manos biónicas
TRANSCRIPT

8/15/2019 Manos Biónicas
http://slidepdf.com/reader/full/manos-bionicas 1/10
MANOS BIÓNICASI-LIMB
• Es la mano biónica mas avanzada,diseñada por una empresa escocesallamada Touch Bionic.
• Esta mano es una prótesis de cincodedos independientes cada uno.
• Cada dedo tiene un motor y el pulgarpuede girar 90 grados, haciendo uecada uno de estos sea independientey pueda agarrar ob!etos.
• "a piel de la mano tiene un tipo depiel donde se implantan doselectrodos ue recibe una señalmicroel#ctrica.
8/15/2019 Manos Biónicas
http://slidepdf.com/reader/full/manos-bionicas 2/10
• $e usan las señales microel#ctricas generadas por los m%spara el control del &'"imb, estas señales son recibidas por electrodos ubicados ba!o la piel.
•
(osee un so)t*are de control avanzado ue permite obtenme!or agarre velocidad y )uerza.
• El aprendiza!e por parte del paciente es r+pido, solo lo logsabiendo ue m%sculos del brazo mover, donde proporciousuario una gran cantidad de posiciones donde puede eupoder y la precisión.
• El usuario puede agarrar di)erentes ob!etos, y tambi#n posdigitar en un teclado.
• $e personaliza la est#tica del &'"imb para proporcionar al umayor comodidad.
• Este dispositivo es usado por mas de 00 pacientes y su calrededor de -/,000.
8/15/2019 Manos Biónicas
http://slidepdf.com/reader/full/manos-bionicas 3/10
MANO OSCURA
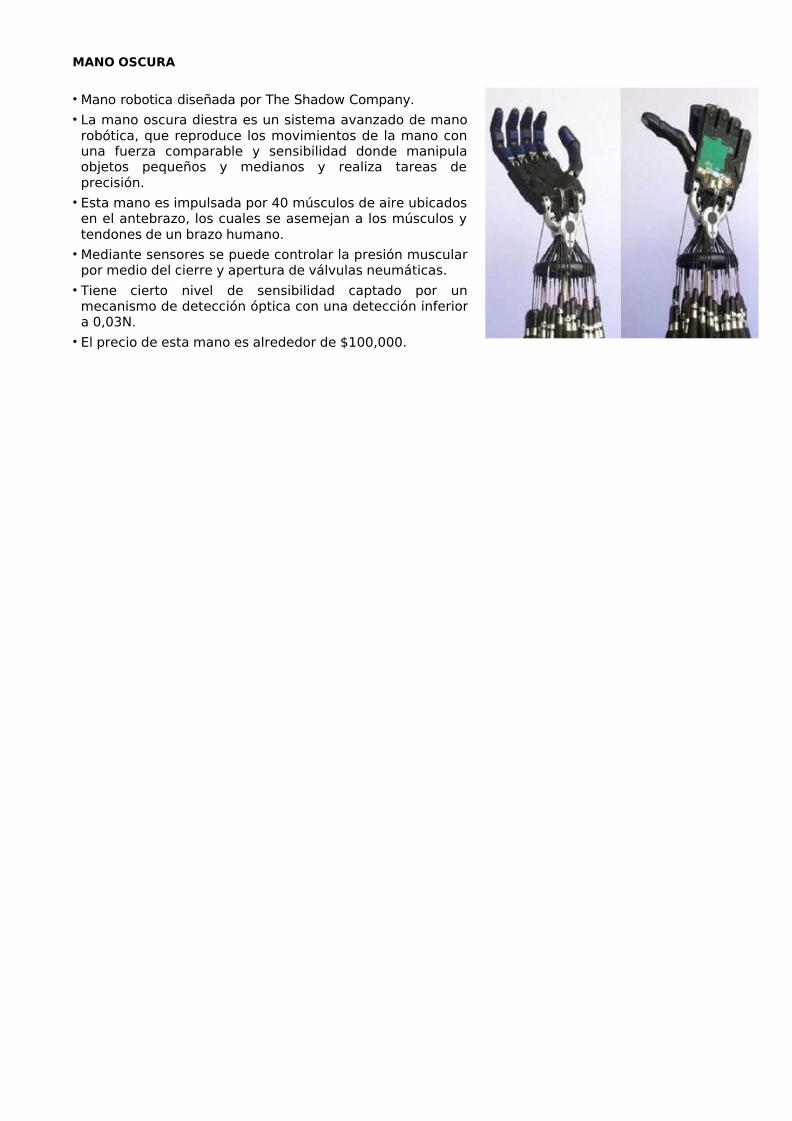
• ano robotica diseñada por The $hado* Company.
• "a mano oscura diestra es un sistema avanzado de mano
robótica, ue reproduce los movimientos de la mano conuna )uerza comparable y sensibilidad donde manipulaob!etos peueños y medianos y realiza tareas deprecisión.
• Esta mano es impulsada por 10 m%sculos de aire ubicadosen el antebrazo, los cuales se aseme!an a los m%sculos ytendones de un brazo humano.
• ediante sensores se puede controlar la presión muscular
por medio del cierre y apertura de v+lvulas neum+ticas.• Tiene cierto nivel de sensibilidad captado por un
mecanismo de detección óptica con una detección in)eriora 0,023.
• El precio de esta mano es alrededor de -00,000.
8/15/2019 Manos Biónicas
http://slidepdf.com/reader/full/manos-bionicas 4/10
• El sistema de la mano esta compuesto por tres partes, eantebrazo, la palma y los dedos y todo esto suma un pes
• El antebrazo se compone de aluminio y resina shell5 la pacetilo, aluminio, policarbonato y los dedos son acetilo, alas uñas de policarbonato y la carne de poliuretano.
• $e compone de 70 unidades inteligentes de motores ubicdeba!o de la muñeca para proporcionar la articulación pala producida por los tendones.
• (ara lograr una recuperación e8itosa del paciente es necue la mano tenga movimientos suaves, esto es logrado ue se tiene un motor ue contiene un sensor y mide la para poderla controlar con precisión.
• "os motores tiene un control (& de la )uerza y la articuladonde el control calcula y luego inicia una acción correcta!ustar el proceso para tener un error minimo.
8/15/2019 Manos Biónicas
http://slidepdf.com/reader/full/manos-bionicas 5/10
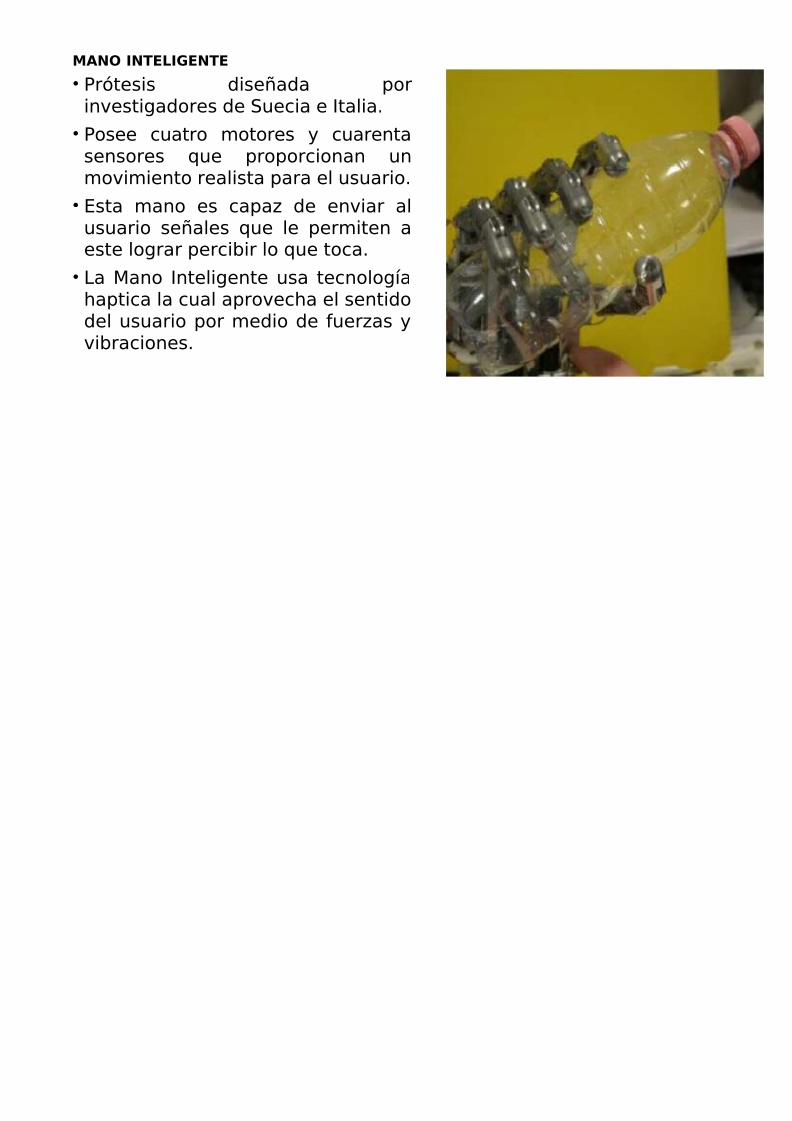
• (rótesis diseñada porinvestigadores de $uecia e &talia.
•
(osee cuatro motores y cuarentasensores ue proporcionan unmovimiento realista para el usuario.
• Esta mano es capaz de enviar alusuario señales ue le permiten aeste lograr percibir lo ue toca.
• "a ano &nteligente usa tecnolog:ahaptica la cual aprovecha el sentidodel usuario por medio de )uerzas yvibraciones.
MANO INTELIGENTE
8/15/2019 Manos Biónicas
http://slidepdf.com/reader/full/manos-bionicas 6/10
• (or medio de un procedimiento uir%rgico se cosensores en el punto de la amputación, permitpaciente la capacidad de controlar la prótesis y sentir
• ; pesar de ue es posible controlar y sentir con laesta limitada debido a la )alta de retroalimentación se
• "a mano inteligente consta de cuatro motores ue pemovimiento de los dedos y la muñeca, adem+s microprocesador, electrodos y un sistema de telemetr
• El microprocesador recibe impulsos electrou:micosconvierte en in)ormación digital donde se ampli<ca lenv:a estos datos a la mano, adem+s permite modedo de )orma individual y realizar movimientos de de libertad como la rotación de la muñeca y el pulgar.
8/15/2019 Manos Biónicas
http://slidepdf.com/reader/full/manos-bionicas 7/10
BRAZOS BIÓNICOS
• "as prótesis de brazos se han mantenido as: desde la guerra gracias al avance cient:<co han venido me!orando.
• espu#s de la guerra de &ra> se produ!o un gran numero de l
por amputaciones, las cuales de!an dos cicatrices a sus vict):sicas y las mentales.
• Con el ob!etivo de devolverle la vida normal a los a)ectados los cy los ingenieros se han es)orzado por crear prótesis )uncionales.
• ebido a la ine<ciencia delas prótesis la ;gencia de (roy&nvestigación lanzo un programa llamado ?evolucionando (rótes
proyecto de =0 millones de dólares.• Este programa creo dos brazos, el primero <nanciado por 20,1 m
dólares, donde se uiso crear un brazo ortop#dico d+ndolo acomo (roto Brazo, y el segundo <nanciado con /, millones dusado por "u>e $y*al>er llam+ndose el brazo de "ucas.

8/15/2019 Manos Biónicas
http://slidepdf.com/reader/full/manos-bionicas 8/10
BRAZO DE
LUCAS• Brazo robótico ue se encuentra en ensayos
cl:nicos, diseñado de la misma )orma y tamañoue el brazo de un humano.
• El control esta a partir de una palanca de mandosubicada en el zapato donde el dedo gordo del piehace ue genere movimientos seg%n se muevaeste.
• Esto se hace por medio de un contactor conectadoa un peueño motor de vibraciones asegurado enla piel, donde vibra a di)erentes velocidadesdonde se mide la )uerza por medio de sensores
conectados al microprocesador.• @tra versión de este utiliza los nervios de una
persona donde decodi<ca estas señales, dondesola la persona debe pensar en un movimiento yeste pensamiento enviara las señales al nerviocomo consecuencia conseguir+ dicho movimiento.
• El brazo permite hacer movimientos del hombrohasta el punto de alcanzar a tocar su cabeza.
8/15/2019 Manos Biónicas
http://slidepdf.com/reader/full/manos-bionicas 9/10
PROTO-1 Y PROTO-2
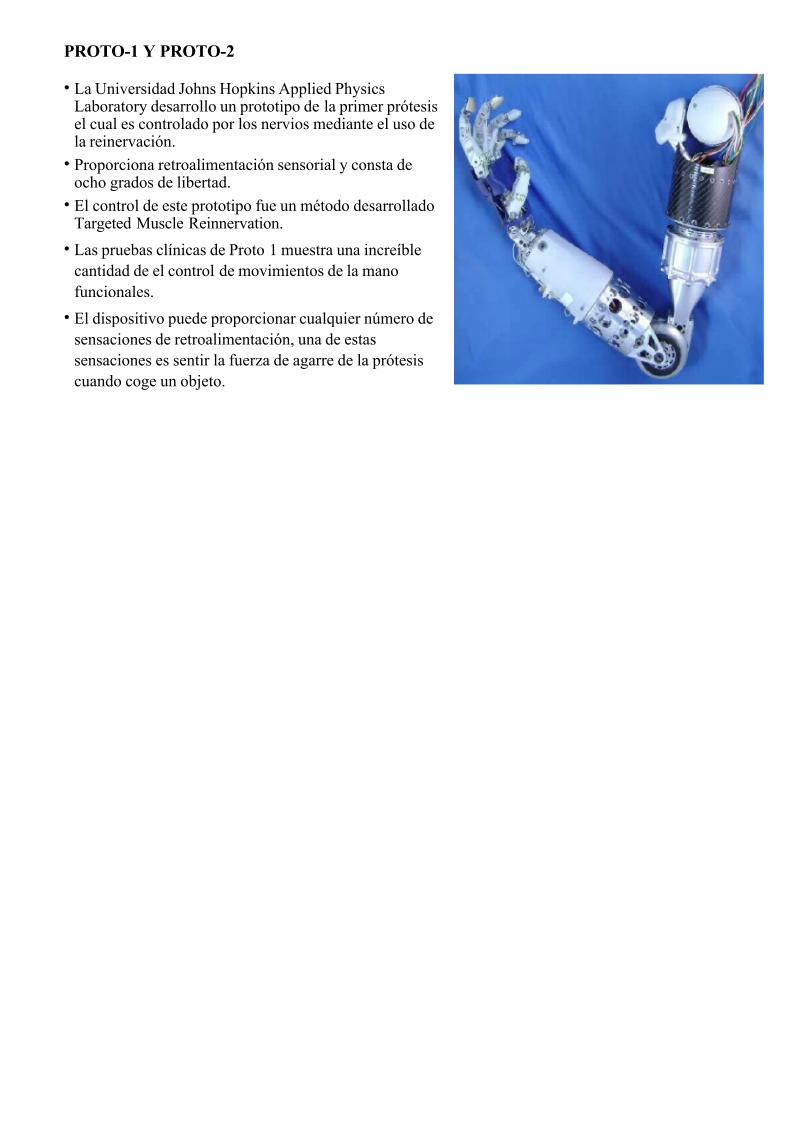
• La Universidad Johns Hopkins Applied PhysicsLaboratory desarrollo un prototipo de la primer prótesisel cual es controlado por los nervios mediante el uso de
la reinervación.• Proporciona retroalimentación sensorial y consta de
ocho grados de libertad.
• El control de este prototipo fue un mtodo desarrollado!argeted "uscle #einnervation.
• Las pruebas cl$nicas de Proto % muestra una incre$ble
cantidad de el control de movimientos de la manofuncionales.
• El dispositivo puede proporcionar cual&uier n'mero de
sensaciones de retroalimentación( una de estas
sensaciones es sentir la fuer)a de agarre de la prótesis
cuando coge un ob*eto.
8/15/2019 Manos Biónicas
http://slidepdf.com/reader/full/manos-bionicas 10/10
• Los Proto + est, configurado para ser accionado por un sistema n
de peró-ido de hidrógeno para reempla)ar motores elctricos.
• El peró-ido de hidrógeno reacciona con un iridio catali)ador par
los movimientos del bra)o( donde el usuario tendr, &ue instalar hde peró-ido fresco todas las maanas.
• ;l usar un cartucho de peró-ido de hidrógeno este por med
catali)ador libera unas r,fagas de vapor &ue se conducen hacia l
diferentes e-tremidades.
• Estos cartuchos tambi#n podr:an comercializarse co
)uentes de energ:a para las prótesis disponibles en
mercado, si los reactivos se pueden crear de una m
menos costosa.