pds - aula 02 eduardo simas disciplina: … · -opera˘c~oes mais comuns em sinais no tempo...
TRANSCRIPT

PDS - Aula 02
EduardoSimas
Introducao
Operacoes emSinais noTempoDiscreto
TransformadasContınuas
Transformada z
Transformada deFourier deTempo Discreto
TransformadasDiscretas
TransformadaDiscreta deFourier
OutrasTransformadasDiscretas
Exemplosusando o Matlab
Disciplina: Processamento Digital de SinaisAula 02 - Operacoes e Transformacoes em
Sinais no Tempo Discreto
Prof. Eduardo Simas([email protected])
Departamento de Engenharia EletricaUniversidade Federal da Bahia

PDS - Aula 02
EduardoSimas
Introducao
Operacoes emSinais noTempoDiscreto
TransformadasContınuas
Transformada z
Transformada deFourier deTempo Discreto
TransformadasDiscretas
TransformadaDiscreta deFourier
OutrasTransformadasDiscretas
Exemplosusando o Matlab
Conteudo
1 Introducao
2 Operacoes em Sinais no Tempo Discreto
3 Transformadas ContınuasTransformada zTransformada de Fourier de Tempo Discreto
4 Transformadas DiscretasTransformada Discreta de FourierOutras Transformadas DiscretasExemplos usando o Matlab

PDS - Aula 02
EduardoSimas
Introducao
Operacoes emSinais noTempoDiscreto
TransformadasContınuas
Transformada z
Transformada deFourier deTempo Discreto
TransformadasDiscretas
TransformadaDiscreta deFourier
OutrasTransformadasDiscretas
Exemplosusando o Matlab
Introducao
O Processamento Digital de Sinais esta fundamentado emferramentas matematicas que permitem a realizacao deoperacoes e transformacoes em sinais no tempo discreto.
Neste modulo iremos estudar:
- Operacoes mais comuns em sinais no tempo discreto;
- Transformadas mais utilizadas para sinais no tempodiscreto.

PDS - Aula 02
EduardoSimas
Introducao
Operacoes emSinais noTempoDiscreto
TransformadasContınuas
Transformada z
Transformada deFourier deTempo Discreto
TransformadasDiscretas
TransformadaDiscreta deFourier
OutrasTransformadasDiscretas
Exemplosusando o Matlab
Operacoes em Sinais no Tempo Discreto

PDS - Aula 02
EduardoSimas
Introducao
Operacoes emSinais noTempoDiscreto
TransformadasContınuas
Transformada z
Transformada deFourier deTempo Discreto
TransformadasDiscretas
TransformadaDiscreta deFourier
OutrasTransformadasDiscretas
Exemplosusando o Matlab
Operacoes em Sinais no Tempo Discreto
Um sistema no tempo discreto opera sobre uma sequencia deentrada segundo regras pre-estabelecidas para gerar umasequencia de saıda.
Em muitos casos, o funcionamento dos sistemas no tempodiscreto pode ser descrito a partir de operacoes basicas como:
- produto;
- adicao;
- multiplicacao por um escalar;
- deslocamento no tempo;
- reversao no tempo;
- alteracao da taxa de amostragem;
- correlacao.
Essas operacoes serao apresentadas a seguir.

PDS - Aula 02
EduardoSimas
Introducao
Operacoes emSinais noTempoDiscreto
TransformadasContınuas
Transformada z
Transformada deFourier deTempo Discreto
TransformadasDiscretas
TransformadaDiscreta deFourier
OutrasTransformadasDiscretas
Exemplosusando o Matlab
Operacoes em Sinais no Tempo Discreto
Produto (ou modulacao): y [n] = x1[n] · x2[n]
Quando o produto e utilizado para obter uma sequencia decomprimento limitado a partir de outra de comprimento infinito(atraves do produto por uma sequencia finita, chamada janela)essa operacao e chamada “janelamento”:

PDS - Aula 02
EduardoSimas
Introducao
Operacoes emSinais noTempoDiscreto
TransformadasContınuas
Transformada z
Transformada deFourier deTempo Discreto
TransformadasDiscretas
TransformadaDiscreta deFourier
OutrasTransformadasDiscretas
Exemplosusando o Matlab
Operacoes em Sinais no Tempo Discreto
Adicao: y [n] = x1[n] + x2[n]
Multiplicacao por um escalar: y [n] = Ax [n]
Deslocamento no tempo: y [n] = x [n − N]
sendo N inteiro. Quando N > 0→ atraso e se N < 0→avanco.
Em geral utiliza-se o operador z−1 para indicar um atraso deuma amostra e z um avanco (veremos o porque quandoestudarmos a transformada z):
x [n] −→ z−1 −→ y [n] = x [n − 1]
x [n] −→ z −→ y [n] = x [n + 1]

PDS - Aula 02
EduardoSimas
Introducao
Operacoes emSinais noTempoDiscreto
TransformadasContınuas
Transformada z
Transformada deFourier deTempo Discreto
TransformadasDiscretas
TransformadaDiscreta deFourier
OutrasTransformadasDiscretas
Exemplosusando o Matlab
Operacoes em Sinais no Tempo Discreto
Reversao no Tempo: y [n] = x [−n]
Alteracao da Taxa de Amostragem: E possıvel gerar umnovo sinal y [n] a partir da modificacao da taxa de amostragemde x [n]. Definindo fx e fy como sendo respectivamente asfrequencias de amostragem de x e y , temos:
Fy
Fx= R
se R > 1 o processo e chamado interpolacao e se R < 1decimacao (ou dizimacao).
Na interpolacao temos: y [n] =
{x [n/L], n = 0± L,±2L, . . .
0, outro n
Na decimacao: y [n] = x [nM]

PDS - Aula 02
EduardoSimas
Introducao
Operacoes emSinais noTempoDiscreto
TransformadasContınuas
Transformada z
Transformada deFourier deTempo Discreto
TransformadasDiscretas
TransformadaDiscreta deFourier
OutrasTransformadasDiscretas
Exemplosusando o Matlab
Operacoes em Sinais no Tempo Discreto
Correlacao: A correlacao indica o nıvel se semelhanca entredois sinais (considerando a estatıstica de segunda ordem).
Define-se a sequencia de correlacao (ou correlacao cruzada):
rx,y [l ] =∞∑
n=−∞x [n]y [n − l ] com l = 0,±1,±2, . . .
sendo l o atraso entre as duas sequencias para o qual esta sendocalculada a correlacao. A sequencia de correlacao indica asemelhanca entre x [n] e versoes deslocadas de y [n].
Quando a sequencia de correlacao e calculada para um mesmosinal e chamada de sequencia de auto-correlacao:
rx,x [l ] =∞∑
n=−∞x [n]x [n − l ] com l = 0,±1,±2, . . .
rx,x [l ] indica a semelhanca entre um sinal x [n] e versoesdeslocadas dele mesmo.

PDS - Aula 02
EduardoSimas
Introducao
Operacoes emSinais noTempoDiscreto
TransformadasContınuas
Transformada z
Transformada deFourier deTempo Discreto
TransformadasDiscretas
TransformadaDiscreta deFourier
OutrasTransformadasDiscretas
Exemplosusando o Matlab
Funcao de Autocorrelacao
A funcao de auto-correlacao mostra a velocidade de variacao deum processo aleatorio com o tempo e tem as propriedades aseguir:
- RXX (τ) = RXX (−τ) (funcao par);
- O valor maximo ocorre em τ = 0 (defasagem zero) e valeRXX (0) = E{X 2(t)}.
- O processo de calculo de RXX (τ) e semelhante ao de umaconvolucao.
Funcao de auto correlacao de um sinal de SONAR pasivo:
−80 −60 −40 −20 0 20 40 60
0
0.1
0.2
τ
RX
X

PDS - Aula 02
EduardoSimas
Introducao
Operacoes emSinais noTempoDiscreto
TransformadasContınuas
Transformada z
Transformada deFourier deTempo Discreto
TransformadasDiscretas
TransformadaDiscreta deFourier
OutrasTransformadasDiscretas
Exemplosusando o Matlab
Funcao de Autocorrelacao - Aplicacao
Deteccao de ecos (medicao de distancias):
A posicao do pico da funcao de correlacao indica o tempo depropagacao T :

PDS - Aula 02
EduardoSimas
Introducao
Operacoes emSinais noTempoDiscreto
TransformadasContınuas
Transformada z
Transformada deFourier deTempo Discreto
TransformadasDiscretas
TransformadaDiscreta deFourier
OutrasTransformadasDiscretas
Exemplosusando o Matlab
Funcao de Autocorrelacao - Aplicacao
y [n] = αx [n − τ ] + N[n],sendo N[n] ruıdo gaussiano.
O pico da funcao decorrelacao pode ser utilizadopara estimar τ .

PDS - Aula 02
EduardoSimas
Introducao
Operacoes emSinais noTempoDiscreto
TransformadasContınuas
Transformada z
Transformada deFourier deTempo Discreto
TransformadasDiscretas
TransformadaDiscreta deFourier
OutrasTransformadasDiscretas
Exemplosusando o Matlab
Coeficiente de Correlacao
Coeficiente de Correlacao:
E um valor esperado calculado numa janela temporal finita dossinais e definido por:
ρx,y =E{(X − µX )(Y − µY )}
σXσY=
σXYσXσY
sendo: E{x [n]} = µX ≈1
N
N∑i=1
x [i ] a media e
E{(x [n]− µX )2} = σ2X ≈
1
N
N∑i=1
(x [i ]− µX )2 a variancia.
O fator σXY e a covariancia de X e Y e quando os sinais saoestatisticamente independentes ρx,y = 0.

PDS - Aula 02
EduardoSimas
Introducao
Operacoes emSinais noTempoDiscreto
TransformadasContınuas
Transformada z
Transformada deFourier deTempo Discreto
TransformadasDiscretas
TransformadaDiscreta deFourier
OutrasTransformadasDiscretas
Exemplosusando o Matlab
Variacao do Coeficiente de Correlacao - Exemplos
−4 −2 0 2 4−20
−10
0
10
20
X
Y
−4 −2 0 2 4−10
−5
0
5
10
X
Y
−4 −2 0 2 4−30
−20
−10
0
10
X
Y
−4 −2 0 2 4−4
−2
0
2
4
X
Y
ρXY
=0,99 ρXY
=−0,98
ρXY
=0,74ρ
XY=0,01

PDS - Aula 02
EduardoSimas
Introducao
Operacoes emSinais noTempoDiscreto
TransformadasContınuas
Transformada z
Transformada deFourier deTempo Discreto
TransformadasDiscretas
TransformadaDiscreta deFourier
OutrasTransformadasDiscretas
Exemplosusando o Matlab
Transformadas Contınuas
PDS - Aula 02
EduardoSimas
Introducao
Operacoes emSinais noTempoDiscreto
TransformadasContınuas
Transformada z
Transformada deFourier deTempo Discreto
TransformadasDiscretas
TransformadaDiscreta deFourier
OutrasTransformadasDiscretas
Exemplosusando o Matlab
Transformada Z

PDS - Aula 02
EduardoSimas
Introducao
Operacoes emSinais noTempoDiscreto
TransformadasContınuas
Transformada z
Transformada deFourier deTempo Discreto
TransformadasDiscretas
TransformadaDiscreta deFourier
OutrasTransformadasDiscretas
Exemplosusando o Matlab
Transformada z
A transformada z de uma sequencia x [n] e definida por:
X (z) = Z{x [n]} =∞∑
n=−∞x [n]z−n
onde z e uma variavel complexa.
E importante observar que X (z) existe apenas para regioes doplano complexo em que o somatorio converge.
A definicao acima e chamada de transformada z bilateral.
PDS - Aula 02
EduardoSimas
Introducao
Operacoes emSinais noTempoDiscreto
TransformadasContınuas
Transformada z
Transformada deFourier deTempo Discreto
TransformadasDiscretas
TransformadaDiscreta deFourier
OutrasTransformadasDiscretas
Exemplosusando o Matlab
Transformada z
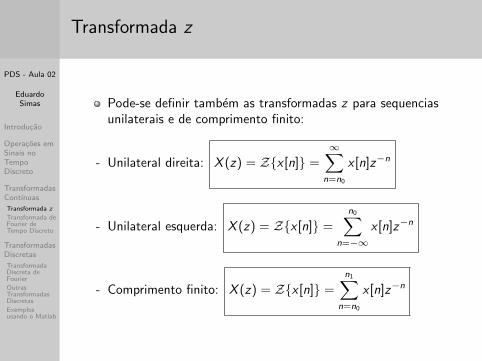
Pode-se definir tambem as transformadas z para sequenciasunilaterais e de comprimento finito:
- Unilateral direita: X (z) = Z{x [n]} =∞∑
n=n0
x [n]z−n
- Unilateral esquerda: X (z) = Z{x [n]} =n0∑
n=−∞x [n]z−n
- Comprimento finito: X (z) = Z{x [n]} =n1∑
n=n0
x [n]z−n

PDS - Aula 02
EduardoSimas
Introducao
Operacoes emSinais noTempoDiscreto
TransformadasContınuas
Transformada z
Transformada deFourier deTempo Discreto
TransformadasDiscretas
TransformadaDiscreta deFourier
OutrasTransformadasDiscretas
Exemplosusando o Matlab
Transformada z
Exemplo: Calcule a transformada z de x [n] = Ku[n]
Por definicao temos: X (z) = K∞∑n=0
z−n.
Entao, X (z) e uma serie de potencias que converge quando|z−1| < 1 para:
X (z) =K
1− z−1

PDS - Aula 02
EduardoSimas
Introducao
Operacoes emSinais noTempoDiscreto
TransformadasContınuas
Transformada z
Transformada deFourier deTempo Discreto
TransformadasDiscretas
TransformadaDiscreta deFourier
OutrasTransformadasDiscretas
Exemplosusando o Matlab
Transformada z
Exemplo: Calcule a transformada z de x [n] = Ku[n]
Por definicao temos: X (z) = K∞∑n=0
z−n.
Entao, X (z) e uma serie de potencias que converge quando|z−1| < 1 para:
X (z) =K
1− z−1

PDS - Aula 02
EduardoSimas
Introducao
Operacoes emSinais noTempoDiscreto
TransformadasContınuas
Transformada z
Transformada deFourier deTempo Discreto
TransformadasDiscretas
TransformadaDiscreta deFourier
OutrasTransformadasDiscretas
Exemplosusando o Matlab
Transformada z
Exemplo: Calcule a transformada z de x [n] = Ku[n]
Por definicao temos: X (z) = K∞∑n=0
z−n.
Entao, X (z) e uma serie de potencias que converge quando|z−1| < 1 para:
X (z) =K
1− z−1

PDS - Aula 02
EduardoSimas
Introducao
Operacoes emSinais noTempoDiscreto
TransformadasContınuas
Transformada z
Transformada deFourier deTempo Discreto
TransformadasDiscretas
TransformadaDiscreta deFourier
OutrasTransformadasDiscretas
Exemplosusando o Matlab
Transformada Z
A transformada z e muito utilizada para a modelagem desistemas no tempo discreto, pois a operacao de convolucao, queno domınio do tempo e utilizada para obter a saıda (a partir daentrada e da funcao de resposta ao impulso) e substituıda poruma multiplicacao.
A transformada z e a contrapartida discreta da transformada deLaplace.
Uma representacao comum para o par x [n] e X (z) e:
x [n]Z←→X (z)
A transformada z transforma a sequencia discreta x [n] nafuncao X (z) da variavel contınua e complexa z .

PDS - Aula 02
EduardoSimas
Introducao
Operacoes emSinais noTempoDiscreto
TransformadasContınuas
Transformada z
Transformada deFourier deTempo Discreto
TransformadasDiscretas
TransformadaDiscreta deFourier
OutrasTransformadasDiscretas
Exemplosusando o Matlab
Regiao de Convergencia da Transformada Z
Considerando a teoria das series, observa-se que a transformadade z de uma sequencia e uma serie de Laurent da variavelcomplexa z .
Definicao da serie de Laurent: f (z) =∞∑
n=−∞an(z − c)n
Neste caso, podemos aplicar resultados da teoria de series echegar ao resultado a seguir:
A transformada z converge se r1 < z < r2, sendo:
r1 = limn→∞
∣∣∣x [n + 1]
x [n]
∣∣∣r2 = lim
n→−∞
∣∣∣x [n + 1]
x [n]
∣∣∣

PDS - Aula 02
EduardoSimas
Introducao
Operacoes emSinais noTempoDiscreto
TransformadasContınuas
Transformada z
Transformada deFourier deTempo Discreto
TransformadasDiscretas
TransformadaDiscreta deFourier
OutrasTransformadasDiscretas
Exemplosusando o Matlab
Regiao de Convergencia da Transformada Z
A regiao no plano complexo na qual a transformada z converge(r1 < z < r2) e conhecida como: Regiao de Convergencia(ROC).
Exemplo de regiao de convergencia da transformada z :

PDS - Aula 02
EduardoSimas
Introducao
Operacoes emSinais noTempoDiscreto
TransformadasContınuas
Transformada z
Transformada deFourier deTempo Discreto
TransformadasDiscretas
TransformadaDiscreta deFourier
OutrasTransformadasDiscretas
Exemplosusando o Matlab
Regiao de Convergencia da Transformada Z
Pode-se observar que, por definicao, a transformada z e umaserie geometrica da variavel complexa z :
X (z) = Z{x [n]} =∞∑
n=−∞x [n]z−n.
Para uma serie geometrica pode-se provar que:N−1∑k=0
ark = a1− rn
1− r, e quando N →∞:
∞∑k=0
ark = a1
1− r, para |r | < 1.

PDS - Aula 02
EduardoSimas
Introducao
Operacoes emSinais noTempoDiscreto
TransformadasContınuas
Transformada z
Transformada deFourier deTempo Discreto
TransformadasDiscretas
TransformadaDiscreta deFourier
OutrasTransformadasDiscretas
Exemplosusando o Matlab
Exemplos: ROC da Transformada Z
Encontre as transformadas z das sequencias abaixo,especificando suas ROC:
1 - x [n] = k2nu[n]2 - x [n] = k2n−1u[n − 1]3 - x [n] = u(−n + 1)
Resolucao:
1 - x [n] = k2nu[n]→ X (z) =∞∑n=0
k2nz−n = k∞∑n=0
(2z−1)n
chega-se entao a: X (z) =k
1− 2z−1, para
|2z−1| < 1→ |z | > 2.

PDS - Aula 02
EduardoSimas
Introducao
Operacoes emSinais noTempoDiscreto
TransformadasContınuas
Transformada z
Transformada deFourier deTempo Discreto
TransformadasDiscretas
TransformadaDiscreta deFourier
OutrasTransformadasDiscretas
Exemplosusando o Matlab
Exemplos: ROC da Transformada Z
Encontre as transformadas z das sequencias abaixo,especificando suas ROC:
1 - x [n] = k2nu[n]2 - x [n] = k2n−1u[n − 1]3 - x [n] = u(−n + 1)
Resolucao:
1 - x [n] = k2nu[n]→ X (z) =∞∑n=0
k2nz−n = k∞∑n=0
(2z−1)n
chega-se entao a: X (z) =k
1− 2z−1, para
|2z−1| < 1→ |z | > 2.

PDS - Aula 02
EduardoSimas
Introducao
Operacoes emSinais noTempoDiscreto
TransformadasContınuas
Transformada z
Transformada deFourier deTempo Discreto
TransformadasDiscretas
TransformadaDiscreta deFourier
OutrasTransformadasDiscretas
Exemplosusando o Matlab
Exemplos: ROC da Transformada Z
Encontre as transformadas z das sequencias abaixo,especificando suas ROC:
1 - x [n] = k2nu[n]2 - x [n] = k2n−1u[n − 1]3 - x [n] = u(−n + 1)
Resolucao:
1 - x [n] = k2nu[n]→ X (z) =∞∑n=0
k2nz−n = k∞∑n=0
(2z−1)n
chega-se entao a: X (z) =k
1− 2z−1, para
|2z−1| < 1→ |z | > 2.

PDS - Aula 02
EduardoSimas
Introducao
Operacoes emSinais noTempoDiscreto
TransformadasContınuas
Transformada z
Transformada deFourier deTempo Discreto
TransformadasDiscretas
TransformadaDiscreta deFourier
OutrasTransformadasDiscretas
Exemplosusando o Matlab
Exemplos: ROC da Transformada Z
Encontre as transformadas z das sequencias abaixo,especificando suas ROC:
1 - x [n] = k2nu[n]2 - x [n] = k2n−1u[n − 1]3 - x [n] = u(−n + 1)
Resolucao:
1 - x [n] = k2nu[n]→ X (z) =∞∑n=0
k2nz−n = k∞∑n=0
(2z−1)n
chega-se entao a: X (z) =k
1− 2z−1, para
|2z−1| < 1→ |z | > 2.

PDS - Aula 02
EduardoSimas
Introducao
Operacoes emSinais noTempoDiscreto
TransformadasContınuas
Transformada z
Transformada deFourier deTempo Discreto
TransformadasDiscretas
TransformadaDiscreta deFourier
OutrasTransformadasDiscretas
Exemplosusando o Matlab
Exemplos: ROC da Transformada Z
Encontre as transformadas z das sequencias abaixo,especificando suas ROC:
1 - x [n] = k2nu[n]2 - x [n] = k2n−1u[n − 1]3 - x [n] = u(−n + 1)
Resolucao:
1 - x [n] = k2nu[n]→ X (z) =∞∑n=0
k2nz−n = k∞∑n=0
(2z−1)n
chega-se entao a: X (z) =k
1− 2z−1, para
|2z−1| < 1→ |z | > 2.

PDS - Aula 02
EduardoSimas
Introducao
Operacoes emSinais noTempoDiscreto
TransformadasContınuas
Transformada z
Transformada deFourier deTempo Discreto
TransformadasDiscretas
TransformadaDiscreta deFourier
OutrasTransformadasDiscretas
Exemplosusando o Matlab
Exemplos: ROC da Transformada Z
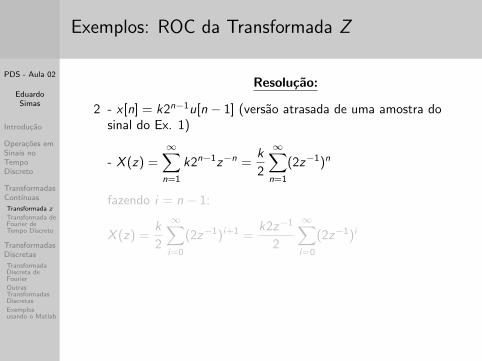
Resolucao:
2 - x [n] = k2n−1u[n − 1] (versao atrasada de uma amostra dosinal do Ex. 1)
- X (z) =∞∑n=1
k2n−1z−n =k
2
∞∑n=1
(2z−1)n
fazendo i = n − 1:
X (z) =k
2
∞∑i=0
(2z−1)i+1 =k2z−1
2
∞∑i=0
(2z−1)i
X (z) =kz−1
1− 2z−1, para |z | > 2.
Comparando com o resultado anterior percebe-se que o atrasode uma unidade corresponde a multiplicacao por z−1.
PDS - Aula 02
EduardoSimas
Introducao
Operacoes emSinais noTempoDiscreto
TransformadasContınuas
Transformada z
Transformada deFourier deTempo Discreto
TransformadasDiscretas
TransformadaDiscreta deFourier
OutrasTransformadasDiscretas
Exemplosusando o Matlab
Exemplos: ROC da Transformada Z
Resolucao:
2 - x [n] = k2n−1u[n − 1] (versao atrasada de uma amostra dosinal do Ex. 1)
- X (z) =∞∑n=1
k2n−1z−n =k
2
∞∑n=1
(2z−1)n
fazendo i = n − 1:
X (z) =k
2
∞∑i=0
(2z−1)i+1 =k2z−1
2
∞∑i=0
(2z−1)i
X (z) =kz−1
1− 2z−1, para |z | > 2.
Comparando com o resultado anterior percebe-se que o atrasode uma unidade corresponde a multiplicacao por z−1.

PDS - Aula 02
EduardoSimas
Introducao
Operacoes emSinais noTempoDiscreto
TransformadasContınuas
Transformada z
Transformada deFourier deTempo Discreto
TransformadasDiscretas
TransformadaDiscreta deFourier
OutrasTransformadasDiscretas
Exemplosusando o Matlab
Exemplos: ROC da Transformada Z
Resolucao:
2 - x [n] = k2n−1u[n − 1] (versao atrasada de uma amostra dosinal do Ex. 1)
- X (z) =∞∑n=1
k2n−1z−n =k
2
∞∑n=1
(2z−1)n
fazendo i = n − 1:
X (z) =k
2
∞∑i=0
(2z−1)i+1 =k2z−1
2
∞∑i=0
(2z−1)i
X (z) =kz−1
1− 2z−1, para |z | > 2.
Comparando com o resultado anterior percebe-se que o atrasode uma unidade corresponde a multiplicacao por z−1.

PDS - Aula 02
EduardoSimas
Introducao
Operacoes emSinais noTempoDiscreto
TransformadasContınuas
Transformada z
Transformada deFourier deTempo Discreto
TransformadasDiscretas
TransformadaDiscreta deFourier
OutrasTransformadasDiscretas
Exemplosusando o Matlab
Exemplos: ROC da Transformada Z
Resolucao:
2 - x [n] = k2n−1u[n − 1] (versao atrasada de uma amostra dosinal do Ex. 1)
- X (z) =∞∑n=1
k2n−1z−n =k
2
∞∑n=1
(2z−1)n
fazendo i = n − 1:
X (z) =k
2
∞∑i=0
(2z−1)i+1 =k2z−1
2
∞∑i=0
(2z−1)i
X (z) =kz−1
1− 2z−1, para |z | > 2.
Comparando com o resultado anterior percebe-se que o atrasode uma unidade corresponde a multiplicacao por z−1.

PDS - Aula 02
EduardoSimas
Introducao
Operacoes emSinais noTempoDiscreto
TransformadasContınuas
Transformada z
Transformada deFourier deTempo Discreto
TransformadasDiscretas
TransformadaDiscreta deFourier
OutrasTransformadasDiscretas
Exemplosusando o Matlab
Exemplos: ROC da Transformada Z
Resolucao:
3 - x [n] = u(−n + 1) (versao revertida no tempo do degrauunitario deslocado)
- X (z) =−1∑
n=−∞z−n
fazendo i = −n − 1: X (z) =0∑
i=∞
z−(−i−1) = z0∑
i=∞
z i
X (z) =z
1− zpara |z | < 1.
Comparando com o par: u[n − 1]Z←→
z−1
1− z−1, percebe-se que
x [−n]Z←→X (z−1)

PDS - Aula 02
EduardoSimas
Introducao
Operacoes emSinais noTempoDiscreto
TransformadasContınuas
Transformada z
Transformada deFourier deTempo Discreto
TransformadasDiscretas
TransformadaDiscreta deFourier
OutrasTransformadasDiscretas
Exemplosusando o Matlab
Exemplos: ROC da Transformada Z
Resolucao:
3 - x [n] = u(−n + 1) (versao revertida no tempo do degrauunitario deslocado)
- X (z) =−1∑
n=−∞z−n
fazendo i = −n − 1: X (z) =0∑
i=∞
z−(−i−1) = z0∑
i=∞
z i
X (z) =z
1− zpara |z | < 1.
Comparando com o par: u[n − 1]Z←→
z−1
1− z−1, percebe-se que
x [−n]Z←→X (z−1)

PDS - Aula 02
EduardoSimas
Introducao
Operacoes emSinais noTempoDiscreto
TransformadasContınuas
Transformada z
Transformada deFourier deTempo Discreto
TransformadasDiscretas
TransformadaDiscreta deFourier
OutrasTransformadasDiscretas
Exemplosusando o Matlab
Exemplos: ROC da Transformada Z
Resolucao:
3 - x [n] = u(−n + 1) (versao revertida no tempo do degrauunitario deslocado)
- X (z) =−1∑
n=−∞z−n
fazendo i = −n − 1: X (z) =0∑
i=∞
z−(−i−1) = z0∑
i=∞
z i
X (z) =z
1− zpara |z | < 1.
Comparando com o par: u[n − 1]Z←→
z−1
1− z−1, percebe-se que
x [−n]Z←→X (z−1)

PDS - Aula 02
EduardoSimas
Introducao
Operacoes emSinais noTempoDiscreto
TransformadasContınuas
Transformada z
Transformada deFourier deTempo Discreto
TransformadasDiscretas
TransformadaDiscreta deFourier
OutrasTransformadasDiscretas
Exemplosusando o Matlab
Exemplos: ROC da Transformada Z
Resolucao:
3 - x [n] = u(−n + 1) (versao revertida no tempo do degrauunitario deslocado)
- X (z) =−1∑
n=−∞z−n
fazendo i = −n − 1: X (z) =0∑
i=∞
z−(−i−1) = z0∑
i=∞
z i
X (z) =z
1− zpara |z | < 1.
Comparando com o par: u[n − 1]Z←→
z−1
1− z−1, percebe-se que
x [−n]Z←→X (z−1)

PDS - Aula 02
EduardoSimas
Introducao
Operacoes emSinais noTempoDiscreto
TransformadasContınuas
Transformada z
Transformada deFourier deTempo Discreto
TransformadasDiscretas
TransformadaDiscreta deFourier
OutrasTransformadasDiscretas
Exemplosusando o Matlab
Funcao de Transferencia
A transformada H(z) da funcao de resposta ao impulso h[n] deum sistema LIT e denominada Funcao de Transferencia.
Com o conhecimento de H(z) e possıvel obter a saıda de umSLIT a partir de uma simples multiplicacao no domınio z :
Y (z) = H(z)X (z)
sendo X (z) e Y (z) as transformadas z da entrada (x [n]) e dasaıda (y [n]) do SLIT.
Em geral uma funcao de transferencia e expressa, de modogenerico, como:
H(z) =Y (z)
X (z)=
M∑l=0
blz−1
1 +N∑i=1
aiz−1

PDS - Aula 02
EduardoSimas
Introducao
Operacoes emSinais noTempoDiscreto
TransformadasContınuas
Transformada z
Transformada deFourier deTempo Discreto
TransformadasDiscretas
TransformadaDiscreta deFourier
OutrasTransformadasDiscretas
Exemplosusando o Matlab
Funcao de Transferencia
E importante notar que para casos especiais (Ex.: filtros naorecursivos) a funcao de transferencia e simplificada para::
H(z) =M∑l=0
blz−1
Outra forma bastante utilizada para representar a funcao detransferencia e em funcao de seus polos (pi ) e zeros (zl):
H(z) =N(z)
D(z)= H0
M∏l=1
(1− z−1zl)
N∏i=1
(1− z−1pi )
= H0zN−M
M∏l=1
(z − zl)
N∏i=1
(z − pi )
zl e pi sao as raızes de N(z) e D(z), respectivamente.

PDS - Aula 02
EduardoSimas
Introducao
Operacoes emSinais noTempoDiscreto
TransformadasContınuas
Transformada z
Transformada deFourier deTempo Discreto
TransformadasDiscretas
TransformadaDiscreta deFourier
OutrasTransformadasDiscretas
Exemplosusando o Matlab
Propriedades da Transformada z
A seguir serao listadas as principais propriedades datransformada z .
=> Linearidade:x [n] = a1x1[n] + a2x2[n]→ X (z) = a1X1(z) + a2X2(z)
a regiao de convergencia de X (z) e a interseccao das regioes deconvergencia de X1(z) e X2(z).
=> Reversao no Tempo:x [−n]←→ X (z−1)
se X (z) converge para r1 < |z | < r2, entao X (z−1) convergepara 1
r1< |z | < 1
r2.
=> Deslocamento no Tempo:x [n + l ]←→ z lX (z)
a regiao de convergencia e a mesma a menos de z = 0 ouz =∞.

PDS - Aula 02
EduardoSimas
Introducao
Operacoes emSinais noTempoDiscreto
TransformadasContınuas
Transformada z
Transformada deFourier deTempo Discreto
TransformadasDiscretas
TransformadaDiscreta deFourier
OutrasTransformadasDiscretas
Exemplosusando o Matlab
Propriedades da Transformada z
=> Multiplicacao por uma exponencial:αnx [n]←→ X (αz)
sendo r1 < |z | < r2 a regiao de convergencia de X (z), entao aregiao de convergencia de X (αz) e r1/|α| < |z | < r2/|α|.
=> Diferenciacao complexa:
nx [n]←→ −z dX (αz)
dz
a regiao de convergencia se mantem a mesma.
=> Teorema do Valor Inicial:se x [n] = 0 para n < 0, entao: x [0] = lim
z→∞X (z).
Teorema da Convolucao:x1[n] ∗ x2[n]←→ X1(z)X2(z)

PDS - Aula 02
EduardoSimas
Introducao
Operacoes emSinais noTempoDiscreto
TransformadasContınuas
Transformada z
Transformada deFourier deTempo Discreto
TransformadasDiscretas
TransformadaDiscreta deFourier
OutrasTransformadasDiscretas
Exemplosusando o Matlab
Tabela de pares da Transformada Z mais utilizados

PDS - Aula 02
EduardoSimas
Introducao
Operacoes emSinais noTempoDiscreto
TransformadasContınuas
Transformada z
Transformada deFourier deTempo Discreto
TransformadasDiscretas
TransformadaDiscreta deFourier
OutrasTransformadasDiscretas
Exemplosusando o Matlab
A Transformada z Inversa
A transformada z inversa e definida por:
x [n] =1
2πj
∮X (z)zn−1dz
e mapeia uma funcao no domınio da variavel contınua ecomplexa z para o domınio da variavel discreta n.
O modo mais simples de obter a transformada z inversa e apartir da combinacao das propriedades da transformada compares transformados conhecidos.
Se nao for possıvel encontrar uma equivalencia a partir desteprocedimento, entao e necessario utilizar um metodo analıticocomo:
- metodo dos resıduos;- expansao em fracoes parciais;- divisao polinomial;- expansao em series.

PDS - Aula 02
EduardoSimas
Introducao
Operacoes emSinais noTempoDiscreto
TransformadasContınuas
Transformada z
Transformada deFourier deTempo Discreto
TransformadasDiscretas
TransformadaDiscreta deFourier
OutrasTransformadasDiscretas
Exemplosusando o Matlab
Metodo da expansao em fracoes parciais
Considerando que uma funcao X (z) = N(z)/D(z) tem k polosdistintos pk (k = 1, 2, . . . ,K ) cada um com multiplicidade mk ,entao X (z) pode ser expandido em fracoes parciais atraves de:
X (z) =M−N∑l=0
glz−l +
K∑k=1
mk∑i=1
cki(1− pkz−1)i
Se M < L, entao gl = 0 para todo l .
Para o caso de polos simples os coeficientes ck podem serdeterminados a partir de:
ck = (1− pkz−1)X (z)
∣∣∣∣z=pk
E a transformada inversa e obtida de:
g [n] =N∑l=1
ck(pk)nu[n]

PDS - Aula 02
EduardoSimas
Introducao
Operacoes emSinais noTempoDiscreto
TransformadasContınuas
Transformada z
Transformada deFourier deTempo Discreto
TransformadasDiscretas
TransformadaDiscreta deFourier
OutrasTransformadasDiscretas
Exemplosusando o Matlab
Expansao em fracoes parciais - Exemplo 1
Obter a representacao no domınio do tempo discreto para
H(z) =z(z + 2)
(z − 0, 2)(z + 0, 6)=
(1 + 2z−1)
(1− 0, 2z−1)(1 + 0, 6z−1)
Resolucao:
Expandindo em fracoes parciais temos: H(z) =c1
(1 + 2z−1)+
c2
(1 + 0, 6z−1)←→ c1(0, 2)nu[n] + c2(−0, 6)nu[n].
Para obtermos os coeficientes c1 e c2 fazemos:
c1 = (1− 0, 2z−1)H(z)
∣∣∣∣z=0,2
=1 + 2z−1
1 + 0, 6z−1
∣∣∣∣z=0,2
= 2, 75
c2 = (1− 0, 6z−1)H(z)
∣∣∣∣z=−0,6
=1 + 2z−1
1− 0, 2z−1
∣∣∣∣z=−0,6
= −1, 75
Entao a sequencia no domınio do tempo correspondente e:
h[n] = 2, 75(0, 2)nu[n]− 1, 75(−0, 6)nu[n]

PDS - Aula 02
EduardoSimas
Introducao
Operacoes emSinais noTempoDiscreto
TransformadasContınuas
Transformada z
Transformada deFourier deTempo Discreto
TransformadasDiscretas
TransformadaDiscreta deFourier
OutrasTransformadasDiscretas
Exemplosusando o Matlab
Expansao em fracoes parciais - Exemplo 1
Obter a representacao no domınio do tempo discreto para
H(z) =z(z + 2)
(z − 0, 2)(z + 0, 6)=
(1 + 2z−1)
(1− 0, 2z−1)(1 + 0, 6z−1)
Resolucao:
Expandindo em fracoes parciais temos: H(z) =c1
(1 + 2z−1)+
c2
(1 + 0, 6z−1)←→ c1(0, 2)nu[n] + c2(−0, 6)nu[n].
Para obtermos os coeficientes c1 e c2 fazemos:
c1 = (1− 0, 2z−1)H(z)
∣∣∣∣z=0,2
=1 + 2z−1
1 + 0, 6z−1
∣∣∣∣z=0,2
= 2, 75
c2 = (1− 0, 6z−1)H(z)
∣∣∣∣z=−0,6
=1 + 2z−1
1− 0, 2z−1
∣∣∣∣z=−0,6
= −1, 75
Entao a sequencia no domınio do tempo correspondente e:
h[n] = 2, 75(0, 2)nu[n]− 1, 75(−0, 6)nu[n]

PDS - Aula 02
EduardoSimas
Introducao
Operacoes emSinais noTempoDiscreto
TransformadasContınuas
Transformada z
Transformada deFourier deTempo Discreto
TransformadasDiscretas
TransformadaDiscreta deFourier
OutrasTransformadasDiscretas
Exemplosusando o Matlab
Expansao em fracoes parciais - Exemplo 1
Obter a representacao no domınio do tempo discreto para
H(z) =z(z + 2)
(z − 0, 2)(z + 0, 6)=
(1 + 2z−1)
(1− 0, 2z−1)(1 + 0, 6z−1)
Resolucao:
Expandindo em fracoes parciais temos: H(z) =c1
(1 + 2z−1)+
c2
(1 + 0, 6z−1)←→ c1(0, 2)nu[n] + c2(−0, 6)nu[n].
Para obtermos os coeficientes c1 e c2 fazemos:
c1 = (1− 0, 2z−1)H(z)
∣∣∣∣z=0,2
=1 + 2z−1
1 + 0, 6z−1
∣∣∣∣z=0,2
= 2, 75
c2 = (1− 0, 6z−1)H(z)
∣∣∣∣z=−0,6
=1 + 2z−1
1− 0, 2z−1
∣∣∣∣z=−0,6
= −1, 75
Entao a sequencia no domınio do tempo correspondente e:
h[n] = 2, 75(0, 2)nu[n]− 1, 75(−0, 6)nu[n]

PDS - Aula 02
EduardoSimas
Introducao
Operacoes emSinais noTempoDiscreto
TransformadasContınuas
Transformada z
Transformada deFourier deTempo Discreto
TransformadasDiscretas
TransformadaDiscreta deFourier
OutrasTransformadasDiscretas
Exemplosusando o Matlab
Expansao em fracoes parciais - Exemplo 1
Obter a representacao no domınio do tempo discreto para
H(z) =z(z + 2)
(z − 0, 2)(z + 0, 6)=
(1 + 2z−1)
(1− 0, 2z−1)(1 + 0, 6z−1)
Resolucao:
Expandindo em fracoes parciais temos: H(z) =c1
(1 + 2z−1)+
c2
(1 + 0, 6z−1)←→ c1(0, 2)nu[n] + c2(−0, 6)nu[n].
Para obtermos os coeficientes c1 e c2 fazemos:
c1 = (1− 0, 2z−1)H(z)
∣∣∣∣z=0,2
=1 + 2z−1
1 + 0, 6z−1
∣∣∣∣z=0,2
= 2, 75
c2 = (1− 0, 6z−1)H(z)
∣∣∣∣z=−0,6
=1 + 2z−1
1− 0, 2z−1
∣∣∣∣z=−0,6
= −1, 75
Entao a sequencia no domınio do tempo correspondente e:
h[n] = 2, 75(0, 2)nu[n]− 1, 75(−0, 6)nu[n]

PDS - Aula 02
EduardoSimas
Introducao
Operacoes emSinais noTempoDiscreto
TransformadasContınuas
Transformada z
Transformada deFourier deTempo Discreto
TransformadasDiscretas
TransformadaDiscreta deFourier
OutrasTransformadasDiscretas
Exemplosusando o Matlab
Expansao em fracoes parciais - Exemplo 1
Obter a representacao no domınio do tempo discreto para
H(z) =z(z + 2)
(z − 0, 2)(z + 0, 6)=
(1 + 2z−1)
(1− 0, 2z−1)(1 + 0, 6z−1)
Resolucao:
Expandindo em fracoes parciais temos: H(z) =c1
(1 + 2z−1)+
c2
(1 + 0, 6z−1)←→ c1(0, 2)nu[n] + c2(−0, 6)nu[n].
Para obtermos os coeficientes c1 e c2 fazemos:
c1 = (1− 0, 2z−1)H(z)
∣∣∣∣z=0,2
=1 + 2z−1
1 + 0, 6z−1
∣∣∣∣z=0,2
= 2, 75
c2 = (1− 0, 6z−1)H(z)
∣∣∣∣z=−0,6
=1 + 2z−1
1− 0, 2z−1
∣∣∣∣z=−0,6
= −1, 75
Entao a sequencia no domınio do tempo correspondente e:
h[n] = 2, 75(0, 2)nu[n]− 1, 75(−0, 6)nu[n]

PDS - Aula 02
EduardoSimas
Introducao
Operacoes emSinais noTempoDiscreto
TransformadasContınuas
Transformada z
Transformada deFourier deTempo Discreto
TransformadasDiscretas
TransformadaDiscreta deFourier
OutrasTransformadasDiscretas
Exemplosusando o Matlab
Expansao em fracoes parciais - polos multiplos
Quando a funcao G (z) tem um polo z = ρ de multiplicidade L eos demais N − L polos z = pl sao simples, a expansao emfracoes parciais pode ser feita a partir de:
G (z) =M−N∑l=0
glz−l +
N−L∑l=1
cl1− plz−1
L∑i=1
cρi(1− ρz−1)i
os resıduos cρi sao calculados usando:
cρi =1
(L− i)!(−ρ)L−idL−i
d(z−1)L−i
[(1− ρz−1)LG (z)
]∣∣∣∣z=ρ
PDS - Aula 02
EduardoSimas
Introducao
Operacoes emSinais noTempoDiscreto
TransformadasContınuas
Transformada z
Transformada deFourier deTempo Discreto
TransformadasDiscretas
TransformadaDiscreta deFourier
OutrasTransformadasDiscretas
Exemplosusando o Matlab
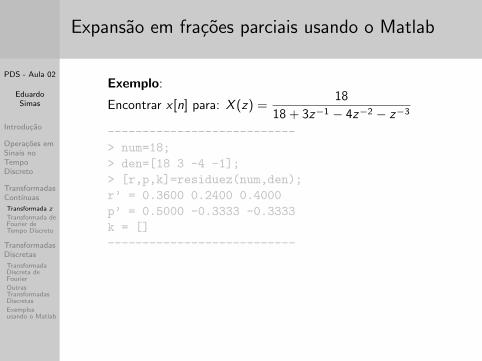
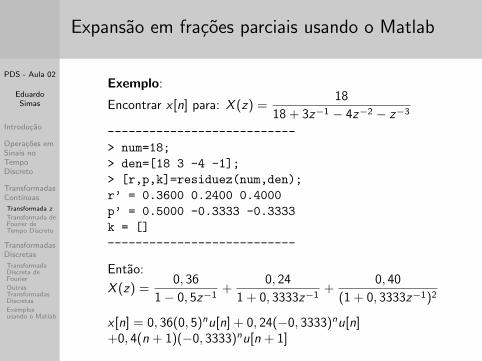
Expansao em fracoes parciais usando o Matlab
Exemplo:
Encontrar x [n] para: X (z) =18
18 + 3z−1 − 4z−2 − z−3
---------------------------
> num=18;
> den=[18 3 -4 -1];
> [r,p,k]=residuez(num,den);
r’ = 0.3600 0.2400 0.4000
p’ = 0.5000 -0.3333 -0.3333
k = []
---------------------------
Entao:
X (z) =0, 36
1− 0, 5z−1+
0, 24
1 + 0, 3333z−1+
0, 40
(1 + 0, 3333z−1)2
x [n] = 0, 36(0, 5)nu[n] + 0, 24(−0, 3333)nu[n]+0, 4(n + 1)(−0, 3333)nu[n + 1]

PDS - Aula 02
EduardoSimas
Introducao
Operacoes emSinais noTempoDiscreto
TransformadasContınuas
Transformada z
Transformada deFourier deTempo Discreto
TransformadasDiscretas
TransformadaDiscreta deFourier
OutrasTransformadasDiscretas
Exemplosusando o Matlab
Expansao em fracoes parciais usando o Matlab
Exemplo:
Encontrar x [n] para: X (z) =18
18 + 3z−1 − 4z−2 − z−3
---------------------------
> num=18;
> den=[18 3 -4 -1];
> [r,p,k]=residuez(num,den);
r’ = 0.3600 0.2400 0.4000
p’ = 0.5000 -0.3333 -0.3333
k = []
---------------------------
Entao:
X (z) =0, 36
1− 0, 5z−1+
0, 24
1 + 0, 3333z−1+
0, 40
(1 + 0, 3333z−1)2
x [n] = 0, 36(0, 5)nu[n] + 0, 24(−0, 3333)nu[n]+0, 4(n + 1)(−0, 3333)nu[n + 1]

PDS - Aula 02
EduardoSimas
Introducao
Operacoes emSinais noTempoDiscreto
TransformadasContınuas
Transformada z
Transformada deFourier deTempo Discreto
TransformadasDiscretas
TransformadaDiscreta deFourier
OutrasTransformadasDiscretas
Exemplosusando o Matlab
Expansao em fracoes parciais usando o Matlab
Exemplo:
Encontrar x [n] para: X (z) =18
18 + 3z−1 − 4z−2 − z−3
---------------------------
> num=18;
> den=[18 3 -4 -1];
> [r,p,k]=residuez(num,den);
r’ = 0.3600 0.2400 0.4000
p’ = 0.5000 -0.3333 -0.3333
k = []
---------------------------
Entao:
X (z) =0, 36
1− 0, 5z−1+
0, 24
1 + 0, 3333z−1+
0, 40
(1 + 0, 3333z−1)2
x [n] = 0, 36(0, 5)nu[n] + 0, 24(−0, 3333)nu[n]+0, 4(n + 1)(−0, 3333)nu[n + 1]
PDS - Aula 02
EduardoSimas
Introducao
Operacoes emSinais noTempoDiscreto
TransformadasContınuas
Transformada z
Transformada deFourier deTempo Discreto
TransformadasDiscretas
TransformadaDiscreta deFourier
OutrasTransformadasDiscretas
Exemplosusando o Matlab
Expansao em fracoes parciais usando o Matlab
Exemplo:
Encontrar x [n] para: X (z) =18
18 + 3z−1 − 4z−2 − z−3
---------------------------
> num=18;
> den=[18 3 -4 -1];
> [r,p,k]=residuez(num,den);
r’ = 0.3600 0.2400 0.4000
p’ = 0.5000 -0.3333 -0.3333
k = []
---------------------------
Entao:
X (z) =0, 36
1− 0, 5z−1+
0, 24
1 + 0, 3333z−1+
0, 40
(1 + 0, 3333z−1)2
x [n] = 0, 36(0, 5)nu[n] + 0, 24(−0, 3333)nu[n]+0, 4(n + 1)(−0, 3333)nu[n + 1]

PDS - Aula 02
EduardoSimas
Introducao
Operacoes emSinais noTempoDiscreto
TransformadasContınuas
Transformada z
Transformada deFourier deTempo Discreto
TransformadasDiscretas
TransformadaDiscreta deFourier
OutrasTransformadasDiscretas
Exemplosusando o Matlab
Estabilidade e Causalidade no Domınio z
Caracterısticas como estabilidade e causalidade de sistemaspodem ser associados a padroes especıficos dos polos e zeros eda ROC da funcao de transferencia do sistema:
- Se um sistema e causal a ROC esta fora do maior polo;
- Se o sistema e estavel a ROC deve incluir o cırculo unitario;
- Se o sistema e causal e estavel as duas condicoes acimaprecisam ser satisfeitas o que implica em ter todos os polosdentro do cırculo unitario.

PDS - Aula 02
EduardoSimas
Introducao
Operacoes emSinais noTempoDiscreto
TransformadasContınuas
Transformada z
Transformada deFourier deTempo Discreto
TransformadasDiscretas
TransformadaDiscreta deFourier
OutrasTransformadasDiscretas
Exemplosusando o Matlab
Estabilidade e Causalidade no Domınio z
Exemplos:
Localizacao dos polos para sistemas (a) causal e estavel e (b) causal
e instavel.

PDS - Aula 02
EduardoSimas
Introducao
Operacoes emSinais noTempoDiscreto
TransformadasContınuas
Transformada z
Transformada deFourier deTempo Discreto
TransformadasDiscretas
TransformadaDiscreta deFourier
OutrasTransformadasDiscretas
Exemplosusando o Matlab
Outros Comandos Uteis no MATLAB
Operacoes com sistemas lineares discretos (convolucao egeracao de graficos):---------------------------
a=[1 1 1 1 1];
b=[1 2 3 4 5 6 7 8 9];
c=conv(a,b);
stem(c)
---------------------------
0 5 100
5
10
15
20
25
30
35

PDS - Aula 02
EduardoSimas
Introducao
Operacoes emSinais noTempoDiscreto
TransformadasContınuas
Transformada z
Transformada deFourier deTempo Discreto
TransformadasDiscretas
TransformadaDiscreta deFourier
OutrasTransformadasDiscretas
Exemplosusando o Matlab
Outros Comandos Uteis no MATLAB
Encontrar raızes do polinomio G (z) = 8z4 + 8z3 + 2z2 − z − 1:
---------------------------
>> roots([8 8 2 -1 -1])
ans =
0.4486
-0.7420
-0.3533 + 0.5007i
-0.3533 - 0.5007i
---------------------------
Tracar diagrama de polos e zeros no plano z :
Exemplo 1: H(z) = (z − 1)/(8z4 + 8z3 + 2z2 − z − 1)
---------------------------
>> zplane([0 0 0 1 -1],[8 8 2 -1 -1])
---------------------------

PDS - Aula 02
EduardoSimas
Introducao
Operacoes emSinais noTempoDiscreto
TransformadasContınuas
Transformada z
Transformada deFourier deTempo Discreto
TransformadasDiscretas
TransformadaDiscreta deFourier
OutrasTransformadasDiscretas
Exemplosusando o Matlab
Outros Comandos Uteis no MATLAB
Saıda do Exemplo 1 - “x” representam os polos e “o” os zeros:
−1 −0.5 0 0.5 1
−1
−0.5
0
0.5
1
Real Part
Ima
gin
ary
Pa
rt

PDS - Aula 02
EduardoSimas
Introducao
Operacoes emSinais noTempoDiscreto
TransformadasContınuas
Transformada z
Transformada deFourier deTempo Discreto
TransformadasDiscretas
TransformadaDiscreta deFourier
OutrasTransformadasDiscretas
Exemplosusando o Matlab
Outros Comandos Uteis no MATLAB
Encontrar um polinomio a partir de suas raızes:
Raızes: 0.4, −0.7, −0.3 + 0.5i e −0.3− 0.5i
---------------------------
>> poly([0.4, -0.7, -0.3 + 0.5i, -0.3 - 0.5i])
ans =
1.0000 0.9000 0.2400 -0.0660 -0.0952
---------------------------
entao o polinomio e:z4 + 0.9000z3 + 0.2400z2 − 0.0660z − 0.0952

PDS - Aula 02
EduardoSimas
Introducao
Operacoes emSinais noTempoDiscreto
TransformadasContınuas
Transformada z
Transformada deFourier deTempo Discreto
TransformadasDiscretas
TransformadaDiscreta deFourier
OutrasTransformadasDiscretas
Exemplosusando o Matlab
Transformada de Fourier de Tempo Discreto

PDS - Aula 02
EduardoSimas
Introducao
Operacoes emSinais noTempoDiscreto
TransformadasContınuas
Transformada z
Transformada deFourier deTempo Discreto
TransformadasDiscretas
TransformadaDiscreta deFourier
OutrasTransformadasDiscretas
Exemplosusando o Matlab
Transformada de Fourier de Tempo Discreto
A transformada de Fourier de tempo discreto (DTFT - DiscreteTime Fourier Transform) pode ser obtida a partir da definicaoda transformada z fazendo z = e jω (ou seja, restringindo odomınio z apenas ao cırculo unitario).
Assim, a DTFT converte uma sequencia no tempo discreto parao domınio da frequencia contınua ω:
X (jω) = X (e jω) =∞∑
n=−∞x [n]e−jωn
E a transformacao inversa e realizada por:
x [n] =1
2πj
∫ π
−πX (jω)e jωndω

PDS - Aula 02
EduardoSimas
Introducao
Operacoes emSinais noTempoDiscreto
TransformadasContınuas
Transformada z
Transformada deFourier deTempo Discreto
TransformadasDiscretas
TransformadaDiscreta deFourier
OutrasTransformadasDiscretas
Exemplosusando o Matlab
Transformada de Fourier de Tempo Discreto
Percebe-se das definicoes anteriores que um sinal x [n] no tempodiscreto pode ser representado por um somatorio infinito desenoides de frequencia ω ponderadas por fatores proporcionais aX (jω).
Lembrando que (Formula de Euler): e jx = cos(x) + j sin(x).
A transformada de Fourier X (jω) e periodica com perıodo 2π:
X (e jω) = X (e jω+2πk),∀k ∈ Z
Assim, a transformada de Fourier de um sinal no tempo discretoso precisa ser especificada num intervalo de 2π, como porexemplo: [−π, π) ou [0, 2π).

PDS - Aula 02
EduardoSimas
Introducao
Operacoes emSinais noTempoDiscreto
TransformadasContınuas
Transformada z
Transformada deFourier deTempo Discreto
TransformadasDiscretas
TransformadaDiscreta deFourier
OutrasTransformadasDiscretas
Exemplosusando o Matlab
DTFT - Exemplo
Encontrar a transforma de Fourier para o sinal:
x [n] =
{1, 0 ≤ n ≤ 50, caso contrario
Solucao:
H(e jω) =5∑
k=0
e−jωk =1− e−6jω
1− e−jω
=e−3jω(e3jω − e−3jω)
e−jω/2(e jω/2 − e−jω/2)
= e−j5ω/2 sin(3ω)
sin(ω/2)

PDS - Aula 02
EduardoSimas
Introducao
Operacoes emSinais noTempoDiscreto
TransformadasContınuas
Transformada z
Transformada deFourier deTempo Discreto
TransformadasDiscretas
TransformadaDiscreta deFourier
OutrasTransformadasDiscretas
Exemplosusando o Matlab
DTFT - Exemplo
Encontrar a transforma de Fourier para o sinal:
x [n] =
{1, 0 ≤ n ≤ 50, caso contrario
Solucao:
H(e jω) =5∑
k=0
e−jωk =1− e−6jω
1− e−jω=
e−3jω(e3jω − e−3jω)
e−jω/2(e jω/2 − e−jω/2)
= e−j5ω/2 sin(3ω)
sin(ω/2)

PDS - Aula 02
EduardoSimas
Introducao
Operacoes emSinais noTempoDiscreto
TransformadasContınuas
Transformada z
Transformada deFourier deTempo Discreto
TransformadasDiscretas
TransformadaDiscreta deFourier
OutrasTransformadasDiscretas
Exemplosusando o Matlab
DTFT - Exemplo
Encontrar a transforma de Fourier para o sinal:
x [n] =
{1, 0 ≤ n ≤ 50, caso contrario
Solucao:
H(e jω) =5∑
k=0
e−jωk =1− e−6jω
1− e−jω=
e−3jω(e3jω − e−3jω)
e−jω/2(e jω/2 − e−jω/2)
= e−j5ω/2 sin(3ω)
sin(ω/2)

PDS - Aula 02
EduardoSimas
Introducao
Operacoes emSinais noTempoDiscreto
TransformadasContınuas
Transformada z
Transformada deFourier deTempo Discreto
TransformadasDiscretas
TransformadaDiscreta deFourier
OutrasTransformadasDiscretas
Exemplosusando o Matlab
DTFT - Exemplo
Encontrar a transforma de Fourier para o sinal:
x [n] =
{1, 0 ≤ n ≤ 50, caso contrario
Solucao:
H(e jω) =5∑
k=0
e−jωk =1− e−6jω
1− e−jω=
e−3jω(e3jω − e−3jω)
e−jω/2(e jω/2 − e−jω/2)
= e−j5ω/2 sin(3ω)
sin(ω/2)

PDS - Aula 02
EduardoSimas
Introducao
Operacoes emSinais noTempoDiscreto
TransformadasContınuas
Transformada z
Transformada deFourier deTempo Discreto
TransformadasDiscretas
TransformadaDiscreta deFourier
OutrasTransformadasDiscretas
Exemplosusando o Matlab
DTFT - Exemplo
As respostas em frequencia de modulo e fase sao dadas por:
Lembrando que, para o numero complexo z = a + jb podemosdefinir a representacao polar z = re jθ, sendo:
r =√a2 + b2 o modulo e θ = arctan(b/a) a fase.
Usando a formula de Euler podemos chegar tambem a:
a = r cos(θ) e b = r sin(θ) .

PDS - Aula 02
EduardoSimas
Introducao
Operacoes emSinais noTempoDiscreto
TransformadasContınuas
Transformada z
Transformada deFourier deTempo Discreto
TransformadasDiscretas
TransformadaDiscreta deFourier
OutrasTransformadasDiscretas
Exemplosusando o Matlab
Consideracoes sobre a DTFT
Para que a transformada de Fourier de uma sequencia exista,sua transformada z deve convergir para |z | = 1
A transformada z converge na circunferencia unitaria quando:∑∞n=−∞ |x [n]| <∞.
O degrau unitario (x [n] = u[n]) e um exemplo de sinal discretoque nao possui DTFT, pois a expressao acima nao e valida.
A condicao acima, porem, nao e necessaria e suficiente paragarantir a existencia da DTFT, ocorrem casos especiais nosquais a DTFT existe, mas a condicao nao e satisfeita.
Outro aspecto interessante e que a transformada z mapeiasempre para um domınio contınuo, entao, sequencias em quetransformada de Fourier e uma funcao descontınua de ω naopossuem transformada z .

PDS - Aula 02
EduardoSimas
Introducao
Operacoes emSinais noTempoDiscreto
TransformadasContınuas
Transformada z
Transformada deFourier deTempo Discreto
TransformadasDiscretas
TransformadaDiscreta deFourier
OutrasTransformadasDiscretas
Exemplosusando o Matlab
Propriedades da DTFT
A seguir serao listadas as principais propriedades da DTFT, quesao analogas as da transformada z .
=> Linearidade:x [n] = a1x1[n] + a2x2[n]→ X (e jω) = a1X1(e jω) + a2X2(e jω)
=> Reversao no Tempo:x [−n]←→ X (e−jω)
=> Deslocamento no Tempo:x [n + l ]←→ e jωlX (e jω)
onde l e inteiro.
=> Multiplicacao por uma Exponencial Complexa:e jω0nx [n]←→ X (e j(ω−ω0))

PDS - Aula 02
EduardoSimas
Introducao
Operacoes emSinais noTempoDiscreto
TransformadasContınuas
Transformada z
Transformada deFourier deTempo Discreto
TransformadasDiscretas
TransformadaDiscreta deFourier
OutrasTransformadasDiscretas
Exemplosusando o Matlab
Propriedades da DTFT
=> Diferenciacao Complexa:
nx [n]←→ jdX (e jω)
ω
=> Teorema da Convolucao:x1[n] ∗ x2[n]←→ X1(e jω)X2(e jω)x1[n]x2[n]←→ X1(e jω) ∗ X2(e jω)
A convolucao no domınio do tempo e igual ao produto nodomınio da frequencia e vice-versa.
=> Teorema de Parseval:∞∑
n=−∞|x [n]|2 =
1
2π
∫ π
−π|X (e jω)|2dω
A energia do sinal no domınio do tempo e igual a energia dosinal no domınio da frequencia dividida por 2π.

PDS - Aula 02
EduardoSimas
Introducao
Operacoes emSinais noTempoDiscreto
TransformadasContınuas
Transformada z
Transformada deFourier deTempo Discreto
TransformadasDiscretas
TransformadaDiscreta deFourier
OutrasTransformadasDiscretas
Exemplosusando o Matlab
DTFT para Sinais Periodicos
Considerando que um sinal periodico x [n] = x [n + kN] deperıodo N e composto por versoes deslocadas do sinal xf [n],que corresponde a um perıodo de x [n], tal que:
xf [n] = 0 para n < 0 e n ≥ N.
Pode-se entao escrever x [n] como:
x [n] =∞∑
k=−∞
xf [n + kN]
Usando a propriedade do deslocamento no tempo chegamos a:
X (e jω) =∞∑
k=−∞
e jωkNXf (e jω)

PDS - Aula 02
EduardoSimas
Introducao
Operacoes emSinais noTempoDiscreto
TransformadasContınuas
Transformada z
Transformada deFourier deTempo Discreto
TransformadasDiscretas
TransformadaDiscreta deFourier
OutrasTransformadasDiscretas
Exemplosusando o Matlab
DTFT para Sinais Periodicos
Apos algum algebrismo chega-se a:
X (e jω) =2π
N
∞∑k=−∞
X (k)δ
(ω − 2π
Nk
),
sendo X (k) =N−1∑n=0
x [n]e−j(2π/N)k .
Percebe-se que, para sinais periodicos, a DTFT se transformanuma soma discreta de senoides com frequencias multiplas de2π/N (chamada por alguns autores de Serie de Fourier).
A transformada inversa e descrita por:
x [n] =1
2π
∫ π
−πX (e jω)e jωndω = . . . =
1
N
N−1∑k=0
X (k)e j(2π/N)kn

PDS - Aula 02
EduardoSimas
Introducao
Operacoes emSinais noTempoDiscreto
TransformadasContınuas
Transformada z
Transformada deFourier deTempo Discreto
TransformadasDiscretas
TransformadaDiscreta deFourier
OutrasTransformadasDiscretas
Exemplosusando o Matlab
Transformadas Discretas

PDS - Aula 02
EduardoSimas
Introducao
Operacoes emSinais noTempoDiscreto
TransformadasContınuas
Transformada z
Transformada deFourier deTempo Discreto
TransformadasDiscretas
TransformadaDiscreta deFourier
OutrasTransformadasDiscretas
Exemplosusando o Matlab
Transformadas Discretas
As transformadas estudadas ate aqui convertem um sinal notempo discreto para um domınio contınuo, e por isso nao saoadequadas para processamento em sistemas digitais.
Nesta secao serao apresentadas algumas transformadas querealizam mapeamentos para domınios discretos, por exemplo:
- A Transformada Discreta de Fourier (DFT - Discrete FourierTransform);
- Transformada Discreta de Cossenos (DCT - Discrete CosineTransform);
- Transformada Wavelet Discreta (DWT - Discrete WaveletTransform);
- Transformada de Karhunen-Loeve (KLT - Karhunen-LoeveTransform).

PDS - Aula 02
EduardoSimas
Introducao
Operacoes emSinais noTempoDiscreto
TransformadasContınuas
Transformada z
Transformada deFourier deTempo Discreto
TransformadasDiscretas
TransformadaDiscreta deFourier
OutrasTransformadasDiscretas
Exemplosusando o Matlab
Transformada Discreta de Fourier

PDS - Aula 02
EduardoSimas
Introducao
Operacoes emSinais noTempoDiscreto
TransformadasContınuas
Transformada z
Transformada deFourier deTempo Discreto
TransformadasDiscretas
TransformadaDiscreta deFourier
OutrasTransformadasDiscretas
Exemplosusando o Matlab
Transformada Discreta de Fourier
Conforme visto anteriormente, a DTFT de um sinal x [n]discreto no tempo e periodico produz uma representacao X (e jω)que e discreta no domınio da frequencia.
Neste caso, para a obtencao da DTFT consideramos apenas umperıodo de x [n], denominado xf [n].
E possıvel extrapolar essa abordagem para sinais xf [n] decomprimento finito L, porem nao periodicos, escolhendo umsinal x [n] de comprimento N ≥ L tal que:.
x [n] =
{xf [n], 0 ≤ n ≤ L− 1
0, L ≤ n ≤ N − 1
Ou seja, x [n] tem toda a informacao de xf [n] e N − L amostrasadicionais com valor zero.
Quando N = L temos x [n] = xf [n]

PDS - Aula 02
EduardoSimas
Introducao
Operacoes emSinais noTempoDiscreto
TransformadasContınuas
Transformada z
Transformada deFourier deTempo Discreto
TransformadasDiscretas
TransformadaDiscreta deFourier
OutrasTransformadasDiscretas
Exemplosusando o Matlab
Transformada Discreta de Fourier
A transformada discreta de Fourier (DFT - Discrete FourierTransform) converte uma sequencia x [n] no tempo discreto parao domınio da frequencia discreta k :
X (e j2πN k) = X [k] =
N−1∑n=0
x [n]W knN , 0 ≤ k ≤ N − 1
A transformada inversa pode ser obtida a partir de:
x [n] =1
N
N−1∑k=0
X [k]W−knN , 0 ≤ n ≤ N − 1
sendo WN = e−j2π/N .

PDS - Aula 02
EduardoSimas
Introducao
Operacoes emSinais noTempoDiscreto
TransformadasContınuas
Transformada z
Transformada deFourier deTempo Discreto
TransformadasDiscretas
TransformadaDiscreta deFourier
OutrasTransformadasDiscretas
Exemplosusando o Matlab
Transformada Discreta de Fourier
Observa-se da definicao da DFT que:
- Ela fornece uma representacao discreta na frequencia para umsinal de comprimento finito L.
- Essa representacao so e util se o numero N de amostras e maiorque L.
- A quantidade de amostras da transformada de Fourier e igual aN (numero de amostras do sinal no domınio do tempo).
Nas figuras do proximo slide observa-se o efeito docompletamento com zeros (zero-padding). Em (a) temos aDTFT, em (b) a DFT para N = 8 e em (c) a DFT para N = 32.
Percebe-se que quanto maior N, melhor a resolucao darepresentacao no domınio da frequencia.


PDS - Aula 02
EduardoSimas
Introducao
Operacoes emSinais noTempoDiscreto
TransformadasContınuas
Transformada z
Transformada deFourier deTempo Discreto
TransformadasDiscretas
TransformadaDiscreta deFourier
OutrasTransformadasDiscretas
Exemplosusando o Matlab
Representacao da DFT na Forma Matricial
As equacoes que definem a DFT e a IDFT podem sermodificadas para a forma matricial, fazendo inicialmente:

PDS - Aula 02
EduardoSimas
Introducao
Operacoes emSinais noTempoDiscreto
TransformadasContınuas
Transformada z
Transformada deFourier deTempo Discreto
TransformadasDiscretas
TransformadaDiscreta deFourier
OutrasTransformadasDiscretas
Exemplosusando o Matlab
Representacao da DFT na Forma Matricial
E finalmente chega-se a:

PDS - Aula 02
EduardoSimas
Introducao
Operacoes emSinais noTempoDiscreto
TransformadasContınuas
Transformada z
Transformada deFourier deTempo Discreto
TransformadasDiscretas
TransformadaDiscreta deFourier
OutrasTransformadasDiscretas
Exemplosusando o Matlab
Representacao da DFT na Forma Matricial
Definindo-se:
e uma matriz WN tal que {WN}ij = W ijN , para 0 ≤ i , j ≤ N − 1,
as equacoes anteriores podem ser reescritas como:
X = WNx
x =1
NW∗NX

PDS - Aula 02
EduardoSimas
Introducao
Operacoes emSinais noTempoDiscreto
TransformadasContınuas
Transformada z
Transformada deFourier deTempo Discreto
TransformadasDiscretas
TransformadaDiscreta deFourier
OutrasTransformadasDiscretas
Exemplosusando o Matlab
Representacao da DFT na Forma Matricial
E interessante notar que a matriz WN tem propriedadesespeciais como:
- e simetrica (WTN = WN);
- W−1N =
1
NW∗N .
Considerando o custo computacional do calculo da DFT,pode-se verificar que, para uma DFT de comprimento N saonecessarias:
- N2 multiplicacoes complexas;
- N(N − 1) adicoes.

PDS - Aula 02
EduardoSimas
Introducao
Operacoes emSinais noTempoDiscreto
TransformadasContınuas
Transformada z
Transformada deFourier deTempo Discreto
TransformadasDiscretas
TransformadaDiscreta deFourier
OutrasTransformadasDiscretas
Exemplosusando o Matlab
Propriedades da DFT
A seguir serao listadas as principais propriedades da DTFT, quesao analogas as da transformada z .
=> Linearidade:x [n] = a1x1[n] + a2x2[n]→ X (k) = a1X1(k) + a2X2(k)
=> Reversao no Tempo:x [−n]←→ X (−k)
=> Deslocamento Circular no Tempo:x [n + l ]←→W−lkN X (k)
onde l e inteiro. Diferente da DTFT, a DFT somente e definidano intervalo 0 ≤ n ≤ N − 1, entao o deslocamento definido pelapropriedade e do tipo “circular”, conforme indicado na figura aseguir:

PDS - Aula 02
EduardoSimas
Introducao
Operacoes emSinais noTempoDiscreto
TransformadasContınuas
Transformada z
Transformada deFourier deTempo Discreto
TransformadasDiscretas
TransformadaDiscreta deFourier
OutrasTransformadasDiscretas
Exemplosusando o Matlab
Propriedades da DFT
Onde temos (a) x [n] e (b) x [n − 3].
=> Deslocamento na Frequencia:W ln
N x [n]←→ X (k + l)
=> Convolucao Circular no Tempo:se x [n] e h[n] sao periodicas com perıodo N, entao:N−1∑l=0
x [l ]h[n − l ]←→ X (k)H(k)
onde X (k) e H(k) sao as DFTs dos sinais de comprimento Ncorrespondentes a um perıodo de x [n e h[n], respectivamente.
A convolucao no domınio do tempo e igual ao produto nodomınio da frequencia e vice-versa.
PDS - Aula 02
EduardoSimas
Introducao
Operacoes emSinais noTempoDiscreto
TransformadasContınuas
Transformada z
Transformada deFourier deTempo Discreto
TransformadasDiscretas
TransformadaDiscreta deFourier
OutrasTransformadasDiscretas
Exemplosusando o Matlab
Propriedades da DFT
=> Teorema de Parseval:N−1∑n=0
|x [n]|2 =1
N
N−1∑n=0
|X (k)|2
A energia do sinal no domınio do tempo e igual a energia dosinal no domınio da frequencia dividida por N.
=> Relacao entre a DFT e a Transformada z :A DFT pode ser definida como uma versao amostrada nafrequencia da DTFT de um sinal no tempo discreto.
Como a DTFT pode ser obtida da transformada z fazendoz = e jω, entao a DFT pode ser obtida da amostragem datransformada z em ω = 2π
N k
PDS - Aula 02
EduardoSimas
Introducao
Operacoes emSinais noTempoDiscreto
TransformadasContınuas
Transformada z
Transformada deFourier deTempo Discreto
TransformadasDiscretas
TransformadaDiscreta deFourier
OutrasTransformadasDiscretas
Exemplosusando o Matlab
Estimacao Computacional da DFT
Conforme mostrado anteriormente o calculo da DFT peladefinicao requer N2 multiplicacoes complexas (ou seja, crescecom o quadrado do comprimento do sinal).
Isso limita sua aplicacao pratica a sinais de pequenocomprimento.
Visando contornar essa limitacao, foram desenvolvidosalgoritmos rapidos para a estimacao da DFT, conhecidosgenericamente como FFT (Fast Fourier Transform).
Existem tambem tecnicas alternativas para determinacao daDFT como:
- WFT (Winograd Fourier Transform);
- NTT (Number Theoretic Transform).

PDS - Aula 02
EduardoSimas
Introducao
Operacoes emSinais noTempoDiscreto
TransformadasContınuas
Transformada z
Transformada deFourier deTempo Discreto
TransformadasDiscretas
TransformadaDiscreta deFourier
OutrasTransformadasDiscretas
Exemplosusando o Matlab
Outras Transformadas Discretas

PDS - Aula 02
EduardoSimas
Introducao
Operacoes emSinais noTempoDiscreto
TransformadasContınuas
Transformada z
Transformada deFourier deTempo Discreto
TransformadasDiscretas
TransformadaDiscreta deFourier
OutrasTransformadasDiscretas
Exemplosusando o Matlab
Outras Transformadas Discretas
Considerando a definicao matricial da DFT, pode-se generalizarpara uma transformada discreta qualquer considerando:
X = ANx
x = γA∗TN X
sendo AN uma matriz N × N tal que:
A−1N = γA∗TN
A definicao acima pode ser aplicada para uma grande variedadede transformadas discretas.
Percebe-se que a transformacao e simplesmente uma mudancade base (ou rotacao) em CN , associada a uma multiplicacao porum fator escalar γ.

PDS - Aula 02
EduardoSimas
Introducao
Operacoes emSinais noTempoDiscreto
TransformadasContınuas
Transformada z
Transformada deFourier deTempo Discreto
TransformadasDiscretas
TransformadaDiscreta deFourier
OutrasTransformadasDiscretas
Exemplosusando o Matlab
Outras Transformadas Discretas
E possıvel mostrar tambem que, os vetores que compoem amatriz AN formam uma base em CN , ou seja, sao ortogonais1.
A relacao de Parseval pode ser estendida para umatransformada discreta generica utilizando:
‖X‖2 =1
γ‖x‖2
sendo: ‖v‖2 = 〈v, v〉 = v∗Tv a norma do vetor v.
Quando γ = 1, a transformada e dita “unitaria”, e isso significaque a energia no domınio transformado e igual a do domıniooriginal.
1Dois vetores v1 e v2 sao ortogonais quando 〈v1, v2〉 = 0, o que implicaque o angulo formado entre eles e π/2.

PDS - Aula 02
EduardoSimas
Introducao
Operacoes emSinais noTempoDiscreto
TransformadasContınuas
Transformada z
Transformada deFourier deTempo Discreto
TransformadasDiscretas
TransformadaDiscreta deFourier
OutrasTransformadasDiscretas
Exemplosusando o Matlab
Transformada Discreta de Cossenos

PDS - Aula 02
EduardoSimas
Introducao
Operacoes emSinais noTempoDiscreto
TransformadasContınuas
Transformada z
Transformada deFourier deTempo Discreto
TransformadasDiscretas
TransformadaDiscreta deFourier
OutrasTransformadasDiscretas
Exemplosusando o Matlab
Transformada Discreta de Cossenos
A transformada discreta de cossenos (DCT - Discrete CosineTransform)de comprimento N de um sinal x [n] pode ser definidaa partir de:
C (k) = α(k)N−1∑n=0
x [n] cos
[π(n + 1/2)k
N
], para 0 ≤ k ≤ N − 1
sendo:
α(k) =
{ √1N , para k = 0√2N , para 1 ≤ k ≤ N − 1
E interessante observar que a DCT e uma transformada real,pois mapeia um sinal real em coeficientes reais.

PDS - Aula 02
EduardoSimas
Introducao
Operacoes emSinais noTempoDiscreto
TransformadasContınuas
Transformada z
Transformada deFourier deTempo Discreto
TransformadasDiscretas
TransformadaDiscreta deFourier
OutrasTransformadasDiscretas
Exemplosusando o Matlab
Transformada Discreta de Cossenos
A DCT inversa pode ser descrita como:
x [n] =N−1∑k=0
α(k)C (k) cos
[π(n + 1/2)k
N
], para 0 ≤ n ≤ N − 1
Definindo:
{CN}kn = α(k) cos
[π(n + 1/2)k
N
]entao, a forma matricial da DCT pode ser representada por:
c = CNx
x = CTNX

PDS - Aula 02
EduardoSimas
Introducao
Operacoes emSinais noTempoDiscreto
TransformadasContınuas
Transformada z
Transformada deFourier deTempo Discreto
TransformadasDiscretas
TransformadaDiscreta deFourier
OutrasTransformadasDiscretas
Exemplosusando o Matlab
Transformada Discreta de Cossenos
A DCT apresenta diversas propriedades, entre elas a relacao deParseval:
N−1∑k=0
C 2(k) =N−1∑n=0
x2[n]
Conforme ilustrado na figura a seguir, quando a DCT e aplicadaa sinais como audio e vıdeo (a), a energia do sinal transformado(b) fica concentrada nos primeiros coeficientes:

PDS - Aula 02
EduardoSimas
Introducao
Operacoes emSinais noTempoDiscreto
TransformadasContınuas
Transformada z
Transformada deFourier deTempo Discreto
TransformadasDiscretas
TransformadaDiscreta deFourier
OutrasTransformadasDiscretas
Exemplosusando o Matlab
DCT - Aplicacoes
Um sistema de compressao de imagem/vıdeo generico pode serrepresentado por:

PDS - Aula 02
EduardoSimas
Introducao
Operacoes emSinais noTempoDiscreto
TransformadasContınuas
Transformada z
Transformada deFourier deTempo Discreto
TransformadasDiscretas
TransformadaDiscreta deFourier
OutrasTransformadasDiscretas
Exemplosusando o Matlab
DCT - Aplicacoes
Efeito da aplicacao da DCT eliminando os coeficientes de menorenergia. Imagem original (esquerda) × imagem no domınio daDCT (direita).

PDS - Aula 02
EduardoSimas
Introducao
Operacoes emSinais noTempoDiscreto
TransformadasContınuas
Transformada z
Transformada deFourier deTempo Discreto
TransformadasDiscretas
TransformadaDiscreta deFourier
OutrasTransformadasDiscretas
Exemplosusando o Matlab
Reconstrucao apos Compactacao via DCT
(a) 100%, (b) 75%, (c) 50% e (d) 25% de retencao dos coeficientesapos a DCT.

PDS - Aula 02
EduardoSimas
Introducao
Operacoes emSinais noTempoDiscreto
TransformadasContınuas
Transformada z
Transformada deFourier deTempo Discreto
TransformadasDiscretas
TransformadaDiscreta deFourier
OutrasTransformadasDiscretas
Exemplosusando o Matlab
Reconstrucao apos Compactacao via DCT
(a) 100%, (b) 75%, (c) 50% e (d) 25% de retencao dos coeficientesapos a DCT.

PDS - Aula 02
EduardoSimas
Introducao
Operacoes emSinais noTempoDiscreto
TransformadasContınuas
Transformada z
Transformada deFourier deTempo Discreto
TransformadasDiscretas
TransformadaDiscreta deFourier
OutrasTransformadasDiscretas
Exemplosusando o Matlab
Implementacao Computacional da DCT
A DCT e amplamente utilizada em sistemas modernos de compressaode vıdeo.
Para sua determinacao em ambiente computacional pode-se:
- utilizar a relacao da DCT com a DFT (a partir da formula de Euler)e em seguida um algoritmo eficiente para a DFT (Ex. FFT).
- Utilizar implementacoes rapidas e otimizadas para o calculo da DCT.

PDS - Aula 02
EduardoSimas
Introducao
Operacoes emSinais noTempoDiscreto
TransformadasContınuas
Transformada z
Transformada deFourier deTempo Discreto
TransformadasDiscretas
TransformadaDiscreta deFourier
OutrasTransformadasDiscretas
Exemplosusando o Matlab
Transformada Discreta de Wavelet

PDS - Aula 02
EduardoSimas
Introducao
Operacoes emSinais noTempoDiscreto
TransformadasContınuas
Transformada z
Transformada deFourier deTempo Discreto
TransformadasDiscretas
TransformadaDiscreta deFourier
OutrasTransformadasDiscretas
Exemplosusando o Matlab
Transformada Wavelet
A transformada wavelet (que em portugues seria chamada de“pequena onda” ou “ondaleta”), diferente das transformadas deFourier e Cossenos (que sao baseadas em funcoes de duracaoinfinita), realiza a aproximacao de sinais atraves do somatorio deversoes delocadas, comprimidas e expandidas de funcoes de curtaduracao ψ(t), conhecidas como “wavelet” mae:

PDS - Aula 02
EduardoSimas
Introducao
Operacoes emSinais noTempoDiscreto
TransformadasContınuas
Transformada z
Transformada deFourier deTempo Discreto
TransformadasDiscretas
TransformadaDiscreta deFourier
OutrasTransformadasDiscretas
Exemplosusando o Matlab
Transformada Wavelet
A transformada wavelet contınua de um sinal x(t) pode ser definidacomo:
Wx(s, u) =
∫ ∞−∞
x(t)1√sψ∗(
t − u
s
)Considerando-se a funcao wavelet “chapeu mexicano”:
ψ(t) = (1− t2)e−t2/2, pode-se observar o efeito da aplicacao dofator de escala s na figura a seguir:
PDS - Aula 02
EduardoSimas
Introducao
Operacoes emSinais noTempoDiscreto
TransformadasContınuas
Transformada z
Transformada deFourier deTempo Discreto
TransformadasDiscretas
TransformadaDiscreta deFourier
OutrasTransformadasDiscretas
Exemplosusando o Matlab
Transformada Wavelet
Uma das principais caraterısticas da transformada wavelet e apossibilidade de explorar simultaneamente os domınios dotempo (atraves do deslocamento u) e da frequencia (atraves dofator de escala s).
A transformada wavelet tem um historico relativamente recente.Sua popularizacao ocorreu a partir da decada de 1980.
Entre as aplicacoes mais difundudas pode-se destacar:codificacao de sinais, processamento de imagens eprocessamento de audio.

PDS - Aula 02
EduardoSimas
Introducao
Operacoes emSinais noTempoDiscreto
TransformadasContınuas
Transformada z
Transformada deFourier deTempo Discreto
TransformadasDiscretas
TransformadaDiscreta deFourier
OutrasTransformadasDiscretas
Exemplosusando o Matlab
Transformada Discreta de Wavelet
A versao digital da transformada wavelet (conhecida comoDWT - Discrete Wavelet Transform) pode ser implementadaatraves de um banco de filtros hierarquicos.
A DWT sera abordada em detalhes posteriormente (apos oestudo dos filtros digitais).

PDS - Aula 02
EduardoSimas
Introducao
Operacoes emSinais noTempoDiscreto
TransformadasContınuas
Transformada z
Transformada deFourier deTempo Discreto
TransformadasDiscretas
TransformadaDiscreta deFourier
OutrasTransformadasDiscretas
Exemplosusando o Matlab
Transformadas Discretas - Exemplos usando o Matlab

PDS - Aula 02
EduardoSimas
Introducao
Operacoes emSinais noTempoDiscreto
TransformadasContınuas
Transformada z
Transformada deFourier deTempo Discreto
TransformadasDiscretas
TransformadaDiscreta deFourier
OutrasTransformadasDiscretas
Exemplosusando o Matlab
Transformadas Discretas - Exemplos usando oMatlab
O Matlab possui diversas funcoes que podem ser utilizadas paracalculo das transformadas discretas. Entre elas podemosdestacar:
- fft: calcula os coeficientes da DFT de um sinal usando oalgoritmo da FFT.
- ifft: calcula a IDFT a partir dos coeficientes da DFT.
- dct e idct: respectivamente a DCT e a inversa da DCT
PDS - Aula 02
EduardoSimas
Introducao
Operacoes emSinais noTempoDiscreto
TransformadasContınuas
Transformada z
Transformada deFourier deTempo Discreto
TransformadasDiscretas
TransformadaDiscreta deFourier
OutrasTransformadasDiscretas
Exemplosusando o Matlab
Exemplo usando o Matlab
Considerando um sinal x(t) = 2 sin(20πt) + sin(100πt)amostrado a 1 kHz, calcular sua DFT usando o Matlab.
Inicialmente deve-se gerar o sinal amostrado x [n]. Para isso epreciso gerar uma “base de tempo” discreta com perıodo igual aT = 1/1000 s:
t=0:.001:1;
Em seguida, faz-se:
x=2*sin(2*pi*10*t)+sin(2*pi*50*t);
A FFT e calculada usando:
X=fft(x);
Caso seja necessario, pode-se especificar o numero (N) decoeficientes da FFT, fazendo: X=fft(x,N);. Se N for maiorque o comprimento de x , e realizada a adicao de zeros em x ese N for menor, o truncamento.

PDS - Aula 02
EduardoSimas
Introducao
Operacoes emSinais noTempoDiscreto
TransformadasContınuas
Transformada z
Transformada deFourier deTempo Discreto
TransformadasDiscretas
TransformadaDiscreta deFourier
OutrasTransformadasDiscretas
Exemplosusando o Matlab
Exemplo usando o Matlab
O algoritmo da FFT do Matlab gera os coeficientes de modoespelhado, ou seja, os coeficientes relativos a ω < 0 aparecemapos os relativos a ω > 0, conforme pode-se observar na Figuraa seguir obtida pelo comando stem(abs(X)):
200 400 600 800 10000
200
400
600
800
1000
Caso deseje-se vizualizar apenas ω ≥ 0, pode-se plotar somentea primeira metade dos coeficientes de X .

PDS - Aula 02
EduardoSimas
Introducao
Operacoes emSinais noTempoDiscreto
TransformadasContınuas
Transformada z
Transformada deFourier deTempo Discreto
TransformadasDiscretas
TransformadaDiscreta deFourier
OutrasTransformadasDiscretas
Exemplosusando o Matlab
Exemplo usando o Matlab
Para uma melhor interpretacao do grafico e interessante geraruma base de frequencias para o eixo x .
Uma opcao e fazer:
fs=1/.001;
F=linspace(0,fs/2,length(X)/2);
Em seguida o grafico pode ser plotado e editado usando asequencia de comandos:
stem(F,abs(X(1:length(X)/2))/500);
set(gca,‘fontsize’,14);
xlabel(‘Frequencia (Hz)’,‘fontsize’,14);
ylabel(‘Amplitude’,‘fontsize’,14)
grid

PDS - Aula 02
EduardoSimas
Introducao
Operacoes emSinais noTempoDiscreto
TransformadasContınuas
Transformada z
Transformada deFourier deTempo Discreto
TransformadasDiscretas
TransformadaDiscreta deFourier
OutrasTransformadasDiscretas
Exemplosusando o Matlab
Exemplo usando o Matlab
O resultado final e:
0 100 200 300 400 5000
0.5
1
1.5
2
2.5
Frequencia (Hz)
Am
plit
ud
e

PDS - Aula 02
EduardoSimas
Introducao
Operacoes emSinais noTempoDiscreto
TransformadasContınuas
Transformada z
Transformada deFourier deTempo Discreto
TransformadasDiscretas
TransformadaDiscreta deFourier
OutrasTransformadasDiscretas
Exemplosusando o Matlab
Bibliografia Consultada
Na elaboracao destes slides foram utilizadas as fontes a seguir:
- DINIZ, P. S. R., da SILVA, E. A. B. e LIMA NETTO, S.Processamento Digital de Sinais. Bookman, 2004.
- MITRA, S., Digital Signal Processing, Bookman, 2005.
- WEEKS, M. Processamento Digital de Sinais, LTC, 2011.
- ANTONIOU, A., Digital Signal Processing, McGraw-Hill,2006.
- KHAYAM, S. A., The Discrete Cosine Transform: Theoryand Application, Michigan State University, 2003.
- THEODORIDIS, S. e KOUTROUMBAS, K., PatternRecognition, Academic Press, 2009.
Algumas figuras foram retiradas na ıntegras das referencias acima.