influÊncia da massa adicional hidrodinÂmica na...
TRANSCRIPT

INFLUÊNCIA DA MASSA ADICIONAL HIDRODINÂMICA NA ANÁLISE
VIBRACIONAL GLOBAL VERTICAL DE UM NAVIO GRANELEIRO
Bilmer II Gamarra Haro
Dissertação de Mestrado apresentada ao Programa de
Pós-graduação em Engenharia Oceânica, COPPE, da
Universidade Federal do Rio de Janeiro, como parte
dos requisitos necessários à obtenção do título de
Mestre em Engenharia Oceânica.
Orientador: Severino Fonseca Da Silva Netto
Rio de Janeiro
JANEIRO - 2012

INFLUÊNCIA DA MASSA ADICIONAL HIDRODINÂMICA NA ANÁLISE
VIBRACIONAL GLOBAL VERTICAL DE UM NAVIO GRANELEIRO
Bilmer II Gamarra Haro
DISSERTAÇÃO SUBMETIDA AO CORPO DOCENTE DO INSTITUTO ALBERTO
LUIZ COIMBRA DE PÓS-GRADUAÇÃO E PESQUISA DE ENGENHARIA (COPPE)
DA UNIVERSIDADE FEDERAL DO RIO DE JANEIRO COMO PARTE DOS
REQUISITOS NECESSÁRIOS PARA A OBTENÇÃO DO GRAU DE MESTRE EM
CIÊNCIAS EM ENGENHARIA OCEÂNICA.
Examinada por:
________________________________________________ Prof. Severino Fonseca da Silva Neto, D.Sc.
______________________________________________ Prof. Webe João Mansur, D.Sc.
________________________________________________ Prof. Carlos Rodrigues Pereira Belchior, D.Sc
RIO DE JANEIRO, RJ - BRASIL
FEVEREIRO - 2012

iii
Haro, Bilmer II Gamarra
Influência da Massa Adicional Hidrodinâmica na Análise
Vibracional Global Vertical de um Navio Graneleiro/ Bilmer
II Gamarra Haro. -Rio de Janeiro: UFRJ/COPPE, 2012.
xii, 101 p.: il.; 29,7 cm.
Orientador: Severino Fonseca Da Silva Neto
Dissertação (mestrado) - UFRJ/ COPPE/ Programa de
Engenharia Oceânica, 2012.
Referencias Bibliográficas: p.87 - 91
1. Massa Adicional Hidrodinâmica. 2. Vibração
Global Vertical. 3. Análise Numérica. I. Neto, Severino
Fonseca Da Silva. II. Universidade Federal do Rio de
Janeiro, COPPE, Programa de Engenharia Oceânica. III.
Título.
iv
AGRADECIMENTOS
À minha família pelo apoio, carinho e incentivo durante o período de execução desta
dissertação.
Ao meu orientador Severino Fonseca Da Silva Neto pelos conhecimentos passados,
sugestões e incentivos durante a execução da tese e pela oportunidade de fazer parte da
equipe de trabalho.
Ao professor Peter Kaleff pelo apoio, sugestões e incentivos no desenvolvimento da
modelação numérica.
Ao professor Luis Vaz pelo apoio do espaço e aparelhos cedidos no Laboratório de
Ensaios Dinâmicos e Análise de Vibração - LEDAV da COPPE/UFRJ.
À Coordenação de Aperfeiçoamento de Pessoal de Nível Superior – CAPES, pelo
apoio financeiro prestado durante os dois anos da pesquisa.

v
Resumo da Dissertação apresentada à COPPE/UFRJ como parte dos requisitos necessários
para a obtenção do grau de Mestre em Ciências (M.Sc.)
INFLUÊNCIA DA MASSA ADICIONAL HIDRODINÂMICA NA ANÁLISE
VIBRACIONAL GLOBAL VERTICAL DE UM NAVIO GRANELEIRO
Bilmer II Gamarra Haro
FEVEREIRO - 2012
Orientador: Severino Fonseca Da Silva Netto
Programa: Engenharia Oceânica
Na atualidade o transporte marítimo é um dos meios mais utilizados para o comércio
no mundo. Tendo em conta que está aumentando esse intercâmbio comercial, os navios
utilizados para satisfazer esta necessidade são cada vez maiores em dimensões, com motores
mais potentes, propulsores maiores, configurações diferentes e os efeitos que essas
mudanças causam no navio não podem ser ignorados, do mesmo modo as fontes de
excitação nas vibrações são relevantes tanto para o casco como para as subestruturas que
compõem o navio.
O presente trabalho aborda o estudo da influência da massa adicional hidrodinâmica
nas vibrações globais verticais de um navio tipo graneleiro.
As formas modais do navio serão determinadas mediante distintos métodos que
estimam a massa adicional hidrodinâmica, e as freqüências verticais serão comparados e
validados com as freqüências naturais achadas das análises espectrais feito aos dados
experimentais do navio real obtidas na prova de mar. É preciso mencionar que nessa
comparação será incluído um modelo unidimensional do mesmo navio feito por outro
pesquisador. Um propósito secundario é saber a diferença da frequencia natural achada com
o modelo tridimensional e o modelo unidimensional comparado ambos com la medições
reais do navio.

vi
Abstract of Dissertation presented to COPPE/UFRJ as a partial fulfillment of the
requirements for the degree of Master of Science (M.Sc.)
HYDRODYNAMIC ADDED MASS INFLUENCE IN THE GLOBAL VERTICAL
VIBRATION OF A BULKCARRIER SHIP
Bilmer II Gamarra Haro
FEBRUARY - 2012
Advisors: Severino Fonseca Da Silva Netto
Department: Ocean Engineering
Currently shipping is one of the most used mains for trade in the world. Given that
this trade is increasing, the vessels used to satisfy this need are increasing in size, with more
powerful engines, larger propellers and different configurations. The effect of those settings
cannot be neglected, at the same time; the excitation source in vibration is relevant to both
the hull and for the substructures that make up the ship.
The present job addresses the hydrodynamic added mass influence in the vertical
global vibration analysis in a bulkcarrier ship
The vertical modal forms in the ship shall be determined through different methods
that will estimate the added mass, the vertical frequencies will be compared and validated
with the natural frequencies obtained by the spectral analysis made with the experimental
data from the real ship which was measured in the sea test. It must be mentioned that this
comparison will be included a unidimensional model made by another researcher for the
same ship. A secondary purpose is to know the difference of the natural frequencies found
with a tridimensional model and the unidimensional model compared them with the real
measurements of the ship.

vii
Sumário
CAPÍTULO 1: INTRODUÇÃO
1.1 Apresentação do Problema 1
1.2 Objetivo 3
1.3 Escopo do Trabalho 3
1.4 Descrição dos Capítulos 3
CAPÍTULO 2: REVIÇÃO BIBLIOGRÁFICA 5
CAPÍTULO 3 : FUNDAMENTOS TEÓRICOS
3.1 Introdução 9
3.2 Definições básicas 9
3.3 Vibração no Navio 11
3.4 Análise Continuo do Navio 11
3.4.1. Viga do Euler-Bernoulli 11
3.4.2. Viga de Timoshenko 16
3.4.3 Diagrama de Corpo Livre do Elemento da Viga 17
3.4.4 Equações Elásticas da Viga 18
3.4.5 Equações Dinâmicas da Viga 19
3.5 Análise Discreta do Navio 20
3.5.1 Equações de Movimento 21
3.5.2 Cálculos de Frequências Naturais e Expansão Modal 22
3.6 Excitações Forçadas no Navio 24
3.6.1 Excitação Induzida pelo Propulsor 24
3.6.2 Excitação Induzida pelo Motor Propulsor 27
3.6.3 Navio em Movimento 30
3.6.4 Equipamentos a Bordo 30
3.7 Métodos de estimação das frequências naturais do navio 31
3.7.1 Método de Lewis 31
3.7.2 Método de Landweber e Macagno 34
3.7.3 Método do Instituto de Pesquisas da Construção Naval de Krylov 35

viii
3.7.4 Método do Instituto de Pesquisas Navais do Japão 37
3.7.5 Método da Sociedade de Classificação ABS 39
3.8 Amortecimento 40
CAPÍTULO 4 : ANALISE E PROCESSAMENTO DAS MEDICOES
EXPERIEMTAIS
4.1 Generalidades 41
4.2 Equipamentos para Medição de Vibrações Globais 41
4.3 Localizações dos Acelerômetros para a Medição Global 42
4.4 Medições nas Velocidades da Prova de Mar 43
CAPÍTULO 5 : AVALIAÇÃO NUMÉRICA
5.1 Introdução 52
5.2 Características do navio empregado na análise 53
5.3 Modelagem do navio 54
5.4 Sistemas de referencia para o navio 55
5.5 Equipamentos do navio 55
5.6 Condições de contorno 56
5.7 Representação do modelo por elementos finitos 56
5.7.1 Elemento finito a utilizar na modelagem 57
5.8 Métodos de extração de autovalores e autovetores 57
5.9 Malhado do modelo 58
5.10 Sensibilidade da Malha 58
5.11 Massa adicional hidrodinâmica do modelo em elementos finitos 59
5.11.1 Massas hidrodinâmicas adicionais nos extremos do navio 59
5.11.2 Distribuição da massa hidrodinâmica no casco 62
5.11.3 Massa adicional por o método de Lewis 64
5.11.4 Massa adicional por o método de Landwerger & Macagno 68
5.11.5 Massa adicional por o método do Instituto de Krylov 71
5.12 Modelo unidimensional do navio 78
5.13 Frequências Natural do Navio Mediante Fórmulas Empíricas 79
ix
CAPÍTULO 6 : CONCLUSÕES E RECOMENDAÇÕES
6.1 Conclusões 84
6.2 Trabalhos Futuros 86
REFERÊNCIAS BIBLIOGRÁFICAS 87
ANEXOS 92

x
LISTA DE FIGURAS
1-1 Distribuição dos tipos de Bulk Carriers (Fonte: MAN Diesel & Turbo, 2010) 2
3-1 Comparação de oscilação: (a) Periódica e (b) Aleatória (Fonte: D.E. Newland, 1993)
10
3-2 Representação gráfica da viga de Euler-Bernoulli (Fonte: Vorus, 1998) 12
3-3 Representação gráfica dos modos vibracionais verticais (Fonte: Vorus, 1998) 16
3-4 Diagrama do corpo livre do elemento da viga 18
3-5 Modelagem do navio mercante (Fonte: Asmussen et al., 2001) 20
3-6 Rango de frequências naturais encontradas nas aplicações de construção naval (Fonte:
Asmussen et al., 2001) 23
3-7 Forças e momentos no propulsor (Fonte: Asmussen et al., 2001) 25
3-8 Efeito da onda na popa (a) e o efeito do afundamento da popa nas amplitudes das
pressões no casco do navio (b)(Fonte: 17th International Ship and Offshore Structure
Congress) 25
3-9 Distribuição da pressão no casco induzida pelo propulsor (Fonte: Sink-Kwan) 27
3-10 Evolução do número de cilindros nas instalações dos navios (Fonte: Fonte: MAN
Diesel & Turbo 2002) 28
3-11 Momentos produzidos pelas forças inerciais (Fonte: MAN Diesel & Turbo 2002) 29
3-12 Modos vibracionais do motor: (a) sim base e (b) com base (Fonte: Asmussen et al.,
2001) 30
3-13 Análise de vibrações no domínio do tempo para o “Slamming” (Fonte: Asmussen et
al., 2001) 31
3-14 Coeficientes de massa virtual (Fonte: Vorus, 1998) 33
3-15 Fator Jn de Lewis (Fonte: Vorus, 1998) 33
3-16 Coeficiente de massa virtual para movimento vertical (Fonte: Apostila de aulas) 34
3-17 Coeficiente de massa virtual para movimento horizontal (Fonte: Apostila de aulas) 35
3-18 Seção definida pelo instituto Krylov ( Fonte: Korotkin, 2007) 36
3-19 Coeficientes P1 e P2 nas vibrações verticais num navio graneleiro (Fonte: Apostila
Troyman) 38

xi
4-1 O navio Graneleiro da Tese 41
4-2 Localização dos acelerômetros na prova do mar 42
4-3 Diagrama de cascada do ponto 1V no navio graneleiro 45
4-4 Diagrama de espectros do ponto 1V a diferentes velocidades do motor 46
4-5 Diagrama de cascada do ponto 4V no navio graneleiro 47
4-6 Diagrama de espectros do ponto 4V a diferentes velocidades do motor 48
4-7 Diagrama de cascada do ponto 2L no navio graneleiro 49
4-8 Diagrama de espectros do ponto 2L a diferentes velocidades do motor 50
5 -1 Detalhe da seção a meia-nau (Web Frame) 53
5-2 Vista em perspectiva do navio 52
5-3 Reforço junto com o casco 56
5-4 Comparação entre casca (esquerda) e membrana (direita) 57
5-5 Frequências naturais do casco seco e com diferente número de elementos finitos na
malha 58
5-6 Massas adicionais hidrodinâmicas 60
5-7 Malha do casco no Aqua v12 62
5-8 Caverna com 7 massas (a) e caverna com 3 massas (b) 63
5-9 Frequências Naturais segundo a distribuição da massa no casco 64
5-10 Distribuição de equipamentos e massa adicional hidrodinâmica 65
5-11 Variação da massa adicional por modo para o método e Lewis 66
5-12 Variação da massa adicional por modo para o método de Landwerger & Macagno 69
5-13 Variação da massa adicional por modo método de Instituto Krylov 72
5-14 Primeiro modo vibracional 74
5-15 Segundo modo vibracional 75
5-16 Terceiro modo vibracional 75
5-17 Quarto modo vibracional 76
5-18 Quinto modo vibracional 76
5-19 Sexto modo vibracional 77
5-20 Sétimo modo vibracional 77
5-21 Vibracoes locais no fundo do casco 78
5-22 Frequências para navios de carga (Fonte: DNV) 80

xii
5-23 Frequências naturais achadas pelos diferentes métodos 83
LISTA DE TABELAS
4-1 Medições da serie temporal para a análise vibracional 43
4-2 Dados das frequências naturais mediante espectros 51
5-1 Características principais do navio 54
5-2 Lista dos principais equipamentos a considerar no navio 55
5-3 Cálculo das massas adicionais com o Aqwa v12 61
5-4 Frequências Naturais segundo a distribuição de massas 63
5-5 Dados iniciais para o método de Lewis 65
5-6 Massa adicional distribuída entre cada baliza (Método de Lewis) 67
5-7 Frequências Naturais (Método de Lewis) 68
5-8 Dados iniciais para o método de Landwerger & Macagno 68
5-9 Massa adicional distribuída entre cada baliza (Método de Landwerger & Macagno) 70
5-10 Frequências Naturais (Método de Landwerger & Macagno) 71
5-11 Dados iniciais para o método do Instituto Krylov 71
5-12 Massa adicional distribuída entre cada baliza (Krylov) 73
5-13 Frequências Naturais (Método Instituto de Pesquisas Krylov) 74
5-14 Frequências naturais verticais - modelo unidimensional (Hz) 78
5-15 Dados para estimação das frequências naturais pelas normas da ABS 79
5-16 Frequências nos modos verticais ABS 79
5-17 Dados para estimação das frequências naturais pelo método do Instituto de Pesquisas
Navais do Japão 81
5-18 Frequências nos modos verticais pelo Instituto de Pesquisas Navais do Japão 81
5-19 Resumo de frequências naturais verticais (Hz) 82

1
CAPÍTULO 1
INTRODUÇÃO
1.1 Apresentação do Problema
Visto que atualmente os países mais industrializados, precisam satisfazer
necessidades cada vez maiores de materiais como carvão, ferro para fabricação de aço e
outro tipo de matérias, os projetos para satisfazer essas demandas crescem em tamanho,
dificuldades e complexidade. No caso da indústria naval os artefatos flutuantes
propulsados, tais como navios, tornaram-se maiores e com motores mais potentes,
atualmente os navios com maior demanda são containers, tanqueiros e graneleiros que
segundo o MAN Diesel & Turbo [1], representam um terço da frota do mundo em
termos de tonelagem. Em consequência os engenheiros navais devem considerar muitos
estudos que são refinados nas diferentes etapas do projeto.
Uma dessas variáveis é o estudo da análise vibracional que pode revelar
problemas no projeto e que de acordo com a severidade da vibração pode causar danos
graves e podem incluir a parada do navio com as consequentes perdas econômicas.
As falhas produzidas num sistema de propulsão podem ser nas estruturas
principais, subestruturas ou em equipamentos como motores principais e maquinaria
auxiliar, por tanto pode-se comprometer a segurança da tripulação ou dos passageiros a
bordo. Além disso, se a segurança não é comprometida pode trazer problemas de
desconforto e cansaço para a tripulação e um aumento de custos operacionais e de
manutenção em reparações a bordo.
Anos atrás o fenômeno da vibração foi estudado analiticamente de um sistema
continuo por Euler e Timoshenko, mediante a viga-navio, os efeitos das vibrações
produzidas por forças de excitação que eram representadas por equações diferenciais
eram de solução muito complexa, e cuja simplificação não atingia um grau de
aproximação adequado. Ainda assim, algumas equações diferenciais de acordo com
certas condições de contorno e dados iniciais davam resultados contrários a os ensaios
experimentais Vorus [2]. Essas dificuldades tem sido superadas mediante de meios
computacionais, atualmente utiliza-se softwares baseados na teoria de elementos finitos,
além disso tem-se computadores muito potentes com as ferramentas para avaliar
grandes projetos e equipes multidisciplinares que podem trabalhar em distintas partes do
mundo poupando tempo e dinheiro no projeto.

2
Com a análise vibracional pode-se tentar estimar o comportamento de uma
estrutura e prever a existência de o fenômeno de ressonância que magnífica os
deslocamentos e provocar a uma falha catastrófica. Podem-se analisar as maneiras de
corrigir a ressonância mediante a modificação da rigidez, distribuição de massa,
mudança de frequências de excitação e frequências naturais de um sistema.
Mas como todo sistema altamente não-linear, o navio não pode evitar a vibração
em sua totalidade, é por isso que também os projetistas e modeladores fazem uso de
normas para comparar os níveis máximos de vibrações para os navios que serão
aprovados pelas organizações internacionais.
Organizações tais como a International Standard Organization (ISO),
International Association of Classification Societies (IACS), entre outras, ganharam
cada vez mais aceitação pela indústria do mundo porque regulam os limites das
vibrações e servem como referência para acordos entre estaleiros e donos dos projetos.
O navio proposto para esta tese é um graneleiro, a seguir apresenta-se a seguinte
figura da distribuição desse tipo do navio no mundo.
Figura 1-1 Distribuição dos tipos de Bulk Carriers (Fonte: MAN Diesel & Turbo,
2010)
No estudo das vibrações quando em um sistema se muda a distribuição de massa
ou a rigidez, consequentemente mudam as frequências naturais de um sistema e também
os modos vibracionais. Atualmente a diversidade nas configurações nas estruturas dos
navios, plantas de propulsão, distribuição de equipamento, etc. mudam de um desenho
para outro, faz que a integração dinâmica entre o casco e as subestruturas tais como

3
masteles, chimeneia, ainda seja matéria de estudo para os pesquisadores. As simulações
numéricas são uma ferramenta poderosa para avaliar resultados dos modelos
matemáticos vibracionais.
1.2 Objetivo
Estudar o comportamento das vibrações globais verticais nos diferentes modos
vibracionais do navio graneleiro considerando diferentes procedimentos para estimar a
massa adicional hidrodinâmica que rodeia o casco.
Como objetivo secundário comparar a consistencia de utilizar um modelo
tridimensional com um modelo unidimensional para representar o mesmo navio em um
estudo vibracional.
1.3 Escopo do Trabalho
Este trabalho se limitará a fazer uma análise da influência da massa adicional
considerando um modelo tridimensional, considerando partes como o casco, estruturas
internas principais, convés, anteparas, superestrutura e os principais equipamentos
considerando os de maior massa, que serão representados por massas concentradas na
simulação.
Para fazer o estudo terão que ser feitas simplificações tais como a não
consideração do amortecimento do navio, porque dado que até o momento o
amortecimento é um tema muito complexo e que ainda não tem um entendimento
completo de este aspecto deve-se mencionar que amortecimento de um navio esta
constituído pelo amortecimento estrutural, amortecimento da carga, amortecimento do
fluido que rodeia o casco entre outros, por tanto não será considerado para o estudo.
Tem-se múltiplas fontes de excitação no casco do navio tais como o propulsor,
motor principal, motores auxiliares, ondas do mar, e massas passivas entre outras, que
envolvem um nível de não linearidade muito alto, e os efeitos das mesmas estarão
presente na parte experimental no momento de realizar a análise espectral. Essas fontes
de excitação serão explicadas para o entendimento geral dos diagramas de cascada que
são parte do trabalho e que mostram como excitam as frequências naturais.
1.4 Descrição dos Capítulos
A seguir apresenta-se uma breve descrição dos capítulos em que se dividiu esta
dissertação.

4
No capítulo II apresentam-se os resumos das principais bibliografias utilizadas
relacionada com o tema de vibração global e a análise de processamento dos sinais para
vibrações do navio.
No capítulo III é apresenta a teoria básica para entender os temas
correspondentes a vibração no navio e seus orígenes, mostra a teoria de modelagem
continua de uma viga-navio mediante as teorias de Euler-Bernoulli e Timoshenko com
as correspondentes diferenças. Também é apresentada a teoria correspondente para a
análise mediante elementos finitos.
No capítulo IV corresponde à análise experimental da tese, que inclui a
aquisição, registro e a análise dos sinais feita por o laboratório, mas também apresenta-
se os resultados obtidos por o autor mediante o uso no software Matlab com o qual
foram feitos as análises espectrais e a cascada espectral para identificar os ordenes de
vibração que afeitam o navio e possíveis ressonâncias..
No capítulo V se desenvolve a modelagem do navio mediante o software
Rhinoceros v4.0 e logo foi feito a análise modal mediante o software de elementos
finitos Ansys-Workbench v13, onde se apresenta uma modelagem em três dimensões do
casco do navio com as estruturas internas e a superestrutura.
No capítulo VI se apresentam as conclusões da presente pesquisa e deixa
caminho com ideais para teses mais profundas que passam considerar efeitos como o
amortecimento ou vibrações forçadas.

5
CAPÍTULO 2
REVIÇÃO BIBLIOGRÁFICA
William S Vorus [2] discute a teoria básica da vibração nos navios desde o
ponto de vista do navio como uma viga continua e também senta algumas bases para a
análise discreta, também apresenta a problemática prática do casco e superestruturas
com os componentes tais como o propulsor.
Iwer Asmussen et al [3] apresentam o estado do arte para os cálculos e as
medições técnicas no campo das vibrações do navio. Faz especial ênfase na análise
mediante os elementos finitos e descreve as principais considerações no estudo das
vibrações no estudo moderno nos escritórios no mundo.
Antonio C. Ramos [4] faz um estudo completo do comportamento dinâmico de
uma viga auto-equilibrada, com o fato de apresentar um modelo matemático que
considera as equações de Timoshenko e Euler para a implementação do procedimento
de diferencias finita mediante ferramentas computacionais desenvolvidas por ele para o
cálculo das frequências naturais do navio.
Sink-Kwan Lee et al [13] publicou um trabalho apoiado nos módulos
desenvolvidos pela American Bureau of Shipping e faz um procedimento para
relacionar a dinâmica computacional de fluidos (CFD) mediante a qual calcula a
interação casco-propulsor e logo calcula as pressões no casco acima do propulsor
mediante a utilização dos elementos finitos (FEM) acha alguns valores das amplitudes
vibracionais induzidas pelo propulsor no casco de um navio, esse trabalho foi feito para
um navio tanqueiro.
S. Hylarides [14] faz um estudo que tenta ampliar o entendimento geral do
amortecimento mostrando resultados do testes experimentais em navios reais mostra
que o comportamento vibracional do navio é dado principalmente pelos níveis de
excitação induzida pelo propulsor. Também faz algumas considerações nas vibrações do
eixo propulsor, coeficientes do propulsor entre outros.

6
Gojko Magazinović [16] faz uma descrição geral das excitações torcionais
variáveis que são geradas pelo motor devido aos gases de combustão e os efeitos que
transmite para o eixo propulsor, também mostra a relevância nas ressonâncias e algumas
contramedidas que são tomadas para evitar esse fenômeno nos eixos.
MAN Diesel & Turbo [17] o propósito desse trabalho é apresentar uma
descrição muito detalhada das características de vibração dos motores de dois tempos de
baixas velocidades e as principais considerações na hora de fazer o estudo de excitações
forçadas nas estruturas do navio.
A.N. Hicks [21] apresenta um estudo de comparação para determinar a
distribuição da massa virtual por efeito hidrodinâmico associada com as vibrações
verticais do navio. Ele considera o uso de massas agrupadas em uma viga-navio sim
considerar o peso da viga mesma, logo com diferentes condições de contorno faz a
análise considerando os coeficientes de redução tridimensional desenvolvida pelo Lewis
e Taylor, dando como resultado diferenças de pequena ordem nos valores, ele atribui
essas diferenças nas inexatidões aos aspectos tais como a inércia da seção transversal e
área de corte mais que por uma inadequada representação da massa hidrodinâmica.
Alexander L. Korotkin [23] o estudo da massa adicional tinha sido matéria de
estudo de muitos pesquisadores, o propósito deste livro publicado mediante o apoio do
Instituto de Pesquisas na Construção Naval do Krylov da Russia, faz uma revisão dos
principais resultados teóricos no estudo da massa adicional e descrever alguns
procedimentos experimentais para a determinação da mesma.
American Bureau of Shipping [24] a sociedade de classificação mostra
procedimentos básicos de cálculos para fazer estimações inicias para os primeiros
modos vibracionais nos navios mercantes de determinados cumprimentos baseado nas
estimativas e estatísticas de dados a traves dos anos de vários projetos.
Ship Structure Comitte [25] o reporte feito mediante a participação de estaleiros,
pesquisadores, armadores, sociedades de classificação, entre outros faz um resumo de
temas relacionados as metodologias para redução e prevenção de vibração,
considerações na predição de níveis de vibração em navios reais e em navios que nesse
7
momento estavam em estudo, conclusões nas vibrações forcadas nas superfícies do
casco e nos mancais dos eixos do propulsor.
D.E. Newland [27] apresenta a teoria da análise da vibração aleatória na qual
introduze a idéia vibração aleatória e como analisar a mesma, também aprofunda na
análise espectral, tanto de sinais continuas como sinais discretos, e faz a introdução e a
descrição da Transformada Rápida de Fourier (FFT) que é o procedimento utilizado
com muita frequência na análise vibracional para processar sinais medidos em função
do tempo (serie temporal).
Tiago Piedras Lopes et al [28] Descreve os métodos experimentais para realizar
medições em estruturas em escala real. Um desses métodos é o excitador harmônico
para determinar a frequência natural do navio, apresenta parâmetros importantes porque
a força de excitação é conhecida, pode determinar amortecimento e a interação das
estruturas. Adicionalmente apresenta o teste de impacto que segundo o Tiago, a
utilidade desse método foi comprovada no estudo da ressonância de superestruturas,
mas não foi verificada ainda para o navio completo. E por último o método da prova de
mar que é considerado de muita importância porque é realizado durante a navegação e
tem as condições reais de operação do navio.
Klaus-Jurgen Bathe [31] apresenta procedimentos de elementos finitos em forma
compreensível e um contexto amplio para sua aplicação nos diferentes problemas de
engenharia. Também mostra os métodos de resolução de os sistemas de equações
utilizados pelos softwares de elementos finitos para grandes sistemas.
Levent Kaydihan et al [33] mostra o procedimento para analisar as vibrações
globais de um navio porta contendores. Esse estudo considera o navio na fase de projeto
de maneira tridimensional para achar as principais características vibracionais,
freqüências e modos vibracionais e para complementar o estudo considera algumas
assunções baseada em dados de outros autores com respeito a amortecimento do navio,
as pressões no casco e dados das ordenes de excitação do motor para tentar predizer os
níveis máximos na vibração do navio em pontos relevantes na superestrutura e praça de
máquinas.

8
Rasvaz Ionas et al [34] o estudo considera alguns aspectos sobre a vibração
global do navio, tomando em consideração características dinâmicas medidas no navio
real. As primeiras trinta frequências naturais são calculadas mediante um modelo
tridimensional e as forças de excitação são consideradas mediante as medições das
pulsações de pressão no casco do navio, dessa maneira as amplitudes de resposta em
alguns pontos são calculadas para a frequência fundamental e para a segunda harmônica
da rotação do propulsor.
Sung Li-ping et al [35] neste trabalho apresenta um estudo feito em um modelo
tridimensional, e mostra as características vibracionais para uma embarcação tipo
catamarã , também apresenta o método da redução dinâmica que elimina as vibrações
locais mediante e deixa visível os modos globais mediante o desacoplamento dos graus
de liberdade que se apresentam em uma análise com milhares de elementos finitos e
desse jeito poupar tempo computacional.
Skaar, Knut T. et al [37] O trabalho descreve o estado do arte na análise
vibracional do navio e faz considerações de distinto tipo para conseguir modelar em
elementos finitos. Faz algumas sugestões dependendo do objetivo da análise, por
exemplo, para poder fazer uma análise global, análise local ou análise vibracional
forçado. Neste trabalho também fazem distinções entre os métodos clássicos, como o
método unidimensional, para vibrações do navio como os métodos bidimensional e
tridimensional, descrevendo brevemente algumas conclusões de utilizar um ou outro
método.

9
CAPÍTULO 3
FUNDAMENTOS TEÓRICOS
3.1 Introdução
Neste capítulo vai-se apresentar a teoria básica sobre a vibração do navio, nesta
parte é preciso fazer lembrar algumas definições básicas utilizadas na teoria de
vibrações para esclarecimento, logo vai-se descrever a análise da vibração de uma viga-
navio continua e discreta, na parte continua vai-se descrever as equações analíticas
clássicas para as vigas de Euller e Timoshenko e na parte de análise discreta aborda a
equação de equilíbrio dinâmico que com diferentes condições de contorno e condições
iniciais pode aplicar para achar frequências naturais e modos vibracionais do navio,
assim como também fazer análise com excitações forçadas que são problemas muito
complexos na teoria de vibrações.
3.2 Definições básicas
Vibração pode ser definida como um movimento oscilatório de pequena
amplitude, ao redor de um ponto de equilíbrio. Uma vibração pode ser periódica ou não,
pode ser medida em distintas unidades que são dadas pelas amplitudes, velocidades e
acelerações. As vibrações podem ser representadas tanto no domínio do tempo quanto
no domínio da frequência, a diferença entre as duas é que a análise no domínio da
frequência é muito mais simples e clara, resumida e decomposta. Segundo a Asmussen
et al [5] em aplicações para navios, a solução no domínio do tempo se limita a casos
especiais, como a análise de vibração de casco em excitação por “Slamming”
Frequência é uma razão que descreve o numero de ciclos por unidade de tempo,
geralmente as unidades utilizadas são Hz (ciclo/s).
Frequencia natural é a frequência na qual um corpo vibra quando é perturbado
da sua posição de equilíbrio mediante alguma força instantânea. Para um corpo continuo
essas frequências naturais são infinitas, isso implica modos infinitos, por o contrario do
um corpo discreto que tem um numero de elementos finitos associado aos graus de
liberdade que podem ser grandes mas são finitos.
Modo é a forma de deflexão característica que um corpo adquire quando esta
vibrando em uma determinada frequência natural. Como os modos são associados a
uma frequência natural, eles também são finitos para um modelo discreto.

10
Nodo é um ponto na distribuição vibracional que não é deslocado em um
determinado modo.
Excitação é um estimulo ou perturbação dependente do tempo e que pode ser
periódica ou aleatória.
Frequência de excitação é a frequência na qual a excitação atua no corpo e é
uma excitação periódica um exemplo em condições quase continua como a perturbação
produzida pelo propulsor no casco.
Ressonância é o fenômeno que é produzido quando a freqüência natural coincide
com a frequência de excitação em um corpo, dessa maneira amplificam-se os
deslocamentos produzindo vibrações excessivas.
(a) (b)
Figura 3-1 Comparação de oscilação: (a) Periódica e (b) Aleatória (Fonte: D.E.
Newland, 1993)
As vibrações encontradas na prática podem ser representadas mediante uma
onda senoidal simples ou compostas, cada uma delas com sua própria frequência e
amplitude. Uma vibração sinusoidal é determinista quando valor futuro pode ser
previsto, esse valor pode-se obter a traves de uma função matemática ou a partir da
história passada. Mas se elas não têm relação alguma, então podem ser chamadas de
aleatórias ou randômicas. As vibrações aleatórias não apresentam uma relação
matemática definida para ser representadas, por tanto elas podem-se estudar mediante as
propriedades estatísticas como media entre outros. Por enquanto, a única coisa que
pode-se fazer é determinar uma faixa de probabilidade de encontrar o valor da
oscilação. As oscilações aleatórias são as mais comuns em casos reais.
A vibração de um sistema se analisa mediante a unidade básica, representada por
um sistema massa-mola que pode ter oscilações livres ou forçadas. Em um sistema com
oscilação livre ideal não amortecida só existe uma perturbação inicial que produze a
oscilação e que continua oscilando infinitamente.

11
Em um sistema com amortecimento provoca dissipação de energia, e por tanto a
oscilação diminui com o tempo até chegar a valores próximos do zero, este tipo de
oscilação é conhecida como vibração transiente.
Nos sistemas forçados amortecidos, a energia dissipada pelo amortecimento é
continuamente fornecida pela fonte de excitação e a característica da vibração nesse
sistema depende das propriedades de massa, rigidez e amortecimento do sistema.
3.3 Vibração no Navio
As vibrações nos navios consideram, em uma primeira etapa, o estudo das
oscilações elásticas do casco junto com as estruturas que conformam o navio dentro de
um médio fluido como a água de mar. Logo com parte complementaria do estudo,
podem ser consideradas também as fontes de excitação que são estudadas para analisar
a resposta das estruturas e evitar os deslocamentos excessivos que trazem possíveis
falhas mecânicas. No caso das excitações forçadas envolve aspectos como valores de
forças, momentos, pressões entre outros que ainda são matéria de pesquisa,
especialmente a ação vibratória do propulsor no casco que será descrita para
conhecimento neste trabalho, assim como também as excitações produzidas pelo motor
propulsor.
Nos modos de vibração do casco podem ser verticais, horizontais, torcionais e
axiais. Um modo terá um grau de importância para um navio dependendo da função
para o qual é projetado, por exemplo, o estudo das vibrações torcionais e horizontais são
muito importante para um navio conteineiro por que tem espaços abertos muito grandes
no convés principal, para outros navios como o tipo cruzeros é importante o estudo de
oscilações forçadas porque sua principal função é transportar com comodidade aos
passageiros.
3.4 Análise Continuo do Navio
No início dos estudos das vibrações de navios as teorias consideravam o casco
do navio em forma continua e faziam semelhança com uma viga. Há duas teorias que
estudam o caso da viga-navio, a teoria Euler-Bernoulli e a teoria do Timoshenko a
diferença entre elas e que a teoria do Timoshenko considera aspectos adicionais como a
cisalhamento devido a flexão e a torção.

12
3.4.1. Viga do Euler-Bernoulli
Esta teoria foi feita por Leonhard Euler e Daniel Bernoulli. Este modelo
simplificado analisa a viga-navio, fazendo as seguintes considerações.
- Hipóteses de comportamento lineal.
- Os pontos da fibra neutra sofrem apenas deslocamento vertical e giro: ux(x, 0) = 0.
- A tensão perpendicular à fibra neutra é nula: σyy= 0.
-As seções planas inicialmente perpendiculares ao eixo da viga se mantêm
perpendiculares ao eixo da viga uma vez curvada.
- A viga e esbelta assume que L >> B
A seguir mostra-se uma viga unidimensional que é suportada por uma base
elástica com uma rigidez uniforme por unidade de comprimento “k” , representando a
força hidrostática da água. Também tem-se a distribuição uniforme da constante de
amortecimento “c” representando o amortecimento hidrodinâmico da água.
Figura 3-2 Representação gráfica da viga de Euler-Bernoulli (Fonte: Vorus, 1998)
A massa uniforme da viga por unidade de comprimento μ (inclui a massa
hidrodinâmica), a rigidez uniforme EI, E é o modulo de elasticidade, I é o momento de
inércia seccional e a f(x,t) representa a força de excitação gerada pelo fluxo a traves do
propulsor. O termo νI ao lado direito representa o amortecimento viscoso do material da
viga do casco, w é o deslocamento vibratório vertical. A equação diferencial que
descreve a teoria de viga de Euler-Bernouli para uma base elástica é apresentada a
seguir.

13
),(2
2
4
5
4
4
txfkwt
wc
t
w
tx
wI
x
wEI
(3.1)
Pode-se verificar nesta equação na expressão ao lado esquerdo no segundo
termo, que representa a inclusão do termo visco-elástico na lei do esforço deformação
para o material da viga. Esta equação não considera os termos da inércia rotacional
(momento fletor) e o efeito da força cortante (distorção). As condições finais para a
unicidade da resolução da equação do movimento são as seguintes.
Lxexemx
w
x
w
00
3
3
2
2
(3.2)
Na vibração induzida pela excitação constante do propulsor e na realidade uma
excitação aleatória que pode ser considerada como periódica enquanto as condições não
sejam alteradas, pode-se considerar como frequência de excitação aproximadamente o
número de rotações do propulsor (rpm) por o número de pás. A excitação pode ser
representada por series de Fourier variáveis no tempo. Para resolver a equação
diferencial serão substituídas as duas séries de f(x,t) y w(x,t) em a equação. A
dependência do tempo se cancela e as series resultantes da equação diferencial em x se
resolvem termo a termo para os coeficientes desconhecidos da serie de deslocamento.
iwtexF
txFtxf
)(Re
)cos()(),( (3.3)
A identidade “Re” denota a parte real da expressão
tite ti sincos (3.4)
F(x) será a amplitude de distribuição da força de excitação que denota ao longo
do comprimento do navio. é a frequência de excitação, que correspondente a
frequência fundamental predominante. Para o estado da resposta constante o
deslocamento terá a seguinte forma.

14
ti
sc
exW
txWtxWtxw
)(Re
sin)(cos)(),( (3.5)
)()()( xiWxWxW sc (3.6)
W(x) é a amplitude complexa desconhecida, que inclui a fase e amplitude que
são resolvidas mediante a equação de movimento geral no processo. Substituindo (3.3)
e (3.6) na equação (3.1) e as condições finais, sem a dependência do tempo, obtém-se.
)(1 2
4
4
xFWkcidx
Wd
EiEI
(3.7)
Adimensionando as variáveis da equação 3.7 para obter a solução geral
3/,,
LEI
FF
L
xx
L
WW (3.8)
Assim, os valores de “x” ficarão entre 0 e 1, sendo ζνfator de amortecimento
estrutural e a equação 3.7 torna-se como segue.
)(21 4
4
4
xFWkdx
Wdi
f
(3.9)
A expansão modal pode-se considerar como á superposição de modos naturais
independentes, e a solução da equação de movimento pode-se expressar como séries
infinitas. O conjunto de séries é expandido em termos de infinitos modos normais de um
sistema não amortecidos (ζν 0) e não forçado (F(x) =0). A seguir se apresenta a
equação adimensional não amortecidos e não forçado.
100
0
3
3
2
2
4
4
4
xexemdx
Wd
dx
Wd
Wkdx
Wd
(3.10)
A solução para a equação diferencial ordinária fica do seguinte modo, para todos
os valores (k ≠ 0)

15
kxCkxCkxCkxCxW coshsinhcossin)( 4321 (3.11)
Aplicando as dois condições finais na equação para x = 0, elimina duas das
quatro constantes desconhecidas, logo as constantes ficam da seguinte maneira.
C2=C4, C1=C3 (3.12)
Aplicando as dois condições finais na equação (2.17) para x = 1, tem se que fica
um sistema de equações tal como.
0CB (3.13)
0
0
sinhsincoshcos
coshcossinhsin
4
3
C
C
kkkk
kkkk (3.14)
Para achar os valores de as constantes, a única solução não trivial é Det [B] = 0 ,
por em quanto a expressão do determinante fica no seguinte modo.
Det[B] = -2(1 - cosk.coshk) (3.15)
coskn.coshkn = 1 (3.16)
Os coeficientes C3 e C4 diferentes de zero, existem só no caso que se cumpra a
relação (3.16) porque de outro modo esses valores não podem ser determinados
mediante o sistema de equações, porque elas são linearmente independentes, a única
coisa que se pode fazer e encontrar uma relação entre elas.
nn
nn
kk
kk
C
C
coshcos
sinhsin
4
3
(3.17)
Agora substituindo as expressões 3.17 e 3.12 na equação 3.11 se terá o seguinte.
16
xkxk
kk
kkxkxkCx nn
nn
nnnnn sinhsin
coshcos
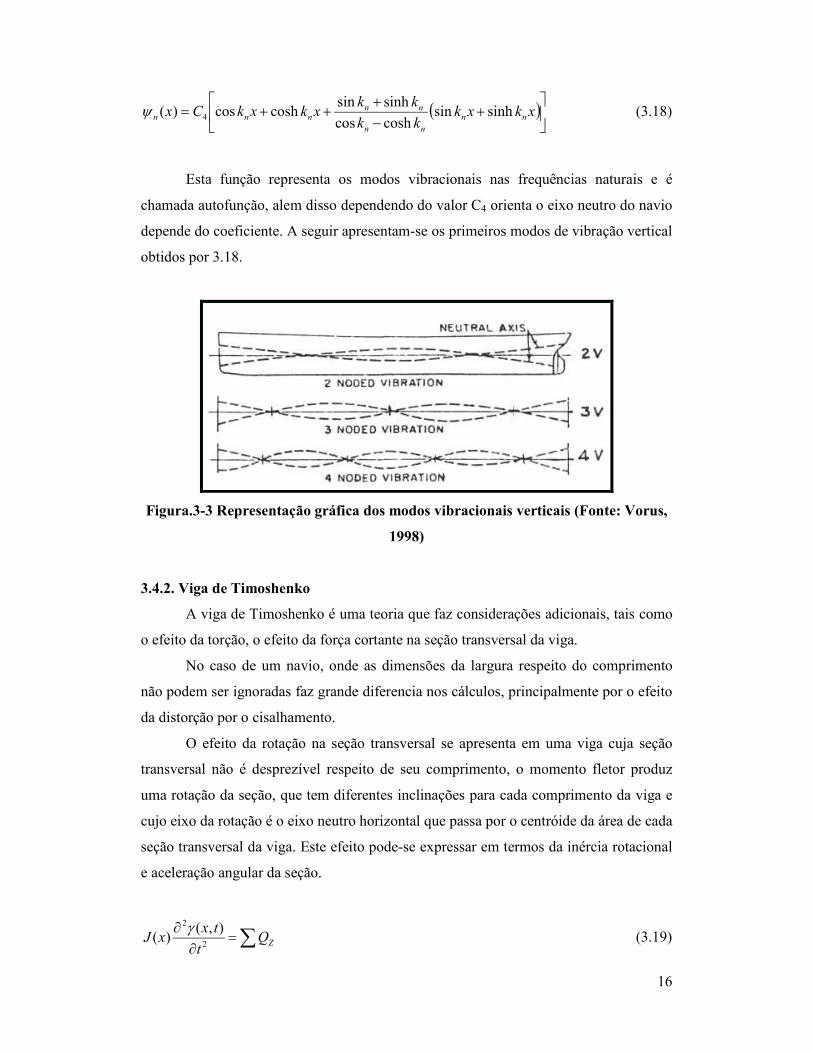
sinhsincoshcos)( 4 (3.18)
Esta função representa os modos vibracionais nas frequências naturais e é
chamada autofunção, alem disso dependendo do valor C4 orienta o eixo neutro do navio
depende do coeficiente. A seguir apresentam-se os primeiros modos de vibração vertical
obtidos por 3.18.
Figura.3-3 Representação gráfica dos modos vibracionais verticais (Fonte: Vorus,
1998)
3.4.2. Viga de Timoshenko
A viga de Timoshenko é uma teoria que faz considerações adicionais, tais como
o efeito da torção, o efeito da força cortante na seção transversal da viga.
No caso de um navio, onde as dimensões da largura respeito do comprimento
não podem ser ignoradas faz grande diferencia nos cálculos, principalmente por o efeito
da distorção por o cisalhamento.
O efeito da rotação na seção transversal se apresenta em uma viga cuja seção
transversal não é desprezível respeito de seu comprimento, o momento fletor produz
uma rotação da seção, que tem diferentes inclinações para cada comprimento da viga e
cujo eixo da rotação é o eixo neutro horizontal que passa por o centróide da área de cada
seção transversal da viga. Este efeito pode-se expressar em termos da inércia rotacional
e aceleração angular da seção.
ZQ
t
txxJ
2
2 ),()(
(3.19)

17
J(x) : Momento de inércia de massa em relação ao eixo neutro
(x,t) : Inclinação da seção transversal devido a flexão
2
2 ),(
t
tx
: Aceleração Angular da seção
ZQ : Momentos internos e externos que são aplicados no elemento da viga.
Outro aspecto a considerar é aquele que produz a força cortante na seção
transversal da viga pela distorção dos elementos da viga produzida pela flexão. Este
efeito, tem uma influencia maior no comportamento dos modos vibracionais mais altos.
A segunda equação dinâmica que descreve esses efeitos é.
YF
t
txyxm
2
2 ),()( (3.20)
m(x) : Massa por unidade de comprimento da viga.
y(x,t) : Deslocamento da seção transversal na direção “y”
2
2 ),(
t
txy
: Aceleração linear da seção
YF : Forças internas e externas que são aplicados no elemento da viga.
3.4.3 Diagrama de Corpo Livre do Elemento da Viga
A seguir, mostra-se o diagrama de corpo livre para um elemento da viga com as
forças, momentos representados na maneira geral.

18
Figura 3-4 Diagrama do corpo livre do elemento da viga
As variáveis são as seguintes:
p(x,t) : Carregamento aplicado à viga por unidade de comprimento
q(x,t) : Momento aplicado à viga por unidade de comprimento
M(x,t) : Momento fletor
V(x,t) : Força cortante
γ(x,t) : Inclinação da seção transversal devida apenas à flexão
β(x,t) : Distorção causada pelo cisalhamento
y(x,t) : Deflexão da viga
xtxy /),( : Inclinação total da seção transversal da viga.
E : Módulo de elasticidade (Módulo de Young)
I(x) : Módulo de inércia da área da seção transversal
A(x) : Área da seção transversal
EI(x) : Rigidez à flexão
k´GA(x) : Rigidez ao cisalhamento
3.4.4 Equações Elásticas da Viga
A seguir mostram-se as equações elásticas da viga, a primeira é relativa ao
cisalhamento e a segunda corresponde à flexão
),()('),( txxGAktxV (3.21)

19
x
txxEItxM
),()(),(
(3.22)
3.4.5 Equações Dinâmicas da Viga
Aplicando as equações diferenciais (3.19) e (3.20) para o corpo rígido da figura
3-4 acha-se o seguinte.
t
txyxC
x
txVtxp
t
txyxm
),()(
),(),(
),()(
2
2
(3.23)
),(),(
),(),(
)(2
2
txVx
txMtxq
t
txxJ
(3.24)
m(x) : Massa efetiva por unidade de comprimento.
C(x) : Coeficiente de amortecimento viscoso por unidade de comprimento da
viga.
Agora para complementar as equações da viga da Timoshenko, da figura 3-4 se
mostra o seguinte.
),(),(),(
txtxx
txy
(3.25)
)('
),(),(
),(
xGAk
txVtx
x
txy
(3.26)
Reescrevendo as equações anteriores obtem-se as equações básicas da viga
Timoshenko que são.
t
txyxC
t
txyxmtxp
x
txV
),()(
),()(),(
),(2
2
(3.27)
),(),(
)(),(),(
2
2
txVt
txxJtxq
x
txM
(3.28)

20
)('
),(),(
),(
xGAk
txVtx
x
txy
(3.29)
)(
),(),(
xEI
txM
x
tx
(3.30)
3.5 Análise Discreta do Navio
Pode-se notar que a análise continua tem uma complexidade considerável para
modelos simplificados como no caso de uma viga simples, na qual inclusive tem
hipóteses que ajudam a resolver as equações dinâmicas e elásticas. Por tanto surge a
necessidade de avaliar os modelos mediante a teoria de elementos finitos, que é bem
mais manipulável e que depende em maior medida do entendimento da teoria e dos
recursos computacionais.
Figura 3-5 Modelagem do navio mercante (Fonte: J.J.Jensen, 2001)
Neste caso, não se quer diminuir a importância da teoria de análise contínua, já
que ela é a base para entender as situações físicas apresentadas na realidade. Por outro
lado a modelagem tem a parte mais laboriosa que é a replicação das estruturas do navio
no programa de computador, leva muito tempo dependendo do nível de exatidão que se
deseja atingir. Mas a experiência demonstra que para a análise vibracional global de
estruturas é suficiente com as componentes principais tais como chapeamentos do
costado, fundo, convés, quilha, cavernas gigantes, longarinas, entre outros.

21
3.5.1 Equações de Movimento
A equação que descreve o comportamento do modelo en elementos finitos é
chamada de equação de equilíbrio dinâmico, na qual são aplicadas condições de
contorno para ser resolvida. Por isso que a aplicação da Lei de Newton em cada grau de
liberdade é representada com a expressão muito conhecida tal como.
fffxm ds ..
(3.21)
[m] : Matriz de massa
..
x : Aceleração nodal
fs : Vetor de força de rigidez
fd : Vetor de força de amortecimento
f : Vetor de força de excitação
No caso de a análise vibracional os modelos em elementos finitos satisfazem os
requerimentos constitutivos dos materiais em um nível local, então se cumprem as
relações de comportamento que na maior parte podem-se assumir lineares entre os
nodos e por tanto as expressões anteriores logo de reordenar-las ficam como segue.
fxkxcxm ...
(3.22)
.
x : Velocidade nodal
x : Deslocamento nodal
Onde [c], [k] são as matrizes de amortecimento e de rigidez respectivamente de
todo o sistema.
Após o estabelecimento das equações dinâmicas, devem ser resolvidas tantas
equações como graus de liberdade existem no sistema. A solução de 3.22 implica
utilizar procedimentos de integração direta que podem ser os métodos das Diferencias
Centrais, Wilson, Newmark, etc.
Na aplicação desta equação em um navio deve-se notar que esta equação leva a
uma resolução de um sistema de equações dependendo de o grado de complexidade do

22
modelo e os tipos de elementos a utilizar os graus de liberdade associados a cada nodo
podem ter milhares e até milhões de graus de liberdade, essa é uma das considerações
de fazer uma modelagem em elementos finitos tridimensionalmente, em consequência
para a resolução do sistema de equações existe outros procedimentos desenvolvidos
para melhorar o desempeno e a exatidão dos resultados.
3.5.2 Cálculos de Frequências Naturais e Expansão Modal
Por definição quando se deseja achar as frequências naturais e seus respectivos
modos de vibração de um sistema, as condições básicas são que não exista o
amortecimento e tampouco força de excitação por tanto as equações dinâmicas ficam do
seguinte modo.
0..
XKXM (3.23)
X = sin[(t-t0)] (3.24)
Onde é um vetor de ordem igual aos graus de liberdade, variável no tempo,
com uma constante de tempo t0 e com que é a frequência de vibração do sistema e do
vetor, logo substituindo 3.24 na equação 3.23
MK 2 (3.25)
A expressão 3.25 pode ser escrita da seguinte maneira.
MK (3.26)
A expressão 3.26 já é conhecida como a equação geral de autovalores “”e
autovetores “”, que neste caso representam as frequências naturais e os modos
vibracionais do sistema. Para resolver esta equação, existem métodos exatos e métodos
aproximados, que dependendo do número de graus de liberdade podem ser utilizados
eficientemente. Os procedimentos exatos demonstram ser eficientes até graus de
liberdade que não sejam muito grandes porque o esforço computacional que implica a

23
solução de sistemas muito grandes faz que o programa fique muito lento e por tanto
inviável quando um sistema complexo é analisado.
Os procedimentos aproximados são mais práticos para resolver sistemas muito
grandes com um grau de exatidão adequado, eles foram desenvolvidos especialmente
para achar os primeiros autovalores e autovetores de um sistema. Todos os métodos
exatos e aproximados são iterativos porque não ha uma solução analítica de uma
equação polinômica acima de quarto grau, e por tanto o uso de um ou outro método fica
a critério de quem o pesquisador. A confiabilidade do sistema depende de a estabilidade
do método as propriedades das matrizes envolvidas na solução e outros fatores.
Alguns métodos utilizados na resolução do problema de autovalores pelos
programas de computação são o método de Rayleigh-Ritz, Método de iteração de
Lanczos.
Às vezes é conveniente fazer uma transformação da equação original para
chegar a uma versão “Standard” para poupar tempo e recursos computacionais. Os
métodos como obter essa transformação se pode obter na bibliografia apresentada, mas
apresentamos a forma standard da equação 3.26 só para ilustração.
~~~
K (3.27)
Figura 3-6 Rango de frequências naturais encontradas nas aplicações de
construção naval (Fonte: Asmussen et al., 2001)

24
Logo de muitos estudos estadísticos por parte das sociedades de classificação a
figura 3-6 mostra uma serie de fenômenos vibratórios versus as frequências para
diferentes aplicações, também mostra a transição entre vibração e ruído.
Também pode-se notar que o estudo de aplicações locais tem frequências
maiores, nesse caso quando maior a frequência maior a densidade modal e por tanto o
esforço é maior para identificar as formas modais, assim o que pode-se fazer são
análises estadísticos meios que darão características de energia em determinadas faixas,
isso equivale a avaliar uma área de interesse em particular.
3.6 Excitações Forçadas no Navio
Quando maior vira a densidade modal mais difícil é identificar e aplicar critérios
de ressonância, em consequência a análise forçado torna-se uma maneira adequada para
estimar respostas dinâmicas do navio. Para fazer mais consistente um modelo finito com
a realidade, propriedades como amortecimento e forças de excitação podem ser
considerados na fase de projeto é mediante a simulação das mesmas estimar a resposta
dinâmica do modelo. Muitas de essas forças e momentos, mesmo que não sejam
estritamente periódicas, podem ser representados como excitações harmônicas como,
por exemplo, as forças produzidas no propulsor, os momentos desbalanceados do motor
produzidos pelos gases de combustão, entre outras fontes de excitação.
As fontes externas de excitação são aquelas produzidas por o encontro do casco
do navio com as ondas do mar, nesse estudo o decaimento das vibrações das excitações
eventuais como o fenômeno de “Slamming” são estudados no domínio do tempo. A
diferença dos outros tipos de excitações que podem ser periódicas e a análise das
mesmas é no domínio da frequência. Visto que, a interação das forças e momentos com
o casco é de natureza altamente não linear e propriedades tais como o amortecimento
são ainda matérias de estudo nas simulações dinâmicas.
3.6.1 Excitação Induzida pelo Propulsor
No momento de desenhar o propulsor o projetista tem que escolher cuidadosamente
as características geométricas porque vão influenciar na eficiência do propulsor e a
cavitação, esta última é uma fonte principal de vibração no casco do navio. As forças
hidrodinâmicas assimétricas no propulsor têm origem no fluxo irregular da esteira que é
originada na interação entre o casco do navio e o propulsor, elas produzem forças e
momentos nos distintos eixos cartesianos tal como se pode apreciar na figura 2-12. As

25
forças e momentos que são transmitidas desde o propulsor podem ser representados
como excitações quase harmônicas e acontecem nas seguintes frequências: frequência
de rotação do eixo, frequência da vibração do propulsor e as harmônicas da frequência
fundamental do propulsor.
Figura 3-7 Forças e momentos no propulsor (Fonte: Asmussen et al., 2001)
A bibliografia especializada apresenta trabalhos que tentam fazer estimações da
predição de vibrações forçadas induzidas pelo propulsor no casco, mas não é tarefa
fácil, o estudo das excitações forçadas geradas pelo propulsor para projetos novos
devem ser avaliados no tanque de provas e segundo o Ligtelijn et al [12], afirma que os
testes nos tanques de prova podem ser validos quando as dimensões do tanque são
muito grandes e que ainda assim esses testes tendem a sobreestimar os valores das
pulsações de pressão no casco comparado com as medições no navio real.
(a) (b)
Figura 3-8 Efeito da onda na popa (a) e o efeito do afundamento da popa nas amplitudes das pressões no casco do navio (b) (Fonte: 17th International Ship
and Offshore Structure Congress)
Também existem os métodos empíricos e semi-empíricos para avaliar as forças na
superfície do casco do navio, as primeiras fazem estimações iniciais. O Holden et al
[12] fez regressões estatísticas e relações geométricas de propulsores junto com as
popas dos navios estudados, numerosas medições experimentais foram feitas nas provas

26
de mar de navios mercantes para validar esse métodos mas ainda não são plenamente
confiáveis.
No caso dos métodos semi-empíricos, são avaliados com ajuda dos meios
computacionais e são comparados com as medições reais, neste caso, se o objetivo é
fazer estimações de flutuações de pressões para a análise standard de vibrações os
métodos empíricos podem ser utilizados.
Os métodos computacionais conformam hoje uma ferramenta muito utilizada nos
escritórios de projetos. Assim Sink-Kwan et al [13] apresenta uma metodologia
computacional que evolve distintos aspectos tais como a dinâmica do fluido
computacional (CFD), elementos finitos (FEM) e a dinâmica da cavitação do propulsor,
com a finalidade de estudar as vibrações induzidas no casco pelas pulsações de pressão,
esse estudo requer entre outros detalhes o conhecimento do fenômeno de cavitação,
fluxo turbulento na zona do propulsor entre outros temas que não serão parte do escopo
no presente trabalho. Nessa investigação, com o apoio da American Bureau of Shipping
(ABS), utiliza três módulos distintos relacionados entre sim para determinar forças e os
respectivos valores das amplitudes das pressões nas áreas próximas ao propulsor, esses
módulos são Propeller/ship flow module (PSF), Hydro-load assessment module (HLA)
e o Finite element analysis module (FEA).
O primeiro estima a interação de fluxo (esteira) entre o casco e o propulsor, o
segundo modulo faz a estimação dos valores das pressões no casco e a distribuição
aproximada na área próxima do propulsor e o ultimo faz o cálculo dos esforços e
vibrações no casco. No final pode-se resumir o trabalho de Sink-Kwan nos siguentes
passos:
1. Simulação do fluxo sem o propulsor (casco só)
2. Simulação casco – propulsor (coeficientes de esteira efetiva)
3. Análise da eficiência do propulsor (coeficiente de torque e empuxo)
4. Análise de cavitação no propulsor
5. Cálculo de cargas hidrodinâmicas do propulsor
6. Análise de vibração e esforços.
Sink-Kwan amostra alguns resultados para os quais demonstra que para diferentes
condições de carregamento, o valor das forças verticais acima do propulsor no casco são
maiores quando navio esta na condição de plena carga comparado com o navio em
condição de lastro tão como mostra a figura 3-9.

27
Figura 3-9 Distribuição da pressão no casco induzida pelo propulsor (Fonte: Sink-
Kwan)
Vibrações Axiais no Propulsor são caracterizadas pela movimentação na direção
da própria linha do eixo. As causas iniciais das vibrações são originadas pelas forças
variáveis no propulsor. Normalmente os motores levam amortecedores internamente
acoplamento do caixa redutora (se tiver) ou direitamente acoplada na saída do motor
para o eixo, para evitar vibrações excessivas na direção axial, que absorvem as
distorções torcionais e axiais. A frequência principal correspondente será as revoluções
do eixo multiplicado pelo número de pás do propulsor.
As vibrações laterais segundo o Magazinović [16], são geradas por o peso do
propulsor, as forças inerciais do peso da linha do eixo entre mancais. Pode-se assegurar
um bom desenvolvimento se afasta as frequências naturais laterais do eixo com respeito
à velocidade de rotação do eixo, para lograr esse objetivo na indústria naval são
aplicadas técnicas muito comuns nas configurações dos eixos propulsores tais como
variação de diâmetros de eixos e diferente tipo de aço para eixos com a finalidade de
lograr tensões nos eixos propulsores que sejam aceitáveis na operação.
3.6.2 Excitação Induzida pelo Motor Propulsor
As forças e movimentos gerados pelo funcionamento do motor propulsor
produzam excitações nas distintas direções, vertical, horizontal, axial e torcionais. As

28
faixas das frequências de vibração são infinitas e são transmitidas para o todo o navio,
dependendo dos tempos de combustão as frequências podem ser múltiplos da frequência
de rotação para motores de dois tempos ou metade dos múltiplos da frequência de
rotação para motores de quatro tempos. O motor propulsor é uma das principais fontes
de vibrações no navio. Nos últimos anos, a configuração mais utilizada pelo custo
operativo e de instalação são os motores com baixos números de cilindros. Segundo a
MAN Diesel & Turbo [17], as excitações do motor em geral podem ser divididos em
duas categorias, excitações primarias e secundarias, a seguir se descreve cada uma
delas.
Excitação primaria, são as forças e momentos originados pela combustão dos
gases e a inércia das massas rotativas e recíprocas do motor. Essas forças criam no
motor momentos que são de primeira ordem (momentos verticais e laterais) e de
segundo ordem (momentos verticais).
Figura 3-10 Evolução do número de cilindros nas instalações dos navios (Fonte:
Fonte: MAN Diesel & Turbo 2002)
As frequências naturais do motor estão determinadas por a rigidez e a
distribuição de massa, mas também estão determinados pela extensão de rigidez adjunta
das estruturas próximas ao motor. Alguns modos fundamentais da vibração do motor

29
estudados por os fabricantes de motores descrevem as formas “H”, “X” e “L”, que são
consequência dos momentos anteriormente mencionados para motores de dos tempos de
baixas revoluções em combinação com a velocidade e número de cilindros do motor.
A predominância para motores de velocidade media é o modo vibracional do
tipo “H”. A figura 3-12 mostra as diferentes formas modais antes mencionadas com um
exemplo modelado em elementos finitos para um motor de sete cilindros em duas
situações quando o motor tem uma base e quando não tem ela, pode-se notar que as
frequências de vibração muda de maneira significativa devido ao aumento da rigidez e
da massa circundante ao motor. Um estudo que considera as excitações produzidas pelo
motor nas estruturas do navio, esta baseado na informação técnica fornecida pelo
fabricante do motor para determinar as características do comportamento dinâmico das
estruturas.
Figura 3-11 Momentos produzidos pelas forças inerciais (Fonte: MAN Diesel &
Turbo 2002)
Vale a pena mencionar, que para fazer uma análise vibracional local na base do
motor propulsor considerando os momentos desbalanceados do motor, o modelo
tridimensional é uma ferramenta adequada, se o fabricante fornece os dados dos testes
do motor. Essa análise também pode levar muito esforço computacional dependendo
dos graus de liberdade na modelação.

30
(a) (b)
Figura 3-12 Modos vibracionais do motor: (a) sim base e (b) com base (Fonte:
Asmussen et al., 2001)
Excitações secundarias, são derivadas das respostas forçadas em uma
subestrutura. Estas características vibratórias das subestruturas são quase independentes
da estrutura restante do navio.
3.6.3 Navio em Movimento
Quando o navio se movimenta a través da água e dependendo de fatores como a
hidrodinâmica do casco, estado de mar, velocidade entre outros, produzam efeitos
conhecidos como “slamming”. Nos quais são estudados no domínio do tempo, esse tipo
de efeito não será considerado no presente trabalho.
A figura 3-13 mostra um exemplo da medição das amplitudes na vibração por
motivo desse fenômeno para diferentes partes do navio como a ponte de navegação, o
radar e a popa.
3.6.4 Equipamentos a Bordo
Durante o funcionamento das maquinas auxiliares se produzem excitações que
afetam o meio circundante (excitações locais).
O equipamento ativo se considera aquele que gera vibração tão como motor
principal, geradores elétricos, compressores, motores auxiliares, unidade de sistema
hidráulico, etc.
Equipamento passivo se comporta como massa elástica e produzem vibração
devido ao movimento completo do sistema que formam parte, como por exemplo,

31
quadros de distribuição elétrica. O equipamento passivo tem menor influência quando a
sua massa não é muito significativa em comparação dos outros equipamentos.
Figura 3-13 Análise de vibrações no domínio do tempo para o “Slamming” (Fonte:
Asmussen et al., 2001)
3.7 Estimações da Massa Adicional Hidrodinâmica
O navio opera em um meio diferente a outros tipos de veículos, os efeitos
inerciais que se apresentam são definidos devido pelo meio que rodeia o casco. As
forças inerciais da água que rodeia o casco são proporcionais à aceleração da superfície
do navio, que implica uma massa de água que é acelerada junto com a massa do navio,
esse efeito é chamado massa adicional hidrodinâmica. El valor da massa hidrodinâmica
adicional pode ser as vezes até cem por cento a massa do corpo parcialmente submerso,
por isso a massa não pode ser ignorada nos cálculos. A seguir serão descritos os
métodos do cálculo da massa hidrodinâmica propostos por diferentes pesquisadores
para que logo esses valores sejam aplicados no modelo tridimensional e avaliar as
frequências naturais.
3.7.1 Método de Lewis
Este método estima a distribuição de massa adicional por unidade de
comprimento vertical na vibração do casco. Para Lewis (1929) a massa por unidade de
comprimento na posição ao longo da vibração vertical do eixo “x” é dada a seguir.

32
mTonxJxCxBxm /)()()(8
)( 2
(3.28)
Densidade da água (Ton/m3)
B(x) : Manga do seção (m)
T(x) : Calado da seção (m)
A(x) : Área da seção embaixo da linha do calado (m2)
C(x) : Coeficiente de massa adicional da seção em duas dimensões
Jn : Fator de Lewis, que representa a redução do fator na massa adicional de duas
dimensões para três dimensões.
n : Coeficiente da área de seção
n = A(x) / [B(x).T(x)]
O coeficiente C(x) determina-se utilizando o mapeamento de conformação das
formas das seções do navio de Lewis. Esta “Transformação Conforme” é dada pela
relação
3
)()(
z
xb
z
xazZ (3.29)
Esta relação transforma um circulo unitário do plano “z” à seção do navio no
plano “Z”, “a” e “b” são parâmetros de mapeamento e são determinados de tal maneira
que a relação entre Boca/Calado seja mantida na transformação. A figura 3-14 resume o
trabalho para obter C(x) mediante a leitura do coeficiente de área secional e a relação
entre Boca e Calado.
Mas como as formas de Lewis não cobrem todas as formas dos navios, os
coeficientes da seção media “βn” tem que cumprir algumas condições que foram
derivadas por Landweber and Macagno (1957) que são apresentadas a seguir.
12
,122
128
3
223
12
,122128
3
223
T
B
B
T
T
B
T
B
T
B
T
B
n
n
(3.30)
Uma vez comprovado o rango adequado para os cálculos, logo pode-se achar o

33
coeficiente “C(x)” da figura 3-14.
Figura 3-14 Coeficientes de massa virtual (Fonte: Vorus, 1998)
O valor de Jn é a razão entre a massa adicional total no n-modo vibracional (n é
o número de modo) ao valor total do fluxo bidimensional seção por seção. A figura 3-15
resume o fator Jn.
Figura 3-15 Fator Jn de Lewis (Fonte: Vorus, 1998)

34
3.7.2 Método de Landweber e Macagno
Após a transformação conforme Landweber e Macagno construíram curvas
praticas para representar os valores dos coeficientes de massa virtual vertical “Cv” e o
coeficiente de massa virtual horizontal “Ch”.
Antes se define as seguintes relações para achar os coeficientes.
S : Área imersa da seção (m2)
b : Meia boca da seção (m)
d : Calado da seção (m)
)(
)(
xd
xb (3.31)
)()(2
)(
xdxb
xS (3.32)
Em função dos parâmetros “” relação calado-meia boca e “” área imersa da
secção, pode-se achar os valores dos coeficientes Cv e Ch, com isso os valores da massa
virtual por unidade de comprimento pode ser calcula mediante as seguintes expressões.
vv Cbm 2
2
1' (3.33)
hh Cdm 2
2
1' (3.34)
A seguir se apresentam as curvas para determinar os valores de Cv e Ch.
Figura 3-16 Coeficiente de massa virtual para movimento vertical (Fonte: Apostila
de aulas)

35
Figura 3-17 Coeficiente de massa virtual para movimento horizontal (Fonte:
Apostila de aulas)
3.7.3 Método do Instituto de Pesquisas da Construção Naval de Krylov
Este método acha as massas adicionais da seção no sentido vertical (33) e
horizontal (22). Adicionalmente definem-se os seguintes coeficientes.
)()(2
)()(
xdxb
xSx (3.35)
)(
)()(
xb
xdxq (3.36)
onde :
S(x) : Área imersa da seção (m2)
b(x) : Meia boca da seção (m)
d(x) : Calado da seção (m)
p : Centróide da área imersa.
c : Posição do centro da oscilação torcional.
a : Coeficiente auxiliar da seção
Cv : Coeficiente para cálculo da massa adicional vertical
Ch : Coeficiente para cálculo da massa adicional horizontal
n : Numero de modo

36
Figura 3-18 Seção definida pelo instituto Krylov ( Fonte: Korotkin, 2007)
qqqqa 32101)1(3
2
1 2 (3.37)
))(1(1 aqaqCv (3.38)
2
22)1(
3
41
4aq
qCh
(3.39)
2*
332
.. bCJ vvn
(3.40)
Considerando só o caso da massa vertical, a correção por o efeito tridimensional
acha-se por meio do coeficiente "Jn". Para achar o coeficiente Jn é preciso introduzir
alguns parâmetros que a seguir se apresentam.
B
Lv (3.41)
v
vve
3.0
116.0 (3.42)

37
v
vp
7.103.1 (3.43)
5.2
125.0
v
vvq
(3.44)
vv
vvvv
qp
eqpf
1
)5( (3.45)
)( nfep
fR
vvv
vvn
(3.46)
v
vJ
674.1035.11 (3.47)
vn
v
vn
vvn
RJ
TBRJJ
.
)2/(02.01.
1
1* (3.48)
3.7.4 Método do Instituto de Pesquisas Navais do Japão
Para realizar as primeiras estimações de as frequências naturais do navio,
existem formulações baseadas em análises estatísticas e experiências de do Instituto de
Pesquisas Navais de Japão, essas formulações são mostradas por o Piedras [22], e são
validas para achar as primeiras frequências naturais de navios com comprimentos
maiores a 150 m.
Com essas formulações podem-se estimar frequências até a sexta frequência
natural para navios tanque, cargueiros, mineraleiros e para navios porta-contentor até a
quinta frequência natural. Para o caso de frequências naturais horizontais, pode-se
estimar até a quarta frequência natural no caso de navio tanque.
Estimação de Frequência Natural Vertical
A fórmula 3.49 mostra o parâmetro P1, cuja base estatística é o momento fletor,
apresenta a estimação vertical para um navio com 2 ou 3 nós.

38
31.L
IP
V
V
(3.49)
Onde:
IV : Momento de inércia vertical, na seção mestra em relação ao eixo neutro (mm2
.m2)
V : Deslocamento total incluindo o efeito da massa virtual para movimento vertical
(Ton)
Lpp : Comprimento entre perpendiculares (m)
A fórmula 3.50 mostra o parâmetro P2 para fazer estimações de frequências verticais
para um navio com 3 ou mais nós, cuja base estatística é a força cortante que atua na
área vertical.
ppV
V
L
AP
.
10. 8
2
(3.50)
Onde:
AV : Área efetiva do cisalhamento vertical, na seção mestra. (m2).
Figura 3-19 Coeficientes P1 e P2 nas vibrações verticais num navio graneleiro
(Fonte: Apostila Troyman)

39
Estimação de Deslocamento Vertical
Para estimar os valores de V, para navios tanque e graneleiro pode-se utilizar a
seguinte formula.
2
033.04.00.1mm
VT
B
T
B (3.51)
Onde:
: Deslocamento do navio (Ton)
B : Boca de navio (m)
Tm : Calado médio do navio (m)
Com os valores dos parâmetros P1 e P2 e o gráfico correspondente mostrado na
figura 3-19 pode-se conseguir os valores das frequências naturais estimadas.
Para a estimação da segunda frequência natural vertical o valor é obtido pela
media dos valores obtidos mediante as gráficas anteriormente mencionadas com os
parâmetros adimensionais P1 e P2.
3.7.5 Método da Sociedade de Classificação ABS
Também existem formulações empregadas por as sociedades de classificação tão
como a American Bureau of Shipping (ABS), que apresenta uma estimação de a
frequência natural inicialmente para dois nodos no modo vertical para um casco
convencional de qualquer comprimento ABS [11], junto com as relações estatísticas e
com o resultado fornecido pelo Kumai, consegue estimar frequências naturais
correspondentes até o terceiro modo.
A seguir apresenta-se a formulação para achar as primeiras frequências naturais
verticais baseadas no valor da segunda freqüência natural vertical do navio.
Formulação de Kumai
cpmL
IxN
ppi
VV 3
62 1007.3
(3.52)
40
m
iT
B
.32.1 (3.53)
IV : Momento de inércia , m4
Tm : Calado meio do navio, m
B : Boca do navio, m
Lpp: Comprimento entre perpendiculares, m
: Deslocamento do navio, Ton
i : Deslocamento virtual que inclui a massa adicional, Ton
Formulação de Johannessen e Skaar
12 nNN VnV (3.54)
n : Numero de nós (n<5)
: 0.845 Navios de carga general
1.000 Bulk Carrier
1.020 Navio tanque
N2V : Frequência natural para forma modal de dois nós. (cpm)
NnV : Frequência natural para n-forma modal. (cpm)
3.8 Amortecimento
O amortecimento segundo o Bishop [10] e o Skaar [37] consideram que ñao
existe informação teórica que defina em forma satisfatória o fenômeno, por outro lado
existem trabalhos com medições para alguns tipos de navios nos quais demonstram que
o amortecimento varia em faixas de frequência e por tanto varia com a forma modal do
navio. Eles consideram que a origem do amortecimento tem duas fontes importantes: a
origem hidrodinâmica que comparada com o amortecimento estrutural é praticamente
desprezível, inclusive para frequências mais altas o amortecimento predominante é o
estrutural. Existem modelos que tentam avaliar o amortecimento, uma deles é o
amortecimento de Rayleigh que define o amortecimento como uma combinação lineal
das matrizes de massa y rigidez com a finalidade de conseguir ortogonalizar o
amortecimento e desacoplar as equações dinâmicas nos programas de elementos finitos
y poder resolver as equações mediante a superposição modal que se aplica para
vibrações forçadas e livres.

41
CAPÍTULO 4
ANALISE E PROCESSAMENTO DAS MEDICOES EXPERIEMTAIS
4.1 Generalidades
As medições dos sinais foram feitas entre os dias 6 e 10 de abril de 2009 por o
Laboratório de Ensaios de Modelos de Engenharia (LEME), no navio “Gypsum
Integrity” construído no Estaleiro Ilha S.A. (EISA), sediado na Ilha do Governador na
cidade do Rio de Janeiro.
As medições feitas correspondem a vibração global, durante a prova do mar,
para diferentes velocidades do motor, a descrição dos equipamentos e as ferramentas
utilizadas para obter medições são descritos neste capítulo.
Figura 4-1 O navio Graneleiro da Tese
4.2 Equipamentos para Medição de Vibrações Globais
Os equipamentos utilizados para aquisição, registro e análise dos sinais de
vibração Global são:
1. Oito acelerômetros (8) resistivos KYOWA de 2g;
2. Uma controladora (1) CompactDaq com 2 módulos NI-9237 (4 canais cada
módulo) da National Instruments;

42
3. Um sensor (1) de proximidade magnético para medição da rotação e
referência de fase;
4. Um Notebook (1)Toshiba Satellite U305 equipado com software
desenvolvido para a aquisição dos sinais.
4.3 Localizações dos Acelerômetros para a Medição Global
Os pontos onde que se obterão as medições vibracionais para a análise global
são os seguintes.
1. Stern C.L. no upper deck (01V - vertical).
2. Fore end da superestrutura no compass deck (02L - longitudinal).
3. Fore end da superestrutura no compass deck (03T - transversal).
4. Fore end da superestrutura no compass deck (04V - vertical).
5. Fore end da superestrutura no upper deck (05V - vertical).
6. MCP topo vante (06L - longitudinal).
7. MCP topo vante (07T - transversal).
8. MCP topo vante (08V - vertical).
Na figura 3-2 mostra os pontos onde foram localizados os acelerômetros para
efetuar as medições.
Figura 4-2 Localização dos acelerômetros na prova do mar
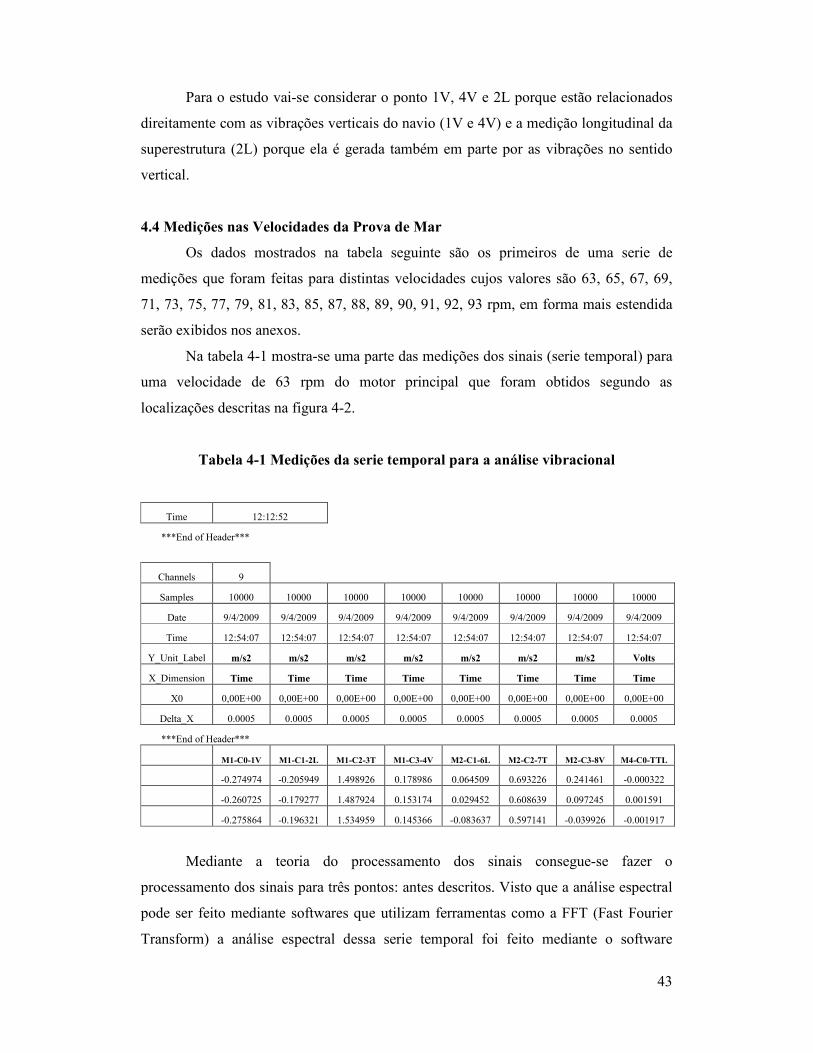
43
Para o estudo vai-se considerar o ponto 1V, 4V e 2L porque estão relacionados
direitamente com as vibrações verticais do navio (1V e 4V) e a medição longitudinal da
superestrutura (2L) porque ela é gerada também em parte por as vibrações no sentido
vertical.
4.4 Medições nas Velocidades da Prova de Mar
Os dados mostrados na tabela seguinte são os primeiros de uma serie de
medições que foram feitas para distintas velocidades cujos valores são 63, 65, 67, 69,
71, 73, 75, 77, 79, 81, 83, 85, 87, 88, 89, 90, 91, 92, 93 rpm, em forma mais estendida
serão exibidos nos anexos.
Na tabela 4-1 mostra-se uma parte das medições dos sinais (serie temporal) para
uma velocidade de 63 rpm do motor principal que foram obtidos segundo as
localizações descritas na figura 4-2.
Tabela 4-1 Medições da serie temporal para a análise vibracional
Time 12:12:52
***End of Header***
Channels 9
Samples 10000 10000 10000 10000 10000 10000 10000 10000
Date 9/4/2009 9/4/2009 9/4/2009 9/4/2009 9/4/2009 9/4/2009 9/4/2009 9/4/2009
Time 12:54:07 12:54:07 12:54:07 12:54:07 12:54:07 12:54:07 12:54:07 12:54:07
Y_Unit_Label m/s2 m/s2 m/s2 m/s2 m/s2 m/s2 m/s2 Volts
X_Dimension Time Time Time Time Time Time Time Time
X0 0,00E+00 0,00E+00 0,00E+00 0,00E+00 0,00E+00 0,00E+00 0,00E+00 0,00E+00
Delta_X 0.0005 0.0005 0.0005 0.0005 0.0005 0.0005 0.0005 0.0005
***End of Header***
M1-C0-1V M1-C1-2L M1-C2-3T M1-C3-4V M2-C1-6L M2-C2-7T M2-C3-8V M4-C0-TTL
-0.274974 -0.205949 1.498926 0.178986 0.064509 0.693226 0.241461 -0.000322
-0.260725 -0.179277 1.487924 0.153174 0.029452 0.608639 0.097245 0.001591
-0.275864 -0.196321 1.534959 0.145366 -0.083637 0.597141 -0.039926 -0.001917
Mediante a teoria do processamento dos sinais consegue-se fazer o
processamento dos sinais para três pontos: antes descritos. Visto que a análise espectral
pode ser feito mediante softwares que utilizam ferramentas como a FFT (Fast Fourier
Transform) a análise espectral dessa serie temporal foi feito mediante o software

44
Matlab. Nas figuras seguintes apresentam os gráficos da análise obtidos pelo autor para
faixa considerada na prova do mar.
Nas análises feitas para as distintas velocidades (rpm) pode-se notar que, as
amplitudes na distribuição de frequências que os gráficos tem, vão variando devido ás
ordens das excitações forçadas do motor, pulsações de pressão provocadas pelo
propulsor, entre muitas outras fontes de excitação. Na mesma maneira, apresentam-se
algumas diferenças para os resultados da análise espectral para as velocidades restantes
nos diferentes pontos da superestrutura, mais guardam consistência porque seguem o
mesmo padrão na distribuição de frequências.
Ao final pode-se coletar essas análises e fazer o diagrama de cascada (Diagrama
de Campbell) o qual demonstra em forma tridimensional a influencia das excitações
forçadas.
Para fazer a análise espectral de uma serie temporal precisam-se determinar
dados como período da amostragem, taxa de aquisição, número de ffts, janela de
visualização entre outros que podem variar de acordo com a necessidade do pesquisador
quando se quer priorizar resolução de espectro, confiabilidade entre outros fatores.
A partir das figuras 4-3 mostra o diagrama de cascada para o navio em estudo,
que é similar a uma cadeia de montanhas que relaciona as amplitudes com as
frequências para uma ordem particular de excitação.
Para obter os gráficos foram utilizado os resultados das análises espectrais nas
diferentes velocidades, o gráfico tem como eixos a frequência em unidades de Hz, a
velocidade de rotação do motor principal em rpm e o eixo das amplitudes representadas
nas unidades de milímetros por segundo.
No caso do navio em estudo, esta representação gráfica em 3-D mostra-se os
níveis de vibração em função da frequência para diferentes velocidades de rotações do
motor principal. O parâmetro principal neste caso é a velocidade que é variada
uniformemente para atingir as diferentes velocidades.
Com o diagrama de cascada pode-se identificar as fontes de vibração que
afeitam ao navio, e pode-se identificar excitações forçadas que amplificam os valores
das amplitudes das velocidades nas frequências naturais do navio cada vez que eles
passam por o valor da frequência natural.

45
Figura 4-3 Diagrama de cascada do ponto 1V no navio graneleiro

46
Figura 4-4 Diagrama de espectros do ponto 1V a diferentes velocidades do motor

47
Figura 4-5 Diagrama de cascada do ponto 4V no navio graneleiro

48
Figura 4-6 Diagrama de espectros do ponto 4V a diferentes velocidades do motor

49
Figura 4-7 Diagrama de cascada do ponto 2L no navio graneleiro
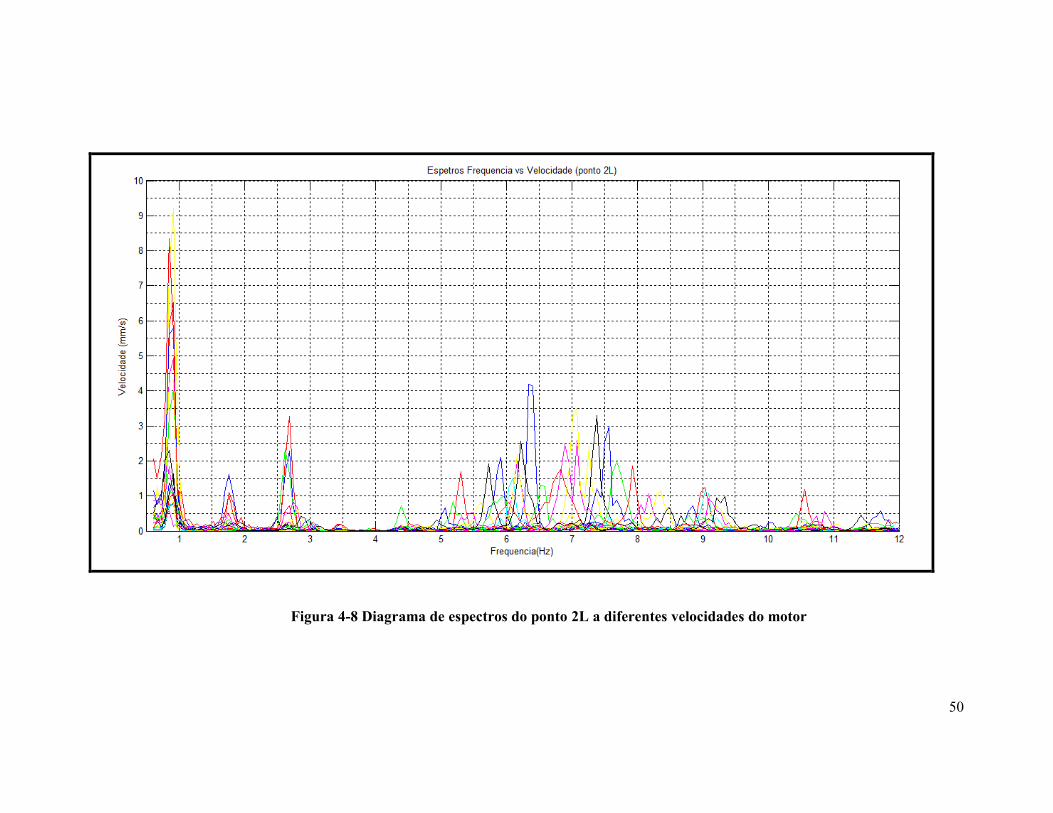
50
Figura 4-8 Diagrama de espectros do ponto 2L a diferentes velocidades do motor

51
O motor principal do navio, o propulsor entre outras fontes geram excitações em
todas as frequências (fundamentais e harmônicas) que são transmitidas para todo o
casco e subestruturas do navio. Essas excitações geradas são em todo tipo de ordens, e
nos diagramas mostrados podem identificar-se facilmente amplitudes notórias
especialmente em baixas frequências. Nas figuras 4-4, 4-6 e 4-8 representam os
espectros de vibração do diagrama de cascada visto desde a perspectiva de frequências e
amplitudes, o propósito desses diagramas é poder diferenciar picos nas frequências que
se repetem nas diferentes curvas de rpm, elas representam as frequências naturais que
estão sendo excitadas pelas forcas de excitação em cada velocidade do motor, para
poder fazer uma diferenciação entre cada curva se colocou diferentes cores, assim as
frequências identificadas tem valores de amostrados na tabela 4-2. Essas frequcncias
encontradas nos diagramas espectrais correspondem aos valores das frequências
fundamentais do navio, logo mais adiante esses valores serão comparados com os
valores obtidos nas formulações empíricas e com o modelo numérico para validar os
valores achados.
Deve-se lembrar que o amortecimento varia com a velocidade, e para o navio
varia com as frequências de cada modo vibracional, por isso cada vez é mais difícil
detectar os valores das frequências naturais dos espectros apresentados em faixas de
frequências altas. Em consequência, na seguinte tabela, vai-se mostrar os valores que
foram possível diferenciar dos gráficos dos espectros anteriores.
Tabela 4-2 Dados das frequências naturais mediante espectros
Frequência Valor (Hz) Valor (cpm)
1er 0.91 54.6
2da 1.90 114.0
3ra 2.80 168.0
4ta 4.36 261.6
5ta 6.40 384.0

52
CAPÍTULO 5
AVALIAÇÃO NUMÉRICA
5.1 Introdução
Considerando nosso estudo dentro das vibrações elásticas, existem três maneiras
de calcular as características dinâmicas das estruturas dos navios: o método da energia,
o método da matriz de transferência e o método dos elementos finitos, também
conhecido como análise de elementos finitos.
No método da energia precisa-se de assumir uma função de deflexões de
vibração aproximada, assume-se o navio como uma viga uniforme, mas quando se
precisa aplicar esse método para estruturas muito complexas não possibilita o uso
prático do mesmo.
O método da matriz de transferência pode-se utilizar para fazer cálculos de
frequências naturais e os modos considerando o navio como uma viga equivalente a
uma viga uniforme ou não uniforme, segundo o Troyman [4] esse método se presta
apenas ao cálculo de vibração natural e não para determinar respostas às forças externas
nem levar em conta influencia de estruturas locais.
O método dos elementos finitos é o mais popular porque possibilita fazer
estudos como análise estrutural, vibracional, entre outros. Dentro dos procedimentos
dos elementos finitos para análise de um navio, tem-se análise unidimensional e análise
tridimensional, uma das desvantagens da análise unidimensional é que não possibilita
fazer estudos de vibrações locais que são muito comuns nos problemas de estruturas,
alem disso leva a fazer cálculos prévios como as propriedades geométricas das seções
ao longo do navio, como por exemplo: momento de inércia vertical e transversal, área
de cisalhamento efetiva das seções, etc. Inclusive pode precisar-se o uso de outros
softwares para achar esses valores (propriedades geométricas) para logo ser ingressados
no software de elementos finitos como dados prévios á análise.
Com a modelagem tridimensional, todos àqueles procedimentos na análise
unidimensional já não serão necessários de realizar porque os elementos definidos no
software já contêm essas propriedades. Mas também na modelagem tridimensional
devem-se ter outras considerações como condições de contorno, tipo de elemento, entre
outros fatores que são definidos no processo e devem satisfazer as equações diferenciais
do problema.

53
Para a modelagem tridimensional do navio foi utilizado o Rhinoceros v4.0 que
logo foi exportado para o ANSYS-Workbench v.13, para fazer o análise mesma.
5.2 Características do navio empregado na análise
Os detalhes da estrutura da caverna gigante típica (Web Frame) a meia nau é
apresentada na figura 5-1.
Figura 5 -1 Detalhe da seção a meia-nau (Web Frame)
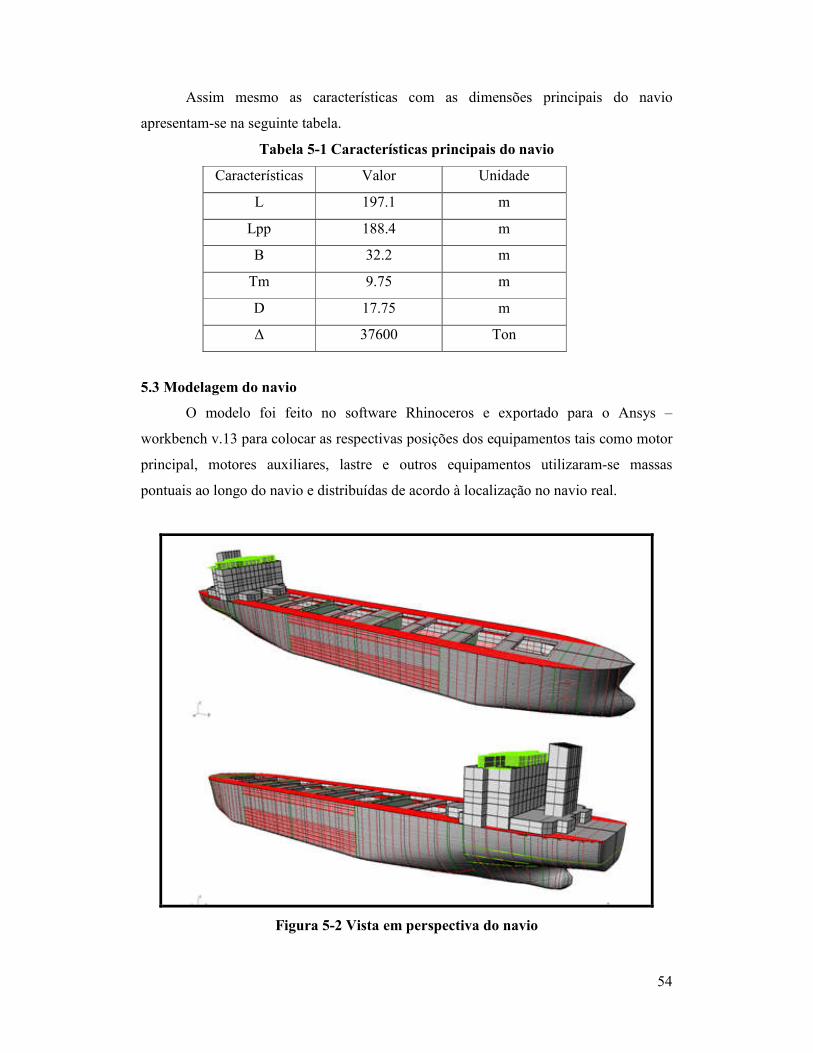
54
Assim mesmo as características com as dimensões principais do navio
apresentam-se na seguinte tabela.
Tabela 5-1 Características principais do navio
Características Valor Unidade
L 197.1 m
Lpp 188.4 m
B 32.2 m
Tm 9.75 m
D 17.75 m
Δ 37600 Ton
5.3 Modelagem do navio
O modelo foi feito no software Rhinoceros e exportado para o Ansys –
workbench v.13 para colocar as respectivas posições dos equipamentos tais como motor
principal, motores auxiliares, lastre e outros equipamentos utilizaram-se massas
pontuais ao longo do navio e distribuídas de acordo à localização no navio real.
Figura 5-2 Vista em perspectiva do navio

55
5.4 Sistemas de referencia para o navio
A origem do sistema de coordenadas será tomada na base da quilha na parte de
ré. Servirá como referencia para posicionar os diferentes equipamentos na praça de
maquinas, convés principal e a proa, também será utilizado para fazer a distribuição da
massa hidrodinâmica adicional que estarão ao longo do casco,
5.5 Equipamentos do navio
Para fazer a análise muito mais próxima do caso real, vai-se considerar os
principais equipamentos que concentram a maior quantidade de massa do sistema
completo do navio, a lista dos equipamentos considerados se mostra na tabela seguinte.
Tabela 5-2 Lista dos principais equipamentos a considerar no navio
N° MARCA COMPONENTE QUANTIDADE MASSA [kg]
1 PUSNES 1-27CUE + 200HW WINDLASS
15M.47 2 23380
2 FOSHAN CHAINS, SPARES & TOOLS 2 92016 3 MACGREEGOR C-LOOP SET 1 114133
4 MACGREEGOR TELESCOPING BOOM
CONVEYOR 1 219745
5 TTS HATCH 1A 1 45572 6 TTS HATCH 1F 1 45572 7 TTS HATCH 2A 1 45572 8 TTS HATCH 2F 1 45572 9 TTS HATCH 3A 1 45572 10 TTS HATCH 3F 1 45572 11 TTS HATCH 4A 1 45570 12 TTS HATCH 4F 1 42000
13 Wärtsilä 6RT – Flex 58T – B 1 325212
14 Wärtsilä PROPELLER + OTHERS
4E1540Rx/R0560 1 36910
15 Wärtsilä PROPELLER SHAFT + OTHERS 1 34573
16 Becker Marine RUDDER BLADE+FLAP FKSR-
1-4550/880/620/2 1 44000
17 Wärtsilä Thruster & Eletric Motor
CT200/4D550 1 12070
18 MAN B&W
DIESEL 6L23/30H 1 21565
19 MAN B&W
DIESEL 6L23/30H 1 21565
20 MAN B&W
DIESEL 6L23/30H 1 21565

56
5.6 Condições de contorno
Dentro de todo problema em análise de elementos finitos existem o campo de
variáveis que são governadas por as equações diferenciais, as variáveis atuam no
domínio do problema, pode-se entender como o domino a estrutura física do problema
em estudo. Adicionalmente as variáveis podem ser valores no ponto do domínio ou suas
derivadas.
Dependendo do tipo de problema que seja analisado, essas variáveis podem ser
deslocamentos, momentos, temperaturas, velocidades, etc.
Para fazer a análise modal, a equação diferencial não considera amortecimento
([C] =0) nem forcas aplicadas ([F] = 0) no modelo de elementos finitos.
5.7 Representação do modelo por elementos finitos
Para tornar o modelo real no modelo de computador, foram utilizados elementos
tipo casca para casco, bodegas, anteparas, superestrutura, etc. As estruturas
longitudinais tais como a asa e a alma das longarinas, também foram modeladas
mediante elementos tipo casca tomadas tanto a, as medidas do plano de estrutura geral e
replicadas no modelo tridimensional.
Este procedimento de tomar os elementos longitudinais como casca fará que o
sistema das equações a resolver demore mais tempo, mas será útil para localizar
vibrações locais das estruturas com maior exatidão.
Figura 5-3 Reforço junto com o casco

57
5.7.1 Elemento finito a utilizar na modelagem
Vai-se utilizar elementos tipo casca para modelar partes como o casco, convés,
cavernas gigantes, etc. O elemento chamado Shell181 foi utilizado na análise. Shell181
é adequado para a análise de estruturas finas a moderadamente grossa. é um elemento
de quatro nós com seis graus de liberdade em cada nó (translações no x, y, z e direções,
e rotações sobre os x, y, e z-eixo). Se a opção de membrana é usado, o elemento tem
apenas graus de liberdade de translação, a membrana não será utilizado porque não
representa adequadamente o comportamento das vibrações especialmente na parte local
das estruturas e os valores das vibrações não são consistentes como pode ser apreciado
na figura 5-4.
Outra consideração é que quando o computador mostra os deslocamentos da
estrutura, ela mostra todos os modos vibracionais e quanto mais alta mais modos, em
consequência para mostrar os modos verticais ou horizontais da estrutura tem-se que
desacoplar os graus de liberdade da equação restringindo as rotações nos eixos
adequados.
Figura 5-4 Comparação entre casca (esquerda) e membrana (direita)
5.8 Métodos de extração de autovalores e autovetores
Para fazer a extração dos autovetores (frequências naturais) e os autovetores
(modos vibracionais), vai-se a utilizar o procedimento de Block Lanczos que o Ansys
tem definido porque é o mais adequado para os grandes problemas de valores próprios
simétrico.
A utilização do método de Block Lanczos é conveniente para resolver modelos
grandes (até 1.000.000 DOF) com muitas equações de restrição, apresenta bom
desempenho especialmente para elementos tipo casca.

58
5.9 Malhado do modelo
O malhado do modelo é uma das partes principais porque vai determinar o
número de nós e número de elementos do modelo, como se indicou a maior quantidade
de nós mais tempo é requerido para a solução do sistema. Neste item vai-se verificar a
influência da quantidade de elementos e de nós do modelo, também se deve mencionar
que esta parte da modelagem é uma das mais difíceis de conseguir porque o software
precisa definições internas tais como tolerâncias da caracterização da malha, tamanho
de elementos, orientação de malha, tipo de elemento que pode se quadrado o triangular
entre outros.
5.10 Sensibilidade da Malha
É importante conhecer até que grau pode ser considerado o comportamento da
um navio como viga, no presente trabalho vai-se apresentar os resultados das
frequências naturais do navio vibrando no ar livremente e com três malhas distintas, a
malha 1, com 136836 elementos finitos, a malha 2, com 246050 elementos e por último
a malha 3 com 629421 elementos finitos.
Figura 5-5 Frequências naturais do casco vibrando no ar e com diferente número
de elementos finitos na malha

59
Como se pode apreciar na figura 5-5 o comportamento das malhas até o modo 5
são coincidentes, mais a diante os modos que se apresentam devido a que a maioria das
frequências apresentadas são frequências de vibrações locais que vão aumentar
conforme aumenta o número de elementos finitos.
5.11 Massa adicional hidrodinâmica do modelo em elementos finitos
O meio fluido que rodeia o casco do navio e um fator importante para o estudo
porque o valor da massa em consideração atinge valores muito altos e varia com cada
modo de vibração tão como já foi mencionado.
Tem-se vários métodos propostos para considerar o efeito de massa adicional ao
redor do casco, mas para o escopo de presente trabalho, vai-se utilizar os métodos de
Lewis, Landwerger e Macagno, do Instituo de Pesquisas da Construção Naval de
Krylov, Método de Instituto de Pesquisas Navais do Japão e o método empírico da
sociedade de classificação ABS.
O propósito de utilizar esses métodos no cálculo das frequências naturais do
navio e estudar é verificar os resultados com as medições do navio real, cujas
frequências naturais já foram encontradas no capítulo anterior mediante a análise
espectral.
O método alternativo é mediante a teoria da hidroelasticidade, é outra maneira
de considerar o efeito da massa adicional, esse conceito utiliza os elementos de fronteira
BEM (Boundary Elements Method), o qual considera a interação da parte casco-agua
mediante painéis hidrodinâmicos como os elementos de fronteira. Os painéis são
modelados separadamente tendo como referencia o casco da parte molhada do navio,
depois são avaliadas os valores das forças em cada painel mediante o potencial linear
distribuído ao longo de cada nó dos painéis.
Neste estudo não será considerado neste trabalho, porque utiliza outros conceitos
hidrodinâmicos que está fora do alcance teórico do presente trabalho.
5.11.1 Massas hidrodinâmicas adicionais nos extremos do navio
Com motivos de comparação vai-se avaliar qual é a diferença que tem o valor da
massa adicional hidrodinâmica do casco completo e o valor da massa adicional sem
incluir o bulbo e uma parte da popa aproximadamente desde o cadaste até o espelho da
popa em função da frequência. O motivo para fazer esta comparação é que as formas
dessas balizas não cumprem com a as expressões para aplicar as formulações nas seções

60
de Lewis, e em consequência não são aplicáveis no cálculo da massa adicional com os
métodos descritos.
Figura 5-6 Massas adicionais hidrodinâmicas
Com a ajuda do software Aqwa v12 vai-se encontrar os valores da massa
hidrodinâmica em uma faixa de freqüências, a limitação do software é que só permite
um número limitado de elementos finitos (12000), por isso também limita o rango de
frequências que software pode atingir, quer dizer que para achar frequências mais altas,
tem-se que refinar ainda mais a malha do casco, mas pela causa do número de
elementos finitos não é possível estender mais as frequências.
Depois de achar os valores da massa adicional hidrodinâmica até uma faixa de
frequências de 0.223 Hz, a maior diferença é mostrada no começo da faixa de
frequências e tem um valor aproximado de 4%, para os valores seguintes essa diferença
tem uma tendência a diminuir.
As tabela 5-3apresenta os cálculos da massa adicional para hidrodinâmica para
ambos casos.

61
Tabela 5-3 Cálculo das massas adicionais com o Aqwa v12
Frequência Massa Vertical (Kg) Frequência Massa Vertical (Kg)
(Hz) (com extremos) (Hz) (sem extremos)
0.016 159000000 0.016 152000000
0.025 163000000 0.030 152000000
0.033 155000000 0.043 133000000
0.042 142000000 0.057 107000000
0.050 125000000 0.071 83100000
0.059 108000000 0.085 65800000
0.068 91400000 0.099 58600000
0.076 77500000 0.113 56900000
0.085 67800000 0.126 56500000
0.093 62400000 0.140 57300000
0.102 60000000 0.154 58900000
0.111 58900000 0.168 60400000
0.119 58300000 0.181 53100000
0.128 58000000 0.195 64700000
0.137 58300000 0.209 66200000
0.145 59100000 0.223 67500000
0.615 59900000 - -
0.161 60500000 - -
0.171 61000000 - -
0.180 57000000 - -
0.188 65000000 - -
0.197 67000000 - -
0.206 68400000 - -
0.214 69400000 - -
0.223 69100000 - -
A Diferença das massas entre dois frequências iguais varia entre 4% para as
frequências mais baixas como 0.016 Hz e até 1% para 0.223 Hz, em consequência com
respeito a essa diferencia, pode ser considerada que tem uma tendência a diminuir na
faixa de frequências considerada da tabela apresentada.
Um dado importante como poderá ser comprovado mais na frente é que o valor
obtido para a massa adicional no rango das frequências amostradas tem a tendência a
coincidir com os valores da massa calculada por os métodos em estudo no presente
trabalho.

62
Figura 5-7 Malha do casco no Aqua v12
5.11.2 Distribuição da massa hidrodinâmica no casco
Para poder fazer o cálculo o mais exato possível da massa adicional, foi
calculada por cada faixa do casco do navio, de acordo com o conceito das seções planas
descritas por o Korotkin [23], a idéia deste método é utilizar seções planas ortogonais
ao eixo coincidente com o comprimento, de tão forma que para achar o valor da massa
adicional do corpo total se integra ao longo do comprimento, para o caso do presente
estudo a referencia das seções ortogonais são as balizas, desse jeito esses valores foram
achados para cada espaçamento entre balizas e foi distribuído para cada caverna gigante
do navio em três pontos da estrutura (bombordo, quilha e estibordo).
Neste item vai-se averiguar como é o comportamento do modelo segundo a
distribuição das massas pontuais que vai representar o efeito da massa hidrodinâmica
adicional ao redor do casco do navio, na determinação das frequências naturais
verticais. Foi escolhido o método de Krylov para testar a distribuição das massas e
averiguar qual é a tendência dos resultados nas frequências naturais. A massa
hidrodinâmica foi calculada por cada faixa ao longo do casco, terá um valor entre cada
baliza do navio, esse valor de massa será distribuído para cada caverna gigante
localizadas entre essas balizas mediante massas pontuais. Na primeira fase da
distribuição será colocada uma massa pontual por caverna e a posição será no fundo da
quilha do navio.

63
(a) (b)
Figura 5-8 Caverna com 7 massas (a) e caverna com 3 massas (b)
A quantidade de modos verticais estudados foram nove modos por cada
método,então a quantidade de massas pontuais nesta primeira fase foi de 19 massas as
quais eram recalculadas para cada modo de vibração vertical dando um total de 171
massas utilizadas para os nove modos, logo para a segunda fase será considerada três
massas por cada caverna gigante, uma na quilha do navio e dois na mesma altura na
metade do calado, no total foram utilizadas 165 massas que também foram recalculadas
para cada modo vibracional vertical dando um total de 1485 massas utilizadas para
todos os modos considerados, e por último para a utilizar sete massas por caverna a
distribuição foi como segue, foram colocadas sete massas pontuais por cada caverna
gigante que totalizaram 385 massas que novamente foram recalculadas por cada modo
vibracional vertical dando um total de 3465 massas utilizadas para os nove modos, e sua
distribuição foi uma no centro ajuntado á quilha, outras massas no fundo do casco
colocadas simetricamente respeito do plano central do navio, dois em uma altura menor
que a metade do calado e as dois ultimas na metade do calado e sendo simétricas
respeito do plano central do navio.
Tabela 5-4 Frequências Naturais segundo a distribuição de massas
Frequências Naturais Verticais (Hz) modo 1 Massa 3 Massas 7 Massas
1 0.538 0.909 0.889 2 1.164 2.076 2.044 3 1.717 3.365 3.256 4 2.221 4.708 4.732 5 2.589 6.097 6.128 6 2.840 7.132 7.424 7 3.076 8.554 8.620 8 3.229 9.340 9.492 9 3.412 9.468 9.580

64
De acordo com os resultados na distribuição das massas observa-se que para
poder representar adequadamente o efeito da massa adicional hidrodinâmica podem-se
considerar apenas três massas por caverna gigante ao longo do comprimento do navio,
considerar massas adicionais para o navio em estudo não vai alterar de maneira
significativa a análise vibracional global do navio. Em quanto considerar uma massa só,
na quilha altera em forma significativa os resultados das frequências naturais. A seguir
apresentam-se os resultados obtidos na figura 5-9.
Figura 5-9 Frequências naturais segundo a distribuição da massa no casco
5.11.3 Massa adicional por o método de Lewis
Visto que o procedimento de calculo por o método de Lewis já foi descrito
anteriormente, vai-se apresentar os dados necessários para o cálculo da massa adicional
vertical.
Outros valores tão como a área da seção submersa, calado e coeficiente de seção
que variam com o posicionamento respeito do comprimento do navio (sendo x, posição
respeito ao eixo de coordenadas descrito), por motivos de espaço serão apresentados os
resultados resumidos e para maior informação temos os valores das propriedades de
cada característica nos anexos.

65
Tabela 5-5 Dados iniciais para o método de Lewis
Característica Valor Unidade
ρ 1.025 Ton / m3
B 32.2 m
L 188.4 m
B/L 0.171
A(x)
B(x)
T(x)
α(x)
B(x)/T(x)
Nas próximas figuras vai-se apresentar os primeiros modos vibracionais achadas
mediante o software de elementos finitos Ansys v.13, os demais modos serão colocados
nos anexos.
Figura 5-10 Distribuição de equipamentos e massa adicional hidrodinâmica

66
Figura 5-11 Variação da massa adicional por modo para o método e Lewis
A seguir apresenta-se a tabela 5-7 mostra os valores obtidos das frequências
naturais do navio considerando a massa adicional mediante o método de Lewis.

67
Tabela 5-6 Massa adicional distribuída entre cada baliza (Método de Lewis)
Massa adicional em Kg Modo 1 Modo 2 Modo 3 Modo 4 Modo 5 Modo 6 Modo 7 Modo 8 Modo 9
L_2,1 1758844 1587845 1465703 1343561 1221419 1148134 1025992 977135 903850
L_3,2 2368758 2138462 1973965 1809468 1644971 1546273 1381775 1315977 1217278
L_4,3 2991237 2700423 2492698 2284973 2077248 1952613 1744888 1661799 1537164
L_5,4 3368417 3040932 2807014 2573096 2339178 2198828 1964910 1871343 1730992
L_6,5 3679783 3322027 3066486 2810946 2555405 2402081 2146540 2044324 1891000
L_7,6 3821313 3449797 3184428 2919059 2653690 2494468 2229100 2122952 1963731
L_8,7 3962896 3577615 3302413 3027212 2752011 2586891 2311689 2201609 2036488
L_9,8 3962896 3577615 3302413 3027212 2752011 2586891 2311689 2201609 2036488
L_10,9 3962896 3577615 3302413 3027212 2752011 2586891 2311689 2201609 2036488
L_11,10 3962896 3577615 3302413 3027212 2752011 2586891 2311689 2201609 2036488
L_12,11 3962896 3577615 3302413 3027212 2752011 2586891 2311689 2201609 2036488
L_13,12 3962896 3577615 3302413 3027212 2752011 2586891 2311689 2201609 2036488
L_14,13 3962896 3577615 3302413 3027212 2752011 2586891 2311689 2201609 2036488
L_15,14 3962896 3577615 3302413 3027212 2752011 2586891 2311689 2201609 2036488
L_16,15 3653081 3297920 3044234 2790548 2536862 2384650 2130964 2029489 1877278
L_17,16 3276062 2957556 2730052 2502547 2275043 2138541 1911036 1820035 1683532
L_18,17 2556683 2308116 2130569 1953022 1775474 1668946 1491398 1420379 1313851
L_19,18 1280548 1156050 1067123 978196 889269 835913 746986 711415 658059
L_19.5,19 306015 276263 255012 233761 212510 199760 178509 170008 157258
Massa Total (Kg) 60763910 54856308 50636592 46416876 42197160 39665330 35445614 33757728 31225898

68
Tabela 5-7 Frequências Naturais (Método de Lewis)
Modo Frequência (Hz)
1 0.914
2 2.073
3 3.099
4 4.663
5 6,076
6 7.118
7 8.640
8 9.343
9 9.648
5.11.4 Massa adicional por o método de Landwerger & Macagno
Este método precisa dos dados apresentados na tabela 5-8 para o cálculo das das
massas adicionais.
Tabela 5-8 Dados iniciais para o método de Landwerger & Macagno
Característica Valor Unidade λ [2.T(x) ] / B(x) - σ A(x) / [ T(x).B(x) ] - ρ 1.025 t /m3 B 32.20 m L 188.4 m
Da mesma maneira que no caso anterior, os valores das áreas, bocas e calados
são variáveis para cada posição longitudinal. Na tabela 5-10 mostram-se os valores das
massas para cada modo vibracional.

69
Figura 5-12 Variação da massa adicional por modo para o método de Landwerger
& Macagno
A seguir apresenta-se a tabela com os valores obtidos das frequências naturais
do navio considerando a massa adicional mediante o método de Landwerger &
Macagno.
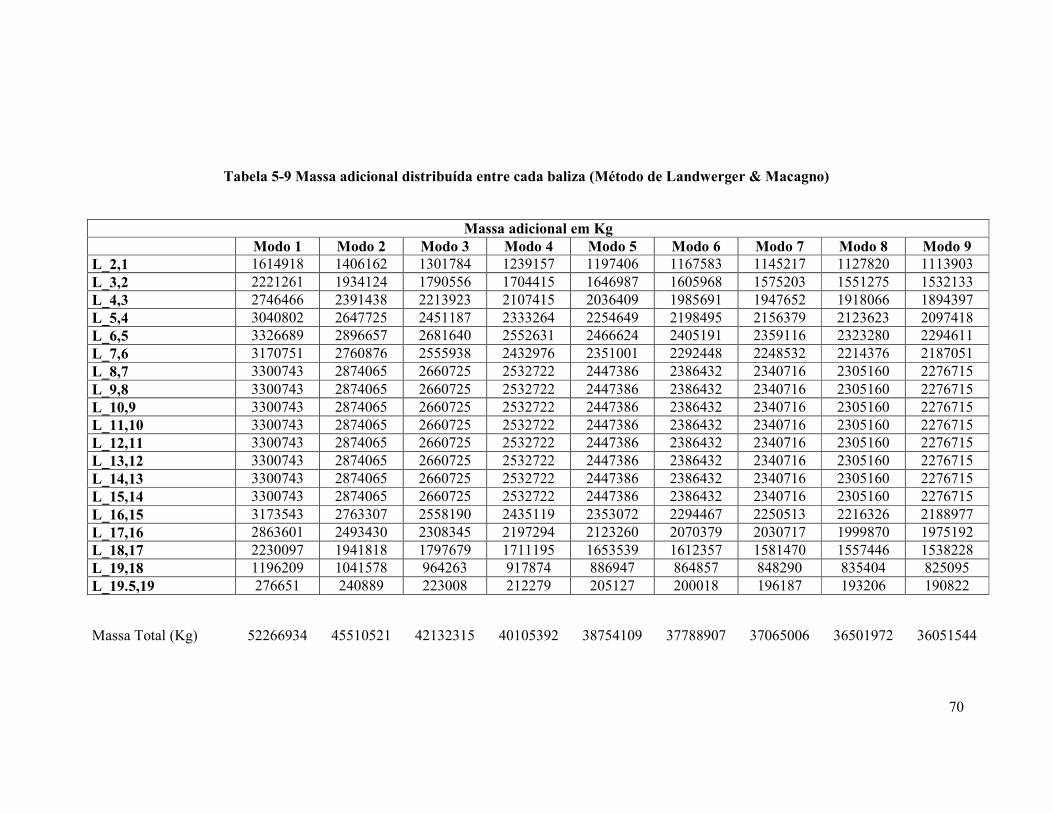
70
Tabela 5-9 Massa adicional distribuída entre cada baliza (Método de Landwerger & Macagno)
Massa adicional em Kg Modo 1 Modo 2 Modo 3 Modo 4 Modo 5 Modo 6 Modo 7 Modo 8 Modo 9
L_2,1 1614918 1406162 1301784 1239157 1197406 1167583 1145217 1127820 1113903 L_3,2 2221261 1934124 1790556 1704415 1646987 1605968 1575203 1551275 1532133 L_4,3 2746466 2391438 2213923 2107415 2036409 1985691 1947652 1918066 1894397 L_5,4 3040802 2647725 2451187 2333264 2254649 2198495 2156379 2123623 2097418 L_6,5 3326689 2896657 2681640 2552631 2466624 2405191 2359116 2323280 2294611 L_7,6 3170751 2760876 2555938 2432976 2351001 2292448 2248532 2214376 2187051 L_8,7 3300743 2874065 2660725 2532722 2447386 2386432 2340716 2305160 2276715 L_9,8 3300743 2874065 2660725 2532722 2447386 2386432 2340716 2305160 2276715 L_10,9 3300743 2874065 2660725 2532722 2447386 2386432 2340716 2305160 2276715 L_11,10 3300743 2874065 2660725 2532722 2447386 2386432 2340716 2305160 2276715 L_12,11 3300743 2874065 2660725 2532722 2447386 2386432 2340716 2305160 2276715 L_13,12 3300743 2874065 2660725 2532722 2447386 2386432 2340716 2305160 2276715 L_14,13 3300743 2874065 2660725 2532722 2447386 2386432 2340716 2305160 2276715 L_15,14 3300743 2874065 2660725 2532722 2447386 2386432 2340716 2305160 2276715 L_16,15 3173543 2763307 2558190 2435119 2353072 2294467 2250513 2216326 2188977 L_17,16 2863601 2493430 2308345 2197294 2123260 2070379 2030717 1999870 1975192 L_18,17 2230097 1941818 1797679 1711195 1653539 1612357 1581470 1557446 1538228 L_19,18 1196209 1041578 964263 917874 886947 864857 848290 835404 825095 L_19.5,19 276651 240889 223008 212279 205127 200018 196187 193206 190822
Massa Total (Kg) 52266934 45510521 42132315 40105392 38754109 37788907 37065006 36501972 36051544
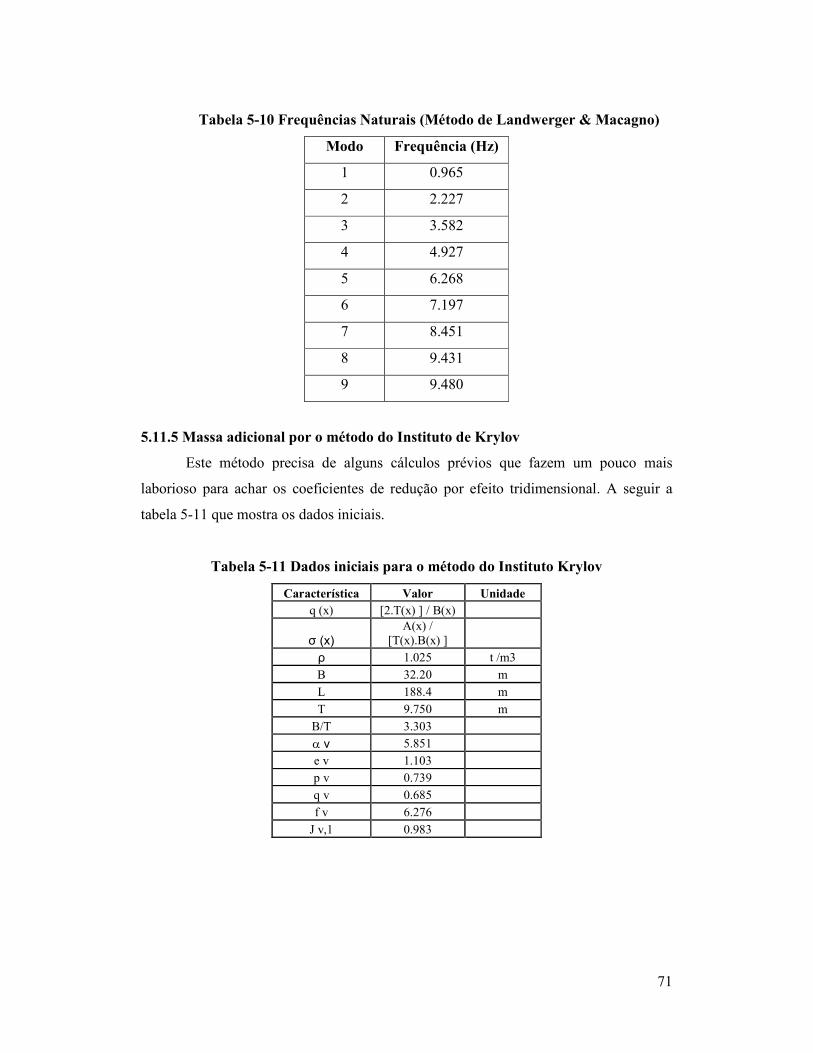
71
Tabela 5-10 Frequências Naturais (Método de Landwerger & Macagno)
Modo Frequência (Hz)
1 0.965
2 2.227
3 3.582
4 4.927
5 6.268
6 7.197
7 8.451
8 9.431
9 9.480
5.11.5 Massa adicional por o método do Instituto de Krylov
Este método precisa de alguns cálculos prévios que fazem um pouco mais
laborioso para achar os coeficientes de redução por efeito tridimensional. A seguir a
tabela 5-11 que mostra os dados iniciais.
Tabela 5-11 Dados iniciais para o método do Instituto Krylov
Característica Valor Unidade
q (x) [2.T(x) ] / B(x)
σ (x) A(x) /
[T(x).B(x) ]
ρ 1.025 t /m3
B 32.20 m
L 188.4 m
T 9.750 m
B/T 3.303 v 5.851 e v 1.103 p v 0.739 q v 0.685
f v 6.276
J v,1 0.983

72
Figura 5-13 Variação da massa adicional por modo método de Instituto Krylov
A tabela5-12 mostra os valores das frequências naturais do modelo para cada
modo.

73
Tabela 5-12 Massa adicional distribuída entre cada baliza (Krylov)
Resumo de massa adicional entre balizas para cada Modo Vertical (Kg) Modo 1 Modo 2 Modo 3 Modo 4 Modo 5 Modo 6 Modo 7 Modo 8 Modo 9
L_2,1 1857733 1666250 1511663 1384245 1277411 1186547 1108321 1040268 980524 L_3,2 2572144 2307025 2092989 1916571 1768654 1642847 1534539 1440314 1357595 L_4,3 3180314 2852509 2587866 2369734 2186843 2031290 1897372 1780869 1678592 L_5,4 3521145 3158209 2865204 2623696 2421204 2248981 2100711 1971723 1858484 L_6,5 3852193 3455134 3134583 2870368 2648839 2460424 2298214 2157099 2033214 L_7,6 3671621 3293175 2987649 2735820 2524675 2345091 2190485 2055985 1937907 L_8,7 3822148 3428187 3110135 2847981 2628180 2441234 2280290 2140275 2017356 L_9,8 3822148 3428187 3110135 2847981 2628180 2441234 2280290 2140275 2017356 L_10,9 3822148 3428187 3110135 2847981 2628180 2441234 2280290 2140275 2017356 L_11,10 3822148 3428187 3110135 2847981 2628180 2441234 2280290 2140275 2017356 L_12,11 3822148 3428187 3110135 2847981 2628180 2441234 2280290 2140275 2017356 L_13,12 3822148 3428187 3110135 2847981 2628180 2441234 2280290 2140275 2017356 L_14,13 3822148 3428187 3110135 2847981 2628180 2441234 2280290 2140275 2017356 L_15,14 3822148 3428187 3110135 2847981 2628180 2441234 2280290 2140275 2017356 L_16,15 3674855 3296075 2990280 2738229 2526898 2347157 2192415 2057795 1939614 L_17,16 3315952 2974166 2698236 2470801 2280110 2117923 1978293 1856822 1750182 L_18,17 2582377 2316202 2101316 1924195 1775690 1649383 1540643 1446044 1362996 L_19,18 1385169 1242395 1127132 1032125 952468 884718 826391 775648 731102 L_19.5,19 320352 287333 260675 238703 220280 204611 191122 179387 169084
Total (Kg) 60511041 54273966 49238672 45088337 41608508 38648844 36100824 33884153 31938141

74
Tabela 5-13 Frequências Naturais (Método Instituto de Pesquisas Krylov)
Modo Frequência (Hz)
1 0.909
2 2.078
3 3.365
4 4.708
5 6.097
6 7.132
7 8.554
8 9.340
9 9.468
A seguir apresentam-se os primeiros modos vibracionais até o quarto modo
vibracional, as formas dos modos para os diferentes métodos de cálculo apresentam uma
configuração similar, em consequência pode ser escolhido qualquer dos resultados para
visualizar os modos, para o presente trabalho foi escolhido os resultados por o método do
instituto Krylov.
Figura 5-14 Primeiro modo vibracional

75
Figura 5-15 Segundo modo vibracional
Figura 5-16 Terceiro modo vibracional

76
Figura 5-17 Quarto modo vibracional
Figura 5-18 Quinto modo vibracional

77
Figura 5-19 Sexto modo vibracional
Figura 5-20 Sétimo modo vibracional
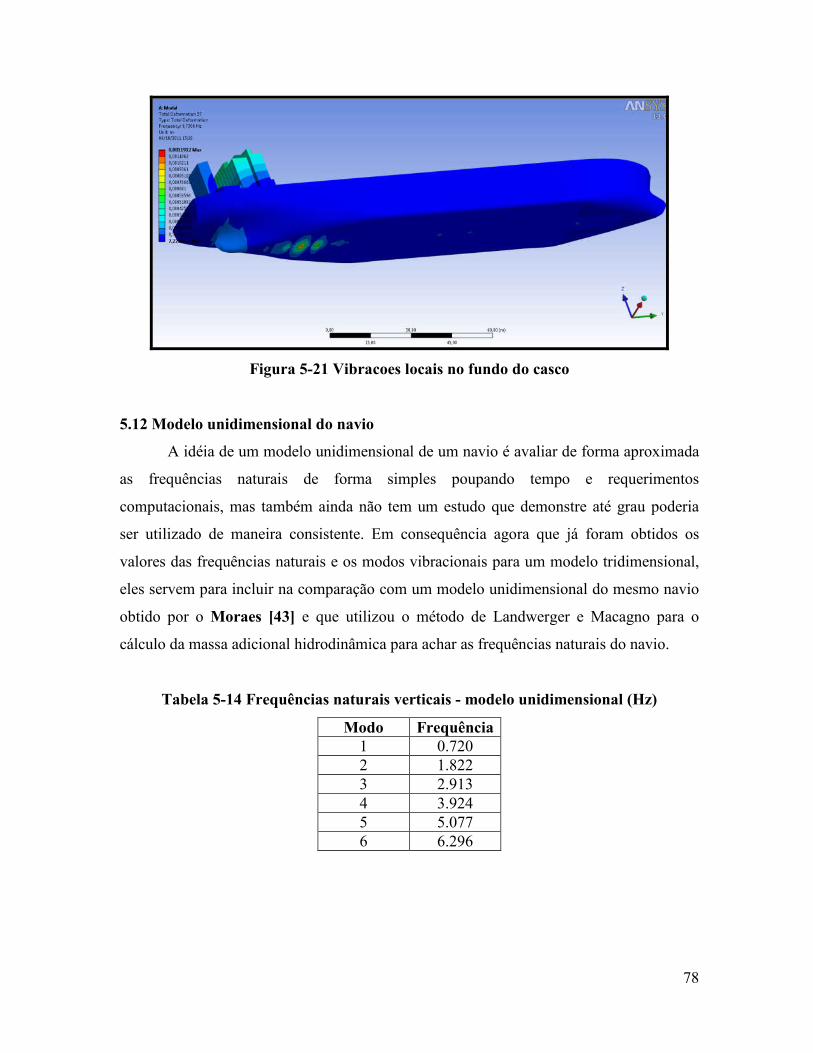
78
Figura 5-21 Vibracoes locais no fundo do casco
5.12 Modelo unidimensional do navio
A idéia de um modelo unidimensional de um navio é avaliar de forma aproximada
as frequências naturais de forma simples poupando tempo e requerimentos
computacionais, mas também ainda não tem um estudo que demonstre até grau poderia
ser utilizado de maneira consistente. Em consequência agora que já foram obtidos os
valores das frequências naturais e os modos vibracionais para um modelo tridimensional,
eles servem para incluir na comparação com um modelo unidimensional do mesmo navio
obtido por o Moraes [43] e que utilizou o método de Landwerger e Macagno para o
cálculo da massa adicional hidrodinâmica para achar as frequências naturais do navio.
Tabela 5-14 Frequências naturais verticais - modelo unidimensional (Hz)
Modo Frequência 1 0.720 2 1.822 3 2.913 4 3.924 5 5.077 6 6.296

79
5.13 Frequências Natural do Navio Mediante Fórmulas Empíricas
Neste item vai-se achar as frequências naturais do navio para diferentes
formulações empíricas para ser comparadas com os valores experimentais achados.
A primeira estimação é feita com as formulações da sociedade de classificação
American Bureau of Shipping (ABS), cuja descrição de cada dado foi descrita no ponto
2.9.2 do marco teórico.
Tabela 5-15 Dados para estimação das frequências naturais pelas normas da ABS
Parâmetro Valor Unidade B 32.2 m L 188.4 m
Tm 9.75 m Δ 37600 Ton Δi 47262 Ton Iv 125.17 m4
1
As planilhas de cálculo são apresentadas nos anexos. A seguir apresentam-se os
valores obtidos para as primeiras frequências naturais. Segundo as formulações de
Johannessen e Skaar [23], pode-se utilizar para achar as frequências até o terceiro modo
de vibração.
Tabela 5-16 Frequências nos modos verticais ABS
Modo Vertical Frequência (Hz)
1 1.02
2 2.04
3 3.06
Das frequências obtidas da tabela 5-16 pode-se notar que os valores verticais são
muito próximos com a tendência da curva estatística apresentada na figura 5-18, que foi
realizada para navios do mesmo tipo pela classificadora da Noruega Det Norske Veritas
(DNV), essa figura é aplicável para navios tipo taqueiro para os primeiros quatro modos

80
vibracionais, mas também é aplicável para os navios tipo graneleiro para os dois primeiros
modos de vibração.
Agora será feito uma estimação com as formulações do Instituto de Pesquisas
Navais do Japão, logo também serão comparados com os valores experimentais dessa
2maneira serão avaliados os valores obtidos pelas formulas.
Figura 5-22 Frequências para navios de carga (Fonte: DNV)
A seguir amostram-se os dados necessários do navio para calcular as primeiras
frequências de vibração vertical.
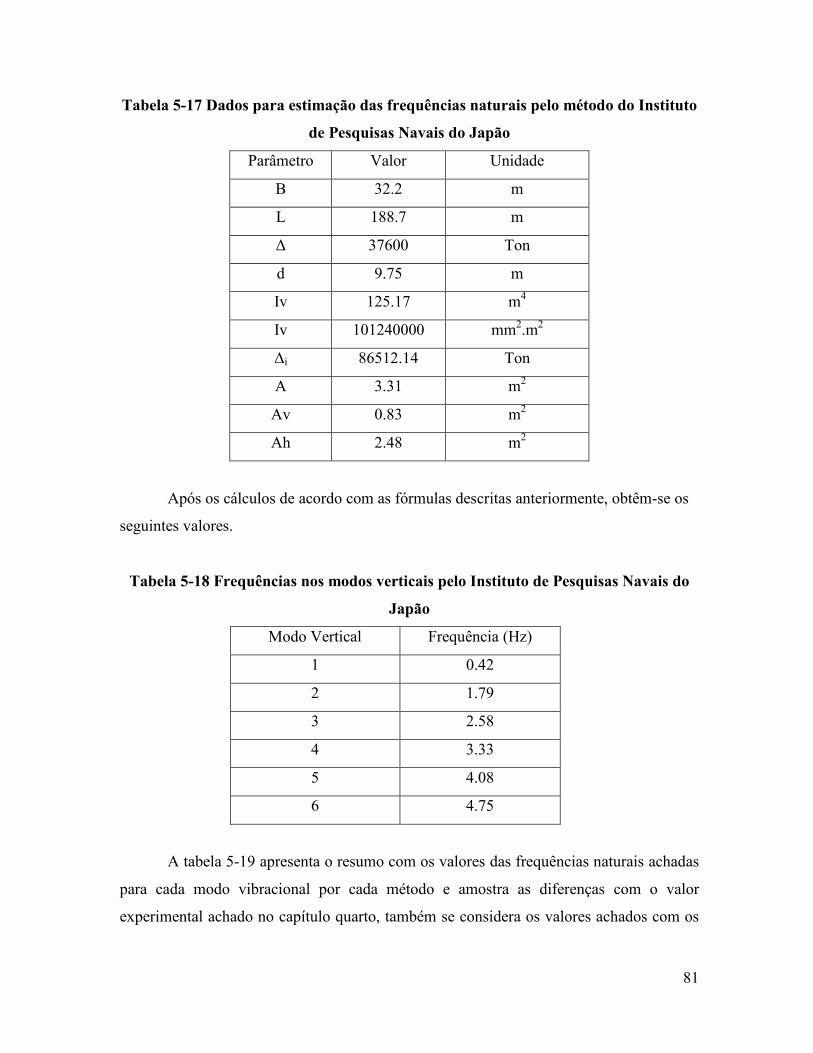
81
Tabela 5-17 Dados para estimação das frequências naturais pelo método do Instituto
de Pesquisas Navais do Japão
Parâmetro Valor Unidade
B 32.2 m
L 188.7 m
Δ 37600 Ton
d 9.75 m
Iv 125.17 m4
Iv 101240000 mm2.m2
Δi 86512.14 Ton
A 3.31 m2
Av 0.83 m2
Ah 2.48 m2
Após os cálculos de acordo com as fórmulas descritas anteriormente, obtêm-se os
seguintes valores.
Tabela 5-18 Frequências nos modos verticais pelo Instituto de Pesquisas Navais do
Japão
Modo Vertical Frequência (Hz)
1 0.42
2 1.79
3 2.58
4 3.33
5 4.08
6 4.75
A tabela 5-19 apresenta o resumo com os valores das frequências naturais achadas
para cada modo vibracional por cada método e amostra as diferenças com o valor
experimental achado no capítulo quarto, também se considera os valores achados com os

82
procedimentos empíricos da ABS, o Instituto de Pesquisas Navais do Japão e o método
tradicional unidimensional, esses valores serão mostrados na figura 5-23 e comparados
para verificar qual se aproxima melhor ao navio real e até que modo pode ser comparável.
Logo de obter e comparar os resultados experimentais, com os resultados mediante
o modelo em elementos finitos dos três métodos utilizados, os método de Lewis e do
Krylov com exceção do terceiro modo vibracional que tem uma diferença porcentual de
20%, apresentam a melhor aproximação como o teste experimental para quase todos os
modos vibracionais comparáveis até o quinto modo, para o método de Lanwerger e
Macagno os resultados mostram uma boa aproximação para o primeiro modo vibracional,
logo para modos superiores tem diferenças que variam em porcentagem desde 13% a 27%
a partir do segundo modo vibracional até o quarto. Com respeito ao procedimento da
sociedade de classificação ABS os resultados mostram resultados consistentes com uma
diferença máxima de 11% para o primeiro modo, mas ainda assim em termos numéricos
essa diferença não é muito significativa para termos gerais de avaliação. No caso de o
método do Instituto do Japão o resultado obtido subestima os valores das frequências em
quase todos os modos, a maior diferença tem uma porcentagem de até 54% que é no
quinto modo, sendo o segundo modo o mais próximo do valor experimental com uma
diferença de 5%. Por último o método unidimensional obteve bons resultados para os três
primeiros modos, mas depois os valores das frequências se afastaram dos valores
experimentais tendo uma diferença máxima de 20% para o quinto modo.
Tabela 5-19 Resumo de frequências naturais verticais (Hz)
Modo Krylov Lewis L & M ABS Japão Unidimensional Experimental 1 0.909 0.914 0.965 1.02 0.42 0.720 0.91 2 2.076 2.073 2.227 2.04 1.79 1.822 1.90 3 3.365 3.099 3.582 3.06 2.58 2.913 2.80 4 4.708 4.663 4.927 3.33 3.924 4.36 5 6.097 6.076 6.268 4.08 5.077 6.40 6 7.132 7.118 7.197 4.75 6.296 7 8.554 8.640 8.451 8 9.340 9.343 9.431 9 9.468 9.648 9.480

83
Figura 5-23 Frequências naturais achadas pelos diferentes métodos

84
CAPÍTULO 6
CONCLUSÕES E RECOMENDAÇÕES
6.1 Conclusões
De maneira geral os resultados obtidos na presente dissertação podem ser
considerados como bons. No presente trabalho desenvolveu-se um modelo em elementos
finitos utilizando o programa Ansys 13 para comparar e validar os resultados com as
medições feitas em um navio a escala real tipo graneleiro mediante na prova do mar.
Numa primeira etapa foi importante definir adequadamente o tipo de elemento
finito a ser utilizados na representação da estrutura interna, superestrutura e o casco. Foi
possível verificar que o elemento tipo membrana tem uma considerável influencia na
frequência natural do navio, e assim a massa hidrodinâmica adicional não conseguiu
mudar os valores das frequências naturais comparando com os valores do teste
experimental, mas por outro lado, o elemento tipo casca alem de apresentar valores muito
próximos ao teste experimental, permite localizar vibrações locais dependendo do modo
vibracional, quando maior o modo vibracional maior é a presencia das vibrações locais no
navio, como são apresentadas no fundo do casco e a superestrutura que começam a ter
vibrações independentes da forma modal global.
Com respeito da quantidade de elementos finitos utilizada na modelação, o estudo
da sensibilidade da malha foram utilizadas três malhas distintas para achar os valores das
frequências naturais do navio vibrando no ar, e os resultados da figura 4-7 mostram que
para o mesmo modelo apresentam-se a partir do quinto modo vibracional variações nos
valores das frequências naturais isso pode atribuir-se a que quando maior é a quantidade
de elementos finitos, mais vibrações locais aparecem na análise do navio, para revelar os
modos globais tem que se desacoplar os graus de liberdade dos nós restringindo, por
exemplo, as rotações em os eixos que não são de interesse. Para nosso estudo pode tomar-
se qualquer das malhas até o quinto modo porque as três estão apresentando o mesmo
comportamento pelo menos até o quinto modo vibracional.
No estudo da correlação numérico-experimental desenvolvido com a utilização de
resultados do teste experimental do navio real na prova de mar revelou uma boa
correlação com os resultados das análises por elementos finitos, mas para os resultados

85
maiores ao quinto modo vibracional já não é possível identificar com suficiente clareza as
frequências naturais nos espectros da prova do mar, porque a distribuição das amplitudes
na faixa de frequências altas está muito espalhada nos diagramas de cascadas, isso pode
acontecer por fatores tais como o amortecimento hidrodinâmico, o amortecimento
estrutural do navio que aumenta quando se incrementa a velocidade da força de excitação
neste caso representada por as pulsações de pressão sobre o casco do navio e as vibrações
forçadas do motor principal.
A distribuição das massas pontuais que representa o efeito da massa adicional
hidrodinâmica ao redor do casco do navio é outro fator que altera significativamente o
resultado dos valores das frequências naturais, tão como e amostrado na tabela 4-4 e na
figura 4-9 mostram que utilizando apenas uma massa pontual por cada caverna gigante -
como é feito nos modelos unidimensionais - para representar a massa adicional
hidrodinâmica, aproxima unicamente o primeiro valor do primeiro modo vibracional com
os valores do teste experimental, logo os resultados se afastam completamente com a
tendência a subestimar os valores das frequências naturais comparadas com o teste
experimental. Para a distribuição com três massas por caverna gigante demonstra uma
aproximação adequada nos resultados comparados com o teste experimental, e por último
para uma distribuição de sete massas por cada caverna gigante, não houve diferencia
significativa nas frequências naturais comparando com o modelo de três massas, por o
qual pode-se concluir que no caso do modelo em estudo apenas três massas são suficientes
para representar o efeito da massa adicional hidrodinâmica, adicionalmente mais uma
vantagem é que representar com apenas três massas ajuda a poupar muito tempo
computacional para resolver as equações internas do modelo.
Os diferentes métodos utilizados para o cálculo da massa adicional hidrodinâmica
do navio em estudo, foram satisfatórios, considerando uma determinada distribuição em
massas pontuais ao redor do casco. De todos os métodos utilizados no estudo o método de
Landwerger e Macagno que é uma versão modificada do método do Lewis, ironicamente
presenteou uns valores um pouco afastados na faixa baixa de frequências do ensaio
experimental. Dentro dos métodos empíricos utilizados tão como o método da sociedade
de classificação ABS também apresentaram una estimação adequada das frequências

86
naturais, mas estão restringidos até os três primeiros modos pelas formulações nas quais
estão baseadas. O método do instituto de construções navais de Krylov da Russia
apresentou valores de frequências naturais próximos aos valores experimentais em
especial no primeiro modo e a partir do quarto modo na frente até o quinto modo com o
teste experimental. O método do instituto de pesquisas navais de Japão teve uma
tendência a subestimar em quase todos os valores das frequências naturais sendo
unicamente próximo no segundo modo vibracional comparado com o ensaio experimental.
Com respeito ao modelo unidimensional também apresenta una adequada
aproximação para uma fase inicial nos três primeiros modos vibracionais, pero pode-se
apreciar que se afasta dos valores experimentais nos modos más altos, isso pode atribuir-
se ao valor da área de cisalhamento que foi calibrada previamente por o pesquisador e que
para aproximar melhor em modos mais altos teria que ser calculada para maior quantidade
de cavernas o que já representa uma tarefa muito mais laboriosa, uma vantagem do
modelo tridimensional é que como as estruturas são modeladas o efeito da área de
cisalhamento já esta inerente a cada elemento estrutural do modelo e não precisa ser
calculado previamente.
6.2 Trabalhos Futuros
Estudo de uma análise forçada mediante uma força harmônica
Estudo das vibração locais em praça de maquinas
Estudo de influencia nos níveis de vibração em águas pouco profundas
Efeito da massa adicional hidrodinâmica mediante o uso de BEM (Boundary
Element Method).

87
Referências Bibliográficas
[1] MAN DIESEL & TURBO, Bulkers – Propulsion Trends in Bulk Carriers,
Copenhagen, 2010
[2] VORUS, WILLIAM S., Principals of Naval Architecture - Vibration, 3 ed, New
Jersey, USA, 1988
[3] IWER ASMUSSEN, WOLFGANG MENZEL, HOLGER MUMM, Ship Vibration,
Germanischer Lloyd´s, Hamburg, 2001
[4] RAMOS TROYMAN, ANTONIO, Calculo da Resposta e Das Frequências
Naturais de Vibração da Viga-Navio pelo Método das Diferenças Finitas, MSc.,
COPPE/UFRJ, Rio de Janeiro, 1983.
[5] RAMOS TROYMAN, ANTONIO C., Aplicação do Método das Diferenças Finitas ao
Problema de Acoplamento Flexão – Torção no Cálculo Estrutural Dinâmico de Vigas
Auto-Equilibradas, 1983
[6] JENSEN, J.J, Load and Global Response of Ships, 1 ed, United Kindong, Elsevier
Science, 2001.
[7] STIANSEN, S. G., Propeller and Wave-Induced Hull Structure Vibrations, New
York, 1978.
[8] BERTRAM, VOLKER, “Vibrations” . In: Elsevier, Practical Ship Hydrodynamics,
2 ed, Chapter 5, Elsevier UK, 2012.

88
[9] MANSOUR,A. E., ERTEKIN, R.C., et al “Damping of Global and Local Vibrations”.
In: Proceedings of the 15th International Ship and Offshore Structures Congress, Vol 1,
226-230, San Diego, California, USA, 2003
[10] BISHOP, R., PRICE, W. “On Structural Damping of Ship Hulls” Journal of Sound
and Vibration, 495-499, London, 1978
[11] KAMINSKI,M.L., BESNIER, F., DU. S, et al “Noise and Vibration”. In:
Proceedings of the 16th International Ship and Offshore Structures Congress, Vol 1, 289-
295 , Southampton, UK, August, 2006.
[12] MUMM, H., ANNICCHIARICO, C. et al “Dynamic Response”. In: Proceedings of
the 17th International Ship and Offshore Structures Congress, Vol 1, 317-331, Seoul,
Korea, 2009.
[13] LEE, SING-KWAN., LIAO, MIN, WANG, SUQIU, “Propeller-Induced Hull
Vibration – Analytical Methods” In: Proceedings of the 2nd International Ship Noise and
Vibration Conference, Lindon., UK, 2006.
[14] HYLARIDES, S., Damping in Propeller-Generated Ship Vibrations, 1 ed,
Germany, 1974.
[15] BEARDS, C.F., “Damping in Structures”, In: Arnold, Structural Vibration :
Analysis and Damping, 1 ed, Chapter 5, London, UK, 1996.
[16] MAGAZINOVIĆ, GOJKO., Shafting Vibration Primer, CADEA, Croatia, 1998
[17] MAN DIESEL & TURBO, Vibration Characteristics of Two-stroke Low Speed
Diesel Engines, Copenhagen, 2002.

89
[18] MAN DIESEL & TURBO, An Introduction to Vibration Aspects of Two-stroke
Diesel Engines in Ships, Copenhagen, 2002.
[19] LANDWERGER, L., MACAGNO, M. “Added Masses of Two-Dimensional Forms
Oscillating in a Free surface”, Jornal of Ship Research, Vol 1, 109-113, 1957.
[20] LANDWERGER, L., MACAGNO, M. “Added Masses of Two-Dimensional Forms
by Comformal Mapping”, Jornal of Ship Research, Vol 1, 20-22, 1967.
[21] HICKS, A.N., A Method for Determining the Virtual Mass Distribution around
a Vibrating Ship, In: Report N° 3272, Naval Ship Research and Development Center,
Washington, D. C., 1970.
[22] PIEDRAS LOPES, TIAGO, Apostila de Vibrações do Navio, COPPE – UFRJ, Rio
de Janeiro, Brasil,
[23] KOROTKIN, ALEKSANDER I., Added Masses of Ship Structures, 1ed, Russia,
Springer, 2007
[24] AMERICAN BUREAU OF SHIPPING (ABS), Guidance Notes on Ship
Vibrations, New York, USA, 2006.
[25] NOONAN, E.F., ANTONIDES, G.P., WOOD, W.A. “Practical Guide for Shipboard
Vibration Control and Attenuation”. In: Ship Structure Comitte, Vol 1, Virginia, USA,
1990.
[26] NOONAN, EDWARD F., “Ship Vibration Design Guide”. In: Ship Structure
Comitte, Vol 2, Virginia, USA, 1990.

90
[27] NEWLAND, D.E., An Introduction to Random Vibration Spectral and Wavelet
Analysis, 3 ed, New York, USA, 1993
[28] PIEDRAS LOPES, TIAGO., RIBEIRO, ROGEIRO., RAMOS TROYMAN,
ANTONIO., Aplicações de Técnicas Experimentais no Estudo das Vibrações de
Navios, In: 8° Congresso Nacional de Transportes Marítimos e Construção Naval, Rio de
Janeiro, Brasil, 1980.
[29] TAWEKAL, RICKY, MIHARJANA, N., Validation of 3650 DWT Semi Container
Ship Finite Element Model by Full Scale Measurements, Indonesia, 1991.
[30] AVITABILE, PETER., Experimental Modal Analysis, University of Massachusetts
Lowell, USA, 2009.
[31] BATHE, KLAUS-JURGEN., Finite Element Procedures, 2 ed, chapter 9, Printice
Hall, New Jersey ,USA, 1996.
[32] KAYDIHAN, L., AHMET ERGIN, BAHADIR UGURLU, Hydroelastic Analysis
of a 1900 TEU Container Ship Using Finite Element and Boundary Element
Methods, Turquía, 2001.
[33] GÜL, Y., KAYDIHAN, L., A Global Vibration Analysis of a 1900 TEU Capacity
Container Ship, Turquía, 2001.
[34] RAZVAN, IONAS., CHIRICA, IONEL., Global Ship Vibration Analysis,
Rumania, 2002.
[35] SUN LI-PING, NIE WU, ZHANG, WEI, “Analysis of Structural Dynamics
Characteristics of High Speed Light Special Catamaran”, Journal of Marine Science and
Application, Vol. 5, N° 1, 1-5, USA, 2006

91
[36] VELONIAS, PLATON MICHAEL., Vibration Analysis of a Swath-type Ship,
Msc., Massachusetts Institute of Technology, USA, 1995.
[37] SKAAR, KNUT T., CARLSEN, CARL A., “Modelling Aspects for Finite Element
Analysis of Ship Vibration”, Journal of Computers & Structure, Vol. 12, 409-419, UK,
1980.
[38] CÉSPEDES CALDERÓN, PABLO, Aplicación del Método de los Elementos
Finitos al Estudio de Vibraciones em Vigas Empleadas em Construcción Naval,
Proyecto de fin de Carrera,Universidad de Cádiz, España, 2006.
[39] ESTEVES, REGINA., GORDO, JOSÉ MANUEL., “Vibration Finite Element
Analysis on a Passenger Vessel´s Self-service”, In: Twelfth International Congress on
Sound and Vibration, 1-8, Lisboa, Portugal, 2005.
[40] MOLINIER PAPPALARDO, MATIAS M., Predicciones de Vibración en Buques,
Universidad de Buenos Aires, Argentina, 2006.
[41] TRATCH, JORGE JR., Vibration Transmission Through Machinery Foundation
and Ship Bottom Structure, Msc., Massachusetts Institute of Technology, USA, 1985.
[42] ZANIBONI, EDUARDO XAVIER, Aplicação de Modelos Numéricos Calibrados
por Medições em Escala Real para Diagnóstico e Análise de Vibração Transversal de
Motores em Praça de Máquinas de Navios, MSc., COPPE/UFRJ, Rio de Janeiro, 2010.
[43] VILELA, FILIPE MORAES., Análise da Influência da Massa Adicional de
Cascos de Navios em sua Frequência de Vibração Natural, Proyecto de Graduação
,COPPE – UFRJ, Rio de Janeiro, 2010.

92
ANEXOS Gráficos das análises espectrais para o ponto 1V.

93

94

95
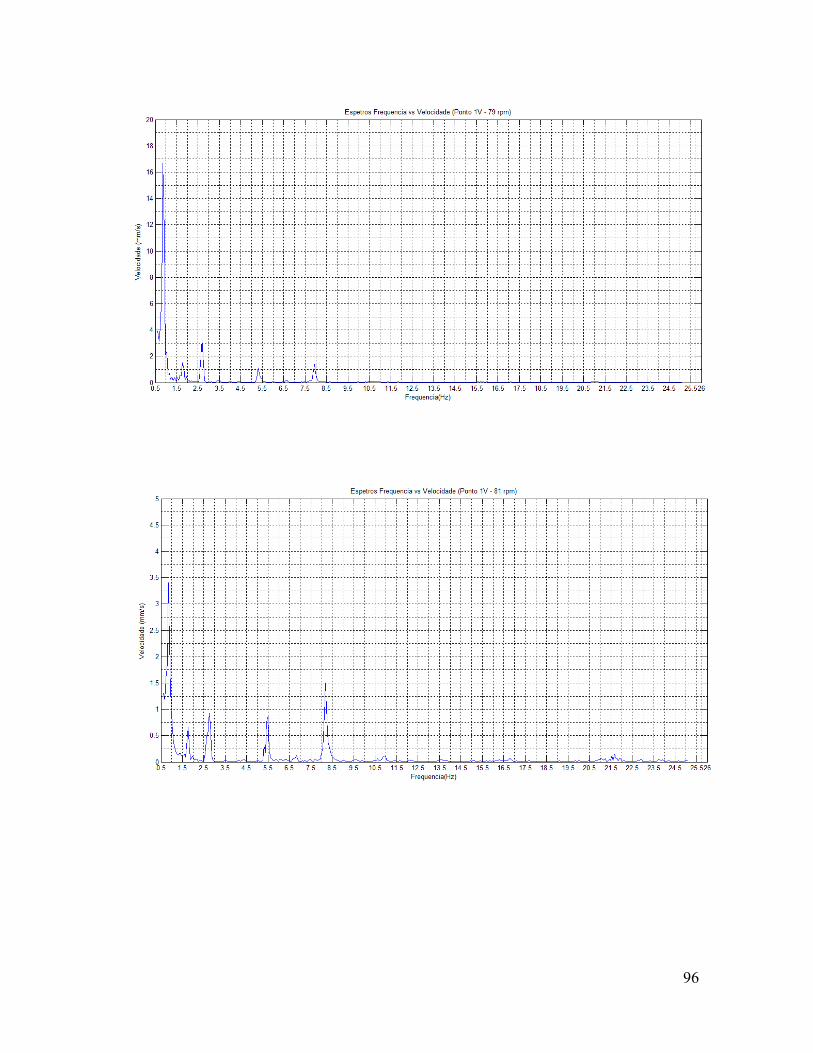
96

97

98

99

100

101