projeto e localizaÇÃo Ótimos de sistemas de ... · neutralizadores de forma que a resposta...
TRANSCRIPT

UNIVERSIDADE TECNOLÓGICA FEDERAL DO PARANÁPR
UNIVERSIDADE TECNOLÓGICA FEDERAL DO PARANÁ
CAMPUS DE CURITIBA
DEPARTAMENTO DE PESQUISA E PÓS-GRADUAÇÃO
PROGRAMA DE PÓS-GRADUAÇÃO EM ENGENHARIA MECÂNICA
E DE MATERIAIS - PPGEM
CLÁUDIO TAVARES DA SILVA
PROJETO E LOCALIZAÇÃO ÓTIMOS DE SISTEMAS DE NEUTRALIZADORES DINÂMICOS
VISCOELÁSTICOS USANDO ALGORITMOS GENÉTICOS
CURITIBA
DEZEMBRO - 2005

CLÁUDIO TAVARES DA SILVA
PROJETO E LOCALIZAÇÃO ÓTIMOS DE SISTEMAS DE NEUTRALIZADORES DINÂMICOS
VISCOELÁSTICOS USANDO ALGORITMOS GENÉTICOS
Dissertação apresentada como requisito parcial à obtenção do título de Mestre em Engenharia Mecânica, do Programa de Pós-Graduação em Engenharia Mecânica e de Materiais, Área de Concentração: Engenharia da Manufatura, do Departamento de Pesquisa e Pós-Graduação, do Campus de Curitiba, da UTFPR.
Orientador: Prof. Carlos Alberto Bavastri, Dr. Eng.
Co-orientador: Prof. Jucélio Tomás Pereira, Dr. Eng.
CURITIBA
DEZEMBRO - 2005

TERMO DE APROVAÇÃO
CLÁUDIO TAVARES DA SILVA
PROJETO E LOCALIZAÇÃO ÓTIMOS DE SISTEMAS DE NEUTRALIZADORES DINÂMICOS VISCOELÁSTICOS USANDO ALGORITMOS GENÉTICOS
Esta Dissertação foi julgada para a obtenção do título de mestre em engenharia, área de concentração em engenharia de Manufatura, e aprovada em sua forma final pelo Programa de Pós-graduação em Engenharia Mecânica e de Materiais.
____________________________________ Prof. Sílvio Luiz de Mello Junqueira, D. Sc.
Coordenador de Curso
Banca Examinadora
______________________________ ______________________________ Prof. José João de Espíndola, PhD Prof. Elizabeth Penner, Dr. Eng. (UFSC) (UTFPR)
______________________________ ______________________________ Prof. Jucélio Tomás Pereira, Dr. Eng. Prof. Carlos Alberto Bavastri, Dr. Eng. (UTFPR) (UTFPR)
Curitiba, 13 de dezembro de 2005

PPGEM – Engenharia de Manufatura (2005)
À minha Mãe Márcia, ao meu Pai José (in
memoriam), e aos meus filhos, Geovanna
e Fábio.

AGRADECIMENTOS
Ao meu orientador Carlos Bavastri pelo incentivo e orientação, pela capacidade
técnica, pela amizade e companheirismo que se desenvolveram ao longo de todo o
trabalho. E pelo carinho de ler antes.
Ao meu co-orientador Jucélio Tomás pela orientação, pelos questionamentos e
pelas idéias que foram essenciais para o desenvolvimento e conclusão desse
trabalho. E também pelo carinho de ler antes.
Aos meus colegas, pelo grande apoio, incentivo e colaboração, assumindo
parte das atividades a mim designadas, possibilitando me dedicar à realização desse
trabalho.
À UTFPR pela oportunidade e incentivos que permitiram a idealização,
desenvolvimento e realização desse trabalho.
Ao DAMEC – Departamento Acadêmico de Mecânica e ao PPGEM – Programa
de Pós-Graduação em Engenharia Mecânica e Materiais que possibilitaram a
realização desse trabalho através de apoio logístico e material.
Os professores e colegas Sílvio Junqueira e Paulo Borges, que acreditaram em
mim e me possibilitaram a oportunidade de realizar esse trabalho.
Quando a velocidade da água que flui alcança o
ponto em que pode mover as pedras, esta é a força
direta. Quando a velocidade e manobrabilidade do
falcão é tal que pode atacar e matar, isto é
precisão.
Sun Tzu

PPGEM – Engenharia de Manufatura (2005)

PPGEM – Engenharia de Manufatura (2005)
SUMÁRIO
RESUMO v
ABSTRACT vi
LISTA DE FIGURAS vii
LISTA DE TABELAS xi
LISTA DE ABREVIATURAS E SIGLAS xii
LISTA DE SÍMBOLOS xiii
1 INTRODUÇÃO 16 1.1 Apresentação do Problema 16 1.2 Relevância do Problema 18
1.2.1 Neutralizadores Dinâmicos Viscoelásticos 18 1.3 Objetivos 21 1.4 Histórico 23
1.4.1 Neutralizadores Dinâmicos de Vibração 24 1.4.2 Cálculo Fracional e Viscoelasticidade 27 1.4.3 Algoritmos Genéticos 28 1.4.4 Localização Ótima dos Neutralizadores 29
1.5 Composição do Trabalho 32 2 REVISÃO BIBLIOGRÁFICA 34
2.1 Viscoelasticidade Linear 34 2.1.1 Introdução 34 2.1.2 Comportamento Dinâmico 34 2.1.3 Temperatura e Freqüência de Transição 39
2.2 Modelo Viscoelástico Baseado em Derivadas Fracionárias 42 2.2.1 Modelos com Derivada de Ordem Fracionária 42
2.3 Quantidades Equivalentes Generalizadas Para Um Neutralizador Simples 47 2.4 Dinâmica de Estruturas 51
2.4.1 Modelo Viscoso 52 2.4.2 Problema de Autovalores não Amortecido 53 2.4.3 Modelo Viscoso Proporcional 55 2.4.4 Resposta em Freqüência – Coordenadas Principais 56 2.4.5 Neutralizadores Dinâmicos Fixados a Sistemas Primários Complexos 58 2.4.6 Truncamento 59
2.5 Técnicas de Otimização Não Linear 62
PPGEM – Engenharia de Manufatura (2005)
2.5.1 Histórico 63 2.5.2 Classificação dos Modelos de Otimização 64 2.5.3 Aplicação a Neutralizadores Dinâmicos 66
2.6 Função Objetivo e Variáveis de Projeto – Otimização dos Parâmetros dos Neutralizadores Dinâmicos 71
3 ALGORÍTMOS GENÉTICOS 75 3.1 Introdução 75 3.2 Terminologia 76 3.3 Operadores Genéticos 78
3.3.1 Cruzamento (Crossover) 78 3.3.2 Mutação 80 3.3.3 Seleção 81 3.3.4 Reprodução 83 3.3.5 Elitismo 84 3.3.6 Compartilhamento 84
3.4 Parâmetros de Influência e Configurações 85 3.4.1 Tamanho da população 86 3.4.2 Probabilidade de Cruzamento 87 3.4.3 Probabilidade de Mutação 88
3.5 A Função Objetivo 88 3.6 Critérios de Convergência 91 3.7 Algoritmo Micro-genético (µGA – micro-GA) 92 3.8 Algoritmo Genético Típico 92 3.9 Teorema Fundamental dos Algoritmos Genéticos 93 3.10 Implementação do Algoritmo Genético para Solução do Problema de Posicionamento de um Sistema de Neutralizadores Dinâmicos de Vibração 99
4 RESULTADOS 101 4.1 Modelo Modal do Sistema Primário 101 4.2 Modelo do Material Viscoelástico 105 4.3 Sistema de Neutralizadores 106 4.4 Técnicas de Otimização Não-Linear 107 4.5 Algoritmo Genético 108 4.6 Casos Avaliados 109
4.6.1 Simulações 1, 2 e 3: Neutralização do Primeiro Modo de Vibrar 109 4.6.2 Comentários relativos às simulações 1, 2 e 3 112 4.6.3 Simulações 4, 5 e 6: Neutralização do Segundo Modo de Vibrar 113 4.6.4 Comentários relativos às simulações 4, 5 e 6 116 4.6.5 Simulações 7, 8 e 9: Neutralização do Terceiro Modo de Vibrar 117 4.6.6 Comentários relativos aos ensaios 7, 8 e 9 120 4.6.7 Simulações 10, 11 e 12: Neutralização do Quarto Modo de Vibrar 121 4.6.8 Comentários relativos às simulações 10, 11 e 12 124
PPGEM – Engenharia de Manufatura (2005)
4.6.9 Simulações 13, 14 e 15: Neutralização dos Segundo, Terceiro e Quarto Modos de Vibrar 125 4.6.10 Comentários relativos aos ensaios 13, 14 e 15 128
4.7 Espaço de Busca 129 5 CONCLUSÕES E RECOMENDAÇÕES 132
5.1 Conclusões 132 5.2 Sugestões para Trabalhos Futuros 134
REFERÊNCIAS 135 APÊNDICE A – Elemento finito shell63 145 APÊNDICE B – Características dinâmicas de um material viscoelástico. 147 APÊNDICE C – Dados numéricos para construção do gráfico tridimensional do espaço de busca. 149

vi
PPGEM – Engenharia de Manufatura (2005)
Da Silva, Cláudio Tavares, Projeto e Localização Ótimos de Sistemas de Neutralizadores Dinâmicos Viscoelásticos Usando Algoritmos Genéticos, 2005,
Dissertação (Mestrado em Engenharia) - Programa de Pós-graduação em
Engenharia Mecânica e de Materiais, Universidade Tecnológica Federal do Paraná,
Curitiba, 154p.
RESUMO
A utilização de material viscoelástico em neutralizadores dinâmicos (NDV)
permite construir dispositivos com formas e tamanhos variados. Essas
características tornam os NDV’s extremamente versáteis para controlar vibrações e
ruído irradiado de diferentes estruturas mecânicas. Devido às características do
material viscoelástico, este dispositivo de controle se torna muito eficaz em uma
banda larga de freqüências. Uma metodologia geral e consagrada para projetar
neutralizadores dinâmicos viscoelásticos (desenvolvida pelo grupo PISA-CNPq)
considera: técnicas de otimização não-linear, parâmetros equivalentes
generalizados, parâmetros modais da estrutura e modelos de derivada fracionária
para o material viscoelástico. Assim, trabalhando em um subespaço modal da
estrutura a controlar, é possível obter os parâmetros físicos ótimos dos
neutralizadores de forma que a resposta daquela seja a menor possível. Neste
processo, a localização dos neutralizadores é preestabelecida, uma vez conhecido o
modelo modal da estrutura. Em algumas aplicações, quando a densidade modal da
estrutura é elevada ou quando os modos estão suficientemente acoplados, a
localização dos neutralizadores não é obvia para o projetista. Nestes casos,
encontrar a melhor localização para os dispositivos de controle pode ser
fundamental. Neste trabalho, propõe-se uma metodologia geral que permite
determinar, simultaneamente, a localização e os parâmetros ótimos de um sistema
de neutralizadores. Um exemplo numérico sobre uma placa de aço, estudando
distintas faixas de freqüências, será apresentado e seus resultados discutidos.
Palavras-chave: Neutralizadores dinâmicos, Material viscoelástico, Localização e
projeto ótimos, Otimização.

vii
PPGEM – Engenharia de Manufatura (2005)
Da Silva, Cláudio Tavares, Projeto e Localização Ótimos de Sistemas de Neutralizadores Dinâmicos Viscoelásticos Usando Algoritmos Genéticos, 2005,
Dissertação (Mestrado em Engenharia) - Programa de Pós-graduação em
Engenharia Mecânica e de Materiais, Universidade Tecnológica Federal do Paraná,
Curitiba, 154p.
ABSTRACT
The use of viscoelastic materials in dynamic neutralizers (VDN) permits to
construct devices with different forms and sizes, making them extremely useful to
noise and vibrations control in many types of structures. Considering the viscoelastic
material characteristics, this form of control device has proved to be very efficient in a
wide frequency band. A general and robust method to design viscoelastic dynamic
neutralizers (developed by the PISA-CNPq group) considers: non-linear optimization
technique, equivalent generalized parameters, the structure’s modal parameters and
fractional derivatives based models for the viscoelastic material. Working in a modal
subspace of the structure to be controlled, it is possible to find the neutralizers
optimal physical parameters such the structure’s response be the minor possible. In
this process, the location of the neutralizers is predetermined, once known the modal
model for the structure. In certain applications, when the modal density of the
structure is high or when the modes are coupled, the neutralizers’ placement is not
so clear for the designer. In these cases, to find the best localization for the control
devices can be fundamental. In this work, a general methodology is suggested
allowing determining, simultaneously, the localization and the optimal parameters of
a neutralizer system. A numerical example on a steel plate is presented and its
results commented.
Keywords: Dynamic neutralizers; Viscoelastic material; Optimal design and location;
Optimization.

viii
PPGEM – Engenharia de Manufatura (2005)
LISTA DE FIGURAS
Figura 1.1 Exemplo de neutralizador dinâmico de vibração (rotor de helicóptero)....17
Figura 1.2 Neutralizador MK......................................................................................17
Figura 1.3 Neutralizador MCK. ..................................................................................18
Figura 1.4 Eficiência em banda larga de freqüência. ................................................20
Figura 1.5 Fluxograma de otimização de um sistema de neutralizadores de vibração
...........................................................................................................................23
Figura 2.1 Variação do módulo dinâmico e do fator de perda com a freqüência para
uma temperatura constante. ..............................................................................39
Figura 2.2 Variação do módulo dinâmico e do fator de perda com a temperatura para
uma freqüência constante. .................................................................................40
Figura 2.3 Variação do módulo dinâmico e do fator de perda com a freqüência para
uma temperatura constante (Parâmetros assintóticos 0G e ∞G ) (Amado, 2004).
...........................................................................................................................45
Figura 2.4 Variação do módulo dinâmico e do fator de perda com a freqüência para
uma temperatura constante (Parâmetro α ) (Amado, 2004). .............................46
Figura 2.5 Variação do módulo dinâmico e do fator de perda com a freqüência para
uma temperatura constante (Parâmetro b) (Amado, 2004)................................47
Figura 2.6 Neutralizador viscoelástico simples..........................................................47
Figura 2.7 Sistemas equivalentes: (a) neutralizador sobre base sem massa e (b)
parâmetros equivalentes generalizados.............................................................50
Figura 2.8 Sistemas equivalentes: neutralizador sobre sistema primário genérico. ..51
Figura 2.9 Processo do projeto ótimo........................................................................63
Figura 2.10 Comparação entre os métodos do gradiente, Newton e quase-Newton.
(Bavastri, 1997)..................................................................................................71
Figura 2.11 Função Objetivo .....................................................................................74
ix
PPGEM – Engenharia de Manufatura (2005)
Figura 3.1 Ilustração de um AG simples, incluindo: 1. população inicial, 2.e 3.
reprodução e cruzamento para formar uma nova geração e 4. obtenção do
melhor indivíduo (Senecal, 2000).......................................................................76
Figura 3.2 Esquema do cruzamento uniforme...........................................................79
Figura 3.3 Esquema do cruzamento de um ponto.....................................................80
Figura 3.4 Esquema do cruzamento de dois pontos. ................................................80
Figura 3.5 Esquema da mutação (troca simples). .....................................................81
Figura 3.6 Exemplo de método da roleta. .................................................................82
Figura 3.7 Subpopulações devidas ao niching ou sharing. .......................................85
Figura 3.8 Fluxograma de um AG típico....................................................................93
Figura 3.9 Fluxograma de busca da localização ótima de um sistema de NDV’s
utilizando algoritmo genético............................................................................100
Figura 4.1 Objeto de estudo: placa plana em aço simplesmente apoiada nos vértices.
.........................................................................................................................101
Figura 4.2 Sistema primário (placa) e malha de FEM com a numeração dos nós. .102
Figura 4.3 Modos de vibrar: (a) primeiro modo; (b) segundo modo; (c) terceiro modo;
(d) quarto modo e (e) quinto modo...................................................................104
Figura 4.4 Módulo da FRF da estrutura primária; H95,123.........................................104
Figura 4.5 Monograma do NEOPRENE® empregado nas simulações....................106
Figura 4.6 Localização do sistema de neutralizadores: 1o modo – 1 neutralizador. 110
Figura 4.7 Resposta do sistema primário com 1 neutralizador................................110
Figura 4.8 Localização do sistema de neutralizadores: 1o modo – 2 neutralizadores.
.........................................................................................................................110
Figura 4.9 Resposta do sistema primário com 2 neutralizadores............................111
Figura 4.10 Localização do sistema de neutralizadores: 1o modo – 4 neutralizadores.
.........................................................................................................................111
Figura 4.11 Resposta do sistema primário com 4 neutralizadores..........................112

x
PPGEM – Engenharia de Manufatura (2005)
Figura 4.12 Localização do sistema de neutralizadores: 1o modo – 1 neutralizador.
.........................................................................................................................113
Figura 4.13 Resposta do sistema primário com 1 neutralizador..............................114
Figura 4.14 Localização do sistema de neutralizadores: 2o modo – 2 neutralizadores.
.........................................................................................................................114
Figura 4.15 Resposta do sistema primário com 2 neutralizadores..........................115
Figura 4.16 Localização do sistema de neutralizadores: 2o modo – 4 neutralizadores.
.........................................................................................................................115
Figura 4.17 Resposta do sistema primário com 4 neutralizadores..........................116
Figura 4.18 Localização do sistema de neutralizadores: 3o modo – 1 neutralizador.
.........................................................................................................................117
Figura 4.19 Resposta do sistema primário com 1 neutralizador..............................118
Figura 4.20 Localização do sistema de neutralizadores: 3o modo – 2 neutralizadores.
.........................................................................................................................118
Figura 4.21 Resposta do sistema primário com 2 neutralizadores..........................119
Figura 4.22 Localização do sistema de neutralizadores: 2o modo – 4 neutralizadores.
.........................................................................................................................119
Figura 4.23 Resposta do sistema primário com 4 neutralizadores..........................120
Figura 4.24 Localização do sistema de neutralizadores: 4o modo – 1 neutralizador.
.........................................................................................................................122
Figura 4.25 Resposta do sistema primário com 1 neutralizador..............................122
Figura 4.26 Localização do sistema de neutralizadores: 3o modo – 2 neutralizadores.
.........................................................................................................................122
Figura 4.27 Resposta do sistema primário com 2 neutralizadores..........................123
Figura 4.28 Localização do sistema de neutralizadores: 4o modo – 4 neutralizadores.
.........................................................................................................................123
Figura 4.29 Resposta do sistema primário com 4 neutralizadores..........................124

xi
PPGEM – Engenharia de Manufatura (2005)
Figura 4.30 Localização do sistema de neutralizadores: 1 neutralizador. ...............125
Figura 4.31 Resposta do sistema primário com 1 neutralizador..............................126
Figura 4.32 Localização do sistema de neutralizadores: 2 neutralizadores. ...........126
Figura 4.33 Resposta do sistema primário com 2 neutralizadores..........................127
Figura 4.34 Localização do sistema de neutralizadores: 4 neutralizadores. ...........127
Figura 4.35 Resposta do sistema primário com 4 neutralizadores..........................128
Figura 4.36 Resposta do sistema primário com 4 neutralizadores..........................130
Figura A.1 Geometria do Elemento Finito SHELL63. ..............................................145
Figura A.2 Saídas do Elemento Finito SHELL63.....................................................146

xii
PPGEM – Engenharia de Manufatura (2005)
LISTA DE TABELAS
Tabela 3.1 Relação da terminologia dos AG’s e a Biologia.......................................78
Tabela 3.2 Indivíduos de uma população e sua aptidões. ........................................94
Tabela 3.3 Exemplo de um indivíduo e 5 esquemas possíveis. ................................94
Tabela 3.4 Exemplo de um indivíduo e 2 esquemas possíveis. ................................97
Tabela 4.1 Freqüências naturais obtidas para a placa plana. .................................103
Tabela 4.2 Parâmetros materiais do modelo baseado em derivadas fracionárias do
NEOPRENE®. ..................................................................................................105
Tabela 4.3 Resultados das simulações 1, 2 e 3. .....................................................112
Tabela 4.4 Resultados das simulações 4, 5 e 6. .....................................................116
Tabela 4.5 Resultados das simulações 7, 8 e 9. .....................................................120
Tabela 4.6 Resultados das simulações 10, 11 e 12. ...............................................124
Tabela 4.7 Resultados das simulações 13, 14 e 15. ...............................................128

xiii
PPGEM – Engenharia de Manufatura (2005)
LISTA DE ABREVIATURAS E SIGLAS
AG - Algoritmo genético
ESPS - Exhaustive Single Point Substitution
MCK - Neutralizador dinâmico de vibração do tipo massa-mola-amortecedor
MK - Neutralizador dinâmico de vibração do tipo massa-mola
NDV - Neutralizador dinâmico viscoelástico
PC - Programação convexa
PI - Programação inteira
PL - Programação linear
PNL - Programação não-linear
RMS - Root Mean Square
TONL - Técnicas de otimização não-linear
WOBI - Worst out Best in
xiv
PPGEM – Engenharia de Manufatura (2005)
LISTA DE SÍMBOLOS
σ - Tensão ε - Deformação
E - Módulo de elasticidade (Modulo de Young)
t - Tempo
Ω - Freqüência ( )ΩcE - Módulo de elasticidade complexo
θ - Temperatura (K) η - Fator de perda
( )ΩcG - Módulo de cisalhamento complexo ( )ΩcB - Módulo volumétrico complexo
[ ]αD - Operador derivada fracional
( )Γ - Função Gama
L - Fator de forma
( )ΩZ - Rigidez dinâmica ou impedância mecânica
( )ΩF - Transformada de Fourier da força de excitação
( )ΩX - Transformada de Fourier da resposta em deslocamento
am - Massa de neutralizador dinâmico de vibração ( )ΩaM - Massa dinâmica
aΩ - Freqüência de anti-ressonância do NDV
M - Matriz de massa
C - Matriz de amortecimento
K - Matriz de rigidez
js - j-ésimo autovalor
jφ - j-ésimo autovetor
Φ - Matriz de autovetores
crc - Amortecimento crítico ξ - Relação de amortecimento modal
ν - Parte imaginária do autovalor
δ - Parte real de autovalor
( )ΩQ - Coordenadas físicas
xv
PPGEM – Engenharia de Manufatura (2005)
( )ΩP - Coordenadas principais
Ψ - Matriz de mudança de coordenadas para o espaço modal
( )Ωα - Resposta em freqüência do sistema em coordenadas generalizadas
M~ - Matriz massa do sistema composto (sistema primário + neutralizador)
C~ - Matriz amortecimento do sistema composto
Φ - Matriz modal truncada
D - Matriz de resposta em freqüência no espaço modal
( )xf - Função objetivo
x - Vetor de variáveis de projeto
( )xg - Vetor de funções de restrições de desigualdade
( )xh - Vetor de funções de restrições de igualdade
∇ - Operador gradiente
λ - Parâmetro escalar (otimização)
H - Matriz Hessiana
( )xη - Fator de direção busca de Newton µ - Relação de massas
2 - Norma 2 de uma matriz
( )a - Função de adequabilidade
( )λ - Função de compartilhamento
( )EO - Ordem de um esquema
( )Eδ - Comprimento de um esquema
exp - Probabilidade de extinção
cp - Probabilidade de ocorrer cruzamento
sp - Probabilidade de sobrevivência
mp - Probabilidade de mutação
smp - Probabilidade de sobrevivência à mutação g - Comprimento em bits do indivíduo

Capítulo 1 Introdução 16
PPGEM – Engenharia de Manufatura (2005)
1 INTRODUÇÃO
1.1 Apresentação do Problema
Em muitas situações as vibrações são indesejáveis e podem provocar
desconforto ou mesmo o desgaste prematuro de componentes estruturais. Pode até
mesmo levar algumas estruturas ao colapso. Com o objetivo de reduzir os níveis de
vibração pode-se utilizar alguma das seguintes técnicas:
• Atuar sobre a força de excitação eliminando-a, reduzindo sua amplitude e/ou
alterando sua freqüência.
• Atuar sobre a estrutura, variando seus parâmetros dinâmicos (massa, rigidez e
amortecimento).
• Acoplar um sistema auxiliar ao sistema principal ou primário procurando
neutralizar a vibração e/ou seus efeitos.
Geralmente atuar sobre a excitação é pouco prático e na maioria das vezes
impossível. Modificar a estrutura primária é sempre uma ação válida quando a sua
densidade modal é relativamente baixa e os esforços são do tipo banda estreita. Por
outro lado, para estruturas com densidade modal elevada e/ou esforços externos
com características de banda larga em freqüência, por exemplo, auto-excitações
provocadas pela ação do vento sobre um dado perfil (desprendimento de vórtices de
von Karman), a modificação estrutural muitas vezes não é uma ação de controle
válida ou eficaz. Em outras ocasiões, a estrutura primária é fruto de um projeto
anteriormente elaborado e uma modificação pode comprometer esse projeto. Sob
esse ponto de vista a terceira alternativa se mostra mais interessante como técnica
de controle passivo de vibração. O sistema auxiliar, que é acoplado ao sistema
principal, é denominado neutralizador dinâmico de vibração (figura 1.1).
Entre as muitas aplicações dos neutralizadores dinâmicos de vibração algumas
podem ser citadas: cabos de linha aérea de transmissão de energia elétrica, prédios
sob ação do vento ou forças sísmicas, máquinas de barbear, rotores dinâmicos, etc.
Capítulo 1 Introdução 17
PPGEM – Engenharia de Manufatura (2005)
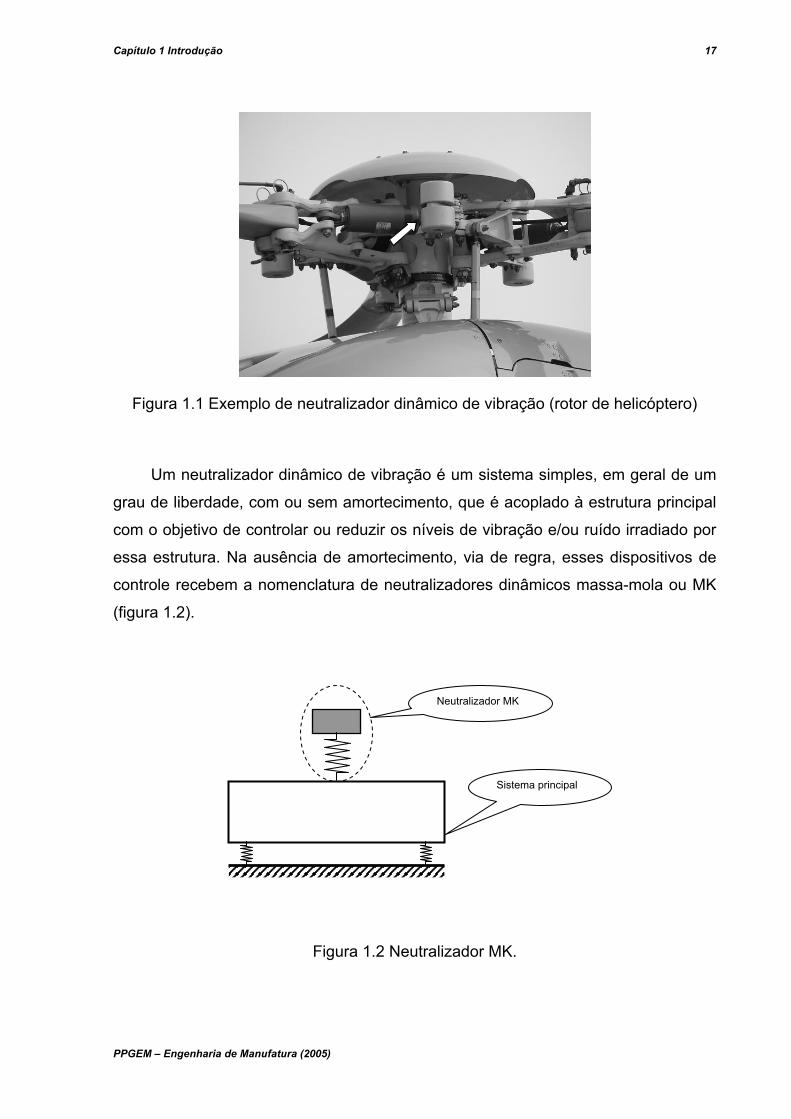
Figura 1.1 Exemplo de neutralizador dinâmico de vibração (rotor de helicóptero)
Um neutralizador dinâmico de vibração é um sistema simples, em geral de um
grau de liberdade, com ou sem amortecimento, que é acoplado à estrutura principal
com o objetivo de controlar ou reduzir os níveis de vibração e/ou ruído irradiado por
essa estrutura. Na ausência de amortecimento, via de regra, esses dispositivos de
controle recebem a nomenclatura de neutralizadores dinâmicos massa-mola ou MK
(figura 1.2).
Figura 1.2 Neutralizador MK.
Neutralizador MK
Sistema principal

Capítulo 1 Introdução 18
PPGEM – Engenharia de Manufatura (2005)
Se for introduzido um elemento dissipador de energia, por exemplo, um
amortecedor viscoso, estes dispositivos são denominados massa-mola-amortecedor
ou simplesmente MCK (figura 1.3).
Figura 1.3 Neutralizador MCK.
1.2 Relevância do Problema
1.2.1 Neutralizadores Dinâmicos Viscoelásticos
Desde que os neutralizadores dinâmicos foram usados pela primeira vez para
controlar o movimento de rolagem de navios (Frahm, 1909) tem-se observado o
aparecimento de muitas publicações sobre esta linha de pesquisa. Isso demonstra o
grande interesse dos pesquisadores por utilizar esta técnica de controle. Por sua
vez, a técnica tem se mostrado eficaz, de simples construção e baixo custo.
Quando um neutralizador dinâmico MK é acoplado a uma estrutura, o princípio
básico de operação não envolve, em primeira análise, dissipação de energia, mas
uma redistribuição dessa energia no espectro de freqüência para neutralizar a
vibração numa certa freqüência especifica, ou faixa estreita de freqüência. Devido a
isso é que se prefere usar a denominação neutralizador dinâmico de vibrações ao
invés de absorvedor dinâmico de vibrações.
Neutralizador MCK
Sistema principal

Capítulo 1 Introdução 19
PPGEM – Engenharia de Manufatura (2005)
Após a aplicação inicial, surgiram os modelos de neutralizadores dinâmicos
com amortecimento viscoso (massa-mola-amortecedor) ou MCK e seus modelos
matemáticos desenvolvidos por Ormondroyd e Den Hartog (1928). Aqui, além de
gerar forças de reação sobre a estrutura, o neutralizador promove uma dissipação
da energia vibratória. Por outro lado, esses dispositivos MCK, com amortecedores
viscosos, são difíceis de construir e em geral utilizados apenas como comparação
dos modelos matemáticos no estudo de controle de vibração.
Os neutralizadores confeccionados com material viscoelástico, NDV
(neutralizadores dinâmicos viscoelásticos), possuem características muito
interessantes e que produzem resultados altamente favoráveis, tanto pela facilidade
de construção prática quanto pela sua eficiência. O material viscoelástico, além de
um efeito resiliente, introduz um fator dissipador de energia intrínseco. Neste caso, a
mola e o amortecedor viscoso são substituídos pelo material viscoelástico. Essa
dissipação de energia reduz significativamente o nível de amplitude de vibração no
neutralizador. Isso aumenta em muito a sua vida útil, pois os efeitos de fadiga são
minorados. Outro aspecto, ainda mais importante, é que a presença desse fator
dissipador de energia “espalha” o efeito absorvedor de vibração do neutralizador
para freqüências vizinhas à freqüência de sintonia, como no neutralizador MCK
(figura 1.4). Isso torna o neutralizador eficiente numa banda de freqüência mais
ampla. Esse fator é extremamente útil, pois torna possível obter excelentes
resultados de redução de níveis de vibração com um ou mais neutralizadores
acoplados à estrutura. Isso também é facilitado se a estrutura é excitada em um
intervalo de freqüências mais amplo. Os neutralizadores viscoelásticos são
facilmente projetados e construídos de forma simples e de baixo custo. Daí a sua
grande vantagem sobre os outros dispositivos. O primeiro em modelar este tipo de
neutralizadores foi Snowdon (1968). Após vários anos de pesquisa, Espíndola e
Silva (1992) desenvolvem uma metodologia geral para o projeto ótimo de um
sistema de neutralizadores dinâmicos viscoelásticos para reduzir os níveis de
vibração e ruído, sobre uma estrutura geometricamente complexa, com
comportamento linear, em uma banda larga de freqüência.
Capítulo 1 Introdução 20
PPGEM – Engenharia de Manufatura (2005)
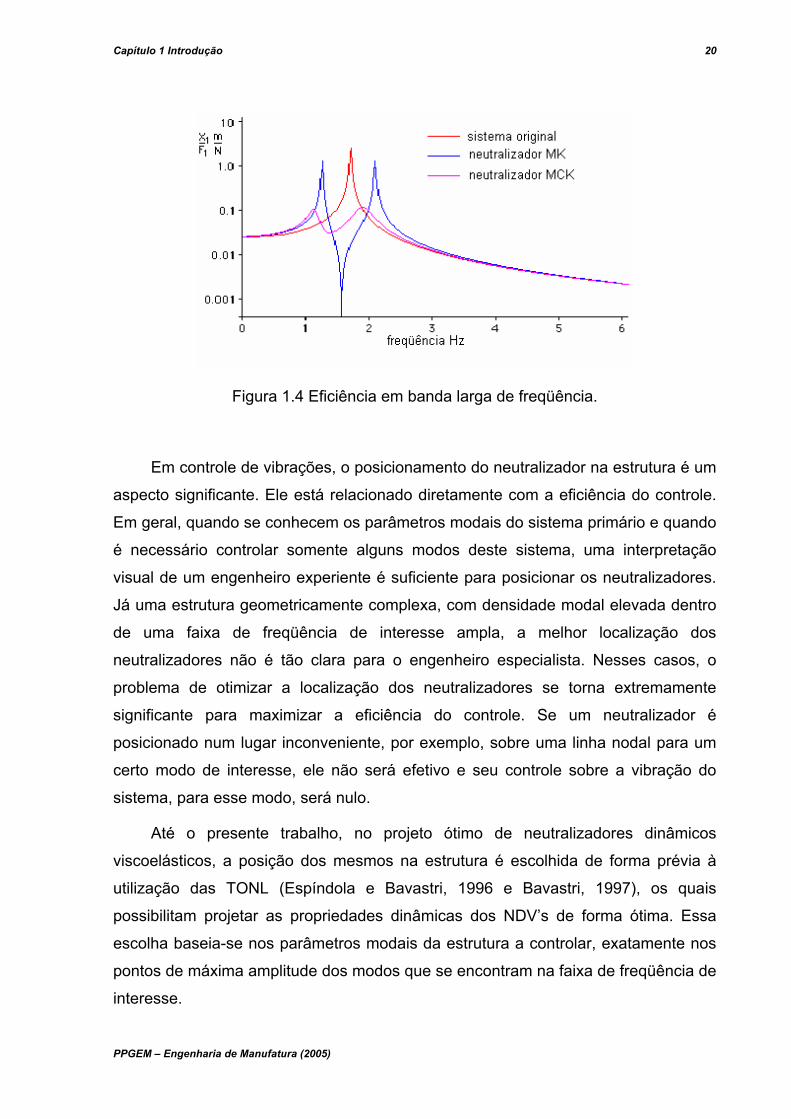
Figura 1.4 Eficiência em banda larga de freqüência.
Em controle de vibrações, o posicionamento do neutralizador na estrutura é um
aspecto significante. Ele está relacionado diretamente com a eficiência do controle.
Em geral, quando se conhecem os parâmetros modais do sistema primário e quando
é necessário controlar somente alguns modos deste sistema, uma interpretação
visual de um engenheiro experiente é suficiente para posicionar os neutralizadores.
Já uma estrutura geometricamente complexa, com densidade modal elevada dentro
de uma faixa de freqüência de interesse ampla, a melhor localização dos
neutralizadores não é tão clara para o engenheiro especialista. Nesses casos, o
problema de otimizar a localização dos neutralizadores se torna extremamente
significante para maximizar a eficiência do controle. Se um neutralizador é
posicionado num lugar inconveniente, por exemplo, sobre uma linha nodal para um
certo modo de interesse, ele não será efetivo e seu controle sobre a vibração do
sistema, para esse modo, será nulo.
Até o presente trabalho, no projeto ótimo de neutralizadores dinâmicos
viscoelásticos, a posição dos mesmos na estrutura é escolhida de forma prévia à
utilização das TONL (Espíndola e Bavastri, 1996 e Bavastri, 1997), os quais
possibilitam projetar as propriedades dinâmicas dos NDV’s de forma ótima. Essa
escolha baseia-se nos parâmetros modais da estrutura a controlar, exatamente nos
pontos de máxima amplitude dos modos que se encontram na faixa de freqüência de
interesse.
Capítulo 1 Introdução 21
PPGEM – Engenharia de Manufatura (2005)
Pode ocorrer, em alguns casos práticos, que a estrutura possua uma
densidade modal elevada ou que exista um certo acoplamento entre modos vizinhos
ou ainda que existam simetrias na estrutura a controlar. Nesses casos, definir a
melhor localização para os neutralizadores (um ou mais neutralizadores) pode não
ser muito simples. Assim, uma localização escolhida previamente à TONL pode
resultar em um controle não ótimo e, conseqüentemente, pode existir uma
localização melhor do que a adotada pelo engenheiro especialista.
Por exemplo, pode-se citar o problema de controle passivo de vibração de
cabos aéreos de transmissão de energia onde, até os dias de hoje, se estuda a
melhor posição para os neutralizadores dinâmicos viscoelásticos sobre a linha, nas
proximidades do engaste desta.
1.3 Objetivos
Este trabalho tem como objetivo principal propor e desenvolver uma
metodologia capaz de determinar a localização ótima e os parâmetros construtivos
ótimos, simultaneamente, do sistema de neutralizadores dinâmicos viscoelásticos
para o controle passivo de vibrações, em uma estrutura com comportamento linear,
geometricamente complexa.
Partindo do conhecimento do sistema a controlar, através de seus parâmetros
modais, é possível, utilizando Técnicas de Otimização Não-Linear (TONL),
determinar a localização e os parâmetros ótimos dos neutralizadores.
Durante muitos anos todos os esforços foram direcionados para introduzir uma
metodologia geral ao projeto ótimo de neutralizadores dinâmicos. Seguindo essa
linha de pesquisa, Espíndola e Silva (1992) introduzem o conceito de parâmetros
equivalentes generalizados e apresentam uma metodologia geral para o controle de
vibração modo a modo, em uma estrutura geometricamente complexa, trabalhando
em uma banda ampla de freqüência. Assim, partindo do conceito de parâmetros
equivalentes generalizados, foi possível trabalhar em um subespaço modal do
sistema primário, com um número reduzido de equações representativas do sistema,
dado pela faixa de freqüência de interesse. Uma equivalência com a teoria de 1 grau
de liberdade (gdl) foi utilizada para o projeto ótimo de um sistema de neutralizadores,

Capítulo 1 Introdução 22
PPGEM – Engenharia de Manufatura (2005)
atuando sobre uma estrutura linear geometricamente complexa. Além de uma
metodologia geral de projeto, as vantagens desta sobre a teoria de 1 gdl
apresentada por Ormondroyd e Den Hartog (1928) são:
• A massa resultante dos neutralizadores é de, aproximadamente, 4 a 5 vezes
menor.
• Uma metodologia geral para o projeto ótimo de um sistema de neutralizadores
de vibração e ruído (controle modo a modo), sobre um sistema
geometricamente complexo.
Posteriormente, Espíndola e Bavastri (1996, 1997), Espíndola, Bavastri e
Teixeira (1998) e Bavastri (1997) generalizam essa teoria ao trabalhar com TONL e
um controle ótimo em uma banda larga de freqüências utilizando neutralizadores
dinâmicos viscoelásticos. Nesses trabalhos, o controle deixa de ser modo a modo
para se converter em um controle sobre uma banda larga de freqüências.
Com isso é possível projetar, de forma ótima, um conjunto de neutralizadores
capaz de reduzir a resposta vibratória de um sistema mecânico geometricamente
complexo, utilizando para isso uma quantidade de massa muito menor que a
necessária se se utilizasse um modelo de 1 gdl para o sistema primário.
Em todos esses trabalhos, a localização dos neutralizadores é sempre
escolhida previamente, uma vez conhecidos os parâmetros modais da estrutura.
Conhecendo os modos a controlar, dentro da faixa de freqüência de interesse, em
geral, é possível determinar os pontos de melhor localização para os
neutralizadores. Em geral, estes pontos encontram-se nos ventres dos modos de
vibrar da estrutura, ou seja, pontos de máxima amplitude relativa de vibração, caso
este se encontre na banda de freqüência de excitação.
Alguns trabalhos têm como meta obter a localização ótima dos neutralizadores
(Abdullah, 2000, Agrawall e Yang, 1998a e 1998b, Arabyan e Chemishkian, 1998,
Furuya e Haftka, 1993, e outros). Entretanto, em nenhum desses foi empregada a
metodologia modal geral aqui proposta, nem os modelos constitutivos de derivada
fracionária para os materiais viscoelásticos empregados em NDV’s.

Capítulo 1 Introdução 23
PPGEM – Engenharia de Manufatura (2005)
Figura 1.5 Fluxograma de otimização de um sistema de neutralizadores de vibração
Portanto, ao final desse trabalho, pretende-se aportar a essa linha de pesquisa
a possibilidade de projetar neutralizadores ótimos e sua localização ótima,
simultaneamente (figura 1.5). Para isso, se partirá da metodologia de projeto ótimo
de NDV’s antes mencionada e se proporá uma nova técnica para encontrar os
pontos ótimos de localização dos neutralizadores.
1.4 Histórico
Nessa secção faz-se um breve histórico sobre o emprego de neutralizadores
dinâmicos. Sua evolução para utilização de material viscoelástico bem como das
teorias relacionadas com a viscoelasticidade e cálculo fracional para modelamento
Estrutura
Identificação
Parâmetros
Modais
Parâmetros do Neutralizador:
Otimização via programação não-linear
Busca por nova posição do
Neutralizador:
Critério de parada
Dados iniciais:
Quantidade de
neutralizadores
Posição inicial
Parâmetros do
neutralizador
Faixa de freqüência
Nova rotina
proposta
Capítulo 1 Introdução 24
PPGEM – Engenharia de Manufatura (2005)
matemático de propriedades viscoelásticas. Segue também uma abordagem
histórica sucinta a respeito dos algoritmos genéticos empregados como métodos de
otimização e o problema de localização de neutralizadores dinâmicos de vibração.
1.4.1 Neutralizadores Dinâmicos de Vibração
Após a aplicação proposta por Frahm (1911), o modelo mais simples, estudado
primeiramente por Ormondroyd e Den Hartog (1928), e apresentado por vários
autores, tal como Harris e Crede (1976), Hunt (1979), Snowdon (1968), foi o
neutralizador dinâmico de um grau de liberdade aplicado a um sistema de um grau
de liberdade. Snowdon (1968) foi o primeiro pesquisador a modelar um neutralizador
dinâmico viscoelástico de um grau de liberdade para controlar um sistema também
de um grau de liberdade. O objetivo desses estudos foi encontrar os parâmetros
ótimos do sistema secundário (neutralizador) para minimizar a vibração do sistema
primário.
1.4.1.1 Neutralizador do Tipo Massa-Mola [MK]
Trabalhando em banda estreita (freqüências de trabalho na vizinhança da
freqüência natural do sistema primário), foi demonstrado (Den Hartog, 1956) que a
amplitude de vibração do sistema primário tende para zero quando a freqüência
natural do neutralizador e a do sistema primário coincidem. Esta escolha, conhecida
como sintonização da freqüência do neutralizador, modifica a resposta do sistema,
introduzindo duas novas freqüências naturais, ao redor da freqüência natural do
sistema primário. Esse tipo de neutralizador possui apenas elementos que
armazenam energia cinética e potencial elástica (denominados MK), não existindo
qualquer tipo de dissipação de energia vibratória. O controle se deve
fundamentalmente às forças de reação.
Duas dificuldades surgem dessa aplicação: a) a amplitude de vibração do
neutralizador é grande, o que em geral, leva à sua ruptura por fadiga; b) se se varia
a freqüência de excitação tornando-a diferente da freqüência de sintonização do
neutralizador, as amplitudes de vibração do sistema podem aumentar (ressonância)
Capítulo 1 Introdução 25
PPGEM – Engenharia de Manufatura (2005)
o que poderia provocar o colapso da estrutura. A fim de evitar esses inconvenientes
é importante introduzir amortecimento no neutralizador.
1.4.1.2 Neutralizador do Tipo Massa-Mola-Amortecedor [MCK]
A alternativa de se introduzir um amortecedor viscoso ao neutralizador
possibilita o trabalho deste numa banda ampla de freqüência (faixa de freqüência de
trabalho).
O método clássico de sintonia do neutralizador [MCK] trabalhando em banda
larga é chamado Método dos Pontos Fixos. A existência dos pontos fixos é garantida
se o sistema primário tem amortecimento nulo (Den Hartog, 1956). Segundo Den
Hartog (1956): “A sintonização dos neutralizadores dinâmicos é mais efetiva quando
os máximos valores de resposta do sistema primário são iguais e coincidem com os
pontos fixos”.
Esta teoria é inadequada para aplicações práticas a sistemas primários
complexos onde vários modos podem contribuir para a resposta do sistema (Silva,
1991). Entretanto, alguns pesquisadores tais como Young (1952) e Snowdon (1968),
estudaram sua aplicação a estruturas complexas.
1.4.1.3 Neutralizador Dinâmico Viscoelástico [NDV]
Uma alternativa para o emprego de neutralizadores dinâmicos de vibração é o
neutralizador dinâmico viscoelástico. Nesse caso, uma peça de material
viscoelástico substitui a mola e o amortecedor viscoso.
O primeiro pesquisador a trabalhar com esse tipo do neutralizador foi Snowdon
(1968). Ele apresenta a análise de um neutralizador viscoelástico de um grau de
liberdade aplicado a um sistema também de um grau de liberdade e sem
amortecimento.
Vários outros trabalhos foram realizados nos últimos anos, analisando o
sistema composto (sistema+neutralizador). Entre eles destacam-se: Asami, et al.
(1991 e 1993), Jolly e Sun (1994), Rossi et al. (1993), Wang e Shang (1989),
Capítulo 1 Introdução 26
PPGEM – Engenharia de Manufatura (2005)
Warburton e Ayorinde (1980), Yamamura et al. (1993), Zhang et al. (1990). Ayorinde
e Warburton (1980), Kaljevic et al. (1993), Kunieda et al. (1987), Özgüven e Çandir
(1986), Peterson (1979), Yamaguchi et al. (1993) desenvolveram trabalhos teóricos
sobre aplicações de neutralizadores para sistema de um e dois graus de liberdade.
Espíndola e Silva (1992), generalizaram o problema do projeto ótimo de um
sistema de neutralizadores dinâmicos viscoelásticos através da via modal.
Introduzindo o conceito de parâmetros equivalentes generalizados para
neutralizadores [MCK] e viscoelásticos foi possível escrever as equações dinâmicas
do sistema composto em função das coordenadas generalizadas do sistema
primário. Esse fato é extremamente vantajoso uma vez que o acréscimo de graus de
liberdade devido ao acoplamento dos neutralizadores não implica no aumento do
tamanho do sistema de equações do sistema composto.
Partindo desse ponto e considerando o modelo do sistema composto em um
sub-espaço modal do sistema primário, é possível projetar, de forma ótima, o
sistema de neutralizadores de duas formas:
• Desconsiderar o acoplamento das equações no sub-espaço modal do sistema
primário e projetar os neutralizadores para cada modo, como em Den Hartog
(1956) para um grau de liberdade. Essa análise foi seguida por Silva (1991).
Nesse caso ocorre o controle modo a modo.
• Tomar o subsistema de equações em coordenadas principais e aplicar técnicas
de otimização não-linear para projetar o sistema de neutralizadores. Essa
análise seria feita em uma faixa de freqüência e não mais modo a modo.
Assim, ocorre o controle em banda larga de freqüência, como proposto por
Espíndola e Bavastri (1995 e 1997) e Bavastri (1997), entre outros trabalhos.
Kittis (1983) aplicou técnicas de otimização não-linear com uma formulação no
espaço físico minimizando a resposta vibratória de um sistema de múltiplos graus de
liberdade. Ao trabalhar no espaço físico, o modelo do sistema composto varia em
cada iteração da otimização do neutralizador. Isso gera uma metodologia
extremamente onerosa, do ponto de vista computacional. Além disso, para um outro
problema que não uma viga engastada-livre, com a estudada por Kittis, uma nova
Capítulo 1 Introdução 27
PPGEM – Engenharia de Manufatura (2005)
função objetivo deve ser proposta o que faz a metodologia perder a sua
generalidade.
Espíndola e Bavastri (1997) aplicaram os conceitos da técnica dos parâmetros
equivalentes generalizados e de técnicas de otimização não-linear na elaboração de
um algoritmo que permitisse encontrar os parâmetros físicos ótimos de um sistema
de neutralizadores dinâmicos viscoelásticos para minimizar a resposta vibratória de
uma estrutura qualquer geometricamente complexa e em uma faixa ampla de
freqüência. O algoritmo é totalmente baseado nos parâmetros modais da estrutura
primária.
1.4.2 Cálculo Fracional e Viscoelasticidade
Os primeiros estudos utilizando o cálculo fracional em equações constitutivas
viscoelásticas foram realizados por Nutting (1921). Ele concluiu que os modelos
matemáticos baseados em derivadas temporais de ordem fracionária eram mais
precisos que os modelos baseados em decaimento exponencial (derivada de ordem
inteira). Gemant (1936) introduziu um operador derivada de ordem ½ atuando sobre
a tensão para descrever características dinâmicas de amortecimento e rigidez. Esse
autor observou que as características de amortecimento e rigidez dinâmica de um
material qualquer eram proporcionais às ordens fracionais da freqüência. Caputo e
Mainardi (1966) descreveram propriedades mecânicas de metais e vidros utilizando
derivada fracional. Em 1971, os mesmos autores apresentaram diferentes modelos
de dissipação para sólidos viscoelásticos, estudando as respostas características de
fluência e relaxação.
Mais recentemente, Bagley e Torvik (1979) construíram uma relação
constitutiva tensão-deformação dinâmica para elastômero usando o cálculo fracional.
Posteriormente, em 1983, os mesmos autores introduziram uma equação
constitutiva geral para viscoelasticidade com operadores de derivada de ordem
fracionária. Para isso, ajustaram satisfatoriamente dados experimentais uniaxiais no
domínio da freqüência utilizando um modelo matemático de quatro parâmetros.
O modelo de derivada fracionária de quatro parâmetros será utilizado neste
trabalho. Será considerado que o material viscoelástico utilizado para a confecção

Capítulo 1 Introdução 28
PPGEM – Engenharia de Manufatura (2005)
dos neutralizadores dinâmicos de vibração é conhecido, portanto, o material é
completamente caracterizado do ponto de vista dinâmico.
1.4.3 Algoritmos Genéticos
1.4.3.1 Algoritmos Genéticos como Método de Otimização
Uma grande parte dos problemas científicos pode ser formulada como
problemas de busca e otimização: basicamente, existem uma série de fatores
influenciando o desempenho de um dado sistema, e tais fatores podem assumir um
número limitado ou ilimitado de valores, e podem ser sujeitos a certas restrições. O
objetivo é encontrar a melhor combinação dos fatores, ou seja, a combinação que
proporcione o melhor desempenho possível para o sistema em questão.
Numa classificação mais ampla, há essencialmente três correntes de métodos
gerais de otimização: métodos probabilísticos, numéricos e enumerativos.
Algoritmos Genéticos (AG) é um conjunto de métodos computacionais de
busca baseados nos mecanismos de evolução natural e na genética. Em AG, uma
população de possíveis soluções para o problema em questão evolui de acordo com
operadores probabilísticos concebidos a partir de metáforas biológicas, de modo que
há uma tendência de que, na média, os indivíduos representem soluções cada vez
melhores à medida que o processo evolutivo continua (Goldberg, 1995). Pode-se
assumir que os AG’s sempre irão evoluir para uma aproximação da solução ótima
global e não local, o que não acontece com outros métodos de otimização.
1.4.3.2 Panorama Histórico
Holland (1975) foi quem primeiro sugeriu Algoritmos Genéticos como um
método de otimização. Similar a outros algoritmos, tais como estratégias
evolucionárias e programação evolucionária, eles são classificados como técnicas
aleatórias dirigidas.
Segundo Michalewicz (1994), “os AG’s têm se mostrado capazes de resolver
problemas lineares e não-lineares explorando todas as regiões do espaço de estado
Capítulo 1 Introdução 29
PPGEM – Engenharia de Manufatura (2005)
ou espaço de busca, e explorando exponencialmente áreas promissoras através dos
operadores de mutação, cruzamento e seleção aplicados a uma população de
indivíduos (possíveis soluções)”.
Uma discussão mais completa sobre o assunto, incluindo extensões e tópicos
relacionados, pode ser encontrada em Davis (1991), Goldberg (1989) e Holland
(1975).
Alguns problemas podem ter soluções ótimas múltiplas dentro de um domínio.
Esse tipo de problema é chamado de problema multimodal. Autores com Sikora e
Shaw (1994) utilizaram com sucesso AG’s para resolver problemas de decisão
financeira desse tipo.
Teoricamente, AG’s são métodos de otimização que garantem uma solução
ótima global. Mesmo em problemas complexos onde a função objetivo é implícita ou
muito complexa, os AG’s, através de uma programação relativamente simples,
conseguem encontrar uma solução ótima global. Pela sua robustez e relativa
simplicidade é que se pretende empregar esses algoritmos para solucionar o
problema de posicionamento ótimo dos neutralizadores dinâmicos viscoelásticos.
Neste trabalho será utilizado um método híbrido. Os AG’s serão empregados
para determinar a posição ótima do sistema de neutralizadores dinâmicos enquanto
que seus parâmetros construtivos ótimos serão determinados empregando Técnicas
de Otimização Não-Linear (TONL).
1.4.4 Localização Ótima dos Neutralizadores
Como os parâmetros dos neutralizadores, controladores passivos de vibração,
não podem ser modificados, projetar esses dispositivos e posicioná-los na estrutura
requer um procedimento muito cuidadoso. O comportamento da estrutura primária
tende a variar sensivelmente dependendo da distribuição dos neutralizadores. Isso
foi verificado especialmente para prédios altos por Hahn e Sathiavageeswaran
(1992).
Alguns pesquisadores têm proposto métodos sistemáticos de busca para
determinar a localização ótima dos neutralizadores dinâmicos de vibração através da

Capítulo 1 Introdução 30
PPGEM – Engenharia de Manufatura (2005)
minimização de funções de performance que são relacionadas com a dinâmica da
estrutura a controlar. Dentre esses trabalhos se destacam Takewaki (1997) e
Takewaki et al. (1999).
O problema de localização ótima de dispositivos de controle de vibração tem
sido também extensivamente investigado para treliças espaciais nas quais os
dispositivos de controle são localizados em pontos discretos. Furuya e Haftka (1993)
e Liu e Begg (1999) focaram suas investigações nesse campo.
Hiramoto et al. (2000) e Arabyan e Chemishkian (1998) examinaram o
problema de localização ótima de dispositivos de controle para outros tipos de
estruturas incluindo vigas contínuas. Abdullah (1998) investigou o problema para
estruturas planas bi-dimensionais, do tipo placas.
Zhang e Soong (1992), Agrawal e Yang (1998a), e Shukla e Datta (1999)
empregaram essencialmente métodos de busca seqüenciais para a determinação da
localização ótima de amortecedores de vibração para prédios altos. Nesses métodos
seqüenciais a localização dos amortecedores é determinada de tal forma que ela
produza a maior redução possível na resposta em freqüência da estrutura primária.
Outros amortecedores são então adicionados até que se chegue a um nível de
resposta em freqüência desejado.
Procedimentos similares aos métodos seqüenciais são os WOBI (Worst Out
Best In) e ESPS (Exhaustive Single Point Substitution), propostos por Agrawal e
Yang (1998b). Ambos WOBI e ESPS são métodos muito úteis para o ajuste fino da
localização dos dispositivos de controle depois que uma solução inicial tenha sido
obtida por um método mais simples.
O tempo requerido para a determinação da solução ótima depende
primeiramente da função objetivo que se deseja minimizar. Por exemplo, se a função
objetivo envolve a resposta da estrutura, serão necessárias simulações numéricas
para avaliar a mesma para cada nova localização dos dispositivos de controle de
vibração. Isso pode demandar tempos computacionais substanciais. Agrawal e Yang
(1998a) investigaram a localização ótima de amortecedores minimizando o valor
RMS (Root-Mean-Square) da inertância para os 75º e 76º andares de um edifício.
Capítulo 1 Introdução 31
PPGEM – Engenharia de Manufatura (2005)
Para reduzir o esforço computacional apenas os 27 andares superiores foram
considerados.
Um inconveniente da utilização da técnica de minimizar o valor RMS é a
possibilidade de que a localização ótima dos neutralizadores seja apenas localmente
ótima e não ótima global. Em outras palavras, podem existir soluções de localização
de neutralizadores de vibração melhores que a encontrada por essa técnica. Os
engenheiros e pesquisadores têm hesitado em implementar soluções utilizando essa
técnica.
Wongprasert e Symans (2000) determinaram a localização de amortecedores a
fluidos viscosos para um edifício de 76 pavimentos, submetido à carga de vento. Ao
invés de utilizar a resposta estrutural obtida diretamente de simulações numéricas, a
função objetivo foi determinada pela norma 2 da matriz de funções de resposta em
freqüência. Essa função objetivo foi então minimizada via algoritmos genéticos. Com
essa abordagem, o tempo requerido para encontrar as localizações ótimas dos
neutralizadores de vibração foi significativamente reduzido, em relação à análise da
resposta estrutural, e a solução ótima pôde ser considerada global e não apenas
local. A norma 2 da matriz de funções de transferência é o valor esperado de RMS
da resposta, se a excitação for assumida como sendo um ruído branco. Ou seja, se
a norma 2 for reduzida também se garante que os valores RMS da resposta em
freqüência serão reduzidos. Aplicação similar dessa função objetivo foi
implementada por Hiramoto et al. (2000) e Agrawal e Yang (1998a) com bons
resultados obtidos.
Adicionalmente, se o sistema é discretizado utilizando elementos finitos, por
exemplo, o cálculo da norma 2 da matriz de funções de resposta em freqüência pode
ser custoso do ponto de vista do tempo e esforço computacionais. As matrizes
dinâmicas do sistema discretizado por elementos finitos podem ter grandes
dimensões.
Entretanto, trabalhando em um sub-espaço do sistema primário (teoria modal),
é possível operar sobre um sistema de equações reduzido, diminuindo
sensivelmente o esforço computacional para essa análise.
Capítulo 1 Introdução 32
PPGEM – Engenharia de Manufatura (2005)
Em muitos casos práticos, quando se têm poucos modos a controlar, em se
utilizando a teoria modal, é possível escolher os pontos ótimos de localização a partir
de um universo restrito de possibilidades. No entanto, se se pretende fazer um
controle em banda larga de freqüência e a densidade modal do sistema a controlar é
elevada na faixa de interesse, esse universo de soluções para a localização ótima
fica muito vasto. É justamente nesses casos que o método que se pretende
desenvolver terá a sua mais valia.
1.5 Composição do Trabalho
No capítulo 2 desse trabalho, é apresentada uma breve revisão dos aspectos
relacionados à viscoelasticidade linear. No capitulo, discute-se do comportamento
dinâmico dos materiais viscoelásticos, à luz da teoria da viscoelasticidade, quando
são variados parâmetros tais com temperatura e freqüência de excitação. Também é
abordado o modelo dos materiais viscoelásticos baseado em derivadas de ordem
fracionaria. Especificamente, o modelo de quatro parâmetros.
Mostra-se também a importância dos conceitos de parâmetros equivalentes
generalizados para aplicações em neutralizadores dinâmicos. É feita uma revisão
desses conceitos para sistemas de múltiplos graus de liberdade.
Aborda-se, também no capitulo 2, os principais conceitos de dinâmica de
estruturas relacionados com esse trabalho, tais como: o problema de autovalores e
autovetores, o modelo viscoso e o modelo viscoso proporcional e as funções de
resposta em freqüência para sistemas dinâmicos com múltiplos graus de liberdade.
São abordados também aspectos do truncamento do modelo modal relacionado com
os conceitos de parâmetros equivalentes generalizados e com espaço modal.
Finalmente, são relacionados os principais aspectos das técnicas de otimização não-
linear e sua aplicação para a otimização de neutralizadores dinâmicos
viscoelásticos.
No capítulo 3 é apresentada uma visão geral da técnica de Algoritmos
Genéticos. Essa técnica de otimização é empregada neste trabalho para localizar o
sistema de neutralizadores na estrutura primária. Também nesse capítulo é definida
a função objetivo e suas restrições. Essa função objetivo é a base do processo de

Capítulo 1 Introdução 33
PPGEM – Engenharia de Manufatura (2005)
otimização, tanto da localização dos neutralizadores na estrutura, bem como dos
parâmetros construtivos ótimos dos neutralizadores.
No capítulo 4 são apresentados os diversos ensaios numéricos realizados
sobre uma estrutura exemplo. A estrutura estudada consiste de uma placa plana
metálica, discretizada em elementos finitos. Seu modelo modal é obtido e a partir
dele é aplicado o processo de otimização da localização e dos parâmetros ótimos
dos neutralizadores, simultaneamente. São realizadas algumas simulações
numéricas, envolvendo diferentes sistemas de neutralizadores em diferentes faixas
de freqüência. São abordadas também diferentes larguras de banda de freqüências.
No capitulo 5 são apresentados comentários pertinentes aos ensaios
numéricos realizados e feitas algumas sugestões para trabalhos futuros.
Capítulo 2 Revisão Bibliográfica 34
PPGEM – Engenharia de Manufatura (2005)
2 REVISÃO BIBLIOGRÁFICA
2.1 Viscoelasticidade Linear
2.1.1 Introdução
Produzidos nas mais diversas formas tais como borrachas, rezinas, vernizes e
outros polímeros, os materiais viscoelásticos têm sido alvo de muitos estudos nos
últimos anos. Em dinâmica estrutural, as principais características requeridas desses
materiais são: rigidez, resiliência e grande capacidade de dissipação de energia
vibratória. Por esse motivo, os materiais viscoelásticos são largamente empregados
em projetos de estruturas aeronáuticas, prediais, de máquinas diversas e em
dispositivos estruturais, tais como isoladores e neutralizadores dinâmicos de
vibração.
2.1.2 Comportamento Dinâmico
A teoria geral da viscoelasticidade foi proposta por Boltzmann em 1874,
baseada no princípio da superposição. Esse princípio estabelece que a tensão
resultante devido à soma das deformações é igual à soma das tensões relativas a
cada deformação aplicada isoladamente em um corpo viscoelástico, ou seja,
( ) ( ) ( )2121 εσεσεεσ baba +=+ . Eq. 2.1
Um material elástico real, por exemplo um aço, submetido a uma série de
deformações 0ε , 1ε , ..., 1−nε , nε , correspondentes aos tempos 00 =t , 1t , ..., 1−nt , nt ,
respectivamente, terá sua tensão final representada por
( ) ( )1010 ... −−++−+= nnEEE εεεεεσ , Eq. 2.2
ou de forma simplificada,
Capítulo 2 Revisão Bibliográfica 35
PPGEM – Engenharia de Manufatura (2005)
nEεσ = . Eq. 2.3
Para os materiais viscoelásticos tem-se a introdução da dependência do tempo
na equação 2.2:
( ) ( )( ) ( )( )10110 ... −−−++−−+= nnnttEttEtE εεεεεσ . Eq. 2.4
A equação 2.4 pode ser escrita de forma compacta como
( ) ( ) ( ) ( ) τττετεσ dddtEtE
t
∫ −+= +
0
0 . Eq. 2.5
O termo ( )τ−tE é comumente referido como módulo de relaxação do material
(Broutman e Krock (1967) e Mainardi (1997)).
Uma forma comum da equação 2.5 é posta no domínio da freqüência e obtida
através da sua transformada de Fourier:
( ) ( ) ( )ΩΩ=Ω εσ E Eq. 2.6
onde ( )Ωσ e ( )Ωε são, respectivamente, a tensão e a deformação no domínio da
freqüência
Pode-se afirmar que as deformações cisalhantes e longitudinais produzidas em
um material viscoelástico não estão relacionadas com a tensão apenas através de
uma constante de proporcionalidade. A relação entre tensão e deformação nesses
materiais varia com o tempo. Esse comportamento pode ser descrito por uma
equação diferencial parcial de ordem arbitrária (Williams, 1962; Snowdon, 1968 e
Jones, 1980) como

Capítulo 2 Revisão Bibliográfica 36
PPGEM – Engenharia de Manufatura (2005)
( ) ( )[ ] ( )
( ) ( )[ ] ( )tdtdbdtdbb
tdtdadtdaa
mmm
nnn
ε
σ
......
......
10
10
++++=
++++, Eq. 2.7
onde ia e ib representam propriedades do material (Bagley e Torvik, 1983) a serem
obtidas experimentalmente. n e m são inteiros.
A equação 2.7 pode ser representada no domínio da freqüência através de sua
transformada de Fourier como
( ) ( )[ ] ( )
( ) ( )[ ] ( )Ω+Ω++Ω+=
Ω+Ω++Ω+
ε
σ
......
......
10
10
mm
nn
ibibb
iaiaa, Eq. 2.8
Pode-se, alternativamente, mostrar essa equação de forma mais compacta
como
( )( )
( )
( )( )Ω=
Ω
Ω=
ΩΩ
∑
∑
=
=cn
j
jj
m
l
ll
Eia
ib
0
0
εσ . Eq. 2.9
O termo ( )ΩcE é chamado de módulo de elasticidade complexo do material.
Como comprovado por experimentos em Lazan (1968), Ferry (1980) e Nashif et al
(1985), o módulo de elasticidade complexo é também dependente da temperatura
(θ ). Portanto uma representação mais geral é expressa pela equação
( ) ( )θθθ ,),(, Ω+Ω=Ω irc iEEE . Eq. 2.10
com rE e iE as partes reais e complexas de cE , respectivamente.
Capítulo 2 Revisão Bibliográfica 37
PPGEM – Engenharia de Manufatura (2005)
Uma forma mais usual de representar o módulo de elasticidade complexo de
um material viscoelástico é
( ) ( )( )θηθθ ,1),(, Ω+Ω=Ω Ec iEE Eq. 2.11
onde
( ) ( )θθ ,, Ω=Ω rEE Eq. 2.12
e
( )),(),(,
θθθη
ΩΩ
=Ωr
iE E
E Eq. 2.13
A parte real do módulo complexo ( rE ) representa a capacidade do material de
armazenar energia e está relacionada à sua resiliência. O termo Eη é o fator de
perda do material viscoelástico e está associado com a capacidade que o material
possui de dissipar energia na forma de calor.
Outras propriedades tais como o módulo de cisalhamento complexo ( cG ) e o
módulo volumétrico ou módulo de Bulk ( cB ) também podem ser expressos de forma
semelhante:
( ) ( )( )θηθθ ,1),(, Ω+Ω=Ω Gc iGG Eq. 2.14
( ) ( )( )θηθθ ,1),(, Ω+Ω=Ω Bc iBB Eq. 2.15
Uma relação entre os módulos de elasticidade e de cisalhamento apresentada
por Snowdon (1968) tem sua origem na teoria clássica da elasticidade. Esta relação
é válida também na viscoelasticidade linear substituindo os módulos constantes e
reais dos materiais elásticos pelos módulos complexos, dependentes da freqüência

Capítulo 2 Revisão Bibliográfica 38
PPGEM – Engenharia de Manufatura (2005)
e temperatura dos materiais viscoelásticos (Nashif et al, 1985; Boresi, 1993 e
Espíndola, 1992) e é dada por
( ) ( ) ( )( ) ( )θθ
θθθ,3,
,,9,Ω+ΩΩΩ
=Ωcc
ccc BG
BGE . Eq. 2.16
Segundo Snowdon (1968), para os elastômeros, uma vez que estes são
considerados incompressíveis, a expressão acima pode ser simplificada. Dessa
forma pode-se considerar que o módulo de Bulk ( cB ) é muito maior que o módulo de
cisalhamento. Também através de meios experimentais pode-se comprovar que o
coeficiente de Poisson (ν ) dos elastômeros pode ser tomado por um valor real e
constante (Chan et al, 1995). Assim, a equação 2.16 pode ser simplificada e posta
como
( ) ( )θθ ,3, Ω≅Ω cc GE . Eq. 2.17
O material viscoelástico torna-se mais rígido à medida que se eleva a
freqüência ou se abaixa a temperatura. Nessas condições, o coeficiente de Poisson
(ν ) deixa de possuir o valor 0,5 e tende para valores próximos aos encontrados nos
metais (0,33). Nesses casos, as hipóteses de simplificação anteriores deixam de ser
adequadas e a relação entre os módulos de elasticidade ( E ) e cisalhamento (G )
passa a ser outra. Segundo Nashif et al (1985), a relação entre esses módulos para
materiais viscoelásticos trabalhando na região vítrea ou próximo dela deve ser
tomada como
( ) ( )θθ ,67,2, Ω≅Ω cc GE . Eq. 2.18
Já o fator de perda, segundo Snowdon (1968), conservam a seguinte relação:
Capítulo 2 Revisão Bibliográfica 39
PPGEM – Engenharia de Manufatura (2005)
( ) ( ) ( )θηθηθη ,,, Ω=Ω=Ω BGE . Eq. 2.19
onde Eη , Gη e Bη são os fatores de perda relacionados com os módulos de
elasticidade, cisalhamento e volumétricos, respectivamente.
2.1.3 Temperatura e Freqüência de Transição
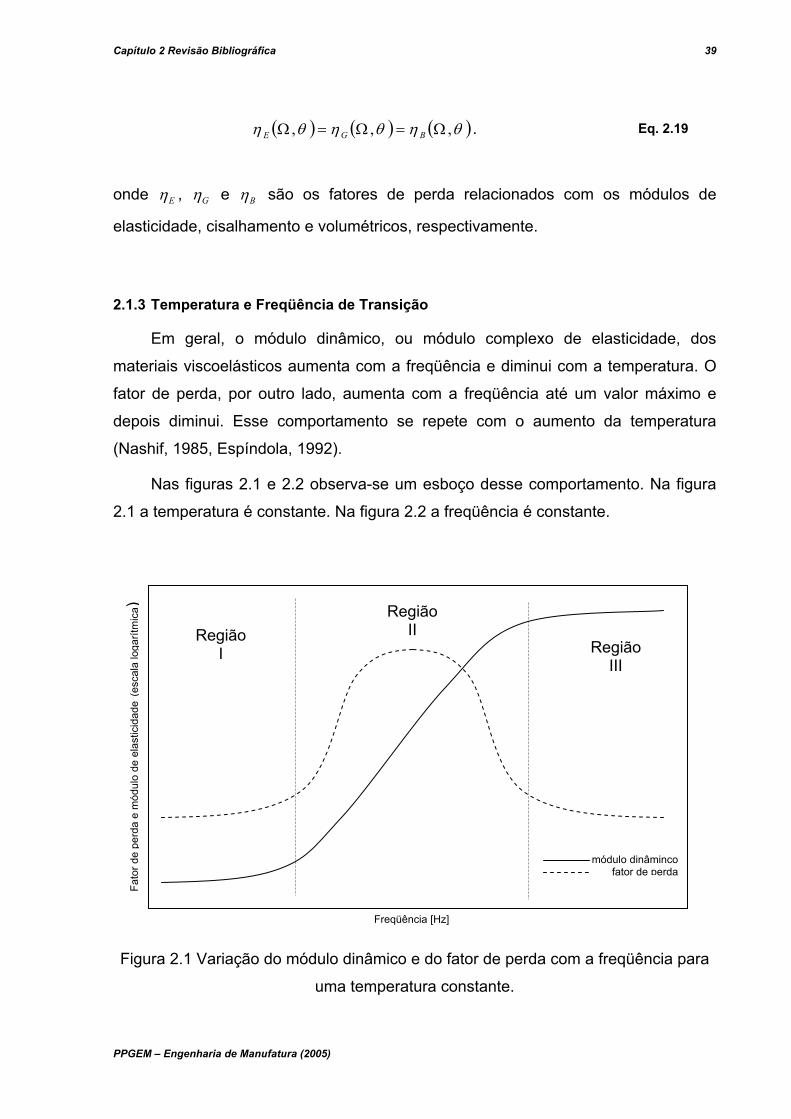
Em geral, o módulo dinâmico, ou módulo complexo de elasticidade, dos
materiais viscoelásticos aumenta com a freqüência e diminui com a temperatura. O
fator de perda, por outro lado, aumenta com a freqüência até um valor máximo e
depois diminui. Esse comportamento se repete com o aumento da temperatura
(Nashif, 1985, Espíndola, 1992).
Nas figuras 2.1 e 2.2 observa-se um esboço desse comportamento. Na figura
2.1 a temperatura é constante. Na figura 2.2 a freqüência é constante.
Figura 2.1 Variação do módulo dinâmico e do fator de perda com a freqüência para
uma temperatura constante.
Freqüência [Hz]
Fato
r de
perd
a e
mód
ulo
de e
last
icid
ade (
esca
la lo
garít
mic
a)
Região I
Região II
Região III
módulo dinâmincofator de perda
Capítulo 2 Revisão Bibliográfica 40
PPGEM – Engenharia de Manufatura (2005)
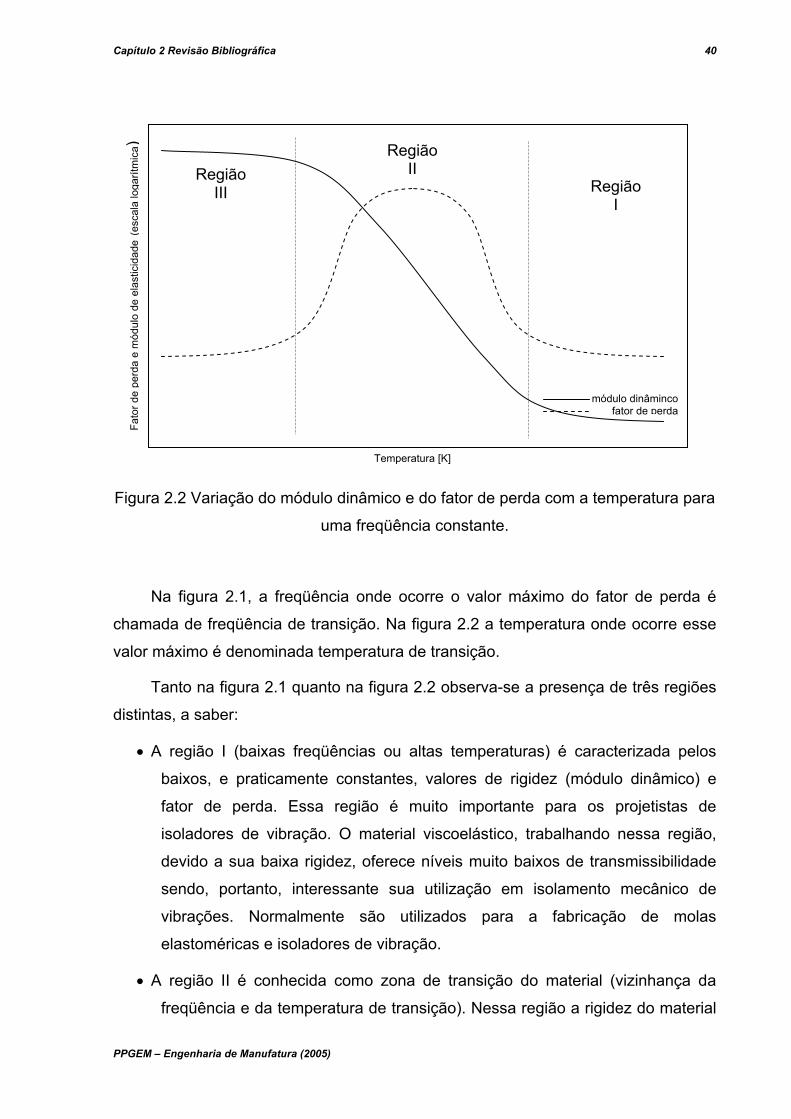
Figura 2.2 Variação do módulo dinâmico e do fator de perda com a temperatura para
uma freqüência constante.
Na figura 2.1, a freqüência onde ocorre o valor máximo do fator de perda é
chamada de freqüência de transição. Na figura 2.2 a temperatura onde ocorre esse
valor máximo é denominada temperatura de transição.
Tanto na figura 2.1 quanto na figura 2.2 observa-se a presença de três regiões
distintas, a saber:
• A região I (baixas freqüências ou altas temperaturas) é caracterizada pelos
baixos, e praticamente constantes, valores de rigidez (módulo dinâmico) e
fator de perda. Essa região é muito importante para os projetistas de
isoladores de vibração. O material viscoelástico, trabalhando nessa região,
devido a sua baixa rigidez, oferece níveis muito baixos de transmissibilidade
sendo, portanto, interessante sua utilização em isolamento mecânico de
vibrações. Normalmente são utilizados para a fabricação de molas
elastoméricas e isoladores de vibração.
• A região II é conhecida como zona de transição do material (vizinhança da
freqüência e da temperatura de transição). Nessa região a rigidez do material
Temperatura [K]
Fato
r de
perd
a e
mód
ulo
de e
last
icid
ade (
esca
la lo
garít
mic
a)
Região III
Região II
Região I
módulo dinâmincofator de perda
Capítulo 2 Revisão Bibliográfica 41
PPGEM – Engenharia de Manufatura (2005)
aumenta com a freqüência (ou com a redução da temperatura) em
incrementos relativamente grandes. O fator de perda tem um aumento de seu
valor até atingir o seu máximo. Após alcançar este valor máximo, o fator de
perda tende a diminuir novamente. Nessa região ocorre o valor máximo do
fator de perda. A região II é a mais importante para projetos de
neutralizadores dinâmicos de vibração e também de estruturas sanduíche. Ela
é naturalmente a mais desejada pelos projetistas devido aos elevados valores
do fator de perda.
• Um material viscoelástico trabalhando na região III não possui maiores
utilidades. A rigidez nessa região torna-se muito elevada, próxima à do aço ou
do alumínio. O fator de perda volta a ter valores muito pequenos. O material
passa a ter um comportamento vítreo.
Segundo Espíndola (1990), algumas observações em relação a materiais
viscoelásticos que trabalham dentro da Região I são:
(a) elevada resiliência,
(b) grande estabilidade estrutural e
(c) baixo ou médio amortecimento.
Pode-se citar dentro dessa categoria de materiais viscoelásticos a borracha
natural, com ou sem enchimento, o Neoprene e o SBR (estireno-butadieno).
Algumas características de materiais operando dentro da Região II são:
(a) grande rigidez (reduzida resiliência),
(b) precária estabilidade estrutural e
(c) elevado amortecimento.
Aqui, deve-se entender por precária estabilidade estrutural a relaxação elevada
experimentada por esses materiais quando submetidos a uma tensão constante.
Pode-se citar entre outros materiais com estas características: a resina de polivinila
butial plastificada, o Thiokol RD, o acetato de polivinila plastificado, a borracha
butílica com enchimento de negro de fumo e outros. Em geral as variações de

Capítulo 2 Revisão Bibliográfica 42
PPGEM – Engenharia de Manufatura (2005)
freqüência promovem modificações mais sensíveis no modulo dinâmico do que no
fator de perda.
2.2 Modelo Viscoelástico Baseado em Derivadas Fracionárias
A relação constitutiva para o modelo viscoelástico linear padrão no tempo é
dada pela equação diferencial (Nashif, Jones e Henderson, 1985)
( ) ( ) ( ) ( )∑∑==
+=+N
nn
n
n
M
mm
m
m dttdEtE
dttdbt
10
1
εεσσ , Eq. 2.20
onde mb , 0E e nE são parâmetros do material. M , m , N e n são números inteiros.
Em geral, para representar o comportamento de materiais viscoelásticos de
forma precisa são necessárias todas as ordens de derivada. Entretanto, de forma
prática, um número finito de termos oferece uma boa aproximação. Por outro lado,
esse modelo torna-se computacionalmente custoso e pouco prático. Quando os
materiais viscoelásticos têm propriedades mecânicas fortemente dependentes da
freqüência em uma faixa ampla, os números de derivadas temporais M e N
tornam-se elevados. Em conseqüência, o número de parâmetros empírico /
experimentais no modelo aumenta consideravelmente, tornando-o pouco prático.
Pode-se mostrar que um modelo mais preciso ao apresentado na equação
2.20, utilizando um número menor de coeficientes, é aquele que emprega derivadas
fracionárias.
2.2.1 Modelos com Derivada de Ordem Fracionária
O conceito de derivada de ordem fracionária, ou não-inteira, surgiu no final do
século XVII com Gottfried W. Leibniz (1646-1716). A partir deste, vários outros
autores desenvolveram esta linha de pesquisa na análise matemática. Alguns dos
autores que possibilitaram avanços nessa área são Euler, Laplace, Fourier, Lacroix,
Neils H. Abel, Liouville e Riemann, além de Gorenflo e Mainardi.
Capítulo 2 Revisão Bibliográfica 43
PPGEM – Engenharia de Manufatura (2005)
Na área de viscoelasticidade, a primeira proposta apresentada de um modelo
matemático foi feita por Scott Blair (1947). Mais tarde, Caputo (1966) utilizou as
derivadas fracionarias para modelar o comportamento de camadas geológicas, o
qual se mostrou semelhante aos materiais viscoelásticos.
Bagley e Torvik (1979, 1983, e 1986) apresentam um modelo matemático
baseado em derivadas de ordem fracionaria com o objetivo de representar o
comportamento mecânico da rigidez de elastômeros por meio de ajustes de curvas
experimentais.
Segundo Bagley e Torvik (1983), uma forma geral para a equação diferencial
fracional como modelo viscoelástico, para uma única dimensão é
( ) ( )[ ] ( ) ( )[ ]∑∑==
+=+N
nn
M
mm tDEtEtDbt nm
10
1εεσσ αβ . Eq. 2.21
Os parâmetros mb , 0E e nE são propriedades intrínsecas do material. nα e mβ
são números reais. [ ]αD representa o operador derivada fracional, definido de
forma mais geral por Gorenflo e Mainardi (1997), pela equação
( )[ ] ( )( )
( )τ
ττ
α αα d
tx
dtd
mtxD
t
mm
m
∫ ++−−−Γ=
01
1 , Eq. 2.22
com mm <<− α1 , m inteiro. ( )κΓ é a função gama de ordem κ .
Através de observações experimentais (Bagley e Torvik, 1983, Pritz, 1996 e
1998 e Lopes, 1998) pode-se concluir que a expansão em apenas um termo da
equação 2.21 é suficiente para descrever o comportamento de um material
viscoelástico. Tomando-se, portanto, 1== NM , o que caracteriza o modelo de
Zener (Snowdon, 1968 e Pritz, 1996), a expressão fica reduzida a um modelo de
apenas cinco parâmetros: 1b , 0E , 1E , α e β , os quais podem ser determinados por
um processo experimental de identificação. Sua forma é
Capítulo 2 Revisão Bibliográfica 44
PPGEM – Engenharia de Manufatura (2005)
( ) ( )[ ] ( ) ( )[ ]tDEtEtDbt εεασ αβ101 +=+ . Eq. 2.23
Aplicando a transformada de Fourier à equação 2.23 e rearranjando o resultado
obtido tem-se
( ) ( )( )
( )( )β
α
εσ
Ω+Ω+
=ΩΩ
=ΩibiEEEc
1
10
1. Eq. 2.24
A equação 2.24 é conhecida como modelo fracional de cinco parâmetros e
representa o módulo de elasticidade complexo de um material, com βα > e α e β
fracionários.
A partir de comprovações obtidas por Bagley e Torvik (1983), a expressão 2.24
pode ser simplificada, para uma certa classe de materiais, utilizados na industria em
controle de vibração. Para isso, supõe-se que os parâmetros que representam a
ordem da derivada não inteira sejam iguais, ou seja, βα ≈ . A equação 2.24 pode
então ser reescrita na forma
( ) ( )( )α
α
Ω+Ω+
≈ΩibiEEEc
1
10
1. Eq. 2.25
Ou ainda, fazendo 11 bEE ∞= e αbb =1 :
( ) ( )( )α
α
bibiEEEc Ω+
Ω+≈Ω ∞
10 . Eq. 2.26
A equação 2.26 é conhecida como modelo fracional de quatro parâmetros.
Para que a mesma seja válida e forneça resultados verossímeis do comportamento
dinâmico de um material viscoelástico, este modelo deve ter razão de energia
Capítulo 2 Revisão Bibliográfica 45
PPGEM – Engenharia de Manufatura (2005)
dissipada internamente positiva. Isso acontece para a grande maioria dos materiais
viscoelásticos empregados em dinâmica estrutural.
Na maioria das vezes, do ponto de vista construtivo, os NDV são produzidos de
tal forma que o material viscoelástico trabalhe em cisalhamento. Sendo assim, pode-
se escrever a equação 2.26 em termos de módulo de cisalhamento complexo.
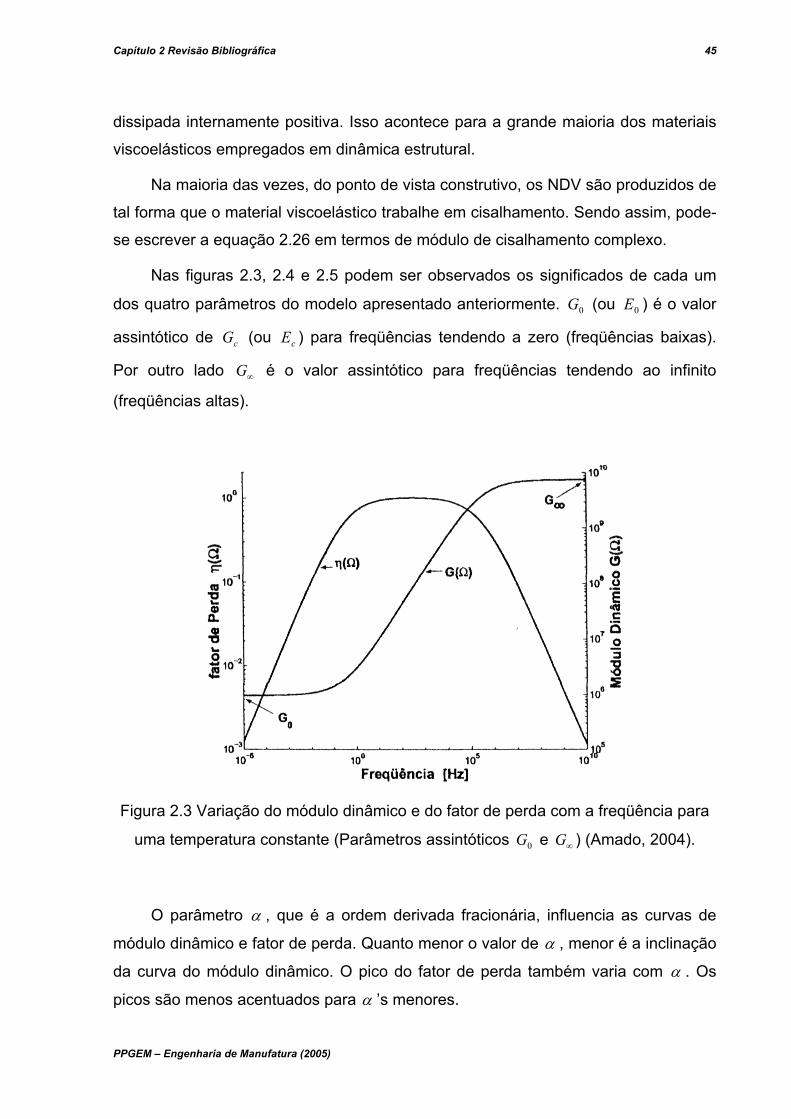
Nas figuras 2.3, 2.4 e 2.5 podem ser observados os significados de cada um
dos quatro parâmetros do modelo apresentado anteriormente. 0G (ou 0E ) é o valor
assintótico de cG (ou cE ) para freqüências tendendo a zero (freqüências baixas).
Por outro lado ∞G é o valor assintótico para freqüências tendendo ao infinito
(freqüências altas).
Figura 2.3 Variação do módulo dinâmico e do fator de perda com a freqüência para
uma temperatura constante (Parâmetros assintóticos 0G e ∞G ) (Amado, 2004).
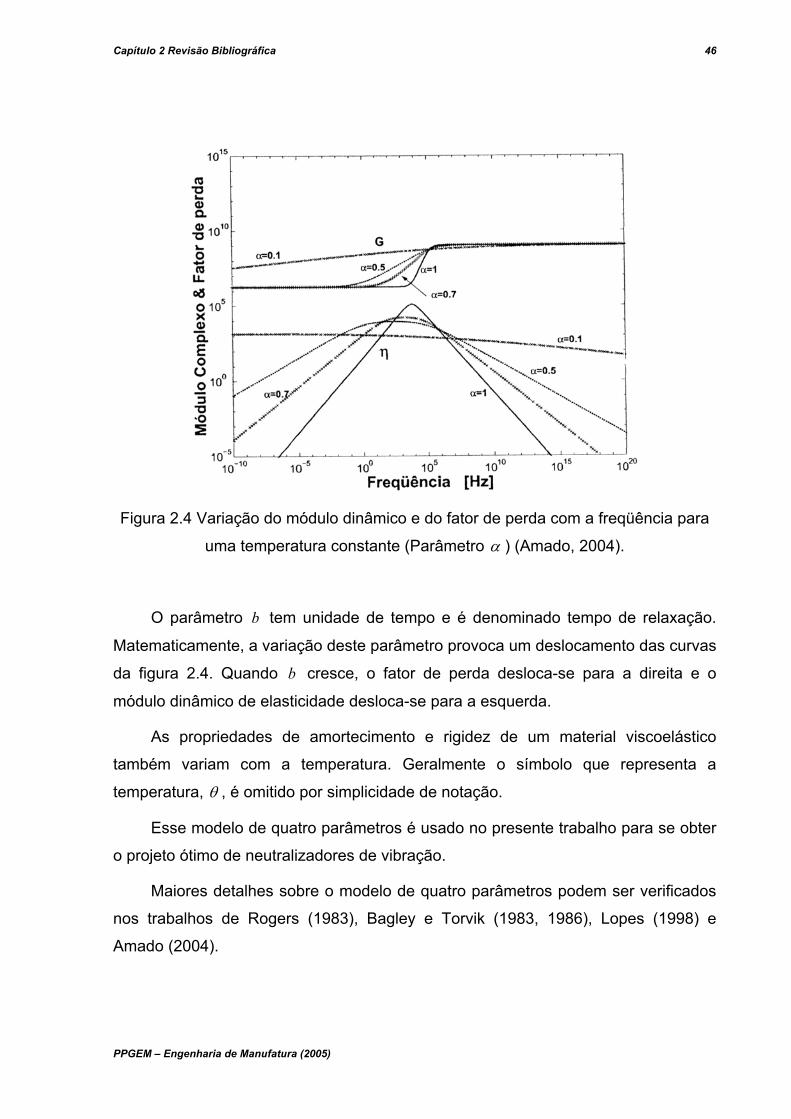
O parâmetro α , que é a ordem derivada fracionária, influencia as curvas de
módulo dinâmico e fator de perda. Quanto menor o valor de α , menor é a inclinação
da curva do módulo dinâmico. O pico do fator de perda também varia com α . Os
picos são menos acentuados para α ’s menores.
Capítulo 2 Revisão Bibliográfica 46
PPGEM – Engenharia de Manufatura (2005)
Figura 2.4 Variação do módulo dinâmico e do fator de perda com a freqüência para
uma temperatura constante (Parâmetro α ) (Amado, 2004).
O parâmetro b tem unidade de tempo e é denominado tempo de relaxação.
Matematicamente, a variação deste parâmetro provoca um deslocamento das curvas
da figura 2.4. Quando b cresce, o fator de perda desloca-se para a direita e o
módulo dinâmico de elasticidade desloca-se para a esquerda.
As propriedades de amortecimento e rigidez de um material viscoelástico
também variam com a temperatura. Geralmente o símbolo que representa a
temperatura, θ , é omitido por simplicidade de notação.
Esse modelo de quatro parâmetros é usado no presente trabalho para se obter
o projeto ótimo de neutralizadores de vibração.
Maiores detalhes sobre o modelo de quatro parâmetros podem ser verificados
nos trabalhos de Rogers (1983), Bagley e Torvik (1983, 1986), Lopes (1998) e
Amado (2004).
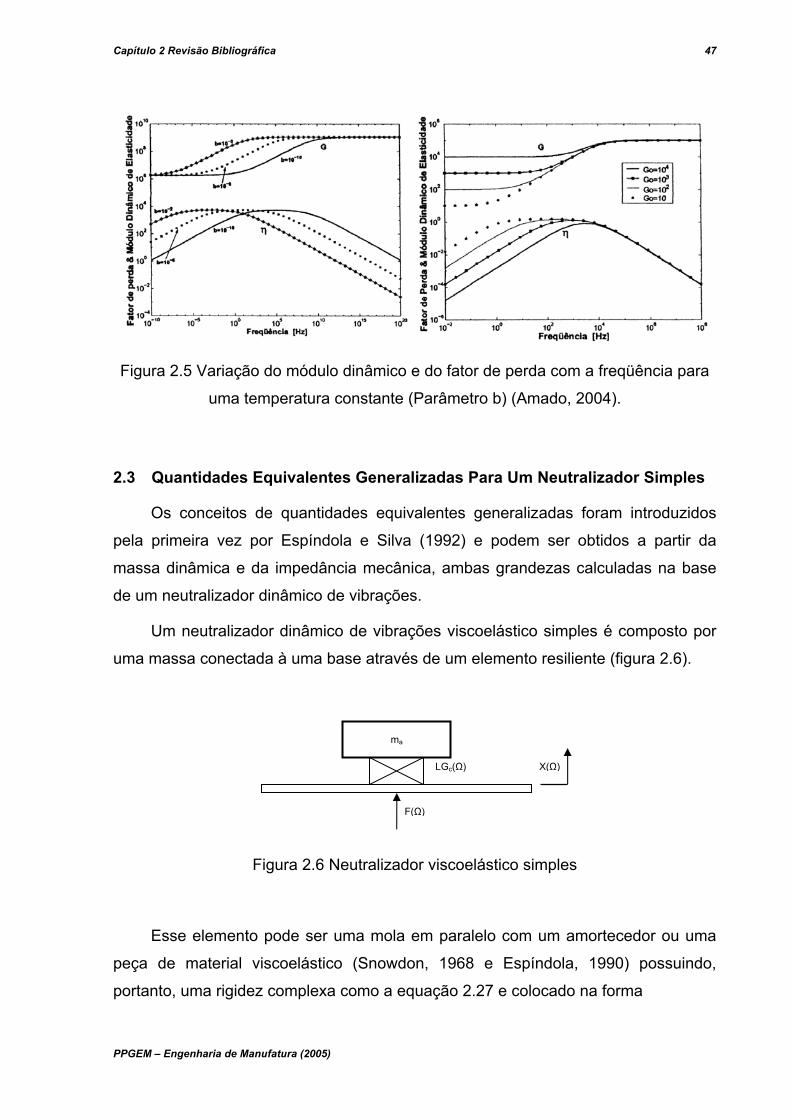
Capítulo 2 Revisão Bibliográfica 47
PPGEM – Engenharia de Manufatura (2005)
Figura 2.5 Variação do módulo dinâmico e do fator de perda com a freqüência para
uma temperatura constante (Parâmetro b) (Amado, 2004).
2.3 Quantidades Equivalentes Generalizadas Para Um Neutralizador Simples
Os conceitos de quantidades equivalentes generalizadas foram introduzidos
pela primeira vez por Espíndola e Silva (1992) e podem ser obtidos a partir da
massa dinâmica e da impedância mecânica, ambas grandezas calculadas na base
de um neutralizador dinâmico de vibrações.
Um neutralizador dinâmico de vibrações viscoelástico simples é composto por
uma massa conectada à uma base através de um elemento resiliente (figura 2.6).
Figura 2.6 Neutralizador viscoelástico simples
Esse elemento pode ser uma mola em paralelo com um amortecedor ou uma
peça de material viscoelástico (Snowdon, 1968 e Espíndola, 1990) possuindo,
portanto, uma rigidez complexa como a equação 2.27 e colocado na forma
ma
F(Ω)
X(Ω) LGc(Ω)

Capítulo 2 Revisão Bibliográfica 48
PPGEM – Engenharia de Manufatura (2005)
( ) ( ) ( )( )θηθθθ ,1),(,, Ω+Ω=Ω=Ω iLGLGK cc Eq. 2.27
onde L é um fator de forma no NDV. Este fator depende da geometria do
neutralizador.
Para simplificar a notação, a letra θ , representando a temperatura, será
omitida a partir daqui.
Na figura 2.6, ( )ΩX ) e ( )ΩF são as transformadas de Fourier do deslocamento
( )tx e da força de excitação ( )tf , respectivamente, aplicada à base sem massa. L é
um fator de forma.
A rigidez dinâmica, ou impedância ( )ΩaZ , na base do neutralizador é definida
por
( ) ( )( )
( )( )Ω−ΩΩΩ−
=ΩΩ
Ω∆Ω
ca
caa LGm
LGimXiFZ 2 Eq. 2.28
e a massa dinâmica ( )ΩaM por
( ) ( )( )
( )( )Ω−Ω
Ω−=
ΩΩ−Ω
∆Ωca
caa LGm
LGmX
FM 22 . Eq. 2.29
A freqüência de anti-ressonância do neutralizador é definida como sendo
aquela que, na ausência de amortecimento, faz com que o denominador das
equações 2.28 e 2.29 se igualem a zero. Ou seja,
( )a
aa m
LG Ω=Ω 2 . Eq. 2.30

Capítulo 2 Revisão Bibliográfica 49
PPGEM – Engenharia de Manufatura (2005)
Na ausência de amortecimento, a parte imaginária de cG é nula, portanto
( ) ( )Ω=Ω GGc .
O conceito fundamental do funcionamento dos neutralizadores dinâmicos de
vibração baseia-se no seguinte princípio: Quando a freqüência de ressonância de
uma estrutura, a qual está fixado o neutralizador dinâmico, coincide com a
freqüência de anti-ressonância calculada na base do neutralizador pela equação
2.30, é necessária uma força infinita, se o amortecimento está ausente, para
provocar um deslocamento na base do neutralizador.
Definindo:
( ) ( )ΩΩ=Ω rLGLG a )( Eq. 2.31
e
( )a
arΩΩ
==Ω ε , Eq. 2.32
pode-se reescrever as equações 2.28 e 2.29 como
( ) ( ) ( )[ ]( ) ( )[ ]Ω+Ω−
Ω+ΩΩ−=Ω
ηεηir
irimZa
aa 11
2 e Eq. 2.33
( ) ( ) ( )[ ]( ) ( )[ ]Ω+Ω−
Ω+Ω−=Ω
ηεηir
irmMa
aa 11
2 . Eq. 2.34
A parte real da impedância mecâmica (equação 2.33) é definida como sendo o
amortecimento viscoso generalizado ( )Ωec e dado por
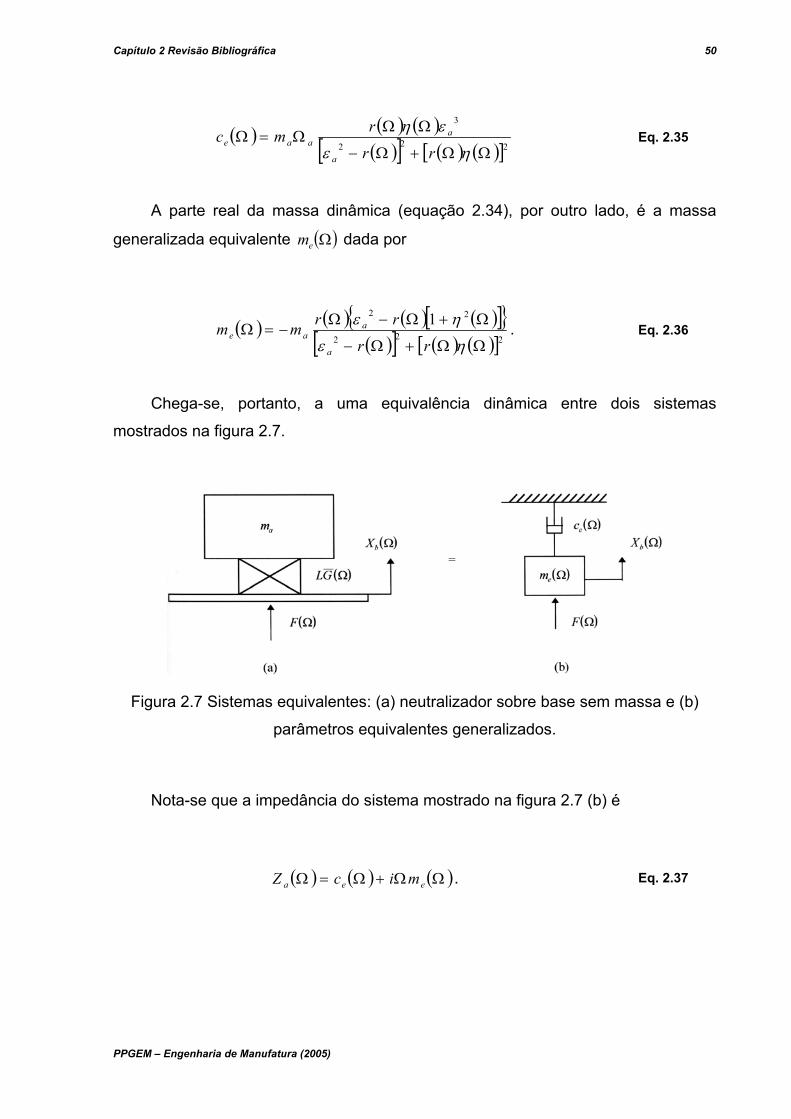
Capítulo 2 Revisão Bibliográfica 50
PPGEM – Engenharia de Manufatura (2005)
( ) ( ) ( )( )[ ] ( ) ( )[ ]222
3
ΩΩ+Ω−
ΩΩΩ=Ω
ηε
εη
rr
rmca
aaae Eq. 2.35
A parte real da massa dinâmica (equação 2.34), por outro lado, é a massa
generalizada equivalente ( )Ωem dada por
( ) ( ) ( ) ( )[ ] ( )[ ] ( ) ( )[ ]222
22 1
ΩΩ+Ω−
Ω+Ω−Ω−=Ω
ηε
ηε
rr
rrmma
aae . Eq. 2.36
Chega-se, portanto, a uma equivalência dinâmica entre dois sistemas
mostrados na figura 2.7.
Figura 2.7 Sistemas equivalentes: (a) neutralizador sobre base sem massa e (b)
parâmetros equivalentes generalizados.
Nota-se que a impedância do sistema mostrado na figura 2.7 (b) é
( ) ( ) ( )ΩΩ+Ω=Ω eea micZ . Eq. 2.37
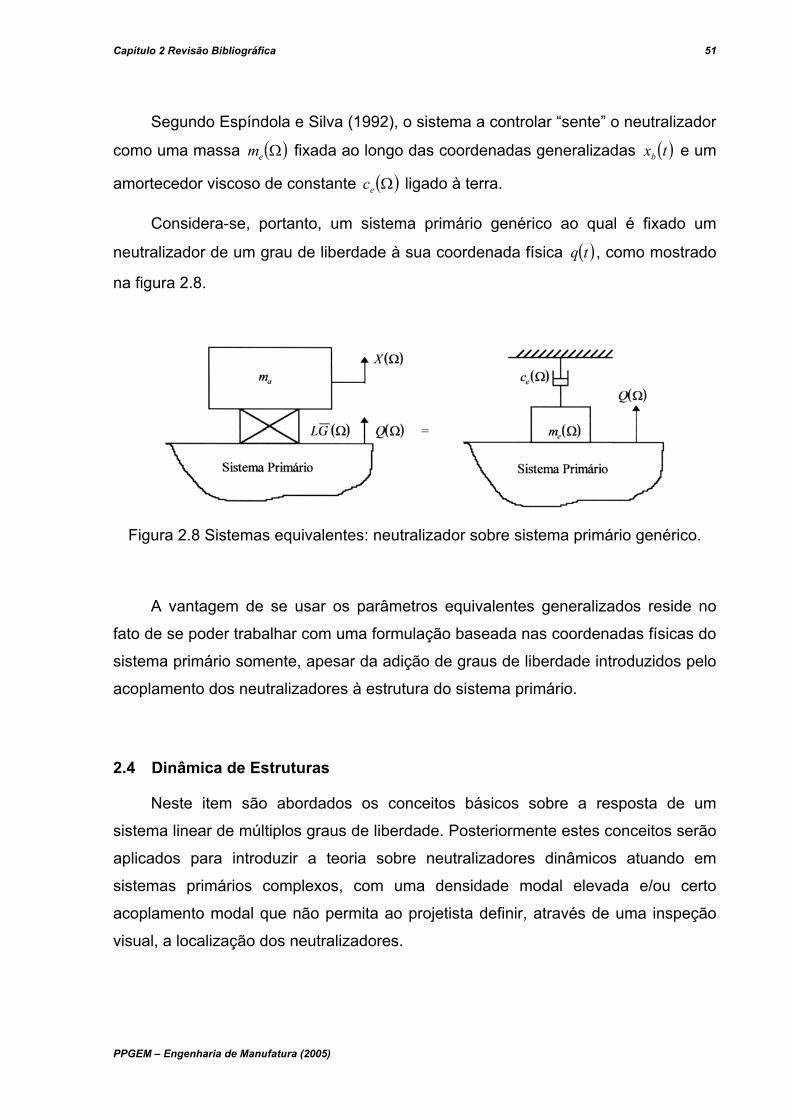
Capítulo 2 Revisão Bibliográfica 51
PPGEM – Engenharia de Manufatura (2005)
Segundo Espíndola e Silva (1992), o sistema a controlar “sente” o neutralizador
como uma massa ( )Ωem fixada ao longo das coordenadas generalizadas ( )txb e um
amortecedor viscoso de constante ( )Ωec ligado à terra.
Considera-se, portanto, um sistema primário genérico ao qual é fixado um
neutralizador de um grau de liberdade à sua coordenada física ( )tq , como mostrado
na figura 2.8.
Figura 2.8 Sistemas equivalentes: neutralizador sobre sistema primário genérico.
A vantagem de se usar os parâmetros equivalentes generalizados reside no
fato de se poder trabalhar com uma formulação baseada nas coordenadas físicas do
sistema primário somente, apesar da adição de graus de liberdade introduzidos pelo
acoplamento dos neutralizadores à estrutura do sistema primário.
2.4 Dinâmica de Estruturas
Neste item são abordados os conceitos básicos sobre a resposta de um
sistema linear de múltiplos graus de liberdade. Posteriormente estes conceitos serão
aplicados para introduzir a teoria sobre neutralizadores dinâmicos atuando em
sistemas primários complexos, com uma densidade modal elevada e/ou certo
acoplamento modal que não permita ao projetista definir, através de uma inspeção
visual, a localização dos neutralizadores.

Capítulo 2 Revisão Bibliográfica 52
PPGEM – Engenharia de Manufatura (2005)
2.4.1 Modelo Viscoso
A equação de movimento de um sistema linear, causal, invariante no tempo e
com múltiplos graus de liberdade é
( ) ( ) ( ) ( )tftKqtqCtqM =++ &&& . Eq. 2.38
A solução da equação 2.38 para vibração livre, ou seja, ( ) 0=tf , supondo
( ) stq t eφ= é
[ ] 02 =++ steKsCMs φ , Eq. 2.39
ou
[ ] 02 =++ φKsCMs , Eq. 2.40
uma vez que ste é diferente de zero.
A solução não trivial leva a
[ ] 0det 2 =++ KsCMs . Eq. 2.41
A equação 2.41 gera um polinômio que por sua vez gera n2 valores para s ( 1s ,
2s , ..., ns2 ), onde n é a dimensão do problema. Substituindo cada valor de js na
equação 2.39 determina-se o vetor jΦ , de valores relativos. As raízes do polinômio
gerado pela equação 2.40, js , são chamados de autovalores e os vetores jΦ , de
autovetores.
Capítulo 2 Revisão Bibliográfica 53
PPGEM – Engenharia de Manufatura (2005)
Os autovalores, dependendo das características do problema, podem ser reais
e iguais ou complexos conjugados. No caso geral apresenta-se a forma complexa e
complexa conjugada.
jjj
jjj
is
is
νδ
νδ
−=
+=* Eq. 2.42
A cada par de autovalores complexos conjugados corresponde um par de
autovetores, também complexos conjugados.
2.4.2 Problema de Autovalores não Amortecido
O problema de autovalores não amortecido não acontece na prática, uma vez
que todos os sistemas físicos reais possuem sempre amortecimento. Entretanto, do
ponto de vista teórico, sua abordagem aqui se torna importante.
Uma vez que o sistema não possui amortecimento, a matriz C é nula e o
problema se resume a
[ ] 02 =+ φKMs . Eq. 2.43
Os autovalores do problema são imaginários puros conjugados (Espíndola,
1986):
jj
jj
is
is
Ω−=
Ω=* Eq. 2.44
Substituindo 2.44 em 2.43.

Capítulo 2 Revisão Bibliográfica 54
PPGEM – Engenharia de Manufatura (2005)
φφ MK 2Ω= Eq. 2.45
Os autovetores correspondentes a js e *js são reais e iguais. A solução do
problema pode ser mostrada na forma matricial como
( )Φ
Ω 2jdiag
Eq. 2.46
onde 2jΩ é conhecido como o quadrado da j-ésima freqüência natural e jΦ o seu
autovetor ou modo de vibrar correspondente (Ewins, 1984).
O conjunto de matrizes da equação 2.46 é conhecido como modelo modal da
estrutura e as matrizes M e K formam o seu modelo espacial (Bavastri, 1997).
Demonstra-se (Ewins, 1984 e Espíndola, 1992) que o modelo modal tem a
propriedade conhecida como ortogonalidade. Ou seja:
( )( )rT
rT
kdiagK
mdiagM
=ΦΦ
=ΦΦ Eq. 2.47
onde
r
rr m
k=Ω 2 . Eq. 2.48
Os parâmetros rm e rk são chamados de massa e rigidez modais do r-ésimo
modo, respectivamente.
Normalizando os autovetores através da raiz quadrada da massa modal as
relações seguintes também são válidas.

Capítulo 2 Revisão Bibliográfica 55
PPGEM – Engenharia de Manufatura (2005)
( )2r
T
T
diagK
IM
Ω=ΨΨ
=ΨΨ Eq. 2.49
onde rr
r mφψ 1
=
2.4.3 Modelo Viscoso Proporcional
Se a matriz de amortecimento C pode ser escrita através da relação de
proporcionalidade KMC γβ += , prova-se que
( ) ( ) ( )rrrT cdiagmdiagkdiagC =+=ΨΨ .. γβ , Eq. 2.50
onde rc é o amortecimento modal.
O amortecimento crítico crc é dado por:
rrcr mc Ω= 2 . Eq. 2.51
A relação de amortecimento modal é
cr
rr c
c=ξ Eq. 2.52
Assim pode-se reescrever o coeficiente de amortecimento modal como
rrrr mc Ω= ξ2 . Eq. 2.53
Capítulo 2 Revisão Bibliográfica 56
PPGEM – Engenharia de Manufatura (2005)
Segundo Ewins (1984), para sistemas modelados com amortecimento viscoso
proporcional, suas freqüências naturais são complexas e suas partes imaginárias
são dadas por
21 rrr ξν −Ω= . Eq. 2.54
A parte imaginária das freqüências naturais representa a parte oscilatória. Por
outro lado, a parte real representa o decaimento. Esse é dado por:
rrr Ω= ξδ . Eq. 2.55
2.4.4 Resposta em Freqüência – Coordenadas Principais
O sistema de equações para descrever o comportamento dinâmico de sistemas
lineares com múltiplos graus de liberdade pode ser escrito no domínio da freqüência,
através de sua transformada de Fourier. Obtém-se, assim,
[ ] ( ) ( )Ω=Ω+Ω+Ω− FQKCiM2 , Eq. 2.56
onde ( )ΩF e ( )ΩQ são a transformada de Fourier de ( )tf e ( )tq respectivamente.
Fazendo uma transformação de coordenadas na forma
( ) ( )ΩΨ=Ω PQ , Eq. 2.57
onde ( )ΩQ são as coordenadas físicas (geralmente denominadas coordenadas
generalizadas) e ( )ΩP as coordenadas principais. Geralmente, essas últimas não
possuem sentido físico. Substituindo 2.57 em 2.56 e premultiplicando essa última
equação por TΨ tem-se
Capítulo 2 Revisão Bibliográfica 57
PPGEM – Engenharia de Manufatura (2005)
( ) ( )[ ] ( ) ( )
( ) ( )ΩΨ=Ω
Ω=ΩΩ+ΩΩ+Ω−
FN
NPdiagdiagiIT
rrr22 2ξ
Eq. 2.58
Da transformação de coordenadas resulta um novo espaço que recebe o nome
de espaço modal. As equações 2.58, que representam do sistema no espaço modal,
estão desacopladas. O desacoplamento das equações no espaço modal permite a
solução independente de cada linha do sistema de equações em 2.58. Uma linha
genérica r desse sistema de equações é
( ) ( ) ( )Ω=ΩΩ+ΩΩ+Ω− rrrrr NPi 22 2ξ . Eq. 2.59
Assim é possível determinar a resposta do sistema, considerando
amortecimento viscoso proporcional. Definindo a matriz 0D como
( ) ( )[ ]220 2 jjj diagdiagiID Ω+ΩΩ+Ω−= ξ , Eq. 2.60
calcula-se as coordenadas principais
( ) ( )Ω=Ω − NDP 10 Eq. 2.61
ou
( ) ( )ΩΨ=Ω − FDP T10 . Eq. 2.62
A matriz 0D é diagonal e sua inversa é calculada por inversão simples de cada
elemento da diagonal. Essa matriz é chamada de matriz resposta em freqüência do
Capítulo 2 Revisão Bibliográfica 58
PPGEM – Engenharia de Manufatura (2005)
espaço modal. Premultiplicando 2.62 por Ψ obtém-se a resposta do sistema no
sistema de coordenadas generalizadas
( ) ( )ΩΨΨ=Ω − FDQ T10 . Eq. 2.63
Define-se, então, a matriz de resposta em freqüência em coordenadas no
espaço de configurações como
( ) TD ΨΨ=Ω −10α , Eq. 2.64
onde cada elemento particular é dado por
( ) ∑= ΩΩ+Ω+Ω−
ΨΨ=Ω
n
r rrr
srkrks i1
22 2ξα . Eq. 2.65
A equação 2.65, ksα , representa a resposta em freqüência do sistema na
coordenada generalizada k quando excitado na coordenada generalizada s .
2.4.5 Neutralizadores Dinâmicos Fixados a Sistemas Primários Complexos
Para vários neutralizadores adicionados a uma estrutura (sistema primário com
múltiplos graus de liberdade) a equação de movimento no domínio da freqüência,
considerando parâmetros equivalentes generalizados, é escrita como
[ ] ( ) ( )Ω=Ω+Ω+Ω− FQKCiM ~~2 , Eq. 2.66
onde M~ e C~ são respectivamente a matriz de massa e de amortecimento do
sistema composto.
Capítulo 2 Revisão Bibliográfica 59
PPGEM – Engenharia de Manufatura (2005)
Para p neutralizadores fixados ao longo de p coordenadas generalizadas 1kq ,
2kq , ...,
pkq , sendo as massas e amortecimentos equivalentes generalizados
1em ,
2em ,
..., pe
m e 1ec ,
2ec , ...,
pec . A nova massa e o novo amortecimento do sistema
composto são, respectivamente,
+=
00
00
~ 1
pe
e
m
mMM O Eq. 2.67
e
+=
00
00
~ 1
pe
e
c
cCC O . Eq. 2.68
A equação 2.66 só é válida no domínio da freqüência, pois os parâmetros
equivalentes generalizados são função da freqüência. O conceito de espaço modal
poderia ser aplicado para o sistema composto, entretanto este não fica desacoplado,
uma vez que a transformação de coordenadas não diagonaliza parte das matrizes C~
e M~ . É importante notar também que, dependendo do modelo matemático, pode-se
trabalhar com mil, dois mil, ou mais graus de liberdade (matrizes computadas
numericamente por elementos finitos).
2.4.6 Truncamento
Na prática, apenas alguns poucos modos estão dentro da faixa de freqüência
de interesse. Portanto, o problema de autovalores e autovetores, em geral, fica
restrito a esses primeiros dez ou vinte modos.
Para tal, considera-se a transformação de coordenadas:

Capítulo 2 Revisão Bibliográfica 60
PPGEM – Engenharia de Manufatura (2005)
( ) ( )ΩΦ=Ω PQ ˆˆ , Eq. 2.69
onde Φ é a matriz modal truncada do sistema primário, de ordem nn ˆ× (n representa
o número de graus de liberdade e n o número de autovetores computados ou
medidos na faixa de freqüência de interesse). Em geral nn <<ˆ .
Substituindo a equação 2.69 na equação 2.66 e premultiplicando por TΦ :
( ) ( )[ ] ( ) ( )[ ] ( )[ ] ( ) ( )Ω=Ω+Ω+Ω+Ω+Ω− NPjkdiagACjcdiagiAMjmdiag ˆˆˆˆˆˆˆ2 Eq. 2.70
Os elementos das matrizes ( )ΩAM e ( )ΩAC podem ser escritos como
( )( ) ∑=
ΦΦ=Ωp
irkskiersA ii
mM1
,ˆ Eq. 2.71
( )( ) ∑=
ΦΦ=Ωp
irkskiersA ii
cC1
,ˆ e Eq. 2.72
( ) ( )ΩΦ=Ω FN Tˆˆ Eq. 2.73
A equação 2.70 representa um sistema de dimensão nn <<ˆ e sua solução
corresponde aos parâmetros equivalentes generalizados. Ela mostra que no espaço
modal o sistema de equações não é desacoplado. Isso ocorre devido à adição dos
neutralizadores dinâmicos ao sistema primário.
Fazendo a transformação inversa da equação 2.69, encontra-se a solução das
coordenadas físicas. De 2.70 e 2.73 mostra-se que:
( ) ( )ΩΦΦ=Ω − FDQ T ˆˆˆˆ 1 Eq. 2.74

Capítulo 2 Revisão Bibliográfica 61
PPGEM – Engenharia de Manufatura (2005)
onde
( ) ( )ΩΩ+ΩΩ−= AA CiMDD ˆˆˆˆ 20 Eq. 2.75
e
( )jjj cimkdiagD ˆˆˆˆ 20 Ω+Ω−= Eq. 2.76
A matriz 0D é diagonal. Já a matriz D , que representa o sistema composto
(sistema primário + neutralizadores) não é diagonal.
Para autovetores normalizados pela matriz massa, a equação 2.76 pode ser
escrita como
( )ΩΩ+Ω−Ω= jjj idiagD ξ2ˆ 220 . Eq. 2.77
Fazendo uma equivalência com sistemas de um grau de liberdade e usando a
equação 2.74 pode-se escrever a matriz de receptância do sistema composto.
( ) TD ΦΦ=Ω − ˆˆˆ 1α . Eq. 2.78
Cada elemento dessa matriz é escrito como
( ) ∑ ∑= =
ΦΦ=Ωn
j
n
ikjsiijks D
ˆ
1
ˆ
1α , Eq. 2.79
onde ijD são elementos da matriz 1ˆ −D e sjΦ são elementos da matriz Φ .
1−D é a matriz de resposta em freqüência no espaço modal do sistema
composto. Ela pode ser calculada conhecendo-se os parâmetros modais da

Capítulo 2 Revisão Bibliográfica 62
PPGEM – Engenharia de Manufatura (2005)
estrutura a controlar (sistema primário) e as características dos neutralizadores
dinâmicos acoplados a ela. É importante lembrar aqui que, no espaço modal, conta-
se com um número reduzido de equações nn <<ˆ .
Partindo-se da formulação descrita até aqui pode-se optar por duas formas
diferentes para controlar as vibrações do sistema primário:
• Controle modo a modo: Aplicada por Silva (1991), nela despreza-se o
acoplamento do sistema e procura-se um controle modo a modo através de
uma correlação direta com a teoria de Den Hartog (1956), para um grau de
liberdade. Resultados utilizando essa técnica podem ser encontrados em
Espíndola e Silva (1992).
• Controle em uma banda ampla de freqüência: Esse procedimento leva em
consideração o acoplamento do sistema composto e baseia-se em técnicas
de otimização não linear para encontrar as características dos
neutralizadores. Os resultados dessa técnica podem ser encontrados em
Bavastri (1997). Essa mesma metodologia será aplicada a esse trabalho.
2.5 Técnicas de Otimização Não Linear
O projeto de um sistema pode ser formulado como um problema de otimização
onde uma medida de performance é maximizada (ou minimizada) enquanto
restrições são satisfeitas. Qualquer problema, no qual parâmetros são determinados
enquanto restrições precisem ser satisfeitas, pode ser formulado como um problema
de otimização (Arora, 1989).
O processo de otimização pode ser resumido com no fluxograma mostrado na
figura 2.14.
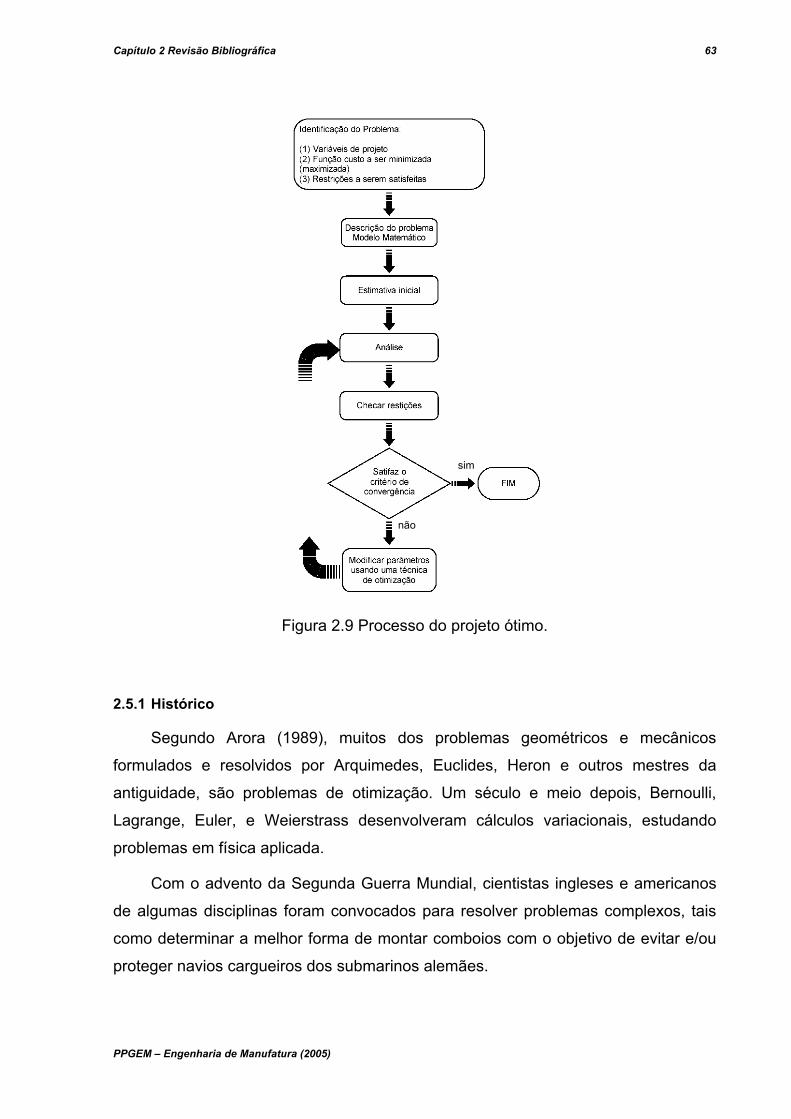
Capítulo 2 Revisão Bibliográfica 63
PPGEM – Engenharia de Manufatura (2005)
Figura 2.9 Processo do projeto ótimo.
2.5.1 Histórico
Segundo Arora (1989), muitos dos problemas geométricos e mecânicos
formulados e resolvidos por Arquimedes, Euclides, Heron e outros mestres da
antiguidade, são problemas de otimização. Um século e meio depois, Bernoulli,
Lagrange, Euler, e Weierstrass desenvolveram cálculos variacionais, estudando
problemas em física aplicada.
Com o advento da Segunda Guerra Mundial, cientistas ingleses e americanos
de algumas disciplinas foram convocados para resolver problemas complexos, tais
como determinar a melhor forma de montar comboios com o objetivo de evitar e/ou
proteger navios cargueiros dos submarinos alemães.
sim
não
Capítulo 2 Revisão Bibliográfica 64
PPGEM – Engenharia de Manufatura (2005)
Podem-se citar alguns dos pesquisadores, matemáticos, físicos e economistas
que contribuíram com o posicionamento da otimização no mapa da pesquisa
mundial, antes e após a guerra.
George W. Dantzig criou o Método Simplex para resolver problemas de
otimização linear durante a Segunda Guerra. Construindo o conhecimento de
dualidade na teoria dos jogos, a qual foi desenvolvida por John Von Neumann em
1920. Dantzig, junto com Albert W. Tucker também desenvolveu a teoria da
dualidade em programação linear, em conjunto com várias caracterizações de uma
solução ótima gerada por aquela teoria. Alguns pesquisadores, interessados em
economia, estudaram tais modelos como problemas de otimização linear. Dois
deles, o matemático Leonid W. Kantorovich e o estatístico Tjalling C. Koopmans
receberam o prêmio Nobel de 1975 “pela sua contribuição à teoria de alocação
ótima de recursos”. Eles, de fato, trabalharam em bases da programação linear,
independente de Dantzig.
2.5.2 Classificação dos Modelos de Otimização
Considerando:
nx ℜ∈ : vetor de variáveis jx , nj ,...,2,1= ;
∞±∪ℜ→ℜnf : : função objetivo;
nX ℜ⊆ : espaço de busca definido logicamente / fisicamente;
nnig ℜ→ℜ: : funções de restrição definindo restrições em x ;
( ) 0≥xgi : restrições de desigualdade;
( ) 0=xhi : restrições de igualdade.
O problema de otimização é:
minimizar ( )xf ,
sujeito a ( ) 0≥xgi
( ) 0=xhi
Capítulo 2 Revisão Bibliográfica 65
PPGEM – Engenharia de Manufatura (2005)
Xx∈
(Se o problema é uma maximização, então se troca o sinal de ( )xf ).
O tipo de problema de otimização está relacionado com a natureza das funções
f , ig e ih , e o espaço de busca X :
• (PL) Programação Linear: a função objetivo, bem como as restrições, são
lineares.
• (PNL) Programação Não-Linear: algumas das funções f , ig e/ou ih são não
lineares.
• Otimização Contínua: f , ig e ih são continuas em um conjunto aberto
contento X ; X é fechado e convexo.
• (PI) Programação Inteira: X é inteiro.
• Otimização Irrestrita: as funções de restrição não existem.
• Otimização Restrita: existem funções de restrição.
• Otimização Diferenciável: f , ig e ih são pelo menos uma vez diferenciáveis
em um conjunto aberto de X (os gradientes de f , ig e ih existem e são
contínuos); X é fechado e convexo.
• Otimização Não-Diferenciável: ao menos uma das funções f , ig e/ou ih não é
diferenciável.
• (PC) Programação Convexa: f é convexa; ig e ih são convexas; X é
fechado e convexo.
• Programação Não-Convexa: o complemento do acima.
Outros importantes casos podem ser destacados:
• Problemas Infinito-dimensionais: problemas formulados em espaços funcionais
ao invés de espaços vetoriais.
• Funções f , ig e/ou ih implícitas: não se pode escrever equações para esses
termos. Muitas aplicações de engenharia podem recair sobre esses casos. Na

Capítulo 2 Revisão Bibliográfica 66
PPGEM – Engenharia de Manufatura (2005)
maioria das vezes os valores das funções implícitas são obtidos via
simulações.
• Otimização Multiobjetivo: minimizar ( )xf1 , ( )xf2 , ..., ( )xfn .
• Otimização sob Incerteza ou Programação estocástica: quando f , ig e/ou ih
são apenas probabilisticamente conhecidas.
2.5.3 Aplicação a Neutralizadores Dinâmicos
Uma vez estabelecido o modelo matemático para o sistema composto (sistema
primário + neutralizadores), os métodos numéricos de otimização não linear podem
ser utilizados para encontrar os parâmetros ótimos dos neutralizadores dinâmicos.
Várias técnicas de otimização não linear, com e sem restrições, podem ser
empregadas para se encontrar esses parâmetros ótimos dos neutralizadores.
Basicamente o que se busca numa técnica de otimização não linear é uma
direção de busca para a variável a ser otimizada e quanto ela deve ser incrementada
nessa direção. A cada iteração, portanto são escolhidos uma nova direção de busca
e um novo incremento, até que se atinja o valor ótimo (satisfeito um critério de
parada).
Podem-se citar aqui algumas dessas técnicas de forma subdividida:
Métodos que não utilizam informação de derivada:
• método da direção aleatória;
• método de Powell;
• método cíclico (variante de Powell);
• método de Hooke e Jeeves;
• método do poliedro rígido;
• método de poliedro flexível.
Métodos que utilizam informação de derivada:
• direção do gradiente (Steepest Descent);

Capítulo 2 Revisão Bibliográfica 67
PPGEM – Engenharia de Manufatura (2005)
• direção conjugada;
• método de Newton;
• método de quase-Newton;
Maiores detalhes sobre todos esses métodos podem ser encontrados em Arora
(1989) e Bazaraa (1979).
O método empregado nesse trabalho para obtenção dos parâmetros ótimos
dos neutralizadores dinâmicos viscoelásticos é o método quase-Newton.
O método quase-Newton é baseado no método de Newton que por sua vez
está também relacionado com o método do gradiente.
No método do gradiente (steepest descent) utiliza-se o vetor gradiente d como
direção de busca para o problema de otimização. A direção d é definida como na
equação 2.80.
( )xfd −∇= Eq. 2.80
Uma vez definida a direção de busca procede-se uma busca unidimensional.
Define-se então o incremento a ser dado na variável para se chegar ao ponto ótimo
(equação 2.81).
kkk dxx λ+=+1 Eq. 2.81
O parâmetro λ é o escalar que define o ponto ótimo a partir de kx , na direção
kd . Uma vez que esse parâmetro tenha sido encontrado, o valor da variável é
atualizado através da equação 2.81. Muitos métodos realizam a busca
unidimensional. Podem ser citados aqui, também de forma subdividida.
Métodos que não utilizam informação de derivada:
• método da secção áurea;
• método da bisseção ou Balzano;

Capítulo 2 Revisão Bibliográfica 68
PPGEM – Engenharia de Manufatura (2005)
• método da dicotomia;
• método de Fibonacci;
• método de Powell.
Métodos que utilizam informação de derivada:
• método de Newton;
No método de Newton a idéia é, de uma única iteração, chegar ao ponto ótimo.
Isso se faz através de uma expansão em série de Taylor da função objetivo. Essa
expansão tem como objetivo representar a função objetivo como uma função
quadrática do vetor projeto. Para se obter essa expansão, é necessário ter
informações sobre a segunda derivada de ( )xf . A função quadrática ajustada tem a
forma
( ) ( ) xHxxfxfxxq TT ∆∆+∆∇+≅∆+ 5.0 , Eq. 2.82
sendo x∆ uma pequena mudança em x e H a matriz Hessiana no ponto x .
A condição necessária para o ponto ótimo na quadrática q é:
( ) 0=∆∂∂xq
Eq. 2.83
De 2.82 e 2.83 obtém-se
fHx ∇−=∆ −1 . Eq. 2.84
Assim sendo o ponto ótimo da ( )1−k -ésima quadrática, ajustada pela série de
Taylor na função objetivo é

Capítulo 2 Revisão Bibliográfica 69
PPGEM – Engenharia de Manufatura (2005)
kqk
qk xxx ∆+=+1 Eq. 2.85
Uma vez atualizado o ponto através de 2.85, ajusta-se uma nova quadrática à
função objetivo e sucessivamente avança-se no processo até o ponto ótimo. Uma
vez satisfeito o critério de convergência, o mínimo da função quadrática confunde-se
com o mínimo da função objetivo.
Por outro lado, pode-se definir a direção de busca através dessa abordagem e
a partir daí realizar uma busca unidimensional para se definir o passo. Isso acelera o
processo de convergência.
fHd ∇−= −1 Eq. 2.86
Ao se aplicar o método do gradiente sobre a quadrática expandida em série de
Taylor, várias iterações são necessárias para se chegar ao ótimo. No método de
Newton, isso é conseguido de uma só vez.
Sendo assim, a direção obtida pelo método de Newton é a melhor direção de
busca. Entretanto o seu uso é limitado. Na pratica ele só funciona bem quando a
função objetivo é convexa e tem variações suaves. Na maioria dos métodos
numéricos, o cálculo de H-1 é evitado, devido a seu alto custo computacional.
O método quase-Newton, empregado nesse trabalho, foi proposto por Davidon
e posteriormente implementado por Flecher e Powell (Bazaraa, 1979, Arora, 1989 e
Bavastri, 1997). Também conhecido por DFP, ele é utilizado para estimar a direção
de busca sem um custo computacional tão alto como no método de Newton. Essa
direção fica entre a direção do gradiente e a direção de Newton e não requer a
informação da segunda derivada da função objetivo.
Essa direção é dada por
( ) fxd ∇−= η Eq. 2.87
Capítulo 2 Revisão Bibliográfica 70
PPGEM – Engenharia de Manufatura (2005)
onde
( ) ( ) ( )kkk xxx ηηη ∆+=+1 e Eq. 2.88
( ) ( )( ) ( )
( )kT
Tk
kT
T
k xgzzxgx
xgyyx
wx
∆∇
−∆∆
=∆ηη .1
Eq. 2.89
onde:
kkk xxx −=∆ +1
( ) ( ) ( )kkk xfxfxg ∇−∇=∆ +1
No método DFP:
( ) ( )kk xgxzxy
w
∆=∆=
=
η
1
O método quase-Newton geralmente começa a busca na direção do gradiente.
No decorrer do processo fica entre a direção do gradiente e a direção de Newton.
Ele fornece excelentes resultados tanto em relação ao esforço computacional quanto
à velocidade de convergência (Bavastri, 1997). Por essas razões, este é o método
empregado no presente trabalho para a otimização dos parâmetros construtivos dos
neutralizadores dinâmicos viscoelásticos.
Na figura 2.10 pode-se observar as direções dos três métodos citados
anteriormente, de forma comparativa.

Capítulo 2 Revisão Bibliográfica 71
PPGEM – Engenharia de Manufatura (2005)
Figura 2.10 Comparação entre os métodos do gradiente, Newton e quase-Newton.
(Bavastri, 1997)
2.6 Função Objetivo e Variáveis de Projeto – Otimização dos Parâmetros dos Neutralizadores Dinâmicos
Da equação 2.66 o vetor ( )ΩF é o vetor de excitação. Ele é definido como
tendo valores unitários para uma coordenada generalizada onde existe excitação e
valor nulo quando nessa coordenada não existe nenhuma excitação. No presente
trabalho, o vetor de excitação é dado por uma função generalizada delta de Dirac
aplicado de forma pontual, ou seja, excita-se em um ponto (coordenada
generalizada) e observa-se a resposta em outros pontos da estrutura.
Da equação 2.70 tem-se que
[ ] ( ) ( )Ω=Ω+ NPDD 21 Eq. 2.90

Capítulo 2 Revisão Bibliográfica 72
PPGEM – Engenharia de Manufatura (2005)
onde
( ) ( ) ( ) jjj kdiagcdiagimdiagD +Ω+Ω−= 21 e Eq. 2.91
( ) ( ) ΩΩ+ΩΩ−= AA cimD 22 Eq. 2.92
Assim, a resposta em freqüência do sistema, no espaço modal, é dada por
( ) [ ] ( )Ω+=Ω − NDDP 121 Eq. 2.93
De 2.69, 2.73 e 2.93, pode-se obter a resposta do sistema, ( )ΩQ , na forma
( ) [ ] [ ] [ ] ( ) ΩΦ+Φ=Ω − FDDQTˆˆ 1
21 . Eq. 2.94
Assim a matriz de receptância do sistema composto (sistema primário +
neutralizadores) é
( )[ ] [ ] [ ] [ ]TDD Φ+Φ=Ω − ˆˆ 121α . Eq. 2.95
Para sistemas com um grau de liberdade, a relação de massas entre o
neutralizador e o sistema primário, de acordo com 2.36 é definida como (Bavastri,
1997)
25,01,0 amma ==µ Eq. 2.96

Capítulo 2 Revisão Bibliográfica 73
PPGEM – Engenharia de Manufatura (2005)
Espíndola e Silva (1992) propõem uma relação de massa modal para sistemas
de múltiplos graus de liberdade, para controle modo a modo na forma
j
p
ijka
m
m ∑=Φ
= 1
2,
µ . Eq. 2.97
Posteriormente, Espíndola e Bavastri (1995) empregam esta relação para um
controle em banda larga, definindo a massa dos neutralizadores por meio de uma
media aritmética. Isto é, a massa dos neutralizadores é calculada para cada modo
dentro de uma faixa de freqüência. Posteriormente, é tomada a média desses
valores, para todos os modos. Esse mesmo procedimento é empregado aqui.
A função objetivo é definida para determinar os parâmetros ótimos dos
neutralizadores dinâmicos e dada por
( )
( ) ( )221
,max
:
Ω<Ω<Ω
Ω=
→
xPxf
RRxf
obj
nobj
, Eq. 2.98
onde 2 representa a norma-2 e 1Ω e 2Ω são os limites inferior e superior,
respectivamente, da banda de freqüência na qual se quer efetivar o controle. Assim,
o problema de otimização é definido como
( )xfobjmin Eq. 2.99
restrito a
Hii
Li xxx << Eq. 2.100

Capítulo 2 Revisão Bibliográfica 74
PPGEM – Engenharia de Manufatura (2005)
onde é o vetor de projeto e Lix e H
ix são os seus limites inferior e superior,
respectivamente. Os componentes desse vetor x são as freqüências de anti-
ressonância de cada um dos neutralizadores acoplados ao sistema primário. Ou
seja, constrói-se um vetor com os valores máximos de cada ( )xPi ,Ω . Obtém-se
então a mínima norma euclidiana possível desse vetor (figura 2.11).
Figura 2.11 Função Objetivo
Dessa forma, ao finalizar-se o processo de otimização dos parâmetros dos
neutralizadores, obtém-se como saída, as freqüências naturais ótimas para cada um
dos neutralizadores acoplados ao sistema primário, bem como suas massas,
previamente fixadas como uma razão das massas modais.
Ω1 Ω2
Capítulo 3 Algoritmos Genéticos 75
PPGEM – Engenharia de Manufatura (2005)
3 ALGORÍTMOS GENÉTICOS
3.1 Introdução
Na engenharia, um grande número de problemas de otimização que
usualmente se trabalha, são não-lineares, de dimensão elevada, com espaços de
busca relativamente grandes e multimodais, isto é, com vários extremos (mínimos ou
máximos). Esse tipo de problema demanda mecanismos de busca que sejam
capazes de determinar o ótimo global (máximo ou mínimo global) e não convergir
prematuramente para ótimos locais.
Os Algoritmos Genéticos (AG’s) se mostram eficientes na determinação desse
ótimo global de uma função multimodal de várias variáveis. Essa técnica tem se
mostrado capaz de resolver problemas lineares e não-lineares, usando operadores
de mutação, cruzamento e seleção, aplicados a indivíduos de uma população que se
encontram dentro de uma região de busca pré-estabelecida em um espaço n-
dimensional.
Basicamente o que o algoritmo faz é uma abstração aos princípios da evolução
das espécies propostos por Charles Darwin (1859). Partindo de uma população de
indivíduos, cada qual com sua adaptabilidade associada, ou aptidão, desenvolvem-
se, através de cruzamentos e mutações, novos indivíduos. Esses formarão uma
nova população ou geração. Cada indivíduo, dentro de uma população, representa
uma solução para o problema que se pretende resolver. Os indivíduos mais aptos,
ou mais adaptados, terão mais chances de sobreviver e reproduzir, garantindo filhos
ainda melhor adaptados. Esses indivíduos com aptidões crescentes representam
soluções cada vez mais próximas da solução ótima. Espera-se, portanto, com as
sucessivas gerações, chegar ao indivíduo idealmente adaptado, o que corresponde
ao ótimo global.

Capítulo 3 Algoritmos Genéticos 76
PPGEM – Engenharia de Manufatura (2005)
Figura 3.1 Ilustração de um AG simples, incluindo: 1. população inicial, 2.e 3.
reprodução e cruzamento para formar uma nova geração e 4. obtenção do melhor
indivíduo (Senecal, 2000).
3.2 Terminologia
Em Algoritmos Genéticos utilizam-se algumas metáforas dos fenômenos que
ocorrem na natureza relacionados ao processo de seleção natural proposto por
Darwin (1859). Esses termos, originalmente empregados na biologia, são usados
também em AG’s. Podem-se citar aqui alguns dos principais termos utilizados na
literatura:
• Cromossomo: segundo a biologia, genoma é o conjunto completo de
genes de um organismo. Os genes, por sua vez, são agrupados
formando um cromossomo. Um genoma é, portanto constituído de vários
cromossomos. Em AG’s é feita uma analogia entre cromossomo e
organismo ou indivíduo. Nesse caso um indivíduo é formado por apenas
um cromossomo. Os cromossomos representam a estrutura de dados
que codifica um ponto do espaço de busca e que representa uma
solução em potencial para o problema de otimização.
• Gen ou Gene: na biologia, é a unidade de hereditariedade que é
transmitida pelo cromossomo e que controla as características do

Capítulo 3 Algoritmos Genéticos 77
PPGEM – Engenharia de Manufatura (2005)
indivíduo. Em AG’s um gene é uma unidade do cromossomo, ou seja,
um elemento do vetor que representa o cromossomo.
• Individuo: Um indivíduo é um membro da população e é formado por um
cromossomo e sua aptidão. Por sua vez o cromossomo é composto de
genes, sendo que cada gene possui um local fixo no cromossomo,
denominado de locus. Cada gene pode assumir um certo valor
pertencente a um conjunto de valores possíveis. Esse conjunto de
valores é denominado de alelo. Em termos de AG’s o cromossomo
corresponde ao individuo e este é representado por um vetor (string) de
comprimento finito. O termo gene é denominado de bit e o locus de
posição do bit no indivíduo. Já o termo alelo refere-se ao conjunto de
valores possíveis de serem atribuídos a um determinado bit, ou seja, o
alfabeto binário, zeros (0’s) ou uns (1’s). A codificação binária é a mais
empregada, mas podem ser utilizadas outras codificações. Na literatura,
a maioria das codificações empregadas é a codificação binária.
• Genótipo e Fenótipo: Na biologia, genótipo corresponde ao conjunto de
cromossomos, genes e alelos. As características conferidas ao indivíduo
pelo genótipo denominam-se fenótipo. Em termos de AG’s o genótipo é
a variável de projeto x codificada e o fenótipo é o valor da função
objetivo da variável x , ( )xf , decodificado.
• Geração: cada uma das iterações executada pelo AG.
• Espaço de busca: é o conjunto, espaço ou região do espaço que
compreende as soluções possíveis ou viáveis de um problema de
otimização. É também caracterizado pelas funções de restrição.
• Função objetivo ou função de avaliação: é a função que se pretende
otimizar. Ela trás a informação sobre o desempenho de cada possível
solução representada por um indivíduo ou cromossomo. O valor da
função de avaliação é muitas vezes chamado de fitness do indivíduo e
representa a sua aptidão frente aos outros indivíduos da população.
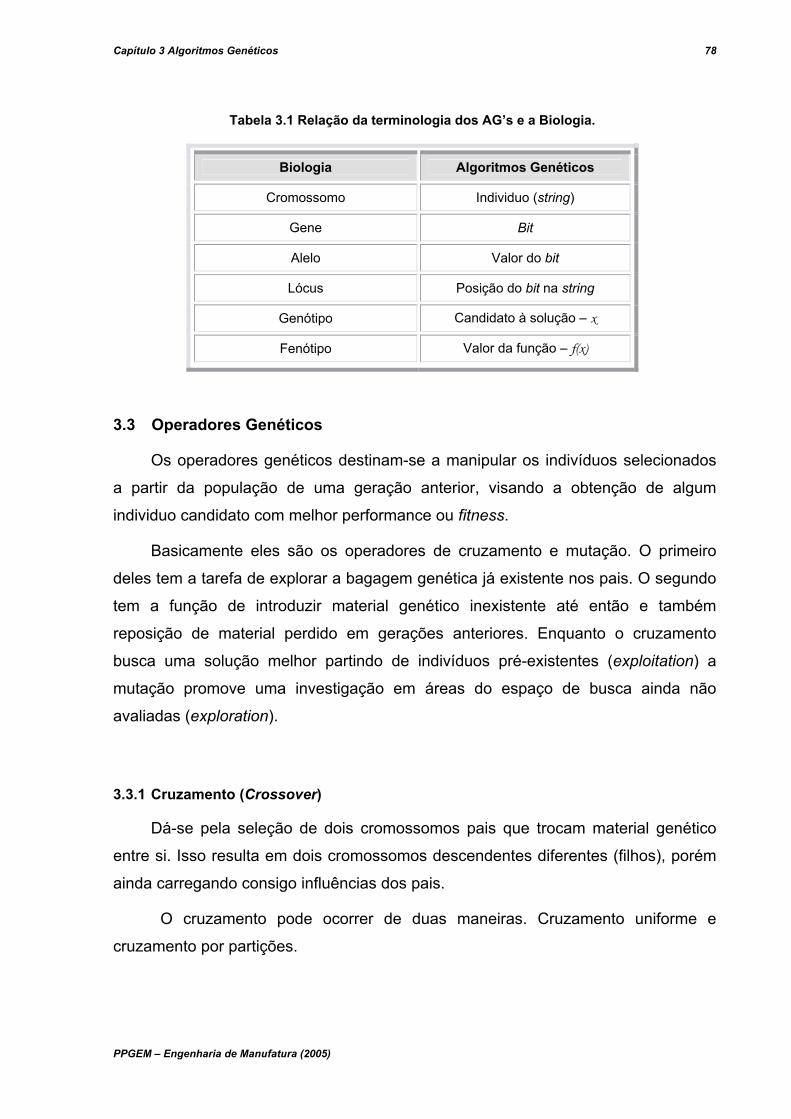
Capítulo 3 Algoritmos Genéticos 78
PPGEM – Engenharia de Manufatura (2005)
Tabela 3.1 Relação da terminologia dos AG’s e a Biologia.
Biologia Algoritmos Genéticos
Cromossomo Individuo (string)
Gene Bit
Alelo Valor do bit
Lócus Posição do bit na string
Genótipo Candidato à solução – x
Fenótipo Valor da função – f(x)
3.3 Operadores Genéticos
Os operadores genéticos destinam-se a manipular os indivíduos selecionados
a partir da população de uma geração anterior, visando a obtenção de algum
individuo candidato com melhor performance ou fitness.
Basicamente eles são os operadores de cruzamento e mutação. O primeiro
deles tem a tarefa de explorar a bagagem genética já existente nos pais. O segundo
tem a função de introduzir material genético inexistente até então e também
reposição de material perdido em gerações anteriores. Enquanto o cruzamento
busca uma solução melhor partindo de indivíduos pré-existentes (exploitation) a
mutação promove uma investigação em áreas do espaço de busca ainda não
avaliadas (exploration).
3.3.1 Cruzamento (Crossover)
Dá-se pela seleção de dois cromossomos pais que trocam material genético
entre si. Isso resulta em dois cromossomos descendentes diferentes (filhos), porém
ainda carregando consigo influências dos pais.
O cruzamento pode ocorrer de duas maneiras. Cruzamento uniforme e
cruzamento por partições.

Capítulo 3 Algoritmos Genéticos 79
PPGEM – Engenharia de Manufatura (2005)
O cruzamento uniforme consiste no emparelhamento dos cromossomos pais
e cada locus tem 50% de chance de ser trocado (figura 2). Cada gene do
descendente é criado através da cópia de um gene dos pais, escolhido de acordo
com uma máscara de cruzamento gerada aleatoriamente. Onde houver 1 na
máscara de cruzamento, o gene correspondente será copiado do primeiro pai e onde
houver 0 será copiado do segundo. O processo pode então ser repetido com os pais
trocados para produzir um segundo descendente. Uma nova máscara de
cruzamento é criada para cada par de pais.
Figura 3.2 Esquema do cruzamento uniforme.
O cruzamento particionado consiste na escolha aleatória de um, ou mais
pontos de cruzamento. Todo o material à direita desse ponto de corte é trocado. Nas
figuras 3.3 e 3.4 podem ser observados os esquemas de cruzamento em um e dois
pontos, respectivamente Pode ocorrer também o cruzamento com mais pontos de
cruzamento.

Capítulo 3 Algoritmos Genéticos 80
PPGEM – Engenharia de Manufatura (2005)
Figura 3.3 Esquema do cruzamento de um ponto.
Figura 3.4 Esquema do cruzamento de dois pontos.
3.3.2 Mutação
A mutação consiste em perturbações na cadeia do cromossomo que podem
ocorrer aleatoriamente após o cruzamento. É a denominação dada a vários
mecanismos de alteração genética, os quais têm em comum o fato de fazerem o
cromossomo descendente apresentar características diferentes das dos pais. Os
mecanismos de mutação empregados em AG’s são: a troca simples, a translocação
e a inversão.
A troca simples consiste de um erro de cópia de um ou mais genes da cadeia.
A inversão é uma retirada seguida de uma inserção de um pedaço da cadeia, porém
na ordem inversa da que foi retirada. A translocação, ao contrário da inversão, retira
uma parte do cromossomo e a recoloca em uma outra posição.

Capítulo 3 Algoritmos Genéticos 81
PPGEM – Engenharia de Manufatura (2005)
Na maioria dos trabalhos desenvolvidos com AG’s o mecanismo de alteração
da cadeia genética é o da troca simples. Por isso o termo mutação é muitas vezes
referenciado como sinônimo de troca simples.
Figura 3.5 Esquema da mutação (troca simples).
3.3.3 Seleção
O objetivo da seleção é fazer com que os indivíduos mais adaptados de uma
determinada geração tenham uma probabilidade maior de participarem do processo
de formação da próxima geração. O processo de seleção se baseia nas aptidões de
cada indivíduo que são representadas pelos valores da função objetivo para cada
um deles.
Um grande número de esquemas de seleção já foi proposto, entretanto
citaremos aqui apenas os dois mais empregados.
3.3.3.1 Método da Roleta
Esse é um método largamente empregado. Cada indivíduo da população é
representado de forma proporcional ao seu valor de aptidão. Dessa forma, um
indivíduo com um valor de aptidão alto recebe uma fatia maior em uma roleta,
enquanto que um indivíduo de menor aptidão recebe uma fatia menor. A roleta é
então rodada, tantas vezes quanto forem o número de indivíduos da população,
escolhendo os que darão origem à nova geração.

Capítulo 3 Algoritmos Genéticos 82
PPGEM – Engenharia de Manufatura (2005)
2% 5%
8%
32%
24%
16%
13%
individuo 1individuo 2individuo 3individuo 4individuo 5individuo 6individuo 7
Figura 3.6 Exemplo de método da roleta.
Uma desvantagem desse método é reduzir a variabilidade das gerações
futuras, podendo gerar uma população com varias cópias de um indivíduo muito
apto. Isso pode levar o método a uma convergência prematura para um ótimo local.
Uma forma de reduzir esse efeito é não utilizar a magnitude da aptidão, mas sim a
posição do indivíduo no ranking de aptidões. Desse modo, mantendo-se a
população ranqueada por valores decrescentes de aptidão, a probabilidade do
indivíduo mais apto ser selecionado é maior, mas os demais indivíduos possuem
também boas chances de participar do processo de formação da nova geração,
quando comparadas com o método anterior.
3.3.3.2 Método do Torneio
Consiste em escolher aleatoriamente n indivíduos da população, com
probabilidades iguais de escolha. O cromossomo com maior aptidão é selecionado.
O processo repete-se até que é formada uma população intermediária é formada.
Normalmente 2=n . Uma vez formada a população intermediária, uma nova geração
é obtida através de cruzamentos e mutações promovidos entre os indivíduos da
população intermediária (candidatos a pais).
Capítulo 3 Algoritmos Genéticos 83
PPGEM – Engenharia de Manufatura (2005)
Não há necessidade de escalonamento e nem ordenamento. Em outras
versões de torneios utilizam-se probabilidades diferenciadas. Se o torneio envolve
dois cromossomos, o primeiro vence o torneio com probabilidade q (onde
15,0 << q ); e o segundo, com probabilidade q−1 . Para um torneio com n
cromossomos, o primeiro vence com probabilidade q , o segundo com ( )qq −1 , o
terceiro com ( )21 qq − , e assim por diante.
Aumentando o número de cromossomos no torneio ou a probabilidade q do
primeiro cromossomo vencer, aumenta-se a pressão de seleção e os cromossomos
com aptidão acima da media terão mais chances de serem selecionados. Essa
pressão precisa ser bem controlada. Uma pressão excessiva pode levar o método a
uma convergência prematura e perda de diversidade. Uma pressão muito amena
pode tornar a convergência demasiado demorada.
O método de seleção empregado neste trabalho é o torneio simples entre dois
indivíduos escolhidos aleatoriamente dentro da população. Este método é de muito
mais simples programação e requer uma quantidade de operações muito menor. Ele
foi escolhido com o objetivo justamente de reduzir o esforço computacional por
envolver um número menor de operações. A função objetivo adotada neste trabalho
requer um grande número de operações e este não pode ser reduzido.
3.3.4 Reprodução
O processo de seleção forma a população intermediária, mas não introduz
novos indivíduos na futura geração. Ele apenas seleciona os progenitores que darão
origem a essa nova geração.
No processo de reprodução os candidatos a pais são agrupados
aleatoriamente em pares. É definida também uma probabilidade de cruzamento, cP ,
que será igual para todos os pares selecionados. O cruzamento então se dá por um
processo de decisão semelhante ao “lançamento de uma moeda”. O lançamento da
moeda corresponde a gerar um número aleatório entre 0 e 1. Se esse número for
inferior a cP , o cruzamento será realizado gerando um ou dois filhos. Em caso
Capítulo 3 Algoritmos Genéticos 84
PPGEM – Engenharia de Manufatura (2005)
contrário, o cruzamento não é realizado e o processo segue até que a nova geração
seja construída.
3.3.5 Elitismo
É bastante comum, depois de aplicados todos os operadores descritos
anteriormente, que o melhor indivíduo de uma população desapareça na geração
seguinte. No entanto é interessante para o AG que o indivíduo mais apto de uma
geração seja transferido para a geração seguinte para que o seu material genético
seja aproveitado. Essa estratégia é chamada de elitismo e hoje é muito comum nos
AG’s tradicionais.
DeJong (1975) foi que primeiro propôs o elitismo. O processo se dá copiando o
indivíduo de maior fitness para a geração seguinte, sem quaisquer alterações no seu
conteúdo genético. Isso garante que a melhor solução sempre estará presente em
qualquer uma das gerações e será mantida até o final do processo.
3.3.6 Compartilhamento
Nos AG’s, o processo de seleção dos indivíduos mais fortes é extremamente
impiedoso. A natureza nos ensina que essa competição não é tão acirrada assim.
Existem diferentes espécies com papeis ecológicos diferentes, os nichos, que não
competem entre si. Essa idéia levou ao conceito do compartilhamento ou niching ou
sharing.
Goldberg e Richardson (1987) propuseram a função de adequabilidade a
seguir,
∑=
−= N
jji
ii
xx
xfxa
1||)(||
)()(λ
Eq. 3.1
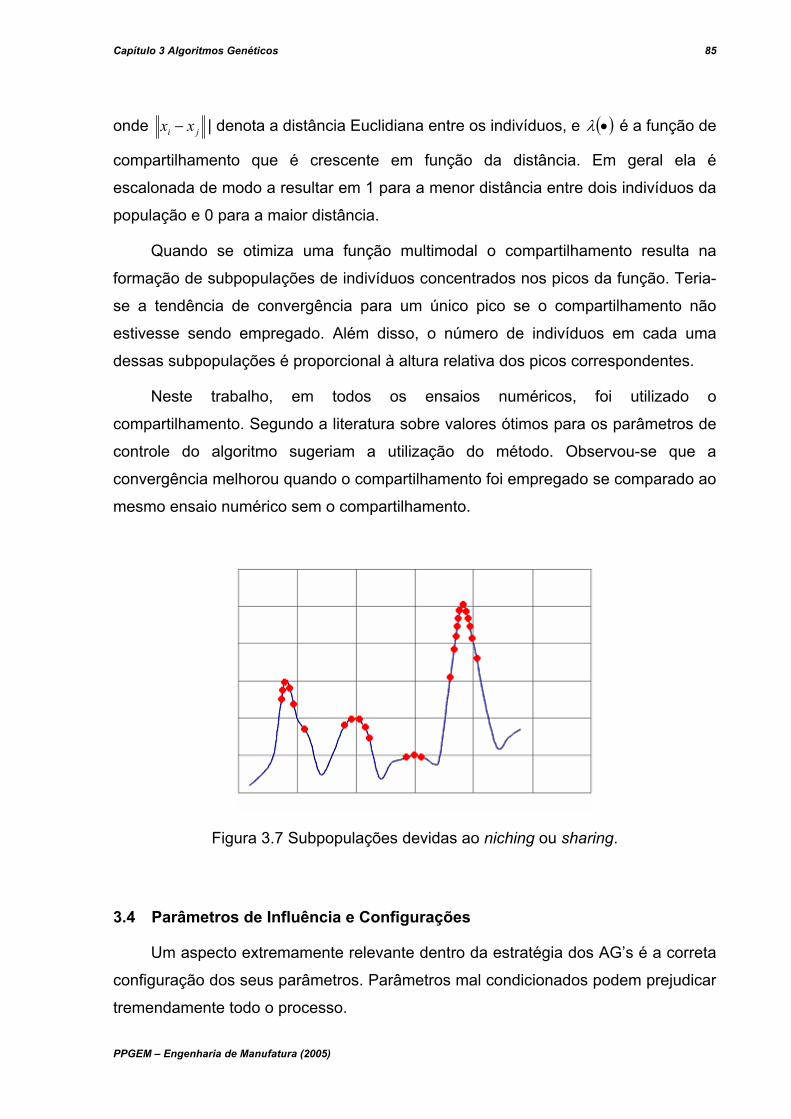
Capítulo 3 Algoritmos Genéticos 85
PPGEM – Engenharia de Manufatura (2005)
onde ji xx − | denota a distância Euclidiana entre os indivíduos, e ( )•λ é a função de
compartilhamento que é crescente em função da distância. Em geral ela é
escalonada de modo a resultar em 1 para a menor distância entre dois indivíduos da
população e 0 para a maior distância.
Quando se otimiza uma função multimodal o compartilhamento resulta na
formação de subpopulações de indivíduos concentrados nos picos da função. Teria-
se a tendência de convergência para um único pico se o compartilhamento não
estivesse sendo empregado. Além disso, o número de indivíduos em cada uma
dessas subpopulações é proporcional à altura relativa dos picos correspondentes.
Neste trabalho, em todos os ensaios numéricos, foi utilizado o
compartilhamento. Segundo a literatura sobre valores ótimos para os parâmetros de
controle do algoritmo sugeriam a utilização do método. Observou-se que a
convergência melhorou quando o compartilhamento foi empregado se comparado ao
mesmo ensaio numérico sem o compartilhamento.
Figura 3.7 Subpopulações devidas ao niching ou sharing.
3.4 Parâmetros de Influência e Configurações
Um aspecto extremamente relevante dentro da estratégia dos AG’s é a correta
configuração dos seus parâmetros. Parâmetros mal condicionados podem prejudicar
tremendamente todo o processo.
Capítulo 3 Algoritmos Genéticos 86
PPGEM – Engenharia de Manufatura (2005)
Vale salientar que não existe muita literatura disponível nessa área uma vez
que esses parâmetros estão altamente relacionados com o problema específico em
questão. Observou-se que o correto dimensionamento desses parâmetros se
baseou, na maioria dos trabalhos pesquisados, no empirismo e na experiência dos
autores.
Os parâmetros de influência adotados nesse trabalho serão abordados com
mais detalhamento no capítulo 4 (Resultados).
A seguir alguns dos principais parâmetros de influência serão abordados.
3.4.1 Tamanho da população
Indica o número de indivíduos ou cromossomos presente em cada geração.
O tamanho da população está intimamente relacionado com a eficiência global
do algoritmo. Uma população grande apresentará uma maior diversidade de
soluções possibilitando uma boa convergência por cobrir uma região maior do
espaço de busca.
Cada indivíduo deve ser avaliado pelo menos uma vez em cada geração. Isso
significa efetuar o processamento da função de avaliação um número de vezes igual
ao tamanho da população. Portanto, uma população com um grande número de
indivíduos, representa um esforço computacional maior.
Uma população pequena pode reduzir o desempenho do algoritmo, reduzindo
a capacidade de exploração do espaço de busca.
Segundo Goldberg (1989) o tamanho da população cresce exponencialmente
com o número de parâmetros do modelo, para codificação binária. Como exemplo
de critério para o tamanho de população podemos citar o Critério de Goldberg onde
o tamanho n da população pode ser encontrado pela expressão:
l21.0265.1 ⋅=n Eq. 3.2

Capítulo 3 Algoritmos Genéticos 87
PPGEM – Engenharia de Manufatura (2005)
onde l é o número de bits necessário para representar um cromossomo. Entretanto,
pode-se observar que esse tamanho de população é utilizado apenas como uma
referência e não propriamente com um critério. Se assim fosse aplicado, encontrar-
se-ia tamanhos de população demasiado grandes, e muitas vezes impraticáveis.
Precisa-se então encontrar um tamanho de população que seja grande o
suficiente para se ter uma certa eficiência e pequeno o bastante para que o esforço
computacional não seja demasiadamente elevado. Em geral relaciona-se o tamanho
da população com o tamanho do cromossomo, ou seja, quanto maior o tamanho da
string maior deverá ser o tamanho da população para que se consiga uma
diversidade razoável.
O critério de Goldberg resulta em populações de ordem elevada, muitas vezes
acima de 3000 indivíduos. Na maioria das aplicações reportadas na literatura o
tamanho das populações empregado fica entre 50 e 200 indivíduos.
3.4.2 Probabilidade de Cruzamento
Este parâmetro determina qual será a probabilidade de ocorrer ou não o
cruzamento entre dois indivíduos de uma população que foram selecionados para
tal.
O algoritmo introduz maior número de novos indivíduos nas gerações futuras
quanto maior for essa taxa. Isso possibilita uma exploração maior do espaço de
busca com maior velocidade, ou seja, com um menor número de gerações.
Entretanto, quando essa taxa é muito elevada, aqueles indivíduos com boas
aptidões podem ter seu material genético retirado das gerações seguintes. Valores
muito baixos de probabilidade de cruzamento podem tornar a convergência muito
lenta.
Usualmente a probabilidade de cruzamento varia entre 0,5 e 0,95.
Capítulo 3 Algoritmos Genéticos 88
PPGEM – Engenharia de Manufatura (2005)
3.4.3 Probabilidade de Mutação
O principal objetivo da mutação é introduzir material genético inédito nas
gerações sucessivas, prevenindo que sejam formadas populações saturadas de
cromossomos idênticos, ou mesmo similares, à medida que o processo do algoritmo
avança. A taxa de probabilidade de mutação indica quando haverá ou não esse
introdução de material genético novo através da mutação.
Altas taxas de mutação podem tornar o processo de otimização uma simples
busca aleatória. Taxas muito pequenas retiram da mutação a capacidade de
exploração de regiões promissoras do espaço de busca.
Os valores de referência para a probabilidade de mutação ficam em torno de
nPm 1= . Em termos de ordem de grandeza, os valores mais comuns adotados nos
trabalhos encontrados na literatura ficam entre 0,001 e 0,1.
3.5 A Função Objetivo
Em algoritmos genéticos a função de custo ou função objetivo é comumente
chamada de função de fitness ou função de aptidão. Em alguns casos a função
objetivo pode ser complexa, demandando um elevado custo computacional. Há
problemas em que a avaliação de um único cromossomo requer uma simulação
completa de um processo que pode demorar algumas horas de implementação
computacional.
No caso específico deste trabalho, a função objetivo empregada requer uma
otimização de parâmetros que utiliza técnicas de otimização não linear. Para avaliar
cada indivíduo, um outro algoritmo de busca encontra o valor ótimo de uma
determinada função. O último valor encontrado dessa função é empregado como
fitness para o algoritmo genético.
O objetivo do algoritmo genético deste trabalho é encontrar a localização ótima
de um sistema de controle passivo de vibração, utilizando neutralizadores dinâmicos
viscoelásticos, sobre uma estrutura mecânica qualquer. Os parâmetros construtivos
desses neutralizadores, massa e freqüência natural, são otimizados para cada
possível localização.

Capítulo 3 Algoritmos Genéticos 89
PPGEM – Engenharia de Manufatura (2005)
Em trabalhos anteriores (Bavastri, 1997; Espíndola e Bavastri, 1997; Bavastri
Espíndola, e Teixeira, 1998) foi proposta uma metodologia geral capaz de projetar
um sistema de neutralizadores dinâmicos viscoelásticos para reduzir a resposta de
uma estrutura a valores aceitáveis, sobre uma banda larga de freqüência. Naquela
oportunidade o modelo modal da estrutura e a experiência do projetista eram a base
de análise para a definição da posição mais adequada, ou mais eficaz, para os
dispositivos de controle (NDV’s).
Entretanto, ainda existirão casos particulares em que esta tarefa não seja
simples, quer seja pela complexidade do modelo modal, quer seja pela densidade
modal da estrutura na faixa de freqüência de análise.
Por tal motivo, neste trabalho, se propõe uma técnica numérica de otimização,
usando AG, para determinar não somente o conjunto de parâmetros físicos ótimos
dos neutralizadores, mas também, a sua localização ótima na estrutura.
Observou-se, ao longo do trabalho, que não só é necessário muitas vezes
determinar uma localização ideal para os neutralizadores, como também escolher,
dentre as várias soluções possíveis, aquelas que fornecessem neutralizadores com
menor massa adicionada à estrutura. Isso constitui o que se chama de otimização
multiobjetivo, ou otimização multiponto.
Segundo Zhang, Chen e Khalid (2002), para uma função multiobjetivo, existem
um conjunto de soluções de compromisso, conhecidas como soluções pareto-
ótimas, que são baseadas em objetivos competitivos. Uma estratégia bem conhecida
para resolver esses tipos de problemas é o método de somas ponderadas. Dessa
forma o problema multiobjetivo é transformado em um problema mono-objetivo. Por
exemplo, para se otimizar duas funções competitivas 1f e 2f , uma função escalar F
pode ser definida como
2211 fwfwF += Eq. 3.3
Em geral 121 =+ ww . Nesse trabalho as duas funções conflitantes são a
redução de vibração da estrutura e a massa dos neutralizadores.

Capítulo 3 Algoritmos Genéticos 90
PPGEM – Engenharia de Manufatura (2005)
Neste trabalho 1f é o valor final da função objetivo da otimização dos
parâmetros físicos de cada neutralizador do sistema, abordada no Capítulo 2.
Devido a sua definição em escala dB, em geral o valor encontrado para essa
função fica entre 100 e 200 dB.
21 ),(21
maxmin xPf Ω= Ω<Ω<Ω Eq. 3.4
Foi adotado o valor de 11 =w . 2f é o valor encontrado para a massa dos
neutralizadores adicionada à estrutura (os neutralizadores do sistema são projetados
todos com a mesma massa).
Do conjunto de trabalhos apresentados por Espíndola e Bavastri (1997 a 2004)
observa-se que, empregando a teoria modal, a massa total de neutralizadores
adicionada à estrutura é 4 a 5 vezes menor do que a encontrada através da teoria
de um grau de liberdade para o sistema primário. Neste trabalho fixou-se a massa
dos neutralizadores em 10% da massa modal. Assim podemos estimar que a massa
de todos os neutralizadores adicionados a uma estrutura, com o objetivo de controlar
a sua vibração, deva ficar entre 2 a 2,5% da massa total de estrutura.
strNDV Mmnf 02,0.2 ≅= Eq. 3.5
onde n é o número de neutralizadores, NDVm é a massa de cada neutralizador e
strM é a massa total da estrutura a controlar.
Dessa forma, para 0=F (mínimo), pode-se estimar o valor de 2w .
strMfw
02.01
2 = Eq. 3.6
Capítulo 3 Algoritmos Genéticos 91
PPGEM – Engenharia de Manufatura (2005)
3.6 Critérios de Convergência
Em geral, estabelecer um critério de convergência para um algoritmo genético
não constitui uma tarefa fácil. Não podemos saber com certeza se o algoritmo já
convergiu para o ótimo global ou simplesmente para um ótimo local. Caso a
convergência tenha se dado de forma local é necessário que o algoritmo continue
explorando o espaço de busca. Por outro lado se a convergência ocorreu para o
ótimo global o algoritmo deve parar o processo de busca. Existem alguns
procedimentos que podem ser adotados. Entre esses se destacam:
• Ajustar um valor esperado para o ótimo: o algoritmo pára quando atinge esse
valor, que constitui uma solução aceitável. A dificuldade nessa estratégia está
em estabelecer esse valor esperado. Para alguns problemas é muito difícil
estabelecer a priori um valor esperado para o ótimo global. Principalmente
quando se desconhece a solução do problema.
• Ajustar um valor esperado para a diferença entre o ótimo e a média entre as
aptidões dos indivíduos da população: Essa estratégia possui a vantagem de
não requerer um valor determinado a priori para o ótimo global.
• Ajustar um valor esperado para a diferença entre a aptidão do melhor indivíduo
da geração atual e da geração anterior ou anteriores. Essa estratégia tem a
vantagem de prevenir que o algoritmo tente refinar a busca demasiadamente
tornando a convergência final muito demorada.
• Ajustar um número Maximo de gerações a ser avaliado: este é um critério do
tipo fail safe. É útil quando se comparam as performances entre dois
algoritmos genéticos com diferentes parâmetros de evolução.
Na maioria dos casos utiliza-se uma combinação de duas ou mais dessas
estratégias. Devido ao condicionamento do problema e do desconhecimento da sua
solução (valor esperado), no presente trabalho utilizou-se como critério de parada o
número máximo de gerações, somente. Terminado o processo é feita uma análise
das últimas populações em busca de uma possível tendência a modificação do
resultado. Caso essa tendência fosse localizada o processo era reiniciado do ponto
onde parou.
Capítulo 3 Algoritmos Genéticos 92
PPGEM – Engenharia de Manufatura (2005)
3.7 Algoritmo Micro-genético (µGA – micro-GA)
Esse algoritmo foi proposto inicialmente por Krishnakumar, 1989. Esta
metodologia utiliza pequenas populações para localizar áreas promissoras dentro do
espaço de busca de forma extremamente eficiente. Em geral os problemas
multiobjetivos e as funções de fitness multimodais causam grandes problemas de
execução. As populações precisam ser muito grandes o que eleva o esforço e o
tempo computacionais. Assim, esta nova técnica surge para solucionar esse tipo de
problema e seu nome é derivado justamente da possibilidade de utilizar populações
muito menores, quando comparadas às populações dos AG’s convencionais.
Populações pequenas são incapazes de manter uma diversidade por muitas
gerações. Assim, em micro-AG, toda vez que a diversidade é perdida, uma nova
população é reiniciada mantendo os indivíduos melhores adaptados. Usualmente
utiliza-se apenas o melhor indivíduo (elitismo).
Com menores populações a convergência pode ser atingida mais rapidamente
e é requerida menos memória para armazenar os dados da população. Usualmente
as populações não precisam ser maiores que 5 ou 7 indivíduos.
3.8 Algoritmo Genético Típico
Um algoritmo genético típico começa com a geração de uma população inicial.
Essa população inicial é representada por um conjunto de soluções aleatórias
possíveis para o problema. Cada indivíduo é avaliado e sua aptidão ou fitness é
determinada pelo valor da função de avaliação, ou função-objetivo. São então
selecionados os indivíduos mais aptos para que esses sejam os progenitores da
próxima geração.
Esses possíveis pais são então codificados em strings de números binários e
são então submetidos ao cruzamento. O cruzamento irá gerar os filhos que
constituirão a geração seguinte. Nesse passo pode ou não ocorrer mutação nesses
novos indivíduos gerados.
Uma vez formada uma nova geração todo o processo é repetido até que o
critério de parada é satisfeito.
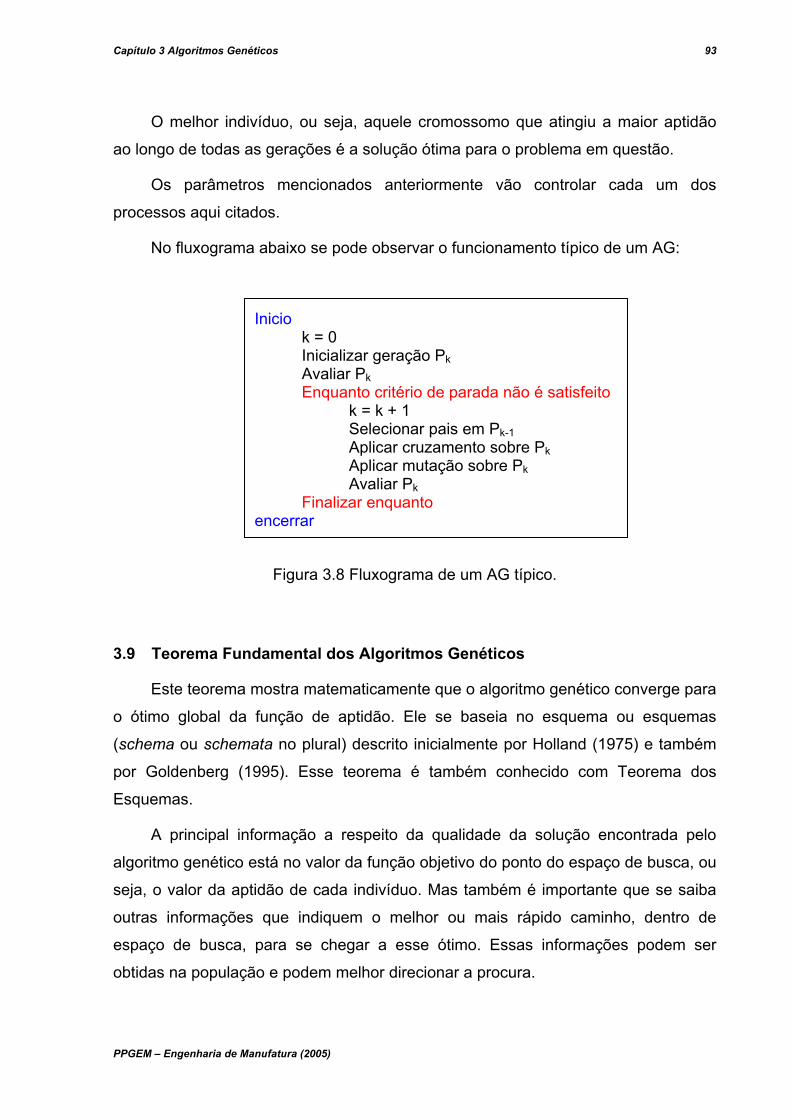
Capítulo 3 Algoritmos Genéticos 93
PPGEM – Engenharia de Manufatura (2005)
O melhor indivíduo, ou seja, aquele cromossomo que atingiu a maior aptidão
ao longo de todas as gerações é a solução ótima para o problema em questão.
Os parâmetros mencionados anteriormente vão controlar cada um dos
processos aqui citados.
No fluxograma abaixo se pode observar o funcionamento típico de um AG:
Inicio k = 0 Inicializar geração Pk Avaliar Pk Enquanto critério de parada não é satisfeito k = k + 1 Selecionar pais em Pk-1 Aplicar cruzamento sobre Pk Aplicar mutação sobre Pk Avaliar Pk Finalizar enquanto encerrar
Figura 3.8 Fluxograma de um AG típico.
3.9 Teorema Fundamental dos Algoritmos Genéticos
Este teorema mostra matematicamente que o algoritmo genético converge para
o ótimo global da função de aptidão. Ele se baseia no esquema ou esquemas
(schema ou schemata no plural) descrito inicialmente por Holland (1975) e também
por Goldenberg (1995). Esse teorema é também conhecido com Teorema dos
Esquemas.
A principal informação a respeito da qualidade da solução encontrada pelo
algoritmo genético está no valor da função objetivo do ponto do espaço de busca, ou
seja, o valor da aptidão de cada indivíduo. Mas também é importante que se saiba
outras informações que indiquem o melhor ou mais rápido caminho, dentro de
espaço de busca, para se chegar a esse ótimo. Essas informações podem ser
obtidas na população e podem melhor direcionar a procura.

Capítulo 3 Algoritmos Genéticos 94
PPGEM – Engenharia de Manufatura (2005)
Considerando-se, como exemplo, uma população de 4 indivíduos com suas
aptidões conforme a tabela 3.2.
Tabela 3.2 Indivíduos de uma população e sua aptidões.
# Indivíduo Fitness (aptidão)
1 01101 169
2 11000 576
3 01000 64
4 10011 361
Os indivíduos 2 e 4 são os mais aptos. Além disso, observa-se também que
ambos tem em comum o primeiro bit igual a 1.Existe uma similaridade entre os dois,
ou existe um esquema que pode guiar o processo de busca.
A definição de esquema foi dada por Holland (1975). Esquema é um
subconjunto de indivíduos com algumas similaridades, ou seja, bits em comum.
Pode-se então descrever um esquema, utilizando o alfabeto binário, acrescido do
símbolo (*) no lucus que pode ser ocupado por um “0” ou um “1”. Por exemplo, o
indivíduo 2, citado acima, poderia fazer parte de alguns esquemas.
Tabela 3.3 Exemplo de um indivíduo e 5 esquemas possíveis.
Indivíduo 1 11000
Esquema (E1) 1***0
Esquema (E2) 11***
Esquema (E3) **00*
Esquema (E4) **000
Esquema (E5) 1**00

Capítulo 3 Algoritmos Genéticos 95
PPGEM – Engenharia de Manufatura (2005)
Portanto, a partir de um único indivíduo, pode-se avaliar o número de
esquemas possíveis. Um geral esse número esquemas possíveis é ( )gk 1+ onde k é
o número de caracteres do alfabeto, ou cardinalidade, e g é o número de bits do
indivíduo. Para os mesmos valores de k e g pode-se obter gk indivíduo diferentes.
Ou seja, no caso de um indivíduo de 5 bits ( 5=g ) tem-se 3225 = indivíduos
possíveis em ( ) 24312 5 =+ possíveis esquemas.
Pode-se também quantificar os esquemas através de duas propriedades: a
ordem ( ( )EO ) e o comprimento ( ( )Eδ ) do esquema. A ordem do esquema
representa o número de bits fixos do esquema. Por exemplo, o esquema 1E tem
ordem 2, ou seja, ( ) ( ) 2011 =∗∗∗=OEO . O comprimento do esquema representa a
distância entre a primeira e a última posição de interesse no esquema. O esquema
1E tem comprimento ( ) 4151 =−=Eδ , pois a última posição de interesse é 5 e a
primeira é 1.
Como já foi visto anteriormente os melhores indivíduos de uma população
passam seu material genético para a geração seguinte através do operador genético
de seleção. Supondo que na geração t e população )(tP existam ( )tEm , esquemas
possíveis. Supondo também que a probabilidade de seleção de um individuo seja
proporcional à razão de sua aptidão pela somatória das aptidões de todos os
indivíduos da população.
∑=
= n
jj
ii
f
fp
1
Eq. 3.7
onde ip é a probabilidade de seleção do indivíduo i ; if é o valor da aptidão do
indivíduo i ; ∑ if é a somatória das aptidões de todos os indivíduos da população
de n indivíduos.
Pode-se, portanto escrever o número de esquemas que serão selecionados
para a próxima geração, ( )1, +tEm , a partir da população atual.

Capítulo 3 Algoritmos Genéticos 96
PPGEM – Engenharia de Manufatura (2005)
∑=
=+ n
jjf
EfntEmtEm
1
)(**),()1,( Eq. 3.8
onde ( )Ef é a aptidão média do esquema E .
A aptidão média Mf da população ( )tP pode ser escrita como:
n
ff
n
jj
M
∑== 1
Eq. 3.9
Portanto:
MfEftEmtEm )(*),()1,( =+ Eq. 3.10
A equação 3.10 mostra que o número de esquemas ( )tEm , que possui valor de
aptidão ( )Ef acima do valor médio Mf crescerá exponencialmente nas gerações
seguintes. Ao contrário, aqueles com aptidão abaixo da media decrescerão também
exponencialmente.
Apesar do comportamento altamente promissor, o processo de seleção sozinho
não é capaz de explorar novas regiões do espaço de busca. Isso porque o operador
de seleção não é capaz de gerar novos pontos no espaço de busca para que sejam
avaliados. Os operadores genéticos que têm a missão de fazer isso são os
operadores cruzamento e mutação.

Capítulo 3 Algoritmos Genéticos 97
PPGEM – Engenharia de Manufatura (2005)
Tabela 3.4 Exemplo de um indivíduo e 2 esquemas possíveis.
Indivíduo 11011 Esquema (E1) **01* Esquema (E2) 1**1*
Na tabela 3.4 tem-se um indivíduo e dois esquemas possíveis. Aplica-se o
operador de cruzamento a esse indivíduo com o ponto de cruzamento escolhido
aleatoriamente tendo sido o ponto 2. Nesse caso o esquema 1E não será extinto. Ao
contrário, o esquema 2E , com o mesmo ponto de cruzamento, será extinto. Conclui-
se disso que a probabilidade de um esquema ser extinto pelo operador de
cruzamento é diretamente proporcional ao comprimento do esquema ( )Eδ . O
esquema 2E possui comprimento ( ) 32 =Eδ , o indivíduo tem 5=g bits de
comprimento e o número de locais possíveis de cruzamento é ( ) 4151 =−=−g
locais. Pode-se disser nesse caso que o esquema 2E tem 43 de chances de ser
extinto pelo cruzamento. Em termos matemáticos:
1)(
−=gEpex
δ Eq. 3.11
Onde: exp é a probabilidade de extinção por cruzamento do esquema E de
comprimento ( )Eδ para indivíduos de g bits de comprimento.
A equação 3.11 só é válida se todos os indivíduos da população forem
cruzados. Cada indivíduo possui a sua probabilidade de sofrer cruzamento, dada por
cp . A equação 3.11 é então reescrita.
1)(
−≥
gEpp cex
δ Eq. 3.12

Capítulo 3 Algoritmos Genéticos 98
PPGEM – Engenharia de Manufatura (2005)
Dessa forma a probabilidade de sobrevivência de um esquema E devido ao
cruzamento, sp é dada por:
1)(*11
−−≥−≥
gEppp cexs
δ Eq. 3.13
A equação 3.14 a seguir, representa, portanto os efeitos de cruzamento e
seleção, combinados.
−
−≥+1)(*1*)(*),()1,(
gEp
fEftEmtEm cM
δ Eq. 3.14
A equação 3.14 indica que a sobrevivência de um determinado esquema
depende do valor da aptidão do esquema em relação ao valor médio de aptidão da
população e do comprimento do esquema.
O cruzamento promove uma busca de um provável melhor individuo dentro de
um material genético existente na população atual, enquanto que a mutação tem por
objetivo repor material genético novo ou perdido em gerações anteriores.
Para que um esquema possa sobreviver a uma mutação de probabilidade mp ,
todos os seus bits tem que sobreviver. Como a probabilidade de sobrevivência de
um bit é ( )mp−1 , a probabilidade de sobrevivência de um esquema à mutação smp é
a probabilidade de sobrevivência de cada bit tantas vezes quanto for a ordem do
esquema, isto é,
)()1( EOmsm pp −≥ Eq. 3.15
Os valores usuais de mp são pequenos, ou seja, 1<<<mp , assim a equação
3.15 pode ser aproximada para.
Capítulo 3 Algoritmos Genéticos 99
PPGEM – Engenharia de Manufatura (2005)
]*)(1[ msm pEOp −≥ Eq. 3.16
A equação a seguir mostra a influência dos operadores de mutação inseridos
na equação 3.14.
−
−−≥+ mc
M
pEOgEp
fEftEmtEm *)(
1)(*1*)(*),()1,( δ
Eq. 3.17
A equação é conhecida como Teorema Fundamental dos Algoritmos Genéticos
ou Teorema dos Esquemas. Pode-se concluir através dela que os esquemas que
possuírem aptidão superior à média da população crescerão exponencialmente, ao
contrário dos esquemas com aptidão inferior à média. Esses últimos terão
probabilidades crescentes de se extinguir.
3.10 Implementação do Algoritmo Genético para Solução do Problema de Posicionamento de um Sistema de Neutralizadores Dinâmicos de Vibração
Para a solução do problema abordado neste trabalho emprega-se o algoritmo
genético para a otimização da posição dos neutralizadores.
Na figura a seguir pode-se visualizar de uma forma global o funcionamento do
algoritmo. Observa-se que existem dois loops. O mais interno deles se refere ao
processo de otimização dos parâmetros físicos do neutralizador e que emprega
TONL (Capítulo 2). O loop mais externo é o algoritmo genético que serve para
otimizar a posição do sistema de neutralizadores.

Capítulo 3 Algoritmos Genéticos 100
PPGEM – Engenharia de Manufatura (2005)
Figura 3.9 Fluxograma de busca da localização ótima de um sistema de NDV’s
utilizando algoritmo genético.
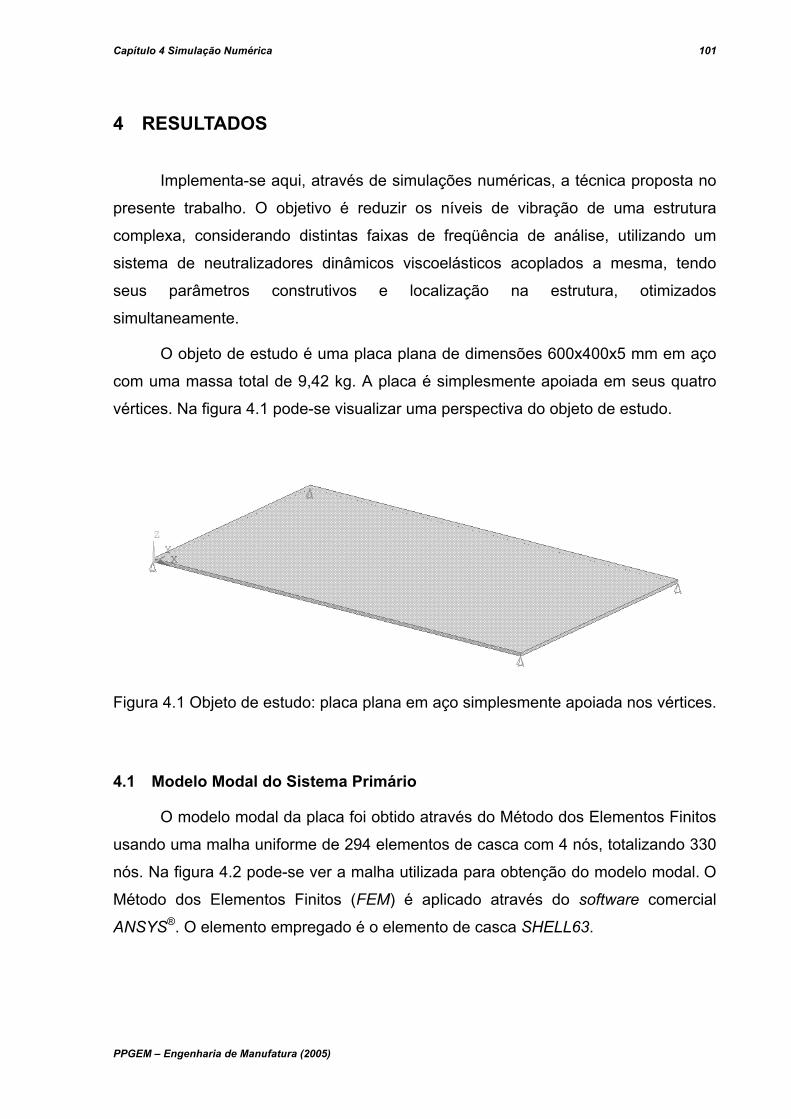
Capítulo 4 Simulação Numérica 101
PPGEM – Engenharia de Manufatura (2005)
4 RESULTADOS
Implementa-se aqui, através de simulações numéricas, a técnica proposta no
presente trabalho. O objetivo é reduzir os níveis de vibração de uma estrutura
complexa, considerando distintas faixas de freqüência de análise, utilizando um
sistema de neutralizadores dinâmicos viscoelásticos acoplados a mesma, tendo
seus parâmetros construtivos e localização na estrutura, otimizados
simultaneamente.
O objeto de estudo é uma placa plana de dimensões 600x400x5 mm em aço
com uma massa total de 9,42 kg. A placa é simplesmente apoiada em seus quatro
vértices. Na figura 4.1 pode-se visualizar uma perspectiva do objeto de estudo.
Figura 4.1 Objeto de estudo: placa plana em aço simplesmente apoiada nos vértices.
4.1 Modelo Modal do Sistema Primário
O modelo modal da placa foi obtido através do Método dos Elementos Finitos
usando uma malha uniforme de 294 elementos de casca com 4 nós, totalizando 330
nós. Na figura 4.2 pode-se ver a malha utilizada para obtenção do modelo modal. O
Método dos Elementos Finitos (FEM) é aplicado através do software comercial
ANSYS®. O elemento empregado é o elemento de casca SHELL63.

Capítulo 4 Simulação Numérica 102
PPGEM – Engenharia de Manufatura (2005)
Figura 4.2 Sistema primário (placa) e malha de FEM com a numeração dos nós.
Os parâmetros do material empregado para a análise são os normalmente
usados para o aço comum. Módulo de elasticidade, PaE 910207×= ; coeficiente de
Poisson, 3,0=ν ; e densidade volumétrica, 37850 mkg=ρ .
Para a obtenção do modelo modal da placa, freqüências naturais e modos de
vibrar, implementa-se uma análise modal de elementos finitos utilizando o método de
iteração subespacial.
Opta-se por obter apenas as 8 primeiras freqüências naturais (subspace
mode). O objetivo dessa redução é obter matrizes modais de tamanhos comparáveis
com os que podem ser encontrados de forma experimental. Uma vez que a malha
obtida tem 326 nós (330 do total menos os 4 dos apoios nos vértices), poder-se-ia
chegar a um modelo com 326 linhas. O que experimentalmente seria muito difícil de
se obter.
Uma vez obtidas as 8 primeiras freqüências naturais consideram-se apenas as
5 primeiras freqüências e modos de vibrar para o estudo de redução de níveis de
vibração. Como houve um truncamento nas 8 primeiras freqüências é mais prudente
não usar as informações completas do modelo por essas trazerem erros inerentes a

Capítulo 4 Simulação Numérica 103
PPGEM – Engenharia de Manufatura (2005)
esse truncamento. Entretanto, para a montagem da matriz de respostas em
freqüência utilizam-se os 8 modos obtidos.
Todas as freqüências naturais obtidas pelo modelo de elementos finitos podem
ser vistas na Tabela 4.1.
Tabela 4.1 Freqüências naturais obtidas para a placa plana.
Freqüência [Hz] Freqüência [Hz]
1ª 30.317 5ª 181.90
2ª 74.070 6ª 198.54
3ª 88.982 7ª 240.73
4ª 115.92 8ª 309.93
A figura 4.3 ilustra os 5 primeiros modos de vibrar da placa de aço
considerados para a análise. Somente estes 5 primeiros modos são levados em
consideração quando o objetivo é redução de níveis de vibração. Ou seja, a banda
na qual se deseja trabalhar, e efetivamente obter redução nos níveis de vibração,
não ultrapassa a 5ª freqüência natural.
A figura 4.4 ilustra a função de resposta em freqüência (FRF) da estrutura
primária (placa plana). A resposta FRF ilustrada na figura 4.4 corresponde à
resposta de aceleração obtida no nó 123 a partir de uma excitação δ (delta) de
Dirac aplicada no nó 95 ( ( )Ω123,95H ).

Capítulo 4 Simulação Numérica 104
PPGEM – Engenharia de Manufatura (2005)
(a) (b)
(c) (d)
(e)
Figura 4.3 Modos de vibrar: (a) primeiro modo; (b) segundo modo; (c) terceiro modo;
(d) quarto modo e (e) quinto modo.
Figura 4.4 Módulo da FRF da estrutura primária; H95,123.

Capítulo 4 Simulação Numérica 105
PPGEM – Engenharia de Manufatura (2005)
A construção do modelo modal, bem como sua utilização pelo algoritmo
desenvolvido, em FORTRAN 90® se dá através de um arquivo de leitura no formato
“.txt“. Esse arquivo é montado de tal forma que na primeira linha são inseridas a
freqüências naturais. Na segunda linha são inseridos os amortecimentos modais da
estrutura. No caso das simulações numéricas realizadas no presente trabalho foi
empregado um amortecimento modal igual para todas os modos de 0,0001. Esse
amortecimento é compatível com o objeto de estudo utilizado nesse trabalho. Nas
linhas seguintes são colocadas as colunas da matriz modal Φ formada pelos
autovetores normalizados pela matriz massa da estrutura primária, extraídos da
solução em FEM do ANSYS®.
4.2 Modelo do Material Viscoelástico
O material viscoelástico empregado na simulação numérica é o NEOPRENE®.
Os parâmetros disponibilizados pelo Instituto de Pesquisa para o Desenvolvimento
(LACTEC) foram levantados no Laboratório de Vibrações e Acústica da Universidade
Federal de Santa Catarina (LVA-PISA/UFSC). O modelo utilizado foi o modelo de 4
parâmetros com derivadas fracionárias. Estes parâmetros estão listados na Tabela
4.2.
Tabela 4.2 Parâmetros materiais do modelo baseado em derivadas fracionárias do NEOPRENE®.
Propriedades do Material Viscoelástico NEOPRENE®
G0 1.53 x 106 MPa G∞ 1.11 x 108 MPa b 1.864 x 10-5 s α 0.396
Na figura 4.5 pode-se visualizar o nomograma do módulo complexo de
elasticidade e também o fator de perda do material NEOPRENE® empregado nas
simulações. O nomograma mostra a variação dessas propriedades com a freqüência
de excitação bem como com a temperatura.

Capítulo 4 Simulação Numérica 106
PPGEM – Engenharia de Manufatura (2005)
Figura 4.5 Monograma do NEOPRENE® empregado nas simulações.
O uso desse material se justifica pela disponibilidade de suas características
dinâmicas bem como do próprio material.
4.3 Sistema de Neutralizadores
A simulação numérica apresentada neste trabalho tem como objetivo projetar
um sistema de neutralizadores dinâmicos viscoelásticos para reduzir os níveis de
vibração da placa plana metálica, objeto de estudo.
São ensaiados 3 sistemas de neutralizadores distintos. Um composto por um
único neutralizador, outro composto por um par de neutralizadores e o último
composto por 4 neutralizadores.

Capítulo 4 Simulação Numérica 107
PPGEM – Engenharia de Manufatura (2005)
Todos os sistemas são compostos de neutralizadores com massa iguais,
variando apenas as freqüências de sintonia de cada um destes dispositivos
(freqüência natural), assim como também a faixa de freqüência de interesse.
Cada um dos sistemas de neutralizadores dinâmicos viscoelásticos é ensaiado
com o objetivo de neutralizar 1, 2 e/ou 3 modos variando a faixa de freqüência de
interesse. As bandas largas de freqüência bem como os modos envolvidos em cada
ensaio estão especificados com mais detalhes neste capítulo.
4.4 Técnicas de Otimização Não-Linear
A técnica de otimização não linear é utilizada para otimizar os parâmetros de
construção dos neutralizadores dinâmicos viscoelásticos, para cada sistema de
neutralizadores, para cada banda de freqüência e uma vez definidas as localizações
dos mesmos.
O método de otimização empregado é o método de quase-Newton. Os
parâmetros utilizados nesse trabalho são:
Discretização (entre as freqüências inferior e superior da banda): 50 pontos de
freqüência.
Relação de massa modal: 0,1 (10% da massa modal)
Restrições inferior e superior das freqüências dos neutralizadores: 10 e 350 Hz
respectivamente.
Valor inicial das freqüências dos neutralizadores (vetor inicial): cada ensaio
teve valores diferentes para o vetor inicial. Os valores dos componentes do vetor
inicial foram adotados todos iguais. Os valores iniciais foram adotados como sendo
os valores dos centros das faixas de interesse. Assim, para os ensaios 1, 2 e 3 os
valores iniciais foram 30 Hz. Nos ensaios 4, 5 e 6, 60 Hz; 7, 8 e 9, 90 Hz; 10, 11 e
12, 120 Hz e finalmente para os ensaios 13, 14 e 15, 90 Hz. A descrição de cada
ensaio será feita mais adiante.
O parâmetro que controla a violação das restrições é ajustado em 1/20
(Bavastri, 1997).
Capítulo 4 Simulação Numérica 108
PPGEM – Engenharia de Manufatura (2005)
A tolerância adotada para o processo iterativo de otimização é de 0,001.
4.5 Algoritmo Genético
Um importante aspecto dos algoritmos genéticos é o correto ajuste de seus
parâmetros de funcionamento. Um não condicionamento desses parâmetros pode
fazer o processo tornar-se pouco eficiente no que diz respeito a sua convergência.
Ainda, esse não condicionamento pode levar o processo a uma busca infrutífera, ou
seja, não se consegue chegar ao ótimo global da função objetivo.
O presente trabalho se apoia principalmente nos estudo realizados por Carroll
(1996) sobre os parâmetros de ajuste do método.
O primeiro parâmetro a ser ajustado é o tamanho da população. Em tese
quanto maior a população maior a diversidade e, teoricamente, maior é a
probabilidade de se encontrar a solução. Entretanto, quanto maior a população,
maior é o esforço computacional para se fazer a qualificação dos indivíduos dessa
população. Ou seja, para cada indivíduo é necessária pelo menos uma avaliação da
função objetivo.
Portanto, deve-se escolher um tamanho de população que não comprometa a
diversidade e que possibilite um esforço computacional suportável.
Neste trabalho empregou-se o algoritmo micro-genético, o que possibilita o
emprego de populações reduzidas. Utilizou-se, portanto uma população de 7
indivíduos (Alvarez, 2002).
O aspecto da diversidade é abordado também pelos parâmetros de
probabilidade de cruzamento e mutação. O primeiro parâmetro deve ficar entre 0,5 e
0,95 e o segundo entre 0,001 e 0,1. Segundo os trabalhos de Carroll (1996) e
Alvarez (2002), usados como referência para essa dissertação, os valores
empregados para esses parâmetros foram:
Probabilidade de cruzamento 8.0=pcross
Probabilidade de mutação 02.0=pmutate
Capítulo 4 Simulação Numérica 109
PPGEM – Engenharia de Manufatura (2005)
Esses valores foram encontrados através de vários testes de convergência
preliminares. São valores que diferem levemente dos valores ideais encontrados nos
trabalhos citados, mas que estão dentro dos limites de referência. Cada problema
tem as suas particularidades e os parâmetros precisam ser ajustados a elas.
4.6 Casos Avaliados
Os diversos casos ensaiados são descritos a seguir, bem com os resultados
obtidos. Os resultados apresentados são a localização ótima para o sistema de
neutralizadores, as freqüências naturais, as massas dos neutralizadores de cada
sistema e a resposta em freqüência do sistema. A resposta em freqüência de cada
sistema composto (estrutura primária + sistema de neutralizadores) é mostrada de
forma comparativa com a mesma resposta em freqüência da estrutura primária, sem
o sistema de neutralizadores acoplado.
4.6.1 Simulações 1, 2 e 3: Neutralização do Primeiro Modo de Vibrar
Estas simulações têm como objetivo neutralizar o primeiro modo de vibrar do
sistema primário utilizando um sistema de neutralizadores com um único
neutralizador, dois neutralizadores e quatro neutralizadores, respectivamente.
A banda de freqüência de interesse vai de 10 Hz até 50 Hz. Essa banda de
freqüências contém apenas a primeira freqüência natural da placa (estrutura
primária), com se pode observar pela figura 4.4.
A localização ótima para o sistema de neutralizadores é mostrada nas figuras
4.6 (um único neutralizador), 4.8 (dois neutralizadores) e 4.10 (quatro
neutralizadores). Nas figuras 4.7, 4.9 e 4.11 observa-se a melhoria na resposta do
sistema após o acoplamento dos sistemas neutralizadores.
A tabela 4.3 traz os resultados encontrados para os ensaios 1, 2 e 3. São
listadas a localização dos sistemas de neutralizadores, as suas massa e freqüências
naturais, bem como o valor da função objetivo para cada sistema.

Capítulo 4 Simulação Numérica 110
PPGEM – Engenharia de Manufatura (2005)
Figura 4.6 Localização do sistema de neutralizadores: 1o modo – 1 neutralizador.
Figura 4.7 Resposta do sistema primário com 1 neutralizador.
Figura 4.8 Localização do sistema de neutralizadores: 1o modo – 2 neutralizadores.

Capítulo 4 Simulação Numérica 111
PPGEM – Engenharia de Manufatura (2005)
Figura 4.9 Resposta do sistema primário com 2 neutralizadores.
Figura 4.10 Localização do sistema de neutralizadores: 1o modo – 4 neutralizadores.
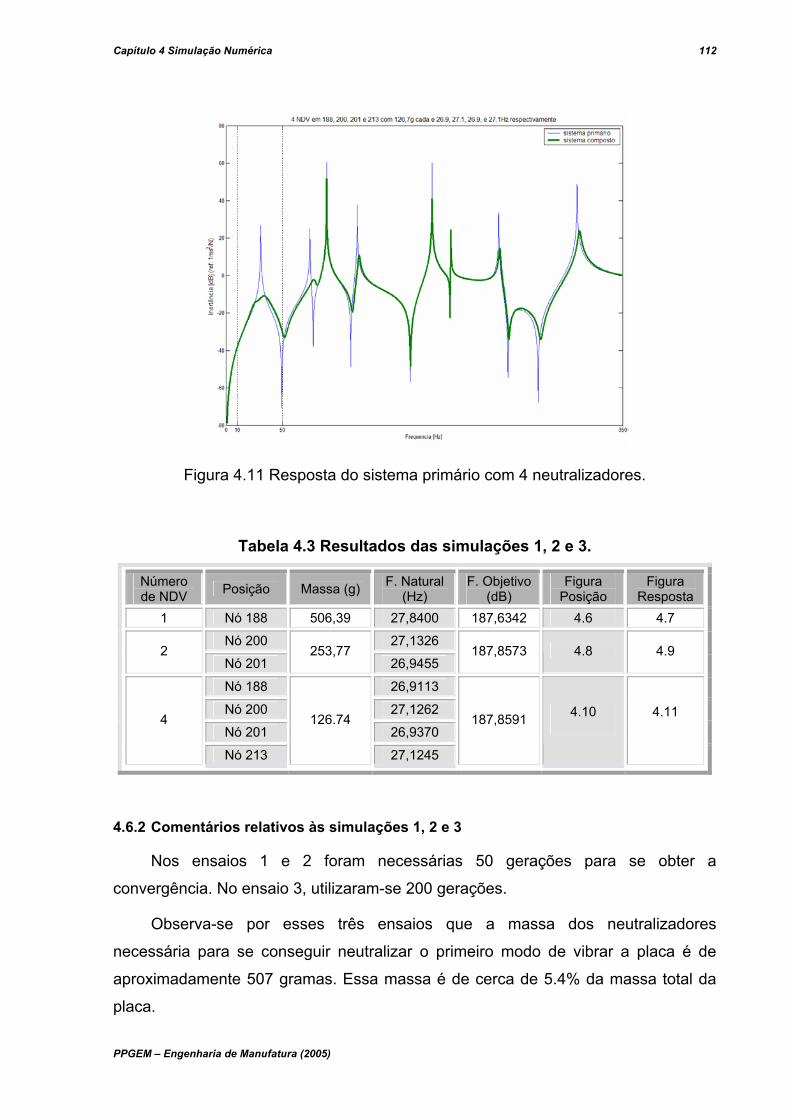
Capítulo 4 Simulação Numérica 112
PPGEM – Engenharia de Manufatura (2005)
Figura 4.11 Resposta do sistema primário com 4 neutralizadores.
Tabela 4.3 Resultados das simulações 1, 2 e 3.
Número de NDV Posição Massa (g) F. Natural
(Hz) F. Objetivo
(dB) Figura
Posição Figura
Resposta 1 Nó 188 506,39 27,8400 187,6342 4.6 4.7
Nó 200 27,1326 2
Nó 201 253,77
26,9455 187,8573 4.8 4.9
Nó 188 26,9113
Nó 200 27,1262
Nó 201 26,9370 4
Nó 213
126.74
27,1245
187,8591 4.10 4.11
4.6.2 Comentários relativos às simulações 1, 2 e 3
Nos ensaios 1 e 2 foram necessárias 50 gerações para se obter a
convergência. No ensaio 3, utilizaram-se 200 gerações.
Observa-se por esses três ensaios que a massa dos neutralizadores
necessária para se conseguir neutralizar o primeiro modo de vibrar a placa é de
aproximadamente 507 gramas. Essa massa é de cerca de 5.4% da massa total da
placa.
Capítulo 4 Simulação Numérica 113
PPGEM – Engenharia de Manufatura (2005)
Os resultados obtidos em relação à redução de vibração foram praticamente
iguais com o valor da função objetivo (norma) ficando em torno de 187.9 dB para os
ensaios 2 e 3 e de 187.6 para o ensaio 1.
As localizações encontradas, como era de se esperar, correspondem aos
pontos de máxima amplitude do modo em estudo.
4.6.3 Simulações 4, 5 e 6: Neutralização do Segundo Modo de Vibrar
Estas simulações têm como objetivo neutralizar o segundo modo de vibrar do
sistema primário utilizando um sistema de neutralizadores com um único
neutralizador, dois neutralizadores e quatro neutralizadores, respectivamente.
A banda de freqüência de interesse vai de 40 Hz até 80 Hz. Essa banda de
freqüências contém apenas a segunda freqüência natural da placa (estrutura
primária), com se pode observar pela figura 4.4.
A localização ótima para o sistema de neutralizadores é mostrada nas figuras
4.12 (um único neutralizador), 4.14 (dois neutralizadores) e 4.16 (quatro
neutralizadores). Nas figuras 4.13, 4.15 e 4.17 observa-se a melhoria na resposta do
sistema após o acoplamento dos sistemas neutralizadores.
A tabela 4.4 traz os resultados encontrados para os ensaios 4, 5 e 6. São
listados a localização dos sistemas de neutralizadores, massa e freqüência natural
de cada um e o valor da função objetivo para cada sistema.
Figura 4.12 Localização do sistema de neutralizadores: 1o modo – 1 neutralizador.

Capítulo 4 Simulação Numérica 114
PPGEM – Engenharia de Manufatura (2005)
Figura 4.13 Resposta do sistema primário com 1 neutralizador.
Figura 4.14 Localização do sistema de neutralizadores: 2o modo – 2 neutralizadores.

Capítulo 4 Simulação Numérica 115
PPGEM – Engenharia de Manufatura (2005)
Figura 4.15 Resposta do sistema primário com 2 neutralizadores.
Figura 4.16 Localização do sistema de neutralizadores: 2o modo – 4 neutralizadores.

Capítulo 4 Simulação Numérica 116
PPGEM – Engenharia de Manufatura (2005)
Figura 4.17 Resposta do sistema primário com 4 neutralizadores.
Tabela 4.4 Resultados das simulações 4, 5 e 6.
Número de NDV Posição Massa (g) F. Natural
(Hz) F. Objetivo
(dB) Figura
Posição Figura
Resposta 1 Nó 200 217,52 60,6419 200,1515 4.12 4.13
Nó 188 68,0038 2
Nó 213 108,50
60,0521 200,0323 4.14 4.15
Nó 188 68,8729
Nó 200 60,0122
Nó 201 68,0759 4
Nó 213
54,315
60,5557
199,9118 4.16 4.17
4.6.4 Comentários relativos às simulações 4, 5 e 6
Nos ensaios 4 e 5 foram necessárias 50 gerações para se obter a
convergência. No ensaio 6, utilizaram-se 200 gerações.
Observa-se por esses três ensaios que a massa de neutralizadores necessária
para se conseguir neutralizar o segundo modo de vibrar é de aproximadamente 217
gramas. Essa massa é de cerca de 2.3% da massa total da placa. A massa
Capítulo 4 Simulação Numérica 117
PPGEM – Engenharia de Manufatura (2005)
encontrada é bem inferior a encontrada nos três ensaios anteriores. Isto pode ser
explicado como sendo devido a menor energia vibratória envolvida no segundo
modo.
Os resultados obtidos em relação à redução de vibração foram praticamente
iguais com o valor da função objetivo (norma) ficando em torno de 200 dB para os
três ensaios.
4.6.5 Simulações 7, 8 e 9: Neutralização do Terceiro Modo de Vibrar
Estas simulações têm como objetivo neutralizar o terceiro modo de vibrar do
sistema primário utilizando um sistema de neutralizadores com um único
neutralizador, dois neutralizadores e quatro neutralizadores, respectivamente.
A banda de freqüência de interesse vai de 80 Hz até 100 Hz. Essa banda de
freqüências contém apenas a terceira freqüência natural da placa (estrutura
primária), com se pode observar pela figura 4.4.
A localização ótima para o sistema de neutralizadores é mostrada nas figuras
4.18 (um único neutralizador), 4.20 (dois neutralizadores) e 4.22 (quatro
neutralizadores). Nas figuras 4.19, 4.21 e 4.23 observa-se a melhoria na resposta do
sistema após o acoplamento dos sistemas neutralizadores.
A tabela 4.5 traz os resultados encontrados para os ensaios 7, 8 e 9. São
listados a localização dos sistemas de neutralizadores, massa e freqüência natural
de cada um e o valor da função objetivo para cada sistema.
Figura 4.18 Localização do sistema de neutralizadores: 3o modo – 1 neutralizador.
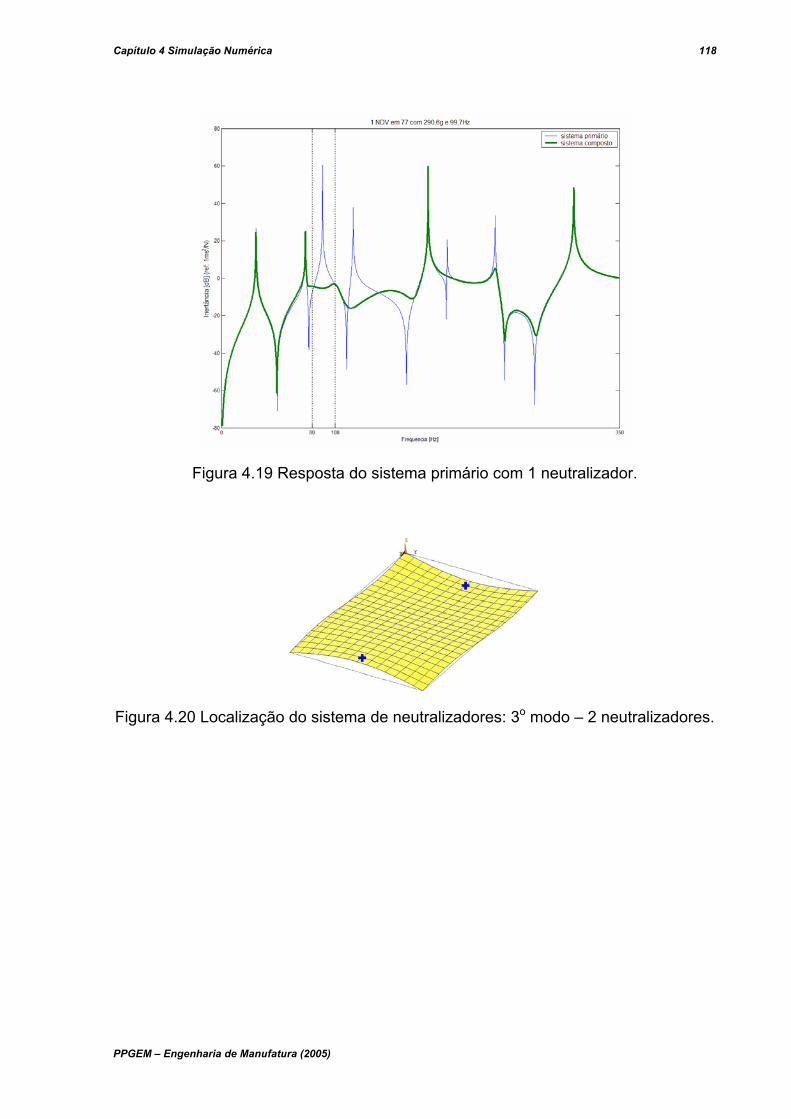
Capítulo 4 Simulação Numérica 118
PPGEM – Engenharia de Manufatura (2005)
Figura 4.19 Resposta do sistema primário com 1 neutralizador.
Figura 4.20 Localização do sistema de neutralizadores: 3o modo – 2 neutralizadores.

Capítulo 4 Simulação Numérica 119
PPGEM – Engenharia de Manufatura (2005)
Figura 4.21 Resposta do sistema primário com 2 neutralizadores.
Figura 4.22 Localização do sistema de neutralizadores: 2o modo – 4 neutralizadores.
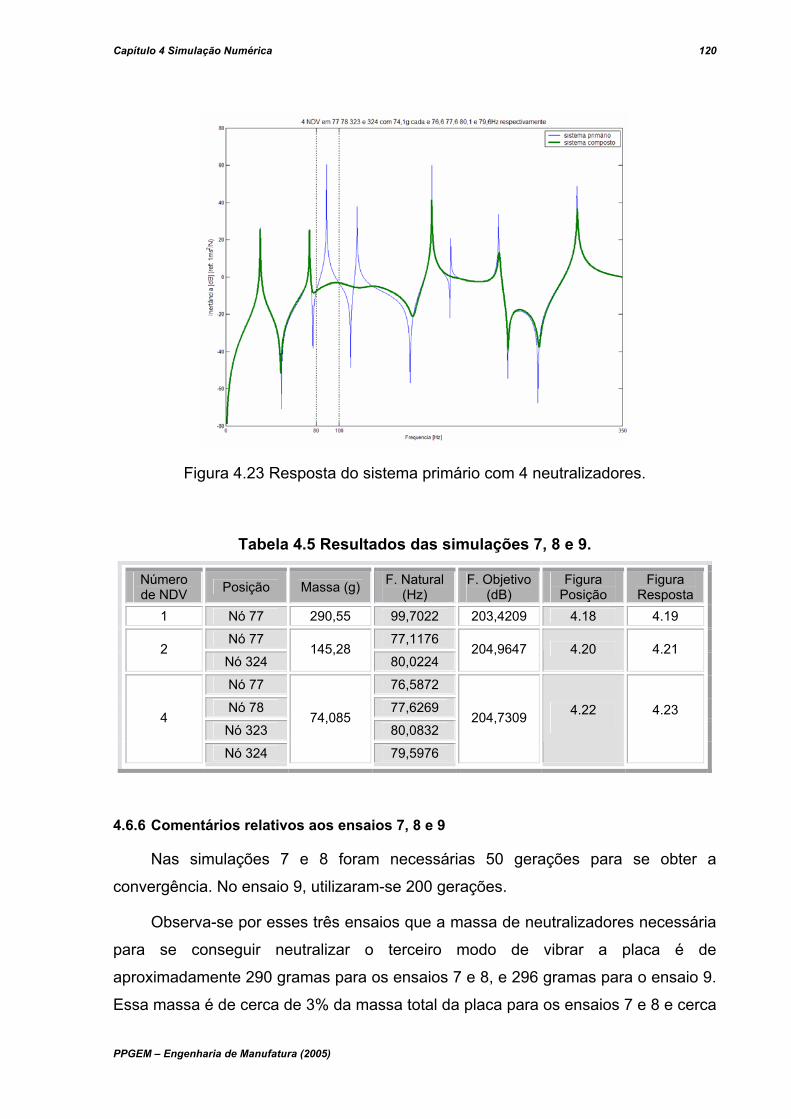
Capítulo 4 Simulação Numérica 120
PPGEM – Engenharia de Manufatura (2005)
Figura 4.23 Resposta do sistema primário com 4 neutralizadores.
Tabela 4.5 Resultados das simulações 7, 8 e 9.
Número de NDV Posição Massa (g) F. Natural
(Hz) F. Objetivo
(dB) Figura
Posição Figura
Resposta 1 Nó 77 290,55 99,7022 203,4209 4.18 4.19
Nó 77 77,1176 2
Nó 324 145,28
80,0224 204,9647 4.20 4.21
Nó 77 76,5872
Nó 78 77,6269
Nó 323 80,0832 4
Nó 324
74,085
79,5976
204,7309 4.22 4.23
4.6.6 Comentários relativos aos ensaios 7, 8 e 9
Nas simulações 7 e 8 foram necessárias 50 gerações para se obter a
convergência. No ensaio 9, utilizaram-se 200 gerações.
Observa-se por esses três ensaios que a massa de neutralizadores necessária
para se conseguir neutralizar o terceiro modo de vibrar a placa é de
aproximadamente 290 gramas para os ensaios 7 e 8, e 296 gramas para o ensaio 9.
Essa massa é de cerca de 3% da massa total da placa para os ensaios 7 e 8 e cerca

Capítulo 4 Simulação Numérica 121
PPGEM – Engenharia de Manufatura (2005)
de 3.1% para o ensaio 9 . A massa encontrada é levemente superior à encontrada
nos três ensaios anteriores. Isso é devido à maior energia vibratória envolvida no
terceiro modo se comparado com o segundo modo. Isso pode ser explicado pelo
maior nível de amplificação na FRF do terceiro modo (figura 4.4).
Os resultados obtidos em relação à redução de vibração foram praticamente
iguais com o valor da função objetivo (norma) ficando em torno de 203 para o ensaio
7, 205 dB para os ensaios 8 e 9. Distribuindo-se mais neutralizadores, praticamente
mantendo a mesma massa adicionada total, consegue-se 2 dB de redução adicional
global.
4.6.7 Simulações 10, 11 e 12: Neutralização do Quarto Modo de Vibrar
Estas simulações têm como objetivo neutralizar o quarto modo de vibrar do
sistema primário utilizando um sistema de neutralizadores com um único
neutralizador, dois neutralizadores e quatro neutralizadores, respectivamente.
A banda de freqüência de interesse vai de 100 Hz até 140 Hz. Essa banda de
freqüências contém apenas a quarta freqüência natural da placa (estrutura primária),
como pode ser observado na figura 4.4.
A localização ótima para o sistema de neutralizadores é mostrada nas figuras
4.24 (um único neutralizador), 4.26 (dois neutralizadores) e 4.28 (quatro
neutralizadores). Nas figuras 4.25, 4.27 e 4.29 observa-se a melhoria na resposta do
sistema após o acoplamento dos sistemas neutralizadores.
A tabela 4.6 traz os resultados encontrados para os ensaios 10, 11 e 12. São
listadas a localização dos neutralizadores, suas massas e as freqüências naturais,
além do valor da função objetivo para cada caso.

Capítulo 4 Simulação Numérica 122
PPGEM – Engenharia de Manufatura (2005)
Figura 4.24 Localização do sistema de neutralizadores: 4o modo – 1 neutralizador.
Figura 4.25 Resposta do sistema primário com 1 neutralizador.
Figura 4.26 Localização do sistema de neutralizadores: 3o modo – 2 neutralizadores.
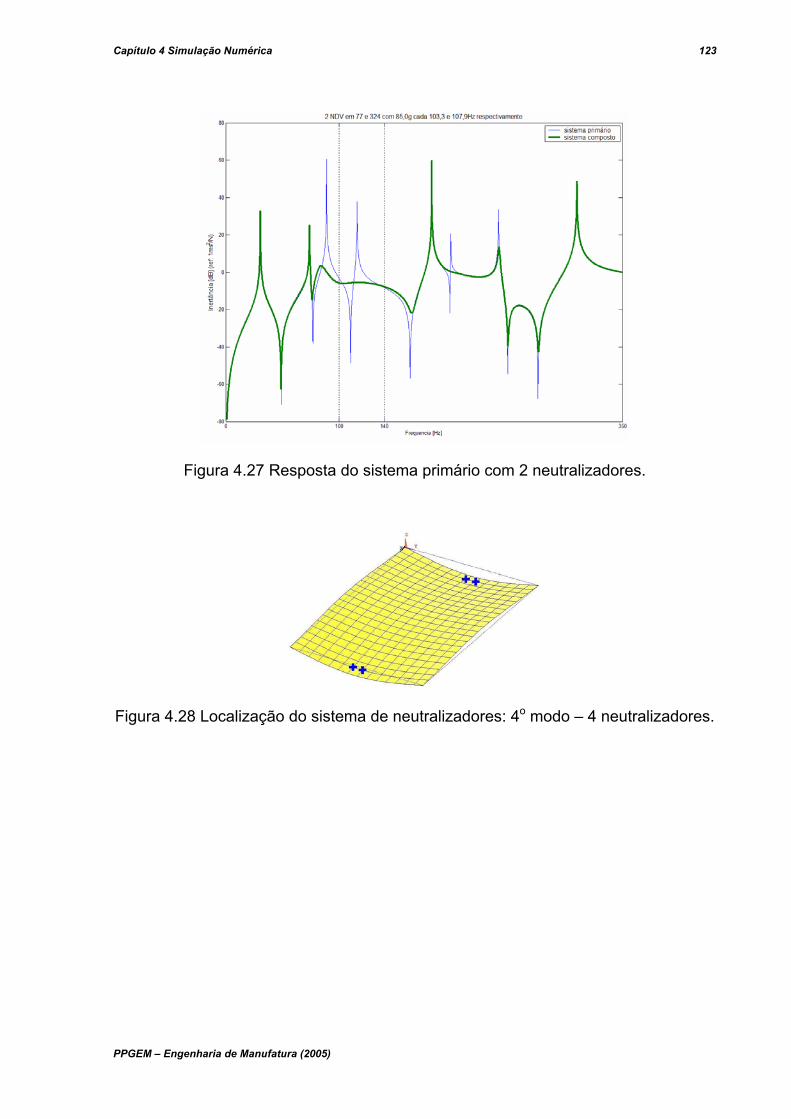
Capítulo 4 Simulação Numérica 123
PPGEM – Engenharia de Manufatura (2005)
Figura 4.27 Resposta do sistema primário com 2 neutralizadores.
Figura 4.28 Localização do sistema de neutralizadores: 4o modo – 4 neutralizadores.
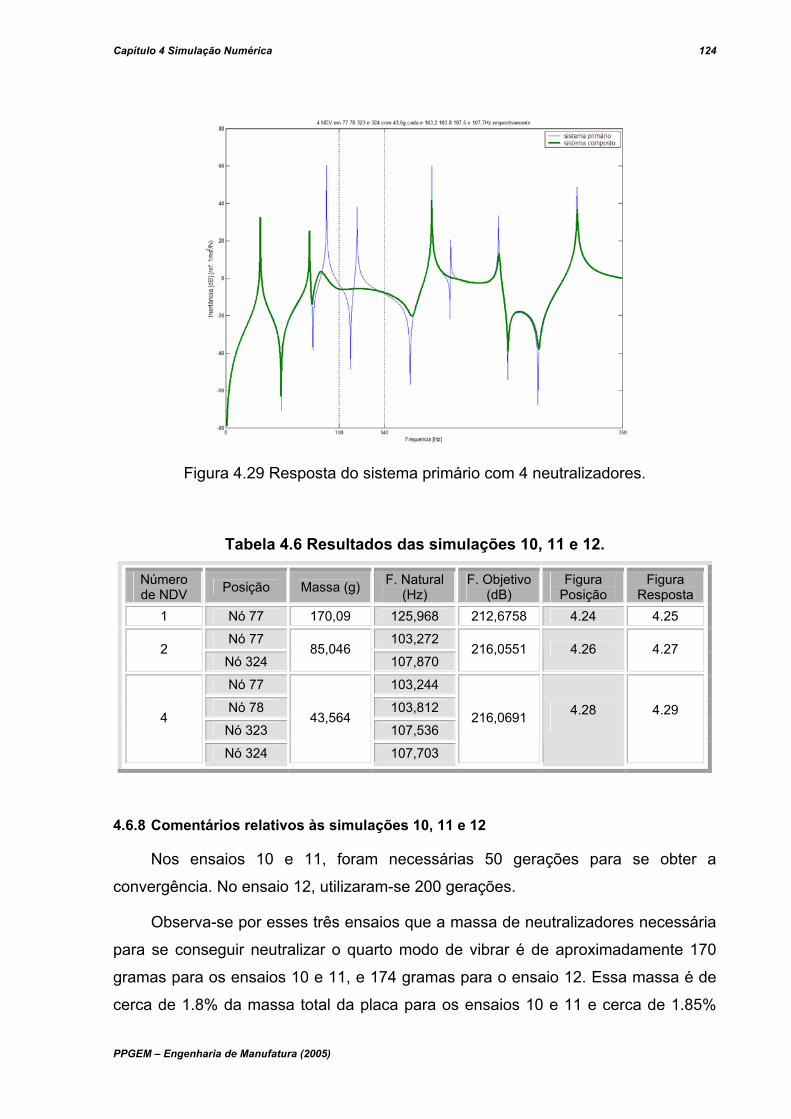
Capítulo 4 Simulação Numérica 124
PPGEM – Engenharia de Manufatura (2005)
Figura 4.29 Resposta do sistema primário com 4 neutralizadores.
Tabela 4.6 Resultados das simulações 10, 11 e 12.
Número de NDV Posição Massa (g) F. Natural
(Hz) F. Objetivo
(dB) Figura
Posição Figura
Resposta 1 Nó 77 170,09 125,968 212,6758 4.24 4.25
Nó 77 103,272 2
Nó 324 85,046
107,870 216,0551 4.26 4.27
Nó 77 103,244
Nó 78 103,812
Nó 323 107,536 4
Nó 324
43,564
107,703
216,0691 4.28 4.29
4.6.8 Comentários relativos às simulações 10, 11 e 12
Nos ensaios 10 e 11, foram necessárias 50 gerações para se obter a
convergência. No ensaio 12, utilizaram-se 200 gerações.
Observa-se por esses três ensaios que a massa de neutralizadores necessária
para se conseguir neutralizar o quarto modo de vibrar é de aproximadamente 170
gramas para os ensaios 10 e 11, e 174 gramas para o ensaio 12. Essa massa é de
cerca de 1.8% da massa total da placa para os ensaios 10 e 11 e cerca de 1.85%
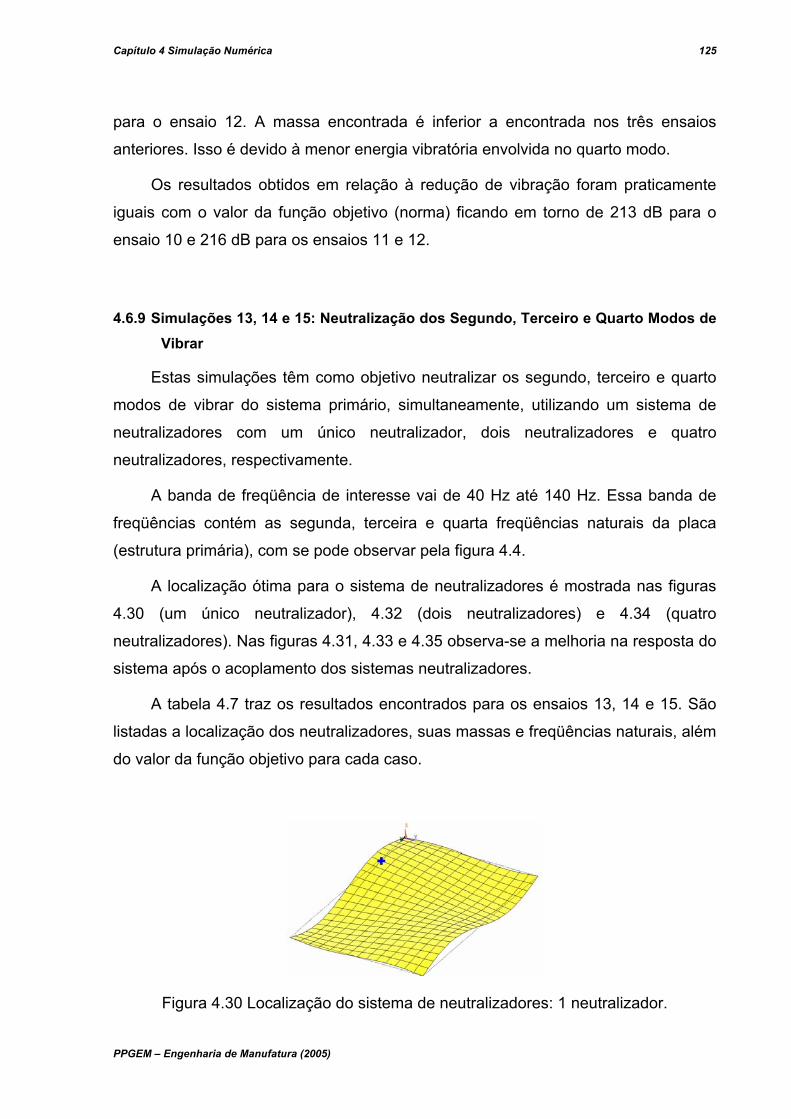
Capítulo 4 Simulação Numérica 125
PPGEM – Engenharia de Manufatura (2005)
para o ensaio 12. A massa encontrada é inferior a encontrada nos três ensaios
anteriores. Isso é devido à menor energia vibratória envolvida no quarto modo.
Os resultados obtidos em relação à redução de vibração foram praticamente
iguais com o valor da função objetivo (norma) ficando em torno de 213 dB para o
ensaio 10 e 216 dB para os ensaios 11 e 12.
4.6.9 Simulações 13, 14 e 15: Neutralização dos Segundo, Terceiro e Quarto Modos de Vibrar
Estas simulações têm como objetivo neutralizar os segundo, terceiro e quarto
modos de vibrar do sistema primário, simultaneamente, utilizando um sistema de
neutralizadores com um único neutralizador, dois neutralizadores e quatro
neutralizadores, respectivamente.
A banda de freqüência de interesse vai de 40 Hz até 140 Hz. Essa banda de
freqüências contém as segunda, terceira e quarta freqüências naturais da placa
(estrutura primária), com se pode observar pela figura 4.4.
A localização ótima para o sistema de neutralizadores é mostrada nas figuras
4.30 (um único neutralizador), 4.32 (dois neutralizadores) e 4.34 (quatro
neutralizadores). Nas figuras 4.31, 4.33 e 4.35 observa-se a melhoria na resposta do
sistema após o acoplamento dos sistemas neutralizadores.
A tabela 4.7 traz os resultados encontrados para os ensaios 13, 14 e 15. São
listadas a localização dos neutralizadores, suas massas e freqüências naturais, além
do valor da função objetivo para cada caso.
Figura 4.30 Localização do sistema de neutralizadores: 1 neutralizador.
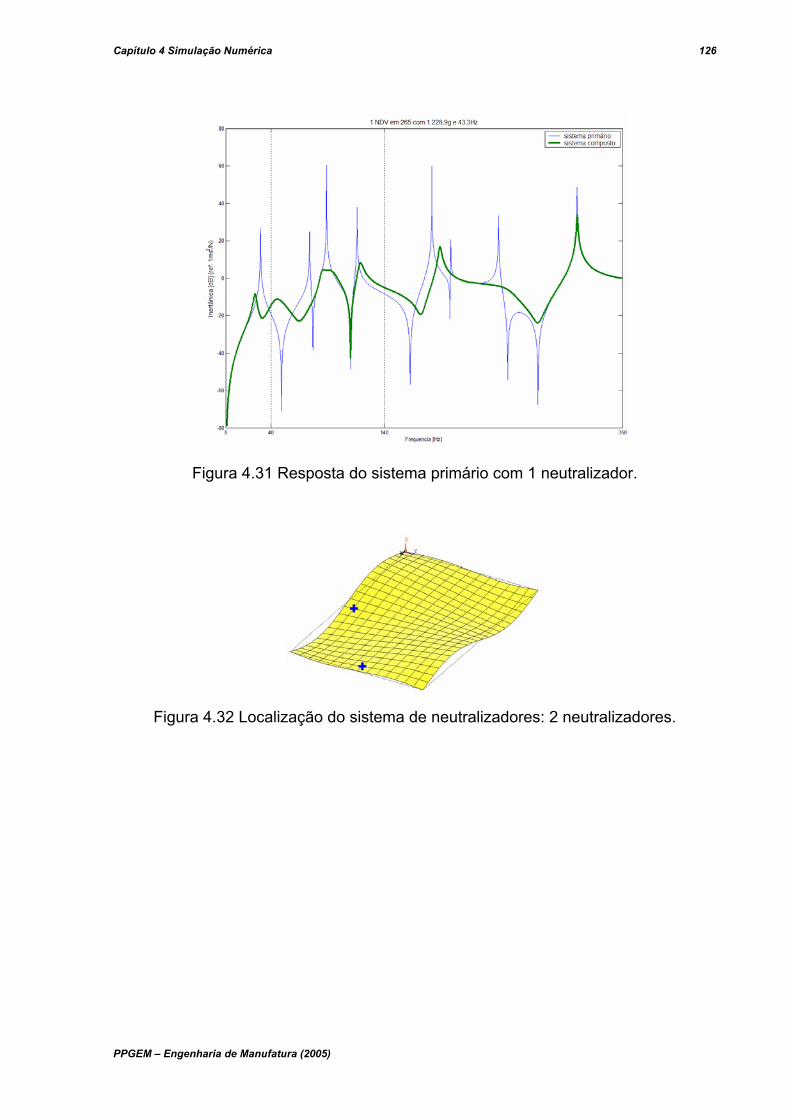
Capítulo 4 Simulação Numérica 126
PPGEM – Engenharia de Manufatura (2005)
Figura 4.31 Resposta do sistema primário com 1 neutralizador.
Figura 4.32 Localização do sistema de neutralizadores: 2 neutralizadores.

Capítulo 4 Simulação Numérica 127
PPGEM – Engenharia de Manufatura (2005)
Figura 4.33 Resposta do sistema primário com 2 neutralizadores.
Figura 4.34 Localização do sistema de neutralizadores: 4 neutralizadores.

Capítulo 4 Simulação Numérica 128
PPGEM – Engenharia de Manufatura (2005)
Figura 4.35 Resposta do sistema primário com 4 neutralizadores.
Tabela 4.7 Resultados das simulações 13, 14 e 15.
Número de NDV Posição Massa (g) F. Natural
(Hz) F. Objetivo
(dB) Figura
Posição Figura
Resposta 1 Nó 265 1.228,9 43,3028 183,4861 4.30 4.31
Nó 77 90,2262 2
Nó 200 212,26
58,4012 200,0650 4.32 4.33
Nó 77 78,5895
Nó 213 60,3491
Nó 201 69,3937 4
Nó 324
106,11
82,3072
199,5927 4.34 4.35
4.6.10 Comentários relativos aos ensaios 13, 14 e 15
Nos ensaios 13 e 14, foram necessárias 50 gerações para se obter a
convergência. No ensaio 15, utilizaram-se 400 gerações.
Esses foram os ensaios mais importantes realizados, pois demonstram a
eficiência e robustez do método. Isso pode ser observado pelos resultados obtidos.
Capítulo 4 Simulação Numérica 129
PPGEM – Engenharia de Manufatura (2005)
O objetivo desses ensaios é neutralizar 3 modos de vibrar de uma só vez
dentro de uma banda larga de freqüências. No ensaio 13 isso é conseguido a custa
de uma massa muito grande. Cerca de 1229 gramas, ou 13% da massa total da
placa. Nos ensaios 14 e 15 conseguem-se resultados muito superiores ao anterior
com massas sensivelmente menores. Nesses últimos ensaios, 14 e 15, a massa dos
neutralizadores é de 424 gramas, ou seja, apenas 4,5% da massa total da placa.
Os resultados obtidos em relação à redução de vibração foram bastante
discrepantes em relação aos testes 13 e 14 e 15. O valor da função objetivo (norma)
do ensaio 13 é em torno de 183 dB. Para os ensaios 14 e 15 o valor da função
objetivo é de 200 dB.
O aumento do número de neutralizadores permite um controle modal mais
adequado, melhorando a eficácia da redução global de níveis de vibração em 7 dB
aproximadamente.
O resultado obtido no ensaio 13 se mostra inviável, devido a que a massa do
único neutralizador é excessivamente grande. Por outro lado, os resultados dos
ensaios 14 e 15 mostram a capacidade do método de posicionar e otimizar os
parâmetros do sistema de neutralizadores dinâmicos. A figura 4.35 ilustra a grande
redução de níveis de vibração obtida no ensaio 15, bem com do ensaio 14 na figura
4.33.
4.7 Espaço de Busca
Para verificar a convergência do método aqui proposto, utilizou-se a simulação
numérica 13. Fazendo uma varredura da posição do neutralizador é possível achar,
de forma visual a melhor posição entre todas as posições possíveis.
Assim, esta nova simulação permite a construção de um gráfico tridimensional
do espaço de busca, onde os eixos x e y deverão conter a localização do NDV e o
eixo z deverá conter o valor da função objetivo. Dessa forma pode-se visualizar o
ponto ótimo global buscado pelo método e se este ponto foi realmente alcançado.
Para possibilitar esta visualização, é necessário calcular os valores da função
objetivo para cada localização sobre a estrutura (todos os nós onde é possível o
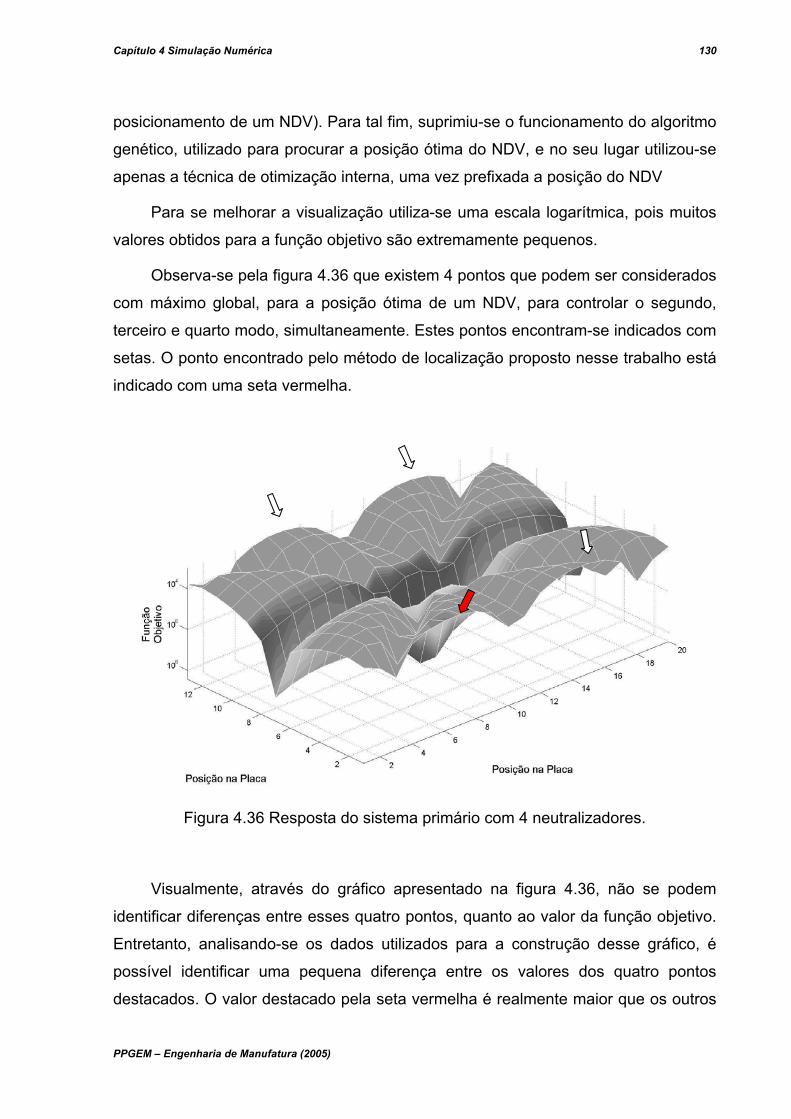
Capítulo 4 Simulação Numérica 130
PPGEM – Engenharia de Manufatura (2005)
posicionamento de um NDV). Para tal fim, suprimiu-se o funcionamento do algoritmo
genético, utilizado para procurar a posição ótima do NDV, e no seu lugar utilizou-se
apenas a técnica de otimização interna, uma vez prefixada a posição do NDV
Para se melhorar a visualização utiliza-se uma escala logarítmica, pois muitos
valores obtidos para a função objetivo são extremamente pequenos.
Observa-se pela figura 4.36 que existem 4 pontos que podem ser considerados
com máximo global, para a posição ótima de um NDV, para controlar o segundo,
terceiro e quarto modo, simultaneamente. Estes pontos encontram-se indicados com
setas. O ponto encontrado pelo método de localização proposto nesse trabalho está
indicado com uma seta vermelha.
Figura 4.36 Resposta do sistema primário com 4 neutralizadores.
Visualmente, através do gráfico apresentado na figura 4.36, não se podem
identificar diferenças entre esses quatro pontos, quanto ao valor da função objetivo.
Entretanto, analisando-se os dados utilizados para a construção desse gráfico, é
possível identificar uma pequena diferença entre os valores dos quatro pontos
destacados. O valor destacado pela seta vermelha é realmente maior que os outros

Capítulo 4 Simulação Numérica 131
PPGEM – Engenharia de Manufatura (2005)
três, mostrando que o método é capaz de encontrar o máximo global. Mesmo sendo
valores muito próximos, o método se mostrou capaz de identificar o máximo global.
Vide apêndice C.

Capítulo 5 Conclusões e Recomendações 132
PPGEM – Engenharia de Manufatura (2005)
5 CONCLUSÕES E RECOMENDAÇÕES
5.1 Conclusões
Fez-se uma revisão dos conceitos utilizados na metodologia geral de
otimização de neutralizadores dinâmicos viscoelásticos, trabalhando em banda larga
de freqüência, controlando simultaneamente, vários modos de vibrar de sistemas
primários lineares, invariantes no tempo e geometricamente complexos.
Abordaram-se os conceitos relacionados aos neutralizadores dinâmicos de
vibração e seus princípios de atuação sobre a estrutura a controlar. Revisou-se os
conceitos da metodologia geral formulada pelo grupo PISA-CNPq para otimização
de neutralizadores dinâmicos viscoelásticos. Foram revistos os conceitos dos
parâmetros equivalentes generalizados, modelagem de sistemas complexos no
espaço modal e funções de resposta em freqüência em subespaço modal do
sistema primário.
No que se refere especificamente aos neutralizadores dinâmicos viscoelásticos
fez-se uma revisão da teoria de viscoelasticidade linear. Para o modelo matemático
do material viscoelástico reviu-se o cálculo fracional e, particularmente, o modelo de
quatro parâmetros baseado em derivada fracionária para a viscoelasticidade linear.
As técnicas de otimização não linear (TONL) foram revistas e estudados os
seus conceitos básicos. Os algoritmos genéticos foram utilizados para determinação
da localização ótima, na estrutura, dos neutralizadores dinâmicos viscoelásticos.
Foram estudados os principais aspectos dos algoritmos genéticos tais como os
principais operadores genéticos, os parâmetros de influência e sua configuração e a
teoria fundamental dos algoritmos genéticos.
Propôs-se e implementou-se uma metodologia para determinar a localização
ótima, bem como os parâmetros físicos construtivos ótimos, simultaneamente, de um
sistema de neutralizadores dinâmicos viscoelásticos, destinado a controlar uma
estrutura geometricamente complexa, qualquer.
A função objetivo proposta para o problema resultou em uma função
multiobjetivo, que além de otimizar os parâmetros físicos do neutralizador e sua
localização, produz resultados com a menor massa de neutralizadores possível,
Capítulo 5 Conclusões e Recomendações 133
PPGEM – Engenharia de Manufatura (2005)
adicionada ao sistema primário. Isto porque, no decorrer do trabalho, a não inclusão
da massa dos neutralizadores na função objetivo, levou a resultados pouco práticos,
como neutralizadores com massas muito grandes, fixadas nos nós dos modos a
controlar. Com a função objetivo multimodal, este problema foi solucionado.
Foram realizados ensaios numéricos em uma estrutura simples (placa
simplesmente apoiada nos vértices). Empregou-se uma placa metálica em aço,
discretizada em elementos finitos, e procurou-se neutralizar alguns modos de vibrar
dessa estrutura, em diferentes bandas de freqüência, envolvendo um ou mais
modos, simultaneamente.
Foi possível, através das simulações numéricas, comprovar a eficiência da
metodologia, conseguindo resultados significativos, no que diz respeito ao controle
de vibrações. A metodologia mostrou ser capaz de localizar e projetar sistemas de
neutralizadores dinâmicos viscoelásticos, com massas reduzidas, que reduzem os
níveis de vibração na faixa de interesse de forma eficaz e satisfatória.
Como exemplo da eficiência da metodologia pode-se comentar aqui os
resultados obtidos na simulação 1. Poderia-se imaginar, a princípio, que a
localização ótima para um neutralizador atuar sobre o primeiro modo de vibrar da
placa deveria ser o centro dessa (nó 194 ou 207). Entretanto, a metodologia indicou
que a melhor localização não é o centro e sim a extremidade lateral (nó 188).
Fazendo uma investigação posterior foi possível comprovar, através de uma
avaliação das duas localizações, que realmente os resultados obtidos com o
neutralizador localizado na lateral são melhores que aqueles dos nós centrais. A
diferença entre os dois resultados verificou-se muito pequena. Entretanto a
metodologia se mostrou capaz, e com sensibilidade suficiente, para localizar o
sistema de neutralizadores de forma ótima.
Ao final desse trabalho pode-se observar que, mesmo em seu estágio inicial de
desenvolvimento, a metodologia geral aqui proposta, mostra resultados promissores.
Capítulo 5 Conclusões e Recomendações 134
PPGEM – Engenharia de Manufatura (2005)
5.2 Sugestões para Trabalhos Futuros
Para trabalhos futuros considera-se importante que a metodologia seja
comprovada experimentalmente. Faz-se necessário, para que a metodologia seja
validada, que seus resultados sejam comparados com medições experimentais.
Somente assim poder-se-á considerar seus resultados confiáveis, plenamente.
Estudar e aplicar esta metodologia em sistemas geometricamente complexos,
com densidade modal elevada assim como um elevado acoplamento entre seus
modos. Tais sistemas solicitariam uma grande sensibilidade por parte da
metodologia aqui apresentada, o qual, segundo este trabalho, tem muito a contribuir
para o desenvolvimento e refino da mesma.
Um estudo relativo ao efeito da temperatura sobre os sistemas de
neutralizadores dinâmicos viscoelásticos também se faz necessário. Isso
principalmente, devido ao fato de que as propriedades dinâmicas dos materiais
viscoelásticos serem dependentes da temperatura, e que os materiais com melhores
fatores de amortecimento serem mais sensíveis a essa variação. Uma abordagem
sobre a dessintonização do sistema de neutralizadores dinâmicos viscoelásticos
devido a uma mudança substancial de temperatura se faz necessário.

Referências 135
PPGEM – Engenharia de Manufatura (2005)
REFERÊNCIAS
[01] – Abdullah, M. M., 2000, “Optimal Placement of Output Feedback Controllers on
Slender Civil Structures at Discrete Locations”, Engineering Structures,
Elsevier Science Ltda.
[02] – Agrawall, K. A. e Yang, J, N., 1998a, “Optimal Placement of Energy Dissipative
Systems Using Combinatorial Optimization”, Proc. Of Structural Engineers
World Congress, San Francisco, CA, July, Paper T167-3.
[03] – Agrawall, K. A. e Yang, J, N., 1998b, “Passive Damper Control of the 76-Story
Wind-Excited Benchmark Building”, Proc. Of The Second World Conference
on Structural Control, Kyoto, Japan, pp.1481-1490.
[04] – Alvarez, G., 2002, “Can We Make Genetic Algorithms Work in High-
Dimensionality Problems?”, SEP Report, Stanford University.
[05] – Amado, G. M. C, 2004, “Projeto Ótimo de Neutralizadores Viscoelásticos
Baseado no Modelo de Derivadas Fracionárias, Tese (Doutorado em
Engenharia Mecânica), UFSC.
[06] - Arabyan, A. e Chemishkian, S., 1998, “H¥–Optimal Mapping of Actuators and
Sensors in Flexible Structures,” Proc. of the Thirty-Seventh IEEE Conf. on
Decision and Control, Tempa, FL, pp. 821-826.
[07] – Arora, J. S., 1989, “Introduction to Optimum Design”, McGraw-Hill Book Co.
International Edition, Singapore.
[08] – Asami, T, Mamose, K. e Hosokawa, Y., 1993, “Aproximated Expression for
Design of Optimal Dynamic Absorbers Attached to Damped Linear Systems
(Optimization Process Based on Minimum Variance Criterion)”,
Transactions of the Japan Society of Mechanical Engineers, Part C, Vol. 59,
pp. 2962-2967.
[09] – Asami, T., Wakasono, T., Kameoka, K., Hasegawa, M. e Sekigushi, H., 1991,
“Optimum Design of Dynamic Absorbers for a System Subjected to
Referências 136
PPGEM – Engenharia de Manufatura (2005)
Random Excitation”, JSME International Journal Series, Vol. 34, pp. 218-
226.
[10] – Ashour, O. N., 2001, “Nonlinear Control of Plate Vibration”, Doctor of
Philosophy in Engineering Mechanics Thesis, Blackburg, Virginia.
[11] – Ayorinde, E. O. e Warburton, G. B., 1980, “Minimizing Structural Vibrations
with Absorbers”, Earthquake Engineering and Structural Dynamics, Vol. 8,
pp. 219-236.
[12] – Bagley, R. L. e Torvik, P. J., 1979, “A generalized Derivative Model for an
Elastomer Damper”, The Shock and Vibration Bulletin, 49(2), pp. 135-143.
[13] – Bagley, R. L. e Torvik, P. J., 1983, “A Theoretical Basis for the Application of
Fractinal Calculus to Viscoelasticity”, Journal of Reology, vol. 27, Nro.3, p.
201-210.
[14] - Bagley, R. L. e Torvik, P. J., 1986, “On the Fractional Calculus Model of
Viscoelastic Behaviour”, Journal of Reology, vol. 30, Nro. 1, p. 133-155.
[15] – Bazaraa, M. S. e Shetty,C. M., 1979, “Nonlinear Programming: Theory and
Algorithms”, John Wiley & Sons, New York, NY.
[16] – Bavastri, C. A., 1997, “Redução de Vibrações de Banda Larga em Estruturas
Complexas por Neutralizadores Viscoelásticos, Tese de Doutorado, UFSC.
[17] – Bavastri, C. A., Espíndola, J. J., e Teixeira, P. H., 1998, “A Hybrid Algorithm to
Compute the Optimal Parameters of a System Viscoelastic Vibration
Neutralizers in a Frequency Band”, MOVIC ‘98, Zurich, Switzerland. Vol. 2,
pp. 577-582.
[18] – Blanc, A., 2001, “Control of Sound Radiation From Structures with Periodic
Smart Skins”, Thesis submitted to the Faculty of the Virginia Polytechnic
Institute and State University in partial fulfillment of the requirements for the
degree of Master of Science.
[19] – Boresi, A. P., et al., 1993, “Advanced Mechanics of Materials”, 5th Edition, John
Wiley & Sons.

Referências 137
PPGEM – Engenharia de Manufatura (2005)
[20] – Brierley, P. D., 1998, “Some practical applications of neural networks in the
electricity industry”, EngD Thesis, Cranfield University.
[21] – Broutman, L. e Krock, R. H., 1967, “Modern Composite Materials, Chapter 4:
Behaviour of Time-Dependent Composite Materials, p. 121-145, Addison-
Wesley Publishing Company.
[22] – Caputo, M. e Mainardi, F., 1966, “A New Dissipation Model Based on Memory
Mechanism”, Pure and Applied Geophysics, Vol. 91, pp. 134-147.
[23] – Carroll, D. L., 1996, “Chemical Laser Modeling With Genetic Algorithms”, AIAA
Journal, Urbana, Illinois.
[24] – Carroll, D. L., 1996, “Genetic Algorithms and Optimizing Chemical Oxygen-
Iodine Lasers”, Developments in Theoretical and Applied Mechanics, Vol.
XVIII, Alabama.
[25] – Chan, Y. W. et al., 1995, “Predicting the Vibration Characteristics of Elements
Incorporating Incompressible and Compressible Viscoelastic Materials”,
Editor Conor D. Johnson, Proceedings of the SPIE – The International
Society for Optical Engineering, Smart Structures and Materials – Passive
Damping, vol. 2445, p. 293-3003, San Diego, California, USA.
[26] – Davis, L., 1991, “Handbook of Genetic Algorithms”, Van Nostrand Reinhold.
[27] – Dayou, J and Brennan, M. J., 2002, “Global Control of Structural Vibration
Using Multiple-Tuned Tunable Vibration Neutralizers”, Elsevier Science
Ltd., Journal of Sound and Vibration, 258(2), 345-357.
[28] – Den Hartog, J. P., 1956, “Mechanical Vibrations”, McGraw-Hill, New York.
[29] – Espíndola, J. J. e Bavastri, C. A., 1996, “Viscoelastic Neutralizers in Vibrations
Abatement: A Nonlinear Optimization Approach”, 9th DYNCO, Rio de
Janeiro – RJ, Brasil.
[30] – Espíndola, J. J. e Bavastri, C. A., 1997, “Reduction of Vibrations in Complex
Structures with Viscoelastic Neutralizers: A Generalized Approach and a
Physical Realization”, DECT97, Sacramento, California.
Referências 138
PPGEM – Engenharia de Manufatura (2005)
[31] – Espíndola, J. J., Bavastri, C. A. e Teixeira, P. H., 1998, “A Hybrid Algorithm to
Compute the Optimal Parameters of a System of Viscoelastic Vibration
Neutralizers in a Frequency Band”, Proceeding of the Four International
Conference on Motion and Vibration Control, MOVIC’98.
[32] – Espíndola, J. J. e Bavastri, C. A., 1999, “Optimum Conceptual Design of
Viscoelastic Dynamic Vibration Neutralizer for Low Frequency Complex
Structures”, Applied Mechanics, Trans. ASME.
[33] – Espíndola, J. J. e Bavastri, C. A., 2003, “Reduction of Vibrations in Complex
Structures With Viscoelastic Dynamic Vibration Absorbers, or Neutralizers”,
X DINAME, Ubatuba-SP, Brazil.
[34] – Espíndola, J. J. e Silva, H. P., 1992, “Modal Reduction of Vibration by Dynamic
Neutralizers: A General Approach”, 10th International Modal Analysis
Conference, San Diego, California, pp. 1367-1373.
[35] – Ewins, D. J., 1984, “Modal Testing: Theory and Practice”, Research Studies
Press Ltd., Somerset, England.
[36] – Ferry, J. D., 1980, “Viscoelastic Properties of Polymers”, 3 ed., John Wiley &
Sons, New York.
[34] – Frahm, H., 1909, “Device for Damping Vibration of Bodies”, US Patent. No.
989959, 30 October 1909.
[38] – Frahm, H., 1911, “Device for Damping Vibration of Bodies”, US Patent. No.
989,958.
[39] - Furuya, H. e Haftka, R. T., 1993, “Genetic Algorithms for Placing Actuators on
Space Structures", ”Proc. of the Fifth International Conf. on Genetic
Algorithms, Urbana-Champaign, IL, pp. 536-542.
[40] – Gemant, A., 1936, “A Method of Analyzing Experimental Results Obtained
from Elasto-Viscous Bodies”, Physics, Vol. 7, pp. 311-317.
[41] – Goldberg, D. E., 1989, “Genetic Algorithms in Search, Optimization and
Machine Learning”, Addison-Wesley.

Referências 139
PPGEM – Engenharia de Manufatura (2005)
[42] – Hahn, G. D. e Sathiavageeswaran, K. R., 1992, “Effects of Added-Damper
Distributin on the Seismic Response of Buildings”, Computers and
Structures, 43(5), pp. 941-950.
[43] – Halim, D. e Reza Moheimani, S. O., 2000, “A Optimization Approach to
Optimal Placement of Collacated Piezoeletric Actuator and Sensors on a
Thin Plate”, Mechatronics 13 (2003), 27-47.
[44] – Harris, C. M., Crede, C. H., 1976, “Shock and Vibration Handbook”, McGraw
Hill Book Company, New York.
[45] - Hiramoto, K. Doki, H., e Obinata, G., 2000, “Optimal Sensor/Actuator
Placement for Active Vibration Control using Explicit Solution of Algebraic
Riccati Equation,” Journal of Sound and Vibration, 229(5), pp.1057-1075.
[46] – Holland, H., 1975, “Adaptation in Natural and Artificial Systems”, Ann Arbor,
The University of Michigan Press.
[47] – Houck, C. R., Joines, J. A. e Kay, M. G., 1995, “A Genetic Algorithm for
Function Optimization: A Mat Lab Implementation”, ACM Transaction on
Mathematical Software.
[48] – Hunt, J. B., 1979, “Dynamic Vibration Absorbers”, Mechanical Engineering
Publications LTD., London.
[49] – Jolly, M. R. e Sun, J. Q., 1994, “Passive Tuned Vibration Absorbers for Sound
Radiation Attenuation from Panels”, Proceedings of Smart Structures and
Materials, SPIE, pp. 194-201.
[50]- Jones, D. I. G., 1980, “Viscoelastic Materials for Damping Applications”, ASME /
AMD Damping Applications for Vibration Control, Editor Peter J. Torvik, vol.
38, p. 27-51.
[51] – Kaljevic, I. Saigal, S. e Broone, Jr., T. H., 1993, “Dynamic Analysis of a
General Mass-Spring Arrangement in Beam System”, Journal of Sound and
Vibration, Vol. 163, pp. 67.
[52] – Kittis, L., 1983, “Vibration Reduction over a Frequency Range”, Journal of
Sound and Vibration, 89 (4), 559-569.

Referências 140
PPGEM – Engenharia de Manufatura (2005)
[53] – Korenev, B. G. e Reznikov, L. M., 1993, “Dynamic Vibration Absorbers”, John
Wiley & Sons, Singapore.
[54] – Kunieda, M., Chiba, T. e Kobayashi, H., 1987, “Positive Use of Damping
Devices for Piping Systems – Some Experiences an New Proposals”,
Nuclear Engineering Design, Vol. 104, pp. 107-120.
[55] – Lazan, B. J., 1968, “Damping of Materials and Members in Structural
Mechanics”, Oxford Pergamon Press.
[56] - Liu, X. e Begg, D. W., 1999, “Second-Order Sensitivity of Smart Structures,”
Journal of Aerospace Engineering, 12(1), pp. 15-22.
[57] – Lopes, E. M. O., “On the Experimental Response Reanalysis of Structures with
Elastomeric Materials”, Tese de Doutorado, University of Wales Cardiff, p.
192.
[58] – Mainardi, F., “Some Basic Problems in Continuum and Statistical Mechanics”,
Fractal and Fractional Calculus in Contiuum Mechanics, Editores A.
Carpinteri e F. Mainardi, Springer Verlag, Wien and New York, p. 291-348.
[59] – Marcotte, P., Fuller, C. R. e Johnson, M. E., 2002, “Numerical Modeling of
Distributed Active Vibration Absorbers (DAVA) For Control of Noise
Radiated by a Plate”, ACTIVE 2002, Southampton, UK.
[60] – Nashif, A. D. et al, 1985, “Vibration Damping”, John Wiley & Sons, Inc., USA.
[61] – Meirovitch, L., 1975, “Elements of Vibration Analysis”, McGraw-Hill
International Editions, Singapore.
[62] – Michalewicz, Z.,1992, “Genetic Algorithms + Data Structures = Evolution
Programs”, Springer-Verlag.
[63] – Miller, B. L. e Shaw, M. J., 1995, “Genetic Algorithms with Dynamic Niche
Sharing for Multimodal Functions Optimization”, Urbana, Illinois.
[64] – Mitchell, M., 1996, “An Introduction to Genetic Algorithms”, Massachusetts
Institute of Technology Press, Cambridge, Massachusetts.
Referências 141
PPGEM – Engenharia de Manufatura (2005)
[65] – Moshrefi-Torbati, M e Hammond, J. K., 1998, “Physical and Geometrical
Interpretation of Fractional Operators”, The Franklin Inst., Great Britain
[66] – Neto, J. M. S., 2004, “Identificação do Modelo Fracionário de Materiais
Viscoelásticos no Domínio da Freqüência”, Tese de Doutorado, UFSC.
[67] – Ng, S. C., Leung, S. H., Chung, C. Y., Luk, A. e Lau, W. H., 1996, “The
Genetic Search Approach: A New Learning Algorithm for Adaptative IIR
Filtering, IEEE Signal Processing Magazine.
[68] – Nutting, P. G., 1921, “A New General Law of Deformations”, Journal of the
Franklin Institute, Vol. 191, pp. 684-697.
[69] – Ormondroyd, J., Den Hartog, J. P., 1928, “The Theory of Dynamic Vibration
Absorber”, ASME Jornal of Applied Mechanics, Vol. 49, pp.A9-A22.
[70] – Özgüven, H. N. e Çandir, B., 1986, “Suppressing the First and Second
Resonances of Beams by Dynamic Vibration Absorbers”, Journal of Sound
and Vibrations, Vol. 111, pp. 377-390.
[71] – Pereira, J. T., 2001, “Otimização Topológica de componentes mecânicos com
restrições sobre o critério de falha material”, Tese (Doutorado em
Engenharia Mecânica), UFSC.
[72] – Peterson, N. R., 1979, “Design of Large Scale Tuned Mass Dampers”,
Proceedings of the ASCE Convention and Exposition.
[73] – Ponslet, E. R., 1996, “Discrete Optimization of Isolator Locations for Vibration
Isolation Systems: an Analytical and Experimental Investigation”, SAND96,
Albuquerque, New Mexico.
[74] – Pritz, T., 1996, “Analysis of Four-Parameter Fractional Derivative Model of
Real Solid Materials”, Journal of Sound and Vibration, vol. 195(1), pp. 103-
115.
[75] – Rogers, L., 1981, “On Modeling Viscoelastic Behaviour”, Shock and Vibration
Bulletin, 51.
Referências 142
PPGEM – Engenharia de Manufatura (2005)
[76] – Rogers, L., 1983, “Operators and Fractional Derivatives for Viscoelastic
Constitutive Equations”, Journal of Reology, 27, 351-372.
[77] – Rossi, R. E., Laura, P. A. A., Avalos, D. R. and Larrondo, H., 1993, “Free
Vibration of Timoshenko Beams Carrying Elastically Mounted,
Concentrated Masses”, Journal of Sound Vibration, Vol. 165, pp. 209-223.
[78] – Salvador, O., 1998, “Introdução a Algoritmos Genéticos”, Pelotas RS, Brasil.
[79] – Scott Blair, G. W., 1947, “The Role of Psychophysics in Reology”, J. Colloid
Sci., 2, 21.
[80] – Senecal, P. K., 2000, “Numerical Optimization Using the GEN4 Micro-genetic
Algorithm Code”, Draft Manuscripf, Engine Reseach Center of the
University of Wiscosin-Madison.
[81] - Shukla, A. K. e Datta, T. K., 1999, “Optimal use of Viscoelastic Dampers in
Building Frames for Seismic Force,” Journal of Structural Engineering,
125(4), pp. 401-409.
[82] – Sikora, R. e Shaw, M. J., 1994, “A Double-Layered Learning Approach to
Acquiring Rules for Class Ification: Interating Genetic Algorithms with
Similarity-Based Learning”, OBSA Journal of Computing, 6(2), 174-187.
[83] – Silva, H. P., 1991, “Controle Modal de Vibrações por Neutralizadores
Dinâmicos: Uma Abordagem Generalizada”, Dissertação de Mestrado,
UFSC, Santa Catarina, Brasil.
[84] – Snowdon, J. C., 1968, “Vibration and Shock in Damped Mechanical Systems”,
John Wiley & Sons Inc., New York.
[85] – Takewaki, L., 1997, “Optimal Damper Placement for Minimum Transfer
Functions”, Earthquake Engineering and Structural Dynamics, Vol. 26, pp.
1113-1124.
[86] – Takewaki, L., Yoshitomi, S., Uetani, K. e Tsuji, M., 1999, “Non-Monotonic
Optimal Damper Placement via Steepest Direction Search”, Earthquake
Engineering and Structural Dynamics, Vol. 28, pp. 655-671.
Referências 143
PPGEM – Engenharia de Manufatura (2005)
[87] – Tang, K. S., Man, K. F., Kwong, S. e He, Q., 1996, “Genetic Algorithms and
Their Applications”, IEEE Signal Processing Magazine.
[88] – Tonamaru, J., 1995, “Motivação, Fundamentos e Aplicações de Algoritmos
Genéticos”, II Congresso Brasileiro de Redes Neurais e III Escola de Redes
Neurais, Curitiba-PR, Brasil.
[89] – Vavreck, A. N., 2000, “Control of Dynamic Vibration Absorber with
Magnetorheological Damping”, Pennsylvania State University, Altoona
College. Altoona, Pennsylvania.
[90] – Venna, S. V. e Lin, Y. J., 2003, “Optimal Placement of PZT Transducers for
Passive Vibration Control of Planar Composite Structures”, Proceedings of
IMECE ’03, ASME International Mechanical Engineering Congress,
Washington, D. C.
[91] – Wang, Y. Z. e Shang, S. H., 1989, “Optimal Design of Dynamic Absorber in the
Time Domain and the Frequency Domain”, Applied Acoustics, Vol. 28, pp.
67-78.
[92] – Warburton, G. B. e Ayorinde, E. O., 1980, “Optimal Absorber Parameters for
Simple Systems”, Earthquake Engineering and Structural Dynamics, Vol. 8,
pp. 197-217.
[93] – Williams, M. L., 1962, “Structural Analysis of Viscoelastic Materials”, AIAA
Journal, vol. 2, No. 5.
[94] – Wongprasert, N. e Symans, M. D., 2000, “Optimal Distribution of Fluid
Dampers for Control of Wind Benchmark Problems”, Washington State
University, Pullman.
[95] – Yamaguchi, M., Takasaki, K. e Hirooka, K., 1993, “Application of Dynamic
Absorbers for Shock-Applied Rolls”, Transaction of the Japan Society of
Mechanical Engineers, Part C, Vol. 59, pp. 2981-2985.
[96] – Yamamura, H., Ono, K. e Toyota, K, 1993, “Optimal Tuning Method for Swing
Reduction of Gondola Lift by Inclined Pendulum-Type Dynamic Absorber”,

Referências 144
PPGEM – Engenharia de Manufatura (2005)
Transaction of the Japan Society of Mechanical Engineers, Part C, Vol. 59,
pp. 3071-3077.
[97] – Young, D., 1952, “Theory of Dynamic Absorbers for Beams”, Proceedings of
First U.S. National Congress of Applied Mechanics, pp. 91-96.
[98] – Zhang, W, Matsuhisa, H. e Sato, S., 1990, “Dynamic Absorber for the General
Multidegree-of-Freedom Vibration System (Theoretical Analysis)”,
Transactions of the Japan Society of Mechanical Engineers, Part C, Vol. 56,
pp. 921-927.
[99] - Zhang, R.H. e Soong, T. T., 1992, “Seismic Design of Viscoelastic Dampers for
Structural Applications,” Journal of Structural Engineering, 118(5), pp. 1375-
1392.
[100] - Zuo, L. e Nayfeh, S. A., 2003, “The Multi-degree-of-Freedom Tuned-Mass
Damper for Suppression of Sigle-Mode Vibration Under Random and
Harmonic Excitation”, *draft for 2003 ASME Design Engineering Technical
Conferences.

Apêndice A Elemento Finito SHELL63 145
PPGEM – Engenharia de Manufatura (2005)
APÊNDICE A – ELEMENTO FINITO SHELL63
Descrição do Elemento Finito SHELL63 do software comercial ANSYS®.
O Elemento Finito SHELL63 possui capacidades de flexão e também de
membrana. Carregamentos, tanto no plano no elemento como também normal a ele,
são possíveis. O elemento possui seis graus de liberdade por nó: translação nodal
nos eixos x, y e z e rotações em torno dos eixos x, y e z (figura A.1).
Figura A.1 Geometria do Elemento Finito SHELL63.
O elemento é definido por quatro nós e quatro espessuras, que variam
gradualmente ao longo da superfície do elemento. Se o elemento possui uma
espessura constante, uma espessura apenas é utilizada para sua caracterização.
A solução associada ao elemento se apresenta de duas formas:
• deslocamento nodal incluído na solução nodal global
• saídas adicionais de elemento
Na figura A.2 pode-se visualizar as diversas soluções que o elemento pode
fornecer.

Apêndice A Elemento Finito SHELL63 146
PPGEM – Engenharia de Manufatura (2005)
Figura A.2 Saídas do Elemento Finito SHELL63.
Maiores detalhamentos a respeito da utilização desse elemento finito podem
ser obtidos nos manuais do ANSYS®, ANSYS Release 9.0 Documentation.

Apêndice B Características Dinâmicas de um Material Viscoelástico 147
PPGEM – Engenharia de Manufatura (2005)
APÊNDICE B – CARACTERÍSTICAS DINÂMICAS DE UM MATERIAL
VISCOELÁSTICO.
Aqui são apresentados os conceitos básicos das características dinâmicas
(módulo de cisalhamento e fator de perda) de um material viscoelástico.
Antes do advento dessa caracterização, várias curvas eram necessárias para
se representar os dados experimentais e características dinâmicas dos materiais
viscoelásticos, uma vez que esses dependem da temperatura e da freqüência. O
método das variáveis reduzidas surge como uma forma de caracterizar essas
propriedades através de um gráfico único.
Segundo Snowdon, 1968 e Nashif, 1985, a freqüência influi qualitativamente de
maneira inversa à temperatura, sobre as propriedades dinâmicas do material
viscoelástico, a menos de um fator de escala. Tal relação pode ser escrita como
( ) ( )( ) ( )θ
θ
αηθηαθΩ=Ω
Ω=Ω
0,
, 0
GG
GG Eq. A.1
sendo θα um fator de deslocamento em freqüência equivalente à alteração de
temperatura θ . 0G e 0G
η são respectivamente o módulo dinâmico e o fator de perda
medidos na temperatura de referência 0θ .
A equação A.1 representa, portanto, que o módulo dinâmico G medido na
freqüência Ω e temperatura θ é equivalente ao módulo dinâmico G0 medido na
freqüência θαΩ e à temperatura 0θ . Isso possibilita a construção de um gráfico com
duas curvas apenas, chamadas curvas mestras (Lopes, 1989), em função de uma
variável única ( θαΩ ) chamada freqüência reduzida.
O fator θα surge da comparação de diversos experimentos, chegando-se a
uma curva universal (equação A.2) em função de 0θθ − (Rogers, 1981).
Apêndice B Características Dinâmicas de um Material Viscoelástico 148
PPGEM – Engenharia de Manufatura (2005)
)(7,291)(12log
0
0
θθθθαθ −+
−−= Eq. A.2
A escolha de 0θ é importante pois permitira uma melhor dispersão dos pontos
experimentais.
Maiores detalhes a respeito dos ensaios necessários e as medições feitas em
um material viscoelástico, para a sua caracterização através das curvas mestras de
suas propriedades dinâmicas, podem ser encontrados em Bavastri, 1997.

Apêndice C Dados Numéricos para Construção do Gráfico Tridimensional do Espaço de Busca 149
PPGEM – Engenharia de Manufatura (2005)
APÊNDICE C – DADOS NUMÉRICOS PARA CONSTRUÇÃO DO
GRÁFICO TRIDIMENSIONAL DO ESPAÇO DE BUSCA.
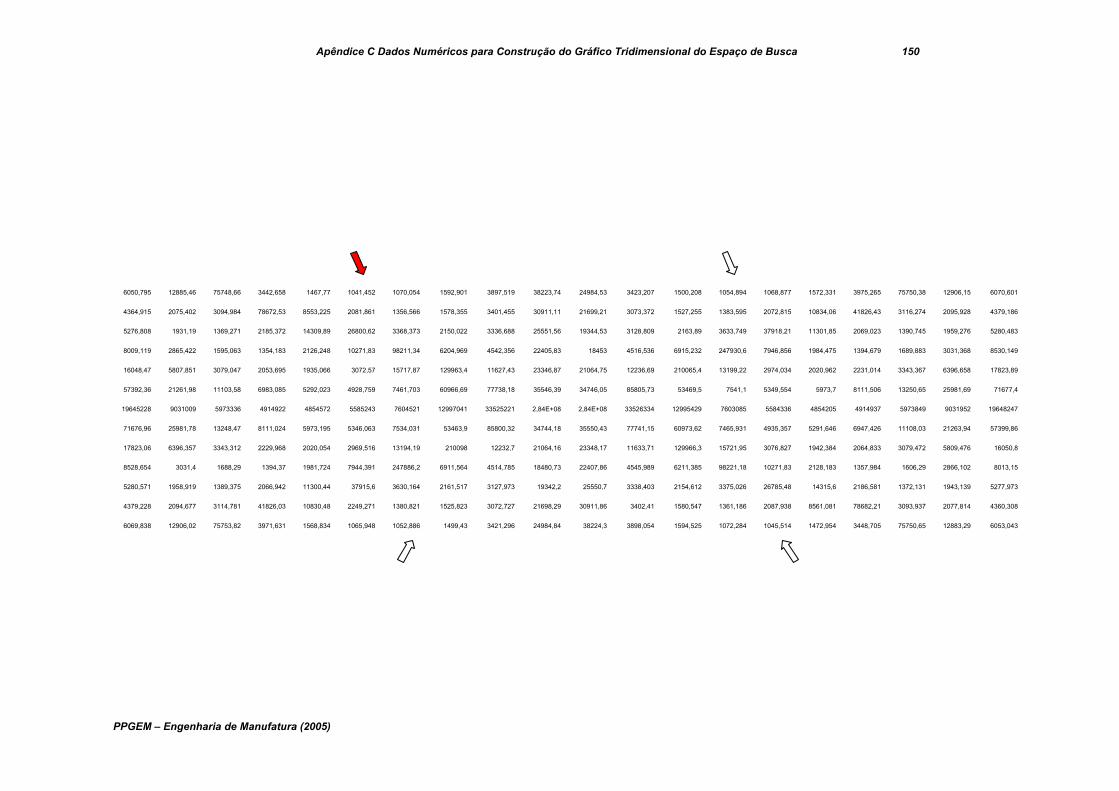
Apêndice C Dados Numéricos para Construção do Gráfico Tridimensional do Espaço de Busca 150
PPGEM – Engenharia de Manufatura (2005)
6050,795 12885,46 75748,66 3442,658 1467,77 1041,452 1070,054 1592,901 3897,519 38223,74 24984,53 3423,207 1500,208 1054,894 1068,877 1572,331 3975,265 75750,38 12906,15 6070,601
4364,915 2075,402 3094,984 78672,53 8553,225 2081,861 1356,566 1578,355 3401,455 30911,11 21699,21 3073,372 1527,255 1383,595 2072,815 10834,06 41826,43 3116,274 2095,928 4379,186
5276,808 1931,19 1369,271 2185,372 14309,89 26800,62 3368,373 2150,022 3336,688 25551,56 19344,53 3128,809 2163,89 3633,749 37918,21 11301,85 2069,023 1390,745 1959,276 5280,483
8009,119 2865,422 1595,063 1354,183 2126,248 10271,83 98211,34 6204,969 4542,356 22405,83 18453 4516,536 6915,232 247930,6 7946,856 1984,475 1394,679 1689,883 3031,368 8530,149
16048,47 5807,851 3079,047 2053,695 1935,066 3072,57 15717,87 129963,4 11627,43 23346,87 21064,75 12236,69 210065,4 13199,22 2974,034 2020,962 2231,014 3343,367 6396,658 17823,89
57392,36 21261,98 11103,58 6983,085 5292,023 4928,759 7461,703 60966,69 77738,18 35546,39 34746,05 85805,73 53469,5 7541,1 5349,554 5973,7 8111,506 13250,65 25981,69 71677,4
19645228 9031009 5973336 4914922 4854572 5585243 7604521 12997041 33525221 2,84E+08 2,84E+08 33526334 12995429 7603085 5584336 4854205 4914937 5973849 9031952 19648247
71676,96 25981,78 13248,47 8111,024 5973,195 5346,063 7534,031 53463,9 85800,32 34744,18 35550,43 77741,15 60973,62 7465,931 4935,357 5291,646 6947,426 11108,03 21263,94 57399,86
17823,06 6396,357 3343,312 2229,968 2020,054 2969,516 13194,19 210098 12232,7 21064,16 23348,17 11633,71 129966,3 15721,95 3076,827 1942,384 2064,833 3079,472 5809,476 16050,8
8528,654 3031,4 1688,29 1394,37 1981,724 7944,391 247886,2 6911,564 4514,785 18480,73 22407,86 4545,989 6211,385 98221,18 10271,83 2128,183 1357,984 1606,29 2866,102 8013,15
5280,571 1958,919 1389,375 2066,942 11300,44 37915,6 3630,164 2161,517 3127,973 19342,2 25550,7 3338,403 2154,612 3375,026 26785,48 14315,6 2186,581 1372,131 1943,139 5277,973
4379,228 2094,677 3114,781 41826,03 10830,48 2249,271 1380,821 1525,823 3072,727 21698,29 30911,86 3402,41 1580,547 1361,186 2087,938 8561,081 78682,21 3093,937 2077,814 4360,308
6069,838 12906,02 75753,82 3971,631 1568,834 1065,948 1052,886 1499,43 3421,296 24984,84 38224,3 3898,054 1594,525 1072,284 1045,514 1472,954 3448,705 75750,65 12883,29 6053,043