isolamento activo a ruídos de percussão em pavimento flutuante · ao ruído de percussão, o qual...
TRANSCRIPT

Isolamento Activo a Ruídos de Percussão em Paviment o
Flutuante
Gonçalo Fernandes Lopes
Dissertação para a obtenção do Grau de Mestre em
Engenharia Civil
Júri Presidente: Prof. António Heleno Domingues Moret Rodrigues Orientador: Prof. Albano Luís Rebelo da Silva Neves e Sousa Vogal: Prof. João Pedro Ramôa Ribeiro Correia
Outubro 2009


i
AGRADECIMENTOS
Em primeiro lugar gostaria de agradecer aos meus pais e à minha irmã o apoio, a todos os níveis,
que possibilitou a realização desta dissertação do Mestrado em Engenharia Civil.
Este trabalho não seria possível sem a crítica e orientação do Professor Albano Luís Rebelo da Silva
Neves e Sousa a quem expresso o meu sincero agradecimento.
Expresso também os meus agradecimentos a todos os professores e colegas que me esclareceram e
ajudaram na resolução de diversas questões. Para além destes, é também de salientar toda a
atenção disponibilizada pelas diversas entidades a quem me dirigi.
Finalmente, ao Instituto Superior Técnico, em particular, ao Departamento de Engenharia Civil, pelos
meios disponibilizados para o desenvolvimento e conclusão do meu trabalho, o meu muito obrigado.

ii
(página em branco)

iii
RESUMO
Os utentes dos edifícios apresentam, hoje em dia, elevados padrões de exigência ao nível do
conforto em geral e do conforto acústico em particular. No entanto, a generalidade dos edifícios não
garante suficiente isolamento face à transmissão de ruído de percussão de baixa frequência, ou seja,
entre os 20 e os 200 Hz. Tal deve-se ao facto de, nesta gama de frequências, as teorias clássicas de
acústica de salas não serem válidas, observando-se que quer os pavimentos quer os compartimentos
apresentam comportamentos dinâmicos claramente modais, podendo registar-se, em determinadas
condições, amplificações significativas da transmissão sonora.
Uma das formas correntes de reduzir a transmissão de ruído de percussão consiste no recurso a
pavimentos flutuantes. Infelizmente, o recurso a esta solução pode ser, em muitas situações,
contraproducente na região das baixas frequências. Também se observa um comportamento
dinâmico distinto dos pavimentos em diferentes compartimentos, o que cria dificuldades de
dimensionamento. Assim, torna-se importante definir um sistema de pavimento flutuante tipificado
ajustável às condições específicas do local de aplicação. Para tal, propõe-se a utilização de um
sistema de revestimento flutuante com camada elástica configurada por câmaras-de-ar de pressão
variável em função das exigências da solicitação dinâmica e do local de instalação.

iv
(página em branco)

v
ABSTRACT
The users of buildings are, nowadays, highly demanding about the level of overall comfort and
acoustic comfort in particular. However, most buildings do not ensure sufficient isolation against the
transmission of low frequency impact noise, i.e. between 20 and 200 Hz. In this frequency range, the
classic theories of room acoustics, where vibration and sound fields are assumed to be diffuse, do not
apply. Both floors and rooms exhibit a clearly modal behaviour.
One simple way to reduce impact sound transmission is to use floating floors. Unfortunately, this
solution may be counterproductive at low frequencies. It is also observed that the same floor solution
can exhibit different dynamic behaviours in different rooms, thus bringing additional difficulties to the
designing process. It is then important to define a typified floating floor system designed to
accommodate the specific conditions of the application site. In this thesis, the use of a floating floor
cover with an elastic layer configured by inner-tubes with enclosed air at pressure depending on the
requirements of the source and rooms, is proposed.

vi
(página em branco)

vii
ÍNDICE
1. INTRODUÇÃO .................................................................................................................................... 1
2. CONCEITOS GERAIS SOBRE ISOLAMENTO A RUÍDO DE PERCUSSÃO .................................... 5
3. MODELOS ANALÍTICOS DE PAVIMENTOS FLUTUANTES........................................................... 11
3.1 Introdução ................................................................................................................................... 11
3.2 Conceitos de ressonância e amortecimento ............................................................................... 12
4. SOLUÇÕES EXISTENTES DE PAVIMENTOS FLUTUANTES ........................................................ 27
4.1 Introdução ................................................................................................................................... 27
4.2 Soluções de base ........................................................................................................................ 27
4.3 Propriedades dos materiais utilizados como camada elástica/resiliente .................................... 29
4.3.1 Cortiça ............................................................................................................................... 29
4.3.2 Espumas de célula fechada .............................................................................................. 33
4.3.2.1 Poliestireno ............................................................................................................ 33
4.3.2.2. Polietileno extrudido .............................................................................................. 34
4.3.3 Poliuretano ......................................................................................................................... 35
4.3.4 PVC ................................................................................................................................... 36
4.3.5 Neoprene ........................................................................................................................... 37
4.3.6 Fibras de vidro e naturais .................................................................................................. 38
4.3.7 Componentes pneumáticos e sistemas de molas ............................................................. 39
4.4 Conclusões.................................................................................................................................. 41
5. UMA SOLUÇÃO DE PAVIMENTO FLUTUANTE SEMI-ACTIVO ..................................................... 43
5.1 Introdução ................................................................................................................................... 43
5.2 Definição da solução proposta .................................................................................................... 43
5.2.1 Aplicação da solução ......................................................................................................... 45
5.2.2 Esquema de montagem .................................................................................................... 46
5.3 Modelação do sistema ................................................................................................................ 47
5.4 Análise do desempenho estático e dinâmico das câmaras-de-ar .............................................. 49
5.4.1 Espaçamento entre câmaras-de-ar ................................................................................... 49
5.4.2 Rigidez dinâmica e coeficiente de amortecimento ............................................................ 50
6. ANÁLISE DO SISTEMA INTEGRADO NUM COMPARTIMENTO ................................................... 63
6.1 Introdução ................................................................................................................................... 63
6.2 Acelerância dos pavimentos de base ......................................................................................... 63
6.3 Definição e análise do revestimento flutuante baseado no sistema de câmaras-de-ar ............. 64
6.4 Desempenho acústico do pavimento flutuante à base de câmaras-de-ar ................................. 70

viii
7. CONCLUSÕES E TRABALHOS FUTUROS ..................................................................................... 75
7.1 Conclusões.................................................................................................................................. 75
7.2 Recomendações para trabalhos futuros ..................................................................................... 75
8. REFERÊNCIAS BIBLIOGRAFICAS .................................................................................................. 77
ANEXOS ................................................................................................................................................ 81

ix
SIMBOLOGIA
Ar – área de absorção sonora.
A0 – valor de referência da área de absorção sonora.
B0 – módulo de compressibilidade volumétrico do ar.
Dd – transmissão directa de sons de percussão entre compartimentos.
Df – transmissão marginal de sons de percussão entre compartimentos.
E – módulo de elasticidade.
Eb – módulo de elasticidade da borracha.
Ear – módulo de elasticidade do ar.
Fe – força elástica.
Fi – força de inércia.
K – efeito da transmissão marginal.
K2 – número de onda.
Lp – nível de pressão sonora.
Lp,r – nível sonoro no compartimento receptor.
Ln – nível sonoro normalizado de percussão com revestimento.
Ln,0 – nível sonoro normalizado de percussão de um pavimento sem revestimento.
w,nTL′ - nível de isolamento sonoro.
Ts,2 – tempo de reverberação estrutural do pavimento.
Tr – tempo de reverberação do local receptor.
T0– valor de referência do tempo de reverberação.
V1 – volume do local receptor.
Vx,2 – mobilidade da placa de suporte.
c0 – velocidade de propagação do som no ar.
eb – espessura da borracha.
f – frequência.
fd – força aplicada na massa pelo amortecedor.
fref – frequência de referência.
f12 - frequência de corte.
g – aceleração da gravidade.
h0 – espessura da camada resiliente.
h1 – espessura do revestimento de piso.
h2 – espessura da laje de suporte.
j – unidade imaginária.
4nm,i 11
k - números de onda da placa i não acoplada.
11nm,Ik - números de onda de flexão para placas acopladas.
1m ′′ - massa do revestimento de piso por unidade de área.

x
2m ′′ - massa por unidade de área de pavimento.
p – pressão sonora.
ps – pressão estática sobre a camada resiliente.
pref – pressão de referência.
20p - valor de referência da pressão sonora.
1s ′′ - rigidez dinâmica da camada resiliente.
Ls ′′ - rigidez conferida pelo ar nos interstícios entre fibras.
ss ′′ - rigidez estrutural.
t – tempo.
ws – espaçamento entre elementos de câmara-de-ar.
∆L – redução do nível sonoro.
∆Lw – redução do nível sonoro de percussão conferido pelo revestimento flutuante.
Ξ - resistência ao fluxo de ar numa manta por unidade de comprimento.
∇ - operador Laplaciano.
γ - razão entre os valores específicos do ar.
ηint – factor de perdas interno.
ηtot,2 – factor de perdas total do pavimento.
η0 – factor de perdas da camada resiliente.
η2 – factor de perdas da placa de suporte.
η1 – factor de perdas da placa de revestimento de piso.
κ – índice de porosidade.
λ - coeficiente de condutibilidade térmica.
µ – deslocamento.
µ̂ - amplitude do movimento.
µ&& - aceleração da massa.
)z,y(µ11nm,1 - função de forma descritora dos modos de vibração.
v – coeficiente de Poisson.
ξ – coeficiente de amortecimento.
ξar – coeficiente de amortecimento do ar.
ξb – coeficiente de amortecimento da borracha.
ξc – coeficiente de amortecimento sistema global.
π – constante Pi.
ρc – massa volúmica da cortiça.
ρf – massa volúmica da fibra.
ρref – valor de referência de massa volúmica de fibras naturais.
σ – eficiência da radiação do pavimento.
ϕm1(y) – funções de forma de pavimentos flutuantes livres.
im,iφ - função descritora dos modos de vibração segundo direcção m.

xi
in,iφ - função descritora dos modos de vibração segundo direcção n.
ω – velocidade ou frequência angular.
ω0 – frequência natural ou própria do sistema.

xii
(página em branco)

1
1. INTRODUÇÃO
1.1 Motivação
Como resultado do desenvolvimento económico, tecnológico e civilizacional, a generalidade dos
utentes dos edifícios apresenta, hoje em dia, maiores exigências de conforto. Tais exigências cobrem
todos os aspectos do conforto humano, incluindo o conforto relativamente ao ruído e, em particular,
ao ruído de percussão, o qual é responsável pela maioria das queixas relativas a ruídos no interior
dos edifícios [1].
A queda de objectos, a locomoção humana ou a vibração de equipamentos mecânicos, apresentam,
em geral, conteúdos energéticos consideráveis para frequências abaixo dos 200 Hz, sendo
particularmente importante o intervalo entre os 20-200 Hz na medida em que, em geral, o ser humano
apenas consegue detectar sons a partir dos 20 Hz.
Em geral, os modos de vibração estruturais mais importantes dos pavimentos situam-se nesta gama
de baixas frequências.
Concomitantemente, para dimensões correntes de compartimentos em edifícios de habitação, mistos
ou destinados a unidades hoteleiras, os campos sonoros gerados pela percussão dos pavimentos
também apresentam, nesta gama de frequências, um comportamento claramente modal, com
variações significativas do nível sonoro entre diferentes pontos do mesmo compartimento [2].
Como consequência do comportamento modal apresentado, nas baixas frequências, pelos
pavimentos e campos sonoros, observam-se efeitos de acoplamento modal entre os campos de
vibração do pavimento e os campos sonoros gerados nos compartimentos. Estes efeitos podem ser
responsáveis pela amplificação do nível sonoro em determinadas frequências [3]. A amplificação
pode ainda resultar da selecção modal efectuada pelo ponto ou áreas de aplicação das forças de
impacto nos pavimentos [3].
Infelizmente, os métodos normalizados de medição e previsão do isolamento a ruído de percussão
baseiam-se nas teorias clássicas de acústica de salas, as quais assumem campos sonoros difusos e
painéis estruturais de dimensão infinita [4]. Como consequência, existem pavimentos que, apesar de
satisfazerem os limites regulamentares de isolamento sonoro [N.1], conduzem, ainda assim, a
situações de incomodidade por excesso de ruído. Nestes casos são geralmente instalados
pavimentos flutuantes, constituídos por uma placa de revestimento de piso colocada sobre uma
camada resiliente. Nestes revestimentos flutuantes são utilizados os conceitos de ressonância e
amortecimento para reduzir a vibração do pavimento de base e, consequentemente, o nível sonoro
nos compartimentos inferiores [5]. A camada de revestimento flutuante pode, ela própria, ser
constituída por uma camada de suporte e um revestimento final da placa. Nesta dissertação, para
simplificação da linguagem, as expressões revestimento de piso ou revestimento flutuante serão
usadas indistintamente para definir todas as camadas colocadas sobre o material resiliente.
A aplicação do conceito de ressonância conduz a revestimentos de massa considerável, o que
introduz problemas ao nível da capacidade de suporte do pavimento de base e da redução do pé-

2
direito dos compartimentos. Estes problemas adquirem maior importância nos casos de reabilitação,
mas também podem surgir em construções de raiz. Assim, têm-se vulgarizado os revestimentos
flutuantes do tipo parquet, os quais são leves e finos [6]. A reduzida massa destes, aumenta a
frequência natural do sistema. Uma vez que nem sempre é possível, devido às limitações dos
materiais, corrigir este aumento da frequência própria do sistema com base na redução da rigidez
dinâmica da camada resiliente, obtêm-se, por vezes, amplificações significativas do nível sonoro
perto da frequência de ressonância, em particular para frequências inferiores a 200 Hz [2].
Finalmente, a combinação de todos os efeitos referidos conduz a diferenças significativas de
desempenho acústico para o mesmo tipo de pavimento aplicado em compartimentos distintos [2].
Assim, é importante definir um sistema de pavimento flutuante tipificado capaz de se ajustar às
condições específicas do local de aplicação, com desempenho eficaz para frequências entre os 20 e
os 200 Hz.
1.2 Objectivos
A presente dissertação tem como objectivo apresentar um sistema semi-activo de pavimento flutuante
para isolamento a sons de percussão em edifícios de habitação ou similares (edifícios mistos de
habitação e serviços ou hotéis), adaptável, de forma não automática, às condições impostas por cada
compartimento.
Para tal, é necessário avaliar os parâmetros que condicionam a implementação do sistema, tais como
as propriedades do material ou materiais a utilizar na camada resiliente e no revestimento de piso.
Numa fase inicial deste trabalho foram considerados sistemas de isolamento constituídos por molas
metálicas de aperto controlável ou câmaras-de-ar de borracha com pressão ajustável. Numa fase
posterior, optou-se por estudar apenas a solução de câmara-de-ar, a qual é já fornecida por diversos
fabricantes [W.1,W.2], embora sem a possibilidade de ajustamento de pressão que configura ao
sistema a designação de semi-activo.
1.3 Estrutura da dissertação
O presente trabalho descreve, no Capítulo 2, alguns conceitos fundamentais de acústica de edifícios
necessários à elaboração da dissertação e à sua compreensão.
No Capítulo 3 são apresentados os conceitos fundamentais para a descrição do comportamento
dinâmico de pavimentos flutuantes e são apresentados modelos de cálculo do campo de vibração
imposto por solicitação dinâmicas neste tipo de pavimentos.
No Capítulo 4 são apresentadas e discutidas as diferentes soluções de pavimento flutuante existentes
no mercado actual. Esta análise permite uma comparação objectiva entre soluções, facilitando a
idealização do sistema proposto nesta dissertação.
No Capítulo 5 é apresentada e desenvolvida a solução de pavimento flutuante semi-activo proposta.
É definido o seu modo de funcionamento, constituição, condicionantes na aplicação e respectivo

3
esquema de montagem. Com esta informação é modelado o sistema, de modo a perceber a
influência no seu comportamento das características dos elementos constituintes.
No Capítulo 6 é ilustrado o desempenho da solução por comparação com outras soluções correntes
de pavimento flutuante discutidas no Capítulo 4. A análise é efectuada em termos do campo sonoro
instalado no compartimento receptor.
Por último, no Capitulo 7, são apresentadas as conclusões obtidas neste trabalho relativamente à
eficiência e aplicabilidade da solução proposta enquanto sistema de isolamento a ruído de percussão.
Para além das referidas considerações finais são ainda propostos desenvolvimentos futuros do
presente trabalho.

4
(página em branco)

5
2. CONCEITOS GERAIS SOBRE ISOLAMENTO A RUÍDO DE PER CUSSÃO
2.1 Introdução
Neste capítulo apresentam-se, de forma sucinta, os conceitos básicos de isolamento a ruído de
percussão e a legislação aplicada em projectos de acústica de edifícios de habitação e similares.
2.2 Definição de isolamento a sons de percussão
Considera-se que o som é uma perturbação sentida pelo ouvido humano em resultado de uma
vibração imposta num determinado meio por uma determinada fonte [7].
O som é caracterizado principalmente pela sua intensidade e frequência. A frequência é uma
característica de qualquer movimento vibrático e corresponde ao número de ciclos, expresso em
Hertz (Hz), completados, durante um segundo, por uma partícula em movimento.
A intensidade do som é, por definição, o débito de energia sonora por unidade de área e é
directamente proporcional ao valor quadrático da pressão sonora eficaz [7]. Uma vez que o ser
humano consegue detectar pressões sonoras situadas, em geral, entre dois limites muito diferentes
(2x10-5 Pa e 2x102 Pa), torna-se necessário usar uma escala logarítmica para a sua representação.
Assim, define-se nível de pressão sonora Lp, em decibel (dB), através de
20
2
pp
plog10L = (dB), (2.1)
onde 20p é o valor quadrático de referência da pressão sonora correspondente ao limiar de
audibilidade, ou seja, ao valor zero na escala decibel [7].
O ouvido humano é capaz de detectar sons com frequências entre 20 a 20000 Hz [5]. O intervalo das
baixas frequências é, em geral, considerado entre os 20 e os 200 Hz. Nestas frequências, o ser
humano detecta sons apenas para intensidades bastante superiores àquelas que correspondem ao
limiar de audibilidade para frequências mais altas, por exemplo, a 1000 ou 2000 Hz (Figura 2.1). No
entanto, pequenos acréscimos de intensidade em ruídos de baixa frequência podem conduzir
rapidamente a situações de incomodidade, ao contrário do que acontece em frequências mais
elevadas [8].
Os sons podem ser divididos entre aéreos ou de percussão consoante o meio de propagação seja o
ar ou um meio sólido como, por exemplo, um elemento de construção.

6
-10
0
10
20
30
40
50
60
70
80
90
100
110
120
130
20
31,5 50 80 125
200
315
500
800
1250
2000
3150
5000
8000
1250
0
Figura 2.1 – Curvas isofónicas e limiares de audibilidade e dor [N.2].
Segundo a norma EN ISO 140-6 [N.3], a medição em laboratório do isolamento a ruídos de
percussão de pavimentos sem revestimento é efectuada recorrendo a uma máquina de percussão
normalizada. O isolamento a ruído de percussão corresponde ao nível sonoro Lp,r (dB) no
compartimento receptor, o qual pode ser normalizado através de
)A/A(log10LL 0rr,pn += (dB), (2.2)
onde: Ar (m2) é a área de absorção sonora do local receptor; A0 = 10 m2 é o valor de referência da
área de absorção sonora, correspondente ao valor normalmente obtido em compartimentos correntes
em edifícios de habitação [N.3].
Para medições in situ, o nível sonoro normalizado de percussão, ( )dBLn′ [N.4], inclui as transmissões
marginais, as quais ocorrem como indicado na Figura 2.2.
f (Hz)
Lp (dB)
100 fones
90
80 70
60
50
40 30
20
10
0
Limites de dor e audibilidade

7
Figura 2.2 – Transmissão de sons de percussão entre compartimentos:
Dd – transmissão directa; Df – transmissão marginal [N.5].
2.3 Métodos normalizados para previsão de isolament o a ruídos de percussão
De acordo com a norma EN 12354-2 [N.5], o nível sonoro normalizado de percussão, ou,
simplesmente, o isolamento a ruído de percussão de um pavimento monolítico pode ser dado por
ref
22,s2o,nf
flog10σlog10Tlog10mlog30155L +++′′= (dB), (2.3)
onde: f (Hz) é a frequência central da banda de terços de oitava analisada; fref é a frequência de
referência, igual a 1000 Hz; 2m ′′ (kg/m2) é a massa por unidade de área de pavimento; Ts,2 (s) é o
tempo de reverberação estrutural do pavimento, definido como o tempo que decorre entre o instante
em que cessa a excitação do pavimento e o instante em que se observa uma queda da vibração de
um milhão de vezes; e σ2 é a eficiência da radiação do pavimento, definida como a razão entre a
energia radiada pelo pavimento e a energia que o mesmo pavimento radiaria se funcionasse como
um pistão totalmente livre, sem ligações nos bordos a outras estruturas.
Segundo a norma EN 12354.2 [N.5], o tempo de reverberação estrutural pode ser dado por
2,tot2,s
ηf2,2
T⋅
= (s), (2.4)
onde 2,totη é o factor de perdas total do pavimento, o qual pode ser aproximado por
f485
mηη 2
2int,2,tot′′
+= , (2.5)
compartimento emissor
compartimento receptor
Df Df
Dd
8
em que a primeira parcela contabiliza as perdas de energia que ocorrem, internamente, por
transformação em calor, e a segunda parcela, as perdas de energia que ocorrem no bordo por
contacto com as estruturas adjacentes. As perdas internas, intη , podem, em geral, ser consideradas
iguais a 0,01.
A previsão da transmissão marginal pode ser efectuada, com base na norma EN 12354-2 [N.5], por
um método detalhado, descrito na norma EN 12354-1 [N.6] ou por um método simplificado. Este
último método limita a transmissão marginal entre 0 e 6 dB [N.5].
2.4 Revestimentos flutuantes
Os revestimentos flutuantes são caracterizados pela redução do nível normalizado de percussão que
conseguem conferir aos pavimentos. De acordo com a norma EN 140-8 [N.7], a redução (ou
melhoria) do nível sonoro de percussão é dada por
n0,n LLL =∆ (dB), (2.6)
onde Ln,0 e Ln (dB) são, respectivamente, o nível sonoro normalizado de percussão do pavimento sem
e com revestimento de piso flutuante aplicado.
De acordo com a norma EN 12354.2 [N.5], a redução do nível sonoro de percussão pode ser
estimada por
0ff
log40L =∆ (dB), (2.7)
onde f0 (Hz) é a frequência de ressonância do sistema constituído pelo revestimento de piso flutuante
de massa 1m ′′ (kg/m2) e pela camada intermédia resiliente de rigidez dinâmica s′′(N/m3).
2.5 Exigências regulamentares
O nível sonoro padronizado de percussão é expresso por
)T/log(T10-LL 0rrp,nT =′ (dB), (2.8)
onde Tr (s) é o tempo de reverberação do local receptor e T0 = 0,5 s é o valor de referência do tempo
de reverberação, correspondente ao valor médio normalmente obtido em compartimentos correntes
de edifícios de habitação.
Tendo em conta que as diversas partes da norma EN 140 [N.3, N.4 e N.7] consideram apenas as
bandas de terços de oitava de 100 a 3150 Hz, onde o campo sonoro se assume com comportamento
difuso, o tempo de reverberação, definido como tempo que decorre entre o instante em que cessa a
excitação sonora de um compartimento e o instante em que se observa uma queda do nível da
pressão sonora de 60 dB (queda de um milhão de vezes do valor quadrático da pressão sonora),
pode ser obtido de acordo com a expressão clássica de Sabine,
r
rr A
V0,16T = (s), (2.9)

9
onde Vr (m3) é o volume do local receptor [9].
Com base na expressão (2.2), obtém-se
( )rnnT V032,0log10LL -′=′ (dB). (2.10)
Para compartimentos correntes de edifícios de habitação ou similares, o termo correctivo
10 log(0,032 Vr) é, em geral, desprezável.
Para efeitos de verificação regulamentar são considerados valores únicos do isolamento a ruído de
percussão e não espectros do nível sonoro de percussão. Estes valores únicos, designados por
w,nTL′ , são obtidos por comparação dos espectros com a descrição convencional de referência
indicada na norma EN 717-2 [N.8]. Para tal, a curva de referência é ajustada de forma a que o valor
médio da diferença desfavorável entre ambos os espectros nas diferentes bandas de frequências
consideradas seja o mais elevado possível, sem ultrapassar o limite de 2 dB. O índice de isolamento
sonoro w,nTL′ corresponde ao valor da ordenada da curva de referência na posição ajustada para a
frequência de 500 Hz (Figura 2.3).
56
58
60
62
64
66
68
70
72
74
76
78
80
82
100
125
160
200
250
320
400
500
630
800
1000
1250
1600
2000
2500
3150
Espectro do nível sonorode percussãopadronizado
Curva convencional dereferência
Figura 2.3 – Cálculo do L’n,w conforme EN 717.2 [N.8].
A previsão de w,nTL′ pode ser efectuada pelo método ilustrado na Figura 2.3, o qual se aplica aos
espectros de nTL′ previstos tal como aos espectros de nTL′ medidos in situ. A norma EN 12354-2 [N.5]
apresenta, no entanto, um método simplificado para pavimentos monolíticos, segundo o qual o
isolamento a ruídos de percussão é dado por
w2w,nT LKmlog35164L ∆−+′′−= (dB), (2.11)
LnT,w (dB)
f (Hz)
desvio desfavorável
LnT,w = 76 dB
10
onde: K (dB) é o efeito de transmissão marginal, o qual se situa entre os 0 e os 6 dB; e ∆Lw (dB) é o
valor único da redução do nível sonoro de percussão conferido pelo revestimento flutuante aplicado a
um revestimento base de referência. ∆Lw é definido, em conformidade com a norma EN 717-2 [N.8],
por
w,r,nw LdB78L −=∆ (dB), (2.12)
onde o Ln,r,w (dB) é o nível sonoro de percussão obtido com o revestimento flutuante aplicado sobre o
pavimento de base de referência.
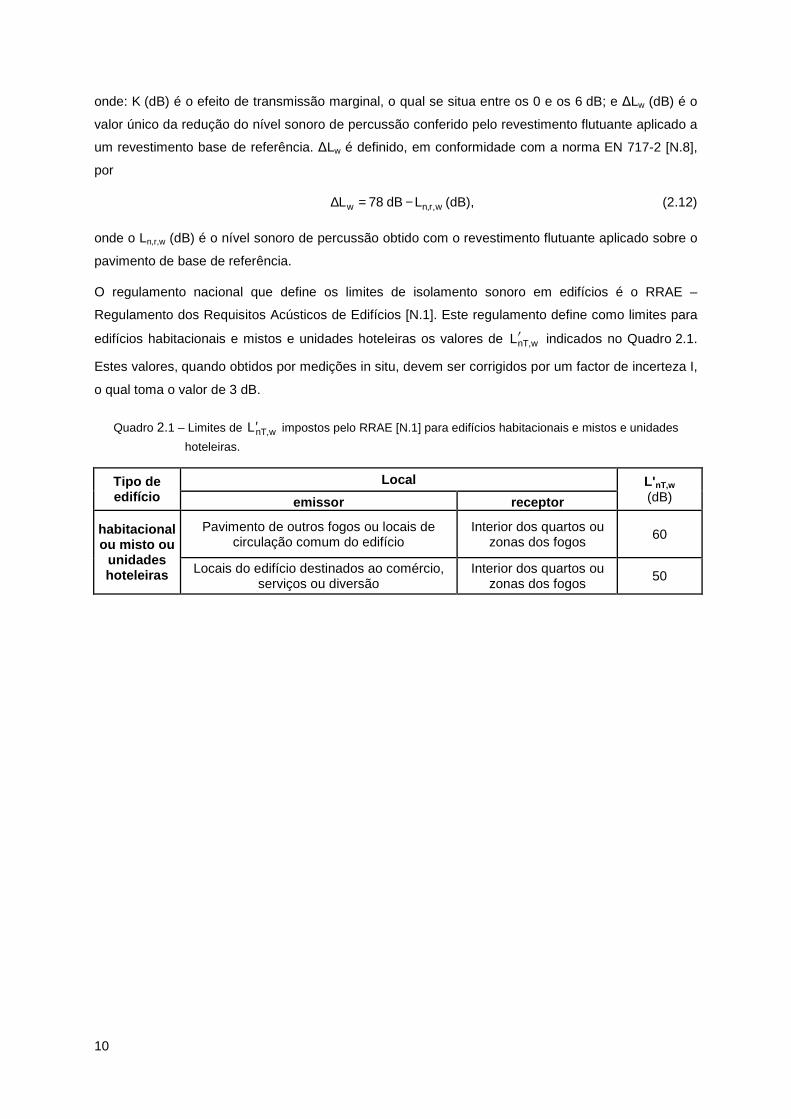
O regulamento nacional que define os limites de isolamento sonoro em edifícios é o RRAE –
Regulamento dos Requisitos Acústicos de Edifícios [N.1]. Este regulamento define como limites para
edifícios habitacionais e mistos e unidades hoteleiras os valores de w,nTL′ indicados no Quadro 2.1.
Estes valores, quando obtidos por medições in situ, devem ser corrigidos por um factor de incerteza I,
o qual toma o valor de 3 dB.
Quadro 2.1 – Limites de w,nTL′ impostos pelo RRAE [N.1] para edifícios habitacionais e mistos e unidades
hoteleiras.
Tipo de edifício
Local L'nT,w (dB) emissor receptor
habitacional ou misto ou
unidades hoteleiras
Pavimento de outros fogos ou locais de circulação comum do edifício
Interior dos quartos ou zonas dos fogos
60
Locais do edifício destinados ao comércio, serviços ou diversão
Interior dos quartos ou zonas dos fogos
50

11
3. MODELOS ANALÍTICOS DE PAVIMENTOS FLUTUANTES
3.1 Introdução
O método mais correntemente utilizado para obter valores aceitáveis de isolamento a ruído de
impacto ou percussão consiste na instalação de pavimentos flutuantes, nos quais o revestimento é
separado do resto da estrutura por uma camada resiliente [6]. Os pavimentos flutuantes podem ser
utilizados com estruturas de suporte em betão armado, aço ou madeira e a sua eficiência na redução
do ruído de percussão depende das propriedades dinâmicas da camada resiliente utilizada. Nesta
tese são considerados pavimentos flutuantes apoiados sobre placas homogéneas de betão armado.
Na Figura 3.1 são apresentados exemplos deste tipo de pavimentos flutuantes, com dimensões em
milímetros.
Figura 3.1 – Pavimentos flutuantes sobre lajes de betão.
A Figura 3.1.a) mostra uma lajeta de betão pobre com 55 mm de espessura sobre uma camada
resiliente, suportada pela laje de betão armado. Em geral, a camada resiliente é constituída por
mantas de fibras minerais com 25 mm de espessura e densidade de cerca de 30 a 40 kg/m3. Para
mantas de fibras minerais com espessura inferior a 25 mm, a rigidez do ar contido na manta será
predominante e, consequentemente, a eficiência do isolamento será reduzida [6].
As exigências estruturais, as quais dão preferência a soluções de revestimento leve, e as exigências
arquitectónicas e de aproveitamento e rentabilização do espaço, as quais privilegiam as soluções de
revestimento de pequena espessura, principalmente em obras de reabilitação, têm fomentado a
investigação de outros materiais para utilização em camadas resilientes. Além das fibras minerais,
constituem exemplos deste tipo de materiais: a cortiça; a borracha em folha ou em aparas; as
espumas de polímeros como o polietileno extrudido de célula fechada; as espumas de poliuretano de
célula aberta; e o poliestireno expandido pré-comprimido (poliestireno expandido comprimido a cerca
de 70% por passagem em rolos, causando a rotura das paredes das células fechadas e tornando,
dessa forma, o material mais flexível). A Figura 3.1.b) mostra uma solução de réguas de madeira de
encaixe tipo macho/fêmea apoiada sobre polietileno de célula fechada com 5 mm de espessura.
8 5
Lajeta de betão
Manta de fibra natural
Pavimento base em betão Pavimento base em betão
Polietileno de célula fechada
Réguas de madeira 555
25
a) b)

12
Segundo Hall [6], as espumas de poliuretano de célula aberta são as alternativas às fibras minerais
que apresentam melhor relação eficiência/preço, com a vantagem de serem mais resistentes à
penetração da água. Contudo, nos pavimentos flutuantes que utilizam espumas de célula aberta de
baixa densidade como camada resiliente, podem observar-se deformações ao caminhar sobre estes,
sendo assim necessário um material mais rígido para evitar problemas devidos à fadiga nas juntas do
revestimento. As espumas em célula fechada são muito mais rígidas que as de célula aberta devido
ao efeito pneumático do ar contido no seu interior e devem ser utilizadas em tiras alternando com
espumas de célula aberta [10].
Acusticamente, o maior problema das camadas resilientes é que se forem suficientemente rígidas
para garantirem uma boa estabilidade do revestimento, então serão menos capazes de proporcionar
elevados graus de isolamento, sendo assim necessário efectuar um balanço entre as suas
propriedades mecânicas e acústicas. No caso dos revestimentos flutuantes, a eficiência do
isolamento a sons de percussão é determinada pela rigidez e factor de perdas da camada resiliente.
De acordo com os fabricantes, o benefício proporcionado por pavimentos flutuantes traduz-se em
reduções do nível normalizado de pressão sonora w,nL′ entre 5 a 10 dB, quando aplicados em
pavimentos de madeira, e entre 15 a 20 dB, quando aplicados sobre a laje de betão armado [2].
O projectista, enquanto responsável pela definição do sistema de isolamento a sons de percussão
dos pavimentos, deve ser capaz de prever o desempenho acústico das diferentes soluções possíveis.
O desempenho acústico dos pavimentos flutuantes deve ser relacionado com as características das
camadas resilientes obtidas em ensaios de laboratório. A informação sobre as propriedades dos
materiais constituintes das soluções de pavimentos flutuantes deve estar disponível, pois é essencial
ao desenvolvimento de modelos de previsão do isolamento a ruídos de percussão conferido por
pavimentos flutuantes [6].
Neste estudo, foi utilizado um modelo de análise modal de pavimentos flutuantes aplicados em placas
homogéneas de espessura uniforme, tipicamente em betão armado, como referido anteriormente.
Os conceitos de ressonância e amortecimento são fundamentais para compreender o funcionamento
de um sistema de pavimento flutuante. Assim, nesta secção é apresentada uma explicação breve
destes conceitos, os quais são relacionados com os métodos simplificados de avaliação do
desempenho acústico dos revestimentos flutuantes indicados em 2.4.
3.2 Conceitos de ressonância e amortecimento
O sistema dinâmico mais simples é o oscilador de um grau de liberdade. Na Figura 3.2 é apresentado
um oscilador deste tipo constituído por uma massa m cujo movimento é condicionado por uma mola
de rigidez s e por um amortecedor viscoso de amortecimento d.

13
Figura 3.2 – Oscilador de um grau de liberdade.
Desprezando o efeito do amortecimento e considerando que a massa se movimenta em regime livre,
tem-se, por equilíbrio de forças elásticas (Fe) e de inércia (Fi),
0µmµs0FF ie =+=+ && ⇒ N, (3.1)
onde µ (m) e µ&& (m/s2) são, respectivamente, o deslocamento e a aceleração da massa em
movimento.
Considerando que o movimento da massa é harmónico [5], então
tωjeµ̂µ = (m), (3.2)
onde: µ̂ é a amplitude do movimento; 1j −= ; ω (rad/s) é a velocidade ou frequência angular; e t (s)
é o tempo.
Substituindo a equação (3.2) em (3.1) e substituindo a aceleração (µ&& ) na equação (3.1) por
22 ∂tµ∂µ =&& , tem-se
.0µ̂)ωm/s(0µ̂mωµ̂s 22 =++ ⇒=- (3.3)
A equação (3.3) tem solução para ω = ω0 = (s/m)1/2. Esta frequência é aquela em que o sistema vibra
de forma natural em regime livre, daí designar-se por frequência natural ou própria do sistema.
A resposta em regime forçado do oscilador de um grau de liberdade considerado na Figura 3.2
decorre da resolução de uma equação de equilíbrio de forças dada por
tωjtωjide eF̂amdvµseF̂FFFF =++⇒==++ , (3.4)
onde Fd (N) é a força aplicada na massa m pelo amortecedor e F é a força de amplitude F̂ que
provoca o regime forçado [11]. Mais uma vez, considerando que o movimento é harmónico, tem-se
que
m
F̂µ̂
m
ωdjω
m
sFµ̂mωµ̂dωjµ̂s 22 =
+
−⇒=−+ . (3.5)
A amplitude do deslocamento é assim dada por
m
d s
m

14
( )
+−=
mωd
jωωm
F̂µ̂
220
. (3.6)
Considerando que a resposta do sistema em regime estático é dada por sF̂µ̂0 = , é possível definir
um factor de amplificação dinâmico dado por
( )
+
−
=
+−=
20
20
2220
0
ωm
ωdj
ω
ω1
1
mωd
jωω
ms
µ̂
µ̂. (3.7)
A magnitude deste factor é dada por
2
20
2
20
20
ωm
ωd
ω
ω1
1
µ̂
µ̂
+
−
= . (3.8)
Definindo um coeficiente de amortecimento como 0ωm2
dξ = , a equação (3.8) toma a forma
2
0
2
20
20
ω
ωξ2
ω
ω1
1
µ̂
µ̂
+
−
= . (3.9)
Na Figura 3.3 é apresentado o factor de amplificação (resposta dinâmica normalizada em função da
resposta estática) para diferentes valores de ξ [11].
A Figura 3.3 mostra que quando a frequência de excitação é próxima da frequência própria do
sistema, este entra em ressonância, ocorrendo amplificação da resposta dinâmica. Quando a
frequência do sistema é muito menor do que a frequência da excitação, a resposta do sistema é
atenuada. É este princípio que está subjacente ao funcionamento do pavimento flutuante, o qual é
eficiente para frequências superiores à sua frequência própria [2].
Na secção 2.4 foi definida a frequência própria do sistema de revestimento flutuante como a
frequência ( ) ( )π2msπ2ωf 100 ′′′′== do sistema constituído pela massa 1m ′′ do revestimento e por
uma mola de rigidez s ′′ conferida pela camada resiliente. Nas secções seguintes mostra-se que esta
hipótese constitui uma simplificação e que a frequência própria do pavimento flutuante, em geral, é
ligeiramente superior em virtude de o sistema ser constituído por duas massas acopladas, as quais
correspondem às massas do pavimento de suporte ( 2m ′′ ) e do revestimento ( 1m ′′ ).

15
0
1
2
3
4
5
6
0 0,5 1 1,5 2 2,5 3
Figura 3.3 – Resposta dinâmica de um sistema de um grau de liberdade.
Outra forma de contrariar a amplificação dinâmica, mesmo para situações de ressonância, consiste
na introdução de amortecimento no sistema. Assim, no caso dos pavimentos flutuantes, a sua
eficiência aumenta quando a camada resiliente apresenta coeficientes de amortecimento mais
elevados [2]. Infelizmente, os materiais tradicionalmente utilizados na construção, mesmo quando
utilizados essencialmente para conferir resiliência ao sistema, possuem coeficientes de
amortecimento relativamente baixos [6].
O amortecimento de um sistema dinâmico pode ser medido com recurso ao método da meia-
potência [11], o qual avalia a forma do espectro de resposta do sistema através do parâmetro
ξ = (f2 - f1) / f0 onde f0, f1 e f2 (Hz) assumem o significado indicado na Figura 3.4.
Para valores baixos, o coeficiente de amortecimento ξ, pode ser relacionado com o factor de perdas
definido em 2.3 através de
2η
ξ = . (3.10)
0µ̂
µ̂
0ω
ω
ξ = 0,05
ξ = 0,1
ξ = 0,2
ξ = 0,3
ξ = 0,4
ξ = 0,5
ξ = 0,6
ξ = 0,7
ξ = 0,8

16
0
1
2
3
4
5
6
0,5 1 1,5 2
Figura 3.4 – Método da meia-potência.
3.3 Equação da onda de flexão do sistema acoplado
O sistema estudado consiste em duas placas interligadas por uma camada resiliente. Estas placas
são, com efeito, dois sistemas dinâmicos acoplados, os quais podem ser descritos através de um
sistema de duas equações de onda de flexão. Mesmo estando as duas placas separadas por uma
camada de elevada elasticidade, como, por exemplo, no caso de uma lajeta flutuante sobre uma
manta de fibras minerais (Figura 3.5), o acoplamento entre as duas placas pode ser significativo.
Figura 3.5 – Representação esquemática de um pavimento flutuante.
As mantas de fibras de pequena espessura podem ser consideradas como um vector de molas pouco
espaçadas de funcionamento independente, tal como numa fundação de Winkler [12,13]. Esta
aproximação é razoável tendo em conta a estrutura destas mantas. A rigidez longitudinal s˝ (N/m3)
pode ser dividida em duas parcelas:
LS s′′+s′′=s′′ . (3.11)
maxµ
2
µmax
f2 - f1= 2ξ
f2 f1
f (Hz)
µ (m)
h1
h2
h0 s′′
1m ′′
2m ′′
1µ
2µ

17
A primeira parcela, Ss′′, corresponde à rigidez devida à estrutura sólida (rigidez estrutural) da camada
resiliente. A segunda parcela, Ls ′′ , corresponde à rigidez conferida pelo ar contido nos interstícios
entre fibras e é dada por
0
0L h
Bs
κ=′′ , (3.12)
onde: h0 (m) é a espessura da camada resiliente; B0 (Pa) é o módulo de compressibilidade
volumétrico do ar; e κ = [(volume de vazios)/(volume total)] ≈ 1 é o índice de porosidade. Para
compressões isotérmicas, as quais são prováveis em baixas frequências devido à condutibilidade
térmica e à capacidade calorífica das fibras, B0 é igual à pressão estática do ar, ou seja,
aproximadamente 105 Pa [5]. Para frequências superiores, a compressão ocorre de forma adiabática,
ou seja, sem trocas de calor com o meio, e, consequentemente, B0 aumenta cerca de 1,4 vezes [7].
Na presença da manta, a compressão do ar segundo a direcção vertical (x) ocorre essencialmente
sem acoplamento lateral. Tal deve-se ao facto de o fluxo lateral de ar ser equilibrado pela resistência
da manta à passagem do ar, o que é descrito por
Xvdxdp Ξ= , (3.13)
onde Ξ é a resistência ao fluxo de ar por unidade de comprimento do material (resistividade). De
acordo com Cremer et al. [5], o acoplamento lateral pode ser prevenido para Ξ ≥ 2 x 104 kg/m3s.
Como referido anteriormente, para baixos coeficientes de amortecimento, a atenuação da resposta
dinâmica é eficiente apenas para frequências bem acima da frequência de ressonância do sistema.
Assim, a camada resiliente deve ser o mais elástica possível, estando, no entanto, a sua rigidez total
s ′′ limitada inferiormente à rigidez do ar contido no seu interior. Há que ter em conta, porém, que a
camada resiliente não pode ser demasiado deformável por razões de conforto e estabilidade do
revestimento de piso.
Uma vez definida a rigidez da camada resiliente, é possível obter as equações da onda de flexão do
sistema acoplado. Para tal, considera-se a equação geral da onda de flexão em placas,
2
24
t
µmµB
∂
∂′′=∇′− , (3.14)
onde B′ (Nm2/m) é a rigidez de flexão da placa e ∇4 = ∇2(∇2) resulta da aplicação consecutiva do
operador Laplaciano,∇2. Restringindo a análise a variações sinusoidais no tempo, o deslocamento é
dado por µ(y,z,t) = µ(z,t) ejωt. Consequentemente, a equação (3.14) pode ser escrita na forma
( ) ( ) 0z,yµkt,z,yµ 44 =−∇ , (3.15)
onde Bmω
k2
4′
′′= é o número de onda.

18
A introdução na equação (3.15) da (muito baixa) pressão ( )21 µµs −′′ que actua nas placas 1 e 2
(Figura 3.5) devido à camada elástica intermédia, conduz às equações da onda de flexão do sistema
acoplado
( ) 0µµsµmωµB 21112
14
1 =−′′+′′−∇′ ; (3.16.a)
( ) 0µµsµmωµB 12222
24
2 =−′′+′′−∇′ ; (3.16.b)
onde os deslocamentos 1µ e 2µ são funções apenas de (y,z) [5].
3.3.1 Solução da equação homogénea da onda de flexã o do sistema acoplado
Uma vez que as equações (3.15) são separáveis, o método de Rayleig pode ser utilizado para
substituir os deslocamentos ( )z,yµ1 e ( )z,yµ2 pelas funções de forma correspondentes,
( ) ( ) ( )zφyφAz,yµ111111 n,1m,1nm,1nm,1 = ; (3.17.a)
( ) ( ) ( )zφyφAz,yµ111111 n,2m,2nm,2nm,2 = . (3.17.b)
As funções ( )yφ1m,1 , ( )zφ
1n,1 , ( )yφ1m,2 e ( )zφ
1n,2 são escolhidas como as funções descritoras dos
modos de vibração fundamentais de vigas que satisfazem a equação 3.15 para as condições de
fronteira de uma placa, implicando que
( ) ( )z,yµkz,yµ111111 nm,1
4nm,1nm,1
4 =∇ ; (3.18.a)
( ) ( )z,yµkz,yµ111111 nm,2
4nm,2nm,2
4 =∇ ; (3.18.b)
onde 1
12
nm,14nm,1 B
mωk 11
11 ′′′
= e 2
22
nm,24nm,2 B
mωk 11
11 ′′′
= são os números de onda para as placas 1 e 2 não
acopladas, e 11nm,1ω e
11nm,2ω são as frequências próprias de vibração das placas.
As frequências naturais correspondentes aos movimentos verticais de cada placa, com a camada
resiliente a funcionar como uma mola e com a placa oposta fixa, são definidas por
110 m
sω
′′′′
= e 2
20 m
sω
′′′′
= . (3.19)
Substituindo as equações (3.17) a (3.19) nas equações (3.16), obtém-se
( ) ( ) ( ) 0z,yµωz,yµωωω111111 nm,2
210nm,1
2210
2nm,1 =−−+ ; (3.20.a)
( ) ( ) ( ) 0z,yµωz,yµωωω111111 nm,2
220nm,2
2220
2nm,2 =−−+ . (3.20.b)
A combinação das equações (3.20.a) e (3.20.b) conduz a
( ) ( ) 0ωωωωω 4120
22nm,22
22nm,11 1111
=−−− , (3.21)

19
onde 210
2nm,1
2nm,11 ωωω
1111+= ; 2
202
nm,22
nm,22 ωωω1111
+= e 220
210
4120 ωωω = .
As soluções da equação (3.21) são dadas por
( ) II,Ii,ω4ωωωω21
ω 4120
22nm,22
2nm,11
2nm,22
2nm,11
2nm,i 1111111111
=
+−±+= . (3.22)
Oniszczuk [12] apresentou a mesma equação. Cremer [5] apresentou esta equação em ordem aos
números de onda de flexão 4nm,I 11
k e 4nm,II 11
k .
Estes números de onda são dados por
⋅+
−−
−±
±
−+
−=
4
220
2104
nm,24
nm,1
22
204nm,2
2104
nm,1
2204
nm,2
2104
nm,14
nm,i
ω
ωωkk
ω
ω1k
ω
ω1k
41
ω
ω1k
ω
ω1k
21
k
11111111
111111
K
K
(3.23)
Esta equação traduz a ocorrência de dois pares de campos de ondas de flexão, tal como acontece
nas duas placas quando desacopladas, mas com números de onda de flexão 4nm,I 11
k e 4nm,II 11
k
diferentes dos relativos a placas desacopladas.
Num sistema de dois osciladores acoplados existem duas frequências naturais, 11nm,Iω e
11nm,IIω , as
quais diferem pouco das obtidas para os sistemas desacoplados, 11nm,1ω e
11nm,2ω , desde que o
acoplamento seja fraco. O mesmo ocorre numa placa com um revestimento flutuante, onde são
definidos dois números de onda, 11nm,Ik e
11nm,IIk , os quais se reduzem aos números de onda 11nm,1k
e 11nm,2k das placas desacopladas quando a rigidez da camada resiliente tende para zero, ou seja,
para ω10 = ω20 =0. Dado que as frequências ω10 e ω 20 surgem na equação (3.23) apenas em divisões
por ω, os números de onda 11nm,Ik e
11nm,IIk também se reduzem a 11nm,1k e
11nm,2k ,
respectivamente, para valores elevados de ω.
A Figura 3.6 mostra a variação dos números de onda ao longo da frequência resultante da
equação (3.23). São considerados dois casos, ambos correspondendo a pavimentos de suporte
homogéneos. No caso a), uma placa em MDF de 18 mm de espessura é apoiada sobre uma espuma
reciclada de poliuretano de célula aberta de 15 mm de espessura, cuja rigidez se assume igual a
s’’ = 12,5 MN/m3. No caso b), as placas de MDF (Medium Density Fibreboard) estão apoiadas sobre
lã de vidro de 25 mm de espessura, com s’’ = 8,2 MN/m3 [2]. Dado que ambas as placas têm
propriedades idênticas nos dois casos, as curvas 11nm,Ik e
11nm,IIk para um dos casos podem ser
obtidas a partir das curvas relativas ao outro caso por translação ao longo das assimptotas
1111 nm,1nm,I kk = e 1111 nm,2nm,II kk = . Analisando a Figura 3.6 das altas para as baixas frequências, as
curvas 11nm,Ik e
11nm,IIk afastam-se das assimptotas numa frequência de corte, f12, na qual o menor

20
número de onda,11nm,IIk , se anula. Esta frequência de corte representa a frequência natural do
sistema constituído pelas massas das duas placas unidas pela camada resiliente com uma dada
rigidez e é expressa por
′′+
′′′′=⇒+=⇒=
21
12220
210
212nm,II
m
1
m
1s
π2
1fωωω0k
11(Hz). (3.29)
Figura 3.6 – Variação dos números de onda 11nm,Ik e
11nm,IIk com a frequência, para a solução descrita em MDF
e lã de rocha.
Para frequências inferiores a f12, o número de onda11nm,Ik aproxima-se da assimptota que se
desenvolve ao longo de ,kk11nm,2≈ sendo o valor exacto dado por
2
21
214
0ωω
BB
mmklim
1n,1m,I ′+′
′′+′′=
→. (3.30)
Nesta região, o campo de vibração é o mesmo nas duas placas, o que significa que a manta actua
como se fosse infinitamente rígida (não comprimida). Assumindo que esta camada não transmite
tensões de corte, o que é uma hipótese razoável para um espaço de ar ou para um material solto, a
rigidez de flexão efectiva do sistema é a das duas placas separadas, e não a de uma placa com
espessura h1 + h2 (ver Figura 3.5). Para valores inferiores à frequência de corte f12, os números de
onda 11nm,IIk tornam-se negativos e, em consequência, os números de onda conjugados complexos
( ) ,kj111nm,II±± os quais correspondem a ondas estacionárias em dissipação ou a um tipo particular de
campo próximo quase estacionário, são aplicáveis [5]. Segundo Cremer et al. [5], as frequências
inferiores a f12 são pouco importantes dado que, nestas regiões, a atenuação gerada pelas camadas
42
21
21 ωBB
mm
′+′
′′+′′
1
10
100
10 100 1000
b,nm,I 11k
a,nm,I 11k
a,nm,II 11k b,nm,II 11
k
11nm,1k
11nm,2k
b,12f a,12f f (Hz)
kI,II (m-1)

21
adicionadas ao sistema é muito pequena. No entanto, neste trabalho a região das baixas frequências
é a de maior interesse.
Outra conclusão importante pode ser obtida pela substituição das soluções (3.17) nas
equações (3.20), de onde resultam as constantes 11nm,1A , dadas por
( )
( ).
s
AωmskB
ω
Aωω
ωmskB
As
ωω
AωA
1111
1111
11
11
11
11
11
nm,22
24
nm,22
220
nm,222
nm,222
14
nm,11
n,m,222
nm,11
n,m,210n,m,1
′′′′−′′+′
=
=−
=′−′′+′
′′=
−
′′=
(3.31)
Substituindo as soluções (3.23) nas equações (3.20), Cremer et al. [2] definiu expressões similares
para relacionar os campos de vibração ( )z,yµ11nm,i,1 e ( )z,yµ
11nm,i,2 ,
( )( ) 2
204
nm,2
4nm,I
220
nm,I,1
nm,I,2
ω
ω1
k
k
ω
ω
z,yµ
z,yµ
11
1111
11
+−
=
;
( )( ) 2
104
nm,1
4nm,II
210
nm,II,2
nm,II,1
ω
ω1
k
k
ω
ω
z,yµ
z,yµ
11
1111
11
+−
= . (3.32)
As expressões anteriores são definidas como razões de modo a fornecerem valores baixos quando o
acoplamento for pouco rígido, ou seja, para frequências elevadas. Estas expressões mostram que a
distribuição espacial dos deslocamentos correspondentes a 11nm,Ik e
11nm,IIk tem de ser a mesma. É
também possível concluir que das expressões (3.32) resultam sempre valores positivos, o que
significa que as duas placas vibram de forma conjunta para o campo ondulatório tipo I. Para o caso
do campo ondulatório tipo II, definido pela segunda das expressões (3.32), a qual conduz sempre a
valores negativos, as placas exibem movimentos opostos.
O efeito do amortecimento na resposta do pavimento pode ser considerado por substituição de iB′ e
s ′′ nas equações (3.16) por ( )iii ηj1BB +′=′ e ( )0ηj1ss +′′=′′ , respectivamente, resultando um novo
conjunto de equações de onda de flexão, dado por
( ) ( )( ) ( ) ( ) ( ) ;0z,yµηj1ωz,yµωηj1ωηj1ω111111 nm,20
210nm,1
20
2101
2nm,1 =+−−+++ (3.33.a)
( ) ( )( ) ( ) ( ) ( ) ;0z,yµηj1ωz,yµωηj1ωηj1ω111111 nm,10
220nm,2
20
2202
2nm,2 =+−−+++ (3.33.b)
onde η0, η1 e η2 são, respectivamente, os factores de perdas da camada resiliente, da placa de
pavimento flutuante e da placa de suporte. De acordo com Cremer et al. [5] e Neves e Sousa [2], o
efeito de η0 é máximo para f = f12. Para frequências inferiores ou superiores a f12, a resposta é pouco
afectada por η0.

22
3.3.2 Solução da equação não homogénea da onda de f lexão do sistema acoplado
A equação não homogénea da onda de flexão do sistema acoplado pode ser obtida a partir das
equações (3.16) pela adição no segundo termo de cada equação das forças exteriores distribuídas
por unidade de área, p1(y,z) e p2(y,z), que actuam nas placas 1 e 2. No presente trabalho, apenas a
primeira placa de revestimento deve ser sujeita a uma distribuição arbitrária de carga contínua
aplicada em toda a superfície, ou seja, p2(y,z) = 0. Assim, as equações (3.16) são reescritas na forma
( ) ( ) ( ) ( )[ ] ( )z,ypz,yµz,yµsz,yµmωz,yµB 121112
14
1 =−′′+′′−∇′ ; (3.34.a)
( ) ( ) ( ) ( )[ ] .0z,yµz,yµsz,yµmωz,yµB 12222
24
2 =−′′+′′−∇′ (3.34.b)
As soluções deste conjunto de equações correspondem à amplitude da resposta em regime
permanente do sistema de duas placas interligadas elasticamente e são dadas pela expansão em
séries de Fourier,
( ) ( )[ ] ( )[ ];z,yφAz,yµz,yµ
1nmnmnm,1
1nmnm,11
11
1111
11
11 ∑∑∞
=
∞
=
== (3.35.a)
( ) ( )[ ] ( )[ ];z,yφAz,yµz,yµ
1nmnmnm,2
1nmnm,22
11
1111
11
11 ∑∑∞
=
∞
=
== (3.35.b)
onde ( )z,yµ11nm,1 são as funções de forma descritoras dos modos de vibração que satisfazem as
equações homogéneas (3.16) da onda de flexão do sistema acoplado. As equações (3.34) podem ser
reescritas como
( ) ( ) ( ) ( );
mz,yp
z,yµωz,yµωω1
1nm,2
210nm,1
22nm,11 111111 ′′
=−− (3.36.a)
( ) ( ) ( ) ;0z,yµωz,yµωω111111 nm,1
220nm,2
22nm,22 =−− (3.36.b)
Da substituição das soluções (3.35) nas equações (3.36) resultam as seguintes relações:
( ) ( )( )( )
⇒′′−−−
−=
1
1
4120
22nm,22
22nm,11
22nm,22
nm,1m
z,yp
ωωωωω
ωωz,yµ
1111
11
11
( ) ( )( )( )
1
1
22nm,II
22nm,I
22nm,22
nmnm,1m
z,yp
ωωωω
ωωz,yA
1111
11
1111 ′′−−
−=⇒ (3.37.a)
( ) ( )( )( )
⇒′′−−−
=1
1
4120
22nm,22
22nm,11
220
nm,2m
z,yp
ωωωωω
ωz,yµ
1111
11
( ) ( )( )( )
.m
z,yp
ωωωω
ωz,yA
1
1
22nm,II
22nm,I
220
nmnm,2
1111
1111 ′′−−=⇒ (3.37.b)

23
As amplitudes da vibração forçada em regime permanente são máximas para as condições de
ressonância 11nm,Iωω = ou
11nm,IIωω = . Se ω = ω22, então ( ) ( ) sz,ypz,yφA 1nmnm,2 1111′′−= e 0A
11nm,1 = ,
o que significa que o pavimento de suporte actua como um amortecedor dinâmico relativamente ao
revestimento flutuante.
De seguida, as soluções das equações (3.37) serão particularizadas em dois casos, ambos
relacionados com pavimentos simplesmente apoiados. O primeiro caso corresponde ao pavimento
flutuante simplesmente apoiado. Neste caso, existe uma solução exacta para o problema. Contudo,
os pavimentos flutuantes são, em geral, completamente livres nos bordos (junto aos rodapés),
requerendo, portanto, um outro modelo.
3.3.3 Solução exacta para pavimentos flutuantes sim plesmente apoiados
Uma vez que as funções de forma modais que satisfazem a equação homogénea (3.15) da onda de
flexão para placas simplesmente apoiadas de dimensões b e c segundo y e z, respectivamente, são
dadas por
)c/)zπnsin(()b/)yπmsin(()z,y(φ 11nm 11 = , (3.38)
a multiplicação dos dois lados da equação (3.37) pelas funções próprias ( )z,y11nmϕ e posterior
integração na área da placa, origina, em resultado da condição de ortogonalidade,
( ) ( ) ( )
( )( )22nm,II
22nm,I1
b
0
c
0
nm122
nm,22
nm,1ωωωωmcb
dzdyz,yφz,ypωω4
A
1111
1111
11−−′′
−
=∫ ∫
; (3.39.a)
( ) ( )
( )( )22nm,II
22nm,I1
b
0
c
0
nm1220
nm,2ωωωωmcb
dzdyz,yφz,ypω4
A
1111
11
11−−′′
=∫ ∫
. (3.39.b)
No caso de uma força sinusoidal aplicada no ponto (y0,z0) com amplitude F, o integral nas
equações (3.39) simplifica-se para
( ) ( ) ( )
π
π=ϕ=ϕ∫∫ czn
sinb
ymsinFz,yFdydzz,yz,yp 11
00nm
b
0
c
0
nm1 1111. (3.40)
O campo de vibração das placas 1 e 2 tem sido descrito em ordem ao deslocamento. No entanto, de
modo a obter a mobilidade do pavimento suporte, a qual é a relação entre a velocidade de vibração
num ponto deste pavimento e a força motriz exercida na placa de revestimento, o campo de vibração
deve ser descrito em função da velocidade transversal. Neves e Sousa [2] apresenta a expressão

24
( ) ( ) ( ) ( )( )( )∑
∞
=
−−′′==
1nm22
nm,II22
nm,I
nm00nm220
1
22,x
11 1111
1111
ωωωω
z,yφz,yφω
cbm
Fω4jz,yµωjz,yv . (3.41)
Esta expressão para a amplitude da resposta forçada em regime permanente da placa não
amortecida foi também obtida por Oniszczuk [13]. De modo a incluir o amortecimento, o denominador
da expressão (3.41) deve ser substituído por
( )( ) ( ) ( )[ ]( ) ( )[ ] ( ) ,ηj1ωωηj1ωηj1ω
ωηj1ωηj1ωωωωω
20
2120
20
2202
2nm,2
20
2101
2nm,1
22nm,II
22nm,I
11
111111
++++×
×+++=
--
---
L
K
(3.42)
onde as frequências naturais 2nm,1 11
ω e 2nm,2 11
ω são obtidas a partir de
.c
πn
b
πm
m
Bω
21
21
i
inm,i 11
+
′′
′= (3.43)
3.3.4 Solução aproximada para pavimentos flutuantes de bordo livre
No caso de pavimentos flutuantes livres, as funções de forma ( )y1mϕ que satisfazem a equação
homogénea da onda de flexão acoplada para uma viga fictícia livre em y = 0 e y = b são definidas por
Warburton [14,15] como
( ) 1yφ1m = para 0m1 = ; ( )
b
y21yφ
1m -= para 1m1 = ; (3.44.a)
( ) ( )
( )
=
2
1
b
yγcosh
2γsinh
2γsin
2
1
b
yγcosyφ 1
1
11m1
para m1 = 2, 4, 6...; (3.44.b)
( ) ( )
( )
+
=
2
1
b
yγsinh
2γsinh
2γsin
2
1
b
yγcosyφ 2
1
12m1
para m1 = 1, 3, 5...; (3.44.c)
onde 1γ e 2γ são as raízes de
;02tanh2tan 11 =
γ+
γ (3.45.a)
.02tanh2tan 22 =
γ+
γ (3.45.b)
De acordo com Warburton [14,15], as funções de forma ( )z1nϕ são definidas analogamente a ( )y
1mϕ
e as frequências naturais são obtidas por:
( )[ ]
+
++
′′
′=
4n,1
22
n,3m,3n,2m,24
m,142nm
c
K
cb
KKν1KKν2
b
Kπ
m
Bω 111111
11
-, (3.46)
25
onde as constantes 1m,1K ,
1m,2K e 1m,3K são dadas por
≥−
=
==
=3mse
21
m
2mse506,1
1mou0mse0
K
11
1
11
m,1 1 (3.47.a)
=
==
=
3mse
2
1mπ
21
2
1m
2mse248,1
1mou0mse0
K
1
1
2
1
1
11
m,2 1
≥-
(3.47.b)
+
=
=
=
=
3mse
2
1mπ
61
2
1m
12mse017,5
1mseπ
12
0mse0
K
1
1
2
1
12
1
m,2 1
≥-
(3.47.c)
As constantes 1m,1K ,
1m,2K e 1m,3K são obtidas pela substituição de m1 por n1 nas expressões
(3.47.a) até (3.47.c), respectivamente [14,15].
A notação adoptada para identificar os modos do pavimento nas equações (3.44) e (3.47) é diferente
da usual. Por exemplo, o modo de vibração do pavimento normalmente denominado por (1,1)
corresponde agora ao modo (2,2). Esta relação pode ser generalizada considerando os modos de
vibração usuais dos pavimentos usuais, (m1,n1), como modos (m1+1,n1+1) em placas livres.
Como descrito em 3.3.1, a distribuição espacial dos deslocamentos correspondentes a cada modo
de vibração do pavimento será, necessariamente, igual nas duas placas que o constituem. Contudo,
as funções de forma (3.44) não são aplicáveis ao pavimento de suporte simplesmente apoiado.
Assim, são necessárias novas funções de forma. Dado que, apenas o campo de vibração do
pavimento simplesmente apoiado necessita de ser avaliado nesta tese, admite-se que as funções de
forma são dadas pela equação (3.38), a qual satisfaz a equação homogénea (3.15) da onda de flexão
para placas não acopladas simplesmente apoiadas.
Assim, a mobilidade pontual da placa de suporte é dada pelas equações (3.41) e (3.42), onde as
frequências fundamentais da placa (11nm,Iω ) do pavimento flutuante são agora dadas pela equação
(3.46), com as constantes ,K1m,1 ,K
1n,1 ,K1m,2 ,K
1n,2 1m,3K e 1n,3K corrigidas de modo a considerar o
facto de que os modos de vibração do pavimento (m1<2,n1) e (m1,n1<2) no pavimento flutuante livre

26
não terem correspondência no pavimento de suporte simplesmente apoiado. Assim, as constantes
,K1m,1 1m,2K e
1m,3K são agora dadas por
≥+
==
.2mse21
m
;1mse506,1K
11
1m,1 1
(3.48.a)
+
+
=
=.2mse
2
1mπ
21
2
1m
;1mse248,1
K1
1
2
1
1
m,2 1 ≥- (3. 48.b)
+
+
+
=
=;2mse
2
1mπ
61
2
1m
;1mse017,5
K1
1
2
1
1
m,2 1 ≥ (3. 48.c)
onde a notação utilizada para identificar os modos do pavimento é, agora, a usual. De agora em
diante neste trabalho, os modos de vibração do pavimento serão sempre identificados pela notação
usual. As constantes 1m,1K ,
1m,2K e 1m,3K são obtidas substituindo m1 por n1 nas expressões (3.48.a)
até (3.48.c), respectivamente.

27
4. SOLUÇÕES EXISTENTES DE PAVIMENTOS FLUTUANTES
4.1 Introdução
Este capítulo tem como objectivo descrever as diferentes soluções de isolamento a ruído de
percussão existentes no mercado e apresentar os diferentes sistemas de pavimentos flutuantes. Esta
pesquisa pretende reunir informação relativa à constituição de cada solução, de modo a que estas
sejam comparadas entre si em termos do seu desempenho.
4.2 Soluções de base
Tal como referido no Capítulo 3, o desempenho do pavimento flutuante dependerá das características
da camada de revestimento de piso e da camada elástica intermédia. No entanto, a camada de
revestimento será sempre constituída por materiais de alguma rigidez e com massa limitada apenas
pela resistência estrutural do pavimento de base. Por outro lado, como referido anteriormente, a cada
tipo de camada de revestimento estão, em geral, associados determinados tipos de camadas
elásticas ou resilientes. Assim, nesta dissertação optou-se por descrever apenas os sistemas
utilizados como camada resiliente ou elástica, os quais, como indicado por Neves e Sousa [2], são os
principais responsáveis pelo desempenho do pavimento flutuante.
Um sistema de pavimento flutuante é, tipicamente, constituído por um revestimento de piso e um
pavimento de suporte, intercalados por uma camada elástica, eventualmente resiliente. Além desta
configuração padrão, os sistemas de pavimento flutuante podem surgir noutras configurações, com
variações, não só nos materiais usados, mas também nas dimensões ou formas das diferentes
camadas.
A camada flutuante do sistema (revestimento de piso) pode ser constituída por diferentes materiais,
como por exemplo o betão, o aço, a madeira ou um seu derivado. O material adoptado para o
revestimento de piso irá condicionar não só a espessura dessa camada, como também as
características exibidas pela camada elástica. Em geral, são utilizadas mantas resilientes sobre a
totalidade da área do pavimento de suporte (Figura 4.1.a), molas metálicas (Figura 4.1.b), blocos ou
lâminas compactas de material resiliente (Figuras 4.1.c e 4.1.d), ou ainda componentes de
amortecimento pneumático (Figura 4.1.e), dispersos de acordo com um determinado espaçamento
entre si.
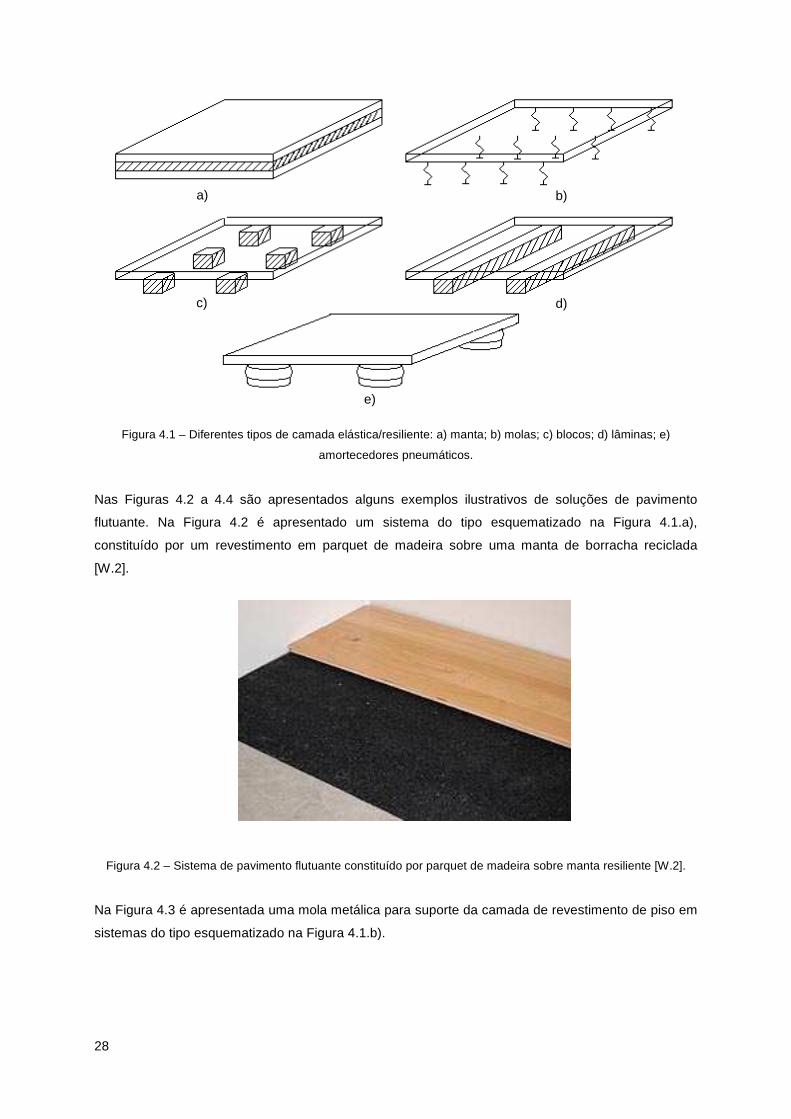
28
Figura 4.1 – Diferentes tipos de camada elástica/resiliente: a) manta; b) molas; c) blocos; d) lâminas; e)
amortecedores pneumáticos.
Nas Figuras 4.2 a 4.4 são apresentados alguns exemplos ilustrativos de soluções de pavimento
flutuante. Na Figura 4.2 é apresentado um sistema do tipo esquematizado na Figura 4.1.a),
constituído por um revestimento em parquet de madeira sobre uma manta de borracha reciclada
[W.2].
Figura 4.2 – Sistema de pavimento flutuante constituído por parquet de madeira sobre manta resiliente [W.2].
Na Figura 4.3 é apresentada uma mola metálica para suporte da camada de revestimento de piso em
sistemas do tipo esquematizado na Figura 4.1.b).
b) a)
c) d)
e)

29
Figura 4.3 – Mola metálica para suporte de revestimento de piso [W.2].
Na Figura 4.4 é ilustrado um pavimento flutuante constituído por um sistema de “deck” assente sobre
blocos de neoprene [W.1], tal como esquematizado na Figura 4.1.c).
Figura 4.4 – Sistema de pavimento flutuante constituído por revestimento de piso assente sobre blocos de
neoprene [W.2].
Todos estes sistemas de isolamento a ruído de percussão fundamentam o seu funcionamento nas
características de um elemento resiliente capaz de atenuar o efeito das acções impostas. Estes
elementos resilientes podem ser constituídos por diferentes materiais, descritos de seguida.
4.3 Propriedades dos materiais utilizados como cama da elástica/resiliente
4.3.1 Cortiça
A cortiça é um material natural, reciclável e biodegradável, o que constitui uma vantagem importante
no âmbito da construção sustentável.
A cortiça apresenta um comportamento viscoelástico, pelo que a deformação do material não ocorre
instantaneamente com a aplicação de uma dada tensão. De facto, os movimentos moleculares
desencadeados pela tensão aplicada ocorrem com uma determinada rapidez, a qual depende da
temperatura e do teor de água [16]. Na deformação plástica, a qual resulta do colapso das células na
cortiça, continua a estar presente a componente viscoelástica, continuando a observar-se o efeito da

30
velocidade de deformação. Quando se retira a tensão aplicada há uma recuperação gradual, ao longo
do tempo, das dimensões iniciais do material, tanto mais lenta quanto maior for a componente
viscosa da deformação. Nesta recuperação, os movimentos moleculares que ocorreram durante a
deformação ocorrem agora em sentido contrário, embora sem reversibilidade total [16].
Os materiais celulares, em geral, e os aglomerados de cortiça em particular, podem ser aplicados no
isolamento sonoro de compartimentos. As melhorias do isolamento sonoro decorrente da utilização
dos aglomerados de cortiça advêm da capacidade de absorção sonora deste material e também das
suas características antivibráticas. Na cortiça, as células são fechadas, pelo que os poros não estão
interligados a aberturas para o exterior. Como tal, a absorção sonora é fraca. No entanto, os
aglomerados negro de cortiça apresentam porosidade aberta entre os grânulos de cortiça, sendo a
fracção em volume destes poros tanto maior quanto menor for a densidade do aglomerado. Estes
materiais apresentam elevados coeficientes de absorção sonora e também de energia mecânica, em
virtude da dissipação de energia resultante da componente viscosa da deformação da cortiça [16]. No
caso dos revestimentos do tipo parquet são muitas vezes utilizados aglomerados brancos de cortiça
(de célula fechada), os quais mantêm as características antivibráticas dos aglomerados negros de
cortiça [16].
Estas propriedades, associadas ao facto de a cortiça ser um material natural, justificam que este
material seja o que apresenta maior tradição no isolamento de vibração e ruído.
De acordo com Barron [18], os aglomerados de cortiça estão, em geral, disponíveis com espessuras
entre 25 a 150 mm, sendo aplicáveis para cargas estáticas até cerca de 0,4 MPa, com deformações
estáticas admissíveis de 0,4 a 2,0 mm.
Como referido anteriormente, na secção 3.2, as propriedades determinantes de um material
antivibrático são a sua rigidez dinâmica e o factor de perdas. No caso da cortiça, a rigidez dinâmica
aumenta com a massa volúmica.
Segundo Cremer [5], a cortiça pode apresentar-se com massas volúmicas (ρc) entre 120 e 250 kg/m³.
O módulo de elasticidade dinâmico é aproximadamente 25 MPa e o factor de perdas varia entre 0,13
e 0,17. Barron [18] indica para o factor de perdas um valor constante de 0,15. Em geral, o factor de
perdas aumenta com a frequência, mas, no intervalo de interesse para o presente estudo (20 a
200 Hz), pode considerar-se que o factor de perdas é aproximadamente constante. Os valores do
factor de perdas indicados por Cremer [5] e Barron [18] são elevados quando comparados com outros
materiais correntemente utilizados no isolamento de ruído de percussão, tais como as espumas de
poliestireno e polietileno, ao mantas de fibras minerais ou o neoprene [2].
Face às características apresentadas, os aglomerados de cortiça são indicados para o amortecimento
de vibração com conteúdo energéticos importantes em frequências mais altas [18]. Segundo
Crede [19], a frequência natural de um sistema de piso flutuante com camada resiliente constituída
por aglomerado de cortiça pode ser dada por
( ) ( )03/1
sref2n hp/pCf Ψ= - , (4.1)

31
0
20
40
60
80
100
125 160 200 250 315 400 500 630 800 1000 1250 1600 2000 2500 3150 4000
Laje não revestida
Solução ensaiada
∆Ln
onde: ps (Pa) é a tensão estática actuante sobre a camada resiliente, com espessura h0, e
pref =101,325x 106 Pa é uma tensão de referência; C2 é uma variável dependente da massa volúmica
da cortiça, pc (kg/m³), a qual é dada por
c32
10091.11
75.19C
ρ−×−
= ; (4.2)
Finalmente, a variável ( )0hΨ
( ) ).hln(25.008175,0h 00 -=Ψ (4.3)
Na Figura 4.5 é apresentada uma laje de betão armado tratada com uma solução de piso flutuante
constituído por betonilha armada com 4 cm de espessura, revestida com tacos de pinho e assente
sobre aglomerado negro de cortiça com massa volúmica de 95 kg/m³ e com 1 cm de espessura.
Figura 4.5 – Piso flutuante constituído por betonilha armada sobre aglomerado negro de cortiça [W.3].
Na figura 4.6 são apresentados os resultados obtidos em ensaios laboratoriais, efectuados no LNEC
pelo grupo Isocor [W.3], para determinação do nível sonoro de percussão com a laje nua e revestida.
Figura 4.6 – Transmissão sonora da solução de pavimento flutuante ilustrada na Figura 4.5 [W.3].
Tacos de pinho
Betonilha armada – 0,04m
Laje de betão 250Kg/m2 –0,10m
Aglomerado negro de cortiça 95Kg/m3 – 0,01m
Ln (dB)
f (Hz)

32
A Figura 4.6 mostra que a solução de pavimento flutuante com camada resiliente constituída por
aglomerado negro de cortiça é suficiente para bandas de frequência acima dos 500Hz e que, nas
baixas frequências, as melhorias são escassas ou nulas. O deslocamento dos pavimentos flutuantes
pode ser melhorado nas aplicações in situ através do controlo das transmissões marginais. Assim, é
necessário garantir a independência entre o pavimento e a restante estrutura pela aplicação do
aglomerado de forma a não existirem “pontes acústicas”, conforme ilustrado na Figura 4.7:
Figura 4.7 – Disposição da solução sobre a laje e junto aos elementos verticais [W.4].
Este tipo de solução de pavimento flutuante também existe no mercado em conjuntos de camadas
combinadas, como, por exemplo, a solução Wicanders Acousticork NRT Series 3000 [W.3]. Neste
caso a disposição das várias camadas constituintes da solução é ilustrada na Figura 4.8:
Figura 4.8 – Constituição, por camadas, da solução Wicanders Acousticork NRT Series 3000 [W.3]
O grupo CDM (Customized Design of Mass-spring-systems) [W.1], comercializa blocos de cortiça
combinada com elastómeros (CR – “Classic range”) ou borracha (RC – “Corkrubber”) com as
propriedades descritas no Quadro 4.1.

33
Quadro 4.1 – Propriedades dos blocos com cortiça comercializados pelo grupo CDM [W.1].
Bloco Corkelastomer
type ρ (Kg/m 3) Edin (MPa)
CDM - 01 Classic range 450 1 - 2,4
CDM - 30 Classic range 500 1,5 - 5
CDM - 33 Classic range 600 3,5 - 14
CDM - 63 Classic range 920 6,1 - 30
CDM - 71 Classic range 1170 27 - 100
CDM - 15 Corkrubber 630 18-25
CDM - 17 Corkrubber 950 25-40
4.3.2 Espumas de célula fechada
4.3.2.1 Poliestireno
O poliestireno (PS) é um polímero composto por monómeros de estireno, um hidrocarboneto oriundo
do petróleo. No estado sólido é um material rígido, com flexibilidade limitada e incolor, que pode
também moldar-se no seu fabrico a formas pré-definidas, obter colorações desejadas, sendo assim
caracterizado por uma vasta gama de aplicações.
Um dos derivados do poliestireno com aplicação corrente no sector da construção é o poliestireno
expandido (EPS), apresentado na forma de pequenos grânulos e uma mistura de aproximadamente
90% de PS e 10% de pentano (C5H12) ou dióxido de carbono (CO2). Para além deste, existem
também o poliestireno extrudido (XPS) que pela sua estrutura de células fechadas cheias de ar
confere uma elevada absorção de impactos, quedas ou vibrações. Assim, estes materiais são
correntemente usados sob a forma de placas no isolamento térmico e acústico de elementos verticais
e horizontais de construção, ou de coberturas inclinadas e caixas de estore. Também é utilizado
material de aligeiramento, por exemplo, em lajes de vigotas pré-esforçadas, reduzindo o peso próprio
destas entre 100 a 130 kg/m2, ou ainda, na forma de granulado de EPS, adicionado na betonagem de
elementos estruturais de menor peso próprio e com propriedades isolantes [W.8].
Segundo Pritz, T. [23], soluções de pavimento flutuante com recurso a espumas de poliestireno
apresentam um factor de perdas baixo, aproximadamente 0,01. O módulo de elasticidade dinâmico
aumenta ligeiramente com a frequência. De acordo com Cremer [5], o poliestireno apresenta
geralmente módulos de elasticidade de 0,3 GPa, com o amortecimento máximo a frequências perto
dos 200 Hz.
A empresa Dow [W.4] comercializa diferentes soluções em poliestireno extrudido, nomeadamente as
placas Styrofoam (Figura 4.6), caracterizadas pela sua estrutura rígida de célula fechada. Este
material é essencialmente utilizado como isolante térmico, mas pode também apresentar
desempenhos antivibráticos interessantes quando aplicado entre a laje estrutural e a lajeta que
suporta o revestimento final.

34
Figura 4.6 – Placas de poliestireno extrudido [W.4].
De acordo com a marca, o valor único da melhoria do isolamento sonoro pode chegar a
∆L,w = 32 dB, mas não é especificada a solução efectivamente utilizada.
4.3.2.2. Polietileno extrudido
O polietileno é um polímero composto por cadeias de monómeros de etileno. Este material existe
numa vasta gama de produtos, em placa ou em rolo. A vasta utilização deste material é justificada
pelas suas características de isolamento acústico e térmico, resistência ao choque e facilidade de
manuseamento. A massa volúmica do polietileno ronda os 30 kg/m3.
Segundo Bies [24], o polietileno apresenta um módulo de elasticidade dinâmico de aproximadamente
0,2 GPa. O factor de perdas máximo atinge 0,23 para frequências em torno de 25 Hz.
O produto ETHAFOAM 222-E, fabricado pelo Grupo Dow [W.5], constituído por uma manta de
polietileno extrudido de cor azul, com espessuras entre 3 e 5 mm, é um exemplo de aplicação deste
material no isolamento acústico. A aplicação do material em rolo permite que o isolamento seja
efectuado num compartimentos com quaisquer formas e dimensões, exigindo apenas a limpeza da
superfície da laje, de modo a evitar a presença de elementos que possam perfurar a manta de
polietileno extrudido e, dessa forma, criar pontes acústicas.
Este material pode suportar a carga de uma camada de betonilha com 4 cm de espessura sobre a
qual assenta o revestimento final de piso, como ilustra a Figura 4.7.
Na Figura 4.8 é apresentado o espectro do nível sonoro de percussão normalizado, Ln, obtido com
um pavimento flutuante com Ethafoam 222-E sob camada da betonilha de 4 cm de espessura, e a
sua comparação com o espectro obtido para a laje de suporte não revestida. Constata-se que a
melhoria do nível sonoro de percussão é mínimo nas baixas frequências e também na banda de 1/3
de oitava de 800 Hz. O resultado obtido nesta banda de frequências é anómalo e carece de
explicação. No entanto, tal não será efectuado na presente dissertação porque esta incide sobre o
intervalo de frequências audíveis abaixo dos 200 Hz.

35
-20
0
20
40
60
80
100
100 125 160 200 250 315 400 500 630 800 1000 1250 1600 2000 2500 3150 4000
Laje não revestida
Solução ensaiada
∆Ln
Figura 4.7 – Modo de aplicação do produto Ethafoam 222-E [W.4].
Figura 4.8 – Transmissão sonora da solução do Ethafoam 222-E [W.4].
4.3.3 Poliuretano
O poliuretano é um polímero formado por cadeias de monómeros orgânicos com ligações de uretano.
Este tipo de material pode ser obtido com diferentes características de massa volúmica e rigidez,
dependendo do monómero utilizado. Este facto permite obter espumas rígidas (célula fechada) ou
flexíveis (célula aberta), bem como elastómeros de elevada durabilidade, produtos adesivos e
isolantes. Este tipo de material tem uma vasta aplicação no isolamento térmico e acústico, podendo
ser comercializado em placas, perfis ou em soluções para projecção ou injecção. Este material
também é utilizado em pavimentos em virtude da sua elevada resistência à compressão e
estabilidade dimensional.
Na Figura 4.9 são exemplificadas, a título de exemplo, soluções de espuma rígida de poliuretano.
Ln (dB)
f (Hz)

36
Figura 4.9 – Diferentes soluções de poliuretano no isolamento acústico [W.7].
O grupo CDM [W.1] produz soluções em poliuretano, sob a forma de mantas com espessuras que
variam de 12 a 50 mm, com as propriedades apresentadas no Quadro 4.2. Observa-se que o módulo
de elasticidade dinâmico pode variar entre 0, 08 e 50 MPa. Também a massa volúmica apresenta
uma variabilidade elevada, entre 150 e 1030 kg/m3, constatando-se que quanto maior for a massa
volúmica maior será o módulo de elasticidade dinâmico.
Quadro 4.2 – Propriedades das soluções comercializadas pelo grupo CDM [W.1].
Solução ρ (Kg/m 3) Edin (MPa)
CDM - 91 PF 150 0,08 – 0,26
CDM - 92 PF 220 0,22 - 0,66
CDM - 93 PF 300 0,43 - 1,1
CDM - 94 PF 400 1,15 - 2,2
CDM - 95 PF 510 2,4 - 3,9
CDM - 96 PF 680 4,2 - 6
CDM - 97 PF 785 8 - 12
CDM – 98 PF 960 22,2 - 32,5
CDM – 99 PF 1030 14,4 - 50
O factor de perdas do poliuretano é bastante elevado e varia entre 0,3 e 0,5 [26].
4.3.4 PVC
O policloreto de vinil (PVC), usualmente designado por vinil, é um plástico que se distingue por ser
composto por 57% de cloro e 43% de etileno (C2H4). As suas características e processo de fabrico
permitem obter uma gama vasta de produtos, facilitada pela possibilidade de combinações de
aditivos, os quais se alojam, durante o processo de fabrico, na estrutura porosa do polímero (resina)
de base.
Apesar deste material ser utilizado com inúmeras finalidades, incluindo a de revestimento de piso,
verifica-se que a sua presença no mercado como solução para isolamento a ruídos de percussão é
bastante reduzida. Ainda assim, existem no mercado soluções à base deste material que constituem
o acabamento final de piso e que conduzam a valores de ∆Lw em torno de 17 dB [W.6].

37
O PVC puro apresenta factores de perdas de 1,8 aos 20 Hz e módulo de elasticidade dinâmico de
aproximadamente 30 MPa [25].
4.3.5 Neoprene
O neoprene é o nome usual para o grupo de borrachas sintéticas cujo composto principal é o
policloropreno, tendo sido o primeiro material de borracha sintética a ser produzido em massa. Pela
sua resistência à água, corrosão, solventes e óleos, e consequentemente, pela sua elevada
durabilidade, é utilizado em isolamento eléctrico e sonoro, em fatos de mergulho, correias e tubos,
entre outras aplicações.
Este material assume um papel importante como solução no isolamento sísmico passivo de edifícios,
pontes e viadutos, ao nível das fundações e apoios entre elementos verticais e horizontais, e também
no isolamento antivibrático de equipamentos industriais.
A Figura 4.10 mostra uma solução de manta de neoprene, a qual é produzida pela empresa
Advanced Antivibration Components [W.7] com espessuras entre 10 a 15 mm.
Figura 4.9 – Solução de neoprene em manta [W.7]
O neoprene produzido para isolamento a vibrações e ruídos de percussão apresenta, em média,
massa volúmica entre 1500 e 1600 kg/m3, módulo de elasticidade dinâmico entre 0,7 e 2 MPa e factor
de perdas em redor de 0,10 [W.10].
Para além do formato em manta, o neoprene é também comercializado na forma de blocos para
apoio de equipamento industrial ou mesmo de pavimentos flutuantes. A composição e dimensões dos
blocos são muito variadas, podendo mesmo ser produzidos blocos à medida das necessidades de
cada caso, em função das características da excitação dinâmica e das resultantes cargas aplicadas
no sistema (ver Figura 4.10).

38
Figura 4.10 – Solução de bloco em neoprene produzido pela empresa Kinetics Noise Control [W.2].
4.3.6 Fibras de vidro e naturais Este material é tradicionalmente associado ao isolamento térmico e acústico, sendo largamente
utilização na construção. Para tal contribui a sua composição estável, elevada resistência química,
baixo coeficiente de condutibilidade térmica, baixa higroscopicidade, bem como o facto de ser um
material incombustível, leve e de fácil aplicação.
Figura 4.11 - Solução em manta de fibra de vidro [W.8]
As mantas de fibra de vidro para isolamento a ruído de percussão podem apresentar-se com
espessuras desde 2 mm e com massas volúmicas desde cerca de 110 kg/m3 (Figura 4.11). Neste
caso, a laje de suporte deve ser regularizada antes da aplicação do material para eliminar eventuais
protuberâncias que criem pontes acústicas.
De acordo com Cremer [5], as mantas ou placas de fibras naturais podem surgir com massas
volúmicas entre os 50 e 300 kg/m3, módulo de elasticidade dinâmicos entre 0,15 e 0,30 MPa e
factores de perdas em torno de 0,1. Neves e Sousa [2] indicou valores de rigidez em torno de
8 MN/m3 para placas de lã de rocha com 25 mm de espessura.
De acordo com Farron [10], é possível estimar a frequência natural da camada resiliente, f0, de
camadas resilientes à base de materiais fibrosos de espessura h através de

39
( ) ( )[ ]( ) ( )h
PP148,0193.14
Cfreff
reff1n Ψ
ρρ−+= , (4.4)
onde Ψ(h) é dado pela expressão (4.3) e pf (Pa) é a pressão estática actuante sobre a camada
resiliente em fibras e pref =101,325x 106 Pa é uma pressão de referência. As grandezas ρ e ρref
correspondem à massa volúmica do material fibroso e massa volúmica de referência, enquanto que
C1 é uma variável dependente da massa volúmica da fibra, pf (kg/m³), a qual é dada por
( )reff1 068.11
29.14C
ρρ−= . (4.5)
Estas expressões são válidas para materiais à base de fibras naturais com espessuras de 25 a
150 mm, massas volúmicas compreendidas entre 200 e 350 kg/m3, e sujeitos a pressões entre 70 e
400 kPa.
4.3.7 Componentes pneumáticos e sistemas de molas
Os componentes hidráulicos são mais utilizados como sistemas de isolamento antivibrático e acções
de choque em ambiente industrial, nomeadamente no suporte de máquinas. Estes elementos contêm,
no seu interior, ar a uma determinada pressão, conferindo assim a rigidez necessária ao sistema. A
Figura 4.12 mostra um exemplo de apoios pneumáticos.
Figura 4.12 – Exemplo de componente hidráulico de isolamento antivibrático [W.7].
O grupo CDM [W.1] apresenta uma solução designada por Air Cushions (Figura 4.13), que consiste
num sistema de 1 e 2 lóbulos em série, constituídos por borracha, com diâmetros de 4,5’’, 6’’ e 12’’,
especialmente concebidos para funcionar sob frequências de excitação não superiores a 3 Hz.
Verifica-se que quanto maior o volume de ar compreendido no componente hidráulico mais baixa é a

40
frequência de ressonância do sistema. Esta pode ser obtida, considerando um sistema de um grau-
de-liberdade, a partir da rigidez dinâmica, a qual pode ser calculada através de
( )
+= 21
38,1
2
02
38,1
1
015
AAVV
AVV
A110
p400s --- (N/m), (4.6)
onde: p é a pressão em (bar = 0,1 MPa); V é o volume em (cm3); A é a área da secção; A1 e A2 são
as áreas da secção, quando aplicadas a carga estática, respectivamente, mais e menos 1 cm2. O
volume quando aplicada a carga estática é designado por V0, e, da mesma forma, V1 e V2 mais e
menos 1 cm2, respectivamente.
Figura 4.13 – Componente pneumático de isolamento antivibrático (cm) [W.7].
É de realçar que esta solução, apesar de possibilitar o ajuste da rigidez da solução, fazendo variar a
pressão do ar até, no máximo, 7 bar (cerca de 6,9 atm), praticamente não confere amortecimento ao
sistema para além daquele que é proporcionado pela borracha.
A CDM desenvolveu também um sistema composto por molas metálicas, o qual é utilizado quando
são necessárias frequências de corte abaixo dos 5 Hz. As molas podem ser concebidas para ter
frequências de ressonância de 2 Hz, dependendo do diâmetro dos filamentos em anel, do diâmetro
exterior do anel e da altura da mola ou do número de anéis. Estes elementos suportam cargas entre
0,15 e 73,6 kN.
As molas praticamente não introduzem amortecimento no sistema excepto quando combinadas com
materiais apropriados, como, por exemplo, a borracha ou cilindros, podendo, nesses casos, obter-se
factor de perdas até 0,1. A Figura 4.15 exemplifica a constituição de uma mola aplicada em sistemas
de pavimento flutuante pela Kinetics Sound Control [W.2].

41
Figura 4.15 – Elemento de mola para isolamento antivibrático [W.2].
4.4 Conclusões
Os sistemas e materiais existentes no mercado para isolamento antivibrático e ruído de percussão
diferem na configuração e, dentro de cada configuração, diferem na espessura total do sistema.
O isolamento desejado pode ser obtido com diferentes soluções, dependendo das condições e
especificidades do compartimento, não existindo, portanto, um sistema que seja claramente melhor
do que os restantes. Usualmente, a escolha do sistema de isolamento baseia-se na economia e
logística associada. A entidade executante ou o dono de obra adopta, em geral, a solução que lhe é
mais conveniente em termos de custos, ou aquela com que está mais familiarizado.
A escolha de um sistema de pavimento flutuante deverá contudo conduzir a sistemas de pavimentos
optimizados em termos de isolamento sonoro e antivibrático. Para tal, apresenta-se , no Quadro 4.3,
um resumo das características dos materiais discutidos neste capítulo.
Quadro 4.3 – Resumo das características das soluções analisadas.
Material ρ (Kg/m 3) E (GPa) η e (m)
Cortiça 120-250 0,025 0,10 - 0,17 0,010
Poliestireno 1040-1100 0,30 0,20 0,040
Polietileno extrudido
23-32 0,20 0,10 0,005
Poliuretano 150-1030 0,0008-0,050 0,30-0,50 0,012-0,05
PVC 704,5 0,03 0,30-0,50 0,0025
Neoprene 1500-1600 0,70-2,00 (x 10-3) 0,10 0,125
Fibra de vidro 110 0,15-0,30 (x 10-3) 0,10 0,002
C. pneumático - - ≈ 0 -
Mola de aço - 203,4 0-0,10 -
Material resiliente
Altura da mola
Largura do apoio
Diâmetro do furo
Largura do apoio

42
(página em branco)

43
5. UMA SOLUÇÃO DE PAVIMENTO FLUTUANTE SEMI-ACTIVO
5.1 Introdução
Como se descreveu nos capítulos anteriores, os pavimentos flutuantes são eficientes para
frequências bem acima da sua frequência de corte. Infelizmente, em virtude das limitações impostas
pela economia e optimização de recursos, observa-se, hoje em dia, uma preferência por soluções
leves de revestimento de piso às quais estão associados valores de f12 elevados relativamente ao
intervalo de frequências de interesse para a presente dissertação (20-200 Hz). Tal significa que os
pavimentos flutuantes podem, em muitos casos, amplificar ruídos de baixa frequência ao invés de os
isolarem. Este efeito pode ser agravado nos compartimentos com volumes abaixo dos 50 m3, nos
quais se desenvolvem campos sonoros claramente modais. O acoplamento modal entre o pavimento
e o espaço acústico pode também contribuir para o surgimento de níveis sonoros muito elevados em
frequências particulares, o que tem consequências graves ao nível da incomodidade dos ocupantes
[2]. Mesmo nos casos em que é possível evitar o acoplamento modal num ou noutro compartimento,
uma vez que a solução de pavimento é, em geral, utilizada de forma uniforme em todo o edifício,
existirão sempre compartimentos onde a amplificação modal ocorrerá. Assim, nos casos em que não
seja possível instalar soluções de pavimento flutuante com valores de f12 abaixo dos 10 a 15 Hz, ou
em casos onde se perspectivem alterações da organização funcional dos espaços ao longo da vida
útil do edifício é conveniente dispor de um sistema de isolamento a ruído de percussão adaptável às
condições de carga e às dimensões dos compartimentos. No fundo, pretende-se um pavimento
flutuante capaz de satisfazer exigências que podem variar ao longo da vida útil do edifício, sem que
seja necessária a sua substituição ou remodelação parcial.
Em seguida, é apresentada e discutida uma solução de pavimento flutuante idealizada para fazer
face a estes requisitos.
5.2 Definição da solução proposta
O desafio colocado reside na definição de um sistema de piso flutuante capaz de alterar de forma
simples, económica e eficaz as suas características dinâmicas, adaptando-se por essa via, às cargas
actuantes e às características acústicas dos espaços inferiores.
O sistema idealizado consiste num conjunto de câmaras-de-ar dispostas linearmente sobre a área a
isolar, entre a laje estrutural e o sistema de revestimento de piso e seu suporte. Nesta dissertação
consideram-se dois tipos de suporte de revestimento: lajeta de betão e placas de MDF. A Figura 5.1
ilustra a solução proposta:

44
1- Revestimento
2- Lajeta de betão/MDF
3- Câmara-de-ar
4- Pavimento de base
Figura 5.1 - Sistema de pavimento flutuante constituído por lajeta sobre conjunto de câmaras-de-ar.
A eficácia da solução depende da adequada distribuição das câmaras-de-ar pela área a isolar, de
forma a garantir que a lajeta ou placa de suporte do revestimento funcionará de modo uniforme. Na
Figura 5.2 é apresentada uma distribuição tipo das câmaras-de-ar para um compartimento de planta
rectangular.
Figura 5.2 – Disposição dos elementos de câmara-de-ar e respectivo espaçamento.
Os elementos de câmara-de-ar internos são dispostos paralelamente entre si com um afastamento
constante (ws). Este valor depende das cargas aplicadas, da resistência da borracha das câmaras-de-
ar e do material que constitui a placa de suporte do revestimento, cujas propriedades mecânicas
controlam a deformação entre linhas de apoio.
Os elementos câmara-de-ar periféricos asseguram o fluxo de ar entre todos os segmentos internos
de câmaras-de-ar, garantindo valores de pressão idênticos na generalidade dos pontos do sistema de
apoio.
Ao contrário das características mecânicas do conjunto placa de suporte e revestimento final de piso,
as quais se mantêm constantes ao longo da vida útil do pavimento, as características mecânicas da
camada elástica, constituída pelo conjunto de câmaras-de-ar, podem ser alteradas de forma simples
1
2 3
4
ws ws ws ws ws ws wWs
ws

45
através de um compressor e manómetro/válvula para controlar a pressão do ar no interior das
câmaras e, consequentemente, a rigidez dinâmica do sistema.
O manómetro poderá ser instalado numa das paredes do compartimento e deverá estar associado a
uma válvula que permita ao utilizador retirar ou colocar ar no sistema.
Figura 5.3 – Tomada de controlo e ajuste de pressão.
De forma a salvaguardar a estética da solução, este elemento deve ser integrado na parede como
uma simples tomada, com aparência discreta.
5.2.1 Aplicação da solução
A instalação desta solução deve ter em atenção diversos factores que condicionam a sua
aplicabilidade, desempenho e durabilidade, tais como:
• O estado do pavimento de base onde vai ser aplicado o sistema. Caso este apresente
irregularidades ou desníveis, deve ser afagado com eventual aplicação de uma camada
regularizadora de modo a não causar roturas e diferenciais de pressão no sistema de
câmaras-de-ar;
• A geometria do compartimento. Esta informação deverá ser fornecida ao fabricante de modo
a que este produza o sistema de câmaras-de-ar com a geometria adequada, dado que esta
não permite alterações posteriores. Os diferentes troços de câmara-de-ar podem ser
vulcanizados em fábrica evitando ligações mecânicas que podem condicionar os
deslocamentos verticais do sistema;
• A cota do piso. É necessário garantir que os diferentes sistemas de pavimento permitem
nivelar os diferentes compartimentos.
• A localização do manómetro e válvula de controlo de pressão do ar. Deve ser previamente
escolhido o local onde será instalada a tomada de injecção de ar com o respectivo
manómetro, de modo a que a interferência na utilização do compartimento seja a menor
possível.
manómetro
válvula

46
5.2.2 Esquema de montagem
Uma vez asseguradas as condições físicas do compartimento quanto à aplicabilidade do sistema, a
montagem deste deverá respeitar os seguintes passos, ilustrados na Figura 5.4:
• Disposição de uma manga plástica em toda a área a isolar, com o objectivo de proteger as
câmaras-de-ar quanto às irregularidades da laje e ao atrito entre as duas superfícies durante
a vida útil do sistema;
• Instalação da tomada de controlo da pressão (passo 1 na Figura 5.4);
• Colocação do sistema de câmara-de-ar no pavimento (passo 2);
• Ligação do sistema de câmaras-de-ar à tomada de controlo;
• Injecção de ar no sistema. Este deve ficar em carga o tempo necessário à medição de
diferenças na pressão imposta, de forma a garantir a ausência de quaisquer fugas de ar;
• Colocação da placa de suporte do revestimento de piso, em MDF ou através de uma lajeta de
betão leve. Neste último caso, será sempre necessário instalar uma placa de cofragem
perdida (passo 3);
• Colocação do revestimento final, garantindo que a placa de suporte do revestimento e o
próprio revestimento de piso ficam completamente desligados das paredes do compartimento
(passo 4).
Figura 5.4 – Esquema de montagem do sistema de pavimento flutuante sobre conjunto de câmaras-de-ar num
compartimento.
1
2
3
4

47
5.3 Modelação do sistema
De forma a avaliar o comportamento da câmara-de-ar quando sujeita a acções de compressão, foi
efectuada a sua modelação no programa de cálculo SAP2000 [20]. Foi considerado o modelo
bidimensional apresentado na Figura 5.5, o qual corresponde a uma secção de câmara-de-ar, no
plano xz (Figuras 5.5 e 5.6). A câmara-de-ar e o ar no seu interior foram modelados com elementos
finitos de membrana, com deformação apenas no plano xz.
Figura 5.5 – Modelo bidimensional da câmara-de-ar sujeita à acção de uma força vertical F.
Figura 5.6 – Referencial considerado no modelo computacional.
Ar
Borracha
F
B
A
x
z
y
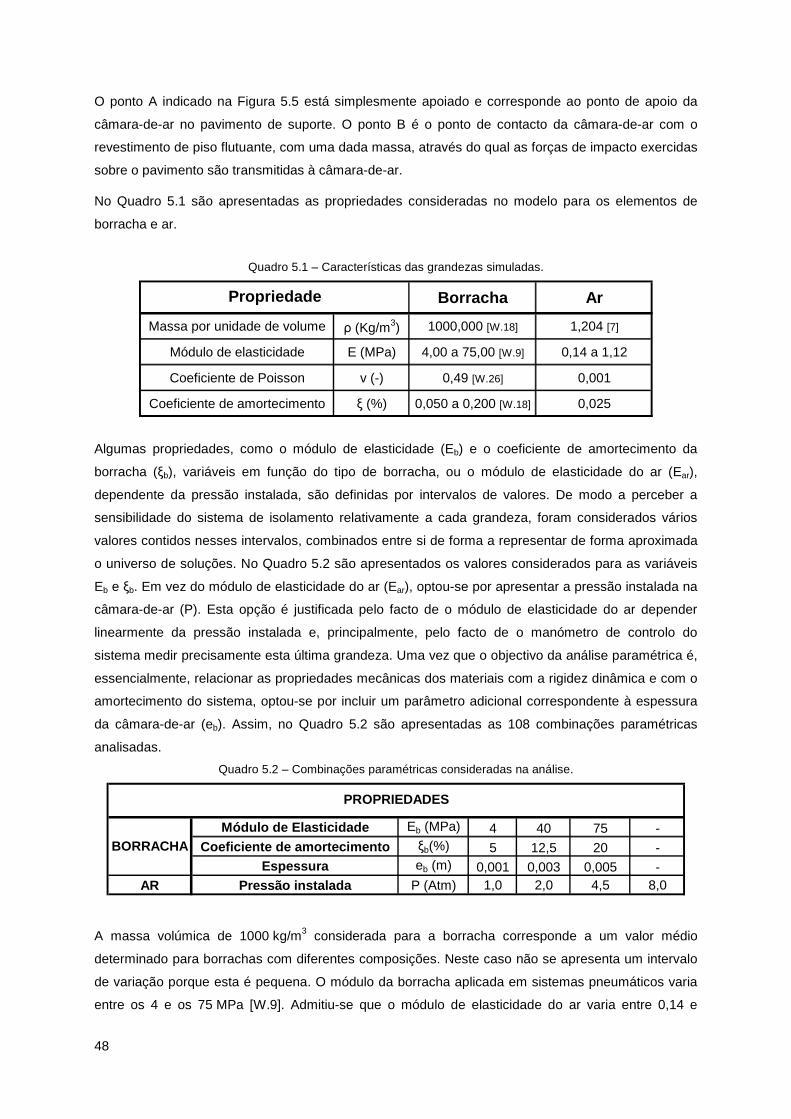
48
Módulo de Elasticidade Eb (MPa) 4 40 75 -Coeficiente de amortecimento ξb(%) 5 12,5 20 -
Espessura eb (m) 0,001 0,003 0,005 -AR Pressão instalada P (Atm) 1,0 2,0 4,5 8,0
BORRACHA
PROPRIEDADES
Borracha Ar
Massa por unidade de volume ρ (Kg/m3) 1000,000 [W.18] 1,204 [7]
Módulo de elasticidade E (MPa) 4,00 a 75,00 [W.9] 0,14 a 1,12
Coeficiente de Poisson v (-) 0,49 [W.26] 0,001
Coeficiente de amortecimento ξ (%) 0,050 a 0,200 [W.18] 0,025
Propriedade
O ponto A indicado na Figura 5.5 está simplesmente apoiado e corresponde ao ponto de apoio da
câmara-de-ar no pavimento de suporte. O ponto B é o ponto de contacto da câmara-de-ar com o
revestimento de piso flutuante, com uma dada massa, através do qual as forças de impacto exercidas
sobre o pavimento são transmitidas à câmara-de-ar.
No Quadro 5.1 são apresentadas as propriedades consideradas no modelo para os elementos de
borracha e ar.
Quadro 5.1 – Características das grandezas simuladas.
Algumas propriedades, como o módulo de elasticidade (Eb) e o coeficiente de amortecimento da
borracha (ξb), variáveis em função do tipo de borracha, ou o módulo de elasticidade do ar (Ear),
dependente da pressão instalada, são definidas por intervalos de valores. De modo a perceber a
sensibilidade do sistema de isolamento relativamente a cada grandeza, foram considerados vários
valores contidos nesses intervalos, combinados entre si de forma a representar de forma aproximada
o universo de soluções. No Quadro 5.2 são apresentados os valores considerados para as variáveis
Eb e ξb. Em vez do módulo de elasticidade do ar (Ear), optou-se por apresentar a pressão instalada na
câmara-de-ar (P). Esta opção é justificada pelo facto de o módulo de elasticidade do ar depender
linearmente da pressão instalada e, principalmente, pelo facto de o manómetro de controlo do
sistema medir precisamente esta última grandeza. Uma vez que o objectivo da análise paramétrica é,
essencialmente, relacionar as propriedades mecânicas dos materiais com a rigidez dinâmica e com o
amortecimento do sistema, optou-se por incluir um parâmetro adicional correspondente à espessura
da câmara-de-ar (eb). Assim, no Quadro 5.2 são apresentadas as 108 combinações paramétricas
analisadas.
Quadro 5.2 – Combinações paramétricas consideradas na análise.
A massa volúmica de 1000 kg/m3 considerada para a borracha corresponde a um valor médio
determinado para borrachas com diferentes composições. Neste caso não se apresenta um intervalo
de variação porque esta é pequena. O módulo da borracha aplicada em sistemas pneumáticos varia
entre os 4 e os 75 MPa [W.9]. Admitiu-se que o módulo de elasticidade do ar varia entre 0,14 e

49
1,12 MPa, como consequência de uma variação da pressão instalada entre valores correntes em
sistemas pneumáticos (1 a 8 atmosferas) [W.1].
Foi considerada uma simplificação corrente na avaliação da rigidez de espaços confinados, a qual
consiste em assumir que o ar se comporta como uma mola elástica com módulo de elasticidade (Ear)
idêntico ao módulo de compressibilidade volumétrico adiabático,B0 (Pa), o qual é dado por B0 = ρ0 c02,
onde ρ0 (kg/m3) é a massa volúmica do ar em regime estático e c0 (m/s) é a velocidade de
propagação do som no ar [7]. Considerando ainda que c02 = γ P/ρ, onde: γ é a razão entre os calores
específicos do ar, a qual assume valores em redor de 1,4 para temperaturas correntes [21]; P (Pa) é
a pressão total instantânea do ar; e ρ (Kg/m3) é a massa volúmica do ar em regime dinâmico, a qual
se assume, simplificadamente, ser muito próxima de ρ0; obtém-se a relação
Ear ≈ B0 = γ P. (5.1)
O coeficiente de Poisson da borracha é, geralmente, igual a 0,5. Para efeito da modelação, assumiu-
se vb = 0,49, o que corresponde ao máximo admitido pelo programa de cálculo SAP2000.
Convém notar que em todas as análises foram consideradas câmaras-de-ar com diâmetro exterior
igual a 4 cm. A limitação desta grandeza resulta da exigência de poupança de espaço que se coloca
às soluções de pavimento flutuante.
5.4 Análise do desempenho estático e dinâmico das c âmaras-de-ar
A análise do desempenho dinâmico das câmaras-de-ar a utilizar no sistema de pavimento flutuante
proposto depende do espaçamento entre elas, ou seja, da carga a que estão sujeitas. Assim, numa
primeira fase, há que definir um critério para o estabelecimento do espaçamento entre câmaras-de-ar.
Uma vez definida a distribuição das câmaras-de-ar no pavimento, é então necessário avaliar as suas
características dinâmicas, nomeadamente a sua rigidez dinâmica e o coeficiente de amortecimento.
Estas grandezas serão posteriormente necessárias para a modelação da vibração do pavimento e,
consequentemente, para a avaliação da transmissão de ruído de percussão.
5.4.1 Espaçamento entre câmaras-de-ar
Usando o modelo descrito em 5.3, é possível determinar a rigidez estática s0 (N/m) da câmara-de-ar
face a acções verticais. Para tal é imposta, no ponto B, uma força de compressão segundo x, com
intensidade de 1 N. A rigidez s0 é obtida a partir da Lei de Hooke, com base na deformação
provocada pela força aplicada, segundo x, no ponto B.
Tendo em conta que o revestimento de piso não deve apresentar uma deformação excessiva em
serviço, considera-se que a deformação máxima, sobre os apoios, será µmáx = b/1000, onde b (m) é a
dimensão em planta do piso na direcção y, ou seja, segundo o comprimento das câmaras-de-ar. A
satisfação deste limite obriga a controlar o valor máximo da acção imposta estaticamente sobre as
câmaras-de-ar para um dado carregamento do piso. Considera-se que este carregamento
corresponderá à combinação quase-permanente de acções na terminologia do RSA [N.9], a qual

50
considera o peso próprio dos suportes do revestimento e o valor quase-permanente da sobrecarga de
utilização do espaço. Em edifícios habitacionais ou destinados à hotelaria, a sobrecarga admitida no
pavimento é de 2,0 kN/m2, devendo esta ser corrigida pelo coeficiente Ψ2 = 0,2, pelo que o valor a
considerar é ll = 0,2 x 2 = 0,4 kN/m2. No Quadro 5.3 são apresentadas as propriedades, massa
volúmica (ρ) e espessura (h), dos materiais que constituem a camada de suporte do revestimento.
Para efeitos da presente dissertação, desprezam-se os acabamentos do piso devido à sua grande
variabilidade. No entanto, em casos de aplicação em obra, os mesmos devem ser considerados.
Note-se que a opção aqui tomada é conservativa por considerar pavimentos com massa
provavelmente inferior à real.
Quadro 5.3 – Propriedades dos materiais constituintes do suporte do revestimento.
Material ρ (kg/m 3) h (m)
Lajeta de betão 2000 0,05
MDF 700 0,03
O peso máximo admissível, Nmáx (N), sobre as câmaras-de-ar é dado por
Nmáx = s0 x µmáx. (5.2)
Assim, a distância ws(m) entre câmaras-de-ar é dada por
Nmáx = ws (ρgh+ll) (5.3)
Os resultados obtidos para ws são apresentados no Anexo I para os dois tipos de material de suporte
do revestimento considerados, admitindo-se um compartimento com b = 4,5m, o que corresponde a
uma dimensão corrente em edifícios de habitação.
5.4.2 Rigidez dinâmica e coeficiente de amortecimen to
Para avaliar a rigidez dinâmica das câmaras-de-ar utilizadas em cada combinação paramétrica, foi
utilizado o modelo descrito em 5.3. Tendo em conta que o problema em estudo adquire importância
apenas no intervalo das baixas frequências, ou seja, abaixo dos 200 Hz, optou-se por considerar uma
força aplicada em B com uma intensidade de 2,5 N em todas as frequências (Figura 5.7.a). O
programa de cálculo automático SAP2000 [20] foi utilizado com base em análise modal para um sinal
no tempo de carácter periódico. Assim, foi necessário recorrer ao algoritmo inverso da Transformada
Rápida de Fourier [22], para, a partir do espectro apresentado na Figura 5.7.a), se obter,
considerando 4096 pontos e uma frequência máxima de 200 Hz, o sinal no tempo apresentado na
Figura 5.7.b).
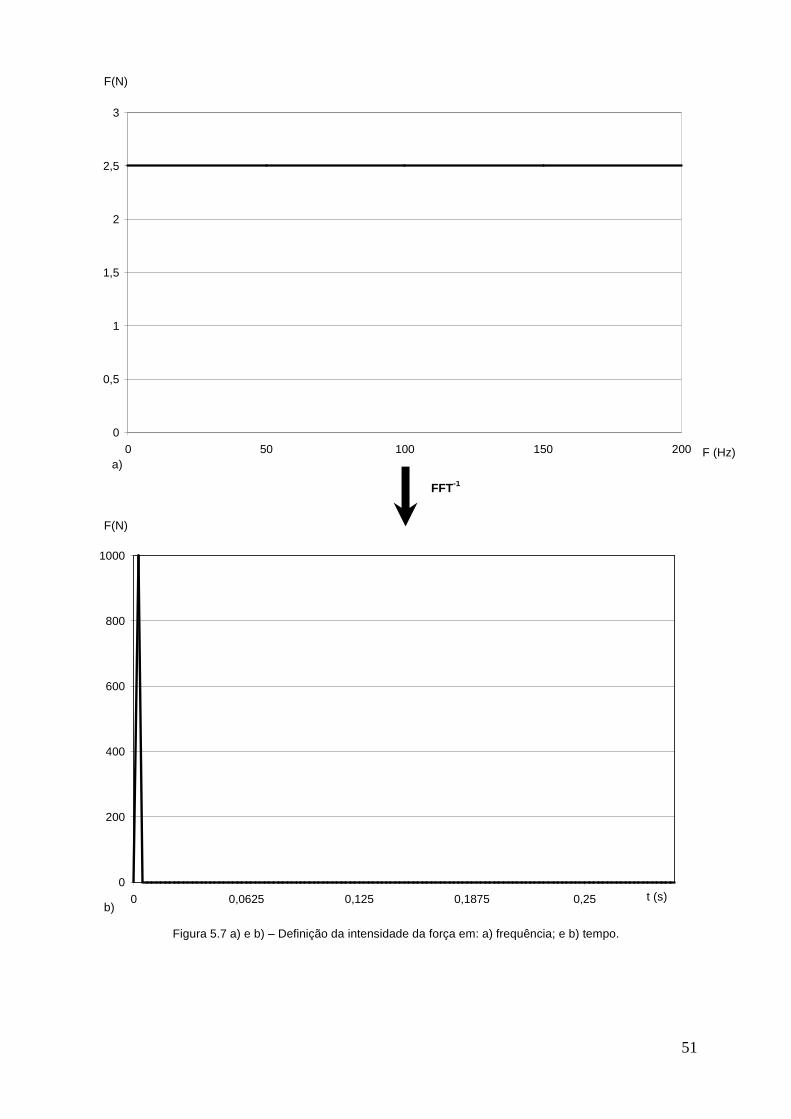
51
0
0,5
1
1,5
2
2,5
3
0 50 100 150 200
0
200
400
600
800
1000
0 0,0625 0,125 0,1875 0,25
Figura 5.7 a) e b) – Definição da intensidade da força em: a) frequência; e b) tempo.
FFT-1
F(N)
F(N)
F (Hz)
t (s)
a)
b)

52
O sinal no tempo do deslocamento segundo x registado no ponto B foi posteriormente transformado
num espectro de deslocamentos, o qual, correspondendo a um sistema dinâmico análogo a um
sistema com um único grau de liberdade, permitiu identificar claramente uma frequência de
ressonância (f0). Para facilitar a leitura, optou-se por centrar a frequência de ressonância em 100 Hz,
para o que foi necessário corrigir a massa do sistema. O acréscimo de massa foi concentrado no
ponto B, como acontece com a massa do suporte do revestimento do pavimento flutuante. A rigidez
foi então calculada com base em
s = m 4 π2 f0. (5.4)
O espectro do deslocamento obtido em B pode também ser utilizado para aplicação do método da
meia-potência, descrito na secção 3.2, o qual permite calcular o amortecimento global do sistema.
No Anexo II apresentam-se os resultados obtidos para cada valor da espessura da borracha utilizada
na câmara-de-ar.
Os 108 resultados apresentados no Anexo II serão, em seguida, analisados de uma forma detalhada
com o objectivo de identificar os factores determinantes para as propriedades dinâmicas das
câmaras-de-ar.
Nas Figuras 5.8 a 5.10 é apresentado o amortecimento global do sistema (ξc) para valores fixos do
coeficiente de amortecimento da borracha (ξb), fazendo variar a espessura da câmara-de-ar, o
módulo de elasticidade da borracha e a pressão instalada no interior da câmara-de-ar. É possível
concluir que, para cada valor que a variável ξb tome, o coeficiente ξc é tanto maior quanto menor for a
pressão instalada na câmara-de-ar. Este comportamento era esperado e mostra que o aumento da
pressão no interior da câmara-de-ar torna o sistema mais rígido, perdendo-se capacidade de dissipar
energia. Para além disto, verifica-se que a diminuição de ξc com a pressão na câmara-de-ar é mais
acentuada quanto maior for a espessura da borracha. É de realçar que este comportamento não é
observado apenas nas combinações (eb = 3 mm; Eb = 4 MPa) e (eb = 5 mm; Eb = 4 MPa), não tendo
sido possível identificar os motivos que justifiquem estes desvios.
A comparação entre as Figuras 5.8 a 5.10 permite concluir que o aumento de ξb conduz ao
consequente aumento de ξc, principalmente para maiores espessuras, dado que, nesses casos, a
borracha contribui mais para o desempenho global do sistema.

53
124,5
8Eb = 4 MP a
E b = 40 MPa
E b = 75 MPa
E b = 4MP a
Eb = 40MPa
E b = 75MP a
E b = 4MP a
Eb = 40MP a
Eb = 75MPa
0,05
0,07
0,09
0,11
0,13
0,15
0,17
0,19
0,21
0,23
0,25Eb = 4 MPa
Eb = 40 MPa
Eb = 75 MPa
c
Figura 5.8 – Amortecimento do sistema para ξb =0,05 com a variação de P, eb e Eb.
124,5
8E b = 4 MPa
Eb = 40 MPa
E b = 75 MP a
Eb = 4MP a
Eb = 40MPa
E b = 75MP a
E b = 4MPa
Eb = 40MPa
Eb = 75MPa
0,00
0,05
0,10
0,15
0,20
0,25
0,30
0,35
0,40
0,45Eb = 4 MPa
Eb = 40 MPa
Eb = 75 MPa
Figura 5.9 – Amortecimento do sistema para ξb =0,125 com a variação de P, eb e Eb.
Nas Figuras 5.11 a 5.13 são apresentados os resultados obtidos para o amortecimento global do
sistema (ξc) para cada valor do módulo de elasticidade da borracha, fazendo variar a espessura da
borracha e o seu coeficiente de amortecimento, bem como a pressão instalada no interior da câmara-
de-ar.
eb = 1mm eb = 3mm
eb = 5mm
eb = 1mm eb = 3mm
eb = 5mm
P (atm)
ξc
P (atm)
ξc

54
124,5
8E b = 4 MPa
Eb = 40 MPa
E b = 75 MP a
Eb = 4MP a
Eb = 40MPa
E b = 75MP a
E b = 4MPa
Eb = 40MPa
Eb = 75MPa
0,00
0,05
0,10
0,15
0,20
0,25
0,30
0,35
0,40
0,45Eb = 4 MPa
Eb = 40 MPa
Eb = 75 MPa
Figura 5.10 – Amortecimento do sistema para ξb = 0,2 com a variação de P, eb e Eb.
Para Eb igual a 40 e 75 MPa, continua a ser evidente a mesma relação inversa entre P e ξc. Para Eb
igual a 4 MPa, o comportamento é muito mais variável. O aumento de ξb reflecte-se no amortecimento
global de forma gradual e positiva para cada espessura e é mais importante para maiores valores da
espessura da borracha.
124,5
8ξb = 0 ,05
ξ b = 0 ,125
ξ b = 0 ,2
ξb = 0,05
ξ b = 0 ,125
ξb = 0,2
ξb = 0,05
ξ b = 0 ,125
ξb = 0, 2
0,00
0,05
0,10
0,15
0,20
0,25ξb = 0,05
ξb = 0,125
ξb = 0,2
Figura 5.11 – Amortecimento do sistema para Eb = 4 MPa com a variação de P, eb e ξb.
eb = 1mm eb = 3mm
eb = 5mm
eb = 1 mm
eb = 5 mm eb = 3 mm
P (atm)
ξc
ξc
P (atm)

55
124,5
8ξb = 0,05
ξb = 0,125
ξb = 0,2
ξb = 0 ,05
ξ b = 0 ,125
ξ b = 0, 2
ξb = 0,05
ξ b = 0 ,125
ξb = 0,2
0,00
0,05
0,10
0,15
0,20
0,25
0,30
0,35
0,40ξb = 0,05
ξb = 0,125
ξb = 0,2
Figura 5.12 – Amortecimento do sistema para Eb = 40 MPa com a variação de P, eb e ξb.
124,5
8ξ b = 0 ,05
ξ b = 0 ,125
ξ b = 0 ,2
ξb = 0,05
ξ b = 0 ,125
ξb = 0,2
ξb = 0, 05
ξb = 0,125
ξ b = 0 ,2
0,00
0,05
0,10
0,15
0,20
0,25
0,30
0,35
0,40
0,45ξb = 0,05
ξb = 0,125
ξb = 0,2
Figura 5.13 – Amortecimento do sistema para Eb = 75 MPa com a variação de P, eb e ξb.
Nas Figuras 5.14 a 5.17 são apresentados os valores obtidos para o amortecimento global da
câmara-de-ar (ξc), fixando a pressão instalada no seu interior e fazendo variar a espessura da
borracha e o seu módulo de elasticidade e coeficiente de amortecimento.
Verifica-se que o amortecimento ξc depende de forma aproximadamente linear de ξb para cada
espessura da borracha. O aumento do módulo de elasticidade da borracha conduz ao aumento do
coeficiente de amortecimento global da câmara-de-ar, o que constitui um resultado inesperado. Para
pressões instaladas de valor elevado, o aumento de ξc com o aumento de Eb torna-se menos
eb = 1 mm
eb = 5 mm eb = 3 mm
eb = 1 mm eb = 5 mm eb = 3 mm
P (atm)
ξc
ξc
P (atm)

56
acentuado. Ao aumentar a pressão instalada, todos os valores de ξc baixam, tal como mencionado
anteriormente.
440
75
ξb = 0,05
ξb = 0,125
ξ b = 0 ,2
ξb = 0,05
ξb = 0,125
ξb = 0,2
ξb = 0 ,05
ξb = 0,125
ξb = 0 ,20
0,05
0,1
0,15
0,2
0,25
0,3
0,35
0,4
0,45
ξb = 0,05
ξb = 0,125
ξb = 0,2
Figura 5.14 – Amortecimento do sistema para P = 1 atm com a variação de Eb, eb e ξb.
440
75
ξb = 0,05
ξb = 0,125
ξb = 0,2
ξ b = 0, 05
ξb = 0,125
ξb = 0,2
ξb = 0, 05
ξb = 0,125
ξb = 0,20
0,05
0,1
0,15
0,2
0,25
0,3
0,35
0,4
ξb = 0,05
ξb = 0,125
ξb = 0,2
Figura 5.15 – Amortecimento do sistema para P = 2 atm com a variação de Eb, eb e ξb.
eb = 1 mm eb = 3 mm
eb = 5 mm
eb = 1 mm eb = 3 mm
eb = 5 mm
ξc
ξc
E (MPa)
E (MPa)

57
440
75
ξb = 0,05
ξb = 0,125
ξb = 0,2
ξ b = 0, 05
ξb = 0,125
ξb = 0,2
ξb = 0, 05
ξb = 0,125
ξb = 0,20
0,05
0,1
0,15
0,2
0,25
0,3
0,35ξb = 0,05
ξb = 0,125
ξb = 0,2
Figura 5.16 – Amortecimento do sistema para P = 4,5 atm com a variação de Eb, eb e ξb.
440
75
ξb = 0,05
ξb = 0,125
ξb = 0, 2
ξ b = 0, 05
ξb = 0,125
ξb = 0,2
ξb = 0,05
ξb = 0,125
ξb = 0,20
0,05
0,1
0,15
0,2
0,25
0,3ξb = 0,05
ξb = 0,125
ξb = 0,2
Figura 5.17 – Amortecimento do sistema para P = 8 atm com a variação de Eb, eb e ξb.
Não se apresentam quaisquer gráficos com o valores obtidos para o coeficiente de
amortecimento global da câmara-de-ar em função da pressão instalada e do módulo de
elasticidade e coeficiente de amortecimento da borracha, para cada espessura deste material,
porque estes não permitem tirar conclusões adicionais.
eb = 1 mm eb = 3 mm
eb = 5 mm
eb = 1 mm eb = 3 mm
eb = 5 mm
ξc
ξc
E (MPa)
E (MPa)

58
Nas Figuras 5.18 a 5.20 são apresentados os resultados obtidos para a rigidez dinâmica da
câmara-de-ar para cada valor do coeficiente de amortecimento da borracha, em função da
pressão instalada na câmara-de-ar e da espessura e módulo de elasticidade da borracha.
Observa-se que a rigidez aumenta com o aumento da pressão instalada na câmara-de-ar e
com o aumento da espessura e do módulo de elasticidade da borracha. Para maiores
espessuras da parede da câmara-de-ar, o crescimento da rigidez da câmara-de-ar com o
módulo de elasticidade da borracha é mais acentuado. Este comportamento resulta do facto
de o sistema funcionar analogamente a um conjunto de molas associadas em série, cuja
rigidez total, st, é dada por
∑s1
1=s n
1=i i
t , (5.5)
onde si (N/m) é a rigidez de cada uma das molas do conjunto. Assim, para grandes
espessuras, a rigidez das camadas de borracha diminui e, portanto, a sua influência na rigidez
total aumenta por força da aplicação da expressão (5.5).
Os valores máximos e mínimos da rigidez do sistema mantêm-se praticamente idênticos para
os diferentes valores de ξb.
12
4,58
Eb = 4 MPa
E b = 40 MP a
Eb = 75 MPa
Eb = 4MP a
Eb = 40MP a
E b = 75MP a
Eb = 4MPa
Eb = 40MPa
Eb = 75MPa
0,0E+00
5,0E+05
1,0E+06
1,5E+06
2,0E+06
2,5E+06Eb = 4 MPa
Eb = 40 MPa
Eb = 75 MPa
Figura 5.18 – Rigidez do sistema para ξb = 0,05 com a variação de P, eb e Eb.
eb = 1 mm
eb = 3 mm eb = 5 mm
P (atm)
s (N/m)

59
12
4,58
Eb = 4 MPa
Eb = 40 MPa
Eb = 75 MPa
Eb = 4MP a
Eb = 40MPa
Eb = 75MPa
Eb = 4MP a
Eb = 40MPa
Eb = 75MPa
0,0E+00
5,0E+05
1,0E+06
1,5E+06
2,0E+06
2,5E+06
Eb = 4 MPa
Eb = 40 MPa
Eb = 75 MPa
Figura 5.19 – Rigidez do sistema para ξb = 0,125 com a variação de P, eb e Eb.
12
4,58
Eb = 4 MPa
Eb = 40 MPa
E b = 75 MP a
E b = 4MPa
E b = 40MPa
Eb = 75MPa
Eb = 4MPa
Eb = 40MPa
Eb = 75MPa
0,0E+00
2,0E+05
4,0E+05
6,0E+05
8,0E+05
1,0E+06
1,2E+06
1,4E+06
1,6E+06
1,8E+06
2,0E+06
Eb = 4 MPa
Eb = 40 MPa
Eb = 75 MPa
Figura 5.20 – Rigidez do sistema para ξb = 0,2 com a variação de P, eb e Eb.
Nas Figuras 5.21 a 5.23 são apresentados os valores obtidos para a rigidez do sistema flutuante
considerando valores fixos do módulo de elasticidade da borracha e fazendo variar a pressão
instalada na câmara-de-ar e a espessura e coeficiente de amortecimento da borracha.
As Figuras 5.21 a 5.23 ilustram claramente a conclusão anterior relativa à pequena dependência
da rigidez do coeficiente de amortecimento da borracha.
eb = 1 mm
eb = 3 mm eb = 5 mm
P (atm)
s (N/m)
eb = 1 mm
eb = 3 mm eb = 5 mm
s (N/m)
P (atm)

60
12
4,58
ξb = 0,05
ξb = 0,125
ξb = 0, 2
ξb = 0,05
ξb = 0,125
ξb = 0 ,2
ξ b = 0 ,05
ξb = 0,125
ξb = 0,2
5,0E+04
1,5E+05
2,5E+05
3,5E+05
4,5E+05
5,5E+05
6,5E+05
7,5E+05
ξb = 0,05
ξb = 0,125
ξb = 0,2
Figura 5.21 – Rigidez do sistema para Eb = 4 MPa com a variação de P, eb e ξb.
12
4,58
ξ b = 0 ,05
ξb = 0,125
ξb = 0,2
ξb = 0,05
ξb = 0,125
ξb = 0,2
ξb = 0,05
ξb = 0, 125
ξb = 0,2
0,0E+00
2,0E+05
4,0E+05
6,0E+05
8,0E+05
1,0E+06
1,2E+06
1,4E+06
1,6E+06
ξb = 0,05
ξb = 0,125
ξb = 0,2
Figura 5.22 – Rigidez do sistema para Eb = 40 MPa com a variação de P, eb e ξb.
eb = 1 mm
eb = 3 mm eb = 5 mm
eb = 1 mm eb = 3 mm
eb = 5 mm
P (atm)
P (atm)
s (N/m)
s (N/m)

61
12
4,58
ξb = 0,05
ξb = 0,125
ξb = 0,2
ξb = 0 ,05
ξb = 0,125
ξb = 0,2
ξb = 0,05
ξb = 0,125
ξ b = 0 ,2
0,0E+00
5,0E+05
1,0E+06
1,5E+06
2,0E+06
2,5E+06
ξb = 0,05
ξb = 0,125
ξb = 0,2
Figura 5.23 – Rigidez do sistema para Eb = 75 MPa com a variação de P, eb e ξb.
Não são apresentados quaisquer gráficos dos valores de rigidez obtidos fixando a pressão instalada
na câmara-de-ar ou a espessura da borracha e fazendo variar os restantes variáveis porque os
mesmos não permitem retirar quaisquer conclusões adicionais.
eb = 1 mm
eb = 3 mm eb = 5 mm
P (atm)
s (N/m)

62
(página em branco)

63
6. ANÁLISE DO SISTEMA INTEGRADO NUM COMPARTIMENTO
6.1 Introdução
Uma vez conhecido o comportamento do sistema de isolamento antivibrático em função da variação
das suas características dinâmicas, torna-se necessário compreender a sua adaptabilidade às
condições físicas de um compartimento. Para tal, serão considerados três compartimentos com
dimensões correntes em edifícios de habitação. Na Figura 6.1 é ilustrado o referencial utilizado e no
Quadro 6.1 são apresentadas as dimensões adoptadas para cada caso de estudo. Foi considerado
um pé-direito constante de 2,5 m, e uma relação largura-comprimento entre 1 e 2, tal como
recomendado pelo RGEU [N.].
Figura 6.1 – Dimensões e referencial dos compartimentos analisados.
Quadro 6.1 – Dimensões dos compartimentos analisados.
A análise será efectuada com base na acelerância dos pavimentos, definindo-se esta grandeza como
a relação entre a aceleração num ponto do pavimento e a força de excitação aplicada.
6.2 Acelerância dos pavimentos de base
Foi considerada, nos três compartimentos, uma laje de betão armado, não revestida, com 20 cm de
espessura. Assumiu-se, para o betão armado, E = 30 GPa, ρ = 2400 kg/m3, ν = 0,2 e η = 0,015.
tipo a (m) b (m) c (m)I 2,5 3 6II 2,5 3 4,5III 2,5 3 3
compartimentos
a
b
c
z
y
x

64
Considera-se ainda que a força é aplicada com intensidade igual a 1 N num ponto em que a resposta
dinâmica do pavimento contenha uma influência positiva de todos os modos de vibração, ou seja,
sem ocorrência de cancelamentos modais. Foi escolhido o ponto com coordenadas (3b/8;3c/8).
Utilizando o código descrito no Anexo III.1, é possível obter as acelerâncias para frequências até 225
Hz. Note-se que pelo facto de o método de cálculo contabilizar de forma aditiva a contribuição em
cada frequência de todos os modos de vibração considerados, a resposta obtida será aceitável
apenas quando o número de modos considerado for suficiente. Assume-se que esta exigência é
satisfeita se forem contabilizados todos os modos de vibração com frequências até 4 × 225 = 900 Hz.
Na Figura 6.2 são apresentados os espectros de Fourier das acelerâncias dos pavimentos. Observa-
se que, apesar de se tratar do mesmo pavimento, a sua instalação em compartimentos com
diferentes dimensões em planta conduz a diferentes comportamentos dinâmicos, com ocorrência de
modos de vibração em diferentes frequências. Curiosamente, é o pavimento mais pequeno e,
portanto, mais rígido, aquele que apresenta picos de acelerância mais elevados. O pavimento
instalado no compartimento tipo I é mais flexível e, como tal, apresenta uma maior densidade modal.
1,0E-07
1,0E-06
1,0E-05
1,0E-04
1,0E-03
1,0E-02
0 20 40 60 80 100 120 140 160 180 200 220
Compartimento tipo ICompartimento tipo IICompartimento tipo III
Figura 6.2 – Espectro de Fourier das acelerâncias dos pavimentos.
6.3 Definição e análise do revestimento flutuante b aseado no sistema de
câmaras-de-ar
Como se referiu anteriormente, os revestimentos flutuantes são eficientes para frequências
superiores à frequência de corte do pavimento, f12. Como tal, o sistema de revestimento flutuante
baseado na utilização de câmaras-de-ar a colocar em cada um dos pavimentos testados deverá
apresentar uma frequência de corte tão baixa quanto possível, adoptando-se os seguintes critérios
por ordem decrescente de preferência:
f (Hz)
Fµ&& (kg-1)
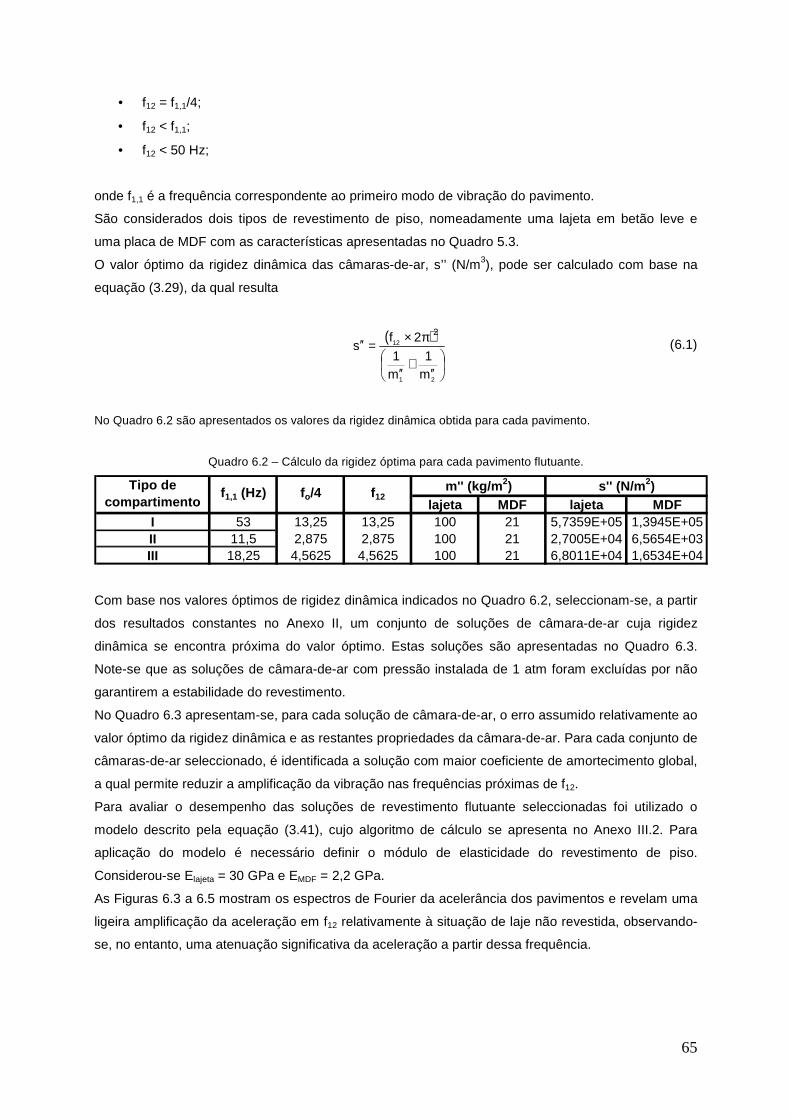
65
• f12 = f1,1/4;
• f12 < f1,1;
• f12 < 50 Hz;
onde f1,1 é a frequência correspondente ao primeiro modo de vibração do pavimento.
São considerados dois tipos de revestimento de piso, nomeadamente uma lajeta em betão leve e
uma placa de MDF com as características apresentadas no Quadro 5.3.
O valor óptimo da rigidez dinâmica das câmaras-de-ar, s’’ (N/m3), pode ser calculado com base na
equação (3.29), da qual resulta
( )
′′+
′′
π×=′′
21
12
m1
m1
2fs
2
(6.1)
No Quadro 6.2 são apresentados os valores da rigidez dinâmica obtida para cada pavimento.
Quadro 6.2 – Cálculo da rigidez óptima para cada pavimento flutuante.
Com base nos valores óptimos de rigidez dinâmica indicados no Quadro 6.2, seleccionam-se, a partir
dos resultados constantes no Anexo II, um conjunto de soluções de câmara-de-ar cuja rigidez
dinâmica se encontra próxima do valor óptimo. Estas soluções são apresentadas no Quadro 6.3.
Note-se que as soluções de câmara-de-ar com pressão instalada de 1 atm foram excluídas por não
garantirem a estabilidade do revestimento.
No Quadro 6.3 apresentam-se, para cada solução de câmara-de-ar, o erro assumido relativamente ao
valor óptimo da rigidez dinâmica e as restantes propriedades da câmara-de-ar. Para cada conjunto de
câmaras-de-ar seleccionado, é identificada a solução com maior coeficiente de amortecimento global,
a qual permite reduzir a amplificação da vibração nas frequências próximas de f12.
Para avaliar o desempenho das soluções de revestimento flutuante seleccionadas foi utilizado o
modelo descrito pela equação (3.41), cujo algoritmo de cálculo se apresenta no Anexo III.2. Para
aplicação do modelo é necessário definir o módulo de elasticidade do revestimento de piso.
Considerou-se Elajeta = 30 GPa e EMDF = 2,2 GPa.
As Figuras 6.3 a 6.5 mostram os espectros de Fourier da acelerância dos pavimentos e revelam uma
ligeira amplificação da aceleração em f12 relativamente à situação de laje não revestida, observando-
se, no entanto, uma atenuação significativa da aceleração a partir dessa frequência.
lajeta MDF lajeta MDFI 53 13,25 13,25 100 21 5,7359E+05 1,3945E+05II 11,5 2,875 2,875 100 21 2,7005E+04 6,5654E+03III 18,25 4,5625 4,5625 100 21 6,8011E+04 1,6534E+04
m'' (kg/m 2) s'' (N/m 2)Tipo de compartimento
f1,1 (Hz) f12fo/4

66
Quadro 6.3 – Selecção de soluções optimizadas de câmara-de-ar.
1,0E-08
1,0E-07
1,0E-06
1,0E-05
1,0E-04
1,0E-03
1,0E-02
1,0E-01
0 20 40 60 80 100 120 140 160 180 200 220
Lajeta óptimo MDF óptimo sem rev
Figura 6.3 – Espectro de Fourier da acelerância do pavimento revestido e não revestido no compartimento tipo I.
Com o objectivo de avaliar a eficiência das soluções de câmara-de-ar atrás identificadas como
óptimas relativamente a outras soluções correntes de pavimento flutuante, considerou-se que o
revestimento de piso (lajeta de betão e placa de MDF) poderia ser instalado sobre mantas de
polietileno extrudido, placas de cortiça ou ainda sobre neoprene. No Quadro 6.5 são apresentadas,
com base no Quadro 4.3, as propriedades médias destes sistemas de pavimento flutuante. Os
valores da rigidez dinâmica apresentados no Quadro 6.5 foram calculados através de
s'' (N/m 2) ξc eb (mm) P (atm) Eb (MPa) ξb
5,995E+05 3,029E-01 5 4,5 75 0,25,902E+05 7,498E-02 5 8 40 0,055,833E+05 1,450E-01 5 8 40 0,1255,742E+05 2,182E-01 5 8 40 0,21,825E+05 5,925E-02 1 2 4 0,051,822E+05 7,956E-02 1 2 4 0,1251,818E+05 9,942E-02 1 2 4 0,24,309E+05 6,716E-02 3 8 75 0,054,283E+05 1,126E-01 3 8 75 0,1254,250E+05 1,599E-01 3 8 75 0,24,374E+05 2,510E-01 5 4,5 40 0,21,825E+05 5,925E-02 1 2 4 0,051,822E+05 7,956E-02 1 2 4 0,1251,818E+05 9,942E-02 1 2 4 0,27,833E+05 7,967E-02 5 8 75 0,057,726E+05 1,649E-01 5 8 75 0,1257,545E+05 2,570E-01 5 8 75 0,22,614E+05 5,734E-02 1 4,5 4 0,052,609E+05 7,296E-02 1 4,5 4 0,1252,604E+05 8,861E-02 1 4,5 4 0,2
Soluções de câmara-de-arErro (%)
s'' óptimo
(N/m3)Material
Tipo de Compartimento
I
751,05E+05MDF
24,32E+05Lajeta
II
Lajeta 5,74E+05 5
401,39E+05MDF
Lajeta 1,09E+06 40
III
MDF 2,65E+05 10
f (Hz)
)kg(F/µ 1−&&

67
camada resiliente E (Pa) e (m) s'' (N/m 3) η
polietileno extrudido 2,00E+08 0,005 4,000E+10 0,2300
cortiça 2,50E+07 0,01 2,500E+09 0,1300
neoprene 1,00E+06 0,0125 8,000E+07 0,1000
0hAE
s =′′ (N/m), (6.2)
onde A (m2) é a área de aplicação da carga e h0 (m) a espessura da solução.
1,0E-08
1,0E-07
1,0E-06
1,0E-05
1,0E-04
1,0E-03
1,0E-02
1,0E-01
0 20 40 60 80 100 120 140 160 180 200 220
Lajeta óptimo MDF óptimo sem rev
Figura 6.4 – Espectro de Fourier da acelerância do pavimento revestido e não revestido no compartimento tipo II.
1,0E-08
1,0E-07
1,0E-06
1,0E-05
1,0E-04
1,0E-03
1,0E-02
1,0E-01
0 20 40 60 80 100 120 140 160 180 200 220
Lajeta óptimo MDF óptimo sem rev
Figura 6.5 – Espectro de Fourier da acelerância do pavimento revestido e não revestido no compartimento tipo
III.
Quadro 6.5 –Propriedades médias de pavimentos flutuantes correntes.
Nas Figuras 6.6 a 6.11 são apresentados os espectros de Fourier da acelerância obtidos em cada
compartimento com os sistemas de pavimento flutuante à base de lajetas de betão leve ou placas de
MDF assentes sobre os materiais considerados no Quadro 6.5. Estes espectros são comparados com
f (Hz)
f (Hz)
)kg(F/µ 1−&&
)kg(F/µ 1−&&

68
os espectros de Fourier da acelerância obtidos com a laje de betão armado não revestida e com a
solução de pavimento flutuante à base de câmaras-de-ar.
1,0E-08
1,0E-07
1,0E-06
1,0E-05
1,0E-04
1,0E-03
1,0E-02
1,0E-01
20 40 60 80 100 120 140 160 180 200 220
Câmara-de-ar Polietileno Cortiça
Neoprene Sem revestimento
Figura 6.6 - Espectro de Fourier da acelerância do pavimento não revestido e revestido com lajeta de betão leve
sobre diferentes camadas resilientes no compartimento tipo I.
A Figura 6.6 mostra que a solução de câmara-de-ar constituída por borracha de espessura de 5 mm,
módulo de elasticidade de 75 MPa e coeficiente de amortecimento de 0,20, com pressão instalada de
4,5 atm, é a mais eficiente para o compartimento tipo I e lajeta de betão. A solução à base de
neoprene apresenta a pior eficiência de entre as soluções. Esta solução conduz a uma amplificação
da aceleração para frequências superiores a 65 Hz. As soluções à base de polietileno extrudido e
cortiça apresentam comportamentos dinâmicos muito semelhantes em todo o intervalo de frequências
analisado. Estas soluções revelam ser eficientes para frequências superiores a 180 Hz.
A Figura 6.7 mostra que a solução de câmara-de-ar continua a ser a mais eficiente quando se utiliza
um revestimento de piso em MDF no compartimento tipo I. As restantes soluções de pavimentos
apresentam espectros de acelerância muito semelhantes ao da laje não revestida.
1,0E-07
1,0E-06
1,0E-05
1,0E-04
1,0E-03
1,0E-02
1,0E-01
20 40 60 80 100 120 140 160 180 200 220
Câmara-de-ar Polietileno Cortiça
Neoprene Sem revestimento
Figura 6.7 - Espectro de Fourier da acelerância do pavimento não revestido e revestido com placa de MDF sobre
diferentes camadas resilientes no compartimento tipo I.
f (Hz)
f (Hz)
)kg(F/µ 1−&&
)kg(F/µ 1−&&

69
A Figura 6.8 mostra que, mais uma vez, o neoprene é o material que pior se comporta com
revestimento em lajeta de betão. No compartimento tipo II, as soluções de pavimentos flutuante
correntes são eficientes para frequências superiores a 160 Hz. A solução à base de câmaras-de-ar é,
indiscutivelmente, a mais eficiente.
1,0E-08
1,0E-07
1,0E-06
1,0E-05
1,0E-04
1,0E-03
1,0E-02
1,0E-01
20 40 60 80 100 120 140 160 180 200 220
Câmara-de-ar Polietileno Cortiça
Neoprene Sem revestimento
Figura 6.8 - Espectro de Fourier da acelerância do pavimento não revestido e revestido com lajeta de betão leve
sobre diferentes camadas resilientes no compartimento tipo II.
As conclusões resultantes da observação de Figura 6.7 aplicam-se também à Figura 6.9, relativa a
revestimentos flutuantes com placas de MDF no compartimento tipo II. O mesmo se passa com as
Figuras 6.10 e 6.11 relativamente às Figuras 6.6 e 6.7, respectivamente.
1,0E-07
1,0E-06
1,0E-05
1,0E-04
1,0E-03
1,0E-02
1,0E-01
20 40 60 80 100 120 140 160 180 200 220
Câmara-de-ar Polietileno Cortiça
Neoprene Sem revestimento
Figura 6.9 – Espectro de Fourier da acelerância do pavimento não revestido e revestido com placa de MDF sobre
diferentes camadas resilientes no compartimento tipo II.
f (Hz)
)kg(F/µ 1−&&
)kg(F/µ 1−&&
f (Hz)

70
1,0E-08
1,0E-07
1,0E-06
1,0E-05
1,0E-04
1,0E-03
1,0E-02
1,0E-01
20 40 60 80 100 120 140 160 180 200 220
Câmara-de-ar Polietileno Cortiça
Neoprene Sem revestimento
Figura 6.10 - Espectro de Fourier da acelerância do pavimento não revestido e revestido com lajeta de betão leve
sobre diferentes camadas resilientes no compartimento tipo III.
1,0E-07
1,0E-06
1,0E-05
1,0E-04
1,0E-03
1,0E-02
1,0E-01
20 40 60 80 100 120 140 160 180 200 220
Câmara-de-ar Polietileno Cortiça
Neoprene Sem revestimento
Figura 6.11 - Espectro de Fourier da acelerância do pavimento não revestido e revestido com placa de MDF
sobre diferentes camadas resilientes no compartimento tipo III.
6.4 Desempenho acústico do pavimento flutuante à ba se de câmaras-de-ar
O campo de pressões sonoras gerado num compartimento por um pavimento em vibração sob a
acção de uma força de impacto pontual, pode ser calculado com base na expressão
( ) ( ) ( )
( )[ ]tωj
0n,m,l2
lmn
lmnmnl
00 e
ωδjωabc
z,y,xφC1c8ρωjt,z,y,xp ∑
∞
-
--
= += , (6.3)
Deduzida por Neves e Sousa [2]. A variável ωlmn (Hz) na expressão 6.3 representa as frequências
próprias do campo sonoro, as quais podem calculadas através de
222
0lmn cπn
bπm
al
πcω
+
+
= . (6.4)
f (Hz)
f (Hz)
)kg(F/µ 1−&&
)kg(F/µ 1−&&

71
1,0E-08
1,0E-07
1,0E-06
1,0E-05
1,0E-04
1,0E-03
1,0E-02
1,0E-01
1,0E+00
1 21 41 61 81 101 121 141 161 181 201 221
comp I - betão - câmara de ar comp I - betão - polietilenocomp I - betão - cortiça comp I - betão - neoprene
Os modos acústicos são descritos por funções de forma dadas por
=
c
zπncos
b
yπmcos
a
xπlcosφ . (6.5)
O factor Cmn tem em conta o acoplamento modal entre o pavimento e o espaço acústico e é calculado
através de
( )
( )( )( )[ ]( )[ ]∑
∞
--
---
--1n,m2
1
2
1
11
nnmm
22nm,II
22nm,I
00nm220
12
mn
11
11
1111
11
1n
n1
m
mnm
1111
ωωωω
z,yω
mπ
Fω4jC
=
++
′′= . (6.6)
Finalmente, o parâmetro δ = 6,9/Tr representa um coeficiente de absorção temporal dependente do
tempo de reverberação, Tr, o qual pode ser calculado pela equação (2.9).
O algoritmo de cálculo correspondente à equação (6.3), que se apresenta no Anexo III.3, foi utilizado
para estimar a função de transferência entre a força de impacto actuante sobre as diferentes soluções
de pavimento flutuante estudadas e a pressão sonora nos 3 compartimento analisados. A pressão
sonora foi avaliada num canto dos compartimentos a 40 cm de distância das superfícies,
considerando uma temperatura de 22,5 ºC, 50 % de humidade relativa e um coeficiente de absorção
sonora global de 0,02.
Nas Figuras 6.12 a 6.14 apresentam-se os espectros de Fourier da magnitude das funções de
transferência entre a força de impacto e a pressão sonora, obtidos nos compartimentos I a III para a
lajeta de betão leve assente sobre as camadas resilientes em estudo. As Figuras 6.15 a 6.17 referem-
se à utilização de placas de MDF como revestimento flutuante.
Figura 6.12 – Função de transferência entre a força de impacto aplicada nos pavimentos flutuantes com lajeta de
betão leve e a pressão sonora num canto do compartimento tipo I.
As Figuras 6.12 a 6.17 mostram que o campo sonoro é controlado pelas características modais dos
compartimentos, observando-se, no entanto uma correspondência entre os espectros das
f (Hz)
p/F (m-2)

72
acelerâncias dos pavimentos e os espectros da transmissão sonora. Assim, as pressões sonoras são
significativamente mais baixas para pavimentos flutuantes à base de câmaras-de-ar e
aproximadamente idênticas para as restantes soluções estudadas. Nos casos em que, por aplicação
dos sistemas de câmaras-de-ar, se registou a amplificação da aceleração dos pavimentos
relativamente à situação de laje não revestida, nomeadamente para frequências em torno dos 20 Hz,
foram também obtidas amplificações sonora significativas nessa gama de frequências.
1,0E-08
1,0E-07
1,0E-06
1,0E-05
1,0E-04
1,0E-03
1,0E-02
1,0E-01
1,0E+00
1 21 41 61 81 101 121 141 161 181 201 221
comp II - betão - câmara de ar comp II - betão - polietilenocomp II - betão - cortiça comp II - betão - neoprene
Figura 6.13 – Função de transferência entre a força de impacto aplicada nos pavimentos flutuantes com lajeta de
betão leve e a pressão sonora num canto do compartimento tipo II.
1,0E-08
1,0E-07
1,0E-06
1,0E-05
1,0E-04
1,0E-03
1,0E-02
1,0E-01
1,0E+00
1 21 41 61 81 101 121 141 161 181 201 221
comp III - betão - câmara de ar comp III - betão - polietileno
comp III - betão - cortiça comp III - betão - neoprene
Figura 6.14 – Função de transferência entre a força de impacto aplicada nos pavimentos flutuantes com lajeta de
betão leve e a pressão sonora num canto do compartimento tipo III.
f (Hz)
p/F (m-2)
p/F (m-2)
f (Hz)

73
1,0E-07
1,0E-06
1,0E-05
1,0E-04
1,0E-03
1,0E-02
1,0E-01
1,0E+00
1 21 41 61 81 101 121 141 161 181 201 221
comp I - MDF - câmara de ar comp I - MDF - polietilenocomp I - MDF - cortiça comp I - MDF - neoprene
Figura 6.15 – Função de transferência entre a força de impacto aplicada nos pavimentos flutuantes com placas
de MDF e a pressão sonora num canto do compartimento tipo I.
1,0E-07
1,0E-06
1,0E-05
1,0E-04
1,0E-03
1,0E-02
1,0E-01
1,0E+00
1 21 41 61 81 101 121 141 161 181 201 221
comp II - MDF - câmara de ar comp II - MDF - polietilenocomp II - MDF - cortiça comp II - MDF - neoprene
Figura 6.16 – Função de transferência entre a força de impacto aplicada nos pavimentos flutuantes com placas
de MDF e a pressão sonora num canto do compartimento tipo II.
p/F (m-2)
p/F (m-2)
f (Hz)
f (Hz)

74
1,0E-07
1,0E-06
1,0E-05
1,0E-04
1,0E-03
1,0E-02
1,0E-01
1,0E+00
1,0E+01
1 21 41 61 81 101 121 141 161 181 201 221
comp III - MDF - câmara de ar comp III - MDF - polietilenocomp III - MDF - cortiça comp III - MDF - neoprene
Figura 6.17 – Função de transferência entre a força de impacto aplicada nos pavimentos flutuantes com placas
de MDF e a pressão sonora num canto do compartimento tipo III.
p/F (m-2)
f (Hz)

75
7. CONCLUSÕES E TRABALHOS FUTUROS
7.1 Conclusões
O objectivo da presente dissertação era a definição de um sistema de pavimento flutuante eficiente
nas baixas frequências e, como tal, adaptável às condições de carga e às características geométricas
dos compartimentos onde serão instalados. Este objectivo foi cumprido com base numa proposta de
pavimento flutuante constituída por uma camada de revestimento de piso assente sobre um sistema
de câmaras-de-ar em pressão. Para efeitos de análise da viabilidade técnica da proposta, foram
considerados dois tipos de revestimento de piso (lajeta de betão leve e placa de MDF) e 108
combinações de propriedades das câmaras-de-ar.
Analisou-se o efeito da pressão instalada na câmara-de-ar, bem como do módulo de elasticidade e do
coeficiente do amortecimento da borracha. Foi efectuada uma análise numérica com base no método
dos elementos finitos para avaliação da rigidez dinâmica do sistema e do seu coeficiente de
amortecimento global. Observou-se que o coeficiente de amortecimento e a rigidez dinâmica do
sistema apresentam uma relação de proporcionalidade directa com as restantes propriedades. Como
se esperava, o coeficiente de amortecimento do sistema é inversamente proporcional à pressão
instalada, sendo esta relação tanto mais acentuada quanto maior for a espessura da borracha. Por
outro lado, a relação linear entre os coeficiente de amortecimento da borracha e do sistema é menos
acentuada para valores elevados da pressão instalada. A rigidez dinâmica do sistema é directamente
proporcional à espessura da borracha e à pressão instalada na câmara-de-ar, diminuindo
ligeiramente quando o coeficiente de amortecimento da borracha aumenta.
A solução de isolamento proposta foi comparada com outras soluções de pavimento flutuante
correntemente utilizadas na construção de edifícios. À semelhança do que ocorre na prática corrente,
consideraram-se propriedades médias para as soluções de pavimento flutuante correntes. No caso
dos pavimentos flutuantes à base de câmaras-de-ar, foram consideradas propriedades optimizadas
em função dos compartimentos em que o sistema seria instalado. Constatou-se que o sistema
proposto é muito eficiente do ponto de vista do isolamento antivibrático e sonoro, podendo, portanto,
ser utilizado como sistema semi-activo de isolamento. O sistema tem a vantagem de se adaptar ao
comportamento modal que os compartimentos exibem nas baixas frequências, permitindo também
alterações da utilização do edifício ao longo da sua vida útil, nomeadamente alterações da carga
estática instalada.
7.2 Recomendações para trabalhos futuros
O trabalho desenvolvido na presente dissertação carece de validação experimental, em particular, no
que se refere à determinação das propriedades dinâmicas das câmaras-de-ar. Assim, é importante
testar dinamicamente um conjunto de câmaras-de-ar com diferentes espessuras de borrachas e
diferentes valores de pressão instalada. Este teste é relativamente simples de efectuar.

76
Também é importante avaliar a viabilidade técnica e económica de aplicação desta solução na
construção de edifícios.

77
8. REFERÊNCIAS BIBLIOGRAFICAS
[1] Shi, W.; Johansson, C.; Sundback, U. (1967): An investigation of the characteristics of impact
sound sources for impact sound insulation measurement, Applied Acoustics, Vol. 51 (1), pp. 85-108;
[2] Neves e Sousa, A. (2005): Low frequency Impact Sound Transmission in Dwellings, Tese de
Doutoramento, The University of Liverpool;
[3] Kihlman, T. (1967): Sound radiation into a rectangular room. Applications to airborne sound
transmission in buildings, Acoustic, Vol.18 (1), pp. 11-20;
[4] Beranek, L.L., Vér, I.L. (1992): Noise and vibration control engineering: principles and applications,
John wiley & Sons, USA;
[5] Cremer, L.; Heckl, M.; Ungar, E.E. (1973): Structure-borne sound: structural vibrations and sound
radiation at audio frequencies - 2nd Edition, Springer-Verlag, Berlin, Germany;
[6] Hall, R. (1997): Impact sound insulation of flooring systems with polyurethane foam on concrete
floors, PhD Thesis, Sheffield Hallam University, Sheffield, UK;
[7] Kinsler, L.E.; Frey, A. R.; Coppens, A. B.; Sanders, J.V. (2000): Fundamentals of acoustics, 4th
Edition, John Wiley & Sons, North Carolina, USA;
[8] Persson, K.; Bjorkman, M., Rylander, R. (1990): Annoyance, loudness and dB(A) in evaluating low
frequency sounds, Proceedings of Inter-Noise 90, pp. 1319-1322, Gothenburg, Sweden;
[9] Kuttruff, H. (1991): Room Acoustics, Elsevier Applied Science, New York, USA;
[10] Stewart, M.A.; Craik, R. J. M. (2000): Impact sound transmission through a floating floor on a
concrete slab, Applied Acoustics, Vol. 59 (4), pp. 353-372;
[11] Norton, M. (1989): Fundamentals of noise and vibration analysis for engineers, Cambrige
University Press, UK;
[12] Oniszczuk, Z. (2000): Free transverse vibrations of an elastically connected rectangular simply
supported double-plate complex system, Journal of Sound and Vibration, Vol. 236 (4), pp. 595-608;
[13] Oniszczuk, Z. (2004): Forced transverse vibrations of an elastically complex rectangular simply
supported double-plate system, Journal of Sound and Vibration, Vol. 270 (4), pp.997-1011;

78
[14] Warburton, G.B. (1954): The vibration of rectangular plates, Proceedings of the institute of
Mechanical Eng., Ser. A, Vol. 168 (12), pp. 371-384;
[15] Leissa, A. (1993): Vibration of plates, Acoustical Society of America, Columbus, Ohio, USA;
[16] Fortes, M.A.; Rosa, M.E.; Pereira, H. (2004): A Cortiça, Ist Press, Lisboa, Portugal;
[17] Amorim Isolamentos S.A. (2000): Medição em laboratório da redução da transmissão de sons de
percussão de revestimentos de piso, LNEC, Lisboa;
[18] Barron, Randall (2001): Industrial noise control and acoustics, Marcell Dekker Inc, Louisiana Tech
University, Huston, Louisiana, USA;
[19] Crede, C.E.; Harris, C.M. (1961): Shock and vibration handbook – Volume I – Basic theory and
measurements, McGraw-Hill, USA;
[20] Computers and Structures Inc. (2005): Analysis Reference Manual for SAP2000 ADVANCED,
Berkeley, California, EUA;
[21] Munson, B.; Young, D.; Okiishi, T. (1994): Fundamentals of fluid mechanics – 2nd Edition, John
Wiley & Sons, New York, USA;
[22] Press, W.H., Teukolsky, S.A., Vetterling, W.T., Flannery, B.P. (1996): Numerical Recipes in
Fortran; Cambridge University Press, 2nd edition, UK;
[23] Pritz, T. (2002): Loss Factor Peak of Viscoelastic Materials; Acoustics Laboratory, Szikkti Labs,
Hungary;
[24] Bies, D.A.; Hansen, C. (2009): Engineering noise control: theory and practice; Taylor & Francis
Group; London;
[25] Cremer, L.; Heckl, M.; Petersson, B.A.T. (2005): Structure-borne sound: structural vibrations and
sound radiation at audio frequencies – 3rd Edition, Springer-Verlag, Berlin, Germany;
[26] Harris, C.; Peirsol, A. (2002): Harri’s shock and vibration handbook, 5th edition, McGraw-Hill, USA.
[26] Lohmar, E., Burak, G. (1989): Polyurethane soft foam with sound insulating and vibration damping
properties, U.S. Patent Documents, USA;

79
[N.1] RRAE - Regulamento dos Requisitos Acústicos dos Edifícios, Decreto-Lei n.º 129/2002,
de 11 de Maio, Diário da República – I Série-A;
[N.2] ISO 226 (2003): Normal equal-loudness-level contours signal description, International
Organisation for Standardisation;
[N.3] EN ISO 140-6 (1998): Acoustics: Measurement of sound insulation in buildings and of building
elements - Part 6: Laboratory measurements of impact sound insulation of floors, International
Organisation for Standardisation;
[N.4] EN ISO 140-7 (1998): Acoustics: Measurement of sound insulation in buildings and of building
elements - Part 7: Field measurements of impact sound insulation of floors, International Organisation
for Standardisation;
[N.5] EN ISO 12354-2 (2000): Building acoustics - Estimation of acoustic performance of buildings
from the performance of elements - Part 1: Impact sound insulation between rooms, International
Organisation for Standardisation;
[N.6] EN ISO 12354-1 (2000): Building acoustics - Estimation of acoustic performance of buildings
from the performance of elements - Part 1: Airborne sound insulation between rooms, International
Organisation for Standardisation
[N.7] EN ISO 140-8 (1998): Acoustics: Measurement of sound insulation in buildings and of building
elements - Part 8: Laboratory measurements of the reduction of transmitted impact noise by floor
coverings on a heavyweight standard floor, International Organisation for Standardisation;
[N.8] EN ISO 717-2 (1997): Acoustics - Rating of sound insulation in buildings and of building
elements: Part 2 - Impact sound insulation, International Organisation for Standardisation;
[N.9] RSA – Regulamento de Segurança e Acções para Estruturas de Edifícios e Pontes, Decreto-Lei
nº 235/83, de 31 de Maio, Diário da República;
[W.1] CDM, Customized Design of Mass-spring-systems - www.cdm.be
[W.2] Kinetics Noise Control – www.kineticsnoise.com
[W.3] Grupo Isocor - www.isocor.pt
[W.4] Grupo Amorim, Acousticork - www.acousticork.eu

80
[W.5] DOW Chemical Company - http://www.dow.com/
[W.6] Upofloor, Remppa - http://www.upofloor.com/
[W.7] Advanced Antivibration Components - www.vibrationmounts.com/
[W.8] Sotecnisol - http://www.sotecnisol.pt
[W.9] Modern Plastics Encyclopedia - www.maropolymeronline.com
[W.10] Aytac Bicer, Material Science - www.aytacbicer.com

81
eb (mm) Ear (Pa) Eb (Pa) µ (m) s0 (N/m) b (m) µmax (m) Nmáx (N) l lageta (m) lmdf (m)
4 2,00E-05 5,00E+04 4,5 0,0045 225,00 0,16 0,37
40 1,30E-05 7,69E+04 4,5 0,0045 346,15 0,25 0,57
75 1,10E-05 9,09E+04 4,5 0,0045 409,09 0,30 0,68
4 1,10E-05 9,09E+04 4,5 0,0045 409,09 0,30 0,68
40 7,52E-06 1,33E+05 4,5 0,0045 598,48 0,43 0,99
75 6,61E-06 1,51E+05 4,5 0,0045 681,20 0,49 1,12
4 5,48E-06 1,83E+05 4,5 0,0045 821,62 0,60 1,36
40 3,91E-06 2,55E+05 4,5 0,0045 1149,72 0,83 1,90
75 3,47E-06 2,89E+05 4,5 0,0045 1298,33 0,94 2,14
4 3,25E-06 3,08E+05 4,5 0,0045 1385,04 1,00 2,29
40 2,44E-06 4,10E+05 4,5 0,0045 1844,26 1,34 3,04
75 2,18E-06 4,59E+05 4,5 0,0045 2064,22 1,50 3,41
4 9,90E-06 1,01E+05 4,5 0,0045 454,36 0,33 0,75
40 4,54E-06 2,20E+05 4,5 0,0045 991,63 0,72 1,64
75 3,23E-06 3,10E+05 4,5 0,0045 1394,48 1,01 2,30
4 5,99E-06 1,67E+05 4,5 0,0045 751,50 0,54 1,24
40 3,03E-06 3,30E+05 4,5 0,0045 1484,17 1,08 2,45
75 2,34E-06 4,28E+05 4,5 0,0045 1923,90 1,39 3,18
4 3,33E-06 3,00E+05 4,5 0,0045 1349,73 0,98 2,23
40 1,76E-06 5,70E+05 4,5 0,0045 2564,10 1,86 4,23
75 1,44E-06 6,95E+05 4,5 0,0045 3129,35 2,27 5,17
4 2,22E-06 4,51E+05 4,5 0,0045 2027,94 1,47 3,35
40 1,16E-06 8,59E+05 4,5 0,0045 3865,98 2,80 6,38
75 9,72E-07 1,03E+06 4,5 0,0045 4630,11 3,36 7,64
4 6,34E-06 1,58E+05 4,5 0,0045 709,33 0,51 1,17
40 1,58E-06 6,34E+05 4,5 0,0045 2851,71 2,07 4,71
75 9,27E-07 1,08E+06 4,5 0,0045 4853,85 3,52 8,01
4 4,20E-06 2,38E+05 4,5 0,0045 1072,71 0,78 1,77
40 1,33E-06 7,55E+05 4,5 0,0045 3396,23 2,46 5,61
75 8,31E-07 1,20E+06 4,5 0,0045 5417,12 3,93 8,94
4 2,56E-06 3,91E+05 4,5 0,0045 1761,25 1,28 2,91
40 9,65E-07 1,04E+06 4,5 0,0045 4663,70 3,38 7,70
75 6,65E-07 1,50E+06 4,5 0,0045 6765,90 4,90 11,17
4 1,82E-06 5,49E+05 4,5 0,0045 2472,53 1,79 4,08
40 7,19E-07 1,39E+06 4,5 0,0045 6256,95 4,53 10,33
75 5,27E-07 1,90E+06 4,5 0,0045 8532,42 6,18 14,08
8,0
4,5
2,0
8,0
4,5
2,0
1,0
5
1,0
8,0
2,0
3
1,0
4,5
1
ANEXOS Anexo I – Cálculo de s (N/m) e w s (m) para pavimentos flutuantes constituídos por la jeta de
betão ou MDF.

82

83
P (Atm) Eb (MPa) ξ (%)
5 6,83E-03 146,51 0,13 0,08 100,73 0,21
12,5 6,83E-03 146,51 0,13 0,08 100,73 0,21
20 6,83E-03 146,51 0,13 0,08 100,73 0,21
5 5,45E-03 183,55 0,13 0,15 100,43 0,28
12,5 5,45E-03 183,55 0,13 0,15 100,43 0,28
20 5,45E-03 183,55 0,13 0,15 100,43 0,28
5 5,08E-03 196,77 0,13 0,18 99,82 0,31
12,5 5,08E-03 196,77 0,13 0,18 99,82 0,3120 5,08E-03 196,77 0,13 0,18 99,82 0,31
5 5,10E-03 195,95 0,13 0,18 101,49 0,31
12,5 5,10E-03 195,95 0,13 0,18 101,49 0,31
20 5,10E-03 195,95 0,13 0,18 101,49 0,31
5 4,14E-03 241,36 0,13 0,29 101,07 0,42
12,5 4,14E-03 241,36 0,13 0,29 101,07 0,42
20 4,14E-03 241,36 0,13 0,29 101,07 0,42
5 3,88E-03 257,79 0,13 0,33 101,71 0,46
12,5 3,88E-03 257,79 0,13 0,33 101,71 0,4620 3,88E-03 257,79 0,13 0,33 101,71 0,46
5 3,60E-03 277,77 0,13 0,42 100,59 0,55
12,5 3,60E-03 277,77 0,13 0,42 100,59 0,55
20 3,60E-03 277,77 0,13 0,42 100,59 0,55
5 2,99E-03 334,09 0,13 0,6 100,75 0,73
12,5 2,99E-03 334,09 0,13 0,6 100,75 0,73
20 2,99E-03 334,09 0,13 0,6 100,75 0,73
5 2,81E-03 355,39 0,13 0,68 100,87 0,81
12,5 2,81E-03 355,39 0,13 0,68 100,87 0,8120 2,81E-03 355,39 0,13 0,68 100,87 0,81
5 2,79E-03 357,98 0,13 0,75 99,58 0,88
12,5 2,79E-03 357,98 0,13 0,75 99,58 0,88
20 2,79E-03 357,98 0,13 0,75 99,58 0,88
5 2,37E-03 422,50 0,13 0,99 100,57 1,12
12,5 2,37E-03 422,50 0,13 0,99 100,57 1,12
20 2,37E-03 422,50 0,13 0,99 100,57 1,12
5 2,23E-03 447,72 0,13 1,12 100,21 1,25
12,5 2,23E-03 447,72 0,13 1,12 100,21 1,2520 2,23E-03 447,72 0,13 1,12 100,21 1,25
m0 (kg) ∆m (kg) F0 corrigido (Hz) m t (kg)CASO
Periodo (s -1) F0 (Hz)
1 mm
75
1
4,5
8
4
40
75
2
4
4
40
75
40
40
75
4
Anexo II.1 – output das simulações com espessura de borracha igual a 1mm e respectiva calibração de
massa.
f0 µmax ξ s
P (Atm) Eb (MPa) ξ (%) Hz m - N/m
5 100,586 1,1207E-03 6,0194E-02 8,14376E+0412,5 100,488 8,0224E-04 8,4062E-02 8,12796E+0420 100,293 6,2509E-04 1,0906E-01 8,09639E+04
5 100,293 7,0475E-04 6,2804E-02 1,08761E+05
12,5 100,098 4,7432E-04 9,3659E-02 1,08338E+05
20 99,902 3,5774E-04 1,2512E-01 1,07915E+055 99,707 6,1034E-04 6,3173E-02 1,19268E+05
12,5 99,512 4,0537E-04 9,5682E-02 1,18801E+0520 99,316 3,0378E-04 1,2881E-01 1,18335E+05
5 101,367 6,4175E-04 5,9249E-02 1,23273E+05
12,5 101,270 4,7988E-04 7,9556E-02 1,23035E+05
20 101,172 3,8347E-04 9,9421E-02 1,22798E+055 100,977 4,0540E-04 6,1896E-02 1,66603E+05
12,5 100,781 2,7453E-04 9,2539E-02 1,65959E+0520 100,586 2,0776E-04 1,2330E-01 1,65317E+05
5 101,563 3,5221E-04 6,2019E-02 1,84831E+05
12,5 101,367 2,3605E-04 9,3931E-02 1,84121E+05
20 101,172 1,7770E-04 1,2548E-01 1,83412E+05
5 100,488 3,2034E-04 5,7337E-02 2,16820E+0512,5 100,391 2,5291E-04 7,2957E-02 2,16399E+0520 100,293 2,0901E-04 8,8608E-02 2,15978E+05
5 100,586 2,1186E-04 6,2136E-02 2,89138E+05
12,5 100,488 1,4601E-04 9,0379E-02 2,88577E+05
20 100,293 1,1141E-04 1,1831E-01 2,87456E+055 100,781 1,8539E-04 6,2016E-02 3,22340E+05
12,5 100,586 1,2561E-04 9,2233E-02 3,21092E+0520 100,391 9,5022E-05 1,2257E-01 3,19846E+05
5 99,512 1,9266E-04 5,6428E-02 3,41636E+05
12,5 99,414 1,5754E-04 6,8762E-02 3,40966E+05
20 99,316 1,3328E-04 8,2104E-02 3,40296E+055 100,488 1,3347E-04 6,0739E-02 4,44050E+05
12,5 100,293 9,4155E-05 8,6173E-02 4,42326E+0520 100,098 7,2796E-05 1,1317E-01 4,40604E+05
5 100,098 1,1754E-04 6,1463E-02 4,92027E+05
12,5 99,902 8,0740E-05 8,9932E-02 4,90108E+05
20 99,707 6,1571E-05 1,1949E-01 4,88194E+05
CASO
4,5
4
40
75
8
4
40
75
1 mm
2
4
40
75
1
4
40
75

84

85
P (Atm) Eb (MPa) ξ (%)5 7,72E-03 129,53 0,35 0,12 100,87 0,47
12,5 7,72E-03 129,53 0,35 0,12 100,87 0,4720 7,72E-03 129,53 0,35 0,12 100,87 0,475 5,15E-03 194,17 0,35 0,42 100,53 0,77
12,5 5,15E-03 194,17 0,35 0,42 100,53 0,7720 5,15E-03 194,17 0,35 0,42 100,53 0,775 4,32E-03 231,48 0,35 0,64 100,78 0,99
12,5 4,32E-03 231,48 0,35 0,64 100,78 0,9920 4,32E-03 231,48 0,35 0,64 100,78 0,99
5 7,68E-03 130,21 0,35 0,3 100,58 0,6512,5 7,68E-03 130,21 0,35 0,3 100,58 0,6520 7,68E-03 130,21 0,35 0,3 100,58 0,655 5,55E-03 180,34 0,35 0,7 100,48 1,05
12,5 5,55E-03 180,34 0,35 0,7 100,48 1,0520 5,55E-03 180,34 0,35 0,7 100,48 1,055 4,88E-03 204,88 0,35 1 97,91 1,35
12,5 4,88E-03 204,88 0,35 1 97,91 1,3520 4,88E-03 204,88 0,35 1 97,91 1,35
5 4,53E-03 220,75 0,35 0,64 100,76 0,9912,5 4,53E-03 220,75 0,35 0,64 100,76 0,9920 4,53E-03 220,75 0,35 0,64 100,76 0,995 3,24E-03 308,64 0,35 1,4 97,44 1,75
12,5 3,24E-03 308,64 0,35 1,4 97,44 1,7520 3,24E-03 308,64 0,35 1,4 97,44 1,755 2,92E-03 342,47 0,35 1,6 101,08 1,95
12,5 2,92E-03 342,47 0,35 1,6 101,08 1,9520 2,92E-03 342,47 0,35 1,6 101,08 1,95
5 3,73E-03 268,10 0,35 1,1 97,41 1,4512,5 3,73E-03 268,10 0,35 1,1 97,41 1,4520 3,73E-03 268,10 0,35 1,1 97,41 1,455 2,64E-03 378,21 0,35 2 101,45 2,35
12,5 2,64E-03 378,21 0,35 2 101,45 2,3520 2,64E-03 378,21 0,35 2 101,45 2,355 2,41E-03 415,11 0,35 2,5 99,76 2,85
12,5 2,41E-03 415,11 0,35 2,5 99,76 2,8520 2,41E-03 415,11 0,35 2,5 99,76 2,85
3 mmCASO
Periodo (s -1) F0 (Hz) m0 (kg) ∆m (kg) F0 corrigido (Hz) m t (kg)
2
4
40
75
40
75
4
40
75
1
4,5
8
4
40
75
4
f0 µmax ξ s
P (Atm) Eb (MPa) ξ (%) Hz m - N/m
5 100,68 8,5896E-04 6,5470E-02 1,8802E+05
12,5 100,49 5,3716E-04 1,0544E-01 1,8729E+05
20 100,20 3,9139E-04 1,4620E-01 1,8620E+05
5 100,29 3,3411E-04 7,5949E-02 3,0569E+05
12,5 99,80 1,7312E-04 1,5020E-01 3,0272E+05
20 98,93 1,1735E-04 2,2754E-01 2,9741E+05
5 100,59 2,1665E-04 8,3010E-02 3,9535E+05
12,5 99,71 1,0350E-04 1,7875E-01 3,8848E+05
20 98,34 6,8484E-05 2,8352E-01 3,7789E+05
5 100,49 5,2927E-04 6,5598E-02 2,5905E+05
12,5 100,20 3,2987E-04 1,0624E-01 2,5754E+05
20 99,90 2,3987E-04 1,4712E-01 2,5603E+05
5 100,29 2,4110E-04 7,0594E-02 4,1688E+05
12,5 100,00 1,3654E-04 1,2598E-01 4,1445E+05
20 99,41 9,5507E-05 1,8369E-01 4,0961E+05
5 97,75 1,7384E-04 7,5425E-02 5,0921E+05
12,5 97,17 9,0674E-05 1,4724E-01 5,0313E+05
20 96,39 6,1625E-05 2,2290E-01 4,9507E+05
5 100,59 2,8683E-04 6,6505E-02 3,9535E+05
12,5 100,39 1,7583E-04 1,0895E-01 3,9382E+05
20 100,00 1,2696E-04 1,5332E-01 3,9076E+05
5 97,27 1,4781E-04 6,6767E-02 6,5354E+05
12,5 97,07 8,9407E-05 1,1167E-01 6,5091E+05
20 96,68 6,4186E-05 1,5808E-01 6,4569E+05
5 100,88 1,1454E-04 6,9216E-02 7,8334E+05
12,5 100,59 6,5969E-05 1,2184E-01 7,7880E+05
20 100,00 4,6445E-05 1,7676E-01 7,6975E+05
5 97,27 1,8828E-04 6,7269E-02 5,4149E+05
12,5 96,97 1,1274E-04 1,1380E-01 5,3823E+05
20 96,58 8,0603E-05 1,6127E-01 5,3390E+05
5 101,27 9,7355E-05 6,6056E-02 9,5137E+05
12,5 101,07 5,9930E-05 1,0870E-01 9,4771E+05
20 100,68 4,3370E-05 1,5179E-01 9,4039E+05
5 99,61 8,0283E-05 6,7157E-02 1,1163E+06
12,5 99,32 4,8329E-05 1,1259E-01 1,1097E+06
20 98,93 3,4610E-05 1,5992E-01 1,1010E+06
CASO
2
4
40
75
1
4
40
75
3 mm
8
4
40
75
4,5
4
40
75
Anexo II.2 – output das simulações com espessura de borracha igual a 3mm e respectiva calibração de massa.

86

87
P (Atm) Eb (MPa) ξ (%)5 7,63E-03 131,10 0,54 0,19 100,14 0,73
12,5 7,63E-03 131,10 0,54 0,19 100,14 0,7320 7,63E-03 131,10 0,54 0,19 100,14 0,735 3,77E-03 265,53 0,54 1,4 99,99 1,94
12,5 3,77E-03 265,53 0,54 1,4 99,99 1,9420 3,77E-03 265,53 0,54 1,4 99,99 1,945 2,88E-03 346,74 0,54 2,5 100,49 3,04
12,5 2,88E-03 346,74 0,54 2,5 100,49 3,0420 2,88E-03 346,74 0,54 2,5 100,49 3,04
5 8,08E-03 123,76 0,54 0,45 97,05 0,9912,5 8,08E-03 123,76 0,54 0,45 97,05 0,9920 8,08E-03 123,76 0,54 0,45 97,05 0,995 4,60E-03 217,44 0,54 1,7 100,26 2,24
12,5 4,60E-03 217,44 0,54 1,7 100,26 2,2420 4,60E-03 217,44 0,54 1,7 100,26 2,245 3,65E-03 274,27 0,54 2,8 100,75 3,34
12,5 3,65E-03 274,27 0,54 2,8 100,75 3,3420 3,65E-03 274,27 0,54 2,8 100,75 3,34
5 4,91E-03 203,58 0,54 0,85 98,33 1,3912,5 4,91E-03 203,58 0,54 0,85 98,33 1,3920 4,91E-03 203,58 0,54 0,85 98,33 1,395 2,96E-03 337,84 0,54 2,4 100,56 2,94
12,5 2,96E-03 337,84 0,54 2,4 100,56 2,9420 2,96E-03 337,84 0,54 2,4 100,56 2,945 2,45E-03 408,00 0,54 3,6 100,11 4,14
12,5 2,45E-03 408,00 0,54 3,6 100,11 4,1420 2,45E-03 408,00 0,54 3,6 100,11 4,14
5 4,19E-03 238,78 0,54 1,3 97,44 1,8412,5 4,19E-03 238,78 0,54 1,3 97,44 1,8420 4,19E-03 238,78 0,54 1,3 97,44 1,845 2,57E-03 389,86 0,54 3,3 100,47 3,84
12,5 2,57E-03 389,86 0,54 3,3 100,47 3,8420 2,57E-03 389,86 0,54 3,3 100,47 3,845 2,19E-03 457,04 0,54 4,6 100,08 5,14
12,5 2,19E-03 457,04 0,54 4,6 100,08 5,1420 2,19E-03 457,04 0,54 4,6 100,08 5,14
5 mmCASO
Periodo (s -1) F0 (Hz) m0 (kg) ∆m (kg) F0 corrigido (Hz) m t (kg)
2
4
40
75
75
4
40
75
4
40
75
1
4,5
8
4
40
f0 µmax ξ s
P (Atm) Eb (MPa) ξ (%) Hz m - N/m
5 100,00 6,7992E-04 7,3242E-02 2,9239E+05
12,5 99,51 3,6832E-04 1,3690E-01 2,8954E+05
20 98,93 2,5323E-04 2,0336E-01 2,8614E+05
5 99,71 1,2908E-04 9,3046E-02 7,6557E+05
12,5 98,44 5,6452E-05 2,2272E-01 7,4620E+05
20 96,09 3,6588E-05 3,7348E-01 7,1109E+05
5 100,20 7,2170E-05 9,6979E-02 1,2090E+06
12,5 98,63 3,0660E-05 2,4059E-01 1,1716E+06
20 95,80 1,9793E-05 4,1386E-01 1,1053E+06
5 96,88 4,7345E-04 7,1069E-02 3,7073E+05
12,5 96,58 2,6450E-04 1,2892E-01 3,6849E+05
20 96,00 1,8393E-04 1,8871E-01 3,6403E+05
5 100,00 1,1570E-04 8,6426E-02 8,8851E+05
12,5 99,02 5,3174E-05 1,9576E-01 8,7124E+05
20 97,27 3,4856E-05 3,1827E-01 8,4059E+05
5 100,49 6,7647E-05 9,2323E-02 1,3357E+06
12,5 99,12 2,9687E-05 2,2020E-01 1,2996E+06
20 96,88 1,9260E-05 3,6996E-01 1,2414E+06
5 98,14 2,8156E-04 7,2139E-02 5,32617E+05
12,5 97,85 1,5570E-04 1,3124E-01 5,2944E+05
20 97,27 1,0790E-04 1,9277E-01 5,2312E+05
5 100,39 9,2267E-05 7,9280E-02 1,1740E+06
12,5 99,71 4,5991E-05 1,6210E-01 1,1580E+06
20 98,63 3,0801E-05 2,5099E-01 1,1332E+06
5 99,90 5,8950E-05 8,5533E-02 1,6354E+06
12,5 98,93 2,7549E-05 1,8855E-01 1,6036E+06
20 97,36 1,8108E-05 3,0291E-01 1,5533E+06
5 97,27 5,0635E-05 7,3795E-02 6,9119E+05
12,5 96,78 2,7267E-05 1,3925E-01 6,8427E+05
20 96,19 7,1868E-05 2,0711E-01 6,7601E+05
5 100,29 1,9557E-05 7,4976E-02 1,5291E+06
12,5 99,71 1,0332E-05 1,4496E-01 1,5113E+06
20 98,93 7,0463E-06 2,1816E-01 1,4877E+06
5 99,90 4,9912E-05 7,9668E-02 2,0294E+06
12,5 99,22 2,4748E-05 1,6486E-01 2,0017E+06
20 98,05 1,6533E-05 2,5697E-01 1,9547E+06
CASO5 mm
2
4
40
75
4
40
75
1
4,5
4
40
75
8
4
40
75
Anexo II.3 – Output das simulações com espessura de borracha igual a 1mm e respectiva calibração de
massa.

88

89
Anexo III.1 – Código fonte em linguagem Visual Basi c para cálculo da acelerância no caso da
laje não revestida
Este programa, desenvolvido por Neves e Sousa [2], constitui o algoritmo de cálculo da expressão
( )( ) ( )
( )∑∞
−+′′=
11 11
1111
n,m2
22
nm
00nmnm
2x
ωηj1ω
z,yφz,yφ
bcmFω4
jz,yV .
b = ym * (t ^ 3) / 12 / (1 - (pr ^ 2)) mass = ro * t cpi = 3.14159265358979 testfi = 0 testfj = 0 i = 0 j = 0 Do While testfi = 0 i = i + 1 Do While (testfj < (fscale * mf)) j = j + 1 testfj = (Sqr(b / mass) * ((i * cpi / ly) ^ 2 + (j * cpi / lz) ^ 2)) / 2 / cpi Loop nmodesf(i) = j - 1 If nmodesf(i) = 0 Then testfi = 1 j = 0 testfj = 0 Loop nlines = i - 1 nmodesft = 0 For i = 1 To nlines For j = 1 To nmodesf(i) wf = Sqr(b / mass) * ((i * cpi / ly) ^ 2 + (j * cpi / lz) ^ 2) ff(i, j) = wf / 2 / cpi nmodesft = nmodesft + 1 Next j Next i nmodesftcount = 0 fmax = 0 fmin = 0 rep = 0 Do While (nmodesftcount < nmodesft) nmodesftcount = nmodesftcount + 1 fmax = fscale * mf For i = 1 To nlines For j = 1 To nmodesf(i) If (ff(i, j) <= fmax And ff(i, j) > fmin) Then fmax = ff(i, j) ny = i nz = j End If

90
Next j Next i fmin = fmax fford(nmodesftcount, 1) = ny fford(nmodesftcount, 2) = nz fford(nmodesftcount, 3) = fmax fford(nmodesftcount, 4) = 2 * cpi * fmax c = 331.5 * Sqr(1 + teta / 273.15) testfi = 0 testfj = 0 testfk = 0 i = 0 j = 0 k = 0 Do While (testfi = 0) Do While (testfj = 0) Do While (testfk < fscale * mf) testfk = c * Sqr((k * cpi / lx) ^ 2 + (i * cpi / ly) ^ 2 + (j * cpi / lz) ^ 2) / 2 / cpi k = k + 1 Loop nmodesr(i + 1, j + 1) = k - 1 If nmodesr(i + 1, j + 1) = 0 Then testfj = 1 If j = 0 Then testfi = 1 End If k = 0 testfk = 0 j = j + 1 Loop nmodesrj(i + 1) = j - 1 j = 0 testfj = 0 i = i + 1 Loop nlines = i - 1 nmodesrt = 0 For i = 1 To nlines For j = 1 To nmodesrj(i) For k = 1 To nmodesr(i, j) wr = c * Sqr(((k - 1) * cpi / lx) ^ 2 + ((i - 1) * cpi / ly) ^ 2 + ((j - 1) * cpi / lz) ^ 2) fr(k, i, j) = wr / 2 / cpi nmodesrt = nmodesrt + 1 Next k Next j Next i nmodesrt = nmodesrt - 1 nmodesrtcount = 0 fmax = 0 fmin = 0 Do While (nmodesrtcount < nmodesrt)
91
nmodesrtcount = nmodesrtcount + 1 fmax = fscale * mf For i = 1 To nlines For j = 1 To nmodesrj(i) For k = 1 To nmodesr(i, j) If (fr(k, i, j) <= fmax And fr(k, i, j) > fmin) Then fmax = fr(k, i, j) nx = k - 1 ny = i - 1 nz = j - 1 End If Next k Next j Next i fmin = fmax frord(nmodesrtcount, 1) = nx frord(nmodesrtcount, 2) = ny frord(nmodesrtcount, 3) = nz frord(nmodesrtcount, 4) = fmax frord(nmodesrtcount, 5) = fmax * 2 * cpi Loop rs = 2 * (lx * ly + ly * lz + lz * lx) rv = lx * ly * lz rt = 0.161 * rv / rs / alfa delta = 6.9 / rt pw = rh * 610.5 * Exp(17.269 * teta / (237.3 + teta)) roa = (101325 - pw) / 287 / (273.15 + teta) + pw / 461 / (273.15 + teta) For i = fstart To mf lf = 1 / Sqr(i) + rlf ' lf = 0 npoints = 0 ReSP = 0 ImSP = 0 For m = 1 To nmodesrt ReB = 0 ImB = 0 For n = 1 To nmodesft If fford(n, 1) = frord(m, 2) Then ReBadd = 0 ImBadd = 0 ElseIf fford(n, 2) = frord(m, 3) Then ReBadd = 0 ImBadd = 0 Else ReBnum = (((-1) ^ (fford(n, 1) + frord(m, 2))) - 1) * (((-1) ^ (fford(n, 2) + frord(m, 3))) - 1) * Sin(fford(n, 1) * cpi * yf / ly) * Sin(fford(n, 2) * cpi * zf / lz) * (fford(n, 4) ^ 2) Bden = fford(n, 1) * fford(n, 2) * (cpi ^ 2) / ly / lz * (((frord(m, 2) / fford(n, 1)) ^ 2) - 1) * (((frord(m, 3) / fford(n, 2)) ^ 2) - 1) * ((((fford(n, 4) ^ 2) - ((2 * cpi * i) ^ 2)) ^ 2) + (lf ^ 2) * (fford(n, 4) ^ 4)) ReBadd = ReBnum / Bden

92
ImBnum = (((-1) ^ (fford(n, 1) + frord(m, 2))) - 1) * (((-1) ^ (fford(n, 2) + frord(m, 3))) - 1) * Sin(fford(n, 1) * cpi * yf / ly) * Sin(fford(n, 2) * cpi * zf / lz) * ((fford(n, 4) ^ 2) - ((2 * cpi * i) ^ 2)) ImBadd = ImBnum / Bden End If ReB = ReB + ReBadd ImB = ImB + ImBadd Next n ReB = 4 * (2 * cpi * i) * lf * fint / mass / ly / lz * ReB ImB = 4 * (2 * cpi * i) * fint / mass / ly / lz * ImB filmn = Cos(frord(m, 1) * cpi * coord(1) / lx) * Cos(frord(m, 2) * cpi * coord(2) / ly) * Cos(frord(m, 3) * cpi * coord(3) / lz) ReSPnum = ((-1) ^ frord(m, 1)) * (2 * delta * frord(m, 5) * ReB - ((frord(m, 5) ^ 2) - ((2 * cpi * i) ^ 2) - (delta ^ 2)) * ImB) * filmn SPden = (((frord(m, 5) ^ 2) - ((2 * cpi * i) ^ 2) - (delta ^ 2)) ^ 2) + 4 * (delta ^ 2) * (frord(m, 5) ^ 2) ReSPadd = ReSPnum / SPden ReSP = ReSP + ReSPadd ImSPnum = ((-1) ^ frord(m, 1)) * (2 * delta * frord(m, 5) * ImB + ((frord(m, 5) ^ 2) - ((2 * cpi * i) ^ 2) - (delta ^ 2)) * ReB) * filmn ImSPadd = ImSPnum / SPden ImSP = ImSP + ImSPadd Next m ReSP = 8 * (2 * cpi * i) * roa * (c ^ 2) / lx / ly / lz * ReSP ImSP = 8 * (2 * cpi * i) * roa * (c ^ 2) / lx / ly / lz * ImSP MagSP = Sqr((ReSP ^ 2) + (ImSP ^ 2)) PhaSP = (Atn(ImSP / ReSP)) * 180 / cpi Next i Label1.Caption = "Program finished." End Sub

93
Anexo III.2 – Código fonte em linguagem Visual Basi c para cálculo da mobilidade no caso de
pavimento flutuante
Private Sub Command1_Click()
b1 = ym1 * (t1 ^ 3) / 12 / (1 - (pr1 ^ 2))
b2 = ym2 * (t2 ^ 3) / 12 / (1 - (pr2 ^ 2))
mass1 = ro1 * t1
cpi = 3.14159265358979
w10 = s / mass1
w20 = s / mass2
testfi = 0
testfj = 0
i = 0
j = 0
Do While testfi = 0
i = i + 1
Do While (testfj < (fscale * mf))
j = j + 1
testfj = (Sqr(b2 / mass2) * ((i * cpi / ly) ^ 2 + (j * cpi / lz) ^ 2)) / 2 / cpi
Loop
nmodesf(i) = j - 1
If nmodesf(i) = 0 Then testfi = 1
j = 0
testfj = 0
Loop
nlines = i - 1
nmodesft2 = 0
For i = 1 To nlines
For j = 1 To nmodesf(i)
wf = Sqr(b2 / mass2) * ((i * cpi / ly) ^ 2 + (j * cpi / lz) ^ 2)
ff(i, j) = wf / 2 / cpi
nmodesft2 = nmodesft2 + 1
Next j
Next i
nmodesftcount = 0
94
fmax = 0
fmin = 0
Do While (nmodesftcount < nmodesft2)
nmodesftcount = nmodesftcount + 1
fmax = fscale * mf
For i = 1 To nlines
For j = 1 To nmodesf(i)
If (ff(i, j) <= fmax And ff(i, j) > fmin) Then
fmax = ff(i, j)
ny = i
nz = j
End If
Next j
Next i
fmin = fmax
fford2(nmodesftcount, 1) = ny
fford2(nmodesftcount, 2) = nz
fford2(nmodesftcount, 3) = fmax
fford2(nmodesftcount, 4) = 2 * cpi * fmax
Loop
For i = 1 To nmodesft2
For j = 1 To 3
ressh.Cells(i, j) = fford2(i, j)
Next j
Next i
' acabou o cálculo, ordenação e escrita das frequências do pavimento de base
' começa a contabilização das frequências próprias do revestimento
i = 0
j = 0
nmodesft1 = 0
For i = 1 To nmodesrev

95
For j = 1 To nmodesrev
nmodesft1 = nmodesft1 + 1
If i = 1 Then
k11 = 1.506
k21 = 1.248
k31 = 5.017
ElseIf i > 1 Then
k11 = i + 0.5
k21 = (i + 0.5) ^ 2 * (1 - 2 / cpi / (i + 0.5))
k31 = (i + 0.5) ^ 2 * (1 + 6 / cpi / (i + 0.5))
End If
If j = 1 Then
k12 = 1.506
k22 = 1.248
k32 = 5.017
ElseIf j > 1 Then
k12 = j + 0.5
k22 = (j + 0.5) ^ 2 * (1 - 2 / cpi / (j + 0.5))
k32 = (j + 0.5) ^ 2 * (1 + 6 / cpi / (j + 0.5))
End If
fford1(nmodesft1, 1) = i
fford1(nmodesft1, 2) = j
fford1(nmodesft1, 3) = cpi ^ 2 * Sqr((b1 / mass1) * (k11 ^ 4 / ly ^ 4 + 2 * (pr1 * k21 * k22 + (1 - pr1) * k31 * k32) / ly ^ 2 /
lz ^ 2 + k12 ^ 4 / lz ^ 4)) / 2 / cpi
fford1(nmodesft1, 4) = (Sqr(b2 / mass2) * ((i * cpi / ly) ^ 2 + (j * cpi / lz) ^ 2)) / 2 / cpi
fford1(nmodesft1, 5) = 2 * cpi * fford1(nmodesft1, 3)
fford1(nmodesft1, 6) = 2 * cpi * fford1(nmodesft1, 4)
Next j
Next i
For i = 1 To 2
coord(i) = datash.Cells(16 + i, 2)
Next i
96
Next i
For i = fstart To mf
lf1 = 1 / Sqr(i) + rlf1
lf2 = 1 / Sqr(i) + rlf2
lf0 = rlf0
npoints = 0
ReV = 0
ImV = 0
For n = 1 To nmodesft1
AuxA = -((fford1(n, 5) ^ 2) * lf1 + (fford1(n, 6) ^ 2) * lf2 + (w10 + w20) * lf0) * (2 * cpi * i) ^ 2
AuxB = w20 * (fford1(n, 5) ^ 2) * (lf0 + lf1) + (fford1(n, 5) ^ 2) * (fford1(n, 6) ^ 2) * (lf1 + lf2) + (fford1(n, 6) ^ 2) * w10 * (lf2
+ lf0)
ReVnum = Sin(fford1(n, 1) * cpi * coord(1) / ly) * Sin(fford1(n, 2) * cpi * coord(2) / lz) * Sin(fford1(n, 1) * cpi * yf / ly) *
Sin(fford1(n, 2) * cpi * zf / lz) * w20 * (AuxA + AuxB)
AuxC = -((fford1(n, 5) ^ 2) + (fford1(n, 6) ^ 2) + w10 + w20) * (2 * cpi * i) ^ 2
AuxD = w20 * (fford1(n, 5) ^ 2) * (1 - lf0 * lf1) + (fford1(n, 5) ^ 2) * (fford1(n, 6) ^ 2) * (1 - lf1 * lf2) + (fford1(n, 6) ^ 2) * w10
* (1 - lf2 * lf0)
Vden = ((2 * cpi * i) ^ 4 + AuxC + AuxD) ^ 2 + (AuxA + AuxB) ^ 2
ReVadd = ReVnum / Vden
ImVnum = Sin(fford1(n, 1) * cpi * coord(1) / ly) * Sin(fford1(n, 2) * cpi * coord(2) / lz) * Sin(fford1(n, 1) * cpi * yf / ly) *
Sin(fford1(n, 2) * cpi * zf / lz) * w20 * ((2 * cpi * i) ^ 4 + AuxC + AuxD)
ImVadd = ImVnum / Vden
ReV = ReV + ReVadd
ImV = ImV + ImVadd
Next n
ReV = 4 * (2 * cpi * i) * fint / mass1 / ly / lz * ReV
ImV = 4 * (2 * cpi * i) * fint / mass1 / ly / lz * ImV
MagV = Sqr((ReV ^ 2) + (ImV ^ 2))
PhaV = (Atn(ImV / ReV)) * 180 / cpi
ReA = -(2 * cpi * i) * ImV
ImA = (2 * cpi * i) * ReV
MagA = Sqr((ReA ^ 2) + (ImA ^ 2))
PhaA = (Atn(ImA / ReA)) * 180 / cpi
Next i
Label1.Caption = "Program finished."
End Sub

97
Anexo III.3 – Código fonte em linguagem Visual Basi c para cálculo da pressão sonora no
compartimento
Private Sub Command1_Click()
b1 = ym1 * (t1 ^ 3) / 12 / (1 - (pr1 ^ 2))
b2 = ym2 * (t2 ^ 3) / 12 / (1 - (pr2 ^ 2))
mass1 = ro1 * t1
mass2 = ro2 * t2
cpi = 3.14159265358979
w10 = s / mass1
w20 = s / mass2
i = 0
j = 0
nmodesft = 0
For i = 1 To nmodesrev
For j = 1 To nmodesrev
nmodesft = nmodesft + 1
If i = 1 Then
k11 = 1.506
k21 = 1.248
k31 = 5.017
ElseIf i > 1 Then
k11 = i + 0.5
k21 = (i + 0.5) ^ 2 * (1 - 2 / cpi / (i + 0.5))
k31 = (i + 0.5) ^ 2 * (1 + 6 / cpi / (i + 0.5))
End If
If j = 1 Then
k12 = 1.506
k22 = 1.248
k32 = 5.017
ElseIf j > 1 Then
k12 = j + 0.5
k22 = (j + 0.5) ^ 2 * (1 - 2 / cpi / (j + 0.5))
k32 = (j + 0.5) ^ 2 * (1 + 6 / cpi / (j + 0.5))
End If
fford(nmodesft, 1) = i

98
fford(nmodesft, 2) = j
fford(nmodesft, 3) = cpi ^ 2 * Sqr((b1 / mass1) * (k11 ^ 4 / ly ^ 4 + 2 * (pr1 * k21 * k22 + (1 - pr1) * k31 * k32) / ly ^ 2 / lz ^
2 + k12 ^ 4 / lz ^ 4)) / 2 / cpi
fford(nmodesft, 4) = (Sqr(b2 / mass2) * ((i * cpi / ly) ^ 2 + (j * cpi / lz) ^ 2)) / 2 / cpi
fford(nmodesft, 5) = 2 * cpi * fford(nmodesft, 3)
fford(nmodesft, 6) = 2 * cpi * fford(nmodesft, 4)
Next j
Next i
c = 331.5 * Sqr(1 + teta / 273.15)
testfi = 0
testfj = 0
testfk = 0
i = 0
j = 0
k = 0
Do While (testfi = 0)
Do While (testfj = 0)
Do While (testfk < fscale * mf)
testfk = c * Sqr((k * cpi / lx) ^ 2 + (i * cpi / ly) ^ 2 + (j * cpi / lz) ^ 2) / 2 / cpi
k = k + 1
Loop
nmodesr(i + 1, j + 1) = k - 1
If nmodesr(i + 1, j + 1) = 0 Then
testfj = 1
If j = 0 Then testfi = 1
End If
k = 0
testfk = 0
j = j + 1
Loop
nmodesrj(i + 1) = j - 1
j = 0
testfj = 0
i = i + 1
Loop

99
nlines = i - 1
nmodesrt = 0
For i = 1 To nlines
For j = 1 To nmodesrj(i)
For k = 1 To nmodesr(i, j)
wr = c * Sqr(((k - 1) * cpi / lx) ^ 2 + ((i - 1) * cpi / ly) ^ 2 + ((j - 1) * cpi / lz) ^ 2)
fr(k, i, j) = wr / 2 / cpi
nmodesrt = nmodesrt + 1
Next k
Next j
Next i
nmodesrt = nmodesrt - 1
nmodesrtcount = 0
fmax = 0
fmin = 0
Do While (nmodesrtcount < nmodesrt)
nmodesrtcount = nmodesrtcount + 1
fmax = fscale * mf
For i = 1 To nlines
For j = 1 To nmodesrj(i)
For k = 1 To nmodesr(i, j)
If (fr(k, i, j) <= fmax And fr(k, i, j) > fmin) Then
fmax = fr(k, i, j)
nx = k - 1
ny = i - 1
nz = j - 1
End If
Next k
Next j
Next i

100
fmin = fmax
frord(nmodesrtcount, 1) = nx
frord(nmodesrtcount, 2) = ny
frord(nmodesrtcount, 3) = nz
frord(nmodesrtcount, 4) = fmax
frord(nmodesrtcount, 5) = fmax * 2 * cpi
rs = 2 * (lx * ly + ly * lz + lz * lx)
rv = lx * ly * lz
rt = 0.161 * rv / rs / alfa
delta = 6.9 / rt
pw = rh * 610.5 * Exp(17.269 * teta / (237.3 + teta))
roa = (101325 - pw) / 287 / (273.15 + teta) + pw / 461 / (273.15 + teta)
lf2 = rlf2
lf0 = rlf0
For i = fstart To mf
lf1 = 1 / Sqr(i) + rlf1
npoints = 0
ReSP = 0
ImSP = 0
For m = 1 To nmodesrt
ReB = 0
ImB = 0
For n = 1 To nmodesft
w1 = fford(n, 5) ^ 2
w11 = w1 + w10
w2 = fford(n, 6) ^ 2
w22 = w2 + w20
ReC = (2 * cpi * i) ^ 4 - (2 * cpi * i) ^ 2 * (w11 + w22) + (w11 * w22 - (w1 * lf1 + w10 * lf0) * (w2 * lf2 + w20 * lf0) - w10 *
w20 * (1 - lf0 ^ 2))
ImC = -(2 * cpi * i) ^ 2 * (w1 * lf1 + w10 * lf0 + w2 * lf2 + w20 * lf0) + (w11 * (w2 * lf2 + w20 * lf0) + w22 * (w1 * lf1 +
w10 * lf0) - 2 * w10 * w20 * lf0)
If fford(n, 1) = frord(m, 2) Then
ReBadd = 0
ImBadd = 0
ElseIf fford(n, 2) = frord(m, 3) Then
ReBadd = 0
ImBadd = 0

101
Else
ReBnum = (((-1) ^ (fford(n, 1) + frord(m, 2))) - 1) * (((-1) ^ (fford(n, 2) + frord(m, 3))) - 1) * Sin(fford(n, 1) * cpi * yf /
ly) * Sin(fford(n, 2) * cpi * zf / lz) * ImC
Bden = fford(n, 1) * fford(n, 2) * (cpi ^ 2) * (((frord(m, 2) / fford(n, 1)) ^ 2) - 1) * (((frord(m, 3) / fford(n, 2)) ^ 2) - 1) *
(ReC ^ 2 + ImC ^ 2)
ReBadd = ReBnum / Bden
ImBnum = (((-1) ^ (fford(n, 1) + frord(m, 2))) - 1) * (((-1) ^ (fford(n, 2) + frord(m, 3))) - 1) * Sin(fford(n, 1) * cpi * yf / ly)
* Sin(fford(n, 2) * cpi * zf / lz) * ReC
ImBadd = ImBnum / Bden
End If
ReB = ReB + ReBadd
ImB = ImB + ImBadd
Next n
ReB = 4 * (2 * cpi * i) * fint * w20 / mass1 * ReB
ImB = 4 * (2 * cpi * i) * fint * w20 / mass1 * ImB
filmn = Cos(frord(m, 1) * cpi * coord(1) / lx) * Cos(frord(m, 2) * cpi * coord(2) / ly) * Cos(frord(m, 3) * cpi * coord(3) / lz)
ReSPnum = ((-1) ^ frord(m, 1)) * (2 * delta * frord(m, 5) * ReB - ((frord(m, 5) ^ 2) - ((2 * cpi * i) ^ 2) - (delta ^ 2)) * ImB) *
filmn
SPden = (((frord(m, 5) ^ 2) - ((2 * cpi * i) ^ 2) - (delta ^ 2)) ^ 2) + 4 * (delta ^ 2) * (frord(m, 5) ^ 2)
ReSPadd = -ReSPnum / SPden
ReSP = ReSP + ReSPadd
ImSPnum = ((-1) ^ frord(m, 1)) * (2 * delta * frord(m, 5) * ImB + ((frord(m, 5) ^ 2) - ((2 * cpi * i) ^ 2) - (delta ^ 2)) * ReB) *
filmn
ImSPadd = -ImSPnum / SPden
ImSP = ImSP + ImSPadd
Next m
ReSP = 8 * (2 * cpi * i) * roa * (c ^ 2) / lx / ly / lz * ReSP
ImSP = 8 * (2 * cpi * i) * roa * (c ^ 2) / lx / ly / lz * ImSP
MagSP = Sqr((ReSP ^ 2) + (ImSP ^ 2))
PhaSP = (Atn(ImSP / ReSP)) * 180 / cpi
Label1.Caption = "Program finished."
End Sub