numero 05 - setembro de 2005
TRANSCRIPT
www.famat.ufu.br
Revista Científica Eletrônica daFaculdade de Matemática - FAMAT
Universidade Federal de Uberlândia - UFU - MG
Número 05 - Setembro de 2005
f��
e-mail: [email protected]
Comitê Editorial: Edson AgustiniValdair BonfimAntônio Carlos NogueiraFlaviano Bahia Paulinelli VieiraMaísa Gonçalves da Silva
- Famat/Ufu
- Famat/Ufu
- Famat/Ufu
- Petmat - Famat/Ufu
- Damat - Famat/Ufu
FAMAT em Revista

FAMAT em RevistaISSN 1806-1958
www.famat.ufu.br
Revista Cientıfica Eletronica Semestral daFaculdade de Matematica - FAMAT
Universidade Federal de Uberlandia - UFU - MG
Comite Editorial:
Edson Agustini - Famat/UfuValdair Bonfim - Famat/Ufu
Antonio Carlos Nogueira - Famat/UfuFlaviano Bahia Paulinelli Vieira - Petmat - Famat/Ufu
Maısa Goncalves da Silva - Damat - Famat/Ufu
Numero 05Setembro de 2005
���������
�
�
�������� ������ �� � ������������� ��� �������� � � ���� �������������������� �� ��
������� �� � ���� ���������������������������������� ���� ������ ���� ��� ��������! ��������"��� �� �������� �� � ���� �� �# ���� ����$ ��%��� �� �&������� ��
#�� ����&���'��� �(�$)������ ���� ��� ������������ ������� ����� ������ ��������� ����
������� �� ��%��� ������� �� ��������� ��������� ���������� ������������� �����
����������� ��������������$ ��%��� ��
�
)��� �" ���� �� *��� �� ������ ������ ����� ���� � ��� ���� �� ���� � ����� +� �
�� ���� ���� ���!������������������� ��������"��� ������� ������*������ ����� �
����� ���������������� ������������"��������������������������������������������
� ��%��� ����� ��������� ������ ����� � �� � ��� � �,�����!� �� ������������!� ����
�����*�����
�
������ ����� ��� ������ ������� � � ������ ��� ��� ��� !��� �" ���� �� ����� �� �
��������� ��� ����������� ����������������������������-����� ������������ � ��� ���� �
���������������������������� �������������� ������ ��������������*��� ������������
� ������������������������������ ��� ������
.���� ���� ��������������������������� ������ ����� ��������� � �� �� ����� ���
��������� �� ��� ��� ��� � �� ��� ��� �� �������� ������ �� /001� � � ��� ��� �!�����
��������������� ������ �*��� ����� ������������������� ������� ������������2��
�� ���� ���������2��� � �������
�
.���� ����� ����� ������!"�����#�� ��" �$��������� ������������� � �,��������! ����
� ������������ ������ ������������ �� ���3���� �� ����� ���� ����"��� � ����� ���� ����
���������� � � #�$�4�� -�� ���� � ����� � ���� ������ ��%� �������� � ���� ���� ��
���� ������� ��%��� ��
�
5 � ����� ���������� �� ���������� ����� ���� � ��������� ���� �� ���� ������ ��
���������� ��� ������ �������� ����� ������� �� ���� ������ �� �� ����� ������ �� ����
�������������������� � ������� � ����������� � � ������������ ��� ������������
�� ��������2������� ����� ��������� ���
�
5 � �����%�" ���� ������������ ���� ��� ������� ������� ��� ���������� � � ���� � ����
��������! ������� ��%��� � ������ ��� ��������!�������������/001�� ����� ����
���������� ���������3%�������� ����� � �������������������/006��
�
5 �������$��&������������ ���������� ��� ����� ����� ������ ���!��7��.������� �
#� �� 8�������� ����� �9������� ������ ��������� ���� ���� ���� ����������� �� ���� � �
�� :;<0��5��� ���!��� ����� � ����� ���� � � ����� � �� ������ ��� �"���� ��� ���� ��� �
���������� ��� ����� �� ����� ��� � � ���� � ������ ��� ��� � ���� ����� � � �� ������� ���
�������� ��������������� ���� ���!����� ����� ����!�������� ������������� ������ �� ��
�������������� ��������������������� ��� ����=� ���������� � ����*�������� � ����
����� �!���� ���������������������������������� ��� �� �&#&���������� � ���������
�
5 ������%��������������'� ������������������� � �,����� ���� ���� �������8����
���� ��� ����������������������������3����� �����!� � �>?=.)(&#&������� ����/00@��
���������� ��� ���������������������������������������3����������������� ���������������
7$ ��%��� � ��=� �4�%��� 9��������������� !�����>.4�� �# ���� �� ��$ ��%��� ����
�!�������������/00@��.�������3����������������� ������ ������������������ ������
���-�������$ ��%��� �� �&#&��
�
5 ������!"�����#�� ��" �$�������()��������� ������� �������������� �� ������3����
������� ��������"��� ��������������� �#�$�4(&#&����������������� ���������-�����
��A����� ��� � �= �, �� �����$ ��%��� ���������������������� �������� � ����� ��
��� �� ���� �� ������ ��!����� ����� �� !� �� ����� ���������� �� ���3���� �� ����� ����
����"��� �����3������������� �#�$�4��
�
5 ������%��������� �������$�����"��*�� ����� ������ �������� ����� ��������� �
$%��� ���!��� �-��� � ������������� ����� � �� �# ���� ����$ ��%��� ���! � ���%� �
��.��� ����$ ��%��� ��5�� �������� � ��������� �$%��� �� � �������� ����! �� ���� �
� ���� �� ���������� ��� � �������������������� ���������� ������������� ��� ���
�������
�
5 ����������������� ������� � ���� �� ����� �������� ����������� ����� ���
� �#�$�4������"������� �����/001� ����������/001��
�
#�� ������ ��� ���� ��� ������� ������� ������ ��� �� � �,��� ���� ������ ���� �
���� ���������"��� �����!��2���������� �������������(���� ���
�
�
-�����.������ ��

Indice de Secoes
Secao 1: Trabalhos Completos de Iniciacao Cientıfica 7
Secao 2: Problemas e Solucoes 235
Secao 3: Eventos 243
Secao 4: Reflexoes sobre o Curso de Matematica 249
Secao 5: Em Sala de Aula 259
Secao 6: Iniciacao Cientıfica em Numeros 299
Secao 7: E o meu Futuro Profissional? 307
Secao 8: Merece Registro 315

FAMAT em Revista
Revista Científica Eletrônica daFaculdade de Matemática - FAMAT
Universidade Federal de Uberlândia - UFU - MG
Número 05 - Setembro de 2005
www.famat.ufu.br
Trabalhos Completos de
Iniciação Científica
PBIIC-FAPEMIG-UFU - Programa de Bolsas Institucionais de Iniciação Científica daFundação de Amparo à Pesquisa do Estado de Minas Gerais
PETMAT-UFU - Programa de Educação Tutorial da Faculdade de Matemática
PIBIC-CNPq-UFU - Programa Institucional de Bolsas de Iniciação Científica doConselho Nacional de Desenvolvimento Científico e Tecnológico
PROMAT-UFU - Programa Institucional de Iniciação Científica e Monitoria da Faculdade de Matemática
IM-AGIMB - Instituto do Milênio - Avanço Global e Integrado da Matemática Brasileira
���

Comitê Editorial da SeçãoTrabalhos Completos de Iniciação Científica
do Número 05 da FAMAT EM REVISTA:
Edson Agustini (coordenador da seção)Valdair Bonfim
Antônio Carlos NogueiraFlaviano Bahia Paulinelli Vieira
Instrucoes para submissao de Trabalhos
A Secao de Trabalhos de Iniciacao Cientıfica visa divulgar trabalhos que estejam as-sociados a projetos cadastrados na(o) PBIIC-FAPEMIG / PETMAT / PIBIC-CNPq /PROMAT ou IM-AGIMB e orientados por docentes da FAMAT.
Trabalhos completos em nıvel de iniciacao cientıfica dos programas acima listadossubmetidos para publicacao na Revista Eletronica “Famat em Revista” estarao sujeitosa apreciacao pelo Comite Editorial responsavel por essa secao de artigos e, se for o caso,por consultores ad hoc ligados a area ou subarea do trabalho. Caso se faca necessario,sugestoes para o aperfeicoamento do trabalho serao dirigidas aos interessados pelo ComiteEditorial.
Alem da redacao clara e concisa que todo trabalho submetido a boa qualidade devepossuir, pede-se evitar o estilo arido e extremamente tecnico caracterıstico de algumaspublicacoes matematicas, nao perdendo de vista que o publico-alvo ao qual se destina arevista e constituıdo por alunos de graduacao.
Os trabalhos submetidos ate o final de um semestre letivo serao publicados na edicaoda revista lancada no inıcio do semestre letivo subsequente.
Quanto as normas tecnicas para submissao dos trabalhos:
1) Formato do arquivo: PDF
2) Tamalho da Folha: A4
3) Margens: 2,5 cm (portanto, area impressa: 16 cm x 24,7 cm)
4) Tamanho de fonte (letra): 12 pontos (exceto tıtulos, subtıtulos, notasde rodape, etc, que ficam submetidos ao bom senso)
5) Espacamento entre linhas: Simples
6) Orientador(es), tipo de programa e orgao de fomento (se houver)devem constar no trabalho.
Envio:Por e-mail: [email protected]


Indice de Trabalhos
Um estudo comparativo entre a Analise de Fourier e Analise Wavelet 13
Arnaldo Jose Pereira R. Junior e Jose Eduardo Castilho
O Modelo van Hiele de Ensino de Geometria aplicado a 5a.e 6a. series do Ensino Fundamental 21
Gisliane Alves Pereira; Sandreane Poliana Silva e Walter dos Santos Motta Jr.
Uma Introducao a Mecanica Classica:Forca Central e Movimento Planetario 51
Neilon Jose de Oliveira e Marcio Jose Horta Dantas
Modelagem Fuzzi na Saude 85
Wanda Aparecida Lopes e Rosana Sueli da Motta Jafelice
Algumas Aplicacoes e Teoria Qualitativa dasEquacoes Diferenciais Ordinarias 127
Juliana Lazara Curcino dos Santos e Lucia Resende Pereira Bonfim
Leis de Kepler para o movimento planetario e alei da gravitacao universal de Newton 147
Eder Lucio da Fonseca e Jocelino Sato
Modelagem de Problemas de Matematica Financeira e suas ResolucoesUtilizando Tecnicas Matematicas e Computacionais 167
Leone Alves Leite e Cesar Guilherme de Almeida
Algebra Linear e Formacao de Imagens:a Tomografia Computadorizada 193
Franciella Marques da Costa e Edson Agustini
Aplicacao da Estatıstica na Manutencao Preditiva 211
Raquel Maria Gondim e Marcus Antonio Viana Duarte
O Problema do Cabo Suspenso 225
Flaviano Bahia Paulinelli Vieira, Laıs Bassame Rodrigues e Edson Agustini


Um estudo comparativo entre a Análise de Fourier e Análise Wavelet
Arnaldo José Pereira R. Junior 1 José Eduardo Castilho 2
Resumo
1 Introdução
De maneira geral, existem muitas semelhanças entre a Análise de Fourier e a Análise Wavelet. Em ambos os casos sinais são analisados por expansões em termos de funções básicas. A base de Fourier é formada por ondas puras, com as freqüências variando sobre todo o espectro. Neste sentido, os coeficientes de Fourier medem puramente o conteúdo frequencial do sinal sem identificar quando tal freqüência ocorre. Já em Análise Wavelet, as bases são localizadas tanto no domínio das freqüências, quanto no domínio temporal. Devido a esta propriedade de dupla localização, há um equilíbrio nas resoluções em cada um dos domínios. Ou seja, o ganho de resolução temporal é compensado com uma perda de resolução frequencial (Castilho [1]).
Aproximação usando superposição de funções tem existido desde aproximadamente 1800, quando Joseph Fourier descobriu que se pode superpor senos e co-senos para representar outras funções. Entretanto, em Análise Wavelet, a escala que se usa para analisar determinada informação é que desempenha um importante papel. Os algoritmos wavelets processam a informação em diferentes escalas ou resoluções. Fazendo uma analogia, para um melhor entendimento da importância da escala pode-se ter em mente o seguinte: imagine que possamos visualizar a região da Amazônia em uma “grande janela”, dessa forma perceberá uma vasta visualização de uma floresta que se tem em tal região (menor escala), porém se dividíssemos aquela “grande janela” em outras menores, e fizermos novamente a visualização, presenciaremos detalhes da floresta e não uma visão geral dela (aumento da escala), já que com uma janela menor consigo fazer uma melhor localização de um determinado ponto. Ou seja, com a Análise Wavelet consigo obter uma imagem ou um sinal de forma geral e os seus detalhes (Graps [3] ).
1 Bolsista; Acadêmico do Curso de Engenharia Elétrica da Universidade Federal de Uberlândia2 Orientador; Professor da Faculdade de Matemática da Universidade Federal de Uberlândia
Fenômenos Físicos podem ser tanto de natureza estacionária, quanta não-estacionária. Sendo assim podem ser utilizadas duas ferramentas paraestudar tais fenômenos: Transformada de Fourier (mais eficaz em fenômenosfísicos de natureza estacionária), e a transformada Wavelet (usada tanto parafenômenos físicos de natureza estacionária, quanta não estacionária). Logoao fazer o estudo de ambas as teorias, serão mostradas as limitações dateoria da Análise de Fourier, quando aplicada a regimes não-estacionários, ea grande eficiência da teoria da Análise Wavelet nestes tipos de fenômenos.

Há muitas décadas cientistas têm procurado funções mais apropriadas do que as senóides e co-senóides que compõem as bases da Análise de Fourier, a fim de aproximar sinais com descontinuidades. Funções senos e co-senos fazem um fraco trabalho quanto à aproximação de “topos de funções agudos” (singularidade de primeira ordem), ou seja, esse problema que ocorre com Fourier é o que se chama de ocorrência do fenômeno de Gibbs, fato que não ocorre com as aproximações usando as wavelets, a não ser que tenhamos uma singularidade de segunda ordem (a função apresenta saltos), dessa forma Gibbs pode ocorrer com wavelet também.
1.1 Funções básicas
Todo vetor de duas dimensões (x,y) é uma combinação linear dos vetores (1,0) e (0,1). Estes dois vetores formam a base do conjunto de vetores (x,y), já que x multiplicado por (1,0) é o vetor (x,0), e y multiplicado pelo vetor (0,1) é o vetor (0,y). A soma é (x,y). Para um conjunto de funções o conceito é o mesmo. Imagine que f(x) representa um tom musical, particularmente uma nota, a qual chamaremos de A Podemos construir A adicionando senos e co-senos com diferentes amplitudes e freqüências. Neste exemplo, os senos e co-senos são as funções básicas, que compõe a base de representação de f(x). Com as senóides e co-senóides escolhidas, pode-se indicar um requerimento adicional propondo que elas sejam ortogonais. Isto pode ser feito escolhendo uma combinação apropriada de termos de função seno e co-seno, cujo produto interno seja zero.
1.2 Funções básicas de escala variante
As funções bases de escala variante são aquelas que geram o espaço de aproximação na resolução desejada. No caso dos senos e co-senos só conseguimos resoluções diferentes na freqüência sen(x) cos(x), sen(2x), cos(2x). Imagine, por exemplo, que se tenha um sinal no domínio de 0 à 1. Pode-se dividir o sinal o sinal com dois níveis de resolução que padronizam de 0 à ½ e de ½ à 1. Dividindo o sinal novamente para quatro níveis de resolução tem-se o mesmo padronizado da seguinte forma: de 0 à ¼, de ¼ à ½, de ½ à ¾, e de ¾ à 1. Dessa forma pode-se dividir o sinal em vários níveis de resolução, ou seja, cada representação codifica o sinal original com uma resolução ou escala particular.
2 Análise de Fourier
Em seu trabalho "Theory Analytique de la chaleur”, Jean Baptist Josph Fourier afirmou que qualquer função f(x), de variável real, definida no intervalo [-l,l], podia ser representada, neste intervalo, por uma série infinita de funções senos e co-senos, onde essa representação seria:
∑∞
=⎥⎦
⎤⎢⎣
⎡⎟⎠
⎞⎜⎝
⎛+⎟⎠
⎞⎜⎝
⎛+=1
0 sencos2
)(k
kk lxkb
lxkaaxf ππ (1)
onde ka e kb são coeficientes reais e seus cálculos são efetuados pelas expressões a seguir:

Κ
Κ
,2,1sen)(1
,2,1cos)(1
)(10
=⎟⎠
⎞⎜⎝
⎛=
=⎟⎠
⎞⎜⎝
⎛=
=
∫
∫
∫
−
−
−
kdxlxkxf
lb
kdxlxkxf
la
dxxfl
a
l
lk
l
lk
l
l
π
π
Com a finalidade de facilitar os cálculos, normalizemos o intervalo ].,[-para],[ ππll− Isto gera a seguinte transformação:
dtl
dx
tl
x
⎟⎟⎠
⎞⎜⎜⎝
⎛=
⎟⎟⎠
⎞⎜⎜⎝
⎛=
π
πqueforma talde
além disso quando lxt ±=±= π
Assim teremos a seguinte equação:
∑∞
=⎥⎦
⎤⎢⎣
⎡⎟⎠
⎞⎜⎝
⎛+⎟⎠
⎞⎜⎝
⎛+=1
0 sencos2
)(k
kk lxkb
lxkaaxf ππ (2)
com:
( )
( ) Κ
Κ
,2,1sen)(1
,2,1cos)(1
)(10
==
==
=
∫
∫
∫
−
−
−
kdtktxfb
kdtktxfa
dttfa
k
k
π
π
π
π
π
π
π
π
π
2.1 Transformada de Fourier
É comum o estudo de sinais que são de natureza não-periódica, usando as técnicas de Fourier. Um dos métodos mais conhecidos para esta aplicação é a chamada transformada de Fourier (FT). A transformada de Fourier )(F ω de um sinal contínuo no tempo )(tf é dada pela equação (3)
∫∞
∞−
−= )()( dtetfF tjωω (3)
onde � tj� t�f e e� j�� sencos2 +== − .
)(F ω constitui-se numa representação de )(tf no domínio da freqüência. Ela é obtida através da soma de um número infinito de exponenciais complexas de freqüências diferentes. Ou seja, a transformada trabalha em princípio transladando a função no domínio do tempo para uma função no domínio em freqüência. O sinal pode então ser analisado pelo conteúdo da freqüência, já que os coeficientes de Fourier da função transformada representam a contribuição de cada função seno e co-seno a cada freqüência. Resolvendo a equação (3), tem-se que quanto maior for o resultado da integração, maior será a amplitude do componente em freqüência correspondente. A freqüência dominante contida no sinal corresponde àquela que produz o máximo valor da integral. Caso o valor da integral seja nulo para uma determinada freqüência, então o sinal em análise não contém tal freqüência no seu espectro. Percebe-se que o método não define a localização das freqüências no tempo. Esta característica não tem grande importância quando o sinal é do tipo estacionário (Neto [4]). Uma transformada inversa de Fourier faria justamente o esperado, ou seja, transforma a informação no domínio em freqüência para o domínio temporal.
2.2 Transformada de Fourier discreta
Existem sinais que não representam sinais contínuos no tempo, mas sim amostras do sinal (esse sinal é limitado no tempo, ou seja, é um sinal finito). Essas amostras podem ser definidas como sinais discretos ou sinais amostrados. Para se determinar a transformada de Fourier )(F ω de sinais amostrados e limitados no tempo, utiliza-se a transformada de Fourier discreta (DFT).
3 Análise Wavelet
As wavelets foram desenvolvidas independentemente, por exemplo, nos campos de: Matemática, Física Quântica, Engenharia Elétrica e Geologia Sísmica. Para maior facilidade do entendimento das wavelets, vamos fazer uso de um método denominado codificação por sub-banda. Um modo de codificar um sinal discreto por sub-banda é através de filtragem digital. Filtrar um sinal nada mais é que eliminar determinadas freqüências, ou bandas de freqüências, do mesmo. Em outra linguagem, isto implica em realizar uma convolução do sinal com a resposta a impulso do filtro (Graps [3]).
3.1 Determinação dos coeficientes wavelets
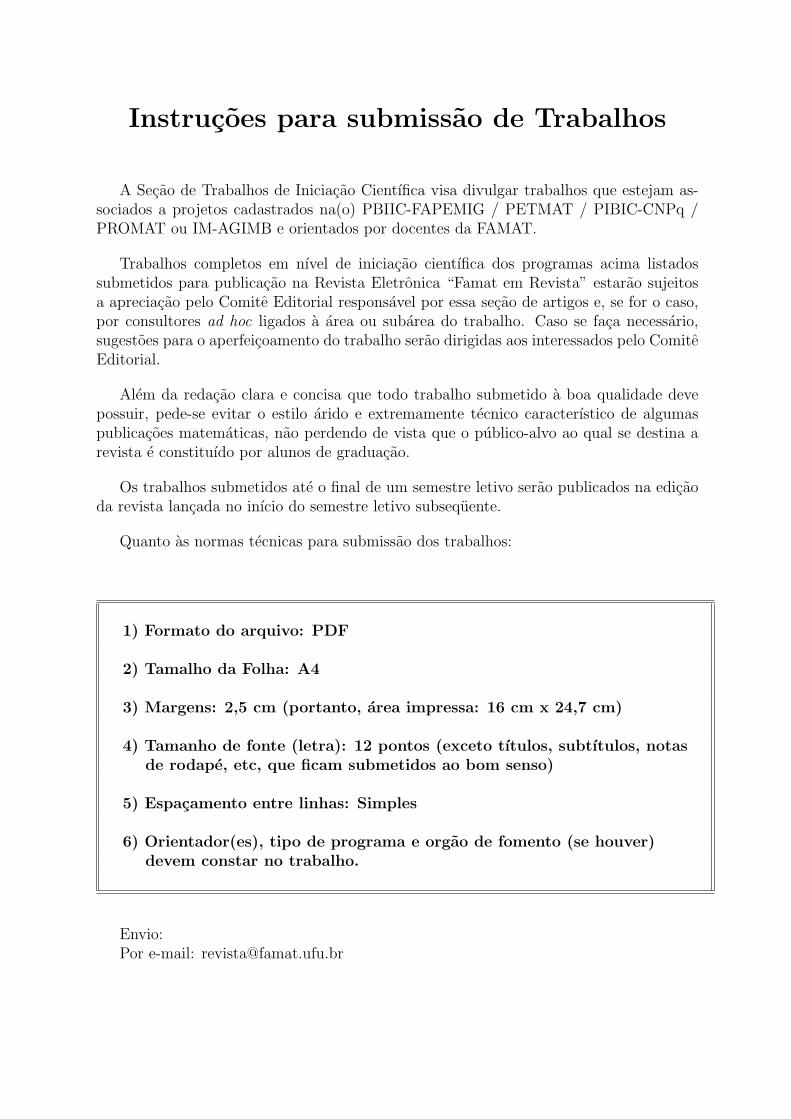
Um sinal discreto, originalmente descrito no domínio do tempo, pode ser representado no domínio wavelet através dos coeficientes wavelets. Esses coeficientes podem ser determinados através da decomposição do sinal estudado em diferentes níveis de resolução no tempo e em freqüência. Para se decompor o sinal será utilizado o processo da codificação por sub-banda. Mostrado na Figura 1.
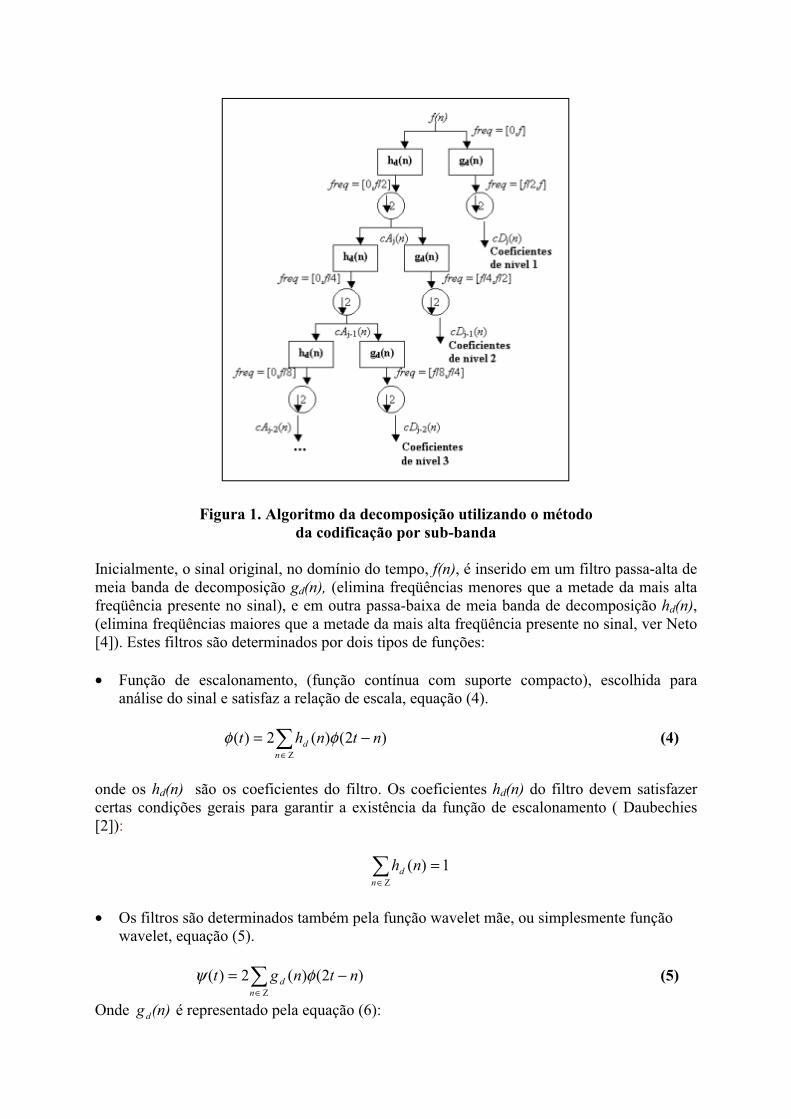
Figura 1. Algoritmo da decomposição utilizando o método da codificação por sub-banda
Inicialmente, o sinal original, no domínio do tempo, f(n), é inserido em um filtro passa-alta de meia banda de decomposição gd(n), (elimina freqüências menores que a metade da mais alta freqüência presente no sinal), e em outra passa-baixa de meia banda de decomposição hd(n),(elimina freqüências maiores que a metade da mais alta freqüência presente no sinal, ver Neto [4]). Estes filtros são determinados por dois tipos de funções:
• Função de escalonamento, (função contínua com suporte compacto), escolhida para análise do sinal e satisfaz a relação de escala, equação (4).
∑∈
−= Z
)2()(2)(n
d ntnht φφ (4)
onde os hd(n) são os coeficientes do filtro. Os coeficientes hd(n) do filtro devem satisfazer certas condições gerais para garantir a existência da função de escalonamento ( Daubechies [2]):
∑∈
= Z
1)(n
d nh
• Os filtros são determinados também pela função wavelet mãe, ou simplesmente função wavelet, equação (5).
∑∈
−= Z
)2()(2)(n
d ntngt φψ (5)
Onde (n)gd é representado pela equação (6):

n)(n)(h)((n)g dn
d −−= 11 (6)
O cálculo da decomposição wavelet do sinal consiste em eliminar metade do número de amostras dos sinais resultantes nas saídas dos filtros passa-baixa e passa-alta (Subamostragem
de dois, a qual está caracterizada pelo símbolo na Figura 1. Os elementos resultantes dessa subamostragem de dois podem ser chamados de coeficientes da aproximação de nível 1, cAj(n), (resultante da saída do filtro passa-baixa), e coeficientes wavelet de nível 1, cDj(n),(resultante da saída do filtro passa-alta, e que representam os detalhes do sinal original). Tais coeficientes são definidos como mostrados nas equações (7) e (8).
∑ +−=s
dj kshsfncA )2()()( (7)
∑ +−=s
dj ksgsfncD )2()()( (8)
onde hd e gd, correspondem, aos filtros passa-baixa e passa-alta, de meia banda, de decomposição do sinal f(s). O índice j representa o número de níveis de decomposição. Os coeficientes do nível 2, serão denominados de cAj-�(n), (coeficientes de aproximação) e cDj-
�(n), (coeficientes wavelets). E são expressos pelas equações (9) e (10), respectivamente.
∑ +−=−s
djj kshscAncA )2()()(1 (9)
∑ +−=−s
djj ksgscAncD )2()()(1 (10)
Observa-se que os coeficientes do nível 2, são obtidos a partir dos coeficientes de aproximação de nível 1. Analogamente, os coeficientes do nível 3, cAj-2(n) e cDj-2(n), serão obtidos a partir dos coeficientes de aproximação do nível 2.
4 Fourier & Wavelet
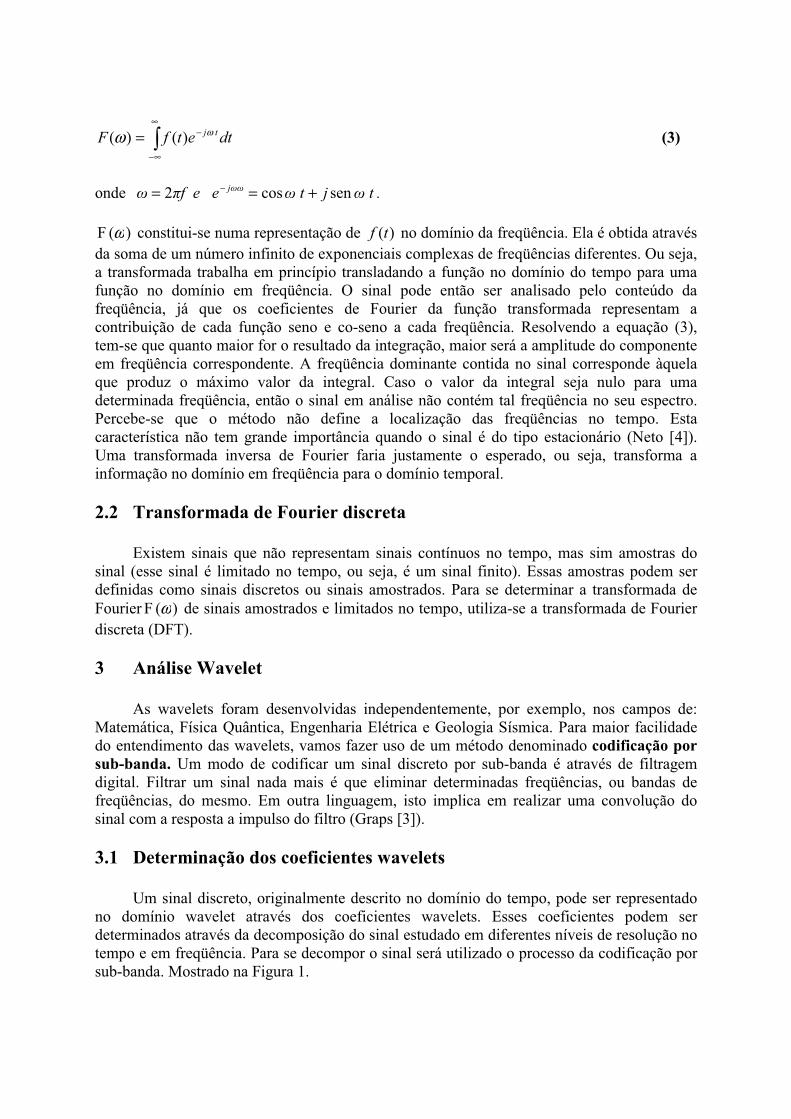
Neste tópico apresentaremos exemplos da Análise de Fourier e Wavelet. As ferramentas utilizadas foram: Um programa de análise e síntese em C++ bem como o software MATLAB(versão 6.0.0.88 Release �2) para análise dos valores obtidos e plotagem dos gráficos. Dessa forma apresentaremos dois sinais, ambos não-estacionários, de tensão em relação ao tempo, com a finalidade de demonstrar as vantagens das wavelets e limitações da transformada de Fourier. Observe que no sinal representado pela Figura 2 a máxima tensão é mantida constante ao longo do tempo, porém a freqüência varia em diferentes intervalos de tempo. Já o sinal representado pela Figura 3 mostra uma onda bastante oscilatória.
Figura 2-Sinal apresentando variação de freqüências Figura 3-Sinal apresentando variação de freqüências diferentes intervalos de tempo durante todo o tempo
Fazendo uso da Análise Wavelet, podem ser detectadas as transições do sinal da Figura 2, (mostrado na Figura 4), e visualizar a localização de mudanças de freqüência durante todo o tempo do sinal da Figura 3, (mostrado na Figura 5).Isto é feito coletando os coeficientes wavelets. Nos testes realizados os coeficientes wavelets são do 1° nível. Também podem ser observados, principalmente na Figura 4, os efeitos dos filtros passa-baixa e passa-alta quando a onda de freqüência mais alta é removida do sinal, sendo transferida para a componente wavelet.
Figura 4-Detalhes do sinal da Figura 2, com os Figura 5-Detalhes do sinal da Figura 3, com os coeficientes wavelets do nível 1 coeficientes wavelets do nível 1
Agora se analisarmos as Figuras 6 e 7, visualizaremos os gráficos após ser aplicado a transformada de Fourier nos sinais. Perceba que as freqüências mais significativas assumem valores de: 10 20 e 40 Hz, em ambos os gráficos, embora os sinais no domínio do tempo não sejam nem próximos um do outro. Esta análise mostrou dois sinais no tempo inteiramente diferentes, porém apresentando espectros em freqüência semelhantes. Do que é mostrado nas Figuras 6 e 7 pode ser observado que, toda a informação a respeito do tempo foi perdida.
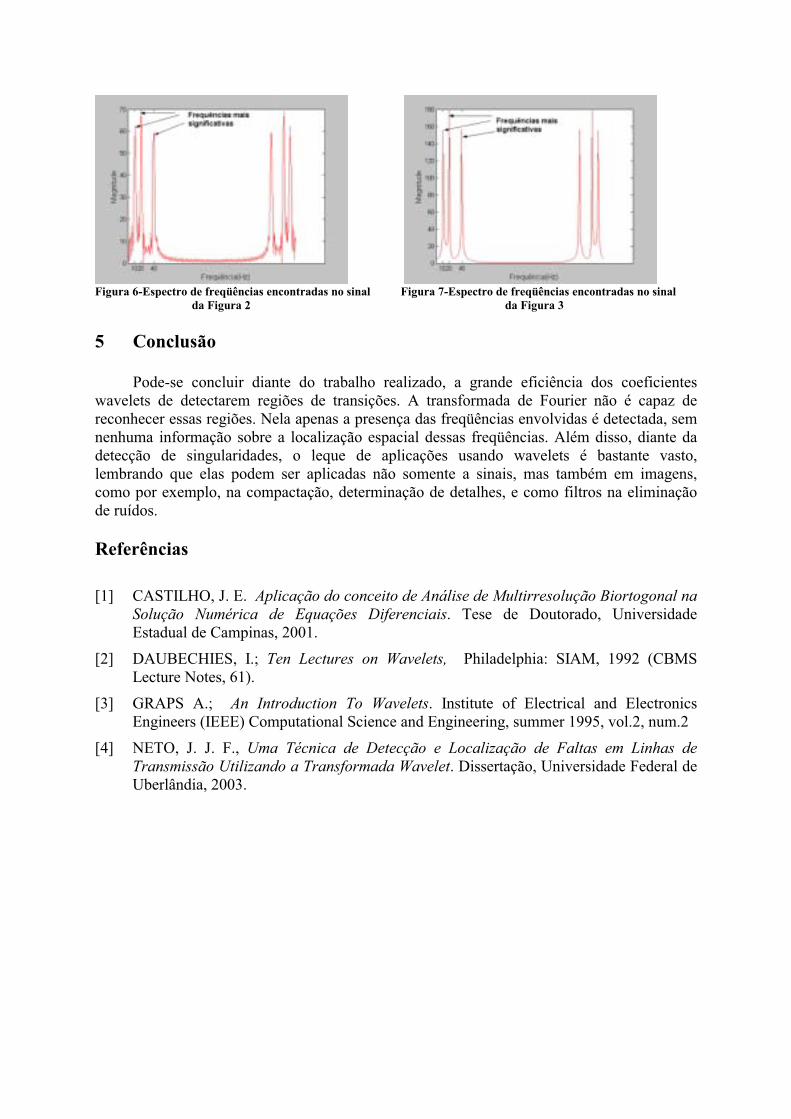
Figura 6-Espectro de freqüências encontradas no sinal Figura 7-Espectro de freqüências encontradas no sinal da Figura 2 da Figura 3
5 Conclusão
Pode-se concluir diante do trabalho realizado, a grande eficiência dos coeficientes wavelets de detectarem regiões de transições. A transformada de Fourier não é capaz de reconhecer essas regiões. Nela apenas a presença das freqüências envolvidas é detectada, sem nenhuma informação sobre a localização espacial dessas freqüências. Além disso, diante da detecção de singularidades, o leque de aplicações usando wavelets é bastante vasto, lembrando que elas podem ser aplicadas não somente a sinais, mas também em imagens, como por exemplo, na compactação, determinação de detalhes, e como filtros na eliminação de ruídos.
Referências
[1] CASTILHO, J. E. Aplicação do conceito de Análise de Multirresolução Biortogonal na Solução Numérica de Equações Diferenciais. Tese de Doutorado, Universidade Estadual de Campinas, 2001.
[2] DAUBECHIES, I.; Ten Lectures on Wavelets, Philadelphia: SIAM, 1992 (CBMS Lecture Notes, 61).
[3] GRAPS A.; An Introduction To Wavelets. Institute of Electrical and Electronics Engineers (IEEE) Computational Science and Engineering, summer 1995, vol.2, num.2
[4] NETO, J. J. F., Uma Técnica de Detecção e Localização de Faltas em Linhas de Transmissão Utilizando a Transformada Wavelet. Dissertação, Universidade Federal de Uberlândia, 2003.

O Modelo van Hiele de Ensino deGeometria aplicado a 5a e 6a series do
Ensino Fundamental
Gisliane A. Pereira∗ Sandreane P. Silva† Walter dos Santos Motta Jr.‡
Faculdade de Matematica - Famat
Universidade Federal de Uberlandia - Ufu - MG
Setembro de 2005
Resumo
Este trabalho teve como fundamento o modelo de desenvolvimento do pensa-mento geometrico de van Hiele. Foram investigadas algumas atividades geometricasdesenvolvidas junto a alunos do Ensino Fundamental, os quais constituiram os gru-pos experimental e de controle. Os mesmos foram submetidos ao pre-teste, inter-vencao pedagogica e pos-teste. Apos analises estatısticas dos resultados obtidos,pudemos observar a eficacia da intervencao pedagogica, concebida segundo o mod-elo de van Hiele. Tais fatos apontam para a efetiva possibilidade em se transmitir deforma satisfatoria conceitos geometricos, para tanto e fundamental que a propostade trabalho pedagogico seja condizente ao nıvel cognitivo dos educandos.
Introducao
A Geometria e parte intrınseca do universo fısico e tambem parte relevante daMatematica. Ela esta no currıculo das escolas de todo o mundo. A analise do en-sino/aprendizagem da Geometria insere-se num quadro global que por vezes transcende oproprio campo da Matematica e tem atraıdo inumeros estudiosos com focos de abordagemapresentando diferentes angulos de estudo.
Dificilmente um professor de ensino fundamental ou medio deixa de defrontar-secom as dificuldades do ensino da Matematica, e neste ambito, verifica-se que grande partedessas dificuldades deve-se ao ensino da Geometria.
Na verdade, o ensino da Matematica vem enfrentando problemas ja a algumasdecadas. Muitos professores definem seu trabalho escolar, tomando por base o conteudodo livro didatico, sem levar em conta ate mesmo as diretrizes presentes nos PCNs. Sendoassim, o livro didatico adotado, passa entao a constituir-se no proprio currıculo e, as
∗[email protected] Orientanda do Programa de Educacao Tutorial da Faculdade de Matematica(PETMAT) de Fev/04 a Abr/05.
†[email protected] Orientanda do Programa de Educacao Tutorial da Faculdade deMatematica (PETMAT) de Fev/04 a Abr/05.
‡[email protected] Professor orientador.
aulas de Matematica sao efetivadas, por exemplo, a partir de ordens dadas pelo professor:“abram o livro em tal pagina e resolvam tais exercıcios”. No caso da Geometria, porexemplo, muitos professores da pre-escola ensinam conceitos de figuras geometricas como oquadrado, o triangulo e o cırculo, da mesma forma mecanica que ensinam leitura e escrita.Tais professores transformam seu papel de educador em roteirista de um simples guia deatividades prontas, mantendo seus alunos dentro da sua visao desarticulada do mundo.Todavia, para a efetividade de uma educacao de qualidade, este quadro, inevitavelmente,deve ser mudado, pois se de fato pretende-se que o ensino da Matematica correspondade modo satisfatorio as expectativas e necessidades da sociedade, devem-se estabeleceruma integracao entre uma solida formacao, a vivencia escolar, as aplicacoes do sabermatematico e a integracao do mesmo com o dia-a-dia. Para que isso ocorra e necessarioo uso de diferentes linhas metodologicas de trabalho que evidenciem a importancia daconstrucao de conceitos matematicos pelos alunos que se tornam sujeitos ativos da propriaaprendizagem.
Na tentativa de enfrentar problemas de ensino/aprendizagem de Geometria comoos citados anteriormente, faz-se necessario desenvolver e testar novas metodologias. Nestesentido, este presente trabalho objetiva apresentar uma visao geral sobre uma metodolo-gia especıfica elaborada pelo casal de pesquisadores holandeses van Hiele. A teoria de-senvolvida pelos educadores van Hiele possui uma forte base estruturalista e apoia-se nascontribuicoes de Piaget sobre o desenvolvimento cognitivo do ser humano, sem deixar delado a didatica da Matematica.
O presente trabalho divide-se em quatro partes. Na primeira parte, desenvolvemosuma abordagem descritiva do modelo de ensino de geometria concebido pelos van Hiele.Descrevemos e analisamos suas principais caracterısticas. Em sequencia, na segunda parte,apresentamos genericamente a metodologia utilizada, descrevemos os procedimentos emateriais utilizados durante as sessoes de intervencao pedagogica no desenvolvimento doexemplo-modelo desenvolvido por nos segundo a metodologia do modelo van Hiele. Aterceira parte destina-se a apresentacao dos resultados, a descricao de testes estatısticos ea analise dos dados obtidos. Na quarta parte, foram apresentadas as consideracoes finaise as conclusoes obtidas por nos quando do desenvolvimento deste exemplo-modelo.
1 Uma visao geral do modelo de van Hiele
1.1 A teoria de van Hiele
O modelo de desenvolvimento do pensamento geometrico desenvolvido pelo casalvan Hiele originou-se dos trabalhos de doutorado dos mesmos. Este casal holandes, Dinavan Hiele e Pierre Marie van Hiele, em meados da decada de 50, desenvolveram seusestudos na Universidade de Utrecht, sob a orientacao de Hans Freudenthal, idealizandouma nova forma de enfocar o desenvolvimento do raciocınio em Geometria. Tal teoriafoi produzida no meio de mudancas no campo da Educacao Matematica em que a comu-nidade internacional estava a discutir novos metodos de ensino e novos topicos curriculares(Matos, 1985).
O casal desenvolveu o seu trabalho/modelo no contexto de um currıculo que en-carava a Geometria como instrumento para exercitar as capacidades logicas da mente.Por outro lado, o seu ponto de vista pedagogico incorpora uma perspectiva muito con-
temporanea, o que se torna visıvel na preocupacao de Pierre pelo insight e na enfase queDina coloca na manipulacao das figuras, no uso do geoplano e nos desenhos feitos pelosalunos com regua e compasso (Matos, 1992).
O insight e, para Pierre van Hiele, um mecanismo chave que permite aos es-tudantes visualizar diferentes campos, o qual lhes permite construir conceitos mais com-plexos. Ele usa a ideia gestaltista de que o insight deve ser compreendido como o resultadoda percepcao de uma estrutura.
O desenvolvimento do insight deve focar-se no desenvolvimento da capacidadedos estudantes verem estruturas como parte de estruturas mais finas, ou como parte deestruturas mais inclusivas.
Gestalt e o termo intraduzıvel do alemao, utilizado para abarcar a teoria dapercepcao visual baseada na psicologia da forma.
Aproximadamente a partir de 1870 alguns pesquisadores alemaes comecaram aestudar os fenomenos perceptuais humanos, especialmente a visao. Seus estudos procu-ravam entender como se davam os fenomenos perceptuais, tendo se utilizado em grandeparte deles, de obras de arte. Queriam entender o que ocorria para que determinado re-curso pictorico resultasse em tal e tal efeito. A estes estudos convencionou-se denominarde Psicologia da Gestalt ou Psicologia da Boa Forma. Seus expoentes mais conhecidosforam Kurt Koffka, Wolfgang Kohler e Max Werteimer. Criaram as Leis da Gestaltrelativas a percepcao humana, que ate hoje se mantem validas.
Um exemplo da Psicologia da Gestalt e a observacao da figura abaixo:
Observando a figura acima da direita para esquerda ve-se um coelho, e da esquerdapara a direita um pato.
Destaca-se ainda a existencia de uma forte base estruturalista no modelo ideal-izado pelo casal, em que a influencia da Psicologia da Gestalt fornece uma base paraanalise da percepcao e interpretacao cognitiva destas estruturas. Para van Hiele, assimcomo na Psicologia da Gestalt, nao ha objetos isolados nem conceitos por si, mas todasas entidades existem num contexto (Matos, 1992).
Pierre van Hiele nao mostra uma definicao de estruturas, mas explica algumas dassuas propriedades e da alguns exemplos propondo que ha varias especies de estruturas:
a) as estruturas do mundo onde vivemos – Mundo 1;
b) as estruturas na nossa mente – Mundo 2;
c) as estruturas no mundo do conhecimento humano comum – Mundo 3.
Ele insiste que, em cognicao, e muito importante que a estrutura possa ser vista comouma totalidade porque a estrutura e mais do que a soma dos seus elementos. Ha quatropropriedades das estruturas que Pierre van Hiele recolheu da Psicologia da Gestalt:
1) estruturas podem ser estendidas;
2) cada estrutura pode ser vista como uma parte de uma estrutura mais fina;
3) uma estrutura pode ser vista como uma parte de uma estrutura mais inclusiva;
4) uma estrutura dada pode ser isomorfa a outra estrutura.
As estruturas de van Hiele sao todas baseadas nas estruturas do Mundo 1 quepodem ser percepcionadas como um gestalt. Com base nas estruturas do Mundo 1, saoconstituıdas as estruturas mentais existentes no Mundo 2, a qual afirma que o desen-volvimento mental progride a medida em que as estruturas dos alunos se transformamgradualmente ou se substitui uma estrutura por outra. Van Hiele utiliza este raciocınioquando descreve seu modelo segundo nıveis de desenvolvimento da aprendizagem.
Alem disso, a influencia dos trabalhos de Piaget quanto ao desenvolvimento dasestruturas de inteligencia em estagios muito contribuıram no embasamento teorico domodelo de van Hiele.
Vejamos a seguir a classificacao de Piaget do desenvolvimento das estruturas deinteligencia em estagios:
1 - Estagio Sensorio Motor: Compreende desde o nascimento ate os 2 anos deidade. Acoes baseadas em percepcoes sensoriais e esquemas motores concluıdos a partirde reflexos inatos, como o da succao, por exemplo. Os esquemas vao sendo modificadoscom experiencia, tornando-se assim mais complexos, ate dar origem a capacidade derepresentar eventos futuros.
2 - Estagio Pre-operatorio: Compreende dos 2 aos 7 anos. Uso da linguagemoral, enriquecendo as relacoes interindividuais. Inteligencia capaz de acoes interiorizadas,isto e, acoes mentais, diferentes do pensamento adulto, pois nesta fase uma caracterısticamarcante e o egocentrismo.
3 - Estagio Operatorio concreto: Compreende dos 7 aos 11 ou 12 anos. Pre-dominancia do pensamento logico e objetivo. O egocentrismo cede lugar a um pensa-mento mais compatıvel com a realidade. O real e o fantastico nao se misturam mais napercepcao da crianca. Mais raciocınio, menos percepcao. A crianca ja realiza operacoeslogico-matematico concretas.
4 - Estagio Operatorio Formal: A partir dos 12 anos. Raciocınio mais formal eabstrato. O adolescente pensa e trabalha com a realidade possıvel utilizando hipoteses.
A partir daı, pode-se perceber que Piaget fornece elementos preciosos que poderaoauxiliar educadores na elaboracao de problemas de ensino de Geometria, como tambemsugere metodologias adequadas as atividades geometricas das series iniciais.
1.2 Descricao do modelo
Van Hiele propoe que “a aprendizagem e um processo recursivo que progride recursi-vamente atraves de nıveis de pensamento descontınuos – saltos na curva de aprendizagem”(van Hiele e van Hiele – Geldof, 1958, p. 75), que pode ser melhorado por um proced-imento didatico adequado. Ele pressupoe que ha diversos nıveis de aprendizagem daGeometria e que a passagem de um nıvel para o proximo deve ocorrer atraves de umasequencia de fases de ensino.
O modelo de van Hiele de desenvolvimento do pensamento geometrico pode serusado para orientar a formacao assim como para avaliar as habilidades dos alunos.
Segue-se abaixo uma caracterizacao dos nıveis de van Hiele bem como suas pro-priedades:
Nıvel 0 : Visualizacao: Neste nıvel os alunos veem o espaco apenas como algoque existe em torno deles. Reconhecem as figuras geometricas apenas pela sua forma(aparencia fısica), nao conseguindo identificar suas partes ou propriedades. Sao capazesde reproduzir figuras dadas e aprender um vocabulario geometrico basico.
Nıvel 1: Analise: E onde comeca a analise dos conceitos geometricos. Nesta fase oaluno comeca a discernir as caracterısticas e propriedades das figuras, mas nao consegueainda estabelecer relacoes entre essas propriedades e nem entende as definicoes ou veinter-relacoes entre figuras.
Nıvel 2: Deducao Informal: Aqui o aluno comeca a estabelecer inter-relacoesde propriedades dentro de figuras e entre figuras, deduzindo propriedades e reconhecendoclasses de figuras. Agora, a definicao ja tem significado, todavia o aluno ainda nao entendeo significado da deducao como um todo ou o papel dos axiomas nas provas formais.
Nıvel 3: Deducao: Neste estagio o aluno analisa e compreende o processo dedutivoe as demonstracoes com o processo axiomatico associado, agora, ele ja consegue construirdemonstracoes e desenvolve-las de mais de uma maneira, tambem faz distincoes entreuma afirmacao e sua recıproca.
Nıvel 4: Rigor: Agora o aluno ja e capaz de trabalhar em diferentes sistemasaxiomaticos; analisa e compreende geometrias nao euclidianas. A geometria e entendidasob um ponto de vista abstrato.
Caracterısticas Gerais do Modelo
1 - Sequencial: O aluno deve necessariamente passar por todos os nıveis, uma vezque nao e possıvel atingir um nıvel posterior sem dominar os anteriores.
2 - Avanco: A progressao ou nao de um nıvel para outro depende mais dos metodosde ensino e do conteudo do que da idade ou maturacao biologica. Nenhum metodo deensino permite ao aluno pular um nıvel, alguns acentuam o progresso, mas ha alguns queretardam.
3 - Intrınseco e Extrınseco: Os objetivos implıcitos num nıvel tornam-se explıcitosno nıvel seguinte.
4 - Linguıstica: Cada nıvel tem sua propria linguagem e um conjunto de relacoesinterligando-os. Assim, uma relacao que e “correta” em um certo nıvel, pode se modificarem outro nıvel.
5 - Combinacao inadequada: O professor e o aluno precisam estar raciocinando emum mesmo nıvel, caso contrario, o aprendizado nao ocorre. Ou seja, professor, materialdidatico, conteudo e vocabulario devem estar compatıveis com o nıvel do aluno.
Van Hiele propoe que “a transicao de um nıvel para o seguinte nao e um processonatural, ela acontece sob a influencia de um programa de ensino-aprendizagem” (vanHiele, 1986, p. 50). Este programa de ensino-aprendizagem inclui uma sequencia didaticade cinco fases de aprendizado. Sao elas:
Fase 1: Interrogacao informadaProfessor e aluno conversam e desenvolvem atividades sobre os objetos do es-
tudo do respectivo nıvel. Aqui se introduz o vocabulario especıfico do nıvel, sao feitasobservacoes e varias perguntas. E uma fase preparatoria para estudos posteriores.
Fase 2: Orientacao dirigidaAtividades sao desenvolvidas para explorar as caracterısticas de um nıvel e isto
deve ser feito atraves do uso de material selecionado e preparado pelo professor.Fase 3: ExplicacaoAgora o papel do professor e de somente orientar o aluno no uso de uma lin-
guagem precisa e adequada. Baseando-se em experiencias anteriores os alunos revelamseus pensamentos e modificam seus pontos de vista sobre as estruturas trabalhadas eobservadas.
Fase 4: Orientacao livreDiante de tarefas mais complexas, os alunos procuram solucoes proprias que po-
dem ser concluıdas de maneiras diferentes. Assim, eles ganham experiencia ao descobrirsua propria maneira de resolver tarefas.
Fase 5: IntegracaoNesta fase o aluno rele e resume o que foi aprendido, com o objetivo de formar
uma visao geral da nova rede de objetos e relacoes, assim, o aluno alcanca um novo nıvelde pensamento.
1.3 Limitacoes do modelo
Apesar da teoria de van Hiele ser eficiente no processo de ensino-aprendizagem elapossui algumas limitacoes nas areas do desenvolvimento cognitivo, dos objetos da apren-dizagem, da geometria, da importancia das diferencas individuais e na autonomia dosestudantes no processo de aprendizagem.
A teoria de van Hiele nao possui uma perspectiva psicologica autonoma. Comoja foi dito, ela se apoia na teoria da Gestalt, deixando de fora algumas areas tais comoa imagetica, isso ocorre, por exemplo, na ideia de que “no nıvel 3 ja nao e possıvel usarestruturas visuais para clarificar ideias” (van Hiele, 1986, p. 141) o que nega o papel queas imagens mentais desempenham no pensamento de tipo superior.
Do ponto de vista pedagogico, a teoria assume implicitamente que o ensino e aaprendizagem da Geometria deve seguir um modelo que privilegia a deducao. A teoria naoabrange areas como medicoes, trigonometria, ou geometria analıtica, que sao importantesnas abordagens curriculares contemporaneas.
Um outro problema verificado e que a teoria nao produz explicacoes satisfatoriasna area das diferencas individuais. Nela os alunos sao sempre considerados como um grupohomogeneo e nao existem estudantes individuais, com estilos cognitivos diferenciados edistintas preferencias de aprendizagem.
A teoria nao aceita que os alunos possam desenvolver um conhecimento matematicoautonomo, e uma das principais contribuicoes para que isso aconteca e o papel sugeridopelo professor. “Durante toda a discussao das fases de aprendizagem o professor e consid-erado como a fonte de conhecimento na sala de aula” (Matos, 1992). Sendo assim, nao seespera que os alunos contribuam com o seu proprio conhecimento ou experiencias, nem seespera que eles desenvolvam producoes matematicas alternativas. Ou seja, a teoria naopermite uma construcao do conhecimento, apenas desenvolve o raciocınio geometrico.
Apesar de suas limitacoes a teoria de van Hiele conseguiu sucesso na descricao dasituacao na sala de aula e no desenvolvimento curricular. Mas ha dois tipos de mudancasnecessarias: mudancas na teoria cognitiva implıcita e mudancas na caracterizacao dosnıveis.
“Uma primeira mudanca necessaria consiste no abandono do pressuposto sobreas “estruturas espontaneas do material”. Esta ideia coloca dificuldades tremendas nacompreensao quer da Matematica sob um ponto de vista cultural e social, quer do pro-cesso de producao das ideias matematicas pelos alunos. Uma segunda mudanca, que euma consequencia natural da primeira e a aceitacao de que o processo atraves do qualmodelamos o nosso conhecimento matematico e construtivo. Uma terceira mudanca e oabandono da ideia das descontinuidades na passagem de uns nıveis para os outros quedeve ser entendida de uma forma contınua. A quarta tem a ver com a caracterizacaodos nıveis 3 e 4, exigindo que a compreensao das definicoes passe para o nıvel 4” (Matos1992).
2 Descricao dos testes e materiais
2.1 Modelagem
Para comprovar a eficiencia do modelo de van Hiele e necessario se fazer um trabalhode intervencao pedagogica, atraves da confeccao de atividades com materiais concretose/ou jogos e/ou problemas que envolvam situacoes do cotidiano do aluno, fundamentadono modelo geometrico de van Hiele e com o apoio da teoria de Piaget.
Ao realizar este trabalho e preciso que o pesquisador estruture dois grupos dealunos. Como ele nao pode escolher aleatoriamente o grupo que recebera a intervencaopedagogica, pois nesse caso tem-se a obtencao de dados nao confiaveis, e fundamental quea escolha destes grupos seja realizada seguindo o modelo 10 (delineamento com grupo decontrole nao-equivalente) de Campbell e Stanley [1]. E importante salientar que existemoutros tipos de modelos para delineamentos, mas o modelo 10 e o que melhor se adaptaa esta situacao devido as suas caracterısticas.
O delineamento com grupo de controle nao - equivalente e um dos mais divulgadosplanos experimentais em pesquisa educacional envolvendo um grupo experimental e umgrupo de controle, ambos submetidos a um pre e pos-teste, mas em que o grupo decontrole e o grupo experimental nao possuem equivalencia amostral pre-experimental.Pelo contrario, os grupos constituem coletivos naturalmente reunidos, tais como classesescolares, tao semelhantes quanto a situacao o permitir, mas, de qualquer forma, nao taosemelhantes que justifiquem a dispensa do pre-teste.
O modelo 10 e um dos modelos utilizados para garantir a validade de um deter-minado delineamento experimental. Tal validade e dividida em duas partes:
1 - Validade interna: Aqui existem 8 “agentes influenciadores” no processo deanalise da validacao dos efeitos de um estımulo experimental num determinado delinea-mento. Estes agentes devem ser considerados/controlados para a eficiencia do processointerpretativo do delineamento experimental, sao eles: historia, maturacao, testagem,instrumentacao, regressao estatıstica, vieses causadores de selecao, mortalidade experi-mental, interacao selecao-maturacao.
2 - Validade externa: Nesta parte existem 4 “fatores influenciadores” no pro-cesso de analise da generalizacao dos efeitos observados num dado delineamento a outrassituacoes modelo, sao eles: efeito de interacao entre testagem e a variavel (evento) ex-perimental, efeito de interacao de condicoes experimentais, interferencia de tratamentosmultiplos, interacao entre vieses decorrentes da selecao e a variavel experimental.
No delineamento 10 os grupos sao coletivos compostos de sujeitos reunidos deforma natural (sem qualquer tipo de similaridade ou equivalencia amostral) que seraoreestruturados em dois grupos, segundo opcao do experimentador, de forma tal que sebusque similaridade (observada atraves dos escores no pre-teste) dos mesmos quando dorecrutamento.
Delineamento 10
O1 X O2 grupo experimental—————O1 O2 grupo de controle
onde:O1: pre-testeX : intervencao pedagogicaO2 : pos-teste
Segundo este modelo de delineamento, e possıvel estruturar um grupo experi-mental e um grupo de controle. Ambos os grupos para serem analisados, em relacao aeficiencia ou nao do modelo de van Hiele, serao submetidos ao pre-teste e ao pos-teste eo grupo experimental, a um trabalho de intervencao de ensino.
Os dados desta pesquisa foram colhidos no perıodo de 25/08/2004 a 01/10/2004.
2.2 Sujeitos
Visando utilizar o metodo de van Hiele e verificar a sua influencia no ensino deGeometria, foi escolhida a Escola Estadual Maria Conceicao de Souza Barbosa, situadaem Uberlandia.
Os sujeitos envolvidos sao 55 estudantes de ambos os sexos com em media 11 anosde idade, cursando a 5a serie do 1◦ grau, e 52 criancas de ambos os sexos entre 10 e 12anos de idade, cursando a 6◦ serie do 1◦ grau desta escola.
Apos a aplicacao do pre-teste a esses alunos, verificou-se que os 28 alunos da 5a/1e os 26 alunos da 6◦/1.fariam parte de distintos grupos de controle. Os outros 27 alunosda 5a/2 e os 26 da 6◦/2 formaram grupos experimentais.distintos.
2.3 Procedimentos e material
Para a elaboracao das questoes do pre-teste e do pos-teste, assim como a selecaode conceitos e objetivos a serem trabalhados na intervencao pedagogica foram considera-dos o conteudo de Geometria da proposta curricular para o ensino de Matematica para a5a e 6a series do 1◦ grau (2004) oferecido pela escola e os parametros curriculares nacionaisrelativos a estas series.
2.3.1 Procedimentos para o pre-teste e para o pos-teste
Para o pre-teste foram elaboradas 10 questoes que foram distribuıdas aos alunosem papel sulfite. As instrucoes para a resolucao das questoes foram dadas pelo pesquisadorem voz alta. Tomou-se o cuidado de dar tempo suficiente para os alunos resolverem asquestoes.
O pos-teste foi composto pelas mesmas questoes do pre-teste.
2.3.2 Intervencao Pedagogica
Tendo por embasamento teorico o modelo de van Hiele e o apoio da Psicologia dePiaget, tomando por base o conteudo e os objetivos do ensino de conteudo de Geometriada proposta curricular para o ensino de Matematica para a 5a e 6a series do 1◦ grau (2004),foram elaboradas diversas atividades destinadas as criancas do grupo experimental quecaracterizam as sessoes de intervencao pedagogica, todas realizadas pelo pesquisador.
Foram realizadas 10 sessoes que duraram em media 50 minutos cada, para taisatividades utilizou-se material concreto, problemas que envolviam situacoes do cotidiano eoutros tipos de exercıcios. Todas as sessoes foram desenvolvidas nos dois primeiros nıveis(visualizacao e analise) do modelo de van Hiele usando suas fases sequenciais.
2.4 Material
Os materiais utilizados para a execucao das atividades foram canudinhos, car-tolinas, folhas de jornais, regua, tesoura, papel sulfite, lapis de cor, papel dobra-cor etambem elementos encontrados na sala de aula. Teve-se a preocupacao de se utilizarmateriais que pudessem ser facilmente adquiridos pelos alunos.
2.5 Algumas das atividades desenvolvidas nas sessoes de inter-vencao pedagogica
Atividades aplicadas a 5a serie:
• Assunto: Perımetro de um polıgono
- Seguindo a fase 1 de aprendizado do modelo de van Hiele, comecou-se a aulaquestionando os alunos sobre o que e perımetro.
Apos esta discussao, foi descrita a situacao abaixo, antes de passar para a definicaode perımetro.
Um terreno de 36 m de frente por 23 m de fundo (lateral), sera cercado com um fiode arame. Quantos metros de fio sao necessarios para cercar todo o terreno?
Solucao: Esse terreno tem a forma de um retangulo. Para calcular quantos metros dearame sao necessarios para cerca-lo, fazemos:
36m + 23m + 36m + 23m = 118m
Logo, sao necessarios 118 m de fio para cercar o terreno.Agora podemos definir o que e perımetro.Perımetro de um polıgono e a soma das medidas dos lados desse polıgono.Para calcular o perımetro de qualquer polıgono basta somar as medidas de seus lados,
utilizando sempre a mesma unidade de medida.
- Construa dois triangulos que possuam o mesmo perımetro.
- Desenhe um polıgono que possua 44 cm de perımetro, usando os canudinhoscomo sendo os lados desse polıgono.
- Num retangulo, a medida da base e 10,4 cm. Sabendo-se que a medida de suaaltura e metade da medida do comprimento, qual e o perımetro desse retangulo?
• Assunto: Area de figuras
- Seguindo a fase 1 de aprendizado do modelo de van Hiele, comecou-se a aulaquestionando os alunos sobre o que e area de uma figura. Algumas das respostas dadasforam: area e um espaco; area e um lugar; area e um terreno.
Apos esta discussao partiu-se para a definicao de area:Area de uma figura plana e o numero que expressa a medida da superfıcie dessa figura,
numa certa unidade.
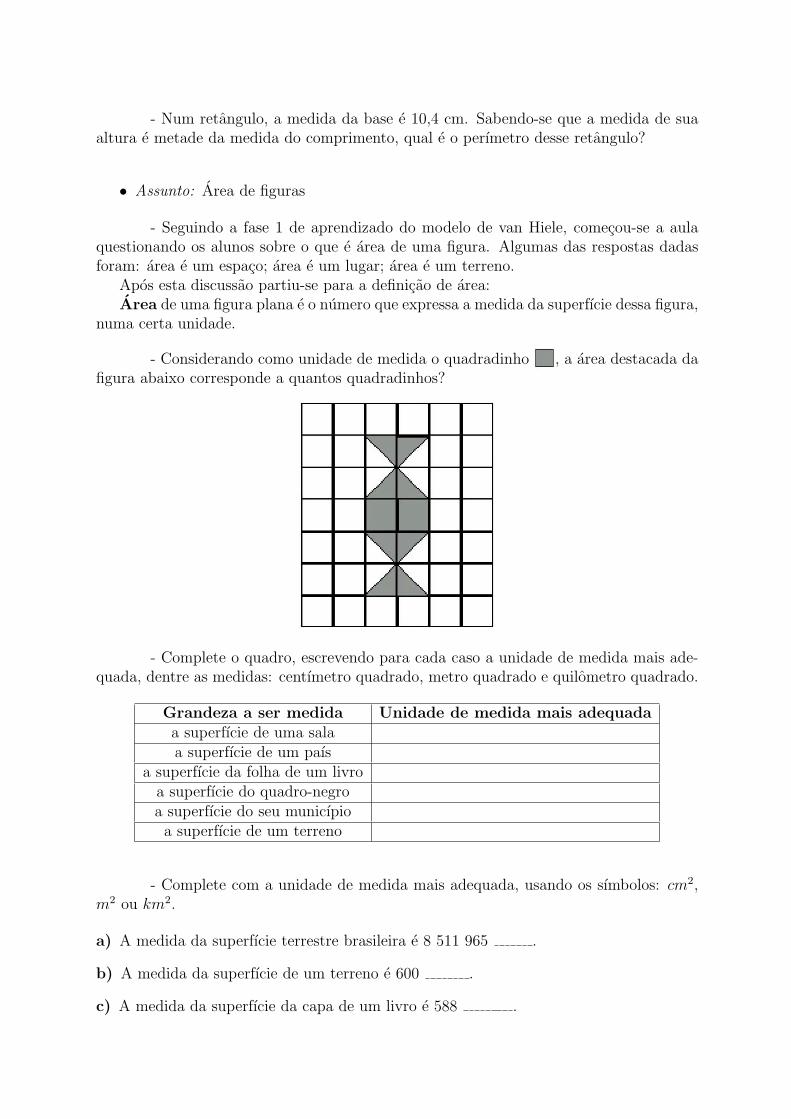
- Considerando como unidade de medida o quadradinho , a area destacada dafigura abaixo corresponde a quantos quadradinhos?
- Complete o quadro, escrevendo para cada caso a unidade de medida mais ade-quada, dentre as medidas: centımetro quadrado, metro quadrado e quilometro quadrado.
Grandeza a ser medida Unidade de medida mais adequadaa superfıcie de uma salaa superfıcie de um paıs
a superfıcie da folha de um livroa superfıcie do quadro-negroa superfıcie do seu municıpioa superfıcie de um terreno
- Complete com a unidade de medida mais adequada, usando os sımbolos: cm2,m2 ou km2.
a) A medida da superfıcie terrestre brasileira e 8 511 965 .
b) A medida da superfıcie de um terreno e 600 .
c) A medida da superfıcie da capa de um livro e 588 .
- Construir o metro quadrado utilizando jornal, revista, cartolina ou outro tipode material. Lembre-se que para representar 1 m2 voce pode construir um quadrado de1 metro de lado.
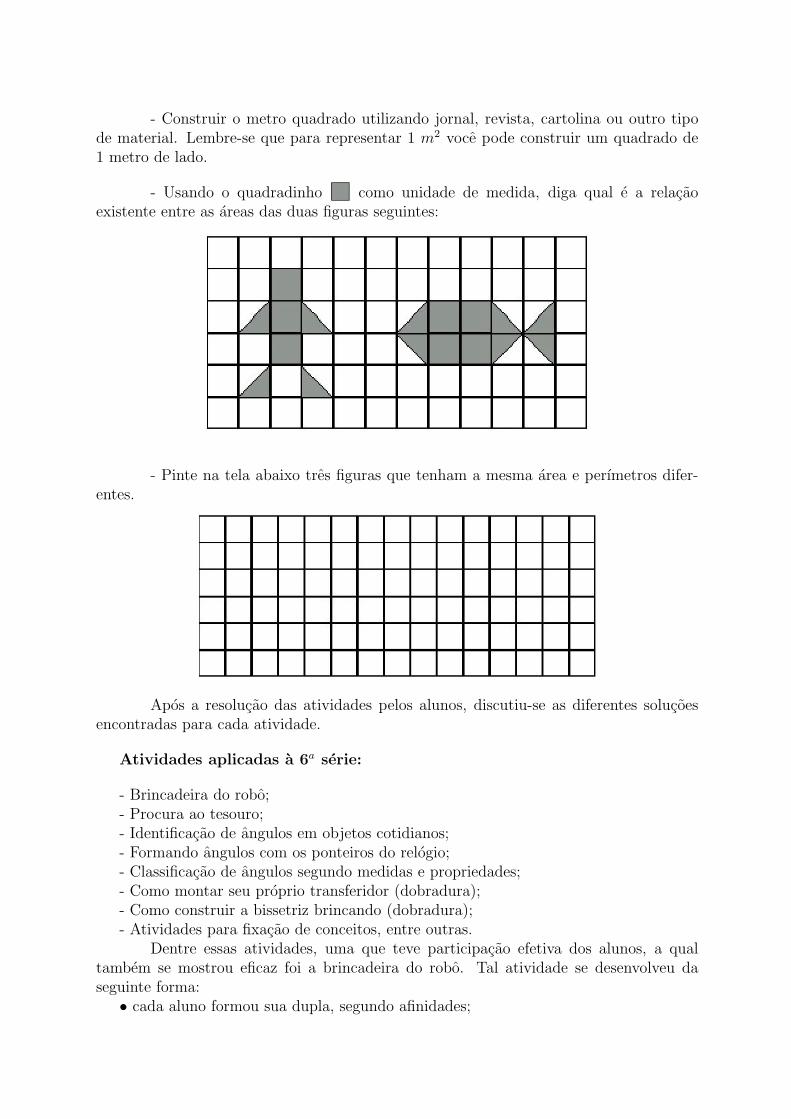
- Usando o quadradinho como unidade de medida, diga qual e a relacaoexistente entre as areas das duas figuras seguintes:
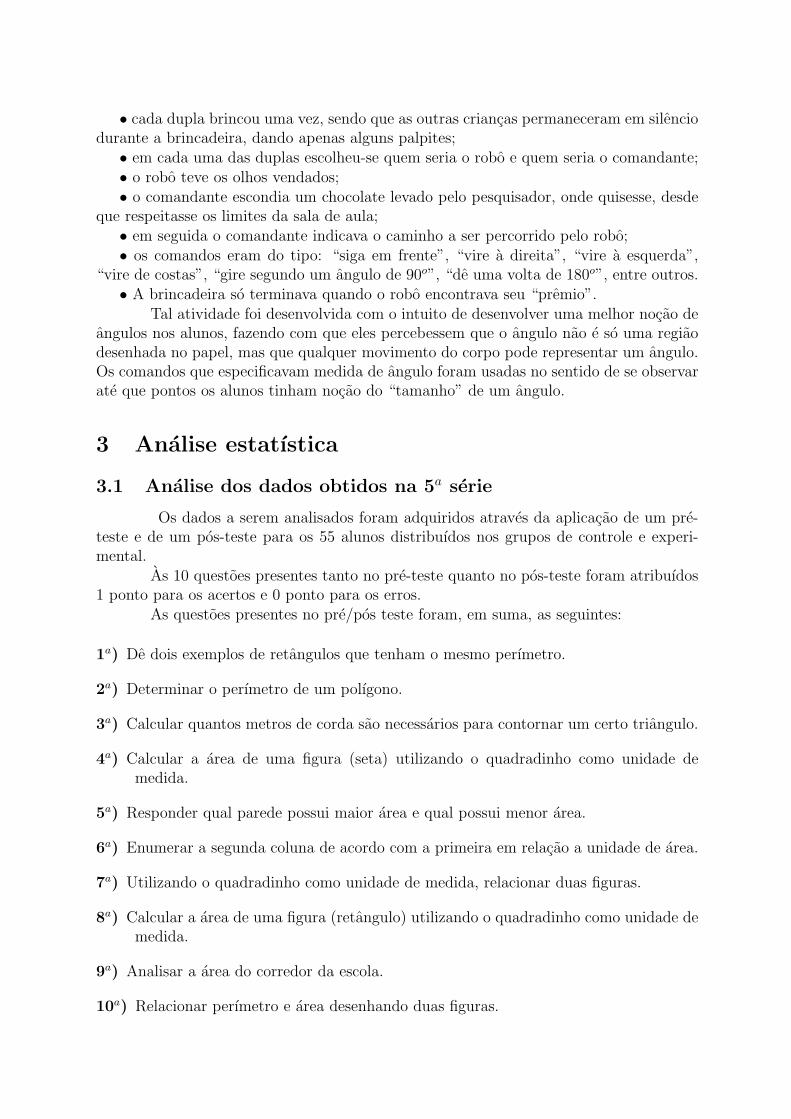
- Pinte na tela abaixo tres figuras que tenham a mesma area e perımetros difer-entes.
Apos a resolucao das atividades pelos alunos, discutiu-se as diferentes solucoesencontradas para cada atividade.
Atividades aplicadas a 6a serie:
- Brincadeira do robo;- Procura ao tesouro;- Identificacao de angulos em objetos cotidianos;- Formando angulos com os ponteiros do relogio;- Classificacao de angulos segundo medidas e propriedades;- Como montar seu proprio transferidor (dobradura);- Como construir a bissetriz brincando (dobradura);- Atividades para fixacao de conceitos, entre outras.
Dentre essas atividades, uma que teve participacao efetiva dos alunos, a qualtambem se mostrou eficaz foi a brincadeira do robo. Tal atividade se desenvolveu daseguinte forma:
• cada aluno formou sua dupla, segundo afinidades;
• cada dupla brincou uma vez, sendo que as outras criancas permaneceram em silenciodurante a brincadeira, dando apenas alguns palpites;
• em cada uma das duplas escolheu-se quem seria o robo e quem seria o comandante;• o robo teve os olhos vendados;• o comandante escondia um chocolate levado pelo pesquisador, onde quisesse, desde
que respeitasse os limites da sala de aula;• em seguida o comandante indicava o caminho a ser percorrido pelo robo;• os comandos eram do tipo: “siga em frente”, “vire a direita”, “vire a esquerda”,
“vire de costas”, “gire segundo um angulo de 90o”, “de uma volta de 180o”, entre outros.• A brincadeira so terminava quando o robo encontrava seu “premio”.
Tal atividade foi desenvolvida com o intuito de desenvolver uma melhor nocao deangulos nos alunos, fazendo com que eles percebessem que o angulo nao e so uma regiaodesenhada no papel, mas que qualquer movimento do corpo pode representar um angulo.Os comandos que especificavam medida de angulo foram usadas no sentido de se observarate que pontos os alunos tinham nocao do “tamanho” de um angulo.
3 Analise estatıstica
3.1 Analise dos dados obtidos na 5a serie
Os dados a serem analisados foram adquiridos atraves da aplicacao de um pre-teste e de um pos-teste para os 55 alunos distribuıdos nos grupos de controle e experi-mental.
As 10 questoes presentes tanto no pre-teste quanto no pos-teste foram atribuıdos1 ponto para os acertos e 0 ponto para os erros.
As questoes presentes no pre/pos teste foram, em suma, as seguintes:
1a) De dois exemplos de retangulos que tenham o mesmo perımetro.
2a) Determinar o perımetro de um polıgono.
3a) Calcular quantos metros de corda sao necessarios para contornar um certo triangulo.
4a) Calcular a area de uma figura (seta) utilizando o quadradinho como unidade demedida.
5a) Responder qual parede possui maior area e qual possui menor area.
6a) Enumerar a segunda coluna de acordo com a primeira em relacao a unidade de area.
7a) Utilizando o quadradinho como unidade de medida, relacionar duas figuras.
8a) Calcular a area de uma figura (retangulo) utilizando o quadradinho como unidade demedida.
9a) Analisar a area do corredor da escola.
10a) Relacionar perımetro e area desenhando duas figuras.
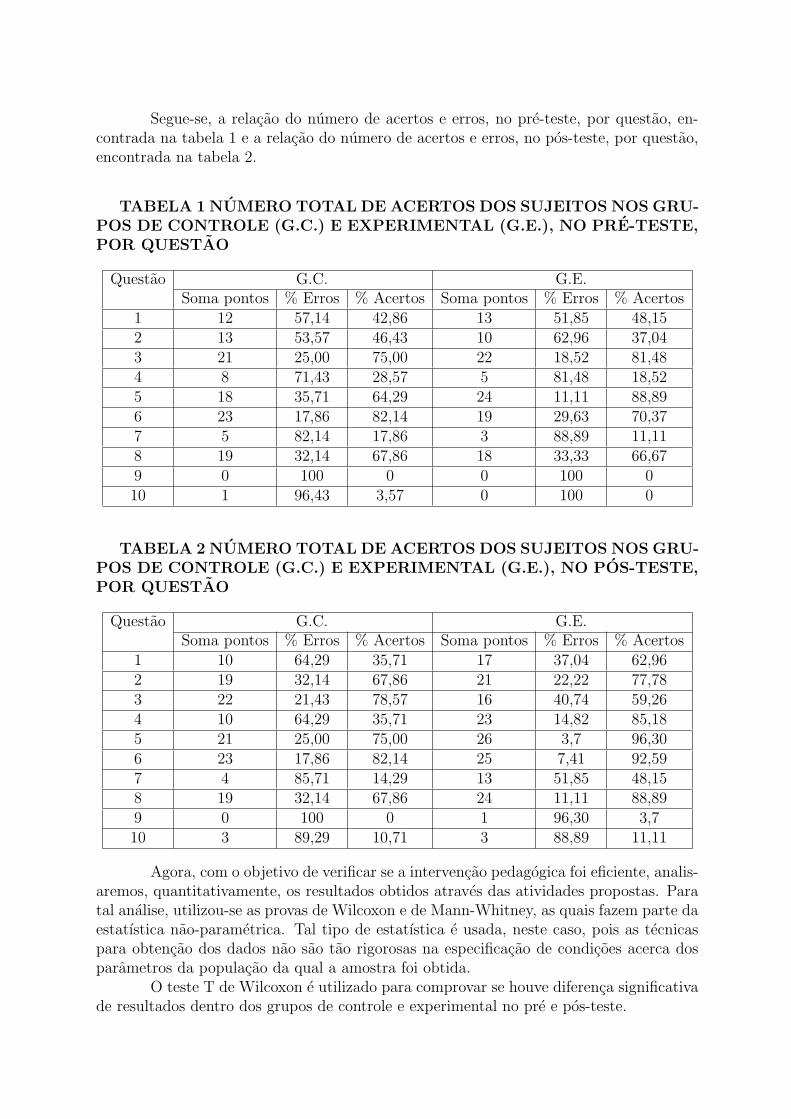
Segue-se, a relacao do numero de acertos e erros, no pre-teste, por questao, en-contrada na tabela 1 e a relacao do numero de acertos e erros, no pos-teste, por questao,encontrada na tabela 2.
TABELA 1 NUMERO TOTAL DE ACERTOS DOS SUJEITOS NOS GRU-POS DE CONTROLE (G.C.) E EXPERIMENTAL (G.E.), NO PRE-TESTE,POR QUESTAO
Questao G.C. G.E.Soma pontos % Erros % Acertos Soma pontos % Erros % Acertos
1 12 57,14 42,86 13 51,85 48,152 13 53,57 46,43 10 62,96 37,043 21 25,00 75,00 22 18,52 81,484 8 71,43 28,57 5 81,48 18,525 18 35,71 64,29 24 11,11 88,896 23 17,86 82,14 19 29,63 70,377 5 82,14 17,86 3 88,89 11,118 19 32,14 67,86 18 33,33 66,679 0 100 0 0 100 010 1 96,43 3,57 0 100 0
TABELA 2 NUMERO TOTAL DE ACERTOS DOS SUJEITOS NOS GRU-POS DE CONTROLE (G.C.) E EXPERIMENTAL (G.E.), NO POS-TESTE,POR QUESTAO
Questao G.C. G.E.Soma pontos % Erros % Acertos Soma pontos % Erros % Acertos
1 10 64,29 35,71 17 37,04 62,962 19 32,14 67,86 21 22,22 77,783 22 21,43 78,57 16 40,74 59,264 10 64,29 35,71 23 14,82 85,185 21 25,00 75,00 26 3,7 96,306 23 17,86 82,14 25 7,41 92,597 4 85,71 14,29 13 51,85 48,158 19 32,14 67,86 24 11,11 88,899 0 100 0 1 96,30 3,710 3 89,29 10,71 3 88,89 11,11
Agora, com o objetivo de verificar se a intervencao pedagogica foi eficiente, analis-aremos, quantitativamente, os resultados obtidos atraves das atividades propostas. Paratal analise, utilizou-se as provas de Wilcoxon e de Mann-Whitney, as quais fazem parte daestatıstica nao-parametrica. Tal tipo de estatıstica e usada, neste caso, pois as tecnicaspara obtencao dos dados nao sao tao rigorosas na especificacao de condicoes acerca dosparametros da populacao da qual a amostra foi obtida.
O teste T de Wilcoxon e utilizado para comprovar se houve diferenca significativade resultados dentro dos grupos de controle e experimental no pre e pos-teste.
Ja o teste U de Mann-Whitney e usado para verificar se houve diferenca signi-ficativa dentro dos dois grupos independentes (pre-teste e pos-teste), e comprovar se haevidencias para acreditar que valores de um grupo A sao superiores aos valores de umgrupo B.
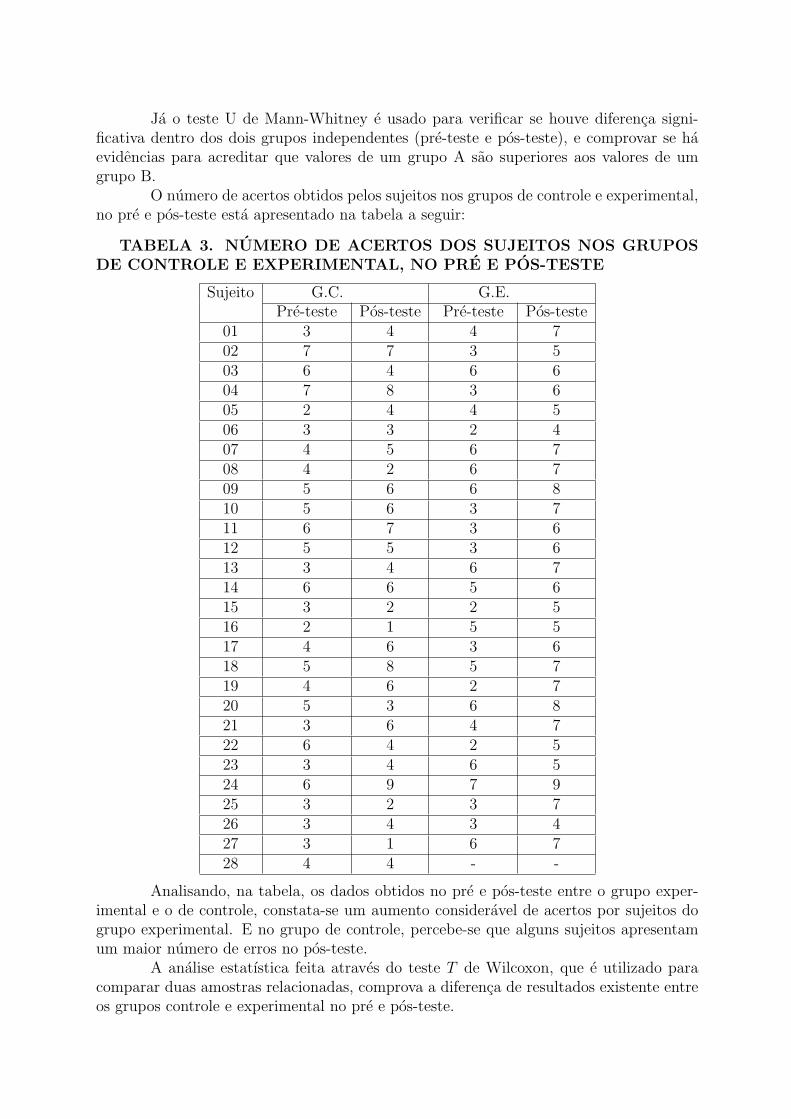
O numero de acertos obtidos pelos sujeitos nos grupos de controle e experimental,no pre e pos-teste esta apresentado na tabela a seguir:
TABELA 3. NUMERO DE ACERTOS DOS SUJEITOS NOS GRUPOSDE CONTROLE E EXPERIMENTAL, NO PRE E POS-TESTE
Sujeito G.C. G.E.Pre-teste Pos-teste Pre-teste Pos-teste
01 3 4 4 702 7 7 3 503 6 4 6 604 7 8 3 605 2 4 4 506 3 3 2 407 4 5 6 708 4 2 6 709 5 6 6 810 5 6 3 711 6 7 3 612 5 5 3 613 3 4 6 714 6 6 5 615 3 2 2 516 2 1 5 517 4 6 3 618 5 8 5 719 4 6 2 720 5 3 6 821 3 6 4 722 6 4 2 523 3 4 6 524 6 9 7 925 3 2 3 726 3 4 3 427 3 1 6 728 4 4 - -
Analisando, na tabela, os dados obtidos no pre e pos-teste entre o grupo exper-imental e o de controle, constata-se um aumento consideravel de acertos por sujeitos dogrupo experimental. E no grupo de controle, percebe-se que alguns sujeitos apresentamum maior numero de erros no pos-teste.
A analise estatıstica feita atraves do teste T de Wilcoxon, que e utilizado paracomparar duas amostras relacionadas, comprova a diferenca de resultados existente entreos grupos controle e experimental no pre e pos-teste.

Segue-se abaixo uma pequena explicacao sobre a prova de Wilcoxon.
Este teste e aplicado em dados pareados, considerando o sinal e o valor dasdiferencas entre os pares. Neste teste utiliza-se ranks, pois ele atribui postos ao ordenaras diferencas entre os pares. No caso deste trabalho, o par (Xi, Yi) e tal que Xi = numerode acertos de cada sujeito no grupo de controle ou no experimental no pos-teste, e Yi =numero de acertos de cada sujeito no grupo de controle ou no experimental no pre-teste.
Metodo
Considere as diferencas d,is onde di = Xi −Yi. Deve-se ordenar os d,
is, porem semconsiderar o sinal da diferenca (em modulo).
• Grandes Amostras (N > 25)
Considere T sendo a menor soma dos postos de mesmo sinal. No caso de grandesamostras T tem distribuicao aproximadamente Normal e pode-se usar a aproximacaoconsiderando:
μT =N(N + 1)
4e σT =
√N(N + 1)(2N + 1)
24, onde
⎧⎨⎩
N = numero de observacoesμT = media
σT = variancia
Calcula-se assim a estatıstica z = T−μT
σTe compara-se com os valores tabelados da
distribuicao de Z (Normal Padrao).
• Empates
Consideremos duas situacoes:
a) Quando Xi = Yi, ou seja, a informacao pre equivale a informacao pos para um mesmoindivıduo, descarta-se este par da analise e redefine-se N como sendo o numero depares tais que Xi �= Yi, para i = 1, 2, 3, ..., N.
b) Quando duas ou mais d,is tem o mesmo valor atribui-se como posto a media dos postos
que seriam atribuıdos a eles caso nao ocorresse empate.
Aplicacao do teste T de Wilcoxon com os dados relativos aos grupos ex-perimental e de controle.
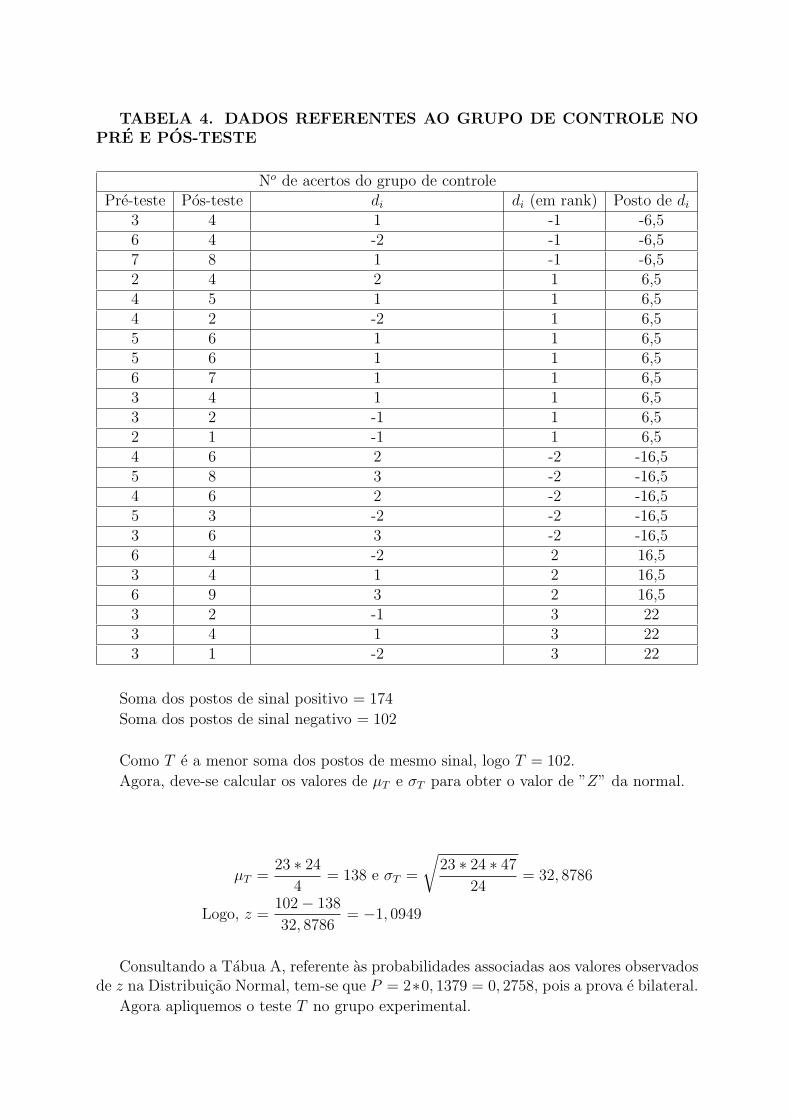
TABELA 4. DADOS REFERENTES AO GRUPO DE CONTROLE NOPRE E POS-TESTE
No de acertos do grupo de controlePre-teste Pos-teste di di (em rank) Posto de di
3 4 1 -1 -6,56 4 -2 -1 -6,57 8 1 -1 -6,52 4 2 1 6,54 5 1 1 6,54 2 -2 1 6,55 6 1 1 6,55 6 1 1 6,56 7 1 1 6,53 4 1 1 6,53 2 -1 1 6,52 1 -1 1 6,54 6 2 -2 -16,55 8 3 -2 -16,54 6 2 -2 -16,55 3 -2 -2 -16,53 6 3 -2 -16,56 4 -2 2 16,53 4 1 2 16,56 9 3 2 16,53 2 -1 3 223 4 1 3 223 1 -2 3 22
Soma dos postos de sinal positivo = 174
Soma dos postos de sinal negativo = 102
Como T e a menor soma dos postos de mesmo sinal, logo T = 102.
Agora, deve-se calcular os valores de μT e σT para obter o valor de ”Z” da normal.
μT =23 ∗ 24
4= 138 e σT =
√23 ∗ 24 ∗ 47
24= 32, 8786
Logo, z =102 − 138
32, 8786= −1, 0949
Consultando a Tabua A, referente as probabilidades associadas aos valores observadosde z na Distribuicao Normal, tem-se que P = 2∗0, 1379 = 0, 2758, pois a prova e bilateral.
Agora apliquemos o teste T no grupo experimental.
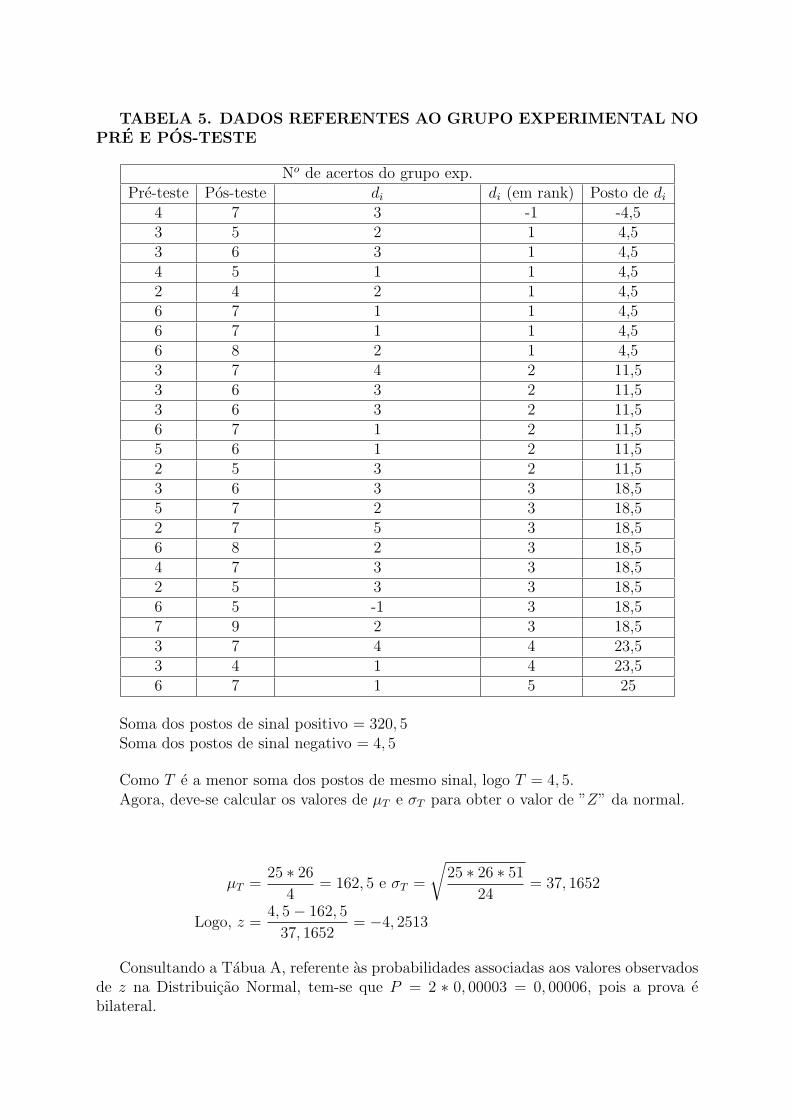
TABELA 5. DADOS REFERENTES AO GRUPO EXPERIMENTAL NOPRE E POS-TESTE
No de acertos do grupo exp.Pre-teste Pos-teste di di (em rank) Posto de di
4 7 3 -1 -4,53 5 2 1 4,53 6 3 1 4,54 5 1 1 4,52 4 2 1 4,56 7 1 1 4,56 7 1 1 4,56 8 2 1 4,53 7 4 2 11,53 6 3 2 11,53 6 3 2 11,56 7 1 2 11,55 6 1 2 11,52 5 3 2 11,53 6 3 3 18,55 7 2 3 18,52 7 5 3 18,56 8 2 3 18,54 7 3 3 18,52 5 3 3 18,56 5 -1 3 18,57 9 2 3 18,53 7 4 4 23,53 4 1 4 23,56 7 1 5 25
Soma dos postos de sinal positivo = 320, 5Soma dos postos de sinal negativo = 4, 5
Como T e a menor soma dos postos de mesmo sinal, logo T = 4, 5.Agora, deve-se calcular os valores de μT e σT para obter o valor de ”Z” da normal.
μT =25 ∗ 26
4= 162, 5 e σT =
√25 ∗ 26 ∗ 51
24= 37, 1652
Logo, z =4, 5 − 162, 5
37, 1652= −4, 2513
Consultando a Tabua A, referente as probabilidades associadas aos valores observadosde z na Distribuicao Normal, tem-se que P = 2 ∗ 0, 00003 = 0, 00006, pois a prova ebilateral.
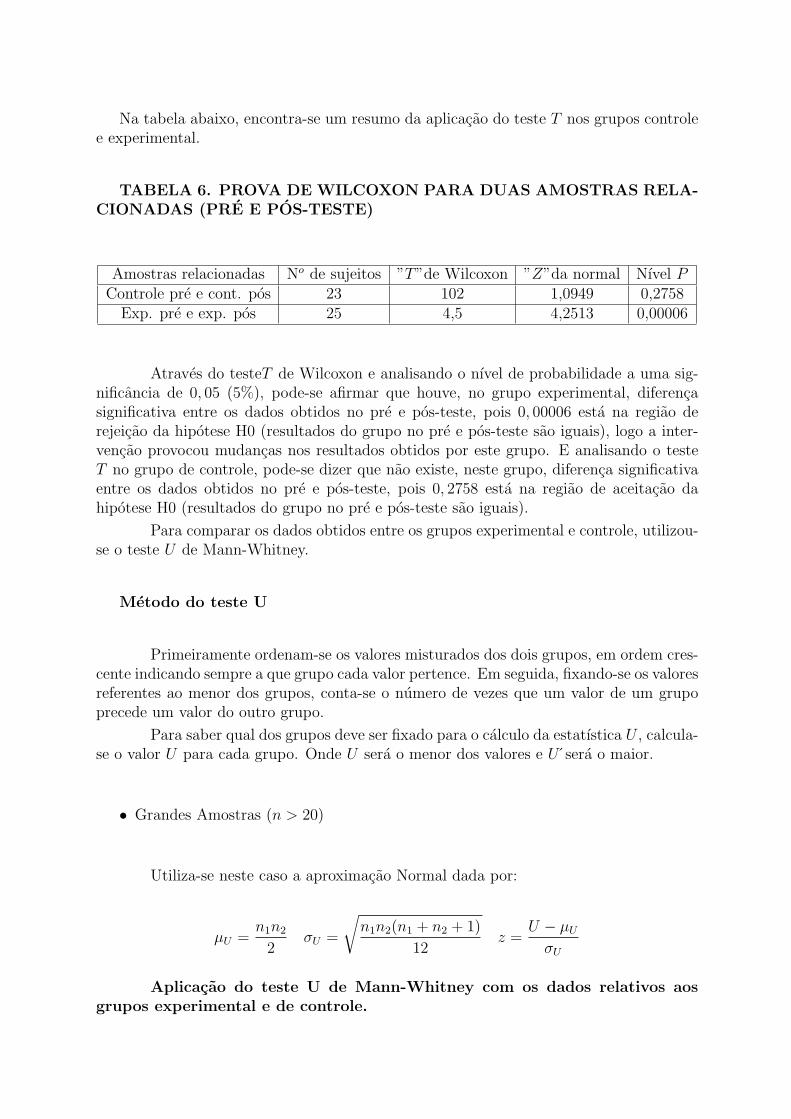
Na tabela abaixo, encontra-se um resumo da aplicacao do teste T nos grupos controlee experimental.
TABELA 6. PROVA DE WILCOXON PARA DUAS AMOSTRAS RELA-CIONADAS (PRE E POS-TESTE)
Amostras relacionadas No de sujeitos ”T”de Wilcoxon ”Z”da normal Nıvel PControle pre e cont. pos 23 102 1,0949 0,2758
Exp. pre e exp. pos 25 4,5 4,2513 0,00006
Atraves do testeT de Wilcoxon e analisando o nıvel de probabilidade a uma sig-nificancia de 0, 05 (5%), pode-se afirmar que houve, no grupo experimental, diferencasignificativa entre os dados obtidos no pre e pos-teste, pois 0, 00006 esta na regiao derejeicao da hipotese H0 (resultados do grupo no pre e pos-teste sao iguais), logo a inter-vencao provocou mudancas nos resultados obtidos por este grupo. E analisando o testeT no grupo de controle, pode-se dizer que nao existe, neste grupo, diferenca significativaentre os dados obtidos no pre e pos-teste, pois 0, 2758 esta na regiao de aceitacao dahipotese H0 (resultados do grupo no pre e pos-teste sao iguais).
Para comparar os dados obtidos entre os grupos experimental e controle, utilizou-se o teste U de Mann-Whitney.
Metodo do teste U
Primeiramente ordenam-se os valores misturados dos dois grupos, em ordem cres-cente indicando sempre a que grupo cada valor pertence. Em seguida, fixando-se os valoresreferentes ao menor dos grupos, conta-se o numero de vezes que um valor de um grupoprecede um valor do outro grupo.
Para saber qual dos grupos deve ser fixado para o calculo da estatıstica U , calcula-se o valor U para cada grupo. Onde U sera o menor dos valores e U sera o maior.
• Grandes Amostras (n > 20)
Utiliza-se neste caso a aproximacao Normal dada por:
μU =n1n2
2σU =
√n1n2(n1 + n2 + 1)
12z =
U − μU
σU
Aplicacao do teste U de Mann-Whitney com os dados relativos aosgrupos experimental e de controle.
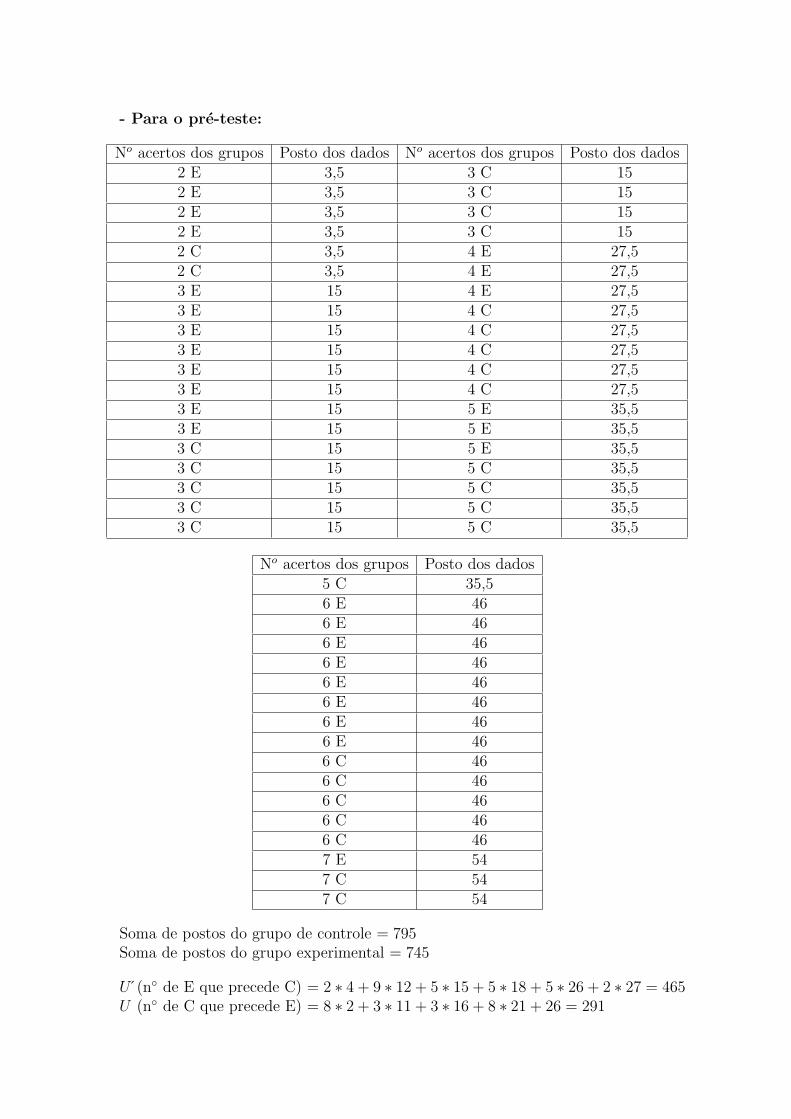
- Para o pre-teste:
No acertos dos grupos Posto dos dados No acertos dos grupos Posto dos dados2 E 3,5 3 C 152 E 3,5 3 C 152 E 3,5 3 C 152 E 3,5 3 C 152 C 3,5 4 E 27,52 C 3,5 4 E 27,53 E 15 4 E 27,53 E 15 4 C 27,53 E 15 4 C 27,53 E 15 4 C 27,53 E 15 4 C 27,53 E 15 4 C 27,53 E 15 5 E 35,53 E 15 5 E 35,53 C 15 5 E 35,53 C 15 5 C 35,53 C 15 5 C 35,53 C 15 5 C 35,53 C 15 5 C 35,5
No acertos dos grupos Posto dos dados5 C 35,56 E 466 E 466 E 466 E 466 E 466 E 466 E 466 E 466 C 466 C 466 C 466 C 466 C 467 E 547 C 547 C 54
Soma de postos do grupo de controle = 795Soma de postos do grupo experimental = 745
U (n◦ de E que precede C) = 2 ∗ 4 + 9 ∗ 12 + 5 ∗ 15 + 5 ∗ 18 + 5 ∗ 26 + 2 ∗ 27 = 465U (n◦ de C que precede E) = 8 ∗ 2 + 3 ∗ 11 + 3 ∗ 16 + 8 ∗ 21 + 26 = 291
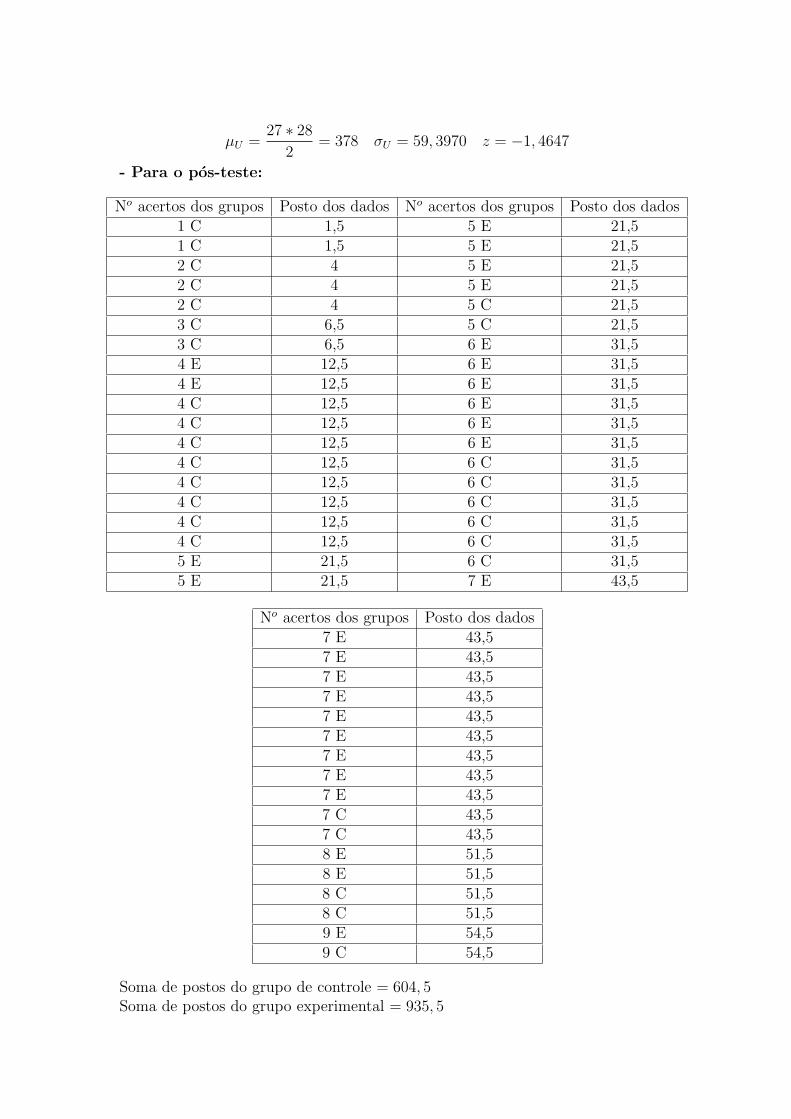
μU =27 ∗ 28
2= 378 σU = 59, 3970 z = −1, 4647
- Para o pos-teste:
No acertos dos grupos Posto dos dados No acertos dos grupos Posto dos dados1 C 1,5 5 E 21,51 C 1,5 5 E 21,52 C 4 5 E 21,52 C 4 5 E 21,52 C 4 5 C 21,53 C 6,5 5 C 21,53 C 6,5 6 E 31,54 E 12,5 6 E 31,54 E 12,5 6 E 31,54 C 12,5 6 E 31,54 C 12,5 6 E 31,54 C 12,5 6 E 31,54 C 12,5 6 C 31,54 C 12,5 6 C 31,54 C 12,5 6 C 31,54 C 12,5 6 C 31,54 C 12,5 6 C 31,55 E 21,5 6 C 31,55 E 21,5 7 E 43,5
No acertos dos grupos Posto dos dados7 E 43,57 E 43,57 E 43,57 E 43,57 E 43,57 E 43,57 E 43,57 E 43,57 E 43,57 C 43,57 C 43,58 E 51,58 E 51,58 C 51,58 C 51,59 E 54,59 C 54,5
Soma de postos do grupo de controle = 604, 5Soma de postos do grupo experimental = 935, 5
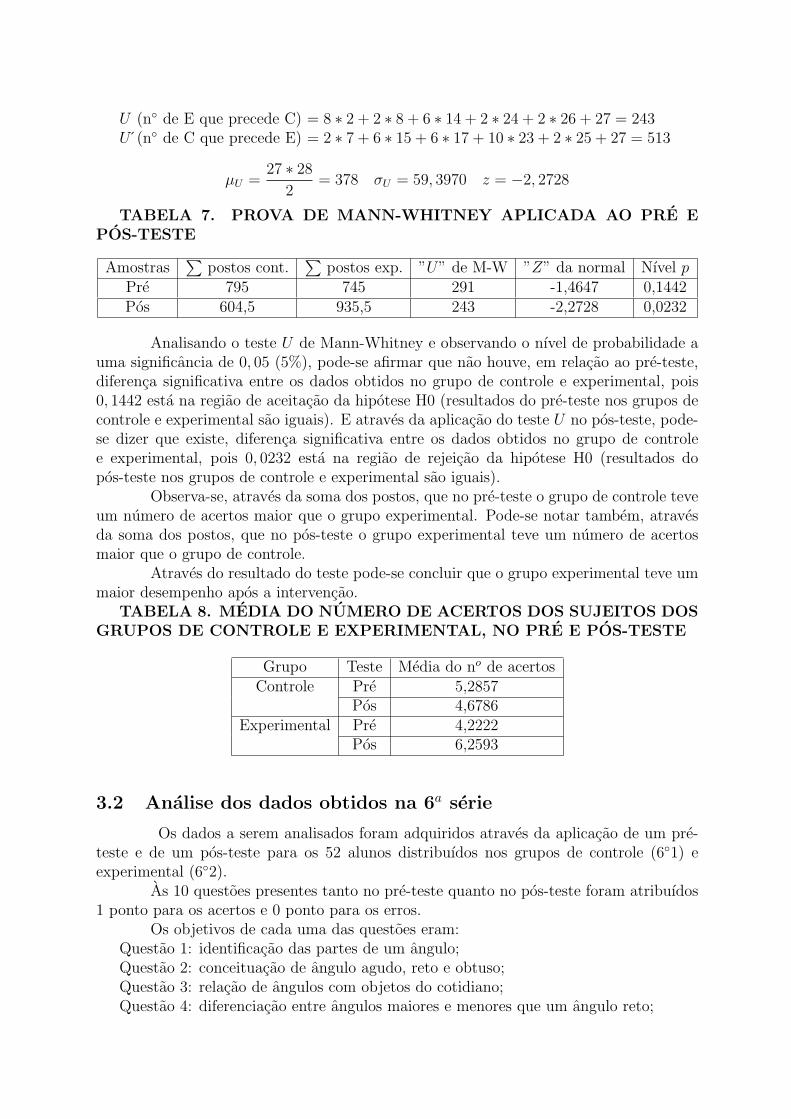
U (n◦ de E que precede C) = 8 ∗ 2 + 2 ∗ 8 + 6 ∗ 14 + 2 ∗ 24 + 2 ∗ 26 + 27 = 243U (n◦ de C que precede E) = 2 ∗ 7 + 6 ∗ 15 + 6 ∗ 17 + 10 ∗ 23 + 2 ∗ 25 + 27 = 513
μU =27 ∗ 28
2= 378 σU = 59, 3970 z = −2, 2728
TABELA 7. PROVA DE MANN-WHITNEY APLICADA AO PRE EPOS-TESTE
Amostras∑
postos cont.∑
postos exp. ”U” de M-W ”Z” da normal Nıvel pPre 795 745 291 -1,4647 0,1442Pos 604,5 935,5 243 -2,2728 0,0232
Analisando o teste U de Mann-Whitney e observando o nıvel de probabilidade auma significancia de 0, 05 (5%), pode-se afirmar que nao houve, em relacao ao pre-teste,diferenca significativa entre os dados obtidos no grupo de controle e experimental, pois0, 1442 esta na regiao de aceitacao da hipotese H0 (resultados do pre-teste nos grupos decontrole e experimental sao iguais). E atraves da aplicacao do teste U no pos-teste, pode-se dizer que existe, diferenca significativa entre os dados obtidos no grupo de controlee experimental, pois 0, 0232 esta na regiao de rejeicao da hipotese H0 (resultados dopos-teste nos grupos de controle e experimental sao iguais).
Observa-se, atraves da soma dos postos, que no pre-teste o grupo de controle teveum numero de acertos maior que o grupo experimental. Pode-se notar tambem, atravesda soma dos postos, que no pos-teste o grupo experimental teve um numero de acertosmaior que o grupo de controle.
Atraves do resultado do teste pode-se concluir que o grupo experimental teve ummaior desempenho apos a intervencao.
TABELA 8. MEDIA DO NUMERO DE ACERTOS DOS SUJEITOS DOSGRUPOS DE CONTROLE E EXPERIMENTAL, NO PRE E POS-TESTE
Grupo Teste Media do no de acertosControle Pre 5,2857
Pos 4,6786Experimental Pre 4,2222
Pos 6,2593
3.2 Analise dos dados obtidos na 6a serie
Os dados a serem analisados foram adquiridos atraves da aplicacao de um pre-teste e de um pos-teste para os 52 alunos distribuıdos nos grupos de controle (6◦1) eexperimental (6◦2).
As 10 questoes presentes tanto no pre-teste quanto no pos-teste foram atribuıdos1 ponto para os acertos e 0 ponto para os erros.
Os objetivos de cada uma das questoes eram:Questao 1: identificacao das partes de um angulo;Questao 2: conceituacao de angulo agudo, reto e obtuso;Questao 3: relacao de angulos com objetos do cotidiano;Questao 4: diferenciacao entre angulos maiores e menores que um angulo reto;
Questao 5: diferenciacao dos varios tipos de angulos;Questao 6: relacao de angulos na circunferencia (informalmente);Questao 7: angulo entre os ponteiros de um relogio;Questao 8: uso do transferidor:Questao 9: definicao de bissetriz;Questao 10: operacoes com angulos.
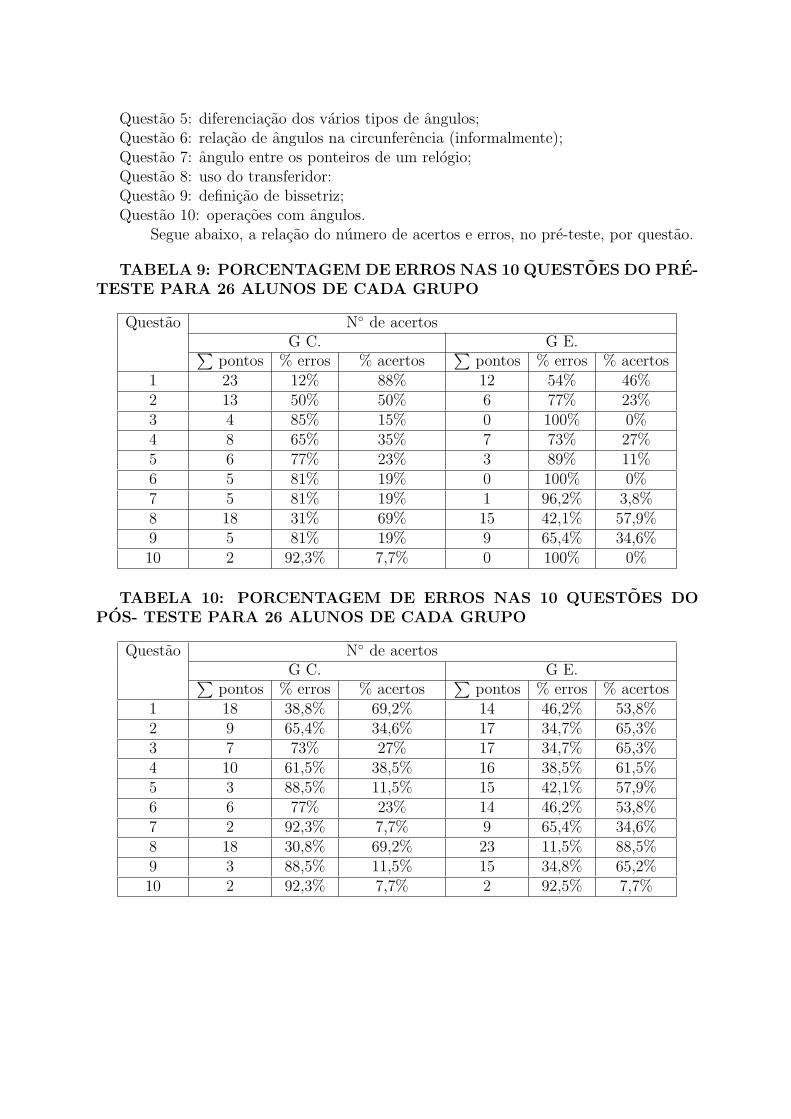
Segue abaixo, a relacao do numero de acertos e erros, no pre-teste, por questao.
TABELA 9: PORCENTAGEM DE ERROS NAS 10 QUESTOES DO PRE-TESTE PARA 26 ALUNOS DE CADA GRUPO
Questao N◦ de acertosG C. G E.∑
pontos % erros % acertos∑
pontos % erros % acertos1 23 12% 88% 12 54% 46%2 13 50% 50% 6 77% 23%3 4 85% 15% 0 100% 0%4 8 65% 35% 7 73% 27%5 6 77% 23% 3 89% 11%6 5 81% 19% 0 100% 0%7 5 81% 19% 1 96,2% 3,8%8 18 31% 69% 15 42,1% 57,9%9 5 81% 19% 9 65,4% 34,6%10 2 92,3% 7,7% 0 100% 0%
TABELA 10: PORCENTAGEM DE ERROS NAS 10 QUESTOES DOPOS- TESTE PARA 26 ALUNOS DE CADA GRUPO
Questao N◦ de acertosG C. G E.∑
pontos % erros % acertos∑
pontos % erros % acertos1 18 38,8% 69,2% 14 46,2% 53,8%2 9 65,4% 34,6% 17 34,7% 65,3%3 7 73% 27% 17 34,7% 65,3%4 10 61,5% 38,5% 16 38,5% 61,5%5 3 88,5% 11,5% 15 42,1% 57,9%6 6 77% 23% 14 46,2% 53,8%7 2 92,3% 7,7% 9 65,4% 34,6%8 18 30,8% 69,2% 23 11,5% 88,5%9 3 88,5% 11,5% 15 34,8% 65,2%10 2 92,3% 7,7% 2 92,5% 7,7%
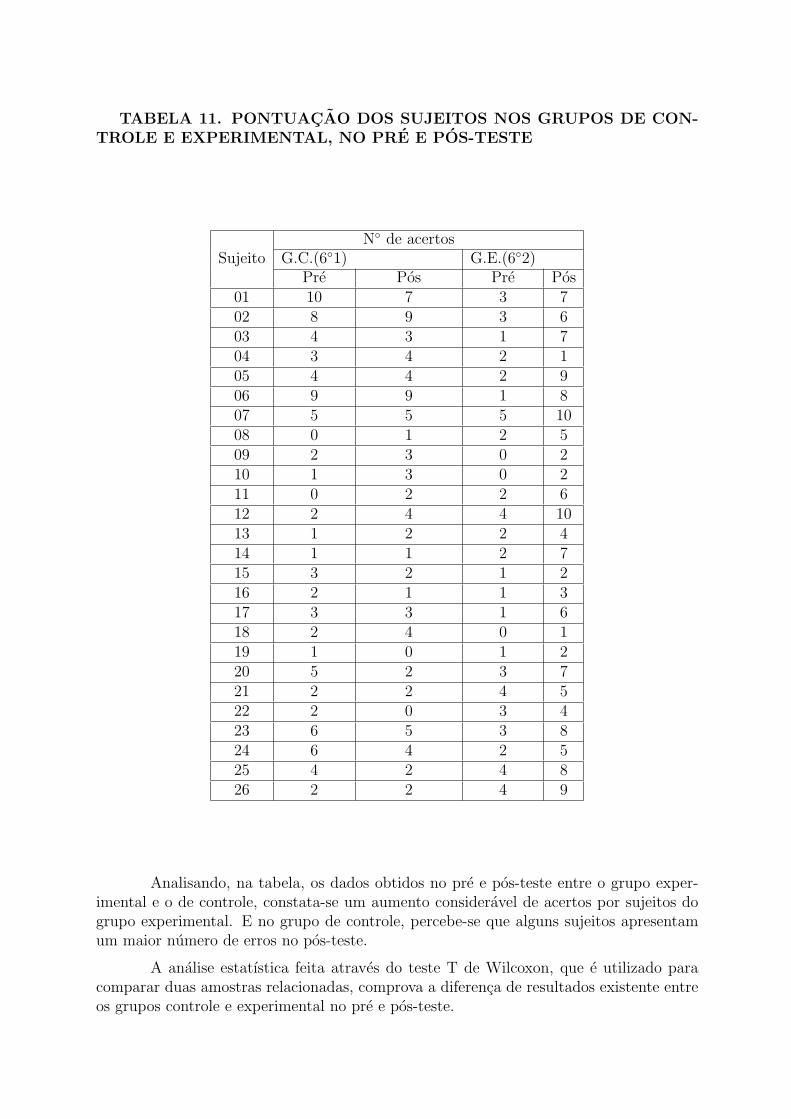
TABELA 11. PONTUACAO DOS SUJEITOS NOS GRUPOS DE CON-TROLE E EXPERIMENTAL, NO PRE E POS-TESTE
N◦ de acertosSujeito G.C.(6◦1) G.E.(6◦2)
Pre Pos Pre Pos01 10 7 3 702 8 9 3 603 4 3 1 704 3 4 2 105 4 4 2 906 9 9 1 807 5 5 5 1008 0 1 2 509 2 3 0 210 1 3 0 211 0 2 2 612 2 4 4 1013 1 2 2 414 1 1 2 715 3 2 1 216 2 1 1 317 3 3 1 618 2 4 0 119 1 0 1 220 5 2 3 721 2 2 4 522 2 0 3 423 6 5 3 824 6 4 2 525 4 2 4 826 2 2 4 9
Analisando, na tabela, os dados obtidos no pre e pos-teste entre o grupo exper-imental e o de controle, constata-se um aumento consideravel de acertos por sujeitos dogrupo experimental. E no grupo de controle, percebe-se que alguns sujeitos apresentamum maior numero de erros no pos-teste.
A analise estatıstica feita atraves do teste T de Wilcoxon, que e utilizado paracomparar duas amostras relacionadas, comprova a diferenca de resultados existente entreos grupos controle e experimental no pre e pos-teste.
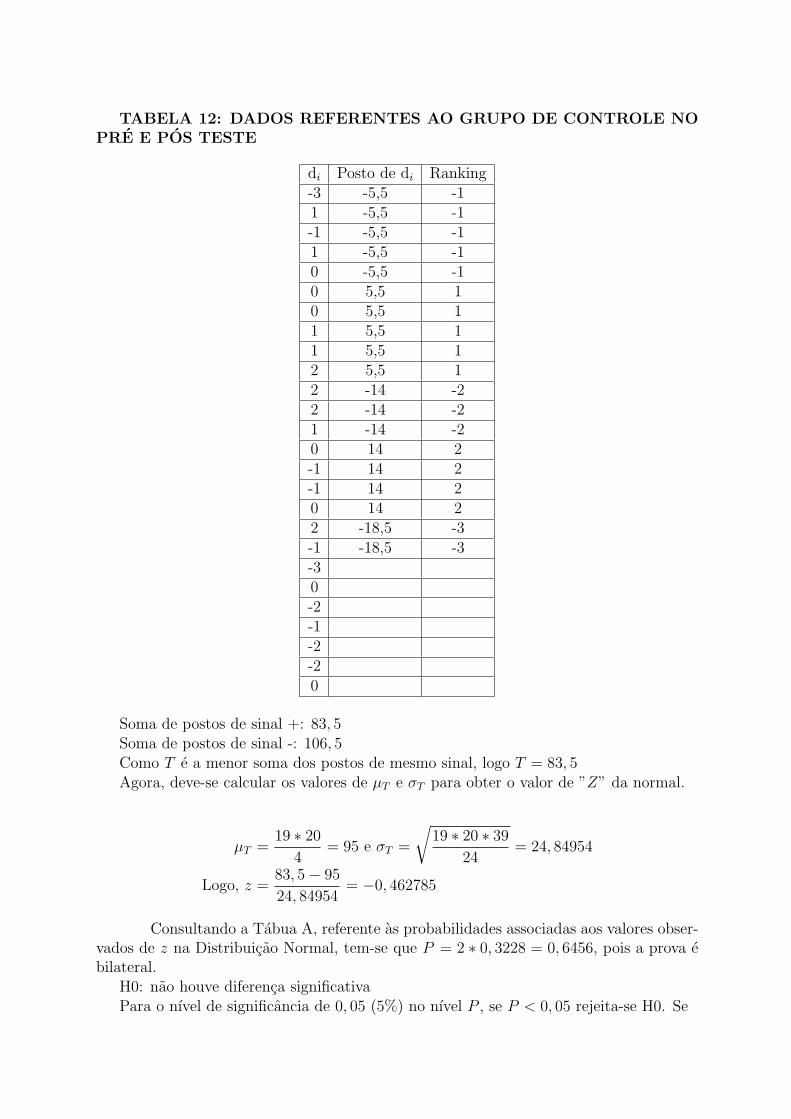
TABELA 12: DADOS REFERENTES AO GRUPO DE CONTROLE NOPRE E POS TESTE
di Posto de di Ranking-3 -5,5 -11 -5,5 -1-1 -5,5 -11 -5,5 -10 -5,5 -10 5,5 10 5,5 11 5,5 11 5,5 12 5,5 12 -14 -22 -14 -21 -14 -20 14 2-1 14 2-1 14 20 14 22 -18,5 -3-1 -18,5 -3-30-2-1-2-20
Soma de postos de sinal +: 83, 5Soma de postos de sinal -: 106, 5Como T e a menor soma dos postos de mesmo sinal, logo T = 83, 5Agora, deve-se calcular os valores de μT e σT para obter o valor de ”Z” da normal.
μT =19 ∗ 20
4= 95 e σT =
√19 ∗ 20 ∗ 39
24= 24, 84954
Logo, z =83, 5 − 95
24, 84954= −0, 462785
Consultando a Tabua A, referente as probabilidades associadas aos valores obser-vados de z na Distribuicao Normal, tem-se que P = 2 ∗ 0, 3228 = 0, 6456, pois a prova ebilateral.
H0: nao houve diferenca significativaPara o nıvel de significancia de 0, 05 (5%) no nıvel P , se P < 0, 05 rejeita-se H0. Se
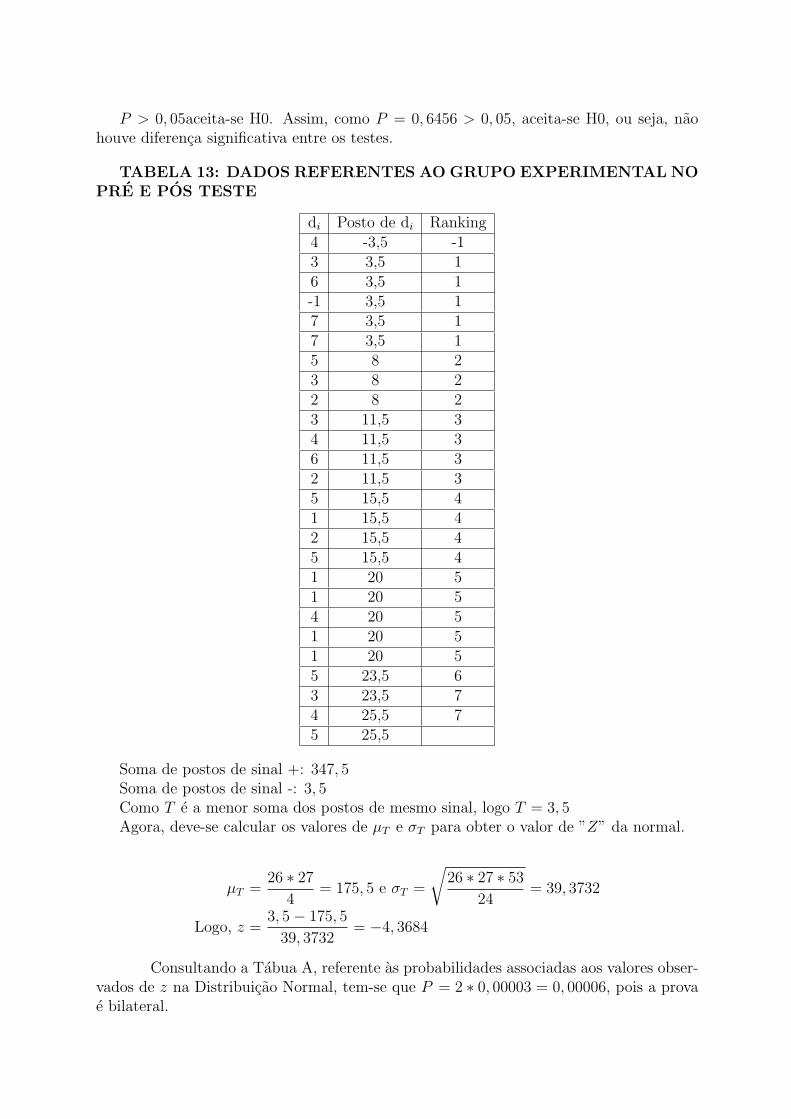
P > 0, 05aceita-se H0. Assim, como P = 0, 6456 > 0, 05, aceita-se H0, ou seja, naohouve diferenca significativa entre os testes.
TABELA 13: DADOS REFERENTES AO GRUPO EXPERIMENTAL NOPRE E POS TESTE
di Posto de di Ranking4 -3,5 -13 3,5 16 3,5 1-1 3,5 17 3,5 17 3,5 15 8 23 8 22 8 23 11,5 34 11,5 36 11,5 32 11,5 35 15,5 41 15,5 42 15,5 45 15,5 41 20 51 20 54 20 51 20 51 20 55 23,5 63 23,5 74 25,5 75 25,5
Soma de postos de sinal +: 347, 5Soma de postos de sinal -: 3, 5Como T e a menor soma dos postos de mesmo sinal, logo T = 3, 5Agora, deve-se calcular os valores de μT e σT para obter o valor de ”Z” da normal.
μT =26 ∗ 27
4= 175, 5 e σT =
√26 ∗ 27 ∗ 53
24= 39, 3732
Logo, z =3, 5 − 175, 5
39, 3732= −4, 3684
Consultando a Tabua A, referente as probabilidades associadas aos valores obser-vados de z na Distribuicao Normal, tem-se que P = 2 ∗ 0, 00003 = 0, 00006, pois a provae bilateral.
H0: nao houve diferenca significativa
Para o nıvel de significancia de 0, 05 (5%) no nıvel P , se P < 0, 05 rejeita-se H0. Se
P > 0, 05 aceita-se H0. Assim, como P = 0, 00006 < 0, 05, rejeita-se H0, ou seja,houve diferenca significativa entre os testes.
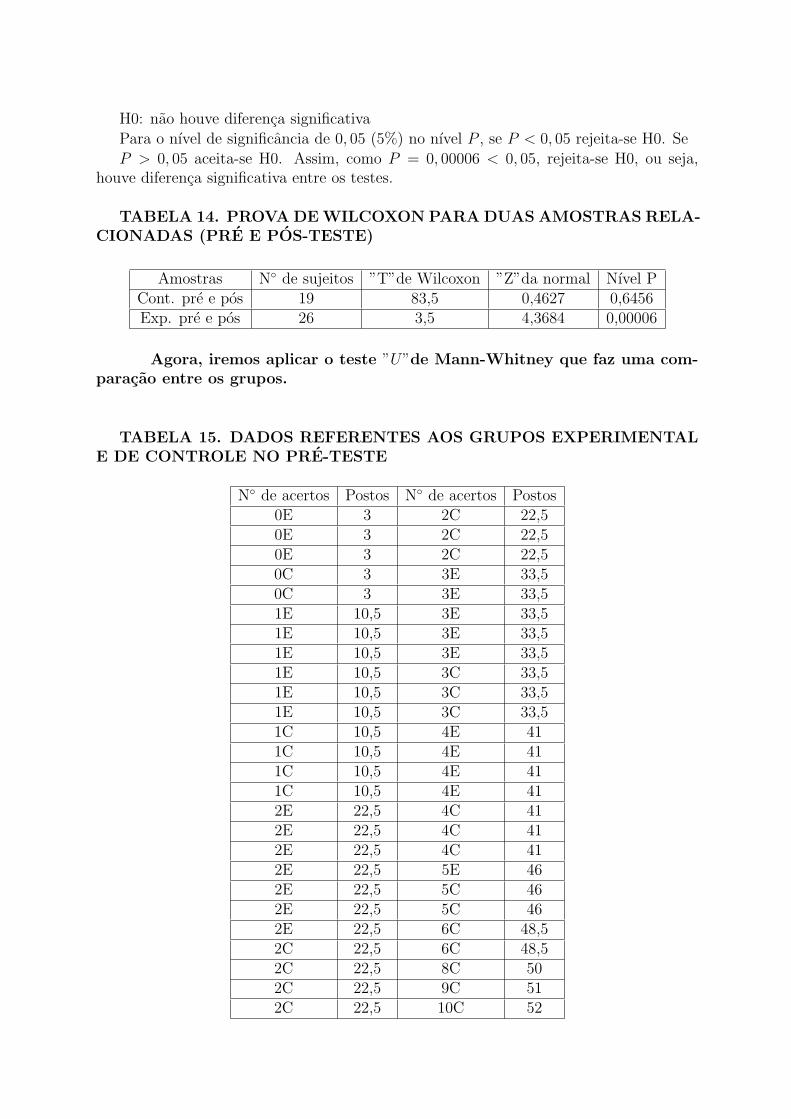
TABELA 14. PROVA DE WILCOXON PARA DUAS AMOSTRAS RELA-CIONADAS (PRE E POS-TESTE)
Amostras N◦ de sujeitos ”T”de Wilcoxon ”Z”da normal Nıvel PCont. pre e pos 19 83,5 0,4627 0,6456Exp. pre e pos 26 3,5 4,3684 0,00006
Agora, iremos aplicar o teste ”U”de Mann-Whitney que faz uma com-paracao entre os grupos.
TABELA 15. DADOS REFERENTES AOS GRUPOS EXPERIMENTALE DE CONTROLE NO PRE-TESTE
N◦ de acertos Postos N◦ de acertos Postos0E 3 2C 22,50E 3 2C 22,50E 3 2C 22,50C 3 3E 33,50C 3 3E 33,51E 10,5 3E 33,51E 10,5 3E 33,51E 10,5 3E 33,51E 10,5 3C 33,51E 10,5 3C 33,51E 10,5 3C 33,51C 10,5 4E 411C 10,5 4E 411C 10,5 4E 411C 10,5 4E 412E 22,5 4C 412E 22,5 4C 412E 22,5 4C 412E 22,5 5E 462E 22,5 5C 462E 22,5 5C 462E 22,5 6C 48,52C 22,5 6C 48,52C 22,5 8C 502C 22,5 9C 512C 22,5 10C 52
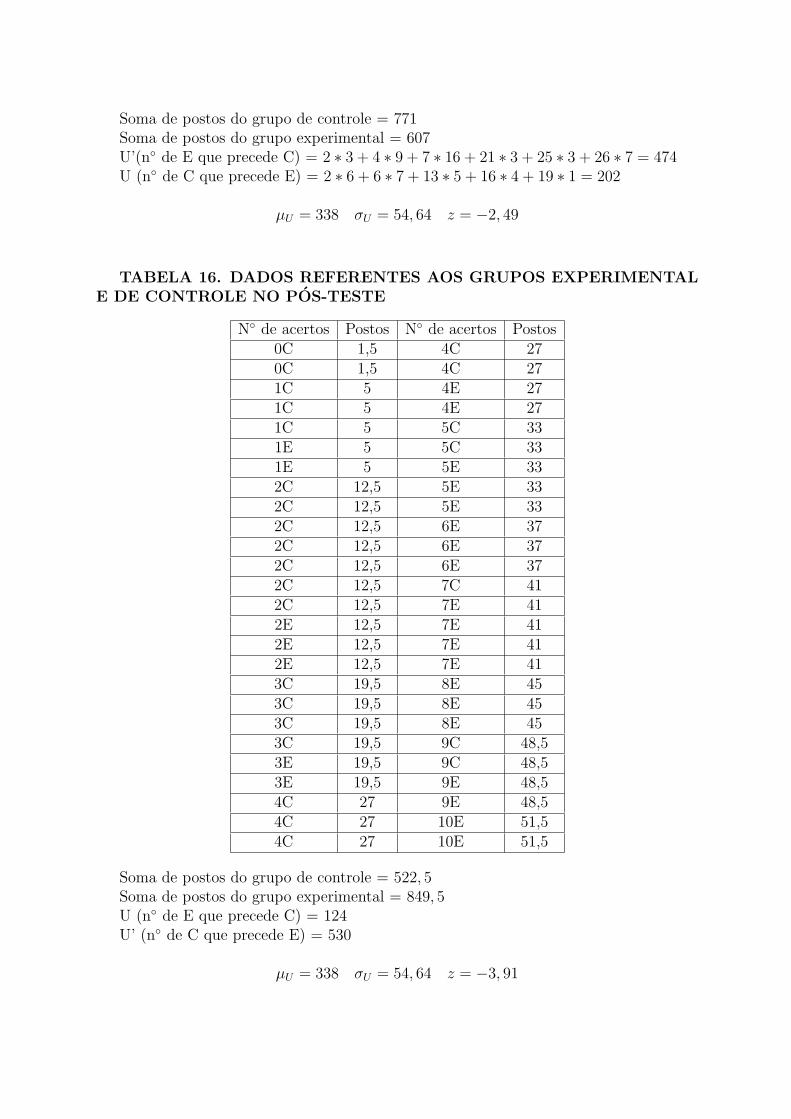
Soma de postos do grupo de controle = 771Soma de postos do grupo experimental = 607U’(n◦ de E que precede C) = 2 ∗ 3 + 4 ∗ 9 + 7 ∗ 16 + 21 ∗ 3 + 25 ∗ 3 + 26 ∗ 7 = 474U (n◦ de C que precede E) = 2 ∗ 6 + 6 ∗ 7 + 13 ∗ 5 + 16 ∗ 4 + 19 ∗ 1 = 202
μU = 338 σU = 54, 64 z = −2, 49
TABELA 16. DADOS REFERENTES AOS GRUPOS EXPERIMENTALE DE CONTROLE NO POS-TESTE
N◦ de acertos Postos N◦ de acertos Postos0C 1,5 4C 270C 1,5 4C 271C 5 4E 271C 5 4E 271C 5 5C 331E 5 5C 331E 5 5E 332C 12,5 5E 332C 12,5 5E 332C 12,5 6E 372C 12,5 6E 372C 12,5 6E 372C 12,5 7C 412C 12,5 7E 412E 12,5 7E 412E 12,5 7E 412E 12,5 7E 413C 19,5 8E 453C 19,5 8E 453C 19,5 8E 453C 19,5 9C 48,53E 19,5 9C 48,53E 19,5 9E 48,54C 27 9E 48,54C 27 10E 51,54C 27 10E 51,5
Soma de postos do grupo de controle = 522, 5Soma de postos do grupo experimental = 849, 5U (n◦ de E que precede C) = 124U’ (n◦ de C que precede E) = 530
μU = 338 σU = 54, 64 z = −3, 91
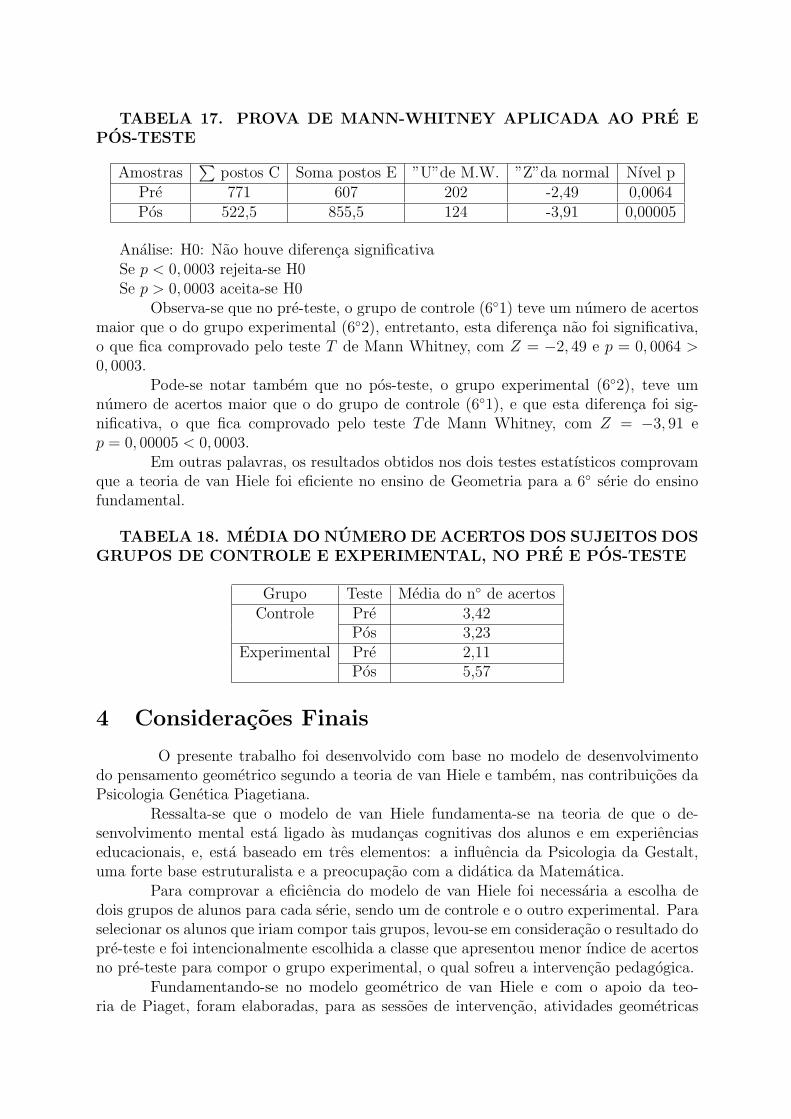
TABELA 17. PROVA DE MANN-WHITNEY APLICADA AO PRE EPOS-TESTE
Amostras∑
postos C Soma postos E ”U”de M.W. ”Z”da normal Nıvel pPre 771 607 202 -2,49 0,0064Pos 522,5 855,5 124 -3,91 0,00005
Analise: H0: Nao houve diferenca significativaSe p < 0, 0003 rejeita-se H0Se p > 0, 0003 aceita-se H0
Observa-se que no pre-teste, o grupo de controle (6◦1) teve um numero de acertosmaior que o do grupo experimental (6◦2), entretanto, esta diferenca nao foi significativa,o que fica comprovado pelo teste T de Mann Whitney, com Z = −2, 49 e p = 0, 0064 >0, 0003.
Pode-se notar tambem que no pos-teste, o grupo experimental (6◦2), teve umnumero de acertos maior que o do grupo de controle (6◦1), e que esta diferenca foi sig-nificativa, o que fica comprovado pelo teste Tde Mann Whitney, com Z = −3, 91 ep = 0, 00005 < 0, 0003.
Em outras palavras, os resultados obtidos nos dois testes estatısticos comprovamque a teoria de van Hiele foi eficiente no ensino de Geometria para a 6◦ serie do ensinofundamental.
TABELA 18. MEDIA DO NUMERO DE ACERTOS DOS SUJEITOS DOSGRUPOS DE CONTROLE E EXPERIMENTAL, NO PRE E POS-TESTE
Grupo Teste Media do n◦ de acertosControle Pre 3,42
Pos 3,23Experimental Pre 2,11
Pos 5,57
4 Consideracoes Finais
O presente trabalho foi desenvolvido com base no modelo de desenvolvimentodo pensamento geometrico segundo a teoria de van Hiele e tambem, nas contribuicoes daPsicologia Genetica Piagetiana.
Ressalta-se que o modelo de van Hiele fundamenta-se na teoria de que o de-senvolvimento mental esta ligado as mudancas cognitivas dos alunos e em experienciaseducacionais, e, esta baseado em tres elementos: a influencia da Psicologia da Gestalt,uma forte base estruturalista e a preocupacao com a didatica da Matematica.
Para comprovar a eficiencia do modelo de van Hiele foi necessaria a escolha dedois grupos de alunos para cada serie, sendo um de controle e o outro experimental. Paraselecionar os alunos que iriam compor tais grupos, levou-se em consideracao o resultado dopre-teste e foi intencionalmente escolhida a classe que apresentou menor ındice de acertosno pre-teste para compor o grupo experimental, o qual sofreu a intervencao pedagogica.
Fundamentando-se no modelo geometrico de van Hiele e com o apoio da teo-ria de Piaget, foram elaboradas, para as sessoes de intervencao, atividades geometricas
explorando-se material concreto, e observando-se a evolucao do desenvolvimento do pen-samento geometrico dos sujeitos desta pesquisa, segundo os nıveis 0 (visualizacao) e 1(analise), identificados por van Hiele.
A analise dos resultados mostrou que ao final do processo de intervencao os alunosdo grupo experimental apresentaram modificacoes nıtidas em relacao aos nıveis de vanHiele, enquanto que os alunos do grupo de controle nao apresentaram evolucao significativanas questoes do pos-teste e alguns ate apresentaram desempenho inferior ao verificado nopre-teste, indicando assim a vantagem da intervencao baseada na teoria de van Hiele.
Verificou-se, atraves dos dados obtidos, que o processo de intervencao nao atingiuigualmente todos os sujeitos, pois o processo educativo e de grande complexidade, envol-vendo inumeras variaveis dentre as quais o nıvel cognitivo dos alunos, suas experienciasanteriores e tambem as condicoes socio-economicas em que vivem.
A analise de dados coletados para este trabalho representa uma contribuicao paraa ampliacao dos conhecimentos existentes sobre o processo ensino – aprendizagem deGeometria e possıveis implicacoes pedagogicas que possam advir a nıvel da EducacaoMatematica.
Os dados indicam, tambem, que e importante um maior investimento em pesquisasem relacao ao ensino de Geometria, levando em conta a comprovacao da eficiencia domodelo de van Hiele, especialmente no primeiro grau. Este trabalho tambem mostra queexistem possibilidades interessantes em atividades semelhantes as desenvolvidas nestapesquisa que podem melhorar o ensino de Geometria no 1◦ grau.
Essas consideracoes mostram que um educador interessado na evolucao cognitivade seus alunos, nao pode apenas restringir-se ao conhecimento do conteudo a ser de-senvolvido em sala de aula. Ao inves de transmitir o conhecimento pronto e necessariobuscar estrategias de ensino que favorecam o interesse e a motivacao dos alunos. O profes-sor deve criar situacoes de encorajamento em sala de aula, que leve os estudantes a buscarrespostas para suas perguntas. Como esse tipo de atitude requer muita habilidade porparte do docente, muitos deles ensinam Geometria somente seguindo o livro didatico, oque implica no desinteresse em aprender por parte dos alunos, gerando assim, uma especiede caos no ensino em geral.
Portanto, e sempre importante que o profissional em educacao busque formaseficazes que melhorem a qualidade do processo ensino – aprendizagem, como por exemplo,o modelo de van Hiele de desenvolvimento do pensamento geometrico.
5 Referencias Bibliograficas
[1] CAMPBELL, D.T. e STANLEY, J.C. Delineamentos experimentais e quase-experimentais de pesquisa. E.P.U. Edusp, 1979.
[2] CROWLEY, M. L. O modelo de desenvolvimento do pensamento geometrico. InAprendendo e ensinando geometria. Lindquist, Mary Montgomery e Shulte, Albert P.(org), trad. De Hygino H. Domingues, Sao Paulo, Atual 1994.
[3] GUIMARAES, P.R.B. Estatıstica nao-parametrica. Universidade Federal do Parana,Departamento de Estatıstica, outubro 2002.
[4] LUJAN, M.L; A Geometria na 1o serie do 1o grau: Um trabalho na perspectiva de
van Hiele. Tese de Mestrado-Universidade Estadual de Campinas – Unicamp/Campinas/SP,1997.
[5] MATOS, J.M. Acomodando a teoria de van Hiele a modelos cognitivos idealizados.In Quadrante I, (pag.93-112), 1992.
[6] NASSER, L. A teoria de van Hiele: pesquisa e aplicacao. Trabalho apresentado no1o Seminario Internacional de Educacao Matematica. UFRJ, 1993.
[7] SIEGEL, S. Estatıstica nao parametrica para as ciencias do comportamento. McGRAW-HILL, 1975.
[8] MATOS, J.M. Cronologia recente do ensino da Matematica [recente chronology ofmathematics teaching]. Lisbon: Associacao de Professores de Matematica,1985.
[9] MATOS, J.M. Cognitive models in geometry. In J.P. Ponte, D. Fernandes, J.F.Matos, & J.M. Matos (Eds.), Mathematical problem solving and information technologies:Research in contexts of practice (Berlim: Springer).
[10] VAN HIELE, P.M. Structure and Insight. Academic Press – 1986.
[11] VAN HIELE-GELDOF, DINA. “Dissertation of Dina van Hiele-Geldof Entitled:The Ditactic of Geometry in the lowest Class of Secondary School”. Em English Trans-lation of Selected Wrintings of Dina van Hiele-Geldof and Pierrre M. van Hiele, editadopor por Dorothy G., David F. e Rosamond T. como parte do projeto de pesquisa “Aninvestigation of the van Hiele model od thinking in geometry among adolescents”, Re-search in Sciense Education (RISE), Program of the National Science Foundation, Grantno 7920640. Washington, D.C.:NSF 1984a. (Trabalho original publicado em 1957).
[12] http://www.gestaltsp.com.br/gestalt.htm.
UMA INTRODUÇÃO À MECÂNICA CLÁSSICA:FORÇA CENTRAL E MOVIMENTO PLANETÁRIO
Neilon José de Oliveira* Márcio José Horta Dantas†
Faculdade de Matemática - FamatUniversidade Federal de Uberlândia - UFU- MG
Julho de 2005
Resumo
Partindo dos princípios da Mecânica Clássica que são as Leis de Newton, dadas comopostulados da Mecânica, definimos Força Central. A partir disto reescrevemos as equações domovimento de uma partícula sobre a ação desta força em coordenadas polares. Através delasmostramos que o movimento de uma partícula em um campo de força central ocorre em umplano fixo. Mostramos que o momento angular e a energia de uma partícula que se move em talcampo são conservados, e também as três leis de Kepler para o movimento planetário. Umoutro resultado obtido, é que dada uma força central, é possível determinar a órbita (outrajetória) da partícula, que pode ser uma elipse, uma hipérbole ou uma parábola. E tambémresolvemos o problema inverso, ou seja, se for conhecida a órbita da partícula, então podemoscalcular a força central correspondente.
1 INTRODUÇÃO
A Física é um ramo da ciência que tem contribuído significativamente para facilitarnossa vida. As conquistas associadas a elas impulsionaram e aperfeiçoaram diversas áreas doconhecimento humano: a engenharia, a agricultura, a astronomia, etc.
Telescópios, microscópios, rádios, televisores, geladeiras, computadores, telefones,lâmpadas e automóveis são exemplos da capacidade criativa dos seres humanos associados àFísica, cujo campo de criação se estende desde o conhecimento das galáxias até às partículaselementares da matéria.
Um dos assuntos mais importantes da Física é o estudo do movimento. A parte daFísica que estuda este assunto é a mecânica, que por sua vez divide-se em duas outras partes,de acordo com o tipo de movimento que aborda. Uma dessas partes é a cinemática, que estudaos movimentos sem se preocupar com as causas que os produzem. É como se você estivesseandando de carro e prestasse atenção apenas ao caminho que ele percorre, ao tempo que elegasta para percorrer este caminho, a sua velocidade e aceleração. A força exercida pelo motor,a resistência do ar, a ação dos freios, a potência deste motor, dentre outros, são estudadas emdinâmica, que é a outra parte da mecânica que estuda o movimento do ponto de vista de suascausas.
* [email protected] Orientando do Curso de Pós Graduação da Faculdade de Matemática (Famat)de jan/04 a jul/05† [email protected] Professor orientador.
Mas quando estudamos as causas de um movimento surge a necessidade de saberoutros conceitos. Por exemplo, uma maneira de descrever a atuação de uma força sobre umcorpo é relacionar esta força com o deslocamento ao longo do qual ela age. Esta descriçãoleva ao conceito de trabalho de uma força. Por outro lado, quando analisamos a ação daforça ao longo de determinado intervalo de tempo, somos conduzidos ao conceito de impulsode uma força (momentum). Da definição de trabalho de uma força decorre um conceitoimportante em nosso cotidiano. É o conceito de energia. Fontes de energia e o seuaproveitamento são temas que sempre estiveram presentes na história da civilização. Por outrolado, da definição de impulso de uma força, temos o conceito de quantidade de movimento,grandeza chave para o entendimento das interações.
No entanto, a Física se baseia em medições. Assim ao tentar explicar o movimento deum corpo, há uma necessidade também de quantificar as grandezas e descrever sua trajetória.Para isto vários conceitos matemáticos foram desenvolvidos como vetores e operaçõesvetoriais, derivada, integral, funções e suas propriedades, etc.
Durante séculos, vários cientistas no mundo inteiro se preocuparam em desenvolveralgoritmos, operadores, métodos geométricos, para resolver problemas do cotidiano, em queum deles era explicar o movimento dos planetas, estrelas e galáxias.
Olhando para o céu e acompanhando o movimento do sol, e da Lua, o dos outrosplanetas e as demais estrelas, temos a nítida impressão de que tudo se movimenta ao redor daTerra. Com base nessas “evidências”, a humanidade aceitou, durante 2000 anosaproximadamente, a teoria geocêntrica, acreditando que a terra fosse o centro do Universo.Assim também nos parece evidente que a existência de um movimento está intimamenteligado, a existência de uma força. Mas, às vezes aquilo que parece ser evidente acaba serevelando falso após uma verificação acurada, através de medições e cálculos, e é nesta parteque entra a ajuda tão importante do matemático-físico.
Ao longo da história, tais observações imprecisas têm contribuído para váriosequívocos a respeito da relação entre força e movimento, que são os temas abordados nestetrabalho, Forças Centrais e o Movimento Planetário. Nesta monografia apresentamos ocomportamento de uma partícula sob ação de um campo de força central e as três leis deKepler, as quais constituem a cinemática do movimento planetário. E também foi abordado,como Newton, baseando-se nos trabalhos de Kepler, desenvolveu a Dinâmica do movimentodos planetas e descobriu uma das leis fundamentais da natureza: a lei da GravitaçãoUniversal.
2 UM BREVE HISTÓRICO – ORIGEM DA FÍSICA
A física originou-se na Antiguidade, onde se acreditava que fenômenos da naturezacomo chuva, trovão, nascimento, morte, dia, noite, etc. eram acontecimentos provenientesdos deuses, onde para o homem era tudo sagrado. Dentro destes fenômenos destacava abeleza esplêndida do arco-íris, que para a Bíblia, significava que era uma manifestação datolerância divina perante a insensatez humana.
Antes de o homem criar a linguagem escrita, marco do inicio da civilização, o homemjá estava em contato com as formas de seres e objetos existentes no mundo. Para sobreviver, ohomem criou nos tempos primitivos, centenas de objetos com as suas variadas formas, comoutensílios domésticos, armas de caça, armas de defesa, calçados, roupas, etc. Os sereshumanos da antiguidade já retratavam em suas pinturas e esculturas, as formas de animais,paisagens e objetos com os quais mantinham contatos.
Chineses, egípcios, assírios, babilônios e especialmente gregos deram grandescontribuições ao estudo das formas, veja [T] . A natureza sempre cercou os seres humanos deuma rica variada de configurações geométricas. Teses sobre curvas, superfícies e volumes
devem ter surgido na mente humana após uma observação de seu meio ambiente. Porexemplo: o arco-íris no céu sugere uma curva de bolhas de água que tem a forma de umhemisfério e os troncos das árvores de cilindros. Admiravelmente, o homem pré-histórico foicapaz de transformar o conhecimento sobre o espaço sobre a sua volta numa espécie degeometria rudimentar prática da qual ele de alguma forma se utilizou para construir moradia,tecer, confeccionar vasos, etc...
Ao contemplar o firmamento, o homem havia percebido que corpos celestesdescreviam movimentos cíclicos, como se todos estivessem incrustados dentro de uma esferagigante a esfera celeste. “A duração de dia e de noite foram as primeiras aplicações da ciênciavisando a melhoria da ciência na sua vida cotidiana”. Os formuladores desta “física” eramsacerdotes, profetas, magos, pessoas que muitas vezes em meio a rituais e invocaçõesmísticas, faziam recomendações, profecias, previsões, elaboravam remédios e porçõesmágicas. Não se podia dizer que esses sacerdotes e magos eram cientistas nem o que faziampudesse ser chamado de ciência, pois abordavam muito misticismo e magia.
Mais tarde, foram possíveis estabelecer propriedades gerais a partir da observação desituações geométricas semelhantes. Com o desenvolvimento da linguagem e com o uso dapalavra, tal percepção quantitativa, aumentou tanto e chegou a tal nível de sofisticação quepermitiu as determinadas culturas definir as grandezas das coisas através de um sistema denumeração que eram acompanhados por alguns símbolos (palavras, pictogramas e sinaisgráficos), no qual estrutura-se em dois princípios: o 1º principio de ordenamento oudisposição que permitiu distinguir o primeiro símbolo (um) do segundo (dois), e outro serefere ao agrupamento, que estabeleceu a expansão das idéias, com a combinação deresultados, veja [T].
A astronomia egípcia conseguiu sua hegemonia, ou seja, seu espaço e objetivos. Osegípcios adotaram um instrumento muito preciso na verificação do tempo, o relógio de sol,que constituía basicamente de uma haste fincada ao solo. O homem nessas remotas épocasverificou a variação do comprimento de uma sombra ao longo do dia. Sendo que com o passardo tempo, ele conseguiu verificar que a sombra era bastante comprida ao nascer do sol, queela ia diminuindo até atingir seu mínimo ao meio dia, e depois crescer ao pôr-do-sol. Há doismilênios, civilizações antigas tinham descoberto que o intervalo de tempo entre doiscomprimentos iguais da sombra do meio dia é 365 dias, que corresponderia a um ano solar.Neste mesmo período, deu-se a definição de ângulos e de medidas de ângulos, que estavamligados a unidade de tempo. Sendo assim criaram um instrumento para a medição de ângulospelo qual eles chamaram de quadrante, útil para determinar a distância que uma embarcaçãose encontrava da terra.
Passados alguns séculos, surgem na Grécia, grandes pensadores filosóficos. Dentreseus principais objetivos estava o de achar o princípio de todas as coisas, saber o motivo daexistência do universo e do homem. Foi daí que surgiu a divisão desse mundo chamadociência em subdivisões importantes como: a biologia, a ecologia, a geologia, a química, afísica, a matemática e muitas outras.
Entre estes pensadores podemos citar:Tales de Mileto (624-548 a.C). Foi considerado um dos sete sábios da antiguidade. Fala-seque Tales havia previsto o eclipse solar de 585 a.C, mas sobre isto não há relatos precisos paraessa afirmação, visto que não haveria tabelas astronômicas nesta época. Tales causou grandeadmiração ao medir a altura da grande pirâmide. Pitágoras (572 a. C.), que fundou emCrotona na Itália uma escola, onde fez grandes contribuições à matemática. Eudóxio, Platão,Arquimedes, Aristóteles, Euclides, todos estes grandes filósofos e matemáticos, e outros mais,contribuíram muito para o desenvolvimento da ciência atual, veja [T].
Podemos observar que a astronomia é uma das mais antigas das ciências. A quantidadee a precisão dos dados astronômicos, conseguidos desde épocas remotas, são realmente
surpreendentes. Isto se deve, provavelmente, à influência que os fenômenos celestes exerciamsobre os povos mais antigos. Assim, a necessidade de se estabelecer épocas de plantio ecolheita e sua relação com as posições do Sol, da Lua e das estrelas, levou os astrônomos daAntiguidade a coletar um grande número de dados sobre os movimentos destes astros.
As primeiras tentativas para explicar o movimento dos corpos celestes são devidas aosgregos, no século IV a. C. Tentando reproduzir os movimentos destes corpos, os gregosestabeleceram um modelo no qual a Terra era situada no centro do Universo (teoriageocêntrica) e os planetas, bem como o Sol, a Lua e as estrelas estariam incrustadas emesferas que giravam em torno da Terra. Com este modelo consegui-se descrever, comaproximação razoável, os movimentos dos corpos no céu. Na tentativa de melhor ajustar omodelo aos fatos observados, os gregos tiveram que lançar mão de um grande número deesferas para explicar o movimento de um único planeta. Isto tornou o universo grego muitocomplicado e, durante muitos anos, várias tentativas foram feitas para se conseguir ummodelo mais simples, veja [A].
As relações entre força e movimento sempre foram objeto de estudo desde aAntiguidade. O filósofo Aristóteles (384 – 322 a. C.), por exemplo, analisando estas relações,acreditava que um corpo só poderia permanecer em movimento se existisse uma forçaatuando sobre ele. Então, se um corpo estivesse em repouso e nenhuma força atuasse sobreele, este corpo permaneceria em repouso. Quando uma força agisse sobre o corpo, ele se poriaem movimento mas, cessando a ação da força, o corpo voltaria ao repouso. Por outro ladoAristóteles também acreditava que abandonando corpos leves e pesados de uma mesma altura,seus tempos de queda não seriam iguais. Aristóteles também acreditava na teoria geocêntrica.
Nas tentativas de simplificação do modelo grego, aquela que obteve maior êxito foi ateoria geocêntrica do grande astrônomo Ptolomeu, que viveu em Alexandria, no século II a.C. Ptolomeu supunha que os planetas moviam-se em círculos, cujos centros giravam em tornoda Terra. Com isto, além de apresentar um modelo mais simples do que os dos gregos eleconseguiu um melhor ajustamento aos movimentos observados no céu. Em virtude darazoável precisão das previsões feitas com o sistema de Ptolomeu e, além disso, como a suateoria, supondo a Terra no centro do Universo, se adaptasse muito bem à filosofia religiosa daIdade Média as idéias de Ptolomeu perduraram durante praticamente 13 séculos.
O astrônomo polonês, Nicolau Copérnico (1473 – 1543), apresentou um modelo maissimples, onde o Sol estaria em repouso e os planetas, inclusive a Terra giravam em torno deleem órbitas circulares (teoria heliocêntrica). Com sua teoria heliocêntrica, Copérnicoconseguiu uma descrição dos movimentos dos corpos celestes tão satisfatória quanto aquelaobtida através do sistema de Ptolomeu, com a vantagem de ser um modelo mais simples doque o geocêntrico. Entretanto, um sistema em que o Sol era considerado imóvel e a Terrapassava a ser um planeta em movimento era fundamentalmente contra as convicçõesreligiosas da época. Em virtude disto Copérnico relutou muito em publicar suas idéias. O livrono qual Copérnico apresentava a sua teoria causou grandes polêmicas e terminou sendocolocado na lista dos livros proibidos pela igreja.
Galileu Galilei, físico e astrônomo italiano.Figura 1
Introduzindo o método experimental para o estudo dos fenômenos físicos, GalileuGalilei (1564 – 1642) realizou uma série de experiências que o levaram a conclusõesdiferentes daquelas de Aristóteles, ou seja, que um corpo podia estar em movimento sem a
ação de uma força que o empurrasse e que abandonando de uma mesma altura, um corpo leve,e um corpo pesado caem simultaneamente, atingindo o chão no mesmo instante. Galileu éconsiderado o introdutor do método experimental na Física, acreditando que qualquerafirmativa relacionada com um fenômeno deveria estar fundamentada em experiência e emobservações cuidadosas. Este método de estudos dos fenômenos da natureza não era adotadoaté então e, por isso mesmo, várias conclusões de Galileu entraram em choque com osensinamentos de Aristóteles. As experiências de Galileu o levaram a atribuir a todos os corposuma propriedade, denominada inércia, pela qual um corpo tende a permanecer em seu estadode repouso ou de movimento.
Além de seus trabalhos no campo da Mecânica, Galileu deu também enormecontribuição para o desenvolvimento da Astronomia. Em virtude de sua grande habilidadeexperimental, ele conseguiu construir o primeiro telescópio pra uso em observaçõesastronômicas. Com este instrumento, realizou uma série de descobertas, quase todascontrariando as crenças filosóficas e religiosas da época, as quais eram baseadas nosensinamentos de Aristóteles. A partir destas descobertas, Galileu passou a defender e adivulgar a teoria de que a Terra, assim como os demais planetas, se movem em torno do Sol,como afirmava o astrônomo Copérnico em sua teoria heliocêntrica. Estas idéias foramapresentadas em sua obra “Diálogos sobre os Dois Grandes Sistemas do Mundo” publicadaem 1632. A obra foi condenada pela igreja e Galileu foi taxado de herético, preso e submetidoa julgamento pela Inquisição em 1633. Para evitar que fosse condenado à morte Galileu se viuobrigado a renegar suas idéias através de uma “confissão”, lida em voz alta perante o SantoConselho da Igreja, veja [T].
Alguns anos depois, o astrônomo dinamarquês Tycho Brahe, começou a desenvolverum importante trabalho no sentido de obter medidas mais precisas das posições dos corposcelestes. Em seu observatório, muito bem equipado para a época, Tycho Brahe realizou,durante cerca de 20 anos, rigorosas observações planetárias, verificando que o sistema deCopérnico não se adaptava satisfatoriamente a essas observações.
Os dados colhidos por Tycho Brahe, cuidadosamente tabelados, constituíram a base dotrabalho que foi desenvolvido, após sua morte, por seu discípulo, o astrônomo alemãoJohannes Kepler (1571 – 1630). Entusiasmado pela simplicidade do sistema de Copérnico,Kepler acreditava que seria possível realizar alguma correção neste modelo, de modo a torná-lo mais ajustado aos movimentos dos corpos celestes realmente observados. Desenvolveu seutrabalho analisando cuidadosamente, com grande habilidade matemática, durante cerca de 17anos, a grande quantidade de dados coletados por Tycho Brahe.
Johannes Kepler, astrônomo alemão.Figura 2
O trabalho de Kepler foi coroado de êxito, tendo conseguido descobrir as três leissobre o movimento dos planetas, que deram origem ao nascimento da Mecânica Celeste.
No dia de Natal de 1642, ano da morte de Galileu, nascia em uma pequena cidade daInglaterra, Isaac Newton (1642 – 1727), o grande físico e matemático que formulou as leisbásicas da Mecânica. Ao estruturar os princípios da Mecânica, Newton se baseou em estudosde grandes físicos que o precederam. Assim, a 1ª lei de Newton não é nada mais do que umasíntese das idéias de Galileu relativas à inércia. Em 1686, Newton apresentava pronta para serimpressa a 1ª edição de sua famosa obra Princípios Matemáticos da Filosofia Natural, onde
foram publicadas as três leis que recebem seu nome. A publicação desta obra em pouco tempoconsagrou Newton como um dos maiores gênios da história.
Com o trabalho de Kepler, a leis básicas dos movimentos dos planetas haviam sidodescobertas e as bases da Mecânica celeste estavam lançadas. Entretanto, o que Kepler fez foidescrever estes movimentos sem se preocupar com suas causas; em outras palavras, as leis deKepler constituem a Cinemática do movimento planetário. Daí, vem o passo mais audaciosodo trabalho de Newton, que demonstra sua capacidade de extrapolação e sua grande intuição.Analisando o movimento da lua em torno da Terra, e baseando-se em suas leis do movimentoe nos estudos de Kepler, Newton percebeu que deveria existir uma força de atração da Terrasobre a Lua, do mesmo modo que o Sol atrai os planetas. Segundo consta, ao observar umamaçã se desprender da árvore, ele concebeu a idéia de que a queda da maçã seria tambémcausada pela atração da Terra. Reunindo estas idéias, Newton conseguiu chegar à expressãomatemática da força de atração entre o Sol e um planeta.
Isaac Newton, físico e matemático inglês.Figura 3
A grandiosidade da obra de Newton não o impediu de reconhecer o mérito dostrabalhos de cientistas que o precederam, como Galileu, Kepler, Copérnico, etc. Com amodéstia própria de muitos sábios, Newton afirmava que ele conseguiu enxergar mais longedo que outros colegas porque se apoiou em “ombros de gigantes”, veja [T].
As aplicações da Mecânica Newtoniana, coroadas de êxitos no estudo de um grandenúmero de fenômenos, fizeram com que as leis básicas lançadas por Newton prevalecessempor mais de 200 anos.
3 FORÇA E AS LEIS DE NEWTON
Ao tentar explicar os movimentos dos corpos, como o movimento do Sol, dosplanetas, de um corpo em queda livre, os cientistas no passado sempre procuravam responderperguntas, como:
• O que provoca o movimento?• Há necessidade de algo para manter um movimento?• Por que a velocidade de um corpo varia?• Quais são as causas das variações observadas em um movimento?• O que mantém o movimento dos planetas em torno do Sol?
Aproximadamente há três séculos, o famoso físico e matemático inglês Isaac Newton(1642 – 1727), baseando em observações suas e de outros cientistas, formulou três princípiosque são fundamentais para responder a estas questões e na solução de outros problemasrelacionados com os movimentos, que foram chamados de Leis do movimento, e sãoconsiderados como os axiomas da Mecânica;
1. Uma partícula P permanece em estado de repouso ou em movimento retilíneo uniforme,a menos que seja compelida a mudar este estado por forças a ela aplicadas, em outraspalavras, se a força resultante aplicada sobre uma partícula é nula, é possível encontrarreferenciais nos quais esta partícula não tenha aceleração.

2. Se F�
é a força aplicada em uma partícula de massa m, a qual como conseqüência semove com velocidade v
�, então
( )vmdt
dF
��= ou ( )p
dt
dF
��=
onde p�
é o momento linear sobre a partícula, veja [H]. Logo podemos dizer que a força
resultante F�
sobre uma partícula de massa m está relacionada com a sua aceleração a�
por: amF��
= que pode ser escrita em suas componentes escalares: xx amF��
= , yy amF��
=
e zz amF��
= . As relações ( )pdt
dF
��= e amF
��= , para uma partícula isolada, são
completamente equivalentes na mecânica Newtoniana ou Mecânica Clássica, como écomumente conhecida.
3. Se um partícula A exerce uma força ABF�
sobre uma partícula B, então B deve exercer
uma força BAF�
sobre o corpo A, sendo que as forças ABF�
e BAF�
tem magnitudes iguais,direções iguais e sentidos contrários. Em outras palavras, a cada ação corresponde umareação igual, em mesma direção e de sentido oposto. Veja [H].
Em unidades para o Sistema internacional, a segunda lei de Newton indica que: 1 N = 1kg m / s2.
4 FORÇA CENTRAL
4.1 Definição de Força Central.
Considere que uma força F�
atuante sobre uma partícula de massa m, como estárepresentado na figura 4, é tal que:
a) ela é sempre dirigida de m para um ponto fixo O ou em sentido contrário.b) seu módulo depende somente da distância r de m a O.
Uma força assim é chamada de força central ou campo de força central, em que O é o centrode força. Logo é uma força central se, e somente se,
( ) ( )r
rrfrrfF���
== 1 , (1)
( ) 1rrfF��
=
r�
O
x
y
z
m
Figura 4Representação da força central atuando sobre a partícula de massa m.

onder
rr�� =1 é o vetor unitário na direção r
�. Se ( ) 0>rf a força central é de repulsão, isto é,
no sentido de O para m. Se ( ) 0<rf a força central é de atração, isto é, no sentido de m paraO, veja [S].
4.2 Movimento de uma partícula em um Campo de Força Central.
Seja ( ) 1rrfF��
= , o campo de força central. Então: ( ) ( ) 011 =×=×=× rrrfrrfrFr������
Logo:
0=× Fr��
. (2)
De fato, F�
tem mesma direção de r�
e 0º0sen.. ==× FrFr��
, ou por 1r�
ser um vetor
unitário na direção do vetor posição r�
. Comodt
vdmF��
= , a equação (2) pode ser escrita
00 =×�=×dt
vdr
dt
vdmr
����ou
( ) 0=×vrdt
d ��(3)
Pois, ( )dt
vdr
dt
vdrvv
dt
vdrv
dt
rd
dt
vdrvr
dt
d�������������� ×=+×=×+×=×+×=× 0 , veja [S].
Integrando (3), temos:
hvr��� =× (4)
onde h�
é um vetor constante.
Fazendo o produto escalar de ambos os lados de (4) por r�
, temos: ( ) hrvrr����� •=ו
Como ( ) ( ) 0=•×=ו vrrvrr������
, veja [R], temos:
0=• hr��
(5)
Assim r�
é um vetor perpendicular a h�
, logo o movimento pertence a um plano.Portanto, se uma partícula move-se em um campo de força central, esta partícula
move-se em um plano fixo perpendicular ao vetor constante.
4.3 Momento angular de uma partícula em um Campo de Força Central.
Consideremos uma partícula P de massa m e momento linear p�
, em uma posição r�
,
relativa à origem de um referencial inercial. O momento angular Ω�
da partícula P, em relação
à origem O, é definido como sendo o produto vetorial entre r�
e p�
, ou seja: pr���
×=Ω , veja
[H]. Assim o momento angular é um vetor cujo módulo é dado por θsenpr���
=Ω , ondeθ é
o ângulo formado entre r�
e p�
. Sua direção é perpendicular ao plano determinado por r�
ep�
, e o sentido é dado pela regra da mão direita, isto é, com os dedos da mão direita curvados,giramos r
�para p
�através do menor ângulo entre eles; o polegar direito estendido apontará o
sentido de Ω�
. O momento angular é também comumente chamado de momento do momentolinear ou momento da quantidade de movimento.
Tomemos a equação (4). Multiplicando pela massa m, obtemos: ( ) hmvrm��� =× ou
hmvmr��� =× .
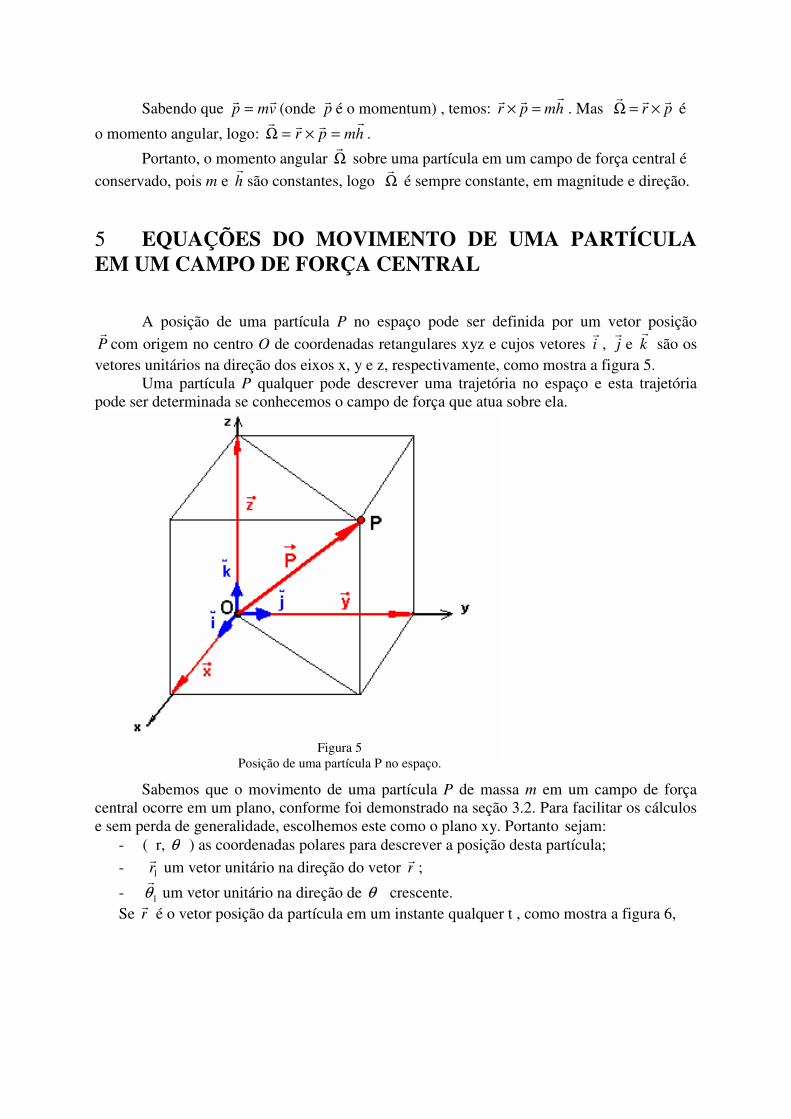
Sabendo que vmp�� = (onde p
�é o momentum) , temos: hmpr
��� =× . Mas pr���
×=Ω é
o momento angular, logo: hmpr����
=×=Ω .
Portanto, o momento angular Ω�
sobre uma partícula em um campo de força central é
conservado, pois m e h�
são constantes, logo Ω�
é sempre constante, em magnitude e direção.
5 EQUAÇÕES DO MOVIMENTO DE UMA PARTÍCULAEM UM CAMPO DE FORÇA CENTRAL
A posição de uma partícula P no espaço pode ser definida por um vetor posição
P�
com origem no centro O de coordenadas retangulares xyz e cujos vetores i�
, j�
e k�
são osvetores unitários na direção dos eixos x, y e z, respectivamente, como mostra a figura 5.
Uma partícula P qualquer pode descrever uma trajetória no espaço e esta trajetóriapode ser determinada se conhecemos o campo de força que atua sobre ela.
Sabemos que o movimento de uma partícula P de massa m em um campo de forçacentral ocorre em um plano, conforme foi demonstrado na seção 3.2. Para facilitar os cálculose sem perda de generalidade, escolhemos este como o plano xy. Portanto sejam:
- ( r, θ ) as coordenadas polares para descrever a posição desta partícula;
- 1r�
um vetor unitário na direção do vetor r�
;
- 1θ�
um vetor unitário na direção de θ crescente.Se r�
é o vetor posição da partícula em um instante qualquer t , como mostra a figura 6,
Figura 5Posição de uma partícula P no espaço.
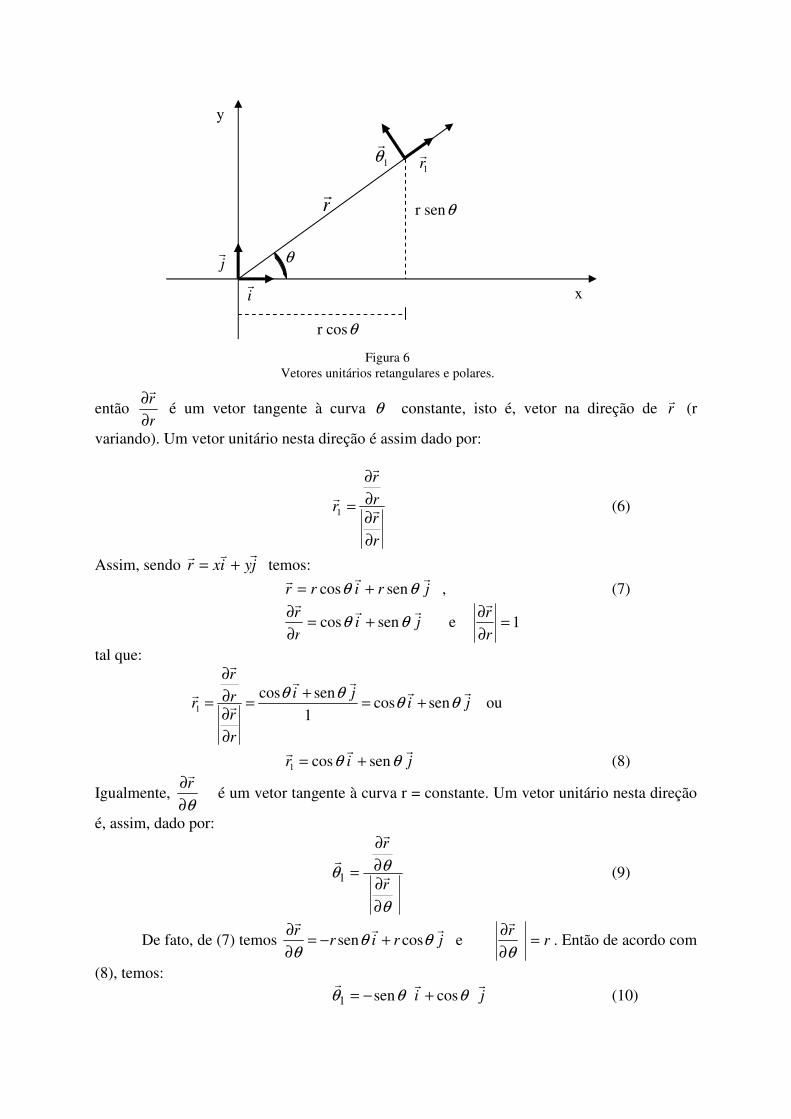
entãor
r
∂∂�
é um vetor tangente à curva θ constante, isto é, vetor na direção de r�
(r
variando). Um vetor unitário nesta direção é assim dado por:
r
rr
r
r
∂∂∂∂
= �
�
�1 (6)
Assim, sendo jyixr��� += temos:
jrirr��� θθ sencos += , (7)
jir
r ���θθ sencos +=
∂∂
e 1=∂∂
r
r�
tal que:
jiji
r
rr
r
r����
�
�
� θθθθsencos
1
sencos1 +=+=
∂∂∂∂
= ou
jir��� θθ sencos1 += (8)
Igualmente,θ∂
∂r�
é um vetor tangente à curva r = constante. Um vetor unitário nesta direção
é, assim, dado por:
θ
θθ
∂∂∂∂
=r
r
�
��1 (9)
De fato, de (7) temos jrirr ���
θθθ
cossen +−=∂∂
e rr =
∂∂θ
�. Então de acordo com
(8), temos:
ji���
θθθ cossen1 +−= (10)
i�
j�
x
y
θ
1θ�
1r�
r senθ
r cosθ
r�
Figura 6Vetores unitários retangulares e polares.

Assim:
��
���
+−=
+=
ji
jir������
θθθθθ
cossen
sencos
1
1
Multiplicando ambos os lados da equação (7) por θsen e da equação (10) por θcos ,obtemos:
( )( )��
���
+−=
+=
ji
jir���
���
21
21
cossencoscos
sencossensen
θθθθθ
θθθθ
Logo:
11 cossen θθθ���
+= rj (11)Por outro lado, multiplicando ambos os lados da equação (7) por θcos e da equação
(10) por θsen− , obtemos:
( )( )��
���
−+=−
+=
ji
jir���
���
θθθθθ
θθθθ
cossensensen
cossencoscos2
1
21
Logo:
11 cossen ri���
θθθ +−= (12)Portanto, (8) e (10) são os vetores unitários polares em função dos vetores unitários
retangulares e (11) e (12) são os vetores unitários retangulares em função dos vetoresunitários polares.
Agora vamos obter os vetores velocidade e aceleração em coordenadas polares.
Assim, sendo jir��� θθ sencos1 += , temos:
dt
dr
dt
rd
r
r
dt
rdr
θθ∂
∂+
∂∂
== 1111
������ , veja [AG].
Mas, como 01 =∂∂
r
r�
, rdt
rd ���
= , 11 cossen θθθ
���
=+−=∂∂
jir
e θθ �=dt
d, então:
θθ ����
���
11
1 )0( +== rdt
rdr ou
11 θθ���� =r (13)
E também sendo ji���
θθθ cossen1 +−= , temosdt
d
dt
rd
rdt
d θθθθθθ
∂∂
+∂
∂== 111
1
������ .
Mas, como 01 =∂∂
r
θ�
, rdt
rd ���
= , 11 sencos rji
����
−=−−=∂∂ θθ
θθ
e θθ �=dt
d, então:
( )( ) ( )θθθθ ������� jir sencos0 −−+= ou
11 r���� θθ −= (14)
Assim, como a velocidade vetorial é dada por:
dt
rdv
�� = e 1rrr�� =
( ) ( )dt
rdrr
dt
dr
dt
rrdv 1
11
���� +==
11 rrrrv ����� +=
11 θθ�����
rrrv += (15)

E também, usando (13) e (14) temos que a aceleração vetorial é dada por:
( )11 θθ����
��rrr
dt
d
dt
vda +==
��
�� ++++= 11111 θθθθθθ ��������������� rrrrrrr
( ) ( )( )11111 rrrrrrr���������
������ θθθθθθθθ −++++=( )( )1
2111 2 rrrrrr
����������� θθθθθ −++=
( ) ( ) 112 2 θθθθ
��������� rrrrr ++−=Portanto, a aceleração vetorial é:
( ) ( ) 112 2 θθθθ
����������rrrrra ++−= (16)
Onde:2θ��� rrar −= é a aceleração radial e
θθ ���� rraN 2+= é a aceleração normal, veja [SY].
Agora, pela segunda lei de Newton, temos:Força resultante = (massa) (aceleração)
( ) ( )[ ]112
1 2)( θθθθ����������
rrrrrmrrf ++−= .Portanto, as equações do movimento de uma partícula P de massa m em um campo de
força central são:
( ) )(2 rfrrm =− θ��� (17)
( ) 02 =+ θθ ���� rrm (18)
6 LEI DAS ÁREAS
Se uma partícula P se move em um campo de força central com O como centro, entãoo vetor raio, desenhado de O à partícula, gera áreas iguais em tempos iguais, isto é, a
velocidade areolar definida como vr2
1A
���×= é constante. Para que possamos verificar a
veracidade dessa lei, tomamos as equações (17) e (18) do movimento de uma partícula em umcampo de força central.De (18) segue que: 0rr2r 2 =+ θθ ����Como:
( ) θθθθθ �������rrr
dt
dr
dt
dr
dt
rd22
22
2
+=+= ,
temos:( )
02
=dt
rd θ�.
Assim, θ�2r é uma constante. Tomemos esta constante como sendo h , e temos:
hr =θ�2 ou2r
h
dt
d =θ(19)
Agora consideremos que no tempo tΔ , a partícula mova-se de M a N, como mostra afigura 7.
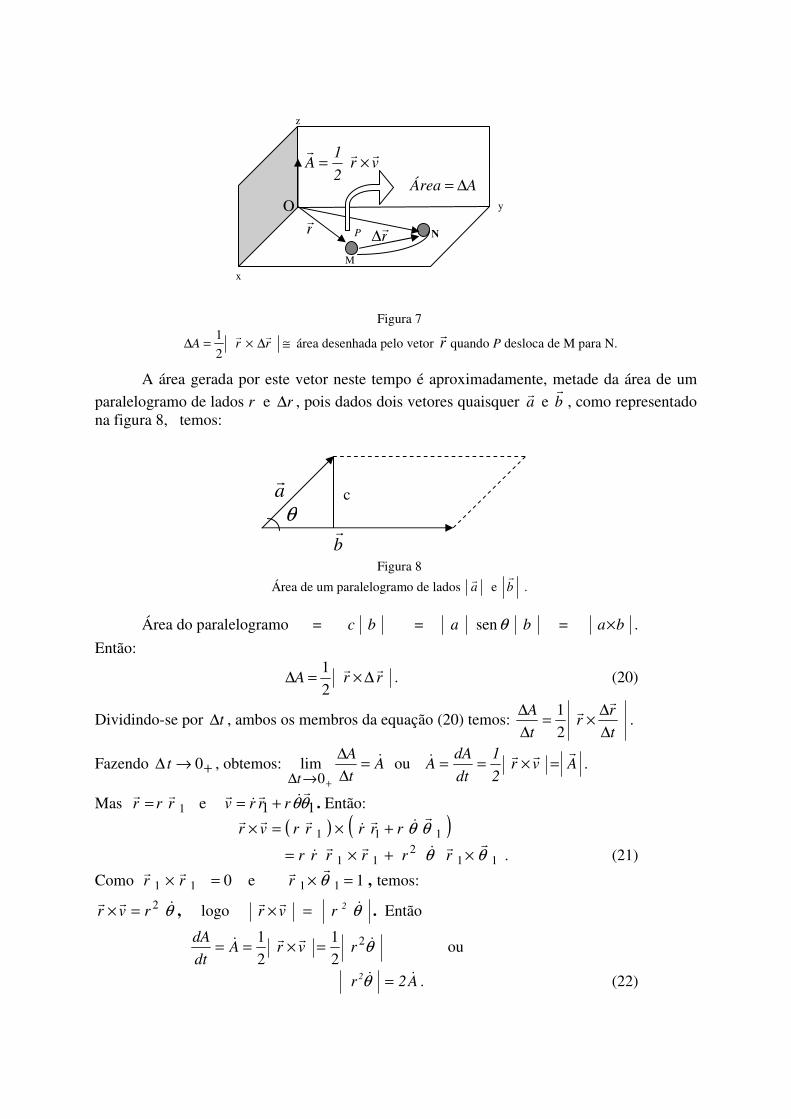
A área gerada por este vetor neste tempo é aproximadamente, metade da área de um
paralelogramo de lados r e rΔ , pois dados dois vetores quaisquer a�
e b�
, como representadona figura 8, temos:
Área do paralelogramo = bc = ba θsen = ba× .
Então:
rrA�� Δ×=Δ
2
1. (20)
Dividindo-se por tΔ , ambos os membros da equação (20) temos:t
rr
t
A
ΔΔ×=
ΔΔ ��
2
1.
Fazendo +→Δ 0t , obtemos: At
A
t�=
ΔΔ
+→Δ 0lim ou Avr
2
1
dt
dAA
���� =×== .
Mas 1rrr�� = e 11 θθ
�����rrrv += . Então:
( ) ( )111 θθ�������
rrrrrvr +×=×
112
11 θθ������ ×+×= rrrrrr . (21)
Como 011 =× rr��
e 111 =× θ��
r , temos:
θ��� 2rvr =× , logo θ��� 2rvr =× . Então
��� 2
2
1
2
1rvrA
dt
dA =×== ou
A2r 2 �� =θ . (22)
c
b�
a�
θ
Figura 8
Área de um paralelogramo de lados a�
e b�
.
O
x
y
z
vr2
1A
���×=
AÁrea Δ=
r�
r�Δ
M
N
Figura 7
≅Δ×=Δ rrA��
2
1área desenhada pelo vetor r
�quando P desloca de M para N.
P
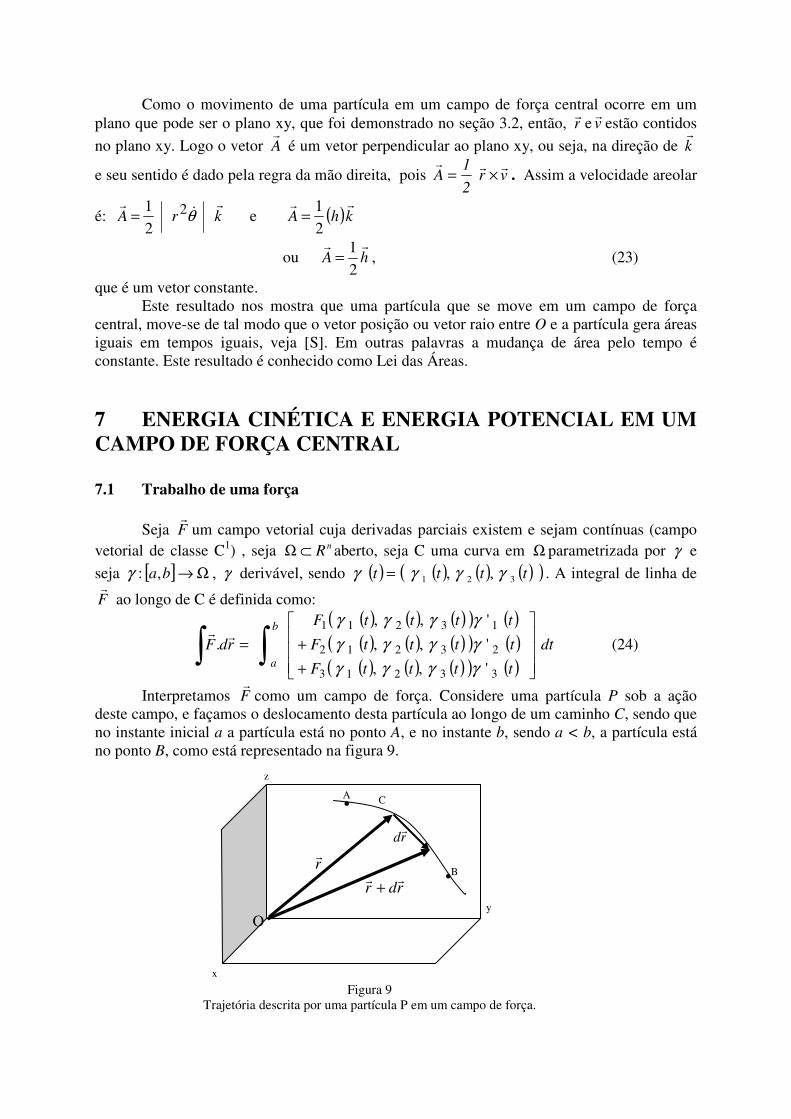
Como o movimento de uma partícula em um campo de força central ocorre em umplano que pode ser o plano xy, que foi demonstrado no seção 3.2, então, r
�e v�
estão contidos
no plano xy. Logo o vetor A�
é um vetor perpendicular ao plano xy, ou seja, na direção de k�
e seu sentido é dado pela regra da mão direita, pois vr2
1A
���×= . Assim a velocidade areolar
é: krA���
θ22
1= e ( )khA��
2
1=
ou hA��
2
1= , (23)
que é um vetor constante.Este resultado nos mostra que uma partícula que se move em um campo de força
central, move-se de tal modo que o vetor posição ou vetor raio entre O e a partícula gera áreasiguais em tempos iguais, veja [S]. Em outras palavras a mudança de área pelo tempo éconstante. Este resultado é conhecido como Lei das Áreas.
7 ENERGIA CINÉTICA E ENERGIA POTENCIAL EM UMCAMPO DE FORÇA CENTRAL
7.1 Trabalho de uma força
Seja F�
um campo vetorial cuja derivadas parciais existem e sejam contínuas (campovetorial de classe C1) , seja nR⊂Ω aberto, seja C uma curva em Ω parametrizada por γ e
seja [ ] Ω→ba,:γ , γ derivável, sendo ( ) ( ) ( ) ( )( )tttt 321 ,, γγγγ = . A integral de linha de
F�
ao longo de C é definida como:( ) ( ) ( )( ) ( )( ) ( ) ( )( ) ( )( ) ( ) ( )( ) ( )
dt
ttttF
ttttF
ttttF
rdFb
a ���
�
�
���
�
�
++=
33213
23212
13211
',,
',,
',,
.
γγγγγγγγγγγγ
��(24)
Interpretamos F�
como um campo de força. Considere uma partícula P sob a açãodeste campo, e façamos o deslocamento desta partícula ao longo de um caminho C, sendo queno instante inicial a a partícula está no ponto A, e no instante b, sendo a < b, a partícula estáno ponto B, como está representado na figura 9.
x
r�
Oy
z
rd�
rdr�� +
A
B
C
Figura 9Trajetória descrita por uma partícula P em um campo de força.
.
.

Então definimos o trabalho realizado para deslocar a partícula de A até B sob a ação docampo de força F
�, veja [GA], como sendo:
rdFWC
��⋅= (25)
7.2 Energia Cinética
Consideremos que uma partícula P, com massa m constante mova-se no espaço sob
influência de um campo de força F�
, e que nos tempos t1 e t2, as velocidades sejamdt
rdv 1
1
�� = e
dt
rdv 2
2
�� = , respectivamente. Então, o trabalho total realizado no movimento da partícula de P1
a P2 é dado por ⋅=⋅=⋅=C
r
r
P
P
rdFrdFrdFW2
1
2
1
�
�
������ou também por ⋅=
2
1
t
t
dtdt
rdFW��
. Assim:
⋅=2
1
t
t
dtvdt
vdmW
��. Sendo ( ) ( ) ( )( )tvtvtvv zyx ,,=� , temos:
( ) ( ) ( ) ( ) ( ) ( )( ) =⋅���
�
�=
2
1
,,,,t
t
zyxzyx dttvtvtv
dt
tdv
dt
tdv
dt
tdvmW
( ) ( ) ( ) ( ) ( ) ( ) ���
�
�=
2
1
,,t
t
zz
yy
xx dttv
dt
tdvtv
dt
tdvtv
dt
tdvm (26)
Como( ) ( )
cxg
dxdx
xdgxg += 2)(
2
temos:
( ) ( ) ( )=
���
�
���
�++=
=
=
2
1
222
222tt
tt
zyx tvtvtvmW
( ) ( ) ( ) ( ) ( ) ( ) =���
�
���
�
���
�
�++−�
��
�
�++=
2222221
21
2
12
22
22
22 tvtvtvtvtvtv
m zyxzyx
( ) ( ) ( )( ) ( ) ( ) ( )( )[ ] =++−++= 12
12
12
22
22
22
2tvtvtvtvtvtv
mzyxzyx
( ) ( )[ ]21
222
tvtvm �� −
( ) ( )22
21
22 tvmtvm
��−= . (27)
A expressão
( )2
2tvm
T
�= (28)
é denominada energia cinética da partícula. Assim o trabalho total realizado pela forçaF�
sobre a partícula P de P1 a P2 ao longo de C é
( ) ( )12
21
22
22TT
tvmtvmW −=−=
��(29)

sendo( )2
21
1tvm
T
�= a energia cinética em t1 e
( )2
22
2tvm
T
�= a energia cinética em t2 .
Em outras palavras, o trabalho total realizado pela força F�
é igual a variação da energiacinética. Note que, se a velocidade da partícula for constante, não haverá variação da energiacinética e o trabalho da força F
�será nulo, veja [C].
7.3 Princípio da conservação da energia
Muitas vezes várias forças agem numa partícula; a resultante F�
dessas forças é sua
soma vetorial, isto é, nFFFF����
+++= ...21 , supondo que seja n as forças atuantes. O trabalho
realizado pela força resultante F�
é a soma algébrica do trabalho realizado pelas forçasindividuais, ou seja, nWWWW +++= ...21 . Portanto temos 1221 ... TTWWWW n −=+++= .
Assim interpretamos a energia cinética de uma partícula como a capacidade que ele possui derealizar trabalho em virtude de seu movimento.
As n forças que agem numa partícula podem ser classificadas em dois tipos, asconservativas e as não conservativas. Se ao fim de um percurso fechado a capacidade dapartícula de realizar trabalho permanece a mesma (foi conservada) dizemos que as forçasatuantes na partícula são conservativas, e se a partícula, sob a ação de uma ou mais forças,retorna à sua posição inicial com energia cinética maior ou menor que à original, issosignifica que, em um percurso fechado, sua capacidade de realizar trabalho foi modificada.Neste caso pelo menos uma das forças atuantes é não conservativa. Assim, podemos dizer queuma força é conservativa se o trabalho realizado por ela sobre uma partícula que se moveentre dois pontos depende somente destes pontos e não da trajetória percorrida. Uma força énão conservativa se o trabalho realizado por ela sobre uma partícula que se desloca entre doispontos depende da trajetória seguida entre os pontos, veja [H].
7.4 Potencial ou Energia Potencial
Seja 3: RF →Ω�
um campo vetorial. Dizemos que F�
é um campo potencial se existeuma função RG →Ω: , de classe C1, tal que:
GF −∇=�
(30)A função G é denominada de um potencial de F
�. Podemos observar facilmente que
F�
pode ter vários potenciais, pois ( )rF�
é um campo potencial se existe ),,( zyxG tal que
( ) GrF −∇=�
. Então, se tomarmos CGG +=1 teremos ( ) GCGG ∇=+∇=∇ 1 , pois:
( ) ( ) ( ) ( )Gk
z
CGj
y
CGi
x
CGCGG1 −∇=
∂+∂−
∂+∂−
∂+∂−=+−∇=∇−
���.
Portando, variando ),,( zyxG de uma constante aditiva, isto não modifica a força calculada naequação (30), o que significa que a escolha de um ponto de referência para a energia potencialé irrelevante, pois o que interessa é calcular a diferença de energia potencial, não o valorabsoluto que ela possa ter em qualquer ponto, veja [H].
7.5 Teorema da Conservação da Energia Mecânica
Se F�
é um campo potencial com um potencial G, então para uma partícula de massa mpercorrendo uma trajetória qualquer C temos:
G + T = E (31)

onde T é a energia cinética da partícula em um instante t, e E uma constante.De fato, dado o vetor posição ( ) ( ) ( ) ( )( )txtxtxtx 321 ,,=�
, pela 2ª lei de Newton,
temos que( )2
2
dt
txdmF
��= , e pela equação (30) , temos GF −∇=
�. Logo:
( )G
dt
txdm −∇=
2
2 �. (32)
Fazendo o produto escalar de( )
dt
txd�
com ambos os membros de (32), obtemos:
( ) ( ) ( )dt
txdG
dt
txd
dt
txdm
���•−∇=•
2
2
, (33)
daí:( ) ( ) ( ) ( ) ( ) ( )
( ) ( ) ( )���
�
�∂∂+
∂∂+
∂∂−
=���
�
�++
dt
txd
z
G
dt
txd
y
G
dt
txd
x
G
dt
txd
dt
txd
dt
txd
dt
txd
dt
txd
dt
txdm
321
2
3
2
3
2
22
2
2
12
1
���
������
. (34)
Integrando para um intervalo de tempo de t1 a t2, temos:
( ) ( ) ( ) ( ) ( ) ( )
( ) ( ) ( )( )
( ) ( ) ( )( )
( ) ( ) ( )( )
dt
txtxtxz
G
txtxtxy
G
txtxtxx
G
dtdt
txd
dt
txd
dt
txd
dt
txd
dt
txd
dt
txdm
t
t
t
t
�������
�
�
�
∂∂
+∂∂
+∂∂
−
=���
�
�++
2
1
2
1
321
321
321
2
32
3
2
2
2
2
2
1
2
1
,,
,,
,,
������
Como[ ] += C
xdf
dx
xfd
dx
xdf
2
)()()( 22
, veja [G], temos:
( ) ( ) ( ) ( ) ( ) ( )[ ] −=���
�
���
����
���+��
����+��
���� 2
1
2
1
321
23
22
21 ,,
2
t
t
t
t
dttxtxtxGdt
ddt
dt
txd
dt
txd
dt
txd
dt
dm���
( ) ( ) ( )( ) ( )( )[ ]122
12
22txGtxGtvtv
m ���� −−=��
�� − o que resulta em:
( ) ( )( ) ( ) ( )( )12
122
2 22txGtv
mtxGtv
m ���� +=+ ou
( ) ( )12 tEtE = (35)Podemos dizer que qualquer variação na energia cinética T da partícula é compensada
por uma variação igual e oposta na sua energia potencial G, de maneira que a soma de ambaspermanece constante durante todo movimento.
Assim, a energia potencial de um sistema representa uma forma de energiaarmazenada que pode ser completamente recuperada e convertida em energia cinética, o quepode ser considerado somente para forças conservativas. Comumente, em lugar de dizermosque a partícula se move, preferencialmente dizemos que a configuração do sistema estávariando. Assim podemos dizer que a energia potencial é uma energia que está ligada àconfiguração do sistema.

A equação (30) só terá significado se soubermos calcular G em função da mudança deposição da partícula (ou mudança da configuração do sistema). Considerando a equação (29),
temos que TW Δ= , sendo W o trabalho realizado pela resultante F�
das forças que agem napartícula quando ela se move de um ponto P1 da trajetória a um ponto P2. Assim, temos:
GTW Δ−=Δ= , o que pode ser escrito na forma:
−=Δ2
1
).(P
p
drrFG (36)
em que GΔ é a variação de energia potencial do sistema quando a partícula se move do pontoP1 ao ponto P2 cujo vetor posição é r
�e ( ) ),,( zyxFrF =� .
Na forma vetorial a equação (35) pode ser escrita como ( ) ( )111222 2
1
2
1rGvvmrGvvm������ +⋅=+⋅ ,
sendo 22
22
2222 zyx vvvvv ++=⋅ �� e 2
121
2111 zyx vvvvv ++=⋅ �� . Logo, a equação (35) transforma-se
em:
( ) EzyxGmv =+ ,,2
1 2 (37)
sendo E a energia mecânica total constante, veja [S].Agora, vamos mostrar que
( ) ( )r
rrf
r
rzyxfzyxF
���=�
�
��++= )(,, 222 (38)
é um campo de força conservativo, onde 222 zyxr ++= .
Para que ( )rF�
seja conservativa deve existir uma função ),,( zyxG , tal que
( ) GrF −∇=�
. Seja ( ) =s
dttfsg0
)( . Então, tomemos ( ) ��
�� ++−= 222,, zyxgzyxG .
Queremos mostrar que ( )rFkz
Gj
y
Gi
x
GG
����−=
∂∂+
∂∂+
∂∂=∇ , então calculemos:
x
G
∂∂
,y
G
∂∂
e
z
G
∂∂
, que são:
( ) ( )r
xrg
zyx
xrg
x
zyxzyxg
x
G'''
222
222
222 −=��
�� ++
−=∂
��
�� ++∂
��
�� ++−=
∂∂
,
( ) ( )r
yrg
zyx
yrg
y
zyxzyxg
y
G'''
222
222
222 −=��
�� ++
−=∂
��
�� ++∂
��
�� ++−=
∂∂
e
( ) ( )r
zrg
zyx
zrg
z
zyxzyxg
z
G'''
222
222
222 −=��
�� ++
−=∂
��
�� ++∂
��
�� ++−=
∂∂
.
Portanto:
( ) ( ) ( ) ( ) ( ) ( ) ��
�� ++−=−−−=
∂∂+
∂∂+
∂∂=∇
r
zrg
r
yrg
r
xrg
r
zrg
r
yrg
r
xrgk
z
Gj
y
Gi
x
GG ''''''
���.
Como ( )sfsg =)(' , temos ( )r
rrfG�
−=∇ ou ),,( zyxFG�
−=∇ . Este resultado nos mostra
que um campo de força ( ) ( )r
rrfzyxF��
=,, é conservativo. Portanto, toda força central é
conservativa, veja [H].
8 DETERMINAÇÃO DA ÓRBITA A PARTIR DA FORÇACENTRAL E DETERMINAÇÃO DA FORÇA CENTRAL APARTIR DA ÓRBITA
8.1 Equações derivadas das equações do movimento
Considere uma partícula P movendo-se em um campo de força central dada por
( ) 1rrfF��
= .Através das equações (17) e (18) do movimento de uma partícula, é possível obter as
equações:
I -( )m
rf
r
hr =−
3
2��
II - ��
��−=+
uf
umhu
d
ud 11222
2
θ
III -( )2
42
2
2 2
mh
rfrr
d
dr
rd
rd =−��
��−
θθ
Demonstração de I
Da equação(17), temos:m
rfrr
)(2 =��
�� − θ��� e da equação (18)
2r
h=θ� , então:
m
rf
r
hrr
)(2
2=
���
�
�
�
���
�
�−�� , ou
m
rf
r
hr
)(3
2
=���
�
�−�� . (39)
Demonstração de II
Por meio da substituição deu
r1= na equação (19) temos 2
2hu
r
h ==θ� . Substituindo
na equação (17), obtemos: ( ) )(42 rfuhrrm =��
�� −�� .
Como2r
h
d
dr
d
dr
dt
d
d
dr
dt
drr
θθ
θθ
θ==== �� , veja [G], e
θθθ d
dur
d
duu
dtu
d
d
dr 22
1
−=−=��
��
= −
Daí,

θθ d
duh
r
h
d
durr −=−=
22� (40)
Então:
��
��−==
θd
duh
dt
d
dt
rdr
��� (41)
Pela regra da derivada de uma função composta, podemos escrever:
dt
d
d
duh
d
d
d
duh
dt
dr
θθθθ��
��−=�
�
��−=��
Pela derivada do produto, obtemos:
( ) ( ) ( )2
2
2
2
θθθθθθ d
udh
d
udh
d
du
d
hd
d
duh
d
d −=−+−=��
��−
pois h é uma constante.Assim
2
2
2
2
22
2
2
2
θθθ
θ d
ud
r
h
r
h
d
udh
dt
d
d
udhr −=−=−=�� . (42)
Masu
r1= , daí:
2
222
θd
uduhr −=�� (43)
Logo podemos escrever a equação (17) comom
rf
r
hr
)(3
2
=���
�
�−�� , ou ainda:
m
uf
uhd
uduh
��
��
=��
�
�
�−−
1
322
222
θ
m
uf
ud
uduh
��
��
=��
�
�
�+−
1
2
222
θ
��
��−=+
uf
umhu
d
ud 11222
2
θ. (44)
Demonstração de III
De (17) temos: )(2 rfrrm =��
�� − θ��� ou
m
rfrr
)(2 =− θ��� . Como2r
h=θ� , obtemos:
m
rf
r
hr
)(3
2
=���
�
�−�� .
Mas de (42) temos:
m
rf
r
h
d
ud
r
h )(3
2
2
2
2
2
=���
�
�−−
θ(45)

Comoθθθ d
dr
rd
drr
dtr
d
d
du2
2 11
−=−=��
��
= −
���
�
�−=��
��=
θθθθθ d
dr
rd
d
d
du
d
d
d
ud22
2 1
Pela derivada do produto, temos:
2
2
232121
θθθθθ d
rd
rd
dr
d
dr
rd
dr
rd
d���
�
�−+���
�
�=���
�
�−
2
2
2
2
322
2 121
θθθθθ d
rd
rd
dr
rd
dr
rd
d
d
ud −��
��=��
�
�
�−= (46)
Substituindo em (46) em (45), temos:
m
rf
r
h
d
rd
rd
dr
rr
h )(123
2
2
2
2
2
32
2
=��
�
�
�−�
��
�
�−�
�
��−
θθ
m
)r(f
r
h
d
rd
r
h
d
dr
r
h23
2
2
2
4
22
5
2
=−+��
��−
θθ
Multiplicando ambos os membros por ���
�
�2
4
h
robtemos:
mh
rfrr
d
dr
rd
rd2
)(4222
2=−�
�
��−
θθ. (47)
8.2 Determinação da Órbita a partir da Força Central
Dada uma força central, é possível determinar a órbita (ou trajetória) da partícula. Estaórbita, pode ser obtida nas formas:
• ( )θrr = ;
• ( )trr = e ( )tθθ = .Como exemplo, considere uma partícula P movendo-se em um campo de força central
dada por ( ) 1rrfF��
= sendo
12
1r
rKF
��−= , (48)
com K > 0. Vamos determinar a trajetória desta partícula.
Tomemosu
r1= e temos: 21
Kuu
f −=��
�� . Substituindo em (II) da seção 6.1.,
obtemos:
( )2
2222
2 1
mh
Kku
umhu
d
ud =−−=+θ
(49)
Esta equação diferencial tem uma solução geral dada por, veja [AG]:
2sencosmh
KBAu ++= θθ . (50)

Mas podemos escrever
���
�
�
++
++=+ θθθθ sencossencos
2222
22
BA
B
BA
ABABA .
Fazendo φcos22
=+ BA
Ae φsen
22=
+ BA
B, obtemos:
( )θφθφθθ sensencoscossencos 22 ++=+ BABA .
Daí, ( )φθθθ −+=+ cossencos 22 BABA .
Tomando 22 BAC += , temos: ( )φθθθ −=+ cossencos CBA Logo:
( )φθ −+= cos2
Cmh
Ku . (51)
Mas como é sempre possível escolher os eixos tais que 0=φ , veja [S], temos:
θcos2
Cmh
ku += ou
θcos
1
2C
mh
Kr
+= , (52)
que é a equação da trajetória da partícula ( )θrr = e representa a equação de uma cônica,conforme pode ser visto no Anexo I, pois
θεθε cospp
11
cos1
pr
+=
+= (53)
com2
1
mh
K
p= e
pC
ε= .
Podemos ainda determinar que tipo de cônica esta equação representa, o que vaidepender da constante C. Assim vamos expressar C em termos da energia total E.
Da equação (15), temos:
222
2
�����
rrvv
vvv
+=⋅
=⋅
Logo: 2222 � rrv += .
Comou
r1= ,
2r
h
dt
d =θe
θd
duh
dt
dr −= , temos:
( )2222
2 1hu
ud
duhv �
�
��+�
�
��−=
θou
���
�
���
�+�
�
��= 2
222 u
d
duhv
θ. (54)
Pelo Teorema da Conservação da Energia Mecânica, visto na seção 6.5. temos:
EVmv =+2
2
1, onde V é a energia potencial. Assim, podemos escrever:
VEud
duhm −=
��
�
�
�
���
�
���
�+�
�
�� 2
22
2
1
θ
( )2
22
2
mh
VEu
d
du −=+��
��
θ(55)

A energia potencial é ( ) drrfV −= , e como ( )2r
Krf
−= , obtemos: 12c
r
Kdr
r
kV +−== .
Mas para 0lim =∞→V
r, logo 01 =c . Assim para
ur
1= , temos:
KuV −= (56)
Voltando na equação (52), temos θθ
senCd
du −= e substituindo em (55), obtemos:
( )22
2
22 22
cossenmh
V
mh
EC
mh
KC −=��
�
�
�++ θθ
( )22
22242
22 22
coscos2
senmh
V
mh
ECC
mh
K
hm
KC −=+++ θθθ . Como KuV −= ,
22242
22 22
cos2
mh
Ku
mh
EC
mh
K
hm
KC +=++ θ . Mas θcos
2C
mh
Ku +=
��
�� ++=++ θθ cos
22cos
2222242
22 C
mh
k
mh
k
mh
EC
mh
k
hm
kC
θθ cos222
cos2
242
2
2242
22 C
mh
K
hm
K
mh
EC
mh
K
hm
KC ++=++
42
2
22 2
hm
K
mh
EC += ou
42
2
2
2
hm
K
mh
EC += (57)
considerando .0>C
Assim a equação da cônica fica: θθ cos2
cos1
42
2
222 hm
K
mh
E
mh
KC
mh
K
ru ++=+== ou
θcos2
112
2
2 ���
�
�
�++=
K
mEh
mh
Ku .
Comparando com a equação de uma cônicaθε cos1+
= pr , veja [J], que pode ser escrita
como:
ppr
θε cos11 += ou ( )θε cos111 +=pr
e
θcos2
111
2
2
2 ���
�
�
�++=
K
mEh
mh
K
r(58)
Assim temosk
mhp
2
= e2
221
K
Emh+=ε .
• Para que a cônica (58) seja uma elipse (veja Anexo I) temos que ter 1<ε , ou seja,
�<+ 12
12
2
K
Emh0<E e 0
21
2
2
>+K
Emh1
22
2
−>�K
Emh2
2
2mh
KE
−>� , logo:
02 2
2
<<−E
mh
K(59)

• Para que (58) seja uma parábola 1=ε , logo:
�= 02
2
2
K
Emh0=E (60)
• E, para que (58) seja uma hipérbole 1>ε , logo:
�> 02
2
2
K
Emh0>E (61)
8.3 Determinação da Força Central a partir da Órbita
Se for conhecida a órbita (ou trajetória) da partícula, então podemos calcular a forçacentral correspondente. Se a órbita é dada por ( )θrr = , a força central pode sercalculada através das equações:
II ��
��−=+
uf
umhu
d
du 11222
2
θ
III( )2
42
2
2 2
mh
rfrr
d
dr
rd
rd =−��
��−
θθ, já demonstradas na seção 8.1.
Assim:
���
�
�+−=�
�
��
ud
duumh
uf 2
2221
θou ( )
���
�
���
�−�
�
��−= r
d
dr
rd
rd
r
mhrf
2
2
2
4
2 2
θθ. (62)
Como exemplo, vamos calcular a força central que atua sobre um planeta que gira emtorno do Sol, em uma trajetória elíptica com o Sol em um dos seus focos.Tomando as equações (17) e (18) do movimento de uma partícula, e como:
•u
r1= ;
•θθθ d
dur
d
duu
dtu
d
d
dr 22
1
−=−=��
��
= − ;
• da equação (19) temos2r
h
dt
d =θ;
•2r
h
d
dr
d
dr
dt
d
d
dr
dt
drr
θθ
θθ
θ==== �� ,
e de (42) a equação (17) pode ser escrita na forma:
��
��=�
��
�
�−−
ufuh
ud
uduhm
11 422
222
θou
���
�
�+−=�
��
�
�−−=�
�
��
ud
uduhmuh
d
uduhm
uf
2
22232
2
2221
θθComo a trajetória é uma elipse, com o Sol em um dos focos, então a distância r até o
Sol, conforme mostrado no Anexo I, é dada por:
θε cos1+= p
r
Assim, sendou
r1= , temos:
pppu
θεθε cos1cos1 +=+=
E, comopd
ud θεθ
cos2
2 −= , teremos: ���
�
�++−−=�
�
��
pppumh
uf
θεθε cos1cos1 22
���
�
�−=�
�
��
pumh
uf
11 22 ou ( ) ���
�
�−=2
2 1
rp
mhrf (63)
ou ainda fazendo Kp
mh =− 2, temos ( ) ��
�
�
�=2
1
rKrf .
Logo:
121
rr
KF�����
�
�= . (64)
Portanto, a força central necessária, para que um planeta gire em torno do Sol, demodo que sua trajetória seja uma elipse com o Sol em um dos focos, varia inversamente aoquadrado da distância do Sol ao planeta, veja [S].
9 AS LEIS DE KEPLER E A LEI UNIVERSAL DE NEWTONPARA A GRAVITAÇÃO
9.1 As leis de Kepler
Antes de Newton ter enunciado suas famosas leis do movimento, usando inúmerosdados acumulados por Tycho Brahe, Kepler formulou suas três leis concernentes aomovimento dos planetas em torno do Sol.A primeira lei está relacionada com o que foi demonstrado nas seções 7.2. e 7.3. , em quecada planeta se move em uma órbita, que é uma elipse, com o sol em um dos focos.
A segunda lei é comumente conhecida como Lei das Áreas, que já foi demonstrada nocap.V, em que o vetor raio do Sol a um planeta qualquer, descreve áreas iguais em temposiguais.
A terceira lei é o que vamos demonstrar agora, em que o quadrado do período derotação de um planeta é proporcional ao cubo do comprimento do semi-eixo maior de suasórbitas.Consideremos então, um ponto fixo O (centro) e uma linha fixa AB (diretriz) distante d de O,como é mostrado abaixo (figura 10). Tomamos um ponto P no plano de O e AB que se movede modo que a razão de sua distância do ponto O pela sua distância da linha AB é sempreigual a uma constante positiva ε (excentricidade). Se 1<ε (veja Anexo – Seções cônicas) oponto P descreve uma elipse.
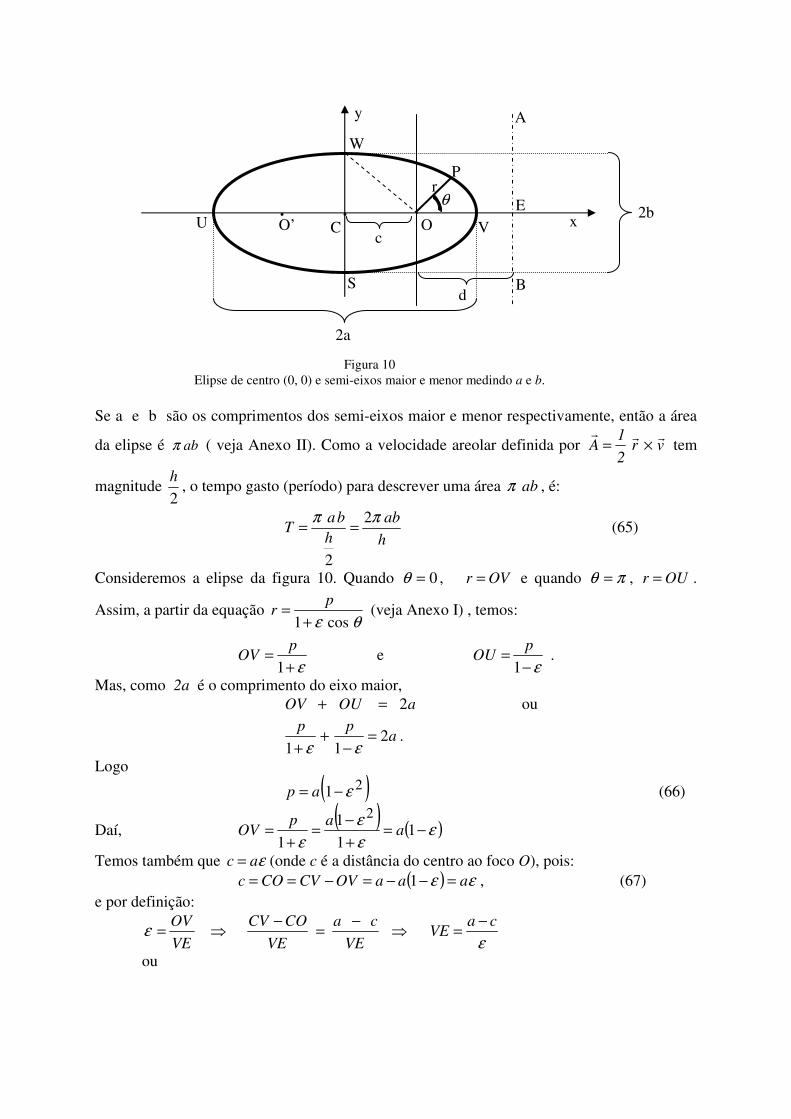
Se a e b são os comprimentos dos semi-eixos maior e menor respectivamente, então a área
da elipse é abπ ( veja Anexo II). Como a velocidade areolar definida por vr2
1A
���×= tem
magnitude2
h, o tempo gasto (período) para descrever uma área abπ , é:
h
abh
baT
ππ 2
2
== (65)
Consideremos a elipse da figura 10. Quando 0=θ , OVr = e quando πθ = , OUr = .
Assim, a partir da equaçãoθε cos1+
= pr (veja Anexo I) , temos:
ε+=
1
pOV e
ε−=
1
pOU .
Mas, como 2a é o comprimento do eixo maior,aOUOV 2=+ ou
app
211
=−
++ εε
.
Logo
( )21 ε−= ap (66)
Daí,( ) ( )ε
εε
ε−=
+−=
+= 1
1
1
1
2a
apOV
Temos também que εac = (onde c é a distância do centro ao foco O), pois:( ) εε aaaOVCVCOc =−−=−== 1 , (67)
e por definição:
εε ca
VEVE
ca
VE
COCV
VE
OV −=�−=−
�=
ou
y
xC VU
S
W
2a
2bO
rθ
A
E
B
O’. .
P
Figura 10Elipse de centro (0, 0) e semi-eixos maior e menor medindo a e b.
c
d
( ) ��
���
���
�� −+=+==�=
εεεεε ca
aVECVCEOWCE
OWe por (67) temos
que: aOW = . Então:
( ) ( ) ( ) �+= 222 CWOCOW ( )22222 εabcba +=+= ou21 ε−= ab . (68)
Sabendo que2
1
mh
k
p= (veja seção 7.2.) temos: ( )
ka
mh
k
mhap
22
22 11 =−�=−= εε .
Então de (65) e (66) podemos ter:
2
1
2
1
2
32
2 22
122
k
ma
hka
mhaa
h
aa
h
baT
ππεππ ==−== ou
k
maT
322 4π= ou também
k
m
a
T 2
3
2 4π= . (69)
Assim, podemos dizer que os quadrados dos períodos dos vários planetas são proporcionaisaos cubos dos seus semi-eixos maiores correspondentes, sendo este resultado a terceira lei deKepler, veja [S].
9.2 Lei Universal de Newton para a Gravitação
Usando a primeira lei de Kepler e as equações II e III da seção 7.1., Newton foicapaz de deduzir sua famosa lei da gravitação entre o Sol e os planetas, veja [S], que elepostulou como válidas para qualquer objeto no universo (veja seção 7.3.).
Lei de Newton para a gravitaçãoDuas partículas quaisquer de massas m1 e m2 e distantes entre si de r atraem –se mutuamentecom uma força
1221 r
r
mGmF
��= (70)
onde G é uma constante universal chamada constante universal.
Comparando o resultado obtido na seção 8.3. e com a lei de Newton para a gravitação temos:KmGm =21 . (71)
REFERÊNCIAS BIBLIOGRÁFICAS
[A] ALVARENGA, Beatriz. Fundamentos da Física. São Paulo, Harbra Ltda, 1993.[AG] ÁVILA, Geraldo. Cálculo 1, 2 e 3. Rio de Janeiro, Livros Técnicos e Científicos,
1995.[B] BONJORNO, José Roberto. Física: história & Cotidiano. São Paulo, FTD, 2003.[C] CARRON, Wilson & GUIMARÃES, Osvaldo. As faces da Física. São Paulo,
Moderna, 1997.
[G] GRANVILLE, W. A. Elementos de Cálculo Diferencial e Integral. Rio de Janeiro,Livros Técnicos e Científicos, 1961.
[H] HALLIDAY, David & RESNICK, Robert. Fundamentos da Física. Rio de Janeiro,Livros Técnicos e Científicos, 1994.
[J] JUDICE, Edson Durão. Elementos de geometria analítica. Belo Horizonte, Vega S.A.,1971.
[R] RIGHETTO, Armando. Vetores e Geometria analítica. Belo Horizonte, Livraria eImportadora Científica, 1976.
[S] SPIEGEL, Murray R. Mecânica Racional. Belo Horizonte, McGraw-Hill do BrasilLtda, 1973.
[SY] SYMON, KEITH R. Mecânica. Rio de Janeiro, Campus, 1982.[T] THUILLIER, Pierre. De Arquimedes a Einstein. Rio de Janeiro, Jorge Zahar, 1994.

10 ANEXO I – Seções Cônicas
Dados uma reta fixa (diretriz) e um ponto fixo (foco) não pertencente à reta, a elipse, ahipérbole e a parábola podem ser definidas como o lugar geométrico dos pontos cuja razãodas distâncias a esse ponto e a essa reta é uma constante. Essa constante é chamada deexcentricidade da cônica e a representaremos por ε .
Tomando o ponto fixo O como pólo, e a perpendicular à reta fixa (diretriz) como eixopolar, figura 1, vamos obter a equação polar das cônicas.
Por definição ε=d
rou
εr
d = .
Para o ponto Q, temos: ε=q
pou qp ε= .
Mas ( )θεε
θε
θ cos1coscos +=+=+= rr
rrdq
Logo ( ) ( )θεθεε
εε cos1cos1 +=+== rr
qp
Então ( )θε cos1+= rp
Portanto: ( )θε cos1+= p
r . (1)
• No caso de 0=ε a equação polar ( )θε cos1+= p
r resulta em
pr = (2)que é a equação polar de uma circunferência, veja [J], que está representada na figura 2.Elevando ao quadrado ambos os membros de (2) temos:
22 pr =222 pyx =+ (3)
que, em coordenadas cartesianas é a equação da circunferência de centro em O (origem) e raiop.
O
Q
pr
d
q
θ
.P
x
y
Figura 1Cônicas
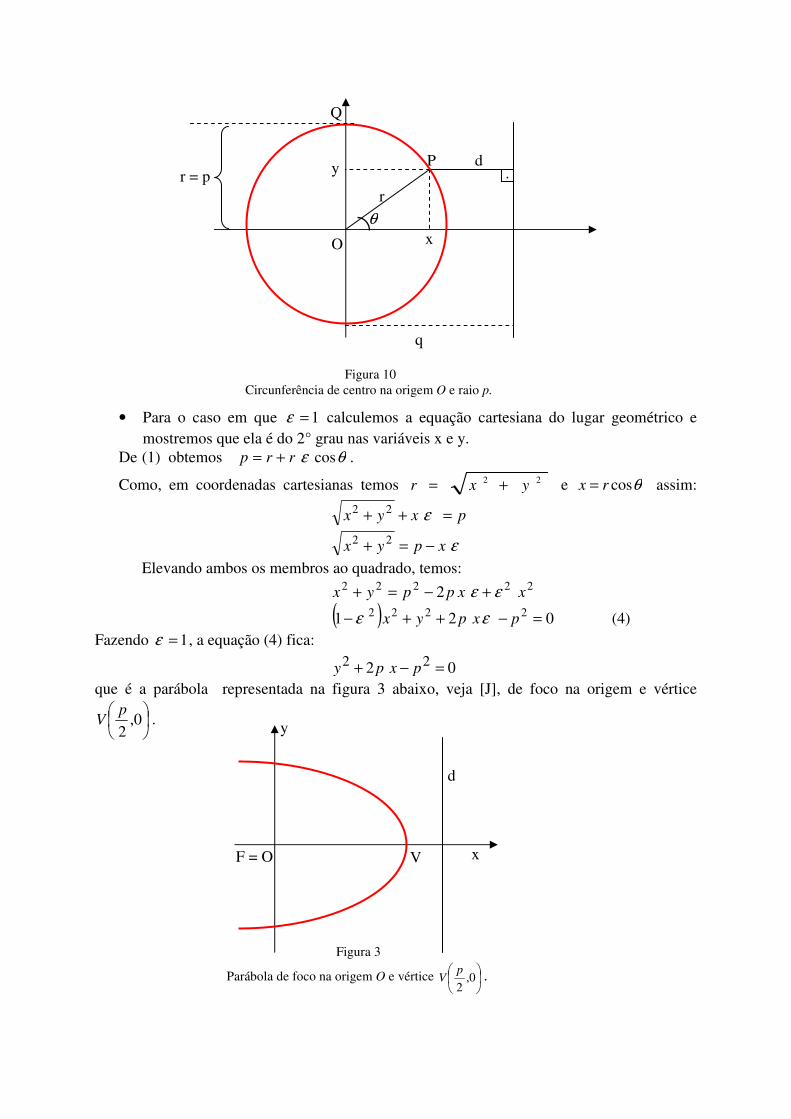
• Para o caso em que 1=ε calculemos a equação cartesiana do lugar geométrico emostremos que ela é do 2° grau nas variáveis x e y.
De (1) obtemos θε cosrrp += .
Como, em coordenadas cartesianas temos 22 yxr += e θcosrx = assim:
pxyx =++ ε22
εxpyx −=+ 22
Elevando ambos os membros ao quadrado, temos:22222 2 xxppyx εε +−=+
( ) 021 2222 =−++− pxpyx εε (4)Fazendo 1=ε , a equação (4) fica:
02 22 =−+ pxpyque é a parábola representada na figura 3 abaixo, veja [J], de foco na origem e vértice
��
��
0,2
pV .
F = O
d
x
y
V
Figura 3
Parábola de foco na origem O e vértice ��
��
0,2
pV .
O
Q
r = pr
d
q
θ
.P
x
y
Figura 10Circunferência de centro na origem O e raio p.

• Para analisar os casos 10 << ε e 1>ε , façamos uma translação dos eixos, tal que:mXx += e nYy +=
Substituindo em (4), temos:
( )( ) ( ) ( ) 021 2222 =−+++++− pmXpnYmX εε( )( ) ( ) 022221 222222 =−+++++++− pmpXpnnYYmmXX εεε( ) ( ) ( ) 02221211 22222222 =−+++++−+−+− pmpXpnnYYmXmX εεεεε( ) ( )[ ] ( )[ ] 02122211 22222222 =−+−++++−++− pmpmnYnXpmYX εεεεε (5)Para eliminarmos os termos lineares, devemos ter:
( )02
0221 2
=
=+−
n
e
pm εε
Logo:21 ε
ε−−= p
m e 0=n .
Desse modo a equação (5) ficará:
( ) ( ) 01
21
101 22
2
222222 =
���
�
�
���
�
�−���
�
�
−−+�
��
�
�
−−−+++− p
pp
pYX
εεε
εεεε
( ) 01
2
11 2
2
22
2
22222 =
���
�
���
�−
−−
−++− p
ppYX
εε
εεε
( ) 011
2
11
2
222
2
22
2
22222 =�
�
���
�
−+−+
−−
−++−
εε
εε
εεε pppp
YX
( ) 0111
2
11
2
22
2
2
2
22
2
22222 =
���
�
���
�
−+
−−
−−
−++−
εε
εεε
εεε pppp
YX
( ) 01
12
2222 =
−−+−
εε p
YX
( )2
2222
11
εε
−=+− p
YX (6)
Logo,• se 10 << ε , o coeficiente de 2X e o 2º membro são positivos e a equação (6) é a
equação de uma elipse, veja [R];
• se 1>ε , os coeficientes de 2X e de 2Y têm sinais contrários, pois 01 2 <− ε e aequação (6) representa uma hipérbole.
A equação (6) pode ser escrita ainda de outra forma, dividindo ambos os membros por
2
2
1 ε−p
.Assim, obtemos:
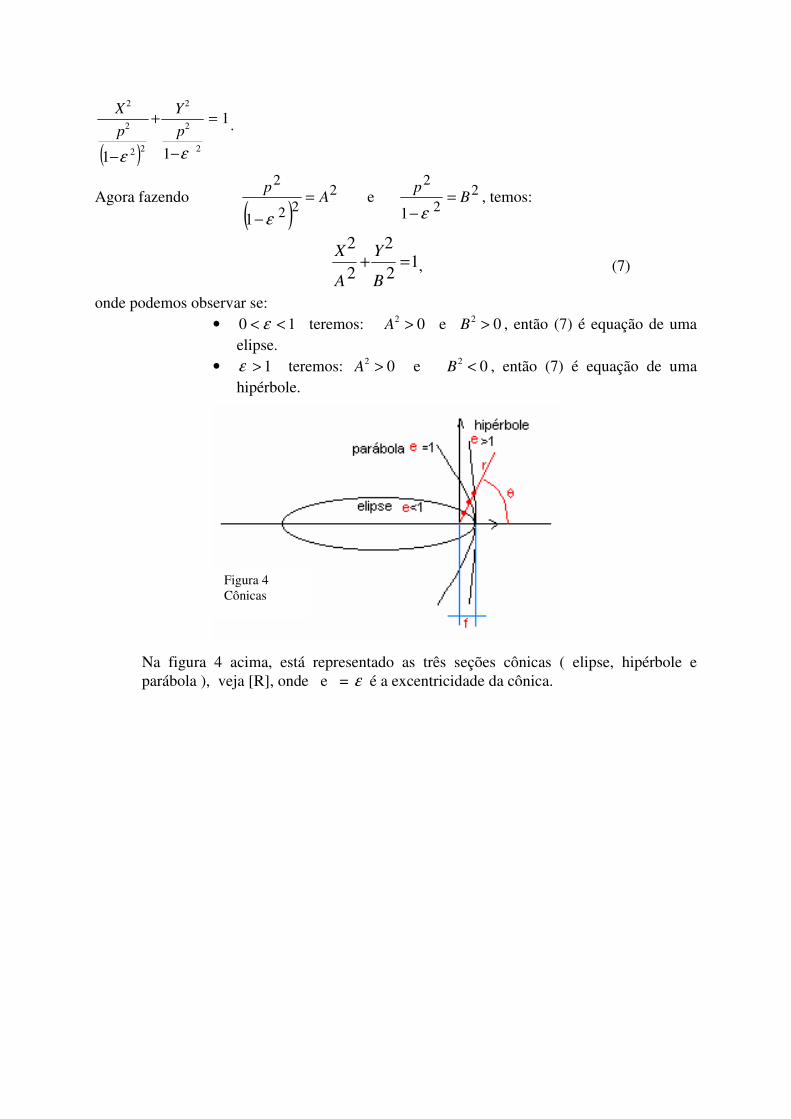
( )1
112
2
2
22
2
2
=
−
+
− εεp
Y
p
X.
Agora fazendo ( )2
22
2
1
Ap =
− εe 2
2
2
1B
p =− ε
, temos:
12
2
2
2=+
B
Y
A
X, (7)
onde podemos observar se:• 10 << ε teremos: 02 >A e 02 >B , então (7) é equação de uma
elipse.• 1>ε teremos: 02 >A e 02 <B , então (7) é equação de uma
hipérbole.
Na figura 4 acima, está representado as três seções cônicas ( elipse, hipérbole eparábola ), veja [R], onde e = ε é a excentricidade da cônica.
Figura 4Cônicas
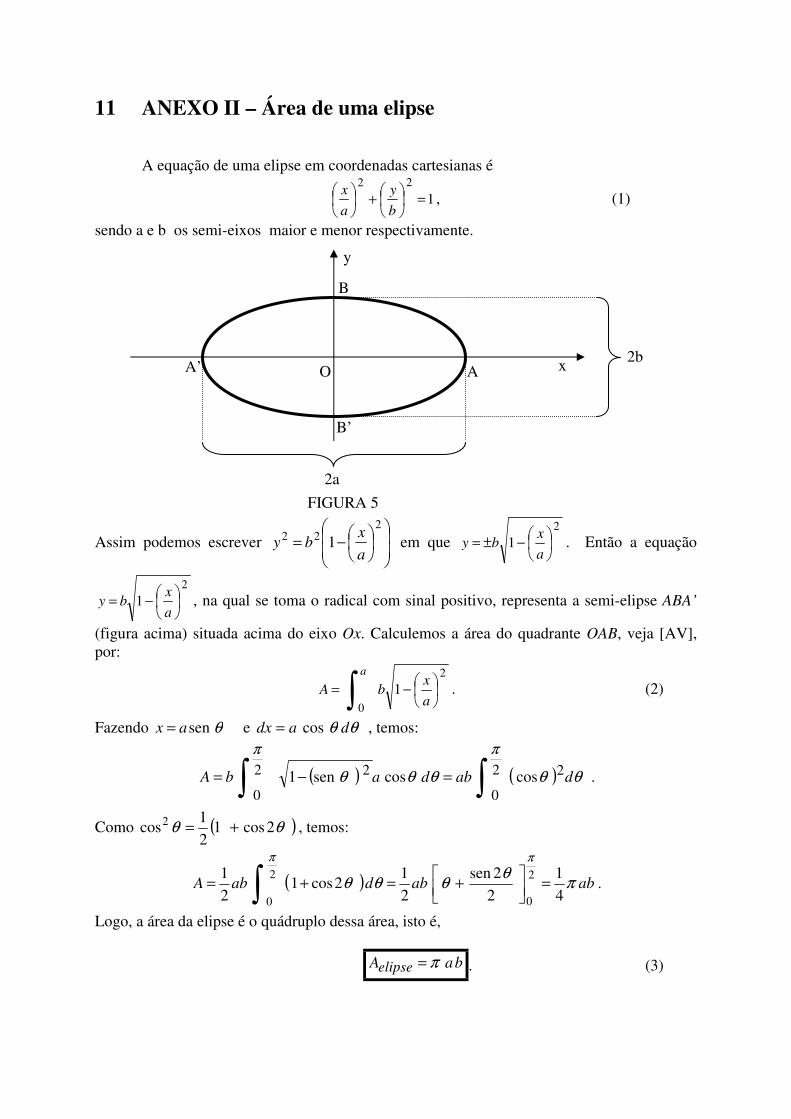
11 ANEXO II – Área de uma elipse
A equação de uma elipse em coordenadas cartesianas é
122
=��
��+�
�
��
b
y
a
x, (1)
sendo a e b os semi-eixos maior e menor respectivamente.
Assim podemos escrever��
�
�
���
��−=
222 1
a
xby em que
2
1 ��
��−±=
a
xby . Então a equação
2
1 ��
��−=
a
xby , na qual se toma o radical com sinal positivo, representa a semi-elipse ABA’
(figura acima) situada acima do eixo Ox. Calculemos a área do quadrante OAB, veja [AV],por:
��
��−=
a
a
xbA
0
2
1 . (2)
Fazendo θsenax = e θθ dadx cos= , temos:
( ) ( ) θθθθθ
ππ
dabdabA =−= 2
0
22
0
2 coscossen1 .
Como ( )θθ 2cos12
1cos2 += , temos:
( ) ababdabA πθθθθππ
4
1
2
2sen
2
12cos1
2
1 2
0
2
0
=���
��� +=+= .
Logo, a área da elipse é o quádruplo dessa área, isto é,
baAelipse π= . (3)
y
xO AA’
B’
B
2a
2b
FIGURA 5


Modelagem Fuzzy na Saude
Wanda Aparecida Lopes∗ Rosana Sueli da Motta Jafelice†
Faculdade de Matematica - FAMAT
Universidade Federal de Uberlandia - UFU
38408-100, Uberlandia - MG
agosto de 2005
Resumo
Este trabalho apresenta modelos de aplicacoes da teoria dos conjuntos fuzzyna area da saude. Apresentamos diagnostico medico fuzzy de doencas das viasaereas superiores e inferiores, com as informacoes da especialista e a partir dossinais e sintomas apresentados pelos pacientes, simulamos a atuacao de um medicono diagnostico de seus pacientes. Representamos atraves de graficos a diferenca decusto do tratamento da pneumonia com antibioticos administrados via oral e viaintravenosa, em seguida, consideramos um indivıduo com pneumonia grave sendonecessario sua internacao e uso de aparelho de respiracao mecanica, em que a com-pensacao das trocas gasosas do indivıduo e tratada como uma variavel linguısticafuzzy que depende da fracao inspirada de oxigenio do aparelho, e da saturacao par-cial de oxigenio do indivıduo, onde inclusive obtemos um indicativo quanto a pos-sibilidade de retirar o indivıduo do aparelho de respiracao mecanica. Alem disso,apresentamos um modelo matematico que descreve como cai a concentracao de umfarmaco no sangue de um indivıduo. Tal modelo e dado por uma equacao diferencialordinaria, na qual a concentracao de um farmaco no compartimento decai a umavelocidade que e proporcional, em cada instante, a sua propria concentracao, onde aconstante de velocidade de eliminacao e considerada como um parametro fuzzy, quedepende da funcao renal do indivıduo. A modelagem da velocidade de eliminacao edeterminada utilizando informacoes de especialista da area.
Palavras-chaves: Conjuntos Fuzzy; Diagnostico Medico; Eliminacao de Farmacos.
∗Orientanda do VII Curso de Especializacao em Matematica. E-mail: [email protected]†Professora orientadora. E-mail: [email protected]
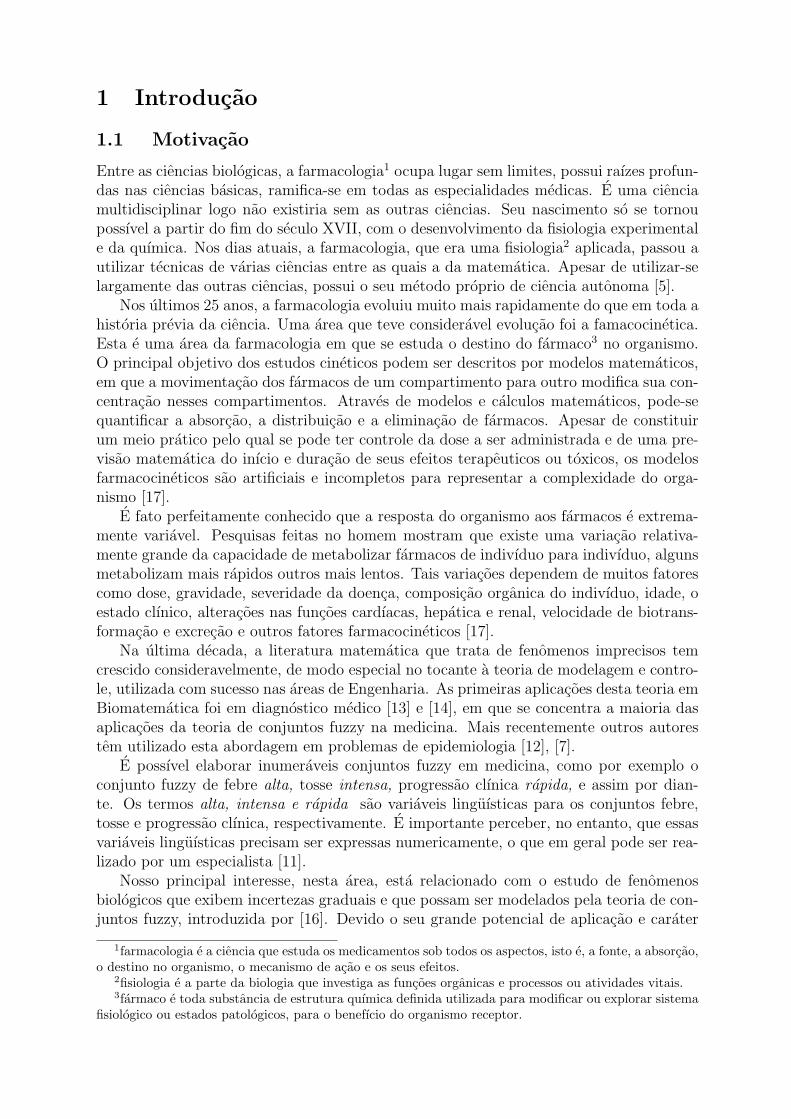
1 Introducao
1.1 Motivacao
Entre as ciencias biologicas, a farmacologia1 ocupa lugar sem limites, possui raızes profun-das nas ciencias basicas, ramifica-se em todas as especialidades medicas. E uma cienciamultidisciplinar logo nao existiria sem as outras ciencias. Seu nascimento so se tornoupossıvel a partir do fim do seculo XVII, com o desenvolvimento da fisiologia experimentale da quımica. Nos dias atuais, a farmacologia, que era uma fisiologia2 aplicada, passou autilizar tecnicas de varias ciencias entre as quais a da matematica. Apesar de utilizar-selargamente das outras ciencias, possui o seu metodo proprio de ciencia autonoma [5].
Nos ultimos 25 anos, a farmacologia evoluiu muito mais rapidamente do que em toda ahistoria previa da ciencia. Uma area que teve consideravel evolucao foi a famacocinetica.Esta e uma area da farmacologia em que se estuda o destino do farmaco3 no organismo.O principal objetivo dos estudos cineticos podem ser descritos por modelos matematicos,em que a movimentacao dos farmacos de um compartimento para outro modifica sua con-centracao nesses compartimentos. Atraves de modelos e calculos matematicos, pode-sequantificar a absorcao, a distribuicao e a eliminacao de farmacos. Apesar de constituirum meio pratico pelo qual se pode ter controle da dose a ser administrada e de uma pre-visao matematica do inıcio e duracao de seus efeitos terapeuticos ou toxicos, os modelosfarmacocineticos sao artificiais e incompletos para representar a complexidade do orga-nismo [17].
E fato perfeitamente conhecido que a resposta do organismo aos farmacos e extrema-mente variavel. Pesquisas feitas no homem mostram que existe uma variacao relativa-mente grande da capacidade de metabolizar farmacos de indivıduo para indivıduo, algunsmetabolizam mais rapidos outros mais lentos. Tais variacoes dependem de muitos fatorescomo dose, gravidade, severidade da doenca, composicao organica do indivıduo, idade, oestado clınico, alteracoes nas funcoes cardıacas, hepatica e renal, velocidade de biotrans-formacao e excrecao e outros fatores farmacocineticos [17].
Na ultima decada, a literatura matematica que trata de fenomenos imprecisos temcrescido consideravelmente, de modo especial no tocante a teoria de modelagem e contro-le, utilizada com sucesso nas areas de Engenharia. As primeiras aplicacoes desta teoria emBiomatematica foi em diagnostico medico [13] e [14], em que se concentra a maioria dasaplicacoes da teoria de conjuntos fuzzy na medicina. Mais recentemente outros autorestem utilizado esta abordagem em problemas de epidemiologia [12], [7].
E possıvel elaborar inumeraveis conjuntos fuzzy em medicina, como por exemplo oconjunto fuzzy de febre alta, tosse intensa, progressao clınica rapida, e assim por dian-te. Os termos alta, intensa e rapida sao variaveis linguısticas para os conjuntos febre,tosse e progressao clınica, respectivamente. E importante perceber, no entanto, que essasvariaveis linguısticas precisam ser expressas numericamente, o que em geral pode ser rea-lizado por um especialista [11].
Nosso principal interesse, nesta area, esta relacionado com o estudo de fenomenosbiologicos que exibem incertezas graduais e que possam ser modelados pela teoria de con-juntos fuzzy, introduzida por [16]. Devido o seu grande potencial de aplicacao e carater
1farmacologia e a ciencia que estuda os medicamentos sob todos os aspectos, isto e, a fonte, a absorcao,o destino no organismo, o mecanismo de acao e os seus efeitos.
2fisiologia e a parte da biologia que investiga as funcoes organicas e processos ou atividades vitais.3farmaco e toda substancia de estrutura quımica definida utilizada para modificar ou explorar sistema
fisiologico ou estados patologicos, para o benefıcio do organismo receptor.
de interdisciplinaridade, tal teoria pode facilitar o trabalho do modelador e de um es-pecialista da area e possivelmente acrescentar ’novas’ informacoes, facilitando a analisee compreensao de algumas situacoes reais [7]. Esse e o caso de eliminacao de farmacose de diagnostico medico, pois as informacoes que os medicos dispoem de seus pacientesem geral sao caracterizadas pela imprecisao; o medico durante horas de trabalho enfrentacasos caracterizados por dados imprecisos e, em alguns casos de natureza contraditorianos sintomas relatados pelo paciente.
Devido as caracterısticas individuais e a imprecisao que caracteriza a biomedicina,em especıfico, diagnostico medico e farmacocinetica em que relacionamos a modelagemmatematica com a teoria dos conjuntos fuzzy.
1.2 Modelagem Matematica
Modelagem Matematica e um processo dinamico utilizado para obtencao e validacao demodelos matematicos. E uma forma de abstracao e generalizacao com a finalidade deprevisao de tendencias. A modelagem consiste, essencialmente, na arte de transformarsituacoes da realidade em problemas matematicos cujas solucoes devem ser interpretadasna linguagem usual [2]. A modelagem eficiente permite fazer previsoes, tomar decisoes,explicar e entender; enfim participar do mundo real com capacidade de influenciar em suasmudancas. Salientamos mais uma vez que a aplicabilidade de um modelo depende subs-tancialmente do contexto em que ele e desenvolvido. Um modelo pode ser ’bom’ para umbiologo e nao para um matematico e vice-versa. A modelagem matematica, atualmenteusada em toda ciencia, tem contribuıdo sobremaneira para a evolucao do conhecimentohumano, com a pretensao de conquistar o universo.
A complexidade dos fenomenos biologicos que poderia ser a causa do desinteresse dematematizacao desta ciencia, ao contrario tem cada vez mais adeptos, mesmo porque aBiomatematica se tornou uma fonte fertil para o desenvolvimento da propria Matematica [2].Nas ultimas decadas a Biomatematica vem tendo um desenvolvimento fortemente encora-jado pelo aparecimento de novas teorias matematicas entre as quais a Teoria Fuzzy, usadano decorrer deste trabalho.
1.3 Diagnostico Medico
O ser humano, ha seculos, sofre e sente dores. O diagnostico medico pode ser uma tarefacomplicada, de certa forma, e um exercıcio de comparacao: o medico precisa confrontar osdados que reuniu (atraves da anamnese4, do exame fısico e dos exames complementares)com as informacoes disponıveis a respeito das diversas doencas existentes. E como ter deverificar, em meio a uma multidao, em quem serve uma determinada camisa... Para daruma pequena ideia da dificuldade enfrentada pelo medico, eis uma breve lista das causasmais comuns de tosse no aparelho respiratorio: Rinites, Sinusites, Faringites, Amigdalites,Laringites, Traqueobronquites, Pneumonias, Pleurites, Tuberculose pulmonar, Corpo es-tranho nas vias aereas, sem contar, naturalmente, as doencas muito raras.
Com as informacoes citadas acima verifica-se que o diagnostico de doencas envolvevarios nıveis de impricisao e incerteza. Um unico sintoma pode ser indicativo de variasdoencas distintas. Alem disso uma unica doenca pode se manifestar de forma totalmente
4anamnese e a conversa realizada entre o medico e o paciente durante a consulta, e um questionarioque ira verificar detalhes do passado e presente do inivıduo, referente ao estilo de vida, doencas, acidentes,cirurgias, ou seja, e a historia da doenca relatada pelo paciente.
diversa em diferentes pacientes, com varios graus de severidade, e a presenca de outrasdoencas em um mesmo indivıduo pode alterar completamente o padrao sintomatico es-perado para qualquer uma delas [4].
1.4 Excrecao de Farmacos
Depois de absorvidos e distribuıdos no organismo, os farmacos sao eliminados. Atual-mente o termo eliminacao nao significa apenas excrecao, mas tambem inclui processosmetabolicos que inativam o farmaco. Os farmacos inalterados ou seus metabolitos saoeliminados por diferentes vias, conforme suas propriedades fısico-quımicas. Entre as viasde excrecao destacam-se por sua importancia a renal, a biliar, enquanto as outras saoconsideradas secundarias. A via renal constitui a principal via de excrecao de farmacos,por isso que havendo patologia renal, a excrecao renal dos farmacos e profundamentemodificada [15].
1.5 Objetivos e Organizacao
O objetivo deste trabalho e estudar modelos usando a aplicacao da teoria dos conjuntosfuzzy na area da saude, neste sentido concentramos este estudo em diagnostico medico,monitoramento do tratamento da pneumonia e eliminacao de farmacos.
O principal interesse e buscar maneiras de realizar uma juncao efetiva dessa teoriacom a area da saude. Para este proposito utilizamos informacoes de especialistas, tantopara simular um sistema fuzzy que atua como um diagnostico medico, como para o mo-nitoramento do tratamento da pneumonia e para calcularmos a constante de velocidadede eliminacao de um determinado farmaco.
O trabalho e organizado da seguinte forma. A secao 2 apresenta definicoes basicas dateoria dos conjuntos fuzzy e de sistemas baseados em regras fuzzy que sao utilizadas notrabalho. A secao 3, em um primeiro momento, apresenta uma aplicacao dos conjuntosfuzzy em diagnostico medico no qual propomos um sistema que simula a atuacao domedico no diagnostico de doencas das vias aereas superiores e inferiores, a partir dossinais e sintomas apresentados pelo indivıduo; em seguida fazemos representacoes graficasdo custo de antibioticos usados no tratamento da pneumonia, alem disso consideramos umindivıduo com pneumonia grave que necessita de internacao e faz uso de um aparelho derespiracao mecanica, em que a compensacao das trocas gasosas do indivıduo foi conside-rada como uma variavel linguıstica fuzzy que depende da fracao inspirada de oxigenio dorespirador e da saturacao parcial de oxigenio do paciente. Inclusive, atraves do sistemabaseado em regras fuzzy, podemos ter um indicativo quanto a possibilidade de retiraro indivıduo da respiracao mecanica. A secao 4 apresenta um modelo matematico quedescreve como cai a concentracao de um farmaco no sangue de um paciente. O modelosupoe que a concentracao de um farmaco decai a uma velocidade que e proporcional, emcada instante, a sua propria concentracao, em que consideramos a constante de velocidadede eliminacao como um parametro fuzzy que depende do volume urinario, do clearancede creatinina5 e do pH serico6 do paciente. A modelagem da velocidade de eliminacao, edeterminada utilizando informacoes de um especialista da area.
5o teste de clearance de creatinina determina a eficiencia com que os rins eliminam a creatinina dosangue.
6pH serico e o pH do sangue.
2 Conjuntos Fuzzy
2.1 Introducao
Durante aproximadamente 300 anos a modelagem da imprecisao e incerteza nas cienciastem sido tratada pelos modelos estatısticos. Atualmente, incerteza e imprecisao saotratadas tambem pela teoria de conjuntos fuzzy. Esta teoria tem demonstrado possuirgrande capacidade de aplicacao em problemas de diversas areas, inclusive em problemasda biomedicina, dado o tipo de incerteza envolvido nos procedimentos medicos, biologicose epidemiologicos. De fato, a aplicacao dessa teoria na area medica, embora recente,ja tem demonstrado a sua capacidade para aprimorar e desenvolver tanto equipamentosquanto modelos nas mais diversas atividades hospitalares e de pesquisa [11].
A teoria fuzzy foi apresentada em 1965 por Lotfi A. Zadeh, professor no departamentode engenharia eletrica e ciencias da computacao da Universidade da California, em Berke-ley, quando ele trabalhava com problemas de classificacoes de conjuntos que nao possuıamfronteiras bem definidas, sua principal intencao era de dar um tratamento matematicoa certos termos linguısticos subjetivos, como ’aproximadamente ’, ’em torno de’ dentreoutros.
Em muitos problemas de fısica e matematica nao temos dificuldade em classificar ele-mentos como pertencentes ou nao a um dado conjunto classico. Dessa forma, dado umconjunto A e um elemento x do conjunto universo U conseguimos muitas vezes dizer sex ∈ A ou se x /∈ A. Afirmamos, por exemplo, sem receio que o numero 5 pertence ao con-junto dos numeros naturais e que o numero −5 nao pertence a este mesmo conjunto. Noentanto, podemos discordar quanto ao fato do numero 4, 5 pertencer ou nao ao conjuntodos numeros aproximadamente iguais a 5. Neste caso a resposta nao e unica e objetiva,pertencer ou nao pode depender do tipo de problema que estamos analisando. Pensamos,por exemplo, que 4, 5 e a media de provas de um aluno extremamente aplicado que estapassando por serios problemas de saude e que, em razao disso, apresenta dificuldades pararealizar as ultimas provas. O professor nesta situacao pode ponderar sobre a capacidadedo aluno, sua dedicacao durante o curso e sua realidade optando por aprova-lo, ainda quea media necessaria seja 5. Neste caso, o numero 4, 5 pode ser visto como pertencente aoconjunto dos numeros aproximadamente iguais a 5.
Existem inumeras situacoes em que a relacao de pertinencia nao e bem definida, enestes casos, nao sabemos dizer se o elemento pertence ou nao a um dado conjunto. Aintensao de Zadeh foi flexibilizar a pertinencia de elementos aos conjuntos criando a ideiade grau de pertinencia. Dessa forma, um elemento pode pertencer parcialmente a umdado conjunto.
A ideia de grau de pertinencia da logica fuzzy nos possibilita agrupar os elementos demaneira diferente da aplicada na logica classica, o que nos permite reinterpretar antigosconceitos, elaborados segundo esta logica. Nao e necessario muito esforco para perceber-mos que poucos sao os casos no cotidiano real em que temos total certeza sobre as coisase os fatos, e que faz parte da atividade humana tomar decisoes considerando a verdadeparcial existente. E neste sentido que a logica fuzzy difere da logica convencional, pois elanos permite assumir afirmacoes com valores entre falso e verdadeiro, nos possibilitandoinclusive trabalhar com variaveis linguısticas. Ela pode ser considerada uma das ferra-mentas matematicas mais poderosas para lidar com incertezas, imprecisoes e verdadesparciais [11].
O termo fuzzy, de origem inglesa, significa incerto, impreciso, subjetivo, nebuloso, di-fuso, e se refere ao fato de, em muitos casos, nao conhecermos completamente os sistemas

que estamos analisando. Como podemos apurar ate agora, nenhuma dessas traducoes etao fiel ao sentido amplo dado pela palavra fuzzy em ingles. Alem disso, temos observadoque todos os paıses tem usado a palavra fuzzy, sem traduzir este termo para a lınguapatria, com excecao da Franca, que traduziu-a por nelule. Essas tem sido as justificativaspara nao traduzirmos esta palavra para o portugues [8].
2.2 Conjunto Fuzzy
Um subconjunto fuzzy � do conjunto universo U e definido em termos de uma funcaode pertinencia u que a cada elemento x de U associa um numero u(x), entre zero e um,chamado de grau de pertinencia de x a �. Assim, o conjunto fuzzy � e simbolicamenteindicado por sua funcao de pertinencia
u� : U → [0, 1] .
Os valores u�(x) = 1 e u�(x) = 0 indicam, respectivamente, a pertinencia plena e anao pertinencia do elemento x a �.
E interessante notar que um subconjunto classico A de U e um particular conjuntofuzzy para o qual a funcao de pertinencia e a funcao caracterıstica de A, dada por:
uA : U → {0, 1}; uA(x) =
{1, se x ∈ A0, se x /∈ A.
Um conjunto fuzzy e normal se sua funcao de pertinencia atinge o valor 1 (um), istoe, existe x ∈ U tal que uU(x) = 1. Um conjunto fuzzy A em R e convexo se sua funcao depertinencia e tal que
uA[ξx1 + (1 − ξ)x2] ≥ min[uA(x1), uA(x2)] (1)
para quaisquer x1, x2 ∈ R, e ξ ∈ [0, 1].
Exemplo 2.1 Considere o suconjunto fuzzy F dos numeros naturais ’pequenos’ [1]:
F = {n ∈ N : n e pequeno} .
O numero 0 pertence a esse conjunto? E o numero 1000? Dentro do espırito da teoriafuzzy, podemos dizer que ambos pertencem a F porem com diferentes graus de pertinencia,de acordo com a propriedade que o caracteriza. Ou seja, a funcao de pertinencia de F deveser ’construıda’ de forma coerente com o termo ’pequeno’ que caracteriza seus elementosno conjunto universo dos numeros naturais. Uma possibilidde para a funcao de pertinenciade F e
uF (n) =1
n + 1(2)
Se esse for o caso, poderiamos dizer que o numero 0 pertence a F com grau de per-tinencia uF (0) = 1, enquanto 1000 pertence a F com grau uF (1000) = 0, 0011, vejaFigura 1.
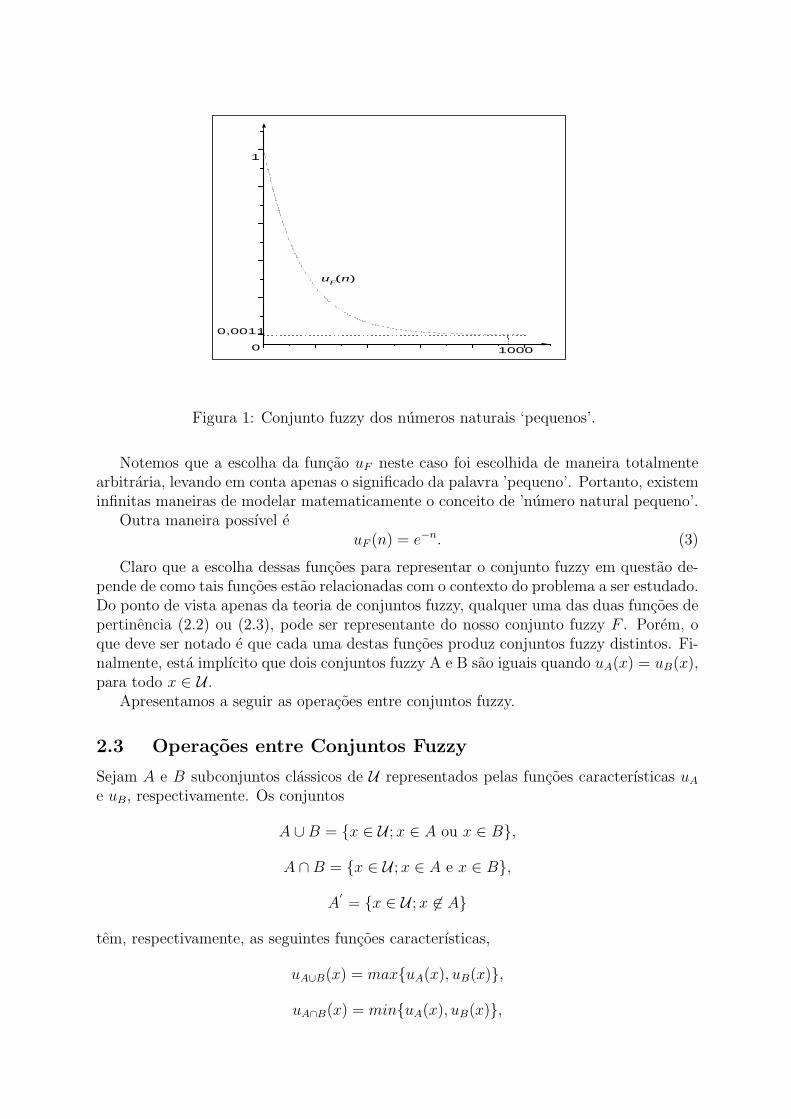
uF(n)
0,0011
1
10000
Figura 1: Conjunto fuzzy dos numeros naturais ‘pequenos’.
Notemos que a escolha da funcao uF neste caso foi escolhida de maneira totalmentearbitraria, levando em conta apenas o significado da palavra ’pequeno’. Portanto, existeminfinitas maneiras de modelar matematicamente o conceito de ’numero natural pequeno’.
Outra maneira possıvel euF (n) = e−n. (3)
Claro que a escolha dessas funcoes para representar o conjunto fuzzy em questao de-pende de como tais funcoes estao relacionadas com o contexto do problema a ser estudado.Do ponto de vista apenas da teoria de conjuntos fuzzy, qualquer uma das duas funcoes depertinencia (2.2) ou (2.3), pode ser representante do nosso conjunto fuzzy F . Porem, oque deve ser notado e que cada uma destas funcoes produz conjuntos fuzzy distintos. Fi-nalmente, esta implıcito que dois conjuntos fuzzy A e B sao iguais quando uA(x) = uB(x),para todo x ∈ U .
Apresentamos a seguir as operacoes entre conjuntos fuzzy.
2.3 Operacoes entre Conjuntos Fuzzy
Sejam A e B subconjuntos classicos de U representados pelas funcoes caracterısticas uA
e uB, respectivamente. Os conjuntos
A ∪ B = {x ∈ U ; x ∈ A ou x ∈ B},
A ∩ B = {x ∈ U ; x ∈ A e x ∈ B},
A′= {x ∈ U ; x �∈ A}
tem, respectivamente, as seguintes funcoes caracterısticas,
uA∪B(x) = max{uA(x), uB(x)},
uA∩B(x) = min{uA(x), uB(x)},

uA′ (x) = 1 − uA(x),
para todo x em U .Pensando novamente em conjuntos fuzzy como sendo caracterizados pelas funcoes de per-tinencias que sao extensoes de funcoes caracterısticas, podemos definir uniao, interseccaoe complementar de conjuntos fuzzy.
Definicao 2.1 Sejam A e B conjuntos fuzzy. As funcoes de pertinencias que representamos conjuntos fuzzy uniao (Figura 2), interseccao (Figura 3) e complementar (Figura 4)de conjuntos fuzzy sao dadas por, ∀x ∈ U ,
uA∪B(x) = max{uA(x), uB(x)},
uA∩B(x) = min{uA(x), uB(x)},
uA′ (x) = 1 − uA(x).
As Figuras 2 e 3 representam, em azul pontilhado a funcao de pertinenica uA(x), emvermelho a funcao de pertinencia uB(x) e na linha vermelha solida representa a funcaode pertinencia uA∪B(x) e uA∩B(x), respectivamente. A figura 4 representa, em preto afuncao de pertinencia uA(x) e na linha vermelha solida representa a funcao uA′ (x).
Figura 2: Uniao dos conjuntos fuzzy [8].
Particularmente, se A e B forem conjuntos classicos, entao as funcoes caracterısti-cas das respectivas operacoes, acima definidas, sastifazem estas igualdades, mostrando acoerencia destas definicoes. Por exemplo, se A e um subconjunto (classico) de U , entao afuncao caracterıstica, do seu complementar e tal que uA
′ (x) = 0 se uA(x) = 1 (i.e.x ∈ A)e uA
′ (x) = 1 se uA(x) = 0 (i.e.x /∈ A ). Neste caso, x ∈ A ou x /∈ A. Na teoria fuzzy naotemos necessariamente essa dicotomia, nem sempre e verdade que A∩A
′= ∅ assim como
nao e verdade que A ∪ A′= U . O exemplo a seguir ilustra tais fatos.
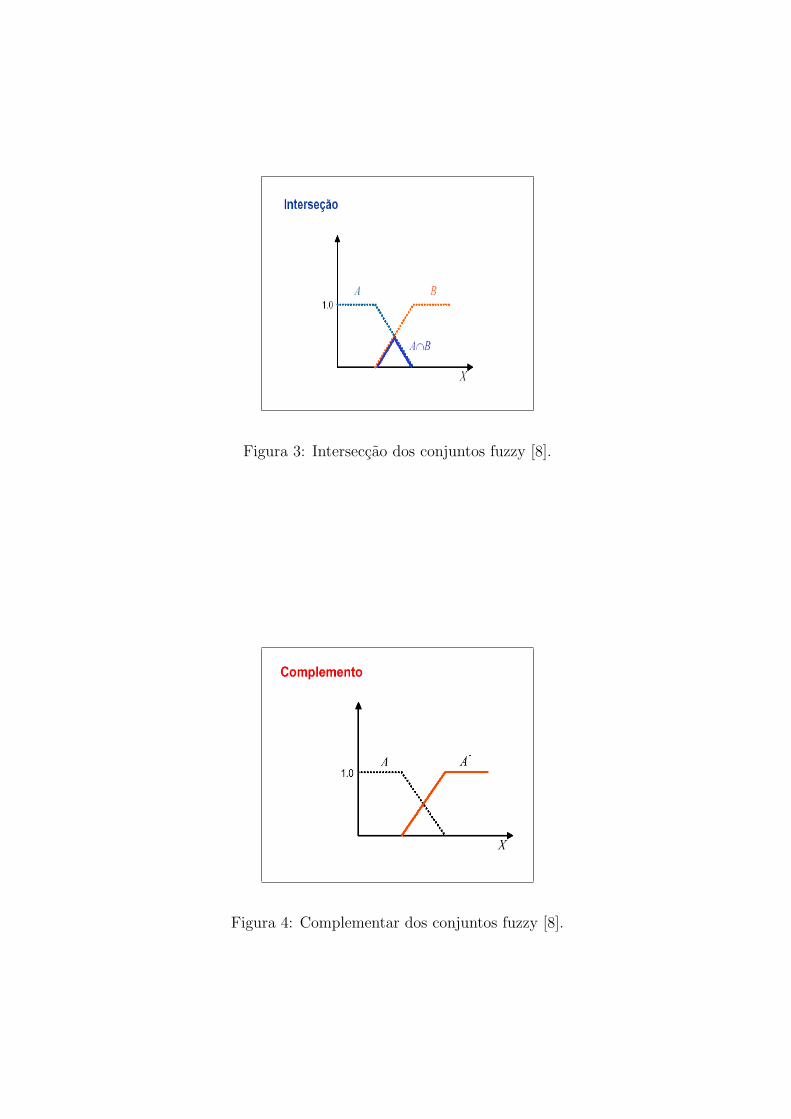
Figura 3: Interseccao dos conjuntos fuzzy [8].
Figura 4: Complementar dos conjuntos fuzzy [8].

Exemplo 2.2 Suponha que o conjunto universo U seja composto pelos paciente de umaclınica, identificados pelos numeros 1, 2, 3, 4 e 5. Sejam A e B os conjuntos fuzzy querepresentam os pacientes com febre e dor, respectivamente. A Tabela abaixo ilustra auniao, interseccao e o complemento [1].
Paciente Febre(uA) Dor(uB) uA∪B uA∩B uA′ uA∩A
′
1 0.7 0.6 0.7 0.6 0.3 0.32 1.0 1.0 1.0 1.0 0.0 0.03 0.4 0.2 0.4 0.2 0.6 0.44 0.5 0.5 0.5 0.5 0.5 0.55 1.0 0.2 1.0 0.2 0.0 0.0
Os valores das colunas, exceto os da primeira, indicam os graus com que cada pacientepertence aos conjuntos fuzzy A, B, A ∩ B, A ∪ B, A
′, A ∩ A
′, respectivamente onde
A e B sao supostamente dados. Na ultima coluna (A ∩ A′), o valor 0.3 indica que o
paciente 1 esta tanto no grupo dos febris como dos nao febris. Como sabemos, este e umfato inadmissıvel na teoria classica de conjuntos na qual temos a lei do terceiro excluıdo(A ∩ A
′= ∅).
2.4 Normas Triangulares
As normas triangulares sao generalizacoes dos operadores uniao e interseccao [8]. Formal-mente sao definidas abaixo:
Definicao 2.2 Uma co-norma triangular (s−norma) e uma operacao binarias : [0, 1] × [0, 1] → [0, 1] satisfazendo as seguintes condicoes:
• Comutatividade: xsy = ysx
• Associatividade: xs(ysz) = (xsy)sz
• Monotonicidade: Se x ≤ y e w ≤ z entao xsw ≤ ysz
• Condicoes de fronteira: xs0 = x, xs1 = 1
Claramente, o operador max e uma s−norma.
Exemplos:
1. Uniao Padrao: xsy = max(x, y)
2. Soma Algebrica: xsy = x + y − xy
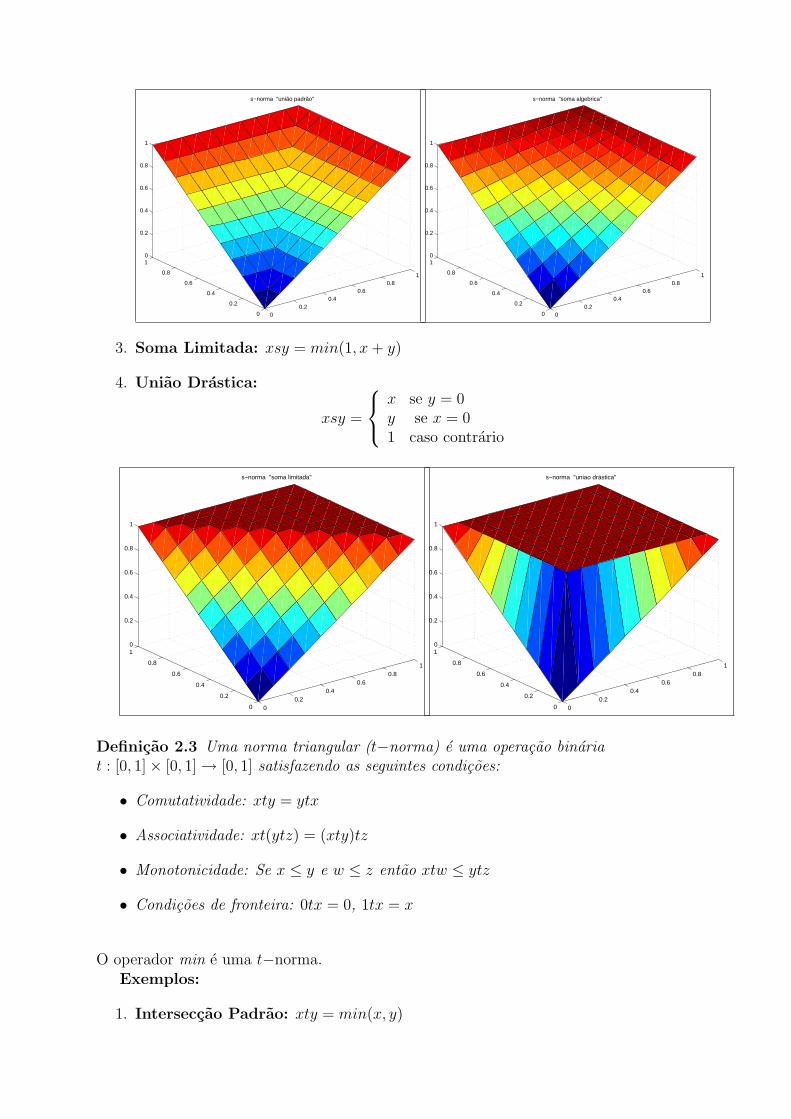
00.2
0.40.6
0.81
0
0.2
0.4
0.6
0.8
10
0.2
0.4
0.6
0.8
1
s−norma "união padrão"
00.2
0.40.6
0.81
0
0.2
0.4
0.6
0.8
10
0.2
0.4
0.6
0.8
1
s−norma "soma algebrica"
3. Soma Limitada: xsy = min(1, x + y)
4. Uniao Drastica:
xsy =
⎧⎨⎩
x se y = 0y se x = 01 caso contrario
00.2
0.40.6
0.81
0
0.2
0.4
0.6
0.8
10
0.2
0.4
0.6
0.8
1
s−norma "soma limitada"
00.2
0.40.6
0.81
0
0.2
0.4
0.6
0.8
10
0.2
0.4
0.6
0.8
1
s−norma "uniao drástica"
Definicao 2.3 Uma norma triangular (t−norma) e uma operacao binariat : [0, 1] × [0, 1] → [0, 1] satisfazendo as seguintes condicoes:
• Comutatividade: xty = ytx
• Associatividade: xt(ytz) = (xty)tz
• Monotonicidade: Se x ≤ y e w ≤ z entao xtw ≤ ytz
• Condicoes de fronteira: 0tx = 0, 1tx = x
O operador min e uma t−norma.Exemplos:
1. Interseccao Padrao: xty = min(x, y)
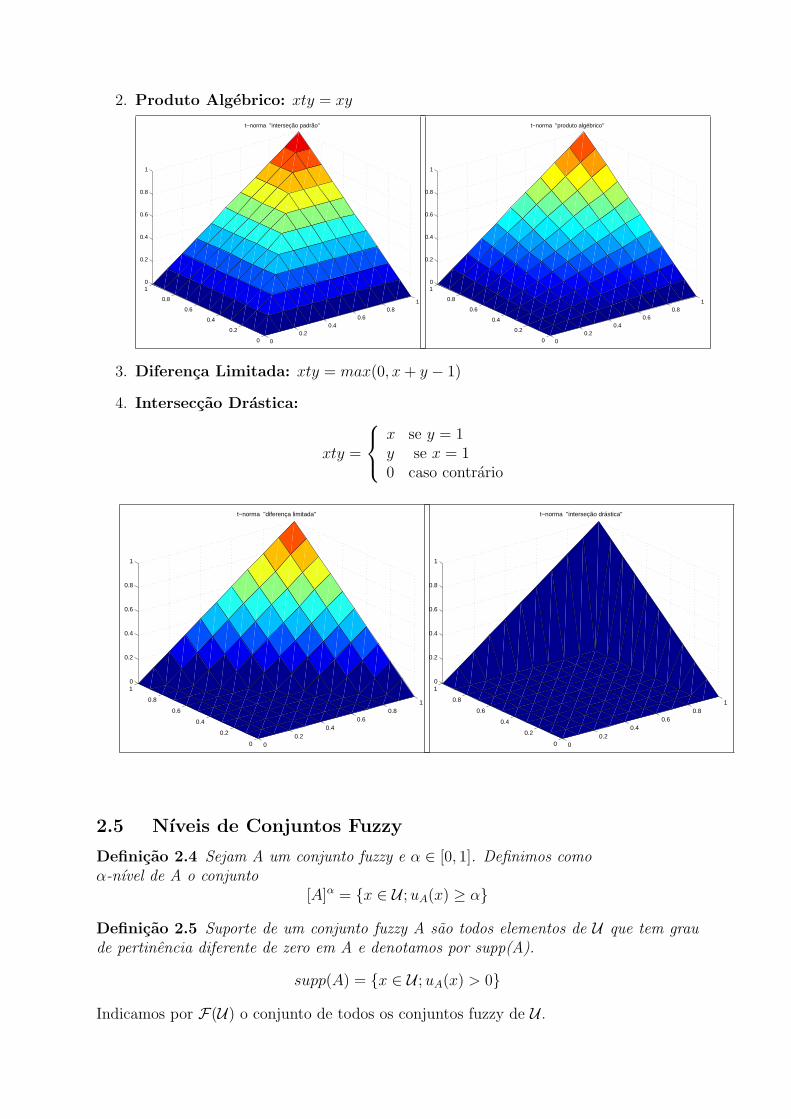
2. Produto Algebrico: xty = xy
00.2
0.40.6
0.81
0
0.2
0.4
0.6
0.8
10
0.2
0.4
0.6
0.8
1
t−norma "interseção padrão"
00.2
0.40.6
0.81
0
0.2
0.4
0.6
0.8
10
0.2
0.4
0.6
0.8
1
t−norma "produto algébrico"
3. Diferenca Limitada: xty = max(0, x + y − 1)
4. Interseccao Drastica:
xty =
⎧⎨⎩
x se y = 1y se x = 10 caso contrario
00.2
0.40.6
0.81
0
0.2
0.4
0.6
0.8
10
0.2
0.4
0.6
0.8
1
t−norma "diferença limitada"
00.2
0.40.6
0.81
0
0.2
0.4
0.6
0.8
10
0.2
0.4
0.6
0.8
1
t−norma "interseção drástica"
2.5 Nıveis de Conjuntos Fuzzy
Definicao 2.4 Sejam A um conjunto fuzzy e α ∈ [0, 1]. Definimos comoα-nıvel de A o conjunto
[A]α = {x ∈ U ; uA(x) ≥ α}Definicao 2.5 Suporte de um conjunto fuzzy A sao todos elementos de U que tem graude pertinencia diferente de zero em A e denotamos por supp(A).
supp(A) = {x ∈ U ; uA(x) > 0}Indicamos por F(U) o conjunto de todos os conjuntos fuzzy de U .

2.6 Relacoes Fuzzy
Estudos de associacoes, relacoes ou interacoes, entre os elementos de diversas classese de grande interesse na analise e compreensao de muitos fenomenos do mundo real.Matematicamente, o conceito de relacao e formalizado a partir da teoria de conjuntos.Desta forma, intuitivamente pode-se dizer que a relacao sera fuzzy quando optamos pelateoria dos conjuntos fuzzy e sera classica quando optamos pela teoria classica de conjuntospara conceituar a relacao em estudo. Qual dos modelos adotar, entre estes dois, dependemuito do fenomeno estudado. Porem, a opcao pela teoria de conjuntos fuzzy sempre temmaior robustez no sentido de que esta inclui a teoria classica de conjuntos. Definimos aseguir relacoes fuzzy.
Definicao 2.6 Uma relacao fuzzy R, sobre U1× U2 × ...× Un, e qualquer subconjuntofuzzy do produto cartesiano U1× U2 × ...× Un. Se o produto cartesiano e formado porapenas dois conjuntos, U1× U2, a relacao e chamada de fuzzy binaria sobre U1× U2 .
A principal vantagem na opcao pela relacao fuzzy, e que a relacao classica indica apenasse ha ou nao relacao entre dois objetos, enquanto uma relacao fuzzy alem de indicar seexiste ou nao relacao, indica tambem o grau desta relacao.
Uma nocao que sera muito importante para o nosso trabalho, e o produto cartesianoentre conjuntos.
Definicao 2.7 O produto cartesiano R(x1, x2, ..., xn) dos subconjuntos fuzzy A1, A2, ...An
de U1, U2, ... Un, e a relacao fuzzy
R(x1, x2, ..., xn) = uA1(x1) ∧ uA2(x2) ∧ ... ∧ uAn(xn) (4)
onde ∧ e a t-norma min.
A nocao e utilizacao de produto cartesiano fuzzy ficara mais clara quando introduzirmoso conceito de sistemas baseados em regras fuzzy, que sao sistemas compostos de regras daforma ’Se...entao’, pois estas regras podem ser interpretadas como produtos cartesianosde conjuntos fuzzy.
2.7 Composicao de Relacoes Fuzzy
Considere R e S duas relacoes fuzzy binarias em U1 × U2 e U2 × U3, respectivamente.
Definicao 2.8 A composicao RoS e uma relacao fuzzy binaria em U1 × U3 tal que
uRoS(x1, x3) = maxx2∈U2
[min(uR(x1, x2), uS(x2, x3))]. (5)
Quando os conjuntos U1, U2 e U3 sao finitos, entao a forma matricial da relacao RoS, dadapela composicao max-min, e obtida como uma multiplicacao de matrizes, substituindo-seo produto pelo mınimo e a soma pelo maximo.
Definiremos um caso especial da composicao max-min, que sera utilizada na Secao 3,em uma importante aplicacao, diagnostico medico.
Definicao 2.9 Sejam U1 e U2 dois conjuntos, F(U1) e F(U2), as classes dos conjuntosfuzzy de U1 e U2, respectivamente, e R uma relacao binaria sobre U1 × U2. Entao arelacao R define um funcional de F(U1) em F(U2) que a cada elemento A1 ∈ F(U1) fazcorresponder o elemento A2 ∈ F(U2) tal que a sua funcao de pertinencia e dada por:
uA2(x2) = maxx1∈U1
[min(uA1(x1), uR(x1, x2))] � uR(A1)(x2) (6)
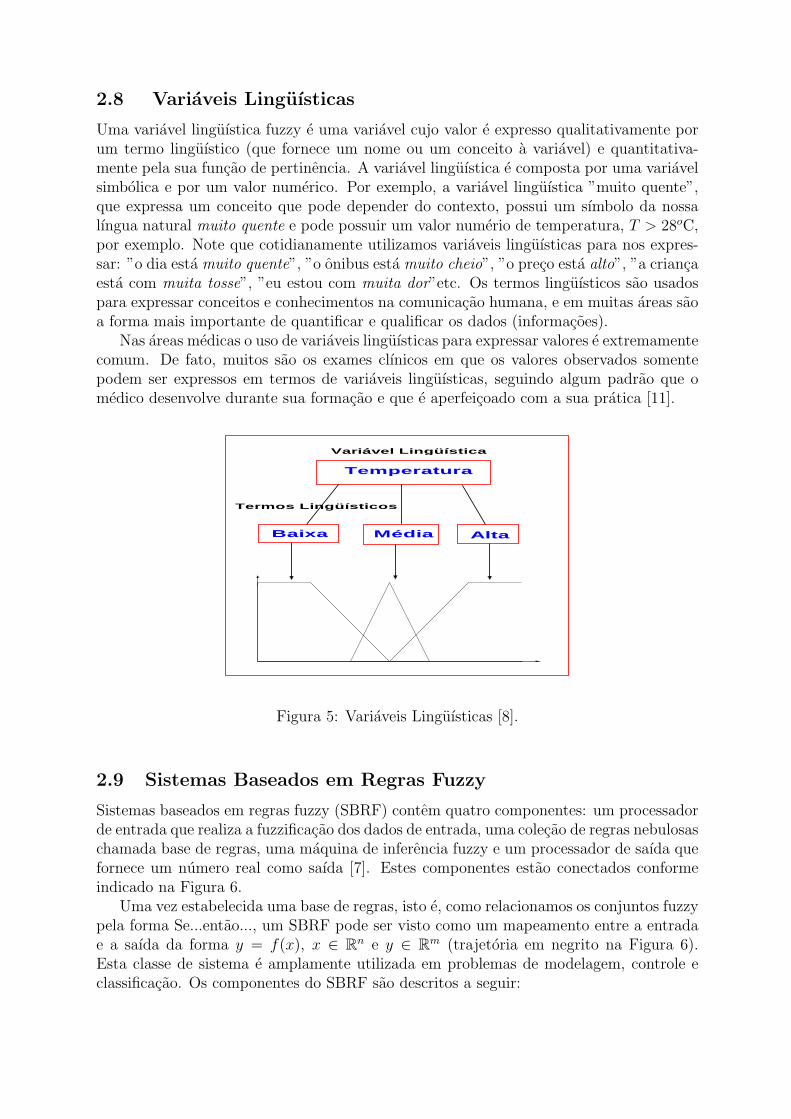
2.8 Variaveis Linguısticas
Uma variavel linguıstica fuzzy e uma variavel cujo valor e expresso qualitativamente porum termo linguıstico (que fornece um nome ou um conceito a variavel) e quantitativa-mente pela sua funcao de pertinencia. A variavel linguıstica e composta por uma variavelsimbolica e por um valor numerico. Por exemplo, a variavel linguıstica ”muito quente”,que expressa um conceito que pode depender do contexto, possui um sımbolo da nossalıngua natural muito quente e pode possuir um valor numerio de temperatura, T > 28oC,por exemplo. Note que cotidianamente utilizamos variaveis linguısticas para nos expres-sar: ”o dia esta muito quente”, ”o onibus esta muito cheio”, ”o preco esta alto”, ”a criancaesta com muita tosse”, ”eu estou com muita dor”etc. Os termos linguısticos sao usadospara expressar conceitos e conhecimentos na comunicacao humana, e em muitas areas saoa forma mais importante de quantificar e qualificar os dados (informacoes).
Nas areas medicas o uso de variaveis linguısticas para expressar valores e extremamentecomum. De fato, muitos sao os exames clınicos em que os valores observados somentepodem ser expressos em termos de variaveis linguısticas, seguindo algum padrao que omedico desenvolve durante sua formacao e que e aperfeicoado com a sua pratica [11].
Variável Lingüística
Termos Lingüísticos
AltaMédiaBaixa
Temperatura
Figura 5: Variaveis Linguısticas [8].
2.9 Sistemas Baseados em Regras Fuzzy
Sistemas baseados em regras fuzzy (SBRF) contem quatro componentes: um processadorde entrada que realiza a fuzzificacao dos dados de entrada, uma colecao de regras nebulosaschamada base de regras, uma maquina de inferencia fuzzy e um processador de saıda quefornece um numero real como saıda [7]. Estes componentes estao conectados conformeindicado na Figura 6.
Uma vez estabelecida uma base de regras, isto e, como relacionamos os conjuntos fuzzypela forma Se...entao..., um SBRF pode ser visto como um mapeamento entre a entradae a saıda da forma y = f(x), x ∈ Rn e y ∈ Rm (trajetoria em negrito na Figura 6).Esta classe de sistema e amplamente utilizada em problemas de modelagem, controle eclassificacao. Os componentes do SBRF sao descritos a seguir:
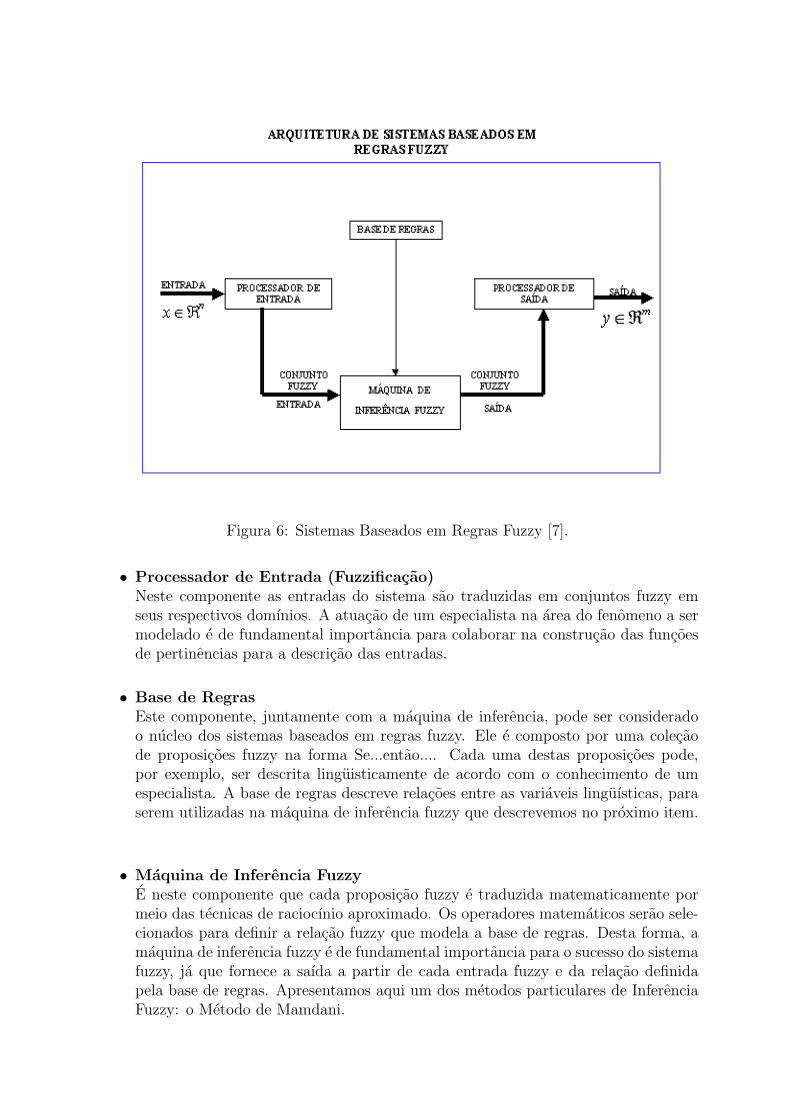
Figura 6: Sistemas Baseados em Regras Fuzzy [7].
• Processador de Entrada (Fuzzificacao)Neste componente as entradas do sistema sao traduzidas em conjuntos fuzzy emseus respectivos domınios. A atuacao de um especialista na area do fenomeno a sermodelado e de fundamental importancia para colaborar na construcao das funcoesde pertinencias para a descricao das entradas.
• Base de RegrasEste componente, juntamente com a maquina de inferencia, pode ser consideradoo nucleo dos sistemas baseados em regras fuzzy. Ele e composto por uma colecaode proposicoes fuzzy na forma Se...entao.... Cada uma destas proposicoes pode,por exemplo, ser descrita linguisticamente de acordo com o conhecimento de umespecialista. A base de regras descreve relacoes entre as variaveis linguısticas, paraserem utilizadas na maquina de inferencia fuzzy que descrevemos no proximo item.
• Maquina de Inferencia FuzzyE neste componente que cada proposicao fuzzy e traduzida matematicamente pormeio das tecnicas de raciocınio aproximado. Os operadores matematicos serao sele-cionados para definir a relacao fuzzy que modela a base de regras. Desta forma, amaquina de inferencia fuzzy e de fundamental importancia para o sucesso do sistemafuzzy, ja que fornece a saıda a partir de cada entrada fuzzy e da relacao definidapela base de regras. Apresentamos aqui um dos metodos particulares de InferenciaFuzzy: o Metodo de Mamdani.
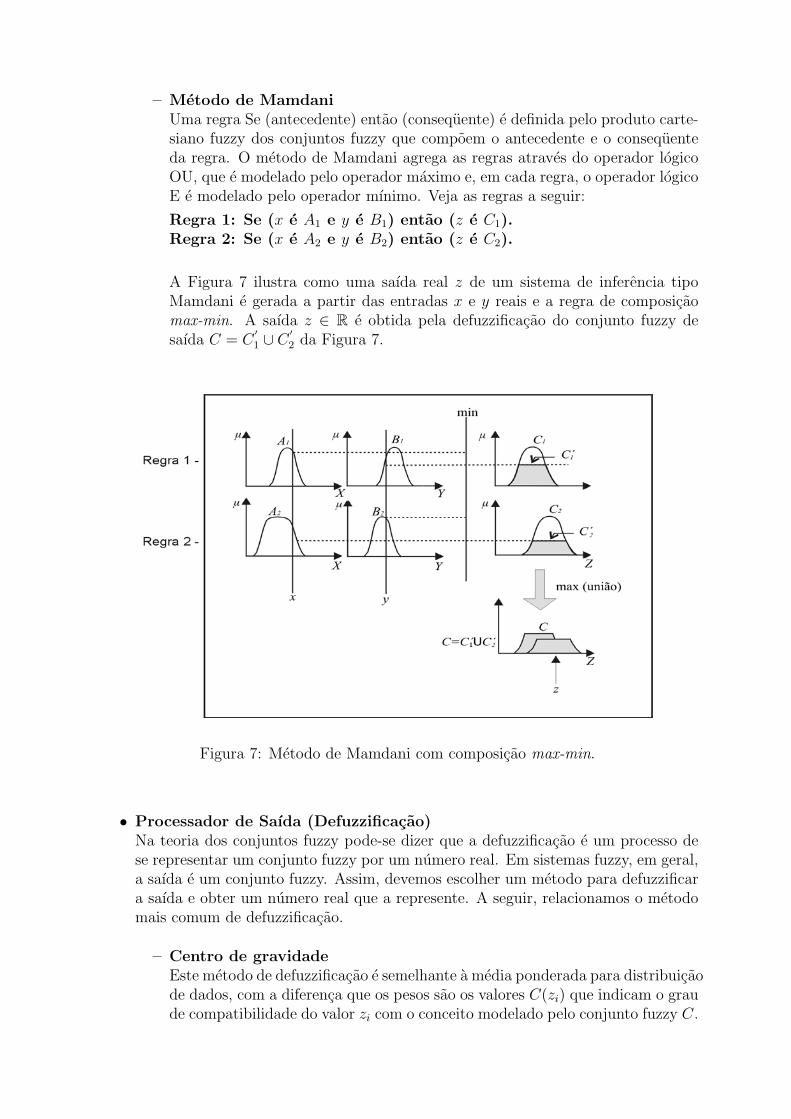
– Metodo de MamdaniUma regra Se (antecedente) entao (consequente) e definida pelo produto carte-siano fuzzy dos conjuntos fuzzy que compoem o antecedente e o consequenteda regra. O metodo de Mamdani agrega as regras atraves do operador logicoOU, que e modelado pelo operador maximo e, em cada regra, o operador logicoE e modelado pelo operador mınimo. Veja as regras a seguir:
Regra 1: Se (x e A1 e y e B1) entao (z e C1).Regra 2: Se (x e A2 e y e B2) entao (z e C2).
A Figura 7 ilustra como uma saıda real z de um sistema de inferencia tipoMamdani e gerada a partir das entradas x e y reais e a regra de composicaomax-min. A saıda z ∈ R e obtida pela defuzzificacao do conjunto fuzzy desaıda C = C
′1 ∪ C
′2 da Figura 7.
Figura 7: Metodo de Mamdani com composicao max-min.
• Processador de Saıda (Defuzzificacao)Na teoria dos conjuntos fuzzy pode-se dizer que a defuzzificacao e um processo dese representar um conjunto fuzzy por um numero real. Em sistemas fuzzy, em geral,a saıda e um conjunto fuzzy. Assim, devemos escolher um metodo para defuzzificara saıda e obter um numero real que a represente. A seguir, relacionamos o metodomais comum de defuzzificacao.
– Centro de gravidadeEste metodo de defuzzificacao e semelhante a media ponderada para distribuicaode dados, com a diferenca que os pesos sao os valores C(zi) que indicam o graude compatibilidade do valor zi com o conceito modelado pelo conjunto fuzzy C.
Para um domınio discreto tem-se
G(C) =
∑ni=0 ziC(zi)∑ni=0 C(zi)
(7)
Para um domınio contınuo tem-se
G(C) =
∫R
uC(u)du∫R
C(u)du(8)
onde R e a regiao de integracao.
2.10 Resumo
Nesta secao, apresentamos algumas definicoes basicas da teoria de conjuntos fuzzy quevamos utilizar nas proximas secoes deste trabalho.
Na proxima secao vamos mostrar o diagnostico medico fuzzy de doencas das viasaereas superiores e inferiores, seguido do monitoramento do tratamento da pneumonia.
3 Diagnostico Medico Fuzzy e Monitoramento do Trata-
mento da Pneumonia
3.1 Diagnostico Medico Fuzzy
3.1.1 Introducao
Diagnostico Medico Fuzzy e uma aplicacao da teoria dos conjuntos fuzzy que e feita coma ajuda de um especialista medico. O objetivo desta aplicacao e propor um sistema fuzzyque imite a atuacao de um medico no diagnostico de seus pacientes, a partir de sinaise sintomas que estes apresentam, com o intuito de ajudar o medico a tomar decisoes eoptar por exames laboratoriais mais detalhados [1].
Neste trabalho optamos por diagnosticar doencas das vias aereas superiores e infe-riores. Com as informacoes da especialista Dra. Alda Valeria Toffoli Rodrigues, medicapediatra da Secretaria Municipal de Saude de Uberlandia, foi possıvel relacionar os sinaise sintomas de alguns pacientes com as doencas em questao.
3.1.2 Base de Conhecimentos
A ideia basica e relacionar os sinais e sintomas dos pacientes com as possıveis doencas dasvias aereas superiores e inferiores, de acordo com os conhecimentos medicos da especialista.
Considere os seguintes conjuntos universais:
• U= conjunto dos pacientes;
• V = conjunto de sinais e sintomas;
• W= conjunto de doencas.

Neste caso, trata-se de doencas das vias aereas superiores e inferiores das quais tem-seconhecimento de sete pacientes P1, P2, P3, P4,P5, P6, P7, com os sinais e sintomas s1, s2,s3 , s4,s5, s6, s7, s8, s9, s10 s11,s12, s13, s14, que apresentaram os diagnosticos d1, d2, d3,d4, d5, d6, d7 onde:
• s1 = febre
• s2 = tosse produtiva
• s3 = tosse seca
• s4 = cefaleia
• s5 = dor toracica
• s6 = dores musculares
• s7 = mal-estar geral
• s8 = irritacao de garganta
• s9 = rouquidao
• s10 = coriza
• s11 = espirros
• s12 = dispneia
• s13 = sudorese
• s14 = calafrios
• d1 = pneumonia
• d2 = bronquite
• d3 = rinite
• d4 = sinusite
• d5 = gripe
• d6 = laringite
• d7 = amigdalite
Esses dados vao compor a base de conhecimentos que sao expressos por meio derelacoes fuzzy. Solicitamos a especialista que estabelecesse o grau de relacao fuzzy, R,apresentada na Tabela 1, em que as colunas sao as doencas consideradas, as linhas sao ossintomas e os valores que compoe a matriz sao os graus com que os sintomas se relacionamcom as doencas:
������sd
d1 d2 d3 d4 d5 d6 d7
s1 1.0 0.1 0.0 0.6 0.5 0.2 0.9s2 0.8 0.3 0.2 0.7 0.5 0.4 0.1s3 0.8 0.9 0.8 0.5 0.5 0.4 0.2s4 0.3 0.2 0.2 0.9 0.8 0.1 0.3s5 0.8 0.4 0.1 0.1 0.2 0.1 0.0s6 0.4 0.0 0.4 0.2 0.9 0.3 0.6s7 0.9 0.3 0.2 0.7 0.8 0.3 0.9s8 0.1 0.1 0.3 0.4 0.8 0.5 1.0s9 0.0 0.3 0.2 0.1 0.3 1.0 0.4s10 0.2 0.2 0.9 0.8 0.5 0.2 0.1s11 0.2 0.2 1.0 0.2 0.6 0.1 0.0s12 0.8 1.0 0.3 0.2 0.5 0.3 0.2s13 0.7 0.6 0.0 0.1 0.4 0.0 0.1s14 0.8 0.0 0.1 0.4 0.6 0.2 0.5
Tabela 1: Relacao fuzzy sintomas x doencas.

������Ps
s1 s2 s3 s4 s5 s6 s7 s8 s9 s10 s11 s12 s13 s14
P1 0.0 0.0 0.9 0.3 0.0 0.0 0.1 0.6 1.0 0.2 0.0 0.1 0.0 0.0P2 0.8 0.0 0.1 0.2 0.0 0.0 0.6 1.0 0.0 0.0 0.0 0.0 0.5 0.2P3 0.0 0.0 1.0 0.3 0.4 0.0 0.0 0.0 0.0 0.0 0.3 1.0 0.8 0.0P4 1.0 0.7 0.4 0.5 0.6 0.6 0.8 0.1 0.0 0.0 0.0 0.5 0.3 0.3P5 0.0 0.0 0.4 0.3 0.0 0.0 0.2 0.2 0.0 0.8 0.9 0.0 0.1 0.1P6 0.3 0.5 0.0 1.0 0.0 0.0 0.3 0.1 0.0 0.4 0.3 0.2 0.0 0.0P7 0.8 1.0 0.0 0.5 0.2 0.9 0.6 0.2 0.0 0.3 0.5 0.1 0.8 0.5
Tabela 2: Relacao fuzzy pacientes x sintomas.
Por exemplo, o diagnostico medico do paciente P1, via relacao fuzzy R, e facilmenteobtido atraves da equacao (6). Assim, de acordo com os sinais e sintomas apresentados,o paciente P1 pode ter uma das doencas di, i = 1, 2, 3, 4, 5, 6, 7, com os respectivos grausde possibilidades:
uR(P1)(d1) = max1≤i≤14
[min[uR(d1, si), uP1(si)]] = 0.8 pois,
uR(P1)(d1) = max[min[(1.0, 0.0); (0.8, 0.0); (0.8, 0.9); (0.3, 0.3); (0.8, 0.0); (0.4, 0.0); (0.9, 0.1);(0.1, 0.6); (0.0, 1.0); (0.2, 0.2); (0.2, 0.0); (0.8, 0.1); (0.7, 0.0); (0.8, 0.0)]]uR(P1)(d1) = max[0.0, 0.0, 0.8, 0.3, 0.0, 0.0, 0.1, 0.1, 0.0, 0.2, 0.0, 0.1, 0.0, 0.0]uR(P1)(d1) = 0.8
uR(P1)(d2) = max1≤i≤14
[min[uR(d2, si), uP1(si)]] = 0.9
uR(P1)(d3) = max1≤i≤14
[min[uR(d3, si), uP1(si)]] = 0.8
uR(P1)(d4) = max1≤i≤14
[min[uR(d4, si), uP1(si)]] = 0.5
uR(P1)(d5) = max1≤i≤14
[min[uR(d5, si), uP1(si)]] = 0.6
uR(P1)(d6) = max1≤i≤14
[min[uR(d6, si), uP1(si)]] = 1.0
uR(P1)(d7) = max1≤i≤14
[min[uR(d7, si), uP1(si)]] = 0.6
Assim, de acordo com os sintomas apresentados, o paciente P4 pode ter tambem umadas doencas di, i = 1, 2, 3, 4, 5, 6, 7, com os respectivos graus de possibilidades:
uR(P4)(d1) = max1≤i≤14
[min[uR(d1, si), uP4(si)]] = 1.0
uR(P4)(d2) = max1≤i≤14
[min[uR(d2, si), uP4(si)]] = 0.5
uR(P4)(d3) = max1≤i≤14
[min[uR(d3, si), uP4(si)]] = 0.4
uR(P4)(d4) = max1≤i≤14
[min[uR(d4, si), uP4(si)]] = 0.7
uR(P4)(d5) = max1≤i≤14
[min[uR(d5, si), uP4(si)]] = 0.8
uR(P4)(d6) = max1≤i≤14
[min[uR(d6, si), uP4(si)]] = 0.4
uR(P4)(d7) = max1≤i≤14
[min[uR(d7, si), uP4(si)]] = 0.9
Desta forma, obtem-se os diagnosticos para todos os pacientes:
• uR(P1) = (0.8; 0.9; 0.8; 0.5; 0.6; 1.0; 0.6)
• uR(P2) = (0.8; 0.5; 0.3; 0.6; 0.8; 0.5; 1.0)
• uR(P3) = (0.8; 1.0; 0.8; 0.5; 0.5; 0.4; 0.3)
• uR(P4) = (1.0; 0.5; 0.4; 0.7; 0.8; 0.4; 0.9)
• uR(P5) = (0.4; 0.4; 0.9; 0.8; 0.6; 0.4; 0.3)
• uR(P6) = (0.5; 0.3; 0.4; 0.9; 0.8; 0.4; 0.3)
• uR(P7) = (0.8; 0.6; 0.5; 0.7; 0.9; 0.4; 0.8)
A possibilidade do paciente P1 ter pneumonia, bronquite, rinite, sinusite, gripe, larin-gite, amigdalite e 0.8, 0.9, 0.8, 0.5, 0.6, 1.0 e 0.6 respectivamente.
E a possibilidade do paciente P4 ter pneumonia, bronquite, rinite, sinusite, gripe, larin-gite, amigdalite e 1.0, 0.5, 0.4, 0.7, 0.8, 0.4 e 0.9 respectivamente. Portanto, nota-se queo paciente P1, pela teoria aplicada, tem maior possibilidade de estar com laringite; e opaciente P4 de estar com pneumonia. Segundo a especialista os pacientes P1 e P4 foramdiagnosticados com laringite e pneumonia, respectivamente.
Notemos que a resposta da composicao e tambem um conjunto fuzzy, ou seja, a com-posicao nem sempre responde qual doenca o paciente possui. Mas fornece a distribuicaode possibilidades do paciente no conjunto de doencas dado que ele apresenta uma certadistribuicao de possibilidades no conjunto de sinais e sintomas [11].
Outra propriedade importante da relacao fuzzy e que apos ter diagnosticos de novospacientes, estes podem ser incluıdos na base de conhecimentos e assim aumentar a capaci-dade de se obter mais diagnosticos por meio da relacao fuzzy R, tal como faz o medico.
A seguir, consideramos um indivıduo com o diagnostico do paciente P4, apresentamosa diferenca de custo do tratamento com antibioticos via oral e via intravenosa, em seguidaconsideramos um indivıduo com uma pneumonia grave que necessitou de internacao, euso de aparelho de repiracao mecanica.
3.2 Monitoramento do Tratamento da Pneumonia
3.2.1 Introducao
Consideramos um indivıduo que tem o mesmo diagnostico do paciente P4, isto e, umindivıduo que esteja com pneumonia bacteriana. Na primeira parte daremos algumasinformacoes sobre a pneumonia e o uso de antibioticos, em seguida faremos representa-coes graficas do custo do tratamento com possıveis antibioticos administrados via oral evia intravenosa usados no tratamento da pneumonia. Na segunda parte consideramos umindivıduo com uma pneumonia bacteriana grave que alem de antibioticos, necessitou deum tratamento em uma UTI (Unidade de Terapia Intensiva) tendo a necessidade do usode um aparelho de respiracao mecanica, em que relacionamos parametros do indivıduo;fracao inspirada de oxigenio do respirador e a saturacao parcial de oxigenio do pacientecomo variaveis linguısticas que influenciam a compensacao das trocas gasosas, atraves deum sistema baseado em regras fuzzy. A partir, da compensacao das trocas gasosas comoantecedente de um outro sistema baseado em regras fuzzy, determinamos se a respiracaomecanica e fraca ou forte. Desta forma, podemos dar um indicativo para o especialista,se o indivıduo tem condicoes de respirar espontaneamente.
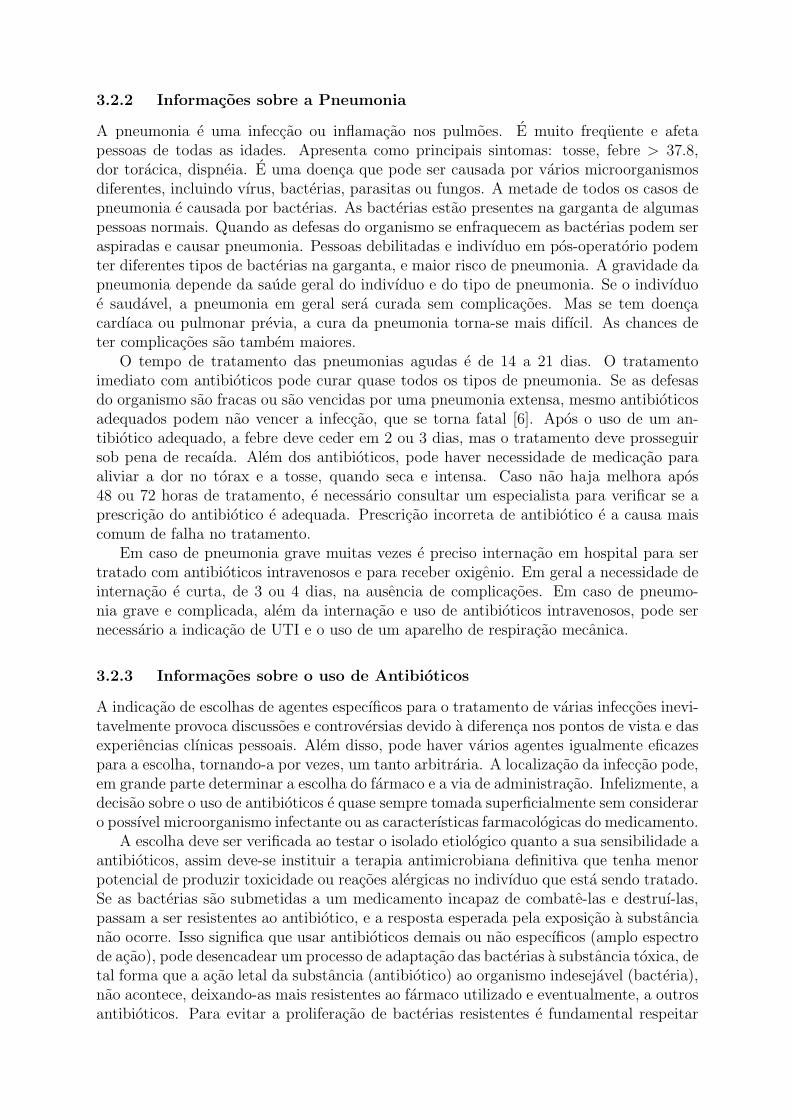
3.2.2 Informacoes sobre a Pneumonia
A pneumonia e uma infeccao ou inflamacao nos pulmoes. E muito frequente e afetapessoas de todas as idades. Apresenta como principais sintomas: tosse, febre > 37.8,dor toracica, dispneia. E uma doenca que pode ser causada por varios microorganismosdiferentes, incluindo vırus, bacterias, parasitas ou fungos. A metade de todos os casos depneumonia e causada por bacterias. As bacterias estao presentes na garganta de algumaspessoas normais. Quando as defesas do organismo se enfraquecem as bacterias podem seraspiradas e causar pneumonia. Pessoas debilitadas e indivıduo em pos-operatorio podemter diferentes tipos de bacterias na garganta, e maior risco de pneumonia. A gravidade dapneumonia depende da saude geral do indivıduo e do tipo de pneumonia. Se o indivıduoe saudavel, a pneumonia em geral sera curada sem complicacoes. Mas se tem doencacardıaca ou pulmonar previa, a cura da pneumonia torna-se mais difıcil. As chances deter complicacoes sao tambem maiores.
O tempo de tratamento das pneumonias agudas e de 14 a 21 dias. O tratamentoimediato com antibioticos pode curar quase todos os tipos de pneumonia. Se as defesasdo organismo sao fracas ou sao vencidas por uma pneumonia extensa, mesmo antibioticosadequados podem nao vencer a infeccao, que se torna fatal [6]. Apos o uso de um an-tibiotico adequado, a febre deve ceder em 2 ou 3 dias, mas o tratamento deve prosseguirsob pena de recaıda. Alem dos antibioticos, pode haver necessidade de medicacao paraaliviar a dor no torax e a tosse, quando seca e intensa. Caso nao haja melhora apos48 ou 72 horas de tratamento, e necessario consultar um especialista para verificar se aprescricao do antibiotico e adequada. Prescricao incorreta de antibiotico e a causa maiscomum de falha no tratamento.
Em caso de pneumonia grave muitas vezes e preciso internacao em hospital para sertratado com antibioticos intravenosos e para receber oxigenio. Em geral a necessidade deinternacao e curta, de 3 ou 4 dias, na ausencia de complicacoes. Em caso de pneumo-nia grave e complicada, alem da internacao e uso de antibioticos intravenosos, pode sernecessario a indicacao de UTI e o uso de um aparelho de respiracao mecanica.
3.2.3 Informacoes sobre o uso de Antibioticos
A indicacao de escolhas de agentes especıficos para o tratamento de varias infeccoes inevi-tavelmente provoca discussoes e controversias devido a diferenca nos pontos de vista e dasexperiencias clınicas pessoais. Alem disso, pode haver varios agentes igualmente eficazespara a escolha, tornando-a por vezes, um tanto arbitraria. A localizacao da infeccao pode,em grande parte determinar a escolha do farmaco e a via de administracao. Infelizmente, adecisao sobre o uso de antibioticos e quase sempre tomada superficialmente sem consideraro possıvel microorganismo infectante ou as caracterısticas farmacologicas do medicamento.
A escolha deve ser verificada ao testar o isolado etiologico quanto a sua sensibilidade aantibioticos, assim deve-se instituir a terapia antimicrobiana definitiva que tenha menorpotencial de produzir toxicidade ou reacoes alergicas no indivıduo que esta sendo tratado.Se as bacterias sao submetidas a um medicamento incapaz de combate-las e destruı-las,passam a ser resistentes ao antibiotico, e a resposta esperada pela exposicao a substancianao ocorre. Isso significa que usar antibioticos demais ou nao especıficos (amplo espectrode acao), pode desencadear um processo de adaptacao das bacterias a substancia toxica, detal forma que a acao letal da substancia (antibiotico) ao organismo indesejavel (bacteria),nao acontece, deixando-as mais resistentes ao farmaco utilizado e eventualmente, a outrosantibioticos. Para evitar a proliferacao de bacterias resistentes e fundamental respeitar
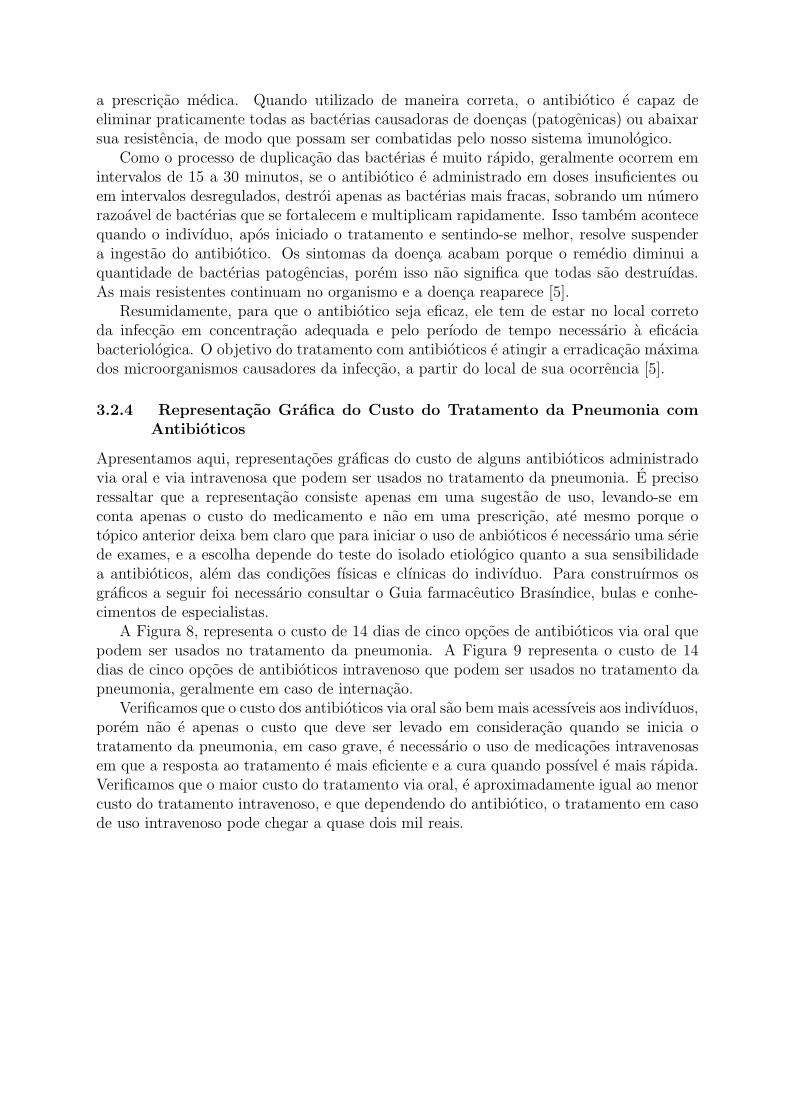
a prescricao medica. Quando utilizado de maneira correta, o antibiotico e capaz deeliminar praticamente todas as bacterias causadoras de doencas (patogenicas) ou abaixarsua resistencia, de modo que possam ser combatidas pelo nosso sistema imunologico.
Como o processo de duplicacao das bacterias e muito rapido, geralmente ocorrem emintervalos de 15 a 30 minutos, se o antibiotico e administrado em doses insuficientes ouem intervalos desregulados, destroi apenas as bacterias mais fracas, sobrando um numerorazoavel de bacterias que se fortalecem e multiplicam rapidamente. Isso tambem acontecequando o indivıduo, apos iniciado o tratamento e sentindo-se melhor, resolve suspendera ingestao do antibiotico. Os sintomas da doenca acabam porque o remedio diminui aquantidade de bacterias patogencias, porem isso nao significa que todas sao destruıdas.As mais resistentes continuam no organismo e a doenca reaparece [5].
Resumidamente, para que o antibiotico seja eficaz, ele tem de estar no local corretoda infeccao em concentracao adequada e pelo perıodo de tempo necessario a eficaciabacteriologica. O objetivo do tratamento com antibioticos e atingir a erradicacao maximados microorganismos causadores da infeccao, a partir do local de sua ocorrencia [5].
3.2.4 Representacao Grafica do Custo do Tratamento da Pneumonia comAntibioticos
Apresentamos aqui, representacoes graficas do custo de alguns antibioticos administradovia oral e via intravenosa que podem ser usados no tratamento da pneumonia. E precisoressaltar que a representacao consiste apenas em uma sugestao de uso, levando-se emconta apenas o custo do medicamento e nao em uma prescricao, ate mesmo porque otopico anterior deixa bem claro que para iniciar o uso de anbioticos e necessario uma seriede exames, e a escolha depende do teste do isolado etiologico quanto a sua sensibilidadea antibioticos, alem das condicoes fısicas e clınicas do indivıduo. Para construırmos osgraficos a seguir foi necessario consultar o Guia farmaceutico Brasındice, bulas e conhe-cimentos de especialistas.
A Figura 8, representa o custo de 14 dias de cinco opcoes de antibioticos via oral quepodem ser usados no tratamento da pneumonia. A Figura 9 representa o custo de 14dias de cinco opcoes de antibioticos intravenoso que podem ser usados no tratamento dapneumonia, geralmente em caso de internacao.
Verificamos que o custo dos antibioticos via oral sao bem mais acessıveis aos indivıduos,porem nao e apenas o custo que deve ser levado em consideracao quando se inicia otratamento da pneumonia, em caso grave, e necessario o uso de medicacoes intravenosasem que a resposta ao tratamento e mais eficiente e a cura quando possıvel e mais rapida.Verificamos que o maior custo do tratamento via oral, e aproximadamente igual ao menorcusto do tratamento intravenoso, e que dependendo do antibiotico, o tratamento em casode uso intravenoso pode chegar a quase dois mil reais.
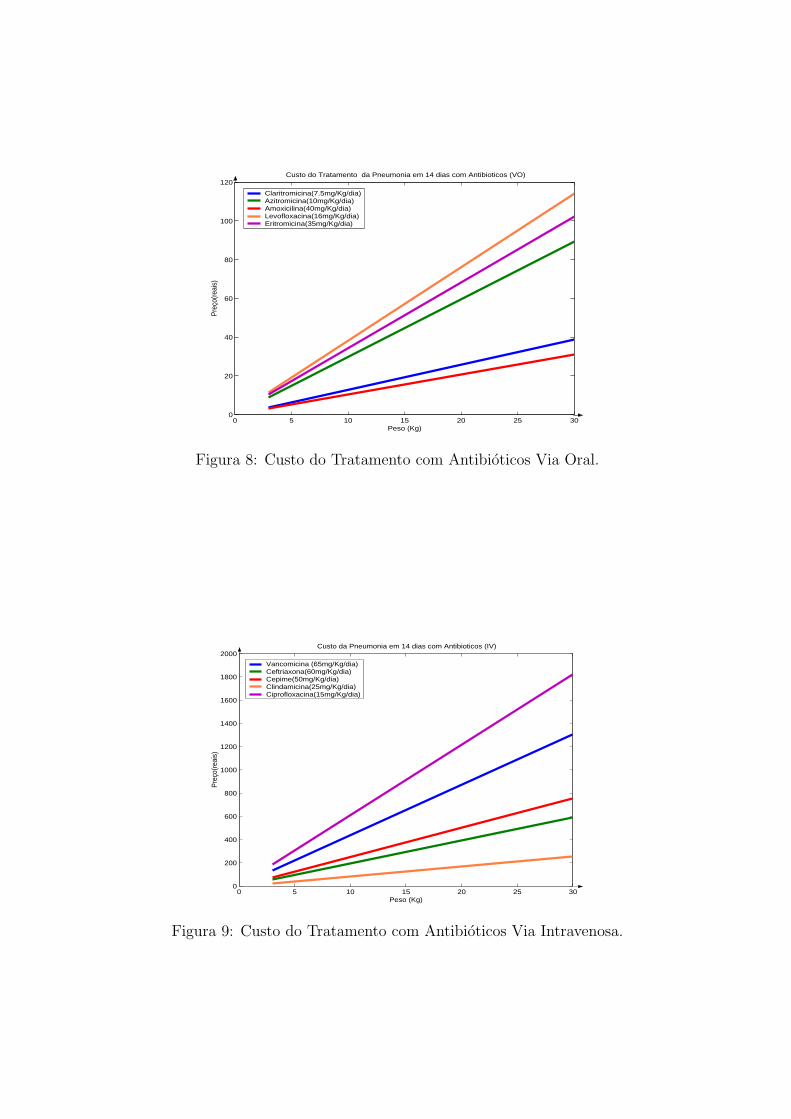
0 5 10 15 20 25 300
20
40
60
80
100
120
Peso (Kg)
Pre
ço(r
eais
)
Custo do Tratamento da Pneumonia em 14 dias com Antibioticos (VO)
Claritromicina(7.5mg/Kg/dia)Azitromicina(10mg/Kg/dia)Amoxicilina(40mg/Kg/dia)Levofloxacina(16mg/Kg/dia)Eritromicina(35mg/Kg/dia)
Figura 8: Custo do Tratamento com Antibioticos Via Oral.
0 5 10 15 20 25 300
200
400
600
800
1000
1200
1400
1600
1800
2000
Peso (Kg)
Pre
ço(r
eais
)
Custo da Pneumonia em 14 dias com Antibioticos (IV)
Vancomicina (65mg/Kg/dia)Ceftriaxona(60mg/Kg/dia)Cepime(50mg/Kg/dia)Clindamicina(25mg/Kg/dia)Ciprofloxacina(15mg/Kg/dia)
Figura 9: Custo do Tratamento com Antibioticos Via Intravenosa.
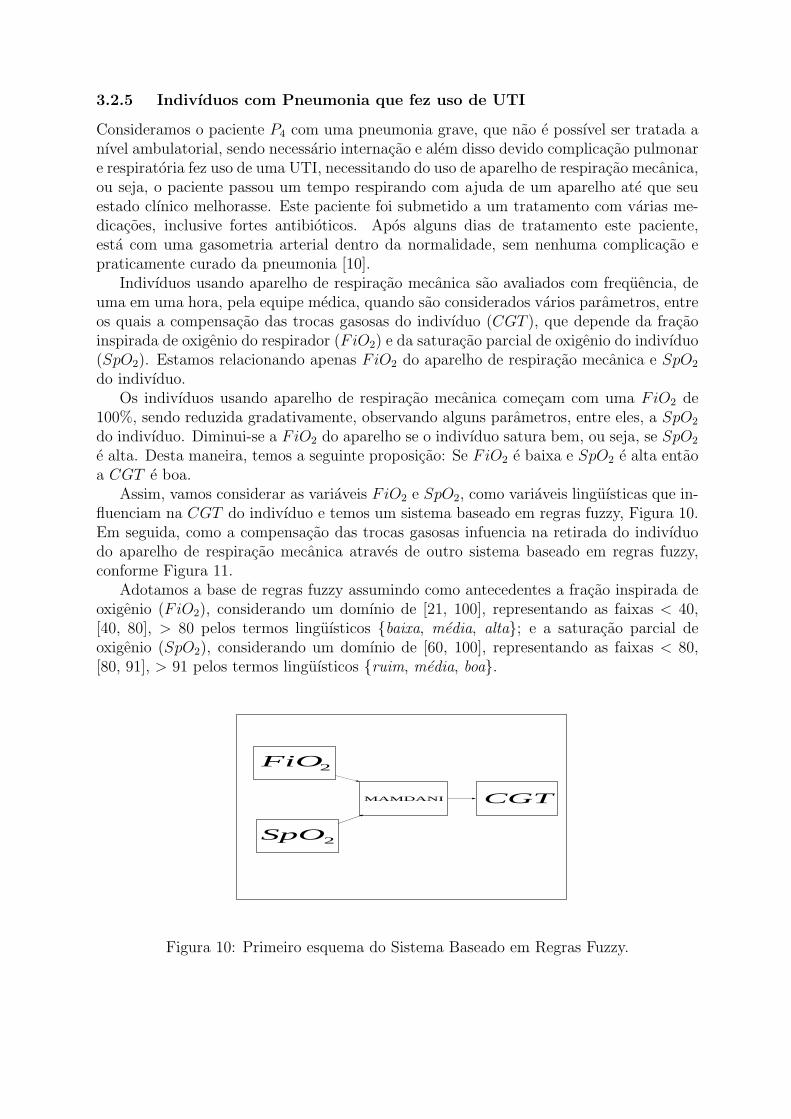
3.2.5 Indivıduos com Pneumonia que fez uso de UTI
Consideramos o paciente P4 com uma pneumonia grave, que nao e possıvel ser tratada anıvel ambulatorial, sendo necessario internacao e alem disso devido complicacao pulmonare respiratoria fez uso de uma UTI, necessitando do uso de aparelho de respiracao mecanica,ou seja, o paciente passou um tempo respirando com ajuda de um aparelho ate que seuestado clınico melhorasse. Este paciente foi submetido a um tratamento com varias me-dicacoes, inclusive fortes antibioticos. Apos alguns dias de tratamento este paciente,esta com uma gasometria arterial dentro da normalidade, sem nenhuma complicacao epraticamente curado da pneumonia [10].
Indivıduos usando aparelho de respiracao mecanica sao avaliados com frequencia, deuma em uma hora, pela equipe medica, quando sao considerados varios parametros, entreos quais a compensacao das trocas gasosas do indivıduo (CGT ), que depende da fracaoinspirada de oxigenio do respirador (FiO2) e da saturacao parcial de oxigenio do indivıduo(SpO2). Estamos relacionando apenas FiO2 do aparelho de respiracao mecanica e SpO2
do indivıduo.Os indivıduos usando aparelho de respiracao mecanica comecam com uma FiO2 de
100%, sendo reduzida gradativamente, observando alguns parametros, entre eles, a SpO2
do indivıduo. Diminui-se a FiO2 do aparelho se o indivıduo satura bem, ou seja, se SpO2
e alta. Desta maneira, temos a seguinte proposicao: Se FiO2 e baixa e SpO2 e alta entaoa CGT e boa.
Assim, vamos considerar as variaveis FiO2 e SpO2, como variaveis linguısticas que in-fluenciam na CGT do indivıduo e temos um sistema baseado em regras fuzzy, Figura 10.Em seguida, como a compensacao das trocas gasosas infuencia na retirada do indivıduodo aparelho de respiracao mecanica atraves de outro sistema baseado em regras fuzzy,conforme Figura 11.
Adotamos a base de regras fuzzy assumindo como antecedentes a fracao inspirada deoxigenio (FiO2), considerando um domınio de [21, 100], representando as faixas < 40,[40, 80], > 80 pelos termos linguısticos {baixa, media, alta}; e a saturacao parcial deoxigenio (SpO2), considerando um domınio de [60, 100], representando as faixas < 80,[80, 91], > 91 pelos termos linguısticos {ruim, media, boa}.
SBRFSBRF
2FiO
2SpO
MAMDANI CGT
Figura 10: Primeiro esquema do Sistema Baseado em Regras Fuzzy.
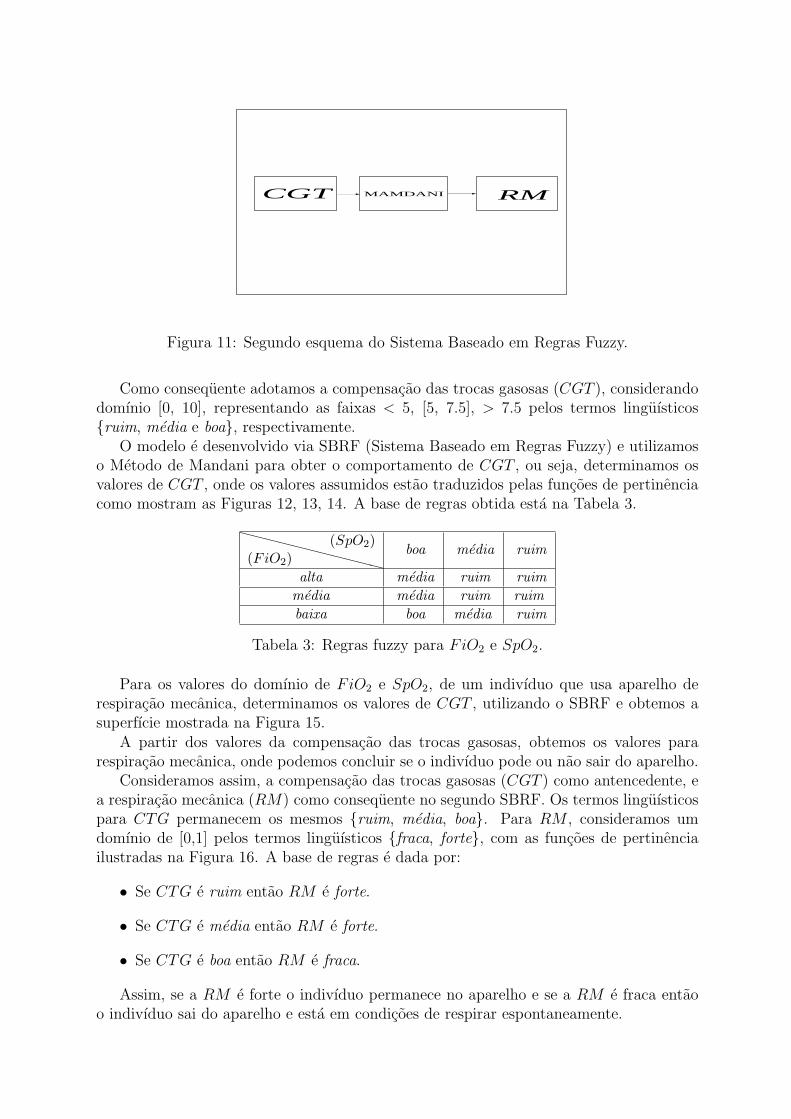
SBRFSBRF
MAMDANICGT RM
Figura 11: Segundo esquema do Sistema Baseado em Regras Fuzzy.
Como consequente adotamos a compensacao das trocas gasosas (CGT ), considerandodomınio [0, 10], representando as faixas < 5, [5, 7.5], > 7.5 pelos termos linguısticos{ruim, media e boa}, respectivamente.
O modelo e desenvolvido via SBRF (Sistema Baseado em Regras Fuzzy) e utilizamoso Metodo de Mandani para obter o comportamento de CGT , ou seja, determinamos osvalores de CGT , onde os valores assumidos estao traduzidos pelas funcoes de pertinenciacomo mostram as Figuras 12, 13, 14. A base de regras obtida esta na Tabela 3.
�����������(FiO2)(SpO2) boa media ruim
alta media ruim ruimmedia media ruim ruimbaixa boa media ruim
Tabela 3: Regras fuzzy para FiO2 e SpO2.
Para os valores do domınio de FiO2 e SpO2, de um indivıduo que usa aparelho derespiracao mecanica, determinamos os valores de CGT , utilizando o SBRF e obtemos asuperfıcie mostrada na Figura 15.
A partir dos valores da compensacao das trocas gasosas, obtemos os valores pararespiracao mecanica, onde podemos concluir se o indivıduo pode ou nao sair do aparelho.
Consideramos assim, a compensacao das trocas gasosas (CGT ) como antencedente, ea respiracao mecanica (RM) como consequente no segundo SBRF. Os termos linguısticospara CTG permanecem os mesmos {ruim, media, boa}. Para RM , consideramos umdomınio de [0,1] pelos termos linguısticos {fraca, forte}, com as funcoes de pertinenciailustradas na Figura 16. A base de regras e dada por:
• Se CTG e ruim entao RM e forte.
• Se CTG e media entao RM e forte.
• Se CTG e boa entao RM e fraca.
Assim, se a RM e forte o indivıduo permanece no aparelho e se a RM e fraca entaoo indivıduo sai do aparelho e esta em condicoes de respirar espontaneamente.
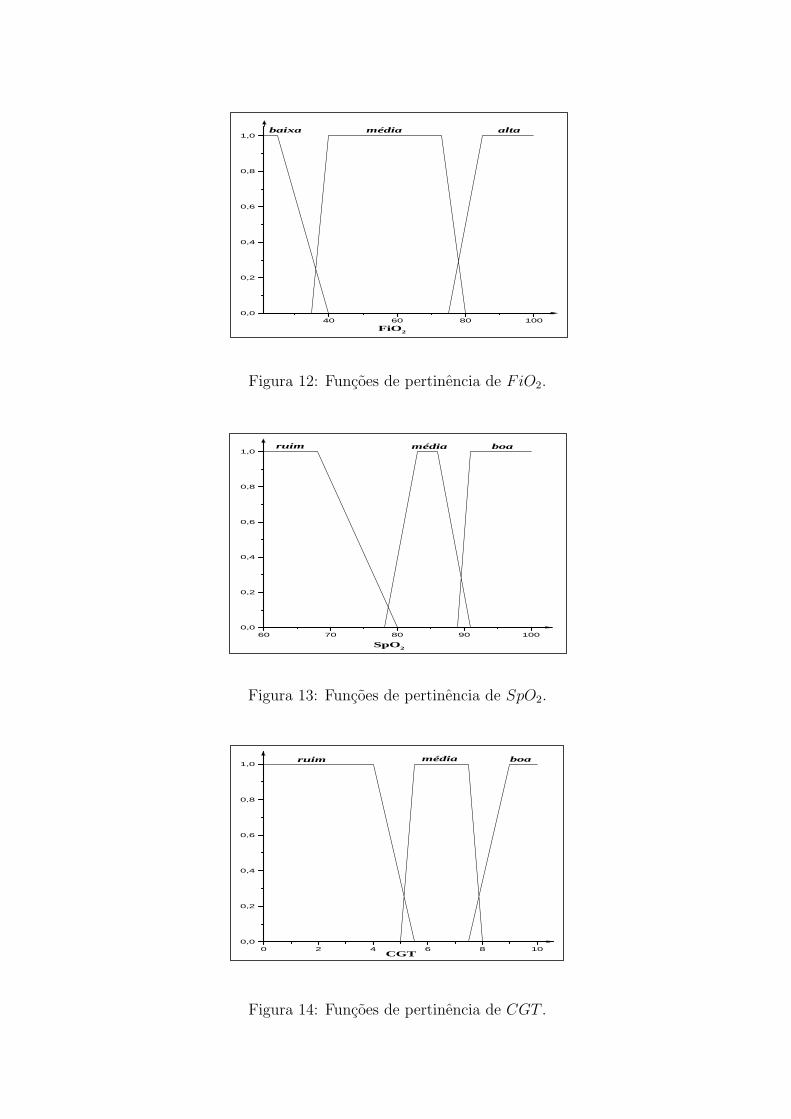
40 60 80 1000,0
0,2
0,4
0,6
0,8
1,0
FiO2
baixa média alta
Figura 12: Funcoes de pertinencia de FiO2.
60 70 80 90 1000,0
0,2
0,4
0,6
0,8
1,0
SpO2
boamédiaruim
Figura 13: Funcoes de pertinencia de SpO2.
0 2 4 6 8 100,0
0,2
0,4
0,6
0,8
1,0
CGT
boamédiaruim
Figura 14: Funcoes de pertinencia de CGT .
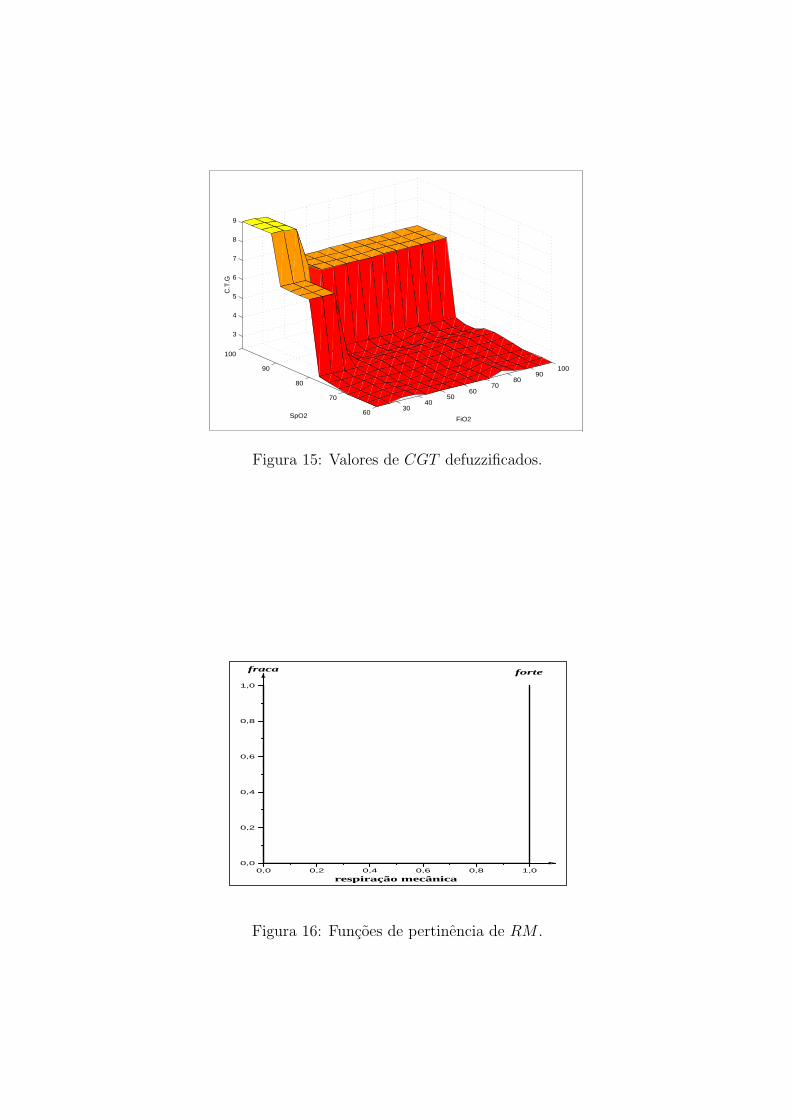
3040
5060
7080
90100
60
70
80
90
100
3
4
5
6
7
8
9
FiO2SpO2
C.T
.G
Figura 15: Valores de CGT defuzzificados.
0,0 0,2 0,4 0,6 0,8 1,00,0
0,2
0,4
0,6
0,8
1,0
fraca
respiração mecânica
forte
Figura 16: Funcoes de pertinencia de RM .
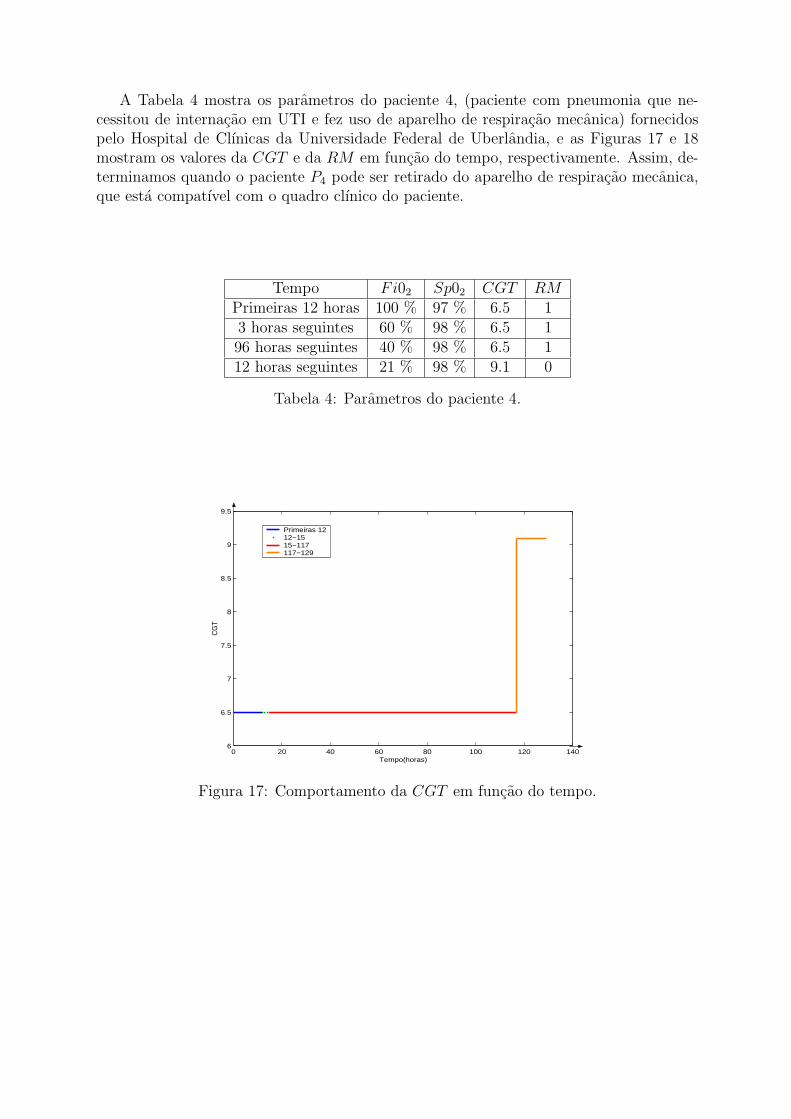
A Tabela 4 mostra os parametros do paciente 4, (paciente com pneumonia que ne-cessitou de internacao em UTI e fez uso de aparelho de respiracao mecanica) fornecidospelo Hospital de Clınicas da Universidade Federal de Uberlandia, e as Figuras 17 e 18mostram os valores da CGT e da RM em funcao do tempo, respectivamente. Assim, de-terminamos quando o paciente P4 pode ser retirado do aparelho de respiracao mecanica,que esta compatıvel com o quadro clınico do paciente.
Tempo Fi02 Sp02 CGT RMPrimeiras 12 horas 100 % 97 % 6.5 13 horas seguintes 60 % 98 % 6.5 196 horas seguintes 40 % 98 % 6.5 112 horas seguintes 21 % 98 % 9.1 0
Tabela 4: Parametros do paciente 4.
0 20 40 60 80 100 120 1406
6.5
7
7.5
8
8.5
9
9.5
Tempo(horas)
CG
T
Primeiras 1212−1515−117117−129
Figura 17: Comportamento da CGT em funcao do tempo.

0 20 40 60 80 100 120 140−0.5
0
0.5
1
1.5
Tempo(horas)
RM
Primeiras 1212−1515−117117−129
Figura 18: Comportamento da RM em funcao do tempo.
Desta forma, atraves da teoria dos conjuntos fuzzy, podemos realizar um possıvel mo-nitoramento do tratamento da pneumonia de indivıduos que estejam na UTI e necessitemde respiracao mecanica.
3.3 Resumo
Nesta secao apresentamos diagnostico medico fuzzy de doencas das vias aereas superiorese inferiores, esta ferramenta matematica nao responde qual doenca o indivıduo possui,apenas fornece as possibilidades com maior ou menor grau do indivıduo estar com umaou outra doenca. Em seguida, atraves de representacoes graficas e sem usar a teoria dosconjuntos fuzzy verificamos a diferenca do custo do tratamento da pneumonia com an-tibioticos administrados via oral e via intravenosa, em que percebemos diferencas de customuito grande usando antibiotico intravenoso. Por ultimo consideramos um indivıduo compneumonia grave que faz uso de UTI, sendo necessario o uso de aparelho de respiracaomecanica, em que relacionamos parametros observados do indivıduo com a teoria dosconjuntos fuzzy, sendo possıvel indicar quando o indivıduo pode sair do aparelho de res-piracao mecanica passando a respirar espontaneamente.
Na proxima secao apresentamos um modelo matematico que descreve como cai aconcentracao de um farmaco no sangue de um indivıduo. O modelo supoe que a concen-tracao de um farmaco decai a uma velocidade que e proporcional, em cada instante, asua propria concentracao, em que consideramos a constante de velocidade de eliminacaocomo um parametro fuzzy que depende da funcao renal do indivıduo.
4 Eliminacao de Farmacos do Organismo
4.1 Introducao
O objetivo desta secao e o estudo da concentracao de farmacos na corrente sanguınea.Nosso interesse principal e modelar a velocidade de eliminacao de farmacos no organismodo indivıduo, segundo as informacoes fornecidas pelo especialista, consideramos que a ve-locidade de eliminacao depende fortemente da funcao renal e ao mesmo tempo, como um

parametro fuzzy que depende das variaveis volume urinario (v), clearance de creatinina(clcr) e pH serico (p). A principal diferenca do modelo fuzzy e o classico e que a veloci-dade de eliminacao (k) e considerada um parametro fuzzy. Esta constante pode variarde um indivıduo para outro pois os farmacos que sao excretados pelo rim, sem seremtransformados metabolicamente, como por exemplo, a digoxina 7 e muitos antibioticos,dependem do estado funcional desse orgao [5]. Entao, a mesma dose de medicamento podeproduzir as mais diferentes constantes de eliminacao. Essas diferencas tambem resultamem diferentes respostas terapeuticas a uma mesma dose de medicamento.
4.2 Modelo Farmacocinetico Classico
4.2.1 Introducao
Nos estudos farmacocineticos, a movimentacao dos farmacos de um compartimento paraoutro modifica sua concentracao nesses compartimentos. Tais modificacoes podem serdescritas por modelos matematicos, os quais constituem, enfim, o principal objetivo dosestudos cineticos. Apesar de artificiais e incompletos para representarem a complexidadedo organismo, os modelos farmacocineticos tem utilidade na interpretacao dos processosde transporte e metabolismo dos farmacos [17].
4.2.2 Modelo Classico
Um problema fundamental em Farmacologia e saber como cai a concentracao de umfarmaco no sangue de um indivıduo. O conhecimento deste fato permite estabelecer quala dosagem a ser inserida e o intervalo de tempo que cada aplicacao deve ser feita. O mo-delo mais simples para descrever a eliminacao do farmaco de um certo compartimento eobtido quando supomos que a concentracao (y) de um farmaco decai a uma velocidade quee proporcional, em cada instante, a sua propria concentracao [3]. Em termos matematicosisto e:
dy
dt= −ky (9)
• k e a constante de velocidade de eliminacao do farmaco;
Suponhamos que seja dada ao indivıduo uma dose inicial y0, absorvida pelo sangue ins-tantaneamente, no instante t = 0. (O tempo de absorcao do farmaco e geralmente muitopequeno, quando comparado com o tempo entre as aplicacoes das doses). A solucao geralda equacao (9) e dada por:
y = y0e−kt (10)
pois,
dy
dt= −ky ⇒
∫dy
y=
∫−kdt ⇒ ln y = −kt + q ⇒ y = eqe−kt,
como y(0) = y0, entao eq = y0.
7digoxina e um medicamento cardiotonico (substancias que reforcam a energia do coracao), e an-tiarrıtmico (que controla os batimentos do coracao).

Suponhamos que depois de um tempo T uma segunda dose da mesma quantidade y0
seja administrada. Temos entaoy(T−) = y0e
−kT− (quantidade de farmaco no sangue antes da segunda dose)y(T+) = y0e
−kT+ + y0 (quantidade do farmaco logo apos a aplicacao da segunda dose)e portanto y(t) = y0(1 + e−kT )e−k(t−T ) nos da a quantidade de farmaco no sangue noinstante t � T .
Continuando o tratamento, pela injecao da quantidade y0 no final de cada intervalode tempo igual a T , obtemos
y(2T−) = y0(1 + e−kT )e−kT ,
y(2T+) = y0(1 + e−kT )e−kT + y0
y(2T+) = y0(1 + e−kT + e−2kT )
portantoy(t) = y0(1 + e−kT + e−2kT )e−k(t−2T ) (11)
para t � 2T .Genericamente, depois da n-esima aplicacao, a quantidade de farmaco no sangue sera
y(nT+) = y0(1 + e−kT + e−2kT + ... + e−nkT ), n = 1, 2, ... (12)
Ora, como 1+ e−kT + e−2kT + ...+ e−nkT e a soma de uma P.G. de (n+1) termos, como primeiro termo a1 = 1 e razao q = e−kT ; assim temos a soma
S = 1 + e−kT + e−2kT + ... + e−nkT (13)
qS = q(1 + e−kT + e−2kT + ... + e−nkT ), fazendo q = e−kT temos;
e−kT S = e−kT + e−2kT + e−3kT + ... + e−(n+1)kT
S − e−kT S = 1 − e−(n+1)kT
s =1 − e−(n+1)kT
1 − e−kT(14)
Portanto, temos
y(nT+) = y01 − e−(n+1)kT
1 − e−kT(15)
Entao, quando n cresce, e−(n+1)kT → 0 e, portanto, y(nT+) tende a
ys =y0
1 − e−kT (16)
• k e a constante de velocidade de eliminacao do farmaco;
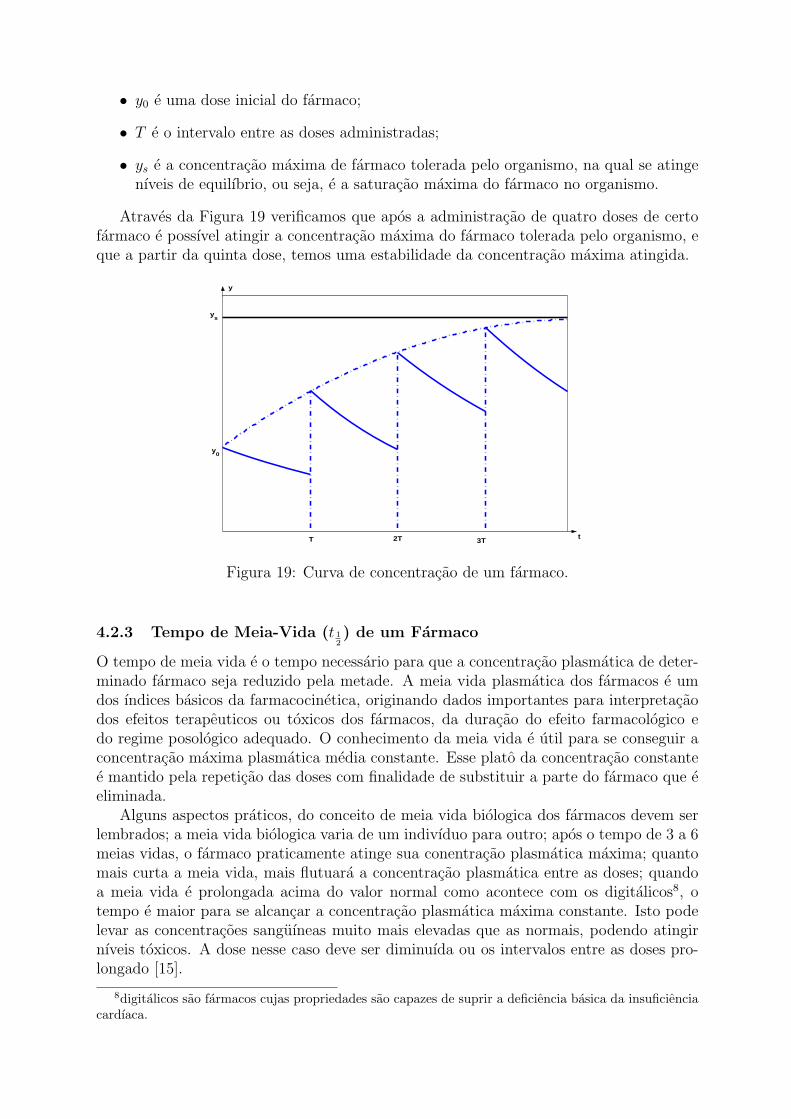
• y0 e uma dose inicial do farmaco;
• T e o intervalo entre as doses administradas;
• ys e a concentracao maxima de farmaco tolerada pelo organismo, na qual se atingenıveis de equilıbrio, ou seja, e a saturacao maxima do farmaco no organismo.
Atraves da Figura 19 verificamos que apos a administracao de quatro doses de certofarmaco e possıvel atingir a concentracao maxima do farmaco tolerada pelo organismo, eque a partir da quinta dose, temos uma estabilidade da concentracao maxima atingida.
y
ys
y0
T 2T 3Tt
Figura 19: Curva de concentracao de um farmaco.
4.2.3 Tempo de Meia-Vida (t 12) de um Farmaco
O tempo de meia vida e o tempo necessario para que a concentracao plasmatica de deter-minado farmaco seja reduzido pela metade. A meia vida plasmatica dos farmacos e umdos ındices basicos da farmacocinetica, originando dados importantes para interpretacaodos efeitos terapeuticos ou toxicos dos farmacos, da duracao do efeito farmacologico edo regime posologico adequado. O conhecimento da meia vida e util para se conseguir aconcentracao maxima plasmatica media constante. Esse plato da concentracao constantee mantido pela repeticao das doses com finalidade de substituir a parte do farmaco que eeliminada.
Alguns aspectos praticos, do conceito de meia vida biologica dos farmacos devem serlembrados; a meia vida biologica varia de um indivıduo para outro; apos o tempo de 3 a 6meias vidas, o farmaco praticamente atinge sua conentracao plasmatica maxima; quantomais curta a meia vida, mais flutuara a concentracao plasmatica entre as doses; quandoa meia vida e prolongada acima do valor normal como acontece com os digitalicos8, otempo e maior para se alcancar a concentracao plasmatica maxima constante. Isto podelevar as concentracoes sanguıneas muito mais elevadas que as normais, podendo atingirnıveis toxicos. A dose nesse caso deve ser diminuıda ou os intervalos entre as doses pro-longado [15].
8digitalicos sao farmacos cujas propriedades sao capazes de suprir a deficiencia basica da insuficienciacardıaca.

Partindo da equacao (10) vamos verificar qual a relacao entre o tempo de meia vida ea constante de velocidade de eliminacao (k) de um farmaco:
y = y0e−kt
ln y = ln y0 − kt (17)
Quando t = t 12
(tempo de meia-vida dos farmacos) entao y =y0
2, assim substituindo
em (17) temos: ln(y0
2) = ln y0 − kt 1
2⇒ ln y0 − ln 2 = ln kt 1
2. Portanto,
t 12
=0, 693
k(18)
A seguir estudamos o modelo farmacocinetico usando a teoria dos conjuntos fuzzy.
4.3 Modelo Farmacocinetico Fuzzy
4.3.1 Introducao
Na ultima decada a literatura matematica da imprecisao e incerteza tem crescido consi-deravelmente. Uma maneira de modelar problemas ligados a realidade biologica, em quetanto as variaveis de estado como os parametros sao empregados de subjetividade, vemganhando terreno na area de biomatematica com resultados significativos e animadores [8].
Os modelos classicos sao artificiais e incompletos para representar a complexidade doorganismo na eliminacao de farmacos do organismo. Nesta secao estudamos um modelofarmacocinetico usando a teoria dos conjuntos fuzzy em que pretendemos representarmelhor o processo de metabolismo dos farmacos.
4.3.2 Informacoes Medicas sobre Excrecao
Depois de absorvidos e distribuıdos segundo as informacoes medicas, os farmacos sao eli-minados por diferentes vias, conforme suas propriedades fısico-quımicas. O sistema renale responsavel pela principal via de excrecao de farmacos. Neste trabalho consideramosa velocidade de eliminacao dependendo do sistema renal. Com as informacoes do espe-cialista na area, Dr. Heleno Batista Oliveira, medico nefrologista do Hospital de Clınicasda Universidade Federal de Uberlandia, consideramos algumas variaveis que influenciama velocidade de eliminacao de um farmaco:
1. Volume Urinario: Consideramos como sendo a producao de urina em um in-divıduo a cada 24 hs, classificado da seguinte maneira dependendo da quantidade;
• anuria: e um volume entre 0 e 100 ml.
• oliguria: e um volume entre 100 e 300 ml.
• diurese normal: e um volume entre 300 e 1500 ml.
• poliuria: e um volume > 1500 ml, consideramos entre 1500 e 3000 ml .

2. Clearance de Creatinina: o teste de clearance de creatinina9 determina a eficienciacom que os rins eliminam a creatinina do sangue. A taxa de clearance e expressa emtermos de volume de sangue (medido em mililitros) que pode ser limpo de creatini-na em 1 minuto. Os nıveis de creatinina tornam-se anormais quando mais de 50%dos nefrons10 tenham sido danificados. O clearance de creatinina foi classificado daseguinte maneira dependendo da quantidade;
• muito baixo: entre 0 e 10 ml/min.
• baixo: entre 10 e 50 ml/min.
• medio baixo: entre 50 e 90 ml/min.
• normal: entre 90 e 120 ml/min.
• alto: > 120 ml/min, consideramos entre 120 e 200 ml/min
3. pH Serico: E o pH do sangue, classificado da seguinte maneira;
• basico: < 7.35
• normal: entre 7.35 e 7.45
• acido: > 7.45
4. Velocidade de Eliminacao: Esta entre 0 e 0.693, a partir da equacao 18 e con-siderando o menor tempo de meia-vida do farmaco igual a uma hora, obtemosk = 0.693 h−1
4.4 Modelo Fuzzy
No modelo classico observamos que a concentracao (y) de um farmaco no compartimentodecai a uma velocidade que e proporcional, em cada instante, a sua propria concentracao,representado pela equacao (9), cuja solucao e (10).
Mas precisamente neste modelo estimamos a velocidade de eliminacao do farmaco (k)como um parametro fuzzy que depende das variaveis volume urinario (v), clearance decreatinina (clcr) e pH serico (p). Assim o modelo (9) e dado por [9]:
dy
dt= −k(v, clcr, p)y (19)
Assim a solucao da equacao (19) e dada por:
y = y0e−k(v,clcr,p)t, t > 0. (20)
A principal diferenca entre o modelo (19) e o modelo (9) e que em (19) o parametro(k) e funcao do volume urinario (v), do clearance de creatinina (clcr) e do pH serico (p),permitindo incorporar as informacoes medicas, citadas em (4.3.2).
Na secao seguinte, faremos um estudo considerando o conhecimento do especialistae a constante de velocidade de eliminacao (k) dependendo do volume urinario (v), doclearance de creatinina (clcr) e do pH serico (p).
9a creatinina e um produto final do metabolismo da creatina (creatina e um composto produzidonaturalmente pelo nosso organismo para fornecer a energia necessaria aos nossos musculos. Creatina eproduzida pelo fıgado e em seguida e levada pelo sangue para as celulas dos musculos) que aparece nosoro em quantidades proporcionais a massa muscular corporea.
10os nefrons sao unidades filtrantes dos rins; cada rim contem 1 milhao de nefrons o que torna esseorgao capaz de filtrar as excretas que circulam no sangue.
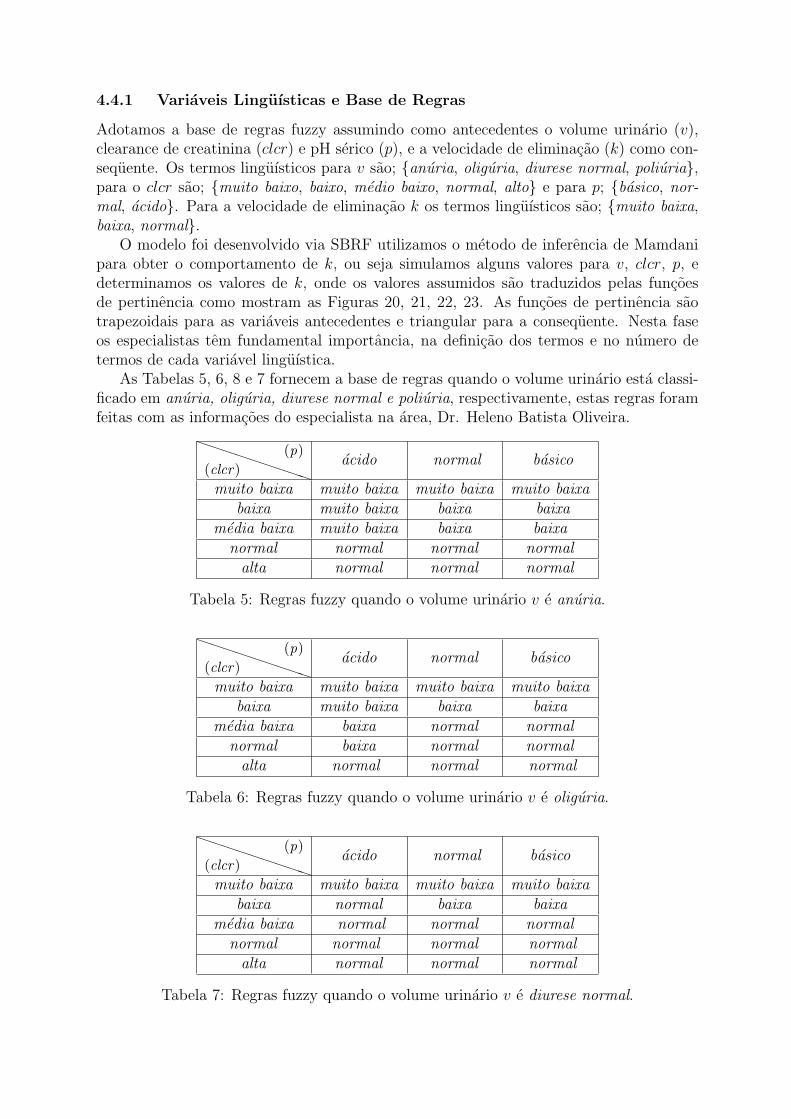
4.4.1 Variaveis Linguısticas e Base de Regras
Adotamos a base de regras fuzzy assumindo como antecedentes o volume urinario (v),clearance de creatinina (clcr) e pH serico (p), e a velocidade de eliminacao (k) como con-sequente. Os termos linguısticos para v sao; {anuria, oliguria, diurese normal, poliuria},para o clcr sao; {muito baixo, baixo, medio baixo, normal, alto} e para p; {basico, nor-mal, acido}. Para a velocidade de eliminacao k os termos linguısticos sao; {muito baixa,baixa, normal}.
O modelo foi desenvolvido via SBRF utilizamos o metodo de inferencia de Mamdanipara obter o comportamento de k, ou seja simulamos alguns valores para v, clcr, p, edeterminamos os valores de k, onde os valores assumidos sao traduzidos pelas funcoesde pertinencia como mostram as Figuras 20, 21, 22, 23. As funcoes de pertinencia saotrapezoidais para as variaveis antecedentes e triangular para a consequente. Nesta faseos especialistas tem fundamental importancia, na definicao dos termos e no numero determos de cada variavel linguıstica.
As Tabelas 5, 6, 8 e 7 fornecem a base de regras quando o volume urinario esta classi-ficado em anuria, oliguria, diurese normal e poliuria, respectivamente, estas regras foramfeitas com as informacoes do especialista na area, Dr. Heleno Batista Oliveira.
���������(clcr)(p)
acido normal basico
muito baixa muito baixa muito baixa muito baixabaixa muito baixa baixa baixa
media baixa muito baixa baixa baixanormal normal normal normal
alta normal normal normal
Tabela 5: Regras fuzzy quando o volume urinario v e anuria.
���������(clcr)(p)
acido normal basico
muito baixa muito baixa muito baixa muito baixabaixa muito baixa baixa baixa
media baixa baixa normal normalnormal baixa normal normal
alta normal normal normal
Tabela 6: Regras fuzzy quando o volume urinario v e oliguria.
���������(clcr)(p)
acido normal basico
muito baixa muito baixa muito baixa muito baixabaixa normal baixa baixa
media baixa normal normal normalnormal normal normal normal
alta normal normal normal
Tabela 7: Regras fuzzy quando o volume urinario v e diurese normal.
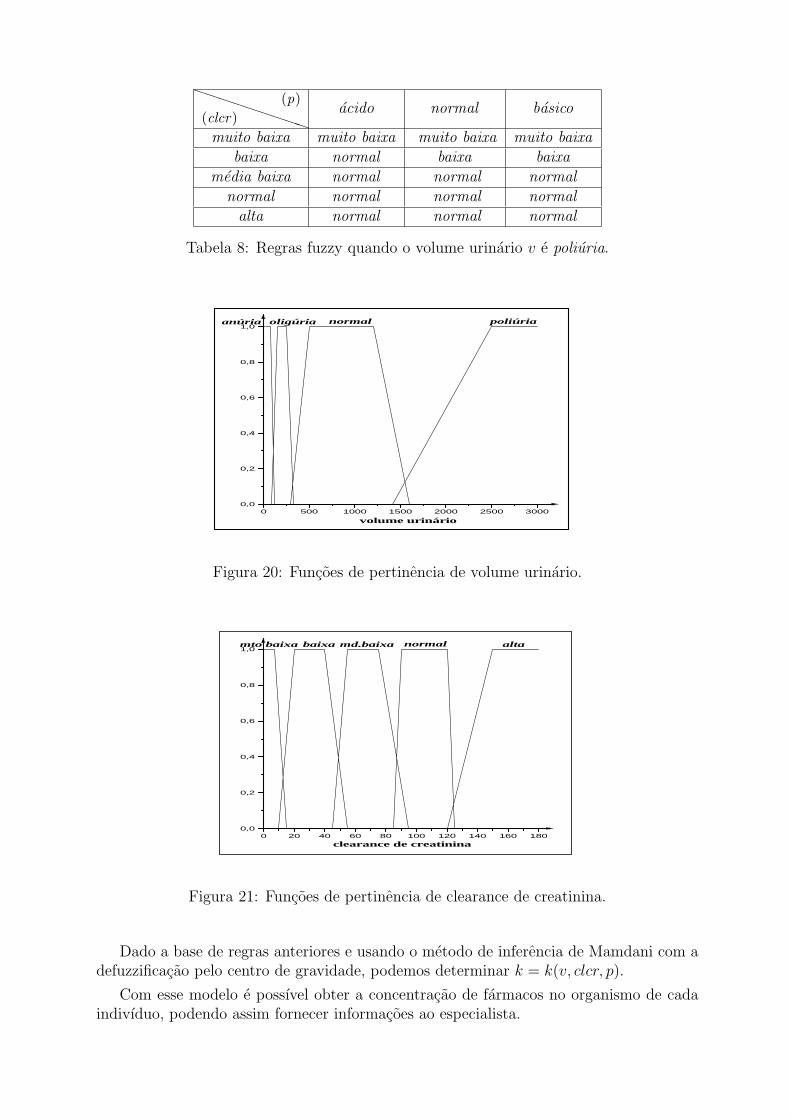
���������(clcr)(p)
acido normal basico
muito baixa muito baixa muito baixa muito baixabaixa normal baixa baixa
media baixa normal normal normalnormal normal normal normal
alta normal normal normal
Tabela 8: Regras fuzzy quando o volume urinario v e poliuria.
0 500 1000 1500 2000 2500 30000,0
0,2
0,4
0,6
0,8
1,0normal
volume urinário
poliúriaoligúriaanúria
Figura 20: Funcoes de pertinencia de volume urinario.
0 20 40 60 80 100 120 140 160 1800,0
0,2
0,4
0,6
0,8
1,0
clearance de creatinina
mto baixa altanormalmd.baixabaixa
Figura 21: Funcoes de pertinencia de clearance de creatinina.
Dado a base de regras anteriores e usando o metodo de inferencia de Mamdani com adefuzzificacao pelo centro de gravidade, podemos determinar k = k(v, clcr, p).
Com esse modelo e possıvel obter a concentracao de farmacos no organismo de cadaindivıduo, podendo assim fornecer informacoes ao especialista.
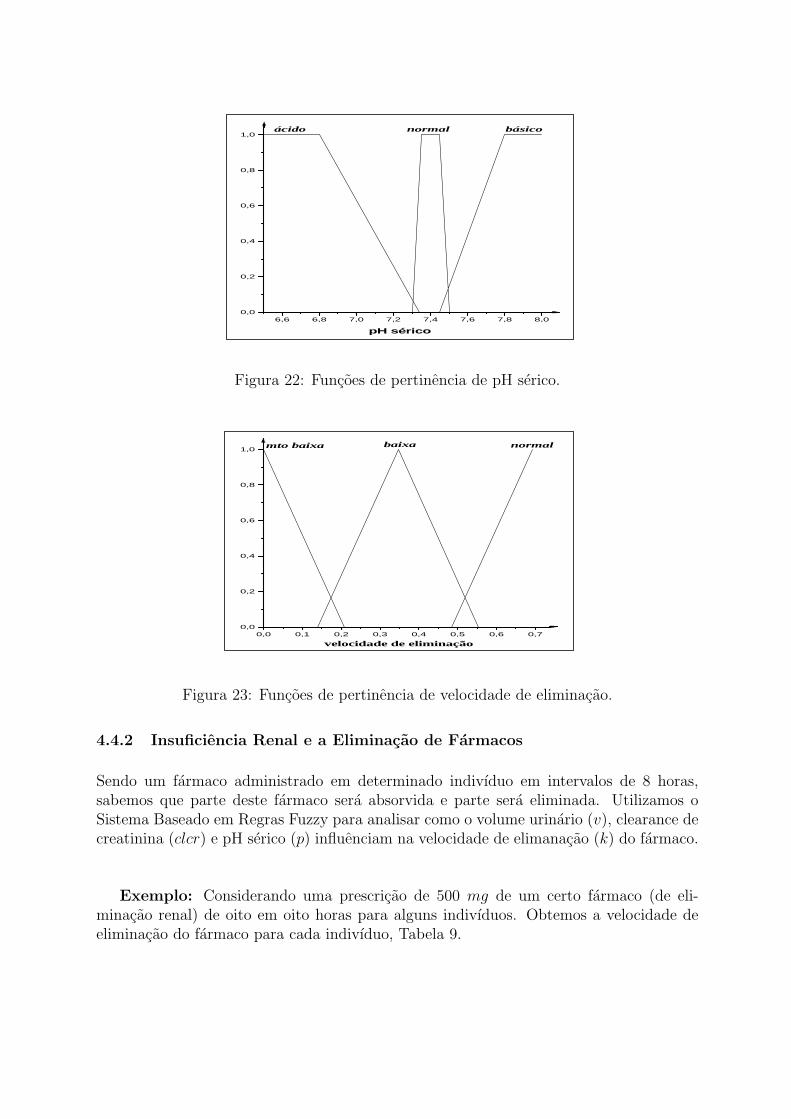
6,6 6,8 7,0 7,2 7,4 7,6 7,8 8,00,0
0,2
0,4
0,6
0,8
1,0
pH sérico
básicoácido normal
Figura 22: Funcoes de pertinencia de pH serico.
0,0 0,1 0,2 0,3 0,4 0,5 0,6 0,70,0
0,2
0,4
0,6
0,8
1,0
velocidade de eliminação
normalbaixamto baixa
Figura 23: Funcoes de pertinencia de velocidade de eliminacao.
4.4.2 Insuficiencia Renal e a Eliminacao de Farmacos
Sendo um farmaco administrado em determinado indivıduo em intervalos de 8 horas,sabemos que parte deste farmaco sera absorvida e parte sera eliminada. Utilizamos oSistema Baseado em Regras Fuzzy para analisar como o volume urinario (v), clearance decreatinina (clcr) e pH serico (p) influenciam na velocidade de elimanacao (k) do farmaco.
Exemplo: Considerando uma prescricao de 500 mg de um certo farmaco (de eli-minacao renal) de oito em oito horas para alguns indivıduos. Obtemos a velocidade deeliminacao do farmaco para cada indivıduo, Tabela 9.
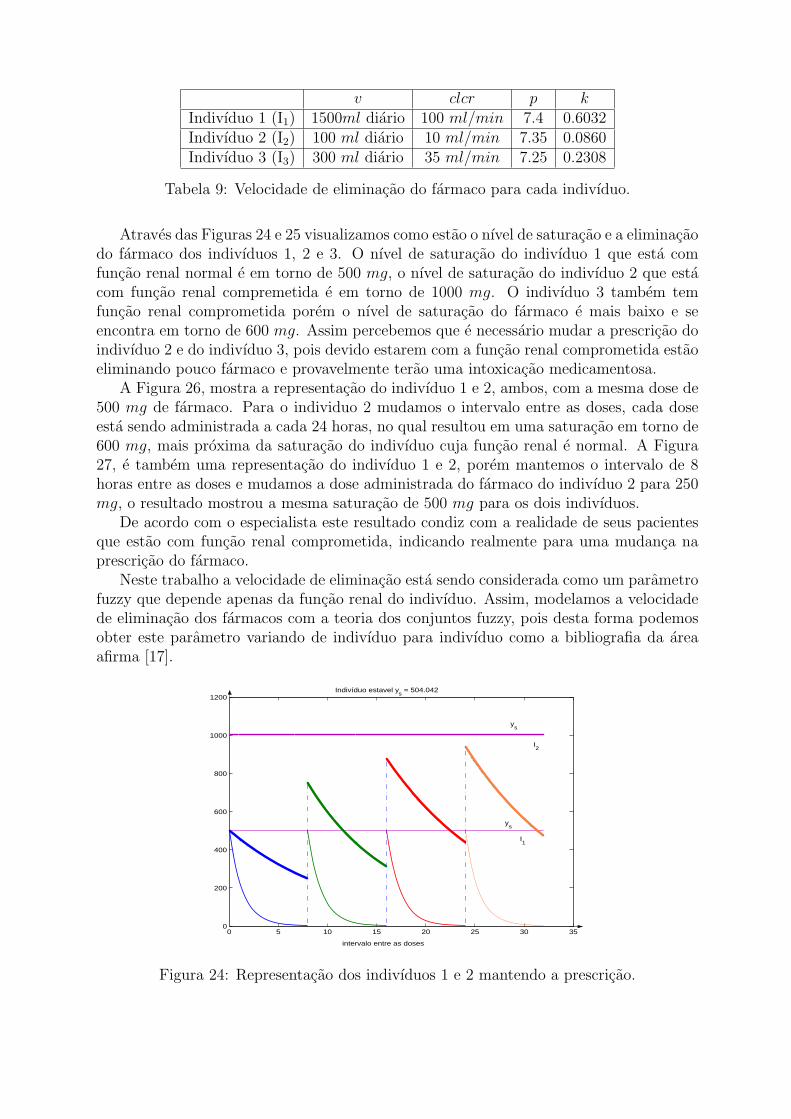
v clcr p kIndivıduo 1 (I1) 1500ml diario 100 ml/min 7.4 0.6032Indivıduo 2 (I2) 100 ml diario 10 ml/min 7.35 0.0860Indivıduo 3 (I3) 300 ml diario 35 ml/min 7.25 0.2308
Tabela 9: Velocidade de eliminacao do farmaco para cada indivıduo.
Atraves das Figuras 24 e 25 visualizamos como estao o nıvel de saturacao e a eliminacaodo farmaco dos indivıduos 1, 2 e 3. O nıvel de saturacao do indivıduo 1 que esta comfuncao renal normal e em torno de 500 mg, o nıvel de saturacao do indivıduo 2 que estacom funcao renal compremetida e em torno de 1000 mg. O indivıduo 3 tambem temfuncao renal comprometida porem o nıvel de saturacao do farmaco e mais baixo e seencontra em torno de 600 mg. Assim percebemos que e necessario mudar a prescricao doindivıduo 2 e do indivıduo 3, pois devido estarem com a funcao renal comprometida estaoeliminando pouco farmaco e provavelmente terao uma intoxicacao medicamentosa.
A Figura 26, mostra a representacao do indivıduo 1 e 2, ambos, com a mesma dose de500 mg de farmaco. Para o individuo 2 mudamos o intervalo entre as doses, cada doseesta sendo administrada a cada 24 horas, no qual resultou em uma saturacao em torno de600 mg, mais proxima da saturacao do indivıduo cuja funcao renal e normal. A Figura27, e tambem uma representacao do indivıduo 1 e 2, porem mantemos o intervalo de 8horas entre as doses e mudamos a dose administrada do farmaco do indivıduo 2 para 250mg, o resultado mostrou a mesma saturacao de 500 mg para os dois indivıduos.
De acordo com o especialista este resultado condiz com a realidade de seus pacientesque estao com funcao renal comprometida, indicando realmente para uma mudanca naprescricao do farmaco.
Neste trabalho a velocidade de eliminacao esta sendo considerada como um parametrofuzzy que depende apenas da funcao renal do indivıduo. Assim, modelamos a velocidadede eliminacao dos farmacos com a teoria dos conjuntos fuzzy, pois desta forma podemosobter este parametro variando de indivıduo para indivıduo como a bibliografia da areaafirma [17].
0 5 10 15 20 25 30 350
200
400
600
800
1000
1200Indivíduo estavel y
s = 504.042
I2
ys
ys
I1
intervalo entre as doses
Figura 24: Representacao dos indivıduos 1 e 2 mantendo a prescricao.
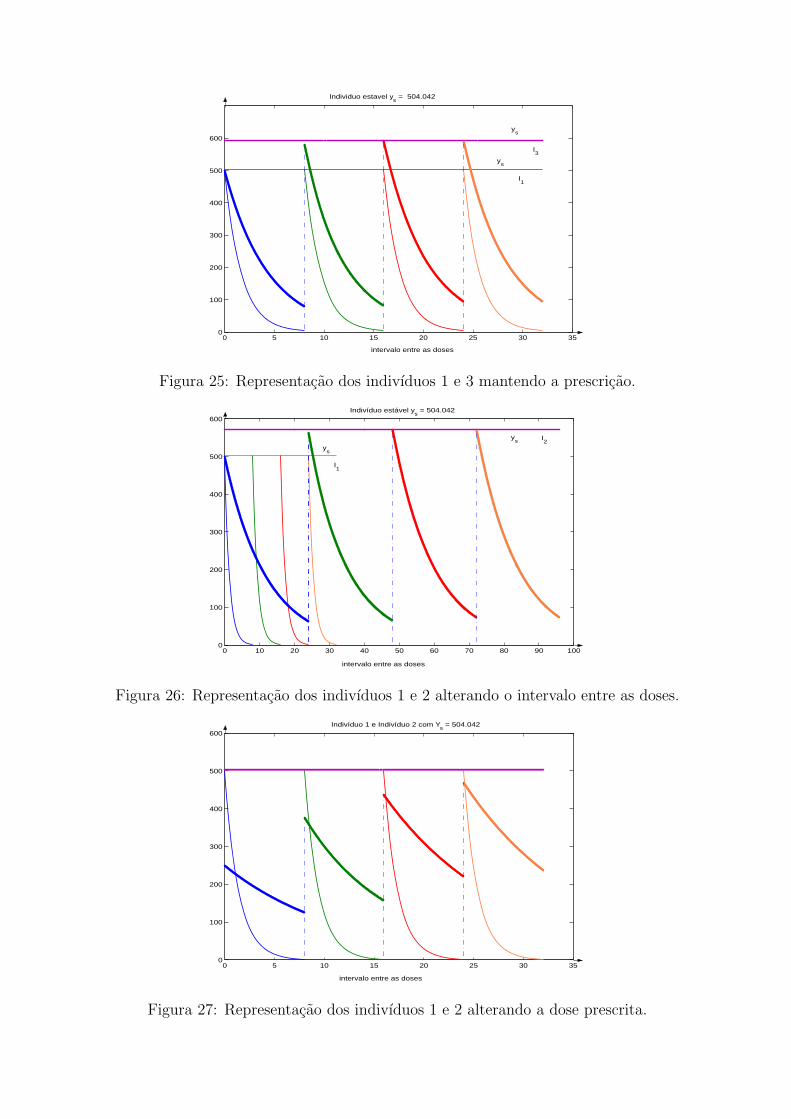
0 5 10 15 20 25 30 350
100
200
300
400
500
600
ys
I3
ys
I1
Individuo estavel ys = 504.042
intervalo entre as doses
Figura 25: Representacao dos indivıduos 1 e 3 mantendo a prescricao.
0 10 20 30 40 50 60 70 80 90 1000
100
200
300
400
500
600Indivíduo estável y
s = 504.042
intervalo entre as doses
ys I
2y
s
I1
Figura 26: Representacao dos indivıduos 1 e 2 alterando o intervalo entre as doses.
0 5 10 15 20 25 30 350
100
200
300
400
500
600Indivíduo 1 e Indivíduo 2 com Y
s = 504.042
intervalo entre as doses
Figura 27: Representacao dos indivıduos 1 e 2 alterando a dose prescrita.

4.5 Resumo
Nesta secao apresentamos modelos envolvendo a eliminacao de farmacos do organismo,em que devido as particularidades de cada indivıduo, alem de apresentarmos um modeloclassico, exploramos a teoria dos conjuntos fuzzy para modelar a constante de veloci-dade de eliminacao (k), onde consideramos esta constante como um parametro fuzzy, quedepende da funcao renal do indivıduo. Incorporando os conhecimentos do especialista,obtemos este parametro variando de indivıduo para indivıduo. Assim consideramos umaprescricao de certo farmaco para alguns indivıduos e atraves de representacoes graficasmostramos a variacao desta constante de velocidade de eliminacao, onde verificamos queo melhor resultado e quando a dose prescrita e diminuıda, o qual podera colaborar com oespecialista para evitar qualquer risco de intoxicacao medicamentosa.
Referencias
[1] Barros, L. e Bassanezi, R. (2001). Introducao a Teoria Fuzzy Aplicacoes em Bio-matematica. Minicurso, paginas 1–46, Campinas, Brasil. Congresso Latino Americanode Biomatematica.
[2] Bassanezi, R. (2002). Ensino-Aprendizagem com Modelagem Matematica. EditoraContexto.
[3] Bassanezi, R. e Ferreira, W. (1988). Equacoes Diferenciais Com Aplicacoes. EditoraHarbra.
[4] Doencas Respiratorias e Cardıacas (2005). http://iatreion.warj.med.br/diagnostico.asp.
[5] Hardman, J. e Gilman, A. (1994). As Bases Farmacologicas da Terapeutica. EditoraMcGraw-Hill, 9a edicao.
[6] Harrison, T., Fauci, A., Braunwald, E., Isselbacher, K., Wilson, J., Martin, J., Kasper,D., Hauser, D., e Longo, D. (1998). Medicina Interna. volume 2. Editora McGraw-Hill,14a edicao.
[7] Jafelice, R. (2003). Modelagem Fuzzy para Dinamica de Transferencia de Soroposi-tivo para HIV em Doenca Plenamente Manifesta. Tese de Doutorado, UniversidadeEstadual de Campinas, Campinas, Brasil.
[8] Jafelice, R. (2004). Aplicacoes da Teoria dos Conjuntos Fuzzy. Minicurso, Uberlandia,Brasil.
[9] Lopes, W. e Jafelice, R. (2005). Fuzzy Modeling in the Elimination of Drugs. BIOMAT2005 - Second International Symposium on Mathematical and Computational Biolo-gy - Fifth Brazilian Symposium on Mathematical and Computational Biology (sub-metido).
[10] Lopes, W., Jafelice, R., e Barros, L. (2005). Modelagem Fuzzy de Diagnostico Medicoe Monitoramento do Tratamento da Pneumonia. Uma Publicacao do Grupo de Bio-matematica IMECC - UNICAMP, 15:77–96.
[11] Massad, E., Menezes, R., Silveira, P., e Ortega, N. (2004). Metodos Quantitativos emMedicina. Editora Manole.
[12] Ortega, N. (2001). Aplicacao da Teoria de Logica Fuzzy a Problemas da Biomedicina.Tese de Doutorado, Universidade de Sao Paulo, Sao Paulo, Brasil.
[13] Sanchez, E. (1977). Solutions in Composite Fuzzy Relation Equations: Applicationto Medical Diagnosis in Brouwerian Logic. Fuzzy Automata and Decision ProcessesM.M. Gupta, North-Holland, Amsterdam.
[14] Sanchez, E. e Bartolin, R. (1990). Fuzzy Inference and Medical Diagnosis, a CaseStudy. Int. J. Biom. Fuzzy Systems Ass.
[15] Silva, P. (1998). Farmacologia. Editora Guanabara Koogan S.A, 5a edicao.
[16] Zadeh, L. (1965). Fuzzy Sets. Information and Control, 8:338–353.
[17] Zanini, A. e Olga, S. (1994). Farmacologia Aplicada. Editora Atheneu, 5a edicao.

Algumas Aplicações e Teoria Qualitativa das EquaçõesDiferenciais Ordinárias
Juliana Lázara Curcino dos Santos1 Lúcia Resende Pereira Bonfim2
Faculdade de Matemática – FAMATUniversidade Federal de Uberlândia – UFU
38408 -100, UberlândiaSetembro de 2005
Resumo
Equações diferenciais são o suporte matemático para muitas áreas da ciência, daengenharia, entre outros.Pretendemos apresentar alguns temas que geralmente não são abordados noscursos tradicionais de graduação em matemática, tais como: modelagemmatemática e teoria qualitativa das equações diferenciais.
Palavras chaves: Sistemas lineares, estabilidade, ponto crítico, modelosmatemáticos.
Introdução
As Equações diferenciais surgem a partir da tentativa de formular, ou descrever, certossistemas físicos em termos matemáticos, ou seja, fazer uma modelagem matemática doproblema.
Em virtude disso, encontra-se neste trabalho desde aplicações desse tipo de equaçõesem oscilações não-lineares: A Esfera Rolante (aplicações de Equações Diferenciais Ordináriasna Física) até aplicações na Biologia, como por exemplo, o modelo Predador-Presa de LotkaVolterra, os quais serão tratados mais adiante. Em alguns casos, uma única equaçãodiferencial pode servir como um modelo matemático para muitos fenômenos diferentes. Aequação diferencial linear de 2º ordem )()()()( ,,, tftcytbytay =++ , por exemplo, aparece naanálise do problema na Física, Engenharia, Química e Biologia.
Além disso, como em diversos problemas da matemática aplicada, por exemplo, opêndulo não-linear, as equações matemáticas que descrevem o seu comportamento sãoequações diferenciais ordinárias não lineares, por isso se faz necessário o estudo da teoriaqualitativa das equações diferenciais, da qual a ênfase é dada não em obtenção de expressõesexatas para as soluções dos problemas, mas em se obter propriedades das soluções, retirando-as através de uma análise das equações.
A seguir dividiremos o nosso trabalho em duas seções: Estudo da teoria qualitativa dasequações diferenciais e algumas aplicações dessas equações.
1 Orientando de Iniciação Científica PROMAT – E-mail: [email protected] Professora Orientadora. E-mail: [email protected]
1 Teoria qualitativa das Equações Diferenciais
Se X, A(t) e F(t) denotam, respectivamente, as matrizes X =
�����
�
�
�����
�
�
)(
)(
)(
2
1
tx
tx
tx
n
�,
A(t) =
�����
�
�
�����
�
�
)(...)()(
)(...)()(
)(...)()(
21
22221
11211
tatata
tatata
tatata
nnnn
n
n
��, F(t) =
�����
�
�
�����
�
�
)(
)(
)(
2
1
tf
tf
tf
n
�
então o sistema de equações diferenciais lineares de primeira ordem
)()(...)()(
)()(...)()(
)()(...)()(
2211
222221212
112121111
tfxtaxtaxtadt
dx
tfxtaxtaxtadt
dx
tfxtaxtaxtadt
dx
nnnnnnn
nn
nn
++++=
++++=
++++=
�
Pode ser escrito comodt
dX= A(t)X+F(t).
No entanto, quando o sistema de equações diferenciais não é linear, em geral não épossível achar soluções em termos de funções elementares. Mas é possível obter informaçõesvaliosas sobre a natureza geométrica das soluções, analisando inicialmente soluçõesconstantes especiais chamadas pontos críticos e procurando soluções periódicas. Essassoluções especiais são, por seu turno, classificadas como estáveis ou instáveis, conforme ocomportamento das soluções nas vizinhanças.
Para essa análise consideremos sistemas da forma
��
��
�
=
=
),(
),(
yxQdt
dy
yxPdt
dx
(*), os quais são
chamados de sistemas autônomos planos, pois P e Q não dependem explicitamente davariável (tempo) t. O vetor V(x, y) = )),(),,(( yxQyxP define um campo vetorial em umaregião do plano, e uma solução do sistema pode ser interpretada como a trajetória resultantede uma partícula que se move nessa região segundo o campo V(x,y). Desse modo, como serãoos tipos de soluções no caso em que se trabalha com sistemas autônomos planos?
Se ),(),,( yxQyxP e as derivadas parciais de primeira ordemxQyPxP ∂∂∂∂∂∂ /,/,/ e yQ ∂∂ / são contínuas em uma região R do plano, então as soluções
de (*) são de três tipos básicos:(i) Uma solução constante x(t) = x0, y(t) = y0, as quais são precisamente os zeros do
sistema�
==
0),(
0),(
yxQ
yxP. Uma solução constante é chamada ponto crítico ou
estacionário.(ii) Uma solução x = x(t), y = y(t) que define um arco, uma curva plana que não se
intercepta.
(iii) Uma solução periódica x = x(t), y = y(t). Uma solução periódica é chamada umciclo.
Portanto, se X0 é um ponto crítico, a partícula permanece estacionária. Entretanto, seX0 é colocado próximo a um ponto crítico X1, pergunta-se: a partícula voltará ao ponto críticoou permanece próxima ao ponto crítico ou se afasta do ponto crítico?
Se é verdade que 1)(lim XtXt =∞→ ou que a partícula permanece próxima do ponto
crítico, então tal ponto é chamado localmente estável. No entanto, se a partícula se afastar doponto crítico então tal ponto é chamado instável.
Desse modo, podemos definir ponto crítico estável e instável do seguinte modo:Pontos Críticos Estáveis: Seja X1 um ponto crítico de um sistema autônomo, e denotemospor X = X(t) a solução que satisfaz a condição inicial X(0) = X0, com X0 ≠ X1. Diz-seque X1 é um ponto crítico estável se, dado um raio arbitrário ρ >0, existe um raio
correspondente r>0 tal que, se a posição inicial X0 satisfaz 10 XX − < r, então a solução X(t)
correspondente verifica 1)( XtX − < ρ para todo t>0. Se, além disso,
1)(lim XtXt =∞→ sempre que 10 XX − < r, X1 é chamado um ponto crítico
assintoticamente estável.
Pontos Críticos Instáveis: Seja X1 um ponto crítico de um sistema autônomo, e denotemospor X = X(t) a solução que satisfaz a condição inicial X(0) = X0, onde X0 ≠ X1. Dizemosque X1 é um ponto crítico instável quando existe um disco de raio ρ > 0 com a propriedade
de que, para qualquer r > 0, existe uma posição inicial X0 que verifica 10 XX − < r e, não
obstante, a solução correspondente X(t) satisfaz 1)( XtX − ≥ ρ para ao menos um t > 0.
1.1 – Análise da Estabilidade de Sistemas LinearesPara uma melhor investigação dessas duas questões de estabilidades para sistemas
autônomos planos lineares utilizaremos o sistema linear

�
��
+=
+=
dycxy
byaxx,
,
(1),
onde será feito uma análise geométrica das soluções de (1) em termos de autovalores e
autovetores da matriz dos coeficientes A = ���
����
�dc
ba.
Suponhamos que a origem seja uma singularidade isolada do sistema (1), ou seja, odeterminante .0≠−=Δ bcad De(1), podemos escrever:
���
����
����
����
�=��
�
����
�y
x
dc
ba
y
x
´
´, ou seja, AXX =' (2).
Isso nos lembra o caso da equação diferencial x’ = ax, cuja solução geral é x(t) = Keat;a,k:constantes. Tentemos soluções da forma
�
��
=
=⇔��
�
����
�=⇔=
t
ttt
ecty
ectx
c
cetXCetX
λ
λλλ
2
1
2
1
)(
)()()( .
Se tCetX λ=)( , segue de (2) que:
���
����
�=��
�
����
�−⇔��
�
����
�=��
�
����
�0
0)(
2
1
2
1
2
1
c
cAI
c
cAe
c
ce tkt λλ λ (3).
Como estamos interessados em soluções não triviais, segue-se que
( ) 0det)(0)(00det 22 =+−=⇔=−++−⇔=−
−⇔=− Apbcadda
dc
baIA τλλλλλ
λλ
λ
chamado polinômio característico, cujas raízes são os autovalores de A e τ = a + d é o traço3
da matriz A.Obtidos os autovalores, voltamos ao sistema (3) e determina-se os autovetores
���
����
�
2
1
c
ccorrespondentes e poderemos escrever a solução de (1) na forma tCetX λ=)( . Note que
os autovalores de A serão da forma:2
42 Δ−±= ττλ , e teremos os três casos usuais dessas
raízes conforme o discriminante seja positivo, negativo ou zero.A seguir, uma análise quanto a estabilidade será feita em cada caso onde também
apresentaremos exemplos que procurem exibir uma coleção típica de curvas solução em tornoda origem, as quais foram conseguidas com o aplicativo Maple.
Caso 1 – Autovalores Reais Distintos )04( 2 >Δ−τ A solução geral de (1) é dadapor
tt eKceKctX 212211)( λλ += , (4)
onde 1λ e 2λ são os autovalores e 1K e 2K são os autovetores correspondentes. Veja[ 7 ].Note que X(t) também pode ser escrito como
][)( )(2211
121 tt eKcKcetX λλλ −+= (5)
(a) Ambos os autovalores negativos ( )00),04( 2 >Δ<>Δ− eττNó estável. De (4) decorre que .0)(lim =∞→ tXt Se admitimos 12 λλ < , então
012 <− λλ e poderemos concluir de (5) que teKctX 111)( λ≈ para grandes valores de t.
3 Em geral, se A é uma matriz n x n, o traço de A é a soma dos elementos da diagonal principal.
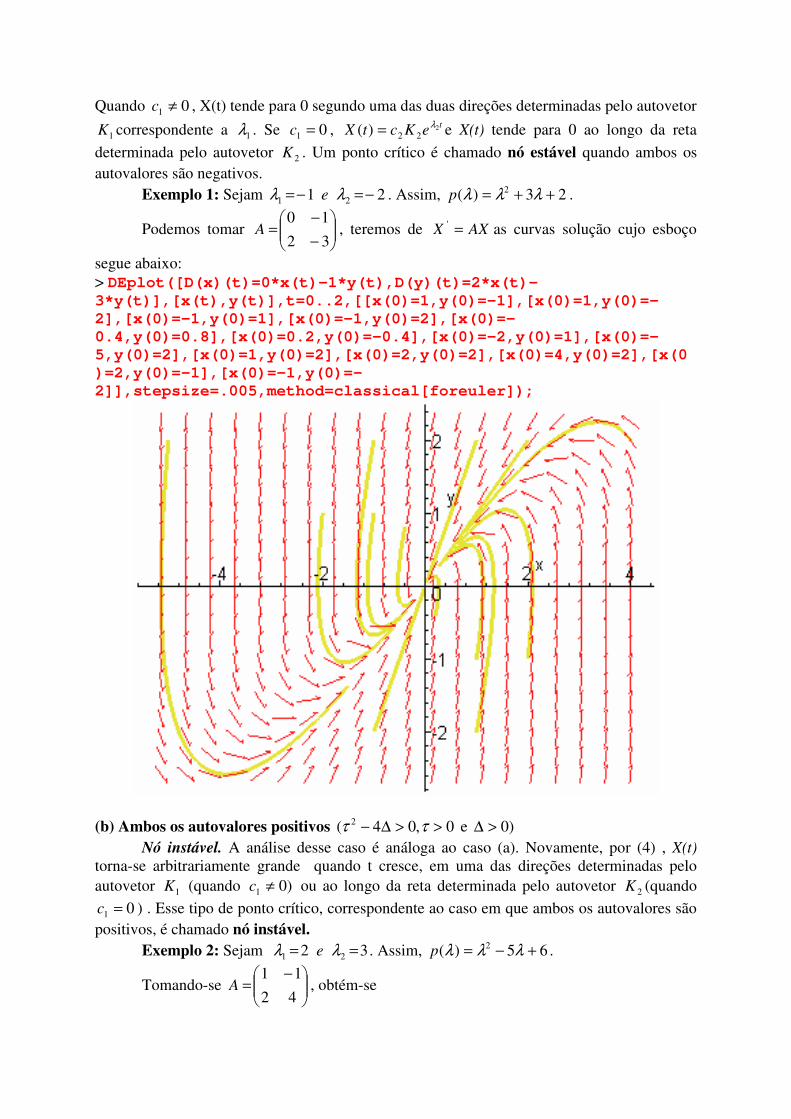
Quando 01 ≠c , X(t) tende para 0 segundo uma das duas direções determinadas pelo autovetor
1K correspondente a 1λ . Se 01 =c , teKctX 222)( λ= e X(t) tende para 0 ao longo da reta
determinada pelo autovetor 2K . Um ponto crítico é chamado nó estável quando ambos osautovalores são negativos.
Exemplo 1: Sejam 21 21 −=−= λλ e . Assim, 23)( 2 ++= λλλp .
Podemos tomar ���
����
�−−
=32
10A , teremos de AXX =' as curvas solução cujo esboço
segue abaixo:> DEplot([D(x)(t)=0*x(t)-1*y(t),D(y)(t)=2*x(t)-3*y(t)],[x(t),y(t)],t=0..2,[[x(0)=1,y(0)=-1],[x(0)=1,y(0)=-2],[x(0)=-1,y(0)=1],[x(0)=-1,y(0)=2],[x(0)=-0.4,y(0)=0.8],[x(0)=0.2,y(0)=-0.4],[x(0)=-2,y(0)=1],[x(0)=-5,y(0)=2],[x(0)=1,y(0)=2],[x(0)=2,y(0)=2],[x(0)=4,y(0)=2],[x(0)=2,y(0)=-1],[x(0)=-1,y(0)=-2]],stepsize=.005,method=classical[foreuler]);
(b) Ambos os autovalores positivos 0,04( 2 >>Δ− ττ e )0>ΔNó instável. A análise desse caso é análoga ao caso (a). Novamente, por (4) , X(t)
torna-se arbitrariamente grande quando t cresce, em uma das direções determinadas peloautovetor 1K (quando )01 ≠c ou ao longo da reta determinada pelo autovetor 2K (quando
01 =c ) . Esse tipo de ponto crítico, correspondente ao caso em que ambos os autovalores sãopositivos, é chamado nó instável.
Exemplo 2: Sejam 32 21 == λλ e . Assim, 65)( 2 +−= λλλp .
Tomando-se ���
����
� −=
42
11A , obtém-se
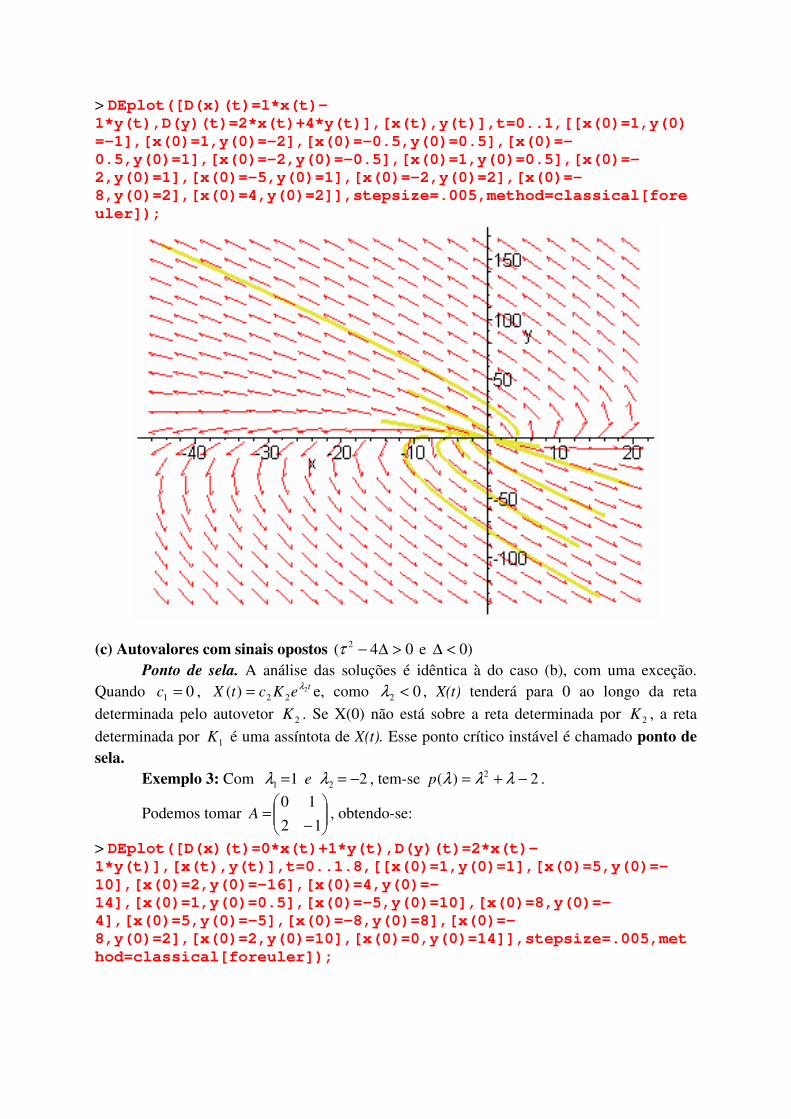
> DEplot([D(x)(t)=1*x(t)-1*y(t),D(y)(t)=2*x(t)+4*y(t)],[x(t),y(t)],t=0..1,[[x(0)=1,y(0)=-1],[x(0)=1,y(0)=-2],[x(0)=-0.5,y(0)=0.5],[x(0)=-0.5,y(0)=1],[x(0)=-2,y(0)=-0.5],[x(0)=1,y(0)=0.5],[x(0)=-2,y(0)=1],[x(0)=-5,y(0)=1],[x(0)=-2,y(0)=2],[x(0)=-8,y(0)=2],[x(0)=4,y(0)=2]],stepsize=.005,method=classical[foreuler]);
(c) Autovalores com sinais opostos 04( 2 >Δ−τ e )0<ΔPonto de sela. A análise das soluções é idêntica à do caso (b), com uma exceção.
Quando 01 =c , teKctX 222)( λ= e, como 02 <λ , X(t) tenderá para 0 ao longo da reta
determinada pelo autovetor 2K . Se X(0) não está sobre a reta determinada por 2K , a reta
determinada por 1K é uma assíntota de X(t). Esse ponto crítico instável é chamado ponto desela.
Exemplo 3: Com 21 21 −== λλ e , tem-se 2)( 2 −+= λλλp .
Podemos tomar ���
����
�−
=12
10A , obtendo-se:
> DEplot([D(x)(t)=0*x(t)+1*y(t),D(y)(t)=2*x(t)-1*y(t)],[x(t),y(t)],t=0..1.8,[[x(0)=1,y(0)=1],[x(0)=5,y(0)=-10],[x(0)=2,y(0)=-16],[x(0)=4,y(0)=-14],[x(0)=1,y(0)=0.5],[x(0)=-5,y(0)=10],[x(0)=8,y(0)=-4],[x(0)=5,y(0)=-5],[x(0)=-8,y(0)=8],[x(0)=-8,y(0)=2],[x(0)=2,y(0)=10],[x(0)=0,y(0)=14]],stepsize=.005,method=classical[foreuler]);
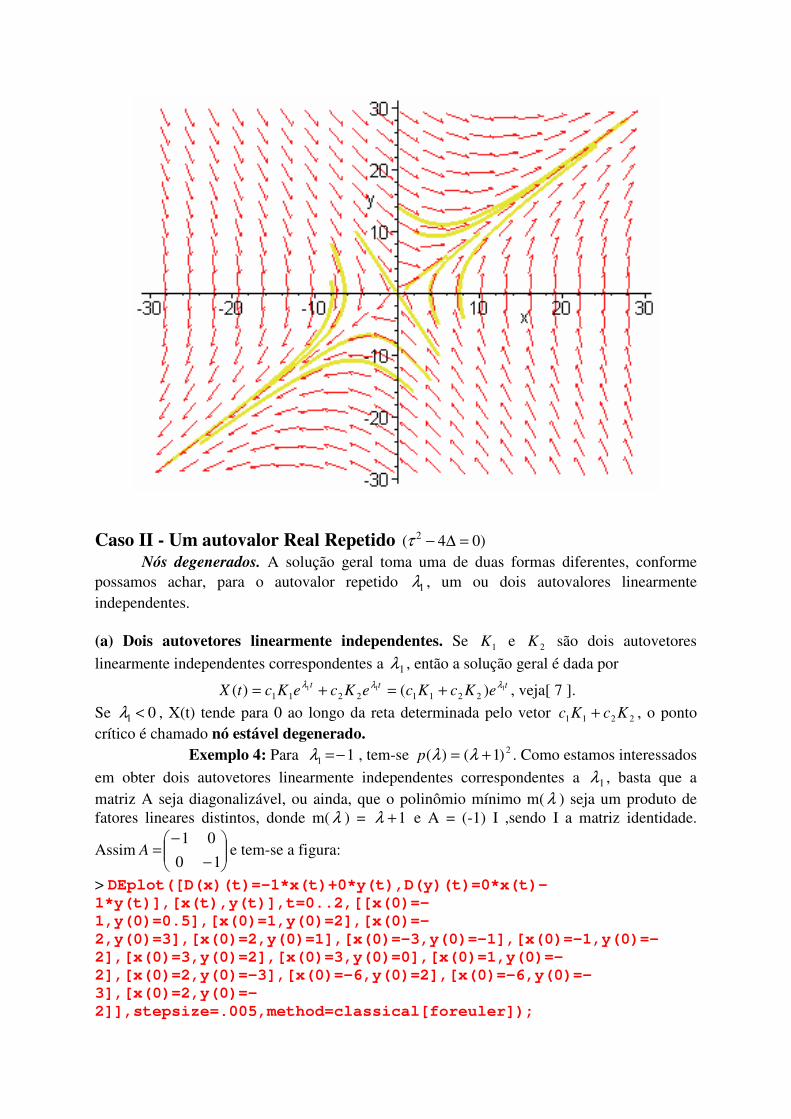
Caso II - Um autovalor Real Repetido )04( 2 =Δ−τNós degenerados. A solução geral toma uma de duas formas diferentes, conforme
possamos achar, para o autovalor repetido 1λ , um ou dois autovalores linearmenteindependentes.
(a) Dois autovetores linearmente independentes. Se 1K e 2K são dois autovetores
linearmente independentes correspondentes a 1λ , então a solução geral é dada porttt eKcKceKceKctX 111 )()( 22112211
λλλ +=+= , veja[ 7 ].
Se 01 <λ , X(t) tende para 0 ao longo da reta determinada pelo vetor 2211 KcKc + , o pontocrítico é chamado nó estável degenerado.
Exemplo 4: Para 11 −=λ , tem-se 2)1()( += λλp . Como estamos interessados
em obter dois autovetores linearmente independentes correspondentes a 1λ , basta que amatriz A seja diagonalizável, ou ainda, que o polinômio mínimo m( λ ) seja um produto defatores lineares distintos, donde m( λ ) = 1+λ e A = (-1) I ,sendo I a matriz identidade.
Assim ���
����
�−
−=
10
01A e tem-se a figura:
> DEplot([D(x)(t)=-1*x(t)+0*y(t),D(y)(t)=0*x(t)-1*y(t)],[x(t),y(t)],t=0..2,[[x(0)=-1,y(0)=0.5],[x(0)=1,y(0)=2],[x(0)=-2,y(0)=3],[x(0)=2,y(0)=1],[x(0)=-3,y(0)=-1],[x(0)=-1,y(0)=-2],[x(0)=3,y(0)=2],[x(0)=3,y(0)=0],[x(0)=1,y(0)=-2],[x(0)=2,y(0)=-3],[x(0)=-6,y(0)=2],[x(0)=-6,y(0)=-3],[x(0)=2,y(0)=-2]],stepsize=.005,method=classical[foreuler]);
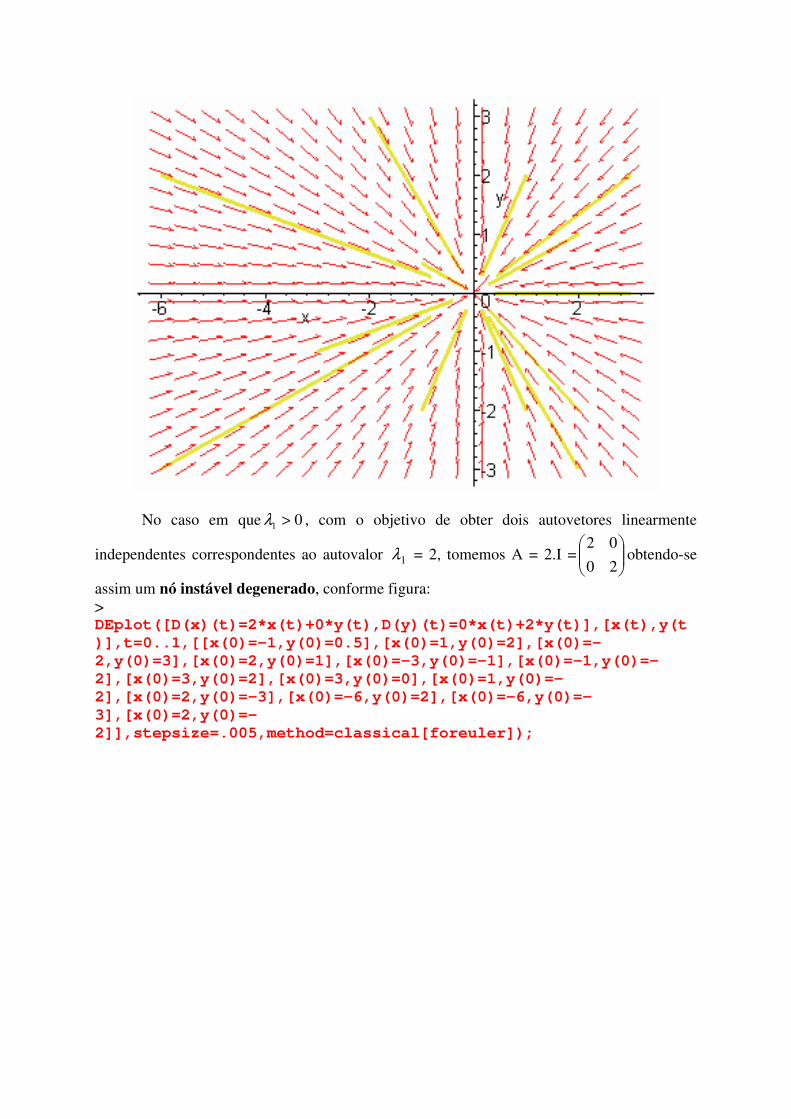
No caso em que 01 >λ , com o objetivo de obter dois autovetores linearmente
independentes correspondentes ao autovalor 1λ = 2, tomemos A = 2.I = ���
����
�20
02obtendo-se
assim um nó instável degenerado, conforme figura:>DEplot([D(x)(t)=2*x(t)+0*y(t),D(y)(t)=0*x(t)+2*y(t)],[x(t),y(t)],t=0..1,[[x(0)=-1,y(0)=0.5],[x(0)=1,y(0)=2],[x(0)=-2,y(0)=3],[x(0)=2,y(0)=1],[x(0)=-3,y(0)=-1],[x(0)=-1,y(0)=-2],[x(0)=3,y(0)=2],[x(0)=3,y(0)=0],[x(0)=1,y(0)=-2],[x(0)=2,y(0)=-3],[x(0)=-6,y(0)=2],[x(0)=-6,y(0)=-3],[x(0)=2,y(0)=-2]],stepsize=.005,method=classical[foreuler]);
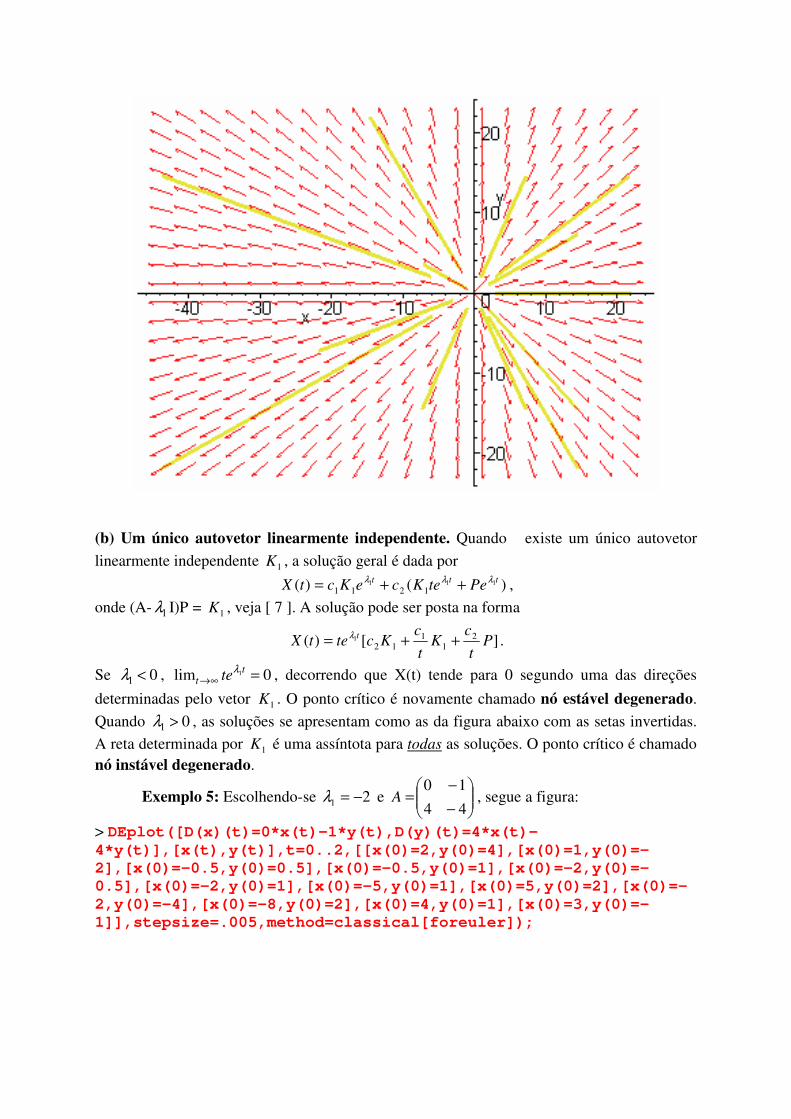
(b) Um único autovetor linearmente independente. Quando existe um único autovetor
linearmente independente 1K , a solução geral é dada por
)()( 1111211
ttt PeteKceKctX λλλ ++= ,
onde (A- 1λ I)P = 1K , veja [ 7 ]. A solução pode ser posta na forma
][)( 21
112
1 Pt
cK
t
cKctetX t ++= λ .
Se 01 <λ , 0lim 1 =∞→t
t teλ , decorrendo que X(t) tende para 0 segundo uma das direções
determinadas pelo vetor 1K . O ponto crítico é novamente chamado nó estável degenerado.
Quando 01 >λ , as soluções se apresentam como as da figura abaixo com as setas invertidas.
A reta determinada por 1K é uma assíntota para todas as soluções. O ponto crítico é chamadonó instável degenerado.
Exemplo 5: Escolhendo-se 21 −=λ e ���
����
�−−
=44
10A , segue a figura:
> DEplot([D(x)(t)=0*x(t)-1*y(t),D(y)(t)=4*x(t)-4*y(t)],[x(t),y(t)],t=0..2,[[x(0)=2,y(0)=4],[x(0)=1,y(0)=-2],[x(0)=-0.5,y(0)=0.5],[x(0)=-0.5,y(0)=1],[x(0)=-2,y(0)=-0.5],[x(0)=-2,y(0)=1],[x(0)=-5,y(0)=1],[x(0)=5,y(0)=2],[x(0)=-2,y(0)=-4],[x(0)=-8,y(0)=2],[x(0)=4,y(0)=1],[x(0)=3,y(0)=-1]],stepsize=.005,method=classical[foreuler]);
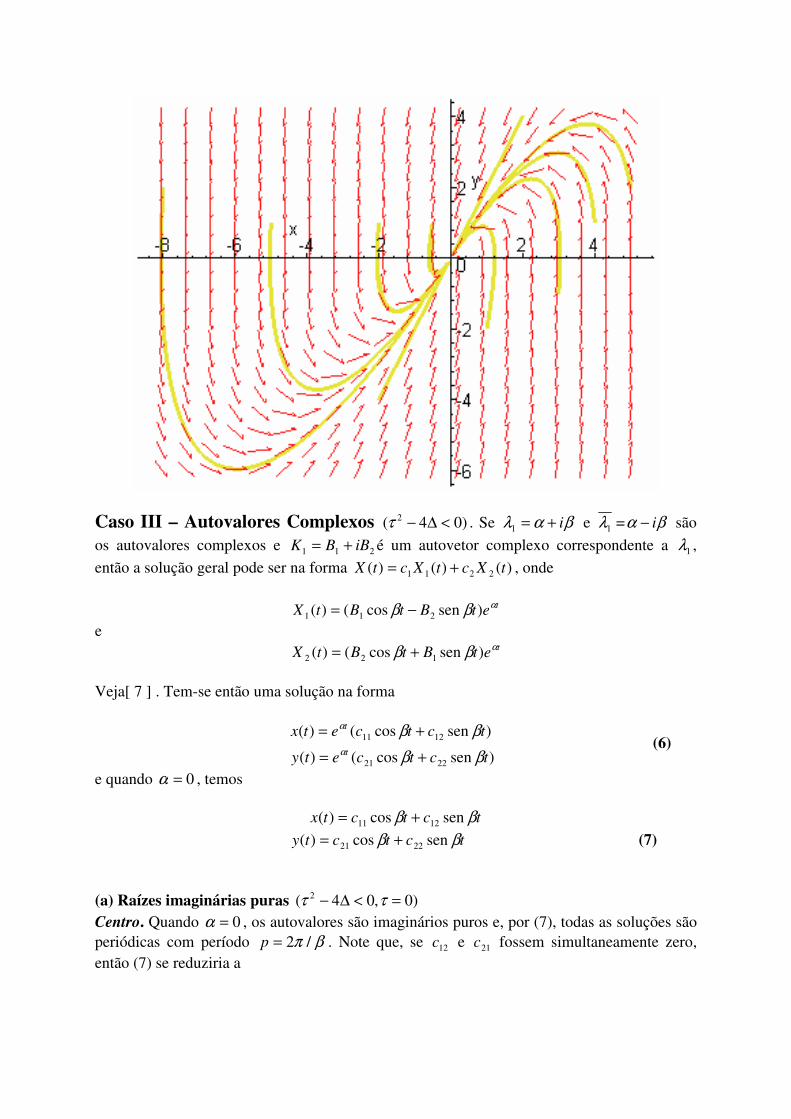
Caso III – Autovalores Complexos )04( 2 <Δ−τ . Se βαλ i+=1 e 1λ = βα i− são
os autovalores complexos e 211 iBBK += é um autovetor complexo correspondente a 1λ ,
então a solução geral pode ser na forma )()()( 2211 tXctXctX += , onde
tetBtBtX αββ )sencos()( 211 −=e
tetBtBtX αββ )sencos()( 122 +=
Veja[ 7 ] . Tem-se então uma solução na forma
)sencos()(
)sencos()(
2221
1211
tctcety
tctcetxt
t
ββββ
α
α
+=
+=(6)
e quando 0=α , temos
tctctx ββ sencos)( 1211 +=tctcty ββ sencos)( 2221 += (7)
(a) Raízes imaginárias puras )0,04( 2 =<Δ− ττCentro. Quando 0=α , os autovalores são imaginários puros e, por (7), todas as soluções sãoperiódicas com período βπ /2=p . Note que, se 12c e 21c fossem simultaneamente zero,então (7) se reduziria a
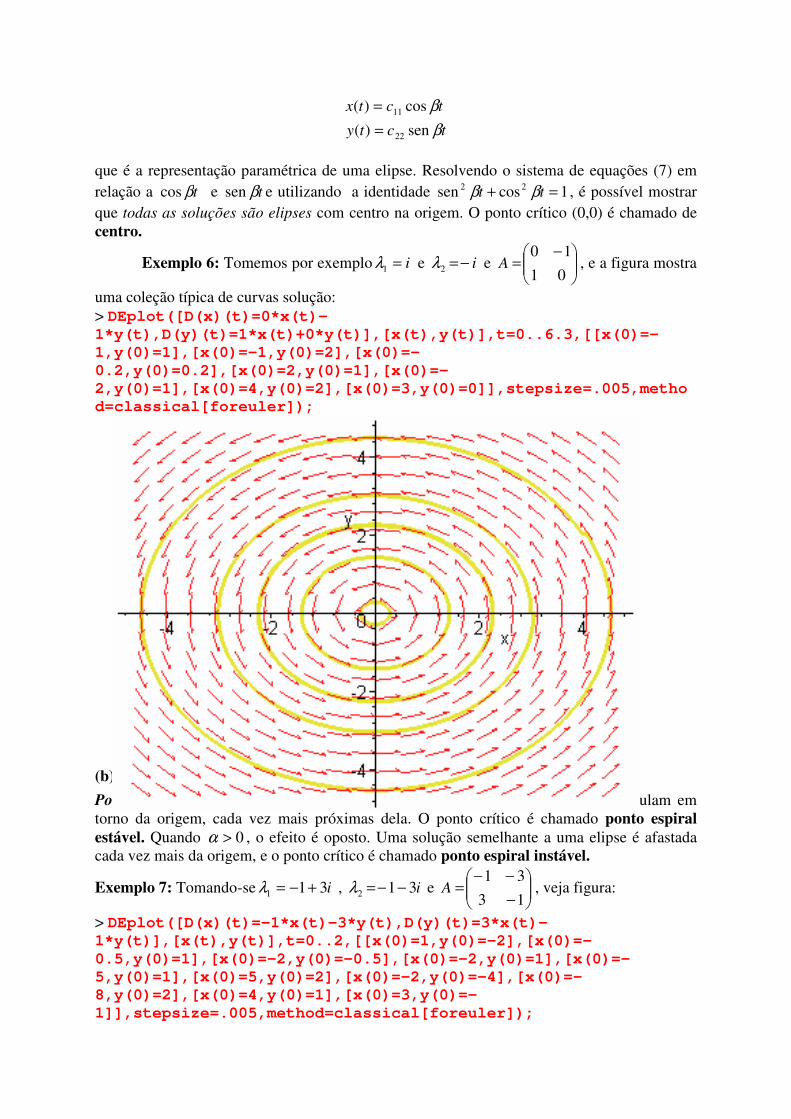
tcty
tctx
ββ
sen)(
cos)(
22
11
==
que é a representação paramétrica de uma elipse. Resolvendo o sistema de equações (7) emrelação a tβcos e tβsen e utilizando a identidade 1cossen 22 =+ tt ββ , é possível mostrarque todas as soluções são elipses com centro na origem. O ponto crítico (0,0) é chamado decentro.
Exemplo 6: Tomemos por exemplo i=1λ e i−=2λ e ���
����
� −=
01
10A , e a figura mostra
uma coleção típica de curvas solução:> DEplot([D(x)(t)=0*x(t)-1*y(t),D(y)(t)=1*x(t)+0*y(t)],[x(t),y(t)],t=0..6.3,[[x(0)=-1,y(0)=1],[x(0)=-1,y(0)=2],[x(0)=-0.2,y(0)=0.2],[x(0)=2,y(0)=1],[x(0)=-2,y(0)=1],[x(0)=4,y(0)=2],[x(0)=3,y(0)=0]],stepsize=.005,method=classical[foreuler]);
(b) Parte real não nula )0,04( 2 ≠<Δ− ττPontos espirais. Quando 0<α , 0→teα e as soluções semelhantes a elipses circulam emtorno da origem, cada vez mais próximas dela. O ponto crítico é chamado ponto espiralestável. Quando 0>α , o efeito é oposto. Uma solução semelhante a uma elipse é afastadacada vez mais da origem, e o ponto crítico é chamado ponto espiral instável.
Exemplo 7: Tomando-se i311 +−=λ , i312 −−=λ e ���
����
�−−−
=13
31A , veja figura:
> DEplot([D(x)(t)=-1*x(t)-3*y(t),D(y)(t)=3*x(t)-1*y(t)],[x(t),y(t)],t=0..2,[[x(0)=1,y(0)=-2],[x(0)=-0.5,y(0)=1],[x(0)=-2,y(0)=-0.5],[x(0)=-2,y(0)=1],[x(0)=-5,y(0)=1],[x(0)=5,y(0)=2],[x(0)=-2,y(0)=-4],[x(0)=-8,y(0)=2],[x(0)=4,y(0)=1],[x(0)=3,y(0)=-1]],stepsize=.005,method=classical[foreuler]);
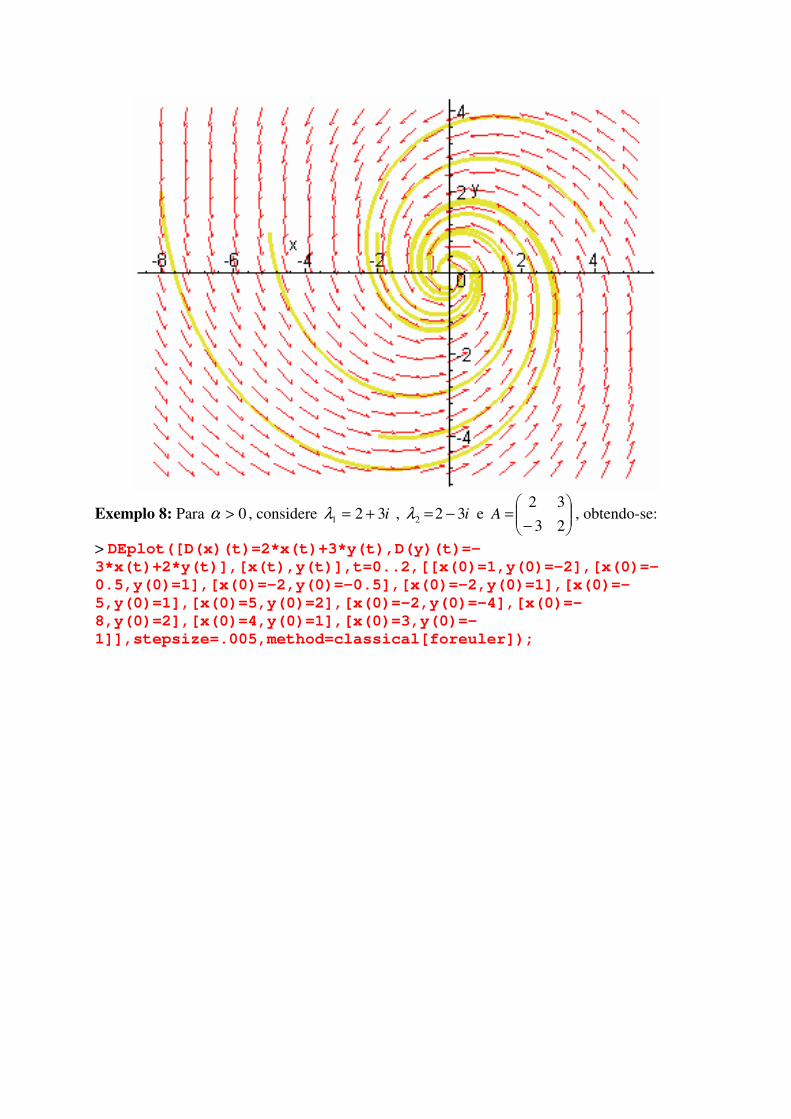
Exemplo 8: Para 0>α , considere i321 +=λ , i322 −=λ e ���
����
�−
=23
32A , obtendo-se:
> DEplot([D(x)(t)=2*x(t)+3*y(t),D(y)(t)=-3*x(t)+2*y(t)],[x(t),y(t)],t=0..2,[[x(0)=1,y(0)=-2],[x(0)=-0.5,y(0)=1],[x(0)=-2,y(0)=-0.5],[x(0)=-2,y(0)=1],[x(0)=-5,y(0)=1],[x(0)=5,y(0)=2],[x(0)=-2,y(0)=-4],[x(0)=-8,y(0)=2],[x(0)=4,y(0)=1],[x(0)=3,y(0)=-1]],stepsize=.005,method=classical[foreuler]);
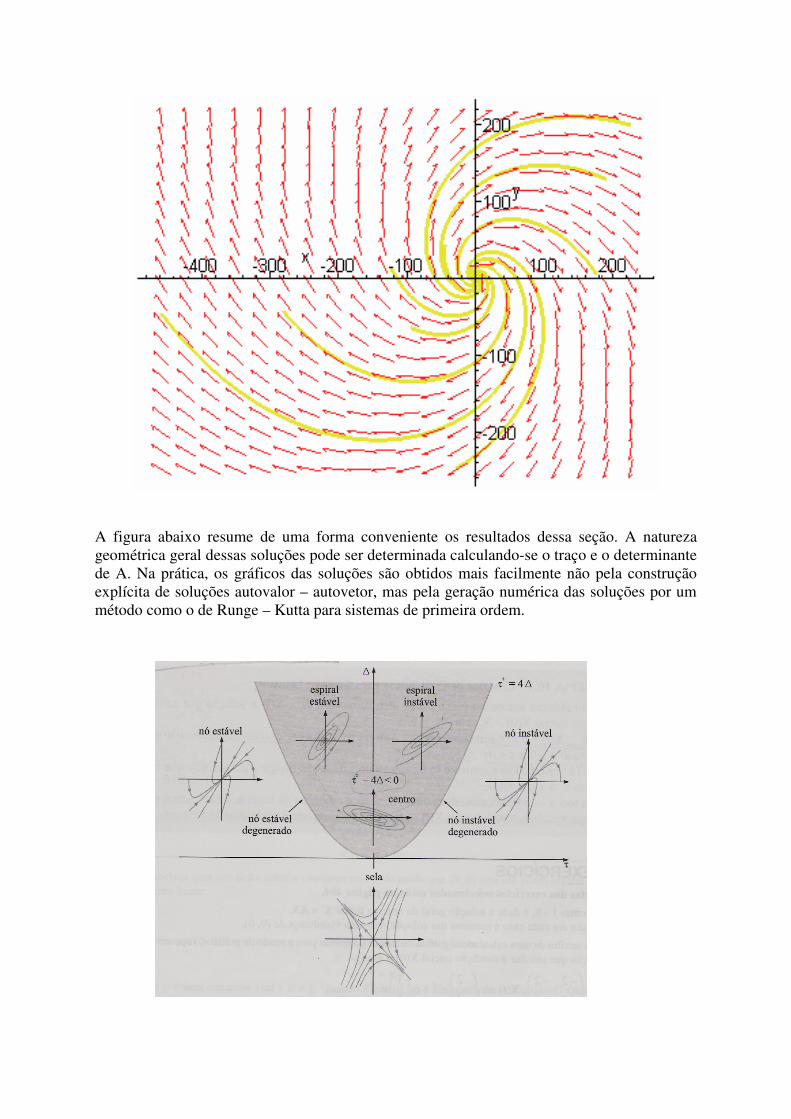
A figura abaixo resume de uma forma conveniente os resultados dessa seção. A naturezageométrica geral dessas soluções pode ser determinada calculando-se o traço e o determinantede A. Na prática, os gráficos das soluções são obtidos mais facilmente não pela construçãoexplícita de soluções autovalor – autovetor, mas pela geração numérica das soluções por ummétodo como o de Runge – Kutta para sistemas de primeira ordem.

1.2 - Linearização
Vimos que enquanto o sistema linear AXX =' tinha apenas um ponto crítico quandodet A ≠ 0, um sistema não – linear pode ter muitos pontos críticos. Raramente é possíveldeterminar a estabilidade de um ponto crítico de um sistema não – linear por meio de soluções
explícitas. Em lugar disso,substituímos o termo g(X) do sistemaautônomo:
por um termo linear A(X-X1) que melhor aproxime g(X) em uma vizinhança de X1. Esseprocesso de substituição, chamado de linearização, será ilustrado para a equação diferencialde primeira ordem )(' xgx = .
Uma equação tangente à curva y = g(x) em 1xx = é
))(()( 11'
1 xxxgxgy −+=E se 1x é um ponto crítico de )(' xgx = , temos
))(()( 11'' xxxgxgx −≈= .
Para a equação diferencial linear ))(( 11'' xxxgx −= obtém-se como solução geral
tcexx 11
λ+= , onde 1λ )( 1' xg= e assim, se )( 1
' xg <0, x(t) tende para 1x , donde 1x é um pontocrítico assintoticamente estável .
O mesmo comportamento se verifica na equação diferencial original desde que x(0) =
0x seja escolhido suficientemente próximo de 1x .
Pode-se fazer uma análise análoga para um sistema autônomo plano. Neste caso,temos que
)()(),( 1),(
1),(
11
1111
yyy
gxx
x
gyxgz
yxyx
−∂∂+−
∂∂+=
é uma equação do plano tangente à superfície z = g(x,y) em X1 = ( 1x , 1y ) e g(x,y) pode seraproximada por seu plano tangente em uma vizinhança de X1. Quando X1 é ponto crítico deum sistema autônomo plano, P( 1x , 1y ) = Q( 1x , 1y ) = 0 e tem-se
)(),(
)()y,(x
),( 111
111
' yyyxy
Pxx
x
PyxPx −
∂∂+−
∂∂≈=
)(),(
)(),(
),( 111
111
' yyyxy
Qxx
yxx
QyxQy −
∂∂+−
∂∂≈= .
O sistema original )(' XgX = pode ser aproximado em uma vizinhança do ponto
crítico X1 pelo sistema linear )( 1' XXAX −= , onde
����
����
�
=
=
=
),...,,(
),...,,(
),...,,(
21
2122
2111
nnn
n
n
xxxgdt
dx
xxxgdt
dx
xxxgdt
dx
�

�����
�
�
�����
�
�
∂∂
∂∂
∂∂
∂∂
=
),(),(
),(),(
1111
1111
yxy
Q
yxx
Q
yxy
P
yxx
P
A
Essa matriz é chamada matriz jacobiana em X1 e se denota por ).( 1' Xg E tem-se o
seguinte resultado:
TEOREMA Critérios de Estabilidade para Sistemas Autônomos PlanosSeja X1 um ponto crítico isolado do sistema autônomo plano ),(' XgX = onde P(x, y) e Q(x,y) têm derivadas parciais de primeira ordem contínuas em um vizinhança de X1.(a) Se os autovalores de A = )( 1
' Xg têm partes reais negativas, então X1 é um ponto crítico
assintoticamente estável de )(' XgX = .
(b) Se A = )( 1' Xg tem um autovalor com parte real positiva, então X1 é um ponto crítico
instável de )(' XgX = .
Comentário: O método de linearização, quando aplicável, pode dar informaçõesúteis sobre o comportamento local de soluções nas proximidades de pontos críticos. Noentanto, às vezes não é possível determinar a natureza das soluções em uma vizinhança doponto crítico. Para solucionar este problema, é utilizado o método do plano de fases, o qualse baseia no fato de que
),(
),(
yxP
yxQ
dtdx
dtdy
dx
dy ==
e procura determinar y como função de x utilizando um dos diversos métodos de resolução deequações diferenciais de primeira ordem.
2 Algumas aplicações das Equações Diferenciais
2.1 Modelo Predador-Presa de Lotka-VolterraOcorre uma interação do tipo predador-presa entre duas espécies quando uma
espécie (predador) se alimenta de uma segunda espécie (presa). Um exemplo são as raposas eos coelhos numa floresta fechada, as raposas caçam os coelhos, os coelhos vivem davegetação da floresta.
Há muitos modelos predador-presa que levam a sistemas autônomos planos com aomenos uma solução periódica. O primeiro desses modelos foi construído independentementepelos pioneiros na biomatemática A. Lotka (1925) e V. Volterra(1926). Se P(t) denota onúmero de predadores e H(t) o número de presas, respectivamente, no tempo t, então omodelo de Lotka-Volterra toma a forma
��
��
�
+−=+−=
−=−=
)(
)(
HcPHPcPdt
dP
PaHHPaHdt
dH
γγ
αα(*)
onde a, c, α e γ são constantes positivas; a e c são a taxa de crescimento das presas e a taxade mortalidade dos predadores, respectivamente, e α e γ são medidas do efeito da interaçãoentre as duas espécies.

Os pontos críticos de (*) são as soluções de
�
=+−=−
0)(
0)(
HcP
PaH
γα
Estas soluções sãoH = 0, P = 0 e H = c/γ , P = a/α .
O ponto crítico (0,0) é um ponto de sela. A entrada no ponto em sela se faz ao longoda linha P = 0; todas as outras trajetórias se afastam do ponto crítico.
Para estudar o ponto crítico (c/γ , a/α ), fazemosH = c/γ + u, P = a/α + v.
Substituindo H e P em (*), obtemos
��
��
�
+=
−−=
uvua
dt
dv
uvvc
dt
du
γα
γ
αγ
α
Este é um sistema quase linear, o sistema linear correspondente é :
��
��
�
=
−=
ua
dt
dv
vc
dt
du
αγ
γα
(**)
A equação característica é r² + ac = 0 de modo que acir ±= .Como as raízes da equação característica são imaginários puros, o ponto crítico é um
centro (estável) do sistema linear. As trajetórias do sistema linear são curvas fechadascorrespondentes a soluções que são periódicas no tempo. Elas nem se aproximam nem seafastam do ponto crítico. Em particular, pode-se mostrar que as trajetórias são elipses doseguinte modo. De (**) temos que
Cvc
ua
vdvc
udua
vc
ua
du
dv =+�=+�−= 220)/(
)/(
γα
αγ
γα
αγ
γααγ
, onde C é uma constante
arbitrária não – negativa de integração.Enquanto o ponto crítico é um centro estável para o sistema linear, precisamos saber
sua característica para o sistema quase linear. Para isso, tentaremos resolver as equações não-lineares de (*) e ver o que acontece. Com o auxílio do método do plano de fases, ou seja,dividindo a segunda das equações de (*) pela primeira equação, obtemos
)(
)(
PaH
HcP
dH
dP
αγ
−+−=
Separando as variáveis na equação anterior, temos

,dHH
HcdP
P
Pa γα +−=−
da qual segue-se que,lnlnln CHHcPPa ++−=− γα onde C é uma constante de integração. Não podemos
resolver a equação anterior explicitamente para P em termos de H ou de H em termos de P,mas o gráfico desta equação para um valor fixo de C é uma curva fechada que engloba oponto crítico (c/γ , a/α ). Deste modo, os predadores e as presas têm variações cíclicas emtorno do ponto crítico.
2.2 O Pêndulo Não – linearO ângulo de deslocamento θ de um pêndulo satisfaz a equação diferencial não –
linear de segunda ordem
02
2
=+ θθsen
l
g
dt
d
Quando fazemos θ=x e 'θ=y , essa equação diferencial pode ser escrita como osistema autônomo plano
�
��
−=
=
senxl
gy
yx
'
'
Fazendo P(x, y) = y = 0 e Q(x, y) = senxl
g−= 0, temos que os pontos críticos são
( )0,πk± . Além disso, a Matriz Jacobiana associada ao sistema autônomo acima em ( )0,πk±é
��
�
�
��
�
�−=± + 0)1(
10)0,(( 1
'
l
gkg kπ
Observa-se que se k = 2n + 1, então 0<Δ , assim todos os pontos críticos( )0,)12(( π+± n são selas. Em particular o ponto em )0,(π é instável, conformeesperado.Quando k = 2n, os autovalores são imaginários puros e, assim, a natureza dessespontos críticos permanece em dúvida. Para solucionar este problema, utilizaremos o métododo plano de fase
,y
senx
l
g
dtdx
dtdy
dx
dy −==
o qual decorre que
cxl
gy += cos
22
Se X(0) = )0,( 0x , então
)cos(2
02 xcox
l
gy −= .
Note que y = 0 quando x = 0x− , e ( )cos)(2 0xcoxlg − > 0 para π<< 0xx . Assim,
cada um desses x tem dois valores correspondentes de y; a solução X = X(t) que satisfaz X(0)= ( )0,0x é, pois, periódica. Podemos concluir que (0, 0) é um centro. O que era de se esperar,
visto que estamos supondo que não há forças amortecedoras atuando sobre o pêndulo. Afigura abaixo exibe uma família de curvas solução.

2.3 A Esfera RolanteSuponha que uma pequena esfera de massa m role ao longo de um arame delgado cuja
forma é dada pela função z = f(x). Pode-se obter uma ampla variedade de oscilações não-lineares, modificando-se a forma do arame e fazendo-se diferentes hipóteses sobre as forçasque atuam na esfera.
A força tangencial F devida ao peso W = mg tem módulo mg senθ e, assim, acomponente x de F é θθ cosmgsenFx −= . Como tg θ = )(' xf , usando a identidade 1 +
θθ 22 sec=tg obtemos
2'
'
22
)]([1
)(
1
1cos
coscos
xf
xfmg
tgmgtg
senmgmgsenFx +
−=+
−=−=−=θ
θθθθθθ .
Supondo que uma força amortecedora D, atuando na direção oposta ao movimento,seja um múltiplo constante da velocidade da esfera. A componente x de D será
.dt
dxDx β−=
Ignorando-se a força de atrito entre o fio e a esfera e admitindo que não haja quaisqueroutras forças externas atuando no sistema, segue-se da segunda lei de Newton que
'2'
'"
)]([1
)(x
xf
xfmgmx β−
+−=
e o sistema autônomo correspondente é
�
�
�
−+
−=
=
.)]([1
)(2'
''
'
ymxf
xfgy
yx
β
Se ( ), 11 yx é um ponto crítico do sistema, então 1y = 0 e, portanto, )( 1' xf = 0. Quando
f é duas vezes diferenciável, a matriz jacobiana em X1 é

���
����
�−−=
mxgfXg β)(
10)(
1"1
'
e assim mβτ −= , )( 1
" xgf=Δ e ).(44 1"
2
22 xgf
m−−=Δ− βτ De acordo com os
resultados apresentados na seção 1.1, chegamos às seguintes conclusões:(i) 0)( 1
" <xf
Ocorre um máximo relativo em x = 1x e, como Δ < 0, temos um ponto de sela
instável em X1 = ( 1x , 0).
(ii) )( 1" xf > 0 e β > 0
Ocorre um mínimo relativo em x = 1x e, como τ < 0 e Δ > 0, X1 = ( 1x , 0) é um ponto
crítico estável. Se )(4 1"22 xfgm>β , o sistema é superamortecido e o ponto crítico é
um nó estável. Se )(4 1"22 xfgm<β , o sistema é subamortecido e o ponto crítico é
um ponto espiral estável. A natureza exata do ponto crítico estável ainda permaneceem dúvida se )(4 1
"22 xfgm=β .
(iii) 0)( 1" >xf e o sistema é não-amortecido ( β = 0)
Nesse caso os autovalores são imaginários puros, mas utilizando o método do plano defases conclui-se que o ponto crítico é um centro. Por conseguinte, as soluções comX(0) = ( ))0(),0( 'xx na vizinhança de X1 = ( 1x , 0) são periódicas.

Bibliografia
[ 1 ] Amann, H. Ordinary Differential Equations with Aplications and Historical Notes McGraw –Hill, 1972.
[ 2 ] Boyce, W. E. e Diprima, R. C. Equações Diferenciais Elementares e Problemas deContorno. Editora Guanabara Koogan S. A, Rio de Janeiro, 1985.
[ 3 ] Braun, M. Differential Equations and Their Applications. Springer – Verlag, 1975.
[ 4 ] Hirsch, M. e Smale, S. Differential; Equations, Dynamical Systems and Linear Algebra.Academic Press, 1974.
[ 5 ] Neves, A. J.F. e Figueiredo, D. G. Equações Diferenciais Aplicadas – ColeçãoMatemática Universitária – IMPA – RJ.
[ 6 ] Simmons, G. Ordinary Differential Equations with Aplications and Historical Notes, McGraw – Hill, 1972.
[ 7 ] Zill, Dennis G. E Cullen, Michael R. Equações Diferencias – Volumes 1 e 2. EditoraMakron Books, São Paulo,2001.

Leis de Kepler para o movimento planetario
e a lei da gravitacao universal de Newton
Eder Lucio da Fonseca∗ Prof. Dr. Jocelino Sato†
Faculdade de Matematica - FAMAT
Universidade Federal de Uberlandia - UFU
38408-100, Uberlandia - MG
setembro de 2005
Resumo
Neste trabalho, utilizando o conceito de elipse e alguns fatos basicos do calculovetorial pudemos fazer a formulacao das leis de Kepler do movimento planetario esua deducao atraves das tres leis do movimento e da lei da Gravitacao Universalde Newton (o caminho cronologico inverso). Posteriormente, usando as tres leis domovimento de Newton e as leis de Kepler, fizemos a deducao da lei da GravitacaoUniversal de Newton (lei do quadrado inverso da forca gravitacional).
1 Introducao
Apolonio de Perga (± 262−190 a.C.) foi o matematico que mais estudou e desenvolveuas secoes conicas na antiguidade. Elas tiveram forte influencia nos estudos de Kepler. Ointeresse de Kepler pelas conicas surgiu devido as suas aplicacoes a optica e a construcaode espelhos parabolicos. Em 1609, Kepler edita a Astronomia Nova, onde apresenta aprincipal lei da astronomia: ”os planetas descrevem orbitas elıpticas em torno do Sol,com o Sol ocupando um dos focos”. A proposito, a palavra foco e devida a Kepler eprovem da forma latinizada foccus, cujo significado e fogo, lareira.
O modelo heliocentrico ja era aceito na epoca de Sir Isaac Newton. Pela primeira lei deKepler, sabia-se que as orbitas planetarias eram elıpticas. Alguns cientistas desconfiavamque a forca gravitacional, que mantem um planeta em orbita, variava com o inverso doquadrado da distancia com relacao ao Sol. As leis de Kepler proporcionaram evidenciasque possibilitaram Newton formular e confirmar sua famosa lei da Gravitacao Universaldo movimento. Coube a ele provar que se a forca de atracao gravitacional variasse como inverso do quadrado da distancia com relacao ao Sol, entao a curva descrita por umplaneta era uma elipse.
Neste trabalho, utilizando o conceito de elipse e alguns fatos basicos do calculo vetorialpudemos fazer a formulacao das leis de Kepler do movimento planetario e sua deducao
∗Orientando de Iniciacao Cientıfica: Programa Institucional de Iniciacao Cientıfica e Monitoria daFAMAT – UFU. E-mail:[email protected]
†Professor Orientador - E-mail: [email protected]
atraves das tres leis do movimento e da lei da Gravitacao Universal de Newton (o caminhocronologico inverso). Posteriormente, usando as tres leis do movimento de Newton e as leisde Kepler, fizemos a deducao da lei da Gravitacao Universal de Newton (lei do quadradoinverso da forca gravitacional).
2 Aspectos Historicos
Gracas ao rei Frederico II, o dinamarques Tycho Brahe (1646 − 1601) conseguiumontar em Uraniborg um grande observatorio astronomico.
Todas as observacoes eram feitas a olho nu (nao haviam telescopios), mas com ins-trumentos de grandes proporcoes, cuidadosamente calibrados e utilizando dotes incrıveisde observacao. Tycho dedicou toda a sua vida a coleta de dados sobre o movimento dosplanetas, conseguindo atingir uma precisao pelo menos duas vezes superior a das melhoresobservacoes da antiguidade.
Tycho propos um modelo intermediario entre os de Ptolomeu e Copernico, em quetodos os planetas com excecao da Terra se moveriam em torno do Sol, mas o Sol se moveriaem redor da Terra. Tycho nao percebeu que seu modelo so diferia do de Copernico poruma mudanca trivial do sistema de referencia.
Johannes Kepler (1571− 1630) foi assistente de Tycho e seu sucessor no observatorio.Kepler foi uma personalidade extremamente curiosa, motivado por uma firme conviccaode tipo plenetonico-pitagorico de que o universo e construıdo de acordo com um planomatematico, cuja estrutura pode ser deduzida por argumentos de perfeicao e da ”har-monia das esferas. Entretanto, ele aliava a essa atitude um grande respeito pelos dadosexperimentais, nao se satisfazendo com qualquer modelo enquanto nao levasse a uma con-cordancia praticamente perfeita com a experiencia. Desde o inıcio de sua carreira, Keplerfoi guiado por uma ideia fantastica, de que os raios das orbitas planetarias deviam teralguma explicacao geometrica-mıstica em termos de figuras perfeitas. Entre os 6 planetasentao conhecidos (Mercurio, Venus, Terra, Marte, Jupiter e Saturno) havia 5 distanciasa explicar, numero igual ao dos solidos regulares ou ”perfeitos”, os solidos platonicos:tetraedo, cubo, octaedro, dodecaedro e icosaedro.
Figura 1: Modelo heliocentrico
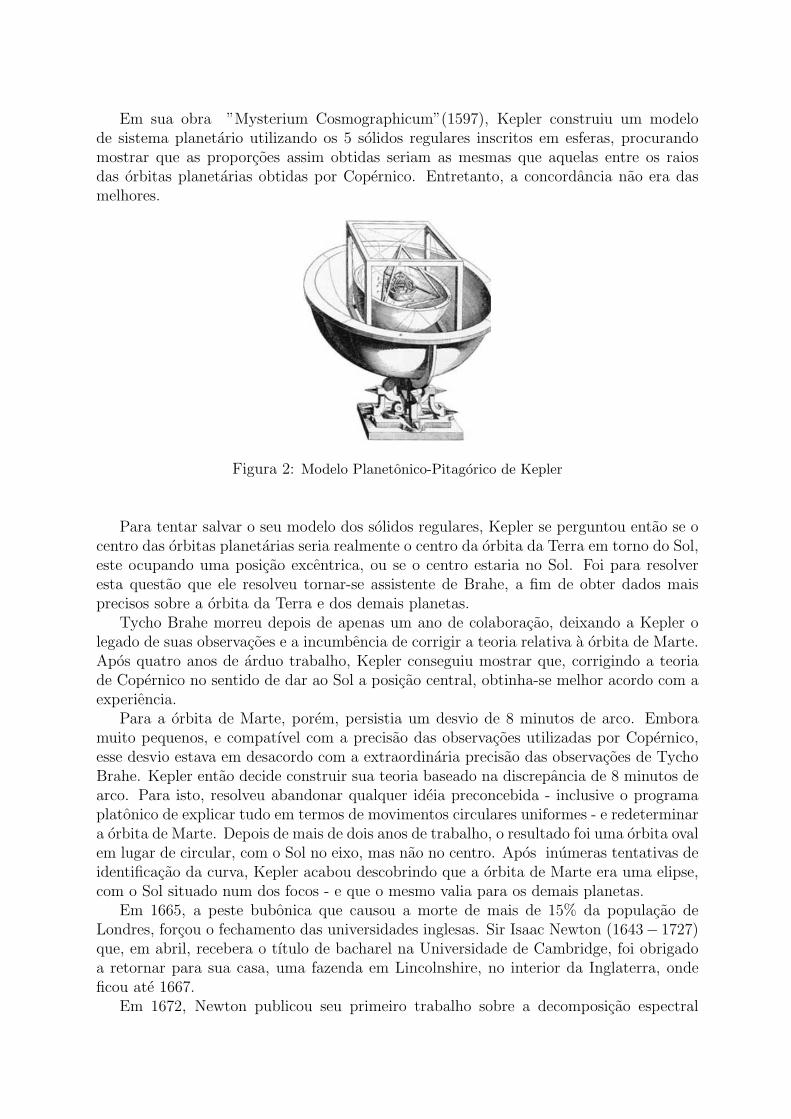
Em sua obra ”Mysterium Cosmographicum”(1597), Kepler construiu um modelode sistema planetario utilizando os 5 solidos regulares inscritos em esferas, procurandomostrar que as proporcoes assim obtidas seriam as mesmas que aquelas entre os raiosdas orbitas planetarias obtidas por Copernico. Entretanto, a concordancia nao era dasmelhores.
Figura 2: Modelo Planetonico-Pitagorico de Kepler
Para tentar salvar o seu modelo dos solidos regulares, Kepler se perguntou entao se ocentro das orbitas planetarias seria realmente o centro da orbita da Terra em torno do Sol,este ocupando uma posicao excentrica, ou se o centro estaria no Sol. Foi para resolveresta questao que ele resolveu tornar-se assistente de Brahe, a fim de obter dados maisprecisos sobre a orbita da Terra e dos demais planetas.
Tycho Brahe morreu depois de apenas um ano de colaboracao, deixando a Kepler olegado de suas observacoes e a incumbencia de corrigir a teoria relativa a orbita de Marte.Apos quatro anos de arduo trabalho, Kepler conseguiu mostrar que, corrigindo a teoriade Copernico no sentido de dar ao Sol a posicao central, obtinha-se melhor acordo com aexperiencia.
Para a orbita de Marte, porem, persistia um desvio de 8 minutos de arco. Emboramuito pequenos, e compatıvel com a precisao das observacoes utilizadas por Copernico,esse desvio estava em desacordo com a extraordinaria precisao das observacoes de TychoBrahe. Kepler entao decide construir sua teoria baseado na discrepancia de 8 minutos dearco. Para isto, resolveu abandonar qualquer ideia preconcebida - inclusive o programaplatonico de explicar tudo em termos de movimentos circulares uniformes - e redeterminara orbita de Marte. Depois de mais de dois anos de trabalho, o resultado foi uma orbita ovalem lugar de circular, com o Sol no eixo, mas nao no centro. Apos inumeras tentativas deidentificacao da curva, Kepler acabou descobrindo que a orbita de Marte era uma elipse,com o Sol situado num dos focos - e que o mesmo valia para os demais planetas.
Em 1665, a peste bubonica que causou a morte de mais de 15% da populacao deLondres, forcou o fechamento das universidades inglesas. Sir Isaac Newton (1643− 1727)que, em abril, recebera o tıtulo de bacharel na Universidade de Cambridge, foi obrigadoa retornar para sua casa, uma fazenda em Lincolnshire, no interior da Inglaterra, ondeficou ate 1667.
Em 1672, Newton publicou seu primeiro trabalho sobre a decomposicao espectral
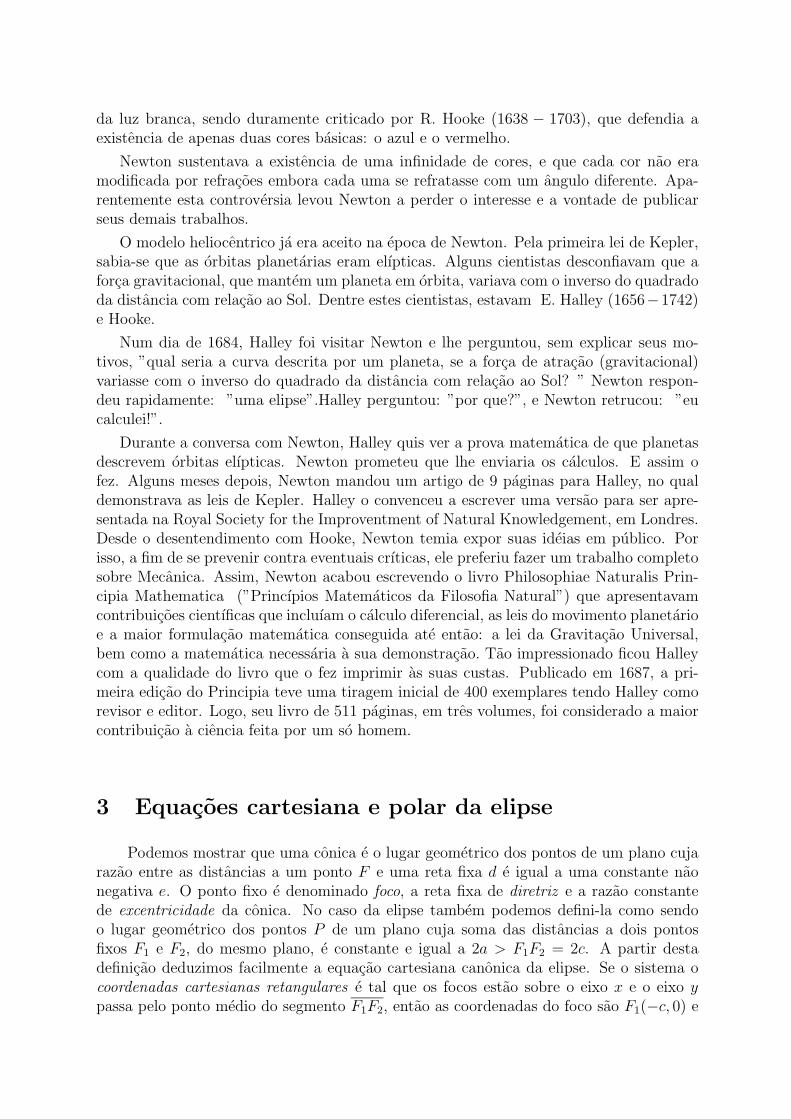
da luz branca, sendo duramente criticado por R. Hooke (1638 − 1703), que defendia aexistencia de apenas duas cores basicas: o azul e o vermelho.
Newton sustentava a existencia de uma infinidade de cores, e que cada cor nao eramodificada por refracoes embora cada uma se refratasse com um angulo diferente. Apa-rentemente esta controversia levou Newton a perder o interesse e a vontade de publicarseus demais trabalhos.
O modelo heliocentrico ja era aceito na epoca de Newton. Pela primeira lei de Kepler,sabia-se que as orbitas planetarias eram elıpticas. Alguns cientistas desconfiavam que aforca gravitacional, que mantem um planeta em orbita, variava com o inverso do quadradoda distancia com relacao ao Sol. Dentre estes cientistas, estavam E. Halley (1656−1742)e Hooke.
Num dia de 1684, Halley foi visitar Newton e lhe perguntou, sem explicar seus mo-tivos, ”qual seria a curva descrita por um planeta, se a forca de atracao (gravitacional)variasse com o inverso do quadrado da distancia com relacao ao Sol? ” Newton respon-deu rapidamente: ”uma elipse”.Halley perguntou: ”por que?”, e Newton retrucou: ”eucalculei!”.
Durante a conversa com Newton, Halley quis ver a prova matematica de que planetasdescrevem orbitas elıpticas. Newton prometeu que lhe enviaria os calculos. E assim ofez. Alguns meses depois, Newton mandou um artigo de 9 paginas para Halley, no qualdemonstrava as leis de Kepler. Halley o convenceu a escrever uma versao para ser apre-sentada na Royal Society for the Improventment of Natural Knowledgement, em Londres.Desde o desentendimento com Hooke, Newton temia expor suas ideias em publico. Porisso, a fim de se prevenir contra eventuais crıticas, ele preferiu fazer um trabalho completosobre Mecanica. Assim, Newton acabou escrevendo o livro Philosophiae Naturalis Prin-cipia Mathematica (”Princıpios Matematicos da Filosofia Natural”) que apresentavamcontribuicoes cientıficas que incluıam o calculo diferencial, as leis do movimento planetarioe a maior formulacao matematica conseguida ate entao: a lei da Gravitacao Universal,bem como a matematica necessaria a sua demonstracao. Tao impressionado ficou Halleycom a qualidade do livro que o fez imprimir as suas custas. Publicado em 1687, a pri-meira edicao do Principia teve uma tiragem inicial de 400 exemplares tendo Halley comorevisor e editor. Logo, seu livro de 511 paginas, em tres volumes, foi considerado a maiorcontribuicao a ciencia feita por um so homem.
3 Equacoes cartesiana e polar da elipse
Podemos mostrar que uma conica e o lugar geometrico dos pontos de um plano cujarazao entre as distancias a um ponto F e uma reta fixa d e igual a uma constante naonegativa e. O ponto fixo e denominado foco, a reta fixa de diretriz e a razao constantede excentricidade da conica. No caso da elipse tambem podemos defini-la como sendoo lugar geometrico dos pontos P de um plano cuja soma das distancias a dois pontosfixos F1 e F2, do mesmo plano, e constante e igual a 2a > F1F2 = 2c. A partir destadefinicao deduzimos facilmente a equacao cartesiana canonica da elipse. Se o sistema ocoordenadas cartesianas retangulares e tal que os focos estao sobre o eixo x e o eixo y
passa pelo ponto medio do segmento F1F2, entao as coordenadas do foco sao F1(−c, 0) e

F2(c, 0) e a equacao cartesiana da elipse e
x2
a2+
y2
b2= 1, (1)
onde b2 = a2 − c2, a > c. De fato, um ponto P (x, y) esta na elipse se, e somente se,√(x + c)2 + y2) +
√(x2 − c) + y2 = 2a.
Racionalizando essa expressao podemos escrever:
(x + c)2 + y2 =[(x − c)2 + y2
] − 4a√
(x − c)2 + y2 + 4a2
a√
(x − c)2 + y2 = a2 − cx
a2x2 − 2a2cx + a2c2 + a2y2 = a4 − 2a2xc + c2x2(a2 − c2
)x2 + a2y2 = a2(a2 − c2).
Como a > c, fazendo a2 − c2 = b2 na igualdade acima e dividindo membro a membropor a2b2, tem-se a equacao reduzida da elipse com focos sobre o eixo x. Neste caso, aexcentricidade satisfaz e = c
a< 1.
B2
d1
F2
A2
B1
F1
OA1
P
A1
F1F = 2c
2
A = 2a2
Figura 3: Foco e diretriz da Elipse
Sabemos que o sistema cartesiano de coordenadas nao e a unica forma de se colocarcoordenadas em um plano. Assim deduziremos utilizando um sistema de coordenadas po-lares a equacao polar da elipse, que tera grande importancia para a formulacao e deducaodas leis de Kepler.
Para determinar a posicao de um ponto nesse sistema toma-se como referencia umponto fixo O, denominado polo, e sua semi-reta fixa Ox, denominada eixo polar.
As coordenadas polares de um ponto P sao: o raio vetor, que e a distancia OP = ρ
do polo ao ponto P , e o angulo θ formado pelo eixo polar com OP .Dados dois numeros reais θ e ρ a este par de numeros corresponde um ponto P , que
fica univocamente determinado no plano polar e se representa por P (θ, ρ).Adotando um sistema de coordenadas cartesianas retangulares xy com origem em
O e eixo dos x contendo o eixo polar obtemos relacoes entre as coordenadas polares ecartesianas: {
x = ρ cos θ
y = ρsenθ⇐⇒
{x2 + y2 = ρ2
ρ = ±√
x2 + y2

Mediante apresentacao do sistema de coordenadas polares, vamos nos ater ao mais im-portante: a deducao da equacao polar de uma conica.
Admitamos que o polo coincida com o foco F e o eixo polar com o eixo focal da conica(eixo horizontal), ou seja, com a perpendicular de F a diretriz. A equacao da conica seradeduzida admitindo-se a diretriz vertical e a esquerda do polo. Seja D a intersecao do eixo
F=O
PN
DM
Figura 4: Equacao polar da Elipse
focal com a diretriz e facamos DF = d. Se P (θ, ρ) e um ponto da conica entao FP = ρ
e, de acordo com a Figura (4), NP = DM = d + FM = d + ρ cos θ.
FP
NP=
ρ
d + ρ cos θ= e.
Desenvolvendo essa igualdade e isolando a variavel ρ obtemos a equacao polar de umaconica de excentricidade e
ρ =ed
1 − e cos θ. (2)
Esta equacao representa a elipse se e < 1. Ver [1].
4 Calculo Vetorial: Produto interno, Produto Veto-
rial e Regras de derivacao
Para acompanharmos uma partıcula movendo-se no espaco tracamos um vetor r daorigem a partıcula, e estudamos a variacao em r. Se as coordenadas do vetor posicaosao funcoes do tempo t,duas vezes diferenciaveis, entao r′ e r′′ tambem sao e podemosencontrar os vetores velocidade e aceleracao da partıcula em qualquer instante, derivandor com relacao a t. Inversamente, se conhecemos o vetor velocidade ou vetor aceleracaocomo uma funcao contınua do tempo e se temos informacoes suficientes sobre a velocidadeinicial e a posicao da partıcula, podemos encontrar r como uma funcao do tempo porintegracao.
Alem disso, o estudo dos produtos interno e vetorial dessas funcoes vetoriais forneceinterpretacoes geometricas importantes para deducao das leis de Kepler.
A seguir faremos um breve comentario sobre o produto interno, o produto vetorial esobre as regras de derivacao de funcoes vetoriais e de produtos de funcoes vetoriais.

Dados os vetores −→u = (u1, u2, u3) e −→v = (v1, v2, v3) em R3 a igualdade
〈−→u ,−→v 〉 = u1v1 + u2v2 + u3v3,
define o produto interno canonico em R3. Sendo um produto interno ele goza das seguintes
propriedades:
1. 〈−→u + −→v ,−→w 〉 = 〈−→u ,−→w 〉 + 〈−→v ,−→w 〉 , ∀−→u ,−→v ,−→w ∈ R3;
2. 〈α−→u ,−→v 〉 = 〈−→u , α−→v 〉 = α 〈−→u ,−→v 〉 , ∀−→u ,−→v ∈ R3 e α ∈ R;
3. 〈−→u ,−→v 〉 = 〈−→v ,−→u 〉, ∀−→u ,−→v ∈ R3;
4. 〈−→u ,−→u 〉 > 0, ∀−→u = 0 e 〈−→u ,−→u 〉 = 0 ⇐⇒ −→u = ∅.Associada a esse produto interno temos a norma euclidiana de um vetor −→u em R
3:
‖−→u ‖ =√〈−→u ,−→u 〉 =
√u2
1 + u22 + u2
3.
Segue diretamente das propriedades do produto interno a seguinte relacao:
‖−→u −−→v ‖2= ‖−→u ‖2 − 2 〈−→u ,−→v 〉 + ‖−→v ‖2
. (3)
Agora, aplicando a lei dos cossenos ao triangulo determinado pelos vetores −→u e −→v obtemos
u
v
u-v
A B
C
�
Figura 5: Lei dos cossenos
‖−→u −−→v ‖2= ‖−→u ‖2
+ ‖−→v ‖2 − 2 ‖−→u ‖ ‖−→v ‖ cos θ, (4)
onde θ e o angulo entre os vetores −→u e −→v . Das igualdades (3) e (4) segue-se a formageometrica do produto interno:
〈−→u ,−→v 〉 = ‖−→u ‖ ‖−→v ‖ cos θ. (5)
Dados os vetores −→u = (u1, u2, u3) e −→v = (v1, v2, v3) associamos a eles um terceirovetor, perpendicular a ambos os vetores e chamado produto vetorial dos vetores −→u e −→v ,dado por
−→u ×−→v = (u2v3 − u3v2,−u1v3 + u3v1, u1v2 − u2v1)
= [u2v3 − u3v2]−→i + [−u1v3 + u3v1]
−→j + [u1v2 − u2v1]
−→k

onde,−→i ,
−→j ,
−→k sao os vetores da base canonica de R
3. Esse produto pode ser calculadousando o determinante:
−→u ×−→v =
∣∣∣∣∣∣−→i
−→j
−→k
u1 u2 u3
v1 v2 v3
∣∣∣∣∣∣ . (6)
Usando as propriedades do determinante concluımos que o produto vetorial possui aspropriedades:
1. (−→u + −→v ) ×−→w = −→u ×−→w + −→v ×−→w , ∀−→u ,−→v ,−→w ∈ R3;
2. (α−→u ) ×−→v = α (−→u ×−→v ) = −→u × (α−→v ) , ∀−→u ,−→v ∈ R3 e α ∈ R;
3. −→u ×−→v = −−→v ×−→u , ∀−→u ,−→v ∈ R3;
4. −→u × −→v = ∅ ⇐⇒ ‖−→u ×−→v ‖ = 0 se, e somente se, −→u e −→v forem linearmentedependentes. Isto e, existe λ com −→u = λv.
Alem disso, um calculo direto (usando as coordenadas dos vetores) fornece a chamadaidentidade de Lagrange
〈−→u ×−→v ,−→z ×−→w 〉 =
∣∣∣∣〈−→u ,−→z 〉 〈−→u ,−→w 〉〈−→v ,−→z 〉 〈−→v ,−→w 〉
∣∣∣∣ . (7)
Proposicao 4.1 Se −→u e −→v sao vetores linearmente independentes, entao {−→u ,−→v ,−→u ×−→v }e uma base ordenada de R
3, onde −→u × −→v e perpendicular a ambos os vetores −→u e −→v .Alem disso, ‖−→u ×−→v ‖ e numericamente igual a area do paralelogramo determinado pelosvetores −→u e −→v .
Demonstracao: A igualdade (6) mostra que o vetor −→u ×−→v e perpendicular a ambosos vetores linearmente independentes −→u e −→v . Assim, {−→u ,−→v ,−→u ×−→v } e um conjuntolinearmente independente e, portanto, uma base de R
3. Da identidade do paralelogramo(7) obtemos
‖−→u × z‖2 = 〈−→u ×−→v ,−→u ×−→v 〉 =
∣∣∣∣〈−→u ,−→u 〉 〈−→u ,−→v 〉〈−→v ,−→u 〉 〈−→v ,−→v 〉
∣∣∣∣= ‖−→u ‖2‖−→v ‖2 − [〈−→u ,−→v 〉]2 =
= ‖−→u ‖2‖−→v ‖2 − [‖−→u ‖2‖−→v ‖2 cos2 θ] =
= ‖−→u ‖2 · ‖−→v ‖2 · sen2θ,
onde θ (0 ≤ θ ≤ π) e o angulos entre os vetores −→u e −→v . Portanto,
‖−→u ×−→v ‖ = ‖−→u ‖‖−→v ‖senθ. (8)
Dessa expressao e da forma para area do paralelogramo concluımos que ‖−→u ×−→v ‖ e nu-mericamente igual a area do paralelogramo determinado pelos vetores −→u e −→v .
Sejam −→u = (u1, u2, u3) uma funcao vetorial com funcoes coordenadas derivaveis ui (t),t ∈ I ⊆ R, −→v = (v1, v2, v3) uma funcao vetorial com funcoes coordenadas derivaveis vi (t),t ∈ I ⊆ R, C um vetor constante e f qualquer funcao escalar derivavel em I. Usandoas regras de derivacao de produtos de funcoes escalares e as definicoes acima obtemos asseguintes regras de derivacao:

1. Regra da soma e diferenca:
d[−→v (t) ±−→u (t)]
dt= −→v ′ (t) ±−→u ′ (t)
2. Regra do produto por um escalar:
d[f (t)−→u (t)]
dt= f ′ (t)−→u (t) + f (t)−→u ′ (t) .
Em particular, se f ≡ C temos d(Cu(t))dt
= Cu′ (t) .
3. Regra do produto interno:
d[〈−→u (t) ,−→v (t)〉]dt
= 〈−→u ′ (t) ,−→v (t)〉 + 〈−→u (t) ,−→v ′ (t)〉 .
4. Regra do produto vetorial:
d[−→u (t) ×−→v (t)]
dt= −→u ′ (t) ×−→v (t) + −→u (t) ×−→v ′ (t) .
5. Derivada da norma de uma funcao vetorial −→u (t) = ∅:
d (‖−→u (t)‖)dt
=〈−→u ′ (t) ,−→u (t)〉
‖−→u (t)‖ .
5 Leis de Kepler para o movimento planetario e a lei
da gravitacao universal
O formato elıptico das orbitas planetarias foi descoberto por Johannes Kepler (1546−1630), atraves da analise cuidadosa das observacoes de Tycho Brahe (1546 − 1601). Edifıcil apreciar inteiramente a magnitude da realizacao de Kepler. Ele nao somente teveque calcular as orbitas planetarias valendo-se dos dados coletados por Brahe, mas teveque corrigir o fato de que as observacoes de Brahe foram feitas sobre uma plataformamovente (a Terra) que tambem viajava sobre uma trajetoria desconhecida. E ele fez todoo seu trabalho em uma epoca em que a maioria dos astronomos acreditava que a Terraestava fixa no centro do universo, com todos os outros corpos descrevendo complexosmovimentos ao redor dela.
As Leis de Kepler
Lei das orbitas elıpticas O planeta Terra viaja em uma orbita elıptica com um focono centro de massa do sistema formado pelo planeta e pelo Sol.
Lei das areas O raio vetor do Sol ate o planeta varre areas iguais em tempos iguais.
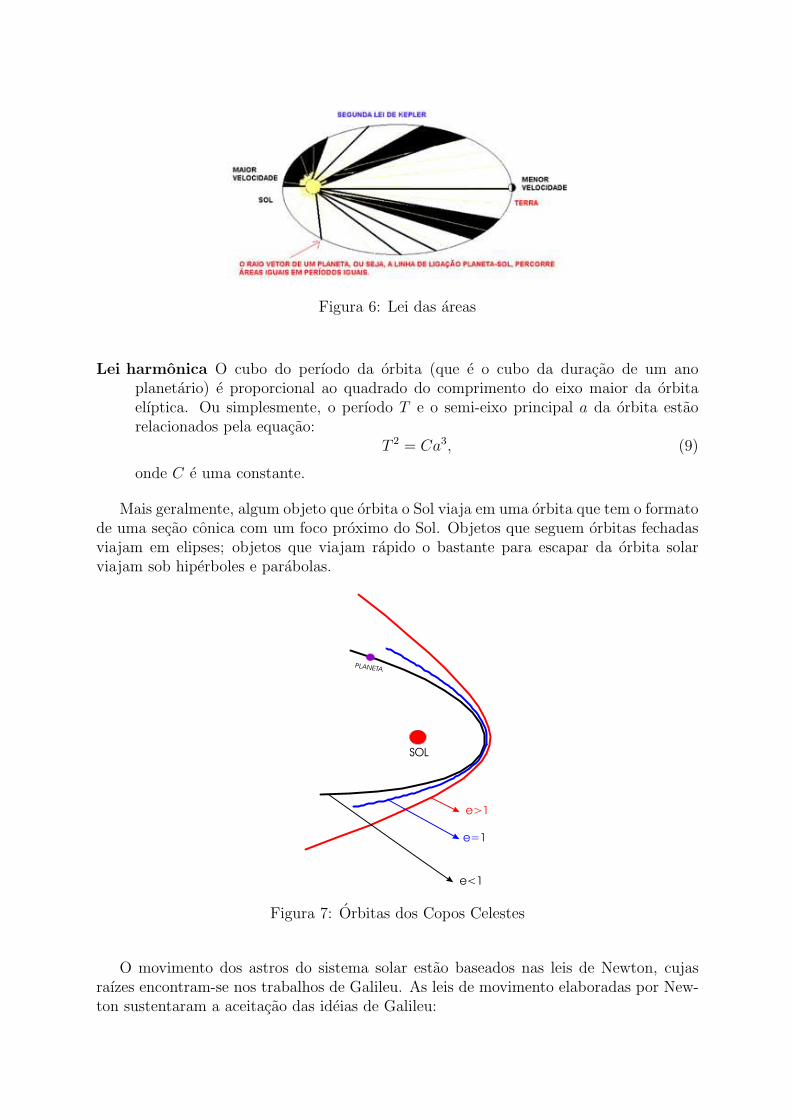
Figura 6: Lei das areas
Lei harmonica O cubo do perıodo da orbita (que e o cubo da duracao de um anoplanetario) e proporcional ao quadrado do comprimento do eixo maior da orbitaelıptica. Ou simplesmente, o perıodo T e o semi-eixo principal a da orbita estaorelacionados pela equacao:
T 2 = Ca3, (9)
onde C e uma constante.
Mais geralmente, algum objeto que orbita o Sol viaja em uma orbita que tem o formatode uma secao conica com um foco proximo do Sol. Objetos que seguem orbitas fechadasviajam em elipses; objetos que viajam rapido o bastante para escapar da orbita solarviajam sob hiperboles e parabolas.
PLANETA
e<1
e=1
e>1
SOL
Figura 7: Orbitas dos Copos Celestes
O movimento dos astros do sistema solar estao baseados nas leis de Newton, cujasraızes encontram-se nos trabalhos de Galileu. As leis de movimento elaboradas por New-ton sustentaram a aceitacao das ideias de Galileu:

Leis de Newton para o movimento.
Princıpio da inercia O centro de massa de um corpo permanece no seu estado de re-pouso ou de movimento retilıneo e uniforme, a menos que forcas externas atuemsobre ele.
Princıpio da dinamica A forca sobre um corpo e igual ao produto entre a massa docorpo e sua aceleracao. −→
F = m−→a . (10)
Princıpio da acao e reacao A toda acao corresponde uma reacao de magnitude iguale sentido oposto. Assim quando dois corpos exercem forcas sobre si mutuamente,as forcas sao sempre iguais em magnitude, mas com direcoes opostas.
Com base nestas leis, Newton conseguiu substituir a formulacao geometrica das leis deKepler para o movimento planetario pela formulacao fısica de sua famosa lei da GravitacaoUniversal do movimento.Com o trabalho de Kepler passou-se a saber como os planetas semovimentavam ao redor do Sol. Mas ainda restava uma pergunta basica: por que? Foiso com a Teoria da Gravitacao Universal que isso foi respondido. A teoria da gravitacaomostra que os corpos se atraem mutuamente, isto e, um corpo cria em torno de si umcampo gravitacional que e sentido por todos os outros corpos. Esse campo gravitacionale mais intenso quanto maior a massa do corpo, sendo proporcionalmente ao quadrado dadistancia. Essa e a razao porque a Terra esta ligada ao Sol.
Lei da Gravitacao Universal de Newton Se −→u e o raio vetor do centro de um ”Sol”de
massa M ate o centro de um planeta de massa m, entao a forca−→F da atracao gra-
vitacional com que o planeta e atraıdo pelo sol e:
−→F = −GmM
‖−→u ‖2
−→u‖−→u ‖ . (11)
Aqui G e a constante chamada de constante de gravitacao universal e vale 6.67259 ×10−11 m3 kg−1 s−2 no sistema MKS de unidades.
Essa lei e considerada universal porque explica o movimento de um planeta em tornodo Sol, da Lua em torno da Terra ou a queda de uma maca.
Implıcito nas leis de Newton, esta o fato de que o movimento de um corpo e medidoem um sistema de coordenadas desacelerado ou ”inercial ”, com eixos x, y e z. O corpopode se mover atraves do espaco, mas sua aceleracao e nula.
Uma das observacoes fundamentais da fısica Newtoniana e o fato de que as proprieda-des fısicas dos objetos sao as mesmas quando sao medidas em um sistema de coordenadasinercial.
5.1 Confirmacao das leis de Kepler
Nesta secao, mostraremos a ordem historica inversa dos eventos e derivaremos as leisde Kepler das leis de Newton. Faremos depois um desenvolvimento obedecendo a ordemhistorica dos eventos, derivando a lei da Gravitacao Universal atraves das leis de Keplere das leis do movimento de Newton.

Considere um sistema isolado com duas massas, m e M , viajando livremente peloespaco, nao afetadas por forca alguma, exceto por suas forcas gravitacionais e denotemospor:−→r : o raio vetor da origem (O) ao centro da massa m.−→
f : o campo de forca gravitacional que M exerce sobre m.−→R : o raio do vetor da origem ao centro da massa M .−→F : o campo de forca gravitacional que m exerce sobre M .
E sejam r = ‖−→r ‖ , f =∥∥∥−→f ∥∥∥ , R =
∥∥∥−→R∥∥∥ e F =∥∥∥−→F ∥∥∥ as magnitudes desses vetores.
O centro de massa de um corpo corresponde ao centro geometrico de sua distribuicaode massa. E o ponto onde toda a massa do corpo pode ser concentrada para efeitocinematico. O conceito de centro de massa pode ser aplicado para qualquer distribuicaode materia, inclusive para dois corpos. Sua localizacao depende das caracterısticas dadistribuicao de massa (forma geometrica e densidade de materia). Com a notacao acimao centro de massa de um sistema de dois corpos m e M e dado pela igualdade
−−→CM = m−→r + M
−→R. (12)
Alem disso, a segunda lei de Newton fornece:
−→f = m−→r ′′ (t) e
−→F = M
−→R ′′ (t) , (13)
onde, pela terceira lei de Newton, tem-se a igualdade
−→F = −−→
f ⇐⇒ m−→r ′′ (t) + M−→R ′′ (t) =
−→∅ . (14)
Assim, concluımos que o centro de massa nao e acelerado. Por isso, para simplificarmosnossos calculos, iremos adotar um sistema de coordenadas adequado em que a origem elocalizada no centro de massa.
Nestas novas coordenadas vale a igualdade
m−→r (t) + M−→R (t) =
−→∅ (15)
que fornece as equacoes:
−→R (t) = −m
M−→r (t) =⇒ R =
m
Mr. (16)
Agora, a forca gravitacional entre dois corpos e sempre atrativa na direcao que une seuscentros de massa. A forca gravitacional exercida pelo primeiro sobre o segundo e igual,em magnitude e direcao, aquela exercida pelo segundo sobre o primeiro, porem atuam emsentidos opostos (princıpio da acao e reacao). A intensidade da forca gravitacional e dadapela lei da gravitacao universal. Assim, das igualdades (11) e (16) temos:
f = F =GmM
(r + R)2=
GmM
(r + mM
r)2=
1
r2
GmM
(1 + mM
)2, (17)
onde a forca gravitacional−→f agindo sobre o planeta m aponta para a direcao M e,
portanto, na direcao oposta de −→r .

A deducao da primeira lei de Kepler usa a segunda lei. Assim, estabeleceremos eprovaremos primeiro a segunda lei. Para deduzir a segunda lei de Kepler, consideremos aarea varrida pelo vetor −→r (t) em funcao de t, com intervalo Δt infinitesimalmente pequeno.
A area infinitesimal ΔA (t) varrida por −→r (t) durante o intervalo de tempo e aproxi-madamente igual a area do triangulo de lados −→r (t) e Δ−→r (t) = −→r (t + �t) − −→r (t), ouseja, igual a metade da area do paralelogramo cujos lados adjacentes sao −→r (t)e Δ−→r (t).Da Proposicao 4.1, obtemos:
ΔA ∼= 1
2‖−→r (t) × Δ−→r (t)‖ . (18)
Por outro lado, se Δt e muito pequeno, da definicao de limite, temos: �−→r (t) ∼= −→r ′ (t) Δt,que substituindo na expressao (18) fornece ΔA ∼= 1
2‖−→r (t) ×−→r ′ (t)‖Δt, com a igualdade
no limite com Δt → 0.Assim, a area A (t) varrida pelo vetor −→r (t) modifica a razao:
dA
dt= lim
Δt→0
ΔA
Δt=
1
2‖−→r (t) ×−→r ′ (t)‖ . (19)
A segunda lei de Kepler afirma que dAdt
e constante. Para provar isso, usamos as proprie-dades do produto vetorial e a derivada do produto vetorial para obter:
d(−→r (t) ×−→r ′ (t))
dt= −→r ′ (t) ×−→r ′ (t) + −→r (t) ×−→r ′′ (t)
= −→r (t) ×−→r ′′ (t) = −→r (t) ×−→f
m,
onde na ultima igualdade usamos (13).
Temos que−→f tem mesma direcao e sentido oposto ao de −→r e, desde que −→r (t)×−→r (t) =−→∅ , segue-se que:
d(−→r (t) ×−→r ′ (t))
dt= ∅. (20)
Portanto, −→r (t)×−→r ′ (t) e um vetor constante e, consequentemente, dAdt
= 12‖−→r (t) ×−→r ′ (t)‖
e constante. O que demonstra a segunda lei de Kepler.Para provar a primeira lei vamos precisar de varias informacoes. Comecamos obser-
vando que o centro de massa de m esta no plano que passa pela origem e e perpendicularao vetor (ver Figura (8)) −→
N = −→r (t) ×−→r ′ (t) . (21)
Desde que−→N seja constante, o plano nao se modifica com o tempo, e portanto, o plano
contem a orbita de m. Podemos adotar um sistema de coordenadas de modo que o plano
que contem a orbita de m seja o plano x,y. Sejam−→i ,
−→j e
−→k =
−→i × −→
j os vetoresdiretores desse sistema cartesiano. O vetor r (t) e da forma
−→r (t) = r (t)[cos θ (t)
−→i + senθ (t)
−→j
], (22)
onde θ = θ (t) e o angulo entre o vetor −→r e o eixo x no instante t.

PLANETA
SOL
x
Y
Z
� �
Figura 8: Lei das orbitas
No que se segue, omitiremos o parametro t nas derivadas que estaremos calculando.Usando as regras de derivacao e a regra da cadeia temos:
−→r ′ (t) = r′(cos θ
−→i + senθ
−→j
)+ rθ′
(−senθ
−→i + cos θ
−→j
)= [r′ (t) cos θ − r (t) θ′senθ]
−→i + [r′ (t) senθ + r (t) θ′ cos θ]
−→j . (23)
−→r ′′ (t) =[r′′ − r (θ′)
2] (
cos θ−→i + senθ
−→j
)+ (2r′θ′ + rθ′′)
(−senθ
−→i + cos θ
−→j
). (24)
Substituindo as equacoes (22) e (23) na equacao (21) obtemos:
N = r (t) (cos θ�i + senθj )] × [r ′ (t) cos θ − r (t) θ′senθ]−→i
+ [r′ (t) senθ + r (t) θ′ cos θ]−→j
N = ∅ + r (t) cos θ [(r′ (t) senθ + r (t) θ′ cos θ)](−→
i ×−→j
)+ r (t) senθ [(r ′ (t) cos θ − r (t) θ′senθ)]
(−→j ×−→
i)
N = (r (t) cos θ)[(r′ (t) senθ + r (t) θ′ cos θ)�k
]+ (r (t) senθ)
[(r′ (t) cos θ − r (t) θ′senθ) (−�k)
]N =
[(r (t) r′ (t) senθ cos θ + r2 (t) θ′ cos2 θ
)�k]
+[(
r (t) r′ (t) senθ cos θ − r2 (t) θ′sen2θ)(−�k)
].
Fazendo todas as simplificacoes, temos:
N =[r2 (t) θ′
(cos2 θ + sen2θ
)]�k =
[r2 (t) θ′
]�k. (25)
O que tomando a norma nos da a igualdade:
a =∥∥∥−→N∥∥∥ = r2 (t) θ′
∥∥∥−→k ∥∥∥ =∥∥∥r2 (t) θ′
−→k
∥∥∥ .
Em particular, a = r2θ′e constante e vale
θ′ (t) =a
r2 (t)> 0. (26)

Diferenciando ambos os membros da igualdade a = r2θ′ obtemos apos simplificacao
2r′ (t) θ′ (t) = −r (t) θ′′ (t) . (27)
A igualdade (27), junto com a equacao (24), fornece:
−→r ′′ =[r′′ − r (θ′)
2](cos θ�i + senθj ) =
[r ′′ − r (θ′)
2] −→r (t)
‖−→r (t)‖ , (28)
onde r′′−r (θ′)2< 0. Substituindo a expressao (28) na segunda lei de Newton e combinando
com a equacao (17) temos:
− 1
r2
GmM
(1 + mM
)2= −f = m
[r′′ − r (θ′)
2]. (29)
Para resolver esta equacao usamos a regra da cadeia e a igualdade (26) para substituirderivadas em funcao de t por funcoes de θ. Entao:
d2r
dt2=
d
dt
(dr
dt
)=
d
dt
(dr
dθ
dθ
dt
)=
d
dt
(dr
dθ
a
r2
)
=d
dt
(dr
dθ
)a
r2+
dr
dθ
d
dt
( a
r2
)
=dθ
dt
d
dθ
(dr
dθ
)a
r2+
dr
dθ
(−2a
r3
dr
dθ
)
=d2r
dθ2
(a2
r2
)2
+dr
dθ
(−2a
r3
dr
dθ
dθ
dt
).
Assim,
r′′ =d2r
dθ2
(a2
r4
)− 2
(dr
dθ
)2a2
r5. (30)
Logo, das equacao (29), (30) e (26) temos:
− 1
r2
GMm
(1 + mM
)2= m
[r′′ − r (θ′)
2]
= m
[d2r
dθ2
a2
r4− 2
(dr
dθ
)2a2
r5− a2
r3
].
Portanto, multiplicando ambos os membros dessa igualdade por r2(t)ma2 , obtemos a seguinte
equacao diferencial de segunda ordem em r = r (θ (t)), governando a orbita de m :
r2
a2
(d2r
dθ2
a2
r4− 2
(dr
dθ
)2a2
r5− a2
r3
)=
r2
a2
(− 1
r2
GM
(1 + mM
)2
),
ou seja,
− 1
r2
d2r
dθ2+
2
r3
(dr
dθ
)2
+1
r=
GM
a2(1 + mM
)2. (31)
Tal equacao pode ainda ser reescrita da seguinte forma:
d2
dθ2
(1
r
)+
1
r=
GM
a2(1 + mM
)2. (32)

Esta e uma equacao diferencial linear de segunda ordem em 1r
= 1r(θ), com coeficientes
constantes e equacao caracterıstica x2 + 1 = 0. Sua solucao geral e da forma:
1
r=
GM
a2(1 + mM
)2+ a cos(θ) + bsen(θ).
E tomando B2 = a2 + b2 temos que existe θ0 ∈]0, π
2
[tal que a = Bsen(θ) e b = B cos(θ).
Donde concluımos que 1r
= GMa2(1+ m
M)2
+ B cos(θ − θ0), onde B e θ0 = θ0(B) sao constantes.
Logo, a solucao pode ser escrita na forma:
1
r=
1 − e cos (θ − θ0)
p⇐⇒ r =
p
1 − e cos (θ − θ0), (33)
onde p e e sao as constantes
p =a2
(1 + m
M
)2
GM(34a)
e = pB. (34b)
Comparando a equacao (33) com a formula em coordenadas polares (ver equacao 2):
ρ =de
1 − e cos θ,
que representa uma conica com foco na origem, parametro p = de, excentricidade e ediretriz r : x ≡ −d paralela ao eixo y, concluımos que a equacao (33) tambem descreveuma conica no plano (x, y) com o foco na origem. Nela, a constante adicional θ0 indicaque a diretriz da conica esta rotacionada por um angulo θ0 relativo ao eixo y. Assimprovamos a primeira lei de Kepler.
Finalmente provaremos a terceira lei de Kepler.Se escrevermos t em funcao de θ, entao, como θ percorre o intervalo a para b, sua
mudanca sera assim definida:
Δt =
∫ b
a
dt
dθdθ. (35)
Usando a equacao (27) obtemos dtdθ
= r2
a, entao, o tempo para fazer uma revolucao com-
pleta, isto e, o perıodo T da orbita e:
T =
∫ 2π
0
r2
adθ =
1
a
∫ 2π
0
r2dθ, (36)
caso a orbita seja fechada. Pela formula em coordenadas polares, a area A limitada pelaorbita e:
A =1
2
∫ 2π
0
r2dθ,
entao o perıodo de orbita e:
T =2
aA. (37)
Por outro lado, sabemos que a area dentro da elipse e: A = π4L1L2, onde L1 e o compri-
mento do eixo maior e L2 e o comprimento do eixo menor. Os comprimentos do maior

e menor eixos da elipse com excentricidade e e parametro p sao facilmente obtidos daformula ρ = p
1−e cos θ, com p = de, usando o fato de que os pontos finais do eixo maior
ocorrem quando θ e igual a 0 ou π, e o pontos finais do eixo menor ocorrem quandoy (θ) = ρ (θ) senθ = psenθ
1−e cos θassume um valor maximo ou mınimo, o que corresponde a
cos θ0 = e . Logo, temos:
L1 = ρ (0) + ρ (π) =p
1 − e+
p
1 + e=
2p
1 − e2(38)
L2 = 2y (θ0) =2psenθ0
1 − e cos θ0
=2p√
1 − e2
1 − e2=
2p√1 − e2
. (39)
Entao, a area A no interior da orbita elıptica e:
A = πp2
(1 − e2)3
2
= πp2
(L1
2p
) 3
2
= 2−3
2 πp1
2 L3
2
1 .
Portanto, usando as equacoes (34a), (34b) e (37) concluımos que o perıodo T da orbita e:
T =2
aA = 2−
1
2 π( p
a2
) 1
2
L3
2
1 = π
(1 + m
M
)√
2GML
3
2 .
O que fornece a igualdade:
T 2 = 8π
(1 + m
M
)√
2GM
(L1
2
)3
,
provando a terceira lei de Kepler.
5.2 As leis de Kepler confirmam a lei da Gravitacao Universal
de Newton!
Os varios resultados experimentais de Galileu sobre os movimentos dos corpos aju-daram Newton a compor a base de seu trabalho. Newton mostrou como obter modelosmatematicos para descrever processos fısicos, que sao, em essencia, consequencias de umconjunto de leis. Ele admitia nao conhecer a natureza da gravidade, entretanto, foi ca-paz de deduzir a lei que rege o comportamento dos corpos sob sua acao. E, com basenesta lei, explicou a orbita dos cometas, que podem ser elipses, parabolas ou hiperboles(dependendo da velocidade do cometa), com o Sol num foco.
A seguir, obedecendo a ordem historica dos eventos, derivaremos a lei da GravitacaoUniversal atraves das leis de Kepler e das leis do movimento de Newton. Isso foi feitooriginalmente por Newton, num trabalho completo sobre Mecanica que apareceu no livroPhilosophiae Naturalis Principia Mathematica (”Princıpios Matematicos da FilosofiaNatural”).
Em toda secao usaremos as notacoes da secao anterior. Retornemos ao sistema isoladocom duas massas: m e M , viajando livremente pelo espaco, nao afetadas por forca alguma,exceto por suas gravidades. A lei das orbitas de Kepler (primeira lei) diz que a orbita C
(traco de uma funcao vetorial r (t)) e uma conica estando, portanto, contida num planofixo Π passando pela origem (foco da conica). Logo, o produto vetorial r (t)× r′ (t) e um

vetor perpendicular a Π e, sendo uma conica uma curva ”convexa”, o angulo β entre r (t)e r′′ (t) satisfaz:
0 ≤ β <π
2. (40)
Pela lei das areas de Kepler (segunda lei) temos que a variacao da area varrida pelo vetor−→r (t), em funcao de t, dAdt
e constante. Assim, de (19) concluımos r (t)× r′ (t) e um vetorconstante N0 = r (t) × r′ (t). Derivando ambos os membros dessa igualdade obtemos:
d(−→r (t) ×−→r ′ (t))
dt= −→r ′ (t) ×−→r ′ (t) + −→r (t) ×−→r ′′ (t)
= −→r (t) ×−→r ′′ (t) = 0. (41)
Do princıpio da dinamica do movimento de Newton (segunda lei) temos −→r ′′ (t) =−→f
m, que
junto com (41) nos da:
0 = −→r (t) ×−→r ′′ (t) = −→r (t) ×−→f (t)
m.
Ou seja, −→r (t) e−→f (t) sao linearmente dependentes. Usando (40) podemos afirmar que−→
f (t) aponta na direcao oposta da direcao do vetor −→r (t) e, portanto, diretamente paraa massa M . Das igualdades (28) e (29) obtemos:
−→f (t) =
[r′′ − r (θ′)
2] −→r (t)
‖−→r (t)‖ , (42)
f = −m[r′′ − r (θ′)
2], (43)
onde, (′) denota a derivada com relacao ao tempo t. Alem disso, a constante a = ‖N0‖satisfaz a igualdade (ver equacao (26)):
θ′ (t) =a
r2 (t). (44)
Agora, da lei das orbitas de Kepler (primeira lei) temos que as orbitas sao conicas deequacao polar
r = r (t) =p
1 − e cos θ (t)⇐⇒ e cos θ =
r − p
r, (45)
para alguma constante p = de, onde a constante e e sua excentricidade. Derivando (45),usando a regra da cadeia e a equacao (44) obtemos:
r′ =
( −epsenθ
(1 − e cos θ)2
)θ′ =
−r2esenθ
p
a
r2=
−ae
psenθ.
Derivando novamente e usando (45) temos:
r′′ =−ae
pcos θθ′ = −a
p
r − p
r
a
r2= −a2
r3
[r
p− 1
].
Logo, de (44) podemos escrever:
r′′ − r [θ′]2
= −a2
r3
[r
p− 1 + 1
]= −a2
p
[1
r2
].
Dessa equacao e das igualdades (43) e (42) concluımos a veracidade da lei da gravitacaouniversal de Newton.
Referencias
[1] Goncalves, Z. M ., Geometria Analıtica: Um Tratamento Vetorial Volumes 1 e 2,Livros Tecnicos e Cientıficos, Rio de Janeiro, 1.978.
[2] Jennings, G. A., Modern Geometry with applications, Springer-Verlag, New York.
[3] Monteiro, L. H. A., Sistemas Dinamicos, Editora Livraria da Fısica, Sao Paulo, 2002.
[4] Tenenblat, K., Introducao a Geometria Diferencial, Editora da Unb, Brasılia 1990.

Modelagem de Problemas de Matemática Financeira esuas Resoluções Utilizando Técnicas Matemáticas e
Computacionais
Leone Alves Leite1 César Guilherme de Almeida2
FAMAT - Faculdade de MatemáticaUFU - Universidade Federal de Uberlândia – MG
Setembro de 2005
ResumoModelos matemáticos relacionados à área de finanças foram construídos a partir deteorias matemáticas simples, envolvendo basicamente somas de progressões geométricas.Como alguns problemas modelados necessitaram de uma abordagem numérica paraserem resolvidos, foi preciso fazer uma pequena introdução ao estudo de métodosnuméricos aplicados a equações não lineares do tipo f(x) = 0: métodos da Bissecção e deNewton-Raphson.Os códigos computacionais e os gráficos exibidos neste trabalho foram implementadosutilizando-se o software Octave3.
Palavras Chave: Matemática Financeira, Métodos Numéricos, Ensino de Matemática,Modelagem Matemática.
1. INTRODUÇÃO
Algumas pessoas tentam ignorar o mundo financeiro, por acharem que se trata de umuniverso à parte e bem diferente daquele cotidiano no qual estão inseridas. Mas, não temcomo ignorá-lo ao se deparar, por exemplo, com as famigeradas compras a prazo e suas taxasde juros, não raro, crudelíssimas.
Este universo também se faz presente em outras situações corriqueiras, que envolvemtomadas de decisões; tais como: na hora de assinar o contrato com uma escola particular,saber fazer a opção pela proposta mais adequada – uma de pagamento à vista e a outra depagamento de mensalidades (12 ou 13, dependendo da escola) – e, quando for realizar aquelecurso superior – há muito cobiçado – saber decidir qual é a melhor opção entre diferentesplanos de empréstimo estudantil. Em ambos os casos, uma análise cuidadosa da situaçãodeverá ser realizada antes da tomada de decisão. Nesta análise, não pode faltar o cálculo dataxa de juros praticada nas diferentes formas de pagamento.
Não tendo como ignorar o mundo das finanças, então, o melhor é tentar compreendê-lo.Esta tarefa não é impossível, já que as idéias que estão por trás da teoria envolvida emMatemática Financeira são simples e podem ser formalizadas matematicamente, sem muitasdificuldades. Para isto, basta utilizar um embasamento mínimo de matemática elementar,acrescido de informações extras – que devem ser facilmente justificáveis. Desta forma, osfundamentos da Matemática Financeira podem ser apresentados a um grande número depessoas, mesmo àquelas que pensam não estar suficientemente preparadas para oentendimento do mundo financeiro.
1 Orientanda do VII Curso de Especialização em Matemática da Universidade Federal de Uberlândia – MG.2 Professor orientador.3 Software livre que pode ser encontrado em www.sourceforge.net/projects/octave
2. JUSTIFICATIVA
A importância da Matemática Financeira na vida das pessoas e das empresas éindiscutível. Embora pareça estar ligada somente à área de finanças ou tesouraria, sabe-se queela é vital nas decisões que norteiam as políticas de investimento e de compras e vendas,atingindo, portanto, todos os segmentos de qualquer empresa.
De uma forma simplificada, levando-se em conta o valor monetário ao longo do tempo,pode-se dizer que a Matemática Financeira é o ramo da Matemática Aplicada que estuda avariação do valor de uma moeda corrente, com o objetivo de quantificar as transações queocorrem no universo financeiro. As principais variáveis envolvidas no processo dequantificação financeira são: a taxa de juros, o capital e o tempo.
A idéia de desenvolver um trabalho relacionado a este tema surgiu logo depois quecomecei a trabalhar em uma instituição financeira. Na verdade, foi a partir daí que comecei avivenciar alguns dos problemas aqui propostos. Então resolvi aproveitar a oportunidade paraconhecer mais e melhor este ramo da matemática que é tão presente na vida de todos.
3. OBJETIVOS
O objetivo principal deste trabalho é a construção de modelos matemáticos relacionadosà área de finanças, utilizando-se teorias matemáticas simples – envolvendo basicamentesomas de progressões geométricas. Com a divulgação destes modelos, espera-se que haja umaumento no número de pessoas interessadas em compreender a matemática financeirautilizada no cotidiano.
É importante mencionar que muitos problemas simples, que aparecem com freqüênciano dia-a-dia dos cidadãos e que seriam ótimos problemas motivadores, deixam de serapresentados aos alunos do ensino fundamental e médio. Isto ocorre devido ao fato de elesexigirem uma técnica diferente daquela usual, onde toda equação proveniente de um problemaformulado pelo professor, ou exibido em um livro didático, possui uma solução que é obtidaapós um número finito de operações algébricas. Parece que é proibido falar para os alunos queexistem outros caminhos para se resolver problemas e que a Matemática, mesmo sendo umaciência exata, às vezes, é incapaz, utilizando apenas teorias clássicas, de apresentar soluçõesanalíticas para todos os problemas. Mesmo problemas aparentemente simples, como aobtenção da raiz de um polinômio, exigem que a teoria clássica seja acrescida de técnicas deanálise numérica.
Com a abordagem numérica de certos problemas, o que se quer evitar é a ocorrência daseguinte situação, não rara, na prática escolar: o aluno estuda intensamente a teoria sobrepolinômios e aprende técnicas de resolução de equações polinomiais; sabe utilizar o algoritmode Briot-Ruffini e as relações de Girard; porém, fica frustrado diante da incapacidade deaplicar estas técnicas à equação do tipo f(x) = Kxn+1 – (K + 1)xn + 1 = 0, proveniente de umproblema real, que calcula a taxa de juros de um financiamento, pago em n parcelas.
Com base nos argumentos anteriores, outro objetivo deste trabalho é incentivar o uso derecursos computacionais e técnicas de aproximações numéricas, quando não existir apossibilidade de obtenção de soluções analíticas dos problemas propostos. Portanto, algunsdos problemas modelados necessitarão de uma abordagem numérica em suas resoluções e,oportunamente, serão exibidos os códigos computacionais, implementados com o auxílio dosoftware Octave, desenvolvidos especificamente para estes problemas. Por este motivo seráapresentada, em uma das seções posteriores, uma pequena introdução ao estudo de métodosnuméricos aplicados a equações não lineares do tipo f(x) = 0: métodos da Bissecção e deNewton-Raphson.
4. UM PROBLEMA MOTIVADOR
Esta seção exibirá um problema motivador, com o intuito de apresentar aos leitores asidéias matemáticas que serão utilizadas nas resoluções dos problemas propostos nestetrabalho. Espera-se que os leitores fiquem instigados a seguirem adiante e descobrirem, naspróximas seções, a aplicabilidade da matemática em problemas corriqueiros.
Para mais informações a respeito dos procedimentos numéricos utilizados nesta seçãoconsulte Barroso, et alli (1987).
4.1 Apresentação do problema
Uma loja de eletrodomésticos oferece dois planos de financiamento para um produtocujo preço à vista é R$ 1.300,00 (quem sabe, aquela geladeira duplex ou, talvez, aquela TV detela plana e cristal líquido).
• Plano A: entrada de R$ 200,00 + 7 prestações mensais de R$ 250,00.• Plano B: entrada de R$ 200,00 + 10 prestações mensais de R$ 195,00.
Qual dos dois planos é melhor para o consumidor?
4.2 Modelo matemático
Para escolher o melhor plano, deve-se saber qual financiamento apresentará a menortaxa de juros. Então, a primeira coisa a fazer é relacionar, em uma mesma equação, o preço àvista (PAV) do produto; a entrada (E) oferecida pelo cliente, ou estabelecida pela loja; o valorfinanciado (VF), que é o preço à vista menos a entrada (VF = PAV - E); a taxa mensal dejuros (j) do financiamento; o valor da prestação mensal (PM) e o número de prestações (n)utilizadas para o pagamento do financiamento.
A equação que relaciona todas estas variáveis é a seguinte:
[1 - (1 + j)-n] / j = VF/PM. (4.1)
Constantemente, recorrem a esta fórmula, aqueles vendedores que ficam fazendo contasmirabolantes na calculadora antes de anunciar um novo plano, na medida do orçamento dofreguês, com prestações mínimas (uns brincam, dizendo que comprar à vista é o ideal, mas,não tendo jeito, o melhor é comprar “a perder de vista”) e pagam sem sofrimento – pelomenos, segundo os vendedores, que dominam a arte da psicologia e da filosofia, ao mododeles, permitindo que conheçam, como poucos, o comportamento humano, o que garante aeles a comissão no final do mês –.
Para se deduzir a equação (4.1), é preciso que se entenda, inicialmente, uma regrafundamental da Matemática Financeira. Observe que o valor resgatado ao final de umaaplicação envolvendo um capital c, a uma taxa de juro mensal j (j %), por um período de nmeses, será igual a c(1+j)n – que é a famosa regra de juros sobre juros –. De fato, se n = 1,então, após um mês, a aplicação renderá j% sobre o capital inicial (que, neste caso, não temnada a ver com Pop-Rock!). Assim, o capital passará de c para c + cj = c(1+j). Se n = 2,então, no primeiro mês após a aplicação, o novo capital será igual a c(1+j), conforme já foimostrado. Utilizando-se o mesmo raciocínio anterior, nota-se que, no segundo mês, ocorreráum rendimento de j% sobre o capital do mês anterior, que era de c(1+j); logo, o capitalpassará de c(1+j) para c(1+j) + c(1+j)j = c(1+j)(1+j) = c(1+j)2. Agora ficou fácil!Continuando este procedimento, suponha que, depois de m-1 meses, o capital seja c(1+j)m-1,

então, pode-se concluir que, após m meses de aplicação, o capital final será igual a c(1+j)m,com efeito
c(1+j)m-1 + [c(1+j)m-1]j = c(1+j)m-1(1+j) = c(1+j)m.
Este tipo de demonstração é denominado demonstração por indução finita. Observe quefoi mostrada a validade da afirmação para n = 1; depois, mostrou-se que a afirmação tambémera válida para n = m, utilizando a hipótese (de indução) de que a afirmação era válida paran = m - 1. Como m é arbitrário, então a afirmação é verdadeira para todos os númerosnaturais, ou seja, ∀ n∈ N.
Agora falta pouco para se deduzir (4.1). Porém, antes de ir adiante, um aviso. Cuidadoao se comparar um valor a prazo com um valor à vista! É ilusão acreditar que simplesmentesomando os valores das prestações mensais obter-se-á o valor a prazo. O problema é umpouco mais complexo, pois, em Matemática Financeira, não é adequado somar valoresprovenientes de datas distintas. Você acha que o “mico-leão-dourado” de hoje terá o mesmovalor de compra depois de um mês? Que mico, hein?
Para se comparar o valor à vista com o valor a prazo de um certo produto, considerando-se prestações mensais PM fixas e uma entrada E, todos os valores das prestações devem sertransportados para a mesma data em que foi efetuada a entrada. É a soma de todos os valorestransportados que deverá ser comparada com o valor à vista.
Note que o valor da primeira parcela PM é equivalente a PM/(1+j), no mês inicial ondese efetuou a entrada, levando-se em conta uma taxa de juros mensal igual a j%. Nenhumanovidade! Apenas foi usada a fórmula do capital inicial: c(1+j) = PM, logo, c = PM/(1+j), ouseja, se o capital c = PM/(1+j) for aplicado por um mês a uma taxa de juros igual a j%, entãoo valor resgatado será igual a PM. Agora que você já conhece demonstração por induçãofinita fica fácil entender porquê o valor da parcela de número n (n meses após a entrada) será,no mês inicial, equivalente a PM/(1+j)n, pois c(1+j)n = PM.
Chame de S a soma de todos os valores das parcelas transportados para a mesma data daentrada. Seja q = 1/(1+j) = (1+j)-1. Então, S = PM(q + q2 + q3 + ... + qn-1 + qn). Multipliqueq por S e obtenha qS = PM(q2 + q3 + ... + qn + qn+1). Note que
S(1 - q) = S – qS = PM(q + q2 + q3 + ... + qn-1 + qn) - PM(q2 + q3 + ... + qn + qn+1) .
Coloque PM em evidência e perceba que várias parcelas irão se cancelar. Daí, conclua que:
S(1 - q) = PM(q - q(n+1)) � S = PM(q - q(n+1))/(1 - q) � S = PM q(1 – qn)/(1 - q).
Ainda, q = (1+j)-1 � 1 - q = 1 - 1/(j+1) = (j + 1-1)/(j+1) = j/(j+1) � 1/(1 - q) = (j + 1)/j.
Desta forma, S = PM [1 - (1 + j)-n] / j. Portanto, S + E é igual ao valor à vista. Usando anotação do início desta seção, segue-se que S = VF (valor financiado). Agora, retorne àequação (4.1) e veja se tudo ficou mais claro.
Agora, o objetivo é transformar (4.1) em uma equação polinomial. Para isto, considerex = 1 + j e K = VF/PM. Desta forma, (4.1) torna-se equivalente a [1 - x-n]/[x - 1] = K.Multiplique os dois lados da igualdade anterior por xn e obtenha [xn - 1]/[x – 1] = K xn, que éequivalente a xn – 1 = K xn (x-1) ⇔ xn – 1 = K xn+1 - Kxn. Assim, conclui-se facilmente que(4.1) é equivalente à equação polinomial de grau n + 1:
f(x) = Kxn+1 – (K + 1)xn + 1 = 0. (4.2)
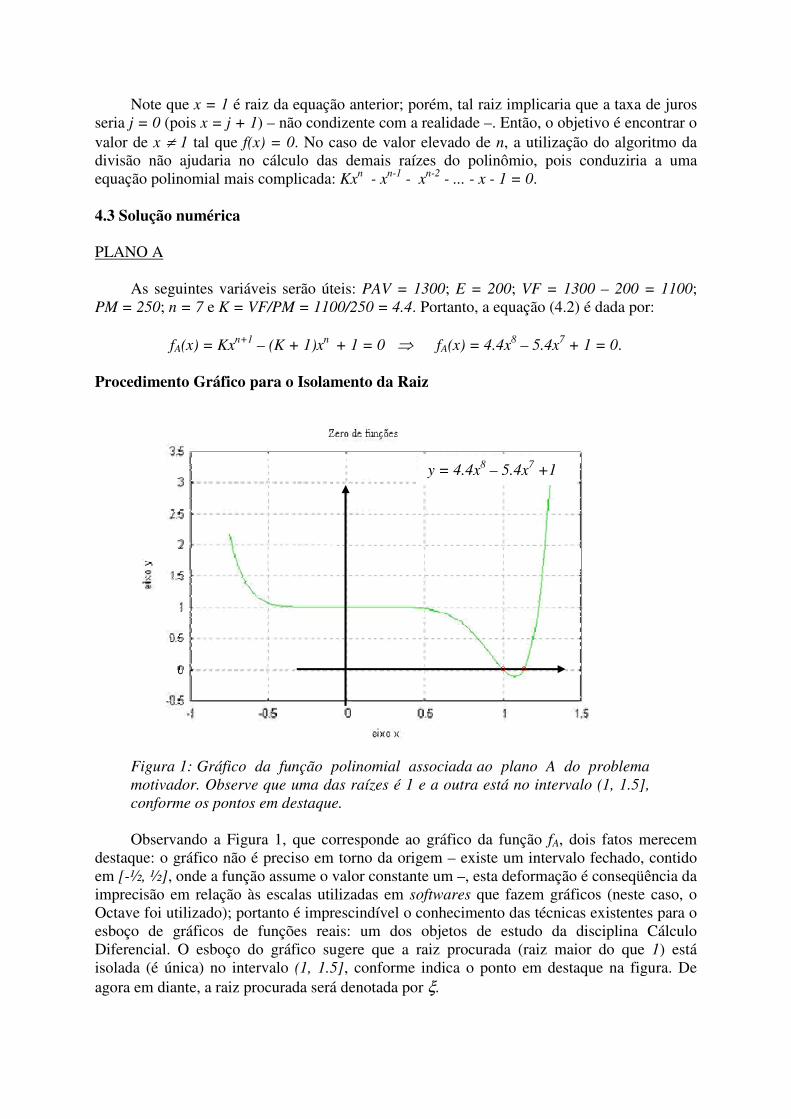
° °
y = 4.4x8 – 5.4x7 +1
Note que x = 1 é raiz da equação anterior; porém, tal raiz implicaria que a taxa de jurosseria j = 0 (pois x = j + 1) – não condizente com a realidade –. Então, o objetivo é encontrar ovalor de x ≠ 1 tal que f(x) = 0. No caso de valor elevado de n, a utilização do algoritmo dadivisão não ajudaria no cálculo das demais raízes do polinômio, pois conduziria a umaequação polinomial mais complicada: Kxn - xn-1 - xn-2 - ... - x - 1 = 0.
4.3 Solução numérica
PLANO A
As seguintes variáveis serão úteis: PAV = 1300; E = 200; VF = 1300 – 200 = 1100;PM = 250; n = 7 e K = VF/PM = 1100/250 = 4.4. Portanto, a equação (4.2) é dada por:
fA(x) = Kxn+1 – (K + 1)xn + 1 = 0 � fA(x) = 4.4x8 – 5.4x7 + 1 = 0.
Procedimento Gráfico para o Isolamento da Raiz
Figura 1: Gráfico da função polinomial associada ao plano A do problemamotivador. Observe que uma das raízes é 1 e a outra está no intervalo (1, 1.5],conforme os pontos em destaque.
Observando a Figura 1, que corresponde ao gráfico da função fA, dois fatos merecemdestaque: o gráfico não é preciso em torno da origem – existe um intervalo fechado, contidoem [-½, ½], onde a função assume o valor constante um –, esta deformação é conseqüência daimprecisão em relação às escalas utilizadas em softwares que fazem gráficos (neste caso, oOctave foi utilizado); portanto é imprescindível o conhecimento das técnicas existentes para oesboço de gráficos de funções reais: um dos objetos de estudo da disciplina CálculoDiferencial. O esboço do gráfico sugere que a raiz procurada (raiz maior do que 1) estáisolada (é única) no intervalo (1, 1.5], conforme indica o ponto em destaque na figura. Deagora em diante, a raiz procurada será denotada por ξ.

°
y = 4.4x8 – 5.4x7 + 1
Refinamento de Intervalo
A seguir, com o objetivo de refinar o intervalo que contém a raiz ξ, será exibido umnovo gráfico da função fA(x) (veja Fig. 2), com x variando em torno da raiz desejada; no caso,o intervalo considerado é [0.9, 1.25].
Figura 2: Gráfico de fA(x), com x variando nas proximidades da raiz procurada(ponto em destaque).
De acordo com a Figura 2, a raiz ξ está contida no intervalo fechado I = [1.1, 1.15].Observe que fA(1.1) < 0 e fA(1.15) > 0. Graficamente, não é difícil perceber o seguinteresultado: dado um intervalo fechado [a, b] ⊂ I = [1.1, 1.15], tem-se que
fA(a). fA(b) < 0 � ξ ∈ [a, b].
A propriedade anterior permite que o intervalo que contém a raiz seja refinado tantasvezes quantas forem necessárias para que se consiga uma boa aproximação para ξ. O objetivoé, após uma seqüência de refinamentos, reduzir consideravelmente o comprimento dointervalo que contém a raiz; desta forma, uma aproximação para ξ poderá ser obtida tomando-se qualquer valor do intervalo refinado; por exemplo, o ponto médio deste intervalo.
O Método da Bissecção, que será detalhado na próxima seção, é utilizado com o intuitode, em cada refinamento, diminuir pela metade o comprimento do intervalo que contém a raiz,ξ, da equação fA(x) = 4.4x8 – 5.4x7 + 1 = 0. O procedimento para se realizar quatrorefinamentos do intervalo I = [1.1, 1.15], que contém a raiz isolada ξ, será dado a seguir e osresultados pertinentes serão exibidos na Tabela 1.
1º) Considere o intervalo inicial I0 = [a0, b0] = [1.1, 1.15], onde a função fA troca de sinal:fA(a0). fA(b0) < 0.2º) Calcule o ponto médio do intervalo inicial: ξ0 = (a0+b0)/2.3º) Se fA(a0). fA(ξ0) < 0, então o intervalo que conterá ξ será I1 = [a1, b1] = [a0, ξ0]; casocontrário I1 = [a1, b1] = [ξ0, b0]. Observe que a raiz estará contida no intervalo onde a funçãomudar de sinal.4º) Repetindo os passos anteriores, até atingir os quatro refinamentos, obter-se-á umaaproximação de ξ: o ponto médio do último intervalo.

Tabela 1: O Método da Bissecção aplicado à equação fA(x) = 4.4x8 – 5.4x7 + 1= 0 – quatro refinamentos do intervalo I = [1.1, 1.15] –.
Ii = [ai, bi] ξi = (ai+bi)/2 fA(ai) fA(ξi)Sinal de
fA(ai). fA(ξi)I0 = [1.1,1.15] ξ0 = 1.125 ≈ -0.0913 ≈ -0.0263 +
I1 = [1.125, 1.15] ξ1 = 1.1375 ≈ -0.0263 ≈ 0.0267 -I2 = [1.125, 1.1375] ξ2 = 1.13125 ≈ -0.0263 ≈ -0.0017 +
I3 = [1.13125, 1.1375] ξ3 = 1.134375 ≈ -0.0017 ≈ 0.01201 -I4 = [1.13125,1.134375 ] ξ4 = 1.1328125 ≈ 0.00503
Conclui-se que ξ4 = 1.1328125 é uma aproximação de ξ, com pelo menos duas casasdecimais, já que o comprimento de I4 é igual a (b0 – a0)/2
4 = 0.003125 < 0.5 × 10-2. (Lembre-se de que o comprimento do intervalo que contém a raiz é dividido ao meio, durante oprocesso de refinamento.) Além disto, fA(ξ4) ≈ 0.005.
Lembrando-se de que x = j + 1, na equação (4.2), então a taxa de juros referente aoPlano A é dada por j = ξ - 1; portanto, j ≈ 0.13 (ou 13% ao mês).
PLANO B
As seguintes variáveis serão úteis: PAV = 1300; E = 200; VF = 1300 – 200 = 1100;PM = 195; n = 10 e K = VF/PM = 1100/195. Portanto, a equação (4.2) é dada por:
fB(x) = Kxn+1 – (K + 1)xn + 1 = 0 � fB(x) = (1100/195)x11 – (1295/195)x10 + 1 = 0.
O procedimento para o cálculo da taxa de juros do Plano B é completamente análogo aodo Plano A. Como o procedimento já foi bastante detalhado, então a solução da equaçãoanterior será obtida através de dois códigos computacionais, implementados em Octave.
O primeiro código (veja Código 1, na subseção 4.4) exibe um esboço do gráfico dafunção polinomial fB(x) = 0, com o intuito de isolar a raiz desta equação, em um determinadointervalo fechado.
O segundo código (veja Código 2, na subseção 4.4) consiste em refinar o intervaloencontrado no primeiro código, ou seja, após o isolamento da raiz, inicia-se o processo derefinamento com o Método da Bissecção.
Utilizando o Código 1, detectou-se que a raiz está contida no intervalo I = [a, b], ondea = 1.1 e b = 1.15. Neste intervalo a função fB muda de sinal. O Código 2 executa orefinamento do intervalo I, através do Método da Bissecção. Os resultados fornecidos por estecódigo, após quatro refinamentos, foram os seguintes:
• aproximação da raiz (ponto médio do intervalo refinado): ξ4 = 1.1203125000;• comprimento do intervalo refinado: 0.0031250000;• valor da função fB na raiz aproximada: fB(ξ4) = -0.000740795089.
A taxa de juros para o Plano B é j = 1 - ξ, ou seja, j ≈ 0.12. Portanto, este plano é o queoferece a menor taxa de juros: 12% ao mês, contra 13% do Plano A; embora, à primeira vista,o Plano A seja mais atrativo para o consumidor, que tem a ilusão de pagar uma quantia menorpelo produto: o valor da soma de todas as prestações, no Plano A, é igual a R$ 1.750,00,menor do que R$ 1.950,00, comparando-se ao valor do outro plano.

4.4 Códigos em Octave
Nos códigos exibidos a seguir, os textos que vem após o símbolo de porcentagem, %,são comentários introduzidos para facilitar a compreensão da rotina computacional e nãointerferem na compilação do programa.
Código 1. Gráfico útil para isolar a raiz de fB(x) = (1100/195)x11 – (1295/195)x10 + 1 = 0.
%análise gráfica de f(x) = 0, onde f(x) = (1100/195)*t^11 - (1295/195)*t^10 + 1.0.%criação de dois vetores t e y = f(t);%t conterá pontos igualmente espaçados compreendidos entre 1.1 a 1.15;%o espaçamento entre os pontos será 0.01 e a notação utilizada é t = 1.1:0.01:1.15;%o gráfico de y = f(t) será exibido no intervalo [1.1, 1.15].
t = 1.1:0.01:1.15;y = (1100/195)*t.^11 - (1295/195)*t.^10 + 1.0;
plot(t,y,'-g;y = (1100/195)*t^11 - (1295/195)*t^10 + 1.0;'); %comando que gera o gráficogrid; %cria uma malha retangular (quadriculado) no gráfico exibido.
xlabel('eixo x') %legenda exibida no eixo horizontalylabel('eixo y') %legenda exibida no eixo verticaltitle('PLANO B') %título do gráfico
%O gráfico pode ser colocado no formato postscript,% bastando retirar o símbolo % das duas próximas linhas.%gset term postscript%gset output "graf1.ps"replot
Código 2. O Método da Bissecção – Refinamento de intervalo.
%O metodo da bisseccao%Cálculo da raiz da equação f(x) = k.x^(p+1) - (1+k).x^p + 1 =0, x em [a, b].clear
%Entrada de dadosiii = input('Entre com a opccao de funccao polinomial 1(Plano A) ou 2 (Plano B)=');a = input('De o extremo inferior do intervalo que contem a raiz da funccao polinomial =');b = input('De o extremo superior do intervalo que contem a raiz da funccao polinomial =');
%Definição de variáveispm = (a+b)/2; %ponto médio do intervalo [a,b]comp = b-a; %comprimento do intevalo [a,b]cont = 0; %variável que conta o número de iteraçõeseps = 0.5*10^(-2); %tolerância usada no teste de parada%Neste código, f(x) é representada por f_leon (veja Código 3);fa = f_leon(a,iii); %cálculo de f(a)fpm = f_leon(pm,iii); %cálculo de f(pm)

%Início do Método da Bissecçãoif(fpm ==0)fprintf('A raiz procurada eh dada por pm =%12.8f\n',pm);else
%Para limitar o número de refinamentos, por exemplo, em 4, deve-se trocar o%comando abaixo pelo seguinte: while((comp > eps) & (abs(fpm) > eps) & cont < 4 )
while((comp > eps) & (abs(fpm) > eps) )
%Procedimento utilizado no Refinamento do Intervalo [a, b]if(fa*fpm<0)
b=pm;else
a=pm;fa=fpm;
endpm=(a+b)/2;fpm=f_leon(pm,iii);cont = cont+1;comp = b-a;
endend
fprintf('\n'); %deixa uma linha em branco
%Saída de dadosfprintf('A raiz aproximada por bissecao eh dada por pm =%12.10f\n',pm);fprintf('O numero de refinamentos do intervalo inicial foi cont = %d\n',cont);fprintf('A tolerancia usada foi eps = %12.10f\n',eps);fprintf('Comprimento do intervalo refinado: = %12.10f\n',comp);fprintf('O valor de f(pm) eh dado por fpm =%12.12f\n',fpm);
Código 3. Definição da função utilizada no Método da Bissecção.
%este arquivo tem que ser salvo com o mesmo nome da função%utilizada após o sinal de igual, no comando abaixo. No caso,%o nome deste arquivo será f_leon.m.function g = f_leon(t,k)
if(k==1)
%plano Ag = 4.4*t^8 - 5.4*t^7 + 1.0;
else%plano Bif (k == 2)g = (1100/195)*t^11 - (1295/195)*t^10 + 1.0;
else%Taxa de retornog = 125.*t^5 - t^4 - t^3 - t^2 - t - 150;

endend
5 - FERRAMENTAS MATEMÁTICAS E NUMÉRICAS
Nesta seção serão apresentados alguns resultados teóricos que, além de formalizar astécnicas utilizadas no problema motivador, darão suporte para a modelagem e resolução dosdemais problemas propostos neste trabalho.
Para mais informações teóricas dos assuntos abordados nesta seção consulte Figueiredo(1996) e Lima (2002).
5.1 A série Geométrica
A série geométrica é dada pela soma infinita de uma progressão geométrica de razão q:
q0 + q1 + q2 + ...+ qn + .... Esta soma infinita é representada pela seguinte notação: �∞
=0nqn.
Para dar sentido a esta soma infinita, isto é, para que esta soma infinita seja um número real,será preciso introduzir a noção de limite de uma seqüência de números reais. No caso, aseqüência das somas parciais da série geométrica: (Sn)n∈N, onde o termo geral é dado por Sn =
Σ0≤k≤n qk. Assim, S0 = q0 = 1, S1 = 1 + q, S2 = 1 + q + q2, etc.
Teorema 5.1 Seja Sn o termo geral da seqüência das somas parciais da série geométrica derazão q ≠ 1. Então, Sn = (1 - qn+1)/(1 - q) = (1/(1-q)) – (qn+1/(1 - q)).
Demonstração:
Sn = 1 + q1 + q2 + ...+ qn � q Sn = q (1 + q1 + q2 + ...+ qn) = q + q2 + ...+ qn + qn+1.
Assim,
Sn - q Sn = 1 - qn+1 � Sn(1 – q) = 1 - qn+1 � Sn =(1/(1-q)) – (qn+1/(1 - q)). �
A tarefa, agora, é tentar mostrar que Sn “está próximo” do número real 1/(1-q), se n forum número muito grande e se |q| < 1 (isto é, -1 < q < 1). Rigorosamente, o que deve sermostrado é que o limite de Sn é igual a 1/(1-q), quando n tende ao infinito, cuja notação é
limn→∞ (Sn) = 1/(1-q).
Antes, porém, será considerada uma outra seqüência, cujo termo geral é dado poran = (-1)n/n, para exemplificar o conceito de limite. Primeiramente, observe que o décimotermo da seqüência é a10 = 0.1, o centésimo é a100 = 0.01, passando-se para o milionésimotermo, que é a1000000 = 0.000001, dá para perceber que os termos da seqüência estão cada vezmais próximos de zero. Se os índices n forem ímpares, os termos da seqüência serão negativose estarão próximos de zero, também; por exemplo, a1000001 = -1/1000001≈ -0.000000999.
A demonstração de que limn→∞ (an) = 0 dependerá do teorema enunciado a seguir.
Teorema 5.2 (Propriedade Arquimediana) Dados dois números reais quaisquer ε e ξ, ε > 0,existe um número natural m tal que m.ε > ξ. Portanto, os números naturais são ilimitados emℜ (conjunto dos números reais).
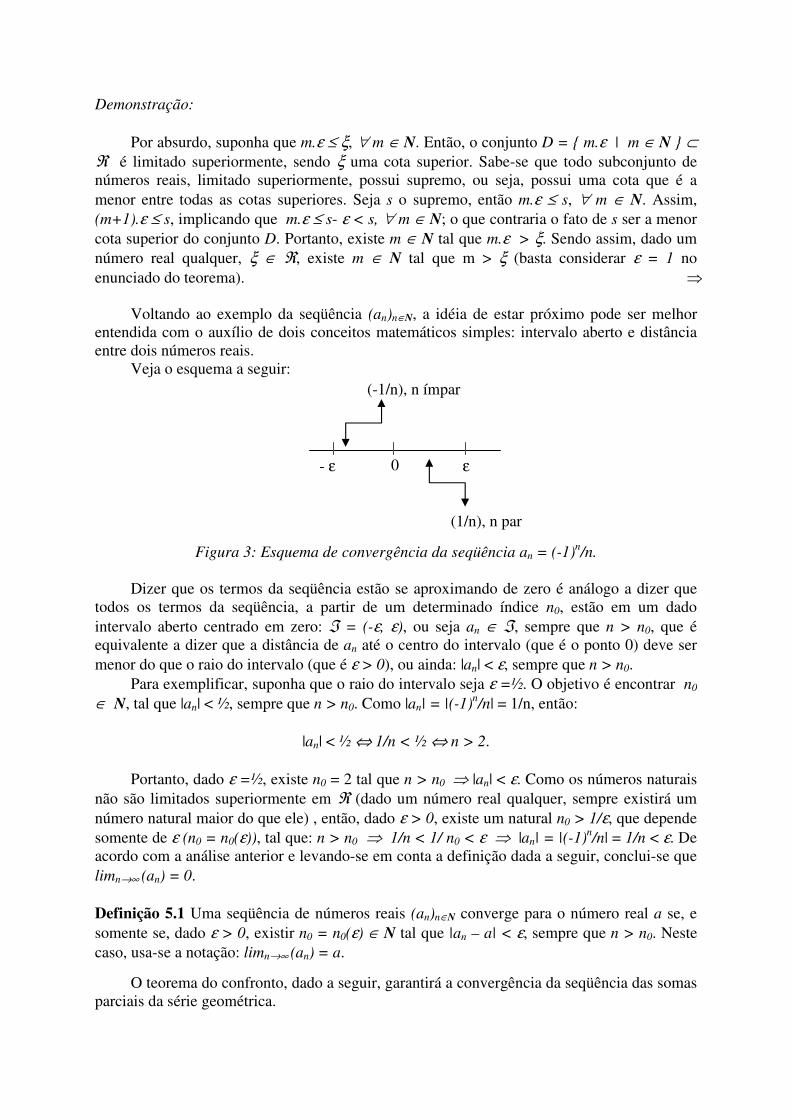
- ε ε0
(1/n), n par
(-1/n), n ímpar
Demonstração:
Por absurdo, suponha que m.ε ≤ ξ, ∀ m ∈ N. Então, o conjunto D = { m.ε | m ∈ N } ⊂ℜ é limitado superiormente, sendo ξ uma cota superior. Sabe-se que todo subconjunto denúmeros reais, limitado superiormente, possui supremo, ou seja, possui uma cota que é amenor entre todas as cotas superiores. Seja s o supremo, então m.ε ≤ s, ∀ m ∈ N. Assim,(m+1).ε ≤ s, implicando que m.ε ≤ s- ε < s, ∀ m ∈ N; o que contraria o fato de s ser a menorcota superior do conjunto D. Portanto, existe m ∈ N tal que m.ε > ξ. Sendo assim, dado umnúmero real qualquer, ξ ∈ ℜ, existe m ∈ N tal que m > ξ (basta considerar ε = 1 noenunciado do teorema). �
Voltando ao exemplo da seqüência (an)n∈N, a idéia de estar próximo pode ser melhorentendida com o auxílio de dois conceitos matemáticos simples: intervalo aberto e distânciaentre dois números reais.
Veja o esquema a seguir:
Figura 3: Esquema de convergência da seqüência an = (-1)n/n.
Dizer que os termos da seqüência estão se aproximando de zero é análogo a dizer quetodos os termos da seqüência, a partir de um determinado índice n0, estão em um dadointervalo aberto centrado em zero: ℑ = (-ε, ε), ou seja an ∈ ℑ, sempre que n > n0, que éequivalente a dizer que a distância de an até o centro do intervalo (que é o ponto 0) deve sermenor do que o raio do intervalo (que é ε > 0), ou ainda: |an| < ε, sempre que n > n0.
Para exemplificar, suponha que o raio do intervalo seja ε =½. O objetivo é encontrar n0
∈ N, tal que |an| < ½, sempre que n > n0. Como |an| = |(-1)n/n| = 1/n, então:
|an| < ½ ⇔ 1/n < ½ ⇔ n > 2.
Portanto, dado ε =½, existe n0 = 2 tal que n > n0 � |an| < ε. Como os números naturaisnão são limitados superiormente em ℜ (dado um número real qualquer, sempre existirá umnúmero natural maior do que ele) , então, dado ε > 0, existe um natural n0 > 1/ε, que dependesomente de ε (n0 = n0(ε)), tal que: n > n0 � 1/n < 1/ n0 < ε � |an| = |(-1)n/n| = 1/n < ε. Deacordo com a análise anterior e levando-se em conta a definição dada a seguir, conclui-se quelimn→∞ (an) = 0.
Definição 5.1 Uma seqüência de números reais (an)n∈N converge para o número real a se, esomente se, dado ε > 0, existir n0 = n0(ε) ∈ N tal que |an – a| < ε, sempre que n > n0. Nestecaso, usa-se a notação: limn→∞ (an) = a.
O teorema do confronto, dado a seguir, garantirá a convergência da seqüência das somasparciais da série geométrica.

c - ε c+εc
xn ∈ (c-ε, c+ε), n > n0x
zn ∈ (c-ε, c+ε), n > n0z
yn ∈ (c-ε, c+ε),
n > max{n0x, n0z}.
Figura 4: Esquema do teorema do confronto.
Teorema 5.3 (Teorema do Confronto). Sejam (xn)n∈N, (yn)n∈N e (zn)n∈N três seqüências denúmeros reais tais que xn ≤ yn ≤ zn , ∀ n ∈ N e limn→∞ (xn) = limn→∞ (zn) = c. Então,limn→∞ (yn) = c.
Demonstração:
Dado ε > 0, existem números naturais n0x e n0z tais que | xn – c | < ε e | zn – c | < ε,sempre que n > n0x e n > n0z. Assim, xn, zn ∈ (c - ε, c + ε), sempre que n > max {n0x, n0z}(veja o esquema exibido na Figura 4).
Portanto,
c - ε < xn < yn < zn < c + ε � |yn – c| < ε, sempre que n > n0 = max {n0x, n0z}.
Então, pela definição 5.1, limn→∞ (yn) = c. �
Teorema 5.4 Seja Sn o termo geral da seqüência das somas parciais da série geométrica derazão q ≠ 1. Então, limn→∞ Sn = 1/(1-q), se |q| < 1.
Demonstração:
Se |q| < 1, então 1/|q| > 1. Definindo-se H = (1/|q|) - 1 > 0, obtém-se que 1/|q| = 1 + H.Utilizando apenas a segunda parcela (k = 1) do binômio
(1 + H)n = �−=
n
k kkn
n
0 !)!(
!(1)n-k Hk,
percebe-se que (1/|q|)n = (1 + H)n > nH; daí, 0 < |q|n < 1/(nH). Sendo H uma constante nãonula e limn→∞ (1/n) = 0, então limn→∞ (1/nH) = 0 (Dado ε > 0, tome n0 > 1/(ε.H)).
Assim, pelo teorema do confronto (Teorema 5.3), limn→∞ (|q|n) = 0 = limn→∞ (|qn|).Conseqüentemente, limn→∞ (qn) = 0 (basta usar a definição 5.1). Lembrando queSn =1/(1-q) - qn+1/(1 - q) (Teorema 5.1), segue que limn→∞ Sn = 1/(1-q). �
Observe que se o termo geral de uma progressão geométrica for multiplicado por umaconstante, então esta nova série será convergente e o seu limite será dado pelo limite da sériegeométrica original multiplicado pela constante considerada.
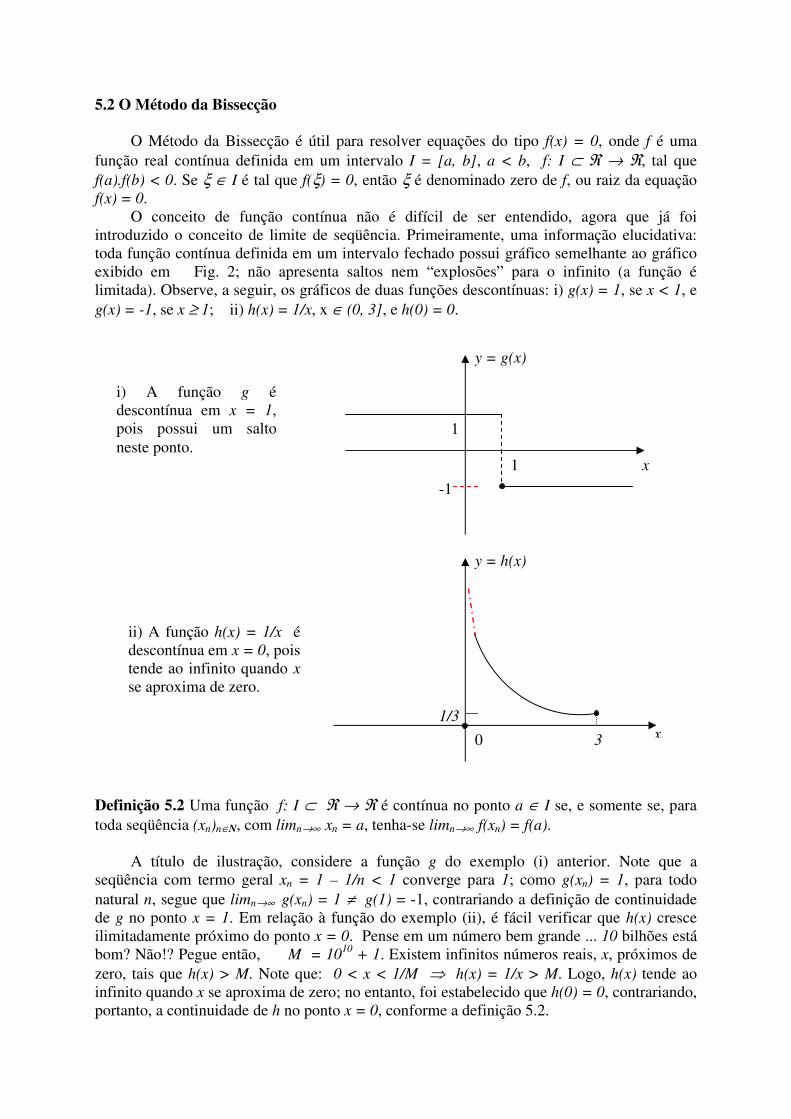
i) A função g édescontínua em x = 1,pois possui um saltoneste ponto.
ii) A função h(x) = 1/x édescontínua em x = 0, poistende ao infinito quando xse aproxima de zero.
1
1
-1
x
y = g(x)
3
1/3x
y = h(x)
0
5.2 O Método da Bissecção
O Método da Bissecção é útil para resolver equações do tipo f(x) = 0, onde f é umafunção real contínua definida em um intervalo I = [a, b], a < b, f: I ⊂ ℜ → ℜ, tal quef(a).f(b) < 0. Se ξ ∈ I é tal que f(ξ) = 0, então ξ é denominado zero de f, ou raiz da equaçãof(x) = 0.
O conceito de função contínua não é difícil de ser entendido, agora que já foiintroduzido o conceito de limite de seqüência. Primeiramente, uma informação elucidativa:toda função contínua definida em um intervalo fechado possui gráfico semelhante ao gráficoexibido em Fig. 2; não apresenta saltos nem “explosões” para o infinito (a função élimitada). Observe, a seguir, os gráficos de duas funções descontínuas: i) g(x) = 1, se x < 1, eg(x) = -1, se x ≥ 1; ii) h(x) = 1/x, x ∈ (0, 3], e h(0) = 0.
Definição 5.2 Uma função f: I ⊂ ℜ → ℜ é contínua no ponto a ∈ I se, e somente se, paratoda seqüência (xn)n∈N, com limn→∞ xn = a, tenha-se limn→∞ f(xn) = f(a).
A título de ilustração, considere a função g do exemplo (i) anterior. Note que aseqüência com termo geral xn = 1 – 1/n < 1 converge para 1; como g(xn) = 1, para todonatural n, segue que limn→∞ g(xn) = 1 ≠ g(1) = -1, contrariando a definição de continuidadede g no ponto x = 1. Em relação à função do exemplo (ii), é fácil verificar que h(x) cresceilimitadamente próximo do ponto x = 0. Pense em um número bem grande ... 10 bilhões estábom? Não!? Pegue então, M = 1010 + 1. Existem infinitos números reais, x, próximos dezero, tais que h(x) > M. Note que: 0 < x < 1/M � h(x) = 1/x > M. Logo, h(x) tende aoinfinito quando x se aproxima de zero; no entanto, foi estabelecido que h(0) = 0, contrariando,portanto, a continuidade de h no ponto x = 0, conforme a definição 5.2.

Explicado o conceito de função contínua, já se pode falar do teorema que garante aconvergência do Método da Bissecção: “O Teorema do Valor Intermediário”:
Teorema 5.5 (Teorema do Valor Intermediário) Seja f: [a, b] → ℜ uma função contínua. Sef(a).f(b) < 0 ( f(a) < 0 < f(b) ou f(b) < 0 < f(a) ), então existe ξ ∈ (a,b) tal que f(ξ) = 0.
Antes da demonstração do teorema, lembre-se de que o Método da Bissecção é baseadona construção de uma seqüência de intervalos In = [an, bn], sendo I0 = [a, b], nos quais afunção troca de sinal, ou seja, f(an).f(bn) < 0, ∀ n ∈ N. A obtenção destes intervalos dá-seatravés do seguinte procedimento:
1) dado In = [an, bn], onde f(an). f(bn) < 0, considere ξn = (an + bn)/2;2) se f(an).f(ξn) < 0, então bn+1 = ξn;3) se f(ξn) = 0, então o zero de f é ξn e o processo é interrompido;4) caso contrário an+1 = ξn;5) troque n por n+1 e repita o procedimento iniciado no passo 1.
Observe que In+1 = [an+1, bn+1] = [an, ξn] ou In+1 = [an+1, bn+1] = [ξn, bn].Assim:
(bn+1 - an+1) = {(an + bn)/2} - an ou (bn+1 - an+1) = bn - (an + bn)/2,
ou seja,
(bn+1 - an+1)= (bn - an)/2.
Demonstração do Teorema 5.5 (apenas uma idéia):
Considere a construção de três seqüências (an)n∈N, (ξn)n∈N e (bn)n∈N, correspondentesao extremo inferior, ponto médio e extremo superior, respectivamente, do n-ésimo intervalorefinado, In = [an, bn], através do Método da Bissecção. Então:
ξn = (an + bn)/2, (bn - an) = (b – a)/2n (por indução finita) e f(an). f(bn) < 0, ∀ n ∈ N.
Pelo procedimento exibido anteriormente (itens de 1 a 5), a seqüência (an)n∈N é não-decrescente e limitada superiormente por b, isto é, an ≤ an+1 < b, ∀ n ∈ N; a seqüência (bn)n∈N
é não-crescente e limitada inferiormente por a, isto é, a < bn+1 ≤ bn, ∀ n ∈ N. Desta forma, oconjunto A = {an, n ∈ N}⊂ ℜ é limitado superiormente, sendo b uma cota superior e B = {bn,n ∈ N}⊂ ℜ é limitado inferiormente, sendo a uma cota inferior. Então, existem números reaissup(A) e inf(B), supremo de A e ínfimo de B, que representam a menor cota superior de A e amaior cota inferior de B, respectivamente. Pode-se demonstrar que:
limn→∞ an = sup(A) e limn→∞ bn = inf(B).
Como limn→∞ (1/2)n = 0 (demonstração do Teorema 5.4), então limn→∞ (bn - an) = 0.Portanto, limn→∞ bn = limn→∞ an; seja ξ este limite. Como f é contínua, entãolimn→∞ f(bn) = f(ξ) = limn→∞ f(an). Lembrando que f(an).f(bn) < 0, ∀ n ∈ N, então:
limn→∞ {f(an). f(bn)} = {limn→∞ f(an)}. {limn→∞ f(bn)} ≤ 0 � 0 ≤ {f(ξ)}2 ≤ 0 � f(ξ) = 0.
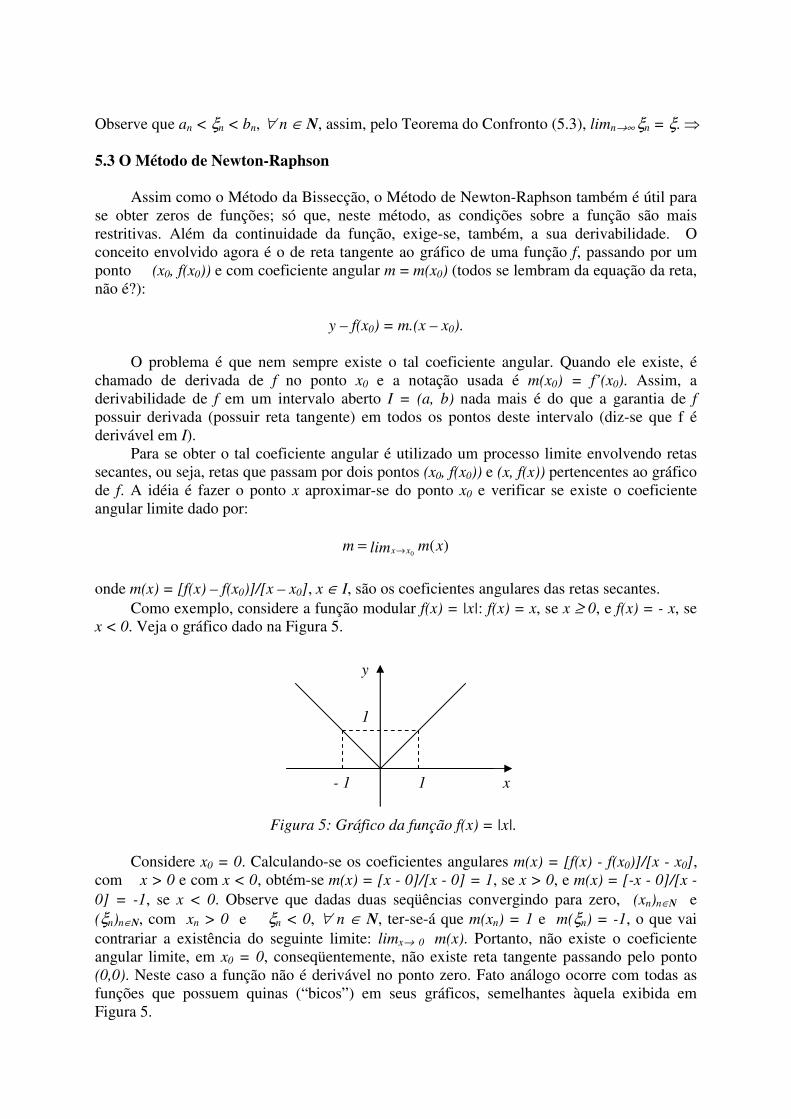
Observe que an < ξn < bn, ∀ n ∈ N, assim, pelo Teorema do Confronto (5.3), limn→∞ ξn = ξ. �
5.3 O Método de Newton-Raphson
Assim como o Método da Bissecção, o Método de Newton-Raphson também é útil parase obter zeros de funções; só que, neste método, as condições sobre a função são maisrestritivas. Além da continuidade da função, exige-se, também, a sua derivabilidade. Oconceito envolvido agora é o de reta tangente ao gráfico de uma função f, passando por umponto (x0, f(x0)) e com coeficiente angular m = m(x0) (todos se lembram da equação da reta,não é?):
y – f(x0) = m.(x – x0).
O problema é que nem sempre existe o tal coeficiente angular. Quando ele existe, échamado de derivada de f no ponto x0 e a notação usada é m(x0) = f’(x0). Assim, aderivabilidade de f em um intervalo aberto I = (a, b) nada mais é do que a garantia de fpossuir derivada (possuir reta tangente) em todos os pontos deste intervalo (diz-se que f éderivável em I).
Para se obter o tal coeficiente angular é utilizado um processo limite envolvendo retassecantes, ou seja, retas que passam por dois pontos (x0, f(x0)) e (x, f(x)) pertencentes ao gráficode f. A idéia é fazer o ponto x aproximar-se do ponto x0 e verificar se existe o coeficienteangular limite dado por:
)(0
xmlimm xx→=
onde m(x) = [f(x) – f(x0)]/[x – x0], x ∈ I, são os coeficientes angulares das retas secantes.Como exemplo, considere a função modular f(x) = |x|: f(x) = x, se x ≥ 0, e f(x) = - x, se
x < 0. Veja o gráfico dado na Figura 5.
Figura 5: Gráfico da função f(x) = |x|.
Considere x0 = 0. Calculando-se os coeficientes angulares m(x) = [f(x) - f(x0)]/[x - x0],com x > 0 e com x < 0, obtém-se m(x) = [x - 0]/[x - 0] = 1, se x > 0, e m(x) = [-x - 0]/[x -0] = -1, se x < 0. Observe que dadas duas seqüências convergindo para zero, (xn)n∈N e(ξn)n∈N, com xn > 0 e ξn < 0, ∀ n ∈ N, ter-se-á que m(xn) = 1 e m(ξn) = -1, o que vaicontrariar a existência do seguinte limite: limx→ 0 m(x). Portanto, não existe o coeficienteangular limite, em x0 = 0, conseqüentemente, não existe reta tangente passando pelo ponto(0,0). Neste caso a função não é derivável no ponto zero. Fato análogo ocorre com todas asfunções que possuem quinas (“bicos”) em seus gráficos, semelhantes àquela exibida emFigura 5.
1
1
- 1 x
y
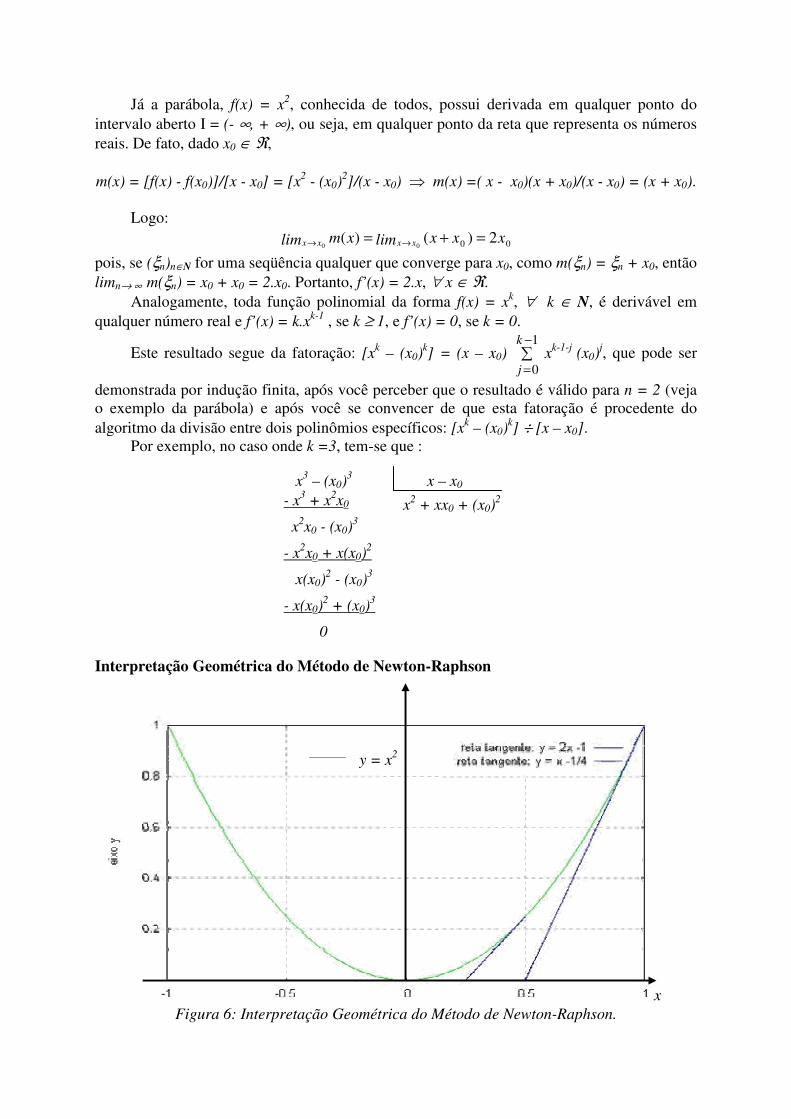
x – x0x3 – (x0)3
x2 + xx0 + (x0)2- x3 + x2x0
x2x0 - (x0)3
- x2x0 + x(x0)2
x(x0)2 - (x0)
3
- x(x0)2 + (x0)
3
0
Já a parábola, f(x) = x2, conhecida de todos, possui derivada em qualquer ponto dointervalo aberto I = (- ∞, + ∞), ou seja, em qualquer ponto da reta que representa os númerosreais. De fato, dado x0 ∈ ℜ,
m(x) = [f(x) - f(x0)]/[x - x0] = [x2 - (x0)2]/(x - x0) � m(x) =( x - x0)(x + x0)/(x - x0) = (x + x0).
Logo:
00 2)()(00
xxxlimxmlim xxxx =+= →→
pois, se (ξn)n∈N for uma seqüência qualquer que converge para x0, como m(ξn) = ξn + x0, entãolimn→ ∞ m(ξn) = x0 + x0 = 2.x0. Portanto, f’(x) = 2.x, ∀ x ∈ ℜ.
Analogamente, toda função polinomial da forma f(x) = xk, ∀ k ∈ N, é derivável emqualquer número real e f’(x) = k.xk-1 , se k ≥ 1, e f’(x) = 0, se k = 0.
Este resultado segue da fatoração: [xk – (x0)k] = (x – x0) �
−
=
1
0
k
jxk-1-j (x0)
j, que pode ser
demonstrada por indução finita, após você perceber que o resultado é válido para n = 2 (vejao exemplo da parábola) e após você se convencer de que esta fatoração é procedente doalgoritmo da divisão entre dois polinômios específicos: [xk – (x0)
k] ÷ [x – x0].Por exemplo, no caso onde k =3, tem-se que :
Interpretação Geométrica do Método de Newton-Raphson
Figura 6: Interpretação Geométrica do Método de Newton-Raphson.
y = x2
x

A partir do gráfico exibido na Figura 6, será feita a dedução do Método de Newton-Raphson. A idéia é construir uma seqüência de números reais que converge para a raiz daequação f(x) = 0. Esta construção levará em consideração as retas tangentes ao gráfico de f,mais precisamente, a interseção da reta tangente com o eixo horizontal (eixo x). Dado o ponto(x0, f(x0)) = (1, 1), a reta tangente ao gráfico de f(x) = x2 é dada por yt -1 = m (x -1), onde m éo coeficiente angular – igual à derivada de f no ponto x = 1 –. Lembre-se de que f’(x) = 2x,conforme as contas apresentadas anteriormente. Logo, m = f’(1) = 2 e a reta tangente possuiequação yt = 2x -1. O próximo ponto da seqüência será x1, obtido da intersecção do eixo dasabscissas com a reta tangente ao gráfico da função no ponto (x0, f(x0)). Então, nesta interseçãoo valor de yt deve ser igual a zero, ou seja, 0 = 2x1 - 1 � x1 = ½.
Os próximos pontos da seqüência são obtidos de forma análoga, isto é, dado (xn-1, f(xn-1))constrói-se a equação da reta tangente:
yt = f(xn-1) + f’(xn-1) (x –xn-1),
então o valor de x correspondente a yt = 0, xn, será o n-ésimo termo da seqüência; portanto, osseus termos obedecem a seguinte expressão:
xn = xn-1 – f(xn-1)/f’(xn-1), (5.1)
que é a fórmula do Método de Newton-Raphson.A convergência do processo iterativo descrito anteriormente depende de algumas
condições, chamadas de suficientes, ou seja, se as condições forem satisfeitas, então oprocesso será convergente. São elas:
i) Existe um intervalo I = [a, b], contendo a raiz x = ξ de f(x) = 0, onde f, f’ e f’’ (derivadasegunda de f, ou seja, derivada da função f’) são funções contínuas;
ii) f’(x) ≠ 0, ∀ x ∈ I, pois, na fórmula (5.1), a derivada de f aparece no denominador (Naverdade, teoricamente, esta condição pode ser trocada por f’(ξ) ≠ 0).
Se as condições i e ii forem satisfeitas, pode-se demonstrar (veja Ruggiero e Lopes(1996)) que existe um intervalo J = [ξ - ε, ξ + ε] ⊂ I, centrado na raiz ξ, tal que, se x0 ∈ J, aseqüência gerada pelo Método de Newton-Raphson convergirá para a raiz da equação f(x) = 0.
Apesar das condições sobre a função f serem mais exigentes no Método de Newton-Raphson do que no Método da Bissecção, não se exige que ela troque de sinal no intervaloque contém a raiz de f(x) = 0. Observando a Figura 6, percebe-se que o Método da Bissecçãonão poderia ser utilizado para obter a raiz de f(x) = x2 = 0 (que é ξ = 0). Porém, utilizando oMétodo de Newton-Raphson: xn = xn-1 – (xn-1)
2/2xn-1 = 0.5xn-1, com x0 = 1, obtém-se:
x1 = 0.5, x2 = 0.25, x3 = 0.125, x4 = 0.0625, x5 =0.03125, x5 = 0.015625, x6 = 0.0078125, ...,
que claramente está convergindo para ξ = 0.
6. PROBLEMAS ABORDADOS
Nesta seção serão propostos problemas de Matemática Financeira que serão resolvidosutilizando-se a teoria apresentada anteriormente. Alguns destes problemas foram formuladoslevando-se em consideração o livro de Goldstein, Lay e Schneider (2000).

Taxa de retorno
Se um investimento de P reais produz retornos R1, R2, R3, ..., Rn , onde Rn é o retorno notérmino do n-ésimo período da aplicação, então a taxa de retorno interno, j (taxa de jurosmensal), é calculada de modo que a soma dos valores presentes dos retornos seja igual aovalor presente do investimento inicial, onde o valor presente de um capital, c, aplicado há nmeses é igual a c(1+j)n (lembre-se da fórmula do “capital inicial” – juros sobre juros – daseção 4.2). Supondo que Ri ≥ ; (i ≥ 1) e que R1 + R2 + R3 + ... + Rn ≥ P, então a taxa deretorno j é obtida resolvendo-se:
P(1 + j)n = R1(1 + j)n-1 + R2(1 + j)n-2 + ... + Rn-1(1 + j) + Rn.
Colocando-se x = (1 + j), o problema se reduz ao cálculo da raiz positiva da equaçãopolinomial:
Pxn - R1xn-1 - R2x
n-2 - ... - Rn-1x - Rn = 0.
Problema modelo
Um advogado comprou uma casa no valor de R$ 50.000,00 e pagou à vista. Após acompra, ele resolveu alugar o imóvel e recebia, do seu inquilino, R$ 400,00 por mês. Mas, aofinal de 5 meses recebeu uma proposta de compra de sua casa no valor de R$ 60.000,00 eacabou fechando o negócio. Determine a taxa de retorno interno deste investimento.
Resolução
Dados:− Valor do investimento: R$ 50.000,00 (P);− Retorno no final dos primeiros meses: R$ 400,00 (R1 = R2 = R3 =R4 = 400);− Retorno no final do quinto mês: R$ 60.000,00 (R5 = 60000);− n = 5 meses;− x = (1+j), onde j = taxa de retorno.
Agora, basta obter a raiz positiva da seguinte equação polinomial:
50000x5 - 400x4 - 400x3 - 400x2 - 400x - 60000 = 0 ⇔ f(x) = 125x5 - x4 - x3 - x2 - x - 150 = 0.
É fácil verificar que f(x) < 0, se 0 ≤ x ≤ 1, e que f(x) > 0, se x ≥ 1.1. Então, a raizpositiva pode ser obtida de maneira mais eficiente se forem utilizados, conjuntamente, osMétodos da Bissecção e de Newton-Raphson. O primeiro refina o intervalo [1, 1.1], quecontém a raiz de f(x) = 0, e determina uma aproximação inicial para o segundo método, oqual produz aproximações mais precisas com poucas iterações.
O Método da Bissecção determinou o seguinte valor inicial para o Método de Newton-Raphson: x0 = 1.0431640625, que é o ponto médio do intervalo obtido após oito refinamentosdo intervalo inicial [1, 1.1]. Com apenas duas iterações, o Método de Newton-Raphsonproduziu a seguinte aproximação para a raiz: ξ = 1.043220972873 e f(ξ) = -0.000000099045.Portanto a taxa de retorno interno é j = ξ - 1 = 0.043220972873 � j ≈ 4.3%.
Códigos Utilizados
Código 1. Gráfico da função polinomial
%análise gráfica de f(x) = 0, onde%f(x) = 125x5 - x4 - x3 - x2 - x - 150 = 0
t=1.:0.01:1.1;y=125.*t.^5 - t.^4 - t.^3 - t.^2 - t - 150;
plot(t,y,'-g;y=125t^5 - t^4 - t^3 - t^2 - t - 150;');grid;xlabel('eixo x')ylabel('eixo y')title('Zero de funcao')replot
Código 2. Método de Newton-Raphson com refinamento de intervalo por Bissecção
%Método de Newton_Raphsonclear
%Cálculo da raiz de uma equação do tipo f(x) = 0fprintf('Entre com a opccao de funccao polinomial\n');fprintf('1(Plano A), 2 (Plano B), 3 (Taxa de Retorno)\n');
iii = input('Entre com a opccao 1, 2 ou 3 =');fprintf('\n');
fprintf('Entre com o extremo inferior do intervalo\n');fprintf('que contem a raiz da funccao polinomial \n');
a = input('Entre com o extremo inferior do intervalo =');fprintf('\n');fprintf('Entre com o extremo superior do intervalo\n');fprintf('que contem a raiz da funccao polinomial \n');
b = input('Entre com o extremo superior do intervalo =');
pm = (a+b)/2; %ponto medio do intervalo [a,b]comp = b-a; %comprimento do intevalo [a,b]cont = 0; %variavel que conta o numero de iteraccoes
eps = 0.5*10^(-3); %tolerancia usada no teste de parada
fa = f_leon(a,iii); %calculo de f(a)fpm = f_leon(pm,iii); %calculo de f(pm)
if(fpm ==0)fprintf('A raiz procurada eh dada por pm =%12.8f\n',pm);
else
%Para limitar o número de refinamentos, por exemplo, em 4,% deve-se trocar o comando abaixo pelo seguinte:% while((comp > eps) & (abs(fpm) > eps) & cont < 4 )
while((comp > eps) & (abs(fpm) > eps) )if(fa*fpm<0)
b=pm;else
a=pm;fa=fpm;
endpm=(a+b)/2;fpm=f_leon(pm,iii);cont = cont+1;comp=b-a;
endend
fprintf('\n');
fprintf('A raiz aproximada por bissecao eh dada por pm =%12.10f\n',pm);fprintf('O numero de refinamentos do intervalo inicial foi cont = %d\n',cont);fprintf('A tolerancia usada foi eps = %12.10f\n',eps);fprintf('Comprimento do intervalo refinado: = %12.10f\n',comp);fprintf('O valor de f(pm) eh dado por fpm =%12.12f\n',fpm);
x0 = pm;dif = 1;
%Método de Newton_Raphson
s = 5;cont = 0;tol = 0.5*10^(-s);
while(dif > tol)
cont = cont+1;x = x0 - (f_leon(x0,iii)/df_leon(x0,iii));dif = abs((x-x0)/(x));x0 = x;
end
fx = f_leon(x,iii);fprintf("O n. de iteraccoes do N-R eh cont = %i \n",cont);fprintf("O erro relativo da aproximaccao da raiz eh dif = %12.12f\n",dif);fprintf("O valor da raiz procurada eh x = %12.12f\n",x);

fprintf("f(x) = %12.12f\n",fx);
Código 3. Funções utilizadas no Método de Newton-Raphson.
Função 1. Função associada à equação f(x) = 0. Já foi dada na seção 4.4 (Código 3).
Função 2. Função correspondente à derivada de f(x), da equação f(x) = 0.
%este arquivo tem que ser salvo com o mesmo nome da função%utilizada após o sinal de igual, no comando abaixo. No caso,%o nome deste arquivo será df_leon.m.
function g = df_leon(t,k)if(k==1)
g = 52.78*t^9 - 6.278*9*t^8;else
if(k == 2)g = 6.50497*13*t^12 - 7.50497*12*t^11;
else
g = 5*125.*t^4 - 4*t^3 - 3*t^2 - 2*t^ - 1;end
end
Problemas envolvendo séries geométricas
A teoria sobre séries geométricas, apresentada na seção 5.1, será utilizada na resoluçãodos próximos três problemas.
Reincidência de impostos
Uma empresa paga à sua diretora-presidente um bônus de R$ 1.000,00 além de umaquantia que cobre todos os gastos referentes aos impostos que reincidem sobre os gastosextras desta funcionária. Se o imposto a ser pago é de 39,6 % sobre qualquer quantia extra,calcule o montante recebido pela funcionária.
Resolução:
Bônus e gastos extras Imposto sobre o bônus e gastos extras
1000 1000 . (0,396)1 (1)
1000 . (0,396)1 1000 . (0,396).(0,396) = 1000 (0,396)2 (2)
1000 . (0,396)2 1000 . (0,396)2.(0,396) = 1000 (0,396)3 (3)
1000 (0,396)3 1000 (0,396)3.(0,396) = 1000 (0,396)4 (4)
... ...
1000 (0,396)n-1 1000 (0,396)n-1.(0,396) = 1000 (0,396)n (n)
Observando a tabela acima, o montante pago à diretora será dado pela soma do bônuscom todos os gastos extras referentes a pagamento de impostos:
M = 1000 + 1000.(0,396)1 + 1000.(0,396)2 + ... + 1000.(0,396)n-1 + ...,
que é uma soma infinita; no caso, a série geométrica M = 1000 �∞
=0k(0.396)k. Conforme a
teoria da seção 5.1, M = 1000.[1/(1 - 0.396)] ≈ 1655.629. Portanto, o montante recebido peladiretora é de R$ 1.655,63 reais.
Montantes em empréstimos bancários
Suponha que o Banco Central introduza 100 milhões de reais na economia e que osbancos emprestem 85% de todo dinheiro que recebem. Suponha também que, de cadaempréstimo, apenas 80% são depositados novamente no sistema bancário. Calcule o montantetotal de empréstimos (teórico) que seriam tomados no sistema bancário.
Resolução:
Dados:- governo introduz: 100 milhões.- bancos emprestam: 85% do dinheiro depositado.- hipótese: apenas 80% de cada empréstimo são depositados novamente em bancos.
(1) Valor inicial emprestado ( Vi ): 85% de 100 milhões = 0.85 × 100.(2) Valor que volta a ser depositado: 80% de Vi = 0.80 × 0.85 × 100.(3) Valor emprestado pelos bancos: 85% do valor obtido no passo anterior (2)= 0.85 × 0.80 × 0.85 × 100 = 0.80.(0.85)2.100.(4) Do valor anterior (3), somente 80% serão depositados novamente: 0.80.[0.80.(0.85)2.100]= (0.80)2.(0.85)2.100.(5) Os bancos emprestam novamente 85% de (4): 0.85.[(0.80)2.(0.85)2.100] =0.80)2.(0.85)3.100.E assim por diante...
Assim, o montante (M) total de empréstimos que seriam tomados no sistema bancário édado pela série geométrica:
M = 0,85.100 + 0.80.(0.85)2.100 + (0.80)2.(0.85)3.100 + ... + (0.80)k-1.(0.85)k.100 + ...
M = �∞
=1k(0.8)k-1(0.85)k.100 = (100/0.8) Σ1≤k≤∞ (0.8×0.85)k = 125 Σ1≤k≤∞ (0.68)k
M = 125 [-1 + 1/(1-0.68)] = 125 [0.68/(1-0.68)] = 265.625. (Observe que Σ0≤k≤∞ (a)k =1 + Σ1≤k≤∞ (a)k � 1/(1-a) = 1 + Σ1≤k≤∞ (a)k � Σ1≤k≤∞ (a)k = [1/(1-a)] -1 = a/(1-a).)
Conclui-se que o montante de empréstimos que seriam tomados no sistema bancário éigual a R$265.265.000,00.

Efeito multiplicativo e gasto adicional em atividades econômicas
Calcule o total de novos gastos em atividades econômicas gerados pelo corte de 10bilhões de reais na arrecadação de Imposto de Renda. Suponha que a propensão ao consumomarginal seja de 95% (todas as pessoas que receberem alguma quantia referente aos gastosgerados pela redução no imposto gastarão 95% da mesma; os 5% restantes serão poupados).
Resolução:
Inicialmente, serão introduzidos na economia gastos adicionais referentes aos 10 bilhõesde reais que o governo deixou de arrecadar com o Imposto de Renda; como a propensão aoconsumo é de 95%, então os gastos adicionais serão iguais a 95% de 10 bilhões, ou seja,0.95×10. Todas as pessoas que receberem alguma quantia proveniente deste montantegastarão 95% da mesma, o que gerará gastos adicionais no valor de (0.95)2.10. Seguindo esteraciocínio, a seguinte série geométrica é obtida:
M = Σ1≤k≤∞ (0.95)k.10 =10. [0.95/(1-0.95)] =190.
Conclui-se que os gastos adicionais em atividades econômicas chegam a 190 bilhões dereais
Equações de Diferenças
Considere a seguinte equação de diferenças: yk = Ayk-1 + B, ∀ k ∈ N, k ≥ 1 e y0 um valordado qualquer.
Observe que :y1 = Ay0 + B; y2 = Ay1 + B = A.(Ay0 + B) + B � y2 = A2 y0 + B.(1 + A); y3 = Ay2 + B= A.(A2y0 + B.(1 + A)) + B � y3 = A3 y0 + B.(1 + A + A2); continuando este procedimentopode-se mostrar que yk = Ak y0 + B.(1 + A + A2 + … + Ak-1),∀ k ∈ N, k ≥ 1.
De fato, basta utilizar indução finita: note que a igualdade é válida para k =1; supondoque a igualdade seja válida para k = m, mostra-se que:
ym+1 = Aym + B = A.(Am y0 + B.(1 + A + A2 + … + Am-1) + B �ym+1 = Am+1y0 + A.B.(1 + A + A2 + ... + Am-1) + B �ym+1 = Am+1y0 + B.(1 + A + A2 + ... + Am).
Utilizando os resultados vistos na seção 5.1 (séries geométricas – Teorema 5.1), aequação de diferenças yk = Ayk-1 + B possui a seguinte solução:
yk = Ak y0 + B(1-Ak)/(1 - A), se A ≠ 1, e yk = y0 + k.B, se A = 1. (6.1)
Observação: Uma equação de diferenças do tipo yk = Ayk-1 + B, com k ≥ m + 1, onde mé um número natural qualquer, possui solução:
yk = Ak-m ym + B(1-Ak-m)/(1 - A), se A ≠ 1, e yk = ym + (k-m).B, se A = 1. (6.2)
De fato, a partir da equação dada constrói-se uma nova equação de diferenças dada porz0 = ym e zk = ym+k, ∀ k ∈ N, k ≥ 1; desta forma, zk = Aym+k-1 + B = A zk-1 + B. Utilizando afórmula anterior (6.1), para a equação de diferenças na variável z, obtém-se:

zn = An z0 + B(1-An)/(1 - A), se A ≠ 1, e zn = z0 + n.B, se A = 1.
Considerando n = k - m, onde k é um número natural qualquer maior do que m + 1,conclui-se que yk = ym+(k-m) = zk-m. Para obter a solução desejada (6.2) basta lembrar que z0 =ym.
Empréstimo Estudantil
P reais são tomados por empréstimo, com taxa anual de juros de R% (com capitalizaçãomensal). O empréstimo deve ser pago em T anos, em prestações mensais iguais de x reais.Qual o valor da prestação mensal?
Resolução:
Primeiramente, será calculado o juro devido pelo empréstimo. Para isto, considere a taxamensal igual a j = R/12 (taxa proporcional)
Seja In o juro devido no pagamento do n-ésimo mês. Então:
I1 = j.P é o juro devido no pagamento do 1º mês;I2 = j.[P - (x - I1)] = I1 – j.(x – I1) = (1 + j)I1 - j.x é o juro devido no pagamento do 2º mês,pois o valor devido no segundo pagamento é (P + I1) - x = P - (x - I1);I3 = j.[P - (x - I1) - (x - I2)] = I2 - j.(x - I2) = (1 + j)I2 - j.x é o juro devido no pagamento do 3ºmês, pois o valor devido no terceiro pagamento é (P + I1 + I2) - 2.x = P - (x - I1) - (x - I2).
Analogamente, Ik+1 = j.[P - (x - I1) - (x - I2) - ... - (x - Ik-1) - (x - Ik)] =j.[ P - (x - I1) - (x - I2) - ... - (x - Ik-1)] - j.(x - Ik) = Ik - j.(x – Ik) = (1 + j).Ik - j.x.
Portanto, Ik = A. Ik-1 + B, para todo k ≥ 2, onde A = (1 + j) > 1 e B = -jx. Assim, da Eq.(6.2) (com m =1), segue que:
Ik = Ak-1 I1 + B.(1 - Ak-1) / (1 - A) � Ik =(1 + j)k-1jP + (-jx).[1 - (1 + j)k-1] / [1 - (1 + j)] �Ik =jP.(1+j)k-1 + x.[1 – (1+j)k-1].
Portanto,
Ik =(1+j)k-1[jP - x] + x. (6.3)
Desta forma, a quantidade de juros paga no empréstimo é igual a I, onde �=
=T
iiII
12
1,
(lembre-se de que o empréstimo deve ser pago em T anos, ou seja, 12T meses). Por outrolado, ao final do pagamento de todas as parcelas, ter-se-á I = x.12T - P.
Considere as seguintes variáveis: c = (jP - x); N = 12T; J = (1 + j). Então, utilizandoEq. (6.3), I = c Σ1≤i≤N Ji-1 + Nx = c.(1-JN)/(1 - J) + 12T.x.
Portanto,
c.(1-JN)/(1 - J) + 12T.x = x.12T - P � -P = c.(1-JN)/(1 - J) �-P = (jP - x).[1 - (1 + j)N]/(-j) � 0 = -jP(1 + j)12T - x.[1 - (1 + j)N] �jP(1 + j)12T = x.[(1 + j)N - 1].
Portanto, o valor da prestação mensal é dado por:
x = jP(1+j)12T/[(1 + j)12T - 1].
7. OUTRO PROBLEMA MOTIVADOR
Comprei recentemente, no lojão dos móveis, um sofá e um rack para som e tv. Ovendedor me informou que o preço à vista das mercadorias era R$518,00; (R$399,00 o sofá eR$119,00 o rack). Disse-me também que iria fazer um “negoção” para mim. Apresentou-me aseguinte proposta de pagamento:
Entrada de R$103,60 + 04 pagamentos de R$103,60.
Certamente, eu poderia ter dado uma contra proposta de pagamento à vista, com umbom desconto (aquela famosa chorada), mas em tempo de dinheiro curto, sabe como é, né?Acabei aceitando o plano de pagamento.
Agora, o que quero saber é o seguinte: Quanto eu poderia ter pedido de desconto parapagamento à vista mesmo, sem juro embutido?
Sugestão: Suponha que a financeira trabalha com uma taxa de juros de 3,5% ao mês.Considere que a poupança dê rendimentos de 1% ao mês. Faça os cálculos com ambas astaxas e considere a média aritmética dos descontos.
Resolução:
Dados:Preço a vista: PAV = R$ 518,00Entrada: E = R$ 103,60Valor Financiado: VF = PAV – E � VF = R$ 414,40Valor da Prestação Mensal: PM = R$ 103,60Número de Prestações: n = 4Taxa mensal de juros Financeira: jF = 3,5 %Taxa mensal de juros Poupança: jP = 1,0 %
Na demonstração do problema modelo inicial, temos em (4.1) : [1 - (1 + j)-n] / j =VF/PM. Substituindo os dados:
•••• p/ jF = 3,5 % � VFF = ( 1- ( 1 + 0,0350 )-4 ).103,60 / 0,0350 � VFF = R$ 380,48•••• p/ jP = 1,0 % � VFP = ( 1- ( 1 + 0,01 )-4 ).103,60 / 0,01 � VFP = R$ 408,03
Utilizando novamente a fórmula: VF = PAV – E, podemos saber quais são os valores exatosque eu pagaria, considerando os juros dados no problema:
PAVREAL = R$ 518,00 (valor cobrado)PAVF = R$ 380,53 + R$ 103,60 ≈ R$ 484,13 - diferença de R$ 33,87 do valor realPAVP = R$ 404,24 + R$ 103,60 ≈ R$ 507,84 - diferença de R$ 10,16 do valor real
Fazendo uma média aritmética das diferenças, concluímos que o vendedor ainda poderiatirar aproximadamente R$ 22,00 do preço á vista (ou pelo menos R$ 6,00 já que se euaplicasse o valor a ser pago - R$ 484,13 - em poupança com rendimento mensal de 1% -ilusão hein!? - não chegaria ao valor cobrado ao final das 4 parcelas).
8. CONCLUSÃO
Com a modelagem dos problemas matemáticos apresentados, a compreensão da partefinanceira fica mais nítida. Se este método for mais explorado em escolas, com certeza, osalunos terão um campo maior de aprendizagem envolvendo desde a matemática tradicional(Aplicada) até a própria financeira. A aprendizagem pode ser mais atrativa se forem utilizadosalguns recursos computacionais para motivar e solucionar os problemas abordados.
O desconhecimento ao se fazer crediários de uma maneira geral, pode se constituir numaarmadilha capaz de corroer o patrimônio e a credibilidade de tomadores e de financiadores (éo que está acontecendo com os atuais “famosos” empréstimos do INSS), daí a necessidade deconhecer alguns mecanismos de cálculo que envolvam os contratos que estão sendo firmados.
Tive um crescimento muito grande com esta monografia, tanto pessoal como profissional ealém do mais despertou minha curiosidade e interesse pela área de financiamentos (que é oque faço todos os dias).
9. REFERÊNCIAS
BARROSO, Leônidas C.; BARROSO, Magali M. A; FILHO, Frederico F. C.; CARVALHO,Marcio L. B.; MAIA, Miriam L. Cálculo numérico com aplicações – 2ª edição –. SãoPaulo: Editora Harbra. 1987. 397 p.
GOLDSTEIN, Larry J., LAY, David C., SCHNEIDER, David I. Matemática aplicada:economia, administração e contabilidade – tradução de Henrique von Dreifus – 8ªedição. Porto Alegre: Bookman, 2000. 484 p.
LIMA, E. L.; Curso de Análise - 10 ed (2ª impressão) - Rio de Janeiro: IMPA (ProjetoEuclides), 2002. 344p.
FIGUEIREDO, D. G. de; Análise 1 – 2ª edição – Rio de Janeiro: LTC, 1996. 256 p.

Algebra Linear e Formacao de Imagens: aTomografia Computadorizada
Franciella Marques da Costa∗ Edson Agustini†
Faculdade de Matematica - Famat
Universidade Federal de Uberlandia - Ufu - MG
Setembro de 2005
Resumo
Neste trabalho apresentamos um algoritmo utilizado em aparelhos de tomografiacomputadorizada que permite elaborar, a partir de uma serie de medicoes de den-sidades de Raios X, imagens de secoes transversais do corpo humano. Alem doalgoritmo exemplificado, e feita uma pequena introducao sobre o princıpio de fun-cionamento de um tomografo e sao tecidos alguns comentarios sobre os problemasdo excesso de radiacao ao qual um paciente esta submetido em sessoes de tomografiade corpo inteiro.
Palavras-chave: tomografia computadorizada, sistemas lineares sobredetermi-nados, algoritmos de Tecnicas de Reconstrucao Algebrica.
1 Introducao
Em 1971, Godfrey Hounsfield, um programador britanico, trabalhando junto com umneurorradiologista, conseguiu mostrar as partes internas de um cerebro humano. Foramesses dois que batizaram o processo que acabavam de inventar com o nome pomposo detomografia computadorizada axial transversa. Vem a ser uma tecnica para reconstruirimagens bidimensionais de secoes transversais de pacientes a partir de um conjunto defluxos de Raios X unidimensionais. As vantagens de tal facilidade sao obvias: ao inves deexaminar vagas sombras em um fotograma (chapa) de Raios X convencional, os medicospodem examinar alteracoes patologicas na anatomia com o mesmo grau de claridade queteriam se tivessem cortado o paciente em duas partes.
Para construir cada imagem, sao emitidos feixes de Raios X que ultrapassam o corpodo paciente e sao captados por detectores. A fracao de fotons da radiacao que nao eabsorvida ou desviada pelo corpo e captada por detectores dotados de um “cristal cinti-lador” ou um “fotomultiplicador” que converte a energia incidente em corrente eletrica,
∗[email protected] Orientanda do Promat - Programa Institucional de IniciacaoCientıfica e Monitoria da Faculdade de Matematica da Universidade Federal de Uberlandia - MG dejan/2005 a dez/2005.
†[email protected] Professor orientador.
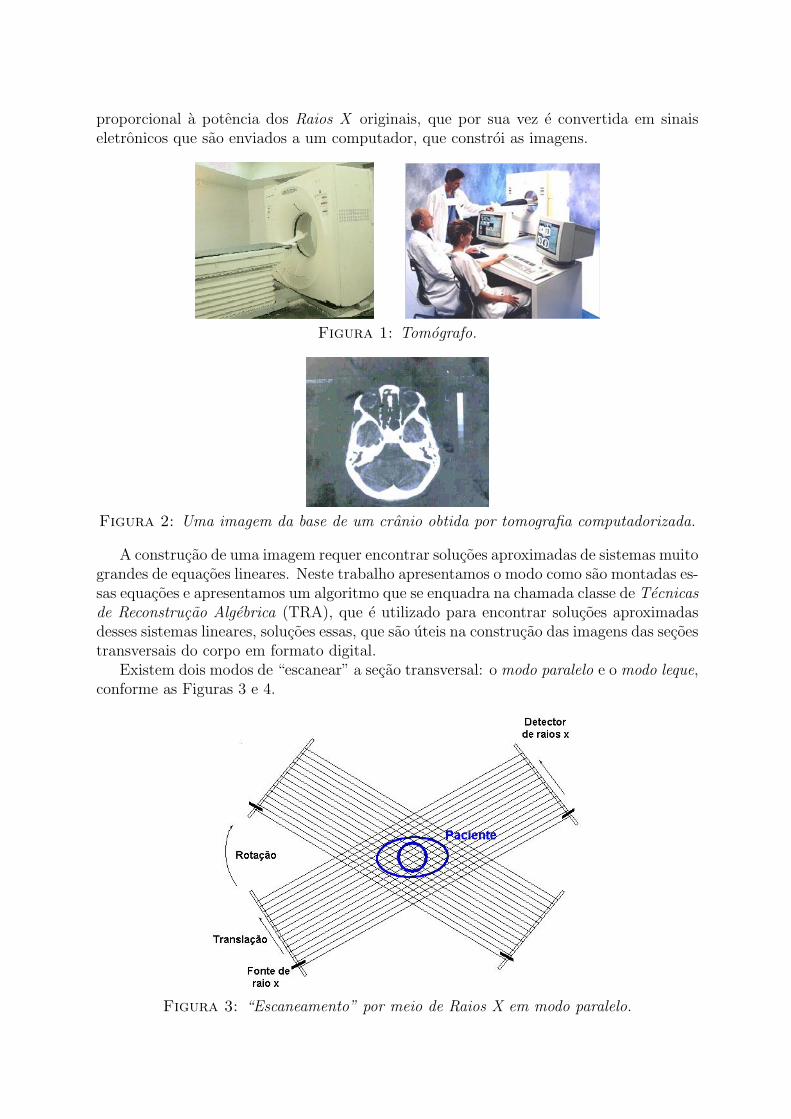
proporcional a potencia dos Raios X originais, que por sua vez e convertida em sinaiseletronicos que sao enviados a um computador, que constroi as imagens.
Figura 1: Tomografo.
Figura 2: Uma imagem da base de um cranio obtida por tomografia computadorizada.
A construcao de uma imagem requer encontrar solucoes aproximadas de sistemas muitograndes de equacoes lineares. Neste trabalho apresentamos o modo como sao montadas es-sas equacoes e apresentamos um algoritmo que se enquadra na chamada classe de Tecnicasde Reconstrucao Algebrica (TRA), que e utilizado para encontrar solucoes aproximadasdesses sistemas lineares, solucoes essas, que sao uteis na construcao das imagens das secoestransversais do corpo em formato digital.
Existem dois modos de “escanear” a secao transversal: o modo paralelo e o modo leque,conforme as Figuras 3 e 4.
Figura 3: “Escaneamento” por meio de Raios X em modo paralelo.
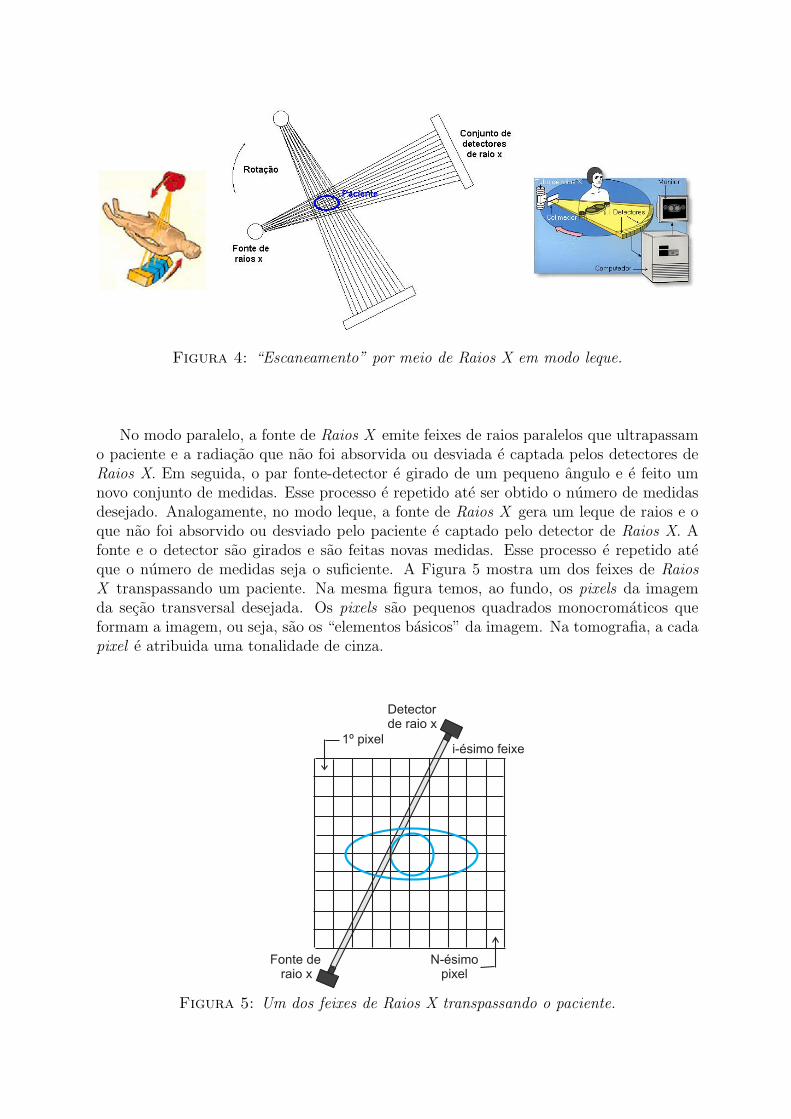
Figura 4: “Escaneamento” por meio de Raios X em modo leque.
No modo paralelo, a fonte de Raios X emite feixes de raios paralelos que ultrapassamo paciente e a radiacao que nao foi absorvida ou desviada e captada pelos detectores deRaios X. Em seguida, o par fonte-detector e girado de um pequeno angulo e e feito umnovo conjunto de medidas. Esse processo e repetido ate ser obtido o numero de medidasdesejado. Analogamente, no modo leque, a fonte de Raios X gera um leque de raios e oque nao foi absorvido ou desviado pelo paciente e captado pelo detector de Raios X. Afonte e o detector sao girados e sao feitas novas medidas. Esse processo e repetido ateque o numero de medidas seja o suficiente. A Figura 5 mostra um dos feixes de RaiosX transpassando um paciente. Na mesma figura temos, ao fundo, os pixels da imagemda secao transversal desejada. Os pixels sao pequenos quadrados monocromaticos queformam a imagem, ou seja, sao os “elementos basicos” da imagem. Na tomografia, a cadapixel e atribuida uma tonalidade de cinza.
1º pixel
Detectorde raio x
i-ésimo feixe
Fonte deraio x
N-ésimopixel
Figura 5: Um dos feixes de Raios X transpassando o paciente.
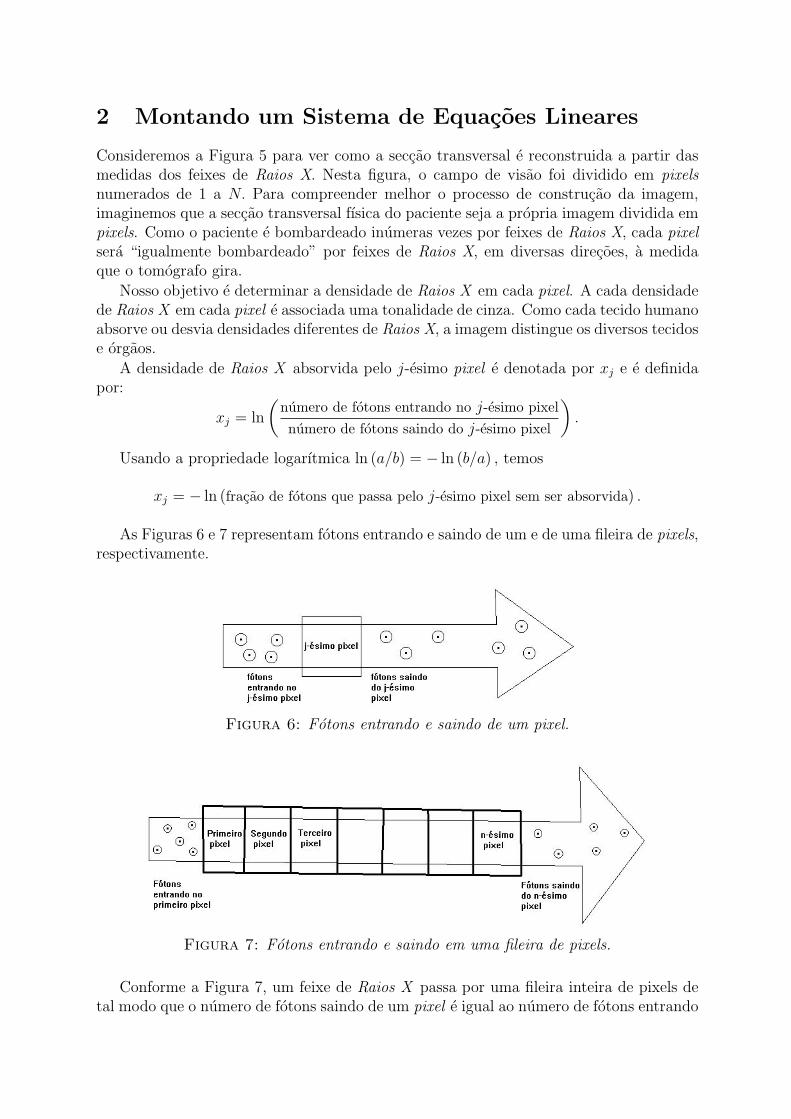
2 Montando um Sistema de Equacoes Lineares
Consideremos a Figura 5 para ver como a seccao transversal e reconstruida a partir dasmedidas dos feixes de Raios X. Nesta figura, o campo de visao foi dividido em pixelsnumerados de 1 a N. Para compreender melhor o processo de construcao da imagem,imaginemos que a seccao transversal fısica do paciente seja a propria imagem dividida empixels. Como o paciente e bombardeado inumeras vezes por feixes de Raios X, cada pixelsera “igualmente bombardeado” por feixes de Raios X, em diversas direcoes, a medidaque o tomografo gira.
Nosso objetivo e determinar a densidade de Raios X em cada pixel. A cada densidadede Raios X em cada pixel e associada uma tonalidade de cinza. Como cada tecido humanoabsorve ou desvia densidades diferentes de Raios X, a imagem distingue os diversos tecidose orgaos.
A densidade de Raios X absorvida pelo j-esimo pixel e denotada por xj e e definidapor:
xj = ln
(numero de fotons entrando no j-esimo pixelnumero de fotons saindo do j-esimo pixel
).
Usando a propriedade logarıtmica ln (a/b) = − ln (b/a) , temos
xj = − ln (fracao de fotons que passa pelo j-esimo pixel sem ser absorvida) .
As Figuras 6 e 7 representam fotons entrando e saindo de um e de uma fileira de pixels,respectivamente.
Figura 6: Fotons entrando e saindo de um pixel.
Figura 7: Fotons entrando e saindo em uma fileira de pixels.
Conforme a Figura 7, um feixe de Raios X passa por uma fileira inteira de pixels detal modo que o numero de fotons saindo de um pixel e igual ao numero de fotons entrando

no proximo pixel. Se esses pixels sao numerados 1, 2, ..., n, pela propriedade aditiva dafuncao logarıtmica temos:
x1 + x2 + ... + xn = ln
(numero de fotons entrando no primeiro pixel
numero de fotons saindo do n-esimo pixel
)= − ln (fracao de fotons que passa pela linha de n pixels sem ser absorvida) .
(1)
Assim, para determinar a densidade de Raios X de uma fileira, basta somar as den-sidades dos pixels individuais. A densidade do i-esimo feixe de um “escaneamento” edenotada por bi e e dada por:
bi = ln
⎛⎜⎜⎝
numeros de fotons do i-esimo feixe entrando no detectorsem ter a secao transversal no campo de visao
numero de fotons do i-esimo feixe entrando no detectorcom a secao transversal no campo de visao
⎞⎟⎟⎠
= − ln (fracao de fotons do i-esimo feixe que passa pela secao transversal sem ser absorvida) .(2)
Para cada feixe que passa por uma fileira horizontal ou vertical de pixels devemos ter:(fracao de fotons do feixe que passa
pela fileira de pixels sem ser absorvida
)=
(fracao de fotons do feixe que passa
pela secao transversal sem ser absorvida
).
Assim, se o i-esimo feixe passa por uma fileira horizontal ou vertical de pixels, entaodas equacoes (1) e (2) temos:
x1 + x2 + ... + xn = bi.
Nesta equacao, a densidade bi e possıvel de ser medida no aparelho de tomografia ex1, x2, ..., xn sao densidades desconhecidas que devem ser determinadas.
De modo analogo ao “caso horizontal ou vertical”, se o i-esimo feixe passa por umconjunto de pixels que numeramos j1, j2, ..., ji, entao temos:
xj1 + xj2 + ... + xji = bi.
Se definirmos
aij =
{1, se j = j1, j2, ..., ji
0, caso contrario,
podemos escrever a equacao como:
ai1x1 + ai2x2 + ... + aiNxN = bi. (3)
A equacao (3) e chamada de i-esima equacao de feixe.Olhando para a Figura 5, observamos que os feixes de Raios X nao passam necessari-
amente verticais ou horizontais por cada pixel. Ha pixels que sao bombardeados apenasminimamente pelo feixe. Logo, nao seria muito preciso atribuir aij = 1 para um feixetotalmente bombardeado ou parcialmente bombardeado por um feixe de Raios X, comoestamos fazendo acima. Dependendo da capacidade computacional do tomografo, pode-sedefinir os aij de modo diferente. Na Figura 8, mostramos tres maneiras de definir os aij
da equacao (3). O metodo do centro do pixel e o que estamos adotando. Embora nao sejao mais preciso, e o que apresenta menor dificuldade computacional.

I-ésimo feixe
J-ésimo pixel
Àrea nonumerador de a
Ij
Área nodenominador de a
Ij
Comprimento dareta central
Largura dopixel
O Método do Centro do Pixel
O Método da Reta Central
O Método da Área
{1 se o i-ésimo feixe passapelo cent ro do j-ésimo pixel0 caso contrário
Comprimento da retacentral do i-ésimo feixeque fica no j-ésimo pixel
_________________________largura do j-ésimo pixel
(
Área do i-ésimo feixe pixel________________________área do i-ésimo feixe queficaria no j-ésimo pixel seo i-ésimo feixe atravessasseo pixel paralelamente
( )
)aIj
=
aIj
=
aIj =
Figura 8: Metodos para determinacao dos coeficientes das densidades de pixel.
Supondo que para construir uma imagem foram emitidos M feixes de Raios X nototal, podemos escrever as M equacoes de feixe de um “escaneamento” completo como:
⎧⎪⎪⎪⎨⎪⎪⎪⎩
a11x1 + a12x2 + ... + a1NxN = b1
a21x1 + a22x2 + ... + a2NxN = b2...
aM1x1 + aM2x2 + ... + aMNxN = bM
(4)
Assim, teremos um sistema linear de M equacoes (as M equacoes do feixe) e Nincognitas (as N densidades de de cada pixel).
Dependendo do numero de feixes e de pixels usados, podemos ter M > N, M = Nou M < N. Vamos considerar o caso sobredeterminado em que M > N, que e o casoque ocorre nos tomografos. Esse sistema nao tera uma solucao matematica exata, devidoaos erros experimentais e de modelagem inerentes ao problema. No entanto, existe umalgoritmo simples que permite achar uma solucao aproximada para o sistema linear (4).
E importante ressaltar que, para a geracao de uma imagem padrao moderna de 512×512 pixels de 1 mm2, temos N = 262.144 e M maior ainda!
3 O Algoritmo
Foram desenvolvidos varios algoritmos para achar uma solucao para um sistema linearsobredeterminado muito grande. (4). O algoritmo que vamos descrever pertence a umaclasse de Tecnicas de Reconstrucao Algebrica (TRA). Esse metodo vem sendo utilizadodesde a primeira maquina comercializada de tomografia computadorizada.
Para introduzir essa tecnica usamos como exemplo o seguinte sistema linear de tres

equacoes (M = 3) e duas incognitas (N = 2):
⎧⎨⎩
L1 : x1 + x2 = 2L2 : x1 − 2x2 = −2L3 : 3x1 − x2 = 3
(5)
As retas L1, L2 e L3 determinadas por estas equacoes estao esbocadas no plano x1x2.Essas tres retas nao tem uma interseccao comum, como mostra Figura 9:
Figura 9: As retas L1, L2 e L3.
Isto significa que esse sistema linear nao tem uma solucao exata. Contudo, os pontos(x1, x2) do triangulo determinado por L1, L2 e L3 podem ser considerados solucoes aprox-imadas do sistema, pois estao situados “perto” dessas tres retas. O seguinte procedimentointerativo descreve uma construcao geometrica para gerar pontos na fronteira dessa regiaotriangular:
3.1 O Algoritmo no Caso Bidimensional
Passo 1: Escolha um ponto inicial x0 arbitrario no plano x1x2.
Passo 2: Projete x0 ortogonalmente sobre a primeira reta L1 e chame a projecao de x(1)1 .
O sobrescrito (1) indica que esta e a primeira de uma sucessao de rodadas do algoritmo.
Passo 3: Projete x(1)1 ortogonalmente sobre a segunda reta L2 e chame a projecao de
x(1)2 .
Passo 4: Projete x(1)2 ortogonalmente sobre a terceira reta L3 e chame a projecao de x
(1)3 .
Passo 5: Tome x(1)3 como o novo valor de x0 repita a rodada de passos de 2 a 4. Na
segunda rodada, chame os pontos projetados de x(2)1 ,x
(2)2 e x
(2)3 ; na terceira rodada chame
os pontos projetados de x(3)1 ,x
(3)2 e x
(3)3 e assim por diante (Figura 10):
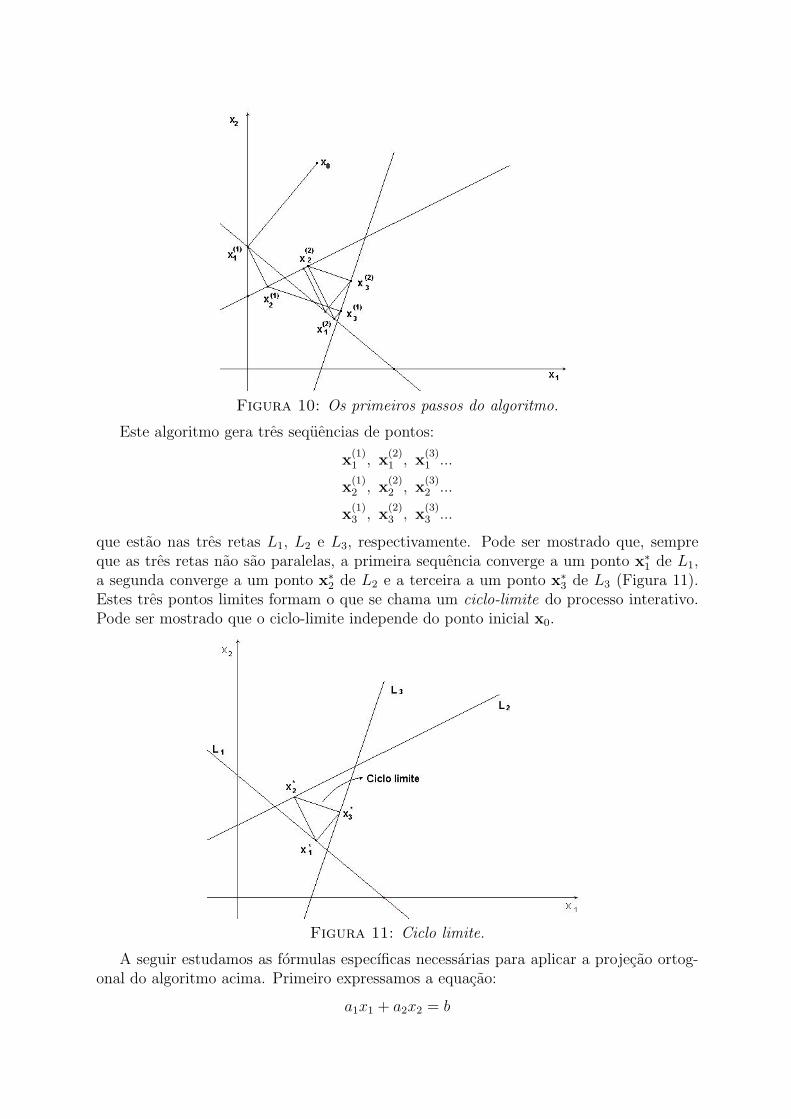
Figura 10: Os primeiros passos do algoritmo.
Este algoritmo gera tres sequencias de pontos:
x(1)1 , x
(2)1 , x
(3)1 ...
x(1)2 , x
(2)2 , x
(3)2 ...
x(1)3 , x
(2)3 , x
(3)3 ...
que estao nas tres retas L1, L2 e L3, respectivamente. Pode ser mostrado que, sempreque as tres retas nao sao paralelas, a primeira sequencia converge a um ponto x∗
1 de L1,a segunda converge a um ponto x∗
2 de L2 e a terceira a um ponto x∗3 de L3 (Figura 11).
Estes tres pontos limites formam o que se chama um ciclo-limite do processo interativo.Pode ser mostrado que o ciclo-limite independe do ponto inicial x0.
Figura 11: Ciclo limite.
A seguir estudamos as formulas especıficas necessarias para aplicar a projecao ortog-onal do algoritmo acima. Primeiro expressamos a equacao:
a1x1 + a2x2 = b
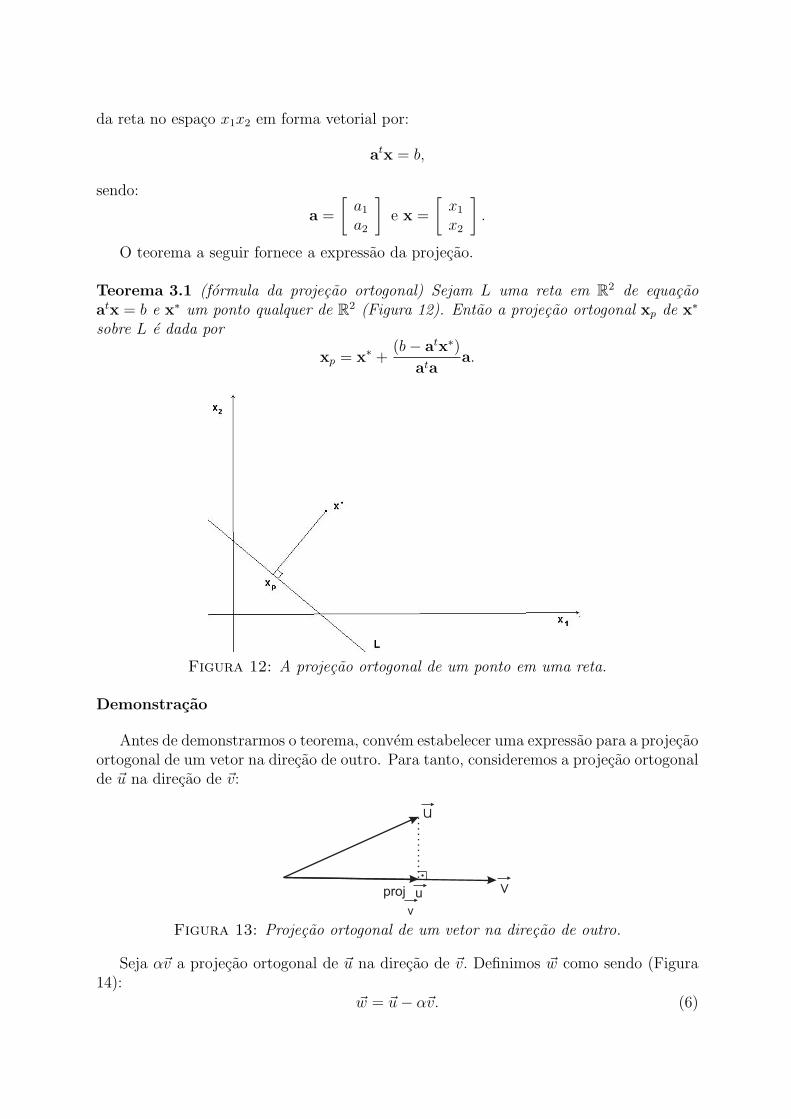
da reta no espaco x1x2 em forma vetorial por:
atx = b,
sendo:
a =
[a1
a2
]e x =
[x1
x2
].
O teorema a seguir fornece a expressao da projecao.
Teorema 3.1 (formula da projecao ortogonal) Sejam L uma reta em R2 de equacaoatx = b e x∗ um ponto qualquer de R2 (Figura 12). Entao a projecao ortogonal xp de x∗
sobre L e dada por
xp = x∗ +(b − atx∗)
ataa.
Figura 12: A projecao ortogonal de um ponto em uma reta.
Demonstracao
Antes de demonstrarmos o teorema, convem estabelecer uma expressao para a projecaoortogonal de um vetor na direcao de outro. Para tanto, consideremos a projecao ortogonalde �u na direcao de �v:
u
vproj u
v
Figura 13: Projecao ortogonal de um vetor na direcao de outro.
Seja α�v a projecao ortogonal de �u na direcao de �v. Definimos �w como sendo (Figura14):
�w = �u − α�v. (6)

u
v
w
� v ; ���
Figura 14: O produto escalar de �w por �v e nulo.
Assim, temos que �w e �v sao ortogonais. Logo, o produto escalar de �w por α�v e nulo,ou seja:
�w. (α�v) = 0. (7)
Logo, de (6) e (7) temos:
(�u − α�v).(α�v) = 0 ⇒�u.(α�v) − (α�v). (α�v) = 0 ⇒
α(�u.�v) − α2(�v.�v) = 0 ⇒�u.�v − α (�v.�v) = 0 ⇒
�u.�v = α (�v.�v) ⇒α =
�u.�v
�v.�v
Mas α�v = proj�v �u, o que implica:
proj�v �u =�u.�v
�v.�v�v
Vamos a demonstracao do teorema propriamente dita.Sejam:
a =
[a1
a2
]e x =
[x1
x2
],
logo, a equacao geral a1x1 + a2x2 = b de uma reta no plano pode ser escrita na forma
atx = b ⇒ [ a1 a2
].
[x1
x2
]= b
O vetor at = (a1, a2) e ortogonal a reta atx = b.Sejam x∗ um vetor qualquer do plano cartesiano e xp sua projecao ortogonal na reta
L de equacao vetorial atx = b.Assim, utilizando projecoes, (Figura 15):
x1
2x
L: a . x=bT
Xp
*
proj
X
Ta
proj Ta
*X
Xp
Xp
Xp*X -
aT
Figura 15: Projecoes ortogonais.

podemos escrever:
x∗ − xp = projat x∗ − projat xp
=x∗.at
at.atat − xp.a
t
at.atat
Na notacao matricial, podemos escrever a equacao vetorial acima como a equacaomatricial abaixo:
x∗ − xp =atx∗
ataa − atxp
ataa
=
(atx∗
ata− atxp
ata
)a
Mas xp pertence a reta L, logo, xp satisfaz a equacao da reta L: atxp = b. Assim:
x∗ − xp =
(atx∗
ata− b
ata
)a ⇒
xp = x∗ +
(b − atx∗
ata
)a,
como querıamos. �
3.2 Um Exemplo
Podemos utilizar o algoritmo no caso bidimensional para obter uma solucao aproximadado sistema linear sobredeterminado:⎧⎨
⎩L1 : x1 + x2 = 2L2 : x1 − 2x2 = −2L3 : 3x1 − x2 = 3
.
Escrevendo as equacoes das tres retas na forma vetorial:
L1 : at1x = b1
L2 : at2x = b2
L3 : at3x = b3
sendo:
x =
[x1
x2
], a1 =
[11
], a2 =
[1−2
]e a3 =
[3−1
],
obtemos pelo Teorema 3.1 a expressao:
x(p)k = x
(p)k−1 +
bk − atkx
(p)k−1
atkak
ak; k = 1, 2, 3
para o esquema iterativo do algoritmo acima, sendo p = 1 para a primeira rodada deiteracao, p = 2 para a segunda rodada de iteracao e assim por diante. Ao fim de cadaciclo de iteracoes, ou seja, depois de calcular x
(p)3 , iniciamos o ciclo seguinte com x0 tomado
como x(p)3 .
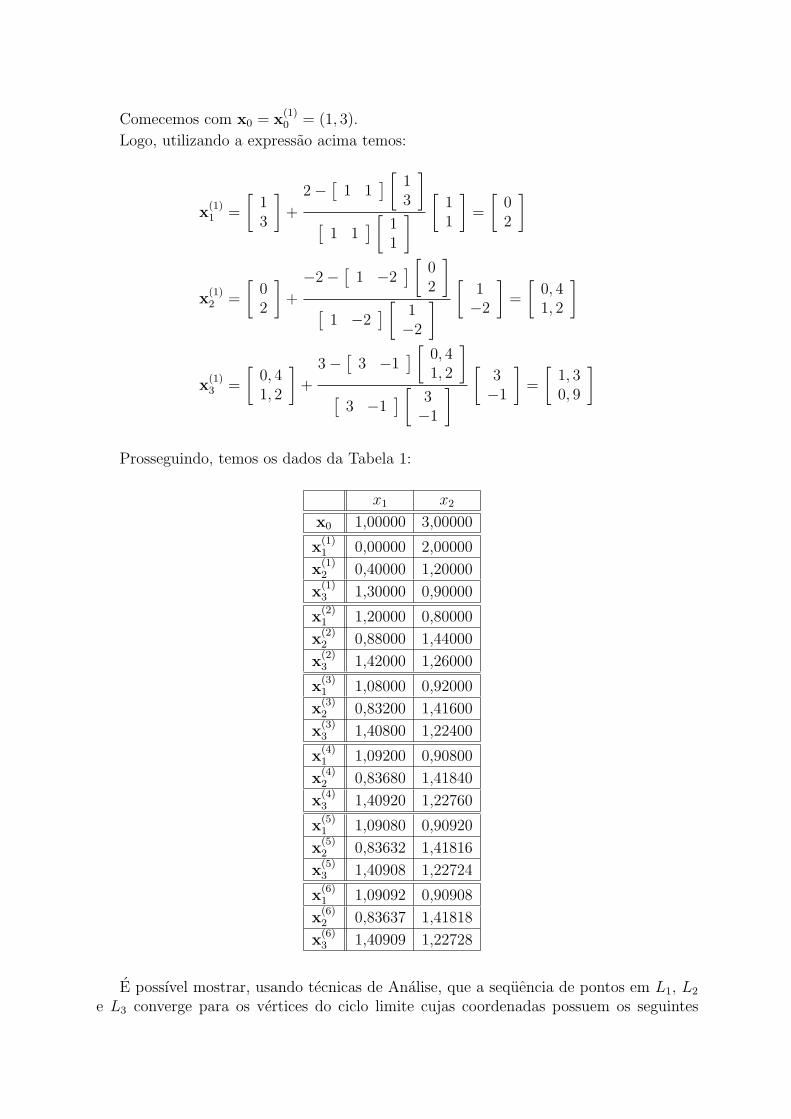
Comecemos com x0 = x(1)0 = (1, 3).
Logo, utilizando a expressao acima temos:
x(1)1 =
[13
]+
2 − [ 1 1] [ 1
3
][
1 1] [ 1
1
] [11
]=
[02
]
x(1)2 =
[02
]+
−2 − [ 1 −2] [ 0
2
][
1 −2] [ 1
−2
] [1−2
]=
[0, 41, 2
]
x(1)3 =
[0, 41, 2
]+
3 − [ 3 −1] [ 0, 4
1, 2
][
3 −1] [ 3
−1
] [3−1
]=
[1, 30, 9
]
Prosseguindo, temos os dados da Tabela 1:
x1 x2
x0 1,00000 3,00000
x(1)1 0,00000 2,00000
x(1)2 0,40000 1,20000
x(1)3 1,30000 0,90000
x(2)1 1,20000 0,80000
x(2)2 0,88000 1,44000
x(2)3 1,42000 1,26000
x(3)1 1,08000 0,92000
x(3)2 0,83200 1,41600
x(3)3 1,40800 1,22400
x(4)1 1,09200 0,90800
x(4)2 0,83680 1,41840
x(4)3 1,40920 1,22760
x(5)1 1,09080 0,90920
x(5)2 0,83632 1,41816
x(5)3 1,40908 1,22724
x(6)1 1,09092 0,90908
x(6)2 0,83637 1,41818
x(6)3 1,40909 1,22728
E possıvel mostrar, usando tecnicas de Analise, que a sequencia de pontos em L1, L2
e L3 converge para os vertices do ciclo limite cujas coordenadas possuem os seguintes

valores exatos:
x∗1 =
(12
11,10
11
)= (1, 0909..., 0, 90909...)
x∗2 =
(46
55,78
55
)= (0, 83636..., 1, 41818...)
x∗3 =
(31
22,27
22
)= (1, 40909..., 1, 22727...)
Pode ser observado que na sexta rodada do algoritmo obtemos uma excelente aprox-imacao do ciclo limite. Portanto, uma das tres iteradas x
(6)1 , x
(6)2 ou x
(6)3 (ou qualquer
ponto no interior do triangulo com esses vertices) pode ser usada como uma solucaoaproximada do sistema linear.
3.3 O Algoritmo Generalizado
Para generalizar o algoritmo do caso bidimensional de tal modo que se aplique a sistemassobredeterminados quaisquer:⎧⎪⎪⎪⎨
⎪⎪⎪⎩a11x1 + a12x2 + ... + a1nxn = b1
a21x1 + a22x2 + ... + a2nxn = b2...
aM1x1 + aM2x2 + ... + aMNxN = bM
(8)
de M equacoes e N incognitas, introduzimos as matrizes coluna x e ai como seguem:
x =
⎡⎢⎢⎢⎣
x1
x2...
xn
⎤⎥⎥⎥⎦ , ai =
⎡⎢⎢⎢⎣
ai1
ai2...
ain
⎤⎥⎥⎥⎦ , i = 1, 2, ..., M.
Com estas matrizes, as M equacoes que constituem o nosso sistema linear (8) podemser escritas em formato matricial como:
atix = bi; i = 1, 2, ..., M.
Cada uma dessas M equacoes define o que e chamado um hiperplano no espaco euclid-iano N -dimensional, Rn. Em geral, estes hiperplanos nao tem interseccao comum e assimprocuramos um ponto que esteja “razoavelmente” proximo de todos os hiperplanos. Umtal ponto sera uma solucao aproximada do sistema linear e suas N entradas determinaraodensidades de pixel aproximadas com as quais formamos a imagem da secao transversaldesejada.
Como no caso bidimensional, introduzimos um processo iterativo que gera ciclos desucessivas projecoes ortogonais sobre os M hiperplanos a partir de um ponto arbitrariodo Rn. Denotamos estas sucessivas iteradas por:
x(p)k =
(A iterada pertence ao k-esimo hiperplanogerado durante o p-esimo ciclo de iteracoes
)

Os resultados que vimo no caso bidimensional valem para o caso N -dimensional e oalgoritmo e como segue:
Passo 1: Escolha um ponto x0 arbitrario do Rn.
Passo 2: Para a primeira rodada, tome p = 1.
Passo 3: Para k = 1, 2, ..., M, calcule:
x(p)k = x
(p)k−1 +
bk − atkx
(p)k−1
atkak
ak .
Passo 4: Denote x(p+1)0 = x
(p)m .
Passo 5: Aumente o numero da rodada p por 1 e retorne ao passo 3.
No passo 3, a iterada x(p)k e chamada a projecao ortogonal de x
(p)k−1 sobre o hiperplano
atkx = bk. Consequentemente, como no caso bidimensional, este algoritmo determina uma
sequencia de projecoes ortogonais de um hiperplano sobre o seguinte ate chegar ao ultimo,quando entao retornamos, cada vez, voltando a projetar sobre o primeiro.
Pode ser mostrado que se os vetores a1, a2, ..., an geram o Rn, entao a iteradas x(1)k ,x
(2)k ,x
(3)k , ...
no k-esimo hiperplano convergem a um ponto x∗k naquele hiperplano, que nao depende
da escolha do ponto inicial x0.
Na tomografia computadorizada e escolhida uma das iteradas x(p)k , com p suficiente-
mente grande, como uma solucao aproximada do sistema linear para as densidades depixel.
Observe que para o metodo do centro de pixel, a quantidade escalar atkak que aparece
na equacao do passo 3 do algoritmo e simplesmente o numero de pixels nos quais o k-esimo feixe passa pelo centro. Analogamente, note que a quantidade escalar bk − at
kx(p)k−1
naquela mesma equacao pode ser interpretada como o excesso de densidade que resultado k-esimo feixe se as densidades de pixel sao tomadas como sendo iguais as entradasde x
(p)k−1. Isto fornece a seguinte interpretacao do nosso esquema de iteracao do tipo TRA
para o metodo do centro de pixel : Gere a densidade de pixel de cada iterada distribuindo oexcesso de densidade de feixe de sucessivos feixes do “escaneamento” de maneira uniformeentre aqueles pixels nos quais o feixe passa pelo centro. Quando for alcancado o ultimofeixe do “escaneamento”, retorne ao primeiro feixe e continue.
3.4 Mais um Exemplo
Podemos usar o algoritmo generalizado para obter as densidades de pixel desconhecidasdos nove pixels que estao dispostos na Figura 16. Estes nove pixels (N = 9) sao “escanea-dos”, usando o modo paralelo, com doze feixes (M = 12) cujas densidades de feixe saomedidas e indicadas na Figura 16:

1 2 34 5 6
7 8 9
1 2 34 5 6
7 8 9
1 2 34 5 6
7 8 9
1 2 34 5 6
7 8 9
1 2 34 5 6
7 8 9
1 2 34 5 6
7 8 9
1 2 34 5 6
7 8 9
1 2 34 5 6
7 8 9
b =8,003
b =15,002
b =13,001
b =3,816 b =14,315
b =14,794
b =10,5110b =16,1311
b =7,0412
b =12,008
b =6,009 b =18,007
Figura 16: Os feixes de raios X e suas medidas no detector.
Escolhemos o metodo do centro de pixel para montar as doze equacoes. Como podeser conferido, as equacoes de feixe sao:
⎧⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎨⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎩
x7 + x8 + x9 = 13, 00x4 + x5 + x6 = 15, 00x1 + x2 + x3 = 8, 00x6 + x8 + x9 = 14, 79x3 + x5 + x7 = 14, 31x1 + x2 + x4 = 3, 81x3 + x6 + x9 = 18, 00x2 + x5 + x8 = 12, 00x1 + x4 + x7 = 6, 00x2 + x3 + x3 = 10, 51x1 + x5 + x9 = 16, 13x4 + x7 + x8 = 7, 04
Utilizando a formula proposta pelo algoritmo generalizado:
x(p)k = x
(p)k−1 +
bk − atkx
(p)k−1
atkak
ak,
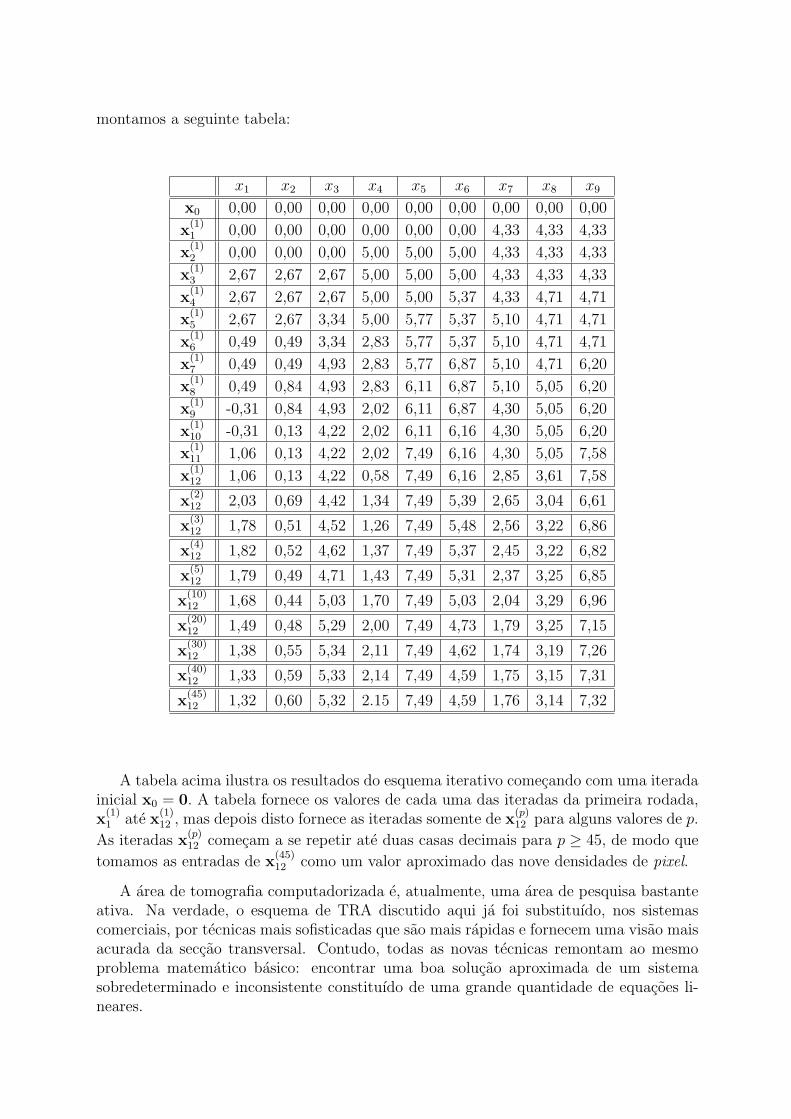
montamos a seguinte tabela:
x1 x2 x3 x4 x5 x6 x7 x8 x9
x0 0,00 0,00 0,00 0,00 0,00 0,00 0,00 0,00 0,00
x(1)1 0,00 0,00 0,00 0,00 0,00 0,00 4,33 4,33 4,33
x(1)2 0,00 0,00 0,00 5,00 5,00 5,00 4,33 4,33 4,33
x(1)3 2,67 2,67 2,67 5,00 5,00 5,00 4,33 4,33 4,33
x(1)4 2,67 2,67 2,67 5,00 5,00 5,37 4,33 4,71 4,71
x(1)5 2,67 2,67 3,34 5,00 5,77 5,37 5,10 4,71 4,71
x(1)6 0,49 0,49 3,34 2,83 5,77 5,37 5,10 4,71 4,71
x(1)7 0,49 0,49 4,93 2,83 5,77 6,87 5,10 4,71 6,20
x(1)8 0,49 0,84 4,93 2,83 6,11 6,87 5,10 5,05 6,20
x(1)9 -0,31 0,84 4,93 2,02 6,11 6,87 4,30 5,05 6,20
x(1)10 -0,31 0,13 4,22 2,02 6,11 6,16 4,30 5,05 6,20
x(1)11 1,06 0,13 4,22 2,02 7,49 6,16 4,30 5,05 7,58
x(1)12 1,06 0,13 4,22 0,58 7,49 6,16 2,85 3,61 7,58
x(2)12 2,03 0,69 4,42 1,34 7,49 5,39 2,65 3,04 6,61
x(3)12 1,78 0,51 4,52 1,26 7,49 5,48 2,56 3,22 6,86
x(4)12 1,82 0,52 4,62 1,37 7,49 5,37 2,45 3,22 6,82
x(5)12 1,79 0,49 4,71 1,43 7,49 5,31 2,37 3,25 6,85
x(10)12 1,68 0,44 5,03 1,70 7,49 5,03 2,04 3,29 6,96
x(20)12 1,49 0,48 5,29 2,00 7,49 4,73 1,79 3,25 7,15
x(30)12 1,38 0,55 5,34 2,11 7,49 4,62 1,74 3,19 7,26
x(40)12 1,33 0,59 5,33 2,14 7,49 4,59 1,75 3,15 7,31
x(45)12 1,32 0,60 5,32 2.15 7,49 4,59 1,76 3,14 7,32
A tabela acima ilustra os resultados do esquema iterativo comecando com uma iteradainicial x0 = 0. A tabela fornece os valores de cada uma das iteradas da primeira rodada,x
(1)1 ate x
(1)12 , mas depois disto fornece as iteradas somente de x
(p)12 para alguns valores de p.
As iteradas x(p)12 comecam a se repetir ate duas casas decimais para p ≥ 45, de modo que
tomamos as entradas de x(45)12 como um valor aproximado das nove densidades de pixel.
A area de tomografia computadorizada e, atualmente, uma area de pesquisa bastanteativa. Na verdade, o esquema de TRA discutido aqui ja foi substituıdo, nos sistemascomerciais, por tecnicas mais sofisticadas que sao mais rapidas e fornecem uma visao maisacurada da seccao transversal. Contudo, todas as novas tecnicas remontam ao mesmoproblema matematico basico: encontrar uma boa solucao aproximada de um sistemasobredeterminado e inconsistente constituıdo de uma grande quantidade de equacoes li-neares.

4 O Problema da Exposicao Excessiva a Radiacao na
Tomografia Computadorizada
Embora esse assunto final nao seja de cunho matematico, encerramos esse trabalho comalgumas palavras sobre a questao do excesso de radiacao ao qual um paciente esta ex-posto em sessoes de tomografia computadorizada. Obviamente nao se discute a utilidadeque a tomogafia computadorizada representa na medicina moderna (tanto que GodfreyHounsfield ganhou o premio Nobel de Medicina em 1979), no entanto, ha um lado negativonessa tecnologia.
Em 1o. de setembro de 2004 a agencia inglesa de notıcias BBC (www.bbc.co.uk) trazuma reportagem intitulada “Tomografia computadorizada pode causar cancer”,cujo conteudo segue abaixo:
Tomografias computadorizadas do corpo inteiro expoem pacientes a nıveis de radiacaosemelhantes aos das bombas atomicas lancadas sobre Hiroshima na Segunda Guerra Mun-dial, afirmam cientistas da Universidade de Columbia, nos Estados Unidos. O exameusa uma forma de radiacao que pode detectar sinais de cancer e outras doencas. Mas elatambem pode causar cancer, segundo a pesquisa da Universidade de Columbia publicadano jornal especializado Radiation.
Os cientistas pedem para que pessoas saudaveis nao se submetam ao exame como partede seus check-ups rotineiros, mas afirmam que para quem tem sintomas de alguma doenca,os benefıcios da tomografia computadorizada compensam de longe os riscos de exposicao aradiacao. Nos Estados Unidos, e em menor escala no Reino Unido, mais e mais pessoassaudaveis e sem nenhum sintoma se submetem ao exame - algumas vezes anualmente -como prevencao.
O medico David Brenner e seus colegas estimaram os riscos de repetidas tomografiasusando dados sobre as vıtimas de radiacao depois do lancamento de bombas atomicas emHiroshima e Nagasaki, em 1945. A dose de radiacao estimada no estomago e nos pulmoesem uma tomografia de corpo inteiro e proxima a recebida por alguns dos sobreviventes dosbombardeios, que foram expostos a radiacao mınima durante as explosoes atomicas. Sabe-se que, por causa da radiacao, esses sobreviventes sofrem maior risco de cancer, o que,para os cientistas, sugere que um risco semelhante advem das tomografias de corpo inteiro.
”Nossa pesquisa prova definitivamente que o risco de radiacao esta associado a tomo-grafia de corpo inteiro”, disse Brenner. Eles estimam que se uma pessoa de 45 anos fizeruma tomografia, o risco de desenvolver cancer como resultado seria uma chance em 1,2mil. Mas se a mesma pessoa passar pelo exame todos os anos, durante 30 anos, este riscosobre para uma chance a cada 50.
Referencias
[1] Anton, H & Rorres, C. Algebra Linear com Aplicacoes. 8a. ed. Porto Alegre:Bookman. 2001.
[2] Boldrini, J. L. et alli. Algebra Linear. 3a. ed. Rio de Janeiro: Harbra. 1986.
[3] Boulos, P. & Camargo, I. Geometria Analıtica: um tratamento vetorial. 2a. ed.Sao Paulo: McGraw-Hill. 1987.

APLICAÇÃO DA ESTATÍSTICA NA MANUTENÇÃO PREDITIVA
Raquel Maria Gondim * Marcus Antonio Viana Duarte ** Faculdade de Engenharia Mecânica
Pós-graduação em Engenharia Mecânica Universidade Federal de Uberlândia – UFU
38400-100, Uberlândia -MG
Outubro 2005
Resumo: A manutenção tem como objetivo garantir a disponibilidade da função dos equipamentos e instalações para atender a um processo de produção ou de serviço com confiabilidade. Neste trabalho daremos ênfase à manutenção preditiva, que visa prevenir as falhas em equipamentos ou sistemas sem que haja a paralisação dos mesmos. Para esta análise apresentaremos algumas distribuições estatísticas e suas aplicações dentro da manutenção. Sendo o estudo da distribuição de Weibull o nosso objetivo, a análise de Weibull é um método estatístico que correlaciona dados específicos de falha com uma distribuição particular, podendo indicar o tipo de falha, prematuro, randômico ou desgaste.
1. Confiabilidade
O termo confiabilidade é muito usado na manutenção, e teve origem na década de 50 nos Estados Unidos para análise de falha em equipamentos eletrônicos de uso militar.
Confiabilidade é a probabilidade que um item possa desempenhar sua função, por um intervalo de tempo [0, t], sob condições definidas de uso. O valor t não pode ser previsto a partir de um modelo determinístico, isto é, componentes “idênticos” sujeitos a “idênticos” esforços falharão em diferentes e imprevistos instantes. Deste modo o emprego de um modelo probabilístico, considerando t uma variável aleatória, constitui-se no único tratamento realista do assunto.
Sendo R(t) a função de confiabilidade de um sistema ou componente na época t, definida como R(t) = P(T>t), onde T é a duração de vida.
A função densidade de probabilidade (fdp) de T, f é R(t)=t
dssf )( .
Em termos da função densidade (fd) de T, F é R(t)= 1-P(T t) = 1- F(t). Além da função de confiabilidade, temos outra função importante em manutenção, que é a taxa de falhas Z(t) dada por: Z(t)= n° de falha/ n° total de horas de op. Ou
Z(t)= n° de falha/unidade testadas x n° de horas de teste.
* Mestranda da Pós-Graduação da Engenharia Mecânica / CNPq E-mail: [email protected]
** Professor orientador E-mail: [email protected]
Matematicamente podemos escrever:
)(1)()(tF
tftZ , ou seja, )()()(
tRtftZ para F(t)<1
Como a taxa de falhas e a confiabilidade estão diretamente ligadas, podemos citar um interessante teorema:
Se T, a duração até falhar, for uma variável aleatória continua, com fdp f e se F(0)=0, onde F é a fd de T, então f poderá ser expressa em termos da taxa de falhas Z, da forma:
f(t)=Z(t).
t
dssZ
e 0
)(
(1)
Este teorema nos mostra que a taxa de falhas Z determina univocamente a fdp f, valendo também a recíproca.
Os conceitos de confiabilidade e taxa de falhas, estão entre as mais importantes ferramentas necessárias para um estudo profundo dos “modelos de falhas” a partir destes chegamos a seguintes questões:
Qual modelo matemático é adequado para a descrição de um fenômeno observável? Que “Lei de Falhas” subjacentes será razoável admitir? (Isto é, que forma a fdp de T deve ter? )
Para responder estas questões, podemos usar o ponto de vista estritamente matemático e assumir qualquer fdp para T, e depois, simplesmente estudar as conseqüências dessa hipótese, contudo estamos interessados em ter um modelo que represente os dados de falhas disponíveis. Então analisaremos a partir de agora os mais importantes tipos de distribuições e leis de falhas, e a aplicação de cada uma.
2. Tipos de Distribuições
Verificamos que, na construção de modelos não-determinísticos para fenômenos observáveis, algumas distribuições de probabilidade são mais usadas que outras, veremos algumas destas distribuições e suas aplicações.
2.1 Distribuições Aleatórias Discretas
2.1.1 Distribuição de Poisson
Def.:Seja X uma variável aleatória discreta (VAD), tomando os seguintes
valores 0,1,...n..., . Se a função de densidade de for dada por P(X=k)=!
).exp(k
k
,
onde k=0,1,2,...,n,..., então X tem a distribuição de Poisson, com parâmetro 0 .Com E(X)= e a variância V(X)=Aplicações:
Modelar eventos aleatórios que ocorrem com uma determinada freqüência, onde a média é conhecida e constante intervalo entre os eventos.

2.1.2 Distribuição Binomial
Def.: Seja X VA definida como o número de vezes que o evento A tenha ocorrido, então X é uma VA Binomial com parâmetro n e p, com P(A)=p (constante) e n= número de repetições.Logo sendo X uma VA Binomial, baseada em n
repetições com a sua função densidade P(X=k)= knk ppkn
1 , K=0,1,...,n, então
temos a distribuição binomial. A média será E(X)=np e a variância V(X)=np(1-p)
Aplicações: Amostragem com reposição Número de sucesso em n tentativas independentes. Número de itens defeituosos num conjunto de tamanho n.
2.1.3 Distribuição Geométrica
Def.: Sendo um experimento e estamos interessados na ocorrência ou não-ocorrência de algum evento A; repetimos o experimento até ocorrer A pela primeira vez, sendo as repetições independentes e que cada repetição tenha P(A)=p e P( A )= 1-p=q sempre os mesmos.
Temos X o número de repetições necessárias para obter a primeira ocorrência de A, X terá sua função densidade dada por: P(X=k)= pq k 1 , k=1,2,... regida pela distribuição geométrica.
A média será E(X)=1/p e a variância V(X)= 2/ pqAplicações:
Número de insucessos antes do primeiro sucesso em n amostragens. Número de amostragens necessárias até obter um sucesso.Número de itens retirados até encontrar um defeituoso.
2.1.4 Distribuição Hipergeométrica
Def.:Suponha que tenhamos um lote de N peças, com r peças defeituosas e (N-r) não defeituosas. Se escolhermos ao acaso n peças deste lote sem reposição,e X o número de peças defeituosas encontradas. Sua função de densidade dado por:
P(X=k)=
nN
knrN
kr
, k=0,1,2,..., então temos a distribuição hipergeométrica.
A média será E(X)=np e a variância V(X)= 1NnNnpq , onde p=r/N e q=1-p
Aplicações: Amostragem sem reposição Número de sucesso em n tentativas independentes. Número de itens defeituosos num conjunto de tamanho n.
2.2. Distribuições Aleatórias Contínuas
2.2.1 Distribuição Normal
Def.: Seja X variável aleatória, que tome os valores reais x , e sua função densidade de probabilidade dada por:
f(x)= 2
2
2 2)(exp
21 x , temos uma distribuição normal N( 2, ).
A média será E(X)= e a variância V(X)= 2 .Aplicações:
Erros de diversos tipos,ruídos. Valores que são a soma de grande número de outros valores Desgaste.
2.2.2 Distribuição Exponencial
Def.: Seja X variável aleatória, que tome todos os valores não negativos. e sua função densidade de probabilidade dada por:
)exp()( xxf , x 0, temos uma distribuição exponencial, com parâmetro >0.
A média será E(X)= 1 e a variância V(X)= 2
1 .
Aplicações: É utilizada normalmente para representar a duração de um determinado serviço. Intervalo de tempo até a falha de uma peça de um equipamento. Fadiga
2.2.3 Distribuição Gama
Def.: Seja X VAC, que tome somente valores não negativo, com função
densidade de probabilidade: xr exr
xf 1)()(
)( , x>0, e os parâmetros r 1 e
0 .Sendo )(r a função Gama definida como:
dxexp xp
0
1)( , p>0
Para r=1 a fdp da distribuição Gama fica idêntica à distribuição exponencial. )exp()( xxf
Para r a fdp da distribuição Gama pode ser generalizada dada pela forma xr ex
rxf 1
!1)( , a partir desta função podemos usar a fd F(x)=1-P(X>x) e
mostrarmos que a fd da distribuição Gama é igual à fd da distribuição de Poisson.
A média será E(X)= r e a variância V(X)= 2
r .
Aplicações: Tempo para realizar uma tarefa.
3. Leis de Falhas
3.1 Lei de Falhas Normal
A lei de falhas normal representa um modelo apropriado para componentes nos quais a falha seja devida a algum efeito de ‘desgaste’. A sua fdp será dada por:
,21exp
21)(
2ttf T 0
Onde: média até falhar desvio padrão
De acordo com a fdp normal, temos que a maioria das peças falham em torno da duração média. A função de confiabilidade para este caso pode ser expressa em termos da fdp:
R(t)=1-P(T t) =1- dxtt 2
21exp
21
3.2 Lei de Falhas Exponencial
É a lei mais importante, pode ser caracterizada de muitas maneiras, mas a maneira mais simples é supor que a taxa de falhas seja constante, isto é, Z(t)= .Esta hipótese pode significar que depois que a peça estiver em uso, sua probabilidade de falhar não se altera, ou seja, não existe o desgaste.
Em conseqüência desta hipótese e aplicando a equação (1) a sua fdp fica: )exp()( ttf , t>0
E a confiabilidade: R(t)= 1- F(t) = )exp( tHá muitas situações encontradas nos estudos de falhas, para os quais a
hipótese básica que levam à distribuição exponencial não será satisfeita, isto porque uma peça que não tenha falhado é tão boa quanto à peça nova, então devemos considerar t como o tempo de operação (até falhar), sem se importar com o histórico da peça.
4. Distribuição de Weibull
Expressão semi-empírica desenvolvida por Ernest H. W. Weibull, físico sueco, que em 1939 apresentou o modelo de planejamento estatístico sobre fadiga de material. Adequada para leis de falhas em equipamentos sempre que o sistema for composto de vários componentes e a falha seja essencialmente devida a “mais grave” imperfeição, dentre um grande número de “imperfeições”, onde a taxa de falha não precisa ser constante. Esta distribuição nos permite:
representar falhas típicas de partida (mortalidade infantil), falhas aleatórias e falhas devido ao desgaste. obter parâmetros significativos da configuração das falhas. representação gráfica simples.

Principais expressões matemáticas:
00 exp)()(
tttttf
0exp1)(tt
tF , probabilidade de um item falhar num intervalo t.
0exp)(1)(tt
tFtR , confiabilidade.
10)( tttZ , taxa de falha.
)1( 10tTMEF , tempo médio entre falhas.
21121 121 , desvio padrão
111)(tE
Onde:
0t Vida mínima, intervalo de tempo que o equipamento não apresenta falhas.
Vida Característica, intervalo de tempo entre 0t e t no qual ocorrem 63,2%das falhas.
Fator de Forma, indica a forma da curva e a características das falhas. Quando:
<1, mortalidade infantil
=1, falhas aleatórias
>1, falhas por desgaste
Uma das particularidades mais interessantes decorre do fato de que alterando o valor de , a função densidade de probabilidade de Weibull toma formas de outras distribuições, dependendo do valor de à distribuição de Weibull pode ser igual ou se aproximar de varias outras distribuições.
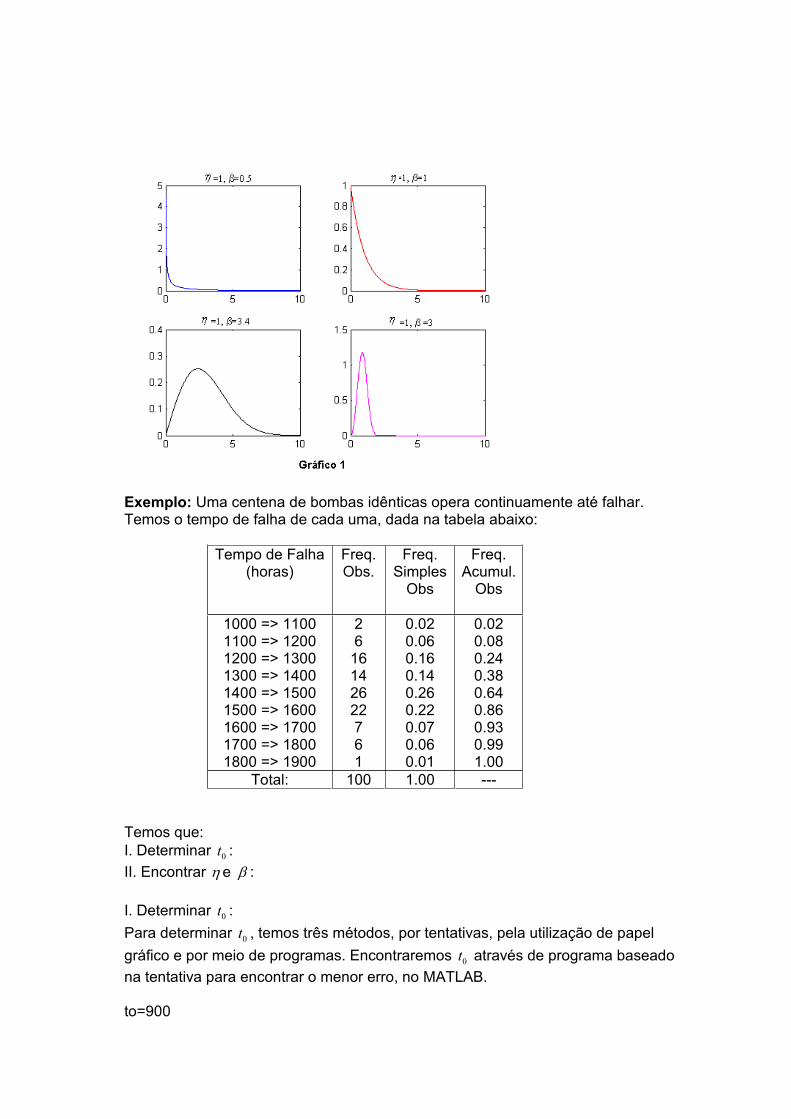
Exemplo: Uma centena de bombas idênticas opera continuamente até falhar. Temos o tempo de falha de cada uma, dada na tabela abaixo:
Tempo de Falha (horas)
Freq. Obs.
Freq. Simples
Obs
Freq.Acumul.
Obs
1000 => 1100 1100 => 1200 1200 => 1300 1300 => 1400 1400 => 1500 1500 => 1600 1600 => 1700 1700 => 1800 1800 => 1900
26
16 14 26 22 761
0.02 0.06 0.16 0.14 0.26 0.22 0.07 0.06 0.01
0.02 0.08 0.24 0.38 0.64 0.86 0.93 0.99 1.00
Total: 100 1.00 ---
Temos que: I. Determinar 0t :II. Encontrar e :
I. Determinar 0t :Para determinar 0t , temos três métodos, por tentativas, pela utilização de papel gráfico e por meio de programas. Encontraremos 0t através de programa baseado na tentativa para encontrar o menor erro, no MATLAB.
to=900

II. Encontrar e : Fazendo a transformação linear da forma da distribuição de Weibull, podemos obter estes coeficientes:
0exp1)(tt
tF 0exp1)(tt
tF
0expln)1)(ln(tt
tF 0)1)(ln(tt
tF
)ln()ln())1)(ln(ln( 0tttFbXaY .
Temos a seguinte tabela:
t F(t) Y=Ln{-Ln[1-F(t)]} X=Ln(t-to)to=900 h
1100 1200 1300 1400 1500 1600 1700 1800 1900
0.020.080.240.380.640.860.930.991.00
-3.9019 -2.4843 -1.2930 -0.7381 0.0214 0.6761 0.9780 1.5272 ------
5.2983 5.7038 5.9915 6.2146 6.3969 6.5511 6.6846 6.8024 ------
= 594,28 = 3,5831
5. Distribuição de Weibull na Manutenção Preditiva
Em muitas máquinas o controle das vibrações só é possível quando a máquina esta em funcionamento, se nós observarmos os sintomas das vibrações para um grupo de máquinas e aplicarmos aos resultados o processo de Weibull podemos calcular a curva da vida dos sintomas, o valor de alarme e de pane.
No monitoramento das condições das vibrações (VCM), temos duas questões fundamentais:
1) Encontrar o sintoma da vibração S, que mostra como descobrir a falha da máquina.
2) Estimar o valor limite LS para o sintoma. Fazemos à estimação dos valores limites LS ,onde temos aS o valor de alerta e
bS o valor de pane.
aS é descoberto por meios de passos da fase da vida da máquina em uso.
bS é determinado com a paralisação da máquina. Estes valores são muitos importantes para o controle contínuo da máquina, mas a sua determinação não é simples.
A observação dos sintomas S no controle contínuo da máquina é realizado através de um processo aleatório de operação da máquina que depende do tempo de vida , e de diferentes parâmetros i até então desconhecidos, então a curva-vida dos sintomas da máquina ,...)],([ 1SS fica completa quando encontramos estes valores , ou temos um método natural dando somente um nível de incerteza para os valores aS e bS .
Para uma grande amostra de máquina, os valores observados dos sintomas S, e as propriedades de e dos parâmetros i é eficiente. Têm-se os resultados dos sintomas para um experimento e os termos para a função de densidade de Weibull, combinamos estes coma técnica de Neyman-Pearson podemos determinar com precisão os valores limites e uma boa média de )(S (curva do tempo de vida).A vantagem deste método é que podemos usar cada ensaio e adaptar os resultados para ensaios operacionais particulares e condições de manutenção. Ordenamos as diferenças entre alguns tipos de controles da qualidade de um experimento, dados pelos seguintes parâmetros:
1 - desvio na fabricação
2 - nível de interação dinâmica (instalação) 3 - diferença entre a carga da máquina em operação
4 - qualidade da manutenção Então encontramos a curva-vida dos sintomas na realização de um processo
estatístico do controle: ),,,,( 4321SSPara N novas máquinas em operação temos 4 constante, logo o
experimento fica idêntico à teoria da confiabilidade. Para 1 máquina com um número suficiente de ciclos na operação-renovável, 1 e
2 são constantes e escolhemos N leituras diferentes dos indícios dos sintomas (ou seja n ).
Para o caso do diagnóstico do experimento passivo todos os parâmetros podem ser diferentes. Procuramos um procedimento para a média dos sintomas representando por:
)],,,,([)( 4321SES W
Onde )],,,,([ 4321SEW é a média dos desvios operacionais dos parâmetros i
possíveis no ensaio. Fazendo uma notação discreta dos seguintes valores: )( inni SS com
2020bn
i , onde bn é o tempo de pane de N máquinas. Como bn não é
exatamente conhecido, fazemos bn , com sendo a média do tempo de pane do grupo de máquina.
Podemos ordenar os resultados do nosso experimento com a média da curva-vida dos sintomas com diferentes densidades de probabilidades:
p(S) a densidade de probabilidade dos sintomas em controle. p( b ) a densidade de probabilidade do valor do tempo de pane. p( )]([) bbb SpS a densidade de probabilidade do valor do sintoma de pane.

Podemos dizer que p(S) e )( bSp tem a forma da distribuição de Weibull, assim assumindo os 3 parâmetros da distribuição de Weibull, chegamos em:
;exp)(1 k
g
gbk
g
gb
gb
kp k>0 e gb (1)
;exp)(0
1
00
k
n
n
k
n
n
n SSSS
SSSS
SSkSp k>0 e nSS (2)
Onde: k –fator forma
- média do tempo de pane g - garante a vida da máquina
nS - determina o valor mínimo do sintoma (qualidade da manutenção)
0S - valor característico do sintoma. Podemos então obter p(S) e )( bp , ajustando a amostra com a média dos
sintomas da curva-vida SS )( , com este procedimento podemos usar a fórmula da transformada da densidade de probabilidade, abaixo:
1
)()(ddSpdSSp , onde )(p é a função densidade de
probabilidade de )(S da amostra. Assumindo a uniformidade da função de densidade para o tempo médio e para a pane em um grupo de maquinas observados, e que os incrementos sejam positivos (ds, d > 0 ,isto é, a curva da vida é monótona) chegamos ao domínio da equação diferencial:
ddSSp )( 1)(p (3)
Substituindo a equação (2) em (3), temos:
dSSSS
SSSS
SSkdS
k
n
n
k
n
n
n 0
1
00
exp
Fazendo a integração por substituição:
knn cSSSS ln)( 0
Quando exigimos uma condição inicial 0 e um ponto abaixo de nS no gráfico 2, a constante de integração c=1. Assim podemos encontrar o resultado para o nosso experimento, a curva-vida para a média dos sintomas.
knn SSSS 1ln)( 0 (4)

5.1. Teoria da Decisão de Neymann-Pearson
Baseado no teste de hipótese, onde teremos Ho a hipótese nula e H1 a hipótese alternativa. Procedimento Geral
Pelo contexto do problema identificar o parâmetro de interesse. Especificar a hipótese nula. Escolher um nível de significância. (0.05 e 0.01) Decidir sobre a rejeição ou não de Ho.
Erro tipo I: Rejeitar Ho quando Ho for verdadeira Erro tipo II: Aceitar Ho quando Ho for falsa A probabilidade de escolhermos Ho quando for falsa e denotada por :
volFA dlHlfP /
Para estimar os valores aS e bS , faremos o uso da Teoria da decisão de Neymann-Pearson, com isso poderemos minimizar os números de panes e perceber os reparos desnecessários A, pois podemos escrever um valor apropriado para bS .Temos:
bS
g dSSpPA )( (5)
onde re
e
re
eg NN
Ntt
tP
gP eficiência dos índices para um grupo de máquinas
et tempo total de controle
rt tempo total de reparo
re NN , número apropriado de máquinas.

Como assumimos a densidade de probabilidade de Weibull para p(S) na equação (2) e Neymann-Pearson na equação (5), podemos obter a razão de pane:
k
gn
nb
k
n
nb
Sg
PA
SSSS
SSSS
dsSpPA
b
ln
exp)(
0
0
Para encontrar aS , podemos usar o mesmo raciocínio que desenvolvemos para estimar bS . Então podemos mudar os limites de integração na equação (5), para chegarmos à razão de alerta :
Sb
Sag dSSpPA )( (6)
k
n
na
gg
k
n
na
g
k
n
nbk
n
naS
Sg
SSSS
PA
PA
SSSS
PA
SSSS
SSSS
dsSpPA b
b
00
00
2lnexp
expexp)(
Dividindo por
k
n
nb
g SSSS
PA
0
ln
Temos: 1ln
2ln
k
g
g
nb
na
PAPA
SSSS
A distribuição de Weibull apresenta uma interessante relação do coeficiente k com o coeficiente de variação:
S
n
n
S SSk
kk
kSS
1111
21
Então o valor característico 0S pode ser determinado: )/11()( 1
0 kSSSS nn
Deste modo nS , 0S e k podem ser encontrados; conseqüentemente , e a curva da vida dos sintomas podem ser calculados.
Tendo os valores limites aS e bS , qual a relação destes com a curva da vida dos sintomas? Para responder esta pergunta utilizaremos a equação (4) substituiremos bSS e
b :
k
n
nknn SSSS
SSSS 1ln1ln)(0
0
g
bb
g
bk
n
nbk b
n
nb
PA
PA
SSSS
SSSS
11
1exp1ln00
Empregando o mesmo raciocínio para aSS e a , chegamos em g
a
PA21 .
Concluímos, que o tempo de pane e o tempo de alerta não dependem dos
parâmetros da distribuição de Weibull, o mesmo acontece com a curva da vida. Portanto, estes dependem somente da eficiência dos índices gP e da manutenção apropriada A. Assim o fator de decisão para o modelo é o fator forma k e a correta
manutenção dada pela razão gP
A .
6. Conclusão
As distribuições aqui apresentadas com suas respectivas aplicações são todas importantes, mas algumas são mais usadas que outras devido à abrangência de casos a serem usadas.
A distribuição de Weibull se mostra mais eficiente na manutenção preditiva, pois dependendo do valor do fator de forma , ela engloba os casos mais importantes de distribuições, constituindo–se, assim, numa poderosa ferramenta de análise e controle estatístico.
7. Referências Bibliográficas
Cempel, Czeslaw – Passive Diagnostics and Reliability Experiment: Application in Machine Condition Monitoring. Vol. 111 Janeiro 1989. Kardec, Alan; Nascif Júlio – Manutenção - Função Estratégica. Edição nº 2 – Rio de Janeiro 2001. Meyer, Paul L. - Probabilidade: aplicações à estatística / tradução Ruy de C. B. Lourenço Filho. Edição nº 1, Rio de Janeiro 1969. Ross, Sheldon M. - Introduction to probability and statistics for engineers and scientists, 1987. Cap. 10. Spiegel, Murray R. - Estatística / tradução de Pedro Consentino.
Edição nº 2, 1971. Wormit, Michael - Detection Neyman-Pearson Theory.
www.klimt.iwr.uni-heidelberg.de/mip/adaptive_filters

O Problema do Cabo Suspenso
Flaviano Bahia P. Vieira∗ Laıs Bassame Rodrigues† Edson Agustini‡
Faculdade de Matematica - Famat
Universidade Federal de Uberlandia - Ufu - MG
Resumo
Neste trabalho deduzimos a funcao real cujo grafico e uma curva chamadacatenaria. Esta curva possui o formato de um cabo homogeneo suspenso sustentadopor suas extremidades e submetido apenas a acao da gravidade. O aspecto historicoe introduzido na primeira secao, bem como algumas curiosidades e aplicacoes dessacurva.
Palavras-chave: Catenaria. Equacoes Diferenciais Ordinarias de Segunda Or-dem Nao Lineares.
1 Introducao
A primeira leitura, a palavra catenaria parece estranha. Vejamos sua etimologia. Catenariavem do latim catena, que quer dizer “cadeia”. A catenaria e um dispositivo que serve parasustentar os cabos da uma rede eletrica de uma via ferrea, ou de uma linha de troles, porexemplo. Como o cabo condutor da corrente tem de permanecer sempre paralelo ao chao,para nao perder o contato com o pantografo (armacao que esta na cobertura das locomoti-vas e dos bondes, para captar a eletricidade), precisa ficar preso a um outro cabo, de aco,preso em postes intervalados. O cabo condutor e preso ao cabo de aco por fios verticais,chamados pendulos. Para fixar os cabos aos postes, as catenarias tem tambem ligamentoslaterais, que evitam as oscilacoes ou balancos, tem suportes de sustentacao e isoladorespara os cabos. De tantos em tantos metros, sao colocados contrapesos, que mantem conve-nientemente esticados os tensores, levando em conta as variacoes de comprimento devidasa dilatacoes provocadas pelo calor. As catenarias utilizam cabo flexıvel, e adaptam-se aquaisquer condicoes de instalacao. A distancia entre dois postes, normalmente, e de 63metros, mas em curvas, esta distancia diminui. A catenaria foi primeiramente utilizadacomo dispositivo de seguranca, a fim de evitar a ruptura de linhas de transporte de cor-rente de alta tensao. Mais tarde, comecou a ser usada tambem nas redes eletricas deferrovias.
∗[email protected] Orientando do Programa de Educacao Tutorial da Faculdade de Matematica(PetMat) de jan/04 a dez/04.
†[email protected] Orientanda do Programa de Educacao Tutorial da Faculdade deMatematica (PetMat) de jan/04 a dez/04.
‡[email protected] Professor orientador.
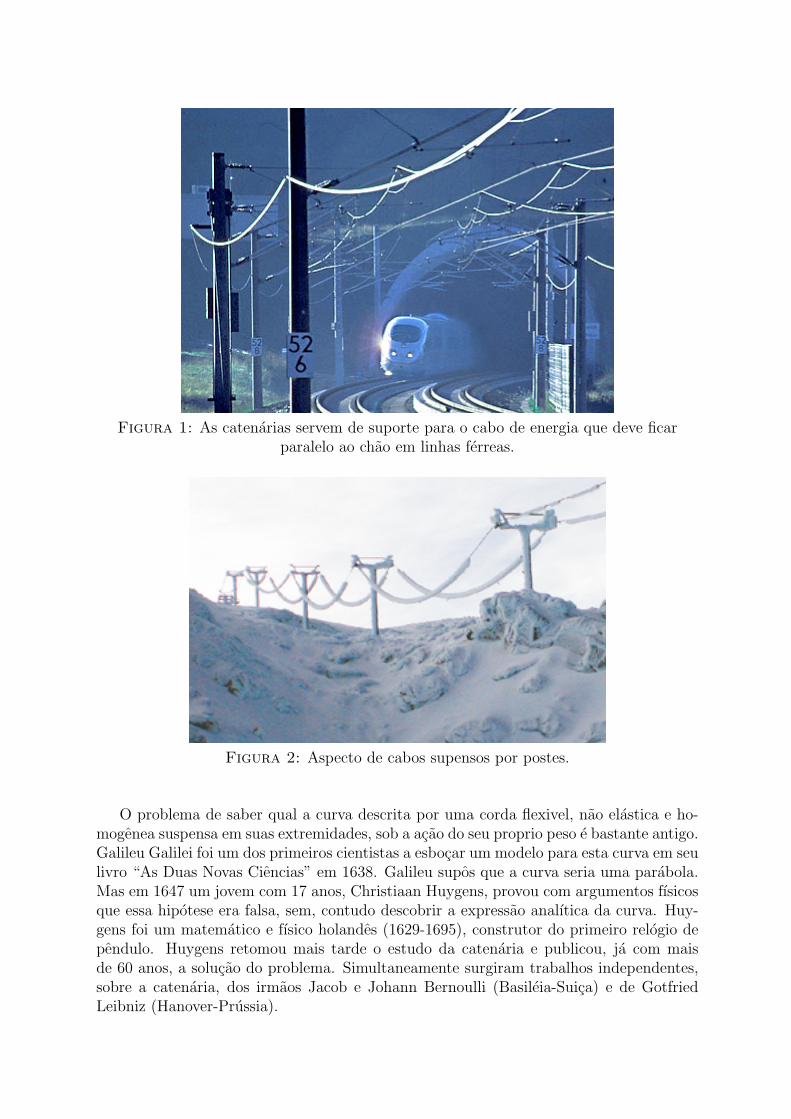
Figura 1: As catenarias servem de suporte para o cabo de energia que deve ficarparalelo ao chao em linhas ferreas.
Figura 2: Aspecto de cabos supensos por postes.
O problema de saber qual a curva descrita por uma corda flexivel, nao elastica e ho-mogenea suspensa em suas extremidades, sob a acao do seu proprio peso e bastante antigo.Galileu Galilei foi um dos primeiros cientistas a esbocar um modelo para esta curva em seulivro “As Duas Novas Ciencias” em 1638. Galileu supos que a curva seria uma parabola.Mas em 1647 um jovem com 17 anos, Christiaan Huygens, provou com argumentos fısicosque essa hipotese era falsa, sem, contudo descobrir a expressao analıtica da curva. Huy-gens foi um matematico e fısico holandes (1629-1695), construtor do primeiro relogio dependulo. Huygens retomou mais tarde o estudo da catenaria e publicou, ja com maisde 60 anos, a solucao do problema. Simultaneamente surgiram trabalhos independentes,sobre a catenaria, dos irmaos Jacob e Johann Bernoulli (Basileia-Suica) e de GotfriedLeibniz (Hanover-Prussia).
Galileu Galilei -1564-1642
Christiaan Huygens -1629-1695
Johann Bernoulli -1667-1748
Jacob Bernoulli -1654-1705
Gottfried Leibniz -1646-1716
Figura 4: Importantes personagens da historia da Matematica estudaram o “Problemada Corda Suspensa”.
2 O Problema
Qual e a funcaof : [a, b] ⊂ R −→ R
x �−→ y = f (x)
cujo grafico possui o aspecto de um cabo homogeneo, flexıvel e nao elastico suspenso porsuas extremidades sob a acao apenas da forca gravitacional?
Figura 5: Qual a funcao real cujo grafico possui esse aspecto?
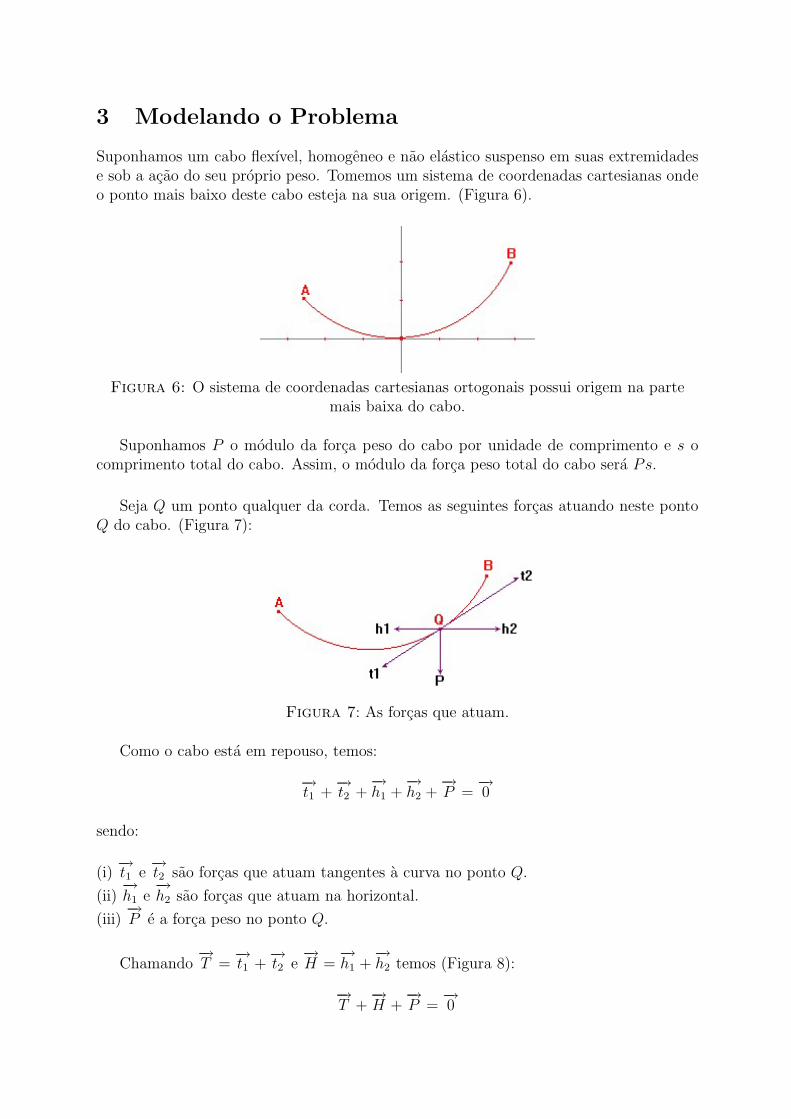
3 Modelando o Problema
Suponhamos um cabo flexıvel, homogeneo e nao elastico suspenso em suas extremidadese sob a acao do seu proprio peso. Tomemos um sistema de coordenadas cartesianas ondeo ponto mais baixo deste cabo esteja na sua origem. (Figura 6).
Figura 6: O sistema de coordenadas cartesianas ortogonais possui origem na partemais baixa do cabo.
Suponhamos P o modulo da forca peso do cabo por unidade de comprimento e s ocomprimento total do cabo. Assim, o modulo da forca peso total do cabo sera Ps.
Seja Q um ponto qualquer da corda. Temos as seguintes forcas atuando neste pontoQ do cabo. (Figura 7):
Figura 7: As forcas que atuam.
Como o cabo esta em repouso, temos:
−→t1 +
−→t2 +
−→h1 +
−→h2 +
−→P =
−→0
sendo:
(i)−→t1 e
−→t2 sao forcas que atuam tangentes a curva no ponto Q.
(ii)−→h1 e
−→h2 sao forcas que atuam na horizontal.
(iii)−→P e a forca peso no ponto Q.
Chamando−→T =
−→t1 +
−→t2 e
−→H =
−→h1 +
−→h2 temos (Figura 8):
−→T +
−→H +
−→P =
−→0

Figura 8: Simplificando o esquema de forcas.
Supondo que toda massa do cabo esteja concentrada no ponto Q, temos:
Figura 9
=⇒Figura 10
Sabemos que−→T e tangente a curva y = f (x) que queremos encontrar e, daı, temos
tan α = f ′ (x) .
Mas pela Figura 10 temos
tan α =Ps
H⇒ f ′ (x) =
Ps
H.
Como s e comprimento da curva e, tomando A = (x0, y0) e B = (x1, y1) , pontosextremos da curva, podemos calcular s da seguinte forma:
s =
∫ x1
x0
√1 + f ′ (x)2dx.
Assim, o comprimento da curva do ponto A ate o ponto Q = (x, y) e dado pela funcaos = s (x) abaixo:
s (x) =
∫ x
x0
√1 + f ′ (x)2dx.
Logo,
s′ =
√1 + f ′ (x)2.
Lembrando que
f ′ (x) =P
Hs (x)
f ′′ (x) =P
Hs′ (x)
f ′′ (x) =P
H
√1 + f ′ (x)2
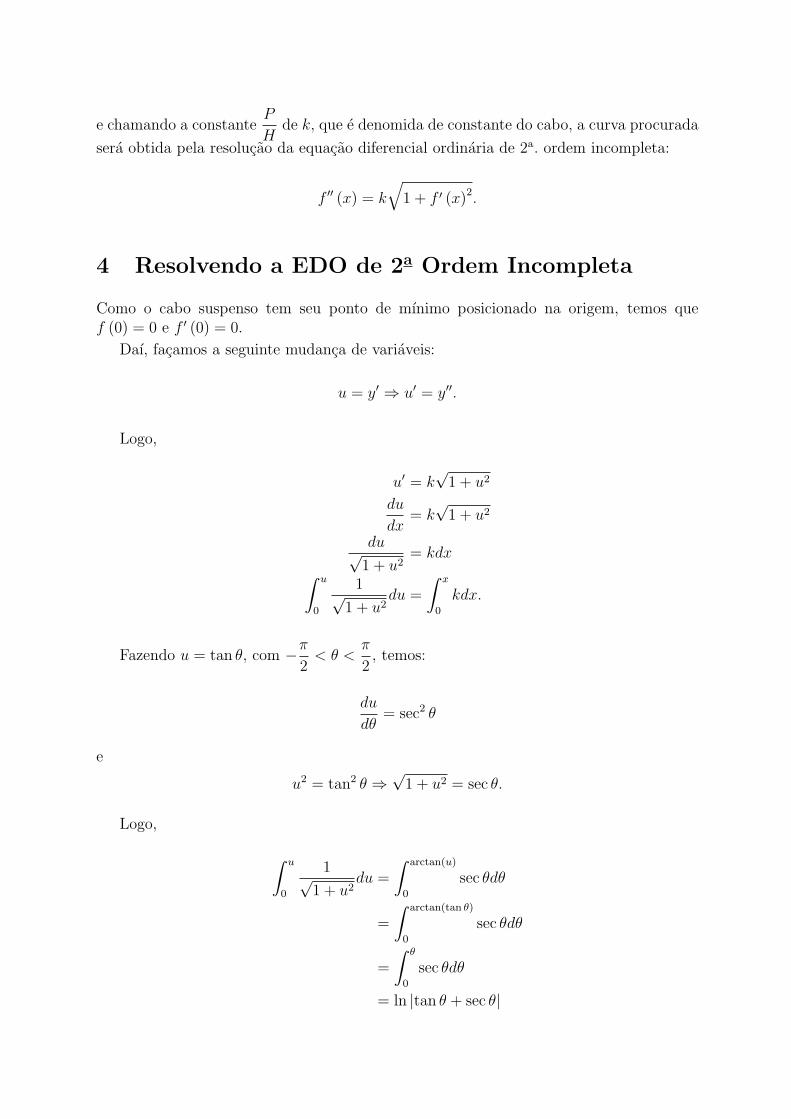
e chamando a constanteP
Hde k, que e denomida de constante do cabo, a curva procurada
sera obtida pela resolucao da equacao diferencial ordinaria de 2a. ordem incompleta:
f ′′ (x) = k
√1 + f ′ (x)2.
4 Resolvendo a EDO de 2a Ordem Incompleta
Como o cabo suspenso tem seu ponto de mınimo posicionado na origem, temos quef (0) = 0 e f ′ (0) = 0.
Daı, facamos a seguinte mudanca de variaveis:
u = y′ ⇒ u′ = y′′.
Logo,
u′ = k√
1 + u2
du
dx= k
√1 + u2
du√1 + u2
= kdx∫ u
0
1√1 + u2
du =
∫ x
0
kdx.
Fazendo u = tan θ, com −π
2< θ <
π
2, temos:
du
dθ= sec2 θ
e
u2 = tan2 θ ⇒√
1 + u2 = sec θ.
Logo,
∫ u
0
1√1 + u2
du =
∫ arctan(u)
0
sec θdθ
=
∫ arctan(tan θ)
0
sec θdθ
=
∫ θ
0
sec θdθ
= ln |tan θ + sec θ|

Assim, ∫ u
0
1√1 + u2
du =
∫ x
0
kdx
ln |tan θ + sec θ| = kx
|tan θ + sec θ| = ekx
tan2 θ + 2 sec θ tan θ + sec2 θ = e2kx
tan2 θ + 2 sec θ tan θ + 1 + tan2 θ = e2kx
tan2 (θ) + tan (θ) sec (θ) =e2kx − 1
2
(tan θ) (tan θ + sec θ) =e2kx − 1
2.
Lembrando que |tan θ + sec θ| = ekx e
tan θ + sec θ =1 + sen θ
cos θ≥ 0
para −π
2< θ <
π
2, temos:
tan θ =e2kx − 1
2ekx
u =e2kx − 1
2ekx
y′ =ekx
2− e−kx
2∫ y
0
y′dy =
∫ x
0
(ekx
2− e−kx
2
)dx
y =ekx
2k+
e−kx
2k− 1
k
f (x) =1
k
(ekx + e−kx
2− 1
)
f (x) =1
k(cosh (kx) − 1)
que e a expressao procurada. Como comentado no inıcio do trabalho, a curva que o cabodescreve e possui a expressao acima recebe o nome de catenaria.
5 Um Problema Pratico
Naturalmente, ao fazer um projeto de implementacao de rede eletrica urbana e altamentedesejavel saber com boa precisao qual a quantidade de cabos eletricos a serem utilizados.Consultando alguns dos manuais disponıveis no site da Cemig (Companhia Energeticade Minas Gerais), encontramos os seguintes dados padrao para a implementacao de redeeletrica em um determinado local: postes de mesma altura a uma distancia de 15 metrose cabos (de determinado diametro) que formam uma flecha (“barriga”) onde o ponto mais

baixo do cabo esta a uma distancia de 0,41 metros da altura do poste e 5,5 metros dochao. Como calcular o comprimento do cabo de um poste ao outro?
Precisamos de uma expressao analıtica que “descreva o formato” do cabo. Essa ex-pressao e a que encontramos acima. Como os dois postes sao de mesma altura, o pontomais baixo do cabo estara exatamente no meio deste, e como a funcao do cabo e
f (x) =1
k(cosh (kx) − 1) ,
devemos descobrir qual o valor da constante k do cabo.
Temos que no meio do cabo a flecha e de 0,41 metros. Adotando o meio do cabo comoa origem de um sistema de coordenadas temos f (−7, 5) = f (7, 5) = 0, 41 e f (0) = 0.
Logo,
0, 41 =1
k(cosh (7, 5k) − 1) .
Utilizando o software de calculo numerico e simbolico Maple para resolver numericamentea equacao acima, temos
k = 0, 014563.
Daı a curva procurada sera grafico da funcao f cuja expressao e
f (x) =1
0, 014563(cosh (0, 014563x) − 1) + 5, 5
e cujo grafico e ilustrado abaixo mantendo-se as proporcoes:
7.552.50-2.5-5-7.5
6.25
5
3.75
2.5
1.25
0
x
y
x
y
Figura 11: O aspecto do cabo suspenso do problema.

O comprimento do cabo de um poste ao outro e dado por
∫ 7.5
−7.5
√1 +
(d
dx
(1
0, 014563(cosh (0, 014563x) − 1) + 5, 5
))2
dx
=
∫ 7.5
−7.5
√1 + (sinh 0, 014563x)2dx
=
∫ 7.5
−7.5
√(cosh 0, 014563x)2dx
=
∫ 7.5
−7.5
cosh 0, 014563xdx
=
∣∣∣∣ 1
0, 014563sinh 0, 014563x
∣∣∣∣7,5
−7,5
=2
0, 014563sinh (0, 014563 (7, 5))
= 15, 03.
ou seja, o cabo possui apenas 3 cm a mais que a distancia entre os postes.
Referencias
[1] Braun, M. Equacoes Diferenciais e suas Aplicacoes. Rio de Janeiro: Editora Cam-pus. 1980.
[2] Figueiredo, D. G. Equacoes Diferenciais Aplicadas. Rio de Janeiro: SociedadeBrasileira de Matematica - SBM. 1999.
[3] Ruffino, P. O Problema da Catenaria. Revista Matematica Unviversitaria. Numero29. Rio de Janeiro: Sociedade Brasileira de Matematica - SBM. 2000.
[4] Site www.cemig.com.br
[5] Site www.macthutor.org.uk

FAMAT em Revista
Revista Científica Eletrônica daFaculdade de Matemática - FAMAT
Universidade Federal de Uberlândia - UFU - MG
Número 05 - Setembro de 2005
www.famat.ufu.br
Problemas e Soluções
���

�
�
�
�
�
�
�
�
�
�
�
�
�
�
�
�
�
�
�
�
�
������������� ���������
������������� ����������������������������������
�
��� �� !�����"���#��� �����$%����#������&����'�
&�#��(�&��#��
�#�)#������ �&���(������
� �*��#��+�,���-�� �#� ���������
Problemas e Solucoes
A revista eletronica FAMAT em Revista publica regularmente uma secao de proble-mas com o tıtulo Problemas e Solucoes. Todos os interessados podem participar dessasecao apresentando solucoes para os problemas ja publicados ou propondo novos proble-mas. Serao publicados problemas de matematica basica ou superior, assim como enigmasde natureza logica que desafiem nossos leitores e lhes proporcionem bom treinamento naresolucao de problemas. O comite editorial selecionara, dentre os problemas propostos, osque mais se destacarem por sua beleza, relevancia e originalidade. Problemas propostosem um numero da revista terao suas solucoes publicadas no numero seguinte. Quandoda publicacao de problemas ou resolucoes enviados por leitor, serao citados o(s) propo-nente(s) e o(s) autor(es) das solucoes recebidas. Ao propor um problema, o leitor deveraencaminhar sua solucao juntamente com o enunciado e citar a fonte de onde ele foi tirado,se for o caso.
Todo participante dessa secao devera identificar-se mencionando seu nome e enderecocompletos (inclusive e-mail). Para fazer contato com a revista, os participantes poderaoutilizar o endereco eletronico
ou encaminhar correspondencia para:
FAMAT em RevistaFaculdade de Matematica
Universidade Federal de UberlandiaAv. Joao Naves de Avila, 2121, Santa Monica
CEP 38408-100 - Uberlandia - MG
Nesse numero, alem de quatro novos desafios, publicamos a resolucao dos quatro donumero anterior.
ATENCAO: Estaremos dando continuidade a promocao do numero anterior. Para osleitores que nos enviarem solucoes corretas, de pelo menos dois dos problemas propostos,estaremos sorteando em Abril de 2006 alguns exemplares do livro:
MOREIRA, C. et. alli. (orgs.) Olimpıadas Brasileiras de Matematica. 9 a . a16 a . Problemas e resolucoes. Rio de Janeiro: Publicacao da Sociedade Brasileira deMatematica, 2003.
“A filosofia esta escrita nesse grande livro - ou seja, o Universo -que se encontra aberto continuamente ante os nossos olhos, mas elenao pode ser entendido a menos que se aprenda, primeiro, a ler sua
linguagem e interpretar as letras com as quais o compuseram. Ele foiescrito no idioma da matematica e seus sımbolos sao triangulos,
cırculos e outras figuras geometricas, sem as quais e humanamenteimpossıvel entender uma unica palavra de seu texto.”
Galileu Galilei, Il Saggiatore (1623)

Problemas Propostos
17. Na figura abaixo, qual e a soma das medidas dos cinco angulos indicados?
Justifique sua resposta.
18. Escolha 101 numeros dentre os elementos do conjunto {1, 2, 3, ..., 200}, ao acaso.Mostre que, dentre os numeros escolhidos, ha dois numeros tais que um e multiplo dooutro.
19. Qual e o ultimo algarismo do perıodo na representacao decimal de1
2003?
20. Seja a um numero irracional. Mostre que o conjunto de todos os numeros daforma pa − q, onde p e q sao inteiros, e denso no conjunto dos numeros reais.

Resolucao dos Problemas Propostos do NumeroAnterior
13. Dispondo de 100 reais, quais sao as quantias que se podem gastar comprandoselos de 5 reais e de 7 reais?
Extraıdo de:HEFEZ, A. – Elementos de Aritmetica – Sociedade Brasileira de Matematica – 2005
Resolucao
Chamemos x e y as quantidades de selos de 5 e 7 reais, respectivamente, adquiridosem uma compra cujo valor total e c. Assim, o problema consiste em determinar para quevalores da constante inteira positiva c a equacao diofantina linear
5x + 7y = c (*)
tem solucoes naturais x e y, onde 5 ≤ c ≤ 100.Como mdc(5, 7) = 1 e 1 e divisor de c, a equacao (*) tem solucao, qualquer que seja
o valor de c, com x, y ∈ Z. Vamos, agora, determinar a solucao geral de (*). Como5 × 3 + 7 × (−2) = 1, segue que 5 × (3c) + 7 × (−2c) = c, isto e, x = 3c e y = −2c saointeiros que satisfazem (*). Portanto, a solucao geral de (*) e dada por{
x = 3c + 7ky = −2c − 5k
com k ∈ Z.Agora, de acordo com as condicoes do problema, somente nos interessam as solucoes
tais que x ≥ 0 e y ≥ 0. Observemos que,
x ≥ 0 ⇔ 3c + 7k ≥ 0 ⇔ k ≥ −3c
7
e
y ≥ 0 ⇔ −2c − 5k ≥ 0 ⇔ k ≤ −2c
5.
Neste ponto, o problema pode ser reformulado da seguinte maneira: dado um inteiro
c, com 5 ≤ c ≤ 100,existe um inteiro k de modo que−3c
7≤ k ≤ −2c
5? Passamos, entao,
a responder esta indagacao.Se c for multiplo de 5 ou de 7, a resposta e claramente afirmativa. Alem disso, como
a diferenca entre−2c
5e−3c
7e igual a
c
35, sempre que c > 35, teremos a existencia de
um inteiro entre−2c
5e−3c
7(pois, nesse caso,
c
35> 1). Para concluirmos o problema,
resta-nos responder a ultima questao no caso de c nao ser multiplo de 5 e nem de 7 e,ainda, c ser menor do que 35. Para tal, basta notarmos que os valores de c que devem serexcluıdos sao aqueles satisfazendo a igualdade[
3c
7
]=
[2c
5
],
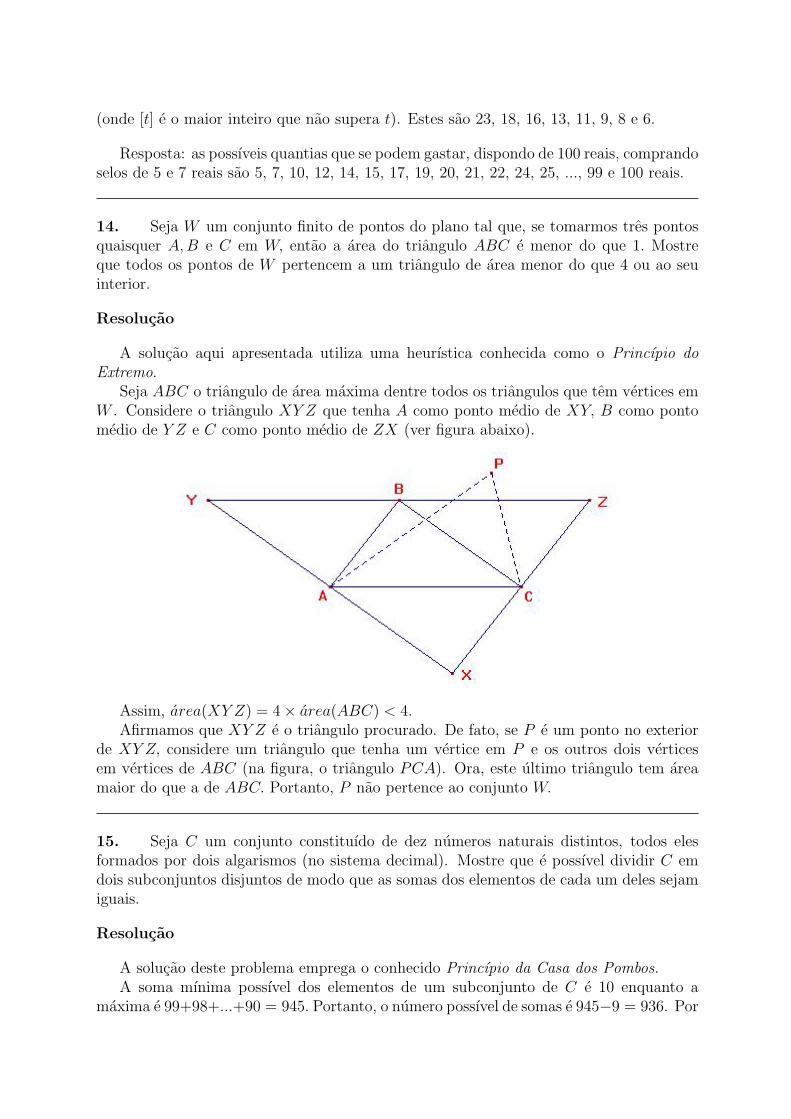
(onde [t] e o maior inteiro que nao supera t). Estes sao 23, 18, 16, 13, 11, 9, 8 e 6.
Resposta: as possıveis quantias que se podem gastar, dispondo de 100 reais, comprandoselos de 5 e 7 reais sao 5, 7, 10, 12, 14, 15, 17, 19, 20, 21, 22, 24, 25, ..., 99 e 100 reais.
14. Seja W um conjunto finito de pontos do plano tal que, se tomarmos tres pontosquaisquer A,B e C em W, entao a area do triangulo ABC e menor do que 1. Mostreque todos os pontos de W pertencem a um triangulo de area menor do que 4 ou ao seuinterior.
Resolucao
A solucao aqui apresentada utiliza uma heurıstica conhecida como o Princıpio doExtremo.
Seja ABC o triangulo de area maxima dentre todos os triangulos que tem vertices emW . Considere o triangulo XY Z que tenha A como ponto medio de XY, B como pontomedio de Y Z e C como ponto medio de ZX (ver figura abaixo).
Assim, area(XY Z) = 4 × area(ABC) < 4.Afirmamos que XY Z e o triangulo procurado. De fato, se P e um ponto no exterior
de XY Z, considere um triangulo que tenha um vertice em P e os outros dois verticesem vertices de ABC (na figura, o triangulo PCA). Ora, este ultimo triangulo tem areamaior do que a de ABC. Portanto, P nao pertence ao conjunto W.
15. Seja C um conjunto constituıdo de dez numeros naturais distintos, todos elesformados por dois algarismos (no sistema decimal). Mostre que e possıvel dividir C emdois subconjuntos disjuntos de modo que as somas dos elementos de cada um deles sejamiguais.
Resolucao
A solucao deste problema emprega o conhecido Princıpio da Casa dos Pombos.A soma mınima possıvel dos elementos de um subconjunto de C e 10 enquanto a
maxima e 99+98+...+90 = 945. Portanto, o numero possıvel de somas e 945−9 = 936. Por

outro lado, o numero de subconjuntos de C e 210 = 1024. Como 1024 > 936, existem mais“pombos” (os subconjuntos de C) do que “buracos” (as somas). Assim, pelo Princıpio daCasa dos Pombos, existem dois subconjuntos A e B de C tais que a soma dos elementosde A seja igual a soma dos elementos de B. Caso A e B sejam disjuntos, nada maistemos a fazer. Caso contrario, retire de A e de B todos os elementos comuns a estesdois conjuntos, obtendo novos conjuntos A′ e B′ que, nesse caso, serao os conjuntos quesatisfarao as condicoes do problema.
16. Encontre todos os quadrados perfeitos (no sistema decimal) cujos tres ultimosalgarismos sao iguais a 4.
Resolucao
Observemos que o primeiro natural candidato a satisfazer a condicao do problema e444; todavia, como 212 = 441 < 444 < 484 = 222, tal numero nao e um quadrado perfeito.O candidato seguinte e 1444 e este e satisfatorio, pois 1444 = 382.
Para um natural N = 1000 k + x, onde k e x sao inteiros e 0 ≤ x < 1000, temos N2 =1000(1000 k2+2kx)+x2, isto e, os tres ultimos algarismos de N2 somente dependem de x2.Agora, se os tres ultimos algarismos de N2 sao todos iguais a 4, entao N2 ≡ 382(mod 1000).Daı, N2 − 382 ≡ 0(mod 1000), 1000 | N2 − 382 e, assim, 1000 | (N − 38)(N + 38). Noentanto, mdc(N − 38, N + 38) = mdc(N − 38, N + 38−N + 38) = mdc(N − 38, 76). Daı,mdc(N − 38, N + 38) e divisor de 76 = 22 × 19. Como 23 × 53 = 1000 | (N − 38)(N + 38),segue que 53 | N − 38 ou 53 | N + 38. Como N − 38 e N + 38 sao ambos divisıveis por4, concluımos que, se N2 finaliza em “444”, entao pelo menos um dos inteiros N − 38 ouN + 38 e divisıvel por 4× 53 = 500. Logo, N = 500k ± 38, para algum inteiro positivo k.
Em contrapartida, e facil verificar que, se N = 500k ± 38, para algum inteiro positivok, entao os tres ultimos algarismos de N2 sao iguais a 4.

FAMAT em Revista
Revista Científica Eletrônica daFaculdade de Matemática - FAMAT
Universidade Federal de Uberlândia - UFU - MG
Número 05 - Setembro de 2005
www.famat.ufu.br
Eventos
�

���������������������
������������� ����������������
�������������������������������
� ������� �!���"�# ��� �����������$%��&���� ��%����� ���'(���������%���%����)�
����*������� �%���+#�����
%����+#%�����
�����������
� +#�%� �%� ,���(�,��%� ������%� �+��%� -������.��(�� /#�� �(������ ������ %����0��� ���1��0��� �� 2���� 3����� ,#0 �(��%� ��� ������� ��������� �%��� ����%��4� ��� �������5� �#���%�������%�/#�����06���(��������%%��,��$�����������%#����# +�����3������,7%���3�(!��������� ������� ��������� �� ����%��4� ����� �%%��5� %��,��� /#�� 3��� ��� ���,�5� �%������%�(��, ����������� �%��+����%�,���(�,��%�������%���%�������%�%#0%�/8����%��%�������%��4�����
��� �������������������������������������������
����������������������
!�� �������"#����$���������������%�99�������������:��9��(�������������.��(����%���$%��(������;<�&�����%�=����>���?#�#0�����2�������� %�<�����%��������� ���&��.%�;�&��@����;�&?�����%!��,�::AAA4���4#3+40���������%BC������.����"�# �%�����D�%�7������#(����������.��(������%B����B2���?#�#0�����2�������� %<�����%����������"�# ��;����,#%�������"�# ��;��"�����%!��,�::AAA4���4#%,40�:E%,!��:��������%=FC���#�������+���� ����%%�(������ ��%� �������%���$%��(������%BG���2B���?#�#0�����2�������� %<�����%��������� �������&�������������;�<��������%!��,�::AAA4�%����%��(�4((��4#3��40�:=F�0���������%������2����;��(��������+���� ��������.��(���, �(��������,#��(���� ����%�2����2F���?#�#0�����2�������� %<�����%��������� ���%,$�����������;����7����;�������%!��,�::AAA4��34#3�%40�:����(2�����������%����������������.��(���������;<�<�����%2����2F���?#�#0�����2�������� %<�����%��������� ���<0�� @����;��&�����%!��,�::AAA43����4#3#40�:%������������%�9� ��"��;��(������ ��%� �������%�#����%���"7%�&��#��������#(����������.��(������%B2���BH��������0�����2�������� %<�"�;�<�����%����������"�# ��;����,#%�������"�# ��;��"�����%!��,�::AAA43�4#%,40��
�������%������3����(�����(���� �%�0������ �+�����#(����������.��(������%�>����F��������0�����2�������� %<�����%����%��#� �������������������;� ������%!��,�::AAA4#�3%40�:(������������%B=I����,7%����������(���� ������(�����������$3�(����<�"�;�����<�"�����%�G���BB��������0�����2�������� %<�����%����������"�# ��;���,#%���������� �%�;��"�����%!��,�::AAA4#%,40�:%��(#%,��������%J2C�� ��;������.���� ��%� ���������. �%������%2=���2J��������0�����2�������� %<����%��������� ���������K�����������%!��,�::AAA4#3340�:%0���������%�����������������.��(����<�������%2F��������0������2���L�1��0�����2�������� %<�����%����%��#� ���������#1�;�� !6#%�;� ������%!��,�::AAA4#�%(40�:��0� �%:��%��������
����������������������
&�������&��'������(��� � +#�%�������%���,�������%�/#���(����������%%��,��$�������������%����(����������3����4����,�7M���������������� �����������%������%�(��, ����������� �%��+�����������%��0��M�4��������%"��+�������"7%;L�#��������������;���"������%�2���K���������2��J���2F���������������2��J����� %��%���#����������.��(��"#������, �(���;�������K�������;��K�����%�!��,�::AAA4��,�40�:������%:2��JN,��+����N,�%N�#�����N�����4!�� ��������%"��+�������������,������%�������������.��(��;�<��� O +�0���P������� ��. �%��������������%�=���K���������2=���3�����������2��J����� %<�����%����%��#� ��������+.�;�"������%!��,�::AAA4,��4#��40���������%"��+�������������,������%�������������.��(��;�<��%,�����%BJ���K���������2H���������������2��J����� %<�����%����%��#� �"�# �%���;����,#%�������K�%6�������"�����;��"�����%!��,�::AAA4���4#0� (�4#��%,40�����

������%�(!�� ����Q��R%!�,����LS����(� ��S%���%�;���"������%BJ���2>���K���������2��J����� %��%���#����������.��(��"#������, �(���;�������K�������;��K�����%�!��,�::AAA4��,�40�:������%:2��JN%(!�� N��NA��R%!�,N��NS����(� N%S%���%4!�� ��������%���%(� �� ��%� �������/#��T�%�L�3����(���%�;���"������%2=���2>���K���������2��J����� %��%���#����������.��(��"#������, �(���;�������K�������;��K�����%�!��,�::AAA4��,�40�:������%:2��JN L4!�� ��������%Q��R%!�,�����#�������%�������(��������,#�������� +������%����0����7���%���%��#�#��%�L�%(����%�;���"������%B����B=����0�� ���2��J����� %���%���#����������.��(��"#������, �(���;�������K�������;��K�����%!��,�::AAA4��,�40�:������%:2��JNA��R%!�,N3#�������%N(���(��N(��,#��(��N� +������%N(��0��������%4!�� �

FAMAT em Revista
Revista Científica Eletrônica daFaculdade de Matemática - FAMAT
Universidade Federal de Uberlândia - UFU - MG
Número 05 - Setembro de 2005
www.famat.ufu.br
Reflexões Sobre o
Curso de Matemática
��
�

���������������������
������������� �����������������������������������������������������������������������
�%����+#%�����'(�����������%����)�
���*������� �%���+#������� ���� ��3���
)�* �+,��������������-����.������� ?%� � ����%���%�%� 3������� 0�%������ ���0� !�� ��%� #����%� �(����(�%� ��<�<�/#��,�%%#���(#�%�%��� �(��(���#��4���,��������2��J��%��%��#�#��%��%�(#�%�%��� �(��(���#�����<�<� ,�%%����� ,��� �����%�%� ��3����%� /#�5� ���� ���������5� %��� /#�%������%� /#����� �� %#���3�(���(������3���������� �(��(���4�?0��������5���/#� ������� #�����+��%%����������%����%#,������ �� %#�� U(# �#��� �� �%�#�%V� %����� ��%� ��� ��%���� 3#������� � ���6��� �5� �������%%���������� ���#����� �� �,����%��5� (�������%� �%� ������%� ����� �� �������� ��(��!�(����� �� %�%����� �� ��%���� 3���(�%� /#�5� ��� 6(��� �� BGF�5� ,�%%�#� ,��� ��3����%��%��#�#���%��%����,�6;�%(� ����6���#�����%���4�?���M��5�� 6�����M,�����%�%���������%���5�6�#���� �����/#� ���#�(����������06���%��3�(# ��%�/#��%#�+����4�"����(��������%�/#���� ��%���� ��� ��%� � �%�.� ��� (��%�� '�%,�(�� ������ �� ��%���� �� �����.��(�)5� �� ��M��� �0��M���3���(��#���0����,���#���������3 �M���,���5�/#���%�0�5������%��� !���%�,��@�����%�,������(��%��#������#��%�%���������%������ !��4��� ?���M���6�����# +�������+�������3���(�%���,���%�����(�����������
!��,�::AAA43���(�4��+40�:�0�:���+�%� �3���(�:��%���4!������
���������/�����%������������ ����� �� ��,�0 �(�� 3���(�%�� ���� J���� !T�%� �� !�0������%5� �%���0#$�%� ��� 22� ��+�T�%� �������7,� �� �� ��%� H� �,���������%� �� # ������� 'B5>� �� !��)4� �� �M,��������� #�� ����(��%(������� ���+�.3�(�� �� �,��M���������� �5HW� ,��� ���4� ���������5� �� ������� �� ��,��,�������� X����%� (�������%���2�� ���%� %�+#���#��� �����(��� �����%��������#������� �%� %��� ��#� ����������%���BG��� !T�%��������7,� �5� �� �/#��� ����� ��=2W���,�,# �������(���� 5� (������ H�W� ,��� �� ��� �� BG>�� �� =�W� ��� 6,�(�� �� ��(��%�������� �� BGG�4��%%�%����%�,����������#�� ��������� !�(���������,�,# ����5�����%�,���#�(���������������/#�� ��� �#���%� ,�$%�%� ��1��!�%� '� ����!�5� ��. ��)5� ������ ���%� /#�� �� ������� ��#� � ����%(������%���+�%������#� ������#��(�����(��%(������4� ?����� ���� #��%����%�#����%�(!�+����B���� !T�%5��#�#��/#�������,�,# ����4�"�#(�����%���2��� !T�%�3��/8����������%����%#,�����4��� ��BGGG5�����/#�1����(���� �'"� )��,��M���;%����G���� !T�%���3���(�%�'B5=���� !������#��%)5����/#��� �������B��4����3���(�%�'224�����#��%)�,���!�0������4�L�%������� 5�,�#(�����%���J���0� !T�%���3���(�%�'G��0� !T�%����#��%)��%�����;%��-%��%,�%�%����#(�����,������3�������� ���(�� ��#�(���$�#���>52W���"� 4����(����M��� �������(���� 5����%3����� 3����(������%������ -� 3�������� ���(�� � %��#�� �� ������� ��� ,�%����� ��������.���5� �/#6�� �%� ,�$%�%��7��(�%�'�#6(��5�L������(�)5���%�( ����������(��������. �������K�,��4�� �������������!�X��2J��� !T�%������0� !����%������%5��%�/#��%�����%���25���� !T�%���(������;%�� �%��,��+��%�� �� $��(�� �� �%��,��+�� �(�0�� �� (���� �0��M�� �� B�W4� �%��������%���3���������(#,���JW���,�,# �����������'(��(����B5���� !�������,��+�%5��������%�/#��%�B��� !�����3#�(���.���%)4��
$����������������������� ���� �� ,�,# ����� �%(� ��� �� �,��M���������� B=� �� !T�%� �� � #��%� �%3�#��� �� #��%�%����� �� ��%���� #��3�(��� (#X�� ��(�0�#��� +��� � '�%(� �%5� (� 6+��%5� �(�#%)� 3���,��+��%%��������� �%��0� �(��� ��%� 6(��%� �� BGJ�� �� BG>�4� %��� %�%����� ��,��%����#� #����#,�#��� �(�%���� ��� �� ����� -� ����� ��������5� ���%� (��,��������� �1��� �� 0�%���� ����(���#��� %�,������� ������ �� ��%���� ,���.���� �� �� %�(#�.���4� L�%�� BGJ>� �� �%(� ������ 6��0��+��7������J���BJ����%4����,��������+��#5�J�4�����%(� �%����������%�� #��%�#�������%�(��(�����%�/#��������(#�%��,��,����7�������2I�������(#�%���6��4�L�%����6(�����BG>�5��� ������� �%���+#�;%�� ���06��,��� #�� �(���#��� �%���� �������� �� ��%���� ,�6;�%(� ���� ������ �����%�(������%���=��������%�����-��%(� ����3��/8�����( �%%�%���������%4��� ?���%����%�(#�.����(��,��������%�(�( �%�%#(�%%���%4�L��BB���B�����%5�/#�%�����%��%�(������%�(#�,������#� �������%�/#��������%���3��������/#�� ��������Y�-�FY�%6���5��#��(� 6+���/#���%��BG>�� �����#;%�����(�4��,7%� ��FY� %6���5� � �%� %�����������%�,������ ��%�����6��5� �#��� �%� ���%� +����%� ��������%� �� %�+#��� (�( �� '��%���� +��� 5� ��(�� 7+�(�� �#�,��3�%%���� )4�%%�%���������%�,��,�����,�����%� U0�((� �#�6��%V� (����%,������%5� �M���%���,�%%�+��� ��� ��%���� %#,������ ,���� �%� /#��%� �%� (������%� U��� +��� V� %�� �,��%������ ��%� BF����%������4��� �%� ��������T�%� '��,������5� ,�%%�+���-� ( �%%�� %#,�����5��#����� �� (#�%�)� %��� 3����%�,��� #�� ,��(�������� /#�� ��%��#��� ��� (��� �%��0� �(������� #�� �. �+�� ������ �� ��%���#������%(� ��� ',��3�%%���%5� �����%������)� �� �%� 3��$ ��%� �� �%� � #��%4� ��� �%� ,��3�%%���%� ��� %#���,�������#��(��%� !����( �%%�5��%�,��%��� � #��%�,������(��������#����(�%���/#������ !�%� (���6�� �� �M�+��5� %�+#��� �� �$�� � �� �����������5� #��� ,�������� ��� #+��� �� #�����,��������#�#�����,���������� #+�����#��(#�%�������%�X��4���(����%��0� �(������5�#��(��,���%,�(�� �1�����(��%� !����%���������������X#���%�� #��%5��%�,��%����%�,��3�%%���%�����%� �����%�,��0 ���%4���#� �����5���=Y�( �%%��(��%���#�5����3�����(� �+�� 5���,�����������,����,��������������������4��� ��+��������������%�� #��%�6���(�0�������%��0� �(������%�%#0�����%�-��#��������� ����%�6���� �� #(����� ��(���� 4� ��%� (��(�� �� B��4���� '�,��%������� �3������%��3�(���(��%)�3��/8�������%��0� �(������%��6�(�;%�(���%�������%�6����������5���2��4�����%���� �+��%� �� �%��0� �(������%� �+�$(� �%� '3�����T�%� �6(��(�%� ��,��3�%%�����%)4����� �����5�=��4���� (��� ���� �$����� �� BJ� ���%� %�+#��� 3�����T�%� �� �,����1�+��� '(�������� �����0� !�)� /#�� �%�� �� ��3����� �� BGF>� ,���� ,��,����� ,���� ���%� �%� ��,�%� �� �, ���%�,��3�%%�����%4��� "��� � ������������%�����%(� ���(��#���M�%���#����%�����%,�(�� �1����#���,���5�/#�� 3��/8���������� 6� ����+���� ��%� �%��0� �(������%� ,���.���%� �� %�(#�.���%5� (���� �%�( �%%�%� �� ����+������ �%(� ��� '�P��)� �� �%� %��T�%� �� ��%���� +��� � �� ,��3�%%���� � ��,����'�&"�)5���%�/#�����06��6��%,��%�������%��0� �(������%��%,�($3�(�%�'�%,�(�� ������������)4�%�����%����0���3�(���(��(�����W��%�(������%���#���+�����������%����(��#1�; �%���#���$�� ��$�������/#� �3�(����5���(����3�(������,�����,��3�%%���� �'��")4��� ?%� �%��0� �(������%� (����� ��%� ,� �� ����%�6���� �� #(����� ��(���� � ,���� %���,�0 �(�%� �#� ,�����%4�?� ��%���� ,������ (��,������ (��(�� �� B�W��%� � #��%� ��� ,��������+��#� �� 2�W� ��� %�+#��� +��#5� ,��(���#��%� /#�� %�� ����������� �%�.���%� ��� ��+�� �� � �����6(��4� ?� �%%��(�� � �� ��%���� ,������ 6� (��%���#$�� �� �%��0� �(������%� (��7 �(�%� %�0�(�����������%%�(������(�����%����'/#�����#�����%�#�,�%%�� )4�?�%�����,������%�0�(��������
(��+��+�� ����%� �� ��4���� � #��%5� (������� (��� #��� 3����� ,����(�,����� 3����(����� �%�3��$ ��%4��$����������������0������� "�$%� �� ���(��� �������� (����� �1��5� ��,�0 �(�� /#�� (��%��#�#� �� (��%� ��#� %#���������������6%���#����%(� ����(#�0�����3�������%�3#�#��%�(����%5����������(��%�����#��%�%���������%����%#0���������(����� �������������%���4� ��,��%���������0#��T�%�3#��������%�����3�������������, �(�������,� $��(���#(�(���� ����%�,��+����%���(�����%��� ��%���4� ��(#�0�;%�� �� ��(�#�������5� �� 3�������� �� �� ���#�������� �%� ,��3�%%���%5� ���������� �%� /#��%� %��� 3#�(���.���%5� 3�����%� ��%� ��%���#��%� #�����%��.���%� �� 3�������� �%���%���%�'�<��)4�%��%���%���#��%5�(����%����BGGB5���(�0����������%�(������%������%������,�������� +��#� ',��3�%%���%� �%� �%(� �%)� /#����� �%� 3#�#��%� ,��3�%%���%� �� %�+#��� +��#�'(����3�(��%� �� �+��+��%)5� /#�� �(#�# ��� ��� 3��� �� %#�� 3�������� (��(�� ���%� �� �%�#�%�,�%�������%� ��� U0�((� �#�6��V4� L�%�� BF�F� �� %$�0� �� �� �, ���� ��(���� � ��*����� 6� ��U0�((� �#�6��V5�/#�������%������,������������%��%�#�%�%�(#�.���%���3����(����,�%%�,������� ������� ��� ��%���� %#,�����4� L�%�� �� ��$(��� �� %6(# �5� �� ,�7,���� 3�������� ,��3�%%���� ��%���� ��#;%�� %�0� �� (����� �� �� %���5� /#�� �,��#� ,��� U�%(� ���1��� �%� �,����1��%V�� �%�/#� �3�(��T�%��/#����%�%������%���%�,� �%�,�������%��, ���%�/#��������%�����(����3�(������,�����,��3�%%���� �'��")������, ����'0�����)����%�#�%�,��3�%%�����%�' ")4��� ?�%����6���������3����(������%�+�%��%����#(�����'(��(������%������%������� ��� J��� 0� !T�%� �� 3���(�%)5� ��,��%������� %�0���#�� �%,�%�%� �� ,�%%�� 4� �� (�����0#���+#� ������(����X#�%�3����(����%�����%�%5�%�0���3�������0� %�%5�%#0����T�%5���(Z��$�����,������,�������������������� D.� �1� ���%5� ����������5� �� ������� ��,��!�#;%�� �#�� #, �� ���������� ���%(��(��������� �� �%(����� �1����4� ��� /#�� �1� ��%,����� -� �#(����5� �%��� ����������,��,��(����#������� ����%���� �� 3 �M�0� ���� ��+���1�(���� � �� #�� %�%����� �� ��%���� ,�������%�#��3���������%������� $��(�4��� �� �%(��(��������� (��%�%��� ��� (��(���� ������%� ,����%� -%� �#������%������%�������%���+�����%��#� �(��%�%#0�����%�-��#�������������%���4������#��X.��+����6��(�������"���%��#���%�+�0�����%�����%������%4�?%��������%5���(#�0��%���3#�(�������������%(� �����(���#����%�=��1���%�+��+�.3�(�%�%�0�%#����%,��%�0� ����'�(�����%)5���(�0�����#� ������ �� �����%������� (����� � �%� ���0�%� ��������.���%� + �0��%5� (#X�� �%�������� ��%��3������%��%��0� �(������%�6�,������(����,���� �%���%��%�'���3�����������T�%�!��.���%�+ �0��%)4� L�%�� BGGG5� �� U�%(��(��������� �� ���������� �%� ,��3�%%���%V� ��#��#� �������0#�������%��������%�����%,��%�0� �������������,�����������%%�+#�����%�����%3�����T�%����#����%�������0#��T�%��������%���%#���(�����4��� ��� , ���� �(� 5� �%��� ���������� ���06�� ��#��#� ��� ������ �0����� �� ���������+���������0���,�����%�U�����%� �(��%V5��%,�(�� �������%��������%����%��0� �(������%4����(����.�����%��%(� �%5��%�(� 6+��%��� �(�#%���������;%���%��0� �(������%�,�0 �(�%� �(��%�����%���� '"P)5� ����%� �� ,��%��� ���� ���� � �� �#�������� 3����(����4� ���06�� 3�����,��+��%%��������� �/#�������#��������,��+7+�(�5� /#�� %�� ���#1���� 3������� U,��X�������%��0� �(������V5� �3������ �%� ��� ���%� �%,�(���%� �� �%���� �������� �%� �0X�����%� ��,��+����%� ��(�����%5� /#�� !�%� ,�������� ��,���;%�� -� ,�,# ����� �%(� ��� /#�� �%� ,��(#��� ���� !������������%#�%���(�%%���%��%,�($3�(�%4�
�� �%� ��%� �� �%(����� �1����� �� BGF2� �� BGF=� (�����0#$���� � 6�� �%%�� ,���� ��3������%��%��� ��������,�,� ��%�(� �������%������������%�� ����%5��#�%�X�5��%��%%��0 6��%���+�����%5��,����������%� �� (��#���%� /#�� �%,T��� �� ���������%� ,�7,���%� (��%���.���%4� �%�,����(�,�����#� ��������3����(����������2�W��%��%,�%�%������%����#(����4��� ���� (� �������� 6� ��(#�0��� �� #�� �$�� � �� ��%���4� �%� (��#��%� ���� ����%,��%�0� ������(��������%��%(� �%�'��������%���,���.���%)�����%#��+�%������������.���5���(#�0���;%�� �� ���#������ %�#� ,�%%�� � ���� �(����4� ?%� �,���������%� %��� ��%,��%.���%�,� �����#������� �� �� (��%��#���� �%� (� 6+��%5� 3����(����� �� ����%,����� �%(� ��4��%� ��+�T�%��M��(��� �%� ��%��%� (��,����(��%� ��� /#�� �1� ��%,����� ��%� �(�#%5� ,����(�,���� ��, ���X��������%(� ���', ������+���� ���3�����T�%5�,��+�������,����%���������%�������%)4��$���������������0���������������� ��%� � ����%� 6(��%5� �� %�%����� �#(������ 3���(�%� ,�%%�#� ,��� ,��3#��%� �#����%�/#����������%4���%����%�J�5�����3�(�#;%����+����� �1�����0�#�� ����(�%%���%�� #��%������%����%�(#�.���5� /#�� ,����(����� #��� �#�����(�� U�M, �%��V� �%� �3�����%� (� �+���%4� �� BGF�5� ������(������������(��#1���F��W��%�X����%�����$�� ���U0�((� �#�6��V���6���3�����%6(# �5����3��������� ������������������ X# !����BGFG5�,����(�#�#��%�+#����0� �4�?%� �(�#%� ���,��%�� �%�����%����%#,�������0�����;%��-��������4��� D�X�5�%���(��(����>�W��%�X����%�/#��(!�+������3�������%����%�(#�.���5�%�X����%��%��0� �(������%� �� �#(����� ��(���� � %�X�� ��%� �(�#%� �+�$(� �%� �#� ������ �� �%���#��� ���,����14� %��� ,��,������ /#�%�� �0��#� �#�� ,��$��� �� B�� ���%5� (��� �%,�(�� ��%���� ���������%�(#�%�%���(�� 7+�(�%���,��3�%%���� �1����%�'/#�����������%,�(����������=�W���BFW��%� 3������%���( �%%��2������U0�((� �#�6��V5��2W��%�/#��%�������%����%6���%�+����%)4��� K.�,����%������ ���������������5�#���#����+������0X���������06��3�����( #$����� ���/8��/8��� ����1��0�����BGG=5��� ������������0� !�5������,��+����-�3��������,��3�%%���� 4� �� �%��0� �(��� (���� ,���($,��� /#�� U���� ����� ���� ������� ����� �� ������ � ����������������������������������� ���������������!������������"#�$����������V4��� �%��%���$%��(�%���#��%�%�0��������������X����%�/#��(��( #���%�#%��%�#�%���%�0���%#����,�������� %�+#��� �� �$�� � �� 3�������� � (������ ��%����� �� � (��(�� �%� ,��+��%%�%���� �1��%���%����������4���,��,�������%�3������%�%������!#���/#� �3�(�������(��!�(���'�#�%�X�5�%�������,� ������%�(!�+����������3��� ���#���3��������,��3�%%���� �(#���)�,�%%�#����,��M����������#�����������6(�����BGJ��������%���B�W������BGG�4��� L�,��%� �� �1� ���%� �� ��%���� �0��+��7���5� �� �%(� �� ���� !�X�� �%%�+#���� �� ���%� ���/#�%�������(��,����(��%������,���%��%(� ���%5���%����06��,��3�%%�����%5�%���,��������/#��#��� 3�������� X����%5������/#�� ��#1��5� 3�/#���%,��,�����,���� %#�� 3#�#������� �# ��� �������4����1�� ��*����������2�����3������������ ������� �� 6(��� �� BGG�� ,��3� �;%�� �%%��� (��� #��� #, �� (���(���$%��(�4� �� �%%�%��� ������������#����%��������%%�5�/#��,������#�� �����(��%������ ���������$�� ���3���������%�X����%�+����T�%5���,����������(��X#������,�,# ����4�<���(�������/#��������!�X��,������
������� ��������M,�(���������3��/8���������%(� ������6���#������BG����%5��#�=����%����%�/#�� %�#%� ,�7,���%� ,��%4� �� ,��,������ �� 0�(!��6�%� �#��� +������� (!�+�� ��#� ������ �� J2W5�(�������,���%�2HW�!.�#��/#�������%6(# �4�������%����%#,�����5����/#� ������(�%%��X.��+�������%� �������� �%� X����%� 3���(�%�%5� �� ������� �� �%�#����%� 3����# ��, �(��� ,��� %���� ����%,���������%�6(��%�'��=��4������25B��� !T�%)4��� %��� �%(� ���1����5�/#�� ����� �� �%��0� �1��;%���#���$�� � � ��5� 6� �(��,��!�����#��%��%$�� � �(�6%(�������+�.3�(�5� ��� ��1��� �� /#��� �� ��%(������%� ��+�%����� �� ,������ ���������6(�����BG>�4� ���(�������,��������;���6��%���#���#����3�������(�����;�#����(#��+����� �1����%��3�����%��%(� ���%5�X.�����+�������%����3#������� ������%���(���������6��������%#,�����4��� %��� ��6+#�� ���+�.3�(�5� (��X#+��� -� ,��%�������� �� ��%��� ��� ��3����� �%� ����%��#(�����%5� �%,�(�� ������ ��� ���6���� �� ������� �� ,��3�%%���%5� ,������#� �� !����� �%�(����T�%� �� ���%%��� �%� � #��%� �� %�#� $��(�� �� �,������������4� ?� ,��+��%%�� 6�,����(# ����������%$�� ����,��������+��#5�0���3�(����(���#�����#������+# ����� �����!���%�( �%%�%5�/#������!�X������6���2J�� #��%����������� ���2=����3#������� 5�(������H����=�5���%,�(���������5����6(�����BGJ�4�������� ������������� ?%� ������%� �� �%(� ���1����� �0������ �%� ,����%� �%� (� 6+��%� �� �%� �(�#%� -��������4�"���������� �� ����%� (���+����%� �� (������%5� ,����������%� ��� �%,�(�� � �� ����%� %�(���%��%3�����(��%5� � (������ �$���%� �� 3�������� �%� /#��%� ��(��������;%�� ���������������3�%���%4���%�,����+��������#����%����(��#�����%���%��%��,���#����%����M�����%(� ��������%��%�X����%5�/#� /#���/#��%�X������������/#�������5��%������������������(����1�����(���� ����%� �3�(# ��%4� �� ��, ��#�� �%� ,��+��%%�%� /#����������%� ���� ���� �(# ���� ��,��%�%���(�����#��U��( ���#��V���3��(�%%���%(� ��5���������������(����X.���%�,�������%����%����%(� �����5���/#������(���� ������6�U%��(�����V����%�%������#(�����������6%�����,����T�%� �� ����%�%� �%(� ���%5� %��� /#�� %�X��� ��(������%� %��,��� �%� ����%� �� (����+�; �4�%%�%��3�(# ��%�,��(�(�%�3�������3���1��%��#���,�%/#�%���,��3#����3��������BGG>�(���� #��%���JY�%6�����B�W����� ����;%����#%� ������%5�(!�+����H�W�� �%���( #%������%��#��T�%�,�7M���%� �� ��� 3�0���%��4� �� �������� �%%�%� (������%� ���.� �3�(# ��� �� %#,����� �%����3�(���(��4�� +#�%� ���%� �,��%5� �%������ ������ �%� X����%� /#�� %�� 3�������� %���/#� �3�(����5��� �����������3�%����,����� ����%�B>��#�BF����%�+����%� �(#��%������%��%���� �1��%�#�������%�K�����%��������(�����-�"��,�������,������L�3�%��'K�"L)4��� ?� �%��0� �(������� !.� ���%� �� �1� ���%� �� ,����%� ��(�����%� �� ��� ������ �%�,��+��%%�%��%(� ���%5���*����0�������.����5�,�������%��%�(������%��%�( �%%�%����2�'F����%)� ����JY� %6���� 'BB� ���%)5� ��%��,��(�%������� �����3�(��� �%%�%� X����%� �3������%� (�����3��(�%%�� �%(� ��4� "���� +�������� #��� ��������� �+#� ��� �� �,���#����%5� ���� �,���%� ����(�%%��-��%(� ��(����������6�������M�����%(� ��5�6���(�%%.���������%�3�(������%��0� �(����������%,�%�����%����,������%�� #��%�����3�(# ��%5�,����������M.; �%�U-�0�������(����!�V4��$�����������������������4��������������� ������ ���,��������+��#5�/#������,���� �+��������$�����%� ��+#�+��%5� ����+���1��������(�( �%�, #����#��%�,��,��(����#�������3 �M�0� ����,��+7+�(�4� ��,������� ��������(�����������%�����%������%����,����1�+��4�<��(�6������#�%�!���%�%������%�6���%��������%�
�%�#�%����+��%5�-��%%�%���(��������#� �1��4����%����%%�%���(����%,�(�� �1�����%�� #��%�����3�(# ��%�'���L)���������%�#�(��+���%�(������%�/#��(��������������%(�4�� ����%� �� ����%�3�(����� �%� ,��(#�%�%� �%(� ���%� ��%� �(�#%5� �� (� 6+��� �%�.� !�X�� ���0#%(����#���%$���%��������#����%����,�������%5�/#��6�#����M�+��(���(��#�5�������(�%%.������,������ �� ,�0 �(�%� 3���������� !�����+����%5� ��� �$����� ,��� %�#� ,�%%��� �%(� ��4� ?�,���($,�����#����%����#��3����5�%��, �%�%#(�%%�����(#�%�%���+�%����%������%����%����������%���+�#,�;( �%%�5�X.�����%��%#%�����4���������������0�%�,�����%��%��0� �(������%�,�����,� ������%�#�%�!���%�%������%�,���������� ��������%�� #��%�/#���������,������JY�%6���5��#������������������!����������$��%�������JY�������Y�%6���%4����������6���%�(�,�1�%����%,������ �� ������%%�� �%� (� �+���%� �� ��� ���%� %������ �� %�#%� �%�#�%5� ,��(#��;%�5� ��%�$�����������������������������%�����&����5��������-%��3�(# ��%�/#�����!�������3������������#����%�����%(�, ����� �� �����������(��,��������� �1��4�L����%��� 3����5������%�����6������%%�%���(��������#� �1���(�����#�%�!���%�%������%5���*����0�������.����4�?���%������# ������%� ���0� !�%�,�%%���%��(��,��!��%�'�"5��%��0� �(��%���%�%6���%�+����%���,��������(�( �����2���)���%������%���� �������,����1������#�������4��� "�����X#����%����%��%,�����%5��������������%�+��� 5��,��#;%��,����%���� �������%�%����� �#(������ #��� ,� $��(�� �� U�%(���������� ,�%�����V5� (��(����1��� ��� ������� ����(#�%�%�%#, ��������%���%��%��0� �(������%��3���%�-�U�#(�����,������.���V5�/#��(��+��+���BFW��%��%(� ���%���2BW��%�(� �+���%4��� � 6�� �%� (��!�(������%� 3#��������%5� ��(�%%.���%� �� ���� �# ��� �#� (�������%,��%.�� � �� �#�*����5� �� �%(� �� ���06�� ���� ,��,����� �%� X����%� ,���� �� %#(�%%�� ��� ����,��3�%%���� 4�?��, ����(�����#��%��������������#��%$�0� ��3�������,��(#���[�(�����#����(�����0#������+����������,��������������%��,��+�5���(��%���#��#�� ��#�3���(�%����,�����(������,����������#����,��+���%�.�� ������ #���,��3�%%���� �����4��$ �������������� �������������� ?%� X����%� /#�� ��M����� �� �%(� �� %��� �, ���� 3����� �%� ,���(�,��%� �3����%� ��%�� ����%� 2�� ���%� ,� �� �#������ �� �%��,��+�4� ��%� �%� ���%� �, ����%5� �� �����������,�#,��%� ��6� �����5� ������ �+����;%�� %��%��� ������ %#�� %��#����� �����X�%�� ��� ����� ��6(�����BGG�4�L�%��BGGF5�%���� �%�/#�����%�%��0���3�(�������� !����+��� ��%�(����T�%�����%������,��3�%%���� 4��� �%�3#�#��%�!�����/#��%�%�(���%�0�%����;%�����+������������%�!�����/#��%��%(� ���%4����(�����%��,7%��� 3����%��%�#�%5�������������, ����%�����%���� %#,�������M��(����#��� ,��3�%%��� %#,������ �#� ��������.���� 6� (��(�� ��1�%� ������ /#�� �� �� �, ����%� ��%�(#�.���4� � �� �(�%%�� ��%� ��,��+�%� �� ,��3�%%���� � �� �$�� � %#,�����5� ��+��!����� �#�,��3�%%���� � �0��� � �%�.����%� ��� � (��(�� �%� �, ����%� �%� +����%� �%(� �%� �� �� ���(�����(�( ��#�����%��.���4��� ���,���#�� ���,���(�� ����/8� �1��������/#���1� ��%,����� ����� ��� ��(��!�(����%�(����3�(��%����%(� ���1����5��%���(��%�����������06��6����������,���(#,����5������������ /#�� �%� �%�+#� ��%� ���� ����� ,��(�0��%� �#���� (��� ����� ��� �%(� �5� �� �3�(� ������%#,����%5� ��M��� ���(�%� #���#��%� ��� �%����� ,��3�%%���� � �%� ����$#�%4� �� 3��������(���$�#�5����%,��%.�� �-������������%�(��!�(������%���� ��+�������5�����%�����(�����(����#����%(� ����%�+#���(!��(��/#������#���#�(����+����� (��(���%��3������%� �+��%�,� ��3�����������(�� 4���%�%7��#������,��3����������� ���%��,��!���%���,�,� 4�L����%���3����5� ���06��+��!�������������6�����/#����,�.��(��,��3�%%���� �(��%���#��#����%�3����%�

,�%%$���%� �� �,����1��5� ������ �� #��� (����3�(����� �/#��� ����� -%� 3�����T�%� �%(� ���%� ��%#,������%4� ��%� �%� ,��(�������%� �� �� ������ �%� (��/#�%��%� ,��3�%%�����%� �%��0� �(��%�,� �%� ��%���BGF����BGG=������%���,�����(���%6���%��0%�.(# �%4���BGGF5��,���%�B24����,�%%��%� (��%�+#����� �� ���� %#�� �M,�����(��� ,��3�%%���� 5� ,���(�,� ������ ��� ��%����#�����%��.���4���#� �����5� �� ,��X���� �� ��� ��������1����� %�(�� � �%����;%�� �� (��, ����� ��%#,����� �� ��#� � �%/#���5� ���������� �� ,��,��(������ #��� �#�����(�� %�+#��� (!��(�� -/#� �%�/#��������������%#�%�(��,����(��%������3�(��%�,� ���%(� �4��
555555666666�
�

FAMAT em Revista
Revista Científica Eletrônica daFaculdade de Matemática - FAMAT
Universidade Federal de Uberlândia - UFU - MG
Número 05 - Setembro de 2005
www.famat.ufu.br
Em Sala de Aula
�� �

���������������������
������������� �����������'���������
�������������������������������
%���+#%�����'(�����������%����)�� ������� �!���"�# ��� ���������
���*������� �%���+#������� ���� ��3���

Indice de Trabalhos
Identificando Curvas Conicas Utilizando Autovalores 263
Rafael Siqueira CavalcantiFranciella Marques da CostaDaniel Vinicius Pinto MaiaLucas Altamirando RochaEdson Agustini
Malthus Volta a Aula de Matematica 277
Clovis Antonio da Silva
Trabalhos do Concurso“Matematica e Boa Tematica”
Segundo Semestre de 2004
Matematica, Filosofia e Logica: Um Labirinto de Ideias 283
Uziel Paulo da Silva
A Informatica Auxiliando no Ensino da Matematica 289
Rafael Siqueira Cavalcanti
Trabalhando com o Software Modellus 293
Edinei Leandro dos Reis

Identificando Curvas Conicas UtilizandoAutovalores
Rafael Siqueira Cavalcanti∗ Franciella Marques da Costa†
Daniel Vinicius Pinto Maia Lucas Altamirando RochaEdson Agustini‡
Faculdade de Matematica - Famat
Universidade Federal de Uberlandia - Ufu- Mg
1 Introducao
Logo nos primeiros meses de ingresso no ensino superior em um curso de Matematica, osalunos sao apresentados ao estudo analıtico de curvas conicas e superfıcies quadricas nadisciplina Geometria Analıtica. Em seguida, em um primeiro curso de Algebra Linear asnocoes de autovalor de autovetor de um operador linear sao apresentadas e algumas desuas aplicacoes sao mencionadas. Dentre as vastas aplicacoes de autovalores e autovetoresde operadores lineares esta o reconhecimento de curvas conicas ou superfıcies quadricas apartir de uma equacao do segundo grau em duas ou tres variaveis.
Este pequeno trabalho desenvolvido junto ao Programa Institucional de Bolsas deEnsino de Graduacao - PIBEG - no curso de Licenciatura e Bacharelado em Matematicada UFU no inıcio de 2005 tem por objetivo fazer a identificacao de curvas conicas a partirda equacao do segundo grau em duas variaveis utilizando autovalores.
2 A Equacao do Segundo Grau em Duas Variaveis
Seja a equacao do segundo grau em duas variaveis:
f(x, y) = a11x2 + 2a12xy + a22y
2 + 2a1x + 2a2y + a = 0, (1)
sendo a211 + a2
12 + a222 �= 0.
Consideremos as matrizes
A =
[a11 a12
a12 a22
]e
X =
[xy
].
∗[email protected] Orientando do Programa Institucional de Bolsas de Ensino de Graduacao- Pibeg - de marco/04 a fevereiro/05.
†[email protected]‡[email protected] Professor orientador.

Assim, a equacao (1) pode ser reescrita na “forma matricial”:
f(x, y) = X tAX + 2[
a1 a2
]X + a = 0. (2)
Como a matriz A e simetrica, sabemos da Algebra Linear que A e ortogonalmentediagonalizavel, ou seja, existe uma matriz ortogonal P (cujas colunas sao autovetoreslinearmente independentes de A) tal que
P tAP =
[λ1 00 λ2
],
sendo λ1 e λ2 autovalores da matriz A. (ver [1], pagina 251 e seguintes).
Observemos que λ1 e λ2 nao podem ser simultaneamente nulos pois, caso contrario, Aseria uma matriz nula, contrariando a2
11 + a212 + a2
22 �= 0.
Como P e ortogonal, significa que P esta associada a uma rotacao no plano comcentro na origem. Logo, P transforma base do R2 em base do R2, ou seja, P pode servista como uma matriz de mudanca de bases de R2. Assim, considerando a mudanca debases determinada por P, cuja equacao e
X = PY,
com Y =
[x1
y1
], sendo x1 e y1 as coordenadas de um vetor generico do R2 em relacao a
nova base, temos que a equacao (2) fica da seguinte forma:
f(x1, y1) = (PY )tA(PY ) + 2[
a1 a2
]PY + a = 0 ⇒
f(x1, y1) = Y t(P tAP )Y + 2[
a1 a2
]PY + a = 0 ⇒
f(x1, y1) =[
x1 y1
] [ λ1 00 λ2
] [x1
y1
]+ 2[
a1 a2
]PY + a = 0 ⇒
⇒ λ1x21 + λ2y
21 + 2b1x1 + 2b2y1 + a = 0, (3)
ressaltando que b1 e b2 estao em funcao de a1 e a2 e das entradas de P.Na proxima secao, analisamos tres casos:
(i) λ1λ2 > 0
(ii) λ1λ2 < 0
(iii) λ1λ2 = 0
Em (i) e (ii) podemos reescrever a equacao (3), completando quadrados, da seguintemaneira:
λ1
(x1 +
b1
λ1
)2
+ λ2
(y1 +
b2
λ2
)2
+ b = 0,
sendo b = a − b21
λ1
− b22
λ2
.
Chamando x1 +b1
λ1
= x2 e y1 +b2
λ2
= y2 (ou seja, aplicando uma translacao ao sistema
de coordenadas x1y1), temos:λ1x
22 + λ2y
22 + b = 0. (4)

Voltando a equacao (1) e a matriz A, temos que o polinomio caracterıstico de A, dadopor PA(t) = det[t Id−A], e:
PA(t) = det
[a11 − t a12
a12 a22 − t
]= t2 − (a11 + a22) + (a11a22 − a2
12).
Chamando
a11 + a22 = s,
que e a soma dos autovalores de A, (λ1 + λ2), e
a11a22 − a212 = det
[a11 a12
a12 a22
]= δ,
que e o produto dos autovalores de A, (λ1λ2), temos:
PA(t) = t2 − st + δ.
Consideremos o determinante de terceira ordem associado a equacao (1):
Δ = det
⎡⎣ a11 a12 a1
a12 a22 a2
a1 a2 a
⎤⎦ .
Temos que s, δ e Δ sao invariantes por movimentos rıgidos, ou seja, os valores de s, δ eΔ sao os mesmos independentemente de utilizarmos a equacao (1) ou (4) para calcula-los.Assim, temos da equacao (4) que Δ pode ser calculado por:
Δ = det
⎡⎣ λ1 0 0
0 λ2 00 0 b
⎤⎦ = bλ1λ2 = bδ.
Logo, podemos reescrever a equacao (4) como segue:
λ1x22 + λ2y
22 +
Δ
δ= 0 . (5)
Finalmente, notemos que a curva cuja equacao e dada por (1) e mesma daquela cujaequacao e dada por (5) . De fato, o procedimento gometrico empregado foi aplicar aprimeira curva uma rotacao seguida de uma translacao ou, equivalentemente, rotacionare transladar o sistema de coordenadas original de modo que sua nova posicao no planotorne a equacao original (1) em uma mais simples (5) .
3 Classificacao de Curvas
Analisemos os seguintes casos:

3.1 Caso 1: O produto dos autovalores e positivo: δ > 0
Neste caso, temos os autovalores λ1e λ2 com mesmo sinal.
(i) Se Δ = 0, a equacao (5) fica:
λ1x22 = −λ2y
22,
cuja solucao ocorre somente quando x2 = y2 = 0, ou seja, coordenadas de apenas umponto. Consequentemente, a equacao (5) representa um ponto.
(ii) Se Δ �= 0, temosΔ
δe Δ com mesmo sinal. Alem disso, sendo δ = λ1λ2 > 0, os sinais
de λ1 e λ2 sao iguais, o que implica em s = λ1 + λ2 ter o mesmo sinal de λ1.
Logo, dizer queΔ
δe λ1 tem mesmo sinal, equivale a dizer que Δ e s tem mesmo
sinal. Consequentemente,Δ
δe λ1 tem sinais contrarios se, e somente se, Δ e s tem sinais
contrarios.
Conclusao:
(ii-a) Se sΔ > 0, entaoΔ
δλ1 > 0 e a equacao (5) escrita como
λ1x22 + λ2y
22 = −Δ
δ
possui primeiro e segundo membros com sinais opostos, ou seja, a equacao (5) representao vazio.
(ii-b) Se sΔ < 0, entaoΔ
δλ1 < 0 e a equacao (5) escrita como acima possui primeiro
e segundo membros com mesmos sinais, ou seja, a equacao (5) representa uma elipse ouuma circunferencia, se λ1 = λ2.
3.2 Caso 2: O produto dos autovalores e negativo: δ < 0
Neste caso, temos os autovalores λ1e λ2 com sinais opostos.
(i) Se Δ = 0, entao a equacao (5) pode ser escrita como
λ1x22 = −λ2y
22.
Como λ1 e λ2 possuem sinais opostos, a equacao acima possui primeiro e segundomembros com mesmo sinal, ou seja, a equacao (5) representa um par de retas concorrentes.
(ii) Se Δ �= 0 e, como λ1 e λ2 possuem sinais opostos, a equacao (5) escrita como
λ1x22 + λ2y
22 = −Δ
δ
e tal que os termos quadraticos possuem sinais opostos, ou seja, a equacao (5) representauma hiperbole. (se λ1 = λ2, temos uma hiperbole equilatera)

3.3 Caso 3: O produto dos autovalores e nulo: δ = 0
Neste caso, temos um dos autovalores, λ1ou λ2, nulo (vimos na secao anterior que os doisnao podem ser simultaneamente nulos).
Como visto na secao anterior, nao podemos partir da equacao (5). Analisemos estecaso a partir da equacao (3).
(i) Se λ1 = 0, λ2 �= 0 e Δ �= 0, podemos escrever a equacao (3) como sendo λ2y21 +2b1x1 +
2b2y1 + a = 0 e, nesse caso,
Δ = det
⎡⎣ 0 0 b1
0 λ2 b2
b1 b2 a
⎤⎦ = −b2
1λ2,
ou seja, b1 �= 0.
Assim, a equacao (3) pode ser escrita como
x1 = − λ2
2b1
y21 −
b2
b1
y1 − a
2b1
,
que representa uma parabola.
(ii) Se λ1 �= 0, λ2 = 0 e Δ �= 0, procedimento totalmente analogo ao acima, permiteconcluir que (3) representa uma parabola.
(iii) Se λ1 = 0, λ2 �= 0 e Δ = 0, temos
Δ = det
⎡⎣ 0 0 b1
0 λ2 b2
b1 b2 a
⎤⎦ = −b2
1λ2,
que implica em b1 = 0, ja que λ2 �= 0. Logo, a equacao (3) pode ser escrita como
λ2y21 + 2b2y1 + a = 0 ⇒
y1 =−b2 ±
√b22 − λ2a
λ2
que e um par de retas paralelas (b22 − λ2a > 0) , coincidentes (b2
2 − λ2a = 0) ou vazio(b2
2 − λ2a < 0).
(iv) Se λ1 �= 0, λ2 = 0 e Δ = 0, procedimento totalmente analogo ao acima, permiteconcluir que (3) tambem representa um par de retas paralelas, coincidentes ou vazio.

Resumindo todos os resultados possıveis, temos a seguinte tabela:
δ > 0
⎧⎪⎪⎪⎪⎨⎪⎪⎪⎪⎩
Δ �= 0
⎧⎨⎩
sΔ < 0: elipse (se λ1 = λ2, temos uma circunferencia)
sΔ > 0: vazio
Δ = 0: um ponto
δ < 0
⎧⎨⎩
Δ �= 0: hiperbole (se λ1 = λ2, temos uma hiperbole equilatera)
Δ = 0: duas retas concorrentes
δ = 0
⎧⎨⎩
Δ �= 0: parabola
Δ = 0: duas retas paralelas, duas retas coincidentes ou vazio
4 Exemplos
Analisemos os seguintes exemplos :
(1) Seja a equacao do segundo grau em duas variaveis:
3x2 + 4xy + y2 − 2x − 1 = 0.
Seguindo os passos da classificacao acima temos:
δ = det
[3 22 1
]= −4 + 3 = −1
e
Δ = det
⎡⎣ 3 2 −1
2 1 0−1 0 −1
⎤⎦ = −3 − 1 + 4 = 0.
Como δ < 0 e Δ = 0 temos que a equacao representa um par de retas concorrentes.
Vamos visualizar o conjunto solucao da equacao utilizando o software de calculonumerico e simbolico Maple. Para esta visualizacao utilizamos os seguintes comandos:
with(plots):
implicitplot(3*x^2+4*x*y+y^2-2*x-1=0,x=-5..5,y=-5..5);
A visualizacao e a seguinte:
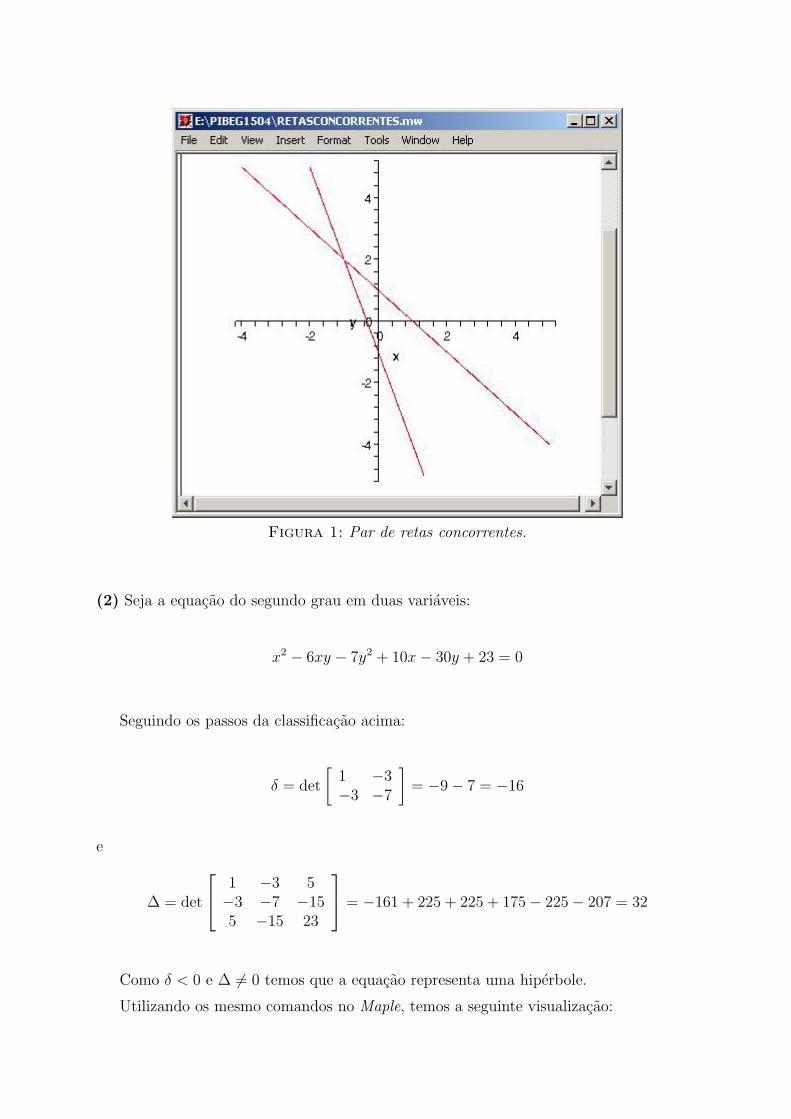
Figura 1: Par de retas concorrentes.
(2) Seja a equacao do segundo grau em duas variaveis:
x2 − 6xy − 7y2 + 10x − 30y + 23 = 0
Seguindo os passos da classificacao acima:
δ = det
[1 −3−3 −7
]= −9 − 7 = −16
e
Δ = det
⎡⎣ 1 −3 5
−3 −7 −155 −15 23
⎤⎦ = −161 + 225 + 225 + 175 − 225 − 207 = 32
Como δ < 0 e Δ �= 0 temos que a equacao representa uma hiperbole.
Utilizando os mesmo comandos no Maple, temos a seguinte visualizacao:
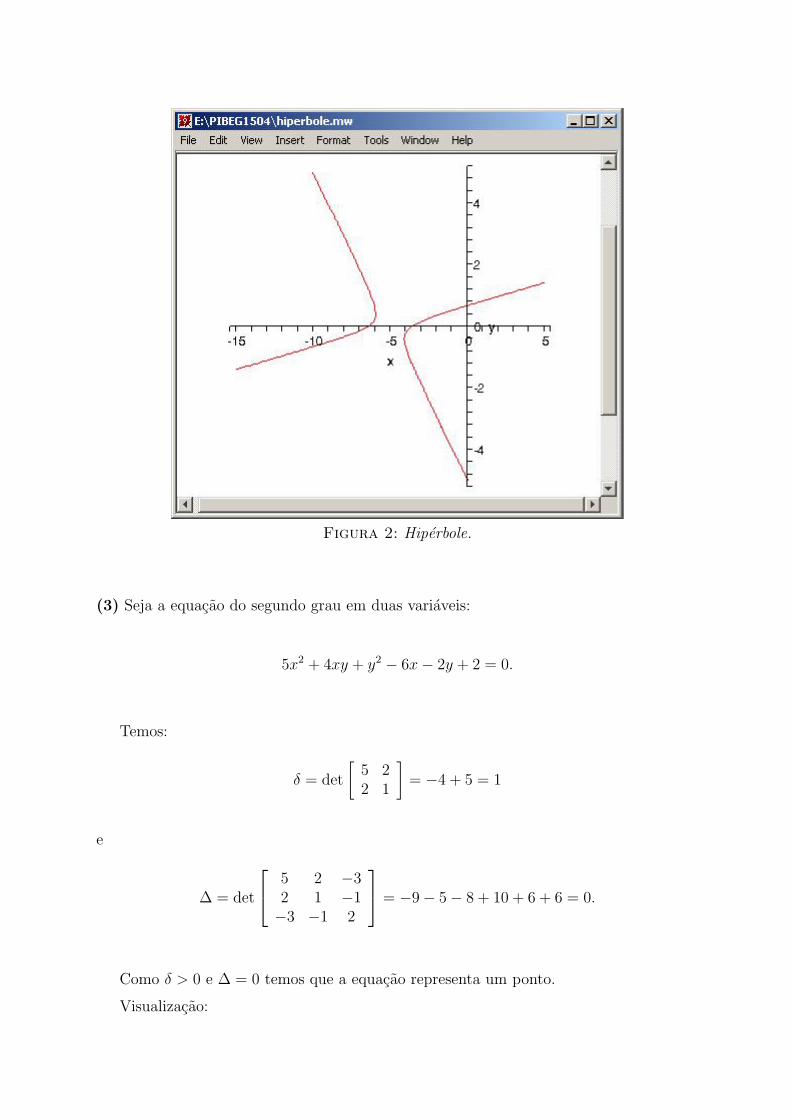
Figura 2: Hiperbole.
(3) Seja a equacao do segundo grau em duas variaveis:
5x2 + 4xy + y2 − 6x − 2y + 2 = 0.
Temos:
δ = det
[5 22 1
]= −4 + 5 = 1
e
Δ = det
⎡⎣ 5 2 −3
2 1 −1−3 −1 2
⎤⎦ = −9 − 5 − 8 + 10 + 6 + 6 = 0.
Como δ > 0 e Δ = 0 temos que a equacao representa um ponto.
Visualizacao:
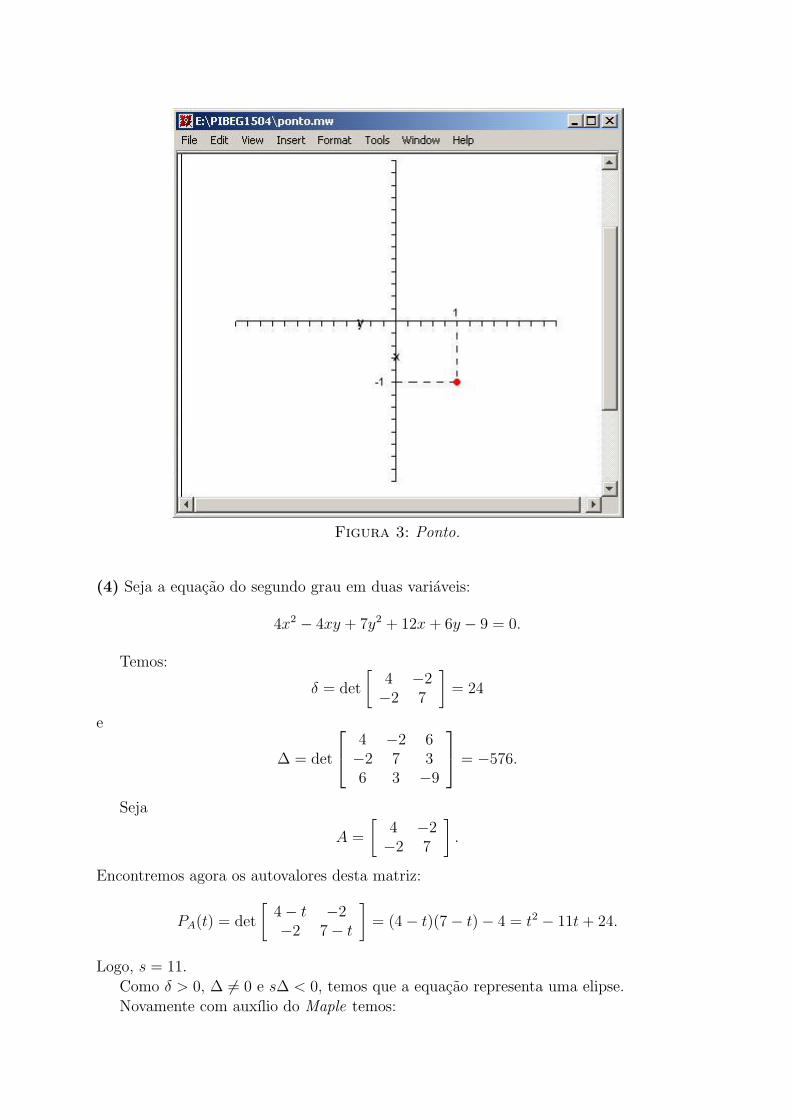
Figura 3: Ponto.
(4) Seja a equacao do segundo grau em duas variaveis:
4x2 − 4xy + 7y2 + 12x + 6y − 9 = 0.
Temos:
δ = det
[4 −2−2 7
]= 24
e
Δ = det
⎡⎣ 4 −2 6
−2 7 36 3 −9
⎤⎦ = −576.
Seja
A =
[4 −2−2 7
].
Encontremos agora os autovalores desta matriz:
PA(t) = det
[4 − t −2−2 7 − t
]= (4 − t)(7 − t) − 4 = t2 − 11t + 24.
Logo, s = 11.
Como δ > 0, Δ �= 0 e sΔ < 0, temos que a equacao representa uma elipse.
Novamente com auxılio do Maple temos:
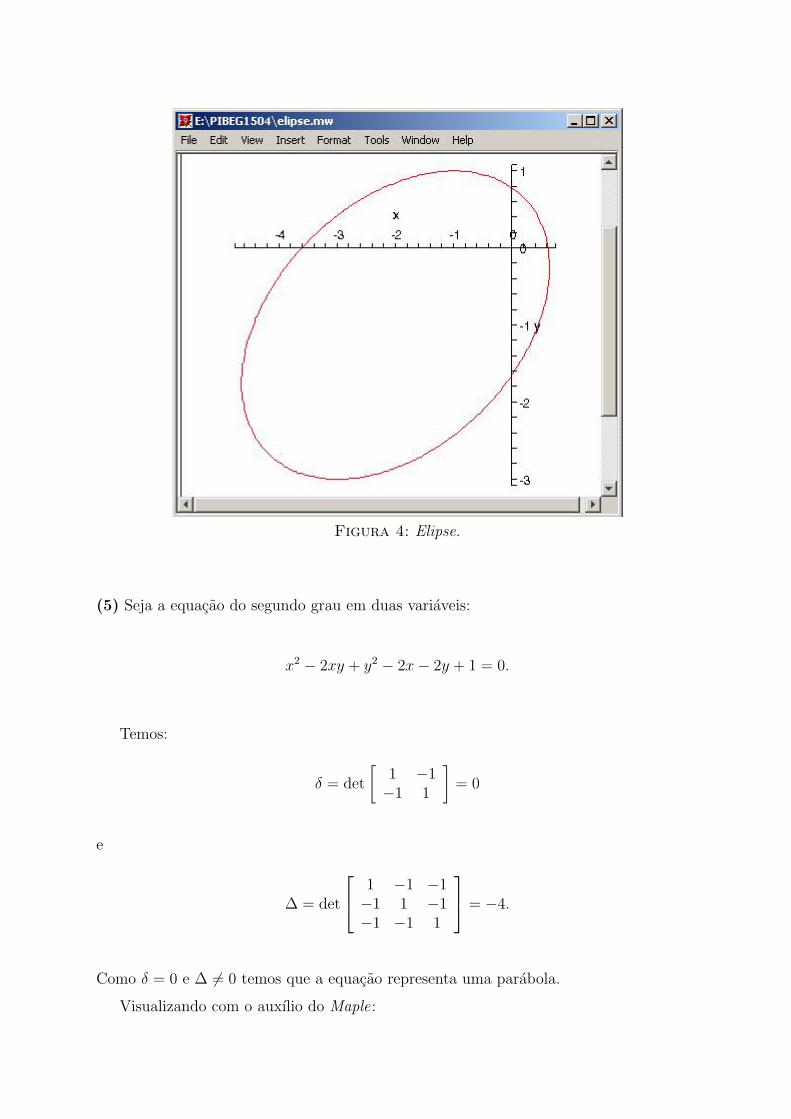
Figura 4: Elipse.
(5) Seja a equacao do segundo grau em duas variaveis:
x2 − 2xy + y2 − 2x − 2y + 1 = 0.
Temos:
δ = det
[1 −1−1 1
]= 0
e
Δ = det
⎡⎣ 1 −1 −1
−1 1 −1−1 −1 1
⎤⎦ = −4.
Como δ = 0 e Δ �= 0 temos que a equacao representa uma parabola.
Visualizando com o auxılio do Maple:
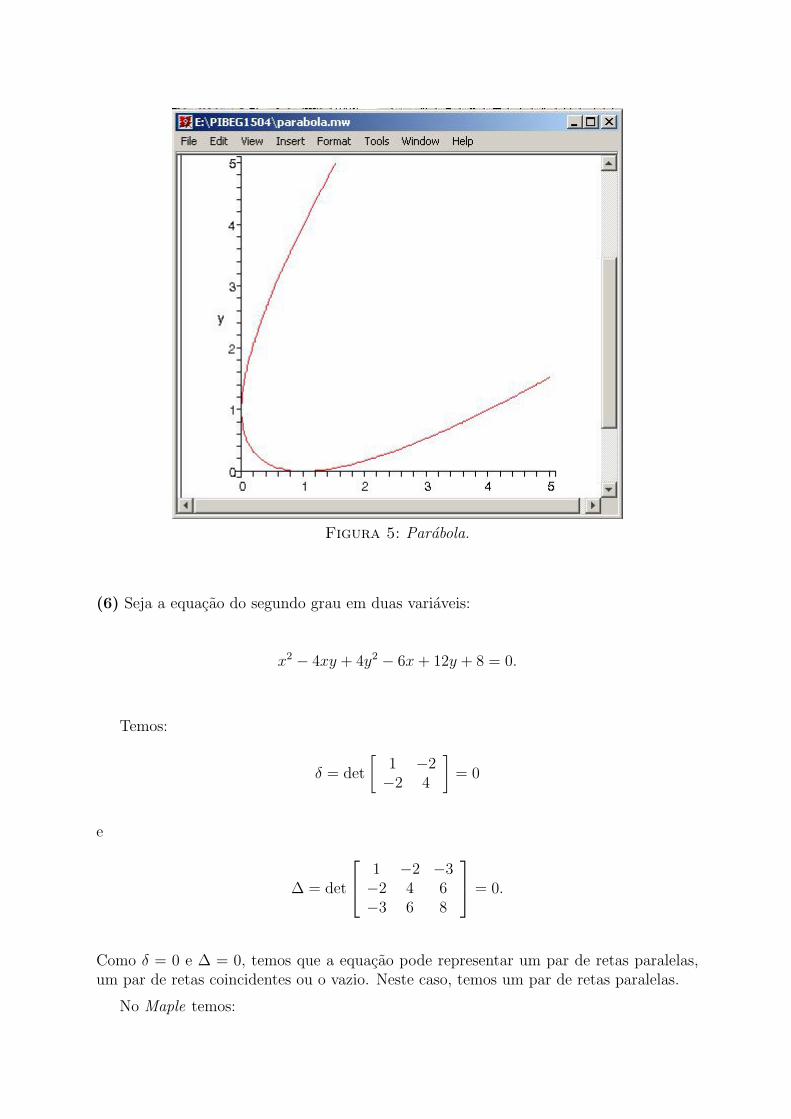
Figura 5: Parabola.
(6) Seja a equacao do segundo grau em duas variaveis:
x2 − 4xy + 4y2 − 6x + 12y + 8 = 0.
Temos:
δ = det
[1 −2−2 4
]= 0
e
Δ = det
⎡⎣ 1 −2 −3
−2 4 6−3 6 8
⎤⎦ = 0.
Como δ = 0 e Δ = 0, temos que a equacao pode representar um par de retas paralelas,um par de retas coincidentes ou o vazio. Neste caso, temos um par de retas paralelas.
No Maple temos:

Figura 6: Par de retas paralelas.
(7) Seja a equacao do segundo grau em duas variaveis:
4x2 − 4xy + 7y2 + 12x + 6y + 16 = 0.
Temos:
δ = det
[4 −2−2 7
]= 24
e
Δ = det
⎡⎣ 4 −2 6
−2 7 36 3 16
⎤⎦ = 24.
Seja
A =
[4 −2−2 7
].
Encontremos agora os autovalores desta matriz:
PA(t) = det
[4 − t −2−2 7 − t
]= (4 − t)(7 − t) − 4 = t2 − 11t + 24.
Logo, s = 11.
Como δ > 0, Δ �= 0 e sΔ > 0, temos que a equacao representa o vazio.
Referencias
[1] Anton, H & Rorres, C. Algebra Linear com Aplicacoes. 8a. ed. Porto Alegre:Bookman. 2001.
[2] Boldrini, J. L. et alli. Algebra Linear. 3a. ed. Rio de Janeiro: Harbra. 1986.
[3] Boulos, P. & Camargo, I. Geometria Analıtica: um tratamento vetorial. 2a. ed.Sao Paulo: McGraw-Hill. 1987.
[4] Callioli, C. A., Domingues, H. H. & Costa, R. F. Algebra Linear e Aplicacoes.6a. ed. Sao Paulo: Atual Editora. 1993.

-� �'���� ��4�� ��������.����
����$���������� ��7
��)�����%���������������� ������������ ��������������������� ������ ��������������� ����� ������������������������ ����� ������������������ � ����� �������������� �� �� ������ ������ �� ��������� ����� � ��� �������������������� � ��� ��� ������� ��������������� � ������ � � � ����������� ����� ��� �� !�� � ���� � � � ������ � ����� ���� �� � �� ���� ������������ �������� ��� �������"���� � �#���� ���$��%� ������������������� ����������� �������� ���& � � ��� '(�������������������� � ���� �� �����!��������� ����������������������������!)*�� �������� � ���� '+������������*�� �����������+������8����������� �� ������ ����������� � �� �� ���� ������ �� ������ ��� ,-.. � ����� /� �������� '(����� � � ��� ����� '+��� ������ � ��������� �� � ���' � ��� �� � ���� ������ �� ��� �����+�������� �� �����������,0-.��1����!��� ��� ��� ��� ��!����2�� ������ ���� ���������� �3� ��� ��� � ��� �� ��� � �(�4��4��� � � � � � ��� ����5�� � ��� !��� ��� ����� � �� ��������������������� ����� ��� � ��2� ������������%���������� � ����� � ������ � ����������������� ������� ����� � ��� �� ��� � � � ��� � ������ �� �� ����� � 2���� ������ �4������������ �� �� �' �� ���!��� �� �� ��� �� � ���� �� ������ �� � ���� !��� ��� ������ � � ������� �� � ����� ����� �������� 1�� ����'+��� ��� �� � ���� �� �� ����6��� �� �������� �������� �� �������� ��� �� � �� ������ �� ��� ������� ������ � �� ������ � ��� �� ����� ���� �6� ���� �����!������������ ������ �� '+���������� �������� !����������� 1���� ��� �� � ���' � ��� �� � ���� �����6�� � � ������ �� '(�� ��!��� � �� � �� ���������������� � ���� ������ � � �� �� �� ����� � ��� ����� ���� 1� ������� � ������� � � ������� ��������������������78333��� 9����� ��� � ������ �� ���� ������������ ��� �� � ������ /� :����'(�� 3������ �� !�������� � � 3��� ���� � ���� ��� � ��� ,0-.� �� ��� ������� ���� ���� �� � ����� � � ����� � �� ��� �1���� ��� ;�������������������%����!���� �������������������������������������������������������������������-� �'���� 9��� �� :������ � ������ � ����� ��� ��� ��� ,0<<� ������ ��� =��>�� � ��� ���� ��� ���?����@ �� �3��� ���� ���� ������������������������������= ������$������ �� �������������� ���� ��(�� � �� ����� �� ����� ��(��� ?��� � � � ����� ���� ���� �� � ����� � � �� ���� ��� � ���������� &������ � /� ��� � ������ � � ��� �� ����� � � � ��� ���� ���� ��� ������� '+���� ��� � � �A��� ���� �4��� /� ����� � ���� ��������� � � ���� ��� � �� � � ������ � ���� ����� /����5�� ��� ��� �����BCD�� � �������������������� ������ ����(���������!��� �)��������������������!� ������ � ����� ���� ���� ���� ���� � ;6�� � ��E��� � � �� �������� �� � �� � ���� '(��
�������������������������������������������������,=�������� �; ���� ������� ������ �4�F����� ���;���� �����F����5�� ��4� �G����� �� �H�� ������
��� �6��� � ���� ���4��� ��� ��� ��� I��� �� J����� �� K����� � � ��L� �� ������ �� K���*� ��� ��*�L � ���� ����� ��� $��%� �� ��� ������ ��� ��� �� � ���� '(�� ��� ����� ��� � ������������ �������������������������� ������ ����� � �������� ���������������� ������ '(������ ���� ������� ����������������*���� $����*�$���"#�� K1����� @���� ����&����������&���� ��� � �� �� 1������� ���� ;������ 3���������� ��� ?����@L � ��� � ����� � ��'(�� �������� � � ��� ,0MN � ��� I������� � � ������� ��� �� ������� �� � ���� ���� ���� � ������ �� � ���� ������������������� � ������������������� ������ '(����� � �� ������������ ���������� � ������� ��� ����%�����O�J�������� �"��E� �P �� ���O���� ����� � ������������ � � ������� �� �� � ����� ��� �� ���� � ����� ����� � � /� ��� '(�� ��� ���� � � ��?������� ��� � � � �� � ��� ��� � ���� � ���� � ��� � � �(�� �� � � ����� ��� ��� � ���������������������� � �� ����� ����������������������1����� ���� �� ���� �� ������������������� � !��� ����� �� ������ ��� ��� � � ���%� � ��� � � � � � ���!���� �� � ���������'(��� ��� �� ������ �������� '(�������������O��� ���������������� ��� ��O� �� ������'(����������� ��� ������*�� � O� � �����'(�� ��� ��������� � ������ ��2��� � �� � ��� � ��� �G� � ��������������� ������ '(����������������������� �����������������������*�� ���������� ���������B,D���-��� ���-� �'���!�������,���� ��Q������R����� ��������� �� ���������������� ���G�BCD��,��Q�� �������������������/�������*�� ���������RS��T��Q1�� 2(�������������2������������� ������������� ������ ���2� � ���������������� ������� �����R���� ?���������� ���� ���� �������(���2 ��� ����� �� ����� ���Q1������ � ��� � !��� �� ���� ������ ��� ��� ������ � ��������� !��� �� ������ � � ����� '(�� ������ ������� ������!������ �9��� �� � ��������� �������*�� �����������1������ '(� �!� ���� �(�� ������� � � ����� � ��� � �(�� �������� � ��!� ���� � ������*�� � ����� � ��� ������ �(�� ������ ��F� ������ �� �� '(��������������������� ��� ������ �������������������������� � '(����������������R�BTD��� 1����� �� � �� ����� �� ����� ��� ��������� ���� � � ������ ����� �������������� ���� ��� 2 ������ ���� � �����S� ���(� � �� � � � � �� � � �� ������ � �� � ������ �� ������� ���� ���A��� � ���� ����� � �� ��6��� ������� �� ��� ������ K���������� �������� ��� Q���� '(����� �RL�� &��� ������ � �� � �� � ��� � ��� ���� ������ � ����� �� �� �������� � � �(�4��4��� ������6�� � � ������ ������ �� ������� � ���4� ����� �� ���� '(������� '(�U����������� 1�� ��� ��� ���� ��� ����� ��� ������*�� � � � �������� � ����� '(�� ��� � �������� � � � ��� � ��� ������� ��� ��� ��������� �������� ���� �%��� ������ ���������� �������������� ������ ������ � ��� F� ������ ����� ���� ������� � �� �������� ����� ����� ������������ ������� ������� ��1���� ���� ������*�� ����� ������'+�� �� � ������ �������6������Q�� ������ � ����� ��� �� !����� ������� /� � 2(�� ������ ��� ��2���� 3� ����� ��� ��� �� ������ � � ��� � � 2(�� ����� ���� ������� � � ��� ������� � �������� � ����� �� � !� ��� ���� � � �� ���� � � � ������� '(�� �������� � ���� �������� 1� � 2(�� ������ ��� ������� ����
����� � ��� ������ � �� � ���'(�G� � ����� '(� � ����� � � ��� � ���� � �� ��� 6��� � ��� ������ ���A����������� ��R�B,D���� 1�� ������ ������5�� ������ ��� � ���!������������������� � ���������������� ������ ������!����� ���������������� ������ '(�� ����������� �� /������ '(�� ���� � ���� ���� K��������(�� �������� � ��� ����������� �2������ �L � �� ���� � ���� � � ����� '(����� � ����� ������������������� ���'(������(� � � � � ��������� �� ������� ��� � ����� � � �4��� ���������� ������ ��������� ��������������+����� F� ���������(�� ������ ����� ���!)*�� ������������K�, ��T ��C ���� ��� ����L�� �!� ��������� ���� �������' �������� � ���������V,��������� ������������������ �������' ������ �������� � � � ��� � �(�� �� ����� ��������� � � ���� ��� 1��� � ��� �� � ��������(�� ������ � K��L� ���� �(��� ����W��,�V�K�+,L� �� � ������������������������ 1�� 2 ������������������ �������� ��� ���� ���� � ���� �� �(�������������� ��������� ���� ���� �� ��� 1��� � �� � �� ���� � !��� � �� � ��� ���� �� � � � �� ���� �� ���� � 2 � ����������������� ����� �� �K�+�LU���� F� ���������(���������� ����� ���!)*�� ������������K!, �!T �!C ���� �!� ����L�� �!� ���� ����� ���� �� !�������� � � ��(�� ������ � � � ������ !�V,� �� �� ���� ����������� !��� �����!������������ � ������� �(������������������ ���������������� ��� ���������(���������� ��� �� � ��!)*�� � � � !� �� � � 2 � ��� ����������� ��� ��� ��� � � � ������ � � � �� �������� ��������� � ���� � �� W� ,� V� α � ����� α� �� � � 2 � ��� ����������� ��� ���� 1��� � ��� �� ���������(���������� �K!�L����� �(��� �!��W��,��4,��� 1������ �� ��������� '(���������� ������ ���������(�� ������ ������������ �����������������' �� ������� '(������������������. � ��������������� �������W��.�V����� � �&1���!��W�!.���� � �&"��� 1��� �����4������� ������� ���������(�� ������ �������� ����'(��!��� ���� � �� � ��������� ��� ������ �������� ����������W��.�V�������� ����'(���� ������'(�� ������������ ��� ��� ����'(�� ����K2L�W��.�V��2��������������� ����'(�������� ��������� ���!)*�� ���������������� ��������� ��G�K. �.L �K, �,L �KT �TL �KC �CL ���� �K� ��L ������
/�����7G������������� ������������� ������ ���������(�� ������ ����� �(��T��
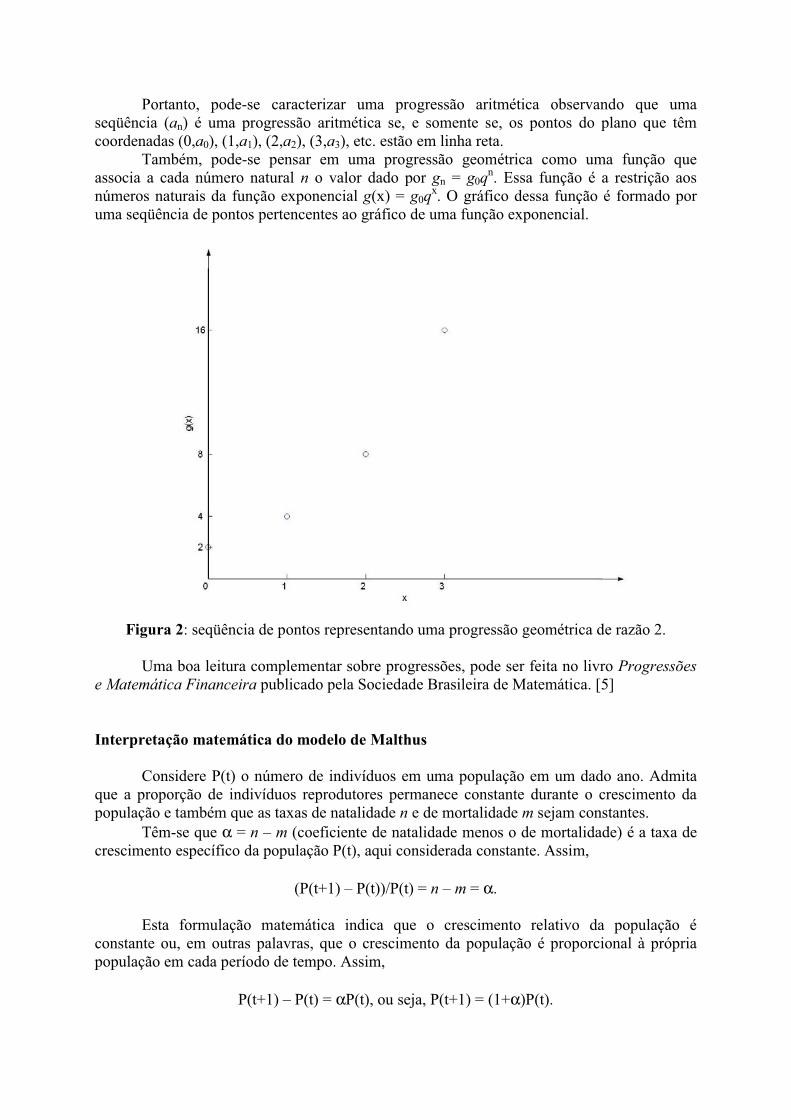
� &��� ��� � ����4��� � � ����� �� �� � ��������(�� ������ � ����� ���� !��� �� ���!)*�� � K��L� �� �� � ��������(�� ������ � �� � �� �������� �� � ��� ������� ��� �� ��� !��� �*��������� � ��K. �.L �K, �,L �KT �TL �KC �CL ���������(�������� ���� ��� 9 ���� � ����4��� ���� �� ��� �� � ��������(�� �������� � ����� �� � ���'(�� !��� ���� � � � � � ������� � ��� �� �� �� ���� � ��� ���� !�� W� !.���� ��� � ���'(�� �� � �����'(�� ������������ ��� ��� � ���'(���2������ ��!K2L�W�!.�2��������������� ����'(���� ���� ��������� ���!)*�� ������������������������ �������������� ����'(���2������ ���
/������G���!)*�� �������������������� ������ ���������(���������� ����� �(��T����� F� ��� ������ ����������� ����������������+�� ������������� ��������*��!��������������������������������� ������ �?���� ���#� ���� ����� ������ ��B-D���8�����������������.���������� ���-� �'���� J��������&K�L���������������6���������� ������ '(��������� ��� ����1��� �!��� � ������'(�� ��� ��6����� ������������� ���� ����� ����� ���� ��� ���� �� ����������� � ������ '(����� �����!��� ��� 2 ������ � �� �������������� �� �������� ������� ������� 9*�4���!���α�W��,��K�������������� � �� ������������������ �� ��L��� �� 2 ��������������������6����� ������ '(��&K�L � !��������� � ������ �����1��� ��
K&K�V,L�O�&K�LLU&K�L�W��,��W���� ��� � ������ '(�� � ������ � ��� � !��� �� ����������� ��� ��� � � ����� '(�� ������� ������ � ������� �� � � � � � !����� ������������ ������ '(�� ����������� �� /���%�� ������ '(������ � ����6��������������1��� ��
&K�V,L�O�&K�L�W�α&K�L ������� �&K�V,L�W�K,VαL&K�L��
�� J������ ����� � � ������ '(���� ��&K.L�W�&. ��&,�W�&.��&T�W�&,��W�&.���W�&.�T�&C�W�&T��W�&.�-��W�&.�C���������������������������������������������������&��W�&�4,��W�&.������������������������������������������������������������ ��
&��W�&.�� ��!��� �� �� � ��������(�� �������� � ��� � �(�� � � �� � �2�����(�� � ������ � ��� ������� ���� ����� �������
��W�,�V�α���� 1��� ���������������������� �6�����T������������ ����� �BTDG��Q1������ '(��� ��� ������� ���� � �������� ������������+��������������� ������'(�� �� ���� �� �� ��������������� �������������������� ���� �� ����� ��� � ������ '(�� ���� ����� ���������+�� �������� �!� ��� ���������� �� ���������� � ������������������*�� ���� �� �� �� � ����� �������� ���� ���� �� ����� ���� ��� ��� � � ����� '(�� ���� � �������������������������+�� ��������������������*�� ����� � �� ��� ��� � � ����� ��������������+����������6����������� � ������ '(�� �� �' � ������!)��� ����������+�� ��� ��� ����� ��� ������*�� � �%� ��� �� ���������� � � � ��� ��� ������ �������� �� ��� �� �� ���������������� � ������ '(����� �4��4 ��������������������+�� ��������������������*�� ��(�� ����� � �� � �� ��� ���� � �� ����� ���+�� � �� !��� ��2 � � ������ � �� ����� ���+��� ��� �� ������ �������R��� 1��� ���� ��2�����(��� ������ � �� ��������� �26�������� �� ���� ��� �����4���������� �� �� 2 �������������������������� �� ��������� ������ �����G��&.�W�0���,.<�&TX�W�&.K,VαLTX�W�0���,.<���K,VαLTX�������&TX�W�,X���,.< �������K,VαLTX�W�T ������� ���
α�≅�. .C.�������� � �� 2 �������������������������������C .�Y� �� ������ � ������ �� � � � � !��� ������� ���� � ����� '(�� ���� �� ��� ��� ���+�� � �����2����� � ��� ���� ��� ���� � ������' � ������ � ����� '(�� �� ��� ����� ��� ������*�� � ��� �!� ��� �� ������� � Q����� � � �����'(�� ���� � ���� � ������ ����� ��� ��� � �2����(������ R��BTD�� ?����� ��� � ����4��� ������� ���� ��� ������ �� � ����� ��� � � ������������ � ����������� �� � ���� ��� ��� � � � �����(��� ������ '(������ ���F����������'�����������
������ ��� ��� ���� �������� ��� ����������� ����� ��� �� !��� ���� � � � 9��� � ��� �� ��� ��������� ������ ������� � ������'(�� ��6��� ������� �����������77��� & � � ��� � ����4��� ���� �� � ���� � ��� ��� � ��������� ��� ����� ��� ���� ������+�$�����&�!�����������!����������������:����@�# �� ������BXD������ ������ �� ������� ��� � ������ ����� ���� ������� ��� ��� ������ � � ���� ��� ��� �� ���� � �����2�����G� ���� � K����������� ��� �� � ����� '(�� � � � ������ ��� �� � ������ � � ����� �� L �� � ������� K���� ��� �������� � � � �� � � �(�L � 6���� �� � ���� �� K����������� ��� �� ������� ���� � L�������(� � ��� �������������� ������� ������������� ������� 1��� ����� ���� ����� ������/� �� ����� ������ � �� �� ���������� �������� ��������� ������J��������� Z���)�*��0�����9�� ����.*�����B,D�=1�31�3 �1��� �I�� ��&���� '(����"���� � ��C�����?(��& ���G�J����2�� �,MM0���BTD��1I9$F? �9��� ��:���������� ����������&���6���� �&���� '(�S��� ��'(�������� ����? �%��J���'(���������������S����C.,���� 4?��� G������ 41���� ���BCD�?[�:�J?\�]3 �9 ����K��� �� ���L��� �����G������� ��?(��& ���G�\�� �,MNT���BXD�#1??1��[[3 �:��������+�$�����&������������!��������������?(��& ���G������ �J����2����T..T���B-D���:"1=� �1��J� �P1"��: ����^�[1�3 �?��J��*��!�����������������������������X ������:�����_ ����G�?���� ���#� ���� ����� ������ ��T..,��
!��2���8���������� ����
-����.����39��:��.����
-����.����;/� ���*����<����%=������������8�3���7
��
F����& ����� �?� ������������������8����������
=����� � ����� ��� �� ������ ������������6���� � ������������������������ ����������%����� ������ ����1��������� �!����2�����������!� ���!�����������6�� �� � ������� ��� ��%��������6���������� �� �' � ��������������������� �� ������ ��&��� ��� ���� ��������!������������������������773� �� ��2�� ������� ��!��� �� ��������������� � ������ ���� � ������ � ��S� !��� ������ �� � ������ �� &��� ������ � �� � � ������ ����' � ���� �� ����� � � � � ������ � ����� � � ����� ���� ������ ������� ��� ������ �� ��� ���� ����������� �!� �!���� ������
��� �������� ����%����� �� ���%����� � � � ������ � ���� ��!���� �(�� ������ ����� ����������� ��� �%���� �� �� ��� � ���� � � ����� ����� � !� ���� � ����� �� �������4��� ��� ������� ����������������� ���� � ������ ������� ����������5�� ��(��� �/������ '(������� � ��(�������� ����������� ����������� �/����!�� ��� ������� ����������� ���
������ �����2��� ����� �� � ���� ����+�� ��� ����%���� ��� �� � ���������� �� � � !� �� ������*�� ������ �� � ����� ������ � ���F��� ���������� ����%� ����%�� ���������4������� �� �� ������ ��� '+�������� ��������� ��� � �����������(���������� S�������!��� ������ ����� �������� ��!��� ����� ������������������ ����������� � ��2���!��������� �� ����������(������������ ������������ ��
����� �� � ���� ����+�� �� � �� � �2���� � � �� �(�� ���5�� � � ���� � ���� '(�����������4 ��������������� ���� �����= ��1�������BTD�� � ������������� ����� ���6�����
�������������������������������������������������,����������������������������������������������Q� ������ ���#� �9����� R ��� ��� ��������&�9�19����T`��������������T..X��
��� �� �� ���������� ��������� ��!��������������������� ���������� ������� ������ ����� � � ������ �� �' ����� �����6������ ������ �����&��� �� � � ���������������������� � ������ �� ������ �� �� ������� � ��2��� � ������� ����%� �� ��*�� �� � � ���������� � '+���� ������ ���� �����%�� ������� ���������������
J�������� ���� ��������� ���� �����/������� ��� �������� � �� � �� ��� ��� ��!������ � �� ���� �Q���������� R ����� ���� � ������ �������������� � ���$� ���>���������
���� ������� ��� ������������ ��� � ������ � �� ����������� �� ��� � ������� � �� � ��� �� �� � �� � ���� ��� ������ ���� ��� ������� � �� ��� ����� � ����� � �� ����'+�� �������'+����� ������ ���?�������������������������� ��� �� �� ����������������� ����(���� � �� ������%�� ��&���� � ������������������������������������������������������������������ ������������� ������ � ���������������������������� ����(���� ��������������������� ����� ��������������*4������!��� ��������� ������ ��� ������ ������ ���!����������6��� ��� �������� � �� ��2���� ������� ���
���� � �� ����������� �!������ ������������ � ���������� ����� ����������������������� ����� ��������� � ��2�� ����� ����� � ����� ������ '+���� �!��� ���'(�������������������� � ���� ����� ���������� ������� ������!����������� Q�(�� �������� � ���� R ������������ ���� �� �������� ��� ������� 1�� ��'+��� ������� �(�� ���������� ���� ����������� ��� �!������(������� ���� � 2� �� ����� ��� � �!��� ���'(���(������������������� �������� �����!����������� ����������������+.�"�������������������/K,L�=� ����� ���� �� ��� ������� ��(���� �����������KTL�?��� ���� ���� �������� ���� � �� �!� �� ���� � ���������� ������ �(���������� ���KCL�?��!� �� ���� ������������� 6� ��� ������ ��!� �� � ��������������(���� ���KXL�J�� ��!������������� ����� ����� ��(���� ���K-L����������� ������!��� ��� �������+*�������������������/K,L�&���4����� ' ���� ���� ���� �K��������L����!� �!����������� � �!� �!�����������KTL�a� �!������������������� ����������������� ��������� ������� � ������������ ���� ��KCL�= �������������!� �!�������� ����5�� �!� �!��� �����4����� ' ������6����������������� !�������������� ���� ��/�� � ����5�� ��KXL�9��������5��������������(���� �����������K-L�?���� ���� ����� ���� ������ ����� ����������!��� ���� ���������5����������������������������� �� ���� �������!�������5������������ ����(�� ���� ������ ����� ��������� � �!� ������������������������� � ����
1�!��� ���'(������������������� ��� �!������������� ���!��� ��� ���� ���!�������������� �� ��� �� � ����������� ��� �����2��� ��� ��� ����� �� � �� ����� 8�� ���� �� ���������2�������
1���� ������� � ����������� ������ �������� �������������������������� ����� ����������� ����� ����� ����� � ���� ���� ���� ���!���� � ��������� �� ������������ ����� � ��� � ����� ��� ��������� ��� ������� ������ � �������� ����� �� !��� � ��� � ��� � ������� �������� ������� ��� ������� ��� � � � ���� ���� 3���� �� ����6��� �������� ���!��� ��� ������� �(�� ������� � � ��� �� ������ ������ �����(�� ���� �(�� ��� � ����6���� �2��� ������ ������� �� � ������� �� � ������
���������������������� ����� ������ ���������������� � � ��' ���4����� ������� ����&����2����� � �%������� �� ����'+��������������������� �������������� ������� ���� ���������������� � ��� �����G�QJ����������6�����������Q�(��������������(�R ��� �� ���� ���� ���� ���������� �bR�=����������� �������(�b��
&������ �� ����� ��� � ��� � ��� ����!��6���� � � �������� � ����� � ��� ����� K��������& ���� B,DL� ���� �� ��������� ��� ���!��6���� ������� � � ���� � � ��� ����� ��� �������� ��������� ��
1����'+������������������ ����� ���� �������������(�������� �� ������������!������� �(�����������������!�������(����� ���� ������� � �!��� ��� ��� ���� ���������� ������ ��������������� ������(��� ���� ��U�����!�������� ������(���
1�%�� ��� ������� ��� ������ ��� !� �� ��� ������ �� �(�� �������� � � � �������� ��������� � �� ���������� ���� �� ��4���� �� ���� �� ������ � �� ��� � � � ����� �U��� ��� ���������� !��� ���� � �� ���� � ���� � '(�� ���� � �� = 6� ���� ����� �� �� $��%� � � �� ������ � �� ����� �� ��� � ����� � � � � ������'(�� � � ����� � � ���� ��� ������� � ���� � ������ �� ������ �(�� ������ �����(�b� ���� ����� �2��� �� !��� ��� �� ������ ������ �����(�������� � � ��� �� � � �� � ��� ��!� '(�� �%�� � ���� �� 9����� � ��� &����� �� K!��� �2��� ���� � 2�L��3�����2�� ������ ������ ��������������������� ���� ���������!�*����� ������ �'(���
� �� !��� ����� �'(�� �� ��� b� & � � ����� ����� ��� � ����� �'(� � ��������� � ����������%����G��$3&�9�?�G�1���� ������� � ������������������� � ������ ��� ������� � �������������������� ����������������������?�� ������������������ �1# ����� �������� ����� ����������������Q���� ��R��
�Q=� � �� ��������� ��� ��� � 1#� ������� ����� � ���� 1J� ��������� � �� � ��� �� � J=� ���� ��� ��� J# � ���� ������ ���� ���� �������� J������ ���� � ��%���� � ��� � ���� '(������� ���!� ���������������1#���������������� ������������(���������������Q���� ��R����� �������!������ � �������1#����� �� ������������������1��� �����K1#L�W���S�������������������� ��� �T��J������ ���� ������ ��������� "� � �������� �������� ���K"�L� W� ��S� ������ �� ��� �������� ��� ���
I��� ���0����
���1��� == LKLK �K� �� �������� ��"�������������L��
&��� ��� � �������� �������� !��� ��� � ���� � ��� ��������� ������ � ���� ��� ������� � ��� ���= 6 � ��� ������� ����� 1#� ����� � ��� �� ��� ��� !� �� ��� ��� � ��� ������ � ������� �
��� ���� �� 9����� � ��� &����� �� !��G� ���K1#L� W� T � K��� ������� �� ��� �L�� 1������ ����� � � ���� ��� �������� !��� 1#� �� � ��� ��� &��� ��� � ��� �� � � �� � ��� ��!� '(�� �%�� ������� ���%���������9����� ����&����� �������� ������ ���� ����%�� ��� �/�����'(��� ���%�������/� ��� '(�����!���������������� �� ������� ��R�
���� � ��%����� ��� � !��� ����� ��������� �� �����������C� �� �� 9����� � ��� &����� ������� ' � ���%���������� ���� ��2��*�� �������������������������� ������ �������������������������������������������������������������������������������������T����K1#L�W����� ����1#��C�=��������������(������������������2������ ���� ���������� ������� ������������������J ����������� ���������������(����������������
�1������� �� �������������� ��G�Q�����������/������(��� ���� R����� �!����(����� ��� �����������%�� ��& � �Q����� �R�!��� ���� ��(���� ��� ������ � ��
����Q��� R��������������������������/��������� ����!��� ����� ������������!��������������(��� &������� ��������� /�� ���������� ����%�� �� � � "��� � 1��� �� ?����� !�� � �� � ��� �!��� � �� �� ��� ����� ��� ������� ������� � � � � ��� ������� � � � �� � ���� ����� �� ��� �' �K$�������� -0<4XN.� �J�L�� _�� � ���� � ��������� ������ � !��� Q � �� �� ��� �� � ���� �*�� � !���� !��� �(�� ��� � ���!��� �� �������� �� ����� ��%��� �� � � �� ����� �� �' ��� ��� ����������(��R�K& ��*����L��& ��*����� ��� �!���Q�������S����(�������(���R�4�����6���������������������%�� ������&:3�Jc&3��=1�3=��93=1=���
� ���������� ����������������%�� ������������������� �� ������(��� ���� b��� ���������� �2��� ��� !��� �2���� ��� ��%����� �� � ��� [��(�� ��� ��� � K���6����� ���
& ��*����L �!����������������������� � ��2�XG�Q9����!�������������� �������� �������������� � ������������ �� ����S�� � �� � ����������� ����� ��������!� ����� � �����������!� ��� ������ � ��� ��� ������� ����� ��������� � � � ���I��� ������������(������ � ��� �� �4�� ������ � ������������������R�
����������� ���������� ������������ ������������������� ����� ������������ �������%� ��� ����������� � ���� ������ ���� ������� � � ��2��� ��� [��(� � � � ���� ��� ����� 737 �!� �������� ����������� � �����������������;F�de� �81:3\8�I �J��93�F3=1=����I3�39���
������������������������ ����� ������ ���������������� � ��2�����[��(� �������������������������������� ��� ���� �����Q& � ��2�����1!������� �9 �� ��� R ���� �������'(���� ����������������&:�":�??e��"���f9:3J1 ����� �����'(���� ���� �������������������
����� �&"����� �(���� �� �T
,G�
�
,���N
,
X
,
T
, =+++=' �
�1���������������+�� ���� � ��2�����1!�������������������� �����%�� ����� � ��2��
���1!�����K&1L������������G��
2������������$����$��%������������!��������������������3����������%�!��� ��!�� ���� ������ � �������!�� ���� �#����� �� �������� ��4� ��������� ��� �!��� ����$��� 5 ����� ��� � ��������� ���� �������� ������� � $�������� ����5� � �������!� ���������3 �� ������ ��������������� �� ��������4 6�!�� �������� ������ �������� ��� ������$����������������"���������!������������������������&������������74�
? ������!���1!������(�� ��� �� �� �' ��� �� �� ��� ������ ���2 ���!��A�������� � ����� �� ���������� �����b�
J������������ ������������ ���� ������� � ��������������!� �!����������������� ������������������ ������ � ��������� ����� �Q!� ��� ��R�������������������%�������6������!��� ���� ����������6� ������������������ ������� ���
� ��������������������� � ��2�����1!����b�J�������� ���������� '(�G�
�
�������������������������������������������������X�& � ��2������������������������ ���������������
�?�������������������������1!������� � � �� ��� �����# ����(��1!���������������������
��� ���� �� �19���� ��9#���� ������ �� ������������������������1� ���#��� �� �� ��� �� �� ������������������������9� ���#��
J��������� ��!� �*�� ������ �� � �������������������1#������������� ����������������������9#�����4��� ����(�� ������������ �������������#�� �� � �����������������
�����������������1!��������� �� �� ��� ������ G��K,L� a��� �� ������ �� ������� � � ���!�� � �(�� �� ������ 1!����� � � �� �� �' � � �
� �� ��� ��KTL��2������ ����� �!� ��� �������������������������1#���9#��KCL��������K1#L����!� ������ ��� ������ ��� �����K9#L��KXL����� ����1#������������� ����� ����9#���1�� �� � '+��� ��� [��(�� ��� �� �������� ������� � !��� � ��'(�� ������ ���
������� �!��� ��� �!�������������������� ���!����� ������ ��� ���� �� ��!������ ���������������������� � ������������������a� ��������� � �����������������������������(����� ���!����� ������ ��� �������%�� ������� �����
1� �� � ����� �� ���� � �� � �� ��' �� � ������ ��� �������� �� ��� ����� �� �� ������� ��� ��������� &��� �������� ��� � �� ����� ����� �������� ������� ������������ �� ��� � �� � ����� �(�� ��6��� � � � �� ��� ������� �� ����� ��%����� ������� ��� =������ ����� �� !��� �� ������ � �(�� �� �� � �*�� � ��� � � �� �� �� ��%�� �� ��+��� �(�� ��� �� � � � � ��� �� ������������������� ��� ����!�� ���� ���� �� ������������4��� ��� ���&����2����� ��� �������� ���������������� � �������� ������������ ����������� ��
1�������� ���������� ����� '(��������� ������ ��� ������� ��� ����!����� ����� � ��2������� ���� �!����������� ��%�� �������������������� �6 ���� ���� ������ ������ �1!������ � �� �� �' � � � � �� ��� ��U��� ��(���2��*�� �������������&��������� ������ ���� �� � � � ������ � ���������� ��� ������� �� ��� ����� �%��� � ������ � ������� ������ �����
����� ���� !��� ��� ��� ������ ������ �����(� � ���� � � ��� ��������������� ��� ����������������������������� � �������������������� � � ���� � ������������� ��� ��������� �� �� ������ ������ ���������� ����� '+�������� �������9����� ����&����� ���
��������������� ����%�� �� � ����� �������� � '+���� ������ ������������ ��� � ���� ������ � �����5�� � ��� ������ ��������� !��� !� ��� ������� �(�� ������� ���� ����� ���� ������ ��� ���������(� �� ��!���� ���� ������������������ �������������������9�� �����*���B,D� 1[��$1 � � � � � � "� ' �� ��������������/ �� *��!�� � ������ ��������� Cg�� ���� ?(��& ���G�\�� �,MMX���BTD���:�3:1 �� ����1��^��1?3�3 ������;�? �� �����$�����&�!����!����������/���������8�����������4�?(��& ���G���� �� �,MNT���BCD4F����� ������ �� �����;�� ����? �� � ��;�������������� '(��� ������ ��1���< ��`��G�0<���00 �� �����1����,MMM��

������������� ��������
��������������������������
�
�
������������������������� �����������������
�
�
������������� ����������
��������� �����
�
� �� �������� ������ ������ ��� ����� ���� �� ������� ����������� ��� ������ ��������� ���
������������������������������������������������ ��!�"������������������������������
����������������������������������������#�����������������������������������������
��$���%����&'&�����������������������������#���������������������������������������
����������������� ��!�(����� �������������������������&����������������������������
������������������������ ��)����������� ��������������������������������)�����������
���������� ���)��������� *����������������!�+��������������)����#�������������,������������� �����!��
!� �"������ �#���� ��������� �
�
� -���� �� ���� ���'��� ���&�� ��� �����.���� ���� ������ ��� � ��������� �����$����� ��
�������� �� � ��.���� ���� �������� ������ ��)� ������ ������ �� ������!� ��� ��������
������ ��� ���������� �� ��������� ��������������� ���/����$���� ��� �������0(1� ���� ���
��&���������������!�2������������010�������3���������&������������������&�������������
�������� ������ ��)� ����� ������ �����$����� ��� �������� ��� ��� �������� ��&������
� �����������!�
� -��4565)� �������74584%459:;��������������������������������������������������������)� �� ������� ����� ��������� �������� ��� �������� &���!� "����� ����)� ������� �������� ��
�����������������48�������������������������������68!�-�����������������#%����������������
������� ��� ��&����� &���� �<� %� 48�� =� 68� >� 8!������������ �� ������� ���� �������������� ���
��������)����&�������� �>�5�?� 45− ��)����������)�����������75�%� 45− ;75�=� 45− ;�>�68�
���������75�%� 45− ;�=�75�=� 45− ;�>�48!�
@�� ������� ������)� �� ��������� ���� �����$����� ���� ��� �������� ������ ��� ���
����������������������&�����&������������$���!�
"���������0(1���������$��������������������������������������� ��)���������%
�������� ��&��������������$����������������������)������ ������������#�������&����������
-�����74989%49AB;)����������)������ �����)���� <− <− �>� 6 �>�<����������&��C���&���
� � �>� �� ��$��������������������������������!�
�� ������� ���� �������� ������ ��� ���&���� ������ �������� ������-����)� ��� 496D)�
����������������=� 4− �����#�������������������������������������������)���������%�4− � ������� �� �!� @���������� ��� ��&���� ��� ������ ��� ��*#��� ���� ����� ��� ���� �������
��������� ���� ��� ������ �� =� � 4− !� +���� ���)� ��� ������$��� �������� �������������� ���
���������������������������� ��)������������.�������&�$���)���&������������������
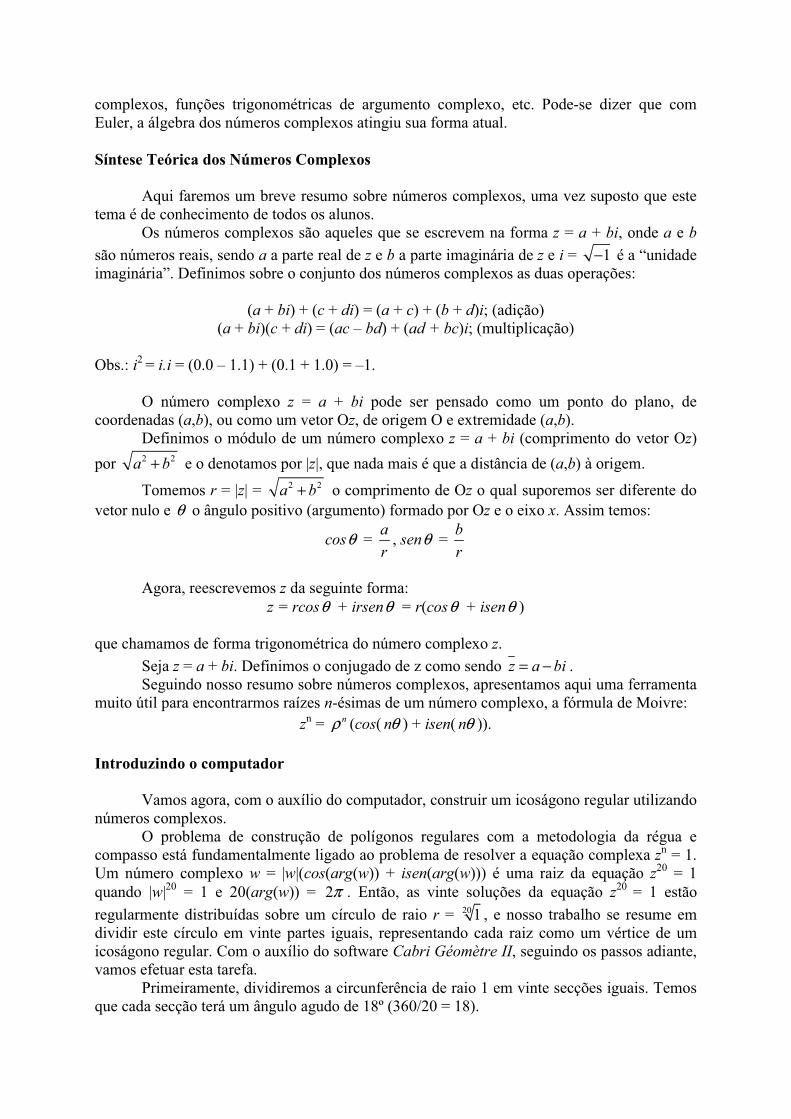
������ ��)� �������� ��&����������� ��� ��&������� ������ �)� ���!� +���%��� �#��� ��� ����
-����)���$�&����������������������� ������&�����������������!�
�
$%�� ����"������� �&#���� �'������� �
�
� 2���������������������������������������������� ��)�������#�����������������
����������������������������������������!�
� ����������������� ����������������������������������������>���=���)����������������������������)�����������������������������������������&�$������������>� 4− �����E�������
��&�$��F!�@������������������������������������������ ��������������������G�
�
7��=���;�=�7��=���;�>�7��=��;�=�7��=��;�H�7�����;�7��=���;7��=���;�>�7�������;�=�7�������;�H�7�����������;�
�
���!G��<�>�����>�78!8�I�4!4;�=�78!4�=�4!8;�>�I4!��
� �� ������� ������ �� �� >� �� =� ��� ����� ���� �������� ����� ��� ������ ��� �����)� ���
������������7�)�;)��������������������)������&�������� ���������7�)�;!�� @����������'������������������������ ����>���=����7����������������������;����� < <� �+ �������������������J�J)�����������������������K�������7�)�;�C���&��!�
� L���������>�J�J�>� < <� �+ ����������������������������������������������������
�������������θ ���K�&�����������7��&������;��������������������� ���!�2���������G�
��θ �>���)����θ �>�
���
�
� 2&���)���������������������&����������G�
�������θ ��������θ ����7��θ �������θ ;��
�����������������������&�������������������������� ���!�� �������>���=���!�@��������������&�������#������������ � � ��= − !�
� ��&�������������������������������������� ��)��������������������������������
�����������������������������*#����%������������������������� �)����'���������/����G�
���>� �ρ 7��7 �θ ;�=�����7 �θ ;;!�
�
�����(�����������������
�
� (������&���)��������� *����������������)����������������$&������&��������#�����
�������������� ��!�
� �� ��������� ��� ����������� ��� ���*&����� ��&������� ���� �� ��������&�� ��� ��&��� ��
������������$�������������������&������������������������������������������� �����>�4!�M�� ������� ������ ���� >� J�J7��7���7�;;� =� ����7���7�;;;� �� ���� ��#� ��� ������� �<8� >� 4������� J�J<8� >� 4� �� <87���7�;;� >� <π !� -����)� ��� ����� ��������� ��� ������� �<8� >� 4� ��������&����������������*���� ����������*��������� ���� ��>� <84 )� �������� ��������� ��� ����������
����� ����� �*������ ��������������� &���)� ������������������� ��#� ���������������������
���$&������&����!� ������� *����������,������������� �����)���&���������������������)��������������������������!�
� +����������)��������������������.�����������4�����������������&���!�L�����
������������������$����K�&�����&�������4AN�7B:8O<8�>�4A;!�
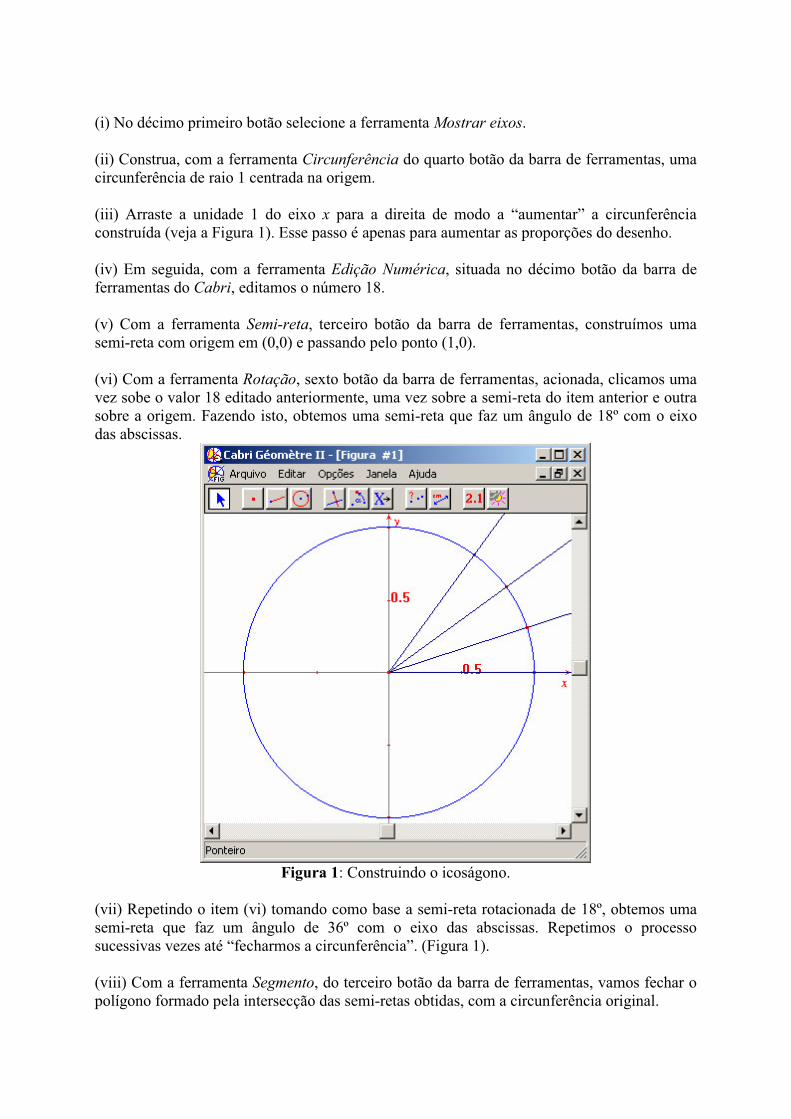
�
7;�"��������������������������������������������� ��������!��
7;� �������)��������������������������� �������������������������������������������)�����
��������.�����������4���������������&��!�
�
7;� 2������� �� ������� 4� ��� � �� �� ����� �� ������ ��� ����� �� E��������F� �� ��������.����
�������*���7�������P&����4;!�-���������������������������������������������������������!�
�
7�;�-����&���)� ������ �����������!��"#�$������)� ����������������������������������
��������������������)������������������4A!�
�
7�;� ��� �� ����������� %���&�� �)� �������� ������ ��� ������ ��� �����������)� �������*���� ����
���%�����������&������78)8;�����������������������74)8;!�
�
7�;� ����������������' �"#)��� ��������������������������������)��������)�������������
��#��������������4A��������������������)�������#������������%����������������������������
����������&��!�P�#��������)����������������%����������#����K�&�������4AN�������� ��
������������!�
�)�*����+G� ���������������$&���!�
�
7�;����������������7�;������������������������%�������������������4AN)�������������
���%����� ��� ��#� ��� K�&���� ��� B:N� ���� �� � �� ���� ��������!� ��������� �� ���������
������������#�������E��������������������.���F!�7P&����4;!�
�
7�;� ����������������%����� )�����������������������������������������)����������������
���*&�����������������������������������%������������)���������������.������&���!�
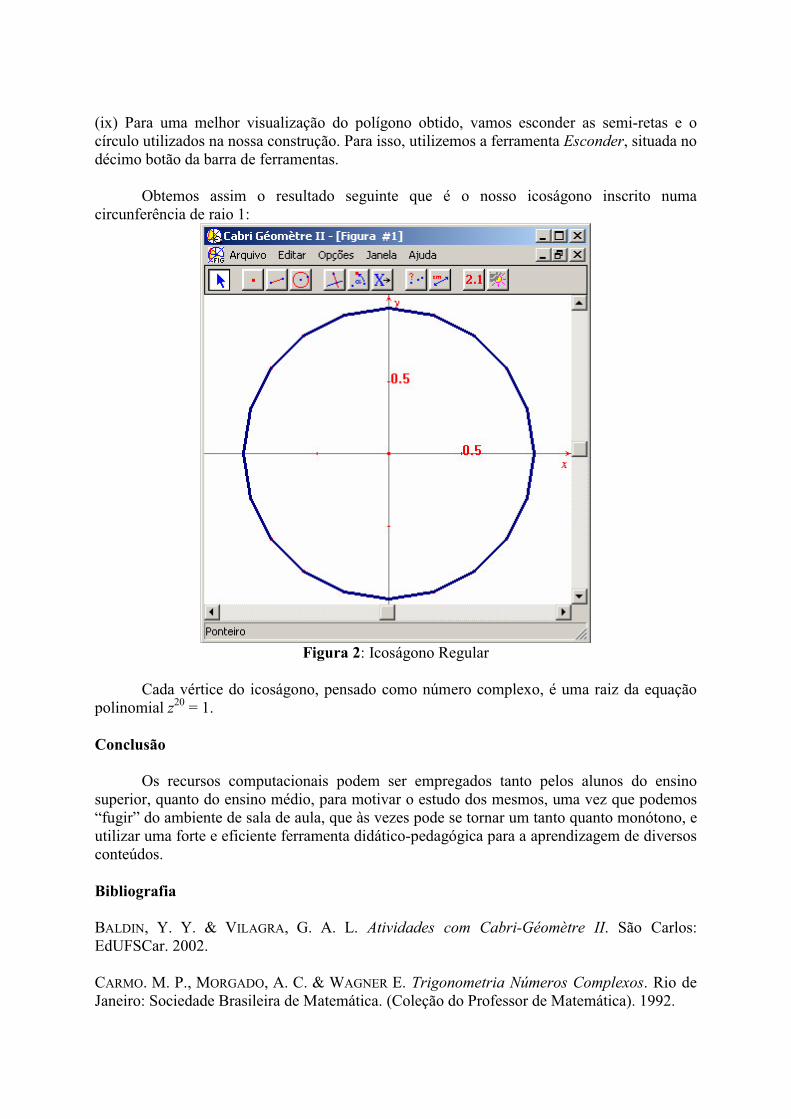
�
7 ;� +���� ���� ������� �����#����� ��� ���*&���� �����)� ������ ��������� ��� ���%������ �� ��
�*���������#������������������������!�+�������)����#������������������!������)����������������������������������������������!�
�
� �������� ����� �� ���������� ��&����� ��� �� �� ������ ���$&���� ������� �����
��������.�����������4G�
�)�*����,G�1���$&������&�����
�
� �����������������$&���)��������������������������� �)���������#�����������
����������<8�>�4!��
'���� -��
�
� ��� ��������� ������������� ������ ���� �����&����� ������ ������ ������� ��� ������
�������)��������������������)��������������������������������)�������#������������
E��&�F���������������������������)����C����#������������������������������������'����)���
���#������������������������������������$���%����&'&����������������#�&��������������
���������!�
�
������*������
�
Q2R@1")� S!� S!� T� (1R23�2)� 3!� 2!� R!� � �(������� ��� �����&��� ��� ��!� ���� �����G�-�MP� ��!�<88<!�
�
2�/�!�/!�+!)�/��32@�)�2!� !�T�U23"-��-!�)������ ����$*�������+,���!�������V�����G����������Q�����������/����$���!�7 ����������+������������/����$���;!�4DD<!�
!��2���8���������� ����
-����.����39��:��.����
:���� '����������*�?�������������
�����I� ���������:��,���8����������� 8� ���� ���� ����� �� � ���� ��������� �� �� � � ��� � ����� � �� ���� � � ����� � �� �������������� ��� ����/�� ������ ���/��6�� ����� ����������E ����������� ����O��������������2�������� ����� 4��� !��� �� �� �� � � �� ��� �� ����� ��� � � � �� ��� ���� �� ��� ����������2���� ��������������E ���� � �������� ��� ��������������� �� ������������� ������ F��� ������������ �� ������ ���� ��6�� �� � ���� ������������ �� '+�����)����������.������)���������"�����.������ I ��� �%�������������� �����������E ������ � ����� �� ������������ ��� �� �� ����������������������������� ���:����"�����.����� =�� T� � C� �� � � ����������� � � � �� �� ��� � � ���� � ���� �� ������ �� �� �������� ������$���������������*�?����� 3�� �������������E �������� � ���������!� ����� ��� �G������� �.���� ���������������"��� 9�������� K;��� � ,L�� ��� ����� (������ ������ ������ � ��*�� �� �� � ��� �� �������E ��G�0������ ������"#���� �������1� 2�������� ������'(������ � ��� �� ��� ��� �G�� ������G� ����� �� � ��� � ��� ����E ��� O� �� ����� �� ������� ���� � ���� K�L� �%���� K�L�!����������� ���������������� ����� .����G� ���� � ��� � �� ����� ������� � ���� ���� � ��� '(�� !��� �� �� �������� � � � ����������������� � ����������� ��������G����� �� ��� ����������� ��������+���!���������� �� � �� '(� ��������� ��� ��� ��� ����� � ���������������� �����"���9�������G� �������� ����� ���� � ����������������� 0������G� ������� ����������� ����'(������ � ��� �����"#�G� ������� ���������������� � ����� '(����������������������� ����
�������������������������������������������������,������� ����H�����������
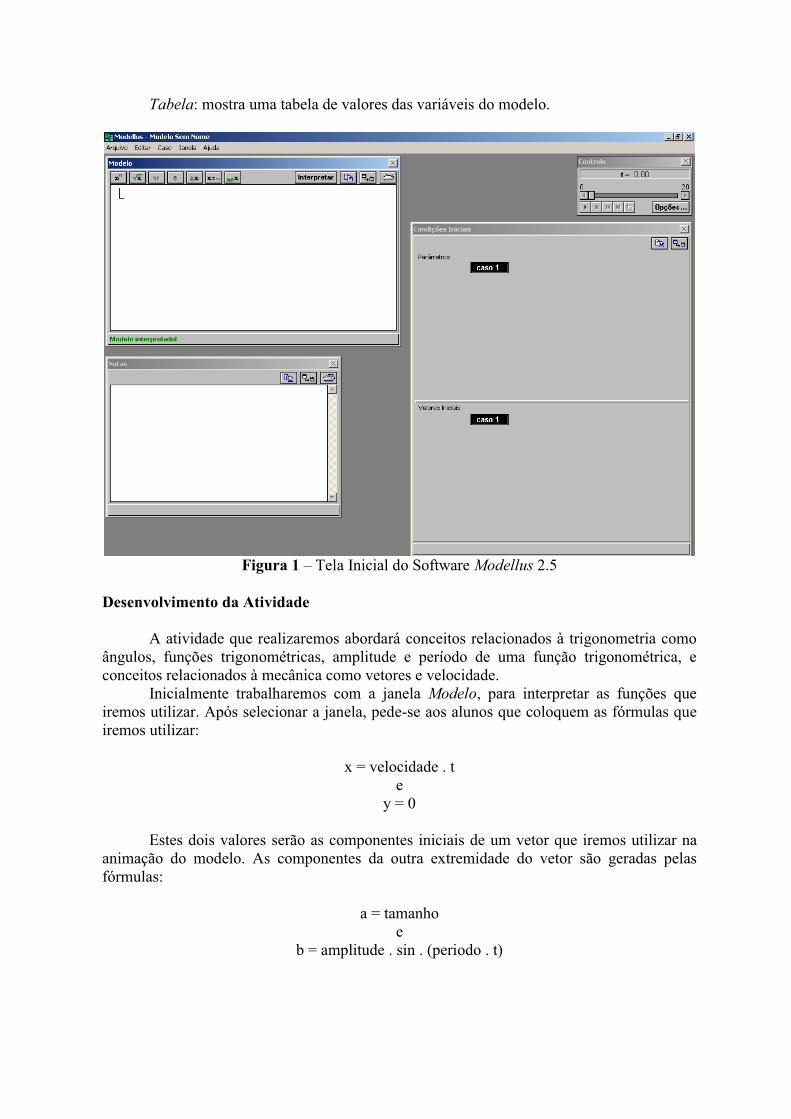
�
�
� �����G������ ��� �� ��� ���� ������� �� �����������������
/�����7�O�9�� �3�� �����?���E ������������T�-��������� ���������$���������� 1� �� ���!����� �� ������ ���� ��������������� ��� ����/����������� ������5������ � ���'+��� ����������� � � �������� �� ���6���� ��� �� � ���'(�� ����������� � �������������� ��� ����/����5�� �������������������� ����� 3�� ������� �� � �� ������ ���� � � ��� � ������ � � � � �������� �� �� ���'+��� !������������� ���1�%��������� �� �� ��� �����4��� ��� ������!�������!���� ���%���� ��!������������� �G��
2�W������ ���������
@�W�.��� ���������� ���������(�� ���������������� �������������!������������� ��� � �� '(�� ��� �������� 1�� ������������ � � ���� � �2����� ��� ��� ����� �(�� ��� � �� ��� ���%���� �G��
�W�� � ������
��W� ���������������K����������L��
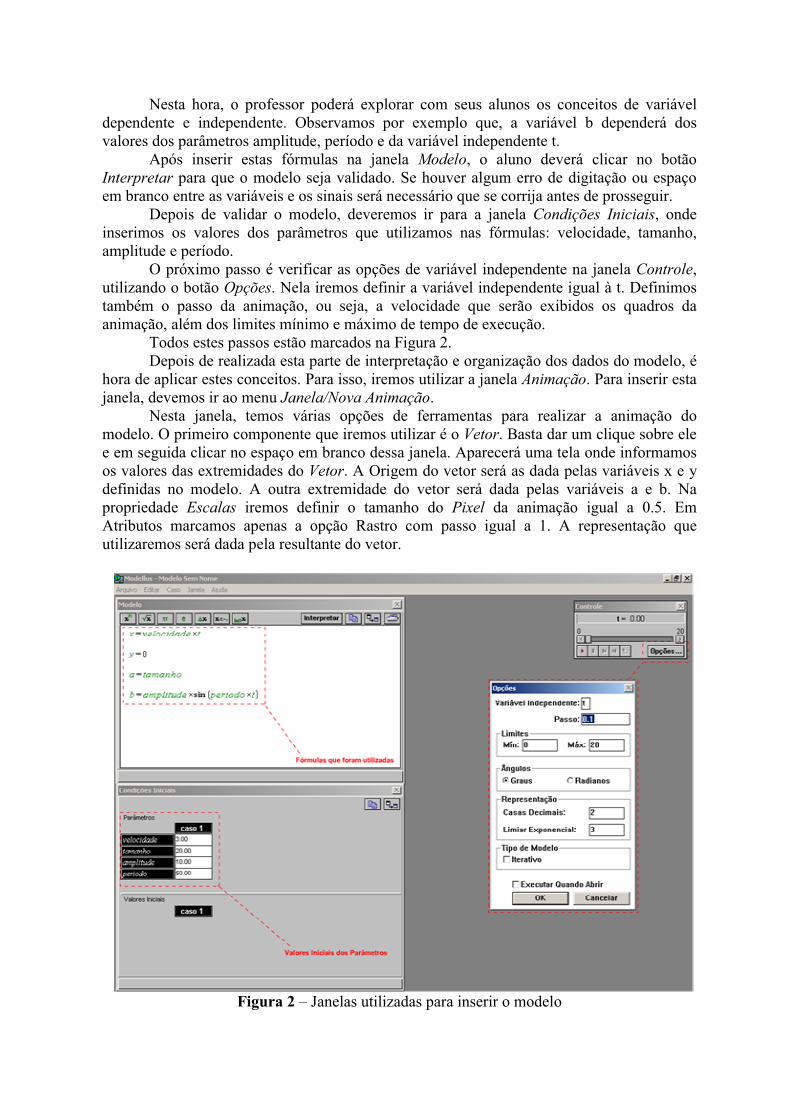
�
�
� ���� � ��� � �� ���������� ������� �2���� �� ���� ����� ������ ��� ��������� ��� ���������������� �� ������������� ����� ���� ���� �2������ !�� � � ����� �� ���������� ���� ����������� �5������� ������� ����6������� � ��������������������� 1�%�� ������ ��� �� �%���� �� � � � ��� � ������ � �� ����� ������ ��� �� ��� ���(��9����$������� � �!��������������� � �� ����?�������� ���������������� '(�������� '������� ���������� �� ������������ �����������������!����������� � �������������������� =����� ��� �� �� �� ������ � ��������� �� � � � � � ��� � �����"��� 9������� � ������������� ��� ������ ���� � �5������� !��� ���� ���� � �� �%���� �G� ����� �� � � � ��� � �������������6������ ����%2���� ���������� �� ����'+������ ������������������ �� ��� ��������� ����� ���������(��:$"�������� ������������� � ������������������� ��/����=�������� ����� �� � ���� � � �� '(� � ��� ��� � � ����� ��� !��� ���(�� �2����� ��� !� ����� � � �� '(� � ���������������6��������2����������������2���'(���� 9������������ ��������(��� �� ����� �;��� �T��� =���������� �� � ���� �� ��������������� '(������� �� '(������� ������������� ������ ���� ��� ������������������& � ���� ����������� �� �� ��� ������"#���& � ���������� �� ��� ���������� �������(�����;.��������"#���� ���� � � ��� � ������ �� �� ��'+��� ��� ���� ���� �� � � � �� �� �� � �� '(�� �������������������������������!������������� ������<������# �� �� �������!����������������������� ���� �������� '������� �������� �� ��� ��1� ��������� ���� ����������� ������� ������� ���2����� �������<������1�������������������� ��� � ���� �� �����2���@������ �� ��� �������� 1� ���� � �2����� ��� ��� ����� ����� � � � ��� �� ����� � �� ��� � �������� ��� �������� ������ ������ �� � � ���� ��� *����� � � �� '(�� �� �� � .�-�� ���1�������� � �� ���� ��� �� � ��'(�� : ����� ���� � ���� �� �� � ,�� 1� ��������� '(�� !������� ������������ � ���� ������� ��������������
/�������O�_ ��� ������ � ��� � ����������������
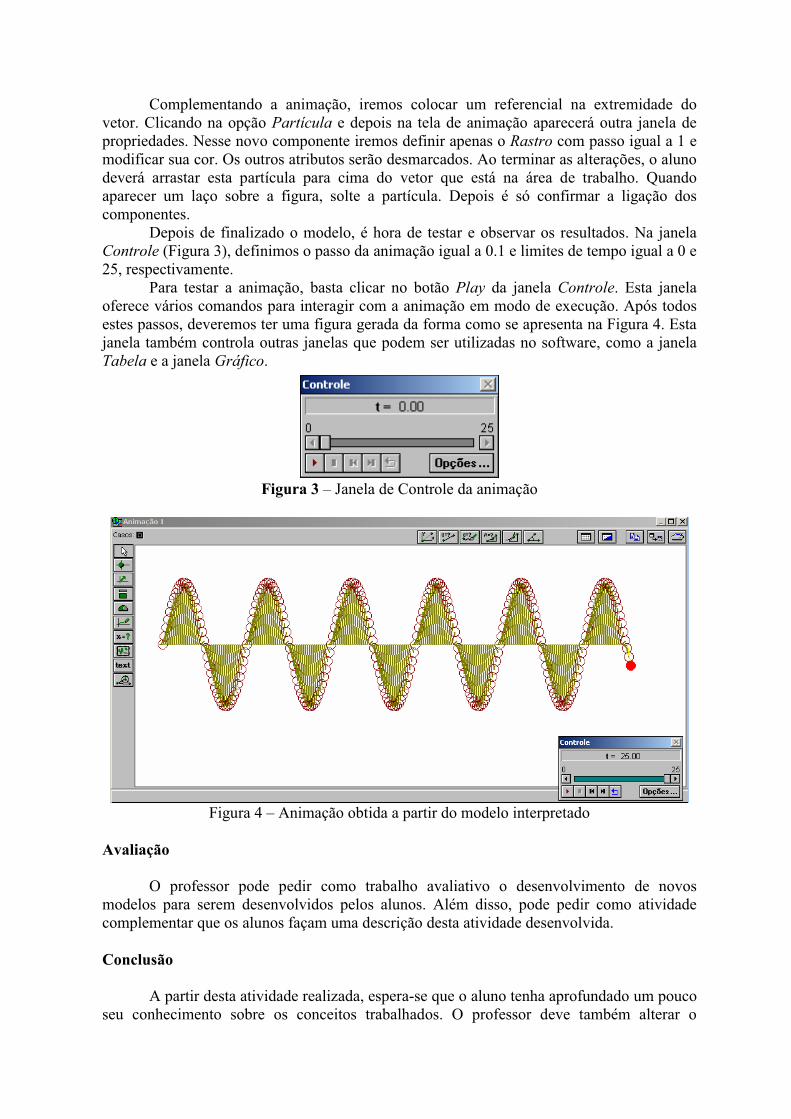
�
�
� J��������� ���� � �� '(� � ������ ����� �� ��� �������� �� � � �2����� ��� ���������J�� ����� ���'(��*��� �������������� ���� ���� �� '(�� � ����������� � � ��� ����������� �������������������������������������� ��� ���������������� ������ �� �,�������� ���� ���������������� �����������(������ �� �����1������� �� �� ���� '+�� ��� ����������� �� �� �� ��� � � ��6��� � � � � �� � ��� ����� !��� ����� � � ��� � ��� �� � ����� a� ���� � ������ ��� � '�� ������ � ���� � ������ � � ��6��� �� =����� �� �%� ������ �� � �� '(�� ������������������ =���������� �� ����������� ������ ���� ���� ��������� ����� ������ ������ � � ��� ����������K;��� �CL ������������ ����� � �� '(���� �� �.�,�������������������� �� �.���T- �������� ��������� & � � ���� �� � �� '(� � � �� � ��� �� ��� ���(�� *��=� � � � ��� � ���������� ��� � � ��� ����������������� ������ � ����� ������� � �� '(��������������2���'(���1�%��������������� ���� ���������������� ����� ���� � �� ����� ��������� ������� �� �;��� �X����� �� ��� �� ������������ ����� ��� ��� ��!����������������� � ���������E �� ������ �� ��� � �������� �� ��� �0��������������
/�����@�O�_ ��� ����J��������� � �� '(���
;��� �X�O�1�� '(������ � �� ���������������������� ����$�� ������� �� ���������� ����� ����� ����� �� � ���� � ��� �� ������������� ��� ������������� � � � ������ ����������� ������ ������� 1���� ���� � ����� ����� ����� �� ������������� ��!������ ������� ' ���� ������'(������ � �� ����������� ������ ������ 1�� �������� � �� ����� �� � ������ 4���!����� ��������� � ������� ���������������� ������������ ������ ��� ��������� �� � �� ����� �� ���������� ���� � ����� ���� �� ��
�
�
������ ������� �����'+���������� ����������� ������ ������� '+���!���������� ����������� ����� ������� � ������)�*��0�����9�� ����.*������\73�� �1��A��S�1I81:��"1 �#� ����� ������?(��& ���G������ �?����� �8���������� �,MM0���"3�81��3 �_����:�@S�#��_�:�� �_����:��������������������?(��& ���G������ �;9= �8������T �,MMT�������GUU�����2���������������U���������4�&��� ���� ���������E ������������

FAMAT em Revista
Revista Científica Eletrônica daFaculdade de Matemática - FAMAT
Universidade Federal de Uberlândia - UFU - MG
Número 05 - Setembro de 2005
www.famat.ufu.br
Iniciação Científica
em Números
���

�
�
�
�
�
�
�
�
�
�
�
�
�
�
�
�
�
�
�
�
�
-�����.������ ��� �B����
!"�����#�� ��" �$�������()���������5�����01�� �#�$�4�.$�C.D?B4�8�
�
#� �� ���= ,� �> ��������D��� �E������ ����� �����F�
.������!�������
$ "� �)��� ����� �B��� �
������������ ��������������������������� �������������
��� ���� � ����� ����� �������� �������� � ���� ������� ����������� ��������� ������������ �� ��������� ���������� ��� ���������� �������� ��� ���������� ! ������������"�������������������#��������$%$&�'�'���������������������������( �����)�������� ���������������%����*����+,�������������������������-���"���������� �������� ��� ����� . � �������� ���������� ���� ��� �� �� ��� � �� ���������� ����������������/�������0123����������4� �����& ����������� �������%����*����1�4&%$&3/153��������6����� ���������������6��������(����7������(8�.1�66(9(8�.3/1:3 �������� �� ����� 6����� ������� �� 6�������� (����7���� �� �$�4%6; 1�66(9�$�4%6;3/1<3��������6����� ���������������4�������;��� ������'�'1�64;9'�'3/1=36����� ����%��"��� ����$�����;������6����������%����*���������������(8�.16%9$;6%9(8�.3/1>3�������� 6����� �������� 6��������(����7���� �%������������� �������%����*����1�?@%$&9�$%$&9'�'3+
,������ � ���� � A����� ��� � ������� . ��. �� �� � �� ��� ������� ��� �������������������+ $��� ������ ������� �� ������������ ��������B�� �� ��������� �����7���� � ������ ���� ����� � ������� ������� �� ��. ��� � ������ ����������� ��� (8�.��$�4%6;� � ����+$���-������������� ������������������ ������������������ ���� �������������������������. �������� ���������������������������$%$&�. �����-�� ���������������������� ���� �����( �����)�������� ���������������%����*����+
���� ��������� ����� . � �-����� � ���� ������� �� ��������� �����7���� �������������������#��������$%$&� ������������������������� �����( ������;��� ������'�'�����������( �����%����*������ ����������������. �������������+������ ��������������� ����������������������������������� �(C�����(�����������4����� !���������������� ������������������������������� ��������������5DD=���������������� �� �������������� �����������&���� ������������������)������ !���)�7�*�����?����� �������������������� ��������������5DD=
����������������������� �4. ��B����(���� "������;�� %����. �'�� !�������7����������������������������������� ��������������5DD=�������������� ����������� �4�� ����� ���7������&�����%C���� !��)������(� �����)���������������������� ��������������5DD=����������������� � ���������������� �6����� ���!;��������$��������� !��E����%���F����� F������������������� ��������������5DD=������������������������� ������������ �6��������!&��������8A������ !��%�G� ��$������(���������������������� ��������������5DD=�������� ��� ��!���� ����� ���� ���4. ����������4. ���� ������ !����������$����(���F��������������������� ��������������5DD=�������� ��� ��!���� ����� �6����� ���!&�������6����������(����������� !�������������������������������������������� ��������������5DD=�����������������"��������������� �@����������&����������H�� ���$�� ������ �B����;�����$������ !�����*���(�������%������I ����F�%������������������������������������������������� ��������������5DD=�������� � �������������#������������ �$�*������(�� ��������������������������4�����������,���������&� ����&���"��������,����� !���$���������?������������������������������� ��������������5DD=����������������� � ������������������ �$J������(�� ��������;��������$��������� !��4�����%�������������EA������������� �������������5DD=����������������� � ������������������ �6����� ���!J������(�� ������(�� ��������� !���K�������������������������L �������������������� �������������5DD=
"����� ��������������� �����#���$%&�����'�������0�$��������%�&������� ������� 0'��6����� ���!%��#����$���7�����!,��#�������)���������������%����9��������9�����9����+� !�0(�����M����. �&�����(�)�&���������0�66(9(8�.���������� �DN�5DD=�D>�5DD>�������0'��� �������������������(���������� 04�� �������#������� FFO���%��������4��� �����$6,����&���������� !�0P���)A������������(�)�&���������0�66(9(8�.���������� 0DN�5DD=�D>�5DD>�������0 � �������������#������������� 0(�� ���������������� ������%�������'����#����9%;0$�*������,� ���"����4� ���9&�� ����� !��0;�����������������$����(�)�&���������0�66(9(8�.���������� 0DN�5DD=�D>�5DD>��������0�����$��������)�*)�������!����� 04�� ����$�� ��$���������4��� ������ !�0E���?�����������(�)�&���������0�66(9�$�4%6;���������� 0D:�5DD=9D5�5DD>�������0���������+����������� 0$����������������B��������� ����7������. 7������� �����������������������B�������������� ��� �������������� ����������������� ������������ !��0���������� ��(�)�����������0�66(9�$�4%6;9'�'���������� 0D:�5DD<�D5�5DD>*����� ������+ +����!� ���,�'%&�������� 06��������� �����������6��������(����� ����0 ���- ���"����!� F���������������F��� ���� �����-�.�������0�� �� ���������,�!������-�.� !��0E �����%������@�������-".��������0����������"������������-".� !�0&�����?����� ���������-*.�������0�������������������� ���������-*.� !��0%������?����?���
-/.�������0�-�������.� (���-/.� !�0,�����$�����%��. �������0DN�5DD=�D>�5DD>���� 0&������������������4� �����4����7�������'��������������������0� ������ �'����!����*� ��������� ������%�����������/ ����� !�0; �������;������������F���������0DN�5DD=�D>�5DD>���� 0$���������(����A�� ���,���� ������� ������������(�� ����������$ �����4����������������������0����� ������%�����������/ ����� !�04�����)���������?��������0DN�5DD=�D>�5DD>/����� ��������������� �������01����������������� ���������� �� ���7�������( ���� ��;� ������(��������� !��� ��8 ������� F�������D:�5DD=�D5�5DD>�������������� ���������� �� ���7����?�������� !��(�* ���M������������������������D:�5DD=�D5�5DD>�������� ��� ��!���� ����� �%������%����*�����$ �������Q$�������M ����� !������������%��. ����(����������D:�5DD=�D5�5DD>����������������� � ������������������ �6����� ���!J������(�� ������(�� ��������� !��-��.�R��������6�*�����%������������DS�5DD=�DN�5DD>����������������� � ������������������ �$J������(�� ��������;��������$��������� !��,����$��T���(������������DS�5DD=�DN�5DD>

�����������������'��������������� � 6� ���������� 4�������� �� %������ ��� ?���� ��� �� �������� ��4. ��B��)�������� !���*�����4 F����?���������DS�5DD=�DN�5DD>�������� ��������������������������� �6����������(����������� !��-��.�%������M����. �,���F��$��A���6�������(��7�����$������������DS�5DD=�DN�5DD>

FAMAT em Revista
Revista Científica Eletrônica daFaculdade de Matemática - FAMAT
Universidade Federal de Uberlândia - UFU - MG
Número 05 - Setembro de 2005
www.famat.ufu.br
E o Meu Futuro Profissional?
� ��

(����"4��������������� ��������������*��(����� ��0�
��8A����D=���$%$&4%?4�6�&$0
%�7��;���������������1�������������������3$��-(�������1�����������3P�����%��������1�����������3
4����$� �����
2�3����������&!������ � ��4��
���������� ������ �� ������������������ ����
����+�1�2�2�
8���� �A���� ������+� ��� '������� � ����� U � ������ �������*��(����� ��0V � �������� !. ���� . � ������� �� �� �� 4������ ��������� � %����+ &��F����� �� ����� �� ����������� � � �� �� �- ���"���� �� ��������� %*���� $ � ��� (������+$� �������� � ��������� %*���� � � �������� �� ��� ����� ��%����*���� �� '����������� ������� �� '����#����+ �� ����������� ��� ����� �� � �� �� '�' ������ ������������� ����������5DD=+8���������� ������������������������=:����1��� ������������!����������� � ��� ����������3������ ������������� ��������� � �� ���� �����"���� . ���� � ��� ��� ����"������%����*����+
������ ��� ������� *��(��������$����3� 4� �� ��� ��� ���� �54���6 ���� � 7�� ��� ���� ��3��54���6 ������7����������� ����$������ ������4��(�����3����� �����������������������(��� ������(������4���!8!����)����� �����4������� ����� �������4��������������������� 9������������ �����������������������%���:�0��� ���� ������ P � � �� ���7��� ����� ����� ������ ������� ��. �� ���� ���"����������� �� ��� ��� �+ 4 �������� � ����� =: ����+ P �C���� . � ��������� ������� ���� ����������� �� ����� �� � ������ 9 �� ��� . � �� � ������ �� � ��� �������� ����� �����������������������������������������������������������. ����������� �������� ��� ���� ������7���� . � ������� ���� �� ��� ���� �������+ %�� � ���������������/ �� �-�� ��� � ������ �� �����*���� �������+ 8� � ��� �� �� �������� ����������ND���� �����������������/�� �������������������� �� ������ ������� �����������. ������ �������+'��������� ����������F����������������. ��. �������/� ������������������� ��������������� �����"9��+��� ������������� �� ���� �����. ���������� �� ������� �� ��� ����� . � ��� ������ �� ����������� � . �� ����. �������� �����. ����* ������������� ������������� �����������+8���� �� ���� �������� ��� �����*9�� � �����"9�� ��� ��� � ���� ��� � �*��� ��� �� �� ���� �� ����� ���������� ��� ������B�� �� �����*9�� �� �*���� ������������+ 4� ������� !�����*������������� ������������� ������*�������� ��������+M� ��� ����� ������������������� �� ����� �� ����� �����/ ��� . � � �������� ����� �� ����� ��� ����/ ��� ��������������� ������ ������������� �� ����� �������� ��������*9���� ��������*9����� �*����+4������C��������������.W"�������������+����������������;��� �� ������ ���������������7�����7������������� �� ��(� ���� ������ �%���� ���� ����� ��� ��� /������� �%�����)� � ��7<� ���� ��3� �� � !����� ��� ��� ��������������!������������4��4�����)��������� ������6������7������0�
�� ����������4���� ������������������F�����/�������������������������������. ��� ��������7��� ������� ����. ���������� �����/ ��. �� ������������ �� �� ����� ������� ��������������������� ����� �������� ��������� ��������������������������� ������������� � �������� ������������������ ���+4������� �� ��� ��� ��� ������� �� ������ ��� ����������! � ��� ��� ��� �������� �������� � ���� ����. "� �������� ����� ���F��+$����������������� ����������������������������*���� �. ����������������������������� ����� ������+4�������� ���� �������������� ���� ������������ �������������F�� �����������������+M������� ������ ������ ������������/���� ��������� ���������� ����� ��������� ������� ������ ������������ � ����� � ���� � ����� �� � �����F����� � ���� ��F��� �� ��� � �������� �������������+
@ �����������������������. ��������������� ����� ���������������"������ ������ ������������� �� ���7���� �� ������ ����� ��F��+ (�� � ����������� �� � � ������������������������������������������������������������-�� � � . �������� �� ��������������������F���. ��. �������������������. ���������������������������������������-��������� ������������ ������������ ��������+8�������������� ���� �������� ����������������� ��������. ��� � ���+I ���������������. � �� � ���� � �� ��B�� �� ������ ��� ����� � ���� ���� �� ��� ���B�� ������� ����� ���������/����� ������ ����������W���� ������������ ���B��+@���������������* ��� �*9����� ����� �����+4���� ������. � ��� ���� �������������������������� � ���� �� ���+8�� �� ������ �������� �� ����� . � � �� �� �� ����������� �������������������. ���������������� �F+$. ��������� �� ����� ����������� ����������������*+������ �������� ��. ������*����. ����������������� ���������������������������������������������� ��. ����������������������������������7� ������������������ ��F�+$� ���� �������� ����� ��������� ����������+���������� ���������. ����*����� �� ����� ��������������U� ������� ����V�����������������0��� ���������� ���������� ���+ $����������� ��� ��� ����� �����/ �� ���� ��*���� �� �������������/�����������-� � ����� ����� ���� �� �"������������������� �������������������� ������� ������������+���!�������! ������������������ ���������������� � ����������� ���� ����� ����� �- ���"������ � . � ��� ��������� ��F�� . � ���� ���� ����� � ������+&���������. ������������ ������������ �������. ���� ������������. � �����������������������! ����+4��� ����������������� ���� ���� ������. ������������������������� ����������. � ������������. ����� ������������ ������� ����F. ������������������������������� ���� ��� ��������������������������B��������7� �����. ������������� ���������������� ������������������������������������� �� ������� !. ��� ������� �� �����������+4����� ���� ������� ��� � �� �F �� ��� �������� . � �. ��� ����� ��� � ���� �� � ��/ � ������� �� ����������� ��� *���� ��������������������������� ��. ����� ���������������������+$��������������*���� �� ������������� ��. � ���� � �� ��� ��F� � ����/ �� �������� ��� � ��� �� ��. ��. �� � ���+ ��������� ��� �� ��� � � �� � ������� �� ���� ������� � �� ���-�������������������� �������! ��������������������/� ������F������ � � �� ������� �. �� �� +����-�� ��� �� � ����������������������������������" ���� ��������+ 4� � �� ��� �� ��� � �� �F �� ��������� �� ������ � ������ � U��� ���F����V� ��������� ��������������+4����������*. ����� � ������ ���/��. ������� ����������������� ����� ��� ��������� ������������������������������ ������C����. ���� ������ �� ��� �� ������ � . � ������ � �����+ ������ �������� �� ������� !��� �������+$��������������������������. � ��� ��� ���� ��������������� ���� ������ ���-�� ��+4�� �������� �������������������������� ������� �������������������� ������������ ������+����������. ��������� �������� ���������
�� ���������������� ���� ������/�����������B����. �������������+8�������������� ���������*���� ���� ������ ����� ���B�������������������� ��������� �����/ �������� � � ������. �������* ����� ��� ������� ���� �������+8�� ���* �� ����� ���������� ���� ������� . � ������� ����� � ��������A��� ��� ���7� ���+4��� ����� � ������� �������+$���. � � ������ ���* �������� � � ��������� �����-� �� ���� � � �������� ���F��9�������������������������� ���+6������*�7��������� �������� ��������������� �����������. ����� ��F����+������������� � ��������������. ������ ��� ����������� ���������+���������������� ������9���=������$����3�����������9�������!�������� ��0��� ����������4��������� ����������������������������� �������� ����/ ��. ������������ ���* ����� ���� � � ����� � ��� ����� ! ������ � ��� � ����� � � ���� ��� �������������� ��� �C ��� �����*����� ��� ������ ��� ��� � "�� ��� ���������� �������C���� ���+$ ��� ��� ��������� � �� �������0 ���� . " � ���� � �������� ����X 4 ���� ��� ������ ��������� ���"������ ��. �����"� ��. "������������� ������. ���+4���������������-� ����������9������������+%����������. ����������X,��������� �������������������� �������+4����������������������������������F�*���� ����� ��������� ������� . � ����� �� �F�� �� ���*9��� � ��� �� � � ���� ����� �. ��� . �������7����. ���������������� ��������+8��. �������*������ ��� � "�������C��������������. ����*�����������������������������+P�C����. ��C�������7����. ����������� �������� ��� �� ����������������� ����� �������� ������� . � ������� ����� ������������������������� ����������� ��+8��� � ��� ���������� ����������������������������������� ��F������*-��� ���7���+P. ������������������ �� ��������������������. ����*��� ��7���+4���������������� �� ���������������������7��������� ��������������������������������������������������������������� ���������B���������7� �+4������� ������� ������+$�������������*����� ���� ���������� �����-��������������0�����A������*9���������������������+M������������������������� ��� � ���� ���������������� �������� �����7� ���. �� �C ��� ��� �+���" �" ������ ��������� �� ������������ �� ������ � �� �������� ������� ���������� �������������� ��������������C��������� ���� ���� ����������A������� �+8��. � ���� ��� ���� �� �������� ��� ��� � �C+ $� ������������ �������� �� ���� �� � � �� ���� ��� ����� ������� �����7����� � ����*9��� �����7���� ��� � � ��� ����������� ����� ������� ��� �. ���� . � ����� �� �� ������ ��� ����� ��� �������� � ������+ @������������� �������� ����� ������ ����� ����� ����������� ����� ������ �����7���� � �C������. �� ��������������*���-�������� � � ��������+++(���������� ���������������������A����. ������� ���� �������������� ������� �����������������+(����� �������� ������� ������������� ������ �� ���� ������� ��������� ����� ������� ���������������� ���+���������������������. ��� ��� ��� �������� � �������������. ������+$���. ��������������*������� ������������������������ �������������������*� ��������� ����������������������� ��������+����������������-���� ������4��������4���� ��3�7�� ������������� ��3����� �������������������(���������0��� ����������4 � �� ��������������������������� ������+&��� �����7���. ������ �������� ��������� ��������������������������������������������������������+%� ������ . �� ��� ���������� ����F. ��. �����-����� ����������������+@(����7���������4�����%���������� ��������. ���F��������������� ��. �� ����������������� �� ����� ��� ��������� �� �����������+ 4 � � ����F ������� �������� ��F �
� ��� (����7���� � ��� ��� � ����� ������ �� ������ ���+ ��F � � ��� �� ����������� ��� ���� ����������� ��� �� ������� ��F ������ � � ��� �� ��������� �� ��� ������� ����F������������������������������+(����� ���F����� ����������������������� ���������������� ��F���������. ����������'�%;�����M���F����+�������������������� ������4����3�7���������4� ������������ /�������������� ����7����� ��������������(�������4����)�>�7����������������� ��3���4�����%�4�7�� �0��� ���� ������ 8��+ 8�� � � ��F� . � � �. ���+ (���� . �� �� ������ �� ����� ����������T��������� ������ ����������������� ����������������� ������� ��+4�� ��� . � ��������� ��� ���������� � ���� ���� ��� � �� ��� ��+ 4�� �� �������� � ��������������+8C���������� ������������������ ��. �������������������� ���� ���� � �� $� � (+ P �� ������������� ����� �� �������� �7���� �� ���� ���� ������. ���+ $����� ����� . � ��� � � � ������� ����� ���� �� ��F�� ��� ��� � �������"��������������. �������������������� ��F������������F������� ���+����������������>�7������� ����������7���4��������������� ���(�����4�����������������2 �����������4���������������������9��0��� ����������P���7��� ������������ �������+(���� ��� ����� ������ ��� �������������� ���������������� � ���������+& ��. �� ��������*����U�������V. � ���������7���������� ���������+����������-������. ����� ���. ����������� ������F������+$�� ���� ������� �� ����������� � �� �������� ������ �� � ������� ���������. ���+�����������������������4�������4� ����7������4��(���������8��4�� �����������$�������� �������� �48�� �� �������� �� !�����9��� �� � �������� �� ���6 ���)�>� 7��� �� �� ����� 4� ��������)��� ����������4 ��������. ��C�� ������������������F����������������� ������������� ��������+ ��� . � ����� ��������� ��� � ���"����X P �C���� . � ��� ������ ��� ������A���*���� �������������������+��������*�� ��������������������������������*�������� �*�� ���������A��������������������������� ������������� ������ �*������ �������������� ��������� �����������������F����� ���- ���"���� ����������� ����������� ������������ �����+����������������*� �� ��� ��4��:������������ ������4��!��������� �� ����� ��� �� ��(� ���� �������%���3����� ����������7�������4����������������(������������ � ���4��������������9����������� ������7������������� �� ���������������4� ��������������(������!���� ��0��� ����������P���� � ����� ���������+8�� ��������. � �����A���� � �* �����������*����������������������. �� ��������������� ������*���� �������������� ����������7�����. ���������������+���������������I ���������� �� ������ ����� ���. ��� ������� ���������������*����X�� ���� ������ @ ����� ���. ��� ��� � ��� �������� � �. ��� . � ��������� ������-������ ���������������+I ����������������.W��������� ��������� ������������������+& ��. ��� ��F ������ �� ��F������������� �������� ��� ������������� � ��
� ������������+)C����. �������9���� � �������������� ����������C���������*������� ������� ������ ������B���� � ��+%�� ��������������. � �-������� � �������� ������������������ �������������������������� �����������������+&����� ���������������� ����� ��� � � �������� ��� ��� �� � ����� �� �������� . � �������� �� U��� ��������V+P ����������������������� ��������*����� ����+������ ��� ������� *���� (� ������3� ������ �� 4������������� ��� ��������� ��� ������ ������� �������� �� ���� �� ��2�23������:$������ ��4������)�>�7������� �����4� ��������0��� ����������4 �������� ����������������������� �C-�������� ���������+%���� ��� �� ��������� �� ��%����*���� �� ��� ��� ����� � ��� ��� �����+ 4�� �* �� �� �� ���������������� ����������"9���-���� ��+4����� ����C�������������. ������� ���+M������. �. �����. ����� ��������������� ������������"�. �����������������+$� ������. ����.W������� ������ ����������������������. ����.W�������� ���+4����"������� ����������������������� ������ � ������ ���+$������� ��7� �� ���������������� 7���� �� ����������������������. �������������������A����� ��� �� ���+ ���� � � ���� �� . � �������� ���� ����������������� ����� ��� � ������� ���������� ��������������'����#����. � ���������������������������������� �������� ���� �������� ���+8������������*�. ������������� ������������ ��. �� ��� �� ������� ������������+ ����� ��F�� �� ����������� �� � ���� �� ���� �� �* �� ������������������������������ �����������������������. ��'�'���������������! ������������������������ ����������� �� ��������. ���������������� � � ��� ��F�+&����F���� ��F�������������������������� ���� �������������. � ����������-���"������������A����� �����������+������ ��� ������� *��(������� �$����3� ����� ��� �� ��� 2�23� ����!�� ��� 4��(������ ����4���� �� ��� �� ����+� ��� '������3� !�������� ��� �!�����61��� 4����� �$����� 4�������� ������ �����������4���6 ������ 8�����4� ����)��� ����������4 ������� � �� �����������������B��. �����*������������� ������� ��� �+8���� ��������� ����������� ��� ��� ��� ��� ���� ���������� � ���� �� ��������������������� ������ ��������+%�� ������� �����������0 � ��. ���F���F���� �������+@�������+
*������5�����������;���� ����������)�


FAMAT em Revista
Revista Científica Eletrônica daFaculdade de Matemática - FAMAT
Universidade Federal de Uberlândia - UFU - MG
Número 05 - Setembro de 2005
www.famat.ufu.br
Merece Registro
� ��

�
�
�
�
�
�
�
�
�
�
�
�
�
�
�
�
�
�
�
�
�
-�����.������ ��� �B����
����������� ������5�����01�� �#�$�4�.$�C.D?B4�8�
�
��� ����- �����5�!��� �E������ ����� �����F�
$ "� �)��� ����� �B��� �
#� �� ���= ,� �> ��������D��� �
������0�)�� �
�.� ����!������5���� �6������� � �� ���&��� ��7��� �� ��� 2D�DN�5DD=� �� ��� ����� �� %����*����� � 666 ( ��� ��4� ������F���� �� 4����7������ ��� � ����������� �� ����+ ?������ �� %��� (���������+
,.� 7���!������5���� �6������� ��8 ������ ������F��� �� A����� �"� �� $����� � �66 ( ��� �� 4� ������F���� ��%����*����+ ����� �����F����� ���� ��. ����� ������ ��� � �������� �� �7� �� ��4� �����������%����*���������� �������������������������0� !� �� ! ,���� � �
������������������ �� ���
'���� ������������������������
����������������������������1�����������3
%� �7���?����������?������ �����%����E�������
Y=
����� ����� ������ ! ������ �
(�� ������������������������?���������)����� �
"��� � ����� �������# �� ! 1@���������3
%�����$��������(#����)A���?������������������
2DD
$� ��% &����' �����'�������� ���!%��#����(�*�����0����������������������� �����*���
���� �% &�( ����)����1@���������3
��F��*������+���������������������������
Y=
���� ���' ������ ���� (C������������������������������
���� ���� � �����*����1@���������3
$������(�����8�� ����) ��$������, ����������
YD
+��,���������� ����� �
(��������F������� ��7������. ���� ������ ��
������ ������*�� ��������������� �����B��
-� ����# ����1@���������3
$������(�����8�� ����)A���?������������������
S=
�����!�.�������� �����T������. ��B�� ����������
��� � ���� �$ �����1@���������3
) ��$������, ����������%�����$��T�����(#����
SD
/��������������0 ��� %��������� FFO����A��
� ������ ������ ����%��� ��1@����������3
(����; ���������$������4����$� �����
YY
0���"��1 �� $���� ������������������ ����4�����(��������
0����� � �#�������1@���������3
$������E������� F�EA����, ���%��O��$������
S=
)�1 ��!�����.������� �� �$������ �' �����
'����������F������������������G
/� ����� ����� �� ����%,� �1@���������3
, ���%��O��$������) ��$������, ����������
YD

�����������������#��� �� ����
'���� ��C����� �������������� ������������*������7������4�����$����������
���������'����#����0��� �����������7�������
����� ����
���� � ������ ! �"����2�1@���������3
%������&������?��������%���(���������
Y=
+ ��1���� �����1�� � $��T��������. �������������� ������
��� �0���������� �3������1@���������3
) ��$��������������4����$� �����
N=
������� �" 1���������� �
$�*����������������������� �����������������!
. �������� ����F����9����*����� ����������
� �&� ������ �� ������ 1@���������3
%������&������4������(�������; �������
Y=
%� ����� ����"����2�� @��������)����� �������������� � ��������
�� ��������1@���������3
?������ �����%����E�������L����( �����
SD
-������������������� 6������������������C����� ����� ����9 �������
�� �� �% &����� ����%,� �1@���������3
$������(�����8�� ����) ��$��������������
Y=
+� 1��������#��������� �
&������������B�� ���������������������7������� ������������G�����
����� ��������1@���������3
4������(�������; �������?��������%���(���������
YD
(� ����������� ���$�� ���������������
�������C����� �����������������*����
0,�����������������# ���1@����������3
%�������;������������������������
N5
� �1�����������' �����
4��� �����68�(�� ��7��������������2YY=���F�������5DD<� ��� ���������
��������� �����
(������)���� ���1@���������3
4������(�������; �������%������&������
YD
0� ���� ���0����
%���������� ���������������*���������������� ������� �B�� ����F�����������������*��������� ���������
�&���"� !��������� ����1@���������3
4����$� �����%�����$��T�����(#����
Y5
�.���� ���5��� ���� � �� ��)������ 2�� ����� � ��)!�� � 5�� ���5��� ���������� ������)���������������� �����������
•� @����+;������%*������$F����������� ������ � ��� ��7�����2S�52��%��� �� 5DD=� �� >2Z �����*������������ ��$�*����� �� ��� E��� ���?�O� ���� � ������� �� ��� ����� ���������0 +?�� �?� �������� �(� ������� �(�4��" ������� � �� �44������� � ��� ���� ��� 4������� !� ���������"� ����� !� � 1�� ������44� !�+
•� @����+%*����E���M����,����� ������ � ��� ��7�����2S�52��%���
��5DD=���>2Z�����*��������������$�*����������E������?�O������ ������� � ��� ���� ��������0 �� ��������"� ������� �(� � >� � ?���� 4�����������((���� ��)�*����@A��� ��4��� ������)�
�
•� $�����+, ���%��O��$������ ������ � ���D2�D=��$�������5DD=����������� 4������� �� ;�������� ,���������� �� '�?E� ���� � ������� ����������4����9������#����������4��(���������'���� ����&B���&C)�
�•� @����+%� �7���?���������� ������ � ��� ��7�����5<�5Y��E �����
5DD=� �� 5=Z(��C. ����������� ��%����*����� ��?�� �� E������ � ���6��F�����R��G��� ��(����� � �@ ����F��������;��#������ ��7�����2S�55��E �����5DD=�� �������������������� ���"������ ������14��5�����4�� ���������(��������� ��� �����4���� �����"�4������)�
�•� @ ����+ 4������ (������� ; ������� ������ � � �� ��7��� �� 2> � 2S ��
$����� �� 5DD=� ��[�66?� ���� �� ���. ��� �� ���� ��?����� �������(������� �� (������� ����C ��� ���� � ������� � �������� '�4����9��� ��� ����8���������!�������������������������:�����2�2+�
�•� $�����+?������ �����%����E������� ������ � ��� ��7�����2:�2=��
����������5DD=�������� �����[[�666(8%$(������������� �����9� ���+������������ :� ����(���"������4����9D��+�
�•� $�����+��F��*������*������������������� ������ � ��� ��7�����2:�
2=������������5DD=�������� �����[[�666(8%$(������ ������� � �������� +��:��8���� 8����� ��� ���� ���������� 4�������� 4���� ��(��� ��������� �9D������� !��������� �����+�
�•� $�����+��F��*������*������������������� ������ � ��� ��7�����2S�
52 ���������� �� 5DD=� �����) �F ��%�������� ���$6�64449)$?������ � ������� � �������� ����9��� ��(��� ����� �4������� =� �������9��� ���������������4�9���������������������� �4����������8����)�
2.��� �)�5!9 ��������� ������� � ������ �� �����+ ?����� � ��� �� %���� E�������� ����� �������������!"����������� �������������� ������"�4��������&@-�4�4������ ���� !����������� �����" �� 6������������ E� ���� �� '���������O� � FF����� ��� K��\����9�����O���������+2:�8+2�:Y9=S�15DD=3+
�.�1 ��5�������� ��8 ������ �����F��� �� A������ ��� DS �� @ � ��� �� 5DD= � 5] ���� �� 2] @��� 7������������ �� %����*���� ��� 4������ �A������ ^ @8%4� 5DD=+ ������� ���� ���������������=DD+DDD�� ������������� � ��������� 1=]�S] ������3������������������+$�$%$&������ ���*��� ���������F������@%4���S5��������� �������� %;9D5 1&��#�� �� �������� $��� ������7�� � 8������� �� %����3����������� ����� �� SDDD �� ���+8� ������ ��'����#���� 2:<5 �� ��� ��F���� �� ������. ������� ���������(�� ������%T����+4����� ��������������������������������������� �(�������$ ���������������+ ���� ���� �� ������ ������� ��� ������� �� ����� 1����������� ����� �������������$%$&�� �����*������'�'��� ��������� ����� C�9���� ����3. � �� ��������� �� ����� ����� �� ����� � ��������� � � ������� ��������� ����� ������ ������+ ����� ���� ������ �� ����� ����� �� <DD ������0 ���� ���
������������� ������������ ��'�' ����� ����� ���� ����� ������ ����� 1�� ����������3 ��� � -����� �� � ������� ��� ������ ����������� ���������� ��� � �����*������������������������ ��������� �����+
&.� :����)��;2���8�����
8����2S��$�������5DD=�������� ���$%$& �� ���������� ����� ���������+ %*���� $ � ��� (������ ����T�F��� � ����� . ����� ,��� %*����� . � ��� ������ ������������+ 8� � ��� ������ ��� ������ �� )������C��� �� 4����� ���$%$&� � ��� � ����� �� �� ���� �� ��������� ! �������� ���������+ 8����������������+����'��������� �������F���� ����������������,���%*����+