levitaÇÃo magnÉtica matheus bezerra eiras da silvamicrocontrolador pic da família 16f, sendo as...
TRANSCRIPT
CENTRO FEDERAL DE EDUCAÇÃO TECNOLÓGICA DE MINAS GERAIS
CURSO DE ENGENHARIA ELÉTRICA
PROJETO E IMPLEMENTAÇÃO DE ESTRATÉGIAS DE
CONTROLE CLÁSSICAS APLICADAS A UM SISTEMA DE
LEVITAÇÃO MAGNÉTICA
MATHEUS BEZERRA EIRAS DA SILVA
Orientador: Ana Paula Batista
Centro Federal de Educação Tecnológica de Minas Gerais – CEFET-MG
BELO HORIZONTE
DEZEMBRO DE 2015
MATHEUS BEZERRA EIRAS DA SILVA
PROJETO E IMPLEMENTAÇÃO DE ESTRATÉGIAS DE
CONTROLE CLÁSSICAS APLICADAS A UM SISTEMA DE
LEVITAÇÃO MAGNÉTICA
Trabalho de Conclusão de Curso submetido a BancaExaminadora designada pelo Colegiado do Curso deEngenharia Elétrica do Centro Federal de EducaçãoTecnológica de Minas Gerais, como requisito parcial paraobtenção do título de Engenheiro Eletricista.
Orientador: Ana Paula BatistaCentro Federal de Educação Tecnológicade Minas Gerais – CEFET-MG
CENTRO FEDERAL DE EDUCAÇÃO TECNOLÓGICA DE MINAS GERAISCURSO DE ENGENHARIA ELÉTRICA
BELO HORIZONTEDEZEMBRO DE 2015
i

MATHEUS BEZERRA EIRAS DA SILVA
PROJETO E IMPLEMENTAÇÃO DE ESTRATÉGIAS DE
CONTROLE CLÁSSICAS APLICADAS A UM SISTEMA DE
LEVITAÇÃO MAGNÉTICA
Trabalho de Conclusão de Curso submetido a BancaExaminadora designada pelo Colegiado do Curso deEngenharia Elétrica do Centro Federal de EducaçãoTecnológica de Minas Gerais, como requisito parcial paraobtenção do título de Engenheiro Eletricista.
Trabalho aprovado. Belo Horizonte, 14 de Dezembro de 2015
Ana Paula BatistaOrientador
Everthon de Souza OliveiraMembro
Euler Cunha MartinsMembro
CENTRO FEDERAL DE EDUCAÇÃO TECNOLÓGICA DE MINAS GERAISCURSO DE ENGENHARIA ELÉTRICA
BELO HORIZONTEDEZEMBRO DE 2015
ii

Dedico este trabalho a meus pais, irmã e atodos aqueles que de alguma forma contri-buíram para sua elaboração.
iii
Agradecimentos
Até aqui, tudo foi um grande desafio, mas junto a este desafio muitos frutosforam colhidos. Para a construção deste conhecimento, não poderia deixar de agradeceràs pessoas que participaram deste processo:
Em primeiro lugar gostaria de agradecer à orientadora, profa.Ana Paula Batistapor todos os ensinamentos que me foram transmitidos, e em especial pela atençãoe paciência dada quando do surgimento das dúvidas, tanto teóricas quanto práticas.Gostaria de agradecer ainda pela amizade e respeito construídos ao longo deste trabalhode conclusão de curso. Muito obrigado.
Ao professor Everthon de Souza Oliveira, gostaria de agradecer pelo acompa-nhamento inicial deste trabalho durante a disciplina de Laboratório de Controles deProcessos, onde foi iniciada a montagem do protótipo e os primeiros estudos e testesdas estratégias de controle classicas realizados. Ao professor Euler Cunha Martins, pelointeresse demonstrado a respeito de sistemas MAGLEV para fins educacionais. Deixo omeu muito obrigado aos membros da banca por estarem presentes.
Agradeço à professora Patrícia Romeiro da Silva Jota por permitir o uso doslaboratórios do CPEI para a realização do trabalho. Aos técnicos do LEACOPI porfornecerem os equipamentos necessários à realização dos testes no laboratório. Alémdestes, não poderia deixar de agradecer aos professores Giovani Guimarães Rodriguese Túlio Charles de Oliveira Carvalho pelo acompanhamento na construção da planta ediscussão dos problemas de controle e instrumentação eletrônica presentes no sistemaconstruído.
Ao Departamento de Engenharia Elétrica do CEFET/MG, por me propiciar umcurso de excelência com professores qualificados e oferecer as ferramentas e recur-sos para a realização de um bom curso, fundamentais para a minha formação comoEngenheiro Eletricista.
Aos colegas do curso Vitor Silva Soares, Tamires Santos de Souza por toda a ajudaoferecida e em especial ao colega Lucas Martins Faria, o qual teve grande participaçãona montagem inicial do sistema, nas discussões a respeito das estratégias de controle ena sugestão de melhorias a serem implementadas na planta. Colegas, obrigado não sópela ajuda oferecida, mas principalmente pelo carinho e amizade que temos uns pelosoutros.
Aos demais colegas do curso de Engenharia Elétrica e aos colegas do CPEIque também tiveram participação neste trabalho, o meu muito obrigado. Em especialaos alunos João Vítor e Hector Vargas pela ajuda dada na montagem dos circuitos
iv

eletrônicos digitais e analógicos.
Por fim, gostaria de agradecer à minha família, amigos e amigas por todos osensinamentos, apoio, paciência e companheirismo dados. Sem a ajuda de vocês eu nãoteria conseguido chegar até onde cheguei. Muito obrigado por se preocuparem com omeu bem estar e por terem me apoiado ao longo desta jornada. Me conforta saber queposso contar com a ajuda de vocês sempre que precisar.
v

“Um especialista em resolver problemas deve serdotado de duas qualidades incompatíveis - umaimaginação inquieta e uma paciente obstinação.”(Howard W.Eves)
vi

Resumo
O presente trabalho tem como objetivo realizar um estudo sobre as estratégias de con-trole aplicadas a um sistema de levitação magnética para implementação em uma plantaprática didática. O sistema consiste em um eletroimã que deve ser capaz de manteruma esfera de material ferromagnético estável a determinada distância do solo, semmanter contato com o eletroimã. Para a implementação das estratégias de controle foirealizado um estudo sobre os modelos matemáticos utilizados para a representação doprocesso e de estratégias de controle que garantam a estabilidade da esfera metálica emuma posição de equilíbrio desejada, com variações mínimas em torno desta posição. Emparalelo a este estudo, detalhes técnicos de montagem e de instrumentação eletrônica daplanta construída, tais como características construtivas, projetos dos módulos sensorese atuadores, bem como as curvas de calibração destes elementos, são apresentadas.A partir destes dados é levantado um modelo para a planta, possibilitando o projetodos controladores. O uso de ferramentas computacionais para simulação da planta,permitem avaliar quais estratégias de controle se adequam à aplicação e por isso sãoutilizadas na escolha dos controladores projetados. Por meio de simulações computaci-onais foram avaliados os controladores PD, PD Polarizado, PID-1DOF e PID-2DOF. Apartir da análise das simulações, foram implementados controladores analógicos, dotipo PD e PD Polarizado, e um controlador PID-2DOF discreto pela utilização de ummicrocontrolador PIC da família 16F, sendo as dificuldades associadas à implementaçãoprática de cada controlador discutidas. Por fim, os resultados experimentais oriundosda aplicação real do controlador PD projetado à planta são apresentados e discutidos.
Palavras-chave: Maglev, Levitação Magnética, Modelagem Linear, Controlador PD,Controlador PD Polarizado, Controlador PID:2-DOF, Instrumentação Eletrônica.
vii

Abstract
The present work aims the study of control strategies applied to magnetic levitation sys-tems for implementation in a practical plant. The system is based on an electromagneticbearing that must be capable of keeping an steel ball static at a desirable equilibriumposition above the ground, allowing only minimal oscillation around this point. Forthe implementation of control strategies a study about the mathematical models thatrepresent the process and a study of control design techniques that assures stabilityaround the desirable operation point are presented. This work also present technicaldetails of the constructed plant and the current electronic instrumentation such as sen-sor’s and actuator’s design. Based on the plant’s characteristics, a model for the plant isset up and the controllers are designed. The use of computational tools for simulatingthe plant, allows to verify if the control strategy fits the practical application. For thisreason simulation tools are used for simulating the designed controllers,(PD, PD-BIAS,PID-1DOF and PID-2DOF). Based on the simulation analisys, analog controllers suchas, PD and PD-BIAS controllers, and a digital PID-2DOF controller are implementedand the system response is valueted. By the end, experimental results based on theapplication of the designed PD controller are presented and discussed.
Keywords: Maglev, Magnetic Levitation, Linear Modelling, PD Controller, PD-BIASController, PID:2-DOF Controller, Electronic Instrumentation.
viii

Lista de Figuras
Figura 1.1 – Princípio da Levitação Eletromagnética, figura adaptada de [1]. . . . 2Figura 2.1 – Arte de Jane Philbrick, Figura retirada de [2]. . . . . . . . . . . . . . . 6Figura 2.2 – Diagrama EDS, Figura adaptada de [2]. . . . . . . . . . . . . . . . . . 7Figura 2.3 – Suspensão de Rotor, Figura retirada de [2]. . . . . . . . . . . . . . . . 8Figura 2.4 – Sistema de Bombeamento Maglev, Figura adaptada de [3]. . . . . . . 9Figura 2.5 – Esquema para o sistema MAGLEV, Figura adaptada de [4]. . . . . . . 10Figura 2.6 – Diagrama de Blocos, Figura retirada de [5]. . . . . . . . . . . . . . . . 14Figura 2.7 – Diagrama De Blocos dos controladores PID, Figura adaptada de [4]. 16Figura 2.8 – Diagrama de Blocos PID-PI, Figura adaptada de [6]. . . . . . . . . . . 17Figura 2.9 – Controlador PI-PD proposto em [7], Figura adaptada de [7]. . . . . . 18Figura 2.10–Compensador em Avanço de Fase, Figura adaptada de [8]. . . . . . . 19Figura 3.1 – Vista Frontal da Planta Construída. . . . . . . . . . . . . . . . . . . . . 21Figura 3.2 – Estação Microcontrolada CAN-PIC, Figura retirada de [9]. . . . . . . 23Figura 3.3 – Pinagem do PIC16F876A, Figura retirada de [10]. . . . . . . . . . . . 24Figura 3.4 – Topologia Emissor Comum, Figura retirada de [11]. . . . . . . . . . . 25Figura 3.5 – Topologia Cascode, Figura retirada de [11]. . . . . . . . . . . . . . . . 26Figura 3.6 – Resposta do Sensor: Topologia Cascode. . . . . . . . . . . . . . . . . . 27Figura 3.7 – Resposta do Sensor: Topologia Emissor Comum. . . . . . . . . . . . . 27Figura 3.8 – Placa do Sensor. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29Figura 3.9 – Transistor TIP31C, Figura retirada de [12]. . . . . . . . . . . . . . . . . 30Figura 3.10–Circuito do atuador. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31Figura 3.11–Circuito do Optoacoplador, Figura retirada de [13]. . . . . . . . . . . 31Figura 3.12–Circuito do Atuador com Optoacoplador . . . . . . . . . . . . . . . . 32Figura 3.13–Procedimento para calibração do Sensor. . . . . . . . . . . . . . . . . 33Figura 3.14–Curva de Calibração do Sensor. . . . . . . . . . . . . . . . . . . . . . . 34Figura 3.15–Circuito utilizado para calibração do atuador. . . . . . . . . . . . . . . 35Figura 3.16–Foto do esquema utilizado para calibração do Atuador. . . . . . . . . 36Figura 3.17–Curva de Calibração do Atuador . . . . . . . . . . . . . . . . . . . . . 37Figura 3.18–Diagrama do Sistema em Malha Aberta. . . . . . . . . . . . . . . . . . 39Figura 3.19–Resposta Temporal da planta em malha aberta à entrada degrau
unitário. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 40Figura 4.1 – Lugar das Raízes da Planta. . . . . . . . . . . . . . . . . . . . . . . . . 45Figura 4.2 – Ângulos dos Pólos e Zeros. . . . . . . . . . . . . . . . . . . . . . . . . 46Figura 4.3 – Lugar das Raízes com adição do zero. . . . . . . . . . . . . . . . . . . 47Figura 4.4 – Diagrama de blocos com controlador PD. . . . . . . . . . . . . . . . . 48Figura 4.5 – Resposta do controlador PD à variação de degrau. . . . . . . . . . . . 48
ix

Figura 4.6 – Sinal de Controle do PD. . . . . . . . . . . . . . . . . . . . . . . . . . . 49Figura 4.7 – Diagrama de blocos com Controlador PD polarizado. . . . . . . . . . 50Figura 4.8 – Resposta ao Degrau com o controlador PD polarizado. . . . . . . . . 50Figura 4.9 – Sinal de Controle com controlador PD Polarizado. . . . . . . . . . . . 51Figura 4.10–Topologias Proporcional e Derivativa . . . . . . . . . . . . . . . . . . 52Figura 4.11–Diagrama da Planta com Controlador PD . . . . . . . . . . . . . . . . 53Figura 4.12–Resposta do Sistema com Controlador PD ao Degrau . . . . . . . . . 53Figura 4.13–Sinal de Controle do PD Polarizado considerando as saturações . . . 54Figura 4.14–Circuito do controlador PD Polarizado . . . . . . . . . . . . . . . . . . 54Figura 4.15–Diagrama Controladores PID-2DOF e PID-1DOF, Figura adaptada de
[4]. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 56Figura 4.16–Lugar das Raízes para o sistema em malha aberta com controlador
PID-2DOF. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 58Figura 4.17–Diagrama de Blocos dos controladores PID . . . . . . . . . . . . . . . 59Figura 4.18–Resposta do Sistema à Variação de Degrau. . . . . . . . . . . . . . . . 60Figura 4.19–Sinal de Controle para o Controlador PID-2DOF. . . . . . . . . . . . . 61Figura 4.20–Sinal de Controle para o Controlador PID-1DOF. . . . . . . . . . . . . 61Figura 4.21–Fluxograma de controle. . . . . . . . . . . . . . . . . . . . . . . . . . . 63Figura 4.22–Resposta do Sistema à Variação de Degrau com controlador PID-
2DOF discreto. Ts = 1ms. . . . . . . . . . . . . . . . . . . . . . . . . . 64Figura 4.23–Sinal de Controle: Controlador PID-2DOF discreto. Ts = 1ms. . . . . 65Figura 4.24–Resposta do Sistema à Variação de Degrau com controlador PID-
2DOF discreto. Ts = 100µs. . . . . . . . . . . . . . . . . . . . . . . . . 66Figura 4.25–Sinal de Controle: Controlador PID-2DOF discreto. Ts = 100µs. . . . 66Figura 4.26–Resposta do Sistema à Variação de Degrau com controlador PID-
2DOF discreto. Ts = 500µs. . . . . . . . . . . . . . . . . . . . . . . . . 67Figura 4.27–Sinal de Controle: Controlador PID-2DOF discreto. Ts = 500µs. . . . 67Figura 4.28–Controlador PD implementado em Protoboard. . . . . . . . . . . . . 69Figura 4.29–Dados obtidos por Osciloscópio: Sinal de Controle e de Sensor. . . . 70Figura 4.30–Dados obtidos por Osciloscópio: Sinal de Controle e de Sensor . . . . 71Figura 4.31–Dados obtidos por Osciloscópio: Sinal de Controle e de Sensor . . . . 71Figura 4.32–Resposta da Planta em Malha Aberta para sinal de controle coletado. 72Figura A.1–Dimensões da Planta . . . . . . . . . . . . . . . . . . . . . . . . . . . . 82Figura E.1 – Sistema Maglev em MA, figura adaptada de [4]. . . . . . . . . . . . . 90Figura E.2 – Resposta do Sistema Maglev em MA. . . . . . . . . . . . . . . . . . . 91Figura E.3 – Diagrama para Simulação dos Controladores . . . . . . . . . . . . . . 91Figura E.4 – Respostas para: PID-1DOF e PID-2DOF (q2 = 0) . . . . . . . . . . . . 92Figura F.1 – Diagrama de Corpo Livre, figura adaptada de [5] . . . . . . . . . . . 93Figura F.2 – Diagrama de Blocos, figura retirada de [5] . . . . . . . . . . . . . . . . 94
x

Figura G.1–Modelagem Geométrica, figura retirada de [14] . . . . . . . . . . . . . 95
xi

Lista de Tabelas
Tabela 3.1 – Add caption . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22Tabela 3.2 – Tempo de Resposta para as topologias . . . . . . . . . . . . . . . . . . 28Tabela 3.3 – Dados: Calibração do Sensor. . . . . . . . . . . . . . . . . . . . . . . . 34Tabela 3.4 – Dados:Calibração do Atuador . . . . . . . . . . . . . . . . . . . . . . . 36Tabela 3.5 – Parametros da Função de Transferência . . . . . . . . . . . . . . . . . 39Tabela 4.1 – Parâmetros do Controlador PD . . . . . . . . . . . . . . . . . . . . . . 47Tabela 4.2 – Valores dos Componentes . . . . . . . . . . . . . . . . . . . . . . . . . 55Tabela 4.3 – Ganhos dos Controladores PID . . . . . . . . . . . . . . . . . . . . . . 59Tabela 4.4 – Fluxo de Comandos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 68
xii

Lista de Abreviaturas e Siglas
EMS Eletromagnetic Stability.
EDS Eletrodynamic Stability.
MAGLEV Magnetic Levitation.
PI Ação Proporcional-Integral.
PD Ação Proporcional-Derivativa.
PID Ação Proporcional-Integral-Derivativa.
PID 1-DOF Controlador Proporcional-Integral-Derivativo com um grau de liber-dade (one degree of freedom).
PID 2-DOF Controlador Proporcional-Integral-Derivativo com dois graus deliberdade (two degree of freedom).
D/A Conversor Digital-Analógico.
A/D Conversor Analógico-Digital.
GPI Generalized Proportional Integral.
CMRR Índice de Rejeição ao Modo Comum.
PSO Particle Swarm Optimization.
LED Light Emitting Diode.
ZOH Zero Order Hold.
CMUF Centro de Monitoramento de Usos Finais.
PWM Pulse Width Modulation.
xiii
Lista de Símbolos
F Força Magnética.
G Força Gravitacional.
Fr Força resultante.
fn Força resultante normalizada.
i Corrente do Eletroimã.
in Corrente do Eletroimã normalizada.
x Distância do centro da esfera ao Eletroimã.
xn Distância do centro da esfera ao Eletroimã normalizada
∆i Variação em torno da corrente de equilíbrio.
∆x Variação em torno da posição de equilíbrio.
v Tensão sobre os terminais da bobina.
xv Tensão de saída do sensor.
m Massa da esfera.
a Aceleração da esfera.
g Aceleração gravitacional.
R Resistência da Bobina.
L Indutância da Bobina.
r Raio do Eletroimã.
l Comprimento do Eletroimã.
q1 Parâmetro 1 do bloco alimentação em avanço.
q2 Parâmetro 2 do bloco alimentação em avanço.
Gv Ganho de tensão.
D Diâmetro da esfera.
tff Tempo de descida do fototransistor.
xiv

tsf Tempo de subida do fototransistor.
tf Tempo de descida da resposta.
ts Tempo de acomodação da resposta.
tr Tempo de subida da resposta.
k Constante dependente dos parâmetros da bobina.
k1 Constante de proporcionalidade para o atuador.
k2 Constante de proporcionalidade para o sensor.
Ki Constante do sistema dependente de i0. .
kx Constante do sistema dependente de x0.
ki Ganho integral.
kd Ganho derivativo.
kp Ganho proporcional.
x0 Posição da esfera na posição de equilíbrio.
i0 Corrente através da bobina na posição de equilíbrio.
n Offset do sensor.
Rl Resistência de Coletor.
rb Resistência da base.
η Constante do sistema em MA.
ω0 Frequência natural.
xv

Sumário
1 – Introdução . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11.1 Introdução ao Problema da Levitação Magnética . . . . . . . . . . . . . . 21.2 Objetivos do Trabalho . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21.3 Organização do Texto . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
2 – LEVITAÇÃO MAGNÉTICA: O ESTADO DA ARTE . . . . . . . . . . . . . . 42.1 Introdução . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 42.2 Breve Histórico . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 42.3 Principais Aplicações Atuais . . . . . . . . . . . . . . . . . . . . . . . . . . 62.4 Modelagem Matemática . . . . . . . . . . . . . . . . . . . . . . . . . . . . 102.5 Estratégias de Controle . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 152.6 Considerações Finais . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
3 – DESCRIÇÃO DA PLANTA . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 213.1 Introdução . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 213.2 Caracterísitcas Construtivas da Planta . . . . . . . . . . . . . . . . . . . . 213.3 Descrição da Estação Microcontrolada . . . . . . . . . . . . . . . . . . . . 223.4 Módulos: Sensor e Atuador . . . . . . . . . . . . . . . . . . . . . . . . . . 25
3.4.1 Módulo Sensor . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 253.4.2 Módulo Atuador . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30
3.5 Calibração do Sensor e do Atuador . . . . . . . . . . . . . . . . . . . . . . 333.5.1 Introdução . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 333.5.2 Testes de Calibração do Sensor . . . . . . . . . . . . . . . . . . . . 333.5.3 Teste de Calibração do Atuador . . . . . . . . . . . . . . . . . . . . 35
3.6 Modelo da Planta . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 383.6.1 Modelo Contínuo . . . . . . . . . . . . . . . . . . . . . . . . . . . . 383.6.2 Modelo Discreto . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 40
3.7 Considerações Finais . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 42
4 – PROJETO E IMPLEMENTAÇÃO DOS CONTROLADORES . . . . . . . . . 434.1 Introdução . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 434.2 Projeto e Simulação do Controlador PD Analógico . . . . . . . . . . . . . 434.3 Implementação Prática do Controlador PD Polarizado . . . . . . . . . . . 524.4 Projeto e Simulação: Controladores PID: 1-DOF e 2-DOF . . . . . . . . . 564.5 Implementação Prática do Controlador PID-2DOF discreto . . . . . . . . 634.6 Resultados Experimentais . . . . . . . . . . . . . . . . . . . . . . . . . . . 69
xvi
4.6.1 Introdução . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 694.6.2 Controlador PD Contínuo . . . . . . . . . . . . . . . . . . . . . . . 694.6.3 Validação do Modelo . . . . . . . . . . . . . . . . . . . . . . . . . . 72
4.7 Considerações Finais . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 73
5 – Conclusão . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 755.1 Trabalhos futuros . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 77
Referências . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 78
Anexos 81
ANEXO A–Dimensional Da Planta . . . . . . . . . . . . . . . . . . . . . . . . . . 82
ANEXO B – Códigos MATLAB . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 83
ANEXO C–Código Elaborado no PIC para implementação do Controlador PID-2DOF . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 87
ANEXO D–Código Elaborado no PIC para Curva de Calibração do Atuador . 89
ANEXO E – Projeto e Simulação: Controlador PID: 1-DOF versus 2-DOF Pro-posto por Ghosh . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 90
ANEXO F – Modelagem Normalizada . . . . . . . . . . . . . . . . . . . . . . . . 93
ANEXO G–Modelagem Geométrica . . . . . . . . . . . . . . . . . . . . . . . . . 95
xvii

1
1 Introdução
O estudo de estratégias de controle aplicados à levitação magnética é um campoque está recebendo atenção crescente devido às suas aplicações em sistemas de trans-porte rápido, como trens MAGLEV(Magnetic Levitation), em tecnologias aplicadas amáquinas elétricas, como enrolamentos que permitem a levitação de rotores e eliminamo atrito entre as partes móvel e estática, na análise de alimentos, como a suspensão desólidos ou amostras que compõem o alimento, em projetos sustentáveis de geraçãode energia, turbinas a vento, entre outras aplicações [1]. Dispositivos cujo princípiode funcionamento se baseiam na levitação magnética não apresentam atrito, devido àausência de contato mecânico entre as partes. Partindo deste princípio, a concepção demeios de transporte eficientes e pouco ruidosos, como trens MAGLEV, se tornou viável.
Sistemas MAGLEV são sistemas intrinsicamente instáveis e não lineares. No en-tanto, sistemas não lineares podem ser aproximados por modelos lineares, em torno depontos de operação específicos. Na literatura, é comum encontrar modelos matemáticosque descrevem esse sistema por meio de equações linearizadas, como em [15], [14], [4],[8], [5]. Controladores lineares e não lineares são usualmente projetados para garantira estabilidade do sistema. A estabilidade pode ser atingida se o controlador garantiroscilações mínimas em torno da posição de equilíbrio (ponto de operação) definido peloprojetista. Diferentes métodos de controle, incluindo controladores clássicos PD e PID,(conforme em [4],[1],[6],[16]), e controladores mais avançados baseados em controleótimo, lógica fuzzy e métodos adaptativos, (como em [5], [8], [17], [15]), vêm sendoaplicados de tal forma a otimizar o controle, melhorando seu desempenho e garantindoa estabilidade. Dessa forma, pode-se otimizar os sistemas de transporte rápido e demaisaplicações, ratificando-se a importância deste estudo.
Neste trabalho, estratégias de controle clássicas são estudadas, para serem imple-mentadas em uma aplicação prática de estabilidade magnética (EMS) sobre uma plantadidática desenvolvida. Este trabalho envolve o aprimoramento de conhecimentos nasáreas de controle de processos, instrumentação eletrônica, sistemas microprocessados eeletromagnetismo, sendo, portanto, interdisciplinar.
A planta em desenvolvimento será disponibilizada para os laboratórios deControle do CEFET-MG, para fins didáticos. Embora neste trabalho, uma das imple-mentações seja feita com o uso da estação microcontrolada do projeto CMUF, (CAN-PIC[9]), a planta poderá ser utilizada em outros módulos de aquisição de controle digi-tais, mostrando-se flexível e possibilitando estudos em plataformas distintas, o que éinteressante para disciplinas práticas de controle.

Capítulo 1. Introdução 2
1.1 Introdução ao Problema da Levitação Magnética
O foco deste trabalho se encontra no problema da Levitação Magnética. A Figura1.1 esquematiza o princípio de funcionamento.
Figura 1.1 – Princípio da Levitação Eletromagnética, figura adaptada de [1].
O problema da levitação consiste em equilibrar uma esfera de material ferromag-nético em uma determinada posição de equilíbrio. Isso é feito pelo controle da correntei que circula nos enrolamentos de um eletroímã, posicionado a uma altura x, acima daesfera. Desta forma, controla-se a força magnética, F, aplicada sobre a esfera de modo acompensar o efeito do campo gravitacional, G, sobre a mesma e assim controlar a suaposição. A estabilidade pode ser atingida utilizando-se um controlador analógico oudigital integrado a um sistema sensorial que permita a detecção da posição da esfera.Dessa forma, o sinal de controle aplicado a um atuador deve controlar a corrente quecirculará através da bobina do eletroímã, aumentando e diminuindo sua intensidade– e consequentemente variar a força magnética - de tal forma que a esfera permaneçasuspensa em torno da posição de equilíbrio.
1.2 Objetivos do Trabalho
Os principais objetivos deste trabalho são realizar um estudo a respeito das estra-tégias de controle aplicadas a um sistema de levitação magnética para a implementaçãode controladores analógicos e um controlador digital em uma aplicação real. Para aimplementação de um sistema de controle é necessário a modelagem matemática doprocesso assim como a escolha da estratégia de controle e do método de síntese docontrolador.

Capítulo 1. Introdução 3
Neste trabalho, diferentes estratégias de controle são estudadas, apresentando-seas vantagens e desvantagens associadas a cada uma. As estratégias escolhidas paraimplementação prática e as simulações dos controladores analisados são discutida nocapítulo 4. Além deste estudo, aspectos construtivos da planta em desenvolvimento,bem como os testes de calibração dos módulos sensor e atuador são apresentados notrabalho.
1.3 Organização do Texto
O trabalho está organizado da seguinte forma.
O Capitulo 1 introduz o problema da levitação magnética, detalhando o princípiode funcionamento do sistema.
No Capítulo 2 é realizada a revisão bibliográfica a respeito dos estudos relaciona-dos à levitação magnética. Nesta etapa um breve histórico é apresentado, discutindo-setambém as principais aplicações atuais relacionadas à tecnologia. Em seguida os mo-delos matemáticos que representam a dinâmica da levitação magnética são abordados.Ao final deste capítulo, os métodos de controle usualmente aplicados aos sistemasMAGLEV são apresentados.
O Capítulo 3 aborda as características construtivas da planta construída. Oscircuitos utilizados na montagem dos módulos sensor e atuador, bem como os condicio-nadores de sinais, são apresentados. Além disso são apresentadas os testes de calibraçãodos elementos sensor e atuador da planta. Por fim, os modelos contínuo e discretolevantados a partir das características da planta são apresentados.
O Capítulo 4 aborda os projetos de controladores PD, PD polarizado, PID comum e dois graus de liberdade, em suas formas contínua e discreta. São apresentados osprojetos e simulações de cada controlador e em seguida a implementação prática doscontroladores PD, PD polarizado e do controlador PID com dois graus de liberdadediscreto. Ao final do capítulo, são discutidos os resultados experimentais oriundos daaplicação do controlador PD sobre a planta prática.
Por fim, no Capitulo 5, são apresentadas as conclusões do trabalho e as propostasde trabalho futuro.
4
2 LEVITAÇÃO MAGNÉTICA: O ESTADO DA ARTE
2.1 Introdução
O objetivo deste capítulo é apresentar um histórico sobre o fenômeno de levitaçãomagnética e as principais aplicações relacionadas ao mesmo. Além disso, neste capítulosão abordados os diferentes modelos matemáticos estudados e as respectivas estratégiasde controle usualmente aplicadas ao problema da levitação magnética.
2.2 Breve Histórico
Levitação Magnética (MAGLEV) é uma forma pela qual um corpo fica suspensono ar, sendo suportado apenas por forças de origem magnética. Os campos magnéticossão utilizados para oposição ou balanceamento da ação gravitacional. A tecnologiaMAGLEV permite a elaboração de sistemas com menor atrito, eficientes e silenciosos.Registros sugerem que os estudos sobre levitação magnética existam desde o século XIX[2].
Em 1842 Samuel Earnshaw demonstrou ser impossível atingir a suspensãomagnética de um corpo "qualquer que seja a combinação de imãs permanentes"[18]. Estademonstração ficou conhecida como teorema de Earnshaw. Apesar desta demonstração,esforços, que não violaram o teorema, foram feitos nas décadas seguintes, de tal formaa alcançar o objetivo da levitação magnética. Em março de 1912 o engenheiro e inventoramericano Emile Bachelet propôs o chamado “Levitated Transmitting Apparatus [19]”,a primeira concepção de um trem MAGLEV, que se movimentaria a altas velocidades,trazendo promessas de um meio de transporte eficiente.
Na década de 1960, baseando-se na ideia de Bachelet, James Powell e GordonDanby propuseram uma metodologia que não violava o teorema de Earnshaw e quepermitia a levitação de condutores elétricos [20]. O método consiste em mover imãs napresença de um condutor elétrico, de tal forma a induzir correntes parasitas no mesmoe assim originar forças magnéticas repulsivas entre o imã e o corpo condutor. Dessaforma a repulsão entre os corpos, oriundo do movimento relativo, possibilita a levitaçãodo condutor ou do imã.
O uso de materiais supercondutores na carroceria de trens, como grandes imãs,induzindo correntes sobre os trilhos de material condutor, permite a levitação se avelocidade dos carros for suficiente para induzir o campo capaz de levitá-lo. Pela lei deFaraday quanto maior for o movimento relativo entre o condutor e o campo, maior é a

Capítulo 2. LEVITAÇÃO MAGNÉTICA: O ESTADO DA ARTE 5
intensidade do campo oposto induzido sobre o carro [21]. Esta oposição entre camposé responsável por erguer o veículo. A metodologia ficou conhecida como aproximaçãomagnética.
Esta ideia serviu de base para a companhia de trem japonesa Japan NationalRailway iniciar um projeto simples de trens MAGLEV ainda naquela época. A aproxi-mação magnética é a tecnologia mais aplicada atualmente quando se fala em MAGLEV.
Além desta tecnologia, outros mecanismos de levitação foram desenvolvidosnos séculos XX e XXI. Nos anos de 1930, pesquisadores alemães conseguiram levitarmateriais de caráter diamagnético fraco, como água, madeira e plástico pela aplicaçãode campos fortes originados de supercondutores. Pouca importância foi dada a esteavanço tecnológico até que em 1997, Andre Geim, (vencedor do prêmio Nobel deFísica em 2010, pelas pesquisas com o grafeno), junto a uma equipe, utilizaram imãssupercondutores para a levitação de uma rã. Este acontecimento chamou a atenção daimprensa para as possibilidades que a levitação magnética poderia proporcionar [22].
Em 1983 Roy Harrigan concebeu um dispositivo que consistia em um imãgirante e que flutuava sobre uma base de material magnético, o chamado Levitron. Alevitação de imãs permanentes sobre supercondutores foi demonstrada primeiramentepor V.Arkadiev em 1945 e a levitação de imã sobre supercondutores se tornou maiscomum após 1987 com a descoberta de materiais supercondutores à temperatura denitrogênio líquido (aproximadamente -196oC). Nos anos de 1990-2000, enrolamentosmagnéticos baseados em forças repulsivas entre imãs permanentes e supercondutores dealta temperatura foram projetados para aplicações em dispositivos de armazenamentode energia como flywheels e em modelos de trens MAGLEV [20].
Em 1932 companhia alemã Werner Kemper of Germany propôs um trem levitadomagneticamente por um sistema de controle com realimentação de uma força atrativae em 2003 esta ideia foi utilizada na implementação do sistema rápido de transportede Shanghai. Um projeto japonês da Japan National Railway está em construção atu-almente. O projeto final interligará as cidades de Tokyo e Nagoya ao longo de umalinha de 300km, com previsão de finalização das obras para 2025 (em 2005 um tremMAGLEV de baixa velocidade urbano começou a operar na cidade de Nagoya. Esteprojeto estimulou o projeto atual [23]).
A tecnologia MAGLEV vai além de aplicações em meios de transporte eficientes.Está presente também no meio artistico. Em meados de 2009 a artista americana JanePhilbrick elaborou a chamada “Floating Sculpture”, uma matriz formada por dozeesferas levitadas magneticamente. A obra foi exibida em 2011 na cidade de Nova York[2], Figura 2.1.
A seguir as principais aplicações atuais da tecnologia MAGLEV são abordadas.

Capítulo 2. LEVITAÇÃO MAGNÉTICA: O ESTADO DA ARTE 6
Figura 2.1 – Arte de Jane Philbrick, Figura retirada de [2].
2.3 Principais Aplicações Atuais
Embora os principais estudos sobre MAGLEV estejam direcionados em projetosde transporte, como os trens MAGLEV, a tecnologia não está limitada apenas a estaaplicação. Segundo [2] a utilização da tecnologia sob o ponto de vista da engenhariapode ser enumerada da seguinte forma:
• Engenharia de Transporte (Trens MAGLEV, Transporte Rápido de Pessoas (PRT),etc):
De acordo com [23] entre as aplicações existentes, os trens MAGLEV são a principaltecnologia. Ao contrário dos demais veículos que se movem sobre trilhos, os trensMAGLEV não apresentam contato físico entre a fuselagem e a via de deslocamento.Devido à não existência de atrito entre estas partes, isso possibilita que os trensMAGLEV atinjam velocidades superiores a 500 km/h. Dessa forma, superam-se aslimitações impostas pela utilização de componentes mecânicos. Esta superioridadetem atraído às industrias mundiais de transporte.
Em [24] os sistemas MAGLEV podem ser distribuídos em duas categorias: Sus-pensão Eletromagnética (Electromagnetic Suspension, EMS) ou Suspensão Eletro-dinâmica (Electrodynamics Suspension, EDS).

Capítulo 2. LEVITAÇÃO MAGNÉTICA: O ESTADO DA ARTE 7
Os veículos MAGLEV são manufaturados em ambas as categorias. A diferençaentre esses sistemas está na maneira em que a levitação é obtida. Em dispositi-vos EMS, os componentes magnéticos estão localizados no interior do veículo,enquanto que em sistemas EDS os dispositivos magnéticos estão localizados nostrilhos ( bobinas de repulsão e de propulsão, além do suporte para deslizamento).Além disso, sistemas EMS se baseiam na ação de forças atrativas enquanto siste-mas EDS em forças repulsivas. A Figura 2.2 esquematiza os trilhos utilizados emtrens do tipo EDS:
Figura 2.2 – Diagrama EDS, Figura adaptada de [2].
• Engenharia Ambiental (Turbinas de Vento).
Segundo [2] as turbinas de aerogeradores convertem de 10 a 30% da energia dosventos em energia útil, devido ao atrito entre as partes da turbina. Pesquisadoresdo Instituto de Pesquisas Energéticas de Guangzhou estimaram que turbinasMAGLEV são capazes de incrementar em até 20% a geração de energia em relaçãoàs turbinas usuais. Os pesquisadores propuseram a utilização de turbinas compás verticais, suspensas a 1.5m da base constituída por imãs de neodímio. Anão existência de atrito entre as partes permitiria um maior aproveitamento daenergia, de tal forma que o preço pela energia eólica cairia para a metade do valorusualmente gasto (valor de 5 centavos de dólares americanos por kilowatt-hora[2]). No entanto, os pesquisadores afirmaram que uma turbina MAGLEV comcapacidade para geração de 1-gigawatt ocuparia o equivalente a 100 acres deterra (aproximadamente 0.40469km2). A desvantagem deste projeto se encontranos custos para a construção da turbina, que apresentaria valores superiores àsturbinas tradicionais.

Capítulo 2. LEVITAÇÃO MAGNÉTICA: O ESTADO DA ARTE 8
• Engenharia Aeroespacial (Foguetes, Aeronaves, etc):
De acordo com [25] a agência espacial norte-americana NASA está desenvolvendoum sistema MAGLEV para o lançamento de foguetes ao espaço. Sistemas pro-pulsores MAGLEV se baseiam em campos magnéticos que levitam e aceleram oveículo ao longo de trilhos, podendo o mesmo atingir velocidades superiores a 966km/h. A utilização deste sistema reduziria significamente os custos de viagensespaciais, uma vez que a fonte de energia é de natureza elétrica, sendo, portanto,uma solução mais econômica ao uso de combustíveis (que tornam o veículo maispesado e é consideravelmente mais caro).
• Engenharia Elétrica (Enrolamentos, Suspensão Eletromagnética, etc):
Os mesmos enrolamentos utilizados em trens MAGLEV estão sendo aplicadosem dispositivos tais como geradores e motores elétricos [2]. Estes enrolamentosquando aplicados em máquinas elétricas permitem que a parte móvel (rotor)flutue, eliminando o atrito entre as partes móvel e outros componentes do motor.Para tanto, bobinas de levitação são alocadas no estator de tal forma a permitir asuspensão do rotor. A Figura 2.3 apresenta o detalhe do rotor suspendido em umamáquina elétrica com tecnologia MAGLEV.
Figura 2.3 – Suspensão de Rotor, Figura retirada de [2].
• Engenharia Biomédica (Bombeamento cardíaco):
Segundo [2], a parada cardíaca é uma das principais causas de morte. Trans-plantes cardíacos em geral são problemáticos devido a reações de rejeição queo indivíduo apresenta. Como opção ao transplante a utilização de dispositivosde bombeamento cardíaco artificiais são utilizados. Tipicamente, estes dispositi-vos apresentam rolamentos com partes deslizantes ou esféricos que entram emcontanto com o sangue, poluindo-o devido ao atrito e desgaste entre as partes,podendo provocar tromboses.
Capítulo 2. LEVITAÇÃO MAGNÉTICA: O ESTADO DA ARTE 9
Com o desenvolvimento da tecnologia MAGLEV, a utilização de bombas cardíacasmotorizadas (motor CC) superaram problemas relacionados ao atrito, reduzindoos danos sobre as células sanguíneas além de garantir maior vida útil ao disposi-tivo de bombeamento.
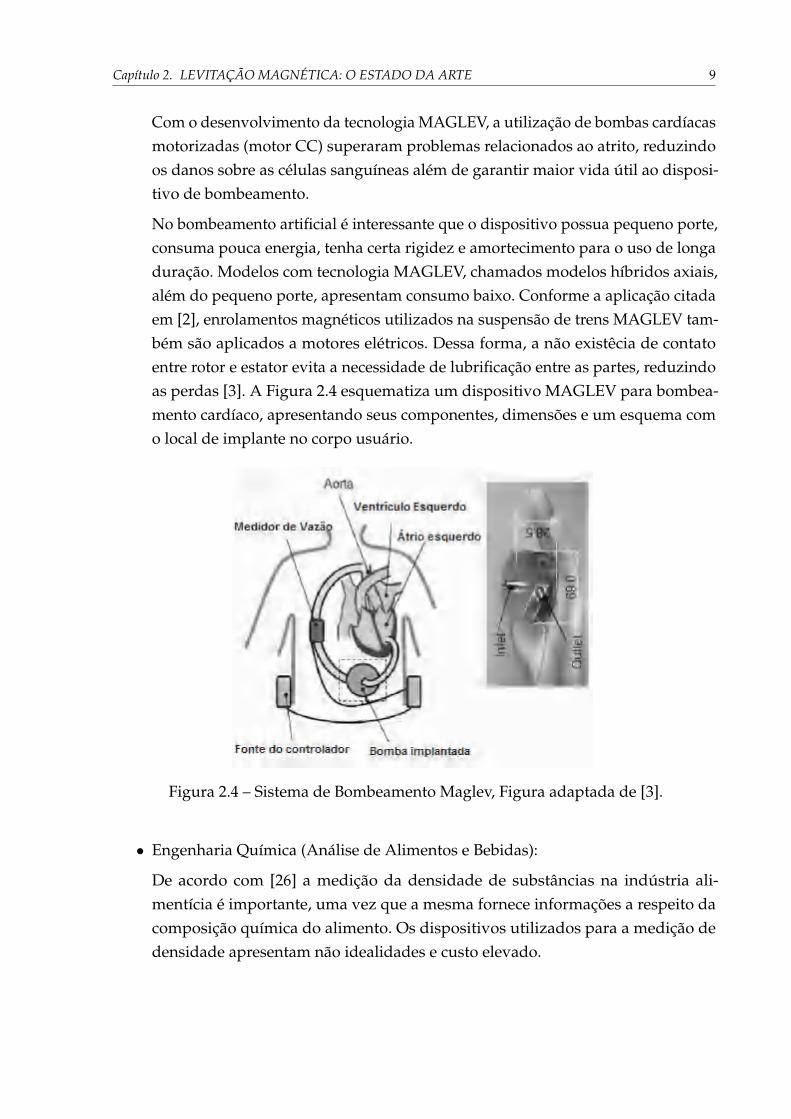
No bombeamento artificial é interessante que o dispositivo possua pequeno porte,consuma pouca energia, tenha certa rigidez e amortecimento para o uso de longaduração. Modelos com tecnologia MAGLEV, chamados modelos híbridos axiais,além do pequeno porte, apresentam consumo baixo. Conforme a aplicação citadaem [2], enrolamentos magnéticos utilizados na suspensão de trens MAGLEV tam-bém são aplicados a motores elétricos. Dessa forma, a não existêcia de contatoentre rotor e estator evita a necessidade de lubrificação entre as partes, reduzindoas perdas [3]. A Figura 2.4 esquematiza um dispositivo MAGLEV para bombea-mento cardíaco, apresentando seus componentes, dimensões e um esquema como local de implante no corpo usuário.
Figura 2.4 – Sistema de Bombeamento Maglev, Figura adaptada de [3].
• Engenharia Química (Análise de Alimentos e Bebidas):
De acordo com [26] a medição da densidade de substâncias na indústria ali-mentícia é importante, uma vez que a mesma fornece informações a respeito dacomposição química do alimento. Os dispositivos utilizados para a medição dedensidade apresentam não idealidades e custo elevado.
Capítulo 2. LEVITAÇÃO MAGNÉTICA: O ESTADO DA ARTE 10
No trabalho de [26], propõem-se um dispositivo sensor baseado em tecnologiaMAGLEV, de custo inferior e maior precisão, que seja capaz de suspender sólidosou amostras líquidas por meio de imãs, de tal forma a medir a densidade da subs-tância. Amostras de diferentes materiais são inseridas em um meio paramagnético(fluido), onde são posicionados os sensores, e a partir do deslocamento da amostrano fluido pode-se medir a densidade da amostra (substância sólida ou líquida).Testes evidenciam que o dispositivo permite estimar rapidamente a concentraçãode sal em diferentes amostras de água e a quantidade de gordura em alimentoscomo leite, queijo, etc. Portanto, a tecnologia é uma alternativa aos instrumentosusualmente aplicados.
Além das aplicações descritas, tecnologia MAGLEV também pode ser encontradanos meios automobilísticos, engenharia de armas, design residencial, etc [2].
2.4 Modelagem Matemática
Nesta seção são apresentados os modelos matemáticos usualmente abordadosna literatura para caracterizar o problema da levitação magnética.
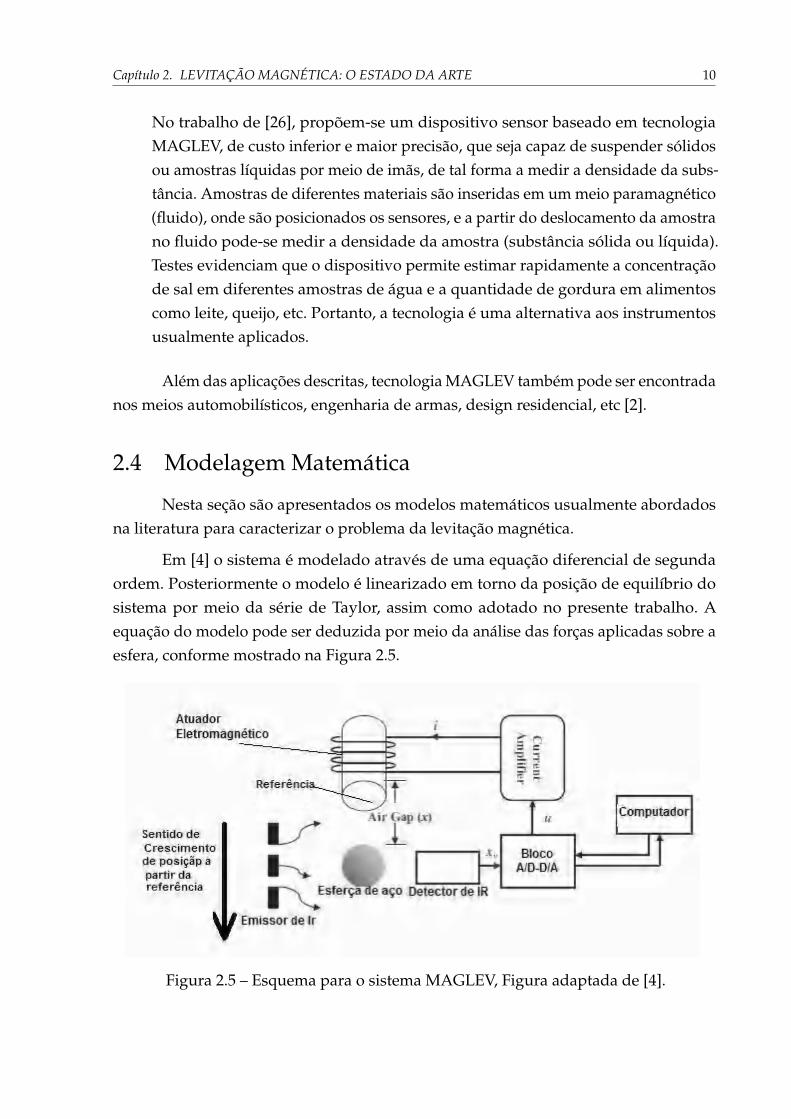
Em [4] o sistema é modelado através de uma equação diferencial de segundaordem. Posteriormente o modelo é linearizado em torno da posição de equilíbrio dosistema por meio da série de Taylor, assim como adotado no presente trabalho. Aequação do modelo pode ser deduzida por meio da análise das forças aplicadas sobre aesfera, conforme mostrado na Figura 2.5.
Figura 2.5 – Esquema para o sistema MAGLEV, Figura adaptada de [4].

Capítulo 2. LEVITAÇÃO MAGNÉTICA: O ESTADO DA ARTE 11
Para a dedução do modelo, deve-se partir da 2a Lei de Newton. Este princípioafirma que o somatório das forças que atuam sobre um corpo, força resultante Fr, éigual ao produto da massa, m, do corpo pela sua aceleração, a, isto é [21].
Fr = ma (2.1)
A força magnética oriunda do campo magnético gerado pela corrente que percorre abobina e que atua sobre a esfera é dada por [27]:
F = −k i2
x2(2.2)
onde x representa a distância da esfera até o eletroimã, i a corrente que percorrea bobina e k uma constante dependente dos parâmetros da bobina, tais como sua resis-tência, indutância, número de espiras e da massa da esfera. Além da força magnética, aforça gravitacional, G, oriunda da atração que a Terra exerce sobre os corpos, tambématua sobre a esfera. A força gravitacional é dada por [21]:
G = mg (2.3)
sendo g a aceleração gravitacional em um dado ponto da superfície terrestre. De possedessas informações, basta aplicar a segunda Lei de Newton para obter um modelo nãolinear simples para o sistema, dado por:
Fr = G+ F (2.4)
Considerando que a aceleração é a derivada segunda da posição e substituindoG e F por 2.2 e 2.3, respectivamente, em 2.4, obtem-se:
mx = mg − k i2
x2(2.5)
Uma vez que a dinâmica do sistema é não linear, para atender ao projeto decontrole proposto por [4], a Equação 2.5 foi linearizada em torno da posição de equilíbriocaracterizada por x = x0 e i = i0. Neste ponto, a resultante das forças que atuam sobre aesfera é nula, ou seja, a força magnética está compensando a força gravitacional. Assim,pela 1a Lei de Newton, na ausência de forças e de aceleração, (neste caso a = 0), umcorpo tende a permanecer em seu estado (de movimento retilíneo uniforme ou emrepouso),[21].

Capítulo 2. LEVITAÇÃO MAGNÉTICA: O ESTADO DA ARTE 12
Sendo a aceleração nula, isto implica que:
k = mgx20i20
(2.6)
Para realizar a linearização, considerou-se que x = x0 + ∆x e i = i0 + ∆i, onde ∆x
representa uma pequena variação em torno da posição de equilíbrio x0 e ∆i umapequena variação em torno da corrente i0 na posição de equilíbrio. Assim, a Equação 2.6pode ser linearizada aplicando-se a série de Taylor para duas variáveis e desprezandoos termos de ordem superior:
∆x = −(∂F (i, x)
∂i|i0x0∆i+
∂F (i, x)
∂x|i0x0∆x) (2.7)
onde F (i, x) = k i2
x2é a força magnética. Tomando-se a transformada de Laplace em
ambos os lados da Equação 2.10, chega-se a:
s2.∆x = −(Ki.∆i+ kx.∆x) (2.8)
Isto é:s2.∆x+ kx.∆x = −Ki.∆i (2.9)
Colocando ∆x em evidência:
∆x.(s2 + kx) = −Ki.∆i (2.10)
Assim, a seguinte função de transferência é obtida:∆x
∆i=−Kis2 − kx
(2.11)
onde Ki = 2gi0
e kx = 2gx0
. Uma vez que o modelo proposto em [4] não considera acomponente dinâmica da bobina, então considera-se que o driver de corrente forneceuma corrente i proporcional à tensão v de controle aplicada sobre a entrada do atuador,ou seja, i = k1v, sendo k1 uma constante de proporcionalidade, uma pequena variaçãona corrente ∆i equivale a:
∆i = k1∆v (2.12)
Portanto, é possível se obter também a função de transferência que relaciona aposição da esfera com a tensão de controle, dada por:
∆x
∆v=−k1.Kis2 − kx
(2.13)
Em [4], considera-se que o sensor apresenta uma relação linear entre tensão de saída e aposição da esfera, por meio de uma constante de proporcionalidade,k2. Assim, a funçãode transferência que relaciona a tensão de controle, com a posição detectada pelo sensor,ou seja, a função de transferência global do sistema em malha aberta é dada por:
Gp(s) =∆xv∆v
=−k1.k2.Kis2 − kx
(2.14)
onde xv é saída do sensor (em volts). Pode-se observar nas equações que o sistemalinearizado é independente da posição da esfera, como demonstrado em [4]

Capítulo 2. LEVITAÇÃO MAGNÉTICA: O ESTADO DA ARTE 13
Em [8] adotou-se a mesma modelagem matemática adotada em [4], diferenciando-se apenas pelas nomenclaturas. A função de transferência do sistema em malha aberta,obtida em [4] é dada por:
Gp(s) =η
s2 − ω20
(2.15)
Onde η é uma constante e ω0 é igual a:
ω0 =
√2g
x0(2.16)
Portanto, nota-se a semelhança entre as funções de transferência obtidas em [4] e [8].
Em [5] a dinâmica é modelada de maneira semelhante. Nesta abordagem torna-se mais explícita a dependência dos parâmetros da bobina, como sua resistência R eindutância L na função de transferência em malha aberta. A modelagem se baseia nalinearização da força magnética F em torno da posição de equilíbrio e na normalizaçãodas grandezas associadas à dinâmica. As grandezas força magnética, F, posição emrelação à bobina, x, corrente na bobina, I, e tensão de controle, V, são normalizadasem relação aos valores máximos que podem assumir. O passo a passo da modelagemdescrita por [5], está apresentado no Anexo F ao final do trabalho.
Em [5], as equações que modelam a dinâmica do sistema MAGLEV obtidas nestaabordagem são:
fn = −T 2m.
d2x
dt2(2.17)
fn = −Km.xn +Ke.in (2.18)
vn = in + Tedi
dt(2.19)
Sendofn a força resultante normalizada, xn a distância normalizada entre aesfera e o eletroimã, ir a corrente normalizada e vn a tensão normalizada e o subíndicen representam as variáveis normalizadas. Os parâmetros Te, Ke, Km e Tm representamganhos e contantes de tempo do sistema. Sua obtenção está explicitada no Anexo F. Estasequações podem ser representadas na forma de um de diagrama de blocos, conforme aFigura 2.6.

Capítulo 2. LEVITAÇÃO MAGNÉTICA: O ESTADO DA ARTE 14
Figura 2.6 – Diagrama de Blocos, Figura retirada de [5].
A partir da simplicação do diagrama é possível determinar a função de transfe-rência que caracteriza o sistema em malha aberta, ou seja a função de transferência daplanta, que está na mesma forma da função de transferência obtida segundo a aborda-gem de [4], exceto pela componente dinâmica da bobina, dado pelo bloco de entrada dodiagrama.
Os modelos apresentados tratam-se de modelos clássicos em que a linearizaçãode equações, em torno de um ponto de operação é um procedimento tradicional eque permite uma aproximação satisfatória para dinâmicas na vizinhança do ponto.Nos trabalhos referenciados, [4],[5],[28],[8] , modelam-se a dinâmica da suspensãomagnética por meio da linearização das equações que caracterizam a dinâmica, taiscomo apresentados nas Equações 2.7 e 2.16. Em [29], [30], [15], [31] a mesma modelagemé utilizada. No entanto, sua utilização é restritiva, pois é válida apenas quando asvariações em torno do ponto de operação do sistema são pequenas. Técnicas avançadasde modelagem, como apresentadas em [14] e [28], que permitem a operação em umafaixa mais amplas também estão presentes na literatura.
Uma das técnicas mais avançadas, se baseia na modelagem geométrica utilizadapor [14]. A modelagem geométrica para o sistema de levitação magnética, se baseiana determinação da força magnética, a partir da determinação do campo magnéticoproduzido por elementos diferenciais da bobina. Para tanto, artifícios geométricos ecálculo diferencial são utilizados em sua determinação. Ao final, o sistema é expressopor meio da representação em espaço de estados, dada por:
x = f(x) + g(x)u
y = h(x) = x2(2.20)
onde:
f(x) = (f1, f2, f3)T =
−Rx1L
x3
g − 1m
x21b0+b1y+b2y3+b3y4
(2.21)

Capítulo 2. LEVITAÇÃO MAGNÉTICA: O ESTADO DA ARTE 15
sendo as variáveis de estado x1 a corrente através da bobina, x2 a posição da esfera, x3sua velocidade e u a tensão sobre os terminais do eletroimã. A modelagem completa éapresentada no Anexo G deste trabalho.
2.5 Estratégias de Controle
Para a compensação de sistemas MAGLEV, diferentes estratégias de controle etécnicas de síntese de controladores analógicos e digitais podem ser encontrados naliteratura. Estratégias clássicas, tais como os controladores PD [16],controlador PI-PDem cascata [7] e PID (com um ou dois graus de liberdade [4],[1],[6],[16]) são usualmenteaplicados em sistemas MAGLEV.
Controladores PD e PID analógicos clássicos são apresentados em [16]. Quanto àsações proporcional e derivativa, a escolha do ganho proporcional e do ganho derivativodeve ser tal que garanta a estabilidade do sistema em malha fechada e uma velocidadede resposta adequada. A ação derivativa utilizada é normalmente acoplada a umfiltro-passa baixas para atenuação do efeito de ruídos. Por sua vez, a ação integral éresponsável por eliminar o erro de estado estacionário. Em processos de regulação,onde é interessante se manter a variável de processo em um valor fixo a ação integral semostra adequada [32].
Segundo [16], uma vez que o sistema Maglev é naturalmente instável, a utilizaçãode controladores PD e PID se demonstra adequada. A ação integral em conjunto àsoutras duas ações (P e D), considerando o interesse de manter a esfera estável na posiçãode equilíbrio, se mostra favorável, uma vez que, o erro de estado estacionário tende azero. Em [16] o controladores PD e PID são ajustados segundo os critérios clássicos deZiegler-Nichols apresentados em [32]. Após o projeto dos controladores, simulaçõesdos dois controladores são realizadas. Os resultados encontrados revelam que, para ocontrolador PD, a cada mudança no sinal de referência (degraus sucessivos), o sistemaresponde rapidamente, porém com sobresinais indesejados e erro de estado estacionáriodiferente de zero. O controlador PID, por sua vez, apresenta sobresinal apenas no inícioda simulação. A resposta é rápida e o erro de estado estacionário é nulo. Portanto ocontrolador PID clássico (com um grau de liberdade) se mostrou mais adequado para aaplicação em [16].
Em [4] é proposto um controlador PID implementado com dois graus de liber-dade (2-DOF) cuja finalidade é tornar o controle mais robusto e evitar a ocorrência desobresinais (overshoot) verificados em um controlador PID com um grau de liberdade(1-DOF), quando da sua aplicação em um sistema MAGLEV. A Figura 2.7 apresenta odiagrama de blocos das duas configurações apresentadas em [4].

Capítulo 2. LEVITAÇÃO MAGNÉTICA: O ESTADO DA ARTE 16
Figura 2.7 – Diagrama De Blocos dos controladores PID, Figura adaptada de [4].
Neste tipo de controle, além do grau de liberdade imposto pelo controlador PID(representado pelos blocos kp, ki/s, kd.s, conforme a Figura 2.7), acresenta-se um novograu de liberdade pela adição de um bloco de entrada , cuja função de transferência édada pela Equação 2.22
F (s) = q2s+ q1 (2.22)
Este bloco é composto por dois parâmetros q1 e q2 que permitem adicionar o zeroem locais desejados, pelo ajuste dos valores de q1 e q2, o que permite reduzir o sobresinala cada variação da referência. Através de comparações entre os controladores 1-DOF e2-DOF, os resultados encontrados em simulações e testes na planta, apresentados em[4], demonstram que para o valor de q2 = 0, o sistema responde com um sobresinalsuperior ao obtido pelo 1-DOF, devido à zona morta do sensor utilizado. No entanto,após o período de acomodação, o sinal passa a rastrear a referência de maneira suave. Asimulação deste método de controle é apresentada no Capítulo 4 do presente trabalho,bem como as análises dos resultados da simulação.
Em [6] o projeto de um controlador PID para o controle da posição da esfera éproposto, conjuntamente a um controlador PI para o controle da corrente de aciona-

Capítulo 2. LEVITAÇÃO MAGNÉTICA: O ESTADO DA ARTE 17
mento. Este tipo de controle, que utiliza de um controlador externo e um controladorna malha interna, recebe o nome de controle em cascata. Dessa forma, também trata-sede um controle com dois graus de liberdade. A necessidade do controlador PI está nodesejo de que a corrente de controle através da bobina, rastreie o valor de correntedeterminado pelo controlador PID. A dinâmica da malha interna deve ser mais rápidaque a da malha externa. Como consequência, o controle da corrente garante menososcilações na posição da esfera.
O controlador de corrente deve diminuir o sobresinal inicial típico da açãoindividual do controlador PID (de um grau de liberdade), além de garantir um erro deestado estacionário igual a zero. O diagrama de blocos para o controle é apresentado naFigura 2.8
Figura 2.8 – Diagrama de Blocos PID-PI, Figura adaptada de [6].
No projeto do bloco PI, os dois pólos de malha fechada interna, obtidos nafunção de transferência, são escolhidos como pólos reais de tal forma a eliminar osobresinal inicial da resposta. Para o projeto do controlador PID, que deve controlar aposição da esfera, os parâmetros do controlador são ajustados de tal forma que os pólosda função de transferência, que caracteriza a malha fechada global, sejam complexosconjugados, com parte real negativa. Os resultados obtidos experimentalmente após aimplementação do controlador evidenciam que a esfera é mantida na posição desejada,com oscilações mínimas em torno da posição de referência.
Na literatura, métodos que utilizam de ferramentas computacionais tais comoalgoritmos de otimização ou algoritmos de estimação de parâmetros em tempo real(online) também estão disponíveis, como em [7] e [15]. Um projeto de controlador PI-PDcom otimização no cálculo dos parâmetros de controle através do método de Otimizaçãode Enxame de Partículas (Particle Swarm Optimization, PSO) é proposto por [7]. Em[4], os parâmetros (ganhos) do controlador PID com um grau de liberdade, kd, ki e kp,são dependentes dos parâmetros da planta, como por exemplo a impedância da bobinaque influencia no valor da corrente da posição de equilíbrio i0. No entanto, este projetonão leva em conta a incerteza associada aos parâmetros da planta durante a estimaçãodos ganhos do controlador. Para [7] um controlador robusto deve, além de garantirestabilidade e apresentar bom desempenho, levar em conta essa incerteza. Dessa forma,a otimização dos ganhos dos controladores PI e PD baseando-se na incerteza das
Capítulo 2. LEVITAÇÃO MAGNÉTICA: O ESTADO DA ARTE 18
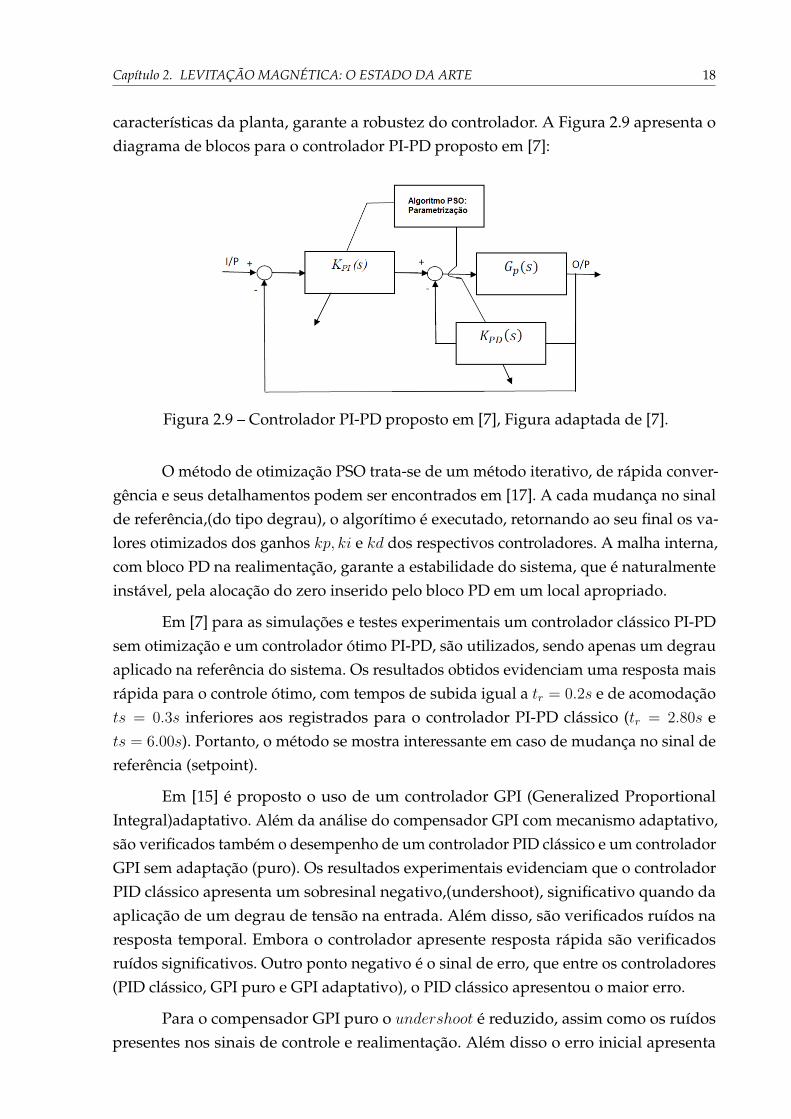
características da planta, garante a robustez do controlador. A Figura 2.9 apresenta odiagrama de blocos para o controlador PI-PD proposto em [7]:
Figura 2.9 – Controlador PI-PD proposto em [7], Figura adaptada de [7].
O método de otimização PSO trata-se de um método iterativo, de rápida conver-gência e seus detalhamentos podem ser encontrados em [17]. A cada mudança no sinalde referência,(do tipo degrau), o algorítimo é executado, retornando ao seu final os va-lores otimizados dos ganhos kp, ki e kd dos respectivos controladores. A malha interna,com bloco PD na realimentação, garante a estabilidade do sistema, que é naturalmenteinstável, pela alocação do zero inserido pelo bloco PD em um local apropriado.
Em [7] para as simulações e testes experimentais um controlador clássico PI-PDsem otimização e um controlador ótimo PI-PD, são utilizados, sendo apenas um degrauaplicado na referência do sistema. Os resultados obtidos evidenciam uma resposta maisrápida para o controle ótimo, com tempos de subida igual a tr = 0.2s e de acomodaçãots = 0.3s inferiores aos registrados para o controlador PI-PD clássico (tr = 2.80s ets = 6.00s). Portanto, o método se mostra interessante em caso de mudança no sinal dereferência (setpoint).
Em [15] é proposto o uso de um controlador GPI (Generalized ProportionalIntegral)adaptativo. Além da análise do compensador GPI com mecanismo adaptativo,são verificados também o desempenho de um controlador PID clássico e um controladorGPI sem adaptação (puro). Os resultados experimentais evidenciam que o controladorPID clássico apresenta um sobresinal negativo,(undershoot), significativo quando daaplicação de um degrau de tensão na entrada. Além disso, são verificados ruídos naresposta temporal. Embora o controlador apresente resposta rápida são verificadosruídos significativos. Outro ponto negativo é o sinal de erro, que entre os controladores(PID clássico, GPI puro e GPI adaptativo), o PID clássico apresentou o maior erro.
Para o compensador GPI puro o undershoot é reduzido, assim como os ruídospresentes nos sinais de controle e realimentação. Além disso o erro inicial apresenta

Capítulo 2. LEVITAÇÃO MAGNÉTICA: O ESTADO DA ARTE 19
redução (da ordem de 5.10−4m). Por fim são apresentados os resultados para o compen-sador GPI com mecanismos adaptativos. Em relação aos demais métodos, possui baixosobresinal negativo, e maior redução do erro.
Além das estratégias anteriores, controladores que utilizam a lógica fuzzy [8],[5]e [33] também estão presentes na literatura para o controle de sistemas Maglev. Segundo[5] o controlador baseado em lógica fuzzy apresenta ferramentas de modelagem eficazespara sistemas instáveis e não-lineares. Em [8] utiliza-se um compensador em avançode fase em conjunto com um controlador fuzzy. O compensador em avanço de fase sebaseia na adição de um zero e um polo à função de transferência do sistema em malhaaberta. A Figura 2.10 apresenta o circuito do compensador adotado em [8].
Figura 2.10 – Compensador em Avanço de Fase, Figura adaptada de [8].
De forma a minimizar os efeitos do polo instável da planta e deslocar o lugardas raízes do sistema para a região de estabilidade (à esquerda do eixo imaginário)adiciona-se o zero próximo ao polo estável.
O controle do tipo fuzzy foi utilizado para garantir a estabilidade em diferentesposições de equilíbrio. Neste caso, a alteração da posição de equilíbrio da esfera foiobtida através de perturbações. Nos experimentos, a massa do sistema foi alteradapela adição de esferas ligadas magneticamente à esfera original. Portanto, a alteraçãoda massa provocou mudanças na posição de equilíbrio e assim, a obtenção de novosparâmetros para o compensador de avanço de fase atuar e garantir a estabilidade dosistema são necessárias.
Capítulo 2. LEVITAÇÃO MAGNÉTICA: O ESTADO DA ARTE 20
2.6 Considerações Finais
Uma avaliação dos métodos descritos nesta seção evidencia que a modelagemmatemática clássica, baseada na linearização em torno da posição de equilíbrio, éadequada à aplicação desejada, uma vez que a posição de equilíbrio da esfera, isto é,o ponto de operação desejado no projeto de controle deste trabalho deve ser único.Do ponto de vista do controle a ser aplicado, o controlador PD clássico garante aestabilidade do sistema, porém com erro de estado estacionário. No entanto, o tempode resposta do sistema é rápido o que é uma característica desejável ao controladoraplicado ao sistema MAGLEV, conforme proposto em [16]. Assim, neste trabalho éprojetado e implementado um controlador PD analógico.
De acordo com [4], um controlador PID 2-DOF apresenta baixo sobresinal, rápidotempo de resposta e bom rastreamento da referência, quando da variação do tipo degrau,em relação a um controlador PID-1DOF. Desta forma, este controle é a opção escolhidapara a implementação de um controlador discreto.
Neste Capítulo, as descobertas associadas à tecnologia MAGLEV ao longo dahistória, bem como as diversas aplicações atuais, reforçam a importância de se estudarmétodos de controle que visem uma otimização da levitação magnética e consequente-mente viabilizem futuras aplicações. Além da revisão histórica, modelos matemáticoslineares e não lineares e métodos de controle clássicos e avançados foram estudados, detal forma a garantir uma escolha adequada ao problema de controle para a levitaçãomagnética.
Modelos lineares se mostraram úteis por tornarem a análise da dinâmica maissimples, sendo aplicáveis numa faixa restrita de pontos próximo à posição de equilíbrio.O modelo não linear, apresentado no Anexo G, por sua vez, se apresenta mais complexo,porém permite a operação do sistema em uma faixa mais ampla de pontos. No presentetrabalho será adotado o modelo linear proposta em [16]. No Capítulo 3, uma descriçãodetalhada dos elementos que compõem a planta é abordada.

21
3 DESCRIÇÃO DA PLANTA
3.1 Introdução
Neste capítulo serão apresentadas as características construtivas da planta elabo-rada, além dos circuitos do módulo sensor e atuador, bem como os ensaios de calibraçãodos mesmos.
3.2 Caracterísitcas Construtivas da Planta
A Figura 3.1, apresenta a vista frontal da planta construída que representa umsistema de levitação magnética. A estrutura inicial desta planta foi desenvolvida em[34]. Posterior ao curso, modificações foram feitas no projeto da planta, sobretudo nosmódulos sensor e atuador, de tal forma a tornar a dinâmica da planta mais rápida e apossibilitar o acionamento e controle usando estações microcontroladas da plataformaCMUF [9].
Figura 3.1 – Vista Frontal da Planta Construída.

Capítulo 3. DESCRIÇÃO DA PLANTA 22
Conforme mostrado na Figura 3.1, a planta consiste em uma caixa sem fundo, noqual são dispostos dois canos cilíndricos de PVC por onde passam os fios dos sensores -par LED/Fototransistor. Um furo superior permite a fixação de uma bobina, dispostaverticalmente com o auxílio de uma rosca. Um esquemático com o dimensional damontagem e a lista de materiais, pode ser encontrado no Anexo A deste trabalho. ATabela ?? reune os parâmetros da planta.
Tabela 3.1 – Add caption
Parâmetro Símbolo Valor
Resistência da Bobina R 39ΩIndutância da Bobina L 230 mH
Massa da Esfera m 0.021 KgGanho do Sensor k2 1058 V/m
Ganho do Atuador k1 0.0382 A/VOffset do Sensor ns 0.4000 V/m
Offset do Atuador na 0.1450 A/VDiâmero da Esfera D 0.017 m
Distância entre a base da bobina e o sensor x 0.02 m
A resistência e a indutância da bobina foram medidas com o multímetro MinipaET-2082C. A massa da esfera foi medida usando-se uma balança de precisão do Labora-tório de Química do CEFET-MG e o diâmetro da esfera foi medido com o uso de umpaquímetro. A maior incerteza nos parâmetros se encontra nos ganhos do sensor e doatuador, devido aos procedimentos de obtenção dos mesmos, conforme é descrito naSeção 3.5.
3.3 Descrição da Estação Microcontrolada
A implementação de um controlador PID discreto com dois graus de liberdadeem um microcontrolador PIC da família 16F é um dos objetivos deste trabalho. Paramanipular os sinais relevantes da malha de controle é necessário utilizar de uma estaçãomicrocontrolada, que garanta o processamento correto do sinal em todas as suas etapas,desde a conversão A/D do sinal de entrada do sensor, passando pelos cálculos da açãode controle, até a obtenção do sinal a ser aplicado no atuador.
Neste trabalho a estação microcontrolada utilizada é a chamada CAN-PIC, hard-ware desenvolvido pelo projeto CMUF R©, “Centro de Monitoramento de Usos Finais”[9]. O CMUF foi desenvolvido para dar suporte ao gerenciamento de energia em edifí-cios, visando suprir as dificuldades de um acompanhamento contínuo e setorizado dodesempenho energético e termo-luminoso das edificações. Os dados coletados são ar-mazenados em bancos de dados, processados e disponibilizados via Internet em tempo

Capítulo 3. DESCRIÇÃO DA PLANTA 23
real. Este monitoramento contínuo e setorizado permite o estudo da matriz energéticaefetiva da edificação e possibilita a implementação de estratégias de atuação e con-trole por meio de estações microcontroladas, buscando a eficiência dos equipamentos esubsistemas da edificação[9].
A estação microcontrolada CAN-PIC possui um microcontrolador PIC16F876A,e é capaz de realizar medições, cálculos de controle, atuar sobre processos e efetuarcontrole distribuído em mais de uma estação por meio de uma rede de comunicação dedados CAN. A estação é composta por um controlador de rede CAN (MCP2515), umtransceptor (MCP2551) e um multiplexador (CI4066) conectado a uma das portas domicrocontrolador, conforme a Figura 3.2:
Figura 3.2 – Estação Microcontrolada CAN-PIC, Figura retirada de [9].
O MCP251 tem como função ajustar os níveis de tensão dos barramentos. Porsua vez, o controlador de rede CAN, MCP2515 é responsável pela montagem e gerenci-amento das mensagens na rede CAN. Neste trabalho os elementos de comunicação nãosão utilizados, uma vez que o controle é feito no modo local.
O PIC16F876A é um microcontrolador de 8 bits, com memória FLASH 8K X14 palavras, memória RAM de 368 bytes distribuída em quatro bancos e memóriaEEPROM de 256 bytes. O microcontrolador possui um conjunto de 30 instruções quepodem ser executadas em apenas um ciclo de máquina e 5 instruções que podem serrealizadas em dois ciclos de máquina. A frequência de operação pode alcançar até20 MHz. Possui um conversor analógico-digital incorporado e três temporizadoresinternos. Possui ainda portas configuráveis como entradas digitais ou analógicas esaídas digitais ou PWM (“Pulse Width Modulation”) [10]. A Figura 3.3 apresenta apinagem do microcontrolador, apresentando as funções de cada um de seus 28 pinos.

Capítulo 3. DESCRIÇÃO DA PLANTA 24
Figura 3.3 – Pinagem do PIC16F876A, Figura retirada de [10].
Para a implementação do controlador PID-2DOF no microcontrolador PIC é ne-cessário utilizar uma linguagem de programação adequada. A linguagem de programa-ção C permite programar e configurar o PIC, garantindo assim o devido processamentodos sinais de entrada e saída e o endereçamento de memória. A vantagem associada aesta linguagem é o seu nível alto, que possibilita ao usuário trabalhar com estruturasde maior assimilação, diferente das linguagens de baixo nível. Para a elaboração docódigo, o editor e compilador IAR Embbeded Workbench da IAR Systems R© foi utili-zado. Este ambiente de programação integrado permite a criação de aplicações em Cdestinadas a microcontroladores PIC e a outros microcontroladores (ex: MSP430). Alémdeste programa, é necessário utilizar de uma plataforma para gravação dos programaselaborados para o microcontrolador. Desta forma, o software MPLAB foi utilizadocomo interface entre o PIC e a IDE (Ambiente de Programação Integrado) utilizada.O MPLAB R© foi desenvolvido pela Microchip, empresa responsável pela fabricaçãodo PIC16F e é disponibilizado gratuitamente pelo fabricante. Além da função de co-municação com o gravador, a plataforma possui editor, compilador e emulador dePIC.
Capítulo 3. DESCRIÇÃO DA PLANTA 25
3.4 Módulos: Sensor e Atuador
3.4.1 Módulo Sensor
O sensor utilizado para a detecção da posição da esfera é um sensor óptico. Estesensor é constituído por um par de emissor -LED TIL 32- e receptor - fototransistor TIL78. O princípio de funcionamento do sensor se baseia na tensão que é gerada no coletordo fototransistor à medida que a área de sua face é parcial ou totalmente obstruídapor um corpo. A presença do corpo impede que a radiação infravermelha do LED sejacaptada pelo receptor. A topologia e o par emissor/receptor escolhidos permitem obteruma faixa de saída no coletor de 0-5 V. O valor de 0V é obtido quando não existe umcorpo obstruindo o par, ou seja quando a radiação oriunda do LED é integralmentecaptada pelo receptor. Por outro lado, os 5V de tensão são obtidos quando o corpoobstrui total ou quase totalmente a área de incidência do fototransistor. Dessa forma, épossível verificar o quanto a posição da esfera varia verticalmente em torno da posiçãode equilíbrio escolhida.
Para a alimentação do LED com 5V, utilizou-se uma fonte de tensão CC de 12V eum regulador de tensão de 5V (LM7805), sendo o sinal positivo conectado ao anodo doLED e o seu catodo ao terra. Com o intuito de delimitar a corrente fornecida ao diodoemissor, utilizou-se um resistor de 220Ω ± 5% conectado no terminal do catodo. Demaneira semelhante, alimentou-se o fototransistor com uma tensão de 5V aplicada aoterminal do coletor.
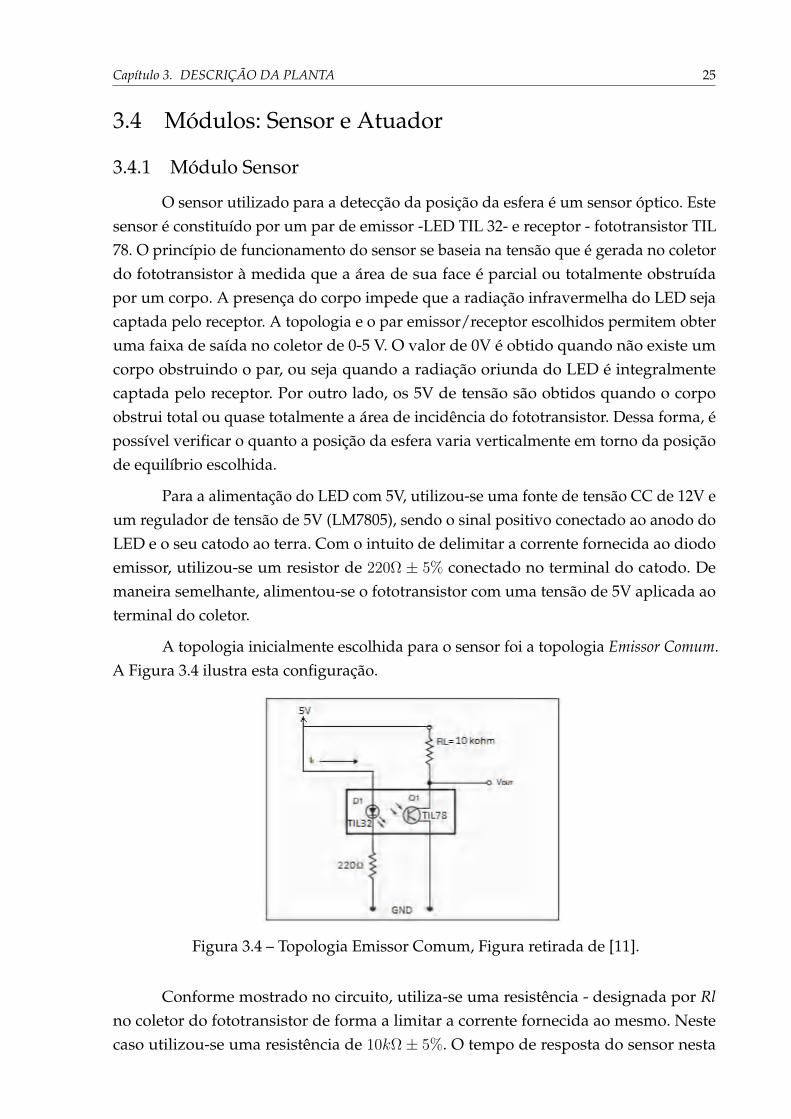
A topologia inicialmente escolhida para o sensor foi a topologia Emissor Comum.A Figura 3.4 ilustra esta configuração.
Figura 3.4 – Topologia Emissor Comum, Figura retirada de [11].
Conforme mostrado no circuito, utiliza-se uma resistência - designada por Rlno coletor do fototransistor de forma a limitar a corrente fornecida ao mesmo. Nestecaso utilizou-se uma resistência de 10kΩ ± 5%. O tempo de resposta do sensor nesta

Capítulo 3. DESCRIÇÃO DA PLANTA 26
configuração, pode ser adequado para o problema de controle em malha fechada. Noentanto, recorrer a uma topologia que torne esta dinâmica mais rápida pode tornaro controle mais eficiente. Com o intuito de diminuir os tempos de resposta do foto-transistor, sem alterar o componente utilizado, optou-se por uma outra topologia, achamada Topologia Cascode. Esta configuração utiliza de um transistor conectado emsérie ao terminal coletor do fototransistor e com resistores Rl e rb ligados aos seusterminais coletor e base, respectivamente. De acordo com [11] essa topologia provocaalterações no tempo de resposta - composto pelos tempos de subida, tsf , e de descida,tff , do fototransistor. A Figura 3.5 apresenta o circuito.
Figura 3.5 – Topologia Cascode, Figura retirada de [11].
Para a implementação deste circuito, além do receptor TIL 78, foram utilizadosos resistores rb = 1kΩ ± %5 e Rl = 4.7kΩ ± %5. O transistor aplicado neste caso foio transistor BC337-25 do tipo NPN. A tensão de saída, Vout, é a tensão de coletor dotransistor.
Para a escolha da topologia mais adequada ao problema, isto é Emissor Comumou Cascode, uma série de testes foram realizados. Nestes testes, as duas configura-ções foram implementadas em uma protoboard. Utilizou-se uma fonte CC (5V) paraa alimentação dos sensores e com o auxílio de um osciloscópio os sinais de tensão decoletor foram obtidos. Neste ponto, vale destacar que a tensão de saída do fototransis-tor excursiona de 0V-5V em ambas configurações. Esta variação pode ser provocada,bloqueando-se parcial ou totalmente o espaço existente entre o LED e o fototransistor.Dessa forma, para a verificação do sinal, a região foi obstruída/desobstruída em inter-valos de tempo. Esse procedimento permitiu determinar aproximadamente os temposde subida, tsf , e de descida, tff .
Capítulo 3. DESCRIÇÃO DA PLANTA 27
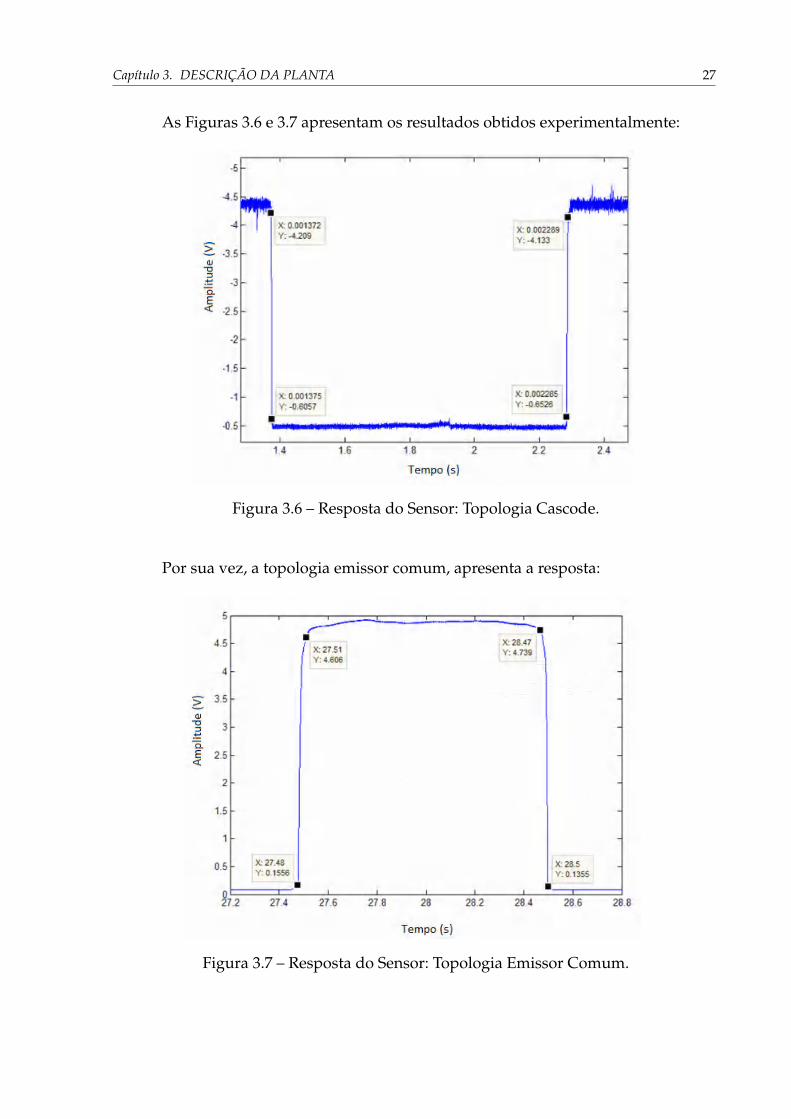
As Figuras 3.6 e 3.7 apresentam os resultados obtidos experimentalmente:
Figura 3.6 – Resposta do Sensor: Topologia Cascode.
Por sua vez, a topologia emissor comum, apresenta a resposta:
Figura 3.7 – Resposta do Sensor: Topologia Emissor Comum.

Capítulo 3. DESCRIÇÃO DA PLANTA 28
A partir dos gráficos,os tempos de subida tsf , e de descida tff , são determinadospela diferença dos tempos relacionados aos pontos selecionados nas curvas. Para otempo de subida a diferença é dada entre a abscissa do ponto que se encontra em nívelalto e a abscissa do ponto em nível baixo do lado esquerdo da curva, nesta ordem. Para otempo de descida a diferença é dada entre a abscissa do ponto que se encontra em nívelbaixo e a abscissa do ponto em nível alto do lado direito da curva, nesta ordem. Umavez que este procedimento foi registrado cinco vezes, uma média dos valores calculadosfoi feita. A Tabela 3.2 apresenta os valores médios obtidos para cada topologia.
Tabela 3.2 – Tempo de Resposta para as topologias
Topologia Tempo de subida (ms) Tempo de descida (ms)
Cascode 4 3,35Emissor comum 35,5 35
Portanto, a partir dos resultados coletados, pode-se dizer que a topologia Cas-code apresenta melhor tempo de resposta quando comparada com a topologia Emissorcomum. Deve-se destacar no entanto, que o sinal verificado para a topologia Cascodeapresenta ruídos, não verificados na topologia Emissor comum. Possivelmente, estesruídos são oriundos da presença do transistor adicional da topologia que atribui umganho ao sinal do sensor, amplificando os ruídos no sinal. Do ponto de vista de RelaçãoSinal Ruído, considerando o valor máximo de 4.3 V e um ruído máximo de 0.5V, o valorverificado foi de SRN = 11.62%, aproximadamente. A utilização de um filtro para aatenuação dos ruídos seria uma solução apropriada. Além disso, recorrer à utilizaçãode outro sensor de tal forma a trabalhar com uma configuração diferencial de sensores,também permitiria a atenuação dos ruídos. Do ponto de vista de interferências externas,alinhar ao máximo os sensores e reduzir a região da face não alinhada por meio de umamáscara, ou mesmo realizar os testes em um ambiente escuro ou de baixa luminosidadesão medidas que poderiam contribruir na minimização de interferências externas.
Apesar disso, a escolha do sensor baseado no circuito Cascode se demonstroumais adequada para os fins de controle. Determinada a topologia, a próxima etapaconsistiu em construir o circuito dos sensores em uma placa universal. A Figura 3.8apresenta a placa dos sensores.

Capítulo 3. DESCRIÇÃO DA PLANTA 29
Figura 3.8 – Placa do Sensor.
Além dos componentes eletrônicos citados anteriormente, foram utilizados doisconectores KRE para disponibilização dos sinais de alimentação e saída.
Capítulo 3. DESCRIÇÃO DA PLANTA 30
3.4.2 Módulo Atuador
Conforme visto na Seção 1.1, uma maneira de se controlar a posição da esfera écontrolar a força magnética que atua sobre o corpo. Portanto, uma maneira de se variara força é controlando a corrente que é fornecida à bobina. Desta forma, optou-se porum circuito que atuasse de forma a controlar esta corrente. Uma vez que o atuador estáintegrado ao circuito de potência, isto é, ao circuito composto pela fonte de alimentaçãoe à bobina, é necessário utilizar um componente eletrônico que suporte elevados valoresde corrente e temperatura.
Para atingir tal objetivo, utilizou-se o transistor de potência TIP31C. O dispositivoé um transistor do tipo NPN que possui uma temperatura máxima de operação dejunção de 150oC. Quando a tensão aplicada em sua base é suficiente para que o transistorconduza (valor máximo de 1,8V, segundo [12]), uma corrente i, irá circular pela bobina.Caso contrário, o componente deixa de conduzir e passa a se comportar como umachave aberta. Dessa forma, nenhuma corrente circulará pela bobina.
É desejável que durante a condução o transistor opere em sua região linear,determinado o ponto quiescente, e fora da região de saturação. Na Subseção 3.5.3 dotrabalho, são apresentados os testes de calibração do atuador e a região de operação docomponente. A Figura 3.9 apresenta o transistor TIP31C utilizado.
Figura 3.9 – Transistor TIP31C, Figura retirada de [12].
Conforme mencionado anteriormente, o transistor de potência é um elementoque deve suportar elevados valores de corrente. Desta forma, este componente dissipauma quantidade significativa de energia na forma de calor. De acordo com [12] quandooperando em temperaturas superiores a 25oC, a potência dissipada é de 40W. Consi-derando que a temperatura durante a operação do componente pode aumentar, casoo valor de 150oC seja superado o componente pode ser danificado permanentemente.Assim, utilizar um dissipador de calor acoplado ao transistor é necessário. O circuito deatuação é apresentado na Figura 3.10.
Capítulo 3. DESCRIÇÃO DA PLANTA 31
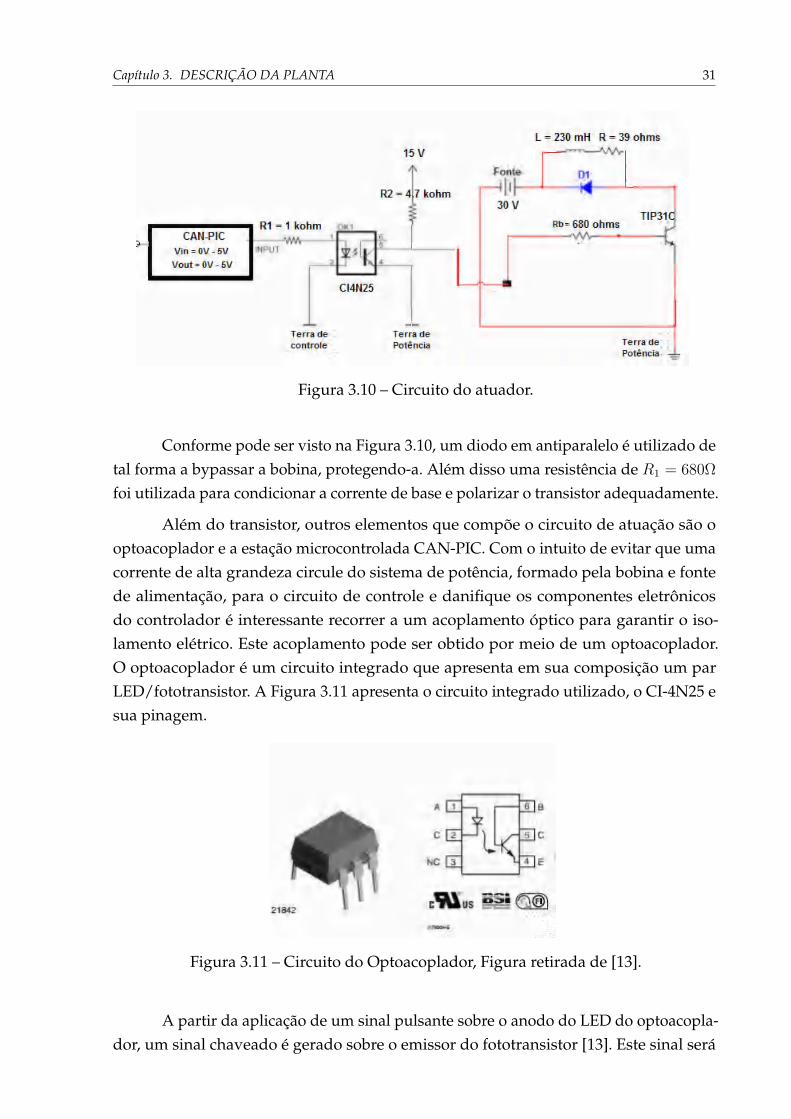
Figura 3.10 – Circuito do atuador.
Conforme pode ser visto na Figura 3.10, um diodo em antiparalelo é utilizado detal forma a bypassar a bobina, protegendo-a. Além disso uma resistência de R1 = 680Ω
foi utilizada para condicionar a corrente de base e polarizar o transistor adequadamente.
Além do transistor, outros elementos que compõe o circuito de atuação são ooptoacoplador e a estação microcontrolada CAN-PIC. Com o intuito de evitar que umacorrente de alta grandeza circule do sistema de potência, formado pela bobina e fontede alimentação, para o circuito de controle e danifique os componentes eletrônicosdo controlador é interessante recorrer a um acoplamento óptico para garantir o iso-lamento elétrico. Este acoplamento pode ser obtido por meio de um optoacoplador.O optoacoplador é um circuito integrado que apresenta em sua composição um parLED/fototransistor. A Figura 3.11 apresenta o circuito integrado utilizado, o CI-4N25 esua pinagem.
Figura 3.11 – Circuito do Optoacoplador, Figura retirada de [13].
A partir da aplicação de um sinal pulsante sobre o anodo do LED do optoacopla-dor, um sinal chaveado é gerado sobre o emissor do fototransistor [13]. Este sinal será

Capítulo 3. DESCRIÇÃO DA PLANTA 32
posteriormente aplicado na base do transistor TIP31C (tensão polarizadora), garantindoassim, o isolamento elétrico físico entre os dois circuitos. A utilização de uma das saídasPWM da CAN-PIC, permite a obtenção de um sinal de controle pulsante na entradado optoacoplador. Consderando que a frequência de oscilação do cristal da CAN-PICutilizada, é de 16kHz, o período do sinal PWM configurado, segundo as especificaçõesde [10], é de 1ms, o que equivale a uma frequência de chaveamento de 1kHz. Por suavez, a razão cíclica não é fixa, uma vez que o sinal de entrada do optoacoplador deveexcursionar dentro de uma faixa de 0V-5V, de acordo com a intensidade do sinal decontrole.
Outra característica importante sobre o optoacoplador é que o sinal de saídagerado é complementar na topologia implementada. Uma vez que a tensão polarizadoradeve ser positiva, de tal forma que o transistor possa entrar em condução, um códigofoi elaborado para o microcontrolador PIC, de tal forma a garantir uma tensão pulsantede saída no optoacoplador, excursionando de 0V-5V. O código elaborado dá origem aum sinal complementar em bits ao sinal de entrada da CAN-PIC, isto é, aplicando-seum sinal de 0V-5V na entrada da CAN-PIC, obtem-se um sinal de 5V-0V na saída PWMda mesma, ou seja, complementar. Este sinal, por sua vez, é aplicado na entrada dooptoacoplador. Dessa forma, devido à inversão imposta pelo CI4N25, uma saída de0V-5V será obtida e aplicada sobre a base do transistor, permitindo sua polarização. Estecódigo se encontra no Anexo D deste trabalho.
Na implementação do circuito do optoacoplador, foram utilizados os valores deR1 = 1kΩ e R2 = 4.7kΩ com incerteza de±5% cada. A alimentação do optoacoplador de15V foi garantida com o uso do regulador de tensão, o CI7815. A Figura 3.12 apresentaa estrutura do atuador construído.
Figura 3.12 – Circuito do Atuador com Optoacoplador
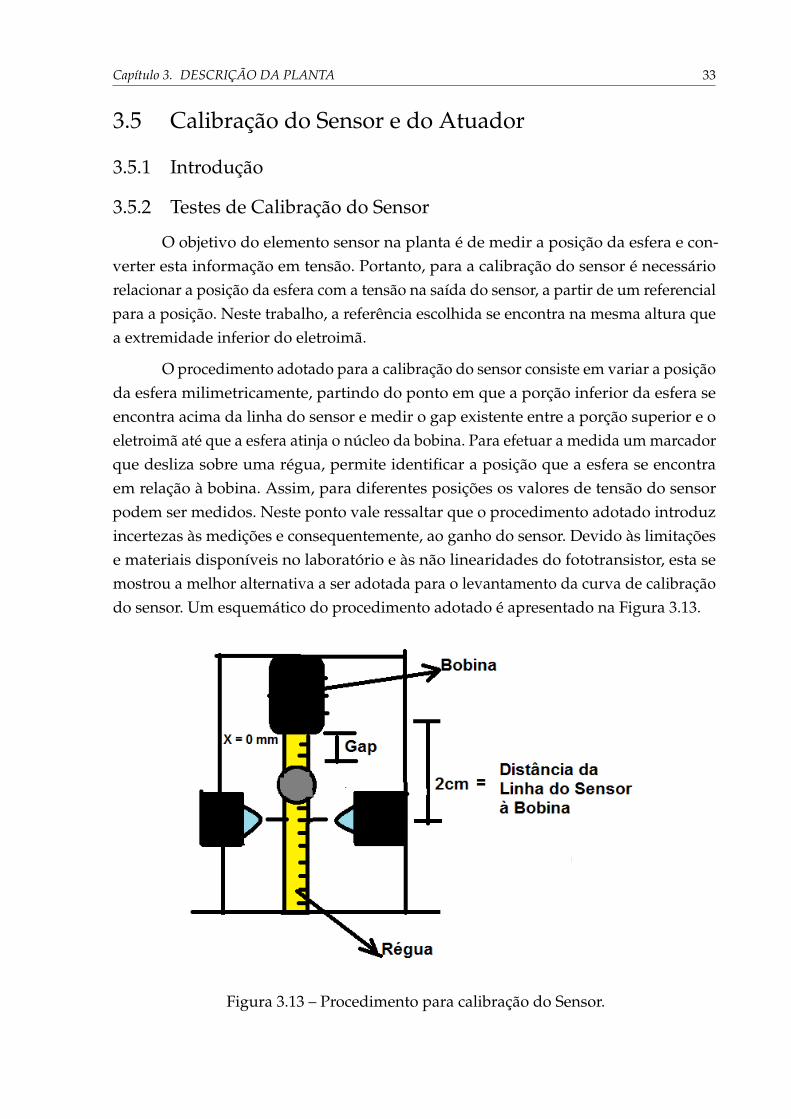
Capítulo 3. DESCRIÇÃO DA PLANTA 33
3.5 Calibração do Sensor e do Atuador
3.5.1 Introdução
3.5.2 Testes de Calibração do Sensor
O objetivo do elemento sensor na planta é de medir a posição da esfera e con-verter esta informação em tensão. Portanto, para a calibração do sensor é necessáriorelacionar a posição da esfera com a tensão na saída do sensor, a partir de um referencialpara a posição. Neste trabalho, a referência escolhida se encontra na mesma altura quea extremidade inferior do eletroimã.
O procedimento adotado para a calibração do sensor consiste em variar a posiçãoda esfera milimetricamente, partindo do ponto em que a porção inferior da esfera seencontra acima da linha do sensor e medir o gap existente entre a porção superior e oeletroimã até que a esfera atinja o núcleo da bobina. Para efetuar a medida um marcadorque desliza sobre uma régua, permite identificar a posição que a esfera se encontraem relação à bobina. Assim, para diferentes posições os valores de tensão do sensorpodem ser medidos. Neste ponto vale ressaltar que o procedimento adotado introduzincertezas às medições e consequentemente, ao ganho do sensor. Devido às limitaçõese materiais disponíveis no laboratório e às não linearidades do fototransistor, esta semostrou a melhor alternativa a ser adotada para o levantamento da curva de calibraçãodo sensor. Um esquemático do procedimento adotado é apresentado na Figura 3.13.
Figura 3.13 – Procedimento para calibração do Sensor.

Capítulo 3. DESCRIÇÃO DA PLANTA 34
Para cada uma das posições, três medidas de tensão foram efetuadas e a mé-dia calculada. Devido ao procedimento de medição adotoado, poucos pontos foramcoletados. Os resultados são apresentados na Tabela 3.3.
Tabela 3.3 – Dados: Calibração do Sensor.
Gap (m) Tensão Sensor Média (V)
0,0030 3,66000,0020 2,65670,0010 0,97670,0000 0,6933
Com o auxílio do programa MATLAB e tomando-se os dados da Tabela 3.3, acurva de calibração do sensor obtida é apresentada na Figura 3.14.
Figura 3.14 – Curva de Calibração do Sensor.
De tal forma a se definir um ganho aproximado para o sensor, a distribuição dospontos obtidos é aproximada por uma reta, em vermelho, cuja equação é:
Vsensor = 1058x+ 0.4 (3.1)
onde x, representa o gap em metros e V a tensão de saída do sensor em volts. Assim,o ganho aproximado para o sensor é de k2 = 1058V/m. O offset do sensor a ser obser-vado equivale ao sinal de tensão acusado pelo sensor quando a esfera se encontra nareferência do sistema. O valor encontrado neste caso é de ns = 0.4V , dado pela equaçãode calibração. Um ponto a ser ressaltado é que, uma vez que o método de levantamentoda curva se apresenta impreciso, coletar mais dadose posteriormente recorrer a ferra-mentas estatísticas, tal como o método de mínimos quadrados, é uma maneira útil de
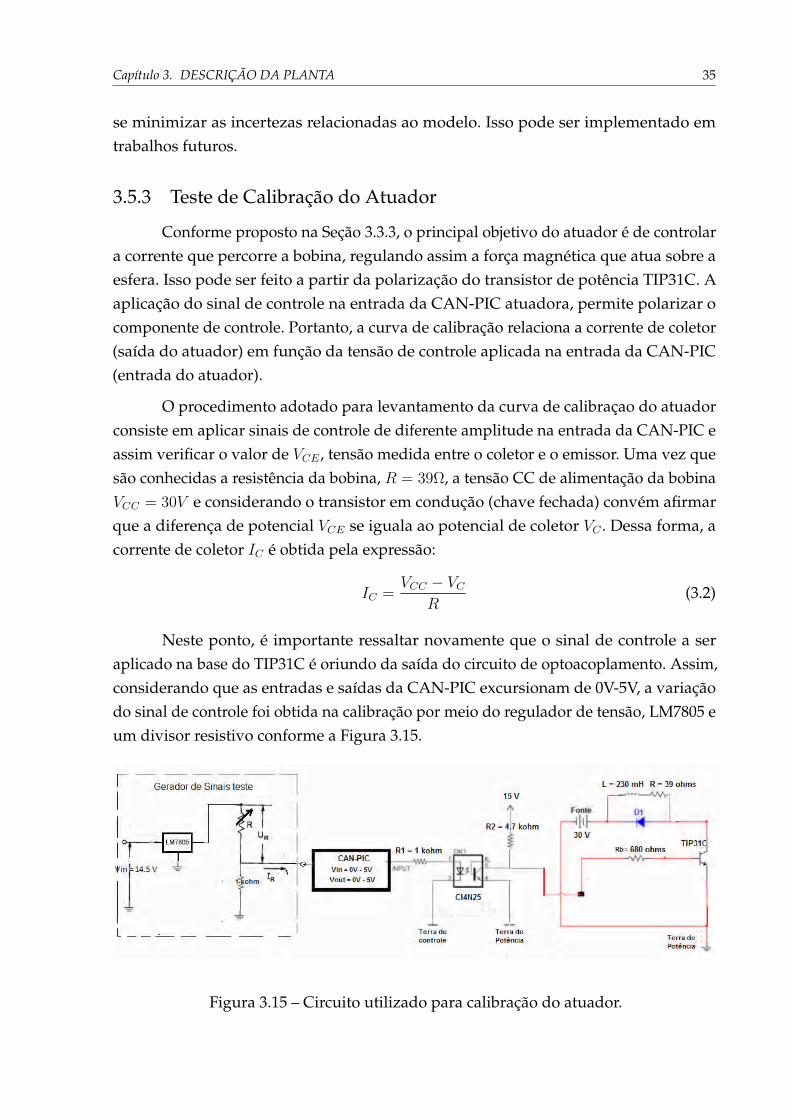
Capítulo 3. DESCRIÇÃO DA PLANTA 35
se minimizar as incertezas relacionadas ao modelo. Isso pode ser implementado emtrabalhos futuros.
3.5.3 Teste de Calibração do Atuador
Conforme proposto na Seção 3.3.3, o principal objetivo do atuador é de controlara corrente que percorre a bobina, regulando assim a força magnética que atua sobre aesfera. Isso pode ser feito a partir da polarização do transistor de potência TIP31C. Aaplicação do sinal de controle na entrada da CAN-PIC atuadora, permite polarizar ocomponente de controle. Portanto, a curva de calibração relaciona a corrente de coletor(saída do atuador) em função da tensão de controle aplicada na entrada da CAN-PIC(entrada do atuador).
O procedimento adotado para levantamento da curva de calibraçao do atuadorconsiste em aplicar sinais de controle de diferente amplitude na entrada da CAN-PIC eassim verificar o valor de VCE , tensão medida entre o coletor e o emissor. Uma vez quesão conhecidas a resistência da bobina, R = 39Ω, a tensão CC de alimentação da bobinaVCC = 30V e considerando o transistor em condução (chave fechada) convém afirmarque a diferença de potencial VCE se iguala ao potencial de coletor VC . Dessa forma, acorrente de coletor IC é obtida pela expressão:
IC =VCC − VC
R(3.2)
Neste ponto, é importante ressaltar novamente que o sinal de controle a seraplicado na base do TIP31C é oriundo da saída do circuito de optoacoplamento. Assim,considerando que as entradas e saídas da CAN-PIC excursionam de 0V-5V, a variaçãodo sinal de controle foi obtida na calibração por meio do regulador de tensão, LM7805 eum divisor resistivo conforme a Figura 3.15.
Figura 3.15 – Circuito utilizado para calibração do atuador.
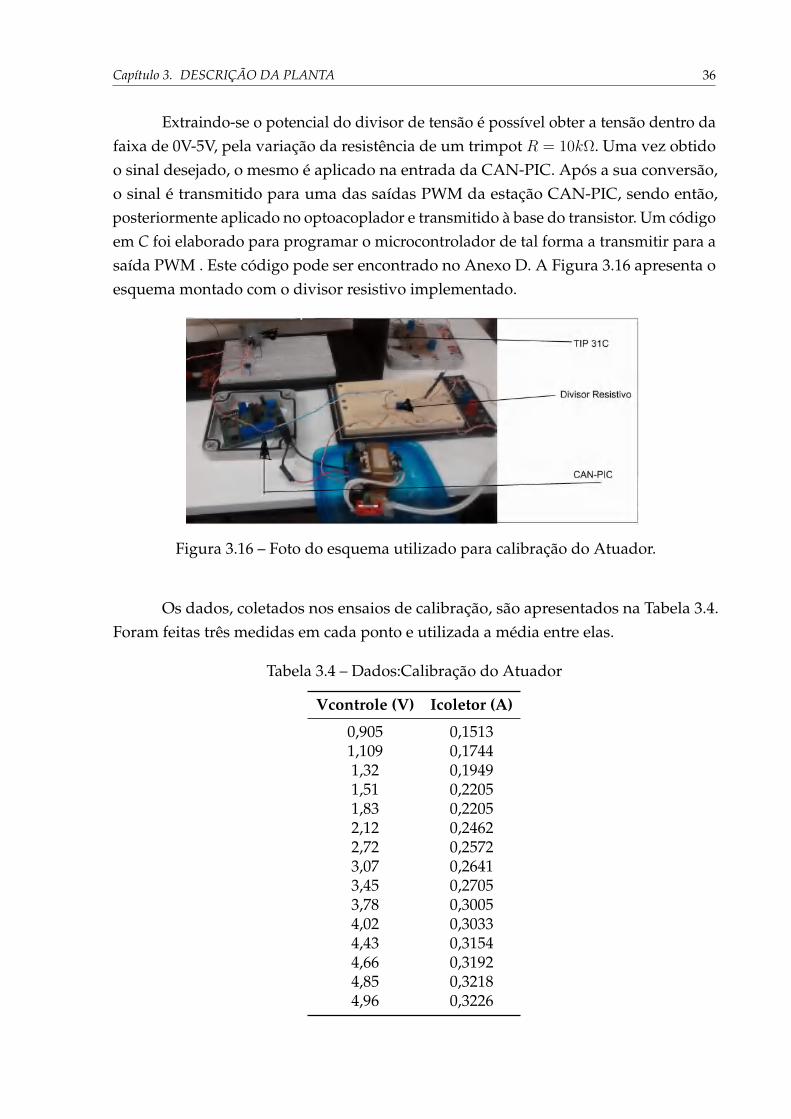
Capítulo 3. DESCRIÇÃO DA PLANTA 36
Extraindo-se o potencial do divisor de tensão é possível obter a tensão dentro dafaixa de 0V-5V, pela variação da resistência de um trimpot R = 10kΩ. Uma vez obtidoo sinal desejado, o mesmo é aplicado na entrada da CAN-PIC. Após a sua conversão,o sinal é transmitido para uma das saídas PWM da estação CAN-PIC, sendo então,posteriormente aplicado no optoacoplador e transmitido à base do transistor. Um códigoem C foi elaborado para programar o microcontrolador de tal forma a transmitir para asaída PWM . Este código pode ser encontrado no Anexo D. A Figura 3.16 apresenta oesquema montado com o divisor resistivo implementado.
Figura 3.16 – Foto do esquema utilizado para calibração do Atuador.
Os dados, coletados nos ensaios de calibração, são apresentados na Tabela 3.4.Foram feitas três medidas em cada ponto e utilizada a média entre elas.
Tabela 3.4 – Dados:Calibração do Atuador
Vcontrole (V) Icoletor (A)
0,905 0,15131,109 0,17441,32 0,19491,51 0,22051,83 0,22052,12 0,24622,72 0,25723,07 0,26413,45 0,27053,78 0,30054,02 0,30334,43 0,31544,66 0,31924,85 0,32184,96 0,3226
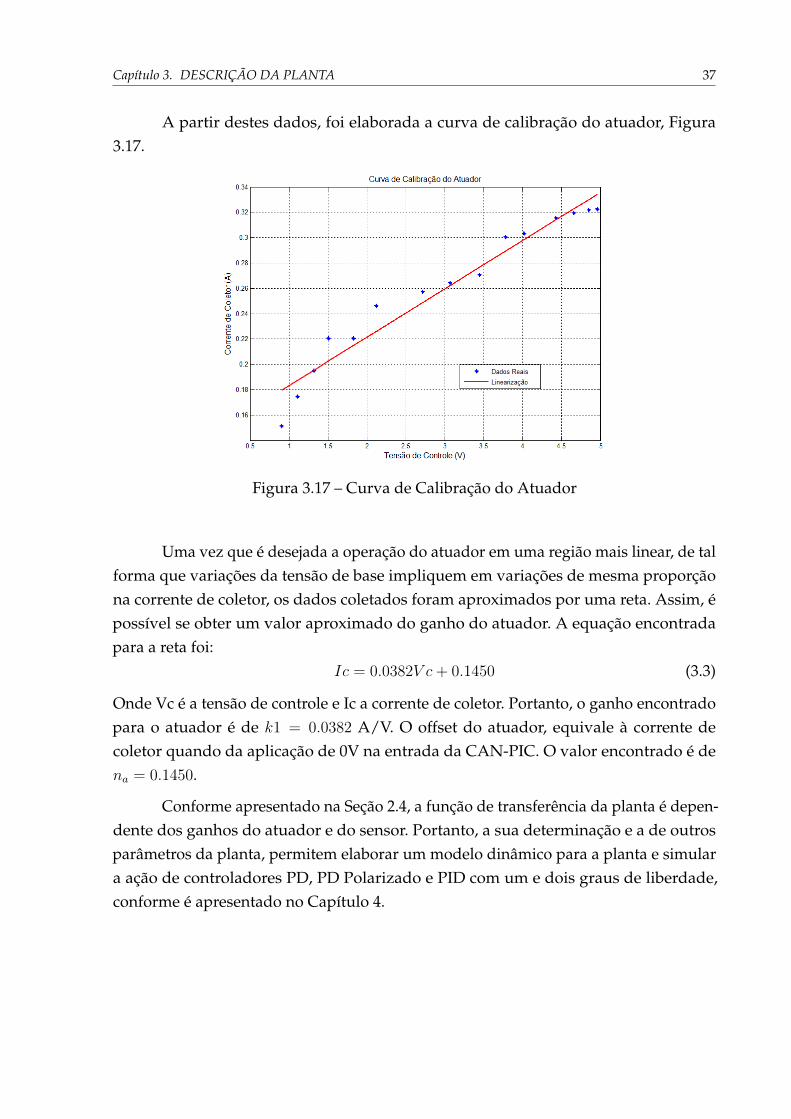
Capítulo 3. DESCRIÇÃO DA PLANTA 37
A partir destes dados, foi elaborada a curva de calibração do atuador, Figura3.17.
Figura 3.17 – Curva de Calibração do Atuador
Uma vez que é desejada a operação do atuador em uma região mais linear, de talforma que variações da tensão de base impliquem em variações de mesma proporçãona corrente de coletor, os dados coletados foram aproximados por uma reta. Assim, épossível se obter um valor aproximado do ganho do atuador. A equação encontradapara a reta foi:
Ic = 0.0382V c+ 0.1450 (3.3)
Onde Vc é a tensão de controle e Ic a corrente de coletor. Portanto, o ganho encontradopara o atuador é de k1 = 0.0382 A/V. O offset do atuador, equivale à corrente decoletor quando da aplicação de 0V na entrada da CAN-PIC. O valor encontrado é dena = 0.1450.
Conforme apresentado na Seção 2.4, a função de transferência da planta é depen-dente dos ganhos do atuador e do sensor. Portanto, a sua determinação e a de outrosparâmetros da planta, permitem elaborar um modelo dinâmico para a planta e simulara ação de controladores PD, PD Polarizado e PID com um e dois graus de liberdade,conforme é apresentado no Capítulo 4.

Capítulo 3. DESCRIÇÃO DA PLANTA 38
3.6 Modelo da Planta
Conforme apresetado na Seção 2.4, o modelo matemático da planta a ser utilizadoneste trabalho, é o modelo baseado na linearização da força magnética, proposto por[4]. Os resultados apresentados por [4] foram reproduzidos por meio de simulaçãocomputacional e são apresentados no Anexo E deste trabalho.
Conforme é apresentado no Capítulo 4, os controladores PD, PD com polarizaçãoe PID com um grau de liberdade (PID-1DOF) analógicos e o controlador PID com doisgraus de liberdade (PID-2DOF) analógico e digital, são projetados e analizados. Dessafoma, é necessário conhecer a função de transferência da planta em suas formas contínuae discreta. Nesta seção os modelos da planta são apresentados.
3.6.1 Modelo Contínuo
De acordo com [4], a função de transferência de um sistema Maglev é da seguinteforma:
Gp(s) =∆xv∆v
=−k1.k2.Kis2 − kx
(3.4)
Sendo ∆xv um pequeno desvio em torno da posição de equilíbrio e ∆v umapequena variação do sinal de controle e k1, k2, Ki, kx os ganhos do sensor e atuador,respectivamente e Ki e kx as constantes dados por Ki = 2g
i0e kx = 2g
x0.
A partir das características da planta levantadas experimentalmente, tais comoganho do sensor e atuador é possível se obter a função de transferêcia da planta prática.Como apresentado na Seção 2.4, os parâmetros kx e Ki são dependentes da posição e dacorrente de equilíbrio xo e io. Considerando as incertezas relacionadas aos ganhos doselementos sensor e atuador devido às incertezas oriundas de processos de calibração, afunção de transferência que relaciona a corrente do atuador com a posição da esfera levaem conta o valor médio de io e xo. A determinação destes valores a partir das curvas decalibração, leva em conta a faixa de corrente e de posição que os elementos atuador esensor, respectivamente, operam, já que não se observa saturação dentro desta faixa. Dacurva de calibração do sensor, verifica-se que xo está entre:
0mm < xo < 3mm (3.5)
E, io, por sua vez está entre:
0.1513A < io < 0.3226A (3.6)
Considerando os valores apresentados, o ponto de equilíbrio escolhido é xo = 0.002m eio = 0.26A. Nesta posição, foi verificado experimentalmente que para uma planta decaracterísticas semelhantes à planta construída [34], que a esfera oscila, evidenciandoque a posição de equilíbrio se encontra próxima a este ponto.

Capítulo 3. DESCRIÇÃO DA PLANTA 39
A Tabela 3.5 resume os valores dos parâmetros presentes na função de transfe-rência da planta.
Tabela 3.5 – Parametros da Função de Transferência
Parâmetro Simbolo Valor
Ganho do Sensor k1 1058 V/mGanho do Atuador k2 0.0382 A/m
Posição de Equilibrio xo 0.002 mCorrente no ponto de Equilíbiro io 0.26 A
A subtituição destes valores na Equação 3.4,resulta em:
Gp(s) =∆xv∆v
=−3050
s2 − 9810(3.7)
É observado que a planta possui pólos em ±99.0454. A partir da função detransferência é possível simular a resposta temporal da planta a uma dada referência. AFigura 3.18, apresenta o diagrama de blocos do modelo da planta em malha aberta coma aplicação de um degrau unitário em sua entrada.
Figura 3.18 – Diagrama do Sistema em Malha Aberta.
A simulação do modelo dá origem a, Figura 3.19.

Capítulo 3. DESCRIÇÃO DA PLANTA 40
Figura 3.19 – Resposta Temporal da planta em malha aberta à entrada degrau unitário.
Conforme a 3.19, é observado que o sistema em malha aberta apresenta umcomportamento instável. Portanto, a validação dos parâmetros do modelo escolhidopara a planta deve ser feita em malha fechada. Uma vez verificada a resposta emmalha fechada do sistema é possível validar a função de transferência da planta eassim, verificar se o modelo levantado é coerente com o processo. Uma das grandesdificuldades na identificação de plantas instáveis é a necessidade de identificação emmalha fechada.
3.6.2 Modelo Discreto
Para a obtenção do modelo discreto, considerou-se um extrapolador de ordemzero,(zero order hold, ZOH). Utilizando as propriedades da transformada Z, apresentadasem [35] chega-se à função de transferência discreta.
A função de transferência contínua é dada por:
Gp(s) =∆xv∆v
=−k1.k2.Kis2 − kx
(3.8)
Usando um extrapolador de ordem zero tem-se:
Gp(z) = (1− z−1)Z[−k1.k2.Kis(s2 − kx)
] (3.9)
O termo entre colchetes pode ser decomposto em frações parciais, facilitandosua manipulação, isto é:
−k1k2Kis(s2 − kx)
=a1s
+a2
s+√kx
+a3
s−√kx
(3.10)

Capítulo 3. DESCRIÇÃO DA PLANTA 41
Onde os resíduos a1, a2 e a3 são:
a1 =k1.k2.Ki
kx, a2 =
−k1.k2Ki2.kx
, a3 =−k1.k2.Ki
2.kx(3.11)
Substituindo 3.10, na Equação 3.9 é obtido:
Gp(z) = (1− z−1).Z[a1s
+a2
s+√kx
+a3
s−√kx
] (3.12)
A aplicação da transformada Z na Equação 3.12 dá origem a:
Gp(z) = (1− z−1)[ a1.zz − 1
+a2.z
z − e−√kx.Ts
+a3.z
z − e√kx.Ts
] (3.13)
Considerando p1 = e−√kx.Ts e p2 = e
√kx.Ts, temos:
Gp(z) = (1− z−1)[ a1.zz − 1
+a2.z
z − p1+
a3.z
z − p2] (3.14)
Em seguida, por meio da manipulação algébrica chega-se a:
Gp(z) = (1− z−1)[a1.z.(z − p1)(z − p2) + a2.z(z − 1)(z − p2) + a3.z(z − 1)(z − p1)
(z − 1)(z − p1)(z − p2)]
(3.15)
A manipulação algébrica da Equação 3.15 dá origem a:
Gp(z) =α1.z
2 + α2.z + α3
z2 − β1.z + β2(3.16)
Onde:α1 = a1 + a2 + a3 = 0 (3.17)
α2 = [−a1.(p1 + p2)− a2.(1 + p2)− a2(1 + p2)− a3(1 + p1)] (3.18)
α3 = a1.p1.p2 + a2.p2 + a3.p1 (3.19)
β1 = −(p1 + p2) (3.20)
β2 = p1.p2 (3.21)
A Equação 3.16, apresenta a função de transferência discretizada considerando umextrapolador de ordem zero (ZOH). Considerando o período de amostragem propostopor, [4], de Ts = 0.001 segundos e os ganhos k1, k2, Ki e kx, apresentados na tabela 3.5,a substituição dos valores nos parâmetros da função de transferência discreta dá origema:
Gp(z) =−3.776.10−5.z − 3.766.10−5
z2 − 2.01.z + 1(3.22)
Portanto, esta é a função de transferência da planta em sua forma discreta.

Capítulo 3. DESCRIÇÃO DA PLANTA 42
3.7 Considerações Finais
Neste capítulo as características da planta e os circuitos dos módulos sensor eatuador foram apresentadas. A escolha da topologia Cascode para o sensor se revelouadequada levando em conta o tempo de resposta do fototransistor, conforme verificadoexperimentalmente. O uso do transistor TIP31C para o controle de corrente, baseando-senas características do componente também é adequado. A necessidade do uso de umdispositivo para optoacoplamento se apresenta importante, por garantir isolamentoelétrico entre as partes de potência e eletrônica do sistema.
Além disso, as curvas de calibração do sensor e do atuador foram levantadas.Apesar da determinação dos ganhos destes elementos, verifica-se que os procedimentosadotados para o levantamento dos dados associa incertezas aos mesmos, o que podedificultar a elaboração de controladores que atinjam o objetivo de controle. Considera-setambém que a não idealidade do elemento sensor, (que sofre influência de luz externa ede sombreamento), a construção artesanal da bobina, que possivelmente produz umcampo magnético uniforme e as conexões não ideais da protoboard utilizada para amontagem do atuador, são problemas que também influenciam nos dados levantadose foram desprezados na modelagem. No entanto, deve-se ressaltar que, dentro daslimitações, foram escolhidos os melhores procedimentos para estimação dos ganhos edas curvas.
Por fim, também neste capítulo, a partir dos ganhos determinados para oselementos sensor e atuador, foi possível chegar aos modelos contínuo e discreto daplanta, segundo a modelagem matemática proposta por [4].
43
4 PROJETO E IMPLEMENTAÇÃO DOS CONTROLA-
DORES
4.1 Introdução
Uma das maneiras de se identificar adequadamente o modelo de um sistemainstável, como é o caso de um sistema MAGLEV, é verificando o comportamento dosistema em malha fechada. Na identificação do modelo de plantas estáveis é usualanalisar a resposta do sistema em malha aberta para uma dada referência. Entretanto, ainstabilidade intrínseca da planta em questão impede que a dinâmica seja verificadanessa situação. No entanto, se ao fechar a malha, o controlador projetado garantir a suaestabilidade, então é possível analisar a resposta da planta para uma dada referênciae posteriormente comparar a resposta temporal real medida com a resposta temporalsimulada, validando ou não o modelo proposto para a planta. Neste capítulo sãoapresentados os controladores projetados para a planta em questão que possibilitarão,além da validação do modelo, atingir o objetivo de controle da planta.
4.2 Projeto e Simulação do Controlador PD Analógico
Para a validação em malha fechada do modelo proposto no Capítulo 3, umcontrolador analógico PD (proporcional e derivativo) é projetado. Conforme apresen-tado em [16], um controlador PD é capaz de garantir a estabilidade a um sistema delevitação magnética sem, contudo, tornar o erro de estado estacionário nulo. Devido àsua simplicidade de implementação, recorreu-se a este controlador para tentar validar omodelo proposto.
Anteriormente à execução deste trabalho, durante a disciplina de Laboratóriode Controle de Processos foi verificado experimentalmente [34], que para a planta decaracterísticas construtivas muito semelhantes (foram reaproveitadas a bobina, a caixada planta e o elemento sensor na planta em estudo), um controlador PD analógico foicapaz de manter a esfera em equilíbrio, sendo a corrente necessária para estabilizaçãoda esfera da ordem de 0.36A e a posição de equilíbrio verificada a 2 milímetros doeletroíma. Entretanto, não foi feito um projeto para sintonia deste controlador PD e oponto de equilíbrio foi obitido por tentativa e erro, não se repetindo novamente emtentativas posteriores na mesma planta.
Neste trabalho, optou-se por elaborar o projeto de um controlador PD baseadono método do lugar das raízes e na função de transferência da planta proposta noCapítulo 3, isto é, que leva em consideração pequenas variações da posição da esfera,
Capítulo 4. PROJETO E IMPLEMENTAÇÃO DOS CONTROLADORES 44
∆x, e pequenas variações da corrente da bobina ∆i em torno do ponto de equilíbriodesignado pelo ponto (xo, io). De posse da função de transferência, é possível obter olugar das raízes, a partir dos polos e zeros da fução de transferência em malha aberta.Conforme apresentado na Seção 2.4, a função de transferência obtida para a planta é daforma:
Gp(s) = −Ki.k1.k2
s2 − kx(4.1)
Onde Ki e kx são parâmetros dependentes de i0 e x0 , e k1, k2 são os ganhos do atuadore do sensor, respectivamente. A substituição dos valores obtidos experimentalmente nafunção de transferência leva a:
Gp(s) =∆xv∆v
=−3050
s2 − 9810(4.2)
Cujos pólos estão em s = ±99.04. Observa-se que os polos são simétricos e estão sobre oeixo real, sendo um dos pólos localizados à direita da origem, o que atribui instabilidadeao sistema. Um controlador PD, [32], possui a função de transferência dada por:
Gc(s) = kp+ s.kd (4.3)
Ou seja, a ação de um controle PD adiciona um zero ao sistema. Considerando a funçãode transferência da planta obtida e a ação do controlador PD, temos:
Gc.Gp(s) = kd.(s+kp
kd).−3050
s2 − 9810(4.4)
Para que a estabilidade do sistema em malha fechada seja garantida é necessárioque os polos em malha fechada desejados estejam à esquerda da origem. De tal formaque o lugar das raízes seja deslocado para a esquerda é necessário adicionar um zero aosistema. Os parâmetros kp, ganho proporcional e kd, ganho derivativo devem ser taisque alterem o lugar das raízes fazendo com que ele passe pelos pólos de malha fechadadesejados.
Conforme apresentado na Equação 4.2, a função de transferência apresenta sinalnegativo. Assim, para facilitar o projeto considerou-se o sinal da função de transferênciapositivo. Após o cálculo dos valores absolutos dos ganhos do controlador PD (kp e kd)os mesmos serão considerados negativos. Desta forma, basta projetar um controladorPD com ganhos positivos e ao final atribuir sinais negativos a ambos os ganhos kp ekd para garantir que a condição angular de Gc(s).Gp(s) seja satisfeita. Levando istoem conta, pode-se considerar para fins de projeto a função de transferência análoga deganho positivo, ou seja:
Gp(s)aux =3050
s2 − 9810(4.5)
A Figura 4.1 apresenta o lugar das raízes do sistema sem o controlador PD.
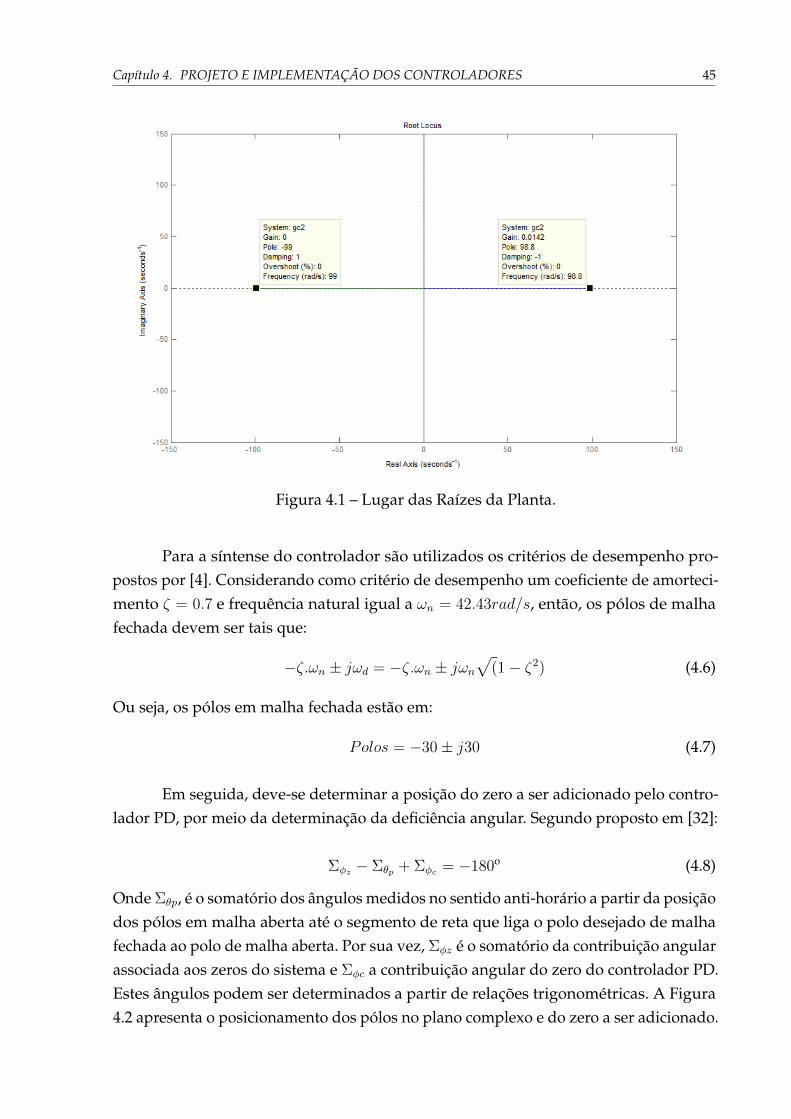
Capítulo 4. PROJETO E IMPLEMENTAÇÃO DOS CONTROLADORES 45
Figura 4.1 – Lugar das Raízes da Planta.
Para a síntense do controlador são utilizados os critérios de desempenho pro-postos por [4]. Considerando como critério de desempenho um coeficiente de amorteci-mento ζ = 0.7 e frequência natural igual a ωn = 42.43rad/s, então, os pólos de malhafechada devem ser tais que:
−ζ.ωn ± jωd = −ζ.ωn ± jωn√
(1− ζ2) (4.6)
Ou seja, os pólos em malha fechada estão em:
Polos = −30± j30 (4.7)
Em seguida, deve-se determinar a posição do zero a ser adicionado pelo contro-lador PD, por meio da determinação da deficiência angular. Segundo proposto em [32]:
Σφz − Σθp + Σφc = −180o (4.8)
Onde Σθp, é o somatório dos ângulos medidos no sentido anti-horário a partir da posiçãodos pólos em malha aberta até o segmento de reta que liga o polo desejado de malhafechada ao polo de malha aberta. Por sua vez, Σφz é o somatório da contribuição angularassociada aos zeros do sistema e Σφc a contribuição angular do zero do controlador PD.Estes ângulos podem ser determinados a partir de relações trigonométricas. A Figura4.2 apresenta o posicionamento dos pólos no plano complexo e do zero a ser adicionado.

Capítulo 4. PROJETO E IMPLEMENTAÇÃO DOS CONTROLADORES 46
Figura 4.2 – Ângulos dos Pólos e Zeros.
Uma vez que φc calculado, foi de aproximadamente 10o, é possível se determinara localização do zero:
arctan(30
x) = φc (4.9)
Resolvendo a equação tem-se:x = 170.13 (4.10)
E então:Zc = 170.13 + 30 = 200.13 (4.11)
Portanto, o zero a ser adicionado pelo controlador PD deve ser em Zc = 200.13. AFigura 4.3 apresenta o lugar das raízes obtido com o controlador PD. Comparando como lugar das raízes original é possível verificar que o zero desloca o lugar das raízes paraa esquerda.

Capítulo 4. PROJETO E IMPLEMENTAÇÃO DOS CONTROLADORES 47
Figura 4.3 – Lugar das Raízes com adição do zero.
Rearranjando a Equação 4.4, a função de transferência do controlador pode serexpressa por:
Gc(s) = kd.(s+kp
kd) (4.12)
Ou seja, a razão entre os ganhos kp/kd deve ser igual ao zero adicionado ao sistema.Pelo critério de condição de módulo unitário, temos:
|Gc.Gp(s)| =∣∣∣∣kd(s+ 200.13).
3050
s2 − 9080
∣∣∣∣ = 1 (4.13)
Resolvendo a igualdade o valor encontrado para o ganho derivativo é Kd = 0.0189.Assim, como:
kp/kd = 200.13 (4.14)
Conclui-se que kp = 3.78. Então, conforme explicitado anteriormente, o sinal dos ganhosdevem ser negativos. Portanto, kp = −3.78 e kd = −0.0189. A Tabela 4.1, resume osvalores de projeto para o controlador PD projetado.
Tabela 4.1 – Parâmetros do Controlador PD
Parâmetros Simbolo Valores
Ganho Proporcional kp -3,78Ganho Derivativo kd -0,0189
Coeficiente de Amortecimento ζ 0,707Frequência Natural ωn 42,43
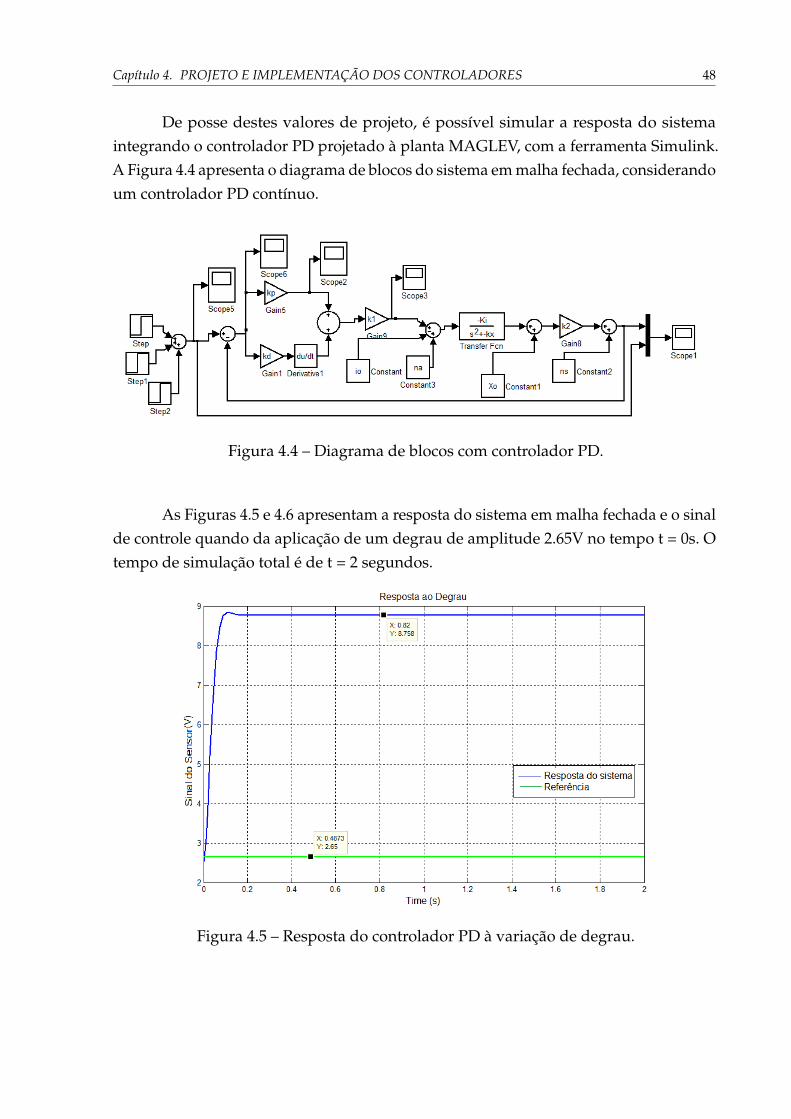
Capítulo 4. PROJETO E IMPLEMENTAÇÃO DOS CONTROLADORES 48
De posse destes valores de projeto, é possível simular a resposta do sistemaintegrando o controlador PD projetado à planta MAGLEV, com a ferramenta Simulink.A Figura 4.4 apresenta o diagrama de blocos do sistema em malha fechada, considerandoum controlador PD contínuo.
Figura 4.4 – Diagrama de blocos com controlador PD.
As Figuras 4.5 e 4.6 apresentam a resposta do sistema em malha fechada e o sinalde controle quando da aplicação de um degrau de amplitude 2.65V no tempo t = 0s. Otempo de simulação total é de t = 2 segundos.
Figura 4.5 – Resposta do controlador PD à variação de degrau.
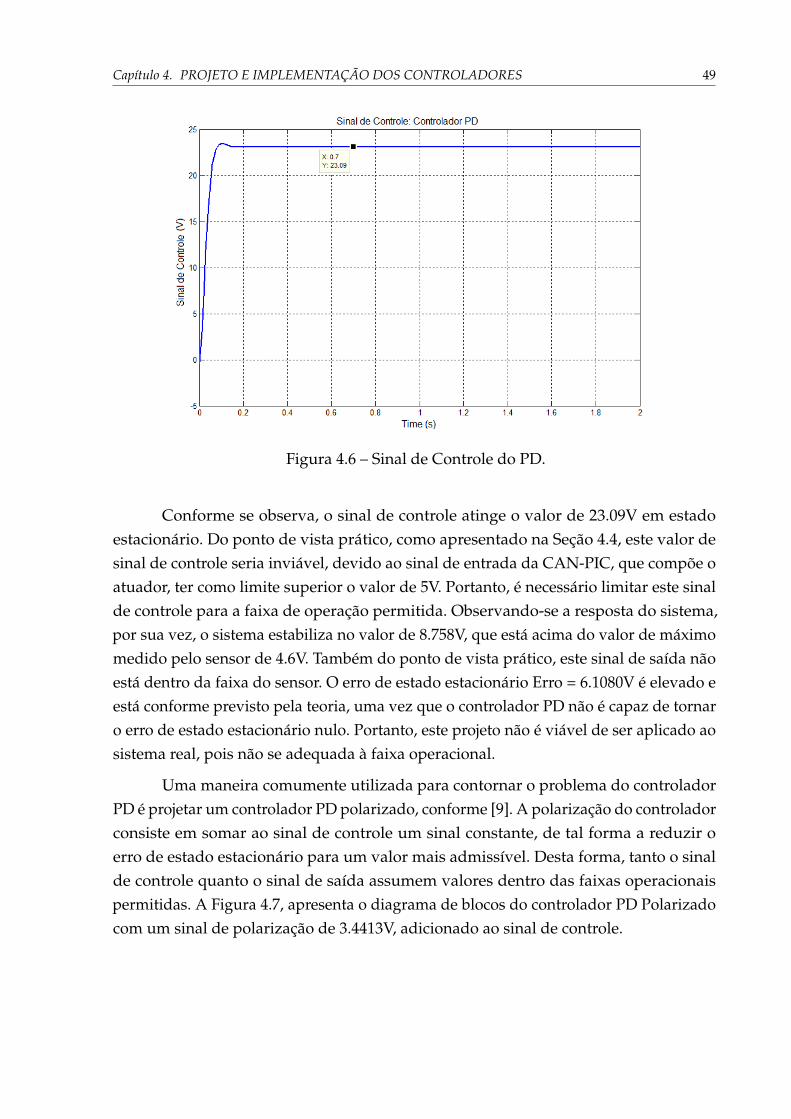
Capítulo 4. PROJETO E IMPLEMENTAÇÃO DOS CONTROLADORES 49
Figura 4.6 – Sinal de Controle do PD.
Conforme se observa, o sinal de controle atinge o valor de 23.09V em estadoestacionário. Do ponto de vista prático, como apresentado na Seção 4.4, este valor desinal de controle seria inviável, devido ao sinal de entrada da CAN-PIC, que compõe oatuador, ter como limite superior o valor de 5V. Portanto, é necessário limitar este sinalde controle para a faixa de operação permitida. Observando-se a resposta do sistema,por sua vez, o sistema estabiliza no valor de 8.758V, que está acima do valor de máximomedido pelo sensor de 4.6V. Também do ponto de vista prático, este sinal de saída nãoestá dentro da faixa do sensor. O erro de estado estacionário Erro = 6.1080V é elevado eestá conforme previsto pela teoria, uma vez que o controlador PD não é capaz de tornaro erro de estado estacionário nulo. Portanto, este projeto não é viável de ser aplicado aosistema real, pois não se adequada à faixa operacional.
Uma maneira comumente utilizada para contornar o problema do controladorPD é projetar um controlador PD polarizado, conforme [9]. A polarização do controladorconsiste em somar ao sinal de controle um sinal constante, de tal forma a reduzir oerro de estado estacionário para um valor mais admissível. Desta forma, tanto o sinalde controle quanto o sinal de saída assumem valores dentro das faixas operacionaispermitidas. A Figura 4.7, apresenta o diagrama de blocos do controlador PD Polarizadocom um sinal de polarização de 3.4413V, adicionado ao sinal de controle.
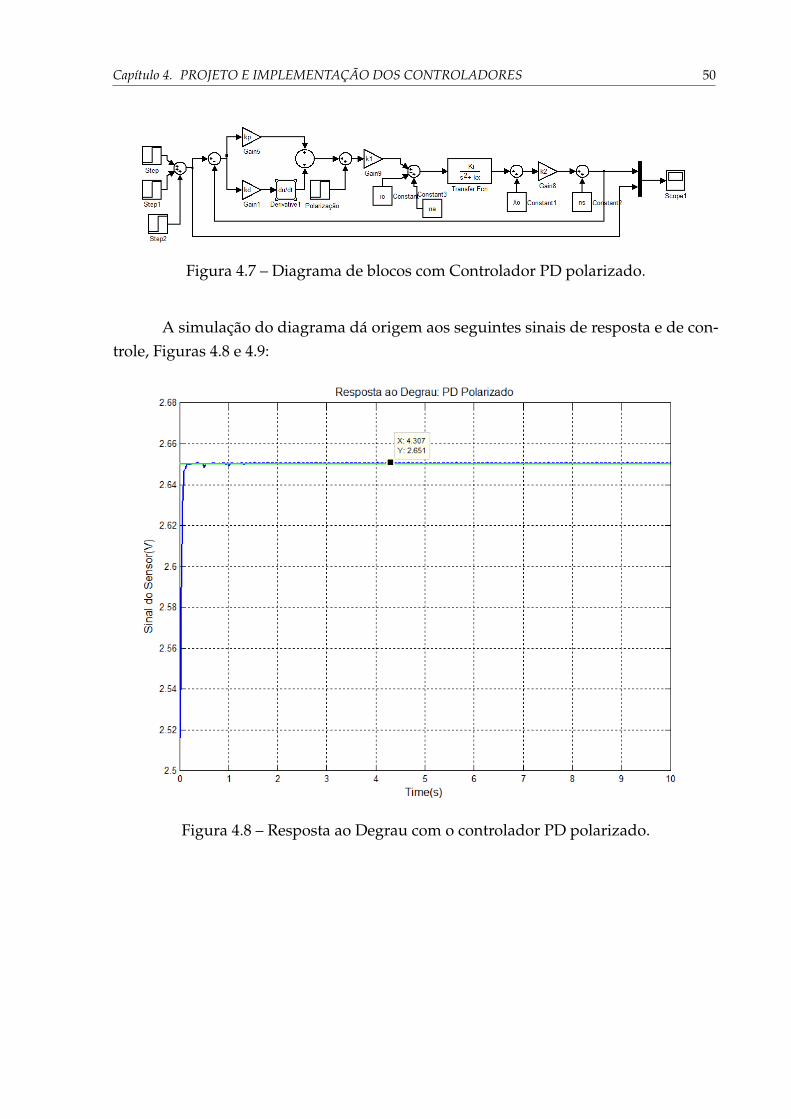
Capítulo 4. PROJETO E IMPLEMENTAÇÃO DOS CONTROLADORES 50
Figura 4.7 – Diagrama de blocos com Controlador PD polarizado.
A simulação do diagrama dá origem aos seguintes sinais de resposta e de con-trole, Figuras 4.8 e 4.9:
Figura 4.8 – Resposta ao Degrau com o controlador PD polarizado.

Capítulo 4. PROJETO E IMPLEMENTAÇÃO DOS CONTROLADORES 51
Figura 4.9 – Sinal de Controle com controlador PD Polarizado.
A Figura 4.9 evidencia que o sinal de controle estabilza no valor de 3.444V e nãosupera o valor de 5V limite. Portanto, a polarização fez com que o sinal de controleexcursionasse dentro da faixa permitida. De maneira similar, observando o sinal desaída do sistema na Figura 4.8, verifica-se o valor em estado estacionário em 2.651V. Considerando o sinal de referência em 2.65V, nota-se que a polarização reduziu osinal de erro para zero. Portanto, o método adotado, em termos operacionais, pode serimplementado, uma vez que as faixas do sinal de controle e da saída estão dentro dasfaixas permitidas.

Capítulo 4. PROJETO E IMPLEMENTAÇÃO DOS CONTROLADORES 52
4.3 Implementação Prática do Controlador PD Polarizado
O controlador PD Polarizado pode ser construído através de topologias básicasenvolvendo amplificadores operacionais tais como topologia inversora e derivadora,assim como os circuitos condicionadores necessários à construção do sinal de controle,como as topologias somadora e diferencial, divisor e seguidor de tensão. A Figura 4.10apresenta os circuitos analógicos que atribuem ao sinal de entrada as ações proporcionale derivativa, bem como suas relações de entrada e saída, respectivamente.
Figura 4.10 – Topologias Proporcional e Derivativa
Uma vez determinados os ganhos proporcional e derivativo, a implementaçãoprática do controlador PD pode ser feita através do ajuste dos ganhos de cada topologia.O ajuste é feito tornando-se fixo o valor de um componente da topologia e variando-seas características do outro (resistência), até obter os ganhos de projeto Kp = -3.78 eKd = -0.0189. Além das topologias proporcional e derivativa é necessário garantir apolarização do sinal de controle. Para tanto, deve-se somar ao sinal de controle umsinal CC. Este sinal polarizador é oriundo de um divisor de tensão resistivo. Conformeapresentado na simulação do controlador projetado, é necessário um sinal de 3.44Vpara garantir a devida polarização do sinal de controle, dentro da faixa operacional.Devido aos aspectos não ideais dos componentes eletrônicos e da incerteza associada àfunção de transferência da planta, pode ser necessário um ajuste fino dos ganhos. Dessaforma, na prática, a estabilidade pode ser garantida para ganhos em torno dos valoresde projeto.
Devido a saturação intrínseca dos circuitos integrados que de acordo com suaalimentação CC, podem saturar os sinais de entrada e saída do sistema, é interessantesimular sua resposta em malha fechada para verificar se as limitações dos componentesutilizados na implementação do controlador e dos elementos sensor/atuador nãoinfluenciam nos sinais de entrada e saída.
A Figura 4.11 apresenta o diagrama de blocos do sistema contínuo, com um con-trolador PD Polarizado integrado ao sistema, considerando as saturações dos blocos desoma, diferença, proporcional e derivativo do Simulink, implementados pelos circuitosintegrados (saturação de ±13.10V para os CI’s dos blocos de diferença, proporcional ederivativo e de 0V a 5V para o bloco de soma).

Capítulo 4. PROJETO E IMPLEMENTAÇÃO DOS CONTROLADORES 53
Figura 4.11 – Diagrama da Planta com Controlador PD
As Figuras 4.12 e 4.13 apresentam a resposta do sistema e o sinal de controleobtido quando da aplicação de um degrau de 2.65V e um sinal polarizador de 3.44Vambos no instante t = 0s.
Figura 4.12 – Resposta do Sistema com Controlador PD ao Degrau
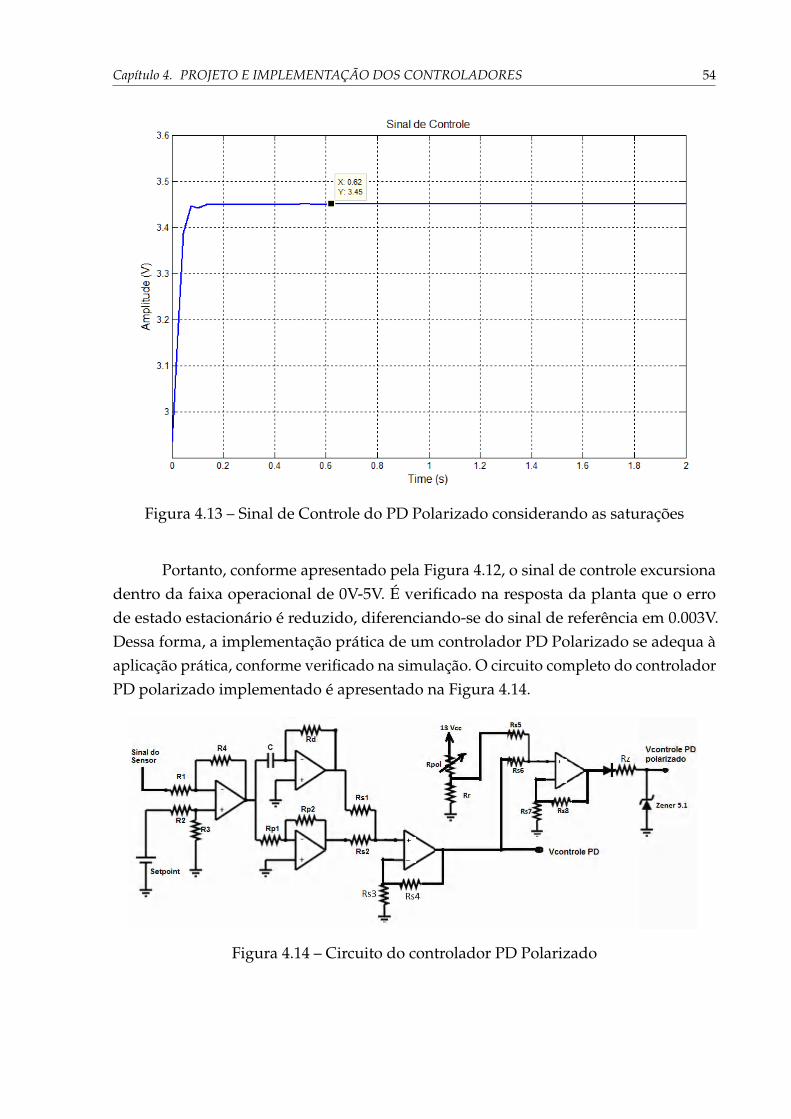
Capítulo 4. PROJETO E IMPLEMENTAÇÃO DOS CONTROLADORES 54
Figura 4.13 – Sinal de Controle do PD Polarizado considerando as saturações
Portanto, conforme apresentado pela Figura 4.12, o sinal de controle excursionadentro da faixa operacional de 0V-5V. É verificado na resposta da planta que o errode estado estacionário é reduzido, diferenciando-se do sinal de referência em 0.003V.Dessa forma, a implementação prática de um controlador PD Polarizado se adequa àaplicação prática, conforme verificado na simulação. O circuito completo do controladorPD polarizado implementado é apresentado na Figura 4.14.
Figura 4.14 – Circuito do controlador PD Polarizado
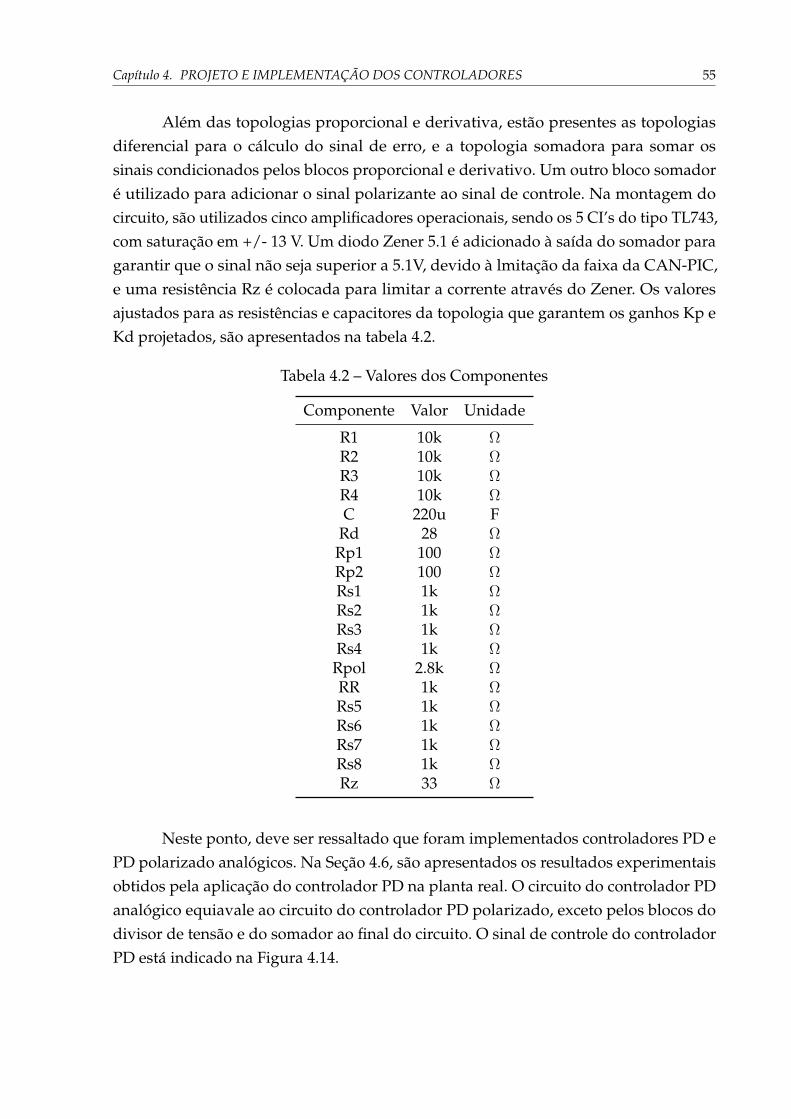
Capítulo 4. PROJETO E IMPLEMENTAÇÃO DOS CONTROLADORES 55
Além das topologias proporcional e derivativa, estão presentes as topologiasdiferencial para o cálculo do sinal de erro, e a topologia somadora para somar ossinais condicionados pelos blocos proporcional e derivativo. Um outro bloco somadoré utilizado para adicionar o sinal polarizante ao sinal de controle. Na montagem docircuito, são utilizados cinco amplificadores operacionais, sendo os 5 CI’s do tipo TL743,com saturação em +/- 13 V. Um diodo Zener 5.1 é adicionado à saída do somador paragarantir que o sinal não seja superior a 5.1V, devido à lmitação da faixa da CAN-PIC,e uma resistência Rz é colocada para limitar a corrente através do Zener. Os valoresajustados para as resistências e capacitores da topologia que garantem os ganhos Kp eKd projetados, são apresentados na tabela 4.2.
Tabela 4.2 – Valores dos Componentes
Componente Valor Unidade
R1 10k ΩR2 10k ΩR3 10k ΩR4 10k ΩC 220u F
Rd 28 ΩRp1 100 ΩRp2 100 ΩRs1 1k ΩRs2 1k ΩRs3 1k ΩRs4 1k Ω
Rpol 2.8k ΩRR 1k ΩRs5 1k ΩRs6 1k ΩRs7 1k ΩRs8 1k ΩRz 33 Ω
Neste ponto, deve ser ressaltado que foram implementados controladores PD ePD polarizado analógicos. Na Seção 4.6, são apresentados os resultados experimentaisobtidos pela aplicação do controlador PD na planta real. O circuito do controlador PDanalógico equiavale ao circuito do controlador PD polarizado, exceto pelos blocos dodivisor de tensão e do somador ao final do circuito. O sinal de controle do controladorPD está indicado na Figura 4.14.
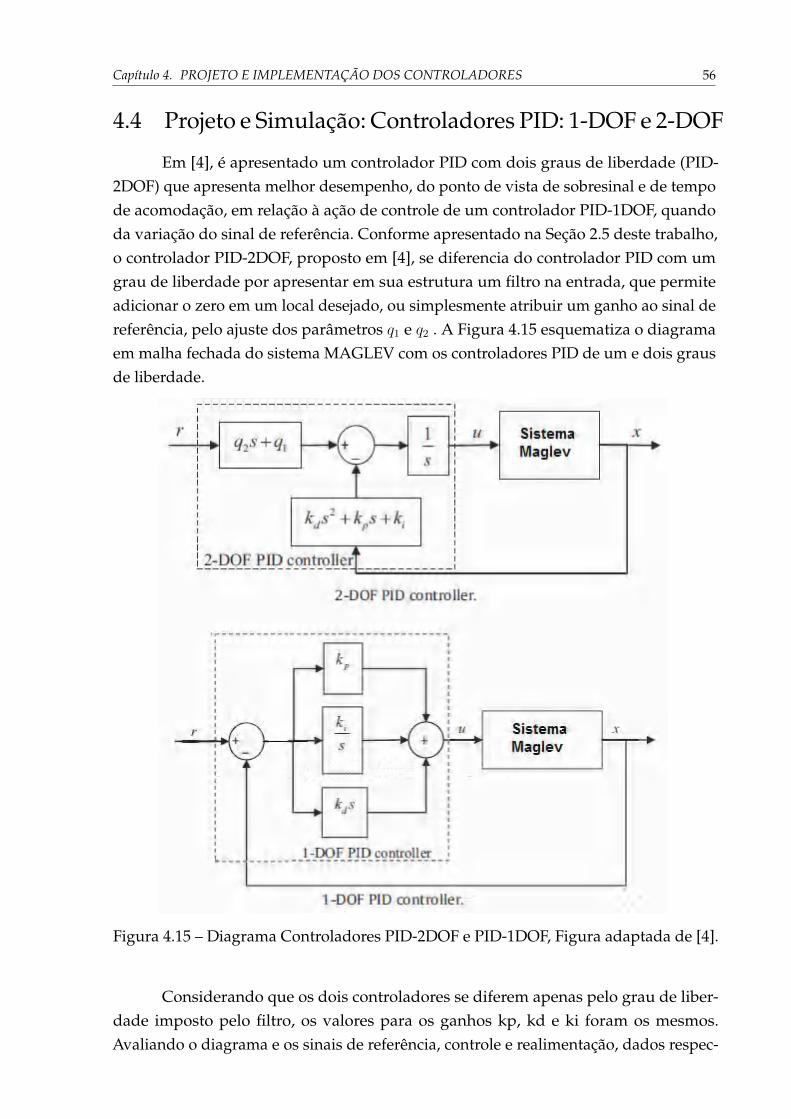
Capítulo 4. PROJETO E IMPLEMENTAÇÃO DOS CONTROLADORES 56
4.4 Projeto e Simulação: Controladores PID: 1-DOF e 2-DOF
Em [4], é apresentado um controlador PID com dois graus de liberdade (PID-2DOF) que apresenta melhor desempenho, do ponto de vista de sobresinal e de tempode acomodação, em relação à ação de controle de um controlador PID-1DOF, quandoda variação do sinal de referência. Conforme apresentado na Seção 2.5 deste trabalho,o controlador PID-2DOF, proposto em [4], se diferencia do controlador PID com umgrau de liberdade por apresentar em sua estrutura um filtro na entrada, que permiteadicionar o zero em um local desejado, ou simplesmente atribuir um ganho ao sinal dereferência, pelo ajuste dos parâmetros q1 e q2 . A Figura 4.15 esquematiza o diagramaem malha fechada do sistema MAGLEV com os controladores PID de um e dois grausde liberdade.
Figura 4.15 – Diagrama Controladores PID-2DOF e PID-1DOF, Figura adaptada de [4].
Considerando que os dois controladores se diferem apenas pelo grau de liber-dade imposto pelo filtro, os valores para os ganhos kp, kd e ki foram os mesmos.Avaliando o diagrama e os sinais de referência, controle e realimentação, dados respec-

Capítulo 4. PROJETO E IMPLEMENTAÇÃO DOS CONTROLADORES 57
tivimante por r, u e x, na Figura 4.15, é possível verificar que a função de transferênciado controlador PID-1DOF é da forma:
Gc(s) = kp+ki
s+ kd.s =
kd.s2 + kp.s+ ki
s(4.15)
De acordo com a Equação 3.4, a função de transferência do sistema MAGLEV édada por:
Gp(s) =−k1.k2.Kis2 − kx
(4.16)
Designando b = k1.k2.Ki e p =√kx, então a função de transferência pode ser
expressada por:
Gp(s) =−b
s2 − p2(4.17)
Assim, a função de transferência em malha aberta do sistema com o controladorPID-1DOF é dada por:
GMA1DOF (s) =b(kd.s2 + kp.s+ ki)
s(s− p2)(4.18)
Por sua vez, a função de transferência de malha fechada pode ser obtida pormeio da realimentação do sinal de saída. A função de transferência em malha fechadado sistema é:
GMF1DOF (s) =∆xv
∆r
=b(kd.s2 + kp.s+ ki)
s3 − b.kd.s2 + (b.kp− p2).s+ b.ki(4.19)
Onde a equação característica do sistema é igual a δ(s) = s3−b.kd.s2+(b.kp−p2).s+b.ki
Procedendo da mesma maneira para o controlador PID com dois graus deliberdade e levando em conta agora a presença do filtro na entrada, é possível obter afunção de trasferência em malha fechada do sitema. A função de transferência é dadapor:
GMF2DOF (s) =∆xv
∆r
=b.(q2.s+ q1)
δ(s)(4.20)
Ou seja, pela Equação 4.20 é observado que a equação característica do sistemacom controlador PID-2DOF é a mesma que a do controlador PID-1DOF. A Figura 4.16apresenta o lugar das raízes do sistema em malha aberta com controlador PID-2DOF,considerando q2 = 0.
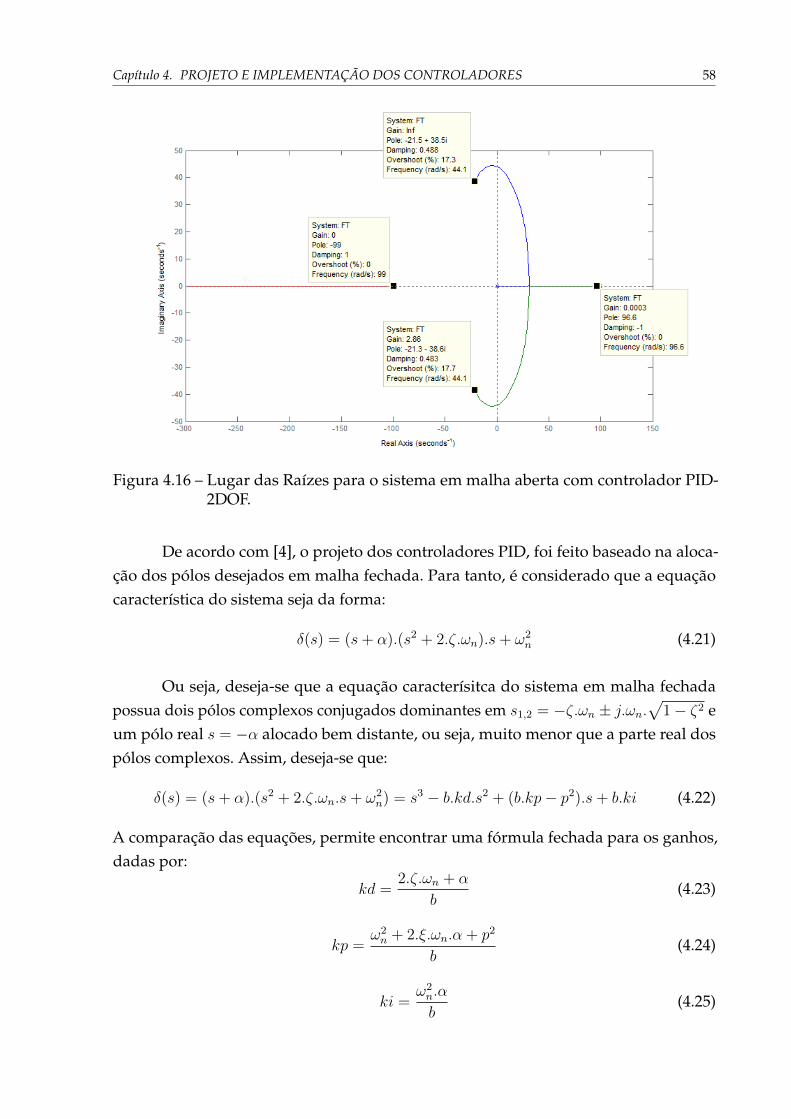
Capítulo 4. PROJETO E IMPLEMENTAÇÃO DOS CONTROLADORES 58
Figura 4.16 – Lugar das Raízes para o sistema em malha aberta com controlador PID-2DOF.
De acordo com [4], o projeto dos controladores PID, foi feito baseado na aloca-ção dos pólos desejados em malha fechada. Para tanto, é considerado que a equaçãocaracterística do sistema seja da forma:
δ(s) = (s+ α).(s2 + 2.ζ.ωn).s+ ω2n (4.21)
Ou seja, deseja-se que a equação caracterísitca do sistema em malha fechadapossua dois pólos complexos conjugados dominantes em s1,2 = −ζ.ωn ± j.ωn.
√1− ζ2 e
um pólo real s = −α alocado bem distante, ou seja, muito menor que a parte real dospólos complexos. Assim, deseja-se que:
δ(s) = (s+ α).(s2 + 2.ζ.ωn.s+ ω2n) = s3 − b.kd.s2 + (b.kp− p2).s+ b.ki (4.22)
A comparação das equações, permite encontrar uma fórmula fechada para os ganhos,dadas por:
kd =2.ζ.ωn + α
b(4.23)
kp =ω2n + 2.ξ.ωn.α + p2
b(4.24)
ki =ω2n.α
b(4.25)
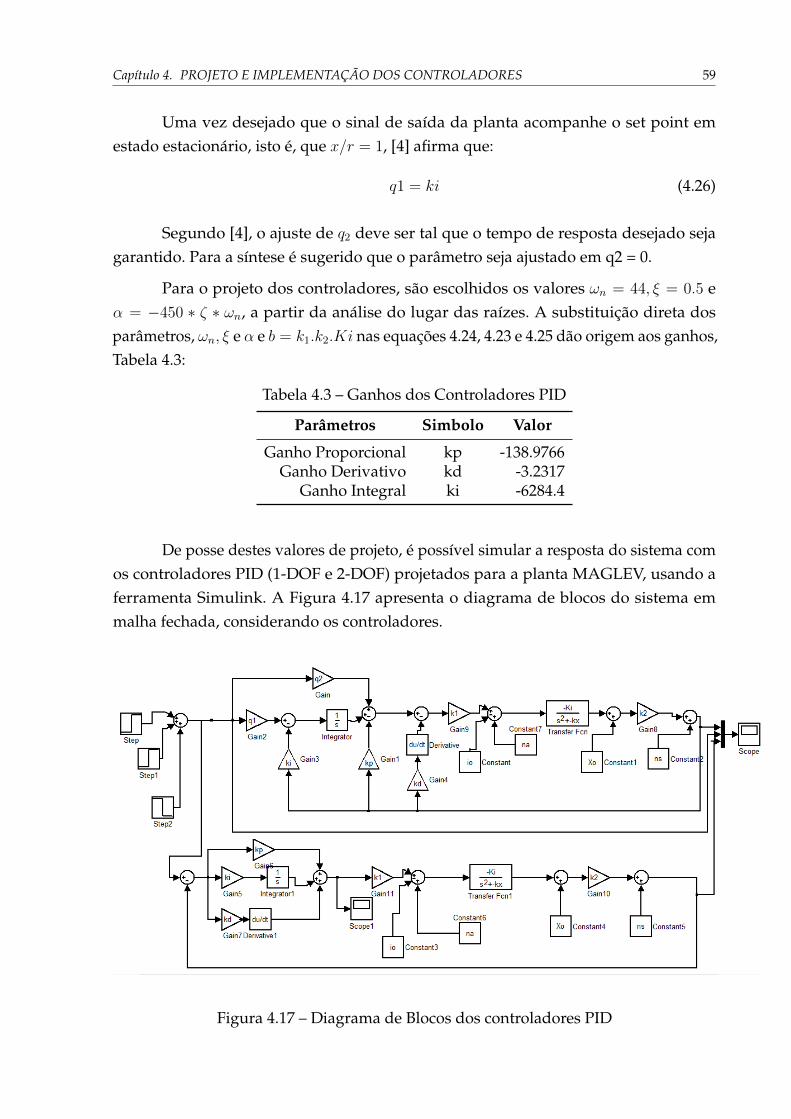
Capítulo 4. PROJETO E IMPLEMENTAÇÃO DOS CONTROLADORES 59
Uma vez desejado que o sinal de saída da planta acompanhe o set point emestado estacionário, isto é, que x/r = 1, [4] afirma que:
q1 = ki (4.26)
Segundo [4], o ajuste de q2 deve ser tal que o tempo de resposta desejado sejagarantido. Para a síntese é sugerido que o parâmetro seja ajustado em q2 = 0.
Para o projeto dos controladores, são escolhidos os valores ωn = 44, ξ = 0.5 eα = −450 ∗ ζ ∗ ωn, a partir da análise do lugar das raízes. A substituição direta dosparâmetros, ωn, ξ e α e b = k1.k2.Ki nas equações 4.24, 4.23 e 4.25 dão origem aos ganhos,Tabela 4.3:
Tabela 4.3 – Ganhos dos Controladores PID
Parâmetros Simbolo Valor
Ganho Proporcional kp -138.9766Ganho Derivativo kd -3.2317
Ganho Integral ki -6284.4
De posse destes valores de projeto, é possível simular a resposta do sistema comos controladores PID (1-DOF e 2-DOF) projetados para a planta MAGLEV, usando aferramenta Simulink. A Figura 4.17 apresenta o diagrama de blocos do sistema emmalha fechada, considerando os controladores.
Figura 4.17 – Diagrama de Blocos dos controladores PID

Capítulo 4. PROJETO E IMPLEMENTAÇÃO DOS CONTROLADORES 60
Avaliando a Tabela 4.3, é verificado que o valor dos ganhos estão elevados. Noentanto, é importante notar que o sinal de referência do sistema, ou setpoint, é multi-plicado pelo ganho q1 no controlador PID-2DOF, que conforme a síntese, é igual aovalor do ganho integral ki. Assim, o sinal de erro calculado pela diferença da referên-cia multiplicada por q1 e a ação integral gera um valor de amplitude factível para aimplementação do controlador.
Na porção superior do diagrama se encontra o controlador PID-2DOF, enquantoque na porção inferior se encontra o controlador PID-1DOF. Aplicando na entrada dossistemas, variações de degrau, é possível se verificar os sinais de controle e a resposta dosistema em cada condição. A simulação é feita aplicando-se um degrau de 2.65V em t =0s, em seguida uma variação de 0.5V em t = 0.5s e por fim uma variação negativa de -0.5em t = 1s. As Figuras 4.19, 4.20 e 4.18 apresentam a resposta do sistema considerandoos dois controladores, os sinais de controle para o controlador PID-2DOF e para ocontrolador PID-1DOF, respectivamente.
Figura 4.18 – Resposta do Sistema à Variação de Degrau.
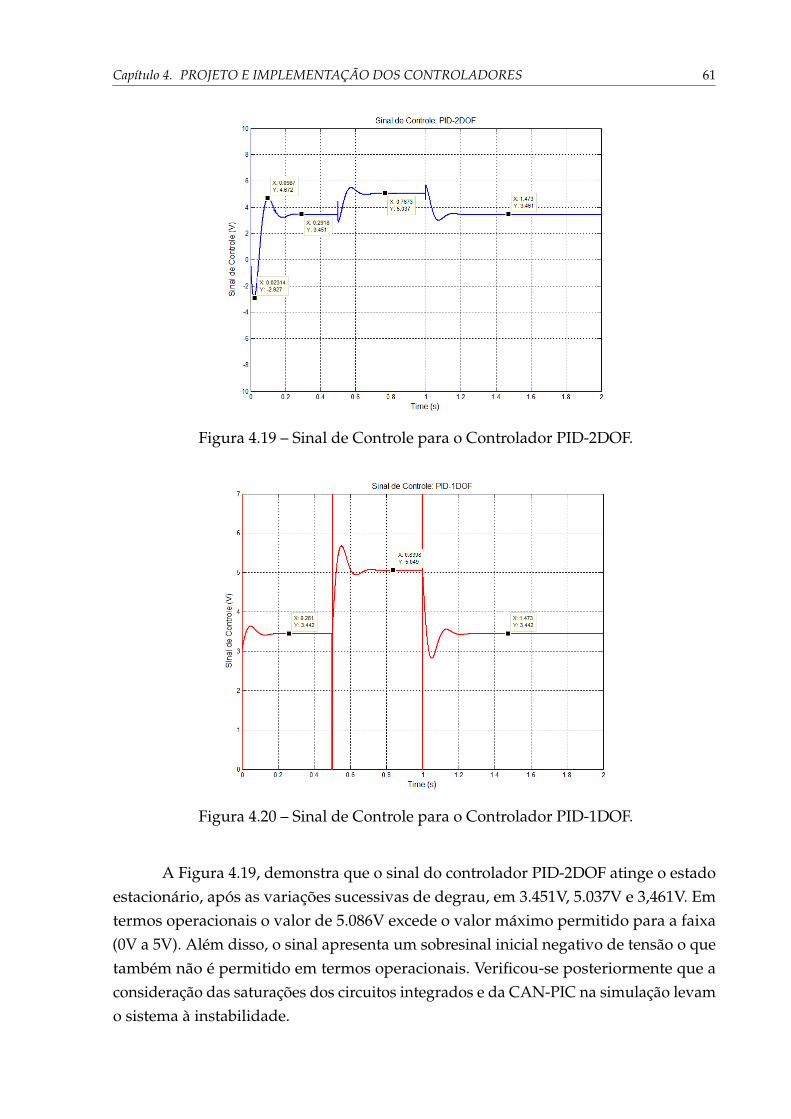
Capítulo 4. PROJETO E IMPLEMENTAÇÃO DOS CONTROLADORES 61
Figura 4.19 – Sinal de Controle para o Controlador PID-2DOF.
Figura 4.20 – Sinal de Controle para o Controlador PID-1DOF.
A Figura 4.19, demonstra que o sinal do controlador PID-2DOF atinge o estadoestacionário, após as variações sucessivas de degrau, em 3.451V, 5.037V e 3,461V. Emtermos operacionais o valor de 5.086V excede o valor máximo permitido para a faixa(0V a 5V). Além disso, o sinal apresenta um sobresinal inicial negativo de tensão o quetambém não é permitido em termos operacionais. Verificou-se posteriormente que aconsideração das saturações dos circuitos integrados e da CAN-PIC na simulação levamo sistema à instabilidade.

Capítulo 4. PROJETO E IMPLEMENTAÇÃO DOS CONTROLADORES 62
Por sua vez a Figura 4.20 evidencia que o sinal do controlador PID atinge oestado estacionário nos valores de 3.442V, 5.049V e 3,442 V. Em termos operacionais ovalor de 5.049V excede o valor máximo permitido para a faixa (0V a 5V). Além disso,verifica-se a ocorrência de picos positivos e negativos no sinal de controle devido àação derivativa que amplifica o sinal de erro a cada variação da referência. Este efeitopoderia ser minimizado pela inserção de um filtro na ação derivativa. Também severificou, posteriormente, que a consideração das saturações dos circuitos integrados eda CAN-PIC na simulação levam o sistema à instabilidade.
Analisando agora a Figura 4.18, verficamos que o sistema apresenta um sobre-sinal inicial de -1.23V, atingindo o estado estacionário em 0.371s para o controladorPID-2DOF. Por sua vez, o sistema com controlador PID-1DOF não apresenta sobresinalinicial negativo e atinge o estado estacionário mais rapidamente em 0.190s. No entanto,na variação positiva da referência em 0.5V, o controlador PID-2DOF atinge o estadoestacionário mais rapidamente, com tempo de acomodação 0.04s mais rápido, e menorovershoot, igual a 0.025V, quando comparado ao controlador PID-1DOF que apresentaum overshoot de 0.10V. Quando da variação negativa de 0.5V na referência, o contro-lador PID-2DOF também apresenta melhor desempenho, com tempo de acomodação0.042s mais rápido e um sobresinal negativo de -0.003V,(o sobresinal negativo verificadopara o controlador PID-1DOF foi de -0.11V). Portanto, o desempenho do controladorcom dois graus de liberdade se demonstra superior nos quesitos sobresinal e tempo deresposta para variações sucessivas de degrau na referência.
Um problema associada à simulação de sistemas no Simulink é a dificuldadede definir as condições iniciais dos estados e variáveis de saída do sistema. O padrãoadotado pelo Simulink é que as condições iniciais do sistema são nulas. Dessa forma,é possível que no início da simulação, os sinais do sistema transitem em valores quese encontram fora da faixa de operação permitida ao sistema, atingindo valores queimpossibilitariam a aplicação dos controladores na planta real. Apesar desta limitaçãodo Simulink, é possivel verificar o desempenho dos controladores projetados e suaslimitações para implementação prática. Para sistemas discretos, é possível recorrer aum arquivo de extensão .m para a simulação e para se definir as condições iniciais dosestados. Este artifício é utilizado para o controlador PID-2DOF discretizado, conformeapresentado na Seção 4.5.

Capítulo 4. PROJETO E IMPLEMENTAÇÃO DOS CONTROLADORES 63
4.5 Implementação Prática do Controlador PID-2DOF dis-
creto
O controlador PID-2DOF discreto a ser utilizado para o controle da plantanão utiliza todos os recursos da CAN-PIC, uma vez que o controle é feito de modolocal. Dessa forma, apenas algumas funções do microcontrolador, tais como conversãoanalógico-digital (A/D), rotinas para cálculos da ação de controle e saídas PWM sãoutilizadas para atingir o objetivo de controle. A Figura 4.21 apresenta o fluxograma doprocesso para o cálculo da ação de controle.
Figura 4.21 – Fluxograma de controle.
Inicialmente o sinal de tensão associado à posição da esfera é medido pelosensor. Em seguida, o sinal é transmitido às portas analógicas do PIC16F, convertido deanalógico para digital e armazenado nos registradores do microcontrolador. O conversorA/D do PIC16F876A possui resolução de 10 bits e portanto, é possível a representaçãode 0 até 1023 bits.
Em seguida, o valor em bits do sinal de entrada é armazenado na variável de

Capítulo 4. PROJETO E IMPLEMENTAÇÃO DOS CONTROLADORES 64
realimentação e a função que calcula a ação de controle é executada. Uma vez que oscanais de saída PWM da CAN-PIC variam na faixa de 0V-5V, o sinal de controle oriundodos cálculos deve estar dentro da faixa de 0 a 1023 bits. A saturação do sinal de controleé feita internamente, via código. Por meio da comparação do sinal calculado com oslimites em bits, atribui-se o valor calculado à variável que armazena a ação de controleou satura-se a variável em 0 ou 1023 bits. Em seguida o valor calculado na ação decontrole é armazenado nos registradores da saída PWM do PIC16F. Este sinal é entãoaplicado na entrada do atuador.
Para a verificação da resposta temporal em malha fechada com o controladorPID-2DOF em sua forma discreta, um arquivo.m foi gerado utilizando os mesmosparâmetros projetados para o controlador PID-2DOF. A determinação das condiçõesinicias da saída e das variáveis intermediárias do sistema foram determinadas através daobservação destes sinais na simulação do Simulink, quando o sistema atinge um estadoestacionário. Assim, é possível iniciar a simulação com a condição inicial dos estados(em torno do ponto de equilíbrio desejado). O código gerado permite simular a respostado sistema composto pelo controlador PID-2DOF e a planta MAGLEV discretizados,sob a variação de um degrau com valor inicial de 2.65V. Após o sistema atingir o estadoestacionário, um degrau positivo de 0.5V é aplicado e, posteriormente um degraunegativo de 0.5V. As Figuras 4.22 e 4.23 apresentam a resposta da planta e o sinal decontrole.
Figura 4.22 – Resposta do Sistema à Variação de Degrau com controlador PID-2DOFdiscreto. Ts = 1ms.

Capítulo 4. PROJETO E IMPLEMENTAÇÃO DOS CONTROLADORES 65
Figura 4.23 – Sinal de Controle: Controlador PID-2DOF discreto. Ts = 1ms.
Avaliando a Figura 4.23, observa-se que o sinal de controle apresenta-se saturado,assumindo os valores limites de 0V e 5V. A resposta do sistema Figura 4.22, por suavez, está dentro da faixa operacional, apesar do sinal apresentar-se ruidoso. Um pontoque deve ser ressaltado é que operíodo de amostragem Ts utilizado na discretizaçãodo sistema foi de Ts = 1ms, conforme proposto por [4]. Apesar do respeito à faixaoperativa, nota-se, no entanto, que o sinal de controle oscila em alta frequência nosvalores de 0V e 5V. Do ponto de vista prático, este comportamento é indesejado, uma vezque o chaveamento em alta frequência do transistor, pode danificar o componente. Emvista deste resultado, resolveu-se verificar os sinais de resposta e controle considerando adiscretização do controlador nos valores de Ts = 100µ segundos e Ts = 500µ segundos,Figuras 4.24, 4.25, 4.26 e 4.27, respectivamente.
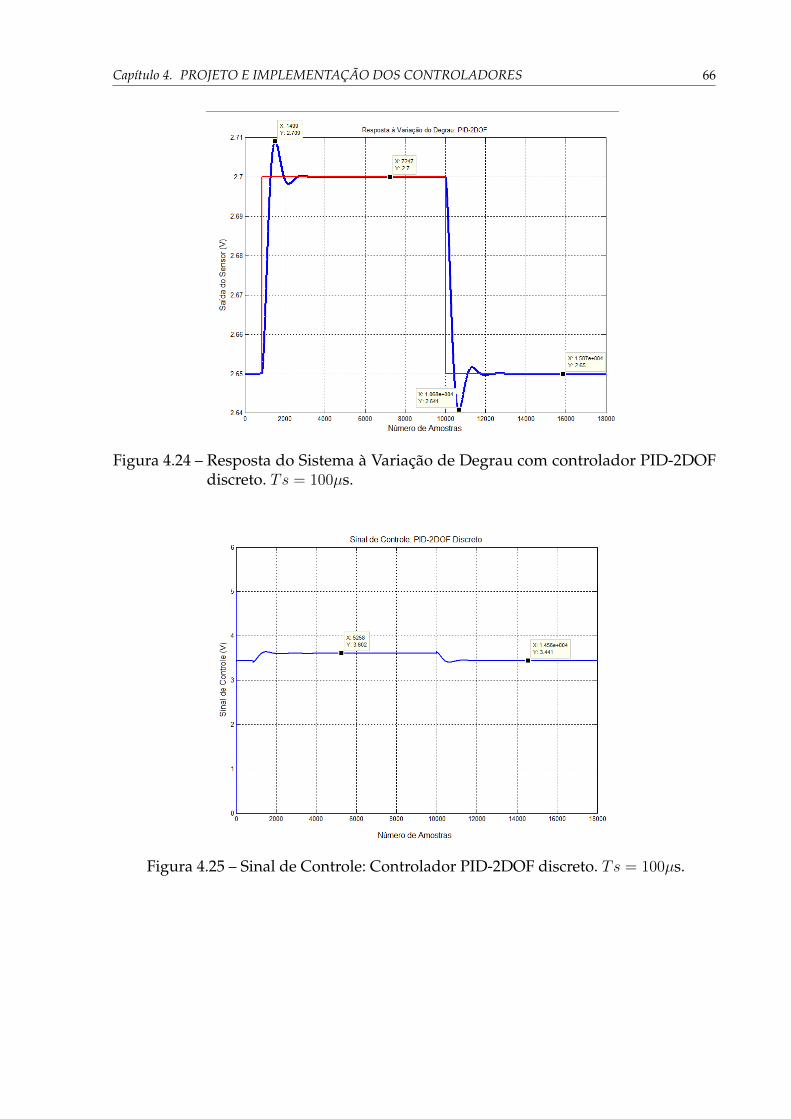
Capítulo 4. PROJETO E IMPLEMENTAÇÃO DOS CONTROLADORES 66
Figura 4.24 – Resposta do Sistema à Variação de Degrau com controlador PID-2DOFdiscreto. Ts = 100µs.
Figura 4.25 – Sinal de Controle: Controlador PID-2DOF discreto. Ts = 100µs.
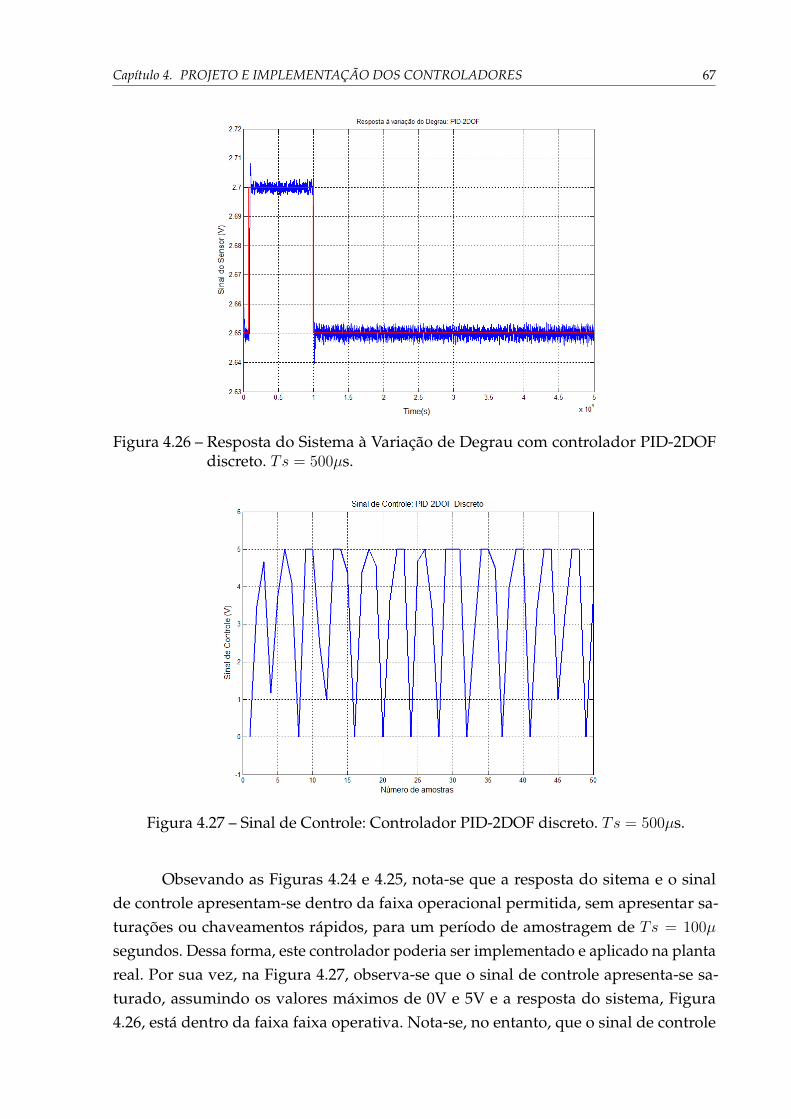
Capítulo 4. PROJETO E IMPLEMENTAÇÃO DOS CONTROLADORES 67
Figura 4.26 – Resposta do Sistema à Variação de Degrau com controlador PID-2DOFdiscreto. Ts = 500µs.
Figura 4.27 – Sinal de Controle: Controlador PID-2DOF discreto. Ts = 500µs.
Obsevando as Figuras 4.24 e 4.25, nota-se que a resposta do sitema e o sinalde controle apresentam-se dentro da faixa operacional permitida, sem apresentar sa-turações ou chaveamentos rápidos, para um período de amostragem de Ts = 100µ
segundos. Dessa forma, este controlador poderia ser implementado e aplicado na plantareal. Por sua vez, na Figura 4.27, observa-se que o sinal de controle apresenta-se sa-turado, assumindo os valores máximos de 0V e 5V e a resposta do sistema, Figura4.26, está dentro da faixa faixa operativa. Nota-se, no entanto, que o sinal de controle

Capítulo 4. PROJETO E IMPLEMENTAÇÃO DOS CONTROLADORES 68
oscila em alta frequência nos valores de 0V e 5V. Novamente, do ponto de vista prático,este comportamento é indesejado, uma vez que o chaveamento em alta frequência dotransistor, pode danificar o componente. Considerando-se estes efeitos, a discretizaçãodo controlador com um período de amostragem de Ts = 100µ segundos, apresenta-se omais adequado para a aplicação, dentre os valores testados.
Partindo deste resultado, quando da implementação prática do controle discretopor meio do microcontrolador PIC, cada etapa necessária para o cálculo e envio da açãode controle deve gastar um tempo de até 100µs. Dessa forma, para que a discretizaçãodo sistema seja feita adequadamente, o tempo total para o cálculo da ação de controlenão deve ser superior a 100µs equivalente ao período de amostragem necessário paraque os sinal de controle garanta a estabilidade do sistema, conforme apresentado nassimulações. No entanto, após a análise do controlador previamente implementado,por meio de um código em C, notou-se que a função de conversão analógica-digitalimplementada leva um torno de 238µs para efetuar a conversão. Dessa forma, a imple-mentação prática do controlador, para o período de amostragem desejado, se demonstralimitado e a sua aplicação real descartada. O código, elaborado previamente a estaanálise, que apresenta a discretização do controlador PID-2DOF e os cálculos necessá-rios para a ação de controle são apresentados no Anexo C deste trabalho. A Tabela 4.4apresenta resumidamente, o fluxo de comandos necessário para o cálculo da ação decontrole da função implementada no microcontrolador, também apresentado, no AnexoC.
Tabela 4.4 – Fluxo de Comandos
Passo Fluxo de Comandos de Um Controlador PID-2DOF
1 Tome o sinal de referência , SetpointnumSCA2 Faça o parametro q1 do filtro q1 = ki3 faça o parametro q2 do filtro q2 = 04 Calcule h(k) = q2.SetpointnumSCA5 Tome o sinal de saída, RealimentCtrlnumSCA6 Calcule a ação proporcional, c(k) = kp*RealimentCtrlnumSCA7 Calcule a ação integral, d(k) = h(k) - c(K) + x(k)8 Calcule a ação derivativa, w(k) = (kd/deltaTnumSCA).y(k) -
(kd/deltaTnumSCA).y(k-1)9 Calcule o sinal de controle, u(k) = d(k) - w(k)
10 Se 0 < u(k) < 1023, u(k) –> u (k) = d(k) - w(k)11 Se u(k) < 0 ou u(k) > 1023, então u(k) = 012 Envia o valor calculado para a variável SaidaAtuadornumSCA13 Atualize a ação integral, x(k + 1) = deltaTnumSCA.q1.SetpointnumSCA -
deltaTnumSCA.ki.y(k) + x(k)
onde w(k), h(k) e d(k) são variáveis auxiliares utilizadas na implementação doalgorítmo no microcontrolador.

Capítulo 4. PROJETO E IMPLEMENTAÇÃO DOS CONTROLADORES 69
4.6 Resultados Experimentais
4.6.1 Introdução
Nesta seção são apresentados e discutidos os resultados experimentais obtidosapós a implementação do controlador PD. O controlador implementado foi baseadosno projeto apresentado na Seção 4.2 deste trabalho. Neste ponto, deve ser ressaltadoque esta tentativa de controle, pela aplicação do controlador PD na planta, foi realizadaantes da avaliação de seu desempenho através das simulações apresentadas na Seção4.2.
4.6.2 Controlador PD Contínuo
A Figura 4.28 apresenta os circuitos do controlador PD montado.
Figura 4.28 – Controlador PD implementado em Protoboard.
O circuito do controlador PD é equivalente ao circuito apresentado pela Figura4.14, exceto pela presença do divisor resistivo, que permite extrair o sinal de polarizaçãoe o bloco somador que adiciona o sinal polarizante ao sinal de controle. A tentativade utilizar este controlador, mesmo após a simulação da planta retornar um sinal decontrole fora da faixa, se deve pelo fato de anteriormente à realização deste trabalho,verificar-se experimentalmente que um controlador PD é capaz de manter a esfera emequilíbrio, mesmo com erro em estado estacionário,[34].
Os componentes utilizados foram inicialmente ajustados segundo os valoresde projeto. Para garantir os ganhos kp e kd, próximos aos valores de kp = −3.78 ekd = −0.0189 foram utilizados trimpots de resistência igual a 10kΩ que permitem oajuste fino. A medição do sinal de controle demonstrou que o sinal obtido na saídado controlador PD analógico excursiona na faixa de 0V-5V. Dessa forma, foi possívelestabelecer a conexão física e elétrica entre o controlador PD e a entrada analógicada CAN-PIC. Neste ponto, deve-se ressaltar que o setpoint inicialmente utilizadonesta tentativa foi ajustado para o valor de 2.65V e que tentou-se manter a esfera a
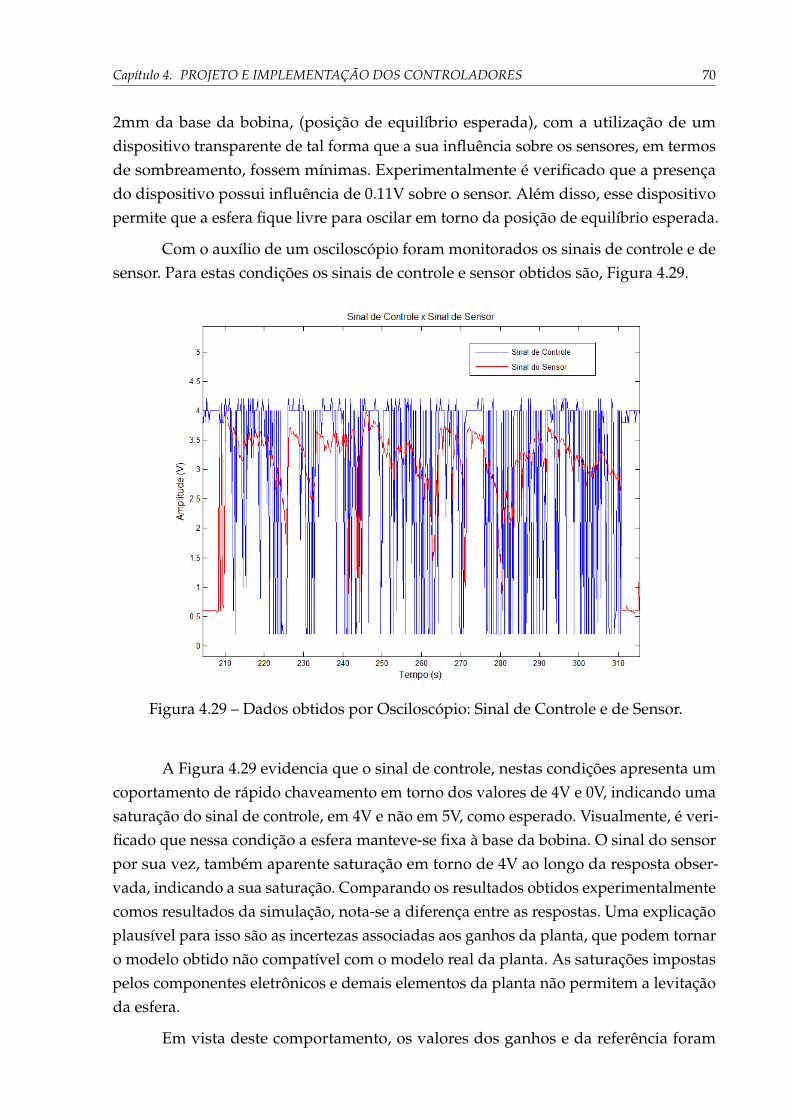
Capítulo 4. PROJETO E IMPLEMENTAÇÃO DOS CONTROLADORES 70
2mm da base da bobina, (posição de equilíbrio esperada), com a utilização de umdispositivo transparente de tal forma que a sua influência sobre os sensores, em termosde sombreamento, fossem mínimas. Experimentalmente é verificado que a presençado dispositivo possui influência de 0.11V sobre o sensor. Além disso, esse dispositivopermite que a esfera fique livre para oscilar em torno da posição de equilíbrio esperada.
Com o auxílio de um osciloscópio foram monitorados os sinais de controle e desensor. Para estas condições os sinais de controle e sensor obtidos são, Figura 4.29.
Figura 4.29 – Dados obtidos por Osciloscópio: Sinal de Controle e de Sensor.
A Figura 4.29 evidencia que o sinal de controle, nestas condições apresenta umcoportamento de rápido chaveamento em torno dos valores de 4V e 0V, indicando umasaturação do sinal de controle, em 4V e não em 5V, como esperado. Visualmente, é veri-ficado que nessa condição a esfera manteve-se fixa à base da bobina. O sinal do sensorpor sua vez, também aparente saturação em torno de 4V ao longo da resposta obser-vada, indicando a sua saturação. Comparando os resultados obtidos experimentalmentecomos resultados da simulação, nota-se a diferença entre as respostas. Uma explicaçãoplausível para isso são as incertezas associadas aos ganhos da planta, que podem tornaro modelo obtido não compatível com o modelo real da planta. As saturações impostaspelos componentes eletrônicos e demais elementos da planta não permitem a levitaçãoda esfera.
Em vista deste comportamento, os valores dos ganhos e da referência foram
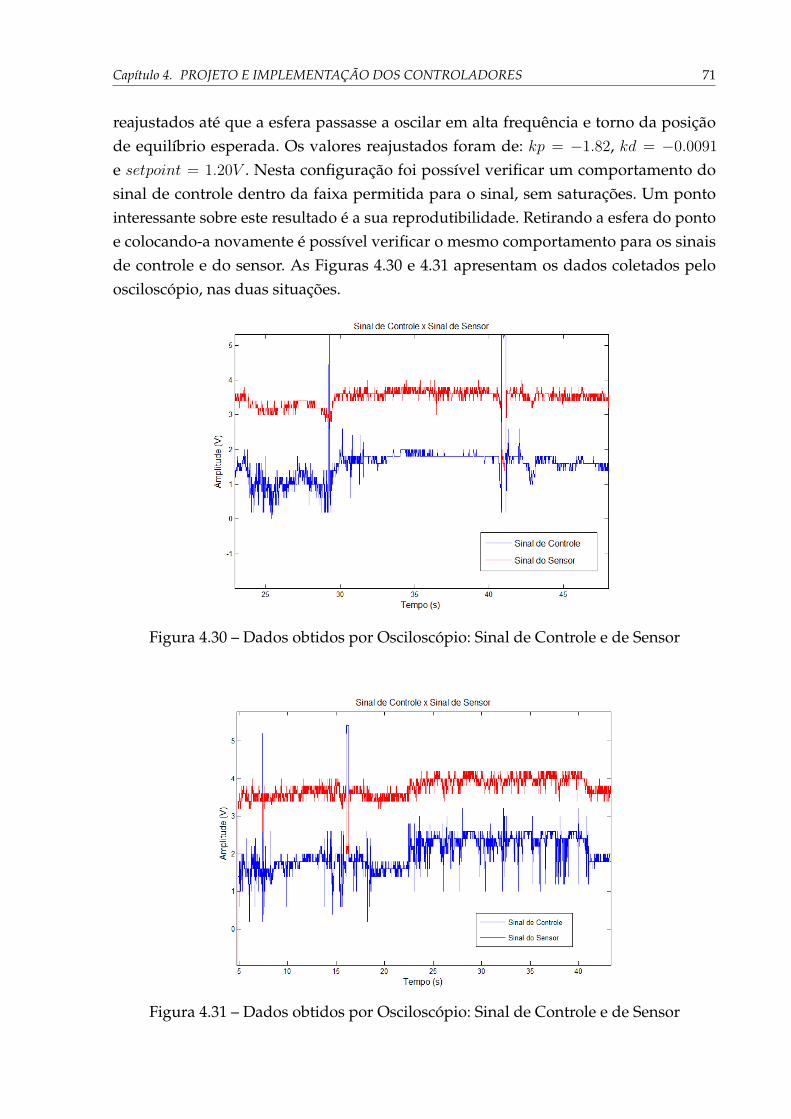
Capítulo 4. PROJETO E IMPLEMENTAÇÃO DOS CONTROLADORES 71
reajustados até que a esfera passasse a oscilar em alta frequência e torno da posiçãode equilíbrio esperada. Os valores reajustados foram de: kp = −1.82, kd = −0.0091
e setpoint = 1.20V . Nesta configuração foi possível verificar um comportamento dosinal de controle dentro da faixa permitida para o sinal, sem saturações. Um pontointeressante sobre este resultado é a sua reprodutibilidade. Retirando a esfera do pontoe colocando-a novamente é possível verificar o mesmo comportamento para os sinaisde controle e do sensor. As Figuras 4.30 e 4.31 apresentam os dados coletados peloosciloscópio, nas duas situações.
Figura 4.30 – Dados obtidos por Osciloscópio: Sinal de Controle e de Sensor
Figura 4.31 – Dados obtidos por Osciloscópio: Sinal de Controle e de Sensor
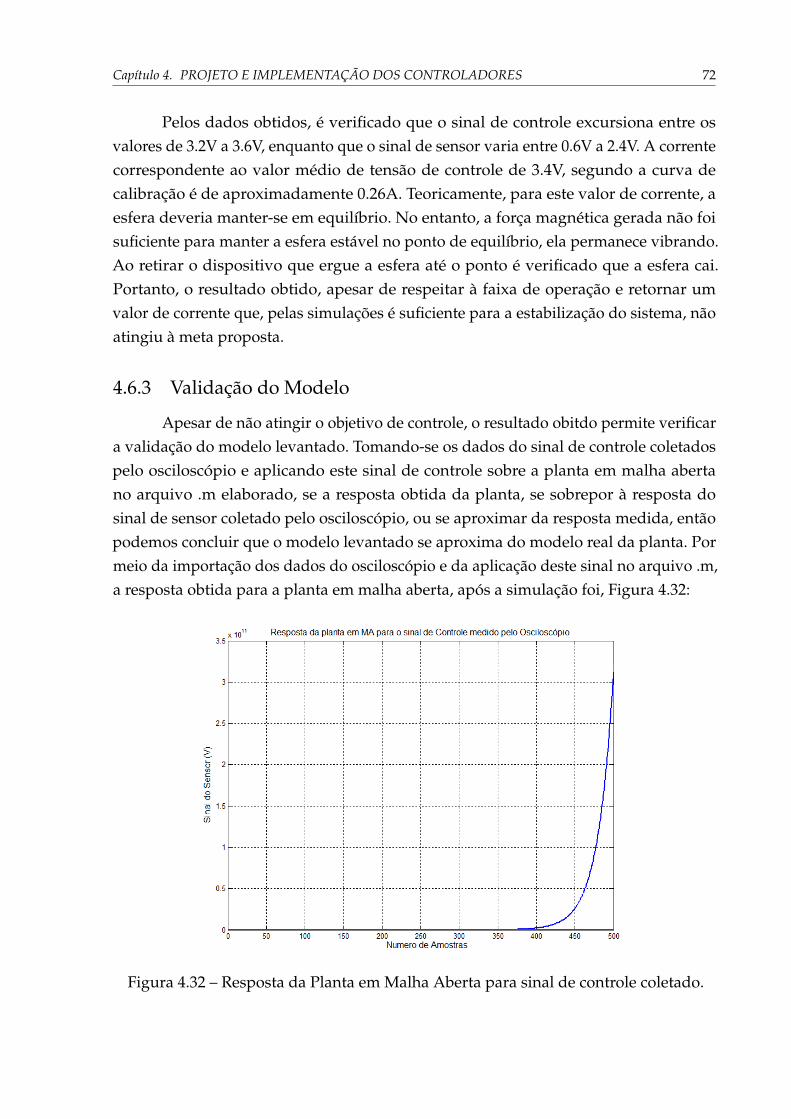
Capítulo 4. PROJETO E IMPLEMENTAÇÃO DOS CONTROLADORES 72
Pelos dados obtidos, é verificado que o sinal de controle excursiona entre osvalores de 3.2V a 3.6V, enquanto que o sinal de sensor varia entre 0.6V a 2.4V. A correntecorrespondente ao valor médio de tensão de controle de 3.4V, segundo a curva decalibração é de aproximadamente 0.26A. Teoricamente, para este valor de corrente, aesfera deveria manter-se em equilíbrio. No entanto, a força magnética gerada não foisuficiente para manter a esfera estável no ponto de equilíbrio, ela permanece vibrando.Ao retirar o dispositivo que ergue a esfera até o ponto é verificado que a esfera cai.Portanto, o resultado obtido, apesar de respeitar à faixa de operação e retornar umvalor de corrente que, pelas simulações é suficiente para a estabilização do sistema, nãoatingiu à meta proposta.
4.6.3 Validação do Modelo
Apesar de não atingir o objetivo de controle, o resultado obitdo permite verificara validação do modelo levantado. Tomando-se os dados do sinal de controle coletadospelo osciloscópio e aplicando este sinal de controle sobre a planta em malha abertano arquivo .m elaborado, se a resposta obtida da planta, se sobrepor à resposta dosinal de sensor coletado pelo osciloscópio, ou se aproximar da resposta medida, entãopodemos concluir que o modelo levantado se aproxima do modelo real da planta. Pormeio da importação dos dados do osciloscópio e da aplicação deste sinal no arquivo .m,a resposta obtida para a planta em malha aberta, após a simulação foi, Figura 4.32:
Figura 4.32 – Resposta da Planta em Malha Aberta para sinal de controle coletado.

Capítulo 4. PROJETO E IMPLEMENTAÇÃO DOS CONTROLADORES 73
Avaliando a Figura 4.32, observamos que o sistema não apresenta a mesmaresposta verificado nas Figuras 4.30 e 4.31, além de apresentar-se instável. Dessa forma,podemos concluir que, o modelo levantado para a planta, não se aproxima do modeloreal da planta. Possivelmente, os procedimentos utilizados na determinação dos ganhosdos elementos sensor e atuador, atribuíram grandes incertezas ao modelo levantado.Portanto, este resultado pode demonstrar que o modelo levantado não se adequa àplanta e que procedimentos mais precisos, devem ser utilizados para a determinaçãodos ganhos dos elementos sensor e atuador, bem como da posição de equilíbrio.
4.7 Considerações Finais
Neste capítulo foram apresentados os projetos dos controladores PD, PD compolarização, PID-1DOF e PID-2DOF analógicos, assim como o controlador PID-2DOFdiscretizado. Foi verificado que a polarização do controlador PD permite reduzir demaneira eficaz o erro de estado estacionário, garantindo assim uma operação dentro dafaixa permitida tanto para o sinal de controle, quanto para o sinal de saída da planta.A consideração das saturações impostas pelos circuitos integrados consideradas nasimulação, revelaram que o controlador PD Polarizado apresenta sinal de controle esaída do sistema dentro das faixas permitidas de operação, sendo portanto, possível deimplementação.
O controlador PID com dois graus de liberdade, por sua vez, se mostrou maiseficiente quando comparado com o controlador PID de um grau de liberdade em termosde velocidade de resposta e sobresinal quando da variação sucessiva de degraus. Alémdisso, o controlador apresenta sinal de controle e resposta do sistema dentro da faixaoperacional permitida, quando da variação do degrau. No entanto, a limitação práticaimposta pelo tempo necessário para a realização dos cálculos acaba excedendo o períodode amostragem necessário para a discretização e controle efetivo da planta. Por isso, asua implementação prática, não permitiria atingir o objetivo de controle com a estaçãomicrocontrolada utilizada, considerando o período de amostragem de 100µs.
Por fim, foram apresentados os resultados experimentais oriundos da aplicaçãodo controlador PD sobre a planta. Os resultados evidenciaram que o controlador nãopermitiu que o objetivo de controle fosse atingido, apesar do sinal de controle variardentro da faixa operacional permitida. Além disso, de posse do sinal de controle e daresposta real da planta, pudemos verificar se o modelo levantado se aproxima ou nãodo modelo real da planta.

Capítulo 4. PROJETO E IMPLEMENTAÇÃO DOS CONTROLADORES 74
Os resultados obtidos, foram negativos, uma vez que a resposta da planta emmalha aberta levantada, se distanciou da resposta real obtida, sugerindo, então, que omodelo levantado, não está adequado. O ideal então é que se recorra a procedimentosmais precisos para o levantamento das características da planta e que os resultadosencontrados sugerem que o modelo levantado não está próximo do modelo real.

75
5 Conclusão
A tecnologia MAGLEV tem recebido mais atenção atualmente, pois além dasaplicações em sistemas de transporte rápido (trens Maglev), apresenta aplicações emdiversas áreas da engenharia. A elaboração de sistemas de geração de energia maiseficientes, com menores perdas, devido à eliminação do atrito entre as partes quecompõem os geradores é uma aplicação importante, uma vez que os países estãoinvestindo em tecnologias alternativas para a geração de energia. Além disso, aplicaçõesmédicas, residenciais e até em meios culturais, reforçam a importância de se estudar eotimizar os métodos de controle aplicado ao problema.
Neste trabalho as estratégias de controle usualmente aplicadas ao problemada estabilidade magnética foram estudadas. O modelo da planta escolhido, baseadona linearização da força magnética em torno da posição de equilíbrio, apresentadoem [4], permite recorrer a estratégias clássicas de controle com o intuito de garantir aestabilidade da esfera. Além das estratégias clássicas, verifica-se na literatura a utilizaçãode estratégias modernas de controle baseadas em lógica fuzzy, controladores GPI emétodos adaptativos.
Em paralelo a este estudo, a planta didática que representa um sistema MA-GLEV foi implementada com o intuito de verificar quais dos controladores projetadospoderiam ser aplicados no sistema, de tal forma a atingir o objetivo final de controle.Elementos sensor, atuador e controladores analógicos e digital foram construídos eutilizados para tanto. Neste ponto é importante ressaltar que dificuldades foram encon-tradas na determinação dos ganhos da planta, uma vez que os métodos utilizados paraa estimação não são precisos e atribuem incertezas ao modelo da planta. Não apenas osmétodos de medição dificultam isso, mas também as não idealidades dos elementos daplanta, tal como a má construção da bobina, a não linearidade e sensibilidade a agen-tes externos dos sensores ópticos e as limitações impostas pelos demais componenteseletrônicos presentes na planta, atribuem mais incertezas à planta.
A partir dos parâmetros levantados da planta construída, foi possível obterum modelo contínuo e discreto da planta e assim testar através de simulações se oscontroladores projetados (PD, PD Polarizado, PID-1DOF, PID-2DOF analógicos e umcontrolador PID-2DOF discreto) se adequam às limitações práticas impostas pela ele-trônica utilizada nos elementos sensor, atuador e controladores/microcontrolador. Pormeio de simulações computacionais, conforme apresentado no capítulo 4, foi verificadoque os controladores citados garantem a estabilidade do sistema. No entanto, somente ocontrolador PD Polarizado poderia ser implementado na prática. As limitações práticasimpostas pela estação microcontrolada utilizada, não permitem o cálculo da ação de
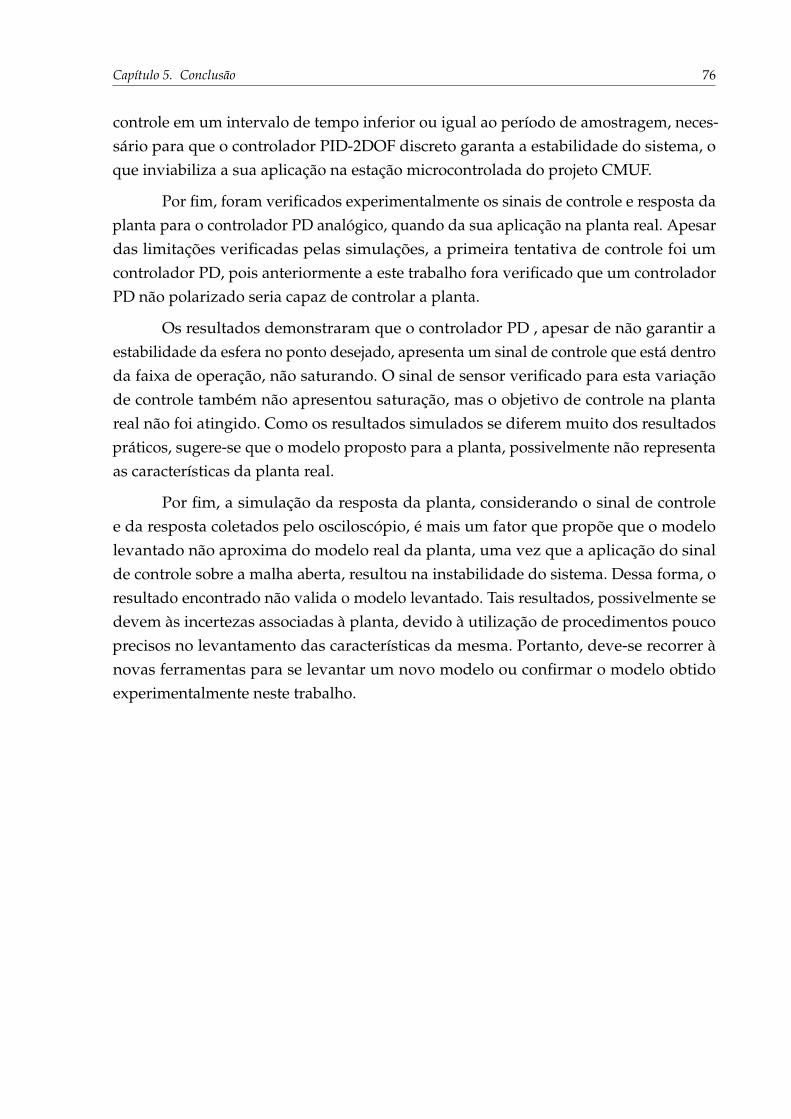
Capítulo 5. Conclusão 76
controle em um intervalo de tempo inferior ou igual ao período de amostragem, neces-sário para que o controlador PID-2DOF discreto garanta a estabilidade do sistema, oque inviabiliza a sua aplicação na estação microcontrolada do projeto CMUF.
Por fim, foram verificados experimentalmente os sinais de controle e resposta daplanta para o controlador PD analógico, quando da sua aplicação na planta real. Apesardas limitações verificadas pelas simulações, a primeira tentativa de controle foi umcontrolador PD, pois anteriormente a este trabalho fora verificado que um controladorPD não polarizado seria capaz de controlar a planta.
Os resultados demonstraram que o controlador PD , apesar de não garantir aestabilidade da esfera no ponto desejado, apresenta um sinal de controle que está dentroda faixa de operação, não saturando. O sinal de sensor verificado para esta variaçãode controle também não apresentou saturação, mas o objetivo de controle na plantareal não foi atingido. Como os resultados simulados se diferem muito dos resultadospráticos, sugere-se que o modelo proposto para a planta, possivelmente não representaas características da planta real.
Por fim, a simulação da resposta da planta, considerando o sinal de controlee da resposta coletados pelo osciloscópio, é mais um fator que propõe que o modelolevantado não aproxima do modelo real da planta, uma vez que a aplicação do sinalde controle sobre a malha aberta, resultou na instabilidade do sistema. Dessa forma, oresultado encontrado não valida o modelo levantado. Tais resultados, possivelmente sedevem às incertezas associadas à planta, devido à utilização de procedimentos poucoprecisos no levantamento das características da mesma. Portanto, deve-se recorrer ànovas ferramentas para se levantar um novo modelo ou confirmar o modelo obtidoexperimentalmente neste trabalho.

Capítulo 5. Conclusão 77
5.1 Trabalhos futuros
Propõe-se como trabalhos futuros:
Recorrer a instrumentos mais precisos no processo de calibração dos módulossensor e atuador, de tal forma a minimizar as incertezas associdas à planta. Além disso,a implementação de um nova função de conversão analógica para digital na estaçãomicrocontrolada CAN-PIC que minimize o tempo de conversão, tornando-a inferior ouigual ao período de amostragem desejado de 100µs também é uma proposta de trabalhofuturo.
Outra proposta seria a implementação do controlador PD-Polarizado, que, con-forme a análise feita através das simulações, pode ser capaz de atingir o objetivo decontrole, uma vez que reduz o erro de estado estacionário. A alteração da bobina utili-zada para uma com características de campo mais uniforme, também é uma propostade trabalho futuro.

78
Referências
[1] RAU, H. D.; SINGH, A.; PATIL, M. D. Design of digital controller using pole place-ment method. In: Control, Automation, Communication And Energy Conserva-tion, 2009 International Conference On. Perundurai, India: [s.n.], 2009. p. 1–5.
[2] YAGHOUBI, H. Practical Applications Magnetic Levitation. Teerã, Irã, 2012.
[3] WU, H.; WANG, Z.; HU, Y. Study on support properties of axial maglev bloodpump. Research Progress of Magnetic Levitating Bearing and Some AdvancedTechnology, v. 150, p. 187–193, 2012.
[4] GHOSH, A. et al. Design and implementation of a 2-dof: Pid compensation formagnetic levitation systems. ISA Transactions, v. 53, n. 4, p. 1216–1222, Jul 2014.
[5] AHMAD, A. et al. Control of magnetic levitation system using fuzzy logic con-trol. In: Computational Intelligence, Modelling and Simulation (CIMSiM), 2010Second International Conference on. [S.l.: s.n.], 2010. p. 51–56.
[6] ZOMORODIAN, A. et al. A real time digital controller for magnetic levitationsystem. Second IEEE Conference on Industrial Electronics and Applications, v. 1,p. 1013–1018, 2007.
[7] ALI, H. I. Robust pi-pd controller design for magnetic levitation sys. Eng.&Tech.Journal, v. 32, n. 3, p. 667–680, 2014.
[8] NGUYEN, H. C. T.; SHEN, A. W. Wide range stabilization of a magnetic levitationsystem using analog fuzzy supervisory phase lead compensated controller. 2011International Conference on Modeling, Simulations and Control, v. 10, p. 1–6,2011.
[9] BATISTA, A. P. Monitoração e Controle de Processos Térmicos em Edificaçõespor meio de um Sistema Distribuído. Dissertação (Mestrado) — UFMG, July2006.
[10] MICROCHIP. 28/4044 - Pin Enhanced Flash Microcontrollers. 2013.
[11] TRAN, V. N.; STUART, R.; BHAVSAR, H. Phototransistor Switching Time Analy-sis. 4590 Patrick Henry Drive, Santa Clara, CA 95054-1817, 2009.
[12] ST:MICROELECTRONICS. TIP31A/31C,TIP32A/32B/32C, Complementary Sili-con Power Transistors. 1999.
[13] SEMICONDUCTORS, V. 4N25,4N26,4N27,4N28. 2010.
[14] EL-HAJJAJI, A.; OULADSINE, M. Modeling and nonlinear control of magneticlevitation systems. Industrial Electronics, IEEE Transactions on, v. 48, n. 4, p. 831–838, Aug 2001. ISSN 0278-0046.

Referências 79
[15] MORALES, R.; FELIU, V.; SIRA-RAMíREZ, H. Nonlinear control for magneticlevitation systems based on fast online algebraic identification of the input gain.IEEE Transactions on Control Systems Technology, v. 19, n. 4, p. 757–771, Jul 2011.ISSN 1063-6536.
[16] FEEDBACK. Magnetic Levitation: Control Experiments Feedback InstrumentsLimited. [S.l.], 2011. UK.
[17] CHEN; LI, Y. On the convergence and arameters selection of an improved particleswarm optimization. International Journal of Control, Automation and Systems,v. 6, n. 4, p. 559–570, 2008.
[18] EARNSHAW, S. On the nature of the molecular forces which regulate the constitu-tion of the luminiferous ether. Transactions of the Cambridge Philosofical Society,v. 7, p. 97–122, Mar 1842.
[19] Emile Bachlet. Levitating Transmitting Apparatus. Mar.19.1912. 1,020,942.
[20] POWELL, J.; DANBY, G. MAGLEV: The New Mode of Transport For the 21stCentury. 2003. 43-57 p. 21tst Century Science & Technology Magazine.
[21] ALONSO; FINN. Física um curso universitário. [S.l.]: Addinson-Wesley Pu-blishing Company, 1994. v. 1.
[22] LIVINGSTON, J. D. Rising Force: The Magic of Magnetic Levitation. [S.l.]: Har-vard University Press, 2011.
[23] YAGHOUBI, H. Magnetically Levitated Trains, Maglev. Tehran, Iran: Puyan Far-negar Publisher, 2008. v. 1.
[24] YAGHOUBI, H.; HOSEINI, S. Mechanical assessment of maglev vehicle - a proposalfor implementating maglev trains in iran. In: The ASME 10th Biennial Conferenceon Engineering Systems Design and Analysis. [S.l.: s.n.], 2010. v. 2.
[25] HULL, J. R. et al. Analysis of levitational systems for a superconducting launchring. Applied Superconductivity, IEEE Transactions on, v. 17, n. 2, p. 2117–2120,June 2007. ISSN 1051-8223.
[26] MIRICA, K. A. et al. Magnetic levitation on the analysis of food and water. Journalof Agricultural and Food Chemistry, v. 58, n. 11, p. 6565–6569, 2010.
[27] SADIKU, M. N. O. Elementos de Eletromagnetismo. [S.l.]: Oxford University Press,2010.
[28] W.YU; X.LI. A magnetic levitation system for advanced control education. TheInternational Federation of Automatic Control, v. 1, n. 1, p. 9032–9037, 2014.
[29] KAWAKAMI, R. et al. A simple technique for identifying a linearizes model for adidactic magnetic levitation system. IEEE Transaction On Education, v. 46, n. 1, p.22–25, Mar 2003.
[30] JEFFERSON, S.; CLEISON, D.; RAPHAEL, B. Modelagem de sistemas de levitagçãomagnética por abordagem analítica baseada no conceito de circuitos magnéticos.XL Congresso Brasileiro De Educação Em Engenharia, v. 1, p. 1–12, Sept 2012.

Referências 80
[31] LIU, H.; ZHANG, X.; CHANG, W. Pid control to mmaglev train system. 2009Internatonal Conference on Industrial and Information Systems, v. 1, p. 341–343,2009.
[32] OGATA, K. Engenharia de Controle Moderno. [S.l.]: Prentice-Hall, 1993. v. 1.
[33] SONI, A. et al. Position control for electromagnetic ssuspension system. Interna-tional Journal of Emerging Technology and Advanced Engineering, v. 4, n. 6, p.329–334, 2014.
[34] FARIA, L. M.; SILVA, M. B. E. da. Relatório Final da Disciplina Laboratório deControle de Processo. [S.l.], 2013.
[35] L.PHILLIPS, C. DSystem Control System Analysis and Design. [S.l.]: Prentice-Hall, 1995.
[36] STEWART, J. Cálculo:Volume 1. [S.l.]: Thomson Learning, 2006. v. 1.
[37] ISADORI, A. Nonlinear Control Systems: An Introduction. [S.l.]: Springer-Verlang, 1989. v. 1.

Anexos

82
ANEXO A – Dimensional Da Planta
A Figura A.1 a seguir, elaborado com o auxílio do software Autocad 2014, apre-senta as dimensões e as vistas frontal e lateral da montagem.
Figura A.1 – Dimensões da Planta
Para a construção da caixa, os seguintes materiais foram utilizados:
• Caixa de madeira, tipo MDF: 30cm x 30cm x 15cm.
• Plataforma de madeira, tipo MDF: 40cm x 60cm x 1,75cm.
• Suporte de madeira para bornes: 5cm x 3,5cm.
• Tinta de Spray Preto Brilhante (ChemiColor)
• Tinta de Spray Preto Fosco (ChemiColor)
• Cano de PVC Amanco (2x): Raio = 1,1cm e 11 cm de comprimento.
• Emissor LED TIL32 e Receptor Fototransistor TIL78 (2 pares).
• Bobina de montagem caseira.
• Bornes de ligação para cabo banana (4x).
• Cabo para alimentação da bobina.
A opção de se pintar a caixa de madeira com a cor preta se deve pelo uso de sensoresópticos que estão sujeitos a ruídos luminosos. Idealmente, a planta deve estar em umambiente escuro de tal forma a minimizar estes ruídos.
83
ANEXO B – Códigos MATLAB
Abaixo os códigos utilizados para a simulação do controlador PID-2DOF discretoe curvas de calibração:
B.1) Código do Controlador PID-2DOF discreto
clc;
clear all;
close all;
g = 9.81;
Xo = 0.002;
io = 0.26;
k1 = 0.0382;
k2 = 1058 ;
ns = 0.4000;
na = 0.1450 ;
Ki = (2*g)/io;
kx = (2*g)/Xo;
% Volt_Bit = 1023/5;
% Bit_Volt = 5/1023;
zt = 0.5; wn = 44; af = -450*zt*wn;
bp= k1*k2*Ki; !!
pp = sqrt(kx);
kp = 1*(((wn^2)+(2*zt*wn*af)+(pp^2))/ bp)
ki= (wn^2*af)/bp
kd = (2*zt*wn+af)/bp
q1 = ki;
q2 = 0;
Ts = 0
Controle_PID = tf([kd kp ki],[1 0])
gc = tf(-Ki*k1*k2,[1 0 -kx])
FT = Controle_PID*gc
rlocus(FT)
%%
Ts = 0.0001*1.2;
gc = tf(-Ki,[1 0 -kx]);
gz = c2d(gc,Ts,’zoh’);
[Nz,Dz] = tfdata(gz,’v’);
ANEXO B. Códigos MATLAB 84
c1 = Nz(2);
b = Dz(2);
m = 12500;
ref = 2.65*ones(1,m);
ref(1:500)= 2.65;
y(1:2)= 2.65
x(1:2)= -364.8
L(1:2)= 1.267e-4
p(1:2)= 0.0017
a(1:2)= 2.1267e-3
for k = 2:m
%-------------------------------------
% Controlador PID-2DOF
%-------------------------------------
h(k) = ref(k)*q1;
c(k) = y(k)*kp;
d(k) = x(k)- c(k) + ref(k)*q2 ;
w(k)= (kd/Ts)*y(k) - (kd/Ts)*y(k-1);
u(k) = d(k)-w(k);
if (u(k) > 1023)
u(k) = 1023;
elseif(u(k) < 0)
u(k) =0;
end
% Atualização da Integral
x(k+1) = Ts*q1*ref(k) - Ts*ki*y(k) + x(k);
%-------------------------------------------
% Simulacao da Planta 1 passo a frente
%--------------------------------------------
p(k) = k1*u(k) - io + na; % sinal de entrada
L(k+1) = -b*L(k) -L(k-1)+ c1*p(k)+c1*p(k-1);
a(k+1) = L(k+1)+ Xo;
y(k+1) = k2*a(k+1) + ns;
end
figure(1)
plot(y,’b’)
hold on
plot(ref,’r’);
ANEXO B. Códigos MATLAB 85
grid on
figure(2)
plot(u,’b’)
B.2) Código: Curva de Calibração do Sensor:
Gap = 10^-2*[0.3 0.2 0.1 0]
V2 = [3.78 3.35 3.85];
V3 = [2.60 2.83 2.54];
V4 = [0.97 0.97 0.99];
V5 = [0.69 0.67 0.72];
V = [mean(V2) mean(V3) mean(V4)
mean(V5)]
figure(1)
plot(Gap,V)
grid on;
hold on
plot(Gap,V)
[P,S] = polyfit(Gap,V,1)
P
Y = polyval(P,Gap)
plot(Gap,Y,’r’)
grid on
R = 1.75
m = 21.71
B.3) Código: Curva de Calibração do Atuador:
Sinal_controle = [0.905 1.109 1.32 1.51
1.83 2.12 2.72 3.07 3.45 3.78 4.02 4.43 4.66 4.85 4.96]
Vcc = 29.9
VCE = [24.0 23.1 22.3 21.3 21.3 20.
3 19.87 19.6 19.35 18.18 18.07 17.60 17.45 17.35 17.32]
Rbobina = 39
Ic = (Vcc - VCE)/Rbobina
figure(2)
plot(Sinal_controle, Ic)
hold on
[P,S] = polyfit(Sinal_controle,Ic,1)
P

ANEXO B. Códigos MATLAB 86
Y = polyval(P,Sinal_controle)
plot(Sinal_controle,Y,’r’)
grid on

87
ANEXO C – Código Elaborado no PIC para
implementação do Controlador PID-2DOF
Principais rotinas utilizadas para implementação do Controle PID-2DOF local:
C.1)Conversão A/D do sinal de entrada no PIC16F876A e chamada da funçãoıcalculaaocontrole”:
SaidaAtuador1_MSB = INIT_CCPR1L;
SaidaAtuador1_LSB = (INIT_CCP1CON << 2) & 0xc0;
SaidaAtuador2_MSB = INIT_CCPR2L;
SaidaAtuador2_LSB = (INIT_CCP2CON << 2) & 0xc0;
a_d_converter(0);
RealimentCtrl1MSB= ADRESH;
RealimentCtrl2MSB= ADRESH;
RealimentCtrl1LSB = ADRESL & 0xC0;
RealimentCtrl2LSB = ADRESL & 0xC0;
Calcula Ação Controle
calcula_acao_controle();
C.2) Cálculo da Ação de Controle:
void calcula_acao_controle()
#ifdef NO_CONTROLADOR
Ki = 29;
Kd = 7;
KpnumSCA=5;
setpointnumSCA = 784;
q2 = 0;
q1= Ki;
aux_float1 = (float) setpointnumSCA*q2;
aux_float2 = (float) KpnumSCA* (RealimentCtrlnumSCA >> 6);
aux_float1 = (float) aux_float1 - aux_float2 + aux_floatx;
aux_float2 = (float) (Kd/deltaTnumSCA)*(RealimentCtrlnumSCA >> 6);
aux_float2 = (float)aux_float2 -(Kd/deltaTnumSCA)*RealimentKmenos1numSCA;
aux_float2 = (float) (aux_float1 - aux_float2);
AcaoControlenumSCA = (float) aux_float2;
AcaoControlenumSCA = (float) KpnumSCA*(RealimentCtrlnumSCA >> 6);

ANEXO C. Código Elaborado no PIC para implementação do Controlador PID-2DOF 88
if(AcaoControlenumSCA > 1023)
AcaoControlenumSCA = 1023;
if(AcaoControlenumSCA < 0)
AcaoControlenumSCA = 0;
//=====================================
// % ATUALIZAÇÃO DA INTEGRAL
// =======================================
aux_float1 =(float)deltaTnumSCA*q1*setpointnumSCA;
aux_float2 = (float)deltaTnumSCA*Ki*(RealimentCtrlnumSCA >> 6);
aux_floatx = (float)aux_float1 - aux_float2 + aux_floatx;
RealimentKmenos1numSCA =(RealimentCtrlnumSCA >> 6);
#endif
C.3) Envio da ação de controle para a saída da CAN-PIC e comparação com o sinalPWM:
calcula_acao_controle();
SaidaAtuadornumSCA = (unsigned int) AcaoControlenumSCA ;
CCPR1L = SaidaAtuador1_MSB; //8 MSB do pwm
CCP1X = SaidaAtuador1_bit7;
CCP1Y = SaidaAtuador1_bit6; //1 LSB do pwm
CCPR2L = SaidaAtuador2_MSB; //8 MSB do pwm
CCP2X = SaidaAtuador2_bit7;
CCP2Y = SaidaAtuador2_bit6; //1 LSB do pwm
CCPR1L = SaidaAtuador1_MSB; //8 MSB do pwm
CCP1X = SaidaAtuador1_bit7;
CCP1Y = SaidaAtuador1_bit6; //1 LSB do pwm
CCPR2L = SaidaAtuador2_MSB; //8 MSB do pwm
CCP2X = SaidaAtuador2_bit7;
CCP2Y = SaidaAtuador2_bit6; //1 LSB do pwm

89
ANEXO D – Código Elaborado no PIC para Curva de
Calibração do Atuador
O código a seguir é utilizado para gerar a lógica necessária à excursão do sinal aser aplicado na resistência da base do transsitor variar de 0V-5V. Neste caso, o sinal deentrada é convertido de analógico para digital, extraindo-se o valor complementar ao si-nal de entrada convertido para bits e por fim enviado à saída PWM do microcontrolador.O Código apresenta apenas a rotina presente no função main do programa:
//****************************Inicio Teste PWM*******
SaidaAtuador1_MSB = INIT_CCPR1L;
SaidaAtuador1_LSB = (INIT_CCP1CON << 2) & 0xc0;
SaidaAtuador2_MSB = INIT_CCPR2L;
SaidaAtuador2_LSB = (INIT_CCP2CON << 2) & 0xc0; //2 LSB do pwm
//LEITURA
a_d_converter(0);
SaidaAtuador1_MSB=ADRESH; //
SaidaAtuador1_LSB=ADRESL; //
SaidaAtuador2_MSB=ADRESH; // Estas variáveis armazenam
SaidaAtuador2_LSB=ADRESL;
//escrita pwm
SaidaAtuador1_MSB = 255 - SaidaAtuador1_MSB;
SaidaAtuador2_MSB = 255 - SaidaAtuador2_MSB;
CCPR1L = SaidaAtuador1_MSB; //8 MSB do pwm
CCP1X = SaidaAtuador1_bit7;
CCP1Y = SaidaAtuador1_bit6; //1 LSB do pwm
CCPR2L = SaidaAtuador2_MSB; //8 MSB do pwm
CCP2X = SaidaAtuador2_bit7;
CCP2Y = SaidaAtuador2_bit6; //1 LSB do pwm
//*****************************Fim Teste PWM*********************

90
ANEXO E – Projeto e Simulação: Controlador PID:
1-DOF versus 2-DOF Proposto por Ghosh
Nesta seção são apresentados e discutidos resultados preliminares de simulaçõesobtidas com o auxílio da ferramenta MATLAB − SIMULINK para os controladoresPID com um e dois graus de liberdade, segundo o projeto proposto por [4]. As simula-ções levam em conta os parâmetros da planta e ganhos utilizados no artigo [4], assimcomo o sinal de referência aplicado na entrada do sistema em malha fechada. Nestecaso, as respostas obtidas são decorrentes de variação ao degrau. Segundo [4], o projetodo controlador PID:2-DOF se apresenta interessante, devido à sua fácil implementação,fácil ajuste e pela robustez, desempenho e capacidade de resposta às perturbaçõesaplicadas sobre o sistema.
Antes de apresentar as respostas para os controladores PID com um e dois grausde liberdade, é interessante verificar por meio de uma simulação a instabilidade dosistema Maglev com os parâmetros do autor. Partindo da representação em diagramade blocos do sistema em malha aberta proposto por [4], conforme a Figura E.1.
Figura E.1 – Sistema Maglev em MA, figura adaptada de [4].
Simulou-se a resposta temporal ao degrau do sistema em malha aberta, que éapresentada na Figura E.2.
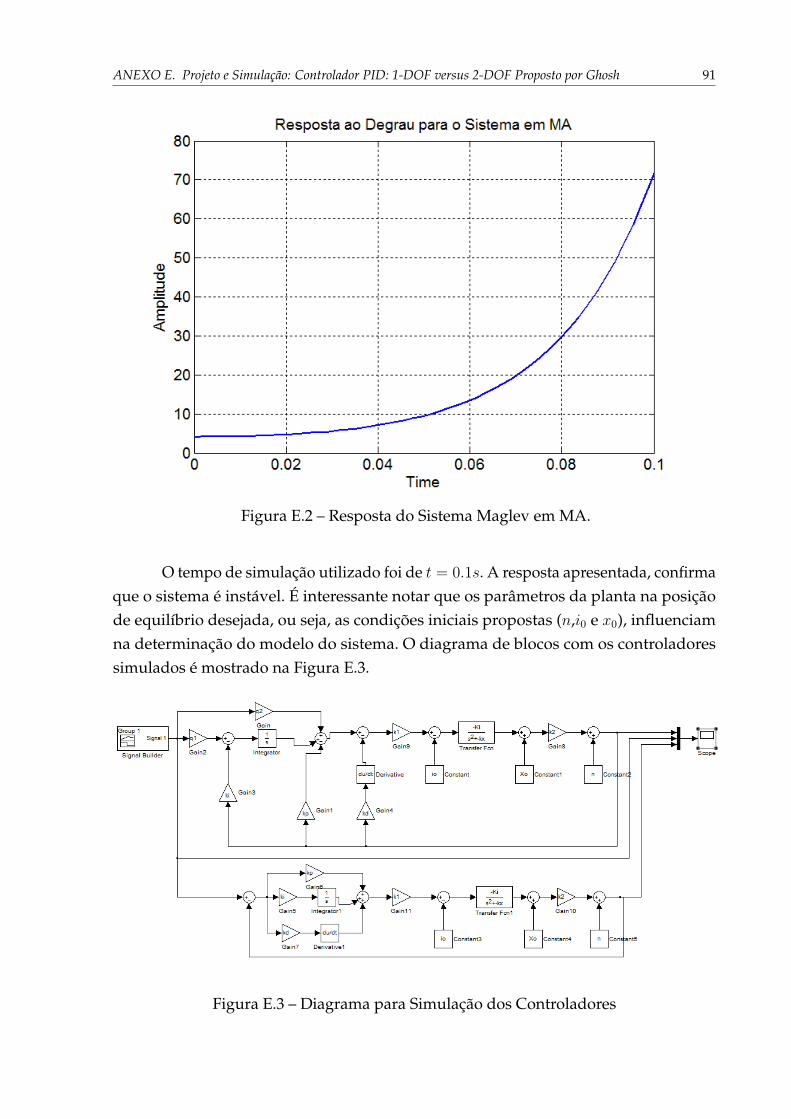
ANEXO E. Projeto e Simulação: Controlador PID: 1-DOF versus 2-DOF Proposto por Ghosh 91
Figura E.2 – Resposta do Sistema Maglev em MA.
O tempo de simulação utilizado foi de t = 0.1s. A resposta apresentada, confirmaque o sistema é instável. É interessante notar que os parâmetros da planta na posiçãode equilíbrio desejada, ou seja, as condições iniciais propostas (n,i0 e x0), influenciamna determinação do modelo do sistema. O diagrama de blocos com os controladoressimulados é mostrado na Figura E.3.
Figura E.3 – Diagrama para Simulação dos Controladores

ANEXO E. Projeto e Simulação: Controlador PID: 1-DOF versus 2-DOF Proposto por Ghosh 92
Na porção superior do diagrama encontra-se o controlador PID de dois grausde liberdade, enquanto que na parte inferior se encontra o controlador de um grau deliberdade. Os sinais de saída das duas malhas, assim como o sinal de referência sãoenviados ao bloco scope para visualização das respostas em relação ao sinal de entrada.O sinal de referência aplicado sobre o sistema segue às especificações propostas em [4],exceto pelas condições iniciais do sistema que não estão especificadas no artigo. Nocaso do sistema com controlador PID de dois gruas de liberdade, aos parâmetros q1 e q2foram atribuídos os valores q1 = −2.6642 e q2 = 0. As respostas obtidas são mostradasna Figura E.4.
Figura E.4 – Respostas para: PID-1DOF e PID-2DOF (q2 = 0)
Conforme a Figura 4.3 a resposta do controlador 1-DOF apresenta sobresinaisa cada mudança do sinal de referência. Isso evidencia que o controlador de um graude liberdade apresenta sobresinais indesejáveis a cada variação do degrau. Por suavez, o controlador 2-DOF apresenta rápido tempo de acomodação à cada variaçãoda referência. De acordo com [4], diferentes ajustes para q1 e q2 permitem reduzir osobresinal inicial, igualando-o (ajuste segundo a relação: q2 = q1/1.2) ou tornando-oinferior ao obtido para o controlador 1-DOF (à medida que q2 aumenta). Portanto, emtermos de tempo de acomodação e de menor sobresinal para variações de degrau, ocontrolador PID-2DOF apresenta melhor desempenho.

93
ANEXO F – Modelagem Normalizada
Em [5], a modelagem se baseia na linearização da força magnética F em torno daposição de equilíbrio e na normalização das grandezas associadas à dinâmica. A FiguraF.1 apresenta o diagrama de corpo livre com as grandezas relacionadas à dinâmicadetalhada em [5].
Figura F.1 – Diagrama de Corpo Livre, figura adaptada de [5]
As grandezas força magnética, F, posição em relação à bobina, x, corrente nabobina, I, e tensão de controle, V, são normalizadas em relação aos valores máximosque podem assumir. Neste ponto, é importante ressaltar que o subíndice n e a letraminúscula são utilizadas na nomenclatura das variáveis normalizadas. As grandezasnormalizadas, são apresentadas por [5] como:
fn =F −GG
, xn =X −X0
D, in =
I − I0Imax
, vn =V − V0Vmax
(F.1)
onde fn é a força resultante normalizada, xn a distância normalizada entre a esfera e oeletroimã, ir a corrente normalizada e vn a tensão normalizada. O valor máximo quefn pode assumir é igual à força gravitacional G, enquanto que o valor máximo que xnpode assumir é igual a distância entre o eletroimã e o solo. Os valores máximos para ine vn são designados por Imax e Vmax.
A substituição de fn na equação leva a:
fn = −mD
G.d2x
dt2= −m D
mg.d2x
dt2= −D
g.d2x
dt2(F.2)
Conforme apresentado em [4], a força magnética que atua sobre a esfera podeser linearizada por meio da aplicação da série de Taylor [36]. Assim:
F = F0 +∂F
∂X|I0(X −X0) +
∂F
∂I|X0(I − I0) (F.3)

ANEXO F. Modelagem Normalizada 94
Este resultado pode ser substituido de tal forma a fornecer a seguinte Equação:
fn =D
G
∂F
∂X|I0 .xn +
ImaxG
∂F
∂I|X0 .in (F.4)
Para simplificação, em [5], os termos da Equação são designados por:
Ke =ImaxG
∂F
∂I|X0 , Te =
L
R,Km =
D
G
∂F
∂X|I0 , Tm =
√D
g(F.5)
Considerando a resistência R e a indutância L da bobina, a tensão terminal podeser expressa por:
vn = in +L
R
di
dt(F.6)
Então a combinação das Equações geram:
fn = −T 2m.
d2x
dt2(F.7)
fn = −Km.xn +Ke.in (F.8)
vn = in + Tedi
dt(F.9)
A partir destas equações, é elaborada a representação em diagramas do bloco dosistema. A sua simplificação permite encontrar a função de transferência do sistemaem malha aberta que relaciona a posição da esfera com a tensão sobre os terminais dabobina:
Figura F.2 – Diagrama de Blocos, figura retirada de [5]
Portanto, esta é a proposta adotada por [5] para modelagem do sistema MA-GLEV.

95
ANEXO G – Modelagem Geométrica
Neste anexo é apresentada a modelagem geométrica proposta por [14]. O es-quema apresentado na Figura G.1 exibe uma bobina de comprimento l, raio r percorridapor uma corrente i.
Figura G.1 – Modelagem Geométrica, figura retirada de [14]
Tomando um elemento infinitesimal de bobina, n.dx, a densidade de campomagnético gerada é dada por:
dB′ =µ0µrI
2r(x2
r2+ 1)−
32 .n.dx (G.1)
Onde x é a distância entre o ponto M e o elemento n.dy. A variável y pode ser expressapor:
y = r.cos(θ) (G.2)
E assim, a equação G.1 se torna:
dB′ =µ0µrI
2r(−sin(θ))dθ (G.3)
Em seguida, a equação G.3 é integrada ao longo do intervalo [θ1θ2]. Assim, a densidadede fluxo magnética produzida pelo elemento ao longo desta faixa de ângulo é:
B′ =µ0µrI
2r(cos(θ2)− cos(θ1)) (G.4)
Onde cos(θ2):
cos(θ2) =y + l√
(y + l)2 + r2(G.5)
E cos(θ1):cos(θ1) =
y√y2 + r2
(G.6)

ANEXO G. Modelagem Geométrica 96
No entanto, a bobina é formada por n elementos infinitesimais posicionados auma distância r em relação ao eixo da bobina, e devem ser considerados. A densidadede fluxo magnético gerado por um elemento n.dr é portanto:
dB =µ0µrI
2r(cos(θ2)− cos(θ1)).ndr (G.7)
Assim, a equação G.7 deve ser integrada ao longo do intervalo [r1r2]. Logo, ocampo magnético total é dado por:
B =µ0µrI
2((y + l)sin−1.(
r2y + l
)− sin−1.( r1y + l
) + y(sin−1(r1y
)− sin−1.(r2y
))) (G.8)
Segundo [27] a força magnética pode ser expressa por:
F =B
2µS (G.9)
Onde S é a superfície cortada pela linhas de densidade de campo magnético. Após asubstituição de G.9 em G.8:
F = C.I2((y + l)sin−1.(r2y + l
)− sin−1.( r1y + l
) + y(sin−1(r1y
)− sin−1.(r2y
))) (G.10)
Sendo C igual a:
C =(µ0µrn
2)2nS
8µ0
(G.11)
De tal forma a simplificar a expressão para a força magnética, é feita a aproxima-ção de F por uma função polinomial, f(y), expressa por:
f(y) =1
b0 + b1y + b2y2 + ...., bnyn(G.12)
A aproximação acima é usual em sistemas não lineares segundo [37]. Os parâmetros dodenominador são obtidos experimentalmente, pela determinação da corrente mínima,suficiente para levitar a esfera em várias posições. Após a determinação destes parâme-tros, uma relação mais simples entre corrente através da bobina e a força magnética éobtida:
F =I2
b0 + b1y + b2y3 + b3y4(G.13)
De posse desta relação a representação em espaço de estados do sistema pode serconstruída. A partir dos vetores de estado:
XT = (x1, x2, x3) = (I, y,y
t) (G.14)
Então, a representação em espaço de estados é obtida como apresentado na EquaçãoG.15.
x = f(x) + g(x)u
y = h(x) = x2(G.15)
ANEXO G. Modelagem Geométrica 97
onde:
f(x) = (f1, f2, f3)T =
−Rx1L
x3
g − 1m
x21b0+b1y+b2y3+b3y4
(G.16)
sendo as variáveis de estado x1 a corrente através da bobina, x2 a posição da esfera, x3sua velocidade e u a tensão sobre os terminais do eletroimã.
Portanto, este é a proposta adotada por [14] para a modelagem do problema daestabilidade magnética.