Hall. A saída deste sensor é em corrente e deve ser aplicada sobre um resistor para
obtenção de uma tensão proporcional à corrente medida. Pela faixa de valores de resistores
aplicáveis neste caso, segundo o fabricante, decidiu-se por um resistor de 82 Ω. O sensor
utilizado (LEM – LA 55-TP) tem atenuação intrínseca de mil vezes a corrente amostrada,
dessa forma o ganho do sensor, como já foi apresentado na seção 4.2.12.2, é de 0,082 Ω.
O sensor em questão tem uma resposta em freqüência com banda larga, reproduzindo
a corrente instantânea com fidelidade. Como o intuito é se fazer o controle da corrente
média de entrada e a planta foi modelada para este caso, optou-se por filtrar a corrente de
entrada com um filtro passa-baixas passivo de primeira ordem formado pelo resistor R10 e
C10.
O compensador de corrente é implementado através do operacional LM318. Na saída
deste operacional encontram-se dois diodos, um de sinal (Di) e um zener (Dz). O diodo
zener tem duas funções, evitar que este operacional opere na saturação e evitar que haja
tensão negativa no pino 9 do integrado SG3525A quando Di estiver conduzindo.

Douglas Pereira da Silva, M. Eng.
133
O diodo Di é responsável pela atuação da malha de corrente no conversor. Como esta
malha tem como função a limitação da corrente na entrada, enquanto a corrente de entrada
for menor que a referência estabelecida quem atua é a malha de tensão. Uma vez que a
corrente de entrada alcance o valor estipulado, a tensão de saída do compensador de
corrente começa a cair até que fique abaixo da tensão de saída do compensador de tensão.
Neste momento quem impõe a razão cíclica é a malha de corrente estando a saída do
compensador de tensão igual à tensão de saída do compensador de corrente mais a queda
de tensão em Di.
Os sinais de comando para o conversor são obtidos nos pinos 11 e 14 do SG3525A,
entretanto devido ao fato de estarem numa massa diferente da do interruptor e também
devido ao calibre deste, é necessário um circuito para adaptação da referência de comando,
com um ganho de corrente considerável para um acionamento eficaz do interruptor.
A adaptação de referência é realizada pelos optoacopladores HP2211, os resistores
R3 e R4 possuem valores tais de forma a polarizá-los adequadamente. O ganho de corrente
é realizado por dois transistores BJT na configuração totem-pole (para cada interruptor),
sendo Q1 e Q3 NPN e Q2 e Q4 PNP, especificados, respectivamente, pelos transistores
BD135 e BD136.
A entrada em condução dos interruptores principais é realizada através de um resistor
de 22 Ω, já o bloqueio é realizado através de um diodo 1N4148 colocado em anti-paralelo
ao resistor de gatilho de forma a garantir rápido bloqueio, já que a capacitância de entrada
do interruptor utilizado é muito alta.
4.3 INVERSOR FULL-BRIDGE PWM SENOIDAL
Ao contrário do dimensionamento analítico feito para o conversor Push-Pull, nesta
seção serão utilizados os recursos oferecidos pela simulação para o dimensionamento de
esforços, como a corrente eficaz nos interruptores.
Na estrutura de potência do inversor Full-Bridge, ao contrário do conversor Push-
Pull, há pouco a se dimensionar, reduzindo-se aos interruptores e ao filtro de saída.
4.3.1 FILTRO LC
O filtro LC é projetado seguindo o roteiro exposto em [10], considerando-se a
operação em regime permanente com uma carga resistiva equivalente. A corrente eficaz da

Douglas Pereira da Silva, M. Eng.
134
carga, no caso o compressor, com a estratégia de partida proposta é de acordo com a seção
3.2.2.2 de 2,4 A. As expressões apresentadas nas eq. (4.89) e (4.90) definem o projeto do
filtro.
Ω=== 17,54A4,2V130
_
__
efout
efouteqout I
VR (4.89)
kHz 220
kHz20.2202
0 === sff (4.90)
Na modulação a três níveis a freqüência na entrada do filtro é o dobro da freqüência
de comutação, sendo assim determinou-se como freqüência de corte do mesmo uma
freqüência igual a fs/10, de forma a se garantir menor distorção harmônica da tensão de
saída.
Definindo-se o coeficiente de amortecimento do filtro (ξ) igual a 1, tem-se que as
expressões que determinam os valores da capacitância e da indutância, são,
respectivamente, apresentados nas eq. (4.91) e (4.92).
F 73,0Ω17,54.1.kHz2.4
14
1
_0
µπξπ
===eqout
f RfC (4.91)
( ) ( )mH 67,8
µF73,0kHz2.21
21
220
===ππ f
f CfL (4.92)
Em [10] é discutida a influência destes elementos reativos na regulação, sobretudo,
do indutor que tem forte influência na regulação de linha da carga. Tomando-se, portanto,
como partida os valores obtidos nas eq. (4.89) e (4.90), através de simulações, definiu-se
valores mais adequados para a carga que se deseja alimentar.
Os valores obtidos por simulação, portanto são apresentados na Tabela 4.9.
Tabela 4.9 – Valores dos elementos do filtro LC obtidos por simulação.
Indutor de filtragem Capacitor de filtragem
1,6 mH 4 µF

Douglas Pereira da Silva, M. Eng.
135
4.3.2 PROJETO DO INDUTOR DE FILTRAGEM
A principal componente da indução magnética no indutor em questão é referente à
componente fundamental da corrente que passa por ele. Entretanto a ondulação na
freqüência de comutação não é negligível, não permitindo o projeto com lâminas de ferro-
silício que possuem densidade de fluxo de saturação mais elevada, resultando num indutor
de menor volume. Essa ondulação provocaria perdas elevadas por correntes de Foucault
em um núcleo com baixa resistividade elétrica.
As especificações para o cálculo deste indutor são as mesmas do indutor de filtragem
do conversor Push-Pull e são reapresentadas na Tabela 4.10.
Tabela 4.10 – Especificações básicas para projeto do indutor de filtragem do inversor.
Parâmetro Valor
Densidade de fluxo máxima 0,3 T
Densidade de corrente máxima 450 A/cm2
Fator de utilização 0,75
4.3.2.1 CÁLCULO DO PRODUTO DE ÁREAS
O núcleo deste indutor, assim como o do indutor do filtro do conversor Push-Pull,
também é calculado pelo produto de áreas.
Apesar da ondulação no indutor não ser desprezível, por exemplo, na consideração
de perdas no núcleo, ela pode ser negligenciada para simplificação do cálculo da corrente
circulante pelo indutor. Baseado nesta hipótese o valor da corrente de pico no indutor é
considerado igual ao da carga. Retornando à seção 3.2.2.2, na qual está apresentado o
ensaio com subtensão e capacitor de partida, a corrente eficaz na carga é igual a 2,4 A.
Sendo assim, a eq. (4.93) e (4.94) expressam, respectivamente, a corrente de pico e o
produto de áreas para este indutor.
A 40,3A4,2.22 __ === efLfpicoLf II (4.93)
( ) 4
cmA
2
maxmax
2_ cm 29,1
450.T3,0.75,0.2A40,3.mH6,1
2 2
===JBK
ILAA
w
pinfwe (4.94)

Douglas Pereira da Silva, M. Eng.
136
O núcleo selecionado, de acordo com a eq. (4.94), é o EC41 – IP12 da Thornton cujo
produto de áreas real é igual a 1,41 cm4.
4.3.2.2 CÁLCULO DO NÚMERO DE ESPIRAS, DO ENTREFERRO E DA BITOLA DO CONDUTOR
Com o núcleo selecionado, o número de espiras do indutor é calculado pela eq.
(4.95) e o entreferro mecânico por (4.96).
173cm44,2.T3,0
A40,3.mH6,12
20_42max
_ ===e
pinfesp AB
ILN (4.95)
mm 23,1mH6,1104173
21
21
2lg m
H72410
2
====−πµδ
f
eesp
LAN
(4.96)
Para o cálculo da bitola do condutor, considerar-se-á apenas a componente de baixa
freqüência da corrente no indutor, de forma a satisfazer o critério de densidade de corrente
máxima.
Novamente fazem-se aqui considerações de ordem térmica, ressaltando-se que a
partida é apenas um instante de funcionamento do sistema se levado em conta as
constantes de tempo térmicas. Dessa forma, a bitola do condutor será dimensionada para o
funcionamento em regime permanente.
Tendo-se que em regime permanente a potência drenada pelo refrigerador é de
aproximados 125 VA e que a tensão eficaz nominal no refrigerador é de 220 V, a eq. (4.97)
define a máxima seção do condutor para tais condições.
2
cmA
max_
cm 0013,0450.V220VA125
2
===JV
PS
efout
outcm (4.97)
De acordo com a eq. (4.95), o valor adotado para a bitola do indutor é o 25 AWG.
4.3.3 DIMENSIONAMENTO DOS ESFORÇOS NOS INTERRUPTORES PRINCIPAIS
A determinação das correntes de pico, média e eficaz nos interruptores foi realizada
por simulação, considerando-se o momento da partida, e são apresentadas na Tabela 4.11.
Pelo fato de se diminuir o valor da indutância (com respectivo aumento da
capacitância) em favorecimento da regulação de linha na carga, permitiu-se uma maior
ondulação da corrente na freqüência de comutação.

Douglas Pereira da Silva, M. Eng.
137
Não sendo esta ondulação desprezível, métodos analíticos de cálculo tornam-se
complexos, sobretudo quando existem diversas configurações topológicas da estrutura,
justificando-se, portanto, a determinação por simulação.
Tabela 4.11 – Esforços de corrente nos interruptores principais do inversor.
Parâmetro Valor
Corrente de pico (dreno-fonte) 3,60 A
Corrente média (dreno-fonte) 0,74 A
Corrente eficaz (dreno-fonte) 1,32 A
Corrente de pico (diodo intrínseco) 3,60 A
Corrente média (diodo intrínseco) 0,20 A
Corrente eficaz (diodo intrínseco) 0,65 A
Os esforços de tensão nos interruptores principais do inversor restringem-se às
tensões de pico nestes elementos. Apesar das diversas configurações topológicas formadas,
a tensão sobre o interruptor no inversor em questão será sempre a tensão de entrada que é
de 400 V acrescida da ondulação, podendo chegar a 405 V.
4.3.4 ESPECIFICAÇÃO DOS INTERRUPTORES PRINCIPAIS
Visando novamente a redução das perdas nestes elementos, a especificação destes foi
realizada visando aplicar-se interruptores com baixa resistência de condução. Pela
disponibilidade, o componente especificado é o apresentado na Tabela 4.12.
Tabela 4.12 – Especificação dos interruptores principais do inversor.
Parâmetro Valor
Tipo / Modelo do interruptor MOSFET / IRFP460
Fabricante International Rectifier
Corrente média @ 100 ºC 12 A
Tensão de bloqueio 500 V
Resistência de condução @ 100 ºC 0,38 Ω
Resistência térmica junção-cápsula 0,50 ºC/W

Douglas Pereira da Silva, M. Eng.
138
4.3.5 CAPACITORES DE GRAMPEAMENTO
Como já discutido na seção 4.2.11, tratando-se dos circuitos de ajuda à comutação do
conversor Push-Pull, sabe-se que elementos parasitas no circuito de potência influenciam
no funcionamento e, sobretudo, na comutação. Um dos fenômenos mais comuns, e também
já discutido, é a sobretensão nos interruptores devido ao armazenamento de energia nas
indutâncias parasitas.
Há circuitos de auxílio à comutação eficazes para inversores, desde os grampeadores
RCD semi-regenerativos até snubbers e grampeadores ativos.
Para o inversor em questão obteve-se resultados muito bons utilizando-se apenas dois
capacitores, um para cada braço, grampeando a tensão sobre dois interruptores ao mesmo
tempo. Foram utilizados capacitores de polipropileno de 0,68 µF / 630 V.
4.3.6 CIRCUITO DE COMANDO E GERAÇÃO DE SINAIS
O circuito de geração dos sinais de comando do inversor Full-Bridge PWM senoidal
a três níveis é realizado inteiramente com amplificadores operacionais e comparadores de
tensão.
Na Fig. 3.27 foi apresentado o esquema de geração dos sinais de comando dos
interruptores do inversor para a modulação a três níveis, sendo necessária a geração de dois
sinais senoidais de freqüência igual a 60 Hz defasados de 180º entre si. Um sinal triangular
na freqüência de comutação desejada também se faz necessário.
Dessa forma, para a geração destes sinais foram empregados circuitos osciladores
bem conhecidos na eletrônica, cujo estudo do funcionamento não é escopo deste texto.
Estes circuitos, bem como a estrutura completa implementada é apresentada na Fig. 4.17.

Douglas Pereira da Silva, M. Eng.
139
Lf
1,6mH
1 2
S2IRFP460
S4IRFP460
Cf
4uF
S3IRFP460
S1IRFP460
Compressor
Cg1
+Vcc
LM311
7
2
3 1
84
DDR05
+
-
VS1
-Vcc
1
R12
LM311
7
2
3 1
84
+
-
2
R15
3
-Vcc
1
R13
R14
+Vcc
R16
VS2
R11
MODULADORES PWM DRIVERS ISOLADOS
R17
R18
INVERSOR CMOS
CD40106
CD40106
U6
U7
U8
U8
DDR05VS3
VS4R17
R18
2
+Vcc
D1
R6
R5
-Vcc
LF351
3
2
7
46
+
-
R10
LF351
3
2
7
4 6
+
-
-Vcc
+Vcc
C2
-Vcc
D2
+VccC3
R8
R9
LF351
3
2
7
4 6
+
-
3
OSCILADOR SENOIDALBUFFER AMP. INVERSOR
R7U1 U2 U3
R2
-Vcc
LF351
3
2
7
46
1
5+
-
R1+Vcc
C1
LF351
3
2
7
4 6
+
-
-Vcc
1
R4
+Vcc
R3
1k
OSCILADOR TRIANGULAR
U4 U5
Cg2
Fig. 4.17 – Esquemático completo do inversor Full-Bridge PWM Senoidal implementado.
O sinal triangular é definido por duas grandezas, valor de pico e freqüência que, de
acordo com os elementos apresentados na Fig. 4.17, são expressos pelas eq. (4.98) e (4.99).
CCT VRRV
2
1= (4.98)
141
2
41CRR
Rfs = (4.99)
O oscilador senoidal apresentado na Fig. 4.17 é composto pelo oscilador em ponte de
Wien estabilizado pelos diodos D1 e D2. O circuito começa a oscilar quando a relação entre

Douglas Pereira da Silva, M. Eng.
140
a resistência de realimentação e a resistência da entrada inversora é maior do que dois.
Dessa forma, ajustando o potenciômetro R8 coloca-se o circuito em oscilação e ajusta-se a
amplitude do sinal senoidal.
Um buffer torna-se necessário para isolar o oscilador, pois se trata de um circuito
muito sensível à variação de parâmetros e ruído. O amplificador inversor tem a função de
inverter o sinal senoidal pelos motivos já explicados na seção 3.3.2.5.
Os moduladores PWM constituem-se de comparadores com histerese, comparando
os sinais senoidais com o sinal triangular de forma a gerar os pulsos de comando com
razão cíclica senoidal. Os resistores R11 e R12, para um modulador, e R14 e R15, para o
outro, são responsáveis pela histerese de aproximadamente 100 mV de forma a evitar
disparos espúrios por ruído. A banda de histerese é definida, para um dos moduladores,
pela eq. (4.98).
+−+ =−= SATTHTH VRRVV
12
11 (4.100)
Os limiares positivos e negativos da banda de histerese são iguais devido à
alimentação simétrica. VSAT é o valor da tensão de saturação do amplificador operacional
que normalmente está um pouco abaixo do valor de alimentação do mesmo.
O comando foi realizado, em caráter experimental, através de drivers para
acionamento de IGBTs produzidos no INEP cuja denominação é DDR05. Cada driver
aciona um braço do inversor, possuindo, portanto, duas saídas isoladas. Foram utilizados,
evidentemente, dois destes drivers.
Assim como no caso do conversor Push-Pull, o comando para a entrada em condução
do interruptor se dá por resistores de gatilho, já o bloqueio é feito através de diodos. Os
diodos utilizados foram os tradicionais diodos de sinal 1N4148.
4.4 SIMULAÇÕES
Esta seção apresenta simulações tanto de cada um dos conversores abordados neste
capítulo isolados quanto interligados. O objetivo é verificar o funcionamento das estruturas
estudadas, tanto dos estágios de potência quanto das malhas de controle, e verificar a

Douglas Pereira da Silva, M. Eng.
141
validade das hipóteses simplificativas e modelos utilizados no projeto dos diversos
elementos de cada um dos conversores.
4.4.1 CONVERSOR PUSH-PULL ALIMENTANDO CARGA RESISTIVA COM ‘SNUBBER’
NOS INTERRUPTORES
Esta simulação visa verificar o comportamento do circuito snubber para uma
corrente de entrada compatível com a corrente drenada no momento da partida,
considerando-se a indutância de dispersão do transformador. Para tanto são consideradas a
tensão de saída na partida de 250 V e uma resistência de carga tal que se processe 350 W.
O circuito simulado é apresentado na Fig. 4.18.
V1
28.8V R30.5
R7
0.02
L3
35.7m
51.4u
V3 TD = 20uTF = 20nPW = 8.5uPER = 40uV1 = 0TR = 20nV2 = 15
0+-
+-S1
C1600u
D13
MUR460
R534
D6
D1
D12MUR460
0
D2
L2
51.4u
L5
39mH1 2L4
1u R1178
C368n
D8
D7
R434
R2100megL6 1u
V2
TD = 0TF = 20nPW = 8.5uPER = 40uV1 = 0TR = 20nV2 = 15
D4
+-+-
S2
D5
R6
0.02
C268n
D3
K K1
COUPLING = 1
K_Linear
Fig. 4.18 – Circuito simulado: Conversor Push-Pull alimentando carga resistiva com
snubber nos interruptores.
Para o circuito em questão, o que é representativo é a tensão e corrente em um dos
interruptores principais. Estas duas formas de onda são apresentadas na Fig. 4.19. Verifica-
se que os picos de tensão no interruptor superam os 100 V de tensão de bloqueio do
interruptor especificado, o que levou a implementar-se na prática, inicialmente,
interruptores com tensão de bloqueio de 200 V.
Todavia, na prática estes picos de mais de 100 V não ocorreram, havendo, dessa
forma, a implementação efetiva com interruptores de tensão de bloqueio de 100 V.

Douglas Pereira da Silva, M. Eng.
142
Tempo13.020ms 13.040ms 13.060ms 13.080ms
V(S1)
I(S1)
0
40
80
120
160
Fig. 4.19 – Tensão e corrente em um dos interruptores do conversor Push-Pull alimentando
carga resistiva, com indutância de dispersão do transformador e circuito snubber.
4.4.2 CONVERSOR PUSH-PULL ALIMENTANDO CARGA RESISTIVA COM
GRAMPEADOR NOS DIODOS RETIFICADORES
Neste caso deseja-se avaliar o desempenho do grampeador dos diodos retificadores
do estágio de saída. A situação mais desfavorável para tal é o caso onde a tensão de entrada
é máxima e o conversor opera no regime permanente com tensão nominal. O circuito
simulado para esta situação é apresentado na Fig. 4.20.
D21MUR8100
0
D2 L6
1u1 2
V3 TD = 20uTF = 20nPW = 11.15uPER = 40uV1 = 0TR = 20nV2 = 15
V1
28.8V C415n
D19MUR8100
D3
R30.5
R6
30k
V2TD = 0TF = 20nPW = 11.15uPER = 40uV1 = 0TR = 20nV2 = 15
D20MUR8100
K K1
COUPLING = 1K_Linear
L335.7m
1
2
D22MUR8100
L5 39mH1 2
L151.4u
1
2
C1600u
+-+-
S2
D1
0
L251.4u
1
2 R2100meg
D18MUR1100 R1
1k
L4
1u1 2
D4
+-+-S1
Fig. 4.20 – Circuito simulado: Conversor Push-Pull alimentando carga resistiva com
grampeamento nos diodos retificadores do estágio de saída.
As formas de onda relevantes nesta simulação são a tensão em um dos diodos do
estágio de saída e a tensão no capacitor de grampeamento. Estas formas de onda estão
apresentadas na Fig. 4.21.

Douglas Pereira da Silva, M. Eng.
143
Tempo38.540ms 38.560ms 38.580ms 38.600ms 38.620ms
V(Dr1)
V(Dg)
0V
200V
400V
600V
800V
Fig. 4.21 – Tensão em um dos diodos retificadores e no capacitor de grampeamento do
conversor Push-Pull alimentando carga resistiva.
Nota-se o bom desempenho do circuito grampeador em simulação, grampeando
efetivamente a oscilação que ocorre no instante do bloqueio dos diodos. Esta oscilação é
devida à interação entre a capacitância de junção e as indutâncias parasitas, neste caso, a
dispersão do transformador. Na prática também se verificou o bom desempenho deste
circuito, como se pode verificar no Capítulo 5.
4.4.3 CONVERSOR PUSH-PULL ALIMENTANDO CARGA RESISTIVA COM CONTROLE
DA TENSÃO DE SAÍDA
Nesta seção são apresentados os resultados de simulação do conversor Push-Pull
operando com carga resistiva e submetido a degraus de carga do tipo entrada e rejeição,
quando operando com tensão nominal.
A situação em que são aplicados os degraus de carga não são situações normais de
operação, já que a operação usual com o refrigerador não é o processamento da potência
nominal na tensão nominal, contudo é uma situação ilustrativa para verificação do
desempenho da malha de controle de tensão.
O circuito simulado é apresentado na Fig. 4.22.

Douglas Pereira da Silva, M. Eng.
144
D8
L5
45mH1 2
R111.2915k
D7
R17
1m
D20
0
D4
U6
60m1 2
I
V2
21
0K K1
COUPLING = 1K_Linear
C1600u
S1
R14
1
D6
R58k
D5
R6
1m
-++-
E1
E
R18
1m
R19
1m
L335.7m
1
2
VCC_BAR
L151.4u
1
2
R9500
D3
+-+-S1
+-+-
S2
R210meg
D1
R30.5
S2
L2
51.4u
1
2
R151
R10100k
0
R13
1
15V
Cc333n
S2
C2100p
R12
1
Vc315
Rc6
1k
Rc9
1kVCC_BAR
Rc131.2meg
SG152515
12
16
1114
13
4
8
53
6
7
VIN
ERR-ERR+
VREF
GND
COMP
SHUT
OUTAOUTB
COSC
START
CTSYNC
RT
DIS
Rc4
4.7k
S1
Cc22.2n
0Rc12
15k
0
Fig. 4.22 – Circuito simulado: Conversor Push-Pull alimentando carga resistiva com
controle da tensão de saída.
A primeira situação simulada foi uma entrada de carga de 20 W para 340 W. Como
não há malha de corrente, a função do compensador é compensar a perturbação e manter a
tensão de saída em seu valor nominal. A Fig. 4.23 apresenta os resultados obtidos com o
compensador prático utilizado.
Tempo50ms 55ms 60ms 65ms 70ms 75ms 80ms
Vout
400V
401V
402VVcomp0V
2.0V
4.0VIout0A
0.5A
1.0A
(a)
(b)
(c)
Fig 4.23 – (a) Corrente na carga, (b) sinal de erro compensado e (c) tensão de saída para
entrada de carga de 20 W para 340 W.

Douglas Pereira da Silva, M. Eng.
145
A segunda situação simulada é a inversa, ou seja, uma rejeição de carga de 340 W
para 20 W. Os resultados obtidos são apresentados na Fig. 4.24.
Time55ms 60ms 65ms 70ms 75ms 80ms 85ms 90ms 95ms
Vout
401V
402V
403VVcomp
2.0V
3.0V
Iout0A
0.5A
1.0A
(a)
(b)
(c)
Fig 4.24 – (a) Corrente na carga, (b) sinal de erro compensado e (c) tensão de saída para
rejeição de carga de 340 W para 20 W.
Verifica-se tanto na Fig. 4.23 quanto na Fig. 4.24 o bom comportamento do
conversor frente às perturbações aplicadas. A atuação do compensador não é tão rápida já
que a planta é naturalmente lenta, sobretudo na rejeição de carga, que é uma situação mais
crítica para o controle.
Outro fator é o capacitor de filtragem na realimentação do compensador que diminui
um pouco a resposta dinâmica deste, porém, a resposta é satisfatória, não havendo grande
sobressinal nem grande tempo de acomodação.
4.4.4 CONVERSOR PUSH-PULL ALIMENTANDO CARGA RESISTIVA COM CONTROLE
DA TENSÃO DE SAÍDA E DA CORRENTE DE ENTRADA
O objetivo desta simulação é verificar o comportamento da malha de corrente numa
situação que representa a passagem da partida para o regime permanente.
Como os parâmetros do compressor mudam com a velocidade de rotação e com a
tensão terminal, a dinâmica apresentada aqui não será a mesma do compressor. Entretanto,
pode-se verificar satisfatoriamente a atuação da malha de corrente, limitando o valor médio
desta na entrada em 18 A (valor estipulado para a simulação que é o valor implementado

Douglas Pereira da Silva, M. Eng.
146
na prática) durante a partida e levando a tensão de saída, com carga em corrente constante,
até a tensão nominal após a desconexão do enrolamento auxiliar do compressor.
O circuito simulado para ambas situações é apresentado na Fig. 4.25.
SG152515
12
16
11
14
134
8
536
7
VIN
ERR-ERR+
VREF
GND
COMP
SHUT
OUTAOUTB
COSC
START
CTSYNC
RT
DIS
0
Rc131.2meg
S2
Rc12
15k
D8
R18
1m
0
L5
39m1 2
R10100k
Iin
Rc6
C3100p
0 D6
K K1
COUPLING = 1K_Linear
Cc22.2n
D1
Dbreak
D18
Vc315
R7
120kS1
R12
1
R17
1m
5.1
0
R14
1
R151
V315V 0
D7C1600u
D4
0
0
I
U4LF411
3
2
7
4
61
5+
-
V+
V-OUT
B1
B2
0
R6
1m
D5
I
S2
+-+-
S2
R16
120k
L151.4u
1
2
R9210
VCC_BAR
+-+S1
0
Rc4
4.7k
0
R1
6.8k
8m1 2
V11.5V
VCC_BAR
0
1m
C22.2n
R51kL2
51.4u
1
2
R111.29k
Iin
1k
R30.5
0-++-
E2
E
V2
21
C4
100p
V415V
15V
0
Cc3 33n
D2
R8
10k
S1
D3
-++-
E1
E
L335.7m
1
2
1
+-H1H
R210meg
Fig. 4.25 – Circuito simulado: Conversor Push-Pull alimentando carga resistiva com
controle da tensão de saída e da corrente de entrada.
A Fig. 4.26 mostra as formas de onda relevantes obtidas com esta simulação.
Tempo0s 20ms 40ms 60ms 80ms 100ms 120ms 140ms 160ms
Vout
250V
313V
375V
Vcomp
Vcomp_i
0V
2.5V
5.0V
Iout
V_Iin
0
1.0
2.0
(a)
(b)
(c)
Fig. 4.26 – (a) Corrente de saída e imagem da corrente média de entrada; (b) sinal de erro
compensado de tensão e corrente; (c) tensão de saída.

Douglas Pereira da Silva, M. Eng.
147
Observa-se pela Fig. 4.26 que o sinal do sensor filtrado (representado por VIin), que é
a imagem da corrente média de entrada, é mantido constante e igual à referência durante a
partida e também durante toda a carga do capacitor de saída. Em todo este intervalo pode-
se ver que o sinal de erro compensado de corrente (Vcomp_i) é quem controla a dinâmica do
sistema, estando o sinal de erro de tensão (Vcomp) seguindo o de corrente.
Após o alcance da tensão nominal, a corrente média começa a cair,
conseqüentemente o sinal de erro de corrente compensado aumenta, passando a atuar a
malha de tensão, regulando a tensão de saída em 400 V.
Na Fig. 4.27 é apresentada uma forma de onda correspondente à potência média de
entrada em função do tempo. Pode-se verificar nesta figura que a potência média se
manteve constante durante a partida e todo o processo de carga do capacitor de saída,
validando o sistema de controle empregado.
Tempo
0s 20ms 40ms 60ms 80ms 100ms 120ms 140ms 160ms
Pin_med
250W
375W
140W
Fig. 4.27 – Potência média de entrada durante partida e passagem para regime permanente.
4.4.5 INVERSOR FULL-BRIDGE PWM SENOIDAL ALIMENTANDO REFRIGERADOR
NA PARTIDA
Nesta simulação deseja-se verificar o comportamento da estrutura do inversor na
partida do compressor. O inversor é alimentado por uma fonte CC ideal e a carga é o
modelo do compressor na partida, com capacitor no enrolamento auxiliar, derivado no
Capítulo 02. O circuito simulado é apresentado na Fig. 4.28.

Douglas Pereira da Silva, M. Eng.
148
2222
V3260 VAC1
0
K K1
COUPLING = 1K_Linear
0
L3
189mVAC2
DbreakD7
R5
1mDbreakD2
S3
15
-15
R2
76.1
22
0 R1
1k
S3-+
+-
E4
E
S4-++-
E1
E
0
0
S4
DbreakD3
C14u
0
S1
R4
71.3
+-
+-
S3
VAC1
+-
+-
S1
DbreakD4
-++-
E5
E
+-
+-
S2S2
-++-
E3
E
DbreakD8
V1
FREQ = 60VAMPL = 7.8VOFF = 0
0
-++-
E6
E
-1
DbreakD5
0
0
L2
63.6m0
VAC2
V2
TD = 0TF = 25uPW = 0.001uPER = 50uV1 = -10TR = 25uV2 = 10
15
-15
V2A
TD = 0TF = 25uPW = 0.001uPER = 50uV1 = -10TR = 25uV2 = 10
V1A
FREQ = 60VAMPL = 7.8VOFF = 0
L1
1.6m1 2
DbreakD1
-++-
E1A
E
DbreakD6
0
-1
0
22
0
C2
45u
S1
0
+-
+-
S4
S2
0
R1A
1k
Fig. 4.28 – Circuito simulado: Inversor Full-Bridge PWM senoidal alimentando
compressor na partida.
A Fig. 4.29 apresenta as formas de onda tensão e corrente na carga, e tensão na carga
versus corrente no indutor.
Tempo0s 10ms 20ms 30ms 40ms 50ms 60ms 70ms 80ms
Vout/20
I(Lf)
-10
0
10
Vout/20
Iout
-10
0
10
(a)
(b)
Fig. 4.29 – (a) Tensão e corrente no compressor, (b) tensão no compressor e corrente no
indutor de filtragem.
Verifica-se que a ondulação de corrente no indutor não é muito grande, valendo
portanto a hipótese adotada no cálculo da corrente eficaz no indutor. Nota-se também que a
forma de onda de tensão é de boa qualidade com TDH de 1,18%. O espectro harmônico da
forma de onda de tensão é apresentado na Fig. 4.30.

Douglas Pereira da Silva, M. Eng.
149
Espectro harmônico da tensão de saída
0,00%
0,10%
0,20%
0,30%
0,40%
0,50%
0,60%
2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30
Ordem da harmônica (60 Hz)
Con
trib
uiçã
o pe
rcen
tual
Fig. 4.30 – Espectro harmônico da tensão de saída obtido por simulação.
Na Fig 4.31 é apresentada a corrente num dos interruptores do inversor. Para uma
visualização didática, a corrente que circula no sentido dreno-fonte é mostrada num gráfico
e a corrente que circula pelo diodo em anti-paralelo é mostrada no outro gráfico.
Esta figura mostra claramente a necessidade de bidirecionalidade do interruptor nesta
estrutura. O MOSFET já é bidirecional naturalmente devido ao diodo intrínseco, contudo
se fossem empregados IGBTs discretos, obrigatoriamente deveriam ser adicionados estes
diodos.
Tempo0s 4.0ms 8.0ms 12.0ms 16.0ms 20.0ms 24.0ms 28.0ms 32.0ms
-I(D1)
-3.0A
-2.0A
-1.0A
0AI(S1)
0A
2.0A
4.0A
(a)
(b)
Fig. 4.31 – (a) Corrente no interruptor no sentido dreno-fonte e (b) pelo diodo intrínseco.
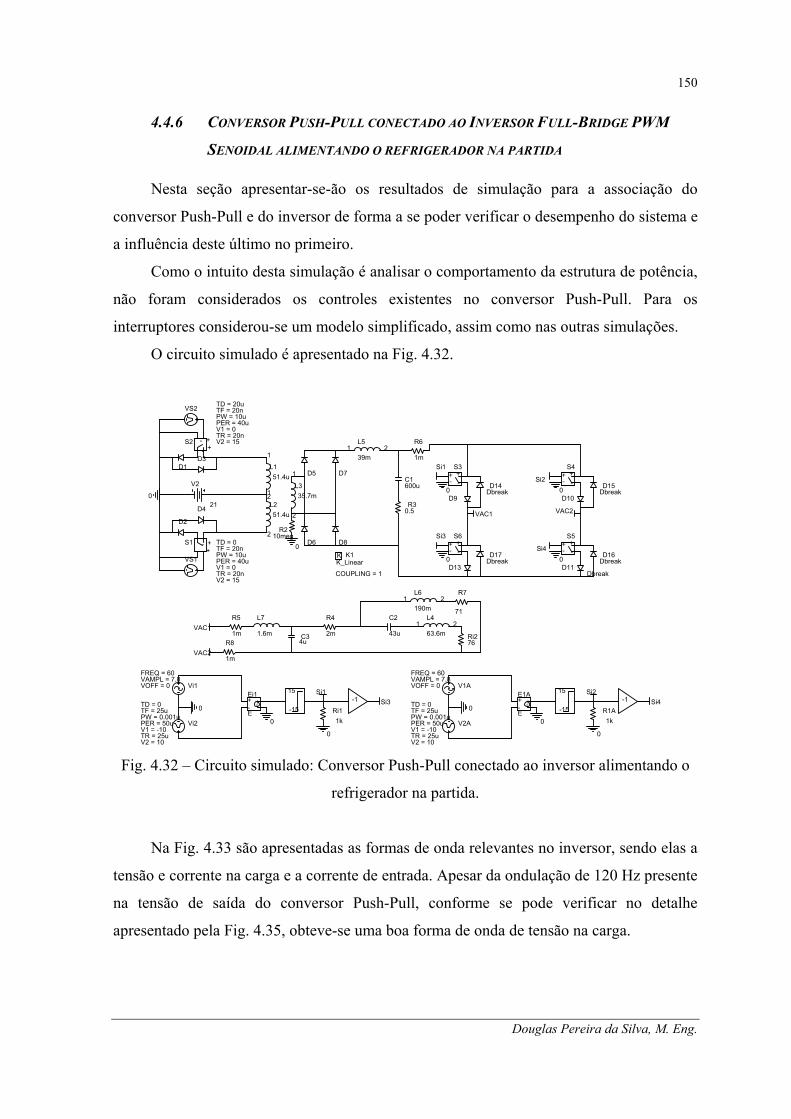
Douglas Pereira da Silva, M. Eng.
150
4.4.6 CONVERSOR PUSH-PULL CONECTADO AO INVERSOR FULL-BRIDGE PWM
SENOIDAL ALIMENTANDO O REFRIGERADOR NA PARTIDA
Nesta seção apresentar-se-ão os resultados de simulação para a associação do
conversor Push-Pull e do inversor de forma a se poder verificar o desempenho do sistema e
a influência deste último no primeiro.
Como o intuito desta simulação é analisar o comportamento da estrutura de potência,
não foram considerados os controles existentes no conversor Push-Pull. Para os
interruptores considerou-se um modelo simplificado, assim como nas outras simulações.
O circuito simulado é apresentado na Fig. 4.32.
Si4
C2
43u
Si3
0 V2A
TD = 0TF = 25uPW = 0.001uPER = 50uV1 = -10TR = 25uV2 = 10
Si2
VAC2
0
Si1
R1A1k
D2
+-
+-
S3
0 DbreakD15
0
+-
+-
S5
DbreakD16
R4
2m
D7
R7
71
D5
R8
1m
L151.4u
1
2
Ri11k
Si1
VAC2
Si4
Vi1
FREQ = 60VAMPL = 7.8VOFF = 0
Si3
0
C34u
+-
+-
S6
-++-
E1A
E
0
15
-15
D10
-1
DbreakD11
L251.4u
1
2D6
+-
+-
S4D3
0
DbreakD14
D13
VAC1
Si2
L4
63.6m1 2
D8
-++-
Ei1
E
D9
0
V2
21
R6
1m
0
VS2 TD = 20uTF = 20nPW = 10uPER = 40uV1 = 0TR = 20nV2 = 15
D4VAC1
0
0
C1600u
+-+-S1
L7
1.6m
15
-15
+-+-
S2
-1
L335.7m
1
2
Vi2
TD = 0TF = 25uPW = 0.001uPER = 50uV1 = -10TR = 25uV2 = 10
VS1
TD = 0TF = 20nPW = 10uPER = 40uV1 = 0TR = 20nV2 = 15
D1
Ri276
DbreakD17
L6
190m1 2
L5
39m1 2
0
R210meg
R5
1m
K K1
COUPLING = 1K_Linear
R30.5
V1A
FREQ = 60VAMPL = 7.8VOFF = 0
Fig. 4.32 – Circuito simulado: Conversor Push-Pull conectado ao inversor alimentando o
refrigerador na partida.
Na Fig. 4.33 são apresentadas as formas de onda relevantes no inversor, sendo elas a
tensão e corrente na carga e a corrente de entrada. Apesar da ondulação de 120 Hz presente
na tensão de saída do conversor Push-Pull, conforme se pode verificar no detalhe
apresentado pela Fig. 4.35, obteve-se uma boa forma de onda de tensão na carga.

Douglas Pereira da Silva, M. Eng.
151
Tempo0s 10ms 20ms 30ms 40ms 50ms 60ms 70ms 80ms
Iin
0A
2.5A
5.0A
Vout/20
Iout
-10
-5
0
5
10
(a)
(b)
Fig. 4.33 – (a) Tensão e corrente no compressor (b) corrente na entrada do inversor na
partida.
O espectro de harmônico da tensão no compressor nestas condições é apresentado na
Fig. 4.34, comprovando a qualidade da tensão de saída com TDH de 1,34%.
Espectro harmônico da tensão de saída
0,00%0,10%0,20%0,30%0,40%0,50%0,60%0,70%0,80%0,90%
2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30
Ordem da harmônica (60 Hz)
Con
trib
uiçã
o pe
rcen
tual
Fig. 4.34 – Espectro harmônico da tensão de saída obtido por simulação para os
conversores acoplados.
Na Fig. 4.35 estão apresentadas as formas de onda de tensão de saída, corrente no
indutor e corrente em um dos interruptores do conversor Push-Pull, evidenciando
claramente a influência do inversor.
Contudo, deve-se remarcar que a simulação em questão foi realizada em malha
aberta. Na realidade, devido ao controle da corrente média de entrada durante a partida não

Douglas Pereira da Silva, M. Eng.
152
há ondulação de 120 Hz sobre o indutor como indicado na Fig. 4.35, e como já citado ao
longo deste capítulo, esta ondulação ocorre somente em regime, quando quem é atuante é a
malha de controle de tensão.
Tempo30ms 40ms 50ms 60ms 70ms 80ms
I(S1)
0A
25A
50AI(Lout)1.00A
1.25A
1.50AVout245V
250V
255V
260V
(a)
(b)
(c)
Fig. 4.35 – (a) Detalhe da ondulação em 120 Hz na (a) tensão de saída, (b) corrente no
indutor e (c) corrente no interruptor do conversor Push-Pull.
Na Fig. 4.36 são apresentados detalhes das comutações dos dois conversores
interconectados em um determinado instante de tempo, sem levar em consideração as não-
idealidades, de forma a ilustrar o funcionamento individual de cada um e evidenciar que
operam com freqüências de comutação diferentes.

Douglas Pereira da Silva, M. Eng.
153
Tempo52.92ms 52.94ms 52.96ms 52.98ms 53.00ms 53.02ms 53.04ms
I(S1)V(S1)
0
25
50
I(S1)*50
V(S1)
0
100
200
264
(a)
(b)
Fig. 4.36 – Tensão e corrente no (a) inversor e (b) no conversor Push-Pull para um
determinado instante onde a corrente na carga está no semiciclo positivo.
4.4.7 CONVERSOR PUSH-PULL CONECTADO AO INVERSOR FULL-BRIDGE PWM
SENOIDAL ALIMENTANDO O REFRIGERADOR NA PARTIDA COM CONTROLE DA
TENSÃO DE SAÍDA E DA CORRENTE DE ENTRADA
Na seção 4.4.4 foi apresentada a simulação evidenciando o funcionamento da malha
de controle da corrente de entrada para o conversor Push-Pull alimentando carga resistiva.
Nesta seção, apresentar-se-ão resultados obtidos por simulação do conversor Push-Pull
conectado ao inversor no instante da partida.
Neste instante e durante toda a evolução da tensão de saída do conversor Push-Pull
quem atua é a malha de corrente, conforme já apresentado na Fig. 4.25. A simulação aqui
apresentada evidencia, portanto, que a atuação da malha de corrente no sistema
interconectado leva e mantém a tensão de saída do conversor Push-Pull em 250 V (que é
equivalente a aproximados 130 V eficazes no refrigerador), tensão esta definida para a
partida do compressor.
Na Fig. 4.37 é apresentado o circuito simulado. As formas de onda de tensão na
carga, tensão de saída do conversor Push-Pull e corrente no indutor de filtragem do mesmo
são apresentadas na Fig. 4.38.

Douglas Pereira da Silva, M. Eng.
154
VCC_BAR
VAC2
0
Rc131.2meg
Si2
0
C52.2n
SG152515
12
16
11
14
13
4
8
53
6
7
VIN
ERR-ERR+
VREF
GND
COMP
SHUT
OUTAOUTB
COSC
START
CTSYNC
RT
DISS2
R8
10k
L251.4u
0
+-
+-
S3
DbreakD15
Si2
0
+-H1H
+-
+-
S4
0
15
-15
1
R210meg
VCC_BAR
R191m
Vc315
+-
+-
S6
V315V
R1
6.8k
Rab
1m
D9
R15
1
DbreakD16
0
0
D2
D6
Rc6
1k
0
Dbreak
D18
0
DbreakD11
VAC2
0
0
+-+-S1
L335.7m
-++-
Ei1
E
Cc333n
Ri11k
0
0
C2
43u
D3
I
-1
K K1
COUPLING = 1K_Linear
R111.29k
R14
1
L6
190m1 2
Si4
D8
0
Si3
U4
LF411
3
2
7
4
6
1
5+
-
V+
V-OUT
B1
B2Cc22.2n
DbreakD17
C60.1n
Si3
D1
V1A
FREQ = 60VAMPL = 7.8VOFF = 0
D4 R30.5
R17
120k
S1
Si1
Vi1
FREQ = 60VAMPL = 7.8VOFF = 0
Vc4 15V
R12
1Iin
C1
600u
-++-
E1
E
R16
120k
0
C4
330p
D7
V415V
0
0
DbreakD14
15
-15
VAC1
S2
C74u
R1A1k
R6
1mL151.4u
Ri276
+-+-
S2
R9
1m
0
Si4
-++-
E2
E
R7
71
Si1
V2
21
-1
+-
+-
S5
D13
0
L7
1.6m
D10
S1
0
R5
1m
-++-
E1A
EV2A
TD = 0TF = 25uPW = 0.001uPER = 50uV1 = -10TR = 25uV2 = 10
5.1
0
Iin
Vi2
TD = 0TF = 25uPW = 0.001uPER = 50uV1 = -10TR = 25uV2 = 10
L4
63.6m1 2
V11.5
L5
39m
VAC1
0
0
Rc12
15k
Rc4
4.7k
Rc9
1k
D5R10
100k
Fig. 4.37 – Circuito simulado: Conversor Push-Pull conectado ao inversor alimentando o
refrigerador na partida com controle da corrente de entrada e tensão de saída.
Tempo20.0ms 25.0ms 30.0ms 35.0ms 40.0ms 45.0ms 50.0ms 55.0ms
I(Lout)
1.0A
1.5A
Vout245V
250V
255V
260VVcarga
-200V
0V
200V
(a)
(b)
(c)
Fig. 4.38 – (a) Tensão de saída do inversor; (b) Detalhe da ondulação de 120 Hz na tensão
de saída do conversor Push-Pull e (c) corrente no indutor do mesmo.

Douglas Pereira da Silva, M. Eng.
155
Na seção 4.2.8 foi discutida a influência do inversor sobre o conversor Push-Pull.
Naquela ocasião apontou-se para o fato de que, com o controle da corrente de entrada, não
haveria ondulação da corrente no indutor de saída do conversor na partida, indicando que o
conversor poderia ser projetado considerando-se a hipótese simplificativa adotada, que era
a de se alimentar uma carga resistiva.
A Fig. 4.37 comprova, portanto, que não há ondulação de 120 Hz na corrente
circulante pelo indutor e que a simplificação é válida. Este fato, todavia, não era extensível
à ondulação de 120 Hz na tensão de saída, e verifica-se que mesmo com todas as malhas de
controle implementadas há necessidade de se dimensionar os capacitores para atenuar esta
ondulação.
Constata-se assim que a malha de corrente realmente é eficaz na correção da
perturbação de 120 Hz que se propaga até a entrada do conversor, inibindo dessa forma a
ondulação no indutor.
A Fig. 4.38 apresenta a corrente de entrada e o sinal de saída do sensor Hall de
corrente após o filtro, confirmando, portanto, que a corrente média de entrada se mantém
constante pela ação do controle.
Tempo28.700ms 28.720ms 28.740ms 28.760ms 28.780ms 28.800ms
V_Iin_med
1.450V
1.475V
1.500V
1.525V
1.550VIin0V
10V
20V
30V
40V
(a)
(b)
Fig. 4.38 – (a) Corrente na entrada do conversor Push-Pull e (b) sinal de saída do sensor
Hall de corrente filtrado indicando corrente média de entrada.

Douglas Pereira da Silva, M. Eng.
156
4.5 CONCLUSÃO
Este capítulo apresentou uma metodologia de projeto para o conversor CC-CC Push-
Pull e para o inversor Full-Bridge PWM Senoidal modulado a três níveis baseada na
característica da carga a ser alimentada por ambos conversores.
Algumas hipóteses simplificativas foram adotadas para os dois conversores, de forma
a facilitar o cálculo de projeto de alguns elementos. A validade destas simplificações foi
discutida durante o texto deixando claro sob que condições utilizá-las.
O projeto dos conversores foi realizado individualmente, contudo uma análise da
influência do inversor sobre o conversor Push-Pull foi realizada, revelando a necessidade
de se redimensionar o capacitor de saída deste último em função da ondulação de 120 Hz
provocada pelo funcionamento do primeiro.
O projeto de controle do conversor foi abordado minuciosamente, sobretudo da
malha de controle da tensão de saída, e pode servir de modelo não só para o conversor
Push-Pull aqui implementado, mas para tantos outros conversores CC-CC, em especial
aqueles com filtro LC de saída.
A estratégia de partida do sistema como um todo foi outro foco importante deste
capítulo, sendo a base sobre a qual foi realizado tanto o projeto do estágio de potência
como do estágio de controle.
Concluindo, as simulações verificaram a viabilidade do sistema e da estratégia de
partida, bem como confirmaram as hipóteses de projeto adotadas.

.
CAPÍTULO 5
RESULTADOS EXPERIMENTAIS
5.1 INTRODUÇÃO
Neste capítulo são apresentados os resultados experimentais do sistema proposto.
Inicialmente, são apresentados resultados do primeiro, segundo e terceiro estágios isolados
e, posteriormente, do sistema interconectado.
Para o sistema rastreador do MPP, são apresentados resultados com controle
analógico e digital, comparando-se a eficácia de cada um dos métodos. Neste sistema tem-
se maior interesse nos resultados que levam a comprovar a operação no MPP do que no
conversor propriamente dito.
Já para os outros dois estágios, há tanto interesse na alimentação da carga quanto nas
grandezas internas do próprio conversor. Para tanto foram realizados diversos ensaios para
avaliação do comportamento dos mesmos.
Perturbações também são aplicadas para verificação da atuação do controle, sendo a
partida do sistema um foco central dos resultados apresentados.
5.2 PRIMEIRO ESTÁGIO: CARREGADOR DO BANCO DE BATERIAS E
CONTROLADOR DO MPP CONVERSOR BUCK COM FILTRO DE
ENTRADA
O objetivo desta seção é apresentar e explorar os resultados relativos ao rastreamento
do ponto de máxima potência de operação do arranjo de painéis fotovoltaicos. O conversor
empregado é clássico, dessa forma preferiu-se focalizar os resultados sobre o MPP.
Dois sistemas de controle foram implementados para o rastreamento do MPP: um
analógico controlando a tensão de entrada com referência fixa e outro digital controlando a
potência de entrada.
Para o segundo sistema de rastreamento, foram realizadas aquisições das formas de
onda de tensão, corrente e potência, tanto de entrada quanto de saída, evidenciando a

Douglas Pereira da Silva, M. Eng.
158
atuação do controle. Para o sistema analógico foi realizada apenas a coleta de dados de
operação, já que suas formas de onda não eram ilustrativas, além do que este sistema
serviu apenas como modelo de comparação para o sistema digital.
5.2.1 FORMAS DE ONDA DO SISTEMA DE RASTREAMENTO DO MPP COM CONTROLE
DIGITAL DA POTÊNCIA DE ENTRADA
A Fig. 5.1 apresenta as formas de onda de tensão e corrente na entrada e na saída,
bem como o produto destas duas grandezas de forma a se verificar a potência processada.
Fig. 5.1 – Formas de onda de entrada e saída do sistema rastreador do MPP com controle
digital.
Verifica-se na Fig. 5.1 claramente que o sistema oscila em torno do ponto de máxima
potência, conforme previsto, sem nunca realmente operar sobre ele. Entretanto, como a
variação dos parâmetros é pequena a potência processada é muito próxima da máxima
potência disponível.
Como estas aquisições foram feitas em instantes diferentes, como se pode verificar
na própria figura, elas não são fonte para a estimativa de rendimento deste sistema.
Certamente houve variação na irradiação solar entre as duas aquisições, já que o
rendimento deste conversor, obtido com um método mais adequado, mostrou-se em torno
de 91%, conforme apresentado na seção 5.5.2.
Na Fig. 5.2 é apresentada uma seqüência de aquisições do sistema rastreando o MPP,
em instantes e dias diferentes, de forma a validar o controle utilizado e, mostrar a não-
necessidade de se conhecer os parâmetros do painel para colocar o sistema em
funcionamento.

Douglas Pereira da Silva, M. Eng.
159
Fig. 5.2 – Formas de onda de entrada do sistema rastreador do MPP com controle digital.
Verifica-se ao longo da seqüência apresentada na Fig. 5.2 que o sistema oscila em
torno de um ponto, sendo este o ponto de máxima potência. Pode-se notar também o efeito
da intensidade da insolação sobre os painéis, sendo a determinante da diferença de potência
em cada aquisição, apesar de o intervalo entre algumas delas ser pequeno. Percebe-se que a
tensão do MPP praticamente não variou, comprovando que a intensidade de insolação tem
como conseqüência direta a amplitude da corrente gerada.
De forma geral, uma das vantagens da utilização de sistemas digitais no controle de
processos é a flexibilidade na alteração dos parâmetros e na implementação de módulos
adicionais, tais como supervisão de operação.
Para o sistema em questão foi implementada a supervisão de sobretensão do banco
de baterias, de forma a preservá-las, já que elas são um dos pontos críticos do sistema. A
supervisão foi implementada através do monitoramento constante de sua tensão terminal.
Quando a tensão nas baterias atinge os 28,8 V, que é a tensão máxima admitida sobre
elas neste projeto, o controle inibe os pulsos de comando do conversor, interrompendo o

Douglas Pereira da Silva, M. Eng.
160
fluxo de energia dos painéis para as baterias. A partir deste instante o sistema fica apenas
monitorando a tensão de saída, até que a tensão terminal caia abaixo deste patamar, e o
conversor seja ativado novamente.
A atuação desta proteção contra sobretensão é apresentada na Fig. 5.3.
Fig. 5.3 – Atuação da proteção contra sobretensão das baterias do sistema com controle
digital.
É interessante verificar o comportamento do sistema frente à atuação da proteção
contra sobretensão. Verifica-se que a tensão na bateria flutua em torno de um valor médio
um pouco menor que o valor estipulado para a atuação, todavia a ondulação em torno deste
ponto médio é que atinge os 28,8 V.
Isto se deve à resistência interna de cada bateria, sendo a tensão terminal amostrada
igual à tensão devido ao estado de carga das baterias, acrescentada à queda de tensão sobre
esta resistência provocada pela corrente de carga. É por isso que quando a corrente é
interrompida a tensão terminal das baterias diminui.
5.2.2 COMPARAÇÃO ENTRE O SISTEMA DE RASTREAMENTO ANALÓGICO E O DIGITAL
Pode-se comparar a eficácia dos dois sistemas de controle pela razão entre a máxima
potência de entrada obtida e a máxima potência de entrada real. Algumas aquisições destes
valores foram realizadas para o confronto. Estas aquisições são apresentadas em forma de
gráfico nas Fig. 5.4.

Douglas Pereira da Silva, M. Eng.
161
Eficácia do Sistema de Controle do MPP DigitalCarga: 1 bateria de 12 V
150
155
160
165
170
175
180
185
1 2 3 4 5 6 7 8 9 10
Aquisições
Potê
ncia
de
entr
ada
[W]
Potência máxima com MPPT Potência máxima real
Eficiácia do S istem a de C o ntrole do M P P
D igital
C arga: 2 baterias de 12 V em série
150
155
160
165
170
175
180
185
190
1 2 3 4 5 6 7 8 9 10
A quisições
Potência m áxim a com M P PT Potência m áxim a real
Eficácia do sistema de controle do MPP Analógico
Carga: 2 baterias de 12 V em série
150
155
160
165
170
175
180
185
190
195
1 2 3 4 5 6 7 8 9 10 11 12
Aquisições
Potê
ncia
de
entr
ada
[W]
Potência máxima com MPPT Potência máxima real
Comparação entre os controles analógico e digital
95,50%
96,00%
96,50%
97,00%
97,50%
98,00%
98,50%
99,00%
99,50%
100,00%
100,50%
1 2 3 4 5 6 7 8 9 10
Aquisições
Eficácia do MPPT Digital - Carga de 12VEficácia do MPPT Digital - Carga de 24VEficácia do MPPT Analógico - Carga de 24V
Fig. 5.4 – Comparativo entre os sistemas de rastreamento do MPP implementados.
As amostras apresentadas nas aquisições da Fig. 5.4 foram tomadas com intervalo
médio de 5 a 10 minutos entre cada uma, e foram realizadas utilizando-se um wattímetro
digital.
Para se definir a potência máxima real, utilizou-se um resistor variável diretamente
conectado aos painéis, com o qual pôde-se verificar a máxima potência dissipada. Logo em

Douglas Pereira da Silva, M. Eng.
162
seguida o conversor rastreador era conectado e, então, verificava-se a potência por este
drenada.
Pela Fig. 5.4 pode-se constatar o desempenho do sistema de controle digital do MPP,
extraindo cerca de 99,75% da potência disponível nos módulos fotovoltaicos. O sistema de
controle analógico também teve um desempenho satisfatório, contudo cabem duas
ressalvas: a primeira é que o sistema foi ajustado poucos dias antes de se realizarem as
medidas, num dia de verão, isto significa que as condições de MPP eram semelhantes às
do momento das aquisições, explicando o ótimo desempenho; a segunda explica a derivada
positiva de eficácia em função da amostra tomada, pois as medidas foram realizadas na
parte da manhã progressivamente até próximo do meio-dia, sendo que o sistema foi
ajustado por volta de meio-dia.
Outra conclusão positiva que se pode tirar da Fig. 5.4 é que o sistema de
rastreamento do MPP, tanto analógico quanto digital (embora este resultado só esteja
apresentado para o sistema digital), não faz distinção quanto à carga, mantendo a mesma
eficácia seja para uma bateria de 12 V ou para um banco de duas baterias perfazendo 24 V.
Deve-se salientar aqui, que o sistema desenvolvido e implementado, mesmo o de
controle digital, é simples. O conversor empregado é robusto, possui apenas um interruptor
e dois diodos, e uma vez desenvolvido o programa de rastreamento, mudanças nos
parâmetros são fáceis.
Dependendo da situação é possível economizar-se módulos fotovoltaicos, que são o
componente mais caro do sistema, como se pode ver nos ganhos percentuais de potência
apresentados na Tabela 5.1.
A economia de um só módulo fotovoltaico de 50 W já supera em muitas vezes o
investimento na implantação de um sistema de rastreamento de MPP seja ele qual for.
Sendo assim, em muitos casos é recomendável sua implementação.
5.2.3 AVALIAÇÃO DO SISTEMA DE RASTREAMENTO DO MPP
Apesar do sistema de rastreamento do MPP não fazer distinção quanto ao ponto de
operação da carga alimentada, para um determinado arranjo de módulos fotovoltaicos
obtém-se diferentes ganhos de potência processada conforme a carga alimentada. Ou em
outras palavras, dependendo da carga alimentada há maior ou menor necessidade de um
sistema de rastreamento do MPP.

Douglas Pereira da Silva, M. Eng.
163
Pode-se melhor entender esta noção, a partir dos dados coletados do sistema
implementado, apresentados na Tabela 5.1, para uma determinada condição climática.
Tabela 5.1 – Ganhos obtidos com sistema de rastreamento do MPP
Carga Potência sem MPPT Potência com MPPT Ganho percentual
02 Baterias: 24 V 114,5 W 160,5 W 40,17 %
01 Bateria: 12 V 59,5 W 146 W 145,38 %
Os dados apresentados na Tabela 5.1 dizem respeito à potência de saída do conversor
rastreador do MPP, isto é, aquela que efetivamente é entregue às baterias e aos próximos
estágios, e se analisados criteriosamente fornecem valiosas informações sobre a aplicação
dos sistemas de rastreamento de MPP no carregamento de baterias.
Inicialmente, tem-se a conclusão óbvia que é o ganho de potência em maior ou
menor grau, o benefício primário que se obtém utilizando um rastreador do MPP.
Progredindo-se nesta linha de raciocínio verifica-se também que quanto maior a diferença
entre a tensão de operação da carga e a tensão do MPP, maior o ganho que se obtém.
Foi mencionado na seção 5.2.2 que o sistema de rastreamento do MPP não faz
distinção quanto ao ponto de operação da carga, drenando sempre a máxima potência dos
módulos fotovoltaicos, o que é fato. Contudo, verifica-se na Tabela 5.1 que apesar de se
estar utilizando um rastreador, a potência entregue às cargas são diferentes. O que explica
esta diferença?
Na realidade, a potência drenada dos painéis é a mesma, entretanto o conversor
implementado foi projetado para operação com uma carga que varia sua tensão de
operação entre 21 e 28,8 V. A alimentação de uma carga com tensão de operação em torno
de 12 V implica numa corrente de saída, deste conversor, duas vezes maior do que a de
projeto. Esta sobrecorrente provoca perdas nos diversos elementos do conversor, baixando
o rendimento do mesmo, ocasionando, portanto, uma redução da potência entregue à carga
de 12 V comparativamente à carga de 24 V.
Dessa forma, pode-se concluir que apesar de o sistema de controle do MPP ser
indiferente quanto à carga, o projeto do conversor não o é. Portanto, mesmo obtendo-se
ganhos como os apresentado na Tabela 5.1 com a carga de 12 V, poder-se-ia melhorar o
desempenho, se o projeto do conversor tivesse sido feito para esta condição. Entretanto

Douglas Pereira da Silva, M. Eng.
164
esta não é a condição normal de operação do sistema rastreador, mas sim um exemplo
ilustrativo de como o ganho do sistema rastreador varia com a tensão de operação da carga.
As conclusões sobre um sistema rastreador do MPP não param por aí. Se quanto
maior a diferença entre a tensão de operação da carga e a tensão do MPP, maior é o ganho
com o sistema rastreador, pode-se inferir que, se para uma determinada carga fixada,
consiga-se, com um arranjo de painéis convenientes, aproximar a tensão do MPP deste
arranjo da tensão de operação da carga, o ganho será mínimo, chegando a ponto de não
mais haver necessidade ou de ser dispensável o uso do sistema rastreador.
A esta linha de pensamento, soma-se o fato de que a inclusão de um conversor para o
rastreamento do ponto de máxima potência cria uma fonte de perdas, pois o conversor ao
processar energia dissipa potência. Ainda há outro argumento de que um conversor a mais
diminui a confiabilidade de um sistema como um todo.
Dessa forma, há casos em que um conversor rastreador do MPP não se justifica. Para
ilustrar esta questão, foi realizada uma alteração no arranjo de painéis fotovoltaicos
disponíveis de forma a associá-los num arranjo 2 x 3, ao contrário do 3 x 2 utilizado.
A Fig. 5.5 apresenta os resultados obtidos com o sistema rastreador do MPP para
esta condição.
Fig. 5.5 – Formas de onda de entrada e saída para sistema rastreador do MPP com controle
digital para o arranjo 2 x 3.
A Fig. 5.6, por sua vez, apresenta uma aquisição dos módulos conectados
diretamente ao banco de baterias.

Douglas Pereira da Silva, M. Eng.
165
Fig. 5.6 – Formas de onda para painéis fotovoltaicos conectados diretamente às baterias.
Verifica-se que a potência entregue pelo rastreador do MPP, para a configuração 2 x
3 do arranjo de painéis, é menor que a potência entregue diretamente pelos painéis
fotovoltaicos. Configurando uma situação em que é dispensável e até desfavorável a
utilização do conversor.
Dessa análise aqui apresentada, verifica-se, portanto, que para carregamento de
baterias há casos onde não se justifica o uso de um conversor para rastreamento do MPP.
Não se pode afirmar, entretanto, com o estudo aqui apresentado que via de regra se possa
chegar a arranjos de módulos que operem com tensão de máxima potência próxima à
tensão de operação da carga.
Não se pode estabelecer também uma regra que indique quais cargas se beneficiam
do fato de trabalharem com ponto de operação perto do MPP de um arranjo de painéis.
Sabe-se, entretanto, que no carregamento de baterias isso é possível como demonstrado nas
Fig. 5.5 e 5.6.
5.3 SEGUNDO ESTÁGIO: ESTÁGIO ELEVADOR DE TENSÃO, ISOLADOR E
REGULADOR CONVERSOR CC-CC PUSH-PULL
Nesta seção são apresentados alguns resultados para o conversor Push-Pull operando
com carga resistiva, de forma a se avaliar alguns aspectos do projeto deste conversor.
Assim como na simulação, onde um degrau de rejeição de carga resistiva foi aplicado para
se analisar a atuação do controle, nos ensaios aqui apresentados há tanto um degrau de
rejeição quanto outro de entrada de carga, nos quais pode ser verificado o comportamento
previsto em projeto e simulação.

Douglas Pereira da Silva, M. Eng.
166
Na Fig. 5.7 são apresentadas as formas de onda do sinal de comando, corrente e
tensão em um dos interruptores do conversor Push-Pull, alimentando uma carga resistiva
de 320 W.
Ch1: Sinal de comando
Ch2:Tensão no InterruptorCh4:Corrente no interruptor
Ch1: 5 V/div Ch2: 20 V/div Ch4: 10 A/divBase de tempo: 10 us/div
Fig. 5.7 – Sinal de comando, corrente e tensão num dos interruptores do conversor Push-
Pull.
Verifica-se na Fig. 5.7 que a tensão de bloqueio do interruptor é bem comportada e
com um pico menor que 80 V, como já citado na seção 4.4.1 e ao contrário do que previa a
simulação naquela ocasião.
Na entrada em condução do outro interruptor há uma perturbação do sinal de
comando do interruptor amostrado, mas que não chega a afetar o funcionamento deste. A
forma de corrente apresentada, apresenta um pico típico, perto do bloqueio, do fenômeno
de saturação do transformador.
O conversor Push-Pull é um conversor no qual a saturação do transformador é um
ponto crítico, difícil de se contornar, devido à impossibilidade de se bloquear qualquer
componente CC, que circule pelo transformador.
Na Fig. 5.8 são apresentadas as formas de onda de tensão do primário do
transformador e da tensão retificada do secundário além da corrente no indutor de saída.

Douglas Pereira da Silva, M. Eng.
167
(a)Ch2: 10 V/divBase de tempo: 10 us/div
Ch4:Corrente no indutor de saída
Ch2:Tensão retificada
(b)Ch2: 250 V/div Ch4: 200 mA/divBase de tempo: 10 us/div
Fig. 5.8 – (a) Tensão no primário do transformador; (b) Tensão retificada do secundário e
corrente no indutor de saída
A forma de onda da tensão no primário do transformador confirma o início do
fenômeno de saturação mostrado pela corrente no interruptor. Pode-se também verificar a
atuação do grampeador utilizado no retificador de saída, controlando a oscilação no
bloqueio dos diodos.
A aquisição apresentada na Fig. 5.8.b foi realizada com a máxima tensão de entrada,
obtendo-se dessa forma uma tensão máxima de 930 V sobre os diodos bloqueados,
indicando o bom desempenho do grampeador.
Na Fig. 5.9 são apresentados dois ensaios, um de entrada de carga a partir de circuito
aberto e outra de rejeição total de carga.
Ch2:Tensão na saída do conversor Push-Pull
Ch1:Corrente na carga resistiva
(a)Ch1: 100 V/div Ch2: 500 mA/divBase de tempo: 40 ms/div
Ch1:Tensão na saída do conversor Push-Pull
Ch2:Corrente na carga resistiva
(b)Ch1: 100 V/div Ch2: 500 mA/divBase de tempo: 40 ms/div
Fig. 5.9 – (a) Entrada e (b) rejeição total de uma carga resistiva de 320 W

Douglas Pereira da Silva, M. Eng.
168
Verifica-se a atuação da malha de corrente e da malha de tensão nestes ensaios.
Inicialmente o sistema está trabalhando em circuito aberto com a malha de tensão
regulando a tensão de saída no valor nominal. Uma carga de 320 W é conectada, fazendo
com que a malha de corrente atue, não permitindo que a corrente de entrada ultrapasse o
valor estipulado. O capacitor de saída, nessas condições, se descarrega até uma tensão tal
que a potência de entrada limitada supra a potência de saída e as perdas do conversor.
No segundo caso a carga é desconectada. A malha de corrente continua atuante
promovendo a carga do capacitor de saída com corrente constante. Quando a tensão de
saída chega ao seu valor nominal, a malha de tensão atua e mantendo este valor, mesmo
em circuito aberto, como anteriormente.
5.4 TERCEIRO ESTÁGIO: ESTÁGIO INVERSOR – INVERSOR FULL-BRIDGE
PWM SENOIDAL COM MODULAÇÃO A TRÊS NÍVEIS
Para este estágio serão apresentadas as formas de onda de tensão e corrente nos
7interruptores, alimentando o refrigerador. Identifica-se, nesta seqüência, quatro dos
estados topológicos apresentados na seção 3.5.3.
(a)
Ch1: Corrente em S1
Ch2: Tensão em S1
Ch1: 500 mA/div Ch2: 100 V/divBase de tempo: 10 us/div (b)
Ch1: Corrente em S1
Ch2: Tensão em S1
Ch1: 500 mA/div Ch2: 100 V/divBase de tempo: 10 us/div

Douglas Pereira da Silva, M. Eng.
169
(c)
Ch1: Corrente em S1
Ch2: Tensão em S1
Ch1: 500 mA/div Ch2: 100 V/divBase de tempo: 10 us/div (d)
Ch1: Corrente em S1
Ch2: Tensão em S1
Ch1: 500 mA/div Ch2: 100 V/divBase de tempo: 10 us/div
Fig. 5.10 – Estados topológicos (a) 01, (b) 02, (c) 03 e (d) 05 do inversor Full-Bridge
PWM Senoidal com modulação a três níveis
Constata-se, pelas Fig. 5.10.a a 5.10.d que a tensão de bloqueio do interruptor é igual
ao barramento de entrada e não possui picos, indicando que o emprego dos capacitores
para o grampeamento dos braços do inversor é bem eficaz.
5.5 SISTEMA INTERLIGADO
Aqui estão apresentados resultados para o sistema interligado, tais como formas de
onda, espectro harmônico da tensão aplicada ao refrigerador e rendimento do sistema
completo.
5.5.1 FORMAS DE ONDA
A Fig. 5.11 apresenta as formas de onda de tensão e corrente no compressor em
regime permanente. Já na Fig. 5.12, é apresentado o espectro harmônico da tensão exibida
na Fig. 5.11 e a título de comparação o espectro harmônico da tensão da rede disponível
em uma das bancadas do laboratório.

Douglas Pereira da Silva, M. Eng.
170
Ch1:Tensão de saída
Ch2:Corrente de saída
Ch1: 100 V/div Ch2: 500 mA/divBase de tempo: 4 ms/div
Fig. 5.11 – Tensão e corrente no refrigerador
Espectro harmônico como um percentual da amplitude da fundamental
2 4 6 8 10 12 14 16 18 20 22 24 26 28 30 32 34 36 38 400.0%
0.2%
0.3%
0.5%
0.6%
0.8%
0.9%
1.1%
1.2%
1.4%
1.5%
2 4 6 8 10 12 14 16 18 20 22 24 26 28 30 32 34 36 38 400.0%
0.2%
0.5%
0.7%
0.9%
1.2%
1.4%
1.7%
1.9%
2.1%
2.4%
(a) (b)
TDH = 1,78% TDH = 3,18%
Fig. 5.12 – Espectro harmônico da tensão de saída do (a) inversor e (b) da rede
Verifica-se pela Fig. 5.11 que se obtém uma tensão de saída de baixa distorção
harmônica, confirmada pela Fig. 5.12, indicando que a qualidade da tensão entregue ao
refrigerador suplanta a da rede elétrica disponível no laboratório no quesito distorção.
O espectro harmônico da corrente drenada pelo compressor é apresentado na Fig.
5.13.

Douglas Pereira da Silva, M. Eng.
171
2 4 6 8 10 12 14 16 18 20 22 24 26 28 30 32 34 36 38 40 42 44 46 48 500.0%
0.8%
1.6%
2.4%
3.2%
4.0%
4.8%
5.6%
6.3%
7.1%
7.9%Espectro harmônico como um percentual da amplitude da fundamental
TDH = 8,75%
Fig. 5.13 – Espectro harmônico da corrente drenada pelo compressor
A distorção harmônica da corrente drenada pelo compressor é maior que a distorção
harmônica da tensão de saída do inversor, ficando em 8,75 %, contra 1,78 % de distorção
da tensão. Por este fato, constata-se que é o próprio compressor o agente responsável pela
distorção da corrente de saída, e não o sistema proposto.
A Fig. 5.14 apresenta a tensão de saída do conversor Push-Pull no sistema
interligado.
(a)Ax1: 100 V/divBase de tempo: 10 ms/div (b)
Ax1: 200 mV/divBase de tempo: 5 ms/div
Fig. 5.14 – (a) Amplitude e (b) ondulação da tensão de saída
Percebe-se que esta tensão se mantém regulada no seu valor nominal e possui baixa
ondulação, menor que 1 Vpp, durante a operação em regime do refrigerador.
Na Fig. 5.15 é apresentada a aquisição da forma de onda de corrente no indutor do
filtro de saída do conversor Push-Pull em regime permanente. Verifica-se claramente a

Douglas Pereira da Silva, M. Eng.
172
influência do inversor sobre a corrente neste indutor, que exibe uma ondulação de 120 Hz
de cerca de 0,35 App, muito próxima da prevista na seção 4.2.10, que foi de 0,34 App.
Ch2: 100 mA/divBase de tempo: 4 ms/div
Fig. 5.15 – Corrente no indutor de saída do conversor Push-Pull em regime permanente
Na Fig. 5.16 são apresentadas as formas de onda de tensão na saída do conversor
Push-Pull versus corrente no indutor de saída e corrente drenada das baterias, de forma a
evidenciar e comprovar a atuação da estratégia de controle adotada, indicando os bons
resultados obtidos.
Ch1: Tensão de saída do convesor Push-Pull
Ch2: Corrente no indutor de saída do conversor Push-Pull
(a)
Partida progressiva Malha de corrente Malha de tensão
Ch1: 100 V/div Ch2: 500 mA/divBase de tempo: 250 ms/div
Ch1: Tensão de saída do convesor Push-Pull
Ch2: Corrente drenada da bateria
(b)
Partida progressiva Malha de corrente Malha de tensão
Ch1: 100 V/div Ch2: 500 mA/divBase de tempo: 250 ms/div
Fig. 5.16 – (a) Tensão de saída versus corrente no indutor de filtro de saída do conversor
Push-Pull e (b) Tensão de saída do conversor Push-Pull versus corrente drenada das
baterias

Douglas Pereira da Silva, M. Eng.
173
Verifica-se na Fig. 5.16 que a partir da limitação da corrente média de entrada,
consegue-se limitar o valor da tensão de saída. Sendo que durante todo o período em que a
corrente permaneceu limitada a tensão de saída permaneceu constante e, aproximadamente,
em 250 V.
O processo apresentado na Fig. 5.16 se dá da seguinte forma: inicialmente, a tensão
de saída cresce em função da partida progressiva promovida pelo integrado SG3525A,
chegando-se ao patamar de 250 V. O motor começa a girar e a corrente atinge o patamar de
limitação, fazendo com que a malha de corrente atue, promovendo a partida do
refrigerador em subtensão.
Após a desconexão do enrolamento auxiliar de partida, a malha de corrente promove
a carga dos capacitores de saída com corrente constante até a tensão nominal, sendo que a
partir deste instante quem atua é a malha de tensão.
Verifica-se que a corrente drenada das baterias é contínua e não pulsada. Isto se deve
aos capacitores colocados na entrada do conversor Push-Pull, na montagem, de forma a
filtrar a componente na freqüência do chaveamento drenada das baterias. O envelope de
corrente pulsante, que se nota na Fig. 5.16.b após a partida, é a ondulação em 120 Hz que
se propaga até a entrada e cuja filtragem exigiria um banco capacitivo de grande valor.
A Fig. 5.17 apresenta, a título de ilustração, a corrente no refrigerador no instante da
partida do sistema. Deve-se atentar à baixa amplitude desta corrente, de acordo com os
ensaios promovidos no Capítulo 2.
Ch2: 1 A/divBase de tempo: 400 ms/div
Fig. 5.16 – Corrente no refrigerador durante o transitório de partida do sistema

Douglas Pereira da Silva, M. Eng.
174
As aquisições apresentadas na Fig. 5.16 demonstram o comportamento do sistema na
partida não só do compressor, mas como do próprio sistema. Entretanto, este fenômeno
ocorre apenas uma vez, quando se liga o sistema.
Uma vez que o sistema foi colocado em marcha, quem promoverá os transitórios é o
termostato do refrigerador. Ou seja, o sistema já estará ativo, com barramento de entrada
do inversor em 400 V quando houver o ligamento ou desligamento do refrigerador
realizado pelo termostato.
Se essa é a operação normal, deve-se garantir que o sistema suporta esta condição.
As aquisições apresentadas na Fig. 5.18 comprovam a eficácia do sistema implementado
nesta situação.
Ch2: Corrente no refrigerador
Ch1: Tensão de saída do conversor Push-Pull
(a) (b)
Ch2: Corrente no refrigerador
Ch1: Tensão de saída do conversor Push-Pull
Fig. 5.18 – (a) Rejeição e (b) entrada do refrigerador com sistema ativo
Na Fig. 5.18.a verifica-se que a malha de tensão atuou, estabilizando plenamente a
tensão de saída em seu valor nominal para a perturbação aplicada. A entrada em
funcionamento do refrigerador comandada pelo termostato também ocorre conforme o
previsto. A malha de corrente atua, reduzindo a tensão de saída e, conseqüentemente, a
corrente drenada pelo inversor, esta corrente estabiliza-se aproximadamente no mesmo
patamar que para a partida de todo o sistema. Após a partida do compressor, a tensão volta
a subir e o refrigerador funciona normalmente com condições nominais.
5.5.2 RENDIMENTO
Nesta seção são apresentadas as curvas de rendimento para o primeiro e segundo
estágio individualmente e para o segundo e terceiro estágio interconectados. Não é possível

Douglas Pereira da Silva, M. Eng.
175
realizar o rendimento para o sistema completo interconectado já que há um banco de
baterias acumuladoras no caminho, as quais absorvem a energia excedente ou compensam
uma falta desta.
Sendo a bateria um elemento desacoplador na estrutura, será considerado como
máximo rendimento do sistema, o rendimento do segundo e terceiro estágio
interconectados.
A Fig. 5.19 apresenta, respectivamente, o rendimento para o primeiro estágio, para o
segundo estágio e para o segundo e terceiro estágios interconectados.
0,85
0,87
0,89
0,91
0,93
0,95
122,8 128,7 141 155,5 184,5 193 210,2 217,6 237,5 250
(a)
0,76
0,78
0,8
0,82
0,84
0,86
0,88
89 105 113 130 143 155 171 189 201
(b)
0,77
0,78
0,79
0,8
0,81
136 158 170 190 209
Potência de entrada [W]
(c)
Fig. 5.19 – Curva de rendimento do (a) primeiro estágio, (b) segundo estágio e (c) do
segundo e terceiro estágios interconectados
Verifica-se que o rendimento do sistema é de 80,5 %. No carregamento das baterias,
cujo rendimento foi de 91 %, metade das perdas é localizada no diodo de bloqueio,

Douglas Pereira da Silva, M. Eng.
176
elemento este que não faz parte da topologia, mas se faz necessário. Uma outra forma de se
realizar este bloqueio, se possível, seria extremamente interessante para o rendimento.
5.6 CONCLUSÃO
Neste capítulo foram apresentados os resultados experimentais de todos os estágios
da estrutura, individualmente e interligados.
Verificou-se a eficácia dos sistemas rastreadores do MPP, sobretudo do digital que
obteve precisão de 99,75 % no rastreamento. Verificou-se que o sistema analógico também
se comporta bem, mas por estar amarrado a um parâmetro do painel que é variante,
somente um estudo que obtivesse os resultados do painel ao longo de um ano poderia
constatar a real eficácia deste sistema.
Uma ampla discussão a respeito da utilização de sistemas de rastreamento do MPP
para o carregamento de baterias, baseado na experiência acumulada neste trabalho, foi
feita, chegando-se à conclusão de que há casos onde não é interessante a aplicação de um
conversor rastreador.
Verificou-se com as aquisições que a estratégia de partida mostrou-se adequada ao
sistema proposto. Até o presente momento, o sistema já foi ensaiado inúmeras vezes, com
operação prolongada e autônoma durante um turno e não se tem encontrado, até então,
problemas nem falhas.
O compressor também foi termicamente analisado, durante prolongado
funcionamento e, verificou-se uma temperatura máxima de 69,3 ºC na carcaça, que é a
mesma temperatura encontrada para alimentação normal da rede elétrica. Conclui-se
portanto que do ponto de vista térmico, o compressor se comporta muito bem com o
sistema proposto.
A única limitação verificada para o sistema é no caso de uma operação do
refrigerador em uma situação não recomendada pelo fabricante, que é a partida imediata do
compressor logo após tê-lo sido desligado. Deve-se esperar um tempo mínimo, cerca de
um a dois minutos, para a acomodação do gás refrigerante após o desligamento e antes de
um religamento, tanto na utilização doméstica convencional, quanto na aplicação do
sistema aqui proposto.

.
CONCLUSÃO GERAL
Apresentou-se ao longo deste trabalho o estudo, projeto, simulação e implementação
prática de um sistema eletrônico para processamento da energia solar fotovoltaica
operando no ponto de máxima potência para alimentação de um refrigerador comercial.
O objetivo deste trabalho foi a proposição de uma alternativa viável para a
implementação de um sistema como este em locais isolados da rede elétrica e com
insolação abundante.
Foi realizada uma abordagem completa do sistema de rastreamento do MPP: com
modelagem, revisão das estratégias empregadas, projeto, simulação, implementação prática
e discussão dos resultados.
Duas das estratégias de rastreamento do MPP apresentadas foram implementadas e
verificou-se que o rastreador trouxe bons ganhos ao sistema proposto, todavia também se
pode concluir que este sistema não é a panacéia em se tratando de conversão fotovoltaica
de energia solar, identificando-se casos onde a necessidade de um sistema deste tipo é
discutível e às vezes desaconselhável.
Um estudo mais aprofundado a respeito desta questão ainda é necessário para
conclusões mais efetivas, restringindo-se aqui a conclusões obtidas com este sistema em
particular.
A partir do estudo realizado e, de acordo com as características desejadas para o
sistema, definiu-se a realização do sistema em três estágios, sendo dois deles controlados e
um operando em malha aberta.
Devido à característica especial da carga alimentada, foi necessária a definição de
uma estratégia de partida sobre a qual foi realizado todo o projeto do segundo e terceiro
estágio, apresentado detalhadamente no Capítulo 4.
Dada a estratégia definida, duas malhas de controle deveriam ser implementadas,
uma para controle da tensão de saída e outra para o controle da corrente média de entrada.
Simulações verificaram a viabilidade da implementação prática do sistema,
confirmando que a estratégia de controle adotada funcionaria bem.
Os resultados experimentais foram satisfatórios, comprovando o estudo realizado.
Verificou-se uma boa atuação do sistema de controle, com boas respostas dinâmicas nas
perturbações e boa regulação.

Douglas Pereira da Silva, M. Eng.
178
O rendimento do sistema é um ponto que ainda pode ser melhorado. Acredita-se que
uma evolução do rendimento para 85% torne o sistema muito mais atrativo.
Muitas dificuldades foram encontradas na implementação prática, sobretudo na
implementação do conversor Push-Pull que possui duas malhas de controle e no qual estão
envolvidas as maiores correntes.
Tanto neste conversor quanto no Buck, ruídos foram a principal dificuldade a se
contornar. Neste último, devido à limitação do microcontrolador PIC no controle de
sistemas chaveados, pelo alto tempo de conversão analógica-digital, os ruídos eram
também amostrados desestabilizando o controle. Esta dificuldade foi contornada,
sobretudo, com a implementação de uma rotina que realiza a média dos valores
amostrados. Esta estratégia diminui a velocidade do sistema, todavia como a dinâmica do
sistema fotovoltaico é de certa forma lenta, não houve prejuízos.
A maior dificuldade encontrada neste trabalho foi a viabilização e concepção do
sistema de controle devido à partida do compressor monofásico, que é uma carga especial
e que durante sua partida em condições nominais desenvolve dez vezes mais potência.
Sugere-se como continuação do trabalho a melhoria do lay-out da estrutura e a
integração do segundo e terceiro estágios em uma única placa. A supervisão de subtensão
das baterias com desligamento do segundo e terceiro estágios é recomendável para
preservação do banco de baterias.
A incorporação do microcontrolador PIC, que no desenvolvimento, não esteve
integrado à placa do primeiro estágio é recomendável, podendo realizar além do
rastreamento do MPP e da supervisão de sobretensão já implementadas, a supervisão de
todo o sistema

.
APÊNDICE A
CÓDIGO-FONTE DO PROGRAMA DE RASTREAMENTO DO MPP
; Programa: Controle do Ponto de Máxima Potência (MPP) ; Objetivo: Controlar a operação de um arranjo de painéis fotovoltaicos no ponto de máxima transferência de potência usando o método: dP/dV = 0 ; Autor: Eng. Douglas Pereira da Silva ;Portas utilizadas: PWM1, AN4, AN5, AN6 ; A/D: Canal 04 - Vin ; Canal 05 - Vout ; Canal 06 - Iin LIST P=17C756 INCLUDE "P17C756.INC" ;/////////////////////// Definição dos Parâmetros /////////////////////// #DEFINE DMAX 0x5E ;Razão cíclica máxima #DEFINE DMIN 0x00 ;Razão cíclica mínima #DEFINE FS 0x63 ;Freqüência de chaveamento = 25kHz #DEFINE VOUTMAX 0x85 ;Vout max = 28,8V #DEFINE IINMIN 0x04 ;Iout min = 0,2A VARIABLE IIN_N=0x1E ;Unbanked - p VARIABLE TEMP=0x1A ;Variável para armazenamento ;temporário (Unbanked - periférica) VARIABLE PROD_HI=0x1B ;MSB Vin(n)*Iin(n) (Unbanked) VARIABLE PROD_LO=0x1C ;LSB Vin(n)*Iin(n) (Unbanked) VARIABLE DVAR=0x1D ;Variável Razão Cíclica (Unbanked) VARIABLE INC=0x1F ;Status da "derivada" de razão cíclica -> 1=positiva; 0=negativa ;----- Conjunto de variáveis para aquisição e media das aquisições ------ ;Variáveis no Banco 0 da RAM interna VARIABLE SOMA_HI=0x20 VARIABLE SOMA_LO=0x21 VARIABLE CONT=0x22 VARIABLE CONTD=0x23 VARIABLE J=0x24 ;------------------------------------------------------------------------ ;///////////////////////// Origem do programa /////////////////////////// ORG 0x2000 GOTO INICIO

Douglas Pereira da Silva, M. Eng.
180
;////////////////////////// Rotina Principal //////////////////////////// INICIO CALL CONFIG_AD ; / CALL CONFIG_PWM ;Inicialização dos módulos | ; |Configurações MOVLB 0x05 ;Inicializar portas |Iniciais CLRF PORTF ;como entrada | MOVLW 0x0F ;RF<3:0> | MOVWF DDRF ; \ MOVLB 0x05 ;Seleciona Banco 05 / MOVLW 0x51 ;Canal 05 - A/D = ON (Vout) |Adquire Vout MOVWF ADCON0 ;Seta controle | CALL AD ;Inicia aquisição \ MOVLW VOUTMAX ;Carrega Voutmax / CPFSLT TEMP ;Vout >= Voutmax? |Testa se Vout ; |é maior que ; |Voutmax GOTO FINALIZA ;Sim --> Finaliza \ MOVLB 0x03 ;Seleciona Banco 03 / MOVLW DMIN ;Carrega Razão cíclica 0 |Liga PWM MOVWF PW1DCH ;Seta Razão cíclica | BSF TCON2,PWM1ON;Liga PWM 1 (PWM) \ MOVWF DVAR ;Carrega D na variável Razão cíclica PARTIDA MOVLW DMAX ;Carrega Dmax / CPFSLT DVAR ;D > Dmax? | GOTO FINALIZA ;Sim --> Finaliza |Rotina para ; |partida do ; |conversor INCF DVAR,F ;Aumenta Razão cíclica |Tenta iniciar ; |a operação do ; |conversor MOVLB 0x03 ;Seleciona Banco 03 |aumentando a ; |Razão cíclica ; |gradativam. MOVFP DVAR,PW1DCH ;Seta razão cíclica /e verificando ; \se há uma |corrente min MOVLB 0x05 ;Seleciona Banco 05 |fluindo pelo ; |shunt. MOVLW 0x61 ;Canal 06 - A/D = ON (Iin) |Se D chegara MOVWF ADCON0 ;Seta controle |1 e o ; |conversor não CALL AD ;Inicia aquisição |tiver partido MOVLW IINMIN ;Carrega Iinmin |a rotina é CPFSGT TEMP ;Iin > Iinmin |reiniciada GOTO PARTIDA ;Não --> Tenta de novo \ MOVPF TEMP,IIN_N ;Guarda Iin para posterior multiplicação MOVLB 0x05 ;Seleciona Banco 05 / MOVLW 0x41 ;Canal 04 - A/D = ON (Vin) |Adquire Vin MOVWF ADCON0 ;Seta controle | CALL AD ;Inicia aquisição \ MOVFP TEMP,WREG ; /

Douglas Pereira da Silva, M. Eng.
181
MULWF IIN_N ;Vin(n)*Iin(n) |Vin(n)*Iin(n) MOVPF PRODH,PROD_HI;Guarda o | MOVPF PRODL,PROD_LO;resultado \ MOVLW 0x01 ;Inicializa DEC com MOVWF INC ;derivada positiva de Razão cíclica SAIDA1 MOVLW DMAX ;Razão cíclica máxima / CPFSGT DVAR ;D < Dmax? Não --> Pula |D < Dmax? INCF DVAR,F ;Aumenta a Razão cíclica |Sim, então D ; |= D+dD MOVLB 0x03 ;Seleciona Banco 03 | MOVFP DVAR,PW1DCH ;Seta Razão cíclica \ BSF INC,0 ;INC = True --> Indica que a derivada é ;positiva SAIDA2 MOVLR 0x00 ; / MOVLW 0x7F ; | MOVWF J ; | DELAY1 MOVLW 0xFF ; |Atraso CALL DELAY ; | DECFSZ J,F ; | GOTO DELAY1 ; \ MOVLB 0x05 ;Seleciona Banco 05 / MOVLW 0x51 ;Canal 05 - A/D = ON (Vout) |Adquire Vout MOVWF ADCON0 ;Seta controle | CALL AD ;Inicia aquisição \ MOVLW VOUTMAX ;Carrega Voutmax / CPFSLT TEMP ;Vout >= Voutmax? |Testa se Vout ; |é maior que GOTO FINALIZA ;Sim --> Finaliza \Voutmax MOVLB 0x05 ;Seleciona Banco 05 / MOVLW 0x61 ;Canal 06 - A/D = ON (Iin) |Adquire Iin MOVWF ADCON0 ;Seta controle | CALL AD ;Inicia aquisição \ MOVPF TEMP,IIN_N ;Guarda Iin para posterior multiplicação MOVLB 0x05 ;Seleciona Banco 05 / MOVLW 0x41 ;Canal 45 - A/D = ON (Vin) |Adquire Vin MOVWF ADCON0 ;Seta controle | CALL AD ; \ MOVFP TEMP,WREG ; /Vin(n+1)* MULWF IIN_N ;Vin(n)*Iin(n) \Iin(n+1) MOVFP PROD_HI,WREG; / CPFSLT PRODH ;PRODH < PROD_HI? | GOTO COMP ;Não --> Testa se é igual | GOTO DIMINUIU ;Sim --> Prod(n+1) < Prod(n) | ; | COMP CPFSEQ PRODH ;PRODH = PROD_HI / Testa se GOTO AUMENTOU ;Não --> Prod(n+1) > Prod(n) \ Prod(n+1) >= ; |Prod(n) MOVFP PROD_LO,WREG; | CPFSLT PRODL ;PRODL < PROD_LO |

Douglas Pereira da Silva, M. Eng.
182
GOTO AUMENTOU ;Não --> Prod(n+1)>=Prod(n) | GOTO DIMINUIU ;Sim --> Prod(n+1) < Prod(n) \ DIMINUIU MOVPF PRODH,PROD_HI;Guarda Prod(n+1)->Prod(n) /Prod(n+1) < MOVPF PRODL,PROD_LO; " " " |Prod(n) ; |Se dD é BTFSS INC,0 ;dD positiva? |positiva ; |diminui-se a GOTO SAIDA1 ;Não, é negativa->aumenta D |Razão cíclica ; |senão, GOTO DEC ;Sim, vá diminuir D \aumenta-se AUMENTOU MOVPF PRODH,PROD_HI;Guarda Prod(n+1)->Prod(n) /Prod(n+1) > ; |Prod(n) MOVPF PRODL,PROD_LO; " " " |Se dD é ; |positiva BTFSC INC,0 ;dD negativa? |continua-se ; |aumentando a ; |Razão cíclica GOTO SAIDA1 ;Não, é positiva -> Loop |senão, ; \diminui-se DEC MOVLW DMIN ;Sim, diminui Razão cíclica / CPFSGT DVAR ;D < Dmin? |D > Dmin? GOTO FINALIZA ;Sim --> Finaliza |Sim, então D DECF DVAR,F ;Diminui Razão cíclica |= D - dD MOVLB 0x03 ;Banco da Razão cíclica | MOVFP DVAR,PW1DCH ;Seta Razão cíclica \ BCF INC,0 ;INC = False --> Indica que a derivada é ;negativa GOTO SAIDA2 ;Loop FINALIZA MOVLB 0x03 ;Banco 03 MOVLW DMIN ; MOVWF PW1DCH ;Zera razão cíclica MOVWF DVAR ;Zera variável Razão cíclica ESPERA MOVLB 0x05 ;Seleciona Banco 05 / MOVLW 0x51 ;Canal 05 - A/D = ON (Vout) |Adquire Vout MOVWF ADCON0 ;Seta controle | CALL AD ;Inicia aquisição \ MOVLW VOUTMAX ;Carrega Voutmax /Testa se Vout CPFSLT TEMP ;Vout >= Voutmax? |é maior ou ; |igual a ; |Voutmax e GOTO ESPERA ;Sim --> Espera |fica em modo ; |de espera GOTO PARTIDA ;Não --> Começa tudo de novo \(D=0) se sim ;///////////////////////// Configuração do A/D ////////////////////////// CONFIG_AD MOVLB 0x05 ;Seleciona Banco 05 MOVLW 0x40 ;Clock Fosc/32 - Alinhado a esquerda – ;Ref: AVdd e AVss MOVWF ADCON1 ;Seta controle RETURN

Douglas Pereira da Silva, M. Eng.
183
;//////////////////////// Configura Timer e PWM ///////////////////////// CONFIG_PWM MOVLB 0x03 ;Seleciona Banco 03 BCF TCON1,T16 ;Timer1 operando em 8 bits (apesar destes ;registradores já iniciarem BCF TCON1,TMR1CS;Timer1 com clock interno (zerados, estas ;instruções garantem este status MOVLB 0x02 ;Seleciona Banco 02 MOVLW FS ;Freqüência do Timer 1 - 25kHz MOVWF PR1 ;Seta Timer 1 MOVLB 0x03 ;Seleciona Banco 03 MOVLW 0xFF ;Valor mínimo dos dois bits menos ;significativos do PWM na lógica inversa MOVWF PW1DCL ;na resolução de 10 bits MOVLW DMIN MOVWF PW1DCH BSF TCON2,TMR1ON;Liga Timer 1 (PWM) RETURN ;///////////////////// Tempo de Recuperação do A/D ////////////////////// DELAY DECFSZ WREG,W ;Decrementa e pula se 0 GOTO DELAY RETURN ;////////////////////////// Aquisição com A/D /////////////////////////// AD MOVLR 0x00 ;Banco 0 da RAM CLRF SOMA_LO,W ;Zera wreg e soma baixa CLRF SOMA_HI,F ;Zera soma alta MOVLW 0x20 ;Define número (32 amostras) MOVWF CONT ;de amostras para média MOVLW 0x05 ;Número de divisões MOVWF CONTD ;por 2 AD1 MOVLW 0x19 CALL DELAY ;Recuperação do A/D BSF ADCON0,GO ;Inicia Conversão A/D MOVLR 0x00 ;RAM de propósito geral POLLING BTFSC ADCON0,DONE ;Polling do bit que indica final da ;conversão GOTO POLLING ;Se não terminou --> testa de novo MOVPF ADRESH,WREG ;Move valor da leitura / ;analógica p/ WREG |Soma ADDWF SOMA_LO,F ;Soma com valor anterior |valores MOVLW 0x01 ;move "vai um" p/ WREG |analógicos BTFSC ALUSTA,C ;Soma estourou? | ADDWF SOMA_HI,F ;Sim, então vai um \ DECFSZ CONT,F ;Numero de leituras acabou? GOTO AD1 ;Não, lê mais uma vez DIV32 BCF ALUSTA,C ;Limpa carry RRCF SOMA_HI,1 ;Divide por 2 RRCF SOMA_LO,1 ; DECFSZ CONTD,F ;Terminou o nº de divisões?

Douglas Pereira da Silva, M. Eng.
184
GOTO DIV32 ;não, divide por 2 de novo MOVFP SOMA_LO,TEMP RETURN END ;Fim do programa

.
APÊNDICE B
PROJETO DE UMA FONTE AUXILIAR PARA O SISTEMA
PROPOSTO
O presente apêndice trata do projeto de uma fonte auxiliar para os circuitos de
controle e comando dos diferentes estágios da estrutura. A referida fonte deve ser capaz de
suprir toda a alimentação necessária a partir do barramento da bateria, já que o sistema é
isolado da rede elétrica e fornecer alimentação simétrica aos circuitos em questão.
Como existe isolamento galvânico entre a entrada e saída da estrutura, a fonte
auxiliar deve prover isolamento entre suas saídas. A tensão do barramento da bateria é
variável entre 21 V e 28,8 V o que torna imprescindível um sistema em malha fechada.
Como ela é destinada a alimentação de circuitos de sinal, seu consumo é baixo. Por tudo
isso, o conversor ideal em questão é o Conversor Flyback.
B.1 ESPECIFICAÇÕES
A Tabela B.1 apresenta sinteticamente as especificações e o desempenho desejado de
tal fonte auxiliar.
Tabela B.1 – Especificações da fonte auxiliar.
Gerais
Saída 2 saídas simétricas isoladas de +15 V e - 15 V
Potência total de saída 8 W
Rendimento do conversor 80 %
Freqüência de comutação 50 kHz
Razão cíclica máxima 0,4
Tipo de condução de corrente Descontínua
Entrada
Tensão mínima 21 V
Tensão máxima 30 V

Douglas Pereira da Silva, M. Eng.
186
Saída
Saída 1 Saída 2 Saída 3 Saída 4
Tensão +15 V -15 V +15 V -15 V
Ondulação 100 mV 100 mV 100 mV 100 mV
Corrente 200 mA 67 mA 200 mA 67 mA
B.2 PROJETO DO ESTÁGIO DE POTÊNCIA
O projeto do estágio de potência consiste no cálculo dos componentes de forma a
contemplar as especificações desejadas e na determinação dos esforços destes. A topologia
de potencia do conversor projetado é apresentada na Fig. B.1
0
0
Vin
S
D3
Cout3 RL3
D4Cout4 RL4
+
-
+
-
D2Cout2 RL2
D1
Cout1 RL1
+
-
+
-
Fig. B.1 – Conversor Flyback com duas saídas simétricas isoladas.
B.2.1 CORRENTE NO INTERRUPTOR PRINCIPAL
O projeto do conversor será para condução descontínua, nestas condições a corrente
no interruptor principal tem formato triangular cujo valor de pico e valor eficaz são dados,
respectivamente, pelas eq. (B .1) e (B.2).
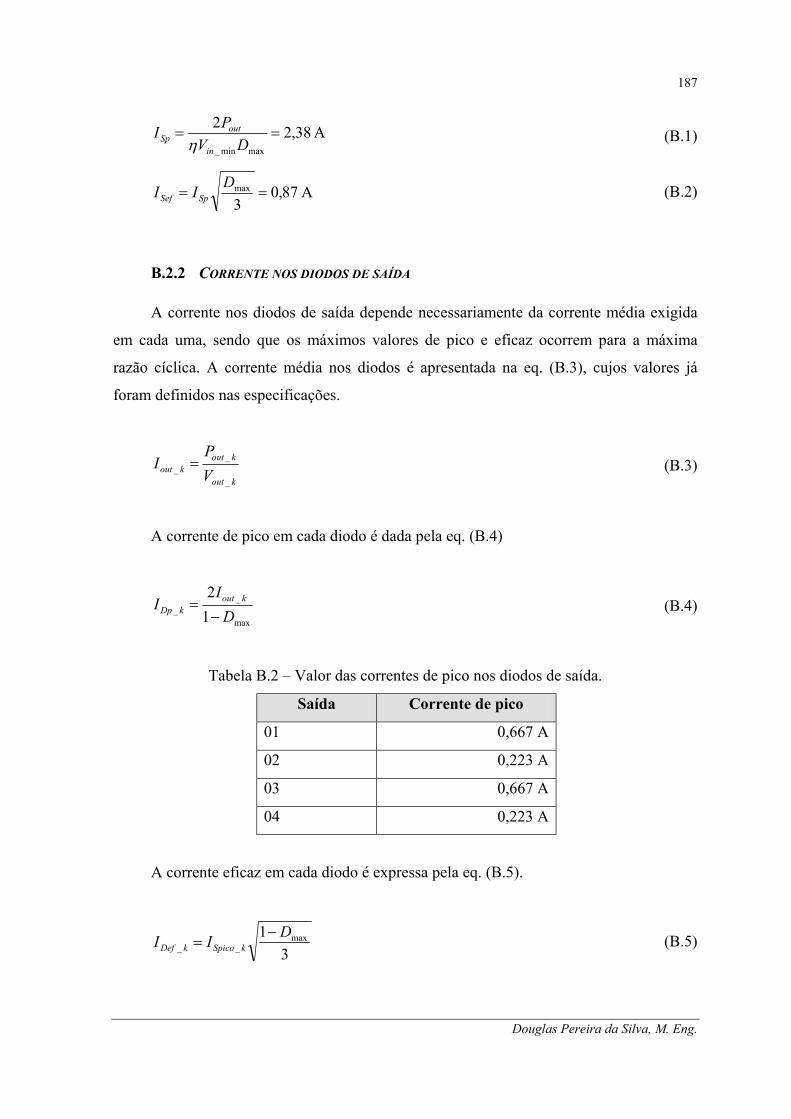
Douglas Pereira da Silva, M. Eng.
187
A 38,22
maxmin_
==DV
PIin
outSp η
(B.1)
A 87,03max ==
DII SpSef (B.2)
B.2.2 CORRENTE NOS DIODOS DE SAÍDA
A corrente nos diodos de saída depende necessariamente da corrente média exigida
em cada uma, sendo que os máximos valores de pico e eficaz ocorrem para a máxima
razão cíclica. A corrente média nos diodos é apresentada na eq. (B.3), cujos valores já
foram definidos nas especificações.
kout
koutkout V
PI
_
__ = (B.3)
A corrente de pico em cada diodo é dada pela eq. (B.4)
max
__ 1
2D
II kout
kDp −= (B.4)
Tabela B.2 – Valor das correntes de pico nos diodos de saída.
Saída Corrente de pico
01 0,667 A
02 0,223 A
03 0,667 A
04 0,223 A
A corrente eficaz em cada diodo é expressa pela eq. (B.5).
31 max
__DII kSpicokDef
−= (B.5)

Douglas Pereira da Silva, M. Eng.
188
Tabela B.3 – Valor das correntes eficazes nos diodos de saída.
Saída Corrente eficaz
01 0,298 A
02 0,1 A
03 0,298 A
04 0,1 A
B.2.3 TENSÃO REVERSA NO INTERRUPTOR PRINCIPAL
A tensão reversa no interruptor principal, assim como no conversor Buck-Boost é
dada pela soma dos módulos da tensão de entrada e da tensão de saída. Entretanto, como o
Flyback trata-se do Buck-Boost isolado, é necessário referenciar a tensão de saída ao
primário, dessa forma a tensão reversa máxima, que ocorre para a máxima tensão de
entrada, é apresentada na eq. (B.6).
V 33,431_
1_max_ =+=Sec
PoutinSp N
NVVV (B.6)
B.2.4 TENSÃO REVERSA NOS DIODOS DE SAÍDA
Da mesma forma que a tensão de saída reflete-se sobre o interruptor principal, a
tensão de entrada reflete-se sobre os diodos de saída. Como todas as tensões de saída são
iguais, as tensões reversas sobre os diodos também serão.
V 75,48max__
__ =+= inP
kSeckoutkDp V
NN
VV (B.7)
B.2.5 CAPACITÂNCIA DE SAÍDA
A expressão que define o valor da capacitância de forma a atender as especificações
de ondulação de tensão em função da corrente drenada do conversor é apresentada na eq.
(B.8)

Douglas Pereira da Silva, M. Eng.
189
Couts
koutkout Vf
IDC
∆= _max
_ (B.8)
Tabela B.4 – Valor dos capacitores de saída em função da corrente drenada.
Saída Corrente eficaz
Saída 01 16 µF
Saída 02 5,36 µF
Saída 03 16 µF
Saída 04 5,36 µF
Levando-se em conta a RSE dos capacitores eletrolíticos comerciais, foram
selecionados os constantes na Tabela 3.4 da série B41857 - Siemens.
Tabela B.5 – Valor dos capacitores de saída em função da RSE máxima.
Saída Capacitância RSE máxima
01 2200 µF 130 mΩ
02 1000 µF 250 mΩ
03 2200 µF 130 mΩ
04 1000 µF 250 mΩ
B.3 PROJETO DO TRANSFORMADOR
O projeto do transformador Flyback é realizado utilizando-se da tradicional
metodologia do produto de áreas. As especificações básicas de projeto estão apresentadas
na Tabela B.6.
Tabela B.6 – Especificações básicas do transformador Flyback.
Parâmetro Valor
Densidade de fluxo máxima 0,2 T
Densidade de corrente máxima 350 A.cm-2
Fator de utilização da janela 0,4
Fator de utilização do primário 0,5

Douglas Pereira da Silva, M. Eng.
190
A expressão para a determinação do núcleo a ser utilizado é apresentada na eq. (B.9).
4
maxmaxPr
max
cm 104,034
==ηsui
out
we fBJKK
DP
AA (B.9)
Com base no resultado apresentado em (B.9) o núcleo escolhido é o E30/7 – IP12 da
Thornton.
B.3.1 CÁLCULO DO ENTREFERRO
O transformador Flyback opera armazenando energia devido à característica de
transferência indireta do conversor. Dessa forma, o entreferro é calculado com base na
energia necessária a ser armazenada. A eq. (B.10) expressa a energia a ser armazenada no
entreferro a cada período de comutação.
mJ 2,0==∆s
out
fPWη
(B.10)
A partir da eq. (B.10) o entreferro mecânico é definido pela eq. (B.11).
mm 12,02
lg7_30
2max
0 =∆
==AeB
Wµδ (B.11)
B.3.2 CORRENTES NO PRIMÁRIO E SECUNDÁRIOS
As correntes circulantes nos enrolamentos do transformador são determinadas pelas
eq. (B.12) a (B.15).
picoSpicoi II __Pr = (B.12)
efSefi II __Pr = (B.13)
kDpkpicoSec II ___ = (B.14)
kefDkefSec II ____ = (B.15)

Douglas Pereira da Silva, M. Eng.
191
B.3.3 CÁLCULO DO NÚMERO DE ESPIRAS
O número de espiras é calculado em função da densidade de fluxo máxima, do
entreferro e da corrente de pico no primário, que para o Flyback é a mesma do interruptor.
espiras 16_0
maxPr ==
picoprii I
BN
µδ
(B.16)
A expressão para o número de espiras dos secundários levando em conta a queda de
tensão nos diodos de saída é dada pela eq. (B.17).
( )( )espiras 18
1
maxmin_
max__ =
−+=
DVDVV
NNin
FkoutPkSec (B.17)
B.3.4 CÁLCULO DA BITOLA DOS CONDUTORES
A bitola dos condutores é determinada a partir da razão entre a corrente eficaz
circulante e a densidade de corrente máxima desejada no primário e secundários conforme
eq. (B.18) e (B.19), respectivamente.
2
maxPr_ cm 0025,0==
JI
S Peficm (B.18)
max
____ J
IS kefSec
kSeccm = (B.19)
Tabela B.7 – Bitola mínima dos condutores em função da densidade de corrente.
Enrolamento Bitola dos condutores
Secundário 01 0,085 mm2
Secundário 02 0,029 mm2
Secundário 03 0,085 mm2
Secundário 04 0,029 mm2

Douglas Pereira da Silva, M. Eng.
192
O valor da bitola para a minimização do efeito pelicular, neste caso onde os níveis de
corrente são baixos, é muito elevado. Dessa forma, optou-se por escolher bitolas um pouco
maiores que a mínima e menores que a bitola para minimização do efeito pelicular. Os
valores AWG destas bitolas são apresentados na Tabela B.8.
Tabela B.8 – Bitola AWG dos condutores dos enrolamentos.
Enrolamento Bitola AWG dos condutores
Primário 23
Secundário 01 27
Secundário 02 30
Secundário 03 27
Secundário 04 30
B.3.5 CÁLCULO TÉRMICO DO TRANSFORMADOR
É possível obter-se uma estimativa da elevação de temperatura no transformador
através do cálculo das perdas nos enrolamento e perdas magnéticas. A expressão que
define as perdas nos enrolamentos ou perdas Joule é apresentada na eq. (B.19).
W065,07_302
__2_2
1 =
Ω+Ω= ∑ MLTININP
kkSefkkSecPefPJ (B.19)
Onde Ωx é a resistividade do condutor do respectivo enrolamento e MLT30_7 é o
comprimento de uma espira média para o núcleo E30/7.
As perdas magnéticas podem ser computadas da mesma forma como foi feito no
Capítulo 4, através da Fig. 4.1. Para a freqüência e densidade de fluxo dadas, tem-se uma
perda no material de aproximadamente 50 mW/g. O núcleo em questao tem massa
aproximada de 11 g. Dessa forma tem-se que as perdas são dadas pela eq. (B.20).
W550,Pmag = (B.20)
As perdas totais no transformador, portanto, é a composição destas duas e é dada
pela eq. (B.21).

Douglas Pereira da Silva, M. Eng.
193
W620,PPP Joulemagtot_trafo =+= (B.21)
Uma vez calculadas as perdas no transformador a elevação de temperatura é
estimada a partir da resistência térmica do núcleo utilizado que no caso é de 27,33 ºC/W. A
eq. (B.22) apresenta o resultado.
Cº 916730 ,RPT __thtot_trafotrafo ==∆ (B.22)
B.4 PROJETO DO ESTÁGIO DE CONTROLE E COMANDO
O estágio de controle e comando do conversor será baseado no controlador PWM
UC3844 que possui facilidades implementadas para o controle do conversor Flyback.
Trata-se de um circuito integrado de 8 pinos com limitação de razão cíclica, Under Voltage
Lockout que inibe o controlador se houver queda na tensão de alimentação, referencia de
controle interna e proteção contra sobrecorrente através do monitoramento da corrente na
intrruptor por um resistor shunt.
Nesta seção será tratado o modelo utilizado para o controle, projeto do compensador
pela metodologia proposta pelo fabricante e dos circuitos auxiliares.
B.4.1 MODELO DO CONVERSOR FLYBACK OPERANDO EM CONDUÇÃO DESCONTÍNUA
Para o projeto de uma malha de controle pelo método clássico, é necessário o modelo
da planta que se deseja controlar. O modelo do Conversor Flyback aqui utilizado é o
desenvolvido em [11] e trata-se de uma função de transferência que relaciona a tensão de
saída do conversor com a tensão de controle do compensador. O conversor em questão
possui 4 saídas, entretanto apenas uma delas é monitorada e controlada, as outras são
indiretamente controladas pelo conceito de regulação cruzada .
Como o modelo proposto do conversor relaciona a tensão de saída com a tensão de
controle, isto é, traduz perturbações na saída em perturbação na razão cíclica, estando o
sistema não-perturbado no ponto de operação, deve-se levar em consideração no modelo
grandezas nestas condições.

Douglas Pereira da Silva, M. Eng.
194
Como existem grandezas relevantes ao modelo tanto no primário quanto no
secundário do transformador, faz-se necessários a padronização através da referência a um
dos enrolamentos. Optou-se por referir as grandezas do primário ao secundário, já que este
possui mais grandezas envolvidas.
Para a determinação da função de transferência, é necessário conhecer-se o valor da
indutância magnetizante referida à saída que se quer controlar. A eq. (B.23) define a
indutância magnetizante referida ao primário e a eq. (B.24) define a mesma magnetizante
referida às outras saídas.
H 72,707_302
0 µδ
µ==
AeNLm P
P (B.23)
H 51,892
__ µ=
=
P
kSecPkSec N
NLmLm (B.24)
A função de transferência para a saída que se deseja controlar, no caso a saída 1, é
definida, portanto, pela eq. (B.25).
+
+=
11
2)(
1_1_
1_1_
1
1_1sec__
outLoad
outout
sSec
Load
S
nomin
CsRCsRSE
fLmR
VV
sG (B.25)
Onde Vin_nom_sec1 é a tensão nominal de entrada referida à saída 1, VS é a tensão de
referência do controlador e RLoad é definida pela eq. (B.26).
1_
1_1_
out
outLoad I
VR = (B.26)
Da função de transferência em (B.25) determinam-se as freqüências do pólo e do
zero do conversor Flyback que são expressas por (B.27) e (B.28), respectivamente.
Hz 96,02
1
1_1__ ==
outLoadfckpólo CR
fπ
(B.27)

Douglas Pereira da Silva, M. Eng.
195
Hz 49,5562
1
1_1__ ==
outoutfckzero CRSE
fπ
(B.28)
Os diagramas de Bode de módulo e fase do conversor Flyback em questão são
apresentados na Fig. B.2.
0.1 1 10 100 1 .103 1 .10440
20
0
20
40
f0.1 1 10 100 1 .103 1 .104
100
80
60
40
20
0
G(f)
f
fGdB( )
(a) (b)Fig. B.2 – Diagramas de Bode de (a) módulo e (b) fase do conversor Flyback.
B.4.2 CÁLCULO DO COMPENSADOR
O cálculo do compensador para a planta é baseado no controle proposto pelo
fabricante em [12]. Neste caso o compensador é composto de um filtro passa-baixas com
um determinado ganho para alocação da freqüência de cruzamento e com um pólo para
anular o zero do conversor. A estrutura do compensador é apresentada na Fig. 5.2.
+
-Ri
Rf
Cf
Rd
Vref
Vo
Vc
Fig. B.3 – Estrutura do compensador utilizado.
A referência apresentada na Fig. B.3 é interna ao integrado e fixada em 2,5 V.

Douglas Pereira da Silva, M. Eng.
196
A freqüência de cruzamento do sistema em laço aberto é fixada em um décimo da
freqüência de comutação. Nesta freqüência, o ganho do conversor é de -25,27 dB. O pólo
do compensador, como já dito será alocado na freqüência do zero do convesor, dessa
forma, o ganho DC do compensador necessário para atender a especificação da freqüência
de cruzamento é expresso pela eq. (B.29).
( )
dB 34,4410log20 20
_
=
=
− cdB fG
comppólo
cDC f
fH (B.29)
Os parâmetros do compensador são calculados a partir da especificação de ganho DC
e freqüência do pólo a ser alocado. Como existem mais parâmetros a serem definidos do
que equações, é necessário arbitrar-se um dos parâmetros. Arbitrando-se o valor de Rf em
820 kΩ, o valor de Ri é obtido pela eq. (B.30).
Ω== k 98,410 20
DCHf
i
RR (B.30)
Adotou-se um resistor de precisão Ri de 4,99 kΩ. O resistor Rd responsável pela
atenuação do sinal de realimentação é calculado pela eq. (B.31).
Ω=−
= k 11_
irefout
refd R
VVV
R (B.31)
O valor do capacitor de realimentação é definido através do resistor Rf e da
freqüência do pólo a ser alocado e é expresso pela eq. (B.32).
pF 78,3482
1
_
==comppólof
f fRC
π (B.32)

Douglas Pereira da Silva, M. Eng.
197
O valor comercial adotado para o capacitor foi de 330 pF. A função de transferência
do compensador e os diagramas de Bode do compensador com parâmetros teóricos e
práticos são apresentados respectivamente na eq. (B.33) e Fig. B.4.
1
1)(+
=ffi
f
CsRRR
sH (B.33)
0.1 1 10 100 1.103 1.10420
30
40
50
HdBf( )
Hprat_dB f( )
f0.1 1 10 100 1.103 1.104
100
50
0
H f( )
H_prat f( )
f(a) (b)
Fig. B.4 – Diagramas de Bode de (a) módulo e (b) fase do compensador utilizado com
parâmetros teóricos e práticos.
Verifica-se na Fig. B.4 a superposição dos gráficos indicando que praticamente não
houve influência na resposta pela pequena variação de parâmetros.
B.4.3 SISTEMA EM LAÇO ABERTO
Com a inserção do compensador pode-se obter os diagramas de Bode do sistema em
laço aberto e verificar se o compensador atende às especificações. Os diagramas de Bode
com parâmetros do compensador teóricos e práticos são apresentados na Fig. B5.

Douglas Pereira da Silva, M. Eng.
198
0.1 1 10 100 1.103 1.10450
0
50
100
FTLAdB f( )
FTLAprat_dBf( )
f0.1 1 10 100 1.103 1.104
100
50
0
FTLA(f)
FTLA_prat(f)
f
(a) (b)Fig. B.5 – Diagramas de bode de módulo e fase do sistema em laço aberto com parâmetros
do compensador teóricos e práticos.
Comprova-se pela Fig. B.5 que o sistema em laço aberto está dentro das
especificações desejadas com freqüência de cruzamento em torno de 5 kHz e ganho
estático elevado.
B.5 CIRCUITOS AUXILIARES
O circuito completo implementado é apresentado na Fig. 6.1.
M1IRF510
Cg12n
R90.25
1.8Rg1.8k
C20.1u
1N4936Dg
R7
12
R822k
U1
UC3844
3
5
6
7
8
4ISENSE
GND
OUT
VCC
VREF
RT/CT
D4MUR110
Cout41000u
D3MUR110 Cout3
2200u
VFB
COMP
2
1
C10.33n R3
820k
R14.99k
R210k
D1MUR110 Cout1
2200u
Vout
Cout21000u
D2MUR110
Vout
R41k
R5
Z1BZX83C18
Q12N2222 MOLEX
2 x 3 pinos
MOLEX2 x 3 pinos
SEC1
SEC2
SEC3
SEC4CT
RT
2.2n
10k
Fusível500mA
C30.47n
1k
R6
Cd1 Cd2220u+
15n
Vin
Fig. B.6 – Diagrama esquemático completo da fonte auxiliar.

Douglas Pereira da Silva, M. Eng.
199
B.5.1 CIRCUITO DE AJUDA À COMUTAÇÃO
O circuito de ajuda à comutação utilizado é um grampeador de tensão do interruptor
principal semi-dissipativo RCD com metodologia de cálculo baseada em [13]. Os
parâmetros para o cálculo deste grampeador são apresentados na Tabela B.10, na qual a
indutância de comutação é considerada a indutância de dispersão do transformador
Flyback real.
Tabela B.10 – Parâmetros para dimensionamento do circuito grampeador de tensão do
interruptor principal.
Parâmetro Valor
Indutância de comutação 1,05 µH
Tensão máxima admissível 70 V
Corrente de pico 2 A
Os valores para os elementos do grampeador dimensionado são mostrados na Tabela
B.11.
Tabela B.11 – Elementos do grampeador.
Elemento do grampeador Resultado teórico Valor implementado
Resistor Rg 201,3 Ω 1 kΩ
Capacitor Cg 11,52 ηF 12 ηF
Diodo Dg 1N4936
B.5.2 CIRCUITOS EXTERNOS AO UC3844
Alimentação do componente
Como se pretende alimentar o componente diretamente do barramento da bateria e o
componente tem algumas características especiais na alimentação, é necessário uma
abordagem diferenciada em relação a outros circuitos integrados.
O UC3844 necessita de uma corrente em torno de 17 mA para o seu funcionamento
além do fato de que o ponto de alimentação do CI é o mesmo de onde é drenada a corrente

Douglas Pereira da Silva, M. Eng.
200
para o comando do interruptor principal. Outro ponto a ser levado em consideração é a
banda alta de histerese de Under Voltage Lockout do CI que é elevada.
O circuito proposto para a alimentação do CI a partir do barramento da bateria é
composto pelos seguintes elementos na Fig. 6.1: Resistores R4 e R5; diodo zener Z1 e
transistor bipolar de sinal Q1. O diodo zener é de 18 V, tendo como função grampear o
valor da tensão na base do transistor e conseqüentemente a tensão de alimentação do
componente. Os resistores R4 e R5 tem a função de polarizar o transistor na região linear
fazendo com que esse forneça um ganho de corrente para a alimentação do UC3844, além
de limitar a corrente no diodo zener.
Circuito de proteção contra sobrecorrente
Conforme já foi dito, o controlador PWM utilizado apresenta algumas facilidades já
implementadas. Uma delas é a proteção contra sobrecorrente que, com apenas alguns
elementos externos ao CI, é realizável.
Esta proteção é implementada dimensionando um resistor shunt para aquisição da
corrente no interruptor principal de tal forma que o máximo pico de corrente admissível
resulte numa tensão de 1 V neste resistor, que deve ser ligado ao pino 3 do UC3844.
Quando é aplicada uma tensão maior ou igual a 1 V no pino 3 o CI inibe os pulsos de
comando evitando assim uma sobrecorrente no interruptor.
Dessa forma, o resistor shunt, que no esquemático da Fig. B.6 é o resistor R9, é
dimensionada pela eq. (B.6), na qual a corrente de pico para proteção é definida como 4 A.
Ω== 25,0A4V1
9R (B.34)
A potência dissipada no resistor shunt para a situação de proteção e para a operação
em regime permanente com tensão de entrada mínima é dada pelas eq. (B.35) e (B.36)
W58,03max2
_99_ ==DIRP protPR (B.35)
W20,03max2
99_ ==DIRP PR (B.36)

Douglas Pereira da Silva, M. Eng.
201
O valor da resistência apresentado em (B.34) é implementado com 4 resistores de 1
Ω de 1/8 W em paralelo.
Com o intuito de evitar que picos de corrente no interruptor oriundos de recuperação
reversa dos diodos, os chamados spikes de corrente façam atuar a proteção contra
sobrecorrente, um pequeno filtro RC com baixíssima constante de tempo é inserido no
entre o resistor shunt e o pino 3 do CI. Este filtro é constituído pelos resistores R6 e C3.
Oscilador
Devido ao flip-flop do tipo Toggle interno ao controlador PWM, responsável pela
limitação da razão cíclica em 0,5, a freqüência de oscilação para o cálculo do resistor e
capacitor do oscilador deve ser igual a duas vezes a freqüência desejada, portanto a
freqüência do 3844 é definida como 100 kHz.
Os componentes adicionais para o funcionamento do oscilador são o resistor RT e o
capacitor CT. Arbitrando este último em 2,2 ηF, tem-se que o resistor pode ser calculado
pela eq. (B.37).
Ω== k 82,772,1
3844 TT Cf
R (B.37)
É adotado na prática um micropotenciômetro de precisão como RT.
B.6 RESULTADOS DE SIMULAÇÃO
As simulações realizadas tratam da estrutura já em malha fechada e com o modelo do
controlador PWM UC3844 existente além de todos os circuitos auxiliares, tal como o
diagrama esquemático da Fig. B.6, salvo o resistor e o capacitor do oscilador, pois a
freqüência deste é definida internamente no modelo. Também cabe aqui ressaltar que
algumas não-idealidades foram consideradas, são elas: a resistência série equivalente dos
capacitores de saída e a indutância de dispersão do transformador.
Na Fig. B.7 e B.8 são apresentados os resultados de uma saída simétrica para tensão
de entrada mínima e máxima, respectivamente.

Douglas Pereira da Silva, M. Eng.
202
Tempo239.200ms 239.250ms 239.300ms 239.350ms 239.400ms 239.450ms
Vout2
-15.00V
-14.98V
-14.96V
-14.94VVout1
14.88V
14.92V
14.96V
(a)
(b)
Fig. B.7 – Detalhe da tensão da saída simétrica (a) 1 e (b) 2 para tensão de entrada de 21 V.
Tempo236.400ms 236.440ms 236.480ms 236.520ms 236.560ms 236.600ms
Vout2
-15.07V
-15.05V
-15.03VVout1
14.96V
15.00V
15.04V
(a)
(b)
Fig. B.8 – Detalhe da tensão da saída simétrica (a) 1 e (b) 2 para tensão de entrada de 30 V.
Pelas Fig. B.7 e B.8 verifica-se que a tensão de saída está regulada no valor desejado
e a ondulação está dentro dos limites especificados. Nas Fig. B.9 e B.10 são mostradas as
formas de onda da tensão e corrente no interruptor principal para entrada mínima e
máxima.

Douglas Pereira da Silva, M. Eng.
203
Tempo234.15ms 234.16ms 234.17ms 234.18ms 234.19ms 234.20ms 234.21ms 234.22ms
I(S)
0A
1.0A
2.0A
V(S)0V
20V
40V
53V
(a)
(b)
Fig. B.9 – (a) Tensão e (b) corrente no interruptor principal.
Tempo233.460ms 233.480ms 233.500ms 233.520ms 233.539ms
I(S)
0A
1.0A
2.0A
V(S)
20.0V
40.0V
60.0V
0V
(a)
(b)
Fig. B.10 – (a) Tensão e (b) corrente no interruptor principal.
Percebe-se pela Fig. B.9 e B.10 que a corrente no interruptor confirma-se
descontínua e que a tensão é grampeada em patamares menores que o especificado e
seguros para o interruptor que é de 100 V. Na Fig. B.11 é mostrado o detalhe da comutação
com a atuação do circuito grampeador.

Douglas Pereira da Silva, M. Eng.
204
Tempo228.4640ms 228.4645ms 228.4650ms 228.4655ms 228.4660msI(Rg)
15mA20mA
10mA
I(Dg)0A
1.0A
2.0AI(S)
0A1.0A2.0A
I(primário)0A
1.0A
2.0A(a)
(b)
(c)
(d)
Fig. B.11 – Detalhe da corrente no (a) primário do transformador; (b) interruptor principal;
(c) diodo de grampeamento; (d) resistor de grampeamento.
Uma vez que o interruptor é comandado a bloquear, a corrente nele imediatamente
começa a se extinguir como é mostrado na Fig. B.11.b, entretanto devido à indutância de
dispersão que não é acoplada magneticamente, é necessário um caminho para a
desmagnetização desta indutância, que é formado pelo grampeador.
O diodo é polarizado a partir do momento em que a tensão no interruptor torna-se
maior que a tensão de entrada somada a do capacitor de grampeamento. A energia na
indutância de dispersão é, portanto entregue ao capacitor que a dissipa no resistor e
regenerada na fonte de entrada.
Verifica-se, dessa forma, que a composição da corrente no indutor com a corrente no
diodo de grampeamento resultam na corrente do primário. A Fig. B.11.d mostra a corrente
circulante pelo resistor de grampeamento que é a imagem da tensão no capacitor de
grampeamento.
Na Fig. B.12 é apresentada a forma de onda de corrente no coletor do transistor Q1
de modo a se verificar a exigência de corrente na alimentação do UC3844.

Douglas Pereira da Silva, M. Eng.
205
Tempo
230.80ms 230.82ms 230.84ms 230.86ms 230.88ms 230.90msIc(Q1)
0A
200mA
400mA
600mA
Fig. B.12 – Corrente de alimentação do UC3844.
Analisando-se a Fig. B.12 nota-se que se trata de uma corrente contínua com baixo
valor e picos curtos em intervalos fixos de elevada amplitude em relação à componente
contínua. A componente contínua é referente ao consumo interno do circuito integrado, já
os picos de corrente são referentes à corrente drenada para a carga da capacitância de
entrada do MOSFET no momento do comando de condução deste interruptor.
B.7 CONCLUSÃO
Neste apêndice foi apresentado o roteiro completo de projeto de uma fonte auxiliar
regulada com duas saídas simétricas de +15V / -15V, a partir de um barramento CC de um
banco de baterias com tensão flutuante entre 21 V e 28,8 V, adaptada ao sistema proposto.
Optou-se por utilizar o conversor Flyback no modo de condução descontinua devido
à simplicidade do seu modelo neste modo. O controlador PWM empregado é o UC3844
que possui algumas facilidades implementadas para o controle de conversores Flyback.
Verificou-se por simulação, em malha fechada e com o modelo do controlador
utilizado, que a fonte atendeu às especificações desejadas. Todos os circuitos auxiliares
foram projetados e também se comportaram, em simulação, dentro do previsto.

.
REFERÊNCIAS BIBLIOGRÁFICAS
[1] RUTHER, R. Panorama atual da utilização da energia solar fotovoltaica e o
trabalho do Labsolar nesta área. Disponível em:
<http://www.labsolar.ufsc.br/Ruther/index.html> Acesso em: janeiro de 2003.
[2] ARAÚJO, R.G.; KRAUTER, S.; QUASCHNING, V. Solar Modules – Experiment
PE1. Disponível em: <http://emsolar.ee.tu-berlin.de/lehre/english/pv1>. Acesso
em: abril de 2002.
[3] KOUTROULIS, E.; KOSTAS, K.; VOULGARIS, C. Development of a
Microcontroller-Based Photovoltaic Maximum Power Point Tracking Control
System. IEEE Transactions on Power Electronics, vol. 16, nº 1, Janeiro, 2001.
[4] KYOCERA. Especificação dos módulos fotovoltaicos KC50.
[5] CASE, M.J.; SCHOEMAN, J.J. A minimum Component Photovoltaic Array
Maximum Power Point Tracker. Proceedings of the European Space Power
Conference. Agosto, 1993, Graz, Austria.
[6] HERRMANN, U; LANGER, H.G. Low Cost DC to AC Converter for Photovoltaic
Power Conversion in Residential Applications. Revista IEEE, 1993.
[7] MWEENE, L. H.; WRIGHT, C. A.; SCHLECHT, M.F. A 1kW, 500 kHz Front-end
converter for a distributed power supply system. In: APEC’89 – Applied Power
Electronics Conference and Exposition Proceeding, Baltimore, Maryland, USA:
1989, p. 423 – 432.
[8] Erickson, R. W. Fundamentals of Power Electronics. 1ª ed. Boulder: Chapman &
Hall, 1997.
[9] HELDWEIN, M. L. Unidade retificadora trifásica de alta potência e alto
desempenho para aplicação em centrais de telecomunicações. Florianópolis, 1999.
Dissertação (Mestrado em Engenharia Elétrica) – INEP/EEL, Universidade Federal
de Santa Catarina.
[10] BARBI, I.; MARTINS, D. C. Teoria fundamental da eletrônica de potência.
Apostila – Publicação interna. Florianópolis, 2001. INEP/EEL – Universidade
Federal de Santa Catarina.
[11] BARBI, I. Projeto de fontes chaveadas. Florianópolis: Ed. do Autor, 2001.

Douglas Pereira da Silva, M. Eng.
207
[12] UNITRODE. Application note U100-A. Manual de aplicacao do circuito integrado
UC3844. 1999.
[13] FLORERO, H. J., Inversor Monofásico com Modulação PWM Otimizada a Três
Níveis. Florianópolis, 1989. Dissertação de Mestrado (Mestrado em Engenharia
Elétrica) – INEP/EEL, Universidade Federal de Santa Catarina
[14] EDELMOSER, K. H.; HIMMELSTOSS, F.A. New High Efficiecy Current Fed DC
–to-AC Inverters. In: 2nd World Conference and Exhibition on Photovoltaic Solar
Energy Conversion. Julho, 1998, Viena, Austria.
[15] BARBI, I.; MARTINS, D. C. Conversores CC-CC Básicos Não Isolados.
Florianópolis: Ed. dos Autores, 2000.