erb ferreira lins tese submetida ao corpo docente da...
TRANSCRIPT

ANÁLISE DE INCERTEZAS EM PROBLEMAS DE ACÚSTICA ATRAVÉS
DO MÉTODO DE ELEMENTOS FINITOS
Erb Ferreira Lins
TESE SUBMETIDA AO CORPO DOCENTE DA COORDENAÇÃO DOS
PROGRAMAS DE PÓS-GRADUAÇÃO DE ENGENHARIA DA
UNIVERSIDADE FEDERAL DO RIO DE JANEIRO COMO PARTE DOS
REQUISITOS NECESSÁRIOS PARA A OBTENÇÃO DO GRAU DE
DOUTOR EM CIÊNCIAS EM ENGENHARIA MECÂNICA.
Aprovada por:
_______________________________________________
Prof. Fernando Alves Rochinha, D.Sc.
_______________________________________________
Prof. Abimael Fernando Dourado Loula, D.Sc.
_______________________________________________
Prof. Álvaro Luiz Gayoso de Azeredo Coutinho, D.Sc.
_______________________________________________
Prof. Webe João Mansur, Ph.D.
_______________________________________________
Prof. Fernando Duda Pereira, D.Sc.
RIO DE JANEIRO, RJ - BRASIL
JULHO DE 2007

ii
LINS, ERB FERREIRA
Análise de Incertezas em Problemas de
Acústica através do Método de Elementos
Finitos [Rio de Janeiro] 2007
VIII, 130 p. 29,7 cm (COPPE/UFRJ, D.Sc.,
Engenharia Mecânica, 2007)
Tese - Universidade Federal do Rio de
Janeiro, COPPE
1. Análise de incertezas
2. Acústica
3. Método de Elementos Finitos
I. COPPE/UFRJ II. Título ( série )

iii
"O verdadeiro valor de um pesquisador está em assimilar tanto os resultados
esperados como os resultados inesperados de uma experiência."
Claude Bernard (1813-1878)

iv
AGRADECIMENTOS
Ao prof. Fernando Rochinha, pela dedicação, paciência e confiança
depositada em minha pessoa ao longo deste trabalho;
À Denise e Carolina, que me deram força e motivação para completar esta
jornada;
Aos meus pais, sempre tão presentes e que não mediram esforços para que
eu chegasse até aqui;
Ao prof. Daniel Onofre, cujo apoio e amizade foram decisivos na minha
pós-graduação;
Ao prof. Álvaro Coutinho, pelos ensinamentos que levarei comigo para o
resto da vida;
Ao CNPq e CAPES, pelo financiamento desta pesquisa;
E aos meus grandes amigos, em especial à Shirley Nascimento, Cláudio
Fialho, Marcelo Silva, Leonardo Dantas, Fábio Comes e Leandro Santos, pela
solidariedade e pelo apoio.

v
Resumo da Tese apresentada à COPPE/UFRJ como parte dos requisitos
necessários para a obtenção do grau de Doutor em Ciências (D.Sc.)
ANÁLISE DE INCERTEZAS EM PROBLEMAS DE ACÚSTICA ATRAVÉS
DO MÉTODO DE ELEMENTOS FINITOS
Erb Ferreira Lins
Julho/2007
Orientador: Fernando Alves Rochinha
Programa: Engenharia Mecânica
Neste trabalho, uma metodologia para a análise da propagação de
incertezas em problemas de acústica é proposta. Será analisada a influência da
Variabilidade da impedância sobre o campo de pressão acústica através do
Método da Colocação. A Variabilidade na impedância de um material induz uma
variabilidade no campo de pressão no ambiente e esta relação deve ser
quantificada para o projeto de sistemas de controle passivo de ruído. A
aproximação do campo de pressão no domínio que representa a idealização de
ambientes fechados será feita através do método de Elementos Finitos. Uma vez
que este problema requer grandes recursos computacionais, diversas técnicas para
a diminuição deste requisito serão utilizadas. A análise dos resultados mostrará
que, mesmo em geometria simples, a propagação do nível de incerteza entre a
entrada e a saída pode ser de várias ordens de grandeza.

vi
Abstract of Thesis presented to COPPE/UFRJ as a partial fulfillment of the
requirements for the degree of Doctor of Science (D.Sc.)
UNCERTAINTY ANALISYS IN ACOUSTIC PROBLEMS USING THE
FINITE ELEMENT METHOD
Erb Ferreira Lins
Julho/2007
Advisor: Fernando Alves Rochinha
Department: Mechanical Engineering
In this work, the Finite Element Method is applied in the solution of
acoustic problems where the impedance boundary condition presents some
uncertainty. This Variability induces uncertainty over the pressure field and this
relation should be quantified in order to better design passive noise control
systems. The approximation of pressure field in a closed domain will be done by
the Finite Element Method. Since the solution of a stochastic problem requires a
large amount of computational resources, some techniques are used to reduce the
computational effort required. The results obtained here shows that even small
uncertainty levels in the absorbing boundary conditions could result in large
variability in the pressure field in domain.

vii
Índice
Capítulo 1 Introdução 1
Capítulo 2 Análise de Incertezas 10
2.1 Formulação Básica ......................................................................15
2.1.1 Modelagem estatística dos parâmetros de entrada .............15
2.1.1.1 Processos Estocásticos ...............................................19
2.1.2 Equações diferenciais randômicas.......................................20
2.1.3 Aproximação das variáveis de entrada ...............................21
2.2 O método de Monte Carlo ..........................................................23
Capítulo 3 Elementos Finitos para problemas de Acústica 27
3.1 Equações de Balanço ..................................................................28
3.2 A Equação de Helmholtz ............................................................31
3.3 Formulação de Elementos Finitos ...............................................33
Capítulo 4 O método de Colocação Esparsa 37
4.1 Métodos de Galerkin estocásticos ...............................................37
4.2 Métodos de Colocação ................................................................40
4.3 Seleção dos pontos de colocação .................................................43
4.3.1 Polinômios completos .........................................................43
4.3.2 Grids esparsos ....................................................................46
4.3.3 Bases polinomiais para malhas esparsas.............................47
4.3.4 Softwares utilizados para a análise estocástica ...................52
4.4 Procedimento computacional ......................................................53

viii
Capítulo 5 Resultados 55
5.1 Tubo de Kundt ...........................................................................56
5.2 Cavidade bidimensional ..............................................................74
5.3 Cavidade tridimensional .............................................................80
5.4 Modelo randômico para a impedância não-local .........................82
5.5 Descrição do modelo físico e resultados ......................................87
Capítulo 6 Conclusões e Trabalhos Futuros 94
Apêndice A Outros métodos para análise estocástica 98
A.1 Métodos de perturbação .............................................................98
A.2 Séries de Neumann ...................................................................101
A.3 O método de Elementos Finitos Espectrais ..............................102
A.4 Método de Galerkin Estocástico não Intrusivo - NISG.............114
Formulação de Galerkin Estocástica ...........................................115
Apêndice B O Algoritmo de Smoljak 119
Referências Bibliográficas 122

1
Capítulo 1
Introdução
Acústica é o ramo da física responsável pelo estudo do som, ou seja, a
propagação, geração e receptação de ondas mecânicas em meios gasosos,
líquidos e sólidos. Desta forma, a Acústica tem papel primordial em um
amplo espectro de aplicações: projeto de instrumentos musicais, aplicações
de ultra-som na área médica, mapeamento geológico, ensaios não destruti-
vos, acústica de ambientes abertos ou fechados, influência do som em seres
humanos etc. Modelos matemáticos que descrevem a propagação do som se
baseiam nas leis de conservação de massa e de quantidade de movimento
de um meio contínuo. Leis constitutivas, que descrevem relações entre
determinadas grandezas e características específicas de meios materiais,
também são empregadas. A utilização dessas leis nos sistemas físicos em
que há propagação de ondas mecânicas resulta na chamada equação da
onda acústica (esta nomenclatura mais específica será empregada aqui,
uma vez que a equação da onda governa também a propagação de ondas
luminosas. No entanto, a formulação desenvolvida ao longo deste trabalho
pode ser facilmente estendida para o tratamento deste outro tipo de onda).
Trata-se de uma equação diferencial parcial hiperbólica que relaciona a
pressão com a posição espacial e temporal. A solução analítica fechada
pode ser obtida para certas combinações da geometria do domínio no qual
2
a onda se propaga e das condições de contorno aplicadas. Na maioria das
aplicações, soluções numéricas devem ser utilizadas para obter aproxima-
ções do campo de pressão.
A transformada de Fourier da equação de onda, que permite obter a
distribuição de pressão em determinado domínio de acordo com a freqüên-
cia das fontes de excitação, resulta em uma equação diferencial parcial
elíptica chamada equação de Helmholtz. Esta equação pode ser empregada
na descrição do campo de pressão em sistemas nos quais a propagação de
onda se dá em regime estacionário e em análises no domínio da freqüência.
Nesta última encontram amplo emprego e são feitas de acordo com a fre-
qüência para a qual a propagação deve ser estudada. Assim, pode-se tratar
de problemas de acústica em altas e baixas freqüências e as estratégias de
solução numérica da equação de Helmholtz variam de acordo com essa
freqüência. Convencionou-se neste trabalho caracterizar baixas freqüências
como sendo aquela menores que 1kHz (para mapeamento de leitos oceâni-
cos, por exemplo, usam-se freqüências abaixo de 500Hz) e as altas
freqüências, aquelas de alguns kiloHertzs. A divisão entre essas duas faixas
pode ser nebulosa. Note-se que a faixa de freqüência em que o som é audí-
vel para seres humanos é de 20Hz à 20kHz. Desta forma, aplicações
voltadas à Psicoacústica devem lidar com todo este espectro. A mesma
faixa deve ser considerada quando se trata de conforto sonoro em certos
ambientes nos quais a predição dos níveis de som é importante tanto para
garantir que a intensidade sonora em certas posições do meio alcance um
nível desejado, como no caso de projeto de auditórios ou salas de música,
quanto para se certificar que o nível sonoro não ultrapasse certos limites,
como em fábricas ou cabines de veículos.
Em ambientes fechados, caso ao qual este trabalho se limitará, as
principais formas para a redução de ruído consistem nos controles ativo e
3
passivo de som. Controle passivo se refere à técnica na qual a redução do
nível sonoro é feita, normalmente, através do emprego de painéis compos-
tos por materiais para a absorção de som. Tais materiais transformam em
calor, através de processos dissipativos, parte da energia da onda sonora
que o atinge. Já o controle ativo tenta reduzir o nível sonoro através da
geração de outras ondas sonoras que se superpõem de maneira destrutiva
àquelas geradas pelas fontes de ruído. De maneira geral, o controle ativo de
ruído é mais eficiente nas baixas freqüências, enquanto em médias e altas
freqüências o controle passivo encontra melhor emprego (Milošević et al.,
1998). Nos últimos anos, procuraram-se formas para estender a aplicação
das duas técnicas para faixas de freqüência mais amplas. Apesar dos prin-
cípios básicos do controle passivo serem conhecidos desde o final do século
XIX, seu emprego de maneira mais sistemática só foi possível com o ad-
vento da Simulação Computacional nas últimas décadas. Paralelamente a
este fato, citem-se o desenvolvimento de novos materiais para a absorção
de som e a maior busca por maneiras de reduzir o nível sonoro em ambien-
tes fechados e particularmente em veículos, nos quais a absorção de som
deve ser feita de maneira a maximizar a redução dos níveis de pressão e
ainda obedecer às restrições relativas ao peso da estrutura e do custo de
fabricação. Apesar dos absorvedores tipo Helmholtz resonators serem os
mais utilizados em controle passivo de grandes salas (Everest, 2001), sua
aplicação para estruturas leves é mais complexa (Sacarcelik, 2004), de
forma que a aplicação de uma camada de material para a absorção de som
representa uma alternativa mais interessante. Infelizmente, nesse caso,
surge o problema da caracterização física deste tipo de material, seja ele
fibroso ou poroso. Apesar da existência de alguns modelos empíricos (Vo-
ronina, 1994, 1999) para a caracterização de diversos materiais ainda há
certa dificuldade de se entender de maneira satisfatória o seu mecanismo

4
de dissipação de energia. Além disso, as medições experimentais de propri-
edades como o coeficiente de absorção de som ou a impedância da
superfície esbarram na dificuldade de se obter um arranjo experimental
que minimize os erros de medição e que represente as diversas situações
pelas quais o material vai passar quando em uso prático. Diferentes ângu-
los de incidência da onda sonora, variações de temperatura, da umidade do
ar, bem como a deposição de poeira sobre o material, causam mudanças
em suas propriedades de absorção de som. Em Takahashi et al. (2005) é
mostrada uma revisão das diversas técnicas de medição atualmente dispo-
níveis e sua comparação com alguns modelos físicos mais elaborados.
Nesse contexto, a aplicação de métodos que possam levar em conta a
incerteza de certos parâmetros de absorção, e em particular da impedância
acústica, se faz necessária. O número de trabalhos lidando especificamente
com este tipo de problema na literatura é bastante reduzido, implicando na
necessidade de mais estudos na área. Em Schladitz et al. (2006), é mostra-
da uma aplicação de técnicas estocásticas para a modelagem de material
para controle passivo de ruído. No caso em questão, os pesquisadores gera-
ram um modelo para a microestrutura do material para a absorção
levando-se em conta as formas, diâmetros e distribuição das fibras, porosi-
dade e alguns outros parâmetros para caracterização do material. Diversas
amostras tridimensionais da microestrutura foram geradas e submetidas a
um simulador do tipo Navier-Stokes para obtenção da resistividade da
amostra e, com esta informação, a sua efetividade na absorção de som.
Apesar de a modelagem estocástica ter sido utilizada apenas na geração do
modelo micro-estrutural, a aplicação demonstra a importância com que
este tema tem sido tratado em aplicações industriais. Além do tratamento
dos materiais para absorção, as técnicas que visam à caracterização de
incerteza em problemas de acústica são empregadas em acústica oceânica

5
(onde pode haver grande variação nas propriedades do leito oceânico), na
caracterização geológica de reservatórios, em problemas inversos surgidos
no âmbito da geofísica, distribuição do som devido à variações na intensi-
dade e freqüência da fonte (situação comum quando há geração de ruído
por equipamentos), sistemas de exaustão etc.
Neste trabalho, faz-se amplo uso de simulações computacionais para a
análise e solução dos problemas propostos. A simulação computacional
consiste no uso de sistemas digitais para prever, caracterizar ou descrever
eventos físicos baseados em estruturas matemáticas as quais, pretensamen-
te, fornecem uma descrição de eventos que ocorrem na natureza. Neste
trabalho, serão tratados sistemas pertencentes à sub-área de Mecânica
Computacional, que são especificamente aqueles cuja descrição matemática
será aquela obtida a partir de princípios da Mecânica, em que certas leis de
conservação devem ser respeitadas.
A história da simulação computacional segue de perto a história da
computação e seu emprego corriqueiro pode ser diretamente vinculado à
simultânea disseminação do uso de computadores. É possível que o primei-
ro emprego em larga escala da simulação computacional tenha se dado
dentro do projeto Manhattan, que resultou no desenvolvimento da bomba
atômica. Em 1944, dentro desse projeto, o método de Monte Carlo foi
empregado para a estimativa da trajetória de Nêutrons, informação essen-
cial para descrever o processo de fissão nuclear em cadeia. A simulação
também acompanhou o desenvolvimento de técnicas para a solução das
equações diferenciais resultantes da descrição de sistema físicos, como na
década de 70, quando se generalizou o emprego do método de Elementos
Finitos. Quanto ao futuro, considera-se que o desempenho dos computado-
res continue a aumentar (é possível que a Lei de Moore continue válida, ou
seja, que o poder de processamento continue dobrando a cada 24 meses

6
(Babuška e Oden, 2006)). Desta forma, é de se esperar que a simulação
computacional seja aplicada a um espectro ainda maior de problemas e
com maior nível de sofisticação.
A simulação computacional teve, nas últimas décadas, um profundo
impacto tecnológico e científico. Em várias áreas como engenharia, física,
química e matemática o uso de tal tecnologia transformou a forma como
cientistas descrevem certos sistemas pois permitiu uma compreensão mais
profunda da natureza de certos fenômenos, como bem demonstram os
estudos de climatologia global, escoamentos em grandes escalas e o com-
portamento de fluidos não-newtonianos apenas para citar alguns exemplos.
Paralelamente, diversas teorias puderam ser testadas, diminuindo o tempo
necessário para que certa descrição de um sistema possa ser validada e
posteriormente incluída como uma ferramenta confiável do arcabouço
científico. Modelos envolvendo o estudo em mecânica quântica ou física
nuclear puderam ser testados e validados em um curto espaço de tempo.
Na área de engenharia e tecnologia, nas quais a descrição de sistemas físi-
cos representa uma ferramenta essencial na prototipagem de produtos, o
impacto da Mecânica Computacional foi ainda mais significativo. Diversas
teorias puderam ser aplicadas de maneira prática, o que permitiu maior
rapidez e confiabilidade no design de novos produtos e grande economia
com a diminuição de experimentos em protótipos. Em certos projetos,
como construção de pontes, verificação do comportamento sob impacto de
veículos, resistência de grandes estruturas ou controle ativo de ruído, a
simulação computacional se tornou a principal ferramenta à disposição do
engenheiro, e, por vezes, a única capaz de desempenhar a tarefa à altura.
Uma revisão de diversos empregos, benefícios e problema em abertos na
área de Mecânica Computacional pode ser encontrada em Oden et al.
(2003).

7
Outro aspecto que deve ser ressaltado consiste no grau de confiabili-
dade das simulações computacionais. Recentemente, tem-se destinado
maior atenção à verificação e validação. Enquanto a Verificação pode ser
descrita como o processo de determinar se um modelo computacional re-
presenta de forma adequada o modelo matemático subjacente, a Validação
trata da precisão do modelo matemático em relação ao processo físico real.
A Verificação consiste em dois aspectos. O primeiro deve ser com a correta
execução e escrita do código, ou seja, se o código faz exatamente aquilo
para o que foi projetado. A segunda etapa está relacionada com a precisão
dos resultados, onde se está interessado na diferença entre a solução exata
do problema matemático e a solução obtida com a simulação computacio-
nal. Existe ampla literatura disponível sobre o tratamento e estimativa de
erros em simulações computacionais (Babuška e Oden, 2006; Oden e Pru-
dhomme, 2002).
Já o processo de Validação envolve uma complexidade muito maior e
está diretamente relacionado com a metodologia científica. Este processo
consiste em estabelecer um modelo para descrever certo fenômeno natural,
esquematizar um processo de coleta de dados experimentais, comparação
entre esses dados com a solução matemática obtida a partir do modelo
adotado e aceitar ou rejeitar o modelo físico proposto. Neste caso, diversos
fatores devem influenciar o processo de Validação: a dificuldade de obter
dados experimentais confiáveis, a definição de um modelo que permita o
tratamento de dados com incertezas e a avaliação do erro gerado pelo
modelo proposto são alguns dos aspectos, todos de grande dificuldade, que
devem ser abordados nesta etapa (Babuška et al., 2003).
Além do papel crucial na Validação de modelos, a incerteza associada
a certos fenômenos naturais é uma questão de grande relevância quando se
busca aprimorar a simulação computacional. É possível afirmar que certo

8
nível de incerteza está presente em todos os dados de entrada de qualquer
sistema físico que se deseje analisar. Felizmente, mesmo processos estocás-
ticos podem ser tratados deterministicamente em problemas matemáticos
através da descrição analítica da incerteza, tornando factível a inclusão
deste tipo de dado na simulação computacional. Ainda deve-se fazer a
distinção entre incerteza epistêmica e a aleatória. A incerteza epistêmica
(ou subjetiva ou do modelo) é aquela derivada da falta de conhecimento do
fenômeno físico estudado. Essa incerteza surge devido à ausência de infor-
mação para caracterizar certos materiais, ao pouco entendimento entre as
relações não lineares entre diversos tipos de variáveis etc. e a mesma pode
ser diminuída através de levantamento de dados sobre o fenômeno ou mo-
delos mais elaborados para a descrição de eventos. Outro tipo de incerteza
é aquela conhecida como Variabilidade (incerteza estocástica, aleatória ou
irredutível). Nesse caso, os fenômenos são intrinsecamente aleatórios: o
escoamento turbulento, variação das propriedades do solo, ruídos em cabi-
nes de veículos etc. Uma vez que a validação de modelos determinísticos
exige dados experimentais sem flutuações aleatórias, o limite entre este
dois tipos de incerteza é bastante nebuloso em alguns sistemas (Helton e
Oberkampf, 2004).
O objeto de estudo deste trabalho são as incertezas induzidas nos ní-
veis sonoros em ambientes nos quais o controle passivo de ruído é
empregado e cujo materiais para absorção de som apresentam Variabilida-
de. A aproximação do campo de pressão no domínio que representa a
idealização deste ambiente será feita através de uma Simulação Computa-
cional utilizando o método de Elementos Finitos aplicados à solução da
equação de Helmholtz. Técnicas que permitirão diminuir o elevado esforço
computacional que seria necessário serão detalhadas, permitindo a utiliza-
ção eficiente dos recursos computacionais disponíveis.

9
Esta tese é dividida em 6 capítulos. No capítulo seguinte, faz-se um
breve resumo sobre alguns conceitos da Teoria Estatística e do método de
Monte Carlo que serão úteis ao longo deste trabalho. No capítulo 3, a
formulação determinística para o método de Elementos Finitos para a
solução da equação de Helmholtz é apresentada. Já no capítulo 4, detalha-
se o método da Colocação Estocástica, mostrando seu emprego para a
solução de problemas nos quais certos parâmetros apresentam Variabilida-
de. No capítulo 5, alguns resultados obtidos da aplicação do método da
Colocação Esparsa para a análise da propagação de incerteza serão anali-
sados. Finalmente, apresentam-se algumas conclusões e sugestões para
trabalhos futuros no capítulo final.

10
Capítulo 2
Análise de Incertezas
A maioria das simulações de sistemas físicos em Engenharia é basea-
da em modelos determinísticos. Na maior parte do tempo, o engenheiro ou
matemático que busca uma descrição física dos fenômenos que ocorrem em
determinado processo considera que tem pleno conhecimento das proprie-
dades físicas dos materiais envolvidos, do carregamento aplicado ou da
geometria do meio. Um pouco mais de rigor nesse tipo de análise nos leva
a crer que isso não é de todo verdadeiro. Verificando, por exemplo, a seção
transversal de uma viga de concreto, nota-se sua heterogeneidade mesmo
em nível macroscópico. Defeitos mecânicos de fabricação em uma barra
alteram a sua condutividade térmica em alguns pontos, bem como sua
resistência. Fatores como o atrito podem alterar o carregamento sobre um
cabo de tração de um elevador. Se esse mesmo cabo apresenta desgaste, ele
pode ter seu diâmetro alterado em alguns pontos.
Assim, todos os dados utilizados apresentam algum nível de incerte-
za. Uma das maneiras de melhorar o projeto desses componentes seria
através de uma medição mais aprimorada dos dados. Por exemplo, a resis-
tência de um material pode ser obtida através de um número maior de
ensaios experimentais. Novamente, esses mesmos ensaios apresentarão
certos níveis de incertezas intrínsecos.

11
Para realizar as simulações físicas considerando as incertezas ineren-
tes ao sistema, pode-se aumentar a robustez do projeto considerando
situações extremamente desfavoráveis resultantes da composição de diver-
sas incertezas ou tomar simplesmente os valores médios e aplicar fatores de
segurança pré-estabelecidos. Isto poderia resultar em projetos superespeci-
ficados, com pouca informação sobre a confiabilidade e aumento dos custos
de fabricação e operação.
Uma alternativa seria considerar o tratamento das incertezas, inclu-
indo a modelagem probabilística dentro da própria estrutura matemática e
obtendo respostas com informações estatísticas. Esta modelagem pode ser
feita de duas formas:
a) Uma abordagem estatística na qual uma técnica como a simulação
de Monte Carlo seria aplicada (Rubinstein, 1981), ensaiando um
grande número de amostras dos dados de entrada, e obtendo pro-
priedades estatísticas dos dados de saída.
b) Ou uma abordagem não-estatística, que leva ao tratamento analí-
tico da incerteza. A representação estocástica dos dados de entrada
seria incorporada ao arcabouço matemático do problema e permi-
tiria a obtenção da solução estocástica das equações governantes
do fenômeno.
A primeira técnica é amplamente utilizada devido à facilidade de im-
plementação e robustez. Já a segunda, permite o tratamento mais refinado
dos processos estocásticos, melhor aproveitamento dos recursos computa-
cionais, gerando soluções com informações estatísticas de maior qualidade.
Esses mesmos resultados podem fornecer informações importantes sobre a
confiabilidade e segurança do projeto, resultando em um projeto mais
elaborado.
12
Do ponto de vista computacional, a análise utilizando o método de
Monte Carlo apresenta a grande vantagem da simplicidade de aplicação
uma vez que pouca ou nenhuma alteração do código de simulação é neces-
sária. Assim, os códigos de Elementos Finitos ou Diferenças Finitas podem
ser utilizados diretamente para a obtenção de parâmetros estatísticos a
partir de certo número de amostras. Esta técnica surgiu por volta de 1940,
mas somente com o aumento da capacidade computacional seu uso pode
ser ampliado. Infelizmente, na maior parte dos casos, o número de amos-
tras a ser obtido é muito elevado, tornando o método custoso, e por vezes,
proibitivo. Ainda assim, esta ferramenta é comumente usada como método
de validação de outras técnicas computacionais nessa área.
Dada a existência de um modelo de elementos finitos para um pro-
blema físico e sendo alguns parâmetros desse modelo representados por
variáveis randômicas, um grupo importante de técnicas de solução que
utilizam uma representação matemática da incerteza é denominado, de
maneira genérica, como método de Elementos Finitos Estocásticos. Esta
técnica é considerada uma abordagem não estatística e dois ramos têm se
sobressaído para aplicações práticas. O método da Perturbação é o mais
aplicado, devido à facilidade de implementação. Neste método uma expan-
são em série de Taylor das quantidades estocásticas é feita sobre o valor
médio das mesmas. A eliminação dos termos de mais alta ordem é feita a
seguir e a solução é obtida sem maiores dificuldades. Devido à própria
natureza da expansão e como a solução utilizando os termos acima dos de
segunda ordem é muitas vezes inviável, o método é limitado para sistemas
com pequenas flutuações. O segundo ramo emprega a manipulação do
próprio operador estocástico e tem uma aplicabilidade mais extensa. Nele,
três outras técnicas têm sido grandemente estudadas: a expansão de Neu-
mann, decomposição de Karhunen-Loève e o uso de Polinômios Caos (ao

13
longo deste trabalho, é usada a expressão Polinômios Caos em referência
ao termo criado por Wiener (1938) equivalente ao termo em inglês Poly-
nomial Chaos). Uma revisão da aplicação destas técnicas pode ser
encontrada em Ghanem e Spanos (1999) e nas referências lá contidas.
Recentemente, novas abordagens com características de grande efici-
ência e não intrusividade (ou seja, que requerem pouca ou nenhuma
alteração dos códigos numéricos já existentes) foram desenvolvidas a partir
dos trabalhos de Deb et al. (2001): em Acharjee e Zabaras (2007) e Xiu e
Hesthaven (2005) o processo estocástico é representado por funções com
suporte local compacto. Esta técnica permite o desacoplamento entre os
graus de liberdade espaciais e randômicos e trazendo grande eficiência
computacional à modelagem estocástica.
As abordagens não-estatísticas têm em comum a representação dos
parâmetros que contém incertezas através da discretização do espaço de
suporte da dimensão estocástica. Em Ghanem e Spanos (1991), as incerte-
zas são tratadas como dimensão adicional e expandidas em uma série de
Polinômios Caos. Quando o método de Elementos Finitos é utilizado como
esquema de solução, esta técnica é conhecida como método de Elementos
Finitos Estocásticos Espectrais. A desvantagem desta estratégia reside no
aumento significativo do número de graus de liberdade necessários para a
solução do problema, uma vez que o sistema linear resultante tem dimen-
sões ndof pN N× , onde ndofN representa o número de graus de liberdade
espaciais e pN representa o número de coeficientes dos Polinômios Caos
utilizados para a representação da solução. Já na abordagem utilizada por
Acharjee e Zabaras (2007), a expansão é feita através de funções de supor-
te local e a aproximação dos graus de liberdade da dimensão estocástica é
feita através da solução determinística nos iN pontos de integração do
espaço de suporte. Isso resultará na solução de iN problemas determinísti-

14
cos cada um contendo um sistema linear de dimensões ndofN . Finalmente,
a minimização do número de pontos necessários para a aproximação foi
feita por Xiu e Hesthaven (2005) através da utilização de esquemas mais
elaborados para a interpolação da solução no espaço de suporte estocásti-
co.
A solução de um sistema de equações diferenciais no qual um ou mais
parâmetros variam de forma aleatória deve ser feita em duas etapas. Pri-
meiramente, é necessário caracterizar o componente responsável pela
introdução de incertezas no sistema. Como a incerteza faz parte de todos
os sistemas mecânicos, a questão que deve ser respondida é qual das fontes
de incerteza tem maior influência na solução do sistema. Esta nem sempre
é uma tarefa fácil, devendo o analista basear sua busca em sua intuição e
obter, através de modelos mais simples (uma vez que esta análise, como
será visto a seguir, pode ser muito custosa do ponto de vista computacio-
nal) o impacto de cada uma das fontes de incerteza sobre a solução do
sistema. Definidos quais os parâmetros serão considerados como estocásti-
cos, é necessário descrevê-los matematicamente. A Estatística provê o
arcabouço teórico que deve ser utilizado para tal, no qual poderão ser
encontradas as informações necessárias para caracterizar, mensurar e tra-
tar variáveis aleatórias. A caracterização estatística de parâmetros físicos
pode ser feita com base em dados experimentais através de diversas técni-
cas como a utilização do princípio da máxima entropia (Soize, 2001) ou
com a reconstrução de amostras de um meio físico (Sundararaghavan e
Zabaras, 2004, Ganapathysubramanian e Zabaras, 2007a-b).
Uma vez construída uma descrição estatística dos parâmetros aleató-
rios em um sistema, procede-se à solução do sistema de equações
diferenciais estocásticas resultante. Nesta etapa é empregado qualquer um
dos métodos disponíveis na literatura, como o método da Perturbação,

15
método de Elementos Finitos Estocásticos Espectrais, métodos de Coloca-
ção etc. Finalmente procede-se a análise estatística da solução obtida, seja
com o cálculo dos principais momentos ou mesmo através de uma estima-
tiva de sua função densidade de probabilidade (pdf, do termo em inglês
probability density function).
No decorrer deste trabalho, o termo métodos de Colocação (em in-
glês, o termo equivalente seria Stochastic Collocation method) dirá respeito
à ampla gama de técnicas que utilizam uma representação do espaço de
suporte e que aproximam a solução dentro deste espaço através de técnicas
de interpolação, já o termo método da Colocação Esparsa (Sparse Grid
Collocation) referenciará a técnica de colocação que utiliza, especificamen-
te, uma interpolação esparsa para esta tarefa.
2.1 Formulação Básica
2.1.1 Modelagem estatística dos parâmetros de entrada
Basicamente, podem ser utilizados dois tipos de modelos probabilísti-
cos para a descrição de parâmetros aleatórios: usando um conjunto de
variáveis aleatórias ou através de campos aleatórios. Far-se-á a seguir uma
revisão sucinta desses dois tipos de representação. Mais informações podem
ser encontradas nos trabalhos de Keese (2004) e Elishakoff (1999).
Variáveis estocásticas (neste trabalho, os termos variáveis estocásti-
cas, variáveis randômicas e variáveis aleatórias serão tratados como
sinônimos) permitem uma descrição conveniente de experimentos através
de valores numéricos. Para cada amostra do espaço de eventos é assinalado
um valor numérico. Em termos matemáticos, dado um espaço de probabi-
lidade descrito por ( , , )FΩ onde Ω representa o conjunto de eventos, é
16
uma família σ -álgebra de eventos e : [0,1]F Ω→ é uma medida de proba-
bilidade (um evento de Ω será representado por θ ). Assim, uma variável
estocástica a valores reais é uma função mensurável :X VΩ→ , onde
V = . Portanto, esta variável aleatória pode ser descrita como uma fun-
ção que associa um evento θ no espaço de amostras a um valor na reta
real. Se dV = , então : VΩ→X é um vetor randômico d-dimensional.
Uma variável aleatória (v.a.) X com valores em V = gera uma medida
de probabilidade XF em V , chamada distribuição de probabilidade cumu-
lativa de X , que é definida como ( )XF x = Probabilidade( )X x≤ =
( )P X x≤ . Define-se também, para esta mesma variável, a função densida-
de de probabilidade ( )Xf x tal que ( )
( ) XX
dF xf x
dx= .
Já o valor esperado de uma variável aleatória é definido através da
integral
( ( )) ( ( )) ( ) ( ) ( ) ( ) ( )X Xg X g X dP g X dF x g X f x dxθ θ
Ω
= = =∫ ∫ ∫
E (2.1)
sendo ( )g X uma função qualquer. Analogamente, os momentos de uma
variável são definidos através do caso particular no qual ( ) kg X X= , onde
0k +∈ N . Para 0k = , o valor esperado é igual a 1. Para 1k = , tem-se a
definição da expectativa matemática:
1 ( ) ( )Xm X X f x dx= = ∫
E (2.2)
e para 1k > , o k -ésimo momento como é definido como
( ) ( )k kk Xm X X f x dx= = ∫
E (2.3)
O k -ésimo momento central corresponde aos valores obtidos quando
a função ( )( ) ( )k
g X X X= − E é empregada, ou seja,

17
( ) ( )( ) ( ) ( )k k
k XX X X X f x dxµ = − = − ∫
E E E (2.4)
de onde se pode inferir que 0 1µ = e 1 0µ = . A variância de X é definida
como o segundo momento central
( ) ( )
( )
2 2
22 22 1
( ) ( ) ( ) ( )
( ) ( )
XVar X X X X X f x dx
X X m m
= − = −
= − = −
∫
E E E
E E
(2.5)
Finalmente, o desvio padrão de uma v.a. X será dado por Xσ , tal
que:
( )X Var Xσ = (2.6)
No caso de um vetor randômico n-dimensional 1 2( , , , )nX X X= …X , a
função cumulativa de probabilidade conjunta é definida como
1 2 1 1 2 2( , , , ) ( , , , )n n nF x x x P X x X x X x= ≤ ≤ ≤… …X
(2.7)
e a função densidade de probabilidade conjunta como (Elishakoff, 1999)
1 21 2
1 2
( , , , )( , , , )
nn
n
n
F x x xf x x x
x x x
∂=
∂ ∂ ∂…
……
X
X (2.8)
De maneira semelhante ao caso unidimensional da v.a., pode-se calcu-
lar a expectativa matemática de uma função qualquer 1 2( , , , )ng x x x… como
sendo
1 2 1 2 1 2( ( )) ( , , , ) ( , , , )n n ng g x x x f x x x dx dx dx+∞ +∞ +∞
−∞ −∞ −∞
= ∫ ∫ ∫… … … …X
XE (2.9)
Analogamente, define-se a função
1 2( , , , ) ( ( )) ( ( ))k rn i i j jg x x x x x x x= − −… E E de forma a obter ( )k r+ -ésimo
momento central conjunto das variáveis iX e jX
( ) ( )( ( , )) ( ) ( )i j
rk
kr i j i i j j X X i jg x x X E X X E X f dx dxµ
+∞ +∞
−∞ −∞
= = − −∫ ∫E (2.10)

18
Desta forma, podem-se obter os momentos centrais para cada uma
das variáveis isoladamente
[ ]( )( )
0
0
( )
( )
k
k i i
r
r j j
X X
X X
µ
µ
= −
= −
E E
E E
(2.11)
o que é equivalente à expressão dada por (2.4). E para o caso 2k r= = ,
obtem-se as variâncias
( )
( )20
02
i
j
Var X
Var X
µ
µ
=
= (2.12)
É importante definir o momento central de primeira ordem 11µ entre
as duas variáveis, também chamado de covariância de iX e jX
11 ( , ) ( ( ))( ( ))i ji j i i j j X X i jCov X X X E X X E X f dx dxµ
+∞ +∞
−∞ −∞
= = − −∫ ∫ (2.13)
Finalmente, o coeficiente de correlação será obtido pela relação
( , )
( ) ( )i j
ij
i j
Cov X Xr
Var X Var X= (2.14)
e a eq. (2.13) pode ser utilizada para montar a matriz de variância-
covariância como
[ ]
1 1 2 1
2 1 2 2
1 2
( ) ( , ) ( , )
( , ) ( ) ( , )
( , ) ( , ) ( )
n
n
n n nn n
Var X Cov X X Cov X X
Cov X X Var X Cov X XV
Cov X X Cov X X Var X×
=
…
…
…
(2.15)
que tem dimensão n n× . Devido à definição da covariância, a matriz [ ]V é
simétrica, pois ( , ) ( , )i j j iCov X X Cov X X= . Além disso, é possível provar
que o determinante é positivo e que a matriz é positiva semidefinida (Eli-
shakoff, 1999).

19
2.1.1.1 Processos Estocásticos
As variáveis randômicas representam um mapeamento entre um con-
junto de amostras e um número real. Quando uma ou mais variáveis
aleatórias estão associadas a parâmetros determinísticos (como uma posi-
ção em um domínio espacial), elas são chamadas de campos aleatórios.
Quando esta associação se dá com um parâmetro temporal, são chamadas
de processos estocásticos.
Um campo randômico S em uma região dD ⊂ e em um espaço de
probabilidade ( , , )FΩ pode ser interpretado como um conjunto de variá-
veis indexadas por x D∈ ou como uma função dependente de x . Assim, o
campo randômico seria um mapeamento mensurável
( ), : ,x D x Dθ θ×Ω→ ∈ ∈ ΩS (2.16)
Resta associar esta variável a um espaço de probabilidade o que pode
ser feito de duas formas. Uma caracterização probabilística onde o campo
randômico seria um conjunto de variáveis
( ) : ( , ) :x x= ⋅ Ω → S S (2.17)
indexadas por x D∈ . Ou uma caracterização de medida, onde o campo
randômico pode ser definido como uma variável randômica que tem valores
em uma região dD ⊂ . Assim, um evento θ representa uma realização:
(, ) :Dθ⋅ → S (2.18)
Suponha um caso geral onde o campo randômico seja também de-
pendente do tempo, ou seja,
( ), , : , ,x t D T x D t Tθ θ× ×Ω→ ∈ ∈ ∈ ΩS (2.19)
O tratamento usual de campos randômicos consiste em decompô-los
através de uma expansão em variáveis randômicas. Assim, um campo

20
randômico será representado através de uma série que associa funções
descrevendo uma distribuição espacial particular, um peso que determina a
importância daquela distribuição espacial e uma variável randômica nor-
malizada. A expansão mais utilizada consiste na expansão de Karhunen-
Lòeve cuja descrição detalhada pode ser encontrada em Ghanem e Spanos
(1991) ou em Sampaio e Wolter (2001).
2.1.2 Equações diferenciais randômicas
Inicialmente, definem-se matematicamente operadores diferenciais
com propriedades estocásticas em uma de suas dimensões. Seja um espaço
de probabilidade completo ( , , )FΩ e um domínio d-dimensional dD ⊂
limitado pelo contorno D∂ , deseja-se saber qual a função estocástica
( , ) :u u x Dθ≡ Ω× → , tal que para F -q.t.p.1 em Ω , ou seja, a seguinte
equação seja válida q.c.2
( ), ; ( , ),x u f x x Dθ θ= ∈L (2.20)
Sendo as condições de contorno
( ), ; ( , ),x u g x x Dθ θ= ∈ ∂B (2.21)
onde 1( ,..., )dx x x= é um ponto no domínio D . ( ).L é um operador esto-
cástico linear ou não-linear dependente de x . ( ).B é o operador de
contorno, que pode representar as condições de contorno de Dirichlet
( ≡B I ), Neumann ( n≡ ⋅∇B , onde n é o vetor unitário normal ao con-
torno) ou Robin ( 0c n≡ + ⋅∇B I , 0c é uma constante qualquer). Assume-
1 Quase em toda a parte, em inglês almost everywhere
2 Quase certamente, em inglês almost surely

21
se que o problema estará bem posto F -q.t.p., θ ∈ Ω considerando o con-
torno como suficientemente regular.
2.1.3 Aproximação das variáveis de entrada
Antes de buscar a solução da eq. (2.20) é necessário buscar formas de
representar matematicamente o espaço de probabilidade associado à equa-
ção diferencial parcial que permitam utilizar um número finito de variáveis
aleatórias. Se as fontes de incertezas em problemas mecânicos puderem ser
representadas usando um pequeno número de variáveis não correlacionadas
e/ou independentes, esta redução da dimensionalidade do espaço de entra-
da pode muito bem ser aplicada. Ademais, aproximações utilizando séries
de Karhunen-Loève, tendem a representar muito bem sistemas físicos esto-
cásticos utilizando um pequeno número de variáveis randômicas (Sampaio
e Wolter, 2001). Considerando-se então que as funções de entrada randô-
micas possam ser representadas por N variáveis randômicas, pode-se
escrever
( ) ( )
( )
( ) ( )
( )
=
1 2
1 2
1 2
1 2
, ; ( ), ( ), , ( ), ;
( , ) ( ), ( ), , ( ),
, ; ( ), ( ), , ( ), ;
( , ) ( ), ( ), , ( ),
N
N
N
N
x u x u
f x f x
x u x u
g x g x
θ ξ θ ξ θ ξ θ
θ ξ θ ξ θ ξ θ
θ ξ θ ξ θ ξ θ
θ ξ θ ξ θ ξ θ
=
=
=
L L
B B
…
…
…
…
(2.22)
A imagem Γ do conjunto 1( ) N
i iy ξ θ
== é gerada pela composição das
imagens de cada variável randômica, ou seja, dado que ( )k kξΓ ≡ Ω é a
imagem de kξ , tem-se 1
;N N
kk=Γ = Γ Γ ⊂∏ .
Como a representação expressa por (2.22) consiste de um número fi-
nito de variáveis, é possível utilizar o teorema de Doob-Dynkin (Øksendal,
1998) e afirmar que a solução u da eq. (2.20) pode ser representada pelo
mesmo conjunto de variáveis, ou seja,

22
( ) ( )1 2, ( ), ( ), , ( ), ( , ), ,Nu x u x u y x y x Dθ ξ θ ξ θ ξ θ= = ∈ Γ ∈… (2.23)
Apesar do conjunto y ser definido até aqui de maneira genérica, a
partir deste ponto este é assumido como composto de variáveis indepen-
dentes. Mais tarde, isso permitirá definir o espaço de funções de Hilbert
através do produto tensorial dos espaços de cada variável. Sem perda de
generalidade, também é assumido que esse é um conjunto de variáveis
randômicas reais com média zero e desvio padrão unitário. Assim, conside-
rando que 1( ) N
i iξ θ
= são variáveis randômicas independentes cada qual com
função de densidade de probabilidade :i iρ +Γ → R , a distribuição de pro-
babilidade conjunta será dada por
1
( ) ( ),N
i ii
y yρ ρ ξ=
= ∀ ∈ Γ∏ (2.24)
O problema dado por (2.20) e (2.21) passa a ser uma equação dife-
rencial em (N d+ ) dimensões com a seguinte formulação matemática
( ), ; ( , ), ( , )y x u f y x y x D= ∈ Γ×L (2.25)
( ), ; ( , ), ( , )y x u g y x y x D= ∈ Γ×∂B (2.26)
Para obter a forma fraca do problema acima, define-se um subespaço
de dimensão finita 2 ( )V LρΓ ⊂ Γ correspondente ao espaço de todas as fun-
ções quadrado integráveis em Γ com respeito à medida ( )y dyρ e procura-
se a função ( , ) ( )Vu y x V yΓ∈ tal que
( )( ) , ; ( ) ( ) ( , ) ( ) , ( ) ,Vy y x u v y dy y f y x v y dy v y V x Dρ ρ Γ
Γ Γ
= ∀ ∈ ∈∫ ∫L (2.27)
( )( ) , ; ( ) ( ) ( , ) ( ) , ( ) ,Vy y x u v y dy y g y x v y dy v y V x Dρ ρ Γ
Γ Γ
= ∀ ∈ ∈ ∂∫ ∫B (2.28)
Uma vez caracterizada a fonte de incertezas em um sistema mecânico,
a modelagem estocástica pode ser feita baseada na formulação matemática
23
do sistema, dada pelas eqs.(2.25) e (2.26), ou pela utilização da forma
fraca expressa pelas eqs.(2.27) e (2.28). Diversos estudos foram feitos para
obter a solução para o caso de um sistema sujeito a excitação estocástica e
com operador determinístico (Ghanem e Spanos, 1991).
Neste trabalho será estudado o caso em que o operador diferencial
( ).L é estocástico, situação que traz um grande número de desafios mate-
máticos e computacionais ao pesquisador da área. Apesar do número de
trabalhos para este tipo de problema ser bastante elevado, restam diversas
questões em aberto, algumas das quais serão abordadas aqui.
O método de Monte Carlo será apresentado a seguir. Sua aplicação
dentro do corpo deste trabalho será feita de forma a verificar o método da
Colocação Esparsa utilizado aqui, o qual será tratado com mais detalhe no
capítulo 5. Já outros métodos não estatísticos são apresentados no Apêndi-
ce A.
2.2 O Método de Monte Carlo
O método de Monte Carlo é o método mais utilizado para simulação
computacional de sistemas com dados randômicos. Seu sucesso se deve à
simplicidade, extrema robustez e à facilidade com que lida com qualquer
sistema, mesmo aqueles de grande complexidade. Enquanto os procedimen-
tos não-estatísticos enfrentam diversos problemas no que diz respeito à
dimensionalidade, variabilidade dos parâmetros de entrada e da não linea-
ridade do problema a ser tratado, o método de Monte Carlo consegue
superar essas dificuldades de maneira simples. Desta forma, esse método é
uma ferramenta essencial, tanto na solução de problemas cuja solução
usando abordagens não-estatísticas é uma tarefa complexa, ou para a
avaliação e verificação dos resultados obtidos por outras técnicas.

24
Dado que a solução de determinado problema possa ser encontrada,
seja utilizando métodos analíticos (aproximados ou exatos) ou numéricos
(como o método de Elementos Finitos), o método de Monte Carlo permite
o cálculo de um conjunto de resultados, associado a um conjunto de amos-
tras utilizadas para os dados de entrada, e a posterior obtenção de
propriedades estatísticas como a média, desvio padrão e mesmo a função
distribuição de probabilidade desses resultados.
O principal inconveniente que recai sobre esta técnica consiste no
custo computacional exigido. É de se esperar que quanto maior o número
de soluções utilizadas para obter a resposta, menor a diferença entre os
valores estatísticos obtidos da resposta e aqueles que seriam os valores
estatísticos corretos. Isto confere ao método um elevado custo computacio-
nal, principalmente em sistemas com grande número de graus de liberdade
ou que apresentem algum tipo de não linearidade na solução, caso muito
comum em análises de problemas de engenharia em dinâmica dos fluidos,
interação fluido-estrutura etc. No entanto, o aumento dos recursos compu-
tacionais disponíveis atualmente e a fácil paralelização do método o tem
tornado uma ferramenta cada vez mais atrativa.
A análise usando o método de Monte Carlo se baseia na definição de
probabilidade através de freqüência relativa (Elishakoff, 1999). Nesta defi-
nição, a probabilidade de um evento é medida dividindo-se o número de
ocorrências do evento desejado pelo número de eventos possíveis. Como
variáveis randômicas contínuas podem gerar um número infinito de amos-
tras, um número infinito de análises deveriam ser realizadas. Assim, em um
conjunto finito de análises, os valores esperados para as propriedades esta-
tísticas da resposta terão sempre algum nível de erro. Diversas técnicas
foram desenvolvidas para a minimização deste erro. Técnicas de aceitação-
rejeição e técnicas de redução da variância como estratificação das amos-

25
tras e a amostragem por importância são alguns dos métodos que visam à
minimização do erro estatístico da resposta e a conseqüente redução do
número de análises requeridos para se atingir certo nível de precisão (Schü-
eller, 1997).
Os primeiros trabalhos utilizando esta técnica datam da década de
1940 (um resumo histórico do desenvolvimento desta técnica pode ser
encontrado em Elishakoff, 2003). Na área da engenharia mecânica sua
aplicação tem início nos anos 70, quando o aumento da tecnologia de com-
putadores e do desenvolvimento de técnicas eficientes para a geração de
números aleatórios, dois fatores que somados permitem obter soluções
rápidas e confiáveis para sistemas com características randômicas, se tor-
naram possíveis (Ghanem e Spanos, 1991).
A técnica de Monte Carlo pode ser esquematizada da seguinte forma:
suponha um sistema que receba uma excitação estocástica. Um exemplo
deste tipo de sistema é um ambiente acústico sujeito ao ruído de um equi-
pamento mecânico (excitação randômica). Basicamente amostras da função
de excitação são geradas. Para cada uma destas amostras, a função respos-
ta do processo pode ser calculada (neste caso, resolvendo de forma
aproximada ou numérica a equação de onda em um meio representando o
ambiente de propagação do som).
Supondo um sistema com excitação randômica ( )f t . No caso de um
processo estocástico, a análise utilizando o método de Monte Carlo requer
a obtenção de um conjunto de valores para a função ( )f t . Em um sistema
digital, estes valores seriam tomados em espaços de tempo discretos
( ), , 1,2, ,j jf t t j t j N= ∆ = … através de um gerador de números aleató-
rios. Pode-se também tomar M amostras ( ), 1,2, ,i jf t i M= … . Para cada
amostra seria possível calcular a solução discreta no domínio do tempo

26
( ), 1,2, , , 1,2, ,i jx t i M j N= =… … . Pode-se então obter a resposta média
em casos de sistemas não estacionários e uma estimativa do desvio padrão
na forma (Roberts e Spanos, 2003)
1
1( ) ( )
M
x j i ji
m t x tM =
= ∑ (2.29)
( )21
1( ) ( ) ( )
1
M
x j i j ji
t x t m tM
σ=
= −− ∑ (2.30)
Além dos momentos, é possível estimar a função distribuição de pro-
babilidade, normalmente através de histogramas. métodos mais elaborados
para obter estas funções são técnicas de estimativas de núcleo, que permi-
tem um cômputo mais preciso usando um número menor de amostras. De
qualquer maneira, para obter estimativas precisas das regiões de menores
probabilidades é necessária a utilização de um número bastante elevado de
amostras (normalmente 610N ∼ ).
A precisão das fórmulas (2.29) e (2.30) pode ser calculada levando-se
em conta que as amostras formam um conjunto estatisticamente indepen-
dente. Para valores de M elevados, tem-se que o desvio padrão de ( )x jm t
é dado por
1
( )( ) x j
j
tt
M
σσ = (2.31)
enquanto ( )x jtσ tem desvio padrão
2
( )( )
2x j
j
tt
M
σσ = (2.32)
Logo, a estimativa da média tem uma dispersão maior que a do des-
vio padrão. A principal característica destas propriedades é que a precisão
é inversamente proporcional à M , ou seja, para aumentar a precisão em
um dígito na resposta média é necessário aumentar em 10 vezes o número
de simulações a serem utilizadas no cálculo.

27
Capítulo 3
Elementos Finitos para Problemas de
Acústica
A teoria relacionada à propagação de ondas acústicas está bem fun-
damentada na literatura. No domínio da freqüência, a propagação de tais
ondas é governada pela equação de Helmholtz, cuja solução analítica é
alcançável apenas para certas combinações de domínio e condições de
contorno. Para a grande maioria das situações, uma solução numérica deve
ser utilizada e, dentro deste contexto, o método de Elementos Finitos tem
ampla utilização. A solução numérica utilizando o método de Elementos
Finitos para a equação de Helmholtz apresenta algumas dificuldades decor-
rentes do problema de poluição da solução, causada pela perda de
elipticidade do operador em altas freqüências. Para manter pequeno este
erro, as malhas utilizadas devem ter elementos com tamanhos reduzidos de
acordo com o aumento do número de onda. Ihlenburg e Babuška (1995)
demonstraram que o erro de aproximação he da solução de elementos fini-
tos satisfaz a seguinte desigualdade
3 21 2he C kh C k h≤ + (3.1)

28
sendo 1 2 e C C constantes independentes do número de onda k e do tama-
nho do elemento h . O primeiro termo do lado direito de (3.1) representa o
erro local da solução de elementos finitos enquanto o segundo se refere à
poluição numérica. Tal erro é característico das soluções tipo Galerkin da
equação de Helmholtz e já foi analisado por diversos autores (Ihlenburg e
Babuška, 1995; Irimie e Bouillard, 2001; Ihlenburg, 1998). Vale lembrar,
que há esquemas de elementos finitos como o GLS (do inglês Galerkin
Least Squares) e o método de Galerkin Descontínuo (Alvarez et al., 2006)
que reduzem sensivelmente o erro de poluição. Outros métodos que permi-
tem utilizar malhas menos refinadas, mesmo para números de onda
elevados, estão disponíveis na literatura (ver Strouboulis et al. (2006) e as
referências lá listadas).
Neste capítulo, as equações de conservação de momento e massa para
um fluido sujeito a pequenos deslocamentos serão apresentadas. A partir
dessas equações, será mostrado como derivar a equação de Helmholtz, cuja
formulação fraca também será obtida e utilizada em um esquema de Ele-
mentos Finitos clássico tipo Galerkin. Apesar de esta formulação ter sido
utilizada por diversos autores (Paulino e Rochinha, 2005; Gamallo, 2002),
a condição de contorno representando a impedância é tratada como uma
interação entre diversos pontos do domínio de absorção, forma bastante
diferente do tratamento encontrado na literatura. Tanto os erros de apro-
ximação e de poluição serão minimizados através da diminuição do
tamanho do elemento.
3.1 Equações de Balanço
Dado um fluido compressível ideal, não viscoso, com pequenas per-
turbações no campo de pressão, em um meio 3fΩ ∈ delimitado por um
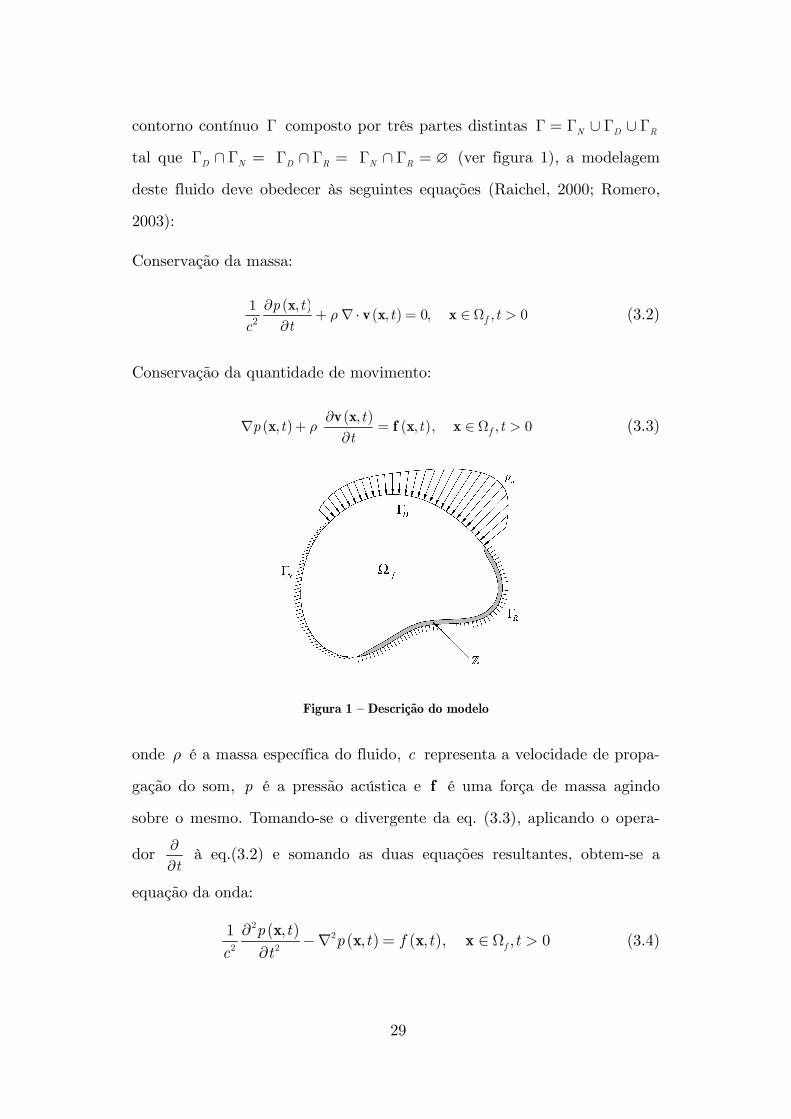
29
contorno contínuo Γ composto por três partes distintas N D RΓ = Γ ∪ Γ ∪ Γ
tal que D NΓ ∩ Γ = D RΓ ∩ Γ = N RΓ ∩ Γ = ∅ (ver figura 1), a modelagem
deste fluido deve obedecer às seguintes equações (Raichel, 2000; Romero,
2003):
Conservação da massa:
( )
( )2
,1, 0, , 0f
p tt t
tcρ
∂+ ∇⋅ = ∈ Ω >
∂x
v x x (3.2)
Conservação da quantidade de movimento:
( )( )
( ),
, , , , 0f
tp t t t
tρ∂
∇ + = ∈ Ω >∂v x
x f x x (3.3)
Figura 1 – Descrição do modelo
onde ρ é a massa específica do fluido, c representa a velocidade de propa-
gação do som, p é a pressão acústica e f é uma força de massa agindo
sobre o mesmo. Tomando-se o divergente da eq. (3.3), aplicando o opera-
dor t
∂∂
à eq.(3.2) e somando as duas equações resultantes, obtem-se a
equação da onda:
( )
( ) ( )2
22 2
,1, , , , 0f
p tp t f t t
c t
∂−∇ = ∈ Ω >
∂x
x x x (3.4)

30
sendo que f é a excitação acústica. As condições de contorno para a equa-
ção da onda dependem dos diferentes tipos de fronteiras do domínio:
1. Parede rígida: Neste caso, não poderá haver deslocamento do fluido
na direção normal à parede. Da mesma forma, a velocidade nessa di-
reção também será nula e tem-se uma condição de segundo tipo:
N0 em p∇ ⋅ = Γn (3.5)
2. Parede aberta: O domínio se comunica com um meio exterior onde
existe uma flutuação de pressão dada. Desta forma, tem-se uma con-
dição de primeiro tipo, não homogênea:
( ) ( ) D, , em dp t p t= Γx x (3.6)
3. Parede com absorção: Esta é a condição adequada para a modelagem
de uma parede que esteja revestida por uma camada (de espessura
desprezível) de material para a absorção de som. A resposta da mes-
ma a uma excitação do campo de pressão agindo sobre ela é
composta por duas partes: uma parte que reage de acordo com o des-
locamento sofrido e outra que responde às flutuações de velocidade,
ou seja,
Rem p α β= ⋅ + ⋅ Γu n v n (3.7)
onde α e β representam a constante de rigidez e de amortecimento
deste material. u é o deslocamento do fluido. No presente caso, pro-
cura-se utilizar um outro modelo para relacionar a pressão e a
velocidade neste tipo de fronteira, como será visto a seguir.
4. Parede rígida sob aceleração: Neste caso a parede se desloca de ma-
neira cíclica, de forma que pode ser obtida uma condição de
Neumann não homogênea
( ) N, em p s t∇ ⋅ = Γn x (3.8)

31
5. Domínio infinito: Para campos distantes utiliza-se a chamada condi-
ção de Sommerfeld. É uma condição relacionada com o fato de que
fontes devem irradiar energia e que não deverá haver reflexão desta
energia em domínios infinitos. Esse tipo de condição garante a solu-
ção única para a equação de Helmholtz em problemas exteriores nos
quais o domínio contém uma fonte do tipo delta de Dirac. Como nes-
te trabalho se tratará apenas com problemas interiores, não se
entrará em grandes detalhes sobre este tipo de condição.
3.2 A Equação de Helmholtz
Assumindo que os termos de excitação da equação da onda sejam
harmônicos com freqüência angular ω , ou seja, que possa haver uma sepa-
ração na forma
( ) ( )
( ) ( )
( ) ( )
,
,
,
i t
i t
i td d
f t F e
s t S e
p t P e
ω
ω
ω
−
−
−
=
=
=
x x
x x
x x
(3.9)
Devido à linearidade da equação de onda, a aplicação das condições
(3.9) gera uma solução ( ) ( ), i tp t P e ω−=x x e ( ) ( ), i tt V e ω−=v x x . Ao se
aplicar essas equações à eq.(3.4), obtem-se a equação de Helmholtz
( ) ( ) ( )2 2P k P F∇ + =x x x (3.10)
sendo k o número de onda definido por
2
kc
ω π
λ= = (3.11)
e λ é o comprimento de onda. A velocidade do fluido pode ser expressa em
função da pressão levando-se em conta a eq.(3.3)
1
V Piωρ
= ∇ (3.12)

32
No domínio da freqüência, as condições vistas na seção anterior se
tornam
1. Parede rígida:
N0 em P∇ ⋅ = Γn (3.13)
2. Parede aberta:
Dem dP P= Γ (3.14)
3. Parede de absorção:
Rem P i Vαβ
ω
= + ⋅ Γ n (3.15)
4. Parede rígida sob aceleração:
Nem P S∇ ⋅ = Γn (3.16)
Generalizando a eq.(3.15), podem-se definir também os operadores
impedância e admitância acústica em um contorno
( ) ( ) ( )( )P V= ⋅x x x nZ (3.17)
( ) ( )( )( )V P⋅ =x n x xA (3.18)
Finalmente, as condições de contorno que serão aplicadas nos pro-
blemas tratados neste trabalho se restringem a
( ) ( )
( ) ( )
( ) ( ) ( )( )
em
em
em
d D
N N
R
P P
P i V
P i ck P
ρω
ρ
= Γ
∇ ⋅ = ⋅ Γ
∇ ⋅ = − Γ
x x
x n x n
x n x xA
(3.19)

33
3.3 Formulação de Elementos Finitos
Para a utilização de um esquema de Elementos Finitos é necessária a
obtenção de uma forma fraca para a equação de Helmholtz. Tomando a
eq.(3.10), e multiplicando por uma função teste q obtem-se3
( ) ( ) ( )( ) ( )2 2 0, qP k P F q d q VΩ
∇ + − Ω = ∀ ∈∫ x x x x (3.20)
ou
2 2Pqd k Pqd FqdΩ Ω Ω
∇ Ω+ Ω = Ω∫ ∫ ∫ (3.21)
usando o teorema da divergência
2.P qd P qd k Pqd FqdΓ Ω Ω Ω
∇ Γ− ∇ ⋅∇ Ω+ Ω = Ω∫ ∫ ∫ ∫n (3.22)
e dividindo o contorno e aplicando as condições dadas por (3.19) resulta o
seguinte problema variacional: Encontrar PP V∈ tal que
( ) ( ), , qP q q q V= ∀ ∈B L (3.23)
sendo
( ) ( )( )
( )
2,R
N
N
P q P qd k Pqd i ck P qd
q V qd Fqd
ρ
Ω Ω Γ
Γ Ω
= ∇ ⋅∇ Ω− Ω+ Γ
= ⋅ Γ− Ω
∫ ∫ ∫
∫ ∫
x
n
B
L
A
(3.24)
O espaço de funções V será tal que
3 Como a pressão é uma variável complexa, este produto deve ser definido através
pqdΩ
Ω∫ onde q é o conjugado da função teste. Será mantida a forma escrita sem a
barra para a representação do conjugado em todas as integrais derivadas da expressão
(3.20).

34
( ) ( ) ( ) 1 1 ,DP D f f D D D DV H P H P PΓ= Ω = ∈ Ω = ∈ Γx x (3.25)
( ) ( ) ( ) 1 10 0,q f f D D DV H q H q= Ω = ∈ Ω = ∈ Γx x (3.26)
( )1fH Ω é o espaço de Hilbert dado pelo conjunto de funções a valores
complexos com derivadas quadrado integráveis em fΩ :
( ) ( ) ( ) ( )1 2 2: , , ; 1,dimf f f f f
i
fH f f L L i
x
∂ Ω = Ω → ∈ Ω ∈ Ω ∀ = Ω ∂ C (3.27)
As funções de excitação são tais que ( ) ( )2 2 e f N NF L V L∈ Ω ∈ Γ . A
prova da existência e unicidade da solução de (3.23) pode ser encontrada
em Gamallo (2002) e nas referências nele citadas.
Busca-se uma aproximação de elementos finitos de (3.23) através da
utilização de um espaço de dimensão finita hS V⊂ . Supondo que o domí-
nio seja dividido em elementos em forma de hexaedros e que em cada
elemento tenham-se funções de interpolação no espaço 1,0hS , que correspon-
dem às funções polinomiais de grau 1. Procura-se então a solução do
seguinte problema aproximado: Encontrar a solução hh PP S∈ tal que
( ) ( ), , ,h hh h h h P h qP q q P S q S= ∈ ∀ ∈B L (3.28)
sendo 1,0 1,0,h hP P h q q hS V S S V S= ∩ = ∩ . De maneira habitual em formulação
do tipo elementos finitos, admite-se uma interpolação do tipo
( ) ( )
( ) ( )
P
q
=
=
x H x P
x H x Q (3.29)
onde H é uma matriz de interpolação cujas funções de aproximação per-
tencem ao espaço 1,0hS e P é o conjunto de valores nodais da função hP .
Aplicando à (3.28) resultaria

35
( ) ( ) ( ) ( )
( ) ( )( )( ) ( ) ( )
2
R
N
T T
T
N
d k d
i ck d F d V dρ
Ω Ω
ΓΩ Γ
∇ ∇ Ω− Ω
+ Γ = Ω+ ⋅ Γ
∫ ∫
∫ ∫ ∫
HP HQ HP HQ
x HP HQ HQ x nHQA
(3.30)
e
( )
( )( ) ( )
2
R N
TT T T
T TN
d k d
i ck d F d V dρ
Ω Ω
Γ Ω Γ
∇ ∇ Ω− Ω
+ Γ = Ω+ ⋅ Γ
∫ ∫
∫ ∫ ∫
P H H P H H
x P H H H x nHA
(3.31)
A questão que surge é como buscar uma forma consistente para
( )( )R
T T dΓ
Γ∫ x P H HA . Inicialmente, pode-se considerar que o operador de
admitância possa ser expresso através da matriz complexa A de dimensão
N N× , onde N é o número de graus de liberdade no contorno RΓ , de tal
forma que ( )( ) ( )TT ≡x P APA que pode ser vista como uma função transfe-
rência entre a pressão e a velocidade normal no contorno RΓ .
Continuando o desenvolvimento anterior
( )
( )
2
R
N
TT T T T
N
d k d i ck d
V d F d
ρ
Ω Ω Γ
Γ Ω
∇ ∇ Ω− Ω+ Γ =
⋅ Γ + Ω
∫ ∫ ∫
∫ ∫
P H H H H A H H
x nH H
(3.32)
ou seja,
2( )ik c kρ+ − =K C M P F (3.33)
sendo que
( )
( )
R N
T T
T TN
d d
d V d F d
Ω Ω
Γ Γ Ω
= ∇ ∇ Ω = Ω
= Γ = ⋅ Γ+ Ω
∫ ∫
∫ ∫ ∫
K H H M H H
C A H H F x nH H(3.34)
36
A matriz A terá a forma
1,1 2,1 ,1
2,2
,
,.
N
i j
N N
A A A
A
A
sim A
=
A
…
(3.35)
onde cada elemento da matriz expressa a relação entre o nó i e o nó j .
Finalmente, tal matriz pode ser obtida a partir da matriz de impedância
Z ,
1−A = Z (3.36)
Para uma condição de contorno tipo Robin, a convergência, existên-
cia e unicidade do esquema de elementos finitos mostrado acima são
apresentadas em Ihlenburg e Babuška (1995) e com mais detalhes em Ga-
mallo (2002).
Outro modelo de impedância que também será utilizado neste traba-
lho consiste em admitir que o a matriz A tem a forma
Z=A I (3.37)
onde I é uma matriz identidade de dimensão N N× . Este é um modelo
simples para a impedância local Z , que será um valor complexo, depen-
dente da freqüência, cuja parte real representa a Resistância do material e
a parte imaginária representa a Reatância.
Maior detalhamento será dado aos modelos de impedância no capítu-
lo 5, quando os mesmo forem analisados em aplicações onde a impedância
acústica é estocástica.
37
Capítulo 4
O Método de Colocação Esparsa
A idéia básica dos métodos de Colocação consiste em obter funções
de interpolação que permitam representar a solução de determinado siste-
ma em função das variáveis randômicas. Analogamente à conhecida técnica
de elementos finitos, a minimização do erro nesse espaço é obtida através
minimização do erro projetado no espaço de aproximação. Uma vez que as
funções de interpolação são ortogonais entre si, o sistema de equações
resultante é desacoplado, tornando necessária apenas a solução de um
conjunto de problemas determinísticos em cada ponto de interpolação do
espaço de suporte (Xiu e Hesthaven, 2005, Ganapathysubramanian e Zaba-
ras, 2007a-b) de maneira muito similar à técnica de Monte Carlo, com a
diferença que as amostras utilizadas para cada solução não são obtidas a
partir de um conjunto aleatório, mas de um conjunto determinístico. Esta
técnica apresenta convergência rápida quando a solução é suave no espaço
de suporte, além de outras interessantes propriedades conforme será visto a
seguir.
4.1 Métodos de Galerkin Estocásticos
A aproximação das equações (2.27) e (2.28) pode ser feita utilizando
o método de Galerkin. Quando a solução é suave no espaço randômico, a

38
convergência desta técnica é bastante acentuada. A aproximação depende
do subespaço VΓ e diversas alternativas podem ser encontradas na literatu-
ra. Babuška et al.(2004, 2005) utilizaram funções contínuas por partes
semelhantes ao método de elementos finitos, Xiu e Hesthaven (2005) fize-
ram uso de grids esparsos para a escolha dos pontos de colocação. Algumas
construções possíveis desse espaço são mostradas a seguir. Dado o espaço
unidimensional para 2 ( )i iLρ Γ
( ) ,
0: , , 1, ,i
ipi p
i m i mW v v span i Nφ ξ
=≡ Γ → ∈ = … (4.1)
onde ( ) m iφ ξ é um conjunto de polinômios ortogonais com respeito ao
produto interno induzido por ( )i iρ ξ , ou seja,
2( ) ( ) ( ) ( ) ( )i i
i i m i n i i mn i i m i id dρ ξ φ ξ φ ξ ξ δ ρ ξ φ ξ ξ
Γ Γ
=∫ ∫ (4.2)
Uma das escolhas possíveis para φ é a utilização de Polinômios Caos
(este tipo de aproximação é tratado no apêndice A.3). Para a construção
do espaço para as N variáveis, toma-se o produto tensorial entre elas, ou
seja,
, ip i pN
pZ Z
≤≡ ⊗
p (4.3)
onde o produto tensorial é definido sobre todas as combinações possíveis
do multi-indexador 1 0( , , ) NNp p += ∈p … satisfazendo
1
N
iip p
== ≤∑p .
Portanto, pNZ é o espaço dos Polinômios Caos N-dimensionais de grau total
p (espaço polinomial completo) e o número de funções base é
( )dim( )p N pN NZ += . Caso se deseje construir esse espaço utilizando o produto
tensorial dos espaços polinomiais unidimensionais obtem-se
,
1, maxi
Np i pN i
iiQ Z p p
=≡ ⊗ = (4.4)

39
Assim, este espaço tensorial de polinômios é criado a partir do espaço
, ii pZ , sendo que a ordem máxima p dos polinômios unidimensionais é a
mesma para todas as dimensões. O número de funções de base é simples-
mente o produto entre as funções de base de cada dimensão, ou seja,
dim( ) ( 1)p NNQ p= + . Nos dois casos, o número de funções de base depende
de p e N e podem crescer até níveis proibitivos para a utilização computa-
cional. Na tabela 1 é mostrado o número de funções de base para alguns
valores de N e p. Nota-se que dim( ) dim( )p pN NZ Q com o aumento de p.
Apesar da alta precisão obtida com os métodos de Galerkin estocásticos,
este fator os torna pouco práticos quando os valores de p ou N forem ele-
vados. Nesses casos, métodos como Monte Carlo acabam se tornando uma
opção mais atrativa do ponto de vista do esforço computacional a ser
realizado.
Tabela 1 – Número de termos na aproximação usando polinômios
de caos e produtos tensoriais completos
N p dim( )pNZ dim( )pNQ
1 3 4
4 15 25 2
10 66 121
1 5 16
4 70 625 4
10 1001 14641
1 7 64
4 210 262144 6
10 8008 1771561
40
4.2 Métodos de Colocação
A partir deste ponto, considera-se que as variáveis de entrada estão
representadas por uma série de Karhunen-Lòeve ou por outra forma qual-
quer que permita representar o campo ou parâmetro randômico utilizando
um conjunto de N variáveis aleatórias. O método de Colocação consiste de
uma aproximação feita por funções polinomiais. A aproximação é construí-
da através do produto tensorial dos polinômios utilizados para cada
dimensão do espaço de suporte da dimensão estocástica. Seja um ponto
( )1, , Ny ξ ξ= … no espaço de suporte N-dimensional NΓ ⊂ , NΠ o espaço
contendo todos os polinômios de dimensão N com coeficientes reais e pNΠ
este mesmo espaço limitado aos polinômios de grau menor que p. Note que
espaço de polinômios de caos pNZ , definido na seção 4.1, está contido em
pNΠ .
Dado o conjunto de pontos 1
M
i iy
=∈ Γ e o conjunto de constantes re-
ais 1
M
i ib
=, deseja-se encontrar o polinômio Il V∈ , sendo IV um subespaço
de NΠ , que satisfaça
( ) , 1, ,i il y b i M= = … (4.5)
Os pontos 1
M
i iy
= são os nós de interpolação e IV é o espaço de inter-
polação. Essa interpolação é langrangiana, uma vez que os valores nodais
representam os próprios valores da função nos pontos de interpolação. No
caso de uma função suave : Nf → a interpolação pode ser vista como
calcular o polinômio de aproximação ( ) If V∈I tal que
( )( ) ( ), 1, ,i if y f y i M= = …I . Fazendo uso dos polinômios de Lagrange é
possível obter uma aproximação para qualquer ponto no espaço Γ através
de
41
1
( )( ) ( ) ( )M
i ii
f y f y L y=
=∑I (4.6)
sendo que os polinômios de Lagrange ( )iL y são dados por
( ) , ( ) , 1 ,i I i j ijL y V L y i j Mδ∈ = ≤ ≤ (4.7)
Assim, se em determinado problema houver um conjunto de valores
( , )iu y x da função ( , )u y x é possível obter uma aproximação ( , )u y x desta
função através do uso da interpolação na forma
1
( , ) ( )( , ) ( , ) ( )M
i ii
u y x u y x u y x L y=
≡ =∑I (4.8)
Para utilizar esta interpolação para um problema com variáveis ran-
dômicas, parte-se do sistema dado pela eq. (2.27)
( )( ) , ; ( ) ( ) ( , ) ( ) , ( ) ,Vy y x u v y dy y f y x v y dy v y V x Dρ ρ Γ
Γ Γ
= ∀ ∈ ∈∫ ∫L (4.9)
Utilizando a interpolação dada por (4.8) 1
( , ) ( , ) ( )M
V i i
i
u y x u y x L y=
=∑ e
escolhendo ( ) ( )jv y L y= se obtêm
1
( ) , ; ( , ) ( ) ( )
( ) ( , ) ( ) , 1, ,
M
i i j
i
j
y y x u y x L y L y dy
y f y x L y dy j M
ρ
ρ
=Γ
Γ
=
=
∑∫
∫
L
…
(4.10)
Dada as propriedades da interpolação Lagrangina, resultará em
( ), ; ( , ) ( , ), 1, , ,i i iy x u y x f y x i M x D= = ∈L … (4.11)
De fato, este é um problema determinístico que deve ser resolvido no
ponto iy . Analogamente, para as condições de contorno
( )( ), ; , ( , ) 1, ,i i iy x u y x g y x i M x D= = ∈ ∂…B (4.12)

42
O operador ( ),.iyL , sujeito às condições de contorno dadas por
( ),.iyB , passa a ser um operador espacial e pode ser resolvido da forma
mais adequada, seja utilizando métodos numérico como Elementos Finitos
ou Volumes Finitos ou até mesmo buscando-se a solução analítica, se ela
for possível. Tem-se assim uma solução aproximada para ( , )iu y x em M
pontos de colocação. Comparando com o método de Elementos Finitos
Estocásticos Espectrais (vide apêndice A), observa-se que será necessária a
solução não de um sistema acoplado de dofM N× ( dofN é o número de graus
de liberdade do problema espacial), mas de M sistemas lineares de dimen-
são dofN . Já em uma comparação com a técnica de Monte Carlo, nota-se
que a técnica de solução e a facilidade de implementação são semelhantes,
com as amostras usadas para avaliação não mais obtidas em um gerador
randômico e sim através de seus valores nos pontos de colocação do espaço
de suporte.
Uma vez obtida as soluções ( , )iu y x nos nós de interpolação do espaço
de suporte, as estatísticas da solução podem ser obtidas utilizando, por
exemplo, para o cálculo da média
[ ] =1
( , ) ( , ) ( ) ( )M
i i
i
u y x u y x L y y dyρ= Γ
∑ ∫E (4.13)
A integração será determinada pela escolha dos polinômios de inter-
polação. No entanto, como alternativa, pode-se utilizar um esquema de
quadratura, permitindo avaliar a integral utilizando seu valor em determi-
nados pontos associados a um conjunto de constantes reais denominados
pesos
1
( ) ( )M
i ii
f y dy w f y=Γ
∑∫ (4.14)

43
Este resultado é exato, dependendo da ordem do polinômio p usado
para a interpolação e do número de pontos de integração empregados. Se
forem escolhidos os pontos de integração do esquema de quadratura como
sendo os mesmos que foram utilizados para os nós de interpolação obtem-
se
[ ] =1
( , ) ( , ) ( )M
i i i
i
u y x u y x y wρ=∑E (4.15)
4.3 Seleção dos Pontos de Colocação
Como foi visto, os métodos de Colocação conseguem encontrar uma
solução aproximada para um problema estocástico através da solução de
M problemas determinísticos. Assim, para reduzir o custo computacional,
deve-se fazer uma escolha que permita obter a maior precisão possível com
o mínimo de pontos necessário. Existem duas alternativas amplamente
usadas: conjunto de pontos baseados em produtos de funções polinomiais
completas em cada dimensão ou a utilização de grids esparsos.
4.3.1 Polinômios completos
Para os esquemas de interpolação unidimensionais há disponível
grande embasamento teórico no que concerne à convergência, controle de
erro e unicidade. Quanto à escolha dos pontos de colocação, nós eqüidis-
tantes são muito utilizados em funções contínuas por partes e para funções
periódicas, mas para a aproximação polinomial ou de funções não periódi-
cas, as distribuições nodais baseadas nos nós de Chebyshev são mais
eficientes, pois proporcionam um erro de interpolação mínimo em casos
unidimensionais (Klimke, 2006). Quando o número de dimensões para as
quais esta interpolação deve ser feita é pequeno (interpolação bi ou tridi-

44
mensional, por exemplo), o uso da aproximação usando produtos tensoriais
a partir de polinômios completos unidimensionais pode ser uma boa esco-
lha, tendo em vista a facilidade de implementação (uma aplicação usando
polinômios completos pode ser encontrada em Acharjee e Zabaras, 2007).
Ademais, a escolha dos pontos de interpolação em cada dimensão pode ser
feita de acordo com a função densidade de probabilidade de cada variável
randômica, proporcionando uma maneira de prover o refinamento do espa-
ço de suporte.
A aproximação pode ser feita para cada dimensão i na forma
=
1
( ) ( )im
i i ik k
k
f f aξ=
⋅∑I (4.16)
sendo que a dimensão i tem um conjunto im pontos
( )1, ,i
i i imξ ξξ = … (4.17)
Uma das alternativas para a interpolação é utilizar o polinômio
0, 1
( )im
ki
k k i k
Lξ ξ
ξξ ξ= ≠
−=
−∏ (4.18)
No que concerne à qualidade dessa aproximação é sabido que, para
um interpolante lagrangiano unidimensional ( )M fI que utiliza M pontos
de interpolação, não se pode assegurar que para uma distribuição espacial
arbitrária de pontos haverá convergência uniforme (Klimke, 2006), ou seja,
- ( ) 0Mf f∞→I se M →∞ (4.19)
Dada a função 1nf C +∈ em um intervalo [ ],a b o erro de interpolação
de um ponto neste intervalo será dado pela expansão em série de Taylor
( )
( )
1
0
( )( ) - ( )( )
1 !
n MM
jj
ff x f x x x
n
ξ+
=
= −+ ∏I se n →∞ (4.20)

45
onde [ , ]a bξ ∈ depende da posição x. Para o caso de malhas com nós i-
gualmente espaçados obtem-se
( )
1( 1)
[ , ]
( )- ( ) max ( )
4 1
nM n
a b
hf f f
n ξ
ξξ
++
∞ ∈≤
+I se n →∞ (4.21)
Nos dois casos a magnitude da derivada ( )1nf + pode suplantar os ou-
tros termos da equação. No entanto, há distribuições de nós para as quais
se pode provar que há convergência uniforme se 1[ , ]f C a b∈ . Uma maneira
de quantificar o erro da interpolação em uma dada distribuição nodal é
compará-lo com o erro obtido para outra distribuição para a qual os nós
tenham sido escolhidos de uma forma ótima para a minimização do erro de
interpolação. Definido o polinômio de aproximação ótimo *1( ) n
np f ∈ Π , de
grau n, com a seguinte propriedade
*1( ) ( ) , ( ) n
nf p f f f f∞∞
− ≤ − ∀ ∈ ΠI I (4.22)
A distância de qualquer outro polinômio de aproximação ao polinô-
mio ótimo pode ser medida através da constante de Lebesgue ( )n XΛ como
sendo
( )( )
( )
*
0
( ) ( ) 1n n
n
n i
i
f f f p f X
X L
∞ ∞
= ∞
− ≤ − +Λ
Λ = ∑
I
(4.23)
A constante de Lebesgue não depende da função interpolada, mas
somente da distribuição dos nós, o que permite construir a priori um con-
junto de nós que possuam pequenos valores para essa constante
(Ganapathysubramanian e Zabaras, 2007a; Klimke, 2006). Finalmente,
após a escolha dos pontos a serem utilizados na interpolação e do cálculo
da constante de Lebesgue podem-se obter os limites de erro para a função
polinomial XI . Por exemplo, para as funções de interpolação que utilizam
os nós de Chebyshev-Gauss-Lobatto (uma distribuição nodal que tem a

46
vantagem de produzir seqüências de nós recorrentes de acordo com o au-
mento da ordem polinomial n) os limites de erros são dados por
( ) log( ),X k kf f Cn n f C−
∞− ≤ ∈I (4.24)
A utilização da teoria de interpolação unidimensional para a aproxi-
mação N-dimensional é feita gerando o espaço polinomial IV através do
produto tensorial entre os vários polinômios usados para a representação
de cada dimensão. Desta forma, o produto tensorial para a dimensão N
será
( ) ( )1
1 1
1 2
1 1
1 1
( ) ( ) ( , , )N
N N
m mi N N N
k k k k
k k
f f f a aξ ξ= =
≡ ⊗ ⊗ = ⋅ ⊗ ⊗∑ ∑… … … …I I I (4.25)
A construção desta aproximação é bastante simplificada e intuitiva.
Polinômios de Lagrange utilizados em interpolações unidimensionais po-
dem ser diretamente aplicados e a aproximação é tanto melhor quanto
maior o número de pontos utilizados. O número de pontos necessários para
a avaliação será 1
N
iiM m
==∏ . Se o número de pontos for o mesmo em
cada direção tem-se que NM m= . Este número pode rapidamente se tor-
nar bastante elevado, impedindo que o conjunto de avaliações
determinísticas possa ser efetuado em um tempo computacional razoável.
4.3.2 Grids esparsos
A formação de interpolantes utilizando o produto tensorial de funções
unidimensionais é relativamente fácil, mas sofre do problema de aumento
do número de pontos necessários para a solução em casos multidimensio-
nais. A diminuição deste número de pontos para problemas com maior
dimensionalidade no espaço de suporte randômico, pode ser feita pelo uso
de interpolantes baseados em malhas esparsas. Neste caso, procura-se
realizar a interpolação em dimensões elevadas utilizando o menor número

47
de pontos possível mantendo o erro obtido na interpolação no menor valor
possível. O fundamento de todas as malhas esparsas é o algoritmo de
Smoljak, que realiza a extensão das formulas de interpolações unidimensio-
nais para o espaço multidimensional através de uma forma particular de
produtos tensoriais e permite também que certa propriedade de interpola-
ção seja mantida de acordo com o aumento da dimensão. Uma significativa
redução do número de pontos necessários para a interpolação em relação
ao produto tensorial completo poderá ser obtida desta forma e os pontos
utilizados na aproximação são definidos de uma maneira predeterminada,
de forma que seu cálculo tem impacto pouco significativo no custo compu-
tacional. Duas outras importantes características deste método são o fato
de que a qualidade da aproximação se mantém em um fator logarítmico e a
sua estrutura hierárquica, que pode ser explorada para obter uma aproxi-
mação do erro de interpolação e que facilita o refinamento sucessivo,
melhorando o controle da interpolação. No Apêndice 4 é apresentada uma
breve revisão do algoritmo de Smoljak.
4.3.3 Bases polinomiais para malhas esparsas
Os pontos a serem utilizados para a malha esparsa também devem
ser escolhidos de maneira adequada. Uma vez que o algoritmo de Smoljak
prevê que o conjunto de nós para determinado nível de interpolação tam-
bém pertença ao conjunto de nós de todos os níveis acima deste
( )H H1
, 1,i i
q N q NX X ++⊂ ⇒ ⊂ a melhor escolha certamente recai sobre os
nós de Chebyschev-Gauss-Lobatto. A distribuição desses nós
1, , ,i
i i imX x x i= ∈… é dada por
48
12 1, 1
( 1)cos , 1, ,
1
ii
ij i
i
m i
jx j m
m
π
−= + >
−= − =
−…
e 1 0, se 1iix m= = . A figura 2 (Klimke, 2006) ilustra a distribuição destes
nós para os casos bi e tridimensional. As malhas completas foram geradas
através do produto tensorial dos pontos unidimensionais. Conforme o nível
de interpolação aumenta, o número de pontos requeridos para a malha
utilizando o produto tensorial de pontos unidimensionais cresce considera-
velmente.
A seguir, é descrito um pequeno exemplo de como é realizada a in-
terpolação da função 2 5( , ) (1 ) yf x y x ye−= − no intervalo [ 1,1] x = −
e [0,1]y = . O gráfico desta função é mostrado na figura 3. Esta função é
composta pelo produto de duas funções. Deve-se notar que a parte da
função dependente de x é quadrática.

49
Figura 2 - Pontos de colocação para problemas bi e tridimensionais. À esquerda: pontos
de interpolação do algoritmo de Smoljak. À direita: malha completa.
Figura 3 – Função original ( , )f x y

50
A seguir são mostradas as sucessivas aproximações da função original
de acordo com a ordem do interpolante esparso. Neste caso, foi utilizada a
mesma ordem nas duas direções de interpolação. Como pode ser notado, os
erros de aproximação desta função foram reduzidos à valores muito baixos
utilizando apenas um conjunto reduzido de pontos.
Figura 4 – Aproximação da função ( , )f x y usando diversos níveis de interpolação
Outra importante característica deste tipo de interpolação é o fato de
permitir ordens diferentes de interpolação em cada dimensão do espaço de
aproximação. Na figura 5 é mostrado como a interpolação é realizada
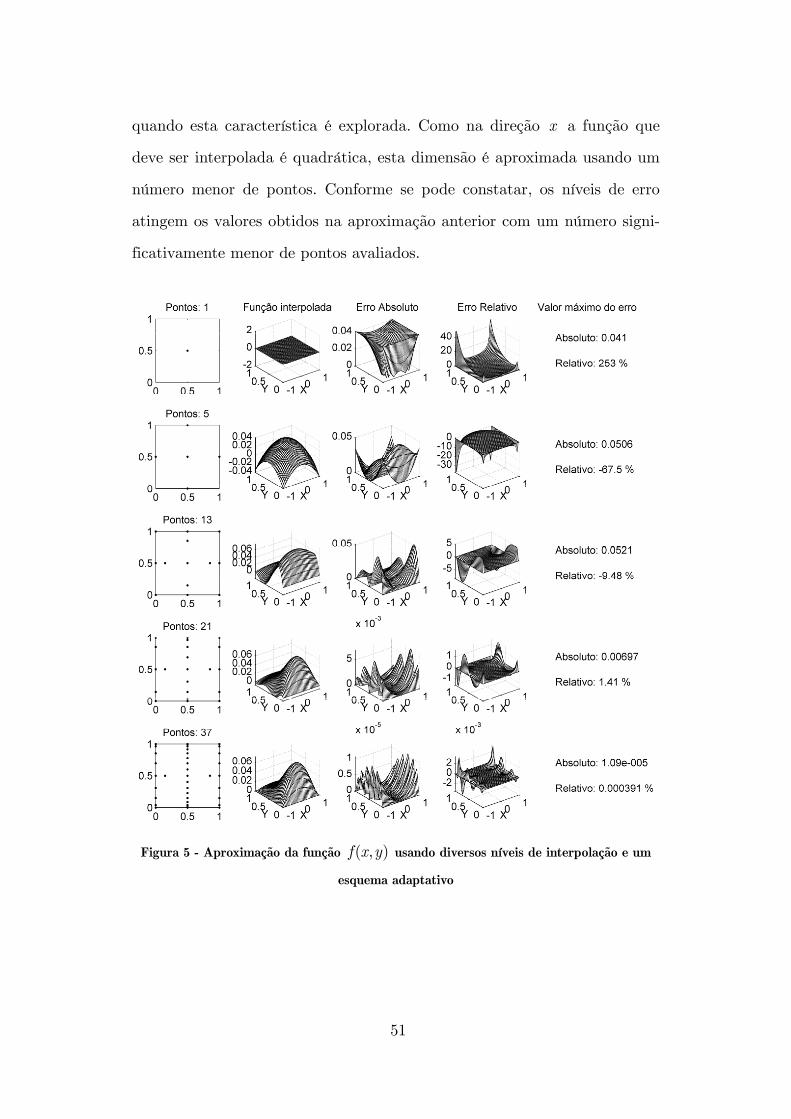
51
quando esta característica é explorada. Como na direção x a função que
deve ser interpolada é quadrática, esta dimensão é aproximada usando um
número menor de pontos. Conforme se pode constatar, os níveis de erro
atingem os valores obtidos na aproximação anterior com um número signi-
ficativamente menor de pontos avaliados.
Figura 5 - Aproximação da função ( , )f x y usando diversos níveis de interpolação e um
esquema adaptativo

52
4.3.4 Softwares utilizados para a análise estocástica
Neste trabalho, diversas ferramentas para a análise do problema esto-
cástico foram utilizadas.
O código para a solução de um problema de Elementos Finitos dado
pela eq.(3.33), com uma matriz de impedância fornecida pelo usuário, foi
escrito em linguagem Fortran90. Como foi de interesse desenvolver tanto
códigos que executassem em computadores executando o sistema operacio-
nal Windows® quanto o Linux, o código foi projetado para ambos os
ambientes usando diretivas de compilação. Particularmente, foi utilizado
em alguns cálculos o cluster de computadores no Núcleo de Computação
de Alto Desempenho (NACAD/UFRJ), de forma que o código foi projeta-
do para a utilização do compilador Intel® Fortran90 disponível naquele
sistema. Para a solução do sistema linear resultante da montagem das
matrizes de Elementos Finitos, foram utilizadas as bibliotecas da IMSL
presentes no ambiente Compaq Visual Fortran (para uso no ambiente
Windows®), o solver PARDISO disponível na biblioteca Intel® Math
Kernel (Linux) e o pacote UMFPACK (Linux/Windows®) descrito em
Davis (2004).
Para a obtenção dos pontos de colocação, cálculo do interpolante es-
parso e interpolação das funções no espaço de suporte foi utilizada a
Sparse Grid Interpolation Toolbox, desenvolvida por W. A. Klimke (2006)
no ambiente MATLAB®. Outros códigos como aqueles necessários para
realizar a análise através de NISG e o Monte Carlo também foram desen-
volvidos na plataforma MATLAB®.

53
4.4 Procedimento Computacional
A figura 6 mostra o procedimento computacional utilizado neste tra-
balho. Com exceção do cálculo da resposta do método de Elementos
Finitos, todas as etapas foram realizadas dentro do ambiente MATLAB®.
Figura 6 – Procedimento computacional
Os diversos problemas tratados no capítulo seguinte diferem basica-
mente na definição da impedância, o que acarreta uma diferença no
número de variáveis no espaço de suporte. Na etapa de solução do proble-
ma de Elementos Finitos, há a opção de se calcular todos os pontos de
interpolação (e conseqüentemente as matrizes de impedância) de determi-

54
nado nível a priori, permitindo que o código de Elementos Finitos possa
ser executado uma única vez a cada nível de interpolação. Desta forma, o
conjunto de soluções desse nível pode ser calculado, por exemplo, em um
cluster de computadores, e os resultados podem ser lidos para a construção
do interpolante em uma etapa posterior. Além disso, não há nenhuma
dependência entre os pontos, o que permite grande facilidade de paraleliza-
ção deste procedimento.
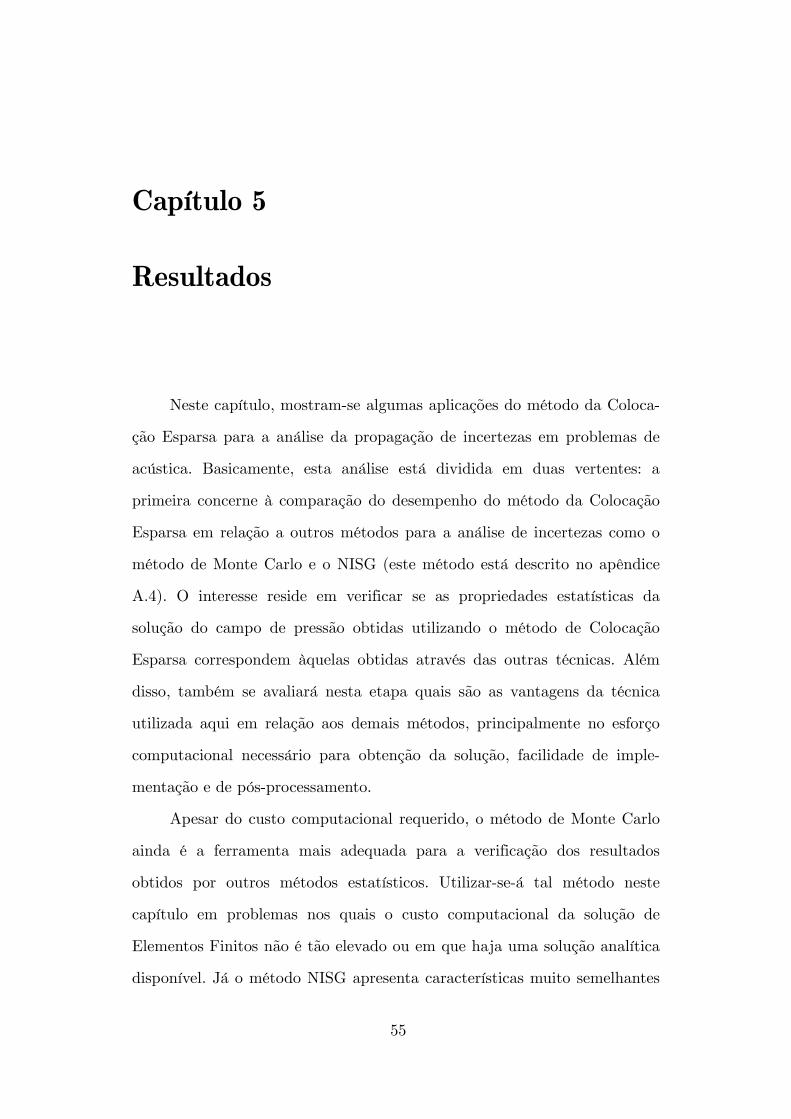
55
Capítulo 5
Resultados
Neste capítulo, mostram-se algumas aplicações do método da Coloca-
ção Esparsa para a análise da propagação de incertezas em problemas de
acústica. Basicamente, esta análise está dividida em duas vertentes: a
primeira concerne à comparação do desempenho do método da Colocação
Esparsa em relação a outros métodos para a análise de incertezas como o
método de Monte Carlo e o NISG (este método está descrito no apêndice
A.4). O interesse reside em verificar se as propriedades estatísticas da
solução do campo de pressão obtidas utilizando o método de Colocação
Esparsa correspondem àquelas obtidas através das outras técnicas. Além
disso, também se avaliará nesta etapa quais são as vantagens da técnica
utilizada aqui em relação aos demais métodos, principalmente no esforço
computacional necessário para obtenção da solução, facilidade de imple-
mentação e de pós-processamento.
Apesar do custo computacional requerido, o método de Monte Carlo
ainda é a ferramenta mais adequada para a verificação dos resultados
obtidos por outros métodos estatísticos. Utilizar-se-á tal método neste
capítulo em problemas nos quais o custo computacional da solução de
Elementos Finitos não é tão elevado ou em que haja uma solução analítica
disponível. Já o método NISG apresenta características muito semelhantes

56
ao método da Colocação Esparsa e fornecerá uma segunda referência para
os resultados obtidos aqui.
A segunda vertente, uma vez validada a metodologia computacional
proposta, corresponde à análise da influência da incerteza na impedância
do material para a absorção de som sobre a distribuição de pressão no
domínio. Neste caso se está interessado em analisar como se dá a propaga-
ção de incerteza dos dados de entrada na resposta do sistema.
5.1 Tubo de Kundt
O tubo de Kundt é um aparato experimental comumente usado para
medida das propriedades acústicas de uma amostra de material. Trata-se
de um dispositivo prático para este tipo de tarefa pois pode ser construído
de maneira simples, em dimensões reduzidas (que permite utilizar amostras
de pequeno tamanho) e requer um número mínimo de equipamentos (Eve-
rest, 2001). Uma montagem típica deste aparato é mostrada na fig. 7.
Basicamente, consiste em um tubo cuja propagação de ondas se dá na
seção longitudinal do mesmo. Em um dos extremos é posicionada uma
fonte acústica (um alto falante) e no outro pode ser utilizado um material
cujas propriedades para absorção de som serão medidas. Admite-se que,
quando excitada, a fonte gere ondas planas que se propagam ao longo do
tubo, sendo apenas parcialmente refletidas pela amostra de material absor-
vente no outro extremo. Após certo tempo, uma onda estacionária é
formada e como a amostra muda a amplitude e a fase da onda que a atin-
ge, é possível calcular a impedância deste material através da medição da
pressão em dois pontos dessa onda estacionária. O aparato pode ser ainda
mais simplificado através da utilização de apenas um microfone, o qual

57
deverá ser deslocado ao longo do tubo para a medição da pressão em dife-
rentes posições.
Existem padrões internacionais para execução do experimento, bem
como alguns detalhes práticos que devem ser seguidos de forma a melhorar
a qualidade dos dados coletados nesse experimento (Cox e D'Antonio,
2004). A posição ideal dos microfones, a forma como as amostras são cor-
tadas e montadas no tubo, modos de evitar que ondas transversais se
estabeleçam no duto e a faixa de freqüência que deve ser utilizada são
algumas das considerações que devem ser levadas em conta para a realiza-
ção do experimento.
Figura 7 - Esquema do tubo de Kundt
Em Schultz et al. (2007a, 2007b) é apresentada uma análise detalha-
da da propagação de incertezas em experimentos para obtenção da
impedância usando o tubo de Kundt. Os níveis de incerteza apresentados
por aqueles autores foram considerados nos experimentos numéricos reali-
zados neste trabalho. No entanto, é necessário ressaltar que a análise de
incertezas, neste caso, não é capaz de tratar dois aspectos considerados
centrais: a Variabilidade espacial e a não localidade da impedância, bem
como a influência do ângulo de incidência da onda plana.

58
Nesta aplicação, deseja-se analisar como se comporta o campo de
pressão neste aparato quando há variabilidade nos valores de impedância
da amostra. Para isso, é tomada uma idealização deste experimento, mos-
trada na fig. 8. Considera-se nesta análise um domínio unidimensional com
uma condição de Dirichlet representando a fonte acústica e uma condição
tipo Robin para representar a impedância da amostra de material. Supon-
do que as propriedades do material absorvente sejam conhecidas, podem-se
obter as seguintes condições de contorno:
0( 0)
( ) 0 em
p x P
dpi p x x L
dx Z
ρω
= =
− = = (5.1)
ou seja, uma pressão harmônica em um extremo e um material para absor-
ção em outro. A solução analítica deste problema é dada por (Crocker,
1998)
0
cos ( ) sin ( )( )
cos sinZ k L x i c k L x
p x pZ kL i c kL
ρ
ρ
− − −=
− (5.2)
Figura 8 – Idealização do experimento
Deve ser notado que o campo de pressão é não linear em relação à
impedância, característica que será verificada mais tarde, quando da análi-
se dos resultados. A solução analítica disponível permitirá a verificação do
método numérico utilizado para a solução do problema espacial. De posse
da eq.(5.2), da qual se pode obter o campo de pressão, e de um número
relativamente elevado de amostras, é possível a obtenção das propriedades
estatísticas da solução do problema com a precisão desejada.

59
A solução de Elementos Finitos será obtida utilizando-se uma malha
unidimensional uniforme com 100n = elementos dispostos ao longo do
comprimento do tubo. As coordenadas dos nós serão tais que
1, 1, , 1k
kx k n
n
−= = +… (5.3)
Na figura 9 é mostrada como estão distribuídos os nós ao longo do
domínio.
Figura 9 - Malha de elementos finitos utilizada
Quanto ao modelo de impedância, se considerará que a mesma seja
composta por uma parte real e outra imaginária na forma
( ) ( ) ( )Z iω α ω ω β ω= + (5.4)
Os dois parâmetros ( ) ( ) e α ω β ω são dependentes da freqüência. Para
facilitar a notação se fará ( ) ( )α ω ω α ω= . Este modelo é bastante conheci-
do na literatura e encontra bastante emprego, uma vez que medições
experimentais fornecem os valores reais e imaginários da impedância. Ape-
sar deste tipo de formulação para a impedância não respeitar certas
condições no que concerne à causalidade do modelo no domínio do tempo
(Berthelot, 2001), esta formulação será utilizada apenas para análise dos
efeitos da incerteza sobre o campo de pressão no domínio espacial.
Neste exemplo, considera-se que o material da amostra de impedância
é a lã de vidro Manville4, para o qual os valores experimentais obtidos para
4 Este tipo de material é bastante comum para absorção de som. No presente caso,
os dados experimentais se referem à lã de vidro fabricada pela empresa norte-americana
Johns Manville Corporation.

60
os parâmetros ( ) ( ) e α ω β ω estão disponíveis em Bermúdez e Rodríguez
(1999) para uma ampla faixa de freqüências. Considera-se que há alguma
incerteza sobre os valores obtidos. Assim, o modelo de impedância propos-
to aqui se torna
( ) ( ) ( ), , ,Z iω θ α ω θ β ω θ= + (5.5)
Supondo que os valores disponibilizados por aqueles autores represen-
tam a média de uma variável estocástica subjacente e, para efeito de
análise, que o desvio padrão destas variáveis é conhecido, pode-se caracte-
rizar estes valores utilizando:
( ) ( ) ( )( )( ) ( ) ( )( )
1
2
, 1
, 1
α ω θ α ω σ ξ θ
β ω θ β ω σ ξ θ
= +
= + (5.6)
1 2 e ξ ξ são duas variáveis randômicas. Analisar-se-ão aqui os casos com o
parâmetro de escala 0,1σ = e 0,2σ = . Os valores numéricos deste parâ-
metro podem ser compreendidos como a flutuação máxima dos valores
reais e imaginário da impedância em torno dos seus valores médios. Esses
níveis de flutuação podem ser considerados conservadores se comparados
com os encontrados em Schultz et al. (2007b). Ainda assim, altos níveis de
incerteza serão obtidos na saída deste problema, conforme será visto a
seguir. Para definir qual a distribuição de probabilidade das variáveis alea-
tórias empregadas pode-se utilizar o principio da máxima incerteza: uma
vez que só se estabeleceu como dados a média e a flutuação de
( ) ( ) e α ω β ω , este princípio estipula que a função distribuição de probabili-
dade das mesmas deve ser tomada como uniforme (Soize, 2001, 2006).
Desta forma, 1 2 e ξ ξ serão consideradas duas variáveis uniformes, com
valores na faixa [ ]1,1− e independentes. Assim e α βσ σ , correspondentes ao
desvio padrão de ( ) ( ) e α ω β ω , são dados por

61
( )( ) ( )
( )( ) ( )
13
13
,
,
std
std
α
β
σ α ω θ α ω σ
σ β ω θ β ω σ
= =
= = (5.7)
Mais tarde, será utilizada como referência para a caracterização do
nível de incerteza a seguinte razão
( ) ( ) 3inr
βασσ σ
α ω β ω= = = (5.8)
que é uma medida de dispersão. No caso das variáveis de entrada
( ) ( ), e ,α ω θ β ω θ esta medida assume um valor constante em toda a faixa
de freqüência. Analogamente, para os dados de saída será utilizada como
variável de referência
[ ]p
outrp
σ=E
(5.9)
sendo e pp σ a pressão e o desvio padrão no duto. O problema será resol-
vido na faixa de freqüência de 1Hz a 2kHz em intervalos de 0,5Hz. Para
cada freqüência, utilizaram-se o método de Monte Carlo, método NISG e o
método da Colocação Esparsa para o cálculo das estatísticas dos resulta-
dos. A tabela 2 resume os parâmetros utilizados para cada um deles.
Tabela 2 – Parâmetros dos métodos utilizados
Método Características Número de Avaliações
(por freqüência)
Monte Carlo Número de amostras: 15000 15.000
NISG 20 20× elementos no espaço de suporte
(4 pontos de integração por elemento) 1.600
Colocação
Máxima ordem da aproximação: 4
Obtenção dos momentos: integração
gaussiana no espaço de suporte
Máximo: 114

62
Ressalte-se que todos os métodos fizeram uso do código de Elementos
Finitos desenvolvido para este trabalho, com exceção do método de Monte
Carlo que utilizou a solução analítica. Note ainda que o método NISG
pode convergir com um número de elementos no espaço de suporte bem
menor que aquele utilizado neste problema. Como se deseja verificar os
resultados obtidos, este número elevado de elementos será utilizado. Por
outro lado, o método da Colocação Esparsa convergiu, na grande maioria
das freqüências calculadas, utilizando somente uma aproximação de ordem
3, que requer apenas 49 avaliações do código de Elementos Finitos.
Dada a representação da eq. (2.23), a resposta ( , , )p x ω θ será uma
função de duas variáveis no espaço de suporte, ou seja,
( ) ( )1 2( , , ) ( , , , )p x p xω θ ω ξ θ ξ θ≈ . Desta forma, para calcular os momentos
desta variável é necessário recorrer a um esquema de integração bidimensi-
onal. No presente exemplo, utilizaremos um esquema de quadratura
numérica utilizando os pontos de Gauss, na forma
( ) ( ) ( ) ( )
( )( ) ( ) ( )
1 2 1 1 2 2 1 2
1 2 1 1 2 21 1
, , ,
,gp gp
n m n m
k k
N N
kn m
n m
p p x f f d d
w w p f f
ω ξ ξ ξ ξ ξ ξ
ξ ξ ξ ξ
+∞ +∞
−∞ −∞
= =
=
=
∫ ∫
∑∑ I
E
(5.10)
onde nw é peso no ponto de integração n e 1 2 e f f representam as funções
densidade de probabilidade de 1 2 e ξ ξ . Desta forma, para a integração
numérica, não se fez uso do código de Elementos Finitos, sendo apenas
necessário avaliar o interpolante esparso para o cálculo do valor da pressão
no ponto de integração 1 2( , )n mξ ξ . Esta etapa corresponde ao pós-
processamento da solução e diferentes métodos para a integração da equa-
ção anterior estão disponíveis como o método de Monte Carlo, por
exemplo.
Os resultados para este problema são mostrados a seguir.

63
Figura 10 – Pressão ao longo do domínio espacial: média e desvio padrão da parte real
para freqüência de 600Hz.
Figura 11 – Pressão ao longo do domínio espacial: média e desvio padrão da parte imagi-
nária para freqüência de 600Hz.
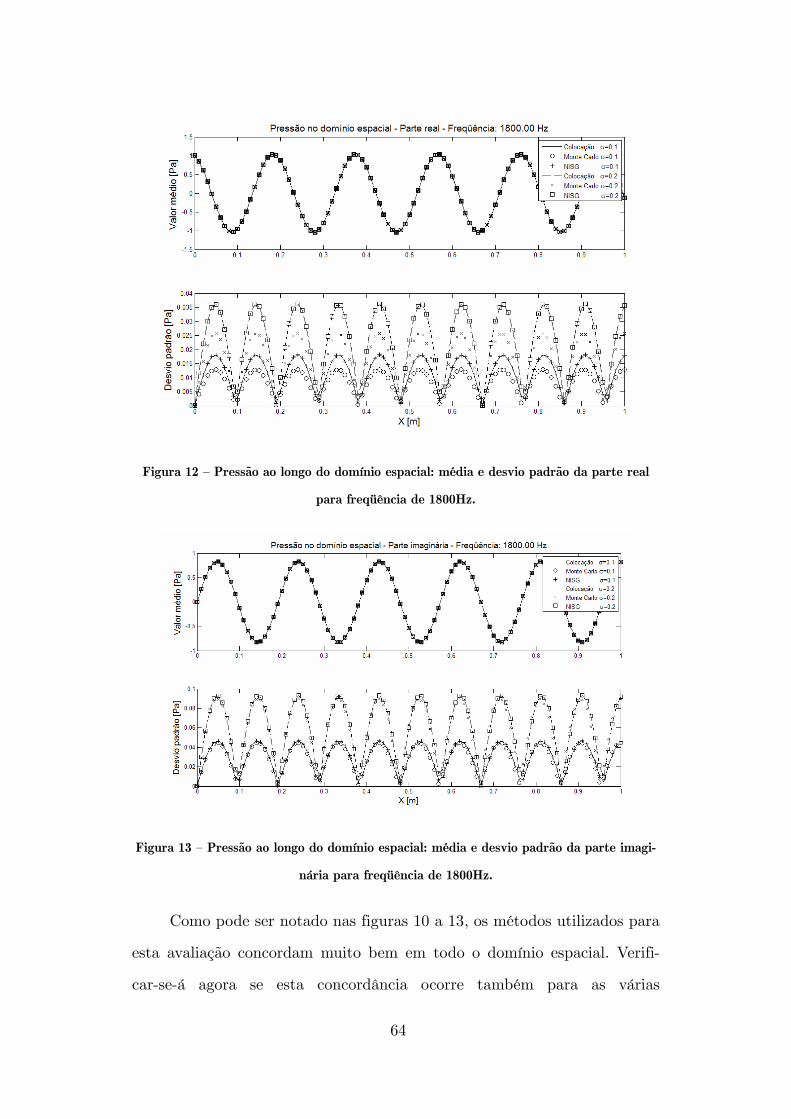
64
Figura 12 – Pressão ao longo do domínio espacial: média e desvio padrão da parte real
para freqüência de 1800Hz.
Figura 13 – Pressão ao longo do domínio espacial: média e desvio padrão da parte imagi-
nária para freqüência de 1800Hz.
Como pode ser notado nas figuras 10 a 13, os métodos utilizados para
esta avaliação concordam muito bem em todo o domínio espacial. Verifi-
car-se-á agora se esta concordância ocorre também para as várias

65
freqüências calculadas. Abaixo é mostrado o comportamento da variável
outr para um ponto no centro e dois outros na proximidade dos extremos
do domínio espacial. As linhas tracejadas horizontais representam o valor
da variável inr utilizada nos parâmetros de entrada. No caso, o desvio
padrão e a média se referem à parte real da pressão.
Figura 14 – Razão [ ]/outr pσ= E para a parte real da pressão em 0,1X = .
Figura 15 – Razão [ ]/outr pσ= E para a parte real da pressão em 0,5X = .

66
Figura 16 – Razão [ ]/outr pσ= E para a parte real da pressão em 0,9X = .
Figura 17 - Razão [ ]/outr pσ= E para a parte imaginária da pressão em 0,1X = . A
região detalhada será mostrada na fig. 18.

67
Figura 18 – Detalhe da região mostrada na fig. 17.
Figura 19 - Razão [ ]/outr pσ= E para a parte imaginária da pressão em 0,9X = .
Note que os resultados obtidos para esta variável utilizando o método
da Colocação Esparsa concordam muito bem com aqueles obtidos usando o
método de Monte Carlo e o NISG, em toda a faixa de freqüência utilizada.
Isto significa que, para este problema, o método da Colocação Esparsa
fornece resultados confiáveis para a análise de incerteza, sendo muito mais
econômico do ponto de vista computacional, uma vez que o número de

68
avaliações do código determinístico do método de Elementos Finitos foi
muito menor que das outras técnicas. Note ainda que, conforme esperado,
há um desvio nos valores de incerteza em relação ao método de Monte
Carlo para as freqüências mais elevadas, conforme pode ser notado no
detalhe mostrado na fig. 18. Isto advém do fato de o método de Colocação
Esparsa e o NISG utilizarem o código de Elementos Finitos, que apresenta
um erro de poluição em elevadas freqüências, enquanto o método de Monte
Carlo fez uso da solução analítica deste problema.
Uma vez verificada a técnica proposta, é feita a seguir uma análise da
incerteza da saída. Nota-se que os níveis de incerteza dos valores de saída
são significativos comparados com os valores de entrada. Na vizinhança de
todas as freqüências próprias deste sistema, os níveis de incerteza na saída
se elevam bastante, como pode ser observado comparando-se os picos e
vales das figuras anteriores com os da fig. 20, a qual mostra a função res-
posta em freqüência para a parte real nos pontos analisados. Por outro
lado esses mesmos níveis alcançam valores bem acima daqueles utilizados
como dado de entrada em diversas faixas freqüências.
Em uma primeira análise, pode-se argumentar que as incertezas se e-
levam nos pontos em que a média [ ] 0p ≅E , dada a razão expressa por
(5.9). De fato, é possível se constatar isso notando que as incertezas no
ponto 0.1X = , para a faixa de 1.2-2.0kHz, são as mínimas obtidas (vide
figura 14) e correspondem à situação em que a Função Resposta em Fre-
qüência (FRF) deste ponto não se anula (vide figura 21). No entanto, há
diversos pontos para a razão outr alcança valores muito superiores aos de
inr , apesar da média da parte real da pressão não tender a zero. Além
disso, deve ser notado que o aumento no nível de incerteza na entrada leva
a um aumento significativo na incerteza da saída.

69
As Funções Resposta em Freqüência média para os três pontos sele-
cionados estão mostradas nas figuras 20 a 22. Nas mesmas figuras, são
apresentadas as regiões de confiabilidade equivalentes a 95%, para os dois
valores da dispersão da entrada. Como se pode notar, esta região de confi-
abilidade tem grande variação ao longo da faixa de freqüência analisada. A
maior contribuição para a avaliação dos níveis de incerteza da resposta,
obtida a partir das funções resposta em freqüência mostradas e de sua
faixa equivalente a 95% de confiança valores amostrados5, é a determinação
de quais combinações entre freqüência/posições no domínio são aquelas
que apresentam o mínimo de incerteza. Essas combinações são as mais
adequadas para a medição da pressão acústica nesse tipo de ensaio. Além
disso, tal informação permite estabelecer níveis de confiabilidade para os
dados medidos experimentalmente, garantido que pontos com menores
níveis de incerteza tenham peso maior no cálculo da impedância acústica
de determinado material. Esta é uma tarefa que deve ser feita na fase de
pós-processamento, ou seja, após a medição experimental da impedância
do material, deve ser calculada a região de confiabilidade e a seguir deve-se
recalcular a impedância, atribuindo maior peso aos dados com menor nível
de incerteza.
Assim, a análise dos resultados mostrados leva a conclusão que as
medições realizadas no tubo de Kundt devem ser bastante criteriosas no
que concerne a posição dos microfones, devendo-se buscar posições para a
colocação dos mesmos que correspondam aos mínimos de outr .
5 Um intervalo de confiança de 95% equivale a dizer que 95% dos valores de uma
amostra se encontram dentro da faixa especificada. Esta faixa equivale àquela obtida do
2,5 ao 97,5 percentil (Montgomery e Runger, 2003).

70
Finalmente, nota-se que à parte da simplicidade aparente do modelo
físico, este problema apresenta características não lineares, conforme tam-
bém já havia sido demonstrado por Schultz et al. (2007b), e de
amplificação das incertezas da entrada em relação à saída. Diferentemente
do método utilizado por aqueles autores, o método da Colocação Esparsa
não apresenta problemas quando o nível de incerteza da entrada é elevado,
o que o torna uma ferramenta muito adequada para a análise desse tipo de
problema.

71
Figura 20 - P
arte real da Função Resp
osta em Freqüência da pressão entre os p
ontos X=0.1,0.5,0.9 e a fonte.

72
Figura 21 - P
arte imaginária da Função R
esposta em
Freqüência da pressão entre os pontos X
=0.1,0.5,0.9 e a fonte.

73
Figura 22 - P
arte imaginária da Função R
esposta em
Freqüência da pressão entre os pontos X
=0.1,0.5,0.9 e a fonte.

74
5.2 Cavidade Bidimensional
Neste problema, trataremos do caso de uma cavidade bidimensional
na qual uma das paredes é revestida com material para absorção de som.
O foco desta análise é realizar uma verificação para atestar a correção do
código. Além disso, este tipo de cavidade bidimensional é muito estudada
na literatura, pois pode representar adequadamente os Helmholtz Resona-
tors, além de ser uma geometria prática tanto para visualização dos
resultados quanto para verificação de modelos de impedância e de elemen-
tos finitos em Acústica (Bermúdez e Rodríguez, 1999). A geometria do
domínio físico utilizado neste problema é mostrada na fig. 23.
(a) (b)
Figura 23 – (a) Geometria da cavidade; (b) malha de Elementos Finitos utilizada. Dimen-
sões em metros
Uma fonte pontual (delta de Dirac) está posicionada no interior da
cavidade e gerará um campo de pressão harmônico nesse meio. A cavidade
tem uma de suas paredes revestidas com material para absorção sonora. A
impedância deste material é definida da mesma forma que foi utilizada na

75
aplicação anterior, inclusive no que se refere ao modelo estocástico, e serão
utilizados os mesmos níveis de incerteza de entrada aplicados ao problema
unidimensional.
A tabela 3 mostra os parâmetros utilizados nos dois métodos para
análise de incerteza. Desta feita, não foi utilizado o método de Monte
Carlo, uma vez que a aplicação anterior demonstrou que o método da
Colocação Esparsa e NISG podem representar adequadamente este tipo de
modelagem estocástica.
Na figuras 24 e 25, são mostrados os resultados para o campo de
pressão nesta cavidade.
Tabela 3 – Parâmetros dos métodos utilizados
Método Características Número de Avaliações
(por freqüência)
NISG 20 20× elementos no espaço de suporte
(4 pontos de integração por elemento) 1.600
Colocação
Máxima ordem da aproximação: 5
Obtenção dos momentos: integração
gaussiana no espaço de suporte
Máximo: 870

76
Figura 24 – Campo de pressão para a freqüência de 400Hz: NISG

77
Figura 25 – Campo de pressão para a freqüência de 400Hz: método de Colocação Esparsa
As figuras 24 e 25 mostram o campo de pressão (valor médio, desvio
padrão e razão outr ) para a solução obtida utilizando-se o NISG e o método
da Colocação Esparsa, respectivamente. Como se pode notar, as duas
técnicas concordam muito bem tanto na parte real como na parte imaginá-
ria. O nível de dispersão aplicada às variáveis de entrada corresponde a
0,1σ = que equivale a 1,480,033 10inr−≅ ≅ . É possível constatar também
que, em se tratando na parte real, a incerteza na saída supera os valores de
entrada em diversas regiões e em todo o domínio, quando se trata da parte

78
imaginária. Outra importante característica que fica bastante explícita no
gráfico da variável outr é o fato desta incerteza apresentar uma distribuição
espacial bastante complexa. No mesmo gráfico podemos notar regiões nas
quais a incerteza é bastante reduzida próximas à regiões nas quais essa
mesma variável assume valores elevados.
Para comparar estas duas técnicas de maneira mais eficiente, 4 pon-
tos nesse domínio foram selecionados e a razão outr foi calculada nesses
pontos para cada freqüência na faixa de 100-600Hz. As localização desses
pontos é mostrada na fig.23a e suas coordenadas são dadas por
1 (0,5;0,5)x = , 2 (0,3;0,7)x = , 3 (0,8;0,2)x = , 4 (0,9;0, 8)x = . Os pontos
foram escolhidos de forma a evitar a proximidade da fonte. Esse resultado
está mostrado na figs. 26 e 27. Como pode ser constatado a partir da aná-
lise desse resultados, há uma excelente concordância entre as duas
metodologias em toda a faixa de freqüência amostrada.
Há grande semelhança entre a análise deste resultado com aquele ob-
tido quando da análise do problema unidimensional. A principal
semelhança consiste no fato de a incerteza aumentar significativamente nas
proximidades das freqüências próprias do sistema. No entanto, pode-se
perceber faixas de freqüências com pouca ou nenhuma proximidade de uma
freqüência própria (400-450Hz, por exemplo) onde a incerteza atinge valo-
res reduzido em alguns pontos do domínio e elevados em outros. Ademais,
é bastante notório que a incerteza da saída supera a incerteza de entrada
em toda a faixa de freqüência quando esta análise é realizada para a parte
imaginária da pressão.
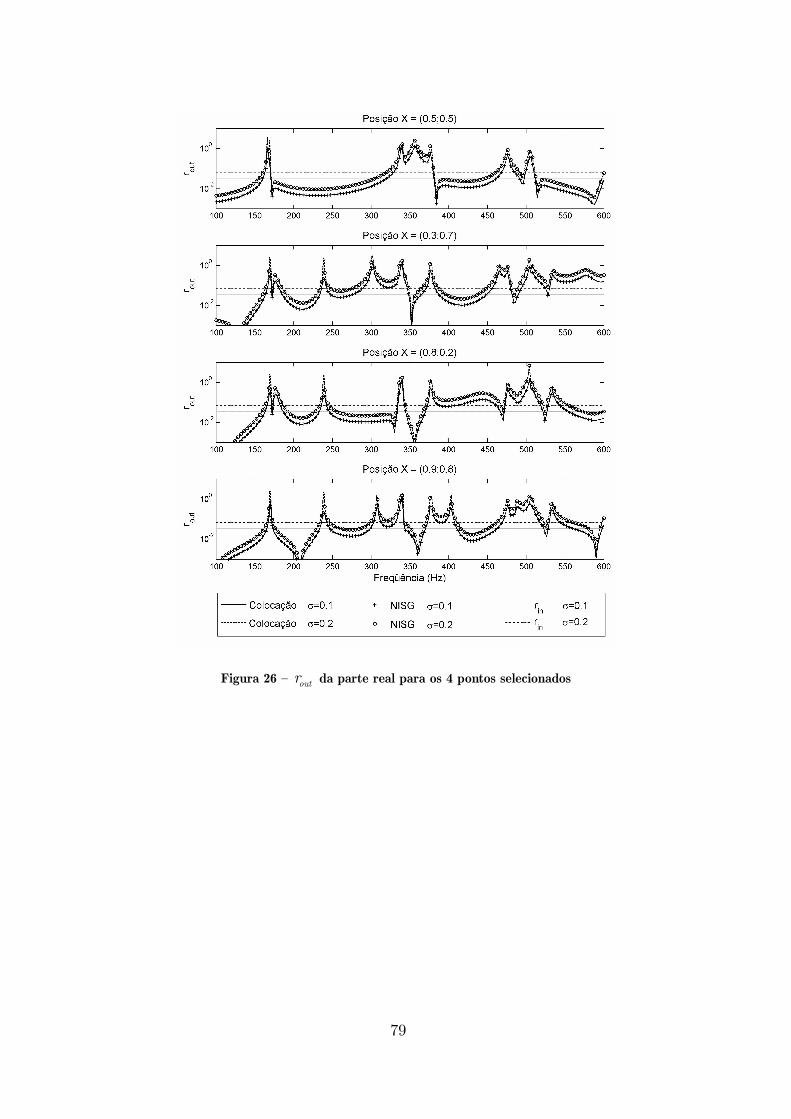
79
Figura 26 – outr da parte real para os 4 pontos selecionados
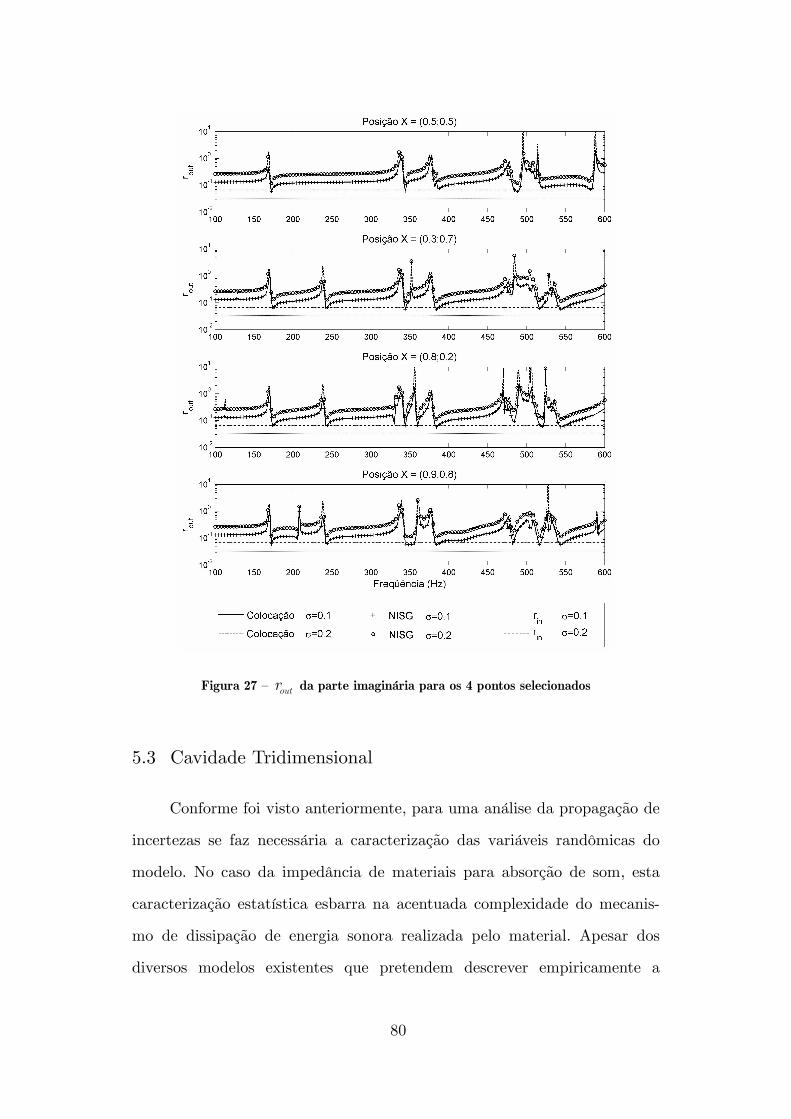
80
Figura 27 – outr da parte imaginária para os 4 pontos selecionados
5.3 Cavidade Tridimensional
Conforme foi visto anteriormente, para uma análise da propagação de
incertezas se faz necessária a caracterização das variáveis randômicas do
modelo. No caso da impedância de materiais para absorção de som, esta
caracterização estatística esbarra na acentuada complexidade do mecanis-
mo de dissipação de energia sonora realizada pelo material. Apesar dos
diversos modelos existentes que pretendem descrever empiricamente a

81
absorção de materiais porosos (Voronina, 1999), as informações disponíveis
atualmente são bastante restritas.
Uma vez que a descrição física do processo de dissipação não pode ser
feita de maneira precisa, outros métodos devem ser utilizados para descri-
ção deste fenômeno. Caso se consiga uma minimização dos erros de
medição experimental das propriedades acústicas do material, as informa-
ções coletadas podem ser utilizadas para caracterizar o fenômeno de
dissipação subjacente. Assim, mesmo com conhecimento limitado do com-
portamento físico do sistema, ainda será possível estabelecer relações entre
variáveis de entrada e de saída. Esta classe de modelos, conhecidos como
modelos data-driven tem recebido cada vez mais atenção nos últimos anos
devido à necessidade de se obter uma descrição estatística acurada (ou
mesmo determinística) de sistema de elevada complexidade física, à facili-
dade de computação dos dados coletados, à melhoria e diminuição dos
custos de equipamentos para aquisição de dados etc.
Em Ganapathysubramanian e Zabaras (2007b) um modelo data-
driven foi utilizado para gerar uma base de dados experimentais a partir
de certo número de amostras. Tal base serviu como dado de entrada para a
solução das equações diferenciais estocásticas que descrevem o processo de
propagação de calor em meios heterogêneos. Já Faverjon e Soize (2004a,b)
propuseram um modelo data-driven para a descrição da impedância em um
sistema de multicamadas para controle de ruído e um modelo randômico
destinado a aumentar a confiabilidade do modelo algébrico obtido a partir
dos dados medidos experimentalmente.
Nesta aplicação se levarão em conta essas duas abordagens: utilizan-
do-se o modelo randômico proposto por Faverjon e Soize (2004a,b), será
obtida uma base de dados composta de um conjunto de amostras que
simulará a situação em que diversos dados experimentais estão disponíveis.

82
Esses dados servirão de entrada para o modelo de Elementos Finitos esto-
cásticos que representa a impedância em uma placa posicionada em uma
parede de uma cavidade tridimensional. Usando a decomposição de Ka-
rhunen-Loève esta base de dados será representada através de um conjunto
de matrizes relacionando a iteração entre cada nó e um grupo de variáveis
estocásticas gaussianas.
5.4 Modelo Randômico para a Impedância Não-Local
A descrição física da impedância em materiais porosos encontra
grandes dificuldades devido à complexidade da interação fluido-estrutura
entre a matriz porosa e o ar. Tal dificuldade se mantém quando o sistema
analisado é um sistema multicamadas. Este tipo de sistema tem amplo uso
em controle de ruído em freqüências altas e médias em aeronaves, veículos,
sistemas de exaustão etc. Uma descrição detalhada de um dos vários expe-
rimentos para coleta de dados experimentais para uma placa deste tipo
pode ser encontrada em Faverjon e Soize (2004a). Não se entrará em gran-
de detalhamento sobre o procedimento experimental seguido pelos autores,
tarefa já minuciosamente feita no artigo acima citado. A seguir, faz-se uma
pequena descrição do modelo de impedância proposto.
Trata-se de uma camada de material poroso inserida entre duas finas
placas de alumínio. A dimensão deste sistema é de 0,6m×0,4m e o mesmo
é suportado por placas rígidas ao longo de suas extremidades. A seção
transversal do sistema é mostrada na fig. 28. Na figura 29 são mostrados
os pontos utilizados para a medição da velocidade.

83
Figura 28 – Seção transversal da placa
Figura 29 – Localização dos pontos de excitação e medição da velocidade
Os pontos de medição têm a mesma coordenada e x y mas diferem
na coordenada z . Cada um dos pontos da placa externa à câmara recebeu
uma excitação e as velocidades foram medidas nos 25 pontos da placa
interna 2P e nos outros 25 da placa externa 1P de alumínio que recobrem o
meio poroso.
A impedância acústica equivalente do sistema é definida como o ope-
rador integral ( )ωZ , dada pela função à valores complexos ( , , )z ω′x x tal
que
( ) ( ) ( ) ( ) ( )( )
1 2
1 2
, ( ) , , ( )
( , , ) , , d
P P
P P
S
p v v
z v v S
ω ω ω ω
ω ω ω ′′∈
= ⋅ − ⋅
′ ′ ′= −∫ x
x
x x
x x x x
Z
(5.11)

84
sendo que ( , , )z ω′x x é a função densidade da impedância acústica equiva-
lente. 1 2 e P Pv v representam a velocidade no ponto ′x da placa 1 e 2,
respectivamente. p é a pressão no ponto x e S é a superfície de 1P onde a
integral (5.11) é definida.
O modelo local para a impedância foi definido como
( ) ( ) ( )( )1 2, ( , ) , , ,loc P Pp z v v Sω ω ω ω= − ∀ ∈x x x x x (5.12)
e a relação entre as duas representações da impedância dada por
0( , , ) ( , ) ( )locz zω ω δ′ ′= −x x x x x (5.13)
0( )δ ′−x x é a função delta de Dirac. Para a definição de um modelo algé-
brico desta impedância local define-se a função ( ) ( ), , ,zζ ω ω=x x x cujas
partes real e imaginária são dadas por ( ),Rζ ωx e ( ),Iζ ωx tal que
( ) ( ) ( ), , ,R Iiζ ω ζ ω ζ ω= +x x x e a função ( ), ,Rρ ω′x x que corresponde à
normalização de ( , , )Rz ω′x x definida por
( )
( , , )( , , )
, ( , )
R
R
R R
z ωρ ω
ζ ω ζ ω
′′ =
′
x xx x
x x (5.14)
e para a parte imaginária ( ), ,Iρ ω′x x
( )
( , , )( , , )
, ( , )
I
I
z ωρ ω
ζ ω ζ ω
′′ =
′
x xx x
x x (5.15)
Logo, é possível obter a seguinte expressão para ( , , )z ω′x x
( )
( )( )
( , , ) , ( , )
, ( , )( , , ) ( , , )
, ( , )R R
R I
z
i
ω ζ ω ζ ω
ζ ω ζ ωρ ω ρ ω
ζ ω ζ ω
′ ′= ×
′ ′ ′+ ′
x x x x
x xx x x x
x x
(5.16)
Utilizando as considerações acima, a análise feita por Faverjon e Soize
(2004a,b) dos dados experimentais obtidos mostrou que para freqüências
abaixo de 300Hz a impedância é não local no espaço. Além disso, para

85
freqüências acima de 300Hz foi possível constatar que a impedância acústi-
ca equivalente experimental pode ser considerada homogênea e isotrópica.
Desta forma a função densidade da impedância acústica equivalente de-
penderá somente da distância ′−x x e a função ( ),Rζ ωx não dependerá
de x . Portanto, a equação (5.16) pode ser reescrita como
( )
( , ) ( ) ( , ) ( , )( )R
R Iz iζ ω
ω ζ ω ρ ω ρ ωζ ω
′ ′ ′− = − + − x x x x x x (5.17)
Aqueles autores definiram os modelos algébricos para ( , )Rρ ω′−x x e
( , )Iρ ω′−x x com base na análise dos dados experimentais disponíveis o
que resultou em
/ ( )( , ) cos(2 / ( ))RLR Re η ωρ η ω πη λ ω−= (5.18)
/ ( )( , ) cos(2 / ( ) ( ))ILI I Ie η ωρ η ω πη λ ω φ ω−= + (5.19)
onde é definido η ′= −x x . Para manter a simplicidade do modelo e
verificando que não há ganho significativo em manter as variáveis
( ), ( ), ( ), ( ) e ( )R R I I IL Lω λ ω ω λ ω φ ω dependentes da freqüência, estas foram
assumidas como sendo constantes em Faverjon e Soize (2004a). No entanto,
com o intuito de aumentar a robustez do modelo, as variáveis , e R I Iλ λ φ
foram consideradas como randômicas. Desta forma, este modelo foi reescri-
to como
/( , ) cos(2 / ( ))RLR Re ηρ η θ πη λ θ−= (5.20)
/( , ) cos(2 / ( ) ( ))ILI I Ie ηρ η θ πη λ θ φ θ−= + (5.21)
A função da impedância será um campo randômico, dependente da
freqüência e da distância entre dois pontos, ou seja,
( )
( , , ) ( ) ( , ) ( , )( )R
R Iz iζ ω
η ω θ ζ ω ρ η θ ρ η θζ ω
= + (5.22)

86
Com base nos dados experimentais, as seguintes funções foram pro-
postas para ( )Rζ ω e ( )Iζ ω
( ) 0
0 0
0
/( )
RbR
R R
max
a
R R R R
R
e
γ
ω ωωζ ω ζ ζ ζ
ω
− = + −
(5.23)
( )
0
4 222 2
( ) 1I II I I
I I
a db c
eζ ω ω ω
ω ω ω ω
= + − + − + (5.24)
e os parâmetros que definem estas funções foram determinados de forma a
minimizar o erro entre os dados experimentais na banda de freqüência
analisada [100,1600]Hz=B . Os valores numéricos foram calculados como
0
0
6 3R
6 3
1,678 10 Pa s/m 2 2
4,717 10 Pa s/m 5303 rad/s 46max
R R
R R R
b
a
ζ γ
ζ ω
= × = =
= × = =
0
3 9 16
25 3 14 6
4,86 10 rad/s 4,7 10 8 10
10 Pa s/m 1,6 10 2,4 10
I I I
I I I
a b
c d e
ω −
−
= × = × = ×
= = × = ×
Para determinação das funções ( , ) e ( , )R Iρ η θ ρ η θ é necessário estabe-
lecer um modelo para as variáveis estocásticas , e R I Iλ λ φ , o que requer a
definição de suas funções distribuição de probabilidade. O princípio da
máxima entropia foi utilizado para tal tarefa. Com os dados disponíveis
nos experimentos, este princípio estabelece que as funções distribuições de
probabilidade devam ter a forma (Faverjon e Soize, 2004a)
( )
( )
( )
21 2
21 2
21 2
0
0
[ , ] 0
( )
( )
( )
R R
R
I I
I
I
R
I
p C e
p C e
p C eφ φ
µ ξ µ ξλ
µ ξ µ ξλ
φ µ ξ µ ξφ π π
ξ ξ
ξ ξ
ξ ξ
+
+
− −
− −
− −−
=
=
=
1
1
1
(5.25)
onde as constantes assumem os seguintes valores
0 1 2
0 1 2
0 1 2
0,926 -67,377 442,809
1,012 -81,157 662,792
0,008125 -8,337 3,564
R R R
I I I
C
C
C φ φ φ
µ µ
µ µ
µ µ
= = =
= = =
= = =

87
Com as funções definidas, é possível então obter um conjunto de a-
mostras para ( , , )z η ω θ através da equação (5.22). Abaixo estão mostradas
algumas amostras obtidas para a impedância ( , , )z η ω θ em função da dis-
tância η , ao se utilizar o modelo proposto por Faverjon e Soize (2004a).
Figura 30 – Algumas amostras para a impedância ( , , )z η ω θ
obtidas através da equação (5.22)
5.5 Descrição do Modelo Físico e Resultados
Para introduzir este modelo de impedância no presente trabalho, um
conjunto de amostras obtidas através da eq.(5.22) será gerado e representa-
rá os dados pseudo-experimentais disponíveis. Neste ponto, devem-se
buscar alternativas para a representação deste conjunto de dados através
de um espaço de dimensão finita que possa ser utilizado para a aproxima-
ção na representação da impedância. A expansão de Karhunen-Loève é
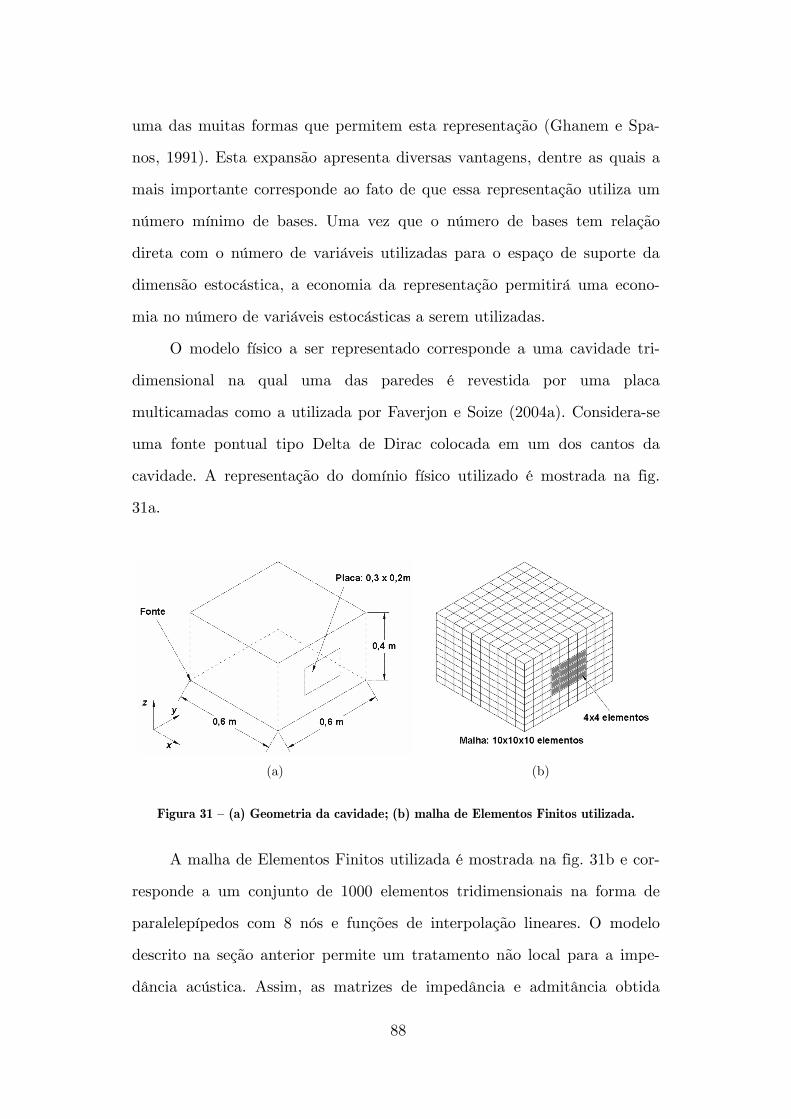
88
uma das muitas formas que permitem esta representação (Ghanem e Spa-
nos, 1991). Esta expansão apresenta diversas vantagens, dentre as quais a
mais importante corresponde ao fato de que essa representação utiliza um
número mínimo de bases. Uma vez que o número de bases tem relação
direta com o número de variáveis utilizadas para o espaço de suporte da
dimensão estocástica, a economia da representação permitirá uma econo-
mia no número de variáveis estocásticas a serem utilizadas.
O modelo físico a ser representado corresponde a uma cavidade tri-
dimensional na qual uma das paredes é revestida por uma placa
multicamadas como a utilizada por Faverjon e Soize (2004a). Considera-se
uma fonte pontual tipo Delta de Dirac colocada em um dos cantos da
cavidade. A representação do domínio físico utilizado é mostrada na fig.
31a.
(a) (b)
Figura 31 – (a) Geometria da cavidade; (b) malha de Elementos Finitos utilizada.
A malha de Elementos Finitos utilizada é mostrada na fig. 31b e cor-
responde a um conjunto de 1000 elementos tridimensionais na forma de
paralelepípedos com 8 nós e funções de interpolação lineares. O modelo
descrito na seção anterior permite um tratamento não local para a impe-
dância acústica. Assim, as matrizes de impedância e admitância obtida

89
para a forma discreta de das equações diferenciais deste sistema represen-
tam a interação entre os nós da superfície onde há a absorção sonora. A
condição de impedância correspondente à placa foi aplicada na face de um
conjunto de 4×4 elementos posição central da parede oposta à posição da
fonte (fig. 31b). A matriz de impedância tem a forma
( )
1,1 1,2 1,
2,1 2,2
,1 ,
,
N
N N N
z z z
z z
z z
ω θ
=
Z
…
…
(5.26)
onde , ,( , , )i j i jz z η ω θ= sendo ,i j i jη ′= −x x . De acordo com o número de
nós utilizados para representar a placa, tem-se 25N = . Nota-se que Z é
simétrica e que só se faz necessário o cálculo de apenas uma das linhas da
matriz (para o presente caso, no qual a distribuição espacial dos nós é
dada pelas coordenadas mostradas na fig. 31b).
Desta forma, é possível calcular certo número de amostras de Z e a
partir desta série de amostras obter uma representação compacta de ma-
neira bastante prática utilizando o método dos retratos (Sampaio e Wolter,
2001). Isto permitirá representar a matriz de impedância utilizando a série
( ) ( )1
, ( ) ( ) ( )i i ii
ω θ ω λ ω ξ θ ω∞
=
= +∑Z Z Z (5.27)
onde ( ) iξ θ é um conjunto de variáveis gaussianas de média nula e desvio
padrão unitário, ( )iλ ω e ( )i ωZ são os autovalores e autovetores do núcleo
de covariância. Utilizando o método dos retratos, esses fatores podem ser
calculados através da solução do seguinte problema de autovalor
λΨ = ΨC (5.28)
no qual as colunas da matriz Ψ serão compostas pelos vetores ( ),iψ η ω ,
que é um ordenamento dos elementos da matriz ( ),i ω θZ na forma de um
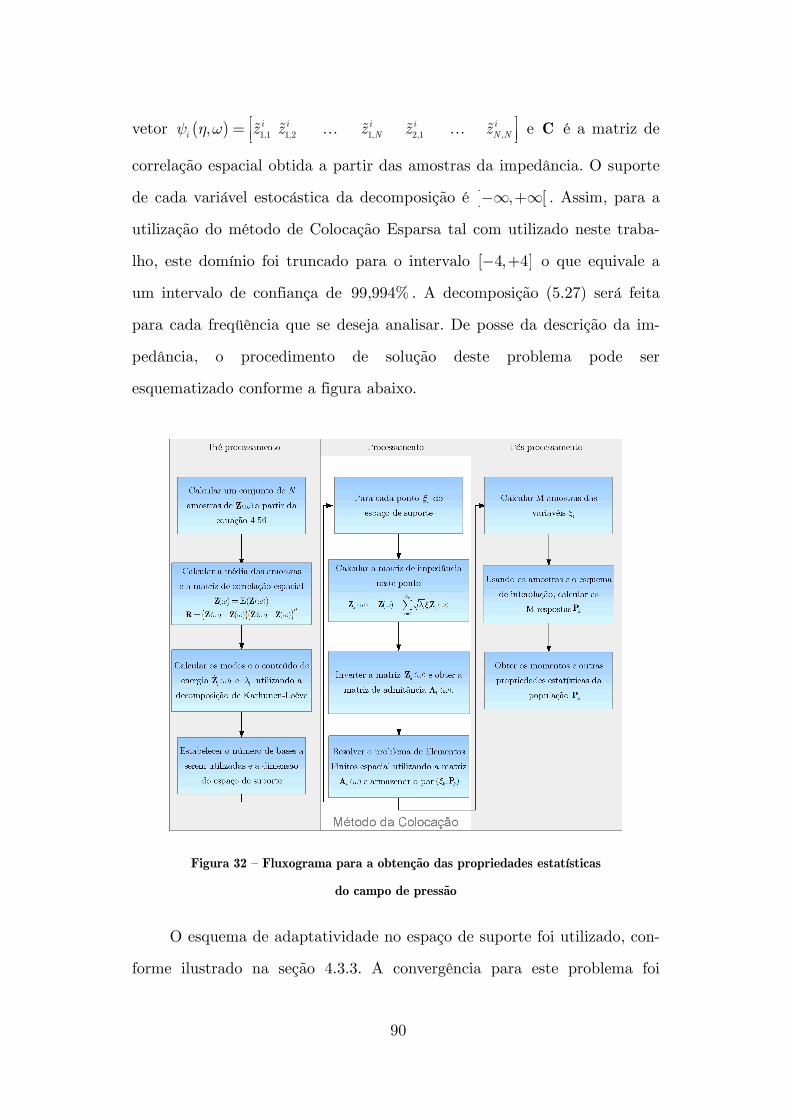
90
vetor ( ) 1,1 1,2 1, 2,1 ,, i i i i ii N N Nz z z z zψ η ω =
… … e C é a matriz de
correlação espacial obtida a partir das amostras da impedância. O suporte
de cada variável estocástica da decomposição é ] [,−∞ +∞ . Assim, para a
utilização do método de Colocação Esparsa tal com utilizado neste traba-
lho, este domínio foi truncado para o intervalo [ ]4, 4− + o que equivale a
um intervalo de confiança de 99,994% . A decomposição (5.27) será feita
para cada freqüência que se deseja analisar. De posse da descrição da im-
pedância, o procedimento de solução deste problema pode ser
esquematizado conforme a figura abaixo.
Figura 32 – Fluxograma para a obtenção das propriedades estatísticas
do campo de pressão
O esquema de adaptatividade no espaço de suporte foi utilizado, con-
forme ilustrado na seção 4.3.3. A convergência para este problema foi

91
obtida com a utilização de 10121 pontos de interpolação no espaço de
suporte. Uma vez calculado o interpolante esparso, 20000 amostras de cada
variável estocástica de entrada foram obtidas e o campo de pressão foi
interpolado. Destes 20000 valores do campo de pressão a média e o desvio
padrão foram calculados. As figuras 33 a 38 mostram os resultados espaci-
ais para a malha empregada no que concerne à média e ao desvio padrão
das partes real e imaginária da pressão, para as freqüências de 400 e
500Hz.
Como pode ser constatada, para as freqüências mostradas, a distribu-
ição da incerteza alcança níveis da ordem de 1% para a parte real. Já para
a parte imaginária, esses níveis são de várias ordens de grandeza. Isto se
deve ao fato de a média da parte imaginária da pressão assumir valores
próximos de zero em todo o domínio, diferentemente do que acontece com
a média da parte real. No entanto, analogamente ao caso unidimensional
analisado, tais níveis podem aumentar sem que o valor médio da pressão
tenda a zero (note-se a incerteza nas proximidades da fonte para a fre-
qüência de 400Hz).
Ainda, é possível verificar, principalmente no gráfico da razão outr pa-
ra a parte real, que existem diversas regiões dentro do domínio espacial nas
quais a incerteza alcança valores próximos ao máximo. A distribuição
espacial desta variável apresenta grande complexidade seguindo o exemplo
do mesmo campo obtido para o caso bidimensional. Desta forma, a locali-
zação das regiões de valores elevados ou reduzidos da incerteza não poderia
ser obtida de maneira simples através da mera medição da pressão em
vários pontos do domínio. Desta maneira, a análise estocástica se torna
fundamental para fornecer tal informação.
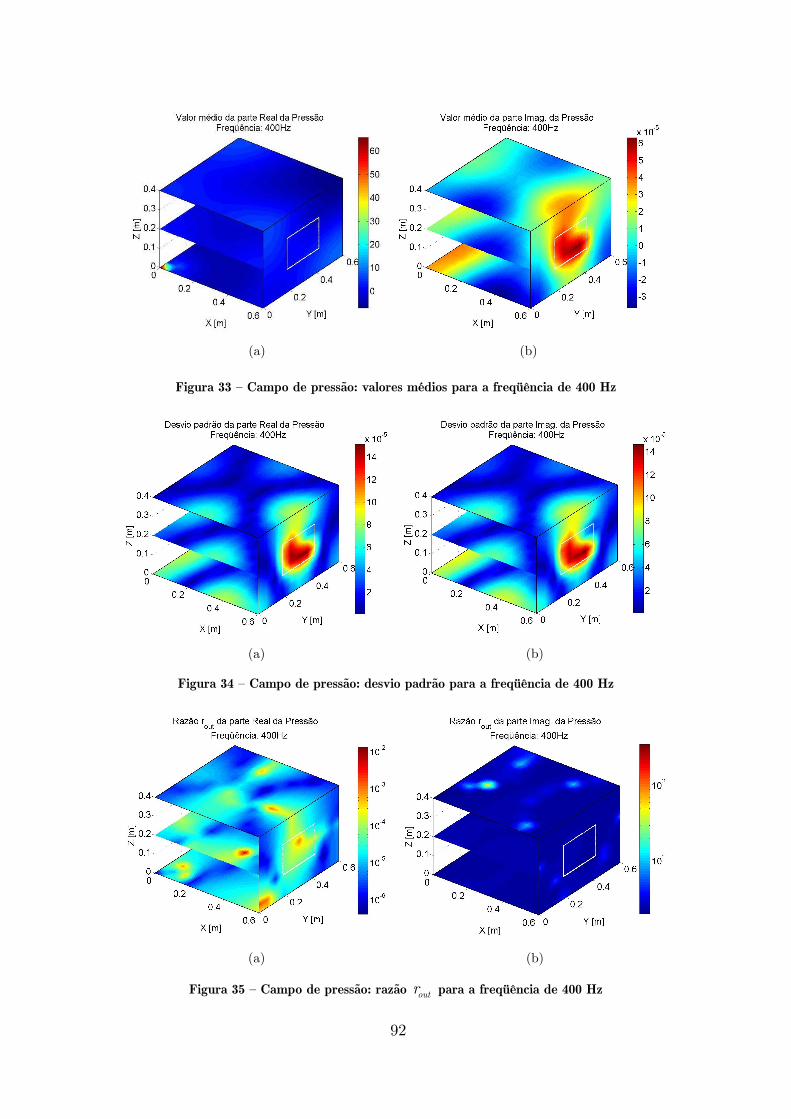
92
(a) (b)
Figura 33 – Campo de pressão: valores médios para a freqüência de 400 Hz
(a) (b)
Figura 34 – Campo de pressão: desvio padrão para a freqüência de 400 Hz
(a) (b)
Figura 35 – Campo de pressão: razão outr para a freqüência de 400 Hz

93
(a) (b)
Figura 36 – Campo de pressão: valores médios para a freqüência de 500 Hz
(a) (b)
Figura 37 – Campo de pressão: desvio padrão para a freqüência de 500 Hz
(a) (b)
Figura 38 – Campo de pressão: razão outr para a freqüência de 500 Hz

94
Capítulo 6
Conclusões e Trabalhos Futuros
Este trabalho propôs uma metodologia para a análise de propagação
de incertezas em problemas de acústica. Tal metodologia se baseia no uso
de uma representação intuitiva do espaço randômico, de técnicas de colo-
cação que permitem o desacoplamento do sistema de equações diferenciais
obtido em relação ao domínio físico espacial e na utilização de interpolan-
tes eficientes para aproximação do campo de pressão na dimensão
estocástica. Apesar de este trabalho ter limitado sua análise aos efeitos da
incerteza na impedância de materiais para a absorção de som, tal metodo-
logia pode ser diretamente aplicada quando esta incerteza estiver presente
em outros parâmetros físicos do sistema, como na intensidade e freqüência
das fontes acústicas, variabilidade da temperatura do meio fluido etc.
Ficou bastante claro que a solução de problema de acústica levando-
se em conta as incertezas de entrada é um problema computacionalmente
intensivo. Por outro lado, alternativas clássicas como o método de Monte
Carlo, método da Perturbação ou o método de Elementos Finitos Espec-
trais ainda apresentam limitações ora devido à quantidade de recursos
computacionais requeridos ora na capacidade de representar adequadamen-
te problemas com alta Variabilidade na entrada. Por outro lado, a
alternativa proposta aqui para este tipo de análise representa uma impor-
tante ferramenta, pois provou ser eficiente nos exemplos apresentados,

95
reduzindo significativamente o esforço computacional requerido necessário
e ainda assim mantendo um nível de representação adequado dos fenôme-
nos estocásticos, mesmo em face de grandes flutuações nos parâmetros de
entrada.
Diferentemente das outras duas técnicas aplicadas (o método de
Monte Carlo e o NISG), a metodologia utilizada transfere para a etapa de
pós-processamento toda a análise estatística requerida. Uma vez que as
avaliações do código de Elementos Finitos espacial são substituídas pela
avaliação do interpolante esparso, o analista pode empregar diferentes
técnicas de obtenção dos momentos e da função de distribuição de probabi-
lidade, fazendo tantas avaliações quantas achar necessárias para a correta
obtenção desses resultados. O método da Colocação Esparsa apresenta
ainda outras vantagens, dentre elas pode-se citar o fato de ser uma abor-
dagem que requer pouca ou nenhuma alteração dos códigos de Elementos
Finitos já utilizados para problemas de Acústica e acentuada facilidade de
paralelização.
Outro aspecto tratado neste trabalho analisou a influência da Varia-
bilidade da impedância em materiais de absorção sonora sobre o
comportamento do campo de pressão em recintos fechados, informação de
grande importância para o projeto de sistemas de controle passivo de ruí-
do. A maior dificuldade que reside neste tipo de análise é como
caracterizar a incerteza das variáveis de entrada. A correta caracterização
deste tipo de parâmetro físico ainda é objeto de muito estudo e talvez a
alternativa mais atrativa, no presente estado da arte, seja a utilização de
modelos data-driven, nos quais os intrincados fenômenos decorrentes da
absorção sonora em materiais porosos podem ser razoavelmente represen-
tados.

96
Notou-se, nos resultados apresentados aqui, que a incerteza nos pa-
râmetros que definem a impedância de um material de absorção tem um
impacto bastante significativo sobre a incerteza nos níveis de pressão sono-
ra em ambientes fechados e em experimentos para a medição de
propriedades acústicas de materiais para a absorção de som. Desta forma,
tal análise deve ser considerada na realização de medições experimentais,
pois permite estabelecer posições para a tomada de pressão, além de forne-
cer informações vitais sobre a confiabilidade dos dados medidos.
A partir do trabalho desenvolvido aqui, pode-se vislumbrar diversas
alternativas para trabalhos futuros, dentre as quais se podem citar:
a) A obtenção de um modelo data-driven para a impedância, que já
inclua na sua descrição as características estocásticas, representa
uma importante fonte de informação para a caracterização física e
projetos de isolação acústica para qualquer material. Atualmente,
há disponível uma ampla base de dados, obtida a partir de medi-
ções experimentais realizadas pelo grupo SACADS do Laboratoire
de Mecanique et Acoustique (LMA-CNRS, Marseille, França), para
a propagação em baixas freqüências em uma cavidade recoberta
com material para absorção de som (Poffa e Friot, 2004).
b) Avaliação da influência da incerteza em outras variáveis em pro-
blemas de Acústica. Particularmente, a influência da incerteza nas
características da fonte sonora como freqüência, intensidade, fase,
posição etc. sobre a incerteza sobre o campo de pressão.
c) Utilizar somente uma plataforma de desenvolvimento de progra-
mação. Atualmente, os códigos computacionais utilizados neste
trabalho foram desenvolvidos na plataforma MATLAB® e para o
FORTRAN90. A conversão de todos os códigos para FORTRAN90

97
permitirá o uso em clusters de computadores e facilitaria a porta-
bilidade do código entre sistemas.
d) A integração necessária para o cálculo dos momentos do campo de
pressão foi feita neste trabalho através da integração gaussiana
quando o número de dimensões do espaço de suporte era bidimen-
sional e da técnica de Monte Carlo para o problema
tridimensional. A técnica de interpolação utilizando o algoritmo de
Smoljak encontra-se bastante desenvolvida para a integração de
funções multidimensionais (Novak e Ritter, 1996). Uma alternativa
possível para esta integração seria utilizar a própria estrutura do
interpolante esparso do campo de pressão para a obtenção do valor
de sua integral, dada a forma da integração utilizando a eq. (2.4).
Isto permitiria grande economia no pós-processamento e aumento
da precisão dos momentos calculados.

98
Apêndice A
Outros métodos para análise estocástica
A.1 Métodos de perturbação
O método da Perturbação se tornou o método não estatístico mais
aplicado para a análise estocástica devido à simplicidade da técnica e a sua
robustez no tratamento de problemas em sistema sujeitos à pequenas per-
turbações. Alguns trabalhos contendo revisões e notas históricas sobre o
desenvolvimento deste método podem ser encontrados na literatura
(Schuëller, 1997, Ghanem e Spanos, 1999, Elishakoff et al., 1996).
Conforme será visto a seguir, a perturbação estocástica pode ser vista
como uma oscilação em torno do valor médio do sistema, e essas perturba-
ções podem ser obtidas através de uma expansão em série de Taylor do
operador e de outras funções envolvidas na equação diferencial parcial
estocástica. Devido à grande complexidade matemática resultante, apenas
expansões usando um ou dois termos são utilizadas, que permitem o cálcu-
lo do 1º e 2º momentos.
Dado que um processo estocástico tenha sido modelado utilizando-se
n variáveis randômicas. Assim, operador estocástico na eq. (2.25) pode ser
representado como

99
( )( ( ), ) ( ( ), ) ( ( ), )x u x f xξ θ ξ θ ξ θ=L (A.1)
Expandindo ( ( ), )xξ θL e a solução ( ( ), )u xξ θ em torno da média es-
pacial obtem-se
2
1 1 1
( , ) ( ) ( , ) ( , )n n n
i i j
i i ji i j
x x x xξ ξ ξ ξ ξ ξξ ξ ξ= = =
∂ ∂= + + +
∂ ∂ ∂∑ ∑∑L L R R … (A.2)
2
1 1 1
( , ) ( ) ( , ) ( , )n n n
i i j
i i ji i j
u x u x u x u xξ ξ ξ ξ ξ ξξ ξ ξ= = =
∂ ∂= + + +
∂ ∂ ∂∑ ∑∑ … (A.3)
Sendo que ( )ξ θ ξ≡ (a dependência de θ ficará implícita a partir des-
te ponto para melhorar a legibilidade) e ( )( ) ( , )x xξ=L LE representa a
média do operador original, ( , )xξR a parte randômica e com expectativa
nula, ou seja, ( )( , ) 0xξ =RE e ξ é um vetor n-dimensional contendo as
variáveis randômicas com média nula. Se a excitação é considerada como
sendo determinística, que o desvio padrão das variáveis iξ é pequeno em
relação as suas médias e se substituir as expansões (A.2) e (A.3) na eq.
(A.1), obtem-se
( ) ( )
1 1
1 1
1 1
( ) ( , ) ( ) ( , )
( ) ( ) ( ) ( , ) ( , ) ( )
( , ) ( , ) ( )
n n
i i
i ii i
n n
i ii ii i
n n
i ii ii i
x x u x u x
x u x x u x x u x
x u x f x
ξ ξ ξ ξξ ξ
ξ ξ ξ ξξ ξ
ξ ξ ξ ξξ ξ
= =
= =
= =
∂ ∂ + + = ∂ ∂ ∂ ∂ + + + ∂ ∂
∂ ∂ = ∂ ∂
∑ ∑
∑ ∑
∑ ∑
L R
L L R
R
(A.4)
que resulta em um polinômio multidimensional para iξ . Equacionando os
polinômios de mesma ordem com o lado direito da equação e desprezando
o produto entre as flutuações resultará
( )
( )1 1
( ) ( ) ( )
( ) ( , ) ( , ) ( ) ( )n n
i ii i
x u x f x
x u x x u x f xξ ξξ ξ= =
=
∂ ∂ + = ∂ ∂ ∑ ∑
L
L R
(A.5)

100
Que é um sistema de equações que pode ser resolvido para a obten-
ção de ( , ) e ( )u x u xξ . Dependendo da magnitude das flutuações, maiores
ou menores números de termos devem ser incluídos nesta derivação. A
expansão resultante pode ser extremamente complexa e a solução, impossí-
vel de obter. Este fator tem limitado a aplicação da técnica para sistemas
apresentando pequenas flutuações.
Se o número de variáveis aleatórias for elevado, o esforço para o cál-
culo dos momentos de segunda ordem poderá comprometer a
aplicabilidade do método. Neste caso, técnicas para a redução do número
de variáveis podem ser utilizadas, selecionando as variáveis de maior im-
pacto na resposta do problema (aquelas que possuem a covariância mais
elevada). Uma revisão de alguns métodos utilizados para esse fim pode ser
encontrada em Schüller (1997).
Um método melhorado para a técnica de perturbação foi proposto
por Elishakoff et al. (1995). Apesar de ser considerado um método de pri-
meira ordem, ficou demonstrado que ele é mais preciso que os métodos
convencionais de segunda ordem. Isto pode ser alcançado levando-se em
consideração os parâmetros estatísticos de segunda ordem das variáveis de
entrada no cálculo do valor médio da resposta na equação (A.2).
Utilizando cálculo matricial e álgebra de Kronecker, Zhang et al.
(1996) estenderam o método da perturbação para operadores matriciais e
vetoriais tornando sua aplicação mais adequada para problemas de elemen-
tos finitos.
Kaminski (2006) desenvolveu um método da perturbação generaliza-
da que permite o desenvolvimento sistemático da aproximação para ordens
elevadas. A técnica, que faz uso de computação simbólica, foi aplicada para
perturbações até de décima ordem e demonstrou que a convergência de-
pende principalmente da covariância das variáveis randômicas utilizadas. A

101
princípio este procedimento poderia estender o método da perturbação
para o tratamento de problemas com grandes variações. No entanto, o
problema tratado foi bastante simples: uma barra sob tração com módulo
de elasticidade sendo uma variável aleatória. A eficiência da técnica para
problemas complexos ainda não foi provada.
A.2 Séries de Neumann
Enquanto no método de perturbação o operador é expandido em uma
série de Taylor, nos métodos de Neumann o operador é expandido em uma
série convergente em termos da inversa da média do operador. A série de
Neumann é uma série convergente para a inversa dada por
1
0
(1 ) k
k
x x∞
−
=
− =∑ (A.6)
Para matrizes quadradas a série é dada por
1
0
( ) k
k
I A A∞
−
=
− =∑ (A.7)
Sendo que I é a matriz identidade de mesma dimensão de A . Esta
série será convergente caso a norma 1A < . Considere a eq. (A.1) cuja
solução é dada por
( )1( ( ), ) ( ( ), ) ( ( ), )u x x f xξ θ ξ θ ξ θ−= L (A.8)
Sendo que 1( ( ), )xξ θ−L representa a inversa do operador ( ( ), )xξ θL .
Como no método de perturbação, expande-se 1( ( ), )xξ θ−L em uma média e
uma parte oscilatória com média nula, ou seja,
( ( ), ) ( ) ( ( ), )x x xξ θ ξ θ= +L L R (A.9)
Se existir a inversa do operador médio ( )xL então 1( ( ), )xξ θ−L pode
ser expandida em uma série convergente na forma

102
( )1 1 1
0
( ( ) ( ( ), )) ( 1) ( ) ( ( ), ) ( )kk
k
x x x x xξ θ ξ θ∞
− − −
=
+ = −∑L R L R L (A.10)
Calcular a inversa do operador pode ser um problema não trivial em
diversos casos. Assim como no método da perturbação, a aplicação desta
técnica pode requerer manipulações simbólicas de grande complexidade. A
aplicação é bastante direta para problemas de elementos finitos, sendo que
o operador que deve ser invertido será a parte média da matriz de rigidez.
Yamazaki et al. (1988) aplicaram o método de Neumann em um problema
de uma placa sujeita a um carregamento determinístico e com variabilida-
de espacial do módulo de elasticidade, notando que este método, associado
com a técnica de Monte Carlo, pode render melhores resultados que o
método de Monte Carlo clássico e que o método de perturbação de 1ª e 2ª
ordens no que se refere à precisão dos resultados a ao custo computacional.
Uma aplicação desta técnica para o caso de uma viga com módulo de
elasticidade randômico, sobre uma fundação randômica e sujeita a um
carregamento randômico é demonstrada por Chakraborty e Dey (1996).
Uma aplicação da expansão para problemas dinâmicos com a integração no
tempo usando o método de Newmark foi feita por Lei e Qiu (2000), mos-
trando bons resultados. Finalmente, Babuška e Chatzipantelidis (2002)
promoveram avanço na técnica ao provar que a existência da solução base-
ada na série de Neumann, bem como sua convergência e estimativas de
erro para problemas elípticos. Os mesmos autores notaram também grande
dificuldade computacional para a aplicação do método.
A.3 O método de Elementos Finitos Espectrais
O método de elementos finitos espectrais (SSFEM, do inglês Spectral
Stochastic Finite Element Method) é um método fundamentado pelos tra-
balhos de Ghanem e Spanos (1991). Neste método, a solução da forma

103
fraca, mostrada em (2.27), é feita selecionando-se um espaço de aproxima-
ção compostos pelos Polinômios Caos (Wiener, 1938). A solução seria uma
série cujas funções de base seriam os polinômios de Hermite (caso se use
variáveis gaussianas para a modelagem dos parâmetros de entrada) e os
coeficientes seriam determinados através de um esquema tipo Galerkin. A
relação entre a função densidade de probabilidade das variáveis randômicas
utilizadas para os parâmetros de entrada e o espaço de aproximação foi
estabelecida por Xiu e Karniadakis (2002) na formulação conhecida como
polinômios de caos generalizados.
A incerteza em um sistema pode estar presente tanto na matriz de
rigidez quanto no vetor de esforços nodais. Nos problemas tratados por
Ghanem e Spanos (1991), a incerteza estava diretamente associada ao
módulo de elasticidade longitudinal. Este caso coincide com a análise do
presente estudo, uma vez que a incerteza na impedância nas condições de
contorno também se reflete sobre a matriz de rigidez. Desta forma, se
seguirá no detalhamento feito por aqueles autores.
Considere que se tem apenas o operador estocástico na eq. (2.27) (re-
petida abaixo), ou seja,
( )( ) , ; ( ) ( , ) ( ) ( ) , ( ) ,Vy y x u v y dy f y x y v y dy v y V x Dρ ρ Γ
Γ Γ
= ∀ ∈ ∈∫ ∫L (A.11)
Tratar-se-á do caso no qual a função do lado direito da equação é de-
terminística e que o operador ( ), ; Vy x uL é linear, de forma que se pode
separá-lo em um componente determinístico e outro randômico para obter
( )( ) ( )[ ]( ) ( , ) , ( ) ( ) ( ) ( )Vy x y x u y x v y dy f x y v y dyρ ρ
Γ Γ
+ =∫ ∫L R (A.12)
( )xL representa um operador determinístico linear e ( , )y xR é um opera-
dor randômico linear. Neste ponto, deve-se considerar que tipo de incerteza
104
tem-se no problema. Pode-se ter incerteza na geometria, no modelo ou nos
parâmetros de entrada. Verificar-se-á somente o caso onde haja incerteza
em determinada propriedade do meio e que esta atue na expressão explici-
ta do operador randômico de maneira multiplicativa, ou seja,
( , ) ( , ) ( )y x y x xα≡R R . Obtem-se
( )( ) ( )[ ]( ) ( , ) ( ) , ( ) ( ) ( ) ( )Vy x y x x u y x v y dy f x y v y dyρ α ρ
Γ Γ
+ =∫ ∫L R (A.13)
Considera-se que o campo randômico ( , )y xα é um dado de entrada e
que sua caracterização estatística esteja completa. Desta forma, sendo o
núcleo de covariância conhecido, uma das possíveis aproximações deste
coeficiente é através de uma série de Karhunen-Loève, truncada em M
termos,
1
( , ) ( ) ( )M
i i ii
y x xα λ ξ θ ψ=
=∑ (A.14)
Aplicando esta expansão em (A.13) obtem-se
( ) ( )[ ]1
( ) ( ) ( ) ( ) , ( )
( ) ( ) ( )
i i i Vi
y x x x u y x v y dy
f x y v y dy
ρ λ ξ θ ψ
ρ
∞
=Γ
Γ
+
=
∑∫
∫
L R
(A.15)
O campo randômico ( ),Vu y x também deve ser expandido através de
duas projeções sucessivas: uma no espaço x e outra no espaço de probabi-
lidade. Inicialmente busca-se uma representação de elementos finitos para
este operador. Utiliza-se uma forma bastante conhecida para a derivação
das equações de elementos finitos que consiste em multiplicar a eq.(A.15)
por uma função teste ( )w x e integrar os termos no domínio espacial, ou
seja,

105
( ) ( )[ ]1
( ) ( ) ( ) ( ) ( ) , ( )
( ) ( ) ( ) ( )
i i i V
i
w x y x x x u y x v y dydx
f x w x y v y dydx
ρ λ ξ θ ψ
ρ
∞
=Ω Γ
Ω Γ
+
=
∑∫ ∫
∫ ∫
L R
(A.16)
Rearranjando os termos na equação anterior pode-se obter
( ) ( )[ ]1
( ) ( ) ( ) ( ) , ( ) ( )
( ) ( ) ( ) ( )
i i i Vi
y x x x u y x w x dx v y dy
y v y dy w x f x dx
ρ λ ξ θ ψ
ρ
∞
=Γ Ω
Γ Ω
+
=
∑∫ ∫
∫ ∫
L R
(A.17)
Da forma habitual, uma expansão de elementos finitos para ( ),Vu y x
terá a forma
( ), ( ) ( )Vu y x x y= N U (A.18)
Sendo que ( )xN representa uma matriz composta por funções de in-
terpolação espaciais com suporte compacto. A diferença no presente caso, é
que os coeficientes ( )yU são variáveis randômicas, em vez dos habituais
coeficientes determinísticos. No caso de malhas langrangianas, isso significa
que os valores nodais do campo ( ),Vu y x são descritos de maneira estatísti-
ca, e seus valores serão alterados caso se obtenha uma diferente realização
das propriedades de entrada. Uma interpolação semelhante pode ser admi-
tida para a função teste ( )w x e obtêm-se de (A.18) em (A.17)
( ) [ ]1
( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( )
( ) ( ) ( ) ( ) ( )
i i ii
y x x x x y x y dx v y dy
y v y dy x y f x dx
ρ λ ξ θ ψ
ρ
∞
=Γ Ω
Γ Ω
+
=
∑∫ ∫
∫ ∫
N U N W
N W
L R
(A.19)
A aplicação dos operadores ( )xL e ( )xR à matriz de interpolação
( )xN pode ser feita de forma usual para obter o seguinte sistema
01
( ) ( ) ( ) ( ) ( ) ( )M
i i i
i
y y v y dy y v y dyλ ξ θ ρ ρ=Γ Γ
+ = ∑∫ ∫K K U F (A.20)

106
sendo 0K é uma matriz determinística, composta pelo operador médio
aplicado à matriz de interpolação de elementos finitos espaciais. As matri-
zes iK dependem do operador ( )xR e do modos ( )i xψ . Resta a expansão
do vetor ( )yU . Como a covariância deste campo não é conhecida a priori,
uma expansão do tipo Karhunen-Loève não é possível. Desta forma, os
autores sugerem uma aproximação baseada em um desenvolvimento de
cada elemento ( )U y utilizando Polinômios Caos. Esta expansão foi descrita
por Wiener (1938) e utiliza polinômios de Hermite para as variáveis aleató-
rias gaussianas e fornece uma maneira eficiente de aproximação de
processos randômicos de segunda ordem (ou seja, com variância finita) em
termos de polinômios ortogonais (Xiu e Karniadakis, 2002). Assim, consi-
derando-se que o processo ( )U y é um processo de segunda ordem tem-se
1 1
1
2 1 2
2
3 1 2 3
3
0 0
11
21
31
( )
( ( ))
( ( ), ( ))
( ( ), ( ), ( ))
i ii
i i ii
i i i i
i
U y U H
U H
U H
U H
ξ θ
ξ θ ξ θ
ξ θ ξ θ ξ θ
∞
=
∞
=
∞
=
=
+
+
+
+
∑
∑
∑…
(A.21)
onde 1
( ( ), , ( ))nn i iH ξ θ ξ θ… representa o polinômio de Hermite de ordem n
para as variáveis ( )1( ), , ( )
ni iξ θ ξ θ… . É preciso notar que o vetor
( )1( ), , ( )
ni iy ξ θ ξ θ= … é composto de variáveis com distribuição gaussiana,
independentes, com média zero e desvio padrão unitário (a distribuição
gaussiana foi utilizada por Ghanem e Spanos (1991), depois estendida para
qualquer distribuição por Xiu e Karniadakis (2002)). Esta representação
pode ser reescrita admitindo uma correspondência de um para um dos
polinômios 1
( ( ), , ( ))nn i iH ξ θ ξ θ… em relação à seqüência ( ) ( )i ξ θΨ . Assim,
pode-se reescrever (A.21) como

107
0
ˆ( ) ( ( ))j jj
U Uθ ξ θ∞
=
= Ψ∑ (A.22)
Os polinômios de caos ( )i θΨ apresentam a propriedade da ortogo-
nalidade
2i j i ijδΨ Ψ = Ψ (A.23)
onde ijδ é o delta de Kronecker e ,⋅ ⋅ denota o produto interno no espaço
de Hilbert, determinado pelo suporte das variáveis gaussianas, isto é,
12
( ), ( ) ( ) ( ) ( )
1( )
(2 )
T
n
f g f g W d
W eπ
− ξ ξ
ξ ξ = ξ ξ ξ ξ
ξ =
∫ (A.24)
Note que essa base de polinômios é ortogonal em relação à função pe-
so ( )W ξ , a qual tem a forma da função de distribuição de probabilidade
para um conjunto de variáveis gaussianas n-dimensional independentes.
Para efeitos de computação, o somatório da eq. (A.22) deve ser finito.
Para tal, define-se o número de variáveis aleatórias a serem utilizadas como
sendo M (igual ao número de variáveis aleatórias utilizadas na aproxima-
ção dos parâmetros de entrada) e a ordem de aproximação requerida como
p. A combinação destes dois parâmetros resultaria em P polinômios de
caos M-dimensionais, ou seja,
0
ˆ( ) ( ( ))P
j jj
U Uθ ξ θ=
= Ψ∑ (A.25)
sendo que P será determinado por
1
01
11 ( )
!
p s
rs
P M rs
−
==
= + +∑ ∏ (A.26)
A caracterização probabilística de ( )U θ estará completa com o cálcu-
lo dos coeficientes ˆjU . Note-se que P depende de M , o número de
variáveis usadas na representação de Karhunen-Loève dos parâmetros de

108
entrada, e de p , a ordem dos polinômios de caos utilizados para a expan-
são da solução. A tabela 4 reproduz alguns valores para esse coeficiente de
acordo com a eq. (A.26). Note que, mesmo para valores moderados dos
parâmetros p e M o número de termos a serem utilizados na expansão
pode crescer várias ordens de grandeza.
Tabela 4 - Valores de P para alguns parâmetros do sistema
p
0 1 2 3 4
2 1 3 6 10 15
4 1 5 15 35 70 M
6 1 7 28 83 210
Para o presente caso, a expansão em polinômios de caos pode ser a-
plicada, lembrando-se que se deve que expandir um vetor, em vez de
apenas uma variável randômica,
( ) [ ]0
( )P
n n Ndofn
y θ ×=
= Ψ∑U U (A.27)
Assim, cada elemento do vetor ( )yU , cuja dimensão corresponde ao
número de graus de liberdade do problema de elementos finitos, é expandi-
do em outro vetor com dimensão igual ao número de polinômios de caos
usados. Escolhe-se também ( )v y como uma das funções do espaço de apro-
ximação dos polinômios de caos para obter a partir de (A.20) e (A.27)
0
1 0
( ) ( ) ( ) ( )
( ) ( ) , 0,1, ,
M P
i i i m n
i n
n
y dy
y dy m P
λ ξ θ θ θ ρ
ρ θ
= =Γ
Γ
+ Ψ Ψ
= Ψ =
∑ ∑∫
∫
K K U
F …
(A.28)

109
0
0 1
( ) ( ) ( ) ( )
( ) ( ) , 0,1, ,
P M
i i i n mn i
n
y dy
y dy m P
λ ξ θ θ θ ρ
ρ θ
= =Γ
Γ
+ Ψ Ψ
= Ψ =
∑ ∑∫
∫
K K U
F …
(A.29)
Rearranjando e omitindo a dependência de θ para efeito de clareza
0
0 0 1
( )
( ) , 0,1, ,
P P M
m n i i i n mn n i
m
y dy
y dy m P
λ ξ ρ
ρ
= = =Γ
Γ
Ψ Ψ + Ψ Ψ
= Ψ =
∑ ∑∑∫
∫
K K U
F …
(A.30)
As integrais podem ser calculadas no sistema acima utilizando–se a
condição de ortogonalidade dos Polinômios Caos. Pode-se chegar desta
forma à
01
, 0,1, ,M
mn i inm mi
d c m P=
+ = = ∑K K U F … (A.31)
sendo que
2
2
nm nm n
inm i n m
m m
d
c
δ
ξ
= Ψ
= Ψ Ψ
= ΨF F
(A.32)
A equação (A.31) é equivalente ao sistema
100 01 0 1
10 2 2
0
ˆ
ˆ
ˆ
P
P PP PP
U
U
U
=
K K K F
K F
K K F
…
…
(A.33)
Ou, de forma compacta
KU = F (A.34)

110
onde K é uma matriz formada por ( 1) ( 1)P P+ × + blocos e cada bloco
com ndof ndofN N× graus de liberdade, sendo ndofN o número de graus de
liberdade do problema de elementos finitos espacial. Cada bloco jkK tem a
forma
01
, , 0,1,...,M
jk kj ijk ii
d c j k P=
= + =∑K K K (A.35)
Já o vetor F é composto pelos vetores kΨF . Uma vez obtida a so-
lução da eq. (A.34), os coeficientes podem ser diretamente aplicados à eq.
(A.27) para obtenção dos momentos e outras propriedades estatísticas da
resposta, em cada um dos graus de liberdade. O sistema de equações em
(A.33) é um sistema acoplado, composto por matrizes por blocos e com
simetria de blocos, pois ijk ikjc c= . Note também que usualmente esquemas
de Elementos Finitos geram matrizes esparsas e com largura de banda
definida. Assim o sistema será esparso tanto em nível de bloco quanto em
nível global, devido ao fato de vários coeficientes ijkc serem nulos. Essas
características levam a um sistema com estrutura especial, que pode ser
aproveitada para a resolução do sistema linear. A figura 39 mostra o pa-
drão de esparsidade típico deste tipo de sistema.
Figura 39 – Padrões de esparsidade da matriz K para 4M = . Aproximação de primei-
ra (esquerda), segunda e terceira ordem (direita) do polinômio de caos.

111
Uma melhor aproximação deste sistema pode ser obtida de duas ma-
neiras. A primeira consiste em melhorar a representação das variáveis de
entrada. Isso implicará no aumento do número de variáveis aleatórias utili-
zadas na aproximação de Karhunen-Loève para os parâmetros de entrada.
A segunda forma é simplesmente aumentar a ordem do maior polinômio
utilizado na representação. A primeira técnica permite levar em conta um
maior nível de flutuação do processo estocástico subjacente. Já a segunda,
permite evidenciar as dependências não lineares deste mesmo processo
(Ghanem e Kruger, 1996).
Há grande eficiência da representação feita pela eq. (A.21) usando
polinômios de Hermite para entradas gaussianas, permitindo uma conver-
gência exponencial conforme mais termos são adicionados à série. No
entanto, para entradas não gaussianas, a convergência ótima é perdida e
para lidar com esse tipo de entrada, Xiu e Karniadakis (2002) propuseram
uma expansão que consiste em polinômios ortogonais da série hipergeomé-
trica de Askey. Assim, tem-se uma generalização da formulação original
dos polinômios de caos de Wiener-Hermite que permite manter a conver-
gência exponencial ótima, de acordo com o tipo de distribuição das
variáveis aleatórias usadas na representação da entrada, utilizando polinô-
mios de Laguerre para distribuições tipo Gama, Legendre para variáveis
uniformes etc.
Sem dúvida, o maior obstáculo à aplicação deste método à problemas
de engenharia consiste em obter a solução do sistema de equações obtido
em (A.33). Os problemas de maior interesse em engenharia consistem de
modelos com elevado número de graus de liberdade para os quais, mesmo a
solução do sistema linear obtido com o esquema de elementos finitos em
termos determinísticos tem grande custo computacional. Este aumento do
sistema linear em 1P + requer estratégias de solução diferenciadas. A

112
maioria dos métodos se aproveita da estrutura de blocos que ocorre nesse
tipo de problema. Ghanem e Kruger (1996) usaram o método de gradientes
conjugados precondicionado como solucionador, sendo que o precondicio-
nador se utiliza do fato que as matrizes de elementos finitos são
diagonalmente dominantes. A técnica proposta por esses autores consegue
diminuir os requisitos de memória necessária para o armazenamento do
sistema para aproximadamente os mesmos valores do problema determinís-
tico, já que a matriz (A.33) não precisa ser explicitamente montada. O
custo computacional também foi bastante reduzido. Outros autores tam-
bém propuseram técnicas para o gerenciamento de dados, esquemas de
precondicionamento, algoritmos eficientes de solução baseados na estrutura
de blocos da matriz (Pellissetti e Ghanem, 2000, Eiermann et al., 2007) e
métodos multinível (Keese, 2003).
Uma vez fundamentada a técnica para diversos tipos de distribuição
estatísticas para os parâmetros de entrada e com o desenvolvimento subse-
qüente de várias abordagens para o tratamento do sistema linear
estendido, diversos pesquisadores fizeram uso do SSFEM para a solução de
problemas de engenharia.
Brzakala e Elishakoff (2001) partiram de um sistema bastante simples
de uma barra com módulo de elasticidade com incerteza e obtiveram solu-
ções analíticas fechadas usando as técnicas de perturbação, perturbação
melhorada, SSFEM e do método da superfície de resposta. A comparação
do erro da média e da variância em relação à solução exata mostrou que o
SSFEM apresenta um dos menores erros, mesmo quando se utiliza apenas
Polinômios Caos de primeira ordem. Outra comparação entre as diversas
técnicas de modelagem computacional estocástica disponíveis pode ser
encontrada em Sudret e Der Kiureghian (2002). Elman et al. (2005) aplica-
ram o SSFEM para problemas envolvendo acústica nos quais a incerteza

113
está presente nas funções de excitação ou nas condições de contorno. O
foco do trabalho está nas técnicas computacionais utilizadas e na proposta
de técnicas para armazenamento e solução do sistema de equações resul-
tantes. Uma análise crítica do potencial do SSFEM para a análise de
confiabilidade foi feita por Sudret e Der kiureghian (2002) que verificaram
que este método tem aplicabilidade duvidosa à problemas que exigem
análise das situações com baixas probabilidades de falha, uma vez que o
cálculo dos eventos de menor probabilidade (nas regiões longe do centro da
distribuição) exige um número de polinômios elevado, o que rapidamente
esgota a capacidade computacional disponível.
Para uma lista sucinta das aplicações desta técnica a diversos tipos
de problemas lineares (vigas, placas, transporte de poluente etc.), proble-
mas transientes (fundações elásticas, dinâmica dos fluidos, equações de
Navier-Stokes etc.), problemas não lineares (Elasto-plástica etc.), aplicação
dos polinômios de caos generalizados, bem como técnica de paralelização
deste método, pode ser encontrada em Keese (2003).
Apesar de o SSFEM ser uma técnica bem fundamentada e com exce-
lentes resultados, há ainda algumas desvantagens neste método. Conforme
visto, sua aplicação ainda enfrenta o problema da dimensionalidade do
sistema estendido. Outra importante característica refere-se ao fato do
esquema SSFEM requerer para sua implementação grandes modificações
dos códigos de elementos finitos já existentes, uma vez que exige a repro-
gramação do cômputo das matrizes de rigidez segundo a forma expressa
pela eq.(A.19). Em razão disso, criar um código que possa lidar com uma
grande variedade de problemas de diferentes áreas ainda é uma questão em
aberto. Também é incipiente a aplicação da técnica para sistemas não
lineares.

114
A.4 Método de Galerkin Estocástico não Intrusivo - NISG
O método de Elementos Finitos estocásticos apresentado a seguir foi
desenvolvido por Deb et al. (2001) e aqui apresentado em uma descrição
semelhante a de Acharjee e Zabaras (2007). Este método envolve a discre-
tização do espaço randômico utilizando elementos finitos e a utilização de
funções de interpolação polinomiais de suporte compacto para aproximar
as funções densidade de probabilidade. Devido às características de apro-
ximação no espaço de suporte e a não intrusividade, esta técnica ficou
conhecida como método de Galerkin Estocástico não Intrusivo (ou NISG,
do inglês Non-Intrusive Stochastic Galerkin).
A modelagem utilizando este método apresenta algumas vantagens
sobre a modelagem utilizando expansão de Polinômios Caos. Dentre elas
podemos citar sua melhor capacidade para tratar de problemas envolvendo
não linearidades, o tratamento de singularidades e de se tratar de uma
abordagem não intrusiva. As funções de base também podem ser reutiliza-
das de outras partes de códigos de elementos finitos, garantindo maior
facilidade de implementação.
A seguir é mostrado como é representado o processo randômico. Su-
ponha a função
( , , ), , ,g t X t Tθ θ∈ ∈ ∈ Θx x (A.36)
O espaço Θ é o espaço de suporte da variável randômica θ . Supondo
que este espaço possa ser gerado através de um conjunto de variáveis ran-
dômicas , 1,...,iy i Nξ= = cuja função densidade de probabilidade
conjunta será dada por
( ) ( )1 i
N
ii
f fξ=ξ = Π ξ (A.37)

115
sendo que ( )i ifξ ξ é a pdf da variável iξ . O espaço Θ é discretizado por
elementos finitos e leva a um novo espaço hΘ onde h é um parâmetro
relacionado ao tamanho do elemento. Esta aproximação pode ser descrita
como
1 2 1 2( , , ) ( , , , ,...) ( , , , ,..., ) ( , , )h hNg x t g x t g x t g x t yθ ξ ξ ξ ξ ξ= ≈ = (A.38)
O processo estocástico terá a então a seguinte representação
1
( , , )Nnos
h hi i
i
g x t y g=
= Φ∑ (A.39)
onde iΦ representa as funções de base com suporte compacto e hig , seus
valores nodais. A figura 40 mostra uma pdf unidimensional discretizada.
Figura 40 - Discretização para uma função densidade de probabilidade unidimensional
Formulação de Galerkin Estocástica
Nesta seção é delineada a implementação desta formulação estocásti-
ca não intrusiva. Supondo o sistema linear
( , ) ( , ) ( , )A y u y b y=x x x (A.40)
onde ( , )A yx é uma matriz estocástica, ( , )b yx é um vetor de forças tam-
bém estocástico e ( , )u yx é a solução desse sistema. No sistema não
intrusivo, essas matrizes são construídas utilizando um espaço de suporte

116
compacto. Considerando agora a solução determinística no ponto específico
jy ou
( ) ( ) ( )j j jA u b=x x x (A.41)
da qual pode ser obtida a solução ju , relacionada ao ponto jy . A partir
desses pontos é possível reconstruir uma aproximação para a solução
( , )u yx . A questão sobre quais pontos jy no espaço randômico deve-se
calcular a solução pode ser respondida levando em consideração que neste
tipo de problema estamos interessados na função densidade de probabili-
dade e nos momentos estatísticos de u . O p -ésimo momento pode ser
calculado como
( )( ) ( ) ( )( ) ( )1
, ,e
nelp p
p
e
M u y f y dy u y f y dy=Θ Θ
= =∑∫ ∫x x (A.42)
onde nel é o número de elementos no espaço de suporte e eΘ representa o
domínio local de cada elemento. Ao se utilizar um esquema de quadratura
gaussiana a integração deve ser calculada utilizando n pontos por elemen-
to, ou seja,
( )( ) ( )1 1
,nel n
p
p k k ke k
M w u y f y= =
=∑∑ x (A.43)
onde ky são as abscissas dos pontos de integração e kw representa seus
pesos. Note que ( ) ( ), k ku x y u= x representa a solução determinística do
problema (A.41) no ponto ky . Daí a terminologia não intrusiva, uma vez
que podemos calcular os momentos estatísticos através de um conjunto de
soluções em pontos predeterminados no espaço randômico, sem nenhuma
alteração da formulação de Elementos Finitos espacial ou temporal já
implementada. Resta calcular a pdf de u , representada por ( )uf y . Inicial-
mente, os valores de u nos pontos nodais do espaço randômico
discretizado devem ser obtidos a partir dos pontos de integração ku . Isto
117
pode ser obtido usando um esquema de projeção local ou global de míni-
mos quadrados. ( )uf ξ pode ser obtida então gerando amostras via Monte
Carlo a partir das pdf das variáveis randômicas de entrada y , seguida de
avaliações de u nesses mesmos pontos. Esta última amostragem pode ser
obtida prontamente a partir da interpolação das avaliações de u já efetua-
das.
Esse esquema de discretização do espaço de suporte segue os esque-
mas de Elementos Finitos tradicionais para domínios espaciais e herda
também todas as suas propriedades, inclusive as características de conver-
gência para os refinamentos h e p (Acharjee e Zabaras, 2007).
O procedimento anterior pode ser esquematizado como:
1. Determinar a pdf das quantidades randômicas de entrada em termos
das variáveis randômicas , 1,...,i i Nξ = e calcular a função densidade
de probabilidade conjunta ( )f y ;
2. Determinar a dimensionalidade do espaço de suporte randômico. De
acordo com a dimensão, discretizá-lo utilizando Elementos Finitos;
3. Para cada ponto de integração, calcular os valores das propriedades
randômicas no ponto de integração do espaço de suporte randômico e
resolver o problema determinístico com esses dados de entrada, ob-
tendo a saída ku ;
4. Calcular os valores de u a partir de ku usando um esquema interpo-
lação local ou global de mínimos quadrados e
5. Calcular os momentos de interesse segundo (A.43).
Em suma, o método consiste em avaliações determinísticas em pontos
específicos do espaço de suporte randômico. Pode-se afirmar que esta téc-
nica é uma estratégia para desacoplar as dimensões randômicas das
espaciais, o que pode se refletir em um significativo ganho computacional.

118
As funções de interpolação do espaço randômico podem ser as mes-
mas utilizadas no domínio espacial, o que traz grande vantagem em termos
de reaproveitamento dos códigos já escritos e validados. Se a dimensionali-
dade do espaço randômico for menor ou igual a 3, Elementos Finitos
normalmente utilizados para discretização espacial podem ser aplicados.
Para o problema de Acústica apresentado neste trabalho, utilizou-se a
eq.(3.33). O objetivo é modelar os parâmetros de absorção como processos
estocásticos, que resultará
( , ) ( , ) ( , )ω θ ω θ ω θ=L P F (A.44)
A solução estocástica ( , )ω θP , encontrada através desta metodologia,
correspondente a aos graus de liberdade de pressão nodal.

119
Apêndice B
O Algoritmo de Smoljak
Dada uma função suave [ ]: 0,1 df → deseja-se fazer uma aproxima-
ção usando um número finito de pontos e sendo a interpolação
unidimensional
=
1
( ) ( )m
mj j
j
f f x L=∑U (B.1)
Os pontos utilizados para esta interpolação constituem o conjunto
( )kΘ (Smoljak 1963). O algoritmo de Smoljak é dado por
( )1,
1
1( ) ( ) ( 1) ,Nq i i
q Nq N q
Nf A f q N
q−
− + ≤ ≤
− ≡ = − ⋅ ⊗ ⊗ ≥ − ∑ i
i iI U U… (B.2)
onde ( )1, , NNi i= ∈i … , 1 Ni i= + +i … , , ( )q NA f é o interpolante esparso
(construído através de produtos das funções unidimensionais), N é o núme-
ro de dimensões e q N− é a ordem de interpolação utilizada. O índice ki
pode ser visto como a ordem de interpolação ao longo da dimensão k. O
algoritmo de Smoljak gera a função de interpolação adicionando uma com-
binação de funções unidimensionais de ordem ki com a restrição que a
soma total i ao longo de todas as dimensões esteja entre 1q N− + e q .

120
Outra forma de verificar esse algoritmo, na qual a estrutura do mes-
mo se torna mais clara, é quando se considera uma seqüência de
aproximações i∆ para gerar o interpolante
( ) ( )1 1
0 1
, 1,
0,
( ) ( ) ( ) ( )N N
i i i
i i i iq N q N
q q
A f f A f f
−
−≤ =
= ∆ = −
= ∆ ⊗ ⊗∆ = + ∆ ⊗ ⊗∆∑ ∑i i
U U U
… … (B.3)
Para calcular , ( )q NA f é necessário avaliar a função no conjunto de
pontos
( )1, 1 1
1
Ni iN q N
q N q− + ≤ ≤
Θ ≡ = Θ × ×Θi
H …∪ (B.4)
Na construção do algoritmo, todos os resultados gerados em um nível
são reutilizados nas aproximações seguintes. Através da escolha adequada
de nós para a interpolação unidimensional, se pode assegurar que os con-
juntos de pontos gerados em dimensões inferiores estão presentes dentro do
conjunto utilizado por dimensões mais elevadas ( 1i i+Θ ⊂Θ ). Assim, para
estender a interpolação um nível acima somente são necessárias avaliações
nos pontos que são particulares ao conjunto 1i+Θ , ou seja, 1\i i i−∆Θ = Θ Θ .
Para ir da ordem 1q − de aproximação para a ordem q em N dimensões é
necessária apenas a avaliação da função no conjunto de nós
, , 1,q N q N q N−∆ = −H H H
( )
( )
1
1
, 1, ,
,
N
N
i iq N q N q N
q
i iq N
q
∆ ∆ −≤
∆ ∆=
= Θ × ×Θ = ∪∆
∆ = Θ × ×Θ
i
i
H H H
H
…
…
∪
∪ (B.5)
A escolha da base de aproximação para o interpolante tem grande
importância no que concerne ao erro, continuidade, suavidade e esforço
computacional da aproximação. Duas escolhas estão presentes na literatu-
ra: funções de aproximação contínuas por partes e funções de base
polinomiais.

121
Ao se utilizar o algoritmo de Smoljak para construir aproximações
multidimensionais usando bases multilineares contínuas por partes para
uma função f N-dimensional que tenha as suas derivadas
1
1N
N
fD f
x x
ββ
β β
∂=∂ ∂…
(B.6)
com 0 1,
NNii
β β β=
∈ =∑ e 1, , 2Nβ β ≤… , ou seja, que a função seja dife-
renciável até segunda ordem em quaisquer das dimensões, o erro de
interpolação pode ser obtido a priori como
( )3( 1)2, 2( ) log
N
q Nf A f M M−−
∞− = O (B.7)
onde H ,dim( )q NM = é o número de pontos de interpolação. Por outro
lado, a construção de interpolantes usando como funções de base polinomi-
ais fornece um erro de interpolação como
( )( 2)( 1) 1
, 2( ) logk Nk
q Nf A f M M+ + +−
∞− = O (B.8)
Note-se que aproximações construídas através de produtos tensoriais
completos usando funções contínuas por partes com P pontos é muito
menos eficiente, sendo o erro da ordem ( )2/NP−O .
122
Referências Bibliográficas
Acharjee, S., Zabaras, N., 2007, “A non-intrusive stochastic Galerkin ap-
proach for modeling uncertainty propagation in deformation
processes”, Computers & Structures, v. 85, pp. 244-254.
Alvarez, G. B., Loula, A. F. D, Dutra do Carmo, E. G. et al., 2006, “A
discontinuous finite element formulation for Helmholtz equation”,
Computer Methods in Applied Mechanics and Engineering, v. 195, pp.
4018-4035.
Babuška, I, Nobile, F., Oden, J. T., Tempone, R., 2003, “Reliability, Un-
certainty, Estimates Validation and Verification”, Transcrição da
apresenteção de I. Babuška no workshop on the Elements of Predict-
ability, J. Hopkins Univ, Baltimore, MD, Nov. 13-14.
Babuška, I., Chatzipantelidis, P., 2002, “On solving elliptic stochastic
partial differential equations”, Computer Methods in Applied Mechan-
ics and Engineering, v. 191, pp. 4093-4122.
Babuška, I., Oden, J. T., 2006, “The reliability of computer predictions:
Can they be trusted?”, International Journal of Numerical Analysis
& Modeling, v. 3, pp. 255-272.
Babuška, I., Tempone, R., Zouraris, G., 2004, “Galerkin finite element
approximations of stochastic elliptic differential equations”, SIAM
Journal on Numerical Analysis, v. 42, pp. 800-825.
Babuška, I., Tempone, R., Zouraris, G., 2005, “Solving elliptic boundary
value problems with uncertain coefficients by the finite element
123
method: the stochastic formulation”, Computer Methods in Applied
Mechanics and Engineering, v. 194, pp. 1251–1294.
Barthelmann, V., Novak, E., Ritter, K., 2000, “High dimensional polyno-
mial interpolation on sparse grids”, Advances in Computational
Mathematics, v. 12, pp. 273-288.
Bathe, K. J., 1995, Finite Element Procedures. New York, Prentice-Hall.
Bermúdez, A., Rodríguez, R., 1999, “Modelling and numerical solution of
elastoacoustic vibrations with interface damping”, International
Journal for Numerical Methods in Engineering, v. 46, pp. 1763-1779.
Berthelot, Y. H., 2001, “Surface acoustic impedance and causality”, The
Journal of the Acoustical Society of America, v. 109, n. 4, pp. 1736-
1739.
Brzakala, W., Elishakoff, I., 2001, “Lessons pertaining to the finite element
method for stochastic problems, learned from simplest example”,
Chaos, Solitons & Fractals, v. 12, pp. 1217-1232.
Chakraborty, S., Dey, S. S., 1996, “Stochastic finite element simulation of
random structure on uncertain foundation under random loading”,
International Journal of Mechanical Sciences, v. 38, pp. 1209-1218.
Cox, J. T., D'Antonio, P., 2004, Acoustic Absorbers and Diffusers - Theory,
Design and Application. London, Spon Press.
Crocker, M. J. (editor), 1998, Handbook of Acoustics. New York, Wiley-
Interscience.
Davis, T. A., 2004, “Algorithm 832: UMFPACK V4.3 - an unsymmetric-
pattern multifrontal method”, ACM Transactions on Mathematical
Software, v. 30, n. 2, pp .196-199.
Deb, M. K., Babuska, I. M., Oden, J. T., 2001, “Solution of stochastic
partial differential equations using Galerkin finite element tech-
124
niques”, Computer Methods in Applied Mechanics and Engineering, v.
190, pp. 6359-6372.
Eiermann, M., Ernst, O. G., Ullmann, E., 2007, “Computational aspects of
the stochastic finite element method”, Computing and Visualization
in Science, v. 10, pp. 3-15.
Elishakoff, I., 1999, Probabilistic Theory of Structures. 2a. ed. New York,
Dover Publications Inc.
Elishakoff, I., 2003, “Notes on philosophy of the Monte Carlo method”,
International Applied Mechanics, v. 39, pp. 753-762.
Elishakoff, I., Ren, Y. J., Shinozuka, M., 1995, “Improved finite element
method for stochastic problems”, Chaos, Solitons & Fractals, v. 5, pp.
833-846.
Elishakoff, I., Ren, Y. J., Shinozuka, M., 1996, “Some critical observations
and attendant new results in the finite element method for stochastic
problems”, Chaos, Solitons & Fractals, v. 7, pp. 597-609.
Elman, H. C., Ernst, O. G., O’Leary, D. P., Stewart M., 2005, “Efficient
Iterative Algorithms for Stochastic Finite Element Method with ap-
plications to acoustic scattering”, Computer Methods in Applied
Mechanics and Engineering, v. 194, pp. 1037-1055.
Everest, F. A., 2001, Master Handbook of Acoustics. 4a. ed. New York,
McGraw-Hill.
Fahy, F. J., 2000, Foundations of Engineering Acoustics. London, Aca-
demic Press.
Faverjon, B., Soize, C., 2004a, “Equivalent acoustic impedance model. Part
1: experiments and semi-physical model”, Journal of Sound and Vi-
bration, v. 276, pp. 571-592.
125
Faverjon, B., Soize, C., 2004b, “Equivalent acoustic impedance model. Part
2: analytical approximation”, Journal of Sound and Vibration, v. 276,
pp. 593-613.
Gamallo, P., 2002, Contribución al estudio matemático de problemas de
simulación elastoacústica y control activo del ruido, tese de D.Sc., U-
niversidade de Santiago de Compostela, Santiago de Compostela,
Espanha.
Ganapathysubramanian, B., Zabaras, N., 2007a, “Sparse grid collocation
schemes for stochastic natural convection problems”, aceito para pu-
blicação em: Journal of Computational Physics.
Ganapathysubramanian, B., Zabaras, N., 2007b, “Modelling diffusion in
random heterogeneous media: Data-driven models, stochastic colloca-
tion and the variational multi-scale method”, aceito para publicação
em: Journal of Computational Physics.
Ghanem, R., Kruger, R. M., 1996, “Numerical solution of spectral stochas-
tic finite element systems”, Computer Methods in Applied Mechanics
and Engineering, v. 129, pp. 289-303.
Ghanem, R., Spanos, P. D., 1991, Stochastic Finite Elements: A spectral
approach. New York, Springer-Verlag.
Helton, J. C., Oberkampf, W. L., 2004, “Alternative representations of
epistemic uncertainty”, Reliability Engineering and System Safety, v.
85, pp. 1–10.
Ihlenburg, F., 1998, Finite Element Analysis of Acoustic Scattering. livro
da série Applied Mathematical Sciences, n. 132, New York, Springer-
Verlag.
Ihlenburg, F., Babuška, I., 1995, “Finite element solution to the Helmholtz
equation with high wave numbers Part 1: the h-version of FEM”,
Computers Math. Applic., v. 30, pp. 9-37.

126
Irimie, S., Bouillard, Ph., 2001, “A residual a posteriori error estimator for
the finite element solution of the Helmholtz equation”, Computer
Methods in Applied Mechanics and Engineering, v. 190, pp. 4027-
4042.
Kaminski, M., 2006, “Generalised perturbation-based stochastic finite
element method in elastostatics”, aceito para publicação em: Com-
puters & structures.
Keese, A., 2003, A Review of Recent Developments in the Numerical Solu-
tion of Stochastic Partial Differential Equations (Stochastic Finite
Elements), Informatikbericht Nr: 2003-06, Technische Universität
Braunschweig, Alemanha.
Klimke, W. A., 2006, Uncertainty modeling using Fuzzy arithmetic and
sparse grids. tese de D.Sc., Universidade de Stuttgart, Aachen, Ale-
manha.
Lei, Z., Qiu, C., 2000, “Neumann dynamic stochastic finite element
method of vibration for structures with stochastic parameters to ran-
dom excitation”, Computers & Structures, v. 77, pp. 651-657.
Loula, A. F. D., Alvarez, G. B., Do Carmo, E. G. D., et al., 2007, “A
discontinuous finite element method at element level for Helmholtz
equation”, Computer Methods in Applied Mechanics and Engineering,
v. 196, pp. 867-878.
Mathelin, L., Hussaini, M., 2003, A stochastic collocation algorithm for
uncertainty analysis. Tech. Report NASA/CR-2003-212153, NASA
Langley Research Center.
Milošević, M. A., Milošević, N. D., Milošević, M. S., 1998, “Noise reduc-
tion in rooms using active and passive control on the basis of modal
analysis”, The scientific journal Facta Universitatis, série Working
and Living Environmental Protection, v. 1, n. 3, pp. 51-58.

127
Montgomery, D. C., Runger, G. C., 2003, Applied Statistics and Probability
for Engineers, 3a. ed, New York, John Wiley & Sons, Inc.
Novak, E., Ritter, K., 1996, “High-dimensional integration of smooth func-
tions over cubes”, Numerische Mathematik, v. 75, n. 1, pp. 79-97.
Oden, J .T., Belytschko, T., Babuška, I., et al., 2003, “Research directions
in computational mechanics”, Computer Methods in Applied Mechan-
ics and Engineering, v. 192, n. 7, pp. 913-922.
Oden, J. T., Prudhomme, S., 2002, “Estimation of Modeling Error in
Computational Mechanics”, Journal of Computational Physics, v.
182, n. 2, pp. 496-515.
Øksendal, B., 1998, Stochastic differential equations: An introduction with
applications. 5a. ed. New York, Springer-Verlag.
Paulino, R. H., Rochinha, F. A., 2005, “A higher-order velocity post-
processing for the Helmholtz equation”, Finite Elements in Analysis
and Design, v. 41, pp. 459-492.
Pellissetti, M. F., Ghanem, R.G., 2000, “Iterative solution of systems of
linear equations arising in the context of stochastic finite elements”,
Advances in Engineering Software, v. 31, pp. 607-616.
Poffa, N., Friot, E., 2004, Mesure, recalage et modélisation de l’acoustique
du simulateur de bang. Rapport de stage de DEA, Laboratoire de
Mécanique et d’Acoustique, Universidade de Aix-Marseille II,
Marseille.
Raichel, D. R., 2000, The Science and Applications of Acoustics. 2a. ed,
New York, Springer.
Roberts, J. B., Spanos, P. D., 2003, Random Vibration and Statistical
Linearization. New York, Dover Publications.
128
Romero, R. P., 2003, Um esquema de pós-processamento para a equação de
Helmholtz e aplicações, tese de D.Sc., COPPE/UFRJ, Rio de Janeiro,
RJ, Brasil.
Rubinstein, R. Y., 1981, Simulation and the Monte Carlo Method, Wiley
Series in Probability and Mathematical Statistics, New York, John
Wiley & Sons.
Sacarcelik, O., 2004, Acoustic Devices for the Active & Passive Control of
Sound in a Payload Compartment”. Dissertação de M.Sc., Virginia
Polytechnic Institute and State University, Blacksburg, Virginia,
USA.
Sampaio, R., Wolter, C., 2001, “Bases de Karhunen-Loève: aplicações à
Mecânica dos Sólidos”. In: Anais da 1a Escola Brasileira de Aplicações
em Dinâmica e Controle (APLICON 2001), EEUSP São Carlos, SP.
Schladitz, K., Peters, S., Reinel-Bitzer, D., et al, 2006, “Design of acoustic
trim based on geometric modeling and flow simulation for non-
woven”, Computational Materials Science, v. 38, pp. 56-66.
Schuëller, G. I. (editor), 1997, “A state-of-the-art report on computational
stochastic mechanics”, Probabilistic Engineering Mechanics, v. 12, pp.
197-321.
Schultz T., Sheplak M., Cattafesta III, L. N., 2007a, “Application of mul-
tivariate uncertainty analysis to frequency response function
estimates”, Journal of Sound and Vibration, v. 305, pp. 116-133.
Schultz T., Sheplak M., Cattafesta III, L. N., 2007b, “Uncertainty analysis
of the two-microphone method”, Journal of Sound and Vibration, v.
304, pp. 91-109.
Smoljak, S. A., 1963, “Quadrature and interpolation formulas for tensor
products of certain classes of functions”, Soviet Mathematics Doklady,
v. 4, pp. 240-243.
129
Soize, C, 2006, “Probabilités et modélisation des incertitudes: elements de
base et concepts fondamentaux”, Notas de aulas do curso ministrado
no Workshop de Modelagem de Incertezas em sistemas Mecânicos,
Pontifica Universidade Católica do Rio de Janeiro, 31/07 a 02/08 de
2006.
Soize, C., 2001, “Maximum entropy approach for modeling random uncer-
tainties in transient elastodynamics”, The Journal of the Acoustical
Society of America, v. 109, n. 5, pp. 1979-1996.
Strouboulis, T., Babuška, I., Hidajat, R., 2006, “The generalized finite
element method for Helmholtz equation: theory, computation, and
open problems”, Computer Methods in Applied Mechanics and Engi-
neering, v. 195, pp. 4711-4731.
Sudret, B., Der kiureghian, A., 2002, “Comparison of finite element meth-
ods”, Probabilistic Engineering Mechanics, v. 17, pp. 337-348.
Sundararaghavan, V., Zabaras, N., 2004, “Classification and reconstruction
of three-dimensional microstructures using support vector machines”,
Computational Materials Science, v. 32, pp. 223-239.
Takahashi, Y., Otsuru, T., Tomiku, R., 2005, “In situ measurements of
surface impedance and absorption coefficients of porous materials us-
ing two microphones and ambient noise”, Applied Acoustics, v. 66,
pp. 845–865.
Voronina, N., 1994, “Acoustic Properties of Fibrous Materials”, Applied
Acoustics, v. 42, pp. 165-174.
Voronina, N., 1999, “An empirical model for rigid-frame porous materials
with low porosity”, Applied Acoustics, v. 58, pp. 295-304.
Wiener, N., 1938, “The homogeneous Chaos”, American Journal of Mathe-
matics, v. 60, pp. 897-936.

130
Xiu, D., Hesthaven, J. S., 2005, “High order collocation methods for the
differential equation with random inputs”, SIAM Journal on Scien-
tific Computing, v. 27, pp. 1118–1139.
Xiu, D., Karniadakis, G. E., 2002, “The Wiener-Askey Polynomial Chaos
for Stochastic Differential Equations”, SIAM Journal on Scientific
Computing, v. 24, pp. 619-644.
Yamazaki, F., Shinozuka, M., Dasgupta, G., 1988, “Neumann expansion
for stochastic finite element analysis”, Journal of Engineering Me-
chanics, v. 114, pp. 1335-1354.
Zhang, Y., Suhuan, C., Liu, O., Liu, T., 1996, “Stochastic perturbation
finite elements”, Computers & Structures, v. 59, pp. 425-429.