numero 07 - setembro de 2006
TRANSCRIPT
www.famat.ufu.br
Revista Científica Eletrônica daFaculdade de Matemática - FAMAT
Universidade Federal de Uberlândia - UFU - MG
Número 07 - Setembro de 2006
f
e-mail: [email protected]
Comitê Editorial: Márcio José Horta Dantas -Valdair Bonfim -Marcos Antônio da Câmara -Flaviano Bahia Paulinelli Vieira -Weyder Orlando Brandão Junior -Maria Luiza Maes - Damat -
Famat/UFU
Famat/UFU
Famat/UFU
Petmat - Famat/UFU
Petmat - Famat/UFU
Famat/UFU
FAMAT em Revista

����� �� ���� ���� �������
����� � ��������
� ������� �� � ��������
������� ��������� ���������� �� ������ ����������� �� ��� !���� �" "#
$����������� ������� �� $%���&���� $�$ '
�( ��) ����(����*
!���( +(�, -(��� .����� ��������/������ 0(�� ��������
���(� "�����( �� �& ��� ���������������( 0�1�� 2��������� /����� ����� � ��������3�4��� 5�����( 0����6( +���(� ����� � ��������
���� 7��8� ��� ���� � ��������
�9 ��( �:���� %�( �� ;���
Editorial.
O Comitê Editorial da FAMAT em Revista, com muita satisfação, vem disponibilizar à comunidade acadêmica o seu sétimo número. A FAMAT em Revista é a revista eletrônica da comunidade acadêmica da Faculdade de Matemática da Universidade Federal de Uberlândia – MG. A sua finalidade é promover a circulação de idéias, estimular o estudo da Matemática e despertar a curiosidade intelectual dos estudantes e de todos aqueles que se interessam pelo estudo de Matemática.
Gostaríamos de externar nosso contentamento com a aceitação de nossa revista; a quantidade de artigos completos de iniciação científica vem se mantendo expressiva desde a terceira edição, o que tomamos como índice de nossos esforços, em prol do estudo de matemática e de mantermos uma revista voltada para os trabalhos de graduação, estão logrando certo êxito.
Em relação ao conteúdo do sétimo número da revista, foram contempladas as atividades desenvolvidas no primeiro semestre de 2006 e parte do degundo semestre de 2006. Abaixo, apresentamos de modo sucinto, as diversas contribuições e matérias que compõe cada seção.
Em Artigos Completos de Iniciação Científica, contamos com dez trabalhos muito interessantes, todos desenvolvidos em projetos de Iniciação Científica orientados por professores da FAMAT. Sem dúvida, a leitura dos mesmos irá enriquecer a formação de estudantes de matemática.
Na Seção Problemas e Soluções, apresentamos as resoluções de quatro problemas propostos no número anterior. Além disso, quatro novos desafiadores problemas são propostos neste número.
Na Seção Eventos, disponibilizamos aos nossos leitores uma lista dos eventos ligados à matemática a serem realizados no segundo semestre de 2006. Damos particular ênfase à realização da Semana da Matemática que será realizada de 12 à 15 de dezembro.
Na Seção Reflexões sobre o Curso de Matemática, temos um artigo do Coordenador do Curso de Matemática, Prof. Valdair Bonfim, sobre o Processo Ensino- Aprendizagem e sua relação com a já implantada reforma curricular. Cremos que será muito instrutivo para os nossos leitores.
Na Seção Em Sala de Aula temos um artigo do Prof. Luiz Alberto Salomão e da aluna Mariana Ramos Reis intitulado “O Papel da Matemática na Óptica”. Este artigo tem entre seus objetivos o de destacar o papel da matemática em alguns pontos do desenvolvimento da ciência. Também temos um artigo do Prof Eugênio Antônio de Paula e da aluna Laís Bássame Rodrigues sobre a Metodologia de Resolução de Problemas no Ensino da Matemática.
Na Seção Iniciação Científica em Números trazemos uma descrição dos atuais projetos de Iniciação Científica e de Ensino da FAMAT – UFU desenvolvido por alunos do Curso de Licenciatura e Bacharelado em Matemática.
Na Seção E o meu Futuro Profissional, apresentamos uma entrevista com o Prof. Cícero Fernandes de Carvalho, Coordenador do Curso de Mestrado em Matemática da FAMAT. A Pós-Graduação se iniciará em janeiro do próximo ano e esperamos que tal entrevista esclareça muitas das perguntas que tem sido feitas sobre o Mestrado.
Na Seção Merece Registro, destacamos as atividades e os fatos que mereceram destaque na FAMAT no período de abril a setembro de 2006.
Finalmente, esperamos que os nossos leitores apreciem os trabalhos aqui publicados e lembramos que críticas e sugestões produtivas são sempre bem-vindas.
Comitê Editorial

Indice de Secoes
Secao 1: Trabalhos Completos de Iniciacao Cientıfica 7
Secao 2: Problemas e Solucoes 233
Secao 3: Eventos 239
Secao 4: Reflexoes sobre o Curso de Matematica 243
Secao 5: Em Sala de Aula 253
Secao 6: Iniciacao Cientıfica em Numeros 287
Secao 7: E o meu Futuro Profissional? 295
Secao 8: Merece Registro 301
FAMAT em Revista
Revista Científica Eletrônica daFaculdade de Matemática - FAMAT
Universidade Federal de Uberlândia - UFU - MG
Número 07 - Setembro de 2006
www.famat.ufu.br
Trabalhos Completos de
Iniciação Científica
PBIIC-FAPEMIG-UFU - Programa de Bolsas Institucionais de Iniciação Científica daFundação de Amparo à Pesquisa do Estado de Minas Gerais
PETMAT-UFU - Programa de Educação Tutorial da Faculdade de Matemática
PIBIC-CNPq-UFU - Programa Institucional de Bolsas de Iniciação Científica doConselho Nacional de Desenvolvimento Científico e Tecnológico
PROMAT-UFU - Programa Institucional de Iniciação Científica e Monitoria da Faculdade de Matemática

Comitê Editorial da Seção Trabalhos Completos de Iniciação Científica
do Número 07 da FAMAT EM REVISTA:
Márcio José Horta Dantas (coordenador da seção) Valdair Bonfim
Marcos Antônio da Câmara Flaviano Bahia Paulinelli Vieira
Instrucoes para submissao de Trabalhos
A Secao de Trabalhos de Iniciacao Cientıfica visa divulgar trabalhos que estejam as-sociados a projetos cadastrados na(o) PBIIC-FAPEMIG / PETMAT / PIBIC-CNPq /PROMAT ou IM-AGIMB e orientados por docentes da FAMAT.
Trabalhos completos em nıvel de iniciacao cientıfica dos programas acima listadossubmetidos para publicacao na Revista Eletronica “Famat em Revista” estarao sujeitosa apreciacao pelo Comite Editorial responsavel por essa secao de artigos e, se for o caso,por consultores ad hoc ligados a area ou subarea do trabalho. Caso se faca necessario,sugestoes para o aperfeicoamento do trabalho serao dirigidas aos interessados pelo ComiteEditorial.
Alem da redacao clara e concisa que todo trabalho submetido a boa qualidade devepossuir, pede-se evitar o estilo arido e extremamente tecnico caracterıstico de algumaspublicacoes matematicas, nao perdendo de vista que o publico-alvo ao qual se destina arevista e constituıdo por alunos de graduacao.
Os trabalhos submetidos ate o final de um semestre letivo serao publicados na edicaoda revista lancada no inıcio do semestre letivo subsequente.
Quanto as normas tecnicas para submissao dos trabalhos:
1) Formato do arquivo: PDF
2) Tamalho da Folha: A4
3) Margens: 2,5 cm (portanto, area impressa: 16 cm x 24,7 cm)
4) Tamanho de fonte (letra): 12 pontos (exceto tıtulos, subtıtulos, notasde rodape, etc, que ficam submetidos ao bom senso)
5) Espacamento entre linhas: Simples
6) Orientador(es), tipo de programa e orgao de fomento (se houver)devem constar no trabalho.
Envio:Por e-mail: [email protected]


Indice de Trabalhos
Avaliacao do Desempenho dos Graduandos de Engenharia Quımicanos Dois Primeiros Anos do Curso na UFU 13
Rodney Silva Abreu e Rogerio de Melo Costa Pinto
Propriedades das Solucoes de Uma Classe de Sistemas de EquacoesDiferenciais Ordinarias 28
Marcelo Lopes da Silva e Valdair Bonfim
Programacao Linear e o Problema do Sistema de TransporteColetivo de Uberlandia 34
Laıs Bassame Rodrigues e Marcos Antonio da Camara
Um Texto sobre Curvas Parametrizadas no Plano 90
Laıs Bassame Rodrigues e Edson Agustini
Uma Caracterizacao dos Numeros Perfeitos Pares 134
Karla Barbosade Freitas, Stela Zumerle Soares e Cıcero Carvalho
Uso De Semivariograma Escalanado Para Comparar ADistribuicao Espaco-Temporal DaPrecipitacao Anual No Estado De Minas Gerais 140
Herbert Rezende De Siqueira, Joaquim Ferreira Vieira Neto,Ednaldo Carvalho Guimaraes e Marcelo Tavares
O Pentagrama 151
Giselle Moraes Resende Pereira e Marcos Antonio da Camara
Codigos Corretores de Erros 160
Flaviano Bahia Paulinelli Vieira e Marcos Antonio da Camara
Uma Analise Da Estabilidade Do Sistema Mecanico PenduloDuplo Planar 191
Carlos Henrique Tognon e Marcio Jose Horta Dantas
Estudos e Algumas Aplicacoes do Calculo Avancado 212
Alessandra Ribeiro da Silva e Lucia Resende Pereira Bonfim

Avaliação do desempenho dos graduandos de Engenharia Química nos dois primeiros anos
do curso na UFU
Ródney Silva Abreu1 Rogério de Melo Costa Pinto2
RESUMO
Através de parâmetros estatísticos, procurou-se identificar se as reprovações e as evasões no Curso de Engenharia Química da UFU estavam relacionadas com as Diretrizes Curriculares do MEC ou com a Grade Curricular/FEQUI. Com esse modelo de análise descritiva, os índices de abandono do respectivo curso foram quantificados e as disciplinas que concentram altas taxas de repetência foram detectadas. Dessa forma, observou-se que ocorre grande variação nos percentuais de reprovação entre as diversas disciplinas. Além disso, cabe enfatizar o alto índice de reprovados por ausência nas aulas ministradas.
Palavras-chave: Parâmetros estatísticos; Analise descritiva; Taxas de repetência; Conteúdos curriculares.
1. INTRODUÇÃO
Visando manter a qualidade dos cursos de graduação e objetivando aprimorar o seu projeto pedagógico, é indispensável fazer um levantamento sistemático e detalhado da sua realidade.
Desse modo, torna-se necessário analisar os dados referentes à graduação de forma lógica e coerente a fim de se obter uma avaliação de conteúdos curriculares e dessa forma possibilitar substratos para responder várias indagações: Qual a situação atual do curso? Quais são os anos que concentraram as maiores taxas de repetência? Qual a taxa de desistência ou abandono do respectivo curso e onde ela aumenta? Quais são os fatores relacionados a estes problemas?
O sistema de avaliação dos cursos de graduação da UFU apresenta determinadas características: para cada disciplina são distribuídos 100(cem) pontos, em números inteiros. Para ser aprovado, o aluno deve alcançar o mínimo de 60 (sessenta) pontos na soma das notas e 75% (setenta e cinco por cento) de freqüência às aulas e outras atividades curriculares dadas. O plano de avaliação é parte integrante do Plano de Ensino e deve ser apresentado pelo professor ao Colegiado de Curso, para aprovação, após a discussão com sua turma, até 30 (trinta) dias após o início do semestre ou ano letivo.
À critério do Colegiado do Curso, nos cursos de regime anual, os alunos reprovados que atingirem o mínimo de 40 (quarenta) pontos de aproveitamento e 75% de freqüência poderão prestar exames de 2ª época, após 30(trinta) dias do término do ano letivo, desde que esse tipo de avaliação esteja previsto, inclusive quanto ao número de reprovações, nas normas do curso. Em hipótese alguma, as aulas e outras atividades curriculares ministradas poderão
1 Bolsista FAPEMIG\UFU; Acadêmico do Curso de Engenharia Elétrica da Universidade Federal de Uberlândia.
2 Orientador; Professor da Faculdade de Matemática da Universidade Federal de Uberlândia.
ser inferiores à carga horária da disciplina aprovada no CONGRAD (GUIA ACADEMICO 2005). O Sistema de avaliação do Curso de Engenharia Química da UFU segue o regime anual de matrícula por disciplina.
2. OBJETIVOS
O principal objetivo do presente trabalho foi quantificar os índices de reprovação nas disciplinas relacionadas à Faculdade de Engenharia Química da Universidade Federal de Uberlândia (FEQUI-UFU). Além do mais, procurou-se identificar as possíveis falhas curriculares e apresentar sugestões plausíveis da problemática reprovação.
A pesquisa tem caráter quantitativo e não busca simplesmente descrever o objeto, mas desenvolver uma análise que contribua para uma leitura crítica e fundamentada sobre o desempenho dos alunos.
3. MATERIAL E MÉTODOS
A pesquisa foi realizada com dados coletados na Universidade Federal de Uberlândia (UFU), fornecidos pela DICOA – Divisão de Controle Acadêmico – e pelo DIRAC – Divisão de Registro e Acompanhamento Acadêmico – referentes à reprovação, aprovação e evasão dos alunos no período compreendido entre 2000 e 2004. Foram utilizados os dados relacionados ao número e percentual de alunos aprovados, dispensados, que trancaram, e reprovados (tanto por nota, falta, ou com RM).
Para a análise dos dados foi utilizada a Análise de Conteúdo, que segue basicamente três pólos cronológicos estabelecidos por BARDIN (1977): 1. Pré-análise; 2. Exploração do material; 3. Tratamento dos resultados, inferência e interpretação.
As disciplinas avaliadas foram: FÍSICA GERAL 01; CÁLCULO DIFERENCIAL E INTEGRAL 01; GEOMETRIA ANÁLITICA E ALGEBRA LINEAR; QUÍMICA GERAL E INORGÂNICA; DESENHO TÉCNICO; INTRODUÇÂO Á ENGENHARIA QUÍMICA; CÁLCULO DIFERENCIAL E INTEGRAL 02; FÍSICA GERAL 02; PROCESSAMENTO DE DADOS; PROCESSOS QUÍMICOS INDUSTRIAIS; QUÍMICA ORGÂNICA; e FISICO-QUÍMICA.
Estes dados obtidos têm o total de alunos matriculados em cada disciplina independente do período em que ingressou na instituição. Foi realizada a estatística descritiva dos dados (Costa Neto, 2002).
Além dos dados quantitativos apresentados em gráficos, foram utilizadas medidas de tendência central (medidas de posição), como média e mediana, e também medidas de dispersão, como amplitude, variância, desvio padrão e coeficiente de variação como mostradas a seguir (VIEIRA, 1988):
MEDIA ARITMÉTICA ˆ = x
x
n
ii
n
1
VARIÂNCIA V(x) = 2
1
2 )(1 xx
N
iiNN
SQD
DESVIO PADRÃO 2
5. RESULTADOS E DISCUSSÃO
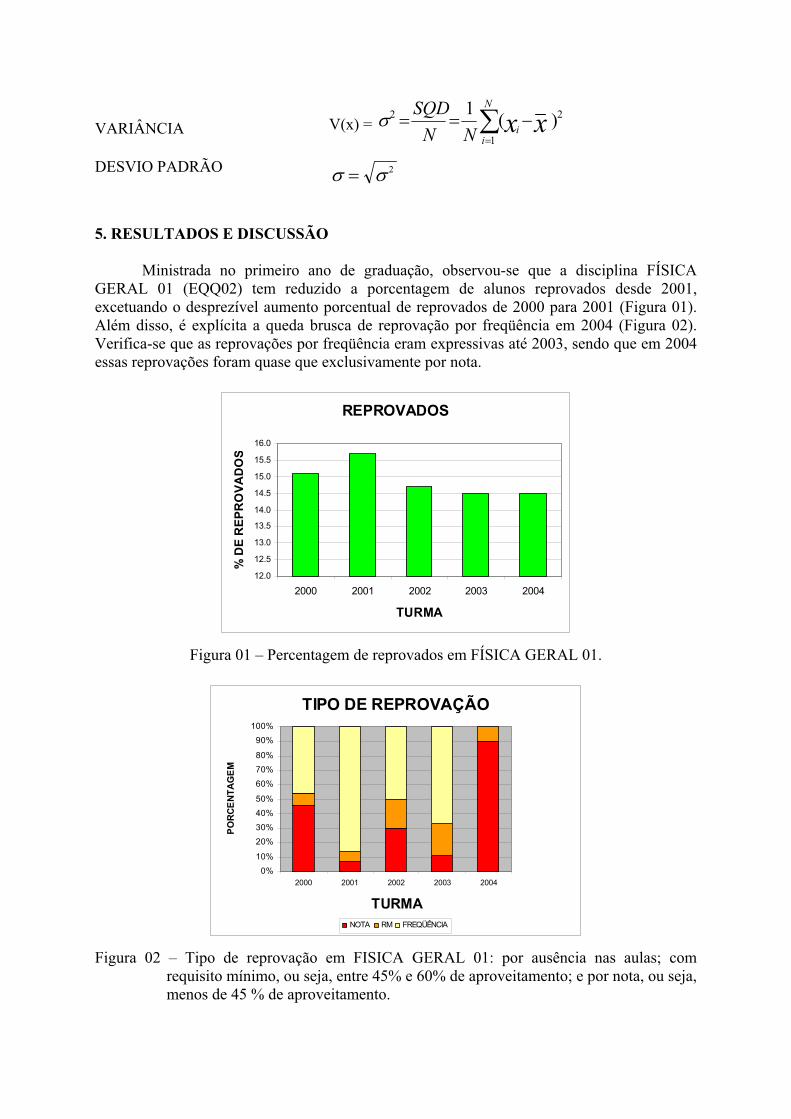
Ministrada no primeiro ano de graduação, observou-se que a disciplina FÍSICA GERAL 01 (EQQ02) tem reduzido a porcentagem de alunos reprovados desde 2001, excetuando o desprezível aumento porcentual de reprovados de 2000 para 2001 (Figura 01). Além disso, é explícita a queda brusca de reprovação por freqüência em 2004 (Figura 02). Verifica-se que as reprovações por freqüência eram expressivas até 2003, sendo que em 2004 essas reprovações foram quase que exclusivamente por nota.
REPROVADOS
12.0
12.5
13.0
13.5
14.0
14.5
15.0
15.5
16.0
2000 2001 2002 2003 2004
TURMA
% D
E R
EPR
OVA
DO
S
Figura 01 – Percentagem de reprovados em FÍSICA GERAL 01.
TIPO DE REPROVAÇÃO
0%
10%
20%
30%
40%
50%
60%
70%
80%
90%
100%
2000 2001 2002 2003 2004
TURMA
POR
CEN
TAG
EM
NOTA RM FREQÜÊNCIA
Figura 02 – Tipo de reprovação em FISICA GERAL 01: por ausência nas aulas; com requisito mínimo, ou seja, entre 45% e 60% de aproveitamento; e por nota, ou seja, menos de 45 % de aproveitamento.
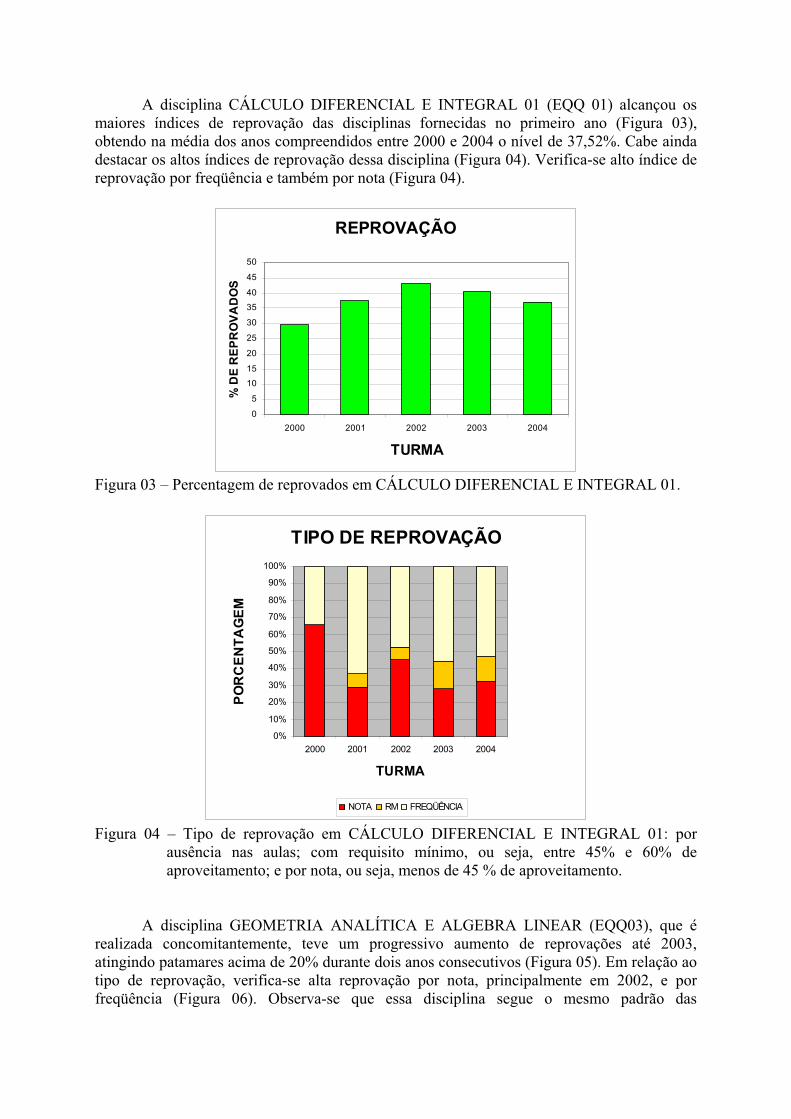
A disciplina CÁLCULO DIFERENCIAL E INTEGRAL 01 (EQQ 01) alcançou os maiores índices de reprovação das disciplinas fornecidas no primeiro ano (Figura 03), obtendo na média dos anos compreendidos entre 2000 e 2004 o nível de 37,52%. Cabe ainda destacar os altos índices de reprovação dessa disciplina (Figura 04). Verifica-se alto índice de reprovação por freqüência e também por nota (Figura 04).
REPROVAÇÃO
0
5
10
15
20
25
30
35
40
45
50
2000 2001 2002 2003 2004
TURMA
% D
E R
EPR
OVA
DO
S
Figura 03 – Percentagem de reprovados em CÁLCULO DIFERENCIAL E INTEGRAL 01.
TIPO DE REPROVAÇÃO
0%
10%
20%
30%
40%
50%
60%
70%
80%
90%
100%
2000 2001 2002 2003 2004
TURMA
PO
RC
ENTA
GEM
NOTA RM FREQÜÊNCIA
Figura 04 – Tipo de reprovação em CÁLCULO DIFERENCIAL E INTEGRAL 01: por ausência nas aulas; com requisito mínimo, ou seja, entre 45% e 60% de aproveitamento; e por nota, ou seja, menos de 45 % de aproveitamento.
A disciplina GEOMETRIA ANALÍTICA E ALGEBRA LINEAR (EQQ03), que é realizada concomitantemente, teve um progressivo aumento de reprovações até 2003, atingindo patamares acima de 20% durante dois anos consecutivos (Figura 05). Em relação ao tipo de reprovação, verifica-se alta reprovação por nota, principalmente em 2002, e por freqüência (Figura 06). Observa-se que essa disciplina segue o mesmo padrão das
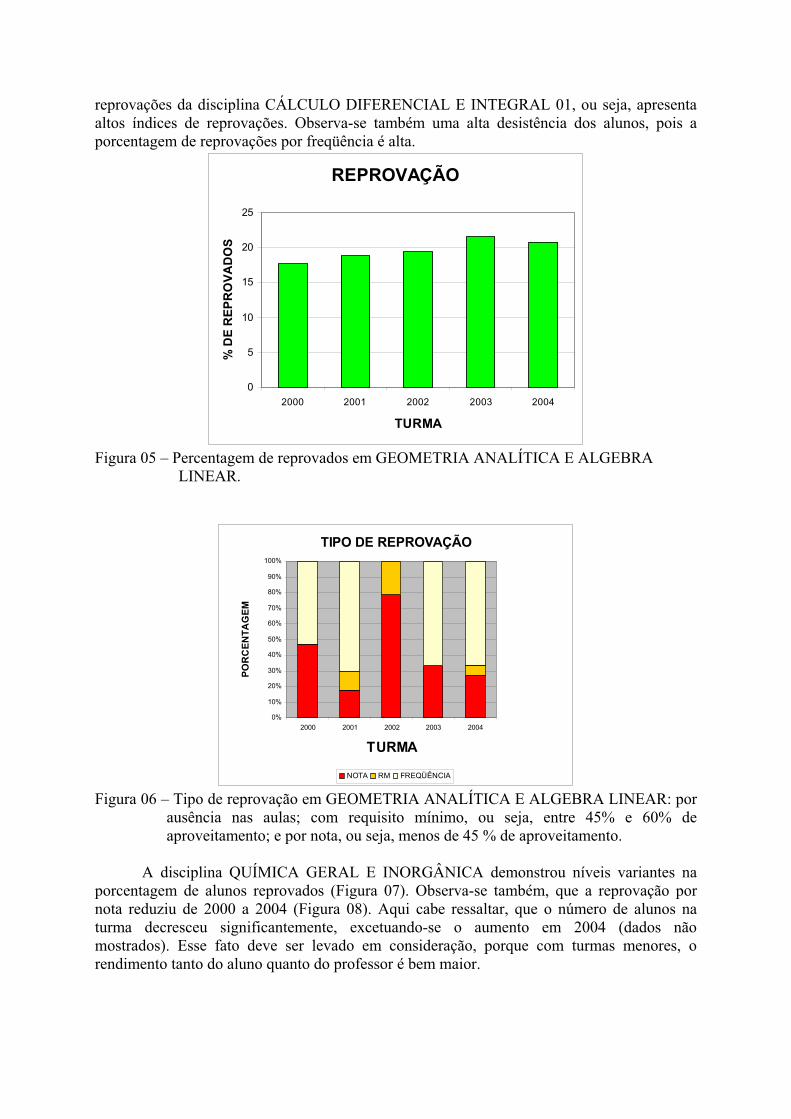
reprovações da disciplina CÁLCULO DIFERENCIAL E INTEGRAL 01, ou seja, apresenta altos índices de reprovações. Observa-se também uma alta desistência dos alunos, pois a porcentagem de reprovações por freqüência é alta.
REPROVAÇÃO
0
5
10
15
20
25
2000 2001 2002 2003 2004
TURMA
% D
E R
EPR
OVA
DO
S
Figura 05 – Percentagem de reprovados em GEOMETRIA ANALÍTICA E ALGEBRA LINEAR.
TIPO DE REPROVAÇÃO
0%
10%
20%
30%
40%
50%
60%
70%
80%
90%
100%
2000 2001 2002 2003 2004
TURMA
POR
CEN
TAG
EM
NOTA RM FREQÜÊNCIA
Figura 06 – Tipo de reprovação em GEOMETRIA ANALÍTICA E ALGEBRA LINEAR: por ausência nas aulas; com requisito mínimo, ou seja, entre 45% e 60% de aproveitamento; e por nota, ou seja, menos de 45 % de aproveitamento.
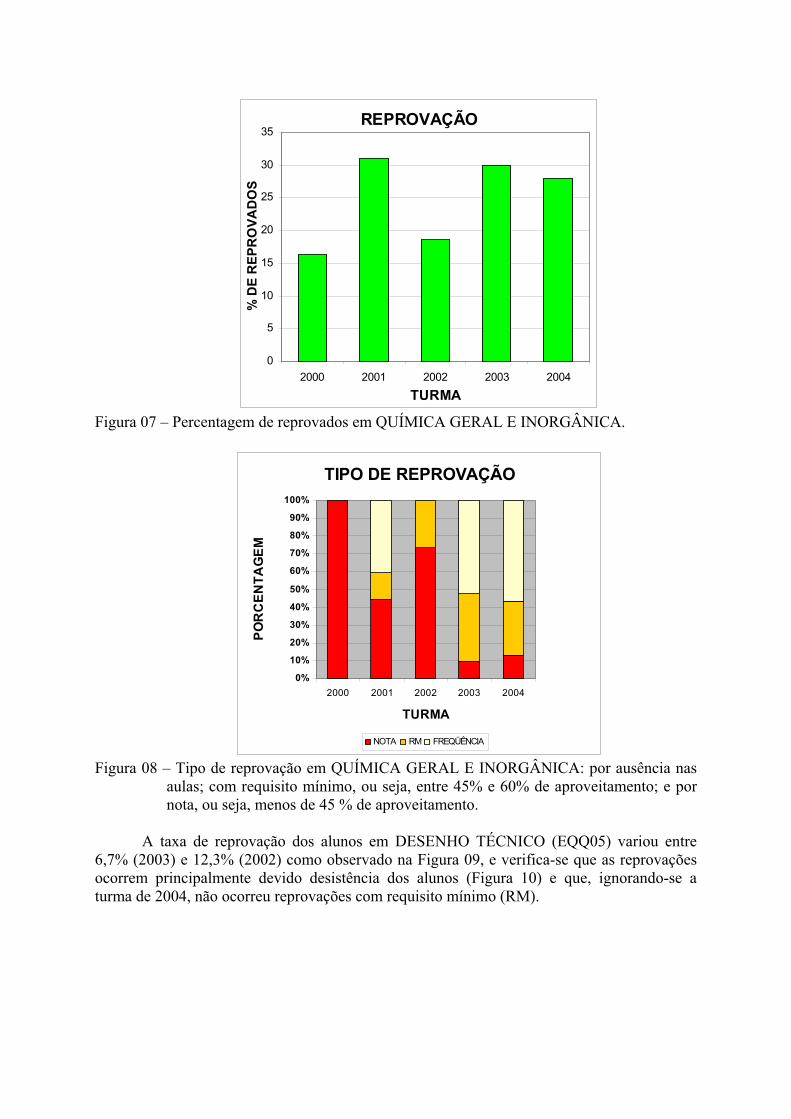
A disciplina QUÍMICA GERAL E INORGÂNICA demonstrou níveis variantes na porcentagem de alunos reprovados (Figura 07). Observa-se também, que a reprovação por nota reduziu de 2000 a 2004 (Figura 08). Aqui cabe ressaltar, que o número de alunos na turma decresceu significantemente, excetuando-se o aumento em 2004 (dados não mostrados). Esse fato deve ser levado em consideração, porque com turmas menores, o rendimento tanto do aluno quanto do professor é bem maior.
REPROVAÇÃO
0
5
10
15
20
25
30
35
2000 2001 2002 2003 2004
TURMA
% D
E R
EPR
OVA
DO
S
Figura 07 – Percentagem de reprovados em QUÍMICA GERAL E INORGÂNICA.
TIPO DE REPROVAÇÃO
0%
10%
20%
30%
40%
50%
60%
70%
80%
90%
100%
2000 2001 2002 2003 2004
TURMA
POR
CEN
TAG
EM
NOTA RM FREQÜÊNCIA
Figura 08 – Tipo de reprovação em QUÍMICA GERAL E INORGÂNICA: por ausência nas aulas; com requisito mínimo, ou seja, entre 45% e 60% de aproveitamento; e por nota, ou seja, menos de 45 % de aproveitamento.
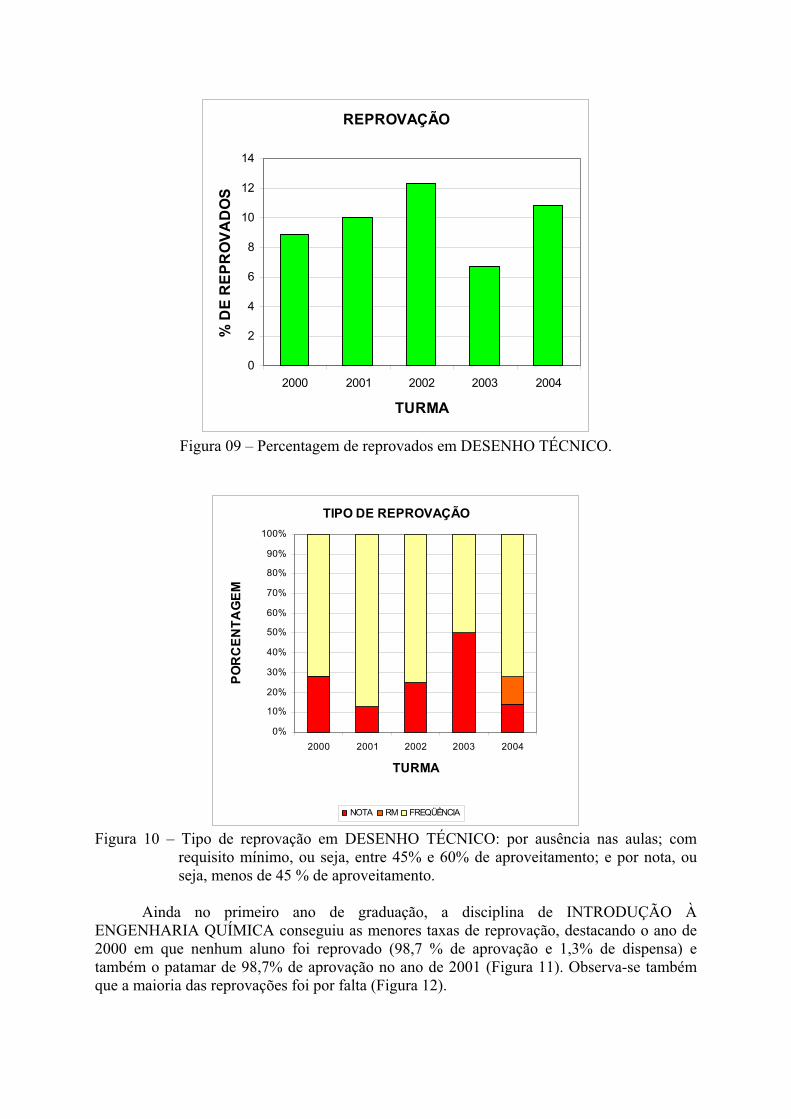
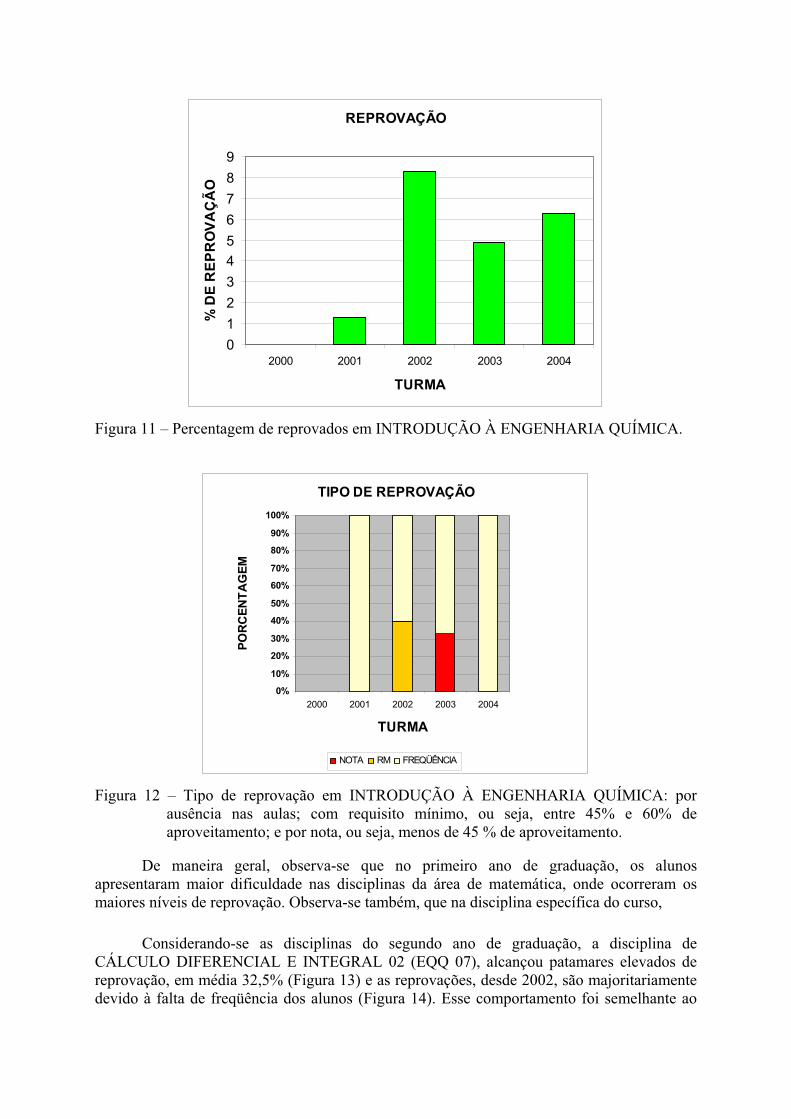
A taxa de reprovação dos alunos em DESENHO TÉCNICO (EQQ05) variou entre 6,7% (2003) e 12,3% (2002) como observado na Figura 09, e verifica-se que as reprovações ocorrem principalmente devido desistência dos alunos (Figura 10) e que, ignorando-se a turma de 2004, não ocorreu reprovações com requisito mínimo (RM).
REPROVAÇÃO
0
2
4
6
8
10
12
14
2000 2001 2002 2003 2004
TURMA
% D
E R
EPR
OVA
DO
S
Figura 09 – Percentagem de reprovados em DESENHO TÉCNICO.
TIPO DE REPROVAÇÃO
0%
10%
20%
30%
40%
50%
60%
70%
80%
90%
100%
2000 2001 2002 2003 2004
TURMA
POR
CEN
TAG
EM
NOTA RM FREQÜÊNCIA
Figura 10 – Tipo de reprovação em DESENHO TÉCNICO: por ausência nas aulas; com requisito mínimo, ou seja, entre 45% e 60% de aproveitamento; e por nota, ou seja, menos de 45 % de aproveitamento.
Ainda no primeiro ano de graduação, a disciplina de INTRODUÇÃO À ENGENHARIA QUÍMICA conseguiu as menores taxas de reprovação, destacando o ano de 2000 em que nenhum aluno foi reprovado (98,7 % de aprovação e 1,3% de dispensa) e também o patamar de 98,7% de aprovação no ano de 2001 (Figura 11). Observa-se também que a maioria das reprovações foi por falta (Figura 12).
REPROVAÇÃO
0
1
2
3
4
5
6
7
8
9
2000 2001 2002 2003 2004
TURMA
% D
E R
EPR
OVA
ÇÃ
O
Figura 11 – Percentagem de reprovados em INTRODUÇÃO À ENGENHARIA QUÍMICA.
TIPO DE REPROVAÇÃO
0%
10%
20%
30%
40%
50%
60%
70%
80%
90%
100%
2000 2001 2002 2003 2004
TURMA
POR
CEN
TAG
EM
NOTA RM FREQÜÊNCIA
Figura 12 – Tipo de reprovação em INTRODUÇÃO À ENGENHARIA QUÍMICA: por ausência nas aulas; com requisito mínimo, ou seja, entre 45% e 60% de aproveitamento; e por nota, ou seja, menos de 45 % de aproveitamento.
De maneira geral, observa-se que no primeiro ano de graduação, os alunos apresentaram maior dificuldade nas disciplinas da área de matemática, onde ocorreram os maiores níveis de reprovação. Observa-se também, que na disciplina específica do curso,
Considerando-se as disciplinas do segundo ano de graduação, a disciplina de CÁLCULO DIFERENCIAL E INTEGRAL 02 (EQQ 07), alcançou patamares elevados de reprovação, em média 32,5% (Figura 13) e as reprovações, desde 2002, são majoritariamente devido à falta de freqüência dos alunos (Figura 14). Esse comportamento foi semelhante ao
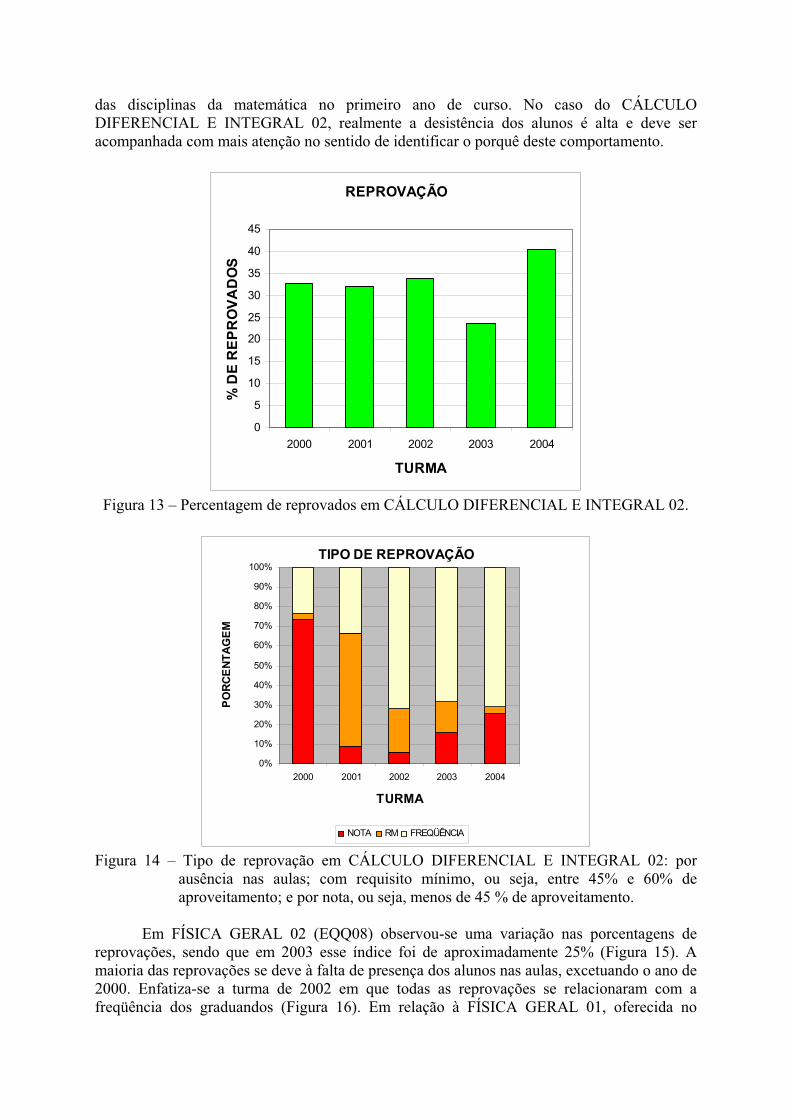
das disciplinas da matemática no primeiro ano de curso. No caso do CÁLCULO DIFERENCIAL E INTEGRAL 02, realmente a desistência dos alunos é alta e deve ser acompanhada com mais atenção no sentido de identificar o porquê deste comportamento.
REPROVAÇÃO
0
5
10
15
20
25
30
35
40
45
2000 2001 2002 2003 2004
TURMA
% D
E R
EPR
OVA
DO
S
Figura 13 – Percentagem de reprovados em CÁLCULO DIFERENCIAL E INTEGRAL 02.
TIPO DE REPROVAÇÃO
0%
10%
20%
30%
40%
50%
60%
70%
80%
90%
100%
2000 2001 2002 2003 2004
TURMA
PORC
ENTA
GEM
NOTA RM FREQÜÊNCIA
Figura 14 – Tipo de reprovação em CÁLCULO DIFERENCIAL E INTEGRAL 02: por ausência nas aulas; com requisito mínimo, ou seja, entre 45% e 60% de aproveitamento; e por nota, ou seja, menos de 45 % de aproveitamento.
Em FÍSICA GERAL 02 (EQQ08) observou-se uma variação nas porcentagens de reprovações, sendo que em 2003 esse índice foi de aproximadamente 25% (Figura 15). A maioria das reprovações se deve à falta de presença dos alunos nas aulas, excetuando o ano de 2000. Enfatiza-se a turma de 2002 em que todas as reprovações se relacionaram com a freqüência dos graduandos (Figura 16). Em relação à FÍSICA GERAL 01, oferecida no
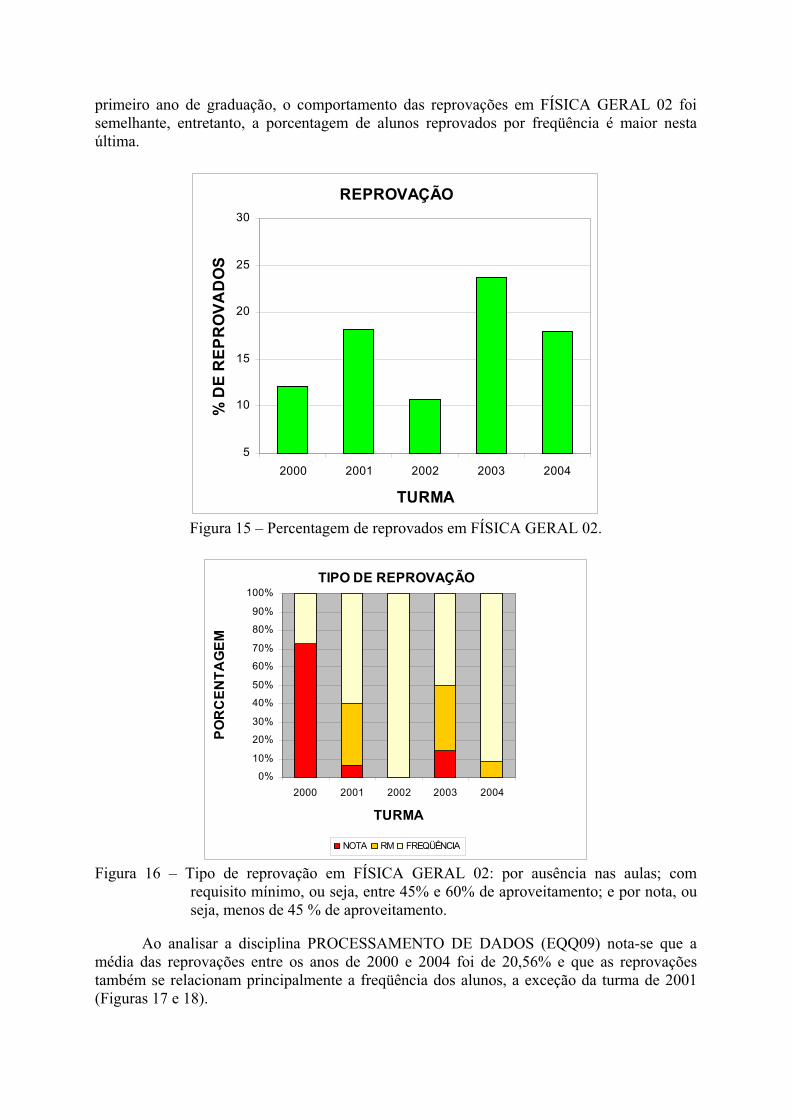
primeiro ano de graduação, o comportamento das reprovações em FÍSICA GERAL 02 foi semelhante, entretanto, a porcentagem de alunos reprovados por freqüência é maior nesta última.
REPROVAÇÃO
5
10
15
20
25
30
2000 2001 2002 2003 2004
TURMA
% D
E R
EPR
OVA
DO
S
Figura 15 – Percentagem de reprovados em FÍSICA GERAL 02.
TIPO DE REPROVAÇÃO
0%
10%
20%
30%
40%
50%
60%
70%
80%
90%
100%
2000 2001 2002 2003 2004
TURMA
POR
CEN
TAG
EM
NOTA RM FREQÜÊNCIA
Figura 16 – Tipo de reprovação em FÍSICA GERAL 02: por ausência nas aulas; com requisito mínimo, ou seja, entre 45% e 60% de aproveitamento; e por nota, ou seja, menos de 45 % de aproveitamento.
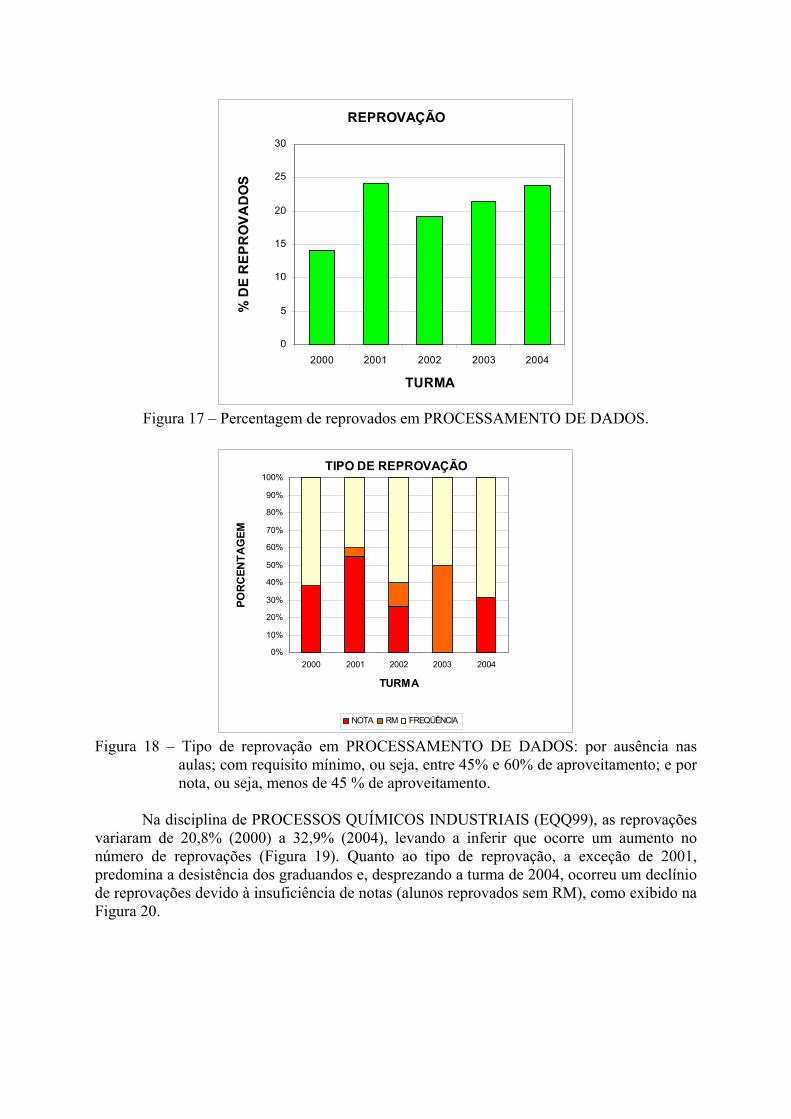
Ao analisar a disciplina PROCESSAMENTO DE DADOS (EQQ09) nota-se que a média das reprovações entre os anos de 2000 e 2004 foi de 20,56% e que as reprovações também se relacionam principalmente a freqüência dos alunos, a exceção da turma de 2001 (Figuras 17 e 18).
REPROVAÇÃO
0
5
10
15
20
25
30
2000 2001 2002 2003 2004
TURMA
% D
E R
EPR
OV
AD
OS
Figura 17 – Percentagem de reprovados em PROCESSAMENTO DE DADOS.
TIPO DE REPROVAÇÃO
0%
10%
20%
30%
40%
50%
60%
70%
80%
90%
100%
2000 2001 2002 2003 2004
TURMA
POR
CEN
TAG
EM
NOTA RM FREQÜÊNCIA
Figura 18 – Tipo de reprovação em PROCESSAMENTO DE DADOS: por ausência nas aulas; com requisito mínimo, ou seja, entre 45% e 60% de aproveitamento; e por nota, ou seja, menos de 45 % de aproveitamento.
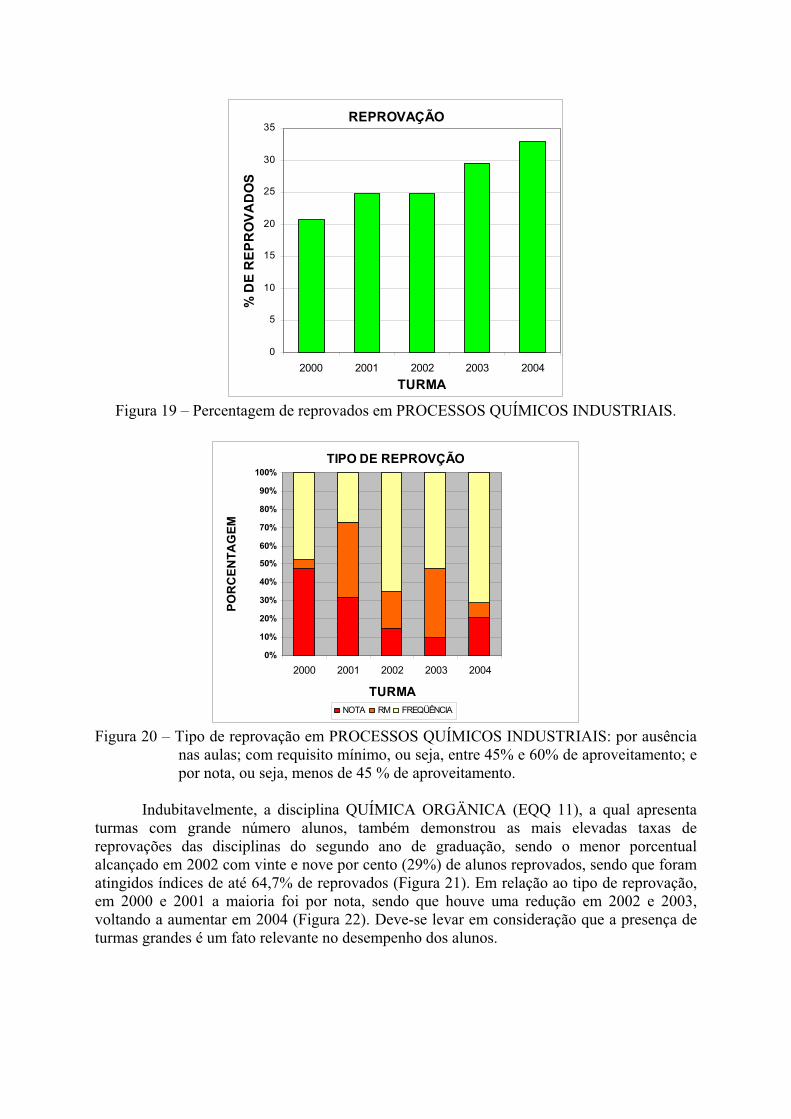
Na disciplina de PROCESSOS QUÍMICOS INDUSTRIAIS (EQQ99), as reprovações variaram de 20,8% (2000) a 32,9% (2004), levando a inferir que ocorre um aumento no número de reprovações (Figura 19). Quanto ao tipo de reprovação, a exceção de 2001, predomina a desistência dos graduandos e, desprezando a turma de 2004, ocorreu um declínio de reprovações devido à insuficiência de notas (alunos reprovados sem RM), como exibido na Figura 20.
REPROVAÇÃO
0
5
10
15
20
25
30
35
2000 2001 2002 2003 2004
TURMA
% D
E R
EPR
OVA
DO
S
Figura 19 – Percentagem de reprovados em PROCESSOS QUÍMICOS INDUSTRIAIS.
TIPO DE REPROVÇÃO
0%
10%
20%
30%
40%
50%
60%
70%
80%
90%
100%
2000 2001 2002 2003 2004
TURMA
POR
CEN
TAG
EM
NOTA RM FREQÜÊNCIA
Figura 20 – Tipo de reprovação em PROCESSOS QUÍMICOS INDUSTRIAIS: por ausência nas aulas; com requisito mínimo, ou seja, entre 45% e 60% de aproveitamento; e por nota, ou seja, menos de 45 % de aproveitamento.
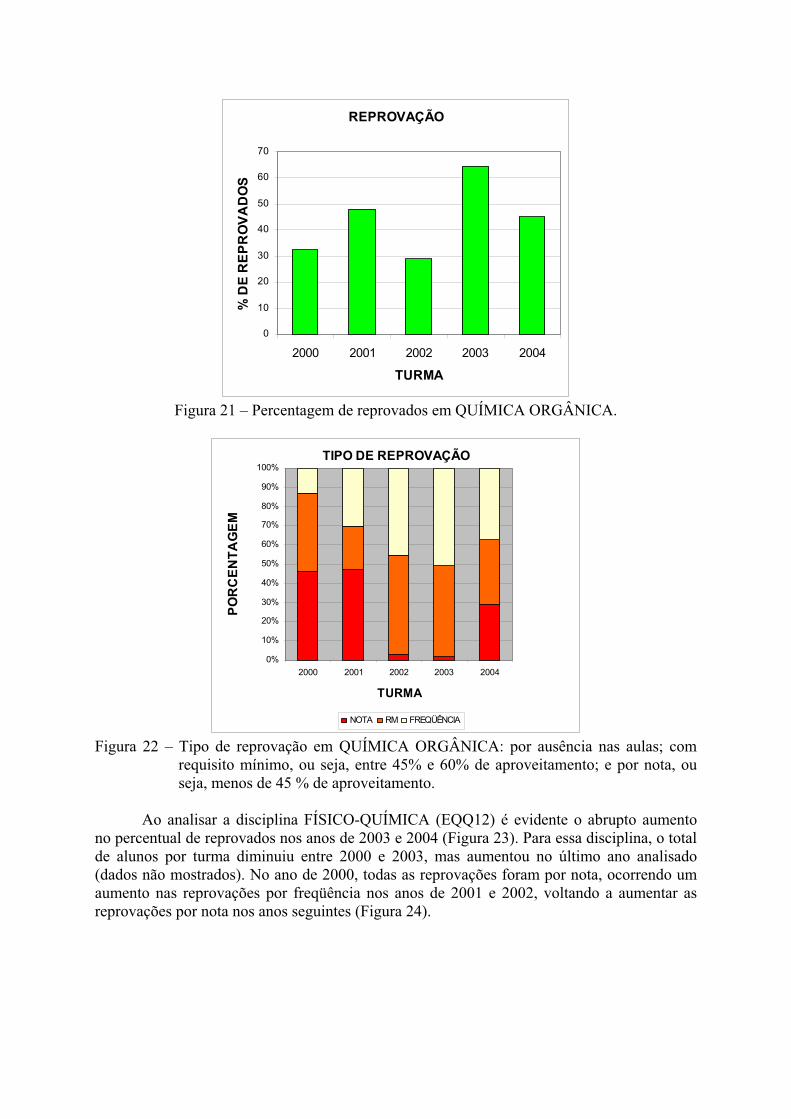
Indubitavelmente, a disciplina QUÍMICA ORGÄNICA (EQQ 11), a qual apresenta turmas com grande número alunos, também demonstrou as mais elevadas taxas de reprovações das disciplinas do segundo ano de graduação, sendo o menor porcentual alcançado em 2002 com vinte e nove por cento (29%) de alunos reprovados, sendo que foram atingidos índices de até 64,7% de reprovados (Figura 21). Em relação ao tipo de reprovação, em 2000 e 2001 a maioria foi por nota, sendo que houve uma redução em 2002 e 2003, voltando a aumentar em 2004 (Figura 22). Deve-se levar em consideração que a presença de turmas grandes é um fato relevante no desempenho dos alunos.
REPROVAÇÃO
0
10
20
30
40
50
60
70
2000 2001 2002 2003 2004
TURMA
% D
E R
EPR
OVA
DO
S
Figura 21 – Percentagem de reprovados em QUÍMICA ORGÂNICA.
TIPO DE REPROVAÇÃO
0%
10%
20%
30%
40%
50%
60%
70%
80%
90%
100%
2000 2001 2002 2003 2004
TURMA
POR
CEN
TAG
EM
NOTA RM FREQÜÊNCIA
Figura 22 – Tipo de reprovação em QUÍMICA ORGÂNICA: por ausência nas aulas; com requisito mínimo, ou seja, entre 45% e 60% de aproveitamento; e por nota, ou seja, menos de 45 % de aproveitamento.
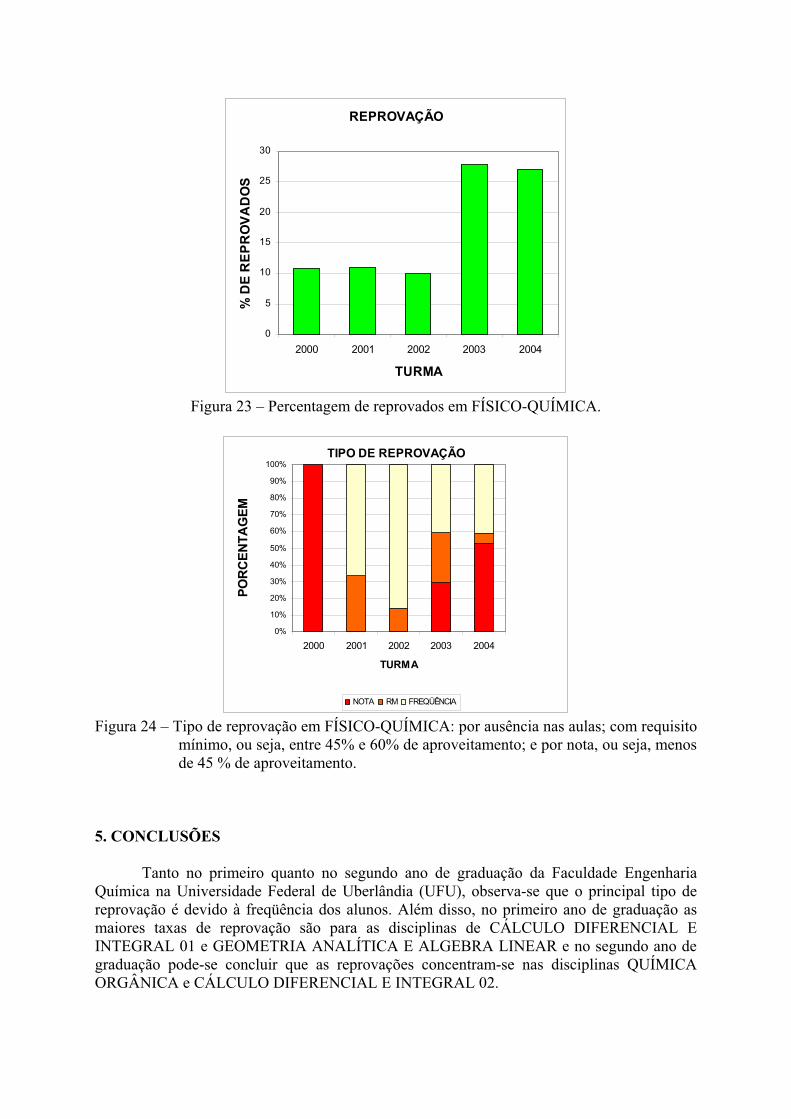
Ao analisar a disciplina FÍSICO-QUÍMICA (EQQ12) é evidente o abrupto aumento no percentual de reprovados nos anos de 2003 e 2004 (Figura 23). Para essa disciplina, o total de alunos por turma diminuiu entre 2000 e 2003, mas aumentou no último ano analisado (dados não mostrados). No ano de 2000, todas as reprovações foram por nota, ocorrendo um aumento nas reprovações por freqüência nos anos de 2001 e 2002, voltando a aumentar as reprovações por nota nos anos seguintes (Figura 24).
REPROVAÇÃO
0
5
10
15
20
25
30
2000 2001 2002 2003 2004
TURMA
% D
E R
EPR
OVA
DO
S
Figura 23 – Percentagem de reprovados em FÍSICO-QUÍMICA.
TIPO DE REPROVAÇÃO
0%
10%
20%
30%
40%
50%
60%
70%
80%
90%
100%
2000 2001 2002 2003 2004
TURMA
POR
CEN
TAG
EM
NOTA RM FREQÜÊNCIA
Figura 24 – Tipo de reprovação em FÍSICO-QUÍMICA: por ausência nas aulas; com requisito mínimo, ou seja, entre 45% e 60% de aproveitamento; e por nota, ou seja, menos de 45 % de aproveitamento.
5. CONCLUSÕES
Tanto no primeiro quanto no segundo ano de graduação da Faculdade Engenharia Química na Universidade Federal de Uberlândia (UFU), observa-se que o principal tipo de reprovação é devido à freqüência dos alunos. Além disso, no primeiro ano de graduação as maiores taxas de reprovação são para as disciplinas de CÁLCULO DIFERENCIAL E INTEGRAL 01 e GEOMETRIA ANALÍTICA E ALGEBRA LINEAR e no segundo ano de graduação pode-se concluir que as reprovações concentram-se nas disciplinas QUÍMICA ORGÂNICA e CÁLCULO DIFERENCIAL E INTEGRAL 02.
6. AGRADECIMENTOS
Ao PBIIC - FAPEMIG\UFU pela Bolsa de Iniciação Científica concedida através do processo nº. A-008/2006. À DICOA – Divisão de Controle Acadêmico – e pelo DIRAC – Divisão de Registro e Acompanhamento Acadêmico.
7. REFERÊNCIAS BIBLIOGRÁFICAS
COSTA NETO, P.L.O, 2002. ESTATÍSTICA. Edgard Blücher, São Paulo. 264p.
GUIA ACADÊMICO, 2005. Pró-Reitoria de Graduação, Universidade Federal de Uberlândia, 30p.
BARDIN, Laurence. Análise de conteúdo. Lisboa, 70ª Edição, 1977.
VIEIRA, SÔNIA. Introdução a bioestatística. Editora Campus. 5ª Edição, 1988.
LEVINE, D.M.; BERENSON, M.L.; STEPHAN, DAVID. Estatística: Teoria e Aplicações. Editora LTC, 1ª Edição, 2000.

Propriedades das Soluções de Uma Classede Sistemas de Equações Diferenciais Ordinárias.
Marcelo Lopes da Silva* e Valdair Bonfim
Faculdade de Matemática – FAMAT Universidade Federal de Uberlândia – UFU
38408-100, Uberlândia – MG Setembro – 2006
Resumo
Um resultado clássico da teoria das equações diferenciais ordinárias diz que se o campo vetorial é Lipschitziano, então o Problema de Valor
Inicial
nn RRDf :
( P ) 0)0(
))(()(
xxtxftx
possui uma única solução. Outras questões abordadas pela teoria clássica, como a estabilidade das soluções de ))(()( txftx , também são provadas com hipóteses adicionais sobre , como por exemplo restrições sobre a localização dos
autovalores de no plano complexo. Condições deste tipo obviamente
exigem, no mínimo, a diferenciabilidade da aplicação . O objetivo deste trabalho é investigar questões semelhantes às investigadas na teoria clássica no caso em que o campo vetorial não é Lipschitziano e nem diferenciável. Veremos que as condições impostas sobre não exigem sequer a sua continuidade.
f(x )0f
f
ff
1 – Alguns Resultados da Teoria Clássica:
Definição 1: é dita ser Lipschitziana quando existe constante tal que
nn RRDf :
0C DyxyxCyfxf ,,.)()( .
Obs.: Na definição acima, denota uma norma qualquer em nR .
Teorema 1: Se é Lipschitziana então, para cada fixado, o problema (P) admite uma única solução. Precisamente, existe uma única curva diferenciável definida num intervalo maximal ( com ) satisfazendo :
nn RRDf :
nRRIx 0:
Dx0
0I 00 I
i ) ; ii )0,)( ItDtx 0,))(()( Ittxftx .
Uma prova do Teorema acima pode ser encontrada, por exemplo, em [1].
Observe que, se , então a curva constante 0)( 0xf 0)( xtx é solução de (P). Elaé chamada solução de equilíbrio ( ou solução estacionária ) de (P).
Definição 2: Uma solução de equilíbrio 0)( xtx de (P) é dita ser estável quando, para cada 0 dado, existir 0 satisfazendo a seguinte propriedade:se 00 xy , então 0)( xty
0)0( yy para todo em , sendo t
a única solução satisfazendo 0t 0I )(ty
.
Vejamos o que é possível fazer quando assumimos que o campo de vetores não é Lipschitiziano, mas satisfaz à seguinte condição: nn RRDf :
Condição 1: Dyxyxyfxf ,,0),()( , onde , denota o produto
escalar usual em nR .
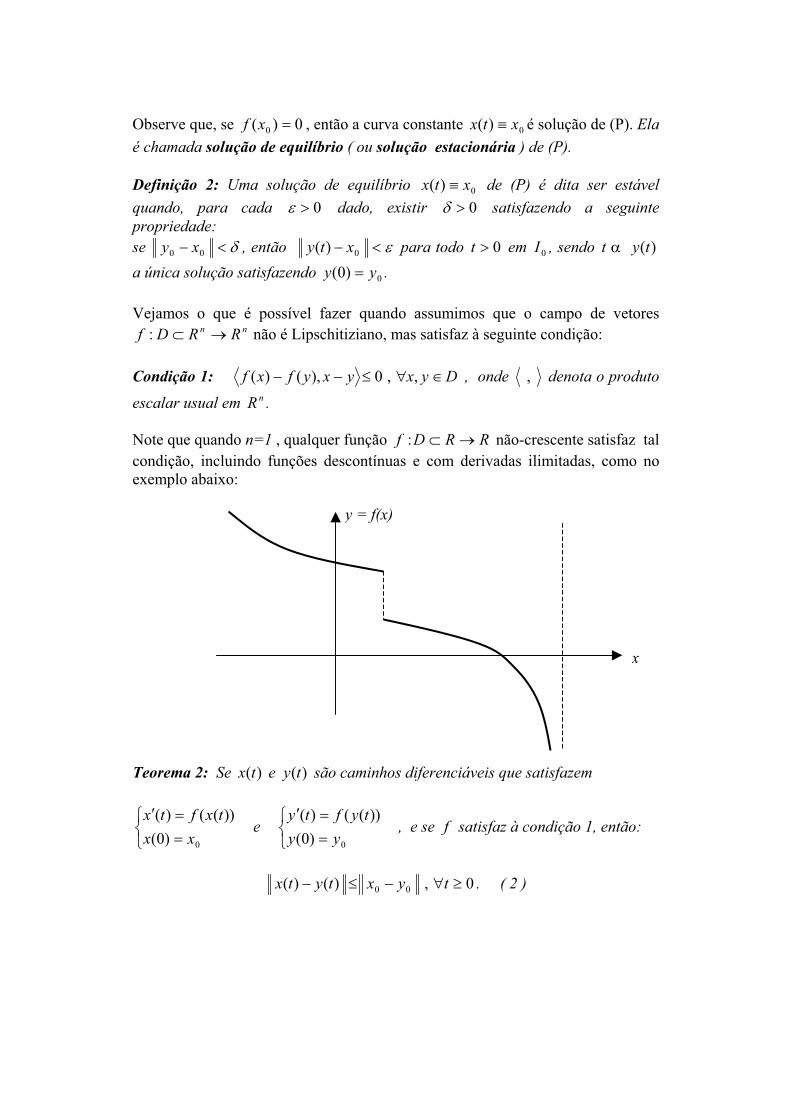
Note que quando n=1 , qualquer função não-crescente satisfaz tal condição, incluindo funções descontínuas e com derivadas ilimitadas, como no exemplo abaixo:
RRDf :
y = f(x)
x
Teorema 2: Se são caminhos diferenciáveis que satisfazem)(tx e )(ty
0)0(
))(()(
xxtxftx
e , e se satisfaz à condição 1, então: 0)0(
))(()(
yytyfty
f
0,)()( 00 tyxtytx . ( 2 )

y(t)••x(t)
• x0
• y0
Demonstração do Teorema 2:
2)()( tytx
dtd
)()(,)()( tytxtytxdtd
)()(),()(2 tytxtytx
)()(,))(())((2 tytxtyftxf 0 , qualquer que seja t .0
Logo, a função 2
)()( tytxt é não-crescente. Daí, para todo t teremos02
00
22)0()0()()( yxyxtytx ,
de onde segue o resultado.
Corolário 1: (Unicidade de Solução) Se satisfaz à condição 1, então o problema de valor inicial (P) tem no máximo uma solução.
nn RRDf :
De fato, se são soluções de (P) e )(tx e )(ty )0()0( 00 yyxx , então a
desigualdade (2) provada acima nos diz que
0,0)()( 00 txxtytx ,
ou seja, 0,)()( ttytx .
Corolário 2: Toda solução de equilíbrio 0)( xtx de (P) é estável.
De fato, dado 0 basta tomar na definição de estabilidade.
Definição 3: Uma solução de equilíbrio 0)( xtx de (P) é dita ser assintoticamente estável quando é estável e, para toda condição inicial suficientemente próxima de , temos que lim
0y
0x 0)( xtyt
, sendo )(tyt a única
solução de (P) tal que .0)0(y y
Consideraremos agora outro tipo de condição sobre o campo vetorial .f
Condição 2: 0 tal que Dyxyxyxyfxf ,,,)()(2 .

Com essa condição é possível provar o próximo resultado.
Teorema 3: Se são caminhos diferenciáveis que satisfazem)(tx e )(ty
0)0(
))(()(
xxtxftx
e , e se satisfaz à condição 2, então: 0)0(
))(()(
yytyfty
f
0,)()(2
00
2 tyxetytx t . ( 3 )
Demonstração do Teorema 3:
2)()( tytx
dtd
)()(,)()( tytxtytxdtd
)()(),()(2 tytxtytx
)()(,))(())((2 tytxtyftxf Dyxyx ,,2 .
Assim,
0,0)()()()(22 ttytxtytx
dtd
,
e multiplicando ambos os membros por obtemoste
0,0)()()()(.22 ttytxetytx
dtde tt ,
ou ainda
0,0)()(.2 ttytxe
dtd t .
Logo, integrando de 0 a chegamos emt
0,0)0()0()()(.22 tyxtytxe t ,
ou seja, 0,)()(2
00
2 tyxetytx t , conforme afirmado.
Exemplos de órbitas típicas de sistemas que satisfazem à condição 2 :

)(ty
)(tx
0y
0x •
••
0x0y•
•
Corolário 3: Se satisfaz à condição 2, então toda solução de equilíbrio é f assintoticamente estável.
De fato, pois se é solução de equilíbrio, então a desigualdade (3) diz que 0)( xtx2
00
2
0 )(0 ytyx xe t , de onde segue a estabilidade assintótica de .0x
Corolário 4: Sistemas que satisfazem à condição 2 não possuem mais do que uma solução estacionária. Neste caso, devido ao Teorema 3, se uma tal solução existir ela será atratora global ( isto é, todas as outras soluções tenderão a quando t ) .
)(ty 0x
De fato, se e são soluções estacionárias de (P), então da desigualdade 3
segue que0x 0y
0,2
00
2
00 tyxeyx t ,
ou seja,
0,0.)1(2
00 tyxe t ,
de onde segue que .00 yx
Uma justificativa mais prosaica para o Corolário 4 é a seguinte:

“ Se existissem soluções estacionárias distintas e de (P) então, pelo Teorema 3, a solução teria que se aproximar da solução , o que é um absurdo, pois , sendo estacionárias, não saem do lugar.”
0x 0y
0)( xtx)(tx e (y
0)( yty)t
Conclusões Finais:
Os resultados provados neste trabalho basearam-se na existência a priori das soluções. Ou seja, provamos propriedades qualitativas das soluções, mesmo semsaber se elas de fato existem. Entretanto, assumindo que o campo vetorial
satisfaz a condição 1 e também a condição Im ( I - f ) = R nn RRDf :
)(txt
n,onde Im ( I - f ) denota a imagem da aplicação I - f , é possível estabelecer umresultado de existência de solução fraca de (P). Neste caso, a existência da derivada da solução fraca é garantida apenas para um conjunto de valores de
que tem medida nula. Isto pode ser feito até mesmo em certos casos em que o espaço R n é substituído por um espaço E de dimensão infinita, em cujo caso a teoria se presta a estabelecer existência de soluções fracas para equações diferenciais parciais de evolução, conforme se pode ver em [2]. Entretanto, isto dá um pouco mais de trabalho, mas está sendo objeto de estudo num programa de iniciação científica no âmbito do PROMAT. Os resultados futuros destes estudos serão reportados nesta revista numa próxima oportunidade.
Bibliografia:
[1] Espaços Métricos. Lima, Elon Lages. Segunda Edição. IMPA – CNPq - RJ. ISBN: 85-244-0158-3.
[2] Operateurs Maximaux Monotones et Semi-Groupes de Contractions dans lês Espaces de Hilbert. Brezis, Haim R. North-Holland, Elsevier, 1983.
Programacao Linear e o Problema doSistema de Transporte Coletivo de
Uberlandia
Laıs Bassame Rodrigues∗ Marcos Antonio da Camara†
Faculdade de Matematica - Famat
Universidade Federal de Uberlandia - Ufu - MG
Setembro de 2006
1 Introducao
Os problemas de programacao linear referem-se a distribuicao eficiente de recursoslimitados entre atividades competitivas, com a finalidade de atender a um determinadoobjetivo, por exemplo, maximizacao de lucros ou minimizacao de custos. Tratando-se deprogramacao linear, esse objetivo sera expresso por uma funcao linear a qual chamaremosde funcao objetivo.
Z = c1x1 + c2x2 + ... + cnxn
E claro que e necessario dizer quais as atividades que consomem cada recurso e emque proporcao e feito esse consumo. Essas informacoes serao dadas por equacoes ou in-equacoes lineares que restringem cada recurso. Ao conjunto dessas equacoes ou inequacoeschamaremos de restricoes do modelo.
Geralmente existem inumeras maneiras de distribuir os escassos recursos entre as ativi-dades, bastando para isso que essas distribuicoes sejam coerentes com as restricoes doproblema. Entretanto, deseja-se que alem de satisfazer as restricoes, uma dessas dis-tribuicoes alcance o objetivo desejado, ou seja, que maximize o lucro ou minimize o custo.A essa solucao damos o nome de solucao otima.
Uma vez obtido o modelo linear, a programacao linear se encarrega de achar a solucaootima.
Os resultados de programacao linear comecaram a ser organizados no final do seculopassado e inıcio deste seculo, a partir de trabalhos de matematicos como H. Minkowski, A.Haar, H. Weyl. A partir dos anos 40 tivemos um rapido desenvolvimento dessa area, prin-cipalmente no que se refere ao desenvolvimento de algoritmos que permitiram programare resolver problemas aplicados envolvendo muitas variaveis.
∗Orientanda Programa de Educacao Tutorial do Curso de Matematica PETMAT. E-mail: [email protected]
†Professor orientador. E-mail: [email protected]

A grande difusao da programacao linear nos ultimos anos deve-se ao fato de que,embora ela trate de um problema especıfico, ela e uma tecnica simples e muitos problemasdo cotidiano podem ser formulados segundo esta linguagem.
2 Modelos de Programacao Linear
Os Problemas de Programacao Linear (PPL) sao problemas do tipo
Maximizar Z = c1x1 + c2x2 + ... + cnxn
a11x1 + a12x2 + ... + a1nxn ≤ b1
a21x1 + a22x2 + ... + a2nxn ≤ b2
...
am1x1 + am2x2 + ... + amnxn ≤ bm
com xj ≥ 0, j = 1, ..., n
e
Minimizar Z = c1x1 + c2x2 + ... + cnxn s/a
a11x1 + a12x2 + ... + a1nxn ≥ b1
a21x1 + a22x2 + ... + a2nxn ≥ b2
...
am1x1 + am2x2 + ... + amnxn ≥ bm
com xj ≥ 0, j = 1, ..., n
onde, todos os aij, bj e cj sao constantes reais.Ou ainda, em notacao matricial
MaxZ =∑n
j=1cjxj
Ax ≤ b
x ≥ 0
e
MinZ =∑n
j=1cjxj
Ax ≥ b
x ≥ 0
onde A e a matriz m × n dos coeficientes aij (i = 1, ..., m; j = 1, ..., n), b e a matrizm × 1 dos bj (j = 1, ..., m) e x e a matriz 1 × n das variaveis.
Num problema tıpico de programacao linear temos:i) um numero finito de variaveis xi;ii) um numero finito de restricoes do tipo desigualdades (lineares), a que as variaveis
devem satisfazer;iii) procura-se maximizar ou minimizar uma certa funcao real do tipo linear nas
variaveis xi, a chamada funcao objetivo do problema.Vejamos alguns exemplos de problemas de programacao linear:

2.1 Problema da Analise de Atividades
Este modelo pode ser associado a uma empresa que tem m recursos disponıveis paraa realizacao de n atividades. Suponha-se que as atividades representem a fabricacao deprodutos.
Este problema consiste em achar x1, x2, ..., xn que maximize a funcao linear (funcaoobjetivo):
Max Z =∑n
j=1cjxj∑nj=1aijxj ≤ bi (i = 1, ..., m)
xj ≥ 0 (j = 1, ..., n)
onde,bi : quantidade do recurso i disponıvel para as n atividades (bi ≥ 0) .xj : nıvel de producao da atividade j. Os xj (j = 1, ..., n) sao as incognitas do problema.cj : lucro unitario do produto j.aij : quantidade do recurso i consumida na producao de uma unidade do produto j.
Verifica-se, entao, que a funcao objetivo a ser maximizada representa o lucro totalda empresa nessas n atividades.
Exemplo 2.1 (Escolha da Producao) Uma determinada empresa esta interessadaem maximizar o lucro mensal proveniente de quatro de seus produtos, designados porI, II, III e IV. Para fabricar esses quatro produtos, ela utiliza dois tipos de maquinas(M1 e M2) e dois tipos de mao-de-obra (M01 e M02) que tem as seguintes disponibili-dades:
Maquinas Tempo DisponıvelM1 80M2 20
Mao-de-obra Tempo DisponıvelM01 120M02 160
Os tempos estao marcados em maquina-hora/mes e homem-hora/mes.O setor tecnico da empresa fornece os seguintes quadros de produtividade:a) Numero de maquina-hora para produzir uma unidade de cada produto:
I II III IVM1 5 4 8 9M2 2 6 − 8
Entao, para se produzir uma unidade do produto I consome-se 5 maquinas-hora damaquina M1 e 2 maquinas-hora da maquina M2. O produto III nao necessita da maquinaM2 e consome 8 horas da maquina M1 para cada uma de suas unidades produzidas.
b) Numero de homens-hora para produzir uma unidade de cada produto:
I II III IVM01 2 4 2 8M02 7 3 − 7

Precisa-se entao de 2 homens-hora da mao-de-obra M01 e de 7 homens-hora da mao-de-obra M02 para fabricar uma unidade do produto I.
O setor comercial da empresa fornece as seguintes informacoes:
Produtos Potencial de Vendas Lucro unitarioI 70 10,00II 60 8,00III 40 9,00IV 20 7,00
O lucro unitario em reais por unidade e o potencial de vendas em unidades por mes.Deseja-se saber a producao mensal dos produtos I, II, III e IV para que o lucro mensal
da empresa, proveniente desses quatro produtos, seja maximo. Formule um modelo deprogramacao linear que expresse o objetivo e as restricoes dessa empresa.
Sejam xj (j = 1, 2, 3, 4) as producoes mensais dos produtos I, II, III e IV, respectiva-mente. O modelo, entao, sera:
max Z = 10x1 + 8x2 + 9x3 + 7x4
sujeito a
⎧⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎨⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎩
x1 ≤ 70x2 ≤ 60
x3 ≤ 40x4 ≤ 20
5x1+ 4x2+ 8x3+ 9x4 ≤ 802x1+ 6x2 +8x4 ≤ 202x1+ 4x2+ 2x3+ 8x4 ≤ 1207x1+ 3x3 +7x4 ≤ 160xj ≥ 0 (j = 1, 2, 3, 4)
2.2 Problema da Dieta
Este modelo pode ser associado a uma pessoa que deseja minimizar o custo da suadieta diaria. As atividades representam os consumos dos alimentos que poderao entrar nadieta, e os recursos sao as vitaminas que nao podem deixar de ser suprimidas pela dieta.
O problema consiste em achar x1, x2, ..., xn que minimize a funcao objetivo:
Min Z =∑n
j=1cjxj∑nj=1aijxj ≥ bi (i = 1, ..., m)
xj ≥ 0 (j = 1, ..., n)
onde,xj : quantidade do alimento j na dieta. Os xj sao incognitas do problema.cj : custo unitario do alimento j.bi : quantidade mınima da vitamina i que deve ser obtida dos n alimentos.aij : quantidade da vitamina i fornecida por uma unidade do alimento j.Verifica-se, entao, que a funcao objetivo a ser minimizada representa o custo total da
dieta a ser realizada com os n alimentos.

Exemplo 2.2 Uma determinada pessoa e forcada pelo seu medico a fazer uma dietaalimentar que forneca, diariamente, pelo menos as seguintes quantidades de vitaminas A,B, C e D:
Vitaminas Quantidade Mınima Diaria (mg)A 80B 70C 100D 60
A dieta devera incluir leite, arroz, feijao e carne, que contem os seguintes miligramasde vitaminas em cada uma de suas unidades de medida:
Leite (l) Arroz (kg) Feijao (kg) Carne (kg)A 10 5 9 10B 8 7 6 6C 15 3 4 7D 20 2 3 9
Assim, um litro de leite contem 10 mg de vitamina A, 8 mg de vitamina B, 15 mg devitamina C e 20 mg de vitamina D.
Os custos unitarios desses alimentos sao o seguintes:
Leite — 1,00R$/lArroz — 1,20R$/kgFeijao — 2,00R$/kgCarne — 5,00R$/kg
Deseja-se saber o consumo diario de cada um desses alimentos de tal maneira qua adieta satisfaca as prescricoes medicas e seja a de menor custo possıvel.
Sejam xj (j = 1, 2, 3, 4) as quantidades de leite, arroz, feijao e carne, medidas nasunidades acima, que deverao entrar diariamente na citada dieta. O modelo, entao, sera:
min Z = x1 + 1, 2x2 + 2x3 + 5x4
sujeito a
⎧⎪⎪⎨⎪⎪⎩10x1 + 5x2 + 9x3 + 10x4 ≥ 80
8x1 + 7x2 + 6x3 + 6x4 ≥ 7015x1 + 3x2 + 4x3 + 7x4 ≥ 10020x1 + 2x2 + 3x3 + 9x4 ≥ 60
xj ≥ 0 (j = 1, 2, 3, 4)
2.3 Problema de Transporte
O modelo dos transportes visa minimizar o custo total do transporte necessario paraabastecer n centros consumidores (destinos), a partir de m centros fornecedores (origens).Pode ser assim esquematizado:

O problema consiste em achar os valores de xij (i = 1, ..., m e j = 1, ..., n) que minimizeo custo total do transporte:
Min Z =∑m
i=1
∑nj=1cijxij∑n
j=1xij = ai (i = 1, ...,m)∑mi=1xij = bj (j = 1, ..., n)
xij ≥ 0
onde,cij : custo unitario de transporte da origem i para o destino j.ai : quantidade disponıvel na origem i.bj : quantidade requerida no destino j.xij : quantidade a ser transportada da origem i para o destino j. Sao as incognitas do
problema.Esse tipo de problema sera o nosso objeto de estudo.
2.4 Problema da designacao
O problema da designacao e um caso particular do problema dos transportes, em quem = n, ai = 1 para i = 1, ..., n e bj = 1 para j = 1, ..., n, isso significa que:
a) o numero de origens e igual ao numero de destinos;b) cada origem deve ser designada para exatamente um destino;c) cada destino deve ser designado para exatamente uma origem.O objetivo e determinar como todas as n designacoes devem ser realizadas para min-
imizar o custo total.O modelo toma, entao, o seguinte aspecto:
min Z =∑n
i=1
∑nj=1cijxij∑n
j=1xij = 1 (j = 1, ..., n)∑ni=1xij = 1 (i = 1, ..., n)
xij ≥ 0

Este modelo tem o nome de problema de designacao porque a sua solucao otima vaiindicar qual a origem i que foi designada para abastecer o destino j. As restricoes saoequivalentes a:
xij = 1 se a origem i for designada para o destino j,
xij = 0 caso contrario.
Exemplo 2.3 Uma companhia de transportes possui 3 caminhoes disponıveis localizadosnas cidades A, B e C. Necessita-se de um caminhao nas cidades 1, 2 e 3. Qual a des-ignacao dos caminhoes que minimize a quilometragem percorrida por todos os caminhoes,dado as quilometragens entre as cidades abaixo?
1 2 3A 20 15 26B 15 32 46C 18 15 2
Assim, o problema modelado matematicamente fica:
min Z = 20xA1 + 15xA2 + 26xA3 + 15xB1 + 32xB2 + 46xB3 + 18xC1 + 15xC2 + 2xC3
sujeito a
⎧⎪⎪⎪⎪⎪⎪⎨⎪⎪⎪⎪⎪⎪⎩
xA1+ xA2+ xA3 = 1xB1+ xB2+ xB3 = 1
xC1+ xC2+ xC3 = 1xA1+ xB1+ xC1 = 1
xA2+ xB2+ xC2 = 1xA3+ xB3+ xC3 = 1
xij ≥ 0 (i = A,B, C e j = 1, 2, 3)
3 Algumas Definicoes
Definicao 3.1 O conjunto S = {X | AX ≤ B (AX ≥ B) ; X ≥ 0} e chamado regiaofactıvel (o conjunto das solucoes possıveis).
Definicao 3.2 Um ponto que pertenca a S e chamado solucao factıvel.
Definicao 3.3 Seja Q (X) = CX. Um ponto X∗ ∈ S tal que Q (X∗) = max ou min{CX : X ∈ S} e chamado solucao otima e o valor Q (X∗) de valor otimo.
Observe que:i) Q (X) = CX e sempre linear em X.ii) Podemos ter uma solucao otima, infinitas ou nenhuma.iii) Um problema de maximizacao (minimizacao) e dito ilimitado se sup {CX : X ∈
S} = +∞ (inf {CX : X ∈ S} = −∞) .

4 Forma padrao
No desenvolvimento do algoritmo simplex que determina a solucao de um PPL efundamental reduzir-lo a forma padrao, definida a seguir:⎧⎪⎪⎨⎪⎪⎩
Min CXAX = BB ≥ 0 (restricoes do PPL)X ≥ 0 (condicao de nao negatividade)
Para reduzir um PPL qualquer a forma padrao temos os seguintes metodos:i) Ocorrencia de desigualdades
Para colocar o problema na forma padrao basta acrescentar ou subtrair variaveisde folgas maiores ou iguais a zero. E necessario colocar uma variavel de folga diferentepara cada linha.
ii) Variaveis livresBasta escrever cada variavel livre (isto e, que nao possui restricoes de sinal) como
diferenca de duas variaveis nao-negativas.iii) A funcao objetivo e de maximizacao
Basta substituir max{Q (X)} por −min{−Q (X)}. De fato, sendo M o conjuntode solucoes factıveis do PPL e sendo max Q (X) = Q (X∗) , temos que Q (X∗) ≥ Q (X) ,∀X ∈ M. Daı, −Q (X∗) ≤ −Q (X) , ∀X ∈ M. Desse modo, min{−Q (X)} = −Q (X∗) .Portanto, max{Q (X)} = Q (X∗) = −min{−Q (X)}.
Exemplo 4.1 Reduzir o seguinte modelo a forma padrao.
⎧⎪⎪⎪⎪⎪⎪⎨⎪⎪⎪⎪⎪⎪⎩
max Q (X) = x1 − x2 + 2x3 − x4 + 3x5
x1 − x2 + 3x3 ≥ 12x2 + x4 − x5 ≤ 0
−2x3 − x4 + x5 ≥ −7x1 − x2 + x3 = 2
x1 ≤ 0, x2 ≥ 0, x4 ≥ 0, x5 ≤ 0
Esse problema ficara reduzido a forma padrao da seguinte forma:⎧⎪⎪⎪⎪⎪⎪⎨⎪⎪⎪⎪⎪⎪⎩
−min Q (−X) = x1 + x2 − 2(x3 − x3) + x4 + 3x5
−x1 − x2 + 3(x3 − x3) − x6 = 12x2 + x4 − x5 + x7 = 0
2(x3 − x3) + x4 + x5 + x8 = 7−x1 − x2 + x3 = 2
x1, x2, x3, x3, x4, x5, x6, x7, x8 ≥ 0
5 Metodo Geometrico
Problemas de programacao linear que envolvem duas variaveis (as vezes tres) podem serresolvidos graficamente, porem este metodo e impraticavel em espacos de dimensao maior.

Considere o exemplo:Uma maquina produz dois tipos A e B de frascos de vidro, mas nao simultaneamente.
Ao produzir um tipo A ela gasta 0,2 horas, e ao produzir um tipo B gasta 0,4 horas.Sabendo que a maquina pode trabalhar no maximo 16 horas por dia e que o fabricantetem um lucro de 2 u.c.p. com um frasco tipo A e 3 u.c.p. com um frasco tipo B, quantosfrascos devem ser produzidos para que o lucro seja maximo?
MaxZ = 2x + 3y
0, 2x + 0, 4y ≤ 16
x ≥ 0
y ≥ 0
O polıgono em azul claro representa a regiao factıvel dada pelas restricoes do problema.Sabemos, por conhecimentos de calculo diferencial, que ocorre um aumento no valor dafuncao no mesma direcao do gradiente ∇Z = (2, 3) (representado na figura pelo vetorazul), as retas tracejadas em preto sao as retas perpendiculares ao gradiente. Assim, omaior valor que a funcao assumira sera no vertice (80, 0), ou seja, o produtor obtera maiorlucro quando produzir 80 frascos do tipo A e nenhum do tipo B.
Um procedimento resumido para resolucao grafica de um PPL no plano e:i) encontrar a regiao de viabilidade S;ii) tracar o vetor gradiente de Z;iii) tracar as perpendiculares ao vetor gradiente;iv) O ponto mais ”distante”na direcao oposta ao vetor gradiente e que intercepta pelo
menos um ponto de S e a solucao otima, no caso da minimizacao;v) O ponto mais ”distante”na direcao do vetor gradiente e que intercepta pelo menos
um ponto de S e a solucao otima, no caso de maximizacao.
5.1 Esquema de Solucoes Graficas em Problemas com 2 variaveis
Considerando a regiao formada pelas restricoes do problema de programacao linear comduas variaveis teremos os seguintes tipos de solucoes:
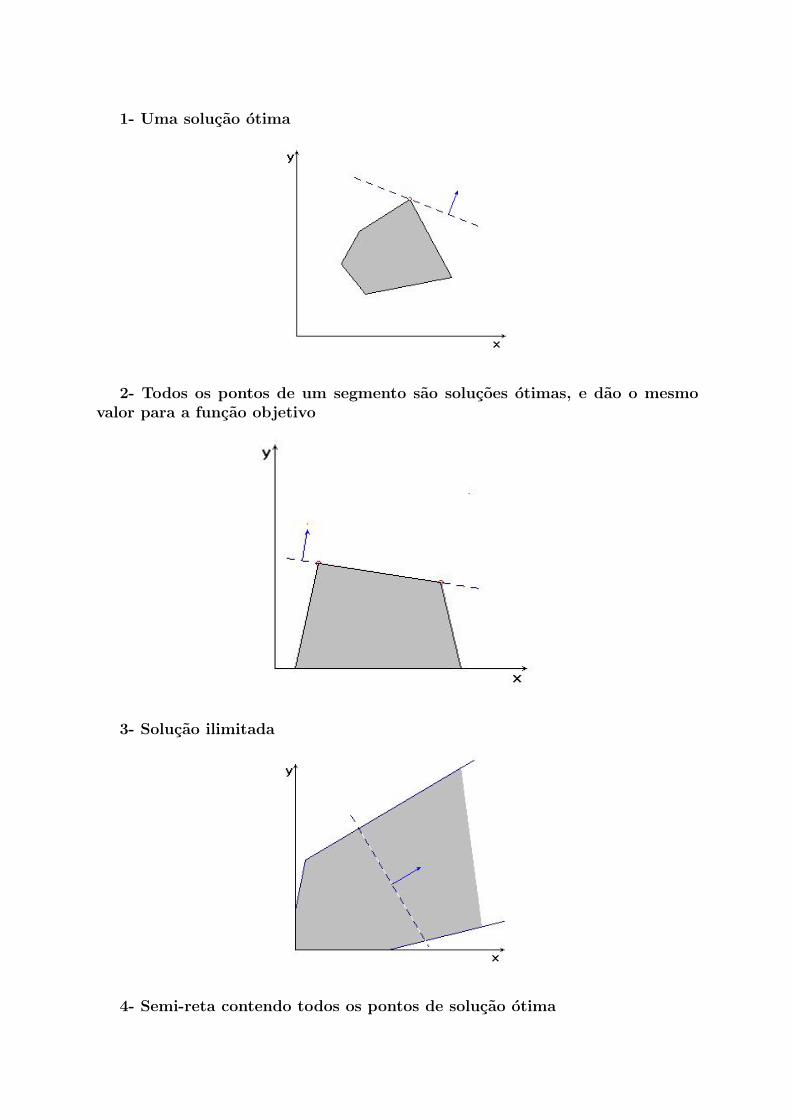
1- Uma solucao otima
2- Todos os pontos de um segmento sao solucoes otimas, e dao o mesmovalor para a funcao objetivo
3- Solucao ilimitada
4- Semi-reta contendo todos os pontos de solucao otima
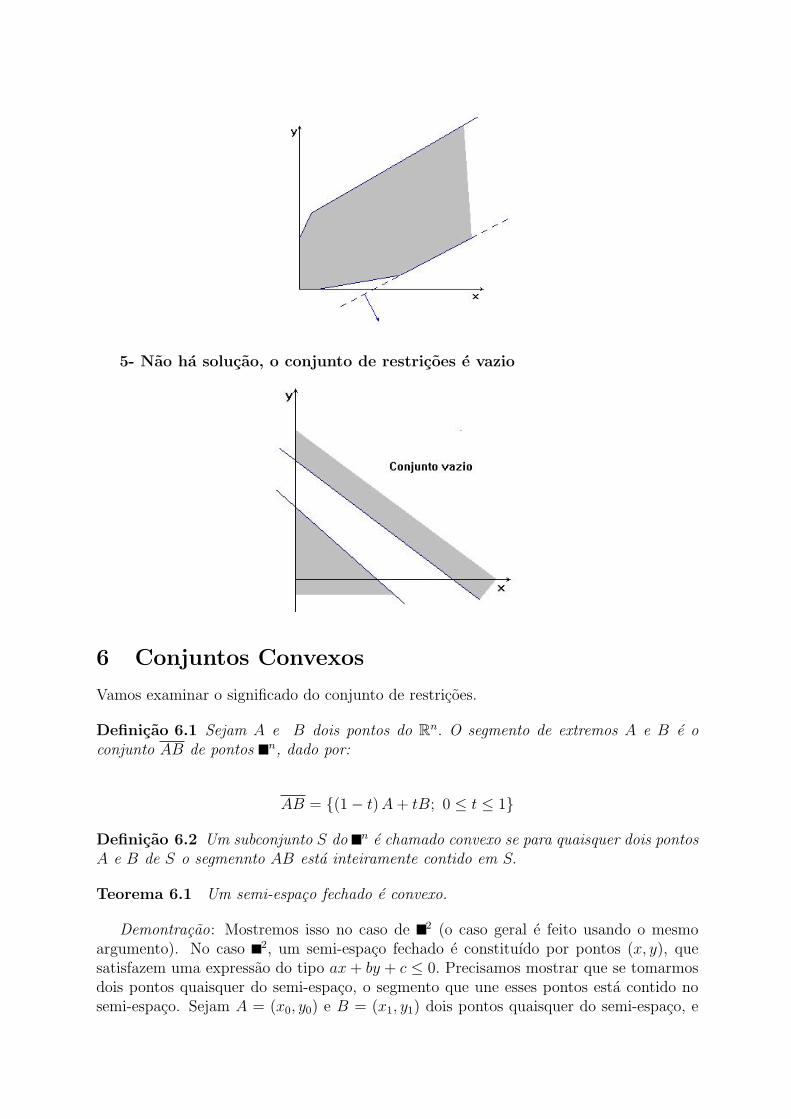
5- Nao ha solucao, o conjunto de restricoes e vazio
6 Conjuntos Convexos
Vamos examinar o significado do conjunto de restricoes.
Definicao 6.1 Sejam A e B dois pontos do Rn. O segmento de extremos A e B e oconjunto AB de pontos n, dado por:
AB = {(1 − t) A + tB; 0 ≤ t ≤ 1}
Definicao 6.2 Um subconjunto S do n e chamado convexo se para quaisquer dois pontosA e B de S o segmennto AB esta inteiramente contido em S.
Teorema 6.1 Um semi-espaco fechado e convexo.
Demontracao: Mostremos isso no caso de 2 (o caso geral e feito usando o mesmoargumento). No caso 2, um semi-espaco fechado e constituıdo por pontos (x, y), quesatisfazem uma expressao do tipo ax + by + c ≤ 0. Precisamos mostrar que se tomarmosdois pontos quaisquer do semi-espaco, o segmento que une esses pontos esta contido nosemi-espaco. Sejam A = (x0, y0) e B = (x1, y1) dois pontos quaisquer do semi-espaco, e

seja P um ponto qualquer de AB. Existe, entao, t1 ∈ , com 0 ≤ t1 ≤ 1, tal que P =(1 − t1) (x0, y0) + t1 (x1, y1) = (x0 (1 − t1) + t1x1, y0 (1 − t1) + t1y1) . Temos que verificarque:
a [(1 − t1)x0 + t1 (x1, y1)] + b [y0 (1 − t1) + t1y1] + c ≤ 0 (∗)que e a condicao para P estar no semi-espaco. Mas, (1 − t1) ax0+t1ax1+by0 (1 − t1)+
t1y1b+c−t1c+t1c = (1 − t1) [ax0 + by0 + c]+t1 [ax1 + by1 + c] . Observe que ax0+by0+c ≤0, pois A esta no semi-espaco, analogamente, ax1 + bx1 + c ≤ 0, pois B tambem esta nosemi-espaco. Observe ainda que, como 0 ≤ t1 ≤ 1 entao 1 − t1 ≥ 0 e t1 ≥ 0. Logo,(1 − t1) [ax0 + by0 + c] ≤ 0 e t1 [ax1 + bx1 + c] ≤ 0. Portanto, a relacao (∗) esta satisfeitae, como P esta no semi-espaco e e um ponto qualquer de AB entao, AB esta inteiramentecontido no semi-espaco e, assim, este e convexo.
Teorema 6.2 A interseccao de conjuntos convexos e um conjunto convexo.
Demonstracao: Sejam S1 e S2 dois conjuntos convexos. Precisamos mostrar que se Ae B sao dois pontos quaisquer de S1 ∩ S2 entao AB ⊂ S1 ∩ S2. Mas se A,B ∈ S1 ∩ S2
entao A,B ∈ S1 e como S1 e convexo entao AB ∈ S1. Analogamente,AB ∈ S2. Portanto,AB ∈ S1 ∩ S2. Logo, S1 ∩ S2 e convexo.
Definicao 6.3 Uma regiao poliedral convexa fechada em n e uma interseccao de umaquantidade finita de semi-espacos fechados do n.
Devido aos dois teoremas anteriores, uma regiao poliedral convexa e um conjuntoconvexo.
Definicao 6.4 Dada uma regiao poliedral convexa fechada do n (determinada por umsistema de inequacoes lineares), os vertices dessa regiao sao os pontos da regiao que satis-fazem um dos possıveis sistemas de n equacoes lineares independentes, obtidas substituindodesigualdades por igualdades.
Teorema 6.3 Se um conjunto convexo X, fechado e estritamente limitado, possui umnumero finito de pontos extremos, qualquer ponto pertencente ao conjunto podera serescrito como um combinacao convexa dos pontos extremos, isto e, X e o conjunto detodas as combinacoes convexas de seus pontos extremos.
Exemplo 6.1 Suponhamos que desejamos escrever qualquer ponto w do interior de umtriangulo como uma combinacao convexa de seus vertices x1, x2, x3, isto e, w =
∑μixi,
∑μi =
1. A situacao esta ilustrada na figura abaixo. Primeiramente tracemos uma linha partindode x2 e passando por w. Esta interceptara o lado oposto do triangulo em v. Entao,w = λ1x2 + (1 − λ1) v, 0 ≤ λ1 ≤ 1. Entretanto, v = λ2x1 + (1 − λ2) x3. Logo,
w = λ1x2 + (1 − λ1) λ2x1 + (1 − λ1) (1 − λ2) x3.
Facamos μ1 = (1 − λ1) λ2, μ2 = λ1, μ3 = (1 − λ1) (1 − λ2) . E obvio que μi ≥ 0 eμ1 + μ2 + μ3 = 1. A expressao procurada e w =
∑μixi.

7 O Metodo Simplex
O metodo grafico apresentado na secao anterior e utilizado apenas para problemas de duasou tres variaveis. Para problemas com mais variaveis introduziremos um novo metodo, oMetodo Simplex.
A resolucao geometrica e a introducao de variaveis de folga sugerem alguns fatos sobreum problema de programacao linear:
(1) A regiao de viabilidade S tem a propriedade de convexidade, isto e, o segmentoque une duas solucoes viaveis pertence a S. (S nao contem ”buracos” e sua fronteira naotem ”dentes”)
(2) As fronteiras de S quando se encontram formam pontos extremos (vertices) e ospontos extremos correspondem a anular convenientemente as variaveis do problema (sejamelas originais ou de folga).
(3) Quando o valor otimo e finito entao a solucao otima e assumida em pelo menosum dos pontos extremos.
Os pontos extremos do conjunto solucao S desempenham um papel central nos algo-ritmos que desenvolveremos para a resolucao de problemas de programacao linear. Faz-senecessario, portanto, obter criterios computacionais para a identificacao dos mesmos
Definicao 7.1 Uma colecao de m variaveis (xj1, xj2, xj3, ..., xjm) e basica ou base para oproblema min CX; AX = B, quando os vetores coluna Pj1, Pj2, ..., Pjm da matriz A saolinearmente independentes.
Definicao 7.2 Atribuindo o valor 0 as demais m−n variaveis obtemos de AX = B val-ores unicos para as variaveis basicas, determinando assim um vetor X ∈ Rn denominadosolucao basica do problema.
Definicao 7.3 Se alem disso xjk ≥ 0, ∀k, dizemos tratar-se de uma solucao basica viavel.
Definicao 7.4 Para o caso em que alguma das variaveis basicas for nula dizemos quea solucao basica e degenerada. Geometricamente, isso ocorre quando temos um verticedeterminado pela intercessao de mais de duas retas.
O Metodo Simplex, para ser iniciado, necessita conhecer uma solucao factıvel basica,ou seja, um dos vertices da regiao factıvel.
O Metodo verifica se essa solucao e otima. Se for, o processo esta encerrado. Se naofor, e porque um dos outros vertices fornece para a funcao objetivo um valor melhor queo atual. O Metodo faz entao a mudanca para o vertice adjacente que melhora o valorda funcao objetivo. E entao, tudo o que foi feito para o vertice anterior e feito para onovo vertice. O processo finaliza quando, estando em um dos vertices, todos os verticesadjacentes a ele nao fornecerem melhor valor para a funcao objetivo.
Algebricamente, um ponto extremo adjacente e uma solucao compatıvel basica in-cluindo todas as variaveis basicas anteriores, com excessao de apenas uma delas. Achar,portanto, a proxima solucao compatıvel basica (ponto extremo adjacente) exige a escolhade uma variavel basica para deixar a base atual, o que a torna nao-basica, e a escolha deuma variavel nao-basica para entrar na base em sua substituicao.
Resumindo:
1) Achar uma solucao compatıvel basica inicial;
2) Verificar se tal solucao e otima. Se for, entao o processo esta encerrado. Casocontrario, siga para o passo 3.
3) Determinar a variavel nao-basica que deve entrar na base.
4) Determinar a variavel basica que sai da base.
5) Achar a nova solucao compatıvel basica e voltar ao passo 2.
8 Teoremas Fundamentais
Teorema 8.1 O conjunto de todas as solucoes compatıveis do modelo de programacaolinear e convexo.
Demonstracao: Esse teorema decorre direto dos teoremas 10 e 11.
Teorema 8.2 Uma solucao compatıvel basica corresponde a um vertice do conjunto desolucoes compatıveis C.
Demonstracao: Considere o conjunto convexo C formado por Ax = b e x ≥ 0. Con-sidere a solucao compatıvel basica com n entradas x = (x1, x2, ..., xm, 0, ..., 0) com todosos xi ≥ 0.
Suponha, por absurdo, que x nao seja um vertice de C. Entao x pode ser obtido comocombinacao convexa de outros dois pontos distintos y e z de C : x = αy + (1 − α) z e0 ≤ α ≤ 1.(∗)
Como y e z pertencem a C as relacoes Ay = b, y ≥ 0, Az = b e z ≥ 0 sao validas.
Se x for um vertice de C entao nao existem y e z tal que a relacao (∗) seja satisfeita.
A relacao (∗) colocada em termos das cordenadas de cada um dos tres vetores, forneceas seguintes relacoes:

x1 = αy1 + (1 − α) z1
...
xm = αym + (1 − α) zm
0 = αym+1 + (1 − α) zm+1
...
0 = αyn + (1 − α) zn
Vamos analisar as ultimas (n − m) equacoes do sistema considerando as relacoes 0 ≤α ≤ 1, y ≥ 0 e z ≥ 0 :
1o caso) 0 < α < 1. Daı, como α > 0, ym+1 ≥ 0, (1 − α) > 0,zm+1 ≥ 0 e 0 =αym+1 + (1 − α) zm+1 entao yi = zi = 0 para i = m + 1, ..., n.
Nesse caso terıamos x = y = z pois as tres solucoes apresentam uma coincidencianas variaveis nao-basicas. Consequentemente, os valores das variaveis basicas serao osmesmos para as tres solucoes.
2o caso) α = 0. Daı, zi = 0 para i = m + 1, ..., n.Nesse caso terıamos x = z pelas mesmas razoes.3o caso) α = 1. Daı, yi = 0 para i = m + 1, ..., n.Nesse caso terıamos x = y pelas mesmas razoes.Portanto, nao existem solucoes compatıveis y e z, distintas de x que satisfacam (∗).
Logo, x e um vertice de C.
Teorema 8.3 Se a funcao objetivo possui um maximo (mınimo) finito, entao pelo menosum vertice C e solucao otima.
Demonstracao: Seja C o conjunto formado por AX = b e x ≥ 0. Seja Z (X) afuncao objetivo que toma o valor maximo M no ponto X0, entao pode-se afirmar queZ (X0) ≥ Z (X) ,∀X ∈ C.
Sejam x1, ..., xp vertices de C. Temos que provar que Z (X0) = Z (Xi) para algumi = 1, 2, ..., p.
Suponha que x0 nao seja um desses vertices. Entao, ele pode ser obtido pela com-binacao linear convexa
x0 =p∑
i=1
αixi sendo αi ≥ 0 ep∑
i=1
αi = 1, por definicao. Assim, Z (x0) = Z
(p∑
i=1
αixi
)=
= Z (α1x1 + ... + αpxp) = α1Z (x1) + ... + αpZ (xp) = M.Considere agora o vertice xM definido por Z (xM) = max Z (xi) . Dessa forma, Z (x0) ≤
α1Z (xM) + ... + αpZ (xM) , ou seja, Z (x0) ≤ Z (xM)p∑
i=1
αi, ou ainda, Z (x0) ≤ Z (xM) .
Mas tınhamos, Z (x0) ≥ Z (x) ,∀x ∈ C. Entao e necessario que Z (x0) = M = Z (xM) efica provado que x0 e um vertice de C.
Dada uma solucao basica Xo ∈ S queremos estabelecer uma rotina para obter outrasolucao x1 melhor que a anterior, isto e, tal que Q (X1) < Q (Xo) , quando isso for possıvel.
A ideia e colocar o problema de programacao linear numa forma basica relativa a basede xo e proceder uma mudanca de base.

Vamos supor por simplicidade que Xo = (x1, ..., xm, 0, ..., 0) e que o problema naopossui solucoes basicas (factıveis) degeneradas.
Definicao 8.1 Dizemos que o problema de PL esta na forma basica, relativo a base(x1, ..., xm) , se ele esta reduzido a forma⎧⎨⎩
min (γm+1xm+1 + ... + γnxn − β)A∗X = b∗
X ≥ 0
onde, A∗ =[
Im×m
| Dm×(n−m)
]e b∗ =
⎡⎢⎣ b∗1...
b∗m
⎤⎥⎦
Proposicao 8.1 Um PPL
⎧⎨⎩min (CX − α)
AX = bX ≥ 0
em que os vetores P1, ..., Pm sao l.i. pode
ser reformulado na forma basica relativo a (x1, ..., xm) .
Demonstracao: Consideremos A =[
A1 m×m| A2 m×(n−m)
]. Como P1, ..., Pm sao
l.i. entao A1 e invertıvel. Multiplicando AX = b por A−11 , teremos que A∗X = b∗ onde
A∗ =[
Im×m
| A−11 A2 m×(n−m)
]e b∗ = A−1
1 b. Escrevendo x1, ..., xm em funcao das
variaveis xm+1, ..., xn a partir de (∗) abaixo e substituindo em cx, teremos o seguintePPL:
min (γm+1xm+1 + ... + γnxn − β)⎧⎪⎪⎪⎨⎪⎪⎪⎩x1+ ... ... ...+ α∗
1m+1xm+1+ ... +α1nxn = b∗1x2+ ... ...+ α2m+1xm+1+ ... +α∗
2nxn = b∗2. . . ...+
......
...xm+ α∗
mm+1xm+1+ ... +α∗mnxn = b∗m
x1, x2, ..., xn ≥ 0
(*)
Obs: Colocar um problema na forma basica em relacao a um determinado conjuntode m variaveis e transformar os coeficientes da funcao objetivo que lhe correspondem emzero, e transformar a submatriz que lhes corresponde na matriz identidade m × m.
Teorema 8.4 Se em (∗) tivermos γm+1, ..., γn ≥ 0, a solucao basica obtida e otimizante.
Demonstracao: Seja Xo = (xo1, x
o2, ..., x
on) a solucao basica de (∗) . Nesse caso, xo
m+1 =xo
m+2 = ... = xon = 0. Consequentemente, Q (Xo) = −β. Se X = (x1, ..., xn) for outra
solucao do problema devemos ter xi ≥ 0, i = 1, ..., n e daı Q (X) = γm+1xm+1 + ... +γnxn − β ≥ −β = Q (Xo) . Portanto, Q (Xo) e o menor valor para Q (X) na regiao deviabilidade S.

Teorema 8.5 Se algum γj com j = m+1, ..., n for negativo em (∗) , uma das alternativasocorre:
i) se o vetor coluna Pj ≤ 0, o problema e ilimitado;ii) se Pj > 0, podemos mudar de base melhorando a solucao, se a solucao basica de
(∗) for nao degenerada.
Demonstracao: Seja Xo = (xo1, x
o2, ..., x
on) uma solucao basica de (∗) . Suponha γm+1 <
0.
Temos que
{b∗ = xo
1P1 + ... + xomPm
Pm+1 = α∗1m+1P1 + ... + α∗
mm+1Pm.Para todo θ ∈ , teremos b∗ =(
xo1 − θα∗
1m+1
)P1 + ... +
(xo
m − θα∗mm+1
)Pm + θPm+1.
Logo, se θ ≥ 0 e xoi − θα∗
im+1 ≥ 0, entao Xθ =(xo
1 − θa∗1m+1, ..., x
om − θa∗
mm+1, θ, 0, ...0)
e uma solucao viavel (que pode nao ser basica) para o problema (∗) , com valor Q (Xθ) =γm+1θ − β.
i) se α∗im+1 ≤ 0, i = 1, ..., m (ou seja, Pm+1 ≤ 0 ), xo
i − θα∗im+1 ≥ 0. Nesse caso, Xθ e
factıvel ∀θ ∈ e como γm+1 < 0, limθ→+∞ Q (X) = −∞ e o problema e ilimitado.ii) suponhamos agora que xo
i > 0 ( Xo nao degenerada) e que nao temos todos os
elementos a∗im+1 negativos (Pm+1 > 0) . Logo, xo
i −θα∗im+1 ≥ 0 se, e somente se, θ ≤ xo
i
α∗im+1
onde α∗im+1 > 0. Tomando entao θo = mini
{xo
i
α∗im+1
; α∗im+1 > 0
}teremos θo =
xok
α∗km+1
=
b∗kα∗
km+1
, para algum k. Como xk − θoα∗km+1 = 0, a solucao correspondente e
Xθ0 =(xo
1 − θoα∗1m+1, ..., x
ok−1 − θoα
∗k−1m+1, 0, x
ok+1 − θoα
∗k+1m+1, ..., x
om − θoα
∗mm+1, θo, 0, ..., 0
).
Temos entao uma solucao viavel cujo valor para a funcao objetivo e γm+1θo −β < −β
(limitado, pois θo = mini
{xo
i
α∗im+1
; α∗im+1 > 0
}, θ e limitado). Falta provar que essa
solucao e basica. Devemos mostrar que P1, ..., Pk−1, Pk+1, ..., Pm, Pm+1 sao l.i. Se fosseml.d., terıamos: Pm+1 = λ1P1 + ... + λk−1Pk−1 + λk+1Pk+1 + ... + λmPm com valores λi bemdeterminados para i = 1, ..., m pois, P1, ..., Pk−1, Pk+1, ..., Pm sao l.i.. Mas, sabemos quePm+1 = α∗
1m+1P1+...α∗km+1Pk+...+α∗
mm+1Pm. Logo, α∗km+1 = 0. Daı, como xo
k−θoα∗km+1 =
0 entao xok = 0. Absurdo, pois supomos que tınhamos uma solucao xo nao degenerada.
Portanto, P1, ..., Pk−1, Pk+1, ..., Pm, Pm+1 sao l.i. e xθo e solucao basica viavel.
9 Tableau Simplex
Consideremos o exemplo:Um fabricante de moveis fabrica apenas cadeiras e mesas. Ele tem lucro de R$ 45,00
em cada cadeira vendida e de R$ 80,00 em cada mesa vendida. Supoe-se que , devidoa forte demanda desses itens consegue-se vender toda a producao da fabrica. Mas, aproducao da firma e limitada em dois aspectos:
1) Cada cadeira produzida utiliza 5 unidades de jacaranda. Da mesma forma, cadamesa de jacaranda produzida utiliza 20 unidades da madeira. Dispomos de 400 jacarandas.
2) Cada cadeira gasta 10 homens-hora e cada mesa gasta 15 homens-hora. Dispomosde 450 homens-hora.
O objetivo e descobrir qual a quantidade otima de cadeiras e mesas para que se obtenhao maior lucro possıvel.
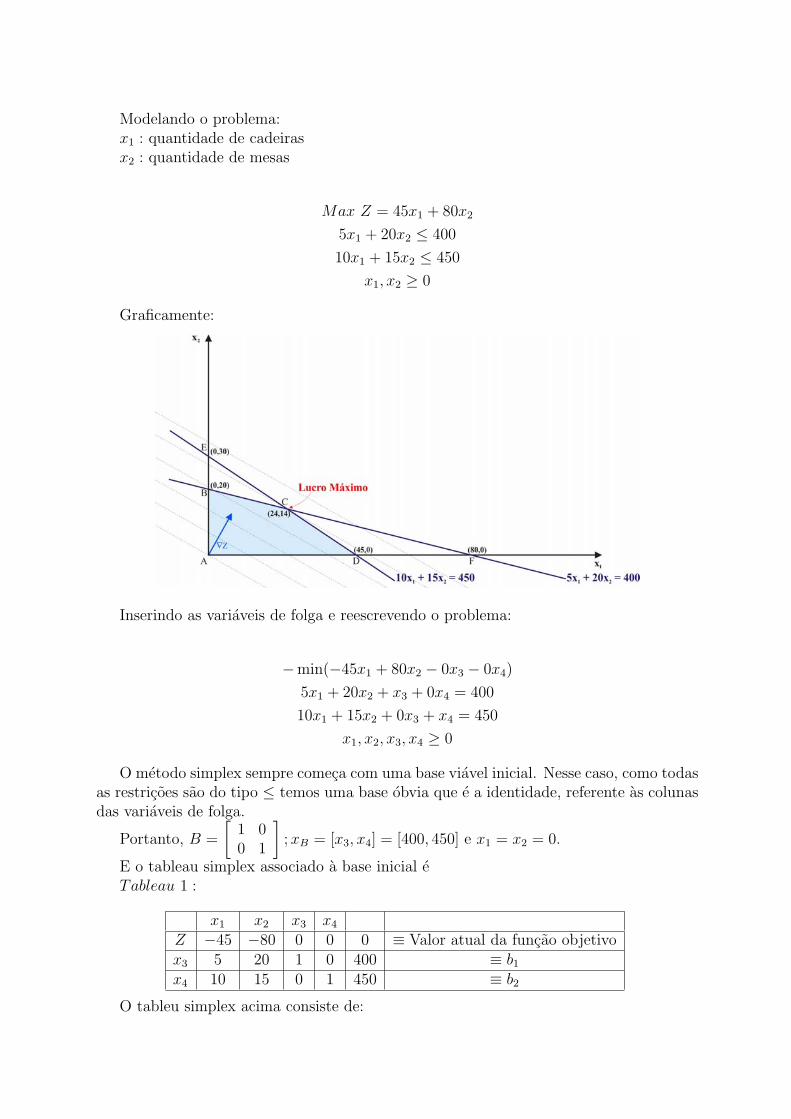
Modelando o problema:x1 : quantidade de cadeirasx2 : quantidade de mesas
Max Z = 45x1 + 80x2
5x1 + 20x2 ≤ 400
10x1 + 15x2 ≤ 450
x1, x2 ≥ 0
Graficamente:
Inserindo as variaveis de folga e reescrevendo o problema:
−min(−45x1 + 80x2 − 0x3 − 0x4)
5x1 + 20x2 + x3 + 0x4 = 400
10x1 + 15x2 + 0x3 + x4 = 450
x1, x2, x3, x4 ≥ 0
O metodo simplex sempre comeca com uma base viavel inicial. Nesse caso, como todasas restricoes sao do tipo ≤ temos uma base obvia que e a identidade, referente as colunasdas variaveis de folga.
Portanto, B =
[1 00 1
]; xB = [x3, x4] = [400, 450] e x1 = x2 = 0.
E o tableau simplex associado a base inicial eTableau 1 :
x1 x2 x3 x4
Z −45 −80 0 0 0 ≡ Valor atual da funcao objetivox3 5 20 1 0 400 ≡ b1
x4 10 15 0 1 450 ≡ b2
O tableu simplex acima consiste de:

1) 6 colunas: A primeira contem informacoes sobre a base atual (observa-se a funcaoobjetivo Z e as variaveis x3 e x4 que sao a base inicial). As colunas 2, 3, 4 e 5 conteminformacoes sobre as variaveis. A ultima coluna contem na 1a linha o valor atual dafuncao objetivo e nas duas ulimas linhas, os valores atuais das variaveis basicas.
2) 3 linhas: A primeira refere-se a funcao objetivo e as duas ultimas referem-se asrestricoes do problema.
Para verificarmos se o tableau expressa uma solucao basica viavel basta verificar seos valores das variaveis basicas sao ≥ 0. E, para sabermos se a solucao e otima ou nao,basta verificar se existe alguma variavel nao basica que entrando na base melhore o valorda funcao objetivo.
No nosso exemplo, o taleau nos diz que se entrarmos com x1 na base teremos umacrescimo de 45x1 no valor da funcao objetivo e se entrarmos com x2 teremos um acrescimode 80x2. Como o objetivo e maximizar a funcao entao entraremos com x2 na base.
Devemos aumentar x2 ao maximo considerando as restricoes de mao-de-obra e materia-prima.
Para a restricao de materia-prima temos:400
20= 20 =⇒ Indica que podem ser processadas 20 unidades de x2 sem que x3 torne-se
negativo.
Para a restricao de mao-de-obra temos:450
15= 30 =⇒ Indica que podem ser processadas 30 unidades de x2 sem que x4 torne-se
negativo.
Devemos entao fabricar 20 unidades de x2 pois se fabricarmos mais de 20 unidades arestricao de materia-prima sera violada. Ao fabricarmos 20 unidades de x2 a variavel x3
torna-se 0.
Portanto, a variavel x2 deve entrar na base e a variavel x3 deve sair.
Agora, devem ser feitas as modificacoes necessarias no tableau. Devemos realizaroperacoes de tal maneira que o elemento que se encontra na interseccao da coluna davariavel que entra na base com a linha da variavel que sai da base se torne 1 e os demaiselementos da coluna sejam transformados em zero. Tal procedimento chama-se pivotea-mento.
Portanto,
Tableau 2 :
x1 x2 x3 x4
Z −25 0 4 0 1600x2 1/4 1 1/20 0 20x4 25/4 0 −3/4 1 150
que corresponde a seguinte base:
B =
[20 015 1
](1a coluna: coluna original de x2; 2a coluna: coluna original de x4);
xB = [x2, x4] = [20, 150] e temos a seguinte solucao basica viavel (0, 20, 0, 150) .
Novamente devemos observar se o valor da funcao objetivo e otimo:
Se entrarmos com x1 na base teremos um acrescimo de 25x1 no valor da funcao obje-tivo. Ao passo que se entrarmos com x3 na base teremos um decrescimo de 4x2 no valorda funcao.

Saira da base a variavel que zerar primeiro. Quando x1 aumenta x2 diminui em 1/4,
portanto, podemos aumentar x1 ate o valor de20
1/4= 80. Quando x1 aumenta x4 diminui
25/4, portanto, podemos aumentar x1 ate o valor de150
25/4= 24. Assim, x4 zera primeiro.
Apos efetuado o pivoteamento o tableau fica:Tableau 3 :
x1 x2 x3 x4
Z 0 0 1 4 2200x2 0 1 2/25 −25 14x1 1 0 −3/25 4/25 24
Essa e a solucao otima? Sim, pois ao tentarmos entrar com as variaveis x3 ou x4 nabase o valor da funcao objetivo decresce. Assim, a base otima e
B =
[20 515 10
]; e a solucao otima e x∗ = (24, 14, 0, 0) . E o valor otimo da funcao e
Z∗ = 2200.Observemos no grafico da regiao viavel o caminho feito pelo metodo simplex ate al-
cancar o ponto otimo x∗.
Tableau Solu cao Pontos correspondentes no grafico1 (inicial) x = (0, 0, 400, 450) A
2 x = (0, 20, 0, 150) B3 x = (24, 14, 0, 0) C
A tabela acima serve simplesmente para verificarmos que o metodo simplex caminhade vertice (=solucao basica viavel) em vertice ate alcancar o ponto otimo.
9.1 Casos especiais
Alguns casos podem ocorrer nos modelos de programacao linear, sao eles:
Empate na Entrada Quando houver empate na escolha da variavel que entra na base,deve-se tomar a decisao arbitrariamente. A unica implicacao envolvida e que pode-seescolher um caminho mais longo ou mais curto para chegar a solucao otima.
Empate na Saıda - Degeneracao O empate na escolha da variavel que sai da baseocorre porque duas ou mais variaveis basicas se anulam ao mesmo tempo. Sempre quehouver empate na saıda uma das variaveis que permanecer na base se anulara. Quandoisso acontece diz-se que a solucao compatıvel basica e degenerada. Como no caso anteriora decisao de quem sai da base deve ser tomada arbitrariamente. Aqui tambem escolhemosentre um caminho mais longo ou mais curto pra se chegar a solucao otima. Entretanto,um dos maiores problemas da degeneracao e o de, eventualmente, se entrar em circuitos(ciclos) interminaveis a procura da solucao otima. Existe um metodo de escolha de quementra na base que evita a ocorrencia desses ciclos, mas nao ha registros de casos ”reais”emque haja ocorrido esses ciclos (ja havia exemplos ”patologicos”de ciclos em 1951). A maiorparte dos codigos de programacao linear simplesmente ignora a possibilidade da ocorrenciadesses ciclos.
9.2 Metodo de duas fases
O metodo simplex parte de uma solucao compatıvel basica e ate agora supusemos queera possıvel obte-la com facilidade. Isto so e verdade para problemas muito simples.Uma maneira muito elegante de contornar essa dificuldade e o chamado metodo de duasfases, que fornece uma solucao compatıvel basica para o problema ou indica que nao temsolucao. Esta caracterıstica torna o metodo de duas fases bastante atraente, pois seriaimpraticavel garantir, a priori, a coerencia das equacoes.
A ideia e a seguinte:
Primeiro estabeleca as equacoes de maneira usual, utilizando as variaveis de folga, e,para cada restricao do tipo ≥ 0 ou = associe uma variavel artificial xj.
O metodo das duas fases comeca com a fase 1, que e a minimizacao da soma dasvariaveis artificiais, sujeita a restricoes Ax + xa = b, x ≥ 0 e xa ≥ 0. Se o problemaoriginal Ax = b, x ≥ 0, tem solucao viavel, entao o valor otimo para a funcao objetivoda fase 1 tende a zero, pois todas as variaveis artificiais acopladas ao problema originaltendem a zero, ou seja, elas deixam a base. Apos eliminarmos as colunas pertencentesas variaveis artificiais nao-basicas, comecamos a fase 2 que e resolver o problema originalcom a base factıvel encontrada na fase 1.
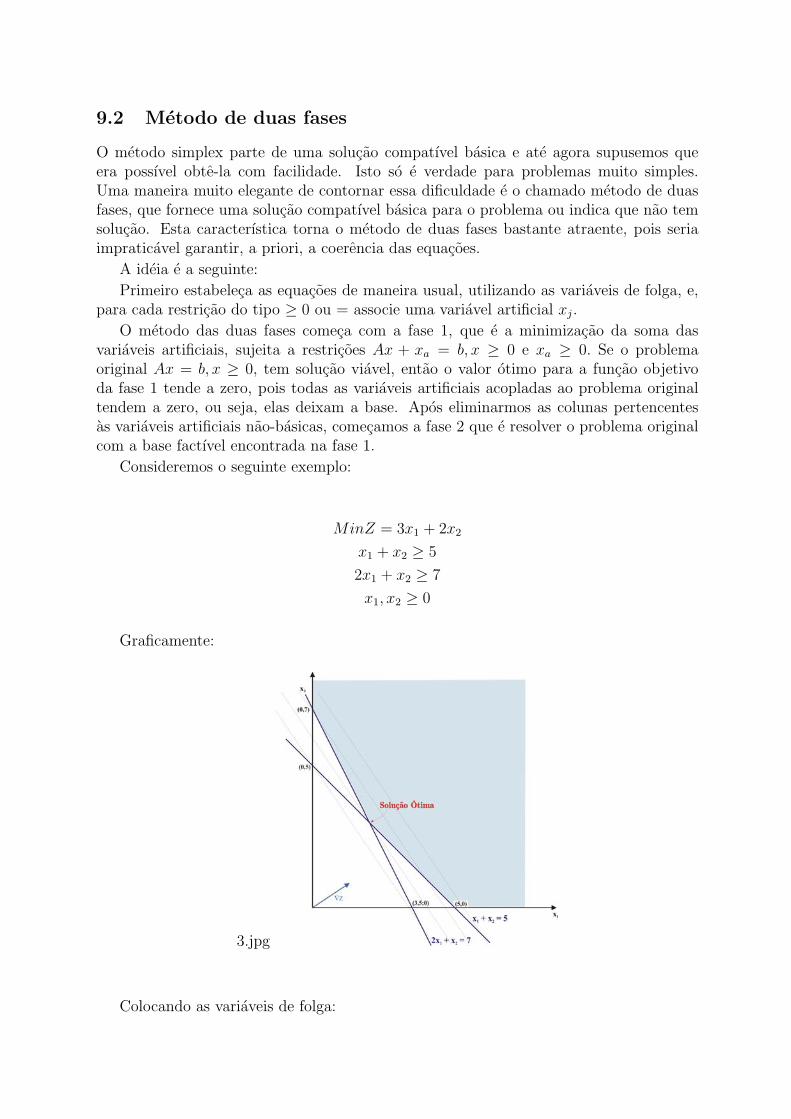
Consideremos o seguinte exemplo:
MinZ = 3x1 + 2x2
x1 + x2 ≥ 5
2x1 + x2 ≥ 7
x1, x2 ≥ 0
Graficamente:
3.jpg
Colocando as variaveis de folga:
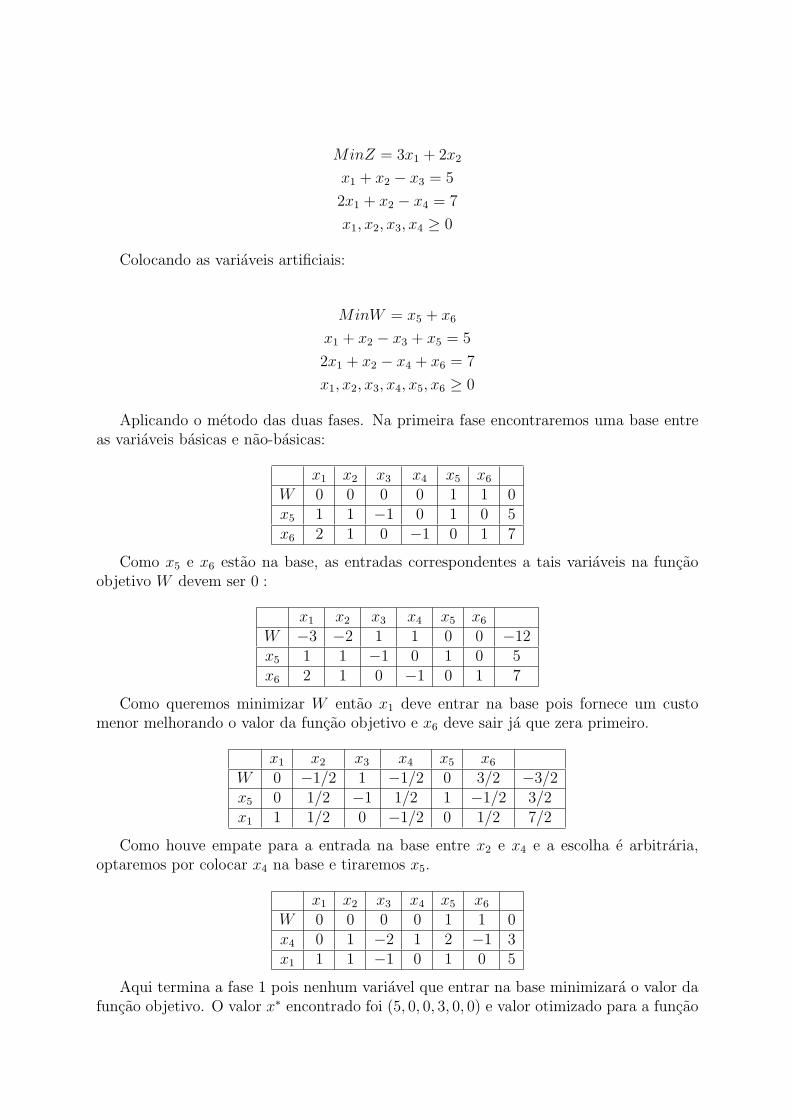
MinZ = 3x1 + 2x2
x1 + x2 − x3 = 5
2x1 + x2 − x4 = 7
x1, x2, x3, x4 ≥ 0
Colocando as variaveis artificiais:
MinW = x5 + x6
x1 + x2 − x3 + x5 = 5
2x1 + x2 − x4 + x6 = 7
x1, x2, x3, x4, x5, x6 ≥ 0
Aplicando o metodo das duas fases. Na primeira fase encontraremos uma base entreas variaveis basicas e nao-basicas:
x1 x2 x3 x4 x5 x6
W 0 0 0 0 1 1 0x5 1 1 −1 0 1 0 5x6 2 1 0 −1 0 1 7
Como x5 e x6 estao na base, as entradas correspondentes a tais variaveis na funcaoobjetivo W devem ser 0 :
x1 x2 x3 x4 x5 x6
W −3 −2 1 1 0 0 −12x5 1 1 −1 0 1 0 5x6 2 1 0 −1 0 1 7
Como queremos minimizar W entao x1 deve entrar na base pois fornece um customenor melhorando o valor da funcao objetivo e x6 deve sair ja que zera primeiro.
x1 x2 x3 x4 x5 x6
W 0 −1/2 1 −1/2 0 3/2 −3/2x5 0 1/2 −1 1/2 1 −1/2 3/2x1 1 1/2 0 −1/2 0 1/2 7/2
Como houve empate para a entrada na base entre x2 e x4 e a escolha e arbitraria,optaremos por colocar x4 na base e tiraremos x5.
x1 x2 x3 x4 x5 x6
W 0 0 0 0 1 1 0x4 0 1 −2 1 2 −1 3x1 1 1 −1 0 1 0 5
Aqui termina a fase 1 pois nenhum variavel que entrar na base minimizara o valor dafuncao objetivo. O valor x∗ encontrado foi (5, 0, 0, 3, 0, 0) e valor otimizado para a funcao
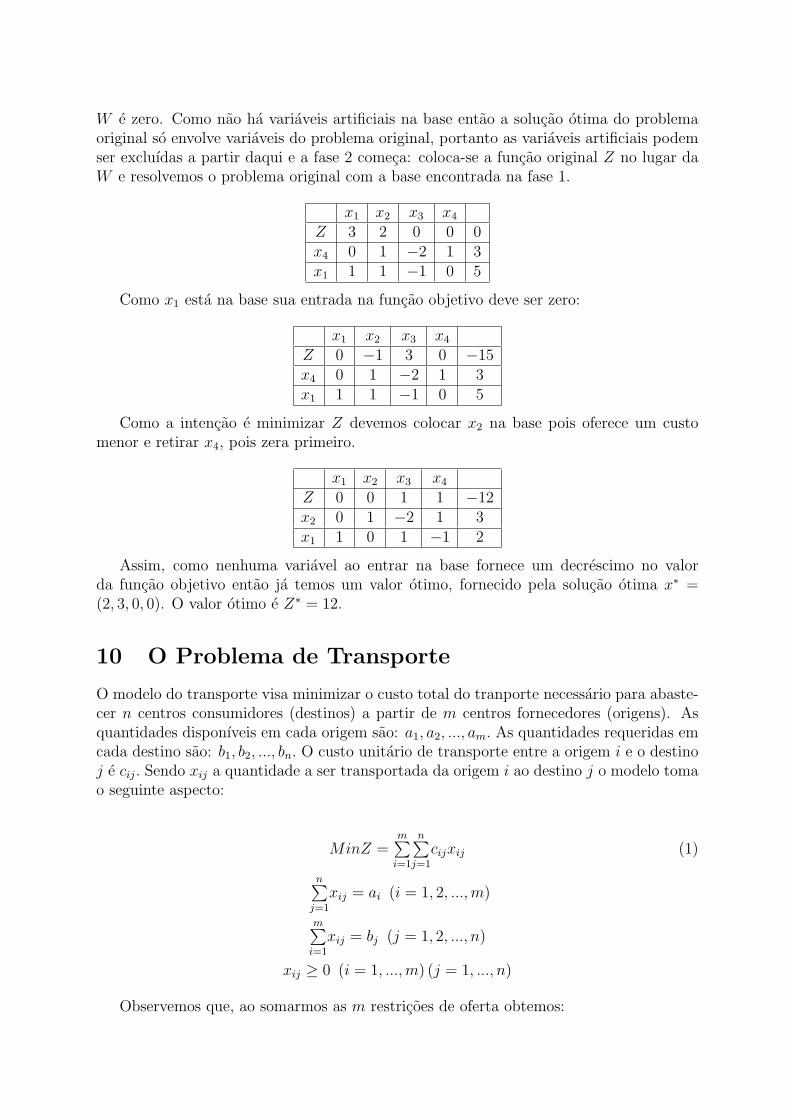
W e zero. Como nao ha variaveis artificiais na base entao a solucao otima do problemaoriginal so envolve variaveis do problema original, portanto as variaveis artificiais podemser excluıdas a partir daqui e a fase 2 comeca: coloca-se a funcao original Z no lugar daW e resolvemos o problema original com a base encontrada na fase 1.
x1 x2 x3 x4
Z 3 2 0 0 0x4 0 1 −2 1 3x1 1 1 −1 0 5
Como x1 esta na base sua entrada na funcao objetivo deve ser zero:
x1 x2 x3 x4
Z 0 −1 3 0 −15x4 0 1 −2 1 3x1 1 1 −1 0 5
Como a intencao e minimizar Z devemos colocar x2 na base pois oferece um customenor e retirar x4, pois zera primeiro.
x1 x2 x3 x4
Z 0 0 1 1 −12x2 0 1 −2 1 3x1 1 0 1 −1 2
Assim, como nenhuma variavel ao entrar na base fornece um decrescimo no valorda funcao objetivo entao ja temos um valor otimo, fornecido pela solucao otima x∗ =(2, 3, 0, 0). O valor otimo e Z∗ = 12.
10 O Problema de Transporte
O modelo do transporte visa minimizar o custo total do tranporte necessario para abaste-cer n centros consumidores (destinos) a partir de m centros fornecedores (origens). Asquantidades disponıveis em cada origem sao: a1, a2, ..., am. As quantidades requeridas emcada destino sao: b1, b2, ..., bn. O custo unitario de transporte entre a origem i e o destinoj e cij. Sendo xij a quantidade a ser transportada da origem i ao destino j o modelo tomao seguinte aspecto:
MinZ =m∑
i=1
n∑j=1
cijxij (1)
n∑j=1
xij = ai (i = 1, 2, ..., m)
m∑i=1
xij = bj (j = 1, 2, ..., n)
xij ≥ 0 (i = 1, ..., m) (j = 1, ..., n)
Observemos que, ao somarmos as m restricoes de oferta obtemos:
m∑i=1
n∑j=1
xij =m∑
i=1
ai
E, ao somarmos as n restricoes de demanda:
n∑j=1
m∑i=1
xij =n∑
j=1
bj
Assim,m∑
i=1
ai =n∑
j=1
bj
indicando que o modelo exige uma igualdade entre a oferta e a demanda totais.
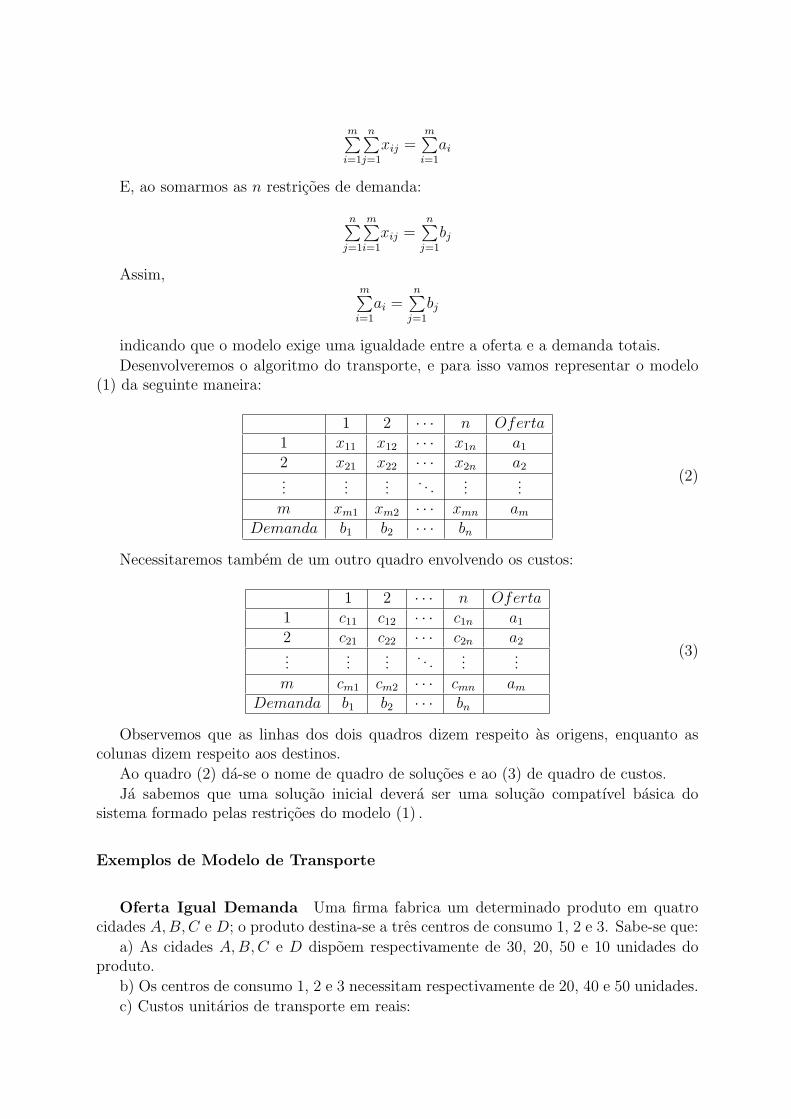
Desenvolveremos o algoritmo do transporte, e para isso vamos representar o modelo(1) da seguinte maneira:
1 2 · · · n Oferta1 x11 x12 · · · x1n a1
2 x21 x22 · · · x2n a2
......
.... . .
......
m xm1 xm2 · · · xmn am
Demanda b1 b2 · · · bn
(2)
Necessitaremos tambem de um outro quadro envolvendo os custos:
1 2 · · · n Oferta1 c11 c12 · · · c1n a1
2 c21 c22 · · · c2n a2
......
.... . .
......
m cm1 cm2 · · · cmn am
Demanda b1 b2 · · · bn
(3)
Observemos que as linhas dos dois quadros dizem respeito as origens, enquanto ascolunas dizem respeito aos destinos.
Ao quadro (2) da-se o nome de quadro de solucoes e ao (3) de quadro de custos.
Ja sabemos que uma solucao inicial devera ser uma solucao compatıvel basica dosistema formado pelas restricoes do modelo (1) .
Exemplos de Modelo de Transporte
Oferta Igual Demanda Uma firma fabrica um determinado produto em quatrocidades A,B, C e D; o produto destina-se a tres centros de consumo 1, 2 e 3. Sabe-se que:
a) As cidades A,B, C e D dispoem respectivamente de 30, 20, 50 e 10 unidades doproduto.
b) Os centros de consumo 1, 2 e 3 necessitam respectivamente de 20, 40 e 50 unidades.
c) Custos unitarios de transporte em reais:

de A para 1 : 1de A para 2 : 2de A para 3 : 3de B para 1 : 10de B para 2 : nao existe estradade B para 3 : 8de C para 1 : 3de C para 2 : 4de C para 3 : 2de D para 1 : 5de D para 2 : 2de D para 3 : 1
Pede-se formular o modelo de transporte para se determinar o programa que tornamınimo o custo total de transporte entre as quatro cidades e os tres centros consumidores.
Seja xij (i = A,B, C,D e j = 1, 2, 3) a quantidade a ser transportada da cidade i parao centro consumidor j. Deseja-se que xB2 seja nulo pois nao ha estrada de B para 2. Paraforcar essa condicao no modelo basta fazer custo de B para 2 um numero M tao grandequanto se queira.
O modelo de transporte correspondente sera:
min Z = xA1 + 2xA2 + 3xA3 + 10xB1 + MxB2 + 8xB3 + 3xC1 + 4xC2 + 2xC3 + 5xD1 + 2xD2 + xD3⎧⎪⎪⎪⎪⎪⎪⎪⎪⎨⎪⎪⎪⎪⎪⎪⎪⎪⎩
xA1+ xA2+ xA3 = 30xB1+ xB2+ xB3 = 20
xC1+ xC2+ xC3 = 50xD1+ xD2+ xD3 = 10
xA1 +xB1 +xC1 +xD1 = 20xA2 +xB2 +xC2 +xD2 = 40
xA3 +xB3 +xC3 +xD3 = 50e xij ≥ 0 para i = A,B,C,D e j = 1, 2, 3.
Note-se que neste exemplo a oferta total (110 unidades do produto) e igual a suademanda total (110 unidades do produto).
Oferta Maior que Demanda Suponha-se que uma firma tenha de abastecer duascidades (1, 2) com produto estocado em dois armazens (A,B) .
As quantidades disponıveis em cada armazem sao:
Armazem A : 30Armazem B : 20Oferta total : 50 unidades
As quantidades requeridas em cada cidade sao:
Cidade 1 : 10Cidade 2 : 30Demanda total : 40 unidades

Os custos unitarios de transporte aparecem no quadro abaixo em reais:
1 2A 1, 0 2, 5B 2, 0 1, 5
Deseja-se obter um modelo de transporte que forneca um programa para tornar mınimoo custo total de transporte entre os armazens e as cidades.
Antes de se formular o modelo convem ressaltar que a oferta total e maior que a de-manda total, indicando que sera necessario se fazer estocagem do produto. Para equilibrara oferta com a demanda, pode-se criar uma cidade fictıcia (3) com demanda igual a 10unidades (diferenca entre oferta total e demanda total).
Seja xij (i = A,B e j = 1, 2, 3) a quantidade a ser transportada do armazem i para acidade j. As quantidades xA3 e xB3 devem ficar estocadas nos armazens A e B, pois naoexiste a cidade 3. Os custos e A para 3 (CA3) e de B para 3 (CB3) representam os custosunitarios de estocagem em cada armazem. Como o modelo classico de transporte nao levaem consideracao o problema da estocagem, far-se-a: CA3 = CB3 = 0.
O modelo entao sera:
min Z = xA1 + 2, 5xA2 + 2xB1 + 1, 5xB2
sujeito a
⎧⎪⎪⎪⎪⎨⎪⎪⎪⎪⎩xA1+ xA2+ xA3 = 30
xB1+ xB2+ xB3 = 20xA1 +xB1 = 10
xA2 +xB2 = 30xA3 +xB3 = 10
e xij ≥ 0 para i = A,B e j = 1, 2, 3.
Oferta Menor que Demanda Suponha-se o mesmo problema do ıtem anterior emque a quantidade disponıvel no armazem A fosse diminuida para 10 unidades.
Ter-se-ia, entao, uma oferta igual a 30 unidades e uma demanda igual a 40 unidades.Para se equilibrar o modelo pode-se imaginar um armazem fictıcio (C) com disponibilidadede 10 unidades (diferenca entre a demanda total e a oferta total).
Seja xij (i = A,B,C e j = 1, 2) a quantidade a ser transportada do armazem i para acidade j. As quantidades xC1 e xC2 nao deverao chegar nas cidades 1 e 2, pois nao existeo armazem C. Os custos CC1 e CC2 representam as multas unitarias por nao se satisfazeras demandas em 1 e 2. O modelo classico de transporte considera esses valores iguais azero.
O modelo seria:
min Z = xA1 + 2, 5xA2 + 2xB1 + 1, 5xB2
sujeito a
⎧⎪⎪⎪⎪⎨⎪⎪⎪⎪⎩xA1+ xA2 = 10
xB1+ xB2 = 20xC1+ xC2 = 10
xA1 +xB1 +xC1 = 10xA2 +xB2 +xC2 = 30
e xij ≥ 0 para i = A,B, C e j = 1, 2.

10.1 Obtencao da Solucao Inicial
Sabemos que uma solucao inicial devera ser uma solucao viavel basica do sistema formadopelas restricoes do modelo. Esta solucao sera um ponto extremo do conjunto das solucoescompatıveis daquele modelo.
Precisamos saber quantas equacoes do sistema do modelo sao independentes. Provare-mos entao o seguinte teorema:
Teorema 10.1 Qualquer equacao do sistema formado pelas restricoes do modelo (1) podeser obtida por uma combinacao linear das demais, e existem exatamente m+n−1 equacoesindependentes naquele sistema.
Demonstracao: Temos
MinZ =m∑
i=1
n∑j=1
cijxij
n∑j=1
xij = ai (i = 1, ..., m)
m∑i=1
xij = bj (j = 1, ..., n)
Reescrevendo as restricoes:
⎧⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎨⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎩
x11 + ... + x1n = a1
x21 + ... + x2n = a2
. . ....
xm1 + ... + xmn = am
x11 + x21 + ... + xm1 = b1
+ x22 + ... + xm2 = b2
. . ....
x1n + + x2n + ... + xmn = bn
em notacao matricial A =
⎡⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣
1 ... 1 0 ... 0 ... 0 ... 00 ... 0 1 ... 1 ... 0 ... 0...
. . ....
.... . .
.... . .
... ......
0 ... 0 0 ... 0 ... 1 ... 11 ... 0 1 ... 0 ... 1 ... 0...
. . ....
.... . .
... ......
. . ....
0 ... 1 0 ... 1 ... 0 ... 1
⎤⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦(m+n)×(mn)
e de forma
mais simples A =
⎡⎢⎢⎢⎢⎢⎣1n 0 ... 00 1n ... 0...
.... . .
...0 0 ... 1n
In In ... In
⎤⎥⎥⎥⎥⎥⎦(m+n)×(mn)

As linhas de A se dividem naturalmente em dois conjuntos: As m primeiras linhasprovenientes das restricoes de origem que chamaremos de linhas de origem e as ultimasn linhas provenientes das restricoes de destino que chamaremos de linhas de destino.Observe que, adicionando-se as m primeiras linhas de A se obtem 1mn e, adicionando-seas ultimas n linhas de A, tambem se obtem 1mn. Assim, a soma das m primeiras linhas deA menos a soma das n ultimas linhas de A, produz um vetor nulo. Consequentemente, oposto de A e menor que m+n. Na verdade, o posto de A e m+n− 1, como mostraremospelo calculo de um determinante de ordem m + n − 1 em A que nao se anula. Considerea matriz D formada de A, tomando-se as colunas n, 2n, ..., mn, 1, ..., n − 1 e as linhas1, ..., m + n − 1 (omitiremos a ultima linha). Entao,
|D| =
∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣
⎡⎢⎢⎢⎣1 0 · · · 00 1 · · · 0...
.... . .
...0 0 · · · 1
⎤⎥⎥⎥⎦m×m
⎡⎢⎢⎢⎣1 1 · · · 10 0 · · · 0...
.... . .
...0 0 · · · 0
⎤⎥⎥⎥⎦m×n−1⎡⎢⎢⎢⎣
0 0 · · · 00 0 · · · 0...
.... . .
...0 0 · · · 0
⎤⎥⎥⎥⎦n−1×m
⎡⎢⎢⎢⎣1 0 · · · 00 1 · · · 0...
.... . .
...0 0 · · · 1
⎤⎥⎥⎥⎦(n−1)×(n−1)
∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣= 1
Ja que D e uma matriz quadrada de ordem m + n − 1, o posto de A e m + n − 1.Denotemos as linhas de origem de A por si, 1 = 1, ..., m, e as linhas de destino de A
por dj, j = 1, ..., n. Entao, a relacao que expressa a dependencia linear entre as linhas deA pode ser escrita como
m∑i=1
si −n∑
j=1
dj = 0 (4)
E importante notar que o coeficiente de qualquer vetor-linha ou e +1 ou e −1. Istosignifica que qualquer linha de A pode ser expressa como uma combinacao linear dasm + n − 1 linhas restantes. Em outras palavras, podemos suprimir qualquer linha de A,e a matriz (m + n − 1) × (mn) resultante tera posto m + n − 1. Isto segue do fato desabermos que pelo menos um conjunto de m + n − 1 linhas e linearmente independente,e que por (4) a linha restante pode substituir qualquer linha do conjunto e tambem seralinearmente independente.
O que acabamos de provar e equivalente a dizer que apenas m+n−1 das restricoes de(1) sao independentes. Alem disso, podemos remover qualquer restricao, e as m + n − 1restricoes restantes serao independentes.
A consequencia desse teorema e que a base sera formada por (m + n − 1) variaveisbasicas e nao por (m + n) variaveis, como era de se esperar.
10.2 Identificacao de Solucao Compatıvel Basica
Uma solucao do modelo de transportes precisa satisfazer as seguintes condicoes para sercompatıvel basica:
a) Ser compatıvel, isto e, satisfazer todas as restricoes do modelo.b) Conter (m + n − 1) variaveis basicas.
c) Nao formar, no quadro de solucoes, circuito fechado com as suas variaveis basicaspois, caso contrario a solucao compatıvel encontrada podera ser obtida por uma com-binacao convexa de outras duas solucoes compatıveis quaisquer do problema.
A Regra do Noroeste e o Processo do Custo Mınimo, sao dois processos de obtencao desolucao inicial para o modelo de transportes. Verificaremos que ambos fornecem solucoescompatıveis basicas, pois satisfazem as tres condicoes anteriores.
Regra do Noroeste O processo sera aplicado no quadro de solucoes segundo os seguintespassos:
1) Comece pela celula superior esquerda.
2) Coloque nessa celula a maior quantidade permitida pela oferta e demanda corre-spondentes.
3) Atualize os valores da oferta e da demanda que foram modificadas no passo 2.
4) Siga para a celula da direita se houver alguma oferta restante e volte ao passo 2.Caso contrario, siga para a celula inferior e volte ao passo 2.
O processo estara concluıdo quando a celula inferior direita do quadro de solucoes foralcancada.
Note que na Regra do Noroeste a solucao inicial e obtida sem levar em consideracaoos custos dos transportes (cij) , isto e, depende exclusivamente das ofertas das origens edas demandas dos destinos.
Processo do Custo Mınimo Este processo fornece uma solucao inicial que dependenao somente dos valores das ofertas e das demandas, como tambem dos custos dostransportes, visando, obter-se uma solucao inicial mais proxima da otima do que aquelafornecida pela Regra do Noroeste.
Os seguintes passos devem ser seguidos nos quadros de solucoes e de custos:
1) Localize no quadro de custos o menor custo cij que nao tenha oferta ou demandanula.
2) Coloque na celula correspondente do quadro de solucoes a maior quantidade per-mitida pela oferta e demanda correspondentes.
3) Atualize os valores da oferta e da demanda que foram modificados pelo passo 2 evolte ao passo 1.
O processo continua ate que sejam esgotadas as ofertas de todas as origens e supridasas demandas de todos os destinos.
11 Como achar a solucao otima
Na obtencao da solucao otima do modelo de transportes serao seguidos os mesmos passosdo metodo simplex.
Obtencao da Funcao Objetivo em funcao das variaveis nao-basicas
Seja o modelo de transportes:

Z −m∑
i=1
n∑j=1
cijxij = 0
n∑j=1
xij = a1 (i = 1, ...,m)
m∑i=1
xij = bj (j = 1, ..., n)
xij ≥ 0 (i = 1, ..., m) (j = 1, ..., n)
E necessario eliminar as variaveis basicas da funcao objetivo e, para isso, deve-se somara ela multiplos das restricoes do modelo. Multiplicaremos ui(i = 1, ..., m) nas restricoesde oferta e vj (j = 1, ..., n) nas restricoes de demanda e somaremos a funcao objetivo.
Z −m∑
i=1
n∑j=1
cijxij +m∑
i=1
ui
n∑j=1
xij +n∑
j=1
vj
m∑i=1
xij =m∑
i=1
uiai +n∑
j=1
bjvj , ou ainda,
Z =m∑
i=1
n∑j=1
xij (cij − ui − vj) +m∑
i=1
uiai +n∑
j=1
bjvj.
Como queremos que as m+n−1 variaveis basicas sejam eliminadas da funcao objetivoentao, conhecida uma solucao compatıvel basica, deve-se ter:
cij − ui − vj = 0
Os multiplos ui e vj, num total de m + n incognitas, serao determinados atraves dasm + n − 1 equacoes cij − ui − vj = 0, uma para cada variavel basica. Como se trata deum sistema de m + n− 1 equacoes a m + n incognitas, podemos resolve-lo arbitrando umvalor qualquer (zero, por exemplo) para uma das incognitas e determinando o valor dasdemais.
Encontrando os valores xij podemos obter a funcao objetivo somente em funcao dasvariaveis nao-basicas e continuar o processo do metodo simplex.
Os casos especiais aqui sao os mesmos encontrados no metodo simplex, e sao resolvidosde forma analoga.
Exemplo 11.1 Consideremos o seguinte quadro de custos de um modelo de transportes:
(cij) 1 2 3 4 Oferta1 10 7 6 5 92 2 8 9 1 103 11 12 8 4 8
Demanda 7 6 10 4
Vamos obter uma solucao inicial pelo Processo do Custo Mınimo, mas antes e necessariocertificar que a soma das ofertas (9 + 10 + 8 = 27) e igual a soma das demandas (7 + 6 + 10 + 4 = 27) .
Agora, podemos seguir os passos do processo:O menor custo do quadro do exemplo que nao tem oferta ou demanda nula e a entrada
(2, 4). Colocaremos nessa entrada 4 unidades que e a maior quantidade permitida pelasoferta e demanda correspondentes. O novo valor para a demanda do destino 4 e zero(eliminando o destino 4 do quadro de custos) e da oferta da origem 2 e 6.
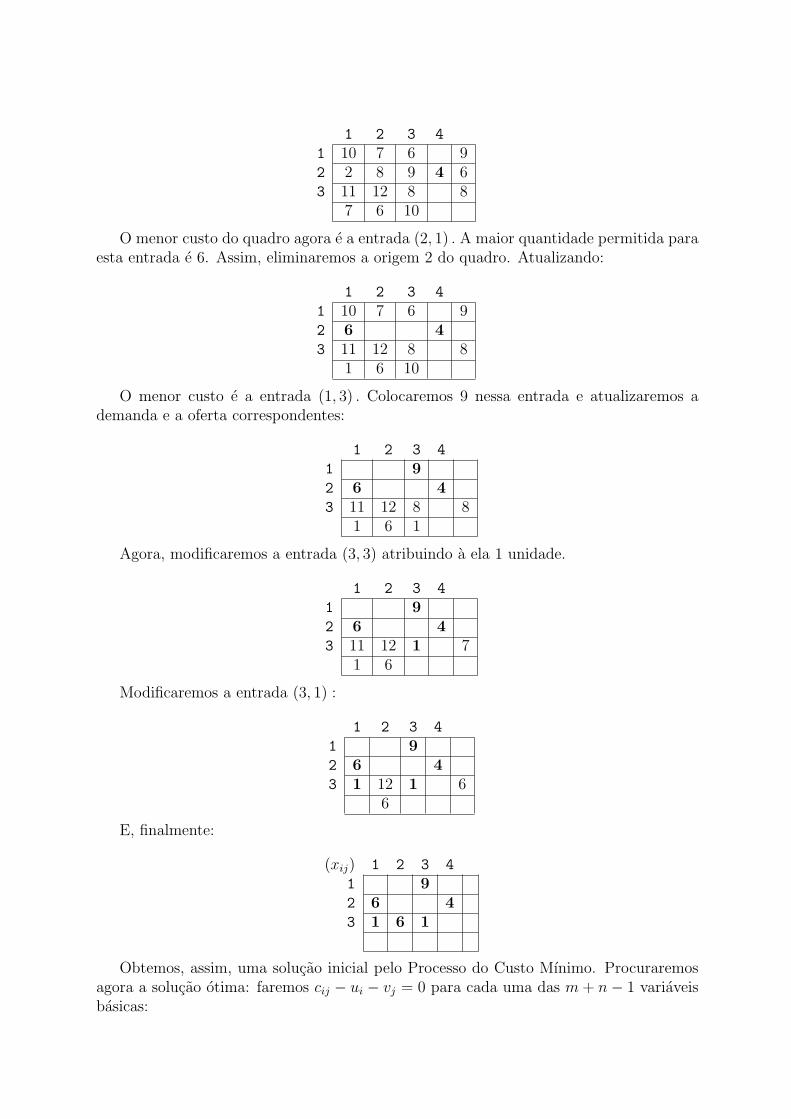
1 2 3 4
1 10 7 6 92 2 8 9 4 63 11 12 8 8
7 6 10
O menor custo do quadro agora e a entrada (2, 1) . A maior quantidade permitida paraesta entrada e 6. Assim, eliminaremos a origem 2 do quadro. Atualizando:
1 2 3 4
1 10 7 6 92 6 43 11 12 8 8
1 6 10
O menor custo e a entrada (1, 3) . Colocaremos 9 nessa entrada e atualizaremos ademanda e a oferta correspondentes:
1 2 3 4
1 92 6 43 11 12 8 8
1 6 1
Agora, modificaremos a entrada (3, 3) atribuindo a ela 1 unidade.
1 2 3 4
1 92 6 43 11 12 1 7
1 6
Modificaremos a entrada (3, 1) :
1 2 3 4
1 92 6 43 1 12 1 6
6
E, finalmente:
(xij) 1 2 3 4
1 92 6 43 1 6 1
Obtemos, assim, uma solucao inicial pelo Processo do Custo Mınimo. Procuraremosagora a solucao otima: faremos cij − ui − vj = 0 para cada uma das m + n − 1 variaveisbasicas:

x13 : 6 − u1 − v3 = 0
x21 : 2 − u2 − v1 = 0
x24 : 1 − u2 − v4 = 0
x31 : 11 − u3 − v1 = 0
x32 : 12 − u3 − v2 = 0
x33 : 8 − u3 − v3 = 0
Fazendo, por exemplo, u1 = 0 :v3 = 6; u3 = 2; v2 = 10; v1 = 9; u2 = −7; v4 = 8.Calculando,3∑
i=1
uiai = 0.9 + (−7) .10 + 2.8 = −54
4∑j=1
vjbj = 9.7 + 10.6 + 6.10 + 8.4 = 215
Variaveis nao-basicas:
coeficiente na funcao objetivo x11 : c11 − u1 − v1 = 10 − 0 − 9 = 1
x12 : c12 − u1 − v2 = 7 − 0 − 10 = −3
x14 : c14 − u1 − v4 = 5 − 0 − 8 = −3
x22 : c22 − u2 − v2 = 8 − (−7) − 10 = 5
x23 : c23 − u2 − v3 = 9 − (−7) − 6 = 10
x34 : c34 − u3 − v4 = 4 − 2 − 8 = −6
Teremos, usando Z =3∑
i=1
4∑j=1
xij (cij − ui − vj) +3∑
i=1
uiai +4∑
j=1
vjbj que
Z = x11 − 3x12 + 5x22 + 10x23 − 3x14 − 6x34 + 161.Observemos que a solucao nao e otima pois, como queremos minimizar Z se entrarmos
com as variaveis x12, x14 ou x34 o valor da funcao objetivo decresce.Podemos fazer o que fizemos ate agora utilizando o quadro de custos:
Notemos que os valores das variaveis basicas foram representados por um ponto (•) ,simbolizando os seus valores nulos.
Obtida a funcao objetivo verificamos que a solucao nao e otima pois existem algunscoeficientes negativos para as variaveis nao-basicas.

A variavel que deve entrar na base e x34 pois apresenta o menor coeficiente negativo.Sabemos, pelo metodo simplex, que deve sair da base a variavel que se anular primeiro.
Isso deve ser feito no quadro de solucoes da seguinte maneira:
a) Imaginar que a variavel x34 entrara na base com o maior valor θ ≥ 0 possıvel.b) Somar e subtrair θ aos valores de certas variaveis basicas de tal modo a se fechar
um circuito que garanta a compatibilidade da nova solucao. No quadro anterior, ao sesomar θ na celula (3, 4) precisou-se subtraı-lo na celula (3, 1) , soma-lo na celula (2, 2) e,finalmente, subtraı-lo na celula (2, 4) . O circuito fechado formado pelos θ e sempre unico.
c) Determinar o maior valor permitido a θ (denominado θmax), isto e, o valor de θ quegera a variavel basica que se anula mais rapidamente. Do quadro anterior tem-se:
x21 = 6 + θx24 = 4 − θ ≥ 0 ∴ θ ≤ 4x31 = 1 − θ ≥ 0 ∴ θ ≤ 1entao, θmax = 1 e x31 e a variavel que sai da base pois se anula primeiro. As demais
variaveis nao se alteram.Assim, o novo quadro de solucoes sera:
1 2 3 4
1 9 92 7 3 103 6 1 1 8
7 6 10 4
Para verificar se essa solucao e otima temos que calcular os ui e vi e reiniciar o processo:
Como alguns dos cij − ui − vj calculados sao negativos a solucao nao e otima. Logo,devemos entrar com a variavel x12 na base pois essa variavel apresenta o menor coeficientenegativo.
Fazendo o circuito fechado como indicado na figura abaixo, tem-se:
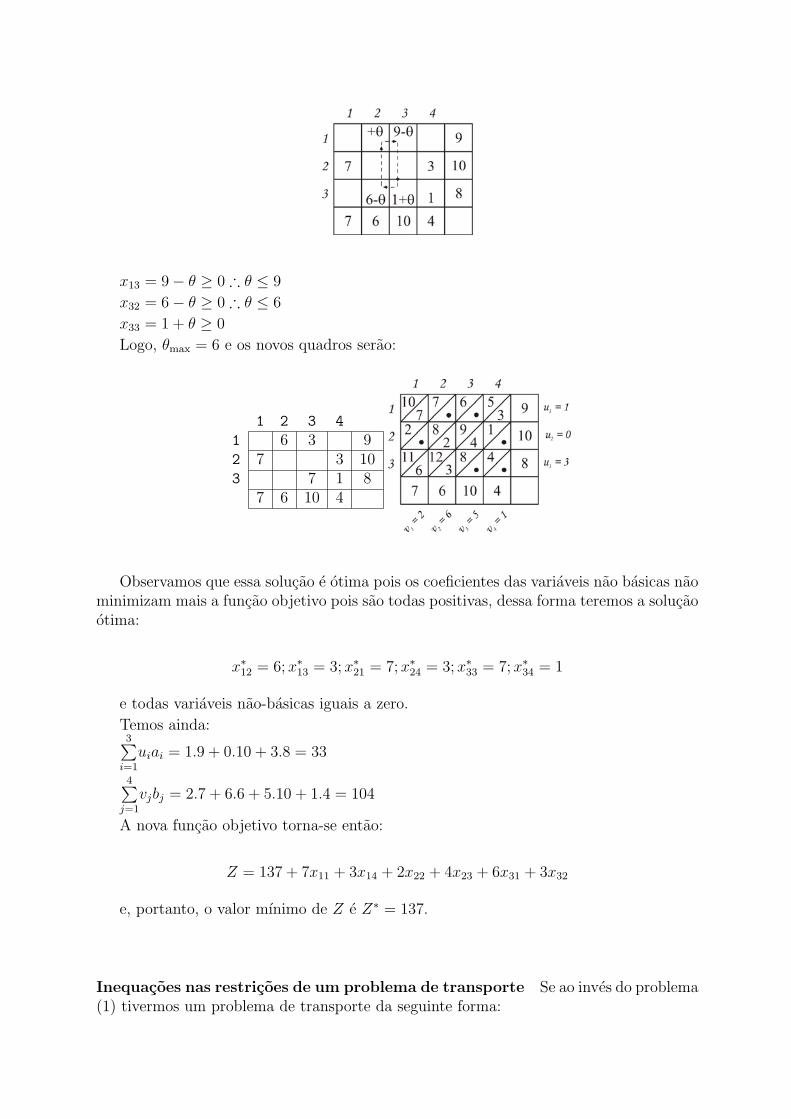
x13 = 9 − θ ≥ 0 ∴ θ ≤ 9
x32 = 6 − θ ≥ 0 ∴ θ ≤ 6
x33 = 1 + θ ≥ 0
Logo, θmax = 6 e os novos quadros serao:
1 2 3 4
1 6 3 92 7 3 103 7 1 8
7 6 10 4
Observamos que essa solucao e otima pois os coeficientes das variaveis nao basicas naominimizam mais a funcao objetivo pois sao todas positivas, dessa forma teremos a solucaootima:
x∗12 = 6; x∗
13 = 3; x∗21 = 7; x∗
24 = 3; x∗33 = 7; x∗
34 = 1
e todas variaveis nao-basicas iguais a zero.
Temos ainda:3∑
i=1
uiai = 1.9 + 0.10 + 3.8 = 33
4∑j=1
vjbj = 2.7 + 6.6 + 5.10 + 1.4 = 104
A nova funcao objetivo torna-se entao:
Z = 137 + 7x11 + 3x14 + 2x22 + 4x23 + 6x31 + 3x32
e, portanto, o valor mınimo de Z e Z∗ = 137.
Inequacoes nas restricoes de um problema de transporte Se ao inves do problema(1) tivermos um problema de transporte da seguinte forma:

min Z =∑i,j
cijxij
m∑i=1
n−1∑j=1
xij ≤m∑
i=1
ai
m∑i=1
n−1∑j=1
xij =n−1∑j=1
bj
xij ≥ 0 para todos i, j
Por uma razao que se tornara brevemente clara, usamos aqui n − 1 ao inves de n. Asprimeiras m restricoes contem agora um sinal ≤ ao inves de igualdade. Fisicamente, istosimplesmente significa que mais unidades podem estar disponıveis nas origens do que saorequeridas nos destinos.
As inequacoes podem ser convertidas para igualdades pela adicao de m variaveis defolga. Estas variaveis de folga serao escritas como xin, i = 1, ..., m. Entao as restricoes setornam
m∑i=1
n−1∑j=1
xij +m∑
i=1
xin =m∑
i=1
ai
m∑i=1
n−1∑j=1
xij =n−1∑j=1
bj
Isolando xin teremos:
m∑i=1
xin =m∑
i=1
ai −n−1∑j=1
bj = bn
Aqui temos o interessante e intuitivamente obvio resultado de que a folga total, istoe, a soma das variaveis de folga, permanece constante e e a diferenca, denotada por bn,entre as disponibilidades de origem e os consumos de destino. Para construirmos o quadrosimplesmente adicionamos uma coluna a mais, isto e, um destino adicional para a ”folga”.Intuitivamente, esta aproximacao e esperada ja que as unidades nao transportadas podemser consideradas como transportadas por si so, a custos nulos. Conforme usual, o custocin associado a variavel de folga xin e zero.
Considere agora o seguinte problema:

max Z =∑i,j
cijxij
m−1∑i=1
n∑j=1
xij =m−1∑i=1
ai
m−1∑i=1
n∑j=1
xij ≥n∑
j=1
bj
xij ≥ 0 para todos i, j
Introduza as variaveis de folga xmj, j = 1, ..., n e note que
−n∑
j=1
xmj =n∑
j=1
bj −m−1∑i=1
ai = am ≤ 0
As restricoes podem portanto ser convertidas no conjunto de equacoes
m−1∑i=1
n∑j=1
xij =m−1∑i=1
ai
−n∑
j=1
xmj = am
m−1∑i=1
n∑j=1
xij −n∑
j=1
xmj =n∑
j=1
bj
Aqui uma nova dificuldade surge porque os coeficientes das variaveis de folga sao −1ao inves de 1. Novamente, e facil mostrar que todos os menores da matriz dos coeficientestem os valores ±1, 0. O metodo computacional e exatamente o mesmo de antes, exceto queusamos zmj = −um−vj para calcular zmj −cmj. Para resolver este problema, adicionamosmais uma linha a um quadro, isto e, uma origem adicional contendo o negativo do excessototal.
Degeneracao Uma solucao factıvel para um problema de transporte e degenerado semenos que m + n − 1 dos xij forem positivos. A degeneracao pode ser encontrada noprocesso de determinacao da solucao basica factıvel inicial ou em alguma iteracao sub-sequente. Do ponto de vista pratico, a degeneracao nao causa qualquer dificuldade, damesma forma que nao causou qualquer dificuldade real no metodo simplex.
12 O Problema no Sistema de Transporte Coletivo
em Uberlandia
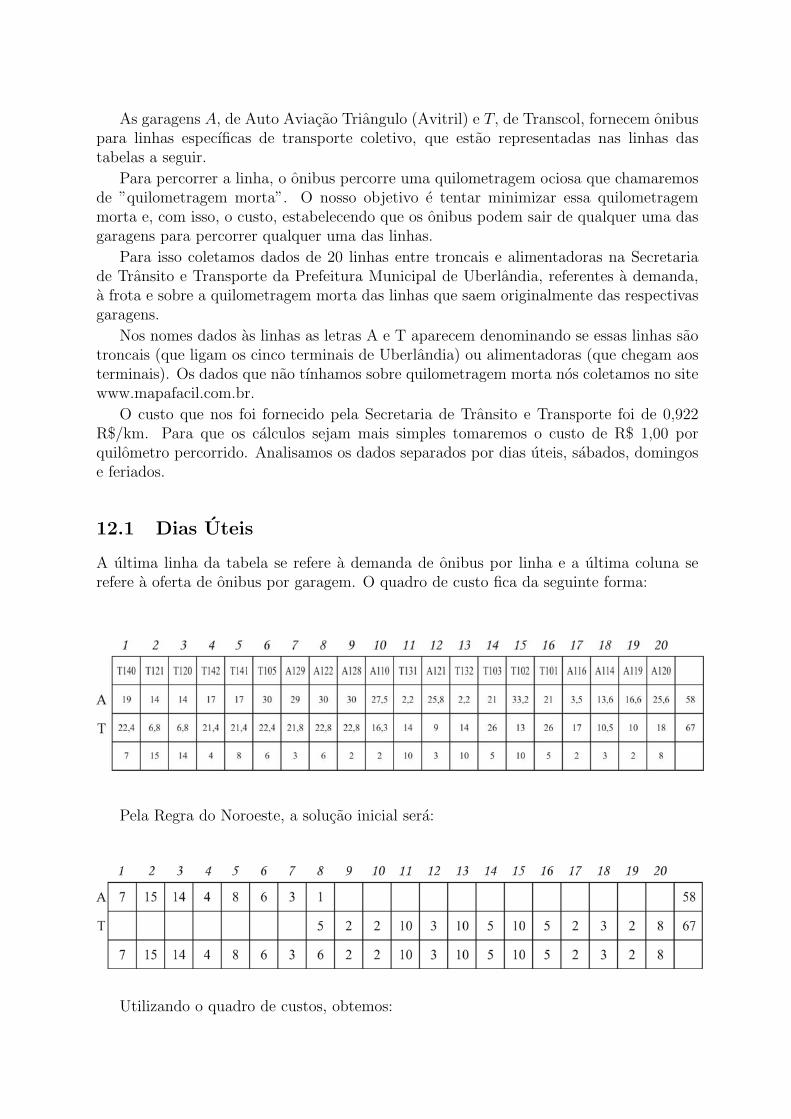
As garagens A, de Auto Aviacao Triangulo (Avitril) e T, de Transcol, fornecem onibuspara linhas especıficas de transporte coletivo, que estao representadas nas linhas dastabelas a seguir.
Para percorrer a linha, o onibus percorre uma quilometragem ociosa que chamaremosde ”quilometragem morta”. O nosso objetivo e tentar minimizar essa quilometragemmorta e, com isso, o custo, estabelecendo que os onibus podem sair de qualquer uma dasgaragens para percorrer qualquer uma das linhas.
Para isso coletamos dados de 20 linhas entre troncais e alimentadoras na Secretariade Transito e Transporte da Prefeitura Municipal de Uberlandia, referentes a demanda,a frota e sobre a quilometragem morta das linhas que saem originalmente das respectivasgaragens.
Nos nomes dados as linhas as letras A e T aparecem denominando se essas linhas saotroncais (que ligam os cinco terminais de Uberlandia) ou alimentadoras (que chegam aosterminais). Os dados que nao tınhamos sobre quilometragem morta nos coletamos no sitewww.mapafacil.com.br.
O custo que nos foi fornecido pela Secretaria de Transito e Transporte foi de 0,922R$/km. Para que os calculos sejam mais simples tomaremos o custo de R$ 1,00 porquilometro percorrido. Analisamos os dados separados por dias uteis, sabados, domingose feriados.
12.1 Dias Uteis
A ultima linha da tabela se refere a demanda de onibus por linha e a ultima coluna serefere a oferta de onibus por garagem. O quadro de custo fica da seguinte forma:
Pela Regra do Noroeste, a solucao inicial sera:
Utilizando o quadro de custos, obtemos:
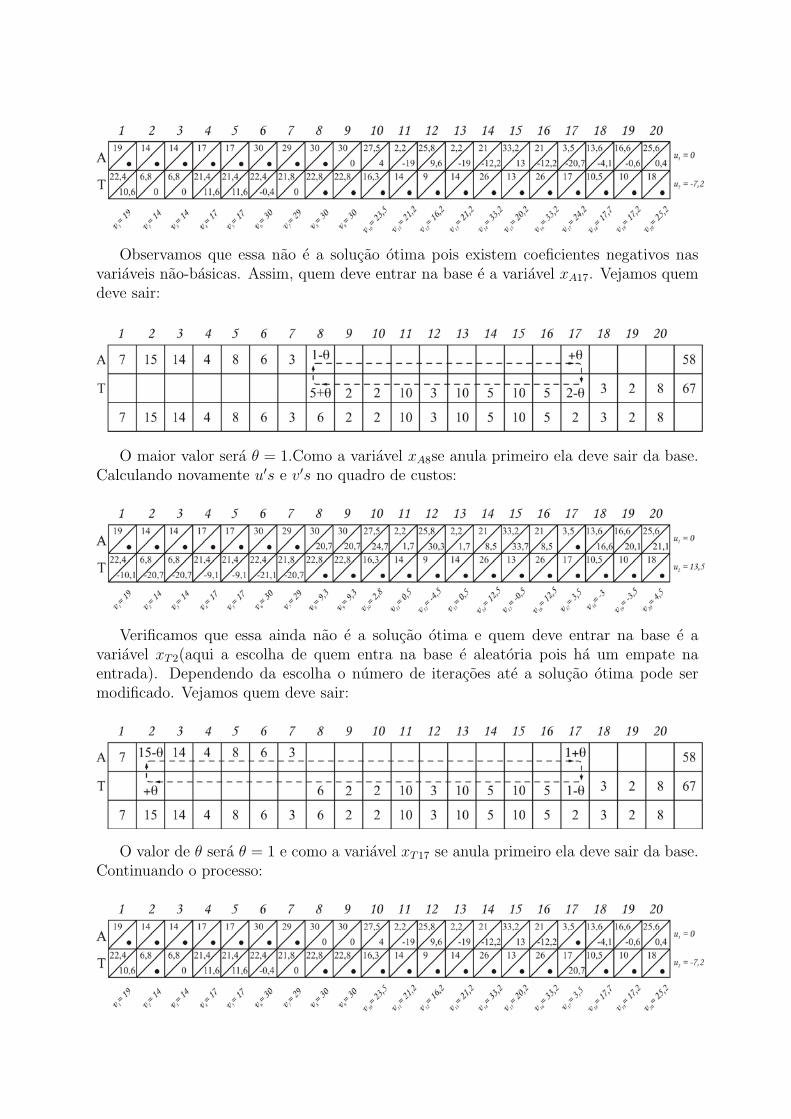
Observamos que essa nao e a solucao otima pois existem coeficientes negativos nasvariaveis nao-basicas. Assim, quem deve entrar na base e a variavel xA17. Vejamos quemdeve sair:
O maior valor sera θ = 1.Como a variavel xA8se anula primeiro ela deve sair da base.Calculando novamente u′s e v′s no quadro de custos:
Verificamos que essa ainda nao e a solucao otima e quem deve entrar na base e avariavel xT2(aqui a escolha de quem entra na base e aleatoria pois ha um empate naentrada). Dependendo da escolha o numero de iteracoes ate a solucao otima pode sermodificado. Vejamos quem deve sair:
O valor de θ sera θ = 1 e como a variavel xT17 se anula primeiro ela deve sair da base.Continuando o processo:
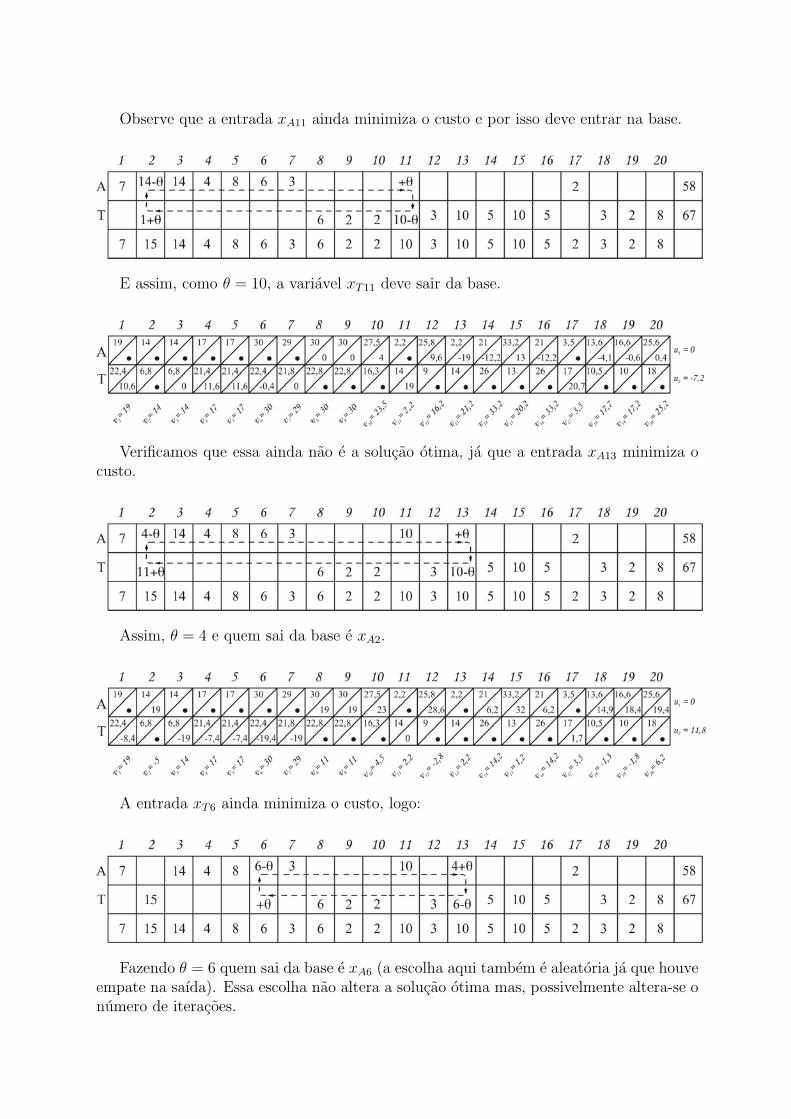
Observe que a entrada xA11 ainda minimiza o custo e por isso deve entrar na base.
E assim, como θ = 10, a variavel xT11 deve sair da base.
Verificamos que essa ainda nao e a solucao otima, ja que a entrada xA13 minimiza ocusto.
Assim, θ = 4 e quem sai da base e xA2.
A entrada xT6 ainda minimiza o custo, logo:
Fazendo θ = 6 quem sai da base e xA6 (a escolha aqui tambem e aleatoria ja que houveempate na saıda). Essa escolha nao altera a solucao otima mas, possivelmente altera-se onumero de iteracoes.
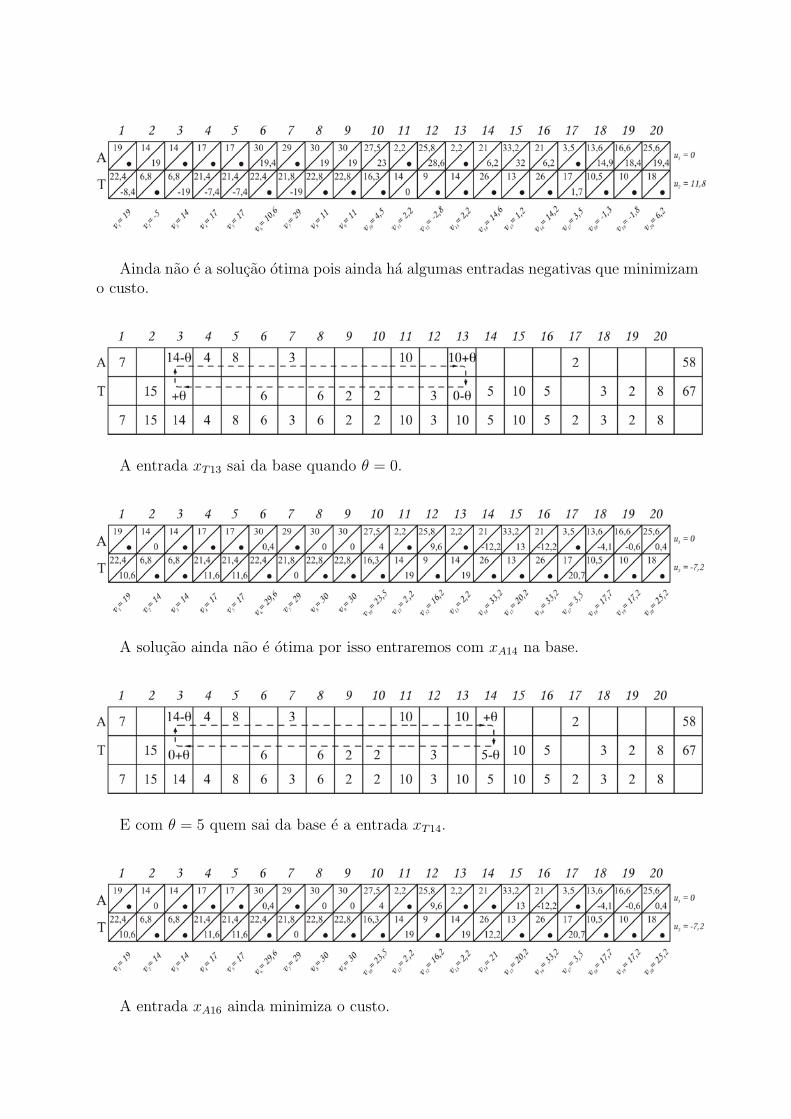
Ainda nao e a solucao otima pois ainda ha algumas entradas negativas que minimizamo custo.
A entrada xT13 sai da base quando θ = 0.
A solucao ainda nao e otima por isso entraremos com xA14 na base.
E com θ = 5 quem sai da base e a entrada xT14.
A entrada xA16 ainda minimiza o custo.

E fazendo θ = 5 quem sai da base e xT16.
A entrada xA18 minimiza o custo.
E com θ = 3 quem sai da base e xT18.
A entrada xA19 ainda e negativa.
Fazendo θ = 1 a entrada xA3 sai da base.
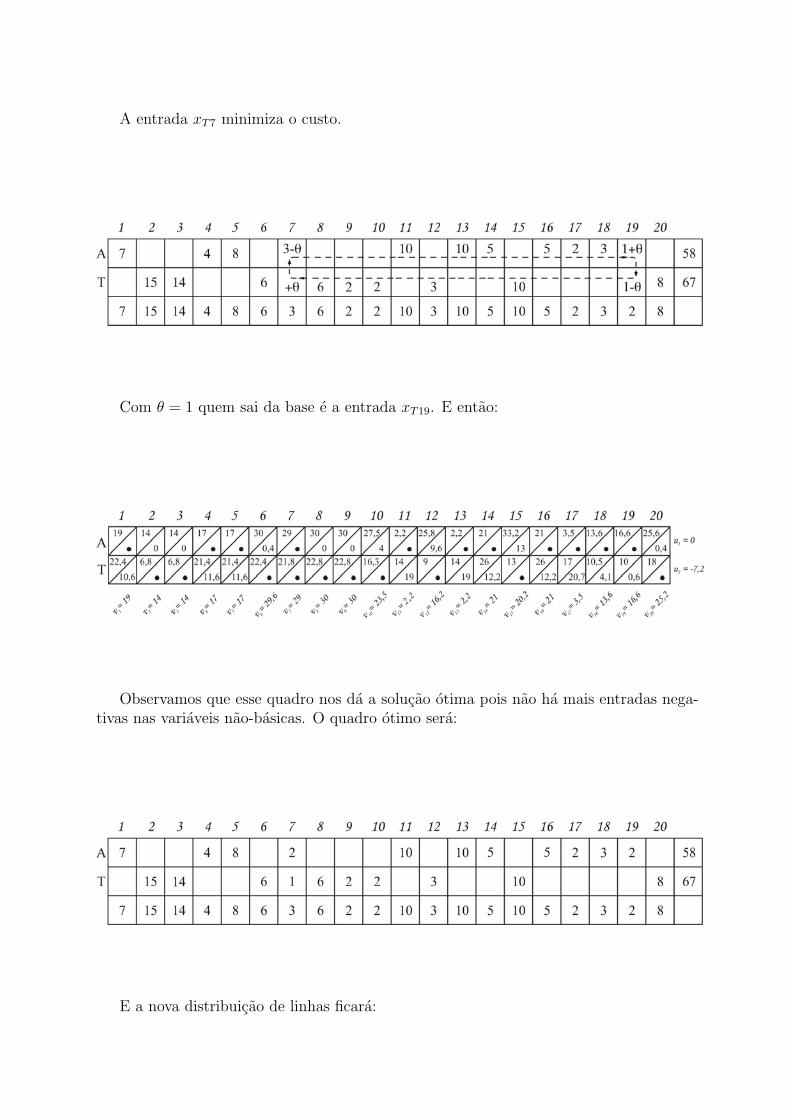
A entrada xT7 minimiza o custo.
Com θ = 1 quem sai da base e a entrada xT19. E entao:
Observamos que esse quadro nos da a solucao otima pois nao ha mais entradas nega-tivas nas variaveis nao-basicas. O quadro otimo sera:
E a nova distribuicao de linhas ficara:
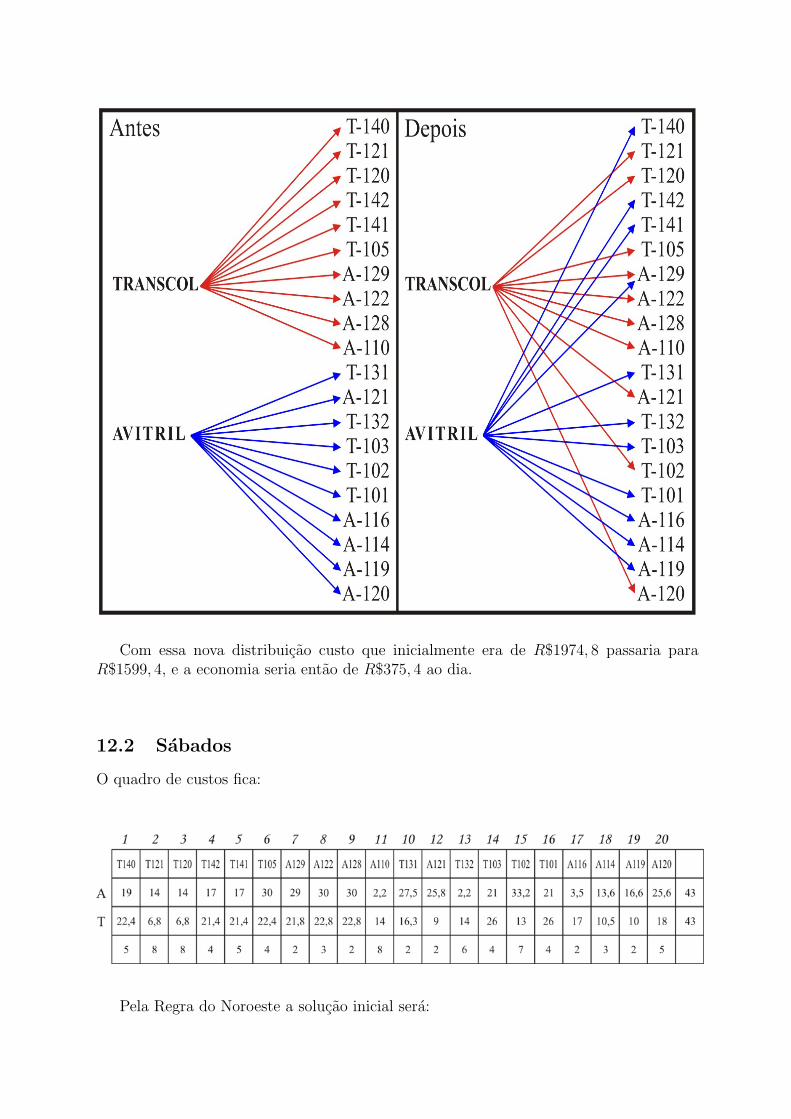
Com essa nova distribuicao custo que inicialmente era de R$1974, 8 passaria paraR$1599, 4, e a economia seria entao de R$375, 4 ao dia.
12.2 Sabados
O quadro de custos fica:
Pela Regra do Noroeste a solucao inicial sera:
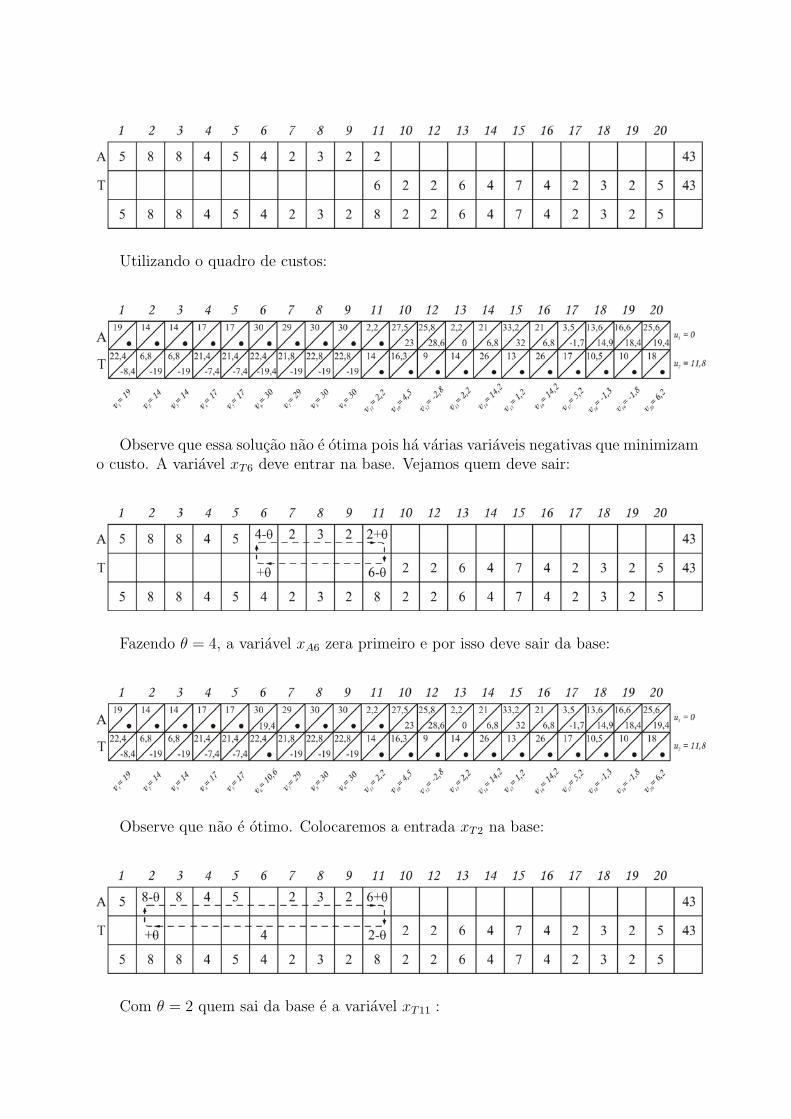
Utilizando o quadro de custos:
Observe que essa solucao nao e otima pois ha varias variaveis negativas que minimizamo custo. A variavel xT6 deve entrar na base. Vejamos quem deve sair:
Fazendo θ = 4, a variavel xA6 zera primeiro e por isso deve sair da base:
Observe que nao e otimo. Colocaremos a entrada xT2 na base:
Com θ = 2 quem sai da base e a variavel xT11 :
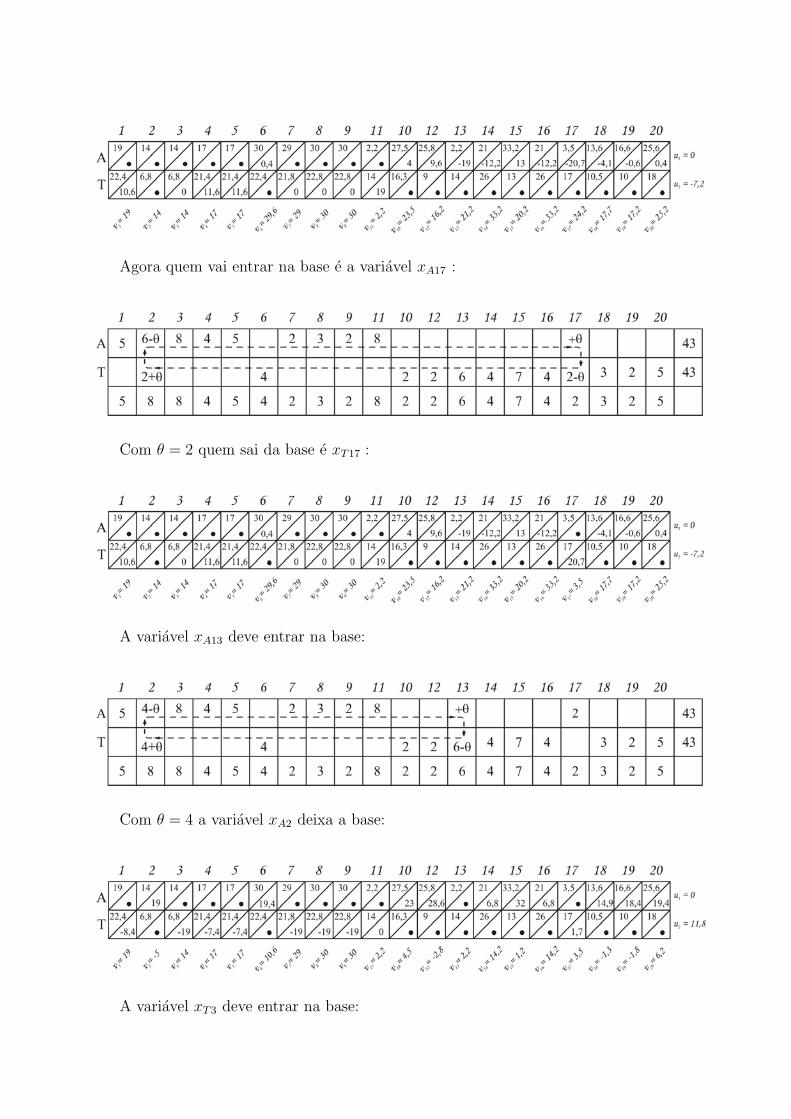
Agora quem vai entrar na base e a variavel xA17 :
Com θ = 2 quem sai da base e xT17 :
A variavel xA13 deve entrar na base:
Com θ = 4 a variavel xA2 deixa a base:
A variavel xT3 deve entrar na base:
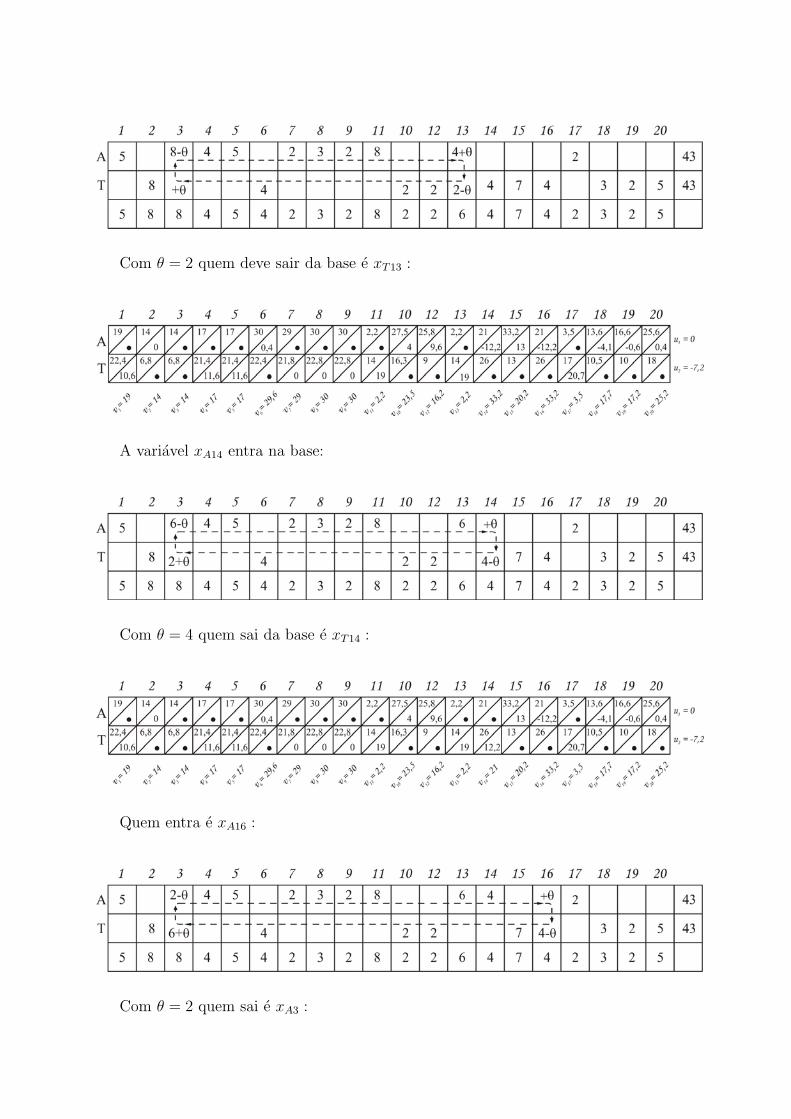
Com θ = 2 quem deve sair da base e xT13 :
A variavel xA14 entra na base:
Com θ = 4 quem sai da base e xT14 :
Quem entra e xA16 :
Com θ = 2 quem sai e xA3 :
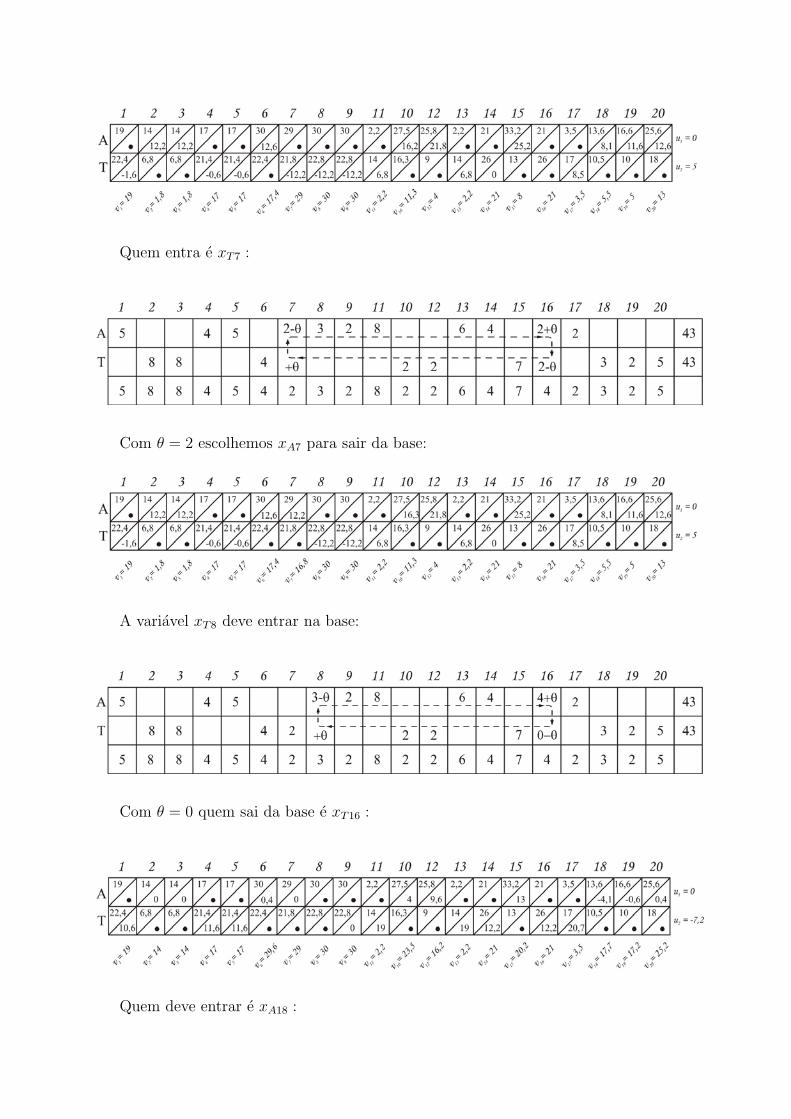
Quem entra e xT7 :
Com θ = 2 escolhemos xA7 para sair da base:
A variavel xT8 deve entrar na base:
Com θ = 0 quem sai da base e xT16 :
Quem deve entrar e xA18 :
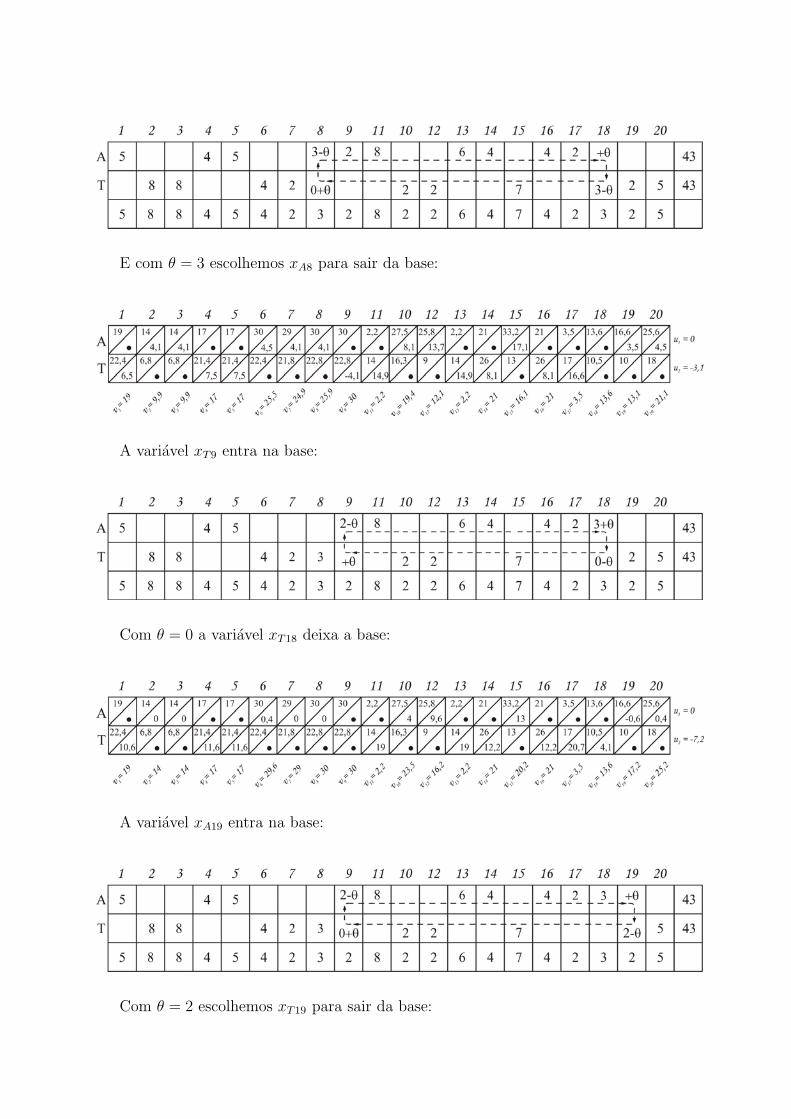
E com θ = 3 escolhemos xA8 para sair da base:
A variavel xT9 entra na base:
Com θ = 0 a variavel xT18 deixa a base:
A variavel xA19 entra na base:
Com θ = 2 escolhemos xT19 para sair da base:
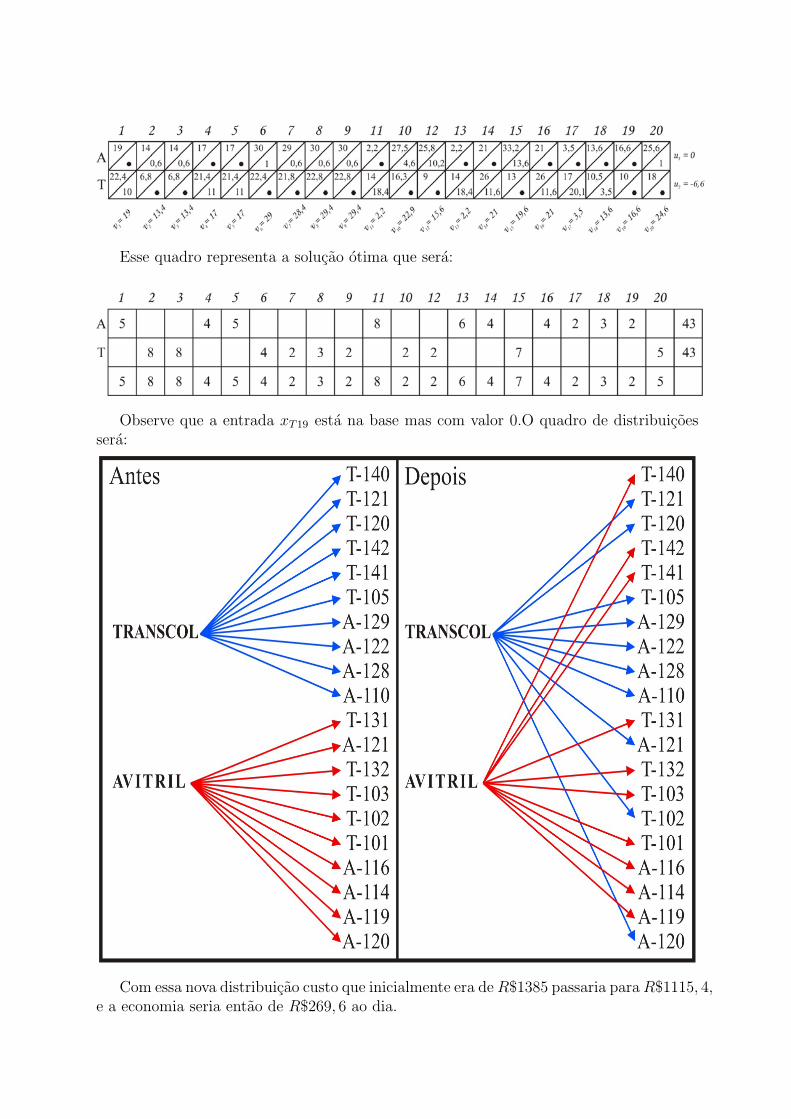
Esse quadro representa a solucao otima que sera:
Observe que a entrada xT19 esta na base mas com valor 0.O quadro de distribuicoessera:
Com essa nova distribuicao custo que inicialmente era de R$1385 passaria para R$1115, 4,e a economia seria entao de R$269, 6 ao dia.
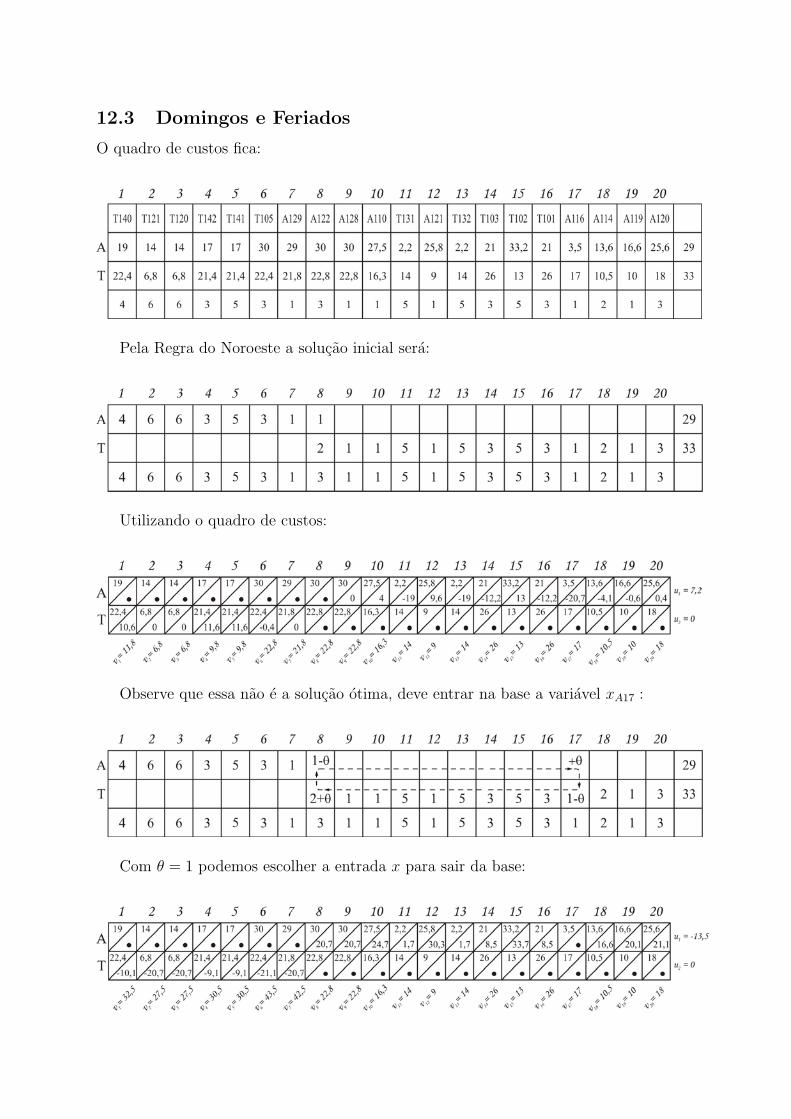
12.3 Domingos e Feriados
O quadro de custos fica:
Pela Regra do Noroeste a solucao inicial sera:
Utilizando o quadro de custos:
Observe que essa nao e a solucao otima, deve entrar na base a variavel xA17 :
Com θ = 1 podemos escolher a entrada x para sair da base:
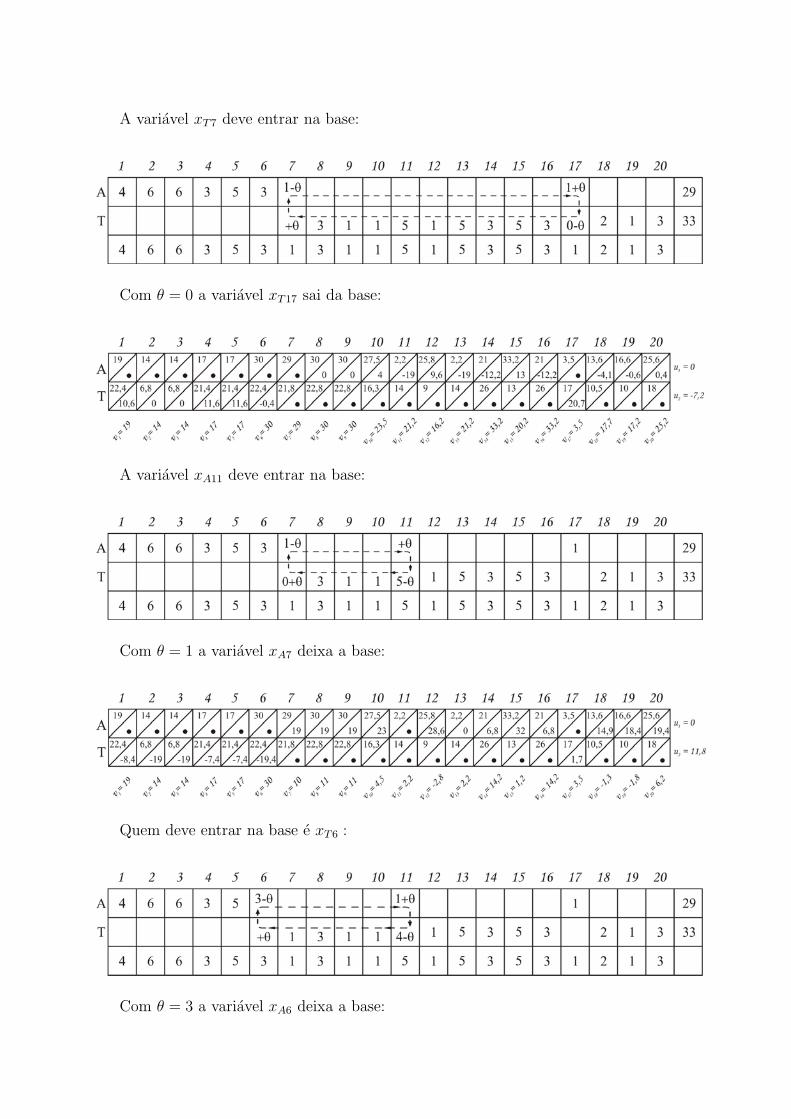
A variavel xT7 deve entrar na base:
Com θ = 0 a variavel xT17 sai da base:
A variavel xA11 deve entrar na base:
Com θ = 1 a variavel xA7 deixa a base:
Quem deve entrar na base e xT6 :
Com θ = 3 a variavel xA6 deixa a base:
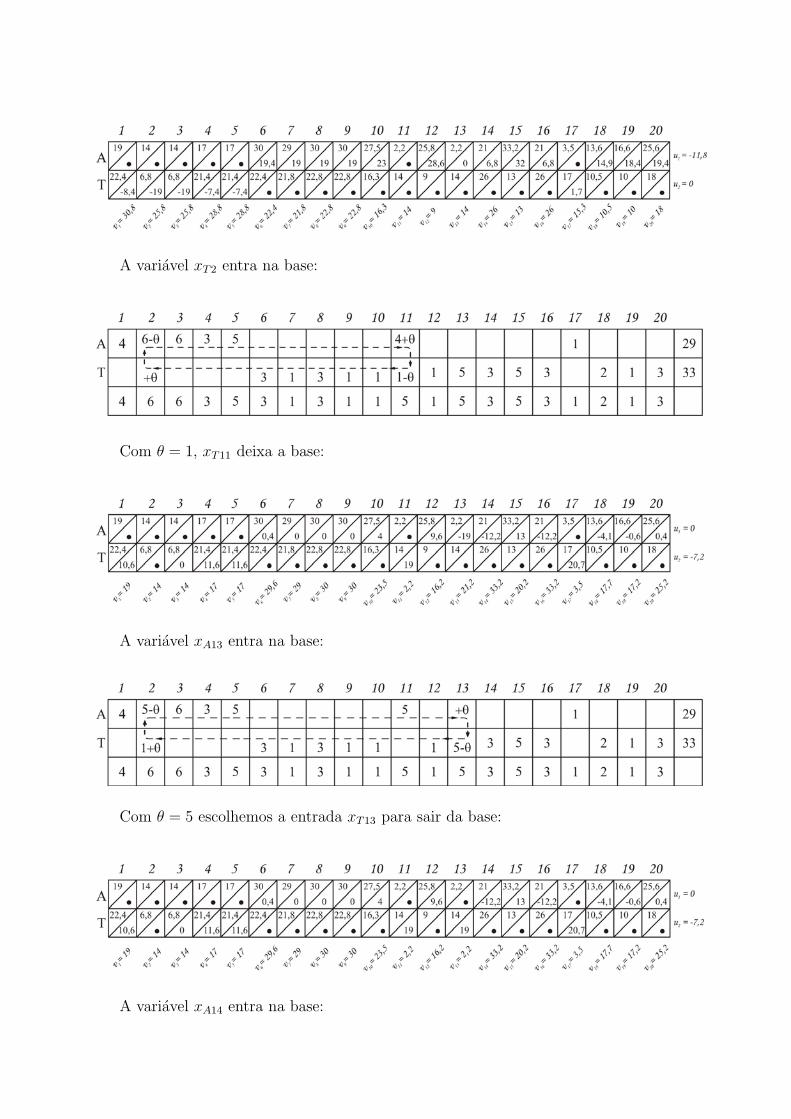
A variavel xT2 entra na base:
Com θ = 1, xT11 deixa a base:
A variavel xA13 entra na base:
Com θ = 5 escolhemos a entrada xT13 para sair da base:
A variavel xA14 entra na base:
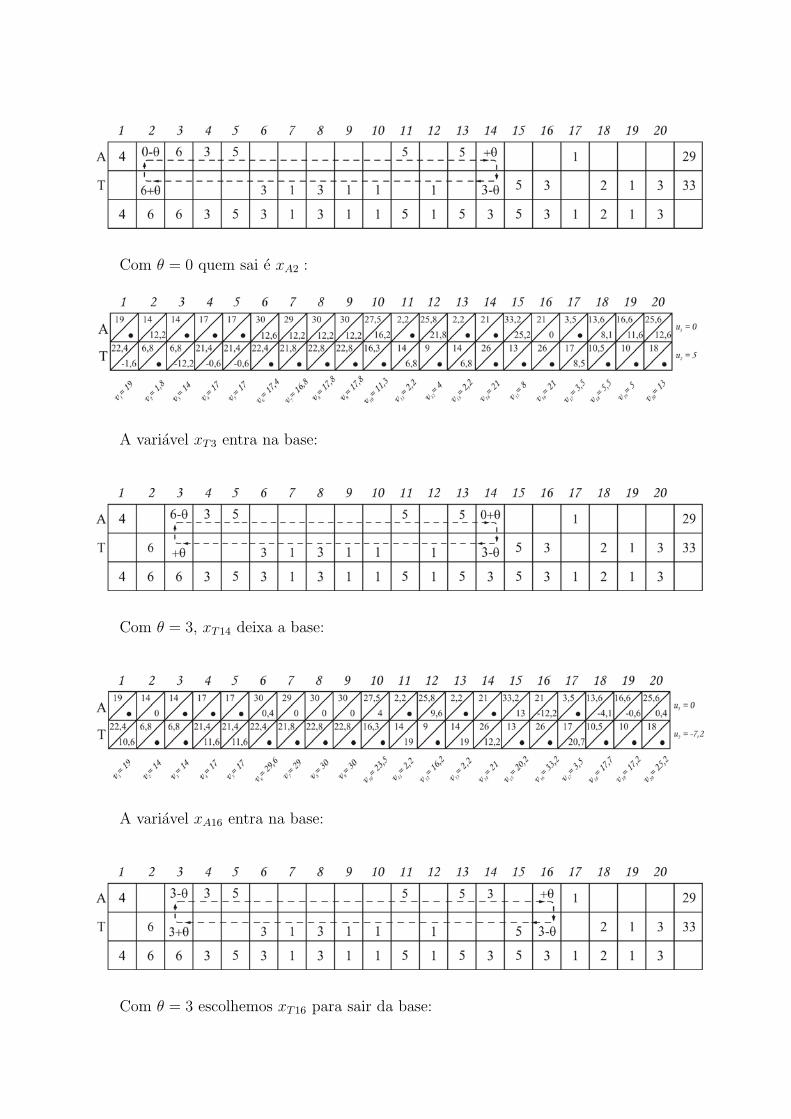
Com θ = 0 quem sai e xA2 :
A variavel xT3 entra na base:
Com θ = 3, xT14 deixa a base:
A variavel xA16 entra na base:
Com θ = 3 escolhemos xT16 para sair da base:
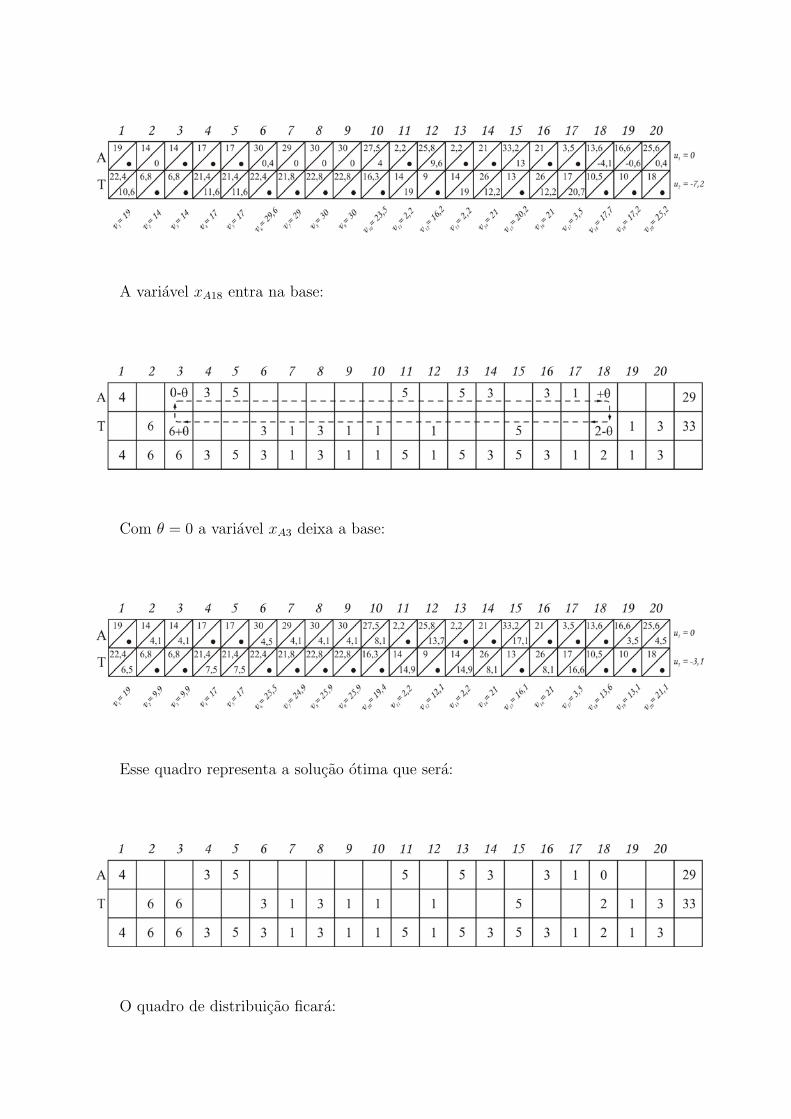
A variavel xA18 entra na base:
Com θ = 0 a variavel xA3 deixa a base:
Esse quadro representa a solucao otima que sera:
O quadro de distribuicao ficara:
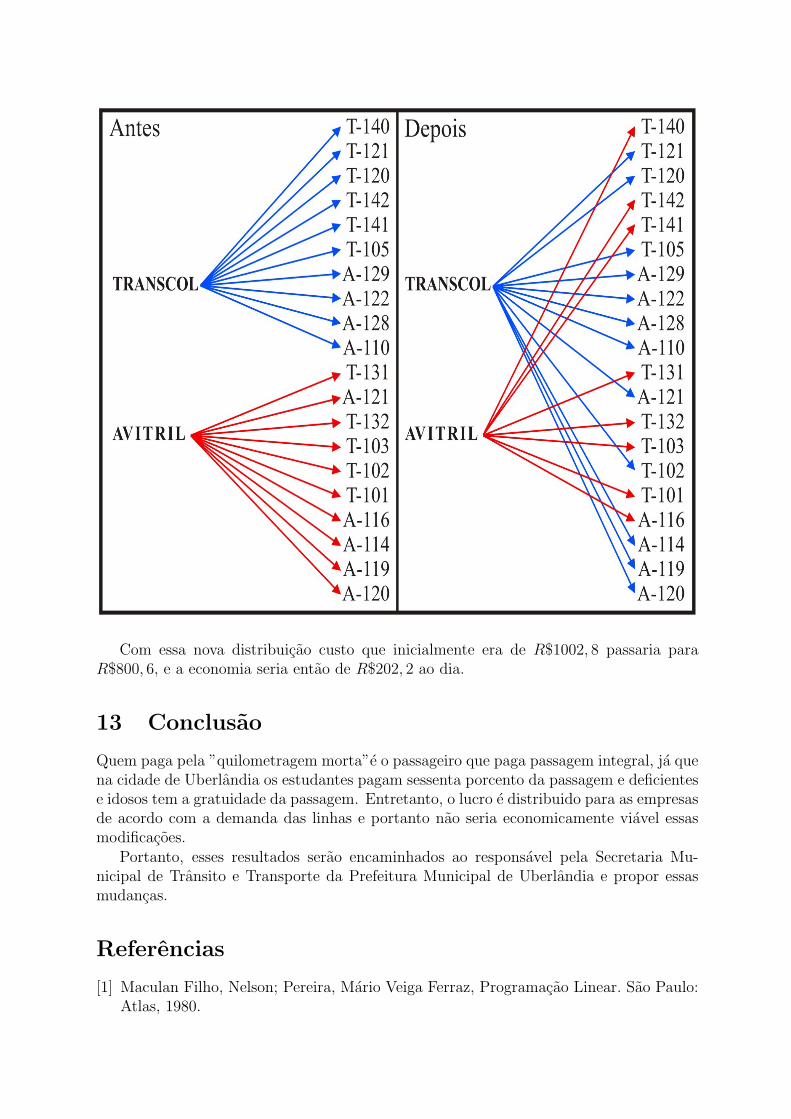
Com essa nova distribuicao custo que inicialmente era de R$1002, 8 passaria paraR$800, 6, e a economia seria entao de R$202, 2 ao dia.
13 Conclusao
Quem paga pela ”quilometragem morta”e o passageiro que paga passagem integral, ja quena cidade de Uberlandia os estudantes pagam sessenta porcento da passagem e deficientese idosos tem a gratuidade da passagem. Entretanto, o lucro e distribuido para as empresasde acordo com a demanda das linhas e portanto nao seria economicamente viavel essasmodificacoes.
Portanto, esses resultados serao encaminhados ao responsavel pela Secretaria Mu-nicipal de Transito e Transporte da Prefeitura Municipal de Uberlandia e propor essasmudancas.
Referencias
[1] Maculan Filho, Nelson; Pereira, Mario Veiga Ferraz, Programacao Linear. Sao Paulo:Atlas, 1980.

[2] Hadley, G., Programacao Linear. Rio de Janeiro: Editora Guanabara Dois S. A., 1982.
[3] Bodrini, J. L.; Costa, S. I. R.; Figueiredo, V. L. & Wetzler, H. G. Algebra Linear. 3a.ed. Sao Paulo: Editora Harbra, 1980.
[4] Puccini, Abelardo de Lima, Introducao a Programacao Linear. Rio de Janeiro: LivrosTecnicos e Cientıficos Editora S. A., 1978.
[5] Bregalda, Paulo Fabio, Introducao a Programacao Linear. Rio de Janeiro: Campus,1981.

Um Texto Sobre Curvas Parametrizadas noPlano
Laıs Bassame Rodrigues∗ Edson Agustini†
Faculdade de Matematica - Famat
Universidade Federal de Uberlandia - Ufu - MG
Setembro de 2006
Resumo
Este trabalho e um texto sobre curvas parametrizadas planas, assunto geralmenteabordado no inıcio de cursos de Geometria Diferencial de graduacao. O TeoremaFundamental das Curvas e demonstrado.
Palavras-chave: Geometria Diferencial, Curvas Parametrizadas Planas, Mu-danca de Parametros, Reparametrizacao, Curvatura, Evoluta, Involuta, TeoremaFundamental das Curvas Planas.
1 Curvas Planas
Definicao: Uma curva parametrizada do plano e uma aplicacao α :]a, b[→ R2 sendo ]a, b[um intervalo aberto da reta:
α : ]a, b[ −→ R2
t �−→ α (t) = (x (t) , y (t)),
sendo:x : ]a, b[ −→ R
t �−→ x (t)e
y : ]a, b[ −→ Rt �−→ y (t)
.
Dizemos que α e contınua se as funcoes x e y forem contınuas.
Exemplo 1: A aplicacao:
α : ]0, 2π[ −→ R2
t �−→ α (t) = (sen t, cos t)
e uma curva parametrizada do plano (circunferencia menos um ponto).
∗[email protected] Orientanda do Programa de Educacao Tutorial da Faculdade deMatematica (PetMat) de jan/06 a dez/06.
†[email protected] Professor orientador.

(-1,0) = (3 /2)� � x
y
0
��
�
�2
�(0,-1) = ( )� �
(1,0) = ( /2)� �
As funcoes componentes:
x : ]0, 2π[ −→ Rt �−→ x (t) = sen t
ey : ]0, 2π[ −→ R
t �−→ y (t) = cos t
sao contınuas. Logo, α e contınua.
Observacoes:(i) A circunferencia (menos um ponto) esbocada acima e o traco de α, ou seja, e a imagemde α:
Traco (α) = Im (α) = {α (t) ∈ R2 | t ∈ ]a, b[} ⊂ R2.
(ii) O grafico de α e o conjunto:
Gα = {(t, α (t)) ∈ R3 | t ∈ ]a, b[} ⊂ R3
que, obviamente, e diferente do traco de α.(iv) Sempre que for conveniente iremos estender o domınio de um curva parametrizadado plano para um conjunto aberto de R.
Exemplo 2: A aplicacao:
α : R −→ R2
t �−→ α (t) =
{ (t, 1
t
); se t �= 0
(0, 0) ; se t = 0
e uma curva parametrizada do plano (hiperbole mais um ponto).
x
y
�
�
�2
As funcoes componentes:⎧⎪⎪⎪⎪⎪⎪⎨⎪⎪⎪⎪⎪⎪⎩
x : R −→ R
t �−→ x (t) =
{t se t �= 00 se t = 0
y : R −→ R
t �−→{
1t
se t �= 00 se t = 0

equivalem a: ⎧⎪⎪⎪⎪⎨⎪⎪⎪⎪⎩x : R −→ R
t �−→ x (t) = tque e contınua
y : R −→ R
t �−→{
1t
se t �= 00 se t = 0
que e descontınua.
Logo, α e descontınua.
Definicao: Uma curva parametrizada do plano:
α : ]a, b[ −→ R2
t �−→ α (t) = (x (t) , y (t))
e diferenciavel de classe Ck; k ≥ 1 se cada uma das funcoes x e y for diferenciavel declasse Ck. Analogamente, α e de classe C0 se x e y forem contınuas. Finalmente, α e declasse C∞ se x e y forem de classe C∞.
Exemplo 3: Consideremos a curva:
α : R −→ R2
t �−→ α (t) = (t, |t|)
x
y
Temos:x : R −→ R
t �−→ x (t) = te de classe C∞.
Entretanto:y : R −→ R
t �−→ y (t) = |t| nao e de classe C1.
De fato:y : R −→ R
t �−→ |t| =
{t se t ≥ 0−t se t < 0
,
desta forma:
limt→0−
y(t)−y(0)t−0
= limt→0−
−tt
= −1
limt→0+
y(t)−y(0)t−0
= limt→0+
tt= 1
⎫⎬⎭ ⇒ � limt→0
y (t) − y (0)
t − 0= y′ (0) .
Logo, y nao e derivavel em t = 0, ou seja, y nao e de classe C1 (mas e de classe C0).Conclusao: α nao e de classe C1 e, portanto, nao e de classe C∞. No entanto, α e de
classe C0.
Exemplo 4: Consideremos:
β : R −→ R2
t �−→ β (t) =
{(t2, t2) se t ≥ 0
(−t2, t2) se t < 0.
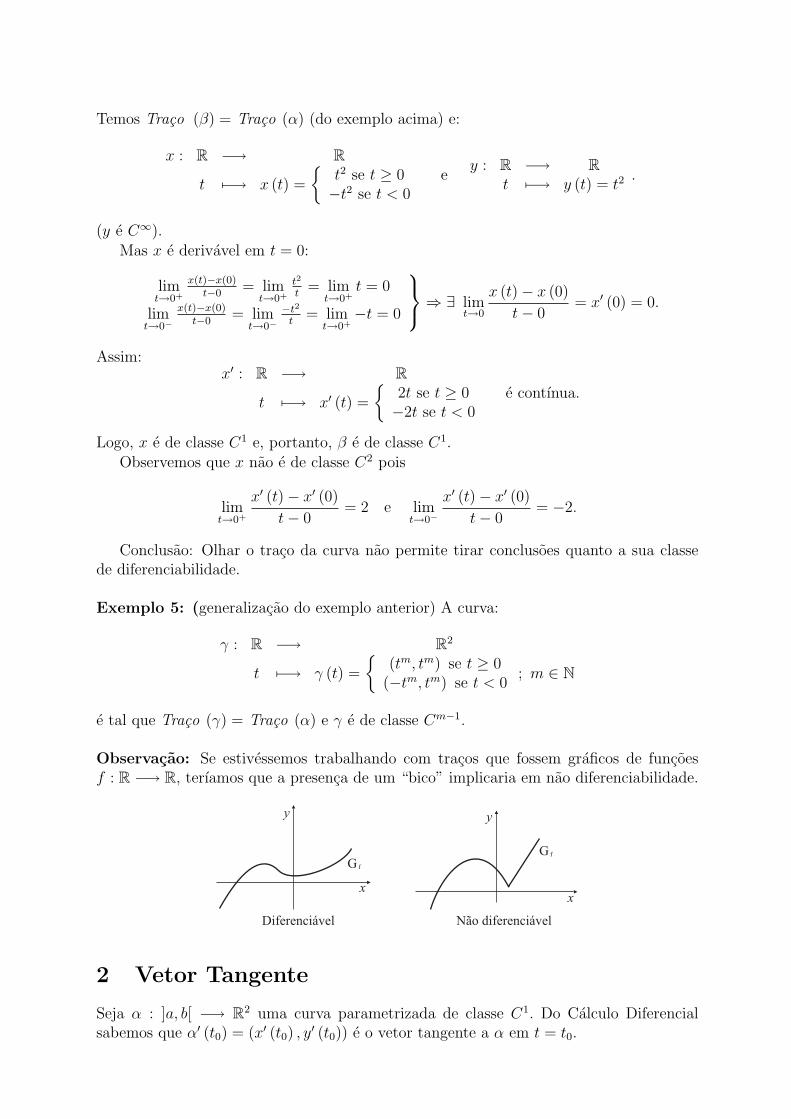
Temos Traco (β) = Traco (α) (do exemplo acima) e:
x : R −→ R
t �−→ x (t) =
{t2 se t ≥ 0−t2 se t < 0
ey : R −→ R
t �−→ y (t) = t2.
(y e C∞).Mas x e derivavel em t = 0:
limt→0+
x(t)−x(0)t−0
= limt→0+
t2
t= lim
t→0+t = 0
limt→0−
x(t)−x(0)t−0
= limt→0−
−t2
t= lim
t→0+−t = 0
⎫⎬⎭ ⇒ ∃ limt→0
x (t) − x (0)
t − 0= x′ (0) = 0.
Assim:x′ : R −→ R
t �−→ x′ (t) =
{2t se t ≥ 0−2t se t < 0
e contınua.
Logo, x e de classe C1 e, portanto, β e de classe C1.Observemos que x nao e de classe C2 pois
limt→0+
x′ (t) − x′ (0)
t − 0= 2 e lim
t→0−
x′ (t) − x′ (0)
t − 0= −2.
Conclusao: Olhar o traco da curva nao permite tirar conclusoes quanto a sua classede diferenciabilidade.
Exemplo 5: (generalizacao do exemplo anterior) A curva:
γ : R −→ R2
t �−→ γ (t) =
{(tm, tm) se t ≥ 0
(−tm, tm) se t < 0; m ∈ N
e tal que Traco (γ) = Traco (α) e γ e de classe Cm−1.
Observacao: Se estivessemos trabalhando com tracos que fossem graficos de funcoesf : R −→ R, terıamos que a presenca de um “bico” implicaria em nao diferenciabilidade.
x
y
G f
x
y
G f
Diferenciável Não diferenciável
2 Vetor Tangente
Seja α : ]a, b[ −→ R2 uma curva parametrizada de classe C1. Do Calculo Diferencialsabemos que α′ (t0) = (x′ (t0) , y′ (t0)) e o vetor tangente a α em t = t0.
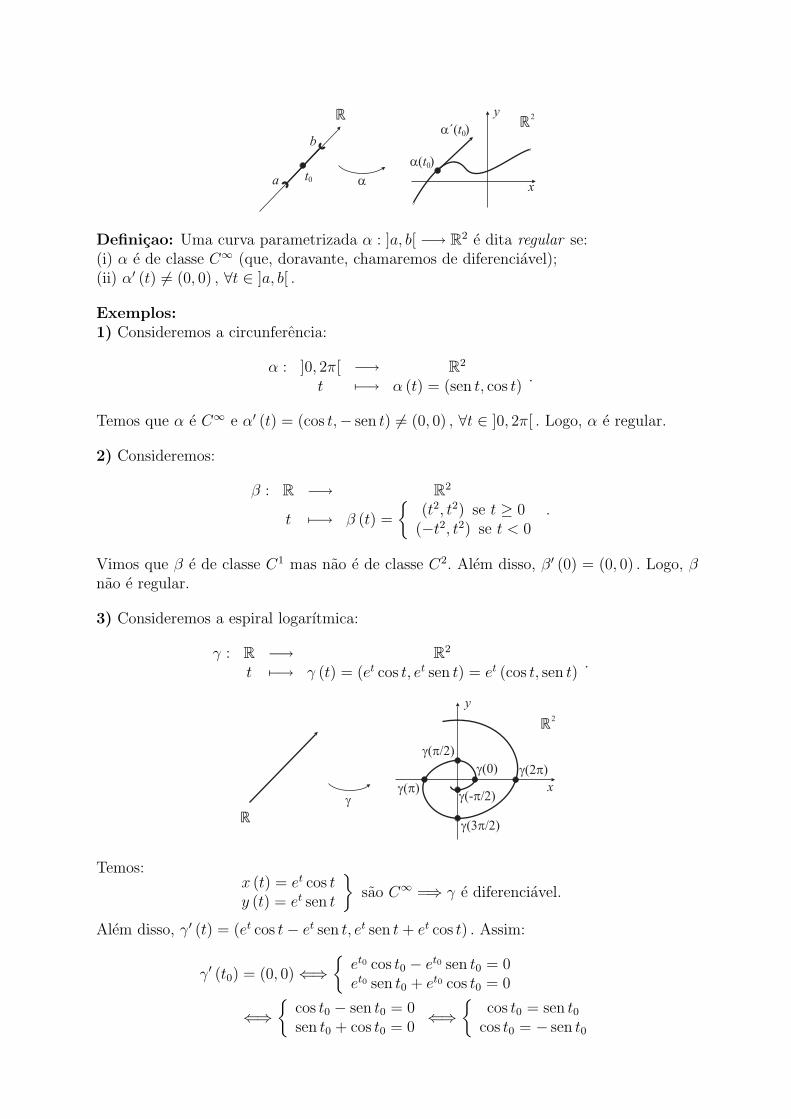
x
y
a
b
�
�
�2
�( )t0
�´( )t0
t0
Definicao: Uma curva parametrizada α : ]a, b[ −→ R2 e dita regular se:(i) α e de classe C∞ (que, doravante, chamaremos de diferenciavel);(ii) α′ (t) �= (0, 0) , ∀t ∈ ]a, b[ .
Exemplos:1) Consideremos a circunferencia:
α : ]0, 2π[ −→ R2
t �−→ α (t) = (sen t, cos t).
Temos que α e C∞ e α′ (t) = (cos t,− sen t) �= (0, 0) , ∀t ∈ ]0, 2π[ . Logo, α e regular.
2) Consideremos:
β : R −→ R2
t �−→ β (t) =
{(t2, t2) se t ≥ 0
(−t2, t2) se t < 0.
Vimos que β e de classe C1 mas nao e de classe C2. Alem disso, β′ (0) = (0, 0) . Logo, βnao e regular.
3) Consideremos a espiral logarıtmica:
γ : R −→ R2
t �−→ γ (t) = (et cos t, et sen t) = et (cos t, sen t).
x
y
�
�
�2
� �( /2)
� �(3 /2)
�(0)
� �(- /2)� �( )
� �(2 )
Temos:x (t) = et cos ty (t) = et sen t
}sao C∞ =⇒ γ e diferenciavel.
Alem disso, γ′ (t) = (et cos t − et sen t, et sen t + et cos t) . Assim:
γ′ (t0) = (0, 0) ⇐⇒{
et0 cos t0 − et0 sen t0 = 0et0 sen t0 + et0 cos t0 = 0
⇐⇒{
cos t0 − sen t0 = 0sen t0 + cos t0 = 0
⇐⇒{
cos t0 = sen t0cos t0 = − sen t0

ou seja, sen t0 = cos t0 = 0, que e uma contradicao. Por conseguinte, γ′ (t) �= (0, 0) ,∀t ∈ R. Logo, γ e regular.
4) Consideremos a tratriz:
α : ]0, π[ −→ R2
t �−→ α (t) =(sen t, cos t + ln
(tan t
2
)) .
x
y
0
�
��
tratriz
� �( /2) = (1,0)�/2
Observemos que t ∈ ]0, π[ ⇐⇒ t
2∈
]0,
π
2
[. Como sen t; cos t; tan t
2; ln
(tan τ
2
)estao
definidas para t ∈ ]0, π[ e sao C∞, da Analise sabemos que composta de funcoes C∞ eC∞. Logo, α e C∞.
Alem disso, α′ (t) =(cos t,− sen t + 1
tan t2
(sec2 t
2
)12
)=(cos t,− sen t + 1
sen t
).
Assim:
α′ (t0) = (0, 0) ⇐⇒{
cos t0 = 0− sen t0 + 1
sen t0= 0
⇐⇒{
cos t0 = 0sen2 t0 = 1
⇐⇒{
cos t0 = 01 − cos2 t0 = 1
⇐⇒{
cos t0 = 0cos2 t0 = 0
⇐⇒ t0 =π
2; (t ∈ ]0, π[) .
Logo, α′ (π2
)= (0, 0) , ou seja, α nao e regular.
Observemos que excluindo-se t =π
2, α seria regular.
3 Reta Tangente
Seja α : ]a, b[ −→ R2 uma curva regular. A reta tangente a α em t0 ∈ ]a, b[ e a reta quepassa por α (t0) e tem a direcao do vetor α′ (t0) . Sua equacao vetorial e dada por
r (s) = α (t0) + sα′ (t0) ; s ∈ R.
x
y
a
b
�
�’( )t0 �( )t
0
�’( )t0
r
�2
�
Exemplo: Seja:α : R −→ R2
t �−→ α (t) = (a + r cos t, b + r sen t),

sendo a, b ∈ R e r ∈ R∗+. Temos que o traco de α e uma circunferencia com centro (a, b)
e raio r:{x (t) = a + r cos ty (t) = b + r sen t
=⇒{
(x (t) − a)2 = r2 cos2 t
(y (t) − b)2 = r2 sen2 t=⇒ (x (t) − a)2 + (y (t) − b)2 = r2
=⇒ (x − a)2 + (y − b)2 = r2 ( x e y nao dependem de t).
x
y
�’(0)
�(0)
a
b
�’(0)
r
Para t = 0 temos α (0) = (a + r, b) e α′ (0) = (0, r) .Reta tangente: g (s) = α (0) + sα′ (0) = (a + r, b) + s (0, r) ou seja:
g (s) = (a + r, b + sr) ; s ∈ R.
Equacao cartesiana: x = a + r.
Exercıcio: Considere a tratriz:
α : ]0, π[ −→ R2
t �−→ α (t) =(sen t, cos t + ln
(tan t
2
)) .
Mostre que o comprimento do segmento de reta tangente compreendido entre α (t) e oeixo y independente de t e sempre possui comprimento igual a 1.
Observacao: Uma curva parametrizada no plano pode ser definida em um intervalofechado [a, b] ⊂ R e, neste caso, α : [a, b] −→ R2 e uma curva parametrizada diferenciavelse existir δ > 0 e β : ]a − δ, b + δ[ −→ R2 diferenciavel tal que β|[a,b] = α.
x
y
b
b+�� �
2
�
a - �a
�
Exemplo: A curva:
α : [0, 2π] −→ R2
t �−→ α (t) = (cos t, sen t)
e diferenciavel, pois ∃ δ = π tal que:
β : ]−π, 3π[ −→ R2
t �−→ β (t) = (cos t, sen t)
e diferenciavel e β|[0,2π] = α.

4 Comprimento de Arco
Seja α : I ⊂ R −→ R2 uma curva regular, sendo I um intervalo de R.
Definicao: O comprimento de arco da curva α entre os pontos t0 e t1 em I e dado por:
l =
∫ t1
t0
|α′ (t)| dt.
Do Calculo Diferencial e Integral sabemos que l e o limite dos comprimentos de umasequencia de poligonais que “tende” ao traco de α.
x
y
�( )t1
�( )t0
poligonal decomprimento Pn
Exemplos:
1) Seja:
α : [0, 2π] −→ R2
t �−→ α (t) = (a + r cos t, b + r sen t); a, b ∈ R e r > 0.
O comprimento de α e:
l =
∫ 2π
0
|α′ (t)| dt =
∫ 2π
0
|(−r sen t, r cos t)| dt =
∫ 2π
0
√r2 sen2 t + r2 cos2 tdt =
∫ 2π
0
rdt = 2πr.
2) Seja a espiral logarıtimica:
α : ]−∞, 0] −→ R2
t �−→ α (t) = et (cos t, sen t).
Temos
l = lima→−∞
∫ 0
a
|α′ (t)| dt
= lima→−∞
∫ 0
a
∣∣(et (cos t − sen t) , et (sen t + cos t))∣∣ dt
= lima→−∞
∫ 0
a
√e2t (cos t − sen t)2 + e2t (sen t + cos t)2dt
= lima→−∞
∫ 0
a
et√
2dt
=√
2 lima→−∞
(e0 − ea
)=
√2.
Observemos que α (0) = (1, 0) .

x
y
��0� � �1,0�
Comprimento finito!
Definicao: Seja α : I ⊂ R −→ R2 uma curva regular e t0 ∈ I. A funcao:
S : [t0, +∞[ ∩ I −→ R
t �−→ S (t) =
∫ t
t0
|α′ (s)| ds
e chamada funcao comprimento de arco da curva α em t0.
Definicao: Dizemos que uma curva regular α esta parametrizada por comprimento dearco se |α′ (t)| = 1 para ∀t ∈ I ⊂ R. Neste caso, S (t) = t − t0.
x
y
0
2�
��
2
�
�� �t�� �t0
Comprimento t - t0
Comprimento t - t0
No exemplo (1) anterior, α (t) = (a + r cos t, b + r sen t) e temos α parametrizada porcomprimento de arco (p.c.a.) quando r = 1 pois, nesse caso, |α′ (t)| = 1.
No exemplo (2) anterior, α (t) = (et cos t, et sen t) nao esta p.c.a. pois |α′ (t)| =√
2et
que e diferente de 1 se t �= ln1√2.
Definicao: Sejam α : ]a, b[ −→ R2 curva regular e ]c, d[ ⊂ R. Uma mudanca deparametros para α e uma aplicacao ψ : ]c, d[ −→ ]a, b[ bijetora de classe C∞ tal queψ′ (s) �= 0, ∀s ∈ ]c, d[ . A composta α = α ◦ ψ : ]c, d[ −→ R2 e chamada reparametrizacaode α.
Exemplo: A curva:
α : ]0, 2π[ −→ R2
t �−→ α (t) = (cos t, sen t)
e curva regular e:
ψ : ]0, π[ −→ ]0, 2π[s �−→ ψ (s) = 2s
e C∞ e ψ′ (s) = 2 �= 0, ∀s ∈ ]0, π[ .

Portanto, ψ e uma mudanca de parametros para α e:
α = α ◦ ψ : ]0, π[ −→ R2
s �−→ α (s) = α (ψ (s)) = α (2s) = (cos 2s, sen 2s)
e uma reparametrizacao de α.
x
y
0
2�
�
�
0
�
�
�
�� � � � �
Notemos que os tracos de α e α coincidem.De fato: seja α (t) ∈ Traco (α) =⇒ ∃t ∈ ]0, 2π[ tal que α (t) = (cos t, sen t) . Seja
s ∈ ]0, π[ tal que t = 2s. Logo, α (t) = (cos 2s, sen 2s) =⇒ α (t) ∈ Traco (α) . Assim,Traco (α) ⊂ Traco (α) . Analogamente, Traco (α) ⊂ Traco (α) . Conclusao: Traco (α) =Traco (α) .
Proposicao: Seja α : ]a, b[ −→ R2 uma curva parametrizada diferenciavel e seja ψ :]c, d[ −→ ]a, b[ uma mudanca de parametros. Se ψ e diferenciavel, entao α = α ◦ ψ ediferenciavel. Alem disso, se α for regular e ψ′ (s) �= 0, ∀s ∈ ]c, d[ , entao α e regular.
Demonstracao: A diferenciabilidade de α segue do fato de que composta de aplicacoes C∞
e C∞. Quanto a segunda parte: α′ (s) = (α ◦ ψ)′ (s) = α′ (ψ (s)) ψ′ (s) . Mas α′ (t) �= 0,∀t ∈ ]a, b[ e ψ′ (s) �= 0, ∀s ∈ ]c, d[ . Logo, α′ (s) �= 0, ∀s ∈ ]c, d[ , ou seja, α e regular.
Exemplos:
1) Sejam os segmentos:
α : ]0, +∞[ −→ R2
t �−→ α (t) = (t, 3t)e
β : ]−3, +∞[ −→ R2
s �−→ β (s) = (s + 3, 3s + 9).
A curva β e uma reparametrizacao de α.De fato: queremos mostrar que ∃ψ : ]−3, +∞[ −→ ]0, +∞[ bijetora, de classe C∞,
ψ′ (s) �= 0, ∀s ∈ ]−3, +∞[ , tal que β = α ◦ ψ. Mas:
β (s) = α ◦ ψ (s) ⇐⇒ (s + 3, 3s + 9) = (ψ (s) , 3ψ (s))
⇐⇒{
ψ (s) = s + 33ψ (s) = 3s + 9
⇐⇒ ψ (s) = s + 3.
Temos ψ : ]−3, +∞[ −→ ]0, +∞[ bijetora, C∞ e ψ′ (s) = 1 �= 0; ∀s ∈ ]−3, +∞[ , ou seja,ψ e uma mudanca de parametros para α e, portanto, β e uma reparametrizacao de α.
2) Consideremos:
α : ]0, +∞[ −→ R2
t �−→ α (t) = (t cos (ln t) , t sen (ln t)).

A curva α e regular pois, considerando a mudanca de parametros:
ψ : R −→ R∗+
s �−→ ψ (s) = es
temos que:α = α ◦ ψ : R −→ R2
s �−→ α (s) = (es cos s, es sen s)
e reparametrizacao de α. Mas ja vimos que α e uma espiral logarıtmica e, portanto,regular.
3) Sejam
α : ]0, 2π[ −→ R2
t �−→ α (t) = (cos t, sen t)e
β : ]0, 2π[ −→ R2
s �−→ β (s) = (cos s,− sen s).
As curvas α e β possuem o mesmo traco.De fato: Consideremos:
ψ : ]0, 2π[ −→ ]0, 2π[s �−→ ψ (s) = −s + 2π
.
Temos que ψ e bijetora, C∞ e ψ′ (s) = −1 �= 0; ∀s ∈ ]0, 2π[ . Mas
α◦ψ (s) = (cos (−s + 2π) , sen (−s + 2π)) = (cos (−s) , sen (−s)) = (cos s,− sen s) = β (s) .
Logo, β e uma reparametrizacao para α, ou seja, α e β possuem mesmo traco.
Proposicao: Seja α : ]a, b[ −→ R2 regular. Entao, existe uma mudanca de parametrosψ : ]c, d[ −→ ]a, b[ (bijetora, C∞, ψ′ (s) �= 0, ∀s ∈ ]c, d[) para α, tal que α = α ◦ψ satisfaz:i) |α′ (s)| = 1; ∀s ∈ ]c, d[ ;
ii)
∫ s1
s0
|α′ (u)| du = s1 − s0; ∀s0, s1 ∈ ]c, d[ ; s0 < s1.
Demonstracao: Seja t0 ∈ ]a, b[ . Considere a funcao comprimento de arco:
S (t) =
∫ t
t0
|α′ (u)| du; t ∈ ]a, b[ .
(Logo, S : ]a, b[ −→ R).Temos que S ′ (t) = |α′ (t)| (Teorema Fundamental do Calculo). Como α e regular,
temos α de classe C∞ e α′ (t) �= 0; ∀t ∈ ]a, b[ . Logo, S e de classe C∞ e S ′ (t) > 0,∀t ∈ ]a, b[ , ou seja, S e contınua e crescente em ]a, b[ . Logo, sua imagem e um intervaloaberto: S (]a, b[) = ]c, d[ e, portanto, S : ]a, b[ −→ ]c, d[ e bijetora, C∞ e S ′ (t) �= 0. Assim,∃S−1 : ]c, d[ −→ ]a, b[ .
O Teorema da Funcao Inversa garante que S−1 e C∞.
Temos (S−1)′(s) =
1
S ′ (S−1 (s))�= 0; ∀s ∈ ]c, d[ . Logo, ψ = S−1 e uma mudanca de
parametros para α.Para α = α ◦ ψ : ]c, d[ −→ R2 temos:
|α′ (s)| =∣∣(α ◦ ψ)′ (s)
∣∣ = |α′ (ψ (s)) ψ′ (s)| = |α′ (ψ (s))| . |ψ′ (s)|= |α′ (ψ (s))| 1
|S ′ (ψ (s))| = |α′ (ψ (s))| 1
|α′ (ψ (s))| = 1, ∀s ∈ ]c, d[ .

e: ∫ s1
s0
|α (u)| du =
∫ s1
s0
1du = s1 − s0; ∀s0, s1 ∈ ]c, d[ ; s0 < s1.
Definicao: A composta α da proposicao acima e chamada de reparametrizacao de α porcomprimento de arco.
Exemplos:
1) Reparametrizemos a circunferencia:
α : [0, 2π] −→ R2
t �−→ α (t) = (a + r cos t, b + r sen t), r > 0, r �= 1,
por comprimento de arco.Primeiramente, observemos que [0, 2π] ⊂ ]0 − ε, 2π + ε[ , ε > 0.Temos α′ (t) = (−r sen t, r cos t) =⇒ |α′ (t)| = r �= 1, ou seja, α nao esta parametrizada
por comprimento de arco.Seja t0 ∈ [0, 2π] . Logo:
S (t) =
∫ t
t0
|α′ (u)| du =
∫ t
t0
rdu = r (t − t0) .
Assim:
S : [0, 2π] −→ Jt �−→ S (t) = r (t − t0)
=⇒ ψ = S−1 : J −→ [0, 2π]s �−→ ψ (s) = t
.
Logo:
ψ (s) = t ⇐⇒ s = S (t) = r (t − t0) =⇒ t =s
r+ t0 =⇒ ψ (s) =
s
r+ t0.
Deste modo:ψ : [−rt0, r (2π − t0)] −→ [0, 2π]
s �−→ ψ (s) = sr
+ t0
e uma mudanca de parametros para α e α = α ◦ ψ, ou seja:
α : [−rt0, r (2π − t0)] −→ R2
s �−→ α (s) =(a + r cos
(sr
+ t0), b + r sen
(sr
+ t0))
e uma reparametrizacao por comprimento de arco para α.
2) Reparametrizemos e espiral logarıtmica:
α : R −→ R2
t �−→ α (t) = (et cos t, et sen t)
por comprimento de arco.Temos |α′ (t)| =
√2et �= 1 e
S (t) =
∫ t
t0
|α′ (u)| du =
∫ t
t0
√2eudu =
√2(et − et0
).

Logo, Im (S) =]−√
2et0 , +∞[e:
S : R −→ ]−√2et0 , +∞[
t �−→ S (t) =√
2 (et − et0).
Seja:ψ = S−1 :
]√2et0 , +∞[ −→ R
s �−→ ψ (s) = t.
Logo:
ψ (s) = t =⇒ s = S (t) =√
2(et − et0
)=⇒ t = ln
(s√2
+ et0
).
Assim:ψ :
]√2et0 , +∞[ −→ R
s �−→ ψ (s) = ln(
s√2
+ et0
)e mudanca de parametros para α. Seja α = α ◦ ψ. Logo:
α :]√
2et0 , +∞[ −→ R2
s �−→ α (s) =(
s√2
+ et0
)(cos
(ln(
s√2
+ et0
)), sen
(ln(
s√2
+ et0
)))e uma reparametrizacao por comprimento de arco para α.
3) Reparametrizemos a cicloide:
α : ]0, 2π[ −→ R2
t �−→ α (t) = (t − sen t, 1 − cos t)
por comprimento de arco.
Temos |α′ (t)| = |(1 − cos t, sen t)| =√
(1 − cos t)2 + (sen t)2 =√
2√
1 − cos t, ou seja,
α nao esta parametrizada por comprimento de arco. Seja t0 ∈ ]0, 2π[ . Temos:
S (t) =
∫ t
t0
|α′ (u)| du =
∫ t
t0
√2√
1 − cos udu.
Mas: {1 = cos2
(u2
)+ sen2
(u2
)cos u = cos2
(u2
)− sen2(
u2
) =⇒ 1 − cos u = 2 sen2(u
2
).
Logo:
S (t) =
∫ t
t0
2 sen(u
2
)du = 2
(−2 cos
u
2
)∣∣∣tt0
= 4
(cos
t02− cos
t
2
).
Assim, S (]0, 2π[) =]4(cos t0
2− 1
), 4(cos t0
2+ 1
)[. Seja:
ψ = S−1 :]4(cos t0
2− 1
), 4(cos t0
2+ 1
)[ −→ ]0, 2π[s �−→ ψ (s) = t
.
Logo:
ψ (s) = t =⇒ s = S (t) = 4
(cos
t02− cos
t
2
)=⇒ t = 2. arccos
(4 cos
t02− s
4
),

ou seja,
ψ :]4(cos t0
2− 1
), 4(cos t0
2+ 1
)[ −→ ]0, 2π[s �−→ ψ (s) = 2 arccos
(4 cos t0
2− s
4
)e uma mudanca de parametros para α.
Finalmente, α = α ◦ ψ :]4.(cos t0
2− 1
), 4(cos t0
2+ 1
)[ −→ R2 tal que:
α (s) =
(2 arccos
(cos
t02− s
4
)− sen
(2 arccos
(cos
t02− s
4
)),
1 − cos
(2 arccos
(cos
t02− s
4
)))e uma reparametrizacao de α por comprimento de arco.
Para t0 = π temos α : ]−4, 4[ −→ R2 e o traco de α ou α e dado na figura abaixo.
x
y
-4
4
�
�� 2�0
2
5 Orientacao de uma Curva
Seja α : ]a, b[ −→ R2 uma curva parametrizada. A orientacao da curva α e o sentido depercurso da curva quando t varia de a ate b.
Considerando α regular, o vetor tangente α′ (t) indica o sentido da orientacao da curva
pois α′ (t0) = limh→0α (t0 + h) − α (t0)
h.
x
y
��t0 �
���t0 �
��t0 � h�
��t0 � h� � ��t0 �
Para h � 0; t0 � h � t0
Seja ψ : ]c, d[ −→ ]a, b[ uma mudanca de parametros para α (ψ bijetora, C∞ e ψ′ (s) �=0 para ∀s ∈ ]c, d[). Tome a reparametrizacao α = α ◦ ψ de α. Entao, se ψ′ (s) > 0, α eα possuem mesma orientacao pois α′ (s) = α′ (ψ (s)) ψ′ (s) . Se ψ′ (s) < 0, α e α possuemorientacoes opostas.
No primeiro caso, dizemos que a mudanca de parametros ψ preserva orientacao e nosegundo caso, que ψ inverte orientacao.
Observacao: Uma curva parametrizada ser regular implica que seu traco nao possui“quinas”, devido ao fato da curva ser C∞. No entanto, uma curva sem “quinas” pode ser

nao regular. Mais ainda, duas curvas parametrizadas podem ter mesmo traco e uma serregular e outra nao. Exemplo:
α : R −→ R2
t �−→ α (t) = (t3, t3)
nao e regular e:β : R −→ R2
t �−→ β (t) = (t, t)
e regular.
6 Forma Local das Curvas Regulares
Seja F : ]a, b[ −→ R uma funcao de classe C∞. Seja:
α : ]a, b[ −→ R2
t �−→ α (t) = (t, F (t))
uma curva parametrizada. Como F e C∞, temos que α e C∞ e α′ (t) = (1, F ′ (t)) �= (0, 0) ,∀t ∈ ]a, b[ , ou seja, α e regular.
Temos Traco (α) = Im (α) = {α (t) | t ∈ ]a, b[} = {(t, F (t)) | t ∈ ]a, b[} = Grafico(F ) .
Teorema: Sejam α : ]a, b[ −→ R2 uma curva regular e t0 ∈ ]a, b[ . Entao existem δ > 0 eψ : ]c, d[ −→ ]t0 − δ, t0 + δ[ uma mudanca de parametros para α|]t0−δ,t0+δ[ tal que α = α◦ψsatisfaz:
α (s) = (s, F (s)) ; ∀s ∈ ]c, d[
ou:α (s) = (F (s) , s) ; ∀s ∈ ]c, d[ ,
sendo F : ]c, d[ −→ R uma funcao C∞.
x
y
t -0 �
�
�
t0
�( )t0
t +0 �
c
�
d
�
~�
�( - )t0
�
�( + )t0
�
Localmente o traço de
é o gráfico de F.�
Demonstracao:
Como α e regular e t0 ∈ ]a, b[ , temos α′ (t0) = (x′ (t0) , y′ (t0)) �= (0, 0) . Suponhamosque x′ (t0) �= 0. Como α e C∞ temos que as funcoes componentes sao C∞. Logo, peloTeorema da Funcao Inversa, a funcao componente x e inversıvel numa vizinhanca de t0,ou seja, ∃δ > 0 tal que x = x|]t0−δ,t0+δ[ e inversıvel.

Seja:x−1 : x (]t0 − δ, t0 + δ[) −→ ]t0 − δ, t0 + δ[
a inversa de x.Tambem pelo Teorma da Funcao Inversa temos que x−1 e C∞.Tomemos ]c, d[ = x (]t0 − δ, t0 + δ[) e ψ = x−1. Logo, ψ : ]c, d[ −→ ]t0 − δ, t0 + δ[ e
bijetora, C∞ e ψ′ (s) �= 0, ∀t ∈ ]t0 − δ, t0 + δ[ . Assim, ψ e uma mudanca de parametrospara α|]t0−δ,t0+δ[.
Seja α = α ◦ ψ. Temos:
α (s) = (α ◦ ψ) (s) = (x (ψ (s)) , y (ψ (s))) = ((x ◦ ψ) (s) , (y ◦ ψ) (s))
= (s, y ◦ ψ (s)) , ∀s ∈ ]c, d[ .
Seja F = y ◦ ψ. Logo, F e C∞, pois y e ψ sao C∞. Assim,
α (s) = (s, F (s)) , ∀s ∈ ]c, d[
e F e C∞.Se tivessemos imposto y′ (t0) �= 0 terıamos α (s) = (F (s) , s) , ∀s ∈ ]c, d[ .
Observacoes:
1) A forma local das curvas regulares justifica o fato do traco de uma curva regular naopossuir “quinas” (localmente a curva e grafico de funcao diferenciavel).
2) Uma curva parametrizada pode ser regular por partes, ou seja, α : ]a, b[ −→ R2 nao e
regular, mas existem t1, ..., tn ∈ ]a, b[ tais que α′ (ti) nao existe ou α′ (ti) =−→0 ; i = 1, ..., n;
e α′ (t) �= −→0 , ∀t �= ti; i = 1, 2, ..., n.
Os pontos t1, ..., tn tais que α′ (ti) =−→0 ; i = 1, ..., n; sao chamados de singularidades
da curva α. Se ti for singularidade de α para qualquer reparametrizacao de α, dizemosque ti e uma singularidade essencial de α.
As singularidades essenciais de α formam “quinas” no traco de α.
3) Dizemos que uma curva parametrizada α e simples se α : ]a, b[ −→ R2 for injetora, istoe, se t0 �= t1 =⇒ α (t0) �= α (t1) . Se α nao for simples, dizemos que α tem auto-interseccao.
x
y
a�
�
b
t0
t1
t2
t3
�(t )=0 1
�(t ) �(t )=2 3
�(t )
� não é injetora
Exemplos:
1) Consideremos a cicloide:
α : R −→ R2
t �−→ α (t) = (t − sen t, 1 − cos t)

A curva α e regular por partes.De fato: temos que α e C∞ pois x (t) = t − sen t e y (t) = 1 − cos t sao C∞. Alem
disso:
α′ (t) = (1 − cos t, sen t) = (0, 0) ⇐⇒{
1 − cos t = 0sen t = 0
⇐⇒ t = 2kπ; k ∈ Z.
Logo, α′ (2kπ) = (0, 0) ; k ∈ Z e α′ (t) �= (0, 0) , ∀t �= 2kπ; k ∈ Z.
x
y
3�0
2
2��-�-2�-4� -3� 4�t = 2k ; k são as singularidades de .� � ��
2) A cubica:α : R −→ R2
t �−→ α (t) = (t2, t3)
e regular por partes.De fato: α e C∞ e α′ (t) = (2t, 3t2) = (0, 0) ⇐⇒ t = 0. Logo, para t > 0 ou t < 0 α e
regular.
x
y
3) Consideremos a curva parametrizada:
α : [0, 2π[ −→ R2
t �−→ α (t) = ((2 cos t − 1) cos t, (2 cos t − 1) sen t).
A curva α e C∞ pois as componentes o sao. Alem disso,
α′ (t) = ((−2 sen t) cos t + (2 cos t − 1) (− sen t) , (−2 sen t) sen t + (2 cos t − 1) cos t)
= (−2 sen 2t + sen t, 2 cos 2t − cos t)
= (0, 0) ⇐⇒{
sen t = 2 sen 2tcos t = 2 cos 2t
.
Assim, 1 = 4 (sen2 2t + cos2 2t) =⇒ 1 = 4, uma contradicao. Logo, α′ (t) �= (0, 0) ,∀t ∈R. Conclusao: α e regular.
A curva α possui auto-interseccoes:
α (t0) = α (t1) ⇐⇒{
(2 cos t0 − 1) cos t0 = (2 cos t1 − 1) cos t1(2 cos t0 − 1) sen t0 = (2 cos t1 − 1) sen t1
.

Assim, se todos os membros fossem diferentes de zero: tan t0 = tan t1 ⇐⇒ t0 = t1 + kπ,(t1 �= π
2+ kπ
). Em [0, 2π] : t0 = t1 − π.
Substituindo na 1a equacao:
(2 cos (t1 − π) − 1) cos (t1 − π) = (2 cos t1 − 1) cos t1 =⇒(−2 cos t1 − 1) (− cos t1) = 2 cos2 t1 − cos t1 =⇒
2 cos2 t1 + cos t1 = 2 cos2 t1 − cos t1 =⇒2 cos t1 = 0 =⇒
t1 =π
2+ kπ
que nao serve nesse caso (tan t0 = tan t1) .Logo, devemos procurar t0 e t1 que anulam algum fator do sistema acima:
2 cos t0 − 1 = 0 =⇒ cos t0 =1
2=⇒ t0 =
π
3ou t0 =
5π
3
2 cos t1 − 1 = 0 =⇒ t1 =π
3ou t1 =
5π
3
cos t0 = 0 =⇒ t0 =π
2ou t0 =
3π
2
cos t1 = 0 =⇒ t1 =π
2ou t1 =
3π
2sen t0 = 0 =⇒ t0 = 0 ou t0 = π
sen t1 = 0 =⇒ t1 = 0 ou t1 = π
Testando as solucoes-candidatas, encontramos t0 =π
3e t1 =
5π
3como solucao, ou
seja, α(π
3
)= α
(5π
3
)= (0, 0) e o unico ponto de auto-interseccao da curva α.
O traco de α e um cardioide:
0
2�
�
� x
y
��
�5�
�3�
��
������0�
7 Formula de Frenet e Curvatura
Seja α : ]a, b[ −→ R2 uma curva regular parametrizada por comprimento de arco.Seja:
T (s) = α′ (s) = (x′ (s) , y′ (s))
vetor tangente a curva α em s. Como |α′ (s)| = 1 temos |T (s)| = 1.Consideremos
N (s) = (−y′ (s) , x′ (s)) .
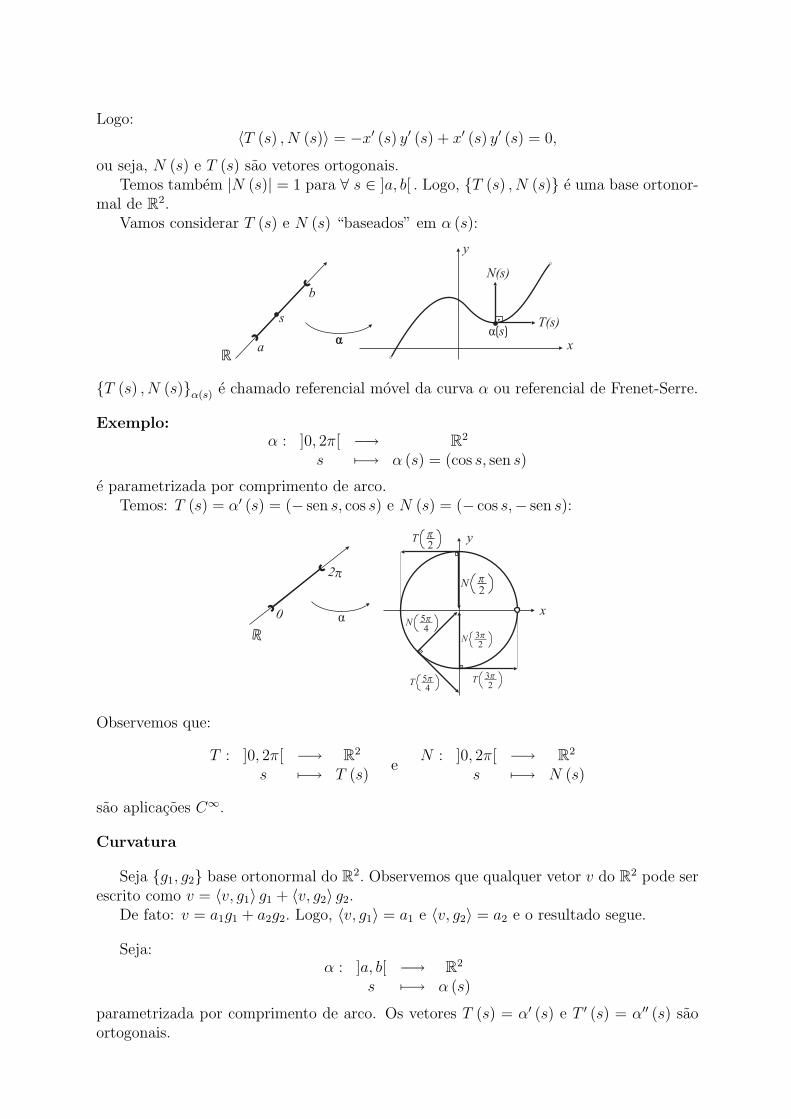
Logo:〈T (s) , N (s)〉 = −x′ (s) y′ (s) + x′ (s) y′ (s) = 0,
ou seja, N (s) e T (s) sao vetores ortogonais.Temos tambem |N (s)| = 1 para ∀ s ∈ ]a, b[ . Logo, {T (s) , N (s)} e uma base ortonor-
mal de R2.Vamos considerar T (s) e N (s) “baseados” em α (s):
x
y
a
b
�
�
s
�( )sT(s)
N(s)
{T (s) , N (s)}α(s) e chamado referencial movel da curva α ou referencial de Frenet-Serre.
Exemplo:α : ]0, 2π[ −→ R2
s �−→ α (s) = (cos s, sen s)
e parametrizada por comprimento de arco.Temos: T (s) = α′ (s) = (− sen s, cos s) e N (s) = (− cos s,− sen s):
x
�
2�
0�
yT�
T5� T
3�
N3�
N�
N5�
Observemos que:
T : ]0, 2π[ −→ R2
s �−→ T (s)e
N : ]0, 2π[ −→ R2
s �−→ N (s)
sao aplicacoes C∞.
Curvatura
Seja {g1, g2} base ortonormal do R2. Observemos que qualquer vetor v do R2 pode serescrito como v = 〈v, g1〉 g1 + 〈v, g2〉 g2.
De fato: v = a1g1 + a2g2. Logo, 〈v, g1〉 = a1 e 〈v, g2〉 = a2 e o resultado segue.
Seja:α : ]a, b[ −→ R2
s �−→ α (s)
parametrizada por comprimento de arco. Os vetores T (s) = α′ (s) e T ′ (s) = α′′ (s) saoortogonais.
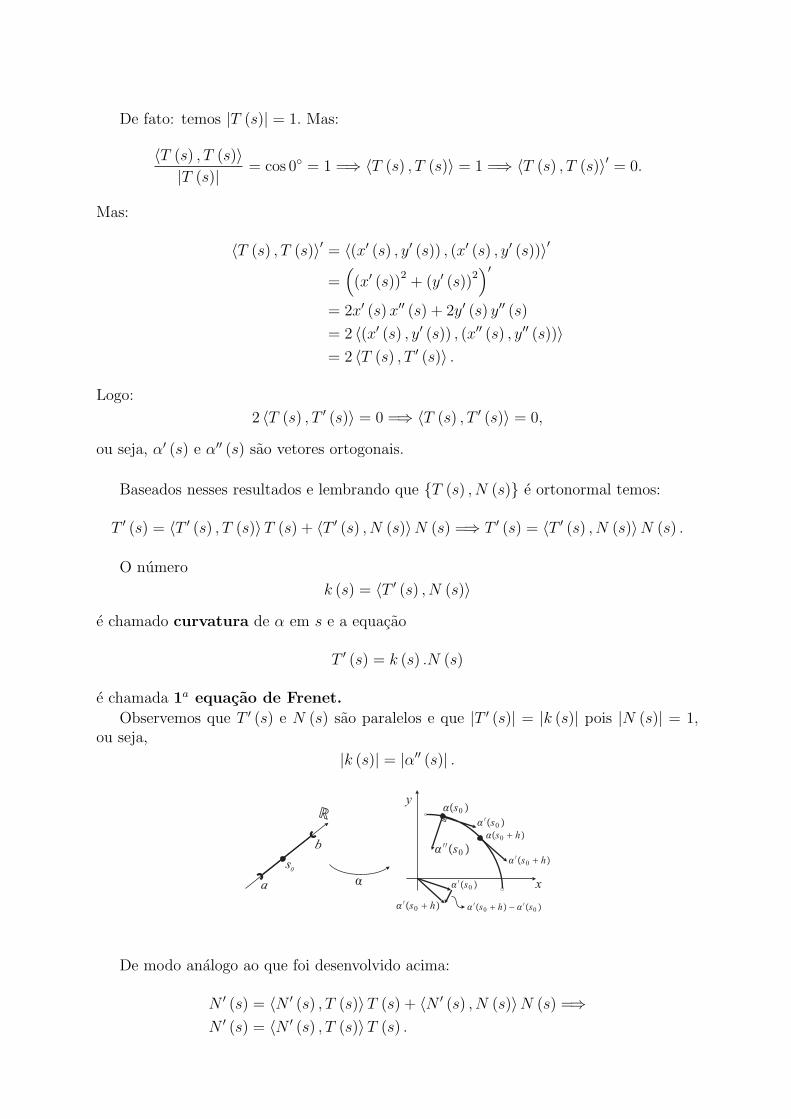
De fato: temos |T (s)| = 1. Mas:
〈T (s) , T (s)〉|T (s)| = cos 0◦ = 1 =⇒ 〈T (s) , T (s)〉 = 1 =⇒ 〈T (s) , T (s)〉′ = 0.
Mas:
〈T (s) , T (s)〉′ = 〈(x′ (s) , y′ (s)) , (x′ (s) , y′ (s))〉′
=((x′ (s))2
+ (y′ (s))2)′
= 2x′ (s) x′′ (s) + 2y′ (s) y′′ (s)
= 2 〈(x′ (s) , y′ (s)) , (x′′ (s) , y′′ (s))〉= 2 〈T (s) , T ′ (s)〉 .
Logo:
2 〈T (s) , T ′ (s)〉 = 0 =⇒ 〈T (s) , T ′ (s)〉 = 0,
ou seja, α′ (s) e α′′ (s) sao vetores ortogonais.
Baseados nesses resultados e lembrando que {T (s) , N (s)} e ortonormal temos:
T ′ (s) = 〈T ′ (s) , T (s)〉T (s) + 〈T ′ (s) , N (s)〉N (s) =⇒ T ′ (s) = 〈T ′ (s) , N (s)〉N (s) .
O numero
k (s) = 〈T ′ (s) , N (s)〉e chamado curvatura de α em s e a equacao
T ′ (s) = k (s) .N (s)
e chamada 1a equacao de Frenet.
Observemos que T ′ (s) e N (s) sao paralelos e que |T ′ (s)| = |k (s)| pois |N (s)| = 1,ou seja,
|k (s)| = |α′′ (s)| .
x
y
�
�a
b
s0
��s0 �
���s0 �
����s0 �
���s0 � h�
��s0 � h�
���s0 � h� � �
��s0 ����s0 � h�
���s0 �
De modo analogo ao que foi desenvolvido acima:
N ′ (s) = 〈N ′ (s) , T (s)〉T (s) + 〈N ′ (s) , N (s)〉N (s) =⇒N ′ (s) = 〈N ′ (s) , T (s)〉T (s) .

Mas:
〈N ′ (s) , T (s)〉 = 〈(−y′′ (s) , x′′ (s)) , (x′ (s) , y′ (s))〉= −x′ (s) y′′ (s) + x′′ (s) y′ (s)
= 〈(x′′ (s) , y′′ (s)) , (y′ (s) ,−x′ (s))〉= 〈T ′ (s) ,−N (s)〉= −〈T ′ (s) , N (s)〉= −k (s) .
Logo:N ′ (s) = −k (s) .T (s)
que e chamada 2a equacao de Frenet.
Observacao: geometricamente, a curvatura indica a velocidade com que o vetor tangentemuda de direcao.
Exemplo:
1) Seja α (s) =(r cos
s
r, r sen
s
r
); s ∈ R e r constante positiva.
Temos α′ (s) =(− sen s
r, cos s
r
)=⇒ |α′ (s)| = 1, ou seja, α esta parametrizada por
comprimento de arco.
Curvatura: k (s) = 〈T ′ (s) , N (s)〉 = −1
r
(cos
s
r
)(− cos
s
r
)− 1
r
(sen
s
r
)(− sen
s
r
)=
1
r, ou seja, a curvatura da circunferencia α de raio r acima e constante e igual a
1
r.
2) Seja α (s) = (a + bs, c + ds) ; s ∈ R; b e d constantes tais que b2 + d2 = 1. Temosα′ (s) = (b, d) =⇒ |(b, d)| =
√b2 + d2 = 1, ou seja, α esta parametrizada por comprimento
de arco.Curvatura: k (s) = 〈(0, 0) , (−d, b)〉 = 0, ou seja, a curvatura da reta α acima e nula.
8 Curvatura de uma Curva α com Parametrizacao
Regular Qualquer
Seja α : ]a, b[ −→ R2 uma curva regular.Existe α : ]c, d[ −→ R2 reparametrizacao de α por comprimento de arco:
x
y
��
a bt
� c ds
S � = S-1
N�s�
�T�s�
��
��t� ����s�
Temos:
{α ◦ ψ = α =⇒ α ◦ ψ (s) = α (s)α ◦ S = α =⇒ α ◦ S (s) = α (s)
=⇒
⎧⎪⎪⎨⎪⎪⎩α (t) = (x (t) , y (t))T (t) = (x′ (t) , y′ (t)) = α′ (t)T ′ (t) = (x′′ (t) , y′′ (t)) = α′′ (t)N (t) = (−y′ (t) , x′ (t))
.

Idem para α (s) = (x (s) , y (s)) .Gostarıamos que o conceito de curvatura, a menos de sinal, nao dependesse da parame-
trizacao adotada.Assim, iremos definir a curvatura k (t) em α (t) como sendo a mesma curvatura k (s)
em α (s) ; s = S (t) ; ou seja, k (t) = k (s) .
Uma observacao: a orientacao da curva regular α e a orientacao da curva parametrizadapor comprimento de arco α pode ser considerada a mesma. Se tomarmos uma reparametri-zacao de α que mude sua orientacao, entao o sinal da curvatura muda. Neste caso, paramudar a orientacao de α basta considerar β (r) = α (b + a − r) ; r ∈ ]a, b[ .
Vamos colocar k (s) em funcao de t.Temos:
T (s) = α′ (t) = α′ (s) S ′ (t) = T (s) S ′ (t) =⇒T ′ (t) =
(T ′ (s) .S ′ (t)
)S ′ (t) + T (s) S ′′ (t) .
Logo:
T ′ (s) =T ′ (t) − T (s) .S ′′ (t)
S ′ (t)2 .
Assim:
k (s) =⟨T ′ (s) , N (s)
⟩=
⟨T ′ (t) − T (s) S ′′ (t)
S ′ (t)2 , N (s)
⟩
=
⟨T ′ (t)
S ′ (t)2 , N (s)
⟩−⟨
T (s) S ′′ (t)
S ′ (t)2 , N (s)
⟩
=
⟨T ′ (t)
S ′ (t)2 ,N (t)
S ′ (t)
⟩− S ′′ (t)
S ′ (t)2
⟨T (s) , N (s)
⟩=
〈T ′ (t) , N (t)〉S ′ (t)3 .
Mas, S ′ (t) = |α′ (t)| = |T (t)| . Logo: k (s) =〈T ′ (t) , N (t)〉
|T (t)|3 , ou seja,
k (t) =〈T ′ (t) , N (t)〉
|T (t)|3
e a expressao para a curvatura de uma curva regular α.
Observemos que se α ja estivesse parametrizada por comprimento de arco terıamos|T (t)| = 1 e recaimos na expressao que ja havıamos obtido.
Observacoes: se α : ]a, b[ −→ R2 e uma curva regular, temos:
T (t) =T (t)
|T (t)|

e:
N (t) =N (t)
|N (t)|sao unitarios e ortogonais.
Chamaremos{T (t) , N (t)
}α(t)
de referencial de Frenet da curva α.
Exemplos:
1) Consideremos a espiral logarıtmica α (t) = (et cos t, et sen t) ; t ∈ R. Temos k (t) =〈T ′ (t) , N (t)〉
|T (t)|3 . Mas:
T (t) = α′ (t) =(et (cos t − sen t) , et (sen t + cos t)
),
T ′ (t) = α′′ (t) =(et (cos t − sen t) + et (− sen t − cos t) , et (sen t + cos t) + et (cos t − sen t)
)=(−2et sen t, 2et cos t
),
N (t) = (−y′ (t) , x′ (t)) =(−et (sen t + cos t) , et (cos t − sen t)
),
|T (t)| =
√(et)2
(cos2 t − 2 sen t cos t +
2sen t
)+ (et)2
(2
sen t + 2 sen t cos t + cos2 t)
= et√
2
Logo:
k (t) =〈(−2et sen t, 2et cos t) , (−et (sen t + cos t) , et (cos t − sen t))〉(
et√
2)3 =⇒
k (t) =2e2t (sen2 t + sen t cos t) + 2e2t (cos2 t − cos t sen t)
e3t2√
2
=2e2t
e3t2√
2
=1
et√
2> 0,
Observemos que k e uma funcao decrescente e
{(t → −∞) ⇒ (k (t) → +∞)(t → +∞) ⇒ (k (t) → 0)
. Portanto,
nao existem pontos onde a curvatura e maxima ou mınima.
2) Consideremos a parabola y = x2 + 2x + 1. Facamos x = t e y = t2 + 2t + 1. Assim:α (t) = (t, t2 + 2t + 1) ; t ∈ R; e C∞ e α′ (t) = (1, 2t + 2) �= (0, 0) ,∀t ∈ R, ou seja, α eregular.
Temos k (t) =〈T ′ (t) , N (t)〉
|T (t)|3 e:
⎧⎨⎩T (t) = α′ (t) = (1, 2t + 2)T ′ (t) = α′′ (t) = (0, 2)N (t) = (−y′ (t) , x′ (t)) = (−2t + 2, 1)
.
Logo:
k (t) =〈(0, 2) , (−2t + 2, 1)〉(√
12 + (2t + 2)2
)3 =2(√
4t2 + 8t + 5)3 .

Observemos que k (t) > 0.Determinando pontos de maximo ou mınimo:
k′ (t) =−3 (8 + 8t)
(4t2 + 8t + 5)52
= 0 ⇐⇒ t = −1.
Como k (t) → 0 quando t → +∞ ou t → −∞, temos que t = −1 e ponto de curvaturamaxima e k (−1) = 2 e a curvatura maxima pois:
(t + 1)2 ≥ 0 =⇒ t2 + 2t + 1 ≥ 0 =⇒4t2 + 8t + 4 ≥ 0 =⇒ 4t2 + 8t + 5 ≥ 1 =⇒(
4t2 + 8t + 5) 3
2 ≥ 132 =⇒ 1√
4t2 + 8t + 5≤ 1 =⇒
2√4t2 + 8t + 5
≤ 2,
ou seja:0 < k (t) ≤ 2.
Nao ha pontos de curvatura mınima.
x
y
�
�
-1 0
1CurvaturaM á x i m a
9 Reta Normal a uma Curva
Seja α : ]a, b[ −→ R2 uma curva regular. Considere os vetores
T (t) =α′ (t)|α′ (t)|
e
N (t) =(−y′ (t) , x′ (t))
|α′ (t)| ,
sendo α (t) = (x (t) , y (t)) .Seja s0 ∈ ]a, b[ .A reta de equacao vetorial
G (s) = α (s0) + sα′ (s0) ; s ∈ R
e a reta tangente a α em s0
(ou G (s) = α (s0) + sT (s0)
).
A reta de equacao vetorial
L (s) = α (s0) + sN (s0) ; s ∈ R
e a reta normal a α em s0.
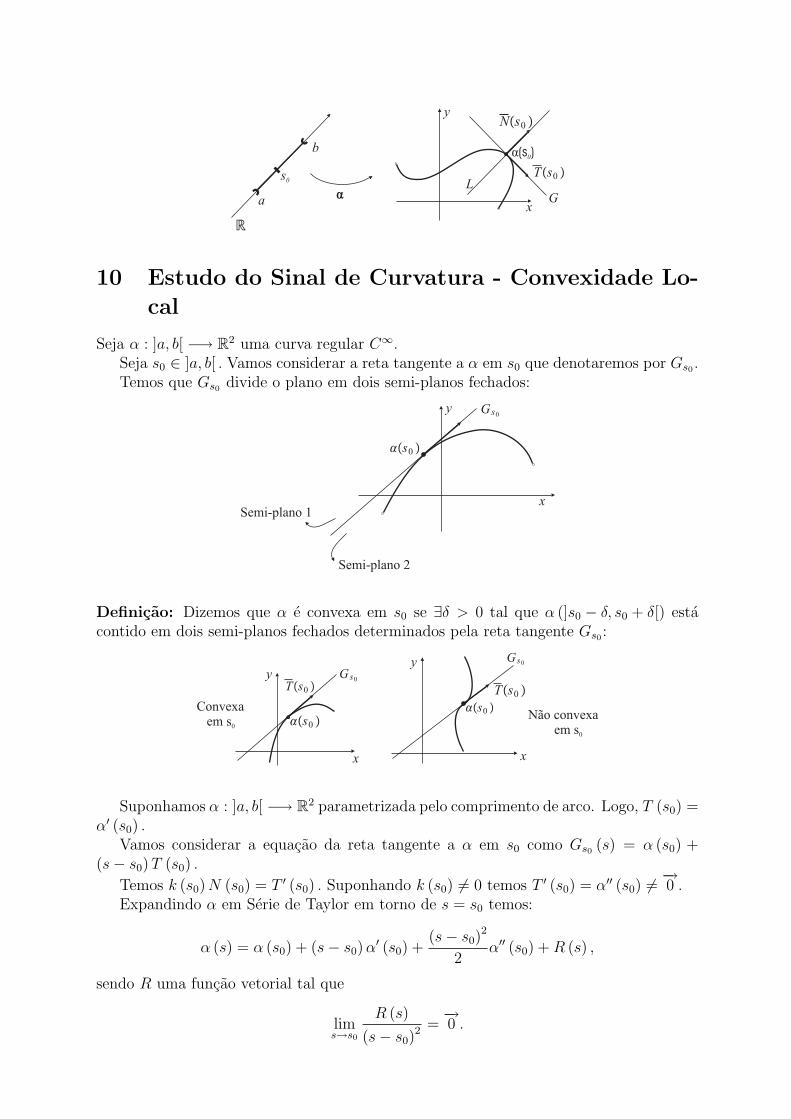
x
y
a
b
�
�
s0
�(s )0
N�s0 �
T�s0 �
G
L
10 Estudo do Sinal de Curvatura - Convexidade Lo-
cal
Seja α : ]a, b[ −→ R2 uma curva regular C∞.Seja s0 ∈ ]a, b[ . Vamos considerar a reta tangente a α em s0 que denotaremos por Gs0 .Temos que Gs0 divide o plano em dois semi-planos fechados:
x
y Gs0
��s0 �
Semi-plano 1
Semi-plano 2
Definicao: Dizemos que α e convexa em s0 se ∃δ > 0 tal que α (]s0 − δ, s0 + δ[) estacontido em dois semi-planos fechados determinados pela reta tangente Gs0 :
x
y Gs0
��s0 �
T�s0 �
Convexaem s0
x
yGs0
��s0 �
T�s0 �
Não convexaem s0
Suponhamos α : ]a, b[ −→ R2 parametrizada pelo comprimento de arco. Logo, T (s0) =α′ (s0) .
Vamos considerar a equacao da reta tangente a α em s0 como Gs0 (s) = α (s0) +(s − s0) T (s0) .
Temos k (s0) N (s0) = T ′ (s0) . Suponhando k (s0) �= 0 temos T ′ (s0) = α′′ (s0) �= −→0 .
Expandindo α em Serie de Taylor em torno de s = s0 temos:
α (s) = α (s0) + (s − s0) α′ (s0) +(s − s0)
2
2α′′ (s0) + R (s) ,
sendo R uma funcao vetorial tal que
lims→s0
R (s)
(s − s0)2 =
−→0 .
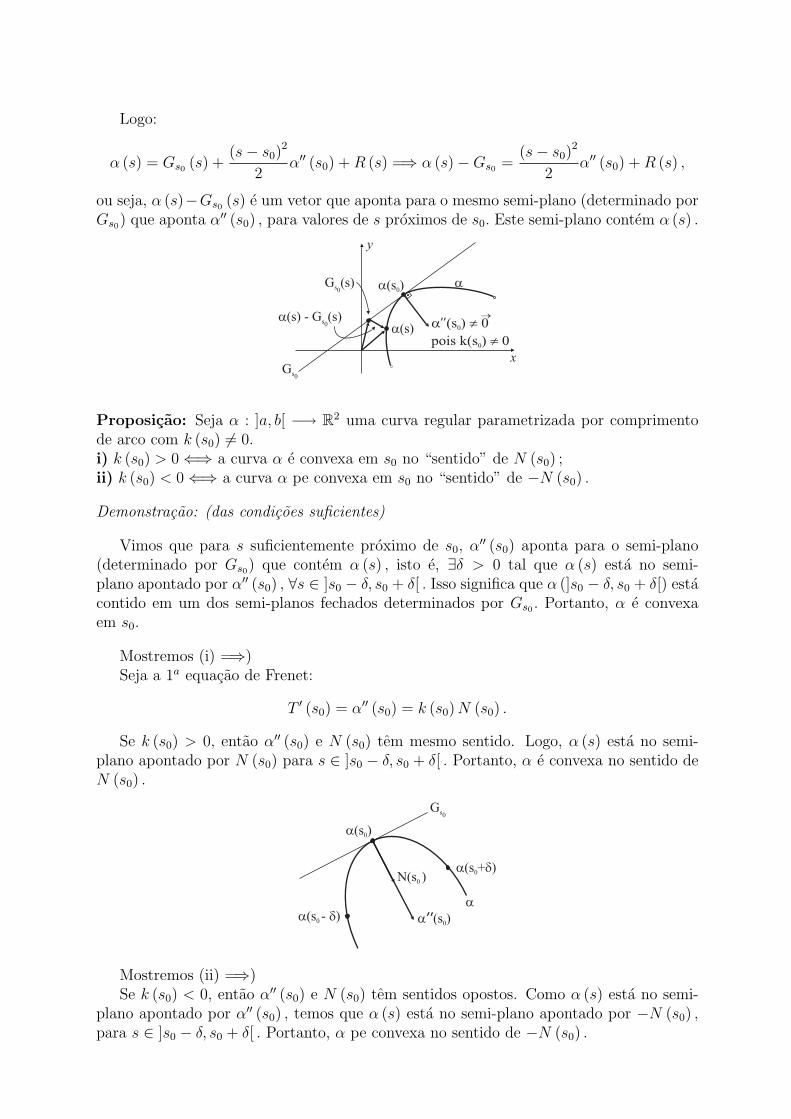
Logo:
α (s) = Gs0 (s) +(s − s0)
2
2α′′ (s0) + R (s) =⇒ α (s) − Gs0 =
(s − s0)2
2α′′ (s0) + R (s) ,
ou seja, α (s)−Gs0 (s) e um vetor que aponta para o mesmo semi-plano (determinado porGs0) que aponta α′′ (s0) , para valores de s proximos de s0. Este semi-plano contem α (s) .
x
y
Gs0
G (s)s0
�(s) - G (s)s0 �
’’(s
s 00
0
)
pois k( )
�
�(s0)
��(s)
�
Proposicao: Seja α : ]a, b[ −→ R2 uma curva regular parametrizada por comprimentode arco com k (s0) �= 0.i) k (s0) > 0 ⇐⇒ a curva α e convexa em s0 no “sentido” de N (s0) ;ii) k (s0) < 0 ⇐⇒ a curva α pe convexa em s0 no “sentido” de −N (s0) .
Demonstracao: (das condicoes suficientes)
Vimos que para s suficientemente proximo de s0, α′′ (s0) aponta para o semi-plano(determinado por Gs0) que contem α (s) , isto e, ∃δ > 0 tal que α (s) esta no semi-plano apontado por α′′ (s0) , ∀s ∈ ]s0 − δ, s0 + δ[ . Isso significa que α (]s0 − δ, s0 + δ[) estacontido em um dos semi-planos fechados determinados por Gs0 . Portanto, α e convexaem s0.
Mostremos (i) =⇒)Seja a 1a equacao de Frenet:
T ′ (s0) = α′′ (s0) = k (s0) N (s0) .
Se k (s0) > 0, entao α′′ (s0) e N (s0) tem mesmo sentido. Logo, α (s) esta no semi-plano apontado por N (s0) para s ∈ ]s0 − δ, s0 + δ[ . Portanto, α e convexa no sentido deN (s0) .
Gs0
�(s )0
�’’(s )0
�
N(s )0
� �(s + )0
� �(s - )0
Mostremos (ii) =⇒)Se k (s0) < 0, entao α′′ (s0) e N (s0) tem sentidos opostos. Como α (s) esta no semi-
plano apontado por α′′ (s0) , temos que α (s) esta no semi-plano apontado por −N (s0) ,para s ∈ ]s0 − δ, s0 + δ[ . Portanto, α pe convexa no sentido de −N (s0) .

Gs0
�(s )0
�’’(s )0
�
-N(s )0
� �(s + )0
� �(s - )0
N(s )0
Observacao: Este resultado tambem e valido para curvas regulares nao parametrizadaspor comprimento de arco.
Exemplo: Estudemos a convexidade local da curva cossenoide
α (t) = (t, cos t) ; t ∈ ]0, 2π[ .
Temos α′ (t) = (1,− sen t) ; |α′ (t)| =√
1 + sen2 t �= 1, ou seja α nao esta parametrizadapor comprimento de arco.
Temos:
α′′ (t) = (0,− cos t) ;
N (t) = (sen t, 1) ;
N (t) =(sen t, 1)√1 + sen2 t
.
Logo:
k (t) =〈α′′ (t) , N (t)〉
|α′ (t)|3 =− cos t(√
1 + sen2 t)3 .
Portanto:
k (t) = 0 ⇐⇒ cos t = 0 ⇐⇒ t =π
2ou t =
3π
2;
k (t) > 0 ⇐⇒ cos t < 0 ⇐⇒ π
2< t <
3π
2;
k (t) < 0 ⇐⇒ cos t > 0 ⇐⇒ 0 < t <π
2ou
3π
2< t < 2π.
Logo:
(a) para t ∈]π
2,3π
2
[a curva e convexa no sentido de N (t)
(ou N (t)
);
(b) para t ∈]0,
π
2
[∪]3π
2, 2π
[a curva e convexa no sentido de −N (t)
(ou − N (t)
).

x
y
��� �
N�
N7�
��� 7�
�
23�2
G �
2
G 3�2
1
0
�
2�N���
������
=Observemos que nos pontos t =
π
2e t =
3π
2, α′′
(π
2
)= α′′
(3π
2
)= 0 (embora
N(π
2
)= (1, 1) e N
(3π
2
)= (1, 1)).
Nestes casos, em uma vizinhanca deπ
2ou
3π
2, a curva α possui pontos nos dois semi-
planos determinados pelas tangentes, ou seja, α nao e convexa nesses dois pontos.
11 Raio de Curvatura - Cırculo Osculador
Seja α : ]a, b[ −→ R2 curva regular parametrizada por comprimento de arco com curvatura
k (s) �= 0,∀s ∈ ]a, b[ . O numero real positivo ρ (s) =1
|k (s)| e chamado de raio de
curvatura de α em s.Consideremos a equacao da reta normal a α em s0:
Hs0 (r) = α (s0) + rN (s0) .
Suponhamos que k (s0) > 0 e tomemos o ponto C (s0) = Hs0 (ρ (s0)) na reta Hs0 , ouseja:
C (s0) = α (s0) + ρ (s0) N (s0) =⇒ C (s0) = α (s0) +1
k (s0)N (s0) .
x
y
��(s )0
C(s )0
N(s )0
Hs0
k(s ) > 00
d(C(s ), ( )) = ( )0 � s s0 0
Suponhamos que k (s0) < 0 e tomemos o ponto C (s0) = Hs0 (−ρ (s0)) na reta Hs0 , ouseja:
C (s0) = α (s0) − ρ (s0) N (s0) =⇒ C (s0) = α (s0) − 1
k (s0)N (s0) .

x
y
��(s )0
C(s )0
N(s )0
Hs0
k(s ) < 00
d(C(s ), ( )) = ( )0 � s s0 0
O ponto C (s0) = α (s0) +1
k (s0)N (s0) e chamado de centro de curvatura de α em
s0.O cırculo de centro em C (s0) e raio ρ (s0) e chamado de cırculo osculador a curva
α em s0.
x
y
�
CN
x
y
�
C
N
Observemos que o cırculo osculador esta sempre na “regiao convexa” que a curvadetermina. Observemos tambem que quanto maior a curvatura (em modulo), menor ocırculo osculador.
N N
N
A curva formada por todos os centros de curvatura e chamada de evoluta de α e edada por:
E (s) = α (s) +1
k (s)N (s) ; s ∈ ]a, b[ .
Proposicao: Seja α : ]a, b[ −→ R2 uma curva regular parametrizada por comprimentode arco com k (s) �= 0.Considere E : ]a, b[ −→ R2 a evoluta de α. Entao:a) E e de classe C∞.b) Se k′ (s) �= 0,∀s ∈ ]a, b[ , entao E e regular.c) Na hipotese de b), as retas tangentes a E sao as retas normais a α.
Demonstracao:
a) Temos que:
α (s) = (x (s) , y (s)) ;
N (s) = (−y′ (s) , x′ (s)) ;
k (s) = 〈α′′ (s) , N (s)〉
sao aplicacoes C∞ pois x (s) e y (s) sao C∞. Logo, E (s) = α (s) +1
k (s)N (s) e C∞.

b) Temos:
E ′ (s) = α′ (s) − k′ (s)
k (s)2N (s) +N ′ (s)k (s)
= T (s) − k′ (s)
k (s)2N (s) − k (s)
k (s)T (s) =
−k′ (s)
k (s)2 N (s) .
Como k′ (s) �= 0 temos E ′ (s) �= −→0 , ou seja, E e regular.
c) A reta tangente a E em s e dada por:
Gs (r) = E (s)+rE ′ (s) = α (s)+1
k (s)N (s)−r
k′ (s)
k (s)2N (s) = α (s)+
(1
k (s)− r
k′ (s)
k (s)2
)N (s) ,
que e reta normal a α em s.
�(s )1
�(s )2
�(s )3
E(s )3E(s )1
E(s )2
�
E
Gs1
Gs2
Gs3
Exemplos:
1) Consideremos a circunferencia α (s) = (cos s, sen s) ; s ∈ [0, 2π] .
Temos α parametrizada por comprimento de arco e E (s) = α (s) +1
k (s)N (s) .
Mas:
k (s) = 〈T ′ (s) , N (s)〉 = 〈(− cos s,− sen s) , (− cos s,− sen s)〉 = 1.
Logo:
E (s) = (cos s, sen s) +1
1(− cos s,− sen s) = (0, 0) ,
ou seja, a evoluta de uma circunferencia e um ponto (seu centro).
2) Consideremos a espiral logarıtmica α (t) = (et cos t, et sen t) ; t ∈ R.
Vimos que a curvatura de α e k (t) =(et√
2)−1
e independe de α estar parametrizadapor comprimento de arco ou nao. Para obtermos a equacao da evoluta, e preciso queo vetor normal seja unitario (assim o raio de curvatura e o raio do cırculo osculador).Assim:
N (t) =(−et (sen t + cos t) , et (cos t − sen t)
) ⇒ |N (t)| = et√
2.
Logo:
E (t) = α (t) +1
k (t)
N (t)
|N (t)|=(et cos t, et sen t
)+ et
√2(−et (sen t + cos t) , et (cos t − sen t))
et√
2=⇒
E (t) =(−et sen t, et cos t
)ou seja, a evoluta de uma espiral logaritmica e tambem uma espiral logarıtmica.
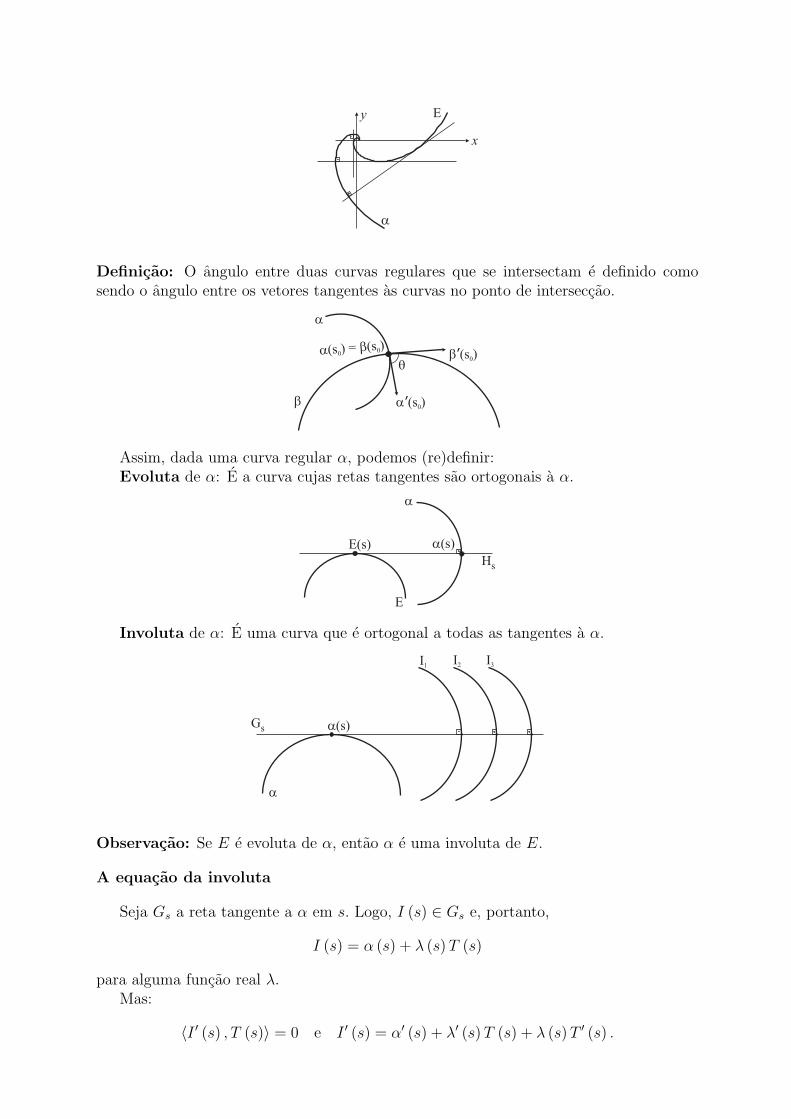
x
y E
�
Definicao: O angulo entre duas curvas regulares que se intersectam e definido comosendo o angulo entre os vetores tangentes as curvas no ponto de interseccao.
�
�
� �’(s )0
�’(s )0� �(s ) = (s )
00
Assim, dada uma curva regular α, podemos (re)definir:Evoluta de α: E a curva cujas retas tangentes sao ortogonais a α.
E
E(s)
�
��s)
Hs
Involuta de α: E uma curva que e ortogonal a todas as tangentes a α.
�
��s)Gs
I1I2 I3
Observacao: Se E e evoluta de α, entao α e uma involuta de E.
A equacao da involuta
Seja Gs a reta tangente a α em s. Logo, I (s) ∈ Gs e, portanto,
I (s) = α (s) + λ (s) T (s)
para alguma funcao real λ.Mas:
〈I ′ (s) , T (s)〉 = 0 e I ′ (s) = α′ (s) + λ′ (s) T (s) + λ (s) T ′ (s) .
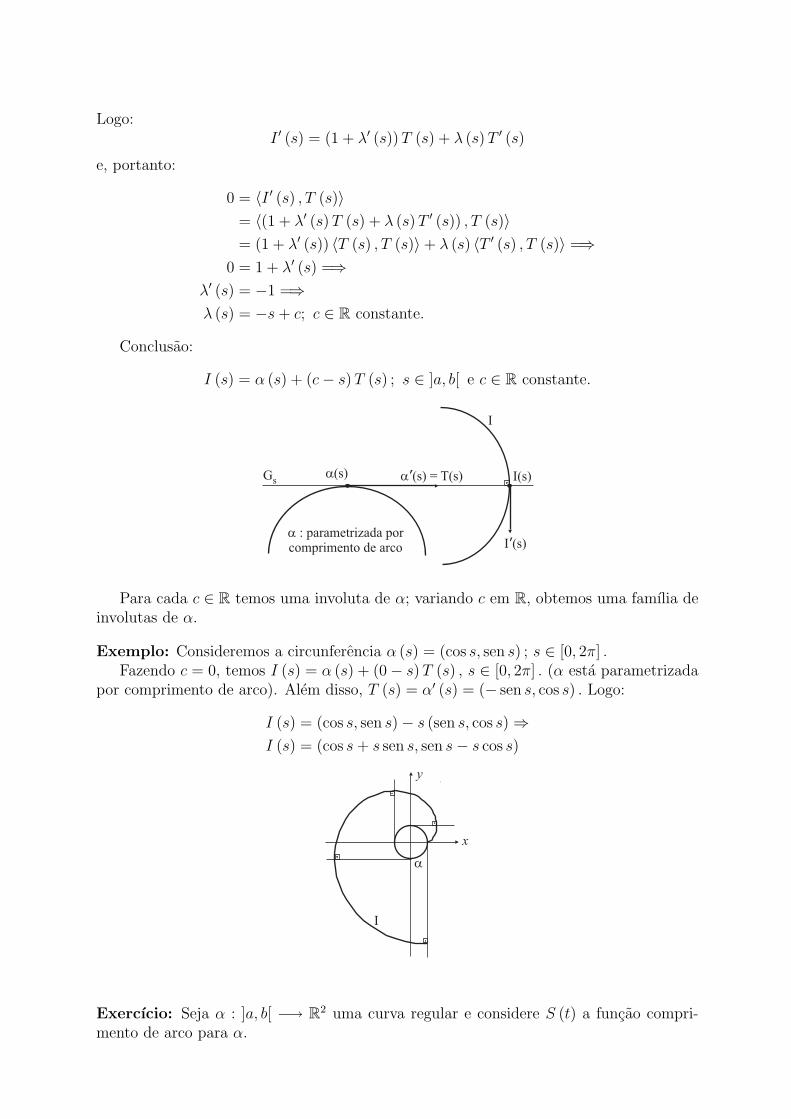
Logo:I ′ (s) = (1 + λ′ (s)) T (s) + λ (s) T ′ (s)
e, portanto:
0 = 〈I ′ (s) , T (s)〉= 〈(1 + λ′ (s) T (s) + λ (s) T ′ (s)) , T (s)〉= (1 + λ′ (s)) 〈T (s) , T (s)〉 + λ (s) 〈T ′ (s) , T (s)〉 =⇒
0 = 1 + λ′ (s) =⇒λ′ (s) = −1 =⇒λ (s) = −s + c; c ∈ R constante.
Conclusao:
I (s) = α (s) + (c − s) T (s) ; s ∈ ]a, b[ e c ∈ R constante.
�� parametrizada porcomprimento de arco
��s)Gs � �’ s) = T(s) I(s)
I (s)’
I
Para cada c ∈ R temos uma involuta de α; variando c em R, obtemos uma famılia deinvolutas de α.
Exemplo: Consideremos a circunferencia α (s) = (cos s, sen s) ; s ∈ [0, 2π] .Fazendo c = 0, temos I (s) = α (s) + (0 − s) T (s) , s ∈ [0, 2π] . (α esta parametrizada
por comprimento de arco). Alem disso, T (s) = α′ (s) = (− sen s, cos s) . Logo:
I (s) = (cos s, sen s) − s (sen s, cos s) ⇒I (s) = (cos s + s sen s, sen s − s cos s)
x
y
�
I
Exercıcio: Seja α : ]a, b[ −→ R2 uma curva regular e considere S (t) a funcao compri-mento de arco para α.

a) Mostre que a famılia de involutas e dada por:
I (t) = α (t) + (c − S (t))T (t)
|T (t)| ; t ∈ ]a, b[ e c ∈ R constante.
Resolucao:Temos:
I (t) = α (t) + λ (t) α′ (t) .
Assim:
0 = 〈I ′ (t) , α′ (t)〉 =⇒0 = 〈α′ (t) + λ′ (t) α′ (t) + λ (t) α′′ (t) , α′ (t)〉 =⇒0 = 〈α′ (t) , α′ (t)〉 + λ′ (t) 〈α′ (t) , α′ (t)〉 + λ (t) 〈α′ (t) , α′′ (t)〉 =⇒0 = (1 + λ′ (t)) |α′ (t)|2 + λ (t) 〈α′ (t) , α′′ (t)〉 .
Mas:
S ′ (t) = |α′ (t)| =√〈α′ (t) , α′ (t)〉 =⇒
S ′′ (t) =2 〈α′ (t) , α′′ (t)〉2√〈α′ (t) , α′ (t)〉 =⇒
〈α′ (t) , α′′ (t)〉 = |α′ (t)|S ′′ (t) =⇒〈α′ (t) , α′′ (t)〉 = S ′ (t) S ′′ (t) .
Assim:
(1 + λ′ (t)) |α′ (t)|2 + λ (t) 〈α′ (t) , α′′ (t)〉 = 0 =⇒(1 + λ′ (t)) (S ′ (t))2
+ λ (t) S ′ (t) .S ′′ (t) = 0 =⇒(1 + λ′ (t)) S ′ (t) + λ (t) S ′′ (t) = 0 =⇒
S ′ (t) + λ′ (t) S ′ (t) + λ (t) S ′′ (t) = 0 =⇒S ′ (t) + (λ (t) S ′ (t))′ = 0 =⇒(S (t) + λ (t) S ′ (t))′ = 0 =⇒
S (t) + λ (t) S ′ (t) = c =⇒λ (t) =
c − S (t)
S ′ (t).
Logo,
I (t) = α (t) +c − S (t)
|α′ (t)| α′ (t) =⇒
I (t) = α (t) +c − S (t)
|T (t)| T (t) .
b) Em que condicoes I e uma curva regular?
Resolucao:

I nao sera regular quando I ′ (t) = 0, ou seja:(α (t) + (c − S (t))
T (t)
|T (t)|)′
= 0 =⇒
α′ (t) + (−S ′ (t))(
T (t)
|T (t)|)
+ (c − S (t))
(T (t)
|T (t)|)′
= 0.
Mas α′ (t) = T (t) e S ′ (t) = |α′ (t)| = |T (t)| . Logo:
T (t) − (|T (t)|)(
T (t)
|T (t)|)
+ (c − S (t))
(T (t)
|T (t)|)′
= 0 =⇒
(c − S (t))
(T (t)
|T (t)|)′
= 0 ⇒
c − S (t) = 0 ou
(T (t)
|T (t)|)′
= 0 =⇒
S (t) = c ouT (t)
|T (t)| = k; k constante.
Mas se S (t) = c, entao 1 = |α′ (t)| = S ′ (t) = 0, uma contradicao. Logo,T (t)
|T (t)| = k, ou
seja, I nao sera regular quandoT (t)
|T (t)| for constante. Conclusao: I sera regular quando
T (t)
|T (t)| depender de t, ou seja, quando I nao for uma reta.
12 Duas Transformacoes Importantes
Definicao: Seja v ∈ R2. A aplicacao T : R2 −→ R2 definida por:
T (x, y) = (x, y) + v
e chamada translacao por v.
A aplicacao T e diferenciavel de classe C∞; v = (v1, v2) e T (x, y) = (x, y) + (v1, v2) =(x + v1, y + v2) .
Definicao: Seja θ ∈ R. A aplicacao L : R2 −→ R2 definida por:
L (x, y) = (x cos θ − y sen θ, x sen θ + y cos θ)
e chamada rotacao por um angulo α.
Se u = (x, y) = (‖u‖ cos ϕ, ‖u‖ sen ϕ) , entao:
L (u) = (‖L (u)‖ cos (ϕ + θ) , ‖L (u)‖ sen (ϕ + θ))
= (‖u‖ (cos ϕ cos θ − sen ϕ sen θ) , ‖u‖ (sen ϕ cos θ + sen θ cos ϕ))
= (x cos θ − y sen θ, x sen θ + y cos θ)

x
y
��
y
x
u = (x,y)
L(u)
Observacoes:
1) L e uma transformacao linear e como ‖L (u)‖ = ‖u‖ , L e uma isometria.
2) Se B = {(1, 0) , (0, 1)} e base canonica de R2, entao [L]B =
[cos θ − sen θsen θ cos θ
]e chamada
matriz de rotacao e [L]B [u] = [L (u)] .
3) L e diferenciavel de classe C∞.
4) Se L e linear, dL (w) = L (w) .
Exercıcio: Seja α uma curva regular parametrizada por comprimento de arco. Considereas curvas T ◦ α e L ◦ α. Mostre que:a) T ◦ α e L ◦ α sao curvas regulares parametrizada por comprimento de arco.
Resolucao:
Temos:
|T ′ (α (x, y))| =∣∣(α (x, y) + v)′
∣∣ = |α′ (x, y)| = 1,
pois α esta parametrizada por comprimento de arco.Analogamente:
|L′ (α (x (t) , y (t)))| =∣∣((x (t) cos θ − y (t) sen θ, x (t) sen θ + y (t) cos θ))′
∣∣= |(x′ (t) cos θ − y′ (t) sen θ, x′ (t) sen θ + y′ (t) cos θ)|=
√(x′ (t) cos θ − y′ (t) sen θ)2 + (x′ (t) sen θ + y′ (t) cos θ)2
=
√x′ (t)2 + y′ (t)2 = |α′ (x, y)| = 1
x
y
v
T � �
� x
y
v
�
�
u
L � �
b) As curvaturas de T ◦ α e L ◦ α sao iguais a curvatura de α.
Resolucao:

A curvatura de α e:
kα (t) = 〈T ′α (t) , Nα (t)〉 = 〈(x′′ (t) , y′′ (t)) , (−y′ (t) , x′ (t))〉 .
Facamos:T ◦ α (t) = β (t) = (x (t) + v1, y (t) + v2) .
Assim, a curvatura de β sera:
kβ (t) =⟨T ′
β (t) , Nβ (t)⟩,
sendo:Tβ (t) = β′ (t) = (x′ (t) , y′ (t)) =⇒ T ′
β (t) = (x′′ (t) , y′′ (t))
e:Nβ (t) = (−y′ (t) , x′ (t)) .
Logo:kβ (t) = 〈(x′′ (t) , y′′ (t)) , (−y′ (t) , x′ (t))〉 = kα (t) .
Facamos
L ◦ α (t) = γ (t) = (x (t) cos θ − y (t) sen θ, x (t) sen θ + y (t) cos θ) .
Assim, a curvatura de γ serakγ = 〈Tγ (t) , Nγ (t)〉 ,
sendo
Tγ (t) = γ′ (t) = (x′ (t) cos θ − y′ (t) sen θ, x′ (t) sen θ + y′ (t) cos θ) =⇒T ′
γ (t) = γ′′ (t) = (x′′ (t) cos θ − y′′ (t) sen θ, x′′ (t) sen θ + y′′ (t) cos θ)
e:Nγ (t) = (−x′ (t) sen θ − y′ (t) cos θ, x′ (t) cos θ − y′ (t) sen θ) .
Logo:
kγ (t) = 〈(x′′ (t) cos θ − y′′ (t) sen θ, x′′ (t) sen θ + y′′ (t) cos θ) ,
(−x′ (t) sen θ − y′ (t) cos θ, x′ (t) cos θ − y′ (t) sen θ)〉= (x′′ (t) cos θ − y′′ (t) sen θ) (−x′ (t) sen θ − y′ (t) cos θ)
+ (x′′ (t) sen θ + y′′ (t) cos θ) (x′ (t) cos θ − y′ (t) sen θ)
= x′′ (t) (−y′ (t)) + y′′ (t) x′ (t)
= 〈(x′′ (t) , y′′ (t)) , (−y′ (t) , x′ (t))〉= kα (t) .
Observacao: pelo exercıcio acima, se α e uma curva regular parametrizada por compri-mento de arco, entao L ◦ T ◦ α e uma curva regular parametrizada por comprimento dearco que tem a mesma curvatura de α.
Lema. Considere P, Q ∈ R2 e u, v vetores do R2, ‖u‖ = ‖v‖ �= 0. Entao existe umatranslacao T : R2 −→ R2 tal que T (P ) = Q e existe uma rotacao (na origem) L : R2 −→R2 tal que L (u) = v.

Demonstracao:Sejam P = (x0, y0) e Q = (x1, y1) . Queremos definir uma translacao:
T : R2 −→ R2
(x, y) �−→ (x, y) + v
tal que T (P ) = Q.Seja v = (v1, v2) . Logo:
T (x0, y0) = (x1, y1) =⇒(x0 + v1, y0 + v2) = (x1, y1) =⇒
v1 = x1 − x0 e v2 = y1 − y0.
Logo, T (x, y) = (x + x1 − x0, y + y1 − y0) e tal que T (P ) = Q.
Seja γ o angulo entre u = (x0, y0) e v = (x1, y1) .
x
y
� u
v �u� � �v�
Queremos definir uma rotacao:
L : R2 −→ R2
(x, y) �−→ (x cos θ − y sen θ, x sen θ + y cos θ)
tal que L (u) = v. Logo:
L (x0, y0) = (x1, y1) =⇒(x0 cos θ − y0 sen θ, x0 sen θ + y0 cos θ) = (x1, y1) =⇒{
x0 cos θ − y0 sen θ = x1
x0 sen θ + y0 cos θ = y1.
Como u �= −→0 , temos x0 �= 0 ou y0 �= 0. Sem perda de generalidade suponhamos que
x0 �= 0. Logo:
sen θ =y1 − y0 cos θ
x0
.
Substituindo na 1a equacao do sistema acima:
x0 cos θ − y0y1 − y0 cos θ
x0
= x1 =⇒(x0 +
y20
x0
)cos θ = x1 +
y1y0
x0
=⇒(x2
0 + y20
)cos θ = x0x1 + y0y1 =⇒cos θ =
x0x1 + y0y1(√x2
0 + y20
)2 =uv
‖u‖2 =uv
‖u‖ ‖v‖ ,
ou seja, θ = γ. Logo:
L (x, y) = (x cos γ − y sen γ, x sen γ + y cos γ)
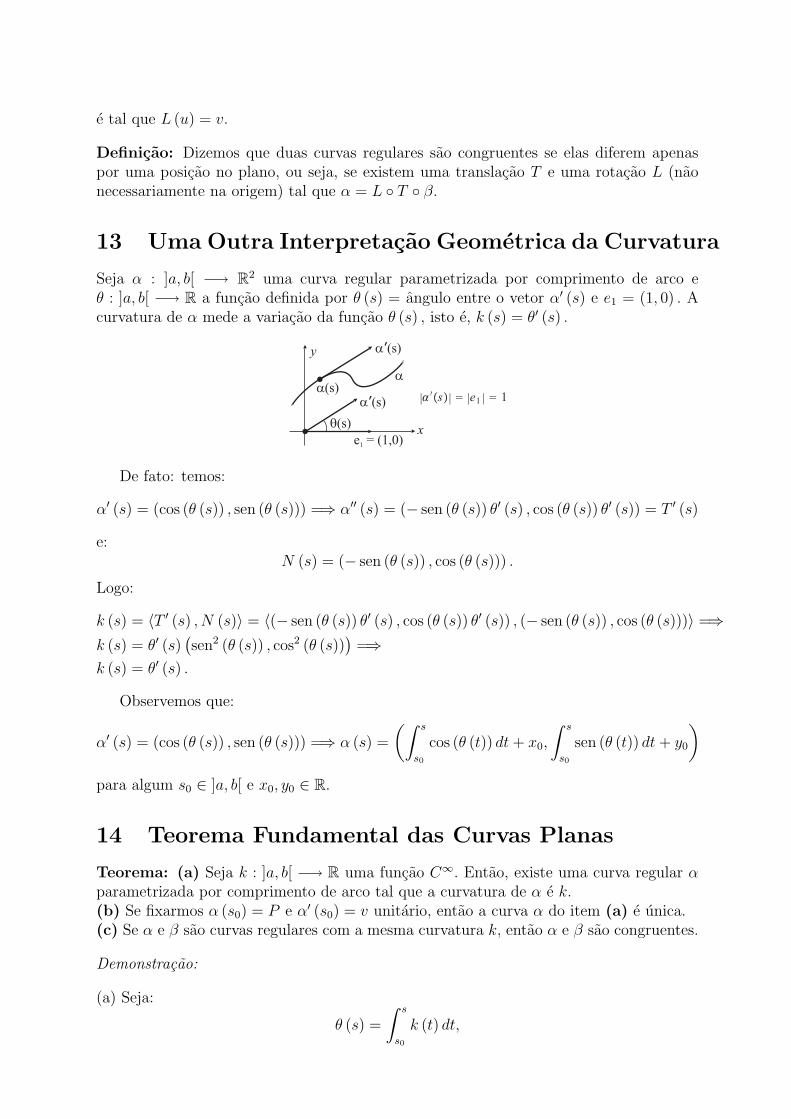
e tal que L (u) = v.
Definicao: Dizemos que duas curvas regulares sao congruentes se elas diferem apenaspor uma posicao no plano, ou seja, se existem uma translacao T e uma rotacao L (naonecessariamente na origem) tal que α = L ◦ T ◦ β.
13 Uma Outra Interpretacao Geometrica da Curvatura
Seja α : ]a, b[ −→ R2 uma curva regular parametrizada por comprimento de arco eθ : ]a, b[ −→ R a funcao definida por θ (s) = angulo entre o vetor α′ (s) e e1 = (1, 0) . Acurvatura de α mede a variacao da funcao θ (s) , isto e, k (s) = θ′ (s) .
x
y
�(s)
�’(s)
�
e = (1,0)1
�’(s)
�(s)
|� ��s�| � |e1 | � 1
De fato: temos:
α′ (s) = (cos (θ (s)) , sen (θ (s))) =⇒ α′′ (s) = (− sen (θ (s)) θ′ (s) , cos (θ (s)) θ′ (s)) = T ′ (s)
e:N (s) = (− sen (θ (s)) , cos (θ (s))) .
Logo:
k (s) = 〈T ′ (s) , N (s)〉 = 〈(− sen (θ (s)) θ′ (s) , cos (θ (s)) θ′ (s)) , (− sen (θ (s)) , cos (θ (s)))〉 =⇒k (s) = θ′ (s)
(sen2 (θ (s)) , cos2 (θ (s))
)=⇒
k (s) = θ′ (s) .
Observemos que:
α′ (s) = (cos (θ (s)) , sen (θ (s))) =⇒ α (s) =
(∫ s
s0
cos (θ (t)) dt + x0,
∫ s
s0
sen (θ (t)) dt + y0
)para algum s0 ∈ ]a, b[ e x0, y0 ∈ R.
14 Teorema Fundamental das Curvas Planas
Teorema: (a) Seja k : ]a, b[ −→ R uma funcao C∞. Entao, existe uma curva regular αparametrizada por comprimento de arco tal que a curvatura de α e k.(b) Se fixarmos α (s0) = P e α′ (s0) = v unitario, entao a curva α do item (a) e unica.(c) Se α e β sao curvas regulares com a mesma curvatura k, entao α e β sao congruentes.
Demonstracao:
(a) Seja:
θ (s) =
∫ s
s0
k (t) dt,

sendo s0 ∈ ]a, b[ .Definimos α : ]a, b[ −→ R2 com α (s) = (x (s) , y (s)) da seguinte forma:
x (s) = x0 +
∫ s
s0
cos (θ (t) + λ) dt e y (s) = y0 +
∫ s
s0
sen (θ (t) + λ) dt,
sendo x0, y0, λ constantes. (Na interpretacao acima λ = 0 pois o referencial era e1 cujoangulo e nulo com x).
Como θ e C∞, temos que α e C∞.Assim:
α′ (s) = (x′ (s) , y′ (s)) = (cos (θ (t) + λ) , sen (θ (t) + λ) dt) ,
|α′ (t)| = cos2 (θ (t) + λ) + sen2 (θ (t) + λ) dt = 1.
Portanto, α e uma curva parametrizada por comprimento de arco.Seja kα (s) = 〈α′′ (s) , N (s)〉 curvatura de α. Temos:
α′′ (s) = (− sen (θ (t) + λ) θ′ (s) , cos (θ (t) + λ) θ′ (s))
eN (s) = (− sen (θ (t) + λ) , cos (θ (t) + λ)) .
Logo:
kα = 〈α′′ (s) , N (s)〉 = θ′ (s)(sen2 (θ (t) + λ) + cos2 (θ (t) + λ)
)= θ′ (s) .
Mas θ′ (s) = k (s) , pois θ (s) =
∫ s
s0
k (t) dt. Assim, kα (s) = θ′ (s) = k (s) , como querıamos.
(b) Seja α : ]a, b[ −→ R2 com curvatura k (s) e seja α (s0) = (x0, y0) e α′ (s0) = (u0, v0) .Pela 1a Equacao de Frenet temos T ′ (s) = k (s) N (s) , ou seja:{
x′′ (s) = −k (s) y′ (s)y′′ (s) = k (s) x′ (s)
.
Desta forma, temos um sistema de Equacoes Diferenciais Ordinarias:{x′′ = −k.y′
y′′ = k.x′
linear de 2a ordem com condicoes iniciais{x (s0) = x0
y (s0) = y0e
{x′ (s0) = u0
y′ (s0) = v0.
Pelo Teorema de Existencia e Unicidade para sistema de equacoes diferenciais ordinariaslineares, existem unicas funcoes x e y satisfazendo o sistema, ou seja, α (s) = (x (s) , y (s))e unica.
(c) Basta provar que existe T : translacao e L : rotacao tais que α = L ◦ T ◦ β.Seja s0 ∈ ]a, b[, considere os pontos P = α (s0) e Q = β (s0) e os vetores u = α′ (s0) e
v = β′ (s0) .

Pelo Lema acima, existem translacoes T1, T2 : R2 −→ R2 tais que T1 (Q) = 0; T2 (0) =P e uma rotacao L1 : R2 −→ R2 tal que L1 (v) = u. (obs: T1 ◦L e rotacao ou translacao).
Seja α = T2 ◦ L1 ◦ T1 ◦ β. Vimos que as curvaturas de β e α sao iguais. Logo, α e αpossuem mesma curvatura.
Temos:
α (s0) = T2 ◦ L1 ◦ T1 ◦ β (s0) = T2 ◦ L1 ◦ T1 (Q) = T2 ◦ L1 (0) = T2 (0) = P = α (s0)
e:
α′ (s0) = d (T2 ◦ L1 ◦ T1)β(s0) β′ (s0) .
Mas
d (T2 ◦ L1 ◦ T1)β(s0) = dL1T1(β(s0)) = dL10 .
De fato:
T2 ◦ L1 ◦ T1 (x, y) = (u2 + (x cos θ − y sen θ) + u1 cos θ − v1 sen θ,
v2 + (x sen θ + y cos θ) + u1 sen θ + v1 cos θ)
sendo:
T1 (x, y) = (x, y) + (u1, v1) ;
L1 (x, y) = (x cos θ − y sen θ, x sen θ + y cos θ) ;
T2 (x, y) = (x, y) + (u2, v2) .
Logo:
JT2◦L1◦T1 (x, y) =
[cos θ − sen θsen θ cos θ
]= JL1 (x, y) .
(Obs: JT2◦L1◦T1 = JT2JL1JT1 = IdJL1Id = JL1).Por fim:
d (T2 ◦ L1 ◦ T1)β(s0) ≡ JL1 (β (s0)) =
[cos θ − sen θsen θ cos θ
]= JL1 (0) ≡ dL10 .
Assim:
α′ (s0) ≡[cos θ − sen θsen θ cos θ
][β′ (s0)] ≡ L1 (v) = u = α′ (s0) .
Logo, α (s0) = α (s0) e α′ (s0) = α′ (s0) . Pelo item (b) temos α = α. Fazendo T2 ◦L1 =L e T1 = T temos α = L ◦ T ◦ β e, daı α e β sao congruentes.
15 Receita para Determinar Curvas de Curvatura k
Seja k : ]a, b[ −→ R funcoes C∞.Para determinar uma curva seguimos os passos:
(1) Determinamos θ (s) =
∫ s
s0
k (t) dt.
(2) Definimos:α : ]a, b[ −→ R2
s �−→ α (s) = (x (s) , y (s))

tal que:
x (s) =
∫ s
s0
cos (θ (t)) dt
e:
y (s) =
∫ s
s0
sen (θ (t)) dt.
Para determinar uma curva com α (s0) = (x0, y0) e α′ (s0) = (u0, v0) fazemos:
x (s) = x0 +
∫ s
s0
cos (θ (t) + λ) dt e y (s) = y0 +
∫ s
s0
sen (θ (t) + λ) dt
e, para determinar λ, fazemos α′ (s0) = (cos (θ (s0) + λ) , sen (θ (s0) + λ)) = (u0, v0) .
Exercıcios:
1) Determine todas as curvas de curvatura constante.
Resolucao:
Queremos k (s) = k (constante).
Fazemos θ (s) =
∫ s
s0
k (s) dt =
∫ s
s0
kdt = ks − ks0.
Se k �= 0:
x (s) =
∫ s
s0
cos (kt − ks0) dt =sen (ks − ks0)
k− sen (0)
k=
sen (ks − ks0)
k;
y (s) =
∫ s
s0
sen (kt − ks0) dt =− cos (ks − ks0)
k+
cos (0)
k=
− cos (ks − ks0)
k+
1
k.
Logo,
α (s) =
(1
ksen (ks − ks0) ,
1
k− 1
kcos (ks − ks0)
),
ou seja, as curvas de curvatura constante nao nula k sao circunferencias (ou arcos de
circunferencia) de raio1
|k| (o sinal de k determina a orientacao da curva).
Se k = 0, entao θ (s) = 0 e
x (s) =
∫ s
s0
cos 0◦dt = s − s0;
y (s) =
∫ s
s0
sen 0◦dt.
Logo, α (s) = (s − s0, 0) , ou seja, as curvas de curvatura constante nula sao retas (ousegmentos de reta).
2) Determine a curva de α tal que α (1) = (1, 1) ; α′ (1) = (1, 0) que tem curvatura
k (s) =1
s; s > 0.
Resolucao:

Facamos:
θ (s) =
∫ s
1
1
tdt = ln |s| .
Observacao: α (1) = (1, 1) =⇒ s0 = x0 = y0 = 1.Assim:
x (s) = 1 +
∫ s
1
cos (ln |t| + λ) dt =⇒ x′ (s) = cos (ln |s| + λ) .
Mas α′ (1) = (0, 1) =⇒ x′ (1) = 0 e y′ (1) = 1.Assim:
x′ (s) = 0 =⇒ cos λ = 0 =⇒ λ =π
2+ hπ; h ∈ Z.
Tomando h = 0 temos λ =π
2.
Logo:
x (s) = 1 +
∫ s
1
cos(ln |t| + π
2
)dt
= 1 −∫ s
1
sen (ln |t|) dt
= 1 −(
t sen (ln |t|)|s1 −∫ s
1
cos (ln |t|))
= 1 − s sen (ln |t|) + (t cos (ln |t|))|s1 −∫ s
1
− sen (ln |t|) ,
ou seja:
1 −∫ s
1
sen (ln |t|) dt = 1 − s sen (ln |t|) + (t cos (ln |t|))|s1 −∫ s
1
− sen (ln |t|) =⇒∫ s
1
sen (ln |t|) dt =1
2+
s
2(sen (ln |s|) − cos (ln |s|)) .
Portanto:
x (s) =1
2− s
2(sen (ln |s|) − cos (ln |s|)) .
Analogamente:
y (s) = 1 +
∫ s
1
sen(ln |t| + π
2
)dt
satisfaz y′ (1) = 1 e y (s) = 1 +
∫ s
1
cos (ln |t|) dt.
Integrando duas vezes por partes:
y (s) =1
2+
s
2(sen (ln |s|) + cos (ln |s|)) .
Mas: {cos (ln |s|) + sen (ln |s|) =
√2 sen
(ln |s| + π
4
)sen (ln |s|) − cos (ln |s|) = −√
2 cos(ln |s| + π
4
) .

Logo:
x (s) =1
2+
√2
2s cos
(ln |s| + π
4
);
y (s) =1
2+
√2
2s sen
(ln |s| + π
4
).
Fazendo u =π
4+ ln |s| =⇒ |s| = eu−π
4 =⇒ s = eu−π4 (pois s > 0).
Tomemos a reparametrizacao β (u) = α ◦ ψ (u) ; sendo ψ (u) = eu−π4 . Logo:
β (u) = (x (ψ (u)) , y (ψ (u))) =
(1
2+
√2
2eu−π
4 . cos u,1
2+
√2
2eu−π
4 . sen u
)=⇒
β (u) =
(1
2,1
2
)+
√2
2e−
π4 (eu cos u, eu sen u) ,
que e uma espiral logarıtmica.
Observacao: a curvatura k (s) =1
s; s > 0 para α fica k (u) =
1
eu−π4
=e
π4
eupara β (a
curvatura nao muda com a reparametrizacao).
3) Determine as curvas regulares do plano que tem curvatura k (s) =1√s; s > 0.
Resolucao:Facamos:
θ (s) =
∫ s
s0
1√tdt = 2
√s − 2
√s0.
Temos α (s0) = (0, 0) =⇒ x0 = y0 = 0. Facamos λ = 0. Logo:
x (s) =
∫ s
s0
cos(2√
s − 2√
s0
)dt
=√
t sen(2√
t − 2√
s0
)∣∣∣ss0
−∫
1
2√
tsen
(2√
t − 2√
s0
)dt =
=√
s sen(2√
s − 2√
s0
)+
1
2cos
(2√
s − 2√
s0
)− 1
2.
Analogamente:
y (s) =
∫ s
s0
sen(2√
t − 2√
s0
)dt =
√s0 +
1
2sen
(2√
s − 2√
s0
)−√s cos
(2√
s − 2√
s0
).
Fazendo u = 2√
s − 2√
s0 =⇒ s =
(u + 2
√s0
2
)2
; u > −2√
s0 e, tomando a
reparametrizacao β (u) = α ◦ ψ (u) ; sendo ψ (u) =
(u + 2
√s0
2
)2
temos:
β (u) =
(u + 2
√s0
2sen u +
1
2cos u − 1
2,√
s0 +1
2sen u − u + 2
√s0
2cos u
)=⇒
β (u) =
(−1
2,√
s0
)+
(2√
s0
2sen u +
1
2cos u,
1
2sen u − 2
√s0
2cos u
)+
1
2(u sen u,−u cos u) .
Para s0 =1
4, temos uma Espiral de Arquimedes.
Consequentemente, as curvas regulares do plano com curvatura k (s) = 1√s; s > 0 sao
Espirais de Arquimedes.
16 Referencias Bibliograficas
[1] Araujo, P. V. Geometria Diferencial. Rio de Janeiro: SBM- Sociedade Brasileirade Matematica. (Colecao Matematica Universitaria). 1998.
[2] Carmo, M. P. do. Geometria Diferencial de Curvas e Superfıcies. Riode Janeiro: SBM-Sociedade Brasileira de Matematica. (Colecao Textos Universitarios).2005.
[3] Tenemblat, K. Introducao a Geometria Diferencial. Brasılia: Editora da UnB.1988.
[4] www-groups.dcs.st-and.ac.uk/˜history/. Site de Historia da Matematica da Universidadede Saint Andrews-UK.

Uma caracterizacao dos numeros perfeitos pares
Karla Barbosa de Freitas∗, Stela Zumerle Soares∗ e Cıcero Carvalho†
1 Introducao
Os numeros perfeitos eram considerados quase que mıticos na velha matematica. O 6
por exemplo, era considerado sımbolo do casamento, da saude e da beleza, devido a
concordancia de suas partes 3, 2 e 1, que somadas resultam no proprio numero.
Nicomaco listou, por volta de 100 d.C., os numeros perfeitos entre 1 e 10.000, notando
que seus algarismos finais eram 6 ou 8.
Santo Agostinho (entre outros, incluindo os primeiros Hebreus) considerava 6 como
sendo o verdadeiro numero perfeito – Deus fez a Terra em precisamente este numero de
dias (ao inves de de uma so vez), para simbolizar a perfeicao de seu trabalho. Philo
Judeus, no primeiro seculo depois de Cristo, chamou 6 o mais produtivo (fertil e sagrado)
de todos os numeros, sendo o menor dos numeros perfeitos.
Com o passar dos seculos, diversos matematicos estudaram cuidadosamente esses
numeros. Ate a epoca de Descartes e Fermat, uma enorme quantidade de conhecimento
sobre numeros perfeitos ja havia sido armazenada.
2 Primeiros resultados sobre numeros perfeitos
Definicao 2.1 Seja N um numero inteiro positivo. A funcao σ (N) =∑
d|N d e chamada
de “soma dos divisores de N”, onde d percorre os divisores de N , incluindo 1 e o proprio
n. Por exemplo, σ (11) = 1 + 11 = 12 e σ (15) = 1 + 3 + 5 + 15 = 24 .
Definicao 2.2 O numero N e dito ser perfeito se σ (N) = 2N . Quando σ (N) < 2N ,
dizemos que N e deficiente; quando σ (N) > 2N , dizemos que N e abundante.
A definicao dos perfeitos e equivalente a dizer que a soma dos divisores proprios de N
e igual a N (somente nao adicionamos o proprio N a soma). Ainda que este modo possa
∗Alunas do PET-FAMAT†Orientador

parecer natural, a principal razao para usar a funcao σ e utilizar algumas propriedades
especiais apresentadas a seguir.
Proposicao 2.3 Se mdc (m, n) = 1, entao σ (mn) = σ (m) σ (n).
Demonstracao. Se d e um divisor de mn, entao pela fatoracao unica, podemos repre-
sentar d de maneira unica como o produto de um divisor de m e um divisor de n (ja
que eles nao tenham fatores comuns). Assim, todo termo de σ (mn) (a soma de todos os
divisores de mn) ocorre exatamente uma vez na soma σ (m) σ (n) (o produto de todos os
divisores de m e n). A recıproca e tambem verdadeira: todo tal produto e um divisor de
mn, assim as somas deverao ser as mesmas. Isto e suficiente para provar a proposicao.
Assim, σ e completamente determinada quando seu valor e conhecido para todos os
argumentos que sao potencias de primos, e usaremos isso para determinar σ(N), para um
numero natural N qualquer.
Teorema 2.4 Se N = pα11 pα2
2 . . . pαkk =
k∏i=1
pαii e uma fatoracao de N em primos, entao:
σ (N) =k∏
i=1
(1 + pi + p2
i + . . . + pαii
)=
k∏i=1
pαi+1i − 1
pi − 1.
Demonstracao. Os unicos divisores de pαii sao 1, pi, p2
i , . . ., pαii , portanto σ (pαi
i ) =
1 + pi + p2i + . . . + pαi
i . Relembrando a serie geometrica temos
1 + x + x2 + . . . + xk =k∑
i=0
xi =xk+1 − 1
x − 1
a qual implica que σ (pαii ) =
(pαi+1i −1)(pi−1)
. Usando a proposicao acima, temos
σ (N) = σ
(k∏
i=1
pαii
)=
k∏i=1
σ (pαii ) =
k∏i=1
(pαi+1
i − 1)
(pi − 1).
Observe que se η|N entao σ (η) ≤ σ (N), mas vale um resultado ainda mais forte.
Lema 2.5 Se η|N , entao σ(η)η
≤ σ(N)N
, e a igualdade vale se e so se η = N .

Demonstracao. Note que, se d|N entao kd = N para algum k, entao k = Nd|N , ou
seja, k|N . Este argumento tambem e valido na recıproca, portanto temos que d|N se, e
somente se,(
Nd
) |N , que implica que
σ (N) =∑d|N
d =∑d|N
N
d= N
∑d|N
1
d
Se η e um divisor proprio de N , temos
σ (N)
N=∑d|N
1
d>∑d′ |η
1
d′ =σ (η)
η.
Do contrario vale a igualdade.
Como consequencia, temos o resultado abaixo.
Corolario 2.6 N e perfeito,se e somente se,∑d|N
(1d
)= 2.
Demonstracao. Acabamos de mostrar que d|N e equivalente a(
dN
) |N , daı
∑d|N
d =∑d|N
N
d= N
∑d|N
1
d= 2N = σ (N)
Cancelando N provamos o corolario.
3 Uma caracterizacao dos numeros perfeitos pares
A primeira pessoa que, segundo sabemos, estudou os numeros perfeitos foi o matematico
grego Euclides. Ele observou que os quatro primeiros numeros perfeitos tinham uma
forma muito especıfica:
6 = 21 (1 + 2) = 2 · 328 = 22
(1 + 2 + 22
)= 4 · 7
496 = 24(1 + 2 + 22 + 23 + 24
)= 16 · 31, e
8128 = 26(1 + 2 + 22 + 23 + 24 + 25 + 26
)= 64 · 127
Observe contudo que os numeros 90 = 23 (1 + 2 + 22 + 23) = 8 · 15 e, 2016 = 25(1 +
2 + 22 + 23 + 24 + 25) = 32 · 63 nao aparecem nessa sequencia. Como Euclides apontou

posteriormente, isso acontece porque 15 = 3 · 5 e, 63 = 32 · 7 sao ambos compostos,
enquanto os numeros 3,7,31,127 sao todos primos.
Assim, no livro IX, proposicao 36 dos ”Elementos”, Euclides escreve: ”Se tantos
numeros quanto quisermos comecarem com uma unidade(o numero 1) e forem dispostos
em sequencia e em proporcao dupla, ate que a soma de todos torne-se prima, multiplicando-
se a soma pelo ultimo desses numeros, entao o produto sera um numero perfeito”.
Observe que 1 + 2 + 22 + · · ·+ 2n−1 = 2n − 1, entao a proposicao de Euclides pode ser
reformulada da seguinte forma.
Teorema 3.1 (Euclides) Se 2n − 1 e primo, entao N = 2n−1 (2n − 1) e perfeito.
Demonstracao. E claro que, os unicos primos divisores de N sao 2n − 1 e 2. Ja que
2n − 1 e primo, temos simplesmente que σ (2n − 1) = (1 + (2n − 1)) = 2n, e assim
σ (N) = σ(2n−1
)σ (2n − 1) =
(2n − 1
2 − 1
)2n = 2n (2n − 1) = 2N
Portanto N e perfeito.
A tarefa de encontrar numeros perfeitos, entao, esta ligada com encontrar primos da
forma 2n−1. Tais numeros sao conhecidos como primos de Mersenne, devido ao monge do
seculo dezessete Marin Mersenne, que foi colega de Descartes, Fermat e Pascal. Ele sabia
que 2n−1 era primo para n = 2,3,5,11,13,17 e 19 e, mais brilhantemente, conjecturou que
os mesmo valeria para os casos em que n = 31,67,127,257. Tomou-se quase dois seculos
para analisar esses numeros.
Proposicao 3.2 (Cataldi-Fermat) Se 2n − 1 e primo, entao o proprio n e primo.
Demonstracao. Observe primeiramente, xn − 1 =
(x − 1) (xn−1 + . . . + x + 1). Suponha que n = rs, onde r, s > 1. Entao
2n − 1 = (2r)s − 1 = (2r − 1)((2r)s−1 + . . . + 2r + 1
)desse modo (2r − 1) | (2n − 1) que e primo, uma contradicao.
Observe que a recıproca nao e verdadeira, tome por exemplo o numero 211 − 1 =2047 = 23 · 89.
Todos os numeros perfeitos pares sao da forma que apareceu no teorema de Euclides?
Leonard Euler, num papel postumo provou que de fato issoacontece. Muitas demons-
tracoes desse fato ja apareceram. Mostramos a seguir duas delas.
Teorema 3.3 (Euler) Se N e um numero perfeito, entao N pode ser escrito na forma
N = 2n−1 (2n − 1), onde 2n − 1 e primo.

Demonstracao 1.
A primeira demonstracao e do proprio Euler. Seja N = 2n−1m um numero perfeito,
onde m e ımpar; ja que 2 nao divide m, ele e relativamente primo com 2n−1, e
σ (N) = σ(2n−1m
)= σ
(2n−1
)σ (m) =
(2n − 1
2 − 1
)σ (m) =
(2n − 1) σ (m)
N e perfeito, portanto σ (N) = 2N = 2 (2n−1m) = 2nm, e como mencionado, 2nm =
(2n − 1) σ (m).
Seja s = σ (m). Entao temos m = (2n − 1)(
s2n
); ja que 2n nao divide 2n − 1, entao
e obrigado a dividir s (pois m e um inteiro), assim m = (2n − 1) q, para algum q = s2n .
Se q = 1, temos um numero do tipo de Euclides, entao m = 2n − 1 e s = σ (m) = 2n =
(2n − 1) + 1 = m + 1. Ja que σ (m) e a soma de todos os divisores de m, m = 2n − 1 e
obrigatoriamente um primo,e N = 2n−1m = 2n−1 (2n − 1).
Se q > 1, refazemos a soma dos divisores de m = (2n − 1) q. Os fatores de m incluem
1,q,2n − 1, e o proprio m, assim
s = σ (m) � 1 + q + (2n − 1) + (2n − 1) q = ((2n − 1) + 1) (q + 1) =
2n (q + 1)
Mas isto implica
m
s� (2n − 1) q
2n (q + 1)=
(2n − 1
2n
)·(
q
q + 1
)<
2n − 1
2n
uma impossibilidade, pois ja estabelecemos a equacao σ (N) = 2nm = (2n − 1) s que
implica que m/s = (2n − 1)/2n.
Demonstracao 2. A segunda (e mais simples) demonstracao e dada por Dickson.
De 2nm = (2n − 1) σ (m) observamos
σ (m) =2nm
2n − 1=
((2n − 1) + 1) m
2n − 1= m +
m
2n − 1
Ja que σ (m) e m sao inteiros, temos tambem que d = m(2n−1)
deve ser um inteiro.
Desta forma (2n − 1) divide m e consequentemente o proprio d divide m.
Mas σ (m) = m + m(2n−1)
= m + d e a soma de todos os divisores de m. Como isto
pode acontecer? Certamente 1 divide m, assim concluımos que d = 1; se este nao for o
caso, entao temos que σ (m) = m + d + 1, uma contradicao. Portanto m = 2n − 1, em
particular, m nao possui outros divisores positivos alem de 1 e ele proprio, assim 2n − 1
e primo.
Referencias
[1] Adilson Goncalves, Introducao a algebra, Rio de Janeiro : IMPA, 1979.
[2] Ivan Morton Niven, Hebert S. Zuckerman, e Hugh L. Montgomery, An introducion to
the teory of numbers; 5a edicao, 1991.
[3] John Voight; Perfect Numbers: An Elementary Introduction, disponıvel em
http://magma.maths.usyd.edu.au/∼voight/notes/perfelem.pdf
USO DE SEMIVARIOGRAMA ESCALANADO PARA COMPARAR A DISTRIBUIÇÃO ESPAÇO-TEMPORAL DA PRECIPITAÇÃO ANUAL NO ESTADO
DE MINAS GERAIS1
HERBERT REZENDE DE SIQUEIRA2; JOAQUIM FERREIRA VIEIRA NETO3;EDNALDO CARVALHO GUIMARÃES4; MARCELO TAVARES4
RESUMO
A análise da variabilidade espaço-temporal de atributos climáticos vem recebendo destaque nos últimos tempos, devido a possibilidade de se realizar estimativas com maior precisão e também devido a busca por conhecimento do comportamento dessas variáveis ao longo do tempo. O objetivo deste trabalho foi verificar se, no decorrer de 5 anos, o comportamento espacial da precipitação anual no estado de Minas Gerias permaneceu o mesmo, alterando apenas as amplitudes de variação. Foram utilizados dados de precipitação anual (mm) de 63 estações climatológicas distribuídas em Minas Gerais. Os dados foram cedidos pelo Instituto Nacional de Meteorologia/5o Distrito de Meteorologia (INMET/5oDISME). Ajustou-se semivariogramas aos dados de precipitação anual para os anos de 1999, 2000, 2001, 2002 e 2003. Em seguida os semivariogramas foram escalonados utilizando-se como fator de escala a variância amostral de cada ano avaliado. Os resultados mostraram ocorreu a dependência espacial para todos os anos avaliados, mostrando que os índices de precipitação no estados estão correlacionados entre si. Os semivariogramas não apresentaram o mesmo comportamento para todos os anos e, portanto, o escalonamento e o uso de um modelo único de semivariograma escalonado para realizar as estimativas de precipitação não é possível, sendo necessário a utilização de um modelo individual para cada ano. Conclui-se que não ocorre a estabilidade temporal da precipitação anual para o estado de Minas Gerais.
Palavras-chave: Semivariogramas escalonados, geoestatística, precipitação.
ABSTRATC
ANNUAL RAINFALL IN MINAS GERAIS STATE – BRAZIL: STANDARDIZED SEMIVARIOGRAM ANALYSIS
The purpose of this work was to verify the temporal behaviour of the annual rainfall in Minas Gerais State, Brazil, using standardized semivariogram. The data of 63 climatological stations of INMET - 5o DISME (Instituto Nacional de Meteorologia - 5o Distrito de Meteorologia) were used in this study. It was used data of 1999, 2000, 2001, 2002 and 2003. Geoestatistical analysis was made by semivariogram and standardized semivariogram. 1 Projeto Financiado pela FAPEMIG - Programa de infra-estrutura para jovens doutores - Edital: 07/2003 - Processo: EDT1923/03. 2 Acadêmico do Curso de Matemática – FAMAT/UFU – Bolsista PIBIC/CNPq - Av. João Naves de Ávila, 2160, Bairro Santa Mônica, Uberlândia – MG, CEP: 38400-900 – [email protected] 3 Acadêmica do Curso de Matemática – FAMAT/UFU – PROMAT 4 Prof. Orientador – FAMAT/UFU – Av. João Naves de Ávila, 2160, Bairro Santa Mônica, Uberlândia – MG, CEP: 38400-900 – [email protected]
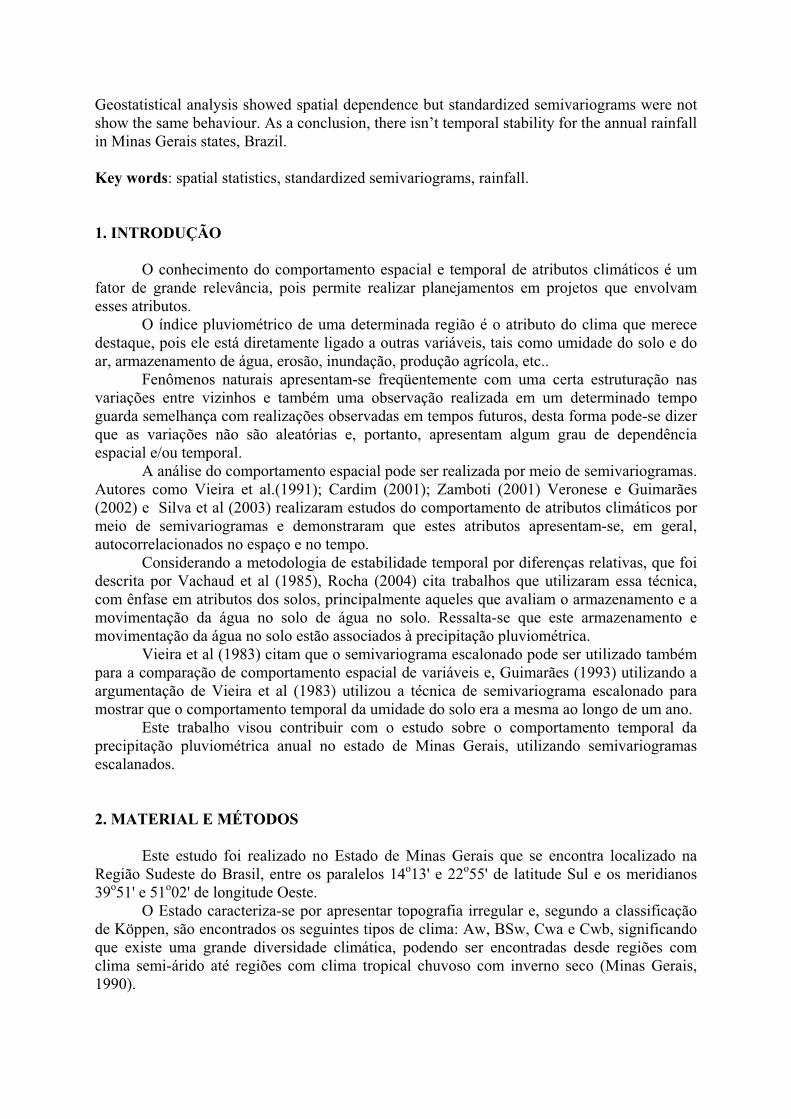
Geostatistical analysis showed spatial dependence but standardized semivariograms were not show the same behaviour. As a conclusion, there isn’t temporal stability for the annual rainfall in Minas Gerais states, Brazil.
Key words: spatial statistics, standardized semivariograms, rainfall.
1. INTRODUÇÃO
O conhecimento do comportamento espacial e temporal de atributos climáticos é um fator de grande relevância, pois permite realizar planejamentos em projetos que envolvam esses atributos. O índice pluviométrico de uma determinada região é o atributo do clima que merece destaque, pois ele está diretamente ligado a outras variáveis, tais como umidade do solo e do ar, armazenamento de água, erosão, inundação, produção agrícola, etc..
Fenômenos naturais apresentam-se freqüentemente com uma certa estruturação nas variações entre vizinhos e também uma observação realizada em um determinado tempo guarda semelhança com realizações observadas em tempos futuros, desta forma pode-se dizer que as variações não são aleatórias e, portanto, apresentam algum grau de dependência espacial e/ou temporal.
A análise do comportamento espacial pode ser realizada por meio de semivariogramas. Autores como Vieira et al.(1991); Cardim (2001); Zamboti (2001) Veronese e Guimarães (2002) e Silva et al (2003) realizaram estudos do comportamento de atributos climáticos por meio de semivariogramas e demonstraram que estes atributos apresentam-se, em geral, autocorrelacionados no espaço e no tempo.
Considerando a metodologia de estabilidade temporal por diferenças relativas, que foi descrita por Vachaud et al (1985), Rocha (2004) cita trabalhos que utilizaram essa técnica, com ênfase em atributos dos solos, principalmente aqueles que avaliam o armazenamento e a movimentação da água no solo de água no solo. Ressalta-se que este armazenamento e movimentação da água no solo estão associados à precipitação pluviométrica.
Vieira et al (1983) citam que o semivariograma escalonado pode ser utilizado também para a comparação de comportamento espacial de variáveis e, Guimarães (1993) utilizando a argumentação de Vieira et al (1983) utilizou a técnica de semivariograma escalonado para mostrar que o comportamento temporal da umidade do solo era a mesma ao longo de um ano.
Este trabalho visou contribuir com o estudo sobre o comportamento temporal da precipitação pluviométrica anual no estado de Minas Gerais, utilizando semivariogramas escalanados.
2. MATERIAL E MÉTODOS
Este estudo foi realizado no Estado de Minas Gerais que se encontra localizado na Região Sudeste do Brasil, entre os paralelos 14o13' e 22o55' de latitude Sul e os meridianos 39o51' e 51o02' de longitude Oeste.
O Estado caracteriza-se por apresentar topografia irregular e, segundo a classificação de Köppen, são encontrados os seguintes tipos de clima: Aw, BSw, Cwa e Cwb, significando que existe uma grande diversidade climática, podendo ser encontradas desde regiões com clima semi-árido até regiões com clima tropical chuvoso com inverno seco (Minas Gerais, 1990).
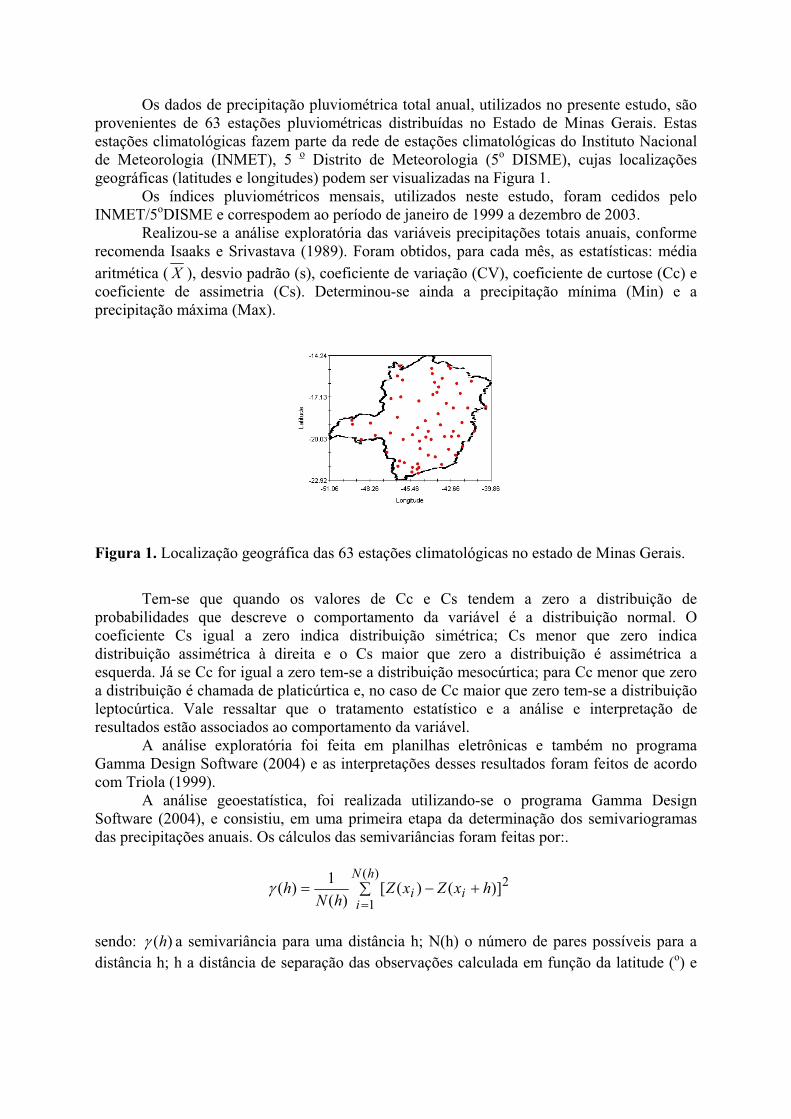
Os dados de precipitação pluviométrica total anual, utilizados no presente estudo, são provenientes de 63 estações pluviométricas distribuídas no Estado de Minas Gerais. Estas estações climatológicas fazem parte da rede de estações climatológicas do Instituto Nacional de Meteorologia (INMET), 5 o Distrito de Meteorologia (5o DISME), cujas localizações geográficas (latitudes e longitudes) podem ser visualizadas na Figura 1.
Os índices pluviométricos mensais, utilizados neste estudo, foram cedidos pelo INMET/5oDISME e correspodem ao período de janeiro de 1999 a dezembro de 2003.
Realizou-se a análise exploratória das variáveis precipitações totais anuais, conforme recomenda Isaaks e Srivastava (1989). Foram obtidos, para cada mês, as estatísticas: média aritmética ( X ), desvio padrão (s), coeficiente de variação (CV), coeficiente de curtose (Cc) e coeficiente de assimetria (Cs). Determinou-se ainda a precipitação mínima (Min) e a precipitação máxima (Max).
Figura 1. Localização geográfica das 63 estações climatológicas no estado de Minas Gerais.
Tem-se que quando os valores de Cc e Cs tendem a zero a distribuição de probabilidades que descreve o comportamento da variável é a distribuição normal. O coeficiente Cs igual a zero indica distribuição simétrica; Cs menor que zero indica distribuição assimétrica à direita e o Cs maior que zero a distribuição é assimétrica a esquerda. Já se Cc for igual a zero tem-se a distribuição mesocúrtica; para Cc menor que zero a distribuição é chamada de platicúrtica e, no caso de Cc maior que zero tem-se a distribuição leptocúrtica. Vale ressaltar que o tratamento estatístico e a análise e interpretação de resultados estão associados ao comportamento da variável. A análise exploratória foi feita em planilhas eletrônicas e também no programa Gamma Design Software (2004) e as interpretações desses resultados foram feitos de acordo com Triola (1999). A análise geoestatística, foi realizada utilizando-se o programa Gamma Design Software (2004), e consistiu, em uma primeira etapa da determinação dos semivariogramas das precipitações anuais. Os cálculos das semivariâncias foram feitas por:.
)(
1
2)]()([)(
1)(
hN
iii hxZxZ
hNh
sendo: )(h a semivariância para uma distância h; N(h) o número de pares possíveis para a distância h; h a distância de separação das observações calculada em função da latitude (o) e

da longitude (o); e Z(xi) e Z(xi+h) as observações da variável aleatória regionalizada na posição xi e xi+h., respectivamente.
Em seguida foram feitos os semivariogramas, que mostram o comportamento das semivariâncias ( ) em função distância (h), definindo, dessa forma, o modelo da variabilidade espacial. Os principais modelos de semivariogramas ajustados aos dados experimentais são descritos em Vieira (2000) e Freitas (2000), como:
Modelo linear
ha
CCh.1
0 ah0
10 CCh ah
onde ha
C.1 é o coeficiente angular para ah0 .
Modelo esférico
ahseahseCC
ah
ahCC
h
o
o ,
,
5,05,1*)(
1
3
3
1
Modelo exponencial
ahCCh 3exp110
Modelo gaussiano
2
2
10 3exp1ahCCh
Modelo sem patamar
hC)h( o
onde: (h) é a semivariância para a distância h; Co é o efeito pepita; Co+C1 é o patamar; a é o alcance da dependência espacial; e são parâmetros do modelo sem patamar, com: 0 < < 2.
Finalmente os semivariogramas foram escalonados considerando-se como fator de escala a variância amostral dos dados. Este procedimento teve o objetivo de padronizar os semivariogramas e, de acordo com Vieira et al (1983), o escalonamento resulta em
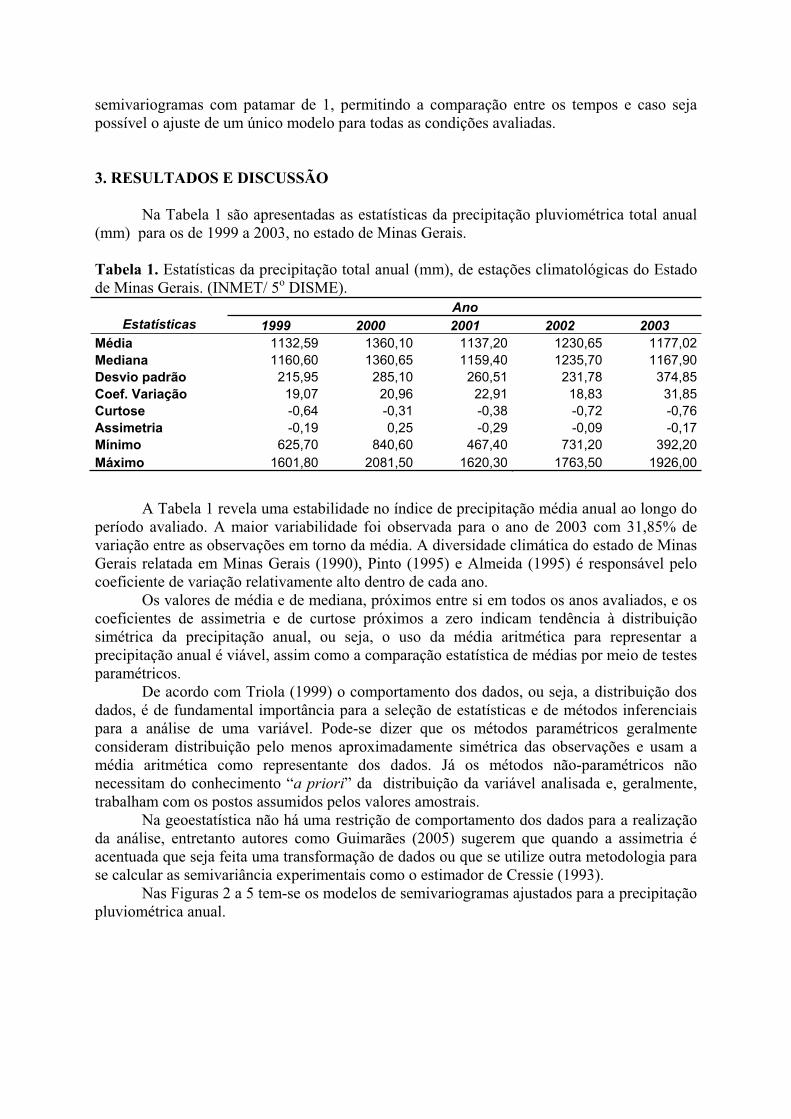
semivariogramas com patamar de 1, permitindo a comparação entre os tempos e caso seja possível o ajuste de um único modelo para todas as condições avaliadas.
3. RESULTADOS E DISCUSSÃO
Na Tabela 1 são apresentadas as estatísticas da precipitação pluviométrica total anual (mm) para os de 1999 a 2003, no estado de Minas Gerais.
Tabela 1. Estatísticas da precipitação total anual (mm), de estações climatológicas do Estado de Minas Gerais. (INMET/ 5o DISME).
AnoEstatísticas 1999 2000 2001 2002 2003
Média 1132,59 1360,10 1137,20 1230,65 1177,02Mediana 1160,60 1360,65 1159,40 1235,70 1167,90Desvio padrão 215,95 285,10 260,51 231,78 374,85Coef. Variação 19,07 20,96 22,91 18,83 31,85Curtose -0,64 -0,31 -0,38 -0,72 -0,76Assimetria -0,19 0,25 -0,29 -0,09 -0,17Mínimo 625,70 840,60 467,40 731,20 392,20Máximo 1601,80 2081,50 1620,30 1763,50 1926,00
A Tabela 1 revela uma estabilidade no índice de precipitação média anual ao longo do período avaliado. A maior variabilidade foi observada para o ano de 2003 com 31,85% de variação entre as observações em torno da média. A diversidade climática do estado de Minas Gerais relatada em Minas Gerais (1990), Pinto (1995) e Almeida (1995) é responsável pelo coeficiente de variação relativamente alto dentro de cada ano.
Os valores de média e de mediana, próximos entre si em todos os anos avaliados, e os coeficientes de assimetria e de curtose próximos a zero indicam tendência à distribuição simétrica da precipitação anual, ou seja, o uso da média aritmética para representar a precipitação anual é viável, assim como a comparação estatística de médias por meio de testes paramétricos. De acordo com Triola (1999) o comportamento dos dados, ou seja, a distribuição dos dados, é de fundamental importância para a seleção de estatísticas e de métodos inferenciais para a análise de uma variável. Pode-se dizer que os métodos paramétricos geralmente consideram distribuição pelo menos aproximadamente simétrica das observações e usam a média aritmética como representante dos dados. Já os métodos não-paramétricos não necessitam do conhecimento “a priori” da distribuição da variável analisada e, geralmente, trabalham com os postos assumidos pelos valores amostrais. Na geoestatística não há uma restrição de comportamento dos dados para a realização da análise, entretanto autores como Guimarães (2005) sugerem que quando a assimetria é acentuada que seja feita uma transformação de dados ou que se utilize outra metodologia para se calcular as semivariância experimentais como o estimador de Cressie (1993).
Nas Figuras 2 a 5 tem-se os modelos de semivariogramas ajustados para a precipitação pluviométrica anual.

Figura 2: Semivariograma da precipitação pluviométrica no ano de 1999, no Estado de Minas Gerais. (INMET/5o DISME).
Figura 3: Semivariograma da precipitação pluviométrica no ano de 2000, no Estado de Minas Gerais. (INMET/5o DISME).
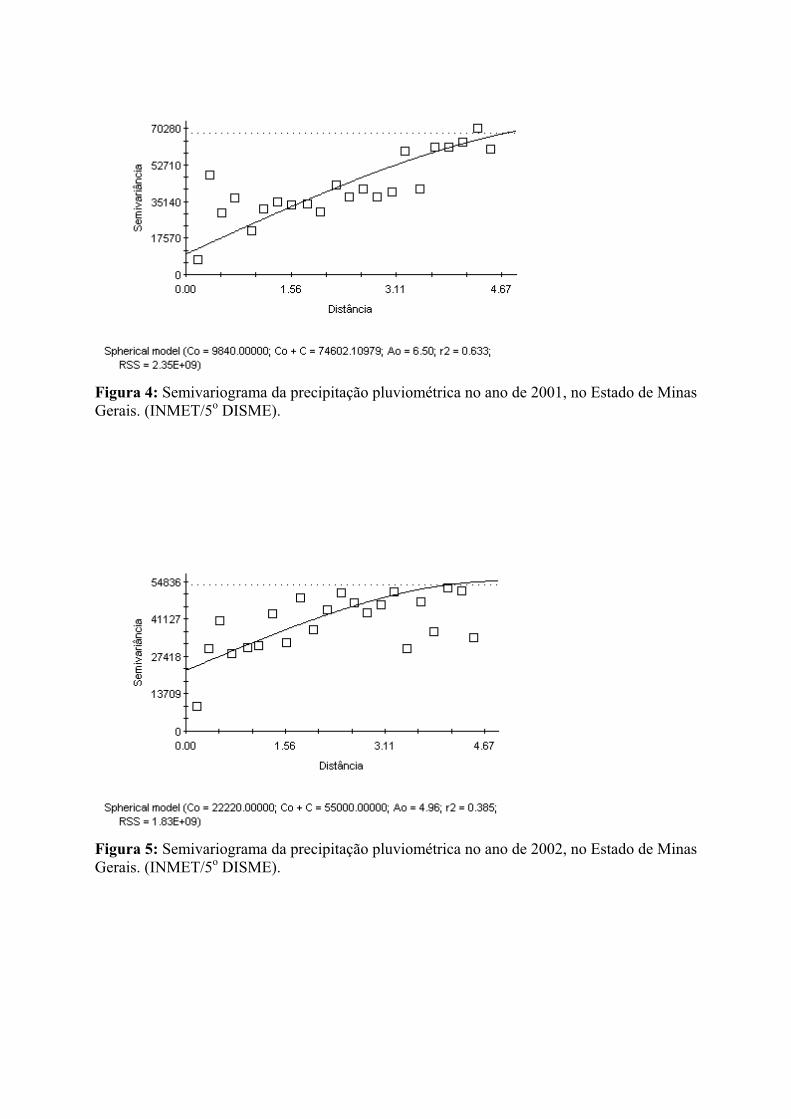
Figura 4: Semivariograma da precipitação pluviométrica no ano de 2001, no Estado de Minas Gerais. (INMET/5o DISME).
Figura 5: Semivariograma da precipitação pluviométrica no ano de 2002, no Estado de Minas Gerais. (INMET/5o DISME).

Figura 6: Semivariograma da precipitação pluviométrica no ano de 2003, no Estado de Minas Gerais. (INMET/5o DISME).
Os semivariogramas mostram comportamentos de variabilidade espacial diferenciado ao longo do tempo, pois apesar do modelo esférico ter sido ajustado para todos os casos percebe-se que os alcances (Ao) e também que a relação entre efeito pepita (Co) e o patamar (Co +C) são diferentes. Este fato revela que o escalonamento das semivariâncias não leva a adoção de um modelo único de comportamento espacial para todos os anos, conforme mostra a Figura 7.
0
0.2
0.4
0.6
0.8
1
1.2
0 1 2 3 4 5
Distância
Sem
ivar
iânc
ia e
scal
onad
a
semi1999
semi2000
semi2001
semi2002
semi2003
Figura 7: Semivariograma escalonado da precipitação pluviométrica nos anos de1990 a 2003, no Estado de Minas Gerais. (INMET/5o DISME).
Verifica-se, desta forma que a distribuição temporal da chuva no estado de Minas Gerais, não possui o mesmo comportamento ao longo dos anos e, portanto, as estimativas devem ser realizadas considerando-se a variabilidade espacial e também temporal da
precipitação, sendo que esta variabilidade temporal deve ser definida por outras metodologias ou com um banco de dados com uma amplitude temporal maior. Gonzaga et al (2005), em estudos sobre a estabilidade temporal da precipitação em Uberlândia – MG e utilizando a metodologia proposta por Vachaud et al (1985), observaram estabilidade temporal para a precipitação mensal. Carvalho et al (2006), estudando o comportamento espacial da precipitação média anual no estado de Minas Gerais, ajustou o modelo de dependência espacial por meio do semivariograma e utilizou esse modelo para realizar o mapeamento da precipitação no estado. Oliveira et al. (2005) também encontraram dependência espacial para a precipitação pluviométrica no período de verão, no estado de Minas Gerais.
A Figura 7 mostra que o ano 2002 foi o que apresentou maior diferença nas semivariâncias escalonadas em relação aos demais anos, necessitando de um estudo aprofundado sobre os acontecimentos climatológicos daquele ano, pois pode ser um ano atípico e, portanto, ter influenciado nos resultados. Deste modo reforça-se a necessidade de estudos com uma série histórica maior, capaz de detectar os valores atípicos ou de revelar ciclicidade nos índices pluviométricos.
Sugere-se que novos estudos sejam realizados com a finalidade de determinar o comportamento temporal da precipitação, utilizando-se, por exemplo, técnicas de análise de séries temporais e também estudos sobre a presença de out-liers no banco de dados de precipitação.
4. CONCLUSÕES
1) A precipitação pluviométrica anual do Estado de Minas Gerais apresenta-se autocrrelacionada no espaço.
2) Estimativas e mapeamentos de precipitação pluviométrica anual devem levar em consideração o modelo de dependência espacial caracterizado pelo semivariograma.
3) Não foi possível utilizar um único modelo de semivariograma escalonado para caracterizar a distribuição espacial da precipitação pluviométrica, indicando a ausência de estabilidade temporal.
5. REFERÊNCIAS BIBLIOGRÀFICAS
ALMEIDA, R. M. B. Características climatológicas do regime de chuvas em Minas Gerais.Viçosa, 1995, 64 p.. Dissertação (Mestrado). Universidade Federal de Viçosa.
CARDIM, M. Mapeamento do comportamento multivariado das principais variáveis climáticas de interesse agrícola do estado de São Paulo. Botucatu. Tese (Doutorado em Agronomia) – Universidade Estadual Paulista “Júlio de Mesquita Filho”, Faculdade de Ciências Agronômicas Campus de Botucatu, 2001. 124p.
CARVALHO, M. F.; GUIMARÃES, E. C. ; SOUZA JUNIOR, A. Comportamento espacial da precipitação anual do Estado de Minas Gerais. In: REUNIÃO ANUAL DA REGIÃO BRASILEIRA DA SOCIEDADE INTERNACIONAL DE BIOMETRIA, 51, 2006, Botucatu. Anais...,2006, 1 CD-ROOM.
CRESSIE, N. A. C. Statistics for spatial data. John Wiley & Sons, Inc., 1993, 900 p..
FREITAS, V. A. Análise de dados espaciais por meio de semivariogramas. Uberlândia. Monografia (Graduação em Matemática) – Universidade Federal de Uberlândia, 2000, 30p.
GAMMA DESIGN SOFTWARE. GS+: Geostatistics for the Environmental Sciences.Gamma Design Software, Plainwell, Michigan USA, 2004.
GONZAGA, F. A. da S.; ALVES, G. de F.; GUIMARÃES, E. C. Estabilidade temporal da precipitação pluviométrica mensal em Uberlândia – MG. In: ENCONTRO INTERNO DE INICIAÇÃO CIENTÍFICA, V, 2005, Uberlândia. Anais..., 2005, 1 CD-ROOM.
GUIMARÃES, E. C. Geoestatística Básica e Aplicada. Uberlândia: UFU, 75p., 2005. (Disponível em: www.ufu.famat.br/prof/ednaldo/ednaldo.htm).
GUIMARÃES, E. C. Variabilidade espacial da umidade e da densidade do solo em um Latossolo Roxo. Campinas, 1993, 135 p. Dissertação (Mestrado em Engenharia Agrícola) - Universidade Estadual de Campinas, Faculdade de Engenharia Agrícola.
ISAAKS, E. H.; SRIVASTAVA, R. M. Applied geostatistics. New York: Oxford University Press, 1989.
MINAS GERAIS. Secretaria de Planejamento. Anuário estatístico de Minas Gerais -1988 e 1989. V. 7, 1990, 896 p.
OLIVEIRA, J. A. de.; GUIMARÃES, E. C. ; TAVARES, M. Comportamento espacial de chuvas de verão no estado de Minas Gerais. In: REUNIÃO ANUAL DA REGIÃO BRASILEIRA DA SOCIEDADE INTERNACIONAL DE BIOMETRIA, 50, 2005, Londrina. Anais...,2005, 1 CD-ROOM.
PINTO, F. A. Chuvas intensas no Estado de Minas Gerais: análises e modelos. Viçosa, 1995, 87 p. Tese (Doutorado). Universidade Federal de Viçosa.
ROCHA, G. C. Estabilidade temporal da distribuição espacial da armazenagem, do gradiente de potencial total e do potencial mátrico da água, em um solo cultivado com citros.Piracicaba. Tese (Doutorado em Agronomia) – Universidade de São Paulo – Escola Superior de Agricultura “Luiz de Queiroz”. 2004. 117 p.
SILVA, J. W.; GUIMARÃES, E. C.; TAVARES, M. Variabilidade temporal da precipitação mensal e anual na estação climatológica de Uberaba-MG, Ciência e Agrotecnologia, 27(3), 2003, p. 665-674.
TRIOLA, M. F. Introdução à Estatística.7 ed. Rio de Janeiro: LTC. 410 p. 1999.
VERONESE, D. O.; GUIMARÃES, E. C. Análise geoestatística da temperatura média de Uberaba - MG, nas quatro estações do ano. Ciência e Engenharia. Uberlândia, 11( 2), 2002, p. 21-26.
VACHAUD, G.; SILANS, A. P. de; BALABANIS, P.; VAUCLIN, M. Temporal stability of spatially measured soil water probability density function. Soil Science Society America Journal.v. 49, p. 822 – 828, 1985.
VIEIRA, S. R. Geoestatística em estudos de variabilidade espacial do solo. In: Novais, R. F.; Alvarez, V. H.; Schaffer, C. E. G. R. Tópicos em Ciência do Solo. Viçosa: Sociedade Brasileira de Ciência do Solo, Cap. 1, p. 1- 54, 2000.
VIEIRA, S. R.; HATFIELD, J. L.; NIELSEN, D. R.; BIGGAR, J. W. Geostatistical theory and application to variability of some agronomical properties. Hilgardia. Berkeley, v. 31, n. 3, 1983. 75 p.
VIEIRA, S. R.; LOMBARDI NETO, F.; BURROWS, I. T. Mapeamento da chuva diária máxima provável para o estado de São Paulo. Revista Brasileira de Ciência do Solo.Campinas, v. 15, n.1, p. 93-98, 1991.
ZAMBOTI, J. L. Mapas pluviométricos médios mensais no verão para o Estado do Paraná, utilizando métodos geoestatisticos. Botucatu. Tese (Doutorado em Agronomia) – Universidade Estadual Paulista “Júlio de Mesquita Filho”, Faculdade de Ciências Agronômicas Campus de Botucatu, 2001. 117p.
UNIVERSIDADE FEDERAL DE UBERLÂNDIAFACULDADE DE MATEMÁTICA
Giselle Moraes Resende Pereira (PET Matemática – SESu-MEC) [email protected]
Marcos Antônio da Câmara (Tutor do PET Matemática)[email protected]
O PENTAGRAMA
“A Geometria possui dois grandes tesouros: um é o Teorema dePitágoras; o outro, a divisão de um segmento em média e extrema razão. Podemos comparar o primeiro a uma porção de ouro e o segundo a uma jóiapreciosa.” (Kepler1571-1630)
1. INTRODUÇÃO
O pentagrama está entre os principais e mais conhecidos símbolos, pois possui diversas representações e significados, evoluindo ao longo da história. Passou de um símbolo cristão para a atual referência onipresente entre os neopagãos com vasta profundidade mágica.A geometria do pentagrama e suas associações metafísicas foram exploradas por Pitágoras e posteriormente por seus seguidores, que o consideravam um emblema de perfeição. A geometria do pentagrama ficou conhecida como A Proporção Divina, que ao longo da arte pós-helênica, pôde ser observada nos projetos de alguns templos.O pentagrama é rico em razões áureas. É a figura formada pela união das diagonais de um pentágono. Está baseado em triângulos isósceles cujos ângulos da base são o dobro do ângulo oposto a base, sendo todos os ângulos múltiplos de 36 graus.
2. ORIGENS E DIFUSÕES
Os primeiros cristãos tinham o pentagrama como um símbolo das cinco chagas de Cristo. Desse modo, visto como uma representação do misticismo religioso e do trabalho do Criador. Também era usado como símbolo da comemoração anual da visita dos três Reis Magos ao menino Jesus. Ainda, em tempos medievais era usado como amuleto de proteção contra demônios.Alguns dizem que o pentagrama é místico porque 5 é místico. É um numero primo, a soma de 2 e 3, bem como de 1 e 4. Cristo tinha 5 feridas, dizem, se não contar com as infligidas pela coroa de espinhos; e distribui 5 cestos de pão por milhares de pessoas. Mais importante, temos 5 dedos nas mãos, 5 dedos nos pés, 5 sentidos.
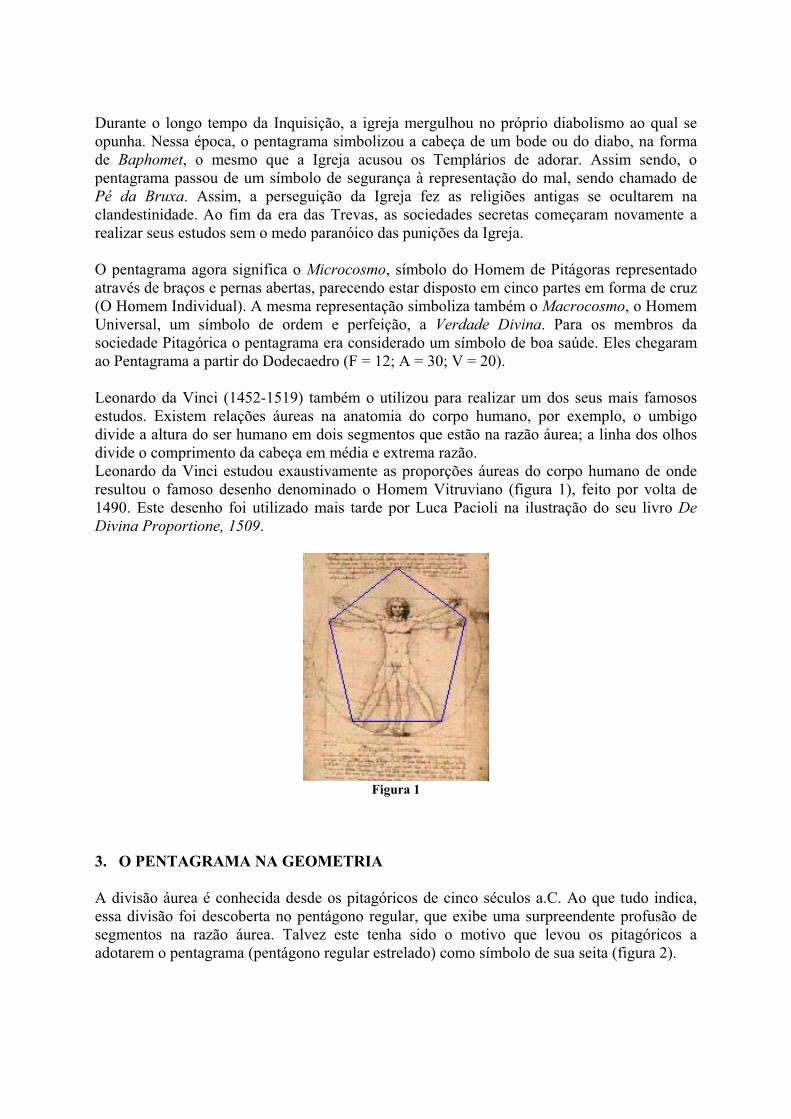
Durante o longo tempo da Inquisição, a igreja mergulhou no próprio diabolismo ao qual se opunha. Nessa época, o pentagrama simbolizou a cabeça de um bode ou do diabo, na formade Baphomet, o mesmo que a Igreja acusou os Templários de adorar. Assim sendo, o pentagrama passou de um símbolo de segurança à representação do mal, sendo chamado de Pé da Bruxa. Assim, a perseguição da Igreja fez as religiões antigas se ocultarem naclandestinidade. Ao fim da era das Trevas, as sociedades secretas começaram novamente a realizar seus estudos sem o medo paranóico das punições da Igreja.
O pentagrama agora significa o Microcosmo, símbolo do Homem de Pitágoras representado através de braços e pernas abertas, parecendo estar disposto em cinco partes em forma de cruz (O Homem Individual). A mesma representação simboliza também o Macrocosmo, o HomemUniversal, um símbolo de ordem e perfeição, a Verdade Divina. Para os membros dasociedade Pitagórica o pentagrama era considerado um símbolo de boa saúde. Eles chegaramao Pentagrama a partir do Dodecaedro (F = 12; A = 30; V = 20).
Leonardo da Vinci (1452-1519) também o utilizou para realizar um dos seus mais famososestudos. Existem relações áureas na anatomia do corpo humano, por exemplo, o umbigodivide a altura do ser humano em dois segmentos que estão na razão áurea; a linha dos olhos divide o comprimento da cabeça em média e extrema razão. Leonardo da Vinci estudou exaustivamente as proporções áureas do corpo humano de onde resultou o famoso desenho denominado o Homem Vitruviano (figura 1), feito por volta de 1490. Este desenho foi utilizado mais tarde por Luca Pacioli na ilustração do seu livro DeDivina Proportione, 1509.
Figura 1
3. O PENTAGRAMA NA GEOMETRIA
A divisão áurea é conhecida desde os pitagóricos de cinco séculos a.C. Ao que tudo indica, essa divisão foi descoberta no pentágono regular, que exibe uma surpreendente profusão desegmentos na razão áurea. Talvez este tenha sido o motivo que levou os pitagóricos a adotarem o pentagrama (pentágono regular estrelado) como símbolo de sua seita (figura 2).

Figura 2
Como exemplo de ocorrência da divisão áurea num pentágono regular convexo menciona que a interseção de duas de suas diagonais divide qualquer uma delas em média e extrema razão.Assim, na figura 3, temos:
ABCB
CBAC
Figura 3
Dizemos que um ponto C divide um segmento AB em média e extrema razão quando:
BCAC
ACAB
SejaACABx .
Temos que xAC
BCAC
BCACx 111 .
Daí, resulta que , isto é, que 012 xx ...68,12
51x .
A razão x é chamada de razão áurea.Assim C é o ponto que divide o segmento AB em média e extrema razão.
4. RELAÇÕES ÁUREAS NO PENTAGRAMA
O pentagrama é rico em relações áureas. A seguir, demonstraremos algumas propriedades conhecidas. Considere o pentagrama representado na figura 4, em que R e r são os raios dascircunferências circunscritas aos pentágonos ' e , respectivamente, e o segmento PQ com comprimento igual à unidade.
'''' EDCBA PQRST

Figura 4
As propriedades são:
4.1 - PA'
De fato:Temos que a soma dos ângulos internos do pentágono é 540 , assim cada ângulo interno é igual a 108 .Do triângulo PAA' temos que
22
1'
'2
1
2
1
'2
1
18
PAPA
PAsen
*Obs.:4
51
2
1
2
118 poissen
4.2 - 2r
OA

Temos que . Vamos determinar o valor de rOPOPOA
.
Do triângulo temos:AOP
254
OPAOsen ,
e
4
14
15422
2
OPAO
sen
Então,
22
1
OPAO
,
pois, da equação , temos que 012 1 .
4.3 - 2'
rOA
Temos que o raio maior R é igual a OA . Então, queremos mostrar que ' 2
rR
.
Por semelhança entre os triângulos e , temos que: OTA' STA'
1
1'
''
STrOT
TARSAOA
Então, 22
1'OA
rR
.
4.4 - Uma diagonal como a diagonal QS tem comprimento igual a .
Traçando as diagonais do pentágono obteremos os triângulos QST e PXQ que são semelhantes.
O ângulo , pois PQX esta inscrito no arco . Logo, Q .72ˆXQP PS 72ˆPXOs segmentos PQ, ST e RS são lados do pentágono, portanto são congruentes. Temos tambémque os segmentos PQ, ST e RS são congruentes ao segmento XS, pois o triângulo RXS é um triângulo isósceles. Segue que,
QXXS
XSQS
.

Considerando a diagonalQS , e sabendo que XS = 1, pois o triângulo SXR é isósceles e , temos:
d1RS SX
1
1
1 dd
se, e somente se,
01
112 dd
dd
Logo1 5
2d . Portanto, é o segmento áureo da diagonal do pentágono. dQS
Assim, podemos concluir que todas as diagonais do pentagrama inscrito na circunferência de raio r, medem .
4.5 - X é o ponto médio de intersecção das diagonais PR e QS. Então,
1XSQS
XQSX
.
Assim,
1XSQS
XRPX
XTXB'
Temos que: PBTB
QBXB
'
'
'
',
Assim,
1
'' TBXB.
Então,1
'
'
TBXB
.
Portanto,
XTXB'
.
1
'
'
SDSB
, pois 1'' RSRBSB .
4.6 - Se o prolongamento de SQ encontra '' BA em V, então, uma vez que VS é paralelo à ' ,' DA
'
'''
'
'
SDSB
XTXB
QPQB
VAVB
.

De fato, se prolongarmos SQ até o ponto V em '' BA , observamos que VQ são paralelos. Então,
''', DAePA
1'
'
VAVB
por semelhança dos triângulos VQB' e QRB' .
1
'
QPQB
1
'
'
SDSB
, pois 1'' RSRBSB ,onde PARB '' e .1RS
4.7 – Os comprimentos dos seis segmentos, , estão em progressão geométrica.
XZeRXRSRBSBDB ,,',',''
De fato, ,3' DB
pois, 3121''' SDRSRBDBObs.: 523
,2'SB pois, 21'' RSRBSB
RB' ,pois, PARB ''
RS = 1, pois é o lado do pentágono.
,1RX
pois, 11
XQSQRX .
2XZComo o triângulo SXR é isósceles, temos que SX = 1 e como RS = QX = , temos que: 1
22
1 111
1
1111XZ .
*Obs.:1
.
4.8 – O comprimento de um lado do pentágono ' é .'''' EDCBA 2
De fato, 21''' QPQBPBBA .
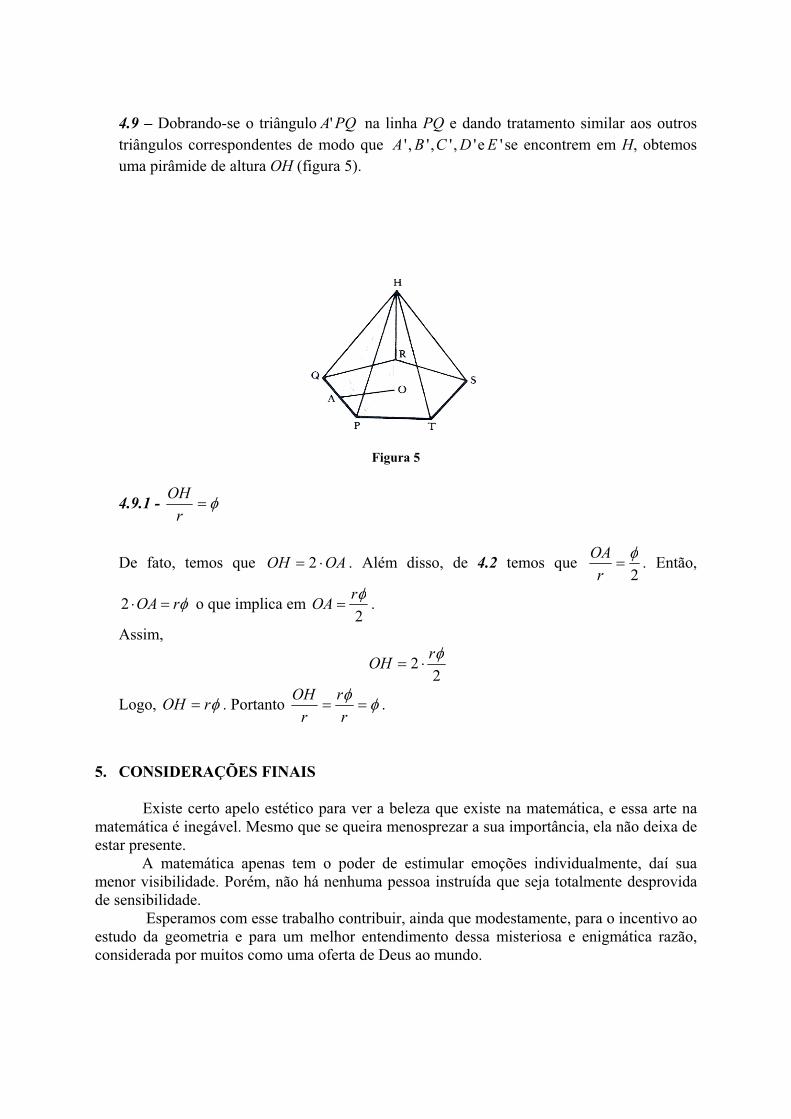
4.9 – Dobrando-se o triângulo na linha PQ e dando tratamento similar aos outros triângulos correspondentes de modo que se encontrem em H, obtemosuma pirâmide de altura OH (figura 5).
PQA'' , ' , ' , 'e 'A B C D E
Figura 5
4.9.1 - r
OH
De fato, temos que . Além disso, de 4.2 temos que OAOH 22r
OA. Então,
2 OA r o que implica em2
rOA .
Assim,
22
rOH
Logo, rOH . Portanto r
rr
OH.
5. CONSIDERAÇÕES FINAIS
Existe certo apelo estético para ver a beleza que existe na matemática, e essa arte na matemática é inegável. Mesmo que se queira menosprezar a sua importância, ela não deixa de estar presente.
A matemática apenas tem o poder de estimular emoções individualmente, daí sua menor visibilidade. Porém, não há nenhuma pessoa instruída que seja totalmente desprovidade sensibilidade.
Esperamos com esse trabalho contribuir, ainda que modestamente, para o incentivo ao estudo da geometria e para um melhor entendimento dessa misteriosa e enigmática razão,considerada por muitos como uma oferta de Deus ao mundo.
6. BIBLIOGRAFIA
[1] Huntley, H.E., A Divina Proporção – Um ensaio sobre a beleza na matemática, Editora UnB, Brasília, 1985.
[2] Ávila, G. S. S., Retângulo áureo, divisão áurea e seqüência de Fibonacci, Revista do Professor de Matemática, São Paulo, v. 6, p,9-14, 1985.
[3] Barison, M. B., Proporção áurea, http://www.mat.uel.br/geometrica/php/pdf/dg_prop_áurea.pdf

Codigos Corretores de Erros
Flaviano Bahia Paulinelli VieiraOrientando
PET-Matematica - SESu/MEC
Marcos Antonio CamaraOrientador
TUTOR PET - Matematica
Faculdade de Matematica - FamatUniversidade Federal de Uberlandia - UFU - MG
Uberlandia, MG
E-mail: bahia [email protected], [email protected]
setembro - 2006

Sumario
1 Codigos Corretores de Erros 31.1 O que e um codigo? . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
1.1.1 Metrica de Hamming . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41.1.2 Equivalencia de Codigos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
2 Codigos Lineares 72.1 Codigos Lineares . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 72.2 Codificando . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 82.3 Matriz Geradora de um Codigo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 82.4 Codigos Duais . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 92.5 Decodificando . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
2.5.1 Decodificando mensagens que contenham mais do que um erro . . . . . . . . . . . 172.5.2 Exemplo de codigo que contenha no maximo um erro . . . . . . . . . . . . . . . . 182.5.3 Exemplo de decodificacao com mensagem que contenha mais de um erro . . . . . . 21
3 Codigos Cıclicos 223.1 Introducao . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 223.2 Ideais de um Anel . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 233.3 Codigos Cıclicos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 253.4 Decodificando em Codigos Cıclicos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28
3.4.1 Codificando em Codigos Cıclicos . . . . . . . . . . . . . . . . . . . . . . . . . . . . 303.4.2 Calculando o Vetor Sındrome em Codigos Cıclicos . . . . . . . . . . . . . . . . . . 30
4 Referencias 31
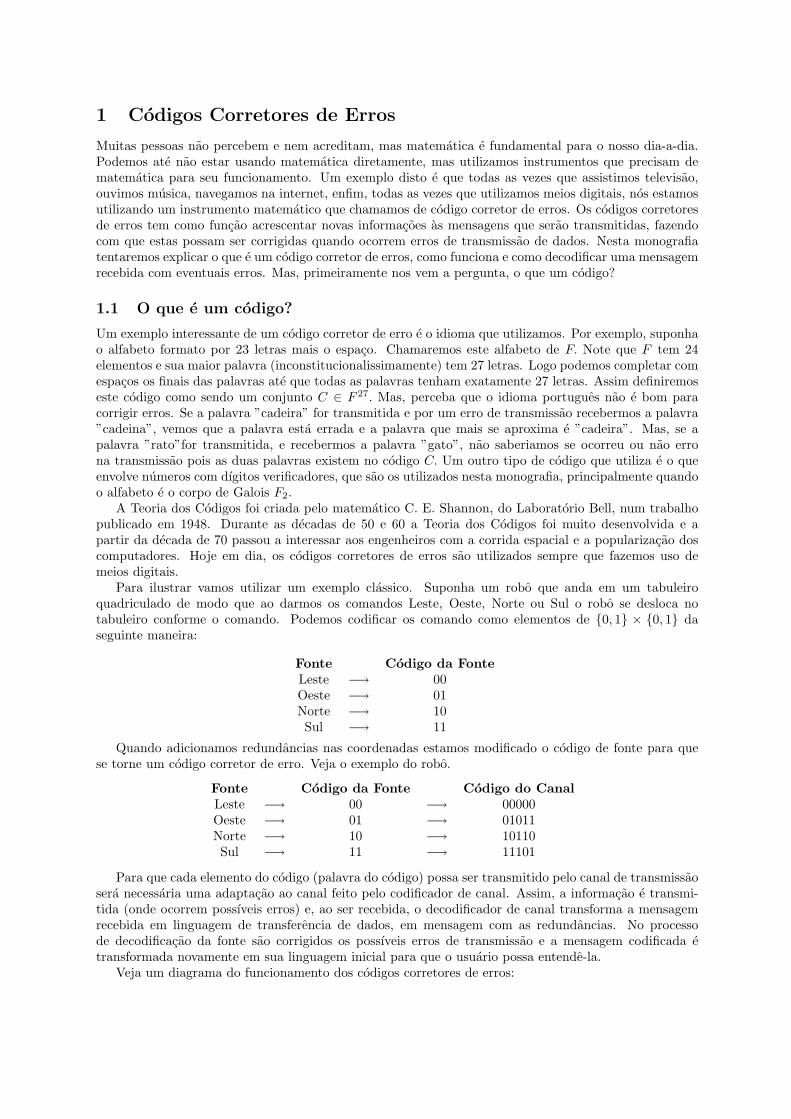
1 Codigos Corretores de Erros
Muitas pessoas nao percebem e nem acreditam, mas matematica e fundamental para o nosso dia-a-dia.Podemos ate nao estar usando matematica diretamente, mas utilizamos instrumentos que precisam dematematica para seu funcionamento. Um exemplo disto e que todas as vezes que assistimos televisao,ouvimos musica, navegamos na internet, enfim, todas as vezes que utilizamos meios digitais, nos estamosutilizando um instrumento matematico que chamamos de codigo corretor de erros. Os codigos corretoresde erros tem como funcao acrescentar novas informacoes as mensagens que serao transmitidas, fazendocom que estas possam ser corrigidas quando ocorrem erros de transmissao de dados. Nesta monografiatentaremos explicar o que e um codigo corretor de erros, como funciona e como decodificar uma mensagemrecebida com eventuais erros. Mas, primeiramente nos vem a pergunta, o que um codigo?
1.1 O que e um codigo?
Um exemplo interessante de um codigo corretor de erro e o idioma que utilizamos. Por exemplo, suponhao alfabeto formato por 23 letras mais o espaco. Chamaremos este alfabeto de F. Note que F tem 24elementos e sua maior palavra (inconstitucionalissimamente) tem 27 letras. Logo podemos completar comespacos os finais das palavras ate que todas as palavras tenham exatamente 27 letras. Assim definiremoseste codigo como sendo um conjunto C ∈ F 27. Mas, perceba que o idioma portugues nao e bom paracorrigir erros. Se a palavra ”cadeira” for transmitida e por um erro de transmissao recebermos a palavra”cadeina”, vemos que a palavra esta errada e a palavra que mais se aproxima e ”cadeira”. Mas, se apalavra ”rato”for transmitida, e recebermos a palavra ”gato”, nao saberiamos se ocorreu ou nao errona transmissao pois as duas palavras existem no codigo C. Um outro tipo de codigo que utiliza e o queenvolve numeros com dıgitos verificadores, que sao os utilizados nesta monografia, principalmente quandoo alfabeto e o corpo de Galois F2.
A Teoria dos Codigos foi criada pelo matematico C. E. Shannon, do Laboratorio Bell, num trabalhopublicado em 1948. Durante as decadas de 50 e 60 a Teoria dos Codigos foi muito desenvolvida e apartir da decada de 70 passou a interessar aos engenheiros com a corrida espacial e a popularizacao doscomputadores. Hoje em dia, os codigos corretores de erros sao utilizados sempre que fazemos uso demeios digitais.
Para ilustrar vamos utilizar um exemplo classico. Suponha um robo que anda em um tabuleiroquadriculado de modo que ao darmos os comandos Leste, Oeste, Norte ou Sul o robo se desloca notabuleiro conforme o comando. Podemos codificar os comando como elementos de {0, 1} × {0, 1} daseguinte maneira:
Fonte Codigo da FonteLeste −→ 00Oeste −→ 01Norte −→ 10Sul −→ 11
Quando adicionamos redundancias nas coordenadas estamos modificado o codigo de fonte para quese torne um codigo corretor de erro. Veja o exemplo do robo.
Fonte Codigo da Fonte Codigo do CanalLeste −→ 00 −→ 00000Oeste −→ 01 −→ 01011Norte −→ 10 −→ 10110Sul −→ 11 −→ 11101
Para que cada elemento do codigo (palavra do codigo) possa ser transmitido pelo canal de transmissaosera necessaria uma adaptacao ao canal feito pelo codificador de canal. Assim, a informacao e transmi-tida (onde ocorrem possıveis erros) e, ao ser recebida, o decodificador de canal transforma a mensagemrecebida em linguagem de transferencia de dados, em mensagem com as redundancias. No processode decodificacao da fonte sao corrigidos os possıveis erros de transmissao e a mensagem codificada etransformada novamente em sua linguagem inicial para que o usuario possa entende-la.
Veja um diagrama do funcionamento dos codigos corretores de erros:
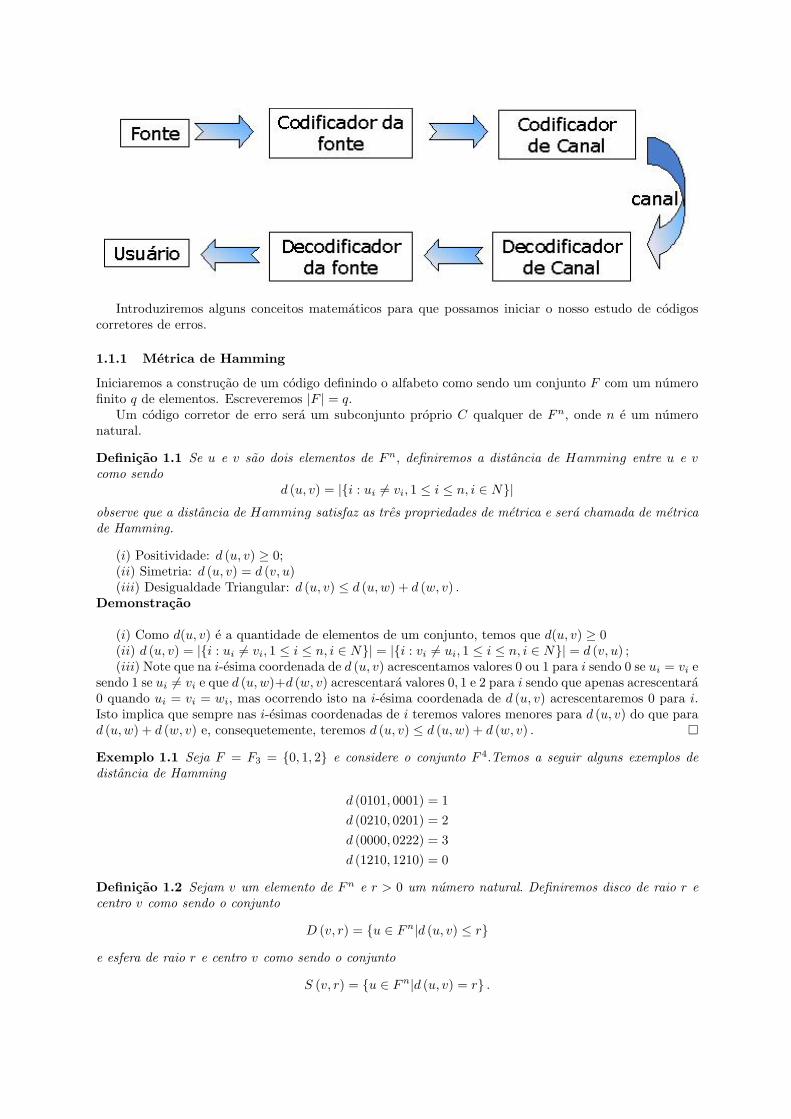
Introduziremos alguns conceitos matematicos para que possamos iniciar o nosso estudo de codigoscorretores de erros.
1.1.1 Metrica de Hamming
Iniciaremos a construcao de um codigo definindo o alfabeto como sendo um conjunto F com um numerofinito q de elementos. Escreveremos |F | = q.
Um codigo corretor de erro sera um subconjunto proprio C qualquer de Fn, onde n e um numeronatural.
Definicao 1.1 Se u e v sao dois elementos de Fn, definiremos a distancia de Hamming entre u e vcomo sendo
d (u, v) = |{i : ui �= vi, 1 ≤ i ≤ n, i ∈ N}|observe que a distancia de Hamming satisfaz as tres propriedades de metrica e sera chamada de metricade Hamming.
(i) Positividade: d (u, v) ≥ 0;(ii) Simetria: d (u, v) = d (v, u)(iii) Desigualdade Triangular: d (u, v) ≤ d (u, w) + d (w, v) .
Demonstracao
(i) Como d(u, v) e a quantidade de elementos de um conjunto, temos que d(u, v) ≥ 0(ii) d (u, v) = |{i : ui �= vi, 1 ≤ i ≤ n, i ∈ N}| = |{i : vi �= ui, 1 ≤ i ≤ n, i ∈ N}| = d (v, u) ;(iii) Note que na i-esima coordenada de d (u, v) acrescentamos valores 0 ou 1 para i sendo 0 se ui = vi e
sendo 1 se ui �= vi e que d (u, w)+d (w, v) acrescentara valores 0, 1 e 2 para i sendo que apenas acrescentara0 quando ui = vi = wi, mas ocorrendo isto na i-esima coordenada de d (u, v) acrescentaremos 0 para i.Isto implica que sempre nas i-esimas coordenadas de i teremos valores menores para d (u, v) do que parad (u, w) + d (w, v) e, consequetemente, teremos d (u, v) ≤ d (u, w) + d (w, v) . �
Exemplo 1.1 Seja F = F3 = {0, 1, 2} e considere o conjunto F 4.Temos a seguir alguns exemplos dedistancia de Hamming
d (0101, 0001) = 1d (0210, 0201) = 2d (0000, 0222) = 3d (1210, 1210) = 0
Definicao 1.2 Sejam v um elemento de Fn e r > 0 um numero natural. Definiremos disco de raio r ecentro v como sendo o conjunto
D (v, r) = {u ∈ Fn|d (u, v) ≤ r}e esfera de raio r e centro v como sendo o conjunto
S (v, r) = {u ∈ Fn|d (u, v) = r} .

Esses conjuntos sao finitos e denotaremos por |D (v, t)| e |S (v, t)| a quantidade de elementos de cadaconjunto.
Lema 1.1 Para todo v ∈ Fn e todo numero natural r > 0 temos que
|D (v, r)| =r∑
i=0
(n
i
)(q − 1)i
onde n e o comprimento das palavras e q e a quantidade de letras que ha no alfabeto.
Demonstracao
Como que |D (v, r)| =r∑
i=0
|S (v, i)| , basta mostrar quantos elementos ha em |S (v, i)| . Mas, veja tambem
que dado um vetor v temos (q − 1) maneiras diferentes de preencher uma unica coordenada do vetor semque este novo vetor seja igual ao vetor v. E impondo que exatamente i coordenadas de um vetor sejamdiferentes do vetor v temos (q − 1)i possibilidades para estas i coordenadas e quando tomamos coordenasaleatorias no vetor v de comprimento n, temos
(ni
)combinacoes para o novo vetor com distancia i de v.
Daı teremos que |S (v, i)| =(
n
i
)(q − 1)i e assim |D (v, r)| =
r∑i=0
(n
i
)(q − 1)i
. �
Definicao 1.3 A distancia mınima de um codigo C sera definida por
d = {min d (u, v) : u, v ∈ C, e u �= v} .
Observe que, a prıncipio, para calcular d e necessario calcular(|C|
2
)distancias, e isto requer um custo
computacional muito elevado. Veremos adiante tecnicas de como calcular d com um custo computacionalmais economico.
Definicao 1.4 Dado um codigo C com distancia mınima C definiremos
t =[d − 1
2
],
onde [k] representa a parte inteira de um elemento k.
Lema 1.2 Seja C um codigo com distancia mınima d. Se c e c′ ∈ C sao palavras distintas, entao
D (c, t) ∩ D (c′, t) = ∅.DemonstracaoSuponhamos por absurdo que v ∈ D (c, t) ∩ D (c′, t) . Logo
d (c, c′) ≤ d (c, v) + d (c′, v) ≤ t + t ≤ d − 1 < d
Absurdo, pois a distancia mınima e d e assim d (c, c′) ≥ d. �
Teorema 1.1 Seja C um codigo com distancia mınima d. Entao, C pode corrigir no maximo t =[
d−12
]erros e detectar ate d − 1 erros.
DemonstracaoSe na transmissao de uma palavra c do codigo ocorrerem s erros com s ≤ t, receberemos uma palavra rcom d (c, r) = s ≤ t. Daı temos que r ∈ D (c, t) e temos pelo lema 1.2 que r /∈ D (c′, t) para c �= c′, ouseja, podemos concluir que d (c, r) e menor do que a distancia de r a qualquer outra palavra do codigo eassim teremos c a partir de r. Se na transmissao de uma palavra c do codigo ocorrerem ate d − 1 erros erecebemos a palavra r, como a distancia mınima entre duas palavras do codigo C e d, temos que r /∈ Cpois d (c, r) < d. �
Veja que quanto maior for a distancia mınima das palavras do codigo, maior o numero de erroscorrigidos. Por isso, e muito importante que saibamos o valor ou pelo menos uma cota inferior para d.

Definicao 1.5 Sejam C ⊂ Fn um codigo com distancia mınima d e t =[d − 1
2
]. O codigo sera dito
perfito se∪c∈CD (c, t) = Fn.
A partir de agora podemos tracar uma estrategia para deteccao e correcao de possıveis erros de umapalavra transmitida. Se C e um codigo com distancia mınima d, temos que t =
[d−12
], e a quantidade
maxima de erros que o codigo corrige. Daı quando transmitimos uma palavra c teremos dois casos:(i) se r ∈ D (c, t) , foi cometido uma quantidade de erros menor ou igual a t e como ja vimos que esta
palavra e unica, podemos substituir r por c;(ii) se r /∈ D (c, t), foi cometido uma quantidade de erros maior que t o que implica que teremos mais
dois casos:(1) se r ∈ D (c′, t) com c′ �= c, substituiremos r por c′ e a correcao ficara incorreta, pois a palavra
transmitida foi c;(2) se r /∈ D (c, t) para ∀c′ ∈ C, nao podemos corrigir a palavra r.
Veja que nunca temos certeza da quantidade de erros que foi cometido na transmissao, logo naosabemos se cairemos no caso (i) ou (ii) e assim nao teremos certeza da correcao. Mas ha uma maneirade melhorar a possibilidade da correcao estar correta, uma vez que quanto maior o valor de d, maior achance de cair no caso (i) .
1.1.2 Equivalencia de Codigos
Definicao 1.6 Quando definimos a classe dos codigos de comprimento n sobre um alfabeto F, podemosdefinir tambem a nocao de equivalencia entre esses codigos. Para definir uma equivalancia entre codigosutilizaremos o conceito de isometria.
Definicao 1.7 Seja A um alfabeto e n um numero natural. Diremos que uma funcao F : An −→ An euma isometria de An se ela preserva distancia de Hamming . Ou seja
d (F (x) , F (y)) = d (x, y) ; ∀x, y ∈ An.
Proposicao 1.1 Toda isometria de Ane uma bijecao de An.DemonstracaoUma isometria F e injetora, pois suponha x, y ∈ An e que F (x) = F (y) .Logo, d (x, y) = d (F (x) , F (y)) =0 e assim x = y.Daı, F e injetora e como toda aplicacao injetora de um conjunto finito nele proprio esobrejetora, temos que F e bijetora. �
Proposicao 1.2 (i) A funcao identidade de An e uma isometria.(ii) Se F e uma isometria de An,entao F−1 e uma isometria de An.(iii) Se F e G sao isometrias de An,entao F ◦ G e uma isometria de An.
Demonstracao(i) Temos que a funcao identidade I leva um vetor x nele mesmo ou seja I (x) = x, logo d (I (x) , I (y)) =d (x, y) e daı I e uma isoemtria.
(ii) Se F e uma isometria, logo (por uma proposicao) temos que existe uma funcao F−1 inversa deF e
d(F−1 (x) , F−1 (y)
)= d
(F(F−1 (x)
), F
(F−1 (y)
))= d (x, y)
Consequentemente, F−1 e uma isometria.(iii) Sejam F e G isometrias e x, y ∈ An. Temos que d (F (x) , F (y)) = d (x, y) e d (G (x) , G (y)) =
d (x, y) e
d ((F ◦ G) (x) , (F ◦ G) (y)) = d (F (G (x)) , F (G (y))) = d (G (x) , G (y)) = d (x, y) .
Logo, F ◦ G e uma isometria. �
Definicao 1.8 Sejam C e C ′ dois codigos sobre An. Diremos que C ′ e equivalente a C se existir umaisometria Fde Antal que F (C) = C ′.

Logo, temos que a equivalencia de codigos e uma relacao de equivalencia, ou seja, satisfaz as seguintespropriedades:
(i) Reflexiva: todo codigo e equivalente a si proprio (pela proposicao 1.2 (i))(ii) Simetrica: se C ′e equivalente a C entao C e equivalente a C ′ (pela proposicao 1.2 (ii))(iii) Transitiva: se C ′′ e equivalente a C ′e C ′ e equivalente a C entao C ′′ e equivalente a C(pela proposicao 1.2 (iii)) .
2 Codigos Lineares
2.1 Codigos Lineares
Na pratica, a classe dos codigos mais utilizadados e a classe dos codigos lineares. Para iniciarmos osestudos dos codigos lineares, denotaremos por K um corpo finito com q elementos. Este corpo K sera oalfabeto. Assim, para cada numero natural n teremos um K-espaco vetorial Kn de dimensao n.
Definicao 2.1 Um codigo C ⊂ Kn sera chamado codigo linear se for um subespaco vetorial de Kn.
Exemplo 2.1 O codigo do robo e um codigo linear de alfabeto F2 e o codigo e subespaco de F 52 .O codigo
e imagem da transformacao linear abaixo
T : F 22 −→ F 5
2
(x1, x2) �→ (x1, x2, x1, x1 + x2, x2)
Por definicao, todo codigo linear e um espaco vetorial de dimensao finita. Seja k a dimensao do codigoC e seja v1, v2, ..., vk uma de suas bases. Logo qualquer elemento de C pode ser escrito de forma unica
c = λ1v1 + λ2v2 + ... + λkvk.
com λ1, λ2, ..., λk ∈ F.Observe que temos q possibilidades para cada λi e, como temos k λis, a quantidade de palavras do
codigo C e qk,ou seja |C| = qk.
Definicao 2.2 Se x ∈ Kn, define-se o peso de x como sendo o numero inteiro
ω (x) = |{i : xi �= 0, 1 ≤ i ≤ n, i ∈ N}| .Ou seja, ω (x) = d (x, 0) , onde d e a metrica de Hamming.
Definicao 2.3 O peso de um codigo linear C sera definido da seguinte maneira
ω (C) = min {ω (x) : x ∈ C − {0}} .
Proposicao 2.1 Seja C ⊂ Kn um codigo linear com distancia mınima d.Temos que(i)∀x, y ∈ Kn, d (x, y) = ω (x − y)(ii) d = ω (C) .
Demonstracao(i) Se x, y ∈ Kn, da definicao de metrica de Hamming d (x, y) = |{i : xi �= yi, 1 ≤ i ≤ n, i ∈ N}| , e dadefinicao de peso ω (x − y) = |{i : xi − yi �= 0, 1 ≤ i ≤ n, i ∈ N}| . Veja que
d (x, y) = |{i : xi �= yi, 1 ≤ i ≤ n, i ∈ N}| = |{i : xi − yi �= 0, 1 ≤ i ≤ n, i ∈ N}| = ω (x − y) .
Logo, d (x, y) = ω (x − y) . Observe que d (x, y) = d (x − y, 0) .(ii) Considere um par de elementos x, y ∈ C com x �= y. Definimos z = x − y ∈ C − {0} e
assim pelo item (i) temos d (x, y) = ω (z) e como x, y percorrem todos elementos de C, temos qued = min {d (x, y) : x, y ∈ C, ex �= y} = ω (C) . �
Agora, para calcular a distancia mınima podemos apenas calcular o peso de todos elementos do codigo,exceto o nulo, e verificar qual o menor valor. Assim, para achar d, basta fazer apenas |C| − 1 calculos de
peso ao inves de(|C|
2
)calculos. Isto otimiza o custo computacional para achar d.Veremos ainda mais
adiante outras maneiras de encontrar d. A partir de agora, a distancia mınima de um codigo podera serchamada de peso do codigo.

2.2 Codificando
Seja Kn um espaco vetorial com dimensao n e C ⊂ Kn um codigo linear com base v1, v2, ..., vk.Queremos transmitir a palavra x = (x1, ..., xk) do codigo da fonte Kk de tal modo que antes de trans-
mitı-la queremos codifica-la para o codigo C. Assim, podemos codificar x por meio de uma transformacaolinear da seguinte maneira:
T : Kk −→ Kn
x = (x1, ..., xk) �−→ x1v1 + x2v2 + ... + xkvk.
Observe que, se x, y ∈ Kk tal que T (x) = T (y) entao,
x1v1 + ... + xkvk = y1v1 + ... + ykvk
(x1 − y1) v1 + ... + (xk − yk) vk = 0
Mas, como v1, ..., vk e uma base de C, temos que v1, ..., vk sao LI e assim xi−yi = 0 ⇒ xi = yi ⇒ x = y.Daı, T e injetora.
Exemplo 2.2 Sejam C ⊂ K7 um codigo sobre o corpo F2 com base{(1, 0, 0, 0, 1, 1, 0) , (0, 1, 0, 0, 0, 1, 1) , (0, 0, 1, 0, 1, 0, 1) , (0, 0, 0, 1, 1, 1, 1)} e x = (1, 0, 1, 1) uma palavra doespaco vetorial K4. Assim para codificar x basta saber T (x) :
T (x) = T (1, 0, 1, 1)= 1 (1, 0, 0, 0, 1, 1, 0) + 0 (0, 1, 0, 0, 0, 1, 1) + 1 (0, 0, 1, 0, 1, 0, 1) + 1 (0, 0, 0, 1, 1, 1, 1)= (1, 0, 1, 1, 1, 0, 0) = c.
Assim a palavra c = (1, 0, 1, 1, 1, 0, 0) esta codificada para o codigo C e ja podemos transmitı-la.
2.3 Matriz Geradora de um Codigo
Definicao 2.4 Chamaremos de parametros do codigo C a terna de inteiros (n, k, d) onde n representa ocomprimento das palavras do codigo C, k representa a dimensao do codigo C e d representa a distanciamınima de C.
Definicao 2.5 Seja B = {v1, v2, ..., vk} uma base ordenada do codigo C onde vi = (vi1, vi2, ..., vin).Chamaremos de matriz geradora do codigo C associada a base B, a matriz onde suas linhas sao osvetores da base de C, isto e:
G =
⎛⎜⎜⎜⎝v11 v12 · · · v1n
v21 v22 · · · v2n
......
. . ....
vk1 vk2 · · · vkn
⎞⎟⎟⎟⎠ .
Assim, temos uma outra maneira de representar a codificacao das palavras do codigo, como veremosabaixo:
T : Kk −→ Kn
x = (x1, ..., xk) �−→ xG
ou seja, T (x) = x1v1 + x2v2 + ... + xkvk.Observe que T
(Kk
)= C. Assim podemos considerer Kk o codigo da fonte e C o codigo do canal e a
transformacao T uma codificacao.Alem disso, podemos obter diferentes bases para o codigo C atraves de uma base ja existente atraves
de operacoes elementares como permutacao de dois elementos da base, multiplicacao de um elemento dabase por um escalar nao nulo e substituicao de um elemento da base por ele mesmo somado com umoutro elemento multiplicado por um escalar, e com estas operacoes obter diferentes matrizes geradorasG.
Ate agora apenas obtive as matrizes geradoras G atraves de um codigo C, mas veja que se tomarmosuma matriz G com linhas linearmente independentes, podemos definir um codigo como sendo a imagemda transformacao linear:

T : Kk −→ Kn
x �−→ xG
Exemplo 2.3 Iremos costruir um codigo C a partir de uma matriz dada G cujas linhas sao linearmenteindependentes. Tome o corpo K = F2, a matriz
G =
⎛⎝ 1 0 1 0 11 1 0 1 01 1 1 1 1
⎞⎠e conside a transformacao anterior
T : F 32 −→ F 5
2
x �−→ xG
A imagem desta transformacao linear e o codigo desejado C. Seja x = (x1, x2, x3) um elemento qualquerde F 3
2 . Assim,xG = (x1 + x2 + x3, x2 + x3, x1 + x3, x2 + x3, x1 + x3) ∈ F 5
2 .Logo, todo elemento do codigo sera da formaxG.Por exemplo, seja x = (1, 0, 1) ∈ F 3
2 . Logo xG = (1 + 0 + 1, 0 + 1, 1 + 1, 0 + 1, 1 + 1) = (0, 1, 0, 1, 0) ∈C.
Imaginemos agora que gostarıamos de fazer o inverso, ou seja dada uma palavra no codigo C gostarıamosde encontrar a sua geradora em Kk. Para isto basta resolver o sistema xG = c, onde x ∈ Kk, G e amatriz geradora do codigo e c ∈ Kn. Veja como farıamos para o exemplo anterior:⎧⎪⎪⎪⎪⎨⎪⎪⎪⎪⎩
x1 + x2 + x3 = 0x2 + x3 = 1x1 + x3 = 0x2 + x3 = 1x1 + x3 = 0
A solucao deste sistema e x = (1, 0, 1) .
Definicao 2.6 Dada uma matriz G geradora de um codigo C, diremos que G esta na forma padraoquando temos
G = (Ik|A)
onde Ik e a matriz identidade de ordem k e A e uma matriz qualquer k × (n − k) .
Teorema 2.1 Dado um codigo C, sempre existe um codigo C ′ equivalente a C com matriz geradora naforma padrao.
DemonstracaoDada uma matriz geradora G de um codigo C, basta permutar colunas e ir escalonando a matriz G demodo a encontrar uma matriz G′ = (Ik|A) geradora do codigo C ′ que e equivalente ao codigo C. �
2.4 Codigos Duais
Antes de dar inıcio a esta secao lembremos a definicao de produto interno de dois vetores u = (u1, ..., un) , v =(v1, ..., vn) ∈ Kn
〈u, v〉 = u1v1 + ... + unvn
e que esta operacao possui as propriedas usuais de produto interno.Simetrica: 〈u, v〉 = 〈v, u〉 ;Bilinear: 〈u + λw, v〉 = 〈u, v〉 + λ 〈w, v〉 ,para qualquer λ ∈ K.
Definicao 2.7 Seja C ⊂ Kn um codigo linear. Definiremos C⊥ = {v ∈ Kn : 〈v, u〉 = 0,∀u ∈ C} .
Veremos agora que C⊥ e um codigo liner que denominaremos codigo dual.

Lema 2.1 Se C ⊂ Kn e um codigo linear, com matriz geradora G,entao:(i) C⊥ e um subespaco vetorial de Kn;(ii) x ∈ C⊥ ⇐⇒ Gxt = 0.
Demonstracao(i) Se u, v ∈ C⊥, λ ∈ K e x ∈ C, entao
〈u + λv, x〉 = 〈u, x〉 + λ 〈v, x〉 = 0 + λ0 = 0
e assim temos que (u + λv) ∈ C⊥ e portanto C⊥ e subespaco vetorial.(ii) Temos que as linhas de G formam uma base para o codigo C, e tomando v1, v2, ..., vk uma base
de C podemos contruir G da seguinte maneira, G =
⎛⎜⎜⎜⎝v1
v2
...vk
⎞⎟⎟⎟⎠ . Como x ∈ C⊥ se e somente se 〈x, v〉 = 0
para qualquer v ∈ C, tomando x ∈ C⊥ temos que
Gxt =
⎛⎜⎜⎜⎝v1
v2
...vk
⎞⎟⎟⎟⎠⎛⎜⎜⎜⎝
x1
x2
...xn
⎞⎟⎟⎟⎠ =
⎛⎜⎜⎜⎝〈v1, x〉〈v2, x〉
...〈vk, x〉
⎞⎟⎟⎟⎠ =
⎛⎜⎜⎜⎝00...0
⎞⎟⎟⎟⎠.
Para provar a volta, consideremos Gxt = 0, onde x ∈ Kn. Logo
⎛⎜⎜⎜⎝〈v1, x〉〈v2, x〉
...〈vk, x〉
⎞⎟⎟⎟⎠ =
⎛⎜⎜⎜⎝00...0
⎞⎟⎟⎟⎠ , e assim,
se v e um elemento qualquer de C, logo v = α1v1 + ... + αkvk. Daı 〈v, x〉 = 〈α1v1 + ... + αkvk, x〉 =α1 〈v1, x〉 + ... + αk 〈vk, x〉 = 0 e assim, x ∈ C⊥. �
Por este lema temos que C⊥ e um espaco vetorial e, consequentemente, um codigo linear.
Proposicao 2.2 Se C ⊂ Kn e um codigo linear de dimensao k com matriz geradora G = (Ik|A) , naforma padrao, entao temos que:
(i) dimC⊥ = n − k(ii) A matriz geradora de C⊥ sera da forma H = (−At|In−k) .
DemonstracaoSabemos que x = (x1, ...xn) ∈ C⊥ se e somente se Gxt = 0
Assim,
Gxt =
⎛⎜⎜⎜⎝1 0 · · · 0 a(k+1)1 a(k+2)1 · · · an1
0 1 · · · 0 a(k+1)2 a(k+2)2 · · · an2
......
. . ....
......
. . ....
0 0 · · · 1 a(k+1)k a(k+2)k · · · ank
⎞⎟⎟⎟⎠⎛⎜⎜⎜⎝
x1
x2
...xn
⎞⎟⎟⎟⎠ =
⎛⎜⎜⎜⎝00...0
⎞⎟⎟⎟⎠
⇒
⎛⎜⎜⎜⎝x1 + a(k+1)1xk+1 + ... + an1xn
x2 + a(k+1)2xk+1 + ... + an2xn
...xk + a(k+1)kxk+1 + ... + ankxn
⎞⎟⎟⎟⎠ =
⎛⎜⎜⎜⎝00...0
⎞⎟⎟⎟⎠
⇒
⎛⎜⎜⎜⎝x1
x2
...xk
⎞⎟⎟⎟⎠ =
⎛⎜⎜⎜⎝−a(k+1)1xk+1 − ... − an1xn
−a(k+1)2xk+1 − ... − an2xn
...−a(k+1)kxk+1 − ... − ankxn
⎞⎟⎟⎟⎠ = −
⎛⎜⎜⎜⎝a(k+1)1 a(k+2)1 · · · an1
a(k+1)2 a(k+2)2 · · · an2
......
. . ....
a(k+1)k a(k+2)k · · · ank
⎞⎟⎟⎟⎠⎛⎜⎜⎜⎝
xk+1
xk+2
...xn
⎞⎟⎟⎟⎠Logo, os (n − k) elementos xk+1, ..., xn podem ser escolhidos aleartoriamente. Daı, temos que a dimensaode C⊥ e n − k.

Veja tambem que xi = −a(k+1)ixk+1 − ... − anixn para i = 1...k.
Logo, x ∈ C⊥ tera a seguinte forma
x =(−a(k+1)1xk+1 − ... − an1xn, ...,−a(k+1)kxk+1 − ... − ankxn, xk+1, ..., xn
)Assim, uma base para C⊥ sera⎧⎨⎩
(−a(k+1)1,−a(k+1)2...,−a(k+1)k, 1, 0, ..., 0),(−a(k+2)1,−a(k+2)2, ...,−a(k+2)k, 0, 1, ..., 0
), ...,
(−an1,−an2, ...,−ank, 0, 0, ..., 1)
⎫⎬⎭e disto teremos que a matriz geradora de C⊥ e
H =
⎛⎜⎜⎜⎝−a(k+1)1 −a(k+1)2 · · · −a(k+1)k 1 0 · · · 0−a(k+2)1 −a(k+2)2 · · · −a(k+2)k 0 1 · · · 0
......
. . ....
......
. . ....
−an1 −an2 · · · −ank 0 0 · · · 1
⎞⎟⎟⎟⎠ =(−At|In−k
)
�
Lema 2.2 Seja C ⊂ Kn um codigo linear de dimensao k e matriz geradora G. Uma matriz H de ordem(n − k) × n, com coeficientes em K e com linhas linearmentes independentes e uma matriz geradora deC⊥ se e somente se
G · Ht = 0
DemonstracaoAs linhas de H geram um subespaco vetorial de Kn de dimensaao n − k, pois existem n − k linhas etodas sao linearmente independentes. Agora, assuma h1, ..., hn−k como sendo as linhas de H e g1, ..., gk
como sendo as linhas de G. Daı
G · Ht =
⎛⎜⎜⎜⎝g1
g2
...gk
⎞⎟⎟⎟⎠(ht
1 ht2 · · · ht
n−k
)=
⎛⎜⎜⎜⎝〈g1, h1〉 〈g1, h2〉 · · · 〈g1, hn−k〉〈g2, h1〉 〈g2, h2〉 · · · 〈g2, hn−k〉
......
. . ....
〈gk, h1〉 〈gk, h2〉 · · · 〈gk, hn−k〉
⎞⎟⎟⎟⎠Se H e geradora do codigo dual C⊥, entao h1, ..., hn−k ∈ C⊥ e assim 〈g, hi〉 = 0 para qualquer g ∈ C.
Logo, G · Ht = 0.Agora, se G · Ht = 0, como g1, ..., gk geram de C e h1, ..., hn−k geram o subespaco D, tomando
g ∈ C e h ∈ D temos que 〈g, d〉 = 〈a1g1 + ... + αkgk, β1h1 + ... + βn−khn−k〉 = a1β1 〈g1, h1〉 + ... +akβn−k 〈gk, hn−k〉 = 0 e concluimos que D = C⊥. �
Corolario 2.1 Dado um codigo linear C, temos que(C⊥)⊥ = C
DemonstracaoSejam G e H, respectivamente, matrizes geradoras de C e C⊥. Logo, G · Ht = 0 o que implica que(
G · Ht)t = 0t = 0
H · Gt = 0
Assim, temos que G e a matriz geradora de(C⊥)⊥, e consquentemente
(C⊥)⊥ = C. �
A seguir veremos um resultado que minimiza o custo computacional para saber se uma palavra estaou nao em um codigo C.
Proposicao 2.3 Seja C um codigo linear e suponhamos que H seja uma matriz geradora de C⊥. Temosentao que
v ∈ C ⇐⇒ Hvt = 0

DemonstracaoComo ja visto em lemas anteriores temos que se G e a matriz geradora de C entao x ∈ C⊥ ⇐⇒ Gxt = 0e de
(C⊥)⊥ = C temos que v ∈ C ⇐⇒ Hvt = 0. �
Antes para verificar se uma palavra v estava ou nao em um codigo C era preciso resolver o sistemaxG = v onde x ∈ Kk e G e a matriz geradora do codigo C. Isto requeria um custo computacional muitoelevado, e agora e possıvel obter esta conclusao apenas com uma multiplicacao de uma matriz por umvetor. Por isso, a matriz H geradora do codigo dual C⊥ e chamada de matriz teste de paridade de C.
Exemplo 2.4 Seja C um codigo sobre F2 com a matriz geradora
G =
⎛⎝ 1 0 0 1 1 10 1 0 0 1 10 0 1 0 1 0
⎞⎠Como a matriz geradora G ja esta na forma padrao e facil obter uma matriz teste de paridade H.
H =
⎛⎝ 1 0 0 1 0 01 1 1 0 1 01 1 0 0 0 1
⎞⎠ .
Agora, e facil verificar se uma palavra esta no codigo C.Sejam v = (1, 0, 0, 1, 1, 1) e v′ = (0, 1, 0, 1, 0, 1)Veja que
Hvt =
⎛⎝ 000
⎞⎠ e H (v′)′=
⎛⎝ 110
⎞⎠ �= 0
Daı, pela proposicao anterior temos que v ∈ C e v′ /∈ C.
A matriz teste de paridade de um codigo C tambem carrega informacoes sobre o peso d do codigo.
Teorema 2.2 Seja H a matriz teste de paridade de um codigo C. Temos que o peso de C e maior doque ou igual a s se, e somente se, quaisquer s − 1 colunas de H sao linearmente independente.
Demonstracao(⇐)Suponhamos, inicialmente, que cada conjunto de s − 1 colunas de H e linearmente independente.Seja c = (c1, c2, ..., cn) uma palavra nao nula de C, e sejam h1, h2, ..., hn as colunas de H. Como Hct = 0temos que
0 = H · ct =∑
cihi, ou seja,
⎛⎜⎜⎜⎝h11 h12 · · · h1n
h21 h22 · · · h2n
......
. . ....
h(n−k)1 h(n−k)2 · · · h(n−k)n
⎞⎟⎟⎟⎠⎛⎜⎜⎜⎝
c1
c2
...cn
⎞⎟⎟⎟⎠ =
⎛⎜⎜⎜⎝h11c1 + h12c2 + ... + h1ncn
h21c1 + h22c2 + ... + h2ncn
...h(n−k)1c1 + h(n−k)2c2 + ... + h(n−k)ncn
⎞⎟⎟⎟⎠ =
=
⎛⎜⎜⎜⎝h11
h21
...h(n−k)1
⎞⎟⎟⎟⎠ c1 + ... +
⎛⎜⎜⎜⎝h1n
h2n
...h(n−k)n
⎞⎟⎟⎟⎠ cn = 0
Visto que w (c) (peso da palavra c) e o numero de componentes nao nulas de c, segue que se w (c) ≤ s−1teriamos uma combinacao nao nula de um numero t de colunas de H, com 1 ≤ t ≤ s − 1, o que econtraditorio, pois cada conjunto de s − 1 colunas de H e linearmente independente, o que ocorretambem para qualquer conjunto com menos do que s − 1 colunas de H. Logo, w (c) ≥ s e, portanto,w (C) ≥ s.

(⇒) Reciprocamente, suponhamos que w (C) ≥ s. Suponhamos tambem, por absurdo, que H tenhas − 1 colunas linearmente dependentes, digamos hi1 , hi2 , ..., his−1 . Logo, existiriam ci1 , ci2 , ..., cis−1 ∈ F,nem todos nulos, tais que:
ci1hi1 + ... + cis−1h
is−1 = 0.
0 =
⎛⎜⎜⎜⎝hi1
1
hi12...
hi1(n−k)
⎞⎟⎟⎟⎠ ci1 + ... +
⎛⎜⎜⎜⎜⎝h
is−11
his−12...
his−1
(n−k)
⎞⎟⎟⎟⎟⎠ cis−1
=
⎛⎜⎜⎜⎜⎝h11 · 0 + h12 · 0 + ... + hi1
1 ci1 + ... + his−11 cis−1 + h1n · 0
h21 · 0 + h22 · 0 + ... + hi12 ci1 + ... + h
is−12 cis−1 + h2n · 0
...h(n−k)1 · 0 + h(n−k)2 · 0 + ... + hi1
(n−k)ci1 + ... + his−1
(n−k)cis−1 + h(n−k)n · 0
⎞⎟⎟⎟⎟⎠
=
⎛⎜⎜⎜⎝h11 h12 · · · h1n
h21 h22 · · · h2n
......
. . ....
h(n−k)1 h(n−k)2 · · · h(n−k)n
⎞⎟⎟⎟⎠
⎛⎜⎜⎜⎜⎜⎜⎜⎜⎜⎜⎜⎜⎜⎜⎜⎝
0...
ci1
0...
cis−1
0...0
⎞⎟⎟⎟⎟⎟⎟⎟⎟⎟⎟⎟⎟⎟⎟⎟⎠Portanto, c =
(0, ..., ci1 , 0, ..., cis−1 , 0, ..., 0
) ∈ C e consequentemente, w (c) ≤ s − 1 < s, o que e umabsurdo. �
Teorema 2.3 Seja H a matriz teste de paridade de um codigo C. Temos que o peso de C e igual a sse, e somente se, quaisquer s− 1 colunas de H sao linearmente independentes e existem s colunas de Hlinearmente dependentes.
Demonstracao(⇒)De fato, se w (C) = s, todo conjunto de s− 1 colunas de H e linearmente independente (Ver teorema2.2). Por outro lado, existem s colunas de H linearmente dependentes, pois, caso contrario, qualqueconjunto de s colunas de H seria linearmente independente. Nesse caso, pelo teorema 2.2 w (C) ≥ s + 1.Absurdo, pois w (C) = s.
(⇐) Reciprocamente, suponhamos que todo conjunto de s−1 colunas de H e linearmente independentee existem s colunas de H linearmente dependentes. Logo, do teorema 2.2, temos que w (C) ≥ s. Mas,w (C) nao pode ser maior do que s, ou seja, w (C) ≥ s + 1, pois do teorema 2.2 terıamos que todoconjunto com s colunas de H seria linearmente independente. Absurdo, pois H tem s colunas linearmentedependentes. �
Corolario 2.2 (Cota de Singleton) Os parametros (n, k, d) de um codigo C satisfazem a desigualdade
d ≤ n − k + 1.
DemonstracaoSe H e uma matriz teste de paridade de um codigo C, ela e a matriz geradora do codigo dual C⊥ quetem dimensao n− k. Logo, H podera ter no maximo n− k colunas linearmente independentes. Daı, peloteorema 2.3 temos que w (C) ≤ s = (n − k) + 1. E como sabemos que w (C) = d, temos que:
d ≤ n − k + 1
�

2.5 Decodificando
O processo que detecta e corrige os erros de um determinado codigo e chamado de decodificacao. Paraisto, definiremos um vetor e ∈ Kn tal que
e = r − c
onde r e o vetor recebido e c e o vetor transmitido.
Exemplo 2.5 Dado um codigo C sobre o corpo Z2. Suponha que trasmitimos a palavra (011100) erecebemos a palavra (011110) . Nesse caso, o vetor erro sera:
e = (011110) − (011100) = (000010) .
O peso do vetor erro w (e) e a quantidade de erros que houve durante a transmissao.Obs.: Seja H a matriz teste de paridade do codigo C, e e um vetor erro. Logo,
Het = H (r − c)t = Hrt − Hct = Hrt
Lembre que c ∈ C implica que Hct = 0.
Definicao 2.8 Dado um codigo C com matriz teste de paridade H e um vetor v ∈ Kn, chamaremos desındrome de v o vetor Hvt.
Daı, temos que o vetor erro e e o vetor recebido r tem a mesma sındrome. De fato, se hi e a i-esimacoluna da matriz teste de paridade H, e e = (α1, ..., αn) entao,
n∑i=1
αihi = α1
⎛⎜⎝ h11
...h(n−k)1
⎞⎟⎠ + ... + αn
⎛⎜⎝ h1n
...h(n−k)n
⎞⎟⎠ =
⎛⎜⎝ α1h11 + ... + αnh1n
...α1h(n−k)1 + ... + αnh(n−k)n
⎞⎟⎠ = Het = Hrt
Lema 2.3 Seja C um codigo linear em Kn com capacidade de correcao t. Se r ∈ Kn e c ∈ C sao taisque d (c, r) ≤ t, entao existe um unico vetor e com w (e) ≤ t cuja sındrome e igual a sındrome de r e talque c = r − e.
DemonstracaoSe tomarmos e = r − c, temos que Het = Hrt − Hct = Hrt e w (e) = w (r − c) = d (r, c) ≤ t. Logo,e = r−c satisfaz a existencia do vetor. Agora, provaremos a unicidade de e. Suponhamos e = (α1, ..., αn)e e′ = (α′
1, ..., α′n) , dois vetores tais que e �= e′, w (e) ≤ t e w (e′) ≤ t (ou seja, ha no maximo t entradas
nao nulas em cada um dos vetores) e que tenham sındromes iguais. Logo,
Het = He′t
n∑i=1
αihi =
n∑i=1
α′ih
i
α1h1 + ... + αnhn − α′
1h1 − ... − α′
nhn = 0
(α1 − α′1) h1 + ... (αn − α′
n) hn = 0
Daı, existem no maximo 2t ındices i tais que (αi − α′i) �= 0. Logo, existe um conjunto com 2t ou menos
colunas de H que nao sao linearmente independentes. Mas, ja vimos que t =[
d−12
], ou seja 2t ≤ d− 1, e
vimos tambem que quaisquer d− 1 colunas de H sao linearmente independente. Daı, temos um absurdo,pois existe um conjunto com 2t ou menos colunas de H que nao sao linearmente independentes. Istoimplica que e = e′. �
Daı, basta decobrir este vetor e a partir de Hrt, pois assim determinaremos c, uma vez que c = r− e.A princıpio vamos trabalhar restringindo o vetor erro a e onde w (e) ≤ 1, ou seja, o vetor erro tem
todas suas entradas nulas ou apenas uma de suas entradas nao nula.Se w (e) = 0, e = (0, 0, ..., 0) e assim, como e = r − c, temos que c = r. Ou seja, a palavra recebida
nao tem erro.

Se w (e) = 1, e = (0, 0, ..., α, 0, ..., 0) , em que apenas a i-esima entrada e nao nula. Como temos
Hrt = Het = 0 · h1 + 0 · h2 + ... + αhi + ... + 0 · hn = αhi
e como o problema esta em saber em qual entrada de e esta o α, por Hrt = αhi temos que bastaanalisarmos as colunas de H, analisar onde esta o hi e ver qual o valor de i. Logo, sabendo o valor de isabemos qual e o erro e.
Assim, teremos que o vetor transmitido sera c = r − e, onde r e e ja conhecemos.
Exemplo 2.6 Seja C um codigo com matriz geradora G =(
1 0 1 1 00 1 0 1 1
)e matriz teste de
paridade H =
⎛⎝ 1 0 1 0 01 1 0 1 00 1 0 0 1
⎞⎠ . Suponha que enviamos a palavra (10110) e recebemos a palavra
r = (11110) .Assim,
Hrt =
⎛⎝ 1 0 1 0 01 1 0 1 00 1 0 0 1
⎞⎠⎛⎜⎜⎜⎜⎝
11110
⎞⎟⎟⎟⎟⎠ =
⎛⎝ 011
⎞⎠ = 1 · h2
ou seja, e = (01000) e logo c = r − e = (11110) − (01000) = (10110) .
Com isto, podemos montar um algoritmo para decodificar palavras recebidas que contenham nomaximo um erro.
Algorıtmo 2.1 Sejam H a matriz teste de paridade do codigo C, tal que w(C) ≥ 3 e r um vetor recebido.(i)− Calcule Hrt
(ii)− Se Hrt = 0, aceite r como sendo a palavra transmitida e fim.(iii)− Se Hrt = st �= 0, compare st com as colunas de H.(iv)− Se existirem i e α tais que st = αhi, para α ∈ K, entao e e o vetor que tem na i-esima entrada
e zeros nas outras posıcoes. Corrija r pondo c = r − e e fim.(v)− Se o contra de (4) ocorrer, entao mais de um erro foi cometido.
Analisaremo agora o caso onde o codigo corrige mais de um erro, ou seja, t > 1. Sejam C ⊂ Kn umcodigo corretor de erros com matriz teste de paridade H, d a distancia mınima de C e t =
[d−12
]. Lembre
que e = r − c e que e e r tem a mesma sındrome, ou seja, Het = Hrt. Alem disso se w (e) = w (r − c) =d (r, c) ≤ t, entao e e univocamente determinado por r.
Definicao 2.9 Se v ∈ Kn, definimos
v + C = {v + c : c ∈ C}Chamanos o conjunto v + C de classe lateral de v segundo C.
Lema 2.4 Os vetores u,v ∈ Kn tem a mesma sındrome se, e somente se, u ∈ v + C.
DemonstracaoHut = Hvt ⇔ H (u − v)t = 0 ⇔ u− v ∈ C ⇔ u− v = c com c ∈ C ⇔ u = v + c com c ∈ C ⇔ u ∈ v + C.�
Os conjuntos v + C tem as seguintes propriedades:i) v + C = v′ + C ⇔ v − v′ ∈ C;ii) (v + C) ∩ (v′ + C) �= ∅ ⇒ v + C = v′ + C;iii) ∪v∈Kn (v + C) = Kn;iv) |(v + C)| = |C| = qk.
Demonstracaoi) v + C = v′ + C ⇔ v + c1 = v′ + c2 para c1, c2 ∈ C ⇔ v − v′ = c2 − c1 = c3 ∈ C;
ii) Temos u ∈ (v + C) ∩ (v′ + C) ⇒ u = v + c1 e u = v′ + c2, com c1, c2 ∈ C ⇒ v + c1 = v′ + c2 ⇒(v − v′) = (c2 − c1) ∈ C ⇒ v − v′ ∈ C ⇒ v + C = v′ + C.

iii) ∪v∈Kn (v + C) ⊂ Kn, pois, para todo v ∈ Kn e c ∈ C ⊂ Kn teremos (v + c) ∈ Kn.Agora, se u ∈ Kn, entao u ∈ (u + c) ⇒ u ∈ ∪v∈Kn (v + C) .iv) Temos que |C| = |(v + C)| pois, para quaiquer c1, c2 ∈ C tais que c1 �= c2, temos v + c1 �= v + c2.
E como |C| = qk ⇒ |(v + C)| = qk. �Note que
v + C = C ⇐⇒ v ∈ C
e das propriedades (ii) e (iv) temos que o numero de classes laterais segundo C e
qn
qk= qn−k.
Veja alguns exemplos de classes laterais.
Exemplo 2.7 Seja C o codigo gerado por G =(
1 0 1 10 1 0 1
). Logo, C = {0000, 1011, 0101, 1110} ,
e as classes laterais segundo C sao:
0000 + C = {0000, 1011, 0101, 1110}1000 + C = {1000, 0011, 1101, 0110}0100 + C = {0100, 1111, 0001, 1010}0010 + C = {0010, 1001, 0111, 1100}
Lembre que pelo Lema 2.4 todos os elementos de mesma classe tem mesma sındrome e elementos declasses diferentes tem sındromes diferentes.
Definicao 2.10 Um vetor v de peso ω (v) mınimo numa classe lateral e chamado de elemento lıder dessaclasse.
Proposicao 2.4 Seja C um codigo linear em Kn com distancia mınima d. Se u ∈ Kn e tal que
ω (u) ≤[d − 1
2
]= t,
entao u e o unico elemento lıder de sua classe lateral segundo C.
DemonstracaoSuponhamos dois vetores u, v ∈ Kn com ω (u) ≤ t e ω (v) ≤ t, tais que u e v sejam da mesma classesegundo C. Logo, u − v ∈ C, e daı temos
ω (u − v) ≤ ω (u) + ω (v) ≤ t + t ≤ d − 1
Neste caso o vetor (u − v) tem peso menor que d, ou seja d (u, v) < d, o que implica que u−v = 0 ⇒ u = v.�
Observacao 2.1 Com isto, tomando um elemento v ∈ Kn tal que ω (v) ≤ t, temos que v e o unicoelemento lıder de uma e somente uma classe lateral segundo C.
Teorema 2.4 Sejam C um codigo com parametros (n, k, d) e D (O, t) o disco onde O = (0, 0, ..., 0) . Se|D (O, t)| = qn−k, entao o codigo e perfeito.
DemonstracaoPela observacao 2.1 temos que o disco D (O, t) e formado apenas por elementos que sao lıderes de classes ecada elemento e lıder de uma e somente uma classe. E como |D (O, t)| = qn−k temos que cada classe lateralsegundo C tem seu lıder contido no D (O, t) . Agora, se para um elemento v qualquer de Kn, mostramosque este elemento esta contido em um D (c, t) , onde c ∈ C, entao mostramos que C e perfeito. Mas, temospela propriedade (iii) que v ∈ (v + C) . Logo, tomando u como sendo o lıder da classe (v + C) , temosque (u + C) = (v + C) e assim, v ∈ (u + C) . Daı, v − u = c ∈ C ⇒ v − c = u ⇒ w (v − c) = w (u) ≤ t⇒ d (v, c) ≤ t. Portanto v ∈ D (c, t) . �
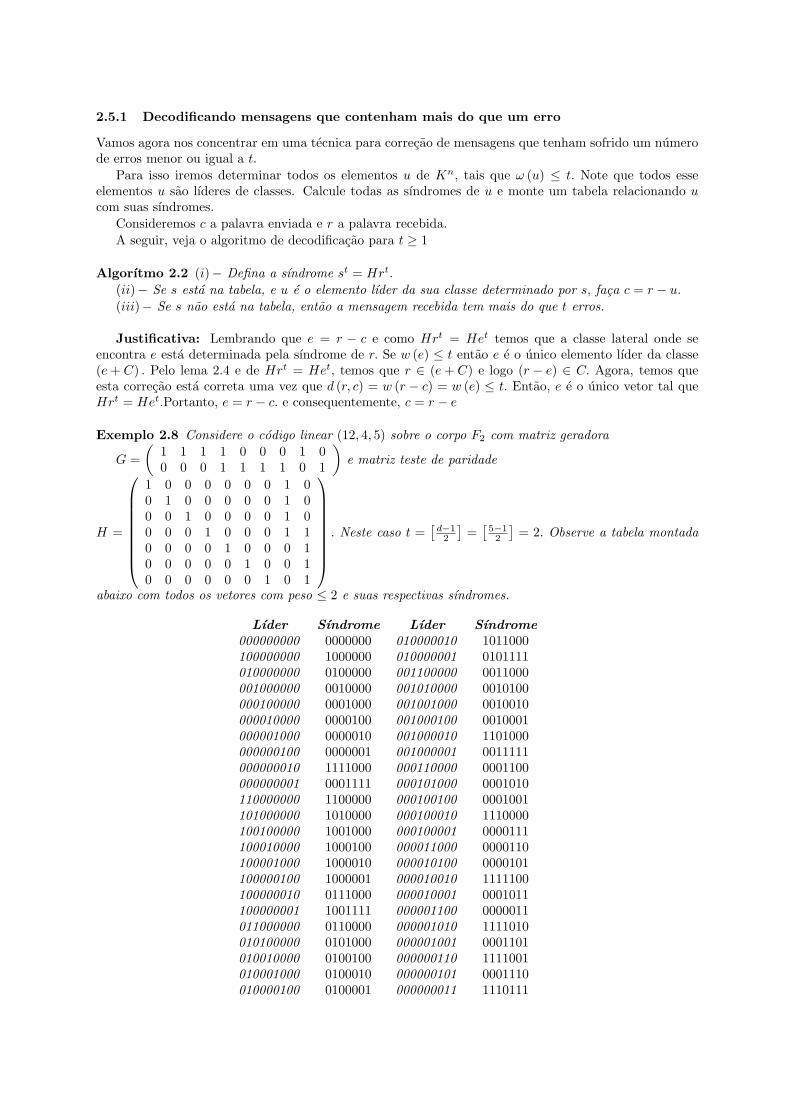
2.5.1 Decodificando mensagens que contenham mais do que um erro
Vamos agora nos concentrar em uma tecnica para correcao de mensagens que tenham sofrido um numerode erros menor ou igual a t.
Para isso iremos determinar todos os elementos u de Kn, tais que ω (u) ≤ t. Note que todos esseelementos u sao lıderes de classes. Calcule todas as sındromes de u e monte um tabela relacionando ucom suas sındromes.
Consideremos c a palavra enviada e r a palavra recebida.A seguir, veja o algoritmo de decodificacao para t ≥ 1
Algorıtmo 2.2 (i)− Defina a sındrome st = Hrt.
(ii)− Se s esta na tabela, e u e o elemento lıder da sua classe determinado por s, faca c = r − u.
(iii)− Se s nao esta na tabela, entao a mensagem recebida tem mais do que t erros.
Justificativa: Lembrando que e = r − c e como Hrt = Het temos que a classe lateral onde seencontra e esta determinada pela sındrome de r. Se w (e) ≤ t entao e e o unico elemento lıder da classe(e + C) . Pelo lema 2.4 e de Hrt = Het, temos que r ∈ (e + C) e logo (r − e) ∈ C. Agora, temos queesta correcao esta correta uma vez que d (r, c) = w (r − c) = w (e) ≤ t. Entao, e e o unico vetor tal queHrt = Het.Portanto, e = r − c. e consequentemente, c = r − e
Exemplo 2.8 Considere o codigo linear (12, 4, 5) sobre o corpo F2 com matriz geradora
G =(
1 1 1 1 0 0 0 1 00 0 0 1 1 1 1 0 1
)e matriz teste de paridade
H =
⎛⎜⎜⎜⎜⎜⎜⎜⎜⎝
1 0 0 0 0 0 0 1 00 1 0 0 0 0 0 1 00 0 1 0 0 0 0 1 00 0 0 1 0 0 0 1 10 0 0 0 1 0 0 0 10 0 0 0 0 1 0 0 10 0 0 0 0 0 1 0 1
⎞⎟⎟⎟⎟⎟⎟⎟⎟⎠. Neste caso t =
[d−12
]=[5−12
]= 2. Observe a tabela montada
abaixo com todos os vetores com peso ≤ 2 e suas respectivas sındromes.
Lıder Sındrome Lıder Sındrome000000000 0000000 010000010 1011000100000000 1000000 010000001 0101111010000000 0100000 001100000 0011000001000000 0010000 001010000 0010100000100000 0001000 001001000 0010010000010000 0000100 001000100 0010001000001000 0000010 001000010 1101000000000100 0000001 001000001 0011111000000010 1111000 000110000 0001100000000001 0001111 000101000 0001010110000000 1100000 000100100 0001001101000000 1010000 000100010 1110000100100000 1001000 000100001 0000111100010000 1000100 000011000 0000110100001000 1000010 000010100 0000101100000100 1000001 000010010 1111100100000010 0111000 000010001 0001011100000001 1001111 000001100 0000011011000000 0110000 000001010 1111010010100000 0101000 000001001 0001101010010000 0100100 000000110 1111001010001000 0100010 000000101 0001110010000100 0100001 000000011 1110111

Suponhamos que a palavra recebida seja r = 111011000. Logo, Hrt = (1110110)t. Observe que nao se
encontra na tabela, o que significa que na palavra (100010) foram cometidos mais do que 2 erros natransmissao. Agora, consideremos a palavra recebida r = (111011100) . Logo, Hrt = (1110111)t e o lıderda classe correspondente e (000000011) . Logo c = (111011100) − (000000011) = (111011111) ∈ C.
A seguir veja uma aplicacao de um codigo corretor de erros.
2.5.2 Exemplo de codigo que contenha no maximo um erro
Exemplo 2.9 Seja C o codigo sobre o corpo F2 que seja gerado pela matriz
G =
⎛⎜⎜⎜⎜⎝1 1 0 0 1 0 0 0 00 1 0 1 0 1 0 0 00 0 1 1 0 0 1 0 01 0 0 1 0 0 0 1 01 1 1 0 0 0 0 0 1
⎞⎟⎟⎟⎟⎠ . Consequentemente temos a matriz teste de paridade
H =
⎛⎜⎜⎝1 0 0 0 1 0 0 1 10 1 0 0 1 1 0 0 10 0 1 0 0 0 1 0 10 0 0 1 0 1 1 1 0
⎞⎟⎟⎠ .Temos tambem que o peso deste codigo e 3 pois quaisquer 2 col-
unas da matriz teste de paridades sao linearmente independente e existem 3 colunas linearmente depen-dentes. Assim, este codigo corrige no maximo 1 erro. Dado o alfabeto da lıngua portuguesa, definiremosuma fonte para este da seguinte maneira:
Letra Fonte - Letra Fonte00000 - m 01001
a 10000 - n 00110b 01000 - o 00101c 00100 - p 00011d 00010 - q 11100e 00001 - r 10110f 11000 - s 10101g 10100 - t 11010h 10010 - u 11001i 10001 - v 01110j 01100 - x 00111l 01010 - z 11110
.
Agora, para que possamos transmitir as fontes de modo que o codigo citado acima as corrija iremoscodificar todas as fontes das letras.
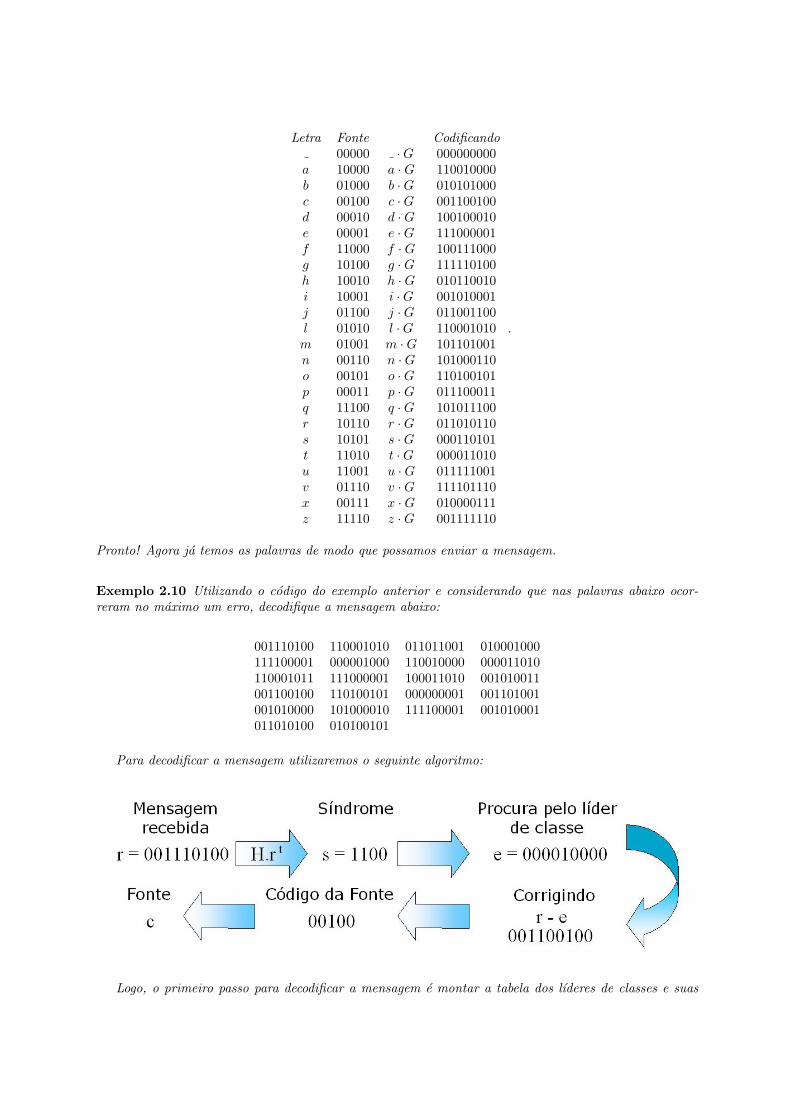
Letra Fonte Codificando00000 · G 000000000
a 10000 a · G 110010000b 01000 b · G 010101000c 00100 c · G 001100100d 00010 d · G 100100010e 00001 e · G 111000001f 11000 f · G 100111000g 10100 g · G 111110100h 10010 h · G 010110010i 10001 i · G 001010001j 01100 j · G 011001100l 01010 l · G 110001010m 01001 m · G 101101001n 00110 n · G 101000110o 00101 o · G 110100101p 00011 p · G 011100011q 11100 q · G 101011100r 10110 r · G 011010110s 10101 s · G 000110101t 11010 t · G 000011010u 11001 u · G 011111001v 01110 v · G 111101110x 00111 x · G 010000111z 11110 z · G 001111110
.
Pronto! Agora ja temos as palavras de modo que possamos enviar a mensagem.
Exemplo 2.10 Utilizando o codigo do exemplo anterior e considerando que nas palavras abaixo ocor-reram no maximo um erro, decodifique a mensagem abaixo:
001110100 110001010 011011001 010001000111100001 000001000 110010000 000011010110001011 111000001 100011010 001010011001100100 110100101 000000001 001101001001010000 101000010 111100001 001010001011010100 010100101
Para decodificar a mensagem utilizaremos o seguinte algoritmo:
Logo, o primeiro passo para decodificar a mensagem e montar a tabela dos lıderes de classes e suas
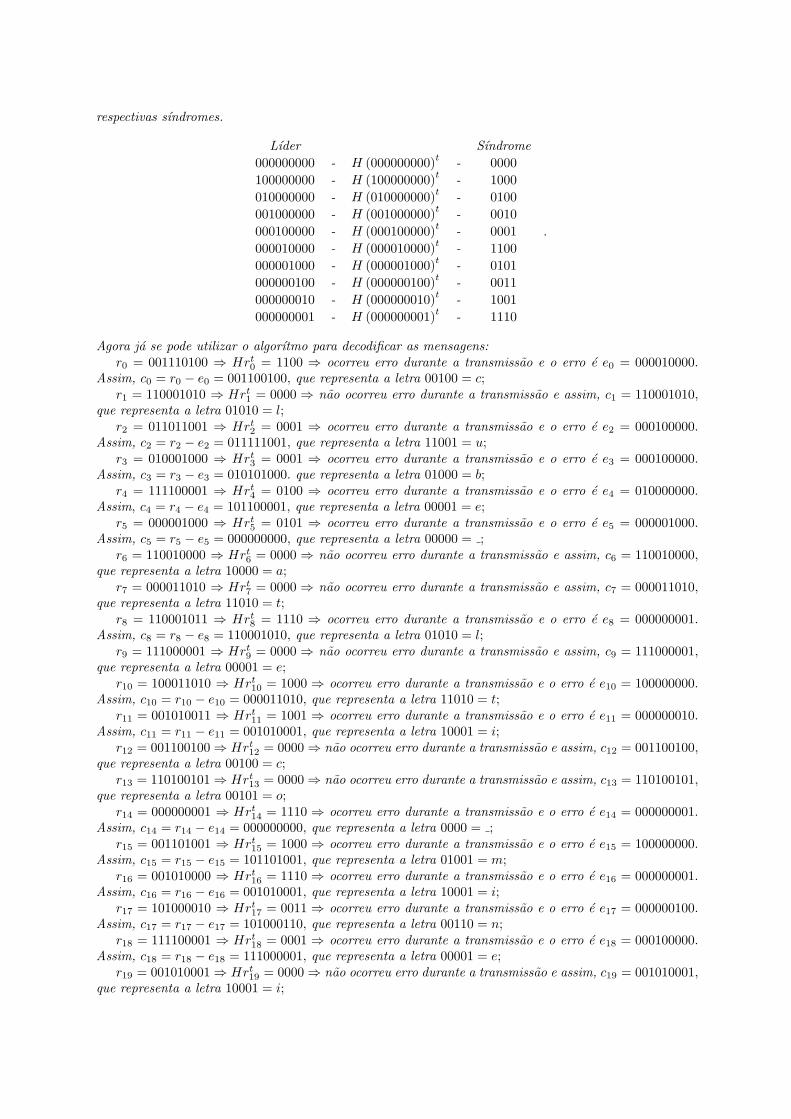
respectivas sındromes.
Lıder Sındrome000000000 - H (000000000)t - 0000100000000 - H (100000000)t - 1000010000000 - H (010000000)t - 0100001000000 - H (001000000)t - 0010000100000 - H (000100000)t - 0001000010000 - H (000010000)t - 1100000001000 - H (000001000)t - 0101000000100 - H (000000100)t - 0011000000010 - H (000000010)t - 1001000000001 - H (000000001)t - 1110
.
Agora ja se pode utilizar o algorıtmo para decodificar as mensagens:r0 = 001110100 ⇒ Hrt
0 = 1100 ⇒ ocorreu erro durante a transmissao e o erro e e0 = 000010000.Assim, c0 = r0 − e0 = 001100100, que representa a letra 00100 = c;
r1 = 110001010 ⇒ Hrt1 = 0000 ⇒ nao ocorreu erro durante a transmissao e assim, c1 = 110001010,
que representa a letra 01010 = l;r2 = 011011001 ⇒ Hrt
2 = 0001 ⇒ ocorreu erro durante a transmissao e o erro e e2 = 000100000.Assim, c2 = r2 − e2 = 011111001, que representa a letra 11001 = u;
r3 = 010001000 ⇒ Hrt3 = 0001 ⇒ ocorreu erro durante a transmissao e o erro e e3 = 000100000.
Assim, c3 = r3 − e3 = 010101000. que representa a letra 01000 = b;r4 = 111100001 ⇒ Hrt
4 = 0100 ⇒ ocorreu erro durante a transmissao e o erro e e4 = 010000000.Assim, c4 = r4 − e4 = 101100001, que representa a letra 00001 = e;
r5 = 000001000 ⇒ Hrt5 = 0101 ⇒ ocorreu erro durante a transmissao e o erro e e5 = 000001000.
Assim, c5 = r5 − e5 = 000000000, que representa a letra 00000 = ;r6 = 110010000 ⇒ Hrt
6 = 0000 ⇒ nao ocorreu erro durante a transmissao e assim, c6 = 110010000,que representa a letra 10000 = a;
r7 = 000011010 ⇒ Hrt7 = 0000 ⇒ nao ocorreu erro durante a transmissao e assim, c7 = 000011010,
que representa a letra 11010 = t;r8 = 110001011 ⇒ Hrt
8 = 1110 ⇒ ocorreu erro durante a transmissao e o erro e e8 = 000000001.Assim, c8 = r8 − e8 = 110001010, que representa a letra 01010 = l;
r9 = 111000001 ⇒ Hrt9 = 0000 ⇒ nao ocorreu erro durante a transmissao e assim, c9 = 111000001,
que representa a letra 00001 = e;r10 = 100011010 ⇒ Hrt
10 = 1000 ⇒ ocorreu erro durante a transmissao e o erro e e10 = 100000000.Assim, c10 = r10 − e10 = 000011010, que representa a letra 11010 = t;
r11 = 001010011 ⇒ Hrt11 = 1001 ⇒ ocorreu erro durante a transmissao e o erro e e11 = 000000010.
Assim, c11 = r11 − e11 = 001010001, que representa a letra 10001 = i;r12 = 001100100 ⇒ Hrt
12 = 0000 ⇒ nao ocorreu erro durante a transmissao e assim, c12 = 001100100,que representa a letra 00100 = c;
r13 = 110100101 ⇒ Hrt13 = 0000 ⇒ nao ocorreu erro durante a transmissao e assim, c13 = 110100101,
que representa a letra 00101 = o;r14 = 000000001 ⇒ Hrt
14 = 1110 ⇒ ocorreu erro durante a transmissao e o erro e e14 = 000000001.Assim, c14 = r14 − e14 = 000000000, que representa a letra 0000 = ;
r15 = 001101001 ⇒ Hrt15 = 1000 ⇒ ocorreu erro durante a transmissao e o erro e e15 = 100000000.
Assim, c15 = r15 − e15 = 101101001, que representa a letra 01001 = m;r16 = 001010000 ⇒ Hrt
16 = 1110 ⇒ ocorreu erro durante a transmissao e o erro e e16 = 000000001.Assim, c16 = r16 − e16 = 001010001, que representa a letra 10001 = i;
r17 = 101000010 ⇒ Hrt17 = 0011 ⇒ ocorreu erro durante a transmissao e o erro e e17 = 000000100.
Assim, c17 = r17 − e17 = 101000110, que representa a letra 00110 = n;r18 = 111100001 ⇒ Hrt
18 = 0001 ⇒ ocorreu erro durante a transmissao e o erro e e18 = 000100000.Assim, c18 = r18 − e18 = 111000001, que representa a letra 00001 = e;
r19 = 001010001 ⇒ Hrt19 = 0000 ⇒ nao ocorreu erro durante a transmissao e assim, c19 = 001010001,
que representa a letra 10001 = i;

r20 = 011010100 ⇒ Hrt20 = 1001 ⇒ ocorreu erro durante a transmissao e o erro e e20 = 000000010.
Assim, c20 = r20 − e20 = 011010110, que representa a letra 10110 = r;
r21 = 010100101 ⇒ Hrt21 = 1000 ⇒ ocorreu erro durante a transmissao e o erro e e21 = 100000000.
Assim, c21 = r21 − e21 = 110100101, que representa a letra 00101 = o.
Assim a mensagem recebida foi: clube atletico mineiro.
2.5.3 Exemplo de decodificacao com mensagem que contenha mais de um erro
Exemplo 2.11 Utilizamos o codigo do exemplo 2.8 e a seguinte tabela com os comandos e suas respec-tivas fontes:
Comando Fonte CodificandoNorte 00 (00)G 000000000Sul 10 (01)G 111100010
Leste 01 (10)G 000111101Oeste 11 (11)G 111011111
Considerando que na transmissao da mensagem ocorra no maximo 2 erros em cada palavra, diga qual ocaminho que o robo, que se move conforme os comandos acima, deve percorrer se este receba os seguintescomandos:
000000011 100111101 000000000 111000111111000110 000111101 .
Considere a tabela com os lıderes de classes e suas respectivas sındromes do exemplo 2.8 e execute oalgoritmo para correcao de mais de um erro.
r0 = 000000011 ⇒ Hrt0 = 1110111 ⇒ ocorreu erro durante a transmissao e o erro e e0 = 000000011.
Assim, c0 = r0 − e0 = 000000000, que representa o comando 00 = Norte;
r1 = 100111101 ⇒ Hrt1 = 1000000 ⇒ ocorreu erro durante a transmissao e o erro e e1 = 100000000.
Assim, c1 = r1 − e1 = 000111101, que representa o comando 01 = Leste;
r2 = 000000000 ⇒ Hrt2 = 0000000 ⇒ nao ocorreu erro durante a transmissao e assim, c2 =
000000000, que representa o comando 00 = Norte;
r3 = 111000111 ⇒ Hrt3 = 0000110 ⇒ ocorreu erro durante a transmissao e o erro e e3 = 000011000.
Assim, c3 = r3 − e3 = 111011111, que representa o comando 11 = Oeste;
r4 = 111000110 ⇒ Hrt4 = 0001001 ⇒ ocorreu erro durante a transmissao e o erro e e4 = 000100100.
Assim, c4 = r4 − e4 = 111100010, que representa o comando 10 = Sul;
r5 = 111011111 ⇒ Hrt5 = 0000000 ⇒ nao ocorreu erro durante a transmissao e assim, c5 =
111011111, que representa o comando 11 = Oeste;
Portanto a mensagem recebida e, consequetemente, o trajeto do robo foi: Norte, Leste, Norte, Oeste,Sul, Oeste.

3 Codigos Cıclicos
3.1 Introducao
Os codigos cıclicos sao os codigos mais estudados pelos seus bons algorıtmos de codificacao e decodificacao.Dado um corpo finito K e seja (x0, ..., xn−1) um elemento de Kn, assim os codigos cıclicos sao carac-
terizados pela seguinte definicao:
Definicao 3.1 Um codigo linear C ⊂ Kn e codigo cıclico se satisfaz a seguinte condicao:(c0, ..., cn−1) ∈ C ⇒ (cn−1, c0, ..., cn−2) ∈ C.
Portanto, dada a transformacao linear
Tπ : C −→ Kn
(c0, ..., cn−2, cn−1) �−→ (cn−1, c0, ..., cn−2)
sabemos que quando o domınio e um codigo cıclico entao, a imagem tambem sera o mesmo codigo cıclicoe que Tπ (C) = C. Veja tambem que Tn
π (c) = c.
Exemplo 3.1 Seja um vetor v ∈ Kn. Logo o espaco vetorial
〈v〉 = k0v + k1Tπ (v) + ... + kn−1Tn−1π (v)
com ki ∈ K para i = 0, 1, ..., n−1 e um codigo cıclico. Considere o corpo K = F2 e seja v = (1, 1, 0) ∈ F 32 .
Portanto,
〈v〉 = k0 (1, 1, 0) + k1 (0, 1, 1) + k2 (1, 0, 1)= {(0, 0, 0) , (1, 1, 0) , (0, 1, 1) , (1, 0, 1)} .
Para otimizarmos o nosso trabalho nos codigos cıclicos tentaremos incrementar a estrutura de anel aocodigo. Iremos fazer isto da seguinte maneira. Definiremos Rn como sendo o anel das classes residuaisem K [x] modulo xn − 1.Ou seja
Rn = K [x](xn−1) .

Um elemento de Rn e da forma [f (x)] = {f (x) + g (x) (xn − 1) : g (x) ∈ K [x]} .Definiremos a adicao e a multiplicacao em Rn da seguinte forma:
[f1 (x)] + [f2 (x)] = [f1 (x) + f2 (x)][f1 (x)] · [f2 (x)] = [f1 (x) · f2 (x)]
e ainda, se definirmos a multiplicacao por um escalar λ ∈ K da seguinte forma,
λ [f1 (x)] = [λf1 (x)]
teremos que Rn e um K-espaco vetorial de dimensao n e com base 1, [x] , ...,[xn−1
].
DemonstracaoDe K ser um corpo temos que K [x] e um domınio com as operacoes definidas acima, logo temos queexiste em Rn a propriedade comutativa e associativa para a adicao alem do elemento neutro e o simetricopara a adicao. E tambem da definicao de multiplicacao por escalar temos as seguintes propriedades:
(1) λ1 (λ2v) = (λ1λ2) v, ∀λ1, λ2 ∈ K e v ∈ Rn
(2) (λ1 + λ2) v = λ1v + λ2v, ∀λ1, λ2 ∈ K e v ∈ Rn
(3) λ (u + v) = λu + λv, ∀λ1 ∈ K e v, u ∈ Rn
(4) 1v = v, onde 1 e o elemento unidade de K e v ∈ Rn
Daı, temos que Rn e um espaco vetorial.Agora, temos que 1, [x] , ...,
[xn−1
]e uma base de Rn pois
α01 + α1 [x] + ... + αn−1
[xn−1
]= [0]
⇒ [α0 + a1x + ... + αn−1x
n−1]
= [0]
⇒ α0 + a1x + ... + αn−1xn−1 = g (x) (xn − 1)
⇒ g (x) = 0
⇒ α0 + a1x + ... + αn−1xn−1 = 0
o que implica que a0 = a1 = ... = an−1 = 0 e consequentemente 1, [x] , ...,[xn−1
]sao LI. E tambem
1, [x] , ...,[xn−1
]gera Rn pois fazendo a divisao de f (x) por xn−1, temos que f (x) = g (x) (xn − 1)+f (x)
com f (x) = 0 ou ∂f (x) ≤ n − 1. Daı temos que
[f (x)] =[f (x) + g (x) (xn − 1)
]=[f (x)
]onde ∂f (x) ≤ n − 1. Assim, tomando f (x) = α0 + α1x + ... + αn−1x
n−1 temos que
[f (x)] =[f (x)
]=[α0 + α1x + ... + αn−1x
n−1]
= 1α0 + α1 [x] + ... + αn−1
[xn−1
].
�Outro propriedade importante de Rn e que Rn e isomorfo a Kn. Para mostrar isto basta definir a
transformacao abaixo:
υ : Kn −→ Rn
(a0, a1,..., an−1) �−→ [a0 + a1x + ... + an−1x
n−1] .
Daı, podemos transportar qualquer codigo C ⊂ Kn para Rn utilizando o isomorfirmo υ. Observe que emRn, alem da estrutura de espaco vetorial que tinhamos em Kn, temos tambem uma estrutura de anel.Veremos adiante que quando tomamos a imagem de um codigo cıclico pela transformacao υ, esta imagemsera um ideal.
3.2 Ideais de um Anel
Definicao 3.2 Seja I um subconjunto nao vazio de um anel A, I e chamado de ideal de A. Se satisfazas seguintes condicoes:
(1) ∀a, b ∈ I, a + b ∈ I(2) ∀a ∈ I e ∀c ∈ A, ca ∈ I.

Veja que 0 (elemento neutro aditivo) esta em todo ideal pois, ∀a ∈ I, 0a = 0 ∈ I
Exemplo 3.2 Seja A um anel e a ∈ A. Entao o conjunto
I (a) = {ca : c ∈ A}
e um ideal de A, chamado ideal principal gerado por a.
Proposicao 3.1 Um ideal de K [x] e da forma I (f (x)) onde f (x) ∈ K [x] .
DemonstracaoNesta demonstracao vamos considerar dois casos:
(1◦ caso) I = {0} . Neste caso basta tomar f (x) = 0 e logo I = I (f (x))(2◦ caso) I �= {0} .Neste caso tomemos f (x) ∈ I nao nulo e com o menor grau possıvel. Vamos provar
que I = I (f (x)) .De fato, como f (x) ∈ I entao I (f (x)) = {f (x) h (x) : h (x) ∈ K [x]} ⊂ I.Agora tome qualquer g (x) ∈ I. Pelo algoritmo da divisao temos que exitem q (x) e r (x) com r (x) = 0
ou ∂ (r (x)) < ∂ (f (x)) , tais que g (x) = f (x) q (x) + r (x) . Logo r (x) = g (x) − f (x) g (x) ∈ I, o queimplica que r (x) = 0, pois f (x) ja foi escolhido com o menor grau possıvel. Assim, g (x) = f (x) q (x) ∈I (f (x)) . Logo I ⊂ I (f (x)) . �
Proposicao 3.2 Se f (x) e g (x) sao geradores de um ideal I = I (f (x)) = I (g (x)) entao f (x) e g (x)sao associados.
DemonstracaoDe g (x) ∈ I (f (x)) e f (x) ∈ I (g (x)) temos
f (x) = a (x) g (x) e g (x) = b (x) f (x)
para alguns a (x) , b (x) ∈ K [x] . Assim, se f (x) = 0, entao g (x) = 0 pois I = {0} . Suponhamos f (x) �= 0.Logo, f (x) = a (x) (b (x) f (x)) e como K [x] e um domınio, temos que 1 = a (x) b (x) , e portanto a (x) eb (x) sao invertıveis, o que implica que f (x) e g (x) sao associados. �
Das duas proposicoes acima teremos o seguinte corolario.
Corolario 3.1 Se I �= {0} e um ideal de K [x] , entao existe um polinomio monico f (x) de grau mınimoem I tal que I = I (f (x)) .
Definicao 3.3 Um anel onde todo ideal e principal e denominado anel principal.
Lembre que todo ideal de K [x] e gerado por um polinomio f (x) , o que implica que K [x] e um umanel principal.
Proposicao 3.3 Todo ideal I de K [x]p(x) e da forma I ([f (x)]) onde f (x) e um divisor de p (x) .
DemonstracaoSeja I um ideal de K [x]p(x) . Considere o ideal J = {g (x) ∈ K [x] : [g (x)] ∈ I} de K [x] . De fato J e umideal de K [x] , pois se g1 (x) e g2 (x) ∈ J entao [g1 (x)] e [g2 (x)] ∈ I, o que implica que [g1 (x)]+[g2 (x)] ∈ I.Consequetemente [g1 (x) + g2 (x)] ∈ I e portanto, g1 (x)+g2 (x) ∈ J. Agora tome g (x) ∈ J e h (x) ∈ K [x] .Logo [g (x)] ∈ I e portanto [g (x) h (x)] = [g (x)] [h (x)] ∈ I,ou seja, g (x) h (x) ∈ J. Assim, fica comprovadoque J e um ideal de K [x] . Note que [0] = [p (x)] e como [0] ∈ I temos que p (x) ∈ J . Assim, do corolarioacima, seque que existe f (x) nao nulo em K [x] tal que J = I (f (x)) . Como p (x) ∈ J = I (f (x)) , segueque f (x) divide p (x) ou seja p (x) = f (x) q (x) , para algum q (x) ∈ K [x] .
Veja que I = {[g (x)] : g (x) ∈ J} e pois, se [a (x)] ∈ I, temos que a (x) ∈ J e daı [a (x)] ∈ {[g (x)] : g (x) ∈ J} ,o que implica que I ⊂ {[g (x)] : g (x) ∈ J} . Agora, se b [x] ∈ {[g (x)] : g (x) ∈ J} , temos que b (x) ∈ J, oque implica que [b (x)] ∈ I e consequentemente {[g (x)] : g (x) ∈ J} ⊂ I.
Como J = I (f (x)) , temos que I ={
[h (x)] [f (x)] : [h (x)] ∈ K [x]p(x)
}= I ([f (x)]) . �

3.3 Codigos Cıclicos
Seja C um codigo linear cıclico. A partir de agora vamos nos focar na matriz geradora na matriz testede paridade de C.
Mas, antes de encontrar as matrizes procuradas, relembre das transformacoe υ e Tπ vistas anterior-mente e considere c = (c0, ..., cn−1) ∈ C. Note que
υ (Tπ (c)) = υ (cn−1, c0, ..., cn−2)
=[cn−1 + c0x + ... + cn−2x
n−1]
= [x][c0 + c1x + ... + cn−1x
n−1]
= [x] υ (c)
ou seja, quando aplicamos a transformacao Tπ em um elemento c de Kn e depois o transportamos paraRn por meio de υ, e equivalente multiplicar por [x] o elemento υ (c) ∈ Rn.
Lema 3.1 Seja V um subespaco vetorial de Rn. Entao, V e um ideal de Rn se, e somente se, V e fechadopela multiplicacao por [x] .
Demonstracao(⇒) Vamos mostrar que o ideal V de Rn e fechado pela multiplicacao por [x] . De fato, se [f (x)] ∈ V,temos que [x] [f (x)] ∈ V pela definicao de ideal.
(⇐) Agora, vamos mostrar que V e um ideal de Rn. Suponhamos que V seja fechado pela multiplicacaopor [x] e tome [f (x)] ∈ V e [g (x)] ∈ Rn. Basta mostrar que [g (x)] [f (x)] ∈ V.
Da hipotese de que V e K−subespaco vetorial, temos que a [f (x)] ∈ V para ∀a ∈ K. Note tambemque
[xf (x)] = [x] [f (x)] ∈ V
e que [x2f (x)
]= [x] [xf (x)] ∈ V
Assim, podemos aplicar inducao finita e obter que, ∀m ∈ N,
[xmf (x)] = [xm] [f (x)] ∈ V
ou seja, se V e fechado para a multiplicacao por [x] , entao V e fechado para a multiplicacao por qualquerpotencia de [x] . Agora, escrevendo [g (x)] =
[a0 + a1x + ... + an−1x
n−1],temos que
[g (x)] [f (x)] = [g (x) f (x)]
=[(
a0 + a1x + ... + an−1xn−1
)f (x)
]= a0 [f (x)] + a1 [x] [f (x)] + ... + an−1
[xn−1
][f (x)]
e, portanto, [g (x)] [f (x)] ∈ V pois cada uma das parcelas de a0 [f (x)]+a1 [x] [f (x)]+...+an−1
[xn−1
][f (x)]
pertence a V. �
Teorema 3.1 Um subespaco C ∈ Kn e um codigo cıclico se, e somente se, υ (C) e um ideal de Rn.
Demonstracao(⇒) Seja C um codigo cıclico e c = (c0, ..., cn−1) ∈ C. Assim, da definicao de codigo cıclico, temos queTπ (c) ∈ C. Como υ (c′) ∈ υ (C) para ∀c′ ∈ C entao, (Tπ (c)) = [x] υ (c) ∈ υ (C) . Daı, do lema 3.1 temosque υ (C) e um ideal de Rn.
(⇐) Seja υ (C) um ideal de Rn e c = (c0, ..., cn−1) ∈ C. Entao υ (c) ∈ υ (C) e [x] υ (c) ∈ υ (C) , o queimplica que υ−1 ([x] υ (c)) = (cn−1, c0, ..., cn−2) ∈ C e consequentemente, C e um codigo cıclico. �
Lembre que Rn = K [x](xn−1) , e se um codigo C e cıclico, entao υ (C) e um ideal. Da proposicao(3.3) temos que υ (C) = I ([g (x)]) onde g (x) ∈ K [x] divide xn − 1.
Veja que Rn nao e um domınio de integridade pois [x − 1][xn−1 + ... + x + 1
]=[xn−1 − 1
]= [0] .
Observacao 3.1 A partir de agora, consideraremos sempre g (x) como um divisores de xn − 1 e h (x) =xn − 1g (x)
.

Teorema 3.2 Seja I = I ([g (x)]) , onde g (x) divide xn − 1 e grau de g (x) e s.Temos que [g (x)] , [xg (x)] , ...,
[xn−s−1g (x)
]e uma base de I como espaco vetorial sobre o corpo K.
DemonstracaoO primeiro passo para mostrar que [g (x)] , [xg (x)] , ...,
[xn−s−1g (x)
]e uma base de I, e mostrar que estes
sao linearmente independente. Assim, sejam a0, a1, ..., an−s−1 ∈ K e suponhamos
a0 [g (x)] + a1 [xg (x)] + ... + an−s−1
[xn−s−1g (x)
]= [0]
⇒ [g (x)][a0 + a1x + ... + an−s−1x
n−s−1]
= [0]
Assim, exitem um d (x) ∈ K [x] de tal maneira que
g (x)(a0 + a1x + ... + an−s−1x
n−s−1)
= d (x)(xn−1
)e como h (x) =
xn − 1g (x)
temos que
a0 + a1x + ... + an−s−1xn−s−1 = d (x) h (x)
Mas, o grau de h (x) e n − s, o que implica que d (x) = 0. Logo, a0 + a1x + ... + an−s−1xn−s−1 = 0.
Portanto, a0 = a1 = ... = an−s−1 = 0 e daı [g (x)] , [xg (x)] , ...,[xn−s−1g (x)
]sao linearmente indepe-
dentes.Agora, devemos mostrar que [g (x)] , [xg (x)] , ...,
[xn−s−1g (x)
]geram I sobre K. Tomando [f (x)] ∈
I,temos quef (x) = d (x) g (x) + t (x) (xn − 1) ,
para algum t (x) ∈ K [x] . Pelo algorıtmo da divisao existem q (x) , r (x) ∈ K [x] de tal maneira qued (x) = h (x) q (x) + r (x) com r (x) = 0 ou grau de r (x) menor que grau de h (x) .Daı,
f (x) = (h (x) q (x) + r (x)) g (x) + t (x) (xn − 1)= h (x) g (x) q (x) + r (x) g (x) + t (x) (xn − 1)= (q (x) + t (x)) (xn − 1) + r (x) g (x)
o que significa que [f (x)] = [r (x)] [g (x)] . Agora, como o grau de r (x) e menor que o grau de h (x) quee igual a n − s, podemos escrever
r (x) = b0 + b1x + ... + bn−s−1xn−s−1
com b0, b1, ..., bn−s−1 ∈ K. Portanto,
[f (x)] =[b0 + b1x + ... + bn−s−1x
n−s−1][g (x)]
= b0 [g (x)] + b1 [xg (x)] + ... + bn−s−1
[xn−s−1g (x)
]e assim, qualquer elemento de I pode ser escrito como combinacao de [g (x)] , [xg (x)] , ...,
[xn−s−1g (x)
].
Portanto [g (x)] , [xg (x)] , ...,[xn−s−1g (x)
]e uma base. �
Corolario 3.2 Dado um codigo cıclico C, existe v ∈ C tal que C = 〈v〉 .
DemonstracaoSe C e um codigo cıclico, entao υ (C) e um ideal I e portando gerado por um polinomio [g (x)] , ondeg (x) divide xn − 1. Agora, fazendo v = υ−1 ([g (x)]) , temos que C e gerado por v, Tπ (v) , ..., Tn−s−1
π (v) ,e portando C = 〈v〉 . �
Veja que estamos a um passo de contruirmos a matriz geradora de C.
Corolario 3.3 Seja g (x) = g0 +g1x+ ...+gsxs um polinomio que divide xn−1. Se I = I ([g (x)]) , entao
dim I = n − s

e alem disso o codigo C = υ−1 (I) tem matriz geradora
G =
⎛⎜⎜⎜⎝υ−1 ([g (x)])υ−1 ([xg (x)])
...υ−1
([xn−s−1g (x)
])⎞⎟⎟⎟⎠ =
⎛⎜⎜⎜⎝g0 g1 · · · gs 0 · · · 00 g0 g1 · · · gs · · · 0. . . . . . . . . . . . . . . . . . . . .0 · · · 0 g0 g1 · · · gs
⎞⎟⎟⎟⎠DemonstracaoSabemos que I e gerado por [g (x)] , [xg (x)] , ...,
[xn−s−1g (x)
]. Logo,
dim I = n − s
e do corolario 3.3 temos tambem que C e gerado por 〈v〉 e tem como vetores geradores v = υ−1 ([g (x)]) ,Tπ (v) = υ−1 ([xg (x)]) , ..., Tn−s−1
π (v) = υ−1([
xn−s−1g (x)])
. Como a matriz tem em suas linhas osvetores geradores entao
G =
⎛⎜⎜⎜⎝v
Tπ (v)...
Tn−s−1π (v)
⎞⎟⎟⎟⎠ =
⎛⎜⎜⎜⎝υ−1 ([g (x)])υ−1 ([xg (x)])
...υ−1
([xn−s−1g (x)
])⎞⎟⎟⎟⎠ .
�
Definicao 3.4 Seja h (x) = h0 + h1x + ... + htxt ∈ K [x] . Definiremos h∗ (x) = ht + ht−1x + ... + h0x
t
como o recıproco de h (x) .
Proposicao 3.4 Se h (x) divide xn − 1, entao h∗ (x) tambem divide xn − 1.
Note, que como h∗ (x) divide xn − 1, entao h∗ (x) e gerador de um codigo linear cıclico.
Teorema 3.3 Seja C = υ−1 (I) um codigo cıclico, onde I = I ([g (x)]) , com g (x) um divisor de xn −1.Entao C⊥ e cıclico e C⊥ = υ−1 (J) ,onde J = I ([h∗ (x)]) .
Demonstracao
Seja g (x) = g0 + g1x+ ...+ gsxx e h (x) =
xn − 1g (x)
. Assim ∂ (h (x)) = n− s, e consequentemente podemos
escrever h (x) = h0 + h1x + ... + hn−sxn−s com hn−s �= 0. Tomemos as matrizes
G =
⎛⎜⎜⎜⎝g0 g1 · · · gs 0 · · · 00 g0 g1 · · · gs · · · 0. . . . . . . . . . . . . . . . . . . . .0 · · · 0 g0 g1 · · · gs
⎞⎟⎟⎟⎠e
H =
⎛⎜⎜⎜⎝hn−s hn−s−1 · · · h0 0 · · · 0
0 hn−s hn−s−1 · · · h0 · · · 0. . . . . . . . . . . . . . . . . . . . .0 · · · 0 hn−s hn−s−1 · · · h0
⎞⎟⎟⎟⎠As linhas de H sao linearmente independente pois se
a1 (hn−s, hn−s−1, ..., h0, 0, ..., 0) + ... + as (0, ..., 0, hn−s, hn−s−1) = (0, ..., 0)
temos que a1hn−s = 0,o que implica a1 = 0. Da mesma forma a2hn−s = 0, ⇒ a2 = 0 e assim sucessiva-mente obtemos, a3 = ... = as = 0.
Considerando {e1, ..., en} a base canonica de Kn, temos que a i-esima linha de G e
Gi = g0ei + ... + gsei+s

com 1 ≤ i ≤ n − s e a j-esima linha de H e
Hj = hn−sej + ... + h0ej+n−s
com 1 ≤ j ≤ s. Note que a j-esima linha de H e a j-esima coluna de Ht.Suponhamos i ≤ j. O produto interno de Gi por Hj e dado por
gj−ihn−s + gj−i+1hn−s−1 + ... + g0hj−i =j−i∑k=0
gj−i−khn−s+k
onde j − i = 0, ..., s − 1.Note que dado, o produto g (x) h (x) = xn − 1, a soma acima e exatamente o coeficiente de xn−s+j−1.
Como 1 ≤ n− s + j − i ≤ n− 1, temos que este coeficiente e 0. Observe que o caso onde j ≤ i e analogo.Assim, teremos que G · Ht = 0, e consequentemente H e a matriz geradora de C⊥. Como no caso da
matriz geradora temos
H =
⎛⎜⎜⎜⎝υ−1 ([h∗ (x)])υ−1 ([xh∗ (x)])
...υ−1 ([xsh∗ (x)])
⎞⎟⎟⎟⎠ =
⎛⎜⎜⎜⎝hn−s hn−s−1 · · · h0 0 · · · 0
0 hn−s hn−s−1 · · · h0 · · · 0. . . . . . . . . . . . . . . . . . . . .0 · · · 0 hn−s hn−s−1 · · · h0
⎞⎟⎟⎟⎠e C⊥ = υ−1 (J), onde J = I ([h∗ (x)]) . �Temos pelo teorema acima que a matriz teste de paridade de C e a matriz H.
Exemplo 3.3 Dados os polinomios x7 − 1 e g (x) =(1 + x + x3
), veja que g (x) divide x7 − 1 e x7 −
1 =(1 + x + x3
) (1 + x + x2 + x4
). Chame de h (x) =
(1 + x + x2 + x4
). Observe que υ−1 ([g (x)]) =
(1, 1, 0, 1, 0, 0, 0) e υ−1 ([h (x)]) = (1, 1, 1, 0, 1, 0, 0) . Seja C = I ([g (x)]) o codigo gerado por g (x) . Entaoa matriz geradora de C e
G =
⎛⎜⎜⎝1 1 0 1 0 0 00 1 1 0 1 0 00 0 1 1 0 1 00 0 0 1 1 0 1
⎞⎟⎟⎠Tomando o recıprico de [h (x)] que e [h∗ (x)] =
[1 + x2 + x3 + x4
], temos que a matriz teste de paridade
de C e
H =
⎛⎝ 1 0 1 1 1 0 00 1 0 1 1 1 00 0 1 0 1 1 1
⎞⎠3.4 Decodificando em Codigos Cıclicos
Seja C um codigo cıclico onde υ (C) = I ([g (x)]) . Assim, uma matriz geradora de C e
G =
⎛⎜⎜⎜⎝υ−1 ([g (x)])υ−1 ([xg (x)])
...υ−1
([xn−s−1g (x)
])⎞⎟⎟⎟⎠ =
⎛⎜⎜⎜⎝g0 g1 · · · gs 0 · · · 00 g0 g1 · · · gs · · · 0. . . . . . . . . . . . . . . . . . . . .0 · · · 0 g0 g1 · · · gs
⎞⎟⎟⎟⎠Note que esta matriz nao esta na forma padrao. Vamos montar uma matriz geradora do codigo C naforma padrao (A|Id) . Para isto vamos definir o isomorfismo
μ : Ks −→ K [x]s−1 ⊂ K [x](a0, a1,..., as−1) �−→ [
a0 + a1x + ... + an−1xn−1
]onde K [x]s−1 e o conjunto dos polinomios de grau menor ou igual a s − 1.

Teorema 3.4 Seja C ⊂ Kn um codigo cıclico e suponhamos C = υ−1 (I) onde I = I ([g (x)]) , com g (x)um divisor de xn − 1. Tomemos a matriz A(n−s)×s cuja i-esima linha e
Ri = −μ−1 (ri (x))
com 1 ≤ i ≤ n − s e ri (x) e o resto da divisao de xs−1+i por g (x) . Assim a matriz (A|Idn−s) e umamatriz geradora de C.
DemonstracaoSejam qi (x) , ri (x) ∈ K [x] tais que xs−1+i = g (x) qi (x) + ri (x) com ri (x) = 0 ou ∂ri (x) < ∂g (x) = s.Como
xs−1+i − ri (x) = g (x) qi (x)
temos que[xs−1+i − ri (x)
] ∈ I ([g (x)]) = I. Veja que[xs−1+(1) − r1 (x)
], ...,
[xs−1+(n−s) − rn−s (x)
]sao linearmente indepenentes sobre K pois,
k1
[xs−1+1 − r1 (x)
], ..., kn−s
[xs−1+(n−s) − rn−s (x)
]= [0]
⇒ [k1x
s + ... + kn−sxn−1 + k1r1 (x) + ... + kn−srn−s (x)
]= [0]
⇒ k1xs + ... + kn−sx
n−1 + k1r1 (x) + ... + kn−srn−s (x) = d (x) (xn
para k1, ..., kn−s ∈ K e d (x) ∈ K [x] , como ∂ (k1r1 (x) + ... + kn−srn−s (x)) < s temos que d (x) = 0, daı
k1xs + ... + kn−sx
n−1 + k1r1 (x) + ... + kn−srn−s (x) = 0
o que implica k1 = ... = kn−s = 0. Daı,{[
xs−1+(1) − r1 (x)], ...,
[xs−1+(n−s) − rn−s (x)
]}tem dimensao
n − s = dimC. O que implica que[υ−1
([xs−1+(1) − r1 (x)
]), ..., υ−1
([xs−1+(n−s) − rn−s (x)
])]= C.
Comoυ−1
([xs−1+i − ri (x)
])= es−1+i − μ−1 (ri (x)) =
(−μ−1 (ri (x)) , 0, ..., 1, ..., 0)
temos que a matriz ⎛⎜⎜⎜⎝−μ−1 (r1 (x)) 1 0 ... 0−μ−1 (r2 (x)) 0 1 ... 0
......
.... . .
...−μ−1 (rn−s (x)) 0 0 ... 1
⎞⎟⎟⎟⎠e geradora de C. �
Exemplo 3.4 Utilizando o mesmo exemplo anterior temos que x7 − 1 =(1 + x + x3
) (1 + x + x2 + x4
)onde g (x) =
(1 + x + x3
)e h (x) =
(1 + x + x2 + x4
). Assim, dividindo x3−1+i por g (x) com i = 1, ..., 4,
(veja que n − s = 4), temos que,
x3 = 1(1 + x + x3
)+ (x + 1)
x4 = x(1 + x + x3
)+ (x2 + x)
x5 =(x2 + 1
) (1 + x + x3
)+(x2 + x + 1
)x6 =
(x3 + x + 1
) (1 + x + x3
)+(x2 + 1
)Logo r1 (x) = x + 1 ⇒ −μ−1 (x + 1) = (1, 1, 0)r2 (x) = x2 + x ⇒ −μ−1
(x2 + x
)= (0, 1, 1)
r3 (x) = x2 + x + 1 ⇒ −μ−1(x2 + x + 1
)= (1, 1, 1)
r4 = x2 + 1 ⇒ −μ−1(x2 + 1
)= (1, 0, 1)
e assim uma matriz geradora de C sera
G =
⎛⎜⎜⎝1 1 0 1 0 0 00 1 1 0 1 0 01 1 1 0 0 1 01 0 1 0 0 0 1
⎞⎟⎟⎠

3.4.1 Codificando em Codigos Cıclicos
Dado um codigo cıclico C com matriz geradora G = (A|Idn−s) na forma padrao, podemos codificar umapalavra do codigo de fonte em Kn−s para o codigo de canal por meio da transformacao
T : Kn−s −→ Kn
a = (a1, ..., an−s) �−→ aG
Como temos G na forma padrao, a codificacao sera (b0, ..., bs−1, a1, ..., an−s) onde
(b0, ..., bs−1) = −a1μ−1 (r1 (x)) − ... − an−sμ
−1 (rn−s (x))
Utilizando o codigo do ultimo exemplo a codificacao de (a1, a2, a3, a4) ∈ F 42 sera
(b0, b1, b2, a1, a2, a3, a4)
onde (b0, b1, b2) sao os coefientes do polinomio
a1 (x + 1) + a2
(x2 + x
)+ a3
(x2 + x + 1
)+ a4
(x2 + 1
)= (a1 + a3 + a4) + x (a1 + a2 + a3) + x2 (a2 + a3 + a4)
Portanto a codificacao de (a1, a2, a3, a4) sera (a1 + a3 + a4, a1 + a2 + a3, a2 + a3 + a4, a1, a2, a3, a4) .
3.4.2 Calculando o Vetor Sındrome em Codigos Cıclicos
Vamos agora calcular o vetor sındrome em um codigo cıclico, sem que seja necessario efetuar o produtomatricial.
Teorema 3.5 Seja C ⊂ Kn um codigo cıclico gerado por um polinomio monico g (x) , com a matrizgeradora G na forma padrao (A|Id) e a matriz teste de paridade H = (Id| − At) . Se v = (v0, ..., vn−1) ∈Kn, entao a sındrome de v com relacao a matriz H e dado por
μ−1 (r (x)) ,
onde r (x) e o resto da divisao de v0 + v1x + ... + vn−1xn−1 por g (x) .
DemonstracaoLembre que a sındrome de um codigo C com matriz teste de paridade H = (Id| − At) e dada por
(Id| − At
)vt =
⎛⎜⎝ 1 . . . 0...
. . .... −At
0 . . . 1
⎞⎟⎠⎛⎜⎝ v0
...vn−1
⎞⎟⎠
onde −At = −
⎛⎜⎜⎜⎝−μ−1 (r1 (x))−μ−1 (r2 (x))
...−μ−1 (rn−s (x))
⎞⎟⎟⎟⎠t
=(
μ−1 (r1 (x))tμ−1 (r2 (x))t · · · μ−1 (rn−s (x))t )
Daı,(Id| − At) =
(μ−1 (1)t
μ−1 (x)t. . . μ− (
xs−1)
μ−1 (r1 (x))tμ−1 (r2 (x))t · · · μ−1 (rn−s (x))t )
Logo,
(Id| − At
)vt =
(μ−1 (1)t
μ−1 (x)t. . . μ− (
xs−1)t
μ−1 (r1 (x))t · · · μ−1 (rn−s (x))t)⎛⎜⎝ v0
...vn−1
⎞⎟⎠= μ−1 (1)t
v0 + μ−1 (x)tv1 + ... + μ− (
xs−1)t
vs−1 + μ−1 (r1 (x))tvs + ... + μ−1 (rn−s (x))t
vn−1
= μ−1(v0 + v1x + ... + vs−1x
s−1 + vsr1 (x) + ... + vn−1rn−s (x))
Como visto anteriormente, temos que v0 + v1x + ... + vs−1xs−1 + vsr1 (x) + ... + vn−1rn−s (x) e o resto
da divisao de v0 + v1x + ... + vn−1xn−1 por g (x). �

Exemplo 3.5 Utilizando o mesmo exemplo anterior, temos que o codigo C gerado pelo polinomi [g (x)] =[1 + x + x3
]tem matriz geradora
G =
⎛⎜⎜⎝1 1 0 1 0 0 00 1 1 0 1 0 01 1 1 0 0 1 01 0 1 0 0 0 1
⎞⎟⎟⎠e matriz teste de paridade
H =
⎛⎝ 1 0 0 1 0 1 10 1 0 1 1 1 00 0 1 0 1 1 1
⎞⎠Assim dado o vetor v = (1101001) ∈ F 7
2 , a sua sındrome sera dada pelo resto da divisao de μ−1 (v) =1 + x + x3 + x6 por g (x) = 1 + x + x3. Veja que
(1 + x + x3 + x6
)=
(x3 + x
)g (x) +
(x2 + 1
)e
consequentemente a sındrome sera μ(x2 + 1
)= (101) .
4 Referencias
[1] R.E. BLAHUT, Theory and Pactice of Error Control Codes, Addison-Wesley Publishing Company,Massachusetts, 1984
[2] A. HEFEZ e M.L.T. VILLELA, Codigos Corretores de Erros, IMPA, Rio de Janeiro 2002
[3] F.J. MACWILLIAMSe N.J.A. SLOANE, The Theory of Error-Correcting Codes, North-Holland,1992
UMA ANÁLISE DA ESTABILIDADE DO SISTEMA MECÂNICO PÊNDULO
DUPLO PLANAR
CARLOS HENRIQUE TOGNON 1, MÁRCIO JOSÉ HORTA DANTAS 1
Resumo
Este trabalho apresenta um problema: fazer a análise da estabilidade do Sistema Mecânico pêndulo duplo planar. Para se fazer esta análise foram usados conceitos de Física, mais especificamente conceitos de Mecânica, para se conseguir obter as Equações de Movimento do Sistema Mecânico pêndulo duplo planar. Logo após obter estas Equações de Movimento, fez-se uma análise das mesmas; foi observado que elas representam Equações Diferenciais Ordinárias e com isso a teoria que diz respeito à Física cedeu espaço a conceitos da Matemática que foram aplicados para se conseguir alcançar a solução do problema em questão. Para auxiliar o estudo da estabilidade do Sistema Mecânico foram utilizados dois teoremas, que são o Teorema da Linearização de Lyapunov-Poincaré e o Critério de Hurwitz. No decorrer do trabalho são realizadas interpretações físicas das situações que envolvem o estudo desta análise a fim de se obter uma melhor compreensão do que ocorre.
Palavras chave: Sistema Mecânico, Equações de Movimento, Estabilidade.
____________________________1 Faculdade de Matemática, UFU, Av. João Naves de Ávila, 2121, Uberlândia, 38408-100,

1. INTRODUÇÃO
Ao analisar um problema de Mecânica, além de se utilizar conceitos da Física para a sua resolução, é necessário introduzir conceitos matemáticos e usar adequadamente a teoria para compreender a situação dada.
Antes de se iniciar a resolução matemática de um problema de Mecânica, ou seja, antes de formular os passos a seguir para obter a solução, é de extrema importância que se faça uma interpretação física do que está acontecendo. Para tanto, muitas vezes precisa-se entender a geometria do problema em questão fazendo-se uma associação com a parte física e com isso chegar a uma previsão do que se espera para o resultado final. Fazendo esta análise pode-se entender melhor o que está por trás de fórmulas e cálculos que eventualmente se utiliza para a solução.
Outro fator relevante para se resolver o problema é a aplicação de conceitos matemáticos para facilitar a obtenção da solução. Conhecimentos de Cálculo Diferencial e Integral são muito usados durante a aplicação dos conceitos de Física, juntamente com alguns conhecimentos sobre equações diferenciais e Álgebra. Estes conceitos matemáticos vêm auxiliar, por exemplo, a obtenção de Equações de Movimento e a análise da estabilidade destes Sistemas Mecânicos. A aplicação correta destes conceitos faz com que a solução do problema se apresente de uma maneira mais clara e objetiva.
Cabe ressaltar também que a teoria Física, que permite chegar ao resultado final, deve ser usada de uma maneira adequada durante a resolução do problema. Por exemplo, a aplicação de algum teorema que permita a obtenção da resposta deve ser feita de modo que as hipóteses já estejam verificadas anteriormente no decorrer da investigação para que assim se alcance diretamente o resultado procurado.
Por fim, observa-se que há muito mais coisas envolvidas na resolução de um
problema de Mecânica do que simplesmente a aplicação de fórmulas e cálculos derivados destas fórmulas. É necessária certa engenhosidade para se modelar o problema e também uma boa compreensão do assunto para que se tenha certeza do que se está fazendo, tentando ao máximo evitar dúvidas que possam causar transtorno em uma fase futura da resolução do problema em questão. 2. OBJETIVOS
Neste trabalho será apresentada a dedução das Equações de Movimento do pêndulo duplo planar.
Para se fazer está dedução serão utilizadas as Equações de Lagrange. Tais equações fornecem as Equações de Movimento de Sistemas Mecânicos. Sistemas Mecânicos são sistemas constituídos por um conjunto de objetos agrupados por alguma interação ou interdependência, de modo que existam relações de causa e efeito nos fenômenos que ocorrem com os elementos desse conjunto. No caso presente, o pêndulo duplo planar é o Sistema Mecânico. Em um Sistema Mecânico algumas grandezas que caracterizam seus objetos constituintes variam no tempo, no caso, os ângulos que o pêndulo forma com seu eixo ao se movimentar. Essas grandezas que variam com o tempo são representadas pelas Equações de Movimento.
As Equações de Lagrange foram obtidas a partir das Equações do Movimento de Newton, por isso não representam propriamente uma nova teoria da Física, mas, simplesmente, uma maneira diferente, mas equivalente, de expressar essas mesmas leis.
Em muitos casos é mais conveniente aplicar o método de Lagrange ao invés do método Newtoniano para se obter as Equações de Movimento de Sistemas Mecânicos. Isto ocorre devido à maneira uniforme que este método propicia de encontrar tais equações.
Para utilizar as Equações de Lagrange, de um modo geral, é necessário encontrar a posição de cada uma das

partículas que compõem o sistema, em termos de coordenadas cartesianas. Assim, consegue-se obter o vetor posição de cada uma das partículas do sistema.
Tendo então o vetor posição, obtém-se o vetor velocidade de cada partícula do sistema, bastando para isto derivar o vetor posição. Após este processo deve-se encontrar a energia cinética de cada partícula.
No caso em que existe energia potencial no sistema, pode-se introduzir a função lagrangiana. Obtém-se então a energia potencial.
A função lagrangiana é igual à energia cinética menos a energia potencial do Sistema Mecânico. Denomina-se a função lagrangiana por L , a energia cinética por T e a energia potencial por V . Portanto VTL .
Neste caso as Equações de Lagrange são expressas da seguinte maneira
0kk q
LqL
dtd
,
onde kq representa as coordenadas
generalizadas das partículas do sistema, nk ,...,1 , onde n é o número de
partículas do sistema. Com isso obtém-se as Equações de Movimento de Sistemas Mecânicos.
Logo após a dedução das Equações de Movimento do pêndulo duplo planar, será apresentada uma análise a respeito da estabilidade de dois pontos de equilíbrio do sistema representado pelas Equações de Movimento. Tal análise será feita usando o Teorema da Linearização de Lyapunov-Poincaré e o Critério de Hurwitz.
Os conceitos que envolvem o estudo da estabilidade juntamente com os dois teoremas serão explicados mais adiante. Antes, faz-se necessário enunciar, na próxima seção, estes dois teoremas a fim de que possam ser utilizados posteriormente. 3. RESULTADOS MATEMÁTICOS
Considere um sistema de n equações diferenciais de primeira ordem,
não-lineares, sendo 1n um número inteiro,
nnn
n
n
xxxfdt
dx
xxxfdt
dx
xxxfdt
dx
...,,,
...,,,
,...,,
21
2122
2111
(1)
Seja nxxx ...,,1 um ponto que
anula simultaneamente as n equações deste sistema, ou seja,
0,...,
0,...,
0,...,
1
12
11
nn
n
n
xxf
xxf
xxf
Um ponto nestas condições é denominado ponto de equilíbrio do sistema de equações diferenciais.
A partir de um sistema de nequações diferenciais de primeira ordem não-lineares, pode-se obter um sistema onde as equações são lineares. Consegue-se isto através de uma linearização do sistema não-linear em torno de um ponto de equilíbrio deste sistema.
A fim de se mostrar como é feita esta linearização considere, por exemplo, um sistema de duas equações diferenciais de primeira ordem não-lineares,
yxGdtdy
yxFdtdx
,
,
Seja 00 , yx um ponto de
equilíbrio deste sistema, isto é, 0, 00 yxF e 0, 00 yxG
Pode-se considerar, sem perda de generalidade, 00x e 00y .
Considerando as funções yxF , e
yxG , contínuas com derivadas de primeira ordem também contínuas numa
vizinhança de 0,0 , pode-se expandi-las pela Fórmula de Taylor, obtendo
yxGy
Gy
xGxGyxG
dtdy
yxFy
Fy
xFxFyxF
dtdx
,0,0
0,00,0,
,0,0
0,00,0,
1
1
Tem-se que 00,00,0 GF ,
pois 0,0 é ponto de equilíbrio do sistema, e
0,
lim,
lim1
01
0 ryxG
ryxF
rr
onde 22 yxr (distância do ponto
yx, à origem 0,0 ).Com isso obtém-se o sistema
linearizado em torno do ponto de equilíbrio do sistema não-linear; este é o seguinte,
yGxGdtdy
yFxFdtdx
yx
yx
0,00,0
0,00,0
Para o caso geral do sistema (1), o procedimento para se fazer a linearização é análogo ao apresentado anteriormente.
Observe que neste exemplo foi considerado o caso em que 2n . Para o caso geral, ao se fazer a linearização, obtém-se a matriz jacobiana calculada no ponto de equilíbrio.
Deste modo, considere a linearizaçao do sistema (1) em torno de seu
ponto de equilíbrio x . A partir do sistema linear pode-se obter uma matriz A cujos elementos são os coeficientes deste sistema.
Os autovalores dessa matriz A são as raízes do chamado polinômio característico, que é obtido através da
expressão do determinante 0det IA ,
onde I é a matriz identidade e A é a matriz dos coeficientes da versão linearizada do sistema não-linear em torno do ponto de equilíbrio deste sistema e
njj ,...,1, são os autovalores.
Antes de enunciar o primeiro teorema que auxiliará no estudo da estabilidade dos pontos de equilíbrio, é necessário definir alguns conceitos. Estes conceitos dizem respeito à chamada matriz de Hurwitz. A matriz de Hurwitz H é construída a partir do polinômio característico da matriz A , ou seja, os elementos dessa matriz são os coeficientes do polinômio característico dispostos da seguinte maneira:
Na primeira linha da matriz, escrevem-se os coeficientes do polinômio
nja j ...,,1, , com índice ímpar, com jcrescente; na segunda linha escrevem-se os coeficientes ja com j par, com jcrescente. As demais posições são preenchidas com zeros.
As duas linhas seguintes são obtidas deslocando-se as duas primeiras linhas uma coluna para a direita, e colocando zeros nas posições que ficaram vazias.
Segue-se esse processo para se construir as demais linhas, até que o coeficiente independente do polinômio ocupe o canto inferior direito.
A partir dessa matriz obtém-se os determinantes njj ,...,1, . Para ilustrar
como são obtidos os determinantes njj ,...,1, da matriz de Hurwitz,
considere a matriz quadrada de ordem 6n abaixo como sendo uma matriz de
Hurwitz. Os termos 6,5,4321 ,,, aaaaaa são
os coeficientes do polinômio característico, que são os elementos da matriz.
H
aaaaaaaaa
aaaaaa
aaa
642
531
642
531
642
531
100
000
010
000
001
000
Conforme colocado tem-se,
11 a
2
312 1 a
aa
H
aaaaaaa
aaaaaa
aaa
aaaaaaaa
aaa
aaaaaaa
6
531
6421
531
642
531
5
42
531
642
531
4
31
42
531
3
00
0
00
01
00
10
0
1
0
0
1
Para matrizes de ordem superior ou inferior a esta do exemplo anterior, o procedimento para se obter os determinantes é o mesmo. Desta maneira, enuncia-se o primeiro teorema.
Teorema 1. (Critério de Hurwitz): Os autovalores de uma matriz
quadrada A possuem parte real negativa se, e somente se, todos os coeficientes do polinômio característico de A são positivos e se todos os determinantes
njj ,...,1, referentes à matriz de
Hurwitz são positivos. Neste momento é conveniente uma
definição matemática do que significa um ponto de equilíbrio do sistema de equações diferenciais (1) ser assintoticamente estável e instável.
Para isso, considere o problema de se resolver (1) com as seguintes condições iniciais,
nn xx
xxxx
0
0
0
22
11
Definição: Considere o sistema,
xfdtdx
(2)
em que nx e nnf : . Denomina-se fluxo do sistema (2) à
função
: x n
definida da seguinte forma: dado y ,considere a solução x de (2), satisfazendo a condição inicial yx 0 .
Dado t define-se
txyt, , ou seja, para cada yfixo, a função ytt , é a solução de (2) com a condição inicial y . Note que é uma função de 1n variáveis.
Para o problema de se resolver o sistema (1) com as condições iniciais
nxxx ...,,, 21 , o fluxo é representado por
0, xt , onde nxxxx ...,,,0 21 é a
condição inicial dada no problema. Com o acréscimo das condições iniciais ao sistema de equações diferenciais (1), formula-se o chamado problema de valores iniciais para este sistema cuja solução existe e é única. A aplicação da solução geral tx à condição inicial 0x dá o valor de x no instante t .
Pode-se verificar que o fluxo calculado no ponto de equilíbrio do sistema é constante e igual ao ponto de
equilíbrio, ou seja, xxt, . Note que
neste caso xx 0 . Com estas considerações, de acordo
com Monteiro (2002), formalmente um
ponto de equilíbrio x é estável se, e somente se, dado 0 , existe

0 tal que para xx 0 ,
então xxt 0, , para todo
0t . Assim, há uma vizinhança de raio em torno do ponto de equilíbrio tal que, para uma condição inicial pertencente a essa vizinhança, a trajetória correspondente a essa condição inicial nunca se afasta mais do que uma distância . O ponto de
equilíbrio x é assintoticamente estável se, e somente se, existe 0 tal que para
xx 0 , então
00, xxt para t . Nesse
caso, conforme o tempo passa, a trajetória que parte de 0x se aproxima cada vez mais do ponto de equilíbrio, ou seja,
xxtt 0,lim . Entretanto, se
independente de quão próximo esteja 0x
de x , uma trajetória que parte de 0xdeixa a vizinhança de raio num tempo tfinito, então o ponto de equilíbrio é instável.
Intuitivamente, pode-se dizer que
x é um ponto de equilíbrio assintoticamente estável se, após uma
perturbação na condição inicial xx 0 ,
então a trajetória 0, xt se aproxima
do ponto de equilíbrio x à medida que o tempo passa, isto é, quando t .
Desta maneira, também se coloca
x como um ponto de equilíbrio instável se, após alguma perturbação na condição
inicial xx 0 , então 0, xt se afasta do ponto de equilíbrio num tempo finito.
A noção de ponto de equilíbrio estável se faz quando após uma
perturbação na condição inicial xx 0 ,
então a trajetória 0, xt não se afasta
do ponto de equilíbrio x , conforme o tempo passa. Repare que essa idéia intuitiva de estabilidade se baseia na
evolução temporal da distância entre a
trajetória 0, xt e o ponto x .Agora se tem condição de enunciar
o segundo teorema. Deve-se notar antes que para o caso geral de uma função de um
conjunto aberto n em n , um sistema linearizado em torno de um ponto de equilíbrio O do sistema não-linear pode ser escrito pela expansão de Taylor da seguinte forma
xxAxf ,
onde A é a matriz dos coeficientes, ou
seja,j
iji x
OfA , que é a matriz
jacobiana calculada no ponto O e xrepresenta os termos de ordem superior na expansão pela fórmula de Taylor e pode-se escrever,
xrxxonde 0lim
00 xr
xx ou
0lim00 x
x
xx
Isto acaba sugerindo que o comportamento das órbitas numa vizinhança do ponto de equilíbrio O de um sistema não-linear seja determinado pelo estudo da versão linearizada deste sistema em torno de O.
Teorema 2. (Teorema da Linearização de Lyapunov-Poincaré):
Seja xf um sistema de equações diferenciais de primeira ordem não-lineares continuamente diferenciável em uma vizinhança de um ponto de equilíbrio O e considere o sistema linearizado em torno de O obtido pela expansão em série de Taylor, isto é,
xxAxf .a) Então, se todos os
autovalores da matriz quadrada Apossuírem parte real negativa, o ponto de equilíbrio O será assintoticamente estável para o sistema não-linear.

b) Se pelo menos um autovalor
de A for tal que 0Re (parte real positiva), o ponto de equilíbrio O é instável para o sistema não-linear.
A demonstração deste último teorema pode ser encontrada em Bassanezi & Ferreira Jr. (1988).4. ANÁLISE DA ESTABILIDADE
4.1. Dedução das Equações de Movimento do pêndulo duplo planar
Conforme colocado na seção 2, será apresentado como se chegar às Equações de Movimento do pêndulo duplo planar por meio do método de Lagrange, método este encontrando em Symon (1982).
Considere o movimento de um pêndulo duplo planar, consistindo de duas massas, 1m e 2m , suspensas num ponto fixo O , que é a origem do plano cartesiano, por meio de duas hastes rígidas e sem peso, de comprimentos, respectivamente, 1l e 2l .
Considere somente movimentos do pêndulo duplo no plano vertical.
A figura seguinte ilustra a situação descrita acima.
Os ângulos e são os ângulos
formados, respectivamente, pela haste 1lcom o eixo vertical que passa pelo ponto de sustentação O , e pela haste 2l com um eixo imaginário paralelo ao eixo de sustentação.
O Sistema Mecânico é composto de duas partículas, que são representadas pelas massas do pêndulo, assim se obtém a posição da massa 1m e a posição da massa
2m em termos de coordenadas cartesianas.
A posição da massa 1m é dada por,
cos11
11
lysenlx
A posição da massa 2m é dada por,
coscos 212
212
llysenlsenlx
Obtendo devidamente a posição de cada uma das partículas do sistema, levando em consideração a orientação do sistema, que é a orientação vertical voltada para cima, tem-se o vetor posição dessas partículas que será indicado por 1r e 2r ,respectivamente vetor posição da primeira partícula e da segunda partícula, ou seja,
jll
isenlsenlr
jlisenlr
coscos
cos
21
212
111
O objetivo ao se fazer isso é obter a energia cinética, T , do sistema. A saber, a energia cinética de um Sistema Mecânico é igual à metade da massa do sistema multiplicado pelo módulo da velocidade ao quadrado do sistema.
Como foi ressaltado, o Sistema Mecânico em questão possui duas partículas, logo a energia cinética T é obtida pela soma da energia cinética de cada partícula. Para se fazer o que segue, a partir deste momento, é considerado a variação dos ângulos e como uma função do tempo t , ou seja, estes ângulos variam conforme o tempo passa. Para representar que os ângulos e são dependentes do tempo t usa-se a notação
t e t .Com estas considerações, obtém-se
a energia cinética da primeira partícula; para isto se faz a derivada do vetor posição da mesma, conseguindo sua velocidade, isto é,
1l
1m
2m
2l
x
y
O
Figura 1. Pêndulo duplo planar.

jtsentl
ittlvtd
rd
1
111
cos
Assim, o módulo de 1v é dado por, 2/122
11 tlvChamando de 1T a energia cinética
da primeira partícula segue que, 22
111 2
1 tlmT
Procedendo da mesma maneira obtém-se a energia cinética da segunda partícula. Assim derivando o vetor posição desta partícula consegue-se a sua velocidade, isto é,
jtsentltsentl
ittlttlvtd
rd
21
2122
coscos
O módulo de 2v é dado por 2/1
21
222
221
2cos2 ttttll
tltlv
Chamando de 2T a energia cinética da segunda partícula segue que,
ttttll
tltlmT
cos22
1
21
222
221
22
Como foi dito, a energia cinética do sistema é igual à soma da energia cinética de cada partícula que o compõe. Portanto,
21 TTT
ttttllm
tlm
tlmtlmT
cos
2
12
1
2
1
212
2222
2212
2211
Para utilizar as equações de Lagrange será preciso introduzir a função lagrangiana. Para isso é necessário obter a energia potencial do sistema. Esta, como a energia cinética, é dada pela soma da energia potencial de cada partícula.
Calcula-se então a energia potencial da primeira partícula. Para isso se faz
necessário esclarecer como se obtém a expressão final de tal energia. É o que se tem a seguir.
Uma função escalar yxu , possui duas derivadas, que podem ser consideradas como componentes de uma função de ponto vetorial denominada gradiente de u , ou seja,
jyui
xuugrad
Pode-se também definir geometricamente ugrad como um vetor cuja direção é aquela em que a função u cresce mais rapidamente e cujo módulo é a chamada derivada direcional de u , isto é, a taxa de crescimento de u por unidade de distância naquela direção.
Diz que uma força F tem potencial V se,
VgradF (3) Esta equação pode ser tomada
como expressão do significado físico da energia potencial, que é uma função cujo gradiente negativo é igual à força.
A partir da equação (3) pode-se escrever para a partícula de massa 1m a seguinte expressão
11 VgradF ,
onde 1V é a energia potencial da primeira partícula. Na forma de componentes tem-se que,
jy
yxVix
yxVjyxFiyxF
1
111
1
111
112111
,,
,,
Igualando componente a componente da expressão acima segue que,
1
111112
1
111111
,,
,,
yyxVyxF
xyxVyxF
Assim obtém-se a energia potencial da primeira partícula observando que a
componente 111 , yxF da força 1F atua horizontalmente sobre a partícula de massa

1m e como está se considerando que a orientação do sistema é no sentido vertical para cima, a componente em questão não exerce força alguma sobre a partícula, isto é, ela é igual à zero, ou seja,
0, 111 yxFEm contrapartida, a componente
112 , yxF da força 1F atua verticalmente sobre a partícula no sentido contrário à orientação do sistema. No nosso problema esta componente representa a força Peso atuante sobre a partícula, que por definição é dada por
mgP ,onde g é a aceleração da gravidade e m é a massa da partícula.
Como a orientação do sistema é no sentido vertical para cima, a aceleração da gravidade é dada com o sinal contrário, portanto g e como a partícula tem massa
1m segue que
gmP 1 ,ou seja,
gmyxF 1112 ,
Tem-se então,
gmy
yxVx
yxV
11
111
1
111
,
0,
Finalmente explicita-se a energia potencial da primeira partícula da seguinte maneira,
1111111
111 , cygmdygmdyy
yxV,
onde 1c é uma constante de integração que pode ser desprezada e como
tly cos11segue que,
tlgmV cos111
Para obter a energia potencial 2Vda segunda partícula procede-se do mesmo
modo, ou seja, observa-se que a força 2Fatuante sobre a segunda partícula é função de sua posição, isto é,
jyxFiyxFF 2222212 ,,Então se tem que,
22 VgradF ,
onde 2V é a energia potencial da partícula
de massa 2m .Colocando na forma de
componentes resulta em,
jy
yxVix
yxV
jyxFiyxF
2
222
2
222
222221
,,
,,
Igualando componente a componente da expressão acima segue que,
2
222222
2
222221
,,
,,
yyxVyxF
xyxVyxF
Pelo mesmo motivo explicado anteriormente se tem que,
gmy
yxVx
yxV
22
222
2
222
,
0,
Assim explicita-se a energia potencial da segunda partícula, ou seja,
222
2222
222 ,
cygm
dygmdyy
yxV
A constante de integração 2c pode ser desprezada e como
tltly coscos 212 ,segue que,
tlgmtlgmtltlgmV
coscos
coscos
2212
2122
A energia potencial do sistema, V ,é a soma da energia potencial de cada partícula, que no caso considerado é
21 VVV ,
tlgmtlgmtlgmV
cos
coscos
22
1211
Tem-se então a energia cinética Te a energia potencial V de todo Sistema Mecânico.

Com isso pode-se introduzir a função lagrangiana L , que se sabe ser igual à energia cinética menos a energia potencial do Sistema Mecânico, ou seja,
VTL ,e como se tem as expressões da energia cinética e potencial segue que,
tlgmtlgmtlgm
ttttllm
tlm
tlmtlmL
cos
coscos
cos
2
12
1
2
1
22
1211
212
2222
2212
2211
Expressam-se assim as Equações de Lagrange com o auxílio da função lagrangiana, isto é,
0LL
tdd
,
como já fora colocado na seção (2). Portanto em relação ao ângulo a
Equação de Lagrange se escreve da seguinte maneira,
ttsentll
mmm
tttll
mmm
tsenlgt
2
1
2
21
2
1
2
21
2
1
cos
Agora a Equação de Lagrange em relação ao ângulo é
0LL
tdd
,
logo
ttsentll
tttll
tsenlgt
2
2
1
2
1
2
cos
Como já foi esclarecido as Equações de Lagrange nos fornecem as Equações de Movimento de Sistemas Mecânicos, portanto as Equações de Movimento do Sistema Mecânico pêndulo duplo planar são
ttsentll
mmm
tttll
mmm
tsenlgt
2
1
2
21
2
1
2
21
2
1
cos
ttsentll
tttll
tsenlgt
2
2
1
2
1
2
cos
Estas duas equações mostram como os ângulos e variam com o passar do tempo, ou seja, como é o movimento do pêndulo em cada instante de tempo t .
Será elaborada agora uma análise destas Equações de Movimento a fim de que se possa fazer o estudo da estabilidade dos pontos de equilíbrio.
4.2. Análise das Equações de Movimento do pêndulo duplo planar
Pode-se considerar as Equações de Movimento do pêndulo duplo planar como um sistema de duas equações diferenciais de segunda ordem não-lineares.
Deste modo considere a seguinte situação física: o pêndulo duplo planar está se movimentando em meio a um gás qualquer e em conseqüência disso sofre atrito causado pelo gás. Este atrito sofrido pelo pêndulo é representado pelos

chamados termos dissipativos, designados por a e b , onde a e b são números reais positivos.
No sistema representado pelas Equações de Movimento do pêndulo duplo planar estes termos dissipativos provenientes do atrito entre o movimento do pêndulo e o gás colocado em meio a este movimento são inseridos da seguinte maneira,
0
cos
2
1
2
21
2
1
2
21
2
1
ta
ttsentll
mmm
tttll
mmm
tsenlgt
0
cos
2
2
1
2
1
2
tb
ttsentll
tttll
tsenlgt
A partir de agora se passa a considerar este último sistema de duas equações diferenciais de segunda ordem não-lineares para se fazer o que segue.
A princípio nota-se que o ponto 0,0, tt anula simultaneamente
as equações deste sistema, visto que assim se tem 0,0, tt e
0,0, tt .Como já foi mencionado, segue
que 0,0, tt é ponto de equilíbrio do sistema de equações diferenciais considerado.
Uma equação diferencial de ordem n , linear ou não, pode ser transformada em um sistema de n equações diferenciais de primeira ordem. Segue então que o sistema do caso presente pode ser escrito como quatro equações diferenciais de primeira
ordem, pois cada equação de ordem dois fornece duas equações de ordem um.
O procedimento para se transformar uma equação de ordem n em n equações de primeira ordem está na definição das variáveis.
Desta maneira a equação diferencial de segunda ordem não-linear
0
cos
2
1
2
21
2
1
2
21
2
1
ta
ttsentll
mmm
tttll
mmm
tsenlgt
pode ser transformada no sistema não-linear de duas equações diferenciais de primeira ordem
ta
ttsentll
mmm
tttll
mmm
tsenlgt
tt
2
112
21
2
21
2
1121
2
21
2
11
2
21
cos
onde,
tt
tttttt
2
121 ;;;
Deste modo, também a equação diferencial de segunda ordem não-linear
0
cos
2
2
1
2
1
2
tbttsentll
tttll
tsenlgt
pode ser transformada no sistema não-linear de duas equações diferenciais de primeira ordem, como segue
tbttsentll
tttll
tsenlgt
tt
2112
22
1
1122
1
12
2
21
cos
onde,
tttttttt
2
121 ;;;
Este sistema não-linear de equações diferenciais de primeira ordem equivale ao sistema de duas equações diferenciais de segunda ordem não-lineares original. Para a transformação ficar completa se faz necessário colocar
tttt 2121 ,,, como função de
tttt 2121 ,,, . Para tanto, se
toma a expressão de t2 e substitui-se
na expressão t2 . Com isso, isolando
t2 , tem-se t2 como função de
tttt 2121 ,,, . Analogamente,
substituindo a expressão de t2 em
t2 e isolando t2 tem-se esta variável como função de
tttt 2121 ,,, .
Com estas adaptações chega-se a um outro sistema não-linear de quatro equações diferenciais de primeira ordem.
Este sistema de equações é equivalente ao sistema original. Observa-se que como 0,0, tt é um ponto de equilíbrio para o sistema original tem-se equivalentemente que
0,0,0,0,,, 2121 tttt é
ponto de equilíbrio para o sistema transformado em equações de primeira ordem.
Não se deve esquecer que o sistema transformado mostra as Equações de Movimento do pêndulo duplo planar com os termos dissipativos do atrito causado
pelo movimento do pêndulo em meio a um gás.
O objetivo a partir deste momento será efetuar a análise da estabilidade do ponto de equilíbrio
0,0,0,0,,, 2121 tttt , que corresponde ao sistema não-linear de quatro equações diferenciais de primeira ordem.
Ao se fazer a análise da estabilidade de um ponto de equilíbrio de um sistema de equações diferenciais é mais conveniente que este sistema esteja representado por equações diferenciais de primeira ordem, pois com isso consegue-se a dimensão do sistema, que é justamente indicada pelo número de equações diferenciais de primeira ordem que o caracteriza.
Ao se fazer esta transformação também se objetiva atender as hipóteses do Teorema da Linearização de Lyapunov-Poincaré.
Isto ficará mais claro quando se utilizar este teorema que irá auxiliar no estudo da estabilidade de pontos de equilíbrio deste sistema.
O novo sistema não-linear de equações diferenciais de primeira ordem que será utilizado a partir deste momento para a análise da estabilidade do ponto de equilíbrio P = 0,0,0,0 deste sistema é o que segue, lembrando sempre que a definição das variáveis se faz da seguinte maneira,
tt
tttttt
2
121 ;;;
Portanto, o sistema mencionado se escreve da seguinte maneira,

ttsent
ll
ttsenmmm
tttb
ll
ttsenmmm
ttttsen
tttsenmm
m
tttsen
lg
ttsenmmm
tattsenmm
mmtsen
lg
ttsenmmmmt
tt
112
2
1
2
112
21
2
112
1
2
112
21
2
1111
22
112
21
2
111
1112
21
2
211
221
21
1
1112
21
212
21
..
.
cos..
.
cos..
.
cos..
.
.
.
tt
tall
ttsenmmmm
tttsen
lg
ttsenmmmm
tsen
lg
ttsenmmmmt
tt
11
22
1
112
21
21
111
2112
21
21
1
2112
21
212
21
cos.
.
cos..
.
.
.
ttttsen
tttsenmm
m
tbll
ttsenmmmm
ttsen
tll
ttsenmmmm
1111
22
112
21
2
22
1
112
21
21
11
22
2
1
112
21
21
cos..
.
.
.
4.3. Estabilidade do ponto de equilíbrio:
0,0,0,0,,, 2121 tttt .No caso estudado a solução
estacionária, que indica quando o Sistema Mecânico para de se mover, representada por 0,0,0,0,,, 2121 tttt(que é o ponto de equilíbrio para o sistema de equações diferenciais), mostra fisicamente que o pêndulo duplo planar realmente está parado, ou seja, não está se movimentando no plano vertical.
Isto fica claro quando se verifica que 01 tt e 01 ttdenotam que não há ângulo entre o pêndulo e o eixo vertical de sustentação mostrando que o pêndulo está na posição vertical mais baixa e as variáveis
02 tt e 02 ttdenotam que não há velocidade angular no pêndulo, ou seja, ele está parado.
A figura seguinte ilustra esta situação.
1lO
1m
2l
2m
Figura 2. Representação física da solução estacionária:
0,0,0,0,,, 2121 tttt
Assim a estabilidade de uma solução estacionária (que equivale à estabilidade do ponto de equilíbrio) nada mais é do que como o Sistema Mecânico se comporta em uma vizinhança desta solução. No caso em estudo a estabilidade de 0,0,0,0,,, 2121 tttt é como o pêndulo se comporta quando se exerce nele uma pequena perturbação ao redor de 0,0,0,0 , ou seja, se após uma
perturbação ao redor de 0,0,0,0 o pêndulo se afasta ou tende a esse ponto com o passar do tempo.
Se após uma pequena perturbação ao redor do ponto de equilíbrio o pêndulo se afastar de tal ponto com o passar do tempo, o mesmo é um ponto de equilíbrio instável. Caso contrário, isto é, se após a perturbação ao redor do ponto de equilíbrio o pêndulo voltar ao estado original com o passar do tempo, este ponto é assintoticamente estável.
Como mencionado, o objetivo é fazer a análise da estabilidade do ponto de equilíbrio P = 0,0,0,0 do sistema de equações diferenciais de primeira ordem. Pela situação física, ao se executar uma perturbação no pêndulo ao redor deste ponto, ele tende a retornar ao estado original com o passar do tempo. Pelo que foi visto anteriormente o ponto é assintoticamente estável.
Porém, esta análise não pode ser feita desta maneira. É necessária uma argumentação matemática para realmente se constatar que este tal ponto de equilíbrio é assintoticamente estável.
Para isto, considera-se o sistema de quatro equações diferenciais de primeira ordem. Como já mencionado este sistema é não-linear, pois as equações diferenciais que o constitui são não-lineares.
Neste sistema não-linear colocou-se tttt 2121 ,,, como função
de tttt 2121 ,,, , ou seja,
ttttpt
tttthtttttwt
ttttft
21212
21211
21212
21211
,,,
,,,
,,,
,,,
O ponto P = 0,0,0,0 é ponto de equilíbrio para o sistema não-linear. Expandem-se essas funções em série de Taylor em torno de P, obtendo,
122
11
22
11
21211
00
00
0,0,0,0
,,,
tftf
tftff
ttttft
222
11
22
11
21212
00
00
0,0,0,0
,,,
twtw
twtww
ttttwt
3
22
11
22
11
21211
00
00
0,0,0,0
,,,
thth
ththh
ttttht
4
22
11
22
11
21212
00
00
0,0,0,0
,,,
tptp
tptpp
ttttpt
Os termos 4321 ,,, são os
termos de ordem superior nas respectivas expansões em série de Taylor.
Por conveniência, escolhe-se um novo sistema de coordenadas a fim de que o ponto de equilíbrio P seja transladado para a origem (neste caso, P = 0,0,0,0 já está na origem).
Além disso, tem-se que
00,0,0,0
00,0,0,0
00,0,0,0
00,0,0,0
phwf
pois P = 0,0,0,0 é ponto de equilíbrio do sistema não-linear. Assim, as equações diferenciais que regem a evolução das novas variáveis são, em primeira aproximação, dadas por outro sistema de quatro equações diferenciais de primeira ordem.
Como as funções phwf ,,, foram expandidas em série de Taylor e se toma a primeira aproximação nessa expansão, os termos obtidos são todos lineares.
O novo sistema de equações resultante deste processo é o seguinte,
tmm
llbt
mm
lg
tm
mma
tm
mmlgt
tt
21
2
1
21
1
2
1
21
21
11
21
12
21
tm
mmbt
mmm
lg
tm
mmll
a
tm
mmlgt
tt
21
211
1
21
2
21
21
2
1
11
21
22
21
Os coeficientes que acompanham ttt 121 ,, e t2 são obtidos
através das derivadas parciais das funções hwf ,, e p , calculadas no ponto de
equilíbrio P, em torno do qual essas funções foram expandidas.
Esse processo, como já foi esclarecido, é denominado linearização do sistema não-linear em torno de um ponto de equilíbrio P deste sistema. O novo sistema obtido pela linearização é formado por quatro equações diferenciais de primeira ordem lineares e é chamado versão linearizada do sistema não-linear em torno de seu ponto de equilíbrio P =
0,0,0,0 .
As variáveis ttt 121 ,, e
t2 do sistema linear descrevem o comportamento das soluções na vizinhança do ponto de equilíbrio P do sistema não-linear. Assim o estudo da estabilidade de um ponto de equilíbrio de um sistema não-linear reduz-se ao estudo do sistema linearizado em torno deste ponto, se certas condições forem satisfeitas. Estas condições são dadas pelos teoremas que foram enunciados.
Então, o motivo pelo qual foi feito a linearização do sistema em torno de P =
0,0,0,0 é o de se estudar a sua estabilidade; os teoremas que serão usados estabelecem condições necessárias e suficientes para que os resultados da aproximação linear sejam válidos, ao menos localmente.
Considera-se então o sistema linear. Note que se pode dispor os
coeficientes que acompanham

ttt 121 ,, e t2 da versão
linearizada do sistema em uma matriz, que será denotada por A , que é a matriz jacobiana calculada no ponto de equilíbrio P = 0,0,0,0 .
Como o sistema possui quatro equações e quatro incógnitas, a matriz Atem ordem 44 .
Colocam-se então os coeficientes do sistema linear na matriz A obtendo,
A
pppp
hhhh
wwww
ffff
P2121
2121
2121
2121
Com essa matriz, têm-se condições de utilizar o primeiro dos dois teoremas que irão auxiliar no estudo da estabilidade do ponto de equilíbrio P do sistema não-linear.
Este teorema é o Critério de Hurwitz (Teorema 1 da seção 3).
De acordo com a recíproca do Critério de Hurwitz o primeiro passo para saber se a parte real de todos os autovalores da matriz A é negativa, será verificar como são os coeficientes do polinômio característico dessa matriz. Obtém-se então o polinômio característico da matriz A a partir da relação,
0det IA
Fazendo o cálculo deste determinante chega-se à seguinte expressão do polinômio característico na variável , expressão esta que é colocada logo a seguir.
021
2121
21
2
1221
2121
211
21
21
2121
2
1
2134
mmmm
llg
lgb
lga
mmmm
lg
lg
mmm
abm
mmm
bam
mm
Observa-se que todos os coeficientes do polinômio característico são positivos, uma vez que 1m e 2m são as massas do pêndulo, logo números reais positivos, 1l e 2l são os comprimentos do fio do pêndulo, então números reais positivos, g a aceleração da gravidade é uma constante positiva e como foi dito a e b , que são os termos dissipativos do atrito causado pelo gás, são números reais positivos.
O segundo passo para se aplicar a recíproca do critério é construir a denominada matriz de Hurwitz. Como a
matriz A é de ordem 44 a matriz de
Hurwitz H também é 44 . Deste modo, como já colocado a matriz H é a seguinte,
H
aaaaaaaa
aa
420
31
420
31
0
00
0
00
Note que o coeficiente 0a do
polinômio é igual a 1. Observe que a diagonal principal dessa matriz contém, sem repetição, os coeficientes
4321 ,,, aaaa .
Agora se deve examinar como são os determinantes menores principais
4321 ,,, obtidos a partir da matriz

H . A obtenção destes determinantes já foi ilustrada anteriormente.
Considerando então a matriz H , o determinante 1 é o seguinte,
bam
mma1
2111
Assim, como a e b são números reais positivos, 1 é positivo.
O determinante 2 vêm logo a seguir e o seu desenvolvimento resulta em,
21
2
1
21
1221
2122
2231
2212
21
31
20
312
2
lgb
lga
mmm
lgb
lga
mmmm
abbam
mmmmm
aaaa
Assim 2 é positivo.
1
3
2
22
1
22
2
3
41
22
212
31
41
1
21
21
22
22
22
22
2
21
2
41
321
22
212
31
2
21
2
21
2121
31
420
31
3
.
.2
.
.2
0
0
lgab
lgba
lgba
lgba
m
mmmmmm
mm
lgb
lga
lgab
lgab
m
mmmmmm
lg
lgab
mmmm
aaaaa
aa
Assim 3 é positivo.
321
2121
21
2
4m
mmmll
g,
e como 3 é positivo, segue que 4
também o é. Como mencionado na seção 3, o
Critério de Hurwitz estabelece que jRe
de uma matriz A é negativa para todo nj ...,,1 se, e somente se, todos os
coeficientes ja do polinômio
característico são positivos e se são positivos os determinantes j referentes à
matriz de Hurwitz. Pelo que foi analisado
anteriormente, segue da recíproca do Critério de Hurwitz que jRe < 0, para
4,3,2,1j , ou seja, todos os autovalores
da matriz jacobiana A calculada no ponto de equilíbrio P do sistema não-linear têm parte real negativa. Falta agora saber como se pode analisar a estabilidade do ponto de equilíbrio P das equações originais, que correspondem ao sistema não-linear. Para isso usa-se o segundo teorema mencionado na seção Resultados Matemáticos, isto é, o Teorema da Linearização de Lyapunov-Poincaré.
Este teorema diz que a estabilidade de um ponto de equilíbrio de um sistema não-linear é estabelecida pelo sinal da parte real dos autovalores da matriz dos coeficientes do sistema linearizado em torno deste ponto pela expansão em série de Taylor. Note que o teorema se refere a autovalores da matriz do sistema linear correspondente ao não-linear, por isso se fez necessário a linearização do sistema não-linear em torno de seu ponto de equilíbrio P = 0,0,0,0 para que assim a
matriz A esteja nas condições do teorema. Portanto, na determinação da estabilidade do ponto de equilíbrio, não é necessário calcular explicitamente os autovalores da matriz A ; basta conhecer o sinal das suas partes reais.
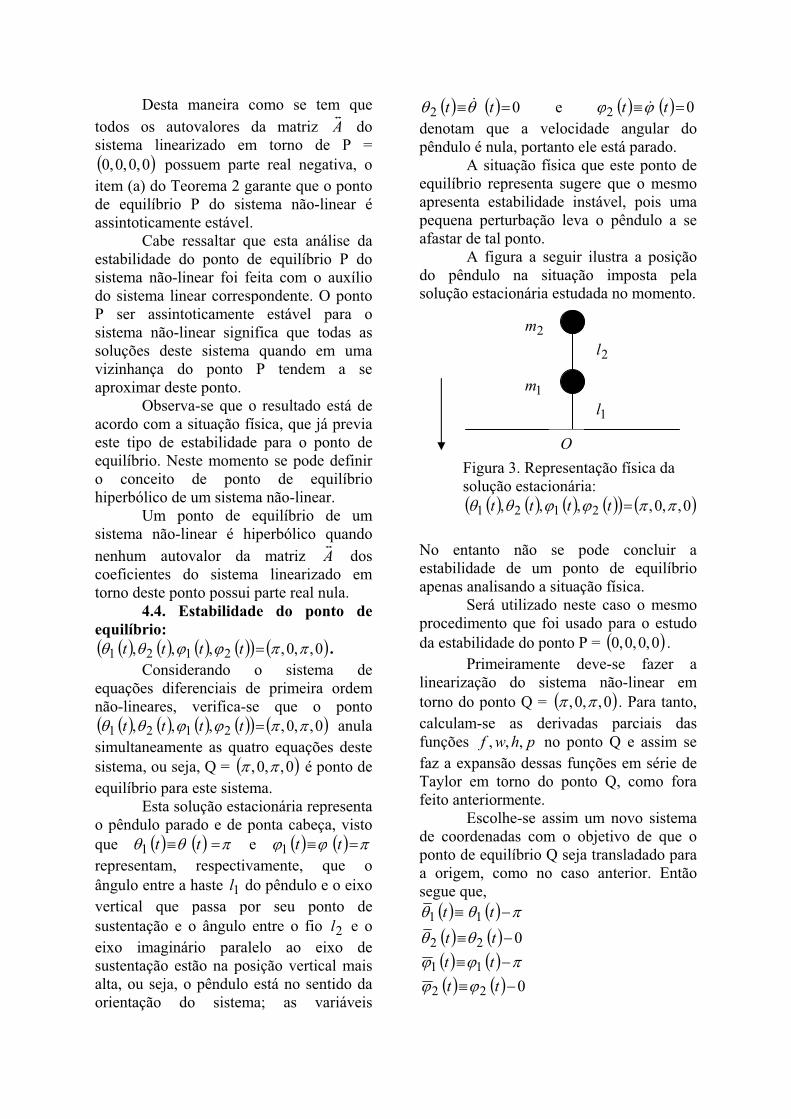
Desta maneira como se tem que todos os autovalores da matriz A do sistema linearizado em torno de P =
0,0,0,0 possuem parte real negativa, o item (a) do Teorema 2 garante que o ponto de equilíbrio P do sistema não-linear é assintoticamente estável.
Cabe ressaltar que esta análise da estabilidade do ponto de equilíbrio P do sistema não-linear foi feita com o auxílio do sistema linear correspondente. O ponto P ser assintoticamente estável para o sistema não-linear significa que todas as soluções deste sistema quando em uma vizinhança do ponto P tendem a se aproximar deste ponto.
Observa-se que o resultado está de acordo com a situação física, que já previa este tipo de estabilidade para o ponto de equilíbrio. Neste momento se pode definir o conceito de ponto de equilíbrio hiperbólico de um sistema não-linear.
Um ponto de equilíbrio de um sistema não-linear é hiperbólico quando nenhum autovalor da matriz A dos coeficientes do sistema linearizado em torno deste ponto possui parte real nula.
4.4. Estabilidade do ponto de equilíbrio:
0,,0,,,, 2121 tttt .Considerando o sistema de
equações diferenciais de primeira ordem não-lineares, verifica-se que o ponto
0,,0,,,, 2121 tttt anula simultaneamente as quatro equações deste sistema, ou seja, Q = 0,,0, é ponto de equilíbrio para este sistema.
Esta solução estacionária representa o pêndulo parado e de ponta cabeça, visto que tt1 e tt1representam, respectivamente, que o ângulo entre a haste 1l do pêndulo e o eixo vertical que passa por seu ponto de sustentação e o ângulo entre o fio 2l e o eixo imaginário paralelo ao eixo de sustentação estão na posição vertical mais alta, ou seja, o pêndulo está no sentido da orientação do sistema; as variáveis
02 tt e 02 ttdenotam que a velocidade angular do pêndulo é nula, portanto ele está parado.
A situação física que este ponto de equilíbrio representa sugere que o mesmo apresenta estabilidade instável, pois uma pequena perturbação leva o pêndulo a se afastar de tal ponto.
A figura a seguir ilustra a posição do pêndulo na situação imposta pela solução estacionária estudada no momento.
No entanto não se pode concluir a estabilidade de um ponto de equilíbrio apenas analisando a situação física.
Será utilizado neste caso o mesmo procedimento que foi usado para o estudo da estabilidade do ponto P = 0,0,0,0 .
Primeiramente deve-se fazer a linearização do sistema não-linear em torno do ponto Q = 0,,0, . Para tanto, calculam-se as derivadas parciais das funções phwf ,,, no ponto Q e assim se faz a expansão dessas funções em série de Taylor em torno do ponto Q, como fora feito anteriormente.
Escolhe-se assim um novo sistema de coordenadas com o objetivo de que o ponto de equilíbrio Q seja transladado para a origem, como no caso anterior. Então segue que,
0
0
22
11
22
11
tttttttt
1l
O
1m
2l2m
Figura 3. Representação física da solução estacionária:
0,,0,,,, 2121 tttt

As equações que governam a evolução temporal das novas variáveis são
tttttt
tt
22
11
22
11
Logo, em primeira aproximação, as equações diferenciais que regem a evolução das novas variáveis são dadas por
tmm
ll
btmm
lg
tm
mmat
mmm
lgt
tt
21
2
1
21
1
2
1
21
211
1
21
12
21
tm
mmbt
m
mm
lg
tm
mm
ll
a
tm
mm
lgt
tt
21
211
1
21
2
21
21
2
1
11
21
22
21
Agora que se tem o sistema linearizado em torno do ponto Q se pode seguir o mesmo processo para aplicar os dois teoremas.
A partir deste sistema linear obtém-se a matriz jacobiana A calculada no ponto Q = 0,,0, , que é a seguinte
A
pppp
hhhh
wwww
ffff
Q2121
2121
2121
2121
Para se descobrir a estabilidade do ponto Q é necessário saber o sinal da parte real dos autovalores 4,3,2,1, jj da
matriz A .De acordo com a recíproca do
Critério de Hurwitz se deve analisar os coeficientes do polinômio característico da matriz A .
Fazendo 0det IA o polinômio em é da forma,
01
21
1
22
1
21
21
2
1221
2121
11
2
21
21
2
1
21
2
1
2134
mmm
mm
mmm
llg
lgb
lga
mmmm
lg
mmab
lg
mmm
mmmab
bam
mm
Note que o coeficiente que acompanha no polinômio é negativo, visto que este coeficiente é o seguinte,
21
2121
121
2121
2 mmmm
lgb
mmmm
lga
Desta maneira existe pelo menos um coeficiente do polinômio característico

que é negativo, assim não se tem condições de aplicar a recíproca do Critério de Hurwitz para saber qual é o sinal da parte real dos autovalores da matriz A visto que em um primeiro momento é necessário que todos os coeficientes do polinômio sejam positivos.
É preciso descobrir outro caminho para se tentar fazer isso. Este outro caminho se baseia na negação da recíproca do Critério de Hurwitz cujo enunciado é dado a seguir:
Se nem todos os coeficientes do polinômio característico da matriz A são positivos ou nem todos os determinantes
njj ...,,1, , da matriz de Hurwitz são
positivos, então nem todos os autovalores da matriz A possuem parte real negativa, isto é, existe pelo menos um autovalor da matriz quadrada A que possui parte real nula ou positiva.
Voltando ao polinômio característico encontrado se tem certeza que pelo menos um de seus coeficientes é negativo, então aplicando a negação da recíproca do Critério de Hurwitz existe pelo menos um autovalor da matriz quadrada A com parte real nula ou positiva.
Como se sabe os autovalores da matriz A são as raízes do polinômio característico.
Assim se existir algum autovalor com parte real nula, existe uma raiz do polinômio da forma ti onde t é um número real e i é a chamada unidade imaginária, isto é, existe uma raiz do polinômio que é um número complexo com parte real nula, que é denominado um número imaginário puro.
Suponha então que exista algum autovalor da matriz quadrada A com parte real nula, portanto ti é uma raiz do polinômio característico dessa matriz, logo satisfaz a igualdade desse polinômio, ou seja, substituindo ti no polinômio tem-se que,
01
21
1
22
1
21
21
2
1221
2121
11
2
21
21
2
1
21
2
1
2134
mmm
mm
mmm
llg
lgb
lga
mmmmti
lg
mmab
lg
mmm
abm
mm
t
bam
mmtit
Igualando parte real com parte real e parte imaginária com parte imaginária da expressão acima seguem as seguintes igualdades,
01
21
1
22
1
21
21
2
11
2
21
21
2
1
21
24
mmm
mm
mmm
llg
lg
mmab
lg
mmm
abm
mm
tt
e
012
21
2121
1
213
lgb
lga
mmmmt
bam
mmt
Trabalhando com a última
expressão obtém-se um valor para 2t de modo que,
bammm
lgb
lga
mmmmt
21
1
1221
21212
.
.
O número real t elevado ao quadrado é igual a algo negativo, o que é um absurdo.
Desta maneira pode-se concluir que não existem raízes do polinômio com parte real nula, ou seja, a matriz quadrada A não possui autovalores com parte real igual à zero. Logo, somente existe pelo menos um autovalor dessa matriz com parte real positiva, de acordo com a negação da recíproca do Critério de Hurwitz.
Para estudar a estabilidade do ponto de equilíbrio Q = 0,,0, usa-se o Teorema 2, item (b), isto é, como existe pelo menos um autovalor da matriz A com parte real positiva segue que o ponto Q é instável para o sistema não-linear.
O ponto Q ser instável para o sistema não-linear significa que existe alguma solução deste sistema que quando em uma vizinhança do ponto Q tende a se afastar deste ponto.
Novamente esta análise da estabilidade não foi contrária à situação física, que antecipava este resultado. 5. CONCLUSÕES
O trabalho realizado mostra como se podem usar diretamente modelos matemáticos para a resolução de problemas de Física.
Observa-se que ao realizar a dedução das Equações de Movimento do pêndulo duplo planar foi feito um modelo matemático do problema, com o qual se obteve os dados necessários para se utilizar as Equações de Lagrange; no processo de desenvolvimento dessas equações foram usados apenas conceitos de cálculo Diferencial e Integral, mostrando que após a teoria Física o que se usa é apenas a Matemática.
Ao se fazer as análises da estabilidade dos pontos de equilíbrio
usaram-se conceitos de Álgebra e as próprias definições formais que dizem respeito ao que significa um ponto de equilíbrio ser assintoticamente estável e instável se baseiam em conceitos matemáticos.
Não se pode deixar de salientar que a interpretação física dos resultados foi de grande importância para se perceber o que acontecia na prática e que esta interpretação também serviu de motivação para se encontrar a estabilidade dos pontos de equilíbrio mencionados, visto que proporcionou uma idéia de onde se teria que chegar.
AGRADECIMENTOS O primeiro autor agradece o CNPq
por conceder suporte financeiro através da bolsa de estudos nº A-014/2005.
REFERÊNCIAS BIBLIOGRÁFICAS
Bassanezi, R.C.; Ferreira Jr., W.C. Equações Diferenciais com aplicações. São Paulo: Harbra, 1988. 572 p.
Symon, K.R. Mecânica. Rio de Janeiro: Campus, 1982. 685 p.
Monteiro, L.H.A. Sistemas Dinâmicos. São Paulo: Livraria da Física, 2002. 527 p.
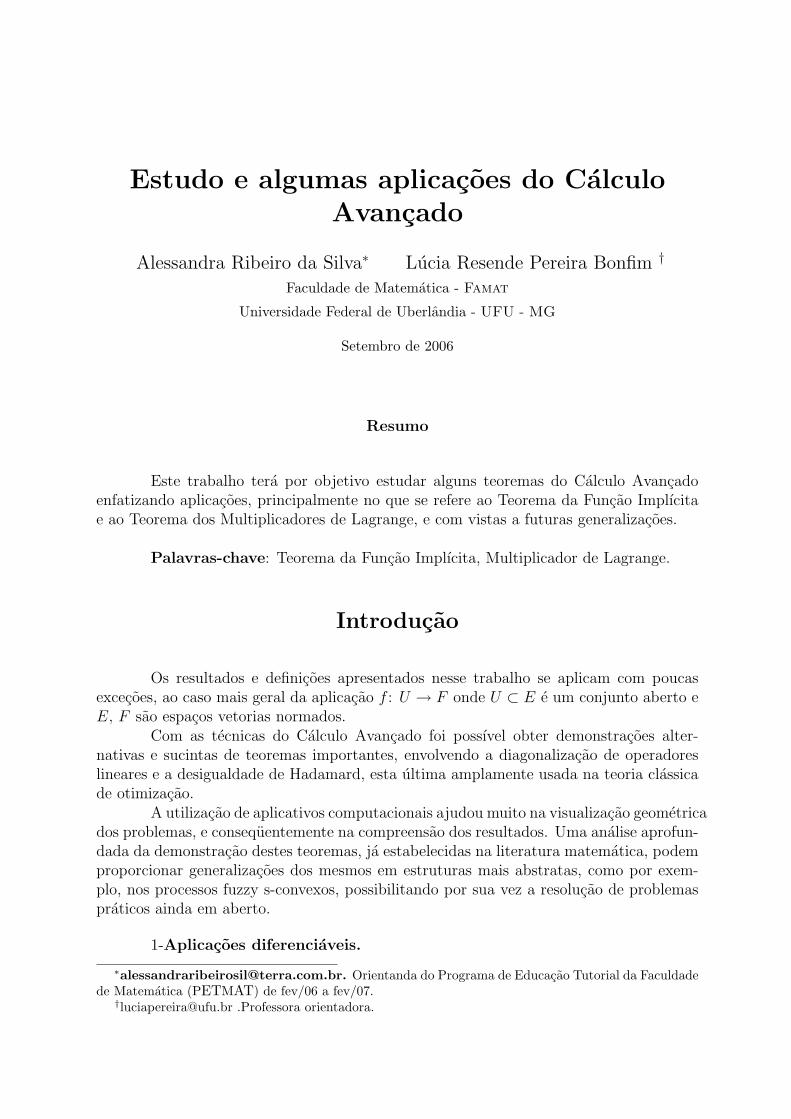
Estudo e algumas aplicacoes do CalculoAvancado
Alessandra Ribeiro da Silva∗ Lucia Resende Pereira Bonfim †
Faculdade de Matematica - Famat
Universidade Federal de Uberlandia - UFU - MG
Setembro de 2006
Resumo
Este trabalho tera por objetivo estudar alguns teoremas do Calculo Avancadoenfatizando aplicacoes, principalmente no que se refere ao Teorema da Funcao Implıcitae ao Teorema dos Multiplicadores de Lagrange, e com vistas a futuras generalizacoes.
Palavras-chave: Teorema da Funcao Implıcita, Multiplicador de Lagrange.
Introducao
Os resultados e definicoes apresentados nesse trabalho se aplicam com poucasexcecoes, ao caso mais geral da aplicacao f : U → F onde U ⊂ E e um conjunto aberto eE, F sao espacos vetorias normados.
Com as tecnicas do Calculo Avancado foi possıvel obter demonstracoes alter-nativas e sucintas de teoremas importantes, envolvendo a diagonalizacao de operadoreslineares e a desigualdade de Hadamard, esta ultima amplamente usada na teoria classicade otimizacao.
A utilizacao de aplicativos computacionais ajudou muito na visualizacao geometricados problemas, e consequentemente na compreensao dos resultados. Uma analise aprofun-dada da demonstracao destes teoremas, ja estabelecidas na literatura matematica, podemproporcionar generalizacoes dos mesmos em estruturas mais abstratas, como por exem-plo, nos processos fuzzy s-convexos, possibilitando por sua vez a resolucao de problemaspraticos ainda em aberto.
1-Aplicacoes diferenciaveis.
∗[email protected]. Orientanda do Programa de Educacao Tutorial da Faculdadede Matematica (PETMAT) de fev/06 a fev/07.
†[email protected] .Professora orientadora.

1.1 - Definicao de aplicacao diferenciavel.
Seja U ⊂ Rm um conjunto aberto. Dizemos que uma aplicacao f : U → Rn ediferenciavel em um ponto x ∈ U quando existe uma transformacao linear T: Rm → Rn
tal que
f(x + h) = f(x) + T.h + r(h), onde limh→0
r(h)
|h| = 0.
Note que, h deve ser tomado suficientemente pequeno para que x + h ∈ U eportanto f(x + h) tenha sentido. Como U e aberto, existe δ > 0 tal que |h| < δ implicax + h ∈ U.
Em algumas situacoes e conveniente escrever a condicao para a diferenciabilidadede f : U → Rn em x ∈ U do seguinte modo :
f(x + h) = f(x) + T.h + ρ(h).|h|, onde limh→0
ρ(h) = 0.
Bastando para isso, tomarmos ρ(h) = r(h)/|h|. Isto deixa ρ(h) sem sentidoquando h = 0. Mas, quando f e diferenciavel no ponto x, e natural definir ρ(0) = 0.Entao ρ(h) sera uma funcao contınua de h no ponto h = 0.
Se f : U → Rn e diferenciavel no ponto x ∈ U entao, para cada vetor h ∈ Rm,tem-se evidentemente:
T.h =T.(th)
t=
f(x + th) − f(x)
t− r(th)
t=
f(x + th) − f(x)
t± r(th)
|th| . |h|
para todo t �= 0 real. Logo:
T.h = limt→0
f(x + th) − f(x)
t= f ′(x)
E unica, portanto, a transformacao linear T: Rm → Rn que da a boa aproximacaopara f perto de x. Ela e chamada de derivada de f no ponto x, e indicada por f ′(x) oudf(x).
A condicao de diferenciabilidade de uma aplicacao f : U → Rn(U ⊂ Rm aberto)em um ponto x ∈ U se escreve :
f(x + h) = f(x) + f ′(x).h + r(h), com limh→0
r(h)/|h| = 0.
Se f e diferenciavel em todos pontos de U, dizemos simplesmente que f e dife-renciavel.
E facil verificar que, se f e diferenciavel no ponto x entao f e contınua nesteponto.
Suponha que f e diferenciavel em x , temos:
f(x + h) = f(x) + T.h + r(h)(∗), onde limh→0
r(h)
|h| = 0
Note que a igualdade (*) e simplesmente a definicao do ”resto” r(h) ∈ Rn.

Qual seria a matriz da transformacao linear T com respeito as bases canonicas deRm e Rn?
Para obter tal matriz precisamos saber quem e T(ej). Temos:
f(x + h) − f(x) = T.h + r(h), onde limh→0
r(h)
|h| = 0.
Tomando-se h = tej = t(0, 0, ..., 1, ..., 0) ∈ Rm, obtem-se:
f(x + tej ) − f(x) = t.T (ej) + r(tej) ⇒ f(x + tej ) − f(x)
t= T (ej) ± r(tej)
|tej|e fazendo t → 0 :
T (ej) =∂f
∂xj
(x), ou seja, T (ej) =
(∂f1
∂xj
(x), ...,∂fn
∂xj
(x)
)=
∂f1
∂xj
(x)e1 + ... +∂fn
∂xj
(x)en .
Assim,
J =
⎡⎢⎣∂f1
∂x1... ∂f1
∂xj... ∂f1
∂xm
.... . .
.... . .
...∂fn
∂x1... ∂fn
∂xj... ∂fn
∂xm
⎤⎥⎦
Esta e chamada matriz jacobiana de f no ponto x. Logo, sendo f diferenciavel emx, dizemos que a diferencial e uma transformacao linear cuja matriz e a matriz J = df(x).
No caso em que f : U ⊂ R2
(x,y)→�→
Rf(x,y)
tem-se J1x2 =[
∂f∂x1
∂f∂x2
].
Para aplicacoes f : Rt→�→
Rn
f(t), temos Jnx1 =
⎡⎢⎣f ′1(t)...
f ′n(t)
⎤⎥⎦Nas proximas secoes, trataremos casos de f : U ⊂ Rn → R, enfatizando os prin-
cipais resultados.
1.2 - A diferencial de uma funcao.
O papel da derivada de uma funcao f : Rn → R e desempenhado por um funcionallinear, conforme mostraremos agora.
Seja f : U → R definida no aberto U ⊂ Rn, diferenciavel no ponto a ∈ U . Adiferencial de f no ponto a e o funcional linear df(a): Rn → R , cujo valor no vetor v =(α1, ...,αn) e dado por
df(a).v =∂f
∂v(a) =
n∑i=1
∂f
∂xi
(a).αi.

Para toda transformacao linear ϕ: Rn → R, com {e1, ..., en} base canonica de Rn
e e1 = {1} base canonica de R, temos x =n∑
i=1
xi.ei donde ϕ(x) =n∑
i=1
xi.ϕ(ei) = ϕ(e1)x1 +
ϕ(e2)x2 + ... + ϕ(en)xn . Podemos escrever : ϕ(x) = 〈(ϕ(e1), ..., ϕ(en)), (x1, x2, ..., xn)〉 ,com 〈 , 〉 o produto interno usual de Rn. Assim, [ϕ(x)]
R= [ϕ]R
n
R. [x]
Rn , sendo o vetor
[ϕ]Rn
R(matriz 1 x n ) que representa o funcional.
Quando ϕ = df(a) , entao, (ϕ(e1), ..., ϕ(en)) = (df(a).e1, ..., df(a).en) =( ∂f
∂x1(a), ..., ∂f
∂xn(a)). Se identificarmos o funcional com sua matriz, teremos
df(a) =
(∂f
∂x1
(a), ...,∂f
∂xn
(a)
).
Quando f : U → R e diferenciavel em todo ponto de U, obtemos uma aplicacaodf : U → ( Rn)* = L (Rn; R), que associa a cada ponto x ∈ U o funcional df(x), cujamatriz e
(∂f
∂x1
(x), ...,∂f
∂xn
(x)
).
A aplicacao df e contınua se, e somente se, cada uma das suas funcoes coordenadas∂f∂xi
: U → R e contınua, isto e, se, e somente se, f e de classe C1.
E comum indicar-se, em Analise, a base canonica de (Rn)*, com (dx1,..., dxn),logo dxi.v = αi se v = (α1,..., αn). O motivo desta notacao e o seguinte: como a i-esimaprojecao πi: Rn → R assume, em cada ponto x =(x1, ..., xn) ∈ Rn o valor πi(x) = xi,escreve-se xi em vez de πi. Calculando a diferencial da i-esima projecao xi:: Rn → R,
obtem-se dπi(a).v = dxi(a).v =n∑
i=1
∂πi
∂xi(a) αi = αi,em todo ponto a ∈ Rn. Escrevendo dxi.v
em vez de αi, a definicao da diferencial fica
df(a).v =n∑
i=1
∂f
∂xi
(a).dxi.v.
Como esta igualdade vale para cada v ∈ Rn, temos
df(a) =n∑
i=1
∂f
∂xi
(a).dxi.
Isto significa que o funcional linear df(a) se exprime como combinacao linear dosfuncionais dxi, sendo (∂f/∂xi)(a) os coeficientes da combinacao. Finalmente, a igualdadeacima valendo para todo ponto a ∈ U , podemos escrever
df =n∑
i=1
∂f
∂xi
dxi.

Todo funcional linear ϕ: Rn → R e diferenciavel e, para todo x ∈ Rn, dϕ(x) = ϕ(isto e, dϕ(x).v = ϕ.v). Com efeito, temos ϕ(x) =c1x1 + ...+cnxn, logo ∂ϕ
∂xi=ci. Portanto
dϕ(x).v =∑ ∂ϕ
∂xi.αi =
∑ciαi = ϕ.v.
TEOREMA 1. Sejam f, g: U → R diferenciaveis no ponto a ∈ U. Entao:
1)f + g: U → R e diferenciavel, e d(f + g) =df + dg ;2)f.g: U → R e diferenciavel, e d(f.g) =f.dg + g.df ;3) Se g(x) �= 0 para todo x ∈ U, entao f/g: U → R e diferenciavel e
d(f/g) = (g.df − f.dg)/g2.
Demonstracao: As funcoes s, m: R2 → R, q: R x (R - {0})→ R, definidas pors(x, y) = x + y, m(x, y) = x . y e q(x, y) = x/ y, sao de classe C∞, logo diferenciaveis. Aaplicacao F : U→ R2, definida por F (x) = (f(x), g(x)), tem coordenadas diferenciaveis.Como f + g = s ◦ F, f.g = m ◦ F, e f/g = q ◦ F, a Regra da Cadeia assegura a diferenci-abilidade de f + g, f.g e f/g. Alem disso, temos
∂(f + g)
∂xi
=∂f
∂xi
+∂g
∂xi
∂(f.g)
∂xi
= f.∂g
∂xi
+ g.∂f
∂xi
∂(fg)
∂xi
=g.∂f/∂xi − f.∂g/∂xi
g2(1)
Verificando as afirmacoes acima, temos que
d(f + g) =n∑
i=1
∂(f + g)
∂xi
.dxi =n∑
i=1
∂f
∂xi
dxi +n∑
i=1
∂g
∂xi
dxi. = df + dg.
d(f.g) =n∑
i=1
∂(f.g)
∂xi
.dxi = f.
n∑i=1
∂g
∂xi
.dxi + g.
n∑i=1
∂f
∂xi
.dxi = f.dg + g.df.
E analogamente tem-se a formula 1.
2 - Teorema do Valor Medio
Seja f : U → R diferenciavel em todos os pontos do segmento de reta aberto (a,a + v) e seja contınua sua restricao ao segmento fechado [a, a + v] ⊂ U ⊂ Rn. Existe θ∈ (0, 1) tal que
f(a + v) − f(a) = df(a + θv).v =n∑
i=1
∂f∂xi
(a + θv).αi, onde v = (α1,...,αn).
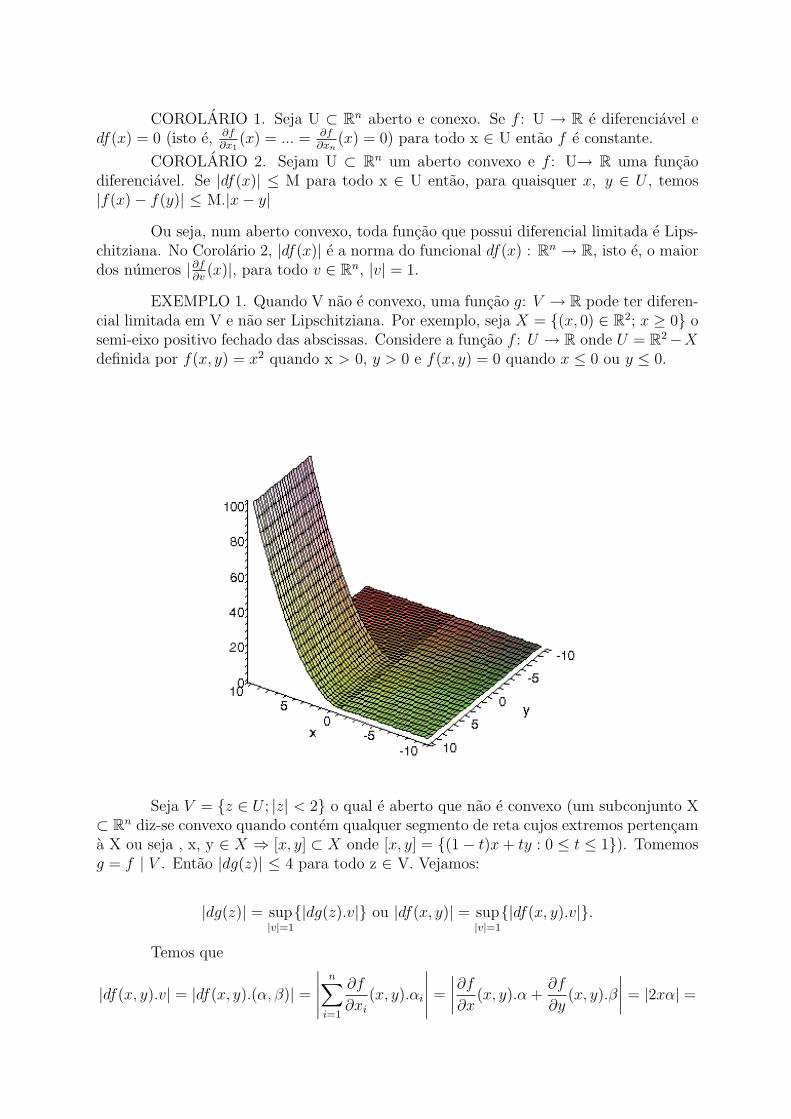
COROLARIO 1. Seja U ⊂ Rn aberto e conexo. Se f : U → R e diferenciavel edf(x) = 0 (isto e, ∂f
∂x1(x) = ... = ∂f
∂xn(x) = 0) para todo x ∈ U entao f e constante.
COROLARIO 2. Sejam U ⊂ Rn um aberto convexo e f : U→ R uma funcaodiferenciavel. Se |df(x)| ≤ M para todo x ∈ U entao, para quaisquer x, y ∈ U , temos|f(x) − f(y)| ≤ M.|x − y|
Ou seja, num aberto convexo, toda funcao que possui diferencial limitada e Lips-chitziana. No Corolario 2, |df(x)| e a norma do funcional df(x) : Rn → R, isto e, o maiordos numeros |∂f
∂v(x)|, para todo v ∈ Rn, |v| = 1.
EXEMPLO 1. Quando V nao e convexo, uma funcao g: V → R pode ter diferen-cial limitada em V e nao ser Lipschitziana. Por exemplo, seja X = {(x, 0) ∈ R2; x ≥ 0} osemi-eixo positivo fechado das abscissas. Considere a funcao f : U → R onde U = R2−Xdefinida por f(x, y) = x2 quando x > 0, y > 0 e f(x, y) = 0 quando x ≤ 0 ou y ≤ 0.
Seja V = {z ∈ U ; |z| < 2} o qual e aberto que nao e convexo (um subconjunto X⊂ Rn diz-se convexo quando contem qualquer segmento de reta cujos extremos pertencama X ou seja , x, y ∈ X ⇒ [x, y] ⊂ X onde [x, y] = {(1 − t)x + ty : 0 ≤ t ≤ 1}). Tomemosg = f | V . Entao |dg(z)| ≤ 4 para todo z ∈ V. Vejamos:
|dg(z)| = sup|v|=1
{|dg(z).v|} ou |df(x, y)| = sup|v|=1
{|df(x, y).v|}.
Temos que
|df(x, y).v| = |df(x, y).(α, β)| =
∣∣∣∣∣n∑
i=1
∂f
∂xi
(x, y).αi
∣∣∣∣∣ =
∣∣∣∣∂f
∂x(x, y).α +
∂f
∂y(x, y).β
∣∣∣∣ = |2xα| =

= 2 |α| . |x| < 2. |α| .2 = 4 |α| ≤ 4√
α2 + β2.
Logo, |df(x, y).v| ≤ 4 |v|. Portanto, |df(x, y)| ≤ 4 para todo z ∈ V mas gnao e Lipschitziana pois, para todo ε > 0 temos |g(1, ε) − g(1,−ε)| = 1 enquanto|(1, ε) − (1,−ε)| = 2ε.
Uma consequencia do Corolario 2 acima e que se f : U → R e diferenciavel e suasderivadas parciais sao limitadas no aberto convexo U ⊂ Rn, entao f e uniformementecontınua em U. De fato,
|df(x)| = sup|v|=1
{|df(x).v|} e |df(x).v| =
∣∣∣∣ n∑i=1
∂f∂xi
(x).αi
∣∣∣∣ ≤ n∑i=1
∣∣∣ ∂f∂xi
(x)∣∣∣. |αi|
≤ M1
n∑i=1
|αi| ≤ M1 |v|S, sendo |v|S a norma da soma em Rn.
Portanto, |df(x)| ≤ M1, para todo x ∈ U (aberto conexo). Segue-se do corolario2 que ∀ x, y ∈ U : |f(x) − f(y)| ≤ M1 |x − y| , isto e , ∀ x, y ∈ U se |x − y| < δ = ε
M1⇒
|f(x) − f(y)| ≤ M1.δ = ε. Assim, f e uniformemente contınua.
3 - O gradiente de uma funcao diferenciavel.
O produto interno natural induz um isomorfismo entre Rn e seu dual (Rn)*. Talisomorfismo faz corresponder a cada vetor v ∈ Rn o funcional ϕ ∈ (Rn)* com ϕ (x) =〈v, x〉 para todo x ∈ Rn (o produto interno de um vetor fixo v por um vetor variavel x).
De fato, defina T: Rn
v→�→
(Rn)T (v)=ϕv
∗, tal que ϕv: Rn
x→�→
Rϕv(x)=〈v,x〉
. T e uma trans-
formacao linear bijetora? Seja T (v1 + v2) := ϕv1+v2 e T(v1)+T(v2)=ϕv1 + ϕv2 . Agora,
ϕv1+v2(x) = 〈v1 + v2, x〉 = 〈v1, x〉 + 〈v2, x〉 = ϕv1(x) + ϕv2(x) = (ϕv1 + ϕv2)(x).
Portanto, T (v1 + v2) = T (v1) + T (v2). E, T (λv1) := ϕλv1 e λT (v1) = λϕv1 ⇒ϕλv1(x) = 〈λv1, x〉 = λ 〈v1, x〉 = λϕv1(x).
Portanto, T (λv1) = λT (v1). Assim, T e uma transformacao linear. T e injetora?Para todo u1,u2 ∈ Rn, considere
T (u1) = T (u2) ⇔ ϕu1= ϕu2
⇔ ϕu1(x) = ϕu2
(x), ∀x ∈ Rn ⇔ 〈u1, x〉 = 〈u2, x〉 ⇔〈u1, x〉 − 〈u2, x〉 = 0 ⇔ 〈u1 − u2, x〉 = 0,∀x ∈ Rn ⇔ u1 − u2 = 0 ⇔ u1 = u2.
Portanto, T e injetora. Como dim Rn = dim(Rn)∗ = n entao T e sobrejetora esegue que T e um isomorfismo.
Dada a funcao diferenciavel f : U → R, definida no aberto U ⊂ Rn, definiremoso gradiente de f no ponto a ∈ U como o vetor fixado grad f(a), que corresponde aofuncional ϕ = df(a) segundo o isomorfismo acima descrito. Isto significa, por definicao,que:
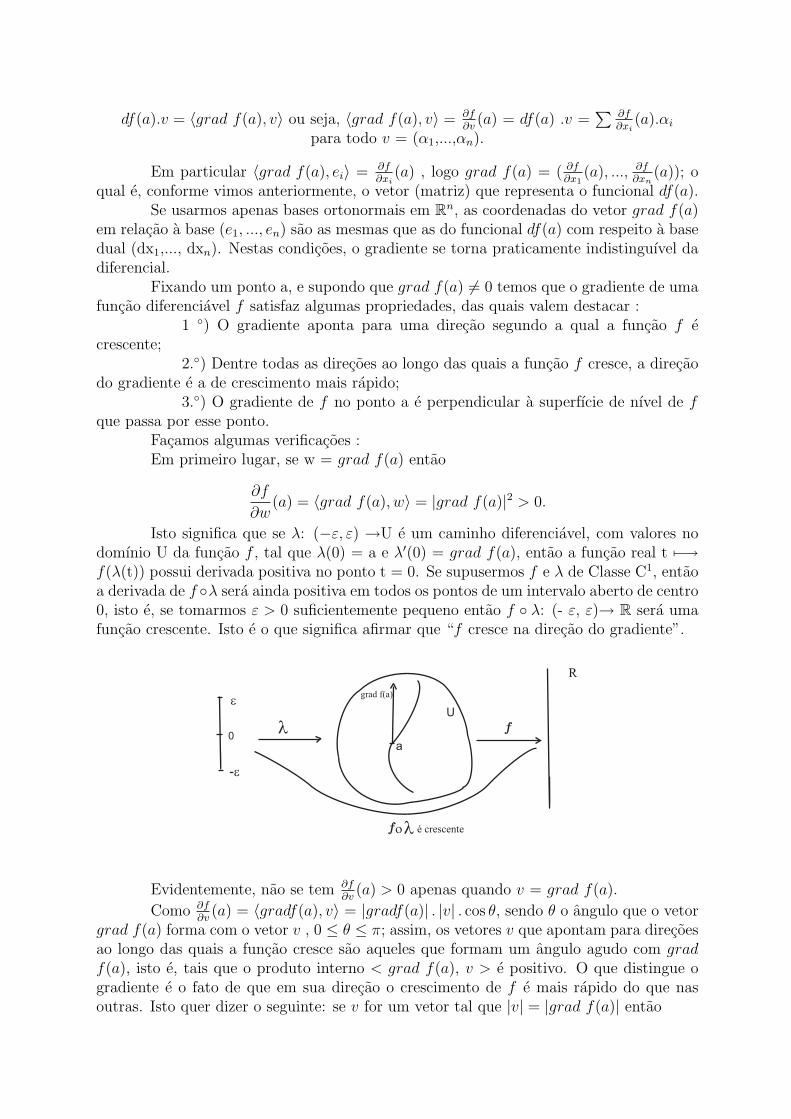
df(a).v = 〈grad f(a), v〉 ou seja, 〈grad f(a), v〉 = ∂f∂v
(a) = df(a) .v =∑ ∂f
∂xi(a).αi
para todo v = (α1,...,αn).
Em particular 〈grad f(a), ei〉 = ∂f∂xi
(a) , logo grad f(a) = ( ∂f∂x1
(a), ..., ∂f∂xn
(a)); oqual e, conforme vimos anteriormente, o vetor (matriz) que representa o funcional df(a).
Se usarmos apenas bases ortonormais em Rn, as coordenadas do vetor grad f(a)em relacao a base (e1, ..., en) sao as mesmas que as do funcional df(a) com respeito a basedual (dx1,..., dxn). Nestas condicoes, o gradiente se torna praticamente indistinguıvel dadiferencial.
Fixando um ponto a, e supondo que grad f(a) �= 0 temos que o gradiente de umafuncao diferenciavel f satisfaz algumas propriedades, das quais valem destacar :
1 ◦) O gradiente aponta para uma direcao segundo a qual a funcao f ecrescente;
2.◦) Dentre todas as direcoes ao longo das quais a funcao f cresce, a direcaodo gradiente e a de crescimento mais rapido;
3.◦) O gradiente de f no ponto a e perpendicular a superfıcie de nıvel de fque passa por esse ponto.
Facamos algumas verificacoes :Em primeiro lugar, se w = grad f(a) entao
∂f
∂w(a) = 〈grad f(a), w〉 = |grad f(a)|2 > 0.
Isto significa que se λ: (−ε, ε) →U e um caminho diferenciavel, com valores nodomınio U da funcao f , tal que λ(0) = a e λ′(0) = grad f(a), entao a funcao real t �−→f(λ(t)) possui derivada positiva no ponto t = 0. Se supusermos f e λ de Classe C1, entaoa derivada de f ◦λ sera ainda positiva em todos os pontos de um intervalo aberto de centro0, isto e, se tomarmos ε > 0 suficientemente pequeno entao f ◦ λ: (- ε, ε)→ R sera umafuncao crescente. Isto e o que significa afirmar que “f cresce na direcao do gradiente”.
0
U
R
f
�
-�
f �� é crescente
grad f(a)
a
�
Evidentemente, nao se tem ∂f∂v
(a) > 0 apenas quando v = grad f(a).
Como ∂f∂v
(a) = 〈gradf(a), v〉 = |gradf(a)| . |v| . cos θ, sendo θ o angulo que o vetorgrad f(a) forma com o vetor v , 0 ≤ θ ≤ π; assim, os vetores v que apontam para direcoesao longo das quais a funcao cresce sao aqueles que formam um angulo agudo com gradf(a), isto e, tais que o produto interno < grad f(a), v > e positivo. O que distingue ogradiente e o fato de que em sua direcao o crescimento de f e mais rapido do que nasoutras. Isto quer dizer o seguinte: se v for um vetor tal que |v| = |grad f(a)| entao

∂f
∂v(a) ≤ ∂f
∂(gradf(a))(a)
Com efeito, pela desigualdade de Schwarz:
∂f
∂v(a) = 〈grad f(a), v〉 ≤ |grad f(a)|.|v| = |grad f(a)|2 =
∂f
∂(grad f(a))(a)
Finalmente, para verificar a terceira das afirmacoes, consideremos:Dada f : U → R, diferenciavel no aberto, U ⊂ Rn, e fixado um numero real c,
definimos o conjunto {x ∈ U : f(x) = c} como a imagem inversa f−1(c), a qual e chamadaa superfıcie de nıvel c da funcao f . Quando n = 2, f−1(c) chama-se a curva de nıvel cde f . Convem, de inıcio, chamar a atencao para o fato de que a imagem inversa f−1(c)as vezes nao tem aspecto de curva ou superfıcie. (Por exemplo, f : R2 → R tal quef(x, y) = x2 + y2 para valores de c < 0 , f−1(c) seria o conjunto vazio ). Melhor seriachamar f−1(c) de “conjunto de nıvel”. Mas a terminologia esta consagrada e se justificadevido a f−1(c) ser mesmo uma superfıcie (ou uma curva) sempre que grad f(x) �=0 paratodo x com f(x) = c, conforme provaremos adiante, com ajuda do teorema da funcaoimplıcita.
Dizer que um vetor w e perpendicular a superfıcie (ou curva) de nıvel f−1(c) noponto a, significa que w e perpendicular ao vetor velocidade, no ponto a, de qualquercaminho diferenciavel no ponto t = 0, com λ(0) = a e λ(t) ∈ f−1(c), isto e, f(λ(t)) = c,para todo t ∈ (-ε,ε). Com efeito, desta ultima igualdade segue-se que
0 = (f ◦ λ)′(0) =n∑
i=1
∂f
∂xi
(a).λ′i(0) = 〈gradf(a), λ′(0)〉
logo grad f(a) e perpendicular a λ´(0), vetor velocidade no ponto a = λ(0) de qualquercaminho diferenciavel λ, contido na superfıcie de nıvel de f que contem a.
Agora, vejamos um exemplo simples:
EXEMPLO 2. Considere f(x, y, z) = ax + by + cz (com a2 + b2 + c2 �= 0). Assuperfıcies de nıvel de f sao planos definidos pelas equacoes ax + by + cz = d , paraqualquer d real. O vetor gradiente de f e constante : grad f = (a, b, c), em qualquerponto (x, y, z) ∈ R3. Assim, as superfıcies de f sao todos os planos perpendiculares aovetor (a, b, c), tais planos sao, evidentemente paralelos uns aos outros.
As superfıcies de nıvel c da funcao g(x, y, z) = x2+ y2 + z2 sao as solucoes deuma equacao do tipo g(x, y, z) = c. Elas sao vazias se c < 0. A superfıcie de nıvel 0reduz-se a um unico ponto, a origem. Para c > 0, a superfıcie de nıvel c e uma esfera decentro na origem e raio
√c. O vetor gradiente de g no ponto (x, y, z) e grad g(x, y, z) =
(2x, 2y, 2z), um vetor paralelo ao raio, o que e de se esperar, pois o raio e perpendiculara todo vetor tangente a esfera naquele ponto.
A superfıcie de nıvel c da funcao h(x, y, z) = x2+ y2 - z2, com c < 0, define umhiperboloide de duas folhas. Para c = 0, a superfıcie de nıvel x2+ y2 - z2 = 0 consiste emum cone duplo, com vertice na origem e eixo no eixo do z. No caso de c > 0, a superfıciex2+ y2 - z2 = c e um hiperboloide de revolucao, com mesmo eixo do cone.
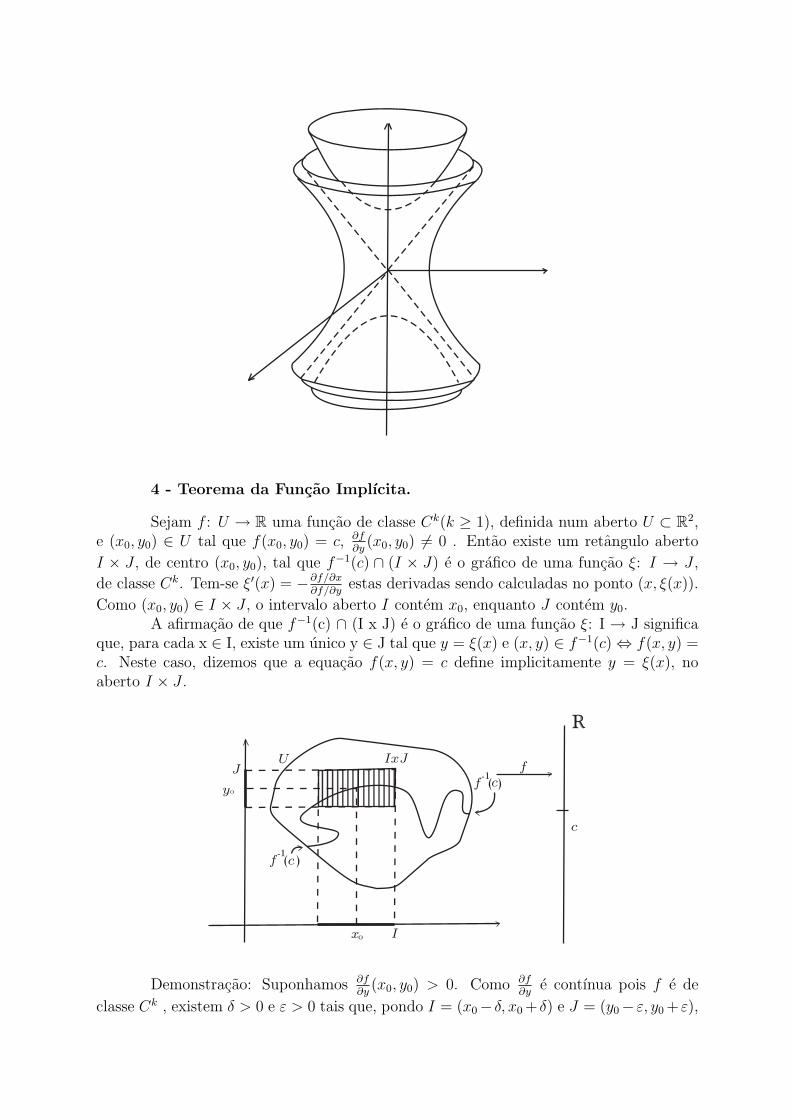
4 - Teorema da Funcao Implıcita.
Sejam f : U → R uma funcao de classe Ck(k ≥ 1), definida num aberto U ⊂ R2,e (x0, y0) ∈ U tal que f(x0, y0) = c, ∂f
∂y(x0, y0) �= 0 . Entao existe um retangulo aberto
I × J , de centro (x0, y0), tal que f−1(c) ∩ (I × J) e o grafico de uma funcao ξ: I → J ,
de classe Ck. Tem-se ξ′(x) = −∂f/∂x∂f/∂y
estas derivadas sendo calculadas no ponto (x, ξ(x)).
Como (x0, y0) ∈ I × J , o intervalo aberto I contem x0, enquanto J contem y0.A afirmacao de que f−1(c) ∩ (I x J) e o grafico de uma funcao ξ: I → J significa
que, para cada x ∈ I, existe um unico y ∈ J tal que y = ξ(x) e (x, y) ∈ f−1(c) ⇔ f(x, y) =c. Neste caso, dizemos que a equacao f(x, y) = c define implicitamente y = ξ(x), noaberto I × J .
�
�
� ���
�-1
�
� �
( )�
�
�-1( )�
R
Demonstracao: Suponhamos ∂f∂y
(x0, y0) > 0. Como ∂f∂y
e contınua pois f e de
classe Ck , existem δ > 0 e ε > 0 tais que, pondo I = (x0− δ, x0 + δ) e J = (y0−ε, y0 +ε),
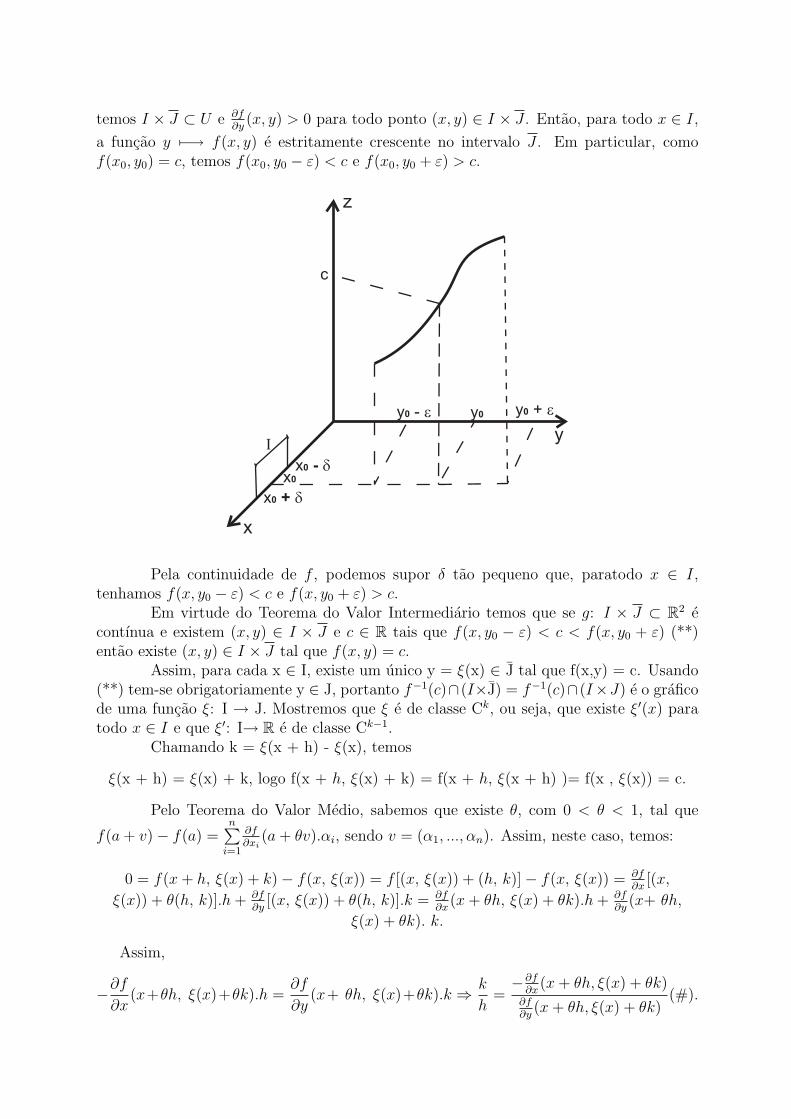
temos I × J ⊂ U e ∂f∂y
(x, y) > 0 para todo ponto (x, y) ∈ I × J . Entao, para todo x ∈ I,
a funcao y �−→ f(x, y) e estritamente crescente no intervalo J . Em particular, comof(x0, y0) = c, temos f(x0, y0 − ε) < c e f(x0, y0 + ε) > c.
y +0 �y -0 � y0
x0
c
z
x
y
x0 - �
x0 + �
�
Pela continuidade de f , podemos supor δ tao pequeno que, paratodo x ∈ I,tenhamos f(x, y0 − ε) < c e f(x, y0 + ε) > c.
Em virtude do Teorema do Valor Intermediario temos que se g: I × J ⊂ R2 econtınua e existem (x, y) ∈ I × J e c ∈ R tais que f(x, y0 − ε) < c < f(x, y0 + ε) (**)entao existe (x, y) ∈ I × J tal que f(x, y) = c.
Assim, para cada x ∈ I, existe um unico y = ξ(x) ∈ J tal que f(x,y) = c. Usando(**) tem-se obrigatoriamente y ∈ J, portanto f−1(c)∩(I×J) = f−1(c)∩(I×J) e o graficode uma funcao ξ: I → J. Mostremos que ξ e de classe Ck, ou seja, que existe ξ′(x) paratodo x ∈ I e que ξ′: I→ R e de classe Ck−1.
Chamando k = ξ(x + h) - ξ(x), temos
ξ(x + h) = ξ(x) + k, logo f(x + h, ξ(x) + k) = f(x + h, ξ(x + h) )= f(x , ξ(x)) = c.
Pelo Teorema do Valor Medio, sabemos que existe θ, com 0 < θ < 1, tal que
f(a + v) − f(a) =n∑
i=1
∂f∂xi
(a + θv).αi, sendo v = (α1, ..., αn). Assim, neste caso, temos:
0 = f(x + h, ξ(x) + k) − f(x, ξ(x)) = f [(x, ξ(x)) + (h, k)] − f(x, ξ(x)) = ∂f∂x
[(x,
ξ(x)) + θ(h, k)].h + ∂f∂y
[(x, ξ(x)) + θ(h, k)].k = ∂f∂x
(x + θh, ξ(x) + θk).h + ∂f∂y
(x+ θh,
ξ(x) + θk). k.
Assim,
−∂f
∂x(x+θh, ξ(x)+θk).h =
∂f
∂y(x+ θh, ξ(x)+θk).k ⇒ k
h=
−∂f∂x
(x + θh, ξ(x) + θk)∂f∂y
(x + θh, ξ(x) + θk)(#).

E como ξ(x + h) - ξ(x) = k segue que ξ(x+h)−ξ(x)h
= kh(##). Igualando (#) e
(##) obtemos:
ξ(x + h) − ξ(x)
h=
k
h= −
∂f∂x
(x + θh, ξ(x) + θk)∂f∂y
(x + θh, ξ(x) + θk)
Segundo o lema que provaremos logo a seguir, ξ e contınua. Logo limh→0
ξ(x + h) −ξ(x) = 0 ⇒ lim
h→0k = 0. A continuidade das derivadas parciais de f nos da portanto
ξ′(x) = limh→0
ξ(x + h) − ξ(x)
h= −
∂f∂x
(x, ξ(x))∂f∂y
(x, ξ(x))(2)
Se f ∈ C1, sendo ∂f/∂x, ∂f/∂y e ξ contınuas, esta formula mostra que ξ′ econtınua, logo ξ ∈ C1. Se f ∈ C2 entao ∂f/∂x, ∂f/∂y e (como acabamos de mostrar) ξsao de classe C1. A formula que da ξ′ mostra entao que ξ′ e tambem de classe C1, isto e,ξ ∈ C2. E assim por diante: se f ∈ Ck entao ξ ∈ Ck.
Vejamos agora o lema usado na demonstracao.
4.1 - LEMA. Se X ⊂ Rm, K ⊂ Rk compacto, f : X ×K → Rp contınua e c ∈ Rp.Se f −1(c) e o grafico de uma aplicacao ξ: X → K, (isto e, para cada x ∈ X existe umunico y = ξ(x) ∈ K com f(x ,ξ(x)) = c) entao ξ e contınua.
Demonstracao: Dado x0 ∈ X, seja y0 = ξ(x0)∈ K. Tomamos uma sequencia de
pontos xn ∈ X, com lim xn = x0, e queremos provar que lim ξ(xn) = y0 = ξ(x0) .Como
a sequencia (ξ(xn)) e limitada (pois ξ(xn) ∈ K ∀ n e como K e um compacto este pordefinicao e fechado e limitado logo, um conjunto de pontos de K, no caso a sequenciaξ(xn), e tambem limitada), basta provar que toda subsequencia ξ(x′
n), convergente em
Rk, tem limite y0. Ora, se for lim ξ(x′n) = y, deve ser y ∈ K pois K e fechado (logo,
contem todos os limites das sequencias). Como limf(x′n, ξ(x′
n)) = c para todo n, temos c
= limf(x′n, ξ(x′
n)) = f(lim x′n, lim ξ(x′
n))=f (x0, y). Pela unicidade de y0, isto obriga y
= y0 e conclui a demonstracao.
Dada uma funcao diferenciavel f : U → R , um ponto x ∈ U chama-se pontocrıtico de f (ou ponto singular) quando df(x) = 0, isto e, ∂f
∂x1(x) = ... = ∂f
∂xn(x) = 0.
Seja f : U → R uma funcao diferenciavel no aberto U ⊂ Rn. Diremos que onumero real c e um valor regular de f quando nao existirem pontos crıticos de f no nıvelc, ou seja f(x) = c ⇒ grad f(x) �= 0. Quando c e um valor regular de f , diz-se tambemque o nıvel c e regular. Quando existem pontos crıticos x ∈ U tais que f(x) = c, dizemosque c e um nıvel crıtico de f .
Um conjunto M ⊂ Rn+1 chama-se uma hiperfıcie de classe Ck quando e localmenteo grafico de uma funcao de n variaveis de classe Ck. Isto significa que cada ponto p ∈ Mpertence a um aberto V ⊂ Rn+1 tal que V ∩ M e o grafico de uma funcao de classeCk definida num aberto do espaco Rn. Quando n = 1 diz-se ”curva”e, se n = 2, diz-se”superfıcie”em vez de ”hiperfıcie”.

EXEMPLO 3: Seja Sn = {x ∈ Rn+1; 〈x, x〉 = 1} a esfera unitaria n-dimensional.Indiquemos com U ⊂ Rn a bola aberta de raio 1, com centro na origem. Para cada i =1. ..., n +1 ponhamos Vi = {x ∈ Rn+1; xi > 0} e i = {x ∈ Rn+1; xi < 0}.
Escrevendo x∗ = (x1,..., xi−1, xi+1, , xn+1), temos:
x ∈ Sn ∩ Vi ⇔ | x∗| < 1 e xi =√
1 − 〈x∗, x∗〉;
x ∈ Sn ∩ Wi ⇔ | x∗| < 1 e xi = −√1 − 〈x∗, x∗〉.
Logo, se considerarmos a funcao ξ: U → R, de classe C∞, definida por ξ(u) =√1 − 〈u, u〉, vemos que, para cada i = 1. ..., n +1, Sn ∩ Vi e o grafico da funcao xi =
ξ(x∗) enquanto que Sn ∩ Wi e o grafico de xi = − ξ(x∗).Como todo ponto p ∈ Sn esta contido em algum Vi ou em algum Wi, concluımos
que Sn e uma hiperfıcie de classe C∞ em Rn+1.
Seja M ⊂ Rn+1. Dado p ∈ M , usaremos a notacao TpM para indicar o conjuntodos vetores velocidade λ′(0), dos caminhos λ: (−ε, ε) → M ⊂ Rn+1, contidos em M ,diferenciaveis no ponto t = 0 e tais queλ(0) = p. Quando M e uma hiperficie diferenciavel,o conjunto TpM chama-se o espaco vetorial tangente a M no ponto p. Esta denominacaotem sua justificativa no
TEOREMA 2. Se a hiperficie M ⊂ Rn+1 e diferenciavel entao, para cada p ∈ M ,o conjunto TpM e um subespaco vetorial de dimensao n do espaco euclidiano Rn+1.
EXEMPLO 4. Para hiperfıcies M ⊂ Rn+1 de classe C0, TpM pode nao ser um
espaco vetorial de dimensao n: se X = {(x, y, z) ∈ R3; z =√
x2 + y2} (cone-fig.2),
tem-se que X nao e uma superfıcie diferenciavel, pois �∂f(0,0)∂x
. Podemos ver que, sendop = (0, 0, 0), tem-se TpM consiste do vetor 0 apenas, donde dim TpM = 0. Se Y ={(x, y, z) ∈ R3; z = |x|}(superfıcie cilındrica ao longo do eixo dos y -fig.1) ) tambem naoe superfıcie diferenciavel para p = (0, 0, 0), TpY e o subespaco formado pelos vetores β�j,
donde dim TpY = 1. Por outro lado, a superfıcie Z = {(x, y, z) ∈ R3; z =√|x2| + |y2|} e
tal que, para p = (0, 0, 0), TpZ ∈ R3 e a reuniao de duas retas (o eixo dos x e o eixo dosy) logo nao e sequer um subespaco vetorial.
EXEMPLO 5. Sabemos que a esfera Sn ⊂ Rn+1 e uma hiperfıcie de classe C∞.Assim, pelo teorema, temos que para cada ponto p ∈ Sn, o espaco vetorial tangente Tp(S
n)tera dimensao n e TpS
n e o conjunto [p]⊥ dos vetores v ∈ Rn+1 tais que 〈p, v〉 = 0. Comefeito, se λ: (−ε, ε) → Sn e um caminho diferenciavel no ponto t = 0, com λ(0) = pentao, como o
|λ(t)| = 1 ∀t ⇒ |λ(t)|2 = 1 ⇒ 〈λ(t), λ(t)〉 = 1 ⇒ 〈λ′(t), λ(t)〉 + 〈λ(t), λ′(t)〉 = 0 ⇒2〈λ′(t), λ(t)〉 = 0 ⇒ 〈λ′(t), λ(t)〉 = 0, isto e λ′(0) ∈ [p]⊥.
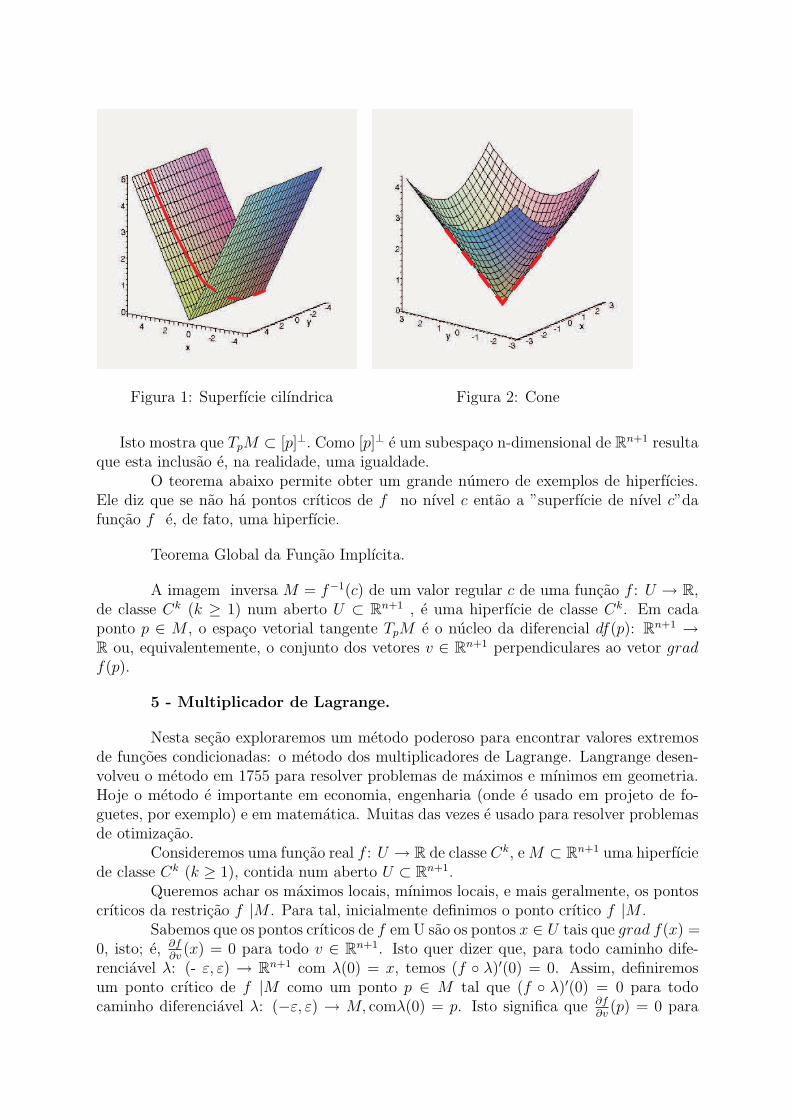
Figura 1: Superfıcie cilındrica Figura 2: Cone
Isto mostra que TpM ⊂ [p]⊥. Como [p]⊥ e um subespaco n-dimensional de Rn+1 resultaque esta inclusao e, na realidade, uma igualdade.
O teorema abaixo permite obter um grande numero de exemplos de hiperfıcies.Ele diz que se nao ha pontos crıticos de f no nıvel c entao a ”superfıcie de nıvel c”dafuncao f e, de fato, uma hiperfıcie.
Teorema Global da Funcao Implıcita.
A imagem inversa M = f−1(c) de um valor regular c de uma funcao f : U → R,de classe Ck (k ≥ 1) num aberto U ⊂ Rn+1 , e uma hiperfıcie de classe Ck. Em cadaponto p ∈ M , o espaco vetorial tangente TpM e o nucleo da diferencial df(p): Rn+1 →R ou, equivalentemente, o conjunto dos vetores v ∈ Rn+1 perpendiculares ao vetor gradf(p).
5 - Multiplicador de Lagrange.
Nesta secao exploraremos um metodo poderoso para encontrar valores extremosde funcoes condicionadas: o metodo dos multiplicadores de Lagrange. Langrange desen-volveu o metodo em 1755 para resolver problemas de maximos e mınimos em geometria.Hoje o metodo e importante em economia, engenharia (onde e usado em projeto de fo-guetes, por exemplo) e em matematica. Muitas das vezes e usado para resolver problemasde otimizacao.
Consideremos uma funcao real f : U → R de classe Ck, e M ⊂ Rn+1 uma hiperfıciede classe Ck (k ≥ 1), contida num aberto U ⊂ Rn+1.
Queremos achar os maximos locais, mınimos locais, e mais geralmente, os pontoscrıticos da restricao f |M . Para tal, inicialmente definimos o ponto crıtico f |M .
Sabemos que os pontos crıticos de f em U sao os pontos x ∈ U tais que grad f(x) =0, isto; e, ∂f
∂v(x) = 0 para todo v ∈ Rn+1. Isto quer dizer que, para todo caminho dife-
renciavel λ: (- ε, ε) → Rn+1 com λ(0) = x, temos (f ◦ λ)′(0) = 0. Assim, definiremosum ponto crıtico de f |M como um ponto p ∈ M tal que (f ◦ λ)′(0) = 0 para todocaminho diferenciavel λ: (−ε, ε) → M, comλ(0) = p. Isto significa que ∂f
∂v(p) = 0 para

todo v ∈ TpM , ou seja, p ∈ M e um ponto crıtico da restricao f |M se, e somente se,〈grad f(p), v〉 = 0 para todo v ∈ TpM , ou ainda, se, e somente se, o vetor grad f(p) enormal a hiperfıcie M no ponto p.
Se p ∈ M e um ponto de maximo local (ou de mınimo local) para a restricao f |Mentao, para todo caminho diferenciavel λ: (−ε, ε) → M , com λ(0) = p, 0 e um ponto demaximo (ou de mınimo) local para a funcao real f ◦ λ: (−ε, ε) → R. Com efeito, temosf(X) � f(p), ∀X ∈ M , em particular, f(λ(t)) � f(p) = f(λ(0)) → (f ◦λ)(t) � (f ◦λ)(0),∀t ∈ (−ε, ε). Logo (f ◦ λ)′(0) = 0, portanto p e um ponto crıtico de f |M de acordo coma definicao acima.
Evidentemente, os pontos crıticos de f em U, que por acaso pertencam a M , seexistirem, serao pontos crıticos de f |M . O interessante, porem, e que podem ocorrerpontos crıticos de f |M que nao sao pontos crıticos de f isto e, nos quais grad f nao seanula. Por exemplo, sejam f(x, y) = x − y, e M = S1 = {(x, y) ∈ R2 : x2 + y2 = 1}.Temos grad f(x, y) = (1,−1) �= (0, 0) ∀(x, y) ∈ R2, isto e, f nao possui pontos crıticos.
Entretanto, p =(
1√2, −1√
2
)e q =
(−1√2, 1√
2
), conforme poderemos ver adiante, sao os
pontos onde f |S1 atinge, respectivamente, seu maximo e seu mınimo; donde p e q saopontos crıticos de f |S1.
De um modo geral, se a hiperfıcie M ⊂ Rn+1 e compacta, entao f |M admite pelomenos dois pontos crıticos, a saber, os pontos onde f |M assume seus valores maximo emınimo.
Finalmente, a resposta ao nosso problema e dada pelo
5.1 - Teorema do Multiplicador de Lagrange.
Consideremos f: U → R, uma funcao de classe Ck (k ≥ 1) no aberto U ⊂ Rn+1,e M = ϕ−1(c) uma hiperfıcie contida em U, imagem inversa do valor regular c ∈ R poruma funcao ϕ: U → R, de classe Ck. Um ponto p ∈ M e ponto crıtico de f |M se, esomente se, existe um numero real λ (chamado de multiplicador de Lagrange) tal quegrad f(p) = λ.grad ϕ(p).
Demostracao: Sendo M uma superfıcie de nıvel de ϕ, tem-se que grad ϕ(p)⊥TpM ,para todo ponto p ∈ M . Agora, tambem temos que, p e ponto crıtico de f |M , se e so se,

grad ϕ(p)⊥TpM . Como TpM ⊂ Rn+1 e um subespaco vetorial de dimensao n, segue-seque, Rn+1 = TpM ⊕ (TpM)⊥ = TpM ⊕ [grad ϕ(p)]. Mas, o grad f(p) ∈ (TpM)⊥ =[grad ϕ(p)]. Assim, existe λ ∈ R tal que, grad f(p) = λ.grad ϕ(p).
Observacao: Quando a hiperfıcie M nao e dada como imagem inversa ϕ−1(c) deum valor regular, os pontos crıticos de f |M sao simplesmente os pontos p ∈ M nos quaisgrad f(p) e normal a M .
A pesquisa dos pontos crıticos de f |M reduz-se, portanto, a resolver o sistemade (n + 2) equacoes {
∂f∂xi
(p) = λ. ∂ϕ∂xi
(p), (i = 1, 2, ..., n + 1);
ϕ(p) = c
nas n + 2 incognitas λ, x1, ..., xn+1, onde p = (x1,..., xn+1).
A presenca do numero λ no sistema acima torna o numero de equacoes igual aonumero de incognitas, o que muitas vezes facilita a resolucao.
Uma interpretacao geometrica deste teorema poderia ser feita, observando que acondicao grad f(p) = λ. grad ϕ(p) significa que a hiperfıcie M e tangente a superfıciede nıvel de f que passa pelo ponto crıtico p da funcao f |M . No caso em que se podemesbocar essas superfıcies, esta observacao auxilia a localizar os pontos crıticos.
Vejamos agora alguns problemas onde se aplica o metodo do multiplicador deLagrange.
EXEMPLO 6. Seja f : R2 → R definida por f(x, y) = ax + by, com a2 + b2 �=0. Quais sao os pontos crıticos da restricao de f ao cırculo unitario S1? Temos grad f= (a, b), S1 = ϕ−l(1),ϕ(x,y) = x2 + y2 e grad ϕ= (2x, 2y). Os pontos crıticos de f |S1
sao aqueles onde os vetores (a, b) e (2x, 2y) sao colinares. Como, alem disso, deve-se terx2 + y2 = 1,isto nos da x = a√
a2+b2, y = b√
a2+b2ou x = −a√
a2+b2, y = −b√
a2+b2.Nestes pontos,
f |S1 assume, respectivamente,seu valor maximo, igual a√
a2 + b2, e seu valor mınimo,igual a −√
a2 + b2.
EXEMPLO 7. Seja (aij) uma matriz real n x n simetrica, isto e, aij = aji. Aela corresponde uma transformacao linear A: Rn → Rn, definida por A. x = y, com
yi =∑j
aijxj.A condicao aij = aji e equivalente a 〈Ax, y〉 = 〈x,Ay〉 para quaisquer
x, y ∈ Rn, ou seja, a transformacao linear A e auto-adjunta. Um vetor x ∈ Rn chama-seum vetor proprio de A quando x �= 0 e A.x = λ.x para algum λ ∈ R. O numero λ chama-se entao o valor proprio correspondente ao vetor proprio x. Em geral, uma transformacaolinear A: Rn → Rn nao precisa ter vetores proprios x ∈ Rn nem valores proprios . (Tome,por exemplo, a transformacao linear A sendo uma rotacao no plano, de angulo θ, com0o < θ < 180o daı �λ ∈ R tal que Ax = λx). Mostraremos agora que se A e auto-adjuntaentao existe uma base ortonormal de Rn formada por vetores proprios de A. Para isso,consideraremos f : Rn → R tal que f(x) = 〈Ax, x〉 e Sn−1 = ϕ−1(1), sendo ϕ: Rn → Rdada por ϕ(x) = |x|2 = 〈x, x〉.
Sabemos que ∃u1 ∈ Sn−1 tal que f(u1) ≥ f(u), ∀u ∈ Sn−1, assim, u1 e pontocrıtico de f |Sn−1.
Analisaremos os pontos crıticos de f |Sn−1:

Temos,
f(x + h) = 〈A(x + h), x + h〉 = 〈Ax + Ah, x + h〉 =
= 〈Ax, x〉 + 〈Ax, h〉 + 〈Ah, x〉 + 〈Ah, h〉 =
= 〈Ax, x〉 + 〈Ax, h〉 + 〈h,Ax〉 + 〈Ah, h〉 =
= f(x) + 〈2.Ax, h〉 + 〈Ah, h〉e
r(h)
|h| =〈Ah, h〉|h| � |Ah|.|h|
|h| � |A|.|h|2|h| = |A|.|h| −−→
h→00
Logo, f e diferenciavel e f ′(x).h = 〈2.Ax, h〉, ou seja, grad f(x) = 2.Ax. Agora,ϕ(x) = x2
1 + x22 + ... + x2
n, e diferenciavel e
grad ϕ(x) = (2.x1, 2.x2, ..., 2.xn) = 2.(x1, x2, ..., xn) = 2x
Portanto, usando o Teorema do multiplicador de Lagrange, tem-se os pontoscrıticos de f |Sn−1 sao os pontos u ∈ Sn−1 tais que grad f(u) = λ.grad ϕ(u) ⇔ 2.Au =λ.2u ⇔ Au = λ.u. Podemos concluir:
Dada a forma quadratica f : Rn → R,f(x) = 〈A.x, x〉, com A: Rn → Rn auto-adjunta, um ponto u ∈ Sn−1 e ponto crıtico de f |Sn−1 se, e somente, A.u = λ.u, ondeλ = f(u), pois f(u) = 〈Au, u〉 = 〈λu, u〉 = λ〈u, u〉 = λ.
Assim, sendo u1 ∈ Sn−1 um ponto crıtico de f |Sn−1, tem-se Au1 = λ1u1. Epodemos considerar o subespaco (n−1)-dimensional E1 = {x ∈ Rn : 〈x, u1〉 = 0} = [u1]
⊥.Note que, se x ∈ E1 ⇒ Ax ∈ E1. De fato, 〈Ax, u1〉 = 〈x,Au1〉 = 〈x, λ1u1〉 =
λ1〈x, u1〉 = 0. Por restricao, obtemos uma transformacao linear auto-adjunto A |E1 :E1 → E1. Seja f(u2) = λ2 o valor maximo da forma quadratica f entre os vetoresunitarios pertencentes a E1 donde, ∃u2 ∈ E1 tal que |u2| = 1 e Au2 = λ2u2, isto e, u2 eautovetor de A, sendo u2 um vetor unitario e ortogonal a u1.
Prosseguindo analogamente, obtemos uma base ortonormal de Rn, (u1,u2, ...,un),formada por vetores proprios de A.
EXEMPLO 8.Usaremos o metodo do multiplicador de Lagrange para mostrar aconhecida desigualdade de Schwarz : |〈x, y〉| ≤ |x| . |y|. Para isso tomaremos a funcao f :R2m → R, dada por f(x, y) = 〈x, y〉 e consideremos a esfera unitaria S = {(x, y) ∈ R2m:|x|2 + |y|2 = 1}. Temos que f e de classe C∞ e S = g−1(1), onde g(x, y) = |x|2 + |y|2 ,e de classe C∞. Sabemos que, sendo f contınua e S um compacto, tem-se que f assumeseus valores maximo e mınimo.
Sendo (x0, y0) ∈ S um ponto de maximo ou mınimo de f, o teorema do multi-plicador de Lagrange nos garante que existira um numero real λ tal que ∇f(x0, y0) =λ.∇g(x0, y0).
Agora,f(x, y) = x1.y1 + x2.y2 + ... + xm.ym, daı:
∇f(x, y) =
(∂f
∂x1
,∂f
∂x2
, ...,∂f
∂xm
,∂f
∂y1
,∂f
∂y2
, ...,∂f
∂ym
)= (y1, y2, ..., ym, x1, x2, ..., xm) e:
g(x, y) = x21 + x2
2 + ... + x2m + y2
1 + y22 + ... + y2
m

∇g(x, y) =
(∂g
∂x1
,∂g
∂x2
, ...,∂g
∂xm
,∂g
∂y1
,∂g
∂y2
, ...,∂g
∂ym
)=
= (2x1, 2x2, ..., 2xm, 2y1, 2y2, ..., 2ym) =
= 2.(x1, x2, ..., xm, y1, y2, ..., ym)
Assim,
{(y0, x0) = λ.2(x0, y0)
|x0|2 + |y0|2 = 1⇐⇒
⎧⎨⎩y0 = 2.λ.x0 (I)x0 = 2.λ.y0 (II)
|x0|2 + |y0|2 = 1 (III)
Substituindo (II) em (I) :
y0 = 2.λ.(2.λy0) ⇐⇒ y0 = 4.λ2y0 ⇐⇒ y0(1 − 4.λ2) = 0 ⇐⇒ y0 = 0 ou 1 − 4.λ2 = 0
Retornando y0 = 0 em (II), x0 = 0 e nao satisfaz (III).
Daı, 1 − 4.λ2 = 0 ⇐⇒ 4.λ2 = 1 ⇐⇒ λ2 = 14⇐⇒ λ = ±1
2
Para λ = +12, tem-se y0 = x0;
Para λ = −12, tem-se y0 = −x0;
Em qualquer caso, segue que
|x0|2 + |y0|2 = |x0|2 + |x0|2 = 1 =⇒ 2. |x0|2 = 1 =⇒ |x0|2 = 12.
Note que f(x0, x0) = 〈x0, x0〉 = |x0|2 = 12
e f(x0,−x0) = 〈x0,−x0〉 = −|x0|2 = −12.
Logo, nos pontos da forma (x0, x0) a funcao assume valor maximo de |x0|2 = 12, e
nos pontos na forma (x0,−x0) o valor da funcao e mınimo com valor −|x0|2 = −12.
Seja (x, y) ∈ Rm × Rm, donde(
x√2|x| ,
y√2|y|
)∈ S, pois
∣∣∣∣ x√2.|x|
∣∣∣∣2 +
∣∣∣∣ y√2.|y|
∣∣∣∣2 = 1.
Assim,
f(
x√2|x| ,
y√2|y|
)≤ f(x0, x0) = 1
2, ou seja
⟨x√2|x| ,
y√2|y|
⟩≤ 1
2⇔ 1√
2|x| .1√2|y| .〈x, y〉 ≤ 1
2⇔ 1
2.
1
|x|.|y| 〈x, y〉 ≤ 1
2⇔
⇔ 〈x, y〉 ≤ |x|.|y|.(a)

Tambem temos que
f(x0,−x0) ≤ f(
x√2|x| ,
y√2|y|
)⇔ −1
2≤ 1
2. 1|x|.|y|〈x, y〉 ⇔ −|x|.|y| ≤ 〈x, y〉(b)
Por (a) e (b) obtem-se: |〈x, y〉| ≤ |x|.|y|.
EXEMPLO 9. Atraves do metodo do multiplicador de Lagrange demonstraremosa desigualdade de Hadamard: se X e uma matriz n × n cujas linhas sao os valores Xi
= (xi1 , xi2 , ..., xin) entao det.X ≤ |X1|.|X2|...|Xn|, onde |Xi| e a norma euclidiana de Xi.Isto e obvio se det.X = 0. Caso det.X �= 0, entao todos os vetores de linha sao �= 0,
logo Xi = |Xi|.Wi, com |Wi| = 1, para todo i. Como X =
⎡⎢⎣ X1...
Xn
⎤⎥⎦ =
⎡⎢⎣ |X1|.W1...
|Xn|.Wn
⎤⎥⎦entao det.X = |X1|.|X2|...|Xn|.det.W , onde W =
⎡⎢⎣ W1...
Wn
⎤⎥⎦ . A desigualdade de Hadamard
ficara provada se mostrarmos que detW ≤ 1 pois teremos que detX = |X1|...|Xn|.detW �|X1|. ... .|Xn|.1 ⇒ detX � |X1|...|Xn|. Mais geralmente, mostraremos que se W = (wij)e uma matriz n × n tal que
∑i,j
w2ij = n entao det.W ≤ 1.
Definamos, portanto f ,ϕ : Rn2 → R pondo f(x) = det.X e ϕ(x) =∑i,j
x2ij = n.
Temos ∂ϕ∂xij
(X) = 2xij e ∂f∂xij
(X) = (−1)i+jX[ij], onde X[ij] e o determinante da matriz
(n−1)×(n−1), obtida de ϕ pela omissao da i-esima linha e j-esima coluna. Todo numeroreal �= 0 e um valor regular de ϕ, pois grad ϕ(X) = 2xij e este so se anula quando xij = 0,ou seja, X e a matriz nula, neste caso, o valor de ϕ e 0, logo ϕ−1(n) e uma hiperfıcie(compacta) de classe C∞(pois ϕ e C∞) em Rn2
(esfera de centro 0 e raio√
n).Uma matriz W = (wij) e o ponto crıtico de f |M se, e somente se,
∑i,j
x2ij = n e
grad f(W ) = λ.grad ϕ(W ) para algum λ real. Daı:
(−1)i+jW[ij] = 2λ.wij para quaisquer i, j ∈ [1, n]. (*)
Multiplicando por wij, somando e lavando em conta a regra de expansao de umdeterminante em relacao aos elementos de uma linha, temos:
n.det W =∑i,j
(−1)i+j.wij.W[ij] = 2.λ.∑i,j
w2ij = 2.λ.n,
onde det W = 2.λ. Agora multipliquemos (*) por wij, fixemos i e somemos em relacaoa j. Resulta:
det W =∑j
(−1)i+j.wij.W[ij] = 2.λ.∑j
w2ij = det W.
∑j
w2ij.

Suponhamos que W seja um ponto onde f |M assume seu valor maximo. Entao:det W = f(W ) �= 0 e da igualdade acima vem |Wi|2 = P
j
w2ij = 1 para todo i.
Em seguida, multipliquemos (*) por wkj, com k �= i, e somemos em relacao a j .Teremos:
∑j
(−1)i+j.wij.W[ij] = 2.λ.∑j
wkj = 2.λ. 〈Wk,Wi〉 .
Ora, o primeiro somatorio acima e zero, por ser desenvolvimento em relacao aoselementos da i-esima linha, do determinante de uma matriz com duas linhas (a i-esima ea k-esima) iguais a Wk. Logo 〈Wk,Wi〉 = 0 para k �= i.
Assim, para todo ponto W ∈ M onde f |M atinja seu valor maximo e uma matrizcujas linhas sao vetores unitarios, 2 a 2 ortogonais; isto e, W e uma matriz ortogonal.Em particular, det W = ±1. Por ser det W maximo, seu valor e evidentemente 1.
Concluimos que det W ≤ 1 para toda W ∈ M, o que demonstra a desigualdadede Hadamard.
Observacao: O valor de det X e o volume do paralelepıpedo n-dimensional deter-minado pelos vetores X1, X2, ..., Xn, que significa, geometricamente, que se mantivermosconstantes os comprimentos desses vetores, det X se torna maximo quando eles forem 2 a2 perpendiculares, caso em que o volume do paralelepıpedo e o produto |X1|.|X2|...|Xn|dos comprimentos das arestas.
Referencias
[1] Lima, Elon Lages. Curso de Analise, vol. 2. Rio de Janeiro: Projeto Euclides,IMPA. 1981.
[2] Lima, Elon Lages. Analise no Espaco Rn. S. Paulo: Editora Edgar Blucher.1970.
[3] Lima, Elon Lages. Espacos Metricos, vol. 2. Rio de Janeiro: Projeto Euclides,IMPA. 1977.

FAMAT em Revista
Revista Científica Eletrônica daFaculdade de Matemática - FAMAT
Universidade Federal de Uberlândia - UFU - MG
Número 07 - Setembro de 2006
www.famat.ufu.br
Problemas e Soluções
�

Comitê Editorial da Seção Problemas e Soluções
do Número 07 da FAMAT EM REVISTA:
Luiz Alberto Duran Salomão (coordenador da seção) Márcio José Horta Dantas
Marcos Antônio da Câmara
Problemas e Solucoes
A revista eletronica FAMAT em Revista publica regularmente uma secao de proble-mas com o tıtulo Problemas e Solucoes. Todos os interessados podem participar dessasecao apresentando solucoes para os problemas ja publicados ou propondo novos proble-mas. Serao publicados problemas de matematica basica ou superior, assim como enigmasde natureza logica que desafiem nossos leitores e lhes proporcionem bom treinamento naresolucao de problemas. O comite editorial selecionara, dentre os problemas propostos, osque mais se destacarem por sua beleza, relevancia e originalidade. Problemas propostosem um numero da revista terao suas solucoes publicadas no numero seguinte. Quandoda publicacao de problemas ou resolucoes enviados por leitor, serao citados o(s) propo-nente(s) e o(s) autor(es) das solucoes recebidas. Ao propor um problema, o leitor deveraencaminhar sua solucao juntamente com o enunciado e citar a fonte de onde ele foi tirado,se for o caso.
Todo participante dessa secao devera identificar-se mencionando seu nome e enderecocompletos (inclusive e-mail). Para fazer contato com a revista, os participantes poderaoutilizar o endereco eletronico
ou encaminhar correspondencia para:
FAMAT em RevistaFaculdade de Matematica
Universidade Federal de UberlandiaAv. Joao Naves de Avila, 2121, Santa Monica
CEP 38408-100 - Uberlandia - MG
Nesse numero, alem de quatro novos desafios, publicamos a resolucao dos quatro donumero anterior.
ATENCAO: Estaremos dando continuidade a promocao do numero anterior. Para osleitores que nos enviarem solucoes corretas, de pelo menos dois dos problemas propostos,estaremos sorteando em Abril de 2006 alguns exemplares do livro:
MOREIRA, C. et. alli. (orgs.) Olimpıadas Brasileiras de Matematica. 9 a . a16 a . Problemas e resolucoes. Rio de Janeiro: Publicacao da Sociedade Brasileira deMatematica, 2003.
“A filosofia esta escrita nesse grande livro - ou seja, o Universo -que se encontra aberto continuamente ante os nossos olhos, mas elenao pode ser entendido a menos que se aprenda, primeiro, a ler sua
linguagem e interpretar as letras com as quais o compuseram. Ele foiescrito no idioma da matematica e seus sımbolos sao triangulos,
cırculos e outras figuras geometricas, sem as quais e humanamenteimpossıvel entender uma unica palavra de seu texto.”
Galileu Galilei, Il Saggiatore (1623)

Resoluções Dos Problemas Da Edição Número 6
21. Mostre que as medianas de um triângulo dividem a região que ele limita em seis regiões de áreas iguais. Resolução: Dado um triângulo ABC, chame AP, BQ e CR suas medianas e O o seu baricentro. Os triângulos OAR e ORB têm a mesma área – vamos chamá-la s1 – pois têmrespectivas bases e alturas iguais. Repetindo o mesmo argumento, temos que os triângulos OBP e OPC têm a mesma área – digamos s2 – e, também OCQ e OQA, cuja área comum vamos representar por s3. Agora, a área do triângulo ABP é a mesma do triângulo RBC, pois ambas são a metade da área do triângulo ABC; esta igualdade pode ser expressa como 2s1 + s2 = s1 + 2s2. Daí, temos que s1 = s2. De modo inteiramenteanálogo, podemos mostrar que s2 = s3 , o que completa a demonstração.
22. Dados um ângulo AÔB e um ponto P em seu interior, construa (com régua e compasso) um ponto X sobre a semi-reta de origem O passando por A e um ponto Ysobre a semi-reta de origem O passando por B, de modo que o ponto P esteja entre X e Ye PX = PY. Justifique a construção. Resolução: Pelo ponto P, trace a reta paralela à semi-reta de origem O que passa por A e chame Q o ponto onde ela intersecta a semi-reta de origem O que passa por B. Agora, tome Y na semi-reta de origem O que contém B de modo que Q esteja entre O e Y e OQ= QY. Por fim, trace a reta por Y e P; o ponto onde esta reta intersecta a semi-reta de origem O que passa por A é o ponto X procurado. Para justificar essa construção, veja que o fato de Q estar entre O e Y acarreta que P está entre X e Y e, além disso,
1QYQO
PYPX
.
23. Dados um ângulo AÔB e um ponto P em seu interior, construa um segmento XY,com X sobre a semi-reta de origem O passando por A e Y sobre a semi-reta de origem Opassando por B, que contenha P, de modo que o triângulo OXY tenha área mínima.Justifique a construção. Resolução: Construa o segmento XY como no problema de número 22. Sejam, agora, X’um ponto sobre a semi-reta de origem O passando por A e Y’ um ponto sobre a semi-reta de origem O contendo B, de modo que P esteja entre X’ e Y’, e X’ seja diferente de X (conseqüentemente, Y’ é diferente de Y). Vamos, a seguir, mostrar que área(OXY) < área(OX’Y’). Como PX’ é diferente de PY’, vamos admitir, sem perda de generalidade, que PX’ > PY’. Pelo ponto X, trace uma reta paralela à semi-reta de origem O passando por B e chame Z o ponto onde esta reta intersecta o segmento de extremidades P e X’.Pelo caso ângulo-lado-ângulo, os triângulos PYY’ e PXZ são congruentes e, portanto, têm a mesma área. Para concluir, veja que área(OXY) = área(OPY’) + área(PYY’) + área(OPX) = área(OPY’) + área(PXZ) + área(OPX) < área(OPY’) + área(PXZ) + área(OPX) + área(ZXX’) = área(OX’Y’).

24. Mostre que o polinômio x2n – 2 x2n-1 + 3x2n-2 - . . . – 2nx + 2n + 1 não tem raízes reais.Resolução: Para 0x , = x)(xp 2n – 2 x2n-1 + 3x2n-2 - . . . – 2nx + 2n + 1>0, como é fácil ver. Suponha, agora, x>0. Assim, veja que
xp(x) + p(x) = x2n+1 – x2n + x2n-1 - x2n-2 + . . . + x + 2n + 1,
o que acarreta
(1+ x)p(x) = 121
1 12
nx
xxn
.
Daí, concluímos que p(x) > 0, sempre que x > 0.

Problemas Propostos
25. É possível embrulhar um cubo de aresta 1 utilizando uma folha de papel quadrada 3 3? Justifique sua resposta.
26. Se a são constantes reais, onde n é um inteiro positivo, enaa ,,, 21
xnxaxaxa n ,0cos2coscos 21 R,
mostre que a , para i = 1, 2, , n.0i
27. É possível extrair da seqüência ,8
1,
4
1,
2
1,1 uma subseqüência cuja soma dos
termos seja 7
1? Justifique sua resposta.
28. Sejam a, b, c e d números reais positivos. Demonstre a seguinte desigualdade:
cbdacdab .
FAMAT em Revista
Revista Científica Eletrônica daFaculdade de Matemática - FAMAT
Universidade Federal de Uberlândia - UFU - MG
Número 07 - Setembro de 2006
www.famat.ufu.br
Eventos

Comitê Editorial da Seção Eventos
do Número 07 da FAMAT EM REVISTA:
Maria Luiza Maes (coordenador da seção) Marcos Antônio da Câmara Márcio José Horta Dantas
EVENTOS
Gostaríamos de enfatizar aqui, A VI Semana da Matemática, evento a ser realizado nos dias de 12 à 15 de dezembro. No próximo número daremos os detalhes da realização deste evento.
VI Semana da Matemática – 12 à 15/12/06 Inscrições: 6/11 à 8/12 – www.famat.ufu.br/sematInformações: PET/ Matemática e DAMAT Palestrantes e Ministrantes de Mini-Cursos Técnicos:
1) Prof. Dr. Geovan Tavares – PUC – Rio de Janeiro – RJ (Palestra em Matemática Aplicada)
2) Prof. Dr. Antônio José Manzato – IBILCE – UNESP (Palestra em Estatística Aplicada)
3) Prof. Ms. Luís Márcio Pereira Imenes – Autor de Livros Didáticos – São Paulo – SP (Palestra em educação em Matemática)
4) Prof. Dr. Marcelo Viana – IMPA – Rio de Janeiro – RJ (Palestra em Matemática Pura)
5) Prof. Dr. Pedro Alberto Morettin – IME – USP – São Paulo – SP (Mini-curso técnico em Estatística Aplicada)
6) Profª. Drª. Rosa Maria dos Santos Barreiro Chaves – IME – USP – São Paulo – SP (Mini-curso técnico em Matemática Pura)
7) Profª. Drª. Sandra Augusta Santos – IMECC – UNICAMP – Campinas - SP (Mini-curso técnico em Matemática Aplicada)
8) Prof. Dr. Sérgio Apparecido Lorenzato – FE – UNICAMP – Campinas – SP (Mini-curso em educação em Matemática)
IV Encontro Mineiro de Educação em Matemática – 02,03 e 04/11/06
Inscrições: 10/08 à 20/10 Informações: www.unibh.br/sbemmg
XXII Semana da Matemática – 25/09 á 29/09/06 Inscrições: A partir de 28/08/06 Informações: www.mat.uel.br/semana/apresent.htm
XVIII Semana da Matemática – 24/10 à 27/10/06 Informações: www.mat.ibilce.unesp.br/semat
1ª Semana da Matemática – 17/11 à 21/11/06 Inscrições: 05 à 17/11Informações: www.mat.unb.br/~semana

III Semana da Matemática da Universidade Federal Fluminense (Niterói – RJ) – 8 à 11/11/06
Informações: www.uff.br/semanadamatenatica
III Bienal da Sociedade Brasileira da Matemática – 06 à 10/11/06 Inscrições: 15/09 à 25/10 Informações: www.mat.ufg.br/conteudo/extensao/bienal
IV Encontro Interno e X Seminário de Iniciação Científica – 07 e 08/11/06
Informações: www.ic-ufu.com.br
14ª SIICUSP – Simpósio Internacional de Iniciação Científica da Universidade de São Paulo - USP - 06, 07 e 08 de novembro de 2006 Informações: http://www.usp.br/siicusp/
FAMAT em Revista
Revista Científica Eletrônica daFaculdade de Matemática - FAMAT
Universidade Federal de Uberlândia - UFU - MG
Número 07 - Setembro de 2006
www.famat.ufu.br
Reflexões Sobre o
Curso de Matemática

Comitê Editorial da Seção Reflexões sobre o Curso de Matemática do Número 07 da FAMAT EM REVISTA:
Márcio José Horta Dantas (coordenador da seção) Marcos Antônio da Câmara
Valdair Bonfim
Reflexões sobre o Curso de Matemática
Falando um pouco sobre o processo ensino-aprendizagem.
Não pretendo neste artigo nenhum aprofundamento num tema que certamente é tão complexo como o de ensinar, e talvez mais complexo ainda em se tratando do caso particular de ensinar Matemática. Quase tudo o que falarei é sobre o ensino específico de Matemática, mas também é verdade que grande parte se aplica ao ensino de uma forma geral. Gostaria inicialmente de tranqüilizar o leitor quanto ao que escrevi acima em itálico. De fato, não que o ensino de Matemática seja mais complexo que o ensino das demais áreas do conhecimento, mas sim que ele está mais complexo por uma série de circunstâncias. Vou discorrer sobre algumas delas seguindo mais ou menos uma ordem cronológica, que vai da infância até a fase adulta de uma pessoa. Uma destas circunstâncias infelizmente já aparece no dia-a-dia da criança, às vezes no lar, antes mesmo desta adentrar os muros de uma escola. Trata-se do infeliz mas costumeiro hábito da grande maioria dispensar à Matemática adjetivos que, verdadeiramente, não lhe são próprios: difícil, chata, impossível de ser assimilada por pessoas normais, coisa de fanáticos, e por aí afora. Até mesmo os comentários negativos mais ingênuos sobre a Matemática dentro do lar são incorporados pelas crianças, que vão formando em sua mente aquilo que, para ela, deve ser a Matemática: um verdadeiro monstro. Até uma simples piada pode contribuir negativamente, piorando o cenário. É óbvio que em se tratando de piadas não devemos levá-las a sério, mas o estrago é grande quando há pessoas, às vezes educadores, que alimentam a “propaganda negativa”. A título de ilustração cito o seguinte exemplo, infelizmente encontrado num site que se dedica a novas metodologias de ensino. O autor da proeza deve ficar tranqüilo, pois sei que a intenção foi apenas a de fornecer um momento agradável ao leitor do site. Particularmente me rendeu boas gargalhadas, mas me preocupa a reação de leitores desavisados que comungam da idéia de que matemática não serve para nada: ao ler tal piada encontram um endosso para a sua tese. Ei-la. Dois homens viajam num balão e estão perdidos numa área deserta e desolada. Lá pelas tantas, voando em baixa altitude, avistam um indivíduo meditando à sombra de uma árvore, e aproveitam para perguntar, aos gritos: – Onde estamos, por favor? Após alguma reflexão, o homem responde: - Num balão. Um dos balonistas retruca, irritado pela “brilhante” informação: – Obrigado, senhor matemático! O homem pergunta, espantado: - Como sabe que sou matemático?, ao que o balonista responde: por três motivos. Primeiro porque o senhor pensou muito antes de responder. Segundo, porque sua resposta é precisa. Terceiro, porque ela não serve para nada! Repare que um aspecto importante no processo de aprendizagem da matemática, qual seja, o ato de pensar bastante, é colocado como algo negativo. Claro que ninguém deveria demorar muito para dar uma resposta tão óbvia e desnecessária quanto a dada pelo colega matemático, mas a piada embute, num certo sentido, uma falsa imagem de que qualidade mesmo é sempre dar uma resposta rápida. Outra coisa mais negativa ainda é a falsa idéia de que, além do fato de demorarem para dar uma resposta, esta não tem valor algum. Poder-se-ia dizer que, de fato, há matemáticos que se ocupam em desenvolver belas teorias, às vezes muito complexas e também muito distantes do alcance de parcela significativa da população. Teorias que parecem não fornecer, de imediato, nenhuma aplicação prática. Entretanto, não se pode desestimular o exercício do pensamento matemático pelo simples fato dele não ser compreendido pela maioria. De fato, a grande maioria da população desconhece os detalhes teóricos que fazem um carro funcionar, mas isso nunca foi, não é, e nunca

deverá ser motivo para desestimular pesquisas nesta área do conhecimento. O carro não deixa de ser útil à pessoa que não conhece o seu funcionamento. Tampouco se deve desestimular o exercício do pensamento matemático pelo simples fato dele, via de regra, não render aplicações a curto prazo. A história já se encarregou de demonstrar isso. De fato, as antenas parabólicas herdam este nome por serem pedaços de superfície obtidas pela rotação de um pedaço de uma curva chamada parábola, em torno de seu eixo de simetria. As antenas parabólicas são assim construídas por causa das propriedades refletoras da parábola, que permitem por exemplo ampliar os sinais recebidos de um satélite artificial, permitindo a reprodução de uma imagem numa tela de televisão, ou então redirecionar os raios luminosos emanados de uma lâmpada posicionada adequadamente no farol de um carro, que para cumprir esta função é fabricado com formato parabólico. Observe que as antenas e os carros são invenções relativamente recentes comparadas com a época em que as propriedades das parábolas, e mais geralmente o estudo das cônicas, foram levadas a termo. Dentre as centenas de matemáticos que se dedicaram ao estudo das cônicas, e que quase certamente jamais vislumbraram as futuras aplicações das mesmas, cito apenas alguns: Hipócrates de Quios - 431 aC; Menecmos, discípulo de Eudoxo, por volta de 350 aC; Euclides – 300 aC; Apolônio de Perga, 225 aC, cujo trabalho é considerado de altíssima qualidade, mas que não tinha à época nenhum objetivo imediato. Apolônio estudava o assunto pela beleza intrínseca do mesmo. O resultado dos estudos de Apolônio vieram a ter suas primeiras aplicações bem mais tarde com os trabalhos de Kepler e Newton, quase 800 anos depois. Após breve divergência do assunto principal, voltemos a comentar sobre mais algumas circunstâncias que fazem do ensino de matemática uma tarefa complexa. Além daquilo que já foi comentado, ou seja, de que muita injustiça é feita à matemática, imputando-lhe adjetivos que intimidam qualquer mortal, há que se acrescentar que em geral nenhum esforço é empreendido pelos pais no sentido de estimularem, em seus filhos, o desenvolvimento da capacidade de pensar matematicamente. Não se trata de obrigá-los a estudar muitas horas além daquelas já habituais e necessárias durante o dia. Isto pode ter um efeito contrário. Trata-se de não desperdiçar momentos ricos que ocorrem naturalmente no quotidiano da criança. Deve-se aliar o útil ao agradável. Se é importante para a criança as brincadeiras e as atividades lúdicas, porque não aproveitar estes momentos? É possível ensinar frações a uma criança enquanto se come uma bela pizza, fazendo-a entender que dois oitavos da pizza é equivalente a um quarto da mesma, ou que quatro oitavos é equivalente à metade da pizza. Até mesmo quando a criança brinca é possível estimular este desenvolvimento. Um parque de diversões pode ser de uma riqueza impressionante, com várias oportunidades de se contextualizar, por exemplo, a geometria euclidiana. Isso tudo enquanto se brinca no escorregador, na gangorra, no balanço. É um local onde a criança ou o adolescente pode comprovar a eficiência da matemática que aprende na escola: seja fazendo uma medida indireta da altura do escorregador a partir da medida de sua sombra, usando-se semelhança de triângulos, ou então especulando as razões pelas quais a sombra da roda-gigante projetada no chão não é uma circunferência. O Princípio de Cavalieri, tópico da geometria espacial, pode ser explorado naturalmente durante um intervalo de um jogo de baralho, pela simples manipulação de um monte de cartas deste baralho. O próprio baralho, ou mais geralmente os jogos, tem muito valor, pois as diferentes estratégias para a vitória são um excelente exercício do pensamento matemático. Passemos à adolescência. Nesta fase, até as compras num shopping podem ser bem exploradas, fazendo o jovem pensar no que é melhor entre uma compra a vista ou uma compra a prazo. Ele deve ser estimulado a fazer comparações antes de tomar decisões, e tudo deve ser feito para que ele veja alguma vantagem pessoal concreta naquele exercício
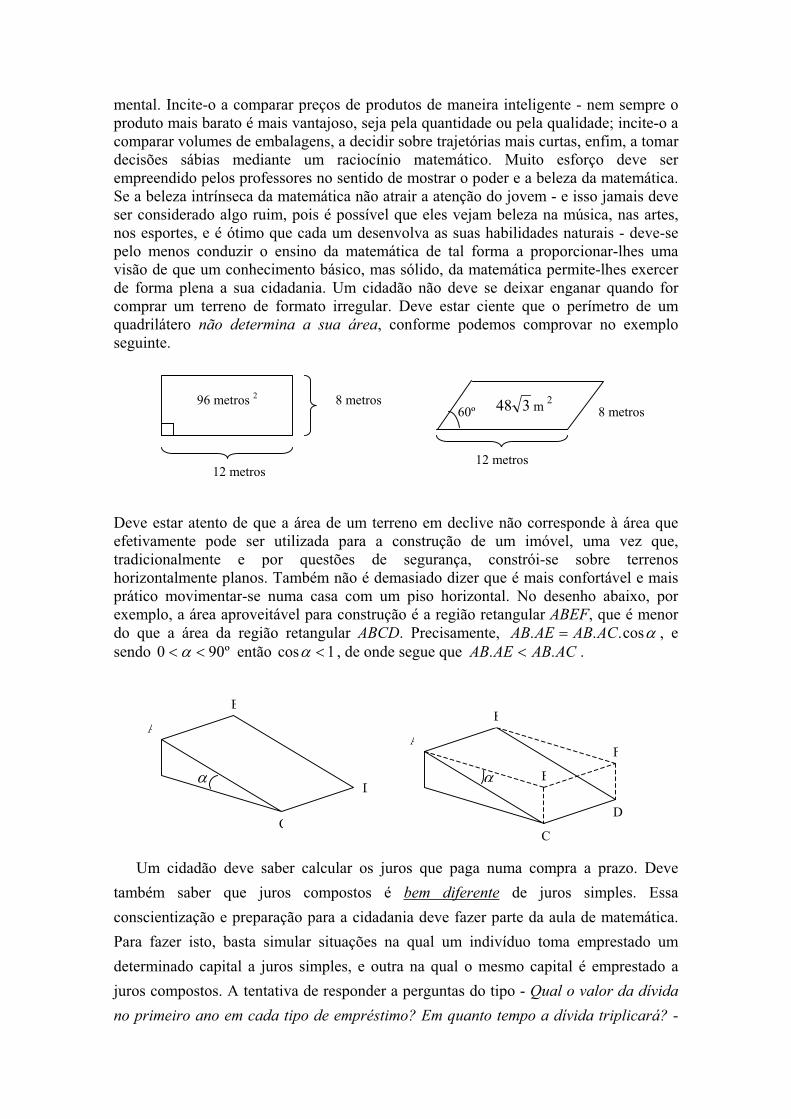
mental. Incite-o a comparar preços de produtos de maneira inteligente - nem sempre o produto mais barato é mais vantajoso, seja pela quantidade ou pela qualidade; incite-o a comparar volumes de embalagens, a decidir sobre trajetórias mais curtas, enfim, a tomardecisões sábias mediante um raciocínio matemático. Muito esforço deve ser empreendido pelos professores no sentido de mostrar o poder e a beleza da matemática.Se a beleza intrínseca da matemática não atrair a atenção do jovem - e isso jamais deve ser considerado algo ruim, pois é possível que eles vejam beleza na música, nas artes, nos esportes, e é ótimo que cada um desenvolva as suas habilidades naturais - deve-se pelo menos conduzir o ensino da matemática de tal forma a proporcionar-lhes umavisão de que um conhecimento básico, mas sólido, da matemática permite-lhes exercer de forma plena a sua cidadania. Um cidadão não deve se deixar enganar quando for comprar um terreno de formato irregular. Deve estar ciente que o perímetro de umquadrilátero não determina a sua área, conforme podemos comprovar no exemploseguinte.
34896 metros 2 8 metros m 260º 8 metros
12 metros12 metros
Deve estar atento de que a área de um terreno em declive não corresponde à área que efetivamente pode ser utilizada para a construção de um imóvel, uma vez que, tradicionalmente e por questões de segurança, constrói-se sobre terrenos horizontalmente planos. Também não é demasiado dizer que é mais confortável e maisprático movimentar-se numa casa com um piso horizontal. No desenho abaixo, por exemplo, a área aproveitável para construção é a região retangular ABEF, que é menordo que a área da região retangular ABCD. Precisamente, cos... ACABAEAB , e sendo 0 º90 então cos 1 , de onde segue que ACAB.AEAB. .
BB
AA
F
ED
DC
C
Um cidadão deve saber calcular os juros que paga numa compra a prazo. Deve
também saber que juros compostos é bem diferente de juros simples. Essa
conscientização e preparação para a cidadania deve fazer parte da aula de matemática.
Para fazer isto, basta simular situações na qual um indivíduo toma emprestado um
determinado capital a juros simples, e outra na qual o mesmo capital é emprestado a
juros compostos. A tentativa de responder a perguntas do tipo - Qual o valor da dívida no primeiro ano em cada tipo de empréstimo? Em quanto tempo a dívida triplicará? -

naturalmente levará aos tópicos das progressões aritméticas, progressões geométricas, e
das funções exponenciais e logarítmicas. Uma abordagem deste tipo valoriza o conteúdo
ensinado. Do contrário, o aluno terá a nítida impressão de que estes conteúdos só
aparecem nos exames escolares e no vestibular, e de que portanto estas devem ser as
únicas motivações para seu estudo. Quando isto ocorre é pior ainda, pois fica instalado o
ambiente propício para a memorização de fórmulas e receitinhas. Quem nunca ouviu o
famoso paralelo com a Canção do Exílio, antigo poema de Gonçalves Dias publicado
em 1846 no livro Primeiros Cantos, utilizado nos cursinhos preparatórios ao vestibular
para que os alunos memorizem mais facilmente a identidade trigonométrica
? Como os objetivos são imediatistas - a
saber: passar de ano; passar no vestibular -, não se “perde tempo” com demonstrações.
Não quero dizer que não se pode usar estratégias para memorização em determinadas
situações, principalmente naquelas em que certas fórmulas ou identidades são usadas
com freqüência. Não é nada prático ter que demonstrar alguma coisa toda vez que ela se
fizer necessária, mas também é inaceitável que os resultados não sejam demonstrados
pelo menos uma vez. Concordo que há situações nas quais uma demonstração rigorosa
de um resultado pode empregar métodos que fogem totalmente dos objetivos propostos,
como por exemplo uma demonstração rigorosa do Teorema Fundamental da Álgebra.
Pode-se demonstrá-lo rigorosamente com técnicas de variáveis complexas, ou com
topologia algébrica, por exemplo. Claro que jamais devemos tentar uma demonstração
rigorosa deste teorema no ensino médio, mas mesmo nesse nível do ensino é possível
utilizar alguns argumentos que tornam este teorema um resultado plausível, como se
pode ver em [1]. Não se trata de uma demonstração rigorosa, mas são argumentos que
convencem. O aluno encontrará prazer ao entender uma demonstração, e sou prova
disso atuando na docência. Aliás, na minha opinião acho estes os momentos mais
prazerosos no processo ensino-aprendizagem, apesar das várias decepções que
frequentemente vivencio. Para o aluno são momentos de descoberta. Resumindo, não
sou contra técnicas de memorização, mas sou extremamente convicto de que o ensino
de matemática jamais pode se reduzir num conjunto de regrinhas. Num ambiente assim
raciocina-se muito pouco. Os alunos, mal instruídos talvez pelo professor ou pelo livro
didático, limitam-se a aplicar de modo mecânico estas “receitas”. Infelizmente há ainda
aqueles professores que tentam classificar os problemas, com procedimentos específicos
para cada tipo. Como se não fosse possível enunciar algo inteiramente fora da
classificação dada. Repito: deve se estimular antes o raciocínio. Já que mencionei os
livros didáticos, aproveito para opinar que, em geral, este pode se caracterizar em outra
circunstância que torna complexa a tarefa de ensinar matemática. Às vezes há tentativas
forçadas de contextualização de conteúdos, com exemplos irreais, ou longe da realidade
)cos().()cos().()( absenbasenbasen
dos alunos. Consegue-se um efeito contrário ao que realmente se deseja, que é pôr em
relevo a importância da matemática através das suas aplicações. Os livros didáticos tem
que proporcionar minimamente aquilo que o professor Elon Lima [2] denomina as três componentes básicas sobre as quais devem apoiar o ensino da matemática, que são a conceituação, a manipulação e as aplicações. Claro que não bastam os livros com estas
características: faz-se necessária a complementação e intermediação indispensável de
um professor bem formado, juntamente com o compromisso e o interesse por parte do
aluno. Entretanto, uma boa formação docente não termina com os estudos em nível
superior, com uma simples graduação, por exemplo. É necessário uma formação
continuada – cursos de especialização, mestrado, doutorado, participação em
congressos, participação em projetos que envolvem a universidade e a escola básica, na
busca de solução para os problemas relacionados ao ensino – e aqui nos deparamos com
outra circunstância complicadora, uma vez que os professores da educação básica
precisam dedicar-se integralmente à docência, às vezes em três turnos, devido aos
baixos salários dispensados a esta categoria. Como participar com aproveitamento,
portanto, de programas de formação continuada sob situações tão adversas? A melhoria
que o país pretende na área da educação não passa somente pela reformulação de
currículos que estamos presenciando atualmente, mas dos investimentos nesta área.
Enquanto a França, com uma população bem menor do que a nossa, emprega 7% de seu
PIB na educação, o Brasil não chegou ainda a 1%. Vou agora expor mais alguns
complicadores, e estes se aplicam ao ensino de um modo geral, e não especificamente
ao da matemática. Quero falar das dificuldades particulares dos professores frente aos
modernos sistema de ensino. De antemão já deixo claro que não estou a defender o
modelo antigo, mas apenas considerando dificuldades surgidas no novo. Vou expor de
maneira bastante resumida, e portanto incompleta, aquilo que Zagury [3] discorre com
bastante propriedade no primeiro capítulo de seu livro Professor Refém. Alguns trechos
serão mera transcrição do referido livro. Nos antigos sistemas de ensino o controle de uma sala de aula era mais fácil para o professor, pois o poder ficava todo concentrado nas suas mãos. O professor ensinava e o aluno tentava aprender, de preferência bem
comportado no seu canto. O modelo antigo era autoritário, impunha medo. Lembro de
histórias escabrosas contadas pelo meu pai a respeito de alguns de seus colegas que
eram submetidos a castigos e constrangimentos por não terem, por exemplo,
memorizado a tabuada no tempo determinado pelo professor. Ajoelhar no milho ou não
participar do momento de recreação eram exemplos canônicos de punição daquela
época. Ainda bem que estes são tempos idos. Já na escola moderna tudo é passível de
discussão, desde o conteúdo até a metodologia e a forma de avaliação. A hierarquia de
poder nesta sala de aula fica menos visível, e para alguns estudantes até mesmo
inexistente. E aqui reside um grave perigo, pois neste tipo de sala de aula os alunos, e
muitas vezes seus responsáveis, se sentem no direito de opinar ( determinar? ) “o que querem aprender”, “o que gostam” e até como querem o que gostam. Não é por acaso que os professores se queixam das dificuldades de motivar, de ter alunos interessados. Torna-se tarefa muito difícil conciliar gostos, propostas e objetivos os mais variados. Chegar ao consenso numa turma pode tornar-se uma tarefa quase impossível. Especialmente quando boa parte dos alunos, muito mais interessados em “passar de ano” (se possível com o menor esforço possível) do que realmente aprender, toma consciência dessa possibilidade e a transforma num ótimo instrumento para o imediatismo que os caracterizam. Com tal prática estes alunos se tornam os maiores
prejudicados, pois saem da escola sem as habilidades e competências esperadas.
Salvadas as exceções, são estes os alunos que estamos recebendo na universidade:
alunos vítimas de suas próprias escolhas. Aquilo que foi incorporado no moderno
sistema de ensino como uma possibilidade de atender aos gostos e às realidades de um
determinado grupo de alunos, foi transformado numa maneira de abreviar caminhos e
contornar dificuldades incontornáveis, inerentes ao processo de ensino e aprendizagem.
Aprender também exige esforço do aluno, e não somente do professor. O professor não
é inteiramente responsável pelo ato de ensinar. Ele, com sua experiência, criará
condições favoráveis para que o aluno consiga aprender por si mesmo. Outra
dificuldade encontrada pelo professor é o fato dele, quase sempre, ser responsabilizado
pelo fracasso do aluno. Definitivamente não é verdade que com um bom professor os alunos aprendem sem fazer esforços, sem fazer tarefas ou atividades em casa, sem
concentração. É óbvio que o professor responsável deverá planejar bem a sua aula,
incorporar novas tecnologias de informação e comunicação, utilizar-se de oficinas
quando for o caso, escolher problemas instigantes, motivadores e desafiadores, ser
acessível ao aluno e sempre disponível às suas indagações. Tudo isso favorecerá a
aprendizagem, mas jamais garantirá a mesma, a não ser que o aluno se comprometa com
o seu esforço. Na minha opinião isso implica na necessidade, por parte do aluno, de um
planejamento de estudos e uma rígida disciplina. É necessário estudos individuais,
leituras complementares, estudos e reflexões em grupo. Há escolas que erram ao
fazerem os alunos e seus familiares acreditarem que, com bons professores, o processo
da aprendizagem estará garantido como que num passe de mágica. Claro que estas
escolas, em geral particulares, fazem isto para conquistar “mais clientes”. Em geral há
prejuízos quando a educação é encarada como mercadoria. O pior são aquelas escolas
que forjam resultados artificiais para aprovar, indevidamente, um aluno sem mérito cujo
pai é fiel pagador das mensalidades escolares. Qualquer gestor que pense somente do
ponto de vista empresarial cogitará numa possibilidade destas para não perder o bom
cliente. Isso é concreto, pois ouvi relato semelhante de uma colega professora que já deu
aulas em instituição particular de “boa reputação”. Mas passemos a outra circunstância
complicadora, apontada por Zagury no livro já mencionado. Com a informação
globalizada e democratizada da atualidade, a sociedade tomou ciência de alguns
modernos conceitos de educação, e aquilo que novamente poderia ser positivo, passou a
ser mais um problema. De fato, muitos confundem o seu pequeno arsenal de
informações com o domínio pleno do saber, e a partir daí sentem-se habilitadas a
questionar a pedagogia da escola. Não que isto não deve ser feito, pois há casos em que
isto é até mesmo necessário. O ruim é que às vezes, conhecendo pouco sobre
determinada teoria educacional, certos pais fazem generalizações equivocadas,
querendo propor coisas absurdas. E aquilo que poderia ser um questionamento legítimo,
assume a forma de confronto, muitas vezes culminando em processos e demandas
judiciais. Coitado do professor sério e competente, que muitas vezes se sente inseguro e
até mesmo ameaçado por pais e alunos, pela sociedade, e até mesmo pelo próprio
sistema interno da escola, que requer resultados a todo custo. Num clima deste o
professor torna-se, como bem percebeu Zagury, refém de todo um contexto, que o
mantém fragilizado e em permanente estresse: tem medo de perder o emprego, tem
medo de ser contestado judicialmente, tem medo de não agradar, enfim, tem medo de
exercer plenamente a profissão que escolheu. Para finalizar este artigo menciono que,
quando as coisas não vão bem, mudanças se fazem necessárias. Há alguns anos atrás
várias reuniões foram promovidas pelo Conselho Nacional de Educação para repensar
os currículos dos cursos de formação de professores, e estas reuniões culminaram com a
elaboração das Diretrizes Curriculares Nacionais para tais cursos. Seguindo estas
diretrizes a nossa faculdade de matemática elaborou uma proposta de projeto
pedagógico que contempla as aspirações de seus membros. Aqueles espaços de
“desordem criativa” mencionados pelo Prof. Paulo Cezar Pinto Carvalho em [4] a ser
pensado na escola básica para favorecer os processos de discussão, foram concretizados
em nosso projeto pedagógico através dos PIPE´s ( Projetos Integrados de Prática
Educativa). Trata-se de um componente curricular novo no qual a ordem natural de uma
sala de aula tradicional ( com carteiras voltadas para a lousa ) é totalmente abolida. Em
alguns casos, a sala como um todo é abolida, pois as atividades acabam sendo não
presenciais. Incorporando essas novidades, nosso projeto foi aprovado, mas não antes de
enfrentarmos sérias dificuldades em conselhos superiores. Verdadeiros confrontos. Por
esta razão vou transcrever algo que acho bastante adequado para o momento,
principalmente por não serem palavras minhas e nem de algum colega da nossa
faculdade de matemática, o que poderia denunciar um corporativismo. São palavras de
Tânia Zagury, professora da Faculdade de Educação da Universidade Federal do Rio de
Janeiro, várias vezes citada neste artigo: Se de fato queremos resolver problemas educacionais, temos que nos munir da necessária isenção intelectual, de uma rígida disposição de não prejulgar, de nada predeterminar. Precisamos ter posturas mais
científicas, e, como se faz em qualquer ciência, pedir (exigir?) dos que defendem a adoção desta ou daquela medida que esclareçam em que se baseia sua escolha e quais as medidas necessárias para sua efetivação na prática.
Bibliografia
[1] Matemática no Ensino Médio. Lima; Morgado; Wagner; Carvalho.
Volume 3; Coleção do Professor de Matemática.
[2] Matemática e Ensino. Lima, Elon Lages. 1ª Edição. Coleção do Professor de Matemática. Publicação SBM, 2001. ISBN 858581815-8.
[3] Professor Refém Zagury, Tânia.
Editora RCB, ISBN: 8501074659; Edição: 2006.
[4] Fazer Matemática e Usar Matemática. Carvalho, Paulo Cezar Pinto. Salto Para o Futuro / TV Escola
FAMAT em Revista
Revista Científica Eletrônica daFaculdade de Matemática - FAMAT
Universidade Federal de Uberlândia - UFU - MG
Número 07 - Setembro de 2006
www.famat.ufu.br
Em Sala de Aula

Comitê Editorial da Seção Em Sala de Aula
do Número 07 da FAMAT EM REVISTA:
Márcio José Horta Dantas (coordenador da seção) Marcos Antônio da Câmara

Indice de Trabalhos
Metodologia de Resolucao de Problemas no Ensino de Matematica 256
Laıs Bassame Rodrigues e Eugenio Antonio de Paula
O Papel da Matematica na Optica 278
Mariana Ramos Reis e Luiz Alberto Duran Salomao

Metodologia de Resolucao de Problemas no Ensino
de Matematica∗
Laıs Bassame Rodrigues† Eugenio Antonio de Paula‡
Faculdade de Matematica - Famat
Universidade Federal de Uberlandia - Ufu - MG
Setembro de 2006
Introducao
Uma grande descoberta resolve um grande problema, mas ha sempre uma pitada de descoberta naresolucao de qualquer problema. O problema pode ser modesto, mas se ele desafiar a curiosidade e
puser em jogo as faculdades inventivas, quem o resolve por seus proprios meios, experimentara a tensaoe gozara o triunfo da descoberta.
(George Polya, A Arte de Resolver Problemas, 1994)
A matematica provoca as mais diversas reacoes entre adultos e criancas, enquanto alguns se divertemresolvendo problemas, outros demonstram aversao ou incapacidade em relacao a matematica.
”O que para alguns e um problema, para outros e um exercıcio e para alguns outros uma distracao”.
A dificuldade em relacao a aprendizagem da matematica e, em parte, justificada pela complexidadedesta area de conhecimento. E claro que o desinteresse dos alunos tambem e causa dessa dificuldade,ainda que a metodologia adotada pelo professor tenha que ser considerada. Mas, o aluno assume a culpaquando diz que ”nao entendo”, ”nao sou bom em matematica”, ou tem dificuldades em contas e raciocıniomatematico. No entanto, essa culpa tambem pode ser dos professores cujo modelo de ensino e rıgido,anacronico, ortodoxo.
Para compreender essas dificuldades evidenciadas pelos alunos uma das variaveis dessa dinamicacomplexa e a metodologia usada pelo professor.
”E importante que a matematica desempenhe equilibrada e indissociavelmente seu papel na formacaodas capacidades intelectuais na estruturacao do pensamento, na agilizacao do pensamento dedutivo doaluno, na sua aplicacao a problemas da vida cotidiana e atividades do mundo, do trabalho e no apoio aconstrucao em outras areas curriculares.”
Para que a aprendizagem da matematica desempenhe esse papel, a resolucao de problemas e um meioque o professor pode recorrer.
No contexto da educacao matematica, um problema, ainda que simples, pode suscitar o gosto pelotrabalho mental se desafiar a curiosidade e proporcionar ao aluno o gosto pela descoberta de resolucao.E ao tentar resolve-los adquirir criatividade, aprimorar o raciocınio e ampliar os seus conhecimentosmatematicos. Guardadas as proporcoes, corrobora essa afirmativa o fato que fez com que Gauss decidissese tornar o grande matematico que conhecemos, foi a sua descoberta, aos 18 anos, de como construir umpolıgono regular de 17 lados, usando apenas regua e compasso.
∗Este trabalho foi desenvolvido como “Projeto Integrado de Pratica Educativa” - PIPE da disciplina “O Ensino daMatematica Atraves de Problemas” do curso de Licenciatura em Matematica.
A intencao da metodologia de resolucao de problemas e tirar o aluno de sua postura passiva, tradi-cional, para uma postura ativa, interessada.
George Polya (1887-1985) e um dos matematicos do nosso seculo que considera a Matematica comouma ”ciencia observacional” na qual a observacao e a analogia desempenham um papel fundamental.Afirma tambem a semelhanca do processo criativo na Matematica e nas ciencias naturais.
”Explorar tem aqui exatamente o sentido normal da palavra: entrar em terreno desconhecido, recolherdados, detectar diferencas, ser sensıvel as repeticoes e as analogias, reconhecer regularidades e padroes -ou porventura um sentido ainda mais forte - investigar, procurar encontrar, procurar descobrir. O espacoa explorar nao e agora o Atlantico, mas, por exemplo, uma pagina cheia de numeros”, Paulo Abrantes.
O desenvolvimento da Educacao Matematica, influenciou o surgimento de linhas de pesquisa, dentreelas a da Resolucao de Problemas. A Resolucao de Problemas passou a ser investigada como campode pesquisa em Educacao Matematica sob influencia de Polya, nos Estados Unidos, nos anos 60 e,mundialmente, na decada de 70 (Onuchic, 1999).
A Resolucao de Problemas e indicada como metodologia de ensino adequada para proporcionar aoaluno a oportunidade de pensar por si mesmo, construir estrategias de resolucao e argumentacoes, rela-cionar diferentes conhecimentos e, enfim, perseverar na busca da solucao de um problema. (Brasil, 2002)
Para Polya, ”resolver problemas” era o tema mais importante para se fazer matematica, o ”ensinar oaluno a pensar” era sua importancia primeira. Um tema que fundamenta a investigacao e a resolucao deproblemas em matematica e ”como pensar” (Onuchic, 1999, p.210).
Problema versus Exercıcio
Qual a diferenca entre problema e exercıcio? Por que nos livros didaticos nos trazem secoes deexercıcios e problemas separados para fixar ou aprender determinado topico da materia?
Em Mathematical Discovery, Polya afirma que uma pessoa tem um problema quando procura ”con-scientemente certa acao apropriada para obter um objetivo claramente concebido, mas nao atingıvel demaneira imediata”.
Um problema matematico e toda situacao requerendo a descoberta de informacoes matematicas de-sconhecidas para a pessoa que tenta resolve-lo e/ou a invencao de uma demonstracao de um resultadodado. Quem o resolve pode ate conhecer o objetivo a ser atingido, mas nao conhece meios para concretizarsua acao.
Nesse trabalho temos dois tipos de problema: Os problemas de determinacao e os problemas dedemonstracao. Tracaremos um paralelo entre estes dois tipos de problemas.
O objetivo de um ”problema de determinacao” e encontrar certo objeto, a incognita do problema.A incognita e tambem chamada de ”quaesitum”, ou aquilo que se procura ou de que se necessita. Os”problemas de determinacao” podem ser teoricos ou praticos, abstratos ou concretos, problemas seriosou simples enigmas.
O objetivo de um ”problema de demonstracao” e mostrar conclusivamente que certa afirmativa,claramente enunciada, e verdadeira, ou entao, que e falsa.
Exercıcio e uma atividade de treinamento de alguma habilidade ou conhecimento matematico, comoa aplicacao de um algoritmo ou formula ja conhecida.
Ou seja, o exercıcio e uma mera aplicacao de resultados teoricos, enquanto o problema envolve,necessariamente, uma invencao significativa.
Por exemplo, considere como resolvedor um aluno no final do Ensino Fundamental (e importante dizero perfil do resolvedor, pois o que pode ser um problema para uma pessoa pode nao ser para outra quetenha mais conhecimento ou que ja tenha visto o problema antes):
· Exercıcio: resolver a equacao x2−3x+1 = 0 (supoe-se que tal aluno conheca a formula de Bhaskara).· Problema: provar a formula de Bhaskara (supoe-se que tal aluno nunca tenha visto tal demonstracao,
mas conheca a formula); aqui percebemos a importancia de definir o perfil do aluno, pois para o professoreste nao seria um problema uma vez que provavelmente ele ja viu esta demonstracao.
· Problema (mais difıcil): descobrir, provando, uma formula para resolver toda e qualquer equacaoalgebrica do segundo grau (supoe-se que tal aluno nao conheca a formula de Bhaskara).
O problema e o meio pelo qual a matematica se desenvolve. A qualidade de um problema esta rela-cionada com a quantidade de ideias novas que ele traz a matematica e de quao ele e capaz de impulsionaros diversos ramos da matematica.
Um otimo problema matematico e sem duvida o que hoje conhecemos como o Ultimo Teorema deFermat.
Se n = 3, 4, 5, ... mostrar que nao ha x, y, z inteiros positivos tal que xn + yn = zn.
O enunciado e simples, porem foram necessarios quase 400 anos para que Andrew Willes da Universi-dade de Princeton conseguisse demonstra-lo. Willes perante este: ”aqui estava um problema que eu, comdez anos de idade, podia compreender e soube a partir desse momento que nunca mais o poderia ignorar.Tinha que o resolver”.Apesar de a utilidade desse resultado ser praticamente inexistente, as tentativasde demonstra-lo produziram ideias produziram ideias e problemas que fertilizaram inumeros campos daMatematica como a Teoria de Numeros e a Geometria Algebrica.
No caso de problemas relacionados a aprendizagem de matematica bons problemas sao aqueles quetem um enunciado acessıvel e de facil compreensao, exercite o raciocınio matematico do aluno, exijacriatividade na resolucao, sirva pra introducao de outros conceitos ou ideias e nao seja muito facil, nemmuito difıcil e sim interessante.
O interesse pelo problema de quem o resolve e essencial. ”O passo crucial do matematico pode serescolher o seu problema”, ou ate mesmo, inventa-lo.
A heurıstica de resolucao de problemas
A atividade heurıstica, definida como um esquema psıquico atraves do qual o homem cria, elabora edescobre a resolucao de um problema, e o eixo central dos estudos sobre “como pensamos”, estabelecidospor Polya, e que fundamentam a Resolucao de Problemas, linha de pesquisa em Educacao Matematica.
Em matematica a heurıstica existe desde a Grecia antiga. Considerando as questoes que fundamen-tam a linha de pesquisa Resolucao de Problemas, vestıgios de heurıstica sao encontrados em obras deArquimedes, Pappus, Descartes, Arnauld, Leibniz, Bolzano, Loria, etc.
Heurıstica, Heuretica ou “ars inveniendi” era o nome de certo ramo de estudo, nao bem delimitado,pertencente a Logica, a Filosofia ou a Psicologia, muitas vezes delineado mas raramente apresentadocom detalhes, hoje praticamente esquecido. O objetivo da Heurıstica e o estudo dos metodos e dasregras da descoberta e da invencao. Alguns indıcios desse estudo podem ser encontrados em trabalho doscomentaristas de Euclides. A este respeito, Pappus tem uma passagem particularmente interessante. Asmais famosas tentativas de sistematizacao da Heurıstica devem-se a Descartes e a Leibniz, ambos grandesmatematicos e filosofos. Bernard Bolzano apresentou notavel descricao pormenorizada da Heurıstica.(Polya, 1994, p.86)
Para explicar e discutir os processos heurısticos e os elementos que dele fazem parte temos um pequenodicionario de heurıstica. Nos problemas descritos na proxima secao utilizaremos esses elementos naresolucao dos problemas:
Para resolver problemas de qualquer natureza devemos seguir um Raciocınio Heurıstico.
Raciocınio heurıstico e aquele que nao se considera final e rigoroso, mas apenas provisorio eplausıvel, e que tem por objetivo descobrir a solucao do problema que se apresenta. Somos muitosvezes levados a usar o raciocınio heurıstico. Teremos a absoluta certeza quando chegarmos a solucaocompleta, mas frequentemente, antes de chegarmos a certeza absoluta, teremos de nos satisfazer comuma estimativa mais ou menos plausıvel. E possıvel que precisemos do provisorio antes de atingirmoso final. Para chegarmos a uma demonstracao rigorosa, e necessario o raciocınio heurıstico, assim comoandaimes sao necessarios a construcao de um edifıcio. (Polya, 1994, p.132)
Para Polya o pensamento matematico nao esta relacionado apenas com axiomas, definicoes e demon-stracoes rigorosas, mas tambem com analogias, inducoes, conjecturas, relacoes, generalizacoes e outrosprocessos mentais.
Para isso vamos nos basear na Heurıstica Moderna.
Heurıstica moderna procura compreender o processo solucionador de problemas, particularmenteas operacoes mentais, tıpicas desse processo, que tenham utilidade. Dispoe de varias fontes de informacao,nenhuma das quais deve ser desprezada. Um estudo consciencioso da Heurıstica deve levar em conta,tanto as suas bases logicas quanto as psicologicas. Nao deve esquecer aquilo que os autores antigos comoPappus, Descartes, Leibniz e Bolzano escreveram sobre o assunto, mas muito menos pode desprezar aexperiencia imparcial. A experiencia na resolucao de problemas e a experiencia na observacao dessaatividade por parte de outros deve constituir a base em que se assenta a Heurıstica. Neste estudo, naodevemos descurar de nenhum tipo de problema, e assim procurar aspectos comuns na maneira de tratarde problemas de toda sorte: devemos considerar os aspectos gerais, independente do assunto especıfico doproblema. O estudo da Heurıstica tem objetivos “praticos”: melhor conhecimento das tıpicas operacoes
mentais que se aplicam a resolucao de problemas pode exercer uma certa influencia benefica sobre oensino, particularmente sobre o ensino da Matematica. (Polya, 1994, p.87)
No processo de resolucao de problemas a primeira dica e:
Considere a incognita. Este e um velho conselho. Corresponde ao ditado latino respice finem, istoe, olhe para o fim. Lembre-se do seu objetivo. Nao esqueca de sua meta. Pense naquilo que deseja obter.Nao perca de vista o que e necessario. Tenha em mente aquilo para que esteja a trabalhar.
O processo se torna mais facil se o aluno conhece um problema correlato:
Conhece um problema correlato?, refere-se especificamente a resolucao de problemas, mas estarelacionado com o procedimento de estabelecer analogias, pois, ao procurar um problema que seja corre-lato ao que se pretende resolver, tem-se que buscar relacoes semelhantes entre eles.
Mas o que e analogia?
Analogia e uma especie de semelhanca. Objetos semelhantes coincidem uns com os outros em algumaspecto; objetos analogos coincidem em certas relacoes das suas respectivas partes. (Polya,1994, p.29)
Descartes, aponta que perceber a semelhanca de relacoes entre os objetos e uma experiencia funda-mental e primordial para a construcao do conhecimento. Dessa forma, segundo ele, cada um pode verpor intuicao intelectual que existe, que pensa, que um triangulo e limitado somente por tres linhas, umcorpo esferico por uma so superfıcie, e outros fatos semelhantes que sao muito mais numerosos do quea maioria observa, em consequencia do desdem que experimentam em voltar as sua inteligencias paracoisas tao faceis. (Descartes, 1908, p.14-15 – Trad.A.)
Polya, do mesmo modo que Descartes, considera que a analogia, ainda que em diferentes nıveis, e umprincıpio essencial que pode levar a descoberta da resolucao de um problema.
A analogia permeia todo o nosso pensamento, a nossa fala cotidiana e as nossas conclusoes triviais,assim como os modos de expressao artıstica e as mais elevadas conclusoes cientıficas. Ela e empregadanos mais diferentes nıveis. E comum o uso de analogias vagas, incompletas ou obscuras, porem a analogiapode alcancar-se ao nıvel do rigor matematico. Todos os tipos de analogia podem desempenhar umafuncao na descoberta da solucao e, por isso, nao devemos desprezar nenhum deles. (Polya, 1994,p.29)
E simetria?
Simetria tem dois significados: um, mais comum, particular, geometrico; outro, menos comum,generico. logico. Se o problema for simetrico em algum aspecto, podemos tirar vantagem da observacaodas duas partes intercambiaveis e muitas vezes compensa tratar da mesma maneira as partes que desem-penham a mesma funcao.
Mas pra isso devemos antes equacionar o problema.
Equacionamento e como traduzir de uma lıngua para outra. Esta comparacao, usada por Newtonna sua Arithmetica Universalis, pode contribuir para esclarecer a natureza de certas dificuldades muitasvezes encontradas, tanto por estudantes como por professores.
E, se possıvel, utilizar uma figura.
O funcionamento heurıstico de uma figura.O papel intuitivo e heurıstico que as figuras tem na representacao geometrica e uma opiniao comumente
admitida, isto porque as figuras permitem analisar uma situacao em conjunto, sao um meio mais diretopara explorar os diferentes aspectos, antecipar os resultados e selecionar uma solucao para o problema(DUVAL, 1995)
O uso de figuras como ferramenta heurıstica, bem como para auxiliar na visualizacao, compreensao eresolucao de problemas matematicos, constitui-se como um forte aliado para a educacao matematica.
Ora, uma analise rapida pela historia e podemos encontrar tantos outros exemplos do uso da operacaode reconfiguracao como possibilidade heurıstica para a resolucao de problemas.
Leonardo da Vinci e suas resolucoes matematicas e um dentre tantos. Ele desenvolveu estudos sobreas proporcoes geometricas, tanto da geometria plana como da geometria dos solidos tridimensionais,
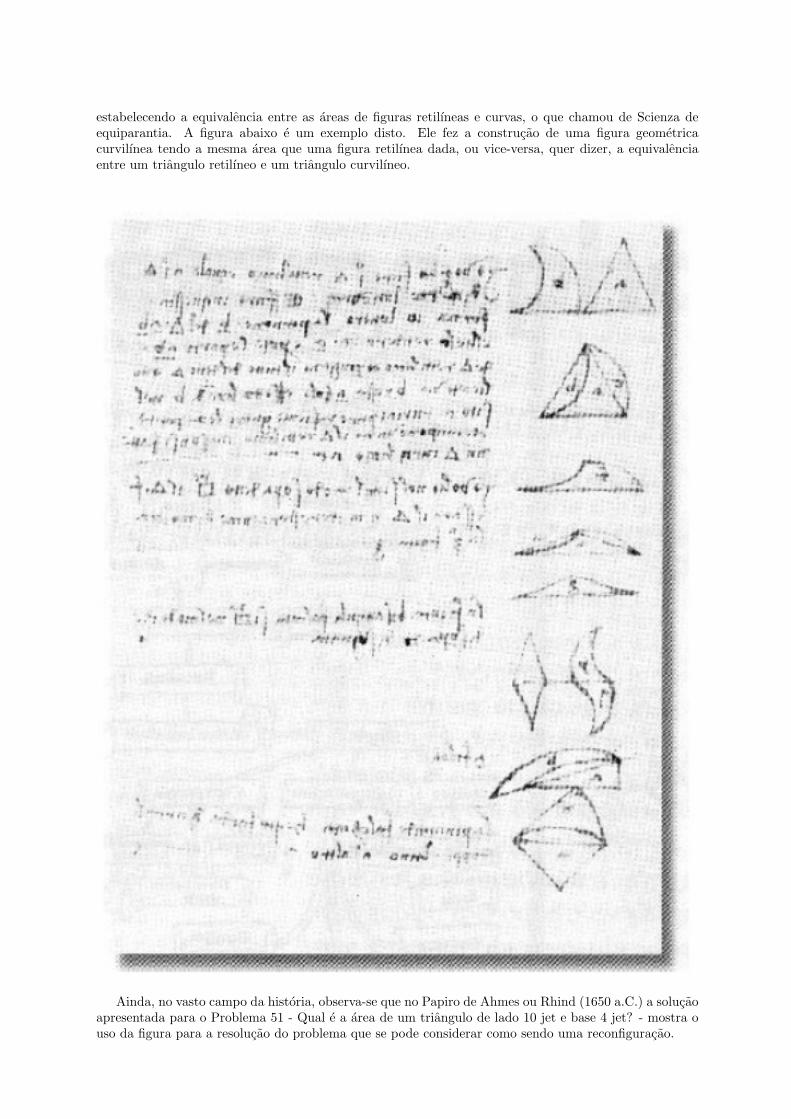
estabelecendo a equivalencia entre as areas de figuras retilıneas e curvas, o que chamou de Scienza deequiparantia. A figura abaixo e um exemplo disto. Ele fez a construcao de uma figura geometricacurvilınea tendo a mesma area que uma figura retilınea dada, ou vice-versa, quer dizer, a equivalenciaentre um triangulo retilıneo e um triangulo curvilıneo.
Ainda, no vasto campo da historia, observa-se que no Papiro de Ahmes ou Rhind (1650 a.C.) a solucaoapresentada para o Problema 51 - Qual e a area de um triangulo de lado 10 jet e base 4 jet? - mostra ouso da figura para a resolucao do problema que se pode considerar como sendo uma reconfiguracao.
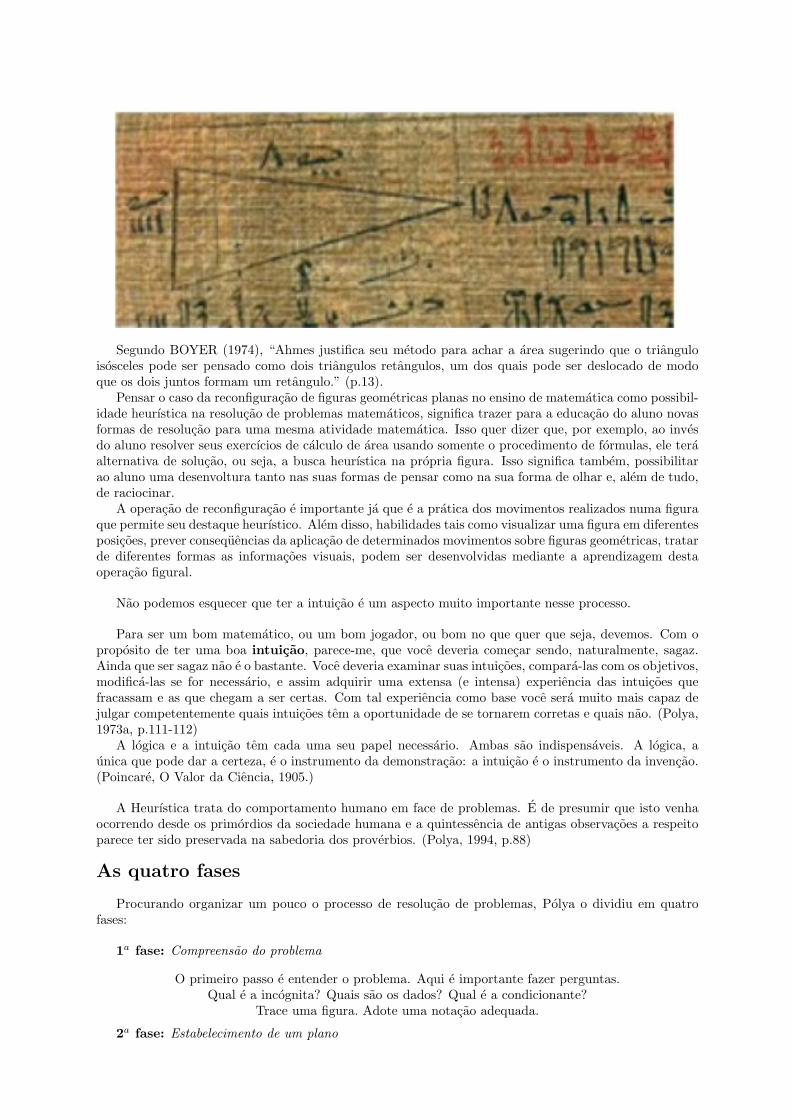
Segundo BOYER (1974), “Ahmes justifica seu metodo para achar a area sugerindo que o trianguloisosceles pode ser pensado como dois triangulos retangulos, um dos quais pode ser deslocado de modoque os dois juntos formam um retangulo.” (p.13).
Pensar o caso da reconfiguracao de figuras geometricas planas no ensino de matematica como possibil-idade heurıstica na resolucao de problemas matematicos, significa trazer para a educacao do aluno novasformas de resolucao para uma mesma atividade matematica. Isso quer dizer que, por exemplo, ao invesdo aluno resolver seus exercıcios de calculo de area usando somente o procedimento de formulas, ele teraalternativa de solucao, ou seja, a busca heurıstica na propria figura. Isso significa tambem, possibilitarao aluno uma desenvoltura tanto nas suas formas de pensar como na sua forma de olhar e, alem de tudo,de raciocinar.
A operacao de reconfiguracao e importante ja que e a pratica dos movimentos realizados numa figuraque permite seu destaque heurıstico. Alem disso, habilidades tais como visualizar uma figura em diferentesposicoes, prever consequencias da aplicacao de determinados movimentos sobre figuras geometricas, tratarde diferentes formas as informacoes visuais, podem ser desenvolvidas mediante a aprendizagem destaoperacao figural.
Nao podemos esquecer que ter a intuicao e um aspecto muito importante nesse processo.
Para ser um bom matematico, ou um bom jogador, ou bom no que quer que seja, devemos. Com oproposito de ter uma boa intuicao, parece-me, que voce deveria comecar sendo, naturalmente, sagaz.Ainda que ser sagaz nao e o bastante. Voce deveria examinar suas intuicoes, compara-las com os objetivos,modifica-las se for necessario, e assim adquirir uma extensa (e intensa) experiencia das intuicoes quefracassam e as que chegam a ser certas. Com tal experiencia como base voce sera muito mais capaz dejulgar competentemente quais intuicoes tem a oportunidade de se tornarem corretas e quais nao. (Polya,1973a, p.111-112)
A logica e a intuicao tem cada uma seu papel necessario. Ambas sao indispensaveis. A logica, aunica que pode dar a certeza, e o instrumento da demonstracao: a intuicao e o instrumento da invencao.(Poincare, O Valor da Ciencia, 1905.)
A Heurıstica trata do comportamento humano em face de problemas. E de presumir que isto venhaocorrendo desde os primordios da sociedade humana e a quintessencia de antigas observacoes a respeitoparece ter sido preservada na sabedoria dos proverbios. (Polya, 1994, p.88)
As quatro fases
Procurando organizar um pouco o processo de resolucao de problemas, Polya o dividiu em quatrofases:
1a fase: Compreensao do problema
O primeiro passo e entender o problema. Aqui e importante fazer perguntas.Qual e a incognita? Quais sao os dados? Qual e a condicionante?
Trace uma figura. Adote uma notacao adequada.
2a fase: Estabelecimento de um plano
Encontre a conexao entre os dados e a incognita.E preciso afinal a um plano para a resolucao.
Conhece algum problema correlato? Conhece algum problema que lhe poderia ser util?Considere a incognita. Pense em um problema conhecido que tenha a mesma incognita ou semelhante.
3a fase: Execucao do plano
Execute o seu plano.Ao executar o seu plano de resolucao verifique cada passo.
E possıvel mostrar que cada um deles esta correto?
4a fase: Retrospecto
Examine a solucao obtida.E possıvel verificar o resultado?
E possıvel obter a solucao de outro modo?Qual e a essencia do metodo aplicado?
Voce consegue usar o mesmo o resultado - ou metodo - em outro problema?Qual a utilidade desse resultado?
Segundo Polya a revisao da solucao e a etapa mais importante das quatro fases, pois esta propicia averificacao da argumentacao usada, procurando simplifica-la, a busca de outras maneiras de se resolvero problema, refletir no processo de resolucao buscando descobrir a essencia do problema e o metodo deresolucao empregado, a possıvel generalizacao do problema.
Ler, escrever, falar e escutar, comparar, opor, levantar hipoteses e prever consequencias sao proced-imentos que acompanham a resolucao de problemas. Esse tipo de atividade cria o ambiente propıciopara que os alunos aperfeicoem esses procedimentos e desenvolvam atitudes como a seguranca em suascapacidades, o interesse pela defesa de seus argumentos, a perseveranca e o esforco na busca de solucoes.A comunicacao e a interacao com os colegas favorecem nao apenas a clareza do proprio pensamento, masas atitudes de cooperacao e respeito pelas ideias do outro.
Algumas heurısticas importantes na resolucao de problemas
Desenhe um diagrama, se for possıvel.Examine casos particulares para exemplificar o problema, explorar as possibilidades,
encontrar padroes.Exemplifique usando simetrias ou ”sem prejuızo da generalidade”.
Planeje solucoes hierarquicamente.Seja capaz de explicar o que e por que voce esta fazendo e o que vai fazer com o resultado.
Considere problemas equivalentes introduzindo elementos auxiliares ou reformulando oproblema, por exemplo.
Problemas
Nessa secao vamos dar exemplos de problemas que podem ser utilizados para a aplicacao da heurısticaestudada apresentada anteriormente. Em alguns foi dado um exemplo de um dialogo entre professores ealunos e em outros apenas o problema e sua resolucao.
Problema 1
O cenario e uma sala de aula da 6a serie. Os alunos estao habituados a trabalhar com equacoeslineares de primeira ordem. O Professor entra na sala e sugere o seguinte problema, e espera um tempopara que os alunos tentem resolve-lo:

Para completar sua colecao de tazos, Joao trocou tres quintos dos que tinha por um tazo raro. Comotres quintos dos tazos que lhe restaram eram repetidos, resolveu oferece-los ao seu amigo Miguel, ficandoassim com 30 tazos. Quantos tazos Joao tinha inicialmente?
Resolucao: Suponha que x seja a quantidade de tazos que Joao tinha inicialmente. Como Joao
trocou35
dos seus tazos por um tazo raro entao Joao ficou com x − 35x + 1 tazos. Mas
35
dos tazos quelhe restaram eram repetidos, por isso ofereceu-os ao Miguel. Logo, Joao ficou com(
x − 35x + 1
)− 3
5
(x − 3
5x + 1
)= 30 =⇒
25
(x − 3
5x + 1
)= 30 =⇒
x − 35x + 1 = 75 =⇒
25x = 74 =⇒x = 185
Logo, Joao tinha 185 tazos.
Dialogo:
Professor: Vamos ver o que voces conseguiram. Gostaram do problema?
Anderson: Sim, professor, parece interessante, mas nao consegui resolve-lo.
Professor: Qual foi sua dificuldade Anderson?
Anderson: Nao consegui escrever o problema matematicamente.
Professor: Entao vamos entender o problema primeiro. O que nos estamos procurando?
Roberto: A quantidade de tazos que Joao tinha inicialmente.
P: Como vamos ”chamar” essa quantidade?
Larissa: Pode ser x.
Roberto: Ou por t que lembra tazos.
Professor: Bom, por qual letra vamos denominar nao importa, mas a sugestao do Roberto e boa poist nos lembra o que estamos procurando, ou seja, a quantidade de tazos. Agora vamos tentar equacionaro problema.
Anderson: Sim, mas como, professor? A linguagem e complicada.
Larissa: Podemos comecar pela primeira frase do problema.
Professor: Boa sugestao Larissa, e como podemos faze-lo?
Roberto: Pra comecar o problema diz que Joao trocou tres quintos dos tazos que tinha por um tazo
raro. Ele trocou entao35t.
Larissa: Mas como ele tinha t entao ele ficou com t − 35t.
Anderson: Mas ele pegou um em troca, entao ficou t − 35t + 1.

Professor: Muito bem, voces equacionaram a primeira frase da equacao. E agora?
Anderson: Agora continuemos com os dados do problema.
Roberto: A proxima passagem diz que tres quintos dos tazos que lhe restaram eram repetidos, ou
seja,35
(t − 3
5t + 1
).
Larissa: E mas ele deu esses tazos pro Miguel.
Anderson: Entao ele ficou com(
t − 35t + 1
)− 3
5
(t − 3
5t + 1
).
Larissa: E no problema diz que essa quantidade e 30.
Professor: Temos um problema resolvido?
Anderson: Agora sim professor. Com essa ultima equacao encontraremos o valor de t.
Professor: E era essa a incognita que procuravamos?
Larissa: Sim, pois chamamos de t a quantidade de tazos que Joao tinha inicialmente.
Professor: Entao facam as contas. Quanto vale t?
Roberto: Temos que t = 185.
Professor: Podemos fazer um retrospecto e conferir se as contas estao certas o que acham?
Larissa: Uma boa ideia.
Anderson: Mas essa e a parte facil. E so voltar ao enunciado e ver se 185 satisfaz as condicionantesdo problema.
Roberto: Temos que tres quintos de 185 e 111.
Larissa: Entao depois da troca pelo tazo raro ele ficou com 185 − 111 + 1 que e igual a 75.
Roberto: E depois de dar tres quintos de 73 para o Miguel ele ficou com 75− 35
(75) que e igual a 30.
Professor: Parabens, voces nao erraram as contas, trabalharam em equipe e muito bem!
Problema 2
O cenario e uma sala de aula de 8a serie. Os alunos ja aprenderam sobre triangulos retangulos,teorema de Pitagoras e congruencia de triangulos. Observemos que esse problema envolve simetria e eimportante o desenho geometrico. O Professor entra na sala e propoe o seguinte problema e espera umtempo para que os alunos compreendam o problema e tentem resolve-lo:
Tracaram-se tres retas paralelas, passando pelos vertices B, C e D do quadrado ABCD, como se indicana figura. A reta que passa em C dista 7cm da que passa em D e 5cm da que passa em B. Qual e a areado quadrado?

A D
B C
7cm
5cm
Resolucao: Temos que CDF = 90◦ − DCF, BCE = 90◦ − CEB, BCE + DCF = 90◦, onde F e oponto da reta que passa por C tal que BF e perpendicular a reta que passa por C, e E e o ponto analogotal que DE e perpendicular a mesma reta. Logo, CDF = BCE e DFC = CEB. Como DC = BC, ostriangulos ΔDFC e ΔCEB sao congruentes. Entao, FC = EB = 5 e, aplicando o Teorema de Pitagorasao triangulo ΔDFC, conclui-se que a area do quadrado ABCD e DC
2= 72 + 52 = 74cm2.
Dialogo:
Professor: Parece complicado?
Renata: Nao.
Pedro: Ah , eu achei, nao tenho ideia de como encontrar a area desse quadrado.
Professor: Bom Pedro, vamos por partes, primeiro precisamos entender o problema. Qual e aincognita?
Pedro: Essa parte eu entendi, e a area do quadrado.
Professor: Do que precisamos pra encontrar a area do quadrado?
Renata: Da medida do lado.
Professor: Como vamos fazer para encontra-la?
Renata: Podemos usar o Teorema de Pitagoras.
Professor: A ideia e boa, mas como podemos utilizar o Teorema nesse problema, Renata?
Renata: Nos temos que a distancia entre B e D e 12 e usando o Teorema de Pitagoras temos quea2 + a2 = 122. Logo, a2 = 72, ou seja, a area do quadrado e 72cm2.
Pedro: Mas Renata a reta que passa por B e D pode nao ser perpendicular as retas paralelas, e assima distancia entre B e D nao e 12
Professor: A observacao e pertinente Pedro, mas a tentativa da Renata nos fez perceber que seencontrarmos a medida da diagonal entao o problema esta resolvido. Entretanto, como voce mesmo dissedevemos tratar distancias perpendicularmente ao segmento, podemos entao tentar trabalhar com essasdistancias.
Pedro: E professor, mas devemos como vamos fazer?
Renata: Podemos tentar tracar entao o segmento partindo de B e que passe perpendicularmente pelareta que passa em C e fazer o analogo para o ponto B.
Pedro: Nao consigo visualizar.
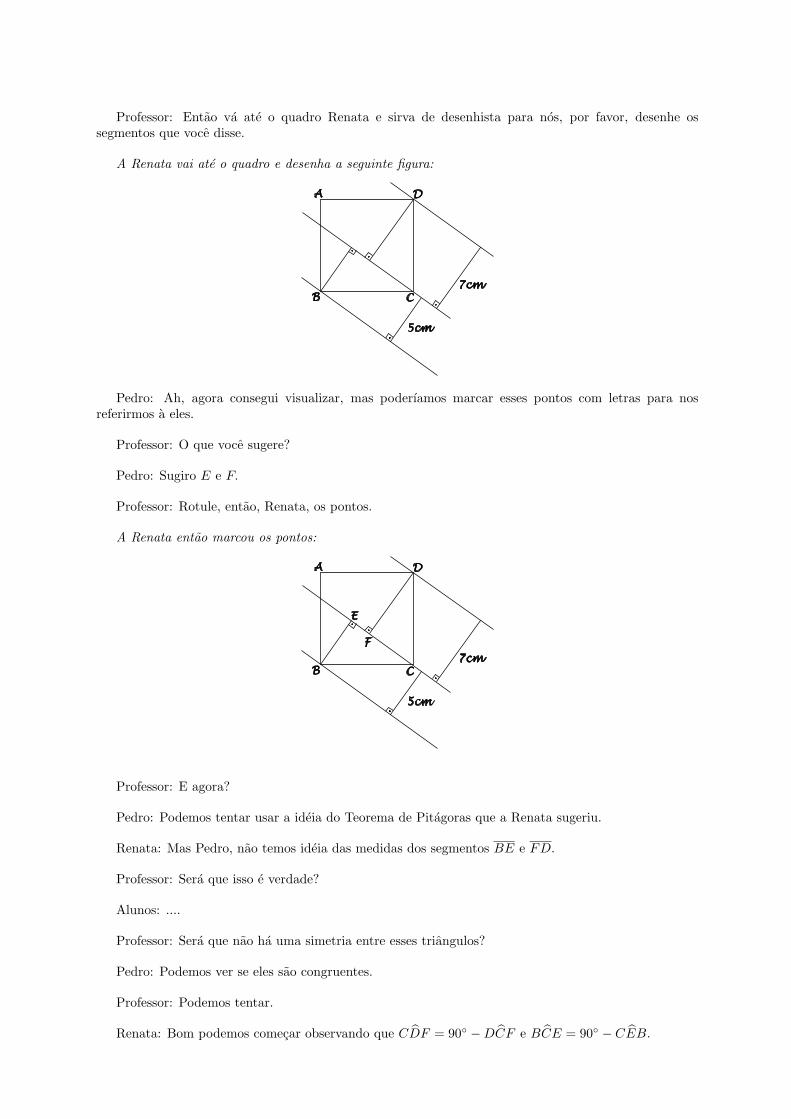
Professor: Entao va ate o quadro Renata e sirva de desenhista para nos, por favor, desenhe ossegmentos que voce disse.
A Renata vai ate o quadro e desenha a seguinte figura:
A D
B C
7cm
5cm
Pedro: Ah, agora consegui visualizar, mas poderıamos marcar esses pontos com letras para nosreferirmos a eles.
Professor: O que voce sugere?
Pedro: Sugiro E e F.
Professor: Rotule, entao, Renata, os pontos.
A Renata entao marcou os pontos:
A D
B C
7cm
5cm
E
F
Professor: E agora?
Pedro: Podemos tentar usar a ideia do Teorema de Pitagoras que a Renata sugeriu.
Renata: Mas Pedro, nao temos ideia das medidas dos segmentos BE e FD.
Professor: Sera que isso e verdade?
Alunos: ....
Professor: Sera que nao ha uma simetria entre esses triangulos?
Pedro: Podemos ver se eles sao congruentes.
Professor: Podemos tentar.
Renata: Bom podemos comecar observando que CDF = 90◦ − DCF e BCE = 90◦ − CEB.

Pedro: Temos ainda que BCE + DCF = 90◦.
Renata: Com essa observacao temos que CDF = BCE e DFC = CEB.
Professor: Chegamos a um caso de congruencia entao?
Pedro: Sim professor, como DC = BC e, como observou a Renata, CDF = BCE e DFC = CEB,entao pelo caso angulo-lado-angulo temos que os triangulos ΔDFC e ΔCEB sao congruentes.
Renata: Agora temos entao as medidas de FC = EB = 5.
Pedro: Realmente, e agora, utilizando a ideia inicial da Renata do Teorema de Pitagoras temos queDC
2= 72 + 52 = 74cm2.
P: Parabens!
Problema 3
O cenario e uma sala de 2 ◦ colegial. O Professor propoe o seguinte problema, que, embora exijatecnicas matematicas simples, faz uso de um raciocınio um pouco mais elaborado.
Um dia Tiago reparou que, curiosamente, na garagem do seu predio havia veıculos de 1,2,3 e 4 rodas:carrinhos de mao, bicicletas, triciclos e automoveis. Ele, o irmao e o pai decidiram contar o numero derodas que estavam na garagem. Tiago contou 26 rodas mas esqueceu de contar as rodas dos automoveis.O irmao dele tambem contou 26 rodas, mas nao contou as rodas dos triciclos e o pai do Tiago contou 26rodas, mas nao contou as rodas das bicicletas. Quantos veıculos estavam na garagem?
Resolucao: Pela contagem do Tiago deduz-se que o numero de automoveis e igual ao numero totalde rodas menos 26. Pela contagem do irmao do Tiago tem-se que o numero de rodas dos triciclos e igualao numero total de rodas menos 26 e pela contagem do pai do Tiago sabe-se que o numero de rodasdas bicicletas e igual ao numero total de rodas menos 26. Logo, o numero de rodas dos automoveis,dos triciclos e das bicicletas e o mesmo. Como esse numero e multiplo de 2,3 e 4, tambem e multiplode m.m.c. (2, 3, 4) = 12. Alem disso, como o pai do Tiago contou as rodas dos automoveis, triciclos ecarrinhos de mao, o numero de rodas dos automoveis e no maximo 26−3−1 = 22. Portanto, existiam 12
rodas de automoveis. Assim, na garagem havia124
= 3 automoveis,123
= 4 triciclos,122
= 6 bicicletas e26 − 2 × 12 = 2 carrinhos de mao. Na garagem estavam 3 + 4 + 6 + 2 = 15 veıculos.
Dialogo:
Professor: Voces entenderam o problema?
Paulo: Sim.
Professor: Voces entao ja podem me dizer quantos veıculos estavam na garagem?
Ana: Nao, professor, entender o que se pede e uma coisa, saber a resposta e outra.
Professor: Tudo bem. Entao vamos ver se voces entenderam mesmo o que se pede. Qual e a incognita?
Ana: O numero de veıculos que ha na garagem.
Professor: Comecamos bem. Que tipo de veıculos ha na garagem?
Paulo: Ha veıculos de 1, 2, 3 e 4 rodas.
Professor: E quais dados temos?
Ana: Temos as contagens de Tiago, do seu irmao e do seu pai do numero de rodas que ha na garagem.
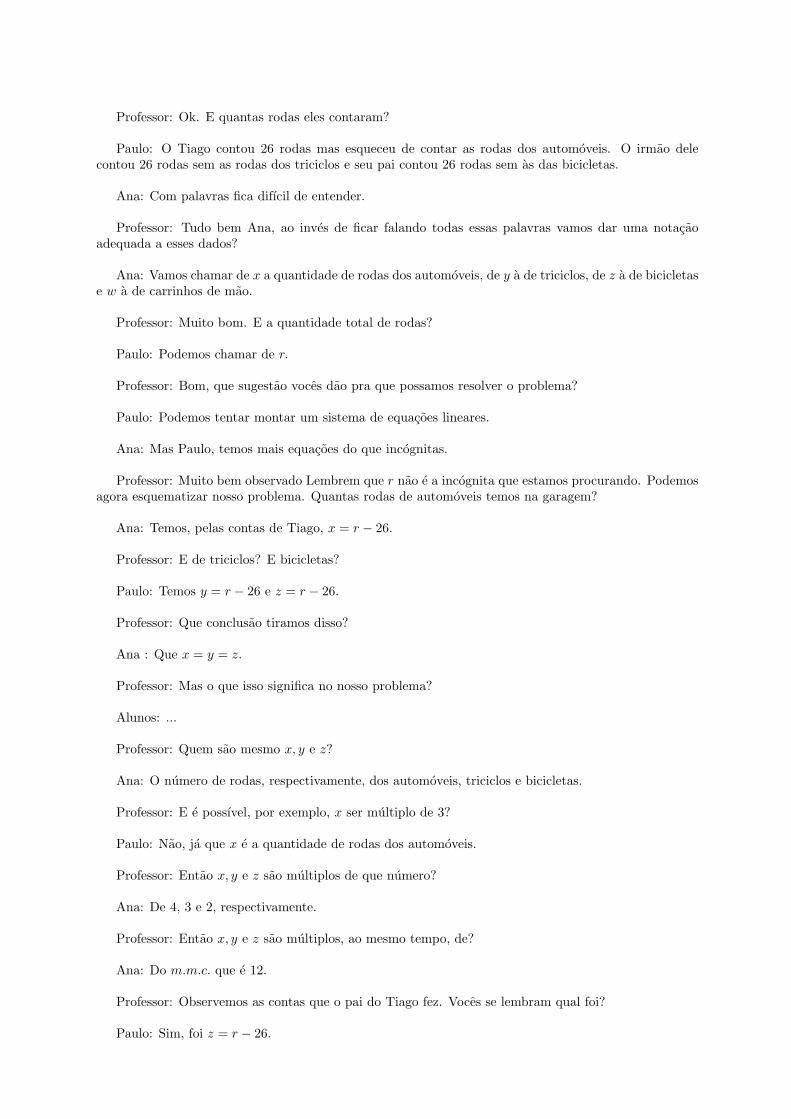
Professor: Ok. E quantas rodas eles contaram?
Paulo: O Tiago contou 26 rodas mas esqueceu de contar as rodas dos automoveis. O irmao delecontou 26 rodas sem as rodas dos triciclos e seu pai contou 26 rodas sem as das bicicletas.
Ana: Com palavras fica difıcil de entender.
Professor: Tudo bem Ana, ao inves de ficar falando todas essas palavras vamos dar uma notacaoadequada a esses dados?
Ana: Vamos chamar de x a quantidade de rodas dos automoveis, de y a de triciclos, de z a de bicicletase w a de carrinhos de mao.
Professor: Muito bom. E a quantidade total de rodas?
Paulo: Podemos chamar de r.
Professor: Bom, que sugestao voces dao pra que possamos resolver o problema?
Paulo: Podemos tentar montar um sistema de equacoes lineares.
Ana: Mas Paulo, temos mais equacoes do que incognitas.
Professor: Muito bem observado Lembrem que r nao e a incognita que estamos procurando. Podemosagora esquematizar nosso problema. Quantas rodas de automoveis temos na garagem?
Ana: Temos, pelas contas de Tiago, x = r − 26.
Professor: E de triciclos? E bicicletas?
Paulo: Temos y = r − 26 e z = r − 26.
Professor: Que conclusao tiramos disso?
Ana : Que x = y = z.
Professor: Mas o que isso significa no nosso problema?
Alunos: ...
Professor: Quem sao mesmo x, y e z?
Ana: O numero de rodas, respectivamente, dos automoveis, triciclos e bicicletas.
Professor: E e possıvel, por exemplo, x ser multiplo de 3?
Paulo: Nao, ja que x e a quantidade de rodas dos automoveis.
Professor: Entao x, y e z sao multiplos de que numero?
Ana: De 4, 3 e 2, respectivamente.
Professor: Entao x, y e z sao multiplos, ao mesmo tempo, de?
Ana: Do m.m.c. que e 12.
Professor: Observemos as contas que o pai do Tiago fez. Voces se lembram qual foi?
Paulo: Sim, foi z = r − 26.

Professor: Qual e o maior valor que x pode assumir?
Alunos: ....
Professor: Quem e r?
Ana: r = x + y + z + w.
Professor: Substituindo naquela equacao como fica?
Paulo: z = x + y + z + w − 26.
Professor: Isolem o x nessa equacao.
Ana : x = 26 − y − w.
Professor: Qual e o maior valor que x pode assumir?
Paulo: Vai ser quando tivermos o menor o numero de rodas de triciclos e de mao.
Professor: E quanto vai ser entao?
Ana: Vai ser x = 26 − 3 − 1 = 22.
Professor: Muito bem, mas esses valores nao poderiam ser zero?
Paulo: Nao, porque no enunciado do exercıcio diz que eles contaram esses veıculos e portanto existiapelo menos um de cada na garagem.
Professor: Muito bem, voces entenderam mesmo o enunciado. Bom, ja da pra concluir alguma coisa?
Alunos: ...
Professor: Se o maior valor possıvel pra x e 22, como voces disseram e tambem temos que x e multiplode 12 entao quanto vale x?
Ana: Vale 12.
Professor: E os outros valores?
Paulo: Valem y = z = 12.
Professor: Ainda esta faltando o w.
Ana: Utilizando, por exemplo, a equacao x = 26 − y − w, chegamos que w = 2.
Professor: Entao qual a resposta do problema?
Paulo: Tem124
= 3 automoveis,123
= 4 triciclos,122
= 6 bicicletas e 2 carrinhos de mao. Logo, temos3 + 4 + 6 + 2 = 15 automoveis na garagem.
Professor: Parabens!!! Vamos fazer um retrospecto pra conferir as contas?
Ana: Vamos.
Professor: Quanto e o numero total de rodas que temos?
Paulo: E 3 × 4 + 4 × 3 + 6 × 2 + 2 = 38.

Professor: Tiago acertou as contas?
Ana: Sim, pois 3 × 4 = 38 − 26.
Professor: E o irmao dele?
Ana: Sim, pois 4 × 3 = 38 − 26.
Professor: E o seu pai?
Paulo: Sim, pois 6 × 2 = 38 − 26.
Professor: Entao todos acertaram as contas. Exercıcio resolvido. Parabens!!!
Problema 4
O cenario e uma sala de aula de 7a serie. Os alunos tem domınio de produtos notaveis e equacoesdo segundo grau. O Professor propoe o seguinte problema, ja que o problema tem um raciocınio simplesespera ate que os alunos tentem resolver e cheguem a uma solucao.
Dois irmaos escrevem as suas idades, uma a seguir da outra, e obtem um numero com quatro algarismosque e exatamente o quadrado da idade do seu pai. Nove anos mais tarde voltam a escrever suas idades,pela mesma ordem, obtendo novamente um numero com 4 algarismos que e o quadrado da idade do seupai. Qual e a diferenca de idade entre os dois irmaos?
Resolucao: Sejam a e b as idades dos irmaos quando escreveram as suas idades pela primeira veze seja p a idade do pai na mesma data. Ao escrever b a seguir a a forma-se o numero 100a + b. Assim,tem-se 100a + b = p2 e 100 (a + 9) + (b + 9) = (p + 9)2 . Desenvolvendo a ultima igualdade, vem
100a + b + 909 = p2 + 18p + 81,
logo, atendendo a que 100a + b = p2, tem-se
909 = 18p + 81,
dondep =
909 − 8118
= 46.
Como 462 = 2116, conclui-se que os irmaos tem uma diferenca de idade de 21 − 16 = 5 anos.
Dialogo:
Professor: O que voces acharam do problema?
Matheus: Aparentemente simples.
Professor: Conseguem resolve-lo?
Andre: Apesar de o enunciado ser simples eu nao consegui equacionar o problema.
Professor: Tudo bem, vamos junto tentar. Voce conseguiu equacionar o problema, Matheus?
Matheus: Bom, professor, podemos tentar agora.
Professor: E qual e o primeiro passo?
Andre: Saber qual e a incognita.
Matheus: Essa e facil. A incognita e a diferenca de idade entre os irmaos.
Professor: E quais sao os dados que temos pra isso?
Andre: Temos que se dois irmaos escrevem as suas idades, uma a seguir da outra, e obtem umnumero...
Matheus: Mas podemos primeiro dar uma notacao para essas idades, senao ficaremos falando o diainteiro.
Professor: Tudo bem Matheus, e o que voce sugere?
Matheus: Ah, pode ser a e b.
Professor: Entao dadas as notacoes adequadas... continue Andre.
Andre: Com essa notacao vou ter que falar menos. Temos que se escrevermos a seguido de b temosum numero com 4 algarismos.
Matheus: Podemos escrever entao ab.
Andre: Mas, nesse caso, como saberemos que esse numero tem 4 algarismos? Como faremos contascom ele?
Professor: Ele tem razao Matheus. A forma que voce escreveu as idades deles nao esta muito clara.Nao poderıamos tentar de outra forma?
Andre: Bom, professor, isso eu nao sei, mas o que a logica nos conta e que a idade de nenhum delesdeve se com 4 algarismos.
Professor: E, essa uma parte da condicionante que nao podemos desprezar.
Andre: Mas, espere, entao eu tive uma ideia, se queremos que a venha antes de b e b e um algarismocom 2 dıgitos entao podemos multiplicar a por 100 e ”andaremos” as duas casas que precisamos com o a.
Professor: Na verdade Andre, e uma excelente ideia.
Matheus: Sim, e entao escreveremos o algarismo como 100a + b.
Professor: Isso mesmo. Bom, continuando, faltou dar uma notacao pra idade do pai deles tambem.
Andre: Pode ser p para lembrar pai.
Professor: Tudo bem. Entao para completar a primeira fase dos dados, temos?
Andre: Temos que 100a + b = p2.
Professor: E agora?
Matheus: Agora se passaram 9 anos no tempo.
Professor: E qual a idade desse pessoal agora?
Andre: E (a + 9) , (b + 9) e (p + 9) , claro.
Professor: E qual dado temos agora?
Matheus: Temos que eles voltaram a escrever seus nomes um seguido do outro e deu novamente oquadrado da idade pai.
Andre: E mas vale observar que eles escreveram na mesma ordem e de novo um numero de 4 algaris-mos.
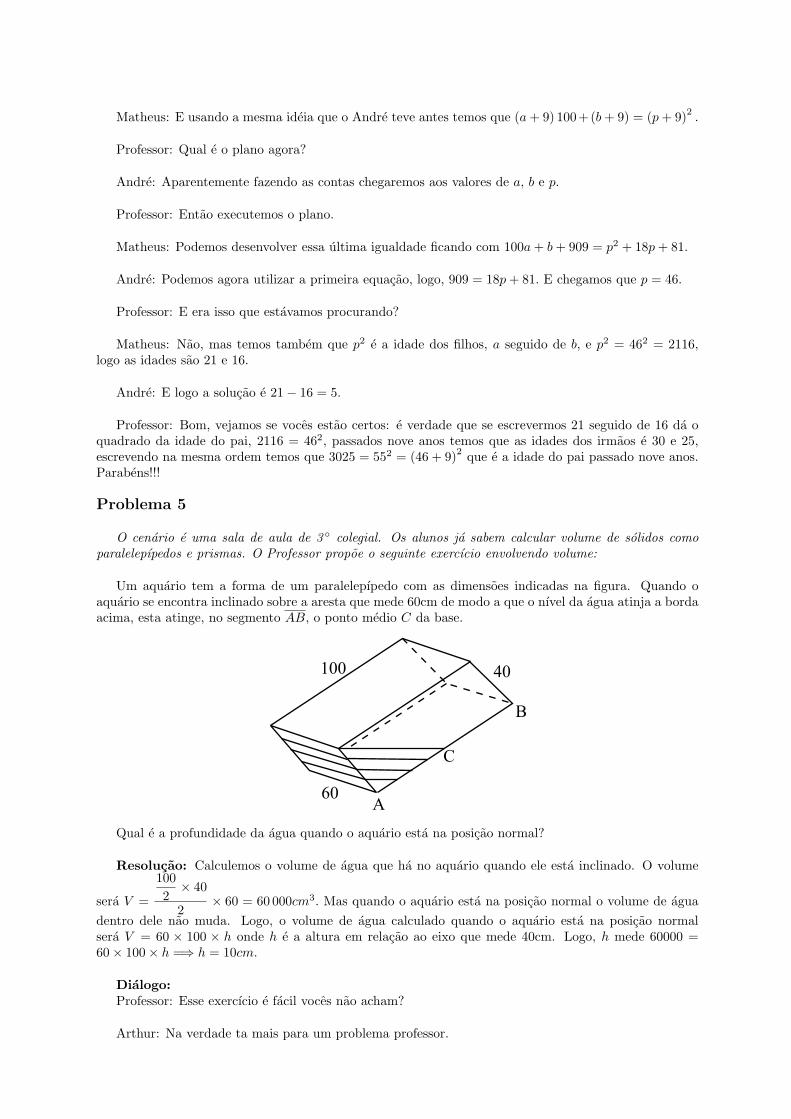
Matheus: E usando a mesma ideia que o Andre teve antes temos que (a + 9) 100+(b + 9) = (p + 9)2 .
Professor: Qual e o plano agora?
Andre: Aparentemente fazendo as contas chegaremos aos valores de a, b e p.
Professor: Entao executemos o plano.
Matheus: Podemos desenvolver essa ultima igualdade ficando com 100a + b + 909 = p2 + 18p + 81.
Andre: Podemos agora utilizar a primeira equacao, logo, 909 = 18p + 81. E chegamos que p = 46.
Professor: E era isso que estavamos procurando?
Matheus: Nao, mas temos tambem que p2 e a idade dos filhos, a seguido de b, e p2 = 462 = 2116,logo as idades sao 21 e 16.
Andre: E logo a solucao e 21 − 16 = 5.
Professor: Bom, vejamos se voces estao certos: e verdade que se escrevermos 21 seguido de 16 da oquadrado da idade do pai, 2116 = 462, passados nove anos temos que as idades dos irmaos e 30 e 25,escrevendo na mesma ordem temos que 3025 = 552 = (46 + 9)2 que e a idade do pai passado nove anos.Parabens!!!
Problema 5
O cenario e uma sala de aula de 3 ◦ colegial. Os alunos ja sabem calcular volume de solidos comoparalelepıpedos e prismas. O Professor propoe o seguinte exercıcio envolvendo volume:
Um aquario tem a forma de um paralelepıpedo com as dimensoes indicadas na figura. Quando oaquario se encontra inclinado sobre a aresta que mede 60cm de modo a que o nıvel da agua atinja a bordaacima, esta atinge, no segmento AB, o ponto medio C da base.
100
60
40
A
B
C
Qual e a profundidade da agua quando o aquario esta na posicao normal?
Resolucao: Calculemos o volume de agua que ha no aquario quando ele esta inclinado. O volume
sera V =
1002
× 40
2× 60 = 60 000cm3. Mas quando o aquario esta na posicao normal o volume de agua
dentro dele nao muda. Logo, o volume de agua calculado quando o aquario esta na posicao normalsera V = 60 × 100 × h onde h e a altura em relacao ao eixo que mede 40cm. Logo, h mede 60000 =60 × 100 × h =⇒ h = 10cm.
Dialogo:Professor: Esse exercıcio e facil voces nao acham?
Arthur: Na verdade ta mais para um problema professor.

Professor: Bom, se voces conseguirem analisar bem o enunciado e usar as teorias certas isso nao vaiparecer um problema.
Sara: O enunciado e muito claro, mas so sabemos calcular o volume de paralelepıpedos e de prismas.
Professor: Sim, mas ja vai ser o bastante. Pra comecar, qual e a incognita?
Arthur: A profundidade da agua quando o aquario esta na posicao normal.
Sara: Pra facilitar podemos chamar isso de p, que lembra profundidade.
Professor: Tudo bem. Alguem tem alguma ideia brilhante?
Sara: Brilhante nao professor, mas eu observei que a quantidade de agua nao muda independente decomo esta o aquario.
Professor: Sim, mas sua ideia diz tudo. O que a agua representa?
Arthur: O volume.
Professor: E que tipo de solido a agua representa quando esta nessa posicao?
Arthur: Um prisma de base triangular.
Sara: Mas pra calcular esse volume precisamos da area da base e da altura. Concordo que a alturanos temos, mas a area da base eu nao saberia calcular.
Arthur: Isso foi porque nao usamos todos os dados do problema. Temos que C e o ponto medio deAB, ou seja, AC = 2AB e como temos a medida de AB entao AC = 50.
Sara: Assim sendo da pra calcular o volume da agua que e V =50 × 40
2× 60 = 60000cm3.
Professor: E como voce observou, Sara, esse volume nao varia se colocarmos o aquario na posicaonormal.
Arthur: Com o aquario na posicao normal temos que o volume do paralelepıpedo e area da base vezesa altura. Mas nao sabemos ate que altura a agua vai quando o aquario esta na posicao normal.
Sara: Mas essa e nossa incognita. Chamando essa altura de h temos que 60000 = 60 × 40 × h. Echegamos que h = 10cm.
Professor: Muito bem. Mas poderıamos ter pensado nesse problema de outra forma.
Sara: Nao vejo como professor.
Professor: Suponhamos que voces nao se lembrassem dos volumes desses solidos, como poderıamostentar trabalhar esse problema?
Arthur: A unica solucao seria tentar considerar uma analogia desse problema num plano.
Sara: Mas nao vejo como.
Professor: Tente visualizar o aquario de lado, dessa forma:
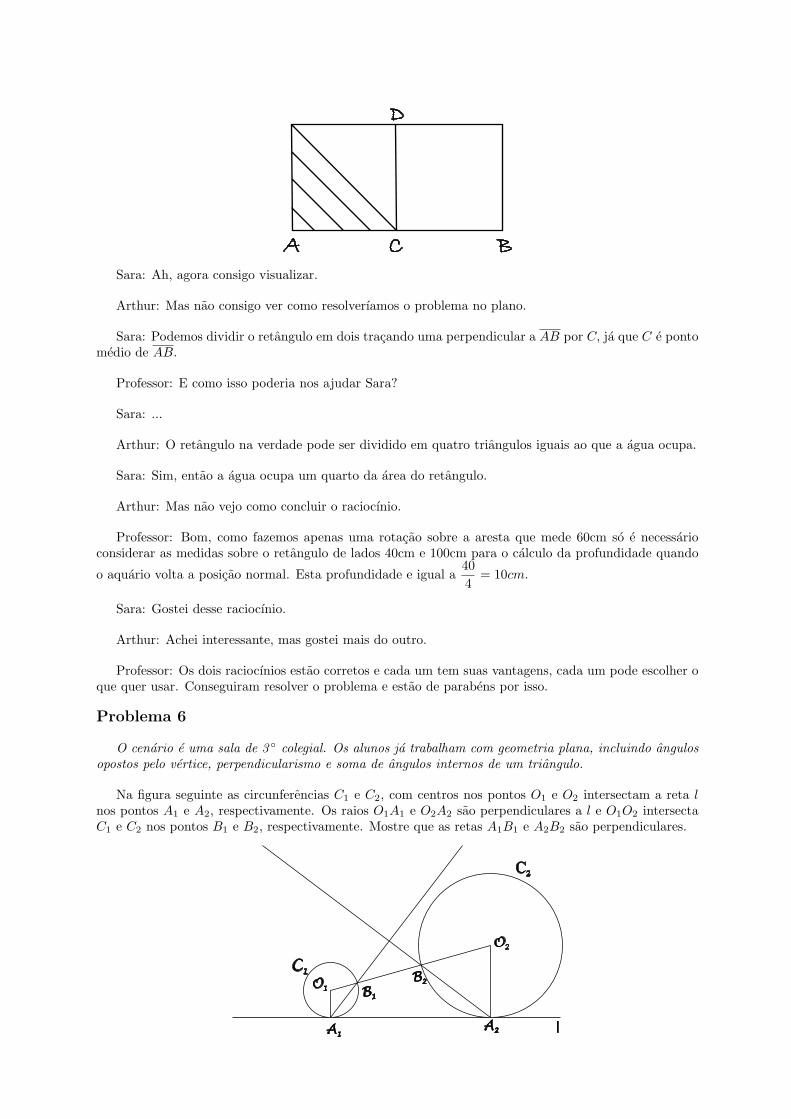
Sara: Ah, agora consigo visualizar.
Arthur: Mas nao consigo ver como resolverıamos o problema no plano.
Sara: Podemos dividir o retangulo em dois tracando uma perpendicular a AB por C, ja que C e pontomedio de AB.
Professor: E como isso poderia nos ajudar Sara?
Sara: ...
Arthur: O retangulo na verdade pode ser dividido em quatro triangulos iguais ao que a agua ocupa.
Sara: Sim, entao a agua ocupa um quarto da area do retangulo.
Arthur: Mas nao vejo como concluir o raciocınio.
Professor: Bom, como fazemos apenas uma rotacao sobre a aresta que mede 60cm so e necessarioconsiderar as medidas sobre o retangulo de lados 40cm e 100cm para o calculo da profundidade quando
o aquario volta a posicao normal. Esta profundidade e igual a404
= 10cm.
Sara: Gostei desse raciocınio.
Arthur: Achei interessante, mas gostei mais do outro.
Professor: Os dois raciocınios estao corretos e cada um tem suas vantagens, cada um pode escolher oque quer usar. Conseguiram resolver o problema e estao de parabens por isso.
Problema 6
O cenario e uma sala de 3 ◦ colegial. Os alunos ja trabalham com geometria plana, incluindo angulosopostos pelo vertice, perpendicularismo e soma de angulos internos de um triangulo.
Na figura seguinte as circunferencias C1 e C2, com centros nos pontos O1 e O2 intersectam a reta lnos pontos A1 e A2, respectivamente. Os raios O1A1 e O2A2 sao perpendiculares a l e O1O2 intersectaC1 e C2 nos pontos B1 e B2, respectivamente. Mostre que as retas A1B1 e A2B2 sao perpendiculares.
C1
C2
A1
A2
O2
B2O
1B
1
l

Resolucao: Seja P o ponto de interseccao das retas A1B1 e A2B2. Uma vez que os triangulosO1A1B1 e O2B2A2 sao isosceles, tem-se O1A1B1 = A1B1O1 e O2B2A2 = B2A2O2. Por outro lado,tem-se A1B1O1 = PB1B2 e O2B2A2 = PB2B1, porque sao angulos opostos pelo vertice. Logo, tambem
PB1B2 = O1A1B1 e PB2B1 = B2A2O2. (#)
Os raios O1A1 e O1A2 sao perpendiculares a l, por hipotese, ou seja, O1A1B1+PA1A2 = 90◦ e O2A2B2+PA2A1 = 90◦. Adicionando estas duas igualdades membro a membro, obtem-se
O1A1B1 + PA1A2 + O2A2B2 + PA2A1 = 180◦,
isto e, por #,PB1B2 + PA1A2 + PB2B1 + PA2A1 = 180◦. (##)
Mas,PB1B2 + PB2B1 = 180◦ − B1PB2
ePA1A2 + PA2A1 = 180◦ − B1PB2,
pela soma dos angulos internos ser 180◦. Somando ambos os membros, e por ##,
PB1B2 + PB2B1 + PA1A2 + PA2A1 = 180◦ − B1PB2 + 180◦ − B1PB2 =⇒180◦ = 180◦ − B1PB2 + 180◦ − B1PB2 =⇒
2B1PB2 = 180◦,
portanto, B1PB2 = 90◦. Conclui-se entao que as retas A1B1 e A2B2 sao perpendiculares.
Problema 7
O cenario e uma sala de aula de 3 ◦ colegial.
Num reino distante quaisquer dois cavaleiros ou sao amigos ou sao inimigos e cada cavaleiro temexatamente 3 inimigos. Nesse reino vigora a seguinte lei entre os cavaleiros: Um inimigo do meu amigoe meu inimigo. Quantas possibilidades ha para o numero de cavaleiros desse reino?
Resolucao: Seja N um numero natural para o qual e possıvel que o reino tenha exatamente Ncavaleiros (nas condicoes do enunciado). Note-se que, em princıpio, N pode assumir mais que um valor.E claro que uma possibilidade e N = 4 (caso em que cada um dos cavaleiros e inimigo dos restantes 3 enao e amigo de nenhum). Porem, nao pode ser N = 5, pois se fosse este o numero de cavaleiros do reinoentao pelo menos um deles seria inimigo dos 4 restantes, o que viola a lei em vigor. (De fato, designem Aum dos 5 cavaleiros, I1, I2 e I3 os 3 cavaleiros seus inimigos, e B o cavaleiro restante. E claro que A e Bsao amigos, pois A nao pode ter mais que 3 inimigos, logo pela lei em vigor I1, I2 e I3 tambem sao inimigosde B. Por outro lado, I1, por exemplo, e inimigo de A e de B, logo ou I2 e seu amigo e I3 seu inimigo,ou o contrario. Suponha-se, sem perda de generalidade, que I2 e amigo de I1 e I3o inimigo. Entao, I3
seria tambem inimigo de I2, logo seria inimigo dos restantes 4 cavaleiros!) Agora, N = 6 tambem e umapossibilidade, ja que 6 cavaleiros podem ser agrupados em dois grupos de 3 elementos cada, de modoa que em cada grupo os 3 cavaleiros sejam amigos comuns e cada um deles inimigo dos 3 cavaleiros dooutro grupo. Vejamos, finalmente, que nao pode ser N ≥ 7. Com efeito, admita-se que N ≥ 7. Sendo Aum dos cavaleiros do reino, ele tera 3 inimigos, digamos, I1, I2 e I3, e todos os restantes N − 4 cavaleirosterao que ser seus amigos. Pela lei em vigor, estes N −4 cavaleiros, por serem amigos de A, terao tambemque ser inimigos de I1, I2 e I3, logo cada um destes tres tem pelo menos 1 + (N − 4) = N − 3 inimigos, oque nao pode acontecer porque N − 3 ≥ 4. Conclui-se que as unicas possibilidades para N sao N = 4 eN = 6, pelo que ha duas possibilidades para o numero de cavaleiros.
Problema 8
O cenario e uma sala de 6a serie. Os alunos tem conhecimento de fracoes e razao.
Harry Potter e Ron Weasley preparam duas pocoes magicas, de igual volume, com lagrimas decrocodilo e suor de gato preto. A razao entre o volume das lagrimas e o volume de suor obtida na

pocao de Harry foi 3 e a obtida na pocao de Ron foi 2. Com um golpe da sua varinha magica o professorSeverus Snape misturou as duas pocoes no mesmo caldeirao. Qual foi a razao obtida?
Resolucao: Sejam S1 e S2 as quantidades de suor de gato preto das pocoes do Harry e do Ron.As correspondentes quantidades de lagrima de crocodilo sao 3S1 e 2S2. Como as duas pocoes tem igualvolume tem-se 4S1 = 3S2 e a razao obtida e
3S1 + 2S2
S1 + S2=
4 (3S1 + 2S2)4 (S1 + S2)
=3 (4S1) + 8S2
4S1 + 4S2=
3 (3S2) + 8S2
3S2 + 4S2=
177
.
Problema 9
O cenario e uma sala de 1 ◦ colegial. Os alunos tem conhecimento de funcoes e de suas propriedades.
A funcao f : R −→ R satisfaz f (x + f (y)) = x+f (f (y)) para todos os numeros reais x e y. Sabendoque f (2) = 8 , calcule f(2005).
Resolucao: Substituindo y por 2 e x por a − f(2) = a − 8, obtemos
f(a − f(2) + f(2)) = a − 8 + f(f(2)) ⇐⇒f(a) = a − 8 + f(8).
Substituindo a por 2 na ultima equacao, obtemos
f(2) = 2 − 8 + f(8) ⇐⇒8 = 2 − 8 + f(8) ⇐⇒
f(8) = 14.
Assim,f(a) = a − 8 + 14 = a + 6
ef(2005) = 2005 + 6 = 2011.
Problema 10
O cenario e uma sala de aula de 6a serie, os alunos conhecem porcentagem e tem habilidade comfracoes.
Num hotel para gatos e caes 10% dos caes julgam que sao gatos e 10% dos gatos julgam que saocaes. Apos cuidadosas observacoes conclui-se que 20% de todos os hospedes pensam que sao gatos eque os restantes 80% pensam que sao caes. Se no hotel estao hospedados 10 gatos, quantos caes estaohospedados no hotel?
Resolucao: Determine-se o numero de hospedes que pensao que sao gatos. Como 10% dos caesjulgam que sao gatos, denotando por C o numero de caes no hotel, o numero de caes que julgam que sao
gatos eC
10. Alem disso, como 10% dos gatos julgam que sao caes, 90% dos gatos do hotel pensam que
sao gatos, isto e, 9 dos gatos pensam que sao gatos. Assim, o numero de hospedes que pensam que sao
gatos eC
10+ 9.
Por outro lado, sabe-se que este numero corresponde a 20% de todos os hospedes. LogoC
10+ 9 =
20 (10 + C)100
donde C = 70.
Conclusao
Para auxiliar os alunos com suas dificuldades matematicas devemos valorizar a matematica comoestımulo a resolucao de problemas, apreciar o raciocınio logico, comunicar matematicamente, identifi-cando, interpretando e utilizando diferentes linguagens e codigos, utilizar situacoes cotidianas e recon-hecer a cooperacao, troca de ideias e o confronto entre as diferentes estrategias de acao como meios quemelhoram a capacidade de resolver problemas.
A resolucao de problemas tem importante papel no desenvolvimento da Matematica em qualquer nıvelde escolaridade. E importante notar que as quatro fases da resolucao de problemas do Polya nao saouma ’pocao magica’ que vai resolver qualquer problema. A intencao de Polya e ajudar o resolvedor deproblemas a organizar as ideias e facilitar a sua resolucao. Nao adianta um matematico ser um excelenteteorico se ele nao souber aplicar as suas teorias, ou seja, se ele nao souber resolver problemas.
Um matematico que conhece uma heurıstica de resolucao de problemas tem um diferencial a seu favor,pois tem uma visao mais completa da matematica, sabera organizar melhor seu raciocınio e tera maiorhabilidade para resolver os problemas que lhe surgir. O interessante e que um professor, de qualquerarea, que conhecer uma heurıstica de resolucao de problemas tera a sua disposicao uma metodologiaque facilitara o processo ensino-aprendizagem , tornando os alunos mais criativos e encorajados a novasdescobertas - o que e muito importante pra qualquer area de conhecimento.
”O resultado do trabalho criador do Matematico e o raciocınio demonstrativo, uma prova,mas a prova se descobre por raciocınio demonstrativo, uma prova, mas a prova se descobrepor raciocınio plausıvel, isto e, por intuicao.Se isso e assim, e eu o creio, havera um lugar para a intuicao no ensino da Matematica. Aeducacao deve preparar-nos para a invencao, ou, ao menos, para o gosto por ela. Em todocaso, a educacao nao deve suprimir os germes inventivos do estudante. (..) Meu conselho aosprofessores de Matematica de todos os graus pode resumir-se nesta exclamacao: Ensinemosa intuir!” (Polya, 1973, p.158)
Bibliografia
BALIEIRO FILHO, I. F. Arquimedes, Pappus, Descartes e Polya – Quatro Episodios daHistoria da Heurıstica. Tese de Doutorado. Programa de Pos-Graduacao em Educacao Matematica-UNESP-Rio Claro-SP, Abril de 2004.
OLIMPIADAS BRASILEIRAS DE MATEMATICA, 2005, Segunda fase, Nıvel 3.
OLIMPIADAS PORTUGUESAS DE MATEMATICA, XXIV (OPM 2005-2006). Categoria A1a. eliminatoria e 2o. dia Final Nacional.
OLIMPIADAS PORTUGUESAS DE MATEMATICA, XXIII (OPM 2004-2005), Categoria A1a. eliminatoria e 2a. eliminatoria.
OLIMPIADAS PORTUGUESAS DE MATEMATICA, XXI (OPM 2002-2003). Categoria AFinal dia 2.
OLIMPIADAS PORTUGUESAS DE MATEMATICA, XX (OPM 2001-2002). Categoria A 2a.eliminatoria e Categoria 1 Final Nacional.
OLIMPIADAS PORTUGUESAS DE MATEMATICA, XII (OPM 1993-1994) Categoria A 2a.eliminatoria.
POLYA, G. A Arte de Resolver Problemas. Rio de Janeiro: Interciencia, 1994.
RAMOS, A. P., MATEUS, A. A.; MATIAS, J. B. O. & CARNEIRO, T. R. A. Problemas matematicos:caracterizacao, importancia e estrategias de resolucao. Trabalho da disciplina “Seminarios deResolucoes de Problemas” - MAT 450 - IME-USP, marco de 2002. Site:www.ime.usp.br/˜trodrigo/documentos/mat450/mat450-2001242-seminario-8-resolucao problemas.pdf.
www.mat.uc.pt/˜opm/OPM/provas.htm, Site oficial das Olimpıadas Portuguesas de Matematica.
www.obm.org.br/frameset-provas.htm, Site oficial das Olimpıadas Brasileiras de Matematica.

O PAPEL DA MATEMÁTICA NA ÓPTICA
Mariana Ramos Reis (*)
Luiz Alberto Duran Salomão (**)
1. Introdução
Estas notas foram produzidas durante o período de vigência da bolsa de estudos
concedida à acadêmica Mariana Ramos Reis pelo Programa Institucional de Bolsas de
Ensino de Graduação da Universidade Federal de Uberlândia – PIBEG/UFU – o que se
deu de junho de 2005 a maio de 2006. O projeto ao qual a bolsista esteve vinculada foi
intitulado “Interdisciplinaridade e interação construtiva: uma experiência à luz das
novas diretrizes curriculares” e foi desenvolvido sob a coordenação do professor Luiz
Alberto Duran Salomão, que também orientou os trabalhos desenvolvidos pela bolsista.
O plano de trabalho da referida bolsista, denominado “O papel da matemática na
ciência”, tinha, dentre seus objetivos, o de destacar o papel da matemática em alguns
pontos do desenvolvimento da ciência, selecionando e apresentando textos de cunho
interdisciplinar, motivadores para o ensino de matemática. O texto aqui apresentado
trata do desenvolvimento histórico da óptica, particularmente da solução do problema
da refração. A matemática aqui empregada é bastante elementar; são utilizados alguns
fatos da geometria, da trigonometria e, ainda, uma idéia incipiente do processo de
passagem ao limite. Mas o que deve ser destacado mesmo é o emprego do método
matemático, ou seja, a real influência da matemática no que concerne à adoção de
princípios para a consecução da solução de um problema. Por fim, a proposta deste
trabalho é ilustrar o fato de que textos dessa natureza, destacando através de episódios
históricos o significado cultural da matemática, podem concorrer para a melhoria de seu
ensino, tornando-a mais significativa e contribuindo efetivamente com a formação geral
dos estudantes.
2. Origens
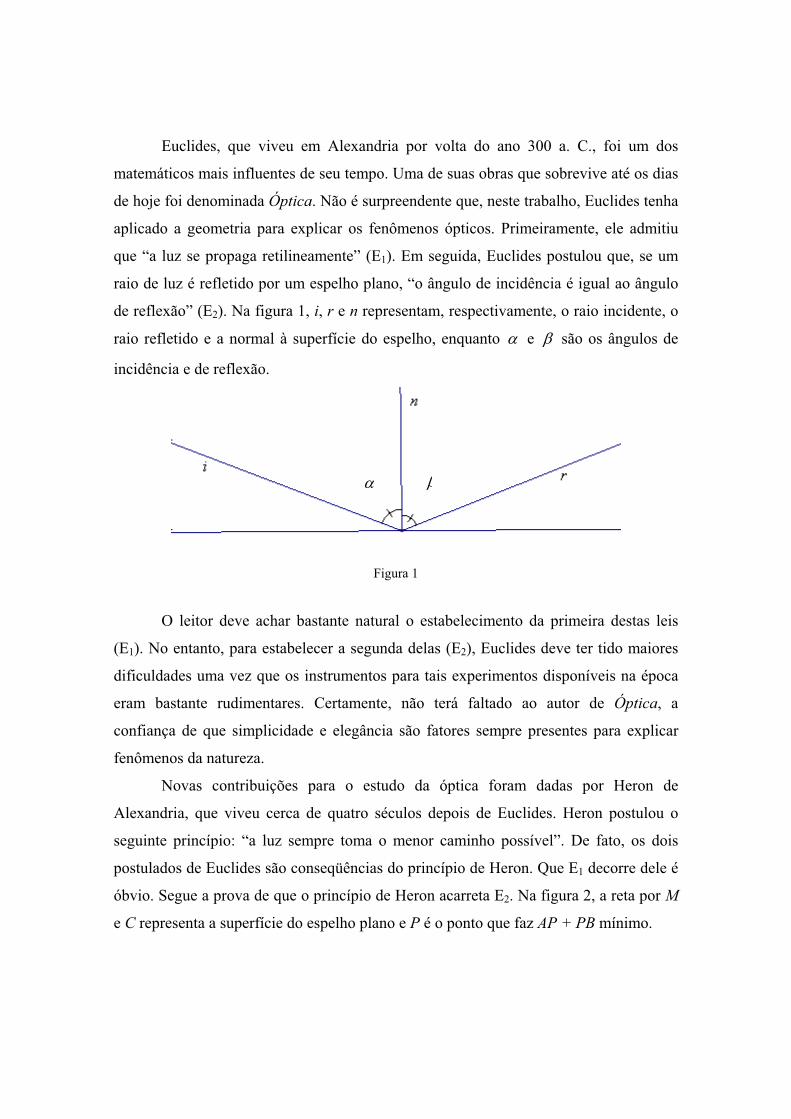
Euclides, que viveu em Alexandria por volta do ano 300 a. C., foi um dos
matemáticos mais influentes de seu tempo. Uma de suas obras que sobrevive até os dias
de hoje foi denominada Óptica. Não é surpreendente que, neste trabalho, Euclides tenha
aplicado a geometria para explicar os fenômenos ópticos. Primeiramente, ele admitiu
que “a luz se propaga retilineamente” (E1). Em seguida, Euclides postulou que, se um
raio de luz é refletido por um espelho plano, “o ângulo de incidência é igual ao ângulo
de reflexão” (E2). Na figura 1, i, r e n representam, respectivamente, o raio incidente, o
raio refletido e a normal à superfície do espelho, enquanto e são os ângulos de
incidência e de reflexão.
Figura 1
O leitor deve achar bastante natural o estabelecimento da primeira destas leis
(E1). No entanto, para estabelecer a segunda delas (E2), Euclides deve ter tido maiores
dificuldades uma vez que os instrumentos para tais experimentos disponíveis na época
eram bastante rudimentares. Certamente, não terá faltado ao autor de Óptica, a
confiança de que simplicidade e elegância são fatores sempre presentes para explicar
fenômenos da natureza.
Novas contribuições para o estudo da óptica foram dadas por Heron de
Alexandria, que viveu cerca de quatro séculos depois de Euclides. Heron postulou o
seguinte princípio: “a luz sempre toma o menor caminho possível”. De fato, os dois
postulados de Euclides são conseqüências do princípio de Heron. Que E1 decorre dele é
óbvio. Segue a prova de que o princípio de Heron acarreta E2. Na figura 2, a reta por M
e C representa a superfície do espelho plano e P é o ponto que faz AP + PB mínimo.
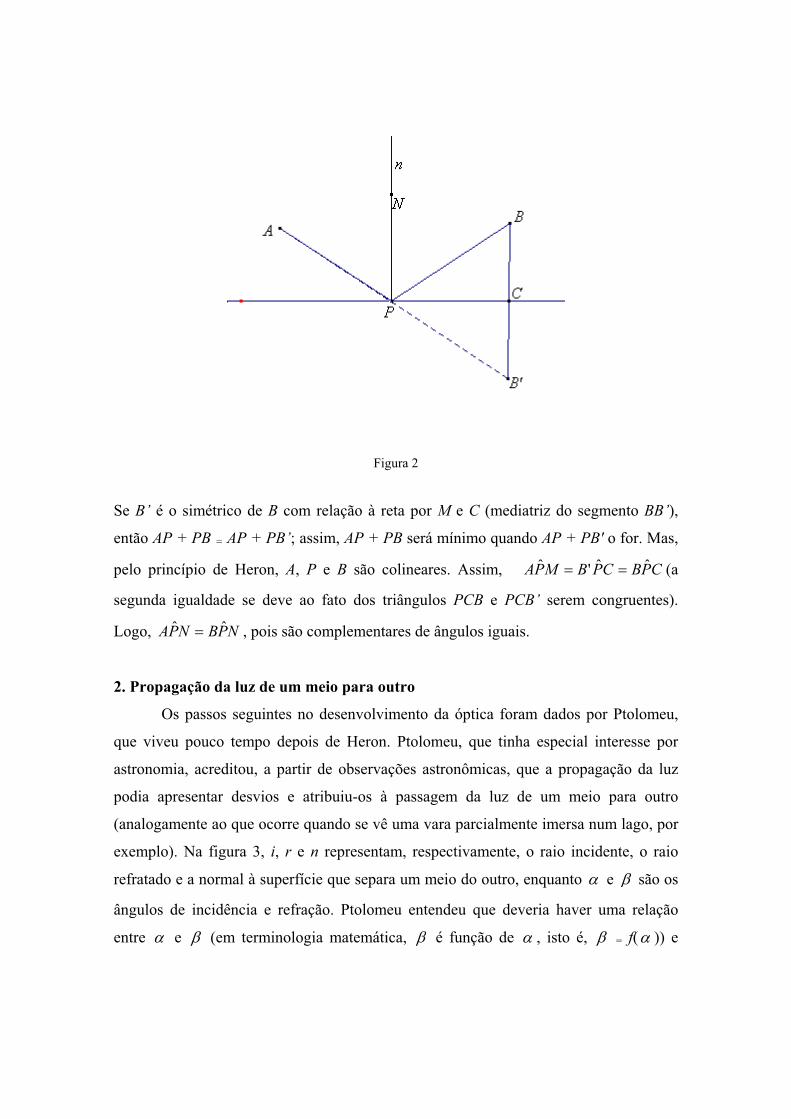
Figura 2
Se B’ é o simétrico de B com relação à reta por M e C (mediatriz do segmento BB’),
então AP + PB = AP + PB’; assim, AP + PB será mínimo quando AP + PB' o for. Mas,
pelo princípio de Heron, A, P e B são colineares. Assim, (a
segunda igualdade se deve ao fato dos triângulos PCB e PCB’ serem congruentes).
Logo, , pois são complementares de ângulos iguais.
CPBCPBMPA ˆˆ'ˆ
NPBNPA ˆˆ
2. Propagação da luz de um meio para outro
Os passos seguintes no desenvolvimento da óptica foram dados por Ptolomeu,
que viveu pouco tempo depois de Heron. Ptolomeu, que tinha especial interesse por
astronomia, acreditou, a partir de observações astronômicas, que a propagação da luz
podia apresentar desvios e atribuiu-os à passagem da luz de um meio para outro
(analogamente ao que ocorre quando se vê uma vara parcialmente imersa num lago, por
exemplo). Na figura 3, i, r e n representam, respectivamente, o raio incidente, o raio
refratado e a normal à superfície que separa um meio do outro, enquanto e são os
ângulos de incidência e refração. Ptolomeu entendeu que deveria haver uma relação
entre e (em terminologia matemática, é função de , isto é, = f( )) e
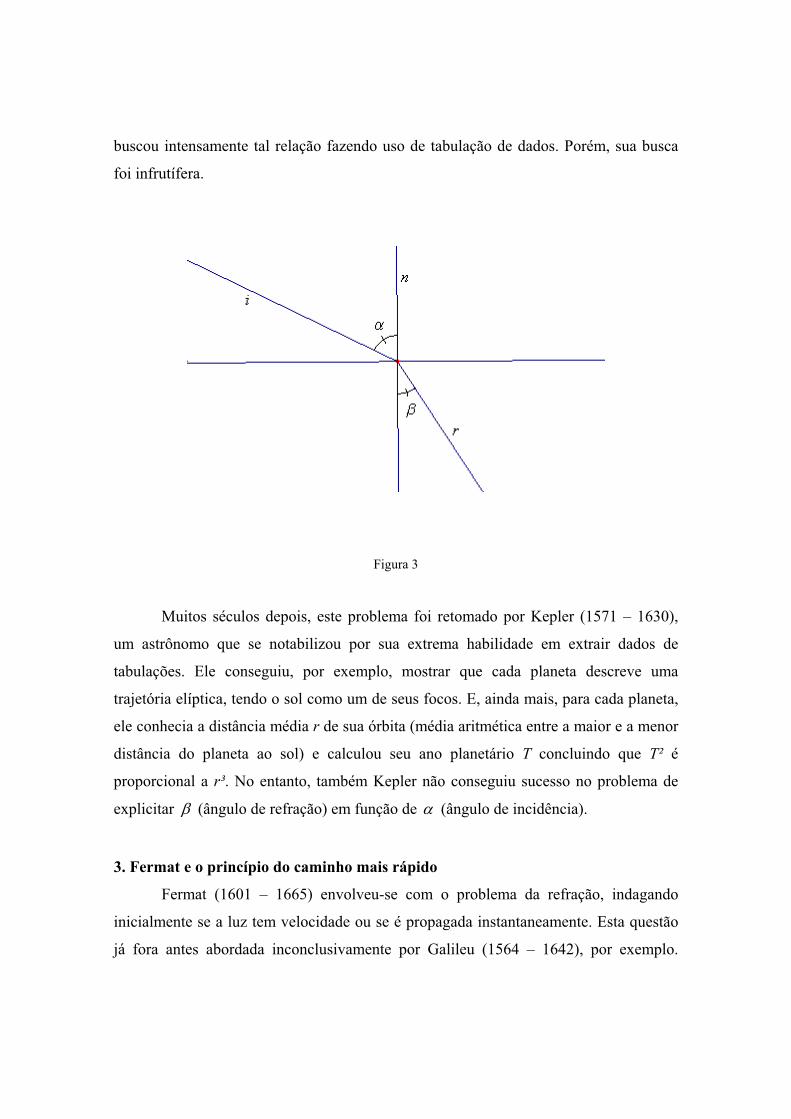
buscou intensamente tal relação fazendo uso de tabulação de dados. Porém, sua busca
foi infrutífera.
Figura 3
Muitos séculos depois, este problema foi retomado por Kepler (1571 – 1630),
um astrônomo que se notabilizou por sua extrema habilidade em extrair dados de
tabulações. Ele conseguiu, por exemplo, mostrar que cada planeta descreve uma
trajetória elíptica, tendo o sol como um de seus focos. E, ainda mais, para cada planeta,
ele conhecia a distância média r de sua órbita (média aritmética entre a maior e a menor
distância do planeta ao sol) e calculou seu ano planetário T concluindo que T² é
proporcional a r³. No entanto, também Kepler não conseguiu sucesso no problema de
explicitar (ângulo de refração) em função de (ângulo de incidência).
3. Fermat e o princípio do caminho mais rápido
Fermat (1601 – 1665) envolveu-se com o problema da refração, indagando
inicialmente se a luz tem velocidade ou se é propagada instantaneamente. Esta questão
já fora antes abordada inconclusivamente por Galileu (1564 – 1642), por exemplo.

Fermat adotou a idéia de que a luz tem velocidade e esta é constante num mesmo meio,
variando de um meio para outro. Em seguida, Fermat estabeleceu o princípio de que “a
luz se propaga segundo o caminho mais rápido”. Não será difícil ao leitor imaginar
situações onde “trajeto mais curto” e “trajeto mais rápido” não sejam expressões
coincidentes. Estabelecido este princípio, segue a solução do problema da refração.
Figura 4
Na figura 4, a reta por M e M' separa o meio 1 (o que contém A), no qual a velocidade
da luz é v1, do meio 2 (o que contém B), onde a referida velocidade é v2. P representa o
ponto da reta por M e M' de modo que o caminho APB seja o mais rápido ligando A a B.
Considere um ponto Q à esquerda de P. Ainda na figura 4,
. Por hipótese, 90ˆˆ'ˆˆ BSPARQPMBPMA
tempo ao longo de AQB tempo ao longo de APB, isto é,

2121 vBP
vAP
vBQ
vAQ
, ou ainda,
0)(12 vAQAP
vBPBQQt . (I)
Observe que, com Q à esquerda de P, ambos os numeradores em (I) são positivos. Na
mesma figura 4, vamos chamar d o comprimento PQ, QBMd ˆ')( (a notação
d indica dependência de d e, por conseguinte, de Q) e, ainda, .PAM
Nos triângulos AQR e PQR, fazendo AR = l1, QR = r e PR = l2, tem-se que r = d cos
e l2 = d sen . Daí, AQ = 2
11
221
cos1
ldlrl . Portanto,
1cos
12
1121 l
dldsenAQllAQAP . (II)
Considerando agora os triângulos QSP e BSP e fazendo QS = m1, BS = m2 e PS = s,
tem-se cosds e dsenm1 . Daí, 2
22
222
cos1
mdmsmBP . Como
BQ = m1 + m2, segue que
1cos
12
22 m
dmdsenBPBQ . (III)
Agora, uma observação sobre números reais: para xxxxx 14
12
1,022
;
logo, xx1
21 e, assim, 11
2xx
. Portanto, para algum2
1,0 , tem-se
xx 11 .
Desse modo, (II) e (III) podem ser reescritos da seguinte maneira:
11
22 cos
lddsenAQAP (IV)

e
22
22 cos
mddsenBPBQ , (V)
onde2
1,0 21 .
Substituindo as expressões (IV) e (V) em (I) e dividindo ambos os membros por d,
obtemos
0
coscos
1
11
2
2
22
2
vl
dsen
vm
dsen. (VI)
Passando ao limite a expressão acima, com d tendendo a 0, tem-se
012 v
senv
sen. (VII)
Note que fazer d tender a 0 em (VI) corresponde a fazer Q tender a P. Ainda, da
expressão (VII), que corresponde a )0( , é o ângulo de refração.
Caso Q tivesse sido tomado à direita de P, um desenvolvimento análogo ao feito acima
acarretaria a desigualdade
012 v
senv
sen. (VIII)
Conclusão: a relação procurada é, portanto,
012 v
senv
sen, (IX)
chamada a Lei de Fermat para a refração.
É interessante observar que, em (IX), quando 21 vv , tem-se . Portanto, o
princípio de Heron é caso particular da lei de Fermat para a refração.
A lei de Fermat também costuma ser creditada a Descartes e a Snell que a
redescobriram, em trabalhos posteriores, desenvolvidos independentemente.
Referências bibliográficas
1. BOYER, C. – História da Matemática – Ed. Edgard Blücher – 1974
2. SCHIFFER, M. e BOWDEN, L. – The Role of Mathematics in Science – The Mathematical Association of America - 1984
(*) Aluna do 7º período do Curso de Matemática da Universidade Federal de Uberlândia e bolsista do Programa Institucional de Bolsas de Ensino de Graduação da Universidade Federal de Uberlândia – PIBEG/UFU – no período de junho de 2005 a maio de 2006.
(**) Professor da Faculdade de Matemática da Universidade Federal de Uberlândia e coordenador do projeto “Interdisciplinaridade e interação construtiva: uma experiência à luz das novas diretrizes curriculares”, vinculado ao Programa Institucional de Bolsas de Ensino de Graduação da Universidade Federal de Uberlândia – PIBEG/UFU – no período de junho de 2005 a maio de 2006.

FAMAT em Revista
Revista Científica Eletrônica daFaculdade de Matemática - FAMAT
Universidade Federal de Uberlândia - UFU - MG
Número 07 - Setembro de 2006
www.famat.ufu.br
Iniciação Científica
em Números

Comitê Editorial da Seção Iniciação Científica em Números
do Número 07 da FAMAT EM REVISTA:
Maria Luiza Maes (coordenador da seção) Márcio José Horta Dantas
������������ �������������
�
� ������� �� �� ��� ������ �������� ��������� �� � ��� � ��� �������� � � ������� � �
������� � �� ��������� ����������� ���� ������� � ������� � ������������ � �� �������
���������� ������� ����������� !"!#�$ $����������� �� �� ����� ��%�� �
��&��������������'������������"����(����)�*� ����� �������������������+� ��������� �� �
������� � �������� � ,��� �������� ������� � ����� � � ��� ���� � � �� � �������� � ������
�������� -� ����� .�
�
/01�2���������3������#��������� ���������"����(�����/23#"!#1-�
�
/41�2�������5� ������������'� � ���5��������%����6������%72,�/25'5%8%72,1-�
�
/91� 2������� �� '� � � 5� ��������� � �� 5�������� %����6����� �� !23"5:� /2'55%8
!23"5:1-�
�
/;1�2�������5� ������������'� � ���3� �����:���������$ $�/25'3:8$ $1-�
�
/<1�5� �������"������������!�����:�������5���������"����(�����'�� ��������%72,�
/5"8!:5"'8%72,1-�
�
/=1�2������� 5� ������������ 5��������%����6����� ��"��������� ���������"����(�����
/2>?"!#8 !"!#8$ $1)�
�
*� �� �� ����� � � @����� ��� ���� ����� ,���,���� ���� �� ����������� � � � ����� �
������ )� !���� � �� ������ � ������������ �������A� � �� ��������� �����6����� ��
�� ��� �������� � �� ����� � �� �� � �� �� ,�� �� �� �� ��� �������� � ���� %72,��
!23"5:������ )�!���+��� ������ ��������������� � ������ �������� ������
�������� �������������� ��,���� ������������������ �������������� !"!#���
,��� ���+��� ���������� ������ �������� ��%�� ���&��������������'������������
"����(����)�
�
�
�
�
�
�
Projetos De Iniciação Científica Que Se Realizam Durante O Período De Setembro De 2006 A Março De 2007
ORIENTADOR: Cícero Carvalho ORIENTADO: Danilo Adrian Marques TÍTULO: Álgebra Comutativa e Computação Algébrica INÍCIO: junho/2006 FIM: maio/2007
ORIENTADOR: Cícero Carvalho ORIENTADO: Flaviano Bahia Paulinelli Vieira TÍTULO: Corpo de Funções Algébricas INÍCIO: março/2006 FIM: fevereiro/2007
ORIENTADOR: Edson Augustini ORIENTADO: Adrielle Giaretta Biase TÍTULO: Tópicos de Álgebra Linear e ModelagemINÍCIO: junho/2006 FIM: maio/2007
ORIENTADOR: Edson Augustini ORIENTADO: Laís Bássame Rodrigues TÍTULO: Tópicos de Geometria Diferencial de Curvas e Superfícies INÍCIO: março/2006 FIM: fevereiro/2007
ORIENTADOR: Edson Augustini ORIENTADO: Patrícia Borges dos Santos e Flávia Cristina Martins Queiroz TÍTULO: Tópicos de Geometria Não-Euclidiana INÍCIO: março/2006 FIM: fevereiro/2007
ORIENTADOR: Dulce Mary de Almeida ORIENTADO: Rafael Henrique Alves de Oliveira TÍTULO: Variedades Diferenciáveis Não-Orientáveis INÍCIO: junho/2006FIM: maio/2007
ORIENTADOR: Ednaldo Carvalho Guimarães ORIENTADO: Joaquim Ferreira Vieira Neto TÍTULO: Ajuste de Distribuição de Probabilidade à Dados Climatológicos de Uberlândia-MGINÍCIO: Junho/2006 FIM: maio/2007
ORIENTADOR: Ednaldo Carvalho Guimarães ORIENTADO: Herbert Rezende Siqueira TÍTULO: Comportamento Temporal do Material Particulado (PM-10) em Uberlândia- MG: Análise da Dependência Temporal por Meio de Semivariograma.INÍCIO: Agosto/2006FIM: julho/2007
ORIENTADOR: Marcelo Tavares ORIENTADO: Eloar Correia de Lima TÍTULO: Sazonalidade e Tendências em Séries Temporais de dados de IPC de Diferentes Instituições INÍCIO: junho/2006 FIM: maio/2007
ORIENTADOR: Marcelo Tavares ORIENTADO: Maria Luiza Maes TÍTULO: Uso de Análise de Variância e Regressão Múltipla na Determinação de Sazonalidade e tendências em Séries Temporais de Dados de INPC nas Regiões Metropolitanas do Rio de Janeiro, São Paulo e Belo Horizonte INÍCIO: junho/2006 FIM: maio/2007
ORIENTADOR: Marcos Antônio da Câmara ORIENTADO: Virgínia Helena Ribeiro Miranda TÍTULO: Aplicações Matemáticas na Geometria INÍCIO: junho/2006FIM: maio/2007
ORIENTADOR: Marcos Antônio da Câmara ORIENTADO: Rafael Alves Figueiredo TÍTULO: Introdução à Criptografia INÍCIO: junho/2006 FIM: maio/2007
ORIENTADOR: Marcos Antônio da Câmara ORIENTADO: Giselle Moraes Resende Pereira TÍTULO: Divisão Áurea INÍCIO: março/2006 FIM: fevereiro/2007
ORIENTADOR: Valdair Bonfim ORIENTADO: Marcelo Lopes Vieira TÍTULO: Tópicos de Matemática com Vistas às Aplicações em Equações Diferenciais INÍCIO: junho/2206 FIM: maio/2007
ORIENTADOR: Lúcia Resende Pereira Bonfim ORIENTADO: Alessandra Ribeiro da Silva TÍTULO: Estudo e Algumas Aplicações do Cálculo Avançado INÍCIO: março/2006 FIM: fevereiro/2007
ORIENTADOR: Luiz Alberto Duran Salomão ORIENTADO: Leandro Cruvinel Lemes TÍTULO: Frações Contínuas e Aplicações INÍCIO: março/2006 FIM: fevereiro/2007
ORIENTADOR: Luiz Alberto Duran Salomão ORIENTADO: Mariana Fernandes dos Santos Villela TÍTULO: Frações Contínuas: Primeiros Passos INÍCIO: março/2006 FIM: fevereiro/2007
ORIENTADOR: Aristeu da Silveira Neto ORIENTADO: Maksuel Andrade Costa TÍTULO: Simulação Numérica de Problemas de Transferência de calor e de mecânica dos Fluidos Unidimensionais Transientes INÍCIO: abril/2006FIM: março/2007
ORIENTADOR: Antônio Carlos Nogueira ORIENTADO: Matheus Bartolo GuerreroTÍTULO: Um Estudo de Funções INÍCIO: março/2006 FIM: fevereiro/2007
ORIENTADOR: Edmilson Rodrigues Pinto ORIENTADO: Gerson Luiz Gonçalves Dias TÍTULO: Aprimoramento do ensino Estatístico e Trabalhos de Projetos na UniversidadeINÍCIO: agosto/2006 FIM: agosto/2007
ORIENTADOR: Sezimária de Fátima P. Saramago ORIENTADO: Bruno Nunes de Souza TÍTULO: Estudo e Comparação de Algumas Técnicas de Otimização Multi-Objetivo INÍCIO: março/2006 FIM: fevereiro/2007
ORIENTADOR: Márcio José Horta Dantas ORIENTADO: Carlos Henrique Tognon TÍTULO: Existência e Estabilidade de Soluções Periódicas Ressonantes em uma Classe de Problemas não Ideais INÍCIO: agosto/2005
FIM: julho/2006
ORIENTADOR: Ednaldo Carvalho Guimarães ORIENTADO: Gabriella de Freitas Alves / Herbert Rezende Siqueira TÍTULO: Comportamento da Precipitação Pluviométrica Mensal do Estado de Minas Gerais: Análise Espacial e Temporal. INÍCIO: agosto/2005FIM: julho/2006
ORIENTADOR: Rogério de Melo Costa Pinto ORIENTADO: Gustavo Silva Sages TÍTULO: Avaliação do Desempenho dos Alunos da Engenharia Elétrica da UFU INÍCIO: novembro/2006 FIM: novembro/2007
ORIENTADOR: Rosana Sueli da Motta Jafelice ORIENTADO: Eder Lúcio da Fonseca TÍTULO: Estudo de Parâmetros Fuzzy nos Modelos de Evolução da AIDS com Tratamento INÍCIO: agosto/2005FIM: julho/2006
ORIENTADOR: Edson Agustini ORIENTADO: Franciella Marques da Costa TÍTULO: Introdução à Teoria da Informação e Codificação INÍCIO: março/2006 FIM: fevereiro/2007


FAMAT em Revista
Revista Científica Eletrônica daFaculdade de Matemática - FAMAT
Universidade Federal de Uberlândia - UFU - MG
Número 07 - Setembro de 2006
www.famat.ufu.br
E o Meu Futuro Profissional?

Comitê Editorial da Seção E o Meu Futuro Profissional?
do Número 07 da FAMAT EM REVISTA:
Marcio José Horta Dantas (coordenador da seção) Maria Luiza Vitorino Gonçalves Flaviano Bahia Paulinelli Vieira
Neste número de FAMAT em REVISTA, a seção “E o meu futuro profissional” é dedicada a uma entrevista com o Prof. Cícero Carvalho sobre a recente criação do curso de Mestrado em Matemática. Tal entrevista foi realizada pela aluna Maria Luiza Maes, membro do Corpo Editorial da FAMAT em REVISTA. Esperamos que as informações dadas pelo Prof. Cícero sejam úteis para a tomada de decisão para os nossos alunos recém formados.
Entrevista com o Prof. Cícero Carvalho sobre o a Implantação do Mestrado em Matemática na UFU
1- Qual a sua formação acadêmica? Sou bacharel em Física e Matemática pela UFRJ (1977-1981), Mestre em Matemática pelo IMPA (1983-1986), Doutor pelo IMPA (1989-1994) e fiz o pós-doutrorado na Universidade de Harvard (1996-1998).
2- Quais serão os critérios para seleção para ingressar no mestrado?
O aluno deve cursar a disciplina Análise na Reta, que será oferecida no período de verão. O ingresso no curso de mestrado será baseado na nota dessa disciplina, no currículo do aluno e em cartas de recomendação.
3- Quais matérias serão oferecidas no verão? E como será a seleção?
A seleção para cursar a disciplina de Análise na Reta será baseada no currículo do aluno e em cartas de recomendação.
4- Qual o perfil desejado dos alunos para o mestrado em Uberlândia?
O ideal é ter alunos que tenham feito um bom curso de graduação, mas, melhor ainda, é ter alunos que gostem de Matemática e que gostem de estudar Matemática.
5- O mestrado será oferecido em quais áreas?
As linhas de pesquisa, conforme informado à CAPES são:
a) Geometria - Algébrica e Diferencial b) Análise Funcional e Equações Diferenciais c) Análise Numérica e Otimização
6- Quais são as disciplinas obrigatórias e optativas para fazer o mestrado?
Existem apenas duas disciplinas obrigatórias: Tese de Mestrado e Seminários. A primeira permite que o aluno tenha um tempo para estudar temas relacionados à tese e a segunda é para que o aluno se acostume a assistir e a ministrar palestras. Mas existe um exame de Qualificação eliminatório em Álgebra Linear e Análise no Rn , que serão disciplinas oferecidas logo no primeiro período do curso, então é recomendável que o aluno faça essas disciplinas.
7- Será possível alunos da graduação cursar matérias do mestrado?
Em princípio, é possível, mas sempre a critério do colegiado. Acredito que se o aluno está dando conta do curso muito bem e está com tempo sobrando, não irá haver problema.
8- Como e quantas serão as bolsas para o mestrado? Qual será o valor?
Não existe previsão de bolsas para os alunos que ingressarem agora.
9- Quais serão os professores?
Os corpo docente é formado pelos professores: Antônio Carlos Nogueira, Célia Barcelos, César Almeida, Cícero Carvalho, Dulce Almeida, Edson Agustini, Geraldo Botelho, Jocelino Sato, Márcio Dantas, Olímpio Miyagaki (UFV), Rosana Jafelice, Sezimária Saramago e Walter Motta.
10- Quais serão as condições para obter o título de mestre?
O regimento do Programa, no ítem 10, prevê o seguinte:“Para obter o grau de Mestre em Matemática , o estudante deverá, no prazo mínimo de
doze (12) meses e no máximo de vinte e quatro (24) meses, contado a partir da data da matrícula inicial:
10.1 Integralizar pelo menos trinta (30) créditos em disciplinas do grupo A, B ou C cursadas no próprio Programa ou em outros Programas, desde que devidamente convalidadas pelo Colegiado.
10.2 Cursar, com aproveitamento, a disciplina Seminários. 10.3 Ser aprovado em exame de proficiência em leitura e interpretação de texto técnico em
língua estrangeira, conforme normas gerais estabelecidas pelo Conselho de Pesquisa e Pós-Graduação da UFU.
10.4 Ser aprovado no exame de qualificação. 10.5 Cursar, em pelo menos um período letivo, e após a aprovação no exame de
qualificação, a disciplina Dissertação de Mestrado. 10.6 Ser aprovado na defesa de dissertação. 10.7 Providenciar para a Coordenação, após a aprovação da dissertação, no prazo máximo
de trinta (30) dias contados a partir da defesa, sete (7) exemplares do texto da dissertação, na sua forma final e uma (1) cópia eletrônica da dissertação conforme modelo existente na secretaria do Programa. “
11- Quais são as atividades profissionais desenvolvidas pelo mestre em Matemática?
A atividade mais comum é o ensino de matemática em instituições públicas ou privadas de ensino superior. O Mestre também pode prosseguir seus estudos num curso de Doutorado, e então, além de ministrar aulas poderá fazer pesquisa e produzir resultados originais.
12- O que você aconselharia para o aluno do curso de Matemática: fazer licenciatura ou bacharelado?
Acho que cada um deve fazer aquilo que gosta, não me sinto capaz de aconselhar nem uma coisa nem outra. O que desaconselho fortemente é gastar tempo em qualquer curso que não seja de fato o que queremos, o que temos vontade de fazer, o que estudamos com gosto.
13- Quais são as vantagens e desvantagens de se ingressar em um curso de mestrado recém-criado?
Não vejo grandes vantagens nem desvantagens. É claro que o aluno egresso de um curso novo, que ainda não é amplamente conhecido poderá ter um pouco mais de dificuldade de ser aceito num doutorado muito conhecido; por outro lado se tiver feito uma boa tese, acho que isso já não acontece (pelo contrário, poderá até ser convidado pelo professor de fora, da banca, para continuar os estudos com ele!).
14- Quais as vantagens (e possíveis desvantagens) de se cursar mestrado na mesma instituição onde o aluno fez a graduação?
Também aqui não vejo grandes vantagens nem desvantagens. Isso é muito comum nas grandes universidades; por outro lado, mesmo lá alunos saem para fazer o mestrado e/ou doutorado em outras instituições.
15- Quais os benefícios para a FAMAT e os alunos do curso com a implantação do mestrado?
A FAMAT poderá receber mais recursos do governo federal devido à existência do mestrado, e é claro que se, por exemplo, compramos computadores “para o mestrado”, isso irá liberar outras máquinas para serem usadas pelos cursos de bacharelado e licenciatura; poderemos comprar mais livros, teremos mais visitas de professores de outras instituições, etc; no fundo os recursos tornam todos os cursos melhores, e todos os alunos e professores se beneficiarão disso. Além disso, com o tempo, será criado um ambiente acadêmico que ainda não existe, o que também contribuirá em muito para o ensino e a aprendizagem de Matemática. Prevemos ainda a criação de um Programa de Verão, onde além da disciplina Análise na Reta, teremos uma outra disciplina do Mestrado sendo ministrada, e mini-cursos e palestras voltados não apenas para os alunos do Mestrado, mas também para os dos cursos de graduação.
16- Quando poderemos pensar numa possível implantação do doutorado?
Daqui muitos, muitos, muitos, muitos anos.
17- Fale um pouco sobre as teses de mestrado.
A tese de mestrado normalmente consiste de um ou mais artigos em uma área específica da matemática que serão estudados pelo aluno, que por sua vez escreverá um trabalho expondo todos os detalhes desse(s) artigo(s). Também é possível, em algumas áreas,especialmente em algumas da matemática aplicada, que o aluno desenvolva um trabalho que tem algo de original, não no volume de uma tese de doutorado, claro, mas algo que por vezes pode até resultar em alguma publicação.
18- Mensagem para os alunos. Estudem!

FAMAT em Revista
Revista Científica Eletrônica daFaculdade de Matemática - FAMAT
Universidade Federal de Uberlândia - UFU - MG
Número 07 - Setembro de 2006
www.famat.ufu.br
Merece Registro

Comitê Editorial da Seção Merece Registro
do Número 07 da FAMAT EM REVISTA:
Marcos Antônio da Câmara (coordenador da seção)
Merece Registro
A) PROJETO UFU - INSTITUTO DO MILÊNIO
De 24 a 28 de julho teve lugar na UFU um módulo do Programa de Aperfeiçoamento para Professores de Matemática do Ensino Médio, realizado pela FAMAT, juntamente com o IMPA, o Instituto do Milênio e a RNP, e que contou com 52 participantes, professores de Uberlândia e região. Em todos os dias, na parte da manhã, eles assistiram a aulas ministradas no IMPA pelos professores Elon Lages Lima, Paulo César Carvalho, Augusto Morgado e Eduardo Wagner, e que foram transmitidas para a UFU via videoconferência. Na parte da tarde, os tópicos ministrados na parte da manhã foram discutidos e houve também uma sessão de resolução de exercícios. O curso foi coordenado pelo Professor. Cícero Fernandes de Carvalho, como parte de um projeto UFU -Instituto do Milênio, coordenado pelo Professor Jocelino Sato.
B) MESTRADO EM MATEMÁTICA NA UFU
Veja entrevista com o Professor Cícero Fernandes de Carvalho nesta revista, coordenador do Programa de Mestrado em Matemática da UFU, que terá início em 2007.
C) VISITA DE REPRESENTANTE DA UNIVERSIDADE ROOSEVELT
Dia 25 de agosto de 2006, recebemos a visita do Prof. Joshua Telser, representando a Universidade Roosevelt, de Chicago, com vistas ao estabelecimento de convênio com a UFU. Além da Faculdade de Matemática, o Prof. Telser visitou também outras Unidades, bem como bibliotecas e laboratórios. O Prof. Geraldo Botelho dialogou longamente com o Prof. Telser, respondendo às suas perguntas e informando sobre o Curso de Graduação em Matemática, dos Cursos de Especialização em Matemática e Estatística, do início do Programa de Mestrado em Matemática em 2007, dos Programas de Iniciação Científica, dos Programas de Ensino, do PET, da Revista Eletrônica da Famat, do sistema de Bibliotecas e seus serviços ( comutação bibliográfica nacional e internacional, etc ).
D) NOVOS PROFESSORES
Publicado no DOU do dia 03 de agosto de 2006 a portaria da redistribuição do Professor ErcílioCarvalho da Silva para a UFABC. Foi solicitada a nomeação do Professor Alessandro Santana, aprovado em concurso, para ocupar a vaga enviada pela UFABC.
Foram contratados para a Faculdade de Matemática e já estão exercendo suas atividades docentes, os professores: - Aurélia Aparecida de Araújo Rodrigues - Área: ESTATÍSTICA;

- Victor Gonzalo Lopes Neumann e Weber Flávio Pereira - Área: MATEMÁTICA.
A FAMAT deseja aos novos professores muito sucesso nesta nova etapa profissional!
E) FACULDADE DE CIÊNCIAS INTEGRADAS DO PONTAL – ITUITABA
Tomaram posse os seguintes docentes que atuarão na Faculdade de Ciências Integradas do Pontal - Campus Ituiutaba:
MATEMÁTICA:
João Carlos Moreira Germano Abud de Rezende Evaneide Alves Carneiro Wallisson da Silva Rosa Edward Luís de Araújo
ESTATÍSTICA
Eliane Maria Brandemarte Moreira
EDUCAÇÃO MATEMÁTICA
Odaléa Aparecida Viana
A FAMAT deseja aos novos professores muito sucesso nesta nova etapa profissional!
F) PIBEG
Projeto PIBEG: Interação Construtiva: uma experiência à luz das novas diretrizes curriculares
Docentes: Luiz Alberto Duran Salomão ( coordenador do projeto ), Antônio Carlos Nogueira, Dulce Mary de Almeida e Valdair Bonfim. Período de abrangência do projeto: 01/06/2005 até 31/05/2006.
Palestras:
1 - O Papel da Matemática na Ótica. Palestrante: Prof. Luiz Alberto Duran Salomão. 01/07/2005.
2 - René Descartes: um pouco de sua vida e obra. Palestrante: Prof. Valdair Bonfim. 26/08/2005.
3 - O Número de Ouro na Natureza. Palestrante: Profª. Dulce Mary de Almeida. 09/09/2005.
4 - O Centro de Massa e a Reta de Euler. Palestrante: Prof. Luiz Alberto Duran Salomão. 21/10/2005.
5 - A Matemática do nosso dia-a-dia. Palestrante: Prof. Antônio Carlos Nogueira. 09/12/2005.
6 - Desigualdades entre as médias clássicas: interpretação geométrica e aplicações. Palestrante: Thiago Rodrigues da Silva. 20/12/2005.
7 - Geometria Analítica para quê ? Palestrante: Danilo Adrian Marques. 06/04/2006.
8 - Resolução de problemas práticos com linguagem vetorial. Palestrante: Valdair Bonfim. 06/04/2006.
9 - Geometria Analítica e Cálculo: Uma retrospectiva histórica. Palestrante: Valdair Bonfim. 11/04/2006.
10 - Até onde podemos chegar com as idéias da Geometria Analítica? Palestrante: Danilo Adrian Marques. 13/04/2006.
Mini-cursos:
1 - Mini-curso: “A Matemática e alguns Princípios da Física”.
Responsáveis: Prof.: Luiz Alberto Duran Salomão; Discente: Mariana Ramos Reis. Dias: 18, 19 e 20 de abril de 2006.
2 - Mini-curso: “Introdução ao CABRI-GÉOMÈTRE”.
Responsável: Profa. Dulce Mary de Almeida. Dias: 24, 25 e 26/04/2006. Laboratório de Informática - Bloco Y- 15:00 às 17:00 horas.
3 - Mini-curso:“Introdução ao MAPLE”.
Responsável: Prof. Antônio Carlos Nogueira. Dias: 24, 25 e 26/04/2006. Laboratório de Informática - Bloco Y - 08:50 às 11:30horas.
4 – Mini-curso: "Introdução ao Processador de Texto Latex".
Responsável:Prof.Antônio Carlos Nogueira. Dias:24, 25 e 26/04/2006.
Projeto PIBEG: Aprimoramento do ensino estatístico e trabalhos de projetos na universidade.
Docente: Edmilson Rodrigues Pinto
Aluno bolsista: Gerson Luiz Gonçalves Dias
Orientação de alunos em projeto final da disciplina MLI54 Estatística e Probabilidade.
Vigência: junho de 2005 a julho de 2006 (foi pedida renovação para agosto 2006 até agosto de 2007)
Financiador: Universidade Federal de Uberlândia
G) NOTAS
O Conselho Administrativo da SBMAC (Sociedade Brasileira de Matemática Aplicada e Computacional) indicou a Professora Rosana Sueli da Motta Jafelice para atuar como a nova Coordenadora da Regional 07 da Sociedade Brasileira da Matemática Aplicada e Computacional, a partir de junho/2006 até 31/12/2007. A área de abrangência é Minas Gerais (exceto Zona da Mata).
Os professores Marcelo Tavares e Luis A. Benedetti participaram como consultores e avaliadores do Curso de Licenciatura em Matemática da FEI- Ituiutaba-MG, nos dias 16 a 18/08.
H) PARTICIPAÇÃO EM BANCAS
O Prof. Geraldo M. A. Botelho participou, no dia 31/07/2006, da banca da tese de doutoramento de Vanessa Bertoni, intitulada "Funções e polinômios univalentes: algumas propriedades e aplicações", no ICMC-USP-São Carlos, SP.
A Profa. Sezimária F. P. Saramago participou, no dia 31/07/2006, da banca de qualificação de doutorado de Francisco Aurilio Azevedo Pinho, intitulada "Simulação Numérica de Grandes Escalas em Cavidades Tridimensionais Uilizando Modelagem Dinâmica", no Programas de Pós-graduação em Engenharia Mecânica -UFU.
I) ORIENTAÇÕES
Docente Orientador: Cícero Fernandes de Carvalho Orientando: Diogo Antônio Cardoso Curso: Matemática Tipo de Orientação: Iniciação Cientifica Título: A Álgebra Comutativa da Geometria Algébrica Programa:PROMATPeríodo: 16 de agosto de 2005 a 16 de agosto de 2006
Docente Orientador: Cícero Fernandes de Carvalho Orientando: Warlisson Inácio de Miranda
Curso: Matemática Tipo de Orientação: Iniciação Cientifica Programa:PROMAT
Docente Orientadora: Dulce Mary de Almeida Orientanda: Thiago Rodrigues da Silva Órgão de fomento: PROGRAD/UFU Programa: PIBEG ( Programa Institucional de Bolsas do Ensino de Graduação )Curso: Matemática Tipo de Orientação: Iniciação científica Projeto: Aspectos Extra-Curriculares de Matemática Elementar I e Iniciação ao Software Cabri-Géomètre II Período:junho 2005 a maio 2006
Docente Orientador: Dulce Mary de Almeida Orientando: Rafael Henrique Alves de Oliveira Curso: Matemática Tipo de Orientação: Iniciação científica Projeto: Variedades diferenciáveis não-orientáveis de dimensão dois Programa:PROMATPeríodo: junho 2006 a maio 2007
Docente Orientador: Marcos Antônio da Câmara Orientanda: Virgínia Helena Ribeiro Miranda Curso: Matemática Tipo de Orientação: Iniciação científica Projeto: Aplicações matemáticas da Geometria Programa: PROMAT Período: junho 2006 a maio 2007
Docente Orientador: Marcos Antônio da Câmara Orientanda: Rafael Alves Figueiredo Curso: Matemática Tipo de Orientação: Iniciação científica Projeto: Introdução à criptografia Programa: PROMAT Período: junho 2006 a maio 2007
Docente Orientador: Rosana Sueli da Motta Jafelice Orientando: Bruno Flávio Zanatta Bechara (até 30/06) Orgão de Fomento: FAPEMIG Curso /Programa: Engenharia Elétrica Tipo de Orientação: Iniciação Científica
Docente Orientador: Rosana Sueli da Motta Jafelice Orientando: Eder Lucio da Fonseca (até 31/07) Orgão de Fomento: CNPq Curso /Programa: Matemática/PIBIC Tipo de Orientação: Iniciação Científica
Docente Orientador: Rosana Sueli da Motta Jafelice

Orientando: Ana Luíza Pereira Saramago Orgão de Fomento: FAPEMIG Curso /Programa: Medicina/PIBIC Tipo de Orientação: Iniciação Científica
Docente Orientador: Sezimária F P Saramago Orientando: Lúcio Aurélio Purcina Órgão de Fomento: Programa: Pós-graduação em Engenharia Mecânica Tipo de Orientação: Doutorado Projeto: Solução de Grandes Sistemas usando Otimização
Docente Orientador: Sezimária F P Saramago Orientando: Giovana Trindade S Oliveira Órgão de Fomento: CNPq Programa: Pós-graduação em Engenharia Mecânica Tipo de Orientação: Mestrado Projeto: Estudo e aplicações da Evolução Diferencial
Docente Orientador: Sezimária F P Saramago Orientando: Carlos Alberto da Silva Junior Órgão de Fomento: Capes Programa: Pós-graduação em Engenharia Mecânica Tipo de Orientação: Mestrado Projeto: Uma contribuição ao Estudo da Programação Linear
Docente Orientador: Sezimária F P Saramago Orientando: Bruno Nunes de Souza Órgão de Fomento: Fapemig Curso: Matemática Tipo de Orientação: IC Projeto: Estudo e Comparação de Algumas Técnicas de Otimização Multi-Objetivo
Docente Orientador: Sezimária F P Saramago Orientando: Aline Rocha de Assis Órgão de Fomento: Fapemig Curso: Engenharia Elétrica Tipo de Orientação: IC Projeto: Evolução Diferencial aplicada à Solução de Problemas de Otimização Multi-Objetivo
Docente Orientador: Sezimária F P Saramago Orientando: Matheus Borges Arantes Órgão de Fomento: CNPq Curso: Engenharia Elétrica Tipo de Orientação: IC Projeto: Otimização de Trajetórias de Robôs com Estrutura Paralela
Docente Orientador: Sezimária F P Saramago Orientando: Antônio Dias Carrijo Neto Órgão de Fomento: Capes Curso: Engenharia Mecânica
Tipo de Orientação: PET Projeto: Estudo da Topologia do Espaço de Trabalho de Robôs Manipuladores 3R
Docente Orientador: Sezimária F P Saramago Orientando: Sidney Araújo Mendonça Órgão de Fomento: Capes Curso: graduando em Engenharia Mecânica Tipo de Orientação: PET Projeto: Estudo da Topologia do Espaço de Trabalho de Robôs Manipuladores 3R
Docente Orientador: Valdair Bonfim Orientando: Danilo Adrian Marques Órgão de Fomento: PROGRAD/UFU Programa: PIBEG ( Programa Institucional de Bolsas do Ensino de Graduação ) Tipo de Orientação: Bolsista do PIBEG. Projeto de Ensino: "Interação Construtiva: uma experiência à luz das novas diretrizes curriculares".
Docente Orientador: Valdair Bonfim Orientando: Marcelo Lopes Vieira Órgão de Fomento: sem financiamento Programa: PROMAT Tipo de Orientação: Iniciação Científica. Projeto: "Tópicos de Matemática com vistas às aplicações em Equações Diferenciais" . Período : 01/06/2006 a 01/06/2007.
Na vigência deste projeto o orientando Marcelo Lopes Vieira apresentou a seguinte comunicação na III Semana Acadêmica da UFU:" Exponencial de Matrizes ". Dia: 09/08/2006.
Orientações PET Matemática
Título: Corpos de Funções Algébricas Orientador: Cícero Fernandes de Carvalho Bolsista(s): Flaviano Bahia Paulinelli Vieira Período de realização: março de 2006 a fevereiro de 2007
Título: Estudo e algumas aplicações do Cálculo Avançado Orientador: Lúcia Resende Pereira Bonfim Bolsista(s): Alessandra Ribeiro da Silva. Período de realização: março de 2006 a fevereiro de 2007.
Título: Tópicos de Geometria Diferencial de Curvas e Superfícies Orientador: Edson Agustini Bolsista(s): Laís Bássame Rodrigues Período de realização: março de 2006 a fevereiro de 2007.
Título: Tópicos de Geometrias Não – Euclidianas Orientador: Edson Agustini Bolsista(s): Patrícia Borges dos Santos e Flávia Cristina Martins Queiroz
Período de realização: março de 2006 a fevereiro de 2007
Título: Frações Contínuas e Aplicações Orientador: Luiz Alberto Duran Salomão Bolsista(s): Leandro Cruvinel Lemes Período de realização: março de 2006 a fevereiro de 2007
Título: A Álgebra Comutativa da Geometria Algébrica Orientador: Cícero Fernandes de Carvalho Bolsista(s): Ernani Magno de Freitas Junior Período de realização: agosto de 2005 a julho de 2006
Título: Introdução à Álgebra Comutativa e Computacional Orientador: Cícero Fernandes Carvalho Bolsistas: Stela Zumerle Soares e Karla Barbosa de Freitas Período de realização: agosto de 2005 a julho de 2006
Título: Frações contínuas: primeiros passos Orientador: Luiz Alberto Duran Salomão Bolsista(s): Mariana Fernandes dos Santos Villela Período de realização: março de 2006 a fevereiro de 2007
Título: Tópicos de Geometria Diferencial de Curvas e Superfícies Orientador: Edson Agustini Bolsista(s):Maksuel Andrade Costa Período de realização: março de 2006 a fevereiro de 2007
Título: Informação e Codificação Orientador: Ercílio Carvalho da Silva Bolsista(s): Weyder Orlando Brandão Junior Período de realização: março de 2006 a agosto de 2007
Título: Um estudo de funções Orientador: Antônio Carlos Nogueira Bolsista(s): Matheus Bartolo Guerrero Período de realização: março de 2006 a fevereiro de 2007
Título: Divisão Áurea Orientador: Marcos Antônio da Câmara Bolsista(s): Giselle Moraes Resende Pereira Período de realização: março de 2006 a fevereiro de 2007
J) PRODUÇÃO CIENTÍFICA
ALMEIDA, D. M.. On fat sub-Riemannian symmetric spaces in codimension three. Differential Geometry and its Applications, v. 4, n.2, p.178-190, 2006
ALMEIDA, D. M., SILVA, T. R., As desigualdades entre as Médias Aritmética, Geométrica, Harmônica e Quadrática de dois números reais. Uberlândia-MG: FAMAT em Revista (Revista Eletrônica da FAMAT/UFU), n.06, p.62-74, maio de 2006
JAFELICE, R. S. M, LOPES, W. A., Fuzzy Modeling in the Elimination of Drugs, Proceedings of the 2005 International Symposium on Mathematical and Computational Biology BIOMAT 2005.
JAFELICE, R. S. M, FONSECA, E. L., Abordagem Fuzzy da Influência do Tratamento na Sobrevida da População HIV-Positiva, Biomatemática 16 (2006) Uma Publicação do Grupo de Biomatemática do IMECC- UNICAMP - pag. 43-52.
PINTO, E. R., PONCE de LEON, A. (2006). Modelagem conjunta da média e dispersão de Nelder e Lee como alternativa aos métodos de Taguchi. Pesquisa Operacional, 26(2), 203-224.
PINTO, E. R., PONCE de LEON, A. (2006). Aplicação da modelagem conjunta da média e dispersão a um experimento de mistura com variáveis de processo. 51a RBRAS – Maio 2006 – Botucatu – SP. (Resumo estendido, publicado nos anais do evento).
PINTO, E. R., PONCE de LEON, A. (2006). Planejamento Ótimo de Experimentos. Editora: Associação Brasileira de Estatística – ABE, São Paulo.
SARAMAGO, Sezimária de Fátima Pereira; BERGAMASCHI, Paulo Roberto; NOGUERIA, Antônio Carlos. Design and optimization of 3R manipulators using the workspace features. Applied Mathematics and Computation, Elsevier, V 172, p. 439 - 463, 2006.
SARAMAGO, Sezimária de Fátima Pereira; OLIVEIRA, Giovana Trindade; CARVALHO, João Carlos Mendes; OLIVEIRA, Plinio José; CECCARELLI, Marco. On the use of Differential Evolution in the Trajectory Modeling of Parallel Architecture Robot. In: III EUROPEAN CONFERENCE ON COMPUTATIONAL MECHANICS SOLIDS, STRUCTURES AND COUPLED PROBLEMS IN ENGINEERING, Lisboa. ECCM 06. Springer, 2006. v. 1, p. 1-13.
SARAMAGO, Sezimária de Fátima Pereira; STEFFEN JUNIOR, Valder; SANTOS, Rogério Rodrigues dos. Robot Path Planning in a Constrained Workspace by using Optimal Control Techniques. In: III EUROPEAN CONFERENCE ON COMPUTATIONAL MECHANICS SOLIDS, STRUCTURES AND COUPLED PROBLEMS IN ENGINEERING, Lisboa. ECCM 06. Springer, 2006. v. 1, p. 1-16.
SATO, J., Complete and Stable O(p+1)×O(q+1)-invariant Hypersurfaces with Zero Scalar Curvature in Euclidean Space R^p+q+2, Annals of Global Analysis and Geometry, 29: 221–240 (2006).
L) PARTICIPAÇÃO EM EVENTOS
O Prof. Arlindo José S. Júnior participou, no período de 07 a 10 de setembro de 2006, do “X Encontro Brasileiro de Estudantes de pós-graduação em Educação Matemática" realizado em Belo Horizaonte -MG.

A Profa. Célia A. Zorzo Barcelos participará , no período de 14 a 26 de setembro de 2006, dos seguintes eventos: - “Advanced Concepts for Intelligent Vision Systems”, de 18 a 21 de setembro a ser realizado na University of Antewerp - Bélgica, onde apresentará o trabalho “Enhanced Watermarking Scheme Based on Texture Analysis”,- “13 th International Conference on Systems, Signals and Image Processing”, de 21 a 23 de setembro ser realizado em Budapeste - Hungria, onde apresentará o trabalho “The effects of Fitness Functions on Genetic Algorithms applied to Relevance Feedback in Image Retrieval”.
O Prof. César Guilherme da Almeida ministrou no dia 14/09/2006, a palestra: "Modelagem de Escoamentos em meios Porosos com Apresentação de Técnicas para o Cálculo das Equações Diferenciais Provenientes do Modelo”, na UNICERP (Centro Universitário do Cerrado-Patrocínio), como parte do Plano de Atividades da Coordenaçao da Regional 7 da SBMAC.
O Prof. César Guilherme da Almeida participará, no período de 18 a 21 de setembro de 2006, do XXIX CNMAC, a ser realizado em Campinas, onde apresentará o trabalho "Técnica de Decomposição do Domínio e de Pré-Condicionamento de Matriz no Cálculo da Velocidade de Darcy em Escoamentos em Meios Porosos".
O Prof. Cícero F. de Carvalho participou, como palestrante convidado, no período de 16 a 18/07, do "Eighth Meeting on Commutative Algebra and Algebraic Geometry", no IMPA - Rio de Janeiro, ministrando a palestra "Codes whose minimum distance beats the Goppa bound".
O Prof. Cícero F. de Carvalho participou, no período de 30/07 a 05/08, da XIX Escola de Álgebra, Diamantina-MG, proferindo a palestra "On V-Weierstrass sets and gaps".
A Profa. Dulce Mary de Almeida atuou como Coordenadora da Comissão Científica da III Semana Acadêmica da UFU intitulada "Universidade no Plural", realizada na UFU de 07 a 11 de agosto de 2006.
O Prof. Edson Agustini participou, no período de 03 a 04/08, do Encontro em Teoria da Informação e Codificação, no IMECC- UNICAMP, apresentando o trabalho "Limitantes da Probabilidade de Erro para Constelações de Sinais em espaços Hiperbólicos".
O Prof. Edmilson Rodrigues Pinto participou da 51a Reunião Anual da Região Brasileira da Sociedade Internacional de Biometria – RBRAS. 24 a 26 de maio - UNESP de Botucatu – SP, onde proferiu a palestra “Aplicação da modelagem conjunta da média e dispersão a um experimento de mistura com variáveis de processo”.
O Prof. Edmilson Rodrigues Pinto participou do 17o Simpósio Nacional de Probabilidade e Estatística – SINAPE . 24 a 28 de julho de 2006 – Hotel Glória – Caxambu, MG, onde apresentou o mini-curso “Planejamento Ótimo de Experimentos”. Nível: Pós-Graduação (Mestrado e Doutorado em Estatística). Carga horária: 6 horas aula.
O Prof. Edmilson R. Pinto participou, no período de 24 a 28/07, do 17o. SINAPE - Simpósio Nacional de Probabilidade e Estatística, Caxambu-MG, ministrando o mini-curso "Planejamento Ótimo de Experimentos".
O Prof. Ednaldo C Guimarães participou no período 24 a 26/05 da 51º. RBRAS, em Botucatu-SP, onde apresentou o artigo "Análise do Índice de Preço ao Consumidor Mensal de Udi - MG".
O Prof. Ednaldo Guimarães participou, no período de 31/07 a 04/08, do XXXV Congresso Brasileiro de Engenharia Agrícola, João Pessoa-PA, apresentando o trabalho "Comportamento da Evaporação de água do tanque "Classe A" em Uberlândia-MG: Análise da Série Temporal ".
O Prof. Ednaldo C. Guimarães participou no dia 13/09/2006 da Semana de Matemática e Fisica da UNIPAM, em Patos de Minas, abordando o tema: "Funções estatísticas no EXCEL".
A Profa. Eila C Borges participou no período 02 a 05/05 do VIII Symposium on Virtual Reality, em Belém-PA, onde apresentou o artigo "Uso de Realidade Virtual na Visualização e Corte de Poliedros Não-Convexos", trabalho em conjunto com a Profa. Marilene A Manara.
O Prof. Geraldo M. Azevedo Botelho participou, no período de 02 a 10 de setembro de 2006, do “Banach space theory: classical topics and new directions” realizado em Cáceres, Espanha, onde apresentou o trabalho: “Holomorphy Types and Ideals of Multilinear Mappings”.
O Prof. Geraldo M A Botelho participou no período 23 a 28/05 da 63º. Seminário Brasileiro de Análise, em Ijuí -RS, onde apresentou o artigo "Dvoretzky Rogers Type Theorems for Absolutely Summing Polynomials".
O Prof. Jocelino Sato participou, no período de 17 a 21/07, da XIV Escola de Geometria Diferencial, Salvador-BA, apresentando o trabalho "Estabilidade de hipersuperfícies invariantes pela ação O(p+1)xO(q+1) com curvatura nula".
O Prof. Marcelo Tavares participou no período 24 a 26/05 da 51º. RBRAS, em Botucatu-SP, onde apresentou o artigo "Avaliação das Características utilizadas no Processo de Industrialização co Couro".
O Prof. Marcelo Tavares participou, no período de 31/07 a 04/08, do XXXV Congresso Brasileiro de Engenharia Agrícola, João Pessoa-PA, apresentando o trabalho "Determinação do número de frutos necessários por meio de estimativas de repetibilidade para avaliação de um processo de limpeza para tomate de mesa".
O Prof. Márcio J. H. Dantas participou, no período de 22 a 25/08, do IV Congresso Nacional de Eng. Mecânica, em Recife -PE, onde apresentou o trabalho "Stability of the inverted position of a Conservative Spring-Pendulum System".
O Prof. Márcio J H Dantas participou no período 23 a 28/05 da 63º. Seminário Brasileiro de Análise, em Ijuí -RS, onde apresentou o artigo "On the Energy Pumping in a Non-linear Mechanical System".
A Profa. Maria Teresa M Freitas participou, no período de 24 a 25/07, do I Simpósio dos Grupos de Pesquisa sobre Formação Profissional, na PUC-SP.
O Prof. Rogério M C Pinto participou no período 24 a 26/05 da 51º. RBRAS, em Botucatu-SP, onde apresentou o artigo "Análise da Regressão Múltipla na Avaliação da Qualidade de Vida relacionada a Saúde de Crianças e Adolescentes com Paralisia Cerebral por meio de CHQ – PF50".
A Profa. Rosana S M Jafelice participou, no período de 21 a 24/07, de seminários com o Prof. Rodney C Bassanezi, na Unicamp, Campinas -SP.
A Profa. Rosana S M Jafelice ministrou um mini-curso de Modelagem Matemática no CEMEPE, para professores da rede minicipal de ensino, nos dias 07/04, 19/05 e 11/08.
A Profa. Rosana S M Jafelice proferiu palestra no dia 17/05 intitulada 'Modelagem Fuzzy na Evolução da População HIV Assintomática' no Seminário do Programa de Pós-Graduação em Imunologia e Parasitologia Aplicadas da UFU .
A Prof. Rosana S. Motta Jafelice ministrou no dia 14/09/2006, a palestra: "Modelagem Fuzzy na Evolução da População HIV Assintomática”, na UNICERP (Centro Universitário do Cerrado-Patrocínio), como parte do Plano de Atividades da Coordenaçao da Regional 7 da SBMAC.
A Prof. Rosana S. Motta Jafelice participará, no período de 18 a 21 de setembro de 2006, do XXIX CNMAC, a ser realizado em Campinas, onde apresentará o trabalho "Modelagem Fuzzy em Dinâmica Populacional" e os Painéis: "Abordagem Fuzzy da Influência do Tratamento na Sobrevida da População HIV-Positiva" e "Autômato Celular com Parâmetro Fuzzy no Estudo Microscópico dos Indivíduos HIV-Positivos com Tratamento".
A Profa. Sezimária F P Saramago participou, no período de 22 a 25/08, do IV Congresso Nacional de Eng. Mecânica, em Recife -PE, onde apresentou o trabalho "Otimização Multi-objetivo aplicada ao Problema do Despacho Econômico de Energia Elétrica".
A Profa. Sezimária F P Saramago participou no dia 01/08, do Seminário "Vibration Control and Diagnosis in Dynamics", na FEMEC- UFU, com a presença dos professores Nicoló Baschschmid e Paolo Pennacchi do Politecnico di Milano- Italia.