obtenção de torque e empuxo de propulsores através … · diagramas kt-kq-j do respectivo...
TRANSCRIPT

Obtenção de Torque e Empuxo de Propulsores através do Uso de Sistema de
Medição de Eixo por Telemetria
Taís Paiva Pinheiro
Projeto de Graduação apresentado ao Curso de
Engenharia Naval e Oceânica da Escola
Politécnica, Universidade Federal do Rio de
Janeiro, como parte dos requisitos necessários à
obtenção do título de Engenheiro.
Orientador: Luiz Antônio Vaz Pinto
Rio de Janeiro
Março de 2014

Obtenção de Torque e Empuxo de Propulsores através do Uso de Sistema de
Medição de Eixo por Telemetria
Taís Paiva Pinheiro
PROJETO DE GRADUAÇÃO SUBMETIDO AO CORPO DOCENTE DO CURSO
DE ENGENHARIA NAVAL E OCEÂNICA DA ESCOLA POLITÉCNICA DA
UNIVERSIDADE FEDERAL DO RIO DE JANEIRO COMO PARTE DOS
REQUISITOS NECESSÁRIOS PARA A OBTENÇÃO DO GRAU DE
ENGENHEIRA NAVAL E OCEÂNICO.
Examinada por:
___________________________________________________
Luiz Antônio Vaz Pinto, D.Sc., DENO/COPPE/UFRJ
(Orientador)
___________________________________________________
Ulisses A. Monteiro Barbosa, D.Sc.., DENO/COPPE/UFRJ
(Co-Orientador)
___________________________________________________
Ricardo Homero Ramírez Gutiérrez,M.Sc., DENO/COPPE/UFRJ
RIO DE JANEIRO, RJ - BRASIL
MARÇO DE 2014

iii
Pinheiro, Taís Paiva
Obtenção de Torque e Empuxo de Propulsores através do
Uso de Sistema de Medição de Eixo por Telemetria/ Taís Paiva
Pinheiro. - Rio de Janeiro: UFRJ/ Escola Politécnica, 2014.
VIII, 44 p.: il.; 29,7 cm.
Orientador: Luiz Antônio Vaz Pinto
Projeto de Graduação – UFRJ/ Escola Politécnica/ Curso de
Engenharia Naval e Oceânica, 2014.
Referências Bibliográficas: p. 44.
1. Torque. 2. Empuxo. 3. SMEG. 4. Strain Gage. I. Luiz
Antônio Vaz Pinto. II. Universidade Federal do Rio de Janeiro,
Escola Politécnica, Curso de Engenharia Naval e Oceânica. III.
Obtenção de Torque e Empuxo através do Uso de Sistema de
Medição de Eixo por Telemetria.

iv
DEDICATÓRIA
.
[TEXTO]

v
AGRADECIMENTOS
[TEXTO]

vi
Resumo do Projeto de Graduação apresentado à Escola Politécnica/ UFRJ como parte
dos requisitos necessários para a obtenção do grau de Engenheira Naval e Oceânica.
Obtenção de Torque e Empuxo de Propulsores através do Uso de Sistema de Medição
de Eixo por Telemetria
Taís Paiva Pinheiro
Março/2014
Orientador: Luiz Antônio Vaz Pinto
Curso: Engenharia Naval e Oceânica
Neste trabalho medições de esforços em linhas de eixos de um navio graneleiro foram
comparadas com os valores estimados por cálculos de resistência ao avanço e por
diagramas Kt-Kq-J do respectivo propulsor. A medições foram feitas usando Sistema de
Medição de Eixos Girantes (SMEG) e os esforços axial, torcional e de flexão
segregados a partir dos fundamentos relacionados a Círculo de Mohr. Os resultados da
medição serão comparados com métodos teóricos.
Palavras-chave: Torque, Empuxo,SMEG, Strain Gage.

vii
Abstract of Undergraduate Project presented to POLI/UFRJ as a partial fulfillment of
the requirements for the degree of Engineer.
Obtaining Torque and Thrust Thrusters through the Use of Measurement System Axle
by Telemetry
Taís Paiva Pinheiro
March/2014
Advisor: Taís Paiva Pinheiro
Course: Naval Architecture and Marine Engineering
In this study, measurements efforts on axle lines of a bulk carrier were compared with
the values estimated by resistance calculations and by Kt-Kq-J diagrams of the
respective thruster. The measurements were made using Measurements of Rotating
Axles (SMEG) and axial, torsional and bending efforts, segregated from the foundations
related to Mohr Circle. The results of measurements are compared with theoretical
methods.
Keywords: Torque, Thrust, SMEG, Strain Gage.

viii
Sumário 1- INTRODUÇÃO ........................................................................................................... 1
1.1- Objetivo do Projeto Final .......................................................................................... 1 2- Fundamentos Teóricos ................................................................................................. 3 2.1- Hélice ........................................................................................................................ 3
2.1.1- Diâmetro do hélice( ) ............................................................................................ 3
2.1.2- Razão de passo do hélice ( ) ............................................................................... 4
2.1.3- Razão de áreas do Hélice ( ) ........................................................................ 4 2.1.4- Número de pás do hélice (z) ................................................................................... 4
2.2- Coeficientes de Propulsão ......................................................................................... 5
2.2.1- Coeficiente de esteira ( )....................................................................................... 5
2.2.2- Coeficiente de redução do empuxo ( ) ................................................................... 6
2.2.3- Coeficiente de Avanço ( ) ...................................................................................... 6
2.2.4- Coeficiente de Empuxo ( ) ................................................................................. 7
2.2.5- Coeficiente de Torque ( ) ................................................................................... 7
2.2.6- Rendimento do Propulsor em Águas Abertas ( ) ................................................ 7
2.2.7- Diagramas - - e ....................................................................................... 7 2.3- Tensões e Deformações ............................................................................................. 8 2.3.1- Conceito de Tensão ................................................................................................ 8
2.3.2- Conceito de Deformação ....................................................................................... 9 2.3.3- Coeficiente de Poisson ........................................................................................ 11 2.3.4- Lei de Hooke ....................................................................................................... 12
2.3.5- Transformação de Tensões no Estado Plano ....................................................... 13 2.3.6- Círculo de Mohr no Estado Plano de Tensões .................................................... 16
2.3.7- Transformação de Deformações no Estado Plano............................................... 17 2.3.8- Círculo de Mohr no Estado Plano de Deformações ............................................ 18 2.4- Medição em Eixos Girantes .................................................................................... 20
2.4.1- Strain Gages ......................................................................................................... 20
2.4.2- Análise do Torque ................................................................................................ 21 2.4.3- Formulação Teórica para o SMEG utilizando a Ponte de Wheatstone ................ 25 3- Estudo de Caso ........................................................................................................... 28
3.1- Características do Objeto de Estudo........................................................................ 28 3.2- Métodos para Comparação ...................................................................................... 29
3.2.1- Formulação Clássica ............................................................................................ 29 3.2.2- Formulação a partir de Parâmetros do Propulsor ................................................. 30 3.2.3- Medição no Eixo .................................................................................................. 32
4- Resultados e Comparação .......................................................................................... 36 4.1- Resultados dos Métodos Teóricos ........................................................................... 36
4.1.1- Comparação entre os Empuxos Teóricos ............................................................. 36 4.1.2- Comparação entre os Torques Teóricos ............................................................... 37
4.2- Resultados da Medição............................................................................................ 38 4.3- Comparação dos Métodos Propostos ...................................................................... 39 4.3.1- Comparação entre os Resultados de Torque ........................................................ 39 4.3.2- Comparação entre os Resultados de Empuxo ...................................................... 41 5- Conclusão ................................................................................................................... 43
6- REFERÊNCIAS BIBLIOGRÁFICAS ....................................................................... 44

1
1- INTRODUÇÃO
No presente trabalho foi feito um estudo a partir de informações do navio
graneleiro Germano Becker, a maior embarcação fluvial do país, projetada para fazer o
transporte de granéis e contêineres entre portos no sul do Brasil. Foram feitas medições
de esforços em linhas de eixo do navio em questão para serem determinados os valores
de Torque e Empuxo. Esses resultados foram comparados com os valores estimados por
cálculos de resistência ao avanço a partir do método Holtrop e por diagramas Kt-Kq-J
do respectivo propulsor.
As medições no eixo foram feitas usando Sistema de Medição de Eixos Girantes
(SMEG) com a instalação de Strain Gages. Os esforços axial, torcional e de flexão
segregados a partir dos fundamentos relacionados a Círculo de Mohr para serem obtidos
os valores de Torque e Empuxo.
1.1- Objetivo do Projeto Final
O presente trabalho tem por objetivo comparar os valores de torque e empuxo
teóricos com os medidos no navio Germano Becker, figura (1.1), através de Sistema de
Medição de Eixos Girantes com o uso de Strain Gages.

2
Figura 1.1: Embarcação Germano Becker

3
2- FUNDAMENTOS TEÓRICOS
Para a realização deste trabalho, mostrou-se necessária a inclusão de
fundamentos teóricos. Na primeira seção serão apresentadas as nomenclaturas utilizadas
para as características do hélice. Na segunda seção, serão definidos os coeficientes de
propulsão.
Relações entre tensão, deformação, Círculo de Mohr e medição em eixo serão
mostradas na terceira e quarta seções.
2.1- Hélice
O hélice é o aparato mais comum dos sistemas propulsivos existentes, e em
geral, o mais eficiente. Ele deve ser corretamente projetado de maneira que traga a
maior eficiência possível ao sistema propulsivo.
2.1.1- Diâmetro do hélice( )
Em geral, quanto maior o diâmetro menor a rotação necessária para a o empuxo
desejado, ou seja, um navio com hélice de grande dimensão operará a mais baixas
rotações. Por outro lado, maior será o torque necessário para o movimento do hélice.
O propulsor deve ter um diâmetro , figura (2.1), de uma forma em que na
condição total de carregamento, o hélice esteja suficientemente submerso. Este cuidado
é com intuito de evitar que o propulsor trabalhe em condição de ar e água, se não foi
projetado para esse propósito.
Figura 2.1: Diâmetro do Hélice

4
2.1.2- Razão de passo do hélice ( )
A distância percorrida por um ponto do hélice em uma rotação completa é
chamada passo do hélice. Essa distância pode ser melhor identificada na figura baixo:
Figura 2.2: Passo do Hélice
Deste passo do hélice dividido pelo diâmetro temos a razão de passo do hélice.
Quanto maior o passo do hélice, maior o empuxo produzido. Por outro lado, maior será
o risco de cavitação do hélice.
2.1.3- Razão de áreas do Hélice ( )
É a razão entre a área expandida das pás do hélice e a área do disco propulsor em
que:
(2.1)
Quanto maior a razão de área, maior o empuxo gerado em cada rotação junto
com o aumento do risco de cavitação.
2.1.4- Número de pás do hélice (z)
O numero de pás do hélice aumenta o risco de cavitação, em oposição, o
empuxo produzido é maior a uma dada rotação.

5
O hélice é um peso considerável na extremidade do eixo e é interessante tentar
não sobrecarregar os mancais com um propulsor demasiadamente grande. Além disso,
como já foi falado, quanto maior o diâmetro, menor a rotação em que o propulsor irá
operar para fornecer o empuxo requerido. Caso se utilizem hélices muito grandes,
podem ser necessárias rotações tão baixas que não existam motores que trabalhem nessa
faixa.
2.2- Coeficientes de Propulsão
Os coeficientes de Propulsão são definidos como:
2.2.1- Coeficiente de esteira ( )
É um parâmetro que diz respeito à velocidade em que o propulsor trabalha. Por
estar situado na esteira do casco, o propulsor opera com um perfil de velocidade distinto
devido influência da viscosidade e localização dessa região. Esta redução é
contabilizada pelo coeficiente de esteira.
(2.2)
Onde:
= coeficiente de esteira;
= velocidade de avanço da embarcação;
= velocidade com a qual a água flui para o propulsor ou velocidade de avanço
do hélice.
Este valor pode ser calculado pelo método Holtrop. Conhecendo é possível
determinar a velocidade média do escoamento incidente no propulsor através da
manipulação da equação acima:
(2.3)
6
2.2.2- Coeficiente de redução do empuxo ( )
Ao operar a ré do casco, o propulsor contribui na resistência ao avanço da
embarcação. Este coeficiente contabiliza esta influencia relacionando o empuxo
necessário para autopropelir a embarcação com a resistência ao avanço total:
(2.4)
Onde:
= empuxo necessário para autopropelir a embarcação;
= coeficiente de redução do empuxo;
= resistência ao avanço total, obtida no ensaio de reboque;
O método de Holtrop calcula o coeficiente de redução do empuxo ( ), assim
pode-se determinar o empuxo requerido para propelir a embarcação na velocidade de
serviço em:
(2.5)
Onde:
= Empuxo Requerido;
Os propulsores, para formarem a família desejada, devem produzir, pelo menos,
o empuxo requerido. É recomendado que o empuxo disponível possua um margem de
no 5% a mais do que o empuxo requerido.
2.2.3- Coeficiente de Avanço ( )
É a velocidade de avanço (Va) adimensionalizada pela rotação do propulsor ( )
e pelo seu diâmetro ( ):
(2.6)

7
2.2.4- Coeficiente de Empuxo ( )
É o adimensional que corresponde ao empuxo gerado pelo propulsor. O empuxo
é normalizado pela a massa especifica do fluido, pela rotação e pelo diâmetro do
propulsor.
(2.7)
2.2.5- Coeficiente de Torque ( )
É coeficiente que relaciona o torque gerado pelo propulsor ( ), a massa
especifica do fluido, a rotação e o diâmetro do propulsor.
(2.8)
2.2.6- Rendimento do Propulsor em Águas Abertas ( )
É o rendimento que relaciona os coeficientes de torque e de empuxo gerado pelo
propulsor e o coeficiente de avanço.
(2.9)
2.2.7- Diagramas - - e
O conjunto de diagramas “ - - e , figura (2.3), é composto por séries
sistemáticas onde é possível gerar diversas configurações de hélices variando suas
características principais ( , , , z). O diagrama “ - - e “ apresenta
os valores de de uma mesma série plotados em função de , com ,
e fixos. Um exemplo de diagrama é mostrado a seguir:

8
Figura 2.3: Exemplo de Diagrama - -
2.3- Tensões e Deformações
2.3.1- Conceito de Tensão
Tensão é a grandeza física definida pela força atuante em uma superfície e a área
dessa superfície.
É chamada Tensão Normal o resultado da aplicação de uma força axial na seção
transversal de um material, de acordo com [5], podendo ser calculada por:
(2.10)
Onde é a força axial que atua na extremidade do material e é o valor da área
transversal do material.
Por sua vez, a Tensão de Cisalhamento é causada por uma força transversal
aplicada na seção transversal de uma barra:
(2.11)
Onde F é a força transversal que atua no material e A é o valor da área
transversal do material.
Para um carregamento genérico, as tensões são tridimensionais. Esse conjunto
de tensões é composto por tensões normais nas direções x, y e z e duas componentes de

9
tensões cisalhantes em cada plano. Na figura a seguir é possível ver a representação de
um cubo infinitesimal que representa esse estado de tensões:
Figura 2.4: Cubo representativo do estado tridimensional de tensões
Na figura acima, é possível ver as tensões normais e (que equivalem
a e ) e as tensões cisalhantes e , onde ,
e . De forma genérica, a primeira letra representa o eixo
perpendicular ao plano de atuação da componente de tensão e a segunda indica qual sua
direção.
2.3.2- Conceito de Deformação
Deformação é a mudança na forma e tamanho de um corpo quando uma força é
aplicada no mesmo, podendo ser perceptível ou não.
Quando uma força axial é aplicada, ocorre a deformação normal, que é o
alongamento ou contração de um corpo por unidade de comprimento. A deformação
específica de certo corpo é a razão entre a deformação e o comprimento original do
corpo:
(2.12)

10
A Deformação por Cisalhamento é a mudança de ângulo ocorrida entre dois
segmentos de retas originalmente perpendiculares entre si. O ângulo é denotado por e
é medido em radianos.
Na ilustração abaixo é considerado um cubo sujeito a tensões cisalhantes em que
as dimensões do elemento são muito pequenas e que segmentos de reta muito pequenos
permanecem retos após a deformação do corpo.
Figura 2.5: Componentes cartesianos da deformação

11
Os comprimentos aproximados dos lados do paralelepípedo são:
(2.13)
Os ângulos aproximados entre os lados, originalmente definidos pelos lados ,
e , são:
(2.14)
Note que os ângulos opostos são:
(2.15)
Como referência, considera-se positiva a deformação cisalhante na qual o ângulo
entre as faces positivas ou negativas do elemento é reduzido, caso contrário, isto é, este
ângulo seja aumentado, a deformação por cisalhamento é considerada negativa. Faces
positivas são aquelas faces cujo vetor normal está na direção positiva do eixo de
referência.
2.3.3- Coeficiente de Poisson
O Coeficiente de Poisson relaciona a deformação específica transversal
proveniente de uma carga longitudinal e a própria deformação longitudinal. Por
exemplo, caso uma barra seja submetida a um carregamento axial no eixo x, sabe-se
que apesar das tensões normais em y e z serem nulas, haverá deformação nessas
direções.
(2.16)
(2.17)
(2.18)
12
O sinal negativo é devido a direção da deformação transversal, que é contrária à
deformação longitudinal.
2.3.4- Lei de Hooke
A Lei de Hooke é a lei da física relacionada à elasticidade dos corpos, que serve
para calcular a deformação causada pela força exercida sobre um corpo:
(2.19)
Onde é a tensão normal no material, é o módulo de elasticidade e é a
deformação específica.
Caso as tensões superem a tensão de escoamento do material, o comportamento
estrutural do corpo entrará em regime plástico e a relação linear entre tensões e
deformações não é mais válida, já que a deformação não se torna nula ao cessar o
carregamento, resultando em uma deformação permanente.
A Lei de Hooke aplicada às tensões e deformações por cisalhamento é análoga
ao que foi descrito anteriormente, sendo descrita pela seguinte expressão:
(2.20)
Onde é a tensão de cisalhamento, é módulo de elasticidade transversal do
material e é a deformação por cisalhamento.
Generalizando a Lei de Hooke para um carregamento multiaxial, deve-se
primeiramente apresentar a definição do Princípio da Superposição. Este princípio
afirma que os efeitos de um carregamento combinado atuando sobre uma estrutura pode
ser considerado como a combinação do efeito de cada carregamento sobre esta
estrutura, analisado independentemente. Para que este princípio seja satisfeito é preciso
que o material esteja no regime elástico e que o efeito de um dos carregamentos não
influencie nas condições de aplicação dos demais carregamentos.
Sabendo que uma deformação axial de um corpo implica também em uma
deformação transversal ao eixo em que foi aplicado o carregamento, será determinado
qual será a deformação específica total no eixo x, devido às tensões normais em x, y e z.

13
Para as deformações devido às Tensões Normais, de acordo com o Princípio da
Superposição, podemos afirmar que a deformação normal total em certa direção é a
soma das contribuições de cada deformação nessa direção de forma independente:
(2.21)
(2.22)
Onde é a deformação normal total na direção do eixo x, é a deformação na
direção x causada pela própria tensão normal em x, é a deformação na direção x
causada pela tensão normal em y, é a deformação na direção x causada pela tensão
normal em z e é o coeficiente de Poisson.
De forma análoga, as deformações nas outras direções são descritas a seguir:
(2.23)
(2.24)
(2.25)
(2.26)
Para a deformação devido às Tensões Cisalhantes, a partir da Lei de Hooke, tem-
se:
(2.27)
(2.28)
(2.29)
2.3.5- Transformação de Tensões no Estado Plano
O Estado plano de tensões é uma condição específica onde duas faces do cubo
possuem tensões nulas.

14
Figura 2.6: Elemento infinitesimal no Estado plano de Tensões
Nesta condição:
(2.30)
Se o cubo mostrado na figura (2.6) for rotacionado no plano xy (em torno do
eixo z) um novo sistema de eixos (x’y’), figura (2.7), será utilizado:
Figura 2.7: Nova orientação do elemento
A intenção é determinar o estado plano de tensões no elemento em sua nova
orientação x’y’ considerando as tensões, que estão em função da orientação original xy.

15
Para isso, é necessário aplicar as equações de equilíbrio no elemento, onde o plano
inclinado que está destacado é referente à orientação x’y’, como pode ser visto na figura
(2.8):
Figura 2.8: Tensões atuando no elemento no estado plano de tensões
Após operações algébricas, as equações de transformação para o Estado Plano
de Tensões são:
(2.31)
(2.32)
Onde é o ângulo entre x e x’.
Para calcular a tensão normal na direção y’ é necessário apenas substituir por
, que é o ângulo entre x’ e y’:
(2.33)
Nota-se que se somarmos as equações de e , temos que a soma das
tensões normais atuantes no elemento é constante e não depende da orientação do
elemento:
(2.34)

16
2.3.6- Círculo de Mohr no Estado Plano de Tensões
O Círculo de Mohr é uma ferramenta gráfica muito usada para resolução de
problemas de tensão e deformação. A equação do Círculo de Mohr é:
(2.35)
Esta equação representa um círculo com as seguintes características:
(2.36)
(2.37)
E centro em ( . Onde é a Tensão Normal Média e R
é o raio do círculo de Mohr. A seguir é mostrado o círculo de Mohr para o estado plano
de tensões:
Figura 2.9: Círculo de Mohr para Estado Plano de Tensões
A vantagem da utilização do Círculo de Mohr é que ele ajuda a determinar
facilmente através da geometria do círculo o estado de tensões em um ponto para
qualquer orientação por inspeção visual, sem que seja necessária uma construção
detalhada do círculo.

17
Uma questão importante é determinar o valor das tensões normais máximas e
mínimas e em que direção elas ocorrem. Essas tensões são chamadas Tensões Principais
e sua direção é a Direção Principal.
O valor dessas tensões pode ser calculado por:
(2.38)
A partir da geometria do círculo, vê-se que nos pontos onde ocorrem as tensões
normais máxima e mínima (tensões principais) as tensões cisalhantes são iguais a zero.
Com isso:
(2.39)
Então:
(2.40)
O ângulo é o ângulo de deslocamento do eixo no Círculo de Mohr, que
equivale à metade do ângulo de rotação do elemento original.
Novamente a partir da geometria do círculo percebe-se que a tensão cisalhante
máxima é igual ao raio R do círculo:
(2.41)
E neste caso a tensão normal equivale a:
(2.42)
2.3.7- Transformação de Deformações no Estado Plano
Assim como com as tensões, as deformações específicas também se alteram com
a rotação do eixo de referência. Nesta seção será mostrado como encontrar as
deformações normal e cisalhante máximas de um elemento infinitesimal.

18
As equações de transformação para o estado plano de deformações são análogas
às do estado plano de tensões:
(2.43)
(2.44)
Analogamente, também se calcula a deformação normal substituindo por
, já que esse é o ângulo entre os eixos x’ e y’.
(2.45)
Note que somando as equações de e , tem-se que a soma das deformações
normais atuantes no elemento é constante e não depende da orientação do elemento:
(2.46)
2.3.8- Círculo de Mohr no Estado Plano de Deformações
O Círculo de Mohr de Deformações tem a seguinte equação:
(2.47)
Esta equação representa um círculo com as seguintes características:
(2.48)
(2.49)
E centro em ( . Onde é a Deformação Normal Média
e R é o raio do círculo de Mohr.
19
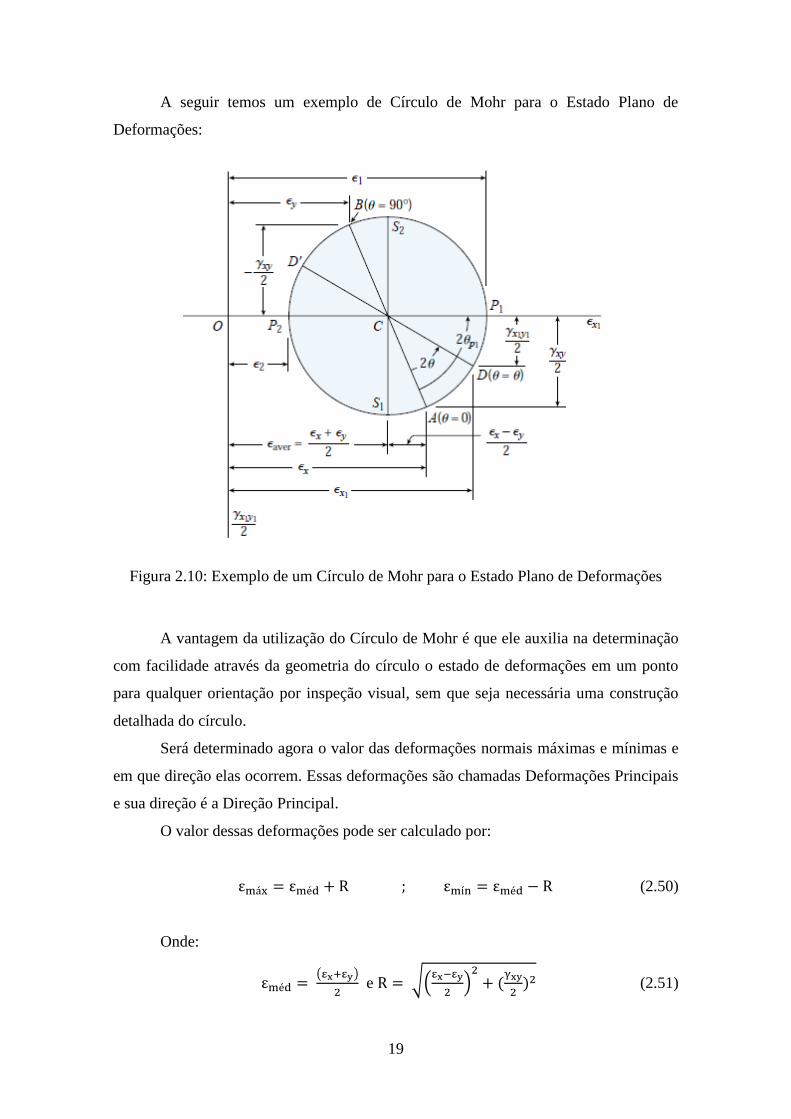
A seguir temos um exemplo de Círculo de Mohr para o Estado Plano de
Deformações:
Figura 2.10: Exemplo de um Círculo de Mohr para o Estado Plano de Deformações
A vantagem da utilização do Círculo de Mohr é que ele auxilia na determinação
com facilidade através da geometria do círculo o estado de deformações em um ponto
para qualquer orientação por inspeção visual, sem que seja necessária uma construção
detalhada do círculo.
Será determinado agora o valor das deformações normais máximas e mínimas e
em que direção elas ocorrem. Essas deformações são chamadas Deformações Principais
e sua direção é a Direção Principal.
O valor dessas deformações pode ser calculado por:
(2.50)
Onde:
e
(2.51)

20
A partir da geometria do círculo, pode ser visto que nos pontos onde ocorrem as
deformações normais máximas e mínimas (deformações principais) as deformações
cisalhantes são iguais à zero. Com isso:
(2.52)
Então:
(2.53)
O ângulo é o ângulo de deslocamento do eixo no Círculo de Mohr, que
equivale à metade do ângulo de rotação do elemento original.
Novamente a partir da geometria do círculo percebe-se que a deformação
cisalhante máxima é igual ao raio R do círculo:
(2.54)
E neste caso a deformação normal equivale a:
(2.55)
2.4- Medição em Eixos Girantes
2.4.1- Strain Gages
Strain Gages ou Extensômetros são sensores elétricos colados na superfície do
material sob analise para obter medidas de deformação. Essas deformações são medidas
no sentido axial pelos Strain Gages. A escolha desse tipo de recurso está ligada ao baixo
custo, alta precisão, facilidade na instalação e leitura da resposta. Como o sinal obtido
pela variação dos Strain Gages é muito pequeno, eles serão utilizados na Ponte de
Wheatstone, com o objetivo de amplificar o sinal de resposta da deformação.

21
Os sinais são obtidos dos Strain Gages por telemetria, ou seja, por comunicação
sem fio, com o auxílio de um Sistema de Medição de Eixos Girantes (SMEG). Estes
sinais serão então amplificados e filtrados para a obtenção da resposta. Um exemplo de
aparato experimental para realizar medições em laboratório está mostrado na figura
(2.11).
Figura 2.11: Aparato Experimental Teste do SMEG[4]
2.4.2- Análise do Torque
De acordo com [4], para relacionarmos o torque, T, aplicado a um eixo maciço,
com a tensão de cisalhamento, τ, e o ângulo de torção, θ, da seção transversal usamos a
equação abaixo:
(2.56)
Onde:
Q = Torque Aplicado ao Eixo (N.m);
D = Diâmetro do Eixo (m);
L = Comprimento do Eixo (m);

22
θ = Ângulo de Torção da Seção Transversal (rad);
G = Módulo de Elasticidade Transversal ( );
τ = Tensão de Cisalhamento ( );
J = Momento Polar de Inércia ( );
Na Equação (2.57), também conhecida como a fórmula da torção, o momento
polar de inércia, J, é dado por:
(2.57)
E o módulo de elasticidade transversal, G, é dado por:
(2.58)
Onde:
E = Módulo de Elasticidade Longitudinal ( );
µ = Coeficiente de Poisson do Aço;
O torque teórico aplicado no eixo ( ) é obtido pela Equação (2.59) e pode ser
visualizado na figura (2.11):
(2.59)
Onde:
= Torque Teórico Aplicado ao Eixo (N.m);
F = Força Aplicada (N);
b = Braço da Alavanca (m);
Já a força axial (empuxo), pode ser obtido da equação (2.10), a partir da
deformação normal medida no eixo. A tensão de cisalhamento (τ) pode ser obtida pela
Equação (2.60):

23
(2.60)
A deformação por cisalhamento (γ), do eixo, é dada por:
(2.61)
O ângulo de torção (θ) da seção transversal, que pode ser obtido pela Equação
(2.62):
(2.62)
As relações entre as tensões de cisalhamento máximas e mínimas ( ) e as
tensões normais principais, para o estado de cisalhamento puro, são dadas pelas
Equações (2.63) e (2.64):
(2.63)
E,
(2.64)
Onde:
=Tensão de Cisalhamento ( );
, = Tensões Normais, Máxima e Mínima, na Direção Principal
( );
Na figura (2.12), o círculo de Mohr ilustra as relações entre tensões normais e
cisalhantes para o plano inclinado a 45º.

24
Figura 2.12: Círculo de Mohr para o Estado de Tensão sob Torção Pura
A deformação linear máxima na direção principal, , é dada pela Equação
(2.65):
(2.65)
Onde:
= Tensão de Cisalhamento Máxima ( );
= Deformação Linear Máxima na Direção Principal (µStrain);
, = Tensões Normais, Máxima e Mínima, na Direção Principal
( );
Por outro lado, a deformação linear máxima na direção principal ( ) pode ser
obtida a partir da equação de transformação das deformações, conforme a Equação
(2.66):
(2.66)
Onde:
= Deformação por Cisalhamento no Plano “x” e na Direção “y” (rad);

25
= Deformação Linear na Direção Principal (µStrain);
= Deformação Linear no Plano “x” (µStrain);
= Deformação Linear no Plano “y” (µStrain);
α = Ângulo do Plano da Direção Principal em relação ao Plano X-Y (rad);
Para o estado de torção pura:
(2.67)
Neste caso, a relação entre a deformação linear e a deformação por cisalhamento
é dada por:
(2.68)
Por outro lado, a deformação por cisalhamento e o ângulo de torção se
relacionam através da Equação (2.69):
(2.69)
2.4.3- Formulação Teórica para o SMEG utilizando a Ponte de Wheatstone
Na prática, as medições de deformação raramente envolvem valores maiores do
que alguns milistrains. Dessa maneira, a medição de deformação exige a medição exata
de variações de resistência muito pequenas. Para medir essas variações tão pequenas, os
Strain Gages são quase sempre usados em uma configuração em ponte, com a inclusão
de uma fonte de tensão de excitação. Uma ponte de Wheatstone, figura (2.13), é
formada por quatro braços resistivos e uma tensão de excitação aplicada na ponte, como
pode ser visto na figura abaixo:

26
Figura 2.13: Exemplo de Ponte de Wheatstone
Neste caso, a relação entre a voltagem de saída da ponte, , a voltagem de
excitação da ponte, , e a deformação linear, , é dada pela seguinte expressão:
(2.70)
Onde:
K = “gage factor” dos strain gages utilizados;
= Voltagem de Excitação da Ponte;
= Ganho do Sistema de condicionamento (depende do torque aplicado);
= Deformação Linear;
A voltagem de saída da ponte, , deve ser multiplicada por um fator de escala,
que é o ganho do sistema ( ), que amplifica o sinal de saída do strain gage, para
facilitar a leitura. Portanto, a voltagem real (corrigida) da saída da ponte, , sem o
efeito do ganho do sistema, é dada por:
(2.71)
A deformação linear na direção principal pode então ser obtida a partir da
Equação (2.72):

27
(2.72)
O torque (Q) pode ser calculado através da Equação (2.73):
(2.73)
Da Equação (2.65),obtemos a relação:
(2.74)
Usando as equações (2.72), (2.73) e (2.74), o torque (Q) pode ser obtido em
função da voltagem corrigida de saída da ponte, , e da voltagem de excitação da
ponte, :
(2.75)
E a relação entre a deformação linear e a deformação por cisalhamento é dada
por:
(2.76)
A partir da voltagem de saída da ponte de Wheatstone corrigida pelo ganho do
sistema é possível calcular a deformação linear (estática), sofrida pelos strain gages e
obter todos os parâmetros relacionados com o teste da torção estática realizado
experimentalmente.

28
3- ESTUDO DE CASO
3.1- Características do Objeto de Estudo
Este trabalho se trata de um estudo do Torque e Empuxo do eixo propulsor de
um navio utilizando o Sistema de Medição de Eixos Girantes (SMEG). O navio
escolhido é o Germano Becker, um navio fluvial do tipo graneleiro, que opera na Lagoa
dos Patos (RS). A região de operação tem uma extensão de aproximadamente 265km
com calado de 5,0 metros. Abaixo podem ser vistas as características desta embarcação:
Tabela 3.1: Características da Embarcação
O propulsor da embarcação é um Série B (B4.50), com 4 pás e razão de área
0,50. Com passo (P) igual a 1105 mm e diâmetro (D) igual a 1700 mm, sua razão P/D é
0,65. O diagrama - - desse propulsor pode ser visto na figura (3.1).
Figura 3.1: Diagrama - - do propulsor presente na embarcação
110,04 m
105,14 m
16,2 m
5,25 m
4,5 m
Comprimento (LOA)
Comprimento entre perpendiculares (LPP)
Boca (B)
Pontal (D)
Calado de Projeto (T)

29
Diversos trabalhos acadêmicos vêm sendo desenvolvidos acerca dessa
embarcação, levando em conta principalmente os altos níveis de vibração verificados e
formação de vórtices devido à forma da embarcação.
O presente trabalho trata de uma comparação de resultados de Torque e Empuxo
obtidos em trabalhos anteriores realizados a partir de formulações teóricas, com os
dados obtidos através de medição utilizando o Sistema de Medição de Eixos Girantes
(SMEG) para serem obtidos os resultados reais do navio.
3.2- Métodos para Comparação
O Empuxo e o Torque de uma embarcação podem ser determinados de três
maneiras. Na primeira delas, que é chamada aqui de Formulação Clássica, é utilizado o
Método Holtrop [1] e a formulação convencional para a escolha do sistema propulsivo.
Na segunda maneira, Formulação a partir de Parâmetros do Propulsor, são utilizadas as
formulações dos parâmetros do propulsor [2] e o diagrama - - do propulsor. Essas
duas formulações foram objeto de estudo de trabalhos anteriores e serão apresentadas
nesta seção.
O terceiro método é a medição em eixo em tempo real e será discutida na
próxima seção.
O Estudo de Caso contemplará os seguintes pontos de operação:
Ponto 1: Velocidade 5,1 nós, Rotação 1100rpm, 50% de Carga
Ponto 2: Velocidade 5,2 nós, Rotação 1300rpm, 60% de Carga
Ponto 3: Velocidade 5,5 nós, Rotação 1500rpm, 78% de Carga
Ponto 4: Velocidade 6,0 nós, Rotação 1680rpm, 100% de Carga
3.2.1- Formulação Clássica
Por este método, primeiramente, foi estimada por [3] a Resistência ao avanço.
Para isso, foi necessário modelar uma forma característica do tipo da embarcação para,
dessa forma, obter os parâmetros necessários para o cálculo da resistência pelo método
Holtrop. A seguir é mostrada a forma gerada:

30
Figura 3.2: Forma Característica do Tipo de embarcação
A partir dessa forma, foram obtidos os parâmetros necessários para iniciar o
método Holtrop. A partir dele, foram obtidas as Resistências ao Avanço para as
respectivas velocidades (pontos de operação). Com a resistência, foi possível calcular o
empuxo requerido para o propulsor nos diversos pontos de operação a partir da equação:
(3.1)
Para o cálculo do Torque, foi preciso consultar as informações do motor, já que
era necessária a informação sobre a Potência Nominal do Motor. O motor em questão é
da marca CUMMINS e do modelo QSK19-M.
Dessa maneira, foram formados os pares de Torque e Empuxo para cada ponto
de operação desejado. Esses resultados serão apresentados e comentados ao final deste
capítulo.
3.2.2- Formulação a partir de Parâmetros do Propulsor
Para obtenção do Empuxo e Torque a partir desta formulação, é necessário
estimar um valor para o coeficiente de esteira (t) para, a partir da velocidade (V) da
embarcação no ponto de operação, foi obtida a velocidade de avanço ( a partir da
equação (2.3). A partir de , com as informações do diâmetro do eixo e rotação, foi
obtido os valores para o coeficiente de avanço ( ), com a equação (2.6).

31
Com o coeficiente de avanço ( ), pode-se obter os Coeficientes de empuxo e de
torque a partir do diagrama - - na Figura (3.1).
O propulsor da embarcação é um série B, com 4 pás e razão de áreas 0,50. O
diâmetro do eixo (D) é 1,7 m enquanto o passo (P) é 1,105 m. Portanto a razão P/D é
0,65. Como pode ser visto na figura (3.1), a razão P/D=0,65 não consta no diagrama.
Devido a isso, foi preciso utilizar os polinômios característicos que são utilizados para
gerar as curvas do diagrama para uma nova razão P/D. O método pode ser visualizado
em [3].
Figura 3.3: Novas curvas do propulsor para P/D=0,65
Com as novas curvas, figura (3.3), foi possível obter os valores de e .
Pelas equações (2.7) e (2.8) obtemos o Torque e o Empuxo. O Torque, porém, deve ser
corrigido para pela equação (2.73), já que as influências da esteira formada pela
popa e a turbulência maior nesse caso do que no caso em águas abertas aumentam o
Torque.
(3.2)
Onde é a eficiência rotativa relativa, sendo:
(3.3)

32
(3.4)
(3.5)
Onde é a eficiência considerando a popa da embarcação é a eficiência em
águas abertas.
A partir desse valor do Torque, foi calculado um novo valor do Torque que deve
se aproximar do Torque da medição, pois considera fatores como alinhamento,
lubrificação dos mancais e da caixa redutora, a partir das equações:
(3.6)
(3.7)
(3.8)
3.2.3- Medição no Eixo
O objetivo deste método é obter os valores reais de Torque e empuxo da
embarcação nos pontos de operação já determinados, a fim de verificar se os esforços
no eixo se aproximam do que calculamos a partir das formulações anteriores.
Para ser realizada a medição, foram utilizados 3 tipos de Strain Gauges, ou
Extensômetros, para o cálculo da deformação no eixo do navio através do Sistema de
Eixos Girantes (SMEG). Os Strain Gages são sensores elétricos colados na superfície do
material analisado. As informações fornecidas pelos Strain Gauges foram obtidas
através de Telemetria, ou seja, por comunicação sem fio. A instalação do sistema pode
ser visto na figura (3.4):

33
Figura 3.4: Sistema de Medição instalado no Eixo MCP de Bombordo
A seguir serão mostrados os 3 tipos de Strain Gages instalados:
Figura 3.5: Strain Gage tipo Roseta

34
Figura 3.6: Strain Gage tipo Torção
Figura 3.7: Strain Gage tipo Fletor
O Strain Gage pode efetivamente medir a tensão em uma única direção. Para
determinar os 3 componentes independentes do plano de deformação, são necessárias 3
medidas de tensão linearmente independentes, ou seja 3 Strain Gages posicionados em
um layout do tipo roseta, representado no primeiro Strain Gage da figura anterior,
figura(3.5).
Quando a torção é aplicada ao eixo fazendo com que ele rode, tensões de corte
são induzidas devido ao movimento. Para medir essas tensões, os Strain Gages são
colados formando 45º com a horizontal onde é aplicado o torque, representado no
segundo Strain Gage na figura anterior, figura(3.6).
O terceiro Strain Gage representado na figura (3.7) mede a tensão devido ao
momento fletor no eixo x e o Efeito Poisson no eixo y. Efeito Poisson é definido como
as alterações na direção perpendicular à carga aplicada quando há a aplicação de uma
carga em certa direção.
Como pode ser visto na seção (2.4.3) os Strain Gages fornecem uma voltagem
de saída, que pode ser relacionada com a deformação naquele ponto da superfície do
material, pela equação (2.70). Por sua vez, a deformação pode ser relacionada com a
Tensão de Cisalhamento pela equação (2.74). O programa utilizado para obter os
valores de Torque e Empuxo na medição utiliza essas informações da operação dos

35
Strain Gages para montar o Círculo de Mohr e a partir dela, pelas relações apresentadas,
pode-se obter a Tensão de Cisalhamento e o Torque no eixo, pela equação (2.73). Para
obter a deformação de cisalhamento foi utilizado o Strain Gage da figura (3.6)
O Empuxo, que é uma força axial no eixo, é relacionado com a deformação
normal e a Tensão Normal e será determinado pela equação (2.10). Para obtermos essa
deformação normal foram utilizados os Strain Gages das figuras (3.5) e (3.7). As
componentes de deformação na direção axial da viga são devidas à compressão, que
ocorre devido à força de empuxo, e à flexão da viga. Para que isolar a deformação
devido ao empuxo, foi medido a deformação em x no Strain Gage de roseta no
momento em que o Strain Gage fletor era nulo.
Com isso, foram obtidos os resultados da medição, que podem ser vistos a
seguir:
Figura 3.8: Gráfico com os resultados da medição
Tabela 3.2: Resultados da Medição
RPM Velocidade (nós) Empuxo (kN) Torque (kN.m) Potência (Kw)
1100 5,1 13,9 0,887096774 103
1300 5,2 18,6 1,290322581 175,4
1500 5,5 20,9 2,056451613 322,6
1680 6 25,5 2,560483871 449,8
36
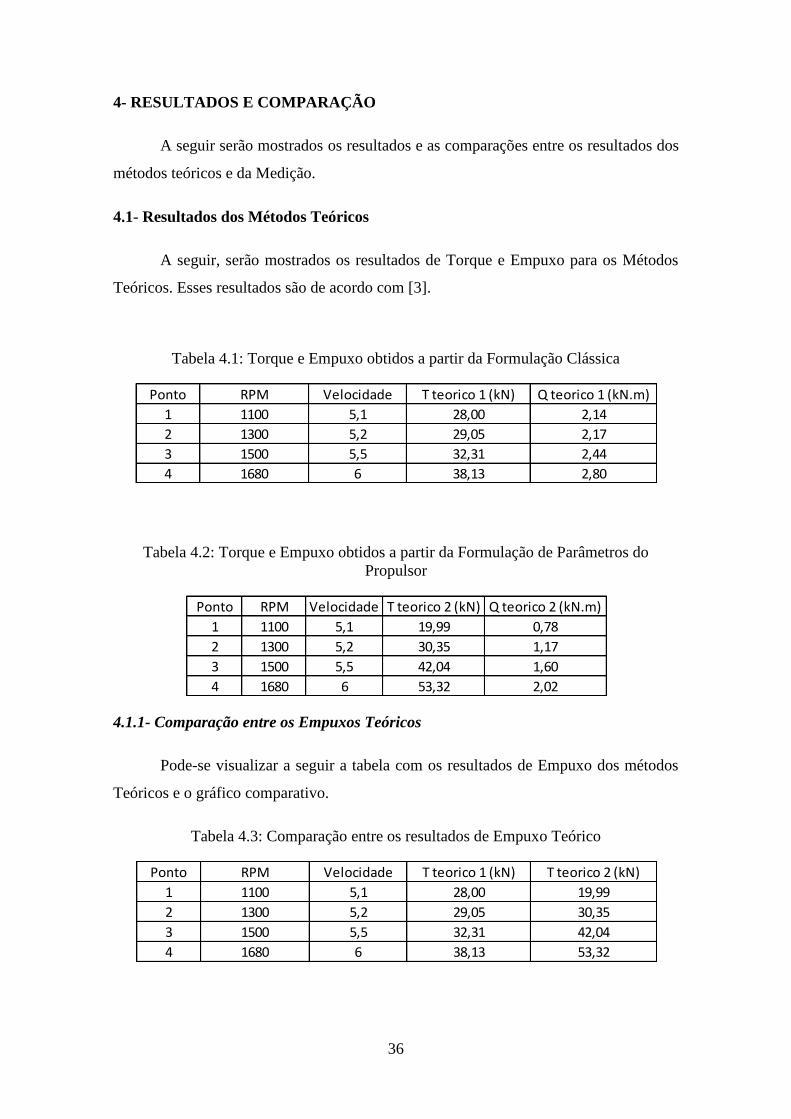
4- RESULTADOS E COMPARAÇÃO
A seguir serão mostrados os resultados e as comparações entre os resultados dos
métodos teóricos e da Medição.
4.1- Resultados dos Métodos Teóricos
A seguir, serão mostrados os resultados de Torque e Empuxo para os Métodos
Teóricos. Esses resultados são de acordo com [3].
Tabela 4.1: Torque e Empuxo obtidos a partir da Formulação Clássica
Tabela 4.2: Torque e Empuxo obtidos a partir da Formulação de Parâmetros do
Propulsor
4.1.1- Comparação entre os Empuxos Teóricos
Pode-se visualizar a seguir a tabela com os resultados de Empuxo dos métodos
Teóricos e o gráfico comparativo.
Tabela 4.3: Comparação entre os resultados de Empuxo Teórico
Ponto RPM Velocidade T teorico 1 (kN) Q teorico 1 (kN.m)
1 1100 5,1 28,00 2,14
2 1300 5,2 29,05 2,17
3 1500 5,5 32,31 2,44
4 1680 6 38,13 2,80
Ponto RPM Velocidade T teorico 2 (kN) Q teorico 2 (kN.m)
1 1100 5,1 19,99 0,78
2 1300 5,2 30,35 1,17
3 1500 5,5 42,04 1,60
4 1680 6 53,32 2,02
Ponto RPM Velocidade T teorico 1 (kN) T teorico 2 (kN)
1 1100 5,1 28,00 19,99
2 1300 5,2 29,05 30,35
3 1500 5,5 32,31 42,04
4 1680 6 38,13 53,32

37
Figura 4.1: Comparação entre os resultados de Empuxo Teórico
Pode ser vista na figura (4.1) uma discrepância entre os valores, principalmente
quando a velocidade da embarcação aumenta. Essas discrepâncias dependem,
principalmente, dos efeitos de esteira e interferências causadas pelo fundo e margem,
além da forma da embarcação utilizada.
4.1.2- Comparação entre os Torques Teóricos
Pode-se visualizar a seguir a tabela com os resultados de Torque dos métodos
Teóricos e o gráfico comparativo.
Tabela 4.4: Comparação entre os resultados de Torque Teórico
Ponto RPM Velocidade Q teorico 1 (kN.m) Q teorico 2 (kN.m)
1 1100 5,1 2,14 0,78
2 1300 5,2 2,17 1,17
3 1500 5,5 2,44 1,60
4 1680 6 2,80 2,02

38
Figura 4.2: Comparação entre os resultados de Torque Teórico
O torque teórico 1(Formulação Clássica) é calculado a partir dos dados reais do
motor da embarcação, tornando-o mais confiável. O torque teórico 2 foi calculado a
partir de parâmetros do propulsor, dependendo do coeficiente de esteira, que foi
estimado.
4.2- Resultados da Medição
Feita a medição na embarcação, obteve-se os seguintes resultados:
Tabela 4.5: Resultados de Torque e Empuxo da Medição
RPM Velocidade (nós) Empuxo (kN) Torque (kN.m)
1100 5,1 13,9 4,4
1300 5,2 18,6 6,4
1500 5,5 20,9 10,2
1680 6 25,5 12,7

39
Figura 4.3: Resultados de Torque e Empuxo da Medição
4.3- Comparação dos Métodos Propostos
4.3.1- Comparação entre os Resultados de Torque
Pode-se visualizar a seguir a tabela com os resultados de Torque dos métodos
propostos e o gráfico comparativo.
Tabela 4.6: Comparação entre os resultados de Torque para os Métodos Propostos
Ponto RPM Velocidade Q teorico 1 (kN.m) Q teorico 2 (kN.m) Q medição (kN.m)
1 1100 5,1 2,14 0,78 0,89
2 1300 5,2 2,17 1,17 1,29
3 1500 5,5 2,44 1,60 2,06
4 1680 6 2,80 2,02 2,56

40
Figura 4.4: Comparação entre os resultados de Torque para os Métodos Propostos
Pela figura (4.4) é possível ver que o Torque resultante da Medição se aproxima
dos resultados teóricos que utilizaram os parâmetros do propulsor nas menores rotações
enquanto nas maiores se aproxima dos resultados obtidos pela formulação Clássica. Nos
pontos de operação 1 e 2, a rotação é menor, portanto as interferências hidrodinâmicas
na popa são menores, se aproximando do método que não considera essas interferências.
Quando a rotação aumenta, há a tendência do resultado da medição se aproximar dos
resultados da formulação que utiliza o Método Holtrop, que estima a resistência ao
avanço a partir de dados estatísticos de navios reais, considerando efeitos reais na
superfície do caso e do propulsor.
No momento da medição foi observada uma esteira muito mal comportada. Essa
diferença entre a medição e os métodos teóricos aparece principalmente na estimativa
do coeficiente de esteira, já que, nesse caso, ela é muito complexa devido a recirculação
e fundo raso, que aumenta a resistência e a massa adicional, sendo necessário um torque
maior para propelir a embarcação na velocidade desejada. Além disso, a esteira não
permanece constante durante uma rotação, o que torna ainda mais difícil essa
estimativa.
Como foi citado no capítulo (3), o navio possui 3 propulsores, sendo que
somente 1 foi considerado nas análises teóricas e também na medição. Nessa situação
da medição, propulsores desligados são considerados apêndices que aumentam a
resistência da embarcação. Além disso, pequenos possíveis erros de eficiência, devido a

41
cuidados com a embarcação, podem ser citados. Vale ressaltar que os métodos teóricos
são mais precisos para situações em águas abertas, onde não há grande interferência
externa.
4.3.2- Comparação entre os Resultados de Empuxo
Pode-se visualizar a seguir a tabela com os resultados de Empuxo dos métodos
propostos e o gráfico comparativo.
Tabela 4.7: Comparação entre os resultados de Empuxo para os Métodos Propostos
Figura 4.5: Comparação entre os resultados de Empuxo para os Métodos Propostos
Pela figura (4.5) pode-se observar que o empuxo gerado na situação real é menor
do que os empuxos teóricos. Em relação à formulação teórica Clássica (Teórico 1), onde
foi necessário o uso de uma forma característica do tipo da embarcação, já era possível
Ponto RPM Velocidade T teorico 1 (kN) T teorico 2 (kN) T medição (kN)
1 1100 5,1 28,00 19,99 13,9
2 1300 5,2 29,05 30,35 18,6
3 1500 5,5 32,31 42,04 20,9
4 1680 6 38,13 53,32 25,5

42
prever um erro associado à essa estimativa, já que foi observado no momento da
medição que a embarcação apresentava uma esteira muito mal comportada, com
velocidade de escoamento baixa, afetando a popa da embarcação e o escoamento nessa
região. Além disso, como já foi citada, a operação é realizado em águas rasas, o que
implica em interferência no desempenho hidrodinâmico dos hélices.
Porém, um fato importante é que, apesar de ser considerado um único propulsor,
o de bombordo, o propulsor de boreste funcionava a baixa carga, mas não está sendo
considerado. Mesmo não sendo possível quantificar essa diferença com as informações
obtidas, a curva de empuxo da medição tende a subir, diminuindo bastante a diferença.

43
5- CONCLUSÃO
Com a comparação dos resultados de Torque e Empuxo obtidos pela medição e
pelas formulações teóricas pode se observar uma pequena, porém considerável,
discrepância entre os valores. Com essa diferença, porém, não é possível tirar as
melhores conclusões sobre os métodos teóricos utilizados, já que eles abrangem
situações de teste de propulsores em águas abertas, utilizam série de dados de
embarcações que navegam em águas profundas, entre outras diferenças com a situação
real analisada. Além disso, o objeto de estudo, a embarcação Germano Becker, possui
uma forma pouco suave, que, somada à navegação fluvial em águas rasas, aumenta a
resistência e a influência do escoamento na popa da embarcação.
Apesar das discrepâncias, foi possível também verificar o sistema utilizado na
medição, que mostrou resultados próximos ás formulações teóricas consolidadas.
Objetivo do estudo foi, portanto, concluído.
Como proposta para futuros trabalhos acerca desse tema, recomenda-se que seja
utilizado um objeto de estudo com operação similar às consideradas pelos métodos.
Além disso, é recomendável que seja utilizada a tabela de cotas da embarcação real,
além de melhores estimativas.

44
6- REFERÊNCIAS BIBLIOGRÁFICAS
[1] HOLTROP, J.; MENNEN, G.G.J., AN APPROXIMATE POWER PREDICTION
METHOD, International Shipbuilding Progress, Vol. 29, July 1982.
[2] HARVALD, SV. AA., 1983, RESISTANCE AND PROPULSION OF SHIPS.
[3] MONTFORT, G. V., 2014, SELEÇÃO DE SISTEMA PROPULSIVO EM
CASCOS DE DESLOCAMENTO: USO DE FORMULAÇÕES CLÁSSICAS E
RESULTADOS DE MEDIÇÃO, Universidade Federal do Rio de Janeiro, Rio
de Janeiro.
[4] MONTEIRO, U.A., 2012, CALIBRAÇÃO DO SISTEMA DE MEDIÇÃO DE
EIXOS GIRANTES (SMEG) E CÁLCULO EXPERIMENTAL DO TORQUE
ESTÁTICO APLICADO A UM EIXO MACIÇO, Universidade Federal do Rio
de Janeiro, Rio de Janeiro.
[5] BEER, Ferdinand P.; DEWOLF, John T.; JOHNSTONE, E. Russell, Jr.,
RESISTENCIA DOS MATERIAIS, 2006.