faculdade senai de tecnologia mecatrÔnicasites.unisanta.br/ppgmec/dissertacoes/dissertacao... ·...
TRANSCRIPT

UNIVERSIDADE SANTA CECÍLIA
PROGRAMA DE PÓS-GRADUAÇÃO EM ENGENHARIA MECÂNICA
MESTRADO EM ENGENHARIA MECÂNICA
ROLDEN BAPTISTA
PROPOSTA DE MODELO PARA CONTROLE DE NÍVEIS DE UM PROCESSO
MULTIVARIÁVEL DE QUATRO TANQUES DE PETRÓLEO COM REDE DE
ANÁLISE PARACONSISTENTE
SANTOS/SP
2014

ROLDEN BAPTISTA
PROPOSTA DE MODELO PARA CONTROLE DE NÍVEIS DE UM PROCESSO
MULTIVARIÁVEL DE QUATRO TANQUES DE PETRÓLEO COM REDE DE
ANÁLISE PARACONSISTENTE
Dissertação apresentada à Universidade Santa
Cecília como parte dos requisitos para obtenção de
título de Mestre no Programa de Pós-Graduação em
Engenharia Mecânica, sob orientação do Prof. Dr.
João Inácio da Silva Filho e co-orientador Prof. Dr.
José Carlos Morilla.
SANTOS/SP
2014

Autorizo a reprodução parcial ou total deste trabalho, por qualquer que seja o processo,
exclusivamente para fins acadêmicos e científicos.
Baptista, Rolden.
Proposta de modelo para controle de níveis de um processo
multivariável de quatro tanques de petróleo com rede de
análise paraconsistente / Rolden Baptista.
- 2014.
157p.
Orientador: João Inácio da Silva Filho.
Coorientador: José Carlos Morilla
Dissertação (Mestrado) -- Universidade Santa Cecília,
Programa de Pós-Graduação em Engenharia Mecânica, Santos,
SP, 2014.
1. Controle de nível. 2. Processo Multivariável. 3. Lógica
Paraconsistente Anotada. 4. Tratamento de incertezas.
5.Contradições. I. Da Silva Filho, João Inácio,
II. Morilla, José Carlos III. Proposta de modelo para controle
de níveis de um processo multivariável de quatro tanques de
petróleo com rede de análise paraconsistente.
Elaborada pelo SIBi – Sistema Integrado de Bibliotecas – Unisanta

Dedico este trabalho à minha filha, para que
ela alce voos ainda maiores na busca do
conhecimento, da ciência e pesquisa.

AGRADECIMENTOS
À minha esposa Gisélia de Cássia Pereira Baptista que sempre me apoiou em
tudo e na vida acadêmica não poderia ser diferente desde a graduação. A minha
filha Giovanna Maria Baptista que soube compreender o esforço aplicado neste
estudo.
Ao professor Dr. João Inácio da Silva Filho meu agradecimento pelo ensino
da Lógica Paraconsistente e sistemas especialistas, pela dedicação e orientações
de eminente importância para o início, desenvolvimento e conclusão desta
dissertação.
Ao professor Dr. José Carlos Morilla pela dedicação e orientações, sobretudo
da formatação e sequenciamento desta dissertação.
À professora Me. Dorotéa Villanova Garcia pelos ensinamentos de
programação em MATLAB® e pelas preciosas observações no exame de
qualificação desta dissertação.
Ao professor Dr. Fábio Vieira do Amaral como membro externo convidado
pela UNISANTA para compor a banca de avaliação da apresentação desta
dissertação. Agradeço pelas preciosas palavras e pela avaliação.
À UNISANTA agradeço pela graduação em engenharia em 2005 e agora em
2014 agradeço pelo título de Mestre conquistado.
A todo corpo docente do programa de Pós-Graduação em Engenharia
Mecânica, com especial destaque para os professores Dr. Aldo Ramos Santos e Dr.
Marcos Tadeu Tavares Pacheco, pelo incentivo no ingresso no ramo de pesquisa
acadêmica.
À equipe da secretaria de Mestrado, Sandra e Imaculada, pelo auxílio e
pronto atendimento em todas as fases do processo de estudo.
À Associação Beneficente dos Empregados em Telecomunicações (ABET)
pela bolsa auxílio durante este programa de mestrado.
À TELEFÔNICA|VIVO que é onde atuo como engenheiro, à UNIMONTE e ao
SENAI Santos que são as instituições que ministro aulas e me auxiliaram muito com
sua estrutura.
E finalmente agradeço a Santa Cecília e a Virgem Maria, minhas santas de
devoção, pela intercessão e recebimento de minhas orações e encaminhamento a
Deus.

RESUMO
Este presente trabalho utiliza-se de um processo de sistema multivariável com quatro tanques e da Lógica Paraconsistente Anotada com Anotação de dois valores LPA2v para um modelo de controle da variável controlada de nível e o ajuste da variável manipulada, que são duas válvulas automáticas de 3 vias. A Lógica Paraconsistente (LPA2v) trata-se de uma lógica não-clássica que possui a propriedade de suportar sinais contraditórios sem que o conflito de informações inviabilize as conclusões. Utilizando-se a LPA2v foram construídas duas Redes de Análise Paraconsistente (RAP) composta de algoritmos denominados de Nós de Análises Paraconsistentes (NAPs) onde através de interações simuladas em MATLAB® consegue-se oferecer um modelo para controle dos níveis fazendo um tratamento das incertezas e contradições. Neste modelo de aplicação cada variável do processo possui dois sensores de nível em cada um dos tanques inferiores e dois sensores de abertura da válvula de 3 vias em cada uma delas, que são as fontes de informação para graus de evidências utilizados no tratamento de incertezas pela LPA2v. Na primeira RAP as contradições entre os Graus de evidência são tratadas em oito NAPs e através do terceiro NAP da variável nível se obtém o Grau de Evidência Resultante para a variável controlada e esta deve ser comparada com o valor de nível requerido inserido através do Set point do sistema. O NAP D pode informar através do Intervalo de Evidência Resultante Real e do Grau de Contradição Normalizado se o sistema atingiu a estabilização. Finalmente o resultado da RAP é o Grau de Evidência Resultante Real da proposição objeto, portanto este valor é utilizado para a tomada de decisão de controle do sistema, para assim haver um melhor tratamento das incertezas e contradições. No Sistema de Controle de nível implementado com a RAP as interações cessam quando não há mais contradições. Para os testes simulados foram feitas duas principais topologias de RAP onde, na segunda RAP foram introduzidas as simulações com a variável de compensação de temperatura dos tanques. Verificou-se que a RAP respondeu bem as duas diferentes configurações sempre alcançando o valor estabelecido pelo set point. Os resultados indicam que a técnica com a LPA é bastante promissora para o uso em controle de sistemas complexos. Palavras-chave: Controle de Nível, Processo Multivariável, Lógica paraconsistente Anotada, tratamento de incertezas.

ABSTRACT
This present work uses a process multivariable system with four tanks and Paraconsistent Annotated Logic with annotation of two values PAL2v for a template control of the controlled variable level and the manipulated variable adjustment, which are two automatics valves with three routes. The Paraconsistent Annotated Logic (PAL2v) is a non-classical logic that has the property to support contradictory signals without that the information conflict makes unviable the conclusions. Using the PAL2v has built two Paraconsistent Network Analysis (PNA) consists of algorithms called Paraconsistent Analyses Node (PAN) where through interactions simulated in MATLAB® software can be offered a template for making a level control and the treatment of uncertainties and contradictions. In this application model each process variable has two level sensors in each tank, and two opening sensors of each 3-way valve, which are the sources of information used for evidence degree in the treatment of uncertainties by PAL2v. In the first PNA the contradictions between evidences degrees are treated in eight PAN and through the third PAN of the variable level was obtained the Resulting Evidence degree for the controlled variable (CV) and this should be compared with the value of the level required inserted through the Set Point (SP) of the system. The PAN D can inform through Real Evidence Resulting Interval and Normalized Contradiction Grade whether the system has reached stabilization. Finally the result of the PNA is the Real Resulting Evidence degree of the object proposition, so this value is used for decision-making control system, thus to be a better treatment of uncertainties and contradictions. In the level control system implemented with the PNA the iterations cease when there is no more contradictions. For the simulated tests two main topologies were made. On second PNA topology was introduced the simulations with the variable of temperature compensation of the tanks. It was found that the PNA responded well for the two different settings always reaching the adjusting value at set point. The results indicate that the technique with the PAL2v is quite promising for use in control of complex systems. Keywords: Level Control, Multivariable Process, Paraconsistent Annotated Logic,
treatment of uncertainties.

LISTA DE ILUSTRAÇÕES
Figura 1 - Modelo de quatro tanques.........................................................................23 Figura 2 - Diagrama esquemático do processo multivariável de 4 tanques da Figura 1..................................................................................................................................25 Figura 3 - Fase mínima e não mínima para as válvulas.............................................26 Figura 4 – Esquema do tanque 1...............................................................................27 Figura 5 – Esquema do tanque 2...............................................................................28 Figura 6 – Esquema do tanque 3...............................................................................28 Figura 7 – Esquema do tanque 4...............................................................................29 Figura 8 – Reticulado de Hasse.................................................................................30 Figura 9 – Reticulado de hasse de 4 estados com anotação de 2 valores................32 Figura 10 – Reticulado representado pelo QUPC......................................................33 Figura 11 – Reticulado representado pelo QUPC......................................................34 Figura 12 – Representação do grau de incerteza......................................................35 Figura 13 – Reticulado representado por QUPC no plano cartesiano.......................36 Figura 14 – Representação do grau de certeza.........................................................37 Figura 15 – Representação dos graus de certeza e de incerteza .........................37 Figura 16 – Quadrado unitário com novos segmentos que delimitam 12 regiões........................................................................................................................38 Figura 17 - Representação no quadrado unitário das regiões dos estados extremos e não-extremos.....................................................................................................................40 Figura 18 – Representação no gráfico dos graus de certeza e incerteza com valores de controle de ajustes em ½......................................................................................41 Figura 19– Representação do algoritmo de análise paraconsistente da LPA2v com saída de grau de evidência resultante real.................................................................44 Figura 20 – Nó de análise paraconsistente com saída de grau de evidência resultante real e bloco de complementação em µ2....................................................47 Figura 21 – Transformação de Gct em µctr.................................................................48 Figura 22 - Gráfico µctr versus φe para análise de evidências....................................49 Figura 23 – Rede de análise paraconsistente simples com três NAPs......................52 Figura 24 – Processo para quatro tanques................................................................53 Figura 25 – Gráficos do grau de evidência favorável µ1 e vazões para os tanques 1 e 4..................................................................................................................................55 Figura 26 – Gráficos do grau de evidência favorável µ2 e vazões para os tanques 1 e 4..................................................................................................................................56 Figura 27 – Gráficos do grau de evidência favorável µ3 e vazões para os tanques 2 e 3..................................................................................................................................57 Figura 28 – Gráficos do grau de evidência favorável µ4 e vazões para os tanques 2 e 3..................................................................................................................................58 Figura 29– Gráfico do grau de evidência favorável µ5 e nível do tanque 1...............59 Figura 30 – Gráfico do grau de evidência favorável µ6 e nível para o tanque 1........60 Figura 31 – Gráfico do grau de evidência favorável µ7 e nível para o tanque 2........61 Figura 32 – Gráfico do grau de evidência favorável µ8 e nível para o tanque 2........62 Figura 33 – Gráfico do grau de evidência favorável µ9 e set point de nível LT1 e LT2.............................................................................................................................63

Figura 34 - Gráfico do grau de evidência favorável µ9 e set point de nível LT1 e LT2.............................................................................................................................64 Figura 35 - Gráfico µctr versus φe para análise de evidências....................................66 Figura 36 - RAP com 8 naps e 1 bloco de análise de sinais ....................................68 Figura 37 - RAP com 9 naps e 1 bloco de análise de sinais ....................................71 Figura 38 - Representação da localização da multivariável zero nos dois planos de zeros...........................................................................................................................73 Figura 39 - Gráfico – Resultado simulação de variação de 30% para 70% (LT1 e LT2)............................................................................................................................75 Figura 40 - Gráfico demonstrando a estabilização do ajuste em φe=1 e µctr=0,5......................................................................................................................75 Figura 41- Gráfico – Resultado simulação de variação de 30% para 70% (LT1 e LT2) com erro de 0,06% no segundo sensor. ....................................................................76 Figura 42 - Gráfico demonstrando a estabilização do ajuste em φe=1 e µctr=0,5 com erro de 0,06% no segundo sensor.............................................................................77 Figura 43 - Gráfico – Resultado simulação de variação de 70% para 30% (LT1 e LT2)............................................................................................................................78 Figura 44 - Gráfico demonstrando a estabilização do ajuste em φe=1 e µctr=0,5....79 Figura 45 - Resultado simulação de variação de 70% para 30% (LT1 e LT2)...........80 Figura 46 - Gráfico demonstrando a estabilização do ajuste em φe=1 e µctr=0,5....80 Figura 47 - Gráfico demonstrando resultado de simulação com temperatura em 10ºC............................................................................................................................81 Figura 48 - Gráfico demonstrando resultado de simulação com temperatura em 35ºC............................................................................................................................82 Figura 49- Gráfico demonstrando resultado de simulação com temperatura em 60ºC............................................................................................................................83

LISTA DE TABELAS
Tabela 1 - Tipos de ondas:.........................................................................................15 Tabela 2 - Classe de erros máximos permissíveis por classe de tanque..................17 Tabela 3 - Relação entre o µctr e φe para análise de sinais e evidências...................65 Tabela 4 - Resultados da primeira forma de simulação sem erro (SP nível para 70%)...........................................................................................................................74 Tabela 5 - Resultados da primeira forma de simulação com erro no segundo sensor de 0,06% (SP nível para 70%)...................................................................................76 Tabela 6 - Resultados da segunda forma de simulação sem erro (SP nível para 30%)...........................................................................................................................78 Tabela 7 - Resultados da segunda forma de simulação com erro no segundo sensor de 0,06% (SP nível para 30%)...................................................................................79 Tabela 8 - Resultados da simulação com temperatura em 10ºC, nível em 30% e set point em 70%..............................................................................................................81 Tabela 9 - Resultados da simulação com temperatura em 35ºC, nível em 30% e set point em 70%..............................................................................................................82 Tabela 10 - Resultados da simulação com temperatura em 60ºC, nível em 30% e set point em 70%..............................................................................................................83

LISTA DE SIGLAS
ANP Agência Nacional de Petróleo
CV Variável Controlada
FMCW Frequency Modulated Continuos Wave
GHz GigaHertz
kHz kilohertz
LP Lógica Paraconsistente
LPA Lógica Paraconsistente Anotada
LPA2v Lógica Paraconsistente Anotada com anotação de 2 valores
LPA4v Lógica Paraconsistente Anotada com anotação de 4 valores
mA mili Amperes
MATLAB® Software de programação de algoritmos matemáticos.
MIMO Multiple Input, Multiple Output
mm milímetro
MV Variável Manipulada
NAP Nó de Análise Paraconsistente.
PID Proporcional, Integral e Derivativo
Po Proposição objeto
RAP Redes de Análise Paraconsistentes
SISO Single Input, Single Output

LISTA DE SÍMBOLOS
p Geradores de diferencial de pressão
Reticulado finito
~ Operador de negação
𝜇 Grau de crença (ou de evidência favorável)
Grau de descrença (ou evidência desfavorável)
ℝ Conjunto dos números reais
T Inconsistente
V Verdadeiro
⊥ Paracompleto
pT Conotação de Inconsistente à proposição p
p1 Conotação de Verdade à proposição p
p0 Conotação de Falsidade à proposição p
p⊥ Anotação ou grau de evidência atribui uma conotação de Indefinição à
proposição p
P𝜇 Sentença proposicional
QUPC Quadrado Unitário do Plano Cartesiano
𝐺𝑐 Grau de Certeza
𝐺𝑐𝑡 Grau de Contradição
𝐺𝑖𝑡 Grau de Inconsistência
𝐺𝑖𝑑 Grau de Paracompleteza
𝐺𝑣 Grau de Verdade
𝐺𝑓 Grau de Falsidade
p Proposição Inicial
⊥ → f Paracompleto tendendo ao Falso
⊥ →v Paracompleto tendendo ao Verdadeiro
T→ f Inconsistente tendendo ao Falso
T→ v Inconsistente tendendo ao Verdadeiro
Qv →T Quase-verdadeiro tendendo ao Inconsistente
Qf →T Quase-falso tendendo ao Inconsistente

Qf→⊥ Quase-falso tendendo ao Paracompleto
Qv→⊥ Quase- verdadeiro tendendo ao Paracompleto
Vscc Valor limite superior de Controle de certeza
Vsci Valor limite superior de Controle de incerteza
Vicc Valor limite inferior de Controle de certeza
Vici Valor limite inferior de Controle de incerteza
S1 Saída discreta
S2a Saída analógica
S2b Saída analógica
Gi Grau de Incerteza
GcmáxV Valor máximo para um estado lógico de Verdade
GcmáxF Valor máximo para um estado lógico de Falsidade
𝜑 Intervalo de certeza
𝜑(±) Intervalo de Certeza sinalizado
𝜑𝐸 Intervalo De Evidência Resultante
𝜑𝐸(±) Intervalo De Evidência Resultante Sinalizado
𝜑𝐸c Intervalo De Evidência Resultante NAP C
𝜑𝐸d Intervalo De Evidência Resultante NAP D
𝜇𝑐𝑡𝑟 Grau De Contradição Normalizado
𝜇1 𝑒 𝜇2 Graus de evidências favoráveis para a válvula X1
𝜇𝐸𝑅1 Grau de Evidência Resultante NAP 1
𝜇3 e 𝜇4 Graus de evidências favoráveis para a válvula X2
𝜇𝐸𝑅2 Grau de Evidência Resultante NA 2
𝜇𝐸𝑅𝐴 Grau de Evidência Resultante NAP A
𝜇5 𝑒 𝜇6 Graus de Evidências Favoráveis para o Tanque 1
𝜇𝐸𝑅3 Grau de Evidência Resultante NAP 3
𝜇7 𝑒 𝜇8 Graus de Evidências Favoráveis para o Tanque 2
𝜇9 Grau de Evidência Favorável para Set Point
𝜇10 Grau de Evidência Favorável para temperatura
𝜇𝐸𝑅4 Grau de Evidência Resultante NAP 4
𝜇𝐸𝑅𝐵 Grau de Evidência Resultante NAP B
𝜇𝐸𝑅𝐶 Grau de Evidência Resultante NAP C
𝜇𝐸𝑅 Grau de Evidência Resultante Real

GCr Grau de Certeza resultante
GCR Grau de Certeza real
𝜇𝐸𝑅 Grau de Evidência Resultante Real da RAP
𝐷 Distância
B1 Bomba 1
LT1 Nível tanque 1
LT2 Nível tanque 2
V1 Válvula 1
V2 Válvula 2
X Parâmetro da Variável Manipulada igual para X1 e X2
X1 Válvula de Três vias 1
X2 Válvula de Três vias 2
h1 Altura tanque 1
h2 Altura tanque 2
h3 Altura tanque 3
h4 Altura tanque 4
F1 Vazão 1
F2 Vazão 2
Ai Área da base do tanque i
ºC Grau Celsius (unidade de temperatura)
Ri Constante de perda de carga da saída do tanque i
hi Nível do tanque i
Fj Vazão no ramo j
Xi Posição da válvula de três vias i
𝑆𝑃 Set Point
e Grau de Evidência Desfavorável Válvula X1
e Grau de Evidência Desfavorável Válvula X2
e Grau de Evidência Desfavorável Nível LT1
e Grau de Evidência Desfavorável Nível LT2
Grau de Evidência Desfavorável Set Point
Grau de Evidência Desfavorável Temperatura

SUMÁRIO
1. Introdução ......................................................................................................... 12
1.1. Justificativa ..................................................................................................... 14
1.2. Relevância do Tema ....................................................................................... 14
1.2.1. Medição de Nível ........................................................................................ 15
1.2.2. Medição de Vazão ...................................................................................... 15
1.2.3. Tanque de Petróleo ..................................................................................... 16
1.2.4. Temperatura ............................................................................................... 16
1.2.5. Erros Admissíveis para Nível em Tanques de Petróleo .............................. 17
1.2.6. Automação .................................................................................................. 18
1.2.7. Sistemas Multivariáveis ............................................................................... 18
1.2.8. Lógica Clássica e Lógica Não-Clássica ...................................................... 18
1.2.9. Lógica Paraconsistente ............................................................................... 19
1.2.10. O Algoritmo - Nó de Análise Paraconsistente (NAP) .................................. 19
1.2.11. Rede de Análise Paraconsistente (RAP) .................................................... 20
1.3. Problematização ............................................................................................. 20
1.4. Objetivo Geral ................................................................................................. 20
1.5. Objetivo Específico ......................................................................................... 21
1.6. Organização da Dissertação .......................................................................... 21
2. Revisão Bibliográfica ....................................................................................... 23
2.1. Processo Multivariável Com Quatro Tanques ................................................ 23
2.2. Modelagem Matemática ................................................................................. 26
2.2.1. Tanque 1: Área, Vazão, Nível e Abertura da Válvula De Três Vias. ........... 26
2.2.2. Tanque 2: Área, Vazão, Nível e Abertura da Válvula De Três Vias. ........... 27
2.2.3. Tanque 3: Área, Vazão, Nível e Abertura da Válvula De Três Vias. ........... 27
2.2.4. Tanque 4: Área, Vazão, Nível e Abertura da Válvula De Três Vias. ........... 27
2.3. Esquematização do Processo em Cada Tanque ............................................ 27
2.3.1. Tanque 1: Vazão de Entrada e Perda De Carga. ....................................... 27
2.3.2. Tanque 2: Vazão de Entrada e Perda De Carga. ....................................... 28
2.3.3. Tanque 3: Vazão de Entrada e Perda De Carga. ....................................... 28
2.3.4. Tanque 4: Vazão de Entrada e Perda De Carga. ....................................... 29
2.3.5. Premissas para as Válvulas X1 e X2. ......................................................... 29
2.4. Lógica Paraconsistente Anotada .................................................................... 30
2.5. Lógica Paraconsistente Anotada com Anotação de Dois Valores (LPA2v) .... 31
2.6. Algoritmo Para-Analisador. ............................................................................. 41

2.7. Aplicações do Algoritmo Para-Analisador ....................................................... 43
2.8. Algoritmos Paraconsistentes .......................................................................... 43
2.9. Simulação do Algoritmo de Análise Paraconsistente com Saída de Grau De Evidência Resultante Real ........................................................................................ 49
2.10. Algoritmo de Análise Paraconsistente em Matlab® ........................................ 50
2.11. Redes de Análise Paraconsistente - RAP ...................................................... 50
3. Materiais ............................................................................................................ 53
3.1. Modelagem do Sistema Multivariável de 4 Tanques com a Lógica Paraconsistente Anotada - LPA ................................................................................ 53
4. Método .............................................................................................................. 55
4.1. Parametrização: Válvula Automática Solenoide de Três Vias X1 (Sensor 1): 55
4.2. Parametrização: Válvula Automática Solenoide de 3 Vias X1 (Sensor 2): ..... 55
4.3. Parametrização: Válvula Automática Solenoide de 3 Vias X2 (Sensor 1): ..... 56
4.4. Parametrização: Válvula Automática Solenoide de 3 Vias X2 (Sensor 2): ..... 57
4.5. Parametrização: Sensor de Nível do tanque 1 LT1 (Sensor 1): ..................... 58
4.6. Parametrização: Sensor de Nível do tanque 1 LT1 (Sensor 2): ..................... 59
4.7. Parametrização: Sensor de Nível do Tanque 2 LT2 (Sensor 1): .................... 60
4.8. Parametrização: Sensor de Nível do Tanque 2 LT2 (Sensor 2): .................... 61
4.9. Parametrização: Set Point (SP) desejado para os Níveis LT1 E LT2: ............ 62
4.10. Parametrização: Temperatura (T): ................................................................. 63
4.11. Fontes de Informação: Graus de Evidência .................................................... 64
4.12. Análise de Medição de Nível LT1 e LT2: ........................................................ 65
4.13. Modelo para Controle do Processo, Valvulas X1 e X2 (Variável Manipulada) ... ....................................................................................................................... 66
4.14. Proposta de Modelo para o Controle do Sistema ........................................... 67
4.15. Algoritmos Extraídos da LPA2v (Nós De Análise Paraconsistente) para Avaliação de Nível e Vazão....................................................................................... 67
4.15.1. NAPs das Válvulas X1 e X2 (Variável Manipulada): ................................... 68
4.15.2. NAPs de Avaliação de Nível LT1 e LT2 (Variável Controlada) ................... 69
4.15.3. NAP de Avaliação de Nível LT1, LT2 e Set Point. ...................................... 70
4.15.4. NAP de Avaliação de Abertura das Válvulas X1, X2 e Ajuste de Nível....... 70
4.16. Algoritmos Extraídos da LPA2v (Nós de Análise Paraconsistente) para Avaliação de Nível, Temperatura e Vazão ................................................................ 71
4.16.1. NAP de Avaliação de Temperatura (NAP T). .............................................. 71
4.17. Simulação para Controle de Nível Utilizando as Variáveis Nível e Vazão. ..... 72
4.17.1. Primeira Forma: Simulação na Fase Não Mínima (X1+X2<1). ................... 72
4.17.2. Segunda Forma: Simulação na Fase Mínima (X1+X2>1). .......................... 72

4.17.3. Duas Formas de Simulação para Nível e Vazão. ....................................... 72
4.17.4. Simulação para Controle de Nível Utilizando as Variáveis de Nível, Temperatura e Vazão. ............................................................................................... 73
5. RESULTADOS .................................................................................................. 74
5.1. Simulação na fase não mínima (X1+X2<1). ................................................... 74
5.2. Simulação na fase mínima (X1+X2>1). .......................................................... 77
5.3. Simulação temperatura em 10ºC .................................................................... 81
5.4. Simulação temperatura em 35ºC .................................................................... 82
5.5. Simulação temperatura em 60ºC .................................................................... 83
6. DISCUSSÕES .................................................................................................... 84
6.1. Simulação na fase não mínima (X1+X2<1). ................................................... 84
6.2. Simulação na fase mínima (X1+X2>1). .......................................................... 85
6.3. Simulações com a inserção da variável temperatura ..................................... 86
7. CONCLUSÕES .................................................................................................. 87
7.1. Pontos Significativos do Trabalho .................................................................. 88
8. TRABALHOS FUTUROS .................................................................................. 89
REFERÊNCIAS ......................................................................................................... 90
APÊNDICE ................................................................................................................ 94
APÊNDICE A - RESULTADOS DA PRIMEIRA INTERAÇÃO .................................. 94
APÊNDICE B - RESULTADOS DA SEGUNDA INTERAÇÃO .................................. 95
APÊNDICE C - RESULTADOS DA TERCEIRA INTERAÇÃO ................................. 96
APÊNDICE D - RESULTADOS DA QUARTA INTERAÇÃO .................................... 97
APÊNDICE E - RESULTADOS DA QUINTA INTERAÇÃO ...................................... 98
APÊNDICE F - RESULTADOS DA SEXTA INTERAÇÃO ........................................ 99
APÊNDICE G - RESULTADOS DA SÉTIMA INTERAÇÃO .................................... 100
APÊNDICE H - RESULTADOS DA OITAVA INTERAÇÃO .................................... 101
APÊNDICE I - RESULTADOS DA NONA INTERAÇÃO ........................................ 102
APÊNDICE J - RESULTADOS DA DÉCIMA INTERAÇÃO .................................... 103
APÊNDICE K - RESULTADOS DA DÉCIMA PRIMEIRA INTERAÇÃO ................. 104
APÊNDICE L - RESULTADOS DA DÉCIMA SEGUNDA INTERAÇÃO ................. 105
APÊNDICE M - RESULTADOS DA DÉCIMA TERCEIRA INTERAÇÃO ................ 106
APÊNDICE N - RESULTADOS DA DÉCIMA QUARTA INTERAÇÃO ................... 107
APÊNDICE O - RESULTADOS DA DÉCIMA QUINTA INTERAÇÃO ..................... 108
APÊNDICE P - RESULTADOS DA DÉCIMA SEXTA INTERAÇÃO ....................... 109
APÊNDICE Q - RESULTADOS DA DÉCIMA SÉTIMA INTERAÇÃO ..................... 110

APÊNDICE R - RESULTADOS DA DÉCIMA OITAVA INTERAÇÃO ..................... 111
APÊNDICE S - RESULTADOS DA DÉCIMA NONA INTERAÇÃO ........................ 112
APÊNDICE T - RESULTADOS DA VIGÉSIMA INTERAÇÃO ................................ 113
APÊNDICE U - RESULTADOS DA VIGÉSIMA PRIMEIRA INTERAÇÃO .............. 114
APÊNDICE V - RESULTADOS DA VIGÉSIMA SEGUNDA INTERAÇÃO ............. 115
APÊNDICE W - RESULTADOS DA VIGÉSIMA TERCEIRA INTERAÇÃO ............ 116
APÊNDICE X - RESULTADOS DA VIGÉSIMA QUARTA INTERAÇÃO ................ 117
APÊNDICE Y - ALGORITMO PARA-ANALISADOR EM MATLAB® ...................... 118
APÊNDICE Z - SCRIPT EM MATLAB® RAP DE NÍVEL E VAZÃO ....................... 120
APÊNDICE AA - SCRIPT EM MATLAB® RAP DE NÍVEL, TEMPERATURA E VAZÃO .................................................................................................................... 128
APÊNDICE BB – RESULTADOS DA PRIMEIRA INTERAÇÃO COM TEMPERATURA EM 10ºC ...................................................................................... 137
APÊNDICE CC – RESULTADOS DA SEGUNDA INTERAÇÃO COM TEMPERATURA EM 10ºC ...................................................................................... 138
APÊNDICE DD – RESULTADOS DA TERCEIRA INTERAÇÃO COM TEMPERATURA EM 10ºC ...................................................................................... 139
APÊNDICE EE – RESULTADOS DA QUARTA INTERAÇÃO COM TEMPERATURA EM 10ºC .................................................................................................................. 140
APÊNDICE FF – RESULTADOS DA QUINTA INTERAÇÃO COM TEMPERATURA EM 10ºC .................................................................................................................. 141
APÊNDICE GG – RESULTADOS DA SEXTA INTERAÇÃO COM TEMPERATURA EM 10ºC .................................................................................................................. 142
APÊNDICE HH – RESULTADOS DA PRIMEIRA INTERAÇÃO COM TEMPERATURA EM 35ºC ...................................................................................... 143
APÊNDICE II – RESULTADOS DA SEGUNDA INTERAÇÃO COM TEMPERATURA EM 35ºC .................................................................................................................. 144
APÊNDICE JJ – RESULTADOS DA TERCEIRA INTERAÇÃO COM TEMPERATURA EM 35ºC ...................................................................................... 145
APÊNDICE KK – RESULTADOS DA QUARTA INTERAÇÃO COM TEMPERATURA EM 35ºC .................................................................................................................. 146
APÊNDICE LL – RESULTADOS DA QUINTA INTERAÇÃO COM TEMPERATURA EM 35ºC .................................................................................................................. 147
APÊNDICE MM – RESULTADOS DA SEXTA INTERAÇÃO COM TEMPERATURA EM 35ºC .................................................................................................................. 148
APÊNDICE NN – RESULTADOS DA PRIMEIRA INTERAÇÃO COM TEMPERATURA EM 60ºC ...................................................................................... 149
APÊNDICE OO – RESULTADOS DA SEGUNDA INTERAÇÃO COM TEMPERATURA EM 60ºC ...................................................................................... 150

APÊNDICE PP – RESULTADOS DA TERCEIRA INTERAÇÃO COM TEMPERATURA EM 60ºC ...................................................................................... 151
APÊNDICE QQ – RESULTADOS DA QUARTA INTERAÇÃO COM TEMPERATURA EM 60ºC .................................................................................................................. 152
APÊNDICE RR – RESULTADOS DA QUINTA INTERAÇÃO COM TEMPERATURA EM 60ºC .................................................................................................................. 153
APÊNDICE SS – RESULTADOS DA SEXTA INTERAÇÃO COM TEMPERATURA EM 60ºC .................................................................................................................. 154
APÊNDICE TT – EXEMPLO DE CONSTRUÇÃO DE GRÁFICO DE RESULTADO EM MATLAB® ......................................................................................................... 155
APÊNDICE UU – EXEMPLO DE CONSTRUÇÃO DE SCRIPT DE ALGORITMO DE ANÁLISE PARACONSISTENTE EM MATLAB® ..................................................... 156

12
1. INTRODUÇÃO
A engenharia, na sua essência, tem uma fundamental importância social,
como motor a impulsionar mudanças no cotidiano das pessoas, transformando o
panorama de onde o profissional atua.
A parceria da Engenharia Elétrica com a Engenharia Mecânica proporciona
uma integração de processos denominados de automação, controle e
instrumentação e estão estreitamente aliados com os avanços computacionais da
microinformática. Estes processos estão em eminente evolução e há várias
inovações sendo aprimoradas para se obter ganhos e assim agregar mais eficiência
aliada ao processo.
O avanço da informática já tem trazido nas atividades do dia-a-dia muitos
benefícios. Mudanças ainda inimagináveis muito maiores estão por vir. Por
exemplo, as mudanças observadas nos últimos anos nos meios de
comunicação e Internet não poderiam ter sido imaginadas anos antes de
ocorrerem. (ABE, 2013).
O estreitamento de áreas de conhecimentos diferentes também auxilia muito nesta
evolução vista recentemente e proporciona o caminhar no desenvolvimento do
“novo” atingindo as fronteiras do conhecimento humano. A lógica clássica aristotélica
que é binária em sua essência começa a dar espaço para a lógica não clássica.
Na segunda metade do século XX as pesquisas na área da lógica
finalmente conseguiram romper a barreira da lógica clássica, ou seja, surge
o primeiro estudo de uma lógica não clássica denominada de lógica
discursiva proposta pelo Polonês Jaskowski. (DE MORAES, 2013).
O grande desafio era lidar com a contradição, pois até então se falava que o
contraditório poderia coexistir sem problema algum.
O processo lógico racional não pode ignorar as contradições, mas procurar
extrair delas informações que possam ser relevantes para a tomada de
decisão. Dessa forma, a Lógica Paraconsistente Anotada pode ser uma boa
ferramenta para tratarmos dados originários do Conhecimento Incerto.
(DA SILVA FILHO et. al., 2008).
Atualmente há muitos tipos de lógicas não clássicas no campo de pesquisa
que envolve controle e automação e também há muitas aplicações que estão sendo
implementadas em várias áreas.

13
Historicamente o conceito da lógica paraconsistente apareceu quando, de
modo independente ao estudo do Polonês Jaskowski, o lógico brasileiro Newton C.
A. da Costa por volta de 1950 apresentou um trabalho que considerava a
contradição na estrutura da lógica. Este estudo foi denominado pelo filósofo peruano
Francisco Miró Quesada de “Paraconsistentes” (“para”, que significa “ao lado de”).
Tal denominação foi aceita pela comunidade científica mundial de imediato e estes
estudos foram sendo cada vez mais aprofundados por diversos pesquisadores. Da
Costa publicou vários trabalhos no campo de pesquisa da lógica paraconsistente
com outros pesquisadores dentre os trabalhos publicados estão: Paraconsistent
Logics as a Formalism for Reasoning About Inconsistent Knowledge Base (1989);
The Paraconsistent Logics Pτ (1989); Automatic Theorem Proving in Paraconsistent
Logics: Teory and Implementation (1990) e Remarks on Annotated Logic (2000).
Em Da Silva Filho (1997) foi proposta uma das primeiras aplicações práticas
da lógica paraconsistente em circuitos eletrônicos. A teoria começou a ganhar “vida”
através desta aplicação inicial que culminou na construção do Controlador Lógico
Paraconsistente (ParaControl) (DA SILVA FILHO, 2000) que foi posto em
funcionamento para controlar o robô Emmy I. Em Torres (2004) foi proposta a
construção do robô Emmy II, outro trabalho de grande relevância é encontrado em
Martins (2003), onde se aplicou a Lógica Paraconsistente num sistema de
supervisão de distribuição de energia elétrica onde foi proposta uma Lógica
Paraconsistente Anotada de quatro valores (LPA4v) aplicada em sistema de
raciocínio baseado em casos para o restabelecimento de subestações elétricas. Em
D’Antonio et. al. (2012) foi desenvolvido um método estatístico paraconsistente de
avaliação quantitativa de grânulos plásticos em praias. Em Nogueira (2013) é
encontrado outro trabalho utilizando a LPA em estudo estatístico. Atualmente
existem muitos outros trabalhos sendo desenvolvidos com a utilização da LPA.
Em um ambiente industrial muitas tecnologias de controle são utilizadas e
para Campos e Teixeira (2010) um dos controles mais importantes é o dos níveis, ou
seja, para manter um nível de um tanque ou vaso constante é necessário que a
vazão de entrada seja igual à de saída. O controle de nível deve aumentar ou
diminuir a vazão de entrada ou saída para manter a estabilidade do sistema. A
técnica de controle é o monitoramento através de sensores para assim um algoritmo
controlador executar a ação mais apropriada no sistema. A realimentação através de
um sistema de malha fechada é muito importante para o controle.

14
Neste presente trabalho há a motivação de uma proposta de poder utilizar a
Lógica Paraconsistente Anotada para ser a principal ferramenta de controle para a
tomada de decisão da automação de um sistema com variáveis de processo
industrial tais como nível, vazão e temperatura.
1.1. JUSTIFICATIVA Segundo Ribeiro (2007) a medição de nível é a medida da altura do conteúdo
de um reservatório que pode conter líquido ou sólido. Neste processo de medição,
por meio de sensores há a detecção da presença do conteúdo deste recipiente. O
nível de tanques é uma variável muito importante nos processos industriais para o
cálculo de custos, controle de inventários e como fator de segurança na prevenção
de transbordamento e sobrecarga. Mesmo sendo a medição em si algo
relativamente fácil, quando comparada com a medição de temperatura e da vazão, é
importante, para evitar acidentes de grandes proporções o controle e a calibração
dos sistemas para a determinação da presença ou ausência de conteúdo.
No trabalho pretende-se aplicar novos conceitos de medição de nível, que
possam capacitar sensores para automação, aprimorar sistemas multivariáveis e
processo multivariável com quatro tanques. Para isso as investigações serão feitas
com verificações dos comportamentos de controles de níveis utilizando a Lógica
Paraconsistente Anotada (LPA), mais precisamente em sua forma estendida
denominada de Lógica Paraconsistente Anotada com anotação de dois valores
(LPA2v). Nestes conceitos serão utilizados os algoritmos denominados de nós de
análise paraconsistente (NAP) interligados em redes de análise paraconsistentes
(RAP).
O controle de níveis em tanque de petróleo foi escolhido para este trabalho
devido à necessidade de grande precisão na medição, ou seja, baixíssima tolerância
a incertezas, imprecisões e contradições.
1.2. RELEVÂNCIA DO TEMA O Controle de nível é de extrema importância em automação que funciona em
sistemas de tanques de petróleo e outros materiais industriais. Os mais recentes
procedimentos capazes de estabelecer otimizações de controle passam pelos

15
processos de tratamento de incertezas os quais são bastante eficientes quando se
utilizam lógicas diferentes da clássica. O controle utilizando a LPA2v é uma inovação
e sua aplicação em controle e automação tem amplo campo a ser estudado nos
quais os controladores de processos baseados em lógicas Não-Clássicas são temas
bem relevantes em processos industriais.
1.2.1. MEDIÇÃO DE NÍVEL
A medida de nível pode ser feita de forma direta ou indireta e um tipo de
sensor muito utilizado para medição indireta de nível é o Ultrassom ou Radar que é
baseado na emissão de pulsos ultrassônicos ou FMCW (Frequency Modulated
Continuos Wave) com alta frequência que é refletida no conteúdo interno que está
sendo medido. No Brasil este tipo de medidor de nível para tanques de petróleo
deve atender o Regulamento técnico da ANP (Agência Nacional de Petróleo)
(RIBEIRO, 2007). O sensor é dotado de cristais piezoelétricos com alta eficácia de
curtos impulsos na forma de ondas de som. O tempo de retorno dos sinais
(refletidos) é medido pelo equipamento eletrônico convenientemente instalado no
topo do tanque. O medidor tipo radar ou ultrassom deve atender a exigência de
incerteza de ± 3mm (RIBEIRO, 2007). A radiação em diferentes frequências pode
ser usada para a medição. Radar e Ultrassom estão na categoria de micro-ondas
conforme Tabela 1.
Tabela 1 - Tipos de Ondas:
TIPO DE ONDA FREQUENCIA COMPRIMENTO
Ultrassom 40kHz (kilohertz) 120km
Radar 10GHz (GigaHertz) 30mm
Fonte: (RIBEIRO, 2007).
1.2.2. MEDIÇÃO DE VAZÃO
A vazão, entre as variáveis frequentemente medidas, é a que requer recursos
tecnológicos mais distintos para medidores e transmissores. A definição de vazão
volumétrica é a quantidade de fluido que passa através da seção reta de um duto
numa certa unidade de tempo (DELMÉE, 2003).

16
No caso do petróleo, existem métodos de medição de vazão para tanques
terrestres, marítimos e em linha, que são feitas instantaneamente por medidores e
proporcionam a totalização de seus volumes em bases que podem ser horárias,
diárias e mensais (FILHO et. al., 2010).
A classificação dos medidores de vazão é obtida por quatro grupos:
Geradores de diferencial de pressão (p); Medidores Lineares; Volumétricos e em
canais abertos. Os medidores de vazão, aprovados pela ANP são Placa de orifício,
turbina, deslocamento positivo, coriolis, ultrassônico e magnético.
Para o controle de vazão é utilizado um mecanismo denominado de válvula.
As válvulas mais modernas possuem um sistema automático de controle de grande
flexibilidade podendo ser utilizado nos mais variados processos inclusive o processo
petroquímico. A válvula é um elemento final de controle numa malha e atua de
acordo com o sinal de entrada. O padrão mais comum de sinais elétricos é em
corrente 4 a 20 mA (mili Amperes) (FRANCHI, 2011, p.38).
1.2.3. TANQUE DE PETRÓLEO O tanque de petróleo é um reservatório que tem seu limite máximo (cheio) e
seu limite mínimo (vazio). Pela lógica clássica têm-se estes dois valores, ou seja,
cheio e vazio.
A avaliação das incertezas de medição dos níveis obtidos é de fundamental
importância para que não ocorram distorções no controle total do produto. A
medição operacional requer incerteza maior que a medição de transferência
de custódia (venda e compra se baseiam na medição do nível e vazão). Na
indústria do petróleo no Brasil há a medição fiscal e de apropriação de nível,
requisitadas pela ANP - Agencia Nacional de Petróleo, e são definidas as
precisões de 6 a 12 mm, respectivamente. (RIBEIRO, 2007).
A arqueação de tanques é a medida volumétrica deste e envolve o
levantamento de dados de uma tabela/gráfico que faz uma relação entre o nível do
conteúdo e o volume correspondente.
1.2.4. TEMPERATURA
Há uma variação do volume do petróleo em conformidade com a temperatura
e segundo Ribeiro (2010) a temperatura padrão para medição do petróleo é de 20ºC.

17
Para tanques não refrigerados a temperatura para estocagem e armazenamento tem
um limite inferior de 10ºC e um limite superior de 60ºC (RIBEIRO, 2010).
Segundo Barp (2000): “[...] sistema automatizado de medição pode ser
composto fisicamente de diversas formas, como, por exemplo, um transdutor ligado
a um instrumento completo ou a composição de módulos [...]”.
Um sistema de medição de temperatura é composto de instrumentos de
medição e outros equipamentos conectados para a execução específica desta
medição. Os transdutores empregados para medir temperatura possuem incertezas
intrínsecas em cada princípio de transdução utilizado.
Um aspecto importante da medição de temperatura é que a calibração é
consistente através de diferentes tipos de fenômenos físicos. Assim, uma
vez que se tenha calibrado dois ou mais pontos determinados para
temperaturas específicas, os vários fenômenos físicos de expansão,
resistência elétrica, força eletromotriz e outras propriedades físicas térmicas,
irão dar a mesma leitura da temperatura. (BERTO, 2007).
1.2.5. ERROS ADMISSÍVEIS PARA NÍVEL EM TANQUES DE PETRÓLEO
A medição de petróleo em tanques consiste em apurar o volume de líquido na
temperatura ambiente. No processo de medição automática de nível através de
equipamentos eletrônicos contém erros máximos permissíveis de acordo com as
classes 2 e 3, tanque não refrigerado e com hidrocarboneto refrigerado,
respectivamente conforme pode ser observado na Tabela 2.
Tabela 2 - Classe de erros máximos permissíveis por Classe de Tanque
Classes de Precisão
2 3
A ±0,02% ±0,03%
B ±0,04% ±0,06%
C 2mm 3mm
D 3mm 4mm
(Fonte: RIBEIRO, 2010).
As linhas A e C são para o medidor automático em si antes da instalação no
tanque e as linhas B e D se aplicam ao medidor automático de nível depois de
instalado no tanque de armazenagem (RIBEIRO, 2010). O valor da linha B para

18
tanque classe 3 (refrigerado) será utilizado nas simulações para tanque refrigerado.
Para tanques não refrigerados também será efetuada simulação.
1.2.6. AUTOMAÇÃO
Na indústria de petróleo as variáveis mais importantes de processo e
transferência de custódia (base para compra e venda) são a vazão e o nível
(RIBEIRO, 2010).
Os instrumentos de registro asseguram a quantidade desejada do petróleo e
a totalização da vazão e de indicação do nível tornam a medição dos volumes ainda
mais confiáveis (RIBEIRO, 2010).
1.2.7. SISTEMAS MULTIVARIÁVEIS
Segundo Sagaz (2003) a maioria dos processos industriais utiliza-se dos
controladores PID (Proporcional, Integral e Derivativo). Estes possuem sistemas com
uma variável controlada (CV) e outra variável manipulada (MV), e é denominado de
sistema SISO (Single Input, Single Output).
Para sistemas multivariáveis n variáveis devem ser controladas e n variáveis
devem ser manipuladas, ou seja, este sistema é denominado de MIMO (Multiple
Input, Multiple Output). Obviamente um sistema multivariável é muito mais complexo
do que um sistema SISO devido às interações que ocorrem entre as variáveis de
entrada e de saída (SAGAZ, 2003).
Quando a interação entre as variáveis do sistema MIMO é fraca, ele pode
ser controlado eficientemente com vários PIDs, é o chamado controle
multimalhas. Entretanto, se a interação for forte, necessita de estratégias de
controle mais elaboradas. (SAGAZ, 2003).
1.2.8. LÓGICA CLÁSSICA E LÓGICA NÃO-CLÁSSICA A lógica é a ciência que estuda as leis do raciocínio e segundo Aristóteles a
lógica estabelece a maneira certa de como a razão deve operar, pouco importando
se o raciocínio tem ou não fundamento na realidade (DA SILVA FILHO; ABE, 2000).
Dentro deste raciocínio a lógica pode ser dividida entre Lógica Clássica, que foi
fundada pelos filósofos da Grécia antiga e fundamentada em rígidas leis binárias, e

19
as Lógicas Não-Clássicas, que em seus fundamentos, existem de alguma forma
conceitos que desconsideram alguns princípios da clássica.
As Lógicas Não-Clássicas violam justamente as suposições binárias que não
admitem indefinições, ambiguidades e contradições nos seus fundamentos.
Estabelece que o conceito de dualidade é algo que pode coexistir com seu oposto
para se obter melhor precisão nas conclusões para a tomada de decisão. As
Lógicas Não-Clássicas podem complementar o escopo da lógica clássica ou
podem rivalizar com ela. (DA SILVA FILHO et. al., 2008).
A Lógica Clássica é binária, ou seja, admite apenas dois estados que podem ser
verdadeiro ou falso, 0 ou 1. Devido a sua característica binária fica, em algumas
situações que retratam o mundo real, que é incompleto e contraditório, impossível de
ser utilizada. Por isso recentemente têm surgidos diversas lógicas consideradas
Não-Clássicas.
1.2.9. LÓGICA PARACONSISTENTE
Outro tipo de lógica não-clássica bastante interessante é a Lógica
Paraconsistente (LP) que atua no mundo real oferecendo condições para
tratamentos adequados as inconsistências, ou seja, dando tratamento adequado a
duas ou mais interpretações diferentes sobre um mesmo assunto (DA SILVA FILHO;
ABE, 2000).
Nesta área de tratamento de incertezas a lógica paraconsistente, na sua
forma estendida, denominada lógica paraconsistente Anotada com
anotação de dois valores (LPA2v) também tem se destacado pelos métodos
eficientes em tratar informações contraditórias valorizando estas
informações que podem trazer evidências para estruturar resultados que
retratam melhor a realidade. (DA SILVA FILHO, 2006).
1.2.10. O ALGORITMO - NÓ DE ANÁLISE PARACONSISTENTE (NAP) Segundo Da Silva Filho (2008) o Nó de Análise Paraconsistente é a
denominação dada a um algoritmo extraído da LPA2v para análise de uma
proposição através da entrada na forma de anotação composta por um Grau de
Evidência Favorável (µ) e um Grau de Evidência Desfavorável (λ). Na saída se
obtém o Grau de Evidência Resultante Real (µER) (quando normalizado) através de
um Intervalo de certeza (φE).

20
1.2.11. REDE DE ANÁLISE PARACONSISTENTE (RAP)
Uma Rede de Análise Paraconsistente RAP compõe-se de dois ou mais
NAPs interligados entre si e em cada nó é efetuada a análise de uma única
proposição. No último nó da rede há uma proposição objeto (Po) e para se chegar
até ela se faz necessária a análise das proposições de cada nó (DA SILVA FILHO,
2008).
1.3. PROBLEMATIZAÇÃO Nos estudos apontados por Johansson (2000) nota-se que o controle é
particularmente difícil num processo multivariável de quatro tanques se o total de
vazão para os tanques inferior e superior da vertical esquerda for igual ao total de
vazão para os tanques inferior e superior da vertical direita. O que corresponderá em
𝑋1 + 𝑋2 = 1. Ou seja, a multivariável zero estará na origem.
Outro problema apontado por Johansson (2000) é que o controle PI
descentralizado demonstrou que era mais difícil controlar o ajuste do processo na
fase não mínima do que o ajuste na fase mínima, ou seja, quando 𝑋1 + 𝑋2 < 1.
Neste trabalho a LPA2v será utilizada para um modelo de controle de níveis
de um processo multivariável de quatro tanques em suas fases mínima e não-
mínima, ou seja, a problematização está em um modelo de controle para os tanques
inferiores num sistema fechado (malha fechada) onde não ocorra transbordamento.
A influência da variável temperatura será levada em consideração através
uma proposta de análise específica com a adição de um NAP configurando assim
outra RAP. No decorrer das investigações irá se verificar a possibilidade da
elaboração de algoritmos controladores paraconsistentes específicos e ajustados
para determinadas condições, que podem ser utilizados conjuntamente para
obtenção de um controlador genérico, capaz de controlar o processo baseado em
LPA2v funcionando em condições de operação variada.
1.4. OBJETIVO GERAL
O objetivo geral deste trabalho é obter maior índice de eficiência em controle
de nível de tanques de petróleo através de uma inovação que utiliza a Lógica
Paraconsistente Anotada - LPA. Para alcançar este objetivo é elaborado em um

21
modelo de controle de níveis de um processo multivariável de quatro tanques com
duas redes de análises paraconsistentes modeladas em linguagem de programação
do MATLAB®. A primeira RAP tratará as variáveis nível e vazão e a segunda RAP
tratará nível, vazão e temperatura.
1.5. OBJETIVO ESPECÍFICO
O objetivo específico deste trabalho consiste lidar com incertezas e
contradições das variáveis do processo multivariável de quatro tanques através da
LPA2v. A aplicação dos algoritmos da LPA2v neste tipo de automação é a utilização
de uma rede para o controle níveis de um processo multivariável de quatro tanques.
O tema proposto permite que através da LPA2v possa ser controlado o nível dos
tanques inferiores através do monitoramento contínuo de diferentes Graus de
Evidência de nível (µ), mostrando assim a eficiência dos algoritmos da LPA2v na
tomada de decisão de alteração da variável manipulada que é a abertura
proporcional de duas válvulas automáticas de três vias.
O desempenho do controle será atingir no processo o nível requerido através
do Set Point inserido na Rede de análise paraconsistente ou a ausência de
contradição no resultado da rede. Uma proposta com análise específica para
tratamento da variável temperatura será inserida em outra RAP para verificação da
influência desta variável no processo.
1.6. ORGANIZAÇÃO DA DISSERTAÇÃO
Esta Dissertação está organizada da seguinte forma: O capítulo 1 traz a
introdução do assunto da pesquisa deste trabalho indicando a justificativa,
relevância do tema tratando de medição de nível, vazão, tanque de petróleo,
temperatura, os erros admissíveis, automação, sistemas multivariáveis, lógica
clássica, Não-Clássica, Lógica paraconsistente, o algoritmo de análise
paraconsistente, rede de análise paraconsistente, problematização, objetivo geral,
objetivo específico e a organização da dissertação. No capítulo 2 é apresentada uma
revisão bibliográfica sobre processo multivariável com quatro tanques, modelagem
matemática (área, vazão, nível e abertura da válvula de três vias para os quatro
tanques), uma visão geral da esquematização do processo em cada tanque e para

22
os quatro tanques e também a fundamentação sobre lógica Paraconsistente
Anotada, Lógica Paraconsistente Anotada com anotação de dois Valores (LPA2v)
com as simulações iniciais com o software MATLAB®, NAP e RAP. No capítulo 3
são descritos os materiais utilizados neste trabalho. No capítulo 4 é descrito o
método utilizado neste presente trabalho. Apresenta-se a modelagem do sistema
multivariável de quatro tanques com a lógica paraconsistente anotada. Neste
capitulo é estudado o modelo para controle do processo com válvula de três vias e
variáveis X1 e X2 (variável manipulada). Ainda neste capítulo é apresentada a
proposta de modelo para o controle do sistema com os algoritmos extraídos da
LPA2V (nós de análise paraconsistente). No capítulo 5 são descritos os resultados
da simulação na fase não mínima, simulação na fase mínima e da simulação da
nova RAP com a inserção da variável temperatura. No capítulo 6 são apresentadas
as discussões sobre os resultados obtidos neste trabalho da simulação na fase não
mínima, simulação na fase mínima e da RAP com a variável temperatura. As
conclusões e os pontos significativos do trabalho estão no capítulo 7 e no capítulo 8
há três propostas de trabalhos futuros. Finalmente são expressas as referências
utilizadas e são inseridos os apêndices deste trabalho.

23
2. REVISÃO BIBLIOGRÁFICA
2.1. PROCESSO MULTIVARIÁVEL COM QUATRO TANQUES
Para se lidar com as incertezas e com o contraditório na automação de um
controle de nível num processo multivariável optou-se pela Lógica Paraconsistente
Anotada, pois procedimentos baseados nesta lógica tem se mostrado muito hábeis
em outros experimentos para tratamentos similares de dados de informação.
O processo utiliza duas válvulas automáticas de três vias (X1 e X2) para
controlar o quanto de vazão irá para sua saída proporcionalmente entre dois tanques
em cada lado do processo. Um esquema deste tipo que será utilizado para aplicar a
Lógica Paraconsistente Anotada é o proposto por Johansson (2000), conforme
mostrado na Figura 1.
Figura 1 - Modelo de quatro tanques. (Fonte: JOHANSSON, 2000)
O desempenho do controle será atingir no processo o nível requerido através
do Set Point.
[...] o processo dos quatro tanques vem sendo amplamente utilizado em estudos
de processos industriais multivariáveis com grande variação de dinâmica, pela
sua complexidade devido ser um processo com interação variável entre as

24
variáveis manipuladas e controladas e pela sua não linearidade. Pode-se citar
além do artigo de Johansson (2000), que fez o primeiro estudo com este
processo, o trabalho com modelo de controladores [...] (SAGAZ, 2003).
As válvulas automáticas, que podem ser definidas como dispositivos
eletromecânicos usados para controlar o fluxo de líquidos ou gases, consistem de
uma bobina solenoide onde a principal função é converter energia elétrica em
energia mecânica. A bobina solenoide abrindo ou fechando a válvula vai fazendo a
distribuição de líquidos ou gases. A válvula de três vias universal possui uma
entrada e duas saídas para distribuição de fluxo (BAPTISTA et. al., 2013).
Segundo Sagaz (2003): “[...] o desafio de controlar este processo da
modificação que ocorre na sua dinâmica quando o parâmetro X é variado [...]”. Esta
modificação se dá proporcionalmente a abertura da válvula denominada de válvula X
e a variação controlada é denominado de parâmetro X.
Considera-se que o sistema da Figura 1 esteja linearizado por espaço de
estados conforme o estudo apontado por Johansson (2000). Segundo Monteiro
(2011): “[...] é representado como um ponto com coordenadas x1(t), x2(t),...,xn(t)
nesse espaço. Conforme o tempo passa, esse ponto se move, sendo sua evolução
temporal determinada pelas n equações diferenciais de primeira ordem [...]”
O processo de linearização de sistemas não lineares é importante, pois
através da linearização de equações não lineares é possível aplicar
numerosos métodos de análise linear que produzirão informação sobre o
comportamento do sistema não linear considerado. (OGATA, 2000).
Através do trabalho de Johansson (2000), singularmente são determinadas
quais as posições das válvulas do processo. O modelo físico de Johansson (2000)
de linearização apresentado na Figura 1 pode ser visto na Figura 2 a seguir:

25
Figura 2 - Diagrama esquemático do processo multivariável de 4 tanques da Figura 1. (Fonte: SAGAZ, 2003).
Dependendo dos valores das válvulas o sistema estará na fase mínima (G_s)
ou na fase não mínima (G+s).
Os parâmetros das válvulas são denominados de X1 e X2 de tal forma que:
{(𝑋1, 𝑋2)|𝑋1, 𝑋2 ∈ [0, 1]∁ℝ}. O somatório X1+X2 determina a localização da
multivariável 0 de modo que:
Se 𝑋1 + 𝑋2 < 1 → Sistema em Fase Não-Mínima;
∴ Vazão Tanques inferiores < Vazão Tanques Superiores.
Se 𝑋1 + 𝑋2 > 1 → Sistema em Fase Mínima;
∴ Vazão Tanques inferiores > Vazão Tanques Superiores.
Se 𝑋1 + 𝑋2 = 1 → a multivariável zero está na origem.
Se 𝑋1 + 𝑋2 > 2 → Possibilidade de transbordamento (desequilíbrio do sistema).
A Figura 3 mostra para as duas válvulas qual é a fase mínima e não mínima
para os parâmetros de X1 e X2 através de dois planos de zeros.
O quociente 𝑋1
𝑋2 indica a direção do zero.

26
Figura 3 - Fase Mínima e não mínima para as válvulas
(Fonte: JOHANSSON, 2000).
Neste trabalho serão utilizados os procedimentos e a fundamentação do
modelo proposto em JOHANSSON (2000) para aplicação da Lógica Paraconsistente
Anotada funcionando em Redes de Análises Paraconsistentes no controle
multivariável de quatro tanques.
2.2. MODELAGEM MATEMÁTICA
Em Sagaz (2003) foi proposta uma modelagem matemática para o sistema de
quatro tanques seguindo os estudos de Johansson (2000):
2.2.1. Tanque 1: Área, Vazão, Nível e abertura da válvula de três vias.
𝐴1.𝑑ℎ1
𝑑𝑡= 𝑋1. 𝐹1 + 𝑅3. √ℎ3 − 𝑅1. √ℎ1
Sendo:
Ai é a área da base do tanque i;
Ri é a constante de perda de carga da saída do tanque i;
hi é o nível do tanque i;
Fj é a vazão no ramo j;

27
Xi é a posição da válvula de três vias i.
2.2.2. Tanque 2: Área, Vazão, Nível e abertura da válvula de três vias.
𝐴2.𝑑ℎ2
𝑑𝑡= 𝑋2. 𝐹2 + 𝑅4. √ℎ4 − 𝑅2. √ℎ2
2.2.3. Tanque 3: Área, Vazão, Nível e abertura da válvula de três vias.
𝐴3.𝑑ℎ3
𝑑𝑡= (1 − 𝑋2). 𝐹2 − 𝑅3. √ℎ3
2.2.4. Tanque 4: Área, Vazão, Nível e abertura da válvula de três vias.
𝐴4.𝑑ℎ4
𝑑𝑡= (1 − 𝑋1). 𝐹1 − 𝑅4. √ℎ4
2.3. ESQUEMATIZAÇÃO DO PROCESSO EM CADA TANQUE
O estudo feito por Sagaz (2003) apresenta a esquematização de processo em
cada tanque seguindo os estudos de Johansson (2000) e obteve as seguintes
configurações no processo multivariável.
2.3.1. Tanque 1: Vazão de entrada e perda de Carga.
Segundo Sagaz (2003) para o tanque 1 a vazão é proporcional à abertura da
válvula X1 de 3 vias, ou seja, a vazão F1 multiplicada por X1. Na Figura 4 há a
indicação do tanque 1, a altura h1 a vazão de entrada (X1.F1) e as razões de perda
de carga do tanque 1 e do tanque 3 que entra no tanque 1.
Figura 4 – Esquema do Tanque 1. (Adaptado de Sagaz, 2003).

28
2.3.2. Tanque 2: Vazão de entrada e perda de Carga.
Segundo Sagaz (2003) para o tanque 2 a vazão é proporcional à abertura da
válvula X2 de 3 vias, ou seja, a vazão F2 multiplicada por X2. Na Figura 5 há a
indicação do tanque 2, a altura h2 a vazão de entrada (X2.F2) e as razões de perda
de carga do tanque 2 e do tanque 4 que entra no tanque 2.
Figura 5 – Esquema do Tanque 2. (Adaptado de Sagaz, 2003).
2.3.3. Tanque 3: Vazão de entrada e perda de Carga.
Segundo Sagaz (2003) para o tanque 3 a vazão é proporcional à abertura da
válvula X2 de 3 vias, ou seja, a vazão F2 multiplicada por 1-X2. Na Figura 6 há a
indicação do tanque 3, a altura h3 a vazão de entrada (1-X2).F2 e a razão de perda
de carga do tanque 3.
Figura 6 – Esquema do Tanque 3. (Adaptado de Sagaz, 2003).

29
2.3.4. Tanque 4: Vazão de entrada e perda de Carga.
Segundo Sagaz (2003) para o tanque 4 a vazão é proporcional à abertura da
válvula X1 de 3 vias, ou seja, a vazão F1 multiplicada por 1-X1. Na Figura 7 há a
indicação do tanque 4, a altura h4 a vazão de entrada (1-X1).F2 e a razão de perda
de carga do tanque 4.
Figura 7 – Esquema do Tanque 4. (Adaptado de Sagaz, 2003).
2.3.5. Premissas para as válvulas X1 e X2.
A ideia deste processo é que tanto a válvula X1 como X2 trabalhem com o
mesmo valor ajustado de parametrização, ou seja, se o valor de X1 for 0,7 este
também será o valor para X2.
30
2.4. LÓGICA PARACONSISTENTE ANOTADA
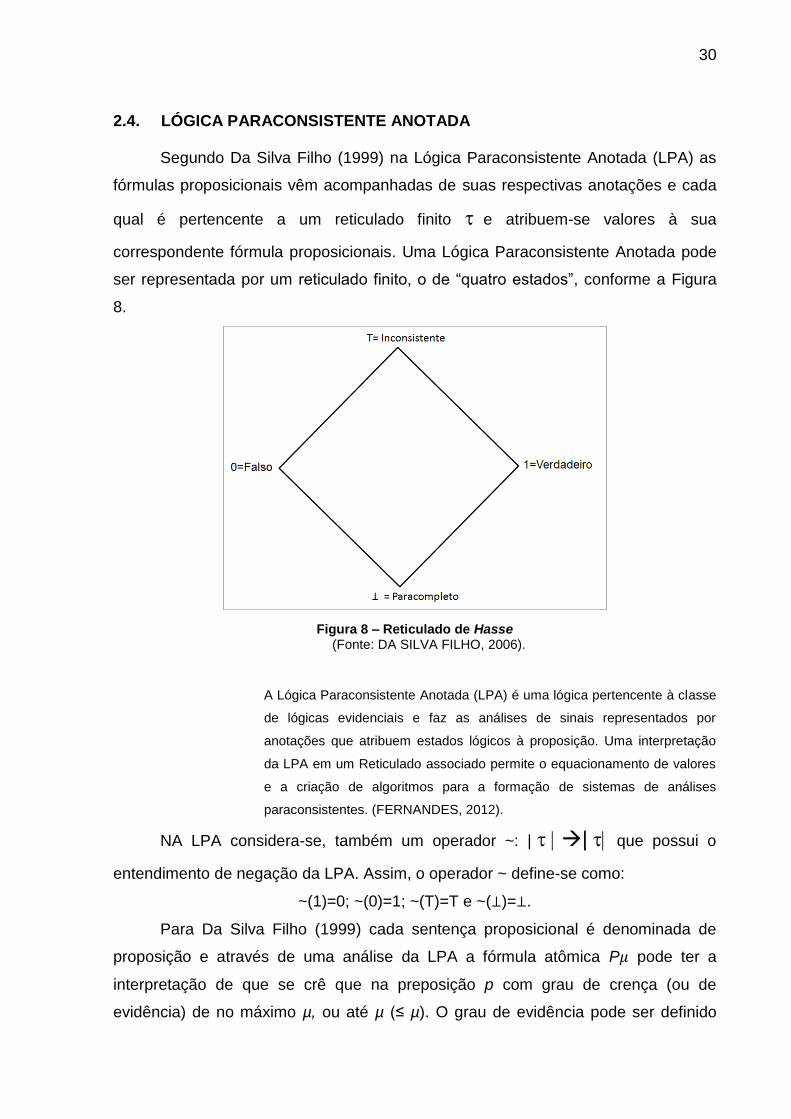
Segundo Da Silva Filho (1999) na Lógica Paraconsistente Anotada (LPA) as
fórmulas proposicionais vêm acompanhadas de suas respectivas anotações e cada
qual é pertencente a um reticulado finito e atribuem-se valores à sua
correspondente fórmula proposicionais. Uma Lógica Paraconsistente Anotada pode
ser representada por um reticulado finito, o de “quatro estados”, conforme a Figura
8.
Figura 8 – Reticulado de Hasse (Fonte: DA SILVA FILHO, 2006).
A Lógica Paraconsistente Anotada (LPA) é uma lógica pertencente à classe
de lógicas evidenciais e faz as análises de sinais representados por
anotações que atribuem estados lógicos à proposição. Uma interpretação
da LPA em um Reticulado associado permite o equacionamento de valores
e a criação de algoritmos para a formação de sistemas de análises
paraconsistentes. (FERNANDES, 2012).
NA LPA considera-se, também um operador ~: || que possui o
entendimento de negação da LPA. Assim, o operador ~ define-se como:
~(1)=0; ~(0)=1; ~(T)=T e ~(⊥)=⊥.
Para Da Silva Filho (1999) cada sentença proposicional é denominada de
proposição e através de uma análise da LPA a fórmula atômica P𝜇 pode ter a
interpretação de que se crê que na preposição p com grau de crença (ou de
evidência) de no máximo µ, ou até µ (≤ µ). O grau de evidência pode ser definido

31
como uma constante anotacional do reticulado, ou seja, induz-se na afirmação de
que cada grau de evidência atribuído à proposição é um valor contido no conjunto de
valores composto pelas constantes anotacionais do reticulado (T, V, F, ⊥).
Conforme Da Silva Filho (1999) cada proposição é acompanhada de
anotação que atribui o grau de evidência correspondente a cada variável
proposicional, conforme segue abaixo:
pT= A anotação ou grau de evidência atribui uma conotação de Inconsistente
à proposição p;
p1= A anotação ou grau de evidência atribui uma conotação de Verdade à
proposição p;
p0= A anotação ou grau de evidência atribui uma conotação de Falsidade à
proposição p;
p⊥ = A anotação ou grau de evidência atribui uma conotação de Indefinição à
proposição p.
2.5. LÓGICA PARACONSISTENTE ANOTADA COM ANOTAÇÃO DE DOIS VALORES (LPA2v)
Pelos estudos de Da Silva Filho (1999) a LPA com Anotação de dois valores
(LPA2v) é adequada ao uso de evidências para ajudar a resolver inconsistências. As
contradições são tratadas conforme a LPA2v e a análise dos Graus de Evidências
traz situações de saídas que são denominadas de estados lógicos resultantes. A
saída pode ter seus estados denominados de extremos ou de estados denominados
de não-extremos. O primeiro é composto por Falso, Verdadeiro, Inconsistente e
Paracompleto, e o segundo possui todos os outros estados representados no
reticulado. Sendo assim, são associados dois valores a uma anotação do reticulado
(DA SILVA FILHO, 2006).
O mesmo estudo de Da Silva Filho (1999) aponta que o primeiro valor da
anotação representa a Evidência Favorável à proposição p e o segundo valor
representa a Evidência Contrária (Evidência Desfavorável) à proposição p. O
símbolo do grau de evidência favorável é a letra grega “𝜇” e o símbolo do grau de
evidencia desfavorável é a letra grega “” Cada constante anotacional do reticulado
pode ser representado pelo par (𝜇, ) conforme a Figura 9.
𝜇 =Grau de evidência favorável;

32
=Grau de evidência desfavorável.
No reticulado de Hasse com anotação de dois valores:
𝜏 = {(𝜇, 𝜆)| 𝜇, 𝜆 ∈ [0, 1]∁ ℝ}
Figura 9 – Reticulado de Hasse de 4 estados com anotação de 2 valores (Fonte: DA SILVA FILHO, 1999).
Assim: Se P é uma fórmula básica, o operador ~ : || → | | é definido como: ~
[(𝜇,)] = (,𝜇) onde, (𝜇, ∈ { x ∈ ℝ | 0 ≤ x ≤ 1}, considera-se (𝜇, ) como uma
anotação de P. A atribuição dos graus de evidencia objetiva solucionar justamente o
problema de sinais contraditórios, ou seja, coletando-se evidências, analisando-as e
assim modificar o comportamento do sistema para que as contradições possam
diminuir.
O reticulado da LPA2v pode ser representada num plano cartesiano como
pontos no quadrado unitário. A Figura 10 representa o quadrado unitário do plano
cartesiano (QUPC).
33
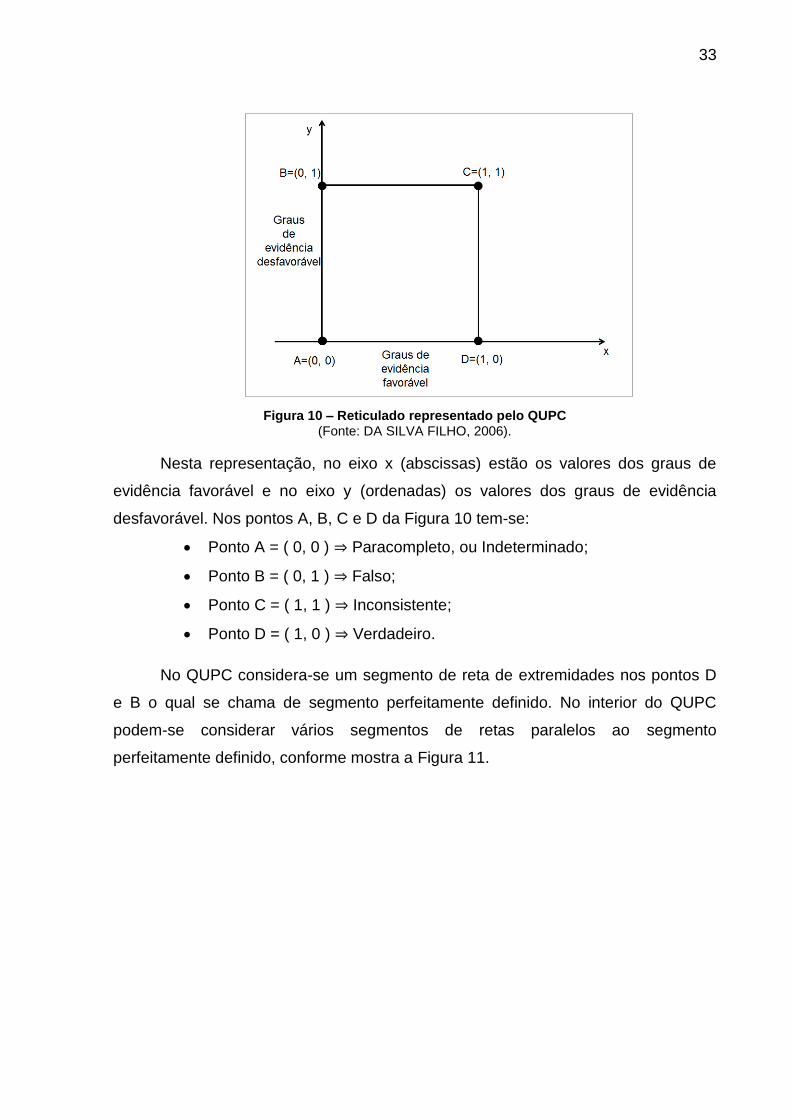
Figura 10 – Reticulado representado pelo QUPC (Fonte: DA SILVA FILHO, 2006).
Nesta representação, no eixo x (abscissas) estão os valores dos graus de
evidência favorável e no eixo y (ordenadas) os valores dos graus de evidência
desfavorável. Nos pontos A, B, C e D da Figura 10 tem-se:
Ponto A = ( 0, 0 ) ⇒ Paracompleto, ou Indeterminado;
Ponto B = ( 0, 1 ) ⇒ Falso;
Ponto C = ( 1, 1 ) ⇒ Inconsistente;
Ponto D = ( 1, 0 ) ⇒ Verdadeiro.
No QUPC considera-se um segmento de reta de extremidades nos pontos D
e B o qual se chama de segmento perfeitamente definido. No interior do QUPC
podem-se considerar vários segmentos de retas paralelos ao segmento
perfeitamente definido, conforme mostra a Figura 11.

34
Figura 11 – Reticulado representado pelo QUPC (Fonte: DA SILVA FILHO, 2006).
A distância d(xij) entre qualquer ponto (x, y) pertencente aos segmentos
paralelos e ao segmento perfeitamente definido é determinada pela equação:
𝑑(𝑥, 𝑦) = 𝑥 + 𝑦 − 1
No QUPC é visto que há uma relação direta entre o valor da distância d(x,y) e
as situações de inconsistência e paracompleteza, da seguinte forma:
d(x,y)=+1 no ponto C(1, 1), estado extremo de inconsistência;
d(x,y)=-1 no ponto A(0, 0), estado extremo de paracompleteza.
Valores intermediários entre +1 e –1 são encontrados quando os valores de x
e de y variam entre 0 e 1, portanto, o resultado do cálculo da distância d(x,y) varia
entre -1 a +1. Com o grau de evidencia favorável 𝜇 disposto no eixo x e o grau de
evidencia desfavorável disposto no eixo y, é definido o valor da distância d(x,y)
quando calculado através dos graus de evidências, como o Grau de Incerteza (Gi)
ou Grau de Contradição (Gct) da proposição p. Portanto:
𝐺𝑐𝑡 = 𝜇 + 𝜆 − 1
Quando o grau de incerteza for maior que zero será denominado de grau de
Inconsistência-Git. Portanto, a equação que define o grau de Inconsistência é:
𝐺𝑖𝑡 = 𝜇 + 𝜆 − 1
Se e somente se 𝜇 ≥ 𝜆.

35
Quando o grau de incerteza for menor que zero será denominado de grau de
Paracompleteza-Gid. Portanto, o Grau de Paracompleteza é encontrado pela
equação:
𝐺𝑖𝑑 = 𝜇 + 𝜆 − 1
Se e somente se 𝜇 < 𝜆.
Estes valores são alocados em um eixo de graus, denominado de eixo dos
graus de incertezas.
A Figura 12 mostra o eixo dos graus de incerteza com os seus valores no
intervalo fechado de -1 a + 1.
Figura 12 – Representação do grau de incerteza (Fonte: DA SILVA FILHO, 2006).
No quadrado unitário do plano cartesiano considerando-se o segmento de
reta determinado pelos pontos A e C. Este novo segmento é denominado de
segmento perfeitamente indefinido. Da mesma forma podem-se considerar
segmentos paralelos ao perfeitamente indefinido, como mostra a Figura 13.
A distância dij’(xij) entre qualquer ponto (x, y) que pertença a estas retas
paralelas e a reta perfeitamente indefinida é determinada por:
𝑑´(𝑥, 𝑦) = 𝑥 − 𝑦
No QUPC é visto que há uma relação direta entre o valor da distância d(x, y)
e as situações de Verdade e Falsidade, da seguinte forma:
d(x,y)= +1 no ponto D(1,0), estado extremo de Verdade.
d(x,y)= -1 no ponto B(0,1), estado extremo de Falsidade.

36
Figura 13 – Reticulado representado por QUPC no plano cartesiano
(Fonte: DA SILVA FILHO, 2006).
Valores intermediários entre +1 e –1 são encontrados quando há variação
entre 0 e 1 nos valores de x e de y, portanto, o resultado do cálculo da distância d(x,
y) varia entre -1 à +1.
Com o grau de evidencia favorável μ dispostos no eixo x e o grau de
evidencia desfavorável 𝜆 disposto no eixo y, é definido o valor da distância d(x, y)
quando calculado através dos graus de evidencias, como sendo o grau de certeza
Gc da proposição p. Portanto:
𝐺𝑐 = 𝜇 − 𝜆
Quando o Grau de certeza for igual ou maior que zero será denominado de
Grau de verdade Gv. Sendo assim, o Grau de verdade pode ser calculado por:
𝐺𝑣 = 𝜇 − 𝜆
Se e somente se μ ≥ 𝜆.
Quando o grau de certeza for menor que zero, será denominado de grau de
falsidade Gf. Pode-se então, calcular o grau de falsidade por:
𝐺𝑓 = 𝜇 − 𝜆
Se e somente se μ < 𝜆.
Estes valores são alocados em um eixo de graus que denominamos de eixo
dos graus de certeza. A Figura 14 mostra o eixo dos graus de certeza.

37
Figura 14 – Representação do Grau de Certeza (Fonte: DA SILVA FILHO, 2006).
De acordo com Da Silva Filho (2006) para cada par ordenado composto pelo
valor do grau de evidencia favorável 𝜇 e do grau de evidencia desfavorável 𝜆, são
encontrados os valores dos graus de inconsistência Git, de indefinição Gid, de
verdade Gv e de falsidade Gf , conforme as equações abaixo:
𝐺𝑖𝑡 = 𝜇 + 𝜆 − 1 se e somente se: (𝜇 + 𝜆 ) ≥ 1;
𝐺𝑖𝑑 = 𝜇 + 𝜆 − 1 se e somente se: (𝜇 + 𝜆 ) < 1;
𝐺𝑣 = 𝜇 + 𝜆 − 1 se e somente se: 𝜇 ≥ 𝜆;
𝐺𝑓 = 𝜇 + 𝜆 − 1 se e somente se: 𝜇 < 𝜆.
Os eixos dos graus de certeza e de incerteza podem ser dispostos num único
plano onde os valores dos graus considerados de incerteza e são alocados na
vertical e os valores dos graus considerados de certeza, na horizontal. Através dos
graus de certeza e de incerteza as equações mostram a qualquer instante em que
região do reticulado está situado o resultado da análise dos graus de evidência
favorável e de evidência desfavorável atribuídos à proposição inicial P. A Figura 15
apresenta esta representação.
Figura 15 – Representação dos Graus de Certeza e de incerteza (Fonte: DA SILVA FILHO, 1999).

38
Com os valores do reticulado, são delimitadas regiões através do quadrado
unitário do plano cartesiano que definem os estados lógicos resultantes de saída.
Estes estados lógicos são descritos apenas com os valores dos graus de certeza e
de incerteza por meio das equações. Cada par de valores composto por grau de
certeza e grau de incerteza define a localização de um ponto no QUPC e
consequentemente no reticulado da LPA2v. Verifica-se que este ponto está situado
em uma única região delimitada correspondendo a um único estado resultante de
saída. Na prática isto significa o número de regiões delimitadas que define a
resolução do quadrado unitário do plano cartesiano é totalmente dependente da
precisão da análise desejada na saída. A resolução de 12 estados pode parecer a
mais adequada para uma pesquisa inicial, ficando claro, no entanto, que o quadrado
unitário pode ser dividido em qualquer número de regiões exigidas pela aplicação do
projeto. Os novos segmentos de reta com suas respectivas denominações, que
delimitam as regiões no quadrado unitário para uma resolução 12, podem ser vistas
na Figura 16.
Figura 16 – Quadrado Unitário com novos Segmentos que delimitam 12 regiões. (Fonte: DA SILVA FILHO, 1999).

39
Conforme Da Silva Filho (1999) para facilitar o reconhecimento de cada
região, cada uma delas recebeu uma denominação de acordo com a sua
proximidade com os pontos de estados extremos do reticulado. O QUPC de
resolução 12 com as regiões e os seus correspondentes estados resultantes de
saída, são mostrados na Figura 17 onde os estados extremos do quadrado unitário
são:
T ⇒ Inconsistente;
F ⇒ Falso;
⊥ ⇒ Paracompleto;
V ⇒ Verdadeiro.
E os estados não-extremos são denominados:
⊥ → f ⇒ Paracompleto tendendo ao Falso;
⊥ →v ⇒ Paracompleto tendendo ao Verdadeiro;
T→ f ⇒ Inconsistente tendendo ao Falso;
T→ v ⇒ Inconsistente tendendo ao Verdadeiro;
Qv →T ⇒ Quase-verdadeiro tendendo ao Inconsistente;
Qf →T ⇒ Quase-falso tendendo ao Inconsistente;
Qf→⊥ ⇒ Quase-falso tendendo ao Paracompleto;
Qv→⊥ ⇒ Quase- verdadeiro tendendo ao Paracompleto.
Na Figura 17 Da Silva Filho (1999) mostra os estados extremos nos eixos dos
valores de certeza foram delimitados pelo grau de verdade igual á ½ para ser
considerado “Verdadeiro” e grau de falsidade igual a -1/2 para ser considerado
“Falso”. Da mesma forma os estados extremos nos eixos dos valores de incerteza
foram delimitados por grau de inconsistência igual á 1/2, para ser considerado
“Inconsistente” e grau de paracompleteza igual a -1/2 para ser considerado
“Paracompleto”.

40
Figura 17 - Representação no quadrado unitário das regiões dos estados extremos e não-extremos.
(Fonte: DA SILVA FILHO, 1999).
Os valores limitantes dos estados extremos e não extremos é decisão de
projeto, portanto é dependente das aplicações. Estes valores podem ser ajustados
externamente e são denominados de Valores Limite ou de ajuste, onde:
Vscc = Valor limite superior de Controle de certeza;
Vsci = Valor limite superior de Controle de incerteza;
Vicc = Valor limite inferior de Controle de certeza;
Vici = Valor limite inferior de Controle de incerteza.
No trabalho de Da Silva Filho (1999) o reticulado da LPA2v representado pelo
quadrado unitário no plano cartesiano, foi projetado com regiões delimitadas por
valores de controle 1/2 e com resolução 12. A representação desta configuração
feita pelos eixos dos valores dos graus de certeza e de incerteza na forma do
reticulado é mostrada na Figura 18.

41
Figura 18 – Representação no gráfico dos graus de certeza e incerteza com valores de controle de ajustes em ½.
(Fonte: DA SILVA FILHO, 1999).
Assim Da Silva Filho (1999) de posse das configurações propostas e os
valores obtidos é então, elaborado o algoritmo baseado na Lógica Paraconsistente
Anotada de anotação com dois valores- LPA2v que denominado de “Para-
Analisador”.
2.6. ALGORITMO PARA-ANALISADOR. Como resultado das várias sentenças descritivas no reticulado representado
no QUPC é proposto por Da Silva Filho (1999) o algoritmo para implementação em
um programa de computação convencional que possibilita a aplicação da Lógica
Paraconsistente Anotada de anotação com dois valores-LPA2v em Sistemas de
Controle e Especialistas de Inteligência Artificial (IA). Um programa em MATLAB®
utilizando-se do algoritmo Para-analisador encontra-se no APÊNDICE Y (página
118).
Lógica Paraconsistente Anotada de Anotação com dois Valores-LPA2v
*/Definições do valores*/
Vscc. = C1 */ Definição do valor superior de controle de certeza*/
Vicc. = C2 */ Definição do valor inferior de controle de certeza*/

42
Vsci = C3 */ Definição do valor superior de controle de incerteza*/
Vici = C4 */ Definição do valor inferior de controle de incerteza*/
*/Variáveis de entrada*/
𝜇
𝜆
*/Variáveis de saída*
Saída discreta = S1
Saída analógica = S2a
Saída analógica = S2b
*/Expressões matemáticas*/
sendo : 0≤ 𝜇 ≤ 1 e 0≤ 𝜆 ≤ 1
Gi = 𝜇 + 𝜆 - 1
Gc = 𝜇 − 𝜆
*/determinação dos estados extremos*/
Se Gc ≥ C1 então S1 = V
Se Gc ≤ C2 então S1 = F
Se Gi ≥ C3 então S1 = T
Se Gi ≤ C4 então S1 = ⊥
*/determinação dos estados não-extremos*/
Para 0 ≤ Gc < C1 e 0 ≤ Gi < C3
se Gc ≥ Gi então S1 = Qv → T
Senão S1 = T → v
Para 0 ≤ Gc < C1 e C4 < Gi ≤ 0
se Gc ≥ | Gi | então S1 = Qv→ ⊥
Senão S1 = ⊥ → v
Para C2 < Gc ≤ 0 e C4 < Gi ≤ 0
se |Gc | ≥ | Gi | então S1 = Qf→ ⊥
Senão S1 = ⊥ → f
Para C2 < Gc ≤ 0 e 0 ≤ Gi < C3
se |Gc | ≥ Gi então S1 = Qf → T
Senão S1 = T → f
Gi = S2a
Gc = S2b

43
*/ FIM*/
2.7. APLICAÇÕES DO ALGORITMO PARA-ANALISADOR
O software para-analisador foi implementado na prática por da Silva Filho
(1999) no robô Emmy que foi o primeiro robô a utilizar a LPA2v.
Como exemplo de aplicação da LPA2v apresenta-se o robô Emmy que tem
dois sensores de Ultrassom que trazem as informações de distância que o separa
dos objetos. Um circuito interno chamado de Para-sônico transforma a distância em
um sinal de tensão elétrica. Como resultado, a intensidade da tensão elétrica é
proporcional à distância. Os objetos são sensoriados a uma faixa de distância de 0,3
a 5m. Sinais proporcionais de 0 a 5V para Grau de Crença e de 5V a 0V para o Grau
de descrença são gerados em um circuito. Estes valores são normalizados e
considerados como as duas entradas para o Algoritmo Para-Analisador. O robô
Emmy tem a capacidade de desviar de obstáculo em ambiente não estruturado
fazendo análise e tratando os sinais conforme a Lógica Paraconsistente. Os dois
sensores enviam os sinais anotados de informações sobre a existência de
obstáculos que são analisados no Para-analisador. A proposição é “Existe obstáculo
à frente”. A análise paraconsistente gera 12 estados lógicos que vão fazer os
circuitos posteriores produzirem 12 diferentes ações no robô Emmy (DA SILVA
FILHO, 2000).
2.8. ALGORITMOS PARACONSISTENTES
O processo lógico racional não pode ignorar as contradições, mas procurar
extrair delas informações que possam ser relevantes para a tomada de decisão (DA
SILVA FILHO et. al., 2008). Os Nós de Análise Paraconsistente (NAPs) são
algoritmos obtidos da metodologia estudada no LPA2v e do Algoritmo Para-
analisador, para tomadas de decisão e controle no tratamento de sinais incertos e
que poderão ser utilizados para compor uma Rede de Análise Paraconsistente.
Para Da Silva Filho et. al. (2008) dados imperfeitos são os que abrangem
informações imprecisas, inconsistentes, parcialmente ignoradas e mesmo
incompletas. Em sistemas de análise paraconsistente estes dados imperfeitos não
são descartados, mas inseridos onde recebe tratamento em NAPs
convenientemente construídos para o apoio a tomada de decisão com este

44
conhecimento incerto. O mesmo estudo de Da Silva Filho et. al. (2008) aponta que
este sistema composto pelo NAP deve ser robusto, bem fundamentado teoricamente
na avaliação do incerto e seguir certos critérios da seguinte classificação:
O NAP deve gerar resultados de boa interpretação;
O NAP deve tratar imprecisões;
O NAP deve calcular valores incertos;
O NAP deve apresentar consistência nos resultados;
O NAP deve apresentar boa computabilidade dos dados envolvidos.
Da Silva Filho et. al. (2008) apontam que as fontes de informações provindas
de várias fontes ou de diferentes especialistas alimentam o NAP. Estas informações
são os Graus de Evidência. Tendo-se duas fontes de informação que enviam para o
NAP sinais de evidência a respeito de uma determinada proposição, tal como:
µ1- Sinal da Fonte de Informação 1;
µ2- Sinal da Fonte de Informação 2.
A fórmula proposicional da LPA2v é dada por 𝑃(𝜇,𝜆) onde:
𝜇 =Grau de Evidência favorável à proposição P;
𝜆=Grau de Evidência Desfavorável à proposição P calculado pelo complemento do
Grau de Evidência Favorável da fonte de informação 2.
𝜆 = 1 − 𝜇2
Na Figura 19 tem-se a representação simbólica de um NAP.
Figura 19– Representação do algoritmo de análise paraconsistente da LPA2v com saída de grau de evidência resultante real.
(Fonte: DA SILVA FILHO et. al., 2008).
Para Da Silva Filho et. al. (2008) quando o resultado do NAP for Grau de
Certeza zero significa que as fontes de informação não possuem evidências
suficientes para afirmar ou refutar uma proposição, ou seja, 50% com Grau de
Evidência favorável e 50% com Grau de Evidência desfavorável. Há a implicação de
que as fontes de informações podem ter duas possibilidades:

45
Baixa intensidade de evidências para afirmar ou negar a proposição;
Evidências com alta intensidade de inconsistência.
Neste mesmo estudo Da Silva Filho et. al. (2008) demonstra que por outro
lado, quando o Grau de Certeza for baixo por insuficiência de informações o sistema
tem condições de receber um “reforço” nos valores dos Graus de Evidência, ou seja,
as evidências devem ser reforçadas até que o Grau de Certeza atinja um valor
máximo apropriado para que seja tomada a decisão. Mas na análise paraconsistente
há o Grau de Certeza Gc e outro correspondente que é o Grau de Contradição Gct e
se este último permitir variação no valor do primeiro pode-se afirmar que existe
valores no eixo de Gc de valor máximo para um estado lógico de Verdade (GcmáxV) e
o de valor máximo para um estado lógico de Falsidade (GcmáxF).
O intervalo de certeza é representado pela legra grega 𝜑 é justamente o
intervalo de valores de certeza em que o Grau de Certeza pode variar sem a
limitação do Grau de Contradição. Este intervalo é representado por:
𝜑 = 1 − |𝐺𝑐𝑡|
O Grau de Certeza máximo tendendo a Verdade é dado por:
𝐺𝐶𝑚á𝑥𝑉 = +𝜑
O Grau de Certeza máximo tendendo a Falsidade é dado por:
𝐺𝐶𝑚á𝑥𝐹 = −𝜑
E a partir disto o Grau de Certeza resultante (GCr) das análises terá a
indicação do quão poderá ser reforçado em suas evidências para aumentar a
certeza da proposição P. A representação do Grau de Certeza resultante é:
Gc= Grau de Certeza calculado.
𝜑=Intervalo de Certeza.
Para Da Silva Filho et. al. (2008) a indicação por 𝜑 é do valor máximo para
afirmar ou refutar a proposição. O Intervalo de certeza informa qual será o Grau de
certeza máximo negativo que se obtém diminuindo-se a afirmação da Evidência
Favorável e aumentando-se a negação da Evidência Desfavorável levando o
resultado se aproximar da Falsidade. O Intervalo de certeza indica qual será o Grau
de Certeza máximo positivo que se obtém aumentando-se a afirmação da Evidência

46
Favorável e diminuindo-se a negação da Evidência Desfavorável levando o
resultado se aproximar do Verdadeiro. Na representação simbólica o Intervalo de
Certeza 𝜑 é acrescido na sua frente de um sinal positivo (+) ou negativo (-) que vai
indicar se o seu valor absoluto foi originado por um Grau de Contradição positivo
tendendo a Inconsistente ou de um Grau de Contradição negativo tendendo a
Indeterminado. A representação fica:
Da Silva Filho et. al. (2008) descreve que o Grau de Certeza real (GCR)
representa o Grau de Certeza livre de efeito de contradição e para isso no processo
de análise é subtraído do seu valor relativo um valor que se considera como o
causado pelo efeito das inconsistências nas informações.
A distância D da reta que vai do ponto máximo Grau de Certeza V até o ponto
Gc e Gct é calculada pela equação abaixo:
𝐷 = √(1 − |𝐺𝑐|)2 + 𝐺𝑐𝑡2
Assim, o Grau de Certeza real GCR é obtido através da determinação da
distância D conforme as seguintes condicionantes:
Para Gc>0:
𝐺𝐶𝑅 = (1 − 𝐷)
ou
𝐺𝐶𝑅 = 1 − √(1 − |𝐺𝑐|)2 + 𝐺𝑐𝑡2
Para Gc<0:
𝐺𝐶𝑅 = (𝐷 − 1)
ou
𝐺𝐶𝑅 = √(1 − |𝐺𝑐|)2 + 𝐺𝑐𝑡2 − 1
Desta forma pode-se obter o Grau de Evidência Resultante Real 𝜇𝐸𝑅
conforme a equação a seguir:
𝜇𝐸𝑅 =𝐺𝐶𝑅 + 1
2

47
Muitas outras possibilidades foram estudadas por Da Silva Filho et. al. (2008)
mas neste presente trabalho optou-se pelo Algoritmo de análise paraconsistente
com saída de grau de evidência resultante real representado com outra simbologia
conforme a Figura 20.
Figura 20 – Nó de Análise Paraconsistente com saída de Grau de Evidência Resultante Real e bloco de complementação em µ2.
(Fonte: DA SILVA FILHO et. al., 2008)
Para que a resposta em um NAP seja padronizada é feita a normalização no
grau de contradição para que assim seus valores fiquem no intervalo real fechado
entre 0 e 1. A equação é representada por:
𝜇𝑐𝑡𝑟 =𝐺𝑐𝑡 + 1
2
ou
𝜇𝑐𝑡𝑟 =𝜇 + 𝜆
2
Segundo Da Silva Filho (2008) A relação entre os valores do Grau de
Contradição Gct e os valores do Grau de Contradição normalizado µctr é
representada na Figura 21:

48
Figura 21 – Transformação de Gct em µctr
(Fonte: DA SILVA FILHO et. al., 2008)
Pela Figura 21 observa-se que a normalização se dá quando µctr é 0,5 e Gct é
0, ou seja, não há contradição. Quando Gct é igual a um tem-se o estado lógico
totalmente inconsistente (µctr=1) e quando Gct é igual a um negativo tem-se o estado
lógico totalmente indeterminado ou Paracompleto (µctr=0).
Através do cálculo do grau de contradição (µctr) normalizado pode-se
determinar o Intervalo de Evidência resultante pela equação:
𝜑𝐸 = 1 − |2. 𝜇𝑐𝑡𝑟 − 1|
Assim pode-se estabelecer uma combinação entre o grau de contradição
normalizado (µctr) e ( 𝜑𝐸) da seguinte maneira:
- Se µctr =1 e 𝜑𝐸=0 O estado lógico totalmente Inconsistente;
- Se µctr =0,5 e 𝜑𝐸=1 O estado lógico sem contradição;
- Se µctr =0 e 𝜑𝐸=0 O estado lógico totalmente Indeterminado.
Na combinação µctr =0,5 e 𝜑𝐸=1 não há contradição, portanto esta associação
pode ser considerada como o ponto ideal de ajuste ou controle de um sistema que
se utiliza de algoritmos paraconsistentes para avaliação de incertezas e
contradições. A Figura 22 demonstra o ponto ideal de controle:

49
Figura 22 - Gráfico µctr versus φE para análise de Evidências (Fonte: DA SILVA FILHO et. al., 2008).
2.9. SIMULAÇÃO DO ALGORITMO DE ANALISE PARACONSISTENTE COM SAÍDA DE GRAU DE EVIDÊNCIA RESULTANTE REAL
Segundo Da Silva Filho et. al. (2008) o sistema ou algoritmo nó de análise
paraconsistente pode ser feito utilizando-se das equações obtidas no estudo dos
NAPs. O sistema Paraconsistente de Tratamento de Incertezas pode ser utilizado
em diversos campos do conhecimento onde informações incompletas e
contraditórias receberão um tratamento adequado através das equações da LPA2v.
O algoritmo de Análise paraconsistente para determinação do Grau de Certeza real
e do Intervalo de Certeza é:
Entre com os valores de Entrada.
𝜇 */ Grau de Evidência favorável 0 ≤ 𝜇 ≤1
𝜆 */ Grau de Evidência desfavorável 0 ≤ 𝜆 ≤1
Calcule o Grau de Contradição Normalizado.
𝜇𝑐𝑡𝑟 =𝜇+𝜆
2
Calcule o Intervalo de Evidência Resultante
𝜑𝐸 = 1 − |2. 𝜇𝑐𝑡𝑟 − 1|
Calcule o Grau de Certeza.
𝐺𝑐 = 𝜇 − 𝜆
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 10
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Grau de Contradição Normalizado
Inte
rvalo
de E
vid
ência
Resultante
Ponto de controle

50
Calcule o Grau de Contradição
𝐺𝑐𝑡 = (𝜇 + 𝜆) − 1
Calcule a distância D
𝐷 = √(1 − |𝐺𝑐|)2 + 𝐺𝑐𝑡2
Calcule o Grau de Certeza Real
Se Gc>0, GCR=(1-D)
Se Gc<0, GCR=(D-1)
Determine o sinal da Saída
Se 𝜑𝐸 ≤0,25 ou D > 1, então faça:
S1 = 0, 5 e S2= 𝜑𝐸(±) = : Indefinição e vá para o fim.
Senão vá para o próximo item
Calcule o Grau de Evidência Resultante real
𝜇𝐸𝑅 =𝐺𝐶𝑅 + 1
2
Determine a sinalização do Intervalo de Evidência resultante
Se 𝜇𝑐𝑡𝑟<0,5, sinalize negativo 𝜑 = 𝜑𝐸(−)
Se 𝜇𝑐𝑡𝑟>0,5, sinalize positivo 𝜑 = 𝜑𝐸(+)
Se 𝜇𝑐𝑡𝑟=0,5, sinalize zero 𝜑 = 𝜑𝐸(0)
Apresente os resultados na saída.
Faça S1=𝜇𝐸𝑅 e S2= 𝜑𝐸 (±)
Fim.
2.10. ALGORITMO DE ANÁLISE PARACONSISTENTE EM MATLAB®
Seguindo os estudos feitos por Da Silva Filho et. al. (2008) o algoritmo NAP
foi confeccionado o Script do Software de análise paraconsistente em MATLAB®
conforme APÊNDICE UU (página 156).
2.11. REDES DE ANÁLISE PARACONSISTENTE - RAP
Uma Rede de Analise paraconsistente RAP para tratamento de incertezas
são diversos sistemas, ou Nós de Análises Paraconsistentes (NAP),
convenientemente interligados para analisar evidências provenientes de
fontes incertas. Mesmo com informações conflitantes, essa Rede de Análise
da Lógica Paraconsistente Anotada de anotação de dois valores (LPA2v) é

51
capaz de fornecer resultados suficientes para originar uma ação.(DA SILVA
FILHO et. al., 2008).
Ainda nestes estudos é expresso que uma RAP compõe-se de dois ou mais
NAPs interligados entre si onde em cada nó é efetuado a análise de uma única
preposição. No último Nó da Rede há uma proposição objeto Po, e, para se chegar
até ela, se faz necessária a análise das proposições em cada nó. Assim para se
obter valores suficientes para tomada de decisão sobre a proposição objeto o
resultado da análise paraconsistente produzido em cada NAP é combinado com os
resultados dos outros NAPs. Essas combinações de resultados levam ao
estabelecimento de determinado Grau de Certeza à Proposição-objeto, que é o
objetivo da análise resultante da RAP.
Para Da Silva Filho et. al. (2008) as combinações dos NAPs em uma RAP
devem considerar três aspectos:
As proposições analisadas em cada NAP podem ser logicamente combinadas
através de Graus de Certeza reais resultantes com diferentes interligações;
Os valores dos Graus de Certeza reais resultantes e os Intervalos de Certeza
Reais provindos dos NAPs de diferentes proposições poderão utilizar-se de
conectivos AND e disjunção OR ou algebricamente (soma, subtração)
conforme topologia da RAP;
Os valores dos Graus de Certeza reais resultantes poderão ser transformados
por meio de normalização em valores entre 0 e 1 no intervalo real e assim
considerados como Graus de Evidência de outras proposições que estão
sendo analisados por outros diferentes NAPs.
Assim conforme os estes estudos a precisão nas respostas e dos tipos de
fontes de informações disponíveis consideradas relevantes para a tomada de
decisão, pode-se configurar uma RAP interligando-se seus NAPs de várias
maneiras. Sabe-se que cada NAP é capaz de receber n valores de Graus de
Evidência, e esses são considerados como entradas que representam evidências
favoráveis ou desfavoráveis. Assim, numa configuração básica a análise preliminar
no NAP produz um valor de Grau de Certeza real GCR e um intervalo de Certeza
sinalizado 𝜑(±) referente a uma única proposição. Portanto, uma RAP de decisão
paraconsistente deve ser modelada de tal forma que os vários valores de Graus de

52
Evidência a respeito de determinada proposição analisados pelo NAP produzirão um
único valor de Evidência, o qual irá entrar na análise posterior como um valor de
Grau de Evidência favorável ou, através de uma complementação, ser considerado
um valor de Grau de Evidência desfavorável.
Com a normalização para o Grau de Evidência Resultante real os valores dos
sinais (aplicados e obtidos na saída) ficam com os seus valores dentro do intervalo
real fechado entre 0 e 1 permitindo assim que numa RAP as saídas sejam utilizadas
como Graus de Evidência para outros proposições subsequentes. Diferentes
topologias podem ser formadas para RAP de decisão, cada qual de acordo com a
finalidade de projeto que se queira. A Figura 23 mostra como exemplo uma RAP
simples com três NAPs.
Figura 23 – Rede de Análise Paraconsistente Simples com três NAPs.
Nesta RAP apresentada na Figura 23 tem-se o NAP1 que analisa através de
𝜇1 e 𝜆 1 a proposição P1 com o intervalo de certeza 𝜑1 e o resultado é o Grau de
Evidência Resultante real 𝜇𝐸𝑅1. O NAP2 que analisa através de 𝜇3 e 𝜆 2 a
proposição P2 com o intervalo de certeza 𝜑2 e o resultado é o Grau de Evidência
Resultante real 𝜇𝐸𝑅2.
Para o NAP3 o Grau de evidência Favorável é a saída do Grau de Evidência
resultante real do NAP 1( 𝜇5 = 𝜇𝐸𝑅1 ) e o Grau de Evidência desfavorável é o
Complemento do Grau de Evidência Resultante real do NAP 2 ( 𝜆3 = 1 − 𝜇𝐸𝑅2 ).
O NAP 3 tem a proposição objeto da RAP, com o intervalo de certeza 𝜑3 e a
saída resultante é o Grau de Evidência Resultante Real 𝜇𝐸𝑅3, que é a saída
resultante da Rede.

53
3. MATERIAIS
3.1. MODELAGEM DO SISTEMA MULTIVARIÁVEL DE 4 TANQUES COM A
LÓGICA PARACONSISTENTE ANOTADA - LPA
Através de estudos da LPA pretende-se executar um modelamento
matemático com algoritmos extraído da LPA2v utilizando-se o Software MATLAB®
R2009b para um controle multivariável de quatro tanques de petróleo com RAP
contendo NAPs.
A válvula de três vias possui uma indicação de seu atual estado e pode
também ser modificada por um Set Point externo para satisfazer um valor desejado
de nível ajustando a alimentação do solenoide desta. Para o processo de controle é
fundamental que se trate as incertezas e contradições para uma resposta plena.
Segundo Da Silva Filho et. al. (2008): “[...] o processo lógico racional não pode
ignorar as contradições, mas procurar extrair delas informações que possam ser
relevantes para a tomada de decisão [...]”. As fontes de informações provindas de
várias fontes ou de diferentes especialistas alimentam o NAP. Na Figura 24 há um
exemplo de funcionamento do processo multivariável de quatro tanques utilizando-
se duas válvulas de três vias automáticas.
Figura 24 – Processo para quatro tanques (Fonte: SAGAZ, 2003).

54
A Figura 24 é composta por:
- 2 Válvulas automáticas solenoides de três vias (X1 e X2 com 2 Sensores e
atuadores);
- 4 Tanques iguais (Tanque 1, Tanque 2, Tanque 3 e Tanque 4);
- 1 Tanque pulmão;
- Malha de Tubulação;
- 2 Válvulas de proteção (V1 e V2);
- 1 Bomba de vazão;
- A Vazão F1;
- Vazão X1.F1;
- Vazão (1-X1).F1;
- Vazão F2;
- Vazão X2.F2;
- Vazão (1-X2).F2;
- 4 Sensores de Nível (2 sensores para LT1 e 2 sensores para LT2);
- 2 Sensores de Temperatura (um em cada tanque inferior).

55
4. MÉTODO
4.1. Parametrização: Válvula automática solenoide de três vias X1 (sensor 1):
De acordo com a parametrização de funcionamento são estabelecidas as
seguintes relações:
X1 ∈ ℝ | 0 ≤ X1 ≤ 1 e proporcional a 4mA ≤ X1 ≤ 20mA;
Se 𝑋1 = 20𝑚𝐴 → 𝜇1 = 1 𝑒 𝜆1 = 0 → Vazão para Tanque 1=100% (1) e Vazão para o
Tanque 4= 0% (0);
Se 𝑋1 = 4𝑚𝐴 → 𝜇1 = 0 𝑒 𝜆1 = 1 → Vazão para Tanque 1=0% (0) e Vazão para o
Tanque 4=100% (1)
Se 4𝑚𝐴 ≤ 𝑋1 ≤ 20𝑚𝐴 → 0 ≤ 𝑋1 ≤ 1 → 𝜇1 =𝑋1−4
20−4 𝑒 𝜆1 = 1 − 𝜇1.
A parametrização é representada graficamente na Figura 25.
Figura 25 – Gráficos do Grau de Evidência favorável µ1 e vazões para os tanques 1 e 4.
4.2. Parametrização: Válvula automática solenoide de 3 vias X1 (Sensor 2):
De acordo com a parametrização de funcionamento são estabelecidas as
seguintes relações:
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 10
10
20
30
40
50
60
70
80
90
100Grau de Evidência Favorável 1
Vazão(%
)
Grau de Evidência Favorável
Vazão para tanque 1
Vazão para tanque 4

56
X1 ∈ ℝ | 0 ≤ X1 ≤ 1 e proporcional a 4mA ≤ X1 ≤ 20mA;
Se 𝑋1 = 20𝑚𝐴 → 𝜇2 = 1 𝑒 𝜆2 = 0 → Vazão para Tanque 1=100% (1) e Vazão para o
Tanque 4= 0% (0);
Se 𝑋1 = 4𝑚𝐴 → 𝜇2 = 0 𝑒 𝜆2 = 1 → Vazão para Tanque 1=0% (0) e Vazão para o
Tanque 4=100% (1)
Se 4𝑚𝐴 ≤ 𝑋1 ≤ 20𝑚𝐴 → 0 ≤ 𝑋1 ≤ 1 → 𝜇2 =𝑋1−4
20−4 𝑒 𝜆2 = 1 − 𝜇2.
A parametrização é representada graficamente na Figura 26.
Figura 26 – Gráficos do Grau de Evidência favorável µ2 e vazões para os tanques 1 e 4.
4.3. Parametrização: Válvula automática solenoide de 3 vias X2 (sensor 1):
De acordo com a parametrização de funcionamento são estabelecidas as
seguintes relações:
X2 ∈ ℝ | 0 ≤ X2 ≤ 1 e proporcional a 4mA ≤ X2 ≤ 20mA;
Se 𝑋2 = 20𝑚𝐴 → 𝜇3 = 1 𝑒 𝜆3 = 0 → Vazão para Tanque 2=100% (1) e Vazão para o
Tanque 3= 0% (0);
Se 𝑋2 = 4𝑚𝐴 → 𝜇3 = 0 𝑒 𝜆3 = 1 → Vazão para Tanque 2=0% (0) e Vazão para o
Tanque 3=100% (1)
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 10
10
20
30
40
50
60
70
80
90
100Grau de Evidência Favorável 2
Vazão(%
)
Grau de Evidência Favorável
Vazão para tanque 1
Vazão para tanque 4

57
Se 4𝑚𝐴 ≤ 𝑋2 ≤ 20𝑚𝐴 → 0 ≤ 𝑋2 ≤ 1 → 𝜇3 =𝑋2−4
20−4 𝑒 𝜆3 = 1 − 𝜇3.
A parametrização é representada graficamente na Figura 27.
Figura 27 – Gráficos do Grau de Evidência favorável µ3 e vazões para os tanques 2 e 3.
4.4. Parametrização: Válvula automática solenoide de 3 vias X2 (Sensor 2):
De acordo com a parametrização de funcionamento são estabelecidas as
seguintes relações:
X2 ∈ ℝ | 0 ≤ X2 ≤ 1 e proporcional a 4mA ≤ X2 ≤ 20mA;
Se 𝑋2 = 20𝑚𝐴 → 𝜇4 = 1 𝑒 𝜆4 = 0 → Vazão para Tanque 2=100% (1) e Vazão para o
Tanque 3= 0% (0);
Se 𝑋2 = 4𝑚𝐴 → 𝜇4 = 0 𝑒 𝜆4 = 1 → Vazão para Tanque 2=0% (0) e Vazão para o
Tanque 3=100% (1)
Se 4𝑚𝐴 ≤ 𝑋2 ≤ 20𝑚𝐴 → 0 ≤ 𝑋2 ≤ 1 → 𝜇4 =𝑋2−4
20−4 𝑒 𝜆4 = 1 − 𝜇4.
A parametrização é representada graficamente na Figura 28.
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 10
10
20
30
40
50
60
70
80
90
100Grau de Evidência Favorável 3
Vazão(%
)
Grau de Evidência Favorável
Vazão para tanque 2
Vazão para tanque 3

58
Figura 28 – Gráficos do Grau de Evidência favorável µ4 e vazões para os tanques 2 e 3.
4.5. Parametrização: Sensor de Nível do Tanque 1 LT1 (sensor 1):
De acordo com a parametrização de funcionamento são estabelecidas as
seguintes relações:
LT1 ∈ ℝ | 0 ≤ LT1 ≤ 1 e proporcional a 4mA ≤ LT1 ≤ 20mA;
Se 𝐿𝑇1 = 20𝑚𝐴 → 𝜇5 = 1 𝑒 𝜆5 = 0 → Nível para Tanque 1=100% (1);
Se 𝐿𝑇1 = 4𝑚𝐴 → 𝜇5 = 0 𝑒 𝜆5 = 1 → Nível para Tanque 1=0% (0);
Se 4𝑚𝐴 ≤ 𝐿𝑇1 ≤ 20𝑚𝐴 → 0 ≤ 𝐿𝑇1 ≤ 1 → 𝜇5 =𝐿𝑇1−4
20−4 𝑒 𝜆5 = 1 − 𝜇5.
A parametrização é representada graficamente na Figura 29.
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 10
10
20
30
40
50
60
70
80
90
100Grau de Evidência Favorável 4
Vazão(%
)
Grau de Evidência Favorável
Vazão para tanque 2
Vazão para tanque 3

59
Figura 29– Gráfico do Grau de Evidência favorável µ5 e Nível do Tanque 1.
4.6. Parametrização: Sensor de Nível do Tanque 1 LT1 (sensor 2):
De acordo com a parametrização de funcionamento são estabelecidas as
seguintes relações:
LT1 ∈ ℝ | 0 ≤ LT1 ≤ 1 e proporcional a 4mA ≤ LT1 ≤ 20mA;
Se 𝐿𝑇1 = 20𝑚𝐴 → 𝜇6 = 1 𝑒 𝜆6 = 0 → Nível para Tanque 1=100% (1);
Se 𝐿𝑇1 = 4𝑚𝐴 → 𝜇6 = 0 𝑒 𝜆6 = 1 → Nível para Tanque 1=0% (0);
Se 4𝑚𝐴 ≤ 𝐿𝑇1 ≤ 20𝑚𝐴 → 0 ≤ 𝐿𝑇1 ≤ 1 → 𝜇6 =𝐿𝑇1−4
20−4 𝑒 𝜆6 = 1 − 𝜇6.
A parametrização é representada graficamente na Figura 30.
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 10
10
20
30
40
50
60
70
80
90
100N
ível(%
)Grau de Evidência Favorável 5
Grau de Evidência Favorável
Nível tanque 1

60
Figura 30 – Gráfico do Grau de Evidência favorável µ6 e Nível para o Tanque 1.
4.7. Parametrização: Sensor de Nível do Tanque 2 LT2 (sensor 1):
De acordo com a parametrização de funcionamento são estabelecidas as
seguintes relações:
LT2 ∈ ℝ | 0 ≤ LT2 ≤ 1 e proporcional a 4mA ≤ LT1 ≤ 20mA;
Se 𝐿𝑇2 = 20𝑚𝐴 → 𝜇7 = 1 𝑒 𝜆7 = 0 → Nível para Tanque 2=100% (1);
Se 𝐿𝑇2 = 4𝑚𝐴 → 𝜇7 = 0 𝑒 𝜆7 = 1 → Nível para Tanque 2=0% (0);
Se 4𝑚𝐴 ≤ 𝐿𝑇2 ≤ 20𝑚𝐴 → 0 ≤ 𝐿𝑇2 ≤ 1 → 𝜇7 =𝐿𝑇2−4
20−4 𝑒 𝜆7 = 1 − 𝜇7.
A parametrização é representada graficamente na Figura 31.
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 10
10
20
30
40
50
60
70
80
90
100N
ível(%
)Grau de Evidência Favorável 6
Grau de Evidência Favorável
Nível tanque 1

61
Figura 31 – Gráfico do Grau de Evidência favorável µ7 e Nível para o Tanque 2.
4.8. Parametrização: Sensor de Nível do Tanque 2 LT2 (sensor 2):
De acordo com a parametrização de funcionamento são estabelecidas as
seguintes relações:
LT2 ∈ ℝ | 0 ≤ LT2 ≤ 1 e proporcional a 4mA ≤ LT1 ≤ 20mA;
Se 𝐿𝑇2 = 20𝑚𝐴 → 𝜇8 = 1 𝑒 𝜆8 = 0 → Nível para Tanque 2=100% (1);
Se 𝐿𝑇2 = 4𝑚𝐴 → 𝜇8 = 0 𝑒 𝜆8 = 1 → Nível para Tanque 2=0% (0);
Se 4𝑚𝐴 ≤ 𝐿𝑇2 ≤ 20𝑚𝐴 é ~ 0 ≤ 𝐿𝑇2 ≤ 1 → 𝜇8 =𝐿𝑇2−4
20−4 𝑒 𝜆8 = 1 − 𝜇8.
A parametrização é representada graficamente na Figura 32.
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 10
10
20
30
40
50
60
70
80
90
100N
ível(%
)
Grau de Evidência Favorável 7
Grau de Evidência Favorável
Nível tanque 2

62
Figura 32 – Gráfico do Grau de Evidência favorável µ8 e Nível para o Tanque 2.
4.9. Parametrização: Set Point (SP) desejado para os níveis LT1 e LT2 :
O valor de set point é o valor desejado inserido no sistema de controle para
os níveis dos Tanques 1 e 2 (iguais).
De acordo com a parametrização de funcionamento são estabelecidas as seguintes
relações:
SP ∈ ℝ | 0 ≤ SP ≤ 1 e proporcional a 0% ≤ SP ≤ 100%;
Se 𝑆𝑃 = 100% → 𝜇9 = 1 𝑒 𝜆9 = 0 → Nível para os Tanque 1 e 2 =100% (1);
Se 𝑆𝑃 = 0% → 𝜇9 = 0 𝑒 𝜆9 = 1 → Nível para os Tanque 1 e 2 = 0% (0);
Se 0% ≤ 𝑆𝑃 ≤ 100% → 0 ≤ 𝑆𝑃 ≤ 1 → 𝜇9 =𝑆𝑃
100 𝑒 𝜆9 = 1 − 𝜇9.
A parametrização é representada graficamente na Figura 33.
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 10
10
20
30
40
50
60
70
80
90
100N
ível(%
)Grau de Evidência Favorável 8
Grau de Evidência Favorável
Nível tanque 2

63
Figura 33 – Gráfico do Grau de Evidência favorável µ9 e Set Point de Nível LT1 e LT2.
4.10. Parametrização: Temperatura (T):
O valor da temperatura será inserido no sistema de controle para os níveis dos
Tanques 1 e 2 em uma outra RAP.
De acordo com a parametrização de funcionamento são estabelecidas as seguintes
relações:
T ∈ ℝ | 0 ≤ T ≤ 1;
Se 10º𝐶 ≤ 𝑇 ≤ 35º𝐶 → 0 ≤ 𝑇 ≤ 1 → 𝜇10 =𝑇−10
35−10 𝑒 𝜆10 = 1 − 𝜇10.
Nesta condição deve-se selecionar NAP T para fortalecer o grau de evidência da
variável nível;
ou
Se 35º𝐶 < 𝑇 ≤ 60º𝐶 → 0 ≤ 𝑇 ≤ 1 → 𝜇10 =𝑇−35
60−35 𝑒 𝜆10 = 1 − 𝜇10.
Então selecionar NAP T para diminuir o grau de evidência da variável nível
invertendo o valor de 𝜆10.
ou
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 10
10
20
30
40
50
60
70
80
90
100N
ível(%
)Grau de Evidência Favorável 9
Grau de Evidência Favorável
Set Point de nível para os tanques 1 e 2

64
Se 𝑇 < 10º𝐶 → 𝜇10 = 0 𝑒 𝜆10 = 1 Fortalecer o grau de evidência da variável nível.
ou
Se 𝑇 > 60º𝐶 → 𝜇10 = 1 𝑒 𝜆10 = 0 Diminuir o grau de evidência da variável nível.
A parametrização é representada graficamente na Figura 34.
Figura 34 - Gráfico do Grau de Evidência favorável µ10 de acordo com a temperatura T(ºC).
4.11. Fontes de informação: Graus de Evidência
As informações µ1, µ2, µ3, µ4, µ5, µ6, µ7, µ8, µ9 e µ10 são os Graus de
Evidências Favoráveis e as informações λ1, λ2, λ3, λ4, λ5, λ6, λ7, λ8, λ9 e λ10 são
Graus de Evidências Desfavoráveis. Tendo-se fontes de informação que enviam
para o NAP sinais de evidência a respeito de uma determinada proposição, tais
como:
µ1- Sinal da Fonte de Informação 1 Válvula X1 de 3 vias sensor 1;
µ2- Sinal da Fonte de Informação 2 Válvula X1 de 3 vias sensor 2;
µ3- Sinal da Fonte de Informação 3 Válvula X2 de 3 vias sensor 1;
0 10 20 30 40 50 60 700
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
TEMPERATURA ºC
Gra
u d
e E
vid
ência
GRÁFICO TEMPERATURA X GRAU DE EVIDÊNCIA

65
µ4- Sinal da Fonte de Informação 4 Válvula X2 de 3 vias sensor 2;
µ5- Sinal da Fonte de Informação 5Nível Tanque 1 LT1 sensor 1;
µ6- Sinal da Fonte de Informação 6 Nível Tanque 1 LT1 sensor 2;
µ7- Sinal da Fonte de Informação 7 Nível Tanque 2 LT2 sensor 1;
µ8- Sinal da Fonte de Informação 8 Nível Tanque 2 LT2 sensor 2;
µ9- Sinal da Fonte de Informação 9 Set Point para Nível dos Tanques 1 e 2.
µ10- Sinal da Fonte de Informação 10 Temperatura dos Tanques 1 e 2.
4.12. Análise de medição de Nível LT1 e LT2:
O nível de LT1 deve ser igual ao nível LT2. Para isto um primeiro NAP deve
comparar se estão iguais. Para isto há uma combinação de análise do valor do
Grau de Contradição Normalizado µctr e do Intervalo de Evidência Resultante φE
(Tabela 3) que são analisados na saída do NAP B da Figura 36.
Tabela 3 - Relação entre o µctr e φE para Análise de Sinais e Evidências
φE µctr Resultante
0,00 0,000 Indeterminação
0,25 0,125
0,50 0,250
0,75 0,375
1,00 0,500 Sem Contradição
0,75 0,625
0,50 0,750
0,25 0,875
0,00 1,000 Inconsistência
(Fonte: DA SILVA FILHO et. al., 2008).
Pela Figura 35 se pode observar que φE é máximo quando µctr é 0,5 que
equivale à inexistência de contradição (situação ideal). De outro lado quando φE é
nulo acontecerá uma contradição máxima por Indeterminação quando µctr é igual a
zero e se µctr for máximo acontecerá uma contradição máxima por Inconsistência.

66
Figura 35 - Gráfico µctr versus φE para análise de Evidências (Fonte: DA SILVA FILHO et. al., 2008).
4.13. MODELO PARA CONTROLE DO PROCESSO, VÁLVULAS X1 E X2
(VARIÁVEL MANIPULADA)
Este sistema estudado por Sagaz (2003) é caracterizado por duas vazões
independentes F1 e F2 que são controladas respectivamente pelas válvulas V1 e V2.
A vazão F1 flui para os tanques 1 e 3 e a divisão do fluido é feita pela válvula X1 de
três vias. A vazão F2 flui para os tanques 2 e 4 e a divisão do fluido é feita pela
válvula X2 de três vias, ou seja, o menor ou maior conteúdo num primeiro momento
dependerá da proporcionalidade de vazão que as válvulas X1 e X2 possuem em suas
duas vias de saída. Estas válvulas variam de 0 a 1 proporcionalmente a 0 a 100%..
Quando X1 estiver em 100% (valor 1) toda a vazão F1 irá para o Tanque 1 e
da mesma forma quando X2 estiver em 100% (valor 1) toda a vazão F2 irá para o
Tanque 2. Na medida em que os valores de X1 e X2 forem caindo (<1) as vazões F1
e F2 continuarão fluindo para os Tanques 1 e 2 (em menor proporção) e passarão a
fluírem para os Tanques 3 e 4 também. E quando X1 e X2 forem iguais a Zero
nenhuma das vazões fluirão para os Tanques 1 e 2, ou seja, irão apenas e tão
somente para os Tanques 3 e 4.
As variáveis que serão controladas serão os níveis dos Tanques 1 e 2,
portanto LT1 e LT2 respectivamente. As variáveis manipuladas serão as vazões F1 e
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 10
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Grau de Contradição Normalizado
Inte
rvalo
de E
vid
ência
Resultante
Ponto de controle

67
F2 através das válvulas X1 e X2 e para facilitar o estudo estas serão denominadas de
parâmetro X e terão o mesmo valor.
No estudo feito por Sagaz (2003) o parâmetro X foi definido em 0,7 num
primeiro experimento e em 0,3 num segundo.
O controlador através de RAP deverá variar as vazões F1 e F2 (variáveis
manipuladas) até atingir os níveis para os Tanques 1 e 2 requeridos através de LT1
e LT2, respectivamente. Os níveis LT1 e LT2 requeridos deverão ser inseridos no
respectivo Set Point (SP).
4.14. PROPOSTA DE MODELO PARA O CONTROLE DO SISTEMA
Para controle do sistema é necessário a observação das seguintes
premissas:
Um mesmo parâmetro X deve ser usado para parametrização de X1 e X2, ou
seja, X1=X2;
Os nível dos Tanques 1 e 2 devem ser iguais, portanto, no NAP de avaliação
se os níveis são iguais φE deve ser 1 e µctr é 0,5, ou seja, sem contradição;
O controle deve observar qual é a fase mínima e qual é a fase não mínima
através dos dois planos de zeros;
O somatório X1+X2 determina a localização da multivariável 0 de modo que:
Se 𝑋1 + 𝑋2 < 1 → Sistema em Fase Não-Mínima;
∴ Vazão Tanques inferiores < Vazão Tanques Superiores.
Se 𝑋1 + 𝑋2 > 1 → Sistema em Fase Mínima;
∴ Vazão Tanques inferiores > Vazão Tanques Superiores.
Se 𝑋1 + 𝑋2 = 1 → a multivariavel zero está na origem.
4.15. ALGORITMOS EXTRAÍDOS DA LPA2v (NÓS DE ANÁLISE
PARACONSISTENTE) PARA AVALIAÇÃO DE NÍVEL E VAZÃO
Na Figura 36 é representada uma RAP com oito NAPs e um bloco de análise
de sinais. O script desta rede está no APÊNDICE Z (página 120).

68
Figura 36 - RAP com 8 NAPs e 1 Bloco de Análise de Sinais
Os itens 4.15.1 até 4.15.4 descrevem cada parte da RAP da Figura 36 acima
em detalhes bem como a proposição de cada um dos NAPs.
4.15.1. NAPs das válvulas X1 e X2 (Variável Manipulada):
Três NAPs analisam as válvulas X1 e X2. São: NAP 1, NAP 2 e NAP A.
NAP 1: Análise da válvula X1.
Com a proposição: “A abertura da válvula X1 está correta”.
O NAP 1 trata os graus de evidências favoráveis μ1 e μ2 para a válvula X1. A
válvula é composta por dois sensores e o grau de evidência desfavorável é obtido
através de 1-μ2. O tratamento das incertezas da válvula X1 é feito no NAP 1 através
da saída do Grau de Evidência Resultante 1 (μER1).
NAP 2: Análise da válvula X2.
Com a proposição: “A abertura da válvula X2 está correta”.
O NAP 2 trata os grau de evidências favoráveis 𝜇3 e 𝜇4 para a válvula X2. A
válvula é composta por dois sensores e o grau de evidência desfavorável é obtido

69
através de 1 − 𝜇4. O tratamento das incertezas da válvula X2 é feito no NAP 2
através da saída do Grau de Evidência Resultante 2 (𝜇𝐸𝑅2).
NAP A: Análise das válvulas X1 e X2.
Com a proposição: “A abertura das válvulas X1 e X2 corresponde em
Ajuste de Sinais de Evidências necessários”.
O NAP A faz o tratamento das incertezas através o Grau de Evidência
Favorável vindo do NAP 1 (𝜇𝐸𝑅1) e do Grau de Evidência desfavorável obtido
através de 1 − 𝜇𝐸𝑅2, onde 𝜇𝐸𝑅2 é o grau de evidência favorável vindo do NAP 2. A
saída do NAP A será justamente o Grau de Evidência Resultante Real (𝜇𝐸𝑅𝐴), ou
seja, ter-se-á apenas um valor resultante para as válvulas X1 e X2.
4.15.2. NAPs de avaliação de nível LT1 e LT2 (variável Controlada)
Três NAPs analisam LT1 e LT2. São: NAP 3, NAP 4 e NAP B.
NAP 3: Análise do nível do Tanque 1 (LT1).
Com a proposição: “O nível LT1 do Tanque 1 está correto”.
O Tanque 1 possui 2 sensores de nível que fornecem os Graus de Evidências
Favoráveis 𝜇5 𝑒 𝜇6 . O grau de evidência desfavorável é obtido através de 1 − 𝜇6. O
tratamento das incertezas do nível LT1 do Tanque 1 é feito no NAP 3 através da
saída do Grau de Evidência Resultante (𝜇𝐸𝑅3).
NAP 4: Análise do nível do Tanque 2 (LT2).
Com a proposição: “O nível LT2 do Tanque 2 está correto”.
O Tanque 2 também possui 2 sensores de nível que fornecem os Graus de
Evidências Favoráveis 𝜇7 𝑒 𝜇8 . O grau de evidência desfavorável é obtido através
de 1 − 𝜇8. O tratamento das incertezas do nível LT2 do Tanque 2 é feito no NAP 4
através da saída do Grau de Evidência Resultante (𝜇𝐸𝑅4).
NAP B: Análise dos níveis dos Tanques 1 e 2 (LT1 e LT2).
Com a proposição: “Os níveis de LT1 e LT2 são iguais”.

70
Há um bloco de análise de sinais na saída do NAP B para a análise do sinal
de saída do NAP B e idealmente se deve obtiver φE = 1 e µctr = 0,5 (não
contradição). O NAP B faz o tratamento das incertezas através o Grau de Evidência
Favorável vindo do NAP 3 (𝜇𝐸𝑅3) e do Grau de Evidência Desfavorável obtido
através de 1 − 𝜇𝐸𝑅4, onde 𝜇𝐸𝑅4 é o grau de evidência favorável vindo do NAP 4. A
saída do NAP B será justamente o Grau de Evidência Resultante Real (𝜇𝐸𝑅𝐵), ou
seja, ter-se-á apenas um valor resultante para os níveis LT1 e LT2 (dependendo
justamente se φE=1 e µctr=0,5, ou seja, sem contradição).
Caso φE≠1 e µctr≠0,5 na análise de sinais há a proposta de que deverá
ocorrer um ajuste da seguinte forma:
Se para φ+ GC>0 decremento do nível LT2;
Se para φ+ GC<0 decremento do nível LT1;
Se para φ- GC>0 incremento do nível LT1;
Se para φ- GC<0 incremento do nível LT2.
Neste trabalho foi considerado que os níveis de LT1 e LT2 são
aproximadamente iguais. A hipótese dos níveis serem diferentes foi colocada como
proposta para futuros trabalhos.
4.15.3. NAP de avaliação de nível LT1, LT2 e Set Point.
NAP C: Análise dos níveis LT1, LT2 e o Set Point.
O NAP C analisa a proposição: “Os níveis LT1, LT2 e o Set Point são
iguais”.
O NAP C recebe o valor de 𝜇𝐸𝑅𝐵 com φE=1 e µctr=0,5 como Grau de
Evidência favorável e 1 − 𝑆𝑃 é o Grau de Evidência Desfavorável (valor de Set Point
parametrizável) e em sua saída será o Grau de Evidência Resultante Real 𝜇𝐸𝑅𝐶, ou
seja, o valor de ajuste entre os níveis LT1, LT2 e SP.
4.15.4. NAP de avaliação de abertura das válvulas X1, X2 e ajuste de nível.
NAP D: Análise da abertura das válvulas X1, X2, LT1, LT2 e Set Point.
O NAP D Analisa a proposição objeto da RAP: “A abertura das válvulas X1
e X2 estão adequadas ao Set point desejado de nível para os Tanques 1 e 2”.

71
O NAP D representado faz o tratamento das incertezas através o Grau de
Evidência Favorável vindo do NAP A (𝜇𝐸𝑅𝐴), que é o valor do Grau de Evidência
resultante Real para as válvulas X1 e X2, e do Grau de Evidência Desfavorável
obtido através de 1 − 𝜇𝐸𝑅𝐶. A saída do NAP D é o 𝜇𝐸𝑅 Grau de Evidência
Resultante Real normalizado para as válvulas X1, X2 e os níveis LT1 e LT2.
4.16. ALGORITMOS EXTRAÍDOS DA LPA2v (NÓS DE ANÁLISE
PARACONSISTENTE) PARA AVALIAÇÃO DE NÍVEL, TEMPERATURA E
VAZÃO
Na Figura 37 é representada uma nova RAP para tratamento das variáveis
nível, vazão e temperatura. Ela é composta por 9 NAPs, um extrator de evidências e
um bloco de análise de sinais. O Grau de evidência µ10 é sinal da Fonte de
Informação 10 que é a temperatura dos tanques 1 e 2. O script desta rede está no
APÊNDICE AA (página 128).
Figura 37 - RAP com 9 NAPs e 1 Bloco de Análise de Sinais
4.16.1. NAP de avaliação de Temperatura (NAP T).
NAP T: Análise da Temperatura

72
O NAP T analisa a proposição: “A Temperatura dos tanques estão dentro
do intervalo de 10 a 60ºC”.
O NAP T tem a função de fortalecer ou enfraquecer o Grau de Evidência resultante
do NAP B que trata dos níveis dos tanques 1 e 2 de acordo com o grau de evidência
10 através do extrator de evidência da variável de temperatura (Figura 37). Por isso
ele está localizado à frente do NAP B.
4.17. SIMULAÇÃO PARA CONTROLE DE NÍVEL UTILIZANDO AS VARIÁVEIS
NÍVEL E VAZÃO.
As simulações utilizam o programa do apêndice Z (página 120) e são feitas de
duas formas: com parâmetros na fase não mínima (parâmetro X=0,3) e com
parâmetros na fase não mínima (parâmetro X=0,7). Também foi considerada
simulação sem erros e com um erro máximo admitido de valor de +0,06% nos
sensores de X1, X2, LT1 e LT2. Uma terceira forma utilizando outra RAP leva em
consideração a variável temperatura além das variáveis nível e vazão.
4.17.1. Primeira forma: Simulação na Fase não mínima (X1+X2<1).
O parâmetro X para X1 e X2 está em 0,3;
O SP de nível para os Tanques 1 e 2 é ajustado para 0,7;
O primeiro e o segundo sensores de X1, X2, LT1 e LT2 enviam informações sem
erro nas interações de 1 a 6. Nas interações de 7 a 12 foram inseridos erro de
+0,06% no segundo sensor.
4.17.2. Segunda forma: Simulação na Fase mínima (X1+X2>1).
O parâmetro X para X1 e X2 está em 0,7;
O SP de nível para os Tanques 1 e 2 é ajustado para 0,3;
O primeiro sensor X1, X2, LT1 e LT2 envia informação sem erro nas interações de
13 a 18. Nas Interações de 19 a 24 foi inserido erro de +0,06% no segundo sensor.
4.17.3. Duas formas de simulação para nível e vazão.

73
As duas formas de simulações podem ser observadas na Figura 38 através
da representação da localização da multivariável zero nos planos de zeros. A
primeira forma de simulação se encontra na fase não mínima e a segunda na fase
mínima.
Figura 38 - Representação da localização da multivariável zero nos dois planos de zeros.
4.17.4. Simulação para controle de nível utilizando as variáveis de nível,
temperatura e vazão.
Há a possibilidade de através de uma nova RAP poder-se analisar as
variáveis de nível, temperatura e vazão. Serão simuladas 3 situações:
- Situação 1: os valores dos níveis dos tanques 1 e 2 em 30%, o valor de
temperatura em 10ºC e o Set point em 70%;
- Situação 2: os valores dos níveis dos tanques 1 e 2 em 30%, o valor de
temperatura em 35ºC e o Set point em 70%;
- Situação 3: os valores dos níveis dos tanques 1 e 2 em 30%, o valor de
temperatura em 60ºC e o Set point em 70%;

74
5. RESULTADOS
Os itens que seguem adiante mostram os resultados obtidos nas duas formas
de simulação utilizando interações da RAP da Figura 36 (página 68).
5.1. Simulação na Fase não mínima (X1+X2<1).
O parâmetro X para X1 e X2 está em 0,3;
O nível dos Tanques 1 e 2 estão em 30%;
O SP de nível para os Tanques 1 e 2 é ajustado para 0,7;
O primeiro e o segundo sensores de X1, X2, LT1 e LT2 enviam informações sem
erro nas interações de 1 a 6.
Os resultados foram obtidos através da simulação em MATLAB® estão na Tabela 4
(Apêndice de A, B, C, D, E e F nas páginas 94, 95, 96, 97, 98 e 99,
respectivamente).
Tabela 4 - Resultados da primeira forma de simulação sem erro (SP nível para 70%).
Interação X1 X2 LT1 LT2 SP(%) φE (NAP D
µctr (NAP D)
µER (NAP D)
1 0,3 0,3 0,3 0,3 70 0,6 0,3 0,4358
2 0,4 0,4 0,4 0,4 70 0,7 0,35 0,4671
3 0,55 0,55 0,55 0,55 70 0,85 0,425 0,5820
4 0,6 0,6 0,6 0,6 70 0,9 0,45 0,6225
5 0,65 0,65 0,65 0,65 70 0,95 0,475 0,6620
6 0,7 0,7 0,7 0,7 70 1,0 0,5 0,7
Nota-se que a resposta do Grau de Evidência Resultante Real foi melhorando
em cada interação até se chegar na estabilização do controle que é justamente
quando o Intervalo de Evidência Resultante Real atinge o valor 1 e o Grau de
contradição normalizado é 0,5 conforme demonstrado nos gráficos das Figuras 39 e
40.

75
Figura 39 - Gráfico – Resultado simulação de variação de 30% para 70% (LT1 e LT2)
Figura 40 - Gráfico demonstrando a estabilização do ajuste em φE=1 e µctr=0,5
1 1.5 2 2.5 3 3.5 4 4.5 5 5.5 60.4
0.45
0.5
0.55
0.6
0.65
0.7
0.75
Interações
Gra
u d
e E
vid
ência
Resultante
Resultado - Ajuste de nível 30% para 70%
0.3 0.32 0.34 0.36 0.38 0.4 0.42 0.44 0.46 0.48 0.5
0.65
0.7
0.75
0.8
0.85
0.9
0.95
1
Inte
rvalo
de E
vid
ência
Resultante
Grau de Contradição Normalizado
Visualização do controle

76
Nas interações de 7 a 12 foram inseridos erro de +0,06% no segundo sensor.
Os resultados estão na Tabela 5 (Apêndice de G, H, I, J, K e L nas páginas 100,
101, 102, 103, 104 e 105 respectivamente).
Tabela 5 - Resultados da primeira forma de simulação com erro no segundo sensor de 0,06%
(SP nível para 70%)
Interação X1 X2 LT1 LT2 SP(%) φE (NAP D
µctr (NAP D)
µER (NAP D)
7 0,3 0,3002 0,3 0,3002 70 0,6003 0,3 0,4358
8 0,4 0,4002 0,4 0,4002 70 0,7002 0,35 0,4671
9 0,55 0,5503 0,55 0,5503 70 0,8502 0,4251 0,5824
10 0,6 0,6004 0,6 0,6004 70 0,9003 0,4501 0,6225
11 0,65 0,6504 0,65 0,6504 70 0,9503 0,4751 0,6620
12 0,7 0,7004 0,7 0,7004 70 0,9997 0,5001 0,70
Nota-se que a resposta do Grau de Evidência Resultante Real foi melhorando
em cada interação até se chegar na estabilização do controle, que é justamente
quando o Intervalo de Evidência Resultante Real atinge o valor bem próximo de
1(erro de 0,028%) e o Grau de contradição normalizado é próximo de 0,5 (erro de
0,028%), conforme demonstrado nos gráficos das Figuras 41 e 42.
Figura 41- Gráfico – Resultado simulação de variação de 30% para 70% (LT1 e LT2) com erro de 0,06% no segundo sensor.
7 7.5 8 8.5 9 9.5 10 10.5 11 11.5 120.4
0.45
0.5
0.55
0.6
0.65
0.7
0.75
Interações
Gra
u d
e E
vid
ência
Resultante
Resultado - Ajuste de nível de 30% para 70%

77
Figura 42 - Gráfico demonstrando a estabilização do ajuste em φE=1 e µctr=0,5 com erro de 0,06% no segundo sensor.
5.2. Simulação na Fase mínima (X1+X2>1).
O parâmetro X para X1 e X2 está em 0,7;
O SP de nível para os Tanques 1 e 2 é ajustado para 0,3;
O primeiro e o segundo sensores de X1, X2, LT1 e LT2 enviam informações sem
erro nas interações de 13 a 18.
Os resultados foram obtidos através da simulação em MATLAB® estão na Tabela 6
(Apêndice de M, N, O, P, Q e R nas páginas 106, 107, 108, 109, 110 e 111,
respectivamente).
0.3 0.32 0.34 0.36 0.38 0.4 0.42 0.44 0.46 0.48 0.5
0.65
0.7
0.75
0.8
0.85
0.9
0.95
1
Inte
rvalo
de E
vid
ência
Resultante
Grau de Contradição Normalizado
Visualização do controle

78
Tabela 6 - Resultados da segunda forma de simulação sem erro (SP nível para 30%).
Interação X1 X2 LT1 LT2 SP(%) φE (NAP D
µctr (NAP D)
µER (NAP D)
13 0,7 0,7 0,7 0,7 30 0,6 0,7001 0,6108
14 0,65 0,65 0,65 0,65 30 0,65 0,6750 0,5720
15 0,60 0,60 0,60 0,60 30 0,7 0,6500 0,5329
16 0,55 0,55 0,55 0,55 30 0,75 0,6250 0,4994
17 0,4 0,4 0,4 0,4 30 0,9 0,5500 0,3775
18 0,3 0,3 0,3 0,3 30 1,0 0,5 0,3000
Nota-se que a resposta do Grau de Evidência Resultante Real foi melhorando em
cada interação até se chegar na estabilização do controle, que é justamente quando
o Intervalo de Evidência Resultante Real atinge o valor 1 e o Grau de contradição
normalizado é 0,5, conforme demonstrado nos gráficos das Figuras 43 e 44.
Figura 43 - Gráfico – Resultado simulação de variação de 70% para 30% (LT1 e LT2).
13 13.5 14 14.5 15 15.5 16 16.5 17 17.5 180.3
0.35
0.4
0.45
0.5
0.55
0.6
Interações
Gra
u d
e E
vid
ência
Resultante
Resultado - Ajuste de nível de 70% para 30%

79
Figura 44 - Gráfico demonstrando a estabilização do ajuste em φE=1 e µctr=0,5.
Nas interações de 19 a 24 foram inseridos erro de +0,06% no segundo
sensor. Os resultados estão na Tabela 7 (Apêndice de S, T, U, V, W e X nas páginas
112, 113, 114, 115, 116 e 117, respectivamente).
Tabela 7 - Resultados da segunda forma de simulação com erro no segundo sensor de 0,06% (SP nível para 30%)
Interação X1 X2 LT1 LT2 SP(%) φE (NAP D
µctr (NAP D)
µER (NAP D)
19 0,7 0,7004 0,7 0,7004 30 0,5999 0,7 0,5643
20 0,65 0,6504 0,65 0,6504 30 0,6497 0,6751 0,5722
21 0,60 0,60004 0,60 0,60004 30 0,6998 0,6501 0,5331
22 0,55 0,5503 0,55 0,5503 30 0,7498 0,6251 0,4996
23 0,4 0,4002 0,4 0,4002 30 0,8998 0,5501 0,3777
24 0,3 0,3002 0,3 0,3002 30 0,9998 0,5001 0,3001
Nota-se que a resposta do Grau de Evidência Resultante Real foi melhorando em
cada interação até se chegar à estabilização do controle, que é justamente quando o
Intervalo de Evidência Resultante Real atinge o valor bem próximo de 1 (erro de
0,017%) e o Grau de contradição normalizado é próximo de 0,5 (erro de 0,016%),
conforme demonstrado nos gráficos das Figuras 45 e 46.
0.5 0.55 0.6 0.65 0.7 0.750.6
0.65
0.7
0.75
0.8
0.85
0.9
0.95
1Visualização do controle
Grau de Contradição Normalizado
Inte
rvalo
de E
vid
ência
Resultante

80
Figura 45 - Resultado simulação de variação de 70% para 30% (LT1 e LT2).
Figura 46 - Gráfico demonstrando a estabilização do ajuste em φE=1 e µctr=0,5.
19 19.5 20 20.5 21 21.5 22 22.5 23 23.5 24
0.35
0.4
0.45
0.5
0.55
0.6
0.65Resultado - Ajuste de nível de 70% para 30%
Gra
u d
e E
vid
ência
Resultante
Interações
0.5 0.52 0.54 0.56 0.58 0.6 0.62 0.64 0.66 0.68 0.70.55
0.6
0.65
0.7
0.75
0.8
0.85
0.9
0.95
1
Grau de Contradição Normalizado
Inte
rvalo
de E
vid
ência
Resultante
Visualização do controle

81
5.3. Simulação Temperatura em 10ºC
Na Tabela 8 são apresentados os valores inseridos para a simulação e
também os resultados obtidos da RAP da Figura 37 (página 71) (APÊNDICE BB,
CC, DD, EE, FF e GG nas páginas 137, 138, 139, 140, 141 e 142, respectivamente).
Tabela 8- Resultados da simulação com temperatura em 10ºC, nível em 30% e Set point em 70%.
Interação X1 X2 LT1 LT2 SP(%) Temp. ºC
φE (NAP D
µctr (NAP
D)
µER (NAP
D)
1 0,3 0,3 0,3 0,3 70 10 0,7828 0,3914 0,42279
2 0,4 0,4 0,4 0,4 70 10 0,86615 0,43307 0,47170
3 0,55 0,55 0,55 0,55 70 10 0,96863 0,51568 0,53405
4 0,6 0,6 0,6 0,6 70 10 0,94094 0,52953 0,56946
5 0,65 0,65 0,65 0,65 70 10 0,91296 0,54352 0,60408
6 0,7 0,7 0,7 0,7 70 10 0,88464 0,55758 0,63770
Os valores do grau de evidência resultante (µer) obtidos em cada interação
foram agrupados no gráfico da Figura 47 para melhor visualização.
Figura 47 - Gráfico demonstrando resultado de simulação com temperatura em 10ºC.
1 1.5 2 2.5 3 3.5 4 4.5 5 5.5 60.4
0.45
0.5
0.55
0.6
0.65
Interações
Resultado - Simulação nível 30%, Temperatura 10ºC e set point 70%
Gra
u d
e E
vid
ência
Resultante

82
5.4. Simulação Temperatura em 35ºC
Na Tabela 9 são apresentados os valores inseridos para a simulação e
também os resultados obtidos da RAP da Figura 37 (APÊNDICE HH, II, JJ, KK, LL e
MM nas páginas 143, 144, 145, 146, 147 e 148, respectivamente).
Tabela 9- Resultados da simulação com temperatura em 35ºC, nível em 30% e Set point em
70%.
Interação X1 X2 LT1 LT2 SP(%) Temp. ºC
φE (NAP D
µctr (NAP
D)
µER (NAP
D)
1 0,3 0,3 0,3 0,3 70 35 0,70927 0,35463 0,46849
2 0,4 0,4 0,4 0,4 70 35 0,76742 0,38371 0,50251
3 0,55 0,55 0,55 0,55 70 35 0,85923 0,42962 0,61391
4 0,6 0,6 0,6 0,6 70 35 0,89155 0,44577 0,65
5 0,65 0,65 0,65 0,65 70 35 0,92500 0,46250 0,68526
6 0,7 0,7 0,7 0,7 70 35 0,95981 0,47990 0,71938
Os valores do grau de evidência resultante (µer) obtidos em cada interação foram
agrupados no gráfico da Figura 48 para melhor visualização. A construção deste
gráfico está no APÊNDICE TT (página 155).
Figura 48 - Gráfico demonstrando resultado de simulação com temperatura em 35ºC.
1 1.5 2 2.5 3 3.5 4 4.5 5 5.5 60.45
0.5
0.55
0.6
0.65
0.7
0.75Resultado - Simulação nível 30%, Temperatura 35ºC e set point 70%
Gra
u d
e E
vid
ência
Resultante
Interações

83
5.5. Simulação Temperatura em 60ºC
Na Tabela 10 são apresentados os valores inseridos para a simulação e
também os resultados obtidos da RAP da Figura 37 (APÊNDICE NN, OO, PP, QQ,
RR e SS nas páginas 149, 150, 151, 152, 153 e 154, respectivamente).
Tabela 10- Resultados da simulação com temperatura em 60ºC, nível em 30% e Set point em
70%.
Interação X1 X2 LT1 LT2 SP(%) Temp. ºC
φE (NAP D
µctr (NAP
D)
µER (NAP
D)
1 0,3 0,3 0,3 0,3 70 60 0,7828 0,3914 0,42279
2 0,4 0,4 0,4 0,4 70 60 0,86615 0,43307 0,47170
3 0,55 0,55 0,55 0,55 70 60 0,96863 0,51568 0,53405
4 0,6 0,6 0,6 0,6 70 60 0,94094 0,52953 0,56946
5 0,65 0,65 0,65 0,65 70 60 0,91296 0,54352 0,60408
6 0,7 0,7 0,7 0,7 70 60 0,88464 0,55758 0,63770
Os valores do grau de evidência resultante (µer) obtidos em cada interação foram
agrupados no gráfico da Figura 49 para melhor visualização.
Figura 49- Gráfico demonstrando resultado de simulação com temperatura em 60ºC.
1 1.5 2 2.5 3 3.5 4 4.5 5 5.5 60.4
0.45
0.5
0.55
0.6
0.65Resultado - Simulação nível 30%, Temperatura 60ºC e set point 70%
Interações
Gra
u d
e E
vid
ência
Resultante

84
6. DISCUSSÕES
Segundo Sagaz (2003, p.55) o processo dos quatro tanques: “[...] vem sendo
amplamente utilizado em estudos de processos industriais multivariáveis com
grande variação de dinâmica, pela sua complexidade devido a este ser um processo
com interação variável [...]”. Este processo utilizando a LPA2v como elemento de
controle, ou seja, o algoritmo inteligente de controle da variável manipulada pode
enviar sinais ao elemento final de controle que são as duas válvulas automáticas de
três vias. A variável controlada (nível dos tanques inferiores) responde em cada
interação as ordens recebidas e executadas pelos elementos finais de controle, ou
seja, abrindo ou fechando as válvulas manipulando a vazão delas.
Para Johansson (2000): “[...] o processo de quatro tanques pode ser
facilmente construído usando dois processos de dois tanques, que são processos
padronizados em muitos laboratórios de controle [...]”. A similaridade do QUPC e do
gráfico das fases mínima e não mínima proporciona a proposta de utilização da
LPA2V como elemento de controle do processo de quatro tanques.
6.1. Simulação na Fase não mínima (X1+X2<1).
Quando o parâmetro X está em 0,3 significa que a vazão nas válvulas de 3
vias X1 e X2 estão em 30% para os Tanques 1 e 2 em 70% para os Tanques 3 e 4.
A Rede de Análises Paraconsistente- RAP faz o tratamento das informações
e das incertezas de modo a atingir o valor da variável controlada de acordo com o
SP de 70% e uma nova parametrização da variável manipulada X1 e X2 é obtida em
cada interação e seguindo para a seguinte. Para tal o valor do Grau de Evidência
Resultante Real irá determinar qual será o novo valor para ajustar o sistema ao que
se está sendo requerido.
O ajuste estará completo quando, para o NAP C, os valores de φE=1 e
µctr=0,5, ou seja, no ponto onde não há mais nenhum ajuste a ser feito (sem
contradição).
Comparando-se os valores dos resultados obtidos com a inserção de dados
sem erro e com erro no segundo sensor, os valores de 𝜇𝐸𝑅, φE e µctr apresentaram
valores muito próximos com erro de 0,028% (metade do erro inserido no segundo
sensor).
85
Tudo leva a crer que os resultados demonstram que os algoritmos de análise
paraconsistente comparados aos métodos tradicionais são muito eficientes no
tratamento das incertezas.
6.2. Simulação na Fase mínima (X1+X2>1).
Quando o parâmetro X está em 0,7 significa que a vazão nas válvulas de 3
vias X1 e X2 estão em 70% para os Tanques 1 e 2 em 30% para os Tanques 3 e 4.
Na segunda forma das simulações se deseja que o nível dos Tanques 1 e 2
fiquem em 30% e a Rede de Análises Paraconsistente - RAP faz o tratamento das
informações e das incertezas de modo a atingir o valor da variável controlada de
acordo com o SP de 30% e uma nova parametrização da variável manipulada X1 e
X2. Para tal o valor do Grau de Evidência Resultante Real irá determinar qual será o
novo valor para ajustar o sistema ao que se está sendo requerido.
O ajuste estará completo quando, para o NAP C, os valores de φE=1 e
µctr=0,5, ou seja, não há mais nenhum ajuste a ser feito (sem contradição).
Comparando-se os valores dos resultados obtidos com a inserção de dados
sem erro e com erro no segundo sensor, os valores de 𝜇𝐸𝑅, φE e µctr apresentaram
valores muito próximos com erros de 0,016% e 0,017%, respectivamente (muito
abaixo do erro de 0,06% inserido no segundo sensor). Os algoritmos de análise
paraconsistente são muito eficientes no tratamento das incertezas.
Segundo Filho et. al. (2010) as fontes de incerteza que contribuem para a
incerteza de medição de petróleo em tanques estão, entre outras, relacionadas com
a medição do nível de líquido. Por esta razão foi inserido um segundo sensor com
erro. Conforme Da Silva Filho et. al. (2008): “[...] com valores significativos para o
Grau de Contradição Normalizado 𝜇𝑐𝑡𝑟, e utilizando-se as equações anteriores, são
encontrados os valores correspondentes para o Intervalo de Certeza 𝜑𝐸[...]”. Desta
forma, quando o Intervalo de Evidência resultante for máximo, 𝜑𝐸 = 1, o Grau de
Contradição Normalizado 𝜇𝑐𝑡𝑟 valerá 0,5 e isto equivale a uma contradição nula. As
contradições máximas são representadas por um valor de intervalo de Evidência
resultante nulo onde acontecem para dois valores de Grau de Contradição:
𝜇𝑐𝑡𝑟
normalizado for zero contradição máxima por indeterminação;
𝜇𝑐𝑡𝑟
normalizado for máximo contradição máxima por Inconsistência.

86
6.3. Simulações com a Inserção da variável temperatura
A ideia da inserção da variável temperatura na RAP é que através do extrator
de grau de evidência pode-se avaliar o valor da temperatura e assim obter uma
compensação no controle, isto é, fortalecer ou enfraquecer o grau de evidência
resultante do NAP de avaliação dos níveis dos tanques 1 e 2.
A topologia da nova RAP foi feita para que neste controle com compensação
de temperatura para valores abaixo de 35ºC haja o fortalecimento do grau de
evidência resultante da avaliação de nível e quando a temperatura for acima de
35ºC haja o enfraquecimento do grau de evidência resultante da avaliação de nível.
Isto se faz necessário, pois, na prática sabe-se que a variável nível de tanques de
petróleo pode sofrer influência da variável temperatura capaz de oferecer
dificuldades na eficiência do processo.
Da mesma forma que a topologia sem a compensação da temperatura pode-
se verificar pelas tabelas 8, 9 e 10 (páginas 81, 82 e 83, respectivamente) que os
resultados alcançaram o valor estabelecido pelo Set Point. A evolução das
interações e os graus de evidência resultantes (µER) das simulações são
demonstrados nos gráficos das Figuras 47, 48 e 49 (páginas 81, 82 e 83,
respectivamente).

87
7. CONCLUSÕES
Este trabalho mostra que é possível levar em consideração as incertezas e
contradições limites para medição de nível em tanques de Petróleo utilizando os
fundamentos da Lógica Paraconsistente. Para isso foram simulados via software
MATLAB® ® uma primeira RAP com dois modelos de controle Paraconsistentes de
nível com fontes de informações sem erro e com erro +0,06%, que é o valor limite
tolerado em engenharia (de acordo com a Tabela 3 na página 65) e uma segunda
RAP com a inserção da variável temperatura.
Nesta pesquisa foram usados conceitos de controle especialmente dedicados a
uma Rede de Análise para estas simulações utilizando os principais conceitos da
Lógica Paraconsistente. Através do Modelo de controle Multivariável
Paraconsistente de 4 tanques (apresentado na figura 3 na página 26), onde
considerou-se a variável controlada (VC) como sendo o nível dos Tanques 1 e 2, e a
variável vazão sendo manipulada (MV) através das válvulas X1 e X2 de 3 vias. A
primeira RAP elaborada para este estudo de nível e vazão com 8 NAPs consegue a
estabilização de controle após várias interações com a combinação do Intervalo de
Evidência Resultante (φE) e do Grau de Contradição Normalizado (µctr). Desta forma
foi conseguido o cálculo do Grau de Evidência Resultante Real para a proposição
objeto da RAP, que é o ajuste do sistema ao requerido pelo Set Point (SP) quando
φE=1 e µctr=0,5, ou seja, ausência de contradição.
Na primeira RAP com a utilização dos conceitos da LPA2v verificou-se que
para os valores de erros de +0,06% inseridos no segundo sensor de X1, X2, LT1 e
LT2 o valor 𝜇𝐸𝑅 teve melhor tratamento de incertezas na fase mínima, ou seja,
quando X1=0,7 e X2=0,7 sendo que X1+X2=1,4 (>1). Houve eliminação de 72,5%
em média das incertezas e contradições.
Dessa forma pode-se fazer uma comparação, pois na fase não mínima
(X1+X2<1) Johansson que utilizou uma Lógica Fuzzy para o Controle já havia
apontado que a obtenção do controle é mais difícil. Com a aplicação da Lógica
Paraconsistente verificou-se que realmente na fase não mínima (X1=0,3 e X2=0,3) o
tratamento das incertezas apenas conseguiu fazer o erro ficar em +0,028% frente ao
erro de +0,06% inserido, ou seja, a RAP mostrou o pior desempenho do controle na

88
fase mínima. No entanto, com a utilização das redes de controle LPA2v foi
conseguida a eliminação de 53,33% das incertezas e contradições.
A utilização da LPA2v em controle deste tipo tem vantagens pela facilidade
computacional e de inclusão ou retirada de algoritmos para a inserção de efeitos de
outras variáveis do processo. Para demonstrar isso neste trabalho foi construída
uma segunda topologia na qual se fez a inserção da variável temperatura numa
nova RAP o que possibilitou uma nova estratégia de controle. Com isso pode-se
fazer a análise da influência desta variável de compensação de temperatura
reforçando ou enfraquecendo o grau de evidência resultante da variável nível até
que seja atingido o valor requerido no Set Point.
A proposta de automação e controle de um processo multivariável de quatro
tanques utilizando-se de uma Rede de Análise Paraconsistente - RAP obteve
resultados importantes para um controle interativo que trata com incertezas
utilizando um tipo de lógica não clássica como a Paraconsistente.
Com isso este trabalho demonstra que as Redes de Análises de sinais
estruturadas em Lógica Paraconsistente são importantes para abertura de novos
caminhos em controle Multivariável iterativos bastante promissores para esta área.
7.1. PONTOS SIGNIFICATIVOS DO TRABALHO
Com os resultados obtidos através da simulação do modelo utilizando a
Lógica Paraconsistente pode-se então destacar dois pontos significativos deste
trabalho, conforme os expostos a seguir.
O primeiro versa sobre a investigação que trata dos aspectos de
controlabilidade da configuração proposta por Johansson no sistema multivariável de
quatro tanques. Este é um dos pontos mais importantes utilizados para a
configuração da RAP para este trabalho.
Outro ponto muito importante que agrega valor aos resultados conseguidos
são os algoritmos da LPA2v com o tratamento de sinais que analisam os valores
obtidos de φE (Intervalo de Evidência) e µctr (Grau de Contradição Normalizado)
para determinar a normalização do controle.
A possibilidade de inserção de variáveis, como temperatura e outras inerentes
ao processo possibilita uma nova e inovadora estratégia de controle.

89
8. TRABALHOS FUTUROS
Como sugestão para trabalhos futuros seguem três proposições:
A primeira trata de um estudo comparativo entre o controle multivariável de quatro
tanques utilizando a lógica paraconsistente e a lógica Fuzzy; a segunda é um estudo
comparativo entre o controle multivariável de quatro tanques utilizando a lógica
paraconsistente e o PID; a terceira seria um simulador do controle multivariável de
quatro tanques utilizando a lógica paraconsistente para níveis diferentes nos
tanques inferiores.

90
REFERÊNCIAS
ABE, J. M.; ABERTURA WICS 2013 – 1º Workshop Intelligence Computing System 2013 vídeo parte 1, IEA USP, Instituto de Estudos Avançados da Universidade de São Paulo, São Paulo, 2013 – Disponível em: <http://www.iea.usp.br/midiateca/video/workshop-de-inteligencia-artificial-
2013-parte-1-1>. Acesso em 23 jul. 2013, 21:23:00. ARAÚJO, J. D. F., “Uma metodologia para redução de incertezas de medição de óleo e gás”, Dissertação de Mestrado, Centro de Tecnologia, Programa de Pós-Graduação em Engenharia Elétrica, Universidade Federal do Rio Grande do Norte, Natal, RN, 2009, 92p. BAPTISTA, R.; DA SILVA FILHO, J. I.; MORILLA, J. C., “Proposal of automatic control three-way valve through algorithms of Paraconsistent Annotated Logic”, Artigo técnico, Revista Science and Technology, Vol. 2, Nº2 , UNISANTA – Universidade Santa Cecília, Santos, 2013, pp.69-73. Disponível em <http://periodicos.unisanta.br/index.php/sat/article/view/189>. Acesso em 08 mar 2014, 19:42:00. BARP, A. M., “Metodologia de avaliação e de gerenciamento da incerteza de sistemas de medição de temperatura”, Dissertação de Mestrado, Centro de Tecnologia, Programa de Pós-Graduação em Metrologia Científica e Industrial, Universidade Federal de Santa Catarina, Florianópolis, SC, 2000, 133p. Disponível em <http://www.posmci.ufsc.br/teses/amb.pdf>.Acesso em 08 mar. 2014, 19:26:00. BERTO, M. F., “Aplicação da Lógica Paraconstistente Evidencial Et no controle de sensores de temperatura na atuação de robôs móveis”, Dissertação de Mestrado, Programa de Pós-Graduação em Engenharia de Produção, Universidade Paulista (UNIP), São Paulo, SP, 2007, 154p. Disponível em <http://www1.unip.br/ensino/pos_graduacao/strictosensu/eng_producao/download/eng_macielfranciscoberto.swf>. Acesso em 08 mar. 2014, 19:33:00. CAMPOS, M. C. M. M.; TEIXEIRA, H. C. G “Controles Típicos de equipamentos e processos industriais” Editora Blucher, 2ª. Ed., São Paulo, 2010, p. 115. DA COSTA, N. C. A, ABE, J.M. e SUBRAHMANIAN V. S. “Remarks on Annotated Logic”. Instituto de Estudos Avançados da USP, 2000.

91
DA COSTA, N. C. A; HENSCHEN, L. J.; LU, J. J. et al. “Automatic Theorem Proving in Paraconsistent Logics: Teory and Implementation”. Instituto de Estudos Avançados da USP - 1990. DA COSTA, N. C. A & SUBRAHMANIAN, V. S.. “Paraconsistent Logics as a Formalism for Reasoning About Inconsistent Knowledge Bases”. Instituto de Estudos Avançados da USP - 1989. DA COSTA, N. C. A; SUBRAHMANIAN, V. S. e VAGO, C. “The Paraconsistent Logics Pτ”. Instituto de Estudos Avançados da USP - 1989. D’ANTONIO, V. J. A.; PEREIRA, C. D. S.; DA SILVA FILHO, J. I., “Um método estatístico/paraconsistente de avaliação quantitativa de grânulos plásticos (Pellets) em praias”, Artigo técnico, Revista Science and Technology, Vol. 1, Nº2 , UNISANTA – Universidade Santa Cecília, Santos, 2012, pp.48-53. Disponível em <http://periodicos.unisanta.br/index.php/sat/article/view/92> Acesso em 08 mar 2014, 19:58:00. DA SILVA FILHO, J. I., “Implementação De Circuitos Lógicos Fundamentados Em Uma Classe De Lógicas Paraconsistentes Anotadas”. 1997. 131p. Dissertação (Mestrado) – Escola Politécnica da Universidade de São Paulo. Departamento de Engenharia Eletrônica. Disponível em: <http://www.paralogike.com.br/Dissertacao%20de%20Mestrado%20LPA.pdf>. Acesso em 07 jul. 2013. 21:05:10. DA SILVA FILHO, J. I., “Métodos De Aplicações Da Lógica Paraconsistente Anotada De Anotação Com Dois Valores-Lpa2v Com Construção De Algoritmo E Implementação De Circuitos Eletrônicos”. 1999. 226p. Tese (Doutorado) – Escola Politécnica da Universidade de São Paulo. Departamento de Engenharia de Computação e Sistemas Digitais. Disponível em: < http://www.paralogike.com.br/Tese.pdf>. Acesso em 20 jul 2013. 21:10:00. DA SILVA FILHO, J. I.; ABE, J. M., “Introdução à lógica paraconsistente anotada com ilustrações” Editora Emmy, 1ª. Ed., Santos, 2000, pp. 25, 54, 147-150. DA SILVA FILHO, J. I., “Métodos de Aplicações da Lógica Paraconsistente Anotada de anotação com dois valores-LPA2v”, Artigo técnico, Revista Seleção Documental, Santos, 2006, pp. 18-25.

92
DA SILVA FILHO, J. I.; ABE, J. M.; LAMBERT TORRES, G., “Inteligência Artificial com as Redes de Análises Paraconsistentes” Editora LTC, 1ª. Ed., Rio de Janeiro, 2008, pp.4-5, pp.40-84, pp.101-185. DA SILVA FILHO, J. I., “Lógica ParaFuzzy-Um método de Aplicação da Lógica Paraconsistente e Fuzzy em Sistemas de Controle Híbridos”, Artigo técnico, Revista Seleção Documental, Santos, 2009, pp. 16-24. DE MORAES, L., Palestra Lógica Discursiva; WICS 2013 – 1º Workshop Intelligence Computing System 2013 vídeo parte 1, IEA USP, Instituto de Estudos Avançados da Universidade de São Paulo, São Paulo, 2013 Disponível em: <http://www.iea.usp.br/midiateca/video/workshop-de-inteligencia-artificial-2013-parte-1-1>. Acesso em 07 jul. 2013, 22:23:00. DELMÉE ,G. J., “Manual de medição de vazão” Editora: Edgard Blucher, 3ª Ed., 2003. FERNANDES, C. L. M.; MARIO, M. C.; DA SILVA FILHO, J. I.; “Estudo para inclusão da Lógica Paraconsistente Anotada em Normas específicas para utilização em Controladores Programáveis” Artigo técnico, Revista Science and Technology, Vol. 1, Nº2 , UNISANTA – Universidade Santa Cecília, Santos, 2012, pp.59-63 FILHO, J. A. P. S.; OLIVEIRA, T. B. V.; DA MATA, J.; DO VAL, L. G., “Importância da Avaliação das Incertezas na Medição dos Volumes de Petróleo e Gás Natural” Artigo Revista Produto & Produção, 2010; FRANCHI, C. M.; “Controle de processos industriais. Princípios e aplicações” Editora Érica, 1ª Ed., São Paulo, 2011, p. 38. GARCIA, D. V.; “Apostila de MATLAB® – Noções de MATLAB® ”, Universidade Santa Cecília, Programa de Pós Graduação em Engenharia Mecânica, Santos, 2013, 84p. JOHANSSON, K. H., “The quadruple-tank process: A multivariable laboratory process with na adjustable zero”, Artigo técnico, IEEE Transactions on Control Systems Technology, Vol. 8, Nº 3, 2000, pp. 456-465. MARTINS, H. G.; “A lógica Paraconsistente Anotada de Quatro Valores – LPA4v aplicada em Sistema de Raciocínio Baseado em Casos para o

93
Restabelecimento de Subestações Elétricas”. 2003. 145p. Tese (Doutorado) – Universidade Federal de Itajubá. Departamento de Engenharia Elétrica. Disponível em: < http://juno.unifei.edu.br/bim/0030095.pdf >. Acesso em 31 ago 2013. 15:05:00. MONTEIRO, L. H. A.; “Sistemas dinâmicos” Editora Livraria da Física, 3ª Ed., São Paulo, 2011, p.66. NOGUEIRA, L. F. G.; PEREIRA, C. D. S.; DA SILVA FILHO, J. I., “Techniques based on Paraconsistent Annotated Logic in the assessment of the mussel Perna perna response (Linnaeus, 1758)”, Artigo técnico, Revista Science and Technology, Vol. 2, Nº1 , UNISANTA – Universidade Santa Cecília, Santos, 2013, pp.24-30. Disponível em <http://periodicos.unisanta.br/index.php/sat/article/view/135>..Acesso em 08 mar 2014, 20:15:00. OGATA, K., “Engenharia de Controle Moderno”, Editora LTC, 3ª. Ed., Rio de Janeiro, 2000, pp.83-84,. RIBEIRO, M. A., “Medição de Petróleo e Gás Natural”, 1ª. Ed. Apostila de treinamento Petrobrás, Salvador, 2003. RIBEIRO, M. A., “Medição de Petróleo e Gás Natural”, 4ª. Ed. Apostila de treinamento Petrobrás, Salvador, 2010. RIBEIRO, M. A., “Medição de Nível”, Artigo técnico, Petrobrás, Salvador, 2007. SAGAZ, F. S. G., “Sistema Baseado em lógica nebulosa aplicado ao controle dos níveis de um processo multivariável com quatro tanques”, Dissertação de Mestrado em Engenharia Elétrica, IME – Instituto Militar de Engenharia, Rio de Janeiro, 2003, 121 p. TORRES, C. R., “Sistema Inteligente Paraconsistente para Controle de Robôs Móveis Autônomos”, Dissertação de Mestrado em Engenharia Elétrica, UNIFEI – Universidade Federal de Itajubá, Itajubá, 2004, 85 p.

94
APÊNDICE
APÊNDICE A - Resultados da primeira interação jec intervalo de evidência resultante= -0.60010
GRAU DE CONTRADIÇÃO Gctc= -0.39990
GRAU DE CONTRADIÇÃO NORMALIZADO Gctcn= 0.30005
GRAU DE CERTEZA RESULTANTE Gcrc= 0.07690
GRAU EV. RESULTANTE FINAL = 0.53845
jed intervalo de evidência resultante= -0.76155
GRAU DE CONTRADIÇÃO NORMALIZADO Gctdn= 0.38077
Dd= 0.87170
GRAU DE CERTEZA RESULTANTE Gcrd= -0.12830
GRAU EV. RESULTANTE FINAL = 0.43585
SISTEMA EM AJUSTE
CORRENTE DE ALIMENTAÇÃO PARA AJUSTE DAS VÁVLVULAS X1 e X2(mA)
= 10.97360
Novo ensaio? s ou n

95
APÊNDICE B - Resultados da segunda interação
jec intervalo de evidência resultante= -0.70000
GRAU DE CONTRADIÇÃO NORMALIZADO Gctcn= 0.35000
GRAU DE CERTEZA RESULTANTE Gcrc= 0.05132
GRAU EV. RESULTANTE FINAL = 0.52566
jed intervalo de evidência resultante= -0.87434
GRAU DE CONTRADIÇÃO NORMALIZADO Gctdn= 0.43717
Dd= 0.93415
GRAU DE CERTEZA RESULTANTE Gcrd= -0.06585
GRAU EV. RESULTANTE FINAL = 0.46707
SISTEMA EM AJUSTE
CORRENTE DE ALIMENTAÇÃO PARA AJUSTE DAS VÁVLVULAS X1 e X2(mA)
= 11.47319
Novo ensaio? s ou n

96
APÊNDICE C - Resultados da Terceira interação jec intervalo de evidência resultante= -0.85010
GRAU DE CONTRADIÇÃO NORMALIZADO Gctcn= 0.42505
Dd= 0.76493
GRAU DE CERTEZA RESULTANTE Gcrc= 0.23507
GRAU EV. RESULTANTE FINAL = 0.61753
jed intervalo de evidência resultante= -0.93247
GRAU DE CONTRADIÇÃO NORMALIZADO Gctdn= 0.46623
Dd= 0.83520
GRAU DE CERTEZA RESULTANTE Gcrd= 0.16480
GRAU EV. RESULTANTE FINAL = 0.58240
SISTEMA EM AJUSTE
CORRENTE DE ALIMENTAÇÃO PARA AJUSTE DAS VÁVLVULAS X1 e X2(mA)
= 13.31840
Novo ensaio? s ou n

97
APÊNDICE D - Resultados da Quarta interação jec intervalo de evidência resultante= -0.90000
GRAU DE CONTRADIÇÃO NORMALIZADO Gctcn= 0.45000
Dd= 0.70711
GRAU DE CERTEZA RESULTANTE Gcrc= 0.29289
GRAU EV. RESULTANTE FINAL = 0.64645
jed intervalo de evidência resultante= -0.95355
GRAU DE CONTRADIÇÃO NORMALIZADO Gctdn= 0.47678
Dd= 0.75498
GRAU DE CERTEZA RESULTANTE Gcrd= 0.24502
GRAU EV. RESULTANTE FINAL = 0.62251
SISTEMA EM AJUSTE
CORRENTE DE ALIMENTAÇÃO PARA AJUSTE DAS VÁVLVULAS X1 e X2(mA)
= 13.96013
Novo ensaio? s ou n

98
APÊNDICE E - Resultados da Quinta interação jec intervalo de evidência resultante= -0.95000
GRAU DE CONTRADIÇÃO NORMALIZADO Gctcn= 0.47500
Dd= 0.65192
GRAU DE CERTEZA RESULTANTE Gcrc= 0.34808
GRAU EV. RESULTANTE FINAL = 0.67404
jed intervalo de evidência resultante= -0.97596
GRAU DE CONTRADIÇÃO NORMALIZADO Gctdn= 0.48798
Dd= 0.67639
GRAU DE CERTEZA RESULTANTE Gcrd= 0.32361
GRAU EV. RESULTANTE FINAL = 0.66181
SISTEMA EM AJUSTE
CORRENTE DE ALIMENTAÇÃO PARA AJUSTE DAS VÁVLVULAS X1 e X2(mA)
= 14.58890
Novo ensaio? s ou n

99
APÊNDICE F - Resultados da Sexta interação GRAU DE CONTRADIÇÃO NORMALIZADO Gctcn= 0.50000
Dd= 0.60000
GRAU DE CERTEZA RESULTANTE Gcrc= 0.40000
GRAU EV. RESULTANTE FINAL = 0.70000
GRAU DE CONTRADIÇÃO NORMALIZADO Gctdn= 0.50000
Dd= 0.60000
GRAU DE CERTEZA RESULTANTE Gcrd= 0.40000
GRAU EV. RESULTANTE FINAL = 0.70000
SISTEMA EM AJUSTE
CORRENTE DE ALIMENTAÇÃO PARA AJUSTE DAS VÁVLVULAS X1 e X2(mA)
= 15.20000
Novo ensaio? s ou n

100
APÊNDICE G - Resultados da Sétima interação jec intervalo de evidência resultante= -0.60027
GRAU DE CONTRADIÇÃO NORMALIZADO Gctcn= 0.30013
Dd= 1.07687
GRAU DE CERTEZA RESULTANTE Gcrc= -0.07687
GRAU EV. RESULTANTE FINAL = 0.46156
jed intervalo de evidência resultante= -0.83860
GRAU DE CONTRADIÇÃO NORMALIZADO Gctdn= 0.41930
Dd= 0.77864
GRAU DE CERTEZA RESULTANTE Gcrd= -0.22136
GRAU EV. RESULTANTE FINAL = 0.38932
SISTEMA EM AJUSTE
CORRENTE DE ALIMENTAÇÃO PARA AJUSTE DAS VÁVLVULAS X1 e X2(mA)
= 10.22911
Novo ensaio? s ou n

101
APÊNDICE H - Resultados da oitava interação jec intervalo de evidência resultante= -0.70020
GRAU DE CONTRADIÇÃO NORMALIZADO Gctcn= 0.35010
Dd= 0.94844
GRAU DE CERTEZA RESULTANTE Gcrc= 0.05156
GRAU EV. RESULTANTE FINAL = 0.52578
jed intervalo de evidência resultante= -0.87441
GRAU DE CONTRADIÇÃO NORMALIZADO Gctdn= 0.43721
Dd= 0.93445
GRAU DE CERTEZA RESULTANTE Gcrd= -0.06555
GRAU EV. RESULTANTE FINAL = 0.46723
SISTEMA EM AJUSTE
CORRENTE DE ALIMENTAÇÃO PARA AJUSTE DAS VÁVLVULAS X1 e X2(mA)
= 11.47563
Novo ensaio? s ou n

102
APÊNDICE I - Resultados da nona interação jec intervalo de evidência resultante= -0.85024
GRAU DE CONTRADIÇÃO NORMALIZADO Gctcn= 0.42512
Dd= 0.76457
GRAU DE CERTEZA RESULTANTE Gcrc= 0.23543
GRAU EV. RESULTANTE FINAL = 0.61771
jed intervalo de evidência resultante= -0.93253
GRAU DE CONTRADIÇÃO NORMALIZADO Gctdn= 0.46626
Dd= 0.83478
GRAU DE CERTEZA RESULTANTE Gcrd= 0.16522
GRAU EV. RESULTANTE FINAL = 0.58261
SISTEMA EM AJUSTE
CORRENTE DE ALIMENTAÇÃO PARA AJUSTE DAS VÁVLVULAS X1 e X2(mA)
= 13.32179
Novo ensaio? s ou n

103
APÊNDICE J - Resultados da Décima interação jec intervalo de evidência resultante= -0.90025
GRAU DE CONTRADIÇÃO NORMALIZADO Gctcn= 0.45013
Dd= 0.70682
GRAU DE CERTEZA RESULTANTE Gcrc= 0.29318
GRAU EV. RESULTANTE FINAL = 0.64659
jed intervalo de evidência resultante= -0.95366
GRAU DE CONTRADIÇÃO NORMALIZADO Gctdn= 0.47683
Dd= 0.75458
GRAU DE CERTEZA RESULTANTE Gcrd= 0.24542
GRAU EV. RESULTANTE FINAL = 0.62271
SISTEMA EM AJUSTE
CORRENTE DE ALIMENTAÇÃO PARA AJUSTE DAS VÁVLVULAS X1 e X2(mA)
= 13.96337
Novo ensaio? s ou n

104
APÊNDICE K - Resultados da Décima primeira interação jec intervalo de evidência resultante= -0.95027
GRAU DE CONTRADIÇÃO NORMALIZADO Gctcn= 0.47513
Dd= 0.65163
GRAU DE CERTEZA RESULTANTE Gcrc= 0.34837
GRAU EV. RESULTANTE FINAL = 0.67418
jed intervalo de evidência resultante= -0.97609
GRAU DE CONTRADIÇÃO NORMALIZADO Gctdn= 0.48804
Dd= 0.67597
GRAU DE CERTEZA RESULTANTE Gcrd= 0.32403
GRAU EV. RESULTANTE FINAL = 0.66202
SISTEMA EM AJUSTE
CORRENTE DE ALIMENTAÇÃO PARA AJUSTE DAS VÁVLVULAS X1 e X2(mA)
= 14.59225
Novo ensaio? s ou n

105
APÊNDICE L - Resultados da Décima Segunda interação jec intervalo de evidência resultante= 0.99972
GRAU DE CONTRADIÇÃO NORMALIZADO Gctcn= 0.50014
Dd= 0.59972
GRAU DE CERTEZA RESULTANTE Gcrc= 0.40028
GRAU EV. RESULTANTE FINAL = 0.70014
jed intervalo de evidência resultante= 0.99986
GRAU DE CONTRADIÇÃO NORMALIZADO Gctdn= 0.50007
Dd= 0.59957
GRAU DE CERTEZA RESULTANTE Gcrd= 0.40043
GRAU EV. RESULTANTE FINAL = 0.70021
SISTEMA EM AJUSTE
CORRENTE DE ALIMENTAÇÃO PARA AJUSTE DAS VÁVLVULAS X1 e X2(mA)
= 15.20342
Novo ensaio? s ou n

106
APÊNDICE M - Resultados da Décima terceira interação jec intervalo de evidência resultante= 0.59990
GRAU DE CONTRADIÇÃO NORMALIZADO Gctcn= 0.70005
Dd= 1.07698
GRAU DE CERTEZA RESULTANTE Gcrc= 0.07698
GRAU EV. RESULTANTE FINAL = 0.53849
jed intervalo de evidência resultante= 0.83849
GRAU DE CONTRADIÇÃO NORMALIZADO Gctdn= 0.58076
Dd= 0.77845
GRAU DE CERTEZA RESULTANTE Gcrd= 0.22155
GRAU EV. RESULTANTE FINAL = 0.61077
SISTEMA EM AJUSTE
CORRENTE DE ALIMENTAÇÃO PARA AJUSTE DAS VÁVLVULAS X1 e X2(mA)
= 13.77239
Novo ensaio? s ou n

107
APÊNDICE N - Resultados da Décima Quarta interação jec intervalo de evidência resultante= 0.65000
GRAU DE CONTRADIÇÃO NORMALIZADO Gctcn= 0.67500
Dd= 1.01242
GRAU DE CERTEZA RESULTANTE Gcrc= 0.01242
GRAU EV. RESULTANTE FINAL = 0.50621
jed intervalo de evidência resultante= 0.85621
GRAU DE CONTRADIÇÃO NORMALIZADO Gctdn= 0.57189
Dd= 0.85595
GRAU DE CERTEZA RESULTANTE Gcrd= 0.14405
GRAU EV. RESULTANTE FINAL = 0.57202
SISTEMA EM AJUSTE
CORRENTE DE ALIMENTAÇÃO PARA AJUSTE DAS VÁVLVULAS X1 e X2(mA)
= 13.15238
Novo ensaio? s ou n

108
APÊNDICE O - Resultados da Décima Quinta interação jec intervalo de evidência resultante= 0.70000
GRAU DE CONTRADIÇÃO NORMALIZADO Gctcn= 0.65000
Dd= 0.94868
GRAU DE CERTEZA RESULTANTE Gcrc= -0.05132
GRAU EV. RESULTANTE FINAL = 0.47434
jed intervalo de evidência resultante= 0.87434
GRAU DE CONTRADIÇÃO NORMALIZADO Gctdn= 0.56283
Dd= 0.93415
GRAU DE CERTEZA RESULTANTE Gcrd= 0.06585
GRAU EV. RESULTANTE FINAL = 0.53293
SISTEMA EM AJUSTE
CORRENTE DE ALIMENTAÇÃO PARA AJUSTE DAS VÁVLVULAS X1 e X2(mA)
= 12.52681
Novo ensaio? s ou n

109
APÊNDICE P - Resultados da Décima Sexta interação jec intervalo de evidência resultante= 0.75000
GRAU DE CONTRADIÇÃO NORMALIZADO Gctcn= 0.62500
Dd= 0.88600
GRAU DE CERTEZA RESULTANTE Gcrc= -0.11400
GRAU EV. RESULTANTE FINAL = 0.44300
jed intervalo de evidência resultante= 0.89300
GRAU DE CONTRADIÇÃO NORMALIZADO Gctdn= 0.55350
Dd= 0.99875
GRAU DE CERTEZA RESULTANTE Gcrd= -0.00125
GRAU EV. RESULTANTE FINAL = 0.49937
SISTEMA EM AJUSTE
CORRENTE DE ALIMENTAÇÃO PARA AJUSTE DAS VÁVLVULAS X1 e X2(mA)
= 11.98999
Novo ensaio? s ou n

110
APÊNDICE Q - Resultados da Décima Sétima interação jec intervalo de evidência resultante= 0.90000
GRAU DE CONTRADIÇÃO NORMALIZADO Gctcn= 0.55000
Dd= 0.70711
GRAU DE CERTEZA RESULTANTE Gcrc= -0.29289
GRAU EV. RESULTANTE FINAL = 0.35355
jed intervalo de evidência resultante= 0.95355
GRAU DE CONTRADIÇÃO NORMALIZADO Gctdn= 0.52322
Dd= 0.75498
GRAU DE CERTEZA RESULTANTE Gcrd= -0.24502
GRAU EV. RESULTANTE FINAL = 0.37749
SISTEMA EM AJUSTE
CORRENTE DE ALIMENTAÇÃO PARA AJUSTE DAS VÁVLVULAS X1 e X2(mA)
= 10.03987
Novo ensaio? s ou n

111
APÊNDICE R - Resultados da Décima Oitava interação GRAU DE CONTRADIÇÃO NORMALIZADO Gctcn= 0.50000
Dd= 0.60000
GRAU DE CERTEZA RESULTANTE Gcrc= -0.40000
GRAU EV. RESULTANTE FINAL = 0.30000
RESULTADOS FINAIS. NAP D.
GRAU DE CONTRADIÇÃO NORMALIZADO Gctdn= 0.50000
Dd= 0.60000
GRAU DE CERTEZA RESULTANTE Gcrd= -0.40000
GRAU EV. RESULTANTE FINAL = 0.30000
SISTEMA EM AJUSTE
CORRENTE DE ALIMENTAÇÃO PARA AJUSTE DAS VÁVLVULAS X1 e X2(mA)
= 8.80000
Novo ensaio? s ou n

112
APÊNDICE S - Resultados da Décima Nona interação jec intervalo de evidência resultante= 0.59972
GRAU DE CONTRADIÇÃO NORMALIZADO Gctcn= 0.70014
Dd= 1.07687
GRAU DE CERTEZA RESULTANTE Gcrc= -0.07687
GRAU EV. RESULTANTE FINAL = 0.46156
jed intervalo de evidência resultante= 0.76128
GRAU DE CONTRADIÇÃO NORMALIZADO Gctdn= 0.61936
Dd= 0.87149
GRAU DE CERTEZA RESULTANTE Gcrd= 0.12851
GRAU EV. RESULTANTE FINAL = 0.56426
SISTEMA EM AJUSTE
CORRENTE DE ALIMENTAÇÃO PARA AJUSTE DAS VÁVLVULAS X1 e X2(mA)
= 13.02811
Novo ensaio? s ou n

113
APÊNDICE T - Resultados da Vigésima interação jec intervalo de evidência resultante= 0.64973
GRAU DE CONTRADIÇÃO NORMALIZADO Gctcn= 0.67513
Dd= 1.01277
GRAU DE CERTEZA RESULTANTE Gcrc= 0.01277
GRAU EV. RESULTANTE FINAL = 0.50638
jed intervalo de evidência resultante= 0.85611
GRAU DE CONTRADIÇÃO NORMALIZADO Gctdn= 0.57194
Dd= 0.85553
GRAU DE CERTEZA RESULTANTE Gcrd= 0.14447
GRAU EV. RESULTANTE FINAL = 0.57223
SISTEMA EM AJUSTE
CORRENTE DE ALIMENTAÇÃO PARA AJUSTE DAS VÁVLVULAS X1 e X2(mA)
= 13.15575
Novo ensaio? s ou n

114
APÊNDICE U - Resultados da Vigésima Primeira interação jec intervalo de evidência resultante= 0.69975
GRAU DE CONTRADIÇÃO NORMALIZADO Gctcn= 0.65013
Dd= 0.94901
GRAU DE CERTEZA RESULTANTE Gcrc= -0.05099
GRAU EV. RESULTANTE FINAL = 0.47450
jed intervalo de evidência resultante= 0.87425
GRAU DE CONTRADIÇÃO NORMALIZADO Gctdn= 0.56288
Dd= 0.93375
GRAU DE CERTEZA RESULTANTE Gcrd= 0.06625
GRAU EV. RESULTANTE FINAL = 0.53313
SISTEMA EM AJUSTE
CORRENTE DE ALIMENTAÇÃO PARA AJUSTE DAS VÁVLVULAS X1 e X2(mA)
= 12.53001
Novo ensaio? s ou n

115
APÊNDICE V - Resultados da Vigésima Segunda interação jec intervalo de evidência resultante= 0.74976
GRAU DE CONTRADIÇÃO NORMALIZADO Gctcn= 0.62512
Dd= 0.88630
GRAU DE CERTEZA RESULTANTE Gcrc= -0.11370
GRAU EV. RESULTANTE FINAL = 0.44315
jed intervalo de evidência resultante= 0.89291
GRAU DE CONTRADIÇÃO NORMALIZADO Gctdn= 0.55354
Dd= 0.99915
GRAU DE CERTEZA RESULTANTE Gcrd= -0.00085
GRAU EV. RESULTANTE FINAL = 0.49957
SISTEMA EM AJUSTE
CORRENTE DE ALIMENTAÇÃO PARA AJUSTE DAS VÁVLVULAS X1 e X2(mA)
= 11.99316
Novo ensaio? s ou n

116
APÊNDICE W - Resultados da Vigésima Terceira interação jec intervalo de evidência resultante= 0.89980
GRAU DE CONTRADIÇÃO NORMALIZADO Gctcn= 0.55010
Dd= 0.70733
GRAU DE CERTEZA RESULTANTE Gcrc= -0.29267
GRAU EV. RESULTANTE FINAL = 0.35366
jed intervalo de evidência resultante= 0.95347
GRAU DE CONTRADIÇÃO NORMALIZADO Gctdn= 0.52327
Dd= 0.75529
GRAU DE CERTEZA RESULTANTE Gcrd= -0.24471
GRAU EV. RESULTANTE FINAL = 0.37765
SISTEMA EM AJUSTE
CORRENTE DE ALIMENTAÇÃO PARA AJUSTE DAS VÁVLVULAS X1 e X2(mA)
= 10.04235
Novo ensaio? s ou n

117
APÊNDICE X - Resultados da Vigésima Quarta interação jec intervalo de evidência resultante= 0.99983
GRAU DE CONTRADIÇÃO NORMALIZADO Gctcn= 0.50008
Dd= 0.60017
GRAU DE CERTEZA RESULTANTE Gcrc= -0.39983
GRAU EV. RESULTANTE FINAL = 0.30008
jed intervalo de evidência resultante= 0.99992
GRAU DE CONTRADIÇÃO NORMALIZADO Gctdn= 0.50004
Dd= 0.60025
GRAU DE CERTEZA RESULTANTE Gcrd= -0.39975
GRAU EV. RESULTANTE FINAL = 0.30012
SISTEMA EM AJUSTE
CORRENTE DE ALIMENTAÇÃO PARA AJUSTE DAS VÁVLVULAS X1 e X2(mA)
= 8.80198
Novo ensaio? s ou n

118
APÊNDICE Y - ALGORITMO PARA-ANALISADOR EM MATLAB®
Seguindo os estudos feitos por Da Silva Filho (2006) foi confeccionado o
script do Software Para-Analisador em MATLAB® conforme segue:
%ALGORITMO PARA-ANALISADOR resp='s'; while resp=='s' || resp=='S' clear all; %LIMPAR MEMÓRIA clc; %limpa a área de trabalho disp ('+------------------------+'); disp ('| ALGORITMO |'); disp ('| PARA-ANALISADOR |'); disp ('| EM MATLAB® |'); disp ('+------------------------+'); disp(' '); %pula uma linha %DEFINIÇÕES DE VALORES disp('VARIÁVEIS DE CONTROLE'); Vscc=input('INSIRA O VALOR SUPERIOR DE CONTROLE DE CERTEZA:'); Vicc=input('INSIRA O VALOR INFERIOR DE CONTROLE DE CERTEZA:'); Vscct=input('INSIRA O VALOR SUPERIOR DE CONTROLE DE CONTRADIÇÃO:'); Vicct=input('INSIRA O VALOR INFERIOR DE CONTROLE DE CONTRADIÇÃO:'); %VARIÁVEIS DE ENTRADA u1=input('INSIRA O GRAU DE EVIDÊNCIA FAVORÁVEL:'); u2=input('INSIRA GRAU DE EVIDÊNCIA DESFAVORÁVEL:'); fprintf ('Grau de Evidência Favorável= %6.3f \n',u1); fprintf ('Grau de Evidência Desfavorável= %6.3f \n',u2); fprintf ('Vscc= %6.3f \n',Vscc); fprintf ('Vicc= %6.3f \n',Vicc); fprintf ('Vscct= %6.3f \n',Vscct); fprintf ('Vicct= %6.3f \n',Vicct); Gct=(u1+u2)-1; fprintf ('Gct= %6.3f \n',Gct); Gc=u1-u2; fprintf ('GC= %6.3f \n',Gc); %DETERMINAÇÃO DE ESTADOS LÓGICOS EXTREMOS% if Gc>=Vscc; disp ('S1=VERDADEIRO'); elseif Gc<=Vicc; disp ('S1=FALSO'); elseif Gct>=Vscct; disp('S1=T INCONSISTENTE'); elseif Gct<=Vicct; disp('S1=L PARACOMPLETO'); end %DETERMINAÇÃO DE ESTADOS LÓGICOS NÃO-EXTREMOS% %Determinação dos estados Lógicos não Extremos*) %primeira fase if(Gc<Vscc)&&(Gc>=0)&&(Gct<Vscct)&&(Gct>=0); if(Gc>=Gct); disp ('S1= Qv-->INCONSISTENTE'); else disp ('S1=INCONSISTENTE --> Verdadeiro'); %segunda fase if(Gc<Vscc)&&(Gc>=0)&&(Gct<=0)&&(Gct>Vicct); if(Gc>=abs(Gct)); disp ('S1= Qv-->PARACOMPLETO'); else disp ('S1=PARACOMPLETO --> Verdadeiro'); %terceira fase

119
if(Gc>Vicc)&&(Gc<=0)&&(Gct<=0)&&(Gct>Vicct) if(abs(Gc)>=abs(Gct)); disp ('S1= Qf-->PARACOMPLETO'); else disp ('S1=PARACOMPLETO --> Falso'); %quarta fase if(Gc>Vicc)&&(Gc<=0)&&(Gct>=0)&&(Gct<Vscct) if(abs(Gc)>=Gct) disp ('S1= Qf-->INCONSISTENTE'); else disp ('S1=INCONSISTENTE --> Falso'); end end end end end end end end S2a=Gct; S2b=Gc; resp=input('Novo ensaio? s ou n ','s'); end;

120
APÊNDICE Z - SCRIPT EM MATLAB® RAP DE NÍVEL E VAZÃO Através do algoritmo criado por Da Silva Filho et. al. (2008) para o Nó de
Análise paraconsistente foi elaborado o Script do programa da Rede de análise
paraconsistente deste trabalho.
%ALGORITMO DE REDE DE ANÁLISE PARACONSISTENTE LPA2v resp='s'; while resp=='s' || resp=='S' clear all; %LIMPAR MEMÓRIA clc; %limpa a área de trabalho disp ('+-----------------------------------+'); disp ('| ALGORITMO |'); disp ('|DE REDE DE ANALISE PARACONSISTENTE |'); disp ('| LPA2v EM MATLAB® |'); disp ('+-----------------------------------+'); disp(' '); %pula uma linha %VARIÁVEIS DE ENTRADA EM mA (4~20mA) X11=input('VALVULA 1 em mA(4~20):'); if (X11<4)||(X11>20) disp(' '); disp ('Valor fora do Range solicitado'); else disp(' '); X21=input('VALVULA 1 em mA(4~20):'); if (X21<4)||(X21>20) disp(' '); disp ('Valor fora do Range solicitado'); else disp(' '); X12=input('VALVULA 2 em mA(4~20):'); if (X12<4)||(X12>20) disp(' '); disp ('Valor fora do Range solicitado'); else disp(' '); X22=input('VALVULA 2 em mA(4~20):'); if (X22<4)||(X22>20) disp(' '); disp ('Valor fora do Range solicitado'); else disp(' '); LT11=input('MEDIÇÃO DO NIVEL 1 DO TANQUE 1 em mA(4~20):'); if (LT11<4)||(LT11>20) disp(' '); disp ('Valor fora do Range solicitado'); else disp(' '); LT21=input('MEDIÇÃO DO NIVEL 2 DO TANQUE 1 em mA(4~20):'); if (LT21<4)||(LT21>20) disp(' '); disp ('Valor fora do Range solicitado'); else disp(' '); LT12=input('MEDIÇÃO DO NIVEL 1 DO TANQUE 2 em mA(4~20):'); if (LT12<4)||(LT12>20) disp(' '); disp ('Valor fora do Range solicitado');

121
else disp(' '); LT22=input('MEDIÇÃO DO NIVEL 2 DO TANQUE 2 em mA(4~20):'); if (LT22<4)||(LT22>20) disp(' '); disp ('Valor fora do Range solicitado'); else disp(' '); SP=input('ENTRE COM O SET POINT DE NIVEL TANQUE 1 E TANQUE2(EM % 0~100):'); if (SP<0)||(SP>100) disp(' '); disp ('Valor fora do Range solicitado'); else disp(' '); %CONVERSÃO DE mA EM GRAUS DE EVIDÊNCIA FAVORÁVEL u1=(X11-4)/16; u2=(X21-4)/16; u3=(X12-4)/16; u4=(X22-4)/16; u5=(LT11-4)/16; u6=(LT21-4)/16; u7=(LT12-4)/16; u8=(LT22-4)/16; %CALCULO DO GRAU DE EVIDENCIA DESFAVORÁVEL l2=1-u2; l4=1-u4; l6=1-u6; l8=1-u8; %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% %NÓ DE ANALISE PARA CONSISTENTE 1 PARA A VALVULA X1 %Calulo do Grau de Contradição Gct1=(u1+l2)-1; %Calculo do Intervalo de Certeza j j1=1-abs(Gct1); %Calculo do Grau de Certeza Gc1=u1-l2; %Calculo da Distancia D D1=sqrt((1-abs(Gc1))^2+Gct1^2); %Determinação do sinal de Saída; if (j1<=0.25)||(D1>=1) S11=0.5; S12=j1; fprintf ('S11= %6.5f \n',S11); fprintf ('S12= %6.5f \n',j1); fprintf ('INDEFINIÇÃO'); elseif Gc1>0; Gcr1=(1-D1); elseif Gc1<0; Gcr1=(D1-1); end; %DETERMINAÇÃO DA SINALIZAÇÃO DO INTERVALO DE CERTEZA if u1+l2>1; fprintf ('j1 intervalo de certeza= %6.5f \n',+j1); elseif u1+l2<1; fprintf ('j1 intervalo de certeza= %6.5f \n',-j1); elseif 1==u1+l2; fprintf ('j10 intervalo de certeza= %6.5f \n',j1); end; %Calculo do Grau de Evidência Resultante Real normalizado uer1=(Gcr1+1)/2; %APRESENTAÇÃO DAS SAÍDAS

122
disp('RESULTADOS NAP 1'); fprintf ('GRAU FAV. u1= %6.5f \n',u1); fprintf ('GRAU DESF. l2= %6.5f \n',l2); fprintf ('GRAU DE CERTEZA GC1= %6.5f \n',Gc1); fprintf ('GRAU DE CONTRADIÇÃO Gct1= %6.5f \n',Gct1); fprintf ('D1= %6.5f \n',D1); fprintf ('GRAU DE CERTEZA RESULTANTE Gcr1= %6.5f \n',Gcr1); fprintf ('GRAU DE EVIDÊNCIA RESULTANTE REAL VALVULA X1= %6.5f \n',uer1); disp(' '); %pula uma linha %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% %NÓ DE ANALISE PARA CONSISTENTE 2 PARA A VALVULA X2 %Calulo do Grau de Contradição Gct2=(u3+l4)-1; %Calculo do Intervalo de Certeza j j2=1-abs(Gct2); %Calculo do Grau de Certeza Gc2=u3-l4; %Calculo da Distancia D D2=sqrt((1-abs(Gc2))^2+Gct2^2); %Determinação do sinal de Saída; if (j2<=0.25)||(D2>=1) S21=0.5; S22=j2; fprintf ('S21= %6.5f \n',S21); fprintf ('S22= %6.5f \n',j2); fprintf ('INDEFINIÇÃO'); elseif Gc2>0; Gcr2=(1-D2); elseif Gc2<0; Gcr2=(D2-1); end; %DETERMINAÇÃO DA SINALIZAÇÃO DO INTERVALO DE CERTEZA if u3+l4>1; fprintf ('j2 intervalo de certeza= %6.5f \n',+j2); elseif u3+l4<1; fprintf ('j2 intervalo de certeza= %6.5f \n',-j2); elseif 1==u3+l4; fprintf ('j20 intervalo de certeza= %6.5f \n',j2); end; %Calculo do Grau de Evidência Resultante Real uer2=(Gcr2+1)/2; %APRESENTAÇÃO DAS SAÍDAS disp('RESULTADOS NAP 2'); fprintf ('GRAU FAV. u3= %6.5f \n',u3); fprintf ('GRAU DESF.l4= %6.5f \n',l4); fprintf ('GRAU DE CERTEZA GC2= %6.5f \n',Gc2); fprintf ('GRAU DE CONTRADIÇÃO Gct2= %6.5f \n',Gct2); fprintf ('D21= %6.5f \n',D2); fprintf ('GRAU DE CERTEZA RESULTANTE Gcr2= %6.5f \n',Gcr2); fprintf ('GRAU DE EVIDÊNCIA RESULTANTE REAL VALVULA X2= %6.5f \n',uer2); disp(' '); %pula uma linha disp(' '); %pula uma linha %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% %CALCULO DO GRAU DE EVIDENCIA DESFAVORÁVEL RESULTANTE PARA AS VÁLVULAR X1 E %X2. ua=uer1; la=1-uer2; %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% %NÓ DE ANALISE PARA CONSISTENTE A (NAP A) PARA AS VALVULAS X1 E X2 %Calulo do Grau de Contradição Gcta=(ua+la)-1;

123
%Calculo do Intervalo de Certeza j ja=1-abs(Gcta); %Calculo do Grau de Certeza Gca=ua-la; %Calculo da Distancia D Da=sqrt((1-abs(Gca))^2+Gcta^2); %Determinação do sinal de Saída; if (ja<=0.25)||(Da>=1) S1a=0.5; S2a=ja; fprintf ('S1a= %6.5f \n',S1a); fprintf ('S2a= %6.5f \n',ja); fprintf ('INDEFINIÇÃO'); elseif Gca>0; Gcra=(1-Da); elseif Gca<0; Gcra=(Da-1); end; %DETERMINAÇÃO DA SINALIZAÇÃO DO INTERVALO DE CERTEZA if ua+la>1; fprintf ('ja intervalo de certeza= %6.5f \n',+ja); elseif ua+la<1; fprintf ('ja intervalo de certeza= %6.5f \n',-ja); elseif 1==ua+la; fprintf ('ja0 intervalo de certeza= %6.5f \n',ja); end; %Calculo do Grau de Evidência Resultante Real uera=(Gcra+1)/2; %APRESENTAÇÃO DAS SAÍDAS disp('RESULTADOS NAP A'); fprintf ('GRAU FAV.ua= %6.5f \n',ua); fprintf ('GRAU DESF.la= %6.5f \n',la); fprintf ('GRAU DE CERTEZA GCa= %6.5f \n',Gca); fprintf ('GRAU DE CONTRADIÇÃO Gcta= %6.5f \n',Gcta); fprintf ('Da= %6.5f \n',Da); fprintf ('GRAU DE CERTEZA RESULTANTE Gcra= %6.5f \n',Gcra); fprintf ('GRAU DE EVIDÊNCIA RESULTANTE REAL VALVULAS X1 E X2 = %6.5f
\n',uera); disp(' '); %pula uma linha %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% %NÓ DE ANALISE PARA CONSISTENTE 3 PARA O TANQUE 1 %Calulo do Grau de Contradição Gct3=(u5+l6)-1; %Calculo do Intervalo de Certeza j j3=1-abs(Gct3); %Calculo do Grau de Certeza Gc3=u5-l6; %Calculo da Distancia D D3=sqrt((1-abs(Gc3))^2+Gct3^2); %Determinação do sinal de Saída; if (j3<=0.25)||(D3>=1) S13=0.5; S23=j3; fprintf ('S13= %6.5f \n',S13); fprintf ('S23= %6.5f \n',j3); fprintf ('INDEFINIÇÃO'); elseif Gc3>0; Gcr3=(1-D3); elseif Gc3<0; Gcr3=(D3-1); end;

124
%DETERMINAÇÃO DA SINALIZAÇÃO DO INTERVALO DE CERTEZA if u5+l6>1; fprintf ('j3 intervalo de certeza= %6.5f \n',+j3); elseif u5+l6<1; fprintf ('j3 intervalo de certeza= %6.5f \n',-j3); elseif 1==u5+l6; fprintf ('j30 intervalo de certeza= %6.5f \n',j3); end; %Calculo do Grau de Evidência Resultante Real normalizado uer3=(Gcr3+1)/2; %APRESENTAÇÃO DAS SAÍDAS disp('RESULTADOS NAP 3'); fprintf ('GRAU FAV.u5= %6.5f \n',u5); fprintf ('GRAU DESF.l6= %6.5f \n',l6); fprintf ('GRAU DE CERTEZA GC3= %6.5f \n',Gc3); fprintf ('GRAU DE CONTRADIÇÃO Gct3= %6.5f \n',Gct3); fprintf ('D3= %6.5f \n',D3); fprintf ('GRAU DE CERTEZA RESULTANTE Gcr3= %6.5f \n',Gcr3); fprintf ('GRAU DE EVIDÊNCIA RESULTANTE REAL NIVEL TANQUE 1 = %6.5f
\n',uer3); disp(' '); %pula uma linha %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% %NÓ DE ANALISE PARA CONSISTENTE 4 PARA O TANQUE 2 %Calulo do Grau de Contradição Gct4=(u7+l8)-1; %Calculo do Intervalo de Certeza j j4=1-abs(Gct4); %Calculo do Grau de Certeza Gc4=u7-l8; %Calculo da Distancia D D4=sqrt((1-abs(Gc4))^2+Gct4^2); %Determinação do sinal de Saída; if (j4<=0.25)||(D4>=1) S14=0.5; S24=j3; fprintf ('S14= %6.5f \n',S14); fprintf ('S24= %6.5f \n',j4); fprintf ('INDEFINIÇÃO'); elseif Gc4>0; Gcr4=(1-D4); elseif Gc4<0; Gcr4=(D4-1); end; %DETERMINAÇÃO DA SINALIZAÇÃO DO INTERVALO DE CERTEZA if u7+l8>1; fprintf ('j4 intervalo de certeza= %6.5f \n',+j4); elseif u7+l8<1; fprintf ('j4 intervalo de certeza= %6.5f \n',-j4); elseif 1==u7+84; fprintf ('j40 intervalo de certeza= %6.5f \n',j4); end; %Calculo do Grau de Evidência Resultante Real normalizado uer4=(Gcr4+1)/2; %APRESENTAÇÃO DAS SAÍDAS disp('RESULTADOS NAP 4'); fprintf ('GRAU FAV.u7= %6.5f \n',u7); fprintf ('GRAU DESF.l8= %6.5f \n',l8); fprintf ('GRAU DE CERTEZA GC4= %6.5f \n',Gc4); fprintf ('GRAU DE CONTRADIÇÃO Gct4= %6.5f \n',Gct4); fprintf ('D4= %6.5f \n',D4); fprintf ('GRAU DE CERTEZA RESULTANTE Gcr4= %6.5f \n',Gcr4);

125
fprintf ('GRAU DE EVIDÊNCIA RESULTANTE REAL NIVEL TANQUE 2 = %6.5f
\n',uer4); disp(' '); %pula uma linha %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% %CALCULO DO GRAU DE EVIDENCIA DESFAVORÁVEL RESULTANTE PARA AS VÁLVULAR X1 E %X2. ub=uer3; lb=1-uer4; %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% %NÓ DE ANALISE PARA CONSISTENTE B (NAP B) PARA OS TANQUES 1 E 2 %Calulo do Grau de Contradição Gctb=(ub+lb)-1; %Calculo do Intervalo de Certeza j jb=1-abs(Gctb); %Calculo do Grau de Certeza Gcb=ub-lb; %Calculo da Distancia D Db=sqrt((1-abs(Gcb))^2+Gctb^2); %Determinação do sinal de Saída; if (jb<=0.25)||(Db>=1) S1b=0.5; S2b=ja; fprintf ('S1b= %6.5f \n',S1b); fprintf ('S2b= %6.5f \n',jb); fprintf ('INDEFINIÇÃO'); elseif Gcb>0; Gcrb=(1-Db); elseif Gcb<0; Gcrb=(Db-1); end; %DETERMINAÇÃO DA SINALIZAÇÃO DO INTERVALO DE CERTEZA if ub+lb>1; fprintf ('jb intervalo de certeza= %6.5f \n',+jb); elseif ub+lb<1; fprintf ('jb intervalo de certeza= %6.5f \n',-jb); elseif 1==ub+lb; fprintf ('jb0 intervalo de certeza= %6.5f \n',jb); end; %Calculo do Grau de Evidência Resultante Real uerb=(Gcrb+1)/2; %APRESENTAÇÃO DAS SAÍDAS disp('RESULTADOS NAP B'); fprintf ('GRAU FAV.ub= %6.5f \n',ub); fprintf ('GRAU DESF.lb= %6.5f \n',lb); fprintf ('GRAU DE CERTEZA Gcb= %6.5f \n',Gcb); fprintf ('GRAU DE CONTRADIÇÃO Gctb= %6.5f \n',Gctb); fprintf ('Db= %6.5f \n',Db); fprintf ('GRAU DE CERTEZA RESULTANTE Gcrb= %6.5f \n',Gcrb); fprintf ('GRAU DE EVIDÊNCIA RESULTANTE REAL NIVEL TANQUE 1 E 2= %6.5f
\n',uerb); disp(' '); %pula uma linha %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% %CALCULO DO GRAU DE EVIDENCIA DESFAVORÁVEL PARA O NAP C uc=uerb; lc=1-(SP/100); %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% %NÓ DE ANALISE PARA CONSISTENTE C (NAP C) PARA OS NAPS A E B NIVEL DE SP %PARA OS TANQUES 1 E 2. %Calulo do Grau de Contradição Gctc=(uc+lc)-1; %Calculo do Grau de Contradição Normalizado

126
Gctcn=(uc+lc)/2; %Calculo do Intervalo de Certeza resultante jec=1-abs(2*Gctcn-1); %Calculo do Grau de Certeza Gcc=uc-lc; %Calculo da Distancia D Dc=sqrt((1-abs(Gcc))^2+Gctc^2); %Determinação do Grau de certeza real if Gcc>0; Gcrc=(1-Dc); elseif Gcc<0; Gcrc=(Dc-1); end; %Determinação do sinal de Saída; if (jec<=0.25)||(Dc>=1) S1c=0.5; S2c=jec; fprintf ('S1c= %6.5f \n',S1c); fprintf ('S2c= %6.5f \n',jec); fprintf ('INDEFINIÇÃO'); end; %DETERMINAÇÃO DA SINALIZAÇÃO DO INTERVALO DE EVIDÊNCIA RESULTANTE if Gctcn>0.5; fprintf ('jec intervalo de evidência resultante= %6.5f \n',+jec); elseif Gctcn<0.5; fprintf ('jec intervalo de evidência resultante= %6.5f \n',-jec); elseif 1==Gctcn; fprintf ('jec0 intervalo de evidência resultante= %6.5f \n',jec); end; %Calculo do Grau de Evidência Resultante Real normalizado uerc=(Gcrc+1)/2; %APRESENTAÇÃO DAS SAÍDAS disp('RESULTADOS NAP C.'); fprintf ('GRAU FAV.uc= %6.5f \n',uc); fprintf ('GRAU DESF.lc= %6.5f \n',lc); fprintf ('GRAU DE CERTEZA Gcc= %6.5f \n',Gcc); fprintf ('GRAU DE CONTRADIÇÃO Gctc= %6.5f \n',Gctc); fprintf ('GRAU DE CONTRADIÇÃO NORMALIZADO Gctcn= %6.5f \n',Gctcn); fprintf ('Dd= %6.5f \n',Dc); fprintf ('GRAU DE CERTEZA RESULTANTE Gcrc= %6.5f \n',Gcrc); fprintf ('GRAU EV. RESULTANTE FINAL = %6.5f \n',uerc); disp(' '); %pula uma linha %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% %CALCULO DO NAP D VALVULAS X1 E X2 + NIVEL TANQUE 1 E TANQUE2 + SP ud=uera; ld=1-uerc; %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% %NÓ DE ANALISE PARA CONSISTENTE D (NAP D) PARA OS NAPS A E B NIVEL DE SP %PARA OS TANQUES 1 E 2. %Calulo do Grau de Contradição Gctd=(ud+ld)-1; %Calculo do Grau de Contradição Normalizado Gctdn=(ud+ld)/2; %Calculo do Intervalo de Certeza resultante jed=1-abs(2*Gctdn-1); %Calculo do Grau de Certeza Gcd=ud-ld; %Calculo da Distancia D Dd=sqrt((1-abs(Gcd))^2+Gctd^2); %Determinação do Grau de Certeza Real if Gcd>0;

127
Gcrd=(1-Dd); elseif Gcd<0; Gcrd=(Dd-1); end; %Determinação do sinal de Saída; if (jed<=0.25)||(Dd>=1) S1d=0.5; S2d=jed; fprintf ('S1d= %6.5f \n',S1d); fprintf ('S2d= %6.5f \n',jed); fprintf ('INDEFINIÇÃO'); end; %DETERMINAÇÃO DA SINALIZAÇÃO DO INTERVALO DE EVIDÊNCIA RESULTANTE if Gctdn>0.5; fprintf ('jed intervalo de evidência resultante= %6.5f \n',+jed); elseif Gctdn<0.5; fprintf ('jed intervalo de evidência resultante= %6.5f \n',-jed); elseif 1==Gctdn; fprintf ('jed0 intervalo de evidência resultante= %6.5f \n',jed); end; %Calculo do Grau de Evidência Resultante Real normalizado uerd=(Gcrd+1)/2; %APRESENTAÇÃO DAS SAÍDAS disp('RESULTADOS FINAIS. NAP D.'); fprintf ('GRAU FAV.ud= %6.5f \n',ud); fprintf ('GRAU DESF.ld= %6.5f \n',ld); fprintf ('GRAU DE CERTEZA Gcd= %6.5f \n',Gcd); fprintf ('GRAU DE CONTRADIÇÃO Gctd= %6.5f \n',Gctd); fprintf ('GRAU DE CONTRADIÇÃO NORMALIZADO Gctdn= %6.5f \n',Gctdn); fprintf ('Dd= %6.5f \n',Dd); fprintf ('GRAU DE CERTEZA RESULTANTE Gcrd= %6.5f \n',Gcrd); fprintf ('GRAU EV. RESULTANTE FINAL = %6.5f \n',uerd); disp(' '); %pula uma linha %ANALISE DO RESULTADO if uerd<=0.25 disp('CRÍTICO = SISTEMA COM BAIXO AJUSTE') elseif uerd>=0.75 disp ('CRÍTICO = SISTEMA COM ALTO AJUSTO') elseif (uerd>0.25)&&(uerd<0.75) disp ('SISTEMA EM AJUSTE') end; end; end; end; end; end; end; end; end; end; disp(' '); resp=input('Nova Simulação? s ou n: ','s'); while resp~='s' && resp~='S' && resp~='N' && resp~='n' disp('Responda somente s ou n'); resp=input('Nova Simulação? s ou n: ','s');
end; end;

128
APÊNDICE AA - SCRIPT EM MATLAB® RAP DE NÍVEL, TEMPERATURA E VAZÃO %ALGORITMO DE REDE DE ANÁLISE PARACONSISTENTE LPA2v resp='s'; while resp=='s' || resp=='S' clear all; %LIMPAR MEMÓRIA clc; %limpa a área de trabalho disp ('+-----------------------------------+'); disp ('| ALGORITMO |'); disp ('|DE REDE DE ANALISE PARACONSISTENTE |'); disp ('| LPA2v EM MATLAB® |'); disp ('+-----------------------------------+'); disp(' '); %pula uma linha %VARIÁVEIS DE ENTRADA EM mA (4~20mA) X11=input('VALVULA 1 em mA(4~20):'); if (X11<4)||(X11>20) disp(' '); disp ('Valor fora do Range solicitado'); else disp(' '); X21=input('VALVULA 1 em mA(4~20):'); if (X21<4)||(X21>20) disp(' '); disp ('Valor fora do Range solicitado'); else disp(' '); X12=input('VALVULA 2 em mA(4~20):'); if (X12<4)||(X12>20) disp(' '); disp ('Valor fora do Range solicitado'); else disp(' '); X22=input('VALVULA 2 em mA(4~20):'); if (X22<4)||(X22>20) disp(' '); disp ('Valor fora do Range solicitado'); else disp(' '); LT11=input('MEDIÇÃO DO NIVEL 1 DO TANQUE 1 em mA(4~20):'); if (LT11<4)||(LT11>20) disp(' '); disp ('Valor fora do Range solicitado'); else disp(' '); LT21=input('MEDIÇÃO DO NIVEL 2 DO TANQUE 1 em mA(4~20):'); if (LT21<4)||(LT21>20) disp(' '); disp ('Valor fora do Range solicitado'); else disp(' '); LT12=input('MEDIÇÃO DO NIVEL 1 DO TANQUE 2 em mA(4~20):'); if (LT12<4)||(LT12>20) disp(' '); disp ('Valor fora do Range solicitado'); else disp(' '); LT22=input('MEDIÇÃO DO NIVEL 2 DO TANQUE 2 em mA(4~20):'); if (LT22<4)||(LT22>20) disp(' '); disp ('Valor fora do Range solicitado'); else

129
disp(' '); SP=input('ENTRE COM O SET POINT DE NIVEL TANQUE 1 E TANQUE2(EM % 0~100):'); if (SP<0)||(SP>100) disp(' '); disp ('Valor fora do Range solicitado'); else disp(' '); T=input ('ENTRE COM O VALOR DA TEMPERATURA DOS TANQUES 1 E 2 (EM ºC):'); if (T<-15)||(T>100) disp(' ') disp ('Valor de Temperatura deve ser revisto') else %CONVERSÃO DE mA EM GRAUS DE EVIDÊNCIA FAVORÁVEL u1=(X11-4)/16; u2=(X21-4)/16; u3=(X12-4)/16; u4=(X22-4)/16; u5=(LT11-4)/16; u6=(LT21-4)/16; u7=(LT12-4)/16; u8=(LT22-4)/16; %CALCULO DO GRAU DE EVIDENCIA DESFAVORÁVEL l2=1-u2; l4=1-u4; l6=1-u6; l8=1-u8; %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% %NÓ DE ANALISE PARA CONSISTENTE 1 PARA A VALVULA X1 %Calulo do Grau de Contradição Gct1=(u1+l2)-1; %Calculo do Intervalo de Certeza j j1=1-abs(Gct1); %Calculo do Grau de Certeza Gc1=u1-l2; %Calculo da Distancia D D1=sqrt((1-abs(Gc1))^2+Gct1^2); %Determinação do sinal de Saída; if (j1<=0.25)||(D1>=1) S11=0.5; S12=j1; fprintf ('S11= %6.5f \n',S11); fprintf ('S12= %6.5f \n',j1); fprintf ('INDEFINIÇÃO'); elseif Gc1>0; Gcr1=(1-D1); elseif Gc1<0; Gcr1=(D1-1); end; %DETERMINAÇÃO DA SINALIZAÇÃO DO INTERVALO DE CERTEZA if u1+l2>1; fprintf ('j1 intervalo de certeza= %6.5f \n',+j1); elseif u1+l2<1; fprintf ('j1 intervalo de certeza= %6.5f \n',-j1); elseif 1==u1+l2; fprintf ('j10 intervalo de certeza= %6.5f \n',j1); end; %Calculo do Grau de Evidência Resultante Real normalizado uer1=(Gcr1+1)/2; %APRESENTAÇÃO DAS SAÍDAS disp('RESULTADOS NAP 1'); fprintf ('GRAU FAV. u1= %6.5f \n',u1);

130
fprintf ('GRAU DESF. l2= %6.5f \n',l2); fprintf ('GRAU DE CERTEZA GC1= %6.5f \n',Gc1); fprintf ('GRAU DE CONTRADIÇÃO Gct1= %6.5f \n',Gct1); fprintf ('D1= %6.5f \n',D1); fprintf ('GRAU DE CERTEZA RESULTANTE Gcr1= %6.5f \n',Gcr1); fprintf ('GRAU DE EVIDÊNCIA RESULTANTE REAL VALVULA X1= %6.5f \n',uer1); disp(' '); %pula uma linha %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% %NÓ DE ANALISE PARA CONSISTENTE 2 PARA A VALVULA X2 %Calulo do Grau de Contradição Gct2=(u3+l4)-1; %Calculo do Intervalo de Certeza j j2=1-abs(Gct2); %Calculo do Grau de Certeza Gc2=u3-l4; %Calculo da Distancia D D2=sqrt((1-abs(Gc2))^2+Gct2^2); %Determinação do sinal de Saída; if (j2<=0.25)||(D2>=1) S21=0.5; S22=j2; fprintf ('S21= %6.5f \n',S21); fprintf ('S22= %6.5f \n',j2); fprintf ('INDEFINIÇÃO'); elseif Gc2>0; Gcr2=(1-D2); elseif Gc2<0; Gcr2=(D2-1); end; %DETERMINAÇÃO DA SINALIZAÇÃO DO INTERVALO DE CERTEZA if u3+l4>1; fprintf ('j2 intervalo de certeza= %6.5f \n',+j2); elseif u3+l4<1; fprintf ('j2 intervalo de certeza= %6.5f \n',-j2); elseif 1==u3+l4; fprintf ('j20 intervalo de certeza= %6.5f \n',j2); end; %Calculo do Grau de Evidência Resultante Real uer2=(Gcr2+1)/2; %APRESENTAÇÃO DAS SAÍDAS disp('RESULTADOS NAP 2'); fprintf ('GRAU FAV. u3= %6.5f \n',u3); fprintf ('GRAU DESF.l4= %6.5f \n',l4); fprintf ('GRAU DE CERTEZA GC2= %6.5f \n',Gc2); fprintf ('GRAU DE CONTRADIÇÃO Gct2= %6.5f \n',Gct2); fprintf ('D21= %6.5f \n',D2); fprintf ('GRAU DE CERTEZA RESULTANTE Gcr2= %6.5f \n',Gcr2); fprintf ('GRAU DE EVIDÊNCIA RESULTANTE REAL VALVULA X2= %6.5f \n',uer2); disp(' '); %pula uma linha disp(' '); %pula uma linha %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% %CALCULO DO GRAU DE EVIDENCIA DESFAVORÁVEL RESULTANTE PARA AS VÁLVULAR X1 E %X2. ua=uer1; la=1-uer2; %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% %NÓ DE ANALISE PARA CONSISTENTE A (NAP A) PARA AS VALVULAS X1 E X2 %Calulo do Grau de Contradição Gcta=(ua+la)-1; %Calculo do Intervalo de Certeza j ja=1-abs(Gcta);

131
%Calculo do Grau de Certeza Gca=ua-la; %Calculo da Distancia D Da=sqrt((1-abs(Gca))^2+Gcta^2); %Determinação do sinal de Saída; if (ja<=0.25)||(Da>=1) S1a=0.5; S2a=ja; fprintf ('S1a= %6.5f \n',S1a); fprintf ('S2a= %6.5f \n',ja); fprintf ('INDEFINIÇÃO'); elseif Gca>0; Gcra=(1-Da); elseif Gca<0; Gcra=(Da-1); end; %DETERMINAÇÃO DA SINALIZAÇÃO DO INTERVALO DE CERTEZA if ua+la>1; fprintf ('ja intervalo de certeza= %6.5f \n',+ja); elseif ua+la<1; fprintf ('ja intervalo de certeza= %6.5f \n',-ja); elseif 1==ua+la; fprintf ('ja0 intervalo de certeza= %6.5f \n',ja); end; %Calculo do Grau de Evidência Resultante Real uera=(Gcra+1)/2; %APRESENTAÇÃO DAS SAÍDAS disp('RESULTADOS NAP A'); fprintf ('GRAU FAV.ua= %6.5f \n',ua); fprintf ('GRAU DESF.la= %6.5f \n',la); fprintf ('GRAU DE CERTEZA GCa= %6.5f \n',Gca); fprintf ('GRAU DE CONTRADIÇÃO Gcta= %6.5f \n',Gcta); fprintf ('Da= %6.5f \n',Da); fprintf ('GRAU DE CERTEZA RESULTANTE Gcra= %6.5f \n',Gcra); fprintf ('GRAU DE EVIDÊNCIA RESULTANTE REAL VALVULAS X1 E X2 = %6.5f
\n',uera); disp(' '); %pula uma linha %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% %NÓ DE ANALISE PARA CONSISTENTE 3 PARA O TANQUE 1 %Calulo do Grau de Contradição Gct3=(u5+l6)-1; %Calculo do Intervalo de Certeza j j3=1-abs(Gct3); %Calculo do Grau de Certeza Gc3=u5-l6; %Calculo da Distancia D D3=sqrt((1-abs(Gc3))^2+Gct3^2); %Determinação do sinal de Saída; if (j3<=0.25)||(D3>=1) S13=0.5; S23=j3; fprintf ('S13= %6.5f \n',S13); fprintf ('S23= %6.5f \n',j3); fprintf ('INDEFINIÇÃO'); elseif Gc3>0; Gcr3=(1-D3); elseif Gc3<0; Gcr3=(D3-1); end; %DETERMINAÇÃO DA SINALIZAÇÃO DO INTERVALO DE CERTEZA if u5+l6>1;

132
fprintf ('j3 intervalo de certeza= %6.5f \n',+j3); elseif u5+l6<1; fprintf ('j3 intervalo de certeza= %6.5f \n',-j3); elseif 1==u5+l6; fprintf ('j30 intervalo de certeza= %6.5f \n',j3); end; %Calculo do Grau de Evidência Resultante Real normalizado uer3=(Gcr3+1)/2; %APRESENTAÇÃO DAS SAÍDAS disp('RESULTADOS NAP 3'); fprintf ('GRAU FAV.u5= %6.5f \n',u5); fprintf ('GRAU DESF.l6= %6.5f \n',l6); fprintf ('GRAU DE CERTEZA GC3= %6.5f \n',Gc3); fprintf ('GRAU DE CONTRADIÇÃO Gct3= %6.5f \n',Gct3); fprintf ('D3= %6.5f \n',D3); fprintf ('GRAU DE CERTEZA RESULTANTE Gcr3= %6.5f \n',Gcr3); fprintf ('GRAU DE EVIDÊNCIA RESULTANTE REAL NIVEL TANQUE 1 = %6.5f
\n',uer3); disp(' '); %pula uma linha %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% %NÓ DE ANALISE PARA CONSISTENTE 4 PARA O TANQUE 2 %Calulo do Grau de Contradição Gct4=(u7+l8)-1; %Calculo do Intervalo de Certeza j j4=1-abs(Gct4); %Calculo do Grau de Certeza Gc4=u7-l8; %Calculo da Distancia D D4=sqrt((1-abs(Gc4))^2+Gct4^2); %Determinação do sinal de Saída; if (j4<=0.25)||(D4>=1) S14=0.5; S24=j3; fprintf ('S14= %6.5f \n',S14); fprintf ('S24= %6.5f \n',j4); fprintf ('INDEFINIÇÃO'); elseif Gc4>0; Gcr4=(1-D4); elseif Gc4<0; Gcr4=(D4-1); end; %DETERMINAÇÃO DA SINALIZAÇÃO DO INTERVALO DE CERTEZA if u7+l8>1; fprintf ('j4 intervalo de certeza= %6.5f \n',+j4); elseif u7+l8<1; fprintf ('j4 intervalo de certeza= %6.5f \n',-j4); elseif 1==u7+84; fprintf ('j40 intervalo de certeza= %6.5f \n',j4); end; %Calculo do Grau de Evidência Resultante Real normalizado uer4=(Gcr4+1)/2; %APRESENTAÇÃO DAS SAÍDAS disp('RESULTADOS NAP 4'); fprintf ('GRAU FAV.u7= %6.5f \n',u7); fprintf ('GRAU DESF.l8= %6.5f \n',l8); fprintf ('GRAU DE CERTEZA GC4= %6.5f \n',Gc4); fprintf ('GRAU DE CONTRADIÇÃO Gct4= %6.5f \n',Gct4); fprintf ('D4= %6.5f \n',D4); fprintf ('GRAU DE CERTEZA RESULTANTE Gcr4= %6.5f \n',Gcr4); fprintf ('GRAU DE EVIDÊNCIA RESULTANTE REAL NIVEL TANQUE 2 = %6.5f
\n',uer4);

133
disp(' '); %pula uma linha %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% %CALCULO DO GRAU DE EVIDENCIA DESFAVORÁVEL RESULTANTE PARA AS VÁLVULAR X1 E %X2. ub=uer3; lb=1-uer4; %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% %NÓ DE ANALISE PARA CONSISTENTE B (NAP B) PARA OS TANQUES 1 E 2 %Calulo do Grau de Contradição Gctb=(ub+lb)-1; %Calculo do Intervalo de Certeza j jb=1-abs(Gctb); %Calculo do Grau de Certeza Gcb=ub-lb; %Calculo da Distancia D Db=sqrt((1-abs(Gcb))^2+Gctb^2); %Determinação do sinal de Saída; if (jb<=0.25)||(Db>=1) S1b=0.5; S2b=ja; fprintf ('S1b= %6.5f \n',S1b); fprintf ('S2b= %6.5f \n',jb); fprintf ('INDEFINIÇÃO'); elseif Gcb>0; Gcrb=(1-Db); elseif Gcb<0; Gcrb=(Db-1); end; %DETERMINAÇÃO DA SINALIZAÇÃO DO INTERVALO DE CERTEZA if ub+lb>1; fprintf ('jb intervalo de certeza= %6.5f \n',+jb); elseif ub+lb<1; fprintf ('jb intervalo de certeza= %6.5f \n',-jb); elseif 1==ub+lb; fprintf ('jb0 intervalo de certeza= %6.5f \n',jb); end; %Calculo do Grau de Evidência Resultante Real uerb=(Gcrb+1)/2; %APRESENTAÇÃO DAS SAÍDAS disp('RESULTADOS NAP B'); fprintf ('GRAU FAV.ub= %6.5f \n',ub); fprintf ('GRAU DESF.lb= %6.5f \n',lb); fprintf ('GRAU DE CERTEZA Gcb= %6.5f \n',Gcb); fprintf ('GRAU DE CONTRADIÇÃO Gctb= %6.5f \n',Gctb); fprintf ('Db= %6.5f \n',Db); fprintf ('GRAU DE CERTEZA RESULTANTE Gcrb= %6.5f \n',Gcrb); fprintf ('GRAU DE EVIDÊNCIA RESULTANTE REAL NIVEL TANQUE 1 E 2= %6.5f
\n',uerb); disp(' '); %pula uma linha %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% %EXTRATOR DE EVIDÊNCIA PARA TEMPERATURA %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% if T<10 u10=0; elseif T>60 u10=1; elseif T>=10 && T<=35 u10=((T-10)/(35-10)); elseif T>35 && T<=60

134
u10=((T-35)/(60-35)); end; if T>35 && T<=60 l10=u10; else l10=1-u10; end; %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% %NAP T ANALISE DE TEMPERATURA E NÍVEL ut=uerb; lt=l10; %Calulo do Grau de Contradição Gctt=(ut+lt)-1; %Calculo do Grau de Contradição Normalizado Gctct=(ut+lt)/2; %Calculo do Intervalo de Certeza resultante jet=1-abs(2*Gctct-1); %Calculo do Grau de Certeza Gct=ut-lt; %Calculo da Distancia D Dt=sqrt((1-abs(Gct))^2+Gctt^2); %Determinação do Grau de certeza real if Gct>0; Gcrt=(1-Dt); elseif Gct<0; Gcrt=(Dt-1); end; %Determinação do sinal de Saída; if (jet<=0.25)||(Dt>=1) S1t=0.5; S2t=jet; fprintf ('S1c= %6.5f \n',S1t); fprintf ('S2c= %6.5f \n',jet); fprintf ('INDEFINIÇÃO'); end; %DETERMINAÇÃO DA SINALIZAÇÃO DO INTERVALO DE EVIDÊNCIA RESULTANTE if Gctct>0.5; fprintf ('jet intervalo de evidência resultante= %6.5f \n',+jet); elseif Gctct<0.5; fprintf ('jet intervalo de evidência resultante= %6.5f \n',-jet); elseif 1==Gctct; fprintf ('jet0 intervalo de evidência resultante= %6.5f \n',jet); end; %Calculo do Grau de Evidência Resultante Real normalizado uert=(Gcrt+1)/2; %APRESENTAÇÃO DAS SAÍDAS disp('RESULTADOS NAP T.'); fprintf ('GRAU FAV.ut= %6.5f \n',ut); fprintf ('GRAU DESF.lt= %6.5f \n',lt); fprintf ('GRAU DE CERTEZA Gct= %6.5f \n',Gct); fprintf ('GRAU DE CONTRADIÇÃO Gctt= %6.5f \n',Gctt); fprintf ('GRAU DE CONTRADIÇÃO NORMALIZADO Gctct= %6.5f \n',Gctct); fprintf ('Dt= %6.5f \n',Dt); fprintf ('GRAU DE CERTEZA RESULTANTE Gcrt= %6.5f \n',Gcrt); fprintf ('GRAU EV. RESULTANTE FINAL = %6.5f \n',uert); disp(' '); %pula uma linha %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% %CALCULO DO GRAU DE EVIDENCIA DESFAVORÁVEL PARA O NAP C uc=uert;

135
lc=1-(SP/100); %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% %NÓ DE ANALISE PARA CONSISTENTE C (NAP C) PARA OS NAPS A E B NIVEL DE SP %PARA OS TANQUES 1 E 2. %Calulo do Grau de Contradição Gctc=(uc+lc)-1; %Calculo do Grau de Contradição Normalizado Gctcn=(uc+lc)/2; %Calculo do Intervalo de Certeza resultante jec=1-abs(2*Gctcn-1); %Calculo do Grau de Certeza Gcc=uc-lc; %Calculo da Distancia D Dc=sqrt((1-abs(Gcc))^2+Gctc^2); %Determinação do Grau de certeza real if Gcc>0; Gcrc=(1-Dc); elseif Gcc<0; Gcrc=(Dc-1); end; %Determinação do sinal de Saída; if (jec<=0.25)||(Dc>=1) S1c=0.5; S2c=jec; fprintf ('S1c= %6.5f \n',S1c); fprintf ('S2c= %6.5f \n',jec); fprintf ('INDEFINIÇÃO'); end; %DETERMINAÇÃO DA SINALIZAÇÃO DO INTERVALO DE EVIDÊNCIA RESULTANTE if Gctcn>0.5; fprintf ('jec intervalo de evidência resultante= %6.5f \n',+jec); elseif Gctcn<0.5; fprintf ('jec intervalo de evidência resultante= %6.5f \n',-jec); elseif 1==Gctcn; fprintf ('jec0 intervalo de evidência resultante= %6.5f \n',jec); end; %Calculo do Grau de Evidência Resultante Real normalizado uerc=(Gcrc+1)/2; %APRESENTAÇÃO DAS SAÍDAS disp('RESULTADOS NAP C.'); fprintf ('GRAU FAV.uc= %6.5f \n',uc); fprintf ('GRAU DESF.lc= %6.5f \n',lc); fprintf ('GRAU DE CERTEZA Gcc= %6.5f \n',Gcc); fprintf ('GRAU DE CONTRADIÇÃO Gctc= %6.5f \n',Gctc); fprintf ('GRAU DE CONTRADIÇÃO NORMALIZADO Gctcn= %6.5f \n',Gctcn); fprintf ('Dd= %6.5f \n',Dc); fprintf ('GRAU DE CERTEZA RESULTANTE Gcrc= %6.5f \n',Gcrc); fprintf ('GRAU EV. RESULTANTE FINAL = %6.5f \n',uerc); disp(' '); %pula uma linha %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% %CALCULO DO NAP D VALVULAS X1 E X2 + NIVEL TANQUE 1 E TANQUE2 + SP ud=uera; ld=1-uerc; %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% %NÓ DE ANALISE PARA CONSISTENTE D (NAP D) PARA OS NAPS A E B NIVEL DE SP %PARA OS TANQUES 1 E 2. %Calulo do Grau de Contradição Gctd=(ud+ld)-1; %Calculo do Grau de Contradição Normalizado Gctdn=(ud+ld)/2; %Calculo do Intervalo de Certeza resultante

136
jed=1-abs(2*Gctdn-1); %Calculo do Grau de Certeza Gcd=ud-ld; %Calculo da Distancia D Dd=sqrt((1-abs(Gcd))^2+Gctd^2); %Determinação do Grau de Certeza Real if Gcd>0; Gcrd=(1-Dd); elseif Gcd<0; Gcrd=(Dd-1); end; %Determinação do sinal de Saída; if (jed<=0.25)||(Dd>=1) S1d=0.5; S2d=jed; fprintf ('S1d= %6.5f \n',S1d); fprintf ('S2d= %6.5f \n',jed); fprintf ('INDEFINIÇÃO'); end; %DETERMINAÇÃO DA SINALIZAÇÃO DO INTERVALO DE EVIDÊNCIA RESULTANTE if Gctdn>0.5; fprintf ('jed intervalo de evidência resultante= %6.5f \n',+jed); elseif Gctdn<0.5; fprintf ('jed intervalo de evidência resultante= %6.5f \n',-jed); elseif 1==Gctdn; fprintf ('jed0 intervalo de evidência resultante= %6.5f \n',jed); end; %Calculo do Grau de Evidência Resultante Real normalizado uerd=(Gcrd+1)/2; %APRESENTAÇÃO DAS SAÍDAS disp('RESULTADOS FINAIS. NAP D.'); fprintf ('GRAU FAV.ud= %6.5f \n',ud); fprintf ('GRAU DESF.ld= %6.5f \n',ld); fprintf ('GRAU DE CERTEZA Gcd= %6.5f \n',Gcd); fprintf ('GRAU DE CONTRADIÇÃO Gctd= %6.5f \n',Gctd); fprintf ('GRAU DE CONTRADIÇÃO NORMALIZADO Gctdn= %6.5f \n',Gctdn); fprintf ('Dd= %6.5f \n',Dd); fprintf ('GRAU DE CERTEZA RESULTANTE Gcrd= %6.5f \n',Gcrd); fprintf ('GRAU EV. RESULTANTE FINAL = %6.5f \n',uerd); disp(' '); %pula uma linha %ANALISE DO RESULTADO if uerd<=0.25 disp('CRÍTICO = SISTEMA COM BAIXO AJUSTE') elseif uerd>=0.75 disp ('CRÍTICO = SISTEMA COM ALTO AJUSTO') elseif (uerd>0.25)&&(uerd<0.75) disp ('SISTEMA EM AJUSTE') end; disp(' '); end; end; end; end; end; end; end; end; end; end; resp=input('Nova Simulação? s ou n: ','s'); end;

137
APÊNDICE BB – Resultados da primeira interação com temperatura em 10ºC jed intervalo de evidência resultante= -0.78280
RESULTADOS FINAIS. NAP D.
GRAU FAV.ud= 0.30000
GRAU DESF.ld= 0.48280
GRAU DE CERTEZA Gcd= -0.18280
GRAU DE CONTRADIÇÃO Gctd= -0.21720
GRAU DE CONTRADIÇÃO NORMALIZADO Gctdn= 0.39140
Dd= 0.84558
GRAU DE CERTEZA RESULTANTE Gcrd= -0.15442
GRAU EV. RESULTANTE FINAL = 0.42279
SISTEMA EM AJUSTE

138
APÊNDICE CC – Resultados da segunda interação com temperatura em 10ºC jed intervalo de evidência resultante= -0.86615
RESULTADOS FINAIS. NAP D.
GRAU FAV.ud= 0.40000
GRAU DESF.ld= 0.46615
GRAU DE CERTEZA Gcd= -0.06615
GRAU DE CONTRADIÇÃO Gctd= -0.13385
GRAU DE CONTRADIÇÃO NORMALIZADO Gctdn= 0.43307
Dd= 0.94340
GRAU DE CERTEZA RESULTANTE Gcrd= -0.05660
GRAU EV. RESULTANTE FINAL = 0.47170
SISTEMA EM AJUSTE

139
APÊNDICE DD – Resultados da terceira interação com temperatura em 10ºC jed intervalo de evidência resultante= 0.96863
RESULTADOS FINAIS. NAP D.
GRAU FAV.ud= 0.55000
GRAU DESF.ld= 0.48137
GRAU DE CERTEZA Gcd= 0.06863
GRAU DE CONTRADIÇÃO Gctd= 0.03137
GRAU DE CONTRADIÇÃO NORMALIZADO Gctdn= 0.51568
Dd= 0.93190
GRAU DE CERTEZA RESULTANTE Gcrd= 0.06810
GRAU EV. RESULTANTE FINAL = 0.53405
SISTEMA EM AJUSTE

140
APÊNDICE EE – Resultados da quarta interação com temperatura em 10ºC jed intervalo de evidência resultante= 0.94094
RESULTADOS FINAIS. NAP D.
GRAU FAV.ud= 0.60000
GRAU DESF.ld= 0.45906
GRAU DE CERTEZA Gcd= 0.14094
GRAU DE CONTRADIÇÃO Gctd= 0.05906
GRAU DE CONTRADIÇÃO NORMALIZADO Gctdn= 0.52953
Dd= 0.86109
GRAU DE CERTEZA RESULTANTE Gcrd= 0.13891
GRAU EV. RESULTANTE FINAL = 0.56946
SISTEMA EM AJUSTE

141
APÊNDICE FF – Resultados da quinta interação com temperatura em 10ºC jed intervalo de evidência resultante= 0.91296
RESULTADOS FINAIS. NAP D.
GRAU FAV.ud= 0.65000
GRAU DESF.ld= 0.43704
GRAU DE CERTEZA Gcd= 0.21296
GRAU DE CONTRADIÇÃO Gctd= 0.08704
GRAU DE CONTRADIÇÃO NORMALIZADO Gctdn= 0.54352
Dd= 0.79184
GRAU DE CERTEZA RESULTANTE Gcrd= 0.20816
GRAU EV. RESULTANTE FINAL = 0.60408
SISTEMA EM AJUSTE

142
APÊNDICE GG – Resultados da sexta interação com temperatura em 10ºC jed intervalo de evidência resultante= 0.88464
RESULTADOS FINAIS. NAP D.
GRAU FAV.ud= 0.70000
GRAU DESF.ld= 0.41536
GRAU DE CERTEZA Gcd= 0.28464
GRAU DE CONTRADIÇÃO Gctd= 0.11536
GRAU DE CONTRADIÇÃO NORMALIZADO Gctdn= 0.55768
Dd= 0.72460
GRAU DE CERTEZA RESULTANTE Gcrd= 0.27540
GRAU EV. RESULTANTE FINAL = 0.63770

143
APÊNDICE HH – Resultados da primeira interação com temperatura em 35ºC jed intervalo de evidência resultante= -0.70927
RESULTADOS FINAIS. NAP D.
GRAU FAV.ud= 0.30000
GRAU DESF.ld= 0.40927
GRAU DE CERTEZA Gcd= -0.10927
GRAU DE CONTRADIÇÃO Gctd= -0.29073
GRAU DE CONTRADIÇÃO NORMALIZADO Gctdn= 0.35463
Dd= 0.93698
GRAU DE CERTEZA RESULTANTE Gcrd= -0.06302
GRAU EV. RESULTANTE FINAL = 0.46849

144
APÊNDICE II – Resultados da segunda interação com temperatura em 35ºC jed intervalo de evidência resultante= -0.76742
RESULTADOS FINAIS. NAP D.
GRAU FAV.ud= 0.40000
GRAU DESF.ld= 0.36742
GRAU DE CERTEZA Gcd= 0.03258
GRAU DE CONTRADIÇÃO Gctd= -0.23258
GRAU DE CONTRADIÇÃO NORMALIZADO Gctdn= 0.38371
Dd= 0.99499
GRAU DE CERTEZA RESULTANTE Gcrd= 0.00501
GRAU EV. RESULTANTE FINAL = 0.50251
SISTEMA EM AJUSTE

145
APÊNDICE JJ – Resultados da terceira interação com temperatura em 35ºC jed intervalo de evidência resultante= -0.85923
RESULTADOS FINAIS. NAP D.
GRAU FAV.ud= 0.55000
GRAU DESF.ld= 0.30923
GRAU DE CERTEZA Gcd= 0.24077
GRAU DE CONTRADIÇÃO Gctd= -0.14077
GRAU DE CONTRADIÇÃO NORMALIZADO Gctdn= 0.42962
Dd= 0.77217
GRAU DE CERTEZA RESULTANTE Gcrd= 0.22783
GRAU EV. RESULTANTE FINAL = 0.61391
SISTEMA EM AJUSTE

146
APÊNDICE KK – Resultados da quarta interação com temperatura em 35ºC jed intervalo de evidência resultante= -0.89155
RESULTADOS FINAIS. NAP D.
GRAU FAV.ud= 0.60000
GRAU DESF.ld= 0.29155
GRAU DE CERTEZA Gcd= 0.30845
GRAU DE CONTRADIÇÃO Gctd= -0.10845
GRAU DE CONTRADIÇÃO NORMALIZADO Gctdn= 0.44577
Dd= 0.70000
GRAU DE CERTEZA RESULTANTE Gcrd= 0.30000
GRAU EV. RESULTANTE FINAL = 0.65000
SISTEMA EM AJUSTE

147
APÊNDICE LL – Resultados da quinta interação com temperatura em 35ºC jed intervalo de evidência resultante= -0.92500
RESULTADOS FINAIS. NAP D.
GRAU FAV.ud= 0.65000
GRAU DESF.ld= 0.27500
GRAU DE CERTEZA Gcd= 0.37500
GRAU DE CONTRADIÇÃO Gctd= -0.07500
GRAU DE CONTRADIÇÃO NORMALIZADO Gctdn= 0.46250
Dd= 0.62948
GRAU DE CERTEZA RESULTANTE Gcrd= 0.37052
GRAU EV. RESULTANTE FINAL = 0.68526
SISTEMA EM AJUSTE

148
APÊNDICE MM – Resultados da sexta interação com temperatura em 35ºC jed intervalo de evidência resultante= -0.95981
RESULTADOS FINAIS. NAP D.
GRAU FAV.ud= 0.70000
GRAU DESF.ld= 0.25981
GRAU DE CERTEZA Gcd= 0.44019
GRAU DE CONTRADIÇÃO Gctd= -0.04019
GRAU DE CONTRADIÇÃO NORMALIZADO Gctdn= 0.47990
Dd= 0.56125
GRAU DE CERTEZA RESULTANTE Gcrd= 0.43875
GRAU EV. RESULTANTE FINAL = 0.71938

149
APÊNDICE NN – Resultados da primeira interação com temperatura em 60ºC jed intervalo de evidência resultante= -0.78280
RESULTADOS FINAIS. NAP D.
GRAU FAV.ud= 0.30000
GRAU DESF.ld= 0.48280
GRAU DE CERTEZA Gcd= -0.18280
GRAU DE CONTRADIÇÃO Gctd= -0.21720
GRAU DE CONTRADIÇÃO NORMALIZADO Gctdn= 0.39140
Dd= 0.84558
GRAU DE CERTEZA RESULTANTE Gcrd= -0.15442
GRAU EV. RESULTANTE FINAL = 0.42279
SISTEMA EM AJUSTE

150
APÊNDICE OO – Resultados da segunda interação com temperatura em 60ºC jed intervalo de evidência resultante= -0.86615
RESULTADOS FINAIS. NAP D.
GRAU FAV.ud= 0.40000
GRAU DESF.ld= 0.46615
GRAU DE CERTEZA Gcd= -0.06615
GRAU DE CONTRADIÇÃO Gctd= -0.13385
GRAU DE CONTRADIÇÃO NORMALIZADO Gctdn= 0.43307
Dd= 0.94340
GRAU DE CERTEZA RESULTANTE Gcrd= -0.05660
GRAU EV. RESULTANTE FINAL = 0.47170
SISTEMA EM AJUSTE

151
APÊNDICE PP – Resultados da terceira interação com temperatura em 60ºC jed intervalo de evidência resultante= 0.96863
RESULTADOS FINAIS. NAP D.
GRAU FAV.ud= 0.55000
GRAU DESF.ld= 0.48137
GRAU DE CERTEZA Gcd= 0.06863
GRAU DE CONTRADIÇÃO Gctd= 0.03137
GRAU DE CONTRADIÇÃO NORMALIZADO Gctdn= 0.51568
Dd= 0.93190
GRAU DE CERTEZA RESULTANTE Gcrd= 0.06810
GRAU EV. RESULTANTE FINAL = 0.53405
SISTEMA EM AJUSTE

152
APÊNDICE QQ – Resultados da quarta interação com temperatura em 60ºC jed intervalo de evidência resultante= 0.94094
RESULTADOS FINAIS. NAP D.
GRAU FAV.ud= 0.60000
GRAU DESF.ld= 0.45906
GRAU DE CERTEZA Gcd= 0.14094
GRAU DE CONTRADIÇÃO Gctd= 0.05906
GRAU DE CONTRADIÇÃO NORMALIZADO Gctdn= 0.52953
Dd= 0.86109
GRAU DE CERTEZA RESULTANTE Gcrd= 0.13891
GRAU EV. RESULTANTE FINAL = 0.56946
SISTEMA EM AJUSTE

153
APÊNDICE RR – Resultados da quinta interação com temperatura em 60ºC ed intervalo de evidência resultante= 0.91296
RESULTADOS FINAIS. NAP D.
GRAU FAV.ud= 0.65000
GRAU DESF.ld= 0.43704
GRAU DE CERTEZA Gcd= 0.21296
GRAU DE CONTRADIÇÃO Gctd= 0.08704
GRAU DE CONTRADIÇÃO NORMALIZADO Gctdn= 0.54352
Dd= 0.79184
GRAU DE CERTEZA RESULTANTE Gcrd= 0.20816
GRAU EV. RESULTANTE FINAL = 0.60408
SISTEMA EM AJUSTE

154
APÊNDICE SS – Resultados da sexta interação com temperatura em 60ºC jed intervalo de evidência resultante= 0.88464
RESULTADOS FINAIS. NAP D.
GRAU FAV.ud= 0.70000
GRAU DESF.ld= 0.41536
GRAU DE CERTEZA Gcd= 0.28464
GRAU DE CONTRADIÇÃO Gctd= 0.11536
GRAU DE CONTRADIÇÃO NORMALIZADO Gctdn= 0.55768
Dd= 0.72460
GRAU DE CERTEZA RESULTANTE Gcrd= 0.27540
GRAU EV. RESULTANTE FINAL = 0.63770
SISTEMA EM AJUSTE

155
APÊNDICE TT – Exemplo de construção de gráfico de resultado em MATLAB® x=[1 2 3 4 5 6]; y=[0.46849 0.50251 0.61391 0.65 0.68526 0.71938]; plot(x,y,'ro-'); grid on; title ('Resultado - Simulação nível 30%, Temperatura 35ºC e setpoint 70%'); ylabel('Grau de Evidência Resultante') xlabel('Interações')

156
APÊNDICE UU – Exemplo de construção de Script de algoritmo de análise paraconsistente em MATLAB® %ALGORITMO DE ANÁLISE PARACONSISTENTE LPA2v - Grau de evidencia real resp='s'; while resp=='s' || resp=='S' clear all; clc; disp('+-----------------------------------------------+'); disp('| Grau de evidência real |'); disp('| LPA2v em MATLAB® |'); disp('+-----------------------------------------------+'); disp(' '); m=input('Dê o grau de evidência favorável (no intervalo fechado de 0 a
1): '); if (m<0) || (m>1) disp(' '); disp('Grau de evidência favorável fora da faixa solicitada.'); else disp(' '); l=input('Dê o grau de evidência desfavorável (no intervalo fechado
de 0 a 1): '); disp(' '); if (l<0) || (l>1) disp(' '); disp('Grau de evidência desfavorável fora da faixa
solicitada.'); else gct=(m+l)-1; fi=1-abs(gct); gc=m-l; d=sqrt((1-abs(gc))^2+gct^2); if gc>0 gcr=1-d; else gcr=d-1; end if (fi<=0.25) || (d>1) s1=0.5; s2=fi; msg='indefinição \n'; else if gct<0 s2=-abs(fi); elseif gct>0 s2=abs(fi); else s2=0; end s1=(gcr+1)/2; end fprintf('Grau de Evidência Resultante Real = %6.5f \n',s1); fprintf('Intervalo de Certeza = %6.5f \n',s2); if (fi<=0.25) || (d>1) fprintf(msg); end end end disp(' '); resp=input('Nova simulação? s ou n: ','s'); while resp~='s' && resp~='S' && resp~='N' && resp~='n' disp('Responda somente s ou n');

157
resp=input('Nova simulação? s ou n: ','s'); end end