parada programada - revista ferroviária: notícias sobre ... · subway´s to stop trains on...
TRANSCRIPT

PARADA PROGRAMADA
2
RESUMO INTRODUTÓRIO
A XXXX possui hoje, em seu planejamento, a meta da melhoria contínua e tem como uma de suas prioridades a satisfação do usuário. Há algum tempo, a empresa busca um sistema de parada nas plataformas similar ao do metrô. Portanto, neste trabalho, será apresentada a proposta de nosso modelo de Parada Programada, focando sua viabilidade e aceitação, apontando a situação atual da XXXX, comparando esta última com o metrô e explicitando os objetivos, a justificativa e o funcionamento do software, através do diagrama de blocos. INTRODUCTORY ABSTRACT
XXXX has today, in its strategic planning, the continuous improvement goal. One of its
priorities is the user satisfaction. For some time, the company has sought a system similar to the subway´s to stop trains on precise points of platforms. The Shutdown is an electronic system controlled by PLC (Programmable Logic Controller) located in the cabin of the driver. An interface light indicates the application of brakes over time and a brake sensor receives references of the field. The principle is applied to the series 5500 trains, which are equipped with electro-pneumatic KBR brakes.

3
1. JUSTIFICATIVA
O projeto se justifica porque, ao ser possibilitado o controle preciso da frenagem que respeita os limites de cada plataforma, evitam-se tumultos no embarque e desembarque, eliminam-se erros com paradas (antes ou depois do estabelecido) e transtornos operacionais como registro de ocorrências e penalidades ao condutor. Além disso, ao atender a uma necessidade da empresa de padronização e melhoria da qualidade, solucionam-se questões de consumo elétrico desnecessário em casos de nova solicitação de tração para reposicionar o trem.
2. OBJETIVOS
1) Propiciar ao usuário maior segurança, comodidade e precisão ao embarcar por meio do sistema Parada Programada; 2) atender a uma necessidade que não é somente da Empresa, mas de todos os setores prestadores de serviço que se comprometem com a busca da excelência, investindo em acessibilidade e aprimorando seus processos.
3. SITUAÇÃO ATUAL
3.1. Na XXXX Atualmente, as seis linhas da XXXX operam sem nenhum sistema de parada programada
nas estações, ou seja, a parada dos trens fica sob responsabilidade total do maquinista, que não possui um controle preciso de frenagem de modo a possibilitar a parada sempre no mesmo ponto. Por esse motivo, os maquinistas conseguem realizar paradas regulares baseando-se apenas em sua experiência, o que, na maioria dos casos, é insuficiente para se obter precisão. Estes conhecimentos empíricos são passíveis de falhas e geradores diretos de transtornos aos usuários, pois as portas do trem nem sempre param na mesma posição. Assim, os usuários que estão na plataforma esperando o trem, por impulso, acabam se empurrando em busca da melhor posição para embarcar. As crianças, as mulheres e os idosos não dispõem da força e agilidade necessária para se locomover em meio ao tumulto gerado, acabando todos por ficar vulneráveis a acidentes.
3.2. No metrô
3.2.1 Dispositivos de Operação Existe uma série de dispositivos e subsistemas que permitem controlar o desempenho do
trem na via. Tais dispositivos geralmente são antenas, as quais enviam informações da via para os trens. Dentre os inúmeros dispositivos que permitem alterar a operação dos trens, dois deles merecem destaque pela sua importância no presente trabalho. São eles os dispositivos de parada programada e os dispositivos de modificação de desempenho. Os dispositivos de parada programada permitem que os trens parem suavemente nas estações. Esses equipamentos geralmente são compostos por antenas que, instaladas na via, transmitem sinais de comando para os trens. No presente trabalho, são abordados dois tipos de parada programada: 1) parada programada de longa distância; 2) parada Programada de estação.
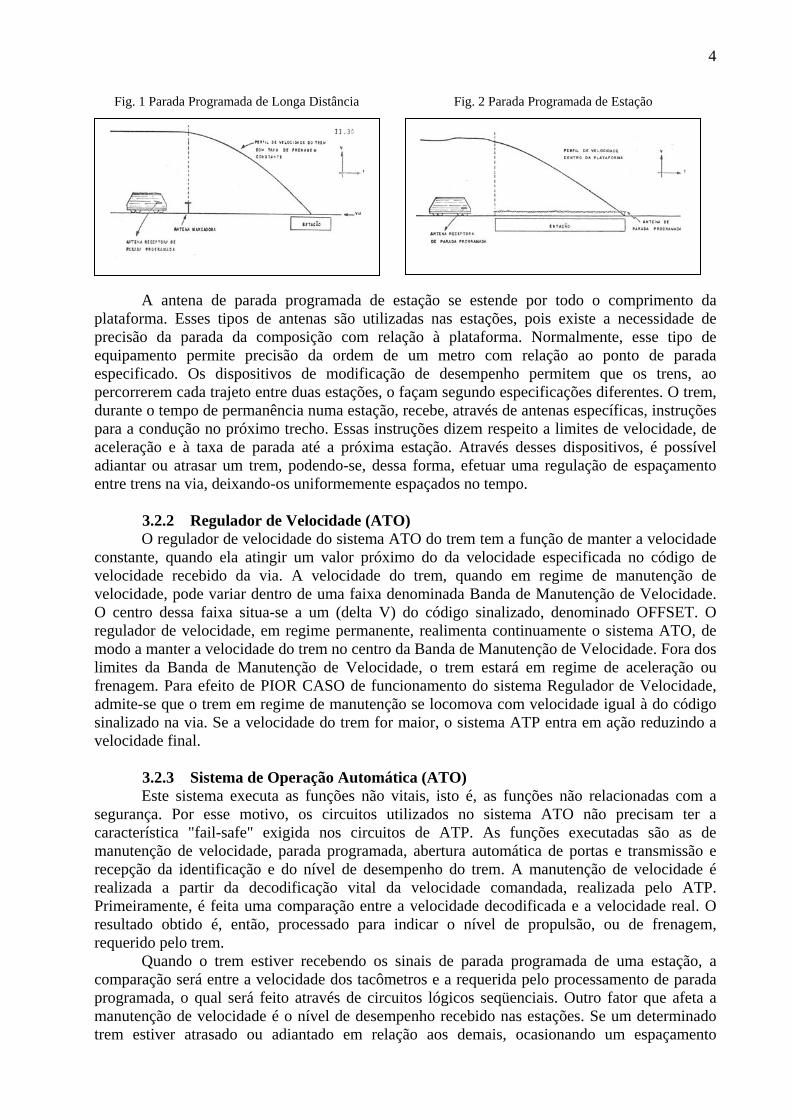
A figura 1, a seguir, mostra que a parada programada de longa distância se inicia muito antes de o trem penetrar nos limites da plataforma de uma estação. O trem, ao receber um sinal de uma antena marcadora, montada na via, inicia a bordo um processo de redução contínua de velocidade, até a parada total na estação. A antena marcadora é montada sempre à mesma distância para qualquer estação da via. A figura 2 mostra que a parada programada de estação é um processo que se inicia quando o carro líder de uma composição penetra no limite de uma estação.
4
Fig. 1 Parada Programada de Longa Distância Fig. 2 Parada Programada de Estação
A antena de parada programada de estação se estende por todo o comprimento da plataforma. Esses tipos de antenas são utilizadas nas estações, pois existe a necessidade de precisão da parada da composição com relação à plataforma. Normalmente, esse tipo de equipamento permite precisão da ordem de um metro com relação ao ponto de parada especificado. Os dispositivos de modificação de desempenho permitem que os trens, ao percorrerem cada trajeto entre duas estações, o façam segundo especificações diferentes. O trem, durante o tempo de permanência numa estação, recebe, através de antenas específicas, instruções para a condução no próximo trecho. Essas instruções dizem respeito a limites de velocidade, de aceleração e à taxa de parada até a próxima estação. Através desses dispositivos, é possível adiantar ou atrasar um trem, podendo-se, dessa forma, efetuar uma regulação de espaçamento entre trens na via, deixando-os uniformemente espaçados no tempo.
3.2.2 Regulador de Velocidade (ATO) O regulador de velocidade do sistema ATO do trem tem a função de manter a velocidade
constante, quando ela atingir um valor próximo do da velocidade especificada no código de velocidade recebido da via. A velocidade do trem, quando em regime de manutenção de velocidade, pode variar dentro de uma faixa denominada Banda de Manutenção de Velocidade. O centro dessa faixa situa-se a um (delta V) do código sinalizado, denominado OFFSET. O regulador de velocidade, em regime permanente, realimenta continuamente o sistema ATO, de modo a manter a velocidade do trem no centro da Banda de Manutenção de Velocidade. Fora dos limites da Banda de Manutenção de Velocidade, o trem estará em regime de aceleração ou frenagem. Para efeito de PIOR CASO de funcionamento do sistema Regulador de Velocidade, admite-se que o trem em regime de manutenção se locomova com velocidade igual à do código sinalizado na via. Se a velocidade do trem for maior, o sistema ATP entra em ação reduzindo a velocidade final.
3.2.3 Sistema de Operação Automática (ATO) Este sistema executa as funções não vitais, isto é, as funções não relacionadas com a
segurança. Por esse motivo, os circuitos utilizados no sistema ATO não precisam ter a característica "fail-safe" exigida nos circuitos de ATP. As funções executadas são as de manutenção de velocidade, parada programada, abertura automática de portas e transmissão e recepção da identificação e do nível de desempenho do trem. A manutenção de velocidade é realizada a partir da decodificação vital da velocidade comandada, realizada pelo ATP. Primeiramente, é feita uma comparação entre a velocidade decodificada e a velocidade real. O resultado obtido é, então, processado para indicar o nível de propulsão, ou de frenagem, requerido pelo trem.
Quando o trem estiver recebendo os sinais de parada programada de uma estação, a comparação será entre a velocidade dos tacômetros e a requerida pelo processamento de parada programada, o qual será feito através de circuitos lógicos seqüenciais. Outro fator que afeta a manutenção de velocidade é o nível de desempenho recebido nas estações. Se um determinado trem estiver atrasado ou adiantado em relação aos demais, ocasionando um espaçamento

5
irregular entre eles, a estação, através de comandos do computador do Centro de Controle Operacional, que supervisiona todo o sistema, enviará ao trem um nível de desempenho que determinará a sua aceleração e/ou velocidade, de maneira a permitir a recuperação do espaçamento regular entre os trens.
Embora vários fatores, tais como rampas, falhas no equipamento, etc., possam afetar a manutenção da velocidade, a proteção de sobrevelocidade, executada pelo ATP, garantirá a segurança do sistema na eventualidade de ocorrência de qualquer disfunção do ATO.
4. SITUAÇÃO PROPOSTA
Propõe-se com o projeto, a implantação de um controlador lógico que trabalhe em conjunto com um sensor alocado no trem, que comande a parada das composições, buscando qualidade, precisão e conforto. O sistema de Parada Programada pretende solucionar conflitos decorrentes dos momentos de chegada dos trens nas estações: controlando os níveis de frenagem de acordo com a velocidade e com a distância da plataforma. Entretanto, o programa não pretende tirar o controle do maquinista. A prioridade será sempre do condutor. A cada estação, o sistema deverá ser ligado e, após a parada, será desligado, reiniciando, assim, o processo. Caso não haja necessidade da permanência na estação (recolhe, manutenção, etc.), o maquinista poderá desativar o equipamento, passando normalmente pelo local, sem nenhum transtorno.
5. O QUE É A PARADA PROGRAMADA?
A Parada Programada é um sistema eletrônico controlado por CLP (Controlador Lógico Programável) e localizado na cabine do maquinista. Corresponde a uma interface luminosa que indica a aplicação de freio no decorrer do tempo de frenagem e a um sensor que recebe referências do campo, o qual foi, a princípio, aplicado nos trens da série 5500, dotados de freio eletro-pneumático KBR e de sensor pick-up, que possibilita uma estimativa, quase exata, da distância percorrida.
5.1. 5500 e seu sistema de frenagem KBR XI.T
Escolhemos o trem da série 5500, pois seu hardware é de fácil acesso. Sendo assim, é possível realizar testes e monitorar seu desempenho. Aproveitando essa interface amigável, conseguimos obter um controle sobre o módulo de frenagem, fator fundamental para a parada programada. O sistema de frenagem KBR é composto de 7 níveis de freio de serviço que variam de, aproximadamente, 0,15m/s² (mínimo) à 0,82m/s² (máximo). Uma vez selecionado o nível de frenagem, o trem o mantém invariável em qualquer que seja a velocidade inicial e qualquer que seja o peso de cada carro. Essa compensação é feita por meio de válvulas “sensoras” de carga. Dessa forma, é possível que se aplique o esforço necessário para obter o nível de frenagem desejado (Anexo 02). O controlador do freio tem as seguintes posições: 1) alívio; 2) freio de serviço níveis 1 a 7; 3) Freio de emergência.
Tabela 1. Válvulas magnéticas do KBR
0 = Comut. aberto ou válvula magnética desernegizada; 1 = Comut. fechado ou válvula magnética energizada
GRAY CODE COMUTADORES Código Binário Válvulas Magnéticas
c1 c2 c3 c4 c5 c6 c7 VM I VM II VM III VME Alívio 1 1 0 1 1 0 1 1 1 1 1
1 0 1 0 1 0 1 1 0 1 1 12 0 0 0 1 0 1 1 1 0 1 13 1 0 0 1 0 1 1 0 0 1 14 1 0 1 1 0 1 1 1 1 0 15 0 0 1 1 0 1 1 0 1 0 16 0 1 1 1 0 1 1 1 0 0 17 1 1 1 1 0 1 1 0 0 0 1
Emergência 1 1 1 0 0 1 0 0 0 0 0

6
5.2 Sensor Pick-up
Outro fator fundamental ao sucesso da parada programada é o sensor pick-up. Esse sensor é acoplado ao truque do trem e conta os dentes de uma engrenagem em forma de pulsos enquanto ela gira junto com o eixo. Uma volta da engrenagem equivale a uma volta da roda, a engrenagem possui 87 dentes e a roda possui um perímetro de 2,87 metros. Através dessas informações, podemos transformar os pulsos em distância com uma simples regra de três.
5.3 Implantação
Serão instalados dois sensores ópticos em cada composição, um na frente e outro na cauda, localizado na parte frontal esquerda do primeiro carro motor, como podemos observar na figura 3.
Fig. 3 – Trem da série 5500
Fig. 4 – Armário com os dispositivos
de controle do KBR O CLP ficará no armário do salão do primeiro carro. No painel do maquinista, estará
alocada a interface luminosa responsável por informar ao maquinista o momento em que a Parada Programada está ativada, bem como a aplicação de freio e os dez metros finais.
Fig. 5 – Cabine de condução do 5500
As duas referências estarão fixadas na via e na plataforma respectivamente, em distâncias
pré-determinadas. A primeira referência a 570 metros e a segunda a 20 metros do ponto de parada. Como foi definido, o sensor estará alocado do lado esquerdo do trem. Porém, existem estações em que o embarque e desembarque se faz pelo lado direito. Nesse caso, a referência deverá ficar no leito da via de modo a refletir o sinal do sensor.
6. DESCRIÇÃO DO PROGRAMA
O programa tem como principal função parar a composição de maneira inteligente e controlada. Através de um sensor (localizado no trem) e duas referências, o programa faz toda sua lógica quando solicitado o sistema. Nesse programa, estão inseridos raciocínios de segurança e de antecipação ao erro. Velocidades são impostas, fazendo com que variações do nível de frenagem aconteçam, sendo basicamente essa a maneira de controlar a composição.

7
6.1 Referências e Atuação do CLP
Para que o programa possa realizar sua função é necessário que ele receba algumas informações dos módulos do trem. Uma entrada analógica do CLP recebe informação do velocímetro que converte a velocidade para valores de tensão onde 1V equivale a 10km/h. Uma entrada digital recebe informação do sensor pick-up, já acoplado ao trem, que conta os pulsos equivalentes à distância. Através dessas informações, o programa atua sobre os níveis de frenagem, alívio e tração do trem.
6.2 Funcionamento
Com o programa ligado, seu funcionamento segue da seguinte maneira. O trem encontra a primeira referência para o sensor a 570 metros do ponto de parada. Essa distância foi estimada levando-se em consideração a situação crítica de velocidade que seria o trem a 90 km/h com o pior nível de frenagem constatado pela XXXX que é de 0,53 m/s2. Dessa forma, o trem poderá atingir a velocidade imposta (VI) antes de receber a segunda referência.
Ao encontrar a segunda referência, o programa começa a contar os pulsos do sensor pick-up, convertendo-os à distância percorrida, e, ao mesmo tempo, dá o comando de frenagem, fazendo com que a velocidade do trem diminua proporcionalmente aos metros faltantes. Existe uma margem de erro e, num último momento, quando o programa percebe que esta margem pode ser rompida, é acionado o freio de emergência que causa um efeito maior de frenagem e ocasiona uma parada mais precisa. Abaixo segue o sistema básico de controle:
SistemaControle-Ordem
Velocidade Erro Saída
Fig. 6 – Sistema básico de controle
Analisando-se o sistema acima, observa-se que de CN (velocidade imposta), é subtraído
MN (medida de velocidade). O resultado da operação é controlado e oferecido ao sistema. A malha é fechada por CN, fazendo com que sempre haja correção quando necessário. Os blocos que serão descritos neste capítulo, esclarecerão a maneira em que o programa irá atuar, desde a passagem do trem pela primeira referência, até sua parada.
6.3 Topologia
A seguinte topologia é utilizada para podermos acompanhar a maneira como o sistema atua, desde a geração e conversão dos sinais, presentes nas “train-lines”. Na topologia, também é ilustrada a função do KBR e a localização do nosso sistema de controle.
8
Fig. 7 - Topologia
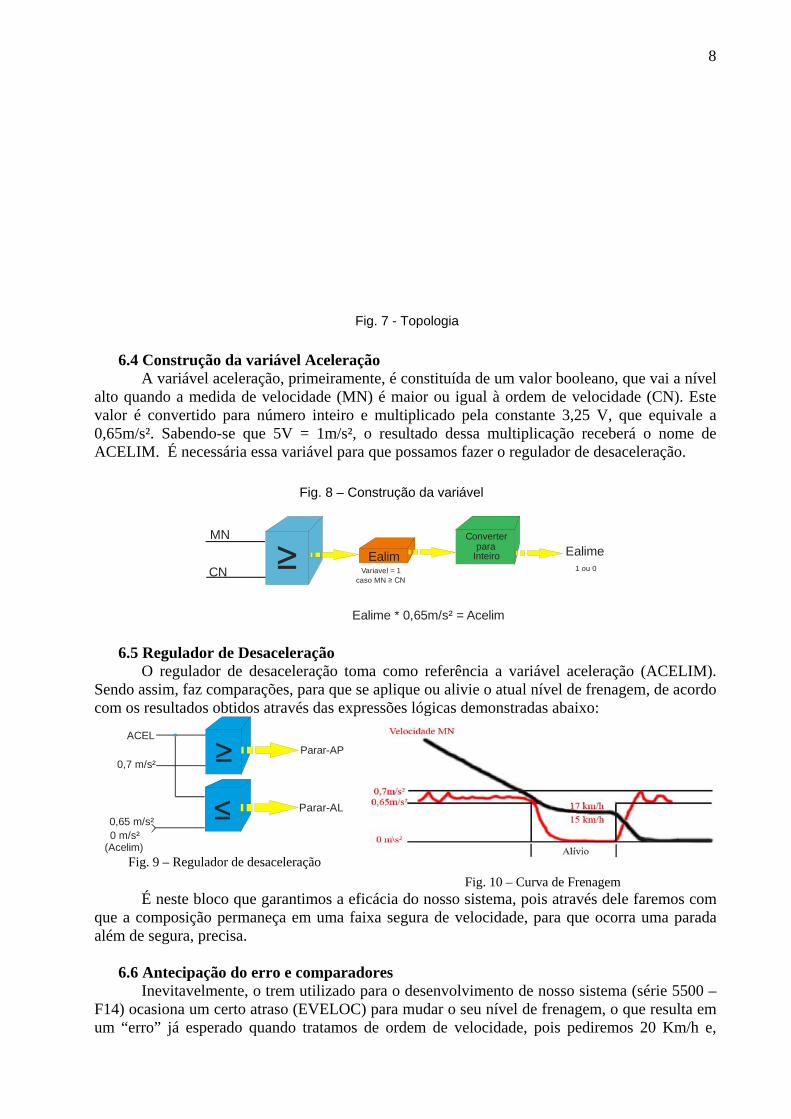
6.4 Construção da variável Aceleração A variável aceleração, primeiramente, é constituída de um valor booleano, que vai a nível
alto quando a medida de velocidade (MN) é maior ou igual à ordem de velocidade (CN). Este valor é convertido para número inteiro e multiplicado pela constante 3,25 V, que equivale a 0,65m/s². Sabendo-se que 5V = 1m/s², o resultado dessa multiplicação receberá o nome de ACELIM. É necessária essa variável para que possamos fazer o regulador de desaceleração.
Fig. 8 – Construção da variável
Ealim
Converterpara
Inteiro≥ Variavel = 1caso MN ≥ CN
MN
CNEalime
1 ou 0
Ealime * 0,65m/s² = Acelim
6.5 Regulador de Desaceleração O regulador de desaceleração toma como referência a variável aceleração (ACELIM).
Sendo assim, faz comparações, para que se aplique ou alivie o atual nível de frenagem, de acordo com os resultados obtidos através das expressões lógicas demonstradas abaixo:
≥
≤
ACEL
0,7 m/s²
0,65 m/s²0 m/s²
Parar-AP
Parar-AL
(Acelim) Fig. 9 – Regulador de desaceleração
Fig. 10 – Curva de Frenagem É neste bloco que garantimos a eficácia do nosso sistema, pois através dele faremos com
que a composição permaneça em uma faixa segura de velocidade, para que ocorra uma parada além de segura, precisa.
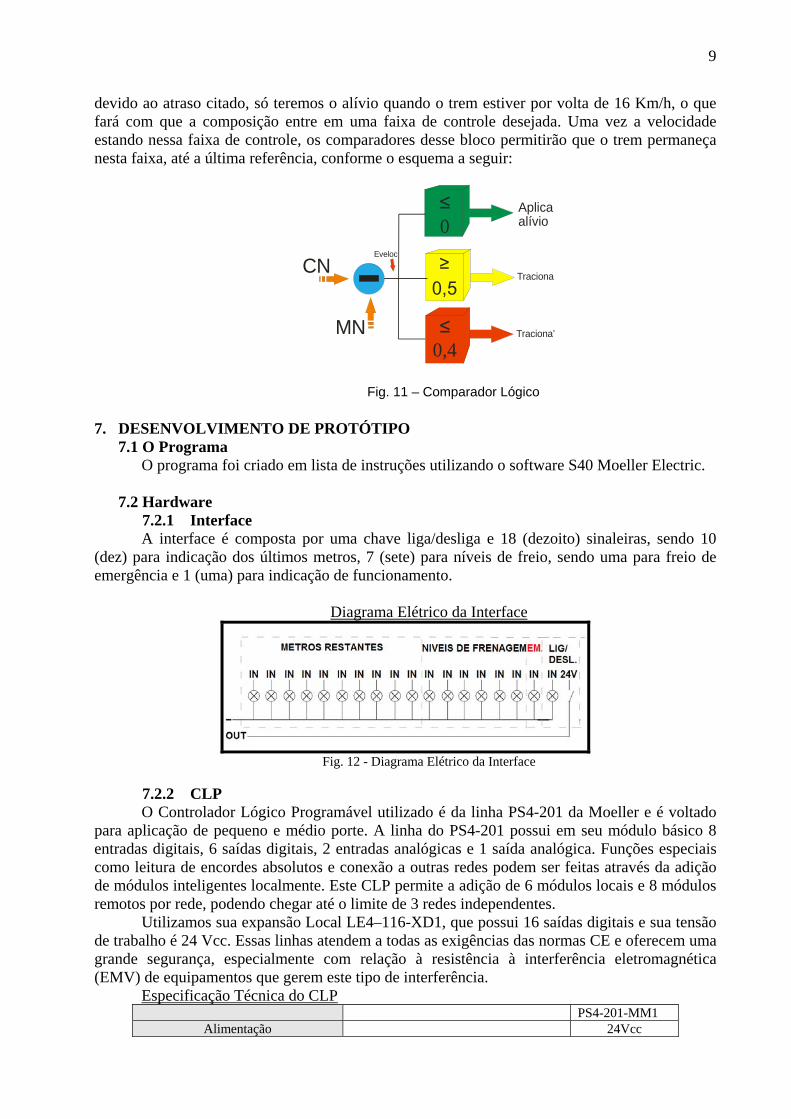
6.6 Antecipação do erro e comparadores
Inevitavelmente, o trem utilizado para o desenvolvimento de nosso sistema (série 5500 – F14) ocasiona um certo atraso (EVELOC) para mudar o seu nível de frenagem, o que resulta em um “erro” já esperado quando tratamos de ordem de velocidade, pois pediremos 20 Km/h e,
9
devido ao atraso citado, só teremos o alívio quando o trem estiver por volta de 16 Km/h, o que fará com que a composição entre em uma faixa de controle desejada. Uma vez a velocidade estando nessa faixa de controle, os comparadores desse bloco permitirão que o trem permaneça nesta faixa, até a última referência, conforme o esquema a seguir:
≤0
≤0,4
≥0,5-CN
MN
Eveloc
Aplicaalívio
Traciona
Traciona’
7. DESENVOLVIMENTO DE PROTÓTIPO 7.1 O Programa
O programa foi criado em lista de instruções utilizando o software S40 Moeller Electric.
7.2 Hardware 7.2.1 Interface A interface é composta por uma chave liga/desliga e 18 (dezoito) sinaleiras, sendo 10
(dez) para indicação dos últimos metros, 7 (sete) para níveis de freio, sendo uma para freio de emergência e 1 (uma) para indicação de funcionamento.
Diagrama Elétrico da Interface
Fig. 12 - Diagrama Elétrico da Interface
7.2.2 CLP O Controlador Lógico Programável utilizado é da linha PS4-201 da Moeller e é voltado
para aplicação de pequeno e médio porte. A linha do PS4-201 possui em seu módulo básico 8 entradas digitais, 6 saídas digitais, 2 entradas analógicas e 1 saída analógica. Funções especiais como leitura de encordes absolutos e conexão a outras redes podem ser feitas através da adição de módulos inteligentes localmente. Este CLP permite a adição de 6 módulos locais e 8 módulos remotos por rede, podendo chegar até o limite de 3 redes independentes.
Utilizamos sua expansão Local LE4–116-XD1, que possui 16 saídas digitais e sua tensão de trabalho é 24 Vcc. Essas linhas atendem a todas as exigências das normas CE e oferecem uma grande segurança, especialmente com relação à resistência à interferência eletromagnética (EMV) de equipamentos que gerem este tipo de interferência.
Especificação Técnica do CLP PS4-201-MM1
Alimentação 24Vcc
Fig. 11 – Comparador Lógico
10
Memória / Ciclo de tempo
Velocidade ms / 1000 instruções Memória RAM (Kb) Expansão Memória RAM (Kb) Memória Flash Dados / Programa (Kb)
5 32
+32 32/32
Funções Contador Rápido Interrupção via Hardware Potenciômetro on-board
1 x 3KHz 1 2
Entradas e saídas integradas
Entradas digitais Saídas digitais Entradas analógicas Saídas analógicas
8 x 24 Vcc 6 x transistor 2 x 0 -10V 1 x 0 – 10V
Expansão local Número máx. de módulos LE 6
Expansão remota via rede Suconet K On board
Nº máximo de saídas e entradas Nº máximo de escravos Bytes comunicação Sena/Receive máx. Bytes comunicação (máximo)
2500 8
128b/128b 256b
Módulos de rede opcionais
Profibus-DP Modbus-RTU Profibus-FMS Ethernet
Escravo Mestre / escravo
Escravo sim
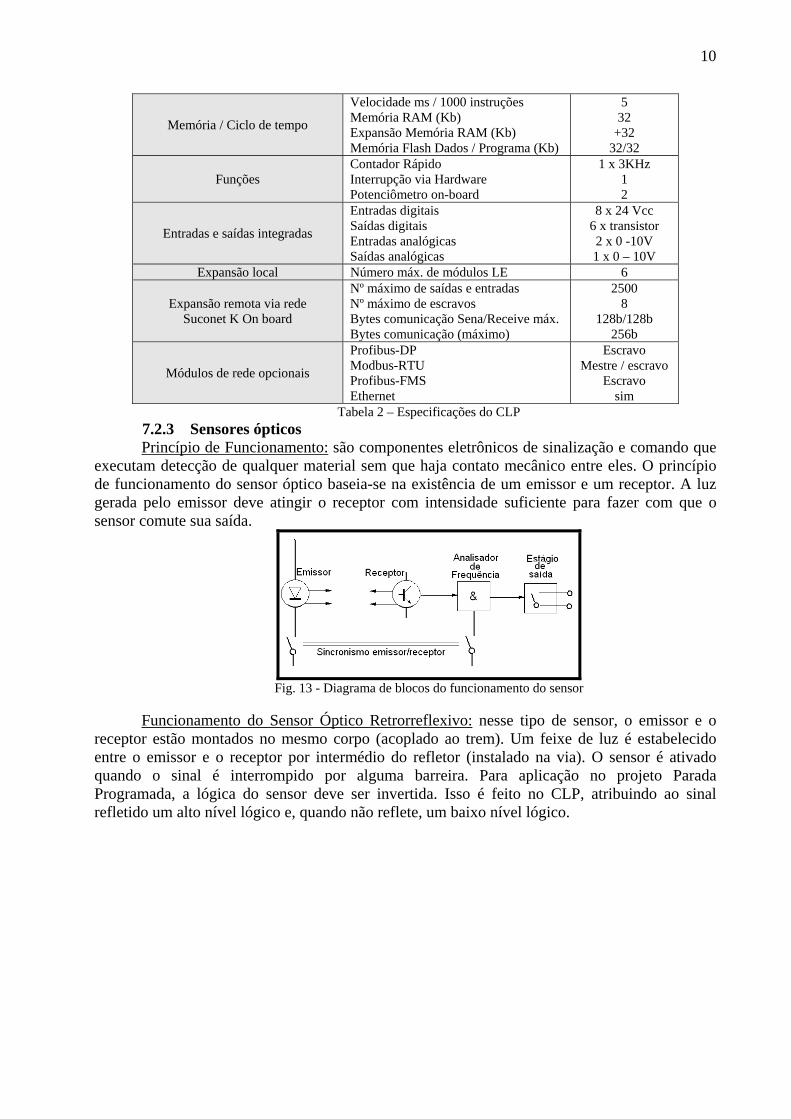
Tabela 2 – Especificações do CLP 7.2.3 Sensores ópticos Princípio de Funcionamento: são componentes eletrônicos de sinalização e comando que
executam detecção de qualquer material sem que haja contato mecânico entre eles. O princípio de funcionamento do sensor óptico baseia-se na existência de um emissor e um receptor. A luz gerada pelo emissor deve atingir o receptor com intensidade suficiente para fazer com que o sensor comute sua saída.
Fig. 13 - Diagrama de blocos do funcionamento do sensor
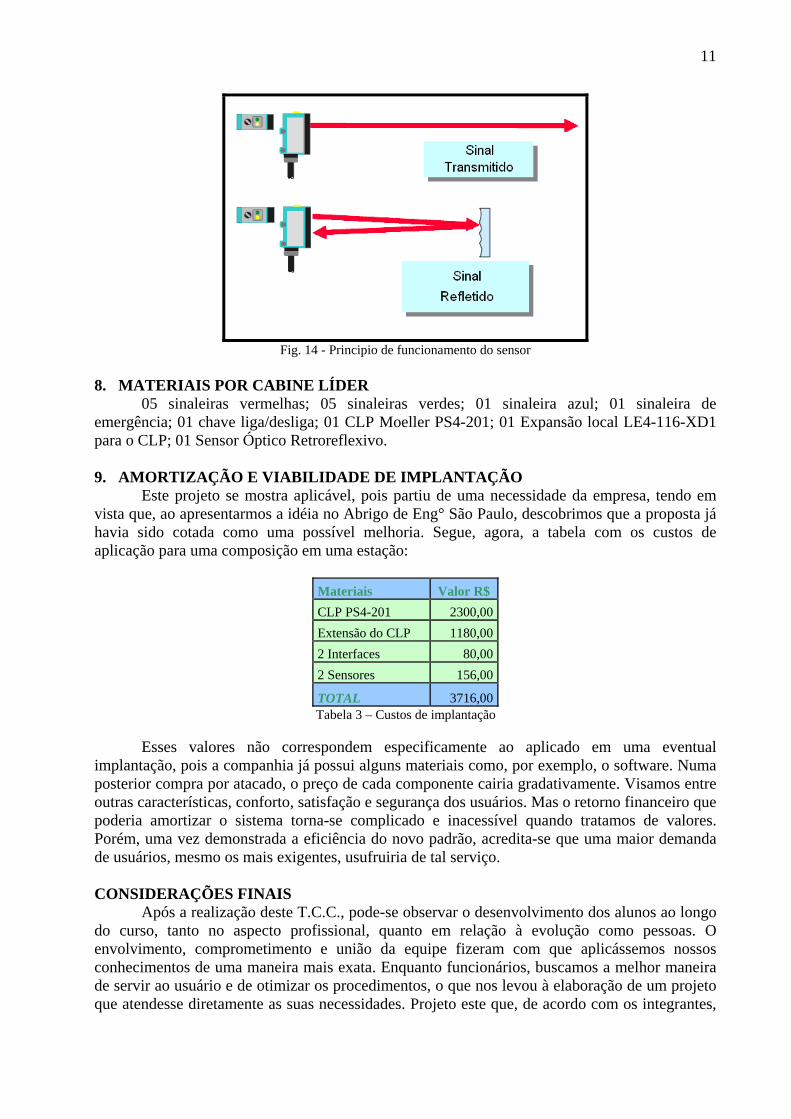
Funcionamento do Sensor Óptico Retrorreflexivo: nesse tipo de sensor, o emissor e o
receptor estão montados no mesmo corpo (acoplado ao trem). Um feixe de luz é estabelecido entre o emissor e o receptor por intermédio do refletor (instalado na via). O sensor é ativado quando o sinal é interrompido por alguma barreira. Para aplicação no projeto Parada Programada, a lógica do sensor deve ser invertida. Isso é feito no CLP, atribuindo ao sinal refletido um alto nível lógico e, quando não reflete, um baixo nível lógico.
11
Fig. 14 - Principio de funcionamento do sensor
8. MATERIAIS POR CABINE LÍDER
05 sinaleiras vermelhas; 05 sinaleiras verdes; 01 sinaleira azul; 01 sinaleira de emergência; 01 chave liga/desliga; 01 CLP Moeller PS4-201; 01 Expansão local LE4-116-XD1 para o CLP; 01 Sensor Óptico Retroreflexivo.
9. AMORTIZAÇÃO E VIABILIDADE DE IMPLANTAÇÃO
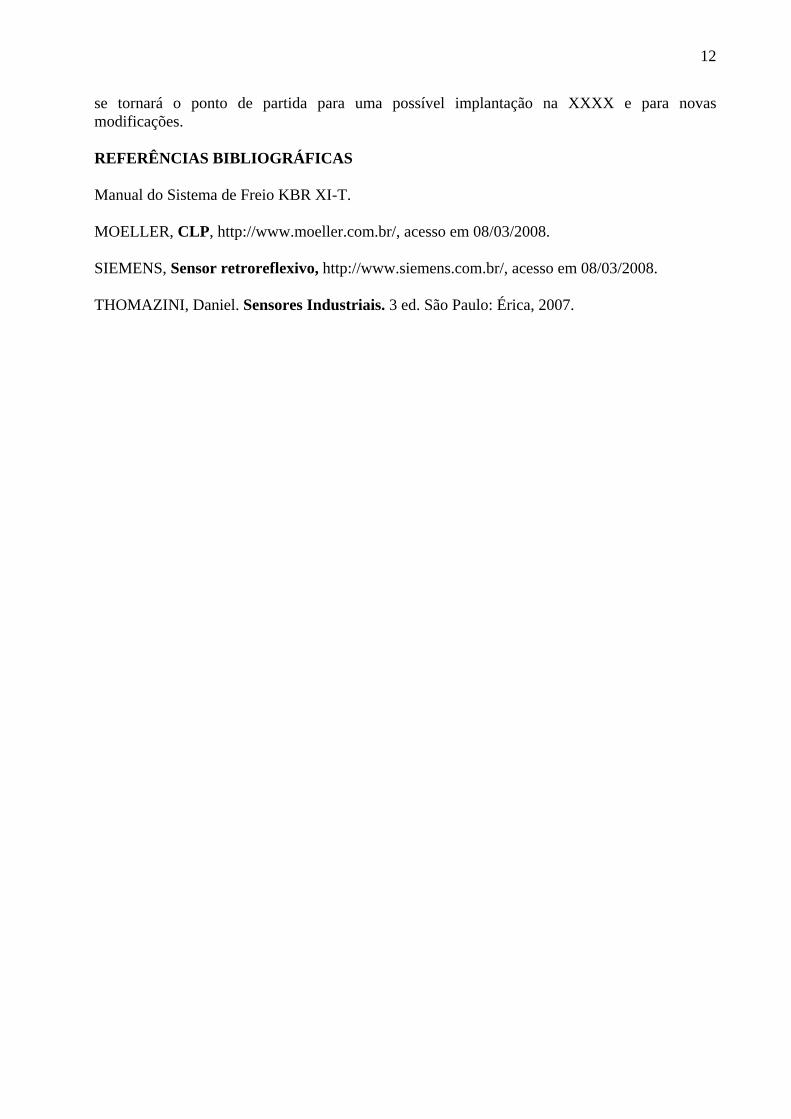
Este projeto se mostra aplicável, pois partiu de uma necessidade da empresa, tendo em vista que, ao apresentarmos a idéia no Abrigo de Eng° São Paulo, descobrimos que a proposta já havia sido cotada como uma possível melhoria. Segue, agora, a tabela com os custos de aplicação para uma composição em uma estação:
Materiais Valor R$ CLP PS4-201 2300,00Extensão do CLP 1180,002 Interfaces 80,002 Sensores 156,00
TOTAL 3716,00 Tabela 3 – Custos de implantação
Esses valores não correspondem especificamente ao aplicado em uma eventual implantação, pois a companhia já possui alguns materiais como, por exemplo, o software. Numa posterior compra por atacado, o preço de cada componente cairia gradativamente. Visamos entre outras características, conforto, satisfação e segurança dos usuários. Mas o retorno financeiro que poderia amortizar o sistema torna-se complicado e inacessível quando tratamos de valores. Porém, uma vez demonstrada a eficiência do novo padrão, acredita-se que uma maior demanda de usuários, mesmo os mais exigentes, usufruiria de tal serviço.
CONSIDERAÇÕES FINAIS
Após a realização deste T.C.C., pode-se observar o desenvolvimento dos alunos ao longo do curso, tanto no aspecto profissional, quanto em relação à evolução como pessoas. O envolvimento, comprometimento e união da equipe fizeram com que aplicássemos nossos conhecimentos de uma maneira mais exata. Enquanto funcionários, buscamos a melhor maneira de servir ao usuário e de otimizar os procedimentos, o que nos levou à elaboração de um projeto que atendesse diretamente as suas necessidades. Projeto este que, de acordo com os integrantes,
12
se tornará o ponto de partida para uma possível implantação na XXXX e para novas modificações.
REFERÊNCIAS BIBLIOGRÁFICAS Manual do Sistema de Freio KBR XI-T. MOELLER, CLP, http://www.moeller.com.br/, acesso em 08/03/2008. SIEMENS, Sensor retroreflexivo, http://www.siemens.com.br/, acesso em 08/03/2008. THOMAZINI, Daniel. Sensores Industriais. 3 ed. São Paulo: Érica, 2007.