modélisation et optimisation robuste de systèmes ...livros01.livrosgratis.com.br/cp069282.pdf ·...
TRANSCRIPT
ANTONIO MARCOS GONÇALVES DE LIMA
Modélisation et Optimisation Robuste de Systèmes Mécaniques en Présence
d’Amortissement Viscoélastique
UNIVERSIDADE FEDERAL DE UBERLÂNDIA FACULDADE DE ENGENHARIA MECÂNICA
2007

Livros Grátis
http://www.livrosgratis.com.br
Milhares de livros grátis para download.

ANTONIO MARCOS GONÇALVES DE LIMA
Modelagem e Otimização Robusta de Sistemas Mecânicos em Presença de Amortecimento
Viscoelástico
Tese apresentada ao Programa de Pós-
graduação em Engenharia Mecânica da
Universidade Federal de Uberlândia, como parte
dos requisitos para a obtenção do título de
DOUTOR EM ENGENHARIA MECÂNICA.
Área de Concentração: Mecânica dos Sólidos
e Vibrações
Orientador: Prof. Dr. Domingos Alves Rade.
Co-Orientador: Prof. Dr. Noureddine Bouhaddi.
UBERLÂNDIA – MG 2007

Dados Internacionais de Catalogação na Publicação (CIP) L732c
Lima, Antônio Marcos Gonçalves de, 1975- Modelagem e otimização robusta de sistemas mecânicos em presença de
amortecimento viscoelástico / Antônio Marcos Gonçalves de Lima. - 2007.
175 f. : il. Orientador: Domingos Alves Rade. Co-orientador: Noureddine Bouhaddi. Tese (doutorado) - Universidade Federal de Uberlândia, Programa de
Pós-Graduação em Engenharia Mecânica.
Inclui bibliografia. 1. Vibração - Teses. 2. Otimização estrutural - Teses. 3. Viscoelasti-cidade - Teses. I. Rade, Domingos Alves. II. Bouhaddi, Noureddine. III. Universidade Federal de Uberlândia. Programa de Pós-Graduação em Engenharia Mecânica. IV. Título. CDU: 621:534
Elaborada pelo Sistema de Bibliotecas da UFU / Setor de Catalogação e Classificação


Je dédie ce mémoire de thèse : À ma femme ALICE
À ma petite fille NICOLE À toute ma famille

Remerciements
La thèse rapportée dans ce Mémoire résulte d’une collaboration scientifique entre le Laboratoire de Mécanique Appliquée R. Chaléat (LMARC) de l’Université de Franche-Comté à Besançon, France, et le Laboratoire de Mécanique des Structures (LMEst), de la Faculté de Génie Mécanique de l’Université Fédérale d’Uberlândia, au Brésil, sous la co-direction de M. Domingos Alves RADE et M. Noureddine BOUHADDI, dans le cadre du Projet CAPES-COFECUB 462/04.
Je suis profondément reconnaissant envers M. Domingos Alves RADE qui m’a suivi et encadré pendant trois ans d’initiation scientifique, deux ans de Master et ces quatre années de thèse. En dépit des difficultés rencontrées, il a su metttre en place les conditions propices au bon déroulement et à l’aboutissement de mes travaux de recherche. J’ai apprécié les conseils qu’il m’a prodigués tant en matière d’enseignement que de recherche.
J’exprime aussi toute ma reconnaissance à M. Noureddine BOUHADDI pour m’avoir accueilli en France dans son groupe de thésars, où j’ai pu travailler pendant quatorze mois sur les sujets abordés dans ce mémoire et sur d’autres sujets passionnants, et pour avoir suivi une partie très significative de mes travaux.
Je remercie cordialement M. Scott COGAN, chercher au CNRS, pour son aide indispensable dans les développements des outils informatiques utilisés durant mes travaux de recherche. L’extension des applications des traitements viscoélastiques par couche contrainte au domaine industriel n’aurait pas été possible sans le concours de Scott Cogan. Je remercie Scott COGAN également pour avoir accepté d’être membre du jury.
Je remercie vivement M. Valder STEFFEN Jr. pour avoir accepté de présider mon jury de thèse, et pour ses conseils et son aide amicale à tout moment.
Je suis très reconnaissant à M. Abdelkhalak EL HAMI et M. José Roberto DE FRANÇA ARRUDA pour avoir accepté d’être rapporteurs de ce mémoire de thèse, ainsi qu’à M. Marcelo AREIAS TRINDADE, pour avoir accepté d’être membre du jury.
Je tiens à remercier chacun des membres des laboratoires LMEst et LMARC, qui d’une manière ou une autre, ont contribué à ce que ces années aient été aussi agréables qu’enrichissantes. Parmi ceux que je n’ai pas encore cités : Jesiel Cunha, Raquel Santini Leandro Rade, Vicente Lopes, Romes Antônio Borges, Cleves Mesquita Vaz, Danuza Cristina, Rodrigo de França Marques, Albert William Faria, Emmanuel Foltête, Morvan Ouisse, Hichem Hanuira, Petr David, Bendali et Tran Wang.

Je tiens à remercier la Fondation CAPES (Coordination de Perfectionnement du Personnel de Niveau Supérieur) du Ministère de l’Evaluation de la Coopération avec les Universités Brésiliennes) pour le financement qui m’a permis de réaliser mon stage de recherche au LMARC, ainsi que le CNPq (Conseil National de Développement Scientifique et Technologique) du Ministère de la Science et Technologie du Brésil pour m’avoir accordé une bourse de doctorat pendant trente-quatre mois. Je suis reconnaissant envers le Projet Européen ALFA II-VICONDIA, coordonné par Mm. Nicolò Bachschmid et Valder Steffen Jr., pour la bourse d’études qui m’a permis de réaliser un stage de recherche de trois mois à la Technische Universität Darmstadt (TUD) en Alemagne.
Enfin, il m’aurait été impossible de réaliser ce travail sans le soutien de ma femme et l’affection dont elle a su m’entourer depuis toujours.
LIMA, A.M.G., Modelagem e otimização robusta de sistemas mecânicos em presença de amortecimento viscoelástico, 2007. Tese de doutorado, Universidade Federal de Uberlândia,
Uberlândia.
Resumo
Nos últimos anos, os materiais viscoelásticos têm sido amplamente utilizados para reduzir os níveis de vibração e de ruído no domíno da dinâmica de estruturas, em virtude de sua capacidade inerente de absorver uma parte da energia vibratória dos sistemas mecânicos e de dissipá-la sob a forma de calor. Esses materiais são aplicados com freqüência seja sob a forma de tratamentos discretos como juntas viscoelásticas rotacionais ou apoios viscoelásticos translacionais, seja sob a forma de tratamentos superficiais. Para estes últimos, a eficiência do material viscoelástico pode ser significativamente aumentada pela utilização de uma configuração chamada de camada restrita passiva que consiste em dispor uma camada de material viscoelástico entre a camada da estrutura base e uma fina camada metálica. Este tipo de configuração permite aumentar enormemente as deformações cisalhantes na camada viscoelástica e, como conseqüência, um aumento na dissipação de energia vibratória. Neste trabalho de tese, é apresentada a modelagem por elementos finitos de elementos retangulares de placas multicamadas considerando-se duas configurações básicas: uma configuração assimétrica composta por três camadas; e uma configuração simétrica formada por cinco camadas. Estes elementos são combinados com modelos de elementos finitos de sistemas de geometria complexa modelados via código de elementos finitos ANSYS, o que permite expandir o domínio de aplicação desses materiais ao domíno industrial. Para considerar a dependência em freqüência e em temperatura das propriedades mecânicas dos materiais viscoelásticos, optou-se por utilizar o modelo frequencial módulo complexo, bem adaptado para o cálculo da resposta dinâmica de sistemas amortecidos viscoelasticamente. Uma extensão natural da modelagem de sistemas viscoelásticos durante a fase de projeto é o uso de técnicas de otimização numérica dos dispositivos viscoelásticos visando a redução do custo e do tempo de execução dos projetos, e o aumento da eficiência, em termos de amortecimento, desses materiais. Na busca pela otimização de sistemas complexos de engenharia tratados com materiais viscoelásticos, optou-se por utilizar o método Non-dominated Sorting Genetic Algorithm. Em vista do grande número de avaliações exatas das funções objetivo associadas a ao procedimento numérico de otimização, propõem-se o acoplamento desse algorítmo multiobjetivo com estratégias de condensação robusta adaptada para sistemas viscoelásticos, e metamodelos, tais como o uso das redes neurais artificiais e de superfícies de resposta clássicas e adaptativas. O objetivo é reduzir com vantagem o tempo de cálculo das soluções ótimas-robustas. Propõem-se igualmente metodologias de propagação de incertezas e avaliação da sensibilidade paramétrica de sistemas viscoelásticos. Com relação à sensibilidade, ela é calculada através das funções resposta em freqüência dos sistemas amortecidos por camada restrita passiva através do cálculo de derivadas de primeira ordem das matrizes fatoradas do modelo de elementos finitos multicamadas parametrizado. Com relação às incertezas, optou-se por utilizar a técnica de discretização de campos aleatórios fundada no desenvolvimento de Karhunen-Loève para sistemas unidimensionais e bidimensionais, respectivamente. Através de vários exemplos de simulações numéricas e de ensaios experimentais com sistemas de engenharia razoavelmente complexos tratados com materiais viscoelásticos, pode-se ilustrar os desenvolvimentos abordados ao longo deste trabalho. Palavras-chave : modelagem por elementos finitos, camada restrita, otimização multiobjetivo, elementos finitos estocásticos, sensibilidade paramétrica, metamodelagem, amortecimento viscoelástico.

ii
LIMA, A.M.G., Modélisation et Optimisation robuste de systèmes mécaniques en présence d’amortissement viscoélastique, 2007. Thèse de doctorat. Universidade Federal
de Uberlância, Uberlândia.
Résumé Dans ces dernières décennies, les matériaux viscoélastiques ont été intensivement utilisés pour réduire les niveaux de vibration et bruit dans le domaine de la dynamique des structures, due à leur capacité d’absorber une partie de l'énergie vibratoire des systèmes structuraux et la dissiper sous la forme de chaleur. Ces matériaux sont souvent appliqués soit sous une forme discrète par des appuis de translation ou des joints de rotation, soit sous la forme de traitements de surface. Pour ce dernier cas, l’efficacité du matériau viscoélastique peut être significativement augmentée par l’utilisation de la configuration appelée « couche contrainte », qui consiste à disposer la couche viscoélastique entre la structure base et une couche métallique mince. Ce fait permet d’augmenter énormément les déformations par cisaillement de la couche viscoélastique, et par conséquence, la dissipation de l’énergie vibratoire. Dans ce mémoire de thèse, on présente la modélisation aux éléments finis en utilisant des éléments rectangulaires de plaque sandwichs, en considérant deux configurations d'éléments : une configuration asymétrique à trois couches ; et une configuration symétrique à cinq couches. Ces éléments sont intégrés dans des modèles EF de systèmes de géométrie complexes modélisés par le code ANSYS, ce qui permet d’élargir le domaine d’application de ces matériaux au domaine industriel. Pour prendre en compte la dépendance en fréquence et en température des propriétés des matériaux viscoélastiques, on utilise l’approche module complexe, bien adapté pour le calcul de réponses dynamiques de systèmes amortis. Une extension naturelle de la modélisation des systèmes viscoélastiques est l’utilisation des techniques d'optimisation paramétrique des dispositifs amortissants visant la réduction du coût et/ou du délai d'exécution des projets. À la recherche de l'optimisation multiobjectif des systèmes viscoélastiques de grande taille, on utilise la méthode NSGA (Non-dominated Sorting Genetic Algorithm). En vu du grand nombre d'évaluations des fonctions coût impliquées dans cette procédure d’optimisation, on propose le couplage de cet algorithme multiobjectif avec des stratégies de condensation robuste adaptées pour des systèmes viscoélastiques, et les métamodèles, tels que les réseaux de neurones artificielles (ANNs) et les méthodologies de surfaces de réponses classiques (RSM) et adaptatives (ARSM), dans le but de réduire davantage le temps de calcul des solutions optimales. On propose également une méthodologie de propagation des incertitudes et d’évaluation des sensibilités paramétriques qui sont liées aux systèmes amortis par matériaux viscoélastiques. En ce qui concerne les sensibilités, elles sont calculés par rapport aux réponses forcées (FRFs) des systèmes amortis par couche contrainte, à travers le calcul des dérivées de premier ordre des matrices factorisées du modèle élément finis de plaque sandwich paramétrisé. Pour les incertitudes, on s’intéresse à la technique de discrétisation des champs aléatoires fondée sur un développement de Karhunen-Loève pour des systèmes bidimensionnels. A travers nombreuses simulations numériques et des essais expérimentaux avec des systèmes moyennement complexes, on illustre les développements abordés tout au long du mémoire. Mots clés : modélisation élément finis, couche contrainte, optimisation multiobjectif, éléments finis stochastiques, sensibilité paramétrique, métamodèlisation, amortissement viscoélastique

iii
Liste de Figures Figure 1.1 – Vue d’une caisse de voiture soumise à traitements viscoélastiques (figure empruntée à la référence Rao (2001)) 2
Figure 1.2 – Application des amortisseurs viscoélastiques dans des structures de génie civil (figure empruntée à la référence Samali et Kwok (1995)) 2
Figure 1.3 – Vue d’un fuselage d’avion avec traitement viscoélastique (figure empruntée à la référence Rao (2001)) 3
Figure 1.4 – Géométries des amortisseurs viscoélastiques : traitement de surface par couche contrainte passive et active (a), et par joints de translation (b) et rotation (c)
4
Figure 1.5 – Structure primaire avec neutralisateurs dynamique (gauche) ; Neutralisateur dynamique (droite). (figure adaptée de la référence (Espíndola et al, 2005))
7
Figure 1.6 – Amortisseur viscoélastique discret synchronisé (TVD) (figure empruntée à la référence Rao (2001)) 10
Figure 1.7 – Amortisseur viscoélastique appliqué au Columbia SeaFirst Building (figure empruntée à la référence Samali et Kwok (1995)) 11
Figure 1.8 – Modélisation mathématique des amortisseurs viscoélastiques discrets 11 Figure 1.9 – Conception robuste des systèmes amortis par matériaux viscoélastiques 16 Figure 2.1 – Structure moléculaire d’un matériau polymère (a) et d’un matériau vitreux (b) (figure empruntée à la référence Nashif et al (1985)) 19
Figure 2.2 – Déformation d’un matériau soumis à un chargement constant sur un intervalle de temps fixé : (a) chargement ; (b) comportement élastique d’un solide ; (c) visqueux d’un fluide ; (d) viscoélastique d’un solide (figure empruntée de la référence (Merlette, 2005))
21
Figure 2.3 – Réarrangements successifs de la structure d’une mousse viscoélastique Soumise à un essai de cisaillement (figure adaptée de la référence (Merlette, 2005))
21
Figure 2.4 – Courbe de fluage (a) et de relaxation (b) 22 Figure 2.5 – Cycle contrainte-déformation elliptique pour un matériau viscoélastique linéaire
24
Figure 2.6 –Spectre en fréquence et en température d’une poutre traitée par matériau viscoélastique (figure adaptée de la référence (Nashif et al, 1985))
25
Figure 2.7 – Variation de E ′ et η d’un matériau viscoélastique quelconque en
Fonction de la température à fréquence constante 26
Figure 2.8 – Illustration des variations de E ′ et η par rapport à la fréquence à
température constante (figure adaptée de la référence Nashif et al, 1985) 27

iv
Figure 2.9 – Illustration du Principe de Superposition Fréquence-Température (PSFT) 28 Figure 2.10 – Illustration d’un abaque ou nomogramme en fréquence réduite 29 Figure 2.11 – Abaque représentant les propriétés du matériau viscoélastique ISD112 30 Figure 2.12 – Modèle d’amortissement simples : (a) Modèle de Maxwell ; (b) Modèle de Kelvin-Voigt ; (c) Amortissement hystérétique ; (d) Modèle de Zener.
32
Figure 2.13 – Fonctions de fluage (a) et relaxation des modèles rhéologiques simples (figure empruntée à la référence Wang (2001))
32
Figure 2.14 – Modèles généralisés : (a) Kelvin-Voigt ;(b) Maxwell 33 Figure 3.1 – Elément fini de plaque sandwich 41 Figure 3.2 – Cinématique de la déformation 41 Figure 3.3 – Elément fini de plaque sandwich à trois couches 48 Figure 4.1 – Cycle de réanalyse approchée par condensation robuste 60 Figure 4.2 – Définition des sous-structures : d.d.l. internes et d.d.l. de jonction i j 61 Figure 4.3 – Schéma bloc représentant un phénomène physique quelconque 63 Figure 4.4 – Illustration d’un neurone (a) et d’un réseau de neurones (b) (figure empruntée à la référence Tertois (2003))
65
Figure 4.5 – Notation des poids et des sorties des couches pour les réseaux de neurones (figure empruntée à la référence Tertois (2003))
66
Figure 4.6 – Stratégie de construction des réseaux de neurones 68 Figure 4.7 – Entraînement et validation de RSM 72 Figure 4.8 – Le domaine Ω discrétisé 73 Figure 4.9 – Normalisation du domaine d’étude de la fonction à approcher 74 Figure 4.10 – Domaine discrétisé initial avec enlèvement du point central 75 Figure 4.11 – Premier processus d’enrichissement du domaine discrétisé 75 Figure 4.12 – Deuxième processus d’enrichissement du domaine discrétisé 75 Figure 4.13 – Fonction de pondération de Hérault 76 Figure 4.14 – Modèle EF ANSYS de la plaque renforcée traitée par couche contrainte 77 Figure 4.15 – FRFs des systèmes de référence et réduits – bases (a), (b)
10T20T
et (c) 30T 78
Figure 4.16 – Erreur relative entre les réponses réduites et les réponses exactes 78 Figure 4.17 – FRFs pour les systèmes nominaux et perturbés : (a) SCAs ; (b) amorti 79 Figure 4.18 – Matrice des MAC entre les vecteurs propres des systèmes nominal et perturbé 80
Figure 4.19 –FRFs (a) et l’erreur relative pour les modèles perturbés nominal et réduit 81 Figure 4.20 – Modèle EF de la plaque renforcée – définition des sous-structures 81
Figure 4.21 – FRFs des systèmes de référence et réduit (a) et les erreurs relatives (b) 82
Figure 4.22 – FRFs des systèmes perturbés de référence et réduit (a) et l’erreur relative (b) 83
Figure 4.23 – Comparaison entre les FRFs exactes et celles approchées par les configurations PMC1 (a) et PMC2 (b) 84

v
Figure 4.24 – Variation de la réponse exacte en fonction de la réponse estimée pour les deux configurations de réseaux : PMC1 (a) et PMC2 (b) 84
Figure 4.25 – Erreur quadratique moyenne pour PMC1 (a) et PMC2 (b) 85 Figure 4.26 – Réponses exactes en fonction des estimées par RSM pour les deux fonctions 86
Figure 4.27 – Réponses exactes en fonction des estimées par ARSM pour les deux fonctions 87
Figure 5.1 – Notion de dominance (figure empruntée à la référence (Ait Brik, 2005)) 90 Figure 5.2 – Espace convexe (a) et non convexe (b) (figure adaptée de la référence Das et al (1997)) 91
Figure 5.3 – Classification des solutions par rang d’un PMO 92 Figure 5.4 – Stratégie NSGA (figure empruntée à la référence (Ait Brik, 2005)) 93 Figure 5.5 – Solutions optimales robustes (figure adaptée de (Lee et Park, 2001)) 95 Figure 5.6 – Méthodologie d’optimisation multiobjectif robuste (figure empruntée à la référence (Ait Brik, 2005)) 96
Figure 5.7 – Analyse de données avec le SOM (figure adaptée de la référence (Ait Brik, 2005)) 97
Figure 5.8 – Visualisation et regroupement des 12 clusters dans l’espace des fonctions coût 97
Figure 5.9 – SOM en post-traitement de donnés 98 Figure 5.10 – Corrélation entre les paramètres de conception – Les U-matrices 98 Figure 5.11 – Front de Pareto de l’optimisation à 8 et 4 paramètres de conception 99 Figure 5.12 – FRF non amortie de la plaque courbe renforcée 100Figure 5.13 – Solutions NSGA et NSGA-CR (a); Premiers Fronts de Pareto (b) 101Figure 5.14 – Solutions NSGA et NSGA-PMC (a); Fronts de Pareto (b) 103Figure 5.15 – FRFs pour le point A 104Figure 5.16 – FRFs pour le point C 105Figure 5.17 – FRFs pour le point B 105Figure 5.18 – Positions optimales de patches viscoélastiques (point B) 105Figure 5.19 – Solutions NSGA et NSGA-RSM (a), et NSGA et NSGA-ARSM (b) 107Figure 5.20 – Fronts de Pareto pour NSGA-RSM (a), et NSGA-ARSM (b) 107Figure 5.21 – Fonctions coût et leurs vulnérabilités 109Figure 5.22 – Comparaison entre les solutions robustes NSGA et NSGA-PMC 109Figure 5.23 – Comparaison entre les solutions déterministes et les solutions robustes 110Figure 5.24 – Comparaison entre les solutions robustes (a) et déterministes (b) 110Figure 6.1 – Illustration du modèle EF de plaque totalement traitée par couche contrainte 121

vi
Figure 6.2 – Sensibilités de par rapport à l’épaisseur de la couche ( pT,ω,IIH )
) viscoélastique (a) et à la couche contrainte (b)
122
Figure 6.3 – Sensibilités de par rapport à la température pour ( pT,ω,IIH
et K298T 0 = K308T 0 =123
Figure 6.4 – Evaluation exacte et perturbés (exacte et estimée) de ( )pT,ω,IIH par
rapport aux épaisseurs de couches (a), et par rapport à la température
pou K298T 0 =124
Figure 6.5 –Modèle EF de la plaque renforcée traitée par 10 patches viscoélastiques (a); réponses fréquentielles (FRFs)du système sans et avec traitement(b) 125
Figure 6.6 – Dispersion des paramètres de conception pour les deux niveaux d’incertitudes 125
Figure 6.7 – Moyenne et statistiques extrêmes de la réponse aléatoire : cas 1 (a); cas 2 (b) 126
Figure 6.8 – Variabilité des fréquences modales et les amplitudes de vibration pour le cas 1 126
Figure 6.9 – Variabilité des fréquences modales et les amplitudes de vibration pour le cas 2 127
Figure 7.1 – Modèle aux éléments finis de la plaque plane 129Figure 7.2 – Montage du dispositif de mesure expérimentale de vibration 130Figure 7.3 – FRFs expérimentale (Exp) et analytique (EF) de la plaque non-amorti 131Figure 7.4 – FRF expérimentale et numérique de la plaque recalé 132Figure 7.5 – Solutions NSGA robustes (a) ; Front de Pareto (b) pour les deux fonctions coût 133
Figure 7.6 – Amplitude au mode M1 – Vulnérabilité (a); Amplitude au mode M2 – Vulnérabilité (b) 134
Figure 7.7 – Positions optimales des traitements pour les points A (a), B (b) et C (c) 135Figure 7.8 – FRFs expérimentale et analytique du système amorti – point A 136Figure 7.9 – FRFs expérimentale et analytique du système amorti – point B 136Figure 7.10 – FRFs expérimentale et analytique du système amorti – point C 136Figure 7.11 – Dispersion des FRFs analytiques du système amorti – point A 138Figure 7.12 – Dispersion des FRFs analytiques du système amorti – point B 139Figure 7.13 – Dispersion des FRFs analytiques du système amorti – point C 139Figure 7.14 –Modèle EF du compresseur (a); FRF normalisée du système non-amorti 140Figure 7.15 – FRFs calculées du système amorti, représentant l’influence de la couche 141
Figure 7.16 – Détail des FRFs calculées du système amorti 142
vii
Figure 7.17 – Montage expérimentale avec la carcasse du compresseur 142Figure 7.18–Structure instrumentée et points d’identification des FRFs expérimentales 143Figure 7.19 – FRFs expérimentales du système amorti, représentant l’influence de l’épaisseur de la couche contrainte sur la performance du traitement viscoélastique
143
Figure A.1 – Elément fini de plaque sandwich à cinq couches 162
Figure B.1 – Définitions du domaine de corrélation pour l’élément fini de plaque sandwich
170
Figure C.1 – Stratégie d’interfaçage/remplacement entre MATLAB® et ANSYS® 172Figure C.2 – Modèle EF ANSYS de la plaque traité par couche contrainte 173Figure C.3 – Distance en forme pour les modèles ANSYS® et MATLAB® 174Figure C.4 – Comparaison entre les FRFs des modèles ANSYS® et MATLAB® 175

viii
Liste de Tableaux Tableau 4.1 – Matrice des effets pour trois paramètres à deux niveaux 69
Tableau 4.2 – Comparaison entre les valeurs/vecteurs propres (systèmes nominal et perturbé) 80
Tableau 4.3 – Définition des variables d’entrée pour les surfaces de réponses 85
Tableau 4.4 – Temps de calcul pour les stratégies RSM/ARSM 88
Tableau 5.1 – Définition de l’espace de conception (NSGA-CR) 100
Tableau 5.2 – Paramètres de NSGA-CR 100
Tableau 5.3 – Distances de Mahalanobis (NSGA-CR) 101
Tableau 5.4 – Temps de calcul (NSGA-CR) 102
Tableau 5.5 – Définition de l’espace de conception (NSGA-PMC) 102
Tableau 5.6 – Paramètres de NSGA-PMC 103
Tableau 5.7 – Distances de Mahalanobis (NSGA-PMC) 103
Tableau 5.8 – Temps de calcul (NSGA-PMC) 104
Tableau 5.9 – Valeurs optimales des épaisseurs de chaque patch (point B) 106
Tableau 5.10 – Temps de calcul (NSGA-RSM, NSGA-ARSM) 107
Tableau 5.11 – Définition de l’espace de conception (optimisation robuste) 108
Tableau 5.12 – Temps de calcul (NSGA-PMC) 109
Tableau 6.1 – Propriétés physiques et géométriques du modèle EF de plaque à trois coches 121
Tableau 7.1 – Fréquences modales calculées et mesurées du système non-amorti 131
Tableau 7.2 – Définition de l’espace de conception - plaque plane 133
Tableau 7.3 – Paramètres de NSGA-PMC 133
Tableau 7.4 – Temps de calcul (NSGA-PMC) 135
Tableau 7.5 – Valeurs optimales des épaisseurs de chaque patch (points A, B, C) 135
Tableau 7.6 –Fréquences modales calculées et mesurées du système amorti–pointA 137
Tableau 7.7 –Fréquences modales calculées et mesurées du système amorti–pointB 137
Tableau 7.8 –Fréquences modales calculées et mesurées du système amorti–pointC 137
Tableau 7.9 – Définition de l’espace de conception - compresseur 141
Tableau C.1 – Comparaison entre les valeurs propres (modèles ANSYS® et MATLAB®) 174
ix
Liste de Notations
( )tσ , ( )tτ : contraintes de traction-compression et de cisaillement ( )tε , ( )tγ : déformations longitudinal et cisaillente. E , G : module d’Young et module de cisaillement µ : caractérise la viscosité.
( )t,F 0σ : fonction de fluage ( )t,R 0ε : fonction de relaxation ( )H s : function de dissipation. ( )G ω : module complexe ( )G ω′ : partie real du module complexe. ( )G ω′′ : patie imaginaire du module complexe.
pE , dE : énergies potentielle et dissipée du matériau η : factor de perte Tα : factor de décalage en fréquence rω : fréquence réduite
T : température en Kelvin. 0T : température de référence.
M , K : matrice de masse et matrice de rigidité. ( )tq , ( )tf : vecteur de déplacements et vecteur de forces externes
( )tu : vecteur réduit des forces externes ( )ty : vecteur des réponses
,eK ( )T,ωvK : matrices de rigidité de la sous-structure élastique et da sous-structure viscoélastique complexe
T : base de réduction robuste ( ) v0v G0 KK = : comportement conservatif associé (CCA)
R : résidu statique de premier ordre associés aux chargements imposés 0R∆ : résidus sont associés aux effets viscoélastiques
0T : base de reduction nominal
∆R : matrice de résidus
cbT : base de reduction de Craig-Bampton nominal
cbeT : base de reduction de Craig-Bampton enrichie robuste P : matrice des effets contenant la base polynomiale a : matrice contenant les coefficients du polynôme ( )aJ : l’erreur quadratique pondérée
W : matrice de pondération ( )xF : vecteur des critères ou fonctions objectif
kRC ⊂ : l’ensemble réalisable (espace de conception) ( )xjg : contraintes d’égalité ou d’inégalité ( )( )ji x,xdsh : function de Sharing

x
σ : constante fixée ( )ji x,xd : distance euclidienne entre deux individus ( )θ,xH : champ aléatoire
dR∈Ω : ensemble ouvert décrivant la géométrie du système n,...,1i,r = ξ : variables aléatoires gaussiennes ( ) n,...,1r,xHr = : fonctions déterministes x , θ : position du champ et variable des événements aléatoires ( )21 x,xC : fonction de covariance ( )rr f,λ : valeurs propres et les fonctions propres de ( )21 x,xC
r , p : vecteurs de réponses et paramètres de conception

xi
Table des matières
Resumo i
Résumé ii
Liste de Figures iii
Liste de Tableaux viii
Liste de Notations ix
CHAPITRE 1 INTRODUCTION GÉNÉRALE
1
1.1 Contexte de l’étude 1 1.2 État de l’art 5
1.2.1 Les modèles rhéologiques simples 5
1.2.2 Les modèles viscoélastiques modernes 6
1.2.3 Applications des matériaux viscoélastiques 10
1.2.4 Optimisation de structures complexes amorties par matériaux viscoélastiques 12
1.2.5 Prise en compte des incertitudes dans le projet et optimisation de structures viscoélastiques 13
1.3 Description des travaux 14 1.4 Contenu du mémoire 16
CHAPITRE 2 AMORTISSEMENT VISCOÉLASTIQUE
19
2.1 Comportement des matériaux viscoélastiques 19 2.1.1 Comportements élastiques des solides et visqueux des fluides 20
2.1.2 Comportement viscoélastique dans le domaine temporel 22
2.2 Approche du module complexe 23 2.3 Facteurs environnementaux 25
2.3.1 Influence de la température 26
2.3.2 Influence de la fréquence. Notion de fréquence réduite 27
2.3.3 Formes paramétriques de la fréquence réduite en température 29
2.4 Représentation du module complexe 30 2.4.1 Formes tabulées 31
2.4.2 Formes paramétriques 31
2.5 Lissage des paramètres des modèles viscoélastiques 35 2.5.1 Propriétés asymptotiques du lissage 36

xii
2.6 Incorporation du comportement viscoélastique dans les modèles EF 37 2.7 Conclusions 39
CHAPITRE 3 MODELISATION DES ELEMENTS DE PLAQUES MULTICOUCHES
40
3.1 Relations cinématiques 40 3.2 Relations contraintes-déformations 42 3.3 Discrétisation par éléments finis 45 3.4 Matrices élémentaires de raideur et de masse d’un élément de plaque multicouche 46
3.5 Plaque sandwich à trois couches 48 3.5.1 Introduction de l’amortissement viscoélastique 51
3.5.2 Paramétrisation du modèle EF de plaque sandwich 51
3.6 Conclusions 53
CHAPITRE 4 CONDENSATION ROBUSTE ET METAMODELISATION ADAPTEES AUX SYSTEMES VISCOELASTIQUES COMPLEXES
54
4.1 Méthode de condensation robuste de modèles viscoélastiques 54
4.1.1 Base des forces associées aux modifications paramétriques 58
4.1.2 Base des déplacements associés aux modifications paramétriques 58
4.1.3 Condensation par sous-structuration dynamique (synthèse modale) 61
4.2 Approximation des réponses par des métamodèles 63 4.2.1 Principe général 63
4.2.2 Réseaux de neurones artificiels (ANNs) 65
4.2.2.1 Le perceptron multicouche (PMC) 65
4.2.3 Méthodologies de surface de réponses 68
4.2.3.1 Plans d’expériences factoriels complets (PFC) 69
4.2.3.2 Les surfaces de réponse classiques (RSM) 70
4.2.3.3 Les surfaces de réponse adaptatives (ARSM) 72
4.3 Exemples numériques 77 4.3.1 Condensation robuste de systèmes viscoélastiques 77
4.3.2 Approximation des FRFs par les ANNs 83
4.3.3 Approximation des FRFs par les surfaces de réponses 85
4.4 Conclusions 88

xiii
CHAPITRE 5 METHODOLOGIE D’OPTIMISATION MULTIOBJECTIF ROBUSTE
89
5.1 Optimisation multiobjectif déterministe 89 5.1.1 Définition d’un problème multiobjectif et notion de dominance 89
5.1.2 Choix d’une méthode d’optimisation multiobjectif 91
5.1.3 Algorithmes évolutionnaires (EAs) 92
5.2 Optimisation multiobjectif robuste 93 5.2.1 Prise en compte de la robustesse dans la recherche d’un optimum 94
5.2.2 Critère de robustesse en optimisation multiobjectif 94
5.3 Analyse des données a posteriori – la méthode SOM 96 5.3.1 SOM : outil d’aide à la décision dans les problèmes d’optimisation multiobjectif 98
5.4 Exemples numériques 99 5.4.1 Couplage NSGA-Condensation robuste (NSGA-CR) 99
5.4.2 Couplage NSGA-réseaux de neurones (NSGA-PMC) 102
5.4.3 Couplage NSGA-RSM et NSGA-ARSM 106
5.4.4 Exemple d’optimisation robuste 108
5.5 Conclusions 111
CHAPITRE 6 ELEMENTS FINIS STOCHASTIQUES ET ANALYSE DE SENSIBILITE POUR LA CONCEPTION ROBUSTE DE SYSTEMES VISCOELASTIQUES
112
6.1 Quelques concepts fondamentaux 1126.1.1 Techniques pour résoudre le problème stochastique 113
6.2 Formulation général du modèle EF viscoélastique stochastique 1146.2.1 Discrétisation des champs aléatoires 114
6.2.2 Modèle éléments finis stochastique de plaque sandwich 115
6.3 Calcul des réponses stochastiques 1166.3.1 La méthode d’Hyper Cube Latin (HCL) 117
6.4 Sensibilité paramétrique des systèmes traités par couche contrainte 1176.4.1 Définition de la sensibilité paramétrique – Evaluation par différences finies
117
6.4.2 Sensibilité des réponses fréquentielles par rapport aux paramètres structuraux et par rapport à la température 119
6.5 Applications numériques 1206.5.1 Sensibilité paramétrique 120

xiv
6.5.2 Elément finis viscoélastiques stochastiques 124
6.6 Conclusions 127
CHAPITRE 7 VALIDATION EXPERIMENTALE DU MODELE DE PLAQUE SANDWICH ET APPLICATION INDUSTRIELLE
129
7.1 Plaque plane traitée par couche contrainte 1297.1.1 Evaluation expérimentale du système non-amorti 130
7.1.2 Optimisation multiobjectif robuste 132
7.1.3 Vérification expérimentale des solutions optimales robustes 135
7.1.4 Discussion des résultats 137
7.2 Application industrielle : Compresseur de réfrigérateurs 1397.2.1 Essai expérimentale avec le compresseur 142
7.3 Conclusions 144
CHAPITRE 8 CONCLUSION GENERALE ET PERSPECTIVES
145
REFERENCES BIBLIOGRAFIQUES 149
ANNEXE A 160A.1 Matrices élémentaires de raideur et de masse d’un élément fini de plaque sandwich 160
A.2 Plaque sandwich à cinq couches 162A.2.1 Paramétrisation du modèle sandwich de plaque à cinq couches 168
ANNEXE B 169B.1 Matrices viscoélastiques stochastiques 169
ANNEXE C 172
C.1 Procédure d’interfaçage entre MATLAB® et ANSYS® 172

CHAPITRE l
Introduction Générale
1.1 – Contexte de l’étude
L’étude présentée dans ce mémoire de thèse s’inscrit dans une thématique de recherche commune des équipes de recherche du Laboratoire de Mécanique des Structures (LMEst), de la Faculté de Génie Mécanique (FEMEC), Université Fédérale de Uberlândia (UFU), et du Laboratoire de Mécanique Appliquée Raymond Chaléat (LMARC), Université de Franche-Comté (UFC), qui concerne la conception optimale de structures mécaniques complexes avec amortissement viscoélastique.
La concurrence sur le marché international pousse la modernisation des processus et des produits industriels qui doivent se conformer aux conditions de confort et de sécurité des opérateurs et des utilisateurs. De plus, les normes environnementales tendent à imposer des restrictions plus sévères aux niveaux admissibles des vibrations et du bruit des équipements industriels. Dans ce contexte, la maîtrise des phénomènes vibratoires est un point essentiel dans la conception de systèmes mécaniques complexes. Les vibrations peuvent engendrer des perturbations dans l’environnement (instabilités aérodynamiques, perturbations de la visée optique, etc.) et occasionner des gênes importantes (niveau de rayonnement acoustique, accélérations perçues par les passagers d’un véhicule, etc.), sans compter les risques de rupture dues à la fatigue vibratoire (aubes de moteurs d’avion, fissures dans les fuselages, etc.) (Kergourlay, 2004).
En conséquence, dans les deux dernières décennies, plusieurs travaux de recherches ont été consacrés à la réduction des niveaux de vibration et de bruit des systèmes mécaniques. Comme exemple de techniques passives, on peut citer l’utilisation des matériaux absorbants (Nashif et al., 1985), des amortisseurs dynamiques de vibration (ADVs) (Korenev et Reznikov, 1993), ou encore les matériaux piézoélectriques combinés avec les circuits électriques passifs, appelés « Shunted piezoceramics » (Banks, 1996). Comme exemple de technique active, on peut utiliser les matériaux piézoélectriques comme capteurs et/ou comme actionneurs (Fuller et al, 1996).
On remarque qu'il n’existe pas une méthode qui peut être considérée comme absolument supérieure aux autres, et le choix de la méthode la plus appropriée doit être fait tenant compte des caractéristiques spécifiques du problème étudié, en termes de coût d’application, d’efficacité du traitement choisi, de la bande fréquentielle utile, des dimensions physiques et des conditions environnementales (Nashif et al., 1985). Néanmoins, par rapport aux approches actives, les procédures passives d’atténuation des vibrations par l’utilisation des matériaux viscoélastiques présentent des avantages importants : ils assurent la stabilité ; ils
Introduction Générale 2
sont efficaces dans les bandes de fréquence larges ; ils présentent des coûts modérés d’installation et d’entretien ; et leur fonctionnement n’exige aucune consommation d’énergie externe. Cependant, il y a certains inconvénients inhérents tels que l’augmentation du poids du système original et le fait que son efficacité dépend fortement des conditions opérationnelles et environnementales (Nashif et al., 1985).
Aujourd’hui, il est connu qu’un grand nombre de problèmes de vibrations peut être résolu par une augmentation du niveau de dissipation dans la structure par l’ajout d’un traitement amortissant passif, dans le but d’amortir les amplitudes de vibration d’un maximum de résonances sur une large bande fréquentielle. Dans ce cadre, l’utilisation de matériaux viscoélastiques dans les structures industrielles, en vue de réduire leur niveau vibratoire et acoustique, devient un procédé de plus en plus utilisé et relativement peu coûteux (Rao, 2001 ; Samali et Kwok, 1995). A titre d’exemple, on peut décrire les applications suivantes :
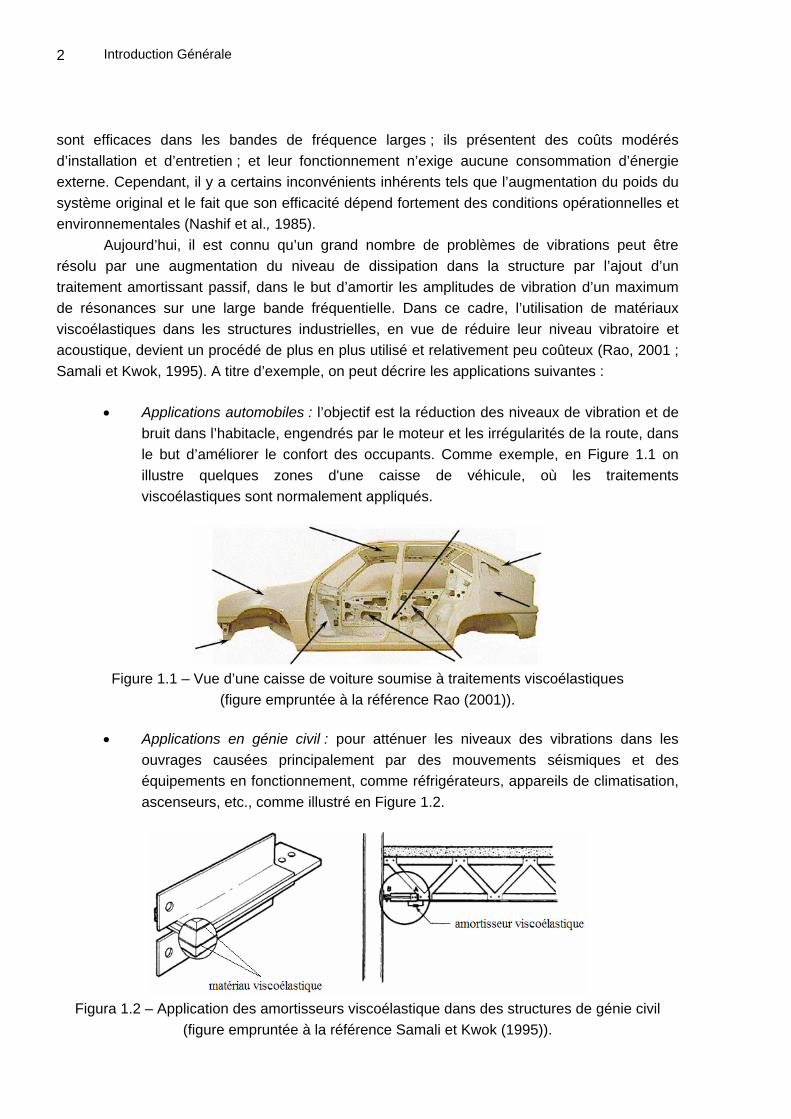
• Applications automobiles : l’objectif est la réduction des niveaux de vibration et de bruit dans l’habitacle, engendrés par le moteur et les irrégularités de la route, dans le but d’améliorer le confort des occupants. Comme exemple, en Figure 1.1 on illustre quelques zones d'une caisse de véhicule, où les traitements viscoélastiques sont normalement appliqués.
Figure 1.1 – Vue d’une caisse de voiture soumise à traitements viscoélastiques
(figure empruntée à la référence Rao (2001)).
• Applications en génie civil : pour atténuer les niveaux des vibrations dans les ouvrages causées principalement par des mouvements séismiques et des équipements en fonctionnement, comme réfrigérateurs, appareils de climatisation, ascenseurs, etc., comme illustré en Figure 1.2.
Figura 1.2 – Application des amortisseurs viscoélastique dans des structures de génie civil
(figure empruntée à la référence Samali et Kwok (1995)).

Introduction Générale 3
• Applications aéronautiques : les matériaux viscoélastiques sont employés dans la réduction du bruit interne causé principalement par la circulation d'air autour de l'avion, par le système de contrôle de l'environnement à l'intérieur de l'avion et par le fonctionnement des moteurs. Ces sources engendrent les vibrations des parties du fuselage, occasionnant les vibrations structurales. Les principales applications portent sur l’utilisation des matériaux viscoélastiques entre le fuselage et une couche contrainte sur forme de sandwichs. La Figure 1.3 montre certains endroits d’un fuselage d’avion, où les traitements viscoélastiques sont appliqués.
Figure 1.3 – Vue d’un fuselage d’avion avec traitement viscoélastique
(figure empruntée à la référence Rao (2001)).
Actuellement, une importante voie de recherche liée à l'utilisation des matériaux viscoélastiques pour le contrôle de vibrations est dédiée à la modélisation analytique et numérique des systèmes mécaniques contenant de tels matériaux. Dans le cadre de la viscoélasticité linéaire, les matériaux viscoélastiques sont caractérisés par un module complexe dépendant de la fréquence et d’autres facteurs tels que la température et la précontrainte (Nashif et al. 1985 ; Christensen, 1982), ce qui conduit à une raideur qui dépend de ces facteurs. Ce fait pose une difficulté supplémentaire pour le calcul des réponses dynamiques (réponses temporelles, réponses forcées et solutions propres) des structures contenant ce type d’amortissement. Néanmoins, on a recours à la simulation numérique par la méthode des éléments finis (EF) pour dimensionner des structures complexes contenant différents types d’amortisseurs viscoélastiques, comme les traitements de surface – où on peut par exemple, insérer une fine couche de polymère entre deux parements métalliques (Passive Constrained Layer Damping – PCLD) ou piézoélectrique (Active Constrained Layer Damping – ACLD), – ou encore des éléments discrètes, comme les joints de translation ou rotation (Nashif et al., 1985 ; Lima et Rade, 2005b), comme illustré en Figure 1.4.

Introduction Générale 4
Figure 1.4 – Géométries des amortisseurs viscoélastiques : traitement de surface par couche
contrainte passive et active (a), et par joints de translation (b) et rotation (c).
Les modèles mathématiques doivent être capables de représenter convenablement la géométrie et les conditions aux limites des structures tout en tenant compte du comportement viscoélastique qui dépend de plusieurs facteurs, dont les plus importants sont la température et la fréquence d’excitation. En plus, on a l'intérêt d'utiliser ces modèles pour décider sur le meilleur emplacement des amortisseurs et optimiser son utilisation (Lima et al., 2006c) avec le but d’extraire leur maximum d’efficacité en termes d’amortissement.
En phase de projet de conception de systèmes amortissants viscoélastiques appliqués à des structures industrielles, on se trouve confronté aux situations suivantes :
• Structures de géométries complexes nécessitant des modélisations 3D, en utilisant des codes d’éléments finis commerciaux tels que ANSYS® et NASTRAN® ;
• Modélisation du traitement viscoélastique, soit sous la forme des éléments de surface, comme les éléments sandwichs de poutre et plaque, soit sous la forme discrète, et leur l’introduction dans les modèles EF 3D ;
• Le besoin d'évaluation rapide du comportement dynamique de ces structures complexes amorties par matériaux viscoélastiques, dans un large ensemble de configurations paramétriques qui caractérisent le traitement ;
• L’optimisation souvent multiobjectif des systèmes viscoélastiques, pour obtenir une configuration du traitement qui soit optimale et/ou robuste au sens de petites variations (incertitudes) dans les paramètres de conception qui caractérisent le traitement amortissant ;
• L’application de méthodologies d’approximations de fonctions et leur couplage avec les algorithmes d’optimisation multiobjectif, pour accélérer le processus de convergence et d’obtention des solutions optimales ;
• L’utilisation des techniques d’évaluation à posteriori des solutions fournies par le processus d’optimisation, pour aider le concepteur à décider sur l’ensemble des solutions optimales.
• L’extension de la théorie des éléments finis stochastiques initialement développées par des éléments élastiques, pour les éléments viscoélastiques (éléments finis stochastiques viscoélastiques). Ce qui permet d’identifier les limites de la modélisation numérique.

Introduction Générale 5
L'étude proposée dans ce mémoire a été réalisée dans le but d’apporter des réponses aux besoins énumérés ci-dessus. 1.2 Etat de l’art
Dans ce paragraphe, on présente un état de l’art sur les développements récents en ce qui concerne la modélisation et les applications des matériaux viscoélastiques dans le domaine de la dynamique des structures. Pour cela, quelques travaux importants sur ce sujet sont cités. 1.2.1 Les modèles rhéologiques simples
Les concepts fondamentaux qui concernent l’amortissement passif par l’utilisation des matériaux viscoélastiques et les méthodes analytiques et expérimentales pour caractériser ce type d’amortissement sont bien détaillés dans l’ouvrage de Nashif et al. (1985). Les modèles mathématiques dites classiques (modèles rhéologiques simples), et les modèles modernes qui sont jusqu’à présent utilisés pour représenter le comportement des matériaux viscoélastiques linéaires sont également évoqués par ces auteurs. Ces modèles ont été proposés pour prendre en compte les variations des propriétés des matériaux viscoélastiques en fonction principalement, de la fréquence d’excitation et de la température de fonctionnement. Pour bien comprendre la dépendance des propriétés mécaniques de ces matériaux en fonction des conditions de fonctionnement et environnementales, les auteurs proposent un chapitre bien détaillé sur ce sujet. En ce qui concerne le projet des amortisseurs viscoélastiques, quelques géométries typiques qui sont fréquemment utilisées sont abordées par les auteurs, comme par exemple, les traitements de surface par l’utilisation de couches contraintes passives et actives, et les éléments discrets, comme les joints de translation et de rotation (voir Figure 1.4).
Dans le même contexte des techniques de contrôle passif de vibration et bruit par l’utilisation d’amortissement, Mead (1982) rappelle les principes de la mécanique vibratoire des structures amorties, notamment par l’emploi des modèles généraux d’amortissement visqueux (proportionnel à la vitesse), le modèle hystérétique ou structural (proportionnel au déplacement), et les modèles rhéologiques classiques pour représenter le comportement viscoélastique. On constate que les modèles visqueux et hystérétiques ne sont pas appropriés pour décrire le comportement des matériaux viscoélastiques réels (les effets de relaxation des matériaux viscoélastiques) sur des larges bandes fréquentielles. La modélisation par les méthodes analytiques des systèmes structuraux de type poutre et plaque sandwichs contenant ce type d’amortissement sont également évoqués par l’auteur. Dans un contexte plus théorique, Christensen (1982) discute en détail la théorie de la viscoélasticité linaire et non linaire, en mettant en évidence les principaux modèles mathématiques développés pour représenter la dépendance en fréquence des propriétés des matériaux viscoélastiques dans le domaine temporel. Parmi les modèles mathématiques étudiés par l’auteur, il y a les modèles rhéologiques simples de Kelvin-Voigt, de Maxwell, de Kelvin-Voigt et Maxwell généralisés, le modèle de Zener, et le modèle généralisé standard, qui ne sont que des combinaisons simples des éléments de ressort et d’amortissement visqueux, traduits par des expressions mathématiquement simples basées sur des dérivées d’ordre entier, utilisées pour représenter

Introduction Générale 6
les champs de contraintes et de déformations des matériaux viscoélastiques. Dans le même registre, Bert (1973) montre, dans une vaste révision, que le modèle de Maxwell est bien adapté pour représenter le comportement d'un liquide viscoélastique. Cependant, si on veut représenter le comportement des solides viscoélastiques, ce modèle présente l’inconvénient qu’il n'y a aucun moyen de prévoir les efforts internes de relaxation (l’historique des contraintes-déformations intérieures) des matériaux viscoélastiques réels (Lazan, 1968). Pour surmonter cette difficulté, le modèle de Kelvin-Voigt a été proposé, et c’est la première approximation mathématique du comportement réel d'un solide viscoélastique. Mais l’inconvénient issu de l’utilisation de ce modèle c’est qu’il ne peut pas représenter les réponses élastiques au cours de l'application des chargements, ce qui conduit à un fluage proche de zéro pour les longues durées des chargements (l'historique de chargements) (Lazan, 1968). L’auteur montre aussi que les modèles de Zener et généralisé standard peuvent être utilisés pour représenter les effets de fluage et relaxation des ces matériaux, mais il faut un nombre élevé des paramètres (l’ordre des dérivées entière du modèle) à identifier pour bien représenter la dépendance en fréquence du comportement des matériaux viscoélastiques réels. 1.2.2 Les modèles viscoélastiques modernes
Pour des matériaux viscoélastiques réels, dont les propriétés mécaniques sont fortement dépendantes de la fréquence, le nombre de dérivés d’ordre entier des modèles rhéologiques classiques nécessaires pour représenter le comportement viscoélastique peut être assez élevé. Ceci signifie qu’un nombre élevé des paramètres à identifier est nécessaire pour ces modèles (Bagley, 1983 ; Nashif et al, 1985 ; Lima, 2003). Par conséquent, la combinaison de ces modèles avec des modèles aux éléments finis de grande taille conduit à un système d’équations du mouvement d'ordre beaucoup plus élevé que le modèle initial, ce qui rend difficile l'utilisation des modèles rhéologiques classiques pour des systèmes industriels. Pour pallier à ces difficultés, dans des contributions récentes consacrées à la modélisation mathématique du comportement viscoélastique, Bagley et Torvik (1979 ; 1983 ; 1985) ont essayé d’améliorer les modèles de Zener et généralisé standard, par la réduction du nombre de paramètres nécessaires pour la représentation du comportement des matériaux viscoélastiques linaires, en proposant un modèle mathématique à cinq ou même quatre paramètres à identifier. Pour cela, ils ont remplacé les dérivées d’ordres entières par des dérivées d’ordre fractionnelles pour représenter les champs de contraintes et de déformations des équations constitutives. Ce modèle a été appelé Fractional Derivative Model (FDM). Espíndola et al. (1988 ; 1992 ; 1997 ; 2005) ont montré que si la dépendance en fréquence des matériaux viscoélastiques n’est pas trop forte, on peut utiliser seulement trois paramètres dans le modèle FDM pour représenter le comportement viscoélastique dans une large bande fréquentielle. Pour vérifier l’efficacité du modèle, on a mesuré expérimentalement les propriétés des matériaux viscoélastiques, comme module de stockage et facteur de perte en fonction de la fréquence d’excitation pour plusieurs températures, en utilisant « un type de neutralisateur » dynamique discret d’un degré de liberté composé par une masse et une ressort viscoélastique, comme illustré en Figure 1.5. Pour cela, ils ont utilisé une chambre thermique dans le but de contrôler la température durant l’essai. Pour vérifier la méthodologie proposée, les résultats expérimentaux ont été confrontés avec des

Introduction Générale 7
résultats issus de simulation numérique. Par contre, l’inconvénient de la combinaison de ce modèle avec des modèles éléments finis des systèmes complexes est la dimension finale des équations plus élevée, puisqu’il conduit à un système d’équations sous une forme d’équation d’état, qui dépend des paramètres du modèle FDM (Lima, 2003).
Figure 1.5 – Structure primaire avec neutralisateurs dynamiques (gauche) ; neutralisateur
dynamique (droite). (figure adaptée de la référence (Espíndola et al, 2005)).
Golla, Hughes et McTavish (1985 ; 1993) ont proposé le modèle connu sous le nom GHM – Golla-Hughes-McTavish. L’idée consiste à représenter le module complexe des matériaux viscoélastiques par un développement en série de fractions partielles. En raison de la forme fonctionnelle qui résulte du modèle, qui ressemble aux fonctions de transfert de systèmes à un degré de liberté dans le domaine de Laplace, le modèle est aussi appelé « modèle des mini-oscillateurs ». Le modèle GHM est un modèle essentiellement du second ordre obtenu par l’introduction des variables ou coordonnées supplémentaires au système initial, qui permettent une description générale de la dépendance en fréquence des propriétés matérielles dans le domaine temporel. Plusieurs auteurs (Lima, 2003 ; Trindade, 2000) qui ont travaillé avec ce modèle, montrent qu’il représente bien la forte dépendance en fréquence des propriétés des matériaux viscoélastiques, mais contrairement au modèle FDM, a un coût plus élevé, à cause de l’ajout d’un grand nombre des variables dissipatives non physiques (variables internes) au système initial, qui doivent être identifiées par la procédure de lissage de paramètres à travers des nomogrammes des matériaux viscoélastiques fournis par des fabricants comme 3M (3M, 2007). Par un procédé semblable, Lesieutre et Bianchini (1995 ; 1996) ont développé le modèle viscoélastique appelé Anelastic Displacement Field (ADF), qui est basé sur la séparation des champs de déplacement en deux parties : une partie purement élastique et un champ anélastique qui représente la relaxation des matériaux viscoélastiques linéaires. Si on compare les modèles GHM et ADF, on remarque que le modèle GHM utilise une formulation dans le domaine de Laplace devant être transformée pour des analyses dans le domaine temporel. Par ailleurs, on aboutit à une équation du second ordre compatible avec les équations provenant des modèles EF des systèmes mécaniques, tandis que le modèle ADF conduit à des équations du premier ordre de telle façon que la compatibilité entre ces équations et celles provenant du modèle éléments finis n’est obtenue qu’à travers la construction d’un système couplé sous la forme d’équations d’état. D’autre part, même si les modèles GHM et ADF utilisent différents paramètres ayant différentes significations physiques, plusieurs auteurs montrent que les modèles aux éléments finis construits en les utilisant présentent des réponses similaires (Trindade, 2000 ; Lima, 2003).

Introduction Générale 8
L’utilisation des modèles FDM, GHM et ADF mène à une étape importante qui concerne l’identification des paramètres, et à ce sujet, de nombreux travaux ont été proposés. Lesieutre et Lee (1996) ont présenté le lissage du matériau ISD112, du fabricant 3M, à une température de 27ºC, entre 8 et 8000 Hz en introduisant leurs modèle ADF. Ils concluent que 11 paramètres au total sont nécessaires pour représentent fidèlement le comportement du module de stockage et du facteur de perte du matériau en fonction de la fréquence. Friswell et al. (1997) ont présenté la même analyse pour le modèle GHM, avec trois ou quatre paramètres par modèle pour le matériau ISD112 à 20ºC entre 2 et 4800 Hz. A travers les résultats obtenus, ils ont conclu que les modèles ADF et GHM lissent généralement bien les courbes maîtresses des matériaux viscoélastiques dont la dépendance en fréquence est forte.
Dans ce même contexte, Trindade (2000) a discuté la validité des modèles ADF et GHM en se basant sur l’identification des paramètres à partir des données expérimentales (courbes maîtresses) pour les matériaux viscoélastiques ISD112 à 27ºC, et DYAD-606 à 38ºC, du fabricant Sorbothane. Pour le lissage des paramètres des modèles, il a utilisé la boîte à outils d’optimisation (Optimization Toolbox) de Matlab®, plus particulièrement la fonction « lsqnonlin », qui utilise un algorithme non-linéaire (Non Linear Least Squares) pour minimiser l’écart entre les valeurs calculées et mesurées des parties réelles et imaginaires du module complexe. Il précise qu’il faut utiliser pour le lissage une bande fréquentielle plus large que celle considérée dans l’analyse du système mécanique, de manière à minimiser l’effet des erreurs aux bords de la bande. Ceci car l’analyse du comportement des courbes maîtresses, représentées analytiquement par les modèles ADF et GHM, en dehors de la bande utilisée pour le lissage, a montré des irrégularités concernant l’identification principalement pour le matériau viscoélastique DYAD-606, qui présente des courbes du module de stockage et du facteur de perte plus plates que celles du matériau ISD112. Une proposition de l’auteur pour surmonter ces inconvénients consiste à augmenter le nombre de paramètres (liés aux variables dissipatives des modèles) à être identifiés pour diminuer l’erreur d’identification.
Espíndola et al. (2005) ont appliqué le neutralisateur viscoélastique à des structures dynamiques dans le but d’augmenter leur durée de vie. Pour augmenter l’efficacité des neutralisateurs, ils proposent une méthodologie d’optimisation pour identifier les paramètres du traitement viscoélastique et montrent que le modèle FDM à quatre ou trois paramètres représente fidèlement le comportement viscoélastique dans un large bande fréquentielle. Les auteurs montrent que la méthodologie proposée présente une simplicité d’utilisation et de mise en œuvre numérique, et qu’elle est bien adaptée aux données expérimentales des matériaux viscoélastiques.
Dans le même contexte d’identification paramétrique, Lima (2003) dans un travail de dissertation de Master, propose des méthodologies d’identification basées sur des stratégies d’optimisation classiques, dans le but d’identifier les paramètres des modèles FDM, ADF et GHM. Les paramètres de chaque modèle sont identifiés pour plusieurs températures du matériau viscoélastique ISD112, et dans un large bande fréquentielle. L’ajustement proposé par l’auteur est basé sur l’emploi d’une méthode de moindres carrés permettant de minimiser l’écart entre les parties réels et imaginaires des modèles viscoélastiques avec les données expérimentales des courbes maîtresses. Il montre que la forte dépendance du comportement des matériaux viscoélastiques avec les conditions de fonctionnement (fréquence de vibration)

Introduction Générale 9
complique énormément l’identification paramétrique principalement pour les modèles ADF et GHM. Dans ce cas, il faut en général augmenter considérablement le nombre de paramètres pour approcher correctement les modèles aux mesures expérimentales, ce qui signifie une augmentation du coût de leur identification, et de l’application aux modèles éléments finis des systèmes structuraux. Toutefois, Espíndola et al. (2005) montrent l’avantage d’utiliser le modèle dérivatif d’ordre fractionnaire FDM, permettant de minimiser le nombre des paramètres à identifier.
D’une manière générale, à travers plusieurs travaux de recherche, il ressort que le principal inconvénient issu de l’utilisation des modèles ADF et GHM associés à une discrétisation par éléments finis, est qu’ils conduisent à des systèmes de grande taille par rapport au nombre de degrés de liberté initial, puisqu’ils ajoutent des coordonnées (ou variables) auxiliaires internes non physiques qu’on doit identifier par les procédures d’optimisation, pour tenir compte de la dépendance en fréquence des matériaux viscoélastiques (Lima, 2003). Même si on utilise des méthodes de réduction de modèles, plusieurs auteurs montrent que pour des systèmes mécaniques industriels, l’utilisation de ces modèles rend pratiquement inexploitable les analyses aux valeurs propres (Balmès, 1996a ; 1996b) et les calculs des réponses dans le domaine temporel ou bien dans le domaine fréquentiel (Salmanoff, 1997 ; Lam, 1997), en raison du coût numérique élevé pour traiter les matrices globales augmentées (Trindade, 2000 ; Lima, 2003). Dans le but de diminuer les coûts numériques, plusieurs auteurs ont montré plus récemment les avantages d’utiliser directement les données expérimentales de ces matériaux obtenus dans le domaine fréquentiel, par l’utilisation de l’approche module complexe (Balmès et Germès, 2002 ; Lima et al, 2006b ; Kergourlay, 2004) pour l’analyse des systèmes mécaniques complexes amortis par matériaux viscoélastiques. L’avantage de cette approche non paramétrique est qu’on peut représenter les comportements généraux des matériaux viscoélastiques fortement dépendants de la fréquence et de la température, sur une large bande fréquentielle. De plus, puisque les données expérimentales sont directement utilisées à travers une fonction module complexe, on peut contourner les étapes liées au choix de représentation du comportement viscoélastique par l’emploi d’un modèle paramétrique spécifique (Kelvin-Voigt, Maxwell, Zener, FDM, ADF ou GHM). On évite également l’étape d’identification des paramètres caractérisant le modèle choisi par l’utilisation des stratégies d’optimisation paramétrique. Un autre avantage présenté par le module complexe c’est qu’on peut le combiner aisément avec des systèmes mécaniques de grande taille (systèmes industriels), ce qui permet le calcul des réponses du système amorti principalement dans le domaine fréquentiel.
Par ailleurs, d'autres modèles viscoélastiques qui sont moins fréquemment utilisés ont été développés, comme les modèles proposés par Johnson et Quigley (1992) et Yiu (1993). Ceux deux modèles viscoélastiques sont semblables, puisqu’ils sont basés sur le modèle de Maxwell généralisé pour représenter le comportement viscoélastique. L’inconvénient issu de ces modèles est aussi le nombre élevé de paramètres nécessaires pour représenter le comportement viscoélastique.

Introduction Générale 10
1.2.3 Applications des matériaux viscoélastiques En ce qui concerne les applications récentes des matériaux viscoélastiques dans le
domaine de la dynamique des structures complexes, Rao (2001) propose un vaste travail de révision pour montrer que ces matériaux sont largement utilisés dans les industries automobiles, de génie civil, et aéronautique, par l’application de plusieurs configurations géométriques. Le but est d’atténuer les niveaux de vibration et de bruit dans les véhicules et dans les avions commerciaux. A travers des résultats expérimentaux de plusieurs structures mécaniques amorties par ces matériaux, il montre l’efficacité de quelques types de traitements viscoélastiques, comme l’utilisation des couches contraintes passives et actives pour amortir plusieurs modes simultanément dans une large bande fréquentielle, et l’application des éléments viscoélastiques discrets synchronisés (Tuned Viscoelastic Dampers (TVD)), dans le but d’augmenter la bande d’action de ces éléments par rapport aux amortisseurs dynamiques de vibrations classiques (DVA – Dynamic Vibration Absorbers). Pour cela, ils ajoutent au DVA classique l’amortissement viscoélastique, comme illustré en Figure 1.6 ci-dessous. De plus, l’auteur montre quelques courbes expérimentales qui montrent que les traitements viscoélastiques d’une manière générale, améliorent la qualité à l’intérieur des structures mécaniques par la réduction des niveaux acoustiques.
ressort viscoélastique
structure
masse synchroniséestructure non amortie
structure avec TVD
Fréquence
Am
plitu
de d
e V
ibra
tion
Figura 1.6 – Amortisseur viscoélastique discret synchronisé (TVD)
(figure empruntée à la référence Rao (2001)).
Samali et Kwok (1995) montrent que ces matériaux ont été appliqués à plusieures structures complexes de génie civile, soit sous forme de couches contraintes, soit comme des éléments discrets, toujours dans le but d’atténuer les niveaux vibratoires et les niveaux de bruits intérieurs à ces structures, qui sont souvent induits par les vents et par les tremblements de terre. Ils montrent aussi quelques résultats expérimentaux de plusieurs ouvrages importants, qui ont été traités par différents types d’amortisseurs viscoélastiques comme celui illustré en Figure 1.7, qui a été appliqué à plusieurs points du bâtiment Columbia SeaFirst Building à Seattle, aux Etas-Unis.

Introduction Générale 11
Figura 1.7 – Amortisseur viscoélastique appliqué au Columbia SeaFirst Building
(figure empruntée à la référence Samali et Kwok (1995)).
Dans ce même contexte, Lima et al. (2003a ; 2003b; 2005b; 2006b ; 2006c ; 2007a ; 2007b) ont proposé plusieurs travaux de recherche qui concernent les procédures de modélisation basées sur les éléments finis comprenant les traitements de surface par des éléments multicouches de poutres et plaques, et les éléments discrets par la représentation des joints de translation et de rotation. Pour cela, ces modèles sont basés sur des éléments ressorts simples du type viscoélastiques pour lesquelles les raideurs sont complexes, comme illustré en Figure 1.8. Les auteurs ont également abordé quelques méthodes de réduction de modèles adaptées aux modèles viscoélastiques ADF et GHM dans le contexte du contrôle passif de vibrations des structures amorties par matériaux viscoélastiques. Dans d’autres travaux l’auteur (Lima, 2003) a mis en évidence les avantages et les inconvénients pour chaque modèle viscoélastique. Pour cela, il a utilisé des structures bidimensionnelles telles que des treillis et des portiques comprenant différents types d’amortisseurs viscoélastiques. Pour vérifier la procédure de modélisation des éléments multicouches, et dans le but de valider les résultats issus des simulations numériques, il a évalué expérimentalement l'efficacité des traitements viscoélastiques pour poutres et plaques traitées partiellement par couches contraintes passives.
Figura 1.8 – Modélisation mathématique des amortisseurs viscoélastiques discrets.
Dans d’autres travaux, Balmès et al. (1996a ; 1996b ; 1997 ; 2002a ; 2002b ; 2005 ;
2006a ; 2006b) ont beaucoup contribué aux développements récents en ce qui concerne les techniques de modélisation des structures viscoélastiques complexes et les stratégies numériques qui peuvent être employées pour analyser et prédire le comportement des systèmes industriels traités par ces matériaux. Dans le cas d’un comportement viscoélastique fortement dépendant des conditions de fonctionnement et de la température, les auteurs

Introduction Générale 12
discutent sur la pertinence des modèles analytiques des éléments multicouches pour représenter la réalité physique du comportement viscoélastique. Ainsi, ils proposent (Balmès et Germès, 2002b) la modélisation des éléments multicouches qui sont utilisés jusqu’au présent par l’utilisation directe des éléments volumiques qui sont proposés par les codes éléments finis – ANSYS® et NASTRAN® spécifiquement – pour représenter plus fidèlement l’état contrainte-déformation des matériaux viscoélastiques. Les couches plus rigides que les couches viscoélastiques (structure base et couches contraintes) sont modélisées par des éléments de plaque simple. Cette méthodologie de modélisation est en réalité une approximation de la modélisation la plus fine, qui utilise également des éléments finis volumiques pour toutes les couches qui constituent un élément fini multicouche. Néanmoins, les auteurs montrent qu’elle peut conduire à des tailles de modèles prohibitives. D’autres articles abordent plus souvent des fonctions analytiques ou des données tabulées pour représenter la dépendance en fréquence et température des propriétés des matériaux viscoélastiques commerciaux. Pour des applications industrielles, Balmès et Germès (2002b) proposent des techniques de réduction des modèles viscoélastiques dans le domaine fréquentiel, basées sur l’enrichissement des bases de condensation qui sont calculées pour le comportement conservatif associé des matériaux viscoélastiques qu’on peut identifier à travers des propriétés asymptotiques du lissage. 1.2.4 Optimisation de structures complexes amorties par matériaux viscoélastiques
Comme on a pu le remarquer, le développement des systèmes et des technologies de contrôle passif par l’utilisation des amortisseurs viscoélastiques fait l’objet actuellement de plusieurs projets de recherche dans le monde. L’analyse des publications trouvées dans la littérature montre que les principaux centres d’intérêt sont : 1) la modélisation des éléments multicouches qui permettent l’introduction du comportement viscoélastique et qu’on peut également combiner avec des modèles aux éléments finis des systèmes complexes ; 2) la représentation du comportement viscoélastique par des modèles mathématiques fiables, et son introduction dans les modèles multicouches ; et 3) la proposition d’une conception du traitement viscoélastique qui soit efficace en termes d’amortissement, en déterminant ses caractéristiques géométriques, c’est-à-dire, l’identification d’une conception en avant-projet des structures amorties par des stratégies d’optimisation. Dans ce contexte, on remarque que peu des travaux ont été proposés (Espíndola et al, 2004), en raison principalement des difficultés dans la combinaison efficace des modèles viscoélastiques avec des modèles aux éléments finis des structures industriels, ou les difficultés à traiter les matrices viscoélastiques complexes dépendantes principalement de la fréquence d’excitation et de la température du matériau. De plus, le temps de calcul des réponses forcées pour des modèles aux éléments finis des systèmes amortis par matériaux viscoélastiques de grande taille (quelques centaines de milliers de degrés de liberté (d.o.f)), dans un processus itératif d’optimisation paramétrique et/ou de recalage de modèles, peut être prohibitif et inexploitable (Lima et al, 2006b).
Dans ce contexte, une voie importante de recherche faisant partie de la modélisation est l'utilisation des stratégies d’optimisation de dispositifs viscoélastiques visant la réduction du coût et du temps d’exécution, et la maximisation de la performance du traitement viscoélastique, en

Introduction Générale 13
cherchant les paramètres optimaux qui caractérisent l’amortissement. De plus, l’optimisation doit également constituer un outil d'investigation pour le concepteur pendant la phase d’avant-projet ou de projet des structures amorties par des matériaux viscoélastiques. Dans une procédure d'optimisation, on remarque que les concepteurs sont fréquemment confrontés à des objectifs contradictoires. Par exemple, dans la dynamique des structures on cherche simultanément une diminution de la masse totale d’une structure mécanique et une augmentation de sa rigidité (en principe la diminution de la masse totale est accompagnée d’une augmentation de la souplesse et donc des déplacements des nœuds). De telles situations sont fréquemment traitées par des approches d'optimisation multiobjectifs ou multicritères (Goldberg, 1989 ; Eschenauer et al, 1990). Dans ce contexte, principalement en ce qui concerne l’optimisation multiobjectif des systèmes dynamiques non amortis, on peut rencontrer plusieurs travaux de recherche, dont les auteurs proposent de nombreuses stratégies d’optimisation efficaces, souvent couplées avec des techniques d’approximations de fonctions, comme par exemple, l’utilisation des réseaux des neurones artificiels (Ait Brik, 2004a ; Soteris, 2004 ; Lima et al, 2006c), les méthodologies de surface de réponses (Ghanmi et Bouazzi, 2005 ; Lima et al, 2007b), ou encore, l’emploi des méthodes de réduction de modèles (Ait Brik, 2003 ; Balmès et Germès, 2002b ; Lima et al, 2006b). Ces stratégies sont souvent utilisées dans le but d’augmenter l’efficacité des algorithmes d’optimisation multiobjectifs en réduisant le temps de calcul pour obtenir les solutions optimales, puisque l'optimisation multiobjectif exige généralement un grand nombre d'évaluations des fonctions coûts. Dans des travaux récents dans ce domaine, Ait Brik (2003) propose dans sa thèse de nombreux exemples d’optimisation multiobjectifs appliquées à plusieurs problèmes de l’ingénierie mécanique académiques et industriels, comme l’optimisation d’un moteur d’un avion à plus de 64000 degrés de liberté. Il propose aussi une stratégie d’optimisation robuste en introduisant des fonctions supplémentaires pour évaluer la robustes des solutions optimales. De plus, des techniques de fouille des données à posteriori et le couplage des techniques d’approximations de fonctions et condensation robuste avec les algorithmes multiobjectifs sont également abordés par l’auteur.
Balmès et Bobillot (2002) ont proposé des stratégies d’optimisation paramétrique pour des systèmes viscoélastiques, plus spécifiquement, pour une enceinte vibroacoustique, dans le but d’évaluer les changements des épaisseurs des couches viscoélastiques et contraintes, et les modifications dans la géométrie d’assemblage, par un modèle aux éléments finis de grande taille. Pour cela, ils ont proposé une méthode de condensation de modèles avec enrichissement de la base par des résidus statiques de premier ordre. 1.2.5 Prise en compte des incertitudes dans le projet et optimisation de structures viscoélastiques
Lors de la phase de conception d’une structure mécanique en présence
d’amortissement viscoélastique, un aspect important à considérer qui doit répondre aux exigences de projet en ce qui concerne la flexibilité des modifications et l’évaluation de la performance du traitement viscoélastique d’une manière générale, est la prise en compte des incertitudes sur les paramètres de conception. En effet, même si on arrive aujourd’hui à traiter

Introduction Générale 14
des modèles éléments finis de grande taille par matériaux viscoélastiques, il est très difficile de prendre en compte les caractères incertains des informations données par les mesures et le modèle. Dans ce cas, il suffit de réaliser plusieurs expérimentations pour rendre compte des limites d’une modélisation déterministe. Par contre, à travers une méthode de propagation des incertitudes de type probabiliste comme la méthode des éléments finis stochastiques (Stochastic Finite Element Model - SFEM) on peut prendre en compte des incertitudes dans les modèles éléments finis de systèmes viscoélastiques, pour répondre aux différentes exigences des projets, parmi lesquels on distingue l’analyse et la conception. Récemment, plusieurs travaux ont été proposés en ce qui concerne la modélisation et l’introduction des incertitudes dans le cadre des éléments finis des systèmes non amortis. L’introduction des incertitudes dans les modèles aux éléments finis peut être faite soit à travers des incertitudes statistiques, par l’utilisation de variables aléatoires, dont on connaît la loi de probabilité, soit par des variables incertaines et bornées (Dessombz et al, 2001), qu’on modélise par des intervalles définies par la physique. Différentes techniques existent pour résoudre les problèmes stochastiques comme la méthode de simulation de Monte Carlo (MC) qui est souvent considérée comme la méthode de référence (Schinozura, 1972 ; Rubinstein, 1981 ; Papadrakakis et Kotsopulos, 1999), mais qui a l’inconvénient d’être très coûteuse en terme de temps de calcul , et pour cela, d’autres alternatives ont été proposées comme la méthode du Latin Hyper Cube (HCL) (Iman et Conover, 1980 ; Florian, 1992 ; Mantefel et Randall, 2000), qui permet de réduire de manière significative les coûts de calcul de la simulation de Monte Carlo, tout en conservant son niveau de prédiction. Il y a aussi les méthodes de perturbation qui sont basées sur une expansion en série de Taylor (Kleiber et Hien, 1992 ; Alvin, 1998), ou bien les expansions en série de Neumann (Yamazaki et Schinozuka, 1988 ; Lei et Qiu, 2000), des réponses autour des moyennes des variables aléatoires, et les méthodes spectrales qui utilisent des fonctions de base dans l’espace de Hilbert (Ghanem et Spanos, 1991 ; Ghanem et Kruger, 1996), associées aux problèmes aléatoires. Ces fonctions peuvent être des polynômes orthogonaux d’une façon générale, et un chaos polynomial en particulier. Dans ce cas, on utilise des variables aléatoires par la discrétisation des champs aléatoires continus. 1.3 Description des travaux
Le but de ces commentaires présentés dans la section précédente est de montrer l’évolution des divers aspects en ce qui concerne la modélisation, l’application et l’évaluation de l’amortissement viscoélastique dans le domaine de la dynamique des structures. D’autre part, cette étude bibliographique est importante pour montrer les aspects qui seront abordés et approfondis dans la suite de ce travail, pour situer les contributions qu’il porte dans le domaine de l’amortissement viscoélastique.
D’une manière générale, la recherche développée concerne la maîtrise de la réponse dynamique des structures industrielles complexes amorties par matériaux viscoélastiques. Elle vise au développement des méthodes de conception et de dimensionnement, adaptées à l'optimisation multiobjectif des structures mécaniques d'architecture complexes contenant de l’amortissement viscoélastique. En particulier, on propose des procédures efficaces de calcul (comprenant le dimensionnement, l'optimisation multiobjectif et la prise en compte des

Introduction Générale 15
incertitudes) adaptées aux structures complexes, modélisées par des modèles aux éléments finis contenant un grand nombre de degrés de liberté (d.d.l.).
Dans le contexte de modèles 3D à grand nombre de d.d.l, les forts niveaux de variations des paramètres et la nécessité d'un grand nombre d'analyses, conduit à exploiter largement les méthodes d’approximation de fonctions : réanalyse de structures modifiées, condensation robuste de modèles, réseaux de neurones et les méthodologies de surface de réponse. On tient compte du fait qu'en ingénierie mécanique, les incertitudes sont issues de plusieurs sources : erreurs de modélisation et de modèle de comportement des phénomènes physiques, caractéristiques mécaniques des matériaux (module d’Young et masse volumique), procédés de fabrication et d’assemblage des composants mécaniques (épaisseur de tôles, raideur de jonction, etc.). La prise en compte de ces incertitudes dans les procédures d’optimisation multiobjectif des systèmes viscoélastiques nécessite l’introduction des indicateurs de robustesse des solutions vis-à-vis de ces incertitudes, afin de trouver les solutions les plus stables.
Plusieurs travaux montrent que la robustesse d’une solution optimale doit être évaluée à la fin de la procédure d’optimisation déterministe, et qu’on doit ensuite sélectionner les solutions plus stables dans l’espace des solutions robustes par des critères stochastiques. Dans ce mémoire, on s’intéresse à une autre approche car on suppose que la solution à la fois optimale et robuste n’est pas forcément une solution dans l’espace déterministe. Pour cela, la robustesse est introduite comme une fonction objectif supplémentaire à maximiser, donc le problème d’optimisation déterministe est enrichi par des fonctions de robustesses supplémentaires afin de guider le processus d’optimisation vers les régions de l’espace des solutions qui sont à la fois optimales et robustes.
La démarche générale « conception robuste des systèmes viscoélastiques » proposée est représentée par le schéma synoptique illustré en Figure 1.9 ci-dessous. Cette démarche comporte les étapes suivantes :
• Modélisation de l’amortissement viscoélastique par l’utilisation de l’approche
module complexe, bien adapté au cas d’analyse de réponses dans le domaine fréquentielle (calcul des fonctions réponses fréquentielles – FRFs) ;
• Modélisation des éléments de plaque sandwichs et leur paramétrisation, dans le
but de définir l’espace de conception à partir du modèle nominal, en mettant tout en évidence les paramètres de design (variables de projet) ;
• Calculs multimodèles utilisant des modèles condensés très prédictifs robustes vis-à-vis des modifications structurales et des incertitudes, selon l’approche paramétrique ;
• Optimisation multiobjectif déterministe et robuste basées sur des algorithmes
évolutionnaires, et leur couplage avec de méthodes d’approximation de fonctions, comme les réseaux de neurones et les surfaces de réponses ;

Introduction Générale 16
• L’analyse de sensibilité paramètrique à priori basée sur des dérivées de première ordre des réponses fréquentielles des systèmes amortis par rapport aux épaisseurs de couches viscoélastiques et contraintes, et par rapport à la température du matériau viscoélastique ;
• Traitement et gestion des solutions optimales contenues dans un espace de
dimension très large par les techniques de fouille des données (SOM) ;
• Extension de la théorie des éléments finis stochastiques (SFEM) au cas de systèmes viscoélastiques (Eléments Finis Stochastiques Viscoélastiques), dans le but de proposer un outil d’évaluation des petits changements sur les paramètres qui caractérisent le traitement viscoélastique.
Figura 1.9 – Conception robuste des systèmes amortis par matériaux viscoélastiques.
1.4 Contenu du mémoire
Le Chapitre 2 présente un bilan général de la connaissance actuelle en ce qui concerne la viscoélasticité linaire, et les modèles mathématiques utilisés pour représenter ce type d’amortissement. On se place dans le cadre de la viscoélasticité linéaire appliquée aux matériaux homogènes isotropes, pour introduire l’approche module complexe. Les modélisations ainsi couramment utilisées sont montrées – modèles rhéologiques classiques, modèles à fractions rationnelles et modèles à dérivées fractionnaires. Finalement, la mise en

Introduction Générale 17
œuvre de l’approche module complexe combinée avec la méthode des éléments finis est discutée et on montre leur pertinence pour le calcul de réponses fréquentielles.
Dans le Chapitre 3 on présente la modélisation aux éléments finis des éléments de plaque sandwichs (on s’intéresse aux modèles à 3 couches), basé sur le travail original de Kathua et Cheung (1978) ainsi que la paramétrisation du modèle aux éléments finis de plaque multicouche, en mettant en évidence les paramètres définissant l’espace de conception. La paramétrisation est une étape essentielle de la modélisation, facilitant l’introduction des incertitudes et/ou modifications paramétriques, et le calcul des sensibilités paramétriques, qui sont souvent utilisées dans les processus d’optimisation et/ou de recalage de modèles.
Le Chapitre 4 est consacré à des méthodes d’approximation des réponses qui seront utilisées dans les procédures d’optimisation multiobjectif, afin d’évaluer les modifications sur les paramètres de conception au cours d’optimisation, et de calculer les réponses en présence d'incertitudes. Dans ce cas, en raison de la taille des modèles complexes traités par matériaux viscoélastiques, les réanalyses exactes ne sont pas envisageables pour des raisons évidentes de coût de calcul de la réponse fréquentielle. La réduction de modèle s’inscrit alors naturellement dans les stratégies de conception robuste, et dans ce contexte, on propose deux stratégies de réanalyse approchée :
• Une première méthode basée sur la réduction de modèles éléments finis de systèmes amortis, en utilisant les techniques de condensation directe. On montrera que ces condensations sont robustes vis-à-vis des petites modifications structurales (incertitudes), ce qui constitue aussi une contribution de ce mémoire de thèse.
• Une seconde méthode basée sur l’implémentation des techniques d’approximation de fonctions, aussi appelées métamodèles, telles que les réseaux de neurones et les surfaces de réponses classiques et adaptatives. Le but est de coupler ces techniques avec les algorithmes génétiques multiobjectif, pour accélérer la convergence et pour diminuer le coût de calcul lors de l'optimisation. L’implémentation et le couplage des surfaces de réponses adaptives composée de plusieurs variables de conception, constituent une autre contribution apportée.
Pour vérifier les stratégies proposées, on montre quelques applications numériques en utilisant une structure moyennement complexe, d'intérêt industriel, composée par une structure de type plaque courbe renforcée par des raidisseurs partiellement traitée par des éléments multicouches développés en Chapitre 3.
Dans le Chapitre 5 on discute la stratégie d’optimisation multiobjectif robuste adoptée dans ce mémoire pour résoudre les problèmes d’optimisation des systèmes amortis par matériaux viscoélastiques. L'optimisation multiobjectif consiste à choisir, en présence de critères multiples, une (des) alternative(s) parmi un nombre infini qui varient généralement dans un domaine continu (Ait Brik et al, 2004b). L’objectif est de proposer les principales stratégies pour le choix d’une méthode d’optimisation multiobjectif en se basant sur la nature du problème à traiter, ainsi que le choix du concepteur et ses préférences. Dans ce chapitre, on montre aussi quelques exemples de couplage entre les algorithmes génétiques et les méthodes d’approximation de fonctions, dans le but d’accélérer la convergence de l’algorithme, et

Introduction Générale 18
diminuer le temps pour obtenir les solutions optimales. On illustre aussi, par un exemple, la prise en compte des incertitudes sur les paramètres de conception au cours d’une procédure d’optimisation multiobjectif d’un système viscoélastique, combinant les outils montrés au chapitre précédent.
Dans le Chapitre 6 on s’intéresse à la notion de propagation des incertitudes, et l’analyse des sensibilités paramétriques, qui sont liées aux systèmes viscoélastiques par couches contraintes. Les incertitudes sont prises en compte dans les modèles viscoélastiques multicouches selon l’approche paramétrique. Pour cela, on s’intéresse à la technique de discrétisation des champs aléatoires fondée sur un développement de Karhunen-Loève, en présentant aussi la formulation sur laquelle est basée la méthode des éléments finis stochastiques viscoélastiques, ce qui constitue une autre contribution apportée par ce mémoire. Pour résoudre les réponses fréquentielles aléatoires, on utilise dans ce mémoire la méthode d’Hyper Cube Latin (HCL), souvent adoptée comme étant la référence. Dans une deuxième étape, ce chapitre présente la méthode d’évaluation des sensibilités des paramètres géométriques qui caractérisent le traitement viscoélastique, et la température du matériau, qui constitue une autre contribution apportée par ce mémoire.
Le Chapitre 7 présente, dans un premier temps, une étude expérimentale d’une plaque plane traitée par couches contraintes. Le but est de vérifier les méthodologies de modélisation des éléments sandwichs composés par trois couches, et la méthodologie d’optimisation multiobjectif robuste, en vérifiant si les solutions calculées sont réellement optimales et robustes au sens de petites modifications des paramètres de conception de la structure réelle. Dans un deuxième temps, on montre l’étude numérique et expérimentale d’une carcasse de compresseur utilisé dans des réfrigérateurs, traitée par couches contraintes, fournie par la Société EMBRACO, au Brésil.
Dans le Chapitre 8 on dresse le bilan et les conclusions générales ainsi que des perspectives de continuité des travaux de recherche.

CHAPITRE 2
Amortissement Viscoélastique
Dans ce chapitre on présente la caractérisation du comportement dynamique des
matériaux viscoélastiques et les principaux modèles mathématiques destinés à la caractérisation du comportement de ces matériaux. Les principes fondamentaux de la viscoélasticité linéaire, les modèles rhéologiques simples et les modèles modernes qui ont été proposés pour représenter le comportement viscoélastique, sont également abordés. 2.1 Comportement des matériaux viscoélastiques
Pour sélectionner le matériau viscoélastique le mieux adapté à une application spécifique et dans le but de dimensionner et prévoir les vibrations des structures amorties par ces matériaux, il est important de connaître le comportement le mode de fonctionnement, et les spécificités des matériaux viscoélastiques. Pour cela, la compréhension des propriétés microscopiques et macroscopiques des solides viscoélastiques est primordiale. Ces propriétés induisent la transformation d’une partie de l’énergie mécanique en énergie thermique, ce qui permet en particulier la dissipation de l’énergie vibratoire traduite par l’amortissement (Nashif et al, 1985 ; Merlette, 2005).
L’amortissement viscoélastique est présent dans plusieurs polymères et matériaux vitreux. Les polymères sont composés par longs réseaux moléculaires, tels que le réseau illustré en Figure 2.1.a. Pour ces matériaux, l'amortissement résulte du processus de relaxation et de rétablissement du réseau moléculaire, après les déformations introduites. Néanmoins, il existe une forte dépendance entre les effets de la fréquence et les effets de la température, à cause de la relation directe entre la température du matériau et les mouvements moléculaires. Les matériaux vitreux, tels que le verre sont caractérisés par des courts réseaux moléculaires, comme illustré en Figure 2.1.b. Pour ces matériaux, l'amortissement résulte aussi de la relaxation et du rétablissement des réseaux moléculaires après les déformations, mais ils ne récupèrent pas la distribution originale du réseau moléculaire, mais une autre condition d’équilibre thermodynamique (Nashif et al, 1985).
Figura 2.1 – Structure moléculaire d’un polymère (a) et d’un matériau vitreux (b)
(figure empruntée à la référence Nashif et al. (1985)).

Amortissement Viscoélastique 20
Les polymères peuvent être fabriqués dans le but d’avoir une grande variété de propriétés mécaniques souhaitables selon l’application. Cette procédure est faite par les changements au niveau moléculaire du matériau qui caractérisent directement la propriété amortissante, la duré de vie, la résistance au fluage, la stabilité thermique, et d'autres propriétés souhaitables, pour une grande bande de fréquence et à plusieures températures. Les mêmes procédures peuvent être appliquées pour les matériaux vitreux à températures élevées. Néanmoins, pour chaque cas, des limitations doivent être respectées, comme les limites supérieures de températures de chaque matériau, dans le but d’éviter que le processus ne devienne irréversible avec la conséquente disparition de la propriété amortissante. 2.1.1 Comportements élastiques des solides et visqueux des fluides.
Selon Persoz (1987), les matériaux viscoélastiques ont un comportement à la fois élastique et visqueux. Pour cette raison, on fait un rappel du comportement élastique, puis du comportement visqueux, avant d’aborder la viscoélasticité linaire qui est introduite dans le domaine temporel, puis exprimée dans le domaine fréquentiel à l’aide de la notion de module complexe.
Un matériau est qualifié d’élastique si et seulement si lorsqu’on lui applique un chargement constant, sa déformation est instantanée et constante ; et lorsque l’on arrête ce chargement, son retour est instantané et complet (retour à l’état initial). Pour ces matériaux, la relation linéaire de contrainte-déformation peut être exprimée à travers la loi de Hooke pour les essais de traction-compression et de cisaillement, respectivement, comme suit :
( ) ( )tEt εσ = ; ( ) ( )tGt γτ = (2.1)
où E et G sont le module d’Young et le module de cisaillement, respectivement. La linéarité provient du fait que l’on reste en petites déformations, et dans ce cas, la loi de comportement représentée par les expressions (2.1), est ainsi une approximation linéaire de la loi réelle de comportement du matériau.
Par ailleurs, les fluides visqueux ont une caractéristique particulière de résistance à l’écoulement, qu’on appelle viscosité. Elle résulte d’une perte d’énergie par frottement, qui est ainsi dissipée dans le fluide sous forme de chaleur. Pour ces matériaux, la contrainte est proportionnelle au taux de déformation dû au cisaillement, selon l’expression suivante :
( ) ( )tt γµτ &= (2.2) où µ caractérise la viscosité.
La Figure 2.2 compare la réponse élastique d’un solide (b), la réponse visqueuse d’un fluide (c), et la réponse viscoélastique d’un solide (d), soumis au même chargement (a). La réponse du fluide est progressive et continue tant que le chargement est maintenu. Lorsque l’on stoppe le chargement, le fluide ne retrouve pas sa position initiale.

Amortissement Viscoélastique 21
Temps
Cha
rgem
ent
(a)
Déf
orm
atio
n
Déf
orm
atio
n
Temps Temps
Déf
orm
atio
n
(b) (c) (d) Figure 2.2 – Déformation d’un matériau soumis à un chargement constant sur un intervalle de
temps fixé : (a) chargement ; (b) comportement élastique d’un solide ; (c) comportement visqueux d’un fluide ; (d) comportement viscoélastique d’un solide
(figure empruntée de la référence (Merlette, 2005))
On remarque que la réponse viscoélastique (d) est un compromis entre celle d’un solide élastique et celle d’un fluide visqueux, et sa caractéristique principale est un retard par rapport à la réponse élastique. Ce retard intervient à la fois dans la phase de déformation et dans la phase de relaxation, et découle directement de la dépendance des propriétés mécaniques des matériaux viscoélastiques en fonction de l’historique des déformations (Christensen, 1982). Par exemple, dans le cas d’une mousse viscoélastique soumise à un essai de cisaillement statique, on observe l’histoire des déformations à travers les changements successifs de sa structure alvéolaire, comme illustré en Figure 2.3.
(b) (c)(a) Figure 2.3 – Réarrangements successifs de la structure d’une mousse viscoélastique soumise à
un essai de cisaillement (figure adaptée de la référence (Merlette, 2005)).
Cette figure montre trois états différents de la structure interne de la mousse à savoir : le premier (Figure 2.3.a) est l’état initial non déformé ; la Figure 2.3.b montre que lorsque l’amplitude de déformation est faible, les alvéoles se déforment progressivement. Lorsque la contrainte est relâchée, elles retrouvent leur état initial. Dans ce cas, la courbe de l’énergie de déformation est linéaire, ce qui correspond à un comportement élastique. Dans le cas où la déformation appliquée à la mousse augmente, toutes les alvéoles vont commencer à glisser les unes sur les autres en commençant par celles en contact avec la surface de chargement. Ce glissement s’accompagne généralement d’un phénomène de viscosité, donc une partie de l’énergie élastique est alors convertie en énergie thermique (comportement viscoélastique linéaire) ; le troisième état (voir Figure 2.3.c) montre que lorsque l’amplitude de déformation atteint une valeur critique, toutes les alvéoles se réarrangent simultanément. L’énergie élastique de la mousse augmente lorsque les alvéoles se déforment. Elle diminue très rapidement,

Amortissement Viscoélastique 22
lorsqu’il y a un réarrangement. Le comportement de la mousse est toujours viscoélastique, mais dans ce cas, non linéaire. 2.1.2 Comportement viscoélastique dans le domaine temporel.
Le comportement d'un matériau viscoélastique dans le domaine temporel est caractérisé
par deux fonctions qui représentent les réponses du matériau : • La fonction de fluage, ( ) ( ) 00 tt,F σεσ = , qui décrit l’évolution de la déformation
du matériau soumis à une contrainte constante, 0σ , illustré en Figure 2.4.a. Le
terme écoulement désigne plus particulièrement le cas d’une déformation qui ne se résorbe pas lorsque la contrainte est annulée.
• La fonction de relaxation, ( ) ( ) 00 tt,R εσε = , qui décrit l’évolution de la contrainte
supportée par le matériau à une déformation constante, 0ε , comme illustré en
Figure 2.4.b. Ce phénomène apparaît lorsque les contraintes se relâchent progressivement sous déformation constante.
t
σ(t)
σ0
(a)
ε(t)
t (b) t
ε(t)
ε 0
σ(t)t
Figure 2.4 – Courbe de fluage (a) et de relaxation (b).
Les fonctions de fluage et de relaxation sont fonctions du temps, et de ce fait résulte que
dans un instant quelconque, la déformation (ou la contrainte) dépend de tous les états de contraintes (ou de déformation) précédents. C’est-à-dire, que les matériaux viscoélastiques linéaires possèdent l’effet de « mémoire », caractérisés par les fonctions de fluage et de relaxation. Pour les matériaux viscoélastiques linéaires, pour lesquels la relation de contrainte-déformation dépend uniquement de l’histoire des sollicitations, comme illustré en Figure 2.3, le principe de superposition de Boltzmann est applicable (si l’on superpose deux histoires de sollicitations, la réponse est la superposition des réponses), et dans ce cas, la loi de comportement ne va donc plus relier directement et proportionnellement les contraintes et les déformations, comme dans le cas de l’élasticité linéaire représentée par les relations (2.1), mais, elle doit prendre en compte tout l’historique des contraintes et des déformations

Amortissement Viscoélastique 23
antérieures. L’application du principe de superposition de Boltzmann conduit à une loi de comportement qui relie les histoires de contrainte et de déformation par une intégrale de convolution, exprimée sous la forme suivante, pour un essai uniaxiale :
( ) ( ) ( )tdtEtt
ετσ ∫∞−
−= (2.3)
où ( )tσ et ( )tε désignent, respectivement, les composants de contrainte et de déformation
(normales ou de cisaillement) ; ( )tE est la fonction module du matériau.
L’expression (2.3) peut être étendue au cas des états multiaxiaux de contrainte-déformation par la substitution des scalaires par des tenseurs. Pour un matériau élastique linéaire, devient constant, et la relation (2.3) se ramène à la première des expressions
(2.1). Néanmoins, pour les matériaux viscoélastiques linéaires, le module n’est pas
constant, et l’intégration (2.3) doit être évaluée pour chaque pas de temps dans l’intervalle [ . Si l’on considère les restrictions physiques en admettant que n’existe pas de
déformations pour les valeurs négatives de temps (
( )tE( )tE
]t,∞−( ) 0t =ε dans l’intervalle [ ]0t <<∞− ),
l’expression (2.3) conduit à la relation suivante :
( ) ( ) ( ) ( ) ( ) τττετεσ dtE0tEt
t
0 ∂∂
−+= ∫ (2.4)
En supposant ( ) ( )thEtE r += , l’expression (2.4) est exprimée sous la forme :
( ) ( ) ( ) ( ) ( ) ( ) τττετεεσ dth0thtEt
t
0r ∂
∂−++= ∫ (2.5)
où encore, dans le domaine de Laplace:
( ) ( ) ( ) ( ) ( )[ ] ( ) ( ) ( )ssEssHEssshsEs rr εεεεσ =+=+= (2.6) où est la variable complexe de Laplace ; est le module de stockage (module à basse
fréquence) ; est la fonction module complexe ;
s rE
( ) ( )sHEsE r += ( ) (sshsH = ) est la fonction de
dissipation ou fonction de relaxation, représentant le comportement dissipatif du matériau (liée à l’amortissement), et ( )sErε représente la partie élastique du matériau viscoélastique.
2.2 Approche du module complexe
Pour les matériaux isotropes et homogènes, les propriétés complexes sont complètement décrites par un module ( )sE et un coefficient de Poisson ( )sν complexes. La
mesure séparée de ( )sν pose cependant des problèmes expérimentaux très significatifs

Amortissement Viscoélastique 24
(Merlette, 2005). La pratique est donc de mesurer le module ( )sE , ou le module de cisaillement
, et de supposer un coefficient de Poisson ( )sG ( )sν constant. Très peu de donnés sont par
ailleurs disponibles sur les variations de ( )sν avec la fréquence. On sait principalement dire
qu’il diminue lorsque la fréquence augmente (Nashif et al., 1985). Une fois évalué au long de l’axe imaginaire, ωis = , l’expression (2.6) mène à
l’expression du module complexe exprimé sous la forme suivante :
( ) ( ) ( ) ( ) ( )[ ] ( ) ( ) ( )[ ] ( )ωεωηωωεωωωεωωσ i1EEiEE +′=′′+′== (2.7) où ( )ωE est l’expression du module complexe du matériau viscoélastique; ( )ωE ′ est la partie
réel du module dénommée module de stockage; ( )ωE ′′ est la partie imaginaire du module
appelée module de perte ; et ( ) ( ) ( )ωωωη EE ′′′= est le facteur de perte, caractérisant
l’amortissement. D’un point de vue pratique, on peut donc résoudre les problèmes de viscoélasticité comme des cas particuliers d’élasticité où les propriétés des matériaux sont complexes et dépendent de la fréquence d’excitation. Cette propriété est connue sous le nom de Principe d’Equivalence Elastique-Viscoélastique (PEEV) (Nashif et al, 1985).
Si on considère une variation harmonique pour la déformation, ( ) ti0et ωεε = , a chaque
pas de fréquence, la courbe représentant la relation contrainte-déformation prend une forme elliptique, comme illustré en Figure 2.5, qu’on peut donc exprimer sous la forme suivante :
( ) ( )[ ] ( ) ( )[ ] ( ) ( )tsintcosEei1EReeERet 0ti
0ti
0 ωηωεωεωηωεωσ ωω −′=+′== (2.8)
ε
σ
0ε
E′ηε0
0−Ε′ηε
−ε0
Figure 2.5 – Cycle contrainte-déformation elliptique pour un matériau viscoélastique linéaire.
Le facteur de perte traduit le rapport entre l’énergie dissipée par le matériau, , et
l’énergie potentielle ou élastique stockée,
dE
2EE 20p ε′= , sur un cycle de déformation maximale,
représentée par l’expression suivante :
p20
2
0
220
T
0d E2EtdtsinEdtE πηηεπωωηεεσ
ωπ
=′=′== ∫∫ & (2.9)
On peut remarquer que la forme de l’ellipse qui décrit un cycle d’hystérésis change avec
l’évolution du facteur de perte η . Plus le facteur η est grand, plus l’énergie dissipée est
grande et plus la surface de l’hystérésis est importante. Par exemple, un facteur de perte égale à signifie que de l’énergie est dissipée à la fin du cycle de vibrations. Néanmoins,
dE
1 %100
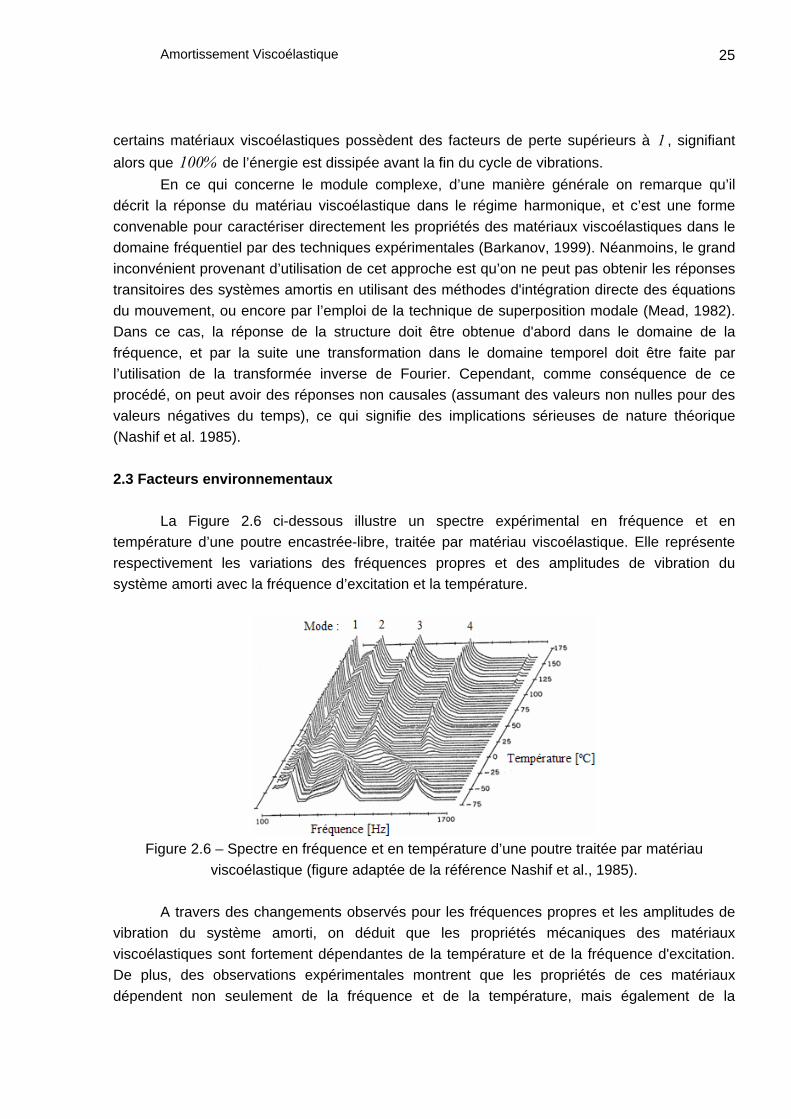
Amortissement Viscoélastique 25
certains matériaux viscoélastiques possèdent des facteurs de perte supérieurs à 1 , signifiant alors que de l’énergie est dissipée avant la fin du cycle de vibrations. %100
En ce qui concerne le module complexe, d’une manière générale on remarque qu’il décrit la réponse du matériau viscoélastique dans le régime harmonique, et c’est une forme convenable pour caractériser directement les propriétés des matériaux viscoélastiques dans le domaine fréquentiel par des techniques expérimentales (Barkanov, 1999). Néanmoins, le grand inconvénient provenant d’utilisation de cet approche est qu’on ne peut pas obtenir les réponses transitoires des systèmes amortis en utilisant des méthodes d'intégration directe des équations du mouvement, ou encore par l’emploi de la technique de superposition modale (Mead, 1982). Dans ce cas, la réponse de la structure doit être obtenue d'abord dans le domaine de la fréquence, et par la suite une transformation dans le domaine temporel doit être faite par l’utilisation de la transformée inverse de Fourier. Cependant, comme conséquence de ce procédé, on peut avoir des réponses non causales (assumant des valeurs non nulles pour des valeurs négatives du temps), ce qui signifie des implications sérieuses de nature théorique (Nashif et al. 1985). 2.3 Facteurs environnementaux
La Figure 2.6 ci-dessous illustre un spectre expérimental en fréquence et en température d’une poutre encastrée-libre, traitée par matériau viscoélastique. Elle représente respectivement les variations des fréquences propres et des amplitudes de vibration du système amorti avec la fréquence d’excitation et la température.
Figure 2.6 – Spectre en fréquence et en température d’une poutre traitée par matériau
viscoélastique (figure adaptée de la référence Nashif et al., 1985).
A travers des changements observés pour les fréquences propres et les amplitudes de vibration du système amorti, on déduit que les propriétés mécaniques des matériaux viscoélastiques sont fortement dépendantes de la température et de la fréquence d'excitation. De plus, des observations expérimentales montrent que les propriétés de ces matériaux dépendent non seulement de la fréquence et de la température, mais également de la
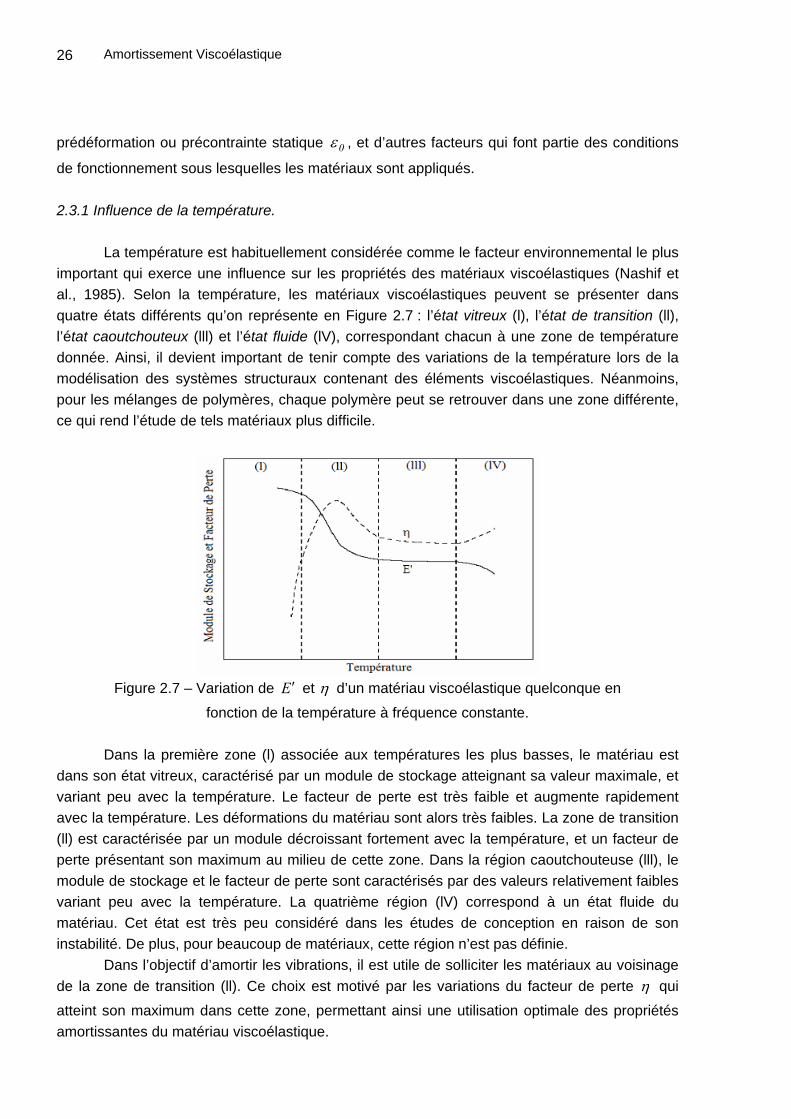
Amortissement Viscoélastique 26
prédéformation ou précontrainte statique 0ε , et d’autres facteurs qui font partie des conditions
de fonctionnement sous lesquelles les matériaux sont appliqués. 2.3.1 Influence de la température.
La température est habituellement considérée comme le facteur environnemental le plus important qui exerce une influence sur les propriétés des matériaux viscoélastiques (Nashif et al., 1985). Selon la température, les matériaux viscoélastiques peuvent se présenter dans quatre états différents qu’on représente en Figure 2.7 : l’état vitreux (l), l’état de transition (ll), l’état caoutchouteux (lll) et l’état fluide (lV), correspondant chacun à une zone de température donnée. Ainsi, il devient important de tenir compte des variations de la température lors de la modélisation des systèmes structuraux contenant des éléments viscoélastiques. Néanmoins, pour les mélanges de polymères, chaque polymère peut se retrouver dans une zone différente, ce qui rend l’étude de tels matériaux plus difficile.
Figure 2.7 – Variation de E ′ et η d’un matériau viscoélastique quelconque en
fonction de la température à fréquence constante.
Dans la première zone (l) associée aux températures les plus basses, le matériau est dans son état vitreux, caractérisé par un module de stockage atteignant sa valeur maximale, et variant peu avec la température. Le facteur de perte est très faible et augmente rapidement avec la température. Les déformations du matériau sont alors très faibles. La zone de transition (ll) est caractérisée par un module décroissant fortement avec la température, et un facteur de perte présentant son maximum au milieu de cette zone. Dans la région caoutchouteuse (lll), le module de stockage et le facteur de perte sont caractérisés par des valeurs relativement faibles variant peu avec la température. La quatrième région (lV) correspond à un état fluide du matériau. Cet état est très peu considéré dans les études de conception en raison de son instabilité. De plus, pour beaucoup de matériaux, cette région n’est pas définie.
Dans l’objectif d’amortir les vibrations, il est utile de solliciter les matériaux au voisinage de la zone de transition (ll). Ce choix est motivé par les variations du facteur de perte η qui
atteint son maximum dans cette zone, permettant ainsi une utilisation optimale des propriétés amortissantes du matériau viscoélastique.

Amortissement Viscoélastique 27
2.3.2 Influence de la fréquence. Notion de fréquence réduite.
Pour une température donnée T proche de la température de transition vitreuse (dans la zone de transition (ll)), la mesure des caractéristiques viscoélastiques donne le module de stockage E ′ et le facteur de perte η dont la variation en fréquence ressemble généralement à
celle illustrée en Figure 2.8 ci-dessous.
Figure 2.8 – Illustration des variations de E ′ et η par rapport à la fréquence à température
constante (figure adaptée de la référence Nashif et al., 1985).
Par la comparaison entre les Figures 2.7 et 2.8, et à partir des observations expérimentales pour des matériaux viscoélastiques thérmorhéologiques simples, on montre que l'influence exercée par la fréquence est, qualitativement, l’inverse de l'effet de la température. On note qu'une variation de la fréquence en quelques décades reflète la même influence dans le comportement d’une variation de quelques degrés dans la température (Nashif et al., 1985). Par conséquent, en décalant en fréquence les courbes donnant les propriétés du matériau (Figure 2.8) à différentes températures, elles tendent à se superposer, et à décrire une courbe continue. Ceci implique que les caractéristiques viscoélastiques aux différentes températures peuvent être reliées entre elles par des changements (ou décalages) des valeurs de la fréquence réelle d'excitation. Ce fait mène aux concepts de facteur de décalage et fréquence réduite, associés au Principe de Superposition Fréquence-Température – PSFT, qui s’applique à beaucoup de matériaux viscoélastiques linéaires. Symboliquement, le PSFT peut être exprimé comme suit :
( ) ( ) ( 0T0r T,ωET,ωET,ωE )α== ; ( ) ( )0Tr T,ωT,ω αηη = (2.10)
Le terme ( )ωTTr αω = est la fréquence réduite, la fréquence actuelle d’excitation, ω( )TTα est le facteur de décalage qui dépend de la température de travail du matériau
viscoélastique, et est la température de référence ; 0T ( )0T T,E ωα et ( 0T T, )ωαη sont
normalement appelées courbes maîtresses et se présentent sous la forme de nomogrammes. En particulier, pour les mélanges de polymères, le principe de superposition Fréquence-
Température n’est pas général. Dans le cas de matériaux non homogènes, le principe ne s’applique pas forcément, même dans la zone de transition. Ceci est le cas des copolymères

Amortissement Viscoélastique 28
(assemblage de deux polymères au niveau des liaisons chimiques, pour créer un nouveau polymère) et des polymères chargés par des éléments organiques et inorganiques, de l’ordre du micron, qui sont ajoutés au polymère. A une température donnée, les deux polymères peuvent se trouver dans deux états différents.
La Figure 2.9 illustre le principe PSFT : ayant le module de stockage et le facteur de perte d'un matériau viscoélastique arbitraire pour différentes valeurs de la température, , ,
, si des décalages horizontaux selon l'axe de la fréquence sont appliqués à chacune de ces
courbes, elles peuvent être combinées dans une courbe unique. Le décalage horizontal est donné par le paramètre
1T− 0T
1T
Tα dépendent de la température.
Frequência
Mod
ule
de S
tock
age
T-1
0T
T1
Fréquence
Fact
eur d
e Pe
rte
T-1
T0
T1 Fréquence Réduite
Mod
ule
de S
tock
age
et F
acte
ur d
e Pe
rte
E'
η
Figure 2.9 – Illustration du Principe de Superposition Fréquence-Température (PSFT)
Les nomogrammes simplifient l’obtention des données des propriétés des matériaux viscoélastiques en fonction de la température T et de la fréquence d’excitation ω . A chaque température correspond un facteur de décalage Tα qui définit une droite isotherme dans le
plan ( )ωω ,r . On définit donc les fréquences réelles sur l’axe vertical et des droites isothermes
permettant de relever graphiquement la fréquence réduite sur l’axe horizontal. Pour une fréquence d’excitation iω et une température quelconques, la lecture de l’abaque se fait en
trois étapes décrites sur la Figure 2.10, à savoir : iT
• Repérage du point d’intersection P de la droite horizontal iω et de l’isotherme
oblique ; iT
• Lecture de l’abscisse du point P qui fournit la valeur de la fréquence réduite ( )iTi Tαω ;
• Lecture de E ′ et η sur les courbes maîtresses en fonction de ( )iTi Tαω .

Amortissement Viscoélastique 29
Figure 2.10 – Illustration d’un abaque ou nomogramme en fréquence réduite.
2.3.3 Formes paramétriques de la fréquence réduite en température.
D’après le paragraphe précédent, on peut utiliser une loi tabulée pour décrire la dépendance du comportement des matériaux viscoélastiques par rapport à la fréquence et à la température. Les fonctions et ( rωE ) ( )TTα peuvent être obtenues à partir des essais
expérimentaux pour des matériaux viscoélastiques spécifiques (Nashif et al, 1985), et on peut stocker dans un tableau les parties réelles et imaginaires du module complexe en fonction de la fréquence réduite. On montre dans cette section les principales représentations paramétriques du facteur de décalage qui permettent de faire la conversion de la fréquence réduite
( )ωαω TTr = en fréquence physique ω .
Comme résultat d'un travail expérimental étendu, Drake et Soovere (1984) suggèrent des expressions analytiques, basées sur la forme de l’équation WLF (Williams-Landel-Ferry) (Williams et al., 1955), pour le module complexe et le facteur de décalage pour différents matériaux viscoélastiques disponibles dans le commerce, dans la zone de transition. Les équations suivantes représentent, respectivement, le module complexe et le facteur de décalage comme fonctions de la température et de la fréquence réduite pour le matériau viscoélastique ISD112™ produit par 3M, de la manière proposée par ces auteurs :
( ) ( )( ) ( ) 46 B3r
B3r521r BiBiB1BBωG −− +++= ωω (2.11)
( ) ( rAZ2rrrrr
T TTSTa
Tb
TTlogb
Ta2303.2
T1
T1alog −⎟
⎟⎠
⎞⎜⎜⎝
⎛−−+⎟⎟
⎠
⎞⎜⎜⎝
⎛⎟⎟⎠
⎞⎜⎜⎝
⎛−+⎟⎟
⎠
⎞⎜⎜⎝
⎛−=α ) (2.12)
où :
( ) ( ) ( ) ( )( ) ( ) ( )( ) ( )( )EACACECBCBAZAHCrHB
2rHAAZALCrLB
2rLA
1AH
1AL
1AZ
HLr654321
DDCCDb;DDCCDa;SSD;T1T1DT1T1D;SSC;T1T1C;T1T1C;K009725.0S;K1474.0S;K05956.0S
;K360T;K210T;K290T;18.0B;241.3B;6847.0B;MPa1543.0B;MPa1200B;MPa4307.0B
−=−=−=−=−=−=−=−====
=========−−−

Amortissement Viscoélastique 30
Dans la Figure 2.11 on montre les courbes normalisées représentant les variations du module de stockage, module de perte et facteur de perte comme fonctions de la fréquence réduite, et la courbe représentant le facteur de décalage en fonction de la température pour le matériau viscoélastique ISD112™.
Figure 2.11 – Abaque représentant les propriétés du matériau viscoélastique ISD112™.
Il est important de souligner, toutefois, que l’utilisation des variables réduites est valable
si et seulement si (Nashif et al., 1985 ; Kergourlay, 2004) :
• Le matériau viscoélastique possède un comportement linéaire ; • Les mêmes valeurs de Tα permettent de superposer toutes les fonctions
viscoélastiques (module de stockage, module de perte et facteur de perte) ; • La structure interne du matériau reste inchangée lors d’une modification de
température.
L’utilisation des variables réduites suppose que le matériau viscoélastique, est à la température de l’enceinte thermo-régulée qui permet d’imposer la température de l’essai pour trouver les courbes représentant la dépendance en fréquence-température du comportement du matériau viscoélastique étudié. En plus, cette hypothèse néglige le phénomène d’auto-échauffement des matériaux viscoélastiques. 2.4 Représentation du module complexe
Ce paragraphe présente les différentes représentations du module complexe. On peut utiliser directement les lois tabulées issues des mesures expérimentales fournies par des fabricants, ou on peut également choisir une loi paramétrique dont on identifie les paramètres à l’aide de mesures expérimentales et d’un processus d’optimisation.

Amortissement Viscoélastique 31
2.4.1 Formes tabulées.
Un certain nombre d’essais dynamiques permettent de mesurer le module de stockage ( )ωE ′ et le facteur de perte ( )ωη d’un matériau en un certain nombre de points de fréquence
ω sur une bande étroite. Si on mesure ces quantités à plusieurs températures, on peut envisager d’utiliser l’hypothèse de superposition fréquence-température explicitée dans les sections précédentes pour obtenir un nomogramme en fréquence réduite (comme celui illustré en Figure 2.11). On dispose alors d’une représentation sous forme de tableau (loi tabulée) du module complexe en fréquence réduite rω , mais également du facteur de décalage Tα aux
températures T . Dans ce cas, pour connaître le module complexe en un point de fonctionnement arbitraire ( )T,ω , on interpole ou extrapole les valeurs expérimentales du facteur
de décalage pour trouver la fréquence réduite, puis on interpole ou extrapole le module sur la courbe maîtresse.
L’avantage d’une représentation non-paramétrique est de permettre la représentation de comportements généraux fortement dépendants de la fréquence et de la température sur une large gamme de valeurs de ces facteurs. De plus, l’utilisation directe des données dispense les étapes du choix de représentation et d’identification des paramètres pour les formes paramétriques du module complexe. 2.4.2 Formes paramétriques.
On cherche à approcher le comportement de matériaux amortissants par un modèle analytique possédant peu de paramètres. L’idée consiste à utiliser des modèles rhéologiques simples par l’association de ressorts et d’amortisseurs visqueux élémentaires, de façon à décrire d’une manière satisfaisante la relation entre contrainte-déformation. Les modèles de Maxwell et de Kelvin-Voigt, illustrés en Figures 2.12.a et b, respectivement, sont caractérisés par des associations en série et en parallèle, des éléments de ressorts et des amortisseurs visqueux. Les relations contrainte-déformation sont (Bert, 1973; Persoz, 1983) :
( ) ( ) ( )dttd
dttd
Et εµσµσ =+ (2.13)
( ) ( ) ( )dttdtEt εµεσ += (2.14)
où E est le module élastique du matériau, et µ est la viscosité.
Le modèle à trois paramètres illustré en Figure 2.12.d, appelé aussi modèle de Zener, ou solide viscoélastique standard, reprend les caractéristiques principales trouvées sur les matériaux réels, à savoir les asymptotes haute et basse fréquence. L’expression suivante représente la relation contrainte-déformation pour ce modèle :
( ) ( ) ( ) ( )dttdEtE
dttdbt sr
εεσσ +=+ (2.15)

Amortissement Viscoélastique 32
où ( )21 EEb += µ ; ( )2121r EEEEE += ; ( )212s EEEE += µ
E µ
EE(1+iη)
E
(a) (b) (c) (d)
µ µ1
E 2
Figure 2.12 – Modèle d’amortissement simples : (a) Modèle de Maxwell ; (b) Modèle de Kelvin-Voigt ; (c) Amortissement hystérétique (structural) ; (d) Modèle de Zener.
La Figure 2.13 est une représentation graphique des fonctions de fluage et de relaxation
typiques des trois modèles rhéologiques simples représentés par les expressions (2.13) à (2.14). Ces fonctions peuvent être obtenues par la résolution des équations constitutives, pour les types spécifiques de chargement : déformation constante et contrainte constante, respectivement.
t(a)
Maxwell
Kelvin-
VoigtZener
(b)
σ(t)
Zener
Kelvin-Voigt
Maxwell
ε(t)
t
Figure 2.13 – Fonctions de fluage (a) et relaxation des modèles rhéologiques simples (figure adaptée de la référence Wang (2001))
A travers des observations expérimentales et considérations thermodynamiques des
matériaux viscoélastiques, la fonction de fluage doit augmenter avec le temps vers une asymptote dans le régime permanent. Par contre, la fonction de relaxation doit diminuer avec le temps vers une asymptote horizontale (Bert, 1973 ; Persoz, 1987 ; Wang, 2001). La Figure 2.13 montre que la fonction de relaxation prévue pour le modèle de Kelvin-Voigt est constante avec le temps, et la fonction de fluage prévue pour le modèle de Maxwell augmente indéfiniment avec le temps. Pourtant, ces modèles ne correspondent pas au vrai comportement des matériaux viscoélastiques. Néanmoins, le modèle de Zener ne présente pas ces limitations, pouvant être considéré comme la première représentation du comportement réel des matériaux viscoélastiques. Si on admet une variation harmonique de la contrainte et de la déformation,
et , en substituant dans l’expression (2.15) on peut obtenir la relation
entre les amplitudes suivante :
( ) ti0et ωσσ = ( ) ti
0et ωεε =

Amortissement Viscoélastique 33
( )
( ) ( ) ( )[ 001r
0 iEiiEib1iEE
εωωεωω
σ ′′+′=⎥⎦
⎤⎢⎣
⎡++
= ] (2.16)
où ( ) ( ) ( )222
1r b1bEEE ωωω ++=′ et ( ) ( ) ( )22r1 b1bEEE ωωω +−=′′ .
On observe que les fonctions ( )ωE ′ et ( )ωE ′′ reflètent la dépendance du comportement
des matériaux viscoélastiques par rapport à la fréquence. Cependant, la variation de ces fonctions avec la fréquence, est beaucoup plus rapide que celle observé dans les matériaux viscoélastiques réels (Nashif et al, 1985). Ce fait a motivé la proposition de plusieurs modèles viscoélastiques comme les modèles généralisés de Maxwell et de Kelvin-Voigt, basés sur la combinaison multiple des modèles rhéologiques présentés en Figure 2.14, qui sont deux représentations classiques des modèles exprimés par les expressions (2.13) et (2.14). Il s’agit respectivement de mettre en parallèle le modèle de Maxwell qui est constitué d’un ressort et d’un amortisseur en série (Figure 2.14.b), et en série le modèle d’amortissement visqueux dit Kelvin-Voigt, constitué lui d’un ressort et d’un amortisseur en série (Figure 2.14.a).
E
(a)
µ
E E E
E
E E
E
(b)
µ µ
µ
µ µ µ
µ
Figure 2.14 – Modèles généralisés : (a) Kelvin-Voigt ; (b) Maxwell.
Une autre approche proposée est le modèle standard généralisé, qui consiste dans l’introduction dans l’expression (2.19) des dérivées d’ordre plus élevé, dans le but de représenter les champs de contraintes et déformations en ce qui concerne le temps (Rogers, 1983), ce qui mène à la relation constitutive générale suivante :
( ) ( ) ( ) ( )∑∑==
+=+N
1nn
n
nr
M
1mm
m
m dttdEtE
dttdbt εεσσ (2.17)
En admettant les variations harmoniques, ( ) ti
0et ωσσ = et , à travers
l’expression (2.17) on peut obtenir la relation des amplitudes suivante :
( ) ti0et ωεε =
( )
( )0M
1m
mm
N
1n
nnr
0
ib1
iEEε
ω
ωσ
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
+
+=
∑
∑
=
= (2.18)

Amortissement Viscoélastique 34
Les parties réels et imaginaires de la fonction module prévue pour ce modèle sont beaucoup plus compliquées que celles obtenues pour le modèle de Zener. Comme résultat, pour des matériaux viscoélastiques dont les propriétés mécaniques sont dépendantes de la fréquence, le nombre de dérivées par rapport au temps nécessaires pour représenter le comportement de ces matériaux dans une large bande fréquentielle peut être élevé. Par conséquent, un grand nombre de paramètres et à identifier sont requis pour bien
représenter le comportement viscoélastique. Cela rend difficile l’utilisation de ce modèle combiné avec les modèles aux éléments finis de systèmes de grande taille. De plus, d’une manière générale, on remarque que les modèles précédents décrivent les réponses des matériaux viscoélastiques directement dans le domaine fréquentiel. Néanmoins, un autre grand inconvénient provenant de l’utilisation de ces modèles rhéologiques est la difficulté d’obtention des réponses de systèmes amortis dans le domaine temporel. Pour cela, on doit appliquer la transformée inverse de Fourier, conduisant à des réponses non causales, et des complications sérieuses de nature théorique (Nashif et al., 1985).
nE mb
En vue de surmonter ces problèmes, plusieurs auteurs ont proposé des modèles viscoélastiques basés soit sur l’utilisation des dérivées d’ordre non entières, soit sur l’emplois des variables internes non physiques, dans le but de représenter le comportement viscoélastique directement dans le domaine temporel et, en même temps, bien adaptés pour être utilisés en combinaison avec les modèles aux éléments finis. Dans le but d’améliorer la précision du modèle généralisé, et réduire le nombre de paramètres requis pour représenter le comportement viscoélastique, Bagley et Torvik (1979 ; 1985) ont proposé une formulation beaucoup plus élaborée, basée sur l’introduction des dérivées d’ordre fractionnaires, appelé Fractional Derivative Model – FDM. Ils proposent l’utilisation de puissances non entières de
ωis = , ce qui permet une représentation fréquentielle par l’utilisation d’un modèle à cinq, quatre ou même trois paramètres qui lissent mieux les courbes de mesures expérimentales du module de stockage et du facteur de perte. Ainsi, selon ce modèle, le module complexe est exprimé comme suit :
( ) ( ) ( )βα bs1sEEsE 1r ++= (2.19)
Les paramètres requis pour représenter le comportement viscoélastique sont , ,
, rE 1E
b α et β . Les coefficients α et β permettent d’ajuster la fréquence du maximum de
dissipation et les inclinaisons du module de stockage et du facteur de perte. Plusieurs travaux montrent qu’on peut supposer βα = (module à quatre paramètres) ou 21== βα (modèle à
trois paramètres). Le principal problème issu de l’utilisation de ce modèle combiné avec les modèles aux éléments finis est la dimension globale des matrices, puisque le problème est formulé dans l’espace d’état (Lima, 2003).
Le module complexe de cisaillement proposé par Golla-Hugues-MacTavish (1985 ; 1993), appelé modèle GHM, développé par Golla et Hughes (1985) et Golla et al. (1993), s’exprime dans le domaine de Laplace, de la manière suivante :

Amortissement Viscoélastique 35
( ) ⎟⎟⎠
⎞⎜⎜⎝
⎛
++
++= ∑
=
n
1i2iii
2ii
2
ir 2ss2s
1EsEωωζ
ωζα (2.20)
Du fait de la similitude entre chaque terme de la série dans l’expression (2.20) et la
fonction de transfert d’un système à un degré de liberté amorti, la fonction module complexe peut être interprétée comme une série de n oscillateurs masse-raideur-amortissement,
représentés par les trois paramètres positifs ( )iii ,, ζωα , qui doivent être déterminés par lissage
des données expérimentales. Pour cette raison, le modèle GHM est aussi nommé modèle des mini-oscillateurs.
Le modèle développé par Lesieutre et Bianchini (1995), appelé Anelastic Displacement Field (ADF), représente le module de cisaillement complexe du matériau viscoélastique dans le domaine fréquentiel par une série de la forme suivante :
( ) ⎟⎟⎠
⎞⎜⎜⎝
⎛
+
++= ∑
=
n
1i2i
2i
2
irj
1EEΩωΩωω
∆ω (2.21)
où i∆ et iΩ sont déterminés par lissage des courbes mesurées de cisaillement du matériau
viscoélastique utilisé. Cette méthode se base sur la séparation des champs de déformations du matériau viscoélastique en une partie élastique, instantanément proportionnelle à la contrainte, et une partie anélastique représentant la relaxation du matériau.
Ces deux modèles sont des cas particuliers de sommes de fractions rationnelles particulièrement intéressantes pour représenter le comportement viscoélastique aussi bien dans le domaine du temps que dans le domaine de la fréquence. Malheureusement, ils nécessitent un nombre élevé de paramètres pour approcher correctement les mesures expérimentales, ce qui les rend beaucoup plus coûteux que les modèles simples présentés précédemment. Quand associés à une discrétisation par éléments finis, ils conduisent à des systèmes de grandes tailles (Lima, 2003 ; Balmès et Babillot, 2002a). 2.5 Lissage des paramètres des modèles viscoélastiques
Un aspect important lié à l'utilisation des modèles viscoélastiques rhéologiques simples, FDM, GHM et ADF, est l'identification des paramètres de ces modèles à partir des courbes maîtresses des matériaux viscoélastiques. Par ce processus, les valeurs des paramètres de chaque modèle sont ajustées dans le but de réduire au minimum les différences entre les données expérimentales et les courbes ajustées. Dans ce contexte, quelques auteurs comme Trindade (2000) et Lima (2003) ont présenté des discussions en ce qui concerne le processus d’identification paramétrique de plusieurs modèles viscoélastiques, à l’aide de la boîte à outils d’optimisation (Optimization Toolbox) de MATLAB, plus particulièrement, la fonction « lsqnonlin », qui utilise un algorithme non-linaire (Nlonlinear Least Squares). Pour le lissage des courbes, Lima (2003) a utilisé des fonctions représentant les parties réelles et imaginaires de chaque modèle viscoélastique, où la fonction objectif utilisée pour le lissage est exprimée comme suit :

Amortissement Viscoélastique 36
( ) ( )( )
( ) ( )( )∑
= ′′
′′−′′+
′
′−′=
freqN
1i iexp
iexpimod
iexp
iexpimodobj E
EEE
EEF
ωωω
ωωω
(2.22)
où est le nombre de points fréquentiels utilisés pour le lissage ; freqN ( )imodE ω et ( )iexpE ω
sont, respectivement, les valeurs des modules complexes des modèles viscoélastiques et des valeurs expérimentales. La bande de fréquences utilisée pour le lissage doit être plus large que celle considérée dans l’analyse du système de manière à minimiser l’effet des erreurs aux bords de la bande (Trindade, 2000). Les paramètres du modèle GHM sont composés de
triplets (
GN
iα , iω , iζ , ) et du module statique . Le nombre de mini-oscillateurs
définit la dimension du système final, en même temps que la précision de l’ajustement. Pour le modèle ADF, en plus du module statique , seuls couples de paramètres
(
GN,...,1i = rE GN
rE AN
i∆ , iΩ , ) sont nécessaires. Dans ce cas, la valeur a la même influence que pour
le modèle GHM. AN,...,1i = AN
Il est connu que les modèles ADF et GHM représentent bien le comportement des matériaux viscoélastiques dont les propriétés varient assez fortement avec la fréquence. Par contre, un nombre élevé de paramètres doit être utilisé dans le lissage, ce qui constitue une difficulté supplémentaire, puisqu’on ne connaît pas a priori quel est le nombre optimal des paramètres ou . Toutefois, on sait que plus la bande fréquentielle est large, plus le
nombre de paramètres doit être élevé pour bien ajuster les courbes expérimentales. Dans ce cas, d’autres méthodes, comme celle des dérivées fractionnaires, s’avère plus intéressantes, puisqu’on n’a besoin d’identifier que cinq, quatre ou paramètres (Espíndola et al, 1997).
GN AN
2.5.1 Propriétés asymptotiques du lissage.
Les valeurs des paramètres identifiés ne sont souvent valables que dans la bande de
fréquence utilisée pour le lissage. Or, dans des simulations, des modes situés hors de cette bande peuvent être excités et il est donc impératif de vérifier la capacité de prédiction du comportement asymptotique du modèle. La mesure brute de caractéristiques viscoélastiques à une température fixée donne le module complexe dont la variation en fréquence ressemble généralement à celle montrée en Figure 2.11 pour le matériau viscoélastique ISD112™, où dans les zones haute et basse fréquence non mesurées, on prolonge les courbes par des asymptotes. Pour l’extrapolation en basse fréquence, on se donnera une asymptote réelle
et
0G
00 =η , car la fonction de relaxation étant réelle, sa transformée de Fourier est paire et réelle
en (Crandall, 1970). Pour les hautes fréquences, on définira une asymptote complexe et 0 ∞G
∞η , comme illustré en Figure 2.11.
Amortissement Viscoélastique 37
2.6 Incorporation du comportement viscoélastique dans les modèles EF
Une fois que l’on dispose de modèles raisonnablement précis pour la représentation de la dépendance en fréquence et de la température des propriétés des matériaux viscoélastiques, il reste à savoir comment se servir de ces représentations pour le calcul des structures réelles amorties par matériaux viscoélastiques.
Dans les références (Trindade, 2000 ; Lima, 2003) on montre comme les modèles FDM, GHM et ADF peuvent être couplés avec des modèles aux éléments finis de façon à produire des équations du mouvement sous la forme d'équations d'état qui peuvent être résolues pour la prévision des solutions propres complexes, réponses forcées et réponses temporelles. Toutefois, comme souligné précédemment, ces modèles entraînent généralement une augmentation très importante de l'ordre des systèmes d'équations et, par conséquent, des coûts de calcul très élevés, très souvent prohibitifs. D'autre part, si on se limite à l'analyse de réponses forcées, on peut s'abstenir d'utiliser ces modèles et employer directement les données expérimentales sous la forme d'abaques ou tableaux, contenant les parties réelles et imaginaires du module en fonction de la fréquence et de la température. De l'étude rapporté dans ce Mémoire ce choix a été fait, tenant compte du fait que les réponses forcées sont considérées suffisantes pour les analyses et procédures d'optimisation envisagées. En plus, ces réponses peuvent être traitées par des procédures d'identification modale pour accéder aux propriétés modales des structures amorties par l'effet viscoélastique.
D’une manière générale, on définit la rigidité dynamique complexe des structures amorties par matériaux viscoélastiques, et on explicite ensuite la construction de la matrice de transfert (fonction réponse forcée) pour l’analyse des problèmes vibratoires de structures amorties.
On considère le modèle EF représenté par les équations du mouvement dans le domaine du temps d’une structure quelconque, sans amortissement externe, traité par matériaux viscoélastiques, contenant dégrées de liberté : N
( ) ( ) ( ) ( )ttT,t fqKqM =+ ω&& (2.23.a)
( ) ( )tt buf = ; (2.23.b) ( ) ( )tt cqy = où sont, respectivement, la matrice de masse (symétrique, définie positive)
et la matrice de rigidité (symétrique, définie non négative).
( ) NNRT,, ×∈ωKM
( ) NR∈tq et sont,
respectivement, le vecteur de déplacements et le vecteur de forces externes. est le
vecteur des réponses, et est le vecteur réduit des forces externes. Les matrices
et sont les matrices qui permettent de choisir, parmi les degrés de liberté du modèle aux élément finis, ceux où sont appliquées les forces d’excitation, et les ceux où les réponses du système sont calculées, respectivement.
( ) NR∈tf
( ) cR∈ty
( ) fR∈tufNR ×∈b NcR ×∈c
On supposera que la structure est composée par des éléments élastiques et des éléments viscoélastiques, de sorte que la matrice de rigidité globale de la structure peut être décomposée comme suit :

Amortissement Viscoélastique 38
( ) ( TT ,, )ωω ve KKK += (2.24) où est la matrice de rigidité correspondant à la sous-structure purement élastique, et eK
( T, )ωvK est la matrice de rigidité liée à la sous-structure viscoélastique. Comme montré dans
les sections précédentes, l'introduction de la dépendance en fréquence du matériau viscoélastique peut être réalisée en exploitant le Principe d’Equivalence Elastique-Viscoélastique (PEEV) (Christensen, 1982), selon lequel, dans un premier temps, pour une température donnée, la matrice ( T, )ωvK peut être générée pour des éléments finis spécifiques
(barres, poutre, plaques, coques, etc.) en supposant que le module d’Young et/ou le
module de cisaillement (selon l’état contrainte-déformation adopté) sont indépendants
de la fréquence. Ensuite, après la construction de la matrice globale d’élément finis, la dépendance en fréquence de tels modules est représentée selon un modèle viscoélastique particulier adopté : soit l’approche du module complexe, soit à travers des modèles de type GHM, ADF ou FDM, comme montré dans les paragraphes précédents. En supposant que le coefficient de Poisson est indépendant de la fréquence,
( Tω,E ))( Tω,G
( )Tω,E devient proportionnel à
selon la relation( Tω,G ) ( ) ( ) ( )ν12Tω,ETω,G += . Alors, un des deux modules peut être
factorisé dans la matrice de rigidité pour la sous-structure viscoélastique sous la forme suivante :
( ) ( ) vv KK TGT ,, ωω = (2.25)
Si on considère l'excitation harmonique de la forme, ( ) tiet ωFf = , , et la
réponse harmonique , , , les équations du mouvement dans le domaine
temporel (2.23) sont transformées en équations algébriques dans le domaine fréquentiel, qu’on peut représenter sous la forme suivante :
( ) tiet ωUu =
( ) tiet ωQq = ( ) tiet ωYy =
( )[ ] FQMK =− 2T, ωω (2.26.a)
bUF = ; (2.26.b) cQY =
En combinant les équations (2.30) et (2.27), on peut obtenir la rigidité dynamique complexe :
( ) ( ) MKKZ ve2T,GT, ωωω −+= (2.27)
Après avoir défini la matrice de rigidité complexe, l’étape suivante consiste à résoudre le
système dans le domaine fréquentiel, ce qui peut être fait par la construction de la matrice de souplesse dynamique ou matrice de Fonctions de Réponses Fréquentielles :
( ) ( ) bcZH -1T,T, ωω = (2.28)

Amortissement Viscoélastique 39
Puisque notre intérêt est focalisé sur les réponses dynamiques dans le domaine fréquentiel, l’expression (2.28) peut, en principe, être directement employée pour le calcul des réponses harmoniques. Cependant, une telle procédure devient pratiquement inexploitable, en termes de temps de calcul, pour des modèles aux éléments finis de grandes tailles associés à des structures industrielles. Les calculs deviennent envisageables lorsqu’on utilise des méthodes de réduction de modèles, où encore des méthodes d’approximation des réponses par les métamodèles. Ces aspects seront abordés dans le Chapitre 4. 2.7 Conclusions
Dans ce chapitre on a fait un bilan de la connaissance actuelle en ce qui concerne les modèles mathématiques utilisés pour représenter l’amortissement viscoélastique associés aux modèles aux éléments finis de structures mécaniques. On est placé dans le cadre de la viscoélasticité linéaire appliquée aux matériaux homogènes isotropes pour introduire l’approche module complexe. Les modélisations couramment utilisées sont introduites - modèles rhéologiques classiques, modèles à fractions partielles, à dérivées d’ordre fractionnelles. On discute de leur pertinence à représenter le comportement des matériaux réels, après identification expérimentale de leurs paramètres. On a constaté que plus le nombre de paramètres est important, plus la représentativité du modèle est assurée, mais plus ils sont difficiles à manipuler. Par conséquent, on a adopté l’approche module complexe, ce choix étant justifié par l’intérêt de limiter l’étude entamée au domaine fréquentiel. Après la discussion des principaux paramètres qui influent de forme significative sur le comportement mécanique des matériaux viscoélastiques, comme fréquence d’excitation et température, on montre la procédure suivie pour introduire l’amortissement viscoélastique dans les modèles aux éléments finis de systèmes mécaniques à travers du principe d’Equivalence Elastique-Viscoélastique.
CHAPITRE 3
Modélisation des Eléments de Plaques Multicouches
Dans ce chapitre la théorie générale de plaques multicouches est développée, basée
sur les développements faits par Kathua et Cheung (1973). Pour le modèle composé par trois couches, après avoir mis en évidence les matrices de masse et raideur de chaque couche, on montre qu’on peut utiliser le Principe de l’Equivalence Elastique-Viscoélastique (PEEV) pour les couches viscoélastiques. Par la suite, on propose un modèle paramétré en mettant en évidence les variables de conception qui caractérisent la structure et en particulier l’amortissement viscoélastique. Le modèle paramétré a l’avantage de conduire à un assemblage systématique et moins coûteux des matrices dépendant de la fréquence et de la température et permet également des calculs très rapides de sensibilités paramétriques, condensation robuste, etc. dans la procédure d’optimisation. 3.1. Relations cinématiques
Dans ce paragraphe, on présente la théorie du modèle aux éléments finis de plaques multicouches en admettant des propriétés isotropiques pour les couches. Couramment appelée plaque sandwich, le modèle élément fini est composé de couches élastiques alternées avec
couches viscoélastiques intermédiaires. n
1n −La Figure 3.1 illustre un modèle de plaque sandwich composé par trois couches : une
couche viscoélastique (couche centrale) située entre deux autres couches élastiques adjacentes. Dans les développements qui suivent on considère seulement les déformations d’extension et de flexion pour les couches élastiques, en négligeant les déformations associées au cisaillement transverse. Pour les couches viscoélastiques, on considère les déformations d’extension et de flexion augmentées par les déformations dues au cisaillement transverse.
On suppose également que le déplacement transverse et les rotations sont communs à toutes les couches élastiques du modèle sandwich.

Modélisation des Eléments de Plaques Multicouches 41
(j) couche viscoélastique
(i) couche élastique
(i+1) couche élastique
x
z
y
a
b
ui+1
v i
vi+1
ui
w
θx
θ y
1 2
3 4
Figure 3.1 – Elément fini de plaque sandwich.
(j) couche viscoélastique
(i) couche élastique
(i+1) couche élastique
x
z
θ x
θx
A
B
C
D
A'
B'C'
D'
..
. hi
h j
hi+1
w
w
ui+1
ui
uC
uB
(j) couche viscoélastique
(i) couche élastique
(i+1) couche élastique
y
z
θ y
θ y
A
B
C
D
A'
B'C'
D'
..
. hi
h j
hi+1
w
wv i+1
v i
vC
v B
Figure 3.2 – Cinématique de la déformation.
Si on considère qu’après déformation les sections droites transversales restent planes,
comme le montre la Figure 3.2, pour chaque couche viscoélastique on peut écrire la relation suivante :
j
CB
j huu
zu −
=⎟⎠⎞
⎜⎝⎛∂∂
(3.1)
où :
xw
2huu 1i
1iB ∂∂
+= ++ (3.2)
xw
2huu i
iC ∂∂
+= (3.3)
et et , sont les déplacements longitudinaux moyens des couches élastiques inférieure et
supérieure, respectivement, dans la direction iu 1iu +
x . Par substitution des expressions (3.2) et (3.3) dans (3.1), on obtient :

Modélisation des Eléments de Plaques Multicouches 42
( ) ⎥⎦
⎤⎢⎣
⎡∂∂
⎟⎠⎞
⎜⎝⎛ +
+−=⎟⎠⎞
⎜⎝⎛∂∂ +
+ xw
2hhuu
h1
zu i1i
i1ijj
(3.4)
ou la forme équivalente :
( )⎥⎥⎦
⎤
⎢⎢⎣
⎡
∂∂
+−
=⎟⎠⎞
⎜⎝⎛∂∂ +
xw
duu
hd
zu
j
i1i
j
j
j (3.5)
où ( ) 2hhd i1ij += + .
De la même façon, pour la direction y , on obtient la relation suivante :
( )⎥⎥⎦
⎤
⎢⎢⎣
⎡
∂∂
+−
=⎟⎠⎞
⎜⎝⎛∂∂ +
yw
dvv
hd
zv
j
i1i
j
j
j (3.6)
où et , sont les déplacements longitudinaux moyens des couches élastiques inférieure et
supérieure, respectivement, dans la direction iv 1iv +
y .
Les déplacements longitudinaux moyens des couches viscoélastiques dans la direction x sont donnés par :
( ) ⎥⎦
⎤⎢⎣
⎡∂∂
⎟⎠⎞
⎜⎝⎛ −
++=+
= ++ x
w2
hhuu21
2uuu i1i
1iiCB
j (3.7)
De la même façon, pour la direction y :
( ) ⎥⎦
⎤⎢⎣
⎡∂∂
⎟⎠⎞
⎜⎝⎛ −
++= ++ y
w2
hhvv21v i1i
1iij (3.8)
3.2. Relations contraintes-déformations
Pour les couches élastiques seulement les déformations d’extension et de flexion sont introduites, tandis que pour les couches viscoélastiques les déformations par cisaillement sont aussi prises en compte. Les relations contraintes-déformations peuvent être données par les expressions suivantes :
xu
x ∂∂
=ε ; yv
y ∂∂
=ε ; xv
yu
xy ∂∂
+∂∂
=γ ; xw
zu
xz ∂∂
+∂∂
=γ ; yw
zv
yz ∂∂
+∂∂
=γ (3.9)
Dans ce qui suit, on présente le développement des relations contraintes-déformations
pour chaque couche faisant partie du modèle de plaque sandwich. L’indice ( )i fait référence à
la -ième couche élastique, et est la distance selon la directioni iz z , mesurée à partir du plan

Modélisation des Eléments de Plaques Multicouches 43
moyen. De la même façon, l’indice ( )j est associé à la -ième couche viscoélastique. Pour
simplifier les notations, les matériaux composants les couches élastiques et couches viscoélastiques sont considérés isotropes. Néanmoins, on peut introduire les caractéristiques d’orthotropie avec une relative facilité.
j
Les déplacements longitudinaux d’un point quelconque dans les directions x et y de la
-ème couche élastique, peuvent être exprimées, respectivement, par les relations suivantes : i
( )
iii
i
xwzuu ⎟⎠⎞
⎜⎝⎛∂∂
−= (3.10)
( )
iii
i
ywzvv ⎟⎟⎠
⎞⎜⎜⎝
⎛∂∂
−= (3.11)
En combinant les relations (3.9) à (3.11), on peut exprimer les déformations par les
relations suivantes :
( )2
2
iii
x xwz
xu
∂∂
−∂∂
=ε (3.12)
( )2
2
iii
y ywz
yv
∂∂
−∂∂
=ε (3.13)
( )yx
w2xv
yu 2
iiixy ∂∂
∂−
∂∂
+∂∂
=γ (3.14)
ce qui permet d'écrire les relations contraintes-déformations sous la forma matricielle :
( ) ( ) ( )iii εΕσ = (3.15)
où le vecteur de contraintes ( )iσ , le vecteur de déformations ( )iε et la matrice de élasticité ( )iΕ pour la -ième couche élastique, sont données par : i
( )
( )
( )
( ) ⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
=i
xy
iy
ix
i
τσσ
σ ; ; ( )
( )
( )
( )⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
=i
xy
iy
ix
i
γεε
ε ( )
( )
( )
( ) ( )
( )( ) ( )
( )
( )
( )( )
⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢
⎣
⎡
−−
−−
=
i
i
i
i
ii
i
ii
i
i
i
G00
01
E
1
E
01
E
1
E
22
22
υυ
υυ
υ
υ
Ε (3.16)
Pour la -ième couche viscoélastique, le déplacement longitudinal d’un point
quelconque dans la direction
jx est donné par :

Modélisation des Eléments de Plaques Multicouches 44
( )
jjj
j
zuzuu ⎟⎠⎞
⎜⎝⎛∂∂
+= (3.17)
et par la combinaison des expressions (3.4) et (3.17), on obtient l’expression suivante :
( )
⎥⎥⎦
⎤
⎢⎢⎣
⎡
∂∂
⎟⎟⎠
⎞⎜⎜⎝
⎛ ++
−+= ++
xw
h2hh
huuzuu
j
i1i
j
i1ijj
j (3.18)
De la même façon, pour la direction y , on obtient :
( )
⎥⎥⎦
⎤
⎢⎢⎣
⎡
∂∂
⎟⎟⎠
⎞⎜⎜⎝
⎛ ++
−+= ++
yw
h2hh
hvvzvv
j
i1i
j
i1ijj
j (3.19)
Si on considère les expressions (3.9), les déformations normales et les déformations de
cisaillement pour les couches viscoélastiques peuvent être écrites comme suit :
( )( )
⎥⎦
⎤⎢⎣
⎡
∂∂
⎟⎠⎞
⎜⎝⎛ +
+⎟⎠⎞
⎜⎝⎛
∂∂
−∂∂
+∂
∂=
∂∂
= ++2
2i1ii1i
j
jjj
jx x
w2
hhxu
xu
hz
xu
xuε (3.20)
( )( )
⎥⎦
⎤⎢⎣
⎡
∂∂
⎟⎠⎞
⎜⎝⎛ +
+⎟⎟⎠
⎞⎜⎜⎝
⎛∂∂
−∂∂
+∂
∂=
∂∂
= ++2
2i1ii1i
j
jjj
jy y
w2
hhyv
yv
hz
yv
yvε (3.21)
( )( ) ( )
( ) ⎥⎦
⎤⎢⎣
⎡∂∂
∂++⎟⎟
⎠
⎞⎜⎜⎝
⎛∂∂
−∂∂
−∂∂
+∂∂
+∂
∂
∂
∂+
∂
∂=
∂∂
+∂∂
= +++
yxwhh
xv
yu
xv
yu
hz
yv
xv
yu
xv
yu 2
i1iii1i1i
j
jjjjjj
jxyγ (3.22)
( )
( )
⎥⎦
⎤⎢⎣
⎡∂∂
⎟⎠⎞
⎜⎝⎛ +
+−=∂∂
+∂∂
= ++ x
w2
hhuuh1
xw
zu i1i
i1ijj
jj
xzγ (3.23)
( )
( )
⎥⎦
⎤⎢⎣
⎡∂∂
⎟⎠⎞
⎜⎝⎛ +
++−=
∂∂
+∂∂
= ++ y
wh2
hhvvh1
yw
zv
ji1i
i1ijj
jj
yzγ (3.24)
Ainsi, on obtient l’expression matricielle suivante pour les relations contraintes-
déformations pour les couches viscoélastiques :
( ) ( ) ( )jjj εΕσ = (3.25) où le vecteur de contraintes ( )jσ , le vecteur de déformations ( )jε et la matrice de élasticité
( )jΕ pour la -ième couche viscoélastique, sont donnés par : j

Modélisation des Eléments de Plaques Multicouches 45
( )
( )
( )
( )
( )
( ) ⎪⎪⎪
⎭
⎪⎪⎪
⎬
⎫
⎪⎪⎪
⎩
⎪⎪⎪
⎨
⎧
=
jyz
jxz
jxy
jy
jx
j
τττσσ
σ ; ;( )
( )
( )
( )
( )
( )⎪⎪⎪
⎭
⎪⎪⎪
⎬
⎫
⎪⎪⎪
⎩
⎪⎪⎪
⎨
⎧
=
jyz
jxz
jxy
jy
jx
j
γγγεε
ε ( )
( )
( )
( ) ( )
( )( )
( )( )
( )
( ) ⎥⎥⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢⎢⎢
⎣
⎡
−
−−
=
j
j
j
j
j
j
jj
j
j
j
G.sym0G00G
0001
E
0001
E
1
E
2
22
υ
υ
υ
υ
Ε (3.26)
On rappelle que les modules ( )jE et ( )jG sont dépendants de la fréquence et de la
température pour les matériaux viscoélastiques. Cette dépendance est prise en compte en faisant appel au principe d’équivalence élastique-viscoélastique (PEEV) (Cf. Section 2.2, Chapitre 2). 3.3. Discrétisation par éléments finis
La discrétisation par éléments finis du modèle de plaque sandwich, est basée sur la proposition de Khatua et Cheung (1973), qui utilise un élément de plaque rectangulaire avec quatre nœuds, composé par couches comme illustré en Figure 3.1. La déflexion transversal
est interpolée par un polynôme cubique à douze termes, et les déplacements et , dans le plan de la plaque, sont approchés par des fonctions bilinéaires en
nw u v
x et y . Les rotations
autour des axes x et y sont dénotées, respectivement, par xwx ∂∂=θ et ywy ∂∂=θ , et et
, sont, respectivement, les dimensions de l’élément de plaque, dans les directions
a
b x et y . Le
vecteur des déplacements nodaux au niveau élémentaire est donné par :
[ T4321 δδδδδ = ] (3.27)
où :
[ ] 4,,1j;wvuvuvu Tyjxjjnjnjj2j2j1j1j KK == θθδ (3.28)
Le champ des déplacements longitudinaux et transversaux à l’intérieur de l’élément est
interpolé selon les expressions suivantes :
( ) ( ) by0;ax0y,xy,x ≤≤≤≤= δΝ∆ (3.29) où ; ( ) [ ]Tyxnn2211 wvuvuvuy,x θθK=∆
( ) ][ Twvuvuvu yxnn2211
NNNNNNNNNy,x θθK=N : est la matrice des fonctions
d’interpolation.

Modélisation des Eléments de Plaques Multicouches 46
En combinant les relations contraintes-déformations (3.9) et l’expression des champs de déplacements donnée par la relation (3.29), on exprime le vecteur de déformations sous la forme suivant :
( ) ( )δε y,xy,x D= (3.30) où est la matrice obtenue en appliquant les opérateurs différentiels indiqués dans les
équations (3.9) à la matrice de fonctions de forme
( y,xD )( )y,xΝ .
3.4. Matrices élémentaires de raideur et de masse d’un élément de plaque multicouche
Les équations du mouvement de l’élément de plaque multicouche peuvent être obtenues à travers les équations de Lagrange. Pour cela, il faut formuler les énergies de déformation et cinétique de l’élément.
L’énergie de déformation totale de la plaque sandwich peut être obtenue par l'addition des énergies de déformation de chaque couche :
( )∑−
==
1n2
1k
kUU (3.31)
où est le nombre totale de couches, et l’indice représente une couche quelconque. On rappelle que est le nombre de couches élastiques.
1n2 − kn
L’énergie de déformation de la -ième couche est donnée par la relation suivante : k
( ) ( ) ( ) ( )dV21U kk
V
Tkk εε E∫= (3.32)
L’introduction de l’expression (3.30) dans l’expression (3.32), donne :
( ) ( ) ( ) ( ) ( )δδδδ kTkk
V
TkTk
21dV
21U KDED =⎟
⎟⎠
⎞⎜⎜⎝
⎛= ∫ (3.33)
où est la contribution de la -ième couche à la rigidité de l’élément
de plaque.
( ) ( ) ( ) ( )dVkk
V
Tkk DEDK ∫= k
Après quelques développements, on montre (Annexe A.1) que la matrice de raideur élémentaire pour les couches élastiques, s’écrit sous la forme :
( ) ( ) ( ) ( )imf
iff
imm
i 2KKKK ++= (3.34) où :

Modélisation des Eléments de Plaques Multicouches 47
, , . ( ) ( ) ( ) ( )dVV
im
iTim
imm ∫= DEDK ( ) ( ) ( ) ( )dV
V
if
iTif
iff ∫= DEDK ( ) ( ) ( ) ( )dV
V
if
iTim
imf ∫= DEDK
De la même façon, pour les couches viscoélastiques, la matrice de raideur élémentaire
prend la forme suivante :
( ) ( ) ( ) ( ) ( ) ( ) ( )jfc
jmc
jmf
jcc
jff
jmm
j 222 KKKKKKK +++++= (3.35) où :
, , , ( ) ( ) ( ) ( )∫=V
jm
jTjm
jmm dVDEDK ( ) ( ) ( ) ( )∫=
V
jf
jTjf
jff dVDEDK ( ) ( ) ( ) ( )∫=
V
jc
jTjc
jcc dVDEDK
( ) ( ) ( ) ( )∫=V
jf
jTjm
jmf dVDEDK , , . ( ) ( ) ( ) ( )∫=
V
jc
jTjm
jmc dVDEDK ( ) ( ) ( ) ( )∫=
V
jc
jTjf
jfc dVDEDK
Les indices , , et sont, respectivement, relatifs aux phénomènes de membrane,
flexion et le couplage des phénomènes membrane-flexion.
m f mf
Par conséquent, la matrice de raideur de l’élément fini de plaque sandwich est donnée par la somme des matrices de raideur associées à chaque couche :
( )∑−
==
1n2
1k
kKK (3.36)
De la même façon que pour l’énergie de déformation, l’énergie cinétique totale de
l’élément fini de plaque sandwich est donnée par la somme des énergies cinétiques des couches :
( )∑−
==
1n2
1k
kTT (3.37)
où :
( ) ( ) ( ) ( ) ( ) ( ) ( )( )dV21T
V
kkkkkkk TTT
∫ ++= wwvvuu &&&&&& (3.38)
où encore sous la forme suivante :
( ) ( ) ( ) ( ) ( ) ( ) ( )⎟⎟⎠
⎞⎜⎜⎝
⎛++= ∫∫∫
A
kk
A
kk
A
kkkkk dAdAdA2hT
TTTwwvvuu &&&&&&
ρ (3.39)
Tenant compte de l’expression (3.29), on peut réécrire l’expression (3.30) sous la forme
suivante :

Modélisation des Eléments de Plaques Multicouches 48
( ) (∑ ∫=
⎟⎟⎠
⎞⎜⎜⎝
⎛++=
n
1k Av
Tvu
Tuw
Twkk
Tk dAh21T
kkkkδNNNNNNδ && ρ ) (3.40)
( ) ( )δMδ && kTk
21T = (3.41)
où ( ) ( )∫ ++=
Av
Tvu
Tuw
Twkk
k dAhkkkk
NNNNNNM ρ est la contribution de la k -ième couche à la
masse de l’élément, , et sont les matrices contenant les fonctions d’interpolation. wNkuN
kvN
La matrice de masse élémentaire peut donc être déterminée comme suit :
( )∑−
==
1n2
1k
kMM (3.42)
Cette formulation est valable pour un élément de plaque sandwich à couches.
Pour ne pas alourdir le mémoire nous présentons dans le paragraphe suivant l’élément de plaque à 3 couches (l’élément de plaque à 5 couches est proposé en Annexe A.2).
1n2 −
3.5. Plaque sandwich à trois couches
On considère un élément à trois couches, composé par une plaque base superposée
par une couche viscoélastique et une couche élastique (couche contrainte), constituant ainsi le système illustré en Figure 3.3.
(2) couche viscoélastique
(1) couche base
(3) couche contraintex
z
ya
b
u3
v1
v3
u1
w
θx
θ y
1 2
3 4
hh
12
3h
Figure 3.3 – Elément fini de plaque sandwich à trois couches.
Pour cette configuration, les équations (3.1) à (3.9) permettent d’écrire les déformations
dues au cisaillement de la couche viscoélastique, sous les formes suivantes :
( )⎥⎦
⎤⎢⎣
⎡∂∂
+−
=xw
duu
hd
2
31
2
22xzγ (3.43)

Modélisation des Eléments de Plaques Multicouches 49
( )⎥⎦
⎤⎢⎣
⎡∂∂
+−
=yw
dvv
hd
2
31
2
22yzγ (3.44)
où ( )3212 hh2h21d ++= .
Selon les relations (3.7) et (3.8), les déplacements longitudinaux moyens dans les
directions x et y pour les couches viscoélastiques sont donnés par :
⎥⎦⎤
⎢⎣⎡
∂∂−
++=xw
2hh
uu21u 31
312 (3.45)
⎥⎦
⎤⎢⎣
⎡∂∂−
++=yw
2hh
vv21v 31
312 (3.46)
Les éléments de plaque sandwich à trois couches sont à quatre nœuds, où chaque
noeud possède 7 degrés de libertés, à savoir : les déplacements longitudinaux et de la
couche contrainte supérieure ; les déplacements et de la couche base ; la déflexion
transversale ; et les rotations
1u 1v
3u 3v
w xwx ∂∂=θ et ywy ∂∂=θ . Ainsi, les degrés de liberté nodaux
sont regroupés dans le vecteur suivant :
[ 4,,1jwvuvu Tyjxjjj3j3j1j1j K== θθδ ]
]
(3.47) et le vecteur de dégrées de liberté au niveau élémentaire est donné par :
[ T4321 δδδδδ = (3.48)
Les déplacements longitudinaux dans les directions x et y sont interpolés par des
fonctions bilinéaires et le déplacement transversal est interpolé par un polynôme de troisième ordre, qu’on peut représenter par les expressions suivantes :
w
312
311
310
29
28
37
265
24321
161514133
12111093
87651
43211
xybyxbybxybyxbxbybxybxbybxbbw
xyayaxaavxyayaxaau
xyayaxaavxyayaxaau
+++++++++++=
+++=+++=
+++=+++=
(3.49)
Selon l’expression (3.29), l’interpolation des champs des déplacements est donnée par
les expressions suivantes :
( ) ( )δN∆ y,xy,x = (3.50)

Modélisation des Eléments de Plaques Multicouches 50
( ) [ Tyx3311 wvuvuy,x θθ=∆ ] , et (3.51)
( ) [ ]Twvuvu yx3311y,x θθ NNNNNNNN = (3.52)
où :
[ ]614613612611u NNNN1
0000N = ,
[ ]5146136126111v NNNN01
0000N = ,
[ ]4146136126112u NNNN3
00000N = ,
, [ ]3146136126113v NNNN3
00000N =
[ ]yxyxyxyx 44w4433w3422w2411w14w NNNNNNNNNNNN θθθθθθθθ 0000N =
[ ]x4
x4
xw44
x3
x3
xw34
x2
x2
xw24
x1
x1
xw14 yxyxyxyxx
NNNNNNNNNNNN θθθθθθθθθ 0000N =
[ ]y4
y4
yw44
y3
y3
yw34
y2
y2
yw24
y1
y1
yw14 yxyxyxyxy
NNNNNNNNNNNN θθθθθθθθθ 0000N =
T4
y4x
443
43
41
41
3y
3x
333
33
31
31
2y
2x
223
23
21
21
1y
1x
113
13
11
11
wvuvuwvuvu
wvuvuwvuvu
θθθθ
θθθθ L=δ, et les termes
i1N , , , , , , , , et pour iwNxiN θ yiN θ
xiwN x
i xN θ
xi y
N θyiwN y
i xN θ
yi y
N θ 4,,1i K= , sont donnés en
Annexe A.1.
A travers les expressions (3.15) et (3.25), les relations contraintes-déformations pour les trois couches peuvent être obtenues, et les matrices de raideur et de masse peuvent être calculées comme suit (voir Annexe A.1) :
( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) dVV
1m
1T1f
1f
1T1m
1f
1T1f
1m
1T1m
1 ∫ ⎟⎠⎞⎜
⎝⎛ +++= DEDDEDDEDDEDK (3.53)
( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) dV
V
2c
2T2c
2f
2T2f
2m
2T2m
2 ∫ ⎟⎠⎞⎜
⎝⎛ ++= DEDDEDDEDK (3.54)
( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) dV
V
3m
3T3f
3f
3T3m
3f
3T3f
3m
3T3m
3 ∫ ⎟⎠⎞⎜
⎝⎛ +++= DEDDEDDEDDEDK (3.55)
( ) ( )dAh
Av
Tvu
Tuw
Tw11
11111∫ ++= NNNNNNM ρ (3.56)
( ) ( )dAh
Av
Tvu
Tuw
Tw22
22222∫ ++= NNNNNNM ρ (3.57)
Modélisation des Eléments de Plaques Multicouches 51
( ) ( )dAhA
vT
vuT
uwT
w333
3333∫ ++= NNNNNNM ρ (3.58)
Finalement, les matrices de raideur et de masse élémentaires de l’élément fini de plaque
à trois couches peuvent être écrites, respectivement, comme suit :
( )∑=
=3
1k
kKK ; (3.59) ( )∑=
=3
1k
kMM
3.5.1 Introduction de l’amortissement viscoélastique
Selon l’expression (2.24) et à travers de la relation ( ) ( ) vv KK T,GT, ωω = , après avoir
obtenu les matrices de raideur élémentaires de plaque sandwich, la dépendance du comportement des matériaux viscoélastiques par rapport à la température et fréquence, peut être introduite dans le modèle :
Couches élastiques : ( ) ( )31e KKK += (3.60)
Couches viscoélastiques : ( ) ( ) ( ) ( )22
v KKK T,GT, ωω == (3.61) où les matrices et sont les matrices de raideur associées à la plaque base et à la
couche contrainte ;
1K 3K( )2K est la matrice de raideur associée à la couche viscoélastique.
Après la obtention des matrices élémentaires, les matrices globales correspondantes sont assemblées tenant compte de la connectivité, en utilisant les procédures standard d’assemblage des matrices élémentaires. 3.5.2 Paramétrisation du modèle EF de plaque sandwich
Les modèles aux éléments finis obtenus par la formulation présentée dans les sections
précédentes seront utilisés dans des procédures d'optimisation, où les fonctions objectif (ou fonctions coût) basées sur des réponses dynamiques doivent être exprimées explicitement ou implicitement en fonction d’un ensemble de paramètres physiques et/ou géométriques appelés paramètres de conception. Dans notre cas, ces paramètres caractérisent l’amortissement viscoélastique et interviennent de façon non-linéaire dans les modèles aux éléments finis. Ils contrôlent son comportement dynamique et gouvernent les valeurs des solutions (ses réponses).
Dans ce mémoire, on distingue deux ensembles de paramètres : les paramètres et
agissant respectivement sur les matrices de raideur et de masse qu’on peut factoriser en
dehors des matrices élémentaires. On parle alors de la paramétrisation des modèles aux éléments finis. Il s’agit donc de définir l’ensemble des matrices possédant des propriétés matérielles et/ou géométriques communes.
ik
im

Modélisation des Eléments de Plaques Multicouches 52
La paramétrisation des modèles est une étape très importante qui doit être réalisée dans un processus itératif telle que l’optimisation, qui peut engendrer des gains importants des coûts de calcul. Dans le cas des systèmes amortis par matériaux viscoélastiques, elle devient particulièrement importante, pour une résolution numérique efficace de problèmes complexes, en mettant en évidence tous les paramètres d’intérêt en dehors des matrices pour faciliter l’introduction des modifications structurales et/ou des incertitudes et l’évaluation de la sensibilité paramétrique dans le cadre d’une procédure d’optimisation paramétrique.
Pour les matrices de masse et raideur d’un modèle aux éléments finis quelconque, les paramètres de masse et de raideur, et , respectivement, interviennent de façon non
linéaire dans les matrices de masse et de raideur et on peut donc factoriser ces paramètres symboliquement sur les formes suivantes :
im ik
( ) ( )Uk_zon_n
1ii T,T,
== ωω KK , (3.62) U
m_zon_n
1ii
== MM
( ) ( ) (∑=
=k_p
0iii T,kT,
αα
α ωω KK ) , (3.63) ( )∑=
=m_p
0iim
ββ
β MM i
où le symbole indique l’assemblage de matrices ; l'indice i indiquent les zones du modèle
EF dans lesquelles les paramètres ou interviennent ;
U
ik im ( )T,i ωK et sont les matrices
de raideur et de masse correspondantes à ces zones ; et
iM
( )T,i ωα K et sont les matrices
factorisées. iMβ
Pour un modèle de plaque ou coque simple, par exemple, le paramétrage de la masse et la raideur par rapport à l’épaisseur est réalisé en découplant la raideur par rapport les effets de membrane et de flexion, ce qui traduit, ce qui traduit par les expressions suivantes :
( ) f3
m EhEhh,E KKK += ; ( ) ( )fmhh, MMM += ρρ (3.64)
Selon la théorie des élément finis de plaque multicouches présenté dans les sections précédentes, les paramètres de conception qui caractérisent la masse et la rigidité, correspondants à chaque couche, peuvent être factorisés en dehors des matrices élémentaires, en découplant les effets de membrane, flexion et cisaillement, comme montré dans les équations suivantes :
( ) ( )( )f
11m
11111 h MMM += ρ (3.65)
( ) ( ) ( ) ( )( )f0
m2
21
m1
m20222 ddh 222 MMMMM +++= 1ρ (3.66)
( ) ( )( )f
31m
31333 h MMM += ρ (3.67)
( ) ( )( )f3
21
m111 hhE 111 KKK += (3.68)

Modélisation des Eléments de Plaques Multicouches 53
( ) ( ) ( )( ) ( ) ( ) ( )( )( ) ( ) ( )( )c
223
c13
c0
2
f2
22
f12
f02
m2
21
m11
m02
ddh1
ddhddh
222
2222222
KKK
KKKKKKK
++
++++++= K
(3.69)
( ) ( )( )f
323
m133 hhE 333 KKK += (3.70)
où , et ( )311 hhd −= ( )312 hhd += ( )3213 hh2hd ++= ; les indices , et ( )m ( )f ( )c sont
associés aux effets de membrane, flexion et cisaillement, respectivement ; kρ ( ) est la
densité de la -ième couche.
3,2,1k =
kDans les expressions (3.65) à (3.70), on peut remarquer que les matrices qui
apparaissent dans les membres à droite sont des matrices constantes, indépendantes des paramètres de conception qui sont alors factorisés en dehors des matrices. On aboutit donc à des expressions qui facilitent et diminuent les calculs liés aux réanalyses et à la sensibilité des réponses par rapport à ces paramètres.
Le modèle aux éléments finis de plaque sandwich à trois couches a été validé dans la référence (Lima et al, 2003a), qui fournit une comparaison entre les fonctions numériques et expérimentales de réponses en fréquence (FRFs) d'une plaque rectangulaire en aluminium sur des conditions libre partiellement traité par couche contrainte. 3.6 Conclusions
Dans cet chapitre on a montré les développements par éléments finis du type de traitement viscoélastique adopté qu’on va utiliser tout au long de ce mémoire pour introduire l’amortissement viscoélastique dans des structures mécaniques. Ce traitement est composé par des éléments finis de plaque sandwichs. Comme il a été remarqué, la théorie des éléments multicouches proposée dans ce mémoire peut être étendue au cas d’un nombre quelconque de couches. Néanmoins, on reste dans le cadre des éléments de plaque à trois couches et on détaille en Annexe A.1, un élément à cinq couches. Puisqu’on est particulièrement intéressé aux applications industrielles avec ce type de traitement viscoélastique, en Annexe C.1 on montre un schéma représentant la stratégie proposée dans ce mémoire pour coupler les éléments finis de plaque sandwich paramétrisés avec des modèles aux éléments finis de structures de géométrie complexes modélisés par le code ANSYS.

CHAPITRE 4
Condensation Robuste et Métamodèlisation Adaptées aux Systèmes Viscoélastiques Complexes
Lors de l’évaluation des réponses d’une structure de grande taille amortie par matériaux
viscoélastiques dont les paramètres de conception varient au cours de l’optimisation ou recalage de modèles, le coût de calcul est primordial. Les réanalyses exactes sont alors exclues, en raison de leur coût élevé et obligent à l’utilisation des techniques d’approximation des réponses ou de réanalyse approchée. Il existe plusieurs méthodes de réanalyse approchée, telles que les analyses par méthodes de perturbations, de sensibilité, les formulations basées sur la réduction de modèles ou encore les métamodèles, qui peuvent être construits soit à partir de réseaux de neurones, soit à partir des méthodologies de surface de réponses. Dans cette partie du mémoire, trois méthodologies d’approximation de fonctions sont abordées, à savoir : les bases de réduction adaptées aux structures viscoélastiques et robustes vis-à-vis de perturbations paramétriques ; les métamodèles basés sur les surfaces de réponses classiques et adaptatives ; et les réseaux de neurones artificielles. Ces méthodes seront, par la suite, associées aux techniques d’optimisation adaptées aux structures contenant des traitements viscoélastiques. 4.1. Méthode de condensation robuste de modèles viscoélastiques
L’objectif de la condensation de modèles est toujours de construire une base de réduction capable de bien représenter les mêmes réponses physiques que le modèle nominal modifié globalement ou localement. En effet, disposer d’une base de réduction capable de représenter le mouvement d’un modèle perturbé est primordial dans des procédures itératives de recalage ou d’optimisation, puisqu’une telle base, permet des réanalyses approchées rapides et économiques en terme de calculs (Masson et al, 2003). La notion de robustesse des bases face aux perturbations paramétriques est primordial, et conditionne la précision du calcul des réponses approchées.
A partir de l’expression (2.28), on peut imaginer que pour des modèles industriels de grande taille amortis par matériaux viscoélastiques, il n’est pas envisageable (d’un point de vue du coût numérique) d’utiliser directement le modèle complet, car cela conduit à des temps de calcul prohibitifs à cause de l’inversion de la matrice de raideur dynamique complexe, pour chaque pas de fréquence. On utilise alors des approximations de réponses en cherchant la solution dans un sous-espace : c’est-à-dire, l’approche modale, que consiste à projeter les équations du mouvement du système amorti sur une base de réduction T , afin de diminuer le nombre de degrés de liberté du système et donc accélérer la résolution numérique du

Condensation Robuste et Métamodèlisation Adaptées aux Sistemas Viscoélastiques Complexes
55
problème, avec l’hypothèse que les réponses exactes, représentées par l’expression (2.26), peuvent être approchées par des solutions dans un sous-espace réduit de la forme suivante :
rTQQ = (4.1) où la matrice est la base de réduction, ou base de Ritz, et avec NRNC ×∈T NR
r C∈Q NNR <<
( étant les modes retenus dans la base). NR
En considérant les expressions (2.26) et (4.1), la fonction de transfert (2.28) peut être donc approchée par :
( ) ( ) bcZH -1rr T,T, ωω = (4.2)
où ( ) ( ) MTTTKTTKTZ T
vT
eT
r2T,GT, ωωω −+= est la matrice de rigidité réduite.
La matrice de rigidité dynamique réduite peut être calculée et inversée pour chaque
fréquence d'une manière directe en utilisant des algorithmes numériques efficaces. Cependant, pour les systèmes amortis par matériaux viscoélastiques, le choix de la base de réduction n’est pas simple ni systématique en raison de la dépendance de la matrice de rigidité par rapport à la fréquence d’excitation et à la température. Il faut alors considérer que la base de réduction doit également prendre en compte les variations de la fréquence et de la température.
Pour résoudre ce problème, trois solutions sont envisageables, à savoir : a) on peut négliger cette dépendance en considérant la matrice de rigidité comme indépendante de la fréquence et de la température. Pour cela, if faut bien choisir « un modèle de départ » pour calculer cette base de réduction indépendante de la fréquence et de la température, qui doit être enrichie par des vecteurs résiduels statiques pour les effets viscoélastiques (Balmès et al, 2002a ; 2002b) ; b) on peut utiliser une base de réduction composée par des modes propres complexes, obtenues par la résolution du problème aux valeurs propres non-linéaire (Daya et Poitier-Ferry, 2001 ; Daya et al, 2002). Cependant, plusieurs auteurs montrent que l’obtention numérique de ces derniers peut conduire à des temps de calcul prohibitifs pour des systèmes de grand taille (Plouin et Balmès, 1998 ; 1999) ; c) on peut également utiliser une méthode itérative, qui permet la réactualisation de la base de réduction en fonction de la fréquence, lorsque cela est nécessaire (Kergourlay et al, 2000).
Dans ce mémoire, on propose de fixer la base de réduction et de déterminer la réponse du système amorti en utilisant l’approximation standard de Ritz-Galerkin (Masson et al, 2003). Pour cela, if faut adopter un point de départ pour déterminer la base de réduction qui sera toujours constante. Balmès et Germès (2002b) a montré que la raideur tangente est un point de départ convenable, ayant l’avantage d’être réel et facile d’être inversé. Il s’agit donc de tenir compte du comportement conservatif associé (CCA) du matériau viscoélastique, pour lequel
( ) v0v G0 KK = . On parlera alors du Système Conservatif Associé (SCA) dans lequel
l’amortissement viscoélastique est éliminé. Le CCA peut être obtenu à travers les propriétés
Condensation Robuste et Métamodèlisation Adaptées aux Sistemas Viscoélastiques Complexes
56
asymptotiques du lissage des courbes maîtresses pour chaque matériau viscoélastique, comme montré dans le Chapitre 2, Section 2.5.1. D’une manière générale, la mesure des caractéristiques viscoélastiques à une température fixée donne le module de stockage et le facteur de perte dont la variation en fréquence ressemble généralement à celle montrée en Figure 2.11 pour le matériau viscoélastique 3M ISD112™. Dans les zones haute et basse fréquence non mesurées, on prolonge par des asymptotes. Par l’extrapolation en basse fréquence on peut obtenir une asymptote réelle et 0G 00 =η et pour les hautes fréquences, on
obtient une asymptote complexe et ∞G ∞η (Crandall, 1970). La matrice de raideur élastique
tangente peut donc être exprimée comme suit :
v0e0 G KKK += (4.3)
La base de réduction nominale contenant les premiers modes maintenus du système amorti par matériaux viscoélastiques peut être obtenue par la résolution du problème aux valeurs propres suivant :
( )[ ] ( NR10NR210
ii0
,,diag,N,,1i0
λλ )φλ
KK
K
====−Λφφφφ
MK (4.4)
La base de réduction 0φ ne contient que des modes propres du système traité en
prenant en compte la matrice élastique tangente (SCA). Pour enrichir cette base, Balmès et Germès (2002) ont proposé d’utiliser des résidus statiques basés sur les déplacements liés aux chargements imposés, qu’on peut obtenir à travers de l’expression suivante :
bKR -10= (4.5)
Cette procédure est appelée correction statique du premier ordre, qui est complétée par
le calcul de la réponse statique aux chargements produits par la partie imaginaire de la matrice de rigidité dynamique complexe, qu’on peut obtenir à travers l’expression (2.26.a) :
00 φv-10 KKR =∆ (4.6)
Ces résidus sont associés aux effets viscoélastiques du système nominal amorti, afin de
tenir compte des forces viscoélastiques (amortissement). Ainsi, la base de réduction nominal enrichie, peut être exprimée comme suit :
[ 00 RRT ∆0φ= ] (4.7)
La base de réduction (4.7) est utilisée pour réduire les modèles amortis par matériaux
viscoélastiques, avec une raisonnable exactitude, mais elle n’est pas forcement assez « robuste » pour tenir compte des modifications paramétriques, ce qu’on cherche à obtenir lorsqu’on utilise des procédures de condensation de modèles pendant les processus itératifs d'optimisation et/ou de recalage de modèles. Ceci signifie que la base de réduction donnée par

Condensation Robuste et Métamodèlisation Adaptées aux Sistemas Viscoélastiques Complexes
57
l’expression (4.7) devrait, en principe, être adaptative vis-à-vis des modifications paramétriques au cours des itérations, pour garantir une exactitude satisfaisante de la réduction. Dans l’optique de diminuer les coûts de calcul d’une nouvelle base de réduction , lors d’une
modification paramétrique, la stratégie suggérée consiste en employer une base de réduction fixe évaluée à partir du modèle nominal (ou modèle initial), donné par la relation (4.7), qu’on doit ensuite enrichir par un ensemble de vecteurs de réponses résiduelles statiques issues des modifications paramétriques (Masson et al, 2003) induites par le traitement viscoélastique (en admettant que les variables de conception sont liées aux caractéristiques du traitement viscoélastique).
0T
Dans la plupart des applications pratiques, les traitements viscoélastiques ne sont pas appliqués à la totalité de la structure, mais seulement dans des zones spécifiques. Ainsi, en exploitant les expressions (2.26) et (2.27), on peut écrire le système dynamique modifié sous la forme suivante :
( ) ( )( FQZZ =+ T,T, )ωω∆ (4.8) où est la variation de la matrice de rigidité dynamique
associée aux modifications paramétriques dues au traitement viscoélastique.
( ) ( ) v2
v T,T, ∆Μ∆Κ∆ ωωω −=Z
En introduisant le concept des forces associées aux modifications, l’expression (4.8) peut être interprété comme l’équation d'équilibre dynamique du modèle nominal, soumis aux forces de modifications paramétriques ( )T,ω∆F , comme suit :
( ) ( T,T, )ωω ∆FFQZ += (4.9.a) où :
( ) ( )QZF T,T, ωω∆ ∆−= (4.9.b)
Les matrices perturbées associées à une zone viscoélastique modifiable, peuvent être exprimées sous les formes suivantes :
∑=
=mp_n
1iim vv Μ∆Μ ∆ , ∑
==
mp_n
1iik vv ΚΚ∆ ∆ (4.10)
où im∆ et ik∆ sont les variations de la masse et de la rigidité, respectivement. Les matrices
et Ui
viΜΜ =v U
ivi
ΚΚ =v sont les matrices de masse et de rigidité associées aux zones
viscoélastiques, respectivement, et et ivΜ
ivΚ sont les matrices élémentaires de masse et de
rigidité d’un élément viscoélastique i . Les matrices v∆Μ et vΚ∆ sont les matrices des
modifications paramétriques, qui sont en général des matrices creuses et fonctions nonlinéaires des paramètres de conception (Cf. Chapitre 3, paragraphe 3.9).

Condensation Robuste et Métamodèlisation Adaptées aux Sistemas Viscoélastiques Complexes
58
4.1.1 Base des forces associées aux modifications paramétriques
L’expression (4.9.b) montre que le vecteur des forces dues aux modifications
structurales, représentés par des variations sur les paramètres de conception du traitement viscoélastique, dépend de la réponse du système modifié Q . Puisque cette réponse est a priori
inconnue les forces dues aux modifications ne peuvent pas être calculées exactement. Le concept essentiel de la condensation robuste est exprimé dans les étapes suivantes (Masson et al, 2003) : d'abord, on utilise l’expression (4.9.b) pour générer un vecteur des forces qui même s’il ne contient pas les forces exactes associées aux modifications, représentera au moins un sous-espace contenant ces vecteurs. Ceci est réalisé en injectant la réponse du système nominal connue dans l’expression (4.9.b) ; ensuite, le vecteur des forces résultant est employé pour générer des réponses statiques, à nouveau sur la base du modèle nominal ; les deux premières étapes sont répétées pour chaque paramètre de conception soumis à des modifications.
Différents types de réponses peuvent être injectées dans l'expression (2.9.b), comme des modes normaux et des vecteurs de sensibilité. Si le vecteur injecté est composé par une base tronquée de modes normaux, on peut réécrire (4.9.b) sous la forme suivante :
( ) ( ) r0QZf φ∆ T,T, ωω∆ −≈ (4.11)
Pour générer la base de forces ( )T,ω∆F représentative de l’ensemble des modifications
potentielles, à partir de l’expression (4.11), pour chaque paramètre, on doit calculer une sous base de forces associée ( )T,ω∆f . Par exemple, pour un paramètre p intervenant linéairement
dans les matrices de masse et de raideur d’une zone viscoélastique, la base de forces peut être déterminée par l’expression suivante :
[ vv KM ffF ppp ∆∆∆ = ] (4.12) où et ( ) 00p p Λφ∆∆ v
M Mf v = ( ) 00p pG φ∆∆ vM Kf v = sont les bases des forces associées aux
modifications sur la masse et sur la rigidité, respectivement, et les matrices ( p)∆vM et ( )p∆vK
sont les matrices de masse et de rigidité associées à une zone viscoélastique modifiable, pour lesquelles on factorise les paramètres de masse et de rigidité, selon les expressions (3.65) à (3.70), respectivement. 4.1.2 Base des déplacements associés aux modifications paramétriques
Une fois la base de forces construite, on peut calculer une série de vecteurs de réponses statiques basés sur la raideur dynamique tangente, utilisés pour enrichir convenablement la base de réduction nominale 0Τ , en utilisant l’expression suivante :

Condensation Robuste et Métamodèlisation Adaptées aux Sistemas Viscoélastiques Complexes
59
p1
p ∆∆ FKR 0−= (4.13)
et la base de réduction finale peut être exprimée comme suit :
[ ∆RTT 0= ] (4.14)
La matrice des résidus , formée par des vecteurs , n'est pas forcement de rang
maximal. Ainsi, pour obtenir un nombre limité de résidus, il est approprié de choisir les directions prépondérantes de cette sous-base. Il s’agit donc d’effectuer une décomposition en valeurs singulières (SVD) de la matrice pour identifier ses plus grandes valeurs singulières.
La décomposition est faite selon l’expression suivante :
∆R p∆R
∆R
TVUR Σ=∆ (4.15)
où U et V sont deux matrices réelles orthogonales, et idiag σ=Σ est une matrice diagonale
composée par les valeurs singulières. A partir d’un découpage matriciel, selon les valeurs singulières plus grandes et plus petites, indiquées par les indices inférieurs et , respectivement, l’expression (4.15) devient :
1 2
T
22T
11 VUVUR 2∆ ΣΣ1 += (4.16)
Si on néglige la contribution des plus petites valeurs singulières, la base reste exprimée sous la forme suivante :
1∆ Σ1UR = (4.17)
Le nombre de valeurs singulières et le nombre de colonnes à retenir sont choisis arbitrairement en définissant un rapport entre deux valeurs singulières successives. Les résidus obtenus sont normalisés par rapport à la masse du système nominal. La base de réduction représentée par l’expression (4.14) sera donc de rang maximal.
Dans le cas des paramètres non-linéaires, on peut découpler chaque effet lié à une puissance α à laquelle un paramètre donné est élevé dans l’expression des vecteurs et
construire autant de bases selon les besoins. Pour le modèle de plaque sandwich, on
peut découpler les effets de membrane, de flexion, et de cisaillement, comme représenté par
les équations (3.65) à (3.70). En conséquence, la base des forces est calculée à partir des
matrices de rigidité associées à chaque effet et pour chaque paramètre
( T,ωα∆f )
∆Fp soumis à des
modifications, comme suit :
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡=
4444 84444 76
K
4444 84444 76
K
4444 84444 76
K
ntcisailleme
pp1
flexion
pp11
membrane
pp11pvvvvvvvvvvvv KMKM
1KMKMKMKM ffffffffffffF ∆∆∆∆∆∆∆∆∆∆∆∆∆ (4.18)
La base de condensation robuste avec les effets découplés, est exprimée comme suit :

Condensation Robuste et Métamodèlisation Adaptées aux Sistemas Viscoélastiques Complexes
60
[ cfm∆∆∆ RRRTT 0= ] (4.19)
Les résidus traités précédemment sont les résidus du premier ordre. Dans certains cas,
on envisage d’améliorer la précision du modèle réduit en ajoutant des résidus d’ordre supérieur. Dans ce sens, les résidus à l’ordre deux sont obtenus en calculant une nouvelle base de forces du système modifié à partir des déplacements résiduels calculés à travers l’expression (4.12), selon :
( ) 2v
M RMf v∆∆ ∆pp = , ( ) 2
vM RKf v
∆∆ ∆pG0p = (4.20)
Le résidu à l’ordre deux est calculé sous la forme suivante :
∆∆ FKR -10
2 = (4.21) et par conséquent la nouvelle base de condensation est exprimée comme suit :
[ 2∆∆ RRTT 0= ] (4.22)
Les résidus à l’ordre deux peuvent être utiles lorsque les résidus à l’ordre un sont
insuffisants pour assurer la précision requise. Leur utilisation améliore les résultats mais augmente la taille de la base de réduction, ce qui peut être préjudiciable en termes de coût de calcul dans le cas de systèmes de grande taille.
La Figure 4.1 illustre un cycle de réanalyse approchée par utilisation d’une base de condensation robuste, augmentée par des résidus statiques associés aux modifications paramétriques, capable de bien représenter le comportement de la structure complète perturbée globale ou localement, sans réactualisation de la base de réduction, associée au système nominal.
R
O
B
U
S
T
E
S
T
A
N
D
A
R
DOptimisation
Modèle inicial
Résolution
Base enrichie
Modification structural
Condensation
Base classique [ T ]0
Condensation
[ T R ]
Base classique [ T ]0
∆0

Condensation Robuste et Métamodèlisation Adaptées aux Sistemas Viscoélastiques Complexes
61
Figure 4.1 – Cycle de réanalyse approchée par condensation robuste 4.1.3 Condensation par sous-structuration dynamique (synthèse modale)
L’objectif des méthodes de sous-structuration est de permettre de représenter le comportement dynamique d’une structure , à partir de la connaissance du comportement dynamique de ses sous-structures, et de l’utilisation de modèles numériques de taille réduite. Les méthodes de sous-structuration diffèrent entre eux essentiellement par le choix de la base de réduction T de chaque sous-structure, et la technique d’assemblage entre elles. De cette façon, les principales sources d’erreur proviennent de l’utilisation des bases de réduction incomplètes, et de la discrétisation du contour de raccordement sur lequel on impose l’égalité des déplacements et l’équilibre des forces.
S
La Figure 4.2 illustre une maillage aux éléments finis de deux sous-structures et respectivement, dont les degrés de liberté peuvent être divisés en deux sous-ensembles :
un domaine interne composé par tous les nœuds qui appartiennent au maillage, et la frontière ou jonction, composée par tous les nœuds de jonction .
1SS2SS
ij
(SS1)
ij
(SS2)
jonction
Figure 4.2 – Définition des sous-structures : d.d.l. internes i et d.d.l. de jonction . j
Ainsi, les degrés de liberté (d.d.l) du vecteur déplacement Q d’une sous-structure
sont divisés en deux sous-ensembles : les d.d.l de jonction et les d.d.l internes :
SS
jQ iQ
⎭⎬⎫
⎩⎨⎧
=i
j
Q (4.23)
et donc l’équation d’équilibre dynamique d’une sous-structure (éventuellement le SCA d’une sous-structure viscoélastique), peut être écrite tenant compte de la partition (4.23) :
SS
⎭⎬⎫
⎩⎨⎧
=⎭⎬⎫
⎩⎨⎧⎟⎟⎠
⎞⎜⎜⎝
⎛⎥⎦
⎤⎢⎣
⎡−
⎥⎥⎦
⎤
⎢⎢⎣
⎡
0f
MMMM
ΛKKKK j
i
j
iiij
jijj
00
00
iiij
jijj (4.24)
où ( )NR1 ,,diag λλ K=Λ .
Les propriétés de couplage des matrices de masse et de raideur réduites dépendent du type de modes et du procédé d’assemblage choisis. Dans ce mémoire, au niveau d’assemblage de matrices réduites de plusieurs sous-structures, on utilise la méthode de sous-structuration

Condensation Robuste et Métamodèlisation Adaptées aux Sistemas Viscoélastiques Complexes
62
proposée par Craig et Bampton (1968), qui impose la continuité de déplacements à l’interface entre les sous-structures sous la forme suivante :
( ) ( ) ( )SSj
2j
1j QQQ === K (4.25)
La méthode de Craig-Bampton est la méthode de sous-structuration la plus connue et
la plus employée pour sa simplicité de mise en œuvre numérique et pour ses performances. La base de condensation dite classique de Craig-Bampton est composé par de vecteurs de modes contraintes enrichie par des modes normaux de la sous-structure à jonction bloquée.
Les modes contraints correspondent à la réponse statique de la sous-structure lorsqu’un déplacement unitaire est imposé sur l’un des degrés de liberté du contour, et que les autres degrés de liberté du contour sont bloqués. Ils forment la matrice qu’on peut obtenir par la
résolution de l’équation suivante : jΘ
⎥⎦
⎤⎢⎣
⎡=
⎥⎥⎦
⎤
⎢⎢⎣
⎡
0f
ΘKKKK j
j00
ji0jj0
iiij
(4.26)
où : . ⎥⎦
⎤⎢⎣
⎡−
=⎥⎦
⎤⎢⎣
⎡= −
ij01
0
jj
ij
jjj
iiKK
IΘI
Θ
Remarque : La résolution de (4.26) exige que la matrice soit non singulière. Lorsque
est singulière, on peut utiliser des procédures numériques pour filtrer les modes de corps rigide (Masson et al, 2003).
ii0Kii0K
Les modes normaux sont les solutions propres d’une sous-structure. Il y a trois types de
modes normaux suivant le type de conditions aux limites à l’interface (Masson et al, 2003). Dans ce rapport, on utilise les modes à l’interface bloquée , obtenus par la résolution du
problème homogène associé à l’ensemble de d.d.l i et à l’ensemble de d.d.l soumis à des
conditions d’encastrement. Les coordonnées généralisées c sont alors composées de
coordonnées physiques et de coordonnées modales associées aux modes bloqués
:
iψj
jQ mQ
iψ
⎭⎬⎫
⎩⎨⎧
=m
j
c (4.27)
La transformation classique de type Craig-Bampton est alors la suivante : cbT
⎥⎦
⎤⎢⎣
⎡=
iij
jjcb ψΘ
0IT (4.28)

Condensation Robuste et Métamodèlisation Adaptées aux Sistemas Viscoélastiques Complexes
63
Cette base de réduction est bien adaptée au cas de systèmes non amortis, et lors qu’on utilise cette procédure de condensation pour des systèmes viscoélastiques, la base liée à
la sous-structure traitée par matériaux viscoélastiques, doit être enrichie par des résidus associés aux forces extérieures et aux efforts des modifications viscoélastiques suivant le même principe décrit précédemment. Les modes propres du modèle nominal choisis pour construire les résidus sont les modes normaux à l’interface bloquée, et les vecteurs de résidus qui représentent les déplacements statiques dues aux efforts extérieurs , et aux
modifications viscoélastiques à la jonction bloquée, et , sont calculés suivant les
expressions (4.6) et (4.13). Les transformations de Craig-Bampton enrichies et pour
une sous-structure traitée peuvent être exprimées par les relations suivantes :
cbT
iR0
i∆R pi∆R0
cbeT cbeT
⎥⎦
⎤⎢⎣
⎡= 0
iiiij
jj0cbe
∆RRψΘ000I
T ;
(4.29)
⎥⎦
⎤⎢⎣
⎡=
pi
0cbecbe
∆R0
TT
4.2 Approximation des réponses par des métamodèles 4.2.1 Principe général
Supposons qu’on veut étudier un phénomène physique qui lie une entré à une sortie
comme illustré en Figure 4.3. L’état de ce phénomène peut être représenté par une série de grandeurs, qu’on peut regrouper dans un vecteur appelé vecteur de sortie ou réponse, noté y ,
qui dépend de plusieurs paramètres regroupés dans un autre vecteur, appelé vecteur d’entrée . Si on suppose que le phénomène n’a pas de mémoire, c’est-à-dire que sa sortie x y à un
instant donné ne dépend que de son entrée à ce même instant, et non pas des entrées précédentes, on peut représenter le phénomène comme une fonction .
x( )xy f=
x yf
Figure 4.3 – Schéma bloc représentant un phénomène physique quelconque.
Si on n’est pas capable de modéliser précisément le phénomène physique mais qu’on aimerait disposer d’une simulation, on peut recourir à aux techniques d’approximation de fonctions (Ait Brik, 2005). Le but est de créer une nouvelle fonction , qu’on connaît
parfaitement et qui représentera le mieux possible la fonction . On définit alors une
mesure de l’écart entre les deux fonctions, qu’on appelle performance. La performance la plus utilisée est l’erreur quadratique :
( )xg
( )xf
qe
( ) ( ) 2q gfe xx −= (4.30)

Condensation Robuste et Métamodèlisation Adaptées aux Sistemas Viscoélastiques Complexes
64
Comme on n’a pas accès à la fonction ( )xf , cette performance ne peut pas être
calculée à priori. Par contre, on dispose d’un jeu de mesures du phénomène physique qu’on peut représenter par une série de couples ( )( )kkk xfy,x = , et dans ce cas, il est possible de calculer une performance approchée. Pour l’erreur quadratique, il s’agit de l’erreur quadratique moyenne :
( )∑=
−=n
1k
2k xgy
n1ε (4.31)
L’approximation de la fonction est faite à l’aide de ce jeu de mesures, et on cherche la
fonction qui minimise la fonction performance ( )xg ε . Généralement la construction de la
fonction passe par deux étapes essentielles : l’apprentissage et la validation.
L’apprentissage est le choix du jeu de données qui servira à réaliser l’approximation. Celui-ci doit être représentatif des évolutions de la fonction
( )xg
( )xf , et pour cella, il faut bien choisir ce jeu
de données, parce qu’il peut arriver que l’erreur quadratique moyenne soit nulle, alors que la fonction ne soit pas une bonne approximation de ( )xg ( )xf . Pour détecter ces anomalies, il
faut définir un autre jeu de valeurs de ( )xf pour valider l’approximation. Le premier, appelé
base d’apprentissage, contient les données qui serviront à déterminer la fonction . Le
second, appelé base de validation, est distinct du premier, et servira simplement à vérifier que l’approximation se déroule correctement. Deux performances sont alors calculées,
( )xg
aε pour la
base d’apprentissage, et vε pour la base de validation. On cherche à minimiser aε et on
surveille l’évolution de vε . Si un écart assez important est constaté entre les deux
performances, ceci veut dire que l’approximation n’est pas bonne, et une cause possible est un mauvais choix de la base d’apprentissage (Ait Brik, 2005).
Il existe de nombreuses méthodes d’approximation pour déterminer une fonction ( )xg
qui approxime dans certaines conditions la fonction ( )xf . Par exemple on peut envisager
d’utiliser la famille des fonctions polynomiales de degré trois. On peut représenter cette famille par où est toujours la variable de la fonction, et est un vecteur de paramètres, qui
caractérise la fonction choisie dans la famille. Dans l’exemple de la famille des fonctions polynomiales de degré 3, le vecteur est l’ensemble des coefficients du polynôme.
( xp,g ) x p
pFinalement, une fois la famille choisie, le problème de l’approximation devient un
problème d’optimisation numérique. En effet, il se réduit à trouver le vecteur de paramètres
qui minimise la fonction suivante : p
( )∑=
−=an
1k
2kk
aa x,gy
n1 pε (4.32)
où est le nombre d’éléments dans la base d’apprentissage an ( )kk y,x , et le nombre de
paramètres (dimension de ) est associé aux degrés de liberté de l’algorithme utilisé pour p

Condensation Robuste et Métamodèlisation Adaptées aux Sistemas Viscoélastiques Complexes
65
l’approximation. Plus ce nombre est grand, plus il est possible d’approcher la fonction ( )xf .
Avec un nombre de degrés de liberté plus faible, la recherche de l’approximation demande moins de calcul. Si le nombre de degrés de liberté est trop élevé, un autre problème survient, celui du surapprentissage, ou apprentissage par cœur. La fonction obtenue est plus
complexe que la fonction d’origine, et est parfaitement égale à celle-ci seulement pour les points utilisés dans l’apprentissage. Mais il peut arriver que ne généralise pas
correctement. Pour éviter ce problème il faut limiter le nombre de degrés de liberté, tout en garantissant que les fonctions
( )xg
( )xg
( )xg pourront être assez complexes pour approximer
correctement. 4.2.2 Réseaux de neurones artificiels (ANNs)
Les réseaux de neurones ont comme leur nom l’indique, comme source d’inspiration les neurones biologiques. Toutefois, ils font maintenant partie des outils dont on dispose pour traiter des données et approximer des fonctions ou des réponses des systèmes complexes. D’abord, la tâche à effectuer par le réseau est décomposée en tâches élémentaires, réalisées par des neurones. Chaque neurone possède des entrées et une sortie, comme illustré en Figure 4.4.a, et ils peuvent être organisés en plusieurs couches, qui sont reliées entre eux (Figure 4.4.b).
Couche 2Couche 1
Couches cachées
Couche sortie
x1
x2
nx ny
1y
Entées Sortiex1x2
3x
Neurones=f(x x x )1 2 3
(a) (b)
Figure 4.4 – Illustration d’un neurone (a) et d’un réseau de neurones (b) (figure empruntée à la référence (Tertois, 2003)).
Une autre caractéristique d’un réseau est qu’il est adaptatif. Dans chaque neurone, les
paramètres peuvent être modifiés, et servent à adapter le réseau à une tâche particulière. Ces modifications sont faites lors de la phase d’apprentissage du réseau. Les ANNs sont utilisés dans des domaines très variés tels que la reconnaissance d’écriture manuscrite, le traitement d’images, les télécommunications (Tertois, 2003), et très récemment en dynamique des structures (Soteris, 2004 ; Ait Brik, 2005). 4.2.2.1 Le perceptron multicouche (PMC)

Condensation Robuste et Métamodèlisation Adaptées aux Sistemas Viscoélastiques Complexes
66
Un perceptron est un type de réseau organisé en plusieurs couches. La première couche est reliée aux entrées, puis ensuite chaque couche est reliée à la couche précédente. C’est la dernière couche qui produit les sorties du PMC. Les sorties des autres couches ne sont pas visibles à l’extérieur du réseau, et elles sont appelées pour cette raison de couches cachées (Figure 4.4.b). Un neurone perceptron i réalise un produit scalaire entre son vecteur
d’entrées avec le nombre d’entrées, et un vecteur de paramètres
appelé vecteur de poids, et on ajoute un biais
N1 x,...,x=x
N
N1 w,...,w=w N1 b,...,b=b , en utilisant une
fonction d’activation pour déterminer sa sortie (Tertois, 2003) : af
(∑=
+=N
1jjjj,lai,l bxwfa
l) (4.33)
où est la fonction d’activation de la couche ; est la sortie du neurone de la couche
; désigne le poids de l’entrée de la couche . laf l i,la i
l j,lw j l
Les fonctions doivent être de préférence strictement croissantes et bornées. Les
fonctions classiquement utilisées sont la tangente hyperbolique
af
( )xf 1a et la sigmoïde standard
, exprimées, respectivement, sous les formes suivantes : ( )xf 2a
( ) ( ) ( ) ( )xxxx1
a eeeextanhxf −− +−== ; ( ) ( )( ) 21xtanhxf 2a += (4.34)
La Figure 4.5 ci-dessous illustre les notations classiques souvent utilisées pour désigner
les réseaux de neurones. On observe que est le vecteur regroupant les sorties des
neurones de la couche , et désigne le vecteur de poids du neurone de la couche
. Tous les vecteurs de poids d'une couche sont regroupés dans la matrice .
n1l R ×∈a
l N1i,l R ×∈w i
l Nnl R ×∈W
Entrées Sortie
a 0 1a 2a 3a
1
1
1
1
1
1
1
1
1
w1
2w
w31,1ww1,2
w2,1
2,2ww3,1
3,2w
Figure 4.5 – Notation des poids et des sorties des couches pour les réseaux de neurones.
(figure empruntée à la référence (Tertois, 2003)).
En ce qui concerne la fonction d’activation d’un neurone, elle peut être exprimée sous la forme suivante :

Condensation Robuste et Métamodèlisation Adaptées aux Sistemas Viscoélastiques Complexes
67
( ) ( ) ( ) ( )( )n,la2,la1,la1a af,,af,affllll
K=a (4.35)
et est le nombre de neurones dans la couche. Comme chaque couche est reliée à la
précédente, est également l’entrée de la couche
n
la 1l + . En considérant comme l’entrée du
réseau, et en ajoutant le biais (souvent considéré comme un poids supplémentaire associé à une entrée qui est toujours égale à ), on utilise la relation suivante pour exprimer la sortie d’une couche en fonction de ses entrées :
0a
1
( l1lal 1
f Waa −= ) (4.36)
De manière plus analytique on peut considérer la sortie d’une couche (expression (4.36)) comme une fonction vectorielle, dont les éléments constituent une base de fonctions. En ajoutant une seconde couche, les sorties sont des combinaisons linéaires des différents éléments de cette base, qui peuvent servir à une nouvelle base pour une autre couche.
On peut rencontrer plus d’informations sur les développements et les applications des ANNs dans les travaux proposés par Tertois (2003), Ait Brik (2005), Ling (2005), Gallagher (2000), et Soteris (2004). On précise que dans ce mémoire l’intérêt est d’utiliser les ANNs déjà développés et testés disponibles dans des codes commerciaux, tels que MATLAB®. Ces outils seront couplés avec les algorithmes génétiques multiobjectif dans le but de rapprocher les réponses dynamiques des systèmes complexes amortis par matériaux viscoélastiques, comme on détaille au Chapitre 6. Pour cella, la Figure 4.6 illustre les étapes essentielles pour la construction du métamodèle (réseau de neurones), à savoir :
• Choix de l’architecture de l’ANN, le nombre de couches cachées et le nombre de neurones par couche. Dans la boite à outils appelée « Neural Network Toolbox » de MATLAB®, sont disponibles plusieurs fonctions représentant un très grand nombre de configurations de réseaux de neurones. Parmi celles qui sont disponibles, on s’intéresse à la fonction « newff ».
• Pour augmenter l’efficacité de construction des ANNs, on normalise les entrées et les cibles
xy pour avoir la moyenne 0=µ et l’écart type 1=σ . Pour cella, on
utilise la fonction « prestd » disponible dans MATLAB®. • Parmi les entrées x et les cibles y normalisées, il faut choisir celles qui seront
utilisées pour l’entraînement (apprentissage), enx et eny , pour l’évaluation, evx et
evy , et pour le test, tex et tey , de l’ANN. Pour cela, on utilise les fonctions « train»
et «sim», respectivement, disponibles dans MATLAB®. • Comme le métamodèle est construit à travers les données normalisées par la
fonction « prestd », on utilise la fonction « poststd » pour sa dénormalisation.

Condensation Robuste et Métamodèlisation Adaptées aux Sistemas Viscoélastiques Complexes
68
- entrées : x- sorties (cibles) : yvecteurs :
Normalisation des données
entrées- le test du réseau :- l'évaluation du réseau :- l'entrainement du réseau :
(x,y) = prestd (x,y)--- - µ = 0- σ = 1
Selection des variables normalisées
evx--x te
-x en
tey-
cibles- le test du réseau :- l'évaluation du réseau :- l'entrainement du réseau : eny-
ev
y-
Création du réseaunet = newff
Entrainement, évaluation et test du réseau- réseau = train
- métamodèle = sim
( -x en, -y ,en--x y,ev ev ), --x te , y te
( réseau, -x en )
Rendre le métamodèle valable dans le domaine de variables naturelles
METAMODELE = poststd (métamodèle, µ, σ)
net,
- type de réseau :- nombre de couches- nombre de neurones par couche
- Surveillance des erreurs : ε eta ε v
écart important entre est observéaε εet vouinon
Figure 4.6 – Stratégie de construction des réseaux de neurones.
Pour la construction des réseaux de neurones, si un écart assez important est observé
entre les performances aε et vε , on doit augmenter soit le nombre de neurones par couche,
soit le nombre de couches cachées. 4.2.3 Méthodologies de surface de réponses
La méthodologie de surface de réponses (Response Surface Methodology – RSM) est une technique statistique dans laquelle les réponses (sorties) des processus sont approchées par des polynômes généralement plus simples à employer que le système physique réel (Myers et Montgomery, 2002). Leur construction, basées sur l’emploi des plans d’expériences à plusieurs paramètres d’entrée (Droesbeke et al, 1997), exige l’affranchissement de deux difficultés : les configurations élevées qui résultent des plans d’expériences ; et le nombre des coefficients du polynôme. Pour s’affranchir du premier problème, Masson (2004) a utilisé la moyenne des différentes configurations des variables dans le polynôme. Pour le second

Condensation Robuste et Métamodèlisation Adaptées aux Sistemas Viscoélastiques Complexes
69
problème, plusieurs auteurs (Batmaz et Tunali, 2003 ; Battaglia et Maynard, 1996) ont employé des métamodèles tronqués a priori au niveau des interactions entre les paramètres, ce qui peut engendrer des erreurs supplémentaires sur la surface de réponse (Ghanmi et al, 2005). 4.2.3.1 Plans d’expériences factoriels complets (PFC)
Le PFC est le plan d’expériences dans lequel on a une matrice des essais qui représente toutes les combinaisons possibles entre les niveaux des variables. Comme exemple, le Tableau 4.1 montre le PFC pour trois variables , et , à deux niveaux
chacune. Le tableau montre que les variables qui varient toute au long des
expériences sont les variables qui influent beaucoup dans la réponse exacte qu’on souhaite approximer par des polynômes, dans l’exemple, la variable . Au contraire, les variables qui
varient peu sont les variables qui n’ont pas une influence significative sur la réponse exacte, c’est le cas de la variable .
1x 2x 3x
[ 11 +− ]
1x
3x
Tableau 4.1 – Matrice des effets pour trois paramètres à deux niveaux Nº de l’essai 1 2 3 4 5 6 7 8
1x -1 +1 -1 +1 -1 +1 -1 +1
2x -1 -1 +1 +1 -1 -1 +1 +1
3x -1 -1 -1 -1 +1 +1 +1 +1
Le nombre d’expériences (nombre des essais) réalisées par un PFC à variables,
à niveaux pour chacune, est exprimé par la relation suivante :
expn k
nivn
knivexp nn = (4.37)
Le grand avantage du PFC est qu’il permet d’estimer toutes les interactions entre les
variables, deux à deux, trois à trois, etc., jusqu’à l’interaction qui fait intervenir les variables. Néanmoins, comme on peut remarquer, lorsque le nombre de facteurs augmente, son utilisation conduit rapidement à un nombre prohibitif d’expériences.
k
Une importante remarque, c’est que les variables considérées lors de l’élaboration d’un PFC sont des variables sans dimension appelées variables codées. Cette opération permet de rendre comparables les effets des variables naturelles, qui ne sont pas forcément exprimées dans les mêmes unités, permettant une comparaison directe entre leurs différents effets sans tenir compte de leurs unités. Pour cela, if faut passer les variables naturelles aux variables codées, et la transformation la plus utilisée est la transformation suivante (Myers et Montgomery, 2002) :
( ) iiii xxxX ∆−= (4.38)

Condensation Robuste et Métamodèlisation Adaptées aux Sistemas Viscoélastiques Complexes
70
où est la valeur de la variable codée i ; est la valeur de la variable naturelle i ; iX ix ix est la
valeur de la variable naturelle au centre du domaine d’étudie (valeur moyenne), et i
( ) 2xxx mini
maxii −=∆ représente la variation de la variable naturelle associée à une variation
d’une unité de la variable codée, appelée pas de variation.
i
4.2.3.2 Les surfaces de réponse classiques (RSM).
Si on considère le système physique montré en Figure 4.3, il est possible d’employer la méthodologie de surfaces de réponses pour rapprocher les solutions exactes y du système
physique par la relation . Les modèles les plus utilisés pour générer les surfaces de
réponses sont ceux du premier ordre (linéaires) et les modèles du second ordre. Les premiers sont normalement divisés en trois groupes, à savoir : les modèles sans interactions, les modèles contenant toutes les interactions, et les modèles contenant seulement les interactions d’ordre 1, représentés, respectivement, comme suit :
( )xgy =
εββββ ++++= 3322110 xxxy (4.39.a)
εββββββββ ++++++++= 3211233223311321123322110 xxxxxxxxxxxxy (4.39.b)
εβββββββ +++++++= 3223311321123322110 xxxxxxxxxy (4.39.c)
Les modèles représentés par les expressions (4.32.a) à (4.32.b) nécessitent au moins
, et ( )1k + k2 ( ) 22kk 2 ++ simulations, respectivement, pour être complètement définis, ce
qui représente le nombre de coefficients du polynôme à déterminer. coefn
Le modèle du second ordre, ayant les termes quadratiques, est exprimé comme suit :
εββββ +++++= ∑∑∑ K2iiijiijii0 xxxxy (4.40)
Ce modèle nécessite au moins ( ) 22k3k 2 ++ simulations pour être complètement défini.
Les expressions (4.39) et (4.40) peuvent être exprimées en notation matricielle comme suit :
εβXY += ˆˆ (4.41) où coefexp nnR ×∈X est la matrice des effets (expériences) définie comme suit :
⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢
⎣
⎡
=
−
−
−
1n,n1,n
1n,21,2
1n,11,1
coefexpexp
coef
coef
xx1
xx1xx1
L
MOMM
L
L
X (4.42)

Condensation Robuste et Métamodèlisation Adaptées aux Sistemas Viscoélastiques Complexes
71
où représente les variables et leurs interactions ; et , sont deux
vecteurs colonnes qui représentent, respectivement, les coefficients à estimer et les erreurs expérimentales. Si , la méthode des moindres carrés récursive (MCR) (Ghanmi et al,
2005) permet de estimer le vecteur de coefficients . Si
j,ix coefnR∈β coefnR∈ε
coefexp nn >
β XX T est non singulière, le vecteur
des estimateurs β peut être exprimé sous la forme suivante :
( ) YXXXβ T1Tˆ −= (4.43)
et, par conséquent, la réponse estimée est exprimée comme suit :
( ) εYXXXXY +=− T1Tˆ (4.44)
• Stratégie de prédiction des RSM
L’emploi d’une seule configuration (métamodèle) pour estimer la réponse réelle d’un
système physique paraît insuffisant du fait qu’elle peut être statistiquement loin du polynôme le plus précis qui représente la réalité. Pour remédier à cet inconvénient, on utilise la méthode proposée dans les travaux de Masson (2004) pour obtenir le métamodèle (polynôme) le plus proche de la référence. Il s’agit donc de construire plusieurs métamodèles qui estiment la réponse du système physique suivant un jeu de paramètres donné, et d’en déduire le meilleur polynôme. Pour construire les métamodèles, trois étapes sont indispensables, comme illustré en Figure 4.7 :
1a) la première étape consiste à choisir l’ordre du polynôme qui représente au mieux
la relation entrée-sortie entre les paramètres de conception et la réponse désirée du système physique. Plus l’ordre est élevé, meilleure sera la prédiction, mais plus nombreux seront les coefficients à déterminer ;
2a) deuxième étape consiste à faire l’entraînement (apprentissage) du polynôme. Il
s’agit donc de sélectionner les meilleurs polynômes par une procédure aléatoire suivant des critères statistiques bien déterminés. Le polynôme obtenu avant la validation représente la moyenne de tous les polynômes obtenus ;
3a) la troisième étape consiste à faire la validation finale du polynôme moyen obtenu
suite à l’apprentissage par la méthode d’Hyper Cube Latin (HCL).

Condensation Robuste et Métamodèlisation Adaptées aux Sistemas Viscoélastiques Complexes
72
Début : Plan factoriel complet
Génération aléatoire de polynomes
critères statistiques
Génération des échantillons (MC)
Erreur acceptableε m
Garder le polynôme
non
oui
oui
non
ENTRAINEMENTPm
EVALUATION
Figure 4.7 – Entraînement et validation de RSM.
Dans la Figure 4.7 ci-dessus, ( ) restn
1i restm nPP rest∑ == ; représente les polynômes
restants; est le polynôme moyen à tester ; est le nombre de polynômes restants.
restP
mP restnUne fois l’entraînement (apprentissage) du polynôme est achevé, on a le polynôme
moyen. Mais un autre test qu’on doit être effectué dans le but de vérifier si le polynôme moyen obtenu est ou non de bonne qualité, sans refaire les simulations exactes. Il s’agit de prendre aléatoirement, par la méthode d’Hyper Cube Latin (HCL), plusieurs échantillons de points et de calculer la réponse à travers le polynôme obtenu. Si l’erreur moyenne de prédiction calculée sous la forme (4.45) est satisfaisante, on a alors un bon estimateur de la réponse exacte. Sinon, on est obligé de refaire la simulation exacte pour obtenir un nouveau polynôme moyen (voir Figure (4.7)).
( )
exp
n
1iiii
m n
yyyexp
∑=
−=ε (4.45)
4.2.3.3 Les surfaces de réponse adaptatives (ARSM)
Les surfaces de réponse adaptatives font partie d’une famille de méthodes numériques appelée Meshless Methods, dont le but est de créer une approximation discrétisée des grandeurs continues dans un domaine d’étude notéΩ . Cette approximation est obtenue à partir d’une discrétisation de ce domaine (Carpinteri et al, 2001 ; Gu et Liu, 2003), reposant sur un nuage de points appelés nœuds, sur lesquels on calcule les valeurs des variables d’état dénommés valeurs nodales. Chaque nœud représente le centre d’un « élément » dont la forme est normalement donnée par une sphère de rayon R représentant sa zone d’influence, comme illustré en Figure 4.8 ci-dessous.

Condensation Robuste et Métamodèlisation Adaptées aux Sistemas Viscoélastiques Complexes
73
node IΩ
R
x 1
x 2
10
1
Figure 4.8 – Le domaine Ω discrétisé.
La méthode ARSM consiste à faire l’approximation de la réponse exacte dans un
domaine discrétisé Ω définie par la relation suivante sous une forme matricielle (Carpinteri et al, 2001) :
PaY =ˆ (4.46)
où coefexp nnR ×∈P est la matrice des effets contenant la base polynomiale sur laquelle
l’approximation est projetée, représentant les nœuds dans le domaine discrétisé Ω ; contient les coefficients du polynôme à être déterminer.
coefnR∈a
L’erreur quadratique pondérée commise dans l’approximation peut être exprimée sous la
forme suivante (Carpinteri et al, 2001) :
( ) ( ) ( ) ( ) ( )YYWYYYPaWYPaa −−=−−= ˆˆ21
21J
TT (4.47)
où Tn21 expy,,y,y K=Y est le vecteur formé par les valeurs de la fonction réelle évaluée aux
nœuds (expériences) ; est la matrice de pondération exprimée sous la forme suivante :
expexp nnR ×∈W
⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢
⎣
⎡
=
expn
2
1
w00
0w000w
K
MOMM
K
K
W (4.48)
où est la valeur de la fonction de pondération pour le nœud i . iw
Le vecteur de coefficients peut être calculé à travers la minimisation de l’erreur quadratique pondérée (4.47) comme suit :
a
( ) 0YBAaaa
=−=∂
∂J (4.49)

Condensation Robuste et Métamodèlisation Adaptées aux Sistemas Viscoélastiques Complexes
74
où coefcoef nnR ×∈A et expcoef nnR ×∈B , sont exprimées, respectivement, par les formes suivantes :
WPPA T= ; (4.50) WPB T= ce qui conduit au vecteur des coefficients de l’approximation comme suit :
BYAa 1−= (4.51)
Par conséquence, la réponse estimée peut être exprimée par l’expression (4.46). Il est important de noter que l'approximation représentée par l’expression (4.51) est bien
définie seulement quand la matrice est non singulière (Carpinteri et al, 2001). A
• Création du domaine discrétisé adaptatif
Les étapes suivantes décrivent la stratégie de création du domaine discrétisé : Etape 1 : cette étape consiste à définir le domaine d’étude de dimension égale au
nombre de paramètres de conception qui interviennent dans la fonction exacte à approcher. Puisque ce domaine est composé par les variables de projet, il est limité par les bornes de variations de chaque variable. Par la suite, on doit faire une transformation des variables par au domaine (procédure de codification), de façon à obtenir un domaine d’étude normalisé,
comme illustré en Figure 4.9, où on représente un exemple d’un domaine défini par une fonction à deux paramètres.
[ 1;0 ]
2xmax
min2x
x1min xmax
1 00
1
1
Normalisation
x2
x1 x1
2x
Figure 4.9 – Normalisation du domaine d’étude de la fonction à approcher.
Etape 2 : après la définition du domaine d’étude, la discrétisation initiale est faite en
prenant des intervalles réguliers définis par le nombre de points d’approximation souhaités pour chacune de ses directions. Les intersections entre ces intervalles représentent les points sur lesquels les nœuds et les sous-régions sont crées pour l’approximation (voir Figure 4.10.a). On fait l’évaluation de la fonction exacte aux nœuds, et on estime la première fonction d’approximation (expression (4.46)). Par la suite, on enlève le point central, comme illustré en Figure 4.10.b, et on estime la seconde fonction d’approximation. Si l’erreur commise entre les deux approximations et la fonction exacte est satisfaisante par rapport à un critère choisi, on arrête le processus, et la première fonction d’approximation est la bonne surface de réponse. Sinon, on passe à l’étape suivante du processus.
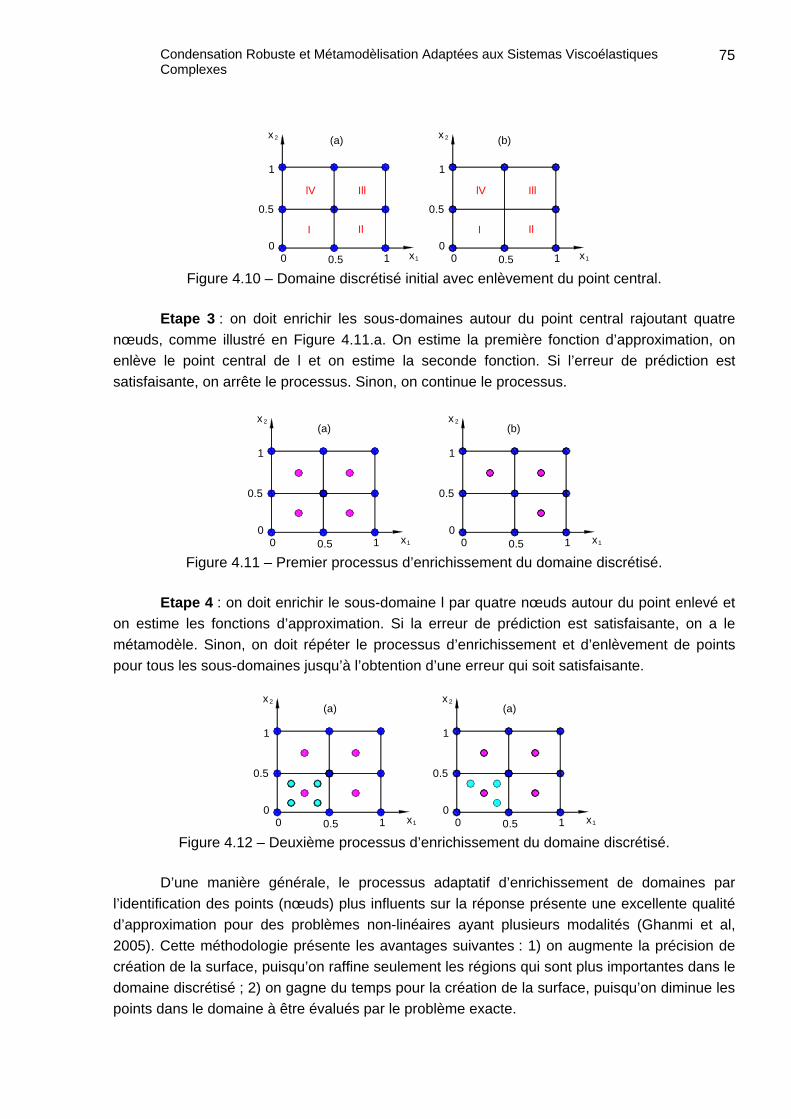
Condensation Robuste et Métamodèlisation Adaptées aux Sistemas Viscoélastiques Complexes
75
00
1
1 x1
2x
0.5
0.5
I Il
IlllV
x2
Ill
Il
0.5
00 0.5
1
I
lV
x1 1
(a) (b)
Figure 4.10 – Domaine discrétisé initial avec enlèvement du point central.
Etape 3 : on doit enrichir les sous-domaines autour du point central rajoutant quatre
nœuds, comme illustré en Figure 4.11.a. On estime la première fonction d’approximation, on enlève le point central de l et on estime la seconde fonction. Si l’erreur de prédiction est satisfaisante, on arrête le processus. Sinon, on continue le processus.
2x
0.5
00
1
0.5 1 x1
x 2
1
0
0.5
0 0.5 1 x1
(a) (b)
Figure 4.11 – Premier processus d’enrichissement du domaine discrétisé.
Etape 4 : on doit enrichir le sous-domaine l par quatre nœuds autour du point enlevé et on estime les fonctions d’approximation. Si la erreur de prédiction est satisfaisante, on a le métamodèle. Sinon, on doit répéter le processus d’enrichissement et d’enlèvement de points pour tous les sous-domaines jusqu’à l’obtention d’une erreur qui soit satisfaisante.
x 2
1
0
0.5
0 0.5 1 x1
(a)2x
0.5
00
1
0.5 1
(a)
x1
Figure 4.12 – Deuxième processus d’enrichissement du domaine discrétisé.
D’une manière générale, le processus adaptatif d’enrichissement de domaines par l’identification des points (nœuds) plus influents sur la réponse présente une excellente qualité d’approximation pour des problèmes non-linéaires ayant plusieurs modalités (Ghanmi et al, 2005). Cette méthodologie présente les avantages suivantes : 1) on augmente la précision de création de la surface, puisqu’on raffine seulement les régions qui sont plus importantes dans le domaine discrétisé ; 2) on gagne du temps pour la création de la surface, puisqu’on diminue les points dans le domaine à être évalués par le problème exacte.

Condensation Robuste et Métamodèlisation Adaptées aux Sistemas Viscoélastiques Complexes
76
La base polynomiale pour cette méthodologie dépend du nombre de variables et de l’ordre du polynôme choisi. On peut utiliser par exemple les modèles linéaires (4.39) ou le modèle du second ordre (4.40). Il est important de préciser que dans ce mémoire on fait l’extension de cette méthodologie adaptative, initialement proposée pour les problèmes à deux variables, au cas de systèmes à plusieurs paramètres d’entrée.
• Choix de la fonction de pondération
La zone d’influence d’un nœud I sur la région du domaine IΩ (voir Figure 4.8),
intervient directement dans l’approximation de la fonction à estimer, comme on peut remarquer à travers l’expression (4.50). Cette zone d’influence est définie par la fonction de pondération
associée au nœud Iw I . Normalement, la fonction de ponderation doit être différente de zéro
seulement dans le domaine d’influence des nœuds, et égale à zéro en dehors de cette région. Le choix est fait de façon que sa valeur est égale à 1 au centre du domaine et égale à 0 à l’extérieur du domaine. De cette façon, l’envergure de la fonction de pondération est limitée, ce qui donne l’aspect local à l’approximation. Parmi les différentes possibilités qu’on a dans la littérature pour définir la fonction de pondération (Ghanmi et al, 2005), dans ce mémoire, on utilise la pondération proposée par Hérault, représentée par l’expression (4.52), illustrée en Figure 4.13.
( )( )⎪⎩
⎪⎨⎧
>−≤−−−=
II
II22
III
Rxxif0RxxifRxx1w (4.52)
-1 -0.8 -0.6 -0.4 -0.2 0 0.2 0.4 0.6 0.8 10
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
abs(x-xi)/ri
w(x
-xi)
Figure 4.13 – Fonction de pondération de Hérault.
où Ixx − sont les distances mesurées à partir d’une coordonnée x autour de la région
d’influence du nœud I de coordonnée ; est la zone d’influence du nœud Ix IR I .

Condensation Robuste et Métamodèlisation Adaptées aux Sistemas Viscoélastiques Complexes
77
4.3 Exemples numériques 4.3.1 Condensation robuste de systèmes viscoélastiques.
Le premier test consiste à évaluer la base de réduction nominale pour les systèmes viscoélastiques, selon l’expression (4.7). Les calculs consistent à obtenir les réponses forcées (FRFs) du système amorti représenté en Figure 4.14, associées au point P. Le modèle EF ANSYS du système sans traitement est composé par 928 éléments finis de plaque simple SHELL63 ayant 6840 d.d.l, et le traitement viscoélastique, dont la position est choisie a priori selon la quantité d’énergie de déformation modale MSE (Modal Strain Energy) (Rogers et al, 1981) observée pour les modes de la bande fréquentielle d’analyse, est composé par 10 patchs viscoélastiques, où chaque patch contient 16 EF de plaque sandwich à trois couches développés au Chapitre 3.
On précise que pour introduire le traitement viscoélastique dans le modèle EF ANSYS de la plaque renforcée illustrée en Figure 4.7, on a mis en œuvre la méthodologie d’interfaçage MATLAB®/ANSYS® développé dans ce mémoire (voir Annexe C) qui permet de faire le couplage/remplacement entre les éléments finis de plaque sandwich développés en plateforme MATLAB® et les éléments finis de plaque simples modélisés par le code ANSYS.
Les conditions aux limites lui imposées sont « libres », et les caractéristiques géométriques en millimètres sont : rayon interne : 938; longueur : 720; longueur d’arc : 680 ; les épaisseurs de la plaque base et des raidisseurs : 1,5 et 0,75, respectivement ; et l’hauteur des raidisseurs : 30. Les épaisseurs des couches, en millimètres, sont : 0,0254 (couche viscoélastique) et 0,5 (couche contrainte). Les propriétés physiques de la plaque base sont : module d’Young, E=2,1x1011 N/m2, densité ρ=7800 Kg/m3 et coefficient de Poisson υ=0,3 ; qui sont les même adoptées pour la couche contrainte. Pour la couche viscoélastique on utilise la fonction module complexe du matériau 3M ISD112 (expressions (2.11) et (2.12), comme illustré en Figure 2.12.
Figure 4.14 – Modèle EF ANSYS de la plaque renforcée traitée par couche contrainte.
Pour vérifier l’efficacité de la condensation dans la bande fréquentielle d'intérêt [135-210
Hertz], on fixe la température du matériau viscoélastique à 25ºC, et dans ce cas, on considère trois bases de réduction, comme suit :

Condensation Robuste et Métamodèlisation Adaptées aux Sistemas Viscoélastiques Complexes
78
• (60 vecteurs propres); ( )[ 600φ=
10T ] ( ) ( )[ ]1600 RT
20 φ= (60 vecteurs propres, 1 vecteur résidu vecteur obtenu par l’emploi de l’expression (4.5)) ; et
(60 vecteurs propres, 1 vecteur résidu obtenu par l’emploi de l’expression (4.5), 54 vecteurs résidus obtenus par l’emploi de l’expression (4.6)). Les résidus
( ) ( ) ( )[ 541600
00 RRT
3 ∆φ= ]( )540R∆ sont associés aux plus grandes valeurs
singulières, pour lesquels 5i1 101×≤σσ 60to1i = .
La Figure 4.15 montre les amplitudes des FRFs calculées en utilisant les trois bases de
réduction, , et , confrontées avec les FRFs de référence, pour lesquelles on utilise
une base de réduction constituée par un nombre élevé des vecteurs propres (600) et des vecteurs résiduels (600). A travers les figures, on montre que la précision de la réduction est sans doute améliorée par l'enrichissement successif de la base de réduction par l'inclusion des vecteurs résiduels statiques pour prendre en compte les efforts extérieurs, et les forces viscoélastiques. Ceci est confirmé par l'analyse des erreurs relatives entre la référence et les approximations pour les trois bases de réduction, comme montré en Figure 4.16.a. La Figure 4.16.b confirme que l'utilisation des résidus de premier ordre associés aux forces externes et les efforts viscoélastiques sont suffisantes pour représenter avec une précision acceptable le comportement dynamique du système amorti, avec une erreur relative maximale de 3,8% pour la première anti-résonance.
10T20T
30T
(a) (b) (c)
Figure 4.15 – FRFs des systèmes de référence et réduits – bases (a), (b) et (c). 10T
20T30T
(a) (b)
Figure 4.16 – Erreur relative entre les réponses réduites et les réponses exactes.

Condensation Robuste et Métamodèlisation Adaptées aux Sistemas Viscoélastiques Complexes
79
L'intérêt maintenant est d’évaluer la robustesse de la base de réduction enrichie, adaptée aux cas de systèmes viscoélastiques selon l’expression (4.22). Ces modifications peuvent être, par exemple, des perturbations dans les paramètres physiques et/ou géométriques des éléments finis contenus dans les zones traitées par matériaux viscoélastiques. Le but est de rapprocher le comportement du système modifié sans l’exécution de réanalyse exacte du système nominal de départ. La modification imposée consiste à augmenter l'épaisseur de la couche contrainte du système nominal en 15%. Dans une première étape, on considère le système conservatif associé (SCA), pour lequel on ne prends en compte que le comportement purement élastique du matériau viscoélastique, caractérisé par les propriétés et 0G 00 =η . A travers la Figure 4.17.a, on compare les amplitudes des FRFs pour
les systèmes SCAs nominal et perturbé, où les deux modèles sont calculés en utilisant la même base de réduction de référence composée par un nombre élevé de vecteurs. La Figure 4.17.b permet une comparaison semblable des amplitudes des FRFs pour les modèles amortis nominal et perturbés calculés en utilisant la même base de réduction de référence. A travers cette figure, on peut également percevoir l'influence de la variation structurale sur l'atténuation des amplitudes de vibration (niveaux d’amortissement viscoélastique).
(a) (b)
Figure 4.17 – FRFs pour les systèmes nominaux et perturbés : (a) SCAs ; (b) amorti.
La Figure 4.18 montre la distance en forme (MAC) entre les modes propres des systèmes SCAs nominal et perturbé, qu’on peut aussi comparer à travers le Tableau 4.2, où on constate l’écart fréquentiel maximal de 1,1% dans la bande fréquentielle d’analyse. La matrice de MAC montre que les modes propres du système nominal de départ ne sont pas très différents des modes propres du système perturbé, ce qui montre que le système modifié garde la forme vibratoire du système nominal de départ, et qu’on peut approcher le comportement du système perturbé par le comportement du système nominal, au moins pour des petites perturbations. Le MAC est défini comme suit :
( ) 2p
2n
2p
TnMAC φφφφ= (4.53)
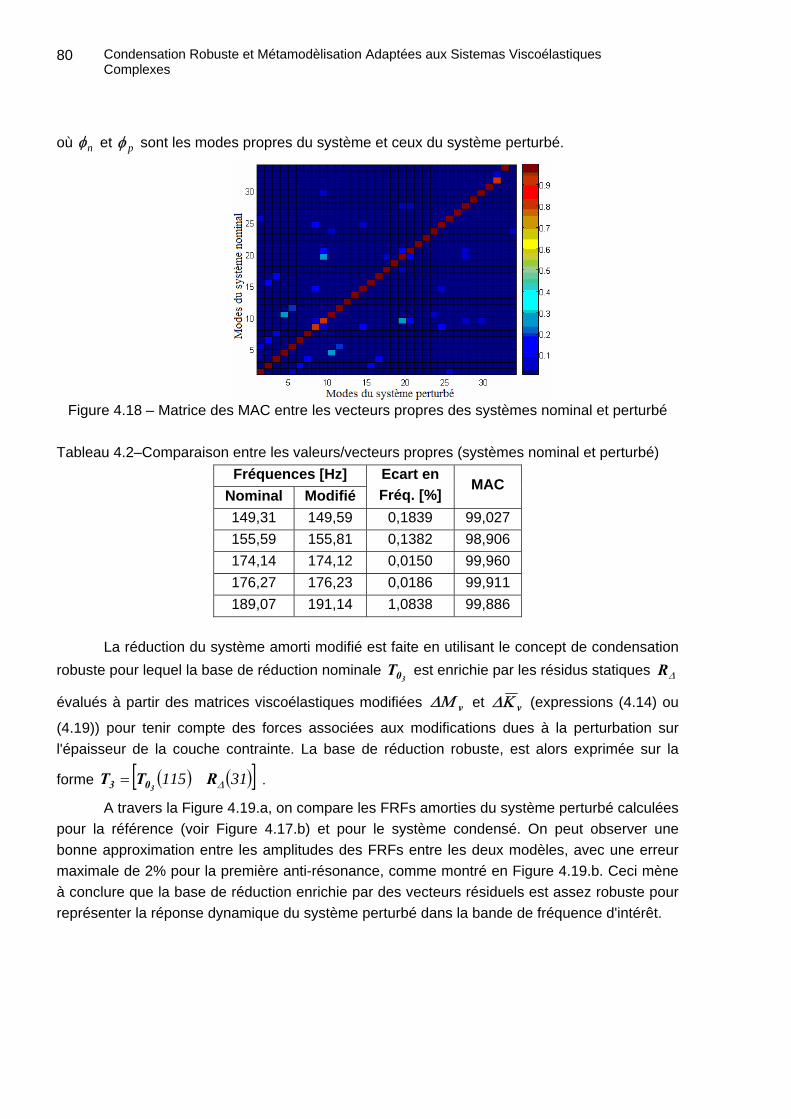
Condensation Robuste et Métamodèlisation Adaptées aux Sistemas Viscoélastiques Complexes
80
où nφ et pφ sont les modes propres du système et ceux du système perturbé.
Figure 4.18 – Matrice des MAC entre les vecteurs propres des systèmes nominal et perturbé
Tableau 4.2–Comparaison entre les valeurs/vecteurs propres (systèmes nominal et perturbé)
Fréquences [Hz] Nominal Modifié
Ecart en Fréq. [%]
MAC
149,31 149,59 0,1839 99,027 155,59 155,81 0,1382 98,906 174,14 174,12 0,0150 99,960 176,27 176,23 0,0186 99,911 189,07 191,14 1,0838 99,886
La réduction du système amorti modifié est faite en utilisant le concept de condensation
robuste pour lequel la base de réduction nominale est enrichie par les résidus statiques
évalués à partir des matrices viscoélastiques modifiées
30T ∆R
v∆Μ et vΚ∆ (expressions (4.14) ou
(4.19)) pour tenir compte des forces associées aux modifications dues à la perturbation sur l'épaisseur de la couche contrainte. La base de réduction robuste, est alors exprimée sur la
forme . ( ) ( )[ ]31115 ∆RTT303 =
A travers la Figure 4.19.a, on compare les FRFs amorties du système perturbé calculées pour la référence (voir Figure 4.17.b) et pour le système condensé. On peut observer une bonne approximation entre les amplitudes des FRFs entre les deux modèles, avec une erreur maximale de 2% pour la première anti-résonance, comme montré en Figure 4.19.b. Ceci mène à conclure que la base de réduction enrichie par des vecteurs résiduels est assez robuste pour représenter la réponse dynamique du système perturbé dans la bande de fréquence d'intérêt.

Condensation Robuste et Métamodèlisation Adaptées aux Sistemas Viscoélastiques Complexes
81
(a) (b)
Figure 4.19 – FRFs (a) et l’erreur relative pour les modèles perturbés nominal et réduit.
• Synthèse modale
Pour vérifier la stratégie de condensation par sous-structuration dynamique, on utilise la plaque renforcée représentée par la Figure 4.14, divisée en deux sous-structure SS1 et SS2, comme illustré en Figure 4.20. La sous-structure SS1 contient 551 EF de plaque simple, 4350 d.d.l (180 d.d.l de jonction), dont 160 EF sont traités par matériau viscoélastique (ISD112 à la température de 25ºC, Cf. Section 2.3.3, Chapitre 2), et le modèle de la sous-structure SS2 contient 377 EF, 2520 d.d.l, sans traitement viscoélastique.
Figure 4.20 – Modèle EF de la plaque renforcée – définition des sous-structures.
Par la méthode de Craig et Bampton enrichie (CBE) (Cf. Section 4.4.4, Chapitre 4), le modèle initial de la sous-structure SS1 est ramené à un modèle condensé à 221 d.d.l. Donc la base de réduction de CBE est composée par les vecteurs suivants :
⎥⎦
⎤⎢⎣
⎡=
××××
××××0
141702041701804170
201801180201801801800cbe
204170∆RRψΘ000I
T (221 vecteurs)

Condensation Robuste et Métamodèlisation Adaptées aux Sistemas Viscoélastiques Complexes
82
où représente les modes contraints du système SCA ; sont les modes
normaux à l’interface bloquée ; est le vecteur de résidus statiques dus à la force
extérieure , et est formé par les résidus associés aux efforts viscoélastiques.
1804170×Θ 204170×ψ
14170×R
P 0204170×∆R
De même, le modèle condensé de la sous-structure SS2 est composé par 190 d.d.l dont la base de réduction de CB, est composée par les vecteurs suivants :
⎥⎦
⎤⎢⎣
⎡=
××
××
1023401802340
10180180180cb ψΘ
0IT (190 vecteurs)
La Figure 4.21.a montre les FRFs de référence et celles obtenues pour le modèle réduit
en utilisant la méthode de CBE. On montre que l’enrichissement de la base de réduction associée aux efforts viscoélastiques pour la sous-structure traitée par matériau viscoélastique permet d’améliorer d’avantage les résultats sur toute l’étendue de la bande de fréquence analysée, en garantissant une bonne approximation, comme on peut remarquer à travers les erreurs relatives entre la solution approchée et celle obtenue par le calcul de référence. Ceci confirme la bonne approximation du système condensé par rapport au calcul de référence, avec une erreur relative maximale de 0,16%.
Figure 4.21 – FRFs des systèmes de référence et réduit (a) et les erreurs relatives (b).
La modification imposée au modèle nominal consiste à perturber tous les éléments
contenus dans les zones traitées de la sous-structure SS1, par une augmentation de 15% sur la valeur nominale de l’épaisseur de la couche contrainte. La réduction du système modifié est faite en utilisant la base de réduction nominale associée au système initial (composé par
221 vecteurs), enrichie par des résidus statiques maintenant évalués sur les matrices
modifiées et pour prendre en compte les efforts associés aux modifications sur les
paramètres viscoélastiques :
cbeT
∆R
v∆M v∆K
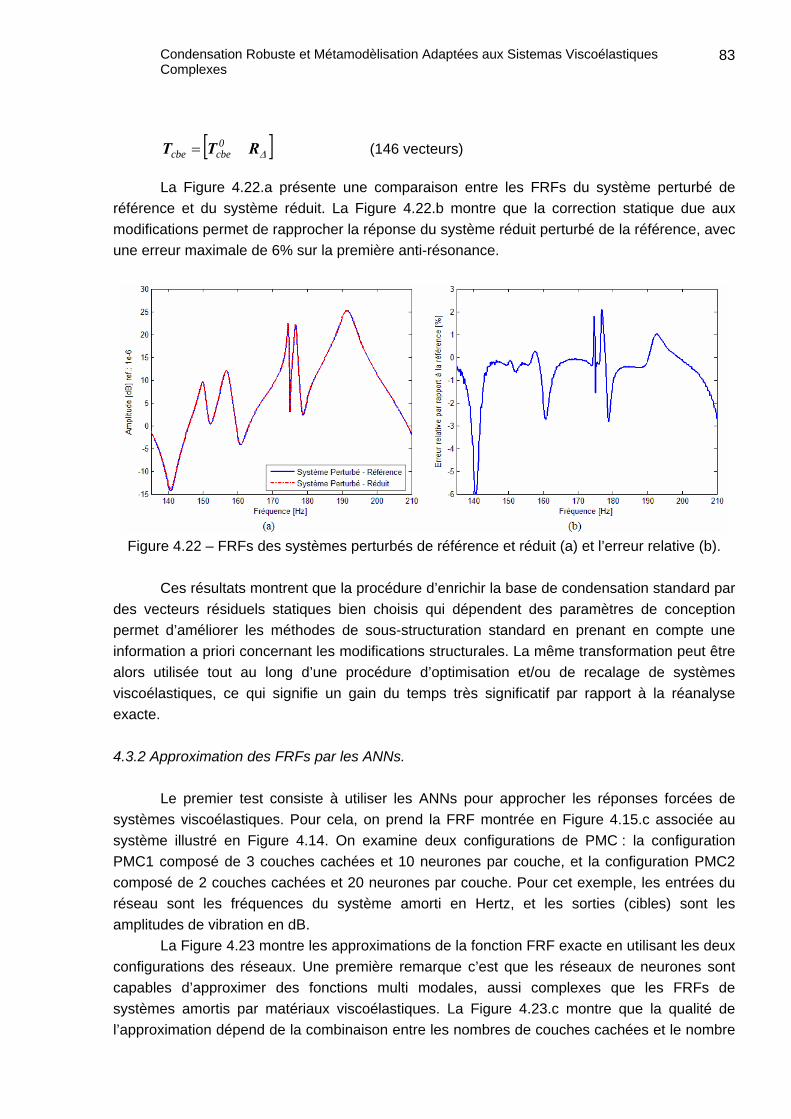
Condensation Robuste et Métamodèlisation Adaptées aux Sistemas Viscoélastiques Complexes
83
[ ∆RTT 0cbecbe = ] (146 vecteurs)
La Figure 4.22.a présente une comparaison entre les FRFs du système perturbé de
référence et du système réduit. La Figure 4.22.b montre que la correction statique due aux modifications permet de rapprocher la réponse du système réduit perturbé de la référence, avec une erreur maximale de 6% sur la première anti-résonance.
Figure 4.22 – FRFs des systèmes perturbés de référence et réduit (a) et l’erreur relative (b).
Ces résultats montrent que la procédure d’enrichir la base de condensation standard par
des vecteurs résiduels statiques bien choisis qui dépendent des paramètres de conception permet d’améliorer les méthodes de sous-structuration standard en prenant en compte une information a priori concernant les modifications structurales. La même transformation peut être alors utilisée tout au long d’une procédure d’optimisation et/ou de recalage de systèmes viscoélastiques, ce qui signifie un gain du temps très significatif par rapport à la réanalyse exacte. 4.3.2 Approximation des FRFs par les ANNs.
Le premier test consiste à utiliser les ANNs pour approcher les réponses forcées de systèmes viscoélastiques. Pour cela, on prend la FRF montrée en Figure 4.15.c associée au système illustré en Figure 4.14. On examine deux configurations de PMC : la configuration PMC1 composé de 3 couches cachées et 10 neurones par couche, et la configuration PMC2 composé de 2 couches cachées et 20 neurones par couche. Pour cet exemple, les entrées du réseau sont les fréquences du système amorti en Hertz, et les sorties (cibles) sont les amplitudes de vibration en dB.
La Figure 4.23 montre les approximations de la fonction FRF exacte en utilisant les deux configurations des réseaux. Une première remarque c’est que les réseaux de neurones sont capables d’approximer des fonctions multi modales, aussi complexes que les FRFs de systèmes amortis par matériaux viscoélastiques. La Figure 4.23.c montre que la qualité de l’approximation dépend de la combinaison entre les nombres de couches cachées et le nombre

Condensation Robuste et Métamodèlisation Adaptées aux Sistemas Viscoélastiques Complexes
84
de neurones par couche. On précise que pour la création des réseaux de neurones, on applique la stratégie illustrée en Figure 4.6.
(a) (b) Figure 4.23 – Comparaison entre les FRFs exactes et celles approchées par les configurations
PMC1 (a) et PMC2 (b).
La Figure 4.24 démontre que la qualité de prédiction des amplitudes de réponses du système amorti est très satisfaisante, principalement pour le PMC2, puisque l’erreur quadratique moyenne dépasse le but fixé a priori de 0,001, comme montré en Figure 4.25.
(a) (b)
Figure 4.24 – Variation de la réponse exacte en fonction de la réponse estimée pour les deux configurations de réseaux : PMC1 (a) et PMC2 (b).
La Figure 4.25 montre que le bon choix du nombre de couches cachées et du nombre
de neurones par couches influe de forme significative dans la précision du PMC et du nombre d’itérations pour arriver au but fixé a priori par le concepteur.

Condensation Robuste et Métamodèlisation Adaptées aux Sistemas Viscoélastiques Complexes
85
Figure 4.25 – Erreur quadratique moyenne pour PMC1 (a) et PMC2 (b).
4.3.3 Approximation des FRFs par les surfaces de réponses.
Pour les surfaces de réponses RSM et ARSM, on considère le même système amorti illustré en Figure 4.14, où les entrées et les sorties utilisées pour générer les surfaces sont :
• Entrées du problème
Les variables d’entrée sont les épaisseurs de couches et la température du matériau viscoélastique, comme illustré au Tableau 4.3.
Tableau 4.3 – Définition des variables d’entrée pour les surfaces de réponses
Variables de conception/ variations admissibles Description
1X 5,0h3 = ; %30± 3h : l’épaisseur de la couche contrainte [mm]
2X 25T = ; %15± T : température du matériau viscoélastique [mm]
3X 0254,0h2 = ; %60± 2h : l’épaisseur de la couche viscoélastique [ºC] • Sorties du problème
Les fonctions à approcher fixées a priori sont définies par la somme des amplitudes de
vibration correspondant aux premier et deuxième modes de vibration du système amorti ( ),
dans la bande fréquentielle d’analyse (Figure 4.23), et la masse totale du traitement viscoélastique ajoutée à la structure initiale
1y
( )2y .
• RSM classique

Condensation Robuste et Métamodèlisation Adaptées aux Sistemas Viscoélastiques Complexes
86
A travers l’analyse de sensibilité, qu’on détaille au Chapitre 6, on remarque que
l’épaisseur de la couche contrainte a l’influence la plus significative sur la réponse du système amorti, suivie de la température du matériau viscoélastique. Le PFC est alors construit de telle façon que la variable prenne toutes les variations (voir Tableau 4.1) des niveaux [-1, 0, 1]
adoptés pour chaque variable. Ceci mène à un PFC composé par 27 expériences. On précise que la construction de la surface de réponse classique est basée sur les étapes décrites en Figure 4.7. Le polynôme désiré est de la forme :
1x
2333
2222
21113223311321123322110 XXXXXXXXXXXXy ββββββββββ +++++++++=
L’application de la méthode RSM conduit aux polynômes suivants :
23
22
2132
31213211
X8471.1X086663.0X43194.0XX61575.0
...XX058855.0XX04243.0X2375.7X5322.3X3968.3498.34y
−++
++−++−=
312 X0015336.0X042901.014556.0y ++=
La décodification des variables , et , est faite comme suit : 1X 2X 3X
( ) ( )min3
max3331 hhhhX −−= ; ( ) ( )minmax
2 TTTTX −−= ; ( ) ( )min2
max2223 hhhhX −−=
où , et 3h 2h T sont les valeurs courantes des variables ; les indices supérieurs 0 , et
, représentent, respectivement, la valeur moyenne, le minimum et le maximum des variables, calculés selon les variations admissibles.
min
max
Une fois l’obtention du polynôme est achevée, on vérifie la qualité des polynômes moyens obtenus sans refaire les simulations exactes. Pou cela, on prend aléatoirement par la méthode d’Hyper Cube Latin (HCL) 200 échantillons de points et on calcule les réponses à travers les polynômes. La Figure 4.26 montre la comparaison entres les résultats estimés issus des polynômes et ceux obtenus des fonctions exactes. On remarque qu’on a des bons estimateurs des fonctions exactes, ce qui est confirmé par les faibles valeurs des erreurs
moyennes pour les deux approximations, et , respectivement. %41,01ym =ε %02y
m ≅ε

Condensation Robuste et Métamodèlisation Adaptées aux Sistemas Viscoélastiques Complexes
87
(a) (b)
Figure 4.26 – Réponses exactes en fonction des estimées par RSM pour les deux fonctions. Les critères statistiques de sélection des polynômes restants, , sont l’erreur MSE
(Root Mean Square Error), qui ne doit pas dépasser la valeur (Battaglia et al., 1996),
et le coefficient de détermination
restP
09028,02R qui doit être le plus proche de 1 ( ). Pour les
approximations ci-dessous, on obtient:
1R0 2 <<
000231,0RMSE = et (première
approximation) ; et
9998,0R2 =
0000158,0RMSE = 1R 2 = (deuxième approximation).
• ARSM L’application de la méthodologie ARSM conduit aux polynômes suivants :
23
22
2132
31213211
X8321.1X072274.0X44414.0XX60234.0
...XX051235.0XX059721.0X2603.7X55566.3X3858.3488.34y
−++
++−++−=
312 X0015336.0X042901.014556.0y ++=
De la même façon que pour le cas précédent, on vérifie la qualité satisfaisante des polynômes obtenus. La Figure 4.27 compare les réponses estimées et les réponses exactes. A travers la figure, on confirme les bonnes estimations des fonctions exactes par les
approximations, avec les erreurs et . %431,01ym =ε %02y
m ≅ε

Condensation Robuste et Métamodèlisation Adaptées aux Sistemas Viscoélastiques Complexes
88
(a) (b)
Figure 4.27 – Réponses exactes en fonction des estimées par ARSM pour les deux fonctions
• Temps de calcul pour les méthodologies RSM classique et ARSM
Le temps de calcul (temps de CPU) pour les deux approches sont donnés en Tableau 4.4. La méthodologie RSM, ayant un PFC composé par 27 expériences, on réalise 20 tirages aléatoires du PFC, ce qui résulte en 540 évaluations du problème exact. La discrétisation du domaine à 3 variables par la méthode ARSM, mène à 256 évaluations du problème exacte, puisque ne sont pas toutes les sous-régions du domaine qui sont raffinées.
Tableau 4.4 – Temps de calcul pour les stratégies RSM/ARSM Stratégie CPU Time [min] RSM (540) 280.85
ARSM (256) 133.15
Ceci mène à conclure que l’utilisation de la méthode ARSM permet une réduction significative du temps de calcul des polynômes, avec un rapport de réduction d’environ 47,41%. 4.4 Conclusions
Dans ce chapitre, on a proposé une stratégie de condensation robuste de systèmes viscoélastiques par l’utilisation d’une base de réduction enrichie par des résidus statiques associés aux forces extérieures et aux effets dus aux modifications viscoélastiques. A travers un exemple, on montre que pour des petites modifications, on peut rapprocher le comportement du système amorti modifié sans l’exécution de réanalyse exacte du système nominal de départ, ce qui justifie l’intérêt à cette stratégie de condensation associée au procédures d’optimisation et/ou le recalage de systèmes amortis de grande taille.
Dans la seconde partie de ce chapitre on a montré quelques techniques d’approximation de fonctions, comme les réseaux de neurones et les surfaces de réponses classiques et adaptatives. A travers des exemples, on a pu remarquer l’efficacité de ces deux approches en représenter les réponses dynamiques des systèmes viscoélastiques. La principale différence

Condensation Robuste et Métamodèlisation Adaptées aux Sistemas Viscoélastiques Complexes
89
entre les deux approches est le domaine d’application mais, en général, les deux techniques peuvent être utilisées pour approximer de fonctions muti-modales et non-linéaires. Néanmoins, les ANNs présentent deux avantages par rapport aux surfaces de réponses. La première est qu’ils permettent de rapprocher les réponses dynamiques de systèmes amortis dont les variables d’entrées sont hybrides, comme les épaisseurs de couches, température, etc., et les positions du traitement viscoélastique. La deuxième est l’avantage en approcher les problèmes à plusieurs variables d’entrée, puisque pour ces problèmes l’utilisation des surfaces de réponses peut conduire à des polynômes plus complexes que le système physique réel en termes du nombre de coefficients à déterminer. Même si les surfaces sont construites à travers le modèle condensé robuste, le nombre prohibitif d’évaluation des fonctions pour les RSM/ARSM les rend inexploitables en termes du temps de calcul. Néanmoins, les RSM et ARSM peuvent trouver de l'intérêt dans les approches stochastiques (Ghanmi et al, 2005).
CHAPITRE 5
Méthodologie d’Optimisation Multiobjectif Robuste
La conception optimale en avant projet d’une structure mécanique amortie par matériaux
viscoélastiques, est aujourd’hui un sujet de grande importance dans plusieurs domaines de la recherche et des applications industrielles dans le domaine spatiale, de l’aéronautique, l’automobile, de la construction civil, etc. En effet, disposer d’une conception optimale et/ou robuste de telles structures amorties est très important en vue de sa fiabilité, robustesse et mise en service avec le maximum de performance et efficacité. Dans ce contexte, l’optimisation intervient de façon primordiale.
Les problèmes d’optimisation dans le domaine de la mécanique des structures, d’une manière générale, sont souvent multiobjectif, étant caractérisés par le fait que les différentes fonctions coût sont généralement en conflit entre elles. Pour cela, il faut choisir une stratégie d’optimisation multiobjectif capable de proposer les meilleures alternatives de projet parmi plusieurs. Les algorithmes évolutionnaires sont largement utilisés pour résoudre des problèmes d’optimisation multiobjectif dans les différents domaines de l’ingénierie, où on a l’intérêt de réduire les coûts et les délais de conception et de fabrication. Dans le but d’avoir une conception robuste des systèmes amortis par matériaux viscoélastiques, l’optimisation robuste s’avère un outil très intéressant, puisque elle prend en compte les incertitudes sur les variables de conception et sur les fonctions coût, ainsi que sur le traitement de contraintes. Avant de passer au problème multiobjectif robuste, il est important de définir un problème multiobjectif déterministe, qui considère seulement les valeurs nominales des variables de conception. Dans ce même contexte, on défini la méthode d’analyse des données a posteriori SOM qu’on utilise comme aide aux concepteurs dans le choix des solutions potentielles parmi les solutions optimales fournies par l’optimisation multiobjectif. 5.1 Optimisation multiobjectif déterministe 5.1.1 Définition d’un problème multiobjectif et notion de dominance.
L’optimisation multiobjectif cherche à optimiser plusieurs composantes d’un vecteur de fonctions coût. Contrairement à l’optimisation monobjectif, la solution d’un problème multiobjectif (PMO) n’est pas unique, mais est constituée d’un ensemble de solutions, connu comme l’ensemble des solutions Pareto-optimales (Eschenauer et Osyczka, 1990). Toute solution de cet ensemble est optimale dans le sens qu’aucune amélioration ne peut être faite sur une composante du vecteur sans dégradation d’au moins une autre composante. Le premier but dans la résolution d’un problème multiobjectif est d’obtenir l’ensemble des solutions
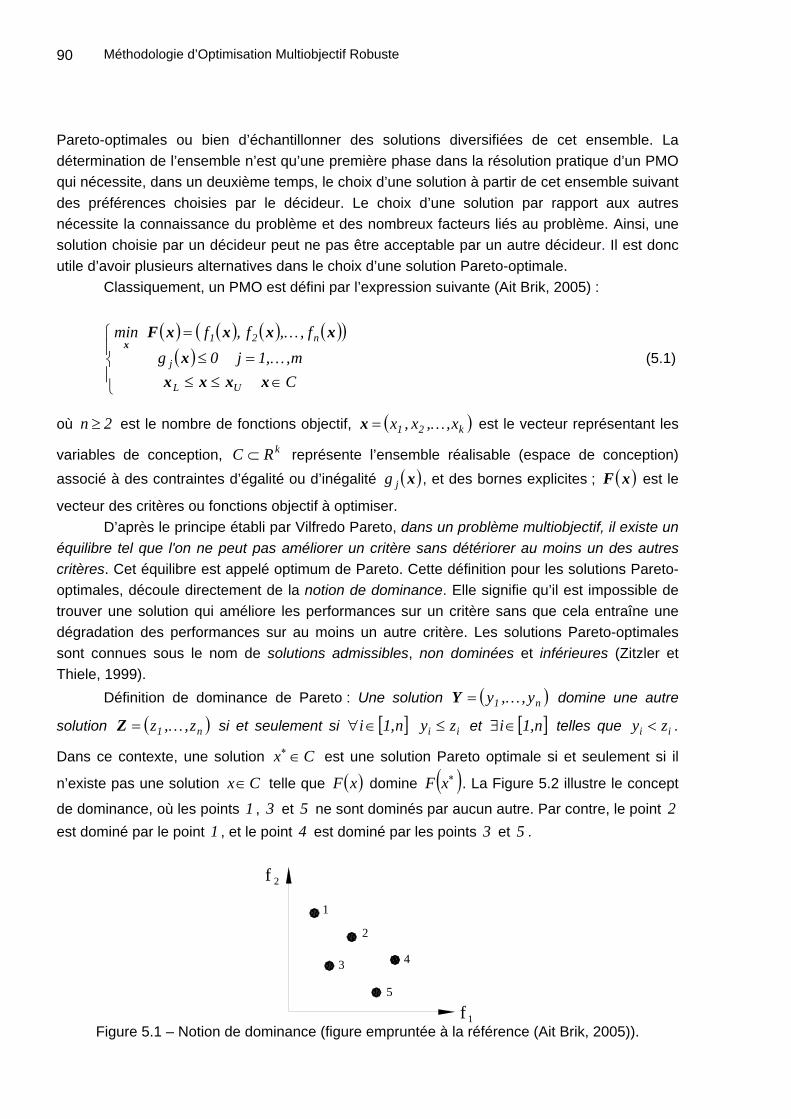
Méthodologie d’Optimisation Multiobjectif Robuste 90
Pareto-optimales ou bien d’échantillonner des solutions diversifiées de cet ensemble. La détermination de l’ensemble n’est qu’une première phase dans la résolution pratique d’un PMO qui nécessite, dans un deuxième temps, le choix d’une solution à partir de cet ensemble suivant des préférences choisies par le décideur. Le choix d’une solution par rapport aux autres nécessite la connaissance du problème et des nombreux facteurs liés au problème. Ainsi, une solution choisie par un décideur peut ne pas être acceptable par un autre décideur. Il est donc utile d’avoir plusieurs alternatives dans le choix d’une solution Pareto-optimale.
Classiquement, un PMO est défini par l’expression suivante (Ait Brik, 2005) :
( ) ( ) ( ) ( )( )( )
⎪⎩
⎪⎨
⎧
∈≤≤=≤
=
Cm,,1j0g
f,,f,fmin
UL
j
n21
xxxxx
xxxxFx
K
K
(5.1)
où est le nombre de fonctions objectif, 2n ≥ ( )k21 x,,x,x K=x est le vecteur représentant les
variables de conception, représente l’ensemble réalisable (espace de conception) associé à des contraintes d’égalité ou d’inégalité
kRC ⊂( )xjg , et des bornes explicites ; est le
vecteur des critères ou fonctions objectif à optimiser.
( )xF
D’après le principe établi par Vilfredo Pareto, dans un problème multiobjectif, il existe un équilibre tel que l'on ne peut pas améliorer un critère sans détériorer au moins un des autres critères. Cet équilibre est appelé optimum de Pareto. Cette définition pour les solutions Pareto-optimales, découle directement de la notion de dominance. Elle signifie qu’il est impossible de trouver une solution qui améliore les performances sur un critère sans que cela entraîne une dégradation des performances sur au moins un autre critère. Les solutions Pareto-optimales sont connues sous le nom de solutions admissibles, non dominées et inférieures (Zitzler et Thiele, 1999).
Définition de dominance de Pareto : Une solution ( )n1 y,,y K=Y domine une autre
solution si et seulement si ( n1 z,,z K=Z ) [ ]n,1i ∈∀ ii zy ≤ et [ ]n,1i ∈∃ telles que .
Dans ce contexte, une solution est une solution Pareto optimale si et seulement si il
n’existe pas une solution
ii zy <
Cx ∈∗
Cx ∈ telle que ( )xF domine ( )∗xF . La Figure 5.2 illustre le concept
de dominance, où les points 1 , et 5 ne sont dominés par aucun autre. Par contre, le point est dominé par le point , et le point est dominé par les points et .
3 21 4 3 5
f 1
1
4
5
3
f 2
2
Figure 5.1 – Notion de dominance (figure empruntée à la référence (Ait Brik, 2005)).

Méthodologie d’Optimisation Multiobjectif Robuste 91
5.1.2 Choix d’une méthode d’optimisation multiobjectif.
La difficulté principale d’un problème multiobjectif ne consiste pas à chercher la solution optimale mais l’ensemble des solutions satisfaisantes, qu’on doit ensuite soumettre à une opération de classement. Les méthodes de résolution des problèmes multiobjectifs sont donc des méthodes d’aide à la décision, car le choix final sera laissé au décideur. Dans ce contexte, il existe deux types de résolution d’un problème multiobjectif (Ait Brik, 2005) : la première solution adopte un point de vue utilisateur, et consiste à ramener le problème multiobjectif à un problème simple monobjectif où les fonctions coût sont pondérées, et la résolution du problème devient alors classique, où la solution est optimale au sens de la fonction monobjectif. Le problème est que cette solution ne satisfait pas nécessairement tous les critères multiobjectifs, de plus, elle enlève toute signification au problème de départ; et enfin elle ne couvre pas l’ensemble des solutions lorsque le domaine des fonctions coût est non convexe (Das et al, 1997) ; la seconde solution est de tenter d’apporter des réponses au problème en prenant en compte l’ensemble des critères selon le concept de Pareto-optimalité. Dans la première méthode, le décideur intervient dès le début de la définition du problème, en exprimant ses préférences, afin de transformer un problème multiobjectif en un problème monobjectif. Dans la deuxième stratégie, le décideur effectue son choix dans l’ensemble des solutions proposées par le solveur multiobjectif.
Dans la plupart des cas, le décideur ne peut pas exprimer clairement ses préférences, soit parce qu’il manque d’expérience ou d’informations, soit parce que les fonctions objectif sont de natures différentes. Un inconvénient majeur est que lorsque l’espace de conception n’est pas convexe, la méthode de pondération ignore cette partie de l’ensemble Pareto-optimal (Das et al, 1997) comme illustré en Figure 5.2 ci-dessous.
f 2
f 1
domaine réalisable
optimisateur
Pareto-solutions
2f(a) (b)
domaine réalisable
optimisateur
f 1
Pareto-solutions
Figure 5.2 – Espace convexe (a) et non convexe (b). (figure adaptée de (Das et al, 1997)).
On remarque qu’il existe un certain nombre de techniques qui permettent de trouver
l’ensemble des solutions Pareto optimales (Das et al, 1997 ; Steuer, 1986). Les principaux avantages de ces méthodes sont que les solutions optimales sont indépendantes des préférences du décideur et que l'analyse peut être exécutée seulement une fois, car l'ensemble de Pareto ne changera pas pourvu que la description de problème demeure sans changement. Une difficulté rencontrée c’est que généralement le nombre des solutions sur le front de Pareto est très grand, ce qui pose un problème au décideur pour faire un choix entre ces solutions. Cependant, il existe des méthodes qui peuvent résoudre ce problème en regroupant les

Méthodologie d’Optimisation Multiobjectif Robuste 92
solutions dans des familles qui ont des propriétés semblables (Rosenmann et Gero, 1985 ; Morse, 1980). 5.1.3 Algorithmes évolutionnaires (EAs).
Les algorithmes génétiques sont des algorithmes d’exploration fondés sur les mécanismes de la sélection naturelle et de la génétique. Ils utilisent à la fois les principes de la survie des individus les mieux adaptés, et des échanges d'informations pseudo-aléatoires. Ces algorithmes tentent de maximiser une fonction profit (positive) en générant au hasard une population initiale de solutions potentielles, pour la faire évoluer au gré des opérateurs génétiques. Il existe plusieurs variantes des algorithmes évolutionnaires pour résoudre un problème multiobjectif, comme par exemple, la méthode VEGA (Vector Evaluated Genetic Algorithm) (Schaffer, 1985) ; la méthode MOGA (Multiple Objective Genetic Algorithm) (Fonseca, 1993) ; la méthode SPEA (Strength Pareto Evolutionary Algorithm) (Zitzler, 1998); et celle qu’on a choisi dans ce mémoire, appelé NSGA (Non dominated Sorting Genetic Algorithm), proposée par Srinivas et Deb (1993).
Le NSGA est basé sur le concept de dominance de Pareto et les solutions sont classées en rang, procédure appelée « ranking », où les individus qui ne sont pas dominés, sont affectés au front n°1 , puis ils sont éliminés de la population. L’ensemble suivant d’individus non dominés est identifié et affecté au rang 2 , et par la suite. Cette procédure est réitérée jusqu’à ce que tous les individus de la population aient un rang.
Figure 5.3 – Classification des solutions par rang d’un PMO.
A titre d’exemple, la Figure 5.3 ci-dessus considère le classement des solutions
optimales au sens de Pareto, issues d’un problème d’optimisation multiobjectif d’une poutre encastrée-libre traitée par couche contrainte, où les fonctions coût et sont,
respectivement, les amplitudes de vibration du système amorti associées au premier et au deuxième modes.
1f 2f

Méthodologie d’Optimisation Multiobjectif Robuste 93
Après le classement de chaque population en rang, on attribue à chaque individu une
valeur appelée « fitness » telle que ix
if r1fi = avec r égale au rang de cet individu. L’objectif
de la résolution d’un problème multiobjectif n’est pas seulement de trouver l’ensemble Pareto-optimal, mais aussi des solutions que soient uniformément réparties dans cet ensemble (Srinivas et Deb, 1993). Pour cela, il est nécessaire d’introduire la technique de formation des niches. Les valeurs de la fonction fitness sont ainsi divisées par la fonction de niche (sharing) suivante :
( )( ) ( ) ( )( )⎩
⎨⎧
≥<−
=σσσ
ji
jijiji x,xdif0
x,xdifx,xd1x,xdsh (5.2)
où et sont des individus ; est la fonction de niche ; ix jx sh σ est une constante fixée par le
décideur afin de définir l’intervalle des niches ; ( )ji x,xd est la distance euclidienne entre deux
individus et . Après la définition de la fonction de fitness, on utilise les opérations standard
d’un algorithme génétique comme sélection, croisement et mutation (Figure 5.4). ix jx
Front = 1
Population initiale gen = 0
population classée?
Selection, croisement, mutation
gen <max?
Stop
gen+1
Recherche des individus non dominés
Fitness
Sharing
Front+1
oui
non
oui
non
Figure 5.4 – Stratégie NSGA (figure empruntée à la référence (Ait Brik, 2005)).
Plusieurs auteurs montrent que cette méthode paraît moins efficace en termes du temps de calcul que les autres méthodes multiobjectif, mais l'utilisation d'un sharing sur l'espace de solutions maintient une grande diversité des populations permettant de répartir plus efficacement les solutions sur le Front de Pareto. De plus, cette méthode est applicable dans des problèmes avec un nombre quelconque d'objectifs (Srinivas et Deb, 1993).
5.2 Optimisation multiobjectif robuste
L’optimisation robuste a les mêmes caractéristiques que l’optimisation déterministe au
niveau du traitement des données, mais tient compte des incertitudes sur les variables de conception et sur les fonctions objectif, ainsi que dans le traitement des contraintes (Lee et

Méthodologie d’Optimisation Multiobjectif Robuste 94
Park, 2001). En ingénierie mécanique, ces incertitudes sont inhérentes aux défauts de modélisation, aux variations des propriétés mécaniques des matériaux, tolérances des processus de fabrication et d’assemblage (épaisseurs de tôles, jonctions, etc.), etc. Dans une phase de conception en avant projet, ces incertitudes sont introduites pour prendre en compte la méconnaissance de certaines variables de conception, ce qui rend toute importance à ces méthodes d’optimisation.
Dans le Chapitre 6 on défini les principaux sources d’incertitudes et l’approche couramment employé en dynamique pour résoudre les systèmes stochastiques. 5.2.1 Prise en compte de la robustesse dans la recherche d’un optimum.
Dans le domaine de l’optimisation des structures amorties par matériaux viscoélastiques, la prise en compte de la robustesse des solutions est essentielle dans la recherche d’une conception optimale du système traité, car il est bien connu qu’une solution théoriquement excellente peut s’avérer catastrophique en pratique si les erreurs commises lors de la fabrication ne permettent pas d’obtenir les valeurs optimales des variables de conception avec une précision suffisante (Ait Brik, 2005). Même un faible écart par rapport à leur valeur optimale théorique pourra se traduire par un comportement très éloigné de celui prévu par l’optimisation numérique (contraintes d’optimisation non satisfaites par exemple). Dans ce contexte, une solution sous optimale mais stable vis-à-vis des tolérances de fabrication sera beaucoup plus intéressante pour le concepteur.
L’approche la plus courante consiste d’abord à prendre des marges sur les contraintes imposées, puis à vérifier a posteriori que la solution trouvée par une optimisation déterministe reste stable lorsque les différentes variables décrivent les intervalles de tolérance estimés. Cette vérification peut être faite par des méthodes probabilistes comme les simulations de Monte Carlo (MC), ou par la méthode d’Hyper Cube Latin (HCL). Par ailleurs, des méthodes dites « possibilistes », basées sur l’arithmétique des intervalles, ont été développées pour évaluer la variation des réponses lorsque les paramètres décrivent les intervalles (Braibant et al, 1998 ; Dessombz et al, 2001). D’autres auteurs ont proposé l’évaluation de la robustesse des optima seulement à la fin du processus d’optimisation (Bennet, 1990). Les principaux inconvénients de ces stratégies sont : le besoin systématique des expressions analytiques de la fonction objectif et l’utilisation de la pondération de ces fonctions, qui exclut la recherche d’éventuelles solutions dans les régions non convexes de l’espace des solutions robustes ; on trouve des zones de robustesse et non des solutions optimales et robustes. 5.2.2 Critère de robustesse en optimisation multiobjectif
Pour définir la robustesse d’une fonction objectif, on considère comme exemple une
fonction coût à un seul paramètre, comme illustrée en Figure 5.5, contenant deux solutions optimales A et B, respectivement. La solution A est l’optimum déterministe, et la solution B est l'optimum robuste. La performance de l'optimum déterministe est meilleure que celle de l'optimum robuste. Cependant, sa distribution est plus large que l'optimum robuste.

Méthodologie d’Optimisation Multiobjectif Robuste 95
Α
Β
∆ 1x
1x
1f(x )
x∆ 1
Figure 5.5 – Solutions optimales robustes (figure adaptée de (Lee et Park, 2001)).
Une fonction de robustesse est un estimateur qui permet d’évaluer l’impact des
variations des paramètres de conception sur la fonction objectif. Généralement la construction d’une fonction de robustesse est basée sur la moyenne ( µ ) et l’écart type (σ ) des fonctions
coût. Dans ce mémoire, on utilise l’approche robuste proposée par Ait Brik (2005), où la
fonction robustesse d’une fonction objectif rf ( )xf est définie par le rapport entre la valeur
moyenne et l’écart type, exprimée sous la forme suivante :
( 1ff
rf −= µσ ) (5.3) où le rapport ( )ff µσ mesure la dispersion, étant nommée fonction vulnérabilité de ( )xf ,
dénoté par . La Figure 5.6 illustre la méthode utilisée dans ce mémoire, dans le but de
trouver des solutions du problème posé au concepteur, en tenant compte des incertitudes sur les paramètres de conception au cours de l’optimisation des structures amorties par matériaux viscoélastiques. Pour cela on défini un nouveau problème d’optimisation multiobjectif robuste (POMR) capable de trouver les optima stables lorsque les paramètres de conception sont aléatoires. Dans ce nouveau problème d’optimisation, l’intérêt est d’optimiser simultanément les fonctions coût initiales et leurs robustesses. Le PMO initial est défini par l’expression (5.1), alors que le PMOR est exprimé comme suit :
( )xf v
( ) ( ) ( ) ( ) ( ) ( ) ( )( )
( )⎪⎩
⎪⎨
⎧
∈≤≤=≤
=∗
Cm,,1j0g
,f,f,,f,f,f,fmin
UL
j
vnn
v22
v11
xxxxx
xxxxxxxFx
K
K
(5.4)
où est la fonction vulnérabilité de la fonction objectif ( )xv
if ( )xif et . N,,1i K=
Les solutions robustes vis-à-vis des incertitudes sont celles qui permettent de minimiser simultanément les fonctions coût initiales et de maximiser leurs robustesses, ou de minimiser leurs vulnérabilités.

Méthodologie d’Optimisation Multiobjectif Robuste 96
Initialisation
Optimisation Robuste Optimisation Déterministe
Fonctions objectif Fonctions robustesse
Algorithmes génétiques
Solutions robustesSolutions déterministes
Algorithmes génétiques
Fonctions objectif
Figure 5.6 – Méthodologie d’optimisation multiobjectif robuste
(figure empruntée à la référence (Ait Brik, 2005))
Une fois le problème d’optimisation robuste défini, le problème consiste à évaluer numériquement la fonction robustesse de manière simple et avec un nombre d’échantillons aussi réduit que possible, puisqu’il ne s’agit pas seulement de caractériser un optimum, mais d’intégrer un critère de robustesse à l’algorithme de recherche. Une solution économique consiste à remplacer un tirage aléatoire classique de Monte Carlo (Papadrakakis et Kotsopulos, 1999) par la méthode d’Hyper Cube Latin (HCL) (Florian, 1992). D’autres méthodes peuvent être utilisées pour résoudre le problème du temps de calcul comme les métamodèles basés sur les surfaces de réponse ou les réseaux de neurones, comme montrés au Chapitre 4, et l’approche non-paramétrique (Soize, 1999 ; 2000).
Comme montré dans le Chapitre 4, les métamodèles sont des outils d’approximation pour approcher les fonctions coût par des polynômes, pour les surfaces de réponses, ou par un modèle non linéaire, pour les réseaux de neurones. La stratégie consiste à évaluer l’effet des incertitudes des paramètres de conception sur les fonctions approchées et non pas sur les fonctions exactes. Cette stratégie permet de réduire considérablement le temps de calcul surtout pour les modèles viscoélastiques de grande taille. L’utilisation de l’approche non paramétrique présente aussi une alternative intéressante lorsque la structure mécanique est définie par un modèle élément fini et l’évaluation des fonctions coûts est relativement coûteuse, comme dans les problèmes de dynamique des structures d’une manière générale. 5.3 Analyse des données a posteriori – la méthode SOM
Dans certains problèmes multiobjectif, l'ensemble des solutions Pareto-optimales est très grand, et dans ce cas, l’utilisation et l’analyse de cet ensemble de données sont très compliquées surtout si l’espace des fonctions coût est de grande dimension (problème d’optimisation multiobjectif de dimension supérieure à trois) (Morse, 1980). Dans ces conditions, les solutions obtenues sont pratiquement inexploitables par le concepteur. Pour cette raison, on utilise alors une technique de clustering ou de regroupement des données similaires pour supprimer un certain nombre de solutions. Cette procédure est justifiée par deux raisons principales : la première c’est que dans le cas d'une frontière de Pareto continue, garder toutes

Méthodologie d’Optimisation Multiobjectif Robuste 97
les solutions n'est pas nécessaire ; et la deuxième c’est d’éviter des temps de calcul importants lorsque l'ensemble de Pareto est relativement grand.
Parmi les plusieurs techniques de datamining, dans ce mémoire, on est particulièrement intéressé aux cartes auto-organisatrices proposées par Kohonen (1982), appelée cartes SOM (Self Organising Map). Elles sont des outils simples d'analyse et de visualisation de données par une représentation synthétique de l’information, permettant une visualisation des données souvent en deux ou trois dimensions nettement plus intéressante dans de nombreux cas qu'une analyse en composantes principales (PCA) (Besse, 2002).
La Figure 5.7 montre le principe général de la technique SOM. A partir des entrées, qui peuvent être par exemple, des solutions d’un problème d’optimisation multiobjectif, après l’application des ces cartes, on a les clusters (ensembles des points semblables au sens d’un certain critère). Ensuite, il faut visualiser ces groupes, et parmi les plusieurs méthodes de visualisation qui peuvent être utilisées pour représenter les résultats obtenus à l’aide de SOM, on peut utiliser le mappage de Sammon, les U-matrices, les plans de projection des données, etc. (Vesanto, 2000). Dans ce mémoire on utilise la technique les U-matrices.
les entrées cartes Kohonen Clusters Visualisation Figure 5.7 – Analyse de données avec le SOM
(figure empruntée à la référence (Ait Brik, 2005)).
Pour mieux comprendre le fonctionnement et l’utilisation du SOM, on prend les solutions optimales mieux classées au rang 1, montrées en Figure 5.3. On applique la technique SOM sur cet ensemble, afin de regrouper les données en différents clusters, comme montré en Figure 5.8, identifiés par les différentes couleurs.
Figure 5.8 – Visualisation et regroupement des 12 clusters dans l’espace des fonctions coût.

Méthodologie d’Optimisation Multiobjectif Robuste 98
5.3.1 SOM : outil d’aide à la décision dans les problèmes d’optimisation multiobjectif
Dans ce mémoire, on s’intéresse à la technique SOM en post-traitement (technique a posteriori) après la phase d’optimisation multiobjectif comme illustré en Figure 5.9. On applique le SOM sur l’espace des fonctions coût afin de créer les clusters et d’organiser cet espace, comme illustré en Figure 5.8. Les valeurs de fonctions coût qui sont semblables sont regroupées dans un même groupe, ce qui permet de réduire considérablement la dimension de l’espace de ces fonctions. Ensuite le concepteur peut choisir un cluster quelconque. Normalement, on préfère le cluster qui garde le mieux compromis entre les fonctions coût. On explore les paramètres de conception par rapport au cluster choisi, et ensuite on applique la technique SOM une fois de plus dans l’espace de conception pour en réduire le nombre de variables, en se basant sur leurs corrélations (Ait Brik, 2005).
Solutions optimales
SOM (clusters)
Choix d'un cluster Paramètres de conception pour ce cluster
Elimination des paramètres non influents
Re-optimisation (paramètres réduits)
Figure 5.9 – SOM en post-traitement de donnés.
Comme illustration de l’efficacité de la méthode SOM appliquée aux solutions Pareto-
optimales afin de réduire le nombre de solutions sur le front de Pareto et aussi de trouver les éventuelles corrélations entre les paramètres de conception optimaux, on s’intéresse au cluster numéro 12, représenté en Figure 5.8. Pour ce cluster, on examine les tendances dans l’espace de conception en appliquant la technique SOM. Pour cela, on considère que le problème de départ était composé par 8 variables de conception. Pour la visualisation des corrélations entre les variables, on utilise les U-matrices, comme montré en Figure 5.10, qui permet de mettre en évidence les 8 variables de conception et leurs corrélations.
Figure 5.10 – Corrélation entre les paramètres de conception – Les U-matrices.
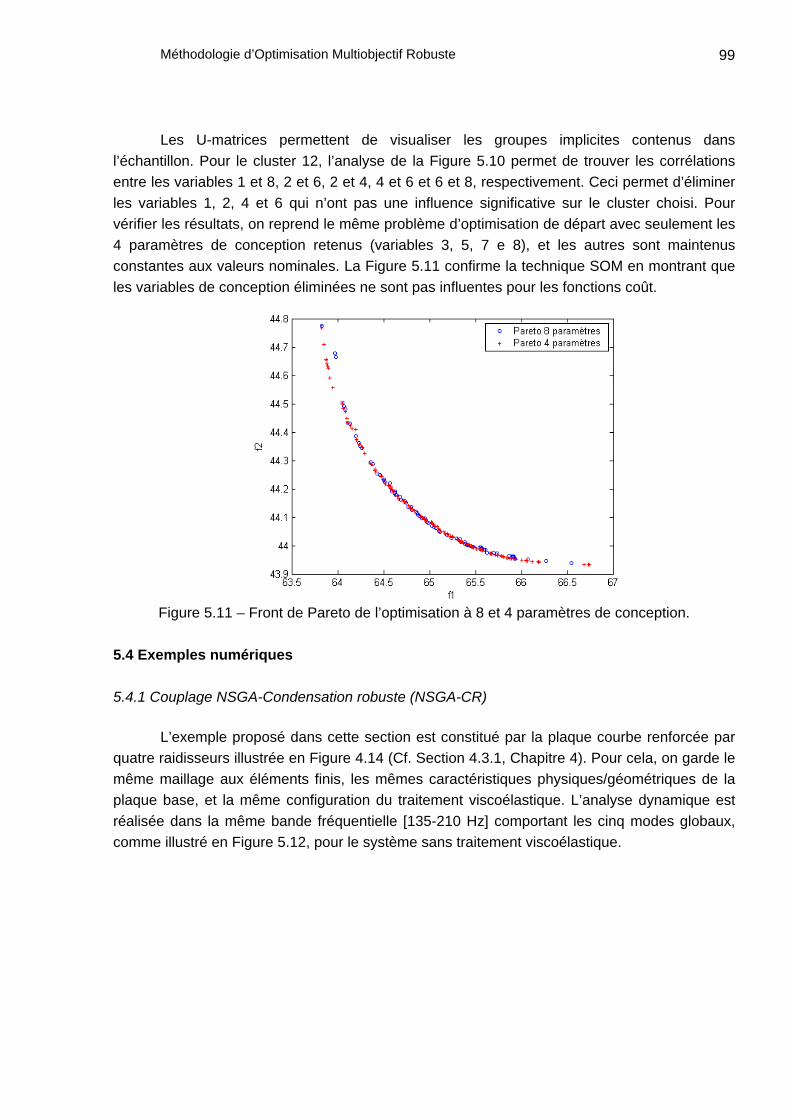
Méthodologie d’Optimisation Multiobjectif Robuste 99
Les U-matrices permettent de visualiser les groupes implicites contenus dans l’échantillon. Pour le cluster 12, l’analyse de la Figure 5.10 permet de trouver les corrélations entre les variables 1 et 8, 2 et 6, 2 et 4, 4 et 6 et 6 et 8, respectivement. Ceci permet d’éliminer les variables 1, 2, 4 et 6 qui n’ont pas une influence significative sur le cluster choisi. Pour vérifier les résultats, on reprend le même problème d’optimisation de départ avec seulement les 4 paramètres de conception retenus (variables 3, 5, 7 e 8), et les autres sont maintenus constantes aux valeurs nominales. La Figure 5.11 confirme la technique SOM en montrant que les variables de conception éliminées ne sont pas influentes pour les fonctions coût.
Figure 5.11 – Front de Pareto de l’optimisation à 8 et 4 paramètres de conception.
5.4 Exemples numériques 5.4.1 Couplage NSGA-Condensation robuste (NSGA-CR)
L’exemple proposé dans cette section est constitué par la plaque courbe renforcée par quatre raidisseurs illustrée en Figure 4.14 (Cf. Section 4.3.1, Chapitre 4). Pour cela, on garde le même maillage aux éléments finis, les mêmes caractéristiques physiques/géométriques de la plaque base, et la même configuration du traitement viscoélastique. L’analyse dynamique est réalisée dans la même bande fréquentielle [135-210 Hz] comportant les cinq modes globaux, comme illustré en Figure 5.12, pour le système sans traitement viscoélastique.
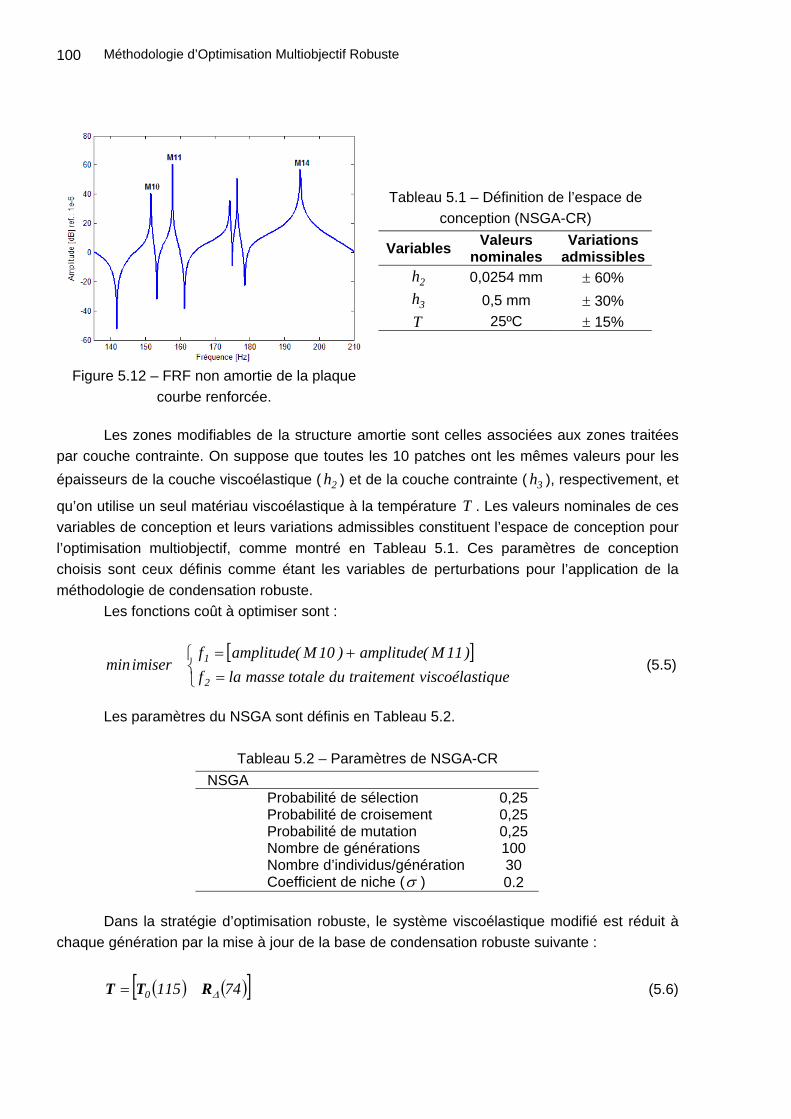
Méthodologie d’Optimisation Multiobjectif Robuste 100
Figure 5.12 – FRF non amortie de la plaque
courbe renforcée.
Tableau 5.1 – Définition de l’espace de conception (NSGA-CR)
Variables Valeurs nominales
Variations admissibles
2h 0,0254 mm ± 60%
3h 0,5 mm ± 30% T 25ºC ± 15%
Les zones modifiables de la structure amortie sont celles associées aux zones traitées
par couche contrainte. On suppose que toutes les 10 patches ont les mêmes valeurs pour les épaisseurs de la couche viscoélastique ( ) et de la couche contrainte ( ), respectivement, et
qu’on utilise un seul matériau viscoélastique à la température 2h 3h
T . Les valeurs nominales de ces variables de conception et leurs variations admissibles constituent l’espace de conception pour l’optimisation multiobjectif, comme montré en Tableau 5.1. Ces paramètres de conception choisis sont ceux définis comme étant les variables de perturbations pour l’application de la méthodologie de condensation robuste.
Les fonctions coût à optimiser sont :
[ ]⎩⎨⎧
=+=
iqueviscoélasttraitementdutotalemasselaf)11M(amplitude)10M(amplitudef
imisermin2
1 (5.5)
Les paramètres du NSGA sont définis en Tableau 5.2.
Tableau 5.2 – Paramètres de NSGA-CR
NSGA Probabilité de sélection 0,25 Probabilité de croisement 0,25 Probabilité de mutation 0,25 Nombre de générations 100 Nombre d’individus/génération 30 Coefficient de niche (σ ) 0.2
Dans la stratégie d’optimisation robuste, le système viscoélastique modifié est réduit à
chaque génération par la mise à jour de la base de condensation robuste suivante :
( ) ( )[ 741150 ∆RTT = ] (5.6)

Méthodologie d’Optimisation Multiobjectif Robuste 101
où est la base de réduction nominale. On précise que la qualité de
prédiction du modèle nominal condensé par l’utilisation de cette base a été vérifiée en Section
4.3.1, au Chapitre 4. Les résidus statiques
( ) ( ) ( )[ 5416000
0RRT ∆φ= ]
( )74∆R sont associés aux modifications des
paramètres et au cours de l’optimisation, pour les zones viscoélastiques. 2h 3h
La Figure 5.13.a montre les solutions optimales obtenues par les stratégies NSGA (prise comme référence) et NSGA-CR. On remarque que les solutions sont comparables. On précise que pour la stratégie NSGA on utilise le modèle nominal condensé construit par la base de
réduction , où à chaque génération, les modes 0T ( )600φ du système SCA, sont obtenus par la
résolution du problème au valeurs propres du système modifié. La Figure 5.13.b compare les Fronts de Pareto pour les fonctions coût pour les deux approches d’optimisation. On peut conclure que la stratégie NSGA-CR représente de forme raisonnable la réponse du système amorti modifié, comme démontré par la similitude des deux nuages des solutions optimales.
(a) (b)
Figure 5.13 – Solutions NSGA et NSGA-CR (a); Premiers Fronts de Pareto (b).
Ces résultats sont confirmés par le calcul de la distance de Mahalanobis, comme on montre en Tableau 5.3, en mettant en évidence que les deux clusters de solutions sont comparables au sens de la norme adoptée.
La distance de Mahalanobis est définie comme suit :
[ ] [ 211-
21 xxSxx −−= T2MD ] (5.7)
où et sont deux nuages de points, et est la matrice de covariance entre et . 1x 2x S 1x 2x
Tableau 5.3 – Distances de Mahalanobis (NSGA-CR) Nuage 1/Nuage 2
50,0DminM = 5,18Dmean
M = 2,33DmaxM =

Méthodologie d’Optimisation Multiobjectif Robuste 102
Pour cet exemple, la comparaison des temps CPU (Tableau 5.4) montre que le couplage NSGA-CR permet une réduction du coût de calcul significative, avec un rapport de réduction d’environ 42%, ce qui démontre l’intérêt de coupler la stratégie de condensation robuste avec les algorithmes itératifs d’optimisation et/ou recalage de modèles.
Tableau 5.4 – Temps de calcul (NSGA-CR) Stratégie CPU Time [min] Rapport [%]
NSGA 1558 NSGA-CR 900 42
5.4.2 Couplage NSGA-réseaux de neurones (NSGA-PMC)
Pour cet exemple, on considère la même structure de la section précédente, sauf que dans ce cas le traitement viscoélastique est composé par 15 patches viscoélastiques, dont chacune est composée par 16 éléments finis de plaque sandwich à trois couches. De plus, dans le but de vérifier la capacité des réseaux de neurones pour approcher des problèmes complexes à plusieurs entrées de natures différentes, on suppose que les positions de patches ne sont pas fixées, et qu’on souhaite optimiser la position de chaque patch. Par conséquent, pour le problème d’optimisation, il y a un total de 45 variables définissant l’espace de conception : 31 variables continues (15 pour les épaisseurs de couches viscoélastiques, 15 pour les épaisseurs de couches contraintes, et la température du matériau) ; et 15 variables discrètes représentant les positions de patches.
Le Tableau 5.5 représente les variables de conception exprimées en termes de leurs valeurs nominales et leurs variations admissibles. Les trois fonctions coût à optimiser sont :
⎪⎩
⎪⎨
⎧
===
)14M(amplitudef)11M(amplitudef)10M(amplitudef
imisermin
3
2
1
(représenté en Figure 5.12) (5.8)
Tableau 5.5 – Définition de l’espace de conception (NSGA-PMC)
Variables de conception
Valeurs nominales
Variations admissibles
( )patches15,...,1ih i2 = 0,0254 mm ± 60% ( )patches15,...,1ih i3 = 0,5 mm ± 30% Continue
T 25ºC ± 15%
Discrète Positions des patches
Seulement les valeurs minimales et maximales admissibles des variables continues définies précédemment sont prises comme contraintes dans le problème d'optimisation. Les paramètres du NSGA-PMC sont définis dans le Tableau 5.6.

Méthodologie d’Optimisation Multiobjectif Robuste 103
Tableau 5.6 – Paramètres de NSGA-PMC NSGA PMC
Probabilité de sélection 0,25 Probabilité de croisement 0,25 Probabilité de mutation 0,25 No. de couches cachées 2 Nombre de générations 100 No. de neurones par couche 20 Nombre d’individus/génération 30 Coefficient de niche (σ ) 0,2
La Figure 5.14.a montre les solutions obtenues à travers les stratégies NSGA et NSGA-
PMC. On précise que pour ces deux processus, on utilise la procédure de condensation robuste. Par la comparaison entre les premiers Fronts de Pareto pour les fonctions coût et
, on remarque que l'approche NSGA-PMC représente la réponse du système amorti, comme
démontré par la similitude des deux nuages des solutions optimales (Figure 5.14.b).
1f
2f
L’erreur quadratique tolérée pour l’apprentissage et la validation du PMC est de 10-3. Si au cours de l’optimisation, la valeur de l’erreur quadratique dépasse la valeur fixée a priori, il y a une augmentation automatique du nombre de neurones dans chaque couche cachée. Cette stratégie permet de construire à chaque fois un réseau de neurones capable de mieux approcher les réponses exactes du système amorti modifié.
Figure 5.14 – Solutions NSGA et NSGA-PMC (a); Fronts de Pareto (b).
Dans le Tableau 5.7 on montre la distance de Mahalanobis, calculée pour les solutions
optimales représentées en Figure 5.14.b, mettant en évidence l’approximation entre les deux clusters au sens de la norme adoptée.
Tableau 5.7 – Distances de Mahalanobis (NSGA-PMC) Nuage 1/Nuage 2
8,0DmaxM = 01,0Dmin
M = 005,0DmeanM =
Le nombre total de générations pour trouver les solutions optimales a été limité à 100,
ce qui signifie que le nombre maximal d’évaluations des fonctions coût en utilisant la stratégie

Méthodologie d’Optimisation Multiobjectif Robuste 104
NSGA est 3000. Le but d'introduire le métamodèle (couplage NSGA-PMC) est de réduire le nombre d'évaluations du problème exact pendant le processus d'optimisation. Pour cela, le PMC est mis à jour à chaque 20 générations après la génération 5, permettant de ramener le nombre d'évaluations exactes de 3000 à 170. Le temps de calcul (temps de CPU) pour les deux approches d'optimisation sont donnés au Tableau 5.8, ce qui mène à conclure que le couplage entre l’algorithme génétique NSGA et les réseaux de neurones permet une réduction drastique du temps de calcul pendant le processus d'optimisation.
Tableau 5.8 – Temps de calcul (NSGA-PMC) Stratégie CPU Time [min] Rapport [%]
NSGA 2016,2 NSGA-PMC 180 91
On évalue maintenant les solutions optimales correspondantes aux points A, B et C,
indiqués en Figure 5.14.b. Pour cela, on compare les amplitudes de vibrations amorties (FRFs) associées au point P (voir Figure 4.14) du système sans et avec traitement viscoélastique. Par la comparaison entre les Figures 5.14.b et 5.15, on remarque que pour le point A, les solutions optimales mènent à une meilleure atténuation de la réponse pour le mode M10. Par contre, pour le point C, la solution optimale conduit à une meilleure atténuation pour le mode M11 (Figure 5.16. Finalement pour le point B, comme prévu, la solution mènent à des atténuations semblables pour les modes M10 et M11 (Figure 5.17).
Figure 5.15 – FRFs pour le point A

Méthodologie d’Optimisation Multiobjectif Robuste 105
Figure 5.16 – FRFs pour le point C
Figure 5.17 – FRFs pour le point B
Comme illustration, la Figure 5.18 montre les positions optimales des patches
viscoélastiques issus du processus d’optimisation pour le point B. Les valeurs optimales des épaisseurs des couches viscoélastiques et contraintes sont aussi indiquées en Tableau 5.9. Pour ce point, la valeur optimale de la température du matériau viscoélastique est 22,5ºC.
Figure 5.18 – Positions optimales de patches viscoélastiques (point B)

Méthodologie d’Optimisation Multiobjectif Robuste 106
Tableau 5.9 – Valeurs optimales des épaisseurs de chaque patch (point B) patches 1,4,7,10,13 patches 2,5,8,11,14 patches 3,6,9,12,15 h2 [m] h3 [m] h2 [m] h3 [m] h2 [m] h3 [m]
1,58×10-5 1,25×10-3 1,65×10-5 0,97×10-3 1,54×10-5 1,25×10-3
1,54×10-5 1,25×10-3 1,54×10-5 1,25×10-3 1,54×10-5 0,40×10-3
1,54×10-5 1,05×10-3 1,54×10-5 1,25×10-3 1,54×10-5 1,17×10-3
1,54×10-5 1,20×10-3 2,45×10-5 1,25×10-3 1,54×10-5 1,25×10-3
1,54×10-5 0,95×10-3 1,54×10-5 1,25×10-3 1,54×10-5 1,25×10-3
5.4.3 Couplage NSGA-RSM et NSGA-ARSM.
Pour illustrer la procédure de couplage entre les algorithmes génétiques multiobjectif, et les surfaces de réponses pour l’optimisation de systèmes viscoélastiques, on considère le même système abordé en Section 5.4.1. De cette façon, les variables de conception qui seront considérées dans le processus d’optimisation avec leurs variations admissibles sont celles représentées en Tableau 5.1, qui ont été utilisées pour générer les polynômes donnés en Section 4.3.3, au Chapitre 4, qu’on rappelle ici :
• RSM classique
23
22
2132
31213211
X8471.1X086663.0X43194.0XX61575.0
...XX058855.0XX04243.0X2375.7X5322.3X3968.3498.34y
−++
++−++−=
312 X0015336.0X042901.014556.0y ++=
• ARSM
23
22
2132
31213211
X8321.1X072274.0X44414.0XX60234.0
...XX051235.0XX059721.0X2603.7X55566.3X3858.3488.34y
−++
++−++−=
312 X0015336.0X042901.014556.0y ++=
On rappelle que les fonctions et , représentent, respectivement, les approximations des fonctions coût, et (expression (5.5)). Les variables , et , sont les variables auxquelles on doit appliquer la technique de décodification suivante :
1y 2y
1f 2f 1X 2X 3X
( ) ( )min
3max3331 hhhhX −−= ; ( ) ( )minmax
2 TTTTX −−= ; ( ) ( )min2
max2223 hhhhX −−=
Les solutions NSGA de référence sont celles obtenus en Section 5.4.1 à travers
l’utilisation des mêmes caractéristiques définies en Tableau 5.2. La Figure 5.19 montre la comparaison entre les Fronts de Pareto obtenus par les processus NSGA (référence), NSGA-RSM et NSGA-ARSM, respectivement. On remarque une bonne concordance entre les nuages de solutions optimales calculées par les deux approches.

Méthodologie d’Optimisation Multiobjectif Robuste 107
(a) (b)
Figure 5.19 – Solutions NSGA et NSGA-RSM (a), et NSGA et NSGA-ARSM (b).
(a) (b)
Figure 5.20 – Fronts de Pareto pour NSGA-RSM (a), et NSGA-ARSM (b).
Pour cet exemple, la comparaison des temps CPU (Tableau 5.10) montre que le couplage NSGA-RSM/ARSM permet une réduction significative des coûts de calcul avec un rapport de réduction minimum d’environ 82%.
Tableau 5.10 – Temps de calcul (NSGA-RSM, NSGA-ARSM) Stratégie CPU Time [min] Rapport [%]
NSGA 1558 NSGA-RSM 280,85 (pol.) + 3,81 (opt.) = 284,66 82
NSGA-ARSM 133,15 (pol.) + 3,78 (opt.) = 136,51 91 où (pol.) et (opt.) signifie, respectivement, les temps pour générer les polynômes, et les temps pour l’optimisation à partir des polynômes.

Méthodologie d’Optimisation Multiobjectif Robuste 108
5.4.4 Exemple d’optimisation robuste
Dans cette section, on applique la stratégie d’optimisation multiobjectif robuste pour l’optimisation de systèmes viscoélastiques. Pour cela, on considère la même plaque courbe traitée montrée en Figure 5.18. Les variables de conception adoptées dans l’optimisation et leurs niveaux d’incertitudes sont montrées au Tableau 5.11.
Tableau 5.11 – Définition de l’espace de conception (optimisation robuste) Variables de conception
Valeurs nominales
Variations admissibles
Niveaux d’incertitudes
2h 0,0254 mm ± 60% %10h2 =∆
3h 0,5 mm ± 30% %10h3 =∆ T 25ºC ± 15% %5T =∆
Les fonctions coût à optimiser sont celles définies par l’expression (5.5). Pour chaque
fonction coût, on introduit une fonction vulnérabilité supplémentaire comme fonction à optimiser en même temps que les fonctions coût originales. On obtient ainsi le problème multiobjectif robuste (PMOR) à quatre fonctions coût :
( ) ( ) ( ) ( ) 122
v2
111
v1
v22
v11 f;foùf,f,f,fx:imisermin −− === µσµσF (5.9)
Pour trouver les solutions optimales robustes, on utilise l’algorithme NSGA couplé avec
les réseaux de neurones (PMC) avec les caractéristiques montrées en Tableau 5.6. Pour calculer les fonctions vulnérabilités, à chaque génération, on génère 200 tirages aléatoires pour chaque variable continue par la méthode d’Hyper Cube Latin (HCL). Remarque : Le nombre de générations pour trouver les solutions optimales est de 100 générations, ce qui signifie qu’il faut 3000 évaluations exactes des réponses fréquentielles, plus l’évaluation des échantillons pour calculer la fonction vulnérabilité pour chaque fonction coût, ce qui engendre un nombre prohibitif de 6x105 évaluations du problème exact. Dans ce cas, on intègre les réseaux de neurones (PMC) dans la procédure d’optimisation robuste, pour en réduire davantage le nombre d’évaluations du problème exact. Pour cela, le PMC est actualisé à chaque 20 générations à partir de la génération 5. Ainsi sur 100 générations, l’opération ne permet de faire que 170 calculs exacts.
La Figure 5.21 montre les résultats issus de l’optimisation robuste NSGA-PMC,
représentant, respectivement, chaque fonction coût et sa vulnérabilité. Dans la pratique, les fonctions vulnérabilités utilisées consistent à minimiser les dispersions autour de chaque solution trouvée. On remarque que l’intervalle de dispersion pour chaque fonction coût est :
• De 0,04% à 0,14% pour les solutions optimales correspondantes à la somme des amplitudes des modes (M10+M11) ;

Méthodologie d’Optimisation Multiobjectif Robuste 109
• De 0% à 0.07% pour les solutions optimales correspondantes à la masse totale du traitement viscoélastique.
Figure 5.21 – Fonctions coût et leurs vulnérabilités.
La Figure 5.22 représente les Fronts de Pareto des solutions robustes exactes NSGA, et
les solutions robustes obtenues par NSGA-PMC, pour les deux fonctions coût. On remarque que les solutions issues des deux procédures sont comparables.
Figure 5.22 – Comparaison entre les solutions robustes NSGA et NSGA-PMC.
Le Tableau 5.12 représente le gain en temps de calcul (temps de CPU) obtenu par la
stratégie NSGA-PMC en comparaison avec NSGA. Pour les deux cas d’optimisation, on utilise la méthode de condensation robuste.
Tableau 5.12 – Temps de calcul (NSGA-PMC) Stratégie CPU Time [jours] Rapport [%]
NSGA 23 NSGA-PMC 3,5 85
La Figure 5.23 montre une comparaison entre les solutions robustes et les solutions
déterministes. On peut conclure que les solutions déterministes dominent les solutions

Méthodologie d’Optimisation Multiobjectif Robuste 110
robustes. Néanmoins, les solutions déterministes ne sont pas robustes vis-à-vis des incertitudes sur les paramètres de conception.
Figure 5.23 – Comparaison entre les solutions déterministes et les solutions robustes.
Dans le but de vérifier la stabilité (niveau de dispersion) des solutions optimales
robustes par rapport aux solutions déterministes, on évalue les solutions optimales correspondantes aux points A et B, indiqués en Figure 5.23. Pour chaque ensemble de solutions, il s’agit de prendre aléatoirement par la méthode d’Hyper Cube Latin (HCL), 200 échantillons de points pour chaque ensemble, et de calculer les réponses, où les dispersion données autour des variables de conceptions sont : %5h2 =∆ , %5h3 =∆ et %2T =∆ .
L’examen de la Figure 5.24, montre que les solutions robustes (Figure 5.24.a) sont plus stables que les solutions déterministes (Figure 5.24.b) vis-à-vis des incertitudes introduites, ce qui montre que les solutions optimales sont assez robustes (vulnérabilités minimales) pour prendre en compte des petits perturbations.
(a) (b)
Figure 5.24 – Comparaison entre les solutions robustes (a) et déterministes (b).

Méthodologie d’Optimisation Multiobjectif Robuste 111
5.5 Conclusions
Dans cette partie du mémoire on a vérifié la procédure de couplage entre les algorithmes génétiques multiobjectif déterministes et les stratégies de réanalyse approchée et d’approximation de fonctions montrées au Chapitre 4. Pour cela, on a utilisé une structure moyennement complexe composée par une plaque courbe renforcée par des raidisseurs, partiellement traitée par couche contrainte. Dans un premier temps, on montre le couplage entre la stratégie NSGA et la méthode de condensation robuste de systèmes viscoélastiques. A travers les résultats issus des simulations numériques on a conclu que pour des raisons de coût de calcul, la réanalyse approchée par condensation robuste a un grand intérêt dans des procédures itératives d’évaluation de solutions, comme l’optimisation multiobjectif et/ou de recalage de modèles, qui requièrent un nombre élevé d’évaluations des réponses. Dans un deuxième temps, on a intégré les réseaux de neurones artificiels et les surfaces de réponses dans la procédure d’optimisation multiobjectif déterministe pour accélérer la convergence, et ainsi réduire le temps de calcul de solutions. Ceci a pu être vérifié à travers les résultats des simulations numériques. Finalement on a vérifié la procédure d’optimisation multiobjectif robuste de systèmes viscoélastiques. À cause du très grand nombre d’évaluation des fonctions vulnérabilité on a intégré les réseaux de neurones pour approcher les fonctions vulnérabilité, ce qui a permit un gain de temps très significatif pour le calcul des solutions robustes.

CHAPITRE 6
Eléments Finis Stochastiques et Analyse de Sensibilité pour la Conception Robuste de Systèmes Viscoélastiques
Dans ce chapitre, on propose un modèle de propagation des incertitudes au niveau des
éléments finis de plaque sandwich. À travers ce modèle, les incertitudes sont introduites dans les paramètres de conception les plus influents qui caractérisent le traitement viscoélastique de façon originale à travers les fonctions d’interpolation du modèle aux éléments finis dans le but d’obtenir les matrices stochastiques. Pour quantifier l’influence des variables de conception on propose une méthodologie numérique pour évaluer la sensibilité des FRFs de systèmes amortis par rapport aux paramètres géométriques et la température du matériau viscoélastique. 6.1 Quelques concepts fondamentaux
Les origines des incertitudes en mécanique vibratoire sont diverses. En effet, elles découlent des tolérances de fabrication, des conditions aux limites, des variabilités affectant les propriétés des matériaux, etc. (Schuëller, 2001). De plus, la modélisation des systèmes physiques passe généralement par une mise en équations mathématiques qui sont dans la majorité des cas difficiles à résoudre numériquement et dont le coût de résolution est élevée. On est alors amené à faire un certain nombre d’hypothèses simplificatrices pour remédier à cet inconvénient majeur, ce qui résulte alors à une source d’incertitudes qu’on doit prendre en compte dans les modèles. Ceci ce traduit par une modélisation plus coûteuse, mais aussi plus réaliste des systèmes mécaniques réels.
D’une manière générale, les incertitudes sont prises en compte dans les modèles selon l’approche non paramétrique qui permet d’introduire les incertitudes directement sur les matrices globales du modèle (Soize, 1999 ; 2000), et les approches paramétriques en utilisant principalement la méthode des éléments finis stochastiques (SFEM), qui combine l’analyse classique par éléments finis et l’analyse statistique (Ghanem et Spanos, 1991 ; Shuëller, 2001).
Dessombz (2001) défini les incertitudes au stade de conception en deux types : les incertitudes statistiques, qu’on modélise par variables aléatoires, dont on connaît bien la loi de probabilité ; et les variables incertaines et bornées, qu'on modélise par des intervalles définies par la physique. De plus, les incertitudes peuvent être classées en quatre grandes catégories :
• Les paramètres aléatoires : les paramètres physiques ou mécaniques dont on connaît bien les tolérances. Ils peuvent être, par exemple, l'épaisseur de tôles métalliques, souvent modélisée par une loi gaussienne (Ghanem et Spanos, 1991).

Eléments Finis Stochastiques et Analyse de Sensibilité pour la Conception Robuste de Systèmes Viscoélastiques
113
• Les paramètres mal connus : les conditions aux limites sont des problèmes typiques. Par exemple, un encastrement correspond à une raideur de très grande valeur, mais dont on ne connaît au mieux qu'un ordre de grandeur ; les différents types d'assemblage, tels que soudage, collage, boulonnage, etc. sont difficiles à modéliser, et il apparaît que les valeurs déterministes utilisées pour représenter ces phénomènes sont insuffisantes.
• Les paramètres variables : on peut distinguer ici les paramètres qui peuvent être
variables dans le temps, et qu'on ne maîtrise pas bien, par exemple la dégradation ou le vieillissement d'un matériau viscoélastique dans le temps.
• Les incertitudes de modèle : ce sont par exemple les lois de comportement
choisies qui représentent mal ou de façon incomplète les phénomènes physiques, les erreurs dues au choix du maillage éléments finis, de sa finesse, des éléments choisis, etc. En général, ces incertitudes sont difficiles à évaluer.
6.1.1 Techniques pour résoudre le problème stochastique
Les méthodes existantes pour résoudre les problèmes stochastiques sont normalement classés en quatre grandes catégories (Benaroya et Rehak, 1988 ; Ibrahim, 1987 ; Shuëller, 2001) : la méthode de simulation de Monte Carlo (MC) (Schinozura, 1972 ; Rubinstein, 1981 ; Papadrakakis et Kotsopulos, 1999) souvent considérée comme la méthode de référence, mais qui a l’inconvénient d’être très coûteuse en temps et en quantité de calculs. Comme alternative, la méthode d’Hyper Cube Latin (HCL) (Iman et Conover, 1980 ; Florian, 1992 ; Mantefel et Randall, 2000) a été proposé, permettant de réduire de manière significative le coût de calcul de la simulation de Monte Carlo tout en conservant son niveau de prédiction ; les méthodes de perturbation qui sont basées sur des expansions en série de Taylor (Kleiber et Hien, 1992 ; Alvin, 1998) ou en série de Neumann (Yamazaki et Schinozuka, 1988 ; Lei et Qiu, 2000), des réponses autour des moyennes des variables aléatoires ; et les méthodes spectrales qui utilisent des fonctions de base de l’espace de Hilbert associées aux problèmes aléatoires (Ghanem et Spanos, 1991 ; Ghanem et Kruger, 1996). Ces fonctions peuvent être des polynômes orthogonaux d’une façon générale, et un chaos polynomial en particulier. Dans ce cas, on utilise des variables aléatoires où les champs aléatoires continus sont discrétisés. Ces catégories de méthodes prennent en compte des variables aléatoires dont on connaît la densité de probabilité. Des variables gaussiennes sont employées dans la plupart des cas ou bien on se ramène par diverses méthodes à un ensemble de variables gaussiennes (Ghanem et Spanos, 1991).
Dans ce mémoire, pour l’analyse dynamique des structures stochastiques viscoélastiques, on est particulièrement intéressé à la méthode d’Hyper Cube Latin (LHC).

Eléments Finis Stochastiques et Analyse de Sensibilité pour la Conception Robuste de Systèmes Viscoélastiques
114
6.2 Formulation général du modèle EF viscoélastique stochastique 6.2.1 Discrétisation des champs aléatoires
Un champ aléatoire ( )θ,xH est une collection de variables aléatoires indexées par un
paramètre continu Ω∈x , où dR∈Ω est un ensemble ouvert décrivant la géométrie du système du système physique. Une procédure de discrétisation est basée sur l’approximation
de ( )θ,xH par ( θ,xH )ˆ . Parmi les familles de méthodes utilisées pour discrétiser spatialement
un champ stochastique, dont la taille du maillage éléments finis dépend de la longueur de corrélation du champ aléatoire, on utilise dans ce mémoire les méthodes appelées Series Expansion Methods (Ghanem et Spanos), qui consistent à coupler un développement en série du champ aléatoire et une analyse spectrale visant à sélectionner les termes les plus importants. Parmi les trois méthodes intégrées dans cette catégorie, on détaille le développement de Karhunen-Loève (KL) proposé par Ghanem et Spanos (1991). La discrétisation par KL d’un champ gaussien homogène, est écrit sous la forme suivante :
( ) ( ) (∑=
+=n
1rrr xH,xH θξµθ )
(6.1)
où n,...,1i,r =ξ sont des variables aléatoires gaussiennes centrées réduites
indépendantes (moyenne zéro et variance un) ; ( ) n,...,1r,xH r = sont des fonctions
déterministes ; et x et θ sont, respectivement, le vecteur position du champ et une variable appartenant à l’espace des événements aléatoires.
Soit la fonction de covariance connue associée à ( 21 x,xC ) ( )θ,xH , bornée, symétrique
et définie positive. La décomposition spectrale de ( )21 x,xC est exprimée comme suit (Ghanem
et Spanos, 1991) :
( ) ( ) (∑∞
==
1r2r1rr21 xfxfx,xC λ )
)
(6.2)
où ( rr f,λ représentent, respectivement, les valeurs propres et les fonctions propres de
. La décomposition de KL de ( 21 x,xC ) ( )θ,xH sur la base des fonctions propres est
donnée par l’expression suivante :
( )xf r
( ) ( ) ( )∑∞
=+=
1rrrr xf,xH θξλµθ (6.3)
dont la forme tronquée aux r premiers termes de la série est écrite comme suit :
( ) ( ) ( )∑=
+=n
1rrrr xf,xH θξλµθ (6.4)

Eléments Finis Stochastiques et Analyse de Sensibilité pour la Conception Robuste de Systèmes Viscoélastiques
115
6.2.2 Modèle éléments finis stochastique de plaque sandwich
La formulation des éléments finis stochastiques viscoélastiques est basée sur l’utilisation de la décomposition de Karhunen-Loève d’un champ aléatoire ( )θ,xH sur la base des
fonctions propres du modèle sandwich dont la formulation déterministe est présentée au Chapitre 3. D’une façon générale, les paramètres incertains choisis pour des systèmes amortis par matériaux viscoélastiques sont liés aux épaisseurs des couches viscoélastiques et couches contraintes, et la température du matériau viscoélastique. A noter que les incertitudes sur la température sont introduites par la formule d’approximation suivante :
( ) ( )( )θξδθ T1TT += (6.5) où T est la température moyenne et Tδ est la dispersion sur la température.
A travers les relations (3.56) à (3.58), la matrice stochastique de masse de l’élément fini de plaque sandwich à trois couches résulte de la combinaison des matrices de masse de chaque couche. La dispersion des paramètres incertains est introduite dans la matrice de masse qui doit être définie positive comme suit :
( ) ( )Uele_n
1iir
i
d,xH= ⎥
⎥⎦
⎤
⎢⎢⎣
⎡= ∫
Ω
Ωθθ NNM T (6.6)
En remplaçant ( )θ,xH r par l’expression (6.4), la matrice de masse stochastique
devient :
( ) ( )∑=
+≈n
1rθξθ rrMMM (6.7)
où est la matrice moyenne de masse du élément fini sandwich, et
représente la partie stochastique.
Uele_n
1id
= ⎥⎥⎦
⎤
⎢⎢⎣
⎡= ∫
Ω
Ωµ NNM T
( )Uele_n
1ir dxH
= ⎥⎥⎦
⎤
⎢⎢⎣
⎡= ∫
Ω
ΩNNM Ti
Pour formuler matrice de rigidité de l’élément finis sandwich on doit reprend l’expression (2.24), de sorte que la matrice de raideur aléatoire globale s’exprime comme suit :
( ) ( ) ( T,,T,, )θωθθω ve KKK += (6.8)
De cette façon, les formes tronquées des matrices aléatoires de rigidités associées aux
couches élastiques et viscoélastiques sont écrites comme suit :
( ) ( )∑=
+≈n
1re θξθ ree r
KKK (6.9)

Eléments Finis Stochastiques et Analyse de Sensibilité pour la Conception Robuste de Systèmes Viscoélastiques
116
( ) ( ) ( ) ( )∑=
+≈n
1rv T,,GT,GT,, θξθωωθω rvv r
KKK (6.10)
où vK est la matrice de raideur de la couche viscoélastique avec le module complexe aléatoire
factorisé; et Uele_n
1ie d
= ⎥⎥⎦
⎤
⎢⎢⎣
⎡= ∫
Ω
ΩEDDK T Uele_n
1i
Tv d
= ⎥⎥⎦
⎤
⎢⎢⎣
⎡= ∫
Ω
ΩEDDK sont, respectivement, les
matrices de raideur moyennes élastique et viscoélastique ; et ( )Uele_n
1ir xH
= ⎥⎥⎦
⎤
⎢⎢⎣
⎡= ∫
Ω
ΩEDDK Ter
( )Uele_n
1ir dxH
= ⎥⎥⎦
⎤
⎢⎢⎣
⎡= ∫
Ω
ΩEDDK Tvr
représentent, respectivement, les parties aléatoires élastique et
viscoélastique. Les détails de développement des matrices stochastiques pour l’élément de plaque
sandwich à trois couches sont donnés dans l’Annexe B. Lorsqu’on attribue à des zones traitées par matériau viscoélastique un niveau
d’incertitude, soit sur les épaisseurs de couches, soit sur la température du matériau viscoélastique, l’équation d’équilibre stochastique de la structure amortie soumise à une excitation harmonique supposée déterministe est écrite sous la forme suivante :
( ) ( ) ( ) ( )[ ] ( ) (ωθωθωθθωθ FQMKK =−+ ,,T,G 2ve )
)
(6.11) ou encore sous la forme suivante :
( ) ( )[ ] ( ) ( θωθωθωω ,,T,,T, FQZZ =+ (6.12) où ( )θM , ( )θeK et ( )θvK sont les matrices stochastiques de masse et de raideur; ( )θω ,T,G
est le module complexe stochastique; ( )θω ,Q et ( )ωF sont, respectivement, les vecteurs de
réponses stochastiques et de forces. ( ) ( ) MKKZ 2ve T,GT, ωωω −+= est la matrice de
raideur dynamique moyenne; ( ) ( )( ) ( )∑=
−+=n
1rrr
2ve rr
T,,GT,, θξωθωθω MKKZ est la raideur
dynamique stochastique. 6.3 Calcul des réponses stochastiques
Dans le cas d’un modèle aux éléments finis de grande taille, la résolution du système aléatoire (6.12) à travers l’inversion directe de la matrice incertaine ( )T,,θωZ est pratiquement
inexploitable et conduirait à des temps de calcul prohibitifs. Dans ce cas, on fait l’appel à la technique de condensation robuste pour des systèmes viscoélastiques (Cf. Section 4.1, Chapitre 4) en ramenant la matrice dynamique aléatoire ( )T,,θωZ à une forme réduite
( )T,,θωrZ .

Eléments Finis Stochastiques et Analyse de Sensibilité pour la Conception Robuste de Systèmes Viscoélastiques
117
6.3.1 La méthode d’Hyper Cube Latin (HCL)
Cette méthode, introduite par Iman et Conovers (1980) puis améliorée par Florian (1992) est considérée comme l’une des meilleures approches de tirages aléatoires de petits échantillons. La méthode d’Hyper Cube Latin (HCL) consiste à diviser l’intervalle de variation des variables incertaines en intervalles dont les probabilités d’obtenir les valeurs inclues dans ceux-ci sont égales. Dans chaque intervalle on choisit une valeur particulière. Cette valeur peut être définie comme le centre de l’intervalle ou déterminée de manière aléatoire. La méthode consiste ensuite à choisir de manière aléatoire une valeur particulière parmi les valeurs de chaque paramètre puis à exécuter le calcul. Lorsqu’une valeur d’une variable a été sélectionnée, elle est éliminée et ne peut pas être sélectionnée une seconde fois. Il y a donc calculs à effectuer.
n
n
n
6.4 Sensibilité paramétrique des systèmes traités par couche contrainte
Dans cette section, on propose une stratégie numérique pour caractériser l’influence des paramètres géométriques des traitements viscoélastiques par couches contraintes, sans recourir à l’analyse exacte. Puisqu’on on s’intéresse à l’optimisation de systèmes viscoélastiques et l’introduction des incertitudes dans les paramètres de conception, cette stratégie constitue un outil efficace pour l’analyse dans la phase d’avant-projet de systèmes amortis par matériaux viscoélastiques : il s’agit de l’analyse de sensibilité paramétrique, qui permet, sous une forme approchée, d’analyser l’influence des variations paramétriques des réponses mécaniques (statiques et/ou dynamiques) de tels systèmes. En conception robuste des structures l’analyse de sensibilité, l’optimisation et la propagation des incertitudes sont trois phases indispensables pour aboutir à une conception orienté qualité. 6.4.1 Définition de la sensibilité paramétrique – Evaluation par différences finies
L'analyse de sensibilité est généralement basée sur l'évaluation des dérivées (le plus fréquemment limitées au premier ordre) de la réponse des systèmes par rapport à un ensemble de paramètres d'intérêt. Elle peut être associée à différents types de réponses mécaniques : déplacements statiques, contraintes dynamiques, solutions propres (valeurs et vecteurs propres), réponses fréquentielles et réponses temporelles (Huang et al, 1996). Selon Murthy et Haftka (1988), la conception optimale des systèmes mécaniques dans une phase d’avant-projet a une relation étroite avec l'analyse de sensibilité paramétrique puisqu'une partie significative des algorithmes d'optimisation exécutent généralement un grand nombre d'évaluations des réponses de systèmes pour différentes valeurs des variables de conception. Les dérivées peuvent être employées pour approcher la réponse des systèmes modifiés, ce qui réduit le coût de réanalyses du problème exact, particulièrement pour les systèmes industriels dont les modèles éléments finis sont d'ordre élevé. De même, lors du calcul de la variabilité des structures en présence d’incertitudes, il est également nécessaire de procéder au préalable à une analyse de sensibilité des variables de conception afin de ne retenir que les variables les plus influentes.

Eléments Finis Stochastiques et Analyse de Sensibilité pour la Conception Robuste de Systèmes Viscoélastiques
118
Plusieurs approches ont été développées pour faire l'analyse de sensibilité des réponses dynamiques de systèmes élastiques. Parmi les techniques pour le calcul des sensibilités des solutions propres on peut citer : la méthode modale (Fox et Kapoor, 1968) ; la méthode de Nelson (Nelson, 1976) ; et la méthode modale améliorée (Lim et al, 1987). La méthode modale nécessite principalement le calcul de toutes les solutions propres du système mécanique, qui peut conduire à des coûts numériques prohibitifs dans le cas de systèmes complexes. Cependant, les applications à des systèmes mécaniques contenant des composants viscoélastiques ne sont pas connues, ce qui motive l'étude rapportée dans cette section.
Dans ce qui suit, la formulation des sensibilités des réponses fréquentielles (FRFs) par rapport aux paramètres géométriques et par rapport à la température de systèmes amortis par matériaux viscoélastiques est développée et appliquée aux structures mécaniques traitées par couches contraintes. Pour cela, on fait appel aux développements présentés dans la Section 3.9, au Chapitre 3, sur la modélisation et la paramétrisation des modèles de plaques sandwichs couplées avec l'approche module complexe pour représenter de comportement des matériaux viscoélastiques.
Les matrices globales de masse et de raideur, et M ( ) NxNRT ∈,ωK , d’un système
mécanique quelconque traité par matériaux viscoélastiques, apparaissant dans l’expression (2.23.a) (Cf. Section 2.6, Chapitre 2), conduisent à la dépendance des réponses dynamiques de ce système par rapport à un ensemble de paramètres de conception (caractéristiques physiques et géométriques, température du matériau viscoélastique). Cette dépendance peut être exprimée sous la forme générale comme suit :
( ) ( )( pKpMrr ,= ) (6.13) où et représentent, respectivement, les vecteurs de réponses (statiques, fréquentielles,
temporelles, etc.) et les paramètres de conception. La sensibilité des réponses structurales par rapport à un paramètre de conception donné , évaluée pour un ensemble donné de valeurs
de ce paramètre , est définie par une dérivée partielle comme suit :
r p
ip0p
( ) ( )( ) ( ) ( )( )⎥⎥⎦
⎤
⎢⎢⎣
⎡−
++=
∂∂
→ i
0i
0i
i
i0ii
0i
0∆ppi ∆p
p,p∆p
∆pp,∆pplim
p i0
KMrKMrr (6.14)
où ip∆ représente une variation arbitraire appliquée à la valeur courante du paramètre ,
alors que tous les autres paramètres demeurent inchangés.
0ip
La sensibilité de la réponse par rapport à peut être estimée par la méthode classique
des différences finies, où l’on calcule successivement les réponses du système mécanique
correspondant à et , respectivement, par l’expression suivante :
ip
0ii pp = i
0ii ppp ∆+=

Eléments Finis Stochastiques et Analyse de Sensibilité pour la Conception Robuste de Systèmes Viscoélastiques
119
( ) ( )( ) ( ) ( )( )⎥⎦
⎤⎢⎣
⎡−
++≈
∂∂
i
0i
0i
i
i0ii
0i
pi ∆pp,p
∆p∆pp,∆pp
p 0
KMrKMrr (6.15)
Une telle approche est en général inefficace du point de vue de calcul. Par ailleurs, les
résultats dépendent du choix des valeurs des l'incréments des paramètres. Une autre stratégie, retenue dans cette étude, consiste à calculer les dérivés analytiques des réponses structurales, comme les fonctions réponses en fréquence (FRFs) de systèmes amortis par rapport aux paramètres d’intérêt. 6.4.2 Sensibilité des réponses fréquentielles par rapport aux paramètres structuraux et par
rapport à la température
Si on prend la matrice complexe des FRFs d'un système viscoélastique donné par l’expression (2.28) (Cf. Section 2.6, Chapitre 2), la sensibilité par rapport à un paramètre
structural donné peut être calculée en dérivant la relation ( ) ( ) IHH -1 =pT,,pT,, ωω , ce qui
mène à l'expression suivante:
( )( )
( ) ( ) ( ) ( bHMKcHH 00
i
02
i
0000
p,T,ip,Tω,
pp
pp,Tω,p,Tω,
ppT,ω,
00⎟⎟⎠
⎞⎜⎜⎝
⎛∂
∂−
∂∂
−=∂
∂ ωω
) (6.16)
où :
( ) ( )[ ] bMKKcH12
ve-
, ωωω −+= 0r TGT,
Concernant l'équation ci-dessus, il convient de noter que lorsque le paramètre apparaît explicitement dans les matrices ou M ( )T,ωK (c’est fréquemment le cas de modèles
paramétrés (Cf. Section 3.9, Chapitre 3)), le calcul des dérivés de ces matrices par rapport à un tel paramètre est beaucoup moins coûteux, ce qui résulte généralement du caractère creux des matrices.
Remarque : Pour les modèles amortis de grande taille, il faut présenter la formule ci-dessus dans un espace réduit en utilisant une base de condensation robuste vis-à-vis des modifications paramétriques introduites par le traitement viscoélastique. Ainsi, au lieu de manipuler ( )T,ωH ,
ce qui peut être coûteux, on propose d’exploiter ( ) ( )THTH r T,T, T ωω = , où T est la base de
réduction robuste exprimée par l’expression (4.14) déjà proposée dans la Section 4.1.1, au Chapitre 4.
( )( )
( ) ( ) ( ) ( bHMKcHHr
rrr
r 00
i
02
i
0000
p,T,ip,Tω,
pp
pp,Tω,p,Tω,
ppT,ω,
00⎟⎟⎠
⎞⎜⎜⎝
⎛
∂∂
−∂
∂−=
∂∂
ωω
) (6.17)
Par contre, le calcul des dérivées des réponses fréquentielles par rapport à la
température des matériaux viscoélastiques exige que ce paramètre apparaisse explicitement

Eléments Finis Stochastiques et Analyse de Sensibilité pour la Conception Robuste de Systèmes Viscoélastiques
120
dans les matrices de rigidité de la sous-structure viscoélastique. Dans ce cas, le procédé basé sur l'utilisation du Principe de Superposition Fréquence-Température (PSFT) et de la fréquence réduite (Cf. Chapitre 2, Section 2.3) peut être utilisé.
En combinant les expressions (2.10) et (2.27) avec l’expression (6.16), on obtient :
( ) ( )[ bMKKcH12
ve-
, ωωω −+= 0r TGT, ] (6.18)
( )
( )( ) ( ) ( ) ( )bHKcHH
v00
r0
0r00
rp,T,
p,T,pTT,Gp,T,
TpT,,
00ω
ωωω
ω⎟⎟⎠
⎞⎜⎜⎝
⎛
∂∂
−=∂
∂ (6.19)
Si on considère la même remarque pour de systèmes industriels, l’expression (6.19) est
ramenée à la forme suivante :
( )( )
( ) ( ) ( ) ( )bHKcHHvr
00rr
00
r00rr
p,T,
r p,T,pTT,Gp,T,
TpT,,
00ω
ωω
ω
ω⎟⎟⎠
⎞⎜⎜⎝
⎛
∂∂
−=∂
∂ (6.20)
A partir des relations (2.10), la dérivée du module complexe par rapport à la température
peut être calculé comme suit:
( )ω
αω
ωω
ωT
GT
GTT,G T
r
r
r
0r
∂∂
∂∂
=∂∂
∂∂
=∂
∂ (6.21)
Les fonctions ( rG )ω et peuvent être obtenues à partir des essais expérimentaux
pour les matériaux viscoélastiques spécifiques. Certaines de ces fonctions sont proposées par Nashif et al. (1985). Comme résultat d'un travail expérimental conséquent, Drake et Soovere (1982) suggèrent des expressions analytiques pour le module complexe et le facteur de décalage pour différents matériaux viscoélastiques disponibles dans le commerce, comme les expressions (2.11) et (2.12) du matériau viscoélastique ISD112™ produit par 3M.
( )TαT
6.5 Applications numériques 6.5.1 Sensibilité paramétrique
Pour illustrer le calcul de sensibilité des FRFs de systèmes amortis par matériaux
viscoélastiques, on utilise le modèle aux éléments finis d'une plaque plane en aluminium, avec les conditions aux limites libres, totalement traitée par couche contrainte, comme illustré en Figure 6.1. Pour les simulations, on utilise le matériau viscoélastique 3M ISD112™ à la température de 25ºC. Les caractéristiques physiques et géométriques utilisées pour générer le modèle EF sont données en Tableau 6.1. Le modèle est constitué de 80 éléments finis de plaque à trois couches, ayant 99 noeuds et 693 degrés de liberté. Les calculs consistent à obtenir les sensibilités des FRFs collocalisées associées au point I , dénote par . ( )pT,ω,IIH

Eléments Finis Stochastiques et Analyse de Sensibilité pour la Conception Robuste de Systèmes Viscoélastiques
121
Figure 6.1 – Illustration du modèle EF de plaque totalement traitée par couche contrainte
Tableau 6.1 – Propriétés physiques et géométriques du modèle EF de plaque à 3 couches
couche Epaisseur [m] Module d’Young [N/m2] Poisson Densité [Kg/m3]contrainte 0,5x10-3 70x109 0,34 2750
viscoélastique 0,0254x10-3 Eqs. (2.11) et (2.12) 0,49 1099,5 structure 3,0x10-3 70x109 0,34 2750
• Sensibilités de FRF par rapport aux épaisseurs de couches
Dans cet exemple, les épaisseurs de la couche contrainte et de la couche viscoélastique sont considérées comme variables de conception dans le calcul des sensibilités de ( )pT,ω,IIH .
Les parties réelles et imaginaires des fonctions de sensibilités complexes obtenues en employant les dérivées de premier ordre selon l’expression (6.17) sont montrées en Figure 6.2. Ces résultats sont comparés avec ceux obtenus par différences finies (selon l’expression (6.15)) pour une variation de 20% sur les valeurs nominales des épaisseurs de couches viscoélastique et contrainte, donnés en Tableau 6.1. Dans les mêmes figures, on note que les parties réelle et imaginaire de ( )pT,ω,IIH sont multipliées par un facteur d’échelle.
Figure 6.2 – Sensibilités de ( )pT,ω,IIH par rapport à l’épaisseur de la couche viscoélastique
(a) et à la couche contrainte (b).

Eléments Finis Stochastiques et Analyse de Sensibilité pour la Conception Robuste de Systèmes Viscoélastiques
122
On remarque que les fonctions de sensibilité, dénotées par sont
normalisées selon l'expressions suivante :
( pT,,N ωFRFS )
( ) ( )( ) ( )0
0
pT,,
0N
pT,,p
ppT,,pT,,
0 ωω
ωω H
HS IIFRF ∂
∂= (6.22)
La Figure 6.2 permet d'évaluer l’efficacité des dérivés de premier ordre pour prévoir les
sensibilités, à travers la comparaison avec les résultats obtenus par la méthode des différences finies. De plus, en se basant sur les amplitudes et les signes des fonctions de sensibilités, on peut évaluer les degrés d'influence des variables de conception sur les amplitudes des FRFs dans la bande de fréquence considérée.
• Sensibilités de FRF par rapport à la température du matériau.
Pour le calcul des dérivées des FRFs par rapport à la température du matériau viscoélastique selon l’équation (6.20), les dérivées de (6.21) sont calculées en dérivant les expression (2.11) et (2.12) par rapport à rω et T , ce qui mènent aux expressions suivantes :
2B
r
32πiBB
r
32πiB
5
1B
r
2πiB
4
1B
r
2πiB
65B32
r 4466
44666
Be
BeB1
1eB1eBBBB
ωG
⎟⎟
⎠
⎞
⎜⎜
⎝
⎛⎟⎟⎠
⎞⎜⎜⎝
⎛+⎟⎟
⎠
⎞⎜⎜⎝
⎛+
⎟⎟
⎠
⎞
⎜⎜
⎝
⎛⎟⎟⎠
⎞⎜⎜⎝
⎛+⎟⎟
⎠
⎞⎜⎜⎝
⎛
=∂∂
−−
+−
+−
ωω
ωω (6.23)
10lnSTa
Tb
Tlogeb
Ta22.303
Taα
Tα
AZ2000
2TT
⎟⎟⎠
⎞⎜⎜⎝
⎛−−+⎟⎟
⎠
⎞⎜⎜⎝
⎛−+−=
∂∂
(6.24)
La Figure 6.3 montre les parties réelles et imaginaires normalisées des fonctions de
sensibilité de la FRF par rapport à la température, pour deux valeurs différentes de
la température nominale
( pT,ω,IIH )0T , comparées aux calculs par différences finies, en utilisant des
variations de 2% autour des valeurs nominales de la température. De la même façon que pour le cas précédent, les parties réels et imaginaires de ( )pT,ω,IIH sont multipliées par un facteur
d’échelle.

Eléments Finis Stochastiques et Analyse de Sensibilité pour la Conception Robuste de Systèmes Viscoélastiques
123
Figure 6.3 – Sensibilités de ( )pT,ω,IIH par rapport à la température pour
K298T 0 = et . K308T 0 =
On note que les résultats issus des dérivées de premier ordre et ceux obtenus par les différences finies sont très proches, permettant d'évaluer les degrés d'influence des variations de la température dans la bande de fréquence d'analyse.
Pour illustre l’intérêt de la méthode de sensibilité au premier ordre pour l'analyse des structures modifiées, la FRF ( )pT,ω,IIH du modèle EF de plaque sandwich à trois couches
selon les étapes successives suivantes : dans la première étape, une fois donné un ensemble de valeurs nominales des variables de conception (épaisseurs de couches viscoélastique et
contrainte données en Tableau 6.1, à température de ), des variations sont volontairement appliquées à ces valeurs nominales (15% pour les épaisseurs de couches et 1,5% pour la température). Puis, les FRFs exactes du système perturbé sont calculées ; dans la deuxième étape, les FRFs du système perturbé sont estimées à partir des FRFs du système nominal en employant les dérivées d'ordre un calculées selon la formulation présentée dans les sections précédentes, comme suit:
K298T 0 =
( ) ( ) ( )( )
pp
pT,,pT,,ppT,,0pp
II0II
0II ∆
ωω∆ω
=∂∂
+≅+HHH (6.25)
( ) ( ) ( )( )
TT
pT,,p,T,pT,T,0TT
II0II
0II ∆ωω∆ω
=∂∂
+≅+HHH (6.26)
La Figure 6.4 montre que les FRFs calculées par les expansions en série de Taylor au
premier ordre sont comparables aux FRFs exactes. Néanmoins, les résultats sont moins satisfaisants pour les variations de la température du matériau, ce qui mène à conclure que les approximations basées sur les développements en série de Taylor au premier ordre ne sont pas assez précises pour prévoir les variations du comportement dynamique des systèmes viscoélastiques associés à plus grandes variations de la température. Néanmoins, la méthode d’ordre 1 donne la bonne tendance de changements de paramètres, et cela constitue une

Eléments Finis Stochastiques et Analyse de Sensibilité pour la Conception Robuste de Systèmes Viscoélastiques
124
information importante pour une étape amont de l’optimisation et/ou de l’évaluation des incertitudes, qui permet de retenir les paramètres les plus influents. Dans ce cas, les résultats peuvent être améliorés en employant les expansions en série de Taylor au second ordre, ce qui exige la connaissance des dérivés de premier ordre et de second ordre, successivement.
Figure 6.4 – Evaluation exacte et perturbés (exacte et estimée) de ( )pT,ω,IIH par rapport aux
épaisseurs de couches (a), et par rapport à la température pour . K298T 0 = 6.5.2 Eléments finis viscoélastiques stochastiques
Pour vérifier la stratégie d’introduction des incertitudes dans les modèles aux éléments finis de systèmes viscoélastiques, on utilise la même structure abordée en Section 4.3.1, au Chapitre 4, en considérant les mêmes propriétés physiques et mécaniques (valeurs nominales), et les mêmes positions de patches (Figure 6.5.a). La Figure 6.5.b présente les réponses fréquentielles (FRFs) de la plaque renforcée sans et avec traitement viscoélastique par couche contrainte pour les valeurs nominales des paramètres de conception.
On considère la structure avec deux niveaux d’incertitudes sur les paramètres de la solution amortissante : (cas 1 : %15
2h =δ , %153h =δ ) à température du matériau de ; et
(cas 2 :
Cº25
%152h =δ , %15
3h =δ , %10T =δ ) . Les paramètres2hδ ,
3hδ et Tδ sont les dispersions
sur les épaisseurs de la couche viscoélastique et la couche contrainte, et sur la température du matériau viscoélastique, respectivement.

Eléments Finis Stochastiques et Analyse de Sensibilité pour la Conception Robuste de Systèmes Viscoélastiques
125
(a) (b)
Figure 6.5 – Modèle EF de la plaque renforcée traitée par 10 patches viscoélastiques (a) ; réponses fréquentielles (FRFs) du système sans et avec traitement (b).
La Figure 6.6 représente trois boxplots représentant les dispersions des variables de
conception pour les deux niveaux d’incertitudes introduits. La « boxplot » ou « boîte à moustache » est une façon visuelle très intéressante de représenter une distribution. Les « moustaches » vont de la valeur minimale au premier quartile à la valeur maximale au troisième quartile. Le quartile en rouge représente la moyenne. De cette façon, la « boîte » ou cadre est définie par le premier quartile, la médiane et le troisième quartile. L’intérêt de ces boxplots est de déterminer l’intervalle de balayage des dispersions des variables ou de réponses physiques de systèmes en fonction des niveaux d’incertitudes des paramètres de conception, qu’on peut utiliser comme intervalle de confiance pour tracer les enveloppes maximales et minimales des réponses aléatoires.
Figure 6.6 – Dispersion des paramètres de conception pour les deux niveaux d’incertitudes.
La figure 6.7 illustre la variabilité de la réponse aléatoire représentant, respectivement, les moyennes et les statistiques extrêmes pour les deux cas d’incertitudes étudiés. Si on compare les deux figures, on peut constater sans difficulté l’influence très significative de la température sur les réponses aléatoires du système amorti, comme prévu par l’analyse de sensibilité paramétrique.
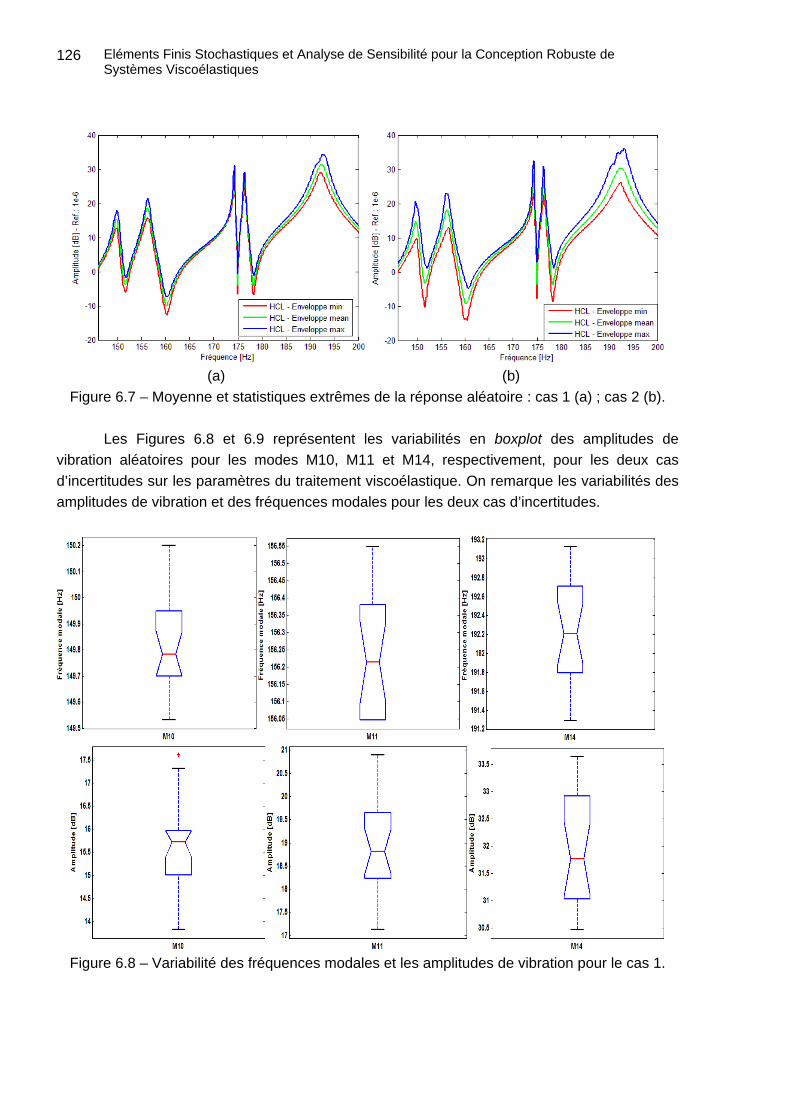
Eléments Finis Stochastiques et Analyse de Sensibilité pour la Conception Robuste de Systèmes Viscoélastiques
126
(a) (b)
Figure 6.7 – Moyenne et statistiques extrêmes de la réponse aléatoire : cas 1 (a) ; cas 2 (b).
Les Figures 6.8 et 6.9 représentent les variabilités en boxplot des amplitudes de vibration aléatoires pour les modes M10, M11 et M14, respectivement, pour les deux cas d’incertitudes sur les paramètres du traitement viscoélastique. On remarque les variabilités des amplitudes de vibration et des fréquences modales pour les deux cas d’incertitudes.
Figure 6.8 – Variabilité des fréquences modales et les amplitudes de vibration pour le cas 1.

Eléments Finis Stochastiques et Analyse de Sensibilité pour la Conception Robuste de Systèmes Viscoélastiques
127
Figure 6.9 – Variabilité des fréquences modales et les amplitudes de vibration pour le cas 2.
6.6 Conclusions
Dans cette partie du mémoire, après avoir mis en évidence les concepts fondamentaux de l’origine et de la propagation des incertitudes dans les modèles et les principales méthodes pour résoudre les systèmes stochastiques résultants, on propose un modèle de propagation des incertitudes dans les modèles aux éléments finis de plaques sandwich de façon originale sous une forme paramétrée, à travers la création directe des matrices stochastiques élémentaires du modèle éléments finis de plaque sandwich. Pour cela, on a utilisé la technique de discrétisation des champs aléatoires fondée sur un développement de Karhunen-Loève pour les problèmes bidimensionnels.
Dans le but de prendre en compte un nombre restreint de paramètres incertains, la méthode d’Hyper Cube Latin (HCL) est alors retenue pour évaluer les réponses aléatoires du modèle aux éléments finis stochastique du système viscoélastique. Pour réduire les coûts numériques induits par la taille des modèles et les calculs itératifs HCL issus des incertitudes, on utilise le modèle paramétrisé de plaque sandwich à trois couches, proposé en Section 3.9, ainsi que la méthode de condensation robuste, capable de réduire davantage le temps de calcul. Après les développements théoriques, on montre les enveloppes des réponses dynamiques dues aux dispersions des caractéristiques vibratoires sur un exemple académique constitué par une plaque courbe renforcée par des raidisseurs, partiellement traitées par couche contrainte. Ces enveloppes constituent une aide à la conception et à l’optimisation de
Eléments Finis Stochastiques et Analyse de Sensibilité pour la Conception Robuste de Systèmes Viscoélastiques
128
structures en présence d’éléments viscoélastiques à paramètres incertains, où on peut quantifier les influences des paramètres sur la performance du traitement viscoélastique.
Pour les traitements viscoélastiques par couches contraintes, on remarque à travers l’analyse de sensibilité des réponses fréquentielles que les paramètres qui influent plus fortement la performance des composantes amortissantes sont les épaisseurs des couches viscoélastique et contrainte, et la température du matériau viscoélastique. Pour l’analyse de sensibilité des systèmes amortis par couche contrainte, une formulation originale a été développée pour le calcul des dérivés de premier ordre des réponses fréquentielles (FRFs) par rapport à deux types de paramètres, à savoir : les paramètres structuraux physiques et/ou géométriques qui apparaissent explicitement dans les matrices éléments finis des couches, et la température du matériau viscoélastique. Comme illustré dans l’application numérique présentée, les sensibilités des FRFs donnent des informations utiles sur l'influence des paramètres de conception sur le comportement dynamique du système amorti, s’avérant également un outil très important pour la conception, analyse et exécution dans une phase d’avant projet des systèmes viscoélastiques.
Les travaux en perspective à cette étude concernent l’approfondissement de la méthode des éléments finis viscoélastiques stochastiques et notamment le couplage de la méthode de condensation robuste vis-à-vis des incertitudes et la méthode de perturbation modale. L’extension de ces travaux aux structures viscoélastiques complexes dont les modèles sont de grande taille est également une voie de recherche en cours d’investigation. L’ensemble des ces travaux fait l’objet actuellement d’une collaboration scientifique tripartite FEMEC (UFU, Uberlândia, Brésil) - LMARC (UFC, Besançon, France) et IPEIN (Nabeul, Tunisie).

CHAPITRE 7
Validation Expérimentale du Modèle de Plaque Sandwich et Application Industrielle
Dans ce chapitre, on valide expérimentalement le modèle aux éléments finis de plaque
sandwich à trois couches et les méthodologies d’optimisation multiobjectif robuste. Pour cela, on utilise dans un premier moment une structure simple composée par une plaque plane où on cherche, par les procédures d’optimisation, les positions optimales et les caractéristiques géométriques robustes de chaque traitement viscoélastique. Dans un deuxième temps, on s’intéresse à une application industrielle constituée d’un compresseur de réfrigérateur dans le but de vérifier la performance du traitement viscoélastique par couche contrainte dans l’atténuation des vibrations de cette structure. 7.1 Plaque plane traitée par couche contrainte
Le but de cette section est décrire une étude numérique et expérimentale d’une plaque traitée par couche viscoélastique contrainte modélisée par l’élément fini de plaque sandwich à trois couches développé au Chapitre 3, et aussi de valider la procédure d’optimisation multiobjectif robuste proposée au Chapitre 5. L’exemple de simulation est une plaque plane modélisée par 143 EFs de plaque simple SHELL63 ayant 1185 d.d.l. Les conditions aux limites sont de type libre aux bords. La Figure 7.1 montre les caractéristiques géométriques utilisées pour générer le modèle aux éléments finis. Les propriétés mécaniques de la plaque sont : module d’Young, E=71,5x109 N/m2, densité ρ=2635 Kg/m3, et coefficient de poisson, 0,34.
P
0.33
m
0.39 m
0.0015 m
Figure 7.1 – Modèle aux éléments finis de la plaque plane

Validation Expérimentale du Modèle de Plaque Sandwich et Application Industrielle 130
Avant de passer à l’optimisation, on compare les FRFs calculées et mesurées sur la plaque sans aucun traitement viscoélastique. L’analyse dynamique expérimentale permet ainsi de connaître le comportement dynamique réel de la structure test, et de faire des éventuelles corrections du modèle pour s’en approcher (recalage de modèle). 7.1.1 Evaluation expérimentale du système non-amorti
La Figure 7.2 présente le montage du dispositif qu’on dispose pour effectuer les mesures dynamiques expérimentales de la plaque. Pour cela, on obtient la fonction de transfert en un même point (collocalisée), définie comme étant le rapport des signaux d’entrée et de sortie au cours de la phase d’acquisition de données. Le signal d’entrée est donné par une mesure de force en Newton, à l’aide d’une cellule de force placée au point d’excitation, et le signal de sortie par une mesure d’accélération (m/s2) obtenue à l’aide d’un capteur placé au même point de mesure que la force.
L’évaluation du modèle EF et les essais sont effectués dans la bande fréquentielle d’intérêt [0-105] Hz, constitué par les calculs des réponses fréquentielles (FRFs) collocalisées associées au point P (indiqué en Figure 7.1).
Figure 7.2 – Montage du dispositif de mesure expérimentale de vibration.
(1) structure test ; (2) accéléromètre ; (3) Marteau d’impact ; (4) Charge amplifier ; (5) Oscilloscope SD380 ; (6) Système d’acquisition des donnés.

Validation Expérimentale du Modèle de Plaque Sandwich et Application Industrielle 131
La Figure 7.3 montre une comparaison entre les amplitudes des FRFs obtenues à partir du modèle élément finis et la correspondante issue de la mesure expérimentale (FRFs identifiées), dans la bande de fréquence comportant les quatre premiers modes de la structure. Le Tableau 7.1 montre les erreurs relatives entre le calcul et l’essai pour les fréquences modales et les amplitudes de vibration du système non-amorti représentées en Figure 7.3.
Figure 7.3 – FRFs expérimentale (Exp) et analytique (EF) de la plaque non-amorti.
Tableau 7.1 – Fréquences modales calculées et mesurées du système non-amorti
Mode Fréquence
[Hz] EFfFréquence
Expf [Hz] Erreur
fε [%] Amplitude
[dB] EFHAmplitude
ExpH [dB] Erreur
Hε [%] M1 39.42 39.76 0.86 78.961 59.331 33.1 M2 52.30 53.50 2.24 83.571 60.669 37.4 M3 77.95 78.01 0.08 64.794 42.531 52.3 M4 96.45 96.00 0.50 61.614 54.617 12.8
Les erreurs relatives entre les valeurs de fréquence propres et entre les amplitudes de
résonances sont définies par les critères suivants :
100f
ff
Exp
ExpEFf ×
−=ε (7.1)
100H
HH
Exp
ExpEFH ×
−=ε (7.2)
Les faibles valeurs des erreurs relatives entre les fréquences montrent qu’on n’a pas
besoin de recaler le module d’Young du matériau pour approcher le modèle EF et l’essai. Néanmoins, on observe que pour les amplitudes de vibration, on doit ajouter l’amortissement dans le modèle EF de manière à rapprocher les valeurs des amplitudes calculées et mesurées.

Validation Expérimentale du Modèle de Plaque Sandwich et Application Industrielle 132
Pour cela, on a constaté qu’une valeur du facteur d’amortissement visqueux qui assure une corrélation satisfaisante entre le modèle et l’essai est 001.0=ζ . La Figure 7.4 montre la FRF
expérimentale et celle obtenue à partir du modèle EF recalé.
Figure 7.4 – FRF expérimentale et numérique de la plaque recalé
7.1.2 Optimisation multiobjectif robuste
Pour l’optimisation, on considère le modèle EF recalé précédemment, où on s’intéresse à l’optimisation des positions de 4 traitements viscoélastiques, chacun composée par 9 éléments finis de plaque sandwich à trois couches. De plus, on considère dans l’optimisation que les épaisseurs des couches viscoélastique et contrainte, ainsi que la température du matériau, sont des variables continues à optimiser. Par conséquent, pour le problème d’optimisation, il y a au total 13 variables définissant l’espace de conception : 9 variables continues (4 pour les épaisseurs de couches viscoélastiques, 4 pour les épaisseurs de couches contraintes, et la température du matériau). Il y a aussi 4 variables discrètes représentant les positions des traitements. Le Tableau 7.2 présente les valeurs nominales des variables de conception continues et les plages de variations admissibles.
Pour prendre en compte les incertitudes dans les variables de conception retenues dans l’optimisation, les paramètres géométriques et la température sont perturbées au maximum de 10% et 5%, respectivement, par rapport à leurs valeurs nominales selon une loi normale. Pour calculer les fonctions de vulnérabilité, à chaque génération, on génère 500 tirages aléatoires pour chaque variable continue par la méthode d’Hyper Cube Latin (HCL). Vu le nombre total d’évaluations des fonctions de vulnérabilité pour chaque génération, dans le problème d’optimisation multiobjectif robuste on utilise les réseaux de neurones (PMC) couplés avec la méthodologie de condensation robuste pour réduire le temps de calcul des solutions. Les paramètres du NSGA-PMC sont définis au Tableau 7.3.

Validation Expérimentale du Modèle de Plaque Sandwich et Application Industrielle 133
Tableau 7.2 – Définition de l’espace de conception – plaque plane
Variables de conception
Valeurs nominales
Variations admissibles
Niveaux d’incertitudes
( )patches4,...,1ih i2 = 0,0254 mm ± 60% %10h2 =∆ ( )patches4,...,1ih i3 = 0,5 mm ± 30% %10h3 =∆ Continue
T 25ºC ± 15% %5T =∆
Discrète Positions des traitements
Tableau 7.3 – Paramètres de NSGA-PMC NSGA PMC
Probabilité de sélection 0,25 Probabilité de croisement 0,25 Probabilité de mutation 0,25 No. de couches cachées 2 Nombre de générations 100 No. de neurones par couche 20 Nombre d’individus/génération 30 Coefficient de niche (σ ) 0,2
Les fonctions objectif à minimiser sont les suivantes :
⎩⎨⎧
==
)2M(amplitudef)1M(amplitudef
imisermin2
1 (Indiquées en Figure 7.3) (7.3)
Ainsi, le problème d’optimisation multiobjectif déterministe à deux fonctions coût est
ramené à un problème d’optimisation multiobjectif robuste à quatre fonctions coût à minimiser, à savoir : les fonctions coût définies initialement par l’expression (7.3), et les fonctions de vulnérabilité supplémentaires (Cf. Section 5.4.4, Chapitre 5).
La Figure 7.5.a montre l’évolution des solutions robustes NSGA pour les deux fonctions coût (soit en total de 18180 solutions), et la Figure 7.5.b représente les points optimaux A, B, et C situés sur le premier Front de Pareto.
(a) (b)
Figure 7.5 – Solutions NSGA robustes (a) ; Front de Pareto (b) pour les deux fonctions coût.
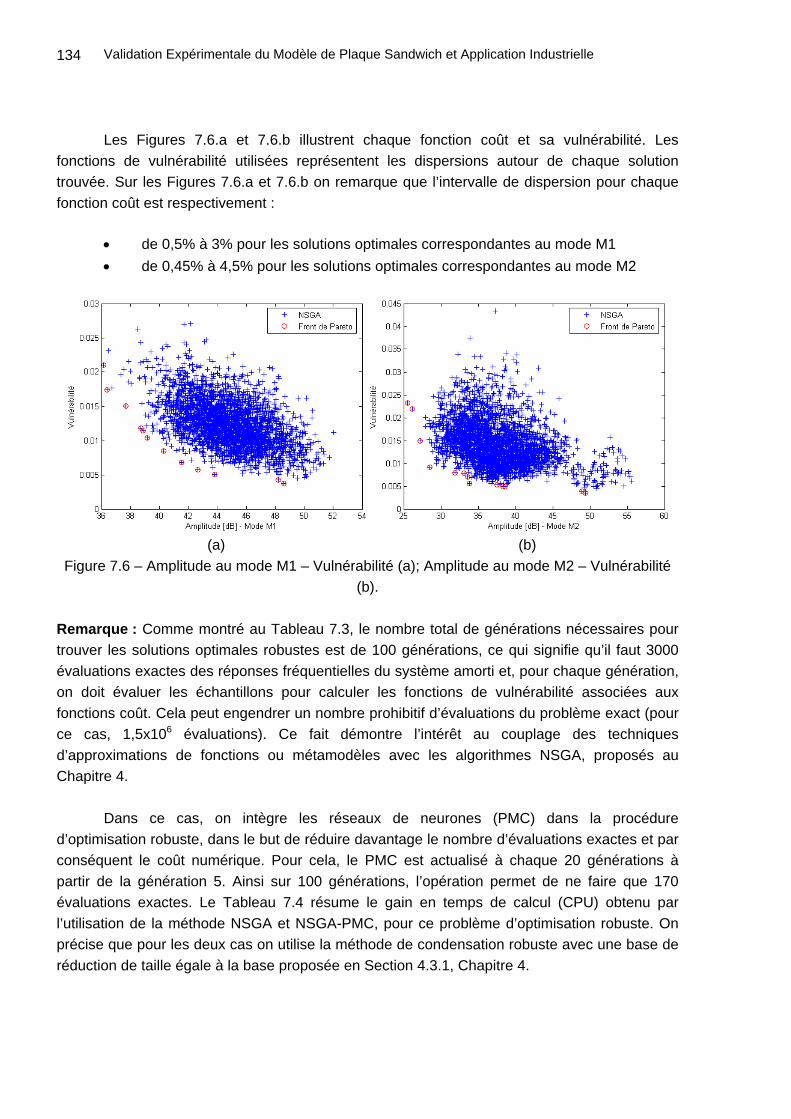
Validation Expérimentale du Modèle de Plaque Sandwich et Application Industrielle 134
Les Figures 7.6.a et 7.6.b illustrent chaque fonction coût et sa vulnérabilité. Les fonctions de vulnérabilité utilisées représentent les dispersions autour de chaque solution trouvée. Sur les Figures 7.6.a et 7.6.b on remarque que l’intervalle de dispersion pour chaque fonction coût est respectivement :
• de 0,5% à 3% pour les solutions optimales correspondantes au mode M1 • de 0,45% à 4,5% pour les solutions optimales correspondantes au mode M2
(a) (b) Figure 7.6 – Amplitude au mode M1 – Vulnérabilité (a); Amplitude au mode M2 – Vulnérabilité
(b). Remarque : Comme montré au Tableau 7.3, le nombre total de générations nécessaires pour trouver les solutions optimales robustes est de 100 générations, ce qui signifie qu’il faut 3000 évaluations exactes des réponses fréquentielles du système amorti et, pour chaque génération, on doit évaluer les échantillons pour calculer les fonctions de vulnérabilité associées aux fonctions coût. Cela peut engendrer un nombre prohibitif d’évaluations du problème exact (pour ce cas, 1,5x106 évaluations). Ce fait démontre l’intérêt au couplage des techniques d’approximations de fonctions ou métamodèles avec les algorithmes NSGA, proposés au Chapitre 4.
Dans ce cas, on intègre les réseaux de neurones (PMC) dans la procédure d’optimisation robuste, dans le but de réduire davantage le nombre d’évaluations exactes et par conséquent le coût numérique. Pour cela, le PMC est actualisé à chaque 20 générations à partir de la génération 5. Ainsi sur 100 générations, l’opération permet de ne faire que 170 évaluations exactes. Le Tableau 7.4 résume le gain en temps de calcul (CPU) obtenu par l’utilisation de la méthode NSGA et NSGA-PMC, pour ce problème d’optimisation robuste. On précise que pour les deux cas on utilise la méthode de condensation robuste avec une base de réduction de taille égale à la base proposée en Section 4.3.1, Chapitre 4.

Validation Expérimentale du Modèle de Plaque Sandwich et Application Industrielle 135
Tableau 7.4 – Temps de calcul (NSGA-PMC) Stratégie CPU Time [jours] Rapport [%]
NSGA 15 NSGA-PMC 3 80
7.1.3 Vérification expérimentale des solutions optimales robustes
Dans cette partie, on évalue les solutions optimales correspondant aux points A, B et C, indiqués en Figure 7.5.b. Pour cela, on compare les amplitudes de vibrations amorties (FRFs) associées au point P (voir Figure 7.1), calculées à partir du modèle EF recalé amorti et celles identifiées expérimentalement.
La Figure 7.7 illustre les positions optimales des traitements viscoélastiques pour les points A (a), B (b), et C (c), respectivement. Le Tableau 7.5 donne les valeurs optimales robustes pour chaque variable de conception continue, pour chaque configuration du traitement viscoélastique montré en Figure 7.7.
(a) (b) (c)
Figure 7.7 – Positions optimales des traitements pour les points A (a), B (b) et C (c).
Tableau 7.5 – Valeurs optimales des épaisseurs de chaque patch (points A, B, C) Patch 1 Patch 2 Patch 3 Patch 4 Point
h2 [mm] h3 [mm] h2 [mm] h3 [mm] h2 [mm] h3 [mm] h2 [mm] h3 [mm] A 0,0261 0,65 0,0406 0,65 0,0332 0,65 0,0264 0,65 B 0,0258 0,65 0,0365 0,65 0,0378 0,55 0,0359 0,65 C 0,0261 0,65 0,0406 0,65 0,0332 0,65 0,0264 0,65
T = 22,45ºC (point A); T = 22,83ºC (point B); T = 22,45ºC (point C);
Par la comparaison entre les Figures 7.5.b et 7.8, pour le point A, on observe que les solutions optimales mènent à une meilleure atténuation de la réponse pour le mode M1 en comparaison avec le mode M2, aussi bien pour le calcul que pour l’essai. De plus, on peut remarquer la bonne précision du modèle aux éléments finis de plaque multicouche pour prédire le comportement réel du système amorti par couche contrainte. Ce fait est confirmé par les erreurs relatives acceptables entre les fréquences modales et les amplitudes des réponses entre le calcul et l’essai, montrées en Tableau 7.6. Pour les points B et C (Figure 7.5.b), les solutions optimales conduisent à une meilleure atténuation pour le mode M2 (Figures 7.9 et 7.10) en comparaison avec le mode M1. Les Tableaux 7.7 et 7.8 montrent les erreurs relatives calcul-essai en fréquence et en amplitude pour ces deux points.

Validation Expérimentale du Modèle de Plaque Sandwich et Application Industrielle 136
Figure 7.8 – FRFs expérimentale et analytique du système amorti – point A
Figure 7.9 – FRFs expérimentale et analytique du système amorti – point B
Figure 7.10 – FRFs expérimentale et analytique du système amorti – point C

Validation Expérimentale du Modèle de Plaque Sandwich et Application Industrielle 137
Tableau 7.6 – Fréquences modales calculées et mesurées du système amorti – point A
Mode Fréquence
[Hz] EFfFréquence
Expf [Hz] Erreur
fε [%] Amplitude
EFH [dB] Amplitude
ExpH [dB] Erreur
Hε [%] M1 40,49 40,01 1,2 38,39 38,92 1,4 M2 54,57 55,10 1,0 40,65 42,69 4,8 M3 79,31 77,52 2,3 30,13 28,67 5,1 M4 97,83 96,83 1,0 26,70 33,87 21,2
Tableau 7.7 – Fréquences modales calculées et mesurées du système amorti – point B
Mode Fréquence
[Hz] EFfFréquence
Expf [Hz] Erreur
fε [%] Amplitude
EFH [dB] Amplitude
ExpH [dB] Erreur
Hε [%] M1 39,88 40,50 1,5 40,05 44,98 11 M2 56,57 56,55 0,03 31,03 34,15 9,1 M3 76,82 77,98 1,5 32,55 34,35 5,2 M4 96,54 96,49 0,1 23,78 22,68 4,9
Tableau 7.8 – Fréquences modales calculées et mesurées du système amorti – point C
Mode Fréquence
[Hz] EFfFréquence
Expf [Hz] Erreur
fε [%] Amplitude
EFH [dB] Amplitude
ExpH [dB] Erreur
Hε [%] M1 41,47 40,61 2,1 41,71 48,77 14,5 M2 60,47 55,87 8,2 27,95 32,95 15,2 M3 78,17 78,82 0,8 31,97 32,53 1,7 M4 99,79 96,50 3,4 19,96 19,81 0,8
7.1.4 Discussion des résultats
• Modèle aux éléments finis de plaque sandwich
Les résultats analytiques et expérimentaux présentés permettent d'évaluer l'influence du traitement viscoélastique par couche contrainte sur le comportement dynamique des systèmes structuraux. Un aspect particulier à retenir est la capacité démontrée par le modèle EF pour représenter le comportement des matériaux viscoélastiques en fonction de la fréquence d’excitation et de la température. En ce qui concerne l'atténuation des niveaux de vibrations, on remarque à travers les Figures 7.8 à 7.10 que le traitement viscoélastique par couche contrainte a permis de diminuer significativement les amplitudes pour tous les modes dans la bande fréquentielle analysée.
A travers la comparaison des erreurs entre le calcul et essai, on conclue que les deux résultats sont raisonnablement proches, dans le sens où les erreurs en fréquence et en amplitude pour le calcul et l’essai ne sont pas trop élevées. Pour les solutions optimales indiquées par les points B et C, on remarque une augmentation des valeurs des erreurs relatives entre les fréquences modales et les amplitudes de vibration, en comparaison avec celles calculées pour le point A. On estime que ces erreurs sont dues principalement aux sources suivantes :
o Dans le modèle EF, on suppose des conditions idéales d’application du traitement viscoélastique, tel que l’état d’adhérence parfaite entre les couches ;
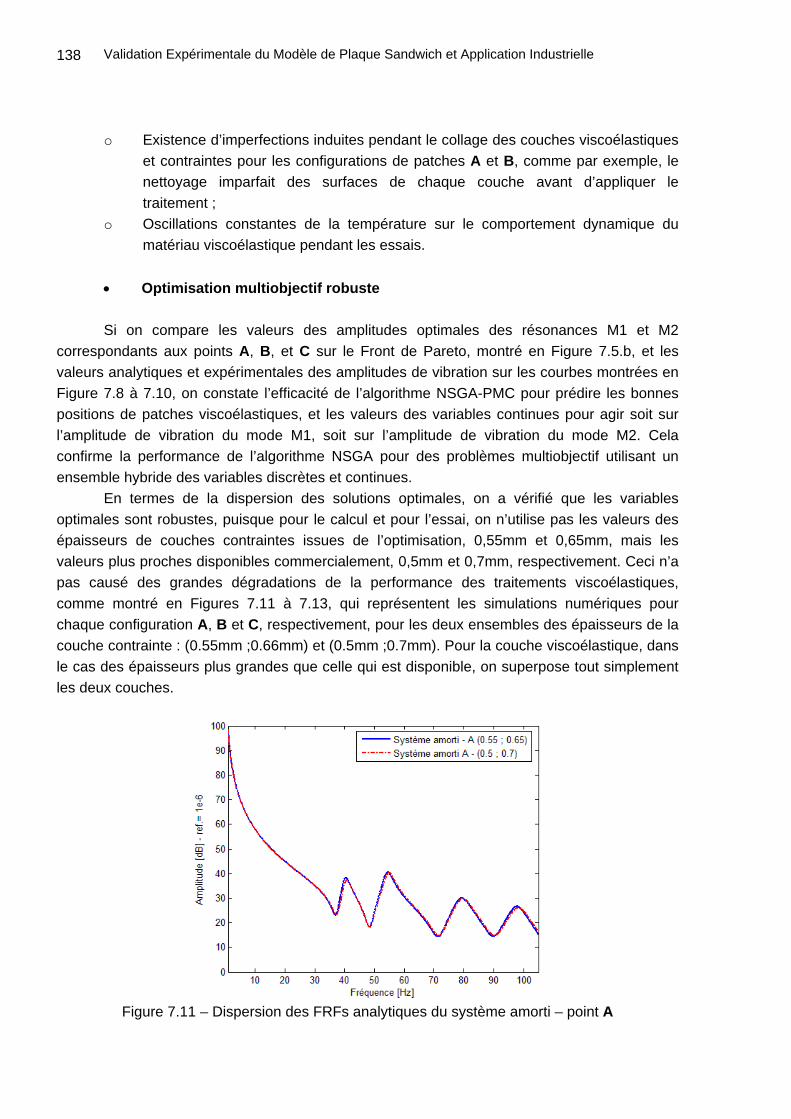
Validation Expérimentale du Modèle de Plaque Sandwich et Application Industrielle 138
o Existence d’imperfections induites pendant le collage des couches viscoélastiques et contraintes pour les configurations de patches A et B, comme par exemple, le nettoyage imparfait des surfaces de chaque couche avant d’appliquer le traitement ;
o Oscillations constantes de la température sur le comportement dynamique du matériau viscoélastique pendant les essais.
• Optimisation multiobjectif robuste
Si on compare les valeurs des amplitudes optimales des résonances M1 et M2
correspondants aux points A, B, et C sur le Front de Pareto, montré en Figure 7.5.b, et les valeurs analytiques et expérimentales des amplitudes de vibration sur les courbes montrées en Figure 7.8 à 7.10, on constate l’efficacité de l’algorithme NSGA-PMC pour prédire les bonnes positions de patches viscoélastiques, et les valeurs des variables continues pour agir soit sur l’amplitude de vibration du mode M1, soit sur l’amplitude de vibration du mode M2. Cela confirme la performance de l’algorithme NSGA pour des problèmes multiobjectif utilisant un ensemble hybride des variables discrètes et continues.
En termes de la dispersion des solutions optimales, on a vérifié que les variables optimales sont robustes, puisque pour le calcul et pour l’essai, on n’utilise pas les valeurs des épaisseurs de couches contraintes issues de l’optimisation, 0,55mm et 0,65mm, mais les valeurs plus proches disponibles commercialement, 0,5mm et 0,7mm, respectivement. Ceci n’a pas causé des grandes dégradations de la performance des traitements viscoélastiques, comme montré en Figures 7.11 à 7.13, qui représentent les simulations numériques pour chaque configuration A, B et C, respectivement, pour les deux ensembles des épaisseurs de la couche contrainte : (0.55mm ;0.66mm) et (0.5mm ;0.7mm). Pour la couche viscoélastique, dans le cas des épaisseurs plus grandes que celle qui est disponible, on superpose tout simplement les deux couches.
Figure 7.11 – Dispersion des FRFs analytiques du système amorti – point A

Validation Expérimentale du Modèle de Plaque Sandwich et Application Industrielle 139
Figure 7.12 – Dispersion des FRFs analytiques du système amorti – point B
Figure 7.13 – Dispersion des FRFs analytiques du système amorti – point C
7.2 Application industrielle : Compresseur de réfrigérateur
Dans cette section, on montre à travers les résultats analytiques et expérimentaux, l’intérêt d’utiliser le traitement viscoélastique par couche contrainte dans les systèmes industriels en vue de la réduction des niveaux de vibration. Pour cela, on évalue de façon expérimentale la performance du traitement viscoélastique appliqué à une carcasse d’un compresseur de réfrigérateur, dans le but d’amortir leurs niveaux vibratoires. On précise que cette partie est en cours d’étude dans le cadre d’un projet de recherche et développement en collaboration entre la Faculté de Génie Mécanique de l’UFU et la société EMBRACO, au Brésil.
Avant de passer aux essais expérimentaux, on réalise quelques simulations numériques avec un modèle EF du compresseur fourni par l’entreprise montré en Figure 7.14.a, auquel on va appliquer le traitement viscoélastique indiqué. On précise que la position du traitement a été

Validation Expérimentale du Modèle de Plaque Sandwich et Application Industrielle 140
choisie a priori à l’aide de l’identification des zones qui présentent des énergies de déformation maximales (Modal Strain Energy–MSE) (Rogers et al, 1981), dans la bande fréquentielle d’intérêt.
(a) (b) Figure 7.14 – Modèle EF du compresseur (a) ; FRF normalisée du système non amorti.
La Figure 7.14.b montre la FRF du système non amorti, associée à la force F et au
déplacement X indiqués en Figure 7.14.a. Dans la bande fréquentielle analysée, il y un total de 7 modes de vibration dont on souhaite diminuer les amplitudes vibratoires par l’introduction du traitement viscoélastique. Le modèle EF du compresseur sans traitement est composé par 3662 éléments finis de plaque mince SHELL63, soit un nombre total de 21870 d.d.l. Le traitement viscoélastique est composé par 177 éléments finis de plaque sandwich à trois couches développé au Chapitre 3, ce qui conduit à une augmentation de 612 d.d.l supplémentaires, soit un nombre total de 22482 d.d.l pour le système traité. Remarque : On précise que pour l’introduction des traitements viscoélastiques dans des modèles EF de géométries complexes, modélisés par le code ANSYS, tels que le modèle EF du compresseur en étude, on utilise la procédure de couplage/remplacement des éléments finis de plaque sandwich développés au Chapitre 3 sur la plateforme MATLAB, avec les éléments de plaque simple modélisés par le code ANSYS. Ensuite, on fait l’introduction des propriétés viscoélastiques et l’évaluation des réponses dynamiques de la structure complète amortie dans la plateforme MATLAB.
Le Tableau 7.9 donne les valeurs des paramètres géométriques des couches viscoélastique et contrainte, utilisées pour évaluer l’influence du traitement viscoélastique sur les niveaux vibratoires de la structure test.

Validation Expérimentale du Modèle de Plaque Sandwich et Application Industrielle 141
Tableau 7.9 – Définition de l’espace de conception – compresseur Variable Valeurs nominales
2h 0,0254 mm
3h 0,5 mm ; 0,9 mm ; 1,2 mm ; 1,5 mm T 25ºC
La Figure 7.15 montre les FRFs amorties calculées à partir du modèle aux éléments
finis, pour les différentes valeurs des épaisseurs de la couche contrainte. Comme prévu, on observe une diminution des amplitudes de vibration pour tous les modes dans la bande fréquentielle d’analyse. Ceci signifie qu’une augmentation de l’épaisseur de la couche contrainte engendre une augmentation de la dissipation du matériau viscoélastique.
Figure 7.15 – FRFs calculées du système amorti, représentant l’influence de la couche
contrainte sur la performance du traitement viscoélastique. Remarque : Le modèle EF du compresseur n’est pas recalé, car à ce stade de l’étude, on souhaite vérifier a priori l’efficacité du traitement viscoélastique.
La Figure 7.16 montre en détaille l’évolution de la performance du traitement viscoélastique pour les différentes épaisseurs de la couche contrainte.

Validation Expérimentale du Modèle de Plaque Sandwich et Application Industrielle 142
Figure 7.16 – Détail des FRFs calculées du système amorti.
7.2.1 Essai expérimental avec le compresseur
Dans cette section, on évalue expérimentalement la performance du traitement viscoélastique pour les différentes couches contraintes. La Figure 7.17 représente le montage expérimental utilisé pour obtenir les réponses dynamiques du compresseur suspendu pour trois fils d’acier suffisamment flexibles pour simuler les conditions libres.
Figure 7.17 – Montage expérimentale avec la carcasse du compresseur.
(1) compresseur ; (2) accéléromètre ; (3) marteau d’impact ; (4) les amplificateurs de signaux ; (5) plaque dSPACE avec 8 chaînes ; (6) ordinateur personnel.

Validation Expérimentale du Modèle de Plaque Sandwich et Application Industrielle 143
La Figure 7.18 montre une photo de la structure, où le point 4 correspond au point d’impact par un marteau de choc et le point X correspond au placement du capteur accéléromètre.
Figure 7.18– Structure instrumentée et points d’identification des FRFs expérimentales.
Figure 7.19 – FRFs expérimentales du système amorti, représentant l’influence de l’épaisseur
de la couche contrainte sur la performance du traitement viscoélastique.
Comme prévu par les simulations numériques montrées en Figure 7.16, la Figure 7.19 montre expérimentalement l’influence très significative de la couche contrainte sur la performance du traitement viscoélastique par couche contrainte. A travers cette figure, on remarque l’efficacité du traitement viscoélastique par couche contrainte en réduire les amplitudes de résonances de tous les modes de la bande fréquentielle analysée, ce qui donne tout l’intérêt à ce type de traitement viscoélastique au domaine industriel.

Validation Expérimentale du Modèle de Plaque Sandwich et Application Industrielle 144
7.3 Conclusions
Dans ce chapitre, on a tenté de valider de façon analytique et expérimentale les éléments finis de plaque à trois couches à travers l’utilisation d’une structure simple composée par une plaque plane partiellement traitée par couche contrainte. Dans le but de vérifier plus précisément l’effet de amortissement introduit dans la structure, un recalage simple du modèle EF de plaque a été effectué par l’introduction d’un facteur d’amortissement visqueux pour mieux approcher les amplitudes de résonances entre le calcul et l’essai de la plaque sans traitement viscoélastique. A partir du modèle non-traité recalé, on a pu appliquer la méthodologie d’optimisation multiobjectif robuste, dans le but de trouver les variables continues (épaisseurs de couches et température), et les positions optimales de patches viscoélastiques, pour amortir les amplitudes de vibration du premier et du deuxième mode de la structure. La comparaison calcul-essai montre l’utilité de la procédure d’optimisation paramétrique multiobjectif qui permet de bien dimensionner et de bien positionner les traitements viscoélastiques pour que leur qualité amortissante soit maximale dans la bande de fréquence d’intérêt. De plus, on a pu vérifier la performance du traitement viscoélastique par couche contrainte pour réduire les niveaux vibratoires des structures.
Pour le deuxième cas étudié, on montre l’utilité du traitement viscoélastique par couche contrainte appliqué aux structures industrielles relativement complexes. Pour cela, on a réalisé des essais expérimentaux avec une carcasse d’un compresseur de réfrigérateur, en vérifiant l’influence de plusieurs épaisseurs de couches contraintes. On a remarqué que l'épaisseur de la couche contrainte joue un rôle très important sur la performance du traitement viscoélastique. Cette étude sera poursuivie et approfondie dans le cadre de la collaboration industrielle en cours.

CHAPITRE 8
Conclusions Générales et Perspectives
Résumé et Contributions
Ce mémoire de thèse vise apporter une contribution aux développements récents
consacrés à la modélisation et l’application des matériaux viscoélastiques par couches contraintes, dans le but de réduire les vibrations basses fréquences de systèmes d’ingénierie de géométries complexes. Ce mémoire représente le résultat de la continuité d’un travail de Master réalisé par Lima (2003), au sujet de la modélisation numérique et la caractérisation expérimentale de différents dispositifs viscoélastiques appliqués aux systèmes structuraux simples du type poutres et portiques bidimensionnels. En particulier, les travaux adressés dans ce mémoire sont consacrés à la modélisation de structures de géométries plus au moins complexes contenant l’amortissement viscoélastique par couche contrainte, et à la proposition d’une méthodologie de conception optimale de solutions amortissantes dans la phase d’avant projet.
Dans la première partie du mémoire, en particulier, les Chapitres 1 et 2, on adresse le bilan en ce qui concerne les développements les plus récents au sujet des matériaux viscoélastiques et leur modélisation mathématique par différents modèles paramétriques et non paramétriques considérés bien adaptés aux modèles aux éléments finis, pour prendre en compte la dépendance en fréquence et en température de leurs propriétés mécaniques. On a utilisé l’approche du module complexe combinée avec l’hypothèse de superposition Fréquence-Température qui a permis d’obtenir le comportement viscoélastique pour différentes valeurs de fréquences et de températures par un simple décalage en fréquence par un facteur dépendant de la température. De plus, cette approche est simple à utiliser étant bien adaptée aux procédures de condensation robuste de modèles viscoélastiques, en vue de réduire le temps de calcul, de stockage de données.
Dans le Chapitre 3, on a mis en œuvre les développements qui concernent les éléments de plaque sandwich par la méthode des éléments finis et leur paramétrisation. Ces éléments finis, initialement modélisés dans la plateforme MATLAB®, ont été intégrés dans des modèles aux éléments finis de structures de géométries complexes, modélisées par le code EF ANSYS®. Cette procédure d’interfaçage/remplacement des éléments de plaque simple par des éléments de plaque sandwich, a permis d’étendre le domaine des applications des traitements viscoélastiques par couches contraintes au domaine industriel. La paramétrisation du modèle aux éléments finis viscoélastiques s’avère très utile puisque les paramètres de conception apparaissent en dehors des matrices élémentaires de chaque couche et pour chaque effet mécanique (membrane, flexion et cisaillement), ce qui permet, par la suite, d’introduire de façon

Conclusions Générales et Perspectives 146
simple et rapide les incertitudes dans les paramètres géométriques/physiques les plus influents, et de mener facilement l’analyse de sensibilité paramétrique. De plus, une fois le modèle paramétré mis en place, la méthodologie de condensation robuste est appliquée.
Dans les Chapitres 4 et 5, visant l’obtention des solutions optimales et robustes des systèmes structuraux traités par matériaux viscoélastiques, l’algorithme évolutionnaire multiobjectif NSGA combiné avec la méthode de condensation robuste de modèles viscoélastiques, et les techniques d’approximation de fonctions, ont été mise en œuvre. La procédure de couplage entre l’algorithme NSGA, condensation robuste, réseaux de neurones, et les méthodologies de surfaces de réponses, s’avère très efficace pour prévoir les réponses dynamiques des systèmes amortis, et de réduire davantage le temps de calcul des solutions optimales pour les systèmes viscoélastiques de taille raisonnable. Néanmoins, on a observé quelques avantages de certaines techniques par rapport aux autres : par exemple, les réseaux de neurones (ANNs) sont bien adaptés au cas où l’optimisation comporte un espace de conception hybride de variables continues, comme les épaisseurs de patches, et discrètes, comme les positions de patches. De plus, les ANNs sont bien adaptés pour approcher les réponses des problèmes fortement non-linéaires ; les surfaces de réponses adaptatives ont l’avantage de permettre d’évaluer le problème exact pour créer les polynômes seulement dans les régions plus influentes du domaine discrétisé. Ceci permet une réduction du nombre d’évaluations exactes du problème par rapport aux RSM classiques, qui utilisent le Plan d’Expérience Factoriel Complet pour générer les polynômes. Cependant, les ARSM/RSM ne peuvent pas être construits avec les variables discrètes, comme les positions de patches, contrairement aux ANNs.
Pour obtenir des solutions robustes, on a pris en compte les incertitudes sur les paramètres de conception caractérisant le traitement viscoélastique par couche contrainte, comme les épaisseurs de couches viscoélastique et contrainte, et la température du matériau viscoélastique. Pour cela, on a introduit des fonctions de robustesse comme fonctions coût supplémentaires à maximiser en même temps que les fonctions coût originales. Cette procédure a permis d’établir un compromis entre optimalité et robustesse des solutions obtenues. A travers plusieurs exemples, on a montré que les solutions optimales sont robustes par rapport aux incertitudes introduites dans les paramètres de conception.
Les diverses applications numériques de simulation des structures d’ingénierie relativement complexes contenant les traitements viscoélastiques par couches contraintes, utilisant les stratégies d’optimisation couplées avec les techniques d’approximation de fonctions décrites précédemment, ont démontré l’efficacité des procédures et techniques proposées, principalement en termes de réduction du temps de calcul pour obtenir les solutions optimales et robustes. Cet ensemble d’outils sera intégré à court terme dans une méthodologie générale d’optimisation qui sera dédiée à la conception de structures industrielles plus complexes amorties par matériaux viscoélastiques.
Les problèmes d'optimisation abordés dans ce mémoire comportent normalement la combinaison de plusieurs variables de conception : des variables continues, comme épaisseurs des couches et la température du matériau viscoélastique ; et des variables discrètes, comme la position des traitements superficiels par couche contrainte, dans le but de réduire au maximum les niveaux vibratoires des systèmes amortis. Le choix des paramètres continus est

Conclusions Générales et Perspectives 147
basé sur une étude préalable de l'influence de ces paramètres sur l'efficacité du traitement viscoélastique. Cette étude peut être conduite par une analyse de sensibilité, comme on l’a montré au Chapitre 6.
Dans le Chapitre 6, on a également proposé un modèle de propagation des incertitudes qui est introduit de façon originale au niveau des éléments finis de poutres et plaques sandwiches, et concerne les paramètres de conception les plus influents qui caractérisent le traitement viscoélastique. Les réponses dynamiques du système amorti aléatoire ont été obtenues par la méthode de tirages aléatoires d’Hyper Cube Latin (HCL), dans le but de générer les enveloppes des réponses dynamiques du système. Ceci permet au concepteur d'analyser l’effet des incertitudes introduites sur la variabilité des réponses dynamiques dans le problème direct. Cette analyse directe permet ensuite d’aborder le problème de l’optimisation robuste avec un choix pertinent des variables incertaines les plus influentes.
Les nombreuses simulations numériques et les essais expérimentaux ont permis d’évaluer la performance des procédures de modélisation développées comme un outil d'analyse et de conception des systèmes complexes d’ingénierie contenant l’amortissement viscoélastique, et de montrer les aspects importants du comportement dynamique des systèmes structuraux traités par ces matériaux. A partir des résultats analytiques et expérimentaux obtenus, on a pu tirer les conclusions spécifiques suivantes :
1ª) Les procédures de modélisation développées se sont avérées efficaces pour
caractériser le comportement dynamique des systèmes structuraux amortis, notamment en ce qui concerne la représentation de la dépendance des caractéristiques dynamiques des matériaux viscoélastiques de la fréquence d’excitation et de la température.
2ª) L’utilisation des traitements viscoélastiques par couches contraintes s’avère une
stratégie efficiente de contrôle passif de vibrations de systèmes dynamiques. Cependant, le degré d’efficacité dépend de quelques facteurs, comme :
• La dépendance des propriétés mécaniques par rapport à la température et à la
fréquence. • Le type de dispositif viscoélastique utilisé, qui peut être superficiel (par couche
contrainte passive) ou discret (les appuis de translation ou les joints de rotation). • Les dimensions, la géométrie, et le positionnement des dispositifs viscoélastiques
utilisés. • Bande de fréquence d’analyse et température de fonctionnement.
Perspectives
Les travaux de cette thèse ont donné lieu à de nombreuses perspectives dont on peut citer les plus importantes :
• Pour poursuivre l’intégration des traitements viscoélastiques dans le domaine industriel par couches contraintes, il paraît nécessaire d’améliorer les éléments finis de plaque sandwich, par la mise en œuvre des éléments de plaques et

Conclusions Générales et Perspectives 148
coques multicouches de théories d’ordre supérieurs, permettant, en particulier, la modélisation de structures à fortes courbures ;
• L’étude de l’auto-échauffement des matériaux viscoélastiques en fonctionnement constitue une autre perspective. Puisqu’on a observé que la température joue un rôle très important sur les propriétés amortissantes pour ces matériaux, il faut proposer un modèle thermomécanique bien adapté pour les cas de solutions amortissants de géométries complexes. De cette manière, on pourra maîtriser l’auto-échauffement des traitements viscoélastiques par couches contraintes pour assurer l’efficacité des systèmes amortissants ;
• Il serait intéressant d’étendre les applications des éléments finis sandwich développés au domaine de la vibroacoustique basses fréquences. Actuellement, ce travail constitue en partie le sujet d’une thèse qui a démarrée en 2006 au LMARC.
• Approfondissement de la méthode des éléments finis viscoélastiques stochastiques. En particulier, le couplage de la méthode de condensation robuste vis-à-vis des incertitudes et la méthode de perturbation modale. Son extension aux structures viscoélastiques complexes dont les modèles éléments sont de grande taille est également une voie de recherche en cours d’investigation. Ces travaux font l’objet d’une collaboration scientifique UFU-UFC-IPEIN.
• Mener un étude de fatigue vibratoire et de fiabilité des structures contenant des éléments amortissants, puisque, pour des applications viscoélastiques au niveau industriel, on doit assurer la sûreté de fonctionnement (vieillissement, tenue en fatigue, durée de vie, etc.) des systèmes amortissants ;
• Optimisation de structures avec éléments viscoélastiques en prenant en compte les incertitudes sur la structure, c’est-à-dire : optimisation structure incluant le traitement viscoélastique, qui permet d’intervenir dès la première phase de conception/construction de la structure à la quelle on souhaite appliquer le traitement viscoélastique, dans le but d’augmenter l’efficacité du traitement.
• La mise en œuvre de procédures de recalage de modèles viscoélastiques basées sur les résultats expérimentales de systèmes amortis. Une technique consiste à recaler les modèles EF à partir des différences entre les réponses du modèle et celles issues de l’essai. Les variables de conception correspondent aux facteurs de correction attribués aux paramètres de conception physiques et/ou géométriques du modèle EF du système traité, liés à la masse, la raideur et, en particulier, au caractéristiques physiques e géométriques des dispositifs amortissants.

Références Bibliographiques
Ait Brik, B., Bouhaddi, N., Cogan, S., 2004a, « Neural Networks and Evolutionary Algorithm for Solving Multi-objective Optimization Problems », Proceedings of the Seventh International Conference on Computational Structures Technology, Lisbon, Portugal, CD-ROM. Ait Brik, Bouhaddi, N., Cogan, S., 2004b, « Multiobjective Optimization Augmented with a Robustness Function », Proceedings of the IMAC XXll, Deardorn, USA. Ait Brik, B., 2005, « Méthodologies de conception robuste et d’optimisation dans un contexte de conception d’architectures mécaniques nouvelles en avant projet », Thèse présentée à l’Université de Franche Comté. Alvin, K. F., 1998, « Efficient computation of eigenvector sensitivities for structural dynamics », American Institute of Aeronautics and Astronautics Journal, Vol. 35(11). Bagley, R. L., Torvik, P. J., 1979, « A Generalized Derivative Model for an Elastomer Damper », Shock and Vibration Bull., Vol. 49, No. 2, pp. 135-143. Bagley, R. L., 1983, « A Theoretical Basis for the Application of Fractional Calculus to Viscoelasticity », Journal of Rheology, Vol. 27, No. 3, pp. 201-210. Bagley, R. L., Torvik, P. J., 1983, « Fractional Calculus - A Different Approach to the Analysis of Viscoelastically Damped Structures », AIAA Journal, Vol. 21, No. 5, pp. 741-748. Bagley, R. L., Torvik, P. J., 1985, « Fractional Calculus in the Transient Analysis of Viscoelastically Damped Structures », AIAA Journal, Vol. 23, No. 6, pp. 918-925. Balmès, E., 1996a, « Parametric families of reduced finite element models. Theory and applications ». Mechanical systems and signal Processing, Vol. 10 (4), pp. 381-394. Balmès, E., 1996b, « Optimal Ritz vectors for component mode synthesis using the singular value decomposition ». AIAA Journal, Vol. 34, pp. 1256-1260. Balmès, E., 1997, « Modèles expérimantaux complets et modèles analytiques réduits en dynamique des structures ». Mémoire de HDR, Université P&M Curie, Paris Vl.
Références Bibliographiques 150
Balmès, E., Babillot, A., 2002a, « Analysis and design tools for structures damped by Viscoelastic materials ». International Modal Analysis Conference (IMAC). Balmès, E., Germès, S., 2002b, « Tools for Viscoelastic Damping Treatment Design: Application to an Automotive Floor Panel », Proceedings of the 28th International Seminar on Modal Analysis (ISMA), Leuven, Belgium. Balmès, E., 2005, « Modes and Regular Shapes. How to Extend Component Mode Synthesis Theory », Proceedings of XI DINAME, Ouro Preto, Brazil. Banks, H. T., 1996, « Smart Material Structures, Modeling, Estimation and Control », John Wiley & Sons, New York. Barkanov, E., 1999, « Transient Response Analysis of Structures Made From Viscoelastic Materials », International Journal for Numerical Methods in Engineering, Vol. 44, pp. 393-403. Batmaz, I., Tunali, S., 2003, « Small response surface designs for metamodel estimation », European Journal of Operational Research, Vol. 145, pp.455-470.
Battaglia, G.J., Maynard, J.M., 1996, « Mean Square Error: A useful tool for statistical process management », Journal of AMP Technology, Vol. 34, pp. 1256-1260. Benaroya, H., Rehak, M., 1988, « Finite element methods in probabilistic structural analysis: A selective review », Applied Mechanics Reviews, ASME, Vol. 41(5), pp. 201-213. Bennett, J. A., Lust, R. V., 1990, « Conservative methods for structural optimization », AIAA Journal. Bert, C. W., 1973, « Material Damping: An Introductory Review of Mathematical Models, Measures and Experimental Techniques », Journal of Sound and Vibration, Vol. 29, No. 2, pp. 129-153. Besse, P., 2002, « Datamining, modélisations statistiques et apprentissage », Cours statistiques. Braibant, V., Delcroix, F., Oudshoorn, A., 1998, « Méthodes non-déterministes pour l’analyse et la conception robuste de produits et de procédés : Approche par l’arithmétique des intervalles », Actes du colloque IDMME’98, Compiègne, pp137-145. Carpinteri, A., Ferro, G., Ventura, G., 2001. « An augmented Lagrangian element – free (ALEF) approach for crack discontinuities », Journal of Computers Methods Applied Mechanics, Vol. 191, pp. 941-957.

Références Bibliographiques 151
Christensen, R. M., 1982, « Theory of Viscoelasticity: An Introduction », Academic Press, Inc., New York, 2nd edition. Craig, R. R. and Bampton, M. C. C., 1968, « Coupling of Substructures for Dynamic Analyses », AIAA Journal, Vol. 6(7). Crandall, S. H., 1970, « The role of damping in vibration theory », Journal of Sound and Vibration, Vol. 11(1), pp. 3-18. Daya, E. M. and Poitier-Ferry, M., 2001, « A numerical method for nonlinear eigenvalue problems. Applications to vibrations of viscoelastic structures ». Computers & Structures, Vol. 79, oo. 533-541. Daya, E. M., Azrar, L., Poitier-Ferry, M., 2002, « Modèlisation des vibrations non-linéaires des structures sandwich viscoélastiques », 7ème Journée d’Analyse Numérique/Optimistion, Maroc. Der Kiureghian, A., Ke, J. B., 1988, « The Stochastic Finite Element Method in Structural Reliability », Probabilistic Engineering Mechanics, Vol. 3, No. 2, pp. 83-91. Dessombz, O., Thouverez, F., Laïne, J. P., Jézéquel, L., 2001, « Analyse Dynamique de Structures Comportant des Paramètres Incertains », Journal of Sound and Vibration, Vol. 239(5), pp. 949-968. Drake, M. L., Soovere, J., 1984, « A Design Guide for Damping of Aerospace Structures », In AFWAL Vibration Damping Workshop Proceedings 3. Droesbeke, J. J., Fine, J., Saporta, G., 1997, « Plans d’expériences: Applications à l’entreprise », Editions Techniques.
Eschenauer, J., Koski, J., Osyczka, A., 1990, « Multicriteria Design Optimization », Springer-Verlag. Espíndola, J.J., Lopes, E.M.O., 1988, « Caracterização de Materiais Elastoméricos para o Controle de Vibrações e Ruídos Acústicos », II Simpósio Brasileiro Sobre Sistemas Dinâmicos da Mecânica – DINAME, Campos do Jordão - SP. Espíndola, J.J and Silva, H.P., 1992, « Modal Reduction of Vibrations By Dynamic Neutralizers », Proc. of The Tenth International Modal Analysis Conference, San Diego,USA, pp. 1367-1373. Espíndola, J.J. and Bavastri, C.A., 1997, « Viscoelastic Neutralizers in Vibration Abatement: A Non-Linear Optimization Approach », Journal of the Brazilian Society of Mechanical Sciences, XIX (2), pp. 154-163.

Références Bibliographiques 152
Espíndola, J.J., Presezniak, F. A., Lopes, E. M. O., Teixeira, P. H., Espíndola, J. J., 2004, « Optimum Design of Viscoelastic Dynamic Neutralizers for Overhead Transmission Lines: Distributed Excitation Model », IEEE/PES, Transmission & Distribution Conf, Latin America. Espíndola, J.J., Lopes, E.M. and Bavastri, C.A., 2005, « A Generalized Fractional Derivative Approach to Viscoelastic Materials Properties Measurements », Applied Mathematics and Computation, v.164, n.2, pp. 473-506. Falsone, G., Impollonia, N., 2002, « A new approach for the stochastic analysis of finite element modelled structures with uncertain parameters », Computers Methods Applied Mechanics Engineering, vol. 191, pp. 5067–5085 Fox, R., L., Kappor, M. P., 1968, Rates of changes of eigenvalues and eigenvectors, AIAA journal, Vol.6 Florian, A.,1992, « An efficient sampling scheme: updates Latin Hypercube sampling », Probabilistic Engineering Mechanics, Vol. 7, pp. 123-130. Friswell M.I., Inman D.J., and Lam M.J, 1997, « On the realisation of GHM models in viscoelasticity ». Journal of Intelligent Material Systems Structures, 8(11):986–993. Fuller, C. R., Elliot, S. J., Nelson, P. A, 1996, « Active Control of Vibration », Academic Press, San Diego, Californie, pp. 332. Gallagher, M. R., 2000, Multi-layer Perceptron Error Surfaces: Visualization, Structure and Modelling, PhD Thesis, Department of Computer Science and Electrical Engineering, University of Queensland, Australia. Ghanmi, S., Guedri, M., Bouazizi, M. L., Majed, R., Bouhaddi, N., 2005, « Méthode des surfaces de réponses robuste pour l’analyse dynamique des structures stochastiques », 17ème Congrès Français de Mécanique, Troyes. Ghanmi, S., Bouazzi, M. L., Bouhaddi, N., 2005, « Modélisation et Optimisation des Structures Mécaniques. Approche Basée sur les Surfaces de Réponses », CMSM Conférence, Hammamet, Tunisie. Ghanem, R. G. and Spanos, P. D., 1991, « Stochastic Finite Elements – A Spectral Approach », Spring Verlag. Ghanem, R. G. and Kruger, R. M., 1996, « Numerical solution of spectral stochastic finite element system », Computers Methods Applied Mechanics Engineering, Vol. 129, pp. 289-303.

Références Bibliographiques 153
Goldberg, D.E., 1989, « Genetic Algorithms in Search, Optimization, and Machine Learning »; Addison-Wesley. Golla, D. F. and Hughes, P. C., 1985, « Dynamics of viscoelastic structures - A time-domain, finite element formulation », Journal of Applied Mechanics, Vol. 52,, No. 4, pp. 897-906. Guedri, M., 2006, « Synthèse Modale : Approches Stochastiques en Elastodynamique Linéaire et Non-linéaire ». Thèse présentée à l’Université El Manar, en Tunisie. Guedri, M., Lima, A.M.G., Bouhaddi, N., Rade, D.A., 2007, « Eléments Finis Viscoélastiques Stochastiques pour la Conception Robuste des Structures Mécaniques », 8ème Colloque National en Calcul des Structures (GIENS), Iles de Porquerolles, Côte d’Azur, France. Gu, Y.T. and Liu, G.R., 2003, « Hybrid boundary point interpolation methods and their coupling with the element free Galerkin method », Engineering Analysis with Boundary Elements, Vol. 27, pp. 905-917. Huang, S. C., Inman, D. J., Austin, E. M., 1996, « Some design considerations for active and passive constrainted layer damping treatments », Smart Materials & Structures, Vol. 5(3), pp. 301-313. Houck, C., Joines, J. and Kay, M., 1995, « A Genetic Algorithm for Function Optimization: A Matlab Implementation », NCSU-IE TR 95-09. Ibrahim, R. A., 1987, « Structural dynamics with parameter uncertainties », Applied Mechanics Reviews, Vol. 40(3), pp 309-328. Iman, R. L. and Conovers, W. J., 1980, « Samll sample sensitivity analysis techniques for computer models, with an application to risk assessment », Communications Statistics, Vol. A9, pp. 1749-1842. Johnson, A. R. and Quigley, C. J., 1992, « A viscohyperelastic Maxwell model for rubber viscoelasticity », Rubber Chemistry and Technology, Vol. 65, pp. 137-153. Khatua, T. P. and Cheung, Y. K., 1973, « Bending and Vibration of Multilayer Sandwich Beams and Plates », International Journal for Numerical Methods in Engineering, Vol. 6, pp 11-24. Kergourlay, G., Balmès, E., Clouteau, D., 2000, « Interface model reduction for efficient FEM/BEM coupling », International Seminar on Modal Analysis, Leuven. Kergourlay, G., 2004, « Mesure et prédiction vibroacoustique de structures viscoélastiques ». Thèse présentée devant l’Ecole Centrale Paris.

Références Bibliographiques 154
Kleiber M. and Hien, T. D., 1992, « The stochastic finite element method, basic perturbation technique and computer implementation », John Wiley & Sons. Korenev, B.G., Reznikov, L.M., 1993, « Dynamic Vibration Absorbers. Theory and Practical Applications ». John Wiley & Sons. Kohonen, T., 1982, « Analysis of a simple Self-Organizing Process ». Biological Cybernetics, Vol. 44(2), pp. 135-140. Lam, M. J., 1997, « Hybrid Active/Passive Models with Frequency Dependent Damping », Ph. D. Thesis, Faculty of the Virginia Polytechnic Institute, Blacksburg, VA, USA. Lazan, B. J., 1968, « Damping of Materials and Members in Structural Mechanics », Oxford: Pergamon Press. Lee, K. H., Park, G. J., 2001,« Robust optimization considering tolerances of design variables », Journal of Computers and Structures, Vol. 79, pp. 77-86. Lei, Z. and Qiu, C., 2000, « Neumann dynamic stochastic finite element method of vibration for structures with stochastic parameters to random excitation », Computers and Structures, Vol. 77, pp. 651-657. Lesieutre, G. A. and Bianchini, E., 1995, « Time Domain Modeling of Linear Viscoelasticity Using Anelastic Displacement Fields », Journal of Vibration and Acoustic, Vol. 117, No. 4, pp. 424-430. Lesieutre, G. A. and Bianchini, E., 1996a, « Finite Element Modeling of One-dimensional Viscoelastic Structures Using Anelastic Displacement Fields », Journal of Guidance, Control, and Dynamics, Vol. 19, No. 3, pp. 520-527. Lesieutre, G. A. and Lee, U., 1996b, « A Finite Element for Beams Having Segmented Active Constrained Layers with Frequency-dependent Viscoelastics », Smart Mater. Struct., Vol. 5, No. 5, pp. 615-627. Lima, A M. G., 2003, « Procedimentos de Modelagem Numérica e Avaliação Experimental Sistemas Estruturais Dotados de Absorvedores de Vibrações Viscoelásticos », Dissertação de Mestrado em Engenharia Mecânica, UFU. Lima, A.M.G., Stoppa, M.H., Rade, D.A., 2003a, “Finite Element Modelling and Experimental Characterization of Beams and Plates Treated with Constraining Damping Layers”, Proceedings of COBEM – International Conference of Mechanical Engineering, São Paulo, Brazil.
Références Bibliographiques 155
Lima, A.M.G., Stoppa, M.H., Rade, D.A., 2003b, “Finite Element Modeling of Structures Incorporating Viscoelastic Materials”, Proceedings of IMACXXI - Conference and Exposition on Structural Dynamics, Orlando, EUA. Lima, A.M.G., Stoppa, M.H., Rade, D.A., Steffen Jr., V., 2005a, Sensitivity Analysis of Viscoelastic Structures, Proceedings of the XI DINAME, Brazil, CD-ROM. Lima A.M.G., Rade, D.A., 2005b, Modelling of Structures Supported on Viscoelastic Mounts Using FRF Substructuring, Proceedings of the Twelfth Int. Congress on Sound and Vibration, ICSV12, Lisbon, Portugal. CD-ROM. Lima, A.M.G., Stoppa, M.H., Rade, D.A., Steffen Jr., V., 2006a, Sensitivity Analysis of Viscoelastic Structures, Shock and Vibration, vol. 13, no. 4-5, pp. 545-558. Lima, A.M.G., Bouhaddi, N., Rade, D.A., 2006b, Métamodèles pour L’Optimisation Multiobjectif des Structures Viscoélastiques, XVe Colloque Vibrations Chocs et Bruit, 14-16 Juin, Ecole Centrale de Lyon, France. Lima, A.M.G., Ait Brik, B. , Bouhaddi, N., Rade, D.A., 2006c, Multi-objective Optimization of Viscoelastically Damped Systems Combining Robust Condensation and Metamodels. Proceedings of the Eighth International Conference on Computational Structures Technology, Las Palmas de Gran Canaria, Spain. Lima, A.M.G., Bouhaddi, N., Rade, D.A., 2007a, Méthodologies d’Optimisation en Dynamique des Structures Viscoélastiques, 2ème Congres International Conception et Modélisation des Systèmes Mécaniques, Ecole Nationale d’Ingénieurs de Monastir, 19-21 Mars, Tunísie. Lima, A.M.G., Bouhaddi, N., Ghanmi, S., Rade, D.A., 2007b, Multiobjective Optimization of Viscoelastic Structures Combining Robust Condensation and Adaptive Response Surface, Proceedings of the Xll International Symposium on Dynamic Problems of Mechanics (DINAME2007), Ilhabela, SP, Brazil. Lim, K. B. Junkins, J. L., Wang, P. B., 1987, Re-examination of eigenvector derivatives, AIAA Journal, Vol. 10. Ling, W, 2005, A hybrid genetic algorithm-neural network strategy for simulation optimization. Journal of Applied Mathematics and Computation. Maia, N. M. M., Montalvão e Silva, J. M., 1997, “Theoretical and Experimental Modal Analysis”, Research Studies Press LTD., England, pp. 468. Mantefel and Randall, D., 2000, Evaluating the convergence of Latin Hypercube sampling, AIAA/ASME Structures, Structural Dynamics and Materials Conference, Vol. 3, pp. 100-106.

Références Bibliographiques 156
Masson, G., Bouhaddi, N., Cogan, S., Laurant, M., 2003, Component Mode Synthesis Method Adapted to Optimization of Structural Dynamics Behaviour, Proceedings of the International Modal Analysis Conference, XXl IMAC, Hyatt Orlando, Florida, CD-ROM. Masson, G., 2004, Synthèse modale robuste adaptée à l’optimisation de modèles de grande taille. Thèse présentée à l’Université de Franche-Comté. Matutti, A. C., Trindade, M. A., Sampaio, R., 2001, “Frequency-dependent Viscoelastic Models for Passive Vibration Isolation Systems”, Proceedings of 16th Brazilian Congress of Mechanical Engineering-COBEM, Vibration and Acoustics, Vol. 10, pp. 349-358. McTavish, D. J. and Hughes, P. C., 1993, “Modeling of Linear Viscoelastic Space Structures”, Journal of Vibration and Accoustics, Vol. 115, No. 1, pp. 103-113. Mead, D. J., 1998, “Passive Vibration Control”, John Wiley & Sons, Canada , pp. 554. Merlette, N., 2005, Amortissement des caisses automobiles par des films minces viscoélastiques pour l’amélioration du confort vibratoire, Thèse de l’Ecole Centrale de Lyon.
Morse, J. N., 1980, Reducing the size of the nondominated set: pruning by clustering, Computers & Operations Research, Vol. 7, pp. 55-66.
Murthy, D., V., Haftka, R. T., 1988, Derivatives of Eigenvalues and eigenvectors of a general complex matrix, International journal for numerical methods in engineering, Vol. 26, pp. 293-311. Myers, R. H. and Montgomery, D. C., 2002, Response Surface Methodology, Second Edition, New York, Wiley.
Nashif, A. D., Jones, D. I. G. and Henderson, J. P., 1985, “Vibration Damping”, John Wiley & Sons, New York. Nelson, R. B., 1976, Simplified calculation of eigenvector derivatives, AIAA Journal Vol. 14. Ogata, K., 1990, “Engenharia de Controle”, Prentice Hall do Brasil LTDA, Rio de Janeiro. Papadrakakis, M. et Kotsopulos, A., 1999, Parallel solution methods for stochastic finite element analysis using Monte Carlo Simulation, Computers Methods Applied Mechanics Engineering, Vol. 168, pp. 305-320. Park, C. H., Inman, D. J., Lam, M. J., 1999, “Model Reduction of Viscoelastic Finite Element Models”, Journal of Sound and Vibration, Vol. 219, No. 4, pp. 619-637.

Références Bibliographiques 157
Persoz, B., 1987, “Introduction a L’Étude de La Rhéologie”, Dunod. Plouin, A. S. and Balmès, E., 1998, Pseudo-modal representation of large models with viscoelastic behavior. International Modal Analysis Conference (IMAC), pp. 1440-1446. Plouin, A. S. and Balmès, E., 1999, A test validated model of plates with constrained viscoelastic methods and experimental validations. International Modal Analysis Conference, pp. 384-390. Rao, M. D., 2001, “Recent Applications of Viscoelastic Damping for Noise Control in Automobiles and Commercial Airplanes”, USA Symposium on Emerging Trends in Vibration and Noise Engineering”, India. Rogers, L. C., Johnson, C. D., Keinholz, D. A., 1981, “The modal strain energy finite elemtn method and its application to damped laminated beams. Shock and Vibration Bulletin, Vol. 51. Rogers, L., 1983, “Operators and Fractional Derivatives for Viscoelastic Constitutive Equations”, Journal of Rheology, Vol. 27, No. 4, pp. 351-372.
Rosenman, M. A. and Gero, J. S., 1985, Reducing the Pareto optimal set in multicriteria optimization (With application to Pareto optimal dynamic programming), Engineering Optimization, Vol. 8, pp. 189-206.
Rubinstein, R. Y., 1981, Simulation and the Monte Carlo Method, John & Wiley & Sons. Rusovici, R., 1999, “Modeling of Shock Wave Progagation and Attenuation in Viscoelastic Structures”, Ph. D. Thesis, Faculty of the Virginia Polytechnic Institute, Blacksburg, VA, USA. Salmanoff, J., 1997, “A Finite Element, Reduced Order, Frequency Dependent Model of Viscoelastic Damping”, Ms. C. Thesis, Faculty of the Virginia Polytechnic Institute, Blacksburg, VA, USA. Samali, B. and Kwok, K. C. S., 1995, “Use of Viscoelastic Dampers in Reducing Wind-and Earthquake-induced Motion of Building Structures”, Engineering Structures, Vol 17, No. 9, pp. 639-654. Schaffer, D., 1985, Multiple Objective Optimisation with Vector Evaluated Genetic Algorithm, In genetic Algorithm and their Applications, Proceedings of the First International Conference on Genetic Algorithm, pp. 93-100. Schinozura, M., 1972, Monte Carlo Solution of Structural dynamics, Computers and Structures, Vol. 2, pp. 855-874.
Références Bibliographiques 158
Shuëller, G. I., 2001, Computational stochastic mechanics – recent advances, Journal of Computers and Structures, Vol. 79, pp. 2225-2234. Soize, C., 1999, A nonparametric model of random uncertainties in linear structural dynamics, ISBN, Vol. 152, pp. 109-138. Soize, C., 2000, A nonparametric model of random uncertainties for reduced matrix models in structural dynamics, Probabilistic Engineering Mechanics, Vol. 15(3), pp. 277-294. Soteris, K. A., 2004, Optimization of Solar Systems using Artificial Neural Networks and Genetic Algorithms, Journal of Applied Energy, pp. 383-405. Srivinas, N., Deb, K., 1993, Multi-objective using Nondominated Sorting in Genetic Algorithms, Technical Report, Department of Mechanical Engineering, Institute of Technology, India. Stoppa, M. H., 2003, Modalagem numérica e projeto ótimo de systemas de amortecimento viscoelásticos applicados a placas retangulares, Tése, Universidade Federal de Uberlandia. Tertois, S., 2003, Réduction des effets des non-linéarites dans une modulation multiporteuse à l’aide de réseaux de neurones, Thèse presentée à l’Université de Rennes. Trindade, M. A., “Contrôle Hydride Actif-passif des Vibrations de Structures par des Matériaux Piézoélectriques et Viscoélastiques: Poutres Sandwich/multicouches Intelligentes”, Thése, Conservatoire National des Arts et Métiers, Juin 2000. Vesanto, T., 2000, Using SOM in Data Mining. Licentiate’s thesis, Finland. Wang, G., 2001, “Analyses of Sandwich Beams and Plates with Viscoelastic Cores”, Ph. D. Thesis, Faculty of the Graduate School of The University of Maryland, College Park. Williams, G., Landel, R. F., Ferry, J. D., 1955. The temperature dependence of relaxation mechanisms in amorphous polymers and other glass forming liquids. Journal of American Chemical Society, Vol. 77, 3701-3707. 3M, 2007, “Ultra-pure Viscoelastic Damping Plymer”, Product Information and Performance Data, www.3M.com. Yae, K. H. And Inman, D. J., 1993. “Control-oriented Order Reduction of Finite Element Model”, Dynamic Systems and Control, Vol. 115, pp. 708-711. Yiu, Y. C., 1993. Finite element analysis of structures with classical viscoelastic materials, Proceedings of the 34th AIAA/ASME/ASCE/AHS/ASC Structures, Structural Dynamics, and Materials Conference, California, pp. 2110-2119.

Références Bibliographiques 159
Yamazaki, F. and Schinozuka, M., 1988, Neumann expansion for stochastic finite element analysis, Journal of Engineering Mechanics ASCE, Vol. 114(8), pp. 1335-1354.
Zitzler, E. and Thiele, L., 1999, Multiobjective Evolutionary Algorithms: A Comparative Case Study and the Strength Pareto Approach. IEEE Transaction on evolutionary computation, Vol. 3, pp. 257-271.

Annexe A
A.1 Matrices élémentaires de raideur et de masse d’un élément finis de plaque sandwich
Dans la Section 3.4, à partir de l’expression (3.33), on peut exprimer le vecteur de déformations pour les couches élastiques ( )i sous la forme suivante :
( )
( )
( )
( )
( ) ( )if
im
2
2
2
2
2
i
ii
i
i
ixy
iy
ix
i
yxw2
yw
xw
z
xv
yu
yvxu
εεε +=
⎪⎪⎪
⎭
⎪⎪⎪
⎬
⎫
⎪⎪⎪
⎩
⎪⎪⎪
⎨
⎧
∂∂∂∂∂∂∂
−
⎪⎪⎪
⎭
⎪⎪⎪
⎬
⎫
⎪⎪⎪
⎩
⎪⎪⎪
⎨
⎧
∂∂
+∂∂
∂∂∂∂
=⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
=γεε
(A.1)
où et sont les vecteurs de déformation de membrane e de flexion, respectivement. Ils
peuvent être exprimés en termes des déplacements nodaux sur la forme suivante :
( )imε
( )ifε
( ) ( )δε i
mi
m D= , (A.2) ( ) ( )δε if
if D=
et l'énergie de déformation (expression (3.32)) peut être réécrite sous la forme :
( ) ( ) ( )( ) ( ) ( ) ( )( dV21U i
fi
mi
V
Tif
im
i εεεε ++= ∫ E ) (A.3)
ou sous la forme :
( ) ( ) ( ) ( )imf
iff
imm
i UUUU ++= (A.4) où :
( ) ( ) ( ) ( ) δδ dV21U
V
im
iTim
Tmm
i
∫ ⎟⎠⎞⎜
⎝⎛= DED (A.5.a)
( ) ( ) ( ) ( ) δδ dV
21U
V
if
iTif
Tffi
∫ ⎟⎠⎞⎜
⎝⎛= DED (A.5.b)

Annexe A 161
( ) ( ) ( ) ( ) δδ dV221U
V
if
iTim
Tmf
i
∫ ⎟⎠⎞⎜
⎝⎛= DED (A.5.c)
Les expressions ci-dessous définissent les fractions de l’énergie de déformation
associés aux effets de flexion, membrane et couplage membrane-flexion, respectivement. Par la comparaison entre les expressions (3.33) et (A.5), la matrice de raideur
élémentaire pour les couches élastiques, sont écrites comme suit (expression (3.34)) :
( ) ( ) ( ) ( )imf
iff
imm
i 2KKKK ++= (A.6)
De la même façon, pour les couches viscoélastiques ( )j , on peut écrire le vecteur de
déformations sous la forme :
( )
( )
( )
( )
( )
( )( )
...
00
yxwhh
xv
yu
xv
yu
hz
yw
2hh
yv
yv
hz
xw
2hh
xu
xu
hz
00
xv
yu
yvx
u
2
i1iii1i1i
j
j
2
2i1ii1i
j
j
2
2i1ii1i
j
j
jj
j
j
jyz
jxz
jxy
jy
jx
j +
⎪⎪⎪⎪⎪
⎭
⎪⎪⎪⎪⎪
⎬
⎫
⎪⎪⎪⎪⎪
⎩
⎪⎪⎪⎪⎪
⎨
⎧
⎥⎦
⎤⎢⎣
⎡∂∂
∂++⎟⎟
⎠
⎞⎜⎜⎝
⎛∂∂
−∂∂
−∂∂
+∂∂
⎥⎦
⎤⎢⎣
⎡
∂∂
⎟⎠⎞
⎜⎝⎛ +
+⎟⎟⎠
⎞⎜⎜⎝
⎛∂∂
−∂∂
⎥⎦
⎤⎢⎣
⎡
∂∂
⎟⎠⎞
⎜⎝⎛ +
+⎟⎠⎞
⎜⎝⎛
∂∂
−∂∂
+
⎪⎪⎪⎪⎪
⎭
⎪⎪⎪⎪⎪
⎬
⎫
⎪⎪⎪⎪⎪
⎩
⎪⎪⎪⎪⎪
⎨
⎧
∂
∂+
∂
∂∂
∂∂
∂
=
⎪⎪⎪
⎭
⎪⎪⎪
⎬
⎫
⎪⎪⎪
⎩
⎪⎪⎪
⎨
⎧
=
+++
++
++
γγγεε
ε
( )
( )
( ) ( ) ( )jc
jf
jm
ji1i
i1ij
j
ji1i
i1ij
j
ywh
2hh
vvhz
xwh
2hh
uuhz
000
... εεε ++=
⎪⎪⎪⎪
⎭
⎪⎪⎪⎪
⎬
⎫
⎪⎪⎪⎪
⎩
⎪⎪⎪⎪
⎨
⎧
⎥⎦
⎤⎢⎣
⎡∂∂
⎟⎠⎞
⎜⎝⎛ +
++−
⎥⎦
⎤⎢⎣
⎡∂∂
⎟⎠⎞
⎜⎝⎛ +
++−
++
++
(A.7)
où , et ( )j
mε( )jfε
( )jcε sont les vecteurs de déformations associés aux effets de membrane, de
flexion et de cisaillement hors plan, respectivement, et l’énergie de déformation peut être exprimée comme suit :
( ) ( ) ( ) ( )( ) ( ) ( ) ( ) ( )( )dV21U j
cj
fj
mV
jTjc
jf
jm
j εεεεεε ++++= ∫ E (A.8)
ou sous la forme suivante:
( ) ( ) ( ) ( ) ( ) ( ) ( )jfc
jmc
jmf
jcc
jff
jmm
j UUUUUUU +++++= (A.9)

Annexe A 162
où les fractions de l’énergie de déformation sont données par :
( ) ( ) ( ) ( ) δδ dV21U
V
jm
jTjm
Tmm
j
∫ ⎟⎠⎞⎜
⎝⎛= DED (A.10.a)
( ) ( ) ( ) ( ) δδ dV21U
V
jf
jTjf
Tff
j
∫ ⎟⎠⎞⎜
⎝⎛= DED (A.10.b)
( ) ( ) ( ) ( ) δδ dV21U
V
jc
jTjc
Tcc
j
∫ ⎟⎠⎞⎜
⎝⎛= DED (A.10.c)
( ) ( ) ( ) ( ) δδ dV221U
V
jf
jTjm
Tmf
j
∫ ⎟⎠⎞⎜
⎝⎛= DED (A.10.d)
( ) ( ) ( ) ( ) δδ dV221U
V
jc
jTjm
Tmc
j
∫ ⎟⎠⎞⎜
⎝⎛= DED (A.10.e)
( ) ( ) ( ) ( ) δδ dV221U
V
jc
jTjf
Tfc
j
∫ ⎟⎠⎞⎜
⎝⎛= DED (A.10.f)
Par la comparaison entre les expressions (3.33) et (A.10), on exprime la contribution à la
matrice de raideur élémentaire des couches viscoélastiques sous la forme suivante (expression (3.35)) :
( ) ( ) ( ) ( ) ( ) ( ) ( )jfc
jmc
jmf
jcc
jff
jmm
j 222 KKKKKKK +++++= (A.11) A.2 Plaque sandwich à cinq couches
Dans cette section, la formulation développée au Chapitre 3 est particularisée pour un élément de plaque sandwich composé par trois couches métalliques et deux couches viscoélastiques alternées, résultant en un multicouche symétrique à cinq couches, comme montré en Figure A.1.
(4) couche viscoélastique
(5) couche contraintex
z
ya
b
u5
v3
v5
u3
w
θx
θ y
1 2
3 4
(1) couche contrainte
(j) couche viscoélastique
v1u 1
(2) couche viscoélastique
(3) couche base
h 5h 4
h 3h 1
h 2
Figure A.1 – Elément fini de plaque sandwich à cinq couches.

Annexe A 163
Tenant compte de la géométrie du multicouche et des expressions (3.1) à (3.9), les déformations dues au cisaillement des couches viscoélastiques sont données par :
( )⎥⎦
⎤⎢⎣
⎡∂∂
+−
=xw
duu
hd
2
31
2
22xzγ (A.12.a)
( )⎥⎦
⎤⎢⎣
⎡∂∂
+−
=yw
dvv
hd
2
31
2
22yzγ (A.12.b)
( )⎥⎦
⎤⎢⎣
⎡∂∂
+−
=xw
duu
hd
4
53
4
44xzγ (A.12.c)
( )⎥⎦
⎤⎢⎣
⎡∂∂
+−
=yw
dvv
hd
4
53
4
44yzγ (A.12.d)
où ( )3212 hh2h21d ++= et ( )5434 hh2h
21d ++= .
À travers les expressions (3.7) et (3.8), les déplacements longitudinaux moyens dans les
directions x et dans les couches viscoélastiques sont donnés par : y
⎥⎦⎤
⎢⎣⎡
∂∂−
++=xw
2hh
uu21u 31
312 (A.13.a)
⎥⎦⎤
⎢⎣⎡
∂∂−
++=xw
2hh
uu21u 53
534 (A.13.b)
⎥⎦
⎤⎢⎣
⎡∂∂−
++=yw
2hh
vv21v 31
312 (A.13.c)
⎥⎦
⎤⎢⎣
⎡∂∂−
++=yw
2hhvv
21v 53
534 (A.13.d)
Comme montré en Figure A.1, les éléments de plaque sandwich à cinq couches sont
limités par quatre nœuds, où chaque nœud contient 9 degrés de libertés, à savoir : les déplacements longitudinaux et de la couche contrainte supérieure ; les déplacements
et de la couche base ; les déplacements longitudinaux et de la couche contrainte
inférieure ; la déflexion transversal ; et les rotations
1u 1v 3u
3v 5u 5v
w xwx ∂∂=θ et ywy ∂∂=θ . On peut
donc représenter les degrés de liberté nodaux sous une forme vectorielle comme suit :
[ ] 4,,1jwvuvuvu Tyjxjjj5j5j3j3j1j1j K== θθδ (A.14)
et le vecteur de dégrées de liberté au niveau élémentaire est donné par :

Annexe A 164
[ T4321 δδδδδ = ] (A.15)
Les déplacements longitudinaux dans les directions x et sont interpolés par des
fonctions bilinéaires, et le déplacement transversal est interpolé par un polynôme de troisième ordre, qu’on peut représenter par les expressions suivantes :
yw
312
311
310
29
28
37
265
24321
242322215
209181175
161514133
12111093
87651
43211
xybyxbybxybyxbxbybxybxbybxbbw
xyayaxaavxyayaxaauxyayaxaav
xyayaxaauxyayaxaavxyayaxaau
+++++++++++=
+++=+++=+++=+++=
+++=+++=
(A.16)
De cette façon, selon l’expression (3.29) et en omettant la dépendance par rapport à x
et pour simplifier la notation, l’interpolation des champs des déplacements, est exprimée
comme suit :
y
( ) ( )δN∆ y,xy,x = (A.17)
( ) [ T
yx553311 wvuvuvuy,x θθ=∆ ] , et (A.18)
( ) [ ]Twvuvuvu yx553311y,x θθ NNNNNNNNNN = (A.19)
où :
[ ]814813812811u NNNN1
0000N = ,
[ ]7148138128111v NNNN01
0000N = ,
[ ]6148138128112u NNNN3
00000N = ,
, [ ]5148138128113v NNNN3
00000N =
[ ]4148138128114u NNNN5
00000N = ,
, [ ]3148138128115v NNNN5
00000N =
[ ]yxyxyxyx 44w4633w3622w2611w16w NNNNNNNNNNNN θθθθθθθθ 0000N = ,
[ ]x4
x4
xw46
x3
x3
xw36
x2
x2
xw26
x1
x1
xw16 yxyxyxyxx
NNNNNNNNNNNN θθθθθθθθθ 0000N = ,
[ ]y4
y4
yw46
y3
y3
yw36
y2
y2
yw26
y1
y1
yw16 yxyxyxyxy
NNNNNNNNNNNN θθθθθθθθθ 0000N = .

Annexe A 165
T4
y4x
445
45
43
43
41
41
3y
3x
335
35
33
33
31
31
2y
2x
225
25
23
23
21
21
1y
1x
115
15
13
13
11
11
wvuvuvuwvuvu
vuwvuvuvuwvuvuvu
θθθθ
θθθθ
K
K=δ.
Les termes , , , , , , , , et pour i1N iwNxiN θ yiN θ
xiwN x
i xN θ
xi y
N θyiwN y
i xN θ
yi y
N θ 4,,1i K= ,
sont donnés par les expressions suivantes :
( )( )ab
bxbyN11−−
= ; ( )ab
ybxN12−
= ; abxyN13 = ;
( )ab
xayN14−
= ;
( )( )( )33
22222222
w1 bababyaay2xabbx2axybN −−+−−−
= ;
( )( )( )33
222222
w2 babx2xab3byaax2axbyxN +−−−−
= ;
( )33
22222222
w3 baay2bx2bya3xab3baxyN ++−−−
= ;
( )( )33
222222
w4 baay2bya3xabbx2axyN +−−−
= ;
( ) ( ) ( )( )ba
axybxN 2
2
2 x
−−=θ ;
( )ba
axyxN 2
2
3 x
−=θ
baybaxxN 2
2
1 x
−−=θ ;
( )baaxxyN 2
2
4 x
−=θ ;
( ) ( )2
2
1 abxabyyN
y
−−=θ ;
( )2
2
2 abbyxyN
y
−=θ ;
( )2
2
3 abbyxyN
y
−=θ
( )( )2
2
4 abxabyyN
y
−−=θ
( )( )33
222222xw1 ba
byaay2xab6bx6ybN −+−−= ; ;
( )( )33
222222xw2 ba
byaay2xab6bx6byN −+−−= ;
( )33
22222222xw3 ba
ay2bx6bya3xab6bayN ++−−−= ;
( )33
22222222xw4 ba
ay2bx6bya3xab6bayN ++−−= ;
( )( )( )ba
ax3ybaxN 2x1 x
−−−=θ ;
( )( ) ( )ba
a2x3xyN 2x3 x
−=θ ;
( )( )ba
ax3axyN 2x4 x
−−=θ ;
baa2x3ybxN 2
x2 x
−−=θ ;
( )2
2x1 ab
byyNy
−−=θ ;
( )2
2x2 ab
byyNy
−=θ ;
( )2
22x3 ab
byyNy
−=θ ;
( )2
2x4 ab
ybyNy
−=θ ;
( )( )33
222222yw1 ba
bya6ay6xabbx2xaN −+−−= ;
( )33
22222222yw2 ba
babx2xab3bya6ay6xN ++−−= ;

Annexe A 166
( )33
22222222yw3 ba
babx2xab3bya6ay6xN ++−−−= ;
( )( )33
222222yw4 ba
bya6ay6xabbx2axN −+−−= ;
( )2
2y1 ba
axxNx
−−=θ ;
( )2
2y2 ba
axxNx
−−=θ
; ( )
2
2y3 ba
axxNx
−=θ ;
( )2
2y4 ba
axxNx
−=θ ;
( )2
2y4 ba
axxNx
−=θ ;
( )( )( )2
x1 ab
by3ybaxNy
−−−=θ
( )( )
2x2 ab
by3byxNy
−−=θ
( ) ;
( )( )2
x4 ab
y3b2axyNy
−−=θ 2
x3 ab
y3b2xyNy
+−=θ ;
On rappelle les expressions (3.15) et (3.25) qui établissent les relations contraintes-
déformations pour les couches élastiques et viscoélastiques sont données par :
( )
( )
( )
( )
( )
( ) ( )
( )( ) ( )
( )
( )
( )( )
( )
( )
( )⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢
⎣
⎡
−−
−−
=⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
1xy
1y
1x
1
1
1
1
11
1
11
1
1
1xy
1y
1x
G00
01
E
1
E
01
E
1
E
22
22
γεε
υυ
υυ
υ
υ
τσσ
ou ( ) ( ) ( )111 εEσ = (A.20.a)
( )
( )
( )
( )
( )
( ) ( )
( )( ) ( )
( )
( )
( )( )
( )
( )
( )⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢
⎣
⎡
−−
−−
=⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
3xy
3y
3x
3
3
3
3
33
3
33
3
3
3xy
3y
3x
G00
01
E
1
E
01
E
1
E
22
22
γεε
υυ
υυ
υ
υ
τσσ
ou ( ) ( ) ( )333 εEσ = (A.20.b)
( )
( )
( )
( )
( )
( ) ( )
( )( ) ( )
( )
( )
( )( )
( )
( )
( )⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢
⎣
⎡
−−
−−
=⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
5xy
5y
5x
5
5
5
5
55
5
55
5
5
5xy
5y
5x
G00
01
E
1
E
01
E
1
E
22
22
γεε
υυ
υυ
υ
υ
τσσ
ou ( ) ( ) ( )555 εEσ = (A.20.c)
( )
( )
( )
( )
( )
( )
( )
( ) ( )
( )( )
( )( )
( )
( )
( )
( )
( )
( )
( )⎪⎪⎪
⎭
⎪⎪⎪
⎬
⎫
⎪⎪⎪
⎩
⎪⎪⎪
⎨
⎧
⎥⎥⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢⎢⎢
⎣
⎡
−
−−
=
⎪⎪⎪
⎭
⎪⎪⎪
⎬
⎫
⎪⎪⎪
⎩
⎪⎪⎪
⎨
⎧
2yz
2xz
2xy
2y
2x
2
2
2
2
j
2
22
2
2
2yz
2xz
2xy
2y
2x
G.sym0G00G
0001
E
0001
E
1
E
2
22
γγγεε
υ
υ
υ
υ
τττσσ
ou ( ) ( ) ( )222 εEσ = (A.20.d)

Annexe A 167
( )
( )
( )
( )
( )
( )
( )
( ) ( )
( )( )
( )( )
( )
( )
( )
( )
( )
( )
( )⎪⎪⎪
⎭
⎪⎪⎪
⎬
⎫
⎪⎪⎪
⎩
⎪⎪⎪
⎨
⎧
⎥⎥⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢⎢⎢
⎣
⎡
−
−−
=
⎪⎪⎪
⎭
⎪⎪⎪
⎬
⎫
⎪⎪⎪
⎩
⎪⎪⎪
⎨
⎧
4yz
4xz
4xy
4y
4x
4
4
4
4
4
4
44
4
4
4yz
4xz
4xy
4y
4x
G.sym0G00G
0001
E
0001
E
1
E
2
22
γγγεε
υ
υ
υ
υ
τττσσ
ou (A.20.e) ( ) ( ) ( )444 εEσ =
Selon le développement présenté par les expressions (3.31) à (3.42), les contributions à
la matrice de raideur associée à chaque couche sont représentées par les expressions suivantes :
( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) dVV
1m
1T1f
1f
1T1m
1f
1T1f
1m
1T1m
1 ∫ ⎟⎠⎞⎜
⎝⎛ +++= DEDDEDDEDDEDK (A.21)
( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) dV
V
2c
2T2c
2f
2T2f
2m
2T2m
2 ∫ ⎟⎠⎞⎜
⎝⎛ ++= DEDDEDDEDK (A.22)
( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) dV
V
3m
3T3f
3f
3T3m
3f
3T3f
3m
3T3m
3 ∫ ⎟⎠⎞⎜
⎝⎛ +++= DEDDEDDEDDEDK (A.23)
( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) dV
V
4c
4T4c
4f
4T4f
4m
4T4m
4 ∫ ⎟⎠⎞⎜
⎝⎛ ++= DEDDEDDEDK (A.24)
( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) dV
V
5m
5T5f
5f
5T5m
5f
5T5f
5m
5T5m
5 ∫ ⎟⎠⎞⎜
⎝⎛ +++= DEDDEDDEDDEDK (A.25)
Finalement, la matrice de raideur élémentaire de l’élément fini de plaque à cinq couches
peut être écrite comme suit :
( )∑=
=5
1k
kKK (A.26)
En suivant un développement similaire, à partir de l’expression (3.38), on peut exprimer
les contributions de chaque couche à la matrice de masse de l’élément comme suit :
( ) ( )dAhA
vT
vuT
uwT
w111
1111∫ ++= NNNNNNM ρ (A.27)
( ) ( )dAhA
vT
vuT
uwT
w222
2222∫ ++= NNNNNNM ρ (A.28)
( ) ( )dAhA
vT
vuT
uwT
w333
3333∫ ++= NNNNNNM ρ (A.29)

Annexe A 168
( ) ( )dAhA
vT
vuT
uwT
w444
4444∫ ++= NNNNNNM ρ (A.30)
( ) ( )dAhA
vT
vuT
uwT
w555
5555∫ ++= NNNNNNM ρ (A.31)
et la matrice de masse élémentaire peut être écrite sous la forme :
( )∑=
=5
1k
kMM (A.40)
A.2.1 Paramétrisation du modèle sandwich de plaque à cinq couches.
Selon la théorie présenté dans la section précédente, les paramètres de conception qui caractérisent la masse et la rigidité, correspondant à chaque couche, peuvent être factorisés en dehors des matrices élémentaires, en découplant les effets de membrane, flexion et cisaillement, comme montré dans les équations suivantes :
Masse : ( ) ( )( )f
11m
11111 h MMM += ρ (A.41.a) ( ) ( ) ( ) ( )( )f
0m
221
m1
m20222 ddh 222 MMMMM +++= 1ρ (A.41.b) ( ) ( )( )f
31m
31333 h MMM += ρ (A.41.c) ( ) ( ) ( ) ( )( )f
0m
222
m2
m40444 ddh 444 MMMMM +++= 1ρ (A.41.d) ( ) ( )( )f
51m
51555 h MMM += ρ (A.41.e)
Raideur :
( ) ( )( )f3
21
m111 hhE 111 KKK += (A.42.a) ( ) ( ) ( )( ) ( ) ( ) ( )( )( ) ( ) ( )( )c
223
c13
c0
2
f2
22
f12
f02
m2
21
m11
m02
ddh1
ddhddh
222
2222222
KKK
KKKKKKK
++
++++++= K
(A.42.b)
( ) ( )( )f3
23
m133 hhE 333 KKK += (A.42.c) ( ) ( ) ( )( ) ( ) ( ) ( )( )( ) ( ) ( )( )c
226
c16
c0
4
f2
25
f15
f04
m2
22
m12
m04
ddh1
ddhddh
444
4444442
KKK
KKKKKKK
++
++++++= K
A.42.d)
( ) ( )( )f3
25
m155 hhE 555 KKK += (A.42.e)
où , ( )311 hhd −= ( )532 hhd −= , ( )3213 hh2hd ++= , et ( )5434 hh2hd ++= ; les indices ( ,
et ( sont associés aux effets de membrane, flexion et cisaillement, respectivement ;
)m
( )f )c kρ
( ) est la densité de la -ième couche. 3,2,1k = k

Annexe B
B.1 Matrices viscoélastiques stochastiques
Pour montrer comment on construit les matrices élémentaires stochastiques du modèle aux élément finis de plaque sandwich, on prend comme exemple la partie stochastique de la matrice de raideur élastique d’un élément multicouche quelconque dans le domaine discrétisé Ω (Cf. Section 6.2.2, au Chapitre 6) :
( )∫=Ω
ΩdxH re EDDK T (B.1)
où , pour un problème bidimensionnel, devient ( )xH r ( )y,xHr , qu’on peut obtenir par la
résolution du problème aux valeurs propres défini par l’intégrale suivante (Ghanem et Spanos, 1991) :
( ) ( ) ( )∫=Ω
λ dxdyy,xfy,xCy,xf rrr (B.2)
où rλ et sont, respectivement, les valeurs propres et les vecteurs propres. ( y,xfr )
)Ainsi, est calculée comme suit : ( y,xHr
( ) ( y,xfy,xH rrr λ= ) (B.3)
Pour ce problème bidimensionnel, on considère toutes les variables factorisées
apparaissant dans le modèle paramétré en Section 3.9, au Chapitre 3, comme des processus aléatoires bidimensionnels Gaussiens ayant la fonction de covariance exprimée comme suit :
( ) ( )( ) ( ) ⎟⎟⎠
⎞⎜⎜⎝
⎛ −−
−−=−−=
y
21
x
2121212211 L
yyL
xxexpyy,xxCy,x,y,xC (B.4)
où ( ) x21 x,x Ω∈ et ( ) y21 y,y Ω∈ . et représentent, respectivement, les longueurs de
corrélation pour les domaines
xL yL
[ ]a,ax +−=Ω et [ ]b,by +−=Ω , respectivement, illustrés en
Figure B.1. Cette fonction de covariance pour des problèmes bidimensionnels est une

Annexe B 170
extension de la fonction de covariance pour des problèmes unidimensionnels définie comme suit :
( ) ( ) ⎟⎟⎠
⎞⎜⎜⎝
⎛ −−=−=
x
212121 L
xxexpxxCx,xC (B.5)
Ly =
b
Lx = ax
y
Elément fini de plaque sandwich
Figure B.1 – Définition du domaine de corrélation pour l’élément fini de plaque sandwich. La conséquence immédiate de ce choix de la fonction de covariance est qu’elle est
séparable, et prenant en compte cette propriété de séparabilité de la fonction de covariance, résulte que le problème 2D est découpé en deux problèmes aux valeurs propres indépendantes de dimensions 1D :
( ) ( ) (yfxfy,xf jir = ) et jir λλλ = (B.6)
Comme conséquence, les couples ( )( )xf, iiλ , solutions de (B.2) par l’introduction de la
fonction de covariance (B.4), sont obtenus en résolvant la décomposition de Karhunen-Loève (KL) de premier ordre, avec une longueur de corrélation xxL Ω∈ , alors que les couples
( )( )yf, jjλ sont obtenus en résolvant le même problème, mais pour la longueur de corrélation
yyL Ω∈ . Ces couples sont exprimées comme suit (Ghanem et Spanos, 1991) :
• Si et i j sont impaires et : 1i ≥ 1j ≥
21
2i
1i c
c2+
=ω
λ ; ( ) ( )xcosxf iii ωα= (B.7.a)
22
2j
2j c
c2+
=ω
λ ; ( ) ( )ycosyf jjj ωα= (B.7.b)
où ( )
i
ii
2a2sina
1
ωω
α+
= et ( )j
jj
2b2sin
b
1
ωω
α
+
= . Les termes iω et jω sont les solutions des

Annexe B 171
équations transcendantales suivantes :
( ) 0atanc ii1 =− ωω ; ( ) 0btanc jj2 =− ωω (B.8)
dans les domaines ( ) ⎥⎦
⎤⎢⎣
⎡⎟⎠⎞
⎜⎝⎛ −−
a21i,
a1i ππ
et ( ) ⎥⎦
⎤⎢⎣
⎡⎟⎠⎞
⎜⎝⎛ −−
b21j,
b1j ππ
. x1 L1c = et Ly1c2 = .
• Si i et j sont paires et : 2i ≥ 2j ≥
21
2i
1i c
c2+
=ω
λ ; ( ) ( )xcosxf iii ωα= (B.9.a)
22
2j
2j c
c2+
=ω
λ ; ( ) ( )ycosyf jjj ωα= (B.9.b)
où ( )
i
ii
2a2sina
1
ωω
α−
= et ( )j
jj
2b2sin
b
1
ωω
α
−
= . Les termes iω et jω sont, respectivement,
les solutions des équations transcendantales suivantes :
( ) 0atanc i1i =+ ωω ; ( ) 0btanc j2j =+ ωω (B.10)
dans les domaines ⎥⎦
⎤⎢⎣
⎡⎟⎠⎞
⎜⎝⎛ −
ai,
a21i ππ
et ⎥⎦
⎤⎢⎣
⎡⎟⎠⎞
⎜⎝⎛ −
bj,
b21j ππ
, respectivement.
Par la substitution des expressions (B.7) et (B.9) dans la relation (B.3), la matrice de raideur élastique stochastique est calculée comme suit :
( )∫ ∫=x y
yxre ddy,xHΩ Ω
ΩΩEDDK T (B.11)
où ( ) ( y,xfy,xH rrr λ= ) est évalué pour r paire et pour r impaire, respectivement.
Si ( ) ( )θξ∆ξθξ rrr += sont les variables aléatoires factorisées associées à un élément
fini, l’approximation est calculée de la manière suivante : ( )∑=
n
1rθξre r
K
( ) ( ) ( )∫ ∫=x y
yxijjijire ddxfyfΩ Ω
ΩΩλλααθξ EDDK T (B.12)
Cette procédure est réalisée pour toutes les matrices élémentaires de l’élément fini de
plaque sandwich, dont on intervient directement dans le processus d’intégration de chaque couche, pour chaque matrice associée aux effets de membrane, flexion et cisaillement, à travers les fonctions de forme, dans le but d’obtenir toutes les matrices élémentaires stochastiques paires et impaires, qui sont utilisées dans la série tronquée de KL.

Annexe C
C.1 Procédure d’interfaçage entre MATLAB® et ANSYS®
Pour traiter les structures de géométries complexes par couches contraintes, on a
développé une stratégie d’interfaçage et remplacement entre les éléments finis de plaque multicouches développés au Chapitre 3 et les éléments de plaque simple ANSYS®.
La Figure C.1 illustre la stratégie d’interfaçage/remplacement entre les codes MATLAB® et ANSYS® développée pour permettre la modélisation de structures complexes en ingénierie contenant des traitements viscoélastiques superficiels.
Structure de géométrie complexe
Modèle EF ANSYS
Par couche contrainte(éléments finis de poutres/plaques sandwich)
Par dispositifs discrets(appuis et joints viscoélastiques)
Interfaçage ANSYS/MATLAB
Remplacement des éléments de plaque ANSYS par des élémenst finis de plaque sandwich MATALB
Introduction de l'amortissement viscoélastique
Choix du traitement viscoélastique
Modèle EF ANSYS de la structure complexe
Modèle EF ANSYS du dispositif
Calcul des FRFs (ANSYS ou MATLAB)
Calcul de réponses en plateforme MATLAB
Sous-structuration basée en FRFs
Introduction de l'amortissement viscoélastique
Calcul des FRFs (ANSYS)
Calcul de réponses en plateforme MATLAB
Figure C.1 – Stratégie d’interfaçage/remplacement entre MATLAB® et ANSYS®.

Annexe C 173
Remarque : On précise que la procédure de couplage et remplacement entre les éléments finis MATLAB® et ANSYS® développée dans ce mémoire de thèse est réalisée par la mise en œuvre des nombreux programmes initialement développés en plateforme MATLAB® par Scott COGAN, chercheur au CNRS, au LMARC, qu’on a modifié pour permettre les applications viscoélastiques contenues dans cette thèse. Ces programmes permettent de lire toutes les matrices élémentaires, les matrices globales, les conditions aux limites, les forces, la géométrie, le repère, etc., des modèles EF des structures modélisées en plateforme ANSYS®, pour n’importe quelle type d’analyse.
Pour vérifier la stratégie proposée on considère le modèle EF ANSYS® d’une plaque courbe renforcée par quatre raidisseurs illustrée en Figure C.2. A travers cette figure, on peut également identifier les 10 zones qu’on va par la suite,remplacer par des éléments finis de plaque sandwich à trois couches. Les conditions aux limites qui lui sont imposées sont « libres », et les caractéristiques géométriques en millimètres sont : rayon interne : 938, longueur : 720, longueur d’arc : 680, les épaisseurs de la plaque base et de les raidisseurs : 1,5, 0,75, respectivement, et l’hauteur des raidisseurs : 30. Les épaisseurs de la couche viscoélastique et de la couche contrainte en millimètres sont, 0,0254 et 0,5, respectivement.
Les propriétés matérielles de la structure sont : module d’Young, E=2,1x1011 N/m2, densité ρ=7800 Kg/m3 et le coefficient de Poisson υ=0,3, qui sont les même adoptées pour la couche contrainte. Pour la couche viscoélastique, on considère le système conservatif associé (SCA) du matériau viscoélastique 3M ISD112 (Cf. Section 2.3, Chapitre 2).
Figure C.2 – Modèle EF ANSYS de la plaque traité par couche contrainte.
Le test proposé est de comparer les amplitudes des réponses forcées (FRFs) et les
fréquences propres du système traité, en considérant le système SCA, dans deux situations : la première, qui est prise comme référence de calcul, consiste à utiliser directement les éléments de plaque sandwich disponibles en plateforme ANSYS®, appelés SHELL99. Ce type d’élément fini multicouche ne considère que les valeurs réelles pour les modules d’Young de couches, ce qui explique pourquoi on considère le système SCA ; dans la deuxième situation, on remplace les éléments ANSYS® indiqués en Figure A.4 par des éléments finis de plaque sandwich à trois couches développés au Chapitre 3 en plateforme MATLAB®.

Annexe C 174
La Figure C.3 montre la distance en forme (MAC) entre les modes du système SCA ANSYS® et ceux obtenus par MATLAB®, qu’on peut aussi comparer à travers le Tableau C.1. Ceci mène à conclure que les deux modèles sont proches, ce qu’on peut remarquer à travers les faibles écarts entre les fréquences propres calculées pour les deux modèles dans la bande fréquentielle d’analyse.
Figure C.3 – Distance en forme pour les modèles ANSYS® et MATLAB®.
Tableau C.1 – Comparaison entre les valeurs propres (modèles ANSYS® et MATLAB®)
Fréquences [Hz] ANSYS MATLAB
Ecart en Fréq.[%]
MAC
10,260 10,332 0,7017 99,627 16,984 17,056 0,4239 99,346 26,408 26,496 0,3332 99,582 47,257 47,290 0,0698 99,684 56,052 56,082 0,0535 99,718 94,376 94,254 0,1293 99,933 102,53 102,32 0,2048 99,967 114,63 114,76 0,1134 88,614 115,02 115,17 0,1304 88,086 149,54 149,27 0,1805 99,832 155,72 155,50 0,1412 99,843 174,09 174,12 0,0172 99,950 176,21 176,25 0,0227 99,948 190,94 188,62 1,2150 99,850
Les réponses forcées (FRFs) collocalisées associées au point P, calculées pour les
deux modèles, sont présentés en Figure C.4. On remarque une bonne corrélation entre les deux modèles, comme on a pu confirmé à travers les écarts en fréquence et la matrice de MAC.

Annexe C 175
Figure C.4 – Comparaison entre les FRFs des modèles ANSYS® et MATLAB®.
On remarque que pour bien approcher les deux modèles, on doit vérifier :
• La convergence du maillage élément finis de telle façon que la taille des
éléments finis ANSYS® qui seront remplacés par des éléments de plaque sandwich modélisés en plateforme MATLAB®, n’est pas trop grande. Ceci peut éviter quelques problèmes des singularités des matrices après la procédure de remplacement ;
• La forme des éléments finis qui seront remplacés, qui doit être de préférence
carrée ou rectangulaire ;
• La courbure de la structure (par exemple, plaques courbes), ne doit pas être trop accentuée ;
• Une procédure de rotation du repère local des éléments finis de plaque sandwich
développés en plateforme MATLAB® doit être réalisée pour être en concordance avec le repère global du modèle EF ANSYS®, avant de faire l’assemblage globale des éléments finis.

Livros Grátis( http://www.livrosgratis.com.br )
Milhares de Livros para Download: Baixar livros de AdministraçãoBaixar livros de AgronomiaBaixar livros de ArquiteturaBaixar livros de ArtesBaixar livros de AstronomiaBaixar livros de Biologia GeralBaixar livros de Ciência da ComputaçãoBaixar livros de Ciência da InformaçãoBaixar livros de Ciência PolíticaBaixar livros de Ciências da SaúdeBaixar livros de ComunicaçãoBaixar livros do Conselho Nacional de Educação - CNEBaixar livros de Defesa civilBaixar livros de DireitoBaixar livros de Direitos humanosBaixar livros de EconomiaBaixar livros de Economia DomésticaBaixar livros de EducaçãoBaixar livros de Educação - TrânsitoBaixar livros de Educação FísicaBaixar livros de Engenharia AeroespacialBaixar livros de FarmáciaBaixar livros de FilosofiaBaixar livros de FísicaBaixar livros de GeociênciasBaixar livros de GeografiaBaixar livros de HistóriaBaixar livros de Línguas

Baixar livros de LiteraturaBaixar livros de Literatura de CordelBaixar livros de Literatura InfantilBaixar livros de MatemáticaBaixar livros de MedicinaBaixar livros de Medicina VeterináriaBaixar livros de Meio AmbienteBaixar livros de MeteorologiaBaixar Monografias e TCCBaixar livros MultidisciplinarBaixar livros de MúsicaBaixar livros de PsicologiaBaixar livros de QuímicaBaixar livros de Saúde ColetivaBaixar livros de Serviço SocialBaixar livros de SociologiaBaixar livros de TeologiaBaixar livros de TrabalhoBaixar livros de Turismo