proposta de protÓtipo de sistema de acionamento … · imagem 10 - sistema de ignição...
TRANSCRIPT

CENTRO UNIVERSITÁRIO CATÓLICO DE VITÓRIA
DARKE MACIEL RANGEL
PROPOSTA DE PROTÓTIPO DE SISTEMA DE ACIONAMENTO REMOTO
DE IGNIÇÃO ELETRÔNICA
VITÓRIA
2016

DARKE MACIEL RANGEL
PROPOSTA DE PROTÓTIPO DE SISTEMA DE ACIONAMENTO REMOTO
DE IGNIÇÃO ELETRÔNICA
Trabalho de Conclusão de Curso apresentado ao Centro Universitário Católico de Vitória, como requisito obrigatório para obtenção do título de Engenheiro em Produção. Orientador: Prof. Wesley Lucas Breda
VITÓRIA
2016
DARKE MACIEL RANGEL
PROPOSTA DE PROTÓTIPO DE SISTEMA DE ACIONAMENTO REMOTO
DE IGNIÇÃO ELETRÔNICA
Trabalho de Conclusão de Curso apresentado ao Centro Universitário Católico de Vitória, como
requisito obrigatório para obtenção do título de Engenheiro em Produção.
Aprovado em _____ de ________________ de ____, por:
________________________________
Prof. Wesley Lucas Breda - Orientador
________________________________
Prof. Fernando Oliveira Boechat, Centro Universitário Católico de Vitória
________________________________
Prof. Jerry Adriane Domingos, Centro Universitário Católico de Vitória

Dedico este trabalho a Deus, a minha família, a minha namorada Késia, e ao
meu orientador Wesley que me ajudaram, me apoiaram e estiveram comigo
nesse período de grandes desafios.
AGRADECIMENTOS
Tenho muito a agradecer por essa conquista a toda minha família e
principalmente a Deus, que me sustentou e me deu forças para superar vários
desafios que surgiram durante esse longo período, com esta vitória várias
oportunidades surgem nessa minha nova etapa da minha vida, estou certo que
continuarei dando orgulho a todos vocês.
A toda a minha família e amigos, quero que saibam que vocês foram
essenciais para que eu alcançasse esse objetivo, sempre me apoiando e
proporcionando momentos de alegria e reflexão para seguir adiante sem
desistir.
A minha namorada, Késia, que esteve sempre me apoiando com amor e
carinho ao longo de todo o curso, não me deixando desistir nos momentos
mais difíceis.
Ao meu orientador Wesley que pacientemente me orientou e aconselhou
sempre objetivo e sincero para que eu pudesse ser aprovado.
Ao professor Jerry e ao professor Fernando, que estiveram me apoiando ao
longo do período do trabalho, demonstrando sempre o cuidado e sua
disponibilidade em ajudar.
A todos vocês os meus sinceros agradecimentos e meu muito obrigado!
"Alguns homens vêem as coisas como são, e dizem 'Por quê?' Eu sonho com
as coisas que nunca foram e digo 'Por que não?'"
George Bernard Shaw
RESUMO
Este trabalho foi elaborado com o objetivo de realizar uma proposta de um
novo sistema de acionamento remoto de ignição eletrônica para automóveis de
câmbio manual e automático, visto que a pequena quantidade de sistemas
nacionais similares a este que estão disponíveis no mercado detêm um alto
custo para o usuário, tornando-se inviável economicamente. Com a utilização
da tecnologia de simulação foi proposto um modelo de sistema de baixo custo,
que foi testado e validado a fim de atender as necessidades básicas dos
clientes e atender ao mercado consumidor nacional. A simulação foi
considerada e utilizada devido à seu papel fundamental de conseguir
reproduzir com veracidade uma visão real do sistema, através de técnicas
computacionais. O modelo proposto de sistema se encaixa como um item
atrativo, devido ao fato de que ele ao ser comparado com seus concorrentes é
destacado como superior, o modelo também traz uma solução inovadora para
o acionamento remoto para automóveis de câmbio manual, que no Brasil atual
detêm um forte mercado consumidor e não era contemplado.
Palavras-chave: Sistema, Simulação, Tecnologia, Custo.

ABSTRACT
This work was done with the purpose of making a proposal for a new remote
drive system electronic ignition for manual and automatic transmission cars,
since the small amount of national systems similar to this that are available in
the market hold a high cost to the user, making it economically unviable. With
the use of simulation technology has been proposed a low-cost system model,
which has been tested and validated to meet the basic needs of customers and
meet the domestic consumer market. The simulation was considered and used
due to its key role to be played back truthfully a real view of the system, using
computational techniques. The proposed model system fits as an attractive
item, due to the fact that it to be compared with its competitors is highlighted as
superior, the model also brings an innovative solution for the remote drive for
manual transmission cars, which in Brazil today hold a strong consumer market
and was not included.
Keywords: System, Simulation, Technology, Cost.
LISTA DE IMAGENS
Imagem 01 - Tipos de energia e sensores .................................................................... 30
Imagem 02 - Arquitetura básica do CLP ....................................................................... 34
Imagem 03 - Forma de atuação do CLP ....................................................................... 35
Imagem 04 - Modelo Arduino Uno ................................................................................. 38
Imagem 05 - Estrutura interna de um relé ..................................................................... 39
Imagem 06 - Ilustração de funcionamento de um relé .................................................. 40
Imagem 07 - Módulo do relé 5v 2 canais ...................................................................... 41
Imagem 08 - Pinagem do módulo do relé 2 canais ....................................................... 41
Imagem 09 - Conexão do módulo do relé com o Arduino e a Carga. ............................ 42
Imagem 10 - Sistema de ignição convencional ............................................................. 45
Imagem 11 - Bobina de ignição convencional ............................................................... 46
Imagem 12 - Vela de ignição nova versus vela de ignição com desgaste .................... 47
Imagem 13 - Módulo receptor de IF ligado ao Arduino Uno .......................................... 55
Imagem 14 – Chave de contato ligado ao Arduino Uno ................................................ 56
Imagem 15 - Resistências ligadas ao fio do comutador ................................................ 57
Imagem 16 - Relé de 15 e 50 ligados ao Arduino Uno .................................................. 59
Imagem 17 - Protótipo do sistema completo ................................................................. 60
Imagem 18 – Fluxograma do sistema ........................................................................... 68
Imagem 19 – Modelo do circuito ................................................................................... 69
LISTA DE TABELAS
Tabela 01 - As vantagens e desvantagens dos sensores de contato ........................... 32
Tabela 02 - As vantagens e desvantagens dos sensores de proximidade .................... 32
Tabela 03 - Comandos Ladder abordados pela IEC 61131-3 ....................................... 37
Tabela 04 - Especificações Técnicas do Arduino Uno .................................................. 38
Tabela 05 - Tipos básicos de dados em C++ ................................................................ 49
Tabela 06 - Comparação funcional de sistemas ........................................................... 70
Tabela 07 - Custos com o protótipo .............................................................................. 72
Tabela 08 - Despesas com o protótipo .......................................................................... 73
Tabela 09 - Gastos totais com o protótipo ..................................................................... 74
Tabela 10 - Comparação de valor entre os sistemas .................................................... 75

LISTA DE GRÁFICOS
Gráfico 01 - Sinal de saídas do sensor analógico ......................................................... 30
Gráfico 02 - Sinal de saída do sensor digital ................................................................. 31
LISTA DE SIGLAS
CLP - Controlador Lógico Programável
CPU - Unidade Central de Processamento
EPROM - Memória Programável Apagável somente de leitura
GND - Terra
IEC - Comissão Eletrotécnica Internacional
IF - Infravermelho
PPM - Partes por milhão
SUMÁRIO
1 INTRODUÇÃO ............................................................................................................... 25
2 REFERENCIAL TEÓRICO ............................................................................................. 29
2.1 AUTOMAÇÃO ............................................................................................................. 29
2.2 TIPOS DE DISPOSITIVOS PARA AUTOMAÇÃO ....................................................... 29
2.2.1 Sensores ................................................................................................................. 29
2.2.1.1 Sensor de contato ................................................................................................. 31
2.2.1.2 Sensor de proximidade .......................................................................................... 32
2.2.1.3 Sensor de posição ................................................................................................. 33
2.2.1.4 Transdutores ......................................................................................................... 34
2.2.2 Controle Lógico Programável ............................................................................... 34
2.2.2.1 Linguagens de programação ................................................................................. 36
2.2.2.2 Arduino .................................................................................................................. 37
2.2.3 Relé - Estrutura e Funcionamento ........................................................................ 39
2.2.3.1 Funcionamento do Relé ........................................................................................ 40
2.2.3.2 Módulo do Relé utilizado no projeto ...................................................................... 40
2.3 TRABALHOS CORRELATOS ..................................................................................... 42
2.3.1 Patente - US 5054569 A .......................................................................................... 43
2.3.2 Viper Basic - Way Remote Start System .............................................................. 43
2.3.3 Chevrolet - OnStar .................................................................................................. 43
2.4 SISTEMA DE IGNIÇÃO CONVENCIONAL ................................................................. 44
2.5 GASTOS, CUSTOS E DESPESAS ............................................................................. 48
2.6 LINGUAGEM DE PROGRAMAÇÃO C++ .................................................................... 49
3 METODOLOGIA ............................................................................................................ 51
4 RESULTADOS E DISCUSSÃO DA PESQUISA ........................................................... 55
4.1 DESCRIÇÃO DO ESQUEMA E FUNÇÃO - MÓDULO INFRAVERMELHO ................ 55
4.2 DESCRIÇÃO DO ESQUEMA E FUNÇÃO - CHAVE DE CONTATO .......................... 56
4.3 DESCRIÇÃO DO ESQUEMA E FUNÇÃO - RESISTÊNCIAS ..................................... 57
4.4 DESCRIÇÃO DO ESQUEMA E FUNÇÃO - RELÉ 15 E 50 ......................................... 58
4.5 DESCRIÇÃO DO ESQUEMA E FUNÇÃO - SISTEMA COMPLETO .......................... 60
4.6 CÓDIGO DE PROGRAMAÇÃO EM LINGUAGEM C++ DO PROTÓTIPO
DO SISTEMA .................................................................................................................... 62
4.7 PROTÓTIPO DO SISTEMA ........................................................................................ 69
4.8 ANÁLISE DA VIABILIDADE FUNCIONAL E ECONÔMICA DO PROTÓTIPO ............ 70
4.8.1 Análise de abrangência funcional......................................................................... 70
4.8.2 Análise de viabilidade econômica ........................................................................ 72
5 CONSIDERAÇÕES FINAIS ........................................................................................... 77
REFERÊNCIAS ................................................................................................................. 79

ANEXO A - PROTÓTIPO DO SISTEMA COMPLETO ..................................................... 84

25
1 INTRODUÇÃO
O mercado automobilístico brasileiro tem se mostrado cada vez mais complexo e
competitivo, as novas tecnologias tem se mostrado variáveis-chaves para o
desenvolvimento contínuo das indústrias automobilísticas. As Indústrias
automobilísticas estão em constante processo de desenvolvimento e otimização,
promovendo novas formas de produzir seus automóveis com maiores quantidades
de funções a fim de atender seus clientes (MCALINDEN et al., 2000; PNGV:
SEVENTH REPORT, 2001). De acordo com Rosário, a inovação tecnológica precisa
ser base para as empresas, pois ela define fatores de competitividade e direcionam
as estratégias para a participação no mercado (ROSÁRIO, 2009).
Segundo Enéas, podemos atribuir a constante evolução da indústria automobilística,
nos principais mercados, pela intensificação da descoberta e compartilhamento da
tecnologia em geral, pelo acirramento da concorrência e por causa da diminuição
dos diferenciais competitivos. "O tempo de realização de uma determinada tarefa
com rapidez e confiabilidade é característica da sociedade moderna" (NEVES et al.,
2007, p. 4), com os constantes avanços na tecnologia o uso da automação nos
automóveis tem sido um grande fator diferencial competitivo, visto que o mercado
tem sido cada vez mais exigente no que se refere á rapidez, confiabilidade,
eficiência, qualidade e inovação, sendo que todos esses fatores resultam em um alto
custo para o desenvolvimento de sistemas.
O trabalho partiu do seguinte problema de pesquisa, há um alto custo para o
desenvolvimento de sistemas de acionamento remoto de automóveis de cambio
automático e manual, devido a diversos fatores sendo eles a tecnologia
desenvolvida, a inovação, a eficiência e confiabilidade desse sistema, como também
os seus funcionalidades, esses fatores contribuem de forma direta e/ou
indiretamente no custo final do sistema, fazendo com que o seu preço repassado ao
cliente seja maior.
Segundo Ruy (2003), só é possível o avanço da tecnologia de automação quando
há junto dela o desenvolvimento da tecnologia eletrônica e computacional. No
entanto mesmo com os diversos avanços na tecnologia e tendo um forte
embasamento teórico, ainda não há um item que seja produzido nacionalmente, com
26
características específicas e com o intuito de acionar remotamente um automóvel
sendo ele manual ou automático, que tenha um custo baixo.
Como desenvolver um sistema de baixo custo que acione a chave de ignição
eletrônica de automóveis manuais e automáticos remotamente?
Com a tecnologia atual a utilização da simulação é o melhor modo proposto à
validação de um modelo de baixo custo de um sistema remoto de ignição eletrônica
nacional, a fim de acionar o automóvel à distância, segundo Harrel (2000) a
simulação computacional nos auxilia na tomada de decisão, e com o apoio da
simulação este modelo foi validado. Segundo Antonelli et al. (2014) a simulação
permite uma visão real através da utilização de softwares e modelos matemáticos.
A principal finalidade deste trabalho foi fazer uma proposta viável do ponto de vista
funcional e econômico de um modelo de baixo custo de um sistema de acionamento
remoto de ignição eletrônica de fabricação nacional, a fim de acionar o automóvel de
câmbio automático e manual à distância.
O mercado de automobilístico está em uma constante busca pelo desenvolvimento
do potencial do automóvel de passeio, para que estes atendam as expectativas
crescentes que são geradas pelos clientes e que possam gerar valor agregado.
Devido a esse cenário de constantes mudanças, é destacado que a diversidade e a
ampliação da tecnologia tem sido um dos fatores que tendem a explicar tais
mudanças (CLARK; FUJIMOTO, 1991).
Dentro deste contexto o modelo do item que foi proposto concede ao automóvel de
passeio, um diferencial que o torna mais competitivo no mercado e atende a
necessidade dos clientes. Este item se enquadra como um atributo atrativo e
segundo Tontini (2003), os atributos atrativos quando atendidos trazem grande
satisfação aos clientes, ele afirma ainda que atender as necessidades dos clientes
esta intimamente ligada à sobrevivência das empresas. O item proposto tem uma
grande vantagem competitiva devido ao Brasil não ter um modelo nacional
produzido com características semelhantes, além de que o mercado consumidor de
automóveis no Brasil com cambio automático e manual ser benéfico e atraente. O
automóvel esta alinhado com as expectativas do mercado, quando se fala em
tecnologia e desenvolvimento, quanto do cliente, que tem o desejo pelo conforto e
qualidade.
27
Metodologicamente, este trabalho adotou quanto à natureza da pesquisa científica o
tipo de pesquisa aplicada, pois tem a necessidade de solucionar um problema
específico. Quanto à abordagem do tipo de pesquisa foi utilizada a pesquisa
qualitativa. Para a definição do tipo de pesquisa quanto aos objetivos, foi utilizada a
pesquisa exploratória.
Para isto foi necessário a realização de estudos a trabalhos correlatos, estudos ao
sistema de ignição convencional de automóveis, a modelagem e simulação de um
sistema remoto da chave de ignição do automóvel, como também uma análise de
viabilidade funcional e econômica do sistema elaborado.

28

29
2 REFERÊNCIAL TEÓRICO
2.1 AUTOMAÇÃO
A palavra Automação teve origem nos anos 60, o marketing da indústria de
equipamentos da época que a criou. Segundo Moraes e Castrucci (2013, p. 12):
Entende-se por automação qualquer sistema, apoiado em computadores, que substitua o trabalho humano em favor da segurança das pessoas, da qualidade dos produtos, da rapidez da produção ou da redução de custos, assim aperfeiçoando os complexos objetivos das indústrias e dos serviços.
Segundo Moraes e Castrucci (2013, p. 12), a automação envolve diversos objetivos
e necessidades como:
Maior nível de qualidade, expressa por especificações numéricas de tolerância;
Maior flexibilidade de modelos para o mercado;
Maior segurança pública e dos operários;
Menores perdas materiais e de energia ;
Mais disponibilidade e qualidade da informação sobre o processo;
Melhor planejamento e controle da produção.
O grande ponto positivo da automação esta no fato de utilizar sistemas que
oferecem diversos recursos, um desses recursos é o controle lógico programável
(CLP), que possibilita a onipresença da automação.
2.2 TIPOS DE DISPOSITIVOS PARA AUTOMAÇÃO
2.2.1 Sensores
Segundo Capelli, os sensores são dispositivos fundamentais na Automação de
forma geral. Segundo Haag, Araujo e Veit (2005) os sensores são dispositivos com
grande utilização na automação que são sensíveis as grandezas físicas como:
posições, velocidade, temperatura, etc., que estão no ambiente, como demonstrado
na Imagem 1. Os sensores segundo Thomazini e Albuquerque (2005) geralmente
dependem de um circuito de interface com o microcontrolador para que seja feita a
manipulação dos dados de saída para que tenham características elétricas para
leitura do sistema de controle.
30
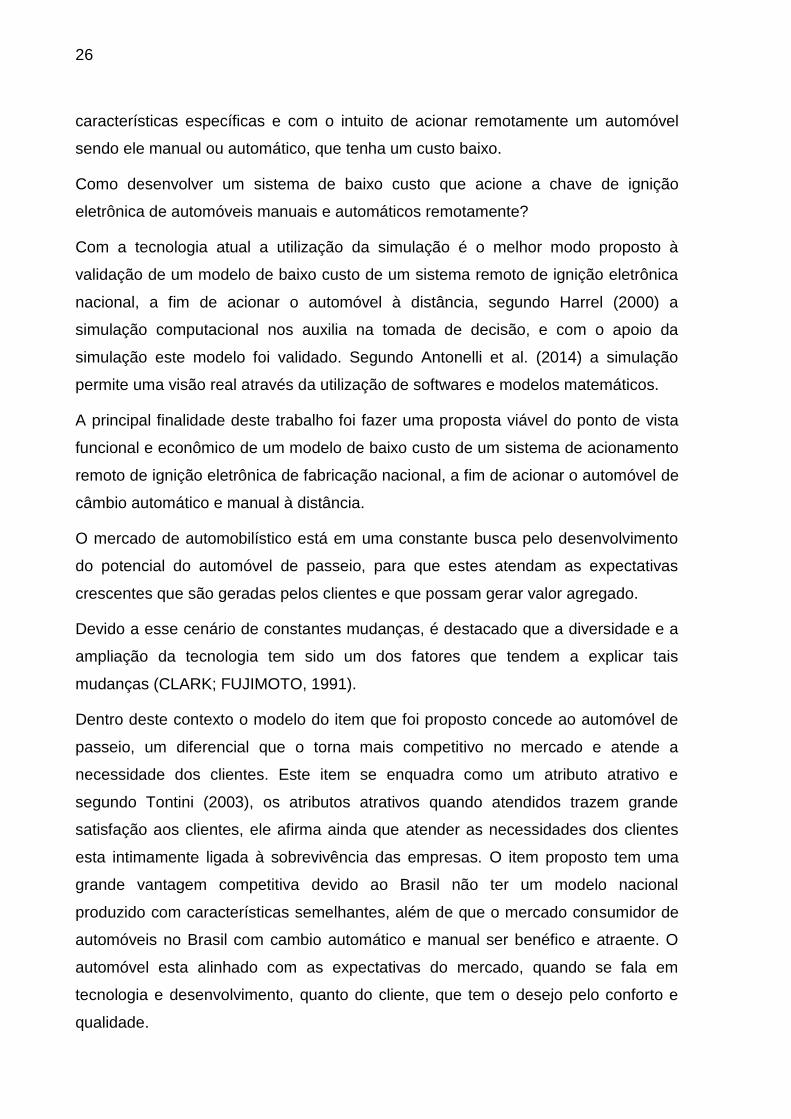
Imagem 1: Tipos de energia e sensores.
Fonte: Thomazini e Albuquerque (2005, p. 18).
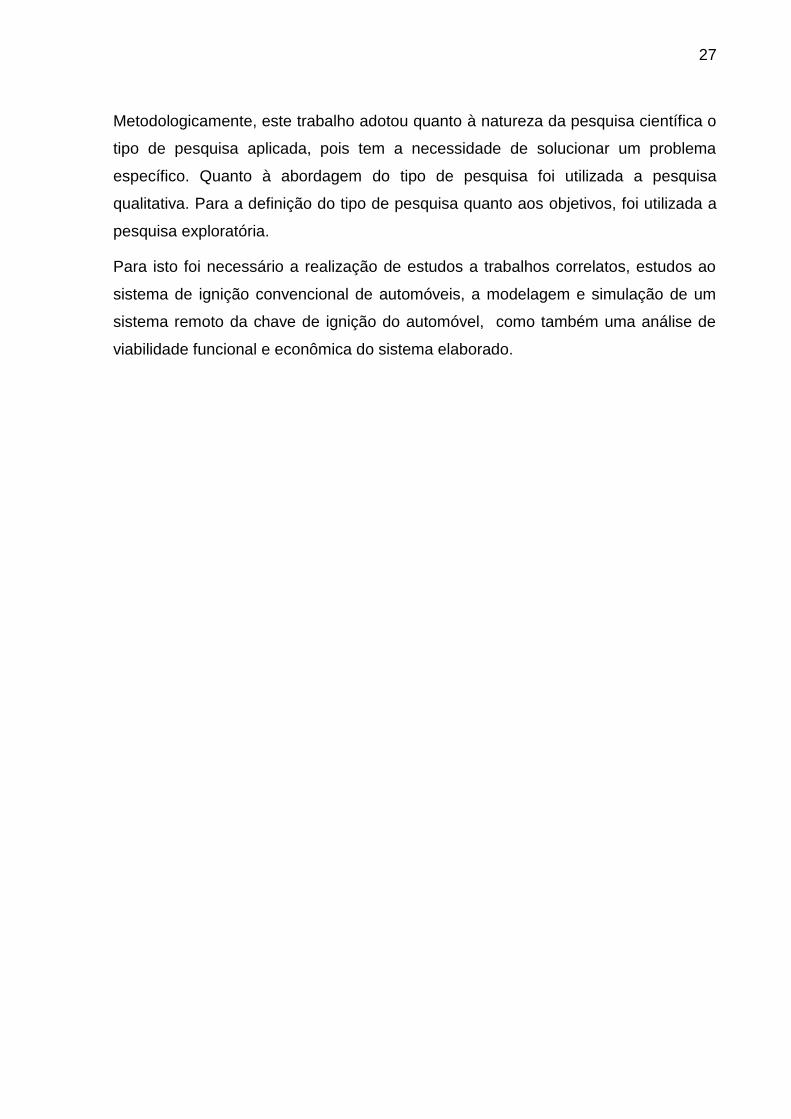
Os sensores podem ser divididos em dois grupos, para a coleta de dados, os
sensores com sinais digitais e os analógicos. Segundo Thomazani e Albuquerque
(2005) os sensores analógicos são utilizados para a mensuração de grandezas
físicas que podem assumir variados valores no seu sinal de saída, tais como:
pressão, temperatura, ângulo, velocidade, vazão, força, distância, torque,
luminosidade e umidade. O Gráfico 1 foi utilizado de modo demonstrativo.
Gráfico 1: Sinal de saídas do sensor analógico.
Fonte: Thomazani e Albuquerque (2005, p. 18).
31
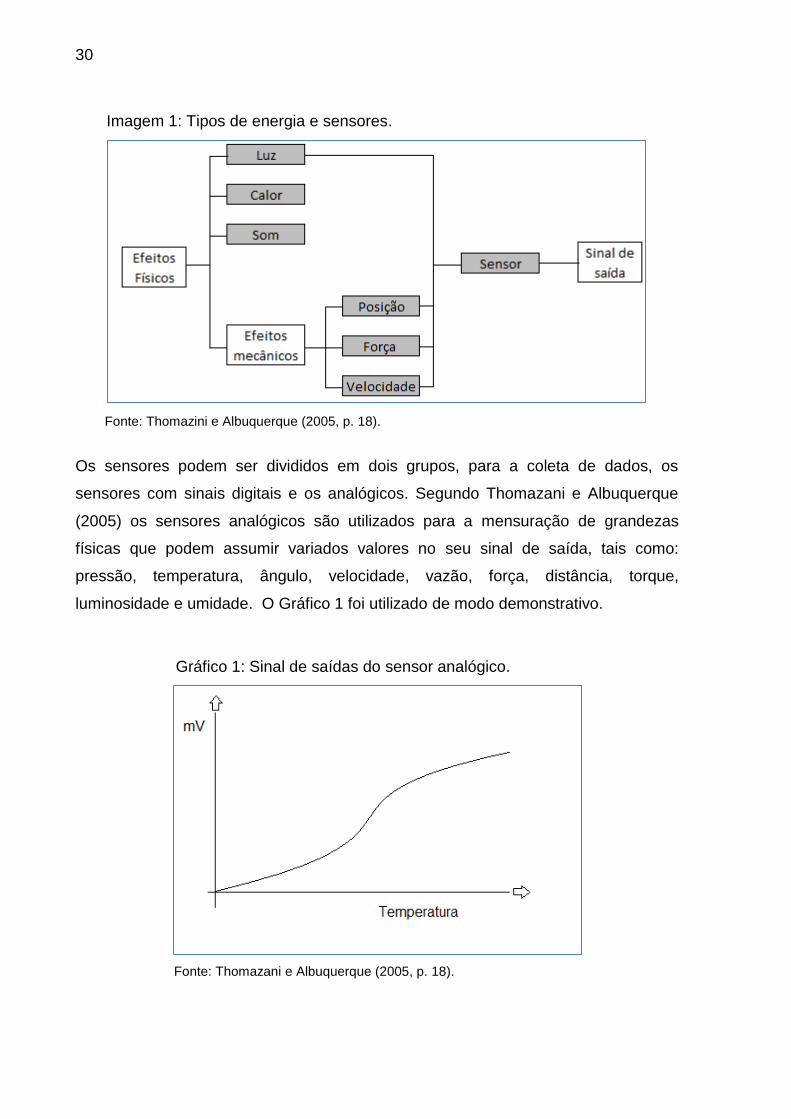
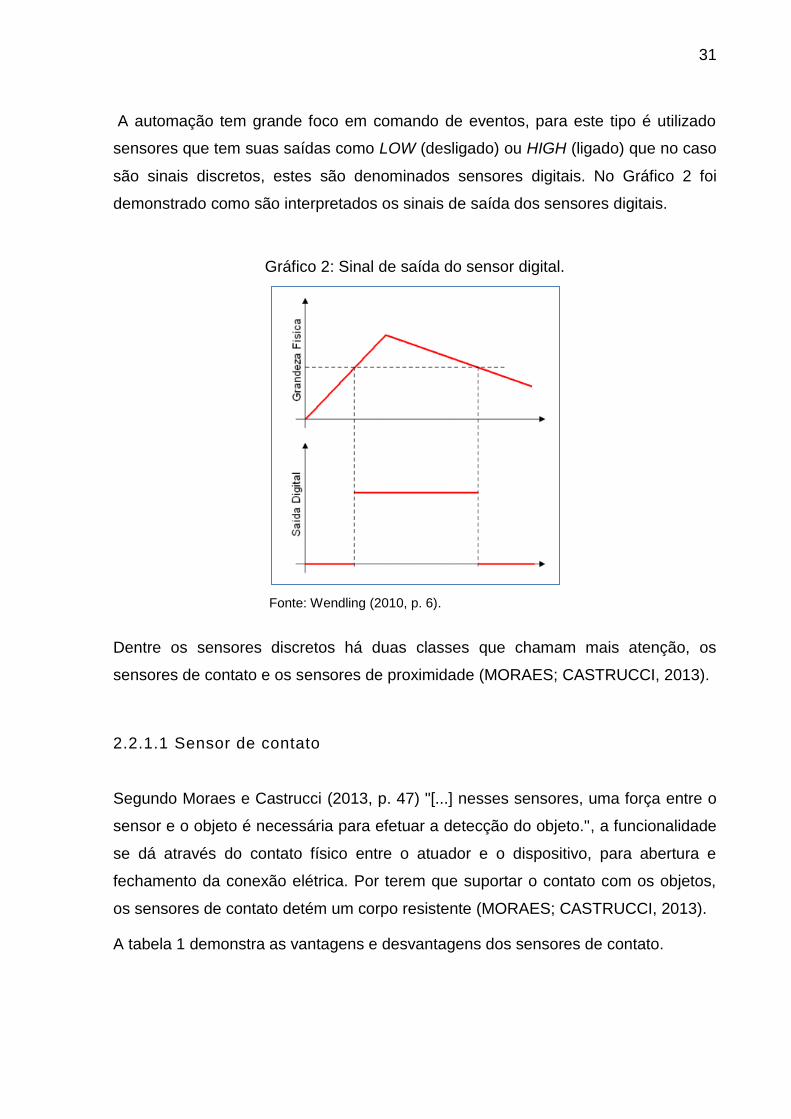
A automação tem grande foco em comando de eventos, para este tipo é utilizado
sensores que tem suas saídas como LOW (desligado) ou HIGH (ligado) que no caso
são sinais discretos, estes são denominados sensores digitais. No Gráfico 2 foi
demonstrado como são interpretados os sinais de saída dos sensores digitais.
Gráfico 2: Sinal de saída do sensor digital.
Fonte: Wendling (2010, p. 6).
Dentre os sensores discretos há duas classes que chamam mais atenção, os
sensores de contato e os sensores de proximidade (MORAES; CASTRUCCI, 2013).
2.2.1.1 Sensor de contato
Segundo Moraes e Castrucci (2013, p. 47) "[...] nesses sensores, uma força entre o
sensor e o objeto é necessária para efetuar a detecção do objeto.", a funcionalidade
se dá através do contato físico entre o atuador e o dispositivo, para abertura e
fechamento da conexão elétrica. Por terem que suportar o contato com os objetos,
os sensores de contato detém um corpo resistente (MORAES; CASTRUCCI, 2013).
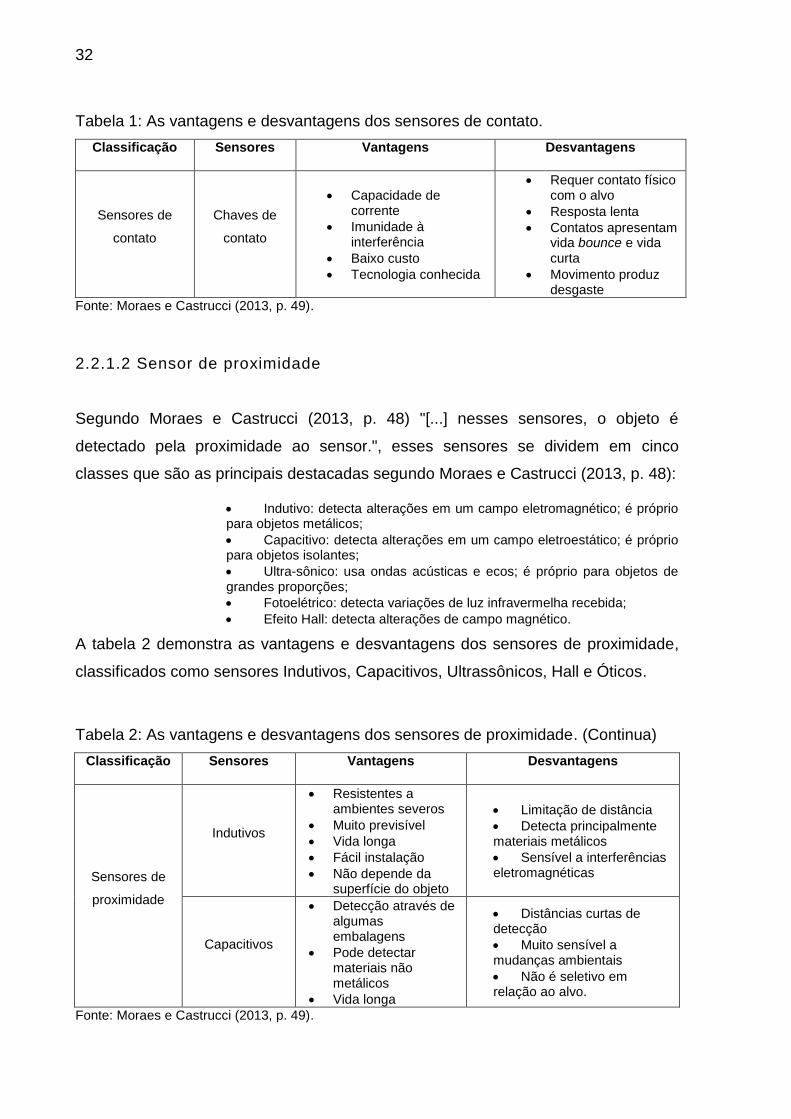
A tabela 1 demonstra as vantagens e desvantagens dos sensores de contato.
32
Tabela 1: As vantagens e desvantagens dos sensores de contato.
Classificação Sensores Vantagens Desvantagens
Sensores de
contato
Chaves de
contato
Capacidade de corrente
Imunidade à interferência
Baixo custo
Tecnologia conhecida
Requer contato físico com o alvo
Resposta lenta
Contatos apresentam vida bounce e vida curta
Movimento produz desgaste
Fonte: Moraes e Castrucci (2013, p. 49).
2.2.1.2 Sensor de proximidade
Segundo Moraes e Castrucci (2013, p. 48) "[...] nesses sensores, o objeto é
detectado pela proximidade ao sensor.", esses sensores se dividem em cinco
classes que são as principais destacadas segundo Moraes e Castrucci (2013, p. 48):
Indutivo: detecta alterações em um campo eletromagnético; é próprio para objetos metálicos;
Capacitivo: detecta alterações em um campo eletroestático; é próprio para objetos isolantes;
Ultra-sônico: usa ondas acústicas e ecos; é próprio para objetos de grandes proporções;
Fotoelétrico: detecta variações de luz infravermelha recebida;
Efeito Hall: detecta alterações de campo magnético.
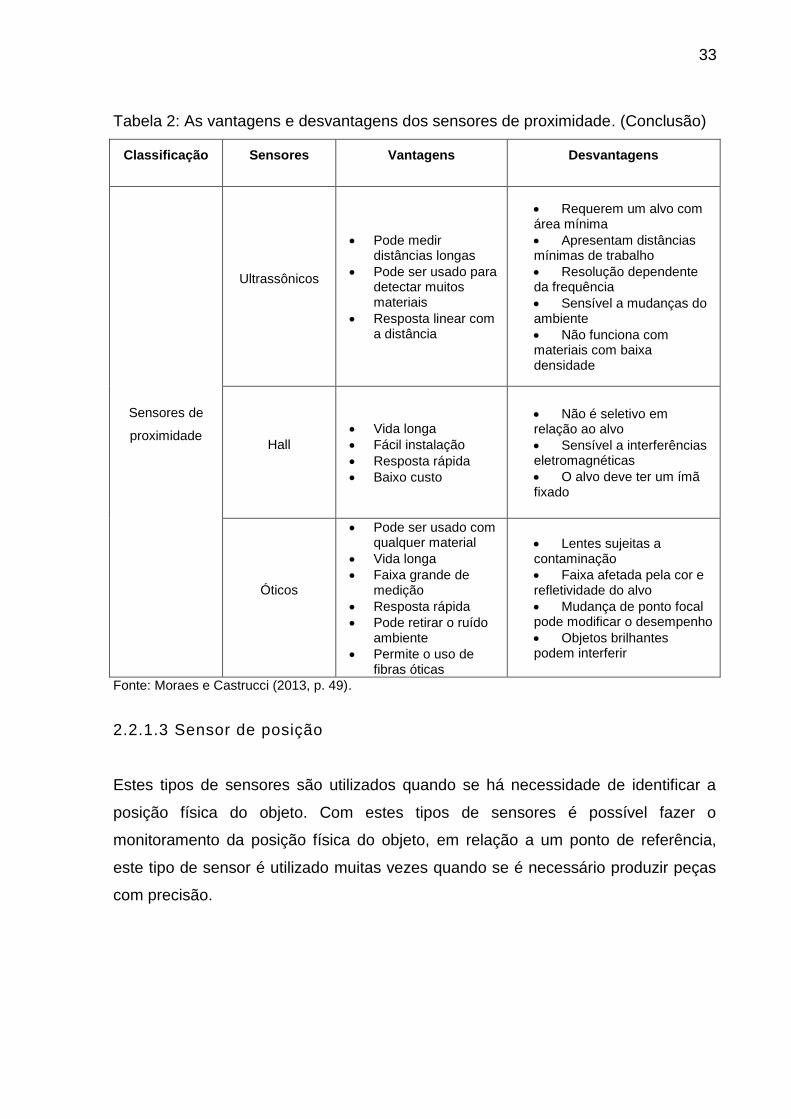
A tabela 2 demonstra as vantagens e desvantagens dos sensores de proximidade,
classificados como sensores Indutivos, Capacitivos, Ultrassônicos, Hall e Óticos.
Tabela 2: As vantagens e desvantagens dos sensores de proximidade. (Continua)
Classificação Sensores Vantagens Desvantagens
Sensores de
proximidade
Indutivos
Resistentes a ambientes severos
Muito previsível
Vida longa
Fácil instalação
Não depende da superfície do objeto
Limitação de distância
Detecta principalmente materiais metálicos
Sensível a interferências eletromagnéticas
Capacitivos
Detecção através de algumas embalagens
Pode detectar materiais não metálicos
Vida longa
Distâncias curtas de detecção
Muito sensível a mudanças ambientais
Não é seletivo em relação ao alvo.
Fonte: Moraes e Castrucci (2013, p. 49).
33
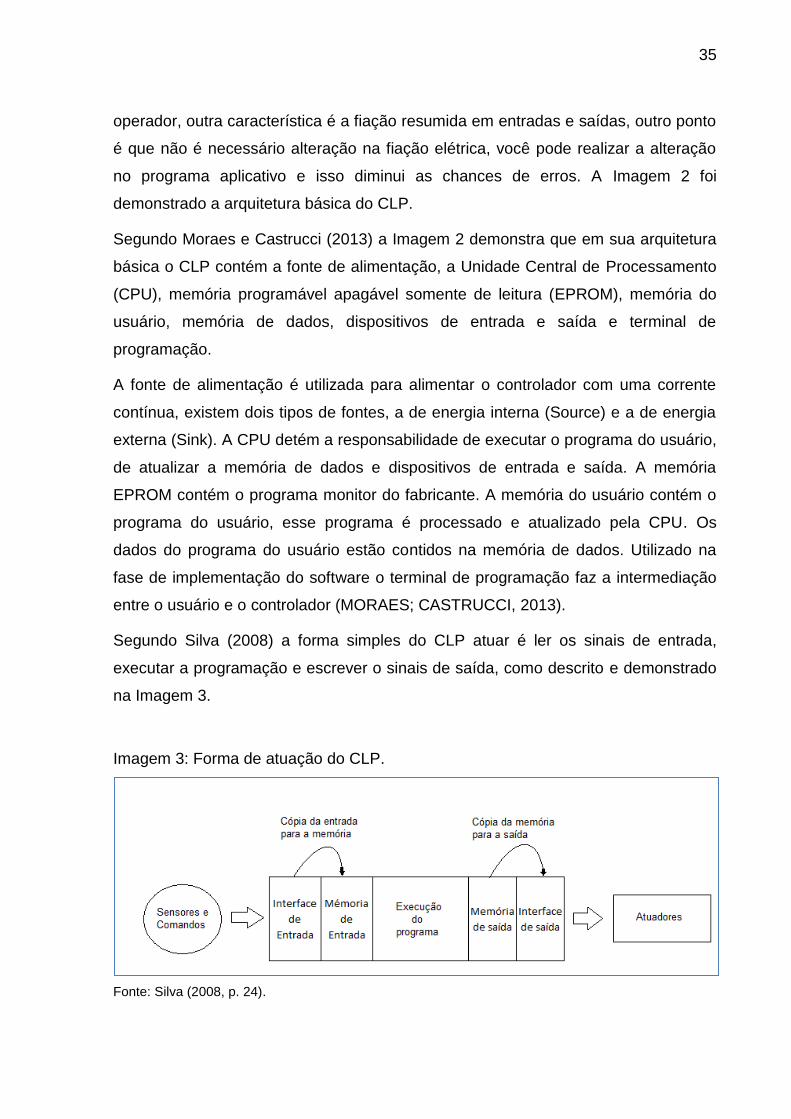
Tabela 2: As vantagens e desvantagens dos sensores de proximidade. (Conclusão)
Classificação Sensores Vantagens Desvantagens
Sensores de
proximidade
Ultrassônicos
Pode medir distâncias longas
Pode ser usado para detectar muitos materiais
Resposta linear com a distância
Requerem um alvo com área mínima
Apresentam distâncias mínimas de trabalho
Resolução dependente da frequência
Sensível a mudanças do ambiente
Não funciona com materiais com baixa densidade
Hall
Vida longa
Fácil instalação
Resposta rápida
Baixo custo
Não é seletivo em relação ao alvo
Sensível a interferências eletromagnéticas
O alvo deve ter um ímã fixado
Óticos
Pode ser usado com qualquer material
Vida longa
Faixa grande de medição
Resposta rápida
Pode retirar o ruído ambiente
Permite o uso de fibras óticas
Lentes sujeitas a contaminação
Faixa afetada pela cor e refletividade do alvo
Mudança de ponto focal pode modificar o desempenho
Objetos brilhantes podem interferir
Fonte: Moraes e Castrucci (2013, p. 49).
2.2.1.3 Sensor de posição
Estes tipos de sensores são utilizados quando se há necessidade de identificar a
posição física do objeto. Com estes tipos de sensores é possível fazer o
monitoramento da posição física do objeto, em relação a um ponto de referência,
este tipo de sensor é utilizado muitas vezes quando se é necessário produzir peças
com precisão.

34
2.2.1.4 Transdutores
O transdutor é um dispositivo completo que contém o sensor e os circuitos que
funcionam como interface entre o sensor e os circuitos de controle, eles podem
realizar a conversão das grandezas físicas do ambiente externo em sinal de tensão,
assim o circuito de controle consegue interpretar tais sinais (THOMAZINI;
ALBUQUERQUE, 2005).
2.2.2 Controle Lógico Programável
Segundo Júnior (2010) o controle lógico programável (CLP) é um dispositivo
microcontrolador com microprocessador e que utiliza o circuito integrado (CI) junto a
um dispositivo elétrico de controle de sequência. O CLP é altamente versátil e nele é
possível realizar diversas funções como: relações lógicas, armazenamento de
dados, temporização, sequenciamento e etc. (CAPELI, 2014).
Imagem 2: Arquitetura básica do CLP.
Fonte: Moraes e Castrucci (2013, p. 25).
Segundo Moraes e Castrucci (2013), as principais características do CLP se residem
no seu alto nível de programação que resulta numa interface amigável com o
35
operador, outra característica é a fiação resumida em entradas e saídas, outro ponto
é que não é necessário alteração na fiação elétrica, você pode realizar a alteração
no programa aplicativo e isso diminui as chances de erros. A Imagem 2 foi
demonstrado a arquitetura básica do CLP.
Segundo Moraes e Castrucci (2013) a Imagem 2 demonstra que em sua arquitetura
básica o CLP contém a fonte de alimentação, a Unidade Central de Processamento
(CPU), memória programável apagável somente de leitura (EPROM), memória do
usuário, memória de dados, dispositivos de entrada e saída e terminal de
programação.
A fonte de alimentação é utilizada para alimentar o controlador com uma corrente
contínua, existem dois tipos de fontes, a de energia interna (Source) e a de energia
externa (Sink). A CPU detém a responsabilidade de executar o programa do usuário,
de atualizar a memória de dados e dispositivos de entrada e saída. A memória
EPROM contém o programa monitor do fabricante. A memória do usuário contém o
programa do usuário, esse programa é processado e atualizado pela CPU. Os
dados do programa do usuário estão contidos na memória de dados. Utilizado na
fase de implementação do software o terminal de programação faz a intermediação
entre o usuário e o controlador (MORAES; CASTRUCCI, 2013).
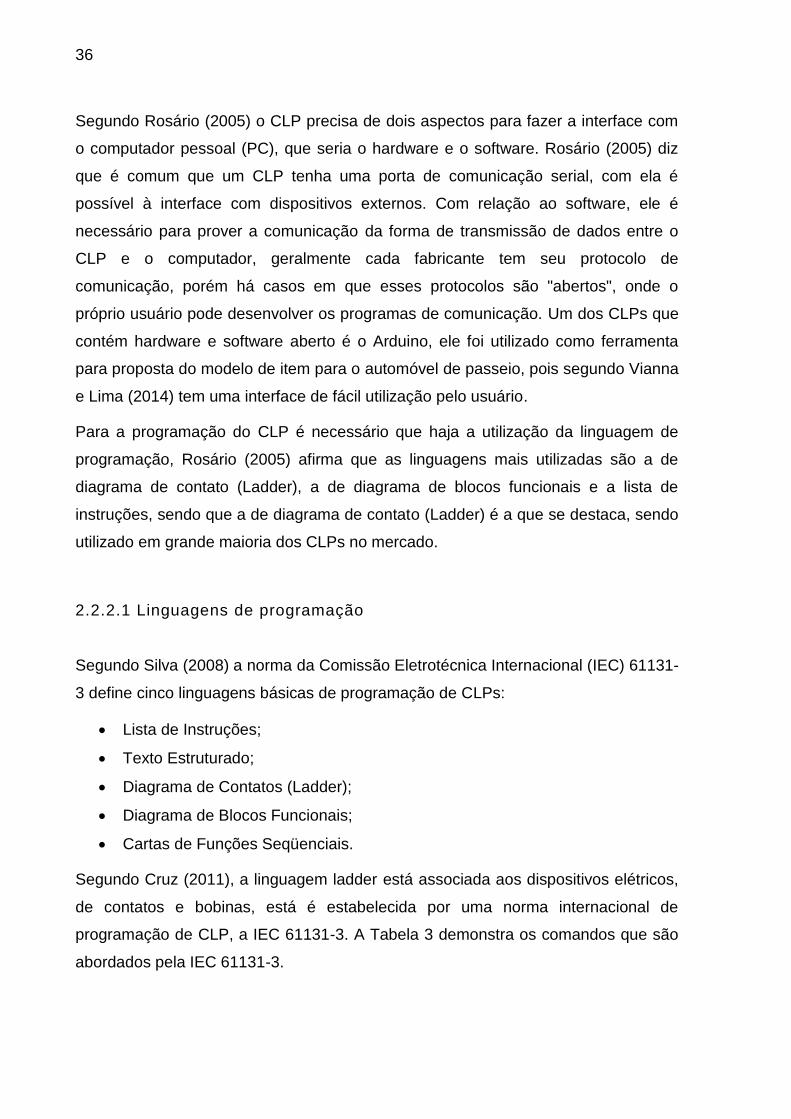
Segundo Silva (2008) a forma simples do CLP atuar é ler os sinais de entrada,
executar a programação e escrever o sinais de saída, como descrito e demonstrado
na Imagem 3.
Imagem 3: Forma de atuação do CLP.
Fonte: Silva (2008, p. 24).
36
Segundo Rosário (2005) o CLP precisa de dois aspectos para fazer a interface com
o computador pessoal (PC), que seria o hardware e o software. Rosário (2005) diz
que é comum que um CLP tenha uma porta de comunicação serial, com ela é
possível à interface com dispositivos externos. Com relação ao software, ele é
necessário para prover a comunicação da forma de transmissão de dados entre o
CLP e o computador, geralmente cada fabricante tem seu protocolo de
comunicação, porém há casos em que esses protocolos são "abertos", onde o
próprio usuário pode desenvolver os programas de comunicação. Um dos CLPs que
contém hardware e software aberto é o Arduino, ele foi utilizado como ferramenta
para proposta do modelo de item para o automóvel de passeio, pois segundo Vianna
e Lima (2014) tem uma interface de fácil utilização pelo usuário.
Para a programação do CLP é necessário que haja a utilização da linguagem de
programação, Rosário (2005) afirma que as linguagens mais utilizadas são a de
diagrama de contato (Ladder), a de diagrama de blocos funcionais e a lista de
instruções, sendo que a de diagrama de contato (Ladder) é a que se destaca, sendo
utilizado em grande maioria dos CLPs no mercado.
2.2.2.1 Linguagens de programação
Segundo Silva (2008) a norma da Comissão Eletrotécnica Internacional (IEC) 61131-
3 define cinco linguagens básicas de programação de CLPs:
Lista de Instruções;
Texto Estruturado;
Diagrama de Contatos (Ladder);
Diagrama de Blocos Funcionais;
Cartas de Funções Seqüenciais.
Segundo Cruz (2011), a linguagem ladder está associada aos dispositivos elétricos,
de contatos e bobinas, está é estabelecida por uma norma internacional de
programação de CLP, a IEC 61131-3. A Tabela 3 demonstra os comandos que são
abordados pela IEC 61131-3.
37
Tabela 3: Comandos Ladder abordados pela IEC 61131-3.
SÍMBOLO NOME DESCRIÇÃO
-I I- Contato NA Contato normalmente aberto
-I\I- Contato NF Contato normalmente fechado
-(S) Liga bobina É ligada quando a linha está energizada e permanece ligada até que
seja desligada em outra parte do código.
-(R) Desliga
bobina
É desligada quando a linha está energizada e permanece desligada
até que seja ligada em outra parte do código.
-( ) Energiza
bobina
Permanece ligada enquanto a linha está energizada.
Fonte: Cruz (2011, p.36).
Contato NA e NF como descrito na Tabela 3 é regularmente utilizado em circuitos
elétricos.
2.2.2.2 Arduino
Segundo Souza et al. (2011) o Arduino é uma plataforma que interage facilmente
com o usuário, com hardware e software "abertos", que possibilitam a interação com
o ambiente através de dispositivos criados, estes dispositivos utilizam os sinais de
entrada (sensores, botões e etc.) como também os sinais de saída (motores, leds,
displays e etc.).
Segundo Souza (2011) o Arduino utiliza a linguagem de processamento em C e
C++, possui um bootloader (software implementado) e dispensa o uso de
compiladores e hardwares adicionais.
De acordo com o site oficial do Arduino, ele pode ser executado no sistema
Windows, Linux e Mac OS X, seu software roda em qualquer plataforma Arduino,
sendo possível a interação entre eles. Segue na Imagem 5 o modelo demonstrativo
do Arduino.
38
Imagem 4: Modelo Arduino Uno.
Fonte: Castle (2013).
Na tabela a seguir é descrito todas as especificações técnicas do Arduino Uno, é
importante destacar que se atenha as recomendações para não acarretar em
problemas com a placa.
Tabela 4: Especificações Técnicas do Arduino Uno.
Microcontrolador ATmega328P
Tensão Operacional 5V
Tensão de Entrada (recomendada) 7 - 12V
Tensão de Entrada (Limite) 6 - 20V
Pinos Digitais 14
Pinos Analógicos 6
Corrente CC por pino 20 mA
Corrente CC para o pino 3,3V 50 mA
Memória Flash 32 KB (0,5KB são utilizados pelo bootloader)
SRAM 2 KB
EEPROM 1 KB
Velocidade de Clock 16 MHz
Fonte: Arduino (2016).

39
2.2.3 Relé - Estrutura e Função
O relé na Imagem 5 é um interruptor eletromagnético operado por uma corrente
elétrica relativamente pequena que pode ligar ou desligar a corrente elétrica muito
maior. Segundo Shannon (1938), o dispositivo é essencial para a separação do
circuito de potência e do circuito eletrônico com segurança.
O coração de um relé é um eletroímã, uma bobina de fio que se torna um ímã
temporário quando a eletricidade flui através dele. Pode-se pensar em um relé como
uma espécie de alavanca elétrica: ligá-lo com uma pequena corrente que conecta
(alavanca) um outro aparelho com uma corrente muito maior. Por que isso é útil?
Como o nome sugere, muitos sensores são peças extremamente sensíveis
equipamentos eletrônicos e podem produzir apenas pequenas correntes elétricas.
Porém, muitas vezes nós precisamos deles para conduzir maiores peças de
aparelhos que utilizam correntes maiores. Isso significa que os relés podem
trabalhar tanto como interruptores (chave) ou como amplificadores convertendo
correntes pequenas em correntes maiores.
Imagem 5: Estrutura interna de um relé.
Fonte: Reviseomatic (2016).
40
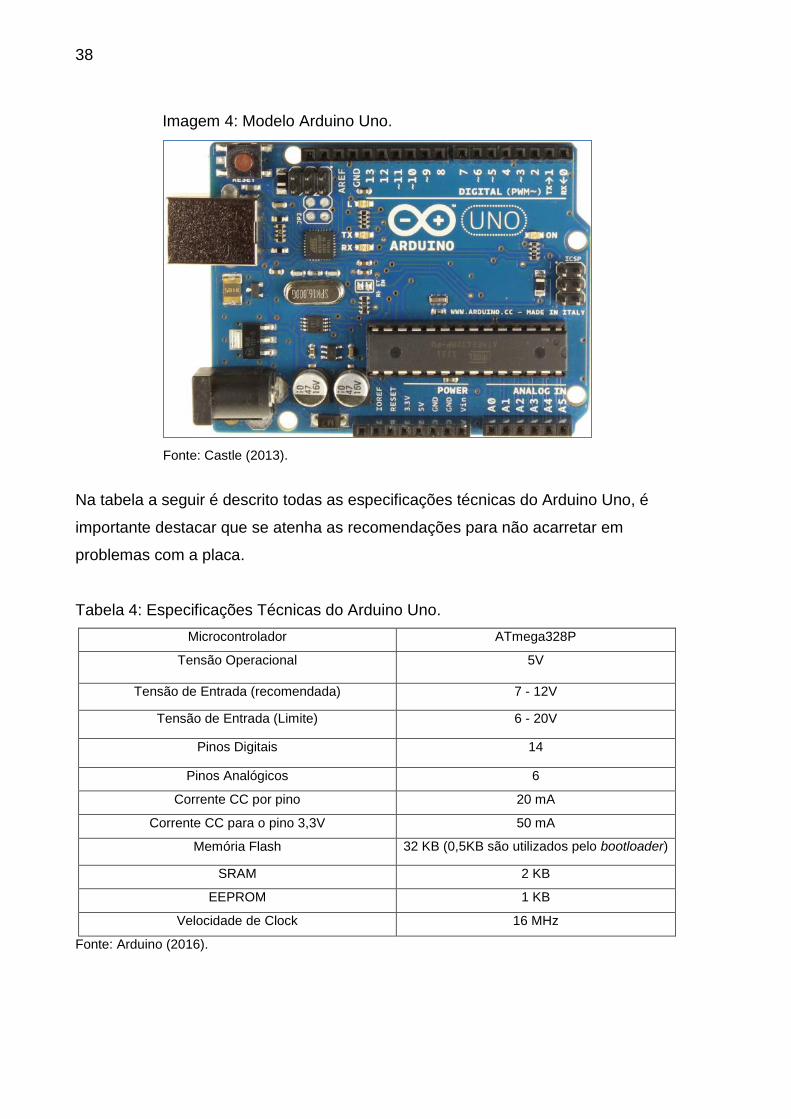
2.2.3.1 Funcionamento do Relé
A demonstração do funcionamento do relé é feita de acordo com a ilustração
mostrada na Imagem 6, quando a energia flui através do primeiro circuito (1), ele
ativa o eletroímã (marrom), gerando um campo magnético (azul), que atrai um
contato (vermelho) e ativa o segundo circuito (2). Quando a energia é desligada,
uma mola puxa o contato de volta para sua posição original, alternando o segundo
circuito novamente.
Imagem 6: Ilustração de funcionamento de um relé.
Fonte: Elaboração própria.
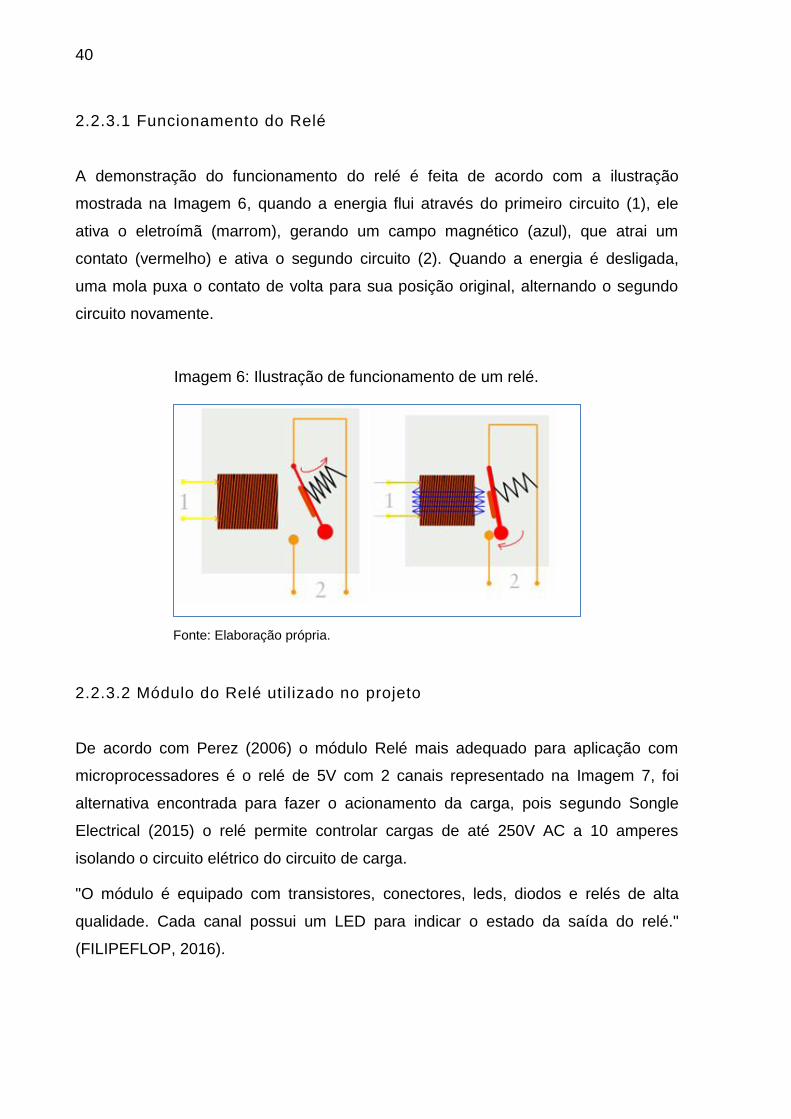
2.2.3.2 Módulo do Relé utilizado no projeto
De acordo com Perez (2006) o módulo Relé mais adequado para aplicação com
microprocessadores é o relé de 5V com 2 canais representado na Imagem 7, foi
alternativa encontrada para fazer o acionamento da carga, pois segundo Songle
Electrical (2015) o relé permite controlar cargas de até 250V AC a 10 amperes
isolando o circuito elétrico do circuito de carga.
"O módulo é equipado com transistores, conectores, leds, diodos e relés de alta
qualidade. Cada canal possui um LED para indicar o estado da saída do relé."
(FILIPEFLOP, 2016).
41
Imagem 7: Módulo do relé 5v 2 canais.
Fonte: Thomsen (2013).
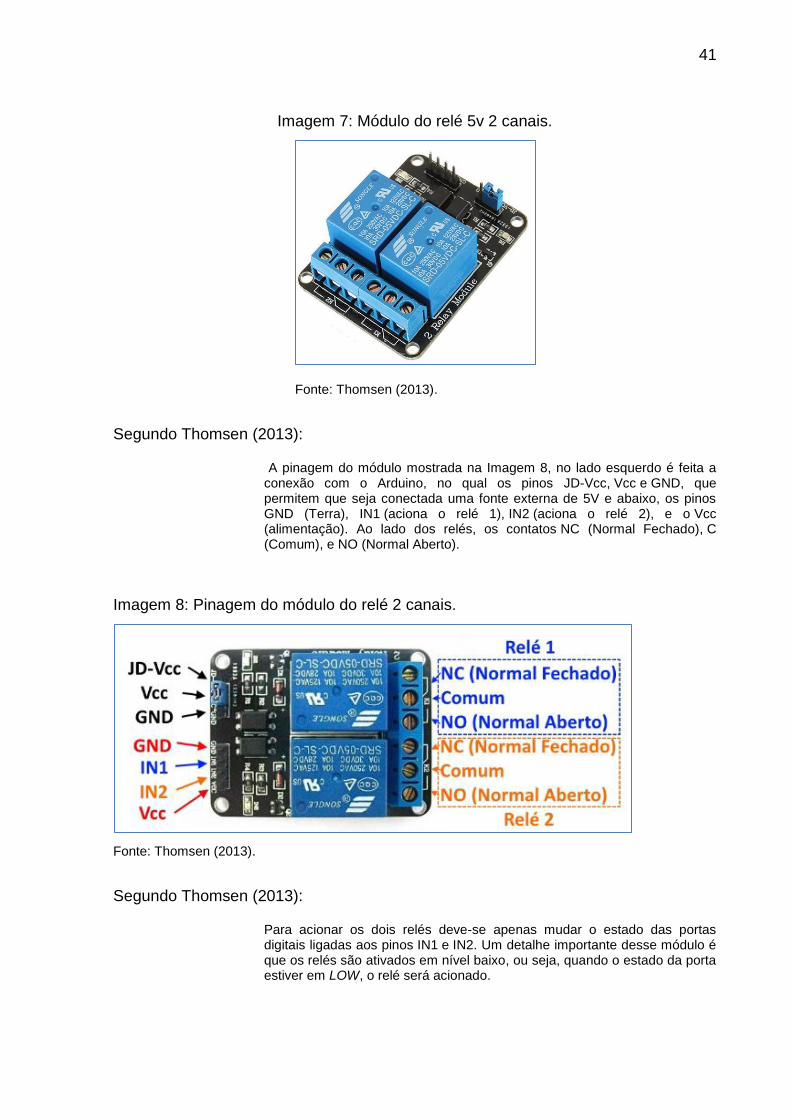
Segundo Thomsen (2013):
A pinagem do módulo mostrada na Imagem 8, no lado esquerdo é feita a conexão com o Arduino, no qual os pinos JD-Vcc, Vcc e GND, que permitem que seja conectada uma fonte externa de 5V e abaixo, os pinos GND (Terra), IN1 (aciona o relé 1), IN2 (aciona o relé 2), e o Vcc (alimentação). Ao lado dos relés, os contatos NC (Normal Fechado), C (Comum), e NO (Normal Aberto).
Imagem 8: Pinagem do módulo do relé 2 canais.
Fonte: Thomsen (2013).
Segundo Thomsen (2013):
Para acionar os dois relés deve-se apenas mudar o estado das portas digitais ligadas aos pinos IN1 e IN2. Um detalhe importante desse módulo é que os relés são ativados em nível baixo, ou seja, quando o estado da porta estiver em LOW, o relé será acionado.
42
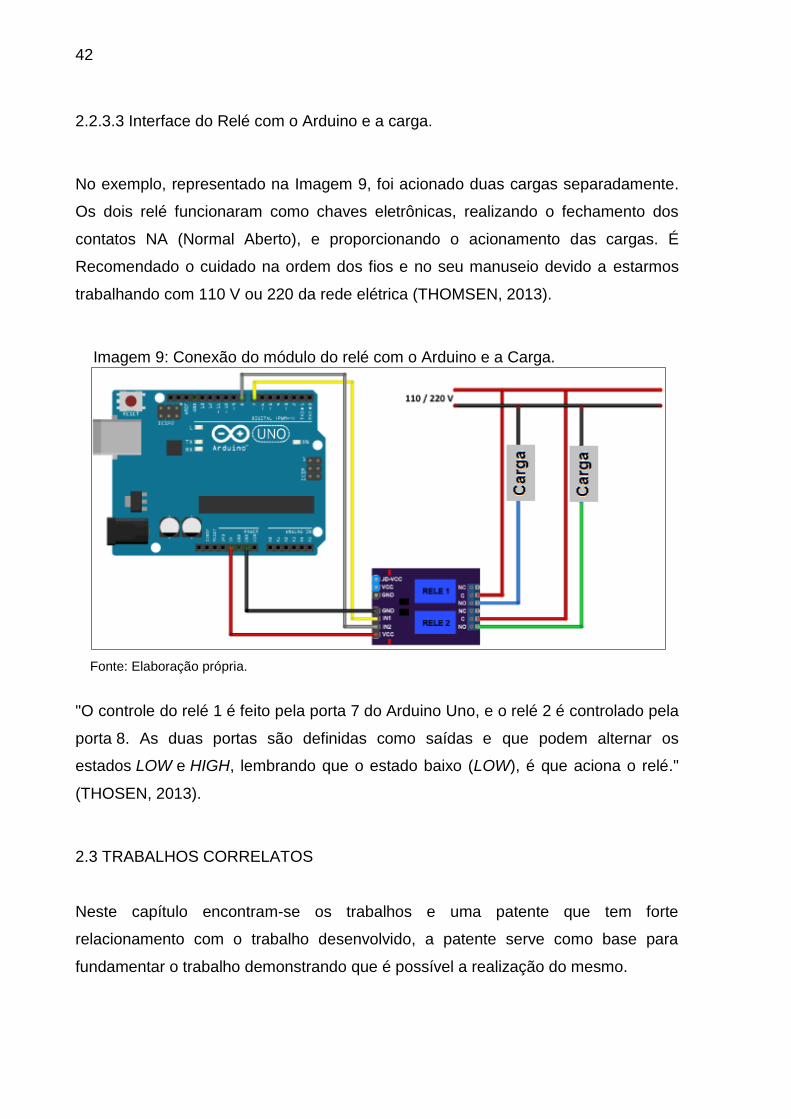
2.2.3.3 Interface do Relé com o Arduino e a carga.
No exemplo, representado na Imagem 9, foi acionado duas cargas separadamente.
Os dois relé funcionaram como chaves eletrônicas, realizando o fechamento dos
contatos NA (Normal Aberto), e proporcionando o acionamento das cargas. É
Recomendado o cuidado na ordem dos fios e no seu manuseio devido a estarmos
trabalhando com 110 V ou 220 da rede elétrica (THOMSEN, 2013).
Imagem 9: Conexão do módulo do relé com o Arduino e a Carga.
Fonte: Elaboração própria.
"O controle do relé 1 é feito pela porta 7 do Arduino Uno, e o relé 2 é controlado pela
porta 8. As duas portas são definidas como saídas e que podem alternar os
estados LOW e HIGH, lembrando que o estado baixo (LOW), é que aciona o relé."
(THOSEN, 2013).
2.3 TRABALHOS CORRELATOS
Neste capítulo encontram-se os trabalhos e uma patente que tem forte
relacionamento com o trabalho desenvolvido, a patente serve como base para
fundamentar o trabalho demonstrando que é possível a realização do mesmo.
43
2.3.1 Patente - US 5054569 A
O modelo do item proposto utiliza parte dos conceitos de uma patente que já foi
criada, segundo Scott, Franklin e Davis (1987) "Um novo sistema para iniciar
remotamente um veículo a motor e operando acessórios do veículo, inclui uma
unidade remota que tem um controlador digital que fornece sinais de comando
digitais codificados e uma unidade do veículo que recebe os sinais de comando
digitais e controladamente opera motor e acessórios do veículo na mesma
dependência.", tal patente é reconhecida pelo governo americano e suas aplicações
são utilizadas.
2.3.2 Viper Basic - Way Remote Start System
Segundo o manual Viper (2016) o Viper Basic é um dispositivo com sistema de start
remoto, esse sistema é programado para quando receber um sinal de comando
específico por rádio frequência, acionar o sistema de ignição do carro. O sistema
também detém outras funcionalidades, como: destravamento das portas, desligar o
motor e localizar o carro. O sistema Viper, é projetado com a tecnologia para poder
suportar vários anos de operação, é compatível com o SmartStart que é utilizado
para controlar e localizar o carro pelo smartphone, a tecnologia utilizada também
proporciona com que os sensores captem os sinais de rádio frequência em até 450
metros de distância e pode ser adquirido no site da Amazon (2016), por R$328,43
considerando os impostos para a importação e a conversão do valor em Dólar para
Reais.
2.3.3 Chevrolet – OnStar
De acordo com o manual da Chevrolet (2016) o OnStar é um sistema que utiliza
tecnologia avançada a fim de integrar a comunicação entre o cliente, o veículo e a
Central de Atendimento e fornecer determinados tipos de serviços especializados
como: emergência, segurança, concierge, navegação e aplicativo/WEB. Segundo
site oficial da Chevrolet a tecnologia OnStar é exclusiva da marca Chevrolet e esta
disponível somente para alguns determinados tipos de modelos de automóveis,
44
sendo eles: Cruze Sport6 LTZ, Cruze Sport6 LT, Cobalt LTZ*, Cobalt Elite, Cruze
Sedan LTZ, Cruze Sedan LT, Novo Cruze 2017, S10 LTZ 2017, S10 High Country
2017, Traílblazer MY 2017.
O sistema depende de uma interface com a rede de telefonia, sendo necessário a
compatibilidade entre seu smartphone e o sistema OnStar para usufruir de sua total
abrangência funcional.
A utilização da função concierge otimiza o tempo do usuário ao facilitar o encontro
de pontos em que o usuário queira conhecer, é bastante útil ao fornecer informações
adicionais como curiosidades a fim de providenciar uma experiência completa ao
usuário. A função permite que o sistema localize os pontos turísticos, eventos e lojas
e fornece ao automóvel o endereço completo. Fornece serviço adicional para
clientes que residem em torno do centro de São Paulo ou que transitem pelo centro,
ao fornecer um aviso sobre os horários e rodízios de placas evitando transtornos
com multas indesejadas.
Para a os serviços de segurança, o sistema esta em um nível totalmente diferente
dos sistemas normais, através de sensores de segurança a central de atendimento
consegue averiguar através do acionamento ao cliente, se o automóvel sofreu algum
tipo de incidente (furto ou roubo) ou não. A máxima do sistema é que o cliente esteja
seguro, por isso em caso de suspeita de furto ou roubo, existe uma equipe
especializada que trabalha 24h por dia e durante toda a semana, que entra em
contato com o usuário a fim de confirmar o roubo ou furto. Fornece ao usuário um
serviço de monitoramento de rotas, com a interface entre o usuário e a central de
atendimento, o cliente é direcionado pela rota ao vivo e é instruído por um atendente
caso se desvie da rota.
2.4 SISTEMA DE IGNIÇÃO CONVENCIONAL
É um conjunto de elementos e/ou dispositivos que são responsáveis por tornar real a
produção da centelha que dá partida no motor através da combustão da mistura da
gasolina e ar. Dentre os elementos que fazem parte do sistema de ignição
convencional podemos destacar alguns principais como:
Chave de Ignição;

45
Bobina de ignição;
Bateria;
Distribuidor;
Cabos de alta tensão;
Velas de ignição.
Apesar de o sistema estar extinto devido às atualizações e desenvolvimento na área
é importante que conheça seu funcionamento, pois o protótipo do sistema de
acionamento remoto de ignição eletrônica funciona paralelamente com o sistema de
ignição do automóvel.
Imagem 10: Sistema de ignição convencional.
Fonte: Leal (2013).
Foi utilizada a Imagem 10 para poder descrever o funcionamento das partes
apresentadas. Para que o automóvel dê partida, é necessário a mistura de três
componentes, sendo eles o combustível, o ar e a centelha. O sistema de ignição
convencional é o responsável por fornecer a centelha, ao entrar em contato com a
mistura de combustível e ar, a centelha inflama a composição que gera força
mecânica suficiente para dar partida no automóvel. Antes de chegar na geração da
centelha, passamos por todos os dispositivos descritos na Imagem 10.
46
As velas de ignição são responsáveis por gerar as centelhas, normalmente é
necessário uma tensão de voltagem elevada de 8000V a 15000V para a produção
da centelha, através dos eletrodos dentro das velas.
A bateria trabalha em uma tensão muito baixa (12V) para que seja gerada a
centelha, e por isso é necessário que haja intermediação de um outro dispositivo,
esse consegue fazer a transformação da tensão de 12V fornecidos pela bateria em
10000V, caso não haja nenhuma interferência de outros fatores como: resistência do
rotor, ponto de ignição, temperatura, resistências dos cabos de ignição e etc. O
dispositivo que faz esse papel de transformação de tensões de voltagem é a bobina
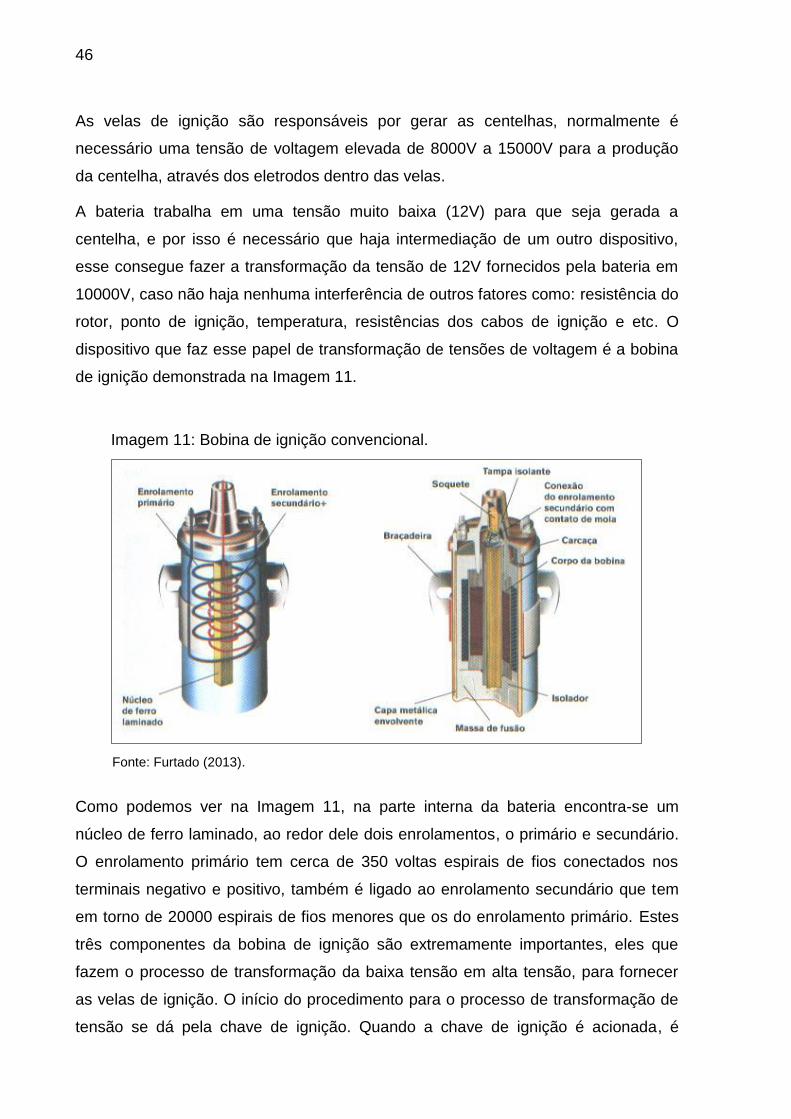
de ignição demonstrada na Imagem 11.
Imagem 11: Bobina de ignição convencional.
Fonte: Furtado (2013).
Como podemos ver na Imagem 11, na parte interna da bateria encontra-se um
núcleo de ferro laminado, ao redor dele dois enrolamentos, o primário e secundário.
O enrolamento primário tem cerca de 350 voltas espirais de fios conectados nos
terminais negativo e positivo, também é ligado ao enrolamento secundário que tem
em torno de 20000 espirais de fios menores que os do enrolamento primário. Estes
três componentes da bobina de ignição são extremamente importantes, eles que
fazem o processo de transformação da baixa tensão em alta tensão, para fornecer
as velas de ignição. O início do procedimento para o processo de transformação de
tensão se dá pela chave de ignição. Quando a chave de ignição é acionada, é

47
enviado os 12V para a bobina de ignição, esses 12V ficam armazenados no
enrolamento primário e durante esse tempo um campo magnético é gerado no
núcleo de ferro laminado da bobina de ignição. Ao chegar no limite máximo desse
campo magnético, o distribuidor interrompe o funcionamento do enrolamento
primário cortando a corrente que circula pelos fios, isso faz com que se dissipe o
campo magnético em grande velocidade. Como há uma grande velocidade de
dissipação do campo magnético que esta no núcleo de ferro laminado, isso acarreta
em uma tensão por indução no enrolamento secundário, que por ter uma alta
quantidade de fios em espiral produz uma tensão alta.
A alta tensão gerada no enrolamento secundário da bobina de ignição é
imediatamente transportada para o distribuidor via cabo de alta tensão. No
distribuidor é feito o papel de distribuição da corrente de alta tensão que foi gerada
na bobina de ignição pelo enrolamento secundário, essas correntes são guiadas
aos cabos de alta tensão com destino as velas de ignição, ao chegar nas velas de
ignição através dos eletrodos essas correntes são utilizadas para gerar a centelha e
assim dar partida no motor.
Imagem 12: Vela de ignição nova versus vela de ignição com desgaste.
Fonte: Mendes (2014).
É importante a manutenção e o cuidado com as velas de ignição, sempre
observando para que em caso de desgaste dos eletrodos como na Imagem 12, haja
a troca do componente. Quando a vela de ignição se encontra num estado de
desgaste, onde os eletrodos tem uma folga maior do que o projetado, há uma
48
necessidade de maiores cargas de tensão para gerar a centelha, de modo que
quanto maior for o desgaste dos eletrodos, maior será a carga exigida e maior será a
tensão de trabalho da bobina de ignição (SILVA, 2012).
2.5 GASTOS, CUSTOS E DESPESAS
Segundo Bruni (2012) a empresa responsável pela aquisição de algum serviço ou
produto de qualquer setor da entidade, realiza uma operação de sacrifício financeiro
que pode ser classificado como gastos, que após análise de sua participação na
criação do produto ou serviços pode ser dada uma nova classificação como custos
ou despesas. Segundo Perez, Oliveira e Costa (2012) o reconhecimento dos gastos
e sua separação é de extrema importância para as empresas, pois nesse
procedimento é feito o reconhecimento dos resultados, sendo eles classificados
como lucros ou prejuízos, tais resultados afetam diretamente de forma positiva ou
negativa a entidade e seus Stakeholders. Foi importante a análise desses conceitos,
pois os gastos do protótipo do sistema de acionamento remoto de ignição eletrônica
afetam diretamente os resultados, de forma a contribuir ou não com a viabilidade
econômica do protótipo e ser possível sua inserção no mercado consumidor
nacional.
Para Bruni (2012) os custos estão intrinsecamente ligados aos gastos relativos aos
serviços e bens consumidos na produção de produtos ou serviços disponibilizados
pela empresa, e por isso podem ser associados aos valores nos estoques. Nos
custos estão também atribuídos a junção de todos os consumos, sendo eles o de
recursos, o de mão de obra e matéria prima. Perez, Oliveira e Costa (2012)
destacam que na setor produtivo não há despesas, todos os gastos existentes são
atribuídos aos custos, sendo eles: mão de obra, matéria prima, custos gerais de
fabricação, materiais auxiliares e etc.
Para Bruni (2012) as despesas estão ligadas a obtenção das receitas das vendas,
qualquer produto ou serviço associado a este fim serão considerados como
despesas, não estão ligadas a produção de bens ou serviços e são considerados
consumos temporais.
49
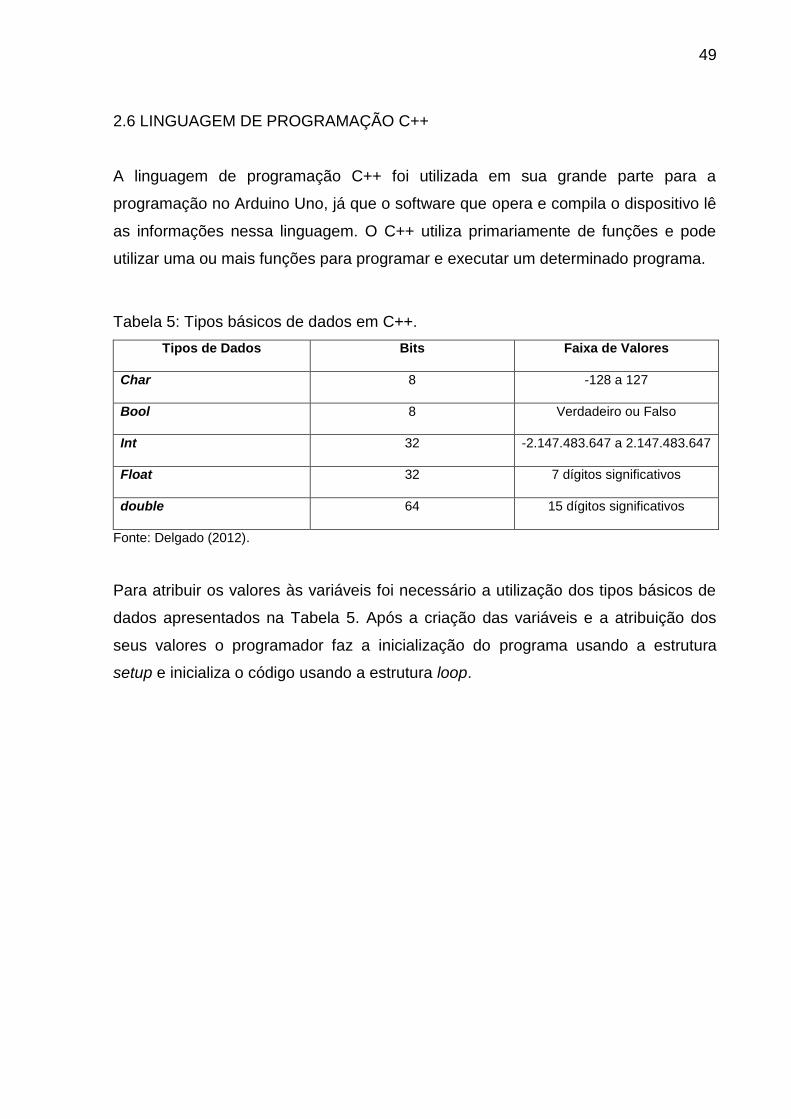
2.6 LINGUAGEM DE PROGRAMAÇÃO C++
A linguagem de programação C++ foi utilizada em sua grande parte para a
programação no Arduino Uno, já que o software que opera e compila o dispositivo lê
as informações nessa linguagem. O C++ utiliza primariamente de funções e pode
utilizar uma ou mais funções para programar e executar um determinado programa.
Tabela 5: Tipos básicos de dados em C++.
Tipos de Dados Bits Faixa de Valores
Char 8 -128 a 127
Bool 8 Verdadeiro ou Falso
Int 32 -2.147.483.647 a 2.147.483.647
Float 32 7 dígitos significativos
double 64 15 dígitos significativos
Fonte: Delgado (2012).
Para atribuir os valores às variáveis foi necessário a utilização dos tipos básicos de
dados apresentados na Tabela 5. Após a criação das variáveis e a atribuição dos
seus valores o programador faz a inicialização do programa usando a estrutura
setup e inicializa o código usando a estrutura loop.

50
51
3 METODOLOGIA
Segundo Prodanov e Freitas (2013, p. 23) "[...] a ciência tem como objetivo
fundamental chegar à veracidade dos fatos". "A pesquisa cientifica é um conjunto de
procedimentos sistemáticos, baseados no raciocínio lógico, que tem por objetivo
encontrar soluções para os problemas propostos mediante o emprego de métodos
científicos." (ANDRADE, 2001 apud CADUXAVIER , 2007).
Para este trabalho a metodologia que foi utilizada é a pesquisa bibliográfica, que de
acordo com Lakatos (1992, p. 44):
A pesquisa bibliográfica permite compreender que, se de um lado a resolução de um problema pode ser obtida através dela, por outro, tanto a pesquisa de laboratório quanto a de campo (documentação direta) exigem como premissa, o levantamento de estudo da questão que se propõe a analisar e solucionar.
Lakatos (1992) confirma que a pesquisa bibliográfica concede ao pesquisador todo
conhecimento teórico-metodológico necessário para sua capacidade de
argumentação.
Foi utilizada a pesquisa aplicada, pois foi motivada pela necessidade de uma
proposta com o objetivo de solucionar um problema com o alto custo para se obter
um sistema de acionamento remoto de ignição eletrônica do automóvel, como
também foi objetivado a geração de conhecimentos novos para a aplicação prática,
dirigida à solução de problemas específicos. Envolvendo verdades e interesses
locais (SILVA, 2010).
Para o ponto de vista do objetivo foi utilizada a Pesquisa Exploratória, que segundo
Gil (1991) objetiva a maior familiaridade com o problema, tornando-o explícito, ou à
construção de hipóteses. Envolvendo levantamento bibliográfico; análise de
exemplos que estimulem a compreensão. Assume, em geral, as formas de
Pesquisas Bibliográficas e Estudos de Caso.
Quanto à abordagem deste trabalho em relação ao tipo de pesquisa foi feita por
meio da pesquisa qualitativa, há a necessidade de uma análise precisa e confiável
para geração de conhecimento a fim de determinar posteriormente uma tomada de
decisão.
Segundo Antonelli et al. (2014) a simulação permite uma visão real através da
utilização de softwares e modelos matemáticos, foram utilizadas a simulação e

52
técnicas computacionais com o objetivo de comprovar a funcionalidade da proposta
do modelo de sistema de acionamento remoto de ignição eletrônica. Segundo
Rengel e Júnior (2014) a simulação pode melhorar a eficiência de um sistema,
utilizando ambientes virtuais como ferramenta. Segundo Chamovitz, Sabbadini e
Oliveira (2008, p. 2) "A simulação pode ser definida como reprodução de um
processo do mundo real ou de um sistema, durante um período de tempo".
Foram utilizados diversos dispositivos e tecnologias neste trabalho para que o
sistema de acionamento remoto de ignição eletrônica fosse criado de maneira com
que suas funções fossem possíveis, observando também a relação entre custo-
benefício para tornar esse sistema viável do ponto de vista funcional como também
econômico.
A análise de viabilidade econômica deste trabalho foi feita com a utilização de sites
online de busca, a fim de encontrar os diversos dispositivos utilizados na produção
do protótipo, comparando os preços de cada um e escolhendo o de menor custo
com o objetivo de diminuir o custo do desenvolvimento do protótipo, sendo que a
data de análise de todos os preços dos dispositivos utilizados foi durante o mês de
outubro de 2016.
Para a validação da proposta do sistema de proposta viável do ponto de vista
funcional e econômico de um modelo de baixo custo de um sistema de acionamento
remoto de ignição eletrônica de fabricação nacional, a fim de acionar o automóvel de
câmbio automático e manual à distância, foi feito um protótipo real com todas suas
funções descritas na Tabela 6, o circuito foi montado e o código de programação
utilizado foi o código contido nos Quadros 1, 2, 3, 4 e 5, foi feito no próprio software
do Arduino Uno, escrito na linguagem C++ e carregado a fim de validar as suas
funções.
O Fritzing é uma das ferramentas que foram utilizadas neste trabalho, segundo a
Fritzing (2016) e a Multilógica-Shop (2016), a plataforma Fritzing é um open-source
(software livre) que facilita a montagem do hardware físico numa plataforma virtual
de modo simples que torna mais acessível aos usuários, pode ser feito o download
do Fritzing pelo seu site oficial, sem nenhum custo. A versão que foi utilizada no
trabalho foi a versão 0.9.3b disponibilizada no site desde o dia 2 de junho de 2016.
Com o Fritzing foi desenvolvido todas as partes dos circuitos do sistema em
esquemas separados para melhor entendimento.
53
Outra tecnologia utilizada foi o kit controle remoto infravermelho (IF), segundo o
Miniinthebox (2013) dentro deste kit está contido um módulo receptor de IF, um
controle remoto, uma bateria CR2025 e conectores, o kit custa R$10,11 a unidade.
O controle remoto contém 21 botões e é alimentado por uma bateria CR2025 já
incluída de 3V, o controle opera junto com o módulo receptor de IF em uma
frequência de transmissão de 38kHz, dependendo do meio ambiente o kit pode
funcionar a mais de 8 metros de distância, com angulação efetiva de 60 graus. Este
kit está classificado como Universal e pode funcionar com a função infravermelho e
WIFI.
Duas resistências foram utilizadas sendo elas de 75Ω e 100Ω, elas foram adquiridas
em um site de compras online, foram disponibilizadas pela empresa Viinko
Electronics. São de um tipo fixo de resistor, tem uma tolerância de 1% de
resistência, suas cores são azuis, detém de um coeficiente de temperatura de 100
partes por milhão (ppm)/ ºC, e potência nominal de 1/4W e seu custo foi de R$ 0,24.
A chave de contato que foi utilizada no protótipo foi um botão normal, adquirido em
um site de compras online e com um custo por unidade de R$ 0,29.
Com o objetivo de estruturar o trabalho com informações, foram utilizados artigos,
livros, sites, dissertações e teses, para que este trabalho detenha todo o acervo
possível, para seu desenvolvimento e conclusão.

54

55
4 RESULTADOS E DISCUSSÃO DA PESQUISA
É explicado o funcionamento desse sistema através de esquemas montados na
plataforma Fritzing, esses esquemas representam partes do sistema de
acionamento remoto de ignição eletrônica como um todo e podem ser considerados
tanto para os automóveis de cambio automático quanto para os automóveis de
cambio manual, desse modo facilita a compreensão de cada um dos componentes
utilizados como também as funções de cada parte desse sistema acionado
remotamente.
4.1 DESCRIÇÃO DO ESQUEMA E FUNÇÃO - MÓDULO INFRAVERMELHO
O esquema na Imagem 13 foi demonstrado a ligação entre um módulo receptor de
infravermelho (IF) com o Arduino Uno.
Imagem 13: Módulo receptor de IF ligado ao Arduino Uno.
Fonte: Elaboração própria.
Este esquema representado é parte do sistema de acionamento remoto de ignição
eletrônica, foi montado utilizando as ferramentas disponíveis na plataforma Fritzing,
consiste em um módulo de IF que realizam três ligações através dos pinos, no cabo
56
preto é demonstrado a ligação entre o módulo IF e o GND (Terra) do Arduino Uno,
no cabo vermelho é demonstrado a ligação entre o módulo IF e o 5V (Energia), e o
cabo laranja é demonstrado a ligação entre o módulo IF e a porta digital 12 do
Arduino Uno. Precisa ser considerado também que para o acionamento desse
módulo remotamente é necessário que haja um controle remoto que emite sinais em
IF e esteja com a mesma frequência que o módulo receptor.
O esquema funciona de modo que o módulo receptor de IF aguarda pelo sinal de IF
emitido pelo controle remoto, quando o botão do controle é pressionado um sinal é
emitido, o módulo receptor faz a leitura do sinal recebido e caso não haja nenhuma
restrição em relação ao acionamento, o sistema de acionamento remoto de ignição
eletrônica é acionado.
4.2 DESCRIÇÃO DO ESQUEMA E FUNÇÃO - CHAVE DE CONTATO
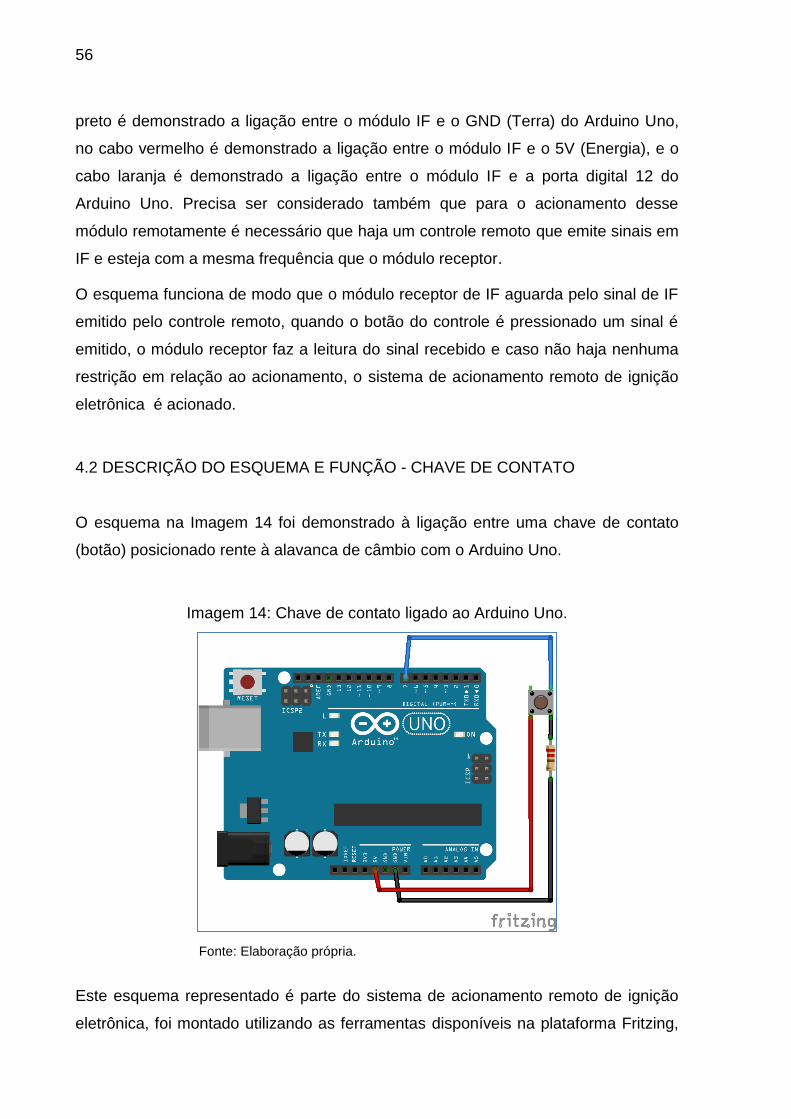
O esquema na Imagem 14 foi demonstrado à ligação entre uma chave de contato
(botão) posicionado rente à alavanca de câmbio com o Arduino Uno.
Imagem 14: Chave de contato ligado ao Arduino Uno.
Fonte: Elaboração própria.
Este esquema representado é parte do sistema de acionamento remoto de ignição
eletrônica, foi montado utilizando as ferramentas disponíveis na plataforma Fritzing,
57
consiste em um botão que é ligado ao Arduino Uno através da porta 7, também
conectado as portas de 5V e a porta GND, para esse circuito é necessário a
utilização também de um resistor de 10Ω, segundo Pimentel et al. (2014) devido as
variações de tensões, os resistores são necessários para não queimar os
dispositivos.
A função desse Botão é de restringir o sistema de acionamento remoto de ignição
eletrônica de ser acionado caso sua condição não seja atendida, esta condição esta
baseada no fato de que alavanca de câmbio do automóvel, tanto automático quanto
manual, precisa necessariamente estar em ponto neutro, para que se possa dar a
partida no automóvel com segurança, o botão esta posicionado junto da alavanca e
será programado de forma com que o Arduino Uno consiga identificar a posição da
alavanca, assim caso a condição seja atendida, que é do câmbio estar em ponto
neutro, seja possível dar continuidade no acionamento do sistema remoto de ignição
eletrônica.
4.3 DESCRIÇÃO DO ESQUEMA E FUNÇÃO - RESISTÊNCIAS LIGADAS AO FIO
DO COMUTADOR
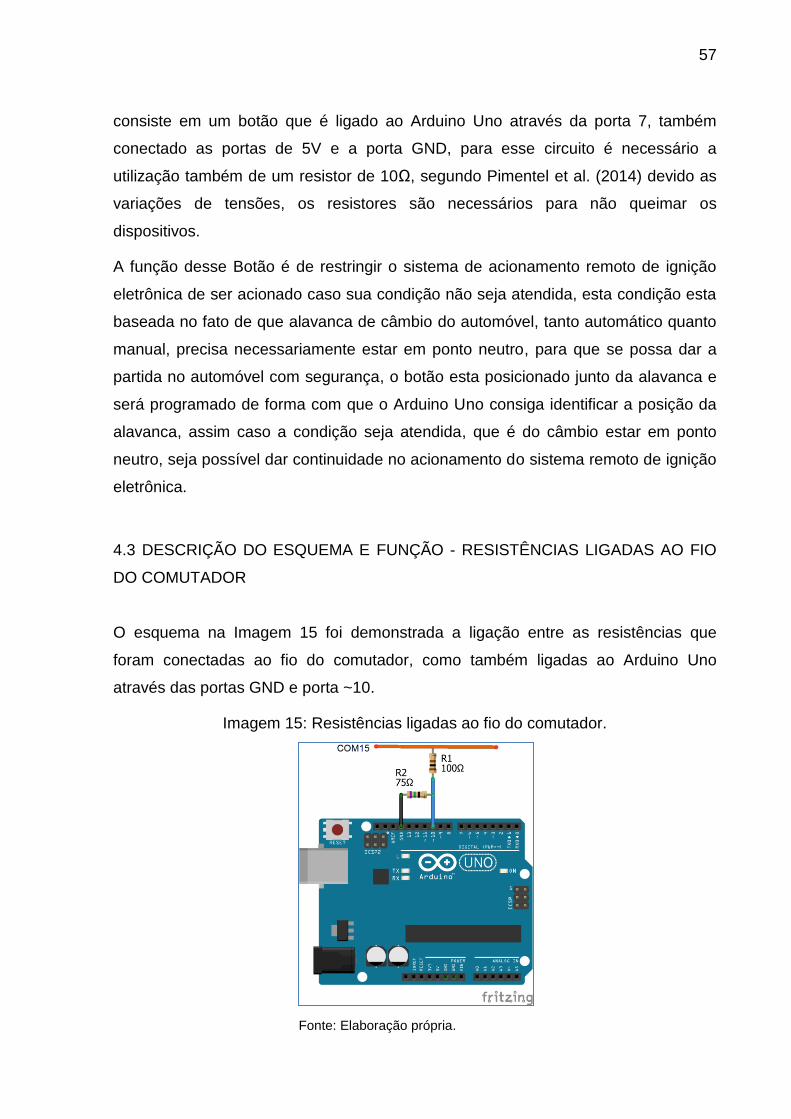
O esquema na Imagem 15 foi demonstrada a ligação entre as resistências que
foram conectadas ao fio do comutador, como também ligadas ao Arduino Uno
através das portas GND e porta ~10.
Imagem 15: Resistências ligadas ao fio do comutador.
Fonte: Elaboração própria.
58
Este esquema representado é parte do sistema de acionamento remoto de ignição
eletrônica, foi montado utilizando as ferramentas disponíveis na plataforma Fritzing,
consiste em duas resistências que foram ligadas ao fio do comutador que é
representado no código como COM15, tais resistências estão representadas como
R1 e R2, as resistências tem sua relação baseada na fórmula (1) elaborada:
.
A função dessas resistências é conseguir identificar se o comutador esta ligado ou
não, ou seja, caso o usuário utilize a própria chave do automóvel para liga-lo, o
sistema através desse circuito informa ao Arduino Uno que consegue restringir o
acionamento do sistema remoto de ignição eletrônica e evita assim possíveis
problemas, caso o comutador não tenha sido acionado através da chave do
automóvel, o Arduino Uno não restringe o acionamento do sistema remoto de
ignição eletrônica, é importante lembrar que o sistema de acionamento remoto de
ignição eletrônica funciona como um sistema paralelo ao sistema de ignição original
do automóvel.
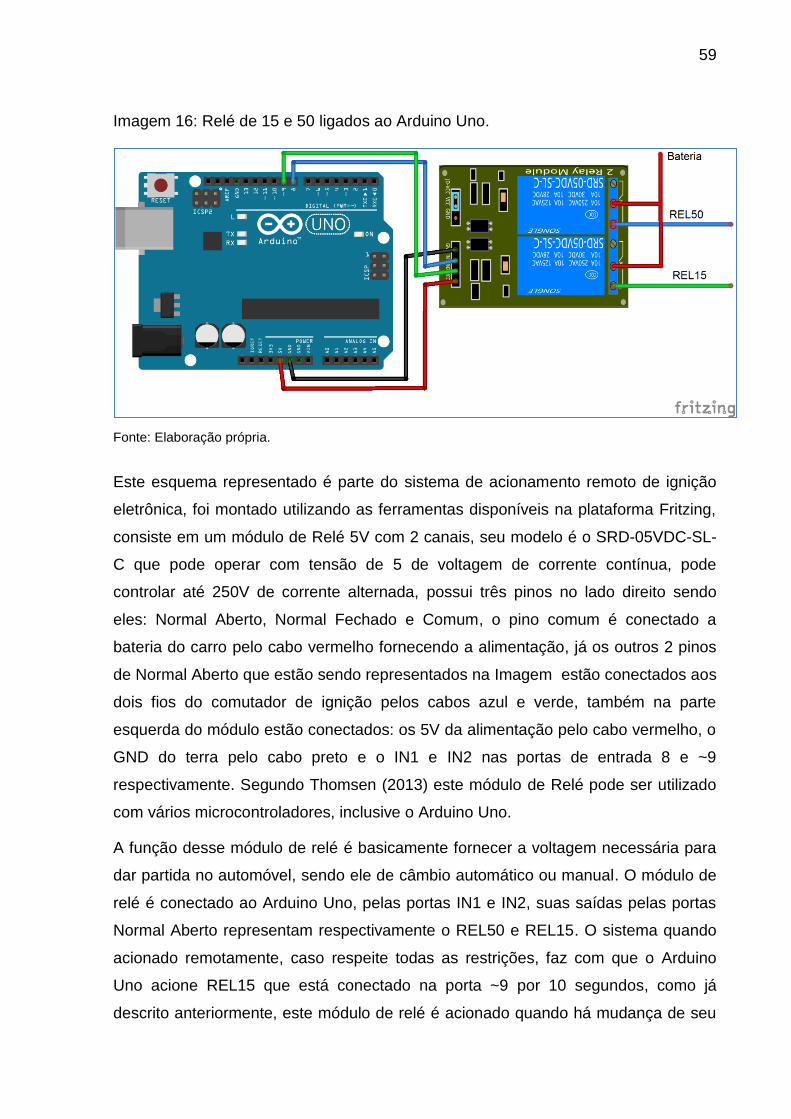
4.4 DESCRIÇÃO DO ESQUEMA E FUNÇÃO - RELÉ 15 E 50
O esquema na Imagem 16 foi demonstrado à ligação entre os dois relé
representados no código como relé de 15 e 50, com o Arduino Uno e com a bateria
do carro. Segundo os testes e projetos realizados com o Arduino UNO junto com o
módulo de relé por You, Yang, Wang (2014), o controle funcionou harmonicamente,
sem incidência significante de erros na comunicação. Essa segurança na
comunicação e a confiabilidade do sistema demonstrada nos testes foram
essenciais na escolha da conImagemção de montagem do projeto. Segundo Omron
Corporation (1990), estes são os parâmetros básicos para projetar o modelo do relé
a ser utilizado no projeto.
59
Imagem 16: Relé de 15 e 50 ligados ao Arduino Uno.
Fonte: Elaboração própria.
Este esquema representado é parte do sistema de acionamento remoto de ignição
eletrônica, foi montado utilizando as ferramentas disponíveis na plataforma Fritzing,
consiste em um módulo de Relé 5V com 2 canais, seu modelo é o SRD-05VDC-SL-
C que pode operar com tensão de 5 de voltagem de corrente contínua, pode
controlar até 250V de corrente alternada, possui três pinos no lado direito sendo
eles: Normal Aberto, Normal Fechado e Comum, o pino comum é conectado a
bateria do carro pelo cabo vermelho fornecendo a alimentação, já os outros 2 pinos
de Normal Aberto que estão sendo representados na Imagem estão conectados aos
dois fios do comutador de ignição pelos cabos azul e verde, também na parte
esquerda do módulo estão conectados: os 5V da alimentação pelo cabo vermelho, o
GND do terra pelo cabo preto e o IN1 e IN2 nas portas de entrada 8 e ~9
respectivamente. Segundo Thomsen (2013) este módulo de Relé pode ser utilizado
com vários microcontroladores, inclusive o Arduino Uno.
A função desse módulo de relé é basicamente fornecer a voltagem necessária para
dar partida no automóvel, sendo ele de câmbio automático ou manual. O módulo de
relé é conectado ao Arduino Uno, pelas portas IN1 e IN2, suas saídas pelas portas
Normal Aberto representam respectivamente o REL50 e REL15. O sistema quando
acionado remotamente, caso respeite todas as restrições, faz com que o Arduino
Uno acione REL15 que está conectado na porta ~9 por 10 segundos, como já
descrito anteriormente, este módulo de relé é acionado quando há mudança de seu
60
estado de HIGH para LOW, quando acionado pelo Arduino Uno o REL15 fornece
uma corrente de 12V contínuos com o objetivo de alimentar todos os circuitos
elétricos do automóvel. Após os 10 segundos do acionamento do REL15 o REL50 é
acionado pelo Arduino Uno por 5 segundos, ele fornece a alimentação de 12V
contínuos para a bobina do automóvel com o objetivo de ligar o automóvel e depois
muda seu estado para HIGH, é importante notar que a partir desse momento o
Arduino Uno não tem mais o controle do restante de etapas do sistema de ignição
original do próprio automóvel.
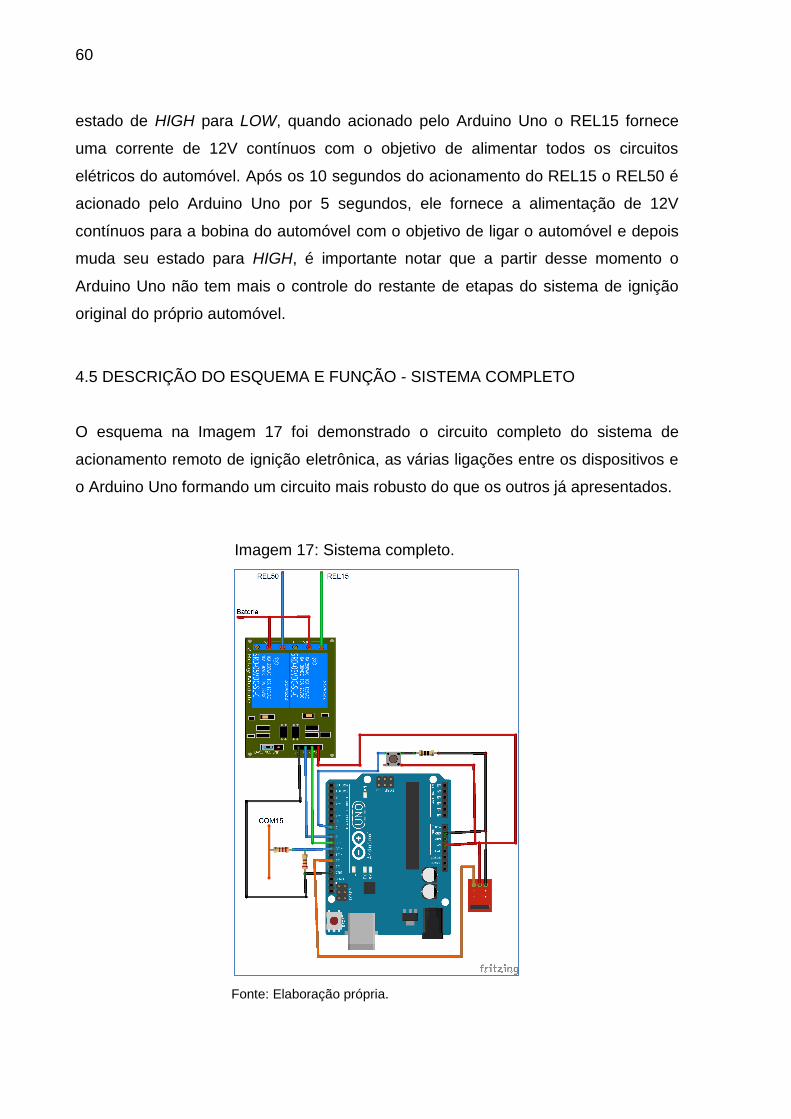
4.5 DESCRIÇÃO DO ESQUEMA E FUNÇÃO - SISTEMA COMPLETO
O esquema na Imagem 17 foi demonstrado o circuito completo do sistema de
acionamento remoto de ignição eletrônica, as várias ligações entre os dispositivos e
o Arduino Uno formando um circuito mais robusto do que os outros já apresentados.
Imagem 17: Sistema completo.
Fonte: Elaboração própria.

61
Também foi colocada a Imagem 17 como anexo A para melhor visualização e
entendimento do circuito.
Este esquema representa o sistema de acionamento remoto de ignição eletrônica, o
mesmo foi montado utilizando as ferramentas disponíveis na plataforma Fritzing,
consiste na junção de todos os esquemas apresentados anteriormente em um só
esquema, este esquema representa o circuito completo do sistema remoto de
ignição para automóveis de câmbio automático e manual.
O sistema de acionamento remoto de ignição eletrônica funciona de modo com que
possibilite ao usuário acionar um botão de controle remoto que emite um sinal de
infravermelho a uma frequência de 38 hertz a uma distância de até 8 metros de
distância do seu automóvel, ao receber o sinal do controle remoto o módulo receptor
envia um sinal ao Arduino Uno, que aciona a programação dos REL15 e REL50
descritos anteriormente e eles ligam o carro sendo ele de câmbio automático ou
manual. O controle remoto foi programado para interagir com um módulo receptor de
infravermelho instalado no automóvel, esse módulo foi conectado ao Arduino Uno e
através de uma programação em linguagem C++, o Arduino Uno faz todo o controle
do sistema.
É necessário que também se atente as restrições feitas ao sistema de acionamento
remoto de ignição eletrônica, pois essas restrições foram programadas no software
do Arduino Uno através da linguagem em C++ no intuito de tornar seguro o
acionamento remoto do sistema de ignição eletrônica. Tais restrições se dão pelo
fato de que problemas como:
O automóvel de câmbio manual ser acionado pelo controle remoto enquanto
está com a marcha em posição diferente do ponto neutro, ocasionando em
vários trancos fortes no automóvel e possível acidente, por isso foi feita uma
restrição de que tanto o automóvel de câmbio manual quanto o de câmbio
automático só podem ser ligados caso a marcha esteja em ponto neutro, é
feita a verificação dessa condição através de um botão instalado na caixa de
marcha, ele fica pressionando levemente o cabo da marcha e retornando o
sinal como HIGH para o Arduino Uno informando que a marcha está em
ponto neutro.
62
O acionamento do automóvel de câmbio automático ou manual ser pelo
controle remoto mesmo que o carro já tenha sido ligado pela chave, podendo
ocorrer a queima dos dispositivos envolvidos no sistema, curto circuitos e até
um possível início de incêndio. Para que isso não ocorra outra restrição é
programada no Arduino Uno em linguagem C++, duas resistências são
instaladas de forma com que possam identificar caso o carro já tenha sido
ligado através da chave, as resistências tem uma relação que é explicada
através da fórmula "R2 = (5.R1) / 7", ou seja R2 é aproximadamente 0.75 de
R1. As resistências são ligadas ao fio do COM15 (Comutador de Ignição) que
é por onde o carro é ligado com a chave, caso o sinal das resistências retorne
como HIGH o Arduino Uno restringe o acionamento do automóvel pelo
controle remoto, pois o carro esta ligado pela chave, caso o sinal retorne ao
Arduino Uno como LOW, torna-se possível o acionamento do sistema remoto
de ignição eletrônica pelo controle remoto devido ao automóvel estar
desligado.
O acionamento contínuo do controle remoto, podendo danificar todo o
sistema de acionamento remoto de ignição eletrônica como também seu
circuito e dispositivos a ele conectado. Para evitar esses danos no sistema foi
feita uma programação para que a cada acionamento do sistema em menos
de três segundos uma contagem é feita iniciando do zero, quando o
somatório dessa contagem atingir a dois, o Arduino Uno bloqueia o sistema
de ser acionado por cinco minutos, após isso a contagem é zerada e o
sistema volta ao normal.
4.6 CÓDIGO DE PROGRAMAÇÃO EM LINGUAGEM C++ DO PROTÓTIPO DO
SISTEMA
Segue o código em linguagem C++ do protótipo do sistema de acionamento remoto
de ignição eletrônica, que foi feito utilizando o software do Arduino Uno para teste e
validação.
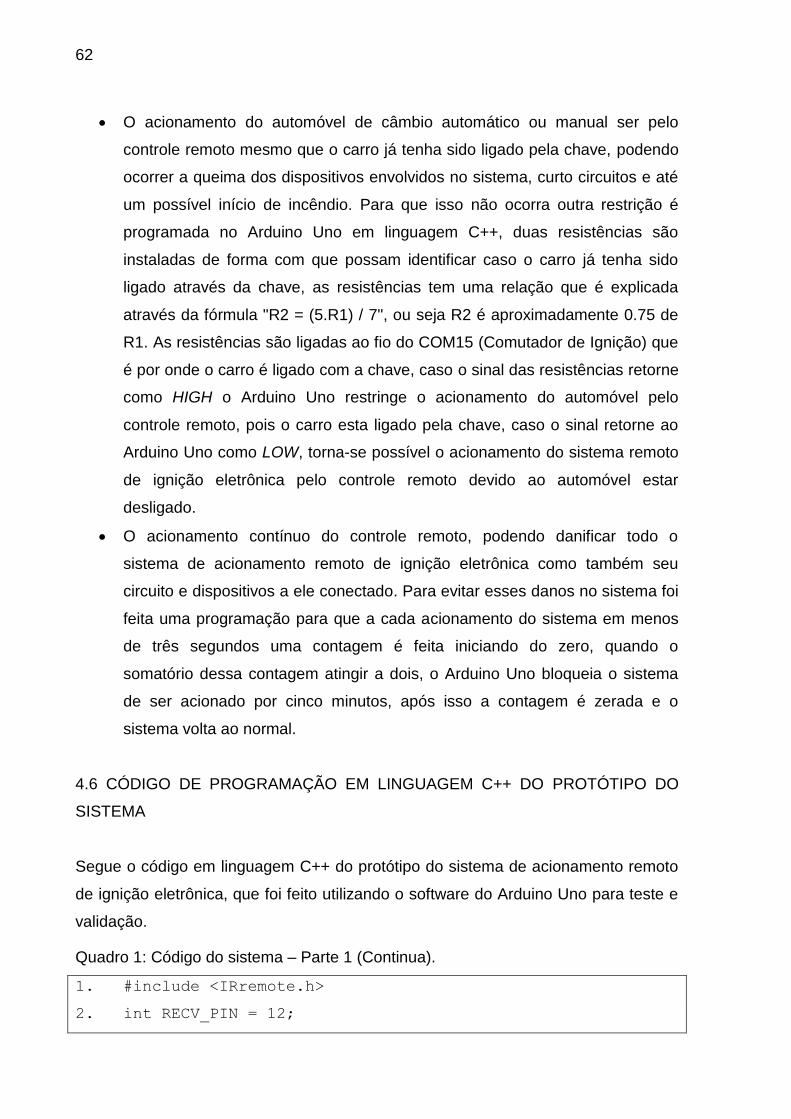
Quadro 1: Código do sistema – Parte 1 (Continua).
1. #include <IRremote.h>
2. int RECV_PIN = 12;
63
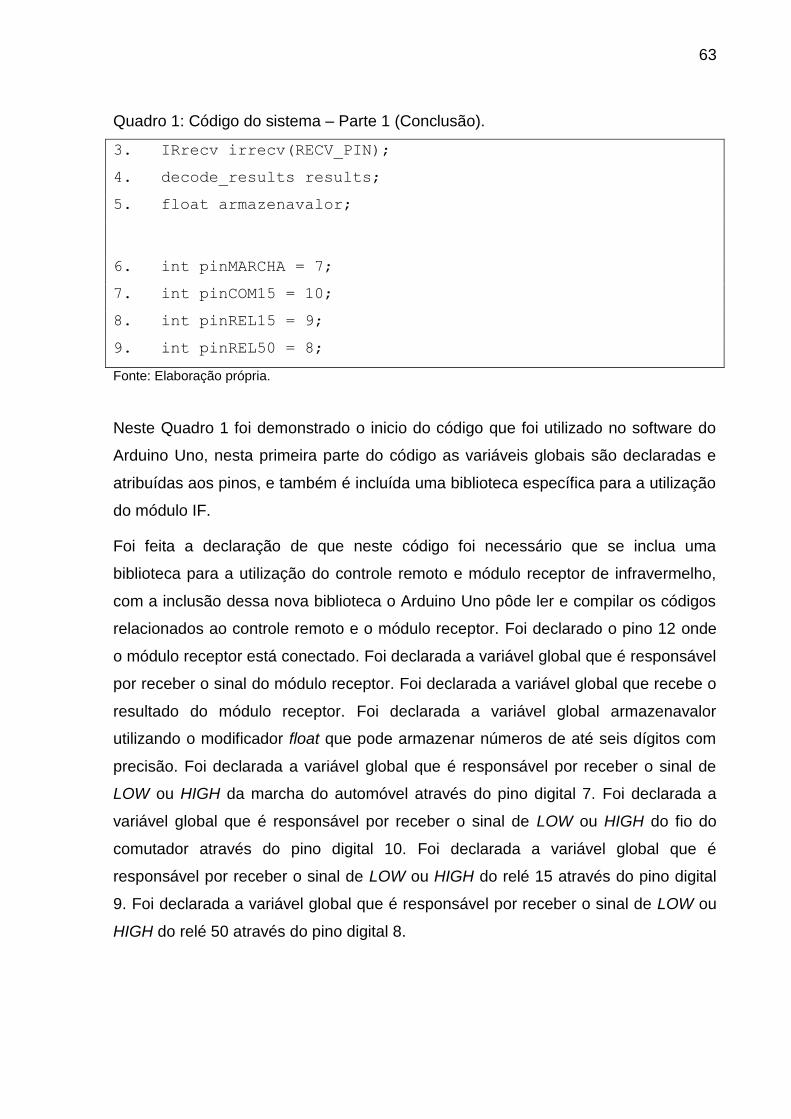
Quadro 1: Código do sistema – Parte 1 (Conclusão).
3. IRrecv irrecv(RECV_PIN);
4. decode_results results;
5. float armazenavalor;
6. int pinMARCHA = 7;
7. int pinCOM15 = 10;
8. int pinREL15 = 9;
9. int pinREL50 = 8;
Fonte: Elaboração própria.
Neste Quadro 1 foi demonstrado o inicio do código que foi utilizado no software do
Arduino Uno, nesta primeira parte do código as variáveis globais são declaradas e
atribuídas aos pinos, e também é incluída uma biblioteca específica para a utilização
do módulo IF.
Foi feita a declaração de que neste código foi necessário que se inclua uma
biblioteca para a utilização do controle remoto e módulo receptor de infravermelho,
com a inclusão dessa nova biblioteca o Arduino Uno pôde ler e compilar os códigos
relacionados ao controle remoto e o módulo receptor. Foi declarado o pino 12 onde
o módulo receptor está conectado. Foi declarada a variável global que é responsável
por receber o sinal do módulo receptor. Foi declarada a variável global que recebe o
resultado do módulo receptor. Foi declarada a variável global armazenavalor
utilizando o modificador float que pode armazenar números de até seis dígitos com
precisão. Foi declarada a variável global que é responsável por receber o sinal de
LOW ou HIGH da marcha do automóvel através do pino digital 7. Foi declarada a
variável global que é responsável por receber o sinal de LOW ou HIGH do fio do
comutador através do pino digital 10. Foi declarada a variável global que é
responsável por receber o sinal de LOW ou HIGH do relé 15 através do pino digital
9. Foi declarada a variável global que é responsável por receber o sinal de LOW ou
HIGH do relé 50 através do pino digital 8.
64
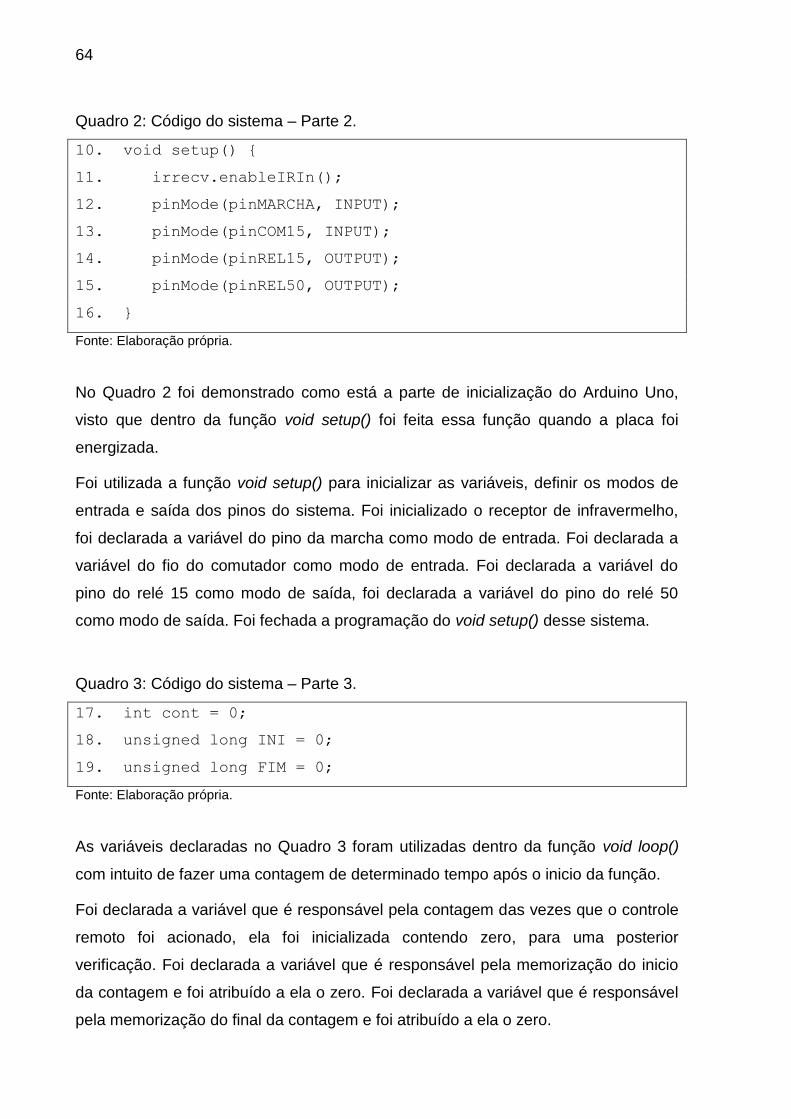
Quadro 2: Código do sistema – Parte 2.
10. void setup()
11. irrecv.enableIRIn();
12. pinMode(pinMARCHA, INPUT);
13. pinMode(pinCOM15, INPUT);
14. pinMode(pinREL15, OUTPUT);
15. pinMode(pinREL50, OUTPUT);
16.
Fonte: Elaboração própria.
No Quadro 2 foi demonstrado como está a parte de inicialização do Arduino Uno,
visto que dentro da função void setup() foi feita essa função quando a placa foi
energizada.
Foi utilizada a função void setup() para inicializar as variáveis, definir os modos de
entrada e saída dos pinos do sistema. Foi inicializado o receptor de infravermelho,
foi declarada a variável do pino da marcha como modo de entrada. Foi declarada a
variável do fio do comutador como modo de entrada. Foi declarada a variável do
pino do relé 15 como modo de saída, foi declarada a variável do pino do relé 50
como modo de saída. Foi fechada a programação do void setup() desse sistema.
Quadro 3: Código do sistema – Parte 3.
17. int cont = 0;
18. unsigned long INI = 0;
19. unsigned long FIM = 0;
Fonte: Elaboração própria.
As variáveis declaradas no Quadro 3 foram utilizadas dentro da função void loop()
com intuito de fazer uma contagem de determinado tempo após o inicio da função.
Foi declarada a variável que é responsável pela contagem das vezes que o controle
remoto foi acionado, ela foi inicializada contendo zero, para uma posterior
verificação. Foi declarada a variável que é responsável pela memorização do inicio
da contagem e foi atribuído a ela o zero. Foi declarada a variável que é responsável
pela memorização do final da contagem e foi atribuído a ela o zero.
65
Quadro 4: Código do sistema – Parte 4.
20. void loop()
21. FIM = millis();
22. int valMARCHA = digitalRead(pinMARCHA);
23. int valCOM15 = digitalRead(pinCOM15);
24. if (valCOM15 == LOW && valMARCHA == HIGH)
25. if (cont < 3)
26. if (irrecv.decode(&results))
27. armazenavalor = (results.value);
28. if (armazenavalor == 0xFF30CF)
29. digitalWrite(pinREL15, LOW);
30. delay(10 * 1000);
31. digitalWrite(pinREL50, LOW);
32. delay(5 * 1000);
33. digitalWrite(pinREL50, HIGH);
34. if (FIM - INI <= 3 * 1000)
35. cont++;
36. else
37. cont = 1;
38.
Fonte: Elaboração própria.
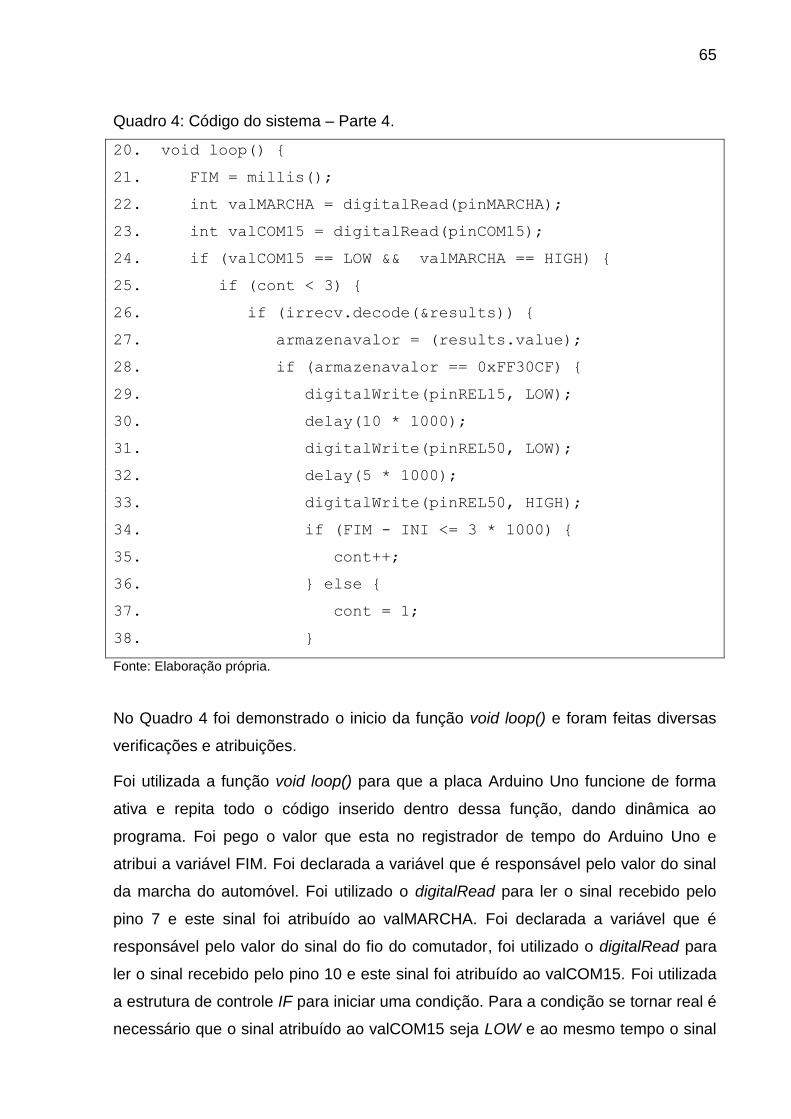
No Quadro 4 foi demonstrado o inicio da função void loop() e foram feitas diversas
verificações e atribuições.
Foi utilizada a função void loop() para que a placa Arduino Uno funcione de forma
ativa e repita todo o código inserido dentro dessa função, dando dinâmica ao
programa. Foi pego o valor que esta no registrador de tempo do Arduino Uno e
atribui a variável FIM. Foi declarada a variável que é responsável pelo valor do sinal
da marcha do automóvel. Foi utilizado o digitalRead para ler o sinal recebido pelo
pino 7 e este sinal foi atribuído ao valMARCHA. Foi declarada a variável que é
responsável pelo valor do sinal do fio do comutador, foi utilizado o digitalRead para
ler o sinal recebido pelo pino 10 e este sinal foi atribuído ao valCOM15. Foi utilizada
a estrutura de controle IF para iniciar uma condição. Para a condição se tornar real é
necessário que o sinal atribuído ao valCOM15 seja LOW e ao mesmo tempo o sinal
66
atribuído ao valMARCHA seja HIGH. Caso a condição seja atendida o Arduino Uno
executa o que está programado para realizar dentro dessa condição, que vai desde
a linha 25 até a linha 48. Na linha 25, após a condição da linha 24 ser atendida,
inicia-se outra condição IF para a contagem das vezes em que o controle remoto foi
acionado. Foi utilizada a estrutura de controle IF para iniciar uma condição, para a
condição se tornar real é necessário que haja um resultado a ser decodificado, caso
a condição tenha sido atendida o Arduino Uno executa o que está programado para
realizar dentro dessa condição, que vai desde a linha 27 até a linha 42. Na linha 27,
caso a condição da linha 26 seja atendida, é atribuído o resultado encontrado à
variável armazenavalor. Foi utilizada a estrutura de controle IF para iniciar uma
condição, para a condição se tornar real é necessário que o resultado dentro da
variável armazenavalor seja igual a “0xFF30CF”, caso a condição seja atendida o
Arduino Uno executa o que está programado para realizar dentro dessa condição,
que vai desde a linha 29 até a linha 40. Foi utilizada a função digitalWrite para
acionar o REL15, esse relé é o responsável por acionar todos os circuitos elétricos
do carro, enviando uma corrente contínua de 12V. Foi utilizado um temporizador
delay para interromper o programa por 10 segundos antes de partir para a próxima
linha. Importante lembrar que o parâmetro do delay é feito em milissegundos. Foi
utilizada a função digitalWrite para acionar o REL50, esse relé é o responsável por
acionar o automóvel, enviando uma corrente contínua de 12V para a bobina de
ignição. Foi utilizado um temporizador delay para interromper o programa por 5
segundos antes de partir para a próxima linha. Foi utilizada a função digitalWrite
para interromper o sinal do REL50 utilizando o sinal HIGH. Foi utilizada a estrutura
de controle IF para iniciar uma condição, para a condição se tornar real é necessário
que o resultado entre a diferença das variáveis FIM e INI seja maior que três
segundos, caso a condição seja atendida o Arduino Uno executa o que está
programado para realizar dentro dessa condição, que é a linha 35. Na linha 35, foi
utilizada a operação de atribuição composta o "++" para incremento de "cont+1" na
variável cont. Foi terminada a condição da estrutura de controle IF da linha 34 e
iniciado a estrutura de controle ELSE que é executada somente se houver uma
resposta negativa da linha 34. Foi atribuído o número 1 para a variável cont. Na linha
38, foi terminada a condição da estrutura de controle ELSE da linha 36.
67
Quadro 5: Código do sistema – Parte 5.
39. INI = millis();
40.
41. irrecv.resume();
42.
43. else
44. digitalWrite(pinREL15, HIGH);
45. digitalWrite(pinREL50, HIGH);
46. delay(5 * 60 * 1000);
47. cont = 0;
48.
49. else
50. digitalWrite(pinREL15, HIGH);
51. digitalWrite(pinREL50, HIGH);
52. cont = 0;
53.
54.
Fonte: Elaboração própria.
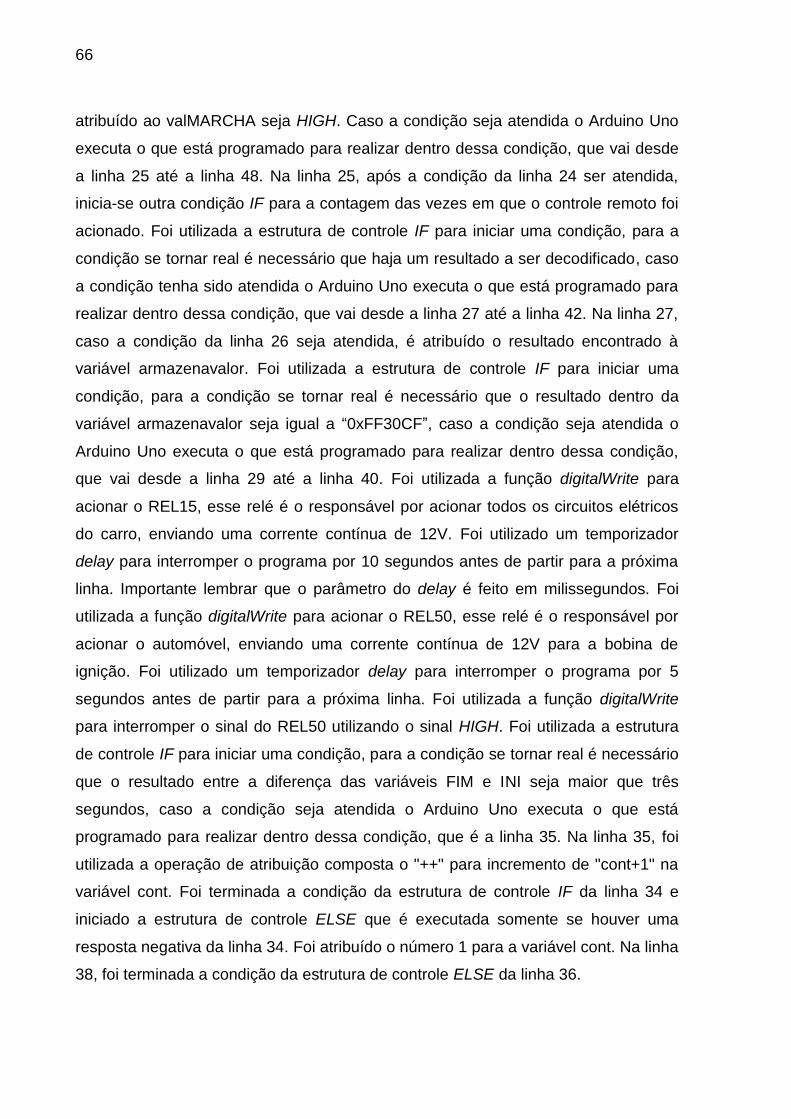
Foi atribuído um número em milissegundos a variável INI, este é o valor contado no
momento, desde que a placa Arduino Uno começou a rodar o programa. Foi
terminada a condição da estrutura de controle do IF da linha 28. Na linha 41, libera o
módulo receptor de infravermelho para receber novos resultados. Foi terminada a
condição da estrutura de controle IF da linha 26. Foi terminada a condição da
estrutura de controle IF da linha 25 e iniciado a estrutura de controle ELSE que é
executada somente se houver uma reposta negativa da condição da linha 25, com
isso é executada as linhas 44 a 47, esta condição ELSE funciona de modo a
restringir o sistema caso o usuário tenha acionado continuamente o botão do
controle remoto, passando de três tentativas em um curto período de tempo. Na
linha 44, foi utilizada a função digitalWrite para interromper o sinal do REL15
utilizando o sinal HIGH. Foi utilizada a função digitalWrite para interromper o sinal do
REL50 utilizando o sinal HIGH. Foi utilizado um temporizador delay para interromper
o programa por 5 minutos. Na linha 47, foi atribuído o número zero a variável cont,
para que se possa iniciar a contagem de vezes de acionamento do controle remoto
68
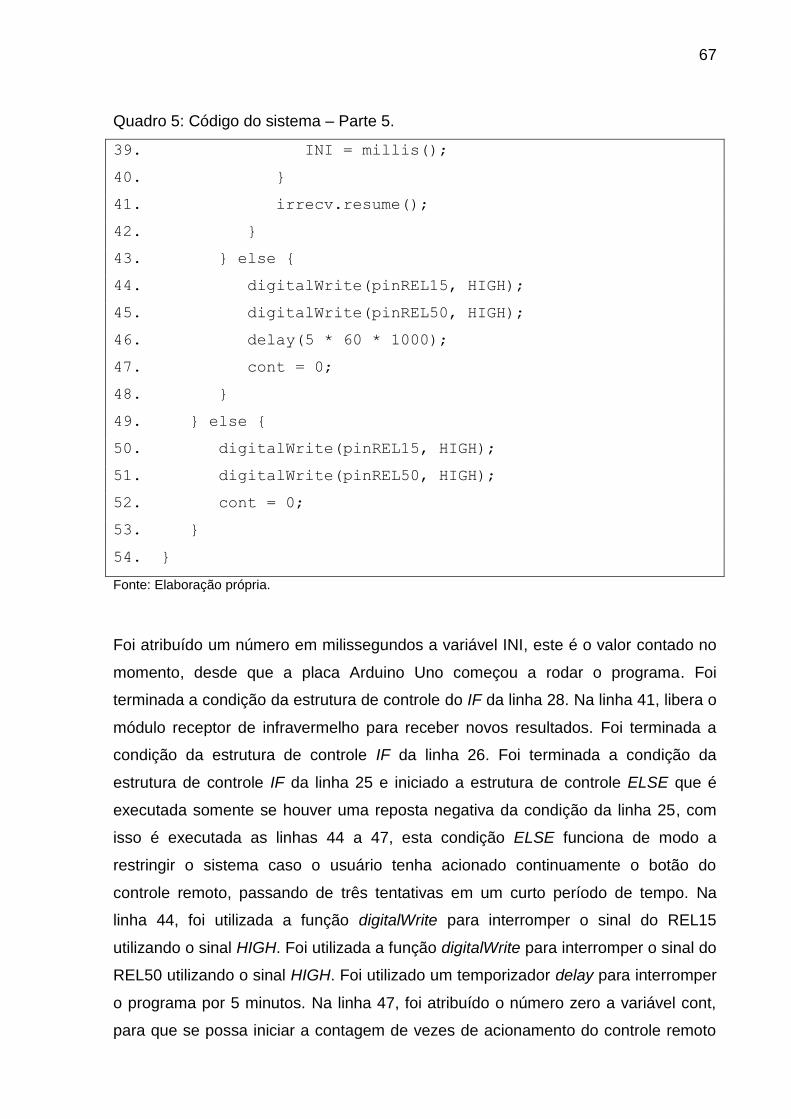
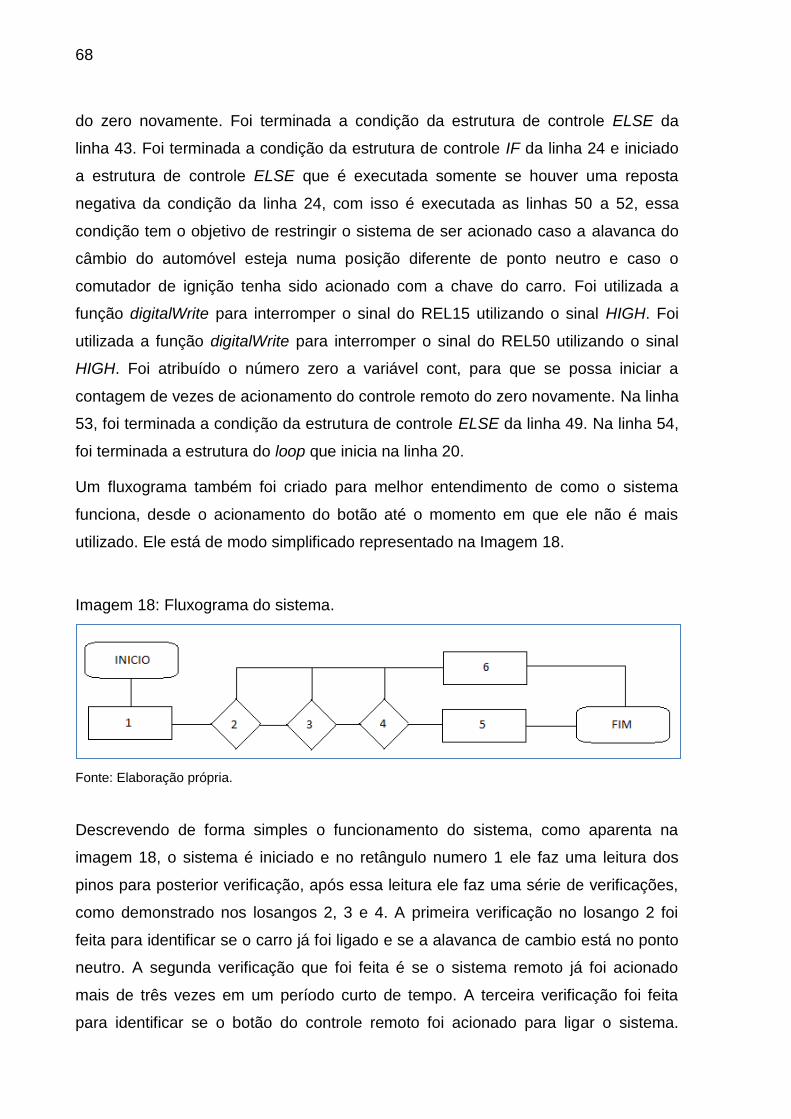
do zero novamente. Foi terminada a condição da estrutura de controle ELSE da
linha 43. Foi terminada a condição da estrutura de controle IF da linha 24 e iniciado
a estrutura de controle ELSE que é executada somente se houver uma reposta
negativa da condição da linha 24, com isso é executada as linhas 50 a 52, essa
condição tem o objetivo de restringir o sistema de ser acionado caso a alavanca do
câmbio do automóvel esteja numa posição diferente de ponto neutro e caso o
comutador de ignição tenha sido acionado com a chave do carro. Foi utilizada a
função digitalWrite para interromper o sinal do REL15 utilizando o sinal HIGH. Foi
utilizada a função digitalWrite para interromper o sinal do REL50 utilizando o sinal
HIGH. Foi atribuído o número zero a variável cont, para que se possa iniciar a
contagem de vezes de acionamento do controle remoto do zero novamente. Na linha
53, foi terminada a condição da estrutura de controle ELSE da linha 49. Na linha 54,
foi terminada a estrutura do loop que inicia na linha 20.
Um fluxograma também foi criado para melhor entendimento de como o sistema
funciona, desde o acionamento do botão até o momento em que ele não é mais
utilizado. Ele está de modo simplificado representado na Imagem 18.
Imagem 18: Fluxograma do sistema.
Fonte: Elaboração própria.
Descrevendo de forma simples o funcionamento do sistema, como aparenta na
imagem 18, o sistema é iniciado e no retângulo numero 1 ele faz uma leitura dos
pinos para posterior verificação, após essa leitura ele faz uma série de verificações,
como demonstrado nos losangos 2, 3 e 4. A primeira verificação no losango 2 foi
feita para identificar se o carro já foi ligado e se a alavanca de cambio está no ponto
neutro. A segunda verificação que foi feita é se o sistema remoto já foi acionado
mais de três vezes em um período curto de tempo. A terceira verificação foi feita
para identificar se o botão do controle remoto foi acionado para ligar o sistema.
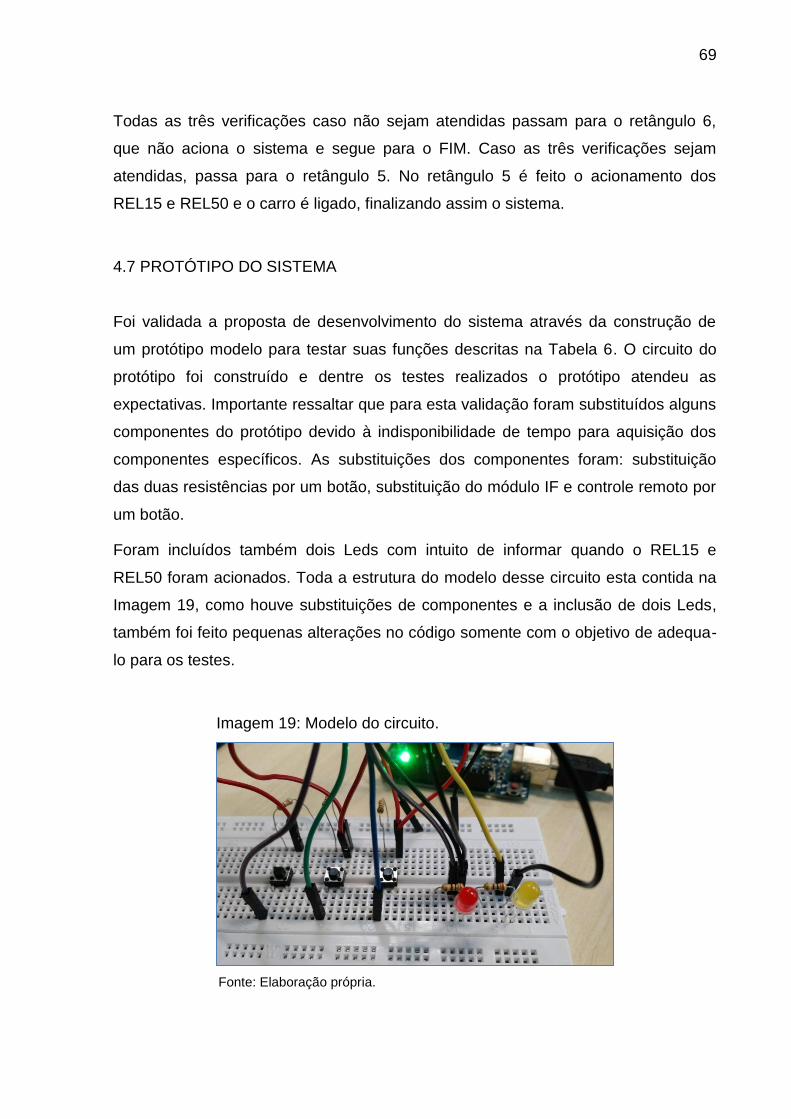
69
Todas as três verificações caso não sejam atendidas passam para o retângulo 6,
que não aciona o sistema e segue para o FIM. Caso as três verificações sejam
atendidas, passa para o retângulo 5. No retângulo 5 é feito o acionamento dos
REL15 e REL50 e o carro é ligado, finalizando assim o sistema.
4.7 PROTÓTIPO DO SISTEMA
Foi validada a proposta de desenvolvimento do sistema através da construção de
um protótipo modelo para testar suas funções descritas na Tabela 6. O circuito do
protótipo foi construído e dentre os testes realizados o protótipo atendeu as
expectativas. Importante ressaltar que para esta validação foram substituídos alguns
componentes do protótipo devido à indisponibilidade de tempo para aquisição dos
componentes específicos. As substituições dos componentes foram: substituição
das duas resistências por um botão, substituição do módulo IF e controle remoto por
um botão.
Foram incluídos também dois Leds com intuito de informar quando o REL15 e
REL50 foram acionados. Toda a estrutura do modelo desse circuito esta contida na
Imagem 19, como houve substituições de componentes e a inclusão de dois Leds,
também foi feito pequenas alterações no código somente com o objetivo de adequa-
lo para os testes.
Imagem 19: Modelo do circuito.
Fonte: Elaboração própria.
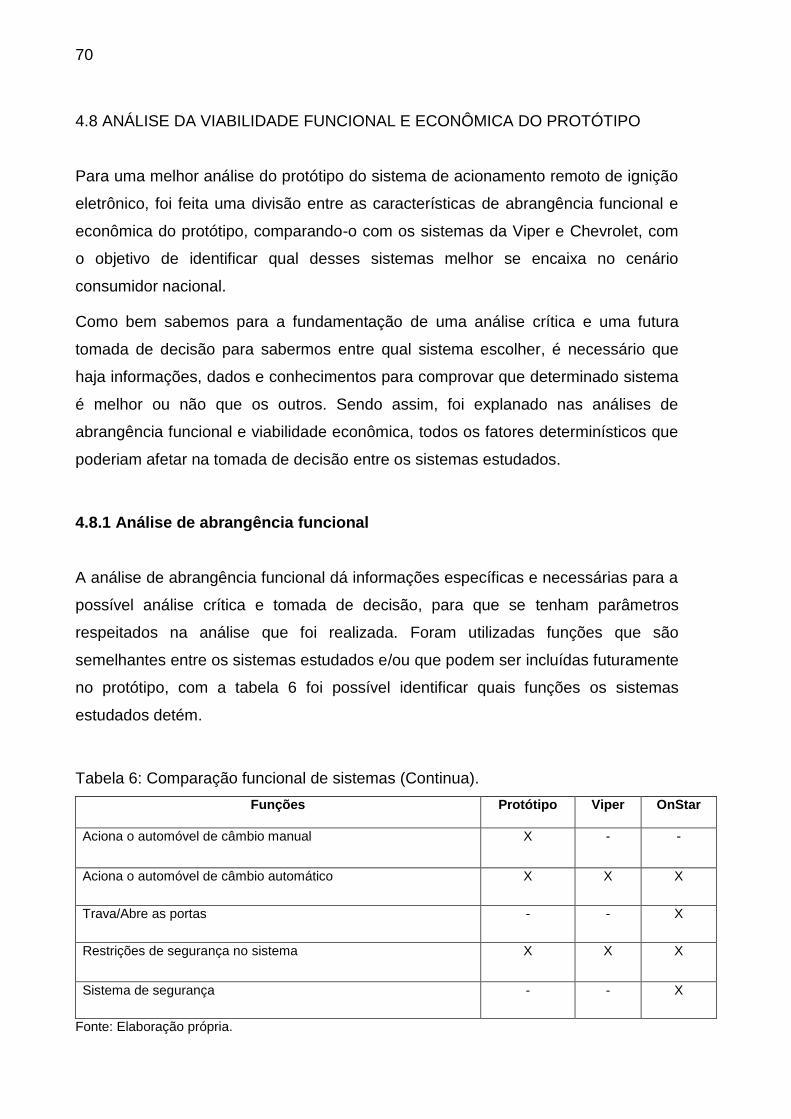
70
4.8 ANÁLISE DA VIABILIDADE FUNCIONAL E ECONÔMICA DO PROTÓTIPO
Para uma melhor análise do protótipo do sistema de acionamento remoto de ignição
eletrônico, foi feita uma divisão entre as características de abrangência funcional e
econômica do protótipo, comparando-o com os sistemas da Viper e Chevrolet, com
o objetivo de identificar qual desses sistemas melhor se encaixa no cenário
consumidor nacional.
Como bem sabemos para a fundamentação de uma análise crítica e uma futura
tomada de decisão para sabermos entre qual sistema escolher, é necessário que
haja informações, dados e conhecimentos para comprovar que determinado sistema
é melhor ou não que os outros. Sendo assim, foi explanado nas análises de
abrangência funcional e viabilidade econômica, todos os fatores determinísticos que
poderiam afetar na tomada de decisão entre os sistemas estudados.
4.8.1 Análise de abrangência funcional
A análise de abrangência funcional dá informações específicas e necessárias para a
possível análise crítica e tomada de decisão, para que se tenham parâmetros
respeitados na análise que foi realizada. Foram utilizadas funções que são
semelhantes entre os sistemas estudados e/ou que podem ser incluídas futuramente
no protótipo, com a tabela 6 foi possível identificar quais funções os sistemas
estudados detém.
Tabela 6: Comparação funcional de sistemas (Continua).
Funções Protótipo Viper OnStar
Aciona o automóvel de câmbio manual X - -
Aciona o automóvel de câmbio automático X X X
Trava/Abre as portas - - X
Restrições de segurança no sistema X X X
Sistema de segurança - - X
Fonte: Elaboração própria.
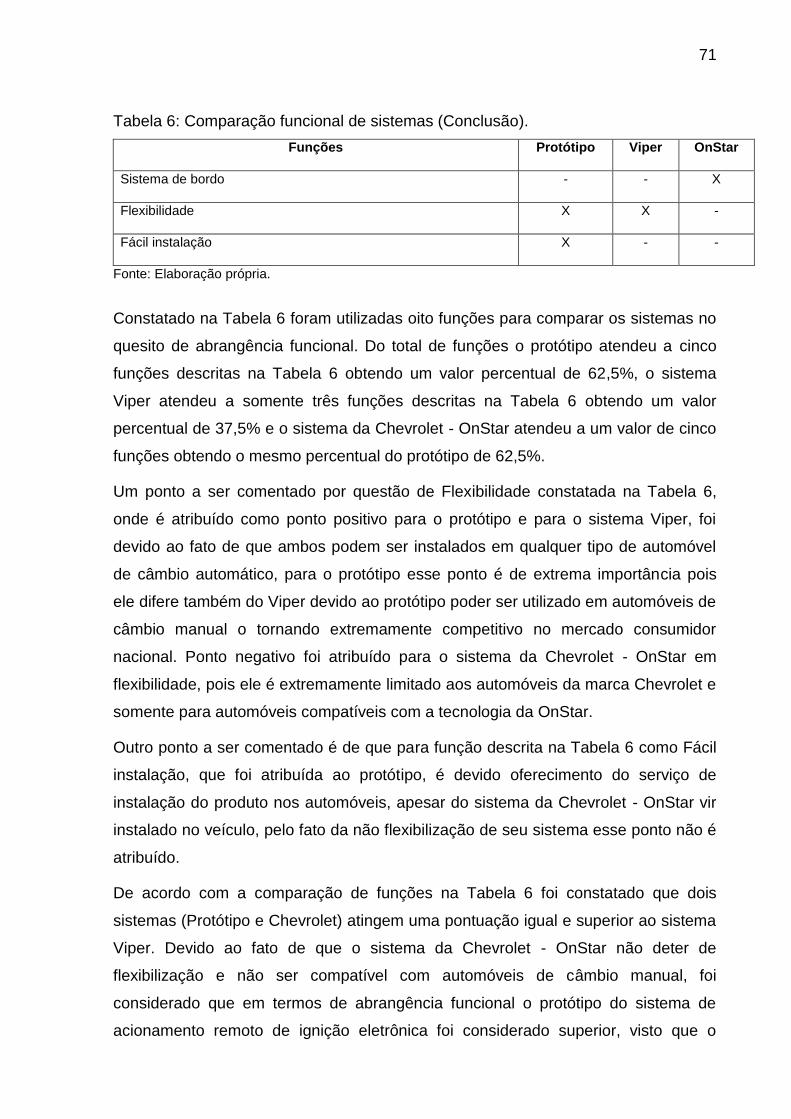
71
Tabela 6: Comparação funcional de sistemas (Conclusão).
Funções Protótipo Viper OnStar
Sistema de bordo - - X
Flexibilidade X X -
Fácil instalação X - -
Fonte: Elaboração própria.
Constatado na Tabela 6 foram utilizadas oito funções para comparar os sistemas no
quesito de abrangência funcional. Do total de funções o protótipo atendeu a cinco
funções descritas na Tabela 6 obtendo um valor percentual de 62,5%, o sistema
Viper atendeu a somente três funções descritas na Tabela 6 obtendo um valor
percentual de 37,5% e o sistema da Chevrolet - OnStar atendeu a um valor de cinco
funções obtendo o mesmo percentual do protótipo de 62,5%.
Um ponto a ser comentado por questão de Flexibilidade constatada na Tabela 6,
onde é atribuído como ponto positivo para o protótipo e para o sistema Viper, foi
devido ao fato de que ambos podem ser instalados em qualquer tipo de automóvel
de câmbio automático, para o protótipo esse ponto é de extrema importância pois
ele difere também do Viper devido ao protótipo poder ser utilizado em automóveis de
câmbio manual o tornando extremamente competitivo no mercado consumidor
nacional. Ponto negativo foi atribuído para o sistema da Chevrolet - OnStar em
flexibilidade, pois ele é extremamente limitado aos automóveis da marca Chevrolet e
somente para automóveis compatíveis com a tecnologia da OnStar.
Outro ponto a ser comentado é de que para função descrita na Tabela 6 como Fácil
instalação, que foi atribuída ao protótipo, é devido oferecimento do serviço de
instalação do produto nos automóveis, apesar do sistema da Chevrolet - OnStar vir
instalado no veículo, pelo fato da não flexibilização de seu sistema esse ponto não é
atribuído.
De acordo com a comparação de funções na Tabela 6 foi constatado que dois
sistemas (Protótipo e Chevrolet) atingem uma pontuação igual e superior ao sistema
Viper. Devido ao fato de que o sistema da Chevrolet - OnStar não deter de
flexibilização e não ser compatível com automóveis de câmbio manual, foi
considerado que em termos de abrangência funcional o protótipo do sistema de
acionamento remoto de ignição eletrônica foi considerado superior, visto que o
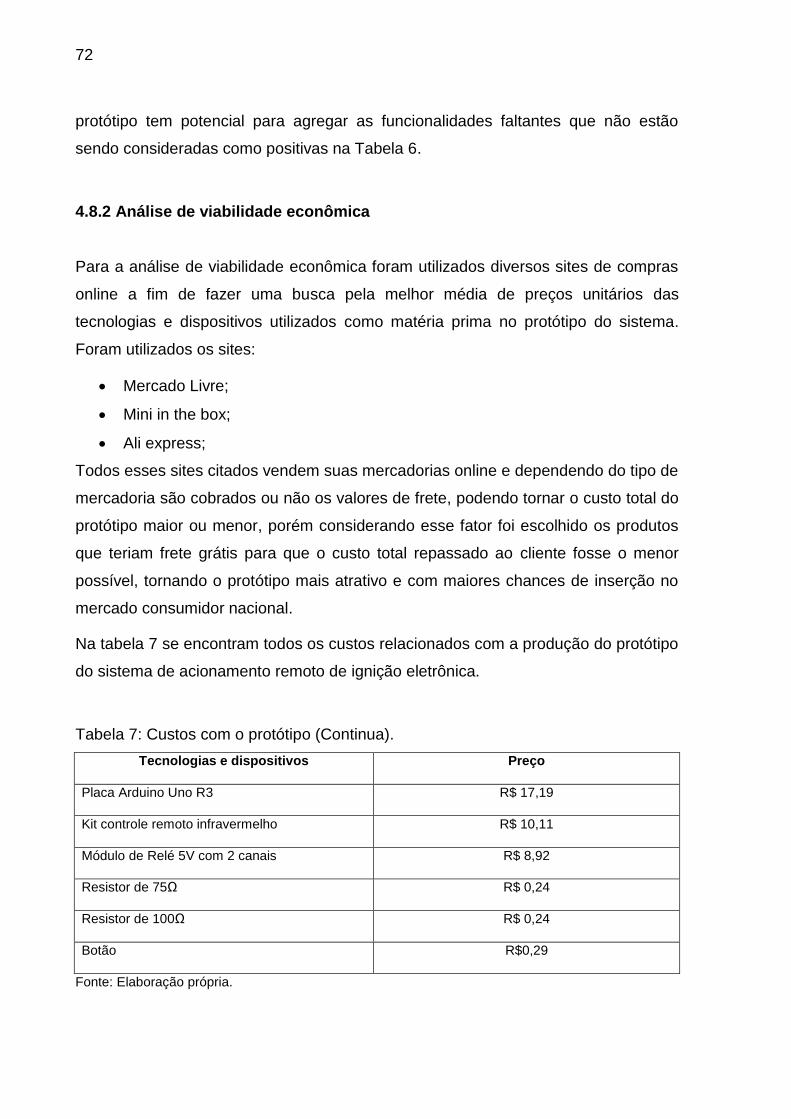
72
protótipo tem potencial para agregar as funcionalidades faltantes que não estão
sendo consideradas como positivas na Tabela 6.
4.8.2 Análise de viabilidade econômica
Para a análise de viabilidade econômica foram utilizados diversos sites de compras
online a fim de fazer uma busca pela melhor média de preços unitários das
tecnologias e dispositivos utilizados como matéria prima no protótipo do sistema.
Foram utilizados os sites:
Mercado Livre;
Mini in the box;
Ali express;
Todos esses sites citados vendem suas mercadorias online e dependendo do tipo de
mercadoria são cobrados ou não os valores de frete, podendo tornar o custo total do
protótipo maior ou menor, porém considerando esse fator foi escolhido os produtos
que teriam frete grátis para que o custo total repassado ao cliente fosse o menor
possível, tornando o protótipo mais atrativo e com maiores chances de inserção no
mercado consumidor nacional.
Na tabela 7 se encontram todos os custos relacionados com a produção do protótipo
do sistema de acionamento remoto de ignição eletrônica.
Tabela 7: Custos com o protótipo (Continua).
Tecnologias e dispositivos Preço
Placa Arduino Uno R3 R$ 17,19
Kit controle remoto infravermelho R$ 10,11
Módulo de Relé 5V com 2 canais R$ 8,92
Resistor de 75Ω R$ 0,24
Resistor de 100Ω R$ 0,24
Botão R$0,29
Fonte: Elaboração própria.
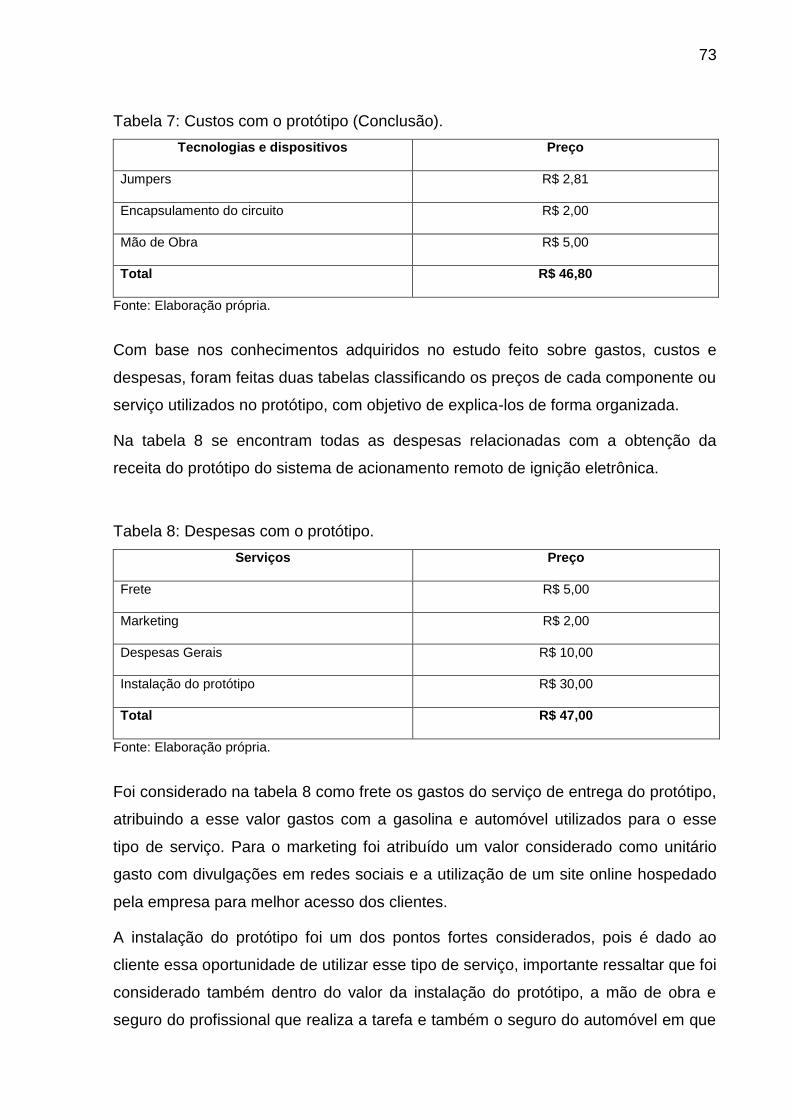
73
Tabela 7: Custos com o protótipo (Conclusão).
Tecnologias e dispositivos Preço
Jumpers R$ 2,81
Encapsulamento do circuito R$ 2,00
Mão de Obra R$ 5,00
Total R$ 46,80
Fonte: Elaboração própria.
Com base nos conhecimentos adquiridos no estudo feito sobre gastos, custos e
despesas, foram feitas duas tabelas classificando os preços de cada componente ou
serviço utilizados no protótipo, com objetivo de explica-los de forma organizada.
Na tabela 8 se encontram todas as despesas relacionadas com a obtenção da
receita do protótipo do sistema de acionamento remoto de ignição eletrônica.
Tabela 8: Despesas com o protótipo.
Serviços Preço
Frete R$ 5,00
Marketing R$ 2,00
Despesas Gerais R$ 10,00
Instalação do protótipo R$ 30,00
Total R$ 47,00
Fonte: Elaboração própria.
Foi considerado na tabela 8 como frete os gastos do serviço de entrega do protótipo,
atribuindo a esse valor gastos com a gasolina e automóvel utilizados para o esse
tipo de serviço. Para o marketing foi atribuído um valor considerado como unitário
gasto com divulgações em redes sociais e a utilização de um site online hospedado
pela empresa para melhor acesso dos clientes.
A instalação do protótipo foi um dos pontos fortes considerados, pois é dado ao
cliente essa oportunidade de utilizar esse tipo de serviço, importante ressaltar que foi
considerado também dentro do valor da instalação do protótipo, a mão de obra e
seguro do profissional que realiza a tarefa e também o seguro do automóvel em que
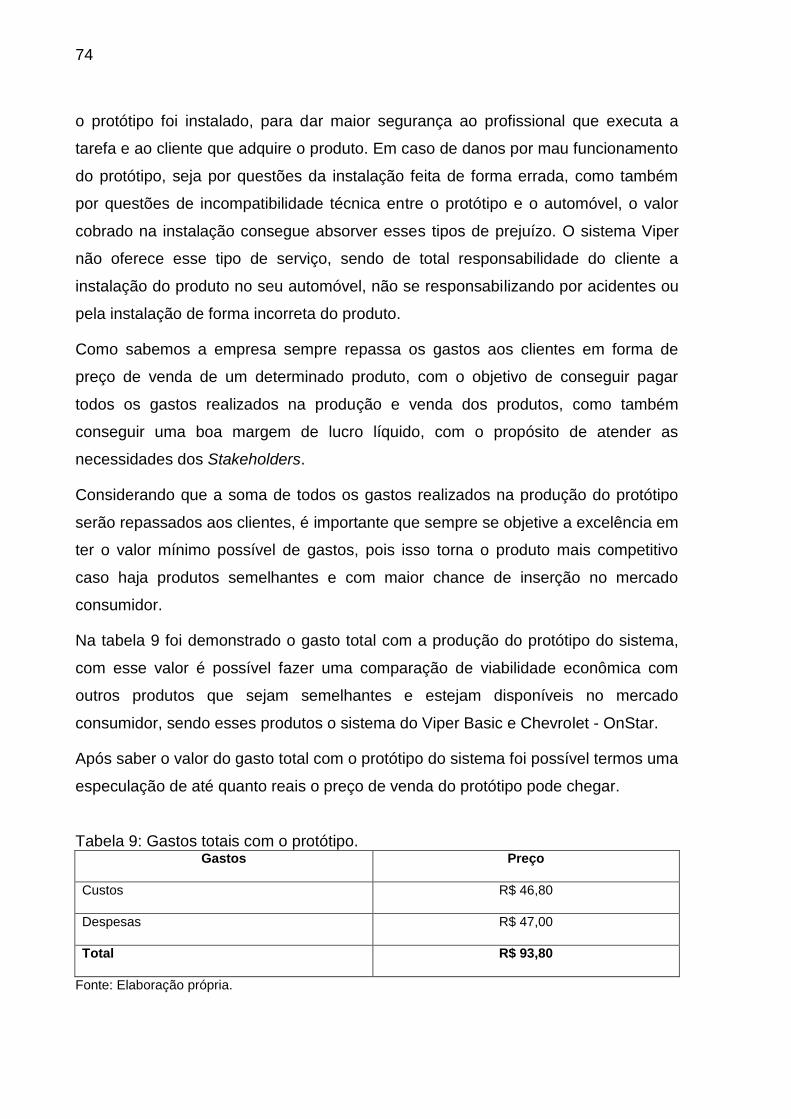
74
o protótipo foi instalado, para dar maior segurança ao profissional que executa a
tarefa e ao cliente que adquire o produto. Em caso de danos por mau funcionamento
do protótipo, seja por questões da instalação feita de forma errada, como também
por questões de incompatibilidade técnica entre o protótipo e o automóvel, o valor
cobrado na instalação consegue absorver esses tipos de prejuízo. O sistema Viper
não oferece esse tipo de serviço, sendo de total responsabilidade do cliente a
instalação do produto no seu automóvel, não se responsabilizando por acidentes ou
pela instalação de forma incorreta do produto.
Como sabemos a empresa sempre repassa os gastos aos clientes em forma de
preço de venda de um determinado produto, com o objetivo de conseguir pagar
todos os gastos realizados na produção e venda dos produtos, como também
conseguir uma boa margem de lucro líquido, com o propósito de atender as
necessidades dos Stakeholders.
Considerando que a soma de todos os gastos realizados na produção do protótipo
serão repassados aos clientes, é importante que sempre se objetive a excelência em
ter o valor mínimo possível de gastos, pois isso torna o produto mais competitivo
caso haja produtos semelhantes e com maior chance de inserção no mercado
consumidor.
Na tabela 9 foi demonstrado o gasto total com a produção do protótipo do sistema,
com esse valor é possível fazer uma comparação de viabilidade econômica com
outros produtos que sejam semelhantes e estejam disponíveis no mercado
consumidor, sendo esses produtos o sistema do Viper Basic e Chevrolet - OnStar.
Após saber o valor do gasto total com o protótipo do sistema foi possível termos uma
especulação de até quanto reais o preço de venda do protótipo pode chegar.
Tabela 9: Gastos totais com o protótipo. Gastos Preço
Custos R$ 46,80
Despesas R$ 47,00
Total R$ 93,80
Fonte: Elaboração própria.
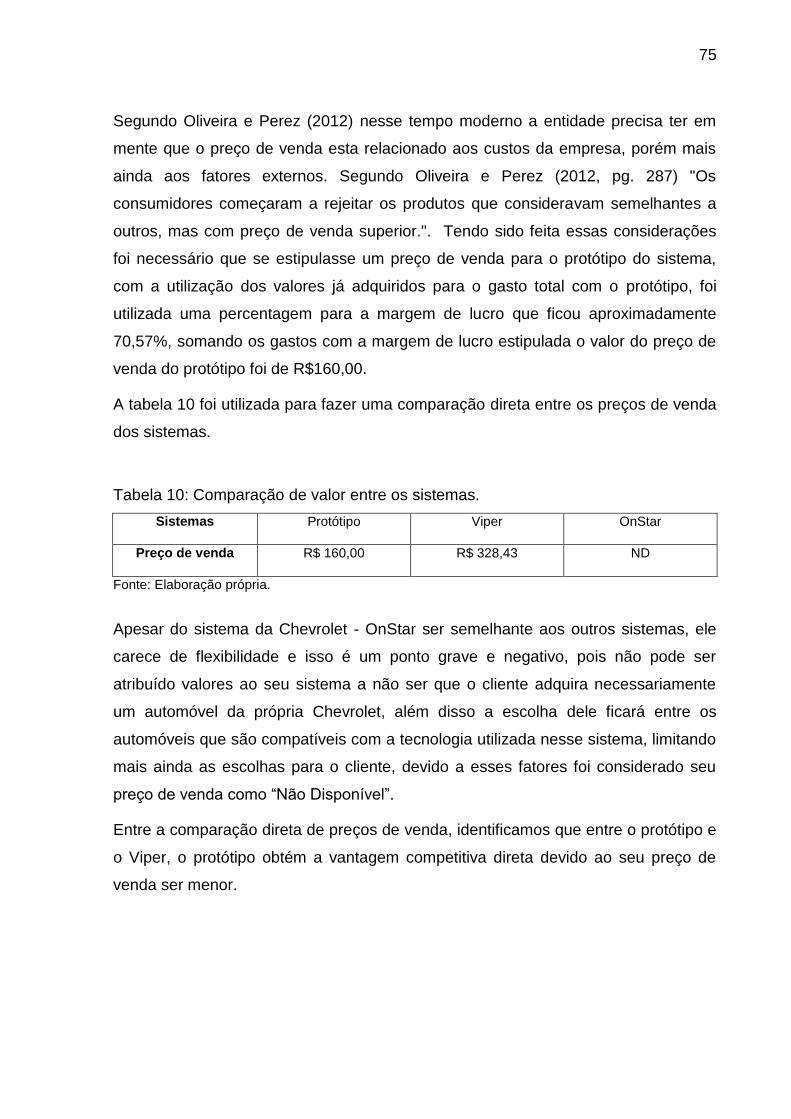
75
Segundo Oliveira e Perez (2012) nesse tempo moderno a entidade precisa ter em
mente que o preço de venda esta relacionado aos custos da empresa, porém mais
ainda aos fatores externos. Segundo Oliveira e Perez (2012, pg. 287) "Os
consumidores começaram a rejeitar os produtos que consideravam semelhantes a
outros, mas com preço de venda superior.". Tendo sido feita essas considerações
foi necessário que se estipulasse um preço de venda para o protótipo do sistema,
com a utilização dos valores já adquiridos para o gasto total com o protótipo, foi
utilizada uma percentagem para a margem de lucro que ficou aproximadamente
70,57%, somando os gastos com a margem de lucro estipulada o valor do preço de
venda do protótipo foi de R$160,00.
A tabela 10 foi utilizada para fazer uma comparação direta entre os preços de venda
dos sistemas.
Tabela 10: Comparação de valor entre os sistemas.
Sistemas Protótipo Viper OnStar
Preço de venda R$ 160,00 R$ 328,43 ND
Fonte: Elaboração própria.
Apesar do sistema da Chevrolet - OnStar ser semelhante aos outros sistemas, ele
carece de flexibilidade e isso é um ponto grave e negativo, pois não pode ser
atribuído valores ao seu sistema a não ser que o cliente adquira necessariamente
um automóvel da própria Chevrolet, além disso a escolha dele ficará entre os
automóveis que são compatíveis com a tecnologia utilizada nesse sistema, limitando
mais ainda as escolhas para o cliente, devido a esses fatores foi considerado seu
preço de venda como “Não Disponível”.
Entre a comparação direta de preços de venda, identificamos que entre o protótipo e
o Viper, o protótipo obtém a vantagem competitiva direta devido ao seu preço de
venda ser menor.

76
77
5 CONSIDERAÇÕES FINAIS
A análise do protótipo do sistema de acionamento remoto de ignição eletrônica foi
feita utilizando comparações com produtos já disponíveis no mercado, que
apresentam diversas características sendo algumas delas semelhantes outras não,
ao protótipo desenvolvido. Através do desempenho de suas funcionalidades e pelo
valor econômico agregado (preço de venda repassado ao cliente) ao protótipo e ao
seus concorrentes que são Viper Basic 1 e o sistema da Chevrolet - OnStar, pode-se
concluir então qual produto terá maior compatibilidade com o mercado atual
nacional.
De acordo com a Tabela 7 são listados os custos unitários de cada componente
necessário para a produção do produto, torna-se necessário ressaltar que esses
custos podem se tornar menores, pois quando falamos em produção em larga
escala, o valor unitário de cada componente diminui afetando diretamente o custo
total e gasto total, com isso a margem de lucro que a entidade adquire se torna
maior, dando a ela a oportunidade em caso de competitividade acirrada com outro
produto, poder diminuir seu preço de venda. Através da Tabela 9 é possível concluir
a viabilidade econômica do protótipo e categoriza-lo como melhor solução
econômica dentre os sistemas apresentados.
É possível concluir qual sistema se sobressai dos outros através da comparação de
sua abrangência funcional, de acordo com a Tabela 6, tanto o protótipo quanto o
sistema da Chevrolet - OnStar alcançaram a maior percentagem sendo 62,5% das
oito funções classificadas na Tabela 6. No confronto direto de abrangência funcional
entre o protótipo e o sistema da Chrevrolet - OnStar é concluído que o sistema do
protótipo é superior, quando considerado que grande parte do mercado consumidor
nacional esta voltada para automóveis de câmbio manual, sendo eles de várias
marcas diferentes, com o protótipo é possível atender tais fatores descritos e
também agregar mais funções no futuro.
É notável que para o desenvolvimento do protótipo desse sistema de acionamento
remoto de ignição eletrônica foi utilizado um dispositivo microcontrolador Arduino
Uno que detém um imenso potencial, apesar deste dispositivo elevar o preço final do
sistema, além de ter sido utilizado somente para algumas funções neste trabalho, o
objetivo futuro é que ele possa agregar diversas funcionalidades, podendo ter o
78
controle do automóvel e ter interface com outros dispositivos, assim tornado-se um
sistema integrado com abrangência de mercado consumidor internacional. Para que
isso se torne real é necessário a utilização de um microcontrolador de qualidade e
confiável, o Arduino atende a esses pré requisitos como foi descrito e demonstrado
no protótipo apresentado.
79
REFERÊNCIAS
ALI Express. Disponível em: <https://es.aliexpress.com/es_home.htm>. Acessado em: 26 out. 2016. AMAZON. Viper 4105V 1-Way remote start system. Disponível em: <https://www.amazon.com/Viper-4105V-1-Way-Remote-System/dp/B00CLE47V6/ref=sr_1_1?ie=UTF8&qid=1477928358&sr=8-1&keywords=viper+basic>. Acesso em: 24 out. 2016. ANDRADE, Maria Margarida de. Introdução à metodologia do trabalho científico: elaboração de trabalhos na graduação. 5. ed. São Paulo: Atlas, 2001. ANTONELLI, Gilberto Clovis.; SABADIN, Alexandre.; NETO, João Batista S. S.; CARREIRA, Suely Silva.; CARREIRA, Manoel Francisco. Análise dos resultados da modelagem para simulação dinâmica de atendimento para serviços de assistência técnica em equipamentos de automação bancária – Uso do Software Arena®. Energep - XXXIV Encontro Nacional de Engenharia de Produção, Curitiba, PR, Brasil, 2014, p. 2-16, out. 2014. ARDUINO. Getting started with Arduino and Genuino products. 2016. Disponível em: <https://www.arduino.cc/>. Acesso em: 6 jul. 2016. BARROS, Ruy Carvalho de. Análise de Maturidade no Gerenciamento de Projetos de Tecnologia de Automação: O Caso da Ciba Especialidades Químicas Ltda. no Site de Camaçari. 2003. 118 f. Dissertação (Mestrado) - Curso de Administração, Universidade Federal da Bahia, Salvador, 2003. BRUNI, Adriano Leal. A administração de custos, preços e lucros. 5ª Ed. São Paulo. Atlas, 2012. CADUXAVIER. O que é pesquisa ?. 2007. Disponível em: <http://www.caduxavier.com.br/mackenzie/index.php?option=com_content&view=article&id=84:o-que-epesquisa-&catid=42:metodologia-i-&Itemid=53>. Acesso em: 2 nov. 2016. CAPELLI , Alexandre. Automação Industrial: Controle de movimento e processos contínuos. 3. ed. Rio de Janeiro: Érica, 2014. 236 p. CASTLE, Alex. Know your arduino: A Pratical guide to the most common boards. 13 Jun. 2013. Disponível em: <http://www.tested.com/tech/robots/456466-know-your-arduino-guide-most-common-boards/>. Acesso em: 13 Nov. 2016. CHAMOVITZ, I.; SABBADINI, F.S.; OLIVEIRA, M.J.F. A utilização da simulação baseada na Web para o estudo de processos operacionais. Revista Produção Online. Vol.8, n.4, Dez.2008. Disponível em: <http://producaoonline.org.br/index.php/rpo/article/viewFile/148/235>. Acesso em: 22 jun. 2016.
80
CHEVROLET. OnStar: Manual do usuário. 2016. Disponível em: <http://www.chevrolet.com.br/onstar.html>. Acesso em: 9 Nov. 2016. CLARK, K. B.; FUJIMOTO, T. Product development performance: strategy, organization and management in the world auto industry. Boston: Harvard Business School Press, 1991. CONSONI, Flávia Luciane; CARVALHO, Ruy de Quadros. Desenvolvimento de produtos na indústria automobilística brasileira: perspectivas e obstáculos para a capacitação local. Rev. Adm. Contemp., [s.l.], v. 6, n. 1, p.39-61, abr. 2002. FapUNIFESP (SciELO). Disponível em: <http://dx.doi.org/10.1590/s1415-65552002000100004>. Acesso em: 15 jun. 2016. CRUZ, Diogo Luiz Lemes da. Metodologia para implementação de controle supervisório modular local em controladores lógicos programáveis. 2011. 101 f. Dissertação (Mestrado) - Curso de Engenharia Elétrica, Universidade do Estado de Santa Catarina, Joinville, 2011. DELGADO, Armando Luiz N.. Programação básica em C++. 2012. Disponível em: <http://www.inf.ufpr.br/ci208/NotasAula.pdf>. Acessado em: 03 nov. 2016. FERREIRA, P.; BUENO, L. R. S.. Utilização da tecnologia arduino como ferramenta para sensoriamento de processos de bancada. Anais do Xx Congresso Brasileiro de Engenharia Química, [s.l.], p.1-9, fev. 2015. Editora Edgard Blucher, Ltda.. Disponível em: <http://dx.doi.org/10.5151/chemeng-cobeq2014-0815-23594-181991>. Acesso em: 6 jun. 2016. FILIPEFLOP. Módulo relé 5V 2 canais. 2016. Disponível em: <http://www.filipeflop.com/pd-6b84a-modulo-rele-5v-2-canais.html>. Acessado em: 2 nov. 2016. FURTADO, Paulo. As famílias das bobinas de ignição. 2013. Disponível em: <http://paulofurtadoacsolidaria.blogspot.com.br/2013_01_01_archive.html>. Acessado em: 28 out. 2016. GIL, Antonio Carlos. Como elaborar projetos de pesquisa. São Paulo: Atlas, 1991. HARRELL, C. R.; GHOSH, B. K.; BOWDEN, R. Simulation using ProModel. Boston McGraw-Hill, 2000. LEAL, Galdeci. Sistema de ignição convencional. 2013. Disponível em: <https://maut06.blogspot.com.br/2013/05/sistema-de-ignicao-convencional.html>. Acesso em: 10 set. 2016. MARCONI, M. de A.; LAKATOS, E. M., Metodologia do trabalho científico. São Paulo: Editora Atlas, 1992. 4ª ed. p. 44. MENDES, João. Trânsito desgasta componentes do motor. 2014. Disponível em: <http://www.memoriamotor.r7.com/transito-desgasta-componentes-do-motor/>. Acesso em: 02 nov. 2016.
81
MERCADO Livre Brasil. Disponível em: <http://www.mercadolivre.com.br/>. Acesso em: 20 out. 2016. MINI in The Box. Disponível em: <http://www.miniinthebox.com/pt/>. Acesso em: 20 out. 2016. MORAES, Cícero Couto de; CASTRUCCI, Plínio de Lauro. Engenharia de Automação Industrial. 2. ed. Rio de Janeiro: Ltc, 2013. 347 p. NEVES, Cleonor et al. Os dez maiores desafios da automação industrial: As perspectivas para o futuro. 02. ed. João Pessoa: Ceteli, 2007. 08 p. OLIVEIRA, Luiz Martins de.; PEREZ, José Hernandez Jr.. Contabilidade de custos para não contadores. 5ª Ed. São Paulo. Atlas, 2012. OMRON Corporation. Relay User’s Guide. 1990. Disponível em: <https://www.components.omron.com/components/web/pdflib.nsf/0/3B7C5B7BB9EA888385257201007DD66D/$file/M20Z54E11.pdf>. Acesso em: 22 out. 2016. PEREZ, José Hernandez Jr.; OLIVEIRA, Luiz Martins de; COSTA, Rogério Guedes. Gestão Estratégica de Custos. 8ª Ed. São Paulo. Atlas, 2012. PEREZ, Sandro Gianny Aquiles. Modeling Relays for power System protection studies. 2006. Disponível em: <http://www.slideshare.net/engr_abuzar/thesis-for-power-system-protection-in-brief>. Acessado em: 22 out. 2016. PERTENCE JÚNIOR, Antonio. Desenvolvimento de um sistema de aquisição de dados para medições mecânicas através da utilização de controlador lógico programável (CLP). 2010. 22 f. Dissertação (Mestrado) - Curso de Engenharia Mecânica, Universidade Federal de Minas Gerais, Minas Gerais, 2010. Cap. 06. PIMENTEL, V. C. A. et al. Uma plataforma de baixo custo comandada por voz para tecnologias assistivas com programação em python. XXIV Congresso Brasileiro de Engenharia Biomédica, 2014. PRODANOV, Cleber Cristiano; FREITAS, Ernani Cesar de. Metodologia do trabalho científico: Métodos e Técnicas da Pesquisa e do Trabalho Acadêmico. 2. ed. Novo Hamburgo: Universidade Feevale, 2013. 276 p. RENGEL, Fernando B.; JÚNIOR, José A. D. Uso da modelagem e simulação para a implementação de uma nova célula de teste funcional de lavadoras de roupa através do software automod. Energep - XXXV Encontro Nacional de Engenharia de Produção, Curitiba, PR, Brasil, 2014, p. 2-22, out. 2014. REVISEOMATIC. Relays. 2016. Disponível em: < http://reviseomatic.org/help/e-switches/Relays.php>. Acessado em: 23 out. 2016. ROSÁRIO, João Maurício. Princípios de Mecatrônica. São Paulo: Pearson Education, 2005. 356 p.

82
SCOTT, Steven S.; FRANKLIN, Robert W.; DAVIS, Manfred. Remote vehicle starting system. 1987. Disponível em: <http://patft.uspto.gov/netacgi/nph-Parser?Sect2=PTO1&Sect2=HITOFF&p=1&u=/netahtml/PTO/search-bool.html&r=1&f=G&l=50&d=PALL&RefSrch=yes&Query=PN/5054569>. Acesso em: 11 Out. 2016. SHANNON, C. E. A Symbolic Analysis of Relay and Switching Circuits. Vol.57. 1938. Trans. AIEE. Disponível em: <http://ieeexplore.ieee.org/document/5057767/>. Acessado em: 22 out. 2016. SILVA, Alexandre de Mello. Aplicação de verificação de modelos a programas de CLP: Explorando a temporização. 2008. 121 f. Dissertação (Mestrado) - Curso de Engenharia Mecânica, Instituto Militar de Engenharia, Rio de Janeiro, 2008. Cap. 07. SILVA, Pedro S. Sistemas de ignição. 2012. Disponível em: <http://www.ebah.com.br/content/ABAAAAo4MAH/sistemas-ignicao>. Acesso em: 26 out. 2016. SONGLE Electrical. Songle Relay Datasheet. Disponível em: <https://www.ghielectronics.com/downloads/man/20084141716341001RelayX1.pdf>.Acesso em: 22 out. 2016. SOUZA, Anderson R. de et al. A placa Arduino: uma opção de baixo custo para experiências de física assistidas pelo PC.Revista Brasileira de Ensino de Física, [s.l.], v. 33, n. 1, p.01-05, mar. 2011. FapUNIFESP (SciELO). Disponível em: < http://dx.doi.org/10.1590/s1806-11172011000100026>. Acesso em: 6 jul. 2016. THOMAZINI, Daniel; ALBUQUERQUE, Pedro Urbano Braga de. Sensores Industriais: Fundamentos e Aplicações. 04. ed. Fortaleza: Editora Érica, 2005. 222 p. THOMSEN, Adilson. Controlando lâmpadas com módulo relé arduino. 10 fev. 2013. Disponível em: <http://blog.filipeflop.com/modulos/controle-modulo-rele-arduino.html>. Acessado em: 24 out. 2016. TONTINI, Gérson; SANT'ANA, André José. Interação de atributos atrativos e obrigatórios de um serviço na satisfação do cliente. Produção, [s.l.], v. 18, n. 1, p.112-125, 2008. FapUNIFESP (SciELO). Disponível em: <http://dx.doi.org/10.1590/s0103-65132008000100009>. Acesso em: 3 Jun. 2016. VIANNA, Plínio Victor Palmezano de Velloso; LIMA, Euclides Antônio Pereira de. Aplicação do arduino no monitoramento ambiental. 2014. Disponível em: <http://www.peteq.feq.ufu.br/jorneq/anais2014/trabalhos/A34.pdf>. Acesso em: 6 Jul. 2016. VIPER. Owner's guide. 2012. Disponível em: <http://www.viper.com/car/remotestart/product/4115v/viper-basic-1-way-remote-start-system>. Acesso em: 13 Nov. 2016.
83
YOU, Yuhui; TANG, Tiffany; WANG, Yichen. When arduino meets kinect: An intelligent ambient home entertainment environment. Vol.2. 2014. Disponível em: <http://ieeexplore.ieee.org/document/6911470/authors>. Acesso em: 22 out. 2016.
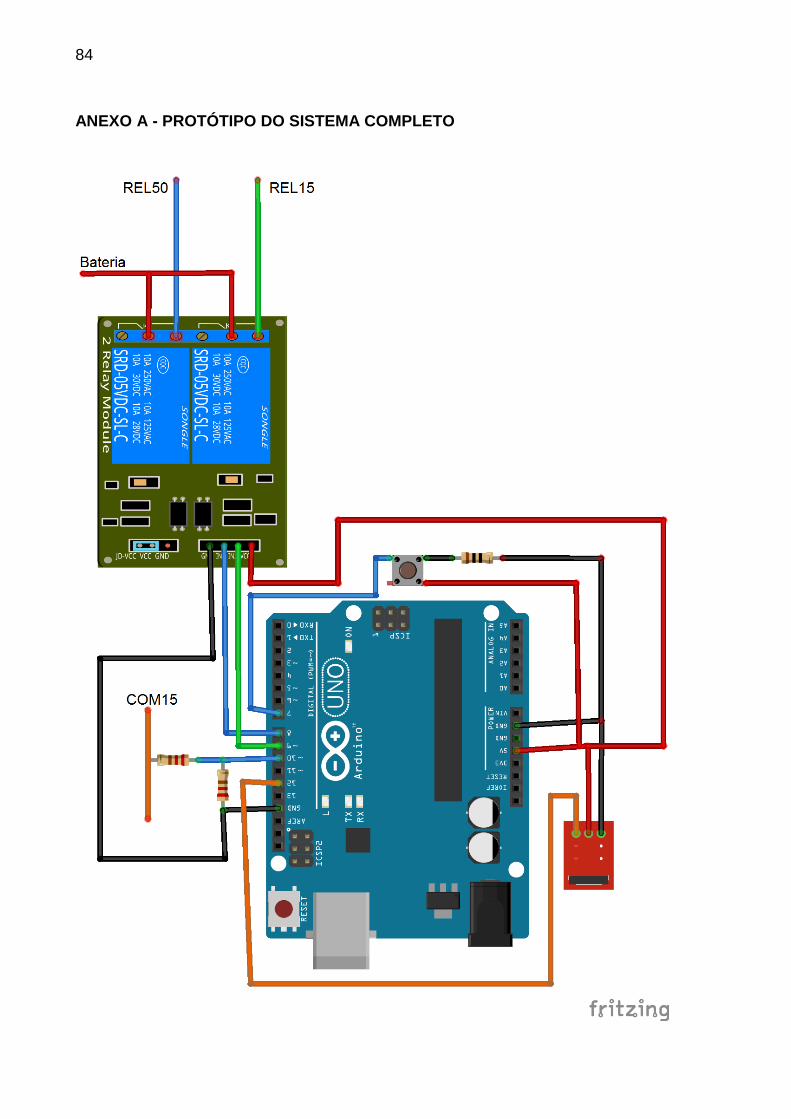
84
ANEXO A - PROTÓTIPO DO SISTEMA COMPLETO