mte105
TRANSCRIPT

5/10/2018 MTE105 - slidepdf.com
http://slidepdf.com/reader/full/mte105 1/8
CONSTRUÇÃO E AVALIAÇÃO DO DESEMPENHO DE UMVEÍCULO AUTOGUIADO – AGV, DE BAIXO CUSTO, PARA
USO EM ENSINO E PESQUISA
Rubem S. Dreger 1, Renato M. Brito 2, Christian R. Kelber 3
Universidade do Vale do Rio dosSinos – UNISINOS 1,
Centro de Ciências Exatas eTecnológicas
Av. Unisinos 95093022-000 São Leopoldo – RS
e-mail: [email protected]
Universidade Federeal do Rio Grandedo Sul – UFRGS 2
Av. Osvaldo Aranha 10390035-190 Porto Alegre – RSe-mail: [email protected]
Universidade do Vale do Rio dosSinos – UNISINOS 3,
Centro de Ciências Exatas eTecnológicas
Av. Unisinos 95093022-000 São Leopoldo – RS
e-mail: [email protected]
Resumo. Este trabalho mostra como se pode construir um Veículo Autoguiado (AGV) de baixocusto, montado sobre uma plataforma móvel, tracionada por dois motores de corrente contínua,
e propõe uma metodologia para avaliação de seu desempenho.
O AGV construído é um protótipo didático que pode ser empregado no ensino de graduação,
pós-graduação e pesquisa, permitindo abordagem de conceitos básicos nas áreas de
instrumentação, eletro-eletrônica e controle.
Para análise do desempenho do AGV foram exploradas as técnicas de controle proporcional e
proporcional-derivativo.
A modificação da técnica de controle é facilitada pelo uso de uma placa microcontrolada
associada ao AGV. Através de um canal de comunicação serial em radiofreqüência ou por linha
física, pode-se transmitir e receber informações da placa microcontrolada. Assim sendo, a partir
de um microcomputador com capacidade de registrar e tratar adequadamente as informações deinteresse é possível monitorar remotamente qualquer dos sinais envolvidos na movimentação do
AGV.
Palavras-chave: AGV, Controle aplicado, Veículo autônomo.
5/10/2018 MTE105 - slidepdf.com
http://slidepdf.com/reader/full/mte105 2/8
1. INTRODUÇÃO
A idéia de construir e avaliar o desempenho de um Veículo Autoguiado (AGV), de baixo custo, para uso emensino e pesquisa, nasceu da tentativa de encontrar um sistema a ser instrumentado que permitisse incluir aspectosdidáticos de forma prática.
A partir de referências levantadas, um AGV reúne características de instrumentação e automação excelentespara uso em ensino e pesquisa em diversos níveis [1].
Percebe-se que todos estes desafios são altamente motivadores para qualquer estudante de engenharia etambém para pesquisadores em instrumentação e controle.
1.2. Objetivos
Os objetivos principais apresentados neste trabalho são:a) Construir um pequeno AGV capaz de locomover-se, percorrendo uma trajetória pré-definida, em uma sala de
aula ou laboratório de ensino.b) Utilizar dispositivos facilmente encontrados no mercado e de custo reduzido, para que o mesmo possa ser
reproduzido por todas as instituições de ensino e pesquisa interessadas no tema.c) Avaliar o desempenho do AGV em uma trajetória fechada previamente estabelecida, com trechos retos e curvos,
empregando diferentes técnicas de controle.
1.3. Histórico do AGV
Um Sistema de Veículo Autoguiado (AGVS – Automated Guided Vehicle System) é um sistema detransporte de materiais que utiliza um veículo que se desloca por um caminho previamente definido, fixo ou variável,dependendo da aplicação.
Em nível industrial, os AGV’s têm sido utilizados como ferramenta de transporte em sistemas de fabricaçãoflexíveis (FMS – Flexible Manufacturing System), que consistem na interconexão de máquinas e robôs da produção,com transportadores e setores de montagem, de elevadores e de armazenadores automáticos, entre outros sistemas. E,também com um computador central responsável pelo gerenciamento de todas as tarefas. Este computador centralizaas tarefas de controle do material enviado às máquinas e robôs e os produtos finais. Desse modo, ele é capaz demonitorar o material utilizado no processo de produção e controlar o seu consumo. O uso de AGVS em um FMStem, entre outras, as seguintes vantagens:a) redução da energia dispendida (não apenas na força humana empregada para carga de materiais, mas também no
controle de estoques);b) operação de deslocamento não-tripulado;c) fornecimento de material de acordo com o fluxo da produção, resultando num controle mais eficiente;d) redução dos danos provocados pelo transporte manual no material de produção.
Além das aplicações industriais, os AGV’s são também encontrados em áreas não-industriais como notransporte de malas, pacotes, correspondências em escritórios e firmas, transportando alimentos, roupas, produtosfarmacêuticos, amostras de laboratório em hospitais, na exploração espacial, deslocamento nas áreas de risco emplantas nucleares e para serviços de vigilância, entre outros.
1.4. AGV’s para uso em ensino e pesquisa
Neste trabalho se dá enfoque apenas à utilização de um único AGV de baixo custo, que foi concebido parauso em ensino e pesquisa. Trabalha-se pois com um sistema de controle interno ao AGV que recebe as tarefas à
executar a partir de um gerente hierarquicamente superior, podendo servir de referência para projetos mais amplos.
2. PROJETO E DESCRIÇÃO DO AGV CONSTRUÍDO
Nesta seção são descritos dados referentes ao projeto mecânico do AGV, aos sensores, motores, circuitoscondicionadores de sinais e ao controle utilizados.
5/10/2018 MTE105 - slidepdf.com
http://slidepdf.com/reader/full/mte105 3/8
2.1. Projeto mecânico e elétrico
Inicialmente, definiu-se as características geométricas do AGV. Esta definição apoiou-se no objetivo deconstruir um veículo de pequenas dimensões mas que não perdesse as características próprias dos AGV’s, comopossibilidade de transportar materiais, ser instrumentado e utilizar-se de alguma forma de controle que o mantivesseautônomo. Optou-se por uma plataforma quase triangular, onde se inscreve um quadrado de 50cm de lado, a fim depoder-se manuseá-la com certa facilidade. Esta forma geométrica permite o transporte de uma carga razoável, capazde simular uma condição mais avançada. Ao mesmo tempo, não requer uma sala com dimensões muito avantajadaspara seu deslocamento.
Por questão de simplicidade e economia, optou-se por utilizar três rodas ao invés da abordagemconvencional com quatro rodas. Assim, tem-se duas rodas em um extremo do veículo, e uma terceira colocada nocentro do lado oposto às outras duas.
Sistema de tração e direção. Para movimentar o veículo estudou-se duas possibilidades:a) tração e direção na roda única central, enquanto as duas outras serviriam apenas de apoio à estruturab) tração e direção em duas rodas e apenas apoio na terceira roda.
Optou-se pela última alternativa, pois embora necessitando utilizar dois motores, um para cada roda, ocontrole de direcionamento fica mais simples, resultando da diferença de velocidade imprimida a cada um dosmotores. Esta técnica produziu um resultado bastante satisfatório. Além disso, os motores utilizados são de correntecontínua, ao invés de motores de passo que exigiriam circuitos mais elaborados para resultados semelhantes.
Foram utilizados dois motores de corrente contínua, de 12V/750mA cada um, do tipo utilizado emlimpadores de para-brisa de automóveis, com caixa de redução interna. O motor escolhido foi este porque, além deser facilmente encontrado no mercado, suas características vinham ao encontro do esperado para o AGV, pois eramais importante o veículo possuir um torque acentuado do que uma elevada velocidade. Além disso, a escolha de ummotor deste tipo leva a uma imediata redução do custo final do AGV, bem como permite que seja utilizada umabateria automotiva de 12V para energizá-lo.
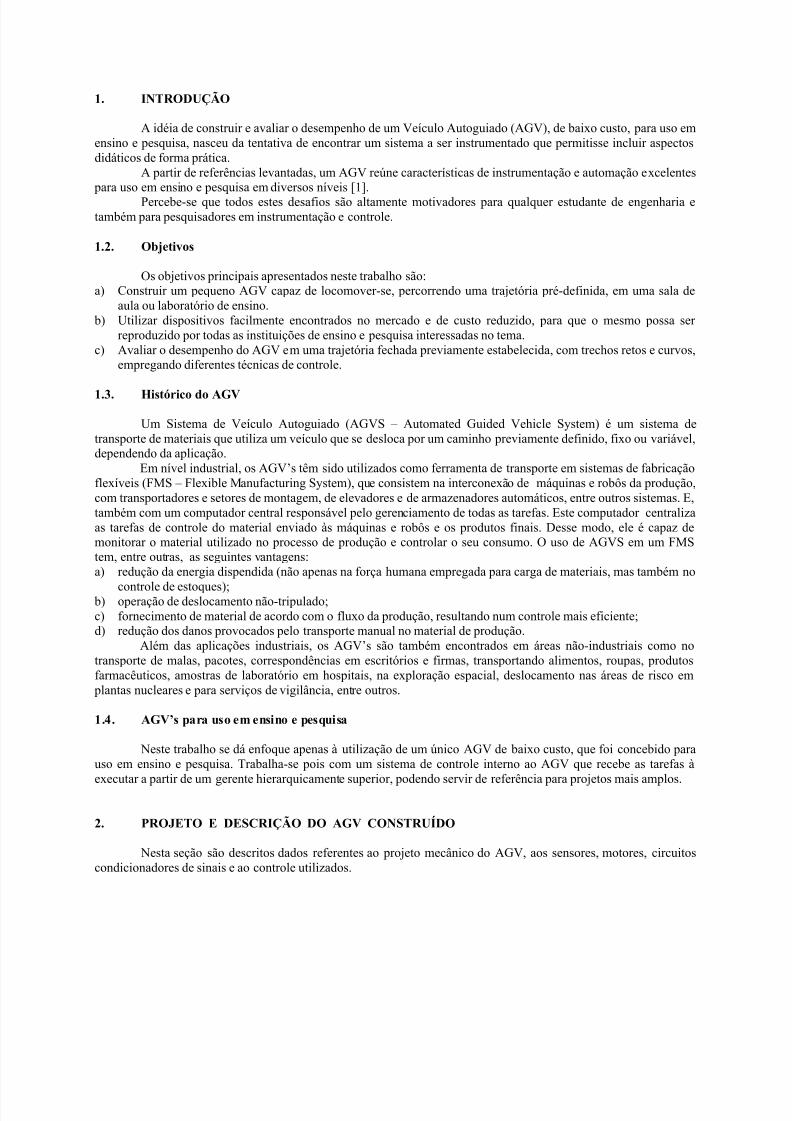
Instrumentação eletro-eletrônica. Para um melhor entendimento das funções de cada um dos subsistemasdesenvolvidos, sugere-se o diagrama mostrado na figura 1. A partir deste, apresentam-se, a seguir, os diversoscircuitos implementados.
Figura 1 - Diagrama em blocos da instrumentação eletro-eletrônica.
5/10/2018 MTE105 - slidepdf.com
http://slidepdf.com/reader/full/mte105 4/8
Nesta figura observa-se que os sinais são emitidos e recebidos a partir do bloco indicado por TMT -transdutores para monitoração de trajetória. Estes sinais são gerados e tratados no bloco PTS – placa de tratamento
de sinais. Esta placa contém todos os circuitos necessários ao tratamento e condicionamento dos sinais recebidos,para posterior digitalização e controle dos motores esquerdo (ME) e direito (MD).
Os sinais recebidos pelo bloco PTS são enviados ao bloco PMIC, placa do microcontrolador , que contémos circuitos de conversão A/D, software de controle para o microcontrolador, e os circuitos de saída em PWM. Asinformações presentes nestas saídas retornam ao bloco PTS e são aplicadas aos circuitos de acionamento dosmotores, a fim de controlá-los.
O bloco indicado por PCOM, placa de comunicação, encarrega-se de receber e enviar os dados do softwarede controle para uma unidade de controle externa, via unidade serial de dados. Esta comunicação pode ocorrer pormeio de linha física, por meio óptico, por radiofrequência ou qualquer outro meio adequado à comunicação de dados.
Os blocos indicados por BAT1 e BAT2 representam, respectivamente, a bateria utilizada para energizar osmotores e os circuitos de controle, e a bateria auxiliar utilizada para os circuitos de memória da placa do
microcontrolador . Estes blocos são descritos com maiores detalhes nos itens a seguir.
Sistema de alimentação (BAT1, BAT2). Como indicado por BAT1 na figura 1, foi utilizada uma bateriaautomotiva chumbo-ácido, de 12V, com capacidade de 45 Ah, do tipo selada, a fim de garantir uma maior segurançaem caso de queda acidental do veículo, bem como uma eficiente autonomia de rodagem para a realização dosdiversos testes. Para os circuitos de memória da placa controladora foi utilizada uma bateria adicional indicada porBAT2, do tipo recarregável de NiCd, de 6 V/650 mAh.
Transdutores para monitoração da trajetória (TMT). Após o estudo de algumas alternativas, decidiu-sepela utilização de instrumentação óptica para o acompanhamento do deslocamento do veículo. A escolha dossensores de luz infravermelho (InfraRed – IR), deveu-se as facilidades de implementação e ao baixo custo dosmesmos. Com o sensoreamento óptico houve facilidade em definir uma trajetória, utilizando-se fitas adesivas nascores amarelo e preto, coladas diretamente no piso do laboratório, configurando uma “pista” fechada.
Foram utilizados sensores ópticos IRD500 na recepção dos sinais produzidos pelo gerador de sinais. Estefotodetetor opera com ganho elevado na faixa de IR em torno 940 nm. Na geração dos sinais não foi utilizado umemissor específico para a faixa de 940 nm, mas sim um diodo emissor de luz de grande intensidade, que respondebem nesta faixa, e também produz um ponto luminoso sobre a pista, o que facilita o acompanhamento visual dodeslocamento do veículo em relação à trajetória imposta pela pista.
Condicionadores de sinais e circuitos de acionamento (PTS). Consideram-se como condicionadores de
sinais os circuitos necessários à geração e captura dos sinais dos sensores ópticos, o chaveamento das entradasreferentes ao sensor esquerdo e direito, a alimentação simétrica a partir dos 12V da bateria e a geração do nível dcque será aplicado ao conversor A/D. Todos estes circuitos foram alojados em uma única placa de circuito impresso,denominada placa de tratamento de sinal. Ainda nesta placa, encontra-se o circuito de acionamento dos motores. Esteé também um condicionador de sinais para os motores, que são os transdutores atuadores.
Placa do microcontrolador e placa de comunicação (PMIC, PCOM). Na placa do microcontrolador estãoos circuitos que realizam a parte “inteligente” do controle. Nela encontram-se todos os circuitos destinados àconversão A/D, software do microntrolador e saídas em PWM para controle dos motores. Também a comunicaçãode dados entre o sistema de microcontrolador e a unidade central de comando ou controle, feita via RS 232,encontra-se nesta etapa, sendo indicado como placa de comunicação uma vez que pode enviar seus dados porualquer método adequado, como RF, ou linha física, conforme a necessidade ou conveniência.
2.2 Veículo montado – identificação dos módulos principaisConforme já mencionado na seção 2.1, o veículo foi montado em uma plataforma quase triangular. Os
motores estão colocados na parte mais larga, realizando a tração nas rodas esquerda e direita, diretamente acopladosaos eixos. Nestas figuras pode-se observar a placa do microcontrolador , a placa de tratamento de sinal, a bateria
automotiva de 45 Ah e a alimentação adicional para os circuitos de memória. Esta alimentação, conformemencionado anteriormente, é fornecida por um conjunto de quatro pilhas de NiCd, tamanho AA. Vê-se tambémum circuito indicado como receptor de acionamento. Trata-se de um receptor operando na faixa de 300 MHz, querecebe uma informação codificada que é utilizado para acionar e desacionar o veículo à distância.

5/10/2018 MTE105 - slidepdf.com
http://slidepdf.com/reader/full/mte105 5/8
Figura 2 - Veículo montado, vista geral.
Na parte mais estreita está colocada a terceira roda, chamada de “roda louca”, que possui movimentos livrespara a esquerda e direita, a fim de adequar-se à trajetória que estiver sendo realizada pelo veículo, servindo de apoiopara o equilíbrio do AGV.
2.3 Detalhamento das soluções mecânicas, elétricas e eletrônicas implementadas
Nesta subseção são descritas as soluções implementadas na construção do veículo, que envolvem soluçõesde ordem mecânica, como na leitura dos sensores, e também de ordem elétrica, como na parte de condicionamento econtrole dos sinais sensoreados.
Na parte de geração e tratamento dos sinais ópticos utiliza-se um sistema básico que consta de um emissorde IR e dois receptores na mesma faixa. O emissor emite os sinais pulsados em direção à linha que serve detrajetória, enquanto que os receptores, pela intensidade dos sinais recebidos, identificam a posição sobre a linha oufora dela.
Esta linha possui 5cm de largura, tendo a parte interna na cor preta, com 1,8cm de largura, e as bordas nacor amarela. Ao emitir em direção ao centro da linha, haverá uma grande atenuação dos pulsos de IR refletidosdevido a cor preta, enquanto que ao emitir para os extremos a atenuação será menor devido a cor mais clara. Tanto oemissor, indicado por Tx, quanto o receptor, indicado por Rx, estão alojados num gabinete na parte inferior do
veículo. A figura 3 dá uma idéia da forma como estão alojados os fotodiodos.
Figura 3 - Aspecto físico do fotoemissor e dos fotoreceptores.
Como se percebe nesta figura, a distância d1 que separa os dois receptores extremos deve estar relacionadacom a largura total da faixa onde será feita a leitura (parte amarela), enquanto que a altura h entre o fotoemissor e alinha central da faixa (parte preta), define a largura total da atenuação produzida.
Foram realizadas medidas nos sensores esquerdo e direito, obtendo-se as tensões denominadas ve e vd,respectivamente, considerando-se o deslocamento do veículo em relação ao centro da linha que define a trajetória.
Basicamente a diferença (vd – ve) indica para que lado da trajetória desejada o veículo se desviou, enquantoque a soma (vd + ve) indica o quão afastado da trajetória, para determinado lado, se encontra o veículo. A utilização

5/10/2018 MTE105 - slidepdf.com
http://slidepdf.com/reader/full/mte105 6/8
de ambos os resultados permite, também, que se amplie a faixa de deslocamento detectada sem perda docomportamento monotônico.
Efetivamente, pode-se utilizar apenas o sinal diferença para saber-se em que lado da curva se encontra oveículo. Porém, como a curva da diferença não apresenta comportamento monotônico, a partir de determinado ponto já não haveria certeza quanto à posição do veículo.
É importante observar que a composição do sinal de erro é realizada pelo próprio software de controle,podendo seus parâmetros serem facilmente modificados.
3. PROJETO DO CONTROLADOR A SER UTILIZADO
Para a escolha do controlador a ser utilizado no controle de direção do sistema deve-se ter, a priori, um bomconhecimento da planta do veículo. De forma a se obter um modelo matemático simples, algumas consideraçõesdevem ser feitas:a) a velocidade de cruzeiro do AGV deve ser baixa e constante;b) atrito da "roda louca" é desprezível;c) centro de massa do veículo encontra-se sobre o eixo principal do AGV.
Conforme indicado no esquema abaixo, para que a direção do veículo, dada pelo ângulo ε, seja alterada, umdiferencial de força é realizado pelas rodas motrizes. O torque resultante é gerado pelos braços de alavanca das rodasao centro de massa do veículo.
Figura 4 – Esquema do modelo simplificado do AGV.
Analisando o equilíbrio dos momentos angulares deste modelo simplificado, chega-se a conclusão de que avelocidade de giro M é proporcional à integral do torque produzido pelo diferencial de força.
Uma vez que a velocidade de giro é a primeira derivada do ânguloε, conclui-se que a planta do AGV possuia característica de um duplo integrador.
Um duplo integrador é representado por dois pólos na origem do plano complexo e caracteriza um sistemainstável. Este pode, no entanto, através de uma escolha certa de estratégia de controle, ser estabilizado. Sendo aplanta do AGV um duplo integrador, métodos empíricos para o ajuste de controladores PID, como os de Nichols,Ziegler e Chien, não podem ser utilizados, uma vez que estes partem do princípio de que a planta, além de estável,deve possuir um comportamento super-amortecido [2].
Conforme apresentado na figura 5.a, que descreve o lugar das raízes do sistema realimentado com umcontrolador P, um ganho proporcional apenas deslocará os dois pólos do sistema sobre o eixo imaginário, mantendo-o instável com uma oscilação permanente.
Controladores com componente integradora são proibitivos neste presente caso, pois a inserção de mais umpólo na origem do plano complexo fará com que os pólos da planta se desloquem para o semi-plano direito logo apóso fechamento da malha, aumentando a instabilidade do sistema [3].
5/10/2018 MTE105 - slidepdf.com
http://slidepdf.com/reader/full/mte105 7/8
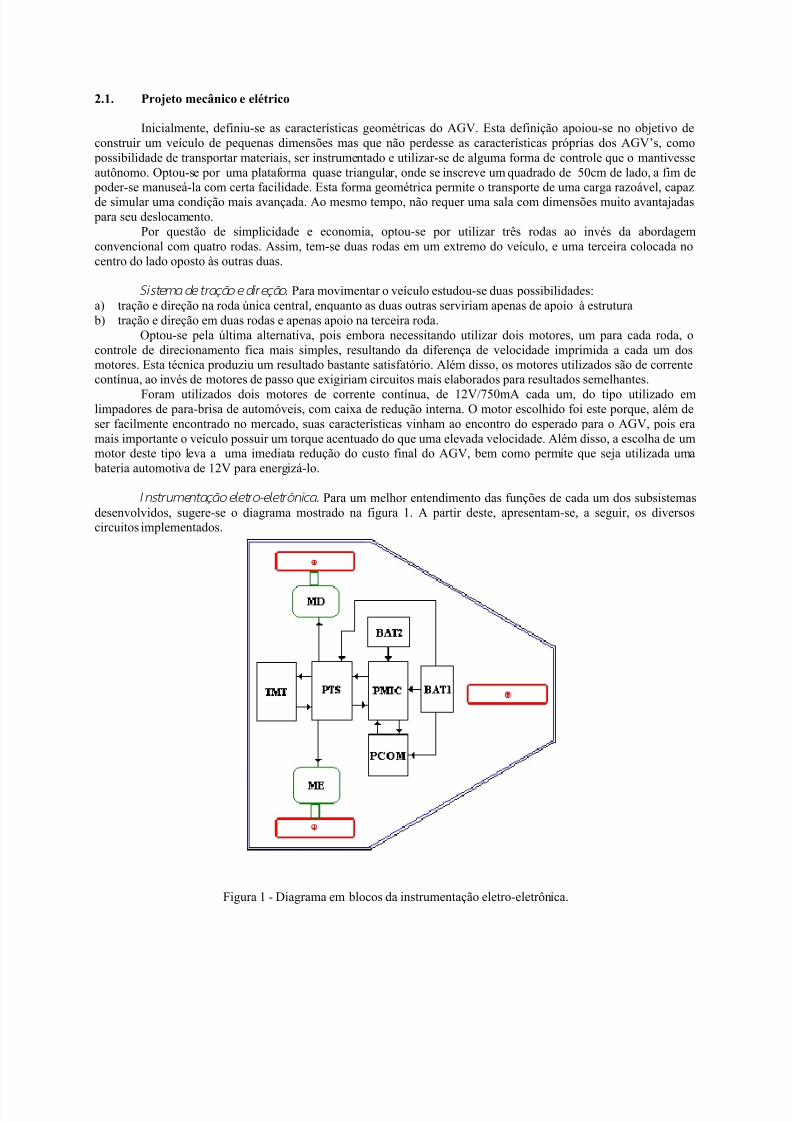
Um controlador PD (proporcional-derivativo), no entanto, deslocará os pólos da planta para o semi-planoesquerdo do plano complexo, tornando o sistema estável. O lugar das raízes do sistema com um controlador PD podeser visto na figura 5.b.
( a ) ( b )Figura 5 – Lugar das raízes do sistema com controlador: a) P; b) PD.
Através de uma escolha precisa da constante de amortecimento do sistema de malha fechada e, por sua vez,da nova posição dos pólos, pode-se determinar através do gráfico do lugar das raízes as constantes do controladorPD, que serão implementadas no circuito de controle.
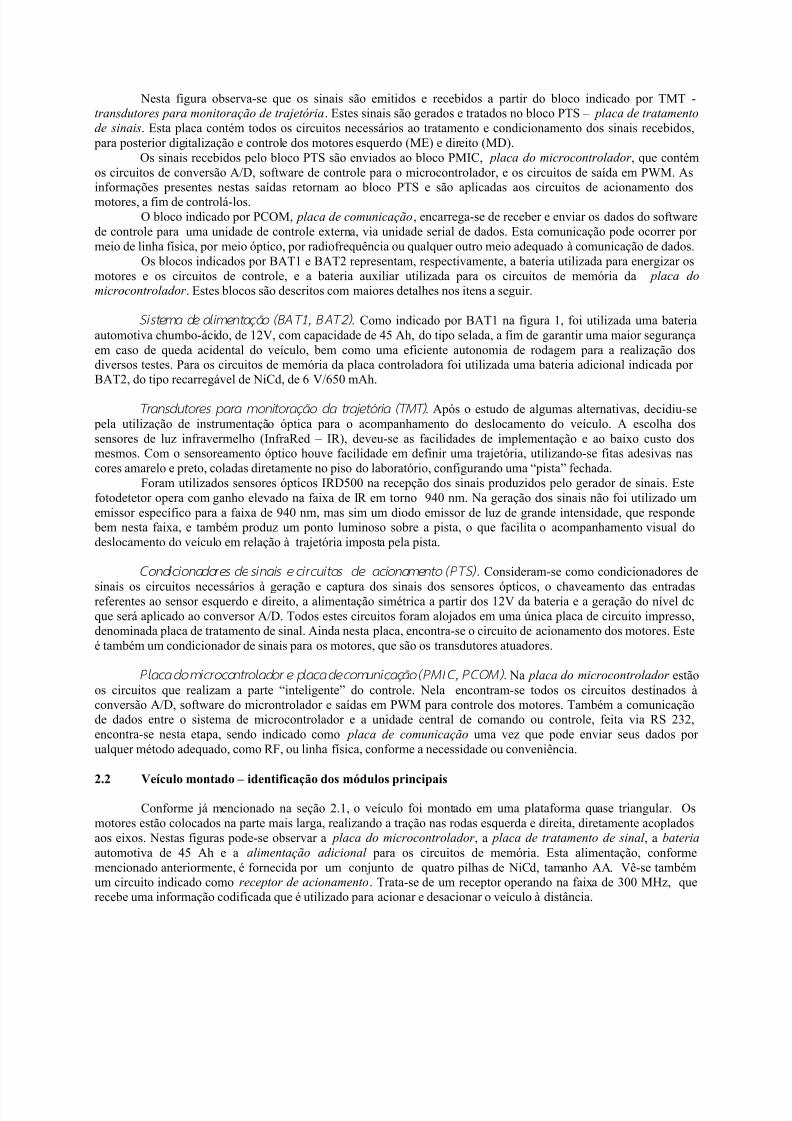
4. SIMULAÇÃO E RESULTADOS EXPERIMENTAIS
Para a avaliação do desempenho do AGV, o sistema foi simulado e testado experimentalmente para umamudança de direção de 20 graus. Os gráficos a seguir apresentam os resultados para o veículo utilizandocontroladores P e PD.
(a) (b)
Figura 6 – Simulação e resultados experimentais: a) P; b) PD.
Como era de se esperar, com apenas o ganho proporcional o veículo ficará oscilando em torno da referência,após a entrada na curva no instante t=0. Com o controlador PD, depois da entrada na curva no instante t=0 e após umpequeno desvio, o sistema seguirá a referência sem ficar oscilando em torno dela.

5/10/2018 MTE105 - slidepdf.com
http://slidepdf.com/reader/full/mte105 8/8
5. CONCLUSÕES
Diante do exposto, conclui-se que é possível a construção de um AGV de baixo custo, que pode serfacilmente empregado como experimento de laboratório em disciplinas na área de controle.
Uma vez que a planta do AGV pode ser descrita por um duplo integrador, métodos empíricos para o ajustede controladores PID não podem ser utilizados. O aluno deverá utilizar necessariamente técnicas mais específicaspara a escolha e o ajuste dos controladores, empregando diretamente os conhecimentos adquiridos em sala de aula.
6. REFERÊNCIAS
[1] R.S. Dreger, “Construção e Avaliação do Desempenho de um Veículo Autoguiado – AGV, de Baixo Custo,para uso em Ensino e Pesquisa”. Dissertação de Mestrado, Curso de Pós-Graduação, Engenharia Elétrica,UFRGS, 2001.
[2] Lutz, Wendt, Taschenbuch der Regelungstechnik, Harry Deutsch Verlag, 2000
[3] W. Leonhard, Einführung in die Regelungstechnik, Viewig Verlag, 1990