projeto de operadores morfolÓgicos...
TRANSCRIPT

INPE-12552-TDI/1002
PROJETO DE OPERADORES MORFOLÓGICOS PARAMETRIZADOS POR TABELAS DE TRANSFORMAÇÃO DE
NÍVEIS DE CINZA
Sergio Donizete Faria
Tese de Doutorado do Curso de Pós-Graduação em Computação Aplicada, orientada pelo Dr. Gerald Francis Banon, aprovada em 29 de junho de 2004.
INPE São José dos Campos
2005

621.376.5 FARIA, S. D. Projeto de operadores morfológicos parametrizados por tabelas de transformação de níveis de cinza / S. D. Faria. – São José dos Campos: INPE, 2004. 165p. – (INPE-12552-TDI/1002). 1.Morfologia Matemática. 2.Operadores morfológicos. 3.Algoritmos genéticos. 4.Projetos de operadores. I.Título.



“... A realidade sempre e mais ou menosdo que nos queremos
So nos somos sempre iguaisa nos proprios ...”
Ricardo Reis(pseudonimo de Fernando Pessoa)


A meus pais,
JUVERSINO e
MARIA APARECIDA,
e a minha famılia.


AGRADECIMENTOS
Ao escrever esta pagina de agradecimentos me dou conta, mais uma vez, da grandequantidade de pessoas que fazem parte tambem do processo de realizacao deste trabalho.Isto comeca com minha famılia e continua com as pessoas que tive o prazer de encontrardurante a minha vida (nas escolas que frequentei, nos bares onde estive, nas ruas eesquinas por onde passei, nas cidades onde morei e/ou visitei, nas instituicoes ondetrabalhei, e por aı, nos cantos e recantos escondidos - ou nao! - da vida). Eu agradecode coracao a todos, pela participacao e pelo prazer do encontro.
Porem, gostaria de agradecer nominalmente a algumas pessoas e instituicoes que estaodiretamente ligadas a este trabalho, de diversas formas e por diversas razoes, sem excluiras demais que tambem contribuıram.
E comeco por agradecer imensamente ao meu orientador, Doutor Gerald Jean FrancisBanon, pelo conhecimento compartilhado, pela orientacao e apoio na realizacao destetrabalho, e pela convivencia nos anos em que estive no Instituto Nacional de PesquisasEspaciais - INPE, durante o mestrado e o doutorado.
A Fundacao Coordenacao de Aperfeicoamento de Pessoal de Nıvel Superior - CAPES,pelo auxılio financeiro recebido durante todo o curso de doutorado e pela oportunidade depassar um ano na Ecole Nationale Superieure de Mines de Paris - Centre de MorphologieMathematique, em Fontainebleau - Franca (Proc. BEX0427/01-2).
Aos Doutores Jean Serra e Fernand Meyer, que me receberam na Ecole NationaleSuperieure de Mines de Paris - Centre de Morphologie Mathematique, em Fontainebleau,bem como a todos os integrantes desse centro. E de maneira especial a Catherine Moysan(uma alma que brilha e esta sempre pronta para ajudar as pessoas a sua volta), por suaeficiencia, bom humor e prestatividade na preparacao de todos os detalhes da minhachegada e temporada na Franca.
Ao Doutor Luiz Antonio Nogueira Lorena pelas discussoes sobre metodos de otimizacao,principalmente sobre algoritmos geneticos.
Ao INPE, pela oportunidade de realizacao deste trabalho. Ao curso de ComputacaoAplicada deste instituto, na pessoa de seus pesquisadores e professores, peloconhecimento compartilhado. E aos funcionarios da Biblioteca e do Servico dePos-Graducao deste instituto, pela constante atencao e prestatividade.
A toda equipe da Divisao de Processamento de Imagem, pela convivencia e pela utilizacaode suas instalacoes durante os anos que passei no INPE.
Ao Marcelo Banik, Nanci Naomi Arai e Thomas Walter, pelas preciosas e indispensaveisdicas sobre LaTeX.
Ao Egıdio Arai e Gabriel Fricout, pelas preciosas e indispensaveis dicas de programacao.
Aos meus amigos de longa data: Rose + Emerson, Tatiana Mora Kuplich + Ronald Buss

de Souza + Isabela + Flora, Marisa da Motta + Luciano Ponzi Pezzi, Lubia Vinhas,Marılia Vidigal Sant´Anna, Silvana Amaral + Milton Kampel + Alexandre + Andre,Maycira + Kevin + Nattan, Claudia Robbi, Evlyn Marcia Leao de Moraes Novo, AlfredoPereira, Jose Eduardo Mantovani, Juliana Braga, Silvely Salomao, Thanisse Braga,Karine Reis, Leila Fonseca + Andre, Sueli Pissarra Castellari, Silvia Pardi Lacruz +Manoel de Araujo Sousa Junior, Fatima Del Fava, Cristina Hirashima + Marcos, AdrianaTanaka, Jaqueline Leal Madruga, Kina, Arley, Natalia Semensato, Luciana Casagrande,Micheli Goncalves, Dorival Arthur Junior, Helen Gurgel, Miriam e Manoel, Maria deLourdes e Galo, Julio Kiyoshi Hasegawa e famılia, Nilton Nobuhiro Imai, ... - pelapresenca e companhia, pelo apoio e incentivo, pelas boas conversas, pelas caronas, pelashospedagens, enfim, pelo prazer de te-los encontrados.
As pessoas que encontrei e aos amigos que fiz na Franca: Nicolas Flipo, Gabriel Fricout,Laurence Perdereau, Sarah Goria + Heiko (Italia), Marta Benito (Espanha), Eric deOliveira, Jesus Angulo + Linda + Carmem (Espanha e Africa do Sul), Allan Hanbury(Africa do Sul), Thomas Walter (Alemanha), Arnaud Delarue, Laura Battisti (Italia),Valery Risson, Julien Senegas, Catherine Noiriel, Matlhide Boehm, Gabriela Ackerman(Argentina), Gustavo Pilger (Brasil), Ana Paula (Brasil), Thaıs (Espanha), MaximiPlatonov (Russia), Orsi Fussi-Nagy (Hungria), Diana (Croacia), Michaella (Finlandia),Martine Collette (professora de Frances), Eva Dejnozkova + Petr Sebesta (RepublicaTcheca), Raffi Enficiaud, Sthephane Dennebouy + Brigitte Maurel, Mireille Bouleau,Otavio Nunes (Brasil), ... - que com certeza tornaram minha temporada naquele paısainda mais feliz.
Um pouco tardiamente, mas ainda em tempo, a Maria Isabel, minha professora daprimeira serie primaria, por ter me ensinado as primeiras letras ... la nos idos anos70, na Escola Rural do Bairro do Mosquitinho - Maracaı - SP.
A meus pais e a minha famılia (irmaos, irmas, sobrinhos, sobrinhas, cunhados ecunhadas), por existirem na minha vida e que, mesmo distantes fisicamente, estao semprepresentes nas minhas aventuras.

RESUMO
Este trabalho tem como objetivo o estudo teorico da decomposicao de operadores dejanela e espacialmente invariantes, em termos de operadores morfologicos elementaresparametrizados por tabelas de transformacao de nıveis de cinza (ou seja, por look-uptables morfologicas elementares). Deste estudo resultam alguns modelos de operadorescaracterizados por operadores morfologicos elementares de janela e espacialmenteinvariantes. Com base nestes modelos e proposto um metodo para o projeto de operadoresdefinidos sobre o reticulado das imagens em nıveis de cinza. Como o problema do projetode operadores implica na busca de uma solucao num espaco geralmente muito grande,neste trabalho, e utilizado como metodo de busca um algoritmo genetico. Finalmente,sao apresentados alguns experimentos ilustrativos em processamento de imagens.


DESIGN OF MORPHOLOGICAL OPERATORS PARAMETERIZED BYGREY LEVEL LOOK-UP TABLES
ABSTRACT
The goal of this work is the theoretic study of the decomposition of spatiallyinvariant window operators, in terms of the elementary morphological operators thathave elementary morphological look-up tables as parameters. This study results insome models of operators characterized by spatially invariant window elementarymorphological operators. Based on these models, a method for the automatic designof operators, defined over the lattice of grey-level images, is proposed. Since the operatordesign problems has usually a very large solution space, a genetic algorithm for theoptimal solution search is used. Finally, some illustrative image processing experimentsare presented.


SUMARIO
Pag.
LISTA DE FIGURAS
LISTA DE TABELAS
LISTA DE SIMBOLOS
CAPITULO 1 INTRODUCAO . . . . . . . . . . . . . . . . . . . . . . . 27
1.1 Consideracoes Gerais . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
1.2 Definicao de Projeto de Operadores . . . . . . . . . . . . . . . . . . . . . . 30
1.3 Objetivos do Trabalho . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
1.4 Estrutura da Tese . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
CAPITULO 2 MODELAGEM DOS OPERADORES DE IMAGEM 33
2.1 Introducao . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33
2.2 Notacoes e Definicoes Matematicas Basicas . . . . . . . . . . . . . . . . . . 33
2.3 Operadores Morfologicos Elementares . . . . . . . . . . . . . . . . . . . . . 35
2.3.1 Definicao e Caracterizacao das LUT s Morfologicas Elementares . . . . . 36
2.3.2 Operadores Morfologicos Elementares Parametrizados por Famılias de
LUT s . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 47
2.4 Decomposicao Morfologica de Operadores de Janela e Espacialmente
Invariantes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 49
2.5 Modelos de Operadores . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 61
CAPITULO 3 ALGORITMO GENETICO E PROJETO DE
OPERADORES . . . . . . . . . . . . . . . . . . . . . . . 67
3.1 Introducao . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 67
3.2 Otimizacao e Algoritmos Evolutivos . . . . . . . . . . . . . . . . . . . . . . 67
3.3 Algoritmo Genetico . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 68
3.3.1 Representacao dos Parametros . . . . . . . . . . . . . . . . . . . . . . . . 72
3.3.2 Operador de Selecao . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 73
3.3.3 Operador de Cruzamento . . . . . . . . . . . . . . . . . . . . . . . . . . . 73
3.3.4 Operador de Mutacao . . . . . . . . . . . . . . . . . . . . . . . . . . . . 75
3.3.5 Criterio de Parada . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 76
3.4 Projeto de Operadores Utilizando Algoritmo Genetico . . . . . . . . . . . . 76
3.4.1 Codificacao das Solucoes em Cadeias Binarias . . . . . . . . . . . . . . . 79
3.4.2 Funcao de Adaptacao . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 83

3.4.3 Operadores Geneticos Utilizados no Projeto de Operadores . . . . . . . . 85
CAPITULO 4 EXPERIMENTOS E RESULTADOS . . . . . . . . . . 87
4.1 Introducao . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 87
4.2 Experimentos com Imagens de uma Cruz . . . . . . . . . . . . . . . . . . . 88
4.3 Experimentos com Imagens de Figuras Geometricas . . . . . . . . . . . . . 99
4.4 Experimentos com Imagens Microscopicas de Celulas do Sangue . . . . . . 106
4.5 Experimentos com Imagens de Chapas de Aco . . . . . . . . . . . . . . . . 120
4.6 Experimentos com Imagens de um DNA Microarray . . . . . . . . . . . . . 131
4.7 Experimentos com uma Imagem de Satelite com Ruıdos Simulados e
Dependentes do Sinal . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 140
CAPITULO 5 CONCLUSAO E PERSPECTIVAS . . . . . . . . . . . 157
5.1 Conclusao . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 157
5.2 Trabalhos Futuros . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 158
REFERENCIAS BIBLIOGRAFICAS . . . . . . . . . . . . . . . . . . . . 159

LISTA DE FIGURAS
Pag.
1.1 Sistema para projeto automatico de operadores . . . . . . . . . . . . . . . 29
2.1 Exemplos de luts morfologicas elementares . . . . . . . . . . . . . . . . . . 37
2.2 Exemplos de luts morfologicas elementares parametricas dadas pelas
Expressoes (2.9) a (2.25) . . . . . . . . . . . . . . . . . . . . . . . . . . . . 42
2.3 Exemplos de luts morfologicas elementares binarias . . . . . . . . . . . . . 44
2.4 Exemplos de unioes das luts morfologicas elementares parametricas da
Figura 2.2 que sao, respectivamente, dilatacoes e anti-erosoes . . . . . . . . 45
2.5 Exemplos de interseccoes das luts morfologicas elementares parametricas
da Figura 2.2 que sao, respectivamente, erosoes e anti-dilatacoes . . . . . . 46
2.6 Exemplos de uniao e interseccao das luts morfologicas elementares binarias
da Figura 2.3 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 47
2.7 Estrutura dos operadores que pertencem ao modelo M (p,w)Λ . . . . . . . . . 62
2.8 Estrutura dos operadores que pertencem ao modelo M (q,w)M . . . . . . . . . 62
2.9 Estrutura dos operadores que pertencem ao modelo M (q,p,w)ΛM . . . . . . . . 63
2.10 Estrutura dos operadores que pertencem ao modelo M (p,q,w)MΛ . . . . . . . . 63
3.1 Componentes de um AG . . . . . . . . . . . . . . . . . . . . . . . . . . . . 71
3.2 Algoritmo genetico . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 72
3.3 Dois cromossomos representados por cadeias binarias . . . . . . . . . . . . 73
3.4 Operadores de cruzamento: (a) 1-ponto, (b) 2-pontos . . . . . . . . . . . . 74
3.5 Operador de mutacao . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 76
3.6 Esquema geral do projeto de operador utilizando o SGA . . . . . . . . . . 78

4.1 Imagens de uma cruz - 11× 9: (a) imagem de entrada (em nıveis de cinza),
(b) imagem de saıda (binaria) . . . . . . . . . . . . . . . . . . . . . . . . . 89
4.2 Representacoes numericas das imagens da Figura 4.1: (a) em nıveis de cinza,
(b) binaria . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 90
4.3 Imagens resultantes das aplicacoes do operador∧Ψ
(2,3)
Λ parametrizado pelas
luts binarias da Tabela 4.5, nas seguintes geracoes: (a) 0, (b) 538, (c) 546,
(d) 549, (e) 550, (f) 552, (g) 554, (h) 555, (i) 557 . . . . . . . . . . . . . . 94
4.4 Parametros das luts binarias resultantes do experimento 3 da Tabela 4.2 . 95
4.5 Parametros das luts binarias resultantes do experimento 13 da Tabela 4.3 . 95
4.6 Parametros das luts binarias resultantes do experimento 14 da Tabela 4.4 . 95
4.7 Valores possıveis para os parametros das luts erosoes e anti-dilatacoes para
o modelo M (1,3)Λ . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 96
4.8 Parametros das luts-erosoes binarias resultantes do experimento 4 da Tabela
4.6 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 98
4.9 Imagens de figuras geometricas - 256 × 256: (a) imagem de entrada (em
nıveis de cinza), (b) imagem de saıda (binaria) . . . . . . . . . . . . . . . . 99
4.10 Representacao numerica da imagem da Figura 4.9(a) . . . . . . . . . . . . 100
4.11 Imagens de treinamento - 128× 128: (a) imagem de entrada (em nıveis de
cinza), (b) imagem de saıda (binaria) . . . . . . . . . . . . . . . . . . . . . 100
4.12 Parametros das luts morfologicas elementares binarias resultantes do
Experimento 1 da Tabela 4.8 . . . . . . . . . . . . . . . . . . . . . . . . . 102
4.13 Parametros das luts morfologicas elementares binarias resultantes do
Experimento 2 da Tabela 4.8 . . . . . . . . . . . . . . . . . . . . . . . . . 103
4.14 Parametros das luts morfologicas elementares binarias resultantes do
Experimento 3 da Tabela 4.8 . . . . . . . . . . . . . . . . . . . . . . . . . 103
4.15 Parametros das luts morfologicas elementares binarias resultantes do
Experimento 4 da Tabela 4.8 . . . . . . . . . . . . . . . . . . . . . . . . . 103

4.16 Parametros das luts morfologicas elementares binarias resultantes do
Experimento 5 da Tabela 4.8 . . . . . . . . . . . . . . . . . . . . . . . . . 104
4.17 Resultados das aplicacoes dos operadores∧Ψ
(p,w)
parametrizados pelas luts
morfologicas elementares binarias, respectivamente, das Figuras: (a)-(b)
4.12, (c)-(d) 4.13, (g)-(h) 4.14, (i)-(j) 4.15, (k)-(l) 4.16 . . . . . . . . . . . . 105
4.18 Imagens microscopicas de celulas do sangue - 256 × 256: (a) imagem de
entrada SN (em nıveis de cinza), (b) imagem de saıda (binaria), (c) imagem
de entrada CN (em nıveis de cinza) . . . . . . . . . . . . . . . . . . . . . . 107
4.19 Imagens de treinamento - 64 × 64: (a)-(d) sub-imagens da Figura 4.18(a),
(e)-(h) sub-imagens da Figura 4.18(b), (i)-(l) sub-imagens da Figura 4.18(c) 107
4.20 Parametros das luts resultantes do experimento 1 da Tabela 4.10 . . . . . 109
4.21 Parametros das luts resultantes do experimento 2 da Tabela 4.10 . . . . . 109
4.22 Parametros das luts resultantes do experimento 3 da Tabela 4.10 . . . . . 109
4.23 Parametros das luts resultantes do experimento 4 da Tabela 4.10 . . . . . 109
4.24 Parametros das luts resultantes do experimento 5 da Tabela 4.10 . . . . . 110
4.25 Parametros das luts resultantes do experimento 6 da Tabela 4.10 . . . . . 110
4.26 Parametros das luts resultantes do experimento 7 da Tabela 4.10 . . . . . 110
4.27 Parametros das luts resultantes do experimento 8 da Tabela 4.10 . . . . . 110
4.28 Imagens binarias e diferencas simetricas resultantes das aplicacoes, sobre
a imagem da Figura 4.18(a) (SN), dos operadores∧Ψ
(4,3)
Λ parametrizados,
respectivamente, pelas luts das Figuras: (a) 4.20, (b) 4.24, (c) 4.21, (d)
4.25, (e) 4.22, (f) 4.26, (g) 4.23, (h) 4.27 . . . . . . . . . . . . . . . . . . . 112
4.29 Imagens binarias e diferencas simetricas resultantes das aplicacoes, sobre
a imagem da Figura 4.18(c) (CN), dos operadores∧Ψ
(4,3)
Λ parametrizados,
respectivamente, pelas luts das Figuras: (a) 4.20, (b) 4.24, (c) 4.21, (d)
4.25, (e) 4.22, (f) 4.26, (g) 4.23, (h) 4.27 . . . . . . . . . . . . . . . . . . . 113
4.30 Imagens microscopicas de celulas - 576 × 768: (a) imagem de entrada (em
nıveis de cinza), (b) imagem de saıda (binaria) . . . . . . . . . . . . . . . . 115

4.31 Imagens de treinamento - 55 × 55: (a) sub-imagem da imagem da Figura
4.30(a), (b) sub-imagem da imagem da Figura 4.30(b) . . . . . . . . . . . . 115
4.32 Parametros das luts resultantes do experimento 1 da Tabela 4.12 . . . . . 116
4.33 Parametros das luts resultantes do experimento 2 da Tabela 4.12 . . . . . 117
4.34 Imagens resultantes da aplicacao dos operadores∧Ψ
(8,3)
Λ parametrizados pelas
luts das Figuras (a) 4.32, (b) 4.33, sobre a imagem da Figura 4.30(a); (c) e
(d) sao as respectivas diferencas simetricas . . . . . . . . . . . . . . . . . . 119
4.35 Imagem da superfıcie (tipo pele de laranja) de uma chapa de aco - tamanho
359× 563 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 121
4.36 Imagem binaria resultante da segmentacao da imagem da Figura 4.35 em
zonas claras e escuras pelo metodo proposto por Fricout e Jeulin (2002) . . 121
4.37 Imagens de treinamento 200 × 200: (a) sub-imagem da imagem da Figura
4.35, (b) sub-imagem da imagem da Figura 4.36 . . . . . . . . . . . . . . . 122
4.38 Parametros das luts resultantes do experimento da Tabela 4.14 . . . . . . . 123
4.39 Resultado da aplicacao do operador∧Ψ
(8,3)
Λ sobre a imagem da Figura 4.35:
(a) imagem resultante , (b) imagem diferenca simetrica . . . . . . . . . . . 125
4.40 Imagens de saıda, resultante e diferenca simetrica 200×200: (a) sub-imagem
da imagem da Figura 4.36 (imagem de saıda do par de treinamento), (b)
imagem resultante, (c) diferenca simetrica, (d) sub-imagem da imagem da
Figura 4.36 (fora da regiao de treinamento), (e) imagem resultante, (f)
diferenca simetrica . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 126
4.41 Aplicacao do operador∧Ψ
(8,3)
Λ : (a) imagem original 1, (b) imagem resultante 1 127
4.42 Aplicacao do operador∧Ψ
(8,3)
Λ : (a) imagem original 2, (b) imagem resultante 2 128
4.43 Aplicacao do operador∧Ψ
(8,3)
Λ : (a) imagem original 3, (b) imagem resultante 3 128
4.44 Imagem da Figura 4.43 com destaque para uma sub-imagem de uma regiao
clara . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 129
4.45 Representacao numerica dos nıveis de cinza da sub-imagem da Figura 4.44 130

4.46 Parametros das luts da Figura 4.38 que parametrizam o operador
sup-gerador diferente do operador Ω . . . . . . . . . . . . . . . . . . . . . 130
4.47 Imagens de um DNA microarray - 512 × 512: (a) imagem de entrada (em
nıveis de cinza), (b) imagem de saıda (binaria) . . . . . . . . . . . . . . . . 132
4.48 Sub-imagens 128× 128 das imagens da Figura 4.47 . . . . . . . . . . . . . 132
4.49 Sub-imagens das imagens da Figura 4.48 contendo um unico spot do DNA
microarray . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 132
4.50 Efeito da dilatacao por elementos estruturantes quadrado e cruz: (a)-(b)
imagem dilatada e diferenca simetrica pelo quadrado 3× 3, (c)-(d) imagem
dilatada e diferenca simetrica pelo quadrado 5× 5, (e)-(f) imagem dilatada
e diferenca simetrica pela cruz 3 × 3, (g)-(h) imagem dilatada e diferenca
simetrica pela cruz 5× 5 . . . . . . . . . . . . . . . . . . . . . . . . . . . . 133
4.51 Parametros das luts morfologicas elementares binarias resultantes do
experimento descrito na Tabela 4.17 . . . . . . . . . . . . . . . . . . . . . 134
4.52 Resultado da aplicacao do operador∧Ψ
(8,3)
Λ parametrizado pelas luts
morfologicas elementares binarias da Figura 4.51, sobre a imagem da Figura
4.47(a): (a) imagem resultante, (b) diferenca simetrica . . . . . . . . . . . 135
4.53 Parametros das luts resultantes do experimento da Tabela 4.19 . . . . . . . 137
4.54 Imagens e diferenca simetrica resultantes da aplicacao do operador∧Ψ
(6,2,3)
MΛ ,
parametrizado pelas luts da Figura 4.53, sobre a imagem da Figura 4.47(a):
(a) saıda do operador∧Ψ
(6,3)
M , (b) saıda do operador∧Ψ
(2,3)
Λ , (c) diferenca
simetrica . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 139
4.55 Imagens TM/LANDSAT: (a) com ruıdo simulado dependente do sinal, (b)
sem ruıdo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 140
4.56 Representacao esquematica do operador ΨΛ . . . . . . . . . . . . . . . . . 142
4.57 Representacao esquematica do operador ΨM . . . . . . . . . . . . . . . . . 143
4.58 Estrutura dos operadores dados pelo modelo M (2,2,w)ΛM . . . . . . . . . . . . 144
4.59 Estrutura dos operadores dados pelo modelo M (2,2,w)MΛ . . . . . . . . . . . . 144

4.60 Parametros “teoricos” das luts que parametrizam o operador ΨM ΨΛ . . . 145
4.61 Imagens resultantes da filtragem de ruıdos (simulados) dependentes do sinal
da imagem da Figura 4.55(a), pelo filtro ΨM ΨΛ parametrizado pelas luts
da Figura 4.60: (a) ΨΛ(f), (b) ΨM(ΨΛ(f)) . . . . . . . . . . . . . . . . . . 146
4.62 Par de imagens de treinamento - 130× 130: (a) sub-imagem da imagem da
Figura 4.55(a), (b) sub-imagem da imagem da Figura 4.55(b) . . . . . . . 147
4.63 Parametros das luts dos operadores sup-geradores e inf-geradores
resultantes do experimento 3 da Tabela 4.21 . . . . . . . . . . . . . . . . . 148
4.64 Imagens resultantes da aplicacao do operador∧Ψ
(2,2,3)
ΛM parametrizado pelas
luts da Figura 4.63, sobre a imagem da Figura 4.55(a): (a)∧ΨΛ(f), (b)
∧ΨM(
∧ΨΛ(f)) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 148
4.65 Tipos e parametros das luts morfologicas elementares parametricas
resultantes do experimento 8 da Tabela 4.22 . . . . . . . . . . . . . . . . . 150
4.66 Imagens resultantes da aplicacao do operador∧Ψ
(2,2,3)
ΛM parametrizado pelas
luts da Figura 4.65, sobre a imagem da Figura 4.55(a): (a)∧ΨΛ(f), (b)
∧ΨM(
∧ΨΛ(f)) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 151
4.67 Representacao grafica das luts-erosoes e anti-dilatacoes da Figura 4.65(a) e
respectivas interseccoes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 152
4.68 Representacao grafica das luts-erosoes e anti-dilatacoes da Figura 4.65(b) e
respectivas interseccoes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 153
4.69 Representacao grafica das luts-dilatacoes e anti-erosoes da Figura 4.65(c) e
respectivas unioes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 154
4.70 Representacao grafica das luts-dilatacoes e anti-erosoes da Figura 4.65(d) e
respectivas unioes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 155

LISTA DE TABELAS
Pag.
4.1 Sımbolos utilizados para denotar os parametros de entrada e inicializacao e
os resultados do SGA . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 88
4.2 Parametros do SGA para os experimentos realizados com as imagens da
Figura 4.1 utilizando o modelo M (4,3)Λ . . . . . . . . . . . . . . . . . . . . . 91
4.3 Parametros do SGA para os experimentos realizados com as imagens da
Figura 4.1 utilizando o modelo M (2,3)Λ . . . . . . . . . . . . . . . . . . . . . 91
4.4 Parametros do SGA para os experimentos realizados com as imagens da
Figura 4.1 utilizando o modelo M (1,3)Λ . . . . . . . . . . . . . . . . . . . . . 92
4.5 Melhor adaptacao e parametros das luts binarias resultantes do experimento
13 da Tabela 4.3 em diversas geracoes . . . . . . . . . . . . . . . . . . . . 93
4.6 Parametros do SGA para os experimentos realizados com as imagens da
Figura 4.1 utilizando o modelo M (1,3)E . . . . . . . . . . . . . . . . . . . . . 97
4.7 Parametros do SGA para o experimento realizado com as imagens da Figura
4.1 utilizando o modelo M (1,1)E . . . . . . . . . . . . . . . . . . . . . . . . . 98
4.8 Parametros do SGA para os experimentos realizados com as imagens da
Figura 4.11 utilizando o modelo M (p,w)Λ , com p = 16, 8, 4, 2, 1 e w = 3 . . . 101
4.9 Diferenca simetrica entre a imagem binaria da Figura 4.9(b) e as imagens
binarias da Figura 4.17 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 104
4.10 Parametros do SGA para os experimentos realizados com pares de imagens
de treinamento da Figura 4.19 utilizando o modelo M (4,3)Λ . . . . . . . . . 108
4.11 Diferencas simetricas entre a imagem saıda da Figura 4.18(b) e as
imagens resultantes das aplicacoes dos operadores∧Ψ
(4,3)
Λ parametrizados,
respectivamente, pelas luts das Figuras 4.20-4.27 . . . . . . . . . . . . . . . 114
4.12 Parametros do SGA para os experimentos realizados com o par de imagens
de treinamento da Figura 4.31 utilizando o modelo M (8,3)Λ . . . . . . . . . 116

4.13 Diferenca simetrica entre a imagem binaria da Figura 4.30(b) e as imagens
binarias das Figuras 4.34(a) e 4.34(b) . . . . . . . . . . . . . . . . . . . . . 118
4.14 Parametros do SGA para o experimento realizado com o par de imagens de
treinamento da Figura 4.37 utilizando o modelo M (8,3)Λ . . . . . . . . . . . 122
4.15 Diferenca simetrica entre a imagem binaria da Figura 4.39(a) e a imagem
binaria da Figura 4.36 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 124
4.16 Diferenca simetrica entre as imagens binarias da Figura 4.40 . . . . . . . . 127
4.17 Parametros do SGA para o experimento realizado com o par de imagens de
treinamento da Figura 4.48 utilizando o modelo M (8,3)Λ . . . . . . . . . . . 134
4.18 Diferenca simetrica entre a imagem binaria da Figura 4.52(a) e a imagem
binaria da Figura 4.47(b) . . . . . . . . . . . . . . . . . . . . . . . . . . . . 135
4.19 Parametros do SGA para o experimento realizado com o par de imagens de
treinamento da Figura 4.48 utilizando o modelo M (6,6,3)MΛ . . . . . . . . . . 136
4.20 Diferenca simetrica entre a imagem binaria da Figura 4.54(b) e a imagem
binaria da Figura 4.47(b) . . . . . . . . . . . . . . . . . . . . . . . . . . . . 138
4.21 Parametros do SGA para os experimentos realizados com o par de imagens
de treinamento da Figura 4.62 utilizando o modelo M (2,2,3)ΛM parametrizado
pelas luts dos tipos 3 e 4 . . . . . . . . . . . . . . . . . . . . . . . . . . . . 147
4.22 Parametros do SGA para os experimentos realizados com o par de imagens
de treinamento da Figura 4.62 utilizando o modelo geral M (2,2,3)ΛM . . . . . . 149

LISTA DE SIMBOLOS
CΨ,f – classe de operadores que geram a mesma saıda que Ψ quandoa entrada e f
di – lut-dilatacao relativa a posicao i dentro da janela W(i = 1, . . . , n e n = #W )
dini=1, di – famılia de luts-dilatacao relativas a janela W (n = #W )di,j – lut-dilatacao relativa a posicao i dentro da janela W e ao
operador elementar j dentro do modelo de ordem p ou q(i = 1, . . . , n; n = #W ; j = 1, . . . , p ou j = 1, . . . , q)
di,jni=1, di,j – famılia de luts-dilatacao relativas a janela W e ao operadorelementar j dentro do modelo de ordem p ou q(n = #W ; j = 1, . . . , p ou j = 1, . . . , q)
dz – lut-dilatacao parametrizada por z
d(m)z – lut-dilatacao parametrizada por z da famılia m
(z ∈ [0, k], k = #K e m = 1, 2, 3, 4)da
i – lut-anti-dilatacao relativa a posicao i dentro da janela W(i = 1, . . . , n e n = #W )
dai
ni=1, da
i – famılia de luts-anti-dilatacao relativas a janela W (n = #W )da
i,j – lut-anti-dilatacao relativa a posicao i dentro da janela W eao operador elementar j dentro do modelo de ordem p ou q(i = 1, . . . , n; n = #W ; j = 1, . . . , p ou j = 1, . . . , q)
dai,j
n
i=1, da
i,j – famılia de luts-anti-dilatacao relativas a janela W e ao
operador elementar j dentro do modelo de ordem p ou q(n = #W ; j = 1, . . . , p ou j = 1, . . . , q)
daz – lut-anti-dilatacao parametrizada por z
da(m)z – lut-anti-dilatacao parametrizada por z da famılia m
(z ∈ [0, k], k = #K e m = 1, 2, 3, 4)E – retangulo de Z2 (produto cartesiano de dois intervalos de Z)ei – lut-erosao relativa a posicao i dentro da janela W
(i = 1, . . . , n e n = #W )eini=1, ei – famılia de luts-erosao relativas a janela W (n = #W )ei,j – lut-erosao relativa a posicao i dentro da janela W e ao
operador elementar j dentro do modelo de ordem p ou q(i = 1, . . . , n; n = #W ; j = 1, . . . , p ou j = 1, . . . , q)
ei,jni=1, ei,j – famılia de luts-erosao relativas a janela W e ao operadorelementar j dentro do modelo de ordem p ou q(n = #W ; j = 1, . . . , p ou j = 1, . . . , q)
ez – lut-erosao parametrizada por z
e(m)z – lut-erosao parametrizada por z da famılia m
(z ∈ [0, k], k = #K e m = 1, 2, 3, 4)ea
i – lut-anti-erosao relativa a posicao i dentro da janela W(i = 1, . . . , n e n = #W )

eai
ni=1, ea
i – famılia de luts-anti-erosao relativas a janela W (n = #W )ea
i,j – lut-anti-erosao relativa a posicao i dentro da janela W e aooperador elementar j dentro do modelo de ordem p ou q(i = 1, . . . , n; n = #W ; j = 1, . . . , p ou j = 1, . . . , q)
eai,j
n
i=1, ea
i,j – famılia de luts-anti-erosao relativas a janela W e ao operador
elementar j dentro do modelo de ordem p ou q(n = #W ; j = 1, . . . , p ou j = 1, . . . , q)
eaz – lut-anti-erosao parametrizada por z
ea(m)z – lut-anti-erosao parametrizada por z da famılia m
(z ∈ [0, k], k = #K e m = 1, 2, 3, 4)f – elemento de KE
f/X – restricao de f a um subconjunto X de EIW∆ – conjunto de dilatacoes de janela W e espacialmente invariantesIW∆a – conjunto de anti-dilatacoes de janela W e espacialmente
invariantesIWE – conjunto de erosoes de janela W e espacialmente invariantesIWEa – conjunto de anti-erosoes de janela W e espacialmente invariantesIWΛ – conjunto de operadores sup-geradores de janela W e
espacialmente invariantesIWM – conjunto de operadores inf-geradores de janela W e
espacialmente invariantes
K – intervalo de Z definido por K4= [0, k]
KE – conjunto dos mapeamentos de E em KM – modelo de operadores
M (q,w)∆ – modelo de operador dado pela interseccao de dilatacoes de
janela W e espacialmente invariantes
M (p,w)E – modelo de operador dado pela uniao de erosoes de janela W e
espacialmente invariantes
M (p,w)Λ – modelo de operador dado pela uniao de operadores sup-geradores
de janela W e espacialmente invariantes
M (q,w)M – modelo de operador dado pela interseccao de operadores
inf-geradores de janela W e espacialmente invariantes
M (p,q,w)ΛM – modelo de operador dado pela composicao do modelo dado pela
uniao de operadores sup-geradores com o modelo dado pelainterseccao de operadores inf-geradores
M (q,p,w)MΛ – modelo de operador dado pela composicao do modelo dado pela
interseccao de operadores inf-geradores com o modelo dado pelauniao de operadores sup-geradores
W – quadrado de Z2 chamado de janela#W – numero de elementos da janela WZ – conjunto dos numeros inteiros

Z2 – produto cartesiano de Z por Z (conjunto dos pares ordenadosde inteiros)
∆d – dilatacao parametrizada pela famılia de luts-dilatacao di∆di,j, ∆d,j – dilatacao parametrizada pela j-esima famılia de luts-dilatacao di,j∆a
da – anti-dilatacao parametrizada pela famılia de luts-anti-dilatacao dai
∆ada
i,j, ∆a
da,j – anti-dilatacao parametrizada pela j-esima famılia de
luts-anti-dilatacao dai,j
Ee – erosao parametrizada pela famılia de luts-erosao eiEei,j, Ee,j – erosao parametrizada pela j-esima famılia de luts-erosao ei,jEa
ea – anti-erosao parametrizada pela famılia de luts-anti-erosao eai
Eaea
i,j, Ea
ea,j – anti-erosao parametrizada pela j-esima famılia de luts-anti-erosao
eai,j
Λ – operador sup-geradorΛj – j-esimo operador sup-gerador do modelo de ordem p (j = 1, . . . , p)M – operador inf-geradorMj – j-esimo operador inf-gerador do modelo de ordem q (j = 1, . . . , q)Ψ – operador desejado∧Ψ – operador projetado


CAPITULO 1
INTRODUCAO
1.1 Consideracoes Gerais
Com a evolucao e a diversificacao da tecnologia para aquisicao de imagens digitais,
atualmente encontra-se disponıvel no mercado uma grande quantidade de dispositivos
para a obtencao de imagens, nas mais diversas areas cientıficas e tecnologicas (como por
exemplo: medicina, biologia, geologia, meteorologia, astronomia, cartografia, arquitetura,
arqueologia, sensoriamento remoto, industria). Estas imagens vem sendo cada vez
mais utilizadas para auxiliar na solucao de problemas e tarefas inerentes a cada uma
destas areas (diagnostico medico, automacao industrial, analise de materiais, previsao
de tempo, mapeamento, etc), fornecendo dados e informacoes uteis que dificilmente
seriam conseguidos de outra forma. Porem, para que estas imagens possam ser utilizadas
de forma eficiente, para extracao de dados e informacoes uteis e confiaveis a cada
usuario, e preciso que elas sejam processadas e analisadas, de preferencia num intervalo
curto de tempo. Sendo assim, o estudo e a automatizacao de metodos eficientes
para o processamento e a analise destas imagens e muito importante, para responder
prontamente as demandas colocadas pelos usuarios.
Por sua vez, o desenvolvimento da tecnologia computacional, tanto em hardware quanto
em software, tem oferecido ferramentas cada vez mais adequadas para trabalhar com
estes dados, o que viabiliza a implementacao pretendida para estes metodos.
Esta realidade tem estimulado e impulsionado as pesquisas na area de tratamento de
imagens nas ultimas decadas. Isto tem resultado na proposicao, estudo e desenvolvimento
de metodos inovadores de processamento e analise de imagens, bem como na
implementacao destes metodos; o que pode ser constatado atraves da literatura
especializada sobre este assunto e dos sistemas existentes no mercado.
No contexto destas pesquisas na area de tratamento de imagens, uma das abordagens
utilizada e a Morfologia Matematica (Serra, 1982, 1988; Haralick et al., 1987; Banon,
1995; Banon e Barrera, 1998; Soille, 1999), a qual oferece uma base teorica para o estudo
e desenvolvimento de algoritmos de processamento e analise de imagens. Esta abordagem
tem sido bastante utilizada por ser adaptada para tratar sistemas nao-lineares na solucao
de problemas de processamento e analise de imagens, alem de estar baseada em teorias
matematicas bem consolidadas (teoria dos conjuntos e dos reticulados).
Originalmente, a teoria da Morfologia Matematica foi desenvolvida para imagens binarias
27

(Serra, 1982) e posteriormente foi estendida para imagens em nıveis de cinza (Serra, 1982;
Sternberg, 1986). Desta forma, os operadores elementares da Morfologia Matematica
sao definidos sobre dois reticulados completos: das imagens binarias e das imagens em
nıveis de cinza. Um estudo detalhado sobre este assunto pode ser encontrado em: Serra
(1982, 1988); Sternberg (1986); Haralick et al. (1987); Heijmans e Ronse (1990); Heijmans
(1991); Banon (1995, 2000); Banon e Barrera (1998); Soille (1999).
Entre outros aspectos teoricos, a Morfologia Matematica estuda as decomposicoes de
operadores (mapeamentos) entre reticulados completos. Mais precisamente, foi provado
por Matheron (1975) que qualquer operador crescente pode ser decomposto em termos
de duas classes de operadores morfologicos elementares, ou seja, das dilatacoes e erosoes.
Posteriormente, Banon e Barrera (1991, 1993) provaram que qualquer operador (nao
necessariamente crescente) pode ser decomposto em termos das quatro classes de
operadores morfologicos elementares, ou seja, das dilatacoes, erosoes, anti-dilatacoes
e anti-erosoes. Estas decomposicoes podem ser expressas em termos de uniao de
interseccoes ou interseccao de unioes de operadores elementares, resultando assim em
formas canonicas.
Os operadores elementares da Morfologia Matematica podem ser apresentados de forma
axiomatica (Serra, Paris. 1986, 1988; Heijmans, 1991; Heijmans e Ronse, 1990) e a
partir de suas caracterizacoes serem deduzidas as formas construtivas, que permitem
as implementacoes em computador (Banon, 1995, 2000; Banon e Barrera, 1998).
A decomposicao dos operadores morfologicos em termos de operadores elementares pode
ser aplicada em projeto de operadores. Contudo, tem-se uma grande dificuldade de
implementacao, uma vez que e necessario saber quais sao os parametros dos operadores
elementares. Na maioria dos casos, o espaco de solucoes deste problema e muito grande,
o que inviabiliza a utilizacao de metodos de enumeracao. Esta dificuldade tem motivado
a pesquisa de metodos para automatizar o projeto de operadores.
O projeto automatico de operadores de imagens pode ser entendido como sendo qualquer
procedimento computacional que gera uma especificacao de um operador, que realiza uma
transformacao de imagens previamente descrita (Hirata, Sao Paulo, 2000). A Figura 1.1
ilustra esta ideia.
28

de imagens
de umatransformacao
Especificacaode um
operador
Descricao
SISTEMA
FIGURA 1.1 – Sistema para projeto automatico de operadores.FONTE: Hirata (Sao Paulo, 2000, p. 2).
Desta forma, uma possibilidade para projetar o operador desejado pode ser a utilizacao
de tecnicas de aprendizagem baseada em exemplos. Neste caso, o operador desejado e
representado por meio de pares de imagens entrada/saıda, onde cada par e formado
por uma imagem a ser processada (imagem de entrada) e uma imagem desejada apos o
processamento (imagem de saıda). Para isto, o “projestista” deve obter algumas imagens
de entrada, tıpicas de uma dada aplicacao, com as correspondentes imagens de saıda.
Essas imagens alimentam o sistema que constroi automaticamente o operador desejado,
por meio de um processo de aprendizado computacional.
Varios metodos para projeto de operadores, com base em amostras de imagens
entrada/saıda, tem sido propostos. Dentre esses metodos pode-se encontrar na literatura
aqueles que utilizam tecnicas no contexto da estimacao estatıstica (Dougherty e Haralick,
1991; Dougherty et al., 1991; Dougherty, 1992a,b; Dougherty e Loce, 1993, 1994; Loncaric
e Dhawan, 1995; Barrera et al., 1997). Outros modelam o problema como um problema de
aprendizado computacional Provavelmente Aproximadamente Correto (PAC) (Barrera
et al., 1995; Tomita, Sao Paulo. 1996; Barrera et al., 1997; Kim, Sao Paulo. 1997; Hirata,
Sao Paulo, 2000). Existem ainda aqueles metodos que utilizam tecnicas adaptativas,
como algoritmo genetico (Harvey e Marshall, 1994; Tamburino et al., 1995; Harvey e
Marshall, 1995; Kraft et al., 1995; Zmuda et al., 1996; Harvey e Marshall, 1996; Oliveira,
Sao Jose dos Campos. 1998; Yoda et al., 1999) ou redes neurais (Sousa, Campina Grande.
2000). Estes metodos estao baseados, em geral, em modelos de operadores sobre o
reticulado das imagens binarias. Ou ainda, quando sao definidos sobre o reticulado das
imagens em nıveis, os modelos se limitam a operadores envolvendo apenas operadores
morfologicos elementares parametrizados por elementos estruturantes planares, ou seja,
eles sao parametrizados por famılias de tabelas de transformacao de nıveis de cinza que
sao transformacoes identidades, como e o caso do metodo proposto por Oliveira (Sao
Jose dos Campos. 1998).
Neste trabalho, o metodo proposto para projeto de operadores trabalha sobre o reticulado
das imagens em nıveis de cinza, e diferentemente dos metodos encontrados na literatura os
29

modelos de operadores utilizados envolvem operadores morfologicos parametrizados por
famılias de tabelas de transformacao de nıveis de cinza, baseado em Banon (1995), que
nao sao limitadas a transformacao identidade. Estas famılias de tabelas de transformacao
de nıveis de cinza sao aqui limitadas a famılias de tabelas parametrizadas por apenas um
numero inteiro pertencente a escala de nıveis de cinza utilizada. Daqui em diante, neste
trabalho, estas tabelas serao chamadas de luts (do ingles, look-up tables) morfologicas
elementares.
A seguir e apresentada a definicao para projeto de operadores, utilizada neste trabalho, e
na sequencia sao apresentados os objetivos deste trabalho e a estrutura deste documento.
1.2 Definicao de Projeto de Operadores
Sejam A e B dois conjuntos. Dado um operador Ψ, de A em B, e f ∈ A, existe uma
classe de operadores, de A em B, denotada por CΨ,f , tal que para todo Φ, de A em B,
tem-se que:
Φ ∈ CΨ,f ⇔ Ψ(f) = Φ(f). (1.1)
A Expressao 1.1 define uma relacao de equivalencia entre operadores de A em B. Assim,
variando-se Ψ tem-se que as classes CΨ,f formam uma particao do espaco de operadores
de A em B.
O problema de projetar o operador Ψ resulta no problema de encontrar, dentro de uma
classe M pre-definida de operadores, um operador∧Ψ que melhor representa os membros
da classe CΨ,f . O criterio utilizado nesta busca e a minimizacao da funcao∧Ψ7→ d(
∧Ψ
(f), Ψ(f)), onde d e uma distancia sobre B.
Neste trabalho, os operadores Ψ e∧Ψ sao chamados, respectivamente, de operador
desejado e operador projetado, e a classe M de modelo de operadores. No
Capıtulo 2 sao apresentados alguns modelos de operadores.
Dependendo da escolha de Ψ, f e M , as classes CΨ,f e M podem se interceptarem.
No caso em que ocorre interseccao entre estas duas classes, tem-se a possibilidade de
encontrar um operador projetado∧Ψ tal que d(
∧Ψ (f), Ψ(f)) = 0, desde que
∧Ψ ∈ CΨ,f
implicar em∧Ψ (f) = Ψ(f). Neste caso, diz-se que foi encontrada uma solucao exata,
ou ainda, que o modelo escolhido leva a solucoes exatas. Nao ocorrendo a interseccao,∧Ψ ∈ M sera apenas uma representacao aproximada dos operadores membros da classe
CΨ,f .
30

1.3 Objetivos do Trabalho
Este trabalho tem como objetivos:
• o estudo teorico da decomposicao de operadores de janela e espacialmente
invariantes em termos de operadores morfologicos elementares parametrizados
por luts morfologicas elementares;
• a aplicacao desta teoria ao projeto de operadores definidos sobre o reticulado
das imagens em nıveis de cinza;
• a avaliacao do resultado da aplicacao desta teoria, utilizando um algoritmo
genetico para encontrar uma solucao do problema (ou seja, como um metodo
de busca de uma solucao).
Os modelos de operadores para o projeto de operadores utilizados neste trabalho
sao caracterizados por operadores morfologicos elementares de janela e espacialmente
invariantes. Estes operadores sao parametrizados por luts morfologicas elementares
parametricas (como aquelas encontradas em: Heijmans (1991, 1994); Sinha e Dougherty
(1992); Bloch e Maıtre (1995); Baets et al. (1994); Banon (1995)) e binarias. Alem disto,
cabe ressaltar que sao utilizados tambem modelos mistos (encadeamentos de modelos).
1.4 Estrutura da Tese
Este trabalho esta dividido em mais quatro capıtulos, conforme descritos a seguir:
• CAPITULO 2 - MODELAGEM DOS OPERADORES DE IMAGEM:
Este capıtulo apresenta uma revisao dos principais conceitos e resultados
da Morfologia Matematica, relevantes para o projeto de operadores
parametrizados por luts morfologicas elementares, para imagens em nıveis de
cinza. Como resultado tem-se alguns modelos para o projeto de operadores
para imagens em nıveis de cinza, parametrizados por estas luts morfologicas
elementares.
• CAPITULO 3 - ALGORITMO GENETICO E PROJETO DE
OPERADORES: Neste capıtulo e apresentada uma breve revisao sobre
algoritmo genetico e a implementacao deste algoritmo genetico para o
projeto de operadores parametrizados por luts morfologicas elementares,
para imagens em nıveis de cinza.
• CAPITULO 4 - EXPERIMENTOS E RESULTADOS: Neste capıtulo sao
apresentados os experimentos realizados e os resultados obtidos, bem como
31

algumas consideracoes sobre eles. Nestes experimentos sao utilizadas imagens
sinteticas e imagens reais.
• CAPITULO 5 - CONCLUSOES: Neste capıtulo sao apresentadas algumas
consideracoes gerais e conclusoes, sobre a metodologia proposta e
implementada, bem como as perspectivas sobre o assunto.
32

CAPITULO 2
MODELAGEM DOS OPERADORES DE IMAGEM
2.1 Introducao
Neste Capıtulo e apresentada uma modelagem para o projeto de operadores de imagens
em nıveis de cinza. Esta modelagem consiste na escolha de uma classe (ou uma famılia)
de operadores, os quais sao construıdos a partir de operadores morfologicos elementares
de janela e espacialmente invariantes.
Para se chegar a esta modelagem sao dadas: a caracterizacao das quatro classes
de luts elementares da Morfologia Matematica (dilatacoes, erosoes, anti-dilatacoes e
anti-erosoes), algumas famılias destas luts e a decomposicao de operadores em termos
de operadores elementares de janela e espacialmente invariantes, parametrizados por
famılias de luts morfologicas elementares.
Para facilitar e sistematizar a apresentacao dos conceitos que fornecem a base teorica
para este trabalho, a seguir sao apresentadas algumas notacoes e definicoes. Na sequencia,
sao estudadas as propriedades dos operadores morfologicos elementares parametrizados
por luts morfologicas elementares, bem como as decomposicoes de operadores que dao
origem aos modelos de operadores.
2.2 Notacoes e Definicoes Matematicas Basicas
Esta Secao apresenta algumas notacoes e definicoes matematicas que sao utilizadas nas
definicoes dos operadores considerados neste trabalho.
Denota-se por Z o conjunto dos numeros inteiros e por Z2 o produto cartesiano de Z por
Z (conjunto dos pares ordenados de inteiros).
Denota-se por E um retangulo de Z2, isto e, um produto cartesiano de dois intervalos
de Z.
Denota-se por K o intervalo de Z definido por K4= [0, k].
O conjunto dos mapeamentos de E em K e denotado por KE. Neste trabalho, estes
mapeamentos representam as imagens em nıveis de cinza com domınio E (conjunto das
posicoes dos pixels) e escala de cinza K (conjunto dos possıveis valores dos pixels).
Denotam-se por o e i as imagens constantes com valores de pixels iguais a 0 e k,
33

respectivamente.
Sejam E1 e E2 dois retangulos de Z2. Sejam K1 e K2 dois intervalos de Z, definidos
por K14= [0, k1] e K2
4= [0, k2]. Neste trabalho, os mapeamentos de K1
E1 em K2E2 sao
chamados de operadores de imagem ou, simplesmente, de operadores.
Seja w um numero natural ımpar. Denomina-se por janela o quadrado W de Z2, definido
por:
W4=
[−w − 1
2,w − 1
2
]×
[−w − 1
2,w − 1
2
]. (2.1)
Seja n4= #W o numero de elementos de W . Entao, n = w2.
Seja X um subconjunto nao-vazio de (Z2, +) e u um elemento de Z2. O transladado de
X por u e o subconjunto de Z2, denotado por X + u e definido por:
X + u4= x ∈ Z2 : x− u ∈ X. (2.2)
Seja B um mapeamento de E2 em P(E1) (colecao de todas as partes de E1). Segundo
Banon (2000), um operador Ψ, de KE11 em KE2
2 , e um operador de janela em relacao
a B se, e somente se, para todo y ∈ E2 e para todo f1, f2 ∈ KE11 , tem-se:
f1/B(y) = f2/B(y)⇒ Ψ(f1)(y) = Ψ(f2)(y), (2.3)
onde, f1/B(y) e a restricao de f a B(y).
Um operador de janela Ψ (em relacao a B), de KE11 em KE2
2 , e um operador de janela
W e espacialmente invariante se, e somente se, existe um subconjunto W de Z2 tal
que E1 = E2 ⊕ W e B(y) = W + y para todo y ∈ E2, e para todo f ∈ KE11 e todo
y1, y2 ∈ E2, tem-se:
f by1 = f by2 ⇒ Ψ(f)(y1) = Ψ(f)(y2), (2.4)
onde, e a operacao de composicao de mapeamentos e para todo y ∈ E2 o mapeamento
34

by, de W em E1, e definido por:
by(u)4= u + y, (2.5)
para todo u ∈ W (Banon, 2000). O sımbolo ⊕ representa a adicao de Minkowski de dois
conjuntos (Banon e Barrera, 1998).
A composicao f by representa uma “copia” da subimagem f/W + y para dentro da
janela W .
O conjunto dos operadores elementares de janela W e espacialmente invariantes, de KE11
em KE22 , e denotado por IW(KE1
1 , KE22 ) ou simplesmente por IW.
Cabe aqui relembrar tambem as definicoes de mapeamentos crescente e descrescente,
respectivamente.
Sejam (A1,≤) e (A2,≤) dois reticulados finitos.
Um mapeamento f de A1 em A2, e crescente se, e somente se,
a ≤ b⇒ f(a) ≤ f(b) (a, b ∈ A1). (2.6)
Um mapeamento f de A1 em A2, e decrescente se, e somente se,
a ≤ b⇒ f(b) ≤ f(a) (a, b ∈ A1). (2.7)
2.3 Operadores Morfologicos Elementares
Chama-se operadores morfologicos os mapeamentos entre reticulados completos
(Banon, 2004). Dentre estes, os operadores elementares da Morfologia Matematica
(dilatacoes, erosoes, anti-dilatacoes e anti-erosoes), tem um papel fundamental na
decomposicao/representacao de qualquer mapeamento entre reticulados completos. Eles
podem ser apresentados de forma axiomatica (Heijmans, 1991; Barrera, Sao Jose dos
Campos. 1992; Banon, 1995, 2000; Banon e Barrera, 1998) e a partir daı serem
deduzidas formas construtivas, chamadas de caracterizacoes dos operadores elementares,
que permitem implementacoes em computador. Nesta linha de abordagem, Banon (1995)
introduz os operadores de forma axiomatica e apresenta a caracterizacao dos operadores
morfologicos elementares de janela e invariantes por translacao, que transformam uma
35

imagem em nıveis de cinza numa outra imagem em nıveis de cinza, com escala de nıveis
de cinza diferente ou nao.
Banon (2000) apresenta a caracterizacao dos operadores morfologicos elementares de
janela e espacialmente invariantes, em termos de famılia de operadores morfologicos
elementares, que sao as luts morfologicas elementares.
A seguir sao apresentadas as definicoes e caracterizacoes destas luts morfologicas
elementares. Sao apresentadas tambem algumas famılias de luts parametricas e as luts
morfologicas elementares binarias. Na sequencia sao definidos os operadores morfologicos
elementares parametrizados por estas luts, bem como as decomposicoes de operadores
em termos de uniao de interseccoes e de interseccao de unioes de operadores elementares
parametrizados por luts.
2.3.1 Definicao e Caracterizacao das LUTs Morfologicas Elementares
Uma lut e um mapeamento entre duas escalas de cinza, as quais podem ser iguais ou
nao (Banon, 2000).
A seguir, considera-se o caso geral onde as luts sao mapeamentos entre duas escalas de
cinza diferentes.
Sejam (K1,≤) e (K2,≤) dois sub-reticulados de (Z,≤), onde K1 = [0, k1] ⊂ Z e K2 =
[0, k2] ⊂ Z.
A uniao e a interseccao definidas sobre estes dois sub-reticulados sao denotadas por ∨ e
∧, respectivamente.
Os mapeamentos ou luts l, de K1 em K2, chamados de dilatacoes, erosoes, anti-dilatacoes
e anti-erosoes, formam as luts morfologicas elementares. Elas sao definidas da seguinte
forma (Banon, 2000, p. 64, Definicao 3.6):
• uma lut l de (K1,∨, 0) em (K2,∨, 0) e uma dilatacao⇔ l(s∨ t) = l(s)∨ l(t)
e l(0) = 0 para todo s e t em K1;
• uma lut l de (K1,∧, k1) em (K2,∧, k2) e uma erosao ⇔ l(s ∧ t) = l(s) ∧ l(t)
e l(k1) = k2 para todo s e t em K1;
• uma lut l de (K1,∨, 0) em (K2,∧, k2) e uma anti-dilatacao ⇔ l(s ∨ t) =
l(s) ∧ l(t) e l(0) = k2 para todo s e t em K1;
• uma lut l de (K1,∧, k1) em (K2,∨, 0) e uma anti-erosao⇔ l(s∧t) = l(s)∨l(t)
36

e l(k1) = 0 para todo s e t em K1.
As caracterizacoes das quatro classes de luts morfologicas elementares sao dadas da
seguinte forma (Banon, 2000, p. 65, Proposicao 3.7):
• l e uma dilatacao ⇔ l e crescente e l(0) = 0;
• l e uma erosao ⇔ l e crescente e l(k1) = k2;
• l e uma anti-dilatacao ⇔ l e decrescente e l(0) = k2;
• l e uma anti-erosao ⇔ l e decrescente e l(k1) = 0.
A Figura 2.1 mostra dois exemplos para cada uma das classes de luts morfologicas
elementares de K1 = 0, 1, 2, 3, 4, 5, 6, 7 em K2 = 0, 1, 2, 3.
01
3
0 1 2 3 4 5 6 7
2
1
3
0 1 2 3 4 5 6 7
2
0
01
32
0 1 2 3 4 5 6 7
01
32
0 1 2 3 4 5 6 7
01
32
0 1 2 3 4 5 6 7
01
32
0 1 2 3 4 5 6 7
1
32
0 1 2 3 4 5 6 7
0
01
32
0 1 2 3 4 5 6 7
dilatacoes anti-erosoesanti-dilatacoeserosoes
FIGURA 2.1 – Exemplos de luts morfologicas elementares.FONTE: Banon (1995, p. 10).
O numero de luts para uma dada classe de luts morfologicas elementares, de K1 em K2,
e dado por (Banon, 1995, p. 11, Proposicao 1.6):
N(k1, k2) =(k1 + k2)!
k1!k2!. (2.8)
Com base na Expressao 2.8 observa-se que o numero de luts morfologicas elementares e,
em geral, muito grande. Conforme k1 e/ou k2 crescem N tambem cresce. Entao, pode
ser inviavel trabalhar com todas elas.
Para contornar este problema, uma alternativa pode ser a definicao e a utilizacao de luts
parametricas. Neste caso, o numero de luts parametricas e igual k ou k + 1, dependendo
a qual famılia elas pertencem.
37

A seguir sao apresentadas as definicoes de algumas famılias de luts morfologicas
elementares parametricas, para cada uma das quatro classes, bem como as definicoes
de luts morfologicas elementares binarias. As luts dilatacoes, erosoes, anti-dilatacoes,
anti-erosoes, sao denotadas, respectivamente, por: d, e, da e ea.
2.3.1.1 Famılias de LUTs Morfologicas Elementares Parametricas
Na literatura podem ser encontradas as definicoes de algumas famılias de luts
morfologicas elementares parametricas, que sao dilatacoes e erosoes, como aquelas
apresentadas por: Heijmans (1991, 1994); Sinha e Dougherty (1992); Bloch e Maıtre
(1995); Baets et al. (1994); Banon (1995).
A seguir sao apresentadas as definicoes para estas famılias de luts (dilatacoes e erosoes)
e tambem, com base nestas definicoes e na definicao de luts morfologicas elementares
(Secao 2.3.1), sao definidas, pela primeira vez, famılias de luts morfologicas elementares
parametricas duais, que sao anti-dilatacoes e anti-erosoes.
Sejam K1 = K2 = K = [0, k] e t ∈ K. As famılias de luts-dilatacoes e luts-erosoes
parametricas sao definidas da seguinte forma:
• lut-dilatacao dada pela adicao de Heijmans (1991, 1994) para variacao
positiva
d(1)z (t)
4=
0, se t = 0
t + z, se t > 0 e t + z ≤ k z ∈ [0, k − 1]
k, se t + z > k
(2.9)
• lut-dilatacao dada pela adicao de Heijmans (1991, 1994) para variacao
negativa
d(2)z (t)
4= 0 ∨ (t− z) =
0, se t− z < 0
z ∈ [0, k]
t− z, se 0 ≤ t− z
(2.10)
• lut-dilatacao introduzida por Bloch e Maıtre (1995) e Baets et al. (1994)
d(3)z (t)
4= t ∧ z =
t, se t ≤ z
z ∈ [0, k]
z, se t > z
(2.11)
38

• lut-dilatacao introduzida por Banon (1995)
d(4)z (t)
4=
0, se t− z ≤ 0
z ∈ [0, k]
t, se 0 < t− z
(2.12)
• lut-erosao dada pela subtracao de Heijmans (1991, 1994) para variacao
negativa
e(1)z (t)
4=
0, se t− z < 0
t− z, se t < k e 0 ≤ t− z z ∈ [0, k − 1]
k, se t = k
(2.13)
• lut-erosao dada pela subtracao de Heijmans (1991, 1994) e Sinha e Dougherty
(1992) para variacao positiva
e(2)z (t)
4= k ∧ (t + z) =
t + z, se t + z ≤ k
z ∈ [0, k]
k, se t + z > k
(2.14)
• lut-erosao introduzida por Banon (1995)
e(3)z (t)
4=
t, se t− z < 0
z ∈ [0, k]
k, se 0 ≤ t− z
(2.15)
• lut-erosao introduzida por Bloch e Maıtre (1995) e Baets et al. (1994)
e(4)z (t)
4= t ∨ z =
z, se t ≤ z
z ∈ [0, k]
t, se t > z
(2.16)
A seguir sao apresentadas as definicoes das famılias de luts duais das famılias de luts
dadas pelas Expressoes 2.9 a 2.16. Estas luts, como ja mencionado anteriormente, sao
luts-anti-dilatacoes e luts-anti-erosoes e sao geradas a partir das luts dadas pelas referidas
expressoes, utilizando a seguinte regra:
l 7−→ la
39

onde,
la (s)4= k − l(s), s ∈ K. (2.17)
Sejam K1 = K2 = K = [0, k] e t ∈ K. Com base na Expressao 2.17, as famılias de
luts-anti-dilatacoes e luts-anti-erosoes parametricas sao definidas da seguinte forma:
• lut-anti-dilatacao dual da lut-dilatacao de Heijmans (1991, 1994) para
variacao positiva
da(1)z (t)
4=
k, se t = 0
k − t− z, se t > 0 e k − t− z ≥ 0 z ∈ [0, k − 1]
0, se k − t− z < 0
(2.18)
• lut-anti-dilatacao dual da lut-dilatacao de Heijmans (1991, 1994) para
variacao negativa
da(2)z (t)
4= k ∧ (z + k− t) =
k, se z − t > 0
z ∈ [0, k]
z + k − t, se z − t ≤ 0
(2.19)
• lut-anti-dilatacao dual da lut-dilatacao de Bloch e Maıtre (1995) e Baets et al.
(1994)
da(3)z (t)
4= (k − t) ∨ (k − z) =
k − t, se t ≤ z
z ∈ [0, k]
k − z, se t > z
(2.20)
• lut-anti-dilatacao dual da lut-dilatacao de Banon (1995)
da(4)z (t)
4=
k, se t ≤ z
z ∈ [0, k]
k − t, se t > z
(2.21)
40

• lut-anti-erosao dual da lut-erosao de Heijmans (1991, 1994) para variacao
negativa
ea(1)z (t)
4=
k, se z − t > 0
k + z − t, se t < k e z − t ≤ 0 z ∈ [0, k − 1]
0, se t = k
(2.22)
• lut-anti-erosao dual da lut-erosao de Heijmans (1991, 1994) e Sinha e
Dougherty (1992), para variacao positiva
ea(2)z (t)
4= 0∨ (k− z − t) =
k − z − t, se 0 < k − z − t
z ∈ [0, k]
0, se k − z − t ≤ 0
(2.23)
• lut-anti-erosao dual da lut-erosao de Banon (1995)
ea(3)z (t)
4=
k − t, se t < z
z ∈ [0, k]
0, se t ≥ z
(2.24)
• lut-anti-erosao dual da lut-erosao de Bloch e Maıtre (1995) e Baets et al.
(1994)
ea(4)z (t)
4= (k − t) ∧ (k − z) =
k − z, se t ≤ z
z ∈ [0, k]
k − t, se t > z
(2.25)
A Figura 2.2 mostra exemplos de luts morfologicas elementares parametricas, dadas pelas
Expressoes (2.9) a (2.25), para K1 = K2 = [0, 7] e z = 3.
41

01
0 1 2 3 4 5 6 7
32
4567
e(1)3 (t)
01
0 1
ea(1)3 (t)
567
d(1)3 (t)
01
0 1 2 3 4 5 6 7
32
4567
2
7
32
4567
01
0 1 2 3 4 5 6 7
32
4
6
3 4 5 6 7
32
4567
da(1)3 (t)
2
01
0 1 2 3 4 5
4
@@
DDDDD
CCCC@
@@
@@
@
01
0 1 2 3 4 5 6 7
3
5
2 3 4 5 6 7
32
4567
01
0 1 2 3 4 51
0 1 2 3 4 5 6 7
32
4567
d(3)3 (t) e
(3)3 (t) d
a(3)3 (t) e
a(3)3 (t)
01
0 6
7
01
0 1 2 3 4 5 6 7
32
4567
ea(4)3 (t)d
a(4)3 (t)d
(4)3 (t) e
(4)3 (t)
6
7
32
4567
01
0 1 2 3 4 5 6 7
32
45
1
2 3 4 5 6 7
32
4567
ea(2)3 (t)d
a(2)3 (t)d
(2)3 (t) e
(2)3 (t)
01
0 1 2
1
67
01
0 1 2 3 4 5 6 7
32
4567
01
0
3
4567
01
0 1 2 3 4 5 6 7
32
4567
0
2
4 5 6 7
32
4567
01
0 1 2 3 4 5 6 7
3
@@
@
@@
@CCCC
CCCC@
@@
@@
@@
@@
@@
ss s s
ss s s
ss s s s s ss
s ssssssssssss
sss
s
s s s s ss
ss
sssssss s
s s s ss
sss
sssssss
sss s
s s s s sssssssss
s s s sssss s s s
ssss
s
sssssssss s sssss
s
sssssss
ssssssss
FIGURA 2.2 – Exemplos de luts morfologicas elementares parametricas dadas pelasExpressoes (2.9) a (2.25) para z = 3.
42

2.3.1.2 LUTs Morfologicas Elementares Binarias
Com base na definicao axiomatica das luts morfologicas elementares (Secao 2.3.1), nesta
Secao sao apresentadas as definicoes de luts morfologicas elementares binarias (ou, luts
morfologicas elementares para limiarizacao).
Sejam K1 = [0, k1] e K2 = [0, 1] duas escalas de cinza e z ∈ K1. Os mapeamentos de K1
em K2, denotados por dz, ez, daz e ea
z, e definidos da seguinte forma:
dz(t)4=
1, se t > z
0, caso contrario(2.26)
ez(t)4=
1, se t ≥ z
0, caso contrario(2.27)
daz(t)
4=
1, se t ≤ z
0, caso contrario(2.28)
eaz(t)
4=
1, se t < z
0, caso contrario(2.29)
para todo t ∈ K1, sao chamados de luts morfologicas elementares binarias.
As expressoes acima podem ainda ser definidas, de forma equivalente, por:
dz4= 1t∈K1 : t>z (2.30)
ez4= 1t∈K1 : t≥z (2.31)
daz
4= 1t∈K1 : t≤z (2.32)
eaz
4= 1t∈K1 : t<z (2.33)
onde 1A e a funcao indicadora do subconjunto A de K1.
43

Observa-se que eu ∧ dav = 1[u,v] e ea
u ∨ dv = 1[u,v]c , para todo u, v ∈ K1 tal que u ≤ v.
De acordo com Banon (1995) e Secao 2.3.1, os mapeamentos dz, ez, daz e ea
z, das Expressoes
2.30 a 2.33, sao, respectivamente, dilatacoes, erosoes, anti-dilatacoes e anti-erosoes.
A Figura 2.3 mostra mapeamentos de K1 = [0, 7] em K2 = [0, 1], que sao exemplos
de luts morfologicas elementares binarias (dilatacao, erosao, anti-dilatacao e anti-erosao,
respectivamente), para z = 3 ∈ K1.
1
0 1 2 3 4 5 6 7
1
0 1 2 3 4 5 6 7
01
0 1 2 3 4 5 6 7
ea3(t)da
3(t)e3(t)
0 0
d3(t)
01
0 1 2 3 4 5 6 7
FIGURA 2.3 – Exemplos de luts morfologicas elementares binarias.
2.3.1.3 Operacoes sobre LUTs Morfologicas Elementares
Como (K2K1 ,≤) e um reticulado, pode-se introduzir as operacoes de uniao e interseccao
sobre o conjunto K2K1 (Banon, 2000).
A uniao sobre (K2K1 ,≤), denotada por ∨, e a extensao para K2
K1 da uniao ∨ sobre K2,
ou seja, para l1, l2 ∈ K2K1 tem-se:
(l1 ∨ l2)(s) = l1(s) ∨ l2(s), (2.34)
para todo s ∈ K1.
A interseccao sobre (K2K1 ,≤), denotada por ∧, e a extensao para K2
K1 da interseccao
∧ sobre K2, ou seja, para l1, l2 ∈ K2K1 tem-se:
(l1 ∧ l2)(s) = l1(s) ∧ l2(s), (2.35)
para todo s ∈ K1.
As Figuras 2.4 e 2.5 mostram, respectivamente, as unioes (entre dilatacoes e anti-erosoes)
e as interseccoes (entre erosoes e anti-dilatacoes) das luts morfologicas elementares
parametricas apresentadas na Figura 2.2.
44

@@
@@0
1
0 1 2 3 4 5 6 7
32
4567
ea(2)3 (t)
5 6 7
32
4567
4
01
0 1 2 3
1 2 3 4 5 6 7
32
4567
d(4)3 (t)
0
01
32
4567
7
d(1)3 ∨ e
a(1)3
d(2)3 ∨ e
a(2)3
01
0 1 2
6
7
2
4567
01
0 1 2 3 4 5
3
3 4 5 6 7
32
4567
3
d(3)3 ∨ e
a(3)3
d(4)3 ∨ e
a(4)3
2
4 5 6 7
32
4567
01
0 1
6
@@
@
@@
AA
01
0 1 2 3 4 5
d(2)3 (t)
ea(3)3 (t)
76
ea(1)3 (t)
2 3 4 5 6 7
32
4567
5
01
0 1 2 3 4 5
2
d(1)3 (t)
76543
76
4
23
76543210
10
@@
DDDDD
76543210
10
3
d(3)3 (t)
7654
2
1
0 1
ea(4)3 (t)
654
23
76543210
10
@@
@
7
0
@@
@CCCC
ss
s s s s s s s ss s s
sss
sss
s sssssss
ss
ss s s s s s
s
sssss
sss
s s s s
ssss
sss
s
s s s
ssssssss
ssssssss
s
sssss s s s
s s s sssss
s s s
FIGURA 2.4 – Exemplos de unioes das luts morfologicas elementares parametricas daFigura 2.2 que sao, respectivamente, dilatacoes e anti-erosoes.
45

6543210
10
@@
@
7
5 6 7
32
456
da(3)3 (t)
7654
23
3 4 5 6 7
32
4
e(3)3 (t)
7
e(1)3 ∧ d
a(1)3
01
0 1 2
e(4)3 (t)
7654
23
76543210
10
3 4
da(4)3 (t)
7654
23
76543210
10
CCCC@
@@
2
@@
@
@@
@
01
0 1
7
76543210
10
CCCC@
@@
3
2
4567
01
da(1)3 (t)
7654
2
32
4567
e(3)3 ∧ d
a(3)3
e(4)3 ∧ d
a(4)3
0 1 2 3 4 5 6 7
e(1)3 (t)
7654
23
76543210
10
567
e(2)3 ∧ d
a(2)3
01
0
da(2)3 (t)
7654
23
76543
654
23
76543210
10
2
6 7
3
e(2)3 (t)
7654
23
76543210
10
5
10
10
@@
@@
1 2 3 4
s
ss s s s s s s
ss ss s s s s
s s s ssss
s
s
ss
sssss s
ss s s s s s
s s s s s s s
s
s s s s s s s
s s s s ssss
s s s s s s s s
s
s s s s s s s
ssssss s s
s
s s s s s s sFIGURA 2.5 – Exemplos de interseccoes das luts morfologicas elementares parametricas
da Figura 2.2 que sao, respectivamente, erosoes e anti-dilatacoes.
46

A Figura 2.6 mostra exemplos de uniao e interseccao das luts morfologicas elementares
binarias apresentadas na Figura 2.3.
1
0 1 2
5 6 7
1
0 1 2 3 4 5 6 7
ea3(t)
0 01
0 1 2 3 4 5 6 7
e3(t)
4
3 4 5 6 7
d3 ∨ ea3
01
0 1 2 3 4 5 6 7
0
e3 ∧ da3
d3(t)
01
0 1 2 3
1
0 1 2 3 4 5 6 7
da3(t)
0
FIGURA 2.6 – Exemplos de uniao e interseccao das luts morfologicas elementaresbinarias da Figura 2.3.
2.3.2 Operadores Morfologicos Elementares Parametrizados por Famılias de
LUTs
Nesta secao sao apresentados os operadores morfologicos elementares parametrizados por
famılias de luts. A importancia destes operadores e devida ao fato deles caracterizarem
os operadores morfologicos elementares de janela e espacialmente invariantes.
Seja n o numero de elementos de W (ver Secao 2.2) e n = [1, . . . , n] ⊂ Z. A enumeracao
das posicoes de W pode ser definida como sendo uma bijecao entre n e W . Esta bijecao
e denotada por b.
Sejam W, E1 e E2 tres retangulos de Z2, tal que E1 = E2 ⊕W .
Sejam di, ei, dai e ea
i famılias de n luts morfologicas elementares (mapeamentos
de K1 em K2).
Seja + o operador usual de adicao sobre Z2.
Os operadores, de K1E1 em K2
E2 , denotados por ∆d, Ee, ∆ada e Ea
ea , e definidos por:
∆d(f)(y)4=
∨i∈n
di(f(y + b(i))) (2.36)
47

Ee(f)(y)4=
∧i∈n
ei(f(y + b(i))) (2.37)
∆ada(f)(y)
4=
∧i∈n
dai (f(y + b(i))) (2.38)
Eaea(f)(y)
4=
∨i∈n
eai (f(y + b(i))) (2.39)
para f ∈ K1E1 e y ∈ E2, sao chamados aqui de operadores morfologicos elementares
parametrizados por famılias de luts.
Segundo o resultado de caracterizacao dos operadores elementares de janela W e
espacialmente invariantes, de K1E1 em K2
E2 , apresentado por Banon (2000), os
operadores ∆d, Ee, ∆ada e Ea
ea , sao operadores de janela W e espacialmente invariantes.
Eles sao, respectivamente, dilatacao, erosao, anti-dilatacao e anti-erosao, desde que
di, ei, dai e ea
i , sejam, respectivamente, famılias de luts dilatacoes, erosoes,
anti-dilatacoes e anti-erosoes. Alem disto, todo operador de janela W e espacialmente
invariante, respectivamente, dilatacao, erosao, anti-dilatacao e anti-erosao, sao do tipo
∆d, Ee, ∆ada e Ea
ea .
Da Expressao (2.8) e da Proposicao 1.31 de Banon (1995, p. 49), tem-se que o numero
de operadores morfologicos elementares de janela W e espacialmente invariantes, de uma
dada classe, de K1E1 em K2
E2 , e dado por:
N(k1, k2, n) =
((k1 + k2)!
k1!k2!
)n
, (2.40)
onde, k1 = (#K1) − 1, k2 = (#K2) − 1 e n = #W . Para o caso das famılias de luts
parametricas, este numero e dado por:
N(k, n) = kn (2.41)
ou
N(k, n) = (k + 1)n (2.42)
48

Por exemplo, para qualquer uma das classes de operadores verificando as Expressoes
(2.26) a (2.29), com K1 = [0, 255], K2 = [0, 1] (k1 = 255 e k2 = 1) e n = 9, tem-se que o
numero de operadores morfologicos elementares e igual a:
N(255, 1, 9) =
((255 + 1)!
255!1!
)9
= 4722366482869645213696
Isto indica que o espaco de solucao e de grande dimensao.
2.4 Decomposicao Morfologica de Operadores de Janela e Espacialmente
Invariantes
Nesta Secao sao apresentadas as decomposicoes morfologicas de operadores de janela e
espacialmente invariantes, as quais sao dadas em termos dos operadores morfologicos
elementares parametrizados por luts.
Sejam K1 e K2 duas escalas de cinza (discretas ou contınuas), e sejam K1E1 e K2
E2 dois
conjuntos de imagens, cujos domınios sao E1 e E2, respectivamente.
Uma vez que as escalas de nıveis de cinza K1 e K2 formam duas cadeias finitas,
por extensao os conjuntos K1E1 e K2
E2 formam dois reticulados completos. Assim, os
operadores considerados sao operadores morfologicos e podem ser combinados atraves
das operacoes de uniao e interseccao.
A uniao e a interseccao (denotadas, respectivamente, por ∨ e ∧) de dois operadores Ψ1
e Ψ2, de K1E1 em K2
E2 , sao as extensoes, para o conjunto de operadores de K1E1 em
K2E2 , da uniao ∨ e da interseccao ∧ sobre as imagens de E2 em K2, respectivamente, ou
seja:
(Ψ1 ∨Ψ2)(f) = Ψ1(f) ∨Ψ2(f) (2.43)
(Ψ1 ∧Ψ2)(f) = Ψ1(f) ∧Ψ2(f), (2.44)
para todo f ∈ K1E1 .
Os primeiros resultados sobre decomposicao de operadores foram dados pelo Teorema
de Representacao de Matheron (Matheron, 1975). Deste teorema tem-se que: qualquer
49

operador, sobre imagens binarias, invariante por translacao e crescente pode ser expresso
como a uniao de erosoes, ou dualmente, como a interseccao de dilatacoes. Uma
generalizacao deste resultado, para operadores invariantes por translacao, mas nao
necessariamente crescentes, foi apresentada por Banon e Barrera (1991).
Estas decomposicoes foram extendidas para operadores sobre imagens em nıveis de cinza
por Banon e Barrera (1993). Estes resultados se aplicam, em particular, para o caso dos
operadores de janela W e espacialmente invariantes, conforme Proposicao 2.4.1.
Proposicao 2.4.1 (propriedade dos operadores de janela W e espacialmente
invariantes) - Sejam Ψ1 e Ψ2 dois operadores, de K1E1 em K2
E2, de janela W e
espacialmente invariantes. Entao, Ψ1 ∨ Ψ2 e Ψ1 ∧ Ψ2 sao dois operadores de janela
W e espacialmente invariantes.
Prova - Primeiro prova-se que se Ψ1 e Ψ2 sao dois operadores de janela (em relacao
a B), entao Ψ1 ∨Ψ2 e tambem um operador de janela (em relacao a B).
Para todo y ∈ E2 e para todo f1, f2 ∈ K1E1 , tal que f1/B(y) = f2/B(y), tem-se:
(Ψ1 ∨Ψ2)(f1)(y) = (Ψ1(f1) ∨Ψ2(f1))(y)
(definicao de ∨ entre operadores)
= Ψ1(f1)(y) ∨Ψ2(f1)(y)
(definicao de ∨ entre imagens)
= Ψ1(f2)(y) ∨Ψ2(f2)(y)
(hipotese e Expressao 2.3)
= (Ψ1(f2) ∨Ψ2(f2))(y)
(definicao de ∨ entre imagens)
= (Ψ1 ∨Ψ2)(f2)(y)
(definicao de ∨ entre operadores)
isto e, Ψ1 ∨Ψ2 e tambem um operador de janela (em relacao a B).
Em segundo lugar, prova-se que se Ψ1 e Ψ2 sao dois operadores de janela W e
espacialmente invariantes, entao Ψ1 ∨ Ψ2 e tambem um operador de janela W e
espacialmente invariante.
Sejam W, E1 e E2, tres retangulos de Z2, tal que E1 = E2 ⊕W . Seja B(y) = W + y,
para todo y ∈ E2. Sejam f ∈ K1E1 e y1, y2 ∈ E2 tais que f by1 = f by2 (onde, by e o
mapeamento dado pela Expressao 2.5). Entao,
50

(Ψ1 ∨Ψ2)(f)(y1) = (Ψ1(f) ∨Ψ2(f))(y1)
(definicao de ∨ entre operadores)
= Ψ1(f)(y1) ∨Ψ2(f)(y1)
(definicao de ∨ entre imagens)
= Ψ1(f)(y2) ∨Ψ2(f)(y2)
(hipotese e Expressao 2.4)
= (Ψ1(f) ∨Ψ2(f))(y2)
(definicao de ∨ entre imagens)
= (Ψ1 ∨Ψ2)(f)(y2)
(definicao de ∨ entre operadores)
isto e, Ψ1 ∨Ψ2 e um operador de janela W e espacialmente invariante.
Pelo princıpio da dualidade, o resultado relativo a interseccao e uma consequencia do
resultado relativo a uniao.
Lema 2.4.2 (distributividade da composicao em relacao a uniao/interseccao) - Sejam
W, E1 e E2, tres subconjuntos nao-vazios de Z2 e seja by um mapeamento de W em E1
definido pela Expressao 2.5. Para todo f1, f2 ∈ KE11 e y ∈ E2 tem-se que:
(f1 ∨ f2) by = (f1 by) ∨ (f2 by) (2.45)
e
(f1 ∧ f2) by = (f1 by) ∧ (f2 by). (2.46)
Prova - Sejam f1, f2 ∈ K1E1 e y ∈ E2. Entao, para todo u ∈ W , tem-se que:
51

((f1 ∨ f2) by)(u) = (f1 ∨ f2)(by(u))
(definicao de composicao)
= (f1 ∨ f2)(u + y)
(definicao de by - Expressao 2.5)
= f1(u + y) ∨ f2(u + y)
(definicao de ∨ entre imagens)
= f1(by(u)) ∨ f2(by(u))
(definicao de by)
= (f1 by)(u) ∨ (f2 by)(u)
(definicao de composicao)
= ((f1 by) ∨ (f2 by))(u).
(definicao de ∨ entre imagens)
Pelo princıpio da dualidade, o resultado relativo a interseccao e uma consequencia do
resultado relativo a uniao.
Dados os operadores ∆d, Ee, ∆ada e Ea
ea (Expressoes 2.36 a 2.39), denota-se por Λ e M,
os operadores de K1E1 em K2
E2 , definidos por:
Λ4= Ee ∧∆a
da (2.47)
M4= ∆d ∨ Ea
ea . (2.48)
Por construcao, os operadores Λ e M sao, respectivamente, operadores sup-geradores
e operadores inf-geradores (Banon e Barrera, 1993, p. 307, Definicao 4.1, p. 315,
Proposicao 5.5). Pela Proposicao 2.4.1, eles sao operadores de janela W e espacialmente
invariantes. Alem disto, todo operador sup-gerador (respectivamente, inf-gerador)
de janela W e espacialmente invariante e do tipo Λ (respectivamente, M). Estes
operadores sao chamados aqui, respectivamente, de operadores sup-geradores
e operadores inf-geradores parametrizados por luts. O conjunto dos
operadores de janela W e espacialmente invariantes, de K1E1 em K2
E2 , que sao
operadores sup-geradores (respectivamente, operadores inf-geradores) e denotado
52

por IWΛ(K1E1 ,K2
E2) (respectivamente, IWM(K1E1 ,K2
E2)) ou simplesmente, IWΛ
(respectivamente, IWM).
Seja Ψ um operador de janela W e espacialmente invariante, de K1E1 em K2
E2 . Para
todo g ∈ K1W , denota-se por µΨ(g) a expressao definida por:
µΨ(g)4= Ψ(f)(y), (2.49)
onde, y ∈ E2, f ∈ K1E1 tal que f by = g e by e o mapeamento dado pela Expressao 2.5.
Seja µ um mapeamento de K1W em K2. Este tipo de mapeamento e chamado de medida
por Banon (2000). Para todo f ∈ K1E1 e y ∈ E2, denota-se por Ψµ(f)(y) a expressao
definida por:
Ψµ(f)(y)4= µ(f by), (2.50)
onde by e o mapeamento dado pela Expressao 2.5.
Proposicao 2.4.3 (caracterizacao dos operadores sup-geradores de janela W e
espacialmente invariantes) - O mapeamento Ψ 7→ µΨ de IWΛ(KE11 , K2
E2) (conjunto
dos operadores sup-geradores de janela W e espacialmente invariantes) em Λ(K1W , K2)
(conjunto dos operadores sup-geradores de K1W em K2) e uma bijecao. Sua inversa e o
mapeamento µ 7→ Ψµ.
Prova - Pela Proposicao 4.20 de Banon (2000, p. 133), Ψ 7→ µΨ e uma bijecao de
IW(KE11 , K2
E2) no conjunto dos operadores de K1W em K2. Portanto, basta provar que
∀Ψ ∈ IWΛ, µΨ ∈ Λ e que ∀µ ∈ Λ, Ψµ ∈ IWΛ.
a) Seja Ψ ∈ IWΛ. Para todo g1, g2 ∈ K1W e para todo y ∈ E2, sejam f1, f2 ∈
K1E1 tais que g1 = f1 by e g2 = f2 by. Entao,
53

µΨ(g1 ∧ g2) ∧ µΨ(g1 ∨ g2) = µΨ((f1 by) ∧ (f2 by)) ∧ µΨ((f1 by) ∨ (f2 by))
(hipotese sobre f1 e f2)
= µΨ((f1 ∧ f2) by) ∧ µΨ((f1 ∨ f2) by)
(Lema 2.4.2)
= Ψ(f1 ∧ f2)(y) ∧Ψ(f1 ∨ f2)(y)
(definicao de µΨ)
= (Ψ(f1 ∧ f2) ∧Ψ(f1 ∨ f2))(y)
(definicao de ∧ entre imagens)
= (Ψ(f1) ∧Ψ(f2))(y)
(Ψ ∈ IWΛ)
= Ψ(f1)(y) ∧Ψ(f2)(y)
(definicao de ∧ entre imagens)
= µΨ(f1 by) ∧ µΨ(f2 by)
(definicao de µΨ)
= µΨ(g1) ∧ µΨ(g2)
(hipotese sobre f1 e f2)
isto e, pela definicao de operador sup-gerador (Banon e Barrera, 1993), µΨ ∈Λ.
54

b) Seja µ ∈ Λ. Para todo f1, f2 ∈ KE11 e para todo y ∈ E2,
(Ψµ(f1 ∧ f2) ∧Ψµ(f1 ∨ f2))(y) = Ψµ(f1 ∧ f2)(y) ∧Ψµ(f1 ∨ f2)(y)
(definicao de ∧ entre imagens)
= µ((f1 ∧ f2) by) ∧ µ((f1 ∨ f2) by)
(definicao de Ψµ)
= µ((f1 by) ∧ (f2 by)) ∧ µ((f1 by) ∨ (f2 by))
(Lema 2.4.2)
= µ(f1 by) ∧ µ(f2 by))
(µ ∈ Λ)
= Ψµ(f1)(y) ∧Ψµ(f2)(y)
(definicao de Ψµ)
= (Ψµ(f1) ∧Ψµ(f2))(y)
(definicao de ∧ entre imagens)
isto e, pela definicao de operador sup-gerador (Banon e Barrera, 1993), Ψµ ∈IWΛ.
Pelo princıpio da dualidade existe um resultado similar para os operadores inf-geradores.
Proposicao 2.4.4 (construcao dos operadores sup-geradores de janela W e
espacialmente invariantes) - Para todo Φ ∈ IWΛ, existem E ∈ IWE (conjunto das erosoes
de janela e espacialmente invariantes) e ∆a ∈ IW∆a (conjunto das anti-dilatacoes de
janela e espacialmente invariantes) tal que Φ = E ∧∆a.
Prova - Seja Φ ∈ IWΛ. Para todo f ∈ K1E1 e y ∈ E2, tem-se:
55

Φ(f)(y) = ΦµΦ(f)(y)
(Proposicao 4.20 de Banon (2000, p. 133))
= µΦ(f by)
(definicao de Ψµ)
= (ε ∧ δa)(f by)
(Proposicao 5.5 de Banon e Barrera (1993, p. 315)
e Proposicao 2.4.3, onde ε e uma erosao
e δa e uma anti-dilatacao)
= ε(f by) ∧ δa(f by)
(definicao de ∧)
= Ψε(f)(y) ∧Ψδa(f)(y)
(definicao de Ψµ)
= (Ψε ∧Ψδa)(f)(y)
(definicao de ∧ entre imagens e entre operadores)
isto e, ∃E, ∆a tal que Φ = E ∧∆a, bastando escolher E = Ψε e ∆a = Ψδa , com ε e δa tal
que ε ∧ δa = µΦ.
Pelo princıpio da dualidade existe um resultado equivalente a este para os operadores
inf-geradores, ou seja, para todo Φ ∈ IWM, existem ∆ ∈ IW∆ e Ea ∈ IWEa tal que
Φ = ∆ ∨ Ea. Este resultado pode ser provado de maneira similar.
A grande importancia dos operadores sup-geradores e inf-geradores esta no fato de que,
qualquer operador Ψ pode ser decomposto na uniao de operadores sup-geradores, ou de
forma equivalente, na interseccao de operadores inf-geradores (Banon e Barrera, 1993).
Esse resultado e conhecido como o Teorema da Decomposicao Canonica.
Proposicao 2.4.5 (isotonia da caracterizacao dos operadores de janela W e
espacialmente invariantes) - O mapeamento Ψ 7→ µΨ, de IW(K1E1 , K2
E2) no conjunto de
mapeamentos de K1W em K2, e um isomorfismo de conjuntos parcialmente ordenados.
Prova - Esta prova esta dividida em tres partes.
a) Pela Proposicao 4.20 de Banon (2000, p. 133), Ψ 7→ µΨ e uma bijecao e a sua
inversa e o mapeamento µ 7→ Ψµ.
56

b) Ψ 7→ µΨ e crescente, uma vez que, ∀Ψ1, Ψ2 ∈ IW tal que Ψ1 ≤ Ψ2, ∀ g ∈ K1W ,
∀ y ∈ E2, e f ∈ K1E1 tal que g = f by, tem-se:
µΨ1(g) = Ψ1(f)(y)
(definicao de µΨ)
≤ Ψ2(f)(y)
(Ψ1 ≤ Ψ2 e definicao de ≤ sobre IW)
= µΨ2(g)
(definicao de µΨ)
isto e, Ψ1 ≤ Ψ2 ⇒ µΨ1 ≤ µΨ2 .
c) µ 7→ Ψµ e crescente, uma vez que, para todo µ1 e µ2 do conjunto de
mapeamentos de K1W em K2, tal que µ1 ≤ µ2, ∀ f ∈ K1
E1 e ∀ y ∈ E2,
tem-se:
Ψµ1(f)(y) = µ1(f by)
(definicao de Ψµ)
≤ µ2(f by)
(µ1 ≤ µ2 e definicao de ≤ sobre o
conjunto de mapeamentos de
K1W em K2)
= Ψµ2(f)(y)
(definicao de Ψµ)
isto e, µ1 ≤ µ2 ⇒ Ψµ1 ≤ Ψµ2 .
Como consequencia da Proposicao 2.4.5 tem-se o corolario apresentado a seguir.
Corolario 2.4.6 (propriedade da caracterizacao dos operadores de janela W e
57

espacialmente invariantes) - Para todo µ de K1W em K2 e Ψ ∈ IW(K1
E1 , K2E2), tem-se:
µ ≤ µΨ ⇔ Ψµ ≤ Ψ. (2.51)
Prova - Pela Proposicao 2.4.5 e Exercıcio 1.51 de Banon (2000, p. 30), para todo
mapeamento µ1 e µ2 de K1W em K2, tem-se que:
µ1 ≤ µ2 ⇔ Ψµ1 ≤ Ψµ2 .
Entao, para todo mapeamento µ de K1W em K2 e Ψ ∈ IW(K1
E1 , K2E2) tem-se que:
µ ≤ µΨ ⇔ Ψµ ≤ ΨµΨ.
Mas pela Proposicao 4.20 de Banon (2000, p. 133), tem-se que:
µ ≤ µΨ ⇔ Ψµ ≤ Ψ.
Teorema 2.4.7 (decomposicao dos operadores de janela W e espacialmente
invariantes) - Seja Ψ ∈ IW. Entao,
Ψ =∨Φ ∈ IWΛ : Φ ≤ Ψ (2.52)
e
Ψ =∧Φ ∈ IWM : Ψ ≤ Φ. (2.53)
Prova - Seja Ψ ∈ IW. Para todo f ∈ K1E1 e y ∈ E2, tem-se:
58

Ψ(f)(y) = ΨµΨ(f)(y)
(Proposicao 4.20 de Banon (2000, p. 133))
= µΨ(f by)
(definicao de Ψµ)
=(∨λ ∈ Λ : λ ≤ µΨ
)(f by)
(Lema 6.1 de Banon e Barrera (1993, p. 316))
=∨λ(f by) : λ ∈ Λ e λ ≤ µΨ
(definicao de ∨)
=∨Ψλ(f)(y) : λ ∈ Λ e λ ≤ µΨ
(definicao de Ψµ)
=∨Ψλ(f)(y) : λ ∈ Λ e Ψλ ≤ Ψ
(Corolario 2.4.6)
=(∨Ψλ : λ ∈ Λ e Ψλ ≤ Ψ
)(f)(y)
(definicao de ∨ sobre imagens e operadores)
=(∨Φ ∈ IWΛ : Φ ≤ Ψ
)(f)(y)
(Proposicao 2.4.3)
isto e, Ψ =∨Φ ∈ IWΛ : Φ ≤ Ψ.
Pelo princıpio da dualidade tem-se que:
Ψ =∧Φ ∈ IWM : Ψ ≤ Φ.
Sejam
Ψ(p)Λ
4=
∨j∈p
Λj
e
Ψ(q)M
4=
∧j∈q
Mj
onde, Λj e Mj sao, respectivamente, operadores sup-geradores e inf-geradores dos tipos
dados pelas Expressoes 2.47 e 2.48, e p e q sao dois inteiros.
59

No caso de domınios e escalas de cinza finitos, o Teorema 2.4.7 tem o seguinte
desdobramento.
Corolario 2.4.8 (decomposicao dos operadores de janela W e espacialmente
invariantes em termos de operadores elementares parametrizados por luts) - Seja
Ψ um operador de janela W e espacialmente invariante de K1E1 em K2
E2 (Ψ ∈IW(K1
E1 , K2E2)). Se E1, E2, K1 e K2 sao finitos, entao existem dois inteiros p e q
tais que:
Ψ = Ψ(p)Λ (2.54)
e
Ψ = Ψ(q)M . (2.55)
Prova - A existencia de p e q decorre dos seguintes argumentos:
• E1 e K1 sendo dois conjuntos finitos tem-se que o conjunto de mapeamentos
K1E1 e tambem finito e de tamanho (#K1)
#E1 ;
• E2 e K2 sendo dois conjuntos finitos tem-se que o conjunto de mapeamentos
K2E2 e tambem finito e de tamanho (#K2)
#E2 ;
• KE11 e KE2
2 sendo dois conjuntos finitos tem-se que o conjunto
dos mapeamentos de KE21 em KE2
2 e tambem finito e de tamanho
((#K2)#E2)
((#K1)#E1 );
• Sendo o conjunto dos mapeamentos de KE21 em K2
E2 finito, qualquer
subconjunto de operadores de KE11 em K2
E2 e tambem finito (porque um
subconjunto de um conjunto finito e finito); em particular o subconjunto
Φ ∈ IWΛ : Φ ≤ Ψ e finito.
• Sendo Φ ∈ IWΛ : Φ ≤ Ψ finito, pelo Teorema 2.4.7, existe um numero
inteiro p de operadores de janela W e espacialmente invariantes cuja uniao e
Ψ.
• Sabendo que todo operador sup-gerador de janela W e espacialmente
invariante e do tipo Λ (Proposicao 2.4.4), entao tem-se Ψ = Ψ(p)Λ .
60

De forma similar prova-se que existe um inteiro q tal que Ψ = Ψ(q)M .
Caso o operador Ψ seja crescente, seus operadores sup-geradores ou inf-geradores se
reduzem a parte crescente, isto e, se tornam simplesmente erosoes ou dilatacoes, ou seja,
pode ser decomposto numa das seguintes formas:
Ψ4=
∨j∈p
Ee,j (2.56)
ou
Ψ4=
∧j∈q
∆d,j. (2.57)
2.5 Modelos de Operadores
O resultado do Corolario 2.4.8 sugere para o projeto de operadores a utilizacao dos
seguintes modelos de operadores:
M (p,w)Λ (K1
E1 , K2E2) =
∨j∈p
Λj : Λj ∈ IWΛ(K1E1 , K2
E2) e j ∈ p
(2.58)
M (q,w)M (K1
E1 , K2E2) =
∧j∈q
Mj : Mj ∈ IWM(K1E1 , K2
E2) e j ∈ q
(2.59)
M (p,w)E (K1
E1 , K2E2) =
∨j∈p
Ej : Ej ∈ IWE(K1E1 , K2
E2) e j ∈ p
(2.60)
M (q,w)∆ (K1
E1 , K2E2) =
∧j∈q
∆j : ∆j ∈ IW∆(K1E1 , K2
E2) e j ∈ q
(2.61)
onde, p e q sao aqui chamados de ordem do modelo e w e o tamanho da janela W .
As Figuras 2.7 e 2.8 mostram as estruturas dos operadores Ψ que pertencem aos modelos
dados pelas Expressoes 2.58 e 2.59, respectivamente.
61

∧
Λ1
dai,1
Ee,1
Ee,p
∧
Λp
ei,1
∆ada,p
∨
∆ada,1
ei,p
dai,p
∈ K1E1 ∈ K2
E2
f Ψ(p)Λ (f)
Ψ(p)Λ
FIGURA 2.7 – Estrutura dos operadores que pertencem ao modelo M (p,w)Λ .
M1
di,1 ∨
eai,1
di,q ∨
eai,q
∆d,q
∆d,1
Eaea,1
Eaea,q
Mq
Ψ(q)M (f)
∈ K2E2
∧f
∈ K1E1
Ψ(q)M
FIGURA 2.8 – Estrutura dos operadores que pertencem ao modelo M (q,w)M .
62

Considerando as composicoes de operadores pertencentes aos modelos dados pela
Expressoes 2.58 e 2.59, pode-se definir tambem os seguintes modelos:
M (p,q,w)ΛM (K1
E1 , K2E2) =
Φ Ψ : Ψ ∈M (p,w)
Λ e Φ ∈M (q,w)M
(2.62)
M (q,p,w)MΛ (K1
E1 , K2E2) =
Ψ Φ : Φ ∈M (q,w)
M e Ψ ∈M (p,w)Λ
. (2.63)
Para estes dois ultimos modelos a ordem deles e dada pelos pares (p, q) e (q, p),
respectivamente.
Nas Figuras 2.9 e 2.10 sao mostradas as estruturas dos operadores que pertencem aos
modelos dados pelas Expressoes 2.62 e 2.63, respectivamente, dados pela composicao de
operadores.
(d, ea)
∈ K2E2
Φ(q)M (Ψ
(p)Λ (f))
Φ(q)M
f
∈ K1E1 ∈ K2
E2
(e, da)
Ψ(p)Λ (f)
Ψ(p)Λ
FIGURA 2.9 – Estrutura dos operadores que pertencem ao modelo M (q,p,w)ΛM .
(e, da)
∈ K2E2
Ψ(p)Λ (Φ
(q)M (f))
Ψ(p)Λ
Φ(q)M (f)f
∈ K1E1 ∈ K2
E2
(d, ea)
Φ(q)M
FIGURA 2.10 – Estrutura dos operadores que pertencem ao modelo M (p,q,w)MΛ .
Seja Ω: KE11 7→ K2
E2 o operador unitario para a uniao entre operadores, isto e, Ω(f) = o,
∀f ∈ K1E1 . Este operador e util para provar a proposicao apresentada a seguir.
Proposicao 2.5.1 (propriedade dos modelos de operadores) - Sejam p1, p2, q1, q2 ∈ N,
w = 1, 3, 5, . . ., M (p1,w)Λ , M (p2,w)
Λ , M (q1,w)M e M (q2,w)
M , modelos de operadores de ordem p1,
63

p2, q1 e q2, respectivamente. Entao,
p1 < p2 ⇒M (p1,w)Λ ⊂M (p2,w)
Λ (2.64)
q1 < q2 ⇒M (q1,w)M ⊂M (q2,w)
M . (2.65)
Prova - Seja Ω : K1E1 7→ K2
E2 tal que Ω(f) = o, ∀f ∈ K1E1 . A prova esta dividida
em duas partes. Primeiro, prova-se que Ω ∈ IWΛ(K1E1 , K2
E2). Para todo f1, f2 ∈ K1E1 ,
tem-se que:
Ω(f1 ∧ f2) ∧ Ω(f1 ∨ f2) = o ∧ o
(definicao de Ω)
= Ω(f1) ∧ Ω(f2)
(definicao de Ω)
isto e, Ω e um operador sup-gerador.
E preciso provar agora que Ω e um operador de janela (em relacao a B). Para todo
y ∈ E2 e para todo f1, f2 ∈ K1E1 tal que f1/B(y) = f2/B(y), tem-se:
Ω(f1)(y) = 0
(definicao de Ω)
= Ω(f2)(y)
(definicao de Ω)
isto e, Ω e um operador de janela (em relacao a B).
Para todo f ∈ K1E1 e todo y1, y2 ∈ E2, tal que f by1 = f by2 , tem-se que:
64

Ω(f)(y1) = 0
(definicao de Ω)
= Ω(f)(y2)
(definicao de Ω)
isto e, Ω e um operador de janela W e espacialmente invariante.
Segundo, para w = 1, 3, 5, . . . e para todo Ψ ∈ IWΛ(K1E1 , K2
E2), tem-se que:
Ψ ∈M (p1,w)Λ ⇔ ∃Λ1, . . . , Λp1 ∈ IWΛ : Ψ =
∨j∈p1
Λj
(definicao de M (p,w)Λ )
⇒ ∃Λ1, . . . , Λp2 ∈ IWΛ : Ψ =∨
j∈p2
Λj
(basta escolher Λp1+1 = Ω, . . . , Λp2 = Ω, pois
Ω ∈ IWΛ (primeira parte da prova) e Ω e o
elemento unitario da uniao entre operadores)
⇔ Ψ ∈M (p2,w)Λ
(definicao de M (p,w)Λ )
isto e, p1 < p2 ⇒M (p1,w)Λ ⊂M (p2,w)
Λ .
A Expressao 2.65 pode ser provada de forma similar.
O resultado da Proposicao 2.5.1 e util, porque indica que, se e encontrada uma solucao
exata dentro de um modelo de ordem p, pode ser possıvel encontrar uma solucao exata
mais simples dentro de um modelo de ordem menor que ou igual a p. Isto e, pode-se
tentar procurar por uma ordem minimal para o modelo escolhido.
65


CAPITULO 3
ALGORITMO GENETICO E PROJETO DE OPERADORES
3.1 Introducao
Neste Capıtulo e apresentada uma breve revisao sobre o conceito de otimizacao e
algoritmos evolutivos. Na sequencia, e apresentado o Algoritmo Genetico (AG) concebido
por John Holland e seus colaboradores da Universidade de Michigan (De Jong, Ann
Arbor. 1975; Grefenstette, 1986; Goldberg, 1989; Holland, 1994). E finalmente, e
apresentada uma metodologia para projeto de operadores baseados em operadores
morfologicos elementares parametrizados por famılias de luts, que utiliza este AG para
encontrar os parametros destas luts.
3.2 Otimizacao e Algoritmos Evolutivos
A otimizacao na busca da melhor solucao para um dado problema consiste em tentar
varias solucoes e utilizar a informacao obtida neste processo para se chegar a solucoes
cada vez melhores. Entao, em geral, as tecnicas de busca e otimizacao trabalham com:
• um espaco de busca, onde estao todas as possıveis solucoes do problema;
• uma funcao objetivo, que associa a cada solucao um valor que sera utilizado
na sua avaliacao.
Matematicamente, o problema da otimizacao consiste em achar a solucao que corresponde
ao ponto de maximo ou de mınimo da funcao objetivo. Este problema pode ser de difıcil
solucao, uma vez que podem existir varios pontos de maximo (ou mınimo) nesta funcao
que nao representam o maior (ou menor) valor que a funcao pode atingir. Tais pontos
sao denominados por maximos (ou mınimos) locais, dado que a funcao nestes pontos
atinge valores maiores (ou menores) do que nas suas respectivas vizinhancas. A melhor
solucao para este problema esta no ponto em que a funcao possui valor maximo global
(ou mınimo global).
Nem todas as tecnicas de otimizacao sao capazes de localizar o ponto de maximo global
(ou mınimo global) de uma funcao com multiplos pontos de maximo (ou mınimo),
como por exemplo, os metodos do gradiente. Mas existe uma classe de algoritmos de
otimizacao, chamados de algoritmos evolutivos, que sao otimizadores globais. Estes
algoritmos utilizam estrategias baseadas na evolucao natural e na genetica. Eles tem
em comum a utilizacao de uma populacao de indivıduos, a qual representa as solucoes
67

candidatas de um determinado problema, e a evolucao desta populacao ao longo do tempo
(geracoes), com os indivıduos competindo entre si para sobreviverem e se reproduzirem.
Os algoritmos evolutivos ao imitarem a evolucao natural dos seres vivos, embora
muitas vezes com grandes simplificacoes, passam a possuir caracterısticas que os tornam
aplicaveis e capazes de obter boas solucoes para uma vasta quantidade de problemas
reais de otimizacao. Estas caracterısticas podem ser resumidas da seguinte forma:
• sao metodos de otimizacao global, robustos e podem encontrar varias solucoes;
• podem otimizar um grande numero de parametros discretos, contınuos ou
suas combinacoes;
• realizam buscas simultaneas em varias regioes do espaco de busca (paralelismo
inerente);
• utilizam informacoes de custo ou ganho e nao necessitam obrigatoriamente de
conhecimento matematico do problema (por exemplo, derivadas) ou outros
conhecimentos adicionais;
• podem ser eficientemente combinados com heurısticas e outras tecnicas de
busca local;
• sao modulares e facilmente adaptaveis a qualquer tipo de problema;
• utilizam regras de transicao probabilısticas, nao determinısticas.
O AG faz parte desta classe de algoritmos, juntamente com as estrategias evolutivas
(Rechenberg, 1973), a programacao evolutiva (Fogel et al., 1966), e a programacao
genetica (Koza, 1992).
A seguir e apresentada uma breve revisao dos principais conceitos e caracterısticas do AG.
Maiores detalhes sobre este assunto podem ser econtrados na literatura especializada,
dentre as quais tem-se: De Jong (Ann Arbor. 1975); Grefenstette (1986); Goldberg (1989);
Holland (1994); Mitchell (1996); Michalewicz (1999); Lorena e Furtado (2001).
3.3 Algoritmo Genetico
Em 1975, John Holland apresenta, em seu livro Adaptation in Natural and Artificial
Systems, o AG como uma abstracao do processo de evolucao biologica (Holland,
1994). Alguns refinamentos deste metodo foram apresentados posteriormente por alguns
pesquisadores: De Jong (Ann Arbor. 1975), Grefenstette (1986), Goldberg (1989).
68

O processo de evolucao biologica ocorre atraves de ciclos de geracoes fixas: cada indivıduo
nasce, cresce, normalmente gera um ou mais filhos e morre. Os filhos recebem atributos
geneticos dos pais que definem suas aparencias, o que e denominado fenotipo. As
informacoes geneticas estao codificadas num conjunto de genes, que sao as unidades
de transferencia de hereditariedade. Cada gene pode assumir um valor particular, o
alelo. Os genes formam os cromossomos, que por sua vez formam as cadeias de DNA
(acido desoxirribonucleico). Um conjunto de cromossomos em um organismo que define
sua informacao genetica completa e denominado genotipo.
O AG e um metodo adaptativo, inspirado nos mecanismos de evolucao de populacoes
de seres vivos, que pode ser utilizado para resolver problemas de busca e otimizacao em
problemas reais. Este algoritmo parte dos princıpios de selecao natural e de sobrevivencia
dos mais aptos, apresentados em 1859 por Charles Darwin em seu livro A Origem das
Especies. Segundo este princıpio os indivıduos mais bem adaptados ao meio tem maior
possibilidade de sobrevivencia.
Este princıpio e resultado da observacao de que as diferentes formas de vida podem passar
por processos de adaptacao, que ocorrem atraves de lentas transformacoes geneticas,
de geracao em geracao. E como esta adaptacao esta relacionada ao ambiente onde se
encontra o indivıduo, ela e uma medida relativa.
Entao, imitando este processo evolucionario o AG e capaz de simular os processos de
populacoes naturais (que sao essenciais para a evolucao) e fazer a evolucao de solucoes
para problemas reais.
O AG trabalha com uma populacao de indivıduos, representados por cromossomos,
em que cada um representa uma possıvel solucao (um ponto no espaco de solucoes)
de um dado problema. E a cada indivıduo e atribuıda uma nota de acordo com o
seu desempenho com relacao a solucao do problema. Na natureza isto e equivalente
a avaliar a capacidade de um organismo de competir por recursos. Aos indivıduos mais
aptos sao dadas oportunidades de se reproduzirem, atraves do cruzamento com outros
indivıduos da populacao. Isto produz novos indivıduos como descendentes, os quais
compartilham algumas caracterısticas herdadas dos indivıduos “pais”. Os indivıduos com
baixo desempenho tem poucas chances de serem selecionados para a reproducao.
A populacao e inicializada aleatoriamente, ou com base em algum conhecimento previo
da regiao do espaco de solucoes onde se encontra a solucao do problema, e evolui neste
espaco utilizando os operadores geneticos. Durante a busca, sao obtidas informacoes
da qualidade (valor da adaptacao) dos pontos do espaco de solucoes, as quais sao
69

utilizadas para direcionar esta busca, favorecendo a escolha (no processo de selecao)
dos indivıduos mais bem adaptados para a geracao de novos indivıduos. Os operadores
geneticos permitem misturar informacoes dos indivıduos de uma geracao e repassa-las
para os seus descendentes; e tambem a introducao de inovacoes na populacao. Portanto,
pode-se dizer que a populacao de indivıduos sofre um processo coletivo de aprendizagem.
Uma nova populacao completa de possıveis solucoes e entao produzida em duas fases.
Numa fase a populacao e modificada para produzir uma populacao intermediaria,
copiando-se indivıduos da populacao corrente de acordo com o desempenho individual
observado. O numero de copias e determinado estocasticamente, de forma que ele
seja proporcional ao desempenho observado. Na outra fase, dois operadores geneticos
sao aplicados a populacao intermediaria, trocando e modificando o conjunto de
caracterısticas, para produzir uma nova geracao. Esta nova geracao contem uma alta
proporcao das caracterısticas dos melhores indivıduos da geracao anterior. Desta forma,
ao longo de muitas geracoes, as caracterısticas boas sao espalhadas para a populacao e
misturadas e trocadas com outras boas que virao. Favorecendo o casamento de indivıduos
mais aptos, as areas mais promissoras do espaco de busca sao exploradas.
A potencia do AG vem do fato de que eles sao robustos e podem ser aplicados com
sucesso a problemas de diversas areas, incluindo aqueles que sao de difıcil solucao por
outros metodos. O AG nao garante encontrar a solucao otima global para um problema,
mas ele e geralmente bom para encontrar solucoes “aceitavelmente” boas num tempo
“aceitavelmente” rapido.
Para resolver um problema utilizando algoritmo genetico e necessario:
• representar as solucoes do problema por cromossomos codificados em cadeias
de caracteres de um dado alfabeto;
• criar uma populacao inicial de solucoes (em geral, aleatoriamente);
• escolher uma funcao de avaliacao para avaliar a adaptacao das solucoes;
• gerar novas solucoes por meio da aplicacao dos operadores geneticos as
solucoes da populacao corrente.
Os operadores geneticos mais comumente utilizados pelo AG sao:
• operador de selecao;
• operador de cruzamento;
70

• operador de mutacao.
Os operadores de cruzamento e mutacao sao os principais mecanismos do AG para
explorar as regioes desconhecidas do espaco de busca.
A Figura 3.1 mostra os componentes de um AG.
CruzamentoSelecaoFuncao de
MutacaoAdaptacao
AG
...
Proxima Geracao
1 1 0 0 1 0 1 0 0 1 1 1 1 0 0 0
0 1 1 1 0 0 1 0 0 1 1 1 1 0 0 1
1 0 1 1 1 0 1 1 0 1 1 0 1 0 1 01 0 1 1 1 0 1 1 0 1 1 0 1 0 1 0
0 0 1 1 1 1 0 1 1 0 0 0 0 1 1 1
...
Geracao Atual
0 0 1 1 0 0 1 0 0 1 1 1 1 0 0 0
0 1 1 1 0 0 1 0 0 1 1 1 1 0 0 1
1 1 0 0 1 1 0 1 1 0 0 0 0 1 1 1
FIGURA 3.1 – Componentes de um AG.
Uma representacao algorıtmica de um AG pode ser dada como mostrado na Figura 3.2,
onde os indivıduos de uma populacao sao representados por cromossomos codificados em
cadeias de caracteres de um dado alfabeto.
Como pode ser visto na Figura 3.2, o primeiro passo na execucao do AG e a geracao
de uma populacao inicial, formada por um conjunto aleatorio de cromossomos que
representam possıveis solucoes do problema a ser resolvido. Durante a evolucao estes
cromossomos sao avaliados e cada um recebe uma nota referente a sua adaptacao,
refletindo a qualidade da solucao que ele representa. Esta nota e utilizada no processo de
selecao para reproducao. Os cromossomos selecionados, em geral, sofrem modificacoes
em suas caracterısticas fundamentais por meio dos operadores geneticos, gerando
descendentes que formam a nova geracao. Este processo e repetido ate que uma solucao
satisfatoria seja encontrada.
A seguir sao apresentadas com mais detalhes cada etapa de um AG e os operadores
geneticos utilizados.
71

Seja P (t) a populacao de cromossomos na geracao t
t← 0;Inicializar P (t);Avaliar P (t);Enquanto nao (condicao de parada) fazer
t← t + 1;Selecionar P (t) de P (t− 1);Aplicar cruzamento sobre P (t);Aplicar mutacao sobre P (t);Avaliar P (t);
Fim do Enquanto
FIGURA 3.2 – Algoritmo genetico.
3.3.1 Representacao dos Parametros
Como ja mencionado anteriormente, um AG trabalha com populacoes de cromossomos
(indivıduos) onde cada um deles representa uma possıvel solucao de um dado problema.
Em geral, um cromossomo representa um conjunto de parametros da funcao a ser
maximizada ou minimizada. O conjunto de todas as configuracoes que um cromossomo
pode assumir forma o espaco de busca. Se o cromossomo representa n parametros de
uma funcao, entao o espaco de busca e um espaco com n dimensoes.
Entao, o primeiro passo para resolver um problema, utilizando um AG, e representar os
parametros deste problema na forma de um cromossomo.
No AG um cromossomo e repesentado por uma estrutura de dados, a qual e codificada
numa cadeia de comprimento c ≥ 0, utilizando um alfabeto A. O espaco das estruturas e
definido como sendo o conjunto de todas as estruturas e de comprimento c que podem ser
escritas com os caracteres de A. Entao o tamanho do espaco das estruturas e dado por
|A|c, onde |A| e o numero de sımbolos em A. Uma escolha comum para A e o conjunto
binario 0, 1. A Figura 3.3 mostra dois cromossomos quaisquer de uma populacao,
representados por cadeias binarias.
72

estrutura1 1100110110000111estrutura2 0011001001111000
FIGURA 3.3 – Dois cromossomos representados por cadeias binarias.
3.3.2 Operador de Selecao
Apos ter escolhido a representacao das solucoes do problema, o proximo passo e a escolha
de como executar a selecao, ou seja, como escolher os indivıduos da populacao que irao
gerar descendentes para a proxima geracao.
Inspirado no processo de selecao natural dos seres vivos, na fase de reproducao o
AG seleciona os cromossomos mais bem adaptados da populacao inicial para gerar
cromossomos filhos, ou seja, a chance de uma estrutura ser selecionada para gerar
descendentes e, em geral, proporcional a sua adaptacao. Os cromossomos selecionados
sao colocados numa populacao intermediaria.
Diversos metodos de selecao tem sido propostos desde o aparecimento do AG. Como
exemplos pode-se citar os seguintes metodos: da roda da roleta, da selecao por torneio,
do escalonamento linear, do escalonamento exponencial, elitista. Detalhes sobre estes
metodos e estudos comparativos podem ser encontrados na literatura sobre AGs, tais
como: Goldberg (1989); Goldberg e Deb (1991); Beasley et al. (1993); Mitchell (1996);
Lacerda e Carvalho (1999); Michalewicz (1999).
A adaptacao de uma estrutura e medida por uma funcao a : E → R+, onde E e
o conjunto das estruturas e R+ e o conjunto dos numeros reais nao negativos. Se a
funcao objetivo do problema de otimizacao for sempre positiva, entao ela podera ser
utilizada diretamente como sendo a funcao de adaptacao a. Caso contrario e necessario
mapear a funcao objetivo na funcao de adaptacao por meio de uma transformacao. Esta
transformacao depende se a funcao objetivo e de minimizacao ou de maximizacao, do
mecanismo de selecao e da funcao de escala utilizados (Goldberg, 1989).
3.3.3 Operador de Cruzamento
Se somente o operador de selecao fosse utilizado no AG, a populacao se tornaria cada vez
mais homogenea apos cada geracao. Entao, e utilizado o operador de cruzamento para
introduzir novas estruturas, atraves da recombinacao das estruturas existentes.
73

Em sistemas biologicos, o cruzamento e um processo de recombinacao de caracterısticas
por meio de troca de segmentos entre pares de cromossomos. Um cruzamento simples
pode ser realizado da seguinte forma:
• duas estruturas “pais” sao selecionadas (em geral, aleatoriamente) da
populacao atual;
• um ponto de cruzamento e selecionado (em geral, aleatoriamente);
• duas novas estruturas sao formadas a partir das estruturas “pais”,
permutando-se o conjunto de genes a direita do ponto de cruzamento de
um pai com aquele do outro pai.
Existem diversos tipos de operadores de cruzamento, mas os operadores de 1-ponto e
2-pontos sao os mais utilizados. A Figura 3.4 ilustra a aplicacao destes dois operadores
sobre o par de cromossomos 1100110110000111 e 0011001001111000.
Antes estrutura pai1 1100 110110000111estrutura pai2 0011 001001111000
Depois estrutura filho1 1100 001001111000estrutura filho2 0011 110110000111
(a)
Antes estrutura pai1 1100 1101100 00111estrutura pai2 0011 0010011 11000
Depois estrutura filho1 0011 1101100 11000estrutura filho2 1100 0010011 00111
(b)
FIGURA 3.4 – Operadores de cruzamento: (a) 1-ponto, (b) 2-pontos.
Para evitar um desenvolvimento caotico, nem todas as estruturas na nova populacao sao
geradas atraves do operador de cruzamento. Entao, este operador e aplicado com uma
dada probabilidade pc (ou taxa de cruzamento), sobre os cromossomos selecionados. Na
pratica esta taxa de cruzamento varia entre 60% e 90% (Beasley et al., 1993). Quando
74

nao ocorre o cruzamento, os filhos serao copias iguais aos pais, o que permite que algumas
solucoes sejam preservadas.
3.3.4 Operador de Mutacao
Numa populacao que tem um conjunto de estruturas relativamente pequeno, existe
sempre a possibilidade da ultima copia de alguma caracterıstica ser eliminada durante a
selecao. As caracterısticas que ocorrem em estruturas com desempenho abaixo da media
sao particularmente suscetıveis de serem eliminadas; porem, em algum estagio posterior
estas mesmas caracterısticas podem ser requeridas numa combinacao necessaria para o
melhoramento da solucao, isto e, a caracterıstica perdida pode ser necessaria para escapar
de um pico falso. Uma vez que a caracterıstica foi perdida da populacao, o operador
de cruzamento nao tem como reintroduzı-la. Esta tarefa e executada unicamente pela
mutacao, porque ela assegura que nenhuma caracterıstica desaparece permanentemente
de uma populacao, garantindo que o operador de cruzamento tenha um espectro completo
de caracterısticas, de forma que o algoritmo nao fique preso num mınimo local.
Em genetica, a mutacao e o processo em que uma caracterıstica de um gene e
aleatoriamente substituıda (ou modificada) por outra, para produzir uma nova estrutura.
Geralmente, existe uma pequena probabilidade de mutacao em cada gene na estrutura.
Apos a operacao de cruzamento, o operador de mutacao e aplicado em cada bit dos
filhos gerados, com uma dada probabilidade, denominada taxa de mutacao pm. Por um
lado a mutacao aumenta a diversidade dos cromossomos na populacao, mas por outro
ela destroi informacoes contidas nos cromossomos. Por esta razao, deve-se utilizar uma
taxa de mutacao pequena mas suficiente para asseguar a diversidade, normalmente entre
0, 1% a 5% (Beasley et al., 1993).
Desta maneira, o operador de mutacao introduz mudancas aleatorias nas estruturas da
populacao atraves da alteracao de um sımbolo da estrutura. No processo de mutacao
cada estrutura na populacao e manipulada da seguinte forma:
• posicoes (genes) dentro da estrutura (cromossomo) sujeitas a mutacoes
sao determinadas (por um processo aleatorio em que cada posicao tem
uma pequena probabilidade de sofrer mutacao, independentemente do que
acontece em outras posicoes);
• uma nova estrutura e formada colocando em cada posicao da estrutura
existente, selecionada aleatoriamente, uma nova caracterıstica dentre os
valores possıveis, os quais sao igualmente candidatos.
75

A Figura 3.5 ilustra a aplicacao deste operador sobre a estrutura filho1 da Figura 3.4(a).
Antes estrutura filho1 1100001001111000
Depois estrutura filho1 1100101001111000
FIGURA 3.5 – Operador de mutacao.
Se sucessivas populacoes sao produzidas por mutacao somente, o resultado e uma
sequencia aleatoria de estruturas do conjunto de todas as estruturas possıveis.
3.3.5 Criterio de Parada
Apos a definicao da populacao inicial, o procedimento se repete por um dado numero
de geracoes. Nao ha um criterio exato para se terminar a execucao do AG. Porem,
com 95% dos cromossomos representando o mesmo valor e possıvel dizer que o algoritmo
convergiu (Lacerda e Carvalho, 1999). Ou quando nao ocorrer melhoramento significativo
no cromossomo de maior aptidao por um dado numero de geracoes.
Uma outra possibilidade e utilizar o valor maximo da funcao objetivo como criterio de
parada do AG, quando se conhece este valor.
Ou ainda, um criterio de parada bastante utilizado e aquele dado por um numero maximo
de geracoes, fixado antes do inıcio da execucao do AG.
3.4 Projeto de Operadores Utilizando Algoritmo Genetico
Nesta Secao e apresentado o metodo proposto neste trabalho para projeto de operadores.
Este metodo esta baseado nos modelos de operadores apresentados no Capıtulo 2 -
Secao 2.5 e utiliza o AG apresentado na Secao 3.3 para encontrar os parametros destes
operadores.
A escolha do modelo a ser utilizado no projeto de um operador e feita em funcao das
propriedades do operador Ψ a ser projetado, muito embora aqueles modelos baseados na
decomposicao canonica sejam gerais.
Como apresentado no Capıtulo 2, estes modelos sao dados em funcao dos operadores
76

morfologicos elementares (dilatacoes, erosoes, anti-dilatacoes, anti-erosoes). No caso
particular deste trabalho, estes operadores morfologicos elementares sao parametrizados
por famılias de luts morfologicas elementares, como aquelas apresentadas nas Secoes
2.3.1.1 (Expressoes (2.9) a (2.25)) e 2.3.1.2 (Expressoes (2.26) a (2.29)) do Capıtulo 2.
Entao, o problema do projeto de um operador Ψ (de janela e espacialmente invariante) a
ser resolvido pode ser colocado da seguinte forma: dadas duas imagens f ∈ K1E e Ψ(f) ∈
K2E e um modelo de operador, encontrar quais sao as luts morfologicas elementares, que
parametrizam os operadores morfologicos elementares, que oferecem uma aproximacao∧Ψ (dentro do modelo escolhido) do operador Ψ, tal que a distancia d(
∧Ψ (f), Ψ(f)) seja
mınima.
O metodo proposto para resolver este problema utiliza o algoritmo genetico simples
de Goldberg (1989), descrito na Secao 3.3, para encontrar os parametros das luts.
A implementacao computacional do AG, utilizada neste trabalho, e aquela realizada
por Smith et al. (1994b,a), que recebe o nome de SGA (do ingles, Simple Genetic
Algorithm), com as alteracoes necessarias para aplicacao corrente. Estas alteracoes estao
relacionadas a interpretacao dos cromossomos e a medida de avaliacao da adaptacao
destes cromossomos na solucao do problema.
A Figura 3.6 mostra um esquema geral do projeto de operador utilizando o SGA. As
aproximacoes de Ψ sao representadas pelos operadores∧Ψli (onde, li sao luts morfologicas
elementares) e as imagens de saıda∧Ψli (f) destes operadores sao comparadas com a
imagem Ψ(f) atraves de uma medida de distancia d. O resultado desta comparacao e
utilizado pelo SGA, durante a evolucao, para gerar as novas famılias de luts. A solucao
do projeto de um operador Ψ, pelo SGA, e dada pela melhor aproximacao∧Ψli deste
operador, em funcao da distancia d.
Conforme mencionado na Secao 3.3, para resolver um problema utilizando um
algoritmo genetico e necessario: codificar as solucoes do problema em cadeias de genes
(cromossomos) e escolher uma medida para avaliar a adaptacao das solucoes. Entao, a
seguir sao apresentadas a codificacao e as medidas de avaliacao utilizadas neste trabalho,
no projeto de operadores utilizando-se o algoritmo genetico descrito na Secao 3.3.
77

AG
d
d
d
d
M
f
∈ K1E1
∈ K2E2
Ψ(f)
∧Ψl1
∧Ψlp−1
∧Ψlp
∧Ψl2
∧Ψlp (f)
∧Ψl1 (f)
∧Ψl2 (f)
∧Ψ
∧Ψlp−1 (f)
d(Ψ,∧Ψlp)
d(Ψ,∧Ψl1)
d(Ψ,∧Ψlp−1)
d(Ψ,∧Ψl2)
FIGURA 3.6 – Esquema geral do projeto de operador utilizando o SGA.
78
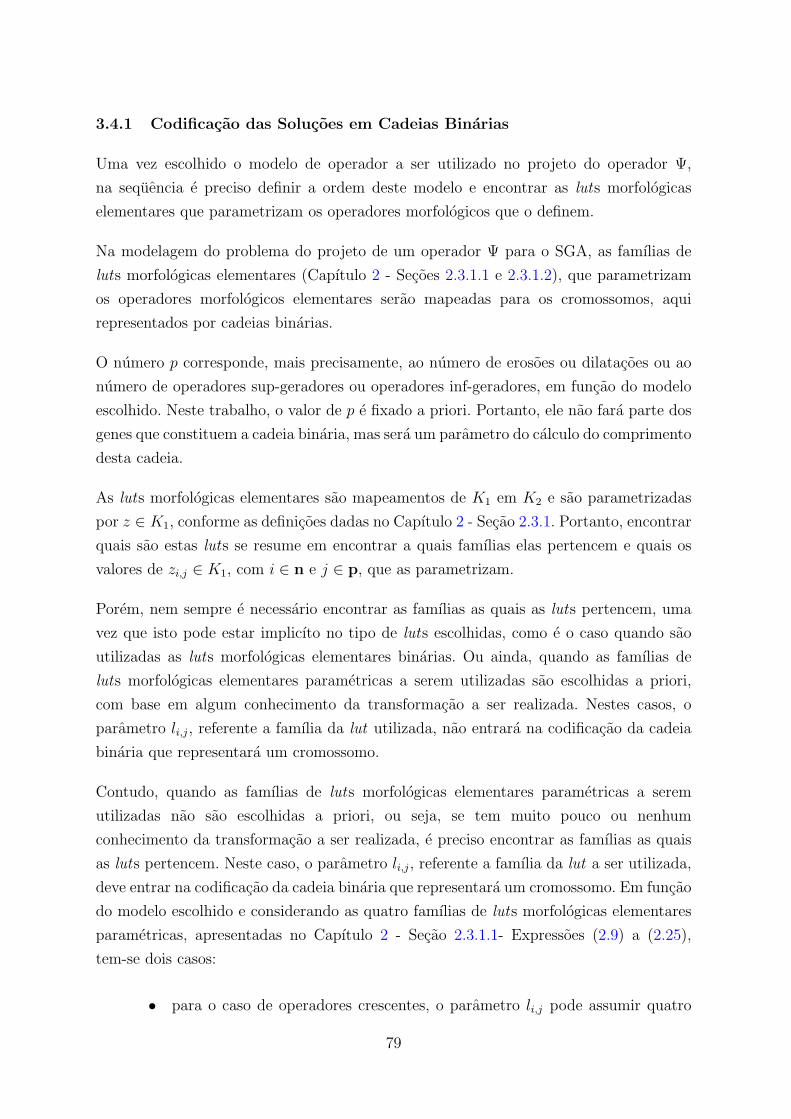
3.4.1 Codificacao das Solucoes em Cadeias Binarias
Uma vez escolhido o modelo de operador a ser utilizado no projeto do operador Ψ,
na sequencia e preciso definir a ordem deste modelo e encontrar as luts morfologicas
elementares que parametrizam os operadores morfologicos que o definem.
Na modelagem do problema do projeto de um operador Ψ para o SGA, as famılias de
luts morfologicas elementares (Capıtulo 2 - Secoes 2.3.1.1 e 2.3.1.2), que parametrizam
os operadores morfologicos elementares serao mapeadas para os cromossomos, aqui
representados por cadeias binarias.
O numero p corresponde, mais precisamente, ao numero de erosoes ou dilatacoes ou ao
numero de operadores sup-geradores ou operadores inf-geradores, em funcao do modelo
escolhido. Neste trabalho, o valor de p e fixado a priori. Portanto, ele nao fara parte dos
genes que constituem a cadeia binaria, mas sera um parametro do calculo do comprimento
desta cadeia.
As luts morfologicas elementares sao mapeamentos de K1 em K2 e sao parametrizadas
por z ∈ K1, conforme as definicoes dadas no Capıtulo 2 - Secao 2.3.1. Portanto, encontrar
quais sao estas luts se resume em encontrar a quais famılias elas pertencem e quais os
valores de zi,j ∈ K1, com i ∈ n e j ∈ p, que as parametrizam.
Porem, nem sempre e necessario encontrar as famılias as quais as luts pertencem, uma
vez que isto pode estar implicıto no tipo de luts escolhidas, como e o caso quando sao
utilizadas as luts morfologicas elementares binarias. Ou ainda, quando as famılias de
luts morfologicas elementares parametricas a serem utilizadas sao escolhidas a priori,
com base em algum conhecimento da transformacao a ser realizada. Nestes casos, o
parametro li,j, referente a famılia da lut utilizada, nao entrara na codificacao da cadeia
binaria que representara um cromossomo.
Contudo, quando as famılias de luts morfologicas elementares parametricas a serem
utilizadas nao sao escolhidas a priori, ou seja, se tem muito pouco ou nenhum
conhecimento da transformacao a ser realizada, e preciso encontrar as famılias as quais
as luts pertencem. Neste caso, o parametro li,j, referente a famılia da lut a ser utilizada,
deve entrar na codificacao da cadeia binaria que representara um cromossomo. Em funcao
do modelo escolhido e considerando as quatro famılias de luts morfologicas elementares
parametricas, apresentadas no Capıtulo 2 - Secao 2.3.1.1- Expressoes (2.9) a (2.25),
tem-se dois casos:
• para o caso de operadores crescentes, o parametro li,j pode assumir quatro
79

valores, ou seja, li,j ∈ [1, 4], uma vez que o modelo e dado por erosoes ou
dilatacoes parametrizadas por uma das quatro famılias de luts morfologicas
elementares parametricas;
• para o caso geral, o parametro li,j pode assumir dezesseis valores, ou
seja, li,j ∈ [1, 16], uma vez que este modelo e dado em termos de
operadores sup-geradores ou inf-geradores, os quais sao dados por erosoes e
anti-dilatacoes ou dilatacoes e anti-erosoes, respectivamente, parametrizadas
por uma das quatro famılias de luts morfologicas elementares parametricas.
Para ambos os casos, o parametro li,j e codificado numa cadeia binaria (cb). Por
conveniencia de implementacao, cada valor de li,j utilizara oito bits para ser representado
nesta cadeia binaria. Como ao converter esta cadeia da base 2 para 10 e encontrado um
numero no intervalo [0, 28−1], e necessario mapea-lo para o intervalo do problema ([1, 4]
ou [1, 16], como mencionado anteriormente). Isto pode ser feito das seguintes formas,
respectivamente:
li,j =
⌊cb
64+ 1
⌋(3.1)
li,j =
⌊cb
16+ 1
⌋, (3.2)
onde, cb ∈ [0, 28−1] e b.c denota uma operacao de arredondamento para o numero inteiro
igual ou imediatamente inferior ao valor encontrado.
Por exemplo, as cadeias binarias
00010110 e 11111110
representam os numeros inteiros 22 e 254, que mapeados para o intervalo do problema
resultam em:
li,j = 1 e li,j = 4
ou
li,j = 2 e li,j = 16,
80

em funcao do modelo escolhido.
Os valores zi,j, que parametrizam as luts morfologicas elementares, tambem sao
codificados em cadeias binarias. Como zi,j ∈ K1 e, em geral, K1 = [0, 255], sao necessarios
oito bits para representar cada valor de z na cadeia binaria. Por exemplo, zi,j = 50 e
zi,j = 120 serao representados, respectivamente, pelas seguintes cadeias binarias:
00110010 e 01111000.
Como um operador∧Ψ e representado por um modelo que e dado por p operadores
elementares e estes operadores sao parametrizados por luts morfologicas elementares, o
comprimento da cadeia binaria que representa um indivıduo na populacao sera dado em
funcao destes parametros.
Sejam n o numero de elementos da janela W (como definido na Secao 2.2), p o numero de
operadores do modelo (ordem do modelo), npop o numero de parametros que definem um
operador da decomposicao e nbits o numero de bits para representar um numero inteiro
na cadeia (como por exemplo, zi,j). Entao, o comprimento da cadeia binaria (ccb), que
representa um indivıduo (cromossomo) na populacao, e dado pela seguinte expressao:
ccb = npop ∗ nbits ∗ n ∗ p. (3.3)
Entao, neste trabalho um indivıduo representa um certo numero de possıveis operadores
que definem o modelo utilizado, ou seja, as luts morfologicas elementares que
parametrizam estes operadores e seus parametros.
Como neste trabalho nbits = 8, tem-se que:
ccb = 8 ∗ npop ∗ n ∗ p. (3.4)
O parametro npop pode assumir os valores 1, 2 ou 3, em funcao do modelo escolhido e
das luts utilizadas nesta decomposicao.
Por exemplo, se o operador Ψ for dado pela uniao de quatro erosoes (ou pela interseccao
de quatro dilatacoes), parametrizadas por luts morfologicas elementares binarias ou por
luts morfologicas elementares parametricas escolhidas a priori, e for utilizada uma janela
81

3× 3, tem-se: p = 4, npop = 1 e n = 9. Portanto, o comprimento da cadeia binaria (ccb),
que representa uma solucao (um indivıduo da populacao), e igual a:
ccb = 8 ∗ 1 ∗ 9 ∗ 4 = 288.
No caso do operador Ψ ser dado pela uniao de quatro erosoes (ou pela interseccao de
quatro dilatacoes), parametrizadas por luts morfologicas elementares parametricas sem
escolha a priori (dentre as quatro famılias utilizadas neste trabalho), e for utilizada uma
janela 3× 3, tem-se: p = 4, npop = 2 e n = 9. Portanto, o comprimento da cadeia binaria
(ccb), que representa uma solucao (um indivıduo da populacao), e igual a:
ccb = 8 ∗ 2 ∗ 9 ∗ 4 = 576.
Se o operador Ψ for dado pela uniao de quatro operadores sup-geradores (ou pela
interseccao de quatro operadores inf-geradores), parametrizados por luts morfologicas
elementares binarias ou por luts morfologicas elementares parametricas, escolhidas a
priori, e for utilizada uma janela 3 × 3, tem-se: p = 4, npop = 2 e n = 9. Portanto,
o comprimento da cadeia binaria (ccb), que representa uma solucao (um indivıduo da
populacao), e igual a:
ccb = 8 ∗ 2 ∗ 9 ∗ 4 = 576.
Um outro caso que pode ocorrer e se o operador Ψ for dado pela uniao de quatro
operadores sup-geradores (ou pela interseccao de quatro operadores inf-geradores),
parametrizados por luts morfologicas elementares parametricas sem escolha a priori
(dentre as quatro famılias de luts utilizadas neste trabalho), e for utilizada uma janela
3×3. Neste caso, tem-se que p = 4, npop = 3 e n = 9, e o comprimento da cadeia binaria
(ccb), que representa uma solucao (um indivıduo da populacao), e igual a:
ccb = 8 ∗ 3 ∗ 9 ∗ 4 = 864.
As operacoes do SGA (cruzamento e mutacao) sao aplicadas sobre as cadeias binarias e
na sequencia estas cadeias binarias sao convertidas para os respectivos valores inteiros,
os quais representam a identificacao das luts a serem utilizadas e os seus parametros z′s.
82

Estes valores sao aplicados a imagem de entrada f , gerando a imagem de saıda∧Ψlj (f),
como ilustrado na Figura 3.6.
A seguir sao apresentadas as funcoes de adaptacao utilizadas neste trabalho.
3.4.2 Funcao de Adaptacao
Como o operador desejado e representado por meio de pares de imagens entrada/saıda
(cada par e formado por uma imagem a ser processada e uma imagem desejada apos o
processamento), este operador sera definido a partir destes pares de imagens.
Seja d uma distancia entre imagens que tenham o mesmo domınio. Entao, como
mencionado na Secao 3.4 deste Capıtulo, o problema do projeto de operador a
ser resolvido consiste em encontrar quais sao as luts morfologicas elementares que
parametrizam uma aproximacao∧Ψ do operador Ψ, tal que a distancia d(
∧Ψ (f), Ψ(f))
seja mınima.
Cada indivıduo da populacao representa uma solucao, que e uma aproximacao∧Ψ do
operador Ψ. Entao, para avaliar a adaptacao dos indivıduos da populacao deve-se
comparar a imagem∧Ψ (f), produzida por cada indivıduo, com a imagem de saıda Ψ(f),
atraves de uma medida de distancia d.
Neste trabalho sao utilizadas as seguintes distancias:
• contagem de pixels diferentes, quando as imagens sao binarias;
• Euclidiana, quando as imagens sao em nıveis de cinza.
Estas distancias sao utilizadas para calcular o valor de adaptacao de cada indivıduo, a
partir do qual o SGA seleciona quais destes indivıduos irao gerar descendentes. A seguir
sao apresentadas as funcoes de adaptacao baseadas nestas distancias.
A distancia entre as imagens∧Ψ (f) e Ψ(f) atraves da contagem do numero de pixels
diferentes entre elas e dada por:
d1(∧Ψ (f), Ψ(f))
4= #x ∈ E2 :
∧Ψ (f)(x) 6= Ψ(f)(x) (3.5)
para todo f ∈ K1E1 e Ψ,
∧Ψ: K1
E1 7−→ K2E2 ; onde, #A representa o numero de elementos
do conjunto A. E importante a utilizacao do sinal 6= na Expressao 3.5, uma vez que a
distancia entre∧Ψ (f) e Ψ(f) deve ser zero quando as duas imagens sao iguais.
83

No caso das imagens binarias utiliza-se a funcao de adaptacao dada por:
ad1(∧Ψ) =
(c
d1 + 1
)r
, (3.6)
onde, d1 denota a distancia dada pela Expressao 3.5, c e uma constante escolhida para
normalizar ad1 , e r e um fator de escalonamento (Goldberg, 1989).
Para o caso da imagens em nıveis de cinza nao e feito o calculo explıcito da distancia
Euclidiana. Utilizando o fato de que a minimizacao da distancia Euclidiana e equivalente
a maximizacao do coeficiente de correlacao, a funcao de adaptacao e dada por:
aρ(∧Ψ) = ρ(
∧Ψ (f), Ψ(f)) + 1, (3.7)
onde, ρ denota o coeficiente de correlacao dado pela Expressao 3.11.
Para calcular o coeficiente de correlacao entre duas imagens utiliza-se a informacao de
brilho medio destas imagens, dada pela media aritmetica como definida a seguir.
Seja f ∈ K1E1 . A media de f, denotada por µ(f), e o numero real dado por:
µ(f) =1
#E1
∑x∈E1
f(x), (3.8)
onde #E1 e o numero de elementos de E1.
De forma a simplificar a apresentacao do coeficiente de correlacao, introduz-se as
seguintes expressoes:
Ψ′(f)(x)4= Ψ(f)(x)− µ(Ψ(f)) (3.9)
∧Ψ′ (f)(x)
4=
∧Ψ (f)(x)− µ(
∧Ψ (f)), (3.10)
onde, x ∈ E1 e µ e a media dada pela Expressao 3.8.
84

O coeficiente de correlacao entre∧Ψ (f) e Ψ(f) e definido por:
ρ(∧Ψ (f), Ψ(f))
4=
∑x∈E Ψ′(f)(x)
∧Ψ′ (f)(x)(∑
x∈E Ψ′2(f)(x)∑
x∈E
∧Ψ′
2
(f)(x)
)1/2(3.11)
para todo f ∈ K1E1 e Ψ,
∧Ψ: K1
E1 7−→ K2E2 .
3.4.3 Operadores Geneticos Utilizados no Projeto de Operadores
O metodo de selecao utilizado neste trabalho e o metodo de selecao por torneio. Neste
metodo sao escolhidos aleatoriamente (com probabilidades iguais) t cromossomos da
populacao, onde t e o tamanho do torneio, e o cromossomo com maior valor de adaptacao
e selecionado e sua copia e alocada para a populacao intermediaria (Goldberg, 1989;
Goldberg e Deb, 1991; Mitchell, 1996; Lacerda e Carvalho, 1999). Isto se repete ate
preencher a populacao intermediaria, que e do mesmo tamanho da populacao atual, uma
vez que este valor e fixo ao longo de todas as geracoes.
O operador de cruzamento utilizado neste trabalho e o operador de cruzamento de
1-ponto, apresentado na Secao 3.3.3. E o operador de mutacao e aquele apresentado
na Secao 3.3.4.
O criterio de parada utilizado e aquele dado por um numero maximo de geracoes, fixado
antes do inıcio da execucao do SGA.
85


CAPITULO 4
EXPERIMENTOS E RESULTADOS
4.1 Introducao
Neste Capıtulo sao apresentados os experimentos realizados e os respectivos resultados
alcancados no decorrer deste trabalho, por meio da aplicacao do metodo proposto para
projeto automatico de operadores de imagens, apresentado no Capıtulo 3.
Conforme ja mencionado no Capıtulo 3 - Secao 3.4, a implementacao computacional
do AG utilizada neste trabalho e aquela realizada por Smith et al. (1994b,a), com as
devidas adaptacoes. Esta implementacao e referida no texto pelo mesmo nome dado por
seus autores, ou seja, por SGA.
O metodo proposto pressupoe a existencia de amostras de pares de imagens
entrada/saıda, ou seja, de pares de imagens formados por uma imagem a ser processada
(entrada) e uma imagem desejada apos o processamento (saıda). Estes pares de imagens,
que representam uma classe de operadores, sao utilizados pelo SGA para projetar o
operador desejado. Neste trabalho os pares de imagens entrada/saıda utilizados pelo
SGA sao denominados por imagens de treinamento.
Em alguns experimentos o operador projetado sera avaliado utilizando-se um par de
imagens diferente do par de imagens de treinamento. Este par de imagens utilizado na
avaliacao do operador projetado e denominado imagens de validacao. Por sua vez, as
imagens de treinamento poderao ser sub-imagens das imagens de validacao.
Nestes experimentos sao utilizadas imagens sinteticas e imagens reais. As imagens
sinteticas sao imagens simples e foram geradas manualmente; as imagens reais sao
provenientes de alguns dispositivos de aquisicao de imagens digitais e de algumas areas
de estudo (biologia, industria, sensoriamento remoto).
Neste trabalho alguns parametros de entrada e incializacao do SGA tem valores fixos
para todos os experimentos apresentados no decorrer deste Capıtulo, os quais sao
escolhidos por tentativa-e-erro e/ou com base na literatura (como e o caso dos valores de
probabilidade de cruzamento e mutacao). Os demais parametros tem valores variaveis e
tambem sao escolhidos por tentativa-e-erro. A escolha destes valores, por tentativa-e-erro,
nem sempre coincide com o melhor valor possıvel, mas apenas possibilita que o SGA
encontre uma solucao para o problema. A Tabela 4.1 apresenta como sao denotados
estes parametros e os respectivos valores, no decorrer deste Capıtulo.
87

TABELA 4.1 – Sımbolos utilizados para denotar os parametros de entrada e inicializacaoe os resultados do SGA.
Descricao Sımbolo Valor
Comprimento do cromossomo ccb variavelConstante para normalizar o valor da adaptacao (para saıda binaria) c 10Expoente da funcao de adaptacao (para saıda binaria) r 1Numero da geracao do melhor indivıduo ngmi variavelNumero de bits para representar um numero inteiro nbits 8Numero de geracoes ng variavelProbabilidade de cruzamento pc 0,85Probabilidade de mutacao pm 0,01Semente para geracao de numeros aleatorios srand 1Tamanho da populacao tp variavelTamanho do torneio para selecao tt variavelValor de adaptacao do melhor indivıduo ami variavel
Como o comprimento do cromossomo (ccb) e dado em funcao do modelo utilizado e
seus parametros (p e/ou q, w, nop) e tambem do numero de bits para representar um
numero inteiro (nbits) - Capıtulo 3 - Secao 3.4.1, a escolha por tentativa-e-erro recai
principalmente sobre os parametros do modelo, sobretudo sobre p e/ou q (os quais
definem a ordem do modelo), uma vez que nbits = 8 e w tem sido fixado igual a 1
ou 3 neste trabalho.
Por conveniencia, as imagens que ilustram os resultados das aplicacoes dos operadores
projetados∧Ψ, mostradas neste Capıtulo, tem como domınio E1 e nao E2. Estas imagens
sao denotadas por g e sao dadas pela seguinte expressao:
g(y) =
∧Ψ (f)(y), se y ∈ E2
∀y ∈ E1
k, caso contrario
(4.1)
onde, k = 0 ou 255, dependendo do modelo utilizado.
A seguir sao apresentados os experimentos realizados, com imagens sinteticas e reais,
para projetar operadores.
4.2 Experimentos com Imagens de uma Cruz
Os experimentos apresentados nesta Secao tem como objetivo mostrar a aplicacao do
metodo de projeto de operadores proposto (Capıtulo 3 - Secao 3.4), para a extracao de
88

objetos de uma imagem em nıveis de cinza, gerando uma imagem binaria. No caso dos
experimentos desta Secao, o objeto a ser extraıdo e uma cruz com largura de um pixel.
Estes experimentos tem tambem como objetivo mostrar que e possıvel, em certos casos,
deduzir a ordem mınima do modelo, assim como, verificar o fato de que este modelo pode
ser apenas crescente. Isto e possıvel porque os modelos utilizados contem solucoes exatas
do problema.
A Figura 4.1 mostra o par de imagens de treinamento para estes experimentos, sendo a
primeira uma imagem em nıveis de cinza e a segunda uma imagem binaria, ambas de
tamanho 11× 9. A Figura 4.2 mostra as representacoes numericas destas imagens, para
facilitar a visualizacao da aplicacao do operador projetado sobre a imagem da Figura
4.1(a).
(a) (b)
FIGURA 4.1 – Imagens de uma cruz - 11 × 9: (a) imagem de entrada (em nıveis decinza), (b) imagem de saıda (binaria).
Para projetar o operador desejado sao utilizados os seguintes modelos:
• M (p,w)Λ
([0, 255]E1 , 0, 255E2
), para p = 4, 2, 1 e w = 3;
• M (p,w)E
([0, 255]E1 , 0, 255E2
), para p = 1 e w = 3, 1.
O fato da imagem de saıda ser binaria e utilizado como conhecimento a priori na escolha
destes modelos, ou seja, na escolha do tipo de lut. Alem disto, o modelo M (p,w)E utiliza
tambem, como conhecimento a priori, o fato do operador desejado ser crescente.
89

10019590909090
10090 90 90 90 195
205
100 100
100 100
10010019590909090
90
70
90 90 90 90 100 100 100 100
100100100909090 100
10010010010090909090
200
707070704040404040
70
100
70
100
100
100
100
100
100
205205 205205205205
40
40
70707040404040
7070707020040404040
707070200404040
(a)
0
0 0 0 0
0
0
000
0
0
0 0
00
0
00
0
0
0 0 0
0
255
0 0 0 0 0 0 0 0
0
0
0
0000
00000
0
0
0
255
0000
0
00
0
0
00
00
255
255
255
255 255 255255
255
255
255
255
0
0 0 0 0
0 0 0
0
0
0000
0
0
00
00
0
0
0 0 0
(b)
FIGURA 4.2 – Representacoes numericas das imagens da Figura 4.1: (a) em nıveis decinza, (b) binaria.
As Tabelas 4.2, 4.3 e 4.4, mostram os valores dos parametros de entrada e inicializacao e os
resultados do SGA, para os experimentos realizados para projetar o operador utilizando
o modelo M (p,w)Λ , com p = 4, 2, 1 e w = 3, respectivamente. Para cada um destes
tres modelos testados tem-se quatro grupos de experimentos, variando-se o tamanho
da populacao (tp); e em cada um destes grupos tem-se cinco experimentos, variando-se
o tamanho do torneio (tt) na fase de selecao dos indivıduos pelo SGA. A variacao dos
valores de tp e tt tem como objetivo permitir a observacao da influencia desta variacao
no resultado do SGA.
Observando as Tabelas 4.2, 4.3 e 4.4, pode-se constatar que a variacao dos valores de
tp e tt tem influencia no resultado do SGA. Embora nao seja possıvel afirmar quais
seriam os melhores valores para estes parametros, em relacao ao tamanho da populacao,
constata-se que conforme p decresce a solucao exata so e encontrada para os dois maiores
valores de tp utilizados. Entao, nao e recomendavel reduzir indiscriminadamente o valor
de tp quando ha uma reducao na ordem do modelo utilizado.
Nas Tabelas 4.2, 4.3 e 4.4, ngmi = 0 significa que na evolucao do SGA, por 1000 geracoes,
nao foi encontrado nenhum outro indivıduo melhor que o melhor indivıduo da geracao
inicial. E tambem nestas tabelas, ami = 10, 000000, significa que foi encontrado um
operador exato, ou seja, uma solucao exata para o problema, uma vez que 10, 000000 e
o maximo valor possıvel para ami nestes experimentos. Entao, nestes casos, ao aplicar o
operador projetado tem-se como imagem de saıda a imagem binaria da Figura 4.1(b).
90

TABELA 4.2 – Parametros do SGA para os experimentos realizados com as imagens daFigura 4.1 utilizando o modelo M (4,3)
Λ .
Experimento tp ccb ng tt ngmi ami
1 2 0 0,7142862 3 487 10,0000003 50 576 1000 5 765 10,0000004 10 178 10,0000005 20 0 0,714286
6 2 736 10,0000007 3 0 0,7142868 100 576 1000 5 0 0,7142869 10 0 0,71428610 20 0 0,714286
11 2 218 10,00000012 3 422 10,00000013 200 576 1000 5 0 0,71428614 10 0 0,71428615 20 0 0,714286
16 2 277 10,00000017 3 396 10,00000018 1000 576 1000 5 281 10,00000019 10 174 10,00000020 20 0 0,714286
TABELA 4.3 – Parametros do SGA para os experimentos realizados com as imagens daFigura 4.1 utilizando o modelo M (2,3)
Λ .
Experimento tp ccb ng tt ngmi ami
1 2 0 0,7142862 3 0 0,7142863 50 288 1000 5 0 0,7142864 10 0 0,7142865 20 0 0,714286
6 2 96 0,7692317 3 0 0,7142868 100 288 1000 5 0 0,7142869 10 0 0,71428610 20 0 0,714286
11 2 0 0,71428612 3 456 0,76923113 200 288 1000 5 557 10,00000014 10 0 0,71428615 20 0 0,714286
16 2 222 0,76923117 3 237 10,00000018 1000 288 1000 5 60 10,00000019 10 0 0,71428620 20 37 10,000000
91

TABELA 4.4 – Parametros do SGA para os experimentos realizados com as imagens daFigura 4.1 utilizando o modelo M (1,3)
Λ .
Experimento tp ccb ng tt ngmi ami
1 2 0 0,7142862 3 0 0,7142863 50 144 1000 5 0 0,7142864 10 0 0,7142865 20 0 0,714286
6 2 0 0,7142867 3 0 0,7142868 100 144 1000 5 0 0,7142869 10 0 0,71428610 20 0 0,714286
11 2 0 0,71428612 3 668 0,83333313 200 144 1000 5 0 0,71428614 10 180 10,00000015 20 0 0,714286
16 2 0 0,71428617 3 337 0,83333318 1000 144 1000 5 913 0,83333319 10 482 10,00000020 20 422 10,000000
92

Para ilustrar um pouco melhor os resultados obtidos, na Tabela 4.5 sao apresentadas
as geracoes em que houve uma variacao positiva no valor de adaptacao do melhor
indivıduo, bem como os valores destas adaptacoes e os parametros das respectivas luts
morfologicas elementares binarias, para o experimento 13 da Tabela 4.3. E na Figura 4.3
sao mostradas as imagens resultantes, respectivamente, das aplicacoes dos operadores∧Ψ
(2,3)
Λ , parametrizados pelas luts morfologicas elementares binarias da Tabela 4.5, sobre
a imagem da Figura 4.1(a).
TABELA 4.5 – Melhor adaptacao e parametros das luts binarias resultantes doexperimento 13 da Tabela 4.3 em diversas geracoes.
Geracao Adaptacao Λ1 Λ2
148 66 242 196 205 233 55 226 5 197 79 2180 0,714286 120 207 58 239 164 104 89 117 254 219 196 108
84 179 59 56 185 127 151 218 87 21 28 42
57 136 181 236 20 110 238 50 25 88 31 45538 0,769231 27 140 29 239 31 137 53 168 233 216 4 104
77 229 192 196 99 248 51 28 253 173 154 198
57 136 148 236 16 111 238 34 27 88 31 25546 0,833333 59 206 189 238 30 137 147 8 177 219 28 110
77 229 64 196 99 124 192 115 26 119 176 244
62 98 53 238 7 111 238 54 27 80 31 205549 0,909091 27 206 157 237 29 137 189 144 11 187 7 78
77 229 64 196 99 216 224 123 142 247 176 61
26 129 21 236 22 230 224 18 25 44 159 61550 1,250000 27 236 189 237 31 205 49 72 234 1 167 150
13 229 64 196 99 232 119 58 74 234 214 206
26 129 21 237 22 230 206 54 25 88 33 45552 1,428570 27 220 189 236 31 205 154 52 200 15 173 205
9 229 80 228 99 216 119 26 106 247 54 61
26 136 21 236 20 231 238 54 27 64 30 237554 1,666670 27 236 189 239 59 237 185 144 26 187 135 74
77 229 66 196 35 216 100 58 162 247 86 160
10 233 17 252 30 231 198 54 25 88 33 45555 2,000000 25 236 189 236 31 205 154 52 200 15 173 205
9 229 80 229 99 216 247 26 106 182 54 61
10 233 17 252 30 231 238 54 27 64 30 253557 10,000000 25 236 189 236 31 205 185 144 26 187 135 74
9 229 80 237 35 216 100 58 162 247 86 92
93

(a) (b) (c)
(d) (e) (f)
(g) (h) (i)
FIGURA 4.3 – Imagens resultantes das aplicacoes do operador∧Ψ
(2,3)
Λ parametrizadopelas luts binarias da Tabela 4.5, nas seguintes geracoes: (a) 0, (b) 538,(c) 546, (d) 549, (e) 550, (f) 552, (g) 554, (h) 555, (i) 557.
Ainda com o objetivo de ilustrar os resultados obtidos, as Figuras 4.4 a 4.6, mostram os
parametros das luts morfologicas elementares binarias resultantes dos experimentos 3 da
Tabela 4.2, 13 da Tabela 4.3 e 14 da Tabela 4.4, respectivamente. Cabe aqui ressaltar
que Λ 6= Ω (Ω e operador unitario para a uniao entre operadores) se, e somente se,
zei≤ zda
ipara i = 1, 2, . . . , n. Assim, nas Figuras 4.4 a 4.6, bem como no decorrer deste
Capıtulo, os parametros das luts morfologicas elementares binarias que parametrizam os
operadores Λ (ou quaisquer outros operadores) diferentes do operador Ω estao destacados
94

em negrito.
180 180 230 100 17 12112 161 40 141 50 13
155 24 68 112 110 139(a)
16 216 3 234 37 22613 228 190 207 35 2267 250 4 234 0 246
(b)
37 218 163 208 183 197239 74 236 108 55 23197 8 238 22 78 41
(c)
110 91 50 23 76 10480 243 109 228 251 153
167 238 216 63 132 251(d)
FIGURA 4.4 – Parametros das luts binarias resultantes do experimento 3 da Tabela 4.2.
10 233 17 252 30 23125 236 189 236 31 2059 229 80 237 35 216
(a)
238 54 27 64 30 253185 144 26 187 135 74100 58 162 247 86 92
(b)
FIGURA 4.5 – Parametros das luts binarias resultantes do experimento 13 da Tabela4.3.
9 248 3 239 22 24424 252 115 239 35 23415 214 19 207 41 212
FIGURA 4.6 – Parametros das luts binarias resultantes do experimento 14 da Tabela4.4.
Observando os parametros das luts das Figuras 4.4(a), 4.4(c), 4.4(d) e 4.5(b), pode-se
concluir que os operadores sup-geradores parametrizados por estas luts podem ser
descartados, uma vez que as aplicacoes destes operadores sobre a imagem da Figura
4.1(a) geram imagens nulas e, portanto, nao tem contribuicao efetiva nos modelos
M (p,w)Λ utilizados (dados pela uniao de operadores sup-geradores). Assim, para os
experimentos 3 da Tabela 4.2 e 13 da Tabela 4.3 restou, respectivamente, apenas um
operador sup-gerador diferente do operador Ω. Desta forma, pode-se concluir que as
solucoes encontradas pertencem tambem ao modelo de ordem 1 dado por M (1,3)Λ . Como
pode ser observado nas tabelas mencionadas, estes resultados correspondem as geracoes
em que os melhores indivıduos tem como adaptacao o maior valor possıvel, ou seja,
ami = 10, 000000, durante as 1000 geracoes fixadas a priori para a evolucao do SGA. Isto
e, o projeto de operadores pode se limitar a utilizacao de um modelo de ordem 1 e ainda
garantir a solucao exata. Uma verificacao disto e dada pelos experimentos 14, 19 e 20,
95

descritos na Tabela 4.4, onde foi aplicado o modelo de ordem 1, dado por M (1,3)Λ , e a
solucao exata foi encontrada.
Como o modelo de ordem 1, dado por M (1,3)Λ , e capaz de transformar a imagem da Figura
4.1(a) na imagem da Figura 4.1(b), e interessante evidenciar quais sao os valores possıveis
para os parametros das luts que parametrizam o operador∧Ψ
(1,3)
Λ . Assim, considerando
este modelo e observando as imagens da Figura 4.2 chega-se aos valores mostrados na
Figura 4.7, onde zeie zda
i(i = 1, 2, . . . , 9) denotam, respectivamente, os parametros das
luts erosoes e anti-dilatacoes.
ze1 ≤ 40 ze2 ≤ 40 ze3 ≤ 40ze4 ≤ 40 101 ≤ ze5 ≤ 195 ze6 ≤ 70ze7 ≤ 40 ze8 ≤ 90 ze9 ≤ 70
(a)
zda1≥ 205 zda
2≥ 205 zda
3≥ 205
zda4≥ 205 zda
5≥ 205 zda
6≥ 205
zda7≥ 205 zda
8≥ 205 zda
9≥ 205
(b)
FIGURA 4.7 – Valores possıveis para os parametros das luts erosoes e anti-dilatacoespara o modelo M (1,3)
Λ .
Observando as restricoes da Figura 4.7 pode-se concluir que operadores simplesmente
crescentes sao capazes de transformar a imagem da Figura 4.1(a) na imagem da
Figura 4.1(b), considerando que para um modelo crescente deve-se ter zdai
= 255
(i = 1, 2, . . . , 9) e este e um valor admissıvel. Com este valor de zdai, a saıda das luts
binarias (anti-dilatacoes) e sempre 1 (o elemento neutro da interseccao). Observando os
parametros das luts das Figuras 4.4(b), 4.5(a) e 4.6, chega-se a mesma conclusao, uma
vez que o valor do segundo parametro de cada posicao da janela e sempre maior que o
maior valor de nıvel de cinza (igual a 205) da imagem da Figura 4.2(a). Desta forma,
pode-se concluir que estes parametros (correspondentes as luts-anti-dilatacoes do modelo
utilizado) nao contribuem no resultado final da aplicacao do respectivo operador sobre
a referida imagem.
Portanto, utilizando estas observacoes como conhecimento a priori, pode-se adotar o
modelo crescente de ordem 1, dado por M (1,3)E , para projetar o operador desejado.
A seguir sao apresentados alguns detalhes dos experimentos realizados no projeto do
operador utilizando o modelo M (1,3)E . A Tabela 4.6 mostra os parametros de entrada,
inicializacao e resultados do SGA para estes experimentos. Como nos experimentos
anteriores, para este modelo tem-se tambem quatro grupos de experimentos, variando-se
o tamanho da populacao (tp); e em cada um destes grupos tem-se cinco experimentos,
96

variando-se o tamanho do torneio (tt) na fase de selecao dos indivıduos pelo SGA. Nesta
tabela, para tp = 50 tem-se valores diferenciados para o numero maximo de geracoes
(ng) conforme varia-se o valor de tt, para permitir que a solucao exata para o problema
seja sempre encontrada durante a evolucao do SGA.
TABELA 4.6 – Parametros do SGA para os experimentos realizados com as imagens daFigura 4.1 utilizando o modelo M (1,3)
E .
Experimento tp ccb ng tt ngmi ami
1 50 2 23 10,0000002 100 3 52 10,0000003 50 72 50 5 36 10,0000004 50 10 15 10,0000005 500 20 420 10,000000
6 2 23 10,0000007 3 11 10,0000008 100 72 50 5 10 10,0000009 10 20 10,00000010 20 8 10,000000
11 2 18 10,00000012 3 13 10,00000013 200 72 50 5 10 10,00000014 10 4 10,00000015 20 5 10,000000
16 2 16 10,00000017 3 7 10,00000018 1000 72 50 5 3 10,00000019 10 1 10,00000020 20 2 10,000000
Observando a Tabela 4.6 pode-se constatar que ami = 10, 000000 para todos os
experimentos realizados. Portanto, para todos estes experimentos foi encontrado um
operador exato, ou seja, uma solucao exata para o problema. Assim, nestes casos ao
aplicar os operadores projetados, tem-se como resultado uma imagem igual a imagem
binaria da Figura 4.1(b).
Ilustrando os resultados obtidos, a Figura 4.8 mostra os parametros das luts-erosoes
binarias resultantes do Experimento 4 da Tabela 4.6.
97

20 22 3638 144 6036 29 64
FIGURA 4.8 – Parametros das luts-erosoes binarias resultantes do experimento 4 daTabela 4.6.
Como pode ser observado, a Figura 4.7(a) mostra tambem as restricoes para os valores dos
parametros das luts-erosoes binarias que parametrizam o modelo M (1,3)E , para o caso das
imagens da Figura 4.1. Comparando-se estas restricoes com os valores dos parametros das
luts da Figura 4.8, pode-se concluir que estes valores satisfazem as respectivas restricoes.
Observando as restricoes da Figura 4.7(a), pode-se ainda deduzir que um modelo M (1,1)E ,
parametrizado por uma unica lut-erosao binaria que satisfaz a restricao 101 ≤ ze5 ≤ 195
(Figura 4.7(a)), e suficiente para projetar o operador desejado, uma vez que zei= 0 e um
valor adimissıvel, para i = 1, 2, . . . , 9 e i 6= 5. Entao, introduzindo mais esta informacao
a priori, a Tabela 4.7 mostra os parametros de entrada e inicializacao do SGA e o valor
de adaptacao do melhor indivıduo, para o experimento realizado utilizando este modelo.
TABELA 4.7 – Parametros do SGA para o experimento realizado com as imagens daFigura 4.1 utilizando o modelo M (1,1)
E .
tp ccb ng tt ngmi ami ze
2 8 50 2 8 10,000000 132
Como pode ser observado na Tabela 4.7, o valor de ami para este experimento e igual
a 10, 000000. Portanto, utilizando um modelo simplificado foi tambem encontrada uma
solucao exata para o problema. Nesta tabela, pode ser observado tambem que o valor do
parametro da lut-erosao, resultante deste experimento, e igual a 132, o qual satisfaz as
restricoes dadas para ze5 na Figura 4.7(a).
98

4.3 Experimentos com Imagens de Figuras Geometricas
Os experimentos apresentados nesta Secao tem como objetivo mostrar a aplicacao do
metodo de projeto de operadores (Capıtulo 3 - Secao 3.4), para a extracao de bordas de
objetos de uma imagem em nıveis de cinza, gerando uma imagem binaria das respectivas
bordas. No caso dos experimentos desta Secao, as bordas a serem extraıdas sao as bordas
das seguintes figuras geometricas: um cırculo, uma estrela, um quadrado, e um pentagono.
A Figura 4.9 mostra um par de imagens destas figuras geometricas, sendo a primeira
uma imagem em nıveis de cinza (entrada) e a segunda uma imagem binaria (saıda)
das respectivas bordas, ambas de tamanho 256 × 256. A imagem da Figura 4.9(b) e o
gradiente morfologico (Barrera et al., 1998), com um elemento estruturante quadrado
3 × 3, da imagem da Figura 4.9(a); consequentemente, a largura das bordas e igual a
dois pixels.
(a) (b)
FIGURA 4.9 – Imagens de figuras geometricas - 256× 256: (a) imagem de entrada (emnıveis de cinza), (b) imagem de saıda (binaria).
A Figura 4.10 mostra uma representacao numerica esquematica dos valores de nıveis de
cinza da imagem da Figura 4.9(a).
99

FIGURA 4.10 – Representacao numerica esquematica da imagem da Figura 4.9(a).
A Figura 4.11 mostra um par de sub-imagens (128×128) das imagens da Figura 4.9. Estas
sub-imagens (entrada/saıda) formam o par de imagens de treinamento dos experimentos
mostrados a seguir.
(a) (b)
FIGURA 4.11 – Imagens de treinamento - 128× 128: (a) imagem de entrada (em nıveisde cinza), (b) imagem de saıda (binaria).
Para projetar o operador desejado e utilizado o seguinte modelo:
M (p,w)Λ
([0, 255]E1 , 0, 255E2
), para p = 16, 8, 4, 2, 1 e w = 3.
O fato da imagem de saıda ser binaria e utilizado como conhecimento a priori na escolha
de luts binarias para parametrizar este modelo.
A Tabela 4.8 mostra os valores dos parametros de entrada e inicializacao e os resultados
do SGA, para os experimentos realizados para projetar o operador desejado, utilizando o
modelo M (p,w)Λ , com p = 16, 8, 4, 2, 1 e w = 3, respectivamente. Para estes cinco modelos
testados, o tamanho da populacao (tp) e o tamanho do torneio (tt) nao variam, o que
varia nestes experimentos e a ordem p do modelo e, consequentemente, o comprimento
da cadeia binaria (ccb) que representa um indivıduo do SGA.
100

TABELA 4.8 – Parametros do SGA para os experimentos realizados com as imagens daFigura 4.11 utilizando o modelo M (p,w)
Λ , com p = 16, 8, 4, 2, 1 e w = 3.
Experimento tp p ccb ng tt ngmi ami
1 16 2304 525 0,04016062 8 1152 804 0,02493773 1000 4 576 1000 10 520 0,02331004 2 288 599 0,02487565 1 144 390 0,0136612
Para ilustrar os resultados obtidos, as Figuras 4.12 a 4.16, mostram os parametros
das luts morfologicas elementares binarias resultantes dos experimentos da Tabela 4.8,
respectivamente.
Observando os parametros das luts das Figuras 4.12 a 4.14 tem-se que: para os
experimentos 1 e 2 da Tabela 4.8 restaram, respectivamente, apenas tres operadores
sup-geradores (parametrizados pelas luts em negrito nas Figuras 4.12 e 4.13) diferentes
do operador Ω; e para o experimento 3 desta tabela, restaram apenas dois operadores
sup-geradores (parametrizados pelas luts em negrito na Figura 4.14). Desta forma,
pode-se concluir que as solucoes encontradas pertencem tambem aos modelos M (3,3)Λ
e M (2,3)Λ , respectivamente. Como pode ser observado na tabela mencionada, estes
resultados correspondem as geracoes em que os melhores indivıduos tem como adaptacao
o maior valor, durante as 1000 geracoes fixadas a priori para a evolucao do SGA;
porem todos estes valores sao menores que o maior valor de adaptacao possıvel (ami =
10, 000000). Isto e, nestes experimentos nenhuma solucao exata foi encontrada durante
a evolucao do SGA. Portanto, ao contrario do experimento da Secao 4.2 nao e possıvel
dizer qual e a ordem do modelo que pode garantir uma solucao exata.
Para avaliar os operadores projetados utiliza-se como imagens de validacao o par de
imagens entrada/saıda da Figura 4.9. Assim, a Figura 4.17 mostra as imagens resultantes,
respectivamente, das aplicacoes dos operadores∧Ψ
(p,w)
Λ (p = 16, 8, 4, 2, 1 e w = 3),
parametrizados pelas luts morfologicas elementares binarias das Figuras 4.12 a 4.16,
sobre a imagem da Figura 4.9(a). Nesta figura sao mostradas tambem as respectivas
diferencas simetricas entre estas imagens resultantes e a imagem de saıda da Figura
4.9(b). A Tabela 4.9 mostra um resumo destas diferencas simetricas.
101

127 46 137 123 184 221194 38 85 155 93 5179 242 122 118 46 74
(a)
109 132 252 209 30 40136 237 134 119 165 225207 4 116 92 78 58
(b)
241 178 198 170 139 81217 246 28 247 109 144148 249 170 142 220 215
(c)
217 230 227 137 81 84190 34 133 229 89 57155 152 20 177 61 141
(d)
211 153 79 106 173 4381 95 48 62 224 114
186 82 217 204 201 74(e)
51 108 132 26 240 19267 168 132 118 96 23571 2 117 61 233 146
(f)
67 193 20 221 4 1982 192 0 191 0 2420 241 0 224 0 83
(g)
39 121 162 200 24 120229 74 58 137 125 114160 95 237 116 88 147
(h)
0 211 0 150 0 2200 238 0 189 0 1680 122 0 223 133 248
(i)
0 183 0 220 0 630 211 0 241 0 197
143 234 0 254 0 190(j)
0 177 140 199 215 3583 3 81 88 148 65
198 222 63 189 161 67(k)
115 116 128 247 73 61215 151 83 156 193 237234 121 223 29 52 108
(l)
235 71 246 146 158 37163 168 155 197 99 84239 197 192 201 128 134
(m)
53 106 234 149 227 145171 111 153 42 116 48115 49 88 159 33 131
(n)
151 241 18 85 197 96233 163 76 26 243 9129 200 28 86 81 97
(o)
186 69 153 40 23 1901 234 99 49 50 93
96 221 42 7 9 30(p)
FIGURA 4.12 – Parametros das luts morfologicas elementares binarias resultantes doExperimento 1 da Tabela 4.8.
102

213 170 167 105 44 215166 228 89 201 115 16582 175 247 125 74 255
(a)
149 220 100 171 58 25468 214 53 195 21 10937 238 66 210 105 191
(b)
158 206 132 229 254 16175 134 112 122 63 152
235 112 25 136 123 234(c)
103 174 0 190 0 1900 234 0 230 0 1590 232 0 220 0 118
(d)
249 50 6 194 16 232228 50 117 99 202 118111 30 83 21 133 22
(e)
175 40 167 124 132 146174 178 173 252 93 168133 215 226 60 9 166
(f)
0 187 0 158 0 960 231 0 223 0 224
116 150 0 172 0 173(g)
196 238 144 22 15 64200 83 208 217 213 24353 166 140 248 187 63
(h)
FIGURA 4.13 – Parametros das luts morfologicas elementares binarias resultantes doExperimento 2 da Tabela 4.8.
235 219 151 185 242 115113 166 180 244 97 23650 72 155 146 33 209
(a)
190 198 129 188 60 16102 30 14 53 205 11567 113 84 142 141 47
(b)
73 246 0 163 0 2330 200 0 194 0 2540 224 0 224 0 62
(c)
0 254 0 236 0 1360 239 0 208 0 2190 232 0 181 126 170
(d)
FIGURA 4.14 – Parametros das luts morfologicas elementares binarias resultantes doExperimento 3 da Tabela 4.8.
0 246 0 168 0 1010 220 0 204 0 166
114 240 0 196 0 245(a)
62 250 0 221 0 2350 173 0 225 0 2210 165 0 250 0 93
(b)
FIGURA 4.15 – Parametros das luts morfologicas elementares binarias resultantes doExperimento 4 da Tabela 4.8.
103

104 178 0 163 0 2040 208 0 240 0 2020 194 0 165 0 112
FIGURA 4.16 – Parametros das luts morfologicas elementares binarias resultantes doExperimento 5 da Tabela 4.8.
TABELA 4.9 – Diferenca simetrica entre a imagem binaria da Figura 4.9(b) e as imagensbinarias da Figura 4.17.
Experimento Total de Pixels Pixels Iguais Pixels DiferentesAvaliados # % # %
1 63728 98,78 788 1,222 63193 97,95 1323 2,053 64516 63191 97,94 1325 2,063 63192 97,95 1324 2,055 62385 96,70 2131 3,30
Observando as imagens resultantes e diferencas simetricas da Figura 4.17, pode-se dizer
que foi encontrada somente uma parte das bordas das figuras geometricas da Figura
4.9(a), com melhor desempenho quando foi utilizado o modelo M (16,3)Λ .
Observando os parametros das luts que parametrizam os operadores sup-geradores
diferentes do operador Ω, destacados em negrito nas Figuras 4.12 a 4.16, pode-se notar
que apresentam direcoes correspondentes as direcoes das figuras geometricas da Figura
4.9. Esta observacao pode ser reforcada pelas imagens e diferencas simetricas da Figura
4.17. Veja como exemplo os parametros das luts da Figura 4.15 e as imagens das Figuras
4.17(i) e 4.17(j). Cada um dos dois sup-geradores parametrizados por estas luts se
especializa numa direcao, ou seja, todo ponto cuja normal ao cırculo varia de 0 a 90
graus (e adotada a convencao trigonometrica para esta contagem) e selecionado com
o sup-gerador parametrizado pelas luts da Figura 4.15(a); enquanto que o sup-gerador
parametrizado pelas luts da Figura 4.15(b) seleciona os pontos cuja normal varia entre
270 e 360 graus. Portanto, pode-se dizer que as vezes o SGA consegue encontrar solucoes
onde cada sup-gerador e especializado na deteccao de borda numa dada direcao da
normal.
104

ModeloImagem de Imagem Modelo Minimal Imagem DiferencaEntrada de Saıda Utilizado da Solucao Resultante Simetrica
Encontrada
M (16,3)Λ M (3,3)
Λ
(a) (b)
M (8,3)Λ M (3,3)
Λ
(c) (d)
(e) (f)
M (4,3)Λ M (2,3)
Λ
(g) (h)
M (2,3)Λ M (2,3)
Λ
(i) (j)
M (1,3)Λ M (1,3)
Λ
(k) (l)
FIGURA 4.17 – Resultados das aplicacoes dos operadores∧Ψ
(p,w)
parametrizados pelasluts morfologicas elementares binarias, respectivamente, das Figuras:(a)-(b) 4.12, (c)-(d) 4.13, (g)-(h) 4.14, (i)-(j) 4.15, (k)-(l) 4.16.
105

Uma outra observacao a ser feita e com relacao a borda do cırculo. Como pode ser visto na
Figura 4.11, a borda deste cırculo nao esta presente neste par de imagens de treinamento
e mesmo assim ela e encontrada satisfatoriamente quando se utiliza o modelo M (16,3)Λ .
Desta forma, pode-se dizer que houve uma generalizacao, pelo SGA, a partir das bordas
dos outros objetos. Mais precisamente, esta generalizacao deve ter sido possıvel devido
ao fato da transicao dos nıveis de cinza (0-150) entre o fundo da imagem e o cırculo e
entre o quadrado e cırculo serem iguais, como pode ser visto na Figura 4.10.
4.4 Experimentos com Imagens Microscopicas de Celulas do Sangue
Nesta Secao sao apresentados alguns experimentos realizados com imagens microscopicas
de laminas de celulas do sangue, bem como os respectivos resultados alcancados. O
objetivo destes experimentos e aplicar o metodo de projeto de operadores, proposto neste
trabalho, para extrair destas imagens nucleos de celulas brancas, chamadas de linfocitos.
Estes experimentos tem tambem como objetivo avaliar a influencia no resultado quando
a imagem de entrada, do par de treinamento, e uma imagem resultante de um processo de
nivelamento (Meyer, 1998; Gomila, Fontainebleau. 2001) e quando se muda as imagens
de treinamento.
As imagens de entrada/saıda utilizadas nestes experimentos sao provenientes do trabalho
realizado por Angulo e Flandrin (2003a,b). As imagens de saıda (binarias) sao resultantes
da aplicacao do metodo de segmentacao, baseado em operacoes morfologicas (abertura,
fechamento, watershed e reconstrucao), proposto por estes autores para segmentar os
linfocitos em duas regioes (nucleo e citoplasma).
A Figura 4.18 mostra um par de imagens microscopicas de celulas do sangue
(entrada/saıda), sendo a primeira em nıveis de cinza (entrada) e a segunda uma imagem
binaria (saıda) contendo o nucleo de um linfocito, ambas de tamanho 256 × 256. Esta
figura mostra tambem uma imagem resultante de uma operacao de nivelamento sobre a
imagem original. As imagens em nıveis de cinza deste experimento, sem nivelamento e
com nivelamento, sao denotadas por SN e CN, respectivamente.
Para as imagens de treinamento sao extraıdos pares de sub-imagens das imagens da
Figura 4.18. Estas sub-imagens sao mostradas na Figura 4.19.
106

(a) (b) (c)
FIGURA 4.18 – Imagens microscopicas de celulas do sangue - 256 × 256: (a) imagemde entrada SN (em nıveis de cinza), (b) imagem de saıda (binaria), (c)imagem de entrada CN (em nıveis de cinza).
(a) (b) (c) (d)
(e) (f) (g) (h)
(i) (j) (k) (l)
FIGURA 4.19 – Imagens de treinamento - 64×64: (a)-(d) sub-imagens da Figura 4.18(a),(e)-(h) sub-imagens da Figura 4.18(b), (i)-(l) sub-imagens da Figura4.18(c).
107

Para projetar o operador desejado e utilizado o seguinte modelo:
M (4,3)Λ
([0, 255]E1 , 0, 255E2
).
O fato da imagem de saıda ser binaria e utilizado como conhecimento a priori na escolha
de luts binarias para parametrizar este modelo.
A Tabela 4.10 descreve os experimentos realizados com os pares de imagens de
treinamento da Figura 4.19, mostrando os dados de entrada, de inicializacao e os
resultados do SGA para estes experimentos:
• 1 a 4 - com os pares de imagens de treinamento formados, respectivamente,
pelas imagens das Figuras 4.19(a) - 4.19(d) (SN) e 4.19(e) - 4.19(h);
• 5 a 8 - com os pares de imagens de treinamento formados, respectivamente,
pelas imagens das Figuras 4.19(i) - 4.19(l) (CN) e 4.19(e) - 4.19(h).
TABELA 4.10 – Parametros do SGA para os experimentos realizados com pares deimagens de treinamento da Figura 4.19 utilizando o modelo M (4,3)
Λ .
Experimento Imagens de Treinamento tp ccb ng tt ngmi ami
Par Nivelamento
1 (4.19(a), 4.19(e)) 182 0,4761902 (4.19(b), 4.19(f)) SN 745 0,8333333 (4.19(c), 4.19(g)) 555 0,5263164 (4.19(d), 4.19(h)) 1000 576 1000 10 133 0,4545455 (4.19(i), 4.19(e)) 166 0,4347836 (4.19(j), 4.19(f)) CN 97 0,5000007 (4.19(k), 4.19(g)) 733 0,3225818 (4.19(l), 4.19(h)) 213 0,454545
Para ilustrar os resultados obtidos, as Figuras 4.20 a 4.27, mostram os parametros
das luts morfologicas elementares binarias resultantes dos experimentos da Tabela 4.10,
respectivamente.
108

248 71 78 242 243 1828 136 92 208 215 29
130 156 119 28 189 14(a)
62 229 11 191 11 17839 166 50 152 18 13753 160 46 143 53 127
(b)
93 82 249 18 105 15068 235 33 74 210 69
216 106 40 134 186 139(c)
23 212 116 179 37 187143 66 28 53 159 96194 135 227 61 20 172
(d)
FIGURA 4.20 – Parametros das luts resultantes do experimento 1 da Tabela 4.10.
36 37 140 194 192 241219 76 179 85 159 65161 40 40 250 225 87
(a)
100 22 165 175 107 222136 147 200 185 52 11659 56 217 189 25 151
(b)
58 181 37 240 59 19615 136 11 251 28 23055 154 54 150 31 245
(c)
143 204 4 174 108 210117 242 12 222 18 15421 123 66 204 72 179
(d)
FIGURA 4.21 – Parametros das luts resultantes do experimento 2 da Tabela 4.10.
154 154 46 105 63 22695 21 106 75 20 42
147 141 147 132 83 173(a)
56 195 34 129 38 23517 253 28 147 29 24443 249 34 229 22 224
(b)
159 59 16 2 255 225235 239 127 4 136 10122 226 76 127 100 187
(c)
102 247 124 142 30 193106 240 61 160 82 149180 222 53 247 28 243
(d)
FIGURA 4.22 – Parametros das luts resultantes do experimento 3 da Tabela 4.10.
183 233 26 217 204 24643 136 121 54 166 48
242 21 44 255 146 76(a)
82 62 213 169 225 135195 116 98 254 236 12285 138 112 53 159 246
(b)
33 227 58 137 11 21345 136 48 232 19 16744 243 9 224 51 210
(c)
186 226 230 155 82 85236 20 31 108 155 226123 46 187 146 174 87
(d)
FIGURA 4.23 – Parametros das luts resultantes do experimento 4 da Tabela 4.10.
109

190 81 131 40 94 2099 212 29 24 69 119
34 59 104 29 206 183(a)
57 199 66 251 67 18015 213 20 147 3 13842 162 37 201 31 165
(b)
110 100 44 248 158 132205 182 51 177 169 141242 137 140 147 114 214
(c)
207 102 101 135 233 176231 151 243 96 27 10446 128 85 88 218 122
(d)
FIGURA 4.24 – Parametros das luts resultantes do experimento 5 da Tabela 4.10.
209 91 76 5 251 24543 230 57 67 244 40
103 17 108 201 50 123(a)
21 204 243 171 96 52205 22 57 138 103 25136 238 125 28 125 38
(b)
26 192 70 174 25 20069 220 48 252 38 21756 123 73 244 7 193
(c)
238 150 231 41 198 72140 189 44 248 20 21060 167 187 176 115 223
(d)
FIGURA 4.25 – Parametros das luts resultantes do experimento 6 da Tabela 4.10.
134 165 193 162 211 194170 114 83 171 125 12574 192 150 140 114 222
(a)
16 201 11 135 2 14535 227 54 160 17 15341 246 58 232 68 209
(b)
134 229 223 1 179 28126 119 214 128 137 195237 173 130 145 34 239
(c)
102 43 127 171 123 20160 98 168 50 25 204
255 121 49 51 87 239(d)
FIGURA 4.26 – Parametros das luts resultantes do experimento 7 da Tabela 4.10.
242 10 171 160 191 207199 3 115 91 127 22496 51 87 204 163 90
(a)
48 101 94 188 246 54120 104 236 125 234 8212 141 67 234 196 188
(b)
3 143 8 169 46 19173 136 16 148 70 1679 180 34 218 21 227
(c)
113 195 62 131 107 5233 4 99 126 164 3148 27 104 203 157 29
(d)
FIGURA 4.27 – Parametros das luts resultantes do experimento 8 da Tabela 4.10.
110

Observando os parametros das luts das Figuras 4.20 a 4.27, pode-se concluir que os
operadores sup-geradores parametrizados por algumas destas luts podem ser descartados,
uma vez que as respectivas aplicacoes destes operadores geram imagens nulas e, portanto,
nao tem contribuicao efetiva no modelo M (4,3)Λ utilizado (dado pela uniao de operadores
sup-geradores). Descartados estes operadores sup-geradores, os quais sao iguais ao
operador Ω, pode-se concluir que as solucoes encontradas pertencem tambem ao modelo
M (2,3)Λ ou M (1,3)
Λ . Como pode ser observado na tabela mencionada, estes resultados
correspondem as geracoes em que os melhores indivıduos tem como adaptacao o maior
valor, durante as 1000 geracoes fixadas a priori para a evolucao do SGA; porem todos
estes valores sao menores que o maior valor de adaptacao possıvel (ami = 10, 000000).
Isto e, nestes experimentos nenhuma solucao exata foi encontrada durante a evolucao
do SGA. Portanto, neste caso nao e possıvel dizer qual e a ordem do modelo que pode
garantir uma solucao exata.
Para avaliar os operadores projetados utiliza-se como imagens de validacao o par de
imagens entrada/saıda da Figura 4.18. Assim, as Figuras 4.28 e 4.29 mostram as imagens
resultantes, respectivamente, das aplicacoes dos operadores∧Ψ
(4,3)
Λ parametrizados pelas
luts morfologicas elementares binarias das Figuras 4.20 a 4.27, sobre as imagens SN e
CN das Figuras 4.18(a) e 4.18(c). Nestas figuras sao mostradas tambem as respectivas
diferencas simetricas entre estas imagens resultantes e a imagem de saıda da Figura
4.18(b). Um resumo destas diferencas simetricas pode ser visto na Tabela 4.11.
Observando as imagens das Figuras 4.28 e 4.29 e a Tabela 4.11, pode-se constatar que
os operadores, projetados a partir dos pares de imagens de treinamento cujas imagens
de entrada sao imagens resultantes de uma operacao de nivelamento (Figuras 4.19(i) a
4.19(l)), sao menos robustos que aqueles projetados a partir de imagens de entrada sem
nivelamento (Figuras 4.19(a) a 4.19(d)). Isto esta associado ao fato das imagens com
nivelamento serem simplificacoes das imagens originais, o que faz com que informacoes
sejam perdidas e com isto os pares de imagens de treinamento se tornam mais pobres.
Uma outra constatacao que pode ser feita, atraves das imagens das Figuras 4.28 e 4.29 e
da Tabela 4.11, e com relacao a influencia do par de imagens de treinamento no resultado
da aplicacao do operador projetado. Observando estas imagens pode-se constatar que os
parametros encontrados guardam informacoes direcionais do objeto presente no par de
imagens de treinamento, uma vez que as diferencas simetricas nas regioes correspondentes
a estas imagens sao menores.
111

Resultado sobre Imagem SN com Imagem de Entrada do Treinamento:SN CN
(a) (b)
(c) (d)
(e) (f)
(g) (h)
FIGURA 4.28 – Imagens binarias e diferencas simetricas resultantes das aplicacoes, sobre
a imagem da Figura 4.18(a) (SN), dos operadores∧Ψ
(4,3)
Λ parametrizados,respectivamente, pelas luts das Figuras: (a) 4.20, (b) 4.24, (c) 4.21, (d)4.25, (e) 4.22, (f) 4.26, (g) 4.23, (h) 4.27.
112

Resultado sobre Imagem CN com Imagem de Entrada do Treinamento:SN CN
(a) (b)
(c) (d)
(e) (f)
(g) (h)
FIGURA 4.29 – Imagens binarias e diferencas simetricas resultantes das aplicacoes, sobre
a imagem da Figura 4.18(c) (CN), dos operadores∧Ψ
(4,3)
Λ parametrizados,respectivamente, pelas luts das Figuras: (a) 4.20, (b) 4.24, (c) 4.21, (d)4.25, (e) 4.22, (f) 4.26, (g) 4.23, (h) 4.27.
113

TABELA 4.11 – Diferencas simetricas entre a imagem saıda da Figura 4.18(b)
e as imagens resultantes das aplicacoes dos operadores∧Ψ
(4,3)
Λ
parametrizados, respectivamente, pelas luts das Figuras 4.20-4.27.
Imagem Imagem Imagem luts Imagem Pixels Pixelsde de de Resultante Iguais Diferentes
Saıda Entrada Entrada edo Diferenca
Treinamento Simetrica (%) (% )
Fig. 4.20 Fig. 4.28(a) 99, 23 0, 77SN Fig. 4.21 Fig. 4.28(c) 99, 55 0, 45
Fig. 4.22 Fig. 4.28(e) 99, 50 0, 50Fig. 4.18(a) Fig. 4.23 Fig. 4.28(g) 99, 46 0, 54
(SN) Fig. 4.24 Fig. 4.28(b) 99, 40 0, 60CN Fig. 4.25 Fig. 4.28(d) 97, 87 2, 13
Fig. 4.26 Fig. 4.28(f) 99, 34 0, 66Fig. 4.18(b) Fig. 4.27 Fig. 4.28(h) 98, 05 1, 95
Fig. 4.20 Fig. 4.29(a) 99, 23 0, 77SN Fig. 4.21 Fig. 4.29(c) 99, 55 0, 45
Fig. 4.22 Fig. 4.29(e) 99, 50 0, 50Fig. 4.18(c) Fig. 4.23 Fig. 4.29(g) 99, 46 0, 54
(CN) Fig. 4.24 Fig. 4.29(b) 99, 50 0, 50CN Fig. 4.25 Fig. 4.29(d) 99, 30 0, 70
Fig. 4.26 Fig. 4.29(f) 99, 48 0, 52Fig. 4.27 Fig. 4.29(h) 99, 49 0, 51
114

A seguir sao mostrados mais dois experimentos realizados com imagens microscopicas de
celulas do sangue. O objetivo destes experimentos e ainda aplicar o metodo de projeto
de operadores para extrair destas imagens nucleos de celulas brancas. Neste caso a
imagem de entrada apresenta mais de um nucleo. As imagens de treinamento, para
estes experimentos, sao sub-imagens do par de imagens mostrado na Figura 4.30, ambas
de tamanho 576 × 768. Estas sub-imagens sao de tamanho 55 × 55 e sao mostradas na
Figura 4.31.
(a) (b)
FIGURA 4.30 – Imagens microscopicas de celulas - 576 × 768: (a) imagem de entrada(em nıveis de cinza), (b) imagem de saıda (binaria).
(a) (b)
FIGURA 4.31 – Imagens de treinamento - 55×55: (a) sub-imagem da imagem da Figura4.30(a), (b) sub-imagem da imagem da Figura 4.30(b).
Para projetar o operador desejado e utilizado o seguinte modelo:
M (8,3)Λ
([0, 255]E1 , 0, 255E2
).
A Tabela 4.12 descreve os experimentos realizados com par de imagens de treinamento
da Figura 4.31, mostrando os dados de entrada, de inicializacao e os resultados do SGA.
115

Como pode ser observado nesta tabela, para estes experimentos sao utilizados dois valores
distintos para tp.
TABELA 4.12 – Parametros do SGA para os experimentos realizados com o par deimagens de treinamento da Figura 4.31 utilizando o modelo M (8,3)
Λ .
Experimento tp ccb ng tt ngmi ami
1 1000 1152 1000 10 424 0,01042752 5000 1152 1000 10 968 0,0106045
As Figuras 4.32 e 4.33, mostram os parametros das luts morfologicas elementares binarias
resultantes dos experimentos 1 e 2 da Tabela 4.12, respectivamente.
17 115 30 219 100 13426 125 26 153 81 15497 232 127 171 65 213
(a)
34 88 153 198 165 198238 212 36 131 203 25244 204 51 55 176 254
(b)
214 237 65 79 134 250217 43 151 38 177 166230 157 210 248 179 23
(c)
12 123 13 101 12 21216 159 15 189 15 1481 101 9 149 8 140
(d)
216 114 2 155 168 1186 132 80 1 173 76
116 175 50 107 42 17(e)
108 156 60 195 182 7123 13 85 107 97 128
105 207 74 100 154 115(f)
42 155 128 206 70 217118 175 103 228 135 207169 233 159 220 38 245
(g)
224 240 41 187 193 21338 78 168 88 25 48
245 57 55 15 86 53(h)
FIGURA 4.32 – Parametros das luts resultantes do experimento 1 da Tabela 4.12.
116

33 16 192 18 103 3742 251 192 52 11 237
206 252 180 192 78 236(a)
173 169 235 124 225 201149 133 101 3 103 122227 13 156 95 17 214
(b)
6 169 4 101 13 19215 208 15 247 15 22813 101 4 153 9 140
(c)
27 178 97 224 135 155118 229 63 243 112 17542 226 149 231 52 216
(d)
68 156 80 125 26 13530 130 76 184 79 153
102 251 133 255 135 246(e)
242 173 189 73 86 199130 12 73 160 208 6893 108 241 40 216 52
(f)
131 181 52 225 128 20299 243 88 246 13 218
186 230 23 226 214 234(g)
171 192 121 103 131 22532 185 79 247 224 5619 105 172 198 147 168
(h)
FIGURA 4.33 – Parametros das luts resultantes do experimento 2 da Tabela 4.12.
117

Observando os parametros das luts das Figuras 4.32 e 4.33, pode-se concluir que os
operadores sup-geradores parametrizados por algumas destas luts podem ser descartados,
uma vez que as respectivas aplicacoes destes operadores sobre a imagem da Figura
4.11(a) geram imagens nulas e, portanto, nao tem contribuicao efetiva no modelo M (8,3)Λ
utilizado (dado pela uniao de operadores sup-geradores), nos respectivos experimentos.
Descartados estes operadores sup-geradores, os quais sao iguais ao operador Ω, pode-se
concluir que as solucoes encontradas pertencem tambem aos modelos M (3,3)Λ e M (4,3)
Λ ,
respectivamente. Como pode ser observado na tabela mencionada, estes resultados
correspondem as geracoes em que os melhores indivıduos tem como adaptacao o maior
valor, durante as 1000 geracoes fixadas a priori para a evolucao do SGA; porem estes
valores sao menores que o maior valor de adaptacao possıvel (ami = 10, 000000). Isto e,
nestes experimentos nenhuma solucao exata foi encontrada durante a evolucao do SGA.
Portanto, neste caso nao e possıvel dizer qual e a ordem do modelo que pode garantir
uma solucao exata.
Para avaliar os operadores∧Ψ
(3,3)
Λ e∧Ψ
(4,3)
Λ , parametrizados, respectivamente, pelas luts
morfologicas elementares binarias das Figuras 4.32 e 4.33, utilizam-se como imagens
de validacao o par de imagens da Figura 4.30. A Figura 4.34 mostra, respectivamente,
as imagens resultantes das aplicacoes destes operadores, juntamente com as respectivas
diferencas simetricas entre estas imagens e a imagem de saıda (Figura 4.30(b)) gerada
pelo metodo proposto por Angulo e Flandrin (2003a,b). A Tabela 4.13 mostra um resumo
destas diferencas simetricas.
TABELA 4.13 – Diferenca simetrica entre a imagem binaria da Figura 4.30(b) e asimagens binarias das Figuras 4.34(a) e 4.34(b).
Experimento Total de Pixels Pixels Iguais Pixels DiferentesAvaliados # % # %
1 439684 437768 99,56 1916 0,442 424813 96,62 14871 3,38
118

(a) (b)
(c) (d)
FIGURA 4.34 – Imagens resultantes da aplicacao dos operadores∧Ψ
(8,3)
Λ parametrizadospelas luts das Figuras (a) 4.32, (b) 4.33, sobre a imagem da Figura4.30(a); (c) e (d) sao as respectivas diferencas simetricas.
119

Observando as imagens da Figura 4.34 pode-se dizer que o par de imagens de treinamento
utilizado nestes experimentos nao foi adequado para generalizar as informacoes de nıveis
de cinza e direcao dos objetos a serem extraıdos (nucleos das celulas), uma vez que foram
extraıdas diversas bordas de outros objetos presentes na imagem que nao correspondem a
nucleos de celulas. Isto pode ser decorrente do fato deste par de imagens de treinamento
nao conter informacoes da presenca de outros nucleos ou de exemplos negativos (que
nao fazem parte dos objetos a serem extraidos). Alem disto, ao aumentar o valor de
tp (Experimento 2 da Tabela 4.12) tem-se um resultado ainda mais degradado. Uma
possıvel justificativa para este resultado e que ao aumentar o valor de tp possibilitou-se
ao SGA encontrar um operador mais especializado no par de imagens de treinamento,
ou seja, com menor capacidade de generalizacao.
4.5 Experimentos com Imagens de Chapas de Aco
As imagens utilizadas nos experimentos apresentados nesta Secao sao imagens de chapas
de aco pintadas, empregadas na fabricacao de refrigeradores e obtidas por um microscopio
interferometrico. Estas imagens sao conhecidas como imagens de superfıcies do tipo pele
de laranja e fazem parte do trabalho de Fricout e Jeulin (2002).
O objetivo do processamento realizado sobre estas imagens e segmenta-las em regioes
claras e escuras, as quais serao utilizadas na caracterizacao e classificacao das superfıcies
pele de laranja correspondentes. Esta caracterizacao e classificacao visam a quantificacao
da qualidade destes materiais, de maneira confiavel e robusta.
Desta forma, o objetivo dos experimentos apresentados nesta Secao e aplicar o metodo
de projeto de operadores, proposto neste trabalho, para realizar esta segmentacao. Alem
disto e testado a capacidade de generalizacao do operador projetado, aplicando este
operador projetado a partir de um par de imagens de treinamento sobre outras imagens
do mesmo material e adquirida pelo mesmo sensor.
A Figura 4.35 mostra uma imagem em nıveis de cinza, de tamanho 359×563, da superfıcie
(tipo pele de laranja) de uma chapa de aco.
A Figura 4.36 mostra uma segmentacao da imagem da Figura 4.35, em regioes claras
e escuras. Esta imagem e resultante da aplicacao do metodo de segmentacao proposto
por Fricout e Jeulin (2002), o qual esta baseado em operacoes morfologicas (dilatacoes,
erosoes e watershed).
120

FIGURA 4.35 – Imagem da superfıcie (tipo pele de laranja) de uma chapa de aco -tamanho 359× 563.
FIGURA 4.36 – Imagem binaria resultante da segmentacao da imagem da Figura 4.35em zonas claras e escuras pelo metodo proposto por Fricout e Jeulin(2002).
121

Das imagens das Figuras 4.35 e 4.36 sao extraıdas as sub-imagens mostradas na Figura
4.37 - tamanho 200×200. Estas sub-imagens sao utilizadas como imagens de treinamento,
pelo SGA, no experimento mostrado a seguir.
(a) (b)
FIGURA 4.37 – Imagens de treinamento 200×200: (a) sub-imagem da imagem da Figura4.35, (b) sub-imagem da imagem da Figura 4.36.
Neste experimento, para projetar o operador desejado e utilizado o seguinte modelo:
M (8,3)Λ
([0, 255]E1 , 0, 255E2
).
O fato da imagem de saıda ser binaria e utilizado como conhecimento a priori na escolha
de luts binarias para parametrizar este modelo.
A Tabela 4.14 descreve o experimento realizado com o par de imagens de treinamento
da Figura 4.37, mostrando os dados de entrada, de inicializacao e os resultados do SGA
para este experimento.
TABELA 4.14 – Parametros do SGA para o experimento realizado com o par de imagensde treinamento da Figura 4.37 utilizando o modelo M (8,3)
Λ .
tp ccb ng tt ngmi ami
1000 1152 1000 10 68 0,002903
Do experimento descrito na Tabela 4.14 obtem-se os parametros das luts morfologicas
elementares binarias apresentados na Figura 4.38.
122

32 86 200 41 93 75184 187 31 66 189 16989 172 42 162 149 82
(a)
94 195 130 225 132 24829 21 65 255 30 122
182 179 109 11 244 111(b)
199 244 214 59 252 199147 44 154 21 234 5264 156 96 115 218 68
(c)
91 207 238 226 189 13865 109 80 221 196 109
212 84 213 245 186 166(d)
40 225 35 243 89 236113 218 118 228 53 207115 218 124 228 116 238
(e)
235 208 235 236 44 164113 227 32 247 247 71145 82 4 119 23 21
(f)
232 137 81 41 37 23183 238 139 131 249 23153 136 29 241 135 74
(g)
158 3 27 20 202 135219 234 1 17 17 47174 216 251 175 84 27
(h)
FIGURA 4.38 – Parametros das luts resultantes do experimento da Tabela 4.14.
123

Observando os parametros da luts da Figura 4.38, pode-se concluir que os operadores
sup-geradores parametrizados por algumas destas luts podem ser descartados, uma vez
que as respectivas aplicacoes destes operadores sobre a imagem da Figura 4.37(a) geram
imagens nulas e, portanto, nao tem contribuicao efetiva no modelo M (8,3)Λ utilizado (dado
pela uniao de operadores sup-geradores). Descartados estes operadores sup-geradores, os
quais sao iguais ao operador Ω, pode-se concluir que a solucao encontrada pertence
tambem ao modelo M (1,3)Λ . Neste experimento tambem nao foi encontrada a solucao
exata durante a evolucao do SGA; portanto, neste caso nao possıvel dizer qual e a ordem
do modelo que pode garantir uma solucao exata.
Para avaliar o operador projetado utiliza-se como imagem de validacao o par de
imagens entrada/saıda das Figuras 4.35 e 4.36. Desta forma, a Figura 4.39 mostra a
imagem resultante da aplicacao do operador∧Ψ
(8,3)
Λ parametrizado pelas luts morfologicas
elementares binarias da Figura 4.38, sobre a imagem da Figura 4.35. Nesta figura e
mostrada tambem a imagem da diferenca simetrica entre a imagem resultante e a imagem
da Figura 4.36. A Tabela 4.15 mostra um resumo desta diferenca simetrica.
TABELA 4.15 – Diferenca simetrica entre a imagem binaria da Figura 4.39(a) e aimagem binaria da Figura 4.36.
Total de Pixels Pixels Iguais Pixels DiferentesAvaliados # % # %
200277 171841 85,80 28436 14,20
124
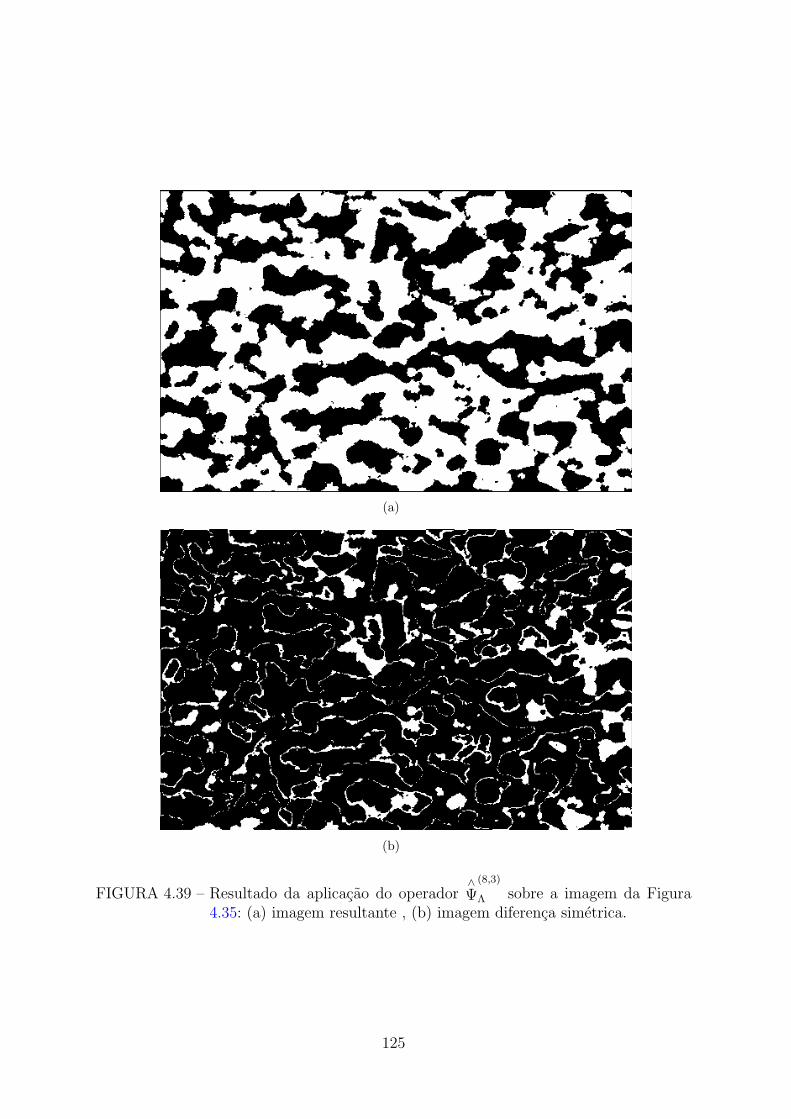
(a)
(b)
FIGURA 4.39 – Resultado da aplicacao do operador∧Ψ
(8,3)
Λ sobre a imagem da Figura4.35: (a) imagem resultante , (b) imagem diferenca simetrica.
125

A percentagem de pixels diferentes (14, 20%) na Tabela 4.15 e resultado de uma avaliacao
realizada sobre a imagem que contem a imagem de treinamento (Figura 4.35). A seguir
e apresentada uma outra avaliacao, utilizando separadamente a regiao de treinamento
e uma outra regiao da imagem da Figura 4.35, fora desta regiao de treinamento. Esta
comparacao e realizada atraves das seguintes diferencas simetricas:
• entre a imagem de saıda do par de imagens de treinamento (Figura 4.37(b))
e a sub-imagem da imagem resultante da Figura 4.39(a) correspodente a este
par de imagens de treinamento;
• entre uma sub-imagem da Figura 4.36, diferente da imagem de saıda do par de
treinamento, e a sub-imagem correspondente da imagem resultante da Figura
4.39(a).
A Figura 4.40 mostra estas sub-imagens e as respectivas diferencas simetricas. E a Tabela
4.16 mostra um resumo das diferencas simetricas entre elas.
Regiao Sub-imagem da Imagem Diferencade Imagem de Saıda Resultante Simetrica
Treinamento da Figura 4.36
Sim
(a) (b) (c)
Nao
(d) (e) (f)
FIGURA 4.40 – Imagens de saıda, resultante e diferenca simetrica 200 × 200: (a)sub-imagem da imagem da Figura 4.36 (imagem de saıda do parde treinamento), (b) imagem resultante, (c) diferenca simetrica, (d)sub-imagem da imagem da Figura 4.36 (fora da regiao de treinamento),(e) imagem resultante, (f) diferenca simetrica.
126

TABELA 4.16 – Diferenca simetrica entre as imagens binarias da Figura 4.40.
Imagem Imagem Total de Pixels Diferenca Pixels Iguais Pixels Diferentesde Saıda Resultante Avaliados Simetrica # % # %
Fig. 4.40(a) Fig. 4.40(b) 39204 Fig. 4.40(c) 35760 91,21 3444 8,79Fig. 4.40(d) Fig. 4.40(e) Fig. 4.40(f) 31997 81,62 7207 18,38
Calculando-se a razao entre as diferencas simetricas encontradas, para a regiao de
treinamento e para a regiao fora dela, tem-se:
#pixels iguais regiao treinamento
#pixels iguais fora regiao treinamento=
35760
31997= 1, 1176
Quanto mais proximo de 1 estiver o resultado desta razao, maior e a capacidade
de generalizacao do operador encontrado. Entao, para o operador encontrado neste
experimento pode dizer que a sua capacidade de generalizacao e satisfatoria
Para testar subjetivamente a robustez do operador projetado∧Ψ
(8,3)
Λ , este e aplicado sobre
outras imagens de chapas de aco do mesmo tipo e obtidas pelo mesmo dispositivo em
condicoes semelhantes. Estas imagens sao mostradas nas Figuras 4.41 a 4.43. Estas figuras
mostram tambem, as respectivas imagens resultantes da aplicacao do operador∧Ψ
(8,3)
Λ .
(a) (b)
FIGURA 4.41 – Aplicacao do operador∧Ψ
(8,3)
Λ : (a) imagem original 1, (b) imagemresultante 1.
127
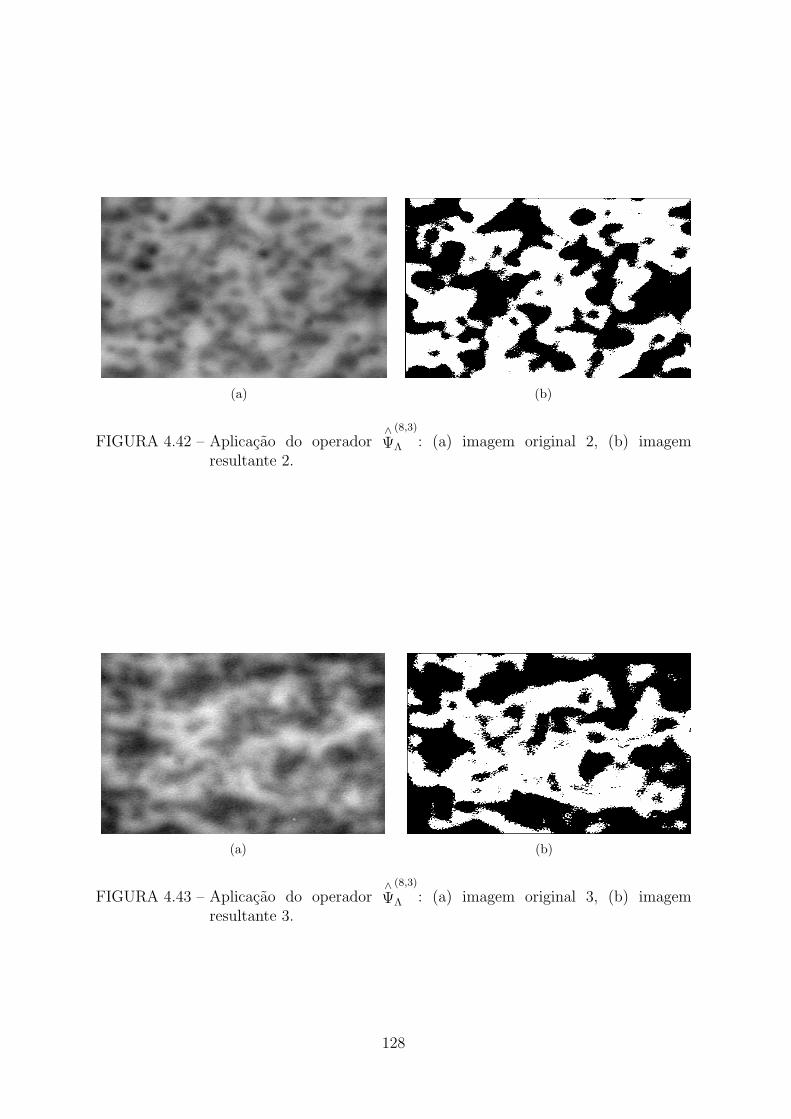
(a) (b)
FIGURA 4.42 – Aplicacao do operador∧Ψ
(8,3)
Λ : (a) imagem original 2, (b) imagemresultante 2.
(a) (b)
FIGURA 4.43 – Aplicacao do operador∧Ψ
(8,3)
Λ : (a) imagem original 3, (b) imagemresultante 3.
128

Observando as imagens das Figuras 4.41 a 4.43 (entrada/saıda do operador∧Ψ
(8,3)
Λ ),
pode-se perceber que o grau de sucesso da aplicacao de luts encontradas a partir de
um determinado par imagens de treinamento, sobre outras imagens de chapas de aco
semelhantes, vai depender da distribuicao dos nıveis de cinza das imagens envolvidas
neste processamento, conforme apresentado a seguir.
Como pode ser observado nas Figuras 4.41 e 4.42, as imagens resultantes das aplicacoes do
operador∧Ψ
(8,3)
Λ apresentam um resultado satisfatorio para a segmentacao destas imagens
em regioes claras e escuras. Porem, isto nao acontece para o caso da imagem da Figura
4.43, na qual pode ser obeservado que a imagem resultante apresenta um defeito grave,
uma vez que ela exibe manchas pretas em areas bem claras na imagem original. Conforme
ja mencionado anteriormente, estas imagens sao resultantes das aplicacoes dos operadores
sup-geradores parametrizados pelas luts da Figura 4.38. Por sua vez, os parametros destas
luts foram encontrados a partir do par de imagens de treinamento da Figura 4.37, sendo
que a imagem observada deste par (Figura 4.37(a)) tem nıveis de cinza entre 52 e 196.
Para ilustrar o que acontece e extraıda uma pequena sub-imagem (10 × 11) de uma
regiao bem clara da imagem da Figura 4.43(a), como mostra a Figura 4.44, sobre a qual
e aplicado o operador∧Ψ
(8,3)
Λ , parametrizado pelas luts da Figura 4.38. A Figura 4.45
mostra a representacao numerica dos valores dos nıveis de cinza desta sub-imagem.
FIGURA 4.44 – Imagem da Figura 4.43 com destaque para uma sub-imagem de umaregiao clara.
129

223 221 222 221 227 230 226 212 203 230221 221 224 222 226 227 221 209 237 225226 227 226 225 228 231 236 235 237 233230 231 238 245 244 242 235 229 228 233232 236 245 252 249 245 234 231 233 239230 239 243 238 241 241 242 250 234 235238 246 250 242 235 238 240 236 242 249234 245 239 230 222 233 239 252 254 244225 231 224 217 212 222 238 243 237 231231 223 220 220 220 229 230 228 224 220233 235 242 238 232 223 220 222 227 234
FIGURA 4.45 – Representacao numerica dos nıveis de cinza da sub-imagem da Figura4.44.
Para facilitar a visualizacao do que acontece quando e aplicado o operador∧Ψ
(8,3)
Λ ,
parametrizado pelas luts da Figura 4.38, sobre a imagem da Figura 4.43(a), a Figura
4.46 apresenta novamente os parametros do operador sup-gerador diferente do operador
Ω.
40 225 35 243 89 236113 218 118 228 53 207115 218 124 228 116 238
FIGURA 4.46 – Parametros das luts da Figura 4.38 que parametrizam o operadorsup-gerador diferente do operador Ω.
Ao percorrer a sub-imagem da Figura 4.45 com a janela da Figura 4.46, tem-se como
resultado uma sub-imagem nula, pois em qualquer posicao existe pelo menos um valor
de cinza desta sub-imagem que nao pertence aos intervalos da referida janela.
Isto e o que acontece nas regioes claras da imagem da Figura 4.43(a) e nas demais imagens
de chapa de aco, que possuem regioes maiores que o tamanho da janela utilizada com
valores de cinza fora dos intervalos contidos nesta janela.
Pode acontecer o contrario tambem. Uma imagem pode conter regioes com valores de
cinza que estao contidos nos intervalos dados pelas janelas e que nao fazem parte da
regiao de interesse. Neste caso, na imagem de saıda estas regioes serao marcadas como
fazendo parte da regiao de interesse.
Diante dos resultados encontrados ainda nao e possıvel pensar na aplicacao de forma
130

sistematica do operador projetado em imagens de outras placas de aco. Uma possıvel
alternativa para resolver este problema seria a utilizacao de pares de imagens de
treinamento de varias placas.
4.6 Experimentos com Imagens de um DNA Microarray
A imagem utilizada nos experimentos apresentados nesta Secao e uma imagem de um
DNA microarray utilizado como ferramenta para identificar e quantificar os nıveis da
expressao genetica para todos os genes de um organismo. Maiores detalhes sobre este
tipo de imagem podem ser encontrados em Angulo e Serra (2003).
O objetivo do processamento realizado sobre imagens deste tipo e a extracao dos spots
do DNA microarray, para auxiliar na analise e na medida da intensidade de cada spot
durante as rotinas de laboratorio. Maiores detalhes sobre um sistema integrado para
processamento e analise de imagens de DNA microarrays, podem ser encontrados em
Angulo e Serra (2003).
Neste trabalho, o objetivo se limita ao projeto de um operador para extracao dos spots
do DNA microarray, utilizando o metodo proposto.
A Figura 4.47 mostra um par de imagens de um DNA microarray (entrada/saıda), sendo
a primeira uma imagem em nıveis de cinza (entrada) e a segunda uma imagem binaria
(saıda), contendo os spots do DNA microarray, ambas de tamanho 512 × 512. Estas
imagens sao provenientes do trabalho de Angulo e Serra (2003).
Das imagens da Figura 4.47 e extraıdo um par de sub-imagens (128× 128), as quais sao
utilizadas pelo SGA como imagens de treinamento. Este par de imagens e mostrado na
Figura 4.48.
Nas imagens das Figuras 4.47 e 4.48 pode-se observar que a extracao dos spots e
acompanhado de um efeito de dilatacao nao desprezıvel. Para ilustrar melhor este efeito
sao extraıdas duas sub-imagens das imagens da 4.48, as quais contem um unico spot do
DNA microarray, conforme ilustra a Figura 4.49.
131

(a) (b)
FIGURA 4.47 – Imagens de um DNA microarray - 512 × 512: (a) imagem de entrada(em nıveis de cinza), (b) imagem de saıda (binaria).
(a) (b)
FIGURA 4.48 – Sub-imagens 128× 128 das imagens da Figura 4.47.
(a) (b)
FIGURA 4.49 – Sub-imagens das imagens da Figura 4.48 contendo um unico spot doDNA microarray.
132

Binarizando a imagem da Figura 4.49(a) e dilatando a imagem resultante por elementos
estruturantes quadrado e cruz (3×3 e 5×5), tem-se como resultado as imagens mostradas
na Figura 4.50. Das imagens que mostram as diferencas simetricas, entre as imagens
resultantes das dilatacoes e a imagem binaria da Figura 4.49(b), pode-se constatar que
o efeito de dilatacao ocorrido pode ser resultado de uma dilatacao por um elemento
estruturante quadrado 3×3 ou 5×5, ou ainda, por uma elemento estruturante na forma
de uma cruz 3× 3 ou 5× 5.
(a) (b) (c) (d)
(e) (f) (g) (h)
FIGURA 4.50 – Efeito da dilatacao por elementos estruturantes quadrado e cruz: (a)-(b)imagem dilatada e diferenca simetrica pelo quadrado 3 × 3, (c)-(d)imagem dilatada e diferenca simetrica pelo quadrado 5 × 5, (e)-(f)imagem dilatada e diferenca simetrica pela cruz 3 × 3, (g)-(h) imagemdilatada e diferenca simetrica pela cruz 5× 5.
Para projetar o operador desejado e utilizado o seguinte modelo:
M (8,3)Λ
([0, 255]E1 , 0, 255E2
).
O fato da imagem de saıda ser binaria e utilizado como conhecimento a priori na escolha
de luts binarias para parametrizar este modelo.
A Tabela 4.17 descreve o experimento realizado com o par de imagens de treinamento
da Figura 4.48, mostrando os dados de entrada, inicializacao e resultados do SGA para
133

este experimento.
TABELA 4.17 – Parametros do SGA para o experimento realizado com o par de imagensde treinamento da Figura 4.48 utilizando o modelo M (8,3)
Λ .
tp ccb ng tt ngmi ami
1500 1152 1000 10 91 0,00568505
A Figura 4.51 mostra os parametros das luts morfologicas elementares binarias,
encontrados na geracao 91 do experimento descrito na Tabela 4.17.
10 73 54 219 72 166153 59 62 200 183 1117 149 64 18 189 56
(a)
22 107 213 73 115 7182 165 235 69 111 23771 22 31 215 145 95
(b)
3 75 79 66 90 16344 165 43 175 15 231
238 199 226 16 100 184(c)
194 238 244 41 196 17849 132 178 59 129 164
191 51 44 105 158 218(d)
219 179 161 253 56 183167 21 111 229 158 229182 247 29 48 228 138
(e)
101 83 102 227 21 201212 213 243 233 192 8214 75 251 91 177 192
(f)
0 255 7 255 0 2550 255 7 255 0 2550 255 0 255 0 255
(g)
193 86 176 171 216 2924 55 52 249 103 3518 241 215 2 50 166
(h)
FIGURA 4.51 – Parametros das luts morfologicas elementares binarias resultantes doexperimento descrito na Tabela 4.17.
Observando os parametros das luts das Figuras 4.51(a)-4.51(f) e 4.51(h), pode-se concluir
que os operadores sup-geradores parametrizados por estas luts podem ser descartados,
uma vez que as respectivas aplicacoes destes operadores sobre a imagem da Figura
4.11(a) geram imagens nulas e, portanto, nao tem contribuicao efetiva no modelo M (8,3)Λ
utilizado (dado pela uniao de operadores sup-geradores). Assim, para este experimento
restou apenas um operador sup-gerador diferente do operador Ω. Desta forma, pode-se
concluir que a solucao encontrada pertence tambem ao modelo M (1,3)Λ . Neste experimento
134

a solucao exata tambem nao foi encontrada durante a evolucao do SGA; portanto, neste
caso nao possıvel dizer qual e a ordem do modelo que pode garantir uma solucao exata.
Para avaliar o operador projetado utiliza-se como imagens de validacao o par de imagens
entrada/saıda da Figura 4.47. A Figura 4.52 mostra a imagem resultante da aplicacao
do operador∧Ψ
(8,3)
Λ , parametrizado pelas luts morfologicas elementares binarias da Figura
4.51, sobre a imagem da Figura 4.47(a). Nesta figura e mostrada tambem a diferenca
simetrica entre a imagem resultante e a imagem de saıda da Figura 4.47(b). Um resumo
desta diferenca simetrica pode ser visto na Tabela 4.18.
(a) (b)
FIGURA 4.52 – Resultado da aplicacao do operador∧Ψ
(8,3)
Λ parametrizado pelas lutsmorfologicas elementares binarias da Figura 4.51, sobre a imagem daFigura 4.47(a): (a) imagem resultante, (b) diferenca simetrica.
TABELA 4.18 – Diferenca simetrica entre a imagem binaria da Figura 4.52(a) e aimagem binaria da Figura 4.47(b).
Total de Pixels Pixels Iguais Pixels DiferentesAvaliados # % # %
260100 236426 90,90 23674 9,10
Na Figura 4.52(b) pode-se observar bordas na reconstrucao dos spots, a qual reproduz
o efeito de dilatacao presente na imagem de saıda do par de imagens de treinamento
(Figura 4.48(b)). Isto e devido a utilizacao de um modelo com w = 3.
135

Na tentativa de reduzir ainda mais este efeito de bordas, a seguir e apresentado um outro
experimento para projetar o operador desejado, com as imagens do DNA microarray da
Figura 4.47, onde o modelo utilizado resulta em w = 5. Este experimento tem tambem
como objetivo projetar um operador para extracao dos spots deste DNA microarray. O
modelo utilizado e dado por:
M (q,p,w)MΛ
([0, 255]E1 , 0, 255E2
), para q = p = 6 e w = 3.
O fato da imagem de saıda ser binaria e utilizado como conhecimento a priori na escolha
do tipo de lut de uma parte deste modelo.
Na primeira parte deste modelo, os operadores inf-geradores sao parametrizados
por luts morfologicas elementares parametricas, pertencentes a uma das quatro
famılias de luts apresentadas no Capıtulo 2 - Secao 2.3.1.1; e na segunda parte, os
operadores sup-geradores sao parametrizados por luts morfologicas elementares binarias,
apresentadas no Capıtulo 2 - Secao 2.3.1.2.
A Tabela 4.19 descreve o experimento realizado com o par de imagens de treinamento
da Figura 4.48, utilizando o modelo M (6,6,3)MΛ . Esta tabela mostra os dados de entrada,
inicializacao e resultados do SGA para o referido experimento.
TABELA 4.19 – Parametros do SGA para o experimento realizado com o par de imagensde treinamento da Figura 4.48 utilizando o modelo M (6,6,3)
MΛ .
tp ccb ng tt ngmi ami
1500 2160 1000 10 987 0,00944287
Para ilustrar o resultado obtido com o modelo M (6,6,3)MΛ , a Figura 4.53 mostra os
parametros das luts morfologicas elementares resultantes do experimento descrito na
Tabela 4.19. Nas seis primeiras janelas, os numeros entre parenteses de cada posicao
correspondem as famılias de luts-dilatacoes e luts-anti-erosoes parametricas (Capıtulo
2 - Secao 2.3.1.1); os outros dois numeros correspondem aos parametros destas luts. E
para as outras seis janelas, os numeros correspondem aos parametros de luts morfologicas
elementares binarias (Capıtulo 2 - Secao 2.3.1.2). Estas luts parametrizam os operadores
inf-geradores e sup-geradores do modelo utilizado.
136

(2)68 (4)67 (2)254 (4)128 (3)125 (1)88(1)172 (4)80 (3)33 (3)88 (3)112 (4)187(3)15 (4)43 (2)247 (3)205 (1)0 (4)108
(a)
(3)47 (2)195 (3)44 (3)0 (3)89 (4)169(3)67 (4)85 (2)214 (4)135 (2)197 (2)75
(2)152 (4)117 (3)151 (4)102 (2)140 (2)81(b)
(1)251 (1)59 (2)71 (4)17 (3)236 (3)117(2)62 (3)68 (4)51 (4)224 (1)112 (2)233(4)88 (3)252 (2)221 (1)145 (3)100 (2)17
(c)
(4)240 (2)213 (1)153 (4)75 (3)241 (2)153(3)62 (1)78 (2)52 (4)241 (4)34 (3)84
(1)205 (2)69 (1)169 (3)59 (4)151 (4)209(d)
(2)124 (2)75 (2)213 (2)161 (2)189 (2)243(2)65 (4)252 (4)224 (4)254 (4)183 (2)92(4)90 (2)215 (4)161 (2)230 (1)129 (4)163
(e)
(3)12 (3)118 (2)20 (4)136 (2)200 (4)214(3)19 (3)16 (3)188 (2)250 (4)175 (2)116(4)28 (2)71 (4)45 (2)209 (4)35 (4)131
(f)
125 132 73 119 108 27119 95 180 90 80 212125 58 115 107 90 203
(g)
16 192 45 245 15 17311 223 56 177 84 17332 213 50 233 125 239
(h)
199 22 128 206 26 237145 18 94 96 60 4874 76 36 250 41 92
(i)
25 239 25 216 58 15587 0 71 64 157 4243 92 7 30 160 192
(j)
28 210 27 254 147 21348 222 68 235 90 196
100 172 131 172 40 250(k)
185 115 157 204 55 20046 213 244 183 51 84
168 230 31 85 252 33(l)
FIGURA 4.53 – Parametros das luts resultantes do experimento da Tabela 4.19.
137

Observando os parametros das luts das Figuras 4.53(g), 4.53(i), 4.53(j) e 4.53(l), pode-se
concluir que os operadores sup-geradores parametrizados por estas luts podem ser
descartados, uma vez que as respectivas aplicacoes destes operadores sobre a imagem da
Figura 4.47(a) geram imagens nulas e, portanto, nao tem contribuicao efetiva no modelo
M (6,6,3)MΛ utilizado neste experimento. Assim, para este experimento restam apenas dois
operadores sup-geradores, parametrizados por luts morfologicas elementares binarias,
diferente do operador Ω. Desta forma, pode-se concluir que este operador projetado
pertence tambem ao modelo M (6,2,3)MΛ .
Para avaliar o operador projetado utiliza-se como imagens de validacao o par de imagens
entrada/saıda da Figura 4.47. Entao, a Figura 4.54 mostra as imagens resultantes
da aplicacao do operador∧Ψ
(6,6,3)
MΛ (parametrizado pelas luts morfologicas elementares
parametricas e binarias da Figura 4.53), sobre a imagem da Figura 4.47(a). A Figura
4.54(a) mostra a imagem resultante da aplicacao do operador∧Ψ
(6,3)
M , parametrizado pelas
luts das Figuras 4.53(a) a 4.53(f). E a Figura 4.54(b) mostra a imagem resultante da
aplicacao do operador∧Ψ
(6,3)
Λ , parametrizado pelas luts das Figuras 4.53(g) a 4.53(l), sobre
a imagem da Figura 4.54(a). Na Figura 4.54 e mostrada tambem a diferenca simetrica
entre a imagem resultante e a imagem de saıda da Figura 4.47(b). Um resumo desta
diferenca simetrica pode ser visto na Tabela 4.20.
TABELA 4.20 – Diferenca simetrica entre a imagem binaria da Figura 4.54(b) e aimagem binaria da Figura 4.47(b).
Total de Pixels Pixels Iguais Pixels DiferentesAvaliados # % # %
260100 243241 93,52 16859 6,48
A largura das bordas da imagem diferenca simetrica diminuiu e o interior dos spots
esta mais limpo (menos ruidoso), quando comparado com o resultado mostrado na
Figura 4.52. Com um modelo incluindo mais uma composicao, isto e, um modelo do
tipo M (q,p,r,w)MΛM , provavelmente diminuiria ainda mais a largura das bordas.
138

(a) (b)
(c)
FIGURA 4.54 – Imagens e diferenca simetrica resultantes da aplicacao do operador∧Ψ
(6,2,3)
MΛ , parametrizado pelas luts da Figura 4.53, sobre a imagem da
Figura 4.47(a): (a) saıda do operador∧Ψ
(6,3)
M , (b) saıda do operador∧Ψ
(2,3)
Λ ,(c) diferenca simetrica.
139

4.7 Experimentos com uma Imagem de Satelite com Ruıdos Simulados e
Dependentes do Sinal
O objetivo dos experimentos apresentados nesta Secao e aplicar o metodo de projeto
de operadores, proposto neste trabalho, na filtragem de ruıdos dependentes do sinal de
imagens de sensoriamento remoto. O objetivo do processamento realizado sobre esta
imagem e filtrar estes ruıdos, melhorando assim a sua qualidade visual.
A imagem em nıveis de cinza utilizada nos experimentos apresentados nesta Secao e uma
imagem de sensoriamento remoto, obtida pelo sensor TM do sistema LANDSAT. Esta
imagem possui ruıdos dependentes do sinal, os quais foram simulados conforme definido
na Expressao 4.2:
g(y) =
255, se f(y) ≥ 128 e y ponto ruidoso
0, se f(y) < 128 e y ponto ruidoso (∀y ∈ E1)
f(y), caso contrario
(4.2)
A Figura 4.55 mostra o par de imagens utilizado nestes experimentos. Na imagem da
Figura 4.55(a), nas areas claras aparece um ruıdo claro, enquanto que nas areas escuras
aparace um ruıdo escuro.
(a) (b)
FIGURA 4.55 – Imagens TM/LANDSAT: (a) com ruıdo simulado dependente do sinal,(b) sem ruıdo.
140

Primeiramente, e apresentada uma solucao teorica para filtrar este tipo de ruıdo, dado
pela Expressao 4.2. A ideia e em parte semelhante a filtragem das listras nas imagens
SPOT (Banon e Barrera, 1989). Na sequencia sao apresentados alguns experimentos
utilizando um modelo geral.
A seguir sao dadas algumas notacoes e definicoes, as quais sao utilizadas na apresentacao
da solucao teorica.
Seja d(4)z a lut-dilatacao do tipo 4, apresentada no Capıtulo 2 - Secao 2.3.1.1 - Expressao
2.12, de K1 = [0, 255] em K2 = [0, 255], com z = 254.
Seja da(4)z a lut-anti-dilatacao do tipo 4, apresentada no Capıtulo 2 - Secao 2.3.1.1 -
Expressao 2.21, ou ainda definida por:
da(4)z (t)
4= 255− d(4)
z , (4.3)
de K1 = [0, 255] em K2 = [0, 255], com z = 254.
Seja id a lut identidade.
Entao, considera-se o operador ΨΛ sobre imagens, com escala de cinza K = [0, 255],
definido da seguinte forma:
ΨΛ(f)4= (d(4)
z (f) ∧ id(f1) ∧ id(f2) ∧ id(f3) ∧ id(f4)) ∨ (da(4)z (f) ∧ id(f)) (4.4)
onde f1, f2, f3 e f4, sao as versoes transladadas de f por (0, 1), (1, 0), (0, -1) e (-1, 0).
A Figura 4.56 mostra esquematicamente o operador ΨΛ dado pela Expressao 4.4.
Observa-se que este operador pertence ao modelo M (2,3)Λ .
O operador ΨΛ detecta a presenca de ruıdo branco. Na presenca deste ruıdo ele substitui
o valor do pixel corrompido pelo menor dos valores dos quatro pixels vizinhos (ver Λ1);
caso contrario ele nao altera o valor do pixel (ver Λ2).
141

τ(0,−1)(f)
τ(−1,0)(f)
τ(1,0)(f)
τ(0,−1)
τ(−1,0)
id
id
τ(0,1)
τ(0,1)(f)id
(d(4)254)
∧
id
id
∧
∈ K1E1
∈ K2E2
∨ΨΛ(f)
ΨΛ
∧
∧
∆
∆a
Λ1
Λ2
∧
f
τ(1,0)
(da(4)254 )
FIGURA 4.56 – Representacao esquematica do operador ΨΛ.
142

Seja e(3)z a lut-erosao do tipo 3, apresentada no Capıtulo 2 - Secao 2.3.1.1 - Expressao
2.15, de K1 = [0, 255] em K2 = [0, 255], com z = 1.
Seja ea(3)z a lut-anti-erosao do tipo 3, apresentada no Capıtulo 2 - Secao 2.3.1.1 - Expressao
2.24, ou ainda definida por:
ea(3)z (t)
4= 255− e(3)
z , (4.5)
de K1 = [0, 255] em K2 = [0, 255], com z = 1.
Entao, considera-se o operador ΨM sobre imagens, com escala de cinza K = [0, 255],
definido da seguinte forma:
ΨM(f)4= (e(3)
z (f) ∨ id(f1) ∨ id(f2) ∨ id(f3) ∨ id(f4)) ∧ (ea(3)z (f) ∨ id(f)) (4.6)
onde f1, f2, f3 e f4, sao as versoes transladadas de f por (0, 1), (1, 0), (0, -1) e (-1, 0).
A Figura 4.57 mostra esquematicamente o operador ΨM dado pela Expressao 4.6.
Observa-se que este operador pertence ao modelo M (2,3)M .
τ(0,−1)(f)
τ(−1,0)(f)
τ(1,0)(f)
τ(0,−1)
τ(−1,0)
id
id
τ(1,0)
τ(0,1)
τ(0,1)(f)id
(e(3)1 )
∨
id
id
∨
∈ K1E1
∈ K2E2
∧ΨM(f)
ΨM
∨
∨
(ea(3)1 )
E
Ea
M1
M2
∨
f
FIGURA 4.57 – Representacao esquematica do operador ΨM.
143

O operador ΨM detecta a presenca de ruıdo preto. Na presenca deste ruıdo ele substitui
o valor do pixel corrompido pelo maior dos valores dos quatro pixels vizinhos (ver M1);
caso contrario ele nao altera o valor do pixel (ver M2).
Por construcao, ΨΛ e dado pela uniao de dois operadores sup-geradores, sendo o primeiro
reduzido a uma erosao, uma vez que d(4)z com z = 254 e tambem uma erosao. E tambem
por construcao, ΨM e dado pela interseccao de dois operadores inf-geradores, sendo o
primeiro reduzido a uma dilatacao, uma vez que e(3)z com z = 1 e tambem uma dilatacao.
As solucoes teoricas para a remocao de ruıdos dependentes do sinal consistem em
encadear os operadores acima. Desta forma, as solucoes podem ser dadas pelos seguintes
filtros: ΨM ΨΛ ou ΨΛ ΨM, representados nas Figuras 4.58 e 4.59, respectivamente.
Os parametros destes filtros sao as luts morfologicas elementares parametricas dos tipos
(4,3) e (3,4), respectivamente.
∈ K1E1
∨
M1
M2Λ2
f
ΨM
∈ K2E2
ΨM(ΨΛ(f))∧
ΨΛ
∈ K2E2
ΨΛ(f)Λ1
FIGURA 4.58 – Estrutura dos operadores dados pelo modelo M (2,2,w)ΛM .
∈ K1E1
∧
M2
Λ1
Λ2
f
ΨΛ
∈ K2E2
ΨΛ(ΨM(f))∨
ΨM
∈ K2E2
ΨM(f)M1
FIGURA 4.59 – Estrutura dos operadores dados pelo modelo M (2,2,w)MΛ .
Como consequencia, um modelo a priori a ser projetado seria a composicao de dois
operadores sup-geradores com dois operadores inf-geradores ou vice e versa, sendo as
luts dos tipos 4 e 3, respectivamente, com z, por exemplo, entre 0 e 254 e entre 1 e 255,
144

respectivamente. A vizinhanca poderia ser a cruz 3 × 3. Este modelo a priori poderia
ser ainda mais especıfico ja que muitas destas luts poderiam ser identidades e algumas
vizinhancas reduzidas a um ponto.
A Figura 4.60 mostra os parametros “teoricos” das luts morfologicas elementares
parametricas - tipos 3 e 4, da solucao teorica apresentada acima e ilustrada na Figura
4.58, que parametrizam o operador ΨM ΨΛ.
× id ×id d
(4)254 id
× id ×≡
× d(4)0 ∧ d
a(4)255 ×
d(4)0 ∧ d
a(4)255 d
(4)254 ∧ d
a(4)255 d
(4)0 ∧ d
a(4)255
× d(4)0 ∧ d
a(4)255 ×
(a) Λ1
× × ×× id ∧ d
a(4)254 ×
× × ×≡
× × ×× d
(4)0 ∧ d
a(4)254 ×
× × ×
(b) Λ2
× id ×id e
(3)1 id
× id ×≡
× e(3)255 ∨ e
a(3)0 ×
e(3)255 ∨ e
a(3)0 e
(3)1 ∨ e
a(3)0 e
(3)255 ∨ e
a(3)0
× e(3)255 ∨ e
a(3)0 ×
(c) M1
× × ×× id ∨ e
a(3)1 ×
× × ×≡
× × ×× e
(3)255 ∨ e
a(3)1 ×
× × ×
(d) M2
FIGURA 4.60 – Parametros “teoricos” das luts que parametrizam o operador ΨM ΨΛ.
A Figura 4.61 mostra as imagens resultantes da aplicacao do operador ΨMΨΛ (ilustrado
na Figura 4.58), parametrizado pelas luts morfologicas elementares parametricas dos
tipos 4 e 3, respectivamente. Os parametros “teoricos” destas luts sao aqueles da Figura
4.60. Este modelo e aplicado para eliminar ruıdos (simulados) dependentes do sinal da
imagem de sensoriamento remoto mostrada na Figura 4.55(a).
145

(a) (b)
FIGURA 4.61 – Imagens resultantes da filtragem de ruıdos (simulados) dependentes dosinal da imagem da Figura 4.55(a), pelo filtro ΨM ΨΛ parametrizadopelas luts da Figura 4.60: (a) ΨΛ(f), (b) ΨM(ΨΛ(f)).
146

Das imagens das Figuras 4.55 sao extraıdas as sub-imagens mostradas na Figura 4.62
- tamanho 130 × 130. Estas sub-imagens sao utilizadas como imagens de treinamento,
pelo SGA, nos experimentos mostrados a seguir.
(a) (b)
FIGURA 4.62 – Par de imagens de treinamento - 130× 130: (a) sub-imagem da imagemda Figura 4.55(a), (b) sub-imagem da imagem da Figura 4.55(b).
A Tabela 4.21 mostra os parametros de entrada e inicializacao e os resultados do SGA,
para os experimentos realizados para projetar o operador, utilizando o modelo teorico
M (2,2,3)ΛM . Nestes experimentos e utilizada a funcao de adaptacao dada pela Expressao 3.7,
Capıtulo 3 - Secao 3.4.2, para avaliar a adaptacao do indivıduos ao longo das geracoes.
Para este modelo tem-se quatro grupos de experimentos, variando-se o tamanho da
populacao (tp); e em cada um destes grupos tem-se dois experimentos, variando-se o
tamanho do torneio (tt) na fase de selecao dos indivıduos pelo SGA. A variacao dos
valores de tp e tt tem como objetivo permitir a observacao da influencia desta variacao
no resultado do SGA.
TABELA 4.21 – Parametros do SGA para os experimentos realizados com o par deimagens de treinamento da Figura 4.62 utilizando o modelo M (2,2,3)
ΛM
parametrizado pelas luts dos tipos 3 e 4.
Experimento tp ccb ng tt ngmi vami
1 50 192 1000 3 441 1,99354002 20 871 1,93061903 100 192 1000 3 576 1,99354004 20 875 1,93213605 200 192 1000 3 241 1,99354006 20 948 1,93956007 1000 192 1000 3 994 1,94578508 20 612 1,9462760
147

Para ilustrar os resultados obtidos com os experimentos da Tabela 4.21, a Figura 4.63
mostra os parametros das luts morfologicas elementares parametricas, dos tipos 3 e 4,
resultantes do experimento 3 descrito na Tabela 4.21, que parametrizam o modelo teorico
M (2,2,3)ΛM .
× × 229 50 × ×100 217 121 185 60 71× × 18 100 × ×
(a) Λ1
× × × × × ×× × 40 205 × ×× × × × × ×
(b) Λ2
× × 233 0 × ×205 0 2 0 206 0× × 246 0 × ×
(c) M1
× × × × × ×× × 242 57 × ×× × × × × ×
(d) M2
FIGURA 4.63 – Parametros das luts dos operadores sup-geradores e inf-geradoresresultantes do experimento 3 da Tabela 4.21.
A Figura 4.64 mostra o resultado da aplicacao do operador∧Ψ
(2,2,3)
ΛM parametrizado pelas
luts morfologicas elementares parametricas da Figura 4.63, sobre a imagem da Figura
4.55(a).
(a) (b)
FIGURA 4.64 – Imagens resultantes da aplicacao do operador∧Ψ
(2,2,3)
ΛM parametrizado
pelas luts da Figura 4.63, sobre a imagem da Figura 4.55(a): (a)∧ΨΛ(f),
(b)∧ΨM(
∧ΨΛ(f)).
148

Apesar do resultado apresentado na Figura 4.64 ser satisfatorio, a seguir sao apresentados
mais alguns experimentos utilizando um modelo mais geral para projetar o operador
desejado. Este modelo e uma composicao de dois modelos em nıveis de cinza (M (2,3)Λ e
M (2,3)M ), cada um com vizinhanca 3 e ordem 2, sem restricao do tipo da famılia de luts.
Este modelo e dado da seguinte forma:
M (2,2,3)ΛM
([0, 255]E1 , [0, 255]E2
).
A Tabela 4.22 mostra os valores dos parametros de entrada e inicializacao e os resultados
do SGA, para os experimentos realizados para projetar o operador, utilizando o modelo
M (2,2,3)ΛM . Para este modelo tem-se tambem quatro grupos de experimentos, variando-se
o tamanho da populacao (tp); e em cada um destes grupos tem-se dois experimentos,
variando-se o tamanho do torneio (tt) na fase de selecao dos indivıduos pelo SGA. A
variacao dos valores de tp e tt tem como objetivo permitir a observacao da influencia desta
variacao no resultado do SGA. Nestes experimentos e utilizada a funcao de adaptacao
dada pela Expressao 3.7, Capıtulo 3 - Secao 3.4.2, para avaliar a adaptacao do indivıduos
ao longo das geracoes.
TABELA 4.22 – Parametros do SGA para os experimentos realizados com o par deimagens de treinamento da Figura 4.62 utilizando o modelo geralM (2,2,3)
ΛM .
Experimento tp ccb ng tt ngmi ami
1 50 864 1000 3 955 1,98971902 20 755 1,98329003 100 864 1000 3 583 1,98993204 20 994 1,98166205 200 864 1000 3 868 1,99260606 20 970 1,98765107 1000 864 1000 3 432 1,99293808 20 992 1,9957880
Para ilustrar os resultados obtidos, a Figura 4.65, mostra os tipos e os parametros das
luts morfologicas elementares parametricas resultantes do experimento 8, descrito na
Tabela 4.22. O primeiro dos tres numeros de cada posicao da janela, corresponde ao
tipo da lut-dilatacao (erosao, anti-dilatacao, anti-erosao, respectivamente), pertencente
a uma das quatro famılias de luts morfologicas elementares parametricas apresentadas
no Capıtulo 2 - Secao 2.3.1.1; os outros dois numeros correspondem aos parametros
149

destas luts. Para facilitar a visualizacao destas luts, as Figuras 4.67 a 4.70 mostram as
respectivas representacoes graficas.
(2)205 (2)96 (4)127 (2)103 (2)105 (3)149(2)209 (3)118 (2)103 (1)64 (4)231 (1)229(2)106 (2)215 (2)105 (3)97 (2)106 (1)58
(a)
(4)185 (2)211 (4)207 (3)90 (4)190 (3)1(2)139 (2)236 (2)197 (3)116 (2)75 (1)64(4)206 (2)191 (4)161 (3)129 (4)205 (3)66
(b)
(2)131 (4)215 (2)25 (2)216 (2)45 (2)150(3)14 (3)223 (2)27 (2)212 (3)54 (4)255
(2)217 (4)204 (4)207 (4)157 (2)23 (4)177(c)
(4)26 (2)146 (4)48 (4)61 (1)82 (2)250(1)255 (2)231 (4)90 (4)5 (4)167 (4)182(1)108 (4)192 (4)166 (4)51 (1)88 (4)58
(d)
FIGURA 4.65 – Tipos e parametros das luts morfologicas elementares parametricasresultantes do experimento 8 da Tabela 4.22.
Para avaliar o operador projetado utiliza-se como imagens de validacao o par de imagens
entrada/saıda da Figura 4.55. Assim, a Figura 4.66 mostra as imagens resultantes
da aplicacao do operador∧Ψ
(2,2,3)
ΛM , parametrizado pelas luts morfologicas elementares
parametricas da Figura 4.65, sobre a imagem da Figura 4.55(a).
150

(a) (b)
FIGURA 4.66 – Imagens resultantes da aplicacao do operador∧Ψ
(2,2,3)
ΛM parametrizado
pelas luts da Figura 4.65, sobre a imagem da Figura 4.55(a): (a)∧ΨΛ(f),
(b)∧ΨM(
∧ΨΛ(f)).
151

No primeiro estagio do modelo M (2,2,3)ΛM , e o valor do pixel a direita do centro da janela
3 × 3 que influencia a saıda deste estagio, como pode ser observado nas Figuras 4.67
e 4.68. Nestas figuras, as luts-interseccao e(4)231(t) ∧ d
a(1)229 (t) e e
(2)75 (t) ∧ d
a(1)64 (t) (Figuras
4.67(f) e 4.68(f), respectivamente) sao as menores dentre as nove de cada sup-gerador.
Destas duas luts, predomina aquela do segundo sup-gerador (Figura 4.68(f)). Observa-se
que esta lut e predominantemente decrescente, o que explica a geracao de uma imagem
negativa na saıda deste primeiro estagio.
0
50
100
150
200
250
0 50 100 150 200 250
k
t
(a) e(2)205(t) ∧ d
a(2)96 (t)
0
50
100
150
200
250
0 50 100 150 200 250
k
t
(b) e(4)127(t) ∧ d
a(2)103 (t)
0
50
100
150
200
250
0 50 100 150 200 250
k
t
(c) e(2)105(t) ∧ d
a(3)149 (t)
0
50
100
150
200
250
0 50 100 150 200 250
k
t
(d) e(2)209(t) ∧ d
a(3)118 (t)
0
50
100
150
200
250
0 50 100 150 200 250
k
t
(e) e(2)103(t) ∧ d
a(1)64 (t)
0
50
100
150
200
250
0 50 100 150 200 250
k
t
(f) e(4)231(t) ∧ d
a(1)229 (t)
0
50
100
150
200
250
0 50 100 150 200 250
k
t
(g) e(2)106(t) ∧ d
a(2)215 (t)
0
50
100
150
200
250
0 50 100 150 200 250
k
t
(h) e(2)105(t) ∧ d
a(3)97 (t)
0
50
100
150
200
250
0 50 100 150 200 250
k
t
(i) e(2)106(t) ∧ d
a(1)58 (t)
FIGURA 4.67 – Representacao grafica das luts-erosoes e anti-dilatacoes da Figura4.65(a) e respectivas interseccoes.
152

0
50
100
150
200
250
0 50 100 150 200 250
k
t
(a) e(4)185(t) ∧ d
a(2)211 (t)
0
50
100
150
200
250
0 50 100 150 200 250
k
t
(b) e(4)207(t) ∧ d
a(3)90 (t)
0
50
100
150
200
250
0 50 100 150 200 250
k
t
(c) e(4)190(t) ∧ d
a(3)1 (t)
0
50
100
150
200
250
0 50 100 150 200 250
k
t
(d) e(2)139(t) ∧ d
a(2)236 (t)
0
50
100
150
200
250
0 50 100 150 200 250
k
t
(e) e(2)197(t) ∧ d
a(3)116 (t)
0
50
100
150
200
250
0 50 100 150 200 250
k
t
(f) e(2)75 (t) ∧ d
a(1)64 (t)
0
50
100
150
200
250
0 50 100 150 200 250
k
t
(g) e(4)206(t) ∧ d
a(2)191 (t)
0
50
100
150
200
250
0 50 100 150 200 250
k
t
(h) e(4)161(t) ∧ d
a(3)129 (t)
0
50
100
150
200
250
0 50 100 150 200 250
k
t
(i) e(4)205(t) ∧ d
a(3)66 (t)
FIGURA 4.68 – Representacao grafica das luts-erosoes e anti-dilatacoes da Figura4.65(b) e respectivas interseccoes.
153

No segundo estagio do modelo M (2,2,3)ΛM , e o valor do pixel a esquerda do centro da janela
3 × 3 que influencia a saıda deste estagio, como pode ser observado nas Figuras 4.69 e
4.70. Nestas figuras, as luts-uniao d(3)14 (t) ∨ e
a(3)223 (t) e d
(1)255(t) ∨ e
a(2)231 (t) (Figuras 4.69(d) e
4.70(d), respectivamente) sao as maiores dentre as nove de cada inf-gerador. Destas duas
luts, predomina aquela do primeiro inf-gerador (Figura 4.69(d)). Observa-se que esta lut
e totalmente decrescente, o que explica o retorno a uma imagem positiva na saıda deste
segundo estagio.
0
50
100
150
200
250
0 50 100 150 200 250
k
t
(a) d(2)131(t) ∨ e
a(4)215 (t)
0
50
100
150
200
250
0 50 100 150 200 250
k
t
(b) d(2)25 (t) ∨ e
a(2)216 (t)
0
50
100
150
200
250
0 50 100 150 200 250
k
t
(c) d(2)45 (t) ∨ e
a(2)150 (t)
0
50
100
150
200
250
0 50 100 150 200 250
k
t
(d) d(3)14 (t) ∨ e
a(3)223 (t)
0
50
100
150
200
250
0 50 100 150 200 250
k
t
(e) d(2)27 (t) ∨ e
a(2)212 (t)
0
50
100
150
200
250
0 50 100 150 200 250
k
t
(f) d(3)54 (t) ∨ e
a(4)255 (t)
0
50
100
150
200
250
0 50 100 150 200 250
k
t
(g) d(2)217(t) ∨ e
a(4)204 (t)
0
50
100
150
200
250
0 50 100 150 200 250
k
t
(h) d(4)207(t) ∨ e
a(4)157 (t)
0
50
100
150
200
250
0 50 100 150 200 250
k
t
(i) d(2)23 (t) ∨ e
a(4)177 (t)
FIGURA 4.69 – Representacao grafica das luts-dilatacoes e anti-erosoes da Figura4.65(c) e respectivas unioes.
154

0
50
100
150
200
250
0 50 100 150 200 250
k
t
(a) d(4)26 (t) ∨ e
a(2)146 (t)
0
50
100
150
200
250
0 50 100 150 200 250
k
t
(b) d(4)48 (t) ∨ e
a(4)61 (t)
0
50
100
150
200
250
0 50 100 150 200 250
k
t
(c) d(1)82 (t) ∨ e
a(2)250 (t)
0
50
100
150
200
250
0 50 100 150 200 250
k
t
(d) d(1)255(t) ∨ e
a(2)231 (t)
0
50
100
150
200
250
0 50 100 150 200 250
k
t
(e) d(4)90 (t) ∨ e
a(4)5 (t)
0
50
100
150
200
250
0 50 100 150 200 250
k
t
(f) d(4)167(t) ∨ e
a(4)182 (t)
0
50
100
150
200
250
0 50 100 150 200 250
k
t
(g) d(1)108(t) ∨ e
a(4)192 (t)
0
50
100
150
200
250
0 50 100 150 200 250
k
t
(h) d(4)166(t) ∨ e
a(4)51 (t)
0
50
100
150
200
250
0 50 100 150 200 250
k
t
(i) d(1)88 (t) ∨ e
a(4)58 (t)
FIGURA 4.70 – Representacao grafica das luts-dilatacoes e anti-erosoes da Figura4.65(d) e respectivas unioes.
155

Observa-se tambem no segundo estagio um efeito de compensacao da translacao de um
pixel para a esquerda ocorrida no primeiro estagio.
Destes ultimos experimentos pode-se dizer que quando e utilizado um modelo muito
geral, como neste caso, o SGA se perde. Embora o modelo encontrado tenha eliminado o
ruıdo, em particular nao preservou o brilho. Uma possıvel alternativa para resolver este
problema poderia ser a modificacao da avaliacao dos indivıduos, incluindo explicitamente
uma medida de diferenca de brilho.
156

CAPITULO 5
CONCLUSAO E PERSPECTIVAS
5.1 Conclusao
O objetivo deste trabalho foi o estudo teorico da decomposicao de operadores de
janela e espacialmente invariantes em termos de operadores morfologicos elementares
parametrizados por luts morfologicas elementares, bem como a aplicacao desta teoria
ao projeto de operadores definidos sobre o reticulado das imagens em nıveis de cinza.
Este estudo esta baseado nas decomposicoes de operadores morfologicos apresentadas
por Matheron (1975) e Banon e Barrera (1991, 1993). Alem disto, foi tambem avaliado
o resultado da aplicacao desta teoria para projeto de operadores, utilizando o algoritmo
genetico de Goldberg (1989) como um metodo de busca da solucao desejada.
Como resultado do estudo teorico tem-se os modelos de operadores apresentados no
Capıtulo 2, a partir dos quais foi implementado um metodo de projeto de operadores
para imagens em nıveis de cinza.
O metodo para projeto de operadores foi experimentado na solucao de alguns problemas
de processamento e analise de imagens (sinteticas e reais), para extracao de objetos e/ou
feicoes de interesse, conforme apresentado no Capıtulo 4. Nestes experimentos, alem de
testar a viabilidade de aplicar o metodo proposto a problemas de processamento e analise
de imagens, foram testados tambem as influencias das mudancas de alguns parametros
envolvidos nos modelos de operadores utilizados (como por exemplo: ordem do modelo,
encadeamento, tamanho de janela, imagens de treinamento) e do algoritmo genetico
(tamanho da propulacao, numero de geracoes, tamanho do torneio na fase de selecao).
Com relacao a robustez de um operador projetado a partir de um determinado par de
imagens de treinamento, sobre outras imagens do mesmo material obtidas pelo mesmo
dispositivo, pode-se dizer que o grau de sucesso da aplicacao deste operador vai depender
da distribuicao dos nıveis de cinza das imagens envolvidas neste processamento, conforme
mostram os experimentos apresentados nas Secoes 4.4 e 4.5 do Capıtulo 4. Portanto,
pode-se dizer que nao e possıvel aplicar de forma sistematica um operador projetado sobre
imagens que nao sejam aquelas de onde foram extraıdos os pares de treinamento. Uma
possıvel alternativa para resolver este problema seria a utilizacao de pares de imagens de
treinamento extraıdos de varias imagens.
Um outro detalhe importante a ser destacado e com relacao ao fato dos parametros
encontrados guardarem informacoes direcionais do objeto presente no par de imagens de
157
treinamento, como pode ser observado nos experimentos apresentados nas Secoes 4.3 e
4.4 do Capıtulo 4.
Adotando-se um modelo de uma determinada ordem, ha casos em que pode-se chegar
a conclusao que a ordem deste modelo pode ser reduzida. Este e o caso quando o
modelo utilizado contem solucoes exatas do problema. Um exemplo disto e o experimento
apresentado no Capıtulo 4 - Secao 4.2, no qual foi possıvel deduzir a ordem mınima do
modelo, assim como verificar que este pode ser apenas crescente.
Na escolha do modelo para o projeto de um operador pode-se utilizar alguns
conhecimentos a priori deste operador, como por exemplo, o fato da imagem de saıda ser
binaria e o operador desejado ser crescente.
Uma boa possibilidade para melhorar o desempenho do operador projetado pode ser a
utilizacao do encadeamento de modelos, como mostrado nos experimentos apresentados
na Secao 4.6 do Capıtulo 4.
De uma maneira geral, pode-se dizer que o projeto de um operador e viavel desde que o
operador a ser projetado nao se afasta muito dos modelos implementaveis.
5.2 Trabalhos Futuros
Como trabalhos futuros e interessante estudar e testar:
• a utilizacao de janelas maiores que 3× 3 e tambem de outras formas;
• a utilizacao de um algoritmo genetico paralelo, para a otimizacao do tempo
computacional;
• a inicializacao do algoritmo genetico levando em consideracao conhecimentos
a priori do problema;
• uma codificacao dos indivıduos utilizando diretamente os nıveis de cinza;
• a eliminacao de operadores sup-geradores e/ou operadores inf-geradores
inuteis, durante o processo de evolucao;
• a utilizacao de outros metodos de busca;
• a utilizacao de outras funcoes de adaptacao.
Um outro aspecto interessante a ser estudado e a analise da complexidade do problema
de projeto de operadores de janela e espacialmente invariantes parametrizados por luts.
158

REFERENCIAS BIBLIOGRAFICAS
Angulo, J.; Flandrin, G. Automated detection of working area of peripheral blood
smears using mathematical morphology. Analytical Cellular Pathology, v. 25,
n. 1, p. 37–49, 2003a. 106, 118
——. Microscopic image analysis using mathematical morphology: application to
haematological cytology. Science, technology and education of microscopy: an
overview. Badajoz, Spain: Formatex Editors, 2003b. p. 304–312. 106, 118
Angulo, J.; Serra, J. Automatic analysis of DNA microarray images using
mathematical morphology. Bioinformatics, v. 19, n. 5, p. 553–562, Mar. 2003. 131
Baets, B.; Kerre, E.; Gupta, M. M. The fundamentals of fuzzy mathematical
morphology. Part 1: basic concepts. International Journal of General Systems,
v. 23, n. 2, p. 155–171, 1994. 31, 38, 39, 40, 41
Banon, G. J. F. Characterization of translation-invariant elementary
morphological operators between gray-level images. Sao Jose dos Campos:
INPE, 1995. 64 p. (INPE-5616-RPQ/671). 27, 28, 30, 31, 35, 37, 38, 39, 40, 41, 44,
48
——. Formal introduction to digital image processing. Sao Jose dos Campos:
INPE, 2000. 180 p. (INPE-7682-PUD/043). Disponıvel na biblioteca digital URLib:
<http://hermes.dpi.inpe.br:1905/ rep/dpi.inpe.br/banon/1999/06.21.09.31>. Acesso
em: 10 ago. 2000. 28, 34, 35, 36, 37, 44, 48, 53, 56, 58, 59
——. Caracterizacao dos operadores elementares como mapeamentos
entre reticulados completos. Instituto Nacional de Pesquisas Espaciais, Sao Jose
dos Campos, 2004. Comunicacao pessoal. 35
Banon, G. J. F.; Barrera, J. Morphological filtering for stripping correction of spot
images. Photogrammetria, v. 43, n. 3–4, p. 195–205, Mar. 1989. 141
——. Minimal representations for translation-invariant set mappings by
mathematical morphology. SIAM J. Appl. Math., v. 51, n. 6, p. 1782–1798, Dec.
1991. 28, 50, 157
——. Decomposition of mappings between complete lattices by mathematical
morphology. Part I: general lattices. Signal Processing, v. 30, n. 3, p. 299–327,
Feb. 1993. 28, 50, 52, 54, 55, 56, 59, 157
159

——. Bases da morfologia matematica para a analise de imagens binarias.
2. ed. Sao Jose dos Campos: INPE, 1998. 242 p. (INPE-11429-RPQ/767). Disponıvel
na biblioteca digital URLib: <http://hermes.dpi.inpe.br:1905/
rep/dpi.inpe.br/banon/1998/06.30.17.56>. Acesso em: 05 mar. 2000. 27, 28, 35
Barrera, J. Uma abordagem unificada para problemas de visao
computacional: a morfologia matematica. 1992. 250 p. (INPE-5391-TAE/012).
Tese (Doutorado em Engenharia Eletrica) - Escola Politecnica da Universidade de
Sao Paulo, Sao Jose dos Campos. 1992. 35
Barrera, J.; Banon, G. J. F.; Lotufo, R. A.; Hirata Junior, R. MMach: a
mathematical morphology toolbox for the KHOROS system. Journal of
Electronic Imaging, v. 7, n. 1, p. 174–210, Jan. 1998. 99
Barrera, J.; Dougherty, E. R.; Tomita, N. S. Automatic programming of binary
morphological machines by design of statistically optimal operators in the context of
computational learning theory. Journal of Eletronic Imaging, v. 6, n. 1, p. 54–67,
Jan. 1997. 29
Barrera, J.; Tomita, N. S.; Silva, F. S. C.; Terada, R. Automatic programming of
binary morphological machines by PAC learning. In: Neural, Morphological, and
Stochastic Methods in Image and Signal Processing, 10-11 July 1995, San Diego, CA,
USA. Proceedings. Bellingham, WA, USA: SPIE, 1995. p. 233–244. (Proceedings
of SPIE, v.2568). 29
Beasley, D.; Bull, D. R.; Martin, R. R. An overview of genetic algorithms: part 1,
fundamentals. University Computing, v. 15, n. 2, p. 58–69, 1993. 73, 74, 75
Bloch, I.; Maıtre, H. Fuzzy mathematical morphologies: a comparative study.
Pattern Recognition, v. 28, n. 9, p. 1341–1387, Sept. 1995. 31, 38, 39, 40, 41
De Jong, K. A. An analysis of the behavior of class of genetic adaptive
systems. 1975. 266 p. Thesis (Doctoral in Computing and Communication Sciences)
- University of Michigan, Ann Arbor. 1975. 67, 68
Dougherty, E. R. Optimal mean-square N-observation digital morphological filters: I.
Optimal binary filters. Computer Vision, Graphics and Image Processing:
Image Understanding, v. 55, n. 1, p. 36–54, Jan. 1992a. 29
——. Optimal mean-square N-observation digital morphological filters: II. Optimal
gray-scales filters. Computer Vision, Graphics and Image Processing: Image
Understanding, v. 55, n. 1, p. 55–72, Jan. 1992b. 29
160

Dougherty, E. R.; Haralick, R. M. The hole spectrum-model-based optimization of
morphological filters. In: Image Algebra and Morphological Image Processing, 2.,
23-24 July 1991, San Diego, CA, USA. Proceedings. Bellingham, WA, USA: SPIE,
1991. p. 233–246. (Proceedings of SPIE, v.1568). 29
Dougherty, E. R.; Loce, R. P. Optimal mean-absolute-error hit-or-miss filters:
morphological representation and estimation of the binary conditional expectation.
Optical Engineering, v. 32, n. 4, p. 815–827, Apr. 1993. 29
——. Precision of morphological representation estimators for translation-invariant
binary filters: increasing and nonincreasing. Signal Processing, v. 40, n. 2–3,
p. 129–154, Nov. 1994. 29
Dougherty, E. R.; Mathew, A. V.; Swarnakar, V. A conditional-expectation-based
implementation of the optimal mean-square binary morphological filter. In: Nonlinear
Image Processing, 2., 28 Feb.–1 Mar. 1991, San Jose, CA, USA. Proceedings.
Bellingham, WA, USA: SPIE, 1991. p. 137–147. (Proceedings of SPIE, v.1451). 29
Fogel, L. J.; Owens, A. J.; Walsh, M. J. Artificial intelligence through
simulated evolution. New York: John Wiley, 1966. 149 p. 68
Fricout, G.; Jeulin, D. Proprietes morphologiques et optiques des surfaces
rugueuses. Fontainebleau: Ecole Nationale Superieure des Mines de Paris, Centre
de Morphologie Mathematique, 2002. 41 p. (Rapport d´Avancement 1). 18, 120, 121
Goldberg, D. E. Genetic algorithms in search, optimization, and machine
learning. New York: Addison-Wesley, 1989. 432 p. 67, 68, 73, 77, 84, 85, 157
Goldberg, D. E.; Deb, K. A comparative analysis of selection schemes used in genetic
algorithms. In: Rawlins, G. J. E. ed. Foundations of genetic algorithms. San
Mateo, CA: Morgan Kaufmann, 1991. p. 69–93. 73, 85
Gomila, C. Mise en correspondance de partitions en vue du suivi d´objets.
2001. 242 p. (TL-08/01/MM). These (Doctorat en Morphologie Mathematique) -
Ecole Nationale Superieure des Mines de Paris, Centre de Morphologie
Mathematique, Fontainebleau. 2001. 106
Grefenstette, J. J. Optimization of control parameters for genetic algorithms. IEEE
Transactions on Systems, Man and Cybernetics, v. 16, n. 1, p. 122–128, 1986.
67, 68
161

Haralick, R. M.; Sternberg, S. R.; Zhuang, X. Image analysis using mathematical
morphology. IEEE Transactions on Pattern Analysis and Machine
Intelligence, v. 9, n. 4, p. 532–550, July 1987. 27, 28
Harvey, N. R.; Marshall, S. Using genetic algorithms in the design of morphological
filters. In: Colloquium on Genetic Algorithms in Image Processing and Vision.
Proceedings. London: IEE Eletronics Division, England, 1994. p. 6/1–6/5. 29
——. The design of different classes of morphological filter using genetic algorithms.
In: International Conference on Image Processing and its Applications, 5.
Proceedings. Edinburg: IEE Eletronics Division, England, 1995. p. 227–231. 29
——. The use of genetic algorithms in morphological filter design. Signal
Processing: Image Communication, v. 8, n. 1, p. 55–71, Jan. 1996. 29
Heijmans, H. J. A. M. Theoretical aspects of gray-level morphology. IEEE
Transactions on Pattern Analysis and Machine Intelligence, v. 13, n. 6,
p. 568–582, June 1991. 28, 31, 35, 38, 39, 40, 41
——. Morphological image operators. Boston: Academic Press, 1994. 509 p.
31, 38, 39, 40, 41
Heijmans, H. J. A. M.; Ronse, C. The algebraic basis of mathematical morphology -
Part I: dilations and erosions. Computer Vision, Graphics, and Image
Processing, v. 50, n. 3, p. 245–295, June 1990. 28
Hirata, N. S. T. Projeto automatico de operadores: explorando
conhecimentos a priori. 2000. 198 p. Tese (Doutorado em Ciencia da
Computacao) - Instituto de Matematica e Estatıstica da Universidade de Sao Paulo,
Sao Paulo, 2000. 28, 29
Holland, J. H. Adaptation in natural and artificial systems: an introductory
analysis with applications to biology, control, and artificial intelligence. 2. ed.
Cambridge, Massachusetts: MIT Press/Bradford Book, 1994. 211 p. 67, 68
Kim, H. Y. Construcao automatica de operadores morfologicos por
aprendizagem computacional. 1997. 204 p. Tese (Doutorado em Engenharia
Eletrica) - Escola Politecnica da Universidade de Sao Paulo, Sao Paulo. 1997. 29
Koza, J. R. Genetic programming: on the programming of computers by means
of natural selection. Cambridge, Massachusetts: MIT Press/Bradford Book, 1992.
840 p. 68
162

Kraft, P.; Marshall, S.; Harvey, N. R. Parallel genetic algorithms for optimizing
morphological filters. In: International Conference on Image Processing and Its
Applications, 5., 4-6 July 1995, Edinburg, UK. Proceedings. Edinburg, UK: IEE
Stevenage England, 1995. p. 762–766. 29
Lacerda, E. G. M.; Carvalho, A. C. P. L. F. Introducao aos algoritmos geneticos. In:
Congresso Nacional da Sociedade Brasileira de Computacao, 19., jul. 1999, Rio de
Janeiro. Anais. Rio de Janeiro: EntreLugar, 1999. v. 2, p. 51–126. 73, 76, 85
Loncaric, S.; Dhawan, A. P. Near-optimal MST-based shape description using
genetic algorithm. Pattern Recognition, v. 28, n. 4, p. 571–579, Apr. 1995. 29
Lorena, L. A. N.; Furtado, J. C. Constructive genetic algorithm for clustering
problems. Evolutionary Computation, v. 9, n. 3, p. 309–327, 2001. 68
Matheron, G. Random sets and integral geometry. New York: John Wiley &
Sons, 1975. 288 p. 28, 49, 157
Meyer, F. The levelings. In: Heijmans, H. J. A. M.; Roerdink, J. B. T. M. ed.
Mathematical morphology and its applications to image and signal
processing. Dordrecht: Kluwer Academic, 1998. p. 191–198. 106
Michalewicz, Z. Genetic algoritms + data estructures = evolution
programs. 3. ed. New York: Springer-Verlag, 1999. 387 p. 68, 73
Mitchell, M. An introduction to genetic algorithms. Cambridge,
Massachusetts: MIT Press/Bradford Book, 1996. 224 p. 68, 73, 85
Oliveira, J. R. F. O uso de algoritmos geneticos na decomposicao
morfologica de operadores invariantes em translacao aplicados a imagens
digitais. 1998. 109 p. (INPE-7513-TDI/726). Tese (Doutorado em Computacao
Aplicada) - Instituto Nacional de Pesquisas Espaciais, Sao Jose dos Campos. 1998.
29
Rechenberg, I. Evolutionstrategie: optimierung technisher systeme nach prinzipien
der biologischen evolution. Sttutgart: Fromman-Holzboog Verlag, 1973. 168 p. 68
Serra, J. Image analysis and mathematical morphology. London: Academic
Press, 1982. 600 p. 27, 28
——. Image analysis and mathematical morphology. London: Academic
Press, 1988. v. 2: Theoretical Advances, 411 p. 27, 28
163

——. Elements de theorie pour l’optique morphologique. 1986. 191 p. These
(Doctorat d´Etat) - Paris VI Universite, Paris. 1986. 28
Sinha, D.; Dougherty, E. R. An intrinsically fuzzy approach to mathematical
morphology. In: Intelligent Robots and Computer Vision: Algorithms and
Techniques, 10., 11-13 Nov. 1991, Boston, MA, USA. Proceedings. Bellingham,
WA, USA: SPIE, 1992. p. 477–488. (Proceedings of SPIE, v.1607). 31, 38, 39, 41
Smith, R. E.; Goldberg, D. E.; Earickson, J. A. SGA-C: C-language implementation
of a simple genetic algorithm. Tuscaloosa: The Clearinghouse for Genetic
Algorithms, The University of Alabama, 1994a. 6 p. (TCGA Report n 91002).
Disponıvel em: <ftp://ftp-illigal.ge.uiuc.edu/pub/src/simpleGA/C>. Acesso em: 03
out. 2001. 77, 87
——. SGA-C (v1.1): a simple genetic algorithm: computer program. Tuscaloosa:
The Clearinghouse for Genetic Algorithms, The University of Alabama, 1994b.
Disponıvel em: <ftp://ftp-illigal.ge.uiuc.edu/pub/src/simpleGA/C>. Acesso em: 03
out. 2001. 77, 87
Soille, P. Morphological image analysis: principles and applications. Berlin:
Springer-Verlag, 1999. 391 p. 27, 28
Sousa, R. P. Projetos de operadores invariantes a translacao via
treinamento de redes neurais. 2000. 117 p. Tese (Doutorado em Engenharia
Eletrica) - Universidade Federal da Paraıba, Campina Grande. 2000. 29
Sternberg, S. R. Grayscale morphology. Computer Vision, Graphics, and
Image Processing, v. 35, n. 3, p. 333–355, Sep. 1986. 28
Tamburino, L. A.; Zmuda, M. A.; Rizki, M. M. Generating pattern recognition
systems using evolutionary learning. IEEE Expert: Intelligent Systems and
Their Applications, v. 10, n. 4, p. 63–68, Aug. 1995. 29
Tomita, N. S. Programacao automatica de maquinas morfologicas binarias
baseada em aprendizado PAC. 1996. 176 p. Dissertacao (Mestrado em
Computacao) - Instituto de Matematica e Estatıstica da Universidade de Sao Paulo,
Sao Paulo. 1996. 29
Yoda, I.; Yamamoto, K.; Yamada, H. Automatic acquisition of hierarchical
mathematical morphology procedures by genetic algorithms. Image and Vision
Computing, v. 17, n. 10, p. 749–760, Aug. 1999. 29
164

Zmuda, M. A.; Tamburino, L. A.; Rizki, M. M. An evolutionary learning system for
synthesizing complex morphological filters. IEEE Transactions on Systems,
Man, and Cybernetics - Part B: Cybernetics, v. 26, n. 4, p. 645–653, Aug. 1996.
29
165