introdução à eletrónica médica joão...
TRANSCRIPT

Revisão de conceitos
Introdução à Eletrónica MédicaJoão Fermeiro

2
Fontes de erro
• Entende-se por erro a diferença entre uma medição de um sistema e o valor real da grandeza.
• Existem diversos aspetos que podem condicionar a reposta de uma medição.

3
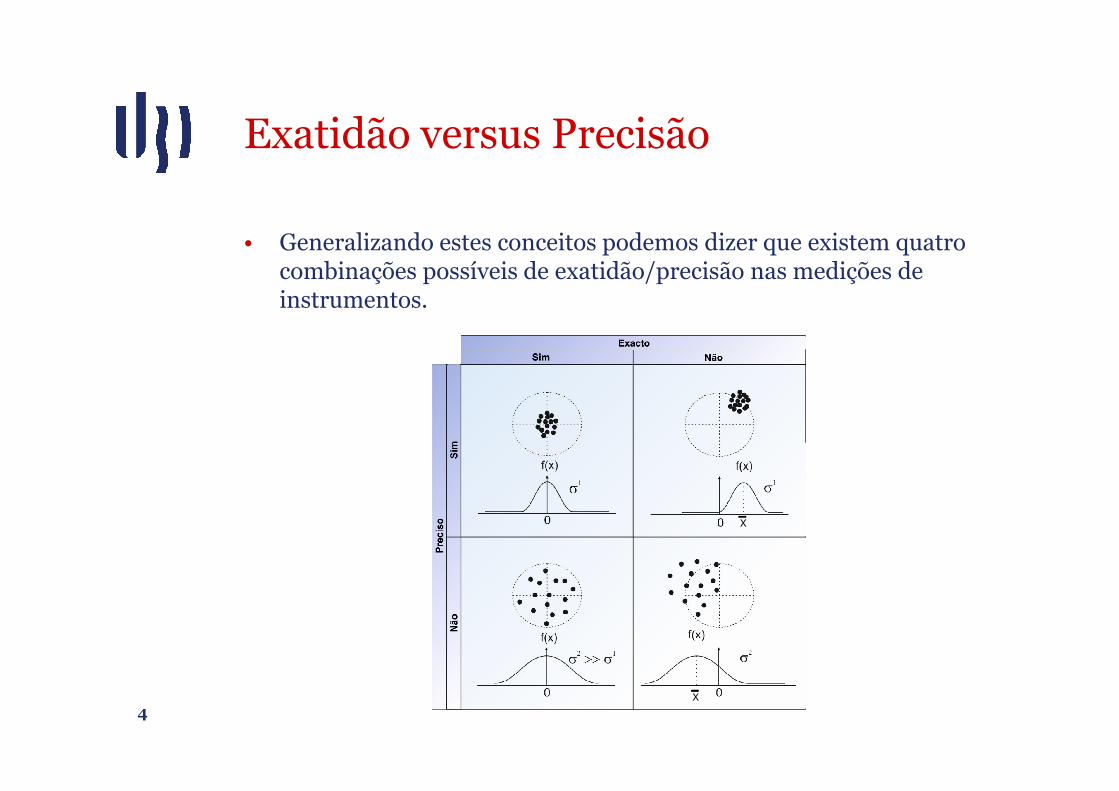
Exatidão versus Precisão
• O que é a exatidão?– Esta aufere o grau de proximidade de uma medição �� relativamente
ao valor real de ��.
• O que é a precisão?– Esta aufere o grau de proximidade entre um conjunto de medições, não
necessariamente próximos do valor real ��.
• Em termos estatísticos a exatidão está associada ao valor da média ��enquanto que o valor da precisão está associada ao valor do desvio-padrão σ.
4
Exatidão versus Precisão
• Generalizando estes conceitos podemos dizer que existem quatro combinações possíveis de exatidão/precisão nas medições de instrumentos.
X
X

5
Tipos de erros
• Os erros dividem-se em:
– Erros grosseiros
• Este tipo de erro é de natureza fortuita. Podem ocorrer devido a uma má leitura de quem opera o instrumento de medida.
• Uma forma de evitar ou eliminar este erro é efetuar um número grande de medições da grandeza desejada e eliminar os valores aberrantes que se destaquem no conjunto das medições.

Tipos de erros
– Erros sistemáticos
• Este tipo de erro ocorrem no momento em que a medição éefetuada. Geralmente provém de uma má ou não calibração doinstrumento ou de uma má preparação do sistema de medição(montagem incorreta de um setup de medição). Neste sentido asleituras realizadas pelo sistema têm uma resposta sempre afetadacom o mesmo desvio do valor real da grandeza.
• Outra situação que ocorre frequentemente é o esquecimento doefeito de carga do aparelho de medida sobre o circuito, isto é, o nãoter em conta as características que o aparelho de medida tem sobreo circuito elétrico.
• Os erros sistemáticos só conseguem ser drasticamente reduzidosde duas formas: se houver uma calibração prévia do instrumentode medida ou se o valor do desvio no instrumento de medida forconhecido a priori, sendo então usado para fazer umacompensação na resposta da leitura.
Tipos de erros
– Erros aleatórios
• Estes erros como o nome indica são erros inesperados e cujocontrolo está para além das possibilidades de quem efetua asmedições ou de qualquer calibração prévia e a sua causa ou causassão difíceis de identificar.
• Geralmente estes erros apresentam amplitudes baixas fazendocom que haja um desvio relativamente baixo.
Indicadores estatísticos mais importantes
• Em termos da instrumentação médica é relevante relembrar os seguintes indicadores estatísticos:
– Média
– Mediana
– Variância e desvio-padrão
– Regressão linear

Média
• Existem diversos tipos de médias sendo as quatro seguintes as maisconhecidas:
– Média aritmética
– Média quadrática
– Média geométrica
– Média harmónica
• A média aritmética �� obtém-se somando todos os valores medidos,��, e dividindo essa soma pelo número de medições N.
�� = 1 ���
��

10
Média
• A média quadrática ��� obtém-se somando os quadrados dosvalores medidos, �� , e dividindo essa soma pelo número demedições N, e finalmente aplicando a raiz quadrada.
• A média geométrica obtém-se multiplicando as N medições ��, eposteriormente aplicar a raiz de ordem N.
��� = 1 ����
��
� ���
�� �

11
Média
• A média harmónica é o inverso da média aritmética do inverso dasN medições �� , ou seja, é o inverso da média aritmética dosvalores �� = ��⁄ .
• As mais médias mais utilizadas são a aritmética e a geométrica, noentanto estas apresentam a propriedade inconveniente de seremsensíveis a valores aberrantes no conjunto de valores.
1 1 ���
�� � = 1 1 1��
�
�� �
• Exemplificando
– Imaginemos o conjunto de valores � = 3,3,3,3,4,5,5,6,7,7,7,500 .– Os valores das médias são:
– Aritmética = 50
– Quadrática = 150
– Geométrica = 7,22
– Harmónica = 4,89
– Podemos retirar que os valores obtidos pelas médias aritméticae quadrática destoam da maioria dos elementos do conjunto.
Média
Média
• Por outro lado
– Considerando o conjunto de valores � = 3,3,3,3,4,5,5,6,7,7,7,0 .– Os valores das médias serão:
– Aritmética = 4,55
– Quadrática = 5,01
– Geométrica = 0
– Harmónica = 0
– Podemos retirar que os valores obtidos pelas médias geométricae harmónica são gravemente influenciados por valores deresposta nula.
• Podemos concluir que é necessário escolher bem o tipo de médiaque melhor se adequa ao conjunto de dados para uma melhormédia do conjunto.
é"#$ %$& ó(#)$ ≤ é"#$ +,- é.&#)$ ≤ é"#$ $&#. é.#)$ ≤ é"#$ /0$"&á.#)$

Mediana
• A mediana pode ser em comparação à média o indicador estatístico mais adequado por indicar o ponto central num conjunto de valores, sendo assim robusta à presença da valores aberrantes.
• Se o número de medições for muito elevado , ambos os conjuntos de valores inferior e superior à mediana ocupam metade (50%) do conjunto das medições
• Para por exemplo o conjunto de valores � =3,3,3,3,4,5, 2, 6,7,7,7,500 a mediana toma o valor 5.
Variância e desvio-padrão
• A Variância 345 � = σ� dá uma informação acerca da dispersãodos valores. É dada pela média dos quadrados dos valores �� onde�� = �� − ��
• O desvio-padrão, σ, é a raiz quadrada da variância. Este éum dos indicadores estatísticos mais importantes pois paraalém de ser sempre positivo o intervalo �� − σ, �� + σ contém68% das medições.
σ� = 1 �� − �� ��
��
Desvio padrão
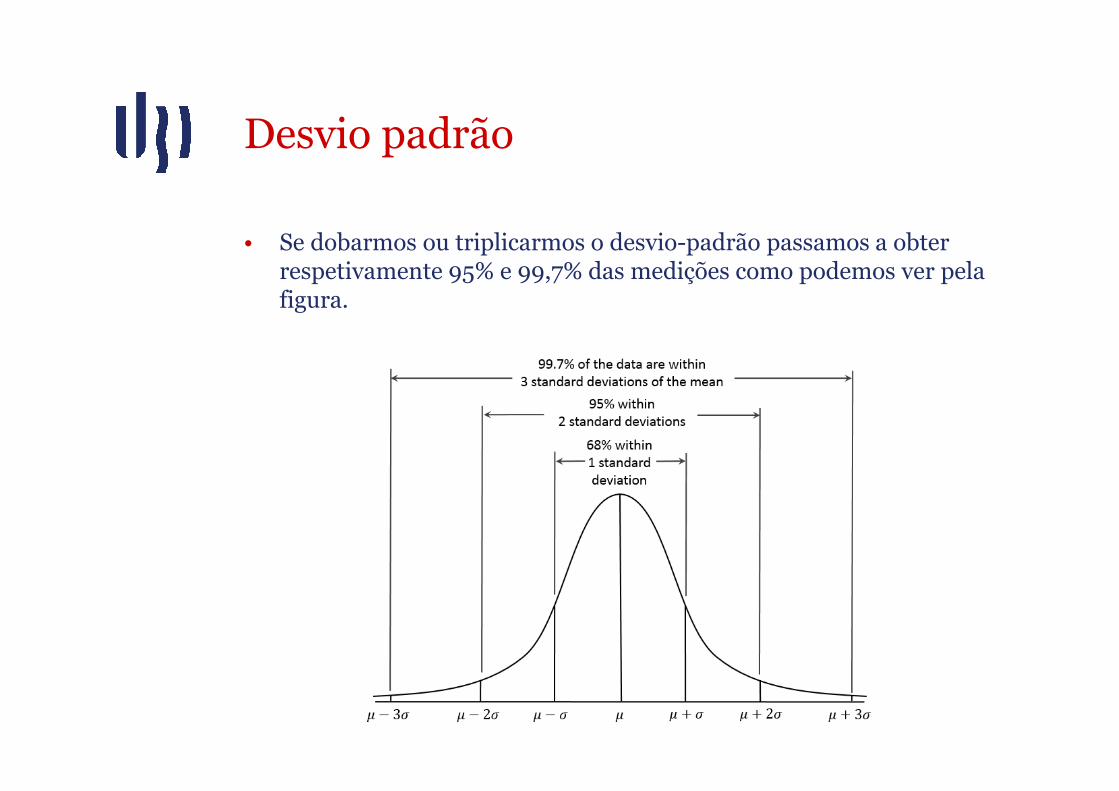
• Se dobarmos ou triplicarmos o desvio-padrão passamos a obter respetivamente 95% e 99,7% das medições como podemos ver pela figura.
17
Regressão linear
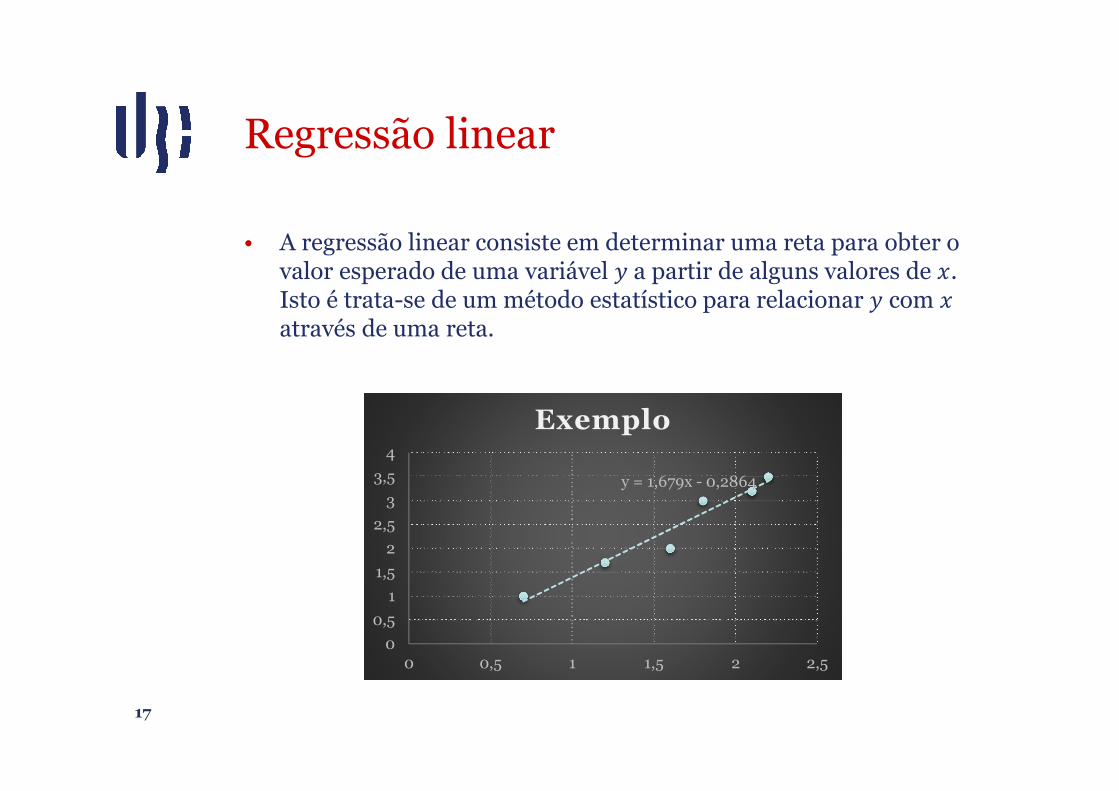
• A regressão linear consiste em determinar uma reta para obter o valor esperado de uma variável � a partir de alguns valores de �. Isto é trata-se de um método estatístico para relacionar � com �através de uma reta.
y = 1,679x - 0,2864
0
0,5
1
1,5
2
2,5
3
3,5
4
0 0,5 1 1,5 2 2,5
Exemplo

18
Regressão linear
• Se assumirmos que as medições �9 se podem exprimir em função de duas parcelas : ,9 e :�,9 ,onde a primeira é responsável por estabelecer uma relação linear entre �9 e �9 enquanto a segunda inclui todos os fatores que contribuem para o desvio de �9 relativamente à reta em �9 então tem-se:
• Os coeficientes A e B são determinados tendo por base a minimização da soma dos desvios de �9 à reta em �9 ,minimizando da seguinte forma
�9 = : ,9 + :�,9 = ; + <. �9 =9
>?@ : ,9 + :�,9 ��
9� = >?@ �9 − ; + <�9 �
�
9�

19
Regressão linear
• Daí a designação de aproximação linear pelo método dos mínimos quadrados, sendo os coeficientes A e B determinados pelas seguintes equações
; = �9 ��
9� �A
�
A� − �9�9
�
9� �9
�
9� �9 �
�
9� − �9
�A
9�
�B
< = �9�9 �
9� − �A
�
A� �9
�
9� �9 �
�
9� − �9
�A
9�
�B

20
Regressão linear
• Um coeficiente de boa aproximação da reta ao conjunto de pontos é o coeficiente de correlação r. Quanto mais próximo da unidade maior a semelhança dos pontos da reta relativamente às medições. Este coeficiente obtém-se através da fórmula
5 = �9 − �� �9 − C��
9� �9 − �� �
�
9� �9 − C� ��A
9� B

21
Características estáticas
• Entende-se por característica estática uma quantidade numéricaque não apresente variação durante um intervalo de tempo deutilização de um instrumento ou cuja variação é muito lentaquando comparada com a duração do intervalo.
• Temos o exemplo da sensibilidade e resolução que são grandezasintrínsecas do instrumento de medida.
• A sensibilidade D relaciona a variação da grandeza de saída ∆�FGH com a variação da grandeza de entrada ∆�9I pela fórmula
D �9I,� = limMNO→MNO,�∆�FGH�9I − �9I,� = lim∆MNO→Q
∆�FGH∆�9I RMNO�MNO,�
= S�FGHS�9I

22
Características estáticas
• Através da equação podemos retirar que existe linearidade do instrumento de medida se a sensibilidade for constante.
• O ideal seria dispor-mos de instrumentos de medida com sensibilidade elevada, independentemente do valor da grandeza de entrada, de influências externas e do efeito conjunto do envelhecimento e do desgaste.
• Outra característica que podemos destacar é a linearidade.
• Esta quantifica o grau de concordância entre a função de transferência estática (dada pela equação da sensibilidade) e uma reta escolhida como referência. Normalmente a linearidade exprime-se em termos do percentual do valor de fim de escala.

23
Características estáticas
• Também podemos mencionar outra característica designada gama de operação.
• Esta define o intervalo dentro do qual a grandeza de entrada de um instrumento de medida pode variar. Este convento está associado ao conceito de gama dinâmica TU.
• A gama dinâmica é dada pela razão entre o maior valor da grandeza de entrada que não força o instrumento a sair da zona linear de funcionamento e entre o plano de ruído . Sinais com amplitudes inferiores do plano de ruído não podem ser detetados pelo instrumento pois a sua presença é mascarada pelo ruído.
TU = 20WXY Q >4� �9I>?@ �9I = 20WXY Q >4� �9I S<
24
Exercício 1
• Os resultados de uma avaliação a uma disciplina foram
X={7.5, 8.1, 8.7, 9.8, 10.4, 11.0, 11.6, 12.8, 13.3, 13.7, 14.4, 15.6 16.0, 16.8}
• Qual a nota média à disciplina?
• Calcule as médias harmónica, geométrica e quadrática.
• Calcule a mediana.
• Calcula o desvio-padrão e a variância.
• Comparar entre si as quatro médias.

25
Exercício 1
X={7.5, 8.1, 8.7, 9.8, 10.4, 11.0, 11.6, 12.3, 12.8, 13.3, 13.7, 14.4, 15.6 16.0, 16.8}
• Qual a nota média à disciplina?
�� = 12.1333• Calcule as médias harmónica, geométrica e quadrática.
��ℎ = 11.4485, ��Y = 11.7956, ��] =12.4525
• Calcule a mediana.�̂ = 12.3• Calcula o desvio-padrão e a variância._ = 2.8997 e Var(x)= 8.4081
• Comparar entre si as quatro médias.

26
Exercício 2
• Os resultados de uma medição foram
X={80, 100, 110, 101, 104, 105, 99, 100, 111, 110}
• Qual a nota média aritmética das medições?
• Calcule as médias harmónica, geométrica e quadrática.
• Calcule a mediana.
• Calcula o desvio-padrão e a variância.
• Comparar entre si as quatro médias.

27
Características dinâmicas
• Estas caracterizam o comportamento de um aparelho de medida em termos da resposta a uma entrada variável no tempo.

28
Características dinâmicas
Função transferência
• O conceito de função de transferência aplica-se a sistemas lineares. Um sistema com respostas y(b), � (b) e �� b às entradas � b , � (b)e ��(b) diz-se linear, se as respostas a k. � b e � b + ��(b) forem respetivamente k. � b e � b + �� b .
• A função transferência � e: de um sistema linear obtém-se a partir da equação diferencial responsável por relacionar a entrada � bcom a saída y b .
29
Características dinâmicas
Função transferência
• O funcionamento da maioria dos instrumentos de medida pode aproximar-se por um sistema linear e pode ser descrito por uma equação diferencial ordinária linear de coeficientes constantes:
4I SI�(b)SbI + ⋯ + 4 S� bSb + 4Q� b = gI SI� bSbI + ⋯ + g S� bSb + gQ�(b)• Aplicando a transformada de Fourier obtém-se
• 4I e2i: IC ?: + ⋯ + 4QC e: = gI e2i: I� ?: + ⋯ + 4Q� e:
30
Características dinâmicas
Função transferência
• Após a colocação de C e: e � e: em evidência e se dividir um pelo outro obtém-se a função de transferência desejada:
� e: = C ?:� ?: = gI e2i: I + ⋯ + g (e2i:) + gQ4I e2i: I + ⋯ + 4 (e2i:) + 4Q
• A função é complexa e por isso é usual apresentarem-se dois gráficos distintos em função da frequência :: módulo e fase.

31
Características dinâmicas
Sistemas de ordem zero
• Num sistema desta ordem a relação entre a entrada e a saída obedece à seguinte equação:
4Q. � b = gQ� b ou � b = j. �(b) onde j = klml
• Exemplos de sistemas de ordem zero incluem os potenciómetros e amplificadores de tensão os quais providenciam atenuação e amplificação, respetivamente.

32
Características dinâmicas
Sistemas de primeira ordem• Num sistema de primeira ordem, a relação entre a entrada e a saída
obedece a:
4 S�(b)Sb + 4Q� b = gQ. � bQue corresponde a uma função de transferência:
� e: = C ?:� ?: = gQ4 (e2i:) + 4Q = j e2i:n + 1Onde j é o coeficiente de sensibilidade estática e j = klml,
e n é a constante de tempo e τ = mpml
• Existem 2 tipos de carga elétrica , positiva e negativa, que provêm de protões e eletrões respetivamente.
• A unidade (SI) da carga elétrica é o Coulomb (C). Este é uma grandeza quantitativa adimensional parecida ao mole. Onde:
1q = 6,24 × 10 s cargas
• Logo a carga de um eletrão representa-se por
Grandezas elétricas - Carga
]t = −1,602 × 10u vq

34
Grandezas elétricas – Corrente elétrica
• Corrente é o fluxo de cargas elétricas por unidade de tempo num condutor. E é definido pela equação
• A sua unidade de grandeza (SI) é o Ampere (A) onde 1; = 1q/1xlogo podemos dizer que 1 A corresponde ao fluxo de 6,24 × 10 scargas elétricas por segundo.
i(b) = S]Sb
35
Grandezas elétricas – Corrente elétrica
• Como a carga pode ser positiva e negativa a corrente também pode se positiva ou negativa.
• Por convenção o sentido da corrente elétrica corresponde ao sentido do campo elétrico no interior do condutor, que vai do polo positivo para o negativo e chama-se sentido convencional.
• O fluxo de cargas negativas (eletrões) acontece no sentido contrário do polo negativo para o polo positivo e é chamado de sentido real.
36
Grandezas elétricas - Tensão
• A tensão ou força eletromotriz ou diferença de potencial é a expressão quantitativa da diferença de potencial da carga elétrica entre dois pontos num campo elétrico.
• A sua unidade medida (SI) é o volt (V). O símbolo usado para representar tensão em corrente contínua (DC) é letra V ou U e para representar uma fonte de corrente alternada (AC) é υ(t) ou apenas υ.
• A tensão entre dois pontos pode ser definida como a energia (w) necessária para mover uma carga (q) entre dois pontos A e B e é dado por
z{| = z(b) = S}S]

37
Grandezas elétricas - Tensão
• Logo podemos dizer que 1 volt é a energia de 1 joule consumida quando carga elétrica de 1 Coulomb flui pelo circuito.
13 = 1~/q
• A tensão não está dependente do caminho que leva a carga elétrica do ponto A até B. Pode-se fazer a analogia à energia potencial, neste caso tanto maior é a energia potencial quanto maior a diferença de alturas.
38
Grandezas elétricas - Potência
• Potência é a taxa de transferência de energia, a sua unidade é o watt (W)
• A potência é determinada pelo produto da diferença de potencial pela corrente num circuito. Por convenção uma potência positiva representa que a energia está a ser absorvida ou consumida pelo elemento do circuito. E uma potência negativa representa que a energia está a ser gerada pelo ou extraída do elemento do circuito, exemplo uma bateria.
P = S}Sb = S}S] S]Sb = υ?

39
Grandezas elétricas - Potência
• A potência dissipada por uma determinada resistência é sempre positiva e é dada por
• No caso
� = ?υ = υ�U = ?�U
3Ω
6V
� = 3U ≫ � = 63 = 2;��FIHt = −� × 3 = −2 × 6 = −12�
�� = �� × U = 2� × 3 = 12�
Elementos de circuito elétrico
• Resistência
• Bobina
• Condensador
40

Resistência
• Uma resistência é um elemento de circuito que oferece resistência à corrente elétrica, a sua unidade é o Ohm (Ω) e 1Ω = 13 1;⁄ .
• Teoricamente o fio condutor de um circuito tem resistência zero e uma separação entre elementos do circuito (sem ligação) tem resistência infinita.
Resistência
• Uma resistência considerada ideal deve reger-se pela lei de Ohm, que relaciona a relação entre diferença de potencial e corrente
• Cada material tem uma propriedade de resistência (R) intrínseca chamada resistividade (ρ) e uma propriedade de condutância intrínseca (inverso de resistência, G) chamada condutividade (σ) que é o inverso da resistividade.
• A condutância é dada em Siemens (S) e rescrevendo a Lei de Ohm para esta fica
υ = ?U
� = ? υ⁄

Resistência equivalente
• Se a mesma corrente fluir através de N resistências diz-se que estes estão em série. Numa malhar fechada com N resistências, a lei das malhas diz-nos que
• Logo a resistência equivalente é
−3� + �U + ⋯ + �U� = 0
U�� = 3� �⁄ = U + ⋯ + U� = U9�
9�

Resistência equivalente
• Se a mesma diferença de potencial fluir através de N resistências diz-se que estes estão em paralelo. Para representar que estão em paralelo é usado o símbolo ∥ da seguinte forma
• Para o seguinte circuito retiramos através da lei dos nós que
−I + 3� U ⁄ + 3� U�⁄ + ⋯ + 3� U�⁄ = 0
U�� = U ∥ U� ∥ ⋯ ∥ U�

Resistência equivalente
• Escrevendo na forma de Resistência equivalente
• Para um caso em que temos apenas duas resistências em paralelo temos
U�� = U ∥ U� = U U�U + U�
U�� = 3�� = 11U + 1U� + ⋯ + 1U�

Resistência equivalente
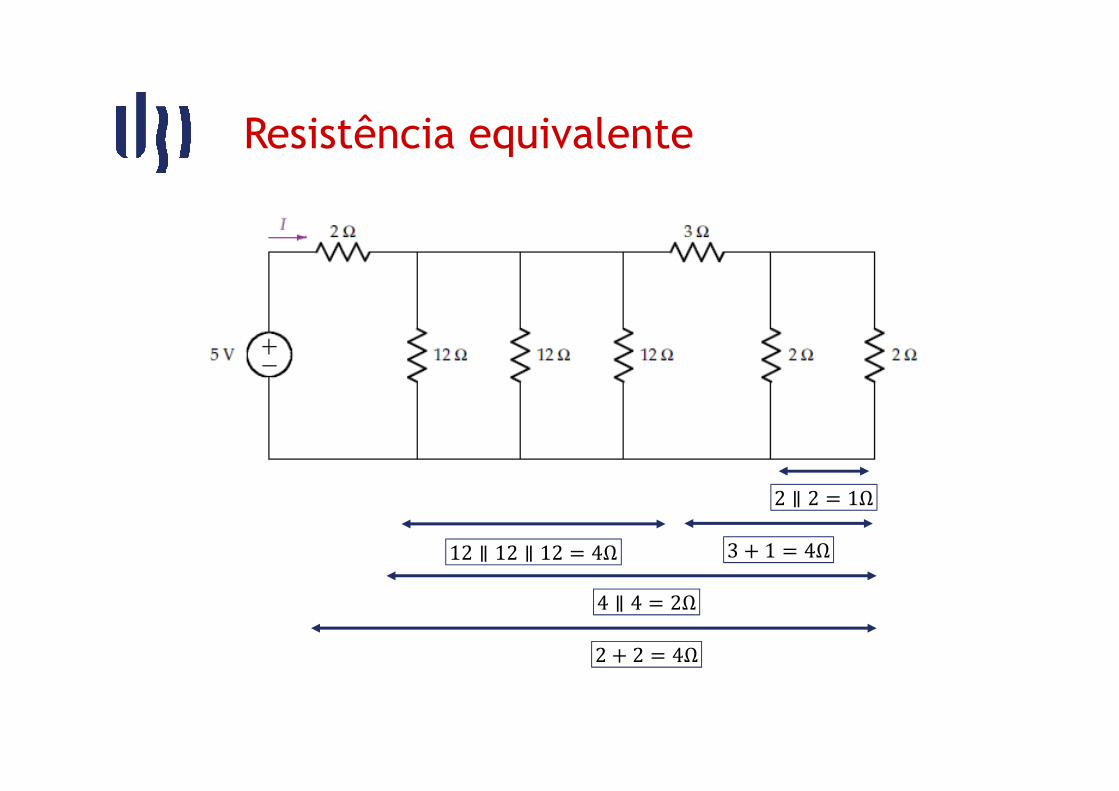
• Encontre o U�� e a potência fornecida pela fonte no seguinte circuito
Resistência equivalente
2 ∥ 2 = 1Ω3 + 1 = 4Ω12 ∥ 12 ∥ 12 = 4Ω
4 ∥ 4 = 2Ω2 + 2 = 4Ω
Resistência equivalente
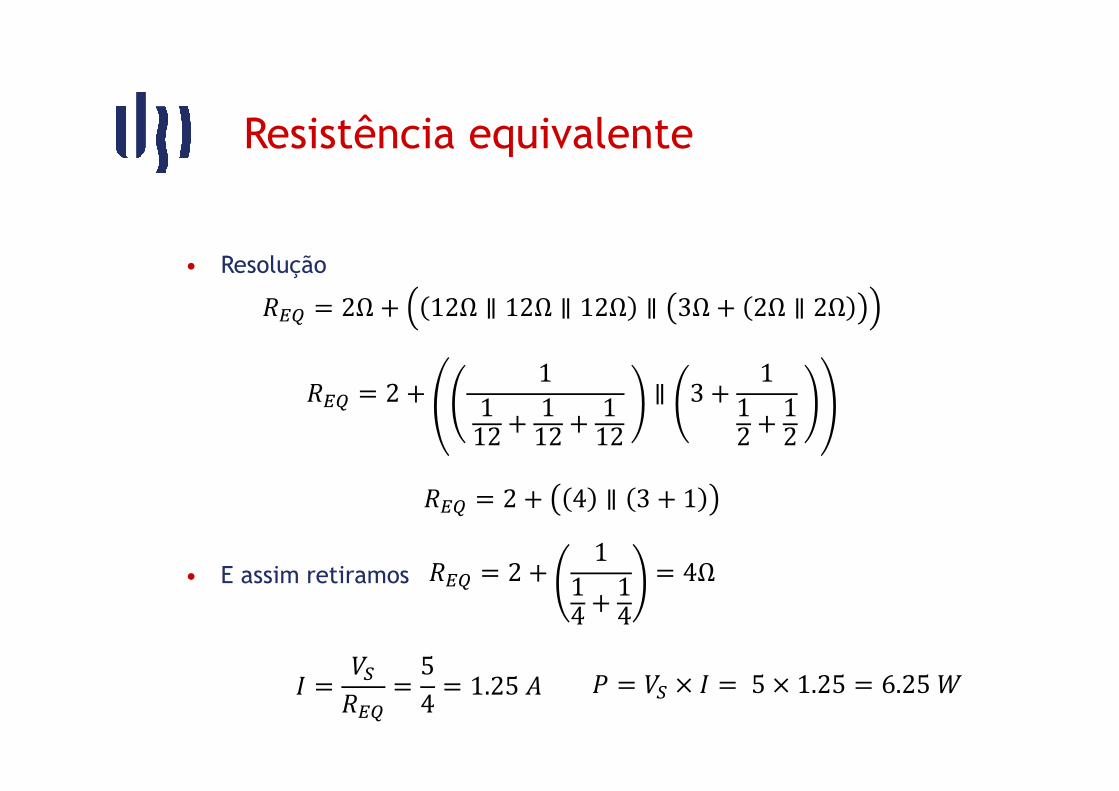
• Resolução
• E assim retiramos
U�� = 2Ω + 12Ω ∥ 12Ω ∥ 12Ω ∥ 3Ω + 2Ω ∥ 2ΩU�� = 2 + 1
112 + 112 + 112 ∥ 3 + 112 + 12
U�� = 2 + 4 ∥ 3 + 1U�� = 2 + 114 + 14
= 4Ω
� = 3�U�� = 54 = 1.25 ; � = 3� × � = 5 × 1.25 = 6.25 �

49
Resistência equivalente
Determine a resistência equivalente do seguinte circuito

Bobina
• A Bobine é um elemento passivo capaz de armazenar energia sob a forma de campo magnético e é formado por um enrolamento de um fio condutor isolado à volta de um núcleo de material ferromagnético.
• A unidade da indutância é o henry (H) onde 1 � = 1 3 x /;. A relação entre a diferença de potencial e a indutância é dada por
• Fisicamente a corrente não pode mudar instantaneamente através de uma bobine, pois seria necessária uma tensão infinita (a derivada da corrente no momento instantâneo da mudança de valor dá infinito).
� = � S?Sb
Bobina
• Por conveniência num circuito com apenas correntes contínuas (DC) a bobine funciona como um curto circuito pois não existe queda de tensão aos terminais da mesma.
• Como é um elemento passivo ele absorve potência de acordo com
• Neste caso a potência não é consumida sob a forma de calor como acontece no resistor, mas sim sob a forma de campo magnético durante um período de tempo. Esta potência armazenada pode ser “recuperada”/devolvida ao circuito. Neste caso se a potência for negativa a energia está a ser extraída da bobine, e se for positiva está a ser armazenada pela bobine.
� = �? = �? S?Sb
Indutância equivalente
• À semelhança da resistência equivalente, podemos determinar uma indutância equivalente para circuitos com N bobines.
• Como no caso das resistências, caso tenhamos N bobines em série, a indutância equivalente é dada por
• Caso tenhamos N bobines em paralelo, a indutância equivalente é dada por
• Para o caso de duas bobines em paralelo temos
��� = � ∥ �� ∥ ⋯ ∥ ��
��� = � + �� + ⋯ + �� = �9�
9�
��� = � ∥ �� = � ��� + ��

Condensador
• O condensador é um dispositivo capaz de armazenar energia sob a forma de campo elétrico ao separar adequadamente as cargas polarizadas por uma tensão.
• Um condensador simples consiste de duas placas paralelas de material condutor separadas por um espaço, geralmente preenchido por um meio dielétrico que possui uma resistência muito elevada. A carga armazenada é proporcional à diferença de potencial externa e é dada por
• Onde C representa a capacidade do condensador. A unidade de medida da capacidade é o farad (F) e 1 F = 1 q/3. Em termos da corrente temos
](b) = q�(b)
? = S]Sb = q S�Sb

Condensador
• A capacidade é influenciada por três fatores:
– A permeabilidade do meio dielétrico que preenche o espaço entre placas (= = 8.854 × 10u � �/� para o ar)
– A distância entre as placas (S)
– A área de secção onde existe sobreposição das placas (A)
• Da maneira que o condensador é constituído, isto é o material dielétrico não conduz correntes contínuas (DC), podemos comparar um condensador com um circuito aberto, quando existem apenas correntes contínuas.
q = =;S
Capacidade equivalente
• Contrariamente aos dois elementos de circuito anteriores, caso tenhamos N condensadores em série, a capacidade equivalente é dada por
• Caso tenhamos N condensadores em paralelo, a capacidade equivalente é dada por
q�� = q ∥ q� ∥ ⋯ ∥ q�
q�� = q + q� + ⋯ + q� = q9�
9�

56
1ª Lei de Kirchhoff (KCL)
• A corrente flui apenas em circuito fechado. Não existe perda de corrente enquanto flui pelo circuito porque a carga final não pode acumular em nenhum elemento do circuito e a carga tem de ser conservada.
• Como a carga não pode ser criada e tem de ser conservada, a soma das correntes num determinado nó (um ponto do circuito onde se ligam no mínimo três elementos) tem de ser igual a zero.
?I b�
I� = 0

57
1ª Lei de Kirchhoff (KCL)
• Correntes que chegam ⇒ sinal positivo
• Correntes que saem ⇒ sinal negativo
Outra forma de pensar: ∑ �tIH�m� = ∑ ��mt�
• Logo para o seguinte circuito
� = �� + ��

58
1ª Lei de Kirchhoff (KVL)
• Determine I3 e I4

59
1ª Lei de Kirchhoff (KVL)
• Determine I3 e I4, I6 e I7

60
1ª Lei de Kirchhoff (KCL)
• Aplique a lei das correntes
de Kirchhoff
Nó B : � + �� = ��Nó F : �� = � + ��
• Observa-se que as equações dos nós B e F são na realidade as mesmas, ou seja, a aplicação da lei das correntes de Kirchhoff ao nó F não aumenta a informação sobre o circuito.
61
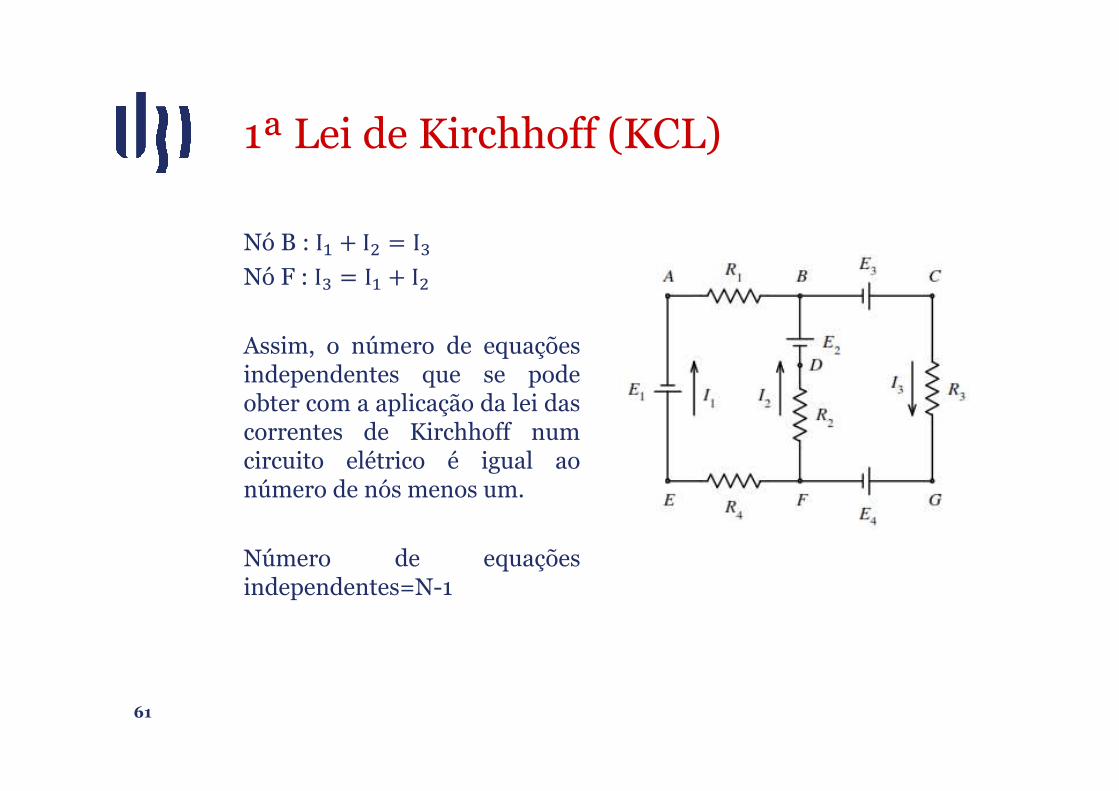
1ª Lei de Kirchhoff (KCL)
Nó B : I + I� = I�Nó F : I� = I + I�
Assim, o número de equaçõesindependentes que se podeobter com a aplicação da lei dascorrentes de Kirchhoff numcircuito elétrico é igual aonúmero de nós menos um.
Número de equaçõesindependentes=N-1

62
2ª Lei de Kirchhoff (KVL)
• À semelhança da 1ª lei de Kirchhoff, a 2ª lei (KVL) diz-nos que a soma de todas as tensões dentro de uma malha fechada é zero, ou seja
• Onde N é o número de quedas de tensão numa malha fechada, com υ9 b simbolizando as quedas de tensão individuais. O sinal dado a cada queda de tensão é dado pelo primeiro sinal encontrado (no primeiro terminal do elemento do circuito) ao fazermos a análise à volta da malha.
υ9 b�
9� = 0

63
2ª Lei de Kirchhoff (KVL)
Dois nós: B e FTrês malhas: ABDFEA, BCGFDB e ABCGFEA
64
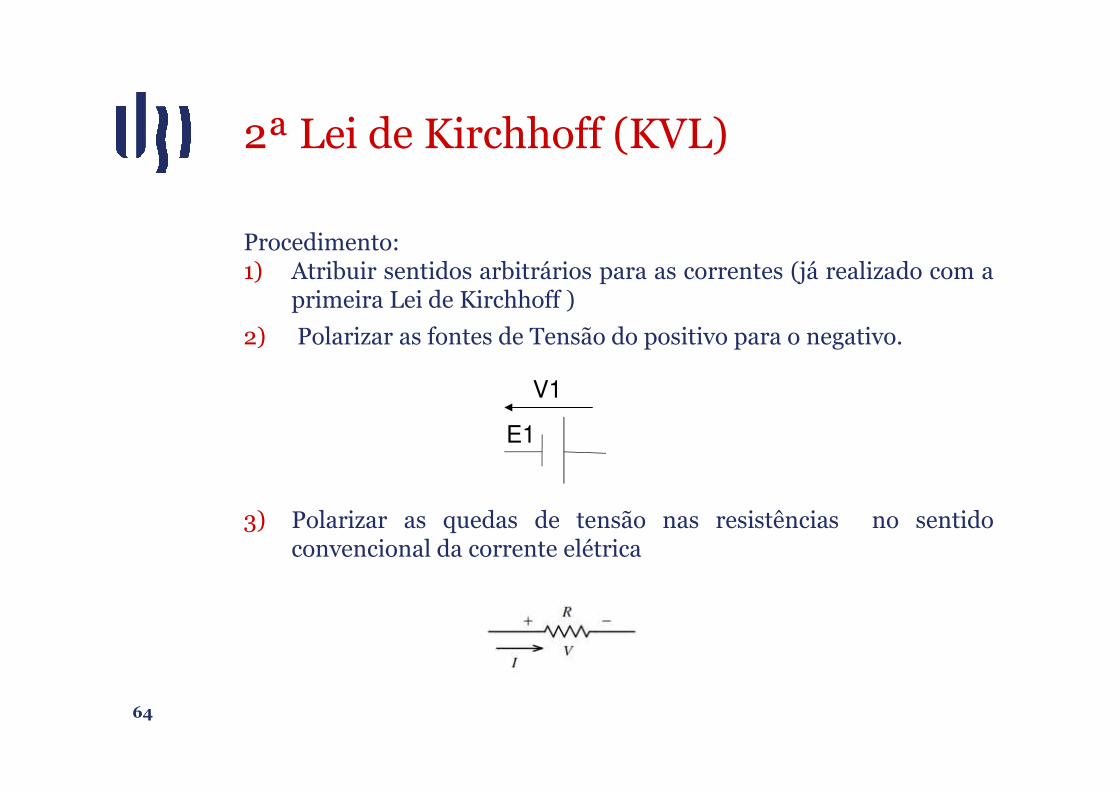
2ª Lei de Kirchhoff (KVL)
Procedimento:1) Atribuir sentidos arbitrários para as correntes (já realizado com a
primeira Lei de Kirchhoff )
2) Polarizar as fontes de Tensão do positivo para o negativo.
3) Polarizar as quedas de tensão nas resistências no sentidoconvencional da corrente elétrica
E1
V1
65
2ª Lei de Kirchhoff (KVL)
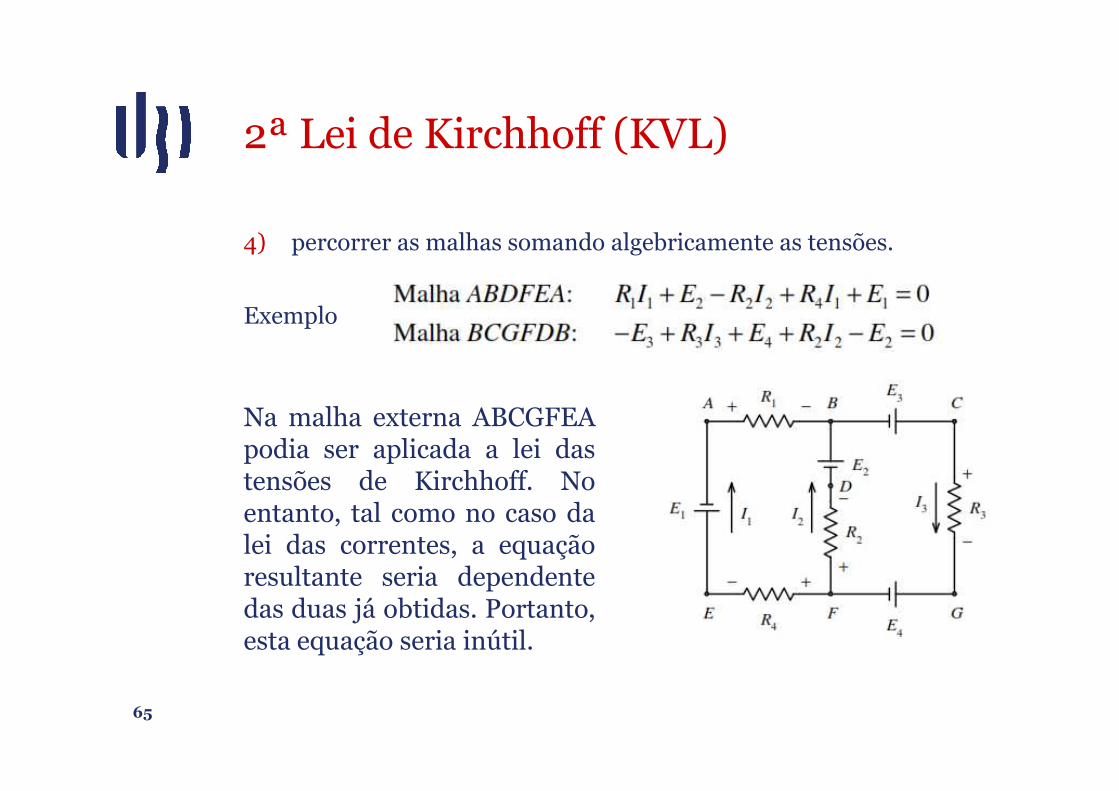
4) percorrer as malhas somando algebricamente as tensões.
Exemplo
Na malha externa ABCGFEApodia ser aplicada a lei dastensões de Kirchhoff. Noentanto, tal como no caso dalei das correntes, a equaçãoresultante seria dependentedas duas já obtidas. Portanto,esta equação seria inútil.

66
Exercícios
67
Exercícios
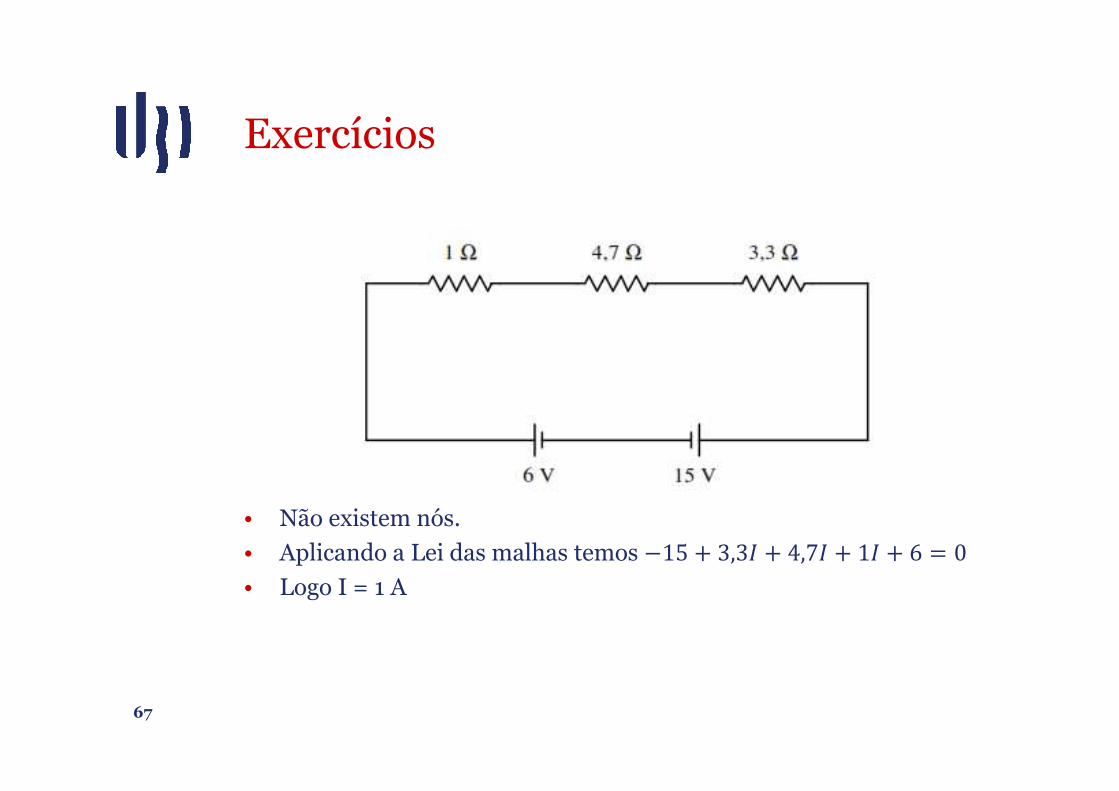
• Não existem nós.
• Aplicando a Lei das malhas temos −15 + 3,3� + 4,7� + 1� + 6 = 0• Logo I = 1 A
68
Exercícios
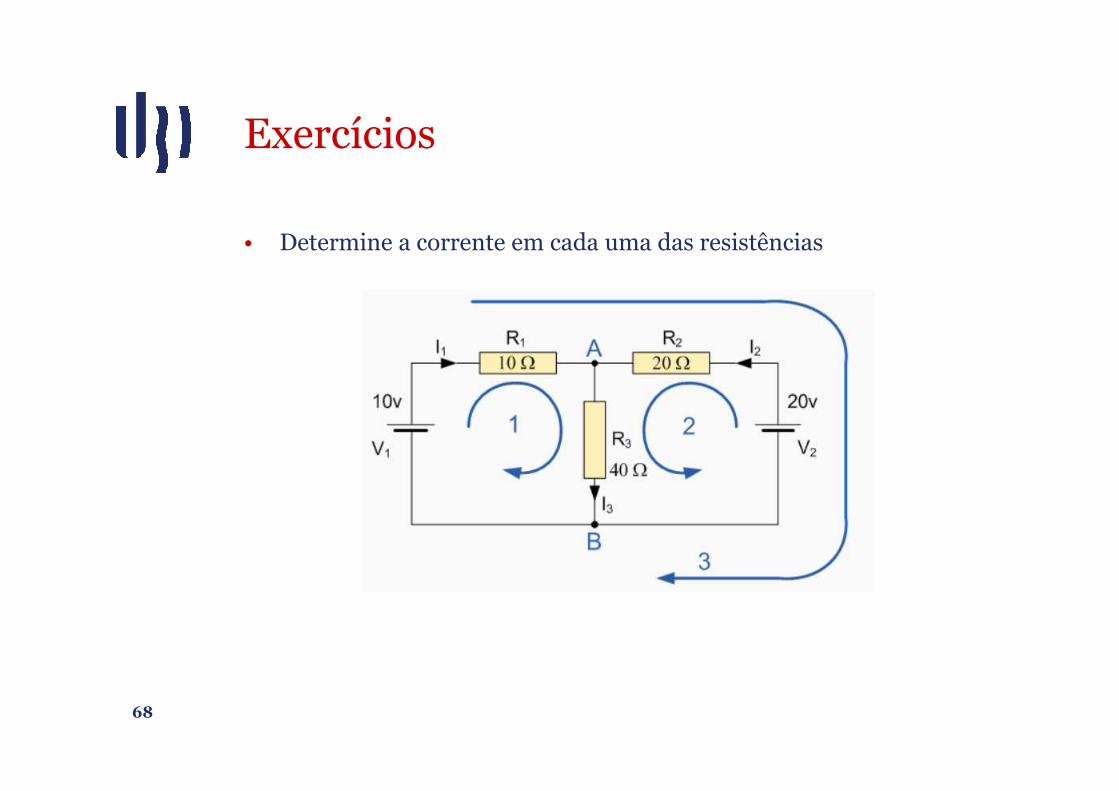
• Determine a corrente em cada uma das resistências

69
Exercícios
• Determine a corrente I1
�1
70
Exercícios
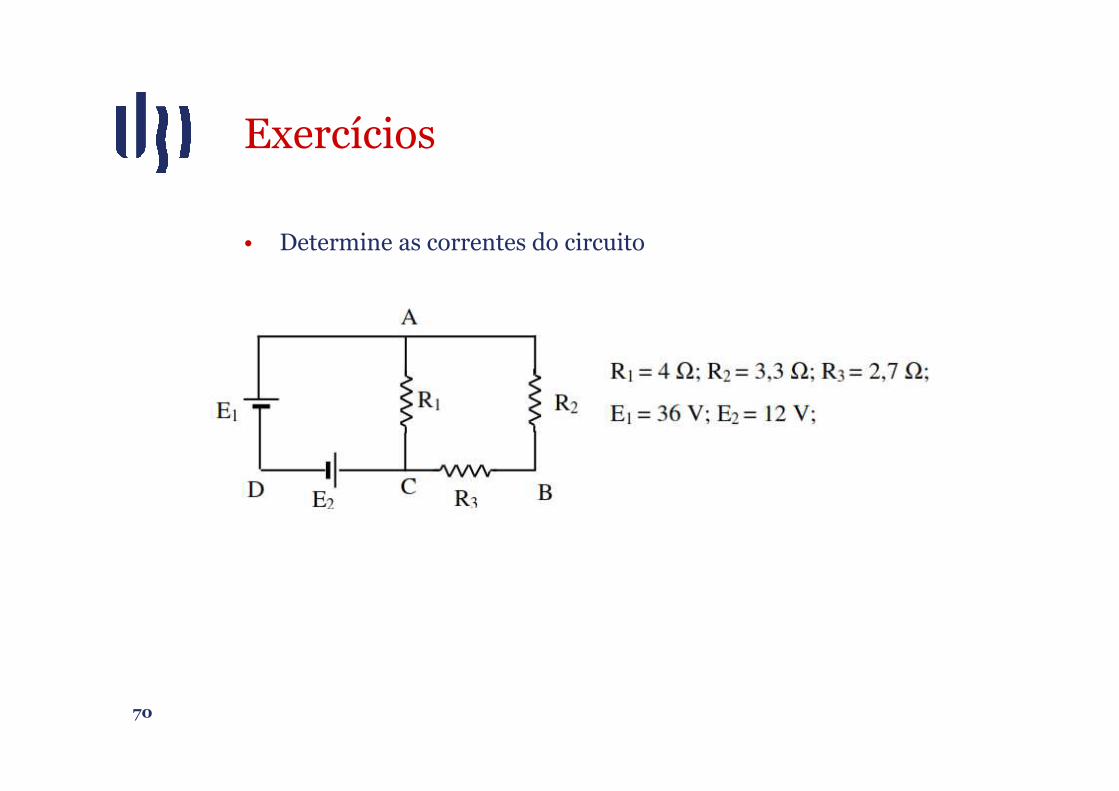
• Determine as correntes do circuito
�1

Divisor de tensão
• Um divisor de tensão permite calcular facilmente a diferença de potencial aos terminais de uma determinada resistência em série.
• Considere o seguinte circuito em que a U�� = U + U�
� = 3�U�� = 3�U + U�3FGH = �U� = 3� U�U + U�
�
3A = 3� UAU + U� + ⋯ + U�
Podemos generalizar para N resistências em série a equação que nos dá a diferença de potencial aos terminais de U� é

72
Amplificadores operacionais
• Como o nome indica é um dispositivo que amplifica, no entanto quando combinado com outros elementos de circuito ele permite integrar, diferenciar, somar e subtrair sinais.
• Os terminais de input são designados de noninverting input (+) e inverting input (-). Os terminais da fonte são designados V+ e V- e pode acontecer estarem omitidos pois não afetam o comportamento do circuito ( a não ser em caso de saturação).
• A relação entre as entradas e as saídas é dada por
• Onde A representa o ganho do amplificador ideal.
�Q = ; �� − �I

73
Amplificadores operacionais
• Idealmente o AMPOP:
• Não tem entrada de corrente, pois deve ter impedância de entrada infinita.
• A relação entre a entrada e a saída é dado por �F=;(�� − �I) para A > 0.
• Num circuito a diferença de potencial na entrada V+ é igual à diferença de potencial na entrada V-. A esta propriedade chamamos terra virtual. Isto acontece porque o ganho do AMPOP em malha aberta é infinito.
74
Amplificadores operacionais
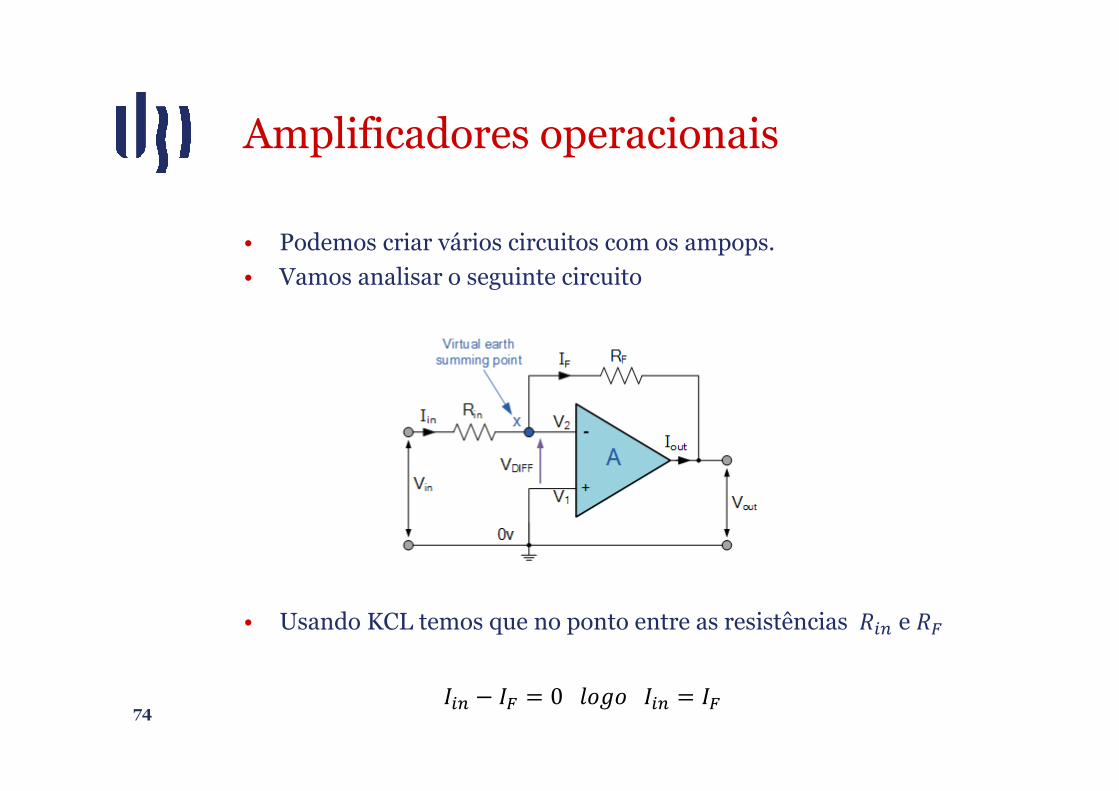
• Podemos criar vários circuitos com os ampops.
• Vamos analisar o seguinte circuito
• Usando KCL temos que no ponto entre as resistências U9I e U�
�9I − �� = 0 WXYX �9I = ��
75
Amplificadores operacionais
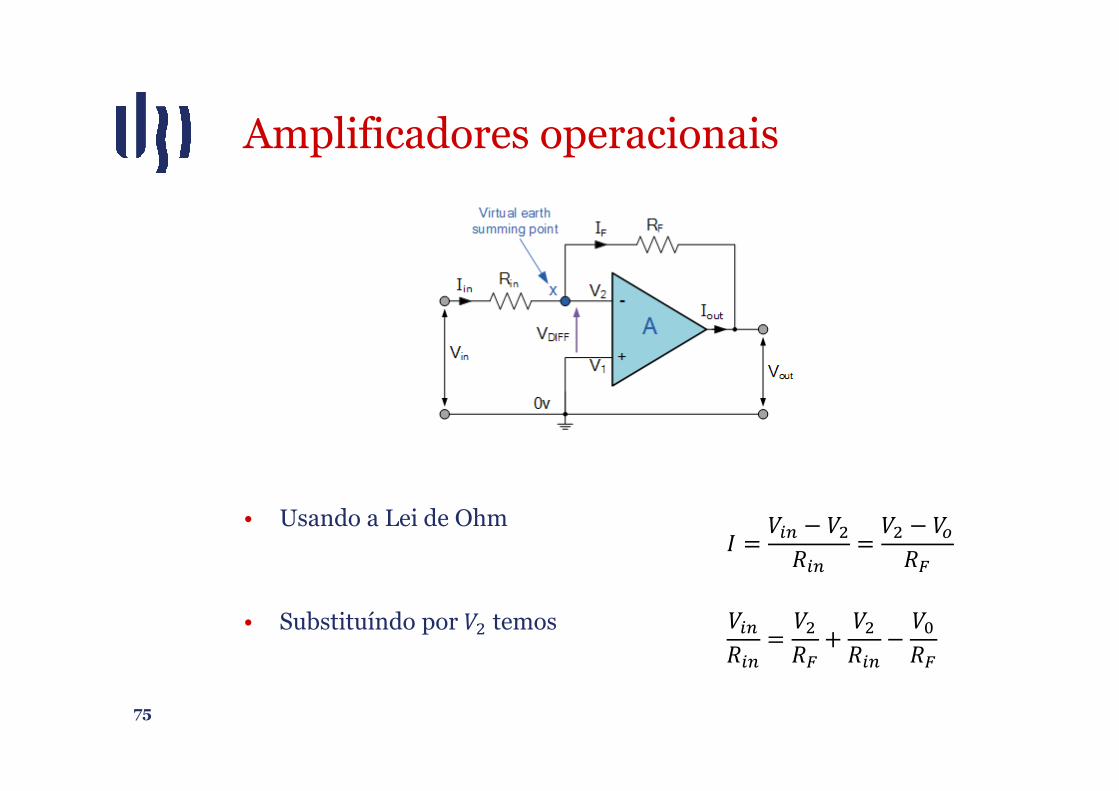
• Usando a Lei de Ohm
• Substituíndo por 3� temos
� = 39I − 3�U9I = 3� − 3FU�39IU9I = 3�U� + 3�U9I − 3QU�
76
Amplificadores operacionais
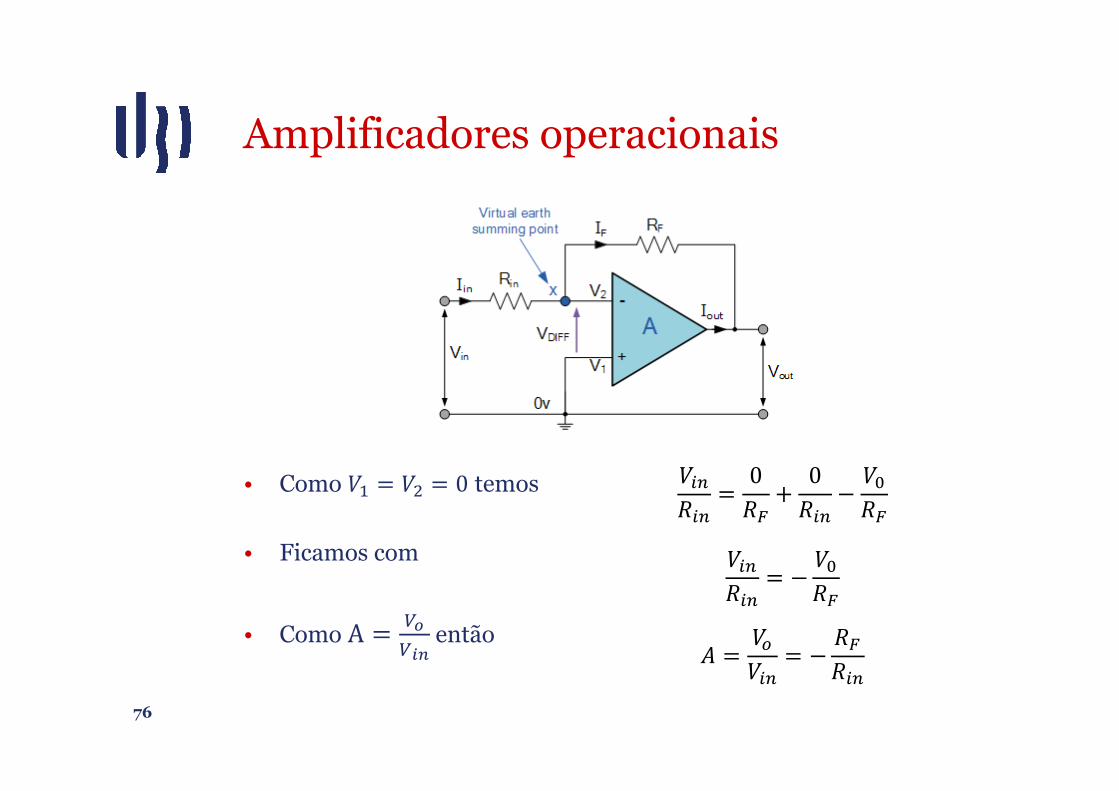
• Como 3 = 3� = 0 temos
• Ficamos com
• Como A = ���NO então
39IU9I = 0U� + 0U9I − 3QU�39IU9I = − 3QU�
; = 3F39I = − U�U9I

77
AMPOP – Amplificador inversor
• Tendo em conta a regra do amplificador ideal em que 3I = 3� como 3I = 0 então 3� = 0. Aplicando KCL
• Ficamos com a equação geral do amplificador inversor
− 3�U + −3QU� = 0
3Q = − U�U 3�

78
AMPOP – Amplificador não inversor
• Vejamos este circuito
• Aplicando KCL
• E ficamos com a equação do circuito amplificador não inversor
��U + �� − �QU� = 0
�Q = U + U�U ��
? + ?� = 0 →

79
AMPOP – Amplificador somador
• Vejamos este
circuito
• Aplicando KCL
• Podemos generalizar a equação para várias entradas como
− �mUm − �kUk − �QU� = 0 → �Q = − U�Um �m + U�Uk �k
�Q = − U�Um �m + U�Uk �k + ⋯ + U�U� ��

80
AMPOP – Amplificador de diferença
• Vejamos este circuito
• Aplicando KCL ao braço de cima
• Como temos duas variáveis desconhecidas precisamos retirar a equação do braço de baixo
U + U� 3I − U�3m = U 3Q
3� = U�U� + U 3k = 3I U�3k − U�3m = U 3Q 3Q = U�U 3k − 3m
81
AMPOP – Amplificador diferenciador
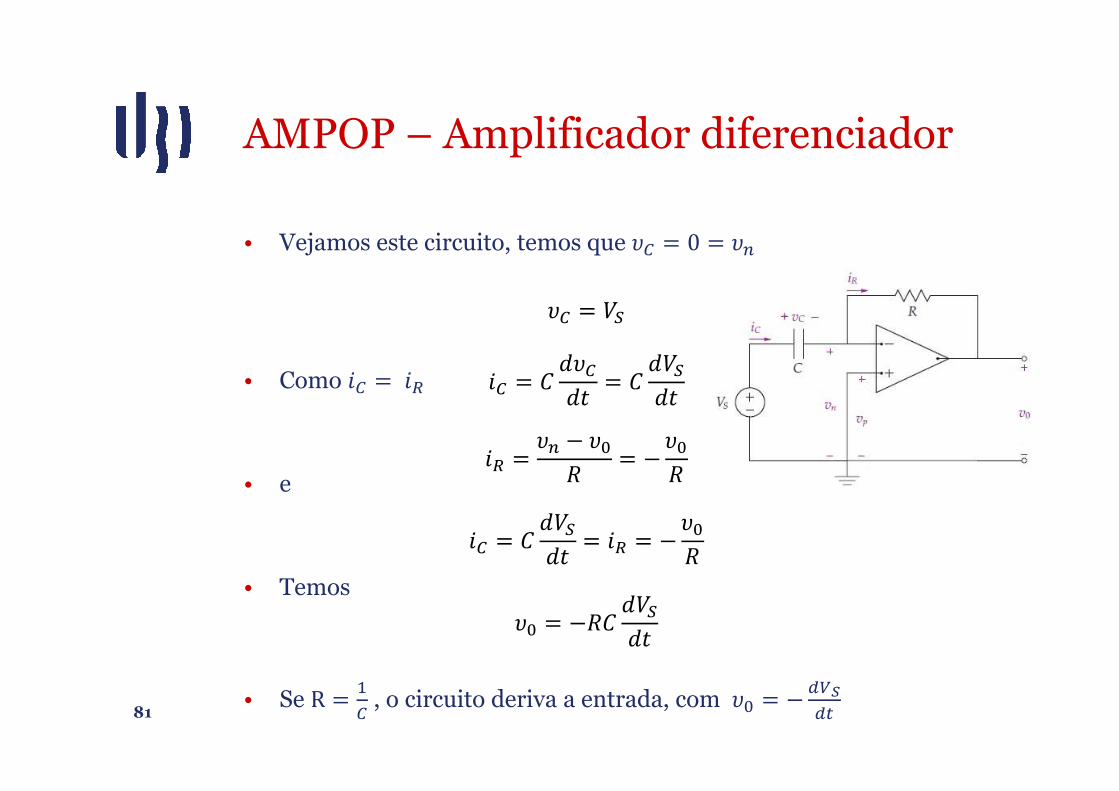
• Vejamos este circuito, temos que �� = 0 = �I
• Como ?� = ?�
• e
• Temos
• Se R = � , o circuito deriva a entrada, com �Q = − ����H
?� = q S��Sb = q S3�Sb
�� = 3�
?� = �I − �QU = − �QU?� = q S3�Sb = ?� = − �QU
�Q = −Uq S3�Sb
82
AMPOP – Amplificador integrador
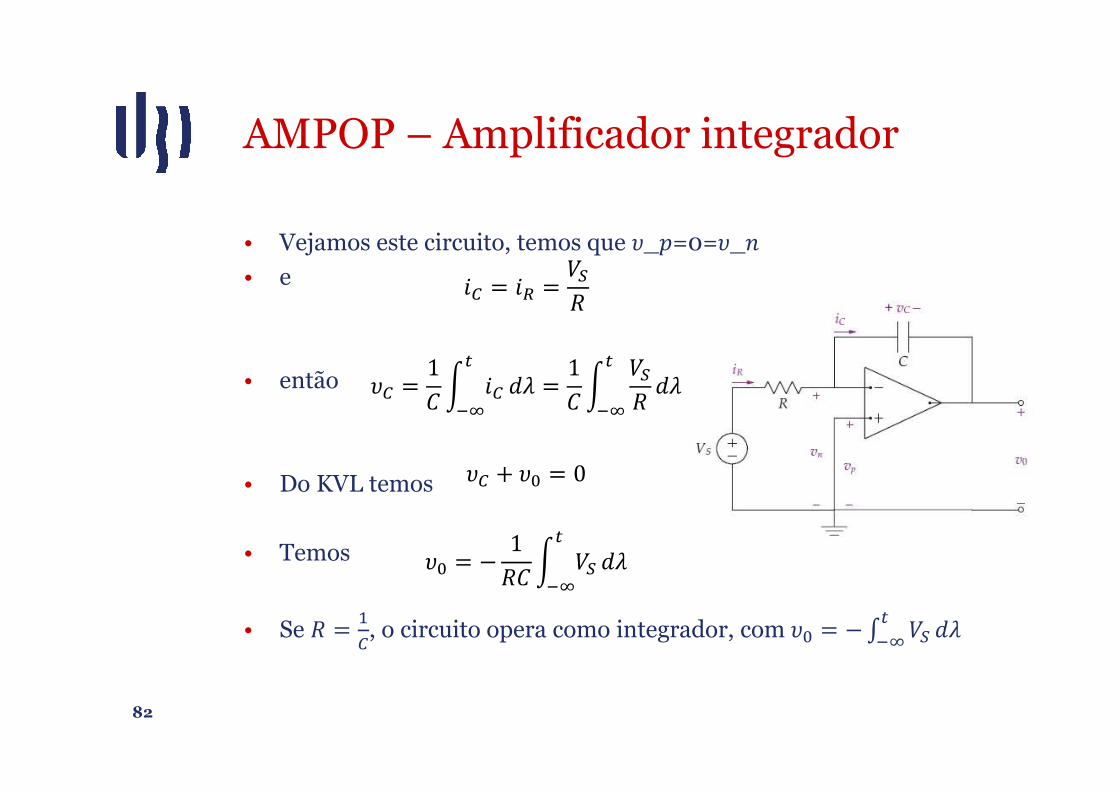
• Vejamos este circuito, temos que �_�=0=�_@• e
• então
• Do KVL temos
• Temos
• Se U = �, o circuito opera como integrador, com �Q = − 3�Hu¡ S¢
?� = ?� = 3�U�� = 1q £ ?�
Hu¡ S¢ = 1q £ 3�U
Hu¡ S¢
�� + �Q = 0
�Q = − 1Uq £ 3�H
u¡ S¢
AMPOP – Amplificador de instrumentação
• No circuito de amplificador de diferença temos o inconveniente ter uma impedância de entrada relativamente baixa. Além disso pequenas variações no valor das resistências resultam no aparecimento de uma componente de modo comum na saída, isto é 3F ≠ 0 para 3 ≠ 3�.
• Para ultrapassar estes inconvenientes é usado um circuito especial chamado de amplificador diferencial ou amplificador de instrumentação.
• Este caracteriza-se por possuir elevada resistência de entrada, muito baixa resistência de saída, elevado grau de rejeição de tensão de modo comum e não inversão da tensão de saída 3F. Permite um ganho diferencial finito, preciso e muito estável.
83
AMPOP – Amplificador de instrumentação
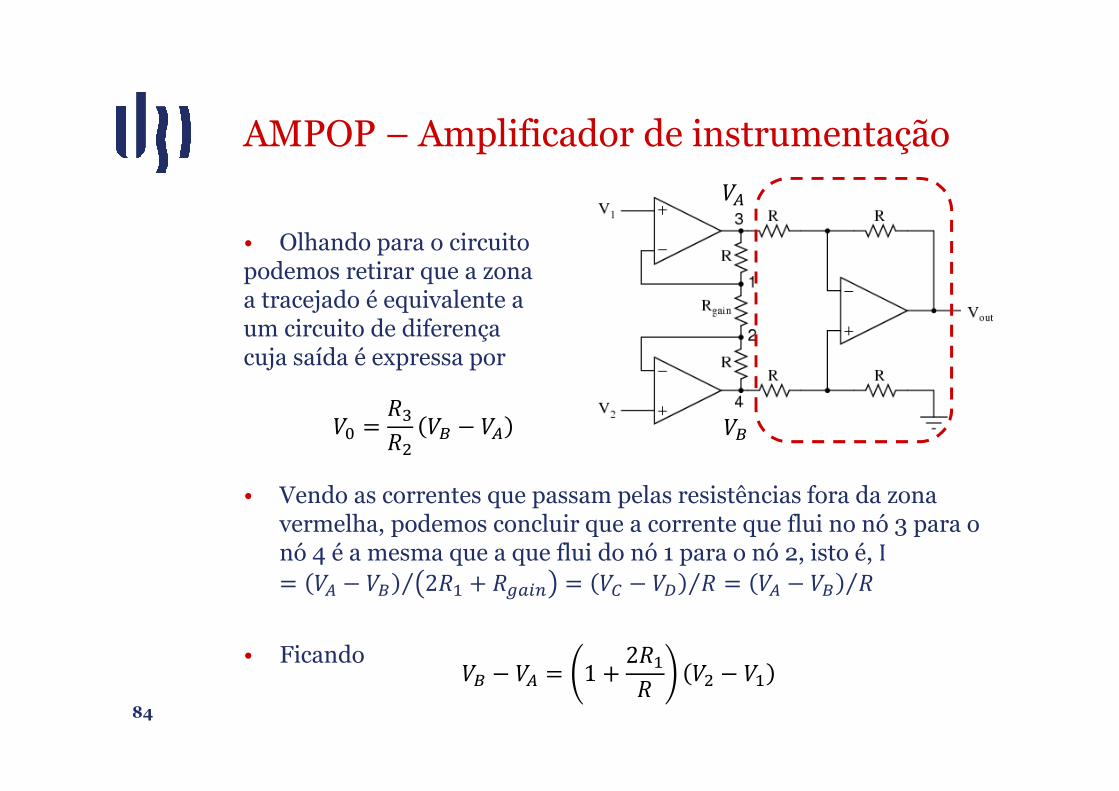
• Olhando para o circuito podemos retirar que a zona a tracejado é equivalente a um circuito de diferença cuja saída é expressa por
• Vendo as correntes que passam pelas resistências fora da zona vermelha, podemos concluir que a corrente que flui no nó 3 para o nó 4 é a mesma que a que flui do nó 1 para o nó 2, isto é, I= 3{ − 3| 2U + U¥m9I⁄ = 3� − 3¦ U⁄ = 3{ − 3| U⁄
• Ficando
84
3| − 3{ = 1 + 2U U 3� − 3
3Q = U�U� 3| − 3{
3{
3|

AMPOP – Amplificador de instrumentação
• Substituindo a tensão 3| − 3{temos a equação do circuito do amplificador de instrumentação.
• Devido às suas características é muito usado em aparelhos de medida como os ECGs, EEGs.
85
3Q = U�U� 1 + 2U U 3� − 3
3{
3|

86
AMPOP – Exercício 1
• Encontre a equação que dá a variável Vout a partir das entradas V1 e V2.

87
AMPOP – Exercício 2
• Encontre a equação que dá a variável Vout em termos das entradas VA e VB.
• Determine o valor da saída para uma resistência do sensor de 9 KΩ.

88
Conceito de filtragem e tipos de filtros
• Um filtro é um sistema físico com a função de reduzir um efeito indesejável. Temos o exemplo de um filtro de café que permite reduzir a quantidade de grão no café apenas deixando passar grãos com o tamanho desejado.
• Num sistema eletrónico permite reduzir a passagem de componentes espectrais no sinal a processar. A sua importância está patente quando se observa que raramente um equipamento usado no quotidiano não possui pelo menos um filtro.

89
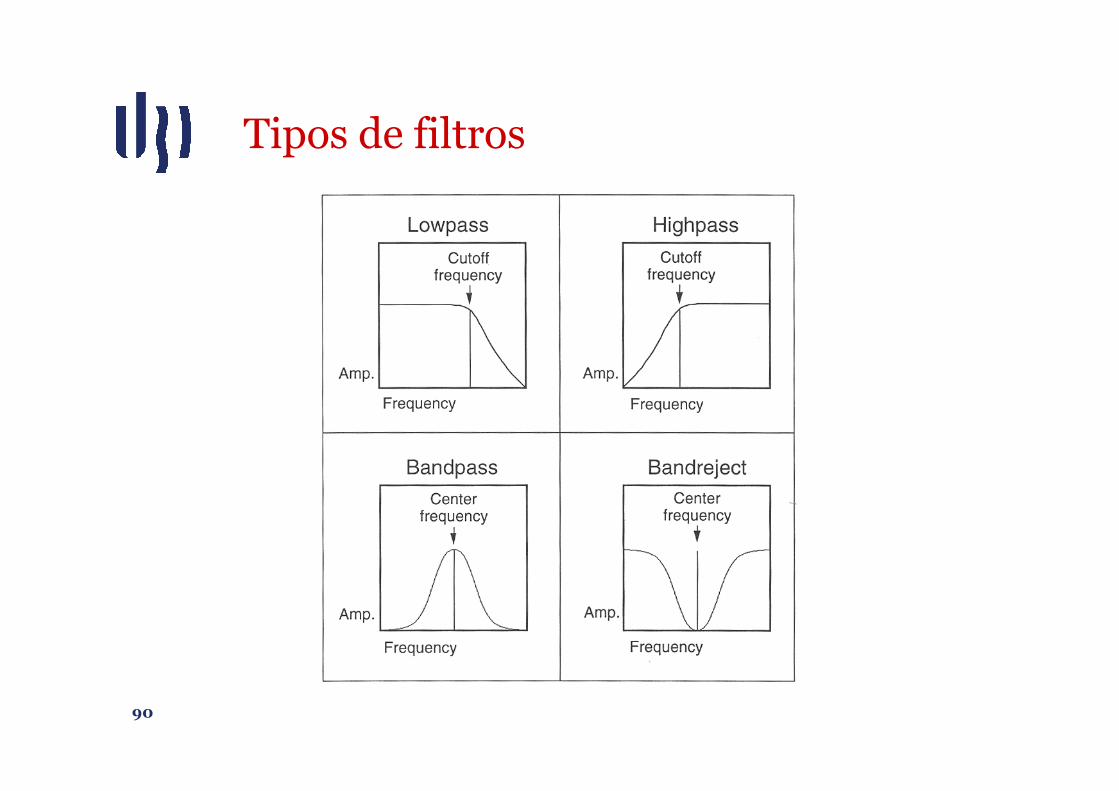
Tipos de filtros
• Existem vários tipos de filtros quanto ao tipo de resposta da função de transferência no domínio das frequências:
– Passa-baixo;
– Passa-alto;
– Passa-banda;
– Rejeita-banda;
– Deslocador de fase.
90
Tipos de filtros
91
Filtros ideais
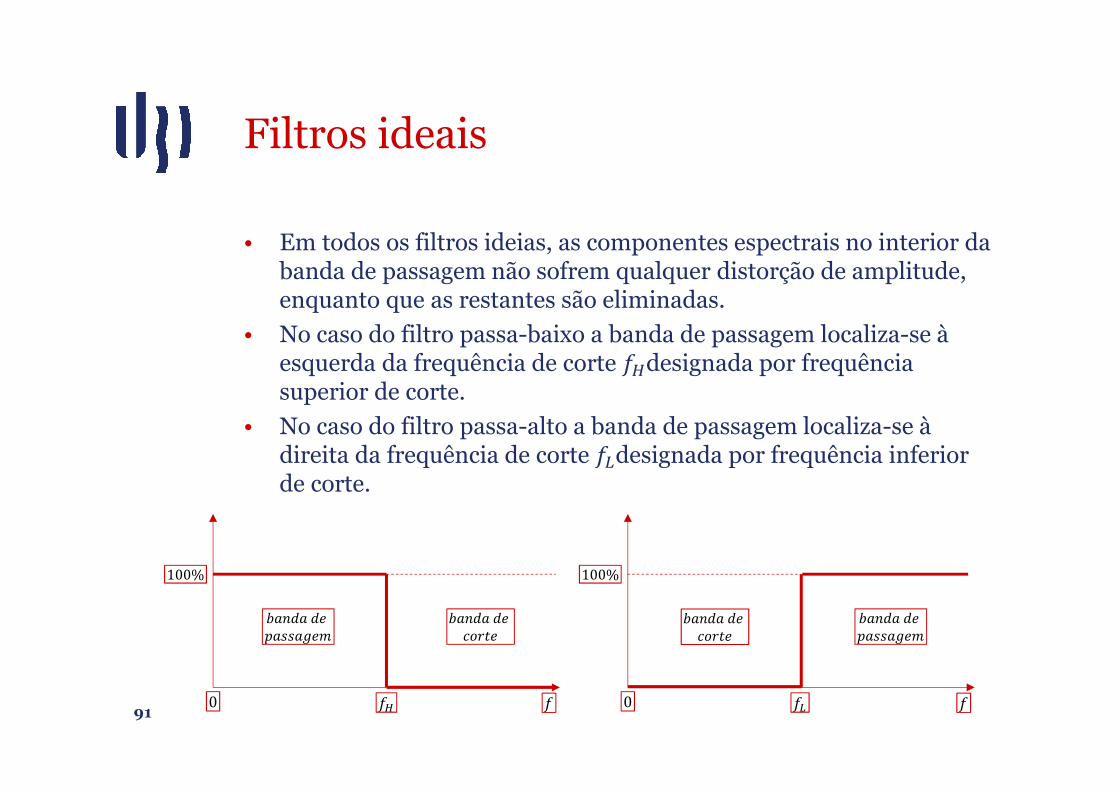
• Em todos os filtros ideias, as componentes espectrais no interior da banda de passagem não sofrem qualquer distorção de amplitude, enquanto que as restantes são eliminadas.
• No caso do filtro passa-baixo a banda de passagem localiza-se à esquerda da frequência de corte :§designada por frequência superior de corte.
• No caso do filtro passa-alto a banda de passagem localiza-se à direita da frequência de corte :̈ designada por frequência inferior de corte.
:§ :0
100%g4@S4 Sª �4xx4Yª> g4@S4 Sª «X5bª
:̈ :0
100%g4@S4 Sª �4xx4Yª>g4@S4 Sª «X5bª

92
Filtros ideais
• No filtro passa-banda ideal tal como o nome indica deixa apenas passar na banda de frequências entre a frequência inferior e superior de corte.
• No filtro rejeita-banda ideal executa a função complementar do filtro passa-banda, isto é apenas deixa passar as frequências fora da banda de rejeição.
:§ :0
100%g4@S4 Sª �4xx4Yª> g4@S4 Sª 5ªeª?çãX
:̈
g4@S4 Sª �4xx4Yª>
:§ :0
100%g4@S4 Sª «X5bª
:̈
g4@S4 Sª �4xx4Yª>g4@S4 Sª «X5bª
93
Filtros ativos de primeira ordem
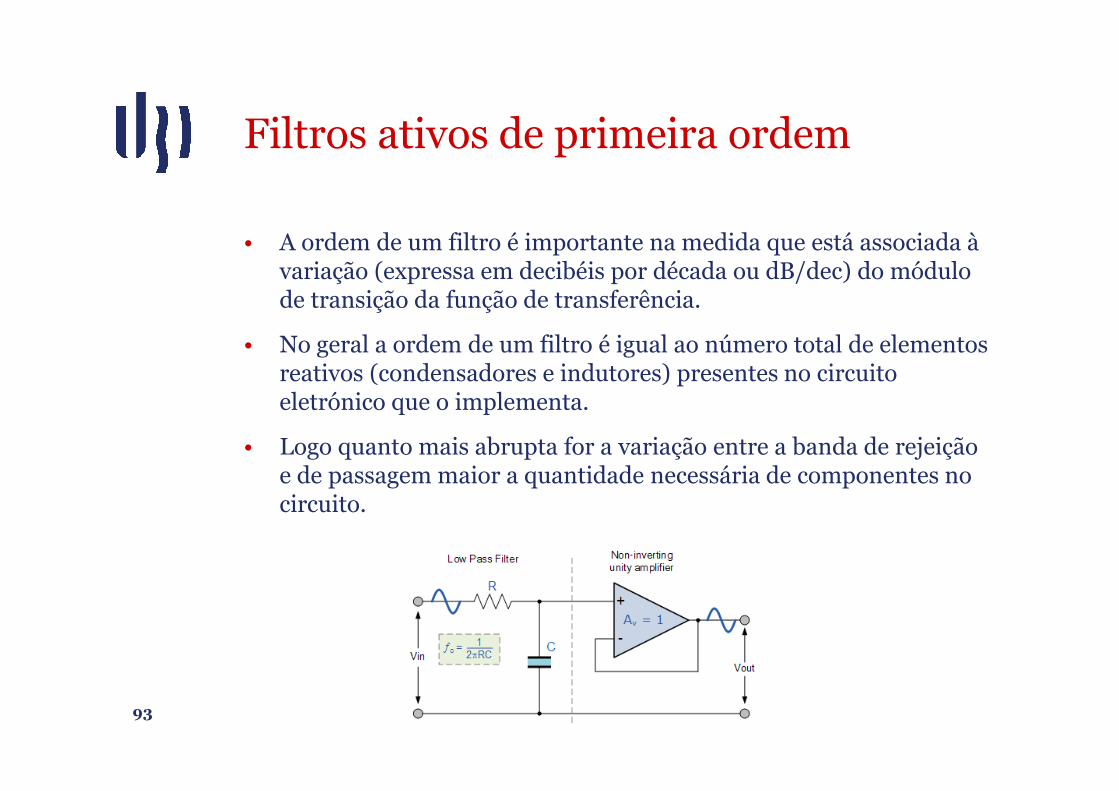
• A ordem de um filtro é importante na medida que está associada à variação (expressa em decibéis por década ou dB/dec) do módulo de transição da função de transferência.
• No geral a ordem de um filtro é igual ao número total de elementos reativos (condensadores e indutores) presentes no circuito eletrónico que o implementa.
• Logo quanto mais abrupta for a variação entre a banda de rejeição e de passagem maior a quantidade necessária de componentes no circuito.

94
Filtros passa-baixo ativo de primeira ordem com ganho
• Em ambiente real em vez de existir um corte total, o que vai acontecer é uma atenuação das frequências acima da frequência de corte :§.
• Podemos determinar a frequência de corte :� = �®�¯� e o ganho que
é dado por ;� = (1 + �°�p).
;� = 3FGH39I = ;�1 + ::§
�
Para : < :² ---��³´�NO ≅ ;�
Para : = :² ---��³´�NO = {¶�
Para : > :² ---��³´�NO < ;�

95
Filtros passa-baixo ativo de primeira ordem com ganho
• Isto quer dizer que até à frequência de corte :� o ganho mantêm-se constante ;�, em :� o ganho é 0,707;� e depois de :� decresce a uma taxa constante à medida que a frequência aumenta.
• Num filtro de primeira ordem o ganho decresce 20dB (=20log10) cada vez que a frequência aumenta em 10 vezes.
;�(S<) = 20WXY Q 3̧ ¹º39I
∴ −3S< = 20WXY Q 0,707 3̧ ¹º39I

96
Filtros passa-alto ativo de primeira ordem com ganho
• Em ambiente real em vez de existir um corte total, o que vai acontecer é uma atenuação das frequências abaixo da frequência de corte :¼.
• Podemos determinar a frequência de corte :½ = �®�¯�p e o ganho
que é dado por ;� = (1 + �°�p).
3FGH39I = ;� ::̈1 + ::̈
�
Para : < :² ---��³´�NO < ;�
Para : = :² ---��³´�NO = {¶�
Para : > :² --- ��³´�NO ≅ ;�
97
Filtros passa-banda ativo de primeira ordem com ganho
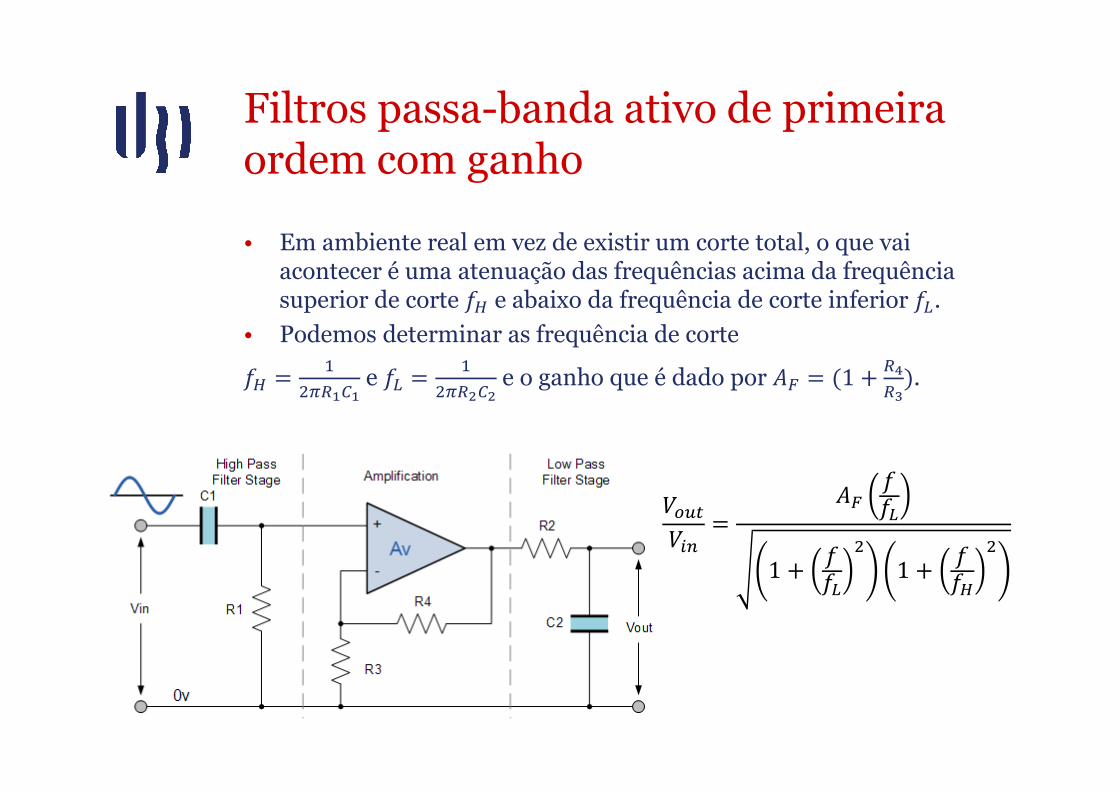
• Em ambiente real em vez de existir um corte total, o que vai acontecer é uma atenuação das frequências acima da frequência superior de corte :§ e abaixo da frequência de corte inferior :̈ .
• Podemos determinar as frequência de corte
:§ = �®�p�p e :̈ =
�®�°�° e o ganho que é dado por ;� = (1 + �¾�¯).
3FGH39I = ;� ::̈1 + ::̈
� 1 + ::§�

Filtros ativos de segunda ordem
• Os filtros de segunda ordem são também designados de filtros VCVS (voltage-controlled voltage-source).
• A maioria dos designs dos filtros de segunda ordem têm o nome do seu inventor, de entre os mais comuns temos:
– Butterworth;
– Chebyshev;
– Bessel;
– Sallen-Key.
• Todos estes têm as diferentes configurações passa-baixo, passa-alto, passa-banda e rejeita-banda, e devido a serem filtros de segunda ordem todos têm atenuação de 40 dB/dec.

Filtros passa-baixo de segunda ordem
• Neste exemplo temos um filtro passa-baixo de segunda ordem
Sallen-Key. A equação do seu ganho é dada por ;� = 1 + �¿�À e a
sua frequência superior de corte é dada por :§ = �® �p�°�p�°.
Filtros passa-alto de segunda ordem
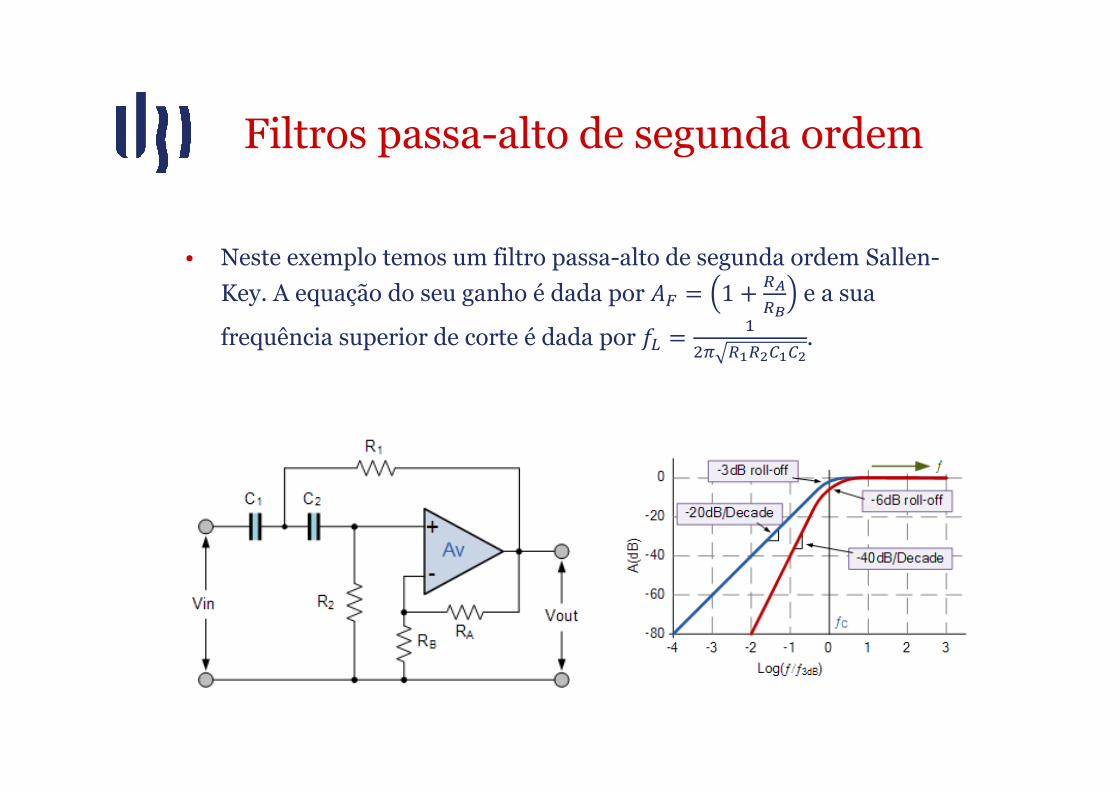
• Neste exemplo temos um filtro passa-alto de segunda ordem Sallen-
Key. A equação do seu ganho é dada por ;� = 1 + �¿�À e a sua
frequência superior de corte é dada por :̈ = �® �p�°�p�°.
Filtros de segunda ordem
• Para estes filtros existem 2 fatores que alteram a resposta do filtro no ponto da frequência de corte:
– O fator de qualidade Q;
– O fator de amortecimento ζ (zeta);
• Ambos são determinados pelo ganho do amplificador A. À medida que um diminui o outro aumenta. O fator de qualidade Q representa a forma do pico de ressonância, isto é a altura e estreitamento em volta do ponto de frequência de corte.
• Resumindo um filtro passa-baixo terá sempre as propriedades de um filtro passa-baixo no entanto pode apresentar um pico de ressonância nas proximidades da frequência de corte, isto é o ganho aumentar rapidamente devido a efeitos de ressonância do ganho do amplificador.
Filtros de segunda ordem
• Para manter a estabilidade do sistema o ganho de amplificador não inversor deve variar entre 1 e 3 e (Á entre zero e 2) e é expresso da seguinte forma.
; = 3 − 2 × Á• Se o ganho tiver valor 3 então ζ é dado por
ζ = 3 − ;2 = 12Ã∴ ; = 3 − 1Ã
Filtros de segunda ordem
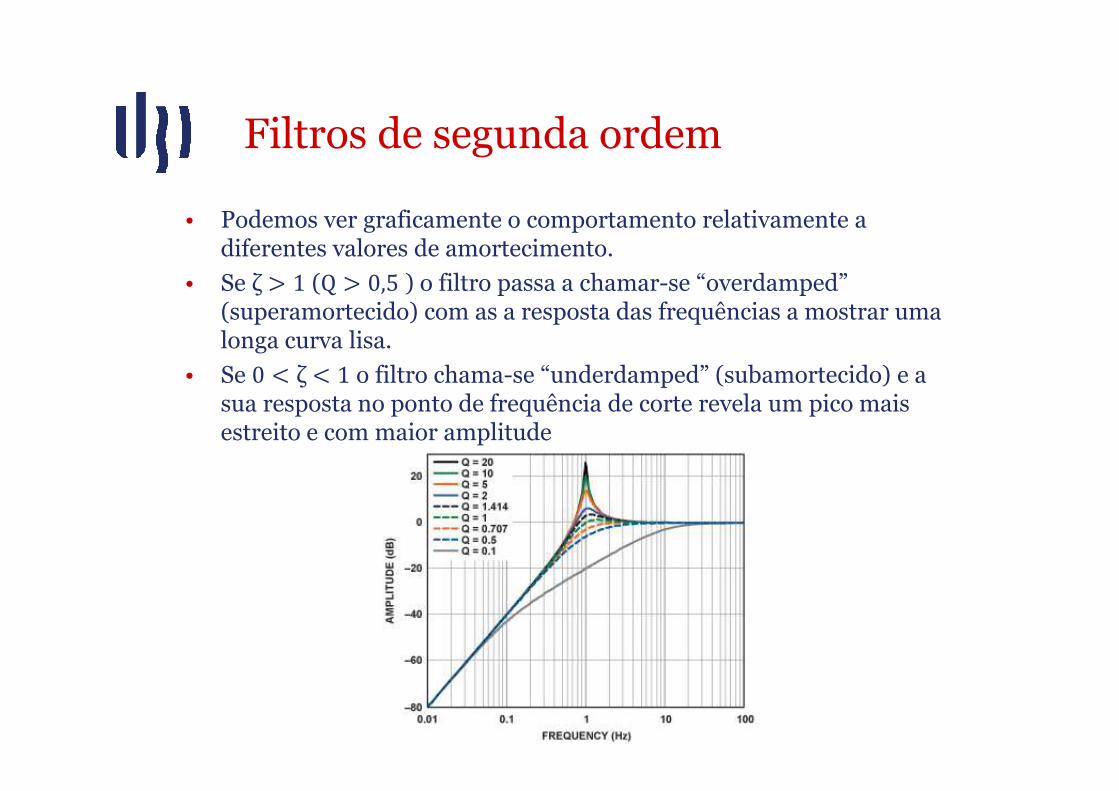
• Podemos ver graficamente o comportamento relativamente a diferentes valores de amortecimento.
• Se ζ > 1 (Q > 0,5 ) o filtro passa a chamar-se “overdamped” (superamortecido) com as a resposta das frequências a mostrar uma longa curva lisa.
• Se 0 < ζ < 1 o filtro chama-se “underdamped” (subamortecido) e a sua resposta no ponto de frequência de corte revela um pico mais estreito e com maior amplitude

Filtros de segunda ordem
• Se ζ = 1 o filtro chama-se “critically damped” (criticamente amortecido) e representa a resposta com amortecimento mais rápido sem oscilações.
Filtros de segunda ordem
• Exemplo temos um filtro passa-baixo de segunda ordem com as seguintes características:à = 1 , :² = 79.5 �Å , U = U� ª q = q�
• Então temos que :� = �®��
• Escolhendo um valor de 1 kΩ para a resistência temos que
:� = 12iUq ∴ q = 12iU:�
q = 12iU:� = 12i × 1jΩ × 79.5�Å = 2.0μ�

Filtros de segunda ordem
• Com o valor de fator à = 1 então o ganho do filtro é calculado :
à = 12Á ∴ Á = 12à = 0.5
Á = 0.5 = 3 − ;2 ∴ ; = 3 − 2Á = 2• Com a equação do ganho
; = 3FGH39I = 1 + U{U| = 2• Então U{ = U|

Referências
• Correia, J., Carmo, J., Introdução à Instrumentação médica, LIDEL, 2013.
• Buchla, D., Mclachlan, W., Applied electronic and measurementtechniques, 1st Edition, Prentic-Hall, 1991.
• Webster, J. G., Medical instrumentation: application and design, 3rd Edition, Jhon Wiley and Sons, 1997.
• Franco, S., Desing with operational amplifier and analogintegrated circuits, 3rd Edition, McGraw-Hill, 2003.
107