sistema de geolocalizac˘ao de animais~ silvestres
TRANSCRIPT
UNIVERSIDADE TECNOLOGICA FEDERAL DO PARANADEPARTAMENTO ACADEMICO DE ELETRONICABACHARELADO EM ENGENHARIA ELETRONICA
BRUNO ASSIS HATSBACH
RICARDO SCHNEIDER
SISTEMA DE GEOLOCALIZACAO DE ANIMAIS
SILVESTRES
TRABALHO DE CONCLUSAO DE CURSO
CURITIBA2018
BRUNO ASSIS HATSBACH
RICARDO SCHNEIDER
SISTEMA DE GEOLOCALIZACAO DE ANIMAIS
SILVESTRES
Trabalho de Conclusao de Curso apresentado aoBacharelado em Engenharia Eletronica da UniversidadeTecnologica Federal do Parana, como requisito parcial paraa obtencao do tıtulo de Bacharel.
Orientador: Bertoldo Schneider JrUniversidade Tecnologica Federal do Pa-rana
Coorientador: Thomaz Milton Navarro VerasteguiUniversidade Tecnologica Federal do Pa-rana
CURITIBA2018
BRUNO ASSIS HATSBACH
RICARDO SCHNEIDER
SISTEMA DE GEOLOCALIZAÇÃO DE ANIMAIS SILVESTRES
Este Trabalho de Conclusão de Curso de Graduação foi apresentado como requisito parcial para obtenção do título de Engenheiro Eletrônico, do curso de Engenharia Eletrônica do Departamento Acadêmico de Eletrônica (DAELN) outorgado pela Universidade Tecnológica Federal do Paraná (UTFPR). Os alunos foram arguidos pela Banca Examinadora composta pelos professores abaixo assinados. Após deliberação, a Banca Examinadora considerou o trabalho aprovado.
Curitiba, 29 de junho de 2018.
____________________________________ Prof. Dr. Robinson Vida Noronha
Coordenador de Curso Engenharia Eletrônica
____________________________________ Profª. Drª. Carmen Caroline Rasera
Responsável pelos Trabalhos de Conclusão de Curso de Engenharia Eletrônica do DAELN
BANCA EXAMINADORA
_________________________________ Prof. Dr. Bertoldo Schneider Jr Universidade Tecnológica Federal do Paraná Orientador _________________________________ Prof. Me. Thomaz Milton Navarro Verastegui Universidade Tecnológica Federal do Paraná Coorientador
_________________________________ Prof. Me. Luiz Fernando Copetti Universidade Tecnológica Federal do Paraná _________________________________ Prof. Dr. Robinson Vida Noronha Universidade Tecnológica Federal do Paraná
A folha de aprovação assinada encontra-se na Coordenação do Curso de Engenharia Eletrônica.

As nossas famılias.

AGRADECIMENTOS
Os autores deste projeto agradecem a seus familiares e amigos, por seu grande
apoio durante o curso. Em especial a Fernanda, por tudo que ajudou e incentivou.
Aos colegas por ajudarem com as dificuldades de aula e com a distancia da famılia.
Agradecendo em especial aos colegas William e Alexandre, por auxiliarem na confeccao
das placas e testes.
Aos professores de Engenharia Eletronica, em especial o Professor Bertoldo Sch-
neider Jr. e o Professor Thomaz Milton Navarro Verastegui que auxiliaram para a efetiva
realizacao deste trabalho.

Progress in science comes when experimentscontradict theory. (FEYNMAN, Richard P.)

RESUMO
HATSBACH, Bruno Assis; SCHNEIDER, Ricardo.Sistema de Geolocalizacao de AnimaisSilvestres. 2018. 57 f. Trabalho de Conclusao de Curso – Bacharelado em EngenhariaEletronica, Universidade Tecnologica Federal do Parana. Curitiba, 2018.
A conservacao de especies depende de acoes que busquem solucoes praticas e eficazesno monitoramento, controle e manejo de animais. A pressao antropogenica e crimesambientais, como o trafico e a caca ilegal, tem levado milhares de animais a extincao. Parapreservar a biodiversidade e necessario aliar o conhecimento ambiental ao desenvolvimentode tecnologias inovadoras.Este projeto tem como objetivo a elaboracao de um prototipo de uma coleira localizadora,para que sejam coletados dados que ajudem no estudo e protecao destes indivıduos. Comoos ambientes onde estes animais vivem dificilmente tem acesso a cobertura de telefoniamovel, a proposta do projeto constitui na criacao de uma rede de comunicacao dentrodesses territorios com o desenvolvimento de gateways que se comuniquem entre si e ascoleiras por uma rede mesh, e com a Internet por comunicacao a cabo ou sem fio. Acomunicacao entre as coleiras e o gateway sera feita em banda Sub-GHz. Ja a comunicacaoentre o Gateway e a nuvem sera feita com o uso de uma conexao Ethernet ou telefonia movel.
Palavras-chave: Sistema de Monitoramento. Animais Silvestres. Coleira de Rastreamento.

ABSTRACT
HATSBACH, Bruno Assis; SCHNEIDER, Ricardo.. Wild Animals Geolocation System.2018. 57 f. Trabalho de Conclusao de Curso – Bacharelado em Engenharia Eletronica,Universidade Tecnologica Federal do Parana. Curitiba, 2018.
The conservation of species depends on actions that seek practical and effective solutions foranimals monitoring, control and management. Anthropogenic pressure and environmentalcrime, such as trafficking and illegal hunting, have led thousands of animals to extinction.To preserve biodiversity, it is necessary to combine environmental knowledge with thedevelopment of innovative technologies.The aim of this project is the elaboration of a tracking collar prototype, so data canbe collected to aid in studies and protection of these individuals. As the environmentswhere these animals live can hardly access mobile telephony coverage, the project proposalconstitutes the creation of a communication network within these territories with thedevelopment of gateways and collars that communicate with each other through a meshnetwork and with the Internet over a cable or wireless communication. The communicationbetween the collars and the gateway will be done with Sub-GHz and the communicationbetween the Gateway and the cloud will be done using a Ethernet or mobile telephonyconnection.
Keywords: Monitoring System. Wild Animals. Tracking Collar.
LISTA DE FIGURAS
Figura 1 – Diagrama simplificado . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
Figura 2 – Fluxograma das Etapas do Projeto . . . . . . . . . . . . . . . . . . . . 5
Figura 3 – Diagrama de Blocos do Circuito da Coleira . . . . . . . . . . . . . . . . 9
Figura 4 – Diagrama de Blocos do Circuito do Gateway . . . . . . . . . . . . . . . 9
Figura 5 – Circuito equivalente LT . . . . . . . . . . . . . . . . . . . . . . . . . . 10
Figura 6 – Diagrama de Blocos Funcionais CC1310 . . . . . . . . . . . . . . . . . 15
Figura 7 – Esquematico Microcontrolador CC1310 . . . . . . . . . . . . . . . . . . 17
Figura 8 – Esquematico Radio Transmissor . . . . . . . . . . . . . . . . . . . . . . 18
Figura 9 – Esquematico do Modulo GPS . . . . . . . . . . . . . . . . . . . . . . . 18
Figura 10 – Esquematico do Modulo GSM . . . . . . . . . . . . . . . . . . . . . . . 20
Figura 11 – Esquematico Antena GSM . . . . . . . . . . . . . . . . . . . . . . . . . 20
Figura 12 – Esquematico Microcontrolador TM4C1294NCPDT . . . . . . . . . . . 21
Figura 13 – Esquematico Conversor UART/USB . . . . . . . . . . . . . . . . . . . 22
Figura 14 – Esquematico Regulador Linear TPS79601 . . . . . . . . . . . . . . . . 23
Figura 15 – Esquematico Regulador Linear LP38501-ADJ . . . . . . . . . . . . . . 23
Figura 16 – Esquematico Ethernet PHY . . . . . . . . . . . . . . . . . . . . . . . . 24
Figura 17 – Esquematico Micro SD . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
Figura 18 – Arquivo KML . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35
Figura 19 – Pagina HTML . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 36
Figura 20 – Pagina KML . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38
Figura 21 – Pagina KML . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38
Figura 22 – Top layer da PCI da Gateway . . . . . . . . . . . . . . . . . . . . . . . 51
Figura 23 – Top layer da PCI da Coleira . . . . . . . . . . . . . . . . . . . . . . . . 52
Figura 24 – Parametro S11 do dipolo pre-ajuste. . . . . . . . . . . . . . . . . . . . . 53
Figura 25 – Parametro S11 do dipolo pre-ajuste - Carta de Smith. . . . . . . . . . . 53
Figura 26 – Parametro S11 do dipolo pos-ajuste. . . . . . . . . . . . . . . . . . . . . 54
Figura 27 – Parametro S11 do dipolo pos-ajuste - Carta de Smith. . . . . . . . . . . 54
Figura 28 – Parametro S11 do monopolo pre-ajuste. . . . . . . . . . . . . . . . . . . 55
Figura 29 – Parametro S11 do monopolo pre-ajuste - Carta de Smith. . . . . . . . . 55
Figura 30 – Parametro S11 do monopolo pos-ajuste. . . . . . . . . . . . . . . . . . . 56
Figura 31 – Parametro S11 do monopolo pos-ajuste - Carta de Smith. . . . . . . . . 56
LISTA DE QUADROS
Quadro 1 – Caracterıstica do CI CC1310. . . . . . . . . . . . . . . . . . . . . . . . 16
Quadro 2 – Caracterıstica do Modulo GPS. . . . . . . . . . . . . . . . . . . . . . . 19
Quadro 3 – Caracterıstica do Modulo GSM. . . . . . . . . . . . . . . . . . . . . . 19
Quadro 4 – Caracterıstica do CI TM4C1294NCPDT. . . . . . . . . . . . . . . . . 21
Quadro 5 – Caracterıstica do Conversor UART/USB. . . . . . . . . . . . . . . . . 22
Quadro 6 – Mensagens NMEA. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28
Quadro 7 – Analise SWOT. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 39
Quadro 8 – Poder de Barganha dos Compradores. . . . . . . . . . . . . . . . . . 41
Quadro 9 – Forca dos Concorrentes. . . . . . . . . . . . . . . . . . . . . . . . . . 41
Quadro 10 – Ameaca de novos entrantes/concorrentes. . . . . . . . . . . . . . . . . 42
Quadro 11 – Forca de barganha dos fornecedores. . . . . . . . . . . . . . . . . . . 42
Quadro 12 – Ameacas de produtos substitutos. . . . . . . . . . . . . . . . . . . . . 43
Quadro 13 – Avaliacao das cinco forcas de Porter. . . . . . . . . . . . . . . . . . . 43

LISTA DE TABELAS
Tabela 1 – Tabela consolidada das Unidades de Conservacao. . . . . . . . . . . . . 7
Tabela 2 – Tabela Custos de Fabricacao em Dolares Estadunidenses (USD). . . . 44
LISTA DE ABREVIATURAS E SIGLAS
AC Alternating Current
ADC Analog to Digital Converter
ANATEL Agencia Nacional de Telecomunicacoes
ARM Acorn RISC Machine
AT Attention
BPSK Binary Phase Shift Keying
CAN Campus Area Network
CEP Circular Error Probable
CI Circuito Integrado
DC Direct Current
DGPS Differential Global Positioning System
EEPROM Electrically Erasable Programmable Read Only Memory
EIRP Effective Isotropic Radiated Power
ENET Erlang Network Element Technology
FAT File Allocation Table
FLASH Fast Low Latency Access with Seamless Handoff
FTP File Transfer Protocol
FW Firmware
GGA Global positioning system fix data
GND Ground
GNSS Global Navigation Satellite System
GPIO General Purpose Input/Output
GPS Global Positioning System
GPRS General Packet Radio Service
GSM Global System for Mobile Communications
HDOP Dilution of Precision
HTML HyperText Markup Language
HTTP Hypertext Transfer Protocol
IEEE Institute of Electrical and Electronics Engineers
INPI Instituto Nacional da Propriedade Industrial
IOT Internet of Things
IP Internet Protocol
I2C Inter-Integrated Circuit
KML Keyhole Markup Language
LWPA Low Power Wide Area
LPWAN Low Power Wide Area Network
lwIP Light Weight Internet Protocol
LT Linha de Transmissao
LTE Long Term Evolution
MAC Medium Access Control
MCU Master Control Unit
M2M Machine To Machine
NB Narrowband
NMEA National Marine Electronics Association
OGC Open Geospatial Consortium
OTA Over the Air
OTG On The Go
PCI Placa de Circuito Impresso
PHY Physical
PPS Pulse Per Second
PSM Power Save Mode
PWM Pulse Width Modulation
RAM Random-Access Memory
RF Radio Frequency
RFID Radio Frequency Identification
RISC Reduced Instruction Set Computer
RMC Recommended Minimum Data
RSSI Received Signal Strength Indicator
RTCM Radio Technical Commission For Maritime
RTK Real Time Kinematic
RTOS Real Time Operating System
RX Receive/Receiver/Reception
SD Secure Digital
SIM Subscriber Identity Module
SMS Short Message Service
SPI Serial Peripheral Interface
SRAM Static Random Access Memory
SSL Secure Sockets Layer
SWOT Strengths, Weaknesses, Opportunities and Threats
TCP Transmission Control Protocol
TI Texas Instruments
TLS Transport Layer Security
TQFP Thin Quad Flat Pack
TTFF Time To First Fixation
TVS Transient Voltage Suppression
TX Transmit/Transmitter/Transmission
UART Universal Asynchronous Receiver Transmitter
UDP User Datagram Protocol
UHF Ultra High Frequency
uIP Micro Internet Protocol
ULL Ultra Low Leakage
ULP Ultra Low Power
ULPI UTMI + Low Pin Interface
UMTS Universal Mobile Telecommunication System
USB Universal Serial Bus
UTC Universal Time Coordinated
UTFPR Universidade Tecnologica Federal do Parana
UTMI USB Transceiver Macrocell Interface
VCC Voltage at The Common Collector
VNA Vector Network Analyzer (Analisador Vetorial de Rede)
VHF Very High Frequency
VQFN Very Thin Quad Flat No-Lead
WGS84 World Geodetic System 1984
XML Extensible Markup Language
LISTA DE SIMBOLOS
α Coeficiente de atenuacao
β Fator/coeficiente de propagacao
δ Tangente de perdas
ε Permissividade eletrica
γ Constante de propagacao
λ Comprimento de onda
ω Velocidade angular
Φ Fase
σ Condutividade
C Capacitancia
c Velocidade da luz no vacuo (c = 299 792 458 m/s)
f Frequencia
G Condutancia
I Corrente eletrica
j Base imaginaria,√−1
L Indutancia
R Resistencia
V Tensao, diferenca de potencial eletrico
Z Impedancia
SUMARIO
1 – INTRODUCAO . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
1.1 JUSTIFICATIVA . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2
1.2 OBJETIVO . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2
1.2.1 OBJETIVO GERAL . . . . . . . . . . . . . . . . . . . . . . . . . 2
1.2.2 OBJETIVOS ESPECIFICOS . . . . . . . . . . . . . . . . . . . . 2
1.3 DIAGRAMA . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
1.4 METODOLOGIA . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
1.5 ORGANIZACAO DO TRABALHO . . . . . . . . . . . . . . . . . . . . . 4
2 – ESCOPO DO PROJETO . . . . . . . . . . . . . . . . . . . . . . . . . . 6
2.1 CONCORRENTES . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
2.2 MERCADO . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
2.3 PATENTES . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
3 – DESENVOLVIMENTO DO HARDWARE . . . . . . . . . . . . . . . . 9
3.1 PLACAS DE CIRCUITO IMPRESSO . . . . . . . . . . . . . . . . . . . 10
3.1.1 TENSOES E CORRENTES EM UMA LINHA DE TRANSMISSAO 10
3.1.2 LINHAS DE MICROSTRIP (MICROFITA) . . . . . . . . . . . . . 11
3.1.3 IMPEDANCIA CARACTERISTICA DE UMA LINHA MICROS-
TRIP . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
3.1.4 PROJETO DAS TRILHAS . . . . . . . . . . . . . . . . . . . . . 13
3.2 FREQUENCIA DE OPERACAO E ASPECTOS REGULATORIOS . . 13
3.3 RADIO TRANSMISSOR . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
3.3.1 SIGFOX . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
3.3.2 LORA . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
3.3.3 NB-IOT . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
3.3.4 ESCOLHA DO RADIO-TRANSMISSOR . . . . . . . . . . . . . . 15
3.3.5 MICROCONTROLADOR COM RADIO INTEGRADO CC1310 15
3.4 MODULO GPS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
3.5 MODULO GPRS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
3.6 MICROCONTROLADOR DEDICADO PARA GATEWAY TM4C1294NCPDT 20
3.7 CONVERSOR UART/USB . . . . . . . . . . . . . . . . . . . . . . . . . 22
3.8 REGULADOR DE TENSAO . . . . . . . . . . . . . . . . . . . . . . . . 22
3.9 ETHERNET PHY . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24
3.10 CARTAO DE MEMORIA . . . . . . . . . . . . . . . . . . . . . . . . . . 25
3.11 ANTENAS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25

3.11.1 ANTENA MONOPOLO DE QUARTO DE ONDA . . . . . . . . 26
3.11.2 ANTENA DIPOLO DE MEIA ONDA . . . . . . . . . . . . . . . 26
4 – DESENVOLVIMENTO DO FIRMWARE E SOFTWARE . . . . . . . 27
4.1 FIRMWARE . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
4.1.1 TI-RTOS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
4.1.2 UART . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
4.1.3 SPI . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
4.1.4 FAT . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28
4.1.5 MENSAGENS (NMEA) . . . . . . . . . . . . . . . . . . . . . . . 28
4.1.6 ARQUIVO KML . . . . . . . . . . . . . . . . . . . . . . . . . . . 30
4.1.7 MICRO IP . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30
4.2 INTERFACES . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
4.2.1 PAGINA WEB . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
4.2.2 ARQUIVO KML . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
5 – ANALISE E DISCUSSAO DOS RESULTADOS . . . . . . . . . . . . . 32
5.1 HARDWARE . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32
5.1.1 PLACAS DE CIRCUITO IMPRESSO . . . . . . . . . . . . . . . 32
5.1.2 SOLDAGEM DOS COMPONENTES . . . . . . . . . . . . . . . . 32
5.1.3 ANTENAS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33
5.2 FIRMWARE . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33
5.3 SOFTWARE . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34
5.4 ARQUIVOS KML . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34
5.4.1 PAGINA HTML . . . . . . . . . . . . . . . . . . . . . . . . . . . 34
6 – TESTES EM CAMPO . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37
6.1 PLANO DE TESTES . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37
6.2 RESULTADOS TESTE EM CAMPO . . . . . . . . . . . . . . . . . . . . 37
7 – PLANO DE NEGOCIOS . . . . . . . . . . . . . . . . . . . . . . . . . . 39
7.1 ANALISE ESTRATEGICA . . . . . . . . . . . . . . . . . . . . . . . . . 39
7.1.1 ANALISE SWOT . . . . . . . . . . . . . . . . . . . . . . . . . . 39
7.1.2 ANALISE CINCO FORCAS DE PORTER . . . . . . . . . . . . . 40
7.2 CUSTOS DE FABRICACAO . . . . . . . . . . . . . . . . . . . . . . . . . 41
8 – CONCLUSAO . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 45
8.1 TRABALHOS FUTUROS . . . . . . . . . . . . . . . . . . . . . . . . . . 45
8.2 CONSIDERACOES FINAIS . . . . . . . . . . . . . . . . . . . . . . . . . 46
Referencias . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 47
Apendices 50
APENDICE A–LAYOUT DAS PCI FABRICADAS . . . . . . . . . . . . 51
APENDICE B–MEDICOES DAS ANTENAS EM UM VNA . . . . . . 53
APENDICE C–ROTINAS EM MATLAB PARA PROJETO DE LI-
NHAS DE TRANSMISSAO . . . . . . . . . . . . . . . . 57
1
1 INTRODUCAO
O Brasil possui uma relevante biodiversidade, porem sua grande extensao territorial
e um obstaculo a pesquisa e protecao da sua fauna e flora. Dentre os diversos desafios
enfrentados pelos profissionais da area, encontra-se o monitoramento de animais silvestres.
Mamıferos de medio porte, como a onca pintada (Panthera onca) e o lobo guara
(Chrysocyon brachyurus), tendem a viver em grandes areas silvestres. Dessa forma estes
animais tendem a sofrer mais com a pressao antropogenica, pois ela pode propiciar o
isolamento de uma populacao, acarretando uniformidades geneticas, reducao da habilidade
destes animas em adaptar-se a mudancas climaticas, diminuicao da fertilidade e maior
suscetibilidade a doencas. Esse conjunto de fatores contribui para a extincao destes animais.
Dado que pouco se sabe sobre o tamanho de area necessario para a sobevivencia dessas
especies, e imprescindıvel que o comportamento destes animais seja estudado, pois estas
especies sao importantıssimas para o equilıbrio do ecossistema onde estao inseridas (PAULA
et al., 2015). Uma vez que os maniferos de medio porte sao responsaveis pelo controle
populacional de suas presas, influenciam na diversidade da comunidade e ajudam na
dispersao de sementes (VENTURELLI et al., 2015).
O trafico de animais silvestres e considerado uma das maiores atividades ilegais do
mundo, sendo que cerca de 38 milhoes de especimes sao retirados anualmente da natureza.
O que movimenta um mercado estimado em 2,5 bilhoes de dolares americanos por ano
(DESTRO et al., 2012).
Alem dos problemas descritos acima, a pressao antropogenica tambem ocasiona
a morte de animais pela caca, perseguicao e tambem atropelamento, uma vez que estas
especies tendem a sair das reservas por conta de fatores climaticos, da reducao das florestas
e da escassez de alimento. Portanto, o controle destes animais pelo monitoramento e pela
utilizacao de barreiras virtuais (MEJDELL; BASIC; BøE, 2017), como por exemplo o som,
vibracao e choque (OLUWARANTI; AYENI, 2015), podem ajudar a controlar e evitar
a saıda destes animais das unidades de conservacao. Tambem podem contribuir para o
manejo e evitar a extincao destes indivıduos.
Os sistemas de telemetria atualmente disponıveis utilizam tecnologias como radio-
telemetria, GPS, satelite e telefonia movel, para monitoramento de animais. Porem estes
equipamentos em muitos casos nao oferecem uma solucao completa ou devido ao grande
consumo delimitam a capacidade do sistema, pela comunicacao ou aquisicao dos dados de
posicionamento. Outro grande problema desses sistemas de telemetria sao seu alto custo
de implantacao e operacao, uma vez que planos de comunicacao via satelite ou celular
nao sao baratos (PAULA et al., 2015). Alem disso, no Brasil a compra de muitos desses
equipamentos se torna inviavel devido as elevadas despesas de importacao.
Por causa dos problemas descritos acima, este projeto propoe o desenvolvimento
Capıtulo 1. INTRODUCAO 2
de um prototipo de sistema de monitoramento para animais silvestres, utilizando novas
tecnologias com objetivo de alcancar maior cobertura em areas remotas, baixo consumo,
baixo custo e maior versatilidade para diferentes necessidades ou aplicacoes.
1.1 JUSTIFICATIVA
As solucoes existentes hoje no mercado de rastreadores de animais silvestres
possuem preco elevado e alto consumo energetico, alem do tamanho e peso inconvenientes.
Tais deficiencias implicam em baixo perıodo de utilizacao entre intervencoes ou baixa taxa
de aquisicao de dados, desconforto para o animal e dificuldade financeira para se implantar
e manter um projeto de telemetria em larga escala.
Dentre os motivos dessas limitacoes, encontram-se: o uso de comunicacoes que
requerem alto consumo, GPS com TTFF (Time To First Fixation) muito grande au-
mentando os gastos energeticos (TOMKIEWICZ et al., 2010), componentes e modulos
com tecnologia ultrapassada ampliando a area ocupada na placa e o consumo final do
equipamento. No Brasil estes equipamentos acabam se tornando ainda mais caros devido
aos custos de importacao. Atualmente existem novas tecnologias que podem auxiliar no
desenvolvimento de sistemas de monitoramento mais eficientes e que possam integrar
plataformas de pesquisa em seu sistema de comunicacao. Como por exemplo os gateways
poderiam ser construidos para integrar cercas virtuais, estacoes meteorologicas, sistemas
RFID para monitoramento de animais de pequeno porte, microfones para identificacao de
animais pelo som, cameras para coleta de imagens. Portanto existe mercado e tecnologia
para o desenvolvimento de novos sistemas de telemetria que facilitem e melhorem o controle
e a pesquisa de animais silvestres.
1.2 OBJETIVO
1.2.1 OBJETIVO GERAL
Projetar um prototipo de um sistema de biotelemetria, consistindo de estacao
movel (coletora e transmissora de dados de geolocalizacao) e estacao fixa (receptora de tais
dados), a fim de propor solucao de melhor desempenho e menor custo que os disponıveis
atualmente.
1.2.2 OBJETIVOS ESPECIFICOS
1. Desenvolver um prototipo de um modulo movel, consistindo de hardware:
a) Firmware;
b) GPS;
c) Armazenamento;
d) Radio;
Capıtulo 1. INTRODUCAO 3
e) Antena.
2. Desenvolver um prototipo de um modulo fixo com:
a) Firmware;
b) Radio;
c) Modem GPRS;
d) Ethernet;
e) Armazenamento;
f) Antenas.
3. Desenvolver um servidor http;
4. Desenvolver um sistema de arquivos KML.
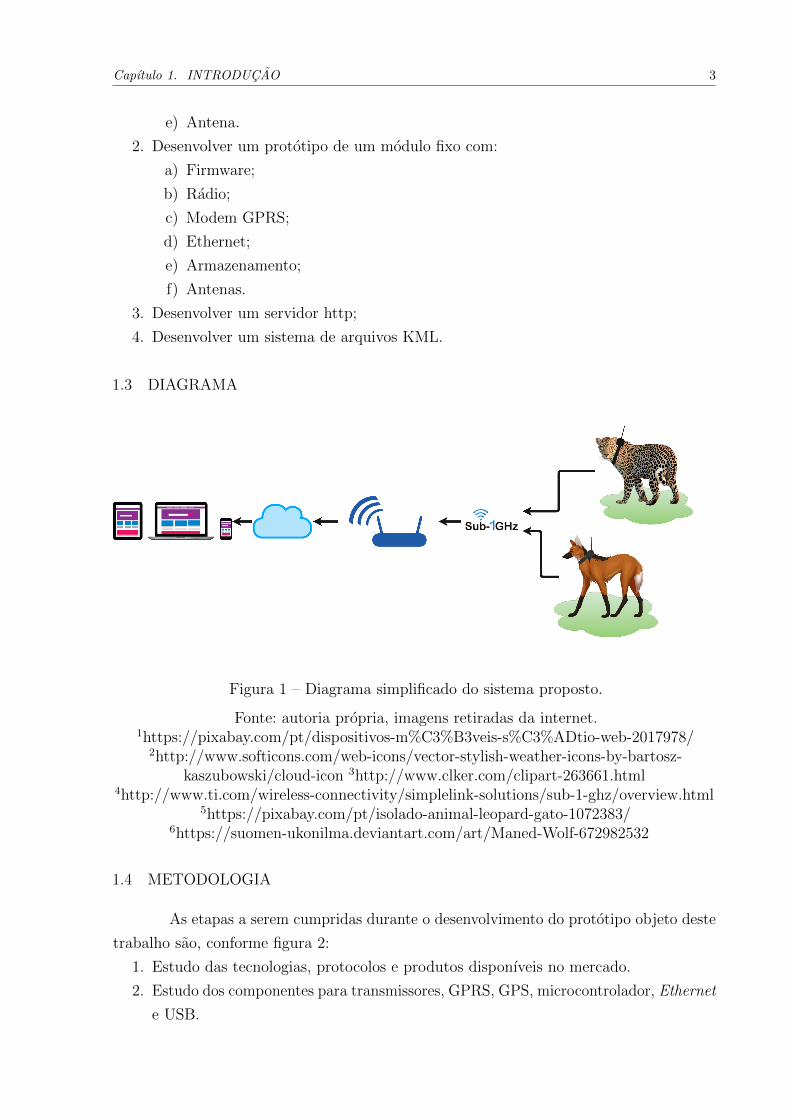
1.3 DIAGRAMA
Figura 1 – Diagrama simplificado do sistema proposto.
Fonte: autoria propria, imagens retiradas da internet.1https://pixabay.com/pt/dispositivos-m%C3%B3veis-s%C3%ADtio-web-2017978/
2http://www.softicons.com/web-icons/vector-stylish-weather-icons-by-bartosz-kaszubowski/cloud-icon 3http://www.clker.com/clipart-263661.html
4http://www.ti.com/wireless-connectivity/simplelink-solutions/sub-1-ghz/overview.html5https://pixabay.com/pt/isolado-animal-leopard-gato-1072383/
6https://suomen-ukonilma.deviantart.com/art/Maned-Wolf-672982532
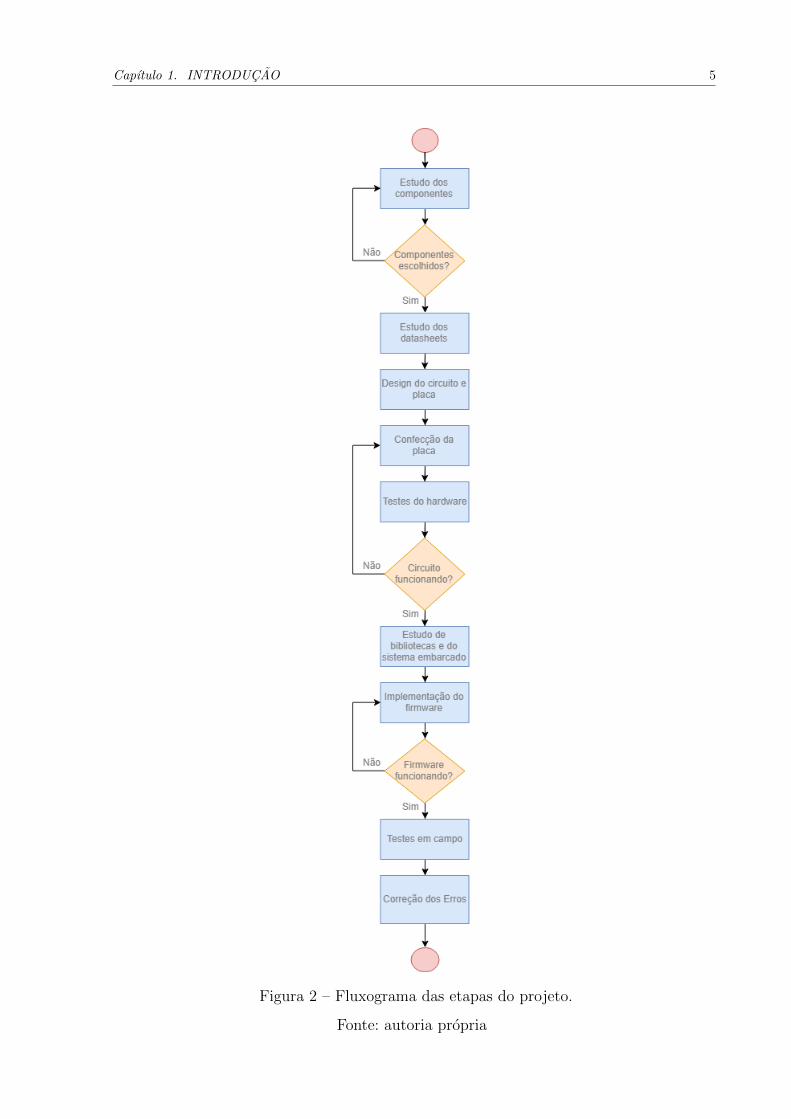
1.4 METODOLOGIA
As etapas a serem cumpridas durante o desenvolvimento do prototipo objeto deste
trabalho sao, conforme figura 2:
1. Estudo das tecnologias, protocolos e produtos disponıveis no mercado.
2. Estudo dos componentes para transmissores, GPRS, GPS, microcontrolador, Ethernet
e USB.
Capıtulo 1. INTRODUCAO 4
3. Selecao dos melhores componentes, considerando funcionalidade, consumo, footprint
e custo.
4. Design do prototipo sem encapsulamento.
5. Manufatura das placas de circuito impresso e compra dos componentes.
6. Solda dos componentes nas placas.
7. Realizacao de testes no prototipo.
8. Desenvolvimento do firmware.
9. Desenvolvimento das interfaces com usuario.
10. Testes de alcance e apresentacao dos resultados.
1.5 ORGANIZACAO DO TRABALHO
Este documento tratara do desenvolvimento do prototipo, delimitando o escopo
do projeto, detalhando as etapas cumpridas na producao de hardware, firmware e software,
assim como apresentando os resultados obtidos na fabricacao, testes laboratoriais e em
campo. Tambem serao discutidas as falhas e dificuldades encontradas. Por fim, apresentar-
se-a relatorio de gestao do projeto e plano de negocios, evidenciando a necessidade do
produto em seu nicho de mercado.
Capıtulo 1. INTRODUCAO 5
Figura 2 – Fluxograma das etapas do projeto.
Fonte: autoria propria
6
2 ESCOPO DO PROJETO
A proposta consiste em um localizador de animais em ambientes remotos. Seus
dados de localizacao serao adquiridos por meio de um GPS e transmitidos por uma rede
Sub-GHz ate um Gateway. Este atuara como um servidor que armazenara os dados e
transmitira as informacoes solicitadas por um usuario conectado a Internet utilizando uma
rede de telefonia movel e/ou uma conexao Ethernet. O design almejado sera em formato
de uma coleira para animais. Tambem visando a maior duracao das baterias serao tomadas
medidas para diminuir o seu consumo, tamanho e peso.
O sistema de coleta armazenara os dados de geolocalizacao do animal e enviara
essas informacoes por uma conexao utilizando uma rede Sub-GHz que conectara as coleiras
a um ou mais Gateways, formando uma rede mesh. Quando a coleira possuir conectividade
com o Gateway, esta transmitira as informacoes armazenadas. Assim a estacao Sub-GHz
recebera esse sinal e enviara essas informacoes pela rede de telefonia movel GPRS ou rede
de Internet a cabo via conexao Ethernet.
Para melhor funcionamento, as estacoes Sub-GHz deverao ser distribuıdas apro-
veitando areas com maior altitude, vegetacao menos densa e maior facilidade de conexao
ou interligacao com redes externas.
O usuario recebera as informacoes da localizacao do animal via mensagem de
celular ou acessando o servidor HTTP, podendo determinar seu comportamento no habitat
em questao sem a necessidade da interacao do homem. Os dados recebidos pela rede
Ethernet ou GSM poderao ser convertidos por um software para visualizacao facilitada
dos dados. A coleta dos dados armazenados no cartao de memoria sera possıvel tambem
ao termino do experimento ou quando for necessario a troca da bateria.
2.1 CONCORRENTES
A NORTRONIC (Sistemas Eletronicos do Nordeste LTDA)1 foi a unica empresa
encontrada no Brasil que produz e comercializa produtos para rastreamento de animais
silvestres. Esta empresa desenvolve transmissores VHF de baixo custo que utilizam a
radiotelemetria para localizar o animal.
No mercado exterior e possıvel encontrar varias empresas neste ramo. As diferen-
tes tecnologias ou solucoes empregadas para comunicacao dos dados sao radios digitais
operando em VHF ou UHF, redes moveis GSM/GPRS e via satelite. Ja para localizacao
do animal sao utilizados radiotelemetria, ARGOS e GPS (TOMKIEWICZ et al., 2010).
Tambem a procura de Gateways a fim de coletar os dados das coleiras a unica plataforma
encontrada oferece apenas a retirada dos dados local. Assim um sistema que crie uma rede
1http://www.nortronic.com.br/

Capıtulo 2. ESCOPO DO PROJETO 7
mesh com as caracterısticas da proposta deste projeto para coleta e transmissao dos dados
ainda nao esta disponıvel no mercado.
Como exposto acima, a unica tecnologia de rastreamento produzida no Brasil
nao utiliza GPS para localizacao do animal e nao permite a comunicacao com a Internet
para aquisicao das informacoes coletadas. Logo estas tecnologias dificultam estudos mais
aprofundados do comportamento do animal, pela falta de precisao e complexidade para
coleta e aquisicao dos dados, em razao da dependencia de um operador que precisa localizar
o animal manualmente.
Ja os concorrentes no mercado exterior, por utilizarem GSM e Satelite, tem como
impeditivo o alto custo de implementacao e operacao, pois cada coleira devera ter uma linha
telefonica paga. Consequentemente inviabilizando, em muitos casos, a implantacao de varias
coleiras. Alem disso, esses sistemas consomem uma grande quantidade de energia quando
comparados com sistemas de comunicacao atualmente em desenvolvimento utilizando
protocolos LPWA.
2.2 MERCADO
Somente no Brasil existem 2.146 unidades de conservacao, que compreendem
1 582 861 km2 (CNUC/MMA, 2018), conforme detalhes expostos na tabela 1. Considerando
a dificuldade na obtencao de coleiras rastreadoras face ao alto custo de importacao e
operacao, existe um grande mercado a ser explorado.
Tabela 1 – Tabela consolidada das Unidades de Conservacao.
Tipo / CategoriaEsfera
TotalFederal Estadual Municipal
Protecao Integral No Area (Km2) No Area (Km2) No Area (Km2) No Area (Km2)Estacao Ecologica 32 74.940 61 47.594 5 40 98 122.574
Monumento Natural 3 443 29 906 15 149 47 1.498Parque Nacional/Estadual/Municipal 73 264.897 209 94.253 135 476 417 359.626
Refugio de Vida Silvestre 8 2.692 45 2.947 7 173 60 5.812Reserva Biologica 31 42.677 23 13.490 8 51 62 56.218
Total Protecao Integral 147 385.648 367 159.190 170 889 684 545.727
Uso Sustentavel No Area (Km2) No Area (Km2) No Area (Km2) No Area (Km2)Floresta Nacional/Estadual/Municipal 67 178.225 39 135.856 0 0 106 314.080
Reserva Extrativista 62 124.724 28 19.867 0 0 90 144.591Reserva de Desenvolvimento Sustentavel 2 1.026 32 111.251 5 171 39 112.447
Reserva de Fauna 0 0 0 0 0 0 0 0
Area de Protecao Ambiental 33 103.266 190 339.409 96 56.955 319 499.631
Area de Relevante Interesse Ecologico 13 341 26 455 10 138 49 934RPPN 635 4.831 223 787 1 0 859 5.619
Total Uso Sustentavel 812 412.413 538 607.626 112 57.264 1.462 1.077.302
Total Geral 959 798.061 905 766.816 282 58.152 2.146 1.623.029
Area Considerando Sobreposicao Mapeada 959 792.282 905 760.327 282 58.107 2.146 1.582.861
Fonte: (CNUC/MMA, 2018)
O prototipo desenvolvido objetiva atender a demanda por parte de biologos que
precisem de coleiras localizadoras para estudos do comportamento de animais silvestres,
como oncas pintadas e lobos guaras. Tambem visa atender a demanda de ONGs que

Capıtulo 2. ESCOPO DO PROJETO 8
estejam a procura de novas tecnologias para automatizar e facilitar o controle de animais
nas unidades de conservacao.
2.3 PATENTES
O INPI (Instituto Nacional da Propriedade Industrial) e a autarquia federal
brasileira responsavel pela aplicacao das normas acerca da Propriedade Industrial. O
INPI e responsavel pelo registro e concessao de marcas, patentes, desenho industrial,
transferencia de tecnologia, indicacao geografica, programa de computador e topografia de
circuito integrado.
O seu website possui a funcionalidade de busca por patentes, permitindo a consulta
por parte do inventor a fim de evitar infracoes da Lei e facilitar a gestao de seu projeto.
Foram realizadas buscas na plataforma2 atraves das palavras chave (rastreador,
animais, sistema, monitoramento, silvestre, etc.) e suas variacoes. Porem nao houve
resultados relevantes relacionados a proposta. Assim nao foram encontradas patentes de
rastreadores de animais silvestres, apenas de sistemas rastreadores de objetos, pessoas,
animais de pecuaria e animais de estimacao.
2https://gru.inpi.gov.br/pePI/servlet/LoginController?action=login
9
3 DESENVOLVIMENTO DO HARDWARE
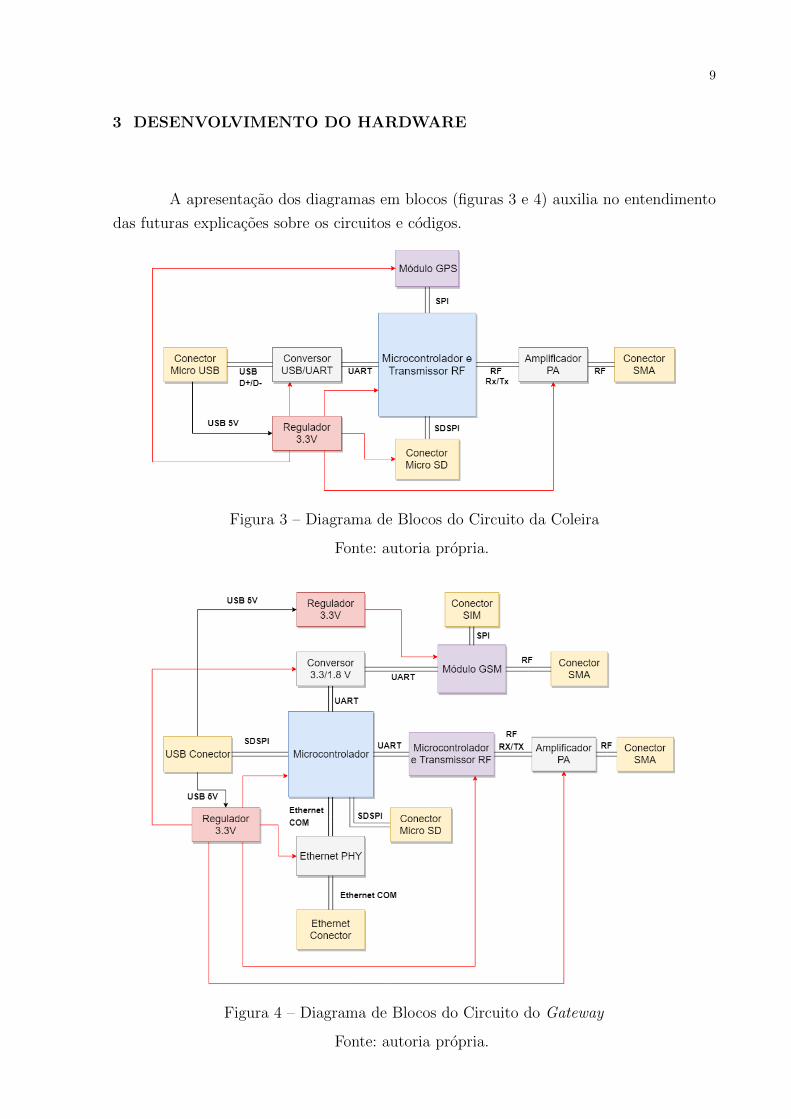
A apresentacao dos diagramas em blocos (figuras 3 e 4) auxilia no entendimento
das futuras explicacoes sobre os circuitos e codigos.
Figura 3 – Diagrama de Blocos do Circuito da Coleira
Fonte: autoria propria.
Figura 4 – Diagrama de Blocos do Circuito do Gateway
Fonte: autoria propria.
Capıtulo 3. DESENVOLVIMENTO DO HARDWARE 10
3.1 PLACAS DE CIRCUITO IMPRESSO
Placas de Circuito Impresso sao atualmente o suporte mais comum na producao
de circuitos e, portanto, sistemas eletroeletronicos. Tais placas servem simultaneamente de
meio de fixacao para os diversos elementos do circuito (de conectores a circuitos integrados)
e de interconexao entre os elementos.
As placas foram projetadas pela equipe utilizando o software Altium Designer 14 e
produzidas no eFAB. O eFAB, coordenado pelo professor Dr. Fernando Cardoso Castaldo,
e um projeto desenvolvido dentro da UTFPR Curitiba com o objetivo de fabricar PCI e
desenvolver ou aprimorar novas tecnicas de fabricacao.
O material fornecido possui, nominalmente, duas superfıcies de cobre com 35 µmde espessura em cada lado do substrato FR4, que possui espessura de 730 µm. Porem tais
dimensoes das placas virgens foram medidas, a fim de se projetar com maior precisao. Tais
valores sao apresentados na subsecao 3.1.4 para calculo das linhas de 50 Ω necessarias,
conforme desenvolvimento a seguir. O acabamento foi feito em estanho e aplicacao de
mascara de solda. Os desenhos dos prototipos do Gateway e da coleira feitos no Altium
estao no apendice A, figuras 22 e 23.
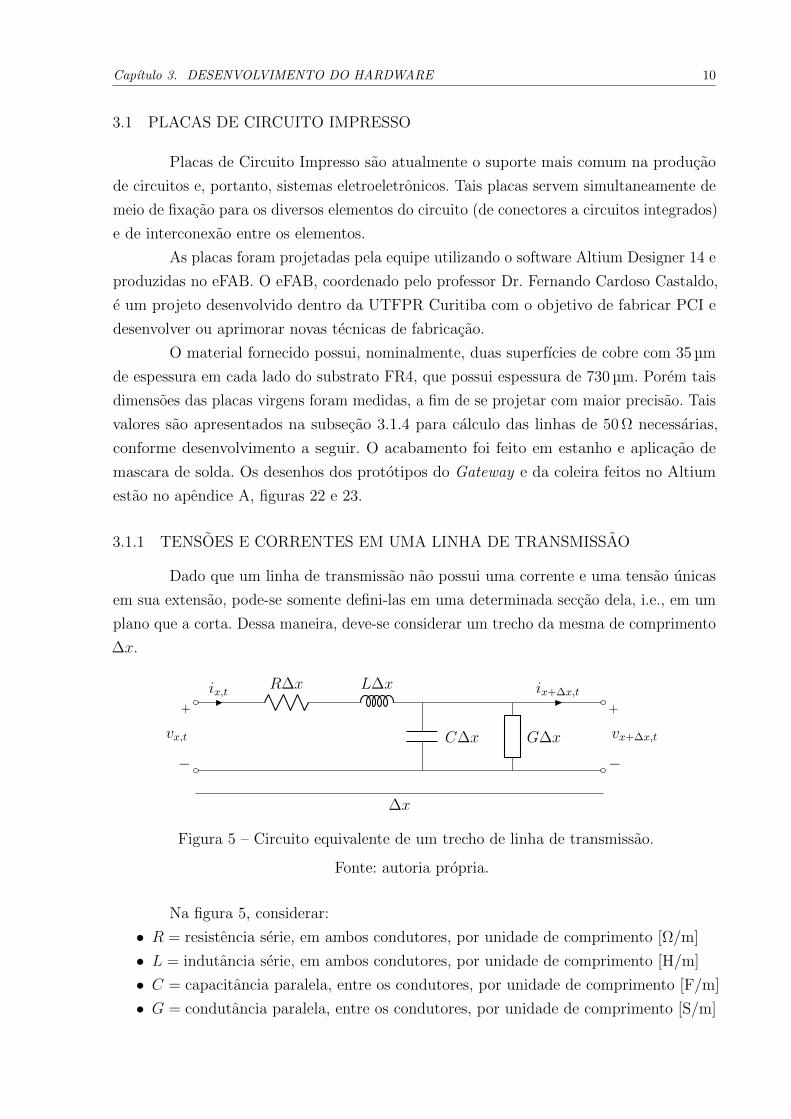
3.1.1 TENSOES E CORRENTES EM UMA LINHA DE TRANSMISSAO
Dado que um linha de transmissao nao possui uma corrente e uma tensao unicas
em sua extensao, pode-se somente defini-las em uma determinada seccao dela, i.e., em um
plano que a corta. Dessa maneira, deve-se considerar um trecho da mesma de comprimento
∆x.
+
−
vx,t
+
−
vx+∆x,t
ix,t R∆x L∆x ix+∆x,t
G∆xC∆x
∆x
Figura 5 – Circuito equivalente de um trecho de linha de transmissao.
Fonte: autoria propria.
Na figura 5, considerar:
• R = resistencia serie, em ambos condutores, por unidade de comprimento [Ω/m]• L = indutancia serie, em ambos condutores, por unidade de comprimento [H/m]• C = capacitancia paralela, entre os condutores, por unidade de comprimento [F/m]• G = condutancia paralela, entre os condutores, por unidade de comprimento [S/m]
Capıtulo 3. DESENVOLVIMENTO DO HARDWARE 11
Aplicando as Leis de Kirchoff, tomando o limite ∆x→ 0 e assumindo oscilacao
harmonica (i.e., ejωt) podem-se constatar as seguintes relacoes (POZAR, 2011, p. 49-51),
conhecidas como a Equacao dos Telegrafistas:
∂V (x)∂x
= −(R + jωL)I(x) (1a)
∂I(x)∂x
= −(G+ jωC)V (x) (1b)
Resolvendo,
d2V (x)dx2 = γ2V (x) (2a)
d2I(x)dx2 = γ2I(x) (2b)
Onde γ e a constante de propagacao (EDWARDS, 1981, p. 3):
γ =√
(R + jωL)(G+ jωC) = α + jβ (3)
Onde α e o Coeficiente de Atenuacao (expresso em Np/m) e β e o Fator ou
Coeficiente de Propagacao (expresso em rad/m ou /m).
Por definicao, a impedancia Z = V/I. Manipulando-se as equacoes anteriores,
temos a impedancia caracterıstica Z0 de uma linha:
Z0 =
√√√√ (R + jωL)(G+ jωC) (4)
3.1.2 LINHAS DE MICROSTRIP (MICROFITA)
Uma PCI pode ser utilizada para construcao de linhas stripline e microstrip, estas
de interesse neste trabalho. A sua impedancia caracterıstica e relacionada as dimensoes da
linha (largura: w; espessura do material isolante: h; e espessura do material condutor: t) e
a permissividade eletrica do dieletrico (εr).
Os principais tipos de linhas de transmissao sao: par metalico (trancado ou nao),
coaxial, microstrip e stripline, os ultimos dois construıdos em PCIs. A principal diferenca
entre eles sao a presenca de um e dois planos-terra, respectivamente.
3.1.3 IMPEDANCIA CARACTERISTICA DE UMA LINHA MICROSTRIP
Diversas equacoes relacionando tais caracterısticas construtivas e a impedancia
da linha sao descritas na literatura. As equacoes abaixo tiveram a sua nomenclatura
uniformizada em relacao ao original:
Formulas encontradas em (PAUL, 2006, p. 202) e (BROOKS, 2003, p. 203-204)
com a condicao de 0,1 ≤ t/w ≤ 0,8:
Capıtulo 3. DESENVOLVIMENTO DO HARDWARE 12
Z0 = 87√εr + 1,41 ln
(5,98h
0.8w + t
)(5a)
C0 = 0,67(εr + 1,41)
ln(
5,98h0,8w + t
) (5b)
∴ w =5,98h exp
(−Z0√εr+1,4187
)− t
0,8 (5c)
Ja as relacoes abaixo podem ser encontradas em (POZAR, 2011, p. 148-149) e
(PAUL, 2006, p. 201):
εe = εr + 12 + εr − 1
21√
1 + 12h/w(6a)
Z0 =
60√εe
ln(
8hw
+ w4h
)se w/h ≤ 1
120π√εew/d+1,393+0,667 ln (w/h+1,444) se w/h ≥ 1
(6b)
w
h=
8 exp (A)
exp (2A)−2 se w/h < 22π
[B − 1− ln (2B − 1) + εr−1
2εr
(ln (B − 1) + 0,39− 0,61
εr
)]se w/h > 2
(6c)
A = Z0
60
√εr + 1
2 + εr − 1εr + 1
(0,23 + 0,11
εr
)(6d)
B = 377π2Z0√εr
(6e)
(POZAR, 2011, p. 149) tambem apresenta equacoes para as atenuacoes por perdas
no dieletrico (αd) e no condutor (αc):
αd = k0εr(εe − 1) tan δ2√εe(εr − 1) Np/m (7a)
αc = Rs
Z0wNp/m (7b)
Onde δ e a tangente de perdas do dieletrico e Rs =√ωµ0/2σ e a resistividade superficial
do condutor.
Tambem notam-se as seguintes relacoes (POZAR, 2011, p. 147-149):
vp = c√εe
(8a)
k0 = 2πfc
(8b)
β = k0√εe (8c)
φ = β` (8d)

Capıtulo 3. DESENVOLVIMENTO DO HARDWARE 13
3.1.4 PROJETO DAS TRILHAS
A fim de se obter uma trilha de 50 ohm, impedancia entrada/saıda dos CIs, e
tambem considerando εr = 4,2, espessura do dieletrico h = 792 µm e espessura do condutor
t = 12 µm, conforme medido no laboratorio fabricante, aplicam-se as formulas (5, p. 11) e
(6, p. 12). Estas foram implementadas em rotinas no software Matlab e sao apresentadas
no apendice (C)
Para (5), obtem-se w1 = 1,5026 mm; e para (6), w2 = 1,5675 mm. Foi tomada a
media geometrica como referencia para o projeto: w = 2√w1w2 = 1,5347 mm. Em virtude
da complexidades das placas projetadas, nao foi possıvel auferir a impedancia real apos a
fabricacao. Variacoes podem ocorrer causadas por imperfeicoes na placa virgem utilizada
(i.e., irregularidades mecanicas, variando h e t), assim como discrepancia na constante
dieletrica informada, ainda mais porque esta nao pode ser medida.
3.2 FREQUENCIA DE OPERACAO E ASPECTOS REGULATORIOS
A frequencia de 433 MHz foi escolhida considerando a banda de operacao delimi-
tada pelo amplificador, assim como esta e uma frequencia dispensada de licenca no Brasil
e em outros paıses. O emprego desta frequencia e amplificador foi motivado pelo desafio
de alcancar longas distancias em florestas com vegetacao densa. Conforme o modelo de
propagacao de dois raios (9), os fatores que influenciam o alcance (d) de uma transmissao
sao a potencia de transmissao (Pt), sensibilidade de recepcao do radio (Pr), ganho das
antenas (Gt e Gr) e altura (ht e hr) das antenas (GOLDSMITH, 2005). Ao mesmo tempo,
e sabido que a propagacao sem visada direta e dificultada com o aumento da frequencia.
Pr =(√
GtGrhthrd2
)2
Pt (9)
Conforme pesquisa feita referente aos requisitos tecnicos para a avaliacao da
conformidade de equipamentos de radiocomunicacao de radiacao restrita estabelecidos
pela Agencia Nacional de Telecomunicacoes (ANATEL), foi verificado que, em acordo com
as normas aplicaveis, a utilizacao da banda de 433–435 MHz por equipamentos de radiacao
restrita podera ser feita com potencia maxima de 10 mW (EIRP).
Portanto, caso o transmissor seja utilizado no Brasil, sua potencia devera ser
limitada a 10 mW. Porem caso esta potencia, conforme testes futuros, nao seja suficiente
para atingir distancias aceitaveis, pode-se utilizar como alternativa a banda de 915–
928 MHz, pois a norma permite uma potencia maxima irradiada de 250 mW (EIRP) em
tal faixa. Tambem em casos onde esta potencia nao seja suficiente, a norma permite que
nesta banda seja utilizado a tecnica de saltos em frequencia com o emprego da potencia
de pico nao superior a 1 W, quando utilizado no mınimo 35 canais de salto. Neste caso, os
saltos em frequencia devem ter um tempo medio de ocupacao das radiofrequencias de no
maximo 0,4 s (ANATEL, 2018).
Capıtulo 3. DESENVOLVIMENTO DO HARDWARE 14
3.3 RADIO TRANSMISSOR
Para o desenvolvimento de uma rede de comunicacao em regioes remotas foi
definida a utilizacao de um transmissor que permitisse a comunicacao em frequencias
abaixo de 1 GHz (Sub-GHz ) e em bandas nao licenciaveis, especificamente 433 MHz, mas
tambem 915 MHz. Para tanto, foram verificadas as tecnologias existentes no mercado, por
exemplo SIGFOX, LORA, NB-IOT, tambem conhecidas como redes Low Power Wide
Area (LPWA). Cada uma dessas tecnologias utiliza metodos de modulacao ou protocolos
diferentes com o proposito de alcancar baixo custo, consumo, banda estreita e longas
distancias ou grande area de cobertura em comunicacoes voltadas para a Internet das
Coisas (IOT).
3.3.1 SIGFOX
SIGFOX e uma rede LPWA projetada para empresas que queiram tornar-se
operadores de telecomunicacao ou para operadoras que queiram agregar esta tecnologia
a sua rede atendendo a nova demanda de IOT (SCHATZ, 2016). SIGFOX utiliza uma
banda ultra estreita com uma modulacao proprietaria BPSK a 100bps. As frequencias
utilizadas pela rede sao nao licenciaveis. Sendo que esta tecnologia permite o envio maximo
de 12 bytes de payload e 6 mensagens em uma hora. Sendo dessa maneira direcionada a
aplicacoes que requeiram baixa taxa de dados (VEJLGAARD et al., 2017).
3.3.2 LORA
LORA e uma rede baseada em uma tecnica proprietaria de modulacao em espa-
lhamento espectral. Esta tecnica foi desenvolvida pela LoRa Alliance, sendo a Microship
e a Semtech algumas das empresas que produzem transmissores compatıveis com esta
tecnologia. Estes transmissores podem operar em frequencias licenciadas ou nao, entre
137 MHz e 1020 MHz, com link budget de 170 dB (SEMTECH, 2018). Porem, conforme
analise realizada por BOR et al., as redes construıdas utilizando configuracoes padroes
baseadas na LoRaWAN nao teriam escalabilidade, pois poderiam receber apenas 120 nodes
e cobririam uma area de apenas 3,8 ha. Tambem os protocolos padroes das redes LORA
nao permitem a criacao de uma rede descentralizada e P2P (BHARDWAJ; TOMAR,
2017). Sendo assim, esta tecnologia e voltada a organizacoes que queiram criar a sua rede
propria utilizando LORA Gateways.
3.3.3 NB-IOT
NB-IOT e uma tecnologia desenvolvida para operadoras de telecomunicacoes, pois
esta tecnica e uma evolucao de sistemas LTE operando em uma banda de 180 kHz e
subportadora de 15 kHz (VEJLGAARD et al., 2017). NB-IOT pode ser implantado dentro
de uma portadora LTE, na banda de guarda ou sozinha. Conforme estudos realizados esta
Capıtulo 3. DESENVOLVIMENTO DO HARDWARE 15
tecnologia entrega a melhor cobertura e performance em relacao as demais redes LPWA
(LAURIDSEN et al., 2017). Tambem como esta rede utiliza frequencias licenciaveis, sofrera
menos com interferencias em relacao as redes LORA e SIGFOX. Porem, assim como as
redes SIGFOX, a implantacao do NB-IOT depende do interesse de operadoras em atender
este mercado. Dessa maneira, estas tecnologias possivelmente possam demorar a serem
implementadas em regioes remotas.
3.3.4 ESCOLHA DO RADIO-TRANSMISSOR
Apos analisar as novas redes LPWA e pesquisar os transmissores desenvolvidos para
estas tecnologias, pode se verificar que muitos desses transmissores podem ser utilizados
sem estes protocolos proprietarios ou em conjunto com outras modulacoes ou protocolos.
Assim permitindo mais liberdade ao desenvolvedor para projetar a sua aplicacao. Tambem
analisando datasheets e testes de comparacao realizados com diferentes transmissores
Sub-1GHz, verifica-se a dificuldade na obtencao de dados que ajudem na escolha do
melhor Circuito Integrado (CI), pois nenhuma das fontes oferece informacoes pertinentes
a aplicacoes especificas com resultados obtidos nas melhores configuracoes para cada
transmissor (HaRING et al., 2017).
Considerando-se os pros e contras de cada uma das tecnologias acima e as ca-
racterısticas a serem atendidas pelo projeto, o hardware adotado foi o CC1310 da Texas
Instruments (TI).
3.3.5 MICROCONTROLADOR COM RADIO INTEGRADO CC1310
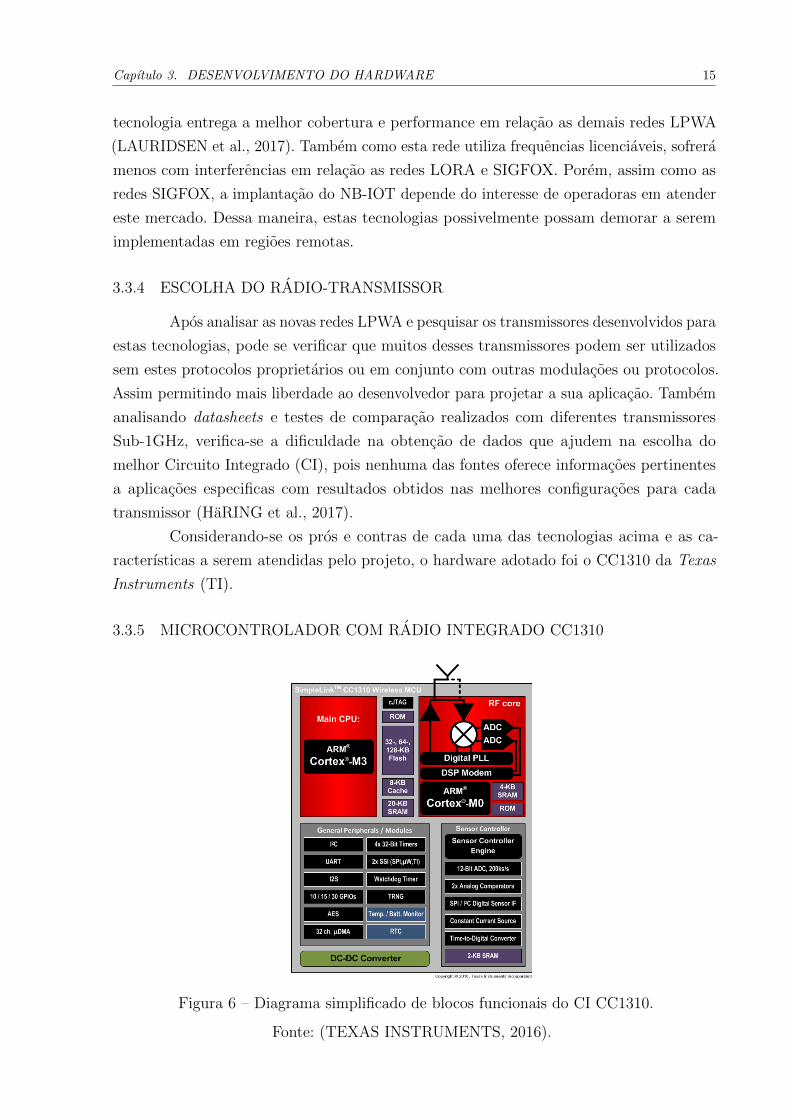
Figura 6 – Diagrama simplificado de blocos funcionais do CI CC1310.
Fonte: (TEXAS INSTRUMENTS, 2016).
Capıtulo 3. DESENVOLVIMENTO DO HARDWARE 16
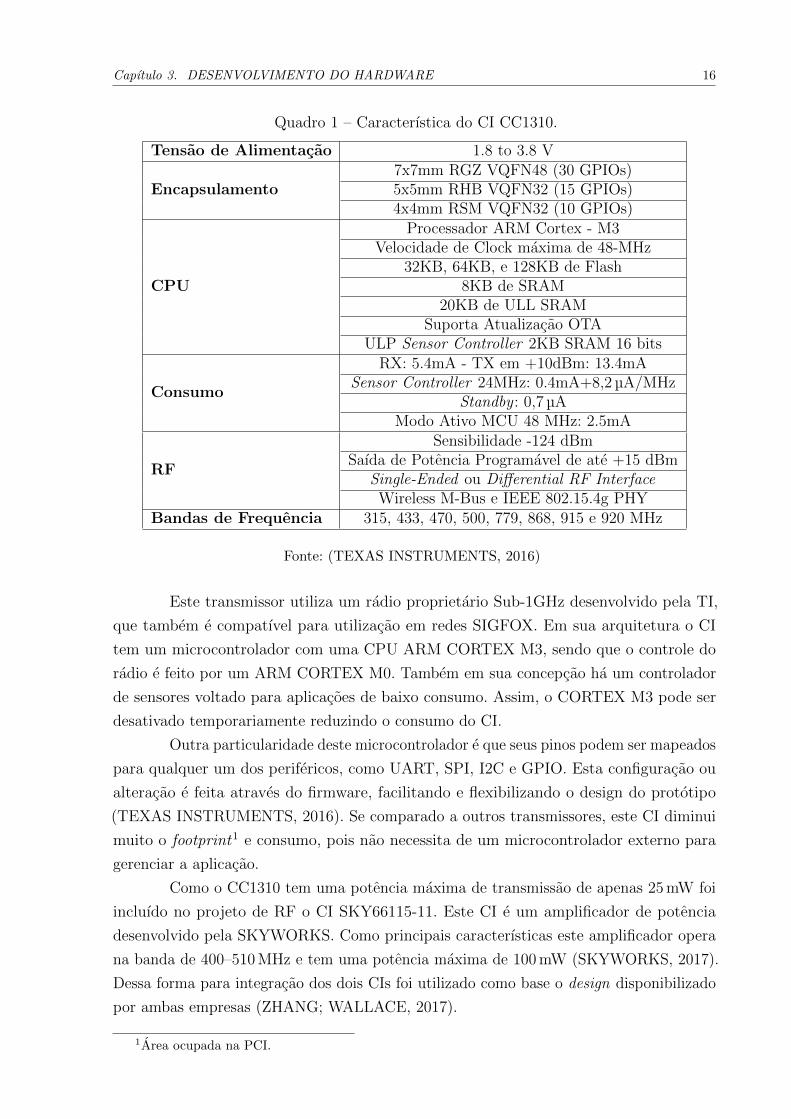
Quadro 1 – Caracterıstica do CI CC1310.
Tensao de Alimentacao 1.8 to 3.8 V
Encapsulamento7x7mm RGZ VQFN48 (30 GPIOs)5x5mm RHB VQFN32 (15 GPIOs)4x4mm RSM VQFN32 (10 GPIOs)
CPU
Processador ARM Cortex - M3Velocidade de Clock maxima de 48-MHz
32KB, 64KB, e 128KB de Flash8KB de SRAM
20KB de ULL SRAMSuporta Atualizacao OTA
ULP Sensor Controller 2KB SRAM 16 bits
Consumo
RX: 5.4mA - TX em +10dBm: 13.4mASensor Controller 24MHz: 0.4mA+8,2 µA/MHz
Standby : 0,7 µAModo Ativo MCU 48 MHz: 2.5mA
RF
Sensibilidade -124 dBmSaıda de Potencia Programavel de ate +15 dBm
Single-Ended ou Differential RF InterfaceWireless M-Bus e IEEE 802.15.4g PHY
Bandas de Frequencia 315, 433, 470, 500, 779, 868, 915 e 920 MHz
Fonte: (TEXAS INSTRUMENTS, 2016)
Este transmissor utiliza um radio proprietario Sub-1GHz desenvolvido pela TI,
que tambem e compatıvel para utilizacao em redes SIGFOX. Em sua arquitetura o CI
tem um microcontrolador com uma CPU ARM CORTEX M3, sendo que o controle do
radio e feito por um ARM CORTEX M0. Tambem em sua concepcao ha um controlador
de sensores voltado para aplicacoes de baixo consumo. Assim, o CORTEX M3 pode ser
desativado temporariamente reduzindo o consumo do CI.
Outra particularidade deste microcontrolador e que seus pinos podem ser mapeados
para qualquer um dos perifericos, como UART, SPI, I2C e GPIO. Esta configuracao ou
alteracao e feita atraves do firmware, facilitando e flexibilizando o design do prototipo
(TEXAS INSTRUMENTS, 2016). Se comparado a outros transmissores, este CI diminui
muito o footprint1 e consumo, pois nao necessita de um microcontrolador externo para
gerenciar a aplicacao.
Como o CC1310 tem uma potencia maxima de transmissao de apenas 25 mW foi
incluıdo no projeto de RF o CI SKY66115-11. Este CI e um amplificador de potencia
desenvolvido pela SKYWORKS. Como principais caracterısticas este amplificador opera
na banda de 400–510 MHz e tem uma potencia maxima de 100 mW (SKYWORKS, 2017).
Dessa forma para integracao dos dois CIs foi utilizado como base o design disponibilizado
por ambas empresas (ZHANG; WALLACE, 2017).
1Area ocupada na PCI.
Capıtulo 3. DESENVOLVIMENTO DO HARDWARE 17
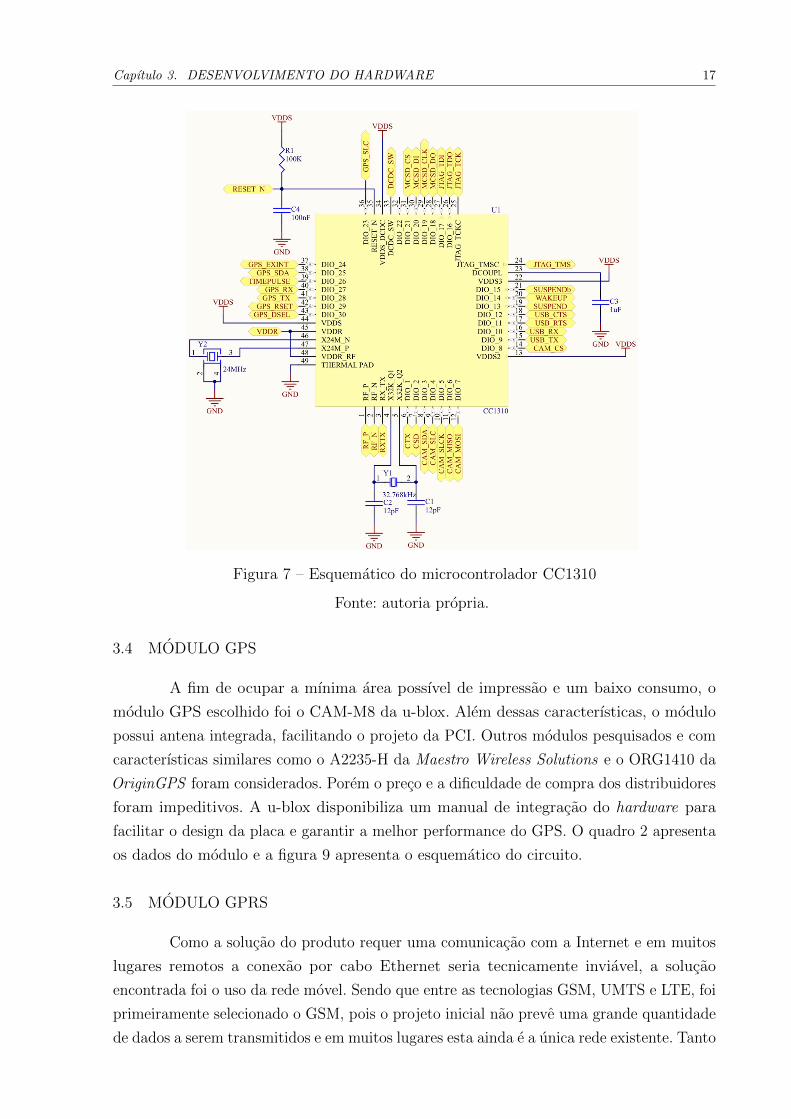
Figura 7 – Esquematico do microcontrolador CC1310
Fonte: autoria propria.
3.4 MODULO GPS
A fim de ocupar a mınima area possıvel de impressao e um baixo consumo, o
modulo GPS escolhido foi o CAM-M8 da u-blox. Alem dessas caracterısticas, o modulo
possui antena integrada, facilitando o projeto da PCI. Outros modulos pesquisados e com
caracterısticas similares como o A2235-H da Maestro Wireless Solutions e o ORG1410 da
OriginGPS foram considerados. Porem o preco e a dificuldade de compra dos distribuidores
foram impeditivos. A u-blox disponibiliza um manual de integracao do hardware para
facilitar o design da placa e garantir a melhor performance do GPS. O quadro 2 apresenta
os dados do modulo e a figura 9 apresenta o esquematico do circuito.
3.5 MODULO GPRS
Como a solucao do produto requer uma comunicacao com a Internet e em muitos
lugares remotos a conexao por cabo Ethernet seria tecnicamente inviavel, a solucao
encontrada foi o uso da rede movel. Sendo que entre as tecnologias GSM, UMTS e LTE, foi
primeiramente selecionado o GSM, pois o projeto inicial nao preve uma grande quantidade
de dados a serem transmitidos e em muitos lugares esta ainda e a unica rede existente. Tanto
Capıtulo 3. DESENVOLVIMENTO DO HARDWARE 18
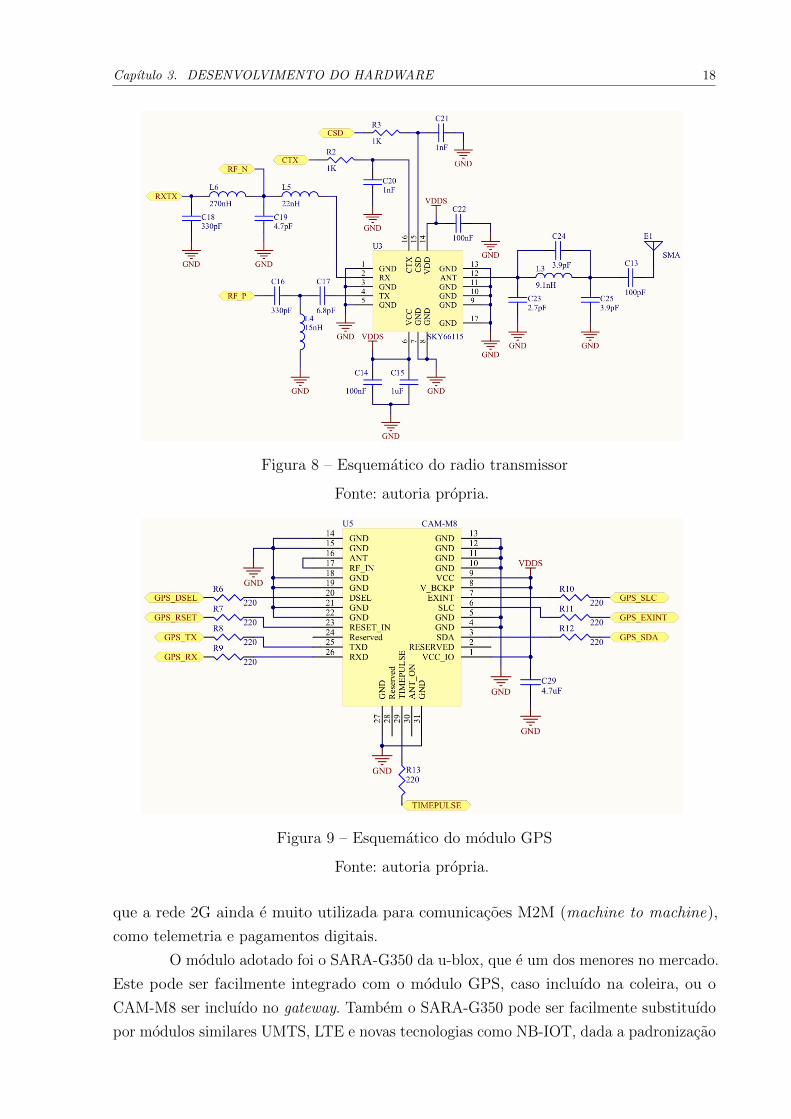
Figura 8 – Esquematico do radio transmissor
Fonte: autoria propria.
Figura 9 – Esquematico do modulo GPS
Fonte: autoria propria.
que a rede 2G ainda e muito utilizada para comunicacoes M2M (machine to machine),
como telemetria e pagamentos digitais.
O modulo adotado foi o SARA-G350 da u-blox, que e um dos menores no mercado.
Este pode ser facilmente integrado com o modulo GPS, caso incluıdo na coleira, ou o
CAM-M8 ser incluıdo no gateway. Tambem o SARA-G350 pode ser facilmente substituıdo
por modulos similares UMTS, LTE e novas tecnologias como NB-IOT, dada a padronizacao
Capıtulo 3. DESENVOLVIMENTO DO HARDWARE 19
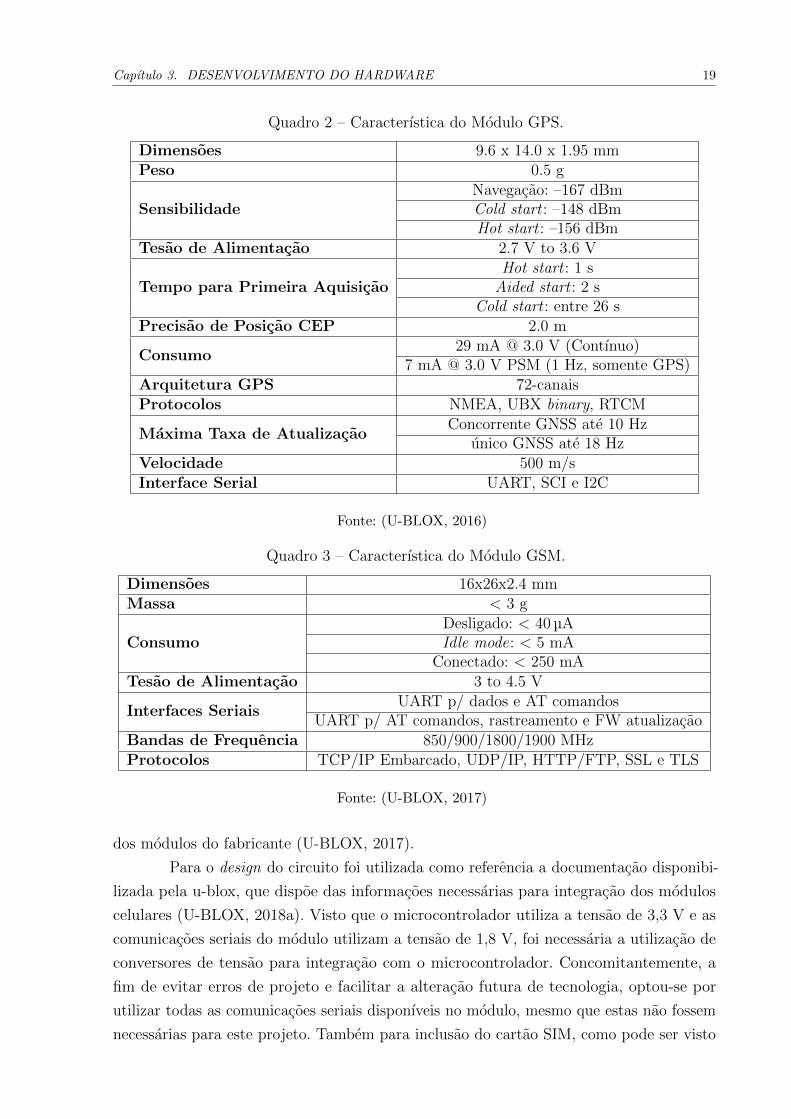
Quadro 2 – Caracterıstica do Modulo GPS.
Dimensoes 9.6 x 14.0 x 1.95 mmPeso 0.5 g
SensibilidadeNavegacao: –167 dBmCold start : –148 dBmHot start : –156 dBm
Tesao de Alimentacao 2.7 V to 3.6 V
Tempo para Primeira AquisicaoHot start : 1 s
Aided start : 2 sCold start : entre 26 s
Precisao de Posicao CEP 2.0 m
Consumo29 mA @ 3.0 V (Contınuo)
7 mA @ 3.0 V PSM (1 Hz, somente GPS)Arquitetura GPS 72-canaisProtocolos NMEA, UBX binary, RTCM
Maxima Taxa de AtualizacaoConcorrente GNSS ate 10 Hz
unico GNSS ate 18 HzVelocidade 500 m/sInterface Serial UART, SCI e I2C
Fonte: (U-BLOX, 2016)
Quadro 3 – Caracterıstica do Modulo GSM.
Dimensoes 16x26x2.4 mmMassa < 3 g
ConsumoDesligado: < 40 µAIdle mode: < 5 mA
Conectado: < 250 mATesao de Alimentacao 3 to 4.5 V
Interfaces SeriaisUART p/ dados e AT comandos
UART p/ AT comandos, rastreamento e FW atualizacaoBandas de Frequencia 850/900/1800/1900 MHzProtocolos TCP/IP Embarcado, UDP/IP, HTTP/FTP, SSL e TLS
Fonte: (U-BLOX, 2017)
dos modulos do fabricante (U-BLOX, 2017).
Para o design do circuito foi utilizada como referencia a documentacao disponibi-
lizada pela u-blox, que dispoe das informacoes necessarias para integracao dos modulos
celulares (U-BLOX, 2018a). Visto que o microcontrolador utiliza a tensao de 3,3 V e as
comunicacoes seriais do modulo utilizam a tensao de 1,8 V, foi necessaria a utilizacao de
conversores de tensao para integracao com o microcontrolador. Concomitantemente, a
fim de evitar erros de projeto e facilitar a alteracao futura de tecnologia, optou-se por
utilizar todas as comunicacoes seriais disponıveis no modulo, mesmo que estas nao fossem
necessarias para este projeto. Tambem para inclusao do cartao SIM, como pode ser visto
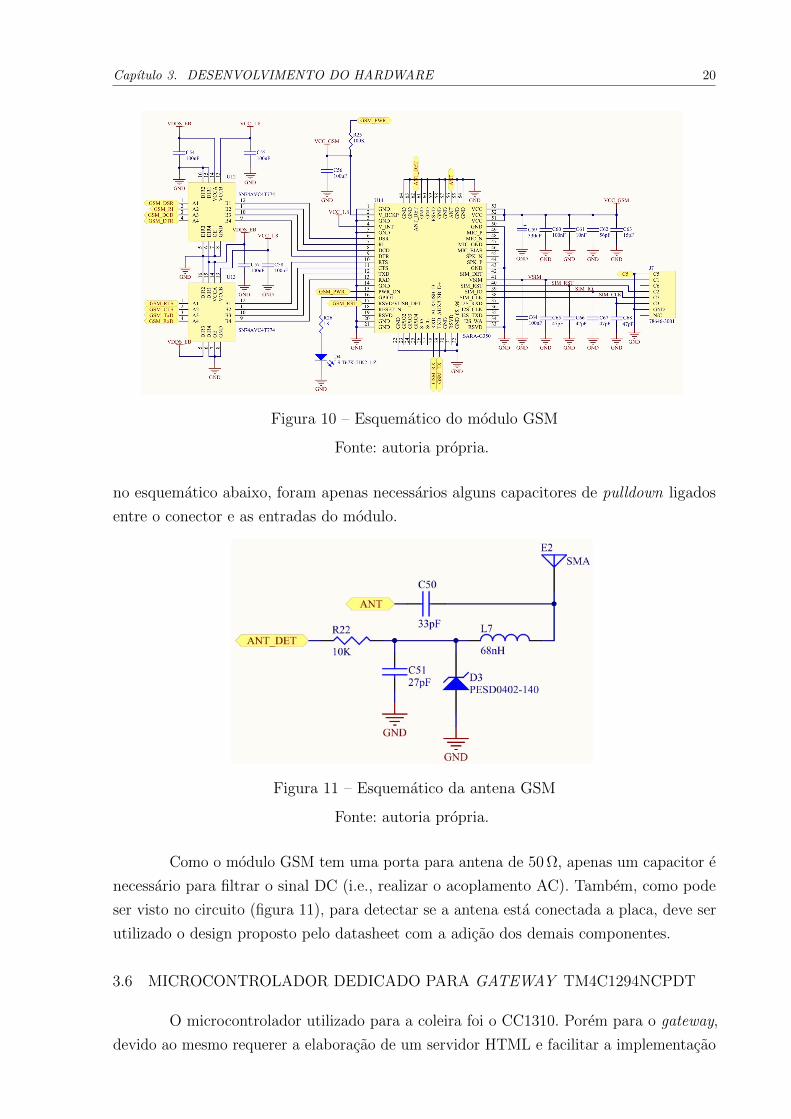
Capıtulo 3. DESENVOLVIMENTO DO HARDWARE 20
Figura 10 – Esquematico do modulo GSM
Fonte: autoria propria.
no esquematico abaixo, foram apenas necessarios alguns capacitores de pulldown ligados
entre o conector e as entradas do modulo.
Figura 11 – Esquematico da antena GSM
Fonte: autoria propria.
Como o modulo GSM tem uma porta para antena de 50 Ω, apenas um capacitor e
necessario para filtrar o sinal DC (i.e., realizar o acoplamento AC). Tambem, como pode
ser visto no circuito (figura 11), para detectar se a antena esta conectada a placa, deve ser
utilizado o design proposto pelo datasheet com a adicao dos demais componentes.
3.6 MICROCONTROLADOR DEDICADO PARA GATEWAY TM4C1294NCPDT
O microcontrolador utilizado para a coleira foi o CC1310. Porem para o gateway,
devido ao mesmo requerer a elaboracao de um servidor HTML e facilitar a implementacao
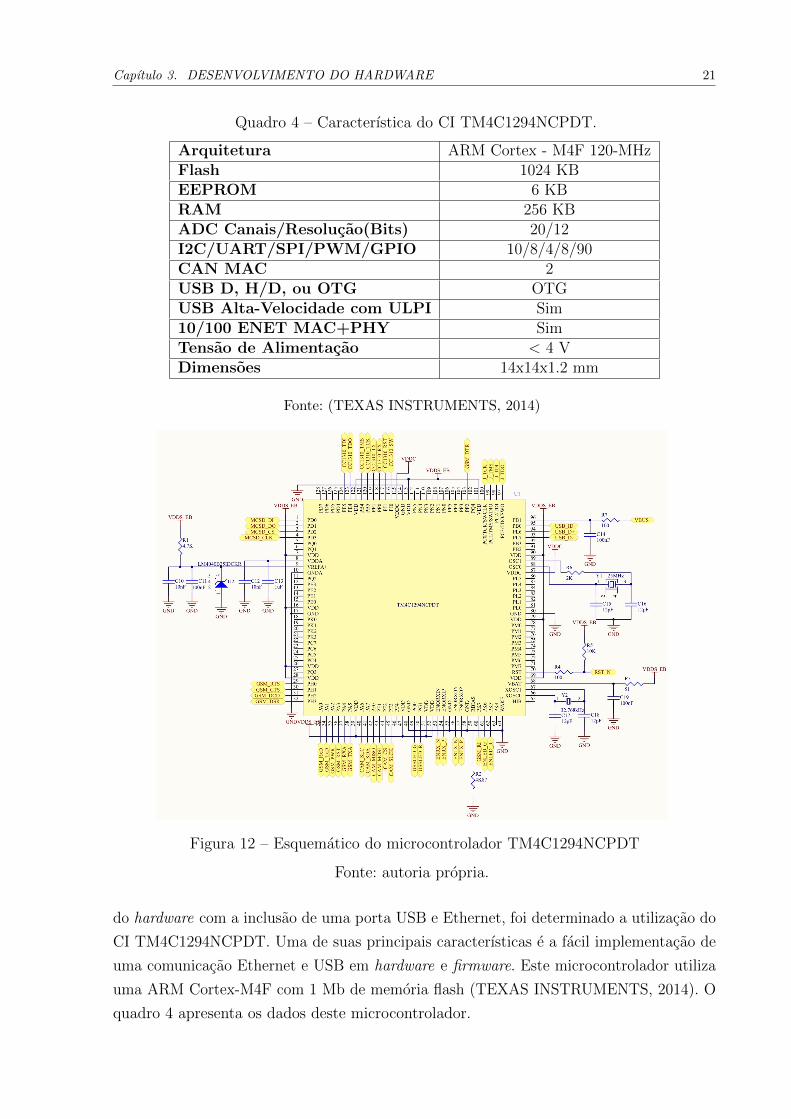
Capıtulo 3. DESENVOLVIMENTO DO HARDWARE 21
Quadro 4 – Caracterıstica do CI TM4C1294NCPDT.
Arquitetura ARM Cortex - M4F 120-MHzFlash 1024 KBEEPROM 6 KBRAM 256 KBADC Canais/Resolucao(Bits) 20/12I2C/UART/SPI/PWM/GPIO 10/8/4/8/90CAN MAC 2USB D, H/D, ou OTG OTGUSB Alta-Velocidade com ULPI Sim10/100 ENET MAC+PHY SimTensao de Alimentacao < 4 VDimensoes 14x14x1.2 mm
Fonte: (TEXAS INSTRUMENTS, 2014)
Figura 12 – Esquematico do microcontrolador TM4C1294NCPDT
Fonte: autoria propria.
do hardware com a inclusao de uma porta USB e Ethernet, foi determinado a utilizacao do
CI TM4C1294NCPDT. Uma de suas principais caracterısticas e a facil implementacao de
uma comunicacao Ethernet e USB em hardware e firmware. Este microcontrolador utiliza
uma ARM Cortex-M4F com 1 Mb de memoria flash (TEXAS INSTRUMENTS, 2014). O
quadro 4 apresenta os dados deste microcontrolador.
Capıtulo 3. DESENVOLVIMENTO DO HARDWARE 22
3.7 CONVERSOR UART/USB
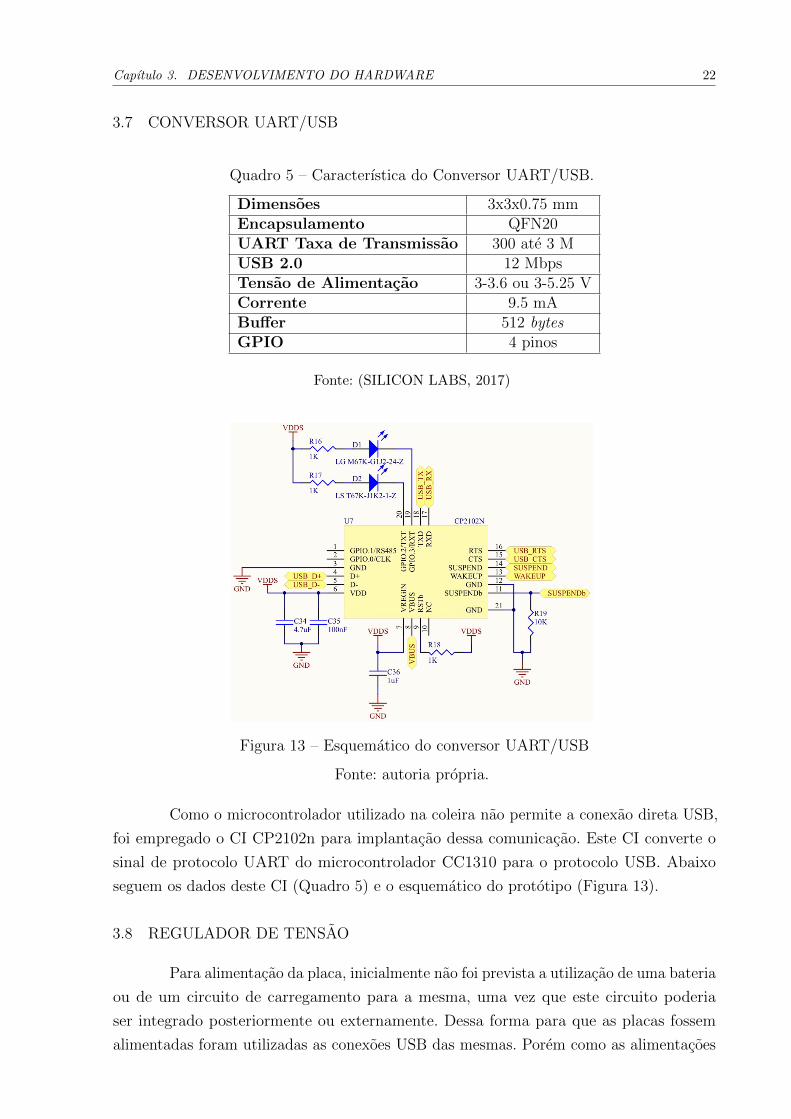
Quadro 5 – Caracterıstica do Conversor UART/USB.
Dimensoes 3x3x0.75 mmEncapsulamento QFN20UART Taxa de Transmissao 300 ate 3 MUSB 2.0 12 MbpsTensao de Alimentacao 3-3.6 ou 3-5.25 VCorrente 9.5 mABuffer 512 bytesGPIO 4 pinos
Fonte: (SILICON LABS, 2017)
Figura 13 – Esquematico do conversor UART/USB
Fonte: autoria propria.
Como o microcontrolador utilizado na coleira nao permite a conexao direta USB,
foi empregado o CI CP2102n para implantacao dessa comunicacao. Este CI converte o
sinal de protocolo UART do microcontrolador CC1310 para o protocolo USB. Abaixo
seguem os dados deste CI (Quadro 5) e o esquematico do prototipo (Figura 13).
3.8 REGULADOR DE TENSAO
Para alimentacao da placa, inicialmente nao foi prevista a utilizacao de uma bateria
ou de um circuito de carregamento para a mesma, uma vez que este circuito poderia
ser integrado posteriormente ou externamente. Dessa forma para que as placas fossem
alimentadas foram utilizadas as conexoes USB das mesmas. Porem como as alimentacoes
Capıtulo 3. DESENVOLVIMENTO DO HARDWARE 23
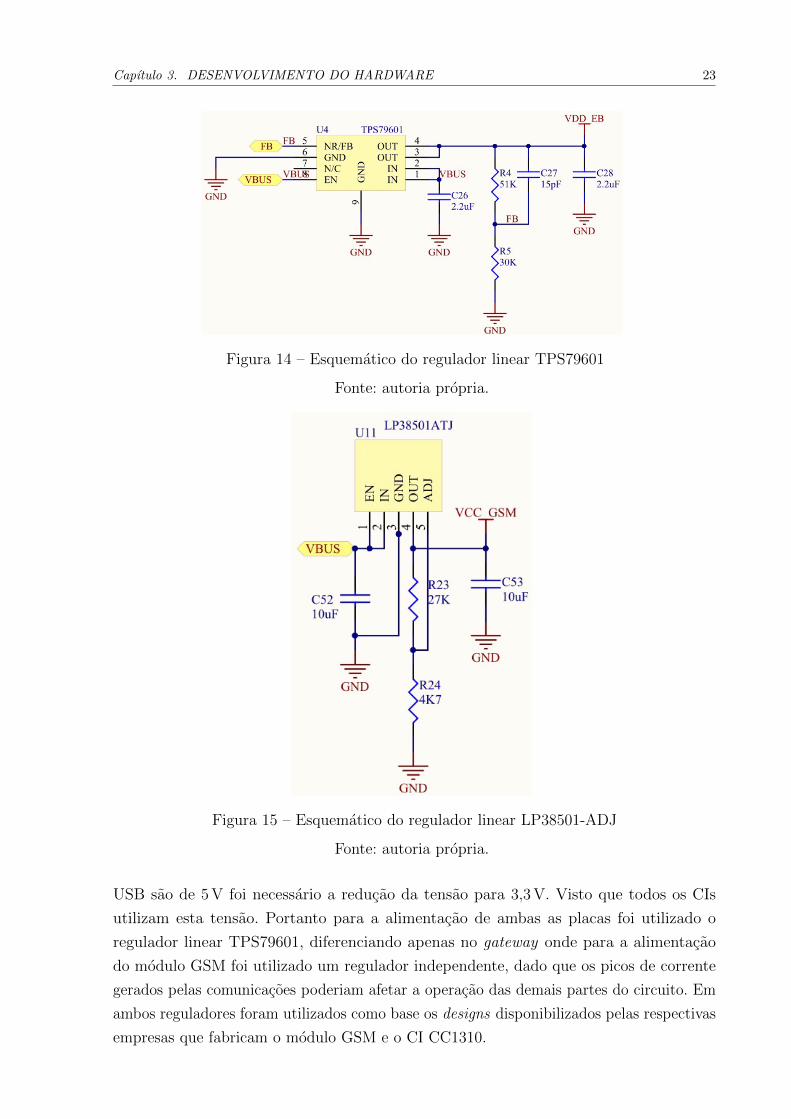
Figura 14 – Esquematico do regulador linear TPS79601
Fonte: autoria propria.
Figura 15 – Esquematico do regulador linear LP38501-ADJ
Fonte: autoria propria.
USB sao de 5 V foi necessario a reducao da tensao para 3,3 V. Visto que todos os CIs
utilizam esta tensao. Portanto para a alimentacao de ambas as placas foi utilizado o
regulador linear TPS79601, diferenciando apenas no gateway onde para a alimentacao
do modulo GSM foi utilizado um regulador independente, dado que os picos de corrente
gerados pelas comunicacoes poderiam afetar a operacao das demais partes do circuito. Em
ambos reguladores foram utilizados como base os designs disponibilizados pelas respectivas
empresas que fabricam o modulo GSM e o CI CC1310.
Capıtulo 3. DESENVOLVIMENTO DO HARDWARE 24
O regulador TPS79601 tem como caracterıstica seu ultra baixo ruıdo, sendo este
um dos requisitos para circuitos de RF. Este CI permite uma maxima corrente de saıda de
1 A (TEXAS INSTRUMENTS, 2015b), o que se demonstrou suficiente para esta aplicacao,
uma vez que o objetivo do projeto e a obtencao de circuitos com baixo consumo. Apesar
disso, deve-se considerar os picos de corrente gerados pelas comunicacoes ou perifericos.
Visto que o modulo GSM tem uma corrente de pico que pode chegar a 1,9 A, foi
necessaria a utilizacao do regulador linear LP38501-ADJ, pois uma de suas caracterısticas
e a sua baixa queda da tensao operacional sob aumento de demanda, ou seja, o mesmo
tem uma rapida resposta para alteracoes da carga. Dessa maneira, a compensacao deste
regulador flexibiliza a escolha do capacitor. A corrente maxima de saıda para este regulador
e de 3 A (TEXAS INSTRUMENTS, 2015a). Abaixo podemos ver o parte do esquematico
que corresponde a este circuito.
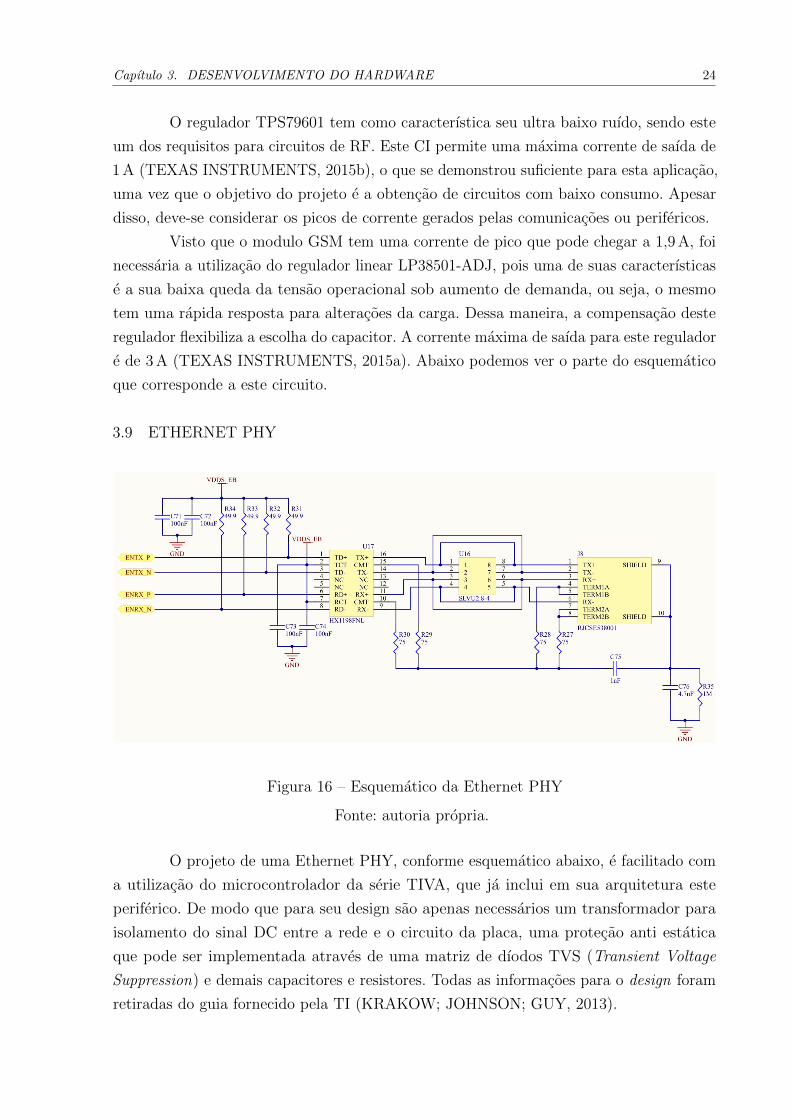
3.9 ETHERNET PHY
Figura 16 – Esquematico da Ethernet PHY
Fonte: autoria propria.
O projeto de uma Ethernet PHY, conforme esquematico abaixo, e facilitado com
a utilizacao do microcontrolador da serie TIVA, que ja inclui em sua arquitetura este
periferico. De modo que para seu design sao apenas necessarios um transformador para
isolamento do sinal DC entre a rede e o circuito da placa, uma protecao anti estatica
que pode ser implementada atraves de uma matriz de dıodos TVS (Transient Voltage
Suppression) e demais capacitores e resistores. Todas as informacoes para o design foram
retiradas do guia fornecido pela TI (KRAKOW; JOHNSON; GUY, 2013).
Capıtulo 3. DESENVOLVIMENTO DO HARDWARE 25
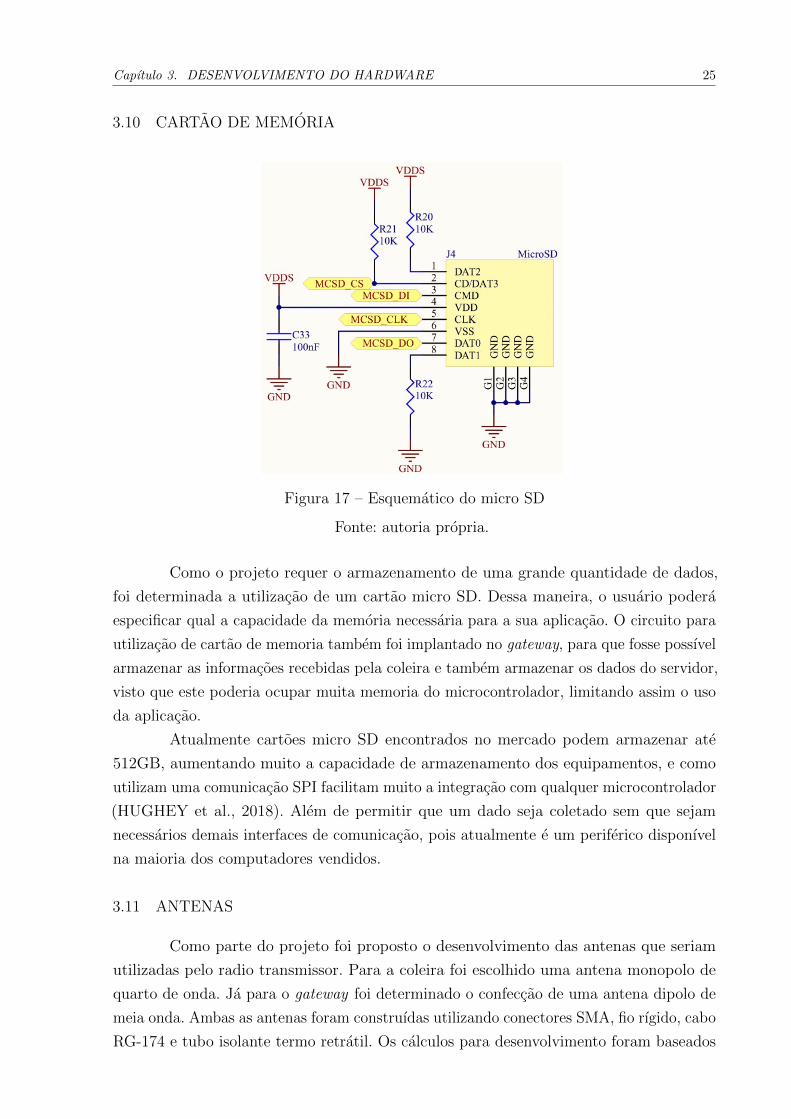
3.10 CARTAO DE MEMORIA
Figura 17 – Esquematico do micro SD
Fonte: autoria propria.
Como o projeto requer o armazenamento de uma grande quantidade de dados,
foi determinada a utilizacao de um cartao micro SD. Dessa maneira, o usuario podera
especificar qual a capacidade da memoria necessaria para a sua aplicacao. O circuito para
utilizacao de cartao de memoria tambem foi implantado no gateway, para que fosse possıvel
armazenar as informacoes recebidas pela coleira e tambem armazenar os dados do servidor,
visto que este poderia ocupar muita memoria do microcontrolador, limitando assim o uso
da aplicacao.
Atualmente cartoes micro SD encontrados no mercado podem armazenar ate
512GB, aumentando muito a capacidade de armazenamento dos equipamentos, e como
utilizam uma comunicacao SPI facilitam muito a integracao com qualquer microcontrolador
(HUGHEY et al., 2018). Alem de permitir que um dado seja coletado sem que sejam
necessarios demais interfaces de comunicacao, pois atualmente e um periferico disponıvel
na maioria dos computadores vendidos.
3.11 ANTENAS
Como parte do projeto foi proposto o desenvolvimento das antenas que seriam
utilizadas pelo radio transmissor. Para a coleira foi escolhido uma antena monopolo de
quarto de onda. Ja para o gateway foi determinado o confeccao de uma antena dipolo de
meia onda. Ambas as antenas foram construıdas utilizando conectores SMA, fio rıgido, cabo
RG-174 e tubo isolante termo retratil. Os calculos para desenvolvimento foram baseados
Capıtulo 3. DESENVOLVIMENTO DO HARDWARE 26
nas formulas classicas da literatura, e apos fabricacao, foram sintonizadas para melhor
performance na frequencia de operacao, conforme descrito na subsecao 5.1.3.
3.11.1 ANTENA MONOPOLO DE QUARTO DE ONDA
A antena monopolo de quarto de onda possui, idealmente, diretividade D0 =3,286 = 5,167dB e impedancia de entrada Zi = 36,5 + j21,25 (BALANIS, 2005, p. 218).
Para f = 433,9 MHz, tem-se λ = cf
= 691 mm no vacuo.
Porem, a velocidade da propagacao das ondas eletromagneticas no meio metalico
e diferente da do vacuo. Para o cobre, admite-se que vp = 0,95c, portanto, o comprimento
de onda neste meio metalico e 656 mm. Assim, o monopolo tem um comprimento de,
aproximadamente, 164,1 mm. Fabricou-se entao uma antena com comprimento de 200 mm,
a fim de permitir posterior sintonizacao, resultados na subsecao 5.1.3.
3.11.2 ANTENA DIPOLO DE MEIA ONDA
A antena dipolo de meia onda possui, idealmente, diretividade D0 = 1,643 =2,156dB e impedancia de entrada Zi = 73 + j42,5 (BALANIS, 2005, p. 217-218). Seu
comprimento na faixa de operacao do sistema e 328,2 mm para antenas de cobre. A antena
foi fabricada com 400 mm, permitindo ajuste futuro, resultados na subsecao 5.1.3.
27
4 DESENVOLVIMENTO DO FIRMWARE E SOFTWARE
4.1 FIRMWARE
4.1.1 TI-RTOS
O TI-RTOS e um sistema embarcado desenvolvido pela Texas Instruments. Este
sistema foi empregado em ambos os microcontroladores utilizados nas placas. Com o
objetivo de acelerar o desenvolvimento dos prototipos, pois elimina a necessidade de
desenvolver-se muitas bibliotecas ou funcoes de controle do hardware. Tambem em pro-
gramas onde e necessario a implementacao de um controle de varios drivers, pode ser
desenvolvido uma gerencia em tempo real de multiplas tarefas. Outra facilidade do TI-
RTOS e que os protocolos atualmente utilizados em comunicacoes Sub-1GHz e Ethernet
ja estao implementados nas suas bibliotecas.
4.1.2 UART
No circuito da coleira foi utilizada uma porta UART para a comunicacao USB
com o computador. Esta comunicacao foi escolhida pela facilidade de implementacao e
tambem porque estes conversores USB sao mais encontrados no mercado e mais baratos
se comparado com outras interfaces seriais. Ja no gateway foi utilizado duas UARTs,
uma para a comunicacao entre os microcontroladores e outra para a comunicacao com
o modulo GSM. As bibliotecas UART utilizadas nos microcontroladores sao de facil
implementacao. Porem para cada hardware elas requerem diferentes configuracoes. Ja que
no CC1310 estas bibliotecas utilizam funcoes de callback como sinalizacao de termino
(TEXAS INSTRUMENTS, 2016) e no TM4C1294 sao utilizadas interrupcoes(TEXAS
INSTRUMENTS, 2014).
4.1.3 SPI
Como o microcontrolador CC1310 tem apenas uma comunicacao UART e esta
foi utilizada na coleira para a comunicacao USB, foi necessario que a comunicacao com o
modulo GPS fosse feita utilizando uma comunicacao SPI. Dessa maneira para que esta
comunicacao fosse configurada o pino 20 (DSEL) do modulo GPS deve ser conectado
ao terra. Apos esta configuracao ser executada o modulo passa a responder por uma
comunicacao SPI. Assim sendo para que sejam enviados os dados do GPS o microcontrolador
deve ser configurado como master e assim que o clock for acionado o modulo GPS comeca
a transferir as mensagens NMEA para o microcontrolador (U-BLOX, 2016).
Outra porta SPI utilizada em ambas as placas foi empregada para comunicacao
com o cartao micro SD. porem para esta comunicacao foi utilizado uma biblioteca distinta
Capıtulo 4. DESENVOLVIMENTO DO FIRMWARE E SOFTWARE 28
destinada a comunicacoes SPI com o cartao SD, pois a comunicacao com o cartao de
memoria requer alguns comandos e controles de gerenciamento de memoria que ja foram
implementados nesta biblioteca.
4.1.4 FAT
A Tabela de alocacao de ficheiros(FAT) e responsavel por criar um mapa do disco.
Este mapa e utilizado para sistemas operacionais encontrarem arquivos alocados no disco.
Dessa forma, caso algum arquivo fosse gravado no cartao de memoria sem a utilizacao de
um padrao FAT, esta informacao so seria lida com a utilizacao de um software especıfico
para leitura da memoria, ja que o sistema operacional nao conseguiria determinar o comeco
e fim desse arquivo ou informacao. O sistema de arquivos FAT utiliza blocos para armazenar
os arquivos. Estes blocos podem ser armazenados em memoria de forma aleatoria. Dessa
forma as informacoes de quais blocos compoem um arquivo sao armazenadas em uma
tabela (SILVA, 2010). Consequentemente, para arquivamento das informacoes coletadas
da coleira foram utilizados bibliotecas FAT em conjunto com a biblioteca de comunicacao
SPI.
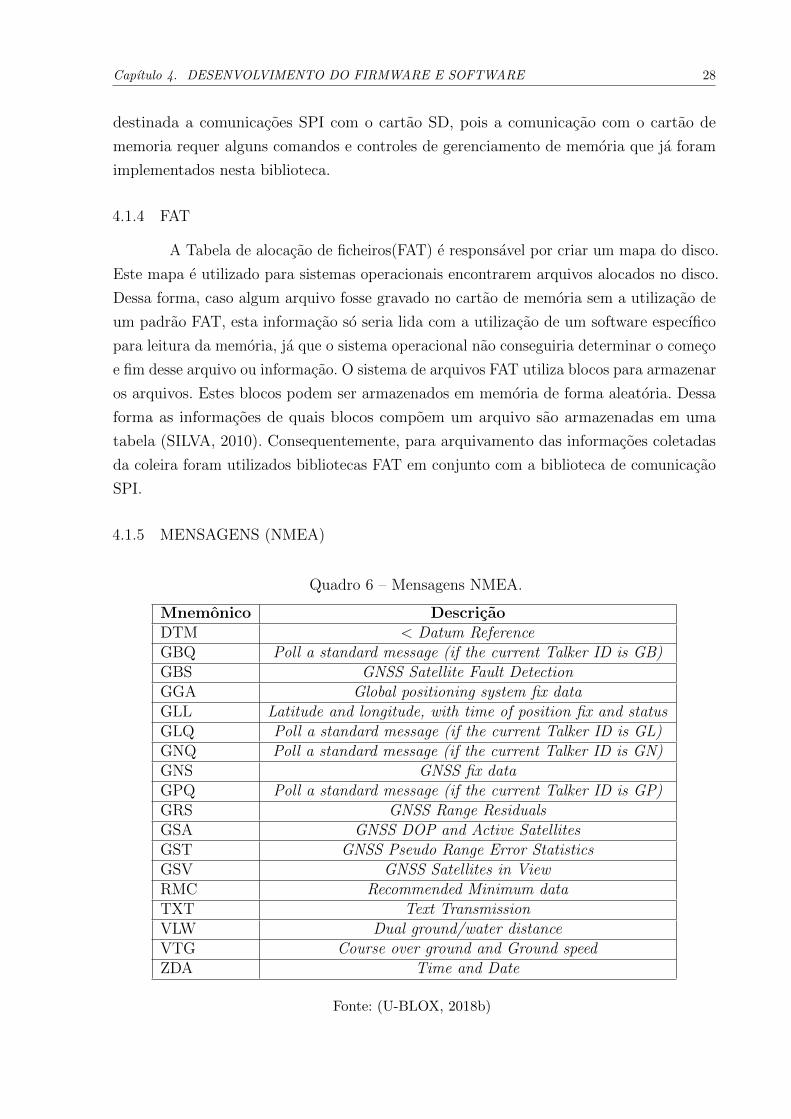
4.1.5 MENSAGENS (NMEA)
Quadro 6 – Mensagens NMEA.
Mnemonico DescricaoDTM < Datum ReferenceGBQ Poll a standard message (if the current Talker ID is GB)GBS GNSS Satellite Fault DetectionGGA Global positioning system fix dataGLL Latitude and longitude, with time of position fix and statusGLQ Poll a standard message (if the current Talker ID is GL)GNQ Poll a standard message (if the current Talker ID is GN)GNS GNSS fix dataGPQ Poll a standard message (if the current Talker ID is GP)GRS GNSS Range ResidualsGSA GNSS DOP and Active SatellitesGST GNSS Pseudo Range Error StatisticsGSV GNSS Satellites in ViewRMC Recommended Minimum dataTXT Text TransmissionVLW Dual ground/water distanceVTG Course over ground and Ground speedZDA Time and Date
Fonte: (U-BLOX, 2018b)
Capıtulo 4. DESENVOLVIMENTO DO FIRMWARE E SOFTWARE 29
O modulo GPS por padrao envia seus dados em mensagens National Marine
Electronics Association (NMEA) (DEPRIEST, ), para utilizar as informacoes recebidas e
necessario o uso de uma biblioteca que interprete esses dados. Como nao havia biblioteca
disponıvel no TIRTOS, empregou-se a biblioteca TinyGPS disponıvel na plataforma
Arduino. Para o utilizacao desta biblioteca foi necessaria a modificacao do projeto para
C++ e a alteracao da funcao de tempo empregada pela biblioteca, pois esta utiliza outra
nomenclatura para os diferentes compiladores dos microcontroladores.
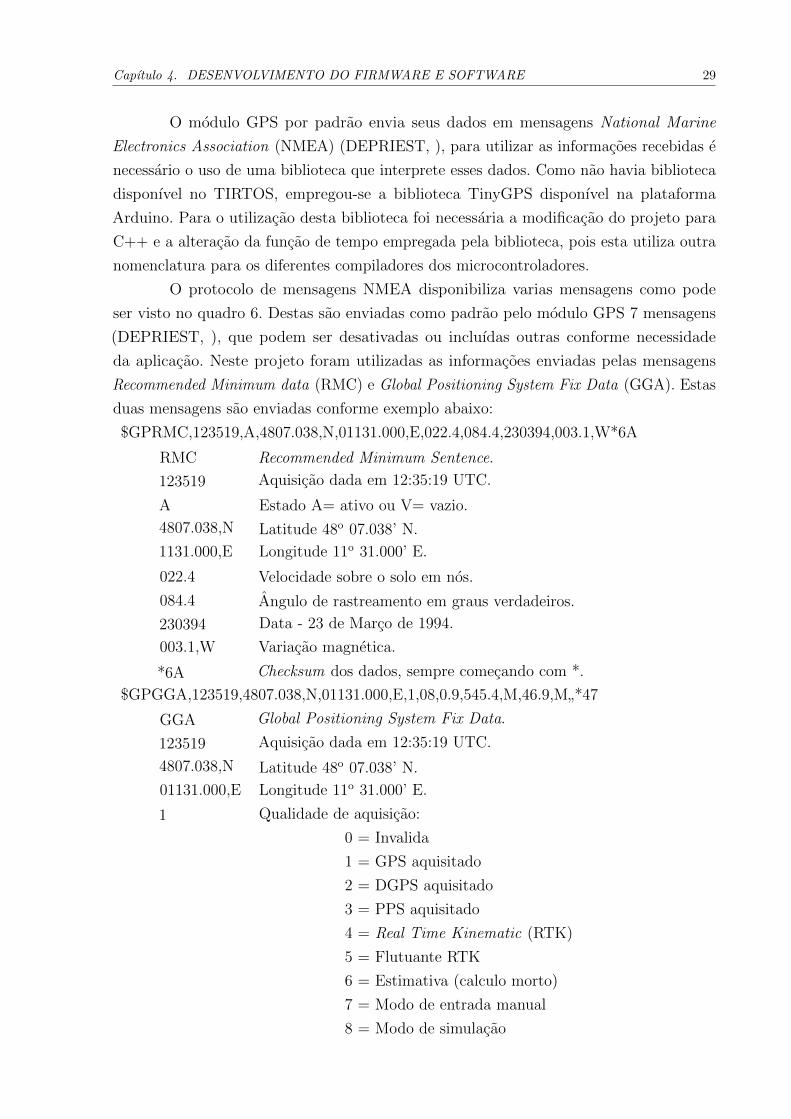
O protocolo de mensagens NMEA disponibiliza varias mensagens como pode
ser visto no quadro 6. Destas sao enviadas como padrao pelo modulo GPS 7 mensagens
(DEPRIEST, ), que podem ser desativadas ou incluıdas outras conforme necessidade
da aplicacao. Neste projeto foram utilizadas as informacoes enviadas pelas mensagens
Recommended Minimum data (RMC) e Global Positioning System Fix Data (GGA). Estas
duas mensagens sao enviadas conforme exemplo abaixo:
$GPRMC,123519,A,4807.038,N,01131.000,E,022.4,084.4,230394,003.1,W*6A
RMC Recommended Minimum Sentence.
123519 Aquisicao dada em 12:35:19 UTC.
A Estado A= ativo ou V= vazio.
4807.038,N Latitude 48o 07.038’ N.
1131.000,E Longitude 11o 31.000’ E.
022.4 Velocidade sobre o solo em nos.
084.4 Angulo de rastreamento em graus verdadeiros.
230394 Data - 23 de Marco de 1994.
003.1,W Variacao magnetica.
*6A Checksum dos dados, sempre comecando com *.
$GPGGA,123519,4807.038,N,01131.000,E,1,08,0.9,545.4,M,46.9,M”*47
GGA Global Positioning System Fix Data.
123519 Aquisicao dada em 12:35:19 UTC.
4807.038,N Latitude 48o 07.038’ N.
01131.000,E Longitude 11o 31.000’ E.
1 Qualidade de aquisicao:
0 = Invalida
1 = GPS aquisitado
2 = DGPS aquisitado
3 = PPS aquisitado
4 = Real Time Kinematic (RTK)
5 = Flutuante RTK
6 = Estimativa (calculo morto)
7 = Modo de entrada manual
8 = Modo de simulacao

Capıtulo 4. DESENVOLVIMENTO DO FIRMWARE E SOFTWARE 30
08 Numero de satelites sendo rastreados.
0.9 Posicao de diluicao horizontal.
545.4,M Altura em metros acima do nıvel do mar.
46.9,M Altura do geoide acima do elipsoide WGS84.
*47 Checksum dos dados, sempre comecando com *.(DEPRIEST, )
Conforme exemplo acima, a Latitude e Longitude sao formatadas em graus,
minutos e fracoes decimais de minutos. Entao essas coordenadas podem ser convertidas
para formatos mais utilizados como graus e fracoes de graus ou graus, minutos e segundos.
Por exemplo, caso a Latitude recebida for 4717.112671 N, esta sera convertida como 47
graus, 17 minutos e 6,76026 segundos ou 47,28521118 graus (U-BLOX, 2018b).
4.1.6 ARQUIVO KML
Para que as informacoes obtidas do modulo GPS fossem utilizadas pelo usuarios
sem a necessidade de tratamento manual dos dados para sua visualizacao, o arquivamento
das informacoes e realizada em formato Keyhole Markup Language (KML). Estes arquivos
sao baseados na linguagem XML e sao destinados a exibicao de informacoes geograficas. O
formato foi desenvolvido pela Google com a Open Geospatial Consortium (OGC), sendo
esta a entidade que atualmente mantem a padronizacao desta linguagem. Para que o
usuario trabalhe e visualize os arquivos KML podem ser utilizadas aplicacoes como Google
Earth, Google Maps, ESRI ArcGIS Explorer, entre outros (GOOGLE, 2014).
4.1.7 MICRO IP
Para elaboracao do servidor HTTP foi necessario o emprego de uma pilha TCP/IP.
Porem como estas pilhas consomem muita memoria e poder de processamento, para
microcontroladores sao utilizadas pilhas desenvolvidas para sistemas embarcados com
limitacoes de recursos. Desta maneira dentre as pilhas desenvolvidas para estas aplicacoes
como lightweight IP(lwIP) e a Micro Internet Protocol(uIP), foi determinado a utilizacao
pilha uIP, pois esta demonstrou maior compatibilidade com os requisitos e caracterısticas
da aplicacao. Esta pilha foi desenvolvida por Adam Dunkels do Networked Embedded
Systems em Swedish Institute of Computer Science. As principais caracterısticas da uIP
sao:
• pequeno tamanho de codigo;
• baixo consumo de RAM;
• livre para aplicacoes comerciais e nao comerciais;
• protocolos ARP, SLIP, IP, UDP, ICMP (ping) e TCP; e
• bem documentado.(LI; JIA, 2007)
Capıtulo 4. DESENVOLVIMENTO DO FIRMWARE E SOFTWARE 31
4.2 INTERFACES
4.2.1 PAGINA WEB
Uma pagina de Internet foi desenvolvida para interface com o usuario. Nesta
pagina foi implementado um mapa utilizando a API da Google, na qual a cada vez que o
usuario atualizar a pagina sera apresentada a ultima posicao recebida do animal. Portanto,
caso o usuario precisar dos dados momentaneos o mesmo podera fazer a requisicao ao
servidor. Esta interface possibilita ao biologo a observacao para controle e protecao do
animal e tambem pode ser utilizada para a captura do mesmo.
4.2.2 ARQUIVO KML
Outra interface disponıvel para o usuario e a utilizacao dos arquivos KML arma-
zenados pela coleira no cartao SD. Estes arquivos podem ser abertos no Google Earth ou
Google Maps. Como a conexao do Gateway com a coleira pode nao estar disponıvel 100%
do tempo esta e a forma mais confiavel para coleta e obtencao da informacao.

32
5 ANALISE E DISCUSSAO DOS RESULTADOS
5.1 HARDWARE
5.1.1 PLACAS DE CIRCUITO IMPRESSO
Apos a producao das placas e antes da soldagem dos componentes, testes de
continuidade foram realizados. Nestes testes foram encontrados um curto entre VCC e GND
na coleira e uma trilha aberta no gateway. Porem estes problemas puderam ser corrigidos
manualmente. Tambem foram encontrados erros no design da placa e componentes. Mais
especificamente para o conector SMA nao foi previsto clearence da mascara de solda dos
pinos de GND. Porem foi necessaria apenas a retirada da mascara de solda nesta regiao.
Outros problemas encontrados foram erros no tamanho do encapsulamento de alguns
capacitores, devido a alteracoes no momento da compra destes. Porem os mesmos puderam
ser soldados facilmente.
5.1.2 SOLDAGEM DOS COMPONENTES
Como foram fabricadas apenas duas placas como prototipo, nao foram utilizadas
maquinas para automatizacao da solda dos componentes. Assim, toda a soldagem foi feita
manualmente utilizando estacao de solda, estencil, pasta de solda, lupa, microscopio e
soprador termico. Porem devido a minuciosidade do processo e a dificuldades de execucao
por conta da utilizacao de equipamentos sem muita precisao e sem muita pratica, ocorreram
muitos retrabalhos, problemas de curtos e erros de montagens. Dessa maneira, um curto
entre pinos que nao foi detectado durante testes acabou causando a queima do conversor
UART/USB do circuito da coleira. Ja no gateway o microcontrolador responsavel pelas
comunicacoes USB, Ethernet, SD e GSM nao funcionou, possivelmente devido aos mesmos
problemas.
Para correcao de ambos problemas nas placas seria necessaria a importacao de
novos componentes, o que oneraria o projeto. Ainda mais porque foi considerado que
apos testes de performance do radio seriam necessarios a confeccao de novas placas com
as devidas melhorias e correcoes. Foi decidido que na coleira seria implementado uma
conexao serial para conexao com o computador e no gateway seria utilizada uma placa
de desenvolvimento para elaboracao de uma comunicacao Ethernet e USB. Portanto
apenas nao foi implementada a comunicacao GSM, ja que nao havia acesso aos pinos para
implantacao de uma comunicacao entre as placas.
Capıtulo 5. ANALISE E DISCUSSAO DOS RESULTADOS 33
5.1.3 ANTENAS
Foi realizado ensaio do desempenho das antenas monopolo e dipolo fabricadas
para o prototipo. O equipamento utilizado foi o Keysight VNA E5071C, e as medicoes
realizadas foram de parametro S11, i.e., reflexao na primeira porta do VNA.
O primeiro passo para se realizar medidas em um analizador vetorial de rede e
a calibracao. O fabricante do equipamento disponibiliza 4 pecas de altıssima precisao e
largura de banda para tal procedimento, conhecido pela sigla, em ingles, SOLT :
• curto-circuito (Short);
• circuito aberto (Open);
• carga casada (50 ohm) (Load); e
• linha (Through).
Para a medicao em uma unica porta, calibra-se apenas com os tres primeiros
elementos.
Mediu-se o parametro S11 na faixa de 300 MHz a 600 MHz. O resultado foi visua-
lizado tanto em grafico linear quanto em uma Carta de Smith. Dois marcadores foram
utilizados:
1. frequencia de melhor performance da antena; e
2. frequencia de operacao do sistema (433,866 00 MHz foi o valor disponibilizado pelo
equipamento mais proximo do operacional do sistema).
Apos a medicao, as antenas (fabricadas inicialmente ligeiramente maiores a fim
de permitir futuro ajuste) foram reduzidas, pois sabidamente teriam performance melhor
em uma frequencia abaixo da de operacao. O monopolo foi alterado para um comprimento
de 141 mm e o dipolo para 311 mm. Todas as capturas de telas estao no apendice B.
5.2 FIRMWARE
Durante o desenvolvimento do firmware foram detectadas algumas dificuldades
de implementacao, dentre elas o CI CC1310 foi comprado sem que o vendedor informasse
qual era a versao do microcontrolador. Dessa maneira a revisao do CI recebida era a A.
Sendo que esta versao nao e indicada para operacao na frequencia de 433MHz, pois esta
banda foi aprimorada apenas na revisao B do microcontrolador. Ou seja nesta frequencia
pode ser que o radio nao opere com eficiencia, diminuindo assim o link budget.
Outra dificuldade encontrada foi a de que o design do circuito para integracao do
amplificador PA utiliza como front end uma operacao em single-ended. Assim sendo quando
houver alguma mudanca entre TX e RX, deve se alterar a configuracao do hardware entre
RFP e RFN. Esta configuracao requer que o radio seja desligado, reconfigurado e reiniciado.
Consequentemente existe um grande delay entre as trocas de operacao. Portando para
uma implementacao onde um delay nao seja aceitavel, e indicado que seja utilizada uma
operacao diferencial.
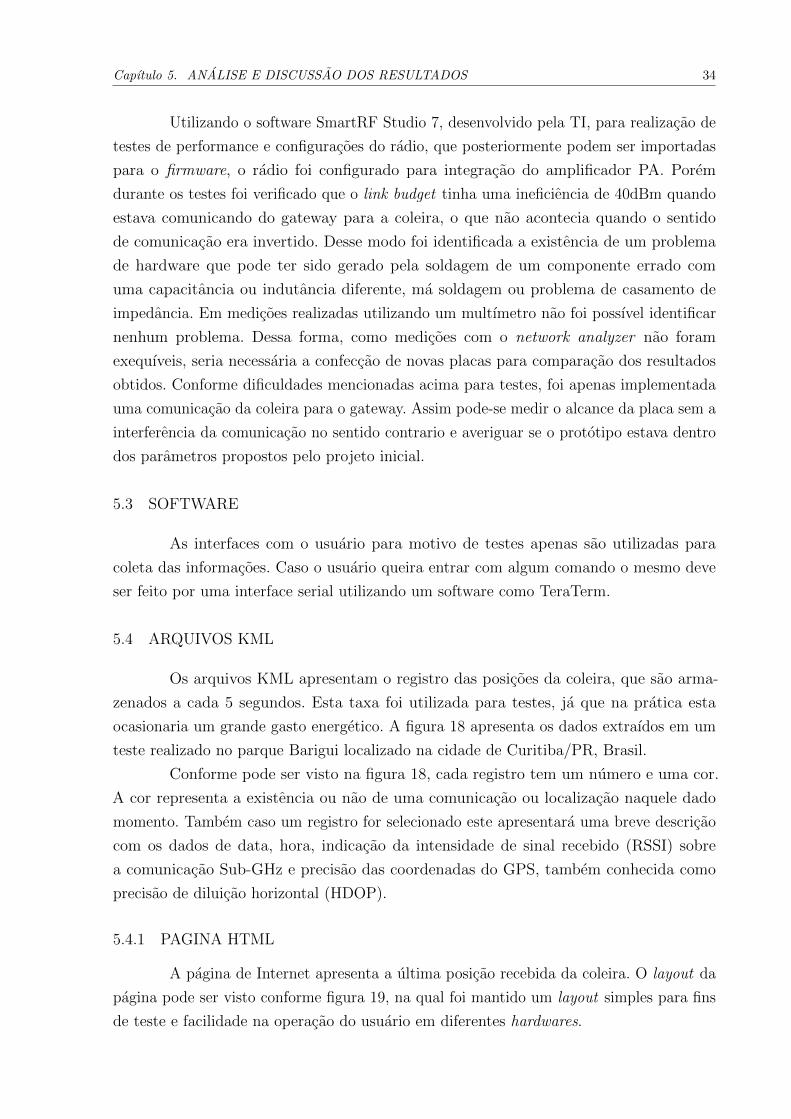
Capıtulo 5. ANALISE E DISCUSSAO DOS RESULTADOS 34
Utilizando o software SmartRF Studio 7, desenvolvido pela TI, para realizacao de
testes de performance e configuracoes do radio, que posteriormente podem ser importadas
para o firmware, o radio foi configurado para integracao do amplificador PA. Porem
durante os testes foi verificado que o link budget tinha uma ineficiencia de 40dBm quando
estava comunicando do gateway para a coleira, o que nao acontecia quando o sentido
de comunicacao era invertido. Desse modo foi identificada a existencia de um problema
de hardware que pode ter sido gerado pela soldagem de um componente errado com
uma capacitancia ou indutancia diferente, ma soldagem ou problema de casamento de
impedancia. Em medicoes realizadas utilizando um multımetro nao foi possıvel identificar
nenhum problema. Dessa forma, como medicoes com o network analyzer nao foram
exequıveis, seria necessaria a confeccao de novas placas para comparacao dos resultados
obtidos. Conforme dificuldades mencionadas acima para testes, foi apenas implementada
uma comunicacao da coleira para o gateway. Assim pode-se medir o alcance da placa sem a
interferencia da comunicacao no sentido contrario e averiguar se o prototipo estava dentro
dos parametros propostos pelo projeto inicial.
5.3 SOFTWARE
As interfaces com o usuario para motivo de testes apenas sao utilizadas para
coleta das informacoes. Caso o usuario queira entrar com algum comando o mesmo deve
ser feito por uma interface serial utilizando um software como TeraTerm.
5.4 ARQUIVOS KML
Os arquivos KML apresentam o registro das posicoes da coleira, que sao arma-
zenados a cada 5 segundos. Esta taxa foi utilizada para testes, ja que na pratica esta
ocasionaria um grande gasto energetico. A figura 18 apresenta os dados extraıdos em um
teste realizado no parque Barigui localizado na cidade de Curitiba/PR, Brasil.
Conforme pode ser visto na figura 18, cada registro tem um numero e uma cor.
A cor representa a existencia ou nao de uma comunicacao ou localizacao naquele dado
momento. Tambem caso um registro for selecionado este apresentara uma breve descricao
com os dados de data, hora, indicacao da intensidade de sinal recebido (RSSI) sobre
a comunicacao Sub-GHz e precisao das coordenadas do GPS, tambem conhecida como
precisao de diluicao horizontal (HDOP).
5.4.1 PAGINA HTML
A pagina de Internet apresenta a ultima posicao recebida da coleira. O layout da
pagina pode ser visto conforme figura 19, na qual foi mantido um layout simples para fins
de teste e facilidade na operacao do usuario em diferentes hardwares.
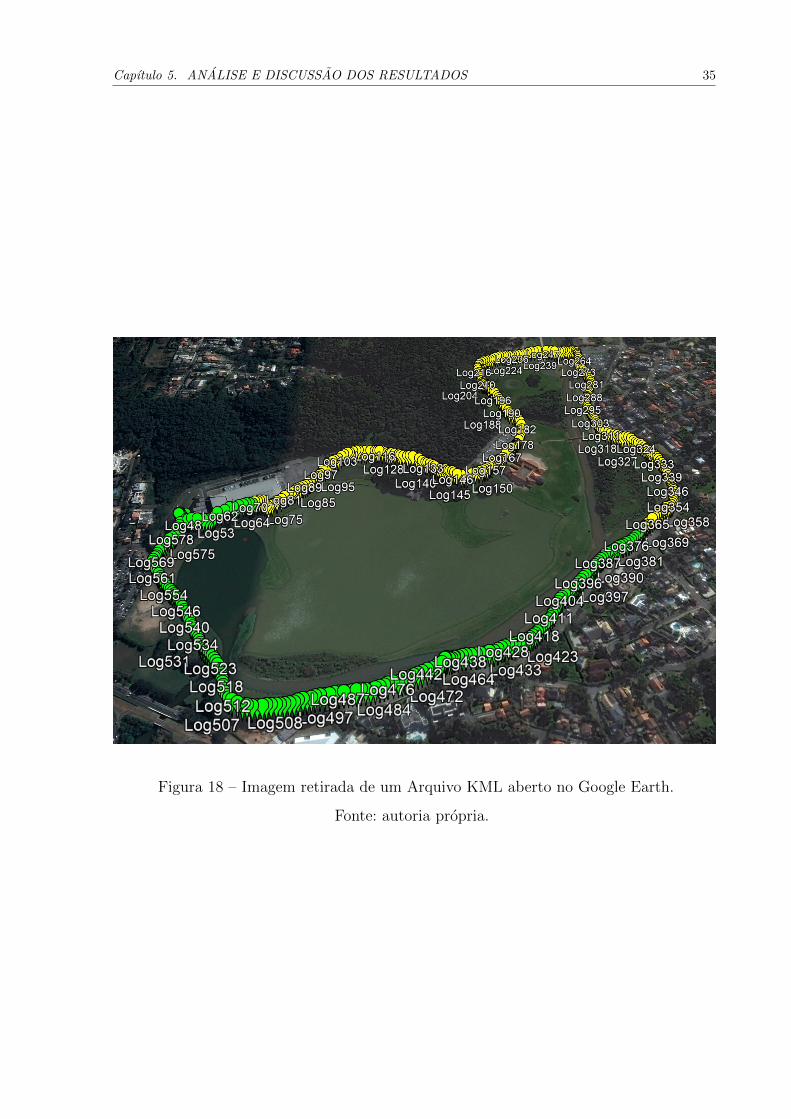
Capıtulo 5. ANALISE E DISCUSSAO DOS RESULTADOS 35
Figura 18 – Imagem retirada de um Arquivo KML aberto no Google Earth.
Fonte: autoria propria.
Capıtulo 5. ANALISE E DISCUSSAO DOS RESULTADOS 36
Figura 19 – Pagina HTML
Fonte: autoria propria.
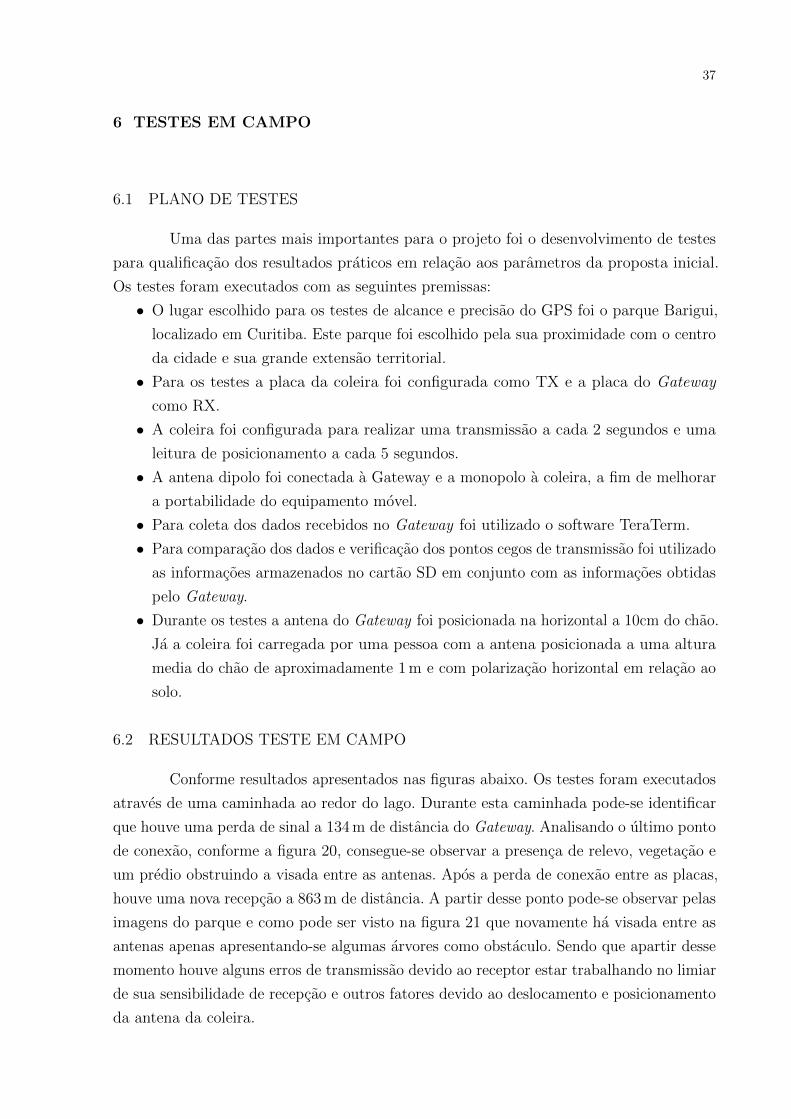
37
6 TESTES EM CAMPO
6.1 PLANO DE TESTES
Uma das partes mais importantes para o projeto foi o desenvolvimento de testes
para qualificacao dos resultados praticos em relacao aos parametros da proposta inicial.
Os testes foram executados com as seguintes premissas:
• O lugar escolhido para os testes de alcance e precisao do GPS foi o parque Barigui,
localizado em Curitiba. Este parque foi escolhido pela sua proximidade com o centro
da cidade e sua grande extensao territorial.
• Para os testes a placa da coleira foi configurada como TX e a placa do Gateway
como RX.
• A coleira foi configurada para realizar uma transmissao a cada 2 segundos e uma
leitura de posicionamento a cada 5 segundos.
• A antena dipolo foi conectada a Gateway e a monopolo a coleira, a fim de melhorar
a portabilidade do equipamento movel.
• Para coleta dos dados recebidos no Gateway foi utilizado o software TeraTerm.
• Para comparacao dos dados e verificacao dos pontos cegos de transmissao foi utilizado
as informacoes armazenados no cartao SD em conjunto com as informacoes obtidas
pelo Gateway.
• Durante os testes a antena do Gateway foi posicionada na horizontal a 10cm do chao.
Ja a coleira foi carregada por uma pessoa com a antena posicionada a uma altura
media do chao de aproximadamente 1 m e com polarizacao horizontal em relacao ao
solo.
6.2 RESULTADOS TESTE EM CAMPO
Conforme resultados apresentados nas figuras abaixo. Os testes foram executados
atraves de uma caminhada ao redor do lago. Durante esta caminhada pode-se identificar
que houve uma perda de sinal a 134 m de distancia do Gateway. Analisando o ultimo ponto
de conexao, conforme a figura 20, consegue-se observar a presenca de relevo, vegetacao e
um predio obstruindo a visada entre as antenas. Apos a perda de conexao entre as placas,
houve uma nova recepcao a 863 m de distancia. A partir desse ponto pode-se observar pelas
imagens do parque e como pode ser visto na figura 21 que novamente ha visada entre as
antenas apenas apresentando-se algumas arvores como obstaculo. Sendo que apartir desse
momento houve alguns erros de transmissao devido ao receptor estar trabalhando no limiar
de sua sensibilidade de recepcao e outros fatores devido ao deslocamento e posicionamento
da antena da coleira.

Capıtulo 6. TESTES EM CAMPO 38
Figura 20 – Imagem do teste realizado em campo com a representacao da visada do sinalcom obstrucao.
Fonte: autoria propria.
Figura 21 – Imagem do teste realizado em campo com a representacao da visada do sinalcom obstrucao.
Fonte: autoria propria.
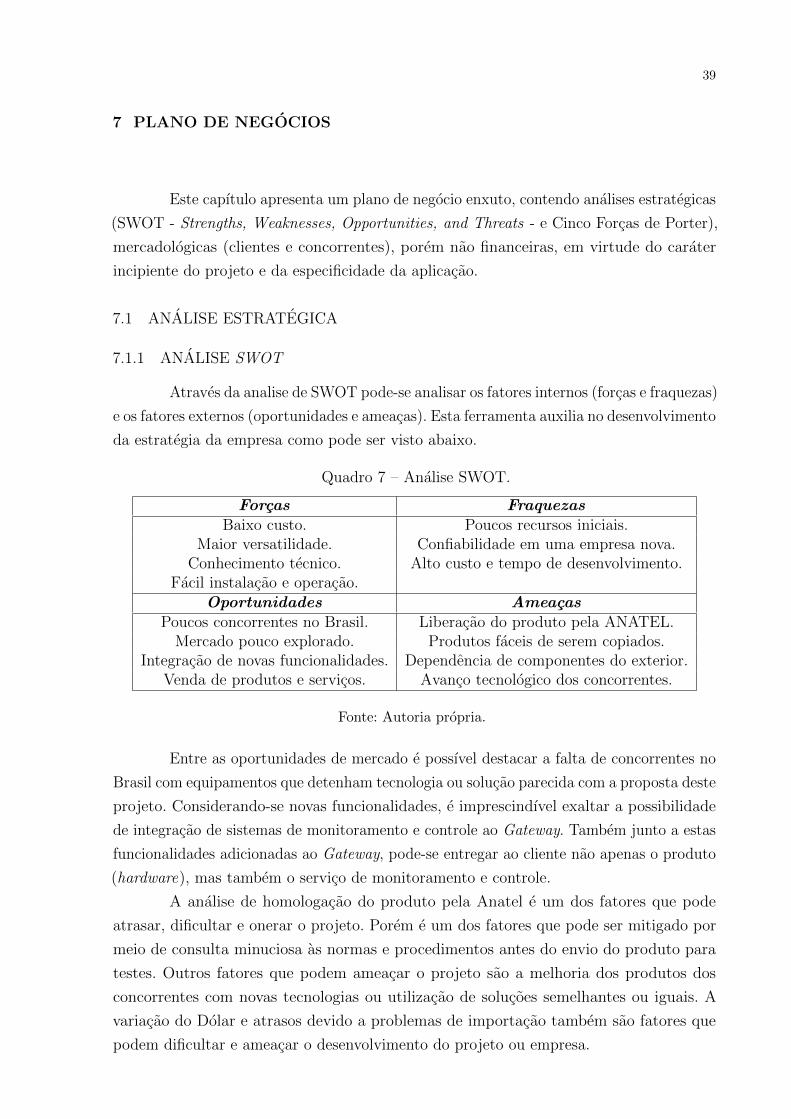
39
7 PLANO DE NEGOCIOS
Este capıtulo apresenta um plano de negocio enxuto, contendo analises estrategicas
(SWOT - Strengths, Weaknesses, Opportunities, and Threats - e Cinco Forcas de Porter),
mercadologicas (clientes e concorrentes), porem nao financeiras, em virtude do carater
incipiente do projeto e da especificidade da aplicacao.
7.1 ANALISE ESTRATEGICA
7.1.1 ANALISE SWOT
Atraves da analise de SWOT pode-se analisar os fatores internos (forcas e fraquezas)
e os fatores externos (oportunidades e ameacas). Esta ferramenta auxilia no desenvolvimento
da estrategia da empresa como pode ser visto abaixo.
Quadro 7 – Analise SWOT.
Forcas FraquezasBaixo custo. Poucos recursos iniciais.
Maior versatilidade. Confiabilidade em uma empresa nova.Conhecimento tecnico. Alto custo e tempo de desenvolvimento.
Facil instalacao e operacao.Oportunidades Ameacas
Poucos concorrentes no Brasil. Liberacao do produto pela ANATEL.Mercado pouco explorado. Produtos faceis de serem copiados.
Integracao de novas funcionalidades. Dependencia de componentes do exterior.Venda de produtos e servicos. Avanco tecnologico dos concorrentes.
Fonte: Autoria propria.
Entre as oportunidades de mercado e possıvel destacar a falta de concorrentes no
Brasil com equipamentos que detenham tecnologia ou solucao parecida com a proposta deste
projeto. Considerando-se novas funcionalidades, e imprescindıvel exaltar a possibilidade
de integracao de sistemas de monitoramento e controle ao Gateway. Tambem junto a estas
funcionalidades adicionadas ao Gateway, pode-se entregar ao cliente nao apenas o produto
(hardware), mas tambem o servico de monitoramento e controle.
A analise de homologacao do produto pela Anatel e um dos fatores que pode
atrasar, dificultar e onerar o projeto. Porem e um dos fatores que pode ser mitigado por
meio de consulta minuciosa as normas e procedimentos antes do envio do produto para
testes. Outros fatores que podem ameacar o projeto sao a melhoria dos produtos dos
concorrentes com novas tecnologias ou utilizacao de solucoes semelhantes ou iguais. A
variacao do Dolar e atrasos devido a problemas de importacao tambem sao fatores que
podem dificultar e ameacar o desenvolvimento do projeto ou empresa.
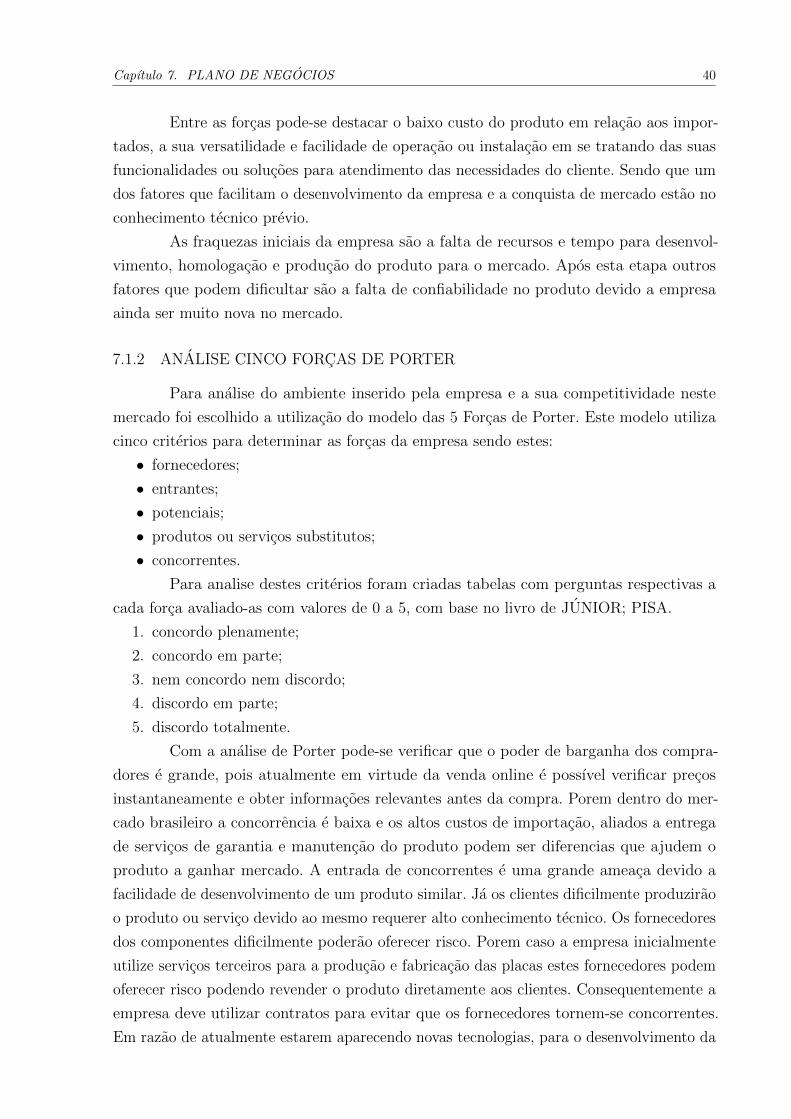
Capıtulo 7. PLANO DE NEGOCIOS 40
Entre as forcas pode-se destacar o baixo custo do produto em relacao aos impor-
tados, a sua versatilidade e facilidade de operacao ou instalacao em se tratando das suas
funcionalidades ou solucoes para atendimento das necessidades do cliente. Sendo que um
dos fatores que facilitam o desenvolvimento da empresa e a conquista de mercado estao no
conhecimento tecnico previo.
As fraquezas iniciais da empresa sao a falta de recursos e tempo para desenvol-
vimento, homologacao e producao do produto para o mercado. Apos esta etapa outros
fatores que podem dificultar sao a falta de confiabilidade no produto devido a empresa
ainda ser muito nova no mercado.
7.1.2 ANALISE CINCO FORCAS DE PORTER
Para analise do ambiente inserido pela empresa e a sua competitividade neste
mercado foi escolhido a utilizacao do modelo das 5 Forcas de Porter. Este modelo utiliza
cinco criterios para determinar as forcas da empresa sendo estes:
• fornecedores;
• entrantes;
• potenciais;
• produtos ou servicos substitutos;
• concorrentes.
Para analise destes criterios foram criadas tabelas com perguntas respectivas a
cada forca avaliado-as com valores de 0 a 5, com base no livro de JUNIOR; PISA.
1. concordo plenamente;
2. concordo em parte;
3. nem concordo nem discordo;
4. discordo em parte;
5. discordo totalmente.
Com a analise de Porter pode-se verificar que o poder de barganha dos compra-
dores e grande, pois atualmente em virtude da venda online e possıvel verificar precos
instantaneamente e obter informacoes relevantes antes da compra. Porem dentro do mer-
cado brasileiro a concorrencia e baixa e os altos custos de importacao, aliados a entrega
de servicos de garantia e manutencao do produto podem ser diferencias que ajudem o
produto a ganhar mercado. A entrada de concorrentes e uma grande ameaca devido a
facilidade de desenvolvimento de um produto similar. Ja os clientes dificilmente produzirao
o produto ou servico devido ao mesmo requerer alto conhecimento tecnico. Os fornecedores
dos componentes dificilmente poderao oferecer risco. Porem caso a empresa inicialmente
utilize servicos terceiros para a producao e fabricacao das placas estes fornecedores podem
oferecer risco podendo revender o produto diretamente aos clientes. Consequentemente a
empresa deve utilizar contratos para evitar que os fornecedores tornem-se concorrentes.
Em razao de atualmente estarem aparecendo novas tecnologias, para o desenvolvimento da

Capıtulo 7. PLANO DE NEGOCIOS 41
Quadro 8 – Poder de Barganha dos Compradores.
Os clientes estao informados sobre o preco praticado no mercado e os custos deproducao?
2
Os clientes compram em grande quantidade e fazem pressao sobre precos e prazos? 3Existe possibilidade de clientes virem a produzir os servicos que agora compramno mercado?
5
Os clientes trabalham com margens achatadas de lucro? 3
E facil para o comprador trocar de fornecedor sem alteracao de qualidade ouimpactos significativos em seus custos?
4
A perda de cliente importante impactara imediatamente na sobrevivencia daempresa?
2
Os clientes costumam comprar servicos padronizados? 3A diferenciacao e importante para o comprador? Ele aceitaria aumento de precoem funcao disso?
1
Nosso servico e essencial para o comprador? 2TOTAL 25
Fonte: Adaptado (JUNIOR; PISA, 2010)
Quadro 9 – Forca dos Concorrentes.
Existem muitos concorrentes com o mesmo porte de empresa? 4A principal forma de concorrencia e por preco, buscando expressividade na vendapor quantidade?
5
Existe diferenciacao dos produtos e servicos oferecidos pelos concorrentes? 2As empresas concorrentes aparentam ter crescimento constante? 2Os concorrentes utilizam diferentes estrategias para superar a concorrencia? 3Constantemente observa-se a utilizacao de tecnologia e inovacao nos servicos eprodutos oferecidos?
4
Os custos fixos para este tipo de negocio sao altos? 3Os clientes podem facilmente alterar de fornecedor sem sofrer perdas de qualidade? 4O setor do negocio apresenta crescimento de mercado existindo ainda margempara o crescimento?
1
TOTAL 28
Fonte: Adaptado (JUNIOR; PISA, 2010)
internet das coisas, e impressıvel que a empresa esteja atenta e busque sempre atualizar os
produtos para que nao aparecam produtos substitutos.
7.2 CUSTOS DE FABRICACAO
Conforme pesquisa de precos realizada atraves dos sites da DigiKey1 e PCBWay2
foi compilado uma tabela com o comparativo de precos em relacao a quantidade de placas
1https://www.digikey.com/2https://www.pcbway.com/
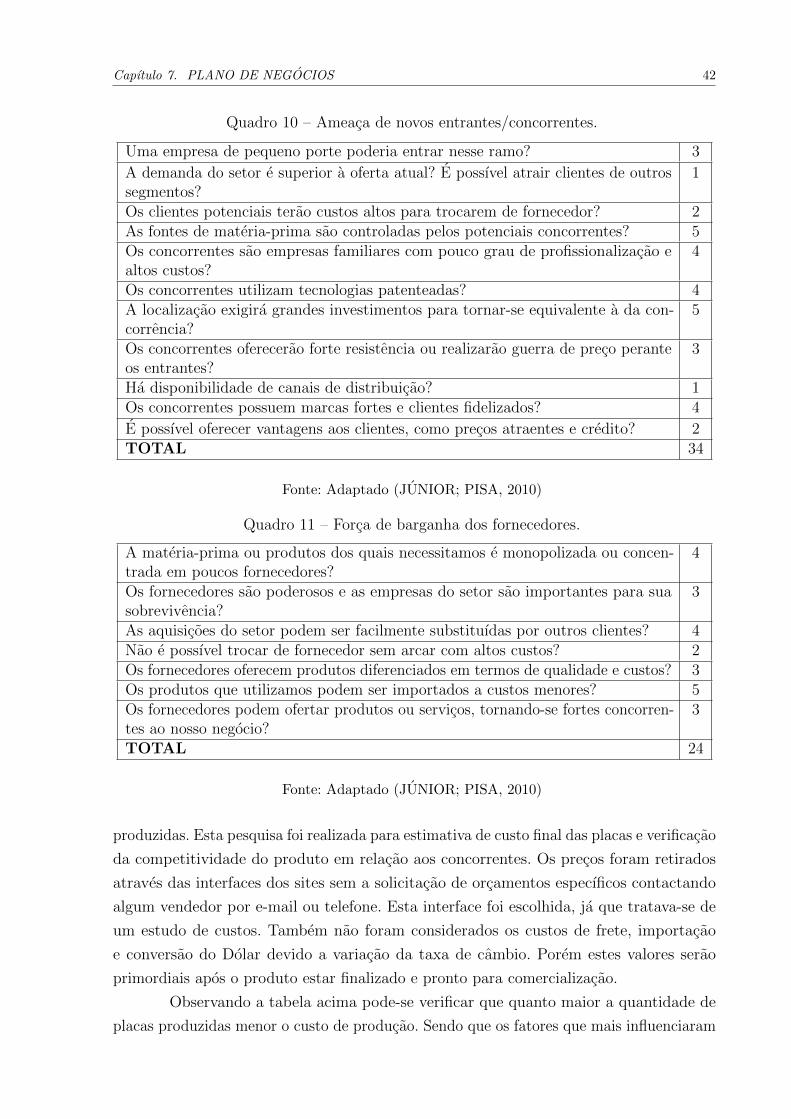
Capıtulo 7. PLANO DE NEGOCIOS 42
Quadro 10 – Ameaca de novos entrantes/concorrentes.
Uma empresa de pequeno porte poderia entrar nesse ramo? 3
A demanda do setor e superior a oferta atual? E possıvel atrair clientes de outrossegmentos?
1
Os clientes potenciais terao custos altos para trocarem de fornecedor? 2As fontes de materia-prima sao controladas pelos potenciais concorrentes? 5Os concorrentes sao empresas familiares com pouco grau de profissionalizacao ealtos custos?
4
Os concorrentes utilizam tecnologias patenteadas? 4A localizacao exigira grandes investimentos para tornar-se equivalente a da con-correncia?
5
Os concorrentes oferecerao forte resistencia ou realizarao guerra de preco peranteos entrantes?
3
Ha disponibilidade de canais de distribuicao? 1Os concorrentes possuem marcas fortes e clientes fidelizados? 4
E possıvel oferecer vantagens aos clientes, como precos atraentes e credito? 2TOTAL 34
Fonte: Adaptado (JUNIOR; PISA, 2010)
Quadro 11 – Forca de barganha dos fornecedores.
A materia-prima ou produtos dos quais necessitamos e monopolizada ou concen-trada em poucos fornecedores?
4
Os fornecedores sao poderosos e as empresas do setor sao importantes para suasobrevivencia?
3
As aquisicoes do setor podem ser facilmente substituıdas por outros clientes? 4Nao e possıvel trocar de fornecedor sem arcar com altos custos? 2Os fornecedores oferecem produtos diferenciados em termos de qualidade e custos? 3Os produtos que utilizamos podem ser importados a custos menores? 5Os fornecedores podem ofertar produtos ou servicos, tornando-se fortes concorren-tes ao nosso negocio?
3
TOTAL 24
Fonte: Adaptado (JUNIOR; PISA, 2010)
produzidas. Esta pesquisa foi realizada para estimativa de custo final das placas e verificacao
da competitividade do produto em relacao aos concorrentes. Os precos foram retirados
atraves das interfaces dos sites sem a solicitacao de orcamentos especıficos contactando
algum vendedor por e-mail ou telefone. Esta interface foi escolhida, ja que tratava-se de
um estudo de custos. Tambem nao foram considerados os custos de frete, importacao
e conversao do Dolar devido a variacao da taxa de cambio. Porem estes valores serao
primordiais apos o produto estar finalizado e pronto para comercializacao.
Observando a tabela acima pode-se verificar que quanto maior a quantidade de
placas produzidas menor o custo de producao. Sendo que os fatores que mais influenciaram
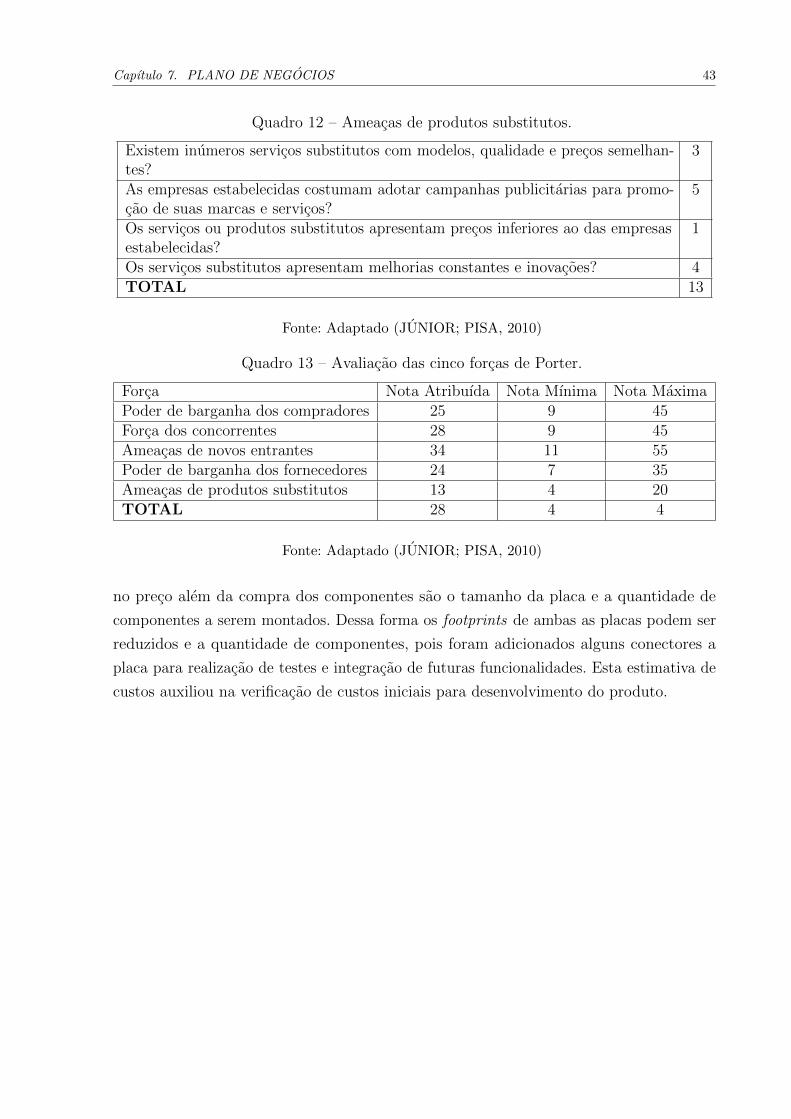
Capıtulo 7. PLANO DE NEGOCIOS 43
Quadro 12 – Ameacas de produtos substitutos.
Existem inumeros servicos substitutos com modelos, qualidade e precos semelhan-tes?
3
As empresas estabelecidas costumam adotar campanhas publicitarias para promo-cao de suas marcas e servicos?
5
Os servicos ou produtos substitutos apresentam precos inferiores ao das empresasestabelecidas?
1
Os servicos substitutos apresentam melhorias constantes e inovacoes? 4TOTAL 13
Fonte: Adaptado (JUNIOR; PISA, 2010)
Quadro 13 – Avaliacao das cinco forcas de Porter.
Forca Nota Atribuıda Nota Mınima Nota MaximaPoder de barganha dos compradores 25 9 45Forca dos concorrentes 28 9 45Ameacas de novos entrantes 34 11 55Poder de barganha dos fornecedores 24 7 35Ameacas de produtos substitutos 13 4 20TOTAL 28 4 4
Fonte: Adaptado (JUNIOR; PISA, 2010)
no preco alem da compra dos componentes sao o tamanho da placa e a quantidade de
componentes a serem montados. Dessa forma os footprints de ambas as placas podem ser
reduzidos e a quantidade de componentes, pois foram adicionados alguns conectores a
placa para realizacao de testes e integracao de futuras funcionalidades. Esta estimativa de
custos auxiliou na verificacao de custos iniciais para desenvolvimento do produto.
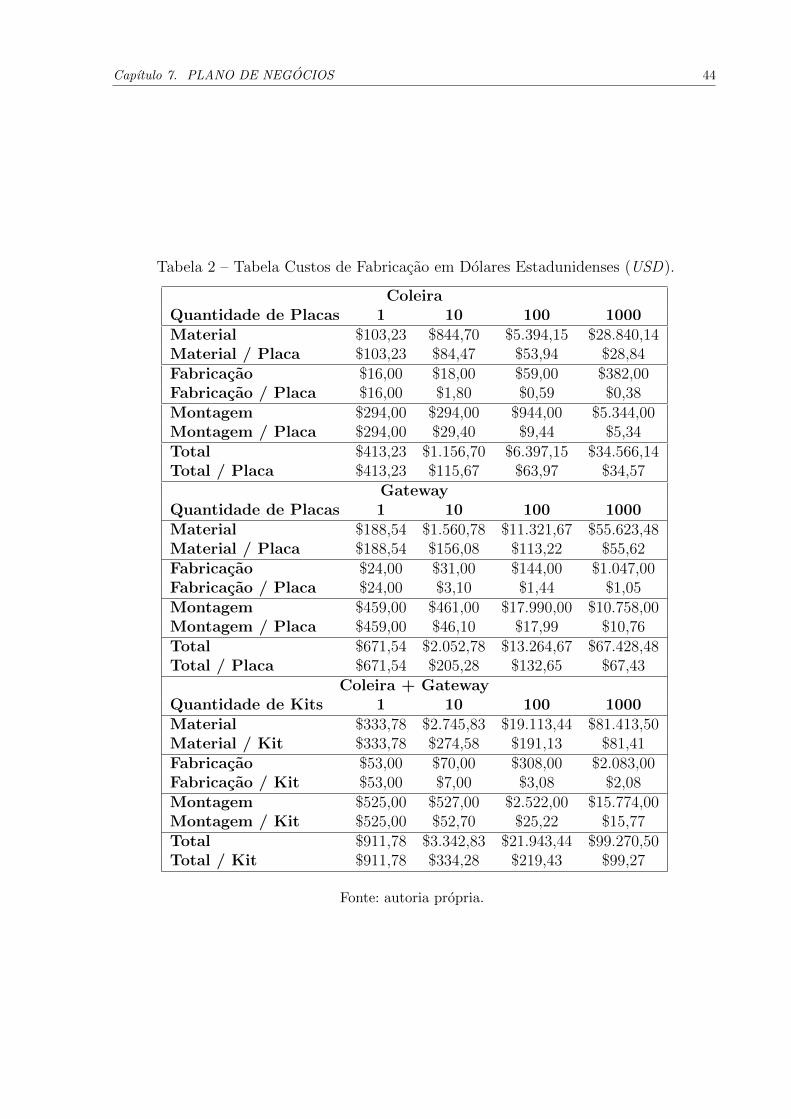
Capıtulo 7. PLANO DE NEGOCIOS 44
Tabela 2 – Tabela Custos de Fabricacao em Dolares Estadunidenses (USD).
ColeiraQuantidade de Placas 1 10 100 1000Material $103,23 $844,70 $5.394,15 $28.840,14Material / Placa $103,23 $84,47 $53,94 $28,84Fabricacao $16,00 $18,00 $59,00 $382,00Fabricacao / Placa $16,00 $1,80 $0,59 $0,38Montagem $294,00 $294,00 $944,00 $5.344,00Montagem / Placa $294,00 $29,40 $9,44 $5,34Total $413,23 $1.156,70 $6.397,15 $34.566,14Total / Placa $413,23 $115,67 $63,97 $34,57
GatewayQuantidade de Placas 1 10 100 1000Material $188,54 $1.560,78 $11.321,67 $55.623,48Material / Placa $188,54 $156,08 $113,22 $55,62Fabricacao $24,00 $31,00 $144,00 $1.047,00Fabricacao / Placa $24,00 $3,10 $1,44 $1,05Montagem $459,00 $461,00 $17.990,00 $10.758,00Montagem / Placa $459,00 $46,10 $17,99 $10,76Total $671,54 $2.052,78 $13.264,67 $67.428,48Total / Placa $671,54 $205,28 $132,65 $67,43
Coleira + GatewayQuantidade de Kits 1 10 100 1000Material $333,78 $2.745,83 $19.113,44 $81.413,50Material / Kit $333,78 $274,58 $191,13 $81,41Fabricacao $53,00 $70,00 $308,00 $2.083,00Fabricacao / Kit $53,00 $7,00 $3,08 $2,08Montagem $525,00 $527,00 $2.522,00 $15.774,00Montagem / Kit $525,00 $52,70 $25,22 $15,77Total $911,78 $3.342,83 $21.943,44 $99.270,50Total / Kit $911,78 $334,28 $219,43 $99,27
Fonte: autoria propria.
45
8 CONCLUSAO
O projeto proposto tinha como objetivo o desenvolvimento de um sistema de
monitoramento de animais silvestres utilizando uma rede Sub-GHz para comunicacao entre
as coleiras e os Gateways.
Este projeto concebeu o desenvolvimento de duas placas. A primeira consistia no
prototipo de uma coleira que utilizava um modulo GPS, cartao de memoria, conversor
UART/USB e um transmissor de RF com microcontrolador. Ja a segunda placa consistia
no prototipo de um Gateway que era composto por um modulo GPRS, microcontrolador
TIVA com entrada USB e Ethernet, transmissor de RF e cartao de memoria.
A metodologia adotada pelo projeto foi o desenvolvimento de prototipos em um
aperfeicoamento contınuo ate que o produto estivesse pronto para ser comercializado. Porem
para a apresentacao deste projeto seria apenas desenvolvido um prototipo e realizado
testes no produto e em campo.
Ambas placas, conforme enunciado nos resultados, obtiveram alguns erros de
projeto e problemas de fabricacao e montagem. Porem estas adversidades nao representaram
impedimento para a realizacao de testes de campo e de performance do circuito, placas e
antenas.
O projeto concebeu o desenvolvimento de uma rede Sub-GHz para as comunicacoes
entre as coleiras e os Gateways. Para esta comunicacao a frequencia utilizada foi a de
433MHz e uma potencia maxima de transmissao de ambas as placas de 100 mW. Durante
testes em campo pode-se verificar que a coleira e o gateway obtiveram um alcance de 800 a
900 metros com visada entre as antenas e 100 a 150 metros sem visada. Considerando que
durante os testes ambas antenas estavam posicionadas em baixas alturas e em polarizacao
horizontal as distancias alcancadas poderiam aumentar consideravelmente. Apos os testes
em campo foram feitos testes em laboratorio o que possibilitou a verificacao e a correcao
do descasamento das antenas em relacao a frequencia da portadora, contribuindo para
uma melhoria de alcance para testes futuros.
Devido a analise dos custos de fabricacao pode-se verificar que caso fosse produzido
uma maior quantidade de placas os custos de fabricacao ficariam menores que 100 dolares,
viabilizando assim a producao e venda no Brasil, considerando os precos praticados pelos
concorrentes. Tambem verificou-se possıveis alteracoes de projeto que proporcionassem
uma reducao nos custos de fabricacao.
8.1 TRABALHOS FUTUROS
Conforme resultados apresentados nos testes realizados, sera necessario o desenvol-
vimento de novos prototipos. Sendo que dentre as melhorias propostas para correcao (alem

Capıtulo 8. CONCLUSAO 46
dos problemas de fabricacao), podem-se destacar outros aperfeicoamentos do produto
como a alteracao da banda para 915 MHz, ja que nesta frequencia, conforme regulacao
da Anatel, e possıvel utilizar potencias de ate 30dBm. Tambem para esta banda existem
mais opcoes de amplificadores ou transmissores com maior potencia de transmissao e
sensibilidade de recepcao. Assim como com o desenvolvimento de um prototipo utilizando
aproximadamente o dobro da frequencia e possıvel comparar as performances do radio
nestas duas bandas. Outra possıvel melhoria seria a utilizacao de um microcontrolador para
o Gateway com maior performance, ja que mesmo ja se antecipando maior carga de pro-
cessamento, o microcontrolador TIVA ficou bastante limitado quando estava hospedando
o servidor HTML, pois apresentava atraso no carregamento da pagina, mesmo servindo
uma aplicacao simples. O modulo GSM em novos prototipos poderia ser substituıdo por
uma tecnologia mais nova, com o objetivo de possibilitar uma maior taxa de transmissao
de dados, entregando para o usuario uma maior gama de funcionalidades.
Em relacao ao software, pode-se destacar as melhorias nas interfaces do usuario,
possibilitando reconfiguracoes do sistema a distancia sem conexoes a cabo. A criacao de
um banco de dados para que o usuario possa coletar as informacoes e o desenvolvimento de
sistemas de seguranca com criptografia. Muitas dessas funcionalidades ja estao disponıveis
nos microcontroladores utilizados neste projeto, porem nao foram desenvolvidas para este
prototipo.
Novos testes serao necessarios em futuros desenvolvimentos. Por exemplo, durante
estes testes nao foram feitos ensaios referentes ao consumo energetico das placas, conside-
rando a utilizacao de todas as funcionalidades dos componentes para reducao do consumo
de energia. Outros testes futuros devem-se principalmente aos futuros desenvolvimentos
como integracao das baterias, desenvolvimento do encapsulamentos e testes de campo
com a utilizacao de animais e em ambientes mais proximos dos encontrados em reservas
florestais.
8.2 CONSIDERACOES FINAIS
Considerando os resultados podemos afirmar que e possıvel se desenvolver um
produto de menor custo e com melhores funcionalidades e desempenho dos equipamentos
ou solucoes encontrados no mercado. Porem, devido aos problemas de desenvolvimento e
fabricacao, serao necessarios futuros desenvolvimentos para obtencao de um produto que
atenda os requisitos que o mercado a ser conquistado requer.
O desenvolvimento de prototipos sem uma infraestrutura trouxe muitos problemas,
o que gerou atrasos e custos a mais de producao. Portanto, para empresas que ainda
estao iniciando, possivelmente a melhor opcao seria a contratacao de uma empresa de
desenvolvimento, para que o produto seja desenvolvido e colocado no mercado o mais breve
possıvel, dado que atualmente a tecnologia melhora muito rapido e a cada ano surgem
novos produtos.

47
Referencias
ANATEL. Requisitos Tecnicos Para A Avaliacao Da Conformidade De Equipa-mentos De Radiocomunicacao De Radiacao Restrita. [S.l.], 2018. ATO No 14448.Citado na pagina 13.
BALANIS, C. Antenna Theory: Analysis and Design. [S.l.]: John Wiley & Sons, 2005.(Antenna Theory: Analysis and Design, v. 1). ISBN 9780471667827. Citado na pagina 26.
BHARDWAJ, A.; TOMAR, A. R. S. Lora wanet: Mac protocol design approach. Research& Reviews: A Journal of Embedded System & Applications, v. 5, p. 19–25, 2017.Citado na pagina 14.
BOR, M. et al. Do lora low-power wide-area networks scale? Proceedings of the 19th ACMInternational Conference on Modeling, Analysis and Simulation of Wireless and MobileSystems, http://dx.doi.org/10.1145/2988287.2989163, p. 59–67, 2016. Citado na pagina14.
BROOKS, D. Signal Integrity Issues and Printed Circuit Board Design. UpperSaddle River: Prentice Hall PTR, 2003. (Prentice Hall modern semiconductor design series).ISBN 9780131418844. Citado na pagina 11.
CNUC/MMA. Tabela Consolidada das Unidades de Conservacao.http://www.mma.gov.br/areas-protegidas/cadastro-nacional-de-ucs/dados-consolidados,2018. Citado na pagina 7.
DEPRIEST, D. Nmea data. http://www.gpsinformation.org/dale/nmea.htm. Citado 2vezes nas paginas 29 e 30.
DESTRO, G. F. G. et al. Efforts to Combat Wild Animals Trafficking in Brazil.http://dx.doi.org/10.5772/48351: Biodiversity Enrichment in a Diverse World, 2012. 421–436 p. ISBN 9809533072017. Citado na pagina 1.
EDWARDS, T. Foundations for Microstrip Circuit Design. Chichester: Wiley, 1981.ISBN 9780471279440. Citado na pagina 11.
GOLDSMITH, A. Wireless Communications. https://doi.org/10.1017/CBO9780511841224:Cambridge University Press, 2005. ISBN 9780511841224. Citado na pagina 13.
GOOGLE. Keyhole Markup Language. https://developers.google.com/kml/, 2014.Citado na pagina 30.
HUGHEY, L. F. et al. Challenges and solutions for studying collective ani-mal behaviour in the wild. Philosophical Transactions Royal Society,http://dx.doi.org/10.1098/rstb.2017.0005373, v. 373, 2018. Citado na pagina 25.
HaRING, B. et al. Comparing selected sub-ghz transceivers – results from the field.Wireless Congress, 2017. Citado na pagina 15.
JUNIOR, A. B. L.; PISA, B. J. Administrando micro e pequenas empresas. [S.l.]:Elsevier, 2010. v. 4. 223 p. ISBN 9788535236989. Citado 4 vezes nas paginas 40, 41, 42e 43.
Referencias 48
KRAKOW, K.; JOHNSON, S.; GUY, J. System Design Guidelinesfor the TM4C129x Family of TivaTM C Series Microcontrollers.http://www.ti.com/lit/an/spma056/spma056.pdf, 2013. Citado na pagina 24.
LAURIDSEN, M. et al. Coverage comparison of gprs, nb-iot, lora, and sig-fox in a 7800 km2 area. IEEE 85th Vehicular Technology Conference,https://doi.org/10.1109/VTCSpring.2017.8108182, 2017. Citado na pagina 15.
LI, W.; JIA, K.-B. Implementation of embedded web server based on uiptcp/ip stack. IET Conference on Wireless, Mobile and Sensor Networks,https://doi.org/10.1049/cp:20070236, 2007. Citado na pagina 30.
MEJDELL, A. M.; BASIC, D.; BøE, K. E. A review on the use of electric devices to modifyanimal behaviour and the impact on animal welfare. Norwegian Scientific Committeefor Food and Environment (VKM), n. 31, 2017. Citado na pagina 1.
OLUWARANTI, A. I.; AYENI, S. Monocular vision based boundary avoidance for non-invasive stray control system for cattle: A conceptual approach. Journal of SensorTechnology, http://dx.doi.org/10.4236/jst.2015.53007, v. 5, n. 3, p. 63–71, 2015. Citadona pagina 1.
PAUL, C. Introduction to Electromagnetic Compatibility. Nova Iorque: Wiley, 2006.(Wiley Series in Microwave and Optical Engineering). ISBN 9780471758143. Citado 2vezes nas paginas 11 e 12.
PAULA, T. et al. Aspectos do uso territorial por onca parda (puma concolor), atraves demonitoramento via satelite, na regiao do parque estadual da serra do brigadeiro, mg. Arq.Bras. Med. Vet. Zootec., http://dx.doi.org/10.1590/1678-7205, v. 67, n. 1, p. 80–88,2015. Citado na pagina 1.
POZAR, D. Microwave Engineering, 4th Edition. Nova Iorque: Wiley, 2011. ISBN9781118213636. Citado 2 vezes nas paginas 11 e 12.
SCHATZ, G. Sigfox vs. lora: A comparison between technologies & business models. LinkLabs, https://www.link-labs.com/blog/sigfox-vs-lora, 2016. Citado na pagina 14.
SEMTECH. LoRa Transceivers. https://www.semtech.com/products/wireless-rf/lora-transceivers, 2018. Citado na pagina 14.
SILICON LABS. USBXpress Family CP2102N Data Sheet.https://www.silabs.com/documents/public/data-sheets/cp2102n-datasheet.pdf, 2017.Citado na pagina 22.
SILVA, C. E. Monitoramento de redes windows com servidor linux utilizando o samba.Revista UNIPLAC, http://revista.uniplac.net/ojs/index.php/tc si/article/view/866,2010. Citado na pagina 28.
SKYWORKS. SKY66115-11: 400 to 510 MHz Front-End Module for Range Extension Applications.http://www.skyworksinc.com/uploads/documents/SKY66115 11 203309H.pdf, 2017.Citado na pagina 16.
Referencias 49
TEXAS INSTRUMENTS. Tiva TM4C1294NCPDT Microcontroller.http://www.ti.com/lit/ds/symlink/tm4c1294ncpdt.pdf, 2014. Citado 2 vezes naspaginas 21 e 27.
TEXAS INSTRUMENTS. Lp3850x-adj, lp3850xa-adj 3-a flexcap low dropout linearregulator for 2.7-v to 5.5-v inputs. http://www.ti.com/lit/ds/symlink/lp38501-adj.pdf,2015. Citado na pagina 24.
TEXAS INSTRUMENTS. TPS796xx Ultralow-Noise, High PSRR, Fast, RF, 1-ALow-Dropout Linear Regulators. http://www.ti.com/lit/ds/symlink/tps796.pdf, 2015.Citado na pagina 24.
TEXAS INSTRUMENTS. CC1310 SimpleLink Ultra-Low-Power Sub-1 GHz Wi-reless MCU. http://www.ti.com/product/CC1310/datasheet, 2016. Citado 3 vezes naspaginas 15, 16 e 27.
TOMKIEWICZ, S. M. et al. Global positioning system and associated technologies inanimal behaviour and ecological research. Philosophical Transactions Royal Society,v. 365, p. 2163–2176, 2010. Citado 2 vezes nas paginas 2 e 6.
U-BLOX. u-blox M8 Concurrent GNSS Antenna Modules. https://www.u-blox.com/sites/default/files/CAM-M8-FW3 DataSheet %28UBX-15031574%29.pdf, 2016.Citado 2 vezes nas paginas 19 e 27.
U-BLOX. SARA-G3 series Dual and quad-band GSM/GPRS modu-les. https://www.u-blox.com/sites/default/files/SARA-G3 DataSheet %28UBX-13000993%29.pdf, 2017. Citado na pagina 19.
U-BLOX. SARA-G3 and SARA-U2 series. https://www.u-blox.com/sites/default/files/SARA-G3-U2 SysIntegrManual 2018. Citado na pagina19.
U-BLOX. u-blox 8 / u-blox M8 Receiver Description.https://www.u-blox.com/sites/default/files/products/documents/u-blox8-M8 ReceiverDescrProtSpec (UBX-13003221) Public.pdf, 2018. Citado 2 vezesnas paginas 28 e 30.
VEJLGAARD, B. et al. Coverage and capacity analysis of sigfox, lora,gprs, and nb-iot. IEEE 85th Vehicular Technology Conference,https://doi.org/10.1109/VTCSpring.2017.8108666, 2017. Citado na pagina 14.
VENTURELLI, O. G. et al. Registro fotografico do lobo-guara, chrysocyon brachyurus(illiger, 1815), em um fragmento de mata atlantica no observatorio pico dos dias, brasopolis- mg. Revista Brasileira de Zoociencias, v. 16, n. 1–3, p. 133–139, 2015. Citado napagina 1.
ZHANG, A.; WALLACE, R. CC1310 Skyworks 433MHz PA Reference Design.http://www.ti.com/lit/an/swra528/swra528.pdf, 2017. Citado na pagina 16.

Apendices
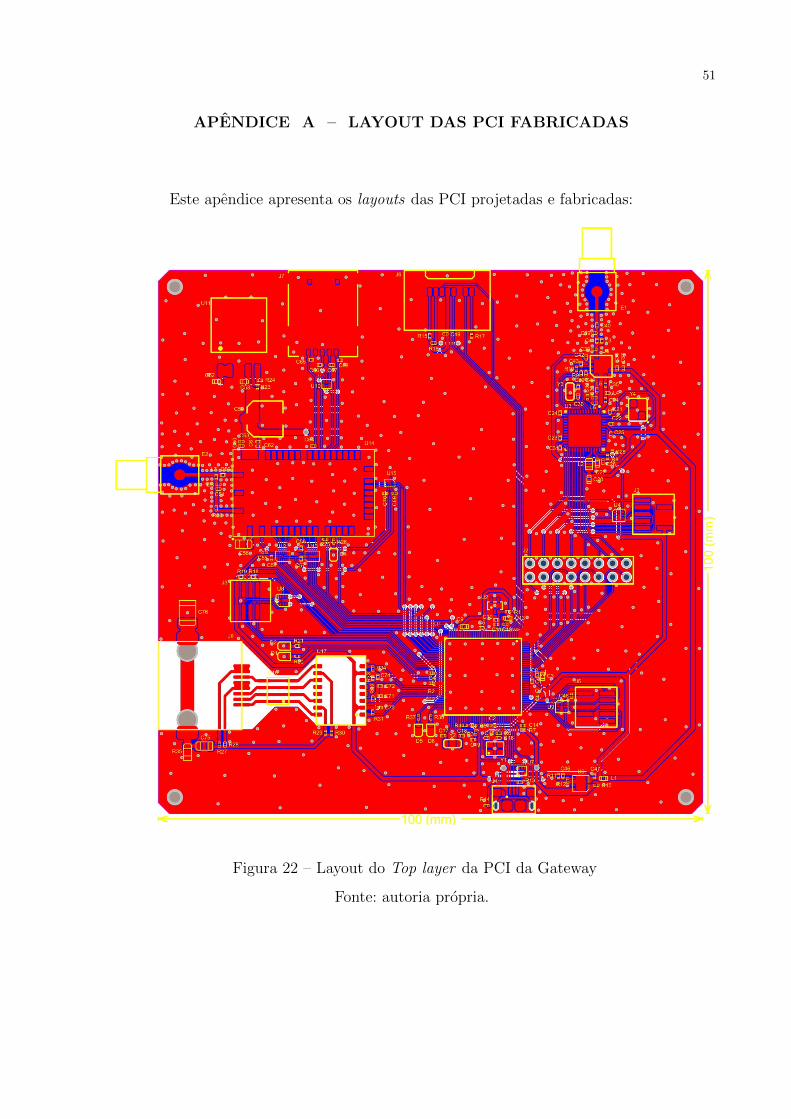
51
APENDICE A – LAYOUT DAS PCI FABRICADAS
Este apendice apresenta os layouts das PCI projetadas e fabricadas:
Figura 22 – Layout do Top layer da PCI da Gateway
Fonte: autoria propria.
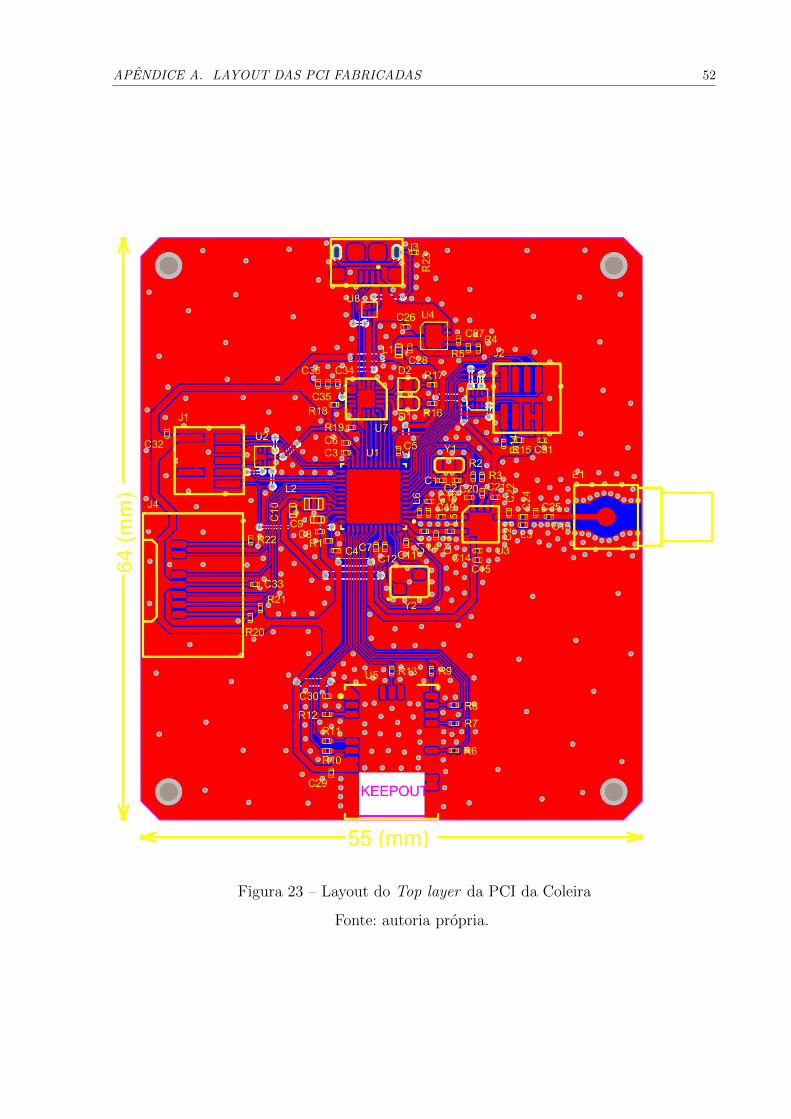
APENDICE A. LAYOUT DAS PCI FABRICADAS 52
Figura 23 – Layout do Top layer da PCI da Coleira
Fonte: autoria propria.
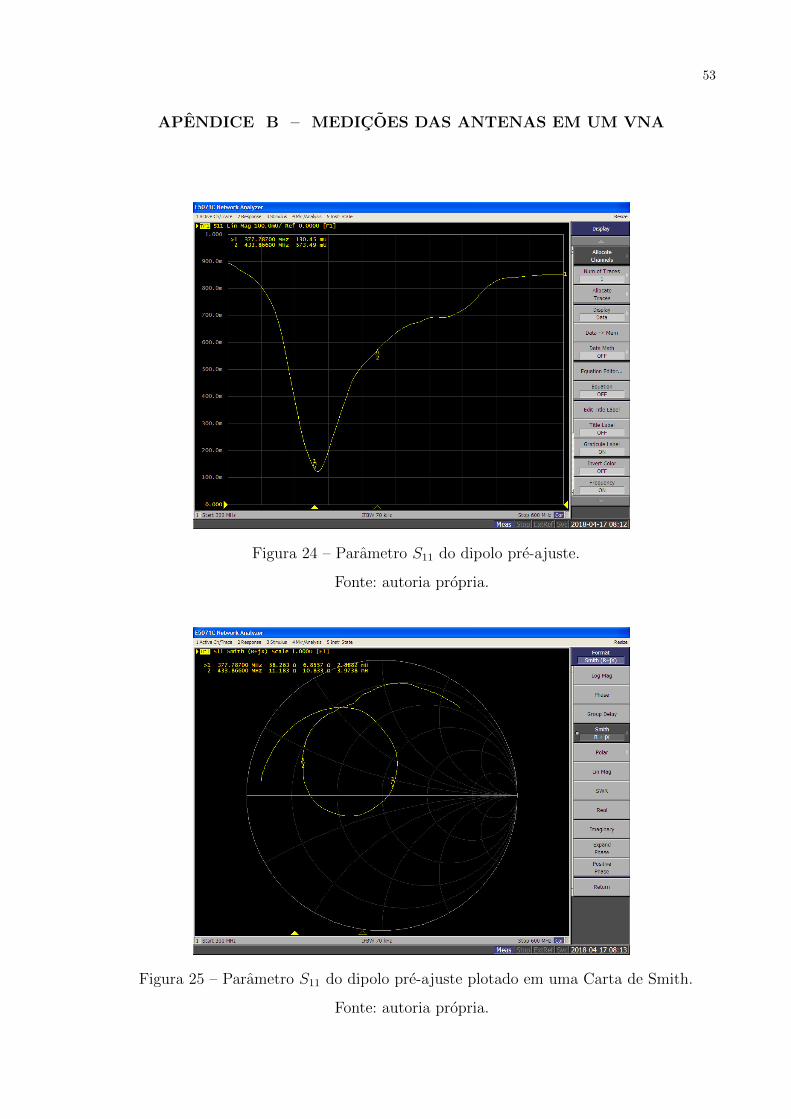
53
APENDICE B – MEDICOES DAS ANTENAS EM UM VNA
Figura 24 – Parametro S11 do dipolo pre-ajuste.
Fonte: autoria propria.
Figura 25 – Parametro S11 do dipolo pre-ajuste plotado em uma Carta de Smith.
Fonte: autoria propria.
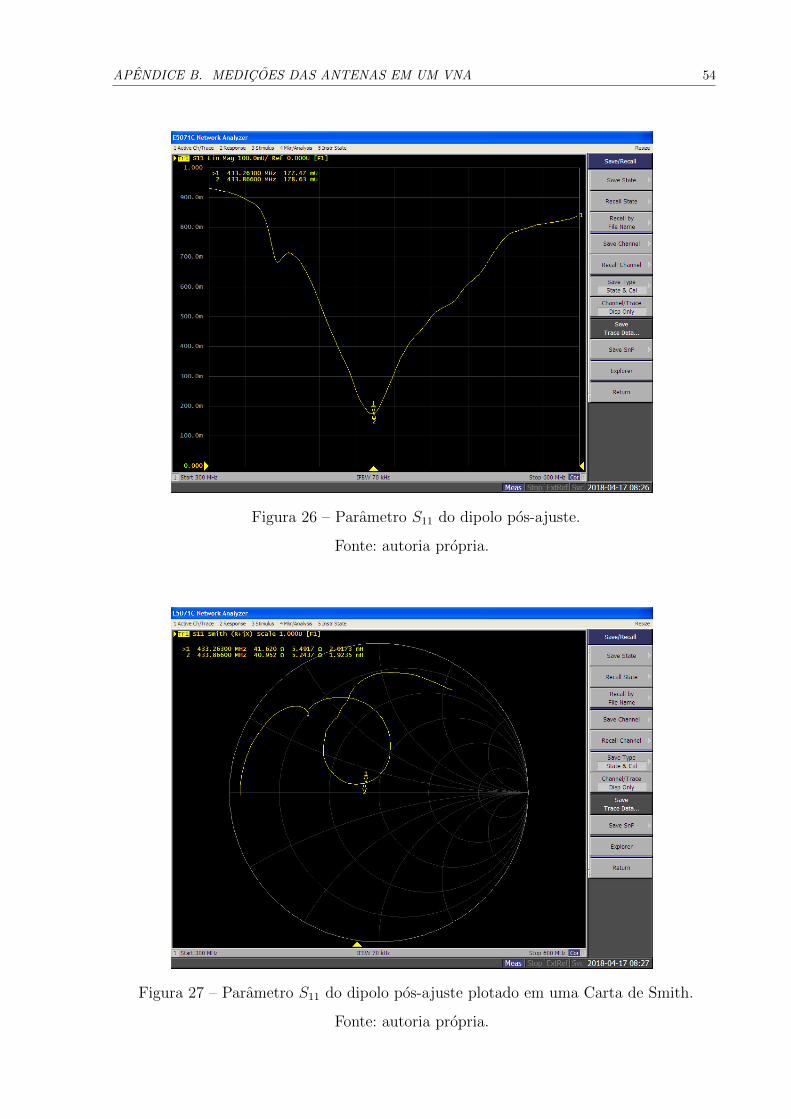
APENDICE B. MEDICOES DAS ANTENAS EM UM VNA 54
Figura 26 – Parametro S11 do dipolo pos-ajuste.
Fonte: autoria propria.
Figura 27 – Parametro S11 do dipolo pos-ajuste plotado em uma Carta de Smith.
Fonte: autoria propria.
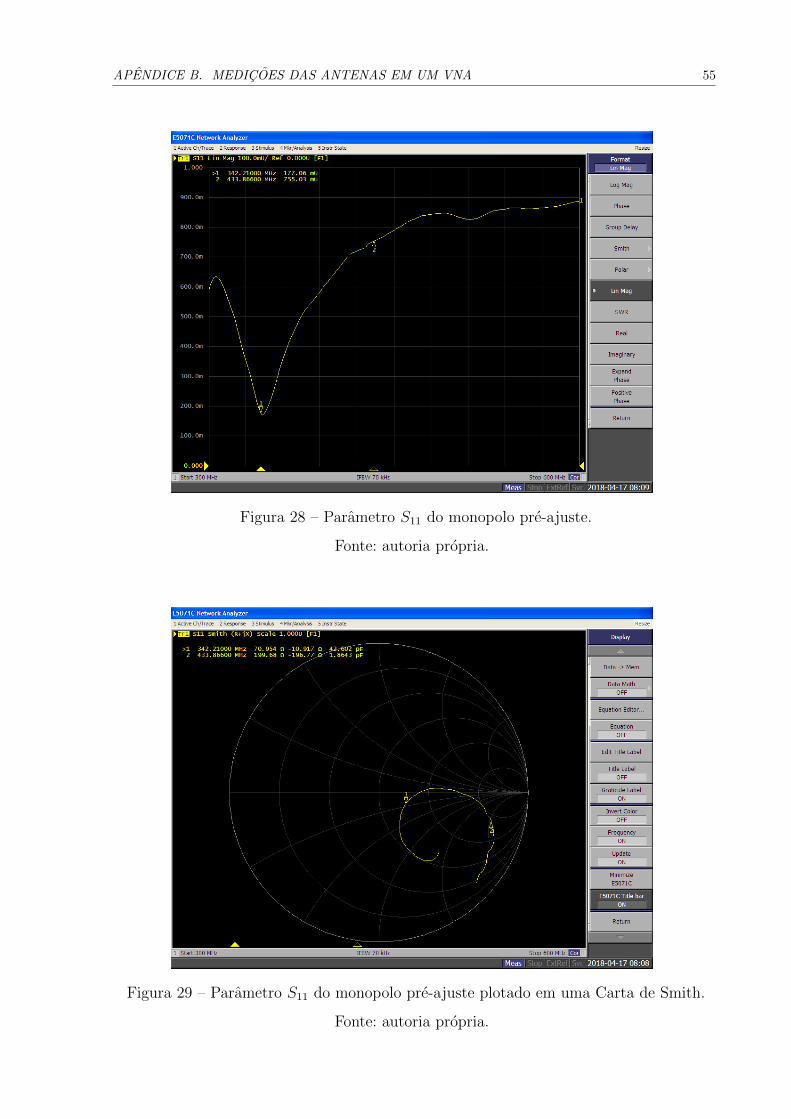
APENDICE B. MEDICOES DAS ANTENAS EM UM VNA 55
Figura 28 – Parametro S11 do monopolo pre-ajuste.
Fonte: autoria propria.
Figura 29 – Parametro S11 do monopolo pre-ajuste plotado em uma Carta de Smith.
Fonte: autoria propria.
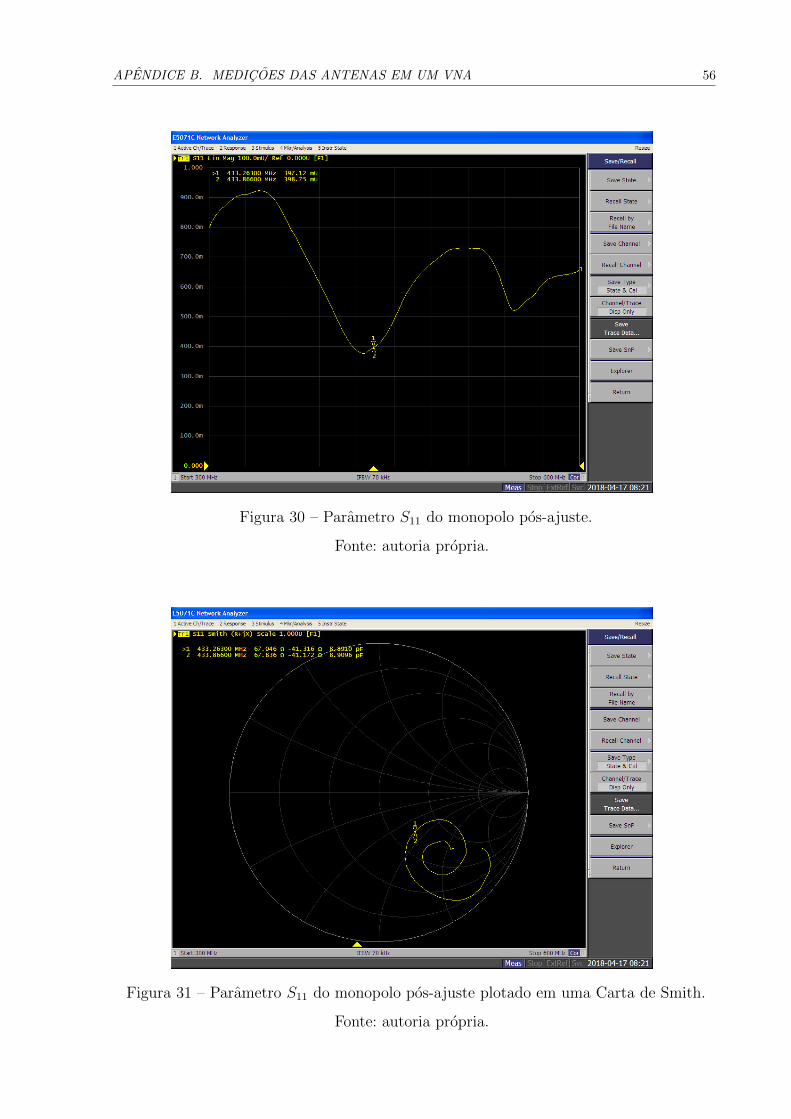
APENDICE B. MEDICOES DAS ANTENAS EM UM VNA 56
Figura 30 – Parametro S11 do monopolo pos-ajuste.
Fonte: autoria propria.
Figura 31 – Parametro S11 do monopolo pos-ajuste plotado em uma Carta de Smith.
Fonte: autoria propria.

57
APENDICE C – ROTINAS EM MATLAB PARA PROJETO DE
LINHAS DE TRANSMISSAO
Rotina em Matlab de acordo com (5, p. 11):
1 function PS = PaulSinthesis(h, t, z, er)
2
3 PS = (5.98*h*exp((-z*sqrt(er +1.41))/87)-t)/0.8;
4
5 end
Rotina em Matlab de acordo com (6, p. 12):
1 function PS = PozarSinthesis(er ,Z0)
2
3 A = (Z0/60)*sqrt((er+1)/2)+(er -1) *(0.23+(0.11/ er))/(er+1);
4 B = 377*pi/(2*Z0*sqrt(er));
5
6 aa = 8*exp(A)/(exp(2*A) -2);
7 bb = (2/pi)*(B-1-log(2*B-1)+((er -1) /(2*er))*(log(B-1) +0.39 -(0.61/ er)));
8
9 if or((aa <2) ,(bb <2))
10 PS = aa;
11 else
12 PS = bb;
13 end
14
15 end