automaÇÃo industrial - autenticação · j.r. caldas pinto ai_2009 /lab 2 automaÇÃo industrial...
TRANSCRIPT

J.R. Caldas Pinto AI_2009 /Lab 2
AUTOMAÇÃO INDUSTRIAL
3º ano – Engenharia Mecânica – 2º semestre
2008/2009
Guias de Laboratório – 2 ATENÇÃO: LEIA ESTE GUIA ATÉ AO FIM ANTES DE QUALQUER IMPLEMENTAÇÃO. SE TIVER DÚVIDAS ESCLAREÇA-AS. Título: Automatização de um sistema de maquinação. Enunciado Suponha que dado processo de maquinação é para ser executado sem interrupção para lotes de m peças (em geral m é grande mas naturalmente em simulação usará um número baixo). O processamento será de acordo com a cor da peça, cor esta detectada por uma câmara vídeo. Vamos supor que são duas as cores que interessam, correspondendo a cada uma um dado processamento. No fim deste, segue-se um processo de lavagem comum aos dois tipos de peças. Genericamente o processo pode resumir-se nos seguintes passos:
1) Uma peça é detectada num sensor de presença. Nesta altura o tapete rolante começa a rolar para a direita. A seguir a peça “cai”1 no tapete e ao deslocar-se sobre ele é detectada pelo sensor de presença da esquerda do tapete. Quando a peça é detectada o tapete pára e uma câmara detecta a sua cor (eventualmente terá de ajustar a peça à mão para ficar debaixo da câmara. Para o efeito vai iniciar um tempo de espera de 5s durante o qual uma luz vermelha deve piscar e que lhe permite colocar a peça de baixo da câmara). A peça pode ser amarela, verde ou outra2. Para cada caso o procedimento é o seguinte:
Amarela: desencadeia-se o ciclo pneumático I (executado uma única vez), diferente para cada turma e descrito na tabela no final deste enunciado. Durante este ciclo uma luz amarela deve permanecer acesa. É incrementado o contador de peças amarelas.
Verde: desencadeia-se o ciclo pneumático II (executado uma única vez), diferente para cada turma e descrito na tabela no final deste enunciado. Durante este ciclo uma luz verde deve permanecer acesa. É incrementado o contador de peças verdes.
1 Ou seja,na prática um dos elementos do grupo coloca a peça sobre o tapete em movimento 2 O software fornecido também detecta o vermelho e o azul. Por isso pode substituir as cores referidas por estas, ou das quatro combinar duas. O ideal será treinar em casa e trazer consigo as peças.

J.R. Caldas Pinto AI_2009 /Lab 2
Outra cor: A peça é rejeitada. Para isso o tapete roda para a esquerda a peça cai e quando o sensor de presença é actuado (significa que a peça foi retirada) o tapete pára, ficando o sistema pronto a receber nova peça.
Quando terminou o processamento da peça amarela ou verde esta é levada para um novo posto através do avanço do tapete, que deve parar quando o sensor da direita é actuado. Inicia-se um fase de limpeza igual para as duas. Esta limpeza é realizada através de um cilindro pneumático (pode escolher o A, B ou C), que deve avançar, ficar neste estado 10s e depois recuar. Depois de recuado o tapete avança durante uns segundos para que a peça caia e depois pára. O sistema fica assim preparado para nova peça.
O operador tem à disposição três botões: um tipo start/stop (SS) e dois de pressão, um para alarme e outro para paragem forçada.
Quando o sistema é iniciado com a ligação do start deve ser iniciado o contador com o lote de peças que deve ser processado (todas são contabilizadas, incluindo as que não são verdes nem amarelas). Quando se liga este interruptor para a posição de stop o sistema deve parar desde que todo o lote em processamento tenha terminado.
A actuação de um botão de paragem forçada vai parar todo o processo. Para garantir que o sistema retoma da posição inicial, o mestre irá dar ordens directas de reset dos cilindros e de paragem do tapete. O sistema só retoma com a colocação do interruptor SS em OFF e depois em ON. A contagem de peças é reinicializada.
Finalmente o botão de alarme deve suspender a execução em qualquer etapa do processo excepto se estiver na limpeza, devendo então esperar que esta tenha terminado. Durante este período deve piscar uma luz vermelha. O processo recomeça quando o botão de alarme deixar de ser premido.
Tabela com os ciclos a realizar por turma
T. 0301 T. 0302 T. 0303 T. 0304 T. 0305 T. 0306 C+C-(A+B+)B-A- C+A+B+(C-A-)B- (B+C+)A+A-C-B- A+(B+C+)A-C-B- A+C+C-B+(B-A-) C+(A+B+)A-B-C- A+A-(B+C+)B-C- (B+A+)C+B-A-C- A+C+B+(C-B-)A- (A+C+)B+B-A-C- B+(C+A+)C-A-B- A+B+B-C+(A-C-)
Como bem sabe os diversos escravos podem ser programados em GRAFTEC, ou outra linguagem, porém recorda-se que o modelo GRAFCET especificado para o mestre não pode ser implementado em GRAFTEC, tendo de recorrer de preferência à implementação em Lista de Instruções com base no modelo.
I) (5 val) Estabeleça o modelo GRAFCET funcional3 deste processo que deve incluir um GRAFCET mestre e um ou mais escravos.
II) (5 val) Derive as equações de movimento para os ciclos correspondentes a cada cor, usando o método dos diagramas de funcionamento.4
3 Não se esqueça que o GRAFCET funcional é independente da implementação. Não use o GRAFTEC para o representar pois é limitado. Considera-se “funcional” o GRAFCET em que os comandos e as receptividades são expressas em linguagem corrente destinadas a um cliente não técnico.

J.R. Caldas Pinto AI_2009 /Lab 2
III) (6 val) Implemente o programa que desenvolveu no autómato SAIA de forma a poder corrê-lo no lab Presencial. Relativamente a esta apresentação faça a listagem dos símbolos usados, e os que declarou como variáveis globais e locais. Forneça ainda o código.
Tem vantagens em fazer alguns testes no lab remoto, mas já tem a experiência de que não o pode guardar para o final. O que se aconselha é o seguinte: 1. Que deduzam desde já as equações de movimento, percebendo como tal é feito a partir do livro das aulas de problemas e de dúvidas. Implementem estas equações como ilustrado no livro e certifiquem-se desde já que os ciclos funcionam como previsto no lab remoto. Em anexo está sugerido como deve posteriormente integrar este módulo no seu programa em GRAFTEC.
2. Se tiver terminado o trabalho cedo e tiver acesso ao lab remoto pode sempre simular todo o processo mas terá de fazer algumas simplificações:
a. Ignore a existência do tapete e de sensor de presença. De acordo com a cor das peças implemente o procedimento descrito ignorando sempre o tapete. Se não tiver webcam ou ligações suficientemente rápidas pode substituir a detecção da cor por registos. As peças que usar em casa serão as que deve levar para o laboratório para detectar a cor. Se não tiver serão fornecidas. Naturalmente o programa de interface que vai usar é o fornecido com este enunciado.
b. Considere três registos um onde vai colocar o valor de m e os outros dois onde vai poder ler o número de peças processadas de cada tipo, antes de iniciar novo ciclo.
c. Considere duas flags para os botões de start e de emergência.
Neste trabalho não é valorizada a utilização do lab remoto pois este serve sobretudo de apoio e confirmação de métodos a usar no presencial e que praticamente todos eles foram ilustrados nas folhas de problemas apresentadas com soluções fornecidas.
4 Divida esta tarefa entre os membros do grupo. Treine-se para o exame!

J.R. Caldas Pinto AI_2009 /Lab 2
Avaliação e Relatório final
1. No início da aula o grupo deve apresentar ao docente o relatório do trabalho a
realizar e que consta genericamente duma introdução ao trabalho, da modelação do
problema e na descrição da resolução de cada uma das alíneas. Naturalmente não
incluirá o capítulo de “Análise de resultados e conclusões”. Será atribuída uma nota
de 0 a 2 em que o zero significa que o trabalho não foi minimamente preparado, 1 que
o trabalho foi minimamente preparado e 2 que foi bem preparado. Grupos
classificados de 0 não poderão realizar o trabalho ficando com 0 na nota final deste.
2. No fim da aula ou antes se o trabalho acabar mais cedo, o docente verifica se o
problema proposto ficou a funcionar de acordo com o especificado. Terá que dar uma
classificação de acordo com esta observação e também de acordo com o tempo levado
pelo grupo a realizar o trabalho e o grau de autonomia revelado. Será atribuída uma
nota de 0 a 2 em que o zero significa que o trabalho não foi terminado ou foi realizado
com grande ajuda do docente, 1 que o trabalho foi terminado em quase todas as
vertentes dentro do tempo previsto e com poucas ajudas e 2 quando trabalha dentro
de todas as especificações, foi feito sem ajudas ou ajudas menores e terminou bem
dentro do tempo previsto.
3. Os alunos terão de apresentar, 2 dias após terem realizado o laboratório, o relatório
final do mesmo, que deve corresponder ao elaborado para a fase 1, acrescentado dum
capítulo de resultados e outro de conclusões. Este trabalho é classificado numa escala
de 0 a 20. Relativamente ao apresentado no ponto 1 deverá incluir um capítulo de
“Análise de resultados e conclusões”. Deverão também ser incluídas correcções de
erros eventualmente detectados. O trabalho deve ser entregue na secretaria da Secção
de Sistemas até às 17h do segundo dia útil após ter realizado o laboratório.
4. As notas indicadas em cada alínea referem-se à avaliação do relatório final. Os 4
valores que faltam destinam-se à apreciação global do trabalho o que inclui a
apresentação geral, o capítulo de introdução e o da análise de resultados e
conclusões. Não é avaliado o facto da simulação no laboratório remoto correr ou não,
mas é exigido o envio do código e uma descrição breve de como a simulação foi feita
(manual de utilização desse código) no relatório.
5. O relatório deverá ser entregue numa versão electrónica (enviada por email para o
docente do laboratório e para o responsável da disciplina numa única file tipo zip
(não rar) – não são aceites diskettes referindo como assunto AI_LAB2) e numa versão
em papel. A versão electrónica deve ter obrigatoriamente o seguinte nome:
turmaGrupoL2.zip (ex: 3301G1L2.zip) e deve incluir o relatório e os ficheiros de
código escritos no PG5. O email deve ter assunto e ser: AI_Lab2.
A versão em papel deve vir agrafada. A capa deve ser exactamente como ilustrado na
última página deste guia. As fotos a incluir serão as disponibilizadas no Fénix.

J.R. Caldas Pinto AI_2009 /Lab 2
A nota final de cada laboratório de 0 a 20 é depois calculada de acordo com a fórmula:
( ) 3
0 0
2 0,6 0Labx Fase1
Labx Fase1 Fase2 Fase Fase1
N se N
N N N N se N
= =
= + × + × ≠
Os alunos deverão apresentar-se pontualmente no início das aulas, pois não é possível
permanecerem para além das 2h, consideradas suficientes com uma preparação adequada
dos trabalhos.
Distribuição das bancadas pelos grupos
No FENIX será disponibilizada a tabela de símbolos relativa a cada bancada.
Esta distribuição poderá ser excepcionalmente revista para o laboratórios 3, para atender eventuais solicitações de alunos com necessidades específicas para o problema proposto, sobre o qual os alunos já têm algum conhecimento. Assim, face ao laboratório 3 os alunos deverão junto dos docentes discutir o mais rapidamente a sua viabilidade e comunicar até ao dia 22 de Maio, as suas pretenções, por email ao docente de laboratório com cópia para o professor responsável da disciplina.
G2
G3
G7
G1 G6
G4
G5
G8
J.R. Caldas Pinto AI_2009 /Lab 2
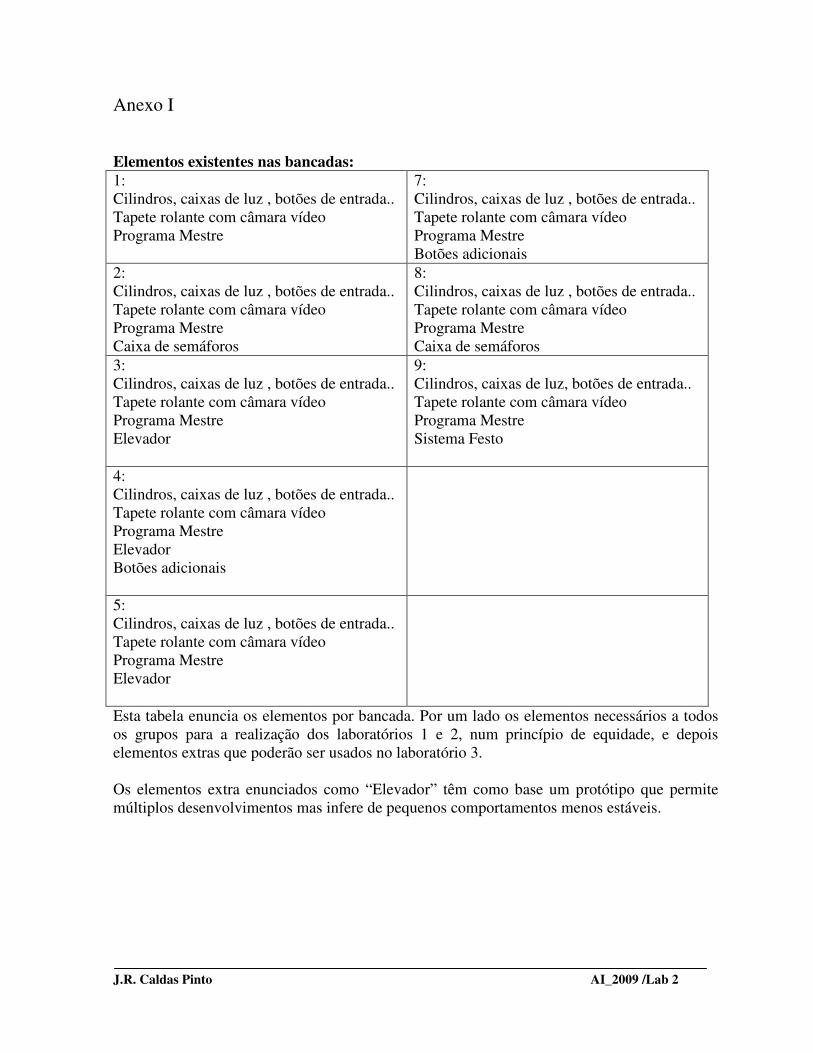
Anexo I Elementos existentes nas bancadas: 1: Cilindros, caixas de luz , botões de entrada.. Tapete rolante com câmara vídeo Programa Mestre
7: Cilindros, caixas de luz , botões de entrada.. Tapete rolante com câmara vídeo Programa Mestre Botões adicionais
2: Cilindros, caixas de luz , botões de entrada.. Tapete rolante com câmara vídeo Programa Mestre Caixa de semáforos
8: Cilindros, caixas de luz , botões de entrada.. Tapete rolante com câmara vídeo Programa Mestre Caixa de semáforos
3: Cilindros, caixas de luz , botões de entrada.. Tapete rolante com câmara vídeo Programa Mestre Elevador
9: Cilindros, caixas de luz, botões de entrada.. Tapete rolante com câmara vídeo Programa Mestre Sistema Festo
4: Cilindros, caixas de luz , botões de entrada.. Tapete rolante com câmara vídeo Programa Mestre Elevador Botões adicionais
5: Cilindros, caixas de luz , botões de entrada.. Tapete rolante com câmara vídeo Programa Mestre Elevador
Esta tabela enuncia os elementos por bancada. Por um lado os elementos necessários a todos os grupos para a realização dos laboratórios 1 e 2, num princípio de equidade, e depois elementos extras que poderão ser usados no laboratório 3. Os elementos extra enunciados como “Elevador” têm como base um protótipo que permite múltiplos desenvolvimentos mas infere de pequenos comportamentos menos estáveis.

J.R. Caldas Pinto AI_2009 /Lab 2
AUTOMAÇÃO INDUSTRIAL
LABORATÓRIOS
2008/2009
Foto aluno 1 Foto aluno 2 Foto aluno 3
Grupo: 3302G1
Laboratório: 2
3º Ano de Engenharia Mecânica
Instituto Superior Técnico
Número NomeAluno1 Número NomeAluno2 Número NomeAluno3

J.R. Caldas Pinto AI_2009 /Lab 2
ANEXO I
Neste anexo apresenta-se um exemplo de como pode ser chamado um grupo de instruções correspondentes às equações de movimento de cilindros pneumáticos. É uma solução, poderá eventualmente haver outras, que tem em conta as especifidades do GRAFTEC. O implementação apresentada corresponde à realização do seguinte ciclo: A+A-B+B- Espera 5s (AcendeLuz) A sequência é controlada por um interruptor start/stop e o ciclo é implementado a partir das equações (ver livro da disciplina pg 199). Note que a flag fim_ciclo é que vai permitir detectar quando o ciclo terminou para poder progredir. Terá de criar uma no seu programa colocada no instrução mais adequada. Solução: XOB 16 RES Cil_A RES Cil_B RES l1 SET F 1 RES F 2 EXOB COB 0 0 STH F 1 ANH start ANH a0 RES F 1 SET F 2 STH F 2 ANL start ANH fim_escravo RES F 2 SET F 1 STH F 1 RES Cil_A RES Cil_A RES L1 STH F 2 CSB H ciclo ECOB

J.R. Caldas Pinto AI_2009 /Lab 2
ANEXO II
Interface com a detecção da cor (Manual do utilizador)
Em primeiro lugar certifique-se que tem o ficheiro de calibração. Se desejar interagir com o autómato clique no menu “PCD” e “Ligar PCD”.
Figura 1:Ligação ao PCD.

J.R. Caldas Pinto AI_2009 /Lab 2
O utilizador pode usar o software de reconhecimento de cor para os mais variados fins. De seguida exemplificamos com um pequeno programa para o autómato SAIA que simplesmente compara o valor do registo R 10 com os valores 1, 2, 3, 4 (respectivamente correspondentes à cor amarelo, vermelho, azul e verde) e acende uma luz correspondente à cor da peça (repare que há um blinker que foi usado para piscar uma lâmpada verde “O 37” de 1 em 1 segundo, devido à ausência de uma lâmpada azul). Note que deverá descarregar o programa para o PCD estar ONLINE e a correr o programa (RUN) de modo a que se dê a interacção entre o autómato e a interface SAIA-MASTER.
Figura 2: Exemplo de uma aplicação para interacção do software com autómatos SAIA.
Vamos então experimentar o programa para 4 peças de cores diferentes, 3 tampas (vermelha, azul e verde) e para um pedaço de cartão amarelo.
Figura 3:Peças usadas para motivo exemplificativo.

J.R. Caldas Pinto AI_2009 /Lab 2
Passamos então a ter os seguintes resultados para cada uma das peças, individualmente:
Figura 4:Análise para pedaço de cartão amarelo.

J.R. Caldas Pinto AI_2009 /Lab 2
Figura 5: Análise para tampa verde.

J.R. Caldas Pinto AI_2009 /Lab 2
Figura 6: Análise tampa azul.

J.R. Caldas Pinto AI_2009 /Lab 2
Figura 7: Análise para tampa vermelha.

J.R. Caldas Pinto AI_2009 /Lab 2
Figura 8:Análise para o caso em que não há nenhum objecto na imagem.

J.R. Caldas Pinto AI_2009 /Lab 2
ANEXO III
Teste de valores inteiros em registos
Neste problema tem de fazer teste com valores inteiros, colocado num registo, para distinguir as cores. Uma forma de implementar este teste é exemplificada na figura a seguir:
Se não percebe as instruções consulte o Help do PG5.

J.R. Caldas Pinto AI_2009 /Lab 2
ANEXO IV
Breve Introdução do espaço de cor CIE Lab (leitura opcional). O espaço de cor CIE Lab (ou também conhecido como CIE L*a*b*) é o espaço de cor que melhor reproduz todas as cores visíveis pelo olho humano. Isto é conseguido porque este espaço de cor imita a resposta logaritmica de células da retina denominadas “cones”5 à luminosidade. Foi desenvolvido pela Comissão Internacional de Iluminação (ou Commission
Internationale d'Eclairage, daí a sigla CIE). O parâmetro “L” representa a luminosidade (L=0 é preto e L=100 representa o branco), o “a” é um parâmetro cujos valores positivos representam o magenta e negativos o verde, e finalmente o “b” representa para valores positivos o amarelo e para negativos o azul. Este espaço de cor foi criado para ser usado como referência no entanto é extremamente importante ter a noção de que a conversão para este espaço de cor (por exemplo do espaço RGB) não é precisa no sentido em que alguma informação sobre a cor é perdida no processo (i.e. a gama de cores de um outro espaço de cor não pode ser traduzida na totalidade para o espaço CIE Lab). Este modelo serve apenas como referência para entender melhor que parâmetros podem alterar uma dada cor visível assim como o processo da mudança para um outro espaço de cor. Este espaço de cor é representado através de um modelo tridimensional e o seu parâmetro de percepção mais intuitiva é o “L” visto que alterar este parâmetro é o equivalente a alterar o brilho (brightness) da televisão comum. Os restantes parâmetros são um pouco mais difíceis de entender visto que é necessária alguma capacidade de abstracção para os visualizar mentalmente. Estes são obtidos para um dado valor de “L” cortando uma “fatia” da representação 3D deste espaço de cor. Deste modo torna-se complicado entender onde começa uma cor e acaba outra já que para diferentes valores de “L”, as mesmas coordenadas “a” e “b” podem representar diferentes cores.
Figura 9:Luminosidade a 25%, 50 % e 75% respectivamente.
Condições para situar o ponto no espaço de cor Para situar um ponto no espaço CIE Lab são precisas três coordenadas: ‘L’, ‘a’ e ‘b’ como já foi referido. Como a coordenada ‘L’ diz respeito à luminosidade e neste trabalho não se
5 Fotoreceptores localizados da retina que possuem pigmentos fotosensíveis que iniciam o processo de visão fotónica (i.e. processo de sensibilidade do olho humano à luminosidade).

J.R. Caldas Pinto AI_2009 /Lab 2
identificam as cores preto ou branco, então optámos por só levar em conta as coordenadas ‘a’ e ‘b’, permitindo-nos assim trabalhar num espaço só com duas dimensões, em lugar de um espaço tridimensional (caso em que entrariam em conta as 3 coordenadas). A razão para tal tem a ver com a dificuldade em distinguir a fronteira entre uma cor e outra (ver introdução teórica). É importante que o utilizador controle bem as condições de iluminação do ambiente de trabalho de forma a que permaneçam constantes. Para isso aconselhamos o uso de uma lâmpada de luz branca. Assim sendo, definimos o seguinte sistema de eixos:
Descrição da figura 2: d1, d2, d3 e d4 são os declives das semi-rectas assinaladas na figura acima, com início na origem do referencial. Assim cada zona é definida pelas seguintes condições: amarelo: a < b*d1 e a > -b*d4; vermelho: a > b*d1 e a > -b*d2; azul: a < -b*d2 e a > b*d3; verde: a < b*d3 e a < -b*d4;
d1
d2
d3
d4