magno antonio calil resende silveira dissertaÇÃo …livros01.livrosgratis.com.br/cp013088.pdf ·...
TRANSCRIPT

CONTROLE DE UM PROCESSO DE TRATAMENTO PRIMÁRIO DE PETRÓLEO
Magno Antonio Calil Resende Silveira
DISSERTAÇÃO SUBMETIDA AO CORPO DOCENTE DA COORDENAÇÃO DOS
PROGRAMAS DE PÓS-GRADUAÇÃO DE ENGENHARIA DA UNIVERSIDADE
FEDERAL DO RIO DE JANEIRO COMO PARTE DOS REQUISITOS
NECESSÁRIOS PARA A OBTENÇÃO DO GRAU DE MESTRE EM CIÊNCIAS EM
ENGENHARIA QUÍMICA.
Aprovada por:
________________________________________________ Prof. Enrique Luis Lima, D.Sc.
________________________________________________ Dr. Giovani Cavalcanti Nunes, Ph. D.
________________________________________________ Prof. Evaristo Chalbaud Biscaia Jr., D.Sc.
________________________________________________ Dr. Mário César Mello Massa de Campos
RIO DE JANEIRO, RJ - BRASIL
ABRIL DE 2006

Livros Grátis
http://www.livrosgratis.com.br
Milhares de livros grátis para download.

SILVEIRA, MAGNO ANTONIO CALIL
RESENDE
Controle de um processo de tratamento
primário de petróleo [Rio de Janeiro] 2006
X, 96 p. 29,7 cm (COPPE/UFRJ, M.Sc.,
Engenharia Química, 2006).
Dissertação – Universidade Federal do Rio
de Janeiro, COPPE.
1. Controle de Processos.
2. Tratamento Primário.
3. Petróleo.
4. Controle Preditivo.
I. COPPE/UFRJ II. Título (série)
i

Aos meus pais, José Garcia da Silveira e
Cleonice Calil de Rezende Silveira, pela
dedicação, amor e carinho a mim
proporcionado.
ii
AGRADECIMENTOS
A Deus, pela criação da humanidade na qual estou inserido.
Ao PEQ/COPPE/UFRJ, pela oportunidade dada.
Aos meus orientadores Enrique Luis Lima e Giovani Cavalcanti Nunes, pela boa
orientação nos trabalhos.
Aos funcionários e professores do PEQ/COPPE/UFRJ, pelos trabalhos e
ensinamentos a mim proporcionado.
A todos aqueles que estive em contato durante essa jornada e que, de alguma
forma deram sua contribuição.
Ao CNPq e à PETROBRÁS, pelo apoio financeiro e suporte técnico.
A todos, o meu muito obrigado.
iii

Resumo da Dissertação apresentada à COPPE/UFRJ como parte dos requisitos
necessários para a obtenção do grau de Mestre em Ciências (M.Sc.)
CONTROLE DE UM PROCESSO DE TRATAMENTO PRIMÁRIO DE PETRÓLEO
Magno Antonio Calil Resende Silveira
Abril/2006
Orientadores: Enrique Luis Lima
Giovani Cavalcanti Nunes
Programa: Engenharia Química
O produto extraído de plataformas de petróleo off shore requer um tratamento primário devido à mistura extraída constituir-se de fases oleosa, aquosa e gasosa, além de outras impurezas. O petróleo e o gás apresentam relevante interesse econômico para a indústria, sendo a água um dos contaminantes mais indesejados em processos downstream de petróleo e gás. Ao mesmo tempo, a concentração de óleo na água deve ser mínima para o descarte regular da fase aquosa ao mar. Para um estudo do processo de separação desses componentes foi efetuada a modelagem de alguns equipamentos, implementando-se no sistema estratégias de controle capazes de lidar com perturbações ocorridas em campo, principalmente na forma de golfadas na carga, respeitando restrições operacionais e de qualidade do produto. O sistema foi implementado no SIMULINK/MATLAB para efetuar as diversas simulações cujos resultados são apresentados neste trabalho.
iv

Abstract of Dissertation presented to COPPE/UFRJ as a partial fulfillment of the
requirements for the degree of Master of Science (M.Sc.)
CONTROL OF A PETROLEUM PRIMARY TREATMENT PROCESS
Magno Antonio Calil Resende Silveira
April/2006
Advisors: Enrique Luis Lima
Giovani Cavalcanti Nunes
Department: Chemical Engineering
As the product from off shore oil wells is a three phase fluid formed by oil, gas and water, including various impurities, it requires a primary treatment. Oil and gas represent products of relevant industrial economic interest, but the water is one of the more undesirable contaminants in downstream oil and gas processes. Also, the concentration of oil in the water phase should be a minimum to be returned to the sea. To study the control of the primary treatment system the different equipments were modeled and control strategies were implemented. These strategies were required to cope with perturbations coming from the well, mainly in the form of a slugged flow, satisfying operational and product quality constraints. The system was implemented in SIMULINK/MATLAB to effectuate the simulations whose results are presented in this work.
v

ÍNDICE
VIII NOMENCLATURA 1 1. INTRODUÇÃO
4 2. HISTÓRICO
6 3. REVISÃO BIBLIOGRÁFICA
3.1 6 Tratamento primário de petróleo
3.1.1 Equipamentos modelados 6
3.1.1.1 7 Separador trifásico
3.1.1.1.1 7 Problemas operacionais nos separadores
3.1.1.2 9 Hidrociclones
3.1.2 Condições e perturbações na entrada do separador 11
3.2 12 Modelagem
3.2.1 Modelagem Fundamental 13
3.2.2 Modelos empíricos 13
3.2.3 Modelagem do separador 14
3.2.3.1 14 Equações para os níveis do separador
3.2.3.2 Equações para as fases dispersas 16
3.2.3.3 18 Pressão no separador
3.2.4 Modelagem dos hidrociclones 18
3.3 Otimização 21
3.4 Controle de processos 22
3.4.1 Controle em tanques e separadores trifásicos 23
3.4.2 Controle em hidrociclones 24
3.4.3 Controle preditivo 25
3.4.3.1 30 Ajuste dos parâmetros do MPC
3.4.3.2 30 Limitações associadas
3.4.4 Controle por bandas 31
vi

3.4.5 Controle PI 33
35 4. DESENVOLVIMENTO E IMPLEMENTAÇÃO DO MODELO 4.1 36 Separador trifásico
4.2 38 Hidrociclones
4.2.1 BOW (Bulk Oil-Water Cyclone) e PDC (Pre Deoiler Cyclone) 38
4.2.1.1 39 Vazão
4.2.1.2 43 Eficiência
4.2.2 DC (Deoiler Cyclone) 49
4.3 50 Operação do sistema
4.4 53 Características da alimentação
56 5. SIMULAÇÕES E CONTROLE
5.1 Controle no separador trifásico 57
5.2 57 Controle da interface água/óleo e nos hidrociclones
5.2.1 Estratégias utilizando DPR em todos os hidrociclones 59
5.2.2 Estratégias utilizando DPR somente no DC 64
5.2.2.1 72 Controle otimizado
75 6. RESULTADOS E DISCUSSÃO
6.1 Nova configuração do sistema 88
91 7. CONCLUSÕES E SUGESTÕES
94 8. REFERÊNCIAS BIBLIOGRÁFICAS
vii

NOMENCLATURA
base : largura das placas de coalescência
BSW : concentração volumétrica de água na fase oleosa na alimentação
(Basic Sediments and Water)
Ccl : comprimento da câmara de óleo
Ccs : comprimento da câmara de separação
comp : comprimento das placas de coalescência
cv : coeficiente de descarga máximo da válvula da fase oleosa maxl
cv : coeficiente de descarga máximo da válvula da fase aquosa maxw
d : perturbação
( )kd : perturbação predita no tempo atual, k
D: : diâmetro do separador
DPR : Razão de queda de pressão
eflw : eficiência de coleta de óleo da fase aquosa
ef : eficiência de coleta da água da fase oleosa wl
: gravidade específica do óleo Gl
Gw : gravidade específica da água
hplaca : distância entre as placas de coalescência na câmara de separação
hvert : altura do vertedouro
K : constante de proporcionalidade dos cotroladores
Lvert : largura do vertedouro
M : horizonte de controle
P : horizonte de predição
Pcomp : pressão da unidade de compressão de gás
Pjus : pressão a jusante da válvula da fase aquosa
Qin : vazão de alimentação no separador
Q : vazão de saída do separador out
viii

QoBOW: vazão no overflow do BOW
QoPDC: vazão no overflow do PDC
QoDC : vazão no overflow do DC
Qu : vazão no underflow do DC
S : matriz dinâmica
sg : fração de abertura da válvula da fase gasosa
s : fração de abertura da válvula da fase oleosa l
sw : fração de abertura da válvula da fase aquosa
T : temperatura interna do separador trifásico
Ta : tempo de amostragem dos controladores
TI : constante de tempo integral dos controladores
TOG : concentração volumétrica de óleo na fase aquosa na alimentação
(Total Oil and Grease)
u(k) : ação de controle no tempo atual, k
V : volume do separador
v : volume total t
y(k) : saída do modelo no tempo atual, k
)(ˆ ky : valor predito em malha aberta no tempo atual, k
)(ˆ ky∗ : valor predito da saída pelo controlador no tempo atual, k
y (k) : valor medido da saída no tempo atual, k med
Γ : matriz peso nas variáveis controladas
Δu(k) : variação da ação de controle no tempo atual, k
ΔP : queda de pressão na válvula da fase aquosa
Λ : matriz peso nas variáveis manipuladas
lγ : peso específico do óleo
wγ : peso específico da água
ix

ηhc : eficiência de separação do hidrociclone
μ : viscosidade da fase contínua
sρ : densidade da fase contínua
: densidade da fase dispersa ρ
x
1. INTRODUÇÃO
A maior parte do petróleo produzido no Brasil é extraída de campos marítimos,
onde os sistemas de produção off shore são os responsáveis por seu tratamento
primário.
Esse tratamento se faz necessário devido à mistura extraída constituir-se,
geralmente, de uma fração oleosa, outra aquosa e uma quantidade de gás, associada
ou não a fase oleosa, além de outras impurezas, tais como sais contidos na fase
aquosa, que devem ser separadas para os devidos processos à jusante. As etapas do
tratamento são:
- separação do óleo, água e gás;
- tratamento ou condicionamento do óleo para que possa ser transferido para
as refinarias;
- tratamento da água para re-injeção no poço ou para descarte no mar.
O petróleo e o gás apresentam relevante interesse econômico para a indústria,
sendo a água, um dos contaminantes mais indesejados no processo de produção do
petróleo, por apresentar elevado teor de sal em sua composição, o que provoca uma
série de problemas no sistema de bombeio e transferência e na operação dos
processos nas refinarias.
Ao mesmo tempo, a concentração de óleo na água deve ser mínima (da ordem
de 40 a 20ppm) para o descarte regular da fase aquosa ao mar, de acordo com as
normas regulamentadoras ditadas por órgãos ambientais fiscalizadores.
O processo de tratamento inicia-se num separador trifásico, que separa as três
fases (óleo, água e gás), além de absorver as flutuações na carga, oriundas dos
reservatórios sob a forma de golfadas.
O óleo é separado das outras fases e bombeado até os tratadores, que retiram
sais e resíduos de água. O gás, já separado do óleo e da água, é canalizado para
compressores, chegando com baixa pressão, em torno de 8,5 kgf/cm2.
A separação das fases líquidas (óleo e água) apresenta-se um pouco mais
complexa do que a separação do gás, pois, embora as fases líquidas sejam
praticamente imiscíveis, elas ascendem à superfície já sob a forma de emulsão, que é
posteriormente decantada no separador trifásico, aparecendo no fundo uma camada
de água relativamente limpa, denominada de água livre. Sobre esta primeira camada
1

forma-se uma segunda (emulsão óleo/água) denominada interface, e sobre esta
última, aparece uma camada de óleo relativamente limpa.
A água separada do óleo não pode ser jogada diretamente ao mar, pois
contém um residual de óleo acima dos padrões especificados para o seu descarte.
Esta água precisa ser tratada para condicioná-la ao descarte, e recuperar parte do
óleo nela presente na forma de emulsão. Ressalta-se que, na produção off shore, a
quantidade de água extraída aumenta com o envelhecimento dos poços.
Uma alternativa é direcionar toda essa emulsão para um tratador eletrostático
que faz a separação do óleo, obtendo-se uma água com qualidade para ser
descartada no mar. Entretanto, tal operação requer um equipamento com dimensões
muito elevadas, além de um grande gasto de energia.
Outra opção é a utilização de baterias de hidrociclones, onde são retiradas as
gotículas restantes de óleo, atingindo níveis de aproximadamente 200ppm para
posterior tratamento em flotadores, atingindo valores abaixo de 20ppm de teor de óleo
graxo, podendo ser descartada ao mar. A pesquisa e utilização desses equipamentos
têm sido bastante difundidas nos últimos 20 anos, mostrando um cenário em que
pequenos espaços e menor gasto de energia são possíveis.
Tal tratamento apresenta um processo cuja operação é extremamente
delicada, devido às suas características inerentes (fluxos multifásicos, golfadas,
combinação de sistemas - separador e baterias de hidrociclones - com dinâmicas
distintas, poucas variáveis de controle, etc.) e fortes restrições determinadas pelas
normas de preservação ambiental (Conselho Nacional do Meio Ambiente estabelece
que a quantidade de óleo na água a ser descartada no mar deve ser de 20ppm). A não
satisfação da exigência ambiental é suficiente para interromper a produção de uma
plataforma de petróleo.
Dentro desse contexto, o problema a ser estudado nesta dissertação é o
controle de um protótipo do processo descrito, formado por um separador trifásico e
três baterias de hidrociclones, em seqüência, acoplados entre si, conforme
apresentado na Figura 1.1.
2

Ls
Qu
QoDC
LTl
Gs
QoBOW
Ws
Qin PT
LTw
DPR
DPR
DPR
QoPDC
Figura 1.1 - Esquema do processo de tratamento de petróleo simulado
Várias estratégias de controle são estudadas e simuladas para o processo
modelado e implementado num software de simulação, com o intuito de identificar a
melhor opção, tendo como principal objetivo a obtenção de uma fase aquosa com
concentração de óleo dentro dos limites requeridos por órgãos fiscalizadores para ser
descartada no mar.
3

2. HISTÓRICO
A produção de um poço de petróleo se modifica continuamente com o passar
do tempo. Numa fase inicial, quando o poço é novo, o produto extraído apresenta uma
reduzida quantidade de água misturada ao petróleo. Entretanto, na medida em que
esse poço envelhece, as quantidades de água misturadas ao produto são crescentes,
estimando-se que, na média, após uma operação continuada de aproximadamente
quatro anos, 50% do produto extraído é formado por água, chegando até 90% em
poços mais antigos.
Para o tratamento da fase aquosa para descarte no mar, utilizam-se,
normalmente, os clássicos separadores gravimétricos, associados a separadores
eletrostáticos. Estes equipamentos são de dimensões e tempo de residência
consideráveis, em função da produção de cada poço, tendendo a aumentar com a
descoberta de novas jazidas (comprovadamente promissoras). Isto coloca uma grande
demanda na estrutura das plataformas de exploração, aumentando seus custos de
capital e operação.
Com o aumento da quantidade de fase aquosa na extração, essas unidades
recebem proporções cada vez maiores de água em relação ao óleo, surgindo a
necessidade de equipamentos mais compactos e com pequeno tempo de residência
para fazer tal separação.
A possibilidade de se utilizar um sistema de separação mais enxuto surgiu há
uns 20 anos, através de pesquisas realizadas na Inglaterra, resultando na introdução
de baterias de hidrociclones, conhecidos como DC (Deoiler Cyclone), projetados para
tratar misturas com concentração de gotículas de óleo na água a descartar, a partir de
efluentes com menos de 2000ppm.
Há aproximadamente seis anos (1999), uma empresa da Noruega (Kvaerner)
introduziu três novos tipos de hidrociclones, que poderiam ser utilizados em seqüência
no tratamento da mistura proveniente dos poços de petróleo (focando a atenção na
produção off shore). O primeiro tipo de hidrociclone tem como objetivo a separação
das fases líquidas e gasosas do petróleo vindo do poço. É conhecido pela sigla CCD
(Compact Cyclone Degasser). O segundo tipo, conhecido como BOW (Bulk Oil-Water
Cyclone), busca levar uma corrente com 15%-50% de óleo a um teor de, no máximo,
15% de óleo. O terceiro tipo, o PDC (Pre Deoiler Cyclone), é projetado para,
recebendo essa corrente com, no máximo, 15% de óleo, tratá-la até um teor de óleo
da ordem de 1500ppm. Esta corrente estaria pronta para ser tratada pelo “tradicional”
4

DC, acima mencionado. Apesar dessa tecnologia ter sido testada com sucesso para a
separação de óleos leves, pouco (ou nada) se conhece em termos da separação de
óleos pesados.
A PETROBRAS se interessou nessa nova tecnologia pelo fato de que, dentre
outras coisas, a mesma visa uma redução considerável do tamanho das plataformas
de exploração de petróleo, tamanho que no caso do Brasil, com óleos pesados
extraídos a profundidades cada vez maiores, em pouco tempo se tornaria inviável.
E é nesse cenário que este trabalho de pesquisa se insere, buscando
determinar a viabilidade de se utilizar os hidrociclones BOW e PDC acoplados ao
separador trifásico, para separação eficiente de óleo/água, no caso de óleos pesados
com elevado conteúdo de água, deixando o efluente em condições de ser operado
pelos hidrociclones DC, bem como estudar estratégias de controle para o processo em
questão, identificando a melhor opção. Tudo isso representa grandes desafios devido
o sistema de processamento, os hidrociclones acoplados ao separador, estar sujeito
às freqüentes perturbações, à estreita faixa de operação e à rápida dinâmica dos
hidrociclones.
5

3. REVISÃO BIBLIOGRÁFICA
3.1 Tratamento primário de petróleo
Geralmente, na produção de petróleo obtêm-se três fluidos simultaneamente:
óleo, gás e água, além de impurezas.
Após extração e envio dessa corrente para a planta de tratamento, o próximo
passo é separar adequadamente a mistura, retirando impurezas e o máximo possível
de água dos outros produtos de interesse econômico. Nessa etapa do processamento,
também é de grande importância o condicionamento da água para descarte no mar ou
re-injeção nos poços. E a complexidade da planta de processamento primário de
petróleo depende da dificuldade em separar tais substâncias (TRIGGIA et al., 2001).
Tipicamente, utilizam-se no início do processo separadores bifásicos e/ou
trifásicos (NUNES, 1994) em série, responsáveis pela separação das fases liquidas e
gasosa. A partir daí, três correntes efluentes seguem para destinos diferentes:
- a fase gasosa com fase líquida (óleo + água) carreada é encaminhada para a
UPGN (Unidade de Processamento de Gás Natural), após passar por torres de
absorção e/ou adsorção para retirada da fase líquida (desidratação) e de gases ácidos
(dessufurização). Em muitos casos, a corrente de gás pode ser queimada devido à
inviabilidade econômica do tratamento da mesma;
- a fase oleosa com água vai para tratadores eletrostáticos para a retirada de
água e outros compostos químicos (enxofre, sais, etc) até os limites aceitos para o
refino;
- e a fase aquosa com óleo passa para o tratamento de água, de onde ela
possa ser re-injetada nos poços ou descartada no mar. Nesse tratamento utilizam-se
flotadores e, mais recentemente, hidrociclones (MORAES, 1994).
Obviamente, as correntes líquidas também carreiam certa quantidade de gás,
principalmente associadas ao óleo.
3.1.1 Equipamentos modelados
O processo considerado neste trabalho não inclui o tratamento da fase gasosa
e nem da oleosa, focando, portanto, no separador trifásico e tratamento da fase
aquosa com hidrociclones.
6
3.1.1.1 Separador trifásico
Os separadores gravitacionais trifásicos são equipamentos de grandes
dimensões e longo tempo de residência, possuindo vários internos que possibilitem
uma boa separação das fases em seu interior. Eles visam efetuar a separação das
fases aquosa, oleosa e gasosa, mantendo dentro de limites toleráveis:
- a quantidade de líquido arrastado no gás
- a quantidade de água arrastada no óleo e
- a quantidade de óleo arrastado na água.
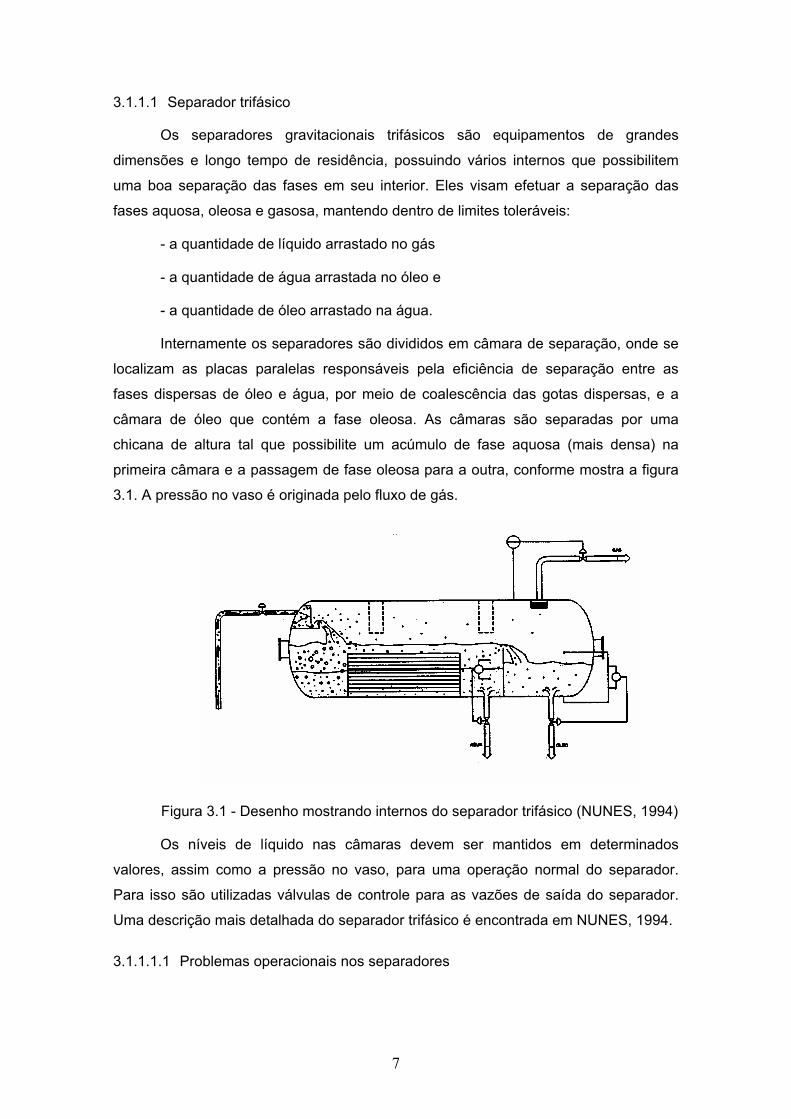
Internamente os separadores são divididos em câmara de separação, onde se
localizam as placas paralelas responsáveis pela eficiência de separação entre as
fases dispersas de óleo e água, por meio de coalescência das gotas dispersas, e a
câmara de óleo que contém a fase oleosa. As câmaras são separadas por uma
chicana de altura tal que possibilite um acúmulo de fase aquosa (mais densa) na
primeira câmara e a passagem de fase oleosa para a outra, conforme mostra a figura
3.1. A pressão no vaso é originada pelo fluxo de gás.
Figura 3.1 - Desenho mostrando internos do separador trifásico (NUNES, 1994)
Os níveis de líquido nas câmaras devem ser mantidos em determinados
valores, assim como a pressão no vaso, para uma operação normal do separador.
Para isso são utilizadas válvulas de controle para as vazões de saída do separador.
Uma descrição mais detalhada do separador trifásico é encontrada em NUNES, 1994.
3.1.1.1.1 Problemas operacionais nos separadores
7

Como todo equipamento de processo o separador também apresenta
problemas na operação. A seguir são listados os mais comuns (TRIGGIA et al, 2001):
a) Espuma – as impurezas presentes no líquido que chega no separador
são as principais causadoras de espuma. Quando presente, ela dificulta o controle de
nível do líquido dentro do separador, ocupa um volume que poderia estar disponível
para a coleta de líquido ou para decantação, e pode ser arrastada pela corrente de
gás ou de óleo desgaseificado. Portanto, quando for possível prever a formação da
espuma, o separador deve ser equipado com dispositivo interno para removê-la,
assegurando um tempo e uma superfície coalescedora suficientes para quebrá-la.
b) Obstrução de parafinas – operações de separação podem ser afetadas
por acúmulo de parafina. As placas coalescedoras na seção líquida e os extratores de
névoa na seção gasosa são particularmente susceptíveis a estas obstruções. Quando
a parafina é um problema real e potencial, extratores alternativos devem ser
considerados e bocas de visitas e orifícios devem ser providenciados para permitir a
entrada de vapor ou solvente de limpeza dos elementos internos do separador.
c) Areia – a areia que eventualmente chega com o líquido no separador
causa erosão nas válvulas, obstrução nos elementos internos e acumula-se no fundo
do separador, de onde é removida por jatos de água e drenos. A melhor solução do
problema é evitar a produção de areia dos reservatórios.
d) Emulsões – a emulsão que se forma na interface óleo/água pode ser
particularmente problemática na operação de um separador. Além de causar
problemas com o controle de nível, o acúmulo de emulsão diminui o tempo de
retenção efetivo, resultando em uma redução na eficiência do processo. A adição de
calor ou de produtos químicos minimiza o acúmulo de emulsão, porém estes
procedimentos são preferencialmente aplicados na fase de tratamento do óleo.
e) Arraste – este é um problema típico operacional. O arraste de óleo pela
corrente de gás ocorre quando o nível do líquido está muito alto, quando existe algum
dano em algum componente interno, formação de espuma, saída de líquido obstruída,
projeto impróprio ou simplesmente porque o vaso está operando com produção
superior do projeto. O arraste de gás pelo líquido pode ser um indicativo de nível muito
baixo de líquido ou falha no sistema de controle de nível.
8

3.1.1.2 Hidrociclones
Originalmente os hidrociclones foram desenvolvidos para a separação de
sólidos em líquidos e, após vários estudos modificações foram feitas para alcançar um
equipamento semelhante para a separação eficiente de líquidos (MORAES, 1994).
Com o intuito de diminuir o tamanho de plantas de tratamento off shore,
empresas do ramo de petróleo vem buscando desenvolver e utilizar equipamentos de
dimensões reduzidas para fazer a separação de emulsões óleo/água. Os hidrociclones
para águas oleosas se enquadram perfeitamente nessa classe e são bastante
interessantes porque ocupam menos espaço em relação aos equipamentos
convencionais, além de possuir um tempo de residência muito reduzido (cerca de 2
segundos), agilizando a produção.
Um hidrociclone para separar fluidos é basicamente um tubo composto de
trechos cilíndricos e cônicos justapostos, onde a entrada de um fluido, contendo uma
fase dispersa de diferente densidade, é feita tangencialmente à seção transversal do
tubo, formando um fluxo axial e possibilitando um movimento de rotação do fluido ao
redor do eixo do equipamento, chamado de vórtice (MORAES, 1994).
O princípio de funcionamento deste tipo de equipamento consiste na entrada
tangencial de água oleosa, sob pressão, no trecho de maior diâmetro do hidrociclone,
sendo direcionada internamente, em fluxo espiral, em direção ao trecho de menor
diâmetro. O contínuo decréscimo de diâmetro faz com que este fluxo seja acelerado,
gerando uma força centrífuga que força o componente mais pesado (água) contra as
paredes. O fluxo axial reverso ocorre, na parte central do equipamento, devido ao
formato cônico do hidrociclone e ao diferencial de pressão existente entre as paredes
e o centro, que se estabelece em conseqüência do campo centrífugo, associado à
perda de intensidade do vórtice ao longo do escoamento axial. A fase líquida central
que deixa o hidrociclone pela parte superior (topo), contendo óleo em maior proporção,
é denominada rejeito. A saída de água se localiza na parte inferior do equipamento
(fundo), contendo uma certa quantidade de óleo residual (FILGUEIRAS, 2005). A
figura 3.2 mostra o desenho esquemático do equipamento e de seu funcionamento.
9

Figura 3.2 - Desenho esquemático de um hidrociclone (TRIGGIA et al, 2001)
Nos processos de tratamento primário do petróleo são utilizados módulos de
hidrociclones, isto é, vários hidrociclones são montados em paralelo, como mostrado
na figura 3.3, de modo que a vazão de alimentação se divida, passando frações
aproximadamente iguais em cada equipamento.
Figura 3.3 - Esquema mostrando módulos de hidrociclones (fonte: APS, 2002)
Os mais utilizados atualmente são os conhecidos como DC (deoiler cyclone),
que devem receber uma corrente de alimentação com um teor máximo de óleo na
alimentação de 2000ppm, limpando a água até aproximadamente 200ppm. O restante
de óleo, em caso de teores maiores é retirado num processo posterior. Contudo, para
se alcançar aquela concentração de óleo na alimentação do deoiler se faz necessária
10

uma pré separação, que pode ser feita por meio de equipamentos parecidos, mas com
faixas de operação diferentes, com o teor de óleo na alimentação maiores. Surgiram
então os hidrociclones BOW (Bulk Oil-Water Cyclone) que buscam levar uma corrente
de alimentação com 15%-50% de óleo a um teor de, no máximo, 15% de óleo e os
PDC (Pré Deoiler Cyclone), projetados para, recebendo essa última corrente com, no
máximo, 15% de óleo, tratá-la até um teor de óleo da ordem de 20ppm (MORAES,
2005). Esta corrente estaria pronta para ser tratada pelo “tradicional” DC.
3.1.2 Condições e perturbações na entrada do separador
A mistura que chega ao separador é constituída de fases dispersa de óleo em
água e água em óleo, além do gás. As quantidades de óleo em água e de água em
óleo nas emulsões, e de gás no fluxo de entrada do separador são definidas devido às
condições do(s) poço(s) de onde está ocorrendo a extração de petróleo e das
condições de escoamento nos dutos, desde o(s) poço(s) até o separador.
A evolução do escoamento é ainda responsável pela principal e mais
preocupante perturbação na entrada do separador, o regime de golfadas severas. Este
é caracterizado por uma instabilidade de fluxo que pode ocorrer a certas vazões
devido a um arranjo do conjunto linha-riser desfavorável, geralmente a baixas vazões
em linhas relativamente longas. Ou seja, é o resultado da instabilidade no fluxo na
junção da linha com o riser e é caracterizado por ciclos regulares com períodos de
vários minutos, com a inclinação da linha sendo negativa (NUNES, 1994).
A formação das golfadas é mostrada na figura 3.4. Esporadicamente ocorre o
bloqueio na base do riser, provocado pelo acúmulo do líquido que escoa no duto,
retendo o gás a montante. Passa a se formar então uma bolha de gás que inicia a
penetração no riser, empurrando o líquido acumulado até que o gás atinja o topo. A
partir daí o gás é produzido no separador.
11

Estágio 1: geração da golfada Estágio 2: produção da golfada
Separador Separador
Estágio 4: produção de gás Estágio 3: penetração da bolha
Figura 3.4 - Evolução de golfadas (fonte: NUNES, 1994)
Este fenômeno pode ser modelado e simulado em pacotes comerciais
específicos de simulação dinâmica de escoamento em dutos, como o OLGA
(SCANDPOWER,2000), por exemplo. Contudo, neste trabalho não foi feita qualquer
modelagem a montante do separador, sendo estimadas e adotadas as condições do
fluxo de entrada através de dados fornecidos pela PETROBRÁS.
3.2 Modelagem
Um modelo é qualquer objeto, concreto ou abstrato, utilizado para explicar
algum tipo de fenômeno.
Matematicamente, obtém-se um modelo quando se torna possível estabelecer
relações quantitativas entre as variáveis do problema apresentado (PINTO e LAGE,
2001).
Então, modelagem, no sentido deste trabalho, é a forma de identificar
qualitativamente e, principalmente, quantitativamente o processo estudado, a fim de se
obter explicações a respeito das características do sistema, fazendo-se algumas
considerações – hipóteses básicas - para necessárias simplificações.
Os modelos podem ser classificados em teóricos (ou fundamentais), empíricos
e híbridos (uma mistura das duas abordagens anterior). A seguir, são comentadas em
linhas gerais as duas modelagens utilizadas neste trabalho.
12

3.2.1 Modelagem Fundamental
Modelos dinâmicos fundamentais são deduzidos pela aplicação dos balanços
transientes de massa, energia e momento do processo (OGUNNAIKE e RAY, 1994).
Na ausência de variações espaciais, os modelos resultantes tem a forma geral
( uxfx ,.= )
)
)
(3.1)
( uxg ,0 = (3.2)
( uxhy ,= (3.3)
onde x é um vetor de n variáveis de estado, u é um vetor de m variáveis manipuladas,
e y é um vetor de p variáveis controladas. As equações diferenciais ordinárias (3.1) e
as equações algébricas (3.2) são deduzidas das leis de conservação e várias relações
constitutivas, enquanto as equações (3.3) são escolhidas de acordo com o controle do
processo.
Modelos fundamentais têm diversas vantagens em relação aos modelos
empíricos. Devido às altas restrições impostas aos modelos fundamentais com
respeito a sua estrutura e parâmetros, menos dados de processo são requeridos para
seus desenvolvimentos. Além disso, modelos fundamentais podem ser extrapolados
para regiões de operação fora dos dados utilizados para a validação do modelo
(MEADOWS e RAWLINGS, 1997). Esta propriedade é particularmente importante
quando um processo opera em uma larga faixa de condições.
Como potencial desvantagem dessa abordagem, pode-se citar a dificuldade de
modelar processos muito complexos e utilizá-los comercialmente (HENSON, 1998).
3.2.2 Modelos empíricos
Em muitas aplicações, a falta de conhecimento do processo e/ou simuladores
dinâmicos apropriados impedem a derivação de um modelo fundamental. Neste caso
utiliza-se a modelagem empírica de processos, que é o levantamento de equações
que descrevam um processo a partir de dados de planta.
As desvantagens desta modelagem são a grande quantidade de dados de
planta necessários para a identificação do processo e a impossibilidade de
extrapolação das equações do modelo para condições de operação fora daquelas em
que os dados utilizados na identificação do processo foram obtidos. E a principal
vantagem está exatamente no fato de não ser necessário conhecimento do processo.
13

3.2.3 Modelagem do separador
Um modelo fenomenológico do separador trifásico utilizado neste trabalho é
apresentado a seguir. Ele foi baseado no trabalho de NUNES (1994), onde maiores
detalhes podem ser encontrados. Outra referência para consulta deste assunto é
FILGUEIRAS (2005). A modelagem em questão representa com boa qualidade o
comportamento dinâmico de um separador de produção em uma plataforma real. A
Figura 3.5 mostra esquematicamente as principais características físicas do
equipamento utilizadas para obtenção do modelo.
hw
ht
hl
p
Gin Lin Win
sg
sw sl
Wout Lout
Gout
Figura 3.5 - Principais variáveis do separador trifásico consideradas no modelo
A modelagem foi realizada estabelecendo os balanços de massa para a
câmara de separação, a câmara de óleo e o espaço de gás, considerando que as
densidades das fases liquidas (aquosa e oleosa) eram iguais. Na prática a diferença é
pequena (0.965 vs. 0.855).
O modelo para a eficiência de separação das fases aquosa e oleosa pode ser
melhor verificado nos trabalhos citados anteriormente.
3.2.3.1 Equações para os níveis do separador
Fazendo-se um balanço material global na câmara de separação, é possível
deduzir uma relação para o nível total dentro do vaso. Se o nível na câmara de óleo,
h , é menor que a altura do vertedouro: l
14

( )( ) ( )[ ]
( ) ( ) ( ) ( )( tWtLtLtWthDthC2
1dt
tdhsvee
ttcs
t −−+−⋅⋅
= ) (3.4)
Do contrário:
( )( ) ( )[ ]
( ) ( ) ( ) ( )( )tWtLtLtWthDthC2
1dt
tdhssee
ttcs
t −−+⋅−⋅⋅⋅
= (3.4’)
onde
ht : nível total na câmara de separação
We : vazão de fase aquosa que entra
Le : vazão de fase oleosa que entra
A vazão de fase oleosa por cima do vertedouro, Lv, a vazão de saída da fase
oleosa da câmara de óleo, Ls e a vazão de saída de água da câmara de separação,
Ws são dados por
( ) ( )[ ]{ } (( 5.1verttverttvertv hthhth2.0L
60KtL −⋅−⋅−⋅= ) ) (3.5)
( ) ( ) ( ) ( )1
jus4
llsllmaxs G
P10thtP028.70
tscvtL
−⋅⋅γ+⋅
⋅=
−
(3.6)
( ) ( ) ( ) ( ) ( )[ ]{ }w
jus4
wtlwwswwmaxs G
P10thththtP0280.70
scvtW
−⋅−⋅γ+⋅γ+⋅
⋅=
−
(3.7)
onde
h : nível da fase oleosa na câmara de óleo l
: nível da fase aquosa na câmara de separação hw
P : pressão no separador s
Também com um balaço material para a fase aquosa na câmara de separação,
é deduzida uma relação para o nível da interface água/óleo, hw:
( )( ) ( )[ ]
( ) ( )[ ] ( ) ( ) ( ){ }tWtefBSWtLtefTOG1tWthDthC2
1dt
tdhswlelwe
wwcs
w −⋅⋅+⋅−⋅−⋅⋅
=
(3.8)
15

E, finalmente, para o nível de óleo na câmara de óleo hl, procede-se ao
balanço de massa da fase oleosa na câmara de óleo, podendo ocorrer duas
possibilidades:
- se o nível da câmara de óleo é menor que a altura do vertedouro:
( )( ) ( )[ ]
( ) ( )[ ]tLtLthDthC2
1dt
tdhsvert
llcl
l −−⋅⋅⋅
= (3.9)
- se o nível da câmara de óleo é maior que a altura do vertedouro:
( ) ( )dt
tdhdt
tdh tl = (3.9’)
É importante notar, a partir da equação (3.8), que diminuir as eficiências de
coleta de óleo da fase aquosa ( ) e de água da fase oleosa ( ) produz: lwef wlef
• aumento do nível da fase aquosa, conforme o balanço de massa, pois sai
menos óleo coletado ( )lwe efTOGW ⋅⋅−
• diminuição do nível dessa fase, pois entra menos água coletada na fase
oleosa . ( )wle efBSWL ⋅⋅
Como a viscosidade da fase oleosa é 17 vezes maior que a da fase aquosa, o
segundo efeito é praticamente desprezível e, conseqüentemente, uma diminuição da
eficiência de coleta de óleo resulta, a princípio, num aumento do nível da fase aquosa.
3.2.3.2 Equações para as fases dispersas
Através do balanço de massa da água na fase oleosa da câmara de separação
encontra-se uma relação para o volume de água na fase oleosa nesta câmara:
( ) ( ) ( )[ ] ( ) ( ){ txtLtef1BSWtLd
}t
tdvwlcsvertwle
wlcs ⋅−−⋅⋅= (3.10)
onde
v : volume de água na fase oleosa na câmara de separação wlcs
x : fração volumétrica de água na fase oleosa da câmara de separação dada por wlcs
( ) ( )( ) ( )tvtv
tvtx
wcscs
wlcswlcs −
= (3.11)
16

Na equação 3.11, vcs é o volume da câmara de separação e vwcs é o volume da
fase aquosa na câmara de separação, dados por
( ) ( ) ( )[ ] ( )[{ tcostsent4
DCtv ttt
2cs
cs θ⋅θ−θ⋅
= ]} (3.12)
( ) ( )[ ] ( )[{ tcostsent4
DCv www
2cs
wcs θ⋅θ−θ⋅
= ]} (3.13)
com
( ) ( )⎥⎦⎤
⎢⎣⎡ −=θ
Dth
21cosat tt (3.14)
( ) ( )⎥⎦⎤
⎢⎣⎡ −=θ
Dth
21cosat ww (3.15)
Com um balanço de massa de óleo na fase aquosa da câmara de separação
chega-se a uma relação para o volume de óleo na fase aquosa da câmara de
separação:
( ) ( ) ( )[ ] ( ) ( )txtWtef1TOGtWdt
tdvlwcsslwe
lwcs ⋅−−⋅⋅= (3.16)
onde
vlwcs : volume de óleo na fase aquosa na câmara de separação
xlfwcs : fração volumétrica de óleo na fase aquosa da câmara de separação, dado por
( ) ( )( )tvtv
txwcs
lwcslwcs = (3.17)
Por último, faz-se um balanço de massa de água na câmara de óleo,
encontrando-se a relação para o volume de água na fase oleosa da câmara de óleo:
( ) ( ) ( ) ( ) ( )[ txtLtxtLd
]t
tdvwlclswlcsvert
wcl ⋅−⋅= (3.18)
onde
v : volume de água na câmara de óleo wcl
xwlcl : fração volumétrica de água na fase oleosa da câmara de óleo, dada por
17

( ) ( )( )tv
tvtx
cl
wlclwlcl = (3.19)
Na equação 3.19 vcl é o volume da câmara de óleo dado por
( ) ( )[ ] ( )[{ tcostsent4
DCv lll
2cl
cl θ⋅θ−θ⋅
= ]} (3.20)
com
( ) ( )⎥⎦⎤
⎢⎣⎡ −=θ
Dth21cosat l
l (3.21)
3.2.3.3 Pressão no separador
Com um balanço de massa da fase gasosa dentro do separador é possível
encontrar a seguinte relação para pressão dentro do vaso:
( ) ( ) ( ) ( ) ( ) ( ) ( )[ ] ( )( ) ( ) ( )tvtvtv
tPtGtLtWtGtLtWdt
tdP
clcst
sssseees
−−⋅−−−++
= (3.22)
completando o sistema de equações diferenciais ordinárias utilizado na modelagem do
separador trifásico gravitacional.
3.2.4 Modelagem dos hidrociclones
Desde 1994 se encontrava disponível um modelo fenomenológico estático para
os hidrociclones DC, baseado em hipóteses de operação simplificadoras e elaborado a
partir das leis de conservação de massa e quantidade de movimento (MORAES,
1994).
Algumas considerações acerca dos hidrociclones são:
- A entrada do meio contínuo deve conter uma fase dispersa de densidade
diferente, porém com baixa concentração (<2000ppm).
- Além do fluxo axial, a entrada tangencial gera um movimento de rotação, se
estabelecendo um campo centrífugo milhares de vezes maior que o gravitacional.
- Dois pontos de alimentação simétricos aumentam a simetria, preservando o
núcleo oleoso.
- Promove segregação por diferença de densidade.
- Ocorre um fenômeno de fluxo reverso por mudança do gradiente de
pressão radial num certo ponto, nas proximidades do eixo.
18

- É considerado fluxo axissimétrico longe da região de entrada.
- Reynolds elevado anula efeito de viscosidade fora da camada limite.
A figura a seguir é um esquema da parte modelada no hidrociclone DC,
mostrando as principais dimensões e seu posicionamento em coordenadas esféricas e
cilíndricas.
Figura 3.6 - Parte modelada do hidrociclone DC (MORAES, 1994)
Nesta figura R1 representa o raio a partir do qual as gotículas de óleo têm
condição de entrar no hidrociclone, Rcrit é o raio a partir do qual gotículas de
determinado tamanho saem pelo underflow, a é o raio do tubo de overflow. A trajetória
tracejada indica o caminho de uma gotícula de tamanho determinado.
A partir das equações de conservação da massa e da quantidade de
movimento, em coordenadas esféricas ( λθ,,r ), fazendo diversas considerações
simplificadoras, chega-se a uma equação diferencial para a função corrente que, após
trabalhada é possível obter o conjunto de equações utilizadas para implementação do
modelo do hidrociclone DC:
- equação que descreve a velocidade tangencial em coordenadas cilíndricas, λq
( ) ( )⎟⎠⎞
⎜⎝⎛=
μρ
λλ RqdRd
R1
dRdRq
dRd
Rq R (3.23)
- equação para a trajetória das gotículas dentro do hidrociclone
19

DR
z
Uqq
dRdz
+= ( ) inicialzaz = (3.24)
- e as condições de contorno dadas por
aRV
q c0a=λ 2
c0
a aRV
dRdq
−=λ e .
zinicial é o valor da coordenada axial em que a velocidade axial reverte seu sinal.
O equacionamento completo deste modelo pode ser encontrado em MORAES
(1994) e FILGUEIRAS (2005).
No trabalho original, este modelo foi validado frente a uma distribuição de
tamanho de gotículas nas faixas indicadas na figura a seguir. Isto é, frações
volumétricas de gotículas com diâmetros entre 7 e 35μm. A eficiência de coleta
reportada oscilava em torno de 0,7. Este valor foi considerado apropriado para os
estudos de controle, pois uma eficiência maior do que essa não daria margem de
manobra ao controlador.
Figura 3.7 - Fração volumétrica de óleo distribuída em faixas de diâmetro de
gotículas (MORAES, 1994)
Maiores detalhes sobre o modelo de eficiência desses hidrociclones podem ser
encontrados também em WOLBERT et al. (1995).
20
3.3 Otimização
A otimização de um sistema consiste na determinação de suas variáveis
independentes, através de um modelo matemático do mesmo e um algoritmo de
programação matemática, com a finalidade de maximizar ou minimizar uma função
objetivo sem violar as restrições do referido sistema (ZANIN, 2001).
Os componentes chaves da formulação de um problema de otimização são: a
função objetivo, o modelo do processo e as restrições.
A função objetivo pode representar lucro, custo, energia, produção, distância,
etc., em termos das variáveis de decisão do processo ou sistema em análise. O
modelo do processo e as restrições descrevem as inter-relações entre estas variáveis.
Alguns conceitos importantes referentes este assunto são:
- função objetivo: é a função matemática cujo máximo ou mínimo deseja-se
determinar;
- variáveis de decisão: são as variáveis independentes que aparecem na
função objetivo. Correspondem, em número, ao excesso de variáveis em relação ao
número de equações (restrições de igualdade), isto é, o grau de liberdade do
sistema;
- restrições: são os limites impostos ao sistema ou estabelecidos pelas leis
naturais que governam o comportamento do sistema, a que estão sujeitas as variáveis
de decisão. As restrições podem ser de igualdade (equações) ou de desigualdade
(inequações);
- região de busca: ou região viável, é a região do espaço definido pelas
variáveis de decisão, delimitada pelas restrições, em cujo interior ou em cuja fronteira
se localiza o ótimo da função objetivo.
Não existe um único método que pode ser aplicado eficientemente para todos
os problemas. O método escolhido para um caso particular depende das
características da função objetivo, da natureza das restrições e do número de
variáveis do problema. Contudo, alguns passos devem ser observados na formulação
e solução de um problema de otimização, tais como análise do processo e suas
variáveis, determinação do critério para otimização e especificação da função objetivo
em termos das variáveis do processo, desenvolvimento do modelo para o processo,
relacionando as suas variáveis através de restrições de igualdade e desigualdade e
21

analise da solução obtida e a sua sensibilidade frente a variações em parâmetros do
modelo e suas considerações (hipóteses).
Algumas dificuldades podem surgir quando o problema de otimização
apresenta funções objetivo e/ou restrições complicadas, principalmente na existência
de descontinuidades, não linearidades, definições em termos de complicadas
interações entre as variáveis, podendo ocorrer valores não únicos destas variáveis
para o valor ótimo da função objetivo e quando a função objetivo apresenta ótimos
locais.
3.4 Controle de processos
Na maior parte dos casos os objetivos de controle consistem em conseguir um
bom acompanhamento das variações dos valores que se desejam (setpoints) para as
variáveis que são controladas em um processo.
Então, espera-se, basicamente, de um sistema de controle que o processo seja
mantido operando eficientemente numa condição desejada, que pode mudar com o
tempo (controle servo), rejeitando o efeito de perturbações conhecidas e
desconhecidas (controle regulador). A eficiência dessa operação envolve conceitos
como o de estabilidade e o de bom comportamento dinâmico.
Para processos químicos essa tarefa não é tão simples, visto a complexidade
de fenômenos associados e falta de conhecimento aprofundado (e necessário) para
montar uma boa malha de controle que lida com várias mudanças ao longo do tempo.
As teorias de controle que têm sido utilizadas ultimamente e têm obtido
excelentes resultados práticos para fins de controle dos processos químicos podem
ser divididas entre clássica e avançada.
O sucesso da teoria clássica se deve ao fato de que o controlador PID utiliza
uma lei de controle extremamente flexível e pouco exigente em relação ao
conhecimento do processo, aliado à exigência da pouca restrição quanto ao
funcionamento eficiente dos processos químicos.
Em relação à teoria de controle moderna, baseada num bom modelo do
sistema e no conhecimento das variáveis de estado, chamada de moderna quando da
sua introdução na década de sessenta, não funciona muito bem sem adaptações para
o caso dos processos químicos. Contudo, com avanços das últimas décadas essa
teoria vem sendo amplamente utilizada com sucesso, sendo chamada de avançada.
Um fator importante a seu favor é a possibilidade e facilidade de levar em conta as
22

restrições rígidas e flexíveis associadas ao processo, o que não acontece em muitas
outras técnicas de controle.
3.4.1 Controle em tanques e separadores trifásicos
Os tanques são utilizados em vários processos químicos na indústria para
diversos fins, desde armazenamento de substâncias até reações químicas. Neste
meio eles podem também exercer a função de separação de produtos. Mas, qualquer
que seja a finalidade, fatalmente um controle no nível do mesmo deverá ser feito.
Tanque pulmão (surge tank) possui a característica de absorver possíveis
perturbações da carga. Logo, suas dimensões devem ser tais que possibilitem essa
propriedade.
Os separadores trifásicos também agem como um tanque pulmão, além de
promover a separação de fases. E o controle do separador deve permitir uma boa
eficiência desta separação e ainda conseguir filtrar as perturbações originadas das
golfadas, enviando uma vazão mais estável para os processos a jusante.
O estudo de estratégias de controle para nível em tanques vem desde
décadas. Em 1976, SHUNTA et al. apresentaram uma proposta que utiliza lei de
controle PI não linear, além de uma estratégia baseada no uso de diferentes
controladores operando por faixas de nível. Em 1977, LUYBEN e BUCKLEY
descreveram uma estratégia de controle cuja idéia básica é o uso de um controlador
de nível proporcional retro-alimentado (feedback) com um controlador feedforward
para a vazão de alimentação. Esta foi medida e transmitida através de um lag de
primeira ordem, e então, o sinal foi adicionado à saída do controlador proporcional.
Este controle ficou conhecido como PL (Proportional-Lag).
Já em 1986 MCDONALD e MCAVOY definiram e resolveram um problema de
controle de nível de média ótima para um tanque pulmão. Neste trabalho eles
desenvolveram um controlador preditivo utilizando a política de controle ótimo. E em
1989, CAMPO e MORARI desenvolveram uma estratégia de controle preditivo
baseado em modelo, cujo objetivo era o de otimizar a vazão de saída de fluxo do
tanque pulmão.
Para o controle de separadores trifásicos, em 1995 STOKKE et al. propuseram
um controle preditivo supervisor com o objetivo de buscar valores ótimos para os
setpoints dos controladores PI’s para as variáveis controladas do equipamento. Em
2001, NUNES desenvolveu uma estratégia de controle preditivo multivariável para o
mesmo equipamento para controlar os níveis da interface água/óleo da câmara de
23

separação e do óleo da câmara de óleo e a pressão no vaso, manipulando as
respectivas vazões de saída. Mais recentemente, em 2005, FILGUEIRAS propôs uma
estratégia de controle descentralizado para o separador, utilizando controladores PI
para as mesmas variáveis usadas no trabalho de NUNES, 2001.
Neste trabalho, várias estratégias de controle como as mencionadas aqui serão
utilizadas.
3.4.2 Controle em hidrociclones
Os hidrociclones operam eficientemente dentro de estreitas faixas,
determinadas quando do seu projeto. Logo, o controle possível para este equipamento
se limita à manipulação apropriada das vazões relativas e estas são dependentes de
equipamentos a montante (neste caso, o separador trifásico). Basicamente os
hidrociclones não apresentam dinâmica significativa e é de praxe considerá-los
operando em estado quase estacionário.
Os controladores convencionais não são adequados para tratar sistemas com
pouco tempo de residência como os hidrociclones, quando estes estão sujeitos a
oscilações de carga. O controle normalmente utilizado baseia-se na manutenção da
razão de perdas de carga (DPR em inglês para representar ∆P Ratio) (NUNES e
SILVEIRA, 2005).
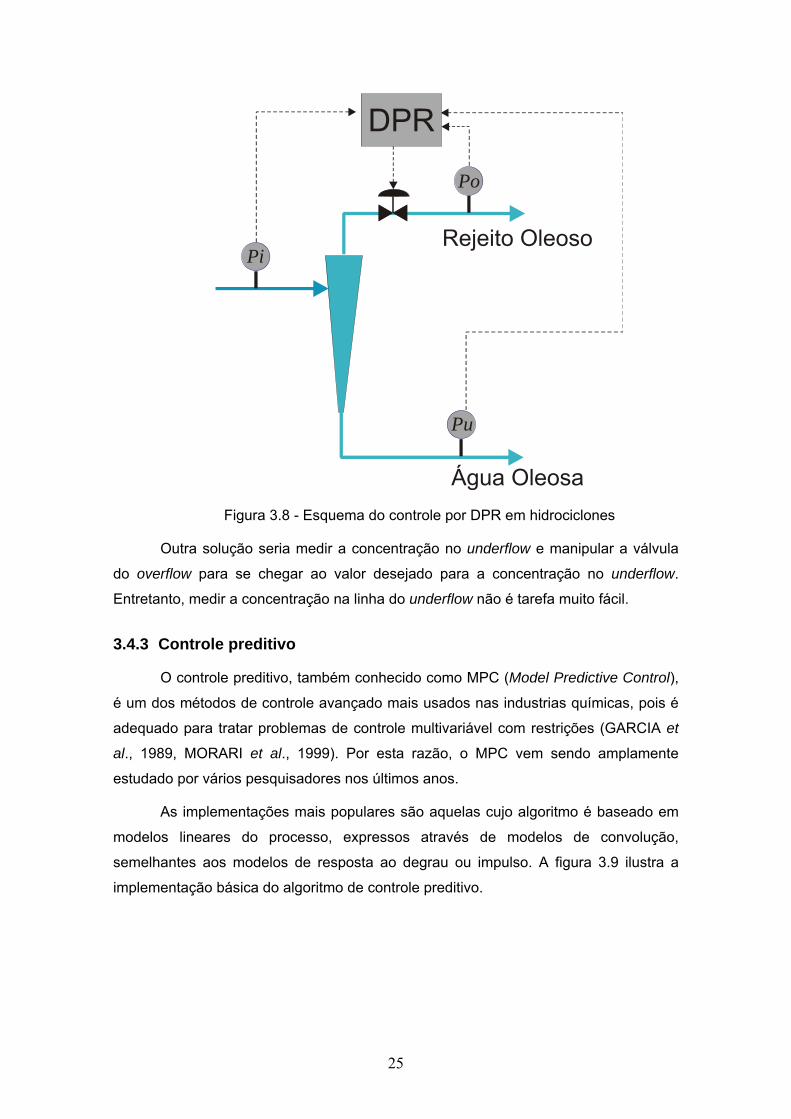
PuPPoPDPR
−−
=
onde Po = pressão no overflow e Pu = pressão no underflow. Geralmente adota-se
uma DPR fixa cujo valor é o setpoint do controlador (normalmente um controlador PI).
Assim uma razão de vazões, split, é mantida. A figura 3.8 mostra esquematicamente a
estratégia utilizando DPR.
24
Rejeito Oleoso
Po
Pi
Pu
Água Oleosa
Figura 3.8 - Esquema do controle por DPR em hidrociclones
Outra solução seria medir a concentração no underflow e manipular a válvula
do overflow para se chegar ao valor desejado para a concentração no underflow.
Entretanto, medir a concentração na linha do underflow não é tarefa muito fácil.
3.4.3 Controle preditivo
O controle preditivo, também conhecido como MPC (Model Predictive Control),
é um dos métodos de controle avançado mais usados nas industrias químicas, pois é
adequado para tratar problemas de controle multivariável com restrições (GARCIA et
al., 1989, MORARI et al., 1999). Por esta razão, o MPC vem sendo amplamente
estudado por vários pesquisadores nos últimos anos.
As implementações mais populares são aquelas cujo algoritmo é baseado em
modelos lineares do processo, expressos através de modelos de convolução,
semelhantes aos modelos de resposta ao degrau ou impulso. A figura 3.9 ilustra a
implementação básica do algoritmo de controle preditivo.
25

k k+1 k+P
tempo
alvo
futuro passado
horizonte
u(k. . . . . . . .
. . . . .
Figura 3.9 - Esquema de implementação do controle preditivo
A estratégia de controle do MPC consiste na utilização de um modelo de
processo capaz de gerar predições ao longo de um período de tempo, denominado
horizonte de predição (P). As ações das variáveis manipuladas ou de decisão
minimizam uma função objetivo, sujeita ou não a restrições nas entradas e/ou saídas.
A função objetivo é normalmente definida como uma função quadrática das
diferenças entre o vetor de predição das saídas (y), ou de estado (x), e o vetor de
referência que pode ter um valor fixo (y ) ou variável no tempo (ys s (k)). As ações de
controle variam dentro de um horizonte M < P, conhecido como horizonte de controle
(M). Apenas a primeira ação de controle calculada é implementada. No instante k+1,
obtém-se uma nova medição da saída da planta e o problema de otimização é
resolvido, gerando um feedback no controlador, sendo o horizonte movido adiante em
um intervalo de amostragem.
A seguir é apresentado o desenvolvimento da estratégia de controle preditivo
(QDMC; Quadratic Dynamic Matrix Control) utilizada neste trabalho.
Dado um sistema contínuo, com tempo de amostragem Ta, obtém-se sua
representação entrada/saída por meio de sua resposta ao degrau unitário. O modelo
do sistema, resultante desta operação, é descrito por
26

( ) ( ) ( )( ) ( ) ( ) (( ) =−−−−⋅+−−−−⋅∑1-N
1j=11 j = y(k) NkuNkuNsjkujkus )
( ) ( ) ( ) ( )∑ −Δ⋅+−Δ⋅1-N
1j= j NkuNsjkus (3.25)
Corrigindo-se a equação (3.25), introduzindo o efeito de perturbações (d), o
modelo passa a ser
( ) ( ) ( ) ( ) ( )kdNkuNsjkus +−Δ⋅+−Δ⋅=∑1-N
1j= j y(k) (3.26)
A utilização, pelo controlador preditivo de modelos matemáticos descritos pela
equação (3.26), faz com que o mesmo possua capacidade de predizer o
comportamento do sistema. Assim, durante a implementação desta estratégia de
controle, realizam-se testes iniciais onde são aplicadas, ao sistema, perturbações tipo
degrau para que se estabeleça uma representação do mesmo.
Durante a predição do futuro do comportamento das variáveis de saída,
realizada pelo controlador, as perturbações futuras são consideradas iguais às
perturbações atuais. Desta forma, as únicas incógnitas da equação (3.26) são as
futuras ações de controle. As perturbações preditas (equação (3.27)) são na realidade
a diferença verificada entre o valor medido e o valor predito pelo controlador para as
variáveis controladas.
( ) ( ) ( ) ( ) ⎥⎦
⎤⎢⎣
⎡Δ⋅+Δ⋅== ∑∗ N)-(k Nj)-(k j -(k)y)(ˆ-kkd
1-N
1j=med ususkyymed (3.27)
É desta forma que o algoritmo incorpora a retroalimentação negativa
(feedback) na sua estrutura.
As predições realizadas pelo controlador, ao longo de um horizonte P, podem
ser representadas utilizando notação matricial:
( )( )
( )
( )( )
( )
( )( ) ( )
( ) ( ) ( )
( )( )
( )
( )( )
( )⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢
⎣
⎡
+
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
−+Δ
+ΔΔ
⋅
⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢
⎣
⎡
−
+
⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢
⎣
⎡
+
++
=
⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢
⎣
⎡
+
++
∗
∗
∗
kd
kdkd
Pku
kuku
SPSPS
SSS
Pky
kyky
Pky
kyky
ˆ
ˆˆ
1
1
11
012001
ˆ
2ˆ1ˆ
ˆ
2ˆ1ˆ
(3.28)
onde as chamadas predições em malha aberta são dadas por
27

( ) ( ) N)-(ku nj)-(ku jS = )(k y1-n
1j=
νννν
+Δ⋅++Δ⋅+ ∑+
∗ S P,,2,1=ν
Simplificadamente chega-se a
( ) ( )kdkuS(k) y= (k) y +Δ⋅+∗ (3.29)
( ) ( 1Pku,,ku −+Δ )Δ . Nestas P equações estão envolvidas as P incógnitas,
Se for exigido que as predições sejam iguais aos valores desejados ao longo
de todo o horizonte de predição, ( ) ( )kdkuS(k) y= (k) y d +Δ⋅+∗ , podem-se calcular
as P ações de controle futuras como solução do seguinte sistema de P equações
( ) ( )[ ] [ ] ( )keS(k)y-(k) ySkd-(k) y-(k) yS=ku 1
medd1d1 ⋅=⋅=⋅Δ −−∗− (3.30)
Trata-se de uma lei de controle proporcional ao erro predito.
As ações de controle calculadas desta forma seriam muito fortes (como
acontece na lei de controle de protótipo mínimo), não sendo apropriadas para
situações práticas.
Para resolver este problema foram sugeridos dois caminhos diferentes.
1) Reduzir o número de incógnitas de P para M<P. Isto é, só permitir variações
das ações de controle ao longo de um horizonte de controle M,
( ) ( ) ( )1Mku,,1ku,ku −+Δ+ΔΔ ,
( )( )
( )
( )( )
( )
( )( ) ( )
( ) ( ) ( )
( )( )
( )
( )( )
( )⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢
⎣
⎡
+
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
−+Δ
+ΔΔ
⋅
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
+−−
+
⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢
⎣
⎡
+
++
=
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
+
++
∗
∗
∗
kd
kdkd
1Mku
1kuku
1MPs1PsPs
01s2s001s
Pky
2ky1ky
Pky
2ky1ky
(3.31)
S é a chamada matriz dinâmica. Neste caso
Desta forma resulta um sistema com mais equações (P) do que incógnitas (M),
que não tem solução, mas que pode ser aproximadamente resolvido como solução de
um problema de otimização que visa minimizar a soma das diferenças entre
e , ao quadrado:
( )ν+kyd
( ν+ky )
( )( ) ( )[ ] ( ) ( )[ ]kykykykymin dTd
ku−−
Δ (3.32)
28

O resultado é a “pseudo inversa” da matriz dinâmica.
( ) ( )[ ] ( )keSSS=ku T1T ⋅⋅Δ−
(3.33)
2) Definir uma trajetória que leve suavemente ao valor desejado
( ) ( )kyky medr =
( ) ( ) ( ) ( ) P,1, ky11kyky drr =νν+⋅α−+−ν+⋅α=ν+ (3.34)
O problema de otimização fica mais completo introduzindo ponderação nas
variáveis controladas e um termo ponderando as variações nas variáveis de controle
(os fatores de ponderação neste último caso são chamados fatores de supressão de
movimento). Considerando que também foi utilizada uma trajetória de referência vem,
( )( ) ( )[ ] ( ) ( )[ ] ( ) ( ){ }kukukykykykymin TTrTTr
kuΔ⋅Λ⋅Λ⋅Δ+−⋅Γ⋅Γ⋅−
Δ (3.35)
com
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
γ
γγ
=Γ
P
2
1
00
0000
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
λ
λλ
=Λ
M
2
1
00
0000
Este problema tem solução analítica
( ) ( )[ ] ( )keSSSku TT1TTT ⋅Γ⋅Γ⋅Λ⋅Λ+⋅Γ⋅Γ⋅=Δ−
(3.36)
onde o erro predito é
( ) ( ) ( ) ( )[ ]kdkykyke r −−= ∗ (3.37)
Admitindo-se agora o mesmo caso com restrições, tem-se:
( )( ) ( )[ ] ( ) ( )[ ] ( ) ( ){ }kUkUkykykykymin TTrTTr
kUΔ⋅Λ⋅Λ⋅Δ+−⋅Γ⋅Γ⋅−
Δ (3.38)
sujeito a
( ) ( )kdkUS(k) y= (k) y +Δ⋅+∗
( )( )
( ) ( ) ( )kykykyUkUU
UkUU
maxmin
maxmin
maxmin
≤≤Δ≤Δ≤Δ
≤≤
29

Neste caso, não é possível uma solução analítica, devendo-se lançar mão de
um algoritmo de programação quadrática para obtenção das ações de controle.
( )kuΔAplicando-se somente a primeira ação de controle, , chega-se às ações
de controle desejadas.
3.4.3.1 Ajuste dos parâmetros do MPC
Os parâmetros de ajuste do controlador preditivo são as matrizes peso nas
variáveis controladas e manipuladas, Γ e Λ, respectivamente, o horizonte de controle,
M, e de predição, P e o tempo de amostragem, Ta. Estes parâmetros não são de fácil
obtenção, necessitando muitas vezes de um desenvolvimento de diretrizes gerais para
estimá-los, como por exemplo, as apresentadas por COOPER e DOUGHERTY (2003),
utilizando algoritmo DMC.
Em geral, os parâmetros de ajuste são escolhidos observando-se (HENSON,
1998):
- Δt – deve ser tal que possibilite uma boa performance de controle da malha
fechada e da computação on-line associada. Pequenos valores melhoram a
performance, mas requer longos horizontes de predição para capturar adequadamente
a dinâmica do processo, aumentando o gasto computacional; e grandes valores para
Δt reduzem o gasto computacional on-line, mas pode resultar em uma pobre
performance, tal como ringing.
- horizonte de controle e de predição – para um horizonte de predição fixo,
pequenos horizontes de controle produzem respostas mais lentas e variações mais
conservativas para as entradas, enquanto valores grandes têm o efeito contrário; além
disso, grandes valores para M levam a um aumento no gasto computacional. O
horizonte de predição tem efeito similar: grandes valores resultam em controles mais
agressivos e aumentam o custo computacional. Logo, devem ser escolhidos valores
de M e P para produzir um equilíbrio entre performance e custo computacional.
- matrizes peso – estes parâmetros são os mais difíceis de serem escolhidos
porque dependem da escala do problema; tipicamente, são escolhidas matrizes
diagonais com elementos positivos, cujas magnitudes dependem tanto da escala
quanto da importância relativa das variáveis associadas.
3.4.3.2 Limitações associadas
A construção do algoritmo DMC (Dynamic Matrix Control) conta com duas
suposições:
30

- o processo pode ser representado por um modelo de respostas degrau
estável;
- e a diferença entre a saída medida e predita pode ser modelada como
perturbações degrau atuando na saída.
Essas suposições, que estão implícitas no algoritmo de cálculo do DMC, são
restritivas e limitam as propriedades de retroalimentação do controlador
(LUNDSTRÖM et al., 1995). Três limitações de grande importância são:
- requerimento de um número excessivo de coeficientes da resposta degrau
para possibilitar uma boa performance;
- performance ruim pode ser observada para perturbações tipo rampa;
- respostas ruins para controle MIMO contendo fortes interações entre as
variáveis manipuladas e controladas.
As duas primeiras limitações estão associadas à magnitude elevada da
constante de tempo do processo. Elas podem ser evitadas utilizando-se um modelo de
espaço estado para representar o processo, ou fazendo-se uma modificação na matriz
dinâmica obtida através das respostas degrau, de modo a representar somente as
dinâmicas inicial e final do processo. Optar simplesmente por representar a dinâmica
do processo, efetuando-se um truncamento no número de pontos representativos
pode ser desastroso, conforme visto em LUNDSTRÖM et al. (1995).
Os problemas associados às fortes interações entre as variáveis manipuladas e
controladas não serão tratados aqui (ou neste trabalho).
3.4.4 Controle por bandas
O controle por bandas, sugerido por NUNES (2004), tem a característica
principal de levar em conta que os separadores de operação sofrem contínuas
mudanças de estratégia, sendo alinhados diferentes poços segundo as conveniências
do momento. Dessa forma as vazões de carga mudam permanentemente e isso
requer mudanças no valor desejado do sistema. Nessa proposta usa-se uma forma de
inferir as perturbações baseadas nos movimentos da válvula de controle. Segue uma
análise preliminar desse controlador por bandas.
O modelo utilizado é
outin QQdtdV
−= (3.39)
31

com
PcuQ vout Δ⋅⋅= (3.40)
Este modelo não considera o peso da coluna de líquido para um vaso (o que
faz sentido em vasos sob pressão)
PcuQdtdhDC vin Δ⋅⋅−=⋅ (3.41)
É considerado um vaso de área transversal retangular. As funções de
transferência envolvidas são
( ) ( ) ( )susDCPc
sQsDC
sh vin ⋅
⋅⋅Δ⋅
−⋅⋅
=1
(3.42)
É argumentado, corretamente, que a vazão de saída deve ser igual ao valor
médio da vazão de entrada. Como esta não é medida, tem que ser inferida. Essa
inferência é feita através do próprio modelo, baseado nas medidas do nível e da vazão
de saída.
mout
m
in QdtdhDCQ +⋅=ˆ (3.43)
O valor médio é calculado ao longo de um certo período de tempo, que neste
caso é considerado o período com que acontecem as golfadas, T.
( ) ( )∫−
⎥⎦
⎤⎢⎣
⎡+⋅=
t
Tt
mout
m
in dQd
dhDCT
Q ττττ1ˆ
( ) ( )[ ] ( ) ( ) ⎥⎦
⎤⎢⎣
⎡−+−−
⋅= ∫ ∫
−t Ttmout
mout
mmin dQdQ
TTthth
TDCQ
0 0
1ˆ ττττ (3.44)
A transformada de Laplace desta equação é
( ) ( ) ( ) ( ) ( )sQsT
esheT
DCsQ mout
TsmTs
in ⋅⋅
−+⋅−⋅
⋅=
−− 11ˆ (3.45)
O valor desejado (setpoint) de um controlador que determina a vazão de saída
do vaso é dado por
( ) ( ) ( ) ( ) ( )sQsT
esheT
DCsQ mout
TsmTsd
out ⋅⋅
−+⋅−⋅
⋅=
−− 11 (3.46)
Considerando que se consegue um controle perfeito
32

( ) ( ) ( ) PcsusQsQ vdout
mout Δ⋅== (3.47)
Substituindo na Equação (3.46)
( ) ( ) ( ) ( ) ( ) PcsusT
esheT
DCPcsu v
TsmTs
v Δ⋅⋅⋅
−+⋅−⋅
⋅=Δ⋅
−− 11 (3.48)
Utilizando-se uma lei de controle que é a média da derivada do nível do
tanque por um termo proporcional ao erro desse nível com relação ao valor desejado
(NUNES, 2004)
( ) ( ) ( )[ ] ( ) ( )susT
eshshKsuTs
mdc ⋅
⋅−
+−⋅=−1 (3.49)
Trabalhando-se,
( ) ( ) ( ) ( ) ( ) ( )[ shshKsT
esTsusT
esu mdc
TsTs
−⋅=⎥⎦
⎤⎢⎣
⎡⋅−−⋅
=⎥⎦
⎤⎢⎣
⎡⋅
−−
−− 111 ] (3.50)
chega-se a
( ) ( ) ( )[ shshe
]sT
sTKsu mdTsc −⋅
+−⋅⋅
⋅=−1
(3.51)
Esta é a lei proposta para quando a variável controlada, o nível, estiver dentro
de uma faixa determinada.
Fora dessa faixa, o esquema é completado com um controlador PI tal que
( ) ( ) ( ) ( ) ⎥⎦
⎤⎢⎣
⎡+⋅+= ∫
t
c deteKtutu0
ττ (3.52)
Desta forma, o controlador apresentado é um controlador PI, com a saída para
erro nulo, u , sendo adaptada em função da média das perturbações ao longo de um
período T.
Portanto, o sistema de controle é acrescentado de uma ação hierarquicamente
superior que, quando o nível do vaso ultrapassa determinados limites (que definem
uma banda), o controle é assumido pelo controlador (PI), com ações mais drásticas,
que se encarrega de levar o sistema ao seu valor desejado, dentro dessa banda.
3.4.5 Controle PI
A lei de controle PI é amplamente utilizada para o controle de nível em
tanques. Os conceitos associados a esse tipo de controlador já estão bastante
33

concretizados. Contudo, vale ressaltar que o algoritmo aqui utilizado foi o de
velocidade.
Logo, considere o controlador PI ideal analógico
( ) ( ) ( ) ⎥⎦
⎤⎢⎣
⎡+⋅+= ∫
t
ics deteKctc
0
1 τττ
(3.53)
e onde τcom e(t) = yd + y é a constante de tempo de integração, kmed i c é o ganho
proporcional do controlador e c é a ação de controle inicial ou anterior. s
Utilizando-se aproximações por diferenças finitas para e(t) = en e
para convertê-lo em um digital, chega-se facilmente a ( ) ∑∫=
≅n
ksk
t
Tede10
ττ
( ) ( ) ⎥⎦
⎤⎢⎣
⎡−⋅+−−⋅+−= )1()1()1( keTakekeKkckc
ic τ
(3.54)
A equação (3.54) é a lei de controle para um controlador PI digital, com
algoritmo de velocidade, que foi utilizado várias vezes neste trabalho.
34

4. DESENVOLVIMENTO E IMPLEMENTAÇÃO DO MODELO
O processo considerado neste trabalho contou com um separador trifásico e três
módulos de hidrociclones colocados em série, conforme mostra o esquema da figura
4.1. A implementação das rotinas de cada equipamento foi feita em MATLAB,
utilizando-se o SIMULINK para as simulações.
ÁGUA
ÁGUA
ÓLEO
ÓLEO
ÁGUA
ÁGUA
DC
BOW
PDC
ÓLEO ÁGUA GÁS
ÓLEO
Figura 4.1 - Processo considerado neste trabalho em malha aberta
Observando a figura 4.1, é possível visualizar a seqüência de eventos do
processo como um todo:
- uma vazão de alimentação, com quantidades de fase oleosa, aquosa e gasosa
definidas, entra no separador trifásico;
- o separador faz uma separação inicial das fases e envia a parte aquosa para
hidrociclones BOW;
- uma separação do óleo na fase aquosa é feita no BOW, enviando uma
corrente aquosa com menos óleo (underflow) para hidrociclones PDC;
35

- no PDC, mais óleo é retirado da fase aquosa, sendo esta encaminhada para
uma separação mais refinada nos hidrociclones DC;
- finalmente, procede-se a separação de óleo da fase aquosa no DC, restando
uma corrente aquosa com um teor muito baixo de óleo que pode ser descartada ao mar
ou env
4.1 S
e equipamento necessitou da construção de uma s-
facilidades oferecidas pelo pacote, principalmente
quanto
gem do separador), que deve
ser res
o
adiante
tação, mostrados na seção 3.2.3 (Modelagem do separador) e no diagrama
da figu
como as saídas para processos a jusante. Existem outras saídas não
mostra
iada a um processo para posterior condicionamento e descarte.
Os tópicos a seguir mostram maiores detalhes do processo implementado em
cada equipamento.
eparador trifásico
A implementação dest
function no MATLAB devido às
à integração no tempo do sistema de equações.
A estrutura da rotina contém uma série de cálculos preliminares e o sistema de
equações diferenciais mostradas na seção 3.2.3 (Modela
olvido para cada intervalo de tempo. O intervalo de tempo utilizado para cada
integração foi de 10 segundos, valor considerado no trabalho de FILGUEIRAS, 2005.
Uma busca de um melhor valor desse parâmetro foi feita através de simulações, de
modo a agilizar o processo (com um valor maior) ou refinar a resolução (para um valor
menor). Porém, o maior valor encontrado para integração adequada do sistema foi de
aproximadamente 12 segundos (muito próximo de 10) e, quando se utiliza um valor
menor que 10, não se observa melhorias acentuadas no resultado final da integração.
O restante do processo também é resolvido para esse intervalo de tempo, com a
ressalva de que não mais existe integração ao longo do tempo, como será vist
.
Na tabela IV.I estão listados os valores dos parâmetros utilizados na
implemen
ra 4.2.
O diagrama da figura 4.2 mostra as entradas necessárias para resolução do
modelo, bem
das neste diagrama no sistema implementado para plotagem de gráficos, razão
pela qual não foram mostradas aqui.
36

Tabela IV.I – Valores dos parâmetros utilizados para o modelo do separador
Parâmetros Valor (unidade)
C 4,4 m cs
C 1,0 m cl
D 1,8 m
h rt 0,867 mve
L 0,9 m vert
h 0,025 m placa
base 0,9 m
comp 1,0 m
T 360 K
Pcomp /cm28,5 Kgf
Cv 0,8365 kmols.cm2/kgf maxl
P 1,0 Kgf/cm2jus
γ 855 Kgf/m3l
γ 965 Kgf/m3w
G 0,855 l
G 0,965 w
K 110,205
TOG vol. 0,30 vol./
BSW 0,30 vol./vol.
37

Separador Trifásico
Água
TOG
Óleo
BSW
Gás
Fase Áquosa
Concentração de óleo
Pressão interna
Demais variáveis de interesse de controle
Figura 4.2 - Diagrama de bloco da rotina do separador
4.2 Hidrociclones
Para os hidrociclones BOW e PDC uma modelagem empírica foi desenvolvida e
será vista adiante. No caso dos DC’s, considerou-se a modelagem fenomenológica,
com o conjunto de equações diferenciais mostradas no item 3.2.4 (Modelagem de
hidrociclones).
As implementações para as rotinas destes equipamentos se deram em uma
function normal do MATLAB, pois não foi necessária integração no tempo. Neste caso,
é mais simples usar essa ferramenta.
Um ponto importante para simulação do sistema completo foi a escolha da
quantidade ideal de hidrociclones dispostos paralelamente em cada módulo. Para se
obter este número, foram feitas simulações variando-se o seu valor para cada módulo
até que a vazão em cada hidrociclone fosse de aproximadamente 5 a 6 m3/h, que é um
valor normalmente utilizado em processos reais. A vazão nominal de cada um é de 7,5
m3/h.
Dessa forma, o valor utilizado para cada módulo de hidrociclones foi: 12 para o
BOW, 6 para o PDC e 4 para o DC.
4.2.1 BOW (Bulk Oil-Water Cyclone) e PDC (Pre Deoiler Cyclone)
Embora o princípio de funcionamento destes hidrociclones seja semelhante ao
do DC, suas faixas de operação são diferentes e, por isso, decidiu-se desenvolver um
modelo empírico para eles. Esta tarefa se tornou possível graças à disponibilidade de
dados reais para estes equipamentos, que estão instalados em uma planta de teste
numa plataforma da PETROBRÁS. O skid de teste com dispositivos para aquisição de
dados é mostrado na figura 4.3.
38

Figura 4.3 - Fotografia do skid de teste montado pela PETROBRÁS
Vale ressaltar que o skid de teste conta com dois hidrociclones BOW em
paralelo, pois a vazão de alimentação é maior que 7,5 m3/h. Portanto, os experimentos
e os dados coletados, bem como os cálculos realizados para o BOW, foram realizados
para o par deste equipamento.
Após vários meses de coleta de dados, com os equipamentos funcionando em
várias condições, principalmente próximo às de operação, fez-se uma filtragem dos
dados para encontrar relações que descrevem algumas propriedades de interesse
neste trabalho para o BOW e PDC. Logo, focou-se em relacionar as vazões de
alimentação e de saída da corrente superior dos hidrociclones com as pressões em
cada linha (medidores de pressão vistos no esquema da figura 3.8) e a eficiência de
separação de óleo da água na corrente inferior e de água do óleo na corrente superior,
para determinadas faixas de teor de óleo na vazão de alimentação.
4.2.1.1 Vazão
De acordo com o próprio fabricante dos hidrociclones uma boa equação que
relaciona a vazão de alimentação (Qalimentação) e a perda de carga (que é a queda de
pressão na corrente inferior, ΔPu = Palimentação – Punderflow) é
βQalimentação = α.ΔPu (4.1)
39

Sabe-se que o valor de β na equação (4.1) é de aproximadamente 0.5 (NUNES
e SILVEIRA, 2005 e MORAES et al., 2005). Então, fazendo-se uma estimação de
parâmetros para os dados selecionados para os hidrociclones BOW e PDC,
relacionando a vazão de alimentação e a perda de carga, chega-se aproximadamente
a:
- BOW: (4.2) 53,0135 PuQ Δ⋅=
- PDC: (4.3) 44,08,83 PuQ Δ⋅=
Estas equações foram utilizadas na implementação das funções do BOW e do
PDC para estimar a queda de pressão na corrente inferior, de acordo com a vazão que
atravessa cada bateria.
Os gráficos com os dados utilizados e parâmetros estimados (software
Statistica) estão apresentados nas figuras 4.4 e 4.5.
Model: Vazao=a*DP**By=(132.302)*x**(.548897) com R =.97919072
0.0 0.2 0.4 0.6 0.8 1.0 1.2 1.4 1.6 1.8
Perda de Carga
0
20
40
60
80
100
120
140
160
180
200
Vazã
o de
alim
enta
ção
(Kg/
min
.)
Figura 4.4 - Gráfico resultante da estimação de parâmetros para o BOW
40

Model: Vazao=a*DP**by=(82.6836)*x**(.426) com R =.96842434
0.0 0.2 0.4 0.6 0.8 1.0 1.2 1.4
Perda de Carga
0
20
40
60
80
100V
azão
de
alim
enta
ção
(Kg/
min
.)
Figura 4.5 - Gráfico resultante da estimação de parâmetros para o PDC
Para a relação entre a vazão da corrente superior e a queda de pressão na linha
superior, o caminho seguido para obtenção das equações foi parecido, ou seja,
considerou-se também que existe uma relação semelhante à apresentada na equação
(4.1). Porém, ao invés de usar as variáveis Qalimentação e ΔPu, usou-se Qoverflow e ΔPo
(ΔPo = Palimentação – Poverflow), respectivamente.
Então, traçando-se uma linha de tendência aos dados selecionados, num gráfico
de vazão da corrente superior pela sua queda de pressão, chega-se aproximadamente
a:
- BOW: (4.4) 5,050 PoQover Δ⋅=
- PDC: (4.5) 62,020 PoQover Δ⋅=
Essas equações foram utilizadas na implementação das funções do BOW e do
PDC para estimar a queda de pressão na corrente superior, de acordo com a vazão na
mesma linha.
Os gráficos mencionados acima e utilizados para obtenção das relações estão
apresentados nas figuras 4.6 e 4.7.
41

Figura 4.6 - Gráfico da relação entre vazão no overflow e sua queda de pressão (BOW)
Figura 4.6 - Gráfico da relação entre vazão no overflow e sua queda de pressão (PDC)
É importante perceber que a maior parte dos dados estão contidos em uma
determinada faixa (proximidades do ponto normal de operação), onde poderia ser
utilizada até mesmo a equação de uma reta. Contudo, isso não foi feito porque uma
42
vazão diferente de zero poderia originar quando a queda de pressão nas linhas fosse
zero.
Outro fato que chama a atenção é a alta dispersão dos dados para a relação
entre a vazão e a queda de pressão na linha superior dos dois hidrociclones, levando a
um coeficiente de ajuste baixo. Entretanto, a utilização dessas relações não causou
problemas na análise de estratégias de controle, principal objetivo deste trabalho.
4.2.1.2 Eficiência
Uma definição muito utilizada para eficiência em hidrociclones leva em
consideração a quantidade de água que sai junto do óleo separado na corrente
superior:
⎟⎟⎠
⎞⎜⎜⎝
⎛−=
lim_
_
lim_
_ 1aagua
overagua
aoleo
overoleoHIDRO Q
QQQ
Ef (4.6)
Houve uma tentativa de utilizar esta mesma relação na modelagem empírica
para a eficiência, mas os ajustes não foram satisfatórios para os dados coletados.
Então, para o BOW e PDC, decidiu-se trabalhar com uma eficiência de separação de
óleo no underflow e uma eficiência de separação de água no overflow, até mesmo por
uma questão de facilidade para o controle por DPR.
A primeira intenção era encontrar uma equação que relacionasse a eficiência
com o split (relação entre a vazão no overflow e na alimentação) e com a concentração
de óleo na alimentação do hidrociclone. Mas durante a coleta de dados, a concentração
foi considerada a mesma ao longo de toda a aquisição, não sendo possível encontrar
um bom ajuste para essa relação.
Partiu-se então para a obtenção de uma relação para a eficiência versus o split
para faixas de concentração de óleo na vazão de alimentação. Com valores médios
para as vazões e com as concentrações (obtida através de análise laboratorial) em
cada corrente, fez-se um balanço de massa para cada componente (água e óleo) e com
os dados resultantes (porção de óleo que entrou no hidrociclone e saiu no overflow e de
água que entrou no hidrociclone e saiu no underflow), plotaram-se gráficos de eficiência
de separação de óleo no overflow e de separação de água no underflow versus split,
por faixas de concentração de óleo na alimentação, para o BOW e o PDC.
Tanto para a eficiência de separação de óleo quanto de água, no BOW e no
PDC, a forma da curva desejada pode ser descrita pela função
43

SplitbeaEf ⋅⋅+
=1
1 (4.7)
onde os parâmetros a e b devem ser estimados para cada faixa considerada.
Os gráficos a seguir apresentam os resultados da estimação de parâmetros para
cada caso. Neles, os eixos de SPLIT variam de 0 (válvula do overflow completamente
fechada, quando a eficiência de separação de óleo é mínima e de água é máxima) a 1
(válvula do overflow completamente aberta, quando a eficiência de separação de óleo é
máxima e de água é mínima).
y=1/(1+(40.3363)*exp((-10.361)*x)) - R =.92932554
#1
#2
#3
#4
#5
#6
#7
#9#10
#11
#12
#13
#14
#15
#16
#17
0.0 0.2 0.4 0.6 0.8 1.0
SPLIT
0.0
0.2
0.4
0.6
0.8
1.0
EF
y=1/(1+(83.4986)*exp((-11.311)*x)) - R =.93730115
#1#2
#3
#4
#6
#7
#8#9
#10
#11
0.0 0.2 0.4 0.6 0.8 1.0
SPLIT
0.0
0.2
0.4
0.6
0.8
1.0
EF
Teor de óleo na alimentação de 18~22% Teor de óleo na alimentação de 13~18%
y=1/(1+(367.235)*exp((-13.67)*x)) - R =.9717722
#1#2
#4
#5
#6
#7
#8
0.0 0.2 0.4 0.6 0.8 1.0
SPLIT
0.0
0.2
0.4
0.6
0.8
1.0
EF
Teor de óleo na alimentação de 22~30%
Figura 4.7 - Curvas com estimação de parâmetros para eficiência de separação de óleo
(BOW)
44

y=1/(1+(.050771)*exp((5.77305)*x)) - R =.97976636
#1
#2#3
#4
#5
#7
#8
#9
#10
#11
#12#13
#14#15#16#17
#19
0.0 0.2 0.4 0.6 0.8 1.0
SPLIT
0.0
0.2
0.4
0.6
0.8
1.0E
F
y=1/(1+(.029198)*exp((6.8447)*x)) - R =.972363
#1#2
#3#4
#5
#7
#8
#9
#10#11
#13
0.0 0.2 0.4 0.6 0.8 1.0
SPLIT
0.0
0.2
0.4
0.6
0.8
1.0
EF
Teor de óleo na alimentação de 13~18% Teor de óleo na alimentação de 18~22%
y=1/(1+(.010952)*exp((8.93239)*x)) - R =.98700726
#1
#2#3
#4#5
#6
#8
#9
#10
#11
#13
0.0 0.2 0.4 0.6 0.8 1.0
SPLIT
0.0
0.2
0.4
0.6
0.8
1.0
EF
Teor de óleo na alimentação de 22~30%
Figura 4.8 - Curvas com estimação de parâmetros para eficiência de separação de
água (BOW)
Ef x Split (Over BOW)
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
0 0.2 0.4 0.6 0.8 1
Split
Ef
Ef - 13-18 Ef - 18-22 Ef - 22-30 Operação
Ef x Split (Under BOW)
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
0 0.2 0.4 0.6 0.8 1
Split
Ef
Ef - 13-18 Ef - 18-22 Ef - 22-30
Figura 4.9 - Gráfico com todas as curvas estimadas para o BOW
Analisando os gráficos da figura 4.9, um fato esperado qualitativamente pode
ser percebido: quanto maior a concentração de óleo na alimentação, mais a curva
45

demora a desprender dos eixos SPLIT para Ef = 0 e Ef=1, mas a inflexão se dá mais
rapidamente. Para o PDC, isso também pode ser observado, como mostram as figuras
a seguir.
y=1/(1+(673.986)*exp((-35.824)*x)) - R =.99534098
#1#3
#7
#10#13
0.0 0.2 0.4 0.6 0.8 1.0
SPLIT
0.0
0.2
0.4
0.6
0.8
1.0
EF
y=1/(1+(1126.06)*exp((-26.441)*x)) - R =.99407066
#1#2
#7 #11
0.0 0.2 0.4 0.6 0.8 1.0
SPLIT
0.0
0.2
0.4
0.6
0.8
1.0
EF
Teor de óleo na alimentação de 7~13% Teor de óleo na alimentação de 1~7%
y=1/(1+(5869.65)*exp((-27.612)*x)) - R =.9999998
#2
#3
#5
0.0 0.2 0.4 0.6 0.8 1.0
SPLIT
0.0
0.2
0.4
0.6
0.8
1.0
EF
Teor de óleo na alimentação de 13~17%
Figura 4.10 - Curvas com estimação de parâmetros para eficiência de separação de
óleo (PDC)
46

y=1/(1+(.046362)*exp((5.83153)*x)) - R =.99375031
#1
#2#3#4#5
#6
#8
#9
#10
#11#12
#13
#14
0.0 0.2 0.4 0.6 0.8 1.0
SPLIT
0.0
0.2
0.4
0.6
0.8
1.0
EF
y=1/(1+(.062004)*exp((5.55417)*x)) - R =.98975547
#1
#2
#3
#4
#6#7
#8
#9#10
#11#12#13
#14#15#16
#17
0.0 0.2 0.4 0.6 0.8 1.0
Split
0.0
0.2
0.4
0.6
0.8
1.0E
F
Teor de óleo na alimentação de 1~7% Teor de óleo na alimentação de 7~13%
y=1/(1+(.041801)*exp((5.96383)*x)) - R =.98549822
#1
#2#3
#4
0.0 0.2 0.4 0.6 0.8 1.0
SPLIT
0.0
0.2
0.4
0.6
0.8
1.0
EF
Teor de óleo na alimentação de 13~17%
Figura 4.11 - Curvas com estimação de parâmetros para eficiência de separação de
água (PDC)
Ef x Split (Over PDC)
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
0 0.2 0.4 0.6 0.8 1
Split
Ef
Ef - 1-7 Ef - 7-13 Ef - 13-17 Operação
Ef x Split (Over PDC)
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
0 0.2 0.4 0.6 0.8 1
Split
Ef
Ef - 1-7 Ef - 7-13 Ef - 13-17
Figura 4.12 - Gráfico com todas as curvas estimadas para o PDC
47

Uma outra análise que pode ser feita através dos gráficos de eficiência de
separação do óleo para o BOW e o PDC é que, para um mesmo valor de split, o PDC
apresenta um melhor desempenho, fato também observado na prática.
O inconveniente de se utilizar essa abordagem (eficiência de separação para
faixas de concentração de óleo) é o aparecimento de descontinuidades quando a
concentração de óleo na alimentação do hidrociclone muda de faixa. O ideal seria usar
uma única função que relacionasse eficiência com split e concentração de óleo para
evitar descontinuidades. Contudo, perante a dificuldade encontrada em levantar tal
curva com os dados coletados, adotou-se uma única relação de eficiência com split,
para cada hidrociclone, independente da concentração de óleo. Elas estão mostradas
nos gráficos das figuras 4.10 e 4.12 (na cor marron e com a legenda “Operação”).
Essa consideração é razoável uma vez que a maioria dos valores coletados
para a concentração de óleo na alimentação dos hidrociclones se encontra nas
proximidades do ponto de operação do processo e das curvas adotadas.
Logo, as curvas implementadas para a eficiência de separação no BOW e no
PDC se encontram na tabela a seguir.
Tabela IV.II - Equações utilizadas para eficiência de separação no BOW e no PDC
BOW PDC
Separação de óleo no
overflow SpliteEf ⋅−⋅+
= 6,105511
SpliteEf ⋅−⋅+
= 5,2795011
(4.8) (4.9)
Separação de água no
underflow SpliteEf ⋅⋅+
= 84,6029,011
SpliteEf ⋅⋅+
= 83,5046,011
(4.10) (4.11)
O diagrama de blocos com as entradas e saídas do modelo dos hidrociclones,
tanto para BOW, PDC e DC, é apresentado na figura 4.13. Aqui também houve a
supressão de outras saídas no sistema implementado para plotagem de gráficos.
48
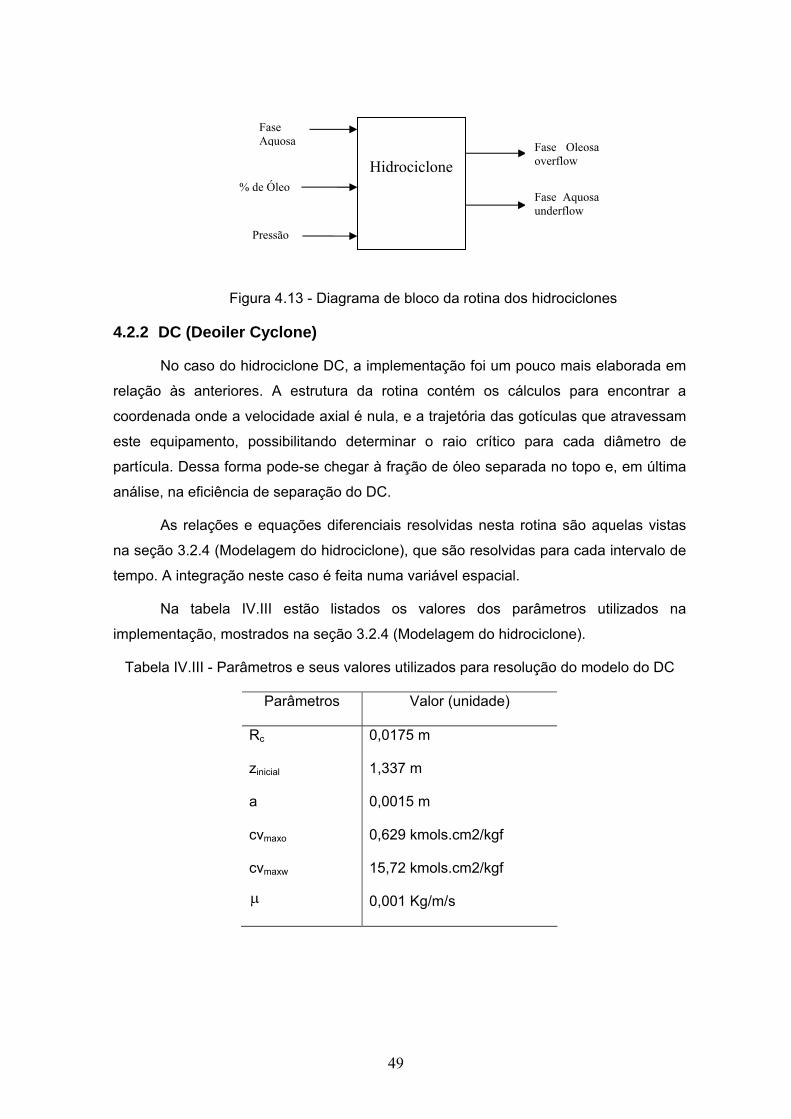
Hidrociclone
Fase Aquosa
% de Óleo
Pressão
Fase Oleosa overflow
Fase Aquosa underflow
Figura 4.13 - Diagrama de bloco da rotina dos hidrociclones
4.2.2 DC (Deoiler Cyclone)
No caso do hidrociclone DC, a implementação foi um pouco mais elaborada em
relação às anteriores. A estrutura da rotina contém os cálculos para encontrar a
coordenada onde a velocidade axial é nula, e a trajetória das gotículas que atravessam
este equipamento, possibilitando determinar o raio crítico para cada diâmetro de
partícula. Dessa forma pode-se chegar à fração de óleo separada no topo e, em última
análise, na eficiência de separação do DC.
As relações e equações diferenciais resolvidas nesta rotina são aquelas vistas
na seção 3.2.4 (Modelagem do hidrociclone), que são resolvidas para cada intervalo de
tempo. A integração neste caso é feita numa variável espacial.
Na tabela IV.III estão listados os valores dos parâmetros utilizados na
implementação, mostrados na seção 3.2.4 (Modelagem do hidrociclone).
Tabela IV.III - Parâmetros e seus valores utilizados para resolução do modelo do DC
Parâmetros Valor (unidade)
R 0,0175 m c
z 1,337 m inicial
a 0,0015 m
cv 0,629 kmols.cm2/kgf maxo
cv 15,72 kmols.cm2/kgf maxw
μ 0,001 Kg/m/s
49

4.3 Operação do sistema
Concluída a implementação de todas as funções dos equipamentos utilizados
na modelagem, o sistema foi acoplado conforme mostrado na figura 4.1, não sendo
considerada ainda a malha de controle, que será vista no capítulo a seguir.
Executaram-se então simulações em malha aberta, a fim de se obter a abertura
ideal de cada válvula para operação normal, sem que haja esvaziamento ou
transbordamento do separador trifásico. Neste caso, a alimentação foi mantida
constante (estado estacionário) ao longo de todo o tempo de simulação. A tabela IV.IV
mostra os valores encontrados para as aberturas das válvulas e as figuras a seguir,
alguns resultados da saída dos equipamentos.
Tabela IV.IV - Abertura das válvulas (sistema operando em estado estacionário)
Válvula Abertura (%)
Overflow do BOW 49
Overflow do PDC 47
Overflow do DC 50
Underflow do DC 40
50

Figura 4.14 - Resultados do separador obtidos com os dados da Tabela IV.IV
Observando os gráficos da figura 4.14, verifica-se uma concentração de óleo
na saída do separador de aproximadamente 12,5%, com uma estabilização rápida do
sistema.
51

Figura 4.15 - Resultados do hidrociclone BOW obtidos com os dados da Tabela IV.IV
Também no estado estacionário, verifica-se na figura 4.15 o comportamento
dos hidrociclones BOW em relação ao tratamento da fase aquosa que atravessa estes
equipamentos. A concentração de óleo na alimentação do BOW é aquela mostrada na
figura 4.14 e na saída, aproximadamente de 7%. A eficiência de separação de óleo
neste caso foi de 70%, com um split de 0.45, ou seja, 45% da vazão que entrou neste
módulo, saiu pelo overflow. O valor de eficiência encontrado está de acordo com o
modelado, mostrado no gráfico da figura 4.9 (Eficiência em função do split para o
BOW).
Para o PDC, a eficiência de separação de óleo encontrada foi elevada devido
ao split utilizado (0,44), conforme visualizado na figura 4.16. E ao consultar a figura
4.12 (Eficiência em função do split para o PDC), esse fato fica evidente, uma vez que
a eficiência de separação no PDC é elevada, mesmo para split pouco menor que 0,4.
Na simulação efetuada, encontrou-se uma concentração de óleo na saída desse
módulo de pouco mais de 500 ppm, que foi posteriormente tratada pelo DC.
52

Figura 4.16 - Resultados do hidrociclone PDC obtidos com os dados da Tabela IV.IV
É importante mencionar que uma pequena variação na abertura dessas
válvulas pode modificar bastante a dinâmica do sistema, como será visto adiante.
4.4 Características da alimentação
Os dados para se estimar essas concentrações foram conseguidos junto à
PETROBRAS, representando condições reais de operação de um campo de
exploração.
A tabela a seguir mostra os dados fornecidos vindos de vários poços para dois
separadores de produção, utilizados para estimativa do valor de TOG. O valor de BSW
foi considerado o mesmo do de TOG, de 0,3 volume/volume.
53

Tabela IV.V - Valores reais de vazões bruta e de óleo na alimentação do separador
Separador A Separador B Vazão de óleo
(m Vazão de óleo (m3/d) Vazão Bruta Vazão Bruta3/d) 113.162 413.00 156.45 1043.00 87.72 1032.00 172.2 600.00 113.295 415.00 218.88 288.00 66.511 293.00 127.395 285.00 100.92 696.00 65.193 701.00 58.735 691.00 55.2 120.00 47.26 556.00 81.43 958.00 81.198 1041.00 34.825 35.00 216.398 533.00 62.05 73.00 315.52 493.00 42 350.00 91.105 665.00 96.266 758.00 253 253.00 146.888 854.00 140.532 196.00 326.012 596.00 179.208 786.00 353.276 868.00 72.076 148.00 71.1 79.00 63.36 64.00Total: 1544.8 7081.0 2464.341 9095.00 Teor de óleo 21.8% 27.1%
O perfil de golfadas adotado para a fase líquida nas simulações do sistema
completo, para avaliação do desempenho das estratégias de controle, pode ser visto
na figura 4.17. Tal perfil também foi estimado a partir de relatos da PETROBRÁS, com
picos e vales variando em torno de 20% do valor nominal para a vazão de
alimentação. A vazão de gás foi considerada constante e igual a 7,8 m3/min. Não foi
disponibilizado qualquer documento para comprovação destes valores adotados.
54

Figura 4.17 - Perfil de golfadas para o líquido adotado para as simulações
55

5. SIMULAÇÕES E CONTROLE
Após desenvolvimento e implementação do modelo de cada equipamento,
partiu-se para a escolha e implementação das estratégias de controle possíveis para o
processo, simulando todo o conjunto para obtenção dos resultados.
As variáveis controladas do separador são os níveis da interface água/óleo na
câmara de separação e do óleo na câmara de óleo e a pressão interna do vaso,
utilizando como manipuladas a vazão de underflow do DC do sistema ciclônico, a
vazão de saída de óleo da câmara de óleo e a vazão de gás do separador,
respectivamente.
Para os hidrociclones, duas estratégias foram adotadas: controle da DPR, e da
concentração de óleo no underflow, ambas sendo manipuladas pela vazão de overflow
de cada equipamento. Vale ressaltar que para o DC foi utilizado somente o controle
por DPR em todas as simulações devido ao bom desempenho demonstrado.
Inicialmente, consideraram-se essas malhas de controle descentralizadas, mas
é fácil perceber que todas as vazões de overflow dos hidrociclones influenciam no
nível da interface água/óleo, pois a vazão de água oleosa que sai do separador se
distribui pelas vazões de overflow e underflow do sistema ciclônico. Por isso utilizou-se
também um controle multivariável para o nível dessa interface e para os hidrociclones
BOW e PDC, controlando para estes dois últimos a concentração de óleo no undeflow.
As outras duas malhas de controle do separador podem ser consideradas
descentralizadas, conforme mostrado no trabalho de FILGUEIRAS (2005).
Portanto, optou-se por dividir as estratégias de controle em dois grupos: com
DPR, onde foi utilizado somente controle de DPR em todos os hidrociclones e, em
conseqüência, as malhas de controle foram descentralizadas, e sem DPR, onde se
utilizou controle multivariável em alguns casos para o BOW e PDC e manteve-se o
controle de DPR no DC, como mencionado anteriormente. Os itens a seguir
apresentam maiores detalhes sobre cada abordagem desenvolvida.
Um ponto importante que merece destaque aqui é o tempo de amostragem
(Ta) utilizado para cada estratégia de controle, que nada tem a ver com o intervalo de
tempo de integração do sistema do separador trifásico, visto no item 4.1 (Separador
trifásico). Aqui, Ta é o tempo de amostragem do controlador, utilizado, por exemplo,
pela equação 3.54 para determinação da ação de controle. Em alguns casos, por mera
56

coincidência, o tempo de amostragem do controlador e o referido intervalo de tempo
de integração tiveram o mesmo valor.
5.1 Controle no separador trifásico
O nível de óleo e a pressão do separador trifásico contaram com uma lei de
controle PI, com algoritmo de velocidade (conforme equação 3.54) para seus
controladores. Essas variáveis apresentam dinâmica um pouco mais rápida do que o
nível da interface água/óleo, sendo necessária uma atuação mais rápida de seus
controladores, refletindo num tempo integral pequeno (a rapidez é principalmente
determinada pela ação proporcional).
Além disso, essas variáveis praticamente não influenciam no controle da
interface água/óleo e nem no processo a jusante para o qual a fase aquosa é
conduzida.
A tabela V.I mostra os parâmetros dos controladores PI utilizados para o
controle de nível de óleo e para a pressão no separador. As estimativas iniciais de tais
valores foram obtidos do trabalho de FILGUEIRAS (2005), sofrendo ajustes finos para
melhor adequação ao sistema atual.
Tabela V.I – Parâmetros dos controladores de nível de óleo e pressão do separador
Ta (s) TI (s) K setpoint
Controlador PI para o
nível de óleo
10 30 -390 %m 0,5 m
Controlador PI para a
pressão
10 99 -24 % kgf/cm2 9,48 kgf/cm2
Estes parâmetros foram mantidos para todas as simulações, independente da
estratégia de controle utilizada para as demais variáveis de controle do processo.
A combinação do conjunto de parâmetros para cada controlador apresentado
na tabela V.I é responsável por uma resposta quase que instantânea para as ações de
controle do nível de óleo e da pressão do vaso, como pode ser visto em FILGUEIRAS,
2005.
5.2 Controle da interface água/óleo e nos hidrociclones
As estratégias de controle para o conjunto interface água/óleo e hidrociclones
adotadas neste trabalho foram várias, considerando-se o sistema descentralizado ou
57

multivariável. Naquelas em que as malhas de controle foram consideradas
descentralizadas, utilizou-se controle de DPR em todos os hidrociclones, adotando a
lei de controle PI (conforme equação 3.54) para os controladores, e para as
multiváriaveis, somente o DC contou com controle de DPR.
No controle de DPR para o DC usou-se um valor fixo de 2,5 para o setpoint de
DPR. Já para o BOW e o PDC, esse valor variava de acordo com as eficiências
requeridas em cada hidrociclone. Este fato se deve à amarração existente entre split,
eficiência e DPR. Sabendo-se a vazão de underflow e overflow no momento atual, o
algoritmo de cálculo adotado para encontrar o split e conseqüentemente a DPR,
ideais, para a próxima ação de controle foi o seguinte:
- estima-se a quantidade de óleo que deve estar presente no underflow para
obter uma concentração de óleo nesta corrente próxima da desejada
(aproximadamente 11% e 0,1%, para o BOW e PDC respectivamente);
- com este valor de óleo na saída, calcula-se a eficiência de separação de óleo
que o equipamento deve ter para atingi-lo;
- calcula-se o valor do split (considerado ideal) para obter tal eficiência, a partir
das equações 4.8 e 4.9, para BOW e PDC, respectivamente;
- entretanto, com o novo valor de split, a eficiência de separação de água do
óleo no overflow também modifica (equações 4.10 e 4.11), modificando a vazão de
água no underflow e sua concentração de óleo, sendo necessário um re-cálculo de
todos os itens anteriores até uma convergência aproximada do valor desejado para a
concentração de óleo no underflow para cada hidrociclone.
Após este cálculo iterativo, onde o split ideal é encontrado, calcula-se o valor
da DPR ideal (que será o setpoint do controlador por DPR do hidrociclone) para a
próxima ação de controle, utilizando-se as equações cedidas pela PETROBRÁS:
⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜
⎝
⎛ −−=
35,30
11
log04,21 SplitDPR (5.1) - BOW:
⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜
⎝
⎛ −−=
38,24
11
log365,11 SplitDPR (5.2) - PDC:
58
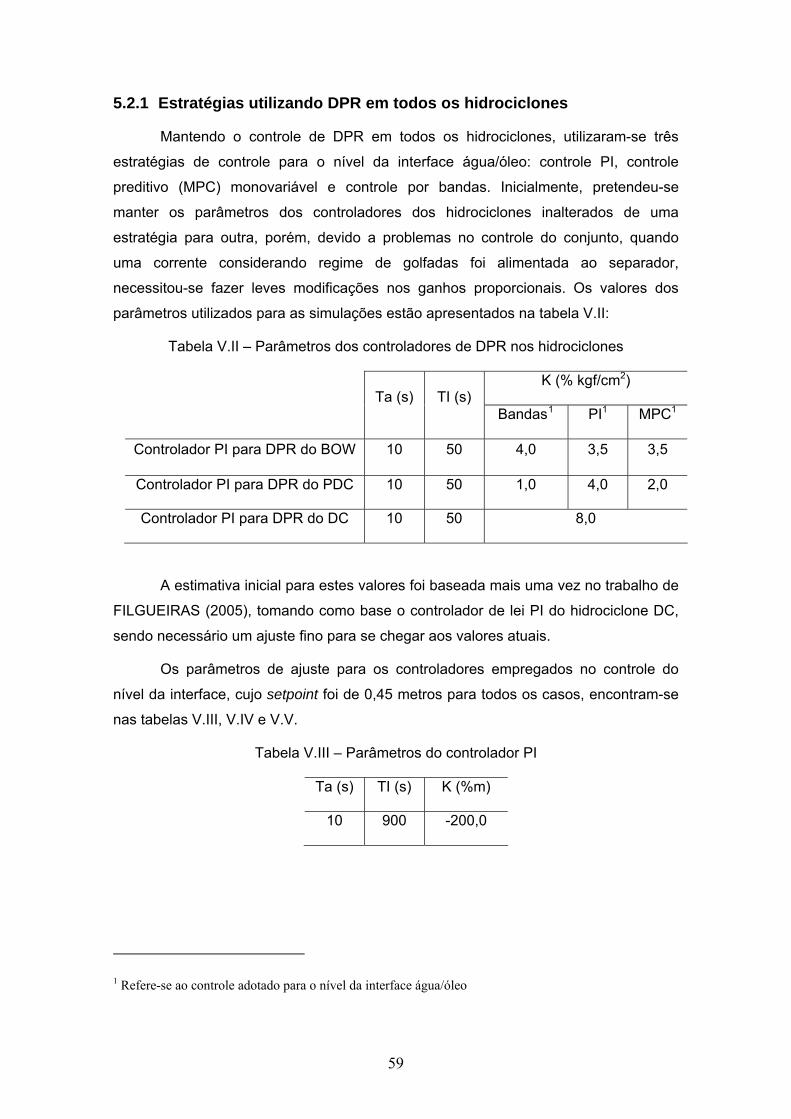
5.2.1 Estratégias utilizando DPR em todos os hidrociclones
Mantendo o controle de DPR em todos os hidrociclones, utilizaram-se três
estratégias de controle para o nível da interface água/óleo: controle PI, controle
preditivo (MPC) monovariável e controle por bandas. Inicialmente, pretendeu-se
manter os parâmetros dos controladores dos hidrociclones inalterados de uma
estratégia para outra, porém, devido a problemas no controle do conjunto, quando
uma corrente considerando regime de golfadas foi alimentada ao separador,
necessitou-se fazer leves modificações nos ganhos proporcionais. Os valores dos
parâmetros utilizados para as simulações estão apresentados na tabela V.II:
Tabela V.II – Parâmetros dos controladores de DPR nos hidrociclones
K (% kgf/cm2) Ta (s) TI (s)
1 1 1Bandas PI MPC
Controlador PI para DPR do BOW 10 50 4,0 3,5 3,5
Controlador PI para DPR do PDC 10 50 1,0 4,0 2,0
Controlador PI para DPR do DC 10 50 8,0
A estimativa inicial para estes valores foi baseada mais uma vez no trabalho de
FILGUEIRAS (2005), tomando como base o controlador de lei PI do hidrociclone DC,
sendo necessário um ajuste fino para se chegar aos valores atuais.
Os parâmetros de ajuste para os controladores empregados no controle do
nível da interface, cujo setpoint foi de 0,45 metros para todos os casos, encontram-se
nas tabelas V.III, V.IV e V.V.
Tabela V.III – Parâmetros do controlador PI
Ta (s) TI (s) K (%m)
10 900 -200,0
1 Refere-se ao controle adotado para o nível da interface água/óleo
59

Tabela V.IV – Parâmetros do controlador por bandas
K (%m) TI (s) Ta (s) T (s)
(fora da banda) fora da banda dentro da banda
10 800 5000 -120 -0,1
Tabela V.V – Parâmetros do controlador MPC monovariável
Γ Λ Ta (s) N P M
10 1200 300 1 60 30
O valor de T foi estimado a partir da freqüência de golfadas, enquanto os
demais parâmetros foram ajustados pelo método de tentativa e erro, com chutes
iniciais levando-se em consideração o conhecimento do processo e o trabalho de
FILGUEIRAS (2005).
Com os parâmetros dos controladores definidos, fez-se um estudo do
comportamento das variáveis de controle do sistema, em malha fechada, dando um
degrau na carga do processo e no setpoint das variáveis nível da interface, para as
estratégias de controle MPC e PI, e DPR’s para esta última estratégia. Os gráficos
apresentando tais comportamentos são vistos a seguir.
Como o controle por bandas utiliza uma inferência da vazão de saída do
underflow do DC para cálculo da média móvel desta vazão, esta estratégia não foi
considerada para análise do comportamento frente à variação da carga e do setpoint
do nível da interface.
60

Figura 5.1 – Variação na carga do processo
Figura 5.2 - Resultados obtidos para variação na carga (estratégia MPC)
Verifica-se que as variáveis de controle na estratégia MPC retornam ao valor
do setpoint cerca de 100 minutos após a perturbação, não apresentando muitas
oscilações, para uma variação na carga de aproximadamente 20%, cujo gráfico está
mostrado na figura 5.1. Este cenário é desejável, uma vez que oscilações em demasia
61

são prejudiciais aos processos a jusante. É importante lembrar que os valores de
setpoint da DPR do BOW e do PDC variam de acordo com seus split’s, que podem
sofrer variação com a mudança da carga no processo, pois existe variação na abertura
de todas as válvulas do sistema.
Figura 5.3 - Resultados obtidos para variação na carga (estratégia PI)
A estratégia PI também apresenta comportamento semelhante daquele
mostrado pela estratégia MPC, com pouca oscilação nas variáveis de controle, para a
mesma perturbação na carga. Entretanto, comparando os gráficos das figuras 5.2 e
5.3, a estabilização do sistema utilizando-se controle PI na interface água/óloe se dá
mais rapidamente do que com a utilização de MPC.
É importante observar que a carga de alimentação ao processo foi considerada
constante, a menos da perturbação degrau, para estas análises. Diferentemente e já
mencionado no capítulo anterior, as simulações para avaliação das estratégias de
controle contaram com uma alimentação com regime de golfadas (ver figura 4.17).
62

Figura 5.4 - Resultados obtidos para variação nos setpoint’s (estratégia PI)
Variando-se o valor do setpoint das DPR’s dos hidrociclones em 20%, cada
controlador PI para controle de cada DPR apresenta bom desempenho, utilizando-se
os parâmetros da tabela V.II, para estratégia PI na interface água/óleo. O novo valor é
alcançado rapidamente e praticamente sem oscilações, conforme gráficos de DPR na
figura 5.4. Para as estratégias MPC e bandas, resultados semelhantes foram
encontrados (embora não tenham sido mostrados aqui), visto as proximidades dos
parâmetros de ajuste para controladores das DPR’s no BOW e PDC (para o DC, são
sempre os mesmos).
Ainda observando a figura 5.4, o novo setpoint do nível da interface água/óleo
é alcançado com oscilações muito suaves, utilizando-se a estratégia PI para esta
variável. Com relação à estratégia MPC, foram encontrados resultados insatisfatórios
em termos de estabilidade da malha para mudança no sepoint da mesma variável de
controle, considerando-se valores grandes e pequenos para N, conforme visto na
figura 5.5. Observa-se que com valores pequenos de N (neste gráfico foi utilizado
100), o comportamento é bastante oscilante, com certa freqüência. Entretanto, como
63

será visto no próximo capítulo, considerando-se uma alimentação com golfadas, a
estratégia MPC com N igual a 1200 mostra comportamento satisfatório. Valores
menores para N e P foram testados sem sucesso, para a mesma alimentação.
N grande N pequeno
Figura 5.5 - Resultados variando-se o setpoint do nível da interface (estratégia MPC)
5.2.2 Estratégias utilizando DPR somente no DC
As mesmas estratégias de controle para a interface água/óleo foram utilizadas,
porém, as válvulas de overflow do BOW e PDC foram manipuladas para controlar este
mesmo nível, e não suas DPR’s, como visto na figura 5.6. Logo, o sistema contou,
neste caso, com três variáveis manipuladas (válvulas de underflow e overflow do BOW
e PDC) e uma controlada (interface água/óleo), havendo a necessidade de modificar
os parâmetros dos controladores PI do BOW e PDC, e do MPC monovariável do nível
da interface, conforme apresentado nas tabelas V.VI e V.VII. O valor de K do
controlador do nível da interface para a estratégia PI também sofreu modificação (de -
200,0% para -50,0%). Para a estratégia bandas, os parâmetros foram os mesmo,
assim como para o controlador PI para a DPR no DC.
Vale ressaltar que esta estratégia só funcionaria na prática se os três
controladores das válvulas de overflow do BOW e do PDC e de underflow do DC
recebessem o mesmo setpoint.
64

Ls
Qu
QoDO
LTl
Gs
QoBOW
Ws
Qin PT
LTw
DPR
QoPDC
LTw
LTw
Figura 5.6 - Esquema do processo para uma estratégia de controle MISO
Tabela V.VI – Novos parâmetros dos controladores PI nos hidrociclones
Ta (s) TI (s) K (% kgf/cm2)
Controlador PI do BOW e PDC (bandas e MPC) 10 250 -10,0
Controlador PI do BOW e PDC (PI) 10 170 -10,0
Tabela V.VII – Parâmetros do controlador MPC monovariável
Γ Λ Ta (s) N P M
10 100 30 1 80 300
65
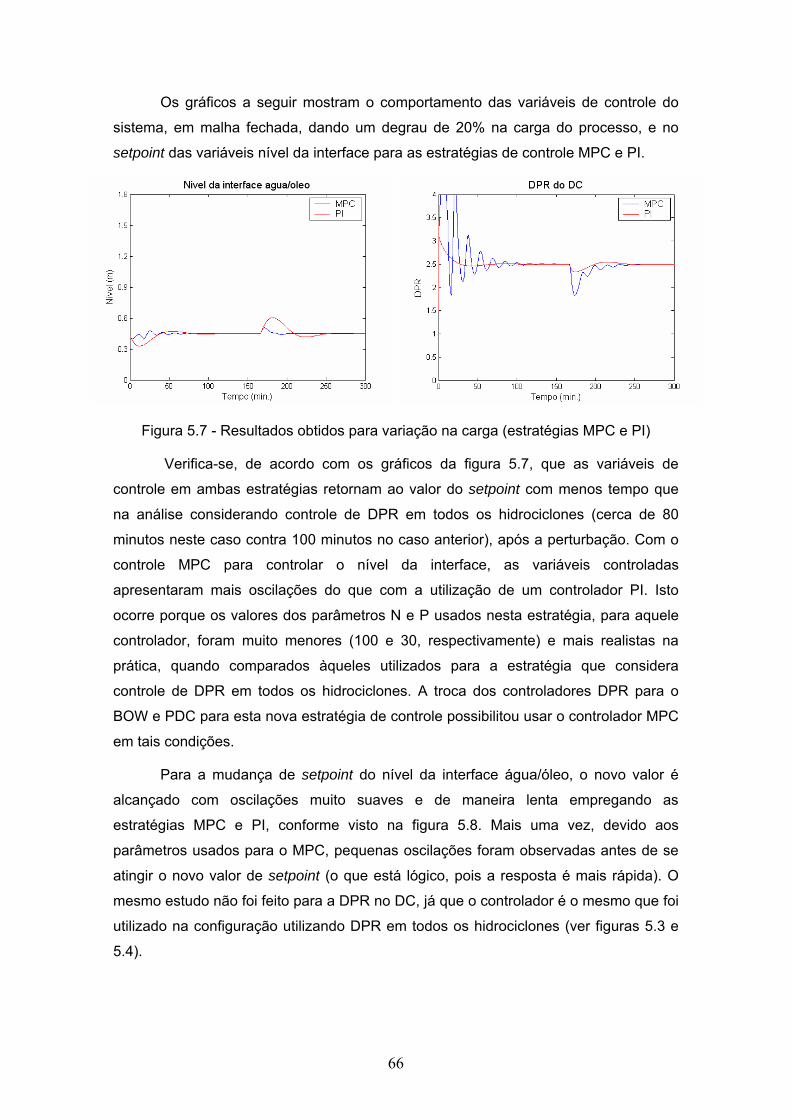
Os gráficos a seguir mostram o comportamento das variáveis de controle do
sistema, em malha fechada, dando um degrau de 20% na carga do processo, e no
setpoint das variáveis nível da interface para as estratégias de controle MPC e PI.
Figura 5.7 - Resultados obtidos para variação na carga (estratégias MPC e PI)
Verifica-se, de acordo com os gráficos da figura 5.7, que as variáveis de
controle em ambas estratégias retornam ao valor do setpoint com menos tempo que
na análise considerando controle de DPR em todos os hidrociclones (cerca de 80
minutos neste caso contra 100 minutos no caso anterior), após a perturbação. Com o
controle MPC para controlar o nível da interface, as variáveis controladas
apresentaram mais oscilações do que com a utilização de um controlador PI. Isto
ocorre porque os valores dos parâmetros N e P usados nesta estratégia, para aquele
controlador, foram muito menores (100 e 30, respectivamente) e mais realistas na
prática, quando comparados àqueles utilizados para a estratégia que considera
controle de DPR em todos os hidrociclones. A troca dos controladores DPR para o
BOW e PDC para esta nova estratégia de controle possibilitou usar o controlador MPC
em tais condições.
Para a mudança de setpoint do nível da interface água/óleo, o novo valor é
alcançado com oscilações muito suaves e de maneira lenta empregando as
estratégias MPC e PI, conforme visto na figura 5.8. Mais uma vez, devido aos
parâmetros usados para o MPC, pequenas oscilações foram observadas antes de se
atingir o novo valor de setpoint (o que está lógico, pois a resposta é mais rápida). O
mesmo estudo não foi feito para a DPR no DC, já que o controlador é o mesmo que foi
utilizado na configuração utilizando DPR em todos os hidrociclones (ver figuras 5.3 e
5.4).
66

Figura 5.8 - Variação no setpoint do nível da interface (estratégias MPC e PI)
Finalmente, considerou-se o emprego de controle multivariável ao processo,
utilizando um MPC 2x2 associado ao controle por bandas e um MPC 3x3.
No primeiro caso, o MPC controla as concentrações de óleo nas correntes de
underflow do BOW e do PDC, manipulando-se suas respectivas válvulas de overflow,
e a interface água/óleo do separador utiliza o controle por bandas, com a manipulação
da válvula de underflow. E no segundo, todas essas variáveis de controle são
controladas pelo MPC, manipulando-se as válvulas de overflow do BOW e do PDC e a
de underflow.
Neste ponto, um estudo da dinâmica das variáveis de controle do processo,
manipulando-se cada uma das válvulas citadas no parágrafo anterior, se faz
necessário para uma utilização adequada do controle preditivo. Logo, efetuaram-se
pequenas variações nessas válvulas, uma de cada vez, mantendo-se as outras com
abertura constante, e observou-se o efeito produzido nas variáveis controladas. As
figuras a seguir mostram as respostas produzidas a essas variações.
Como pode ser visto nas figuras 5.9, 5.10 e 5.11, as dinâmicas das
concentrações de óleo no underflow do BOW e do PDC são muito rápidas, ao
contrário do nível da interface água/óleo, onde há uma demora de aproximadamente
180 minutos para estabilização.
67

Figura 5.9 - Respostas das variáveis para uma variação de 2% na válvula do BOW
Figura 5.10 - Respostas das variáveis para uma variação de 2% na válvula do PDC
68

Figura 5.11 - Respostas das variáveis para uma variação de 2% na válvula do DC
Esses resultados induzem a valores elevados para o parâmetro N (da ordem
de 1000) do MPC 3x3 (e conseqüentemente para P) para pegar a dinâmica do nível da
interface água/óleo, aumentando-se a complexidade dos cálculos, inviabilizando o uso
desta estratégia de controle na prática. Entretanto, utilizaram-se valores muito
menores para N e P que, associados aos valores de Γ e Λ, apresentaram bons
resultados quanto à controlabilidade do processo. Para o MPC 2x2 este problema não
ocorre, pois as variáveis controladas neste caso são as concentrações de óleo no
underflow, que apresentam dinâmicas rápidas.
Os parâmetros dos controladores MPC 3x3 e MPC 2x2 utilizados nas
simulações são apresentados nas tabelas V.VIII e V.IX, respectivamente. Para o
controle de DPR do DC, os parâmetros utilizados são os mesmos daqueles mostrados
na tabela V.II e para o controle por bandas associado ao MPC 2x2, estão mostrados
na tabela V.X. O tempo de amostragem para os controladores MPC é de 10 segundos.
69

Tabela V.VIII – Parâmetros do controlador MPC 3x3
Γ (controladas) Λ (manipuladas) N P M
hw PDC BOW hw PDC BOW
80 25 1 20 40 20 45 45 80
Tabela V.IX – Parâmetros do controlador MPC 2x2
Γ (controladas) Λ (manipuladas) N P M
PDC BOW PDC BOW
40 8 3 15 1 1 10
Tabela V.X – Parâmetros do controlador por bandas associados ao MPC 2x2
K (%m) TI (s) Ta (s) T (s)
(fora da banda) fora da banda dentro da banda
10 800 5000 -300 -0,5
Promovendo uma variação degrau na carga do processo de 20%, verifica-se
que o controlador é capaz de fazer com que as variáveis controladas retornem aos
setpoints estipulados (0,45 para o nível da interface, 10% e 1000ppm para a
concentração de óleo no underflow do BOW e PDC, nesta ordem), ainda que haja uma
demora para tal no PDC, conforme mostrado na figura 5.12. Modificando-se os
setpoints das variáveis de controle, este controlador demonstra o mesmo desempenho
em atingir o novo valor, como mostram os gráficos da figura 5.13.
Ainda em relação a essas figuras, é evidente que, para o tempo de simulação,
o setpoint para a concentração de óleo no underflow do PDC não é atingido. Contudo,
este fato não compromete o desempenho dessa estratégia de controle preditivo
multivariável, pois a alimentação real do sistema é oscilatória, como já visto
anteriormente.
70

Figura 5.12 - Resultados obtidos para variação na carga (estratégia MPC 3x3)
Figura 5.13 - Resultados obtidos para variação nos setpoint’s (estratégia MPC 3x3)
O mesmo estudo para o MPC 2x2 associado ao controle por bandas não foi
possível devido ao motivo de o controle por bandas utilizar uma inferência da vazão de
71

saída do underflow do DC para cálculo da média móvel desta vazão, permanecendo
oscilante.
5.2.2.1 Controle otimizado
Outra estratégia considerada para o controle do conjunto interface água/óleo
do separador e hidrociclones foi a utilização de um controle por bandas para a
interface, associado a um controle com otimização nas aberturas das válvulas de
overflow do BOW e do PDC. Dessa forma, controla-se a concentração de óleo no
underflow do DC.
Uma vez definidas as vazões que saem do DC, o restante em relação à vazão
mássica da fase aquosa que deixa o separador corresponde à soma das vazões
mássicas que saem pelo overflow dos módulos de hidrociclones BOW e PDC.
Mantendo essa soma, as vazões individuais podem ter um valor otimizado visando
aumentar a saída de óleo por essas correntes.
Para o cálculo desses valores ótimos, define-se a seguinte função objetivo a
minimizar, em termos de frações mássicas de óleo, x:
( ) ( )PDCOv
BOWOv x1x1J −+−= (5.3)
Isto é, quanto mais próximos de um estiverem essas frações mássicas, maior a
quantidade de óleo presente, o que é desejável nas correntes de overflow. As
variáveis de decisão neste problema de otimização são as vazões mássicas no
overflow dos módulos BOW e PDC - - sujeitas a determinadas restrições. PDCOv
BOWOv Q,Q
Dada a vazão mássica que entra no módulo BOW, , e sua fração
mássica de óleo, , a fração mássica que sai no overflow é calculada em função
da eficiência de coleta desse óleo, .
BOWeQ
BOWex
BOWlη
BOWOv
BOWe
BOWe
BOWlBOW
Ov QxQ
x⋅⋅η
= (5.4)
Da mesma forma, dada a vazão mássica de óleo que entra no módulo PDC,
( )PDCe
PDCe xQ ⋅ , a fração mássica que sai no overflow é calculada em função da
eficiência de coleta desse óleo, . PDClη
PDCOv
PDCe
PDCe
PDClPDC
Ov QxQ
x⋅⋅
=η
(5.5)
72

Efetuando-se um balanço de massa no PDC, tem-se:
DCUn
DCOv
PDCOv
PDCe QQQQ ++= (5.6)
Por sua vez, o balanço de massa global no conjunto de hidrociclones deve ser
satisfeito, isto é:
DCUn
DCOv
PDCOv
BOWOv
BOWe QQQQQ +++= (5.7)
Efetuando-se as substituições de 5.6 em 5.5 e 5.7 em 5.4, e utilizando-se as
equações 4.8 e 4.9 para as eficiências do BOW e PDC, respectivamente, chega-se
finalmente a:
( )BOWOv
BOWe
DCUn
DCOv
PDCOv
BOWOv
QQQQQ
BOWOv Q
xQQQQ
e
xDCUn
DCOv
PDCOv
BOWOv
BOWOv
⋅+++
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
⋅+
=⎟⎟⎠
⎞⎜⎜⎝
⎛
+++⋅− 6.10
551
1 (5.8)
( )[ ]PDCOv
PDCe
DCUn
DCOv
PDCOv
QQQQ
PDCOv Q
xQQQ
e
xDCUn
DCOv
PDCe
PDCOv
⋅++
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
⋅+
=⎟⎟⎠
⎞⎜⎜⎝
⎛
++⋅− 5.27
9501
1 (5.9)
Foi assumido que os valores de xeBOW e xe
PDC são conhecidos, obtidos através
de medidas (ou inferidos).
Substituindo na função objetivo
( ) ( )
⎟⎟⎟⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜⎜⎜⎜
⎝
⎛
⋅⎥⎥
⎦
⎤
⎢⎢
⎣
⎡⋅+
++−+
⎟⎟⎟⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜⎜⎜⎜
⎝
⎛
⋅⎥⎥
⎦
⎤
⎢⎢
⎣
⎡⋅+
⋅+++−=
⎟⎟⎠
⎞⎜⎜⎝
⎛
++⋅−⎟
⎟⎠
⎞⎜⎜⎝
⎛
+++⋅−
PDCOv
QQQQ
PDCe
DCUn
DCOv
PDCOv
BOWOv
QQQQQ
BOWe
DCUn
DCOv
PDCOv
BOWOv
Qe
xQQQ
Qe
xQQQQJ
DCUn
DCOv
PDCe
PDCOv
DCUn
DCOv
PDCOv
BOWOv
BOWOv 5.276.10
9501
.1
551
1
(5.10)
Derivando a equação 5.10 em relação às variáveis de decisão, , e
igualando as equações resultantes a zero,
PDCOv
BOWOv Q,Q
0=∂∂
BOWOvQJ
(5.11)
0=∂∂
PDCOvQJ
(5.12)
73

obtém-se um sistema cujas incógnitas são as variáveis de decisão que otimizam a
função J. A resolução deste sistema resulta nas vazões de overflow do BOW e PDC.
Para esta estratégia não foi feito qualquer estudo de variação degrau na carga
ou no setpoint. Os parâmetros utilizados para os controles por bandas e DPR foram os
mesmos das tabelas V.X e V.II.
74

6. RESULTADOS E DISCUSSÃO
Os resultados apresentados nesta seção dizem respeito ao principal objetivo
deste trabalho: obter uma concentração de óleo na corrente de underflow do sistema
ciclônico dentro dos limites toleráveis para posterior tratamento e descarte ao mar.
Para alcançar tal resultado é necessário que as vazões a jusante de cada válvula
desse sistema não sofram variações intensas, a fim de manter a saída de fase aquosa
do separador o mais constante possível, não comprometendo a operação dos
hidrociclones.
Para as estratégias de controle citadas na seção anterior, efetuou-se uma
simulação de todo o sistema, com um tempo de aproximadamente 200 minutos para
cada uma e a alimentação de líquido apresentada na figura 4.17. Um esquema do
ambiente de simulação em SIMULINK é mostrado na figura 6.1.
Figura 6.1 - Esquema do simulador do processo para a estratégia MPC 3x3
75

No sistema utilizando-se somente controle de DPR em todos os hidrociclones,
verifica-se uma ineficiência na separação do óleo da fase aquosa (onde a
concentração é sempre superior a 200ppm), principalmente quando um controle PI é
empregado para controlar o nível da interface água/óleo, conforme visto na figura 6.2.
Observa-se ainda, do mesmo gráfico, que o controle por bandas para o nível da
interface apresenta melhor performance, permanecendo mais constante.
Figura 6.2 - Gráfico comparativo da concentração de óleo no underflow do DC -
estratégias de controle empregando controlador DPR em todos hidrociclones
A concentração de óleo na fase aquosa do underflow do deoiler é
conseqüência direta do fluxo de saída de água oleosa do separador, que influencia na
eficiência de todos os hidrociclones. A figura 6.3 mostra o gráfico daquele fluxo para
as mesmas estratégias exibidas na figura 6.2. Pode ser visto da figura 6.3 uma
variação muito grande entre o valor mínimo e máximo quando se utiliza a estratégia
PI, refletindo na pobre performance desta estratégia na separação de óleo da água. É
mostrado também, na figura 6.4, o gráfico da eficiência do DC, para as mesmas
estratégias adotadas na figura 6.2, onde verifica-se realmente uma maior constância
para a estratégia por bandas para o controle do nível da interface.
76

Figura 6.3 - Gráfico comparativo da vazão de fase aquosa saindo do separador -
estratégias de controle empregando controlador DPR em todos hidrociclones
Figura 6.4 - Gráfico comparativo da eficiência do DC - estratégias de controle
empregando controlador DPR em todos hidrociclones
O comportamento dos outros hidrociclones anteriores ao DC é mostrado na
figura 6.5. Nota-se que o BOW consegue entregar uma fase aquosa com
concentração de óleo dentro do esperado (aproximadamente 10%), não acontecendo
o mesmo com o PDC, onde várias vezes a concentração permanece com valores
superiores a 2000ppm. Mesmo nestes dois hidrociclones fica evidente a vantagem de
77

se utilizar o controle por bandas para o nível da interface, uma vez que para esta
estratégia as concentrações no underflow do BOW e PDC também permanecem mais
constantes que nas outras duas estratégias.
Figura 6.5 - Gráficos comparativos para o BOW e PDC - estratégias de controle
empregando controlador DPR em todos hidrociclones
No entanto, conforme observado na figura 6.6, o nível da interface água/óleo
do separador é sacrificado para manter uma concentração menor e mais estável no
underflow dos hidrociclones, quando a estratégia que utiliza o controle por bandas é
empregada. Ao contrário, quando se emprega o controlador PI, o nível permanece
mais estável, sacrificando a concentração final de óleo, como foi visto nas figuras
anteriores.
As ações de controle do controlador por bandas são suaves dentro da banda,
fazendo com que a vazão no underflow do DC varie pouco e suavemente, ocorrendo o
mesmo com as vazões do BOW e PDC, com exceção fora da banda (que é limitada
por valores máximo e mínimo estipulados para o nível), onde as ações de controle são
agressivas. Como na maior parte do tempo o nível permanece dentro da banda, existe
pouca modificação nas vazões dos hidrociclones, mantendo assim valores mais
78

estáveis para as concentrações no underflow, explicando a melhor performance
quando se utiliza o controle por bandas. Já com o controlador PI, sem considerar
bandas, as ações de controle não são tão suaves, apresentando os piores
comportamentos, como verificado nos gráficos.
Figura 6.6 - Gráfico comparativo do nível da interface água/óleo - estratégias de
controle empregando controlador DPR em todos hidrociclones
O controlador MPC monovariável para controlar o nível da interface apresentou
um desempenho intermediário daquelas estratégias que utilizaram o PI e o bandas.
Quando o controle por DPR é utilizado somente no DC, verifica-se uma
melhora acentuada em relação aos resultados anteriores (quando foi utilizado DPR em
todos os hidrociclones). Observando-se o gráfico da figura 6.7 este fato é facilmente
verificado. As concentrações de óleo na saída do sistema, para as estratégias de
controle PI e bandas para controlar o nível da interface água/óleo, permanecem abaixo
de 200ppm, como desejado, sendo que com o bandas são obtidos valores próximos
de zero. Somente quando se emprega o MPC (que neste caso possui N, P menores -
Tabela V.VII) notam-se concentrações fora do desejado em alguns momentos.
79

Figura 6.7 - Gráfico comparativo da concentração de óleo no underflow do DC -
estratégias de controle empregando controlador DPR somente no DC
A figura 6.8 mostra o gráfico do fluxo de fase aquosa que deixa o separador
para as mesmas estratégias exibidas na figura 6.7.
Figura 6.8 - Gráfico comparativo da vazão de fase aquosa saindo do separador -
estratégias de controle empregando controlador DPR somente no DC
Pode ser visto que as variações são parecidas quando se emprega PI ou
bandas, ficando as maiores variações a cargo da estratégia MPC, que em
80

conseqüência disso apresentou a pior performance entre as três estratégias na
separação de óleo da água.
A figura 6.9 mostra o gráfico da eficiência do DC para estes casos. A variação
na eficiência deste equipamento ao longo do tempo de simulação é muito intensa para
qualquer uma das estratégias adotadas nesta análise, levando a crer que a
performance total na separação das substâncias se deve aos hidrociclones anteriores
ao DC.
Figura 6.9 - Gráfico comparativo da eficiência do DC - estratégias de controle
empregando controlador DPR somente no DC
O comportamento do BOW e do PDC é mostrado na figura 6.10, verificando-se
realmente a grande influência destes na performance total para a separação de óleo
da fase aquosa de todo o sistema, uma vez que a eficiência individual de cada um é
elevada, principalmente para as estratégias que utilizam PI e bandas para o controle
do nível da interface. O BOW consegue entregar uma fase aquosa com concentração
de óleo abaixo do desejado (menor que 10%) em todas as estratégias, e o PDC
também (abaixo de 1000ppm, com exceção para a estratégia que utiliza MPC).
81
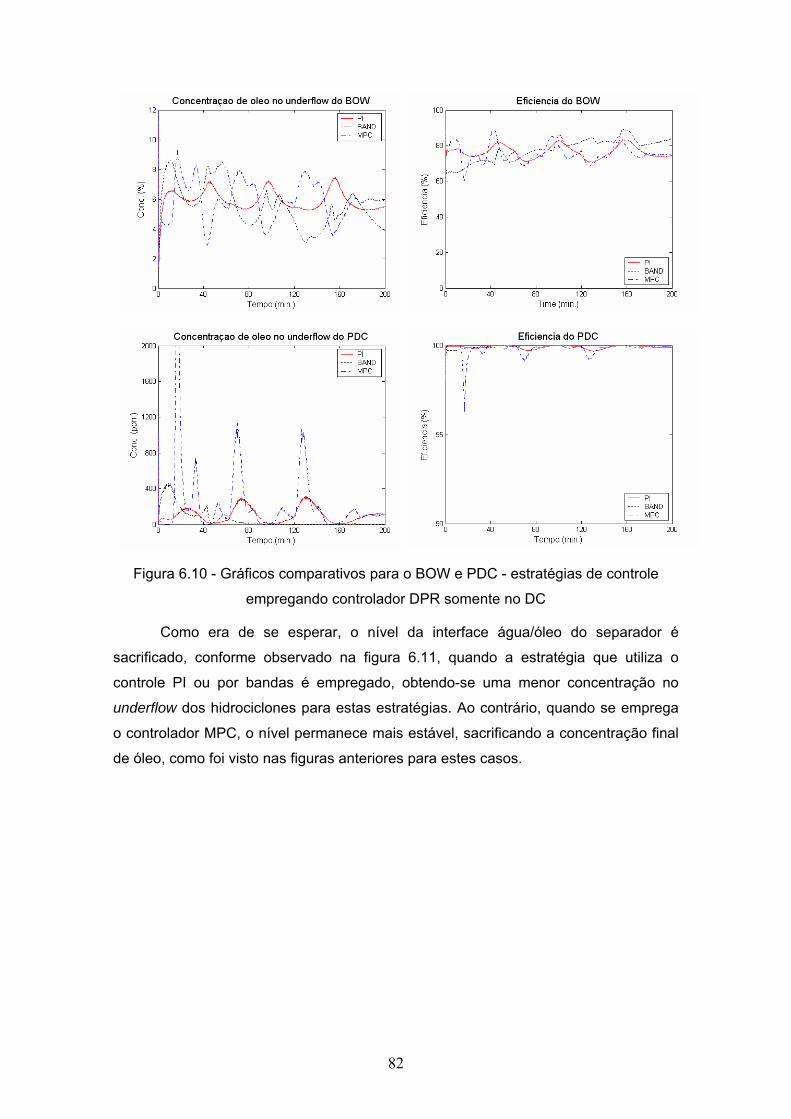
Figura 6.10 - Gráficos comparativos para o BOW e PDC - estratégias de controle
empregando controlador DPR somente no DC
Como era de se esperar, o nível da interface água/óleo do separador é
sacrificado, conforme observado na figura 6.11, quando a estratégia que utiliza o
controle PI ou por bandas é empregado, obtendo-se uma menor concentração no
underflow dos hidrociclones para estas estratégias. Ao contrário, quando se emprega
o controlador MPC, o nível permanece mais estável, sacrificando a concentração final
de óleo, como foi visto nas figuras anteriores para estes casos.
82

Figura 6.11 - Gráfico comparativo do nível da interface água/óleo - estratégias de
controle empregando controlador DPR somente no DC
Ainda com controle por DPR somente no DC, mas considerando-se agora as
estratégias multivariáveis, observa-se que a concentração na saída do sistema
ciclônico é superior do que aquela observada na análise anterior, como pode ser visto
na figura 6.12.
Figura 6.12 - Gráfico comparativo da concentração de óleo no underflow do DC -
estratégias de controle multivariáveis
83

Neste caso, verifica-se que o controle preditivo multivariável 3x3, onde são
controlados o nível e as concentrações de óleo no underflow do BOW e do PDC com
um MPC, é ligeiramente melhor do que as outras duas estratégias, principalmente na
segunda metade da simulação.
Na figura 6.13 é apresentado o gráfico do fluxo de fase aquosa que deixa o
separador para as mesmas estratégias exibidas na figura 6.12. Nela pode ser visto
que as variações desse fluxo são parecidas para as três estratégias, sendo que,
naquela que utiliza o controle por bandas para controlar o nível da interface e um MPC
2x2 para as concentrações de óleo no underflow do BOW e do PDC, o fluxo se
apresenta mais constante.
Figura 6.13 - Gráfico comparativo da vazão de fase aquosa saindo do separador -
estratégias de controle multivariáveis
A figura 6.14 mostra o gráfico da eficiência do DC para estes casos,
observando-se também uma certa semelhança no desempenho deste equipamento
nas estratégias empregadas aqui. Mais uma vez, a variação na sua eficiência ao longo
do tempo de simulação é muito intensa para qualquer uma das estratégias adotadas
nesta análise, sendo crucial o comportamento dos hidrociclones anteriores, mostrado
na figura 6.15.
84

Figura 6.14 - Gráfico comparativo da eficiência do DC - estratégias multivariáveis
Figura 6.15 - Gráficos comparativos para o BOW e PDC - estratégias multivariáveis
85

Constata-se, observando a figura 6.15, que a performance total na separação
de óleo e água na estratégia que utiliza otimização das vazões de overflow do BOW e
do PDC, se deve principalmente ao desempenho individual do BOW, cuja
concentração de óleo no underflow chega a 5%. Obviamente, para isto ocorrer é
necessário que a válvula do overflow deste equipamento permaneça bem aberta,
elevando-se seu split e, conseqüentemente, sua eficiência. Para o PDC,
comportamento inverso é notado: para essa mesma estratégia, a concentração de
óleo no underflow do PDC é maior do que nas outras duas estratégias, pois a válvula
do overflow deste equipamento permanece um pouco mais fechada (quando se utiliza
otimização), reduzindo-se seu split e, conseqüentemente, sua eficiência. Estes
resultados podem ser observados na figura 6.16.
Figura 6.16 - Gráficos comparativos de split para o BOW e PDC - estratégias
multivariáveis
Já para as estratégias que utilizam MPC multivariável, as concentrações de
óleo no underflow do BOW e PDC permanecem próximas dos setpoints: 10% para o
BOW e 1200ppm para o PDC. Logo, para estas duas estratégias, a performance
individual do PDC é crucial.
Em relação ao nível da interface água/óleo do separador, cujo gráfico é visto na
figura 6.17, observa-se uma melhor performance quando se utiliza o controle preditivo
3x3, sendo que o controle por bandas para o nível empregado nas outras duas
estratégias proporciona maiores oscilações.
86

Figura 6.17 - Gráfico comparativo do nível da interface - estratégias multivariáveis
Comparando-se as melhores estratégias das duas últimas análises, que
empregam controle por bandas para o nível da interface, com DPR somente no DC, e
o MPC 3x3, verifica-se a superioridade da primeira, considerando-se separação de
óleo da água, conforme figura 6.18. Obviamente, esta estratégia também apresenta
uma maior constância para o fluxo de água que sai do separador e variações mais
acentuadas para o nível da interface água/óleo (figura 6.19).
Figura 6.18 - Comparação da concentração final de óleo para as duas melhores
estratégias
87

Figura 6.19 - Fluxo e nível da interface do S.T. para as duas melhores estratégias
6.1 Nova configuração do sistema
Uma vez que o regime de golfadas é incerto, havendo principalmente grandes
aumentos na vazão de alimentação do sistema, optou-se por colocar mais
equipamentos (hidrociclones) a jusante do separador para escoar a fase líquida, nos
momentos de elevadas vazões de alimentação.
Desta forma, com a finalidade de reduzir o efeito das golfadas sobre o nível da
interface água/óleo, elaborou-se uma nova configuração para o processo, onde
hidrociclones seriam incluídos paralelamente aos módulos já existentes do BOW, PDC
e DC. Estes entrariam em operação caso um certo valor para o nível da interface
dentro do separador fosse atingida (no caso, esse nível variou de acordo com as
estratégias empregadas: 0,55m, 0,6m ou 0,65m). Após retorno do nível para um valor
inferior ao estipulado, tais equipamentos deixariam de operar, retornando à
configuração normal.
Assim, a vazão aquosa a jusante ao separador se dividiria em um número
maior de hidrociclones, esperando-se uma redução na concentração de óleo na fase
aquosa que deixa o sistema ciclônico.
Em decorrência da amplitude máxima utilizada para as golfadas neste trabalho
ter sido de aproximadamente 20%, somente um hidrociclone foi posto em operação
adicionalmente, paralelamente a cada módulo. A figura 6.20 mostra
esquematicamente a nova configuração.
88

Qu
Qos
Qgs
QoBOW
Qas
Q
QoPDC
Inclusão de hc dependendo do
nível da interface
QoDC
Figura 6.20 - Esquema da nova configuração do processo
Verifica-se que essa nova configuração foi bem sucedida somente no caso em
que foi empregada a estratégia com controle PI na interface, utilizando-se DPR em
todos os hidrociclones, conforme mostra a figura 6.21. Mesmo assim, não foram
atingidos valores dentro do desejado (aproximadamente 200ppm) para a concentração
final de óleo. Nas outras estratégias não houve melhora, ocorrendo algumas vezes até
uma piora no resultado final. As figuras 6.22 e 6.23 mostram os resultados produzidos,
neste caso, empregando-se bandas para controlar a interface, com DPR em todos os
hidrociclones e o controle preditivo multivariável (3x3), respectivamente.
89

Figura 6.21 - Resultados usando a nova configuração (estratégia PI)
Figura 6.22 - Resultados usando a nova configuração (estratégia bandas)
Figura 6.23 - Resultados usando a nova configuração (estratégia MPC 3x3)
Nenhum resultado para as demais estratégias foi mostrado para essa nova
configuração justamente porque não produziu efeitos relevantes para o processo.
90

7. CONCLUSÕES E SUGESTÕES
Neste trabalho foram desenvolvidos modelos empíricos para hidrociclones
BOW e PDC a partir de dados de planta fornecidos pela PETROBRÁS, e, de posse
destes modelos, além daqueles que descrevem o comportamento do separador
trifásico e do hidrociclone deoiler, implementou-se um sistema em
SIMULINK/MATLAB, montando-se estratégias de controle para o estudo da
controlabilidade do processo acoplado.
Para o ajuste dos parâmetros dos controladores, utilizando-se vazão de
alimentação constante, a menos da perturbação degrau aplicada, foi possível observar
a estabilidade do processo (figuras do capítulo 5). Contudo, com a vazão de
alimentação com golfadas, o processo oscila bastante, mas pode-se verificar, de
acordo com as figuras do capítulo 6, o bom desempenho dos controladores ajustados.
Apesar de tantas perturbações, o processo se mantém sob controle, ainda que a
concentração de óleo no underflow ficasse acima do desejado em alguns casos.
Os parâmetros utilizados para os controladores de DPR proporcionaram ações
de controle suaves o bastante para não comprometerem o processo de separação
ciclônico, uma vez que o sistema é muito sensível às grandes variações de abertura
de válvulas. Os resultados demonstraram que a utilização de controle de DPR nos
hidrociclones BOW e PDC, quando colocados no meio do conjunto não é bem
sucedida. Nestes controladores, em que um controle feedback é utilizado, a ação de
controle é tomada (e de maneira suave) após modificação da vazão no underflow de
cada hidrociclone, promovendo variação da pressão nesta linha, requerendo também
uma variação na pressão da linha do overflow para manutenção da DPR. Este
problema não se verifica no DC, podendo ser adotado o controle DPR. Vale lembrar
que a vazão no overflow do BOW e do PDC é muito maior do que a do DC.
Das estratégias estudadas, a que apresentou melhor performance na
separação de óleo da fase aquosa que deixa o sistema foi aquela que utiliza controle
por bandas para controlar a interface água/óleo do separador, com DPR somente no
DC. Como foi visto, o controle da vazão do overflow dos outros hidrociclones nesta
estratégia utiliza uma lei PI que manipula as válvulas desta corrente no BOW e no
PDC, controlando o nível da interface. Logo, o controle tanto da válvula de underflow
quanto das de overflow do BOW e do PDC está amarrado à variável nível da interface.
Para as amplitudes de golfadas utilizadas nas simulações deste trabalho, não foi
verificado qualquer problema quanto a esta estratégia, mas vale ressaltar que o
91

regime de golfadas é bastante incerto na prática, podendo variar a amplitude além do
estudado aqui, proporcionando grandes variações no nível da interface, originando
ações de controle muito fortes para as válvulas do BOW e do PDC, podendo
comprometer todo o processo de separação ciclônico.
O controle preditivo multivariável que controla o nível da interface e as
concentrações nas linhas do underflow do BOW e do PDC também apresentou um
bom desempenho, podendo melhorar ajustando-se mais adequadamente seus
parâmetros, ou utilizando-se uma representação de espaço estado para o modelo do
processo. Contudo, como as ações de controle nas válvulas citadas no parágrafo
anterior não estão todas amarradas ao nível da interface, talvez esta estratégia se
adapte melhor às grandes variações das golfadas, sendo necessário um cenário de
testes para tal comprovação. É importante frisar que, devido à estrutura já montada, e
às condições de operação deste processo serem bastante agressivas (geralmente off
shore), um controle PI é facilmente implementado na prática, enquanto o MPC sofre
alguma resistência.
A nova configuração para o processo, considerando-se adição de hidrociclones
paralelamente aos módulos já existentes, não apresentou uma melhora relevante para
o processo. Entretanto, neste trabalho foram feitos estudos preliminares sobre este
assunto, sendo necessária uma abordagem mais aprofundada para verificar a
viabilidade (ou não) dessa configuração.
Todas as simulações efetuadas neste trabalho utilizaram uma distribuição de
óleo por diâmetro de gotas semelhante daquela utilizada no trabalho de FILGUEIRAS
(2005). Simulações com distribuições mais realistas devem ser efetuadas para
verificação da performance de todo o sistema de separação.
O desenvolvimento de modelos empíricos para os hidrociclones BOW e PDC
que leva em consideração toda a faixa de concentração possível em suas
alimentações deveria ser equacionado, originando-se modelos para a eficiência de
separação nesses equipamentos em função não só do split, mas também da
concentração de óleo na alimentação. Isto geraria modelos mais realistas.
Estudo com outros regimes de golfadas na alimentação, variando-se as
amplitude e as freqüências também podem ser feitos para avaliação das estratégias
de controle estudadas aqui. De particular interesse para as empresas de petróleo é a
utilização da ferramenta OLGA, responsável por simular escoamento em dutos,
considerando o regime de golfadas de acordo com várias variáveis do processo
(quantidade de gás associado, pressão, diâmetro, comprimento e formato dos dutos
92

em questão), acoplada a este sistema SIMULINK, representando um processo de
tratamento em plataformas.
A utilização de um controlador PI dentro da banda no controle por bandas ao
invés de um controlador baseado na inferência da perturbação usando vazão de saída
no underflow deve ser verificada. Estratégias de controle preditivo supervisor,
responsáveis por otimizar os setpoints de controladores PI também podem ser
estudadas e implementadas ao processo de separação ciclônico.
93

8. REFERÊNCIAS BIBLIOGRÁFICAS
APEX, P. S. P., 2002, Oil and Water Separation Using Deoiler Cyclones in the Oil and
Gas Industry. V. 1.1. Beenleigh, Australia.
BIRD, R. B., STEWART, W. E., LIGHFOOT, E. N., 1960, Transport Phenomena. New
York, John Wiley & Sons.
CAMPO, P. J., MORARI, M., 1989, “Model Predictive Optimal Averaging Level
Control”. AIChE Journal, v. 35, nº 4, pp. 579-591.
COOPER, D. J., DOUGHERTY, D., 2003, “Tuning guidelines of a DMC for integrating
(non-self regulating) processes”. Ind. Eng. Chem. Res., v. 42, nº 8, pp. 1739-
1752.
FILGUEIRAS, N. G. T., 2005, Modelagem, Análise e Controle de um Processo de
Separação Óleo/água. Tese de M.Sc., COPPE/UFRJ, Rio de Janeiro, RJ, Brasil.
GARCIA, C. E., PRETT, D. M., MORARI, M., 1989, “Model predictive control: theory
and practice, a survey”. Automatica, v. 25, pp. 335-348.
HENSON, M. A., 1998, “Nonlinear Model Predictive Control: Current Status and Future
Directions”, Computers & Chemical Engineering, v. 23, pp. 187-202.
LUNDSTÖM, P., LEE, J. H.; MORARI, M., SKOGESTAD, S., 1995, “Limitations of
dynamic matrix control”. Computers & Chemical Engineering, v. 19, nº 4, pp. 409-
421.
LUYBEN, W. L., BUCKLEY, P. S., 1977, “A proportional-lag Level Controller”.
Instrumentation Technology, pp. 65-68.
MCDONALD, K. A., MCAVOY, T. J., 1986, “Optimal Averaging Level Control”. AIChE
Journal, v. 32, nº 1, pp. 75-86.
MEADOWS, E. S., RAWLINGS, J. B., 1997, “Model Predictive Control”. In: Henson, M.
A., Seborg, D. E. (Eds). Nonlinear Process Control, Chapter 5, Englewood Cliffs,
N.J., USA, Prentice-Hall.
MORAES, C. A. C., 1994, Modelo Fluidodinâmico para a Estimativa de Eficiência em
Hidrociclone para Águas Oleosas. Tese de M.Sc., COPPE/UFRJ, Rio de Janeiro,
RJ, Brasil.
MORAES, C. A. C., 2005, Avaliação do Desempenho da Separação Ciclônica na
Plataforma de PAMPO (PPM-1), PETROBRÁS RT-TE nº 003/2005.
94

MORARI, M., LEE, J. H., 1999, “Model predictive control: past, present and future”.
Computers & Chemical Engineering, v. 23, pp. 667-682.
NUNES, G. C., 1994, Modelagem e Simulação Dinâmica de Separador Trifásico Água-
Óleo-Gás. Tese de M.Sc., COPPE/UFRJ, Rio de Janeiro, RJ, Brasil.
NUNES, G. C., 2001, Design and Analysis of Multivariable Predictive Control Applied
to an Oil-Water-Gas Separator. Ph. D. dissertation, University of Florida, Florida,
USA.
NUNES, G. C., 2004, Controle por Bandas para Processamento Primário: Aplicação e
Conceitos fundamentais, PETROBRÁS - Comunicação Técnica.
NUNES, G. C., SILVEIRA, M. A. C. R., 2005, Modelagem Empírica dos Hidrociclones
BOW e PDC, PETROBRÁS RT-APTP nº 008/2005.
OGUNNAIKE, B. A., RAY, W. H., 1994, “Process Dynamics, modeling and control”.
New York, NY, Oxford Press.
PETERSON, T., HERNÁNDEZ, E., ARKUN, Y., 1992, “A Nonlinear DMC Algorithm
and its Application to a Semibath Polymerization Reactor”. Chemical Engineering
Science, v. 47, pp. 737-753.
PINTO, J. C., LAGE, P. L. C., 2001, Métodos Numéricos em Engenharia Quimica. 2ª
ed. Rio de Janeiro, Brasil, E-papers.
SCANDPOWER, P. T., 2000, User’s Manual OLGA 2000. V. 4.17. Kjeller, Norway.
SHUNTA, J. P., FEHERVARI, W., 1976, “Nonlinear Control of Liquid Level”.
Instrumentation Technology, pp. 43-48.
STOKKE, S., STRAND, S., SJONG, D., 1995, “Model Predictive Control (MPC) of a
Gas-Oil-Water Separator Train”. In: Methods of Model Based Process Control,
Vol. 293, pp 701-713, Netherlands.
TRIGGIA, A. A., CORREIA, C. A., FILHO, C. V., et al., 2001, “Processamento Primário
de Fluidos”. In: Thomas, J. E., Barros, V., Santos, C. L., Fernandes, E.,
Fundamentos de Engenharia de Petróleo, 2ª ed., Capítulo 9, Rio de Janeiro,
Brasil, Editora Interciência.
WOLBERT, D., MA, B. F., AURELLE, Y., 1995, “Efficiency Estimation of Liquid-Liquid
Hydrocyclones Using Trajectory Analysis”. AIChE Journal, v. 41, nº 6, pp. 1395-
1402.
95

ZANIN, A. C., 2001, Implementação Industrial de um Otimizador em Tempo Real. Tese
de D.Sc., Escola Politécnica/USP, São Paulo, SP, Brasil.
96

Livros Grátis( http://www.livrosgratis.com.br )
Milhares de Livros para Download: Baixar livros de AdministraçãoBaixar livros de AgronomiaBaixar livros de ArquiteturaBaixar livros de ArtesBaixar livros de AstronomiaBaixar livros de Biologia GeralBaixar livros de Ciência da ComputaçãoBaixar livros de Ciência da InformaçãoBaixar livros de Ciência PolíticaBaixar livros de Ciências da SaúdeBaixar livros de ComunicaçãoBaixar livros do Conselho Nacional de Educação - CNEBaixar livros de Defesa civilBaixar livros de DireitoBaixar livros de Direitos humanosBaixar livros de EconomiaBaixar livros de Economia DomésticaBaixar livros de EducaçãoBaixar livros de Educação - TrânsitoBaixar livros de Educação FísicaBaixar livros de Engenharia AeroespacialBaixar livros de FarmáciaBaixar livros de FilosofiaBaixar livros de FísicaBaixar livros de GeociênciasBaixar livros de GeografiaBaixar livros de HistóriaBaixar livros de Línguas

Baixar livros de LiteraturaBaixar livros de Literatura de CordelBaixar livros de Literatura InfantilBaixar livros de MatemáticaBaixar livros de MedicinaBaixar livros de Medicina VeterináriaBaixar livros de Meio AmbienteBaixar livros de MeteorologiaBaixar Monografias e TCCBaixar livros MultidisciplinarBaixar livros de MúsicaBaixar livros de PsicologiaBaixar livros de QuímicaBaixar livros de Saúde ColetivaBaixar livros de Serviço SocialBaixar livros de SociologiaBaixar livros de TeologiaBaixar livros de TrabalhoBaixar livros de Turismo