laboratÓrio de automaÇÃo
TRANSCRIPT

EPUSP
ConvênioRockwell Automation
Escola Politécnica da USP
LABORATÓRIO DE AUTOMAÇÃO
PLATAFORMA MICROLOGIX
Av. Prof. Luciano Gualberto, trav. 3 nº. 158 – Prédio de Engenharia Elétrica – Bloco A – TérreoCEP 05508-900 – Butantã - São Paulo. Telefone: ++55 11 30377545 / Fax: ++55 11 30377536

EPUSP
ConvênioRockwell Automation
Escola Politécnica da USP
ÍNDICE
1. LABORATÓRIO DE AUTOMAÇÃO – INTRODUÇÃO TEÓRICA..............................................................................4
1.1. HISTÓRICO.........................................................................................................................................................41.2. INTRODUÇÃO......................................................................................................................................................41.3. POR QUE USAR O CLP?........................................................................................................................................51.4. ARQUITETURA DO CLP.......................................................................................................................................10
1.4.1 Fonte de Alimentação..............................................................................................................................111.4.2 UCP - Unidade Central de Processamento................................................................................................111.4.3 Memória EPROM.....................................................................................................................................111.4.4 Memória do Usuário................................................................................................................................111.4.5 Memória de Dados...................................................................................................................................111.4.6 Módulos de Entrada e Saída (E/S)............................................................................................................12
1.5. ENDEREÇAMENTO..............................................................................................................................................131.6. LINGUAGEM DE DIAGRAMA DE CONTATOS (LADDER)...............................................................................................141.7. INSTRUÇÕES E COMANDOS DA LINGUAGEM LADDER..................................................................................................1
1.7.1 Instrução NA (XIC) (eXamine If Closed).....................................................................................................151.7.2 Instrução NF (XIO) (eXamine If Open)......................................................................................................161.7.3 Instrução de Saída – Bobina Energizada (OTE) (Output Terminal Energize).............................................17
1.8. CONTROLADOR LÓGICO PROGRAMÁVEL MICROLOGIX 1200.....................................................................................17
2. INTRODUÇÃO TEÓRICA - ANEXO.................................................................................................................... 22
2.1. COMUNICAÇÃO COM O CLP SLC-500/MICROLOGIX...............................................................................................222.2. CONFIGURAÇÃO DE DRIVER.................................................................................................................................232.3. DESENVOLVIMENTO DE UM NOVO PROGRAMA........................................................................................................242.4. PROGRAMAÇÃO DO MICROLOGIX.........................................................................................................................252.5. TRANSFERÊNCIA DO PROGRAMA DO PC PARA O CLP (DOWNLOAD)...........................................................................262.6. PROCEDIMENTO PARA PROGRAMAR, CARREGAR E DESCARREGAR O PROGRAMA APLICATIVO NO CLP.................................27
2.6.1 Conexão do PC ao CLP..............................................................................................................................272.6.2 Programação do aplicativo Ladder..........................................................................................................272.6.3 Carregando o programa do PC no CLP.....................................................................................................28
3. EXPERIÊNCIA 1 – MOTORES E SEMÁFOROS....................................................................................................29
3.1. INTRODUÇÃO....................................................................................................................................................293.2. OBJETIVO........................................................................................................................................................293.3. PARTE PRÁTICA.................................................................................................................................................30
3.3.1 Partida de motor......................................................................................................................................303.3.2 Semáforo Duplo.......................................................................................................................................323.3.3 Projeto – Semáforo inteligente................................................................................................................37
3.4. MATERIAL UTILIZADO.........................................................................................................................................383.5. BIBLIOGRAFIA...................................................................................................................................................39
4. EXPERIÊNCIA 1 - ANEXO................................................................................................................................ 40
4.1. INSTRUÇÕES DE TEMPORIZAÇÃO E CONTAGEM........................................................................................................404.1.1 Instrução TON - Temporizador Crescente Sem Retenção à Energização..................................................404.1.2 Instrução CTU - Contador Crescente........................................................................................................41
4.2. INSTRUÇÕES DE BIT AUXILIAR...............................................................................................................................424.3. ENERGIZAR / DESENERGIZAR SAÍDA COM RETENÇÃO – OTL E OTU............................................................................43
Av. Prof. Luciano Gualberto, trav. 3 nº. 158 – Prédio de Engenharia Elétrica – Bloco A – TérreoCEP 05508-900 – Butantã - São Paulo. Telefone: ++55 11 30377545 / Fax: ++55 11 30377536
2

EPUSP
ConvênioRockwell Automation
Escola Politécnica da USP
5. EXPERIÊNCIA 2 - ESTEIRA TRANSPORTADORA................................................................................................44
5.1. INTRODUÇÃO....................................................................................................................................................445.2. PARTIDA DE MOTORES.......................................................................................................................................445.3. OBJETIVOS.......................................................................................................................................................455.4. PARTE PRÁTICA.................................................................................................................................................46
5.4.1 Montagem Experimental.........................................................................................................................465.4.2 Simulação de partida direta em triângulo com finalização no fim de curso 2..........................................465.4.3 Simulação de partida estrela/triângulo com finalização no fim de curso.................................................495.4.4 Partida estrela/triângulo com ciclo completo..........................................................................................505.4.5 Análise da operação.................................................................................................................................555.4.6 Alteração do Programa............................................................................................................................55
5.5. PROJETOS PARA O RELATÓRIO.............................................................................................................................565.5.1 Esteiras em Série......................................................................................................................................565.5.2 Esteiras Sincronizadas com Enchimento de Container.............................................................................57
5.6. MATERIAL UTILIZADO.........................................................................................................................................585.7. BIBLIOGRAFIA...................................................................................................................................................59
6. EXPERIÊNCIA 3 – AUTOMAÇÃO DE REATOR QUÍMICO....................................................................................60
6.1. INTRODUÇÃO....................................................................................................................................................606.2. OBJETIVOS.......................................................................................................................................................606.3. DESCRIÇÃO DO PROCESSO...................................................................................................................................616.4. PARTE PRÁTICA.................................................................................................................................................626.5. PROJETO..........................................................................................................................................................666.6. MATERIAL UTILIZADO.........................................................................................................................................666.7. Bibliografia....................................................................................................................................................67
Av. Prof. Luciano Gualberto, trav. 3 nº. 158 – Prédio de Engenharia Elétrica – Bloco A – TérreoCEP 05508-900 – Butantã - São Paulo. Telefone: ++55 11 30377545 / Fax: ++55 11 30377536
3

EPUSP
ConvênioRockwell Automation
Escola Politécnica da USP
1. LABORATÓRIO DE AUTOMAÇÃO – INTRODUÇÃO TEÓRICA
1.1. HistóricoNo fim da década de 1960, os circuitos integrados permitiram o desenvolvimento de
minicomputadores, que foram logo utilizados para controle on-line de processos industriais.
Em 1969, surgiram os primeiros controladores baseados numa especificação da General Motors, devido a grande dificuldade de mudar a lógica de controle de painéis de comando a cada mudança na linha de montagem. Tais mudanças implicavam em altos gastos de tempo e dinheiro.
Sob a liderança do engenheiro Richard Morley, foi preparada uma especificação que refletia as necessidades de muitos usuários de circuitos à reles, não só da indústria automobilística, como de toda a indústria manufatureira.
Nascia assim, um equipamento bastante versátil e de fácil utilização, que vem se aprimorando constantemente, diversificando cada vez mais os setores industriais e suas aplicações.
Na década de 1970, os controladores passaram a ter microprocessadores e a serem denominados Controladores Lógicos Programáveis (CLPs). Na década de 1980, houve aperfeiçoamento das funções de comunicação dos CLPs, sendo então utilizados em rede.
Desde o seu aparecimento, até hoje, muita coisa evoluiu nos controladores lógicos, como a variedade de tipos de entradas e saídas, o aumento da velocidade de processamento, a inclusão de blocos lógicos complexos para tratamento das entradas e saídas e principalmente o modo de programação e a interface com o usuário.
1.2. IntroduçãoA palavra automation foi inventada pelo marketing da indústria de equipamentos na
década de 1960. O neologismo, sem dúvida sonoro, buscava enfatizar a participação do computador no controle automático industrial.
O que significa automação, hoje? Entende-se por automação qualquer sistema, apoiado em computadores, que substitua o trabalho humano, em favor da segurança das pessoas, da qualidade dos produtos, da rapidez da produção ou da redução de custos, assim aperfeiçoando os complexos objetivos das indústrias e dos serviços. Exemplos: automação da mineração, da
Av. Prof. Luciano Gualberto, trav. 3 nº. 158 – Prédio de Engenharia Elétrica – Bloco A – TérreoCEP 05508-900 – Butantã - São Paulo. Telefone: ++55 11 30377545 / Fax: ++55 11 30377536
4

EPUSP
ConvênioRockwell Automation
Escola Politécnica da USP
manufatura metálica, dos grandes processos químicos contínuos, automação bancária, metroviária, aeroportuária.
É comum pensar que a automação resulta tão somente do objetivo de reduzir custos de produção. Isto não é verdade: ela decorre mais de necessidades tais como maior nível de qualidade, expressa por especificações numéricas de tolerância, maior flexibilidade de modelos para o mercado, maior segurança pública e dos operários, menores perdas materiais e de energia, mais disponibilidade e qualidade da informação sobre o processo e melhor planejamento e controle da produção.
A automação envolve a implantação de sistemas interligados e assistidos por redes de comunicação, compreendendo sistemas supervisórios e interfaces homem-máquina que possam auxiliar os operadores no exercício da supervisão e da análise dos problemas que porventura venham a ocorrer.
1.3. Por que usar o CLP?Como informação preliminar, o Controlador Lógico Programável (CLP) é um dispositivo
digital que controla máquinas e processos. Utiliza uma memória programável para armazenar instruções e executar funções específicas: energização/desenergização, temporização, contagem, seqüenciamento, operações matemáticas e manipulação de dados.
O desenvolvimento dos CLPs começou em 1968 em resposta a uma necessidade constatada pela General Motors. Naquela época, freqüentemente se consumiam dias ou semanas para se alterar um sistema de controle baseado em relés, e isso ocorria sempre que se mudava um modelo de carro ou se introduziam modificações na linha de montagem. Para reduzir esse alto custo, a GM especificou um sistema de estado sólido, com a flexibilidade de um computador, que pudesse ser programado e mantido pelos engenheiros e técnicos nas fábricas. Também era preciso que suportasse o ar poluído, a vibração, o ruído elétrico e os extremos de umidade e temperatura encontrados normalmente num ambiente industrial. Os primeiros CLPs foram instalados em 1969, com sucesso quase imediato. Funcionando como substitutos de circuitos de relés, eram mais confiáveis que os sistemas originais. Permitiam reduzir os custos dos materiais, da mão-de-obra, da instalação e da localização de falhas; reduziam as necessidades de fiação e os erros a ela associados. Os CLPs ocupavam menos espaço que os contatores, temporizadores e outros componentes de controles utilizados anteriormente. Mas, talvez, a razão principal da aceitação dos CLPs tenha sido a linguagem de programação baseada no diagrama ladder, em que os programas gerados se assemelham visualmente aos clássicos esquemas dos circuitos lógicos a relés.
Av. Prof. Luciano Gualberto, trav. 3 nº. 158 – Prédio de Engenharia Elétrica – Bloco A – TérreoCEP 05508-900 – Butantã - São Paulo. Telefone: ++55 11 30377545 / Fax: ++55 11 30377536
5

EPUSP
ConvênioRockwell Automation
Escola Politécnica da USP
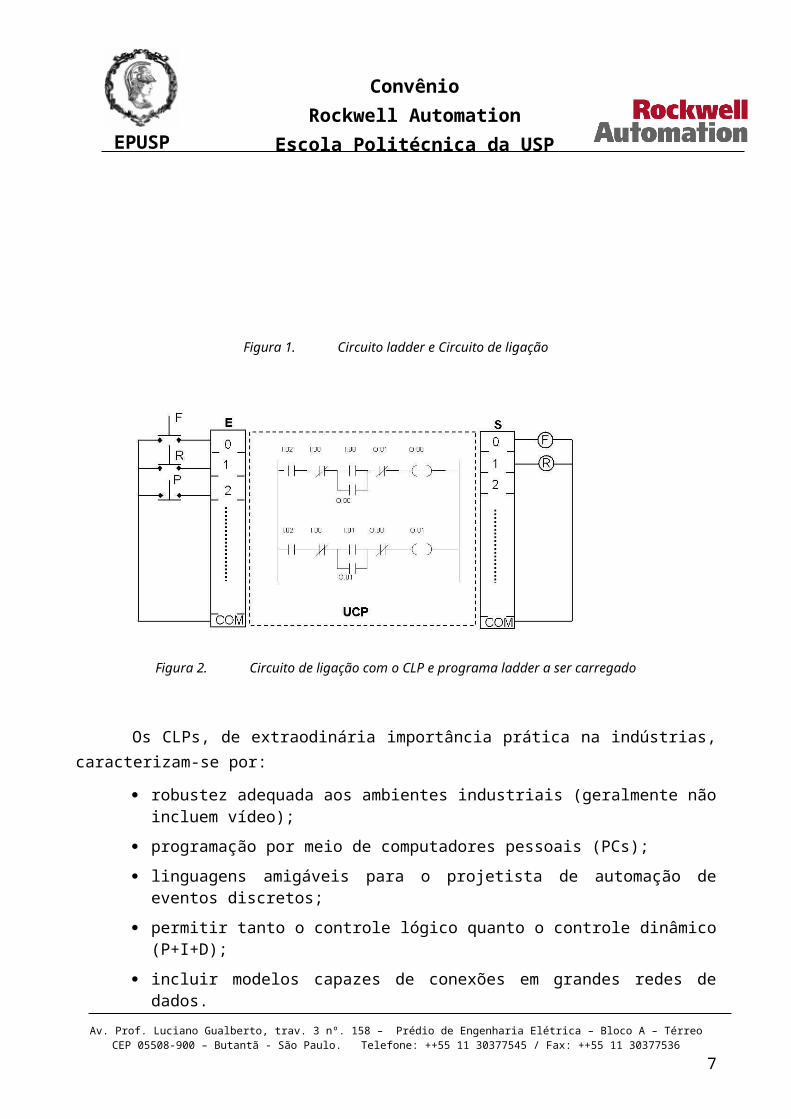
Mostramos nas figuras a) e b) abaixo o circuito de ligação que deve ser montado fisicamente para que uma lógica de rele simples seja implementada. Já na figura c) seguem a ligação física dos componentes ao CLP e o programa Ladder que será carregado no CLP e executará a lógica que antes era construída fisicamente.
Figura 1. Circuito ladder e Circuito de ligação
Figura 2. Circuito de ligação com o CLP e programa ladder a ser carregado
Os CLPs, de extraodinária importância prática na indústrias, caracterizam-se por:
robustez adequada aos ambientes industriais (geralmente não incluem vídeo);
programação por meio de computadores pessoais (PCs);
linguagens amigáveis para o projetista de automação de eventos discretos;
Av. Prof. Luciano Gualberto, trav. 3 nº. 158 – Prédio de Engenharia Elétrica – Bloco A – TérreoCEP 05508-900 – Butantã - São Paulo. Telefone: ++55 11 30377545 / Fax: ++55 11 30377536
6
F
1
9
L1 2 3 4 5 6
L2
7 8
R
R
R
FF
RF
F
R
L2
L1
R
F
F
R
1 2 5 6
7 8
3 4
EPUSP
ConvênioRockwell Automation
Escola Politécnica da USP
permitir tanto o controle lógico quanto o controle dinâmico (P+I+D);
incluir modelos capazes de conexões em grandes redes de dados.
Um diagrama de blocos mais completo mostra como se processa a interação entre do CLP com o processo industrial através de sensores e atuadores.
Figura 3. Interação do CLP com o processo industrial
Um Controlador Lógico Programável automatiza uma grande quantidade de ações, com precisão, confiabilidade, rapidez e pouco investimento. Informações de entrada são analisadas, decisões são tomadas, comandos são transmitidos, tudo concomitantemente com o desenrolar do processo. A figura abaixo apresenta um exemplo de rede de automação de um sistema Híbrido Cliente, Supervisório e CLP em uma rede ModBus /Ethernet.
Av. Prof. Luciano Gualberto, trav. 3 nº. 158 – Prédio de Engenharia Elétrica – Bloco A – TérreoCEP 05508-900 – Butantã - São Paulo. Telefone: ++55 11 30377545 / Fax: ++55 11 30377536
7

EPUSP
ConvênioRockwell Automation
Escola Politécnica da USP
Figura 4. Exemplo de Sistema Híbrido Cliente, Supervisório e CLP em uma rede ModBus /Ethernet
No programa supervisório se dará a operação integrada com o CLP, durante a automação da planta em tempo real. A figura abaixo apresenta um exemplo de um sistema supervisório de controle e monitoração de uma planta de uma indústria alimentícia.
Av. Prof. Luciano Gualberto, trav. 3 nº. 158 – Prédio de Engenharia Elétrica – Bloco A – TérreoCEP 05508-900 – Butantã - São Paulo. Telefone: ++55 11 30377545 / Fax: ++55 11 30377536
8

EPUSP
ConvênioRockwell Automation
Escola Politécnica da USP
Figura 5. Exemplo de uma tela de supervisório para controle e monitoração
Os CLPs são encontrados em diversos setores industriais, tais como:
Metalurgia, principalmente pela segurança, controlando a temperatura de fornos de cozimento e na análise do controle de qualidade e de fluxo.
Engenharia Mecânica e Automotiva: estão principalmente na produção e nas linhas de montagem fazendo conexão entre máquinas. Em 1986 50% das máquinas eram controladas por CLP ou por microcomputadores nesta área; atualmente este número ultrapassa 95%. O resultado deste quadro é uma produção cada vez mais rápida e eficiente, com um custo reduzido.
Indústrias Químicas: são utilizados atualmente no controle de unidades de produção, na mistura e dosagem de produtos e no tratamento dos efluentes. O CLP também pode ser encontrado na indústria de plástico e no controle de algumas máquinas da indústria de borracha.
Indústrias Petroquímicas: estão nas estações de bombeamento, no controle e supervisão de encanamentos e na distribuição de gases e líquidos.
Agricultura e Indústria Alimentícia: são encontrados principalmente nas estações de mistura e produção de alimentos. São encontrados também na secagem, separação e teste de produtos.
Av. Prof. Luciano Gualberto, trav. 3 nº. 158 – Prédio de Engenharia Elétrica – Bloco A – TérreoCEP 05508-900 – Butantã - São Paulo. Telefone: ++55 11 30377545 / Fax: ++55 11 30377536
9

EPUSP
ConvênioRockwell Automation
Escola Politécnica da USP
1.4. Arquitetura do CLPUm CLP (Figura 6) é constituído basicamente de:
Fonte de alimentação;
Unidade Central de Processamento (UCP);
Memórias dos tipos fixo e volátil;
Dispositivos de entrada e saída;
Terminal de programação.
Figura 6. Diagrama de blocos da UCP do CLP
Av. Prof. Luciano Gualberto, trav. 3 nº. 158 – Prédio de Engenharia Elétrica – Bloco A – TérreoCEP 05508-900 – Butantã - São Paulo. Telefone: ++55 11 30377545 / Fax: ++55 11 30377536
10

EPUSP
ConvênioRockwell Automation
Escola Politécnica da USP
1.4.1Fonte de Alimentação
Converte corrente alternada em contínua para alimentar o controlador. Caso falte energia, há uma bateria que impede a perda do programa do usuário. Ao retornar a energia, o programa se reinicia.
Existem dois tipos de fontes:
Source: fonte de energia interna ao controlador;
Sink: fonte de energia externa ao controlador.
1.4.2UCP - Unidade Central de Processamento
Responsável pela execução do programa do usuário e pela atualização da memória de dados e da memória-imagem das entradas e saídas.
1.4.3Memória EPROM
Contém programa monitor elaborado pelo fabricante que faz o start-up do controlador, armazena dados e gerencia a seqüência de operações. Este tipo de memória não é acessível ao usuário do controlador programável.
1.4.4Memória do Usuário
Armazena o programa aplicativo do usuário. A CPU processa esse programa e atualiza a memória de dados internos e a de imagem E/S.
1.4.5Memória de Dados
Encontram-se aqui dados referentes ao processamento do programa do usuário, isto é, uma tabela de valores manipuláveis.
Memória-Imagem das Entradas e Saídas
Memória que reproduz o estado dos periféricos de entrada e saída.
Circuitos das entradas são provenientes de chaves, seletoras, limitadoras...
Av. Prof. Luciano Gualberto, trav. 3 nº. 158 – Prédio de Engenharia Elétrica – Bloco A – TérreoCEP 05508-900 – Butantã - São Paulo. Telefone: ++55 11 30377545 / Fax: ++55 11 30377536
11

EPUSP
ConvênioRockwell Automation
Escola Politécnica da USP
Circuitos das saídas são destinados a dar partida em motores, solenóides...
A correspondência entre níveis 0 e 1 e níveis de tensão varia conforme a necessidade; por exemplo, pode ocorrer: nível 0 para 0 volt e nível 1 para 115 volts CA.
1.4.6Módulos de Entrada e Saída (E/S)
A Figura 7 exibe detalhes físicos típicos das barras de terminais de entrada e de saída.
Figura 7. Módulo de E/S
Av. Prof. Luciano Gualberto, trav. 3 nº. 158 – Prédio de Engenharia Elétrica – Bloco A – TérreoCEP 05508-900 – Butantã - São Paulo. Telefone: ++55 11 30377545 / Fax: ++55 11 30377536
12

EPUSP
ConvênioRockwell Automation
Escola Politécnica da USP
1.5. EndereçamentoOs métodos de endereçamento de entradas e saídas nos controladores programáveis são
bastante semelhantes. Palavras ou bits podem ser endereçados. A imagem das entradas e saídas (I/O) são realizadas da seguinte maneira:
Exemplo I: 12/04 ou 0:02/06
A primeira letra refere-se à variável estar indexada como entrada ou como saída, ou seja, I (input) para a palavra de entrada e O (output) para a palavra de saída. Convém lembrar que a imagem da palavra de entrada é completamente separada da imagem de saída: I:12/04 e O:12/04 são endereços completamente diferentes.
Os dois dígitos após o ponto duplo, “:”, correspondem à localização que o respectivo módulo de entrada ou saída ocupa no controlador programável ou na sua expansão. Nos exemplos são, respectivamente, módulos imagem 12 para a entrada e 02 para a saída.
Os dois dígitos após a barra inclinada, “/”, correspondem ao endereço o bit da imagem da palavra de entrada ou saída.
Figura 8. Endereços de entrada e de saída
Nesse caso, o endereço de entrada corresponde ao bit 4 da ranhura n.o 12 de entrada do controlador, que, ativada pela linha 15 do programa aplicativo, habilita a saída correspondente ao
bit 6 da ranhura n.o 02 de saída do controlador programável.
Av. Prof. Luciano Gualberto, trav. 3 nº. 158 – Prédio de Engenharia Elétrica – Bloco A – TérreoCEP 05508-900 – Butantã - São Paulo. Telefone: ++55 11 30377545 / Fax: ++55 11 30377536
13
15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0
1
15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0
1
( )O:02I:12
4 6
O:02
I:12
15

EPUSP
ConvênioRockwell Automation
Escola Politécnica da USP
1.6. Linguagem de Diagrama de Contatos (Ladder)Considerações Gerais
Nos circuitos de relés, cada contato, ao assumir dois estados (fechado ou aberto), representa uma variável booleana, ou seja, uma variável que assume dois estados: verdadeiro ou falso. Na Figura 9, recapitula-se a conexão entre álgebra de Boole e circuitos elétricos.
Figura 9. Conexão entre álgebra booleana e circuitos
Pela facilidade do desenho e da inspeção de circuitos, e pela longa experiência e tradição dos engenheiros projetistas dos quadros de comando elétrico, uma das primeiras técnicas de programação dos CLPs foi chamada de linguagem “de relés” ou “ladder” (que quer dizer em escada ou cascata). Essa técnica mantém regras e símbolos tradicionais do projeto de quadros de comando.
Assim, o diagrama ladder parte de duas linhas verticais, também chamadas de barras de alimentação. Cada representação de causalidade é feita por uma linha horizontal. Esta linha, por sua vez, é formada por, pelo menos, um elemento controlado (bobina de relé) e um conjunto de condições para o controle desse elemento (rede de contatos).
O diagrama ladder é apenas uma representação lógica, trabalhando somente com símbolos, não considerando a tensão envolvida nas barras de alimentação e nem a intensidade da corrente pelo circuito. Os contatos e outros dispositivos, no diagrama estão em cada momento abertos ou fechados e as bobinas, por conseqüência, ficam desenergizadas ou energizadas.
O Controlador Lógico Programável examina a continuidade de cada linha, isto é, verifica se todas as variáveis de entrada são verdadeiras. Trata-se de uma “continuidade lógica”. Cada linha ladder permite programar desde funções binárias até funções digitais complexas.
Vamos detalhar as principais instruções e comandos utilizados nesta linguagem.
Av. Prof. Luciano Gualberto, trav. 3 nº. 158 – Prédio de Engenharia Elétrica – Bloco A – TérreoCEP 05508-900 – Butantã - São Paulo. Telefone: ++55 11 30377545 / Fax: ++55 11 30377536
14

EPUSP
ConvênioRockwell Automation
Escola Politécnica da USP
1.7. Instruções e Comandos da Linguagem LadderA linguagem ladder é uma linguagem gráfica de alto nível que se assemelha ao esquema
elétrico de um circuito de comando ou diagrama de contatos. No ladder todos os tipos de instruções pertencem a dois grandes grupos: instruções de entrada e instruções de saída. Nas instruções de entrada são formuladas perguntas enquanto que as instruções de saída executam algum tipo de ação em função das respostas afirmativas ou negativas das instruções de entrada que estão representadas na mesma linha lógica da instrução de saída.
A CPU do Controlador Programável executa, todas as instruções, começando pela primeira instrução da primeira linha do programa indo até a última instrução da última linha do programa do usuário.
Uma instrução de bit pode ser de entrada ou de saída. Durante a execução de uma instrução de entrada o estado de um bit em um determinado endereço é examinado. Durante a execução de uma instrução de saída de bit o estado de um bit de um determinado endereço é alterado para 0 ou 1 conforme haja ou não continuidade lógica da linha com a qual a instrução está relacionada.
As principais instruções de bit (de entrada e de saída), da linguagem ladder, são:
Lógica de Relé ou Instrução de Bit
1.7.1Instrução NA (XIC) (eXamine If Closed)
A CPU executa esta instrução verificando o valor do bit endereçado pela instrução. Se o bit endereçado pela instrução estiver no estado lógico 0 a instrução retorna com o valor lógico falso e portanto não há continuidade lógica no trecho do ladder em que a instrução está inserida. Se o bit endereçado pela instrução estiver no estado lógico 1 a instrução retorna com o valor lógico verdadeiro e portanto há continuidade lógica no trecho do ladder em que a instrução está inserida. A representação desta instrução na linguagem ladder juntamente com a sua operação faz com que a mesma seja comumente interpretada como um contato normalmente aberto de um relé. A Figura 10 representa a instrução NA em linguagem ladder e também a sua tabela-verdade de operação.
Estado do BIT Instrução NA
0 Falsa
1 Verdadeira
Av. Prof. Luciano Gualberto, trav. 3 nº. 158 – Prédio de Engenharia Elétrica – Bloco A – TérreoCEP 05508-900 – Butantã - São Paulo. Telefone: ++55 11 30377545 / Fax: ++55 11 30377536
15

EPUSP
ConvênioRockwell Automation
Escola Politécnica da USP
Figura 10. Representação em linguagem Ladder da instrução XIC e a respectiva tabela verdade de operação
1.7.2Instrução NF (XIO) (eXamine If Open)
A CPU executa esta instrução verificando o valor do bit endereçado pela instrução. Se o bit endereçado pela instrução estiver no estado lógico 1 a instrução retorna com o valor lógico falso e portanto não há continuidade lógica no trecho do ladder. Se o bit endereçado pela instrução estiver no estado lógico 0 a instrução retorna com o valor lógico verdadeiro e portanto há continuidade lógica no trecho do ladder. A representação gráfica desta instrução juntamente com a sua operação faz com que ela seja interpretada como um contato normalmente fechado de um relé. Porém, convém ressaltar que apesar da analogia é uma instrução lógica e não um contato de circuito elétrico. A Figura 1.9 representa a instrução NF em linguagem ladder e também a sua tabela-verdade de operação.
Estado do BIT Instrução NF
0 Verdadeira
1 Falsa
Figura 11. Representação em linguagem Ladder da instrução XIO e a respectiva tabela verdade de operação
Av. Prof. Luciano Gualberto, trav. 3 nº. 158 – Prédio de Engenharia Elétrica – Bloco A – TérreoCEP 05508-900 – Butantã - São Paulo. Telefone: ++55 11 30377545 / Fax: ++55 11 30377536
16
No do Bit
Endereço
] [
No do Bit
Endereço
] [

EPUSP
ConvênioRockwell Automation
Escola Politécnica da USP
1.7.3Instrução de Saída – Bobina Energizada (OTE) (Output Terminal Energize)
A CPU executa esta instrução verificando se há ou não continuidade lógica na linha que antecede a instrução. Caso haja continuidade lógica da linha, o bit endereçado pela instrução será colocado no estado lógico 1. Se não houver continuidade na linha o bit endereçado pela instrução será colocado no estado lógico 0.
A Figura 12 apresenta o aspecto gráfico da instrução OTE.
Figura 12. Representação em linguagem Ladder da instrução OTE
1.8. Controlador Lógico Programável MicroLogix 1200O MicroLogix 1200 controlador lógico programável é composto de uma unidade de base,
que contem uma fonte de alimentação, circuitos de entrada e saída e um processador.
O CLP está disponível com 24 e 40 pontos de entrada/saída internos, pontos adicionais podem ser utilizados utilizando-se cartões de E/S (Entrada/Saída) específicos da família (1762).
Av. Prof. Luciano Gualberto, trav. 3 nº. 158 – Prédio de Engenharia Elétrica – Bloco A – TérreoCEP 05508-900 – Butantã - São Paulo. Telefone: ++55 11 30377545 / Fax: ++55 11 30377536
17
EPUSP
ConvênioRockwell Automation
Escola Politécnica da USP
Figura 13. Controlador Micrologix 1200
Descrição do Equipamento: Controlador Programável MicroLogix 1200 (Allen Bradley)
A família dos CLPs MicroLogix da Allen-Bradley tem característica modular, e a versão do controlador disponível no laboratório é constituída por: chassi, fonte, módulo processador (CPU), módulo de entradas digitais, módulo de saídas digitais.
Módulo Código Observações
CPU 1762 8k de memória de instruções e controle
Ent/Sai 1762-IF2OF2 08 entradas digitais, 100/200 volts
Av. Prof. Luciano Gualberto, trav. 3 nº. 158 – Prédio de Engenharia Elétrica – Bloco A – TérreoCEP 05508-900 – Butantã - São Paulo. Telefone: ++55 11 30377545 / Fax: ++55 11 30377536
18
EPUSP
ConvênioRockwell Automation
Escola Politécnica da USP
A Figura 14 mostra a disposição física dos principais componentes do equipamento. Caso o usuário deseje mais pontos de entrada, saída ou até mesmo funcionalidades de rede de comunicação de dados, este poderá adquirir cartões específicos que permitirão aumentas os recursos do equipamento.
Os cartões devem ser instalados em trilhos padrão DIN fisicamente conectados aos outros cartões ou ao corpo do CLP (Respeitando-se as limitações do controlador empregado).
Figura 14. Principais componentes do CLP MicroLogix 1200.
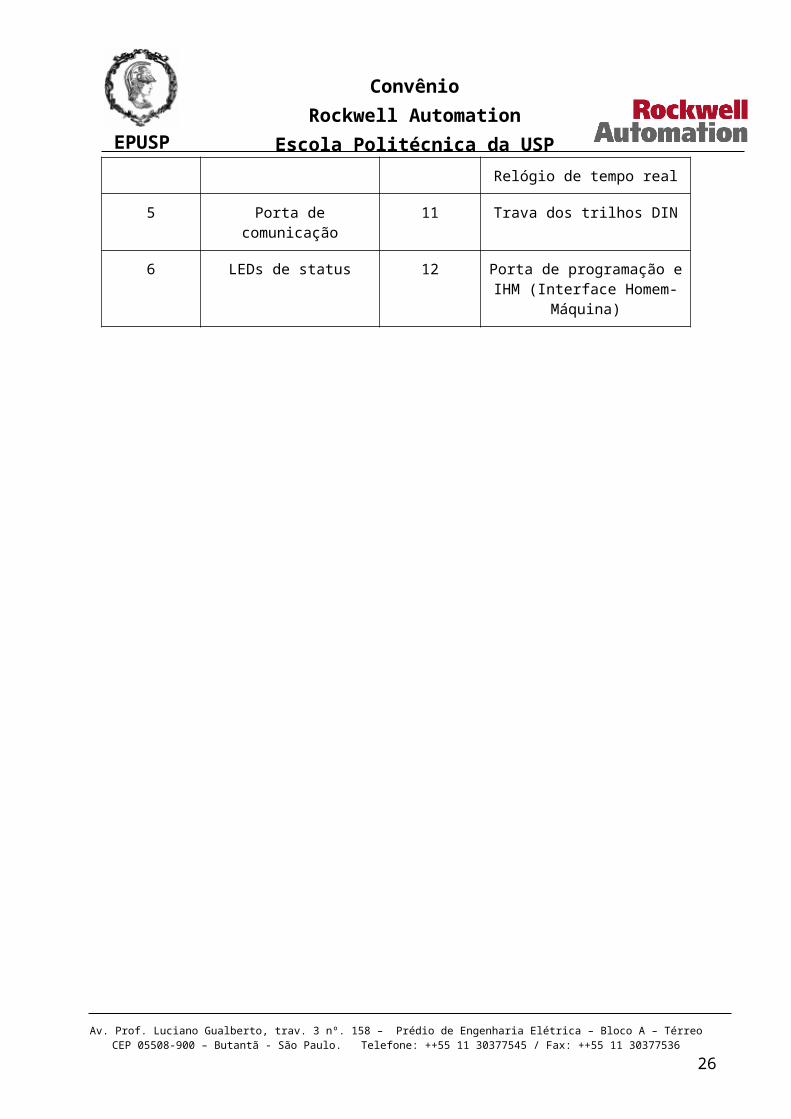
A tabela a seguir mostra os principais componentes físicos do CLP MicroLogix 1200.
Componente Descrição Componente Descrição
1 Terminal removível de bloco 7 Tampas dos terminais e etiquetas
2 Interface para Expansão de I/O, Barreira Removível
8 Chaves de ajustes
3 LEDs de entradas 9 Chaves para troca de modo
4 LEDs de saídas 10 Modulo de Memória/ Relógio de tempo real
5 Porta de comunicação 11 Trava dos trilhos DIN
6 LEDs de status 12 Porta de programação e IHM (Interface Homem-Máquina)
Av. Prof. Luciano Gualberto, trav. 3 nº. 158 – Prédio de Engenharia Elétrica – Bloco A – TérreoCEP 05508-900 – Butantã - São Paulo. Telefone: ++55 11 30377545 / Fax: ++55 11 30377536
19

EPUSP
ConvênioRockwell Automation
Escola Politécnica da USP
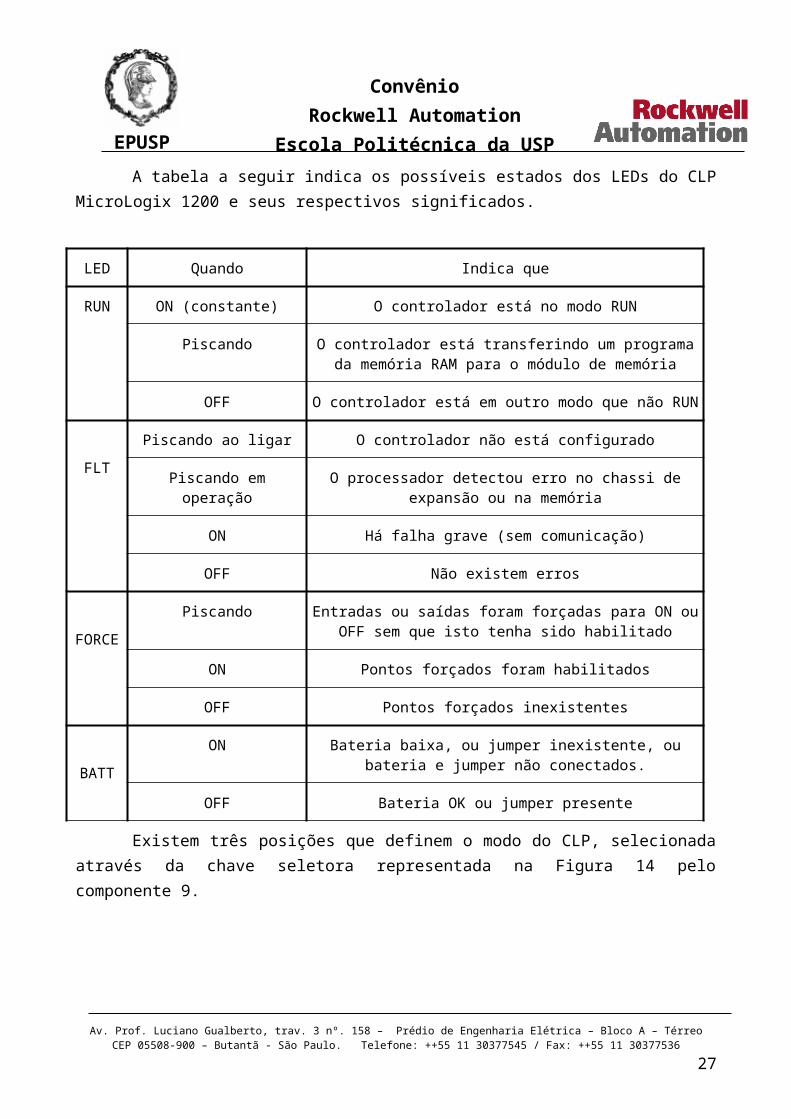
A tabela a seguir indica os possíveis estados dos LEDs do CLP MicroLogix 1200 e seus respectivos significados.
LED Quando Indica que
RUN ON (constante) O controlador está no modo RUN
Piscando O controlador está transferindo um programa da memória RAM para o módulo de memória
OFF O controlador está em outro modo que não RUN
FLT
Piscando ao ligar O controlador não está configurado
Piscando em operação O processador detectou erro no chassi de expansão ou na memória
ON Há falha grave (sem comunicação)
OFF Não existem erros
FORCE
Piscando Entradas ou saídas foram forçadas para ON ou OFF sem que isto tenha sido habilitado
ON Pontos forçados foram habilitados
OFF Pontos forçados inexistentes
BATT
ON Bateria baixa, ou jumper inexistente, ou bateria e jumper não conectados.
OFF Bateria OK ou jumper presente
Existem três posições que definem o modo do CLP, selecionada através da chave seletora representada na Figura 14 pelo componente 9.
Posição RUN
Esta posição habilita o CLP ao modo de operação (Run). O CLP varre/executa o programa ladder, monitora dispositivos de entrada, energiza dispositivos de saída e ativa pontos forçados de E/S habilitados. O modo do CLP pode ser alterado somente por meio da chave seletora. Não é possível desenvolver a edição do programa on-line.
Av. Prof. Luciano Gualberto, trav. 3 nº. 158 – Prédio de Engenharia Elétrica – Bloco A – TérreoCEP 05508-900 – Butantã - São Paulo. Telefone: ++55 11 30377545 / Fax: ++55 11 30377536
20

EPUSP
ConvênioRockwell Automation
Escola Politécnica da USP
Posição PROG
Esta posição habilita o CLP ao modo de programação (Program). O controlador não varre/executa o programa ladder e as saídas são desligadas. É possível desenvolver a edição do programa on-line. O modo do CLP pode ser alterado somente por meio da posição da chave seletora.
Posição REM
Esta posição habilita o CLP ao modo remoto (Remote): modos REMote Run, REMote Program ou REMote Test. O modo do controlador pode ser alterado por meio da posição da chave seletora ou mudando o modo por meio de uma interface de programação/operação. É possível desenvolver a edição de programa on-line nessa posição.
Av. Prof. Luciano Gualberto, trav. 3 nº. 158 – Prédio de Engenharia Elétrica – Bloco A – TérreoCEP 05508-900 – Butantã - São Paulo. Telefone: ++55 11 30377545 / Fax: ++55 11 30377536
21

EPUSP
ConvênioRockwell Automation
Escola Politécnica da USP
2. INTRODUÇÃO TEÓRICA - ANEXO
Esta apostila apresenta um resumo do manual indicado na bibliografia do software Logix 500, este software funciona sobre o sistema operacional MS-Windows.
O software RSLogix500 é um programa desenvolvido com o objetivo de configurar, programar, monitorar e comandar os CLPs da série MicroLogix e SLC-500 da Allen Bradley. A Figura 15 apresenta um exemplo de tela do mesmo.
Figura 15. Exemplo de tela do RSLogix 500
2.1. Comunicação com o CLP SLC-500/MicroLogixA comunicação do PC com o CLP MicroLogix (Ou família SLC-500) se faz fisicamente por
meio de um cabo de comunicação que atenda o padrão RS-232, e virtualmente por meio do software RSLinx. Por meio deste software, pode-se configurar o CLP, transferir programas elaborados no RSLogix para o CLP (Download), transferir programas existentes no CLP para o RSLogix (Upload), e ainda monitorar e comandar o CLP, em tempo real. A Figura 16 apresenta um exemplo de tela de configuração do RSLinx.
Av. Prof. Luciano Gualberto, trav. 3 nº. 158 – Prédio de Engenharia Elétrica – Bloco A – TérreoCEP 05508-900 – Butantã - São Paulo. Telefone: ++55 11 30377545 / Fax: ++55 11 30377536
22

EPUSP
ConvênioRockwell Automation
Escola Politécnica da USP
Figura 16. Figura A.2 - Exemplo de tela do RSLinx
2.2. Configuração de DriverPrimeiramente, deve-se criar um driver para comunicação do CLP com o PC. No software
RSLinx, clique em Communications / Configure Drivers. Em Available Driver Types, selecione o driver desejado e configure-o.
Neste caso o driver RS-232 DF1 device deve ser selecionado. Em Comm Port, selecione a porta de comunicação utilizada e em Device, selecione SLC-CH0/Micro/PannelView. As outras informações necessárias para configuração do driver podem ser obtidas por meio do Auto-Configure. A Figura 17 apresenta um exemplo de tela de configuração do Driver serial Linx.
Av. Prof. Luciano Gualberto, trav. 3 nº. 158 – Prédio de Engenharia Elétrica – Bloco A – TérreoCEP 05508-900 – Butantã - São Paulo. Telefone: ++55 11 30377545 / Fax: ++55 11 30377536
23

EPUSP
ConvênioRockwell Automation
Escola Politécnica da USP
Figura 17. Exemplo de configuração de driver
2.3. Desenvolvimento de um novo programaPara criar um novo arquivo no RSLogix500, siga os seguintes passos:
No RSLogix, ao selecionar o menu File – New, surgira uma lista com os processadores possíveis;
Escolha “BUL. 1762-Micrologix 1200- Series C” e clicar em OK;
No menu Comm, clicar em System Comms; isso abre o RSLinx e a janela Communications, semelhante à anterior. Procurar a estação correspondente ao CLP em uso, no canal DF-1. Caso exista um “X” vermelho no ícone do CLP, está ocorrendo uma falha na comunicação.
No menu à esquerda, selecione IO Configuration, fazendo surgir a tela de configuração de entradas e saídas, onde é feita a configuração dos módulos que compõem as gavetas. Após observar que o módulo do processador (CPU) já está configurado para a gaveta 0, clique então em Read IO Config para que o programa leia os outros cartões acoplados ao CLP.
Av. Prof. Luciano Gualberto, trav. 3 nº. 158 – Prédio de Engenharia Elétrica – Bloco A – TérreoCEP 05508-900 – Butantã - São Paulo. Telefone: ++55 11 30377545 / Fax: ++55 11 30377536
24

EPUSP
ConvênioRockwell Automation
Escola Politécnica da USP
2.4. Programação do MicroLogixOs CLPs da família MicroLogix, são programados por meio de uma combinação entre a
linguagem ladder com blocos de função.
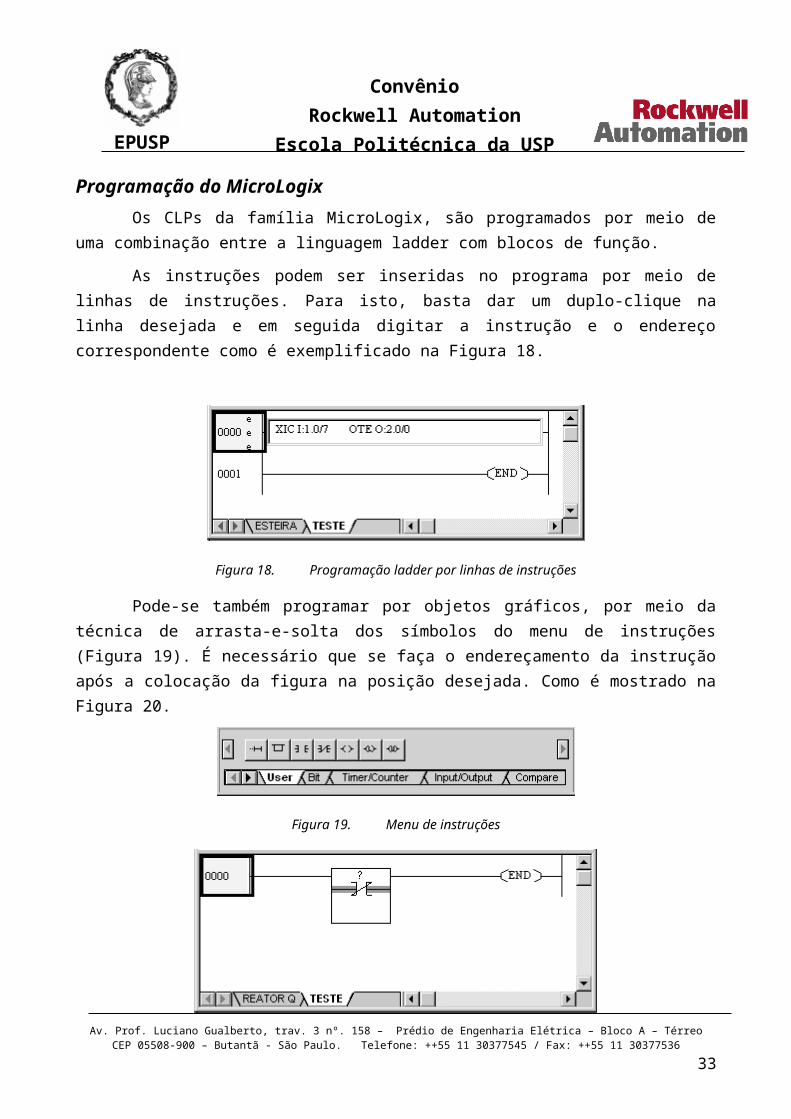
As instruções podem ser inseridas no programa por meio de linhas de instruções. Para isto, basta dar um duplo-clique na linha desejada e em seguida digitar a instrução e o endereço correspondente como é exemplificado na Figura 18.
Figura 18. Programação ladder por linhas de instruções
Pode-se também programar por objetos gráficos, por meio da técnica de arrasta-e-solta dos símbolos do menu de instruções (Figura 19). É necessário que se faça o endereçamento da instrução após a colocação da figura na posição desejada. Como é mostrado na Figura 20.
Figura 19. Menu de instruções
Figura 20. Programação por objetos gráficos
Av. Prof. Luciano Gualberto, trav. 3 nº. 158 – Prédio de Engenharia Elétrica – Bloco A – TérreoCEP 05508-900 – Butantã - São Paulo. Telefone: ++55 11 30377545 / Fax: ++55 11 30377536
25
EPUSP
ConvênioRockwell Automation
Escola Politécnica da USP
Após a programação de todo ladder estar finalizada, é recomendado fazer uma
verificação lógica do programa, por meio do botão . Havendo erros, eles serão enumerados e indicados na tela.
2.5. Transferência do Programa do PC para o CLP (Download)Após finalizar um programa no software RSLogix500, é necessário que o mesmo seja
transferido para o CLP; isto é denominado Download. Para efetuar o Download, deve-se seguir os seguintes passos:
No menu Online do RSLogix500 (Figura 21), mudar a opção Offline para Download, por
meio da escolha de opções .
Figura 21. Menu Online
Para todas as janelas que aparecem em seguida, deve-se escolher a opção Sim.
Para voltar a programar, basta escolher a opção Offline.
Av. Prof. Luciano Gualberto, trav. 3 nº. 158 – Prédio de Engenharia Elétrica – Bloco A – TérreoCEP 05508-900 – Butantã - São Paulo. Telefone: ++55 11 30377545 / Fax: ++55 11 30377536
26
EPUSP
ConvênioRockwell Automation
Escola Politécnica da USP
2.6. Procedimento para programar, carregar e descarregar o programa aplicativo no CLP
2.6.1Conexão do PC ao CLP
1º passo: Ligar o PC e o CLP e verificar a conexão do cabo serial;
2º passo: Abrir o programa RS Linx Classic localizado em Menu Iniciar/Todos os programas/Rockwell Software/RS Linx
3º passo: Na tela do RS Linx Classic Lite, clique em Communications/RSWho. Vide fig. A.2 do anexo
4º passo: Verifique a existência da conexão AB_D F1-1, DH-485. Se ela existir, pule direto para o 10º passo.
5º passo: Não existindo a conexão acima, é necessário criá-la para que o PC enxergue o CLP. Na tela do RS Linx Classic Lite clique em Communications/Configure Drivers.
6º passo: Na tela Configure Drivers em Available Driver Types, selecione a opção RS-232 DFI devices, clique em Add new e, na tela seguinte, em OK.
7º passo: A tela Configure RS-232 DFI devices deve abrir automaticamente (vide fig. A.3 no anexo). Em Comm port, selecione a opção COM1 e clique em Auto config.
8º passo: Clique em OK
9º passo: Clique em Close
10º passo: Minimize o RS Linx
2.6.2 Programação do aplicativo Ladder
Todo novo programa Ladder aplicativo criado precisa seguir esse procedimento para que reconheça o CLP e seus cartões de expansão.
1º passo: Abrir o programa RS Logix 500 english localizado em Menu Iniciar/Todos os programas/Rockwell Software/RS Logix 500 english
2º passo: Clique em file/new
3º passo: Abrirá a tela Select processor type. Dê um nome para o seu programa em Processor name (p.ex.: exp1) e selecione o CLP a ser utilizado; no caso, o Bul 1762 Micrologix 1200 Serie C
Av. Prof. Luciano Gualberto, trav. 3 nº. 158 – Prédio de Engenharia Elétrica – Bloco A – TérreoCEP 05508-900 – Butantã - São Paulo. Telefone: ++55 11 30377545 / Fax: ++55 11 30377536
27

EPUSP
ConvênioRockwell Automation
Escola Politécnica da USP
4º passo: Confirme também se o Driver selecionado é o mesmo do item A.6.1 e clique em OK. A tela do seu programa irá abrir.
5º passo: Abra o project/controller/IO Configuration localizado à direita na tela
6º passo: Na tela IO Configuration, clique em Read IO Config
7º passo: Na tela Read IO Configuration from Online processor, confirme se o Driver é o mesmo do passo A.6.1 e clique em Read IO Config.
Esse passo é necessário para garantir que o PC está conectado ao CLP e todas as suas expansões de entrada e saída foram reconhecidas.
8º passo: Fechar a tela IO Configuration
Você está pronto para começar a programação
9º passo: Crie seu programa clicando nos ícones referente às instruções de programação e arrastando-os para a linha do programa. Ver figuras A.5, A.6, A.7 do anexo.
10º passo: Clique em file/save e salve seu programa
2.6.3 Carregando o programa do PC no CLP
1º passo: Mude o status localizado no canto superior esquerdo de offline para download. Ver fig. A.4 do anexo.
2º passo: Confirme todas as janelas que aparecerem.
Av. Prof. Luciano Gualberto, trav. 3 nº. 158 – Prédio de Engenharia Elétrica – Bloco A – TérreoCEP 05508-900 – Butantã - São Paulo. Telefone: ++55 11 30377545 / Fax: ++55 11 30377536
28

EPUSP
ConvênioRockwell Automation
Escola Politécnica da USP
3. EXPERIÊNCIA 1 – MOTORES E SEMÁFOROS
3.1. IntroduçãoOs Controladores Lógicos Programáveis (CLPs) são equipamentos de grande importância
nas aplicações de automação de processos industriais. Neles estão centralizadas as funções de controle, sendo que seus programas determinam o funcionamento dos dispositivos de comando e a lógica de trabalho dos equipamentos industriais.
Os CLPs são programados para produzir o funcionamento desejado nos equipamentos controlados através de linguagens de programação. Agindo a partir de sinais de sensores ou medidores (dados de entrada), os sinais de saída comandam os equipamentos industriais que compõem o processo industrial.
3.2. ObjetivoO objetivo deste experimento é a familiarização com o CLP Micrologix1200, suas
conexões externas e seu funcionamento básico, e também com o software RSLogix500 para PC, que é o meio de programação do CLP, e de monitoramento visual das entradas e saídas do mesmo.
O aluno tem como atividades:
1) Simulação de partida de motor com sinalização.
2) Programação e simulação de sistema de semáforo simples.
3) Projeto de programa em ladder, para aperfeiçoamento do semáforo.
Av. Prof. Luciano Gualberto, trav. 3 nº. 158 – Prédio de Engenharia Elétrica – Bloco A – TérreoCEP 05508-900 – Butantã - São Paulo. Telefone: ++55 11 30377545 / Fax: ++55 11 30377536
29

EPUSP
ConvênioRockwell Automation
Escola Politécnica da USP
3.3. Parte Prática
3.3.1Partida de motor
Antes da energização do CLP, selecione a chave da tensão de alimentação no módulo da fonte para 100/120V. Aplique 120VAC entre os terminais 120/240VOLTS e conecte o neutro em VAC NEUT (Figura 22). As ligações devem ser executadas observando-se atentamente as pinagens dos diagramas das Figuras 22 e 25, evitando erros que podem provocar a queima de equipamentos.
O esquema de ligação do experimento é o da Figura 22. O CLP deve ser ligado a duas entradas: um push-button NA “botão liga” e um push-button NF “botão desliga”. Duas saídas ligadas a duas lâmpadas incandescentes sinalizarão situações de partida e de funcionamento pleno do motor de algum equipamento industrial.
Figura 22. Esquema de montagem do sistema de partida de motor
Av. Prof. Luciano Gualberto, trav. 3 nº. 158 – Prédio de Engenharia Elétrica – Bloco A – TérreoCEP 05508-900 – Butantã - São Paulo. Telefone: ++55 11 30377545 / Fax: ++55 11 30377536
30

EPUSP
ConvênioRockwell Automation
Escola Politécnica da USP
Utilizando o software de programação RSLogix500, foi estabelecido o arquivo do programa exp1-1.rss, o qual se encontra no disquete fornecido. O programa corresponde ao diagrama lógico da Figura 24
O endereçamento correspondente às ligações físicas da Figura 22 é o seguinte:
Push button Liga – PB Liga I:1/0
Push button de parada – PB Desliga I:1/1
Partida (Luz Vermelha) – Partida O:2/0
Funcionamento (Luz Verde) – Funcionamento O:2/1
Diagrama de tempos:
Figura 23. Temporização para acionamento do motor
Av. Prof. Luciano Gualberto, trav. 3 nº. 158 – Prédio de Engenharia Elétrica – Bloco A – TérreoCEP 05508-900 – Butantã - São Paulo. Telefone: ++55 11 30377545 / Fax: ++55 11 30377536
31
10 s
PB LigaPB
Desliga
Partida
Funcionamento
t

EPUSP
ConvênioRockwell Automation
Escola Politécnica da USP
Figura 24. Diagrama ladder do sistema de partida de motor
Faça o download do ladder correspondente ao controle de motor conforme o Anexo A.1, Seção A.1.2. Feito o download, passe o CLP ao modo de execução e online.
Verifique o funcionamento do sistema, que deve iniciar o processo de partida com o acionamento do push-button Liga. A lâmpada sinalizadora do processo de partida deve acender-se durante 10 segundos. Após esse tempo, ocorre o funcionamento pleno, representado pela segunda lâmpada acesa. Acione o push-button Desliga, para interromper o funcionamento, que é sinalizado pelo desligamento da segunda lâmpada.
3.3.2Semáforo Duplo
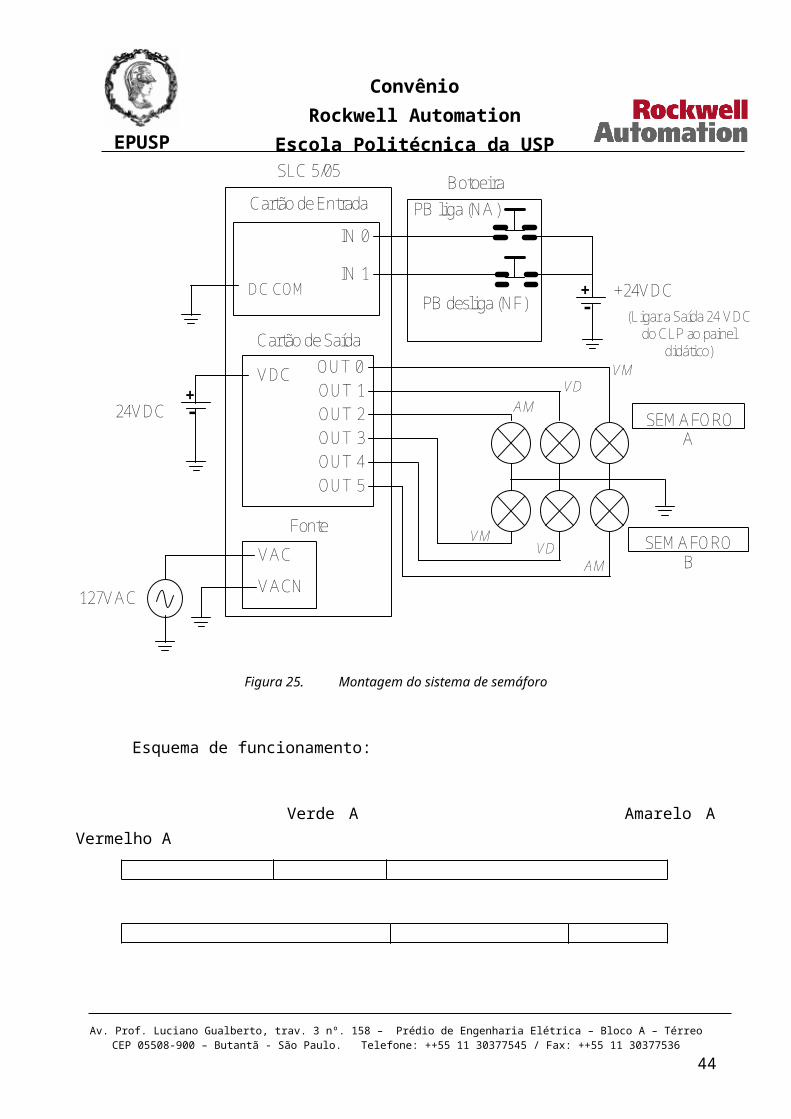
O sistema a ser simulado consiste em dois semáforos com controle temporizado, num cruzamento simples de duas vias. O funcionamento das 6 lâmpadas (vermelhas, amarelas e verdes) é seqüencial, com intervalos de tempo definidos. O esquema de ligações da montagem do CLP correspondente é apresentado na Figura 25.
Av. Prof. Luciano Gualberto, trav. 3 nº. 158 – Prédio de Engenharia Elétrica – Bloco A – TérreoCEP 05508-900 – Butantã - São Paulo. Telefone: ++55 11 30377545 / Fax: ++55 11 30377536
32
EPUSP
ConvênioRockwell Automation
Escola Politécnica da USP
SEMAFOROA
SEMAFOROB
+24VDC
VDCOUT 1OUT 2OUT 3OUT 4OUT 5
IN 0
IN 1
24VDC
PB liga (NA)
PB desliga (NF)
OUT 0
Botoeira
Cartão de Saída
Cartão de Entrada
SLC 5/05
Fonte
VAC
127VAC
(Ligar a Saída 24 VDCdo CLP ao painel
didático)VM
VD
AM
VMVD
AM+-
+-
VACN
DC COM
Figura 25. Montagem do sistema de semáforo
Esquema de funcionamento:
Verde A Amarelo A Vermelho A
Vermelho B Verde B Amarelo B
Av. Prof. Luciano Gualberto, trav. 3 nº. 158 – Prédio de Engenharia Elétrica – Bloco A – TérreoCEP 05508-900 – Butantã - São Paulo. Telefone: ++55 11 30377545 / Fax: ++55 11 30377536
33

EPUSP
ConvênioRockwell Automation
Escola Politécnica da USP
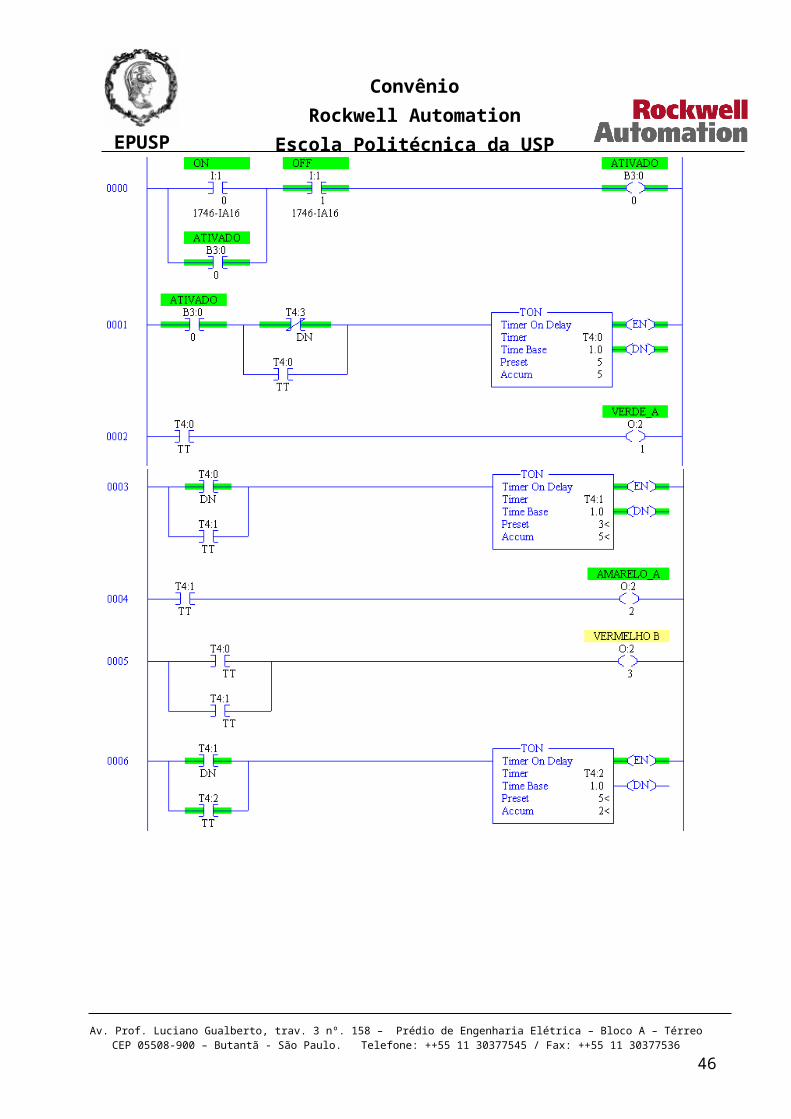
Inicialmente, faça as conexões dos elementos do sistema, de acordo com o esquema da Figura 25. Em seguida, estude o diagrama ladder da Figura 26 e faça o diagrama de tempos correspondente. Programe o ladder no RSLogix500 usando as informações do Anexo A.1, Seção A.1.5. Faça o download. Coloque o CLP no modo Run, aperte o botão liga e verifique se o funcionamento das lâmpadas está correto. Em caso negativo, corrija o programa.
O endereçamento para o programa no RSLogix é o seguinte:
Push button de partida - ON = I:1/0 Bit auxiliar – Ativado = B3/0
Push button de parada - OFF = I:1/1 Temporizador 0 - T0 = T4:0
Temporizador 3 – T3=T4:3
Luz Vermelha – Vermelho A = O:2/0 Temporizador 1 - T1 = T4:1
Luz Verde - Verde A = O:2/1 Temporizador 2 - T2 = T4:2
Luz Amarela – Amarelo A = O:2/2 Luz Verde - Verde B = O:2/4
Luz Vermelha – Vermelho B = O:2/3 Luz Amarela – Amarelo B = O:2/5
Av. Prof. Luciano Gualberto, trav. 3 nº. 158 – Prédio de Engenharia Elétrica – Bloco A – TérreoCEP 05508-900 – Butantã - São Paulo. Telefone: ++55 11 30377545 / Fax: ++55 11 30377536
34

EPUSP
ConvênioRockwell Automation
Escola Politécnica da USP
Av. Prof. Luciano Gualberto, trav. 3 nº. 158 – Prédio de Engenharia Elétrica – Bloco A – TérreoCEP 05508-900 – Butantã - São Paulo. Telefone: ++55 11 30377545 / Fax: ++55 11 30377536
35

EPUSP
ConvênioRockwell Automation
Escola Politécnica da USP
Figura 26. Diagrama Ladder do sistema semafórico
Apresente observações e conclusões a respeito dos exercícios.
Av. Prof. Luciano Gualberto, trav. 3 nº. 158 – Prédio de Engenharia Elétrica – Bloco A – TérreoCEP 05508-900 – Butantã - São Paulo. Telefone: ++55 11 30377545 / Fax: ++55 11 30377536
36

EPUSP
ConvênioRockwell Automation
Escola Politécnica da USP
3.3.3Projeto – Semáforo inteligente
O Projeto associado a esta experiência consiste no aperfeiçoamento do sistema semafórico acima estudado. Projete um semáforo inteligente simples, em que o trânsito pela via preferencial flui livremente até que seja detectada a chegada de um veículo pela via secundária. Após determinado tempo de espera, o semáforo deve dar passagem à via secundária, por um determinado tempo, e depois retorna ao estado inicial. Escolha os tempos de espera livremente. Apresente o diagrama ladder do sistema.
Partida
Sensor
VIA PRINCIPAL
Verde A
Amarelo A
Vermelho A
VIA SECUNDÁRIA
Verde B
Amarelo B
Vermelho B
Figura 27. Diagrama de Tempos do projeto de Semáforo Inteligente
Av. Prof. Luciano Gualberto, trav. 3 nº. 158 – Prédio de Engenharia Elétrica – Bloco A – TérreoCEP 05508-900 – Butantã - São Paulo. Telefone: ++55 11 30377545 / Fax: ++55 11 30377536
37

EPUSP
ConvênioRockwell Automation
Escola Politécnica da USP
Para ser implementado este projeto no painel de simulação deve-se utilizar um artificio para transformar um dos botões momentaneos em retentivo, assim pode-se utilizar o outro botão como sinal do sensor. Este artificio é realizado utlizando o ladder abaixo:
3.4. Material Utilizado
Hardware:
Material Quantidade
CLP SLC-500 com CPU SLC 5/05 1
Fonte 1746-P1 1
Módulo de Entrada Digital código 1746-IA16 1
Módulo de Saída Digital a relé código 1746-OW16 1
Módulo de Entrada/Saída Analógica código 1746-NIO4V 1
PC com MS Windows (9x, NT ou posteriores) com porta de comunicação com conector DB-9 (macho)
1
Cabo DB9/DB9 (fêmea) para conexão do CLP com o computador 1
Modulo para a realização do experimento 1
Botoeira 1
Multímetro 1
Chave de fenda 1
Cabos elétricos 20
Av. Prof. Luciano Gualberto, trav. 3 nº. 158 – Prédio de Engenharia Elétrica – Bloco A – TérreoCEP 05508-900 – Butantã - São Paulo. Telefone: ++55 11 30377545 / Fax: ++55 11 30377536
38

EPUSP
ConvênioRockwell Automation
Escola Politécnica da USP
Software:
RSLinx e RSLogix500 (Plataforma MS Windows)
3.5. Bibliografia
Manuais on-line sobre a plataforma SLC 500 disponibilizados no site mundial da Rockwell Automation - www.ab.com/manuals/cp/#slc500
Moraes, Cicero Couto e Castrucci, Plinio de Lauro. Engenharia de Automação Industrial. Editora LTC, 2007.
Natale, Ferdinando. Automação Industrial (S. Brasileira de Tecnologia). Editora Erica, 20
Av. Prof. Luciano Gualberto, trav. 3 nº. 158 – Prédio de Engenharia Elétrica – Bloco A – TérreoCEP 05508-900 – Butantã - São Paulo. Telefone: ++55 11 30377545 / Fax: ++55 11 30377536
39

EPUSP
ConvênioRockwell Automation
Escola Politécnica da USP
4. EXPERIÊNCIA 1 - ANEXO
4.1. Instruções de Temporização e ContagemNesta experiência veremos que o sequenciamento de operações passa a ser o ponto
fundamental do desenvolvimento do processo.
Na experiência anterior foi dada ênfase na lógica combinacional utilizando-se das instruções NA, NF e de bobina energizada.
Agora na experiência de esteira transportadora para análise da lógica seqüencial estaremos utilizando as instruções do temporizador crescente – TON e do contador crescente – CTU.
4.1.1Instrução TON - Temporizador Crescente Sem Retenção à Energização
A CPU executa a instrução TON verificando se há ou não continuidade lógica na linha da instrução. Caso haja continuidade lógica da linha, a instrução TON inicia uma contagem de tempo, baseada nos intervalos da base de tempo que deve ter sido selecionada durante a programação da instrução. A instrução TON possui bits de controle e de sinalização do seu estado de operação.
O bit EN é colocado no estado lógico 1 cada vez que a instrução é acionada. O bit DN é colocado no estado lógico 1 quando o “valor do registrador acumulado” valor ACCUM for igual ao “valor do registrador pré-selecionado” valor PRESET. A Figura 28 ilustra a instrução TON na linguagem ladder, já a Figura 29 mostra sua carta de tempos.
Figura 28. Representação em linguagem Ladder da instrução TON. Temporizador crescente sem retenção
Av. Prof. Luciano Gualberto, trav. 3 nº. 158 – Prédio de Engenharia Elétrica – Bloco A – TérreoCEP 05508-900 – Butantã - São Paulo. Telefone: ++55 11 30377545 / Fax: ++55 11 30377536
40
DN
ENTIMER ON DELAYTimer T4:0Timer Base 1.0Preset 10Accum 2
( )
( )
TON

EPUSP
ConvênioRockwell Automation
Escola Politécnica da USP
Figura 29. Carta de Tempos da Instrução TON. Temporizador crescente sem retenção
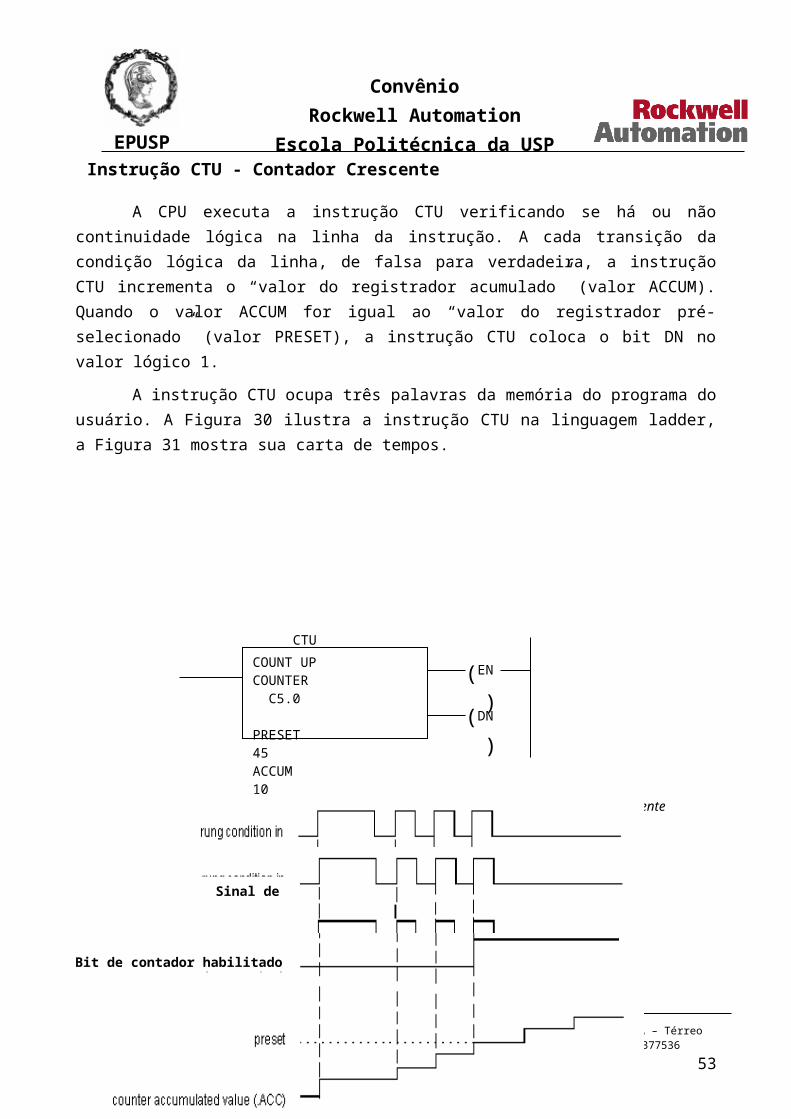
4.1.2Instrução CTU - Contador Crescente
A CPU executa a instrução CTU verificando se há ou não continuidade lógica na linha da instrução. A cada transição da condição lógica da linha, de falsa para verdadeira, a instrução CTU incrementa o “valor do registrador acumulado” (valor ACCUM). Quando o valor ACCUM for igual ao “valor do registrador pré-selecionado” (valor PRESET), a instrução CTU coloca o bit DN no valor lógico 1.
A instrução CTU ocupa três palavras da memória do programa do usuário. A Figura 30 ilustra a instrução CTU na linguagem ladder, a Figura 31 mostra sua carta de tempos.
Av. Prof. Luciano Gualberto, trav. 3 nº. 158 – Prédio de Engenharia Elétrica – Bloco A – TérreoCEP 05508-900 – Butantã - São Paulo. Telefone: ++55 11 30377545 / Fax: ++55 11 30377536
41
Sinal de
Bit de temporizador habilitado
Bit de temporizador contando
Bit de temporizador finalizado
Valor do temporizador acumulado
Valor pré-definido Temporizador não atingiu valor de preset

EPUSP
ConvênioRockwell Automation
Escola Politécnica da USP
Figura 30. Representação em linguagem Ladder da instrução CTU. Contador crescente
Figura 31. Carta de tempos da instrução CTU. Contador crescente
4.2. Instruções de Bit auxiliarMuitas vezes é necessário em um projeto ter bits de informação que não são
necessariamente uma entrada ou uma saída da sua planta, mas que serão usados mais adiante para alguma lógica sequencial. Para isso usam-se os chamados bits auxiliares.
Para isso, basta endereçar o bit em B3:0/X, sendo X a numeração do bit, que pode variar de 0 a 255.
Av. Prof. Luciano Gualberto, trav. 3 nº. 158 – Prédio de Engenharia Elétrica – Bloco A – TérreoCEP 05508-900 – Butantã - São Paulo. Telefone: ++55 11 30377545 / Fax: ++55 11 30377536
42
DN
ENCOUNT UPCOUNTER C5.0 PRESET 45 ACCUM 10
( )
( )
CTU
Sinal de entrada
Bit de contador habilitado (EN)
Bit de contador finalizado (DN)
Valor pré-definido (PRESET)
Valor do contador acumulado (ACC)

EPUSP
ConvênioRockwell Automation
Escola Politécnica da USP
4.3. Energizar / Desenergizar Saída com Retenção – OTL e OTU
A instrução OTL (Figura A.1.11), quando habilitada, energiza o dispositivo de saída ou bit da tabela de dados correspondente com retenção, isto é, uma vez energizado, apenas uma instrução de desenergização pode modificar o seu estado. Logo, mesmo que a condição lógica da linha onde se encontra a instrução OTL se modifique de verdadeira para falsa, o terminal correspondente de saída não será desenergizado.
A instrução OTU (Figura A.1.12) desenergiza o dispositivo de saída ou bit da tabela de dados com retenção. Portanto, uma vez que o terminal de saída correspondente seja desenergizado, seu estado não se modifica com a mudança de condição lógica da linha; isto apenas acontece com a aplicação de uma instrução de energização ao mesmo endereço.
Av. Prof. Luciano Gualberto, trav. 3 nº. 158 – Prédio de Engenharia Elétrica – Bloco A – TérreoCEP 05508-900 – Butantã - São Paulo. Telefone: ++55 11 30377545 / Fax: ++55 11 30377536
43
L
O:2/1 U
O:2/2
EPUSP
ConvênioRockwell Automation
Escola Politécnica da USP
5. EXPERIÊNCIA 2 - ESTEIRA TRANSPORTADORA
5.1. IntroduçãoAs esteiras transportadoras são utilizadas em numerosos processos com o propósito de
providenciar um fluxo contínuo de materiais entre diversas operações, com economia e segurança de operação, confiabilidade, versatilidade e enorme gama de capacidades. Sua maior capacidade de atendimento às restrições ambientais é também outro fator que incrementa a utilização de correias transportadoras sobre outros meios de transporte.
Esteiras transportadoras podem suportar cargas de até 1500 toneladas para distâncias de até alguns milhares de metros, utilizando para isso várias etapas. Pode ser utilizada para transporte de todo tipo de material, em diversas áreas da economia, como em indústrias alimentícias, (bebidas, biscoitos, no envasamento de líquidos etc.), automobilística, gráfica, farmacêutica, metalúrgica, ferro e aço, em portos e aeroportos, no transporte de mercadorias e de pessoas, etc. Na indústria e no transporte são utilizados os mais diversos tipos de esteiras transportadoras, confeccionadas com diferentes tipos de materiais, de vários tamanhos e para diversas finalidades. A esteira pode ser controlada por um CLP para que faça movimentos e paradas programadas em pontos específicos, com aceleração e redução da velocidade. A otimização de uma esteira melhora o transporte de peças, adequando-o ao processo de produção.
5.2. Partida de MotoresSempre que possível, a partida de um motor deverá ser feita de forma direta, ou seja,
sem artifícios para redução da corrente de partida. Por outro lado, quando a corrente de partida do motor é elevada, o que ocorre para motores de elevada potência, podem ocorrer alguns transtornos, tais como:
Interferência no funcionamento de equipamentos instalados no mesmo sistema, devido à queda de tensão excessiva.
Necessidade de superdimensionar os sistemas de proteção, com conseqüente aumento de custos.
Por imposição da redução da corrente de partida pela companhia concessionária de energia elétrica, de forma a limitar a queda de tensão na rede.
Quando tais fatos ocorrem, é necessário recorrer a um sistema de partida indireta, de modo a reduzir o pico de corrente na entrada.
O sistema de partida indireta mais usado é a partida estrela-triângulo que consiste em ligar, numa primeira instância, as bobinas do enrolamento do motor numa configuração estrela e,
Av. Prof. Luciano Gualberto, trav. 3 nº. 158 – Prédio de Engenharia Elétrica – Bloco A – TérreoCEP 05508-900 – Butantã - São Paulo. Telefone: ++55 11 30377545 / Fax: ++55 11 30377536
44

EPUSP
ConvênioRockwell Automation
Escola Politécnica da USP
b)
SR T
220 VAC
R S T
Bobinas do Motor
a)
127 VAC
220 VAC
portanto, alimentando cada bobina com vezes a tensão nominal do motor (Figura 32a),
quando o motor atingir aproximadamente a metade de sua rotação nominal, a ligação das bobinas é mudada para a configuração triângulo, com isso alimentando o motor com sua tensão nominal (Figura 32b), essa mudança pode ser feita por um operador, por relés temporizados ou por contatores controlados como é o caso para esta experiência. Do repouso, um motor de alta potência quando alimentado com sua tensão nominal precisaria de uma alta corrente para partir, no entanto, para uma tensão menor a corrente necessária também seria menor.
Figura 32. Tipos de Ligação: a) Ligação Estrela; b) Ligação Triângulo.
5.3. ObjetivosNesta experiência o aluno deve conectar uma esteira transportadora em miniatura a seu
controlador, utilizando entradas e saídas discretas do CLP. A esteira é movimentada por um motor trifásico, energizado por meio de contatores na linha de alimentação, com partida em estrela-triângulo, temporizada. O aluno deve utilizar os programas Ladder já fornecidos, instalá-los com o RSLogix500, e verificar o funcionamento do sistema em cada caso. Serão abordados também alguns conceitos de simulação de uma planta de automação e segurança envolvida na mesma.
Av. Prof. Luciano Gualberto, trav. 3 nº. 158 – Prédio de Engenharia Elétrica – Bloco A – TérreoCEP 05508-900 – Butantã - São Paulo. Telefone: ++55 11 30377545 / Fax: ++55 11 30377536
45
EPUSP
ConvênioRockwell Automation
Escola Politécnica da USP
5.4. Parte Prática
5.4.1Montagem Experimental
A montagem para este experimento é ilustrada na Figura 33.
Figura 33. Ilustração da montagem do experimento
Para os ítens 5.4.2 e 5.4.3 abaixo a tomada trifásica do kit da esteira deverá permanecer desligada.
5.4.2Simulação de partida direta em triângulo com finalização no fim de curso 2.
Nesta montagem deve-se acionar o motor através do botão Liga, deve ainda ser possível desligá-lo em qualquer instante que for necessário através do botão Desliga. Para o acionamento do motor em triângulo no sentido de ida do fim de curso 1 para o fim de curso 2 devem ser usados os contatores A e D (ver figura abaixo), por se tratar de uma simulação o acionamento do fim de curso 2 deve ser feito através do curto-circuito dos dois fios que chegam nesse sensor.
Av. Prof. Luciano Gualberto, trav. 3 nº. 158 – Prédio de Engenharia Elétrica – Bloco A – TérreoCEP 05508-900 – Butantã - São Paulo. Telefone: ++55 11 30377545 / Fax: ++55 11 30377536
46

EPUSP
ConvênioRockwell Automation
Escola Politécnica da USP
Figura 34. Circuito de potência para controle do motor
ATENÇÃO
Antes de interligar o kit do CLP com o kit da Esteira, certifique-se que a tomada trifásica do kit da esteira esteja DESLIGADA.
O esquema de ligações utilizado está apresentado abaixo. Ainda não ligue os terminais que estão tracejados, estes só devem ser ligados no ítem 5.4.4 quando a esteira será realmente ligada.
Av. Prof. Luciano Gualberto, trav. 3 nº. 158 – Prédio de Engenharia Elétrica – Bloco A – TérreoCEP 05508-900 – Butantã - São Paulo. Telefone: ++55 11 30377545 / Fax: ++55 11 30377536
47

EPUSP
ConvênioRockwell Automation
Escola Politécnica da USP
Figura 35. Esquema de Ligação
Av. Prof. Luciano Gualberto, trav. 3 nº. 158 – Prédio de Engenharia Elétrica – Bloco A – TérreoCEP 05508-900 – Butantã - São Paulo. Telefone: ++55 11 30377545 / Fax: ++55 11 30377536
48

EPUSP
ConvênioRockwell Automation
Escola Politécnica da USP
Complete o ladder abaixo de modo a implementar essas funções.
ATENÇÃO
Certifique-se que a tomada trifásica do kit da esteira esteja DESLIGADA.
5.4.3Simulação de partida estrela/triângulo com finalização no fim de curso
Neste ítem deve-se aprimorar o sistema anterior com a introdução da partida através dos estágios estrela-triângulo. A partida deverá ocorrer primeiramente em estágio estrela e permanecer nesse estado por 3 segundos, devendo então reverter para o estágio em triângulo.
Complete o ladder abaixo de modo a implementar essas funções.
Av. Prof. Luciano Gualberto, trav. 3 nº. 158 – Prédio de Engenharia Elétrica – Bloco A – TérreoCEP 05508-900 – Butantã - São Paulo. Telefone: ++55 11 30377545 / Fax: ++55 11 30377536
49

EPUSP
ConvênioRockwell Automation
Escola Politécnica da USP
5.4.4Partida estrela/triângulo com ciclo completo
Antes de ligar o kit da esteira na tomada trifásica, certifique-se que o CLP já está com o programa da esteira carregado.
A descrição do processo é apresentada a seguir:
Ao acionamento de um botão Liga/Desliga, a esteira deve partir no sentido da posição 1 em direção à posição 2 (vai).
Na partida, seja qual for a posição da esteira, o motor é ligado em estrela, e depois de 3 segundos, a ligação é modificada para triângulo, por meio dos contatores da Figura 34.
Sempre que a esteira chegar à posição 2 (situação detectada pela chave de fim de curso 2), a esteira permanece parada durante 7 segundos (tempo referente a uma carga/descarga de material); então parte de volta em direção à posição 1. Chegando à posição 1, o processo é finalizado.
Av. Prof. Luciano Gualberto, trav. 3 nº. 158 – Prédio de Engenharia Elétrica – Bloco A – TérreoCEP 05508-900 – Butantã - São Paulo. Telefone: ++55 11 30377545 / Fax: ++55 11 30377536
50

EPUSP
ConvênioRockwell Automation
Escola Politécnica da USP
Um botão de parada ou emergência, permite interromper o processo imediatamente, sempre que acionado, em qualquer situação.
Lembre-se que o conjunto da esteira e o motor têm inércia, ou seja, mesmo após desligar a energia do motor, o conjunto se move alguns centímetros antes de parar, esse pequeno espaço é suficiente para fazer o atuador da esteira (carga) passar do sensor e este parar de detectá-lo (o atuador), o sistema deve compensar isso registrando de alguma forma a passagem pelos sensores.
CUIDADO!
Confira atentamente as ligações efetuadas nesta etapa da experiência bem como as instruções ladder antes de programá-las no CLP, como se pode perceber pela figura 34 se os contatores A e B ou C e D forem acionados
simultaneamente, ocorrerá um curto-circuito entre duas ou três fases do trifásico causando danos aos aparelhos e às dependências do laboratório.
ATENÇÃO!
Antes de ligar a esteira posicione o atuador no meio do percurso, ligue a esteira e confirme o lado para o qual ela está indo, o correto é ela estar rumando para o fim de curso 2 (ver figura 33) se isso não acontecer desligue a esteira e inverta, no painel da bancada, duas fases da tomada; religue a esteira e veja o rumo dela.
Av. Prof. Luciano Gualberto, trav. 3 nº. 158 – Prédio de Engenharia Elétrica – Bloco A – TérreoCEP 05508-900 – Butantã - São Paulo. Telefone: ++55 11 30377545 / Fax: ++55 11 30377536
51

EPUSP
ConvênioRockwell Automation
Escola Politécnica da USP
Tabela 2.1 – Endereçamento do programa em Logix500
nome da variável valor da variável = 0 se valor da variável = 1 se
Sentido sentido da esteira = “vai” sentido da esteira = “volta”
ciclo completo Ciclo em andamento esteira voltou da posição 2 para a posição 1
chaves Fim de curso carga da esteira ausente carga da esteira presente
Habilita sistema desenergizado sistema energizado
Tabela 2.2 – Comentário das linhas do ladder da Figura 36
Linha Comentário
0 Define o valor da variável sentido, indicando se a esteira está se movimentando no sentido de vai ou volta.
1Esta linha faz com que a presença da carga na posição 1 torne a variável ciclo
completo=1 durante um ciclo de varredura e modifique o valor da variável sentido para 0 (vai), na linha 0.
2O valor da variável vai se torna 1 quando sentido=0, a carga ainda não chegou no fim de curso 2 e o botão de partida é acionado. Caso contrário, vai=0. (Alimenta
bobina A até chegar no Fim de curso 2).
3 O valor da variável volta se torna 1 quando sentido=1 e o temporizador acabou a contagem. (Começa a voltar quando acaba o tempo de parada).
4 Quando o botão de partida é acionado, a variável habilita se torna 1.
5 Quando a variável habilita está em 1, e a carga alcança a posição 2, inicia-se a contagem de 10 segundos até a partida do motor da esteira.
6 Tanto no sentido vai como volta, a partida do motor da esteira deve durar 5 segundos.
7 Após 5 segundos na posição Estrela, o fim da contagem modifica a configuração do motor da esteira para Triângulo.
8 Durante a contagem dos 5 segundos, a configuração de partida do motor da esteira se mantém em Estrela.
Av. Prof. Luciano Gualberto, trav. 3 nº. 158 – Prédio de Engenharia Elétrica – Bloco A – TérreoCEP 05508-900 – Butantã - São Paulo. Telefone: ++55 11 30377545 / Fax: ++55 11 30377536
52
EPUSP
ConvênioRockwell Automation
Escola Politécnica da USP
O endereçamento para o diagrama Ladder pode ser visualizado na tabela abaixo:
Tabela 2.3 – Endereçamento para o ladder da Figura 36
Botão de partida = I:0/0 Variável para instrução OSR = B3/3
Botão de parada = I:0/1 Sinal vai (bobina A) = O:0/1
Chave Fim de curso1 = I:0/2 Ligação Estrela (bobina C) = O:0/3
Chave Fim de curso2 = I:0/3 Ligação Triângulo (bobina D) = O:0/4
Variável sentido = B3/0 Sinal volta (bobina B) = O:0/2
Variável ciclo completo = B3/1 Timer 1 (T1) = T4:0
Variável habilita = B3/2 Timer 2 (T2) = T4:1
Av. Prof. Luciano Gualberto, trav. 3 nº. 158 – Prédio de Engenharia Elétrica – Bloco A – TérreoCEP 05508-900 – Butantã - São Paulo. Telefone: ++55 11 30377545 / Fax: ++55 11 30377536
53

EPUSP
ConvênioRockwell Automation
Escola Politécnica da USP
Figura 36. Diagrama ladder do sistema
Av. Prof. Luciano Gualberto, trav. 3 nº. 158 – Prédio de Engenharia Elétrica – Bloco A – TérreoCEP 05508-900 – Butantã - São Paulo. Telefone: ++55 11 30377545 / Fax: ++55 11 30377536
54

EPUSP
ConvênioRockwell Automation
Escola Politécnica da USP
5.4.5Análise da operação
Preencha a tabela abaixo com o estado de cada bit nas diversas etapas do funcionamento.
Etapas
B3:0/0 B3:0/1 B3:0/2 O:0/1 O:0/2 O:0/3 O:0/4 T4:0/DN T4:0/TT T4:1/DN T4:1/TT
A
B
C
D
E
F
Etapas:
A – Indo, antes do primeiro estágio Y-Δ;
B – Indo, depois do primeiro estágio Y-Δ e antes do fim de curso 2 ;
C – Parado no fim de curso 2;
D – Voltando, antes do segundo estágio Y-Δ;
E – Voltando, depois do segundo estágio Y-Δ;
F – Parado no fim de curso 1;
Qual a função dos bits Ciclo_completo e Sentido no ladder apresentado?
5.4.6Alteração do Programa
Altere o programa Ladder de modo que a esteira execute três ciclos antes de parar na posição inicial. Descreva a alteração executada.
Av. Prof. Luciano Gualberto, trav. 3 nº. 158 – Prédio de Engenharia Elétrica – Bloco A – TérreoCEP 05508-900 – Butantã - São Paulo. Telefone: ++55 11 30377545 / Fax: ++55 11 30377536
55
EPUSP
ConvênioRockwell Automation
Escola Politécnica da USP
5.5. Projetos para o Relatório
5.5.1Esteiras em Série
Em um processo de mineração o uso de esteiras em série é imprescindível quando se deseja efetuar o transporte por grandes distâncias.
Projete um programa Ladder que controle 3 esteiras em série E1, E2, E3 acionadas pelos motores M1, M2, M3, respectivamente, com os seguintes requisitos (ver também Figura 37):
A esteira E3 recebe o material a ser transportado e a esteira E1 é a última do processo onde o material é entregue;
A esteira E3 só pode ser acionada se a esteira E2 estiver ligada;
A esteira E2 só pode ser acionada se a esteira E1 estiver ligada;
Seu projeto deve prever um botão Liga para iniciar o processo e um botão Desliga para interrompê-lo a qualquer instante (desligamento simultâneo dos motores);
Não é necessário implementar os estágios Y-Δ.
Figura 37. Exemplo de Esteiras em Série
Av. Prof. Luciano Gualberto, trav. 3 nº. 158 – Prédio de Engenharia Elétrica – Bloco A – TérreoCEP 05508-900 – Butantã - São Paulo. Telefone: ++55 11 30377545 / Fax: ++55 11 30377536
56
E3
M3
E2
M2
E1
M1
Botão Liga Botão Desliga

EPUSP
ConvênioRockwell Automation
Escola Politécnica da USP
5.5.2 Esteiras Sincronizadas com Enchimento de Container
Projete um programa Ladder que controle o enchimento de containeres onde cabem 12 peças de um determinado produto, com os seguintes requisitos:
E1 - esteira que transporta os produtos a serem embalados;
E2 - esteira que transporta os containeres;
SP – Sensor de passagem de produtos;
SC – Sensor de posicionamento da caixa (só é acionado quando a caixa está em posição adequada);
Seu projeto deve prever um botão Liga para iniciar o sistema e um botão Desliga para interrompê-lo a qualquer instante;
Enquanto em processo de enchimento, a esteira dos containeres deve permanecer desligada até o enchimento completo (12 Produtos);
Quando o container estiver cheio deve-se desligar E1 e ligar E2 até um novo container entrar em posição e então se deve retomar o processo de enchimento.
Veja exemplo na figura a seguir:
Figura 38. Exemplo de Esteiras Sincronizadas para Enchimento de Container
(Vista Superior)
Av. Prof. Luciano Gualberto, trav. 3 nº. 158 – Prédio de Engenharia Elétrica – Bloco A – TérreoCEP 05508-900 – Butantã - São Paulo. Telefone: ++55 11 30377545 / Fax: ++55 11 30377536
57

EPUSP
ConvênioRockwell Automation
Escola Politécnica da USP
5.6. Material Utilizado
Hardware:
Material Quantidade
CLP SLC-500 com CPU SLC 5/05 1
Fonte 1746-P1 1
Módulo de Entrada Digital código 1746-IA16 1
Módulo de Saída Digital a relé código 1746-OW16 1
Módulo de Entrada/Saída Analógica código 1746-NIO4V 1
PC com MS Windows (9x, NT ou posteriores) com porta de comunicação com conector DB-9 (macho)
1
Cabo DB9/DB9 (fêmea) para conexão do CLP com o computador 1
Montagem com 4 contatores já interligados adequadamente 1
Multímetro 1
Chave de fenda 1
Montagem experimental incluindo motor trifásico de 220V, esteira e 2 chaves de fim de curso (NA)
1
Cabos elétricos 26
Software:
- RSLinx e RSLogix500 (Plataforma MS Windows).
Av. Prof. Luciano Gualberto, trav. 3 nº. 158 – Prédio de Engenharia Elétrica – Bloco A – TérreoCEP 05508-900 – Butantã - São Paulo. Telefone: ++55 11 30377545 / Fax: ++55 11 30377536
58

EPUSP
ConvênioRockwell Automation
Escola Politécnica da USP
5.7. Bibliografia
Manuais on-line sobre a plataforma SLC 500 disponibilizados no site mundial da Rockwell Automation - www.ab.com/manuals/cp/#slc500
Moraes, Cicero Couto e Castrucci, Plinio de Lauro. Engenharia de Automação Industrial. Editora LTC, 2001.
Natale, Ferdinando. Automação Industrial (S. Brasileira de Tecnologia). Editora Erica, 2000.
Av. Prof. Luciano Gualberto, trav. 3 nº. 158 – Prédio de Engenharia Elétrica – Bloco A – TérreoCEP 05508-900 – Butantã - São Paulo. Telefone: ++55 11 30377545 / Fax: ++55 11 30377536
59

EPUSP
ConvênioRockwell Automation
Escola Politécnica da USP
6. EXPERIÊNCIA 3 – AUTOMAÇÃO DE REATOR QUÍMICO
6.1. IntroduçãoUm dos principais usos dos CLPs destina-se a controlar processos químicos de batelada
(batch process). Através de sensores, pode-se monitorar grandezas como temperatura, pressão, pH, entre outras e então controlar válvulas, misturadores, sinalizadores e esteiras. A automação contribui para a segurança de trabalhadores, possibilitando evitar o contato com produtos e ambientes mais agressivos, típicos da indústria química, além de proporcionar maior velocidade e precisão às tarefas.
6.2. ObjetivosNesta experiência o aluno deve instalar o CLP, conectando-o a um painel didático e
programá-lo para processar entradas digitais e analógicas. O aluno deve simular manualmente variações de temperatura e o nível do reator. O funcionamento do sistema automatizado será visualizado através do painel didático munido de LEDs indicadores (Figura 39).
Figura 39. Ilustração referente ao painel di
Av. Prof. Luciano Gualberto, trav. 3 nº. 158 – Prédio de Engenharia Elétrica – Bloco A – TérreoCEP 05508-900 – Butantã - São Paulo. Telefone: ++55 11 30377545 / Fax: ++55 11 30377536
60
Válvula 4 - Dreno
Esteira
Tanque
Bóia 1
Bóia 3
Bóia 2
Válvula 3
Válvula 2
Válvula 1
Misturador

EPUSP
ConvênioRockwell Automation
Escola Politécnica da USP
6.3. Descrição do ProcessoA descrição do processo automatizado é a seguinte:
A condição para início do processo é o posicionamento correto de um tanque debaixo do reator. Satisfeita esta condição, ao ser acionado o botão de Partida inicia-se o aquecimento do reator pela injeção de vapor, através da abertura da Válvula 3.
Atingida a temperatura de 100 oC, deve abrir-se a Válvula 1 para a entrada de 400 litros da mistura 1, que é indicado pelo nível da bóia 2 (a bóia 1 deve ser aberta anteriormente, indicando que passou por aquele nível).
Com o acionamento da bóia 2, a válvula 1 deve fechar e a válvula 2 abrir, permitindo a entrada de 200 litros da mistura 2, que é indicada pela bóia 3. Durante esta etapa, a temperatura deve ser mantida em 100 oC ± 10%. Sempre que a temperatura cair abaixo desta faixa, o processo deve ser interrompido e o reator deve ter sua temperatura reajustada pela abertura da Válvula 3.
Após a adição das duas substâncias, a temperatura deve ser elevada para 300º C± 10%. A partir deste momento o misturador deve ser acionado durante 20 segundos e a temperatura deve ser mantida constante na faixa de 300 oC± 10%. Caso a temperatura caia abaixo desta faixa, interrompe-se o processo e a mistura deve ser reajustada através da Válvula 3.
Após o desligamento do misturador, abre-se a válvula 4(dreno) para a transferência da mistura final ao tambor. Esvaziado o reator, o que é detectado pela bóia 1, a Válvula 4 deve ser fechada, e assim finalizar o processo.
Ao posicionar-se um novo tanque, um novo processo pode ser inicializado.
Na experiência, as bóias serão simuladas por chaves a serem comandadas manualmente, e a temperatura será simulada por um potenciômetro que ajusta um valor proporcional de tensão aplicada à entrada analógica do CLP. A abertura e fechamento das válvulas e o funcionamento do misturador são indicadas por LEDs no painel didático.
Av. Prof. Luciano Gualberto, trav. 3 nº. 158 – Prédio de Engenharia Elétrica – Bloco A – TérreoCEP 05508-900 – Butantã - São Paulo. Telefone: ++55 11 30377545 / Fax: ++55 11 30377536
61

EPUSP
ConvênioRockwell Automation
Escola Politécnica da USP
6.4. Parte PráticaEstude o ladder da Figura 40, linha por linha, assegurando-se que seu funcionamento é
adequado.
Após a interligação física dos equipamentos esquematizada na Figura 39, programe este ladder da Figura 40 através do RSLogix500 instalado no PC e verifique o funcionamento correto da montagem do reator químico comandado pelo CLP. Sempre verificar as condições iniciais do sistema antes de iniciar um processo (chaves de indicação das bombas e temperatura em zero).
Obs: O potenciômetro utilizado para o comando do valor analógico de temperatura varia de 0 a +10 volts. Este sinal é convertido no módulo de entradas analógicas do CLP para a faixa de valores de 0 a 32767, o que corresponde, nesta simulação, à faixa de temperaturas de 0 a 500 C.
Portanto, para este transdutor, teremos os seguintes valores correspondentes às temperaturas utilizadas no programa em ladder:
Temperatura (º C) Tensão (Volts) Valor Convertido
90 1,8 5898
98 1,96 6422
102 2,04 6685
110 2,2 7209
115 2,3 7536
270 5,4 17695
294 5,88 19268
306 6,12 20054
330 6,6 21627
345 6,9 22609
Av. Prof. Luciano Gualberto, trav. 3 nº. 158 – Prédio de Engenharia Elétrica – Bloco A – TérreoCEP 05508-900 – Butantã - São Paulo. Telefone: ++55 11 30377545 / Fax: ++55 11 30377536
62
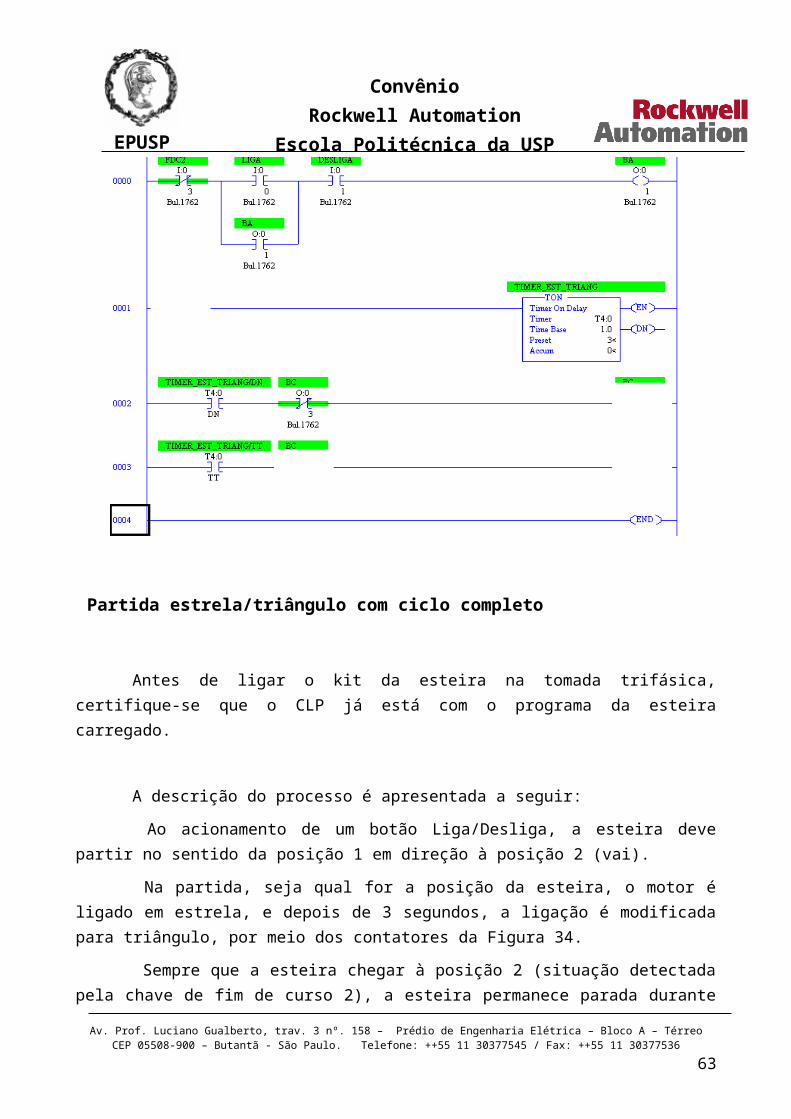
EPUSP
ConvênioRockwell Automation
Escola Politécnica da USP
Endereçamento para o diagrama ladder:
Chave bóia 1 I:1/0 Bit Start B3:0/0
Chave bóia 2 I:1/1 Bit T1 B3:0/1
Chave bóia 3 I:1/2 Bit T1AC B3:0/2
Chave posição tanque I:1/3 Bit T1OKI B3:0/3
Válvula de entrada mistura 1 O:2/0 Bit T1OKS B3:0/4
Válvula de entrada mistura 2 O:2/1 Bit T1OK B3:0/5
Válvula entrada de vapor O:2/2 Bit Esvazia B3:0/6
Válvula de dreno O:2/3 Bit T2 B3:0/7
Motor misturador O:2/4 Bit T2AC B3:0/8
Timer TEMP1 T4:0 Bit T2OKI B3:0/9
Palavra para Temperatura I3:0 Bit T2OKS B3:0/10
Bit T2OK B3:0/11
Bit Agita B3:0/12
Av. Prof. Luciano Gualberto, trav. 3 nº. 158 – Prédio de Engenharia Elétrica – Bloco A – TérreoCEP 05508-900 – Butantã - São Paulo. Telefone: ++55 11 30377545 / Fax: ++55 11 30377536
63

EPUSP
ConvênioRockwell Automation
Escola Politécnica da USP
Av. Prof. Luciano Gualberto, trav. 3 nº. 158 – Prédio de Engenharia Elétrica – Bloco A – TérreoCEP 05508-900 – Butantã - São Paulo. Telefone: ++55 11 30377545 / Fax: ++55 11 30377536
64

EPUSP
ConvênioRockwell Automation
Escola Politécnica da USP
Figura 40. Diagrama ladder do sistema
Obs.: os bits T_OKI e T_OKS testam um limite de temperatura mais preciso (2%) em relação ao teste feito por T_AC (10%).
Av. Prof. Luciano Gualberto, trav. 3 nº. 158 – Prédio de Engenharia Elétrica – Bloco A – TérreoCEP 05508-900 – Butantã - São Paulo. Telefone: ++55 11 30377545 / Fax: ++55 11 30377536
65

EPUSP
ConvênioRockwell Automation
Escola Politécnica da USP
6.5. ProjetoO projeto desta experiência consiste na inclusão de acionamentos de alarmes no
diagrama ladder para duas situações:
Bomba defeituosa (por tempo): Se o tempo decorrente da abertura de uma válvula até o atingir o nível da bóia correspondente demorar mais do que um tempo previsto, deve-se acionar um alarme indicando defeito na bomba correspondente.
Superaquecimento (por nível de temperatura): Um alarme deve ser acionado no caso da temperatura suba acima de 15% do valor desejado.
No caso de acionamento de qualquer um dos alarmes, o processo deve ser interrompido.
Apresente o diagrama ladder contendo estes dispositivos de alarme.
6.6. Material UtilizadoHardware:
Material Quantidade
CLP SLC-500 com CPU SLC 5/05 1
Fonte 1746-P1 1
Módulo de Entrada Digital código 1746-IA16 1
Módulo de Saída Digital a relé código 1746-OW16 1
Módulo de Entrada/Saída Analógica código 1746-NIO4V 1
PC com MS Windows (9x, NT ou posteriores) com porta de comunicação com conector DB-9 (macho)
1
Cabo DB9/DB9 (fêmea) para conexão do CLP com o computador 1
Painel didático para simular o reator, tanque, bóias e válvulas, com potenciômetro simulando a variação de temperatura
1
Botoeira 1
Multímetro 1
Chave de fenda 1
Cabos elétricos 26
Av. Prof. Luciano Gualberto, trav. 3 nº. 158 – Prédio de Engenharia Elétrica – Bloco A – TérreoCEP 05508-900 – Butantã - São Paulo. Telefone: ++55 11 30377545 / Fax: ++55 11 30377536
66

EPUSP
ConvênioRockwell Automation
Escola Politécnica da USP
Software:
RSLinx e RSLogix500 (Plataforma MS Windows)
6.7. Bibliografia
Manuais on-line sobre a plataforma SLC 500 disponibilizados no site mundial da Rockwell Automation - www.ab.com/manuals/cp/#slc500
Moraes, Cicero Couto e Castrucci, Plinio de Lauro. Engenharia de Automação Industrial. Editora LTC, 2001.
Natale, Ferdinando. Automação Industrial (S. Brasileira de Tecnologia). Editora Erica, 2000.
Av. Prof. Luciano Gualberto, trav. 3 nº. 158 – Prédio de Engenharia Elétrica – Bloco A – TérreoCEP 05508-900 – Butantã - São Paulo. Telefone: ++55 11 30377545 / Fax: ++55 11 30377536
67