plataforma móvel geoposicionada - up.edu.br · agradeço a deus por me proporcionar tamanha...
TRANSCRIPT

Centro Universitário Positivo - UnicenP Núcleo de Ciências Exatas e Tecnológicas – NCET
Engenharia da Computação Thiago Felipe
Plataforma Móvel Geoposicionada
Curitiba 2006

Centro Universitário Positivo - UnicenP Núcleo de Ciências Exatas e Tecnológicas – NCET
Engenharia da Computação Thiago Felipe
Plataforma Móvel Geoposicionada Monografia apresentada à disciplina de Projeto Final, como requisito parcial à conclusão do Curso de Engenharia da Computação. Orientador: Alessandro Zimmer
Curitiba
2006
AGRADECIMENTOS
Agradeço a Deus por me proporcionar tamanha felicidade nesta vida e por dar-me forças para seguir meu caminho. A meus pais, Marco Aurélio Felipe e Maria Agostinha Drulla Felipe, pela oportunidade de cursar uma faculdade, pela educação que me deram, pelos bens materiais que possuo, pelo apoio e ajuda nas dificuldades encontradas neste longo caminho de estudos. A minha namorada, Larissa Jakolinski, pela paciência em momentos de nervosismo, pelo incentivo nos momentos de dificuldade encontrados e pelo carinho e felicidade que me proporciona diariamente. A minha vó, Sofia Ivankio Drulla, que deixou na Terra importantes ensinamentos, sendo um exemplo à ser seguido em todas as situações . Ao meu querido colega de turma, Dirnei Túlio, onde desde o primeiro ano ajudou-me em momentos de dúvidas e dificuldades nos trabalhos acadêmicos, e ao ótimo companheiro que ele é.

LISTA DE SIGLAS
UNICENP - Centro Universitário Positivo NCET - Núcleo de Ciências Exatas e Tecnológicas GPS - Sistema de Posicionamento Global SMS - Short Message Service PDU - Protocol Description Unit NMEA - National Marine Electronics Association CI - Circuito Integrado PC - Computador DFD - Diagrama de fluxo de dados ASCII - American Standard Code for Information Interchange

SUMÁRIO
1. INTRODUÇÃO......................................................................................................... 10
1.1 Tema.................................................................................................................... 11
1.2 Visão Geral ........................................................................................................ 12
1.3 Objetivo............................................................................................................... 13
1.4 Motivação ........................................................................................................... 15
2. FUNDAMENTAÇÃO TEÓRICA............................................................................ 16
2.1 Sistema Global de Posicionamento (GPS).................................................. 16
2.1.1 Funcionamento .......................................................................................... 16
2.1.2 Componentes dos receptores GPS........................................................ 16
2.1.3 Protocolo de comunicação....................................................................... 17
2.1.4 Fontes de Erros ......................................................................................... 18
2.2 SMS ................................................................................................................... 18
2.2.1 Formato PDU ............................................................................................. 19
2.2.2 AT Comandos ............................................................................................ 21
2.3 Microcontrolador .............................................................................................. 22
2.3.1 Microcontrolador 8051 .............................................................................. 22
2.4 . Porta Serial ...................................................................................................... 23
2.4.1 Modos de comunicação............................................................................ 24
2.4.2 Modos de comunicação serial 8051 ....................................................... 24
2.4.3 Comunicação RS-232 para o 8051 ........................................................ 25
2.5 Display LCD ................................................................................................... 26
3.ESPECIFICAÇÃO.................................................................................................... 28
3.1 HARDWARE...................................................................................................... 28
3.1.1 Módulo comunicação ................................................................................ 28
3.1.2 Módulo aquisição....................................................................................... 29
3.1.2.1 Receptor GPSM002 – Xemics ............................................................ 31

3.1.2.2 Especificação GPSM002 – Xemics..................................................... 32
3.1.2.3 Pinagem GPSM002 – Xemics.............................................................. 32
3.1.2.4 Kit 8051.................................................................................................... 33
3.1.2.5 Sensor 1490............................................................................................ 34
3.1.2.6 Especificação sensor 1490................................................................... 34
3.1.2.7 Circuito auxiliar ....................................................................................... 36
3.1.3 Circuito de expansão ................................................................................ 38
3.1.4 Módulo de controle do motor ................................................................... 39
3.1.5 Verificação de posição e rota .................................................................. 42 3.2 SOFTWARE........................................................................................................... 43
3.2.1 SOFTWARE PC............................................................................................. 43
3.2.1.1 DFD .......................................................................................................... 43
3.2.2 SOFTWARE EMBARCADO........................................................................ 44
3.2.2.1 DFD .......................................................................................................... 45 4. PROCEDIMENTO DE TESTES ........................................................................... 47 5. RESULTADOS OBTIDOS ......................................................................................48 6. CONCLUSÃO.......................................................................................................... 48 7. CUSTOS................................................................................................................... 51 8. CRONOGRAMA ...................................................................................................... 52 9. REFERÊNCIAS BIBLIOGRÁFICAS .................................................................... 53

LISTA DE FIGURAS
Figura 1 – Componentes do sistema .................................................... 12
Figura 1.1 - Diagrama em blocos ........................................................... 13
Figura 2 - Módulo Receptor GPSM002 Xemics.................................... 17
Figura 2.1 – Chip microcontrolador 8051................................................ 23
Figura 2.2 – Módulo Display LCD .......................................................... 27
Figura 3 - Módulo de comunicação ....................................................... 28
Figura 3.1 -Esquemático módulo aquisição ........................................... 30
Figura 3.2 - Módulo receptor GPSM002 Xemics .................................. 31
Figura 3.3 – Kit 8051 .............................................................................. 33
Figura 3.4 – Sensor 1490 ....................................................................... 34
Figura 3.5 - Circuito bússola digital ........................................................ 35
Figura 3.6 – Esquemático circuito auxiliar ............................................. 37
Figura 3.7 – Esquemático circuito expansão ......................................... 38
Figura 3.8 – Carrinho Elétrico ................................................................ 40 Figura 3.9 – Circuito controle do motor .................................................. 41 Figura 3.10 –DFD Software ................................................................... 43 Figura 3.11 –Software PC ...................................................................... 44 Figura 3.12 – DFD Software Embarcado ............................................... 45
Figura 3.13 –Fluxograma Software Embarcado .................................... 46

LISTA DE TABELAS
Tabela 1 – Exemplo mensagem recebida em formato PDU................................ 19 Tabela 2 – Exemplo de mensagem enviada em formato PDU............................ 20 Tabela 3 – Principais comandos AT utilizados nos celulares .............................. 21 Tabela 4 – Registros para comunicação serial ...................................................... 24 Tabela 5 – Módulos LCD............................................................................................ 26 Tabela 6 – Pinagem do módulo LCD....................................................................... 27 Tabela 7 – Especificação GPS xemics ................................................................... 32 Tabela 8 – Pinagem GPS xemics ............................................................................. 32 Tabela 9 – Especificação sensor 1490 .................................................................... 34 Tabela 10 – Movimentos do carrinho ....................................................................... 40 Tabela 11 – Regra de verificação de Posição........................................................ 42 Tabela 12 – Custos na implementação do projeto ................................................ 51 Tabela 13– Cronograma de desenvolvimento ........................................................ 52

RESUMO
Este documento descreve um sistema de posicionamento móvel utilizando um
carrinho elétrico, um sistema de aquisição GPS, onde através da coordenada inicial
obtida pelo GPS, o carrinho realiza o movimento até uma coordenada de destino que
será fornecida pelo usuário através do computador. Para o envio da coordenada de
destino, foi desenvolvido um software de comunicação serial para que o celular
acoplado ao computador envie mensagens de SMS para o celular acoplado ao carrinho
com as coordenadas de latitude e longitude.
Após o recebimento das coordenadas de destino do carrinho, o microcontrolador
acoplado ao carrinho recebe a coordenada atual do carrinho através do GPS, sendo
que estas informações são gravadas no microprocessador do circuito. Após o
recebimento das coordenadas, é comparada as coordenadas iniciais e finais para que
seja definido a quantidade de intervalos de tempo para a atualização da rota bem como
para saber em qual direção o carrinho deve seguir e também para o controle de
acionamento dos motores do carrinho.
Com a rota pré-estabelecida, o circuito aciona bússola digital para verificar para que
lado o carrinho esteja apontado, se estiver apontado corretamente o microcontrolador
aciona o motor para o início da movimentação.

ABSTRACT
This document describes a system of movable positioning using an electric pushcart
and an acquisition system GPS, where through the initial coordinate obtained by GPS,
the pushcart will accomplish the movement until a destiny coordinate that will be
supplied by the user through the computer. For the sending of the destiny coordinate, it
was developed a software of serial communication so that the cellular coupled to the
computer sends messages of SMS for the cellular coupled to the pushcart with the
latitude coordinates and longitude.
After the sending of the coordinates, the circuit coupled to the pushcart receives the
information and the circuit works GPS and it receives the information of the current
coordinates of the pushcart that are recorded in the microprocessor. After the reception
of the coordinates, it is made the calculation of the best route and the total distance to
travel so the amount of intervals of time is defined for the updating of the route and
works the motors of the pushcart.
With the pré-established route, the circuit works digital compass to verify so that side
the pushcart this appeared, and if it be appeared correctly and the calculations already
made the circuit works the motor for the begin of the movement.

10
1. INTRODUÇÃO Com o avanço tecnológico conseguido no ramo de geotecnologia, pode-se hoje em
dia utilizar os sistemas cartográficos GPS para uma variedade de aplicações. Eles
criam e atualizam bancos de dados em disciplinas tão diversas como ciências dos
recursos naturais, desenvolvimento urbano e análise, agricultura e ciências sociais.
Informações sobre posição, tempo e atributos são coletadas andando, passeando,
dirigindo e voando ao redor de lugares de interesse, para uma localização exata da
posição do objeto ao redor do planeta, além disso, dominar o conhecimento espacial do
ambiente na qual o objeto está inserido. Para tamanho resultado, é necessário que os
satélites sejam pontos de referência precisos, pois para determinar uma posição na
Terra, é realizado um cálculo através da distância a partir de um grupo de satélites à
posição.
O presente trabalho visa apresentar resultados da integração entre um carrinho
elétrico, um sistema de aquisição GPS e uma bússola digital, onde através da
coordenada inicial obtida pelo GPS, o carrinho realizará o movimento até a coordenada
de destino, na qual é fornecida pelo usuário através do PC. Para o envio da
coordenada de destino ao carrinho, um celular estará acoplado ao PC para o envio das
coordenadas via SMS para o carrinho elétrico, no carrinho outro celular está acoplado
para o recebimento da mensagem SMS.
11
1.1 Tema O projeto consiste na utilização de um carrinho elétrico incorporado a um circuito de
GPS e uma bússola digital a fim de, partindo de um conjunto de coordenadas
adquiridas pelo GPS, guiar o carrinho através do acionamento dos motores até as
coordenadas de destino desejadas. Através de um circuito micro-processado, as
coordenadas de destino serão escolhidas pelo usuário através do software
desenvolvido e enviados ao carrinho pelo celular através de mensagens de SMS.
Durante o funcionamento dos motores, a cada intervalo de tempo pré-determinado, o
carrinho receberá sinais do GPS, verificando a posição correta, se a posição não foi
ultrapassada , o carrinho realiza um movimento ate o fim do intervalo de tempo. Após o
término do percurso, uma mensagem de SMS será enviada para o usuário informando
as coordenadas finais e o erro obtido em relação à coordenada desejada.
O sistema será formado por um GPS, celular e uma bússola incorporada ao
carrinho, um computador para a receptação e envio das coordenadas provenientes do
GPS, celular para a comunicação com o carrinho via SMS, e um módulo micro-
processado para o controle do acionamento dos motores. Para um melhor
acompanhamento do sistema, foi acoplado ao microcontrolador um display LCD, para
visualizar a coordenada recebida pelo celular bem como a coordenada recebida do
GPS.

12
1.2 Visão Geral
Figura 1 – Componentes do sistema

13
Figura 1.1 - Diagrama em Blocos
1.3 Objetivo A meta do projeto é criar uma plataforma móvel geoposicionada, onde através do
GPS acoplado ao carrinho elétrico, podem-se obter as coordenadas em tempo real do
carrinho e sua rota de movimentação. Para saber qual o destino do carrinho, o PC se
comunica com o aparelho celular através do software desenvolvido, no qual envia uma
mensagem de SMS para o celular instalado no carrinho. O circuito microprocessado
tem a finalidade de controlar as mensagens recebidas pelo telefone celular acoplado ao
carrinho, e também mostrar as coordenadas recebidas no display LCD. Quando o
celular recebe a mensagem, o circuito aciona o GPS e recebe as informações das
coordenadas do carrinho.
Inicialmente, o computador será utilizado para que o usuário informe as
coordenadas de destino desejadas, como a latitude e longitude, e para que seja
enviado ao microprocessador, onde é verificado as coordenadas e definida a distância
a ser percorrida pelo carrinho, e através da distância calculada, será definido pelo
PLATAFORMA MÓVEL
GEOPOSICIONADA
MÓDULO COMUNICAÇÃO
MÓDULO AQUISIÇÃO
MÓDULO CONTROLE MOTOR

14
microprocessador o intervalo de tempo para o recebimento da informação(atualização)
das coordenadas do carrinho durante sua movimentação. Após o recebimento da
coordenada do GPS num determinado intervalo de tempo, o microprocessador verifica
a coordenada obtida com a coordenada final definida pelo usuário, se houver alguma
diferença entre elas, o carrinho seguirá até um intervalo de tempo pré-estabelecido.
O dispositivo instalado no carrinho conterá um kit 8051, que será responsável pelo
envio e recebimento de mensagens SMS enviadas e recebidas pelo celular, pelo
verificação da rota a ser percorrida, pelo intervalo de tempo pré-definido, pelo controle
do display LCD e pela comunicação com o GPS. O dispositivo primeiramente, fica
monitorando o telefone esperando que chegue uma mensagem SMS, quando o
aparelho recebe uma mensagem o programa fará a validação da mensagem, após
isso, o programa embarcado no circuito pede para que sejam lidos os dados do
aparelho GPS para efetuar os cálculos da rota.
Posteriormente, o projeto terá um módulo extra, que através do mapa de uma
determinada região, o usuário define através de um click sobre a área pretendida o
destino final do carrinho, não sendo necessário o usuário digitar manualmente as
coordenadas de latitude e longitude do destino.

15
1.4 Motivação Com o avanço da tecnologia, oferecer ao mercado um sistema de locomoção
inteligente, através de um carrinho, ter a capacidade de ser guiado automaticamente
para um determinado serviço, tendo uma localização exata do carrinho numa
determinada posição, e uma realização detalhada de cálculos para determinar o tempo
de trajetória e a quantidade percorrida além da possibilidade de calcular a velocidade
do mesmo.

16
2. FUNDAMENTAÇÃO TEÓRICA 2.1 Sistema Global de Posicionamento (GPS) O GPS, é um sistema de posicionamento por satélite, utilizado para determinação
da posição de um receptor na superfície da Terra ou em órbita. O sistema GPS foi
criado e é controlado pelo Departamento de Defesa dos Estados Unidos da América, e
pode ser utilizado por qualquer pessoa, gratuitamente, necessitando apenas de um
receptor que capte o sinal emitido pelos satélites (ARVUS TECNOLOGIA, 2006).
2.1.1 Funcionamento Os receptores captam os sinais emitidos pelos satélites visíveis. Estes dados são
processados pelo GPS que os traduz nas três coordenadas de posição (latitude,
longitude e altitude), velocidade e tempo.
Essencialmente, o receptor de GPS compara o tempo em que um sinal foi transmitido
por um satélite, com o tempo que foi recebido, sendo que esta diferença de tempo é
transmitida para o receptor de GPS.
Com medidas de distância de mais alguns satélites, o receptor pode determinar a
posição do usuário e pode exibir isto no mapa eletrônico da unidade (ARVUS
TECNOLOGIA,2006).
2.1.2 Componentes dos receptores GPS - Antena: A antena recebe os sinais dos satélites. Como os sinais são de baixa
intensidade, as dimensões da antena podem ser muito reduzidas.
- Canais : O canal do receptor é responsável pelo recebimento das informações
provenientes da antena, podendo o receptor possuir um ou mais canais.

17
- Microprocessador: É necessário no controle das operações do receptor, obtendo e
processando o sinal, decodificando a mensagem de navegação, bem como calcular
posições e velocidade (SEMTECH,2006).
Figura 2 - Módulo Receptor GPSM002 Xemics Fonte adaptada de SEMTECH, p 1
2.1.3 Protocolo de comunicação Para um perfeito funcionamento, o receptor deve usar uma linguagem que o
equipamento a ele associado possa entender. A linguagem padrão para equipamentos
de navegação é chamada: Protocolo NMEA, que é a mesma utilizada para este projeto,
pois foi verificado no datasheet do GPS o protocolo de saída. O protocolo NMEA foi
instituído pela National Marine, para padronização das mensagens utilizadas em
embarcações, todas as mensagens NMEA são caracteres ASCII.
As mensagens obedecem a seguinte sintaxe:
$GP<id mensagem>,< dados>,<dados>,,,..*<checksum><CR><LF>
As mensagens começam com o campo "$GP", seguido de pelo identificador da
mensagem. Os campos de dados são separados por vírgulas e após o checksum,
existe um caractere de retorno <CR> e de nova linha <LF>. Os campos nulos são
omitidos, sendo separados por vírgulas e sem conter nenhuma informação (ARVUS
TECNOLOGIA,2006).

18
2.1.4 Fontes de erros Abaixo estão relacionadas possíveis fontes de erros na captação de sinal do GPS: - Erro do relógio do satélite
- Erro de efemérides: Erros orbitais, são imprecisões nos relatórios de localização dos
satélites.
- Erros dos receptores: Ocorre pelas variações no relógio do receptor, e quando o sinal
é refletido por prédios ou formações rochosas, o tempo de propagação muda e isto
causa erros.
- Atmosférico/Ionosférico: Ocorre pelo atraso do sinal nesta parte da atmosfera é
compensado por um modelo incluído no receptor, porém por fazer apenas uma média
dos atrasos, não é exato e assim perde-se um pouco de precisão(ARVUS
TECNOLOGIA,2006).
2.2 SMS Define-se SMS um serviço de mensagens curtas disponibilizado pelas operadoras
de telefonia celular, através do qual o usuário recebe em seu celular mensagens
enviadas via internet ou de outro celular.
Para além do tipo de caracteres utilizar existem duas formas de mandar e receber
mensagens SMS: uma por modo de texto e outra por modo PDU. O primeiro modo
indisponível num grande número de telefones somente codifica algumas partes
representadas pelo modo PDU. Este tipo de mensagens traz alguns
problemas, pois existem diferentes codificações para representar o mesmo alfabeto
sendo assim necessário escolher a codificação apropriada para cada caso. Deste
modo se o modo de texto for usado, a leitura de uma mensagem pode ser limitada às
opções de codificação disponíveis no telefone, o que não acontece se usarmos o modo
PDU (DREAMFABRIC,2006).

19
2.2.1 Formato PDU Recebimento de mensagens:
A mensagem recebida contém inúmeras informações sobre a pessoa que mandou a
mensagem, o centro de mensagens, entre outros. Para analisar a palavra é necessário
dividir em grupos de caracteres para verificar o significado de cada um destes grupos.
Os grupos são denominados por octetos (CABRAL,2003).
Na tabela 1 é apresentado a seguinte palavra que é o resultado da leitura da
Mensagem recebida :
0791539111161616240C9153914157253600002060021130610002F530
Tabela 1 – Exemplo mensagem recebida em formato PDU
07 Informação sobre o comprimento do SMS (neste caso 7 octetos -“91 53 91 11 16 16 16”)
91 Tipo de endereço do SMS
53 91 11 16 16 16 Numero do centro de mensagens
24 Primeiro octetos da mensagem
OC Comprimento do numero de origem da mensagem (0C hex = 12 dec)
91 Tipo de endereço do numero de origem.
53 91 41 57 25 36
Numero de origem (em decimal octetos)
00 Protocolo identificador. TP-PID
00 Esquema de codificação de dados. TP-DCS
20 60 02 11 30 61 00 Informação temporal
02 Comprimento da mensagem. TP-UDL
F5 30 Mensagem representada em octetos de 8 bits representando dados de 7 bits
20
Observação: Se o número de telefone for impar será necessário acrescentar um F para
ficar par. Todos os octetos na tabela 1 estão representados em hexadecimal, exceto o
número do centro de mensagens, o número de origem e a informação temporal.
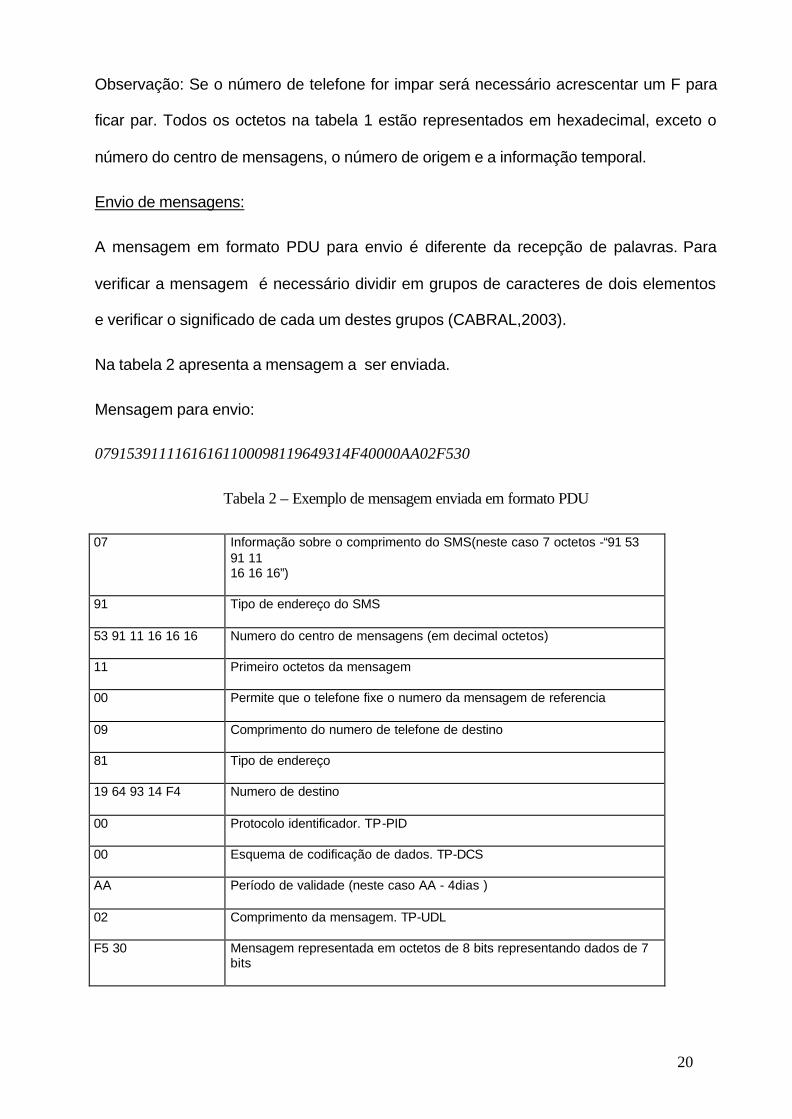
Envio de mensagens:
A mensagem em formato PDU para envio é diferente da recepção de palavras. Para
verificar a mensagem é necessário dividir em grupos de caracteres de dois elementos
e verificar o significado de cada um destes grupos (CABRAL,2003).
Na tabela 2 apresenta a mensagem a ser enviada.
Mensagem para envio:
07915391111616161100098119649314F40000AA02F530
Tabela 2 – Exemplo de mensagem enviada em formato PDU
07 Informação sobre o comprimento do SMS(neste caso 7 octetos -“91 53 91 11 16 16 16”)
91 Tipo de endereço do SMS
53 91 11 16 16 16
Numero do centro de mensagens (em decimal octetos)
11
Primeiro octetos da mensagem
00 Permite que o telefone fixe o numero da mensagem de referencia
09 Comprimento do numero de telefone de destino
81 Tipo de endereço
19 64 93 14 F4
Numero de destino
00 Protocolo identificador. TP-PID
00 Esquema de codificação de dados. TP-DCS
AA Período de validade (neste caso AA - 4dias )
02 Comprimento da mensagem. TP-UDL
F5 30
Mensagem representada em octetos de 8 bits representando dados de 7 bits

21
2.2.2 AT Comandos Os comandos AT são protocolos utilizados para o controle de determinadas funções
dos telefones celulares, como também possibilita a comunicação com modem. Para
utilizar os AT comandos, primeiramente deve pesquisar se o celular a ser utilizado na
comunicação suporta os comandos AT, pois cada celular utiliza diferentes tipos de
comandos. Na tabela 3 apresenta os principais comandos utilizados nos telefones
celulares encontrados atualmente:
Tabela 3 – Principais comandos AT utilizados nos celulares
Fonte adaptada de Siemens, p 8
Finalidade Comando Resultados Testar comunicação AT <CR> OK/ERROR
Envio mensagem SMS AT+ CMGS=140 <CR>
OK/ERROR
Seleciona tipo formato SMS AT+CMGF=0 AT+CMGF=1
Formato PDU Formato Texto
Apagar mensagens do celular AT+CMGD OK/ERROR Lê uma mensagem SMS AT+CMGR=0
AT+CMGR=1 AT+CMGR=2
AT+CMGR=3
Mensagens recebidas Mensagens recebidas Lidas Mensagens não enviadas
Mensagens enviadas salvas
Relógio AT+CCLK Relógio Volume toque AT+CRSL Toque
Carga de bateria AT+CBC Bateria Lista as mensagens de SMS do
celular AT+CMGL=0 AT+CMGL=1 AT+CMGL=2 AT+CMGL=3 AT+CMGL=4
Mensagens Recebidas Mensagens recebidas Lidas Mensagens não enviadas
Mensagens enviadas salvas Todas as mensagens
Exemplo: Envio de uma mensagem usando os AT+ comandos.
Mensagem : AT+CMGS=140 <CR>
>079153911116161611000C915391413649410000AA02C52A <CTRL+Z>
Resposta se enviada com sucesso: +CMGS: 230 OK
Resposta se não for enviada com sucesso: ERROR (CABRAL,2003).

22
2.3 Microcontrolador É um dispositivo eletrônico desenvolvido para executar tarefas específicas, com
linguagem de comando específica. Ele se utiliza de uma memória de programa(ROM)
para ler as instruções que deve executar e se utiliza de uma memória de dados (RAM)
para armazenar temporariamente informações de uso próprio das instruções, enquanto
essas informações devem ser armazenadas.
2.3.1 Microcontrolador 8051 O 8051, da Intel, é, sem dúvida, o microcontrolador mais popular atualmente. O
dispositivo em si é um microcontrolador de 8 bits relativamente simples, mas com
ampla aplicação. Porém, o mais importante é que não existem somente o CI 8051,
mais sim uma família de microcontroladores baseada no mesmo. Entende-se família
como sendo um conjunto de dispositivos que compartilha os mesmos elementos
básicos, tendo também um mesmo conjunto básico de instruções.
O mesmo tem dois modos básicos de funcionamento:
a) modo mínimo, onde somente recursos internos são utilizados pela CPU. Neste
modo, estão disponíveis 4 KB de ROM para memória de programa e 128 bytes de RAM
para memória de dados. O modo mínimo possui a vantagem (além da economia de
componentes e espaço físico) de poder utilizar as 4 portas de 8 bits cada para controle
(I/O);
b) modo expandido. Neste modo, a memória de programa (ROM), a memória de dados
(RAM) ou ambas podem ser expandidas para 64 kB, através do uso de CIs externos.
No entanto, apresenta a desvantagem de "perder" duas das 4 portas para comunicação
com as memórias externas (NICOLOSY,2000, p 58).

23
A pinagem para o 8051, é mostrada abaixo na figura 2.1:
Figura 2.1 – Chip microcontrolador 8051 Fonte adaptada de NICOLOSY(2000)
2.4 . Porta Serial O periférico comunicador serial permite a comunicação bidirecional entre as
máquinas apenas com dois fios, e também permite, por meio de um MODEM, transferir
e receber dados via sistema de telefonia tradicional.
O periférico chama-se serial porque transmite um byte, bit por bit, em seqüência
preestabelecida e pré-programada, para que o receptor possa recebê-lo e transformá-
lo de novo em um byte, igual ao originalmente transmitido. Além do byte que é
transmitido no canal serial, inserem-se também alguns bits de controle de transmissão
e recepção, como por exemplo, os bits de “start” e o bit “stop”, que sinalizam ao
receptor o início e o fim da transmissão/recepção do byte. (SILVA JÚNIOR, 1998).

24
2.4.1 Modos de comunicação - Serial Síncrona : utiliza-se de uma saída como envio ou recepção de dados e outra
para levar um sinal de sincronismo, para que o receptor possa “enxergar” quem é bit”0”
e quem é bit “1” na comunicação. Além disto, é necessário enviar um byte inicial de
geração do sincronismo citado e , no fim da transmissão do arquivo desejado, enviar
um byte de indicação do fim da transmissão.
- Serial Assíncrona: não é dependente do sinal de sincronismo, pois se gera um
padrão de transmissão para cada byte transmitido: cada byte é “cercado” por um bit de
início (start) e um bit de fim (stop). O sistema de recepção fica esperando um bit de
start(1 p/ 0), inicia a recepção dos outros bits do byte e, contando-os, fica à espera do
bit de stop(0 p 1), finalizando a comunicação. (NICOLOSY,2000, p 96).
2.4.2 Modos de comunicação serial 8051 O microcontrolador 8051 possui um modo de comunicação síncrona e três modos
de comunicação assíncrona. A interface serial no 8051 é do tipo Full-Duplex, isto
significa que o microcontrolador pode receber e transmitir dados simultaneamente,
sendo que para tal existem registros especiais para este fim. Esse registro chama-se a
SBUF e uma escrita no mesmo implica em automática transmissão do dado escrito,
assim como um dado que chegue ao pino de recepção(SILVA JÚNIOR,1998).
Na tabela abaixo são descritos os registros utilizados no microcontrolador para a
programação da comunicação serial :
Tabela 4 – Registros para comunicação serial
SCON Permite programar os modos de funcionamento e o estado da comunicação serial. SBUF Permite ler e escrever dados na porta serial IE Permite controlar a geração da interrupção associada a comunicação serial. TMOD Programação dos timers. TH1 Programação dos timers. TL1 Programação dos timers. TR1 Programação dos timers.

25
Através do registrador de função especial SCON a porta serial é programável por
software e pode ter quatro modos de operação:
?? modo 0 - operação síncrona - dados são transmitidos e recebidos pelo pino RXD e
no pino TXD tem-se o sinal de clock. A taxa de transmissão é de 1/12 da freqüência de
funcionamento do microcontrolador.
?? modo 1 - operação assíncrona - são transmitidos ou recebidos dez bits, sendo um
start bit (0), 8 bits de dados (o bit menos significativo primeiro) e um stop
bit (1). A taxa de transmissão é fornecida pelo Temporizador/Contador 1 (T/C 1).
?? modo 2 - operação assíncrona - são transmitidos ou recebidos onze bits, sendo um
start bit (0), 8 bits de dados, um nono bit, que é armazenado no bit RB814 do
registrador SCON, e um stop bit (1). A taxa de transmissão é de 1/32 ou 1/64 da
freqüência do clock do microcontrolador dependendo do valor do bit SMOD contido
no registrador PCON.
?? modo 3 - este modo é idêntico ao anterior, com exceção de que a taxa de
transmissão é variável, ou seja, dependente do T/C 1 (SILVA JUNIOR,1998).
2.4.3 Comunicação RS-232 para o 8051 No projeto será necessário conectar o celular e GPS ao 8051 através do padrão
RS232 ao invés dos níveis TTL presentes nos pinos do chips convencionais.
A comunicação RS232 consiste num padrão de comunicação serial, através de
níveis de tensão e de impedância para a transmissão de dados, permitindo que
equipamentos incompatíveis entre si pudessem ser interligados (Jan,1998). Para a
conversão de nível TTL – RS232 é utilizado o CI MAX233 (da Maxim). Ele inclui um
circuito de “charge pump” capaz de gerar tensões de +10 volts e –10 volts a partir de

26
uma fonte de alimentação simples de +5 volts, bastando para isso alguns capacitores
externos. Este CI também tem 2 receivers e 2 drivers no mesmo encapsulamento
(SILVA JUNIOR,1998).
2.5 Display LCD Os módulos LCD são interfaces de saída muito útil em sistemas microprocessados.
Estes módulos podem ser gráficos e a caracter. Os módulos LCD gráficos são
encontrados com resoluções de 122x32, 128x64, 240x64 e 240x128 pixel, e
geralmente estão disponíveis com 20 pinos para conexão. Os LCD comuns (tipo
caracter) são especificados em número de linhas por colunas e são encontrados nas
configurações previstas na Tabela 5 (EDSON FERLIN,2002).
Tabela 5 – Módulos LCD
Fonte adaptada de EDSON FERLIN, p 5
Estes módulos utilizam um controlador próprio, permitindo sua interligação com
com outras placas através de seus pinos, onde deve ser alimentado o módulo e

27
interligado o barramento de dados e controle do módulo com a placa do usuário.
A Tabela 6 descreve cada pino do módulo ou do display para conexão deste a
outras placas :
Tabela 6 – Pinagem do Módulo LCD
Fonte adaptada de EDSON FERLIN, p 5
Figura 2.2 – Módulo Display LCD

28
3.ESPECIFICAÇÃO 3.1 HARDWARE O projeto envolve três módulos, comunicação, aquisição e controle do motor.
3.1.1 Módulo comunicação Responsável pela comunicação do computador com o celular. Dentro deste módulo,
o celular acoplado ao PC tem a responsabilidade de se comunicar com o celular
acoplado ao carrinho elétrico. A comunicação entre o computador e o aparelho
telefônico será feita através de um cabo serial acoplado ao aparelho que se acopla ao
computador através da interface serial (RS-232). O módulo de comunicação será
comandado pelo software instalado no computador, que realiza o envio de mensagens
de SMS para o celular acoplado ao carrinho e recebimento de informações de
comunicação e controle.
Equipamentos :
?? Aparelho celular Siemens MC60
?? Cabo serial para interface (RS232)
?? Computador
Figura 3 - Módulo de comunicação

29
3.1.2 Módulo aquisição Responsável pelo recebimento das informações enviadas pelo usuário através das
mensagens SMS e pelo recebimento das informações provenientes do GPS e da
bússola digital. O módulo é composto por um aparelho celular, um GPS xemics, uma
bússola digital e um microcontrolador 8051. O funcionamento do sistema é realizado da
seguinte maneira: o microcontrolador espera o recebimento de uma mensagem SMS
do telefone celular acoplado ao carrinho, a partir do recebimento desta mensagem, o
microcontrolador grava as coordenadas de latitude e longitude de destino do carrinho
na memória RAM, após isso o GPS é acionado para a captura da posição de latitude e
longitude atualmente ocupada pelo carrinho. Com a posição localizada, o
microcontrolador aciona a bússola digital para verificar para que lado o carrinho está
apontado, se estiver apontado corretamente para o local de destino, é definido um
intervalo de tempo de controle do motor e o carrinho realiza um movimento em linha
reta até que o tempo pré-determinado se esgote, se a posição da bússola estiver
incorreta, o microcontrolador aciona o motor para que o carrinho vire para a posição
correta.
Para que o microcontrolador se conecte através da porta serial ao telefone celular,
GPS e bússola simultaneamente, deve-se implementar um circuito auxiliar, onde será
responsável pelo envio e recebimento de informações vindas do microcontrolador 8051
através da porta serial. Esse circuito auxiliar é de extrema importância pois o kit 8051
tem apenas uma porta serial para fazer a comunicação, e é necessário três aparelhos
serem conectados ao microcontrolador, onde dois deles devem utilizar a comunicação
serial para a transferência de informações, para isso foi implantado um circuito auxiliar
com duas portas seriais multiplexadas.

30
Figura 3.2 - Esquemático Módulo Aquisição

31
Equipamentos:
?? 1 Módulo Receptor GPSM002 – Xemics
?? 1 Antena receptora Xemics.
?? 1 Aparelho Celular
?? 1Kit 8051
?? 3 Cabos serial para interface (RS-232)
?? 6 Circuitos Integrado
?? 1 bússola digital
?? 1 Display LCD
3.1.2.1 Receptor GPSM002 – Xemics O receptor GPSM002 é um módulo totalmente autônomo que fornece a posição,
velocidade e tempo de qualquer ponto do território terrestre. O módulo tem um elevado
grau de exatidão da posição e velocidade, sendo sua utilização própria para ambientes
urbanos. Tem a facilidade de conexão com qualquer microcontrolador disponível no
mercado, pois necessita somente uma conexão serial com o microcontrolador
(SEMTECH,2003).
Figura 3.2 - Módulo Receptor GPSM002 Xemics Fonte adaptada de SEMTECH, p 1

32
3.1.2.2 Especificação GPSM002 – Xemics
Tabela 7 – Especificação GPS xemics
Fonte adaptada de SEMTECH Xemics, p 3
3.1.2.3 Pinagem GPSM002 – Xemics
Tabela 8 – Pinagem GPS xemics
Fonte adaptada de SEMTECH Xemics, p 4 PINO NOME TIPO DESCRIÇÃO 1 GND Terra 2 ON/OFF Entrada Liga/Desliga comando 3 VCC Tensão de entrada 4 USPED Entrada Configuração da velocidade serial 5 RXA Entrada Receptor serial porta A 6 VRTCBK Backup dos dados 7 TXA Saída Transmissor serial porta A 8 PPS Saída Tempo de pulso de clock 9 GND Terra 10 RESETN Entrada Reset GPS 11 ALMRDY Saída Atualização dos dados 12 STY1 Saída Procura de modos de saída 13 14 DELPOSN Entrada Deleta posição inicial 15 16 STANDBY Entrada Pausa /Espera
Descrição Mínimo Típico Máximo
Velocidade atualização 1/minuto 1/segundo 1/segundo
Tempo requisição do satélite 1 segundo
Inicialização ( dia ensolarado) 12 segundos
Inicialização ( dia chuvoso) 32 segundos
Sensibilidade -173 BW
Voltagem 3 V 3,3 V 3,67 V
Backup VRTCBK 1,9 V 3,65 V
Protocolo saída NMEA 0183
Consumo de corrente 19 mA

33
3.1.2.4 Kit 8051
Figura 3.3 – Kit 8051 Fonte adaptada de EDSON P. FERLIN(2004), p 5

34
3.1.2.5 Sensor 1490 Este sensor tem a finalidade de fornecer oito sentidos de informações cardeais
medindo o campo magnético da terra, para isso utiliza a tecnologia de efeito hall. O
sensor 1490 é projetado internamente para responder à mudança de direção similar a
um compasso líquido. Retornará ao sentido indicado de um deslocamento de 90 graus
em aproximadamente 2.5 segundos com nenhum atraso, podendo ser utilizado
inclinando até 12 graus com erro aceitável e pode ser conectado facilmente aos
circuitos digitais e aos microprocessadores que utilizam resistores pull-up.
Este sensor pode emitir os seguintes tipos de saídas:
(Norte – Nordeste – Leste – Sudoeste – Sul – Sudeste – Oeste – Noroeste).
3.1.2.6 Especificação sensor 1490
Tabela 9 – Especificação Sensor 1490
Fonte adaptada de DinsmoreSensors, p 2 Alimentação 5 V – 18 V DC Saída Open Collector NPN Peso 2,25 gr Pinos 3 pinos em 4 lados Temperatura -20 à 85 graus Celsius
Figura 3.4 – Sensor 1490

35
Para visualizar a posição indicada pela bússola, foi desenvolvido um circuito que
indicará a posição apontada pela agulha através da ligação de um LED, podendo
acender de um a dois LEDS ao mesmo tempo conforme a posição indicada.
Figura 3.5 – Circuito Bússola Digital

36
3.1.2.7 Circuito auxiliar O circuito auxiliar tem a finalidade de conectar o celular, bússola e o GPS ao
microcontrolador 8051, isto é necessário porque o microcontrolador 8051 tem apenas
uma entrada serial disponível, isso significa que apenas um dos componentes pode
enviar ou receber dados em determinado momento. Com o circuito auxiliar, o
microcontrolador poderá receber os dados provenientes dos três componentes, em
momentos distintos a partir do sinal de controle enviado pelo microcontrolador.
O controle das entradas do circuito auxiliar funcionará da seguinte maneira, a partir
do sinal de controle enviado pelo microcontrolador ao circuito, uma entrada será
disponibilizada na saída do circuito para ser enviada ao microcontrolador, ao fim da
transmissão, um sinal de controle habilita outra entrada para o envio de seus dados ao
microcontrolador, e assim sucessivamente.
O circuito auxiliar contém um regulador de tensão de 5V para 3,3 V para alimentar o
GPS conectado ao circuito.

37
Figura 3.6 – Esquemático circuito auxiliar

38
3.1.3 Circuito de expansão Este circuito tem a finalidade de aumentar a capacidade de utilização da Porta 3
do Kit 8051, isso é possível através de dois multiplexadores que permitem a ligação
dos quatros pinos da bússola digital ao microcontrolador e permitem também a ligação
dos quatro pinos de controle do motor ao microcontrolador ao mesmo tempo, porém a
Porta 3 recebe uma informação de cada vez, isso é possível através do pino sete que
controla os multiplexadores.
Figura 3.7 - Esquemático Circuito de Expansão

39
3.1.4 Módulo de controle do motor Este módulo tem a finalidade de controlar o motor do carrinho elétrico. Isto será
possível através do KIT 8051, que envia sinais de controle para o acionamento do
motor como virar à direita, esquerda, em frente. O funcionamento deste módulo ocorre
da seguinte maneira: a partir que a coordenada atual e de destino do carrinho
estiverem gravadas na memória do microcontrolador, é feita a verificação da posição
apontada pela bússola para definir em qual direção o carrinho deve seguir, se a
direção não estiver correta, é realizado um movimento de curva para direita ou para a
esquerda conforme a necessidade, sendo que este movimento ocorrerá até que o
carrinho não esteja apontado corretamente para a posição de destino. Se a direção
estiver correta, o microcontrolador realizar uma comparação entre as coordenadas
verificando se as mesmas são iguais ou estiverem dentro de um limite de erro pré-
estabelecido, realizada a verificação, é definido o intervalo de tempo entre cada
movimento retilíneo do carrinho e a distância aproximada entre os dois pontos, isso
através da diferença entre as coordenadas , após isso o microcontrolador envia sinais
ao motor para que o carrinho se movimente por um determinado tempo pré-
estabelecido, a partir do término do tempo o carrinho recebe informações do GPS com
a posição atualizada, recebida a posição, é verificado se a coordenada atual é igual ou
maior ou dentro do limite aceitável à coordenada prevista anteriormente, se a condição
não for aceita, o microcontrolador envia sinais para o motor para que o carrinho
movimente mais um intervalo de tempo até o término do tempo definido, se a condição
for aceita, a trajetória é finalizada.

40
Os possíveis movimentos do carrinho são:
Tabela 10 – Movimentos do carrinho
Movimento Porta Nível Lógico
Anda P3^0 0
ParaAnda P3^0 1
Adiante P3^1 0
Ré P3^1 1
Vira P3^2 0
ParaVira P3^2 1
Esquerda P3^3 0
Direita P3^3 1
Figura 3.8 – Carrinho Elétrico

41
Figura 3.9 – Circuito Controle Motor

42
3.1.5 Verificação de posição e rota Verificação da Posição: Para verificar se o carrinho esta apontado para a posição
correta de destino, o microcontrolador verifica a seguinte regra:
Se a diferença entre a latitude final(definida pelo usuário) e a latitude inicial(adquirida
pelo GPS) e a diferença entre a longitude final(definida pelo usuário) e a longitude
inicial(definida pelo GPS) for:
Tabela 11 – Regra de verificação posição
Verificação de Rota: Após o direcionamento correto do carrinho, conforme a regra de
verificação e pela posição fornecida pela bússola digital, o carrinho é programado para
realizar o movimento em linha reta, esse movimento tem a duração definida conforme a
diferença entre as coordenadas. Após o término do movimento, o carrinho pàra e o
microcontrolador verifica a coordenada atual do carrinho através do GPS, após a
verificação o microcontrolador verifica se a coordenada do GPS é igual ou maior ou
próxima(dentro de um limite pré-estabelecido) a coordenada desejada, se for
verdadeira a condição, o microcontrolador envia um SMS ao celular acoplado ao
computador informando que o carrinho chegou ao ponto desejado, senão o carrinho
movimenta-se novamente e assim sucessivamente.
Latitude Longitude Direção
Negativa Negativa Nordeste Negativa Positiva Noroeste
Igual à zero Negativa Leste Positiva Positiva Sudoeste Positiva Negativa Sudeste
Igual à zero Positiva Oeste Negativa Igual à zero Norte Positiva Igual à zero Sul

43
3.2 SOFTWARE 3.2.1 SOFTWARE PC Finalidade: um software capaz de se comunicar com um aparelho celular, que
acoplado a serial do computador envie e receba mensagens de SMS para o celular
acoplado no carrinho.
A mensagem de SMS é composta pelas coordenadas de latitude e longitude
digitadas pelo usuário e pelo número do celular ao qual deseja enviar a mensagem.
Antes do envio da mensagem, o software faz um teste de conexão com a serial para
verificar se a conexão esta transmitindo perfeitamente, se estiver o usuário pode enviar
uma mensagem, se houver problema, o usuário deverá localizar o problema antes de
enviar a mensagem.
3.2.1.1 DFD Verifica Conexão
Conexão estabelecida
Figura 3.10 – DFD software PC
USUÁRIO
Verificar Conexão
Enviar Mensagem
Latitude
Longitude
Número Celular
Confirmação Envio
Receber Mensagem
Latitude
Longitude

44
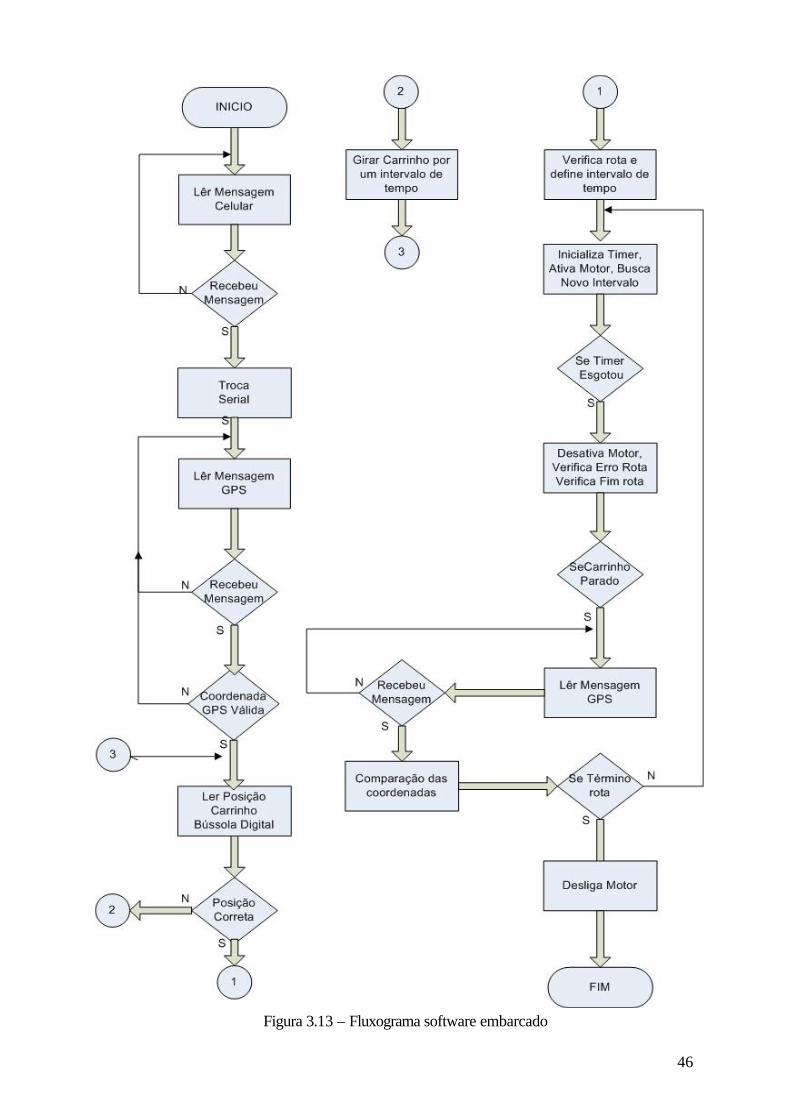
Figura 3.11 – Software PC 3.2.2 SOFTWARE EMBARCADO Software com a finalidade de funcionamento na plataforma do kit 8051, sendo
responsável pelo recebimento das informações provenientes do GPS, aparelho celular
e bússola digital, verificação da rota correta, armazenamento de informações e envio
de informações de controle para o motor do carrinho. O software será desenvolvido em
linguagem C e o compilador a ser utilizado será o Keil.

45
3.2.2.1 DFD
GPS Latitude, Longitude
CELULAR
Lat, Long
BÚSSOLA Posição Próxima Coordenada/ Intervalo de tempo COORDENADAS Coordenadas GPS Coordenadas Celular Posição Carrinho
Figura 3.12 – DFD Software embarcado
Microcontrolador 8051
Receber Coordenada GPS
Receber Coordenadas Celular
Receber Posição Bússola
Compara Posição
Acionar Motor
46
Figura 3.13 – Fluxograma software embarcado

47
4. PROCEDIMENTO DE TESTES Teste de comunicação serial: tem a finalidade de verificar a comunicação serial entre
o computador e o celular acoplado ao computador pela porta serial, esse teste pode ser
realizado quando executado o Software de Controle e apertado o botão “Testar
Comunicação”.
Teste de envio de SMS através do PC: tem a finalidade de verificar se o celular
acoplado ao PC envia SMS com sucesso, esse teste é possível quando o usuário clica
no botão “Enviar Mensagem” através do Software de Controle.
Teste de comunicação com o microcontrolador: tem a finalidade de verificar a
comunicação do microcontrolador com o celular, esse teste é verificado quando o
firmware é resetado.
Teste de verificação das coordenadas do GPS: tem a finalidade de verificar se a
coordenada obtida do GPS é valida, esse teste é realizado quando a coordenada do
GPS é recebida.
Integração do sistema: Para testar a integração de todos os componentes do sistema,
primeiro deve ser verificado se o microcontrolador está ligado, estando ligado é feita a
validação dos componentes do sistema conectados ao microcontrolador.

48
5. RESULTADOS OBTIDOS 5.1 SOFTWARE PC Através do software desenvolvido em linguagem C++ foi possível enviar e receber
mensagens de SMS através do celular acoplado ao computador, feita também uma
validação da mensagem, verificando se a mensagem de SMS foi enviada com sucesso
para o celular acoplado ao carrinho, e desenvolvido também uma verificação da
mensagem recebida pelo celular.
5.2 HARDWARE Foi obtido êxito na aquisição das informações do GPS através da porta serial do KIT
8051, na verificação da posição através da bússola digital, no controle do display LCD,
no controle do motor do carrinho elétrico e no envio e recebimento de mensagens de
SMS através do KIT 8051 e do celular.
Porém alguns problemas foram encontrados, como no direcionamento do carrinho,
visto que o carrinho não consegue realizar movimentos em linha reta, isto ocorreu pelo
fato de o mesmo não dispor de um sensor de direcionamento das rodas.
Outro problema encontrado ocorreu no microcontrolador utilizado, isso porque o
microcontrolador utilizado trabalha apenas com números inteiros. Esse problema
inviabilizou certos passos do projeto, como calcular a velocidade do carrinho, traçar a
rota antes do carrinho iniciar o movimento e medir a distância entre as coordenadas
obtidas pelo GPS.

49
6. CONCLUSÃO Com o desenvolvimento do projeto de final do curso de Engenharia da Computação,
pudemos verificar a importância de um sistema de posicionamento móvel através da
utilização do GPS, visto que é possível obter a posição atual do objeto ao qual o GPS é
utilizado. Vimos também que a imprecisão ocasionada na captura das informações do
GPS pode ocasionar grandes problemas no resultado do projeto, pois o GPS utilizado
para o desenvolvimento do projeto apresentou certas imprecisões na captura das
coordenadas do carrinho prejudicando certas etapas do projeto.
O desenvolvimento do software de envio de SMS ficou bastante comprometido no
início do projeto, pois não encontrava no mercado nenhum cabo serial disponível para
o celular Siemens MC60 e, além disso, o desconhecimento da tecnologia que era
necessária para a comunicação do PC com o celular, após pesquisas sobre a
tecnologia PDU e a aquisição dos cabos, o Sofware foi desenvolvido com sucesso.
Fiquei surpreso com o resultado obtido, pois consegui enviar e receber mensagens de
SMS para qualquer celular de tecnologia GSM e além do mais o conforto de enviar a
mensagem através de um computador.
Conforme especificação do projeto, utilizei o carrinho elétrico encontrado no
Laboratório de Engenharia da Computação no Unicenp, porém inicialmente tive
diversos problemas para o controle do carrinho, pois o mesmo tinha o seu próprio
microcontrolador de controle do motor e o projeto necessitava de um microcontrolador
externo ao carrinho. Para resolver o problema, foi decidido retirar o microcontrolador
próprio do carrinho e colocar o microcontrolador externo no carrinho. No
microcontrolador externo foi desenvolvido o software de controle do motor e realizado
diversos testes, sendo que os mesmos foram realizados com sucesso, porém o
carrinho não tinha um sensor de posicionamento das rodas e isso dificultou os

50
resultados apresentados, pois no momento de movimentação do carrinho em linha reta,
o carrinho não realizava o movimento corretamente.
Foram encontrados problemas na execução da rota do carrinho, pois o
microcontrolador utilizado no projeto kit 8051 não calculava números ponto-flutuante e
isso inviabilizou a realização de cálculos da rota, pois a imprecisão seria muito grande
e o resultado seria pouco confiável.
Para o desenvolvimento do projeto, inicialmente foi realizado um cronograma das
etapas a serem seguidas e os passos a serem tomados, apesar de alguns atrasos que
ocorreram no desenvolvimento do projeto, todas as etapas foram concluídas e a data
prevista para o término foi respeitada e os resultados obtidos foram satisfatórios.
Posteriormente, o projeto terá um módulo extra, que através do mapa de uma
determinada região, o usuário defina através de um click sobre a área pretendida o
destino final do carrinho, não sendo necessário o usuário digitar manualmente as
coordenadas de latitude e longitude do carrinho.
Por fim, acredito que com este trabalho aprendi profundamente todas as atividades
realizadas no decorrer do projeto, e que os resultados alcançados ao longo do projeto
foram satisfatórios.

51
7. CUSTOS
Tabela 12 – Custos na implementação do projeto
Descrição Custo em reais( R$)
Borland C++ Builder 6 professional 2700,00 Keil uVision 2500,00 MicrosoftWindows XP 1200,00 Módulo GPS 1000,00 Gravador de memória 350,00 Telefones Celulares 250,00 Cabos e Conectores 110,00 Kit 8051 50,00 Bússola Digital( Sensor) 30,00 Componentes( Resistores, Capacitores, CI) 100,00 MAX233 10,00 Horas gastas (1000 h) 4000,00 Total 12.300,00

52
8. CRONOGRAMA
Tabela 13– Cronograma de desenvolvimento

53
9. REFERÊNCIAS BIBLIOGRÁFICAS ARVUS TECNOLOGIA. [online] Disponível na internet via www.url: http:// www.arvus.com.br/infos_GPS.htm. Arquivo capturado em 22 de março de 2006. Definição SMS. [online] Disponível na internet via www.url: http://www.dreamfabric.com/sms . Arquivo capturado em 23 de março de 2006. Comunicação serial. [online] Disponível na internet via www.url: http://www.eee.ufg.br/cepf/pff/2003/pf2003_08.pdf . Arquivo capturado em 23 de março de 2006. Configuração do Aparelho GPS. [online] Disponível na internet via www.url: http://www.semtech.com . Arquivo capturado em 23 de março de 2006. Datasheet GPS Xemics. [on-line] Disponível na internet via www.url: http://www.semtech.com/pc/downloadDocument.do?navId=H0,C193,C198,P2634&id=783 Arquivo capturado em 27 de março de 2006. Sensor de campo magnético digital. [online] Disponível na internet via www.url: http://www.dinsmoresensors.com Arquivo capturado em 28 de março de 2006. CABRAL, C. SMS através da RS232. Dissertação (Mestrado em engenharia mecânica) DEM-UA NICOLOSI, Denys Emilio. Microcontrolador 8051 detalhado. São Paulo . Érica, 2000 SILVA JÚNIOR, Vidal. Aplicações Práticas do microcontrolador 8051. 7. Ed. São Paulo. Érica,1998 FERLIN, Edson Pedro. Kit didático microcontrolador 8031. Curitiba. Laboratório de engenharia da computação, 2004 AXELSON, Jan. Serial port complete . Madison,1998