elementos finitos convencionais versus mitc na análise ... · fem context, this dissertation...
TRANSCRIPT

Elementos finitos convencionais versus MITC naanálise estrutural de lajes moderadamente espessas
Rui Rodrigues Araújo
Dissertação para obtenção do Grau de Mestre em
Engenharia Civil
Júri
Presidente: Prof. Fernando Manuel Fernandes Simões
Orientador: Prof. Carlos Manuel Tiago Tavares Fernandes
Vogal Prof. João António Teixeira de Freitas
Setembro 2013


Resumo
No presente trabalho, a teoria de lajes moderadamente espessas é consistentementeobtida a partir das equações do contínuo tridimensional, para os casos da análise estática,de vibração livre e linear de estabilidade. Através da aplicação do teorema de Hamiltondeduzem-se as equações de equilíbrio no domínio e na fronteira estática e as equações decompatibilidade na fronteira cinemática.
De entre os vários métodos numéricos existentes, o Método dos Elementos Finitos(MEF) tem-se revelado o mais utilizado na obtenção de soluções aproximadas na análisede estruturas. Na sua utilização é essencial conhecer os erros envolvidos na aproximaçãoda solução em função do tipo de elemento e da sua dimensão característica, para que sepossa decidir qual o tipo de elemento mais adequado ao caso em apreciação. Deste modo,nesta dissertação, procurou-se, no contexto do MEF, analisar e comparar os resultadosobtidos usando dois tipos de elementos finitos com formulações distintas: os elementosconvencionais, cuja formulação se baseia numa aproximação do campo de deslocamentos,e os elementos MITC, que se caracterizam por uma formulação mista em coordenadasconvectivas.
Consideraram-se os elementos convencionais quadrilaterais, Lagrangeanos (QL4, QL9,QL16, QL25, QL36) e Serendipianos (QS8, QS12, QS16, QS20), e triangulares (T3, T6,T10, T15, T21), e os elementos MITC, de laje (MITC4, MITC9p, MITC16p, MITC7pe MITC12p) e de casca (MITC9s e MITC16s). São descritos os elementos em estudo ediscutidos alguns aspectos inerentes à formulação de cada tipo de elemento (convencionale MITC). A sua implementação foi efectuada no programa MATLAB, que permitiu obterinformações importantes relativamente à qualidade dos vários elementos em estudo.
Para avaliar o comportamento e desempenho dos vários elementos finitos em estudo,para a análise estática, de vibração livre e linear de estabilidade recorreu-se a vários testesde uma laje rectangular simplesmente apoiada, cuja solução exacta é possível encontrar nabibliografia especializada: (i) determinou-se a convergência da energia de deformação e asensibilidade de retenção ao corte, para uma laje sujeita a carga uniformemente distribuída,(ii) avaliou-se a convergência das frequências de vibração naturais e (iii) calculou-se a con-vergência dos parâmetros de carga de instabilidade, para uma laje sujeita a compressãobi-axial. Dos seus resultados, são inferidas conclusões acerca das vantagens e inconvenien-tes intrínsecos a cada um dos tipos de elementos, tendo em conta os erros cometidos naaproximação.
Palavras-Chave: MEF, lajes moderadamente espessas, MITC, shear-locking,elementos convencionais.
iii

iv

Abstract
In the present work, the theory of Reissner-Mindlin plates is developed for the static,free vibration and linear stability cases. Applying Hamilton’s principle is possible to deducethe equilibrium equations in the domain and on the static boundary of the problem andcompatibility equations on the kinematic boundary.
Among the several existing numerical methods, the Finite Element Method (FEM) hasproved the most adequate to obtain approximated solutions in structural analysis. It isessential to be aware of the errors involved in the approximation of the solution, whichdepend on the type of element and its characteristic dimension, in order to decide whichtype of element is the most appropriate to the case under consideration. Thus, in theFEM context, this dissertation sought to analyze and compare the results obtained usingtwo types of finite elements with different formulations: the conventional elements, whoseformulation is based on an approximation of the generalized displacement field, and theMITC elements, based on mixed formulation in convective coordinates.
Here Were considered the conventional quadrilateral elements, Lagrangian (QL4, QL9,QL16, QL25, QL36) and Serendipity (QS8, QS12, QS16, QS20), and triangular (T3, T6,T10, T15, T21), and plate (MITC4, MITC9p, MITC16p, MITC7p and MITC12p) and shell(MITC9s and MITC16s) MITC elements. A description of each element is made, besidesa discussion about some aspects in the formulation of each element type (conventional andMITC). Its implementation, made in MATLAB environment, allowed to obtain importantinformation about the quality of the elements.
To evaluate the behavior and performance of the several finite elements under consi-deration for static, free vibration and linear stability analysis, various tests of a simplysupported rectangular plate, whose exact solution can be found in the relevant literature,were made: (i) determination of the strain energy convergence and the sensitivity to shear-locking phenomenon of a plate with uniformly distributed load, (ii) assess the convergenceof the natural vibration frequencies and (iii) calculate the convergence of loading para-meters of instability for a plate subjected to bi-axial compression. From their results,conclusions are drawn about the advantages and disadvantages inherent to each type ofelement, taking into account the approximation errors.
Keywords: Finite Element Method, thick plates, MITC, shear-locking, conventio-nal elements.
v

vi

Agradecimentos
Agradeço aos meus amigos e colegas de estudo, André, António e Francisco, pela ajudae incentivo, não só ao longo da realização deste trabalho como também ao longo de todoo curso.
Agradeço à minha família, em particular aos meus pais e irmão, que sempre acreditaramno meu potencial e valor e me transmitiram força e apoio quando eu mais necessitei. Aosmeus avós, que sempre demonstraram interesse em acompanhar o meu percurso académico.
Ao meu orientador, Professor Carlos Tiago Fernandes, desejo expressar o meu sinceroagradecimento pela enorme paciência e disponibilidade que sempre demonstrou, mesmoquando muito atarefado, o rigor do trabalho sempre incutido e o gosto pelo mesmo semprepresente. Os seus conhecimentos e a sua contribuição foram indispensáveis na realizaçãodesta dissertação.
vii

viii

Índice
Índice ix
Lista de Figuras xiii
Lista de Tabelas xvii
1 Introdução 11.1 Considerações iniciais . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11.2 Descrição do trabalho . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21.3 Organização do documento . . . . . . . . . . . . . . . . . . . . . . . . . . . 31.4 Notação . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
2 A forma geral do Problema de Valores na Fronteira 52.1 O problema linear . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 52.2 Generalização do problema linear . . . . . . . . . . . . . . . . . . . . . . . . 6
3 Teoria da elasticidade 93.1 Elasticidade tridimensional . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
3.1.1 Equações de equilíbrio na configuração indeformada . . . . . . . . . 93.1.2 Equações de compatibilidade não-lineares . . . . . . . . . . . . . . . 103.1.3 Relação constitutivas . . . . . . . . . . . . . . . . . . . . . . . . . . . 113.1.4 O problema complementar . . . . . . . . . . . . . . . . . . . . . . . . 123.1.5 O Teorema de Hamilton . . . . . . . . . . . . . . . . . . . . . . . . . 13
3.2 Relações constitutivas em elasticidade bidimensional . . . . . . . . . . . . . 14
4 Teoria de lajes moderadamente espessas 174.1 Campo de deslocamentos e deformações generalizados . . . . . . . . . . . . 174.2 Aplicação do teorema de Hamilton . . . . . . . . . . . . . . . . . . . . . . . 19
4.2.1 Variação da energia de deformação, δU . . . . . . . . . . . . . . . . . 194.2.2 Variação do potencial das forças aplicadas, δV . . . . . . . . . . . . 234.2.3 Variação da energia cinética, δK . . . . . . . . . . . . . . . . . . . . 244.2.4 Equações de equilíbrio . . . . . . . . . . . . . . . . . . . . . . . . . . 25
4.3 Relação constitutiva elástica linear . . . . . . . . . . . . . . . . . . . . . . . 274.4 Resumo das equações . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
5 Formulação do Método dos Elementos Finitos Convencionais 315.1 Introdução . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 315.2 Descrição do Método dos Elementos finitos . . . . . . . . . . . . . . . . . . 31
5.2.1 Equação do Método dos Elementos Finitos . . . . . . . . . . . . . . 32
ix

x Índice
5.2.2 Análise estática linear . . . . . . . . . . . . . . . . . . . . . . . . . . 395.2.3 Análise de vibração livre . . . . . . . . . . . . . . . . . . . . . . . . . 405.2.4 Análise linear de estabilidade . . . . . . . . . . . . . . . . . . . . . . 405.2.5 Consideração de eixos locais . . . . . . . . . . . . . . . . . . . . . . . 41
6 Elementos Finitos Convencionais 436.1 Introdução . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 436.2 Implementação . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 43
6.2.1 Funções de aproximação . . . . . . . . . . . . . . . . . . . . . . . . . 436.2.2 Elementos isoparamétricos . . . . . . . . . . . . . . . . . . . . . . . . 456.2.3 Cálculo de integrais no domínio e na fronteira . . . . . . . . . . . . . 486.2.4 Cálculo das derivadas das funções de aproximação . . . . . . . . . . 53
7 Uma formulação de elementos mistos em coordenadas convectivas 557.1 Introdução aos MITC . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 557.2 Coordenadas covariantes e contravariantes . . . . . . . . . . . . . . . . . . . 557.3 Formulação de elementos finitos em coordenadas convectivas . . . . . . . . . 587.4 Formulação mista u-λ
˜-γ . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 61
7.4.1 Introdução . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 617.4.2 Formulação baseada em distribuições assumidas de γ . . . . . . . . . 62
7.5 Relação entre a formulação mista e a integração selectiva . . . . . . . . . . . 667.6 Elementos MITC . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 70
7.6.1 Introdução . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 707.6.2 Elementos quadrilaterais de laje . . . . . . . . . . . . . . . . . . . . 737.6.3 Elementos triangulares de laje . . . . . . . . . . . . . . . . . . . . . . 767.6.4 Elementos quadrilaterais de casca . . . . . . . . . . . . . . . . . . . . 817.6.5 Integrações em elementos MITC . . . . . . . . . . . . . . . . . . . . 89
8 Resultados Numéricos 918.1 Introdução . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 918.2 Análise estática . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 92
8.2.1 Patch Test . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 928.2.2 Teste de Convergência . . . . . . . . . . . . . . . . . . . . . . . . . . 1008.2.3 Teste de shear-locking . . . . . . . . . . . . . . . . . . . . . . . . . . 110
8.3 Análise de vibração livre . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1188.4 Análise linear de estabilidade . . . . . . . . . . . . . . . . . . . . . . . . . . 125
9 Considerações finais 1339.1 Conclusões . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1339.2 Desenvolvimentos Futuros . . . . . . . . . . . . . . . . . . . . . . . . . . . . 138
A Diagramas de esforços de laje rectangular simplesmente apoiada 141
B Solução de laje rectangular simplesmente apoiada sujeita a carga uni-forme 151B.1 Série dupla . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 152
B.1.1 Solução . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 152B.1.2 Resultados numéricos . . . . . . . . . . . . . . . . . . . . . . . . . . 155
B.2 Série simples . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 155

Índice xi
B.2.1 Solução . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 155B.2.2 Resultados numéricos . . . . . . . . . . . . . . . . . . . . . . . . . . 160
C Solução de laje rectangular sujeita a carga de compressão bi-axial 163
Bibliografia 167

xii Índice

Lista de Figuras
2.1 Esquema geral. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
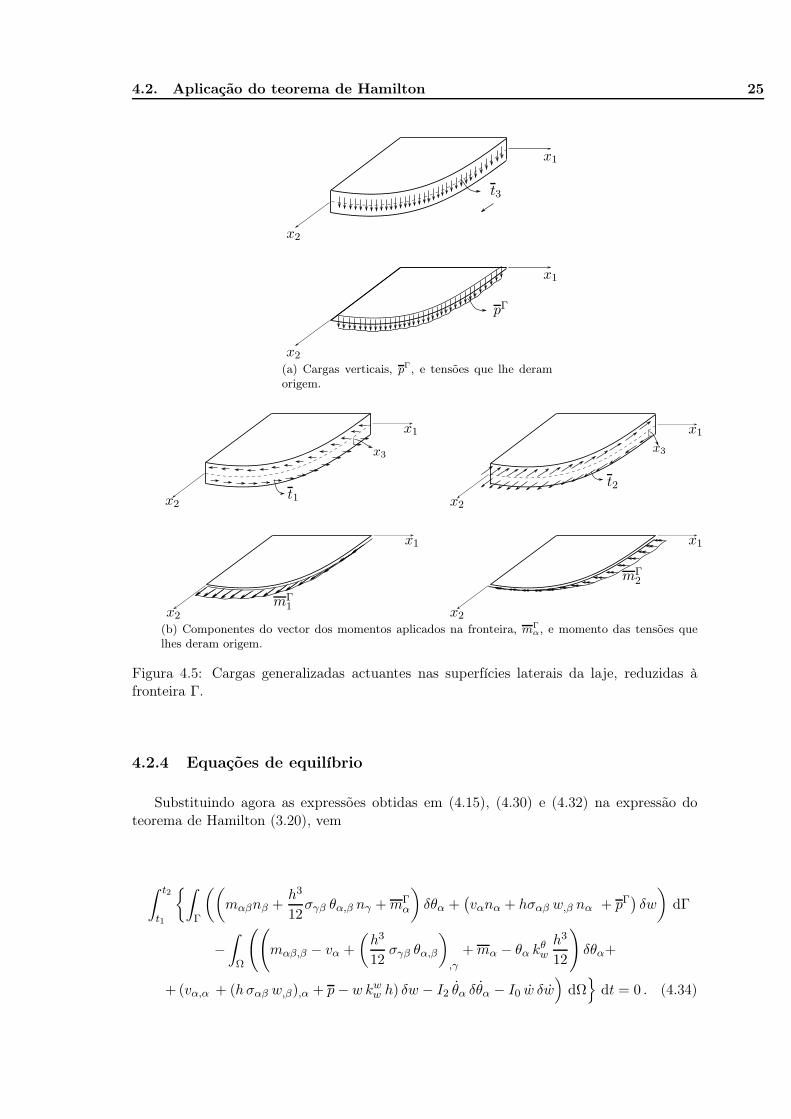
4.1 Modelação de uma peça laminar através da sua redução ao plano médio. . . . . 184.2 Ilustração da teoria de Reissner-Mindlin. . . . . . . . . . . . . . . . . . . . . . . 194.3 Tensões e esforços generalizados. . . . . . . . . . . . . . . . . . . . . . . . . . . 214.4 Cargas generalizadas sobre o plano médio. . . . . . . . . . . . . . . . . . . . . . 244.5 Cargas generalizadas actuantes nas superfícies laterais da laje, reduzidas à fron-
teira Γ. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
5.1 Eixos locais e eixos globais. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 42
6.1 Triângulo de Pascal para ξi1 ξj2. . . . . . . . . . . . . . . . . . . . . . . . . . . . 44
6.2 Elementos triangulares. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 456.3 Elementos quadrilaterais Lagrangeanos. . . . . . . . . . . . . . . . . . . . . . . 466.4 Elementos quadrilaterais Serendipianos. . . . . . . . . . . . . . . . . . . . . . . 466.5 Exemplo de representação paramétrica de um elemento QL9. . . . . . . . . . . 476.6 Elementos-mestre. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 486.7 Equações paramétricas de uma linha Γ. . . . . . . . . . . . . . . . . . . . . . . 52
7.1 Representação das componentes de um vector genérico x na base ortogonal enas bases covariante e contravariante. . . . . . . . . . . . . . . . . . . . . . . . 57
7.2 Significado físico das componentes da base covariante, gα. . . . . . . . . . . . . 577.3 Funções de interpolação unidimensionais, que valem uma unidade no ponto de
integração e zero nos restantes. . . . . . . . . . . . . . . . . . . . . . . . . . . . 687.4 Graus de liberdade associados a cada nó, tying points na direcção ξ1 e espaços
usados para geração das funções de aproximação Ψw e Ψθ, para o elementoMITC9p. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 75
7.5 Intersecção dos espaços de aproximação dos elementos convencionais T15 e QL16. 757.6 Algumas funções de interpolação Ψw
i , para o MITC16p. . . . . . . . . . . . . . 777.7 Graus de liberdade associados a cada nó, tying points na direcção ξ1 e espaços
usados para geração das funções de aproximação Ψw e Ψθ, para o elementoMITC16p. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 78
7.8 Algumas funções de interpolação Ψθi , para o MITC7p. . . . . . . . . . . . . . . 79
7.9 Graus de liberdade associados a cada nó, tying points e espaços usados parageração das funções de aproximação Ψw e Ψθ, para o elemento MITC7p. . . . 80
7.10 Algumas funções de interpolação Ψθi , para o MITC12p. . . . . . . . . . . . . . . 82
7.11 Graus de liberdade associados a cada nó, tying points e espaços usados parageração das funções de aproximação Ψw e Ψθ, para o elemento MITC12p. . . . 84
xiii

xiv Lista de Figuras
7.12 Função de interpolação Φγ11 , para o MITC4. . . . . . . . . . . . . . . . . . . . . 847.13 Graus de liberdade associados a cada nó, tying points na direcção ξ1 e espaços
usados para geração das funções de aproximação Ψw e Ψθ, para o elementoMITC4. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 85
7.14 Funções de interpolação Φγ1i , para o MITC9s. . . . . . . . . . . . . . . . . . . . 867.15 Graus de liberdade associados a cada nó, tying points na direcção ξ1 e espaços
usados para geração das funções de aproximação Ψw e Ψθ, para o elementoMITC9s. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 87
7.16 Funções de interpolação Φγ1i , para o MITC16s. . . . . . . . . . . . . . . . . . . 887.17 Graus de liberdade associados a cada nó, tying points na direcção ξ1 e espaços
usados para geração das funções de aproximação Ψw e Ψθ, para o elementoMITC16s. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 90
8.1 Laje analisada após dupla simplificação de simetria. . . . . . . . . . . . . . . . 928.2 Discretização de malhas regulares no caso dos elementos de quatro nós. . . . . . 938.3 Discretização de malhas distorcidas no caso dos elementos de quatro nós. . . . . 948.4 Patch tests para uma laje de dimensões (a× b). . . . . . . . . . . . . . . . . . . 958.5 Geometria da malha utilizada nos patch tests. . . . . . . . . . . . . . . . . . . . 958.6 Erro associadado à energia de deformação para integração completa, no caso
de uma malha regular. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1028.7 Erro associadado à energia de deformação para integração selectiva, no caso de
uma malha regular. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1028.8 Erro associadado à energia de deformação para integração reduzida, no caso de
uma malha regular. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1038.9 Erro associadado à energia de deformação para integração completa, no caso
de uma malha distorcida. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1048.10 Erro associadado à energia de deformação para integração selectiva, no caso de
uma malha distorcida. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1048.11 Erro associadado à energia de deformação para integração reduzida, no caso de
uma malha distorcida. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1058.12 Erro associadado à energia de deformação para malhas regulares. . . . . . . . . 1078.13 Erro associadado à energia de deformação para malhas distorcidas. . . . . . . . 1078.14 Resultados obtidos para o deslocamento adimensional, w/we, a meio vão da laje,
utilizando os elementos MITC4 e QL4 recorrendo aos vários tipos de integração. 1098.15 Deformada da laje em análise, com simplificação de simetria, sujeita a carga
uniformemente distribuída, utilizando uma malha distorcida de 128 elementosMITC9p. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 110
8.16 Tempo de cálculo dispendido pelo programa, por elemento, na formação dasmatrizes de rigidez, dos vectores de forças, na rotação destes para o referenciallocal e seu espalhamento, para uma malha de 32 elementos dos 21 tipos deelementos em estudo, para a laje rectangular simplesmente apoiada sujeita acarga uniforme unitária. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 111
8.17 shear-locking dos elementos QL. . . . . . . . . . . . . . . . . . . . . . . . . . . . 1138.18 shear-locking dos elementos QS, para malhas de 32 elementos. . . . . . . . . . . 1148.19 shear-locking dos elementos QL4 e QL9, para malhas de 512 elementos. . . . . 1158.20 shear-locking dos elementos triangulares, para malhas de 32 elementos. . . . . . 1168.21 shear-locking dos elementos quadrilaterais Serendipianos, para malhas de 512
elementos. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 117

Lista de Figuras xv
8.22 shear-locking dos elementos triangulares, para malhas de 512 elementos. . . . . 1178.23 shear-locking dos elementos MITC. . . . . . . . . . . . . . . . . . . . . . . . . . 1188.24 Modos de vibração livre da laje simplesmente apoiada utilizando 512 elementos
MITC4. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1208.25 Erro relativo na aproximação à frequência de vibração fundamental para malhas
regulares, utilizando os elementos convencionais. . . . . . . . . . . . . . . . . . 1218.26 Erro relativo na aproximação à frequência de vibração fundamental para malhas
regulares, utilizando os elementos MITC. . . . . . . . . . . . . . . . . . . . . . 1248.27 Frequências de vibração adimensionalisadas. No caso da modelação da laje
através da teoria de Reissner-Mindlin foi utilizada uma malha de 128 elementosMITC16p. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 125
8.28 Laje rectangular simplesmente apoiada sujeita a carga de compressão bi-axial. . 1268.29 Modo espúrio correspondente ao primeiro modo de instabilidade obtido para
integração selectiva do elemento QL4, para uma malha de 128 elementos. . . . 1278.30 Erro relativo na aproximação da carga de bifurcação associada ao primeiro modo
de instabilidade, para malhas regulares, utilizando integração selectiva para oselementos quadrilaterais e integração completa para os elementos triangulares. . 128
8.31 Erro relativo na aproximação da carga de bifurcação associada ao primeiro modode instabilidade, para malhas regulares, utilizando integração selectiva, para oselementos convencionais Lagrangeanos, sem escolha criteriosa dos modos. . . . 128
8.32 Erro relativo na aproximação da carga de bifurcação associada ao primeiromodo de instabilidade, para malhas regulares, utilizando integração completa,para os elementos convencionais Lagrangeanos. . . . . . . . . . . . . . . . . . . 129
8.33 Erro relativo na aproximação à cargas de bifurcação associada ao primeiro modode instabilidade, para malhas regulares, utilizando os elementos MITC. . . . . . 131
A.1 Resultados obtidos para a componente do esforço transverso v1, utilizando oelemento QL4 com integração selectiva, no caso de uma malha regular. . . . . . 142
A.2 Resultados obtidos para a componente do esforço transverso v1, utilizando oelemento MITC4, no caso de uma malha regular. . . . . . . . . . . . . . . . . . 142
A.3 Resultados obtidos para a componente do esforço transverso v1, utilizando oelemento QL4 com integração selectiva, no caso de uma malha distorcida. . . . 143
A.4 Resultados obtidos para a componente do esforço transverso v1, utilizando oelemento MITC4, no caso de uma malha distorcida. . . . . . . . . . . . . . . . 143
A.5 Resultados obtidos para a componente do tensor de momentos m11, utilizandoo elemento QL4 com integração selectiva, no caso de uma malha regular. . . . . 144
A.6 Resultados obtidos para a componente do tensor de momentos m11, utilizandoo elemento MITC4, no caso de uma malha regular. . . . . . . . . . . . . . . . . 144
A.7 Resultados obtidos para a componente do tensor de momentos m11, utilizandoo elemento QL4 com integração selectiva, no caso de uma malha distorcida. . . 145
A.8 Resultados obtidos para a componente do tensor de momentos m11, utilizandoo elemento MITC4, no caso de uma malha distorcida. . . . . . . . . . . . . . . 145
A.9 Resultados obtidos para a componente do esforço transverso v1, utilizando oelemento triangular T6 com integração selectiva, no caso de uma malha regular. 146
A.10 Resultados obtidos para a componente do esforço transverso v1, utilizando oelemento MITC7p, no caso de uma malha regular. . . . . . . . . . . . . . . . . 146
A.11 Resultados obtidos para a componente do esforço transverso v1, utilizando oelemento triangular T6 com integração selectiva, no caso de uma malha distorcida.147

xvi Lista de Figuras
A.12 Resultados obtidos para a componente do esforço transverso v1, utilizando oelemento MITC7p, no caso de uma malha distorcida. . . . . . . . . . . . . . . . 147
A.13 Resultados obtidos para a componente do esforço transverso v1, utilizando oelemento QL9 com integração selectiva, no caso de uma malha regular. . . . . . 148
A.14 Resultados obtidos para a componente do esforço transverso v1, utilizando oelemento MITC9p, no caso de uma malha regular. . . . . . . . . . . . . . . . . 148
A.15 Resultados obtidos para a componente do esforço transverso v1, utilizando oelemento MITC9s, no caso de uma malha regular. . . . . . . . . . . . . . . . . . 148
A.16 Resultados obtidos para a componente do esforço transverso v1, utilizando oelemento QL9 com integração selectiva, no caso de uma malha distorcida. . . . 149
A.17 Resultados obtidos para a componente do esforço transverso v1, utilizando oelemento MITC9p, no caso de uma malha distorcida. . . . . . . . . . . . . . . . 149
A.18 Resultados obtidos para a componente do esforço transverso v1, utilizando oelemento MITC9s, no caso de uma malha distorcida. . . . . . . . . . . . . . . . 149
B.1 Laje rectangular simplesmente apoiada. . . . . . . . . . . . . . . . . . . . . . . 151

Lista de Tabelas
6.1 Grau das funções integrando (caso |J| = constante) em cada direcção paraelementos quadriláteros. No cálculo do vector de forças, fΩ(e), assumiu-se queb é constante. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 50
6.2 Grau máximo do polinómio, gpmáx, que pode ser integrado exactamente usandoa regra de Gauss-Legendre com n pontos de integração. . . . . . . . . . . . . . 50
6.3 Grau das funções integrando (caso |J| = constante) para elementos triangulares. 51
6.4 Regras de integração dos elementos triangulares, ver Cowper (1973). . . . . . . 51
7.1 Avaliação de∫
ΩΨγT IΨγ dΩ. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 71
7.2 Grau das funções integrandas (caso |J| = constante) em cada direcção paraelementos quadrilaterais MITC. . . . . . . . . . . . . . . . . . . . . . . . . . . . 90
7.3 Grau das funções integrandas (caso |J| = constante) para elementos triangula-res MITC. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 90
8.1 Tabela de integrais Ii =∫ 1−1 ψi(ξ) dξ. . . . . . . . . . . . . . . . . . . . . . . . . 96
8.2 Resultados dos vários patch tests (flexão, corte e torção), consoante o tipo deintegração (completa, selectiva e reduzida), utilizando cada tipo de elementoconvencional, para as malhas da Figura 8.5, para uma espessura de laje h = 0, 05e número de graus de liberdade (ndof ) e número de nós para cada modelo etipo de teste. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 97
8.3 Resultados dos vários patch tests (flexão, corte e torção), utilizando cada tipode elemento MITC, para as malhas da Figura 8.5, para uma espessura de lajeh = 0, 05 e número de graus de liberdade (ndof ) e número de nós para cadamodelo e tipo de teste. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 99
8.4 Taxa de convergência para a energia de deformação dos diferentes elementosconvencionais com os diferentes tipos de integrações, utilizando malhas regula-res e distorcidas, para o caso de estudo. . . . . . . . . . . . . . . . . . . . . . . 105
8.5 Taxa de convergência para a energia de deformação dos elementos MITC utili-zando malhas regulares e distorcidas, para o caso de estudo. . . . . . . . . . . . 108
8.6 Número de valores próprios iguais a zero, presentes numa matriz de rigidezelementar, para os vários elementos convencionais quadrilaterais, para carrega-mento vertical uniformemente distribuído. . . . . . . . . . . . . . . . . . . . . . 114
8.7 Resultados obtidos para os valores exactos de frequências de vibração livreadimensionais, para uma laje moderadamente espessa (Reissner-Mindlin) e umalaje fina (Kirchhoff), rectangular (a = 2 b) simplesmente apoiada em todo ocontorno, ν = 0, 3, h = b
10 , κ = 56 e ρ = 1. . . . . . . . . . . . . . . . . . . . . . 119
xvii
xviii Lista de Tabelas
8.8 Taxa de convergência das frequências de vibração, utilizando os elementos con-vencionais, para o caso de estudo. . . . . . . . . . . . . . . . . . . . . . . . . . . 123
8.9 Taxa de convergência das frequências de vibração, utilizando os elementosMITC, para o caso de estudo. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 124
8.10 Taxa de convergência das cargas de bifurcação, utilizando os elementos conven-cionais, para o caso de estudo. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 130
8.11 Taxa de convergência das cargas de bifurcação, utilizando os elementos conven-cionais Lagrangeanos, recorrendo à integração completa, para o caso de estudo. 130
8.12 Taxa de convergência da cargas crítica do primeiro modo de instabilidade, uti-lizando os elementos MITC, para o caso de estudo. . . . . . . . . . . . . . . . . 131
B.1 Resultados obtidos utilizando série dupla para os valores adimensionalizadosde w(a2 ,
b2), m11
(a2 ,
b2
), m22
(a2 ,
b2
), m12 (0, 0) e Uf e Us em laje rectangular
(a = 2 b) simplesmente apoiada sujeita a carga uniforme, ν = 0, 3, h = b10 e
κ = 56 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 156
B.2 Resultados obtidos utilizando série simples para os valores adimensionalizadosde w(a2 ,
b2), m11
(a2 ,
b2
), m22
(a2 ,
b2
), m12 (0, 0) e Uf e Us em laje rectangular
(a = 2 b) simplesmente apoiada sujeita a carga uniforme, ν = 0, 3, h = b10 e
κ = 56 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 161
B.3 Resultados obtidos utilizando série simples para os valores adimensionalizadosde v1(0, b2 e v2(a2 , 0) em laje rectangular (a = 2 b) simplesmente apoiada sujeitaa carga uniforme, ν = 0, 3, h = b
10 e κ = 56 . . . . . . . . . . . . . . . . . . . . . 162
C.1 Resultados obtidos para os valores das cargas de bifurcação adimensionais, parauma laje rectangular (a = 2 b) simplesmente apoiada sujeita a carga de com-pressão bi-axial igual nas duas direcções, ν = 0, 3, h = b
10 e κ = 56 . . . . . . . . 165

Capítulo 1
Introdução
1.1 Considerações iniciais
Durante séculos a solução de muitos dos problemas que ocorrem em engenharia passavainvariavelmente pelo recurso a métodos experimentais e ao conhecimento empírico. Anecessidade de resolver problemas cada vez mais complexos num período de tempo razoávele a procura por entender as leis pelas quais a natureza se rege parecia incompatível com aconstrução de modelos, medição de resultados e sua extrapolação para diferentes condições.
A procura de caminhos alternativos à solução de problemas nos mais diversos camposda ciência e tecnologia levou à formulação dos mesmos em termos de sistemas de equaçõesdiferenciais às derivadas parciais com condições de fronteira e iniciais apropriadas. Devido àsua complexidade, apenas em casos muito simples a sua solução exacta pode ser encontrada.
A possibilidade de usar métodos numéricos para obter soluções aproximadas — comuma precisão razoável — de sistemas de equações diferenciais às derivadas parciais foio caminho naturalmente escolhido. De entre os vários métodos numéricos existentes, oMétodo dos Elementos Finitos (MEF) é, actualmente, o mais utilizado para obter soluçõesaproximadas para este tipo de problemas.
O processo sistemático de obtenção de soluções do método e a generalização de meiosde cálculo automático cada vez mais potentes que tem ocorrido nas últimas décadas, pos-sibilitou a disseminação do recurso ao MEF nas mais variadas áreas do conhecimentocientífico.
O MEF consiste na discretização do domínio do problema em subdomínios, chamadoselementos finitos, mantendo as mesmas propriedades do meio original. Esses elementosencontram-se ligados entre si, formando uma malha designada por malha de elementosfinitos. O refinamento exigido para a malha depende do grau de complexidade do problemae da precisão pretendida para o resultado. A geometria do problema é então subdivididanum conjunto de elementos. Recorrendo ao cálculo variacional e à imposição na formafraca de algumas das condições do problema, é efectuada a substituição do sistema deequações diferenciais por um sistema de equações algébricas. Este último, é resolvido afim de obter uma solução aproximada para o problema. Para problemas governados porsistemas de equações diferenciais lineares/não-lineares, a solução é obtida por resolução desistemas de equações lineares/não-lineares. Em geral, quanto mais refinada a malha deelementos finitos, mais próxima da solução exacta é a solução obtida, apesar do aumentodo custo computacional envolvido. É nesta fase que a análise das soluções é importante.
Para além do problema de lajes tratado nesta dissertação, no âmbito da engenharia deestruturas, existe uma grande variedade de outros problemas, tais como os problemas de
1

2 Introdução
cabos, vigas, de cascas e elasticidade, que podem ser analisados através do MEF.
1.2 Descrição do trabalho
Este trabalho incide sobre o estudo de peças laminares planas, sujeitas a solicitaçõesperpendiculares ao plano médio da peça. Estas são habitualmente designadas por la-jes (LNEC, 1966). Em particular, pretende-se analisar o comportamento de lajes cuja de-formabilidade devido ao esforço transverso possa ser significativa e não deva ser, em geral,desprezada, i.e., lajes moderadamente espessas. De acordo com Szilard (2004, página 6),considera-se que este tipo de laje que se caracteriza por uma relação de 0, 1 ≤ h/L ≤ 0, 2.
Para a análise e estudo da laje moderadamente espessa recorreu-se ao MEF. Sendoeste um método aproximado, é essencial conhecer os erros envolvidos na aproximação dasolução em função do tipo de elemento e da sua dimensão característica, h1, para que sepossa decidir qual o tipo de elemento mais adequado ao caso em apreciação.
Um elemento baseado na teoria de Reissner-Mindlin deve recuperar os resultados for-necidos pela teoria de Kirchhoff à medida que a relação h/L da laje diminui. A maioriados elementos finitos de laje baseados na teoria de Reissner-Mindlin apresentam, em ge-ral, um bom comportamento em lajes com uma relação de h/L ≥ 0, 1. No entanto, àmedida que esta relação diminui, nem todos os elementos — em especial os elementos con-vencionais, cuja formulação se baseia apenas na aproximação do campo de deslocamentosgeneralizado, quando se recorre à integração completa — fornecem bons resultados, devidoao fenómeno de shear-locking. Este fenómeno, que corresponde a uma sobrestimação darigidez de corte do modelo dos elementos finitos relativamente à laje real, e torna muitopequenos (ou mesmo nulos) os valores calculados para o campo de deslocamentos genera-lizado, pode destruir por completo a solução. As integrações reduzida (Zienkiewicz et al.,1971, Zienkiewicz e Hinton, 1976) ou selectiva (Hughes et al., 1977) foram introduzidasna tentativa de resolver este problema. Contudo, na presença de problemas de condiçõesde fronteira cinemáticas muito restritas, ainda podem ocorrer problemas de retenção aocorte. Por outro lado, se as condições de fronteira cinemáticas do problema forem poucorestritivas, as soluções podem ser afectadas por oscilações provocadas pelo aparecimento demodos espúrios (Huang e Hinton, 1984, página 369). Neste contexto, foram introduzidoselementos baseados em aproximações mistas com o objectivo de superar as dificuldadesde shear-locking sem ter de se efectuar uma integração diferente da completa (Malkus eHughes, 1978).
Neste trabalho procurou-se, no contexto do MEF, analisar e comparar os resultadosobtidos usando dois tipos de elementos finitos com formulações distintas: os elementosconvencionais, cuja formulação se baseia numa aproximação ao campo de deslocamen-tos generalizados, e os elementos MITC, cujo acrónimo significa Mixed Interpolation ofTensorial Components. Os elementos desta família caracterizam-se pela assumpção de de-terminados campos de deformações generalizadas. A sua origem pode ser fundamentadaatravés de formulações mistas.
Os elementos convencionais são isoparamétricos (Ergatoudis et al., 1968), podendo serquadrilaterais e triangulares. Os primeiros dividem-se em duas famílias: os Serendipianos(QS), elementos sem nós interiores, e os Lagrangeanos (QL), elementos que os possuem.
1A designação h é utilizada tanto para a dimensão característica do elemento como para a espessurada laje. O conflito de notação é facilmente resolvido, visto que o sentido pretendido pode ser facilmenteinferido a partir do contexto em se insere.

1.3. Organização do documento 3
São considerados, neste trabalho, os elementos triangulares de 3, 6, 10, 15 e 21 nós, oselementos quadrilaterais Lagrangeanos de 4, 9, 16, 25 e 36 nós e Serendipianos de 8, 12,16 e 20 nós.
Os elementos MITC dividem-se também em duas famílias: MITC de laje e de casca. Osprimeiros serão designados por MITCp, sendo aqui analisados os quadrilaterais MITC4p,o MITC9p, o MITC16p e os triangulares o MITC7p e o MITC12p. Os segundos serãodesignados por MITCs, dos quais se considerou apenas os elementos quadrilaterais MITC4s,MITC9s e MITC16s. Tendo em consideração os objectivos do presente trabalho, no casodestes elementos, apenas foi analisado o seu comportamento à flexão. Note-se que oselementos MITC4p e MITC4s coincidem, tal como os elementos QL4 e QS4.
Todos estes 21 elementos de laje moderadamente espessa foram implementados emambiente MATLAB (2012), especialmente vocacionado para realizar operações algébricascom matrizes. O programa, que é constituído por várias rotinas, permite a visualização dedeformadas, diagramas de esforços, configurações de modos de vibração e instabilidade. Osoftware de cálculo Mathematica (Wolfram Research, 2013) foi utilizado para efectuar todaa parte de cálculo simbólico, nomeadamente a determinação de funções de aproximaçãoe, em alguns casos, das soluções exactas presentes em anexo. A geração das malhas deelementos finitos foi efectuada com recurso ao software GMSH (Geuzaine e Remacle, 2009).
1.3 Organização do documento
O trabalho encontra-se organizado em 9 capítulos.No capítulo 2 é efectuada uma descrição concisa do problema a resolver, começando-se
por introduzir a forma geral clássica do problema linear de valores de fronteira e posteriorgeneralização para inclusão dos efeitos dinâmicos, possibilidade de fundação elástica e dedeformações geometricamente não-lineares.
No capítulo seguinte, são descritas as relações fundamentais da teoria da elasticidadepara o caso tridimensional, incluindo equações de equilíbrio na posição indeformada, equa-ções de compatibilidade não-lineares e relações constitutivas, sendo estas últimas particu-larizadas para o caso bidimensional.
No capítulo 4 descreve-se a teoria linear de lajes moderadamente espessas, impondo ashipóteses de Reissner-Mindlin nas equações da mecânica dos meios contínuos tridimensio-nal. Através da aplicação do teorema de Hamilton, deduzem-se as equações de equilíbriono domínio e na fronteiras estática, para a laje moderadamente espessa.
No capítulo 5 reescreve-se o problema das lajes sob forma matricial e são expostasas aproximações necessárias para a sua análise através do MEF. Procura-se deduzir aequação geral do método para o caso da laje moderadamente espessa, em fundação elástica,incluindo efeitos dinâmicos e análise geometricamente não-linear. Posteriormente, sãofeitas particularizações desta mesma equação para as situações de análises estática, devibração livre e linear de estabilidade.
No capítulo 6 é feita uma descrição dos elementos convencionais em estudo assim comoalgumas particularidades inerentes à sua implementação, como sejam as funções de inter-polação, integração numérica das grandezas elementares e as diversas operações inerentesà utilização de elementos isoparamétricos.
No capítulo 7 começa-se por se fazer uma introdução às coordenadas covariantes econtravariantes. Posteriormente é apresentada uma formulação mista nos campos de des-locamento generalizado, u, de distorções generalizadas covariantes, γ, e de multiplicadoresde Lagrange contravariantes, λ
˜, para lajes de Reissner-Mindlin, que conduz a uma forma

4 Introdução
geral da parcela da matriz de rigidez associada à deformabilidade por corte, Kss, paraos elementos MITC e que também serviu para justificar a utilização da integração selec-tiva em elementos quadrilaterais convencionais. No final do capítulo, são apresentadas ascaracterísticas inerentes a cada elemento MITC analisado, nomeadamente as funções deaproximação e as regras de integração a utilizar.
No capítulo 8 avalia-se o comportamento e desempenho dos vários elementos finitos emestudo. Começa-se por testar a qualidade dos elementos e da respectiva implementaçãoatravés da realização de três patch test para todos os elementos: flexão, corte e torção.Seguidamente foi aferida a sensibilidade de retenção ao corte de cada elemento. Por fim,avalia-se a convergência (i) da energia de deformação, para uma laje sujeita a carga uni-formemente distribuída, (ii) das frequências de vibração naturais e (iii) dos parâmetros decarga de instabilidade para uma laje sujeita a compressão bi-axial, para a análise está-tica, de vibração livre e linear de estabilidade, respectivamente, de uma laje rectangularsimplesmente apoiada.
Por fim, no capítulo 9, são efectuadas algumas considerações finais, apresentando asconclusões sobre os resultados obtidos e possíveis desenvolvimentos futuros deste trabalho.
1.4 Notação
Nesta subsecção é explicada o tipo de notação usada no documento, tendo como ob-jectivo uniformizar e facilitar a compreensão do seu texto. Deste modo, as letras latinasou gregas minúsculas (a, b, . . . α, β, . . .) denotam quantidades escalares, letras latinas ougregas minúsculas em negrito (a, b, . . .α,β, . . .) denotam vectores, letras latinas ou gre-gas maiúsculas (A,B, . . .) denotam tensores de segunda ordem, letras caligráficas latinas(A,B, . . .) denotam tensores de terceira ordem e letras maiúsculas latinas em blackboarditálico (A,B, . . .) denotam tensores de quarta ordem no espaço euclidiano tridimensional.
Para efeitos de implementação as entidades definidas anteriormente são transformadasem matrizes. Estas são denotadas por letras latinas a negrito romanas (A,B, . . . a,b . . .).
A convenção de soma em índices repetidos é adoptada ao longo de todo o texto, comíndices gregos em itálico a variarem de 1 a 2 e índices latinos em itálico a variarem de 1 a3.
“ ·” e “ :” representam o produto interno de vectores e tensores de ordem superior a um,respectivamente, “×” denota o produto vectorial e “⊗” representa o produto tensorial.
δij é o símbolo de Kronecker e δji é o símbolo de Kronecker misto. εijk é o símbolo depermutação.
∂i denota a derivada parcial em ordem à coordenada xi, ∂∂xi
, excepto em alguns casosparticulares do capítulo 7 onde é especificado que ∂i representa a derivada parcial em ordemà coordenada natural ξi, ∂
∂ξi.
diag (A1,A2, ...,An) e diag (a1, a2, ..., an) representam, as matrizes diagonais cujascomponentes diagonais, a começar no canto superior esquerdo, são, respectivamente, A1,A2, ..., An e a1, a2, ..., an.

Capítulo 2
A forma geral do Problema deValores na Fronteira
2.1 O problema linear
Seja d ∈ 1, 2, 3 o número de dimensões espaciais do problema em análise e Ω ⊂ Rd um
conjunto aberto com uma fronteira suave — excepto num número limitado de pontos —, Γ.Um ponto genérico, x, pode ser identificado em relação a um sistema de eixos ortogonal,ei, através de x = xi ei, onde xi são as componentes do vector posição e i = 1, . . . , d.
A sua fronteira, Γ, pode ser parametrizada a partir de um espaço de dimensão (d− 1)e pode ser decomposta nas parcelas cinemática, Γu, e estática, Γt, sendo Γ = Γt ∪ Γu,Ø = Γt∩Γu e Ω = Ω∪Γ. Por simplicidade, condições do tipo misto, em que se impõe umacombinação linear de grandezas estáticas e cinemáticas, não são aqui tratadas. É habitualdesignar as condições de fronteira cinemática, estática e mista por Dirichlet, Neumann eRobin, respectivamente.
Qualquer problema de mecânica dos sólidos ou das estruturas pode ser expresso atravésde um conjunto de equações — no domínio, Ω, e na fronteira, Γ, — que regem o seucomportamento.
No domínio do problema em análise, Ω, estas equações, nas hipóteses da linearidadefísica e geométrica e no caso de aplicação quasi-estática da solicitação, podem ser escritas— usando notação matricial — na forma
∂∗ σ + b =0 (2.1a)
σ − σ0 =D (ǫ− ǫ0) (2.1b)
ǫ =∂ u , (2.1c)
onde ∂∗ é o operador diferencial de equilíbrio, σ é um vector que agrupa as tensões ge-neralizadas, σ0 é um vector que agrupa as tensões generalizadas iniciais, b é o vector dasforças de massa generalizadas, D é um operador constitutivo de rigidez generalizado, ǫ éo vector que reúne as deformações lineares generalizadas, ǫ0 é um vector que agrupa asdeformações generalizadas iniciais, ∂ é o operador diferencial de compatibilidade e u é ocampo de deslocamentos generalizados.
Os operadores ∂∗ e ∂ são auto-adjuntos.Em alternativa ao formato de rigidez expresso pela expressão (2.1b), a relação consti-
tutiva pode ser expressa no formato de flexibilidade
ǫ− ǫ0 = F (σ − σ0) , (2.2)
5

6 A forma geral do Problema de Valores na Fronteira
Forçasgeneralizadas
b
Equilíbrio
∂∗ σ + b = 0
Tensõesgeneralizadas
σ
Elasticidade
σ − σ0 = D (ǫ− ǫ0)
Deformaçõesgeneralizadas
ǫ
Compatibilidade
ǫ = ∂ u
Deslocamentosgeneralizados
u
Figura 2.1: Esquema geral.
onde F = D−1 é um operador constitutivo de flexibilidade generalizado.Na Figura 2.1 é apresentado o diagrama de Tonti do problema descrito pelas equa-
ções (2.1).As equações a satisfazer na fronteira, Γ, podem, em certos casos, ser escritas na forma1:
t =t em Γt (2.3a)
u =u em Γu , (2.3b)
em que t = N∗ σ é um vector que armazena as tracções generalizadas, N∗ é a projecção nafronteira estática de ∂∗, t é um vector que armazena as tracções generalizadas prescritasna fronteira estática e u é um vector que reúne os deslocamentos generalizados prescritosna fronteira cinemática.
2.2 Generalização do problema linear
O problema de valores na fronteira descrito na secção 2.1 é generalizado em seguida.A equação de equilíbrio que rege o problema no domínio, incluindo os termos associados
aos efeitos dinâmicos e de uma fundação elástica, podem ser escritas — usando notaçãomatricial — na forma
∂∗ σ + b+Kwu = ρu, (2.4)
onde Kw é a matriz de rigidez de fundação elástica de Winkler generalizada, ρ é a matrizde densidade mássica generalizada e u é o vector das acelerações generalizadas.
1Estas equações necessitam de ser generalizadas para expressar as condições de fronteira de certasteorias estruturais (vigas e lajes finas, por exemplo) ou para considerar a presença de apoios inclinados.No entanto, vai utilizar-se a forma acima indicada por ser simples e suficientemente geral no presentecontexto.

2.2. Generalização do problema linear 7
A equação de compatibilidade — incluindo termos não-lineares no campo de desloca-mentos — pode ser escrita na forma genérica
ε = ǫ+ ǫNL , (2.5)
onde ε é um vector de deformações não-linear no campo de deslocamentos que resulta dasoma das componentes linear, ǫ, e não-linear, ǫNL.
Finalmente a relação constitutiva é reescrita para atender à presença do novo vectorde deformações, i.e.,
σ − σ0 = D (ε− ε0) . (2.6)
Ambas as condições de fronteira continuam a ser expressas através de (2.3).Note-se que as equações de equilíbrio e compatibilidade apresentadas nesta secção não
são coerentes entre si, pelo que não fazem parte da mesma formulação. Para que tal severificasse as equações de equilíbrio teriam de ser estabelecidas na configuração deformada.Este procedimento é suficiente para os objectivos do presente trabalho, visto que permitedeterminar exactamente as equações que regem o problema da laje, incluindo os termosassociados a análises estática, de vibração livre, linear de estabilidade e considerar o efeitode uma fundação elástica.

8

Capítulo 3
Teoria da elasticidade
3.1 Elasticidade tridimensional
No caso da elasticidade tridimensional o domínio genérico é designado por V , no espaçode dimensão d = 3. A sua fronteira, S, pode ser parametrizada a partir de um espaçode dimensão 2 e pode ser decomposta nas parcelas cinemática, Su, e estática, St, sendoS = St ∪ Su e Ø = St ∩ Su.
3.1.1 Equações de equilíbrio na configuração indeformada
No caso da elasticidade tridimensional as equações de equilíbrio na configuração in-deformada — incluindo efeitos dinâmicos e fundação elástica — podem ser escritas, nodomínio, V , na forma,
σij,i + bj + kw ji ui = ρ uj , (3.1)
onde σij são as componentes do tensor das tensões, bj são as componentes do vectordas forças de massa, kw ji corresponde às componentes da matriz de rigidez da fundaçãoelástica, ρ é a densidade mássica do material, ui são as componentes do deslocamento e ujsão as componentes da aceleração.
As equações de equilíbrio na fronteira estática, St, são
ti = ti , (3.2)
onde tj = σij ni são as componentes do vector de tracções na fronteira estática, ni são ascomponentes da normal unitária exterior e ti são as componentes das tracções aplicadasna fronteira estática.
Estas expressões podem ser escritas na forma geral definida pelas equações (2.4) e (2.3a)definindo os seguintes vectores que agrupam as tensões, as forças de massa, as tracçõesaplicadas na fronteira, os deslocamentos e as acelerações
σ =
σ11
σ22
σ33
σ12
σ13
σ23
, b =
b1
b2
b3
, t =
t1
t2
t3
, u =
u1
u2
u3
, u =
u1
u2
u3
(3.3)
9

10 Teoria da elasticidade
e as matrizes de rigidez de fundação elástica, de densidade mássica do material, de opera-dores diferenciais e normais na fronteira estática
Kw =
kw 11 kw 12 kw 13
kw 21 kw 22 kw 23
kw 31 kw 32 kw 33
, ρ =
ρ 0 0
0 ρ 0
0 0 ρ
,
∂∗ =
∂1 0 0 ∂2 ∂3 0
0 ∂2 0 ∂1 0 ∂3
0 0 ∂3 0 ∂1 ∂2
, N∗ =
n1 0 0 n2 n3 0
0 n2 0 n1 0 n3
0 0 n3 0 n1 n2
.
(3.4)
3.1.2 Equações de compatibilidade não-lineares
O tensor de Green-Lagrange, que agrupa as componentes lineares do tensor das defor-mações e ainda uma parcela de segunda ordem contendo termos não-lineares resultantesdo produto (de derivadas) de componentes do campo de deslocamentos, é definido atravésde
Eij =1
2(ui,j + uj,i + uk,iuk,j) . (3.5)
Efectuando a expansão de cada um dos seus componentes obtém-se
E11 = u1,1 +1
2
(u21,1 + u22,1 + u23,1
)
E22 = u2,2 +1
2
(u21,2 + u22,2 + u23,2
)
E33 = u3,3 +1
2
(u21,3 + u22,3 + u23,3
)
E12 =1
2
(u1,2 + u2,1 + u1,1u1,2 + u2,1u2,2 + u3,1u3,2
)
E13 =1
2
(u1,3 + u3,1 + u1,1u1,3 + u2,1u2,3 + u3,1u3,3
)
E23 =1
2
(u2,3 + u3,2 + u1,2u1,3 + u2,2u2,3 + u3,2u3,3
)
E21 = E12
E32 = E23
E31 = E13 .
(3.6)
Para que seja possível a determinação das equações da análise linear de estabilidade énecessário considerar alguns termos desta parcela não-linear. Desta forma, tem-se emconta a influência dos deslocamentos transversais nas deformações no plano médio da laje.No caso de se assumir pequenas deformações e rotações moderadas, a análise linear deestabilidade de lajes pode ser efectuada substituindo o tensor de Green-Lagrange, Eij , poruma sua aproximação. Desprezando apenas os termos não-lineares a sublinhado, resultaum tensor das deformações, simétrico, aqui designado por εij .
Deste modo, tem-se
εij = ǫij + ǫNLij , (3.7)

3.1. Elasticidade tridimensional 11
onde ǫij e ǫNLij são, respectivamente, as componentes do tensor das deformações correspon-dentes a termos lineares e não-lineares, e são dadas por
ǫij =1
2(ui,j + uj,i) (3.8a)
ǫNLij =
ǫNLαβ = 12 (u3,α u3,β)
ǫNL33 = 12 u
23,3
ǫNLα3 = 12 (u3,α u3,3)
, (3.8b)
sendo ui as componentes do campo de deslocamentos.
As equações de compatibilidade na fronteira cinemática, Su, são
ui = ui , (3.9)
onde ui são as componentes prescritas do campo de deslocamentos na fronteira cinemática.
Definindo a distorção através de γij = 2 ǫij , para i 6= j, tem-se,
ǫ =
ǫ11
ǫ22
ǫ33
γ12
γ13
γ23
, ǫNL =1
2
u23,1u23,2u23,3
u3,1 u3,2
u3,1 u3,3
u3,2 u3,3
, u =
u1
u2
u3
, u =
u1
u2
u3
, (3.10)
∂ =
∂1 0 0
0 ∂2 0
0 0 ∂3
∂2 ∂1 0
∂3 0 ∂1
0 ∂3 ∂2
. (3.11)
3.1.3 Relação constitutivas
No caso de um material elástico linear, homogéneo e isotrópico, a relação constitutivapode escrever-se no formato de rigidez
σij =E
1 + ν
(ǫij +
ν
1− 2 νǫkk δij
)− E α∆T
1− 2 νδij , (3.12)
onde foram introduzidas as constantes elásticas do material, nomeadamente o módulo deelasticidade, E, o coeficiente de Poisson, ν, o coeficiente de dilatação térmica linear, α, ea variação de temperatura, ∆T .

12 Teoria da elasticidade
Esta expressão pode ser convenientemente escrita em forma matricial. Neste caso, osoperadores intervenientes assumem a forma
D =E
(1 + ν)(1− 2ν)
1− ν ν ν 0 0 0
ν 1− ν ν 0 0 0
ν ν 1− ν 0 0 0
0 0 0 1−2 ν2 0 0
0 0 0 0 1−2 ν2 0
0 0 0 0 0 1−2 ν2
, (3.13)
σ0 =− E α∆T
1− 2 ν
1
1
1
0
0
0
. (3.14)
No formato de flexibilidade ter-se-ia
ǫij =1 + ν
Eσij −
ν
Eσkk δij + α∆T δij , (3.15)
ou seja,
F =1
E
1 −ν −ν 0 0 0
−ν 1 −ν 0 0 0
−ν −ν 1 0 0 0
0 0 0 2(1 + ν) 0 0
0 0 0 0 2(1 + ν) 0
0 0 0 0 0 2(1 + ν)
, ǫ0 = α∆T
1
1
1
0
0
0
. (3.16)
3.1.4 O problema complementar
O problema da elasticidade tridimensional foi formulado de tal modo que seria trivialsubstituir as deformações compatíveis com o campo de deslocamentos na relação consti-tutiva e as tensões daí resultantes nas equações de equilíbrio. Obter-se-ia assim o sistemade equações governativas (de equilíbrio) em que as variáveis do problema são campos dedeslocamentos. É habitual denominar este conjunto de equações por equações de Navier--Lamé.
O problema pode ser formulado de uma forma inteiramente complementar, em que asequações governativas são equações de compatibilidade em função de campos de tensões.É habitual denominar este conjunto de equações por equações de Beltrami-Mitchell.
Este problema complementar não será aqui descrito, mas importa observar as corres-pondentes equações de compatibilidade que lhe correspondem.
As equações (3.8) permitem determinar, dado um campo de deslocamentos, o tensordas deformações. Mas será sempre possível que, dado um tensor de deformações, encontrarum campo de deslocamentos que lhe corresponda? Note-se que se tem seis componentes in-dependentes do tensor de deformações e três componentes para o campo de deslocamentos.

3.1. Elasticidade tridimensional 13
Assim, as deformações devem satisfazer três condições de integrabilidade entre si. Estascondições podem ser escritas na forma
ǫij,kl + ǫkl,ij − ǫik,lj − ǫjl,ik = 0 (3.17)
Notando que todos os índices são livres, tem-se 34 = 81 equações. De todas estas equações,apenas seis são distintas entre si:
2 ǫ12,12 − ǫ11,22 − ǫ22,11 =0 (3.18a)
2 ǫ31,31 − ǫ33,11 − ǫ11,33 =0 (3.18b)
2 ǫ23,23 − ǫ22,33 − ǫ33,22 =0 (3.18c)
ǫ11,23 − ǫ23,11 − ǫ12,13 − ǫ13,12 =0 (3.18d)
ǫ22,31 − ǫ31,22 − ǫ23,21 − ǫ21,23 =0 (3.18e)
ǫ33,12 − ǫ12,33 − ǫ31,32 − ǫ32,31 =0 . (3.18f)
Destas seis equações distintas, pode mostrar-se que apenas três são independentes1, comose referiu anteriormente. No entanto, a forma mais simples de verificar se um dado campode deformações é integrável é verificar se estas seis equações são satisfeitas.
3.1.5 O Teorema de Hamilton
No que se segue, o teorema de Hamilton será utilizada tendo como objectivo funda-mental, a dedução da forma geral das equações de equilíbrio dinâmico da teoria de lajesmoderadamente espessas, consistente com as respectivas hipóteses cinemáticas. Incluindoa possibilidade de fundação elástica e análise geometricamente não-linear, o teorema deHamilton pode ser expresso através de
∫ t2
t1
(δU − δV − δK) dt = 0 (3.20)
e permite relacionar a variação da energia interna, δU , a variação do potencial das forçasaplicadas, δV , e a variação da energia cinética, δK, de um corpo (Fung e Tong, 2001,Capítulo 11, página 379). Cada um dos termos da equação (3.20) é definido pelas seguintesexpressões
δU =
∫
Vσij δεij dV (3.21a)
δV =
∫
V(bi δui + ui kw ij δuj) dV +
∫
Sti δui dS (3.21b)
δK =
∫
Vui ρ δui dV . (3.21c)
1Seja o tensor Eijkl definido através de
Eijkl = ǫij,kl + ǫkl,ij − ǫik,lj − ǫjl,ik . (3.19)
O tensor das deformações pode ser interpretado como um tensor métrico e o tensor Eijkl como o tensorde Riemann-Christoffel correspondente (de Arantes e Oliveira, 1999, página 50). A segunda identidadede Bianchi (Bishop e Goldberg, 1981, página 235) fornecerá, então, as três equações de compatibilidadeindependentes em função do tensor Eijkl.

14 Teoria da elasticidade
O termo cinético contempla a possibilidade de haver variações dos deslocamentos aolongo do tempo. Note-se que, excluindo o último termo, δK, esta equação resume-se aoprincípio dos trabalhos virtuais, tal como habitualmente definido em análise estática:
∫
Vσij δεij dV =
∫
V(bi δui − ui kw ij δuj) dV +
∫
Sti δui dS . (3.22)
3.2 Relações constitutivas em elasticidade bidimensional
A teoria de lajes a desenvolver no capítulo 4 recorre a relações constitutivas da elasti-cidade plana. Assim, estas são apresentadas em seguida.
O estado plano de deformação é obtido através da imposição de γ13 = γ23 = ǫ33 = 0na relação da elasticidade tridimensional. Resulta assim
σ13 =0
σ23 =0
σ33 =E ν
(1 + ν)(1− 2 ν)ǫαα − E α∆T
1− 2 ν,
o que conduz a
σαβ =E
1 + ν
(ǫαβ +
ν
1− 2 νǫγγ δαβ
)− E α∆T
1− 2 νδαβ (3.23)
ou
D =E
(1 + ν)(1− 2ν)
1− ν ν 0
ν 1− ν 0
0 0 1−2 ν2
, σ0 = −E α∆T
1− 2 ν
1
1
0
. (3.24)
No formato de flexibilidade, ter-se-ia
ǫαβ =1 + ν
E(σαβ − ν σγγ δαβ) + (1 + ν)α∆T δαβ , (3.25)
ou seja,
F =1 + ν
E
1− ν −ν 0
−ν 1− ν 0
0 0 2
, ǫ0 = (1 + ν)α∆T
1
1
0
. (3.26)
O estado plano de tensão é obtido através da imposição de σ13 = σ23 = σ33 = 0 narelação da elasticidade tridimensional. Resulta então
γ13 =0
γ23 =0
ǫ33 =− ν
Eσαα + α∆T ,
o que conduz a
σαβ =E
1 + ν
(ǫαβ +
ν
1− νǫγγ δαβ
)− E α∆T
1− νδαβ (3.27)

3.2. Relações constitutivas em elasticidade bidimensional 15
ou
D =E
1− ν2
1 ν 0
ν 1 0
0 0 1−ν2
, σ0 = −E α∆T
1− ν
1
1
0
. (3.28)
No formato de flexibilidade, ter-se-ia
ǫαβ =1 + ν
E
(σαβ −
ν
1− νσγγ δαβ
)+ α∆T δαβ , (3.29)
ou seja,
F =1
E
1 −ν 0
−ν 1 0
0 0 2 (1 + ν)
, ǫ0 = α∆T
1
1
0
. (3.30)

16

Capítulo 4
Teoria de lajes moderadamenteespessas
Neste capítulo é descrita a teoria linear de lajes moderadamente espessas, habitual-mente designada por teoria de Reissner-Mindlin no contexto das teorias estruturais depeças laminares. Esta teoria foi desenvolvida essencialmente por Reissner (1945) e Mindlin(1951). A teoria de lajes finas, também designada por teoria de Kirchhoff (Timoshenkoe Woinowsky-Krieger, 1959), é um caso particular da teoria de Reissner-Mindlin, onde adeformabilidade devida ao esforço transverso é desprezada.
A exposição seguida segue a apresentada em Tiago (2009): a partir de hipóteses cine-máticas, é estabelecida uma relação entre o campo de deslocamentos da laje e do sólidoque pretende simular. Em seguida as equações de equilíbrio são obtidas através do teoremade Hamilton.
4.1 Campo de deslocamentos e deformações generalizados
Considere-se um corpo V com a forma particular de uma peça laminar plana1. Estepode ser descrita através de
V =
(x1, x2, x3) ∈ R
3|(x1, x2) ∈ Ω ⊂ R2, x3 ∈
[−h2,h
2
],
onde h é a espessura da laje e Ω designa o seu plano médio. A fronteira do plano médio éindicada por Γ. Na Figura 4.1 encontra-se ilustrada a modelação da peça laminar atravésda sua redução ao plano médio.
O campo de deslocamentos do contínuo tridimensional é relacionado com grandezas de-finidas sobre o plano médio da lajes. Estas grandezas constituem o campo de deslocamentosgeneralizados da laje. No caso da laje moderadamente espessa, devido à necessidade de con-sideração da deformabilidade por corte, este campo é formado pelo deslocamento transver-sal do plano médio, w(x1, x2), e pelas rotações2, θα. Na teoria de lajes de Reissner-Mindlin,para se ter em conta o efeito de deformabilidade por esforço transverso, considera-se quefibras inicialmente perpendiculares ao plano médio da laje permanecem rectas após a de-formação do elemento estrutural, mas não continuam necessariamente ortogonais àquele
1De acordo com (LNEC, 1966), uma estrutura laminar é aquela em que uma das dimensões é muitomenor que as restantes.
2Chamar-se-á rotação nesta dissertação à pseudo-rotação, ou rotação linearizada, visto que θα não éuma rotação mas apenas uma sua aproximação.
17

18 Teoria de lajes moderadamente espessas
x1
x2x3
V
SuSt
h/2h/2
(a) Contínuo tridimensional.
x1
x2 x3
Γu
Γt
Ω
(b) Modelo de laje.
Figura 4.1: Modelação de uma peça laminar através da sua redução ao plano médio.
mesmo plano, ao contrário do que acontece na teoria de Kirchhoff, tal como ilustrado naFigura 4.2.
A relação entre os deslocamentos do contínuo e os seus análogos generalizados é dadapor
uα(x1, x2, x3) =x3 θα(x1, x2) (4.1a)
u3(x1, x2, x3) =w(x1, x2) , (4.1b)
onde θα são as componentes do vector rotação.Note-se que, de acordo com a definição (4.1) a rotação θ1(x1, x2) é um vector segundo e2
e rotação θ2(x1, x2) é um vector segundo (−e1). Esta notação simplifica consideravelmenteos operadores de equilíbrio e compatibilidade, pelo que será a utilizada doravante.
Substituindo o campo de deslocamentos (4.1) nas condições de compatibilidade docontínuo tridimensional (3.8) obtém-se o tensor de deformações não-linearizado na laje
εαβ =x31
2(θα,β + θβ,α) +
1
2
(x23θγ,αθγ,β + w,α w,β
)(4.2a)
εα3 =1
2(w,α + θα) (4.2b)
ε33 =0. (4.2c)
O anulamento da componente ε33 é uma consequência directa da hipótese da inexten-sibilidade das fibras perpendiculares ao plano médio, sendo implicitamente admitida naequação (4.1b).

4.2. Aplicação do teorema de Hamilton 19
xα
x3 (w)
θα
θα
γα
w,α
w,α=∂w∂xα
Reissner-Mindlin
Kirchhoff
Figura 4.2: Ilustração da teoria de Reissner-Mindlin.
É conveniente introduzir agora medidas de deformação generalizadas, i.e., medidasdefinidas sobre o plano médio da laje. Estas têm a vantagem de permitir caracterizartotalmente o tensor das deformações em qualquer ponto da laje com base unicamente eminformação definida sobre o plano médio, baixando assim a dimensão do problema a re-solver para duas dimensões. Na verdade, para as componentes εα3, que coincidem com ascomponentes ǫα3, este procedimento é redundante, visto que estas deformações são inde-pendentes de x3, ver expressão (4.2b). Assim, para estas duas componentes, utiliza-se comodeformação generalizadas as próprias deformações do contínuo. Para simplificar a notaçãoutilizar-se-á a distorção, definida por γα = 2ǫα3. Quanto às deformações linearizadas quedependem (linearmente) da distância ao plano médio, introduz-se as grandezas
ǫαβ = x3 χαβ . (4.3)
Estas três grandezas, que caracterizam totalmente o estado de deformação linearizado dasfibras contidas em planos paralelos ao folheto médio, são as componentes do tensor dascurvaturas. As duas primeiras representam curvaturas de flexão e a terceira é a curvaturade torção.
Assim, as equações de compatibilidade linearizadas da laje podem ser escritas na forma
χαβ =1
2(θα,β + θβ,α) (4.4a)
γα =w,α + θα . (4.4b)
4.2 Aplicação do teorema de Hamilton
4.2.1 Variação da energia de deformação, δU
As equações de equilíbrio dinâmico consistentes com a cinemática admitida podemser extraídas a partir do teorema de Hamilton, expresso na equação (3.20). Comece--se então por analisar o termo definido em (3.21a), δU , referente à variação da energia de

20 Teoria de lajes moderadamente espessas
deformação. Atendendo às relações definidas em (3.8), é possível separar o integral definidona equação (3.21a) em dois
∫
Vσij δεij dV =
∫
Vσij δǫij dV +
∫
Vσij δǫ
NLij dV . (4.5)
O primeiro integral, associado aos termos lineares da deformação, tendo em considera-ção (4.2c) fica, ∫
Vσij δǫij dV =
∫
V(σαβ δǫαβ + σα3 2δǫα3) dV . (4.6)
Substituindo as definições do campo de deslocamentos e de deformações linearizadas tem--se, ∫
Vσij δǫij dV =
∫
V(x3 σαβ δχαβ + σα3 δγα3) dV . (4.7)
Tendo em consideração que, para a geometria de uma peça laminar plana, se pode escrever
∫
Vf(x1, x2, x3) dV =
∫
Ω
∫ h2
−h2
f(x1, x2, x3) dx3 dΩ (4.8a)
∫
Sf(x1, x2, x3) dS =
∫
Ωf(x1, x2,
h
2) dΩ +
∫
Ωf(x1, x2,−
h
2) dΩ+
+
∫
Γ
∫ h2
−h2
f(x1, x2, x3) dx3 dΓ ,
(4.8b)
segue-se
∫
Vσij δǫij dV =
∫
Ω
(∫ h2
−h2
x3 σαβ dx3 δχαβ +
∫ h2
−h2
σα3 dx3δγα3
)dΩ . (4.9)
A partir desta equação torna-se claro quais as tensões que são conjugadas das deforma-ções lineares generalizadas definidas anteriormente. Assim, define-se o vector dos esforçostransversos e o tensor de momentos
vα =
∫ h2
−h2
σα3 dx3 (4.10a)
mαβ =
∫ h2
−h2
x3 σαβ dx3 (4.10b)
como as tensões generalizadas (esforços) desta teoria de lajes, encontrando-se representadosna Figura 4.3.
Assim a expressão (4.7) é reescrita na forma∫
Vσij δǫij dV =
∫
Ω(mαβ δχαβ + vα δγα3) dΩ . (4.11)
Substituindo as definições (4.4) tem-se
∫
Vσij δǫij dV =
∫
Ω
(1
2mαβ (δθα,β + δθβ,α) + vα (δw,α + δθα)
)dΩ . (4.12)

4.2. Aplicação do teorema de Hamilton 21
x1
x1
x2
x2
σ13
σ23
v1v1
v2
v2
(a) Componentes do vector dos esforços transver-sos, vα, e tensões que lhes deram origem.
x1
x1
x2
x2
x3
m11
m11
m22
m22
m12
m12
m21
m21
σ11σ12
σ21σ22
(b) Componentes do tensor de momentos, mαβ , emomentos de tensões que lhes deram origem.
Figura 4.3: Tensões e esforços generalizados.
Integrando por partes a expressão anterior e tirando partido da simetria do tensor dosmomentos, tem-se
∫
Ωmαβ (δθα,β + δθβ,α) dΩ =
∫
Ω(mαβ δθα,β +mαβ δθβ,α) dΩ =
=
∫
Γ(mαβ δθα nβ +mαβ δθβ nα) dΓ−
∫
Ω(mαβ,β δθα +mαβ,α δθβ) dΩ =
=
∫
Γ(mαβ δθα nβ +mβα δθβ nα) dΓ−
∫
Ω(mαβ,β δθα +mβα,α δθβ) dΩ =
=
∫
Γ(mαβ δθα nβ +mαβ δθα nβ) dΓ−
∫
Ω(mαβ,β δθα +mαβ,β δθα) dΩ =
= 2
∫
Γmαβ nβ δθα dΓ− 2
∫
Ωmαβ,β δθα dΩ (4.13)
e ∫
Ωvα δw,α dΩ =
∫
Γvα nα δw dΓ−
∫
Ωvα,α δw dΩ , (4.14)
onde nα são as componentes do vector da normal exterior ao domínio, Ω.Assim, vem
∫
Vσij δǫij dV =
∫
Γ(mαβ nβ δθα + vα nα δw) dΓ−
∫
Ω(mαβ,β δθα + vα,α δw − vα δθα) dΩ .
(4.15)
Relativamente ao segundo integral do segundo membro da expressão (4.5), os termosnão-lineares da deformação, são dados por
ǫNLij = ǫNLαβ =1
2
(x23 θγ,α θγ,β + w,αw,β
), (4.16)
cuja variação é
δǫNLαβ =1
2
(x23 (δθγ,α θγ,β + θγ,α δθγ,β) + (δw,α w,β + w,α δw,β)
). (4.17)

22 Teoria de lajes moderadamente espessas
Então,∫
Vσij δǫ
NLij dV =
∫
Vσαβ δǫ
NLαβ dV =
=
∫
Ω
∫ h2
−h2
(σαβ
1
2x23 (δθγ,α θγ,β + θγ,α δθγ,β ) + σαβ
1
2(δw,α w,β + w,α δw,β)
)dx3 dΩ =
=1
2
∫
Ω
(h3
12(δθγ,α σαβ θγ,β + θγ,α σαβ δθγ,β) + h (δw,α σαβ w,β + w,α σαβ δw,β)
)dΩ .
(4.18)
Atendendo que o tensor das tensões é simétrico, esta expressão pode ser escrita naforma ∫
Vσij δǫ
NLij dV =
∫
Ω
h3
12δθγ,α σαβ θγ,β dΩ +
∫
Ωh δw,α σαβ w,β dΩ . (4.19)
Efectuando a integração por partes, o primeiro termo do segundo membro da expressãoanterior assume a seguinte forma
∫
Ω
h3
12δθγ,α σαβ θγ,β dΩ =
∫
Ω
(h3
12δθγ σαβ θγ,β
)
,α
dΩ−∫
Ωδθγ
(h3
12σαβ θγ,β
)
,α
dΩ
=
∫
Γ
h3
12δθγ σαβ θγ,β nα dΓ−
∫
Ωδθγ
(h3
12σαβ θγ,β
)
,α
dΩ.
(4.20)
Procedendo de igual forma para o segundo termo do segundo membro de (4.19), tem-se∫
Ωh δw,α σαβ w,β dΩ =
∫
Ω(h δw σαβ w,β),α dΩ−
∫
Ωδw(hσαβ w,β),α dΩ
=
∫
Γh δw σαβ w,β nα dΓ−
∫
Ωδw(hσαβ w,β),α dΩ .
(4.21)
Assim,∫
Vσij δǫ
NLij dV =
∫
Γ
(h δw σαβ w,β nα +
h3
12δθγ σαβ θγ,β nα
)dΓ−
−∫
Ω
(δw(hσαβ w,β),α + δθγ
(h3
12σαβ θγ,β
)
,α
)dΩ . (4.22)
Reunindo o desenvolvimento dos integrais associados aos termos lineares e não-linea-res, (4.15) e (4.22), respectivamente, a variação da energia de deformação total fica
δU =
∫
Γ
((mαβ nβ +
h3
12σγβ θα,β nγ
)δθα + (vα nα + hσαβ w,β nα) δw
)dΓ−
−∫
Ω
((mαβ,β − vα +
(h3
12σγβ θα,β
)
,γ
)δθα + (vα,α + (hσαβ w,β),α) δw
)dΩ . (4.23)
A partir de (4.11) e (4.19) é possível escrever a expressão anterior na forma
δU =
∫
Vσij δεij dV =
∫
Ω(mαβ δχαβ + vα δγα3) dΩ+
+
∫
Ω
h3
12δθγ,α σαβ θγ,β dΩ +
∫
Ωh δw,α σαβ w,β dΩ, (4.24)

4.2. Aplicação do teorema de Hamilton 23
que será utilizada para formular a equação do MEF.
4.2.2 Variação do potencial das forças aplicadas, δV
De seguida é analisado o termo definido em (3.21b), referente à variação do potencialdas forças aplicadas. Após substituição das definições do campo de deslocamentos narespectiva expressão e assumindo que Kw = diag
(kθw, k
θw, k
ww
), δV pode ser representado
na forma
δV =
∫
V(bi δui − ui kw ij δui) dV +
∫
Sti δui dS =
=
∫
V
(x3 bα δθα + b3 δw − (x3 θα) k
θw (x3 δθα)− w kww δw
)dV+
+
∫
S
(x3 tα δθα + t3 δw
)dS . (4.25)
Tendo em conta (4.8) segue-se
δV =
∫
Ω
(∫ h2
−h2
x3 bα dx3 δθα +
∫ h2
−h2
b3 dx3δ w −∫ h
2
−h2
x23 dx3 θα kθw δθα−
−∫ h
2
−h2
1 dx3 w kww δw
)dΩ +
∫
Ω
(h
2tαδθα + t3 δw
)∣∣∣∣x3=
h2
dΩ+
+
∫
Ω
(−h2tαδθα + t3 δw
)∣∣∣∣x3=−h
2
dΩ +
∫
Γ
∫ h2
−h2
(x3 tαδθα + t3 δw
)dx3 dΓ . (4.26)
Da equação anterior, é possível perceber quais as cargas generalizadas que são conju-gadas dos deslocamentos generalizados definidos anteriormente. Assim, define-se as cargasgeneralizadas sobre o plano médio por
p =
∫ h2
−h2
b3 dx3 + t3∣∣x3=
h2+ t3
∣∣x3=−h
2(4.27a)
mα =
∫ h2
−h2
x3 bα dx3 +
[h
2tα
]∣∣∣∣x3=
h2
+
[−h2tα
]∣∣∣∣x3=−h
2
, (4.27b)
onde p é a carga aplicada no domínio e mα é a componente α do vector dos momentosaplicados no domínio. Esta componente actua segundo a direcção e3×eα = ε3αβ eβ. Estascargas encontram-se representadas na Figura 4.4.
As cargas que actuam nas superfícies laterais da laje, reduzidas à fronteira Γ = ∂Ω,ilustradas na Figura 4.5, são
pΓ =
∫ h2
−h2
t3 dx3 (4.28a)
mΓα =
∫ h2
−h2
x3 tα dx3 , (4.28b)
onde pΓ é a carga aplicada na fronteira e mΓα é a componente α do vector dos momentos
aplicados na fronteira. Esta componente actua segundo a mesma direcção de mα.

24 Teoria de lajes moderadamente espessas
x2
x2
x1
x1
p
t3∣∣x3=−h
2
b3
b3t3∣∣x3=
h2
(a) Carga vertical, p, e tensões que lhe deram ori-gem.
x2
x2
x1
x1
x3
m1
m2
b1
b2
(b) Componentes do vector dos momentos aplica-dos no domínio, mα, e momento das tensões quelhes deram origem.
Figura 4.4: Cargas generalizadas sobre o plano médio.
Assim a equação (4.26) é reescrita na forma
δV =
∫
Ω
(mα δθα + p δw − θα
h3
12kθw δθα − w hkww δw
)dΩ +
∫
Γ
(mΓα δθα + pΓ δw
)dΓ .
(4.29)Assim, vem
δV =
∫
Ω
((mα − θα
h3
12kθw
)δθα + (p− whkww) δw
)dΩ +
∫
Γ
(mΓα δθα + pΓ δw
)dΓ .
(4.30)
4.2.3 Variação da energia cinética, δK
Por último, analisa-se o termo definido em (3.21c), δK, referente à variação da energiacinética. Substituindo, mais uma vez, as definições de campo de deslocamentos tem-se,
δK =
∫
Vui ρ δui dV =
∫
V((x3 θα) (x3 δθα) + w δw)ρdV . (4.31)
Tendo novamente em consideração (4.8), obtém-se
δK =
∫
Ω
∫ h2
−h2
(x23 θα δθα) + w δw)ρdx3 dΩ =
=
∫
Ω
(∫ h2
−h2
ρ x23 dx3 θα δθα +
∫ h2
−h2
ρ dx3 w δw
)dΩ =
=
∫
Ω
(I2 θα δθα + I0 w δw
)dΩ ,
(4.32)
onde Iα representa o momento de ordem α em relação ao plano médio da laje, cuja ex-pressão geral é a seguinte
Iα =
∫ h2
−h2
ρ xα3 dx3. (4.33)
4.2. Aplicação do teorema de Hamilton 25
x1
x1
x2
x2
pΓ
t3
(a) Cargas verticais, pΓ, e tensões que lhe deramorigem.
x1
x1
x1
x1
x2
x2
x2
x2
x3x3
mΓ1
mΓ2
t1t2
(b) Componentes do vector dos momentos aplicados na fronteira, mΓα, e momento das tensões que
lhes deram origem.
Figura 4.5: Cargas generalizadas actuantes nas superfícies laterais da laje, reduzidas àfronteira Γ.
4.2.4 Equações de equilíbrio
Substituindo agora as expressões obtidas em (4.15), (4.30) e (4.32) na expressão doteorema de Hamilton (3.20), vem
∫ t2
t1
∫
Γ
((mαβnβ +
h3
12σγβ θα,β nγ +mΓ
α
)δθα +
(vαnα + hσαβ w,β nα + pΓ
)δw
)dΓ
−∫
Ω
((mαβ,β − vα +
(h3
12σγβ θα,β
)
,γ
+mα − θα kθw
h3
12
)δθα+
+(vα,α + (hσαβ w,β),α + p−w kww h) δw − I2 θα δθα − I0 w δw)dΩdt = 0 . (4.34)

26 Teoria de lajes moderadamente espessas
Integrando por partes os termos referentes à energia cinética (que possuem derivadas emordem ao tempo) tem-se
∫ t2
t1
θα δθα dt =
∫ t2
t1
(θα δθα
)dt−
∫ t2
t1
θα δθα dt = θα δθα
∣∣∣t2
t1−∫ t2
t1
θα δθα dt (4.35a)
∫ t2
t1
w δw dt = w δw|t2t1 −∫ t2
t1
w δw dt . (4.35b)
Assim, impondo δθα|t1 = δθα|t2 = 0 e δw|t1 = δw|t2 = 0, ver Fung e Tong (2001, Capítulo11, página 381), a equação (4.34) pode ser reescrita na forma
∫ t2
t1
∫
Γ
((mαβ nβ + σγβ
h3
12θα,β nγ +mΓ
α
)δθα +
(vα nα + σαβ hw,β nα + pΓ
)δw
)dΓ
−∫
Ω
((mαβ,β − vα +
(σγβ
h3
12θα,β
)
,γ
+mα − θαh3
12kθw − I2 θα
)δθα+
+(vα,α + (σαβ hw,β),α + p− whkww − I0 w) δw) dΩ dt = 0 . (4.36)
Assim, para variações arbitrárias δw e δθα, as três equações de equilíbrio no domínio,são
mαβ,β − vα +
(σγβ
h3
12θα,β
)
,γ
+mα − θαh3
12kθw =I2 θα (4.37a)
vα,α + (σαβ hw,β),α + p− w hkww =I0 w . (4.37b)
Por sua vez, as equações de equilíbrio na fronteira estática, Γt, são então
mαβ nβ + σγβh3
12θα,β nγ +mΓ
α =0 (4.38a)
vα nα + σαβ hw,β nα + pΓ =0 (4.38b)
As três equações de compatibilidade na fronteira cinemática, Γu, são
θα − θα =0 (4.39a)
w − w =0 . (4.39b)
Em lugar de definir as condições de fronteira (4.38) e (4.39) no referencial global é usualfazê-lo num referencial local. Este referencial é definido em cada ponto da fronteira atravésdo vector normal exterior, n = nα eα, e do vector tangencial3, t = tα eα. Este último égerado tendo em consideração que n × t = e3, ou seja, t = e3 × n. Assim, t1 = −n2 et2 = n1.
No caso das condições de fronteira cinemáticas pode definir-se
θn =θα nα (4.40a)
θt =θα tα (4.40b)
3A mesma designação é utilizada para as componentes do vector de tracções na fronteira, ti, e para ascomponentes do vector tangencial, tα. O significado correcto pode ser inferido do contexto.

4.3. Relação constitutiva elástica linear 27
e as equações (4.39) podem ser reescritas na forma
w − w =0 (4.41a)
θn − θn =0 (4.41b)
θt − θt =0. (4.41c)
No caso das condições de fronteira estática, em lugar das componentes do vector mo-mento no referencial global, dadas por mα = mαβ nβ, podem então ser usadas as compo-nentes normal, mnn, e tangencial, mnt, do vector momento. Estas são obtidas projectandoo vector momento segundo as direcções n e t, ou seja,
mnn =mα nα = mαβ nβ nα (4.42a)
mnt =mα tα = mαβ nβ tα . (4.42b)
Em função das componentes do vector normal exterior, n, tem-se
mnn =m11 n21 +m22 n
22 + 2m12 n1 n2 (4.43a)
mnt =(m22 −m11) n1 n2 +m12
(n21 − n22
). (4.43b)
Quanto ao esforço transverso, é habitual definir a quantidade vn = vα nα como o esforçotransverso normal. Assim, tem-se
mnn + σγβh3
12θn,β nγ +mΓ
nn =0 (4.44a)
mnt + σγβh3
12θt,β nγ +mΓ
nt =0 (4.44b)
vn + σαβ hw,β nα + pΓ =0 . (4.44c)
Evidentemente, as equações (4.44a) e (4.44b) podem ser obtidas a partir de (4.38a)multiplicando ambos os termos por nα e tα, respectivamente.
4.3 Relação constitutiva elástica linear
Como foi visto no capítulo 3, secção 3.2, página 14, a imposição de um estado planode tensão na direcção perpendicular ao plano médio, σ33 = 0, na relação constitutiva docontínuo tridimensional conduz a
σαβ =E
1 + ν
(ǫαβ +
ν
1− νǫγγ δαβ
)− E α∆T
1− νδαβ . (3.27)
Por outro lado, a partir da relação constitutiva para o contínuo tridimensional (3.12),tem-se
σα3 = Gγα , (4.45)
onde G é o módulo de distorção dado por G = E2(1+ν) . Note-se que estas tensões tangenciais
são independentes da hipótese do estado plano de tensão.Até este ponto não foi efectuada nenhuma hipótese sobre a forma como varia a tem-
peratura na laje. Obviamente que só faz sentido considerar variações de temperatura

28 Teoria de lajes moderadamente espessas
antissimétricas em relação ao plano médio. No que se segue assume-se que a tempera-tura não só é antissimétrica, como também varia linearmente na espessura da laje e que adiferença entre o valor da fibra inferior e o valor na fibra superior é igual a ∆TL, i.e.,
∆T (x1, x2, x3) = x3∆TL(x1, x2)
h. (4.46)
Substituindo as relações de compatibilidade (4.3) na relação constitutiva (3.27) e depoiso resultado na definição do tensor de momentos (4.10b) e tendo em conta que
∫ h2
−h2
x23 dx3 =h3
12, (4.47)
obtém-se
mαβ =E h3
12 (1 + ν)
(χαβ +
ν
1− νχγγ δαβ
)− E h2 α∆TL
12 (1 − ν)δαβ (4.48)
ou, ainda,
mαβ = Df ((1− ν)χαβ + ν χγγ δαβ)−E h2 α∆TL12 (1 − ν)
δαβ , (4.49)
onde Df = E h3
12(1−ν2) é a rigidez de flexão da laje.Esta relação constitutiva generalizada pode ser escrita na forma
mαβ = Cαβγδ χγδ −E h2 α∆TL12 (1 − ν)
δαβ , (4.50)
onde Cαβγδ são as componentes do tensor (de quarta ordem) que exprime a relação cons-titutiva generalizada. Este é dado por
Cαβγδ = Df
(1− ν
2(δαγ δβδ + δαδ δβγ) + ν δαβ δδγ
). (4.51)
Substituindo a relação constitutiva (4.45) na definição dos esforços transversos (4.10a)obtém-se
vα = Ghγα . (4.52)
No entanto, para ter em conta a distribuição não uniforme das tensões tangenciais é comumintroduzir factores de corte, κ, na relação constitutiva obtida, ficando
vα = Ds γα (4.53)
e Ds = κGh é a rigidez de corte da laje.Tendo-se três campos de deslocamentos generalizados (deslocamento transversal e rota-
ções do plano médio) e cinco campos de deformações generalizadas (curvaturas e distorçõesdo plano médio), dados os campos de deformações generalizadas nem sempre será possívelintegrá-los e obter campos de deslocamentos generalizados. O número de condições terá deser exactamente igual à diferença entre o número de deformações generalizadas (cinco) e onúmero de campos de deslocamentos generalizados (três), logo serão duas. Estas condiçõespodem ser encontradas de várias formas. Por consistência com o restante texto, elas sãoaqui deduzidas a partir dos seus equivalentes do contínuo.

4.4. Resumo das equações 29
Substituindo (4.3) nas condições de integrabilidade obtém-se naturalmente seis equa-ções. Das condições (3.18b), (3.18c) e (3.18f) resulta a identidade trivial. De (3.18a)resulta
x3 (2χ12,12 − χ11,22 − χ22,11) = 0 . (4.54)
Note-se que esta equação no plano médio também se reduz à identidade trivial.Finalmente, das condições (3.18d) e (3.18e) obtém-se
χ11,2 − χ12,1 +1
2γ2,11 −
1
2γ1,12 = 0 (4.55a)
χ22,1 − χ12,2 +1
2γ1,22 −
1
2γ2,12 = 0 , (4.55b)
que são as condições de integrabilidade da laje moderadamente espessa. Caso γα seja nulo,então estas degeneram nas condições de integrabilidade da laje fina.
4.4 Resumo das equações
Os operadores associados à teoria linear de lajes são identificados em seguida, seguindoa notação introduzida no capítulo 2, secção 2.1.
Os operadores associados às equações de equilíbrio no domínio e fronteira estática são
σ =
m11
m22
m12
v1
v2
, b =
p
m1
m2
, t =
pΓ
mΓ1
mΓ2
, (4.56)
∂∗ =
0 0 0 ∂1 ∂2
∂1 0 ∂2 −1 0
0 ∂2 ∂1 0 −1
, N∗ =
0 0 0 n1 n2
n1 0 n2 0 0
0 n2 n1 0 0
. (4.57)
Note-se que as condições de fronteira estática estão escritas no referencial global, e nãono referencial local.
As deformações, o campo de deslocamentos, o campo de deslocamentos prescrito e ooperador das deformações são, respectivamente,
ǫ =
χ11
χ22
2χ12
γ1
γ2
, u =
w
θ1
θ2
, u =
w
θ1
θ2
, (4.58)
e
∂ =
0 ∂1 0
0 0 ∂2
0 ∂2 ∂1
∂1 1 0
∂2 0 1
. (4.59)

30 Teoria de lajes moderadamente espessas
O operador constitutivo generalizado é:
D =
Df ν Df 0 0 0
ν Df Df 0 0 0
0 0 1−ν2 Df 0 0
0 0 0 Ds 0
0 0 0 0 Ds
, σ0 = −Df
(1 + ν)α∆TLh
1
1
0
0
0
. (4.60)

Capítulo 5
Formulação do Método dosElementos Finitos Convencionais
5.1 Introdução
No presente capítulo começar-se-á por fazer uma abordagem ao MEF, obtendo-se aequação geral para o caso da laje moderadamente espessa, em fundação elástica, incluindoefeitos dinâmicos e análise geometricamente não-linear. Posteriormente, são feitas parti-cularizações desta mesma equação para a situação de análises estática, de vibração livre ede estabilidade linear. Por fim, a formulação é generalizada para atender à existência delajes com bordos enviesados em relação aos eixos globais.
5.2 Descrição do Método dos Elementos finitos
O MEF é, em geral, aplicado seguindo uma metodologia que engloba alguns passosfundamentais. Começa-se por fazer uma discretização da estrutura em elementos finitos,de seguida definem-se as funções de aproximação do campo de deslocamentos generali-zados de cada elemento. Para garantir que a aproximação é cinematicamente admissívelno sentido forte, as deformações generalizadas são determinadas impondo a condição decompatibilidade no domínio (2.1c). Da mesma forma, a aproximação do campo de tensõesé determinada impondo localmente (ou de maneira forte) a relação de elasticidade (2.1b)sobre a aproximação do campo de deformações generalizadas. A aplicação da poderaçãodas condições de equilíbrio no domínio e na fronteira do elemento, definidas pelas equa-ções (2.1a) e (2.3a) respectivamente, permitem determinar as forças nodais equivalentesgeneralizadas que equilibram o campo de tensões generalizadas aproximado. Depois deformulado o elemento e estabelecida a equação resolvente do elemento, é feita a assembla-gem do sistema de equações elementares e impõe-se as condições de fronteira cinemáticasde maneira a satisfazer localmente a condição de fronteira cinemática (2.3b) do modeloe, ainda, as condições de continuidade entre elementos1. Finalmente, resolvido o sistemageral de equações, determinados os deslocamentos nodais generalizados em cada elementoatravés da relação de incidências, são calculados os deslocamentos, as deformações e astensões generalizadas em cada elemento recorrendo às aproximações do campo de desloca-mentos e às condições de compatibilidade e elasticidade impostas localmente e faz-se uma
1Note-se que nem sempre é possível impor [u = u]|Γu
e assegurar a continuidade entre elementos, e.g.,o elemento da laje fina Adini-Clough-Melosh (ACM) (Melosh, 1963).
31

32 Formulação do Método dos Elementos Finitos Convencionais
análise crítica dos resultados obtidos. Conclui-se, portanto, que a solução obtida aplicandoo MEF não satisfaz, em geral, as condições de equilíbrio no domínio e na fronteira doselementos, independentemente dos valores que se venham a obter para os deslocamentosnodais do elemento. As condições de equilíbrio não são, por isso, impostas localmentemas sim de maneira fraca recorrendo ao conceito de força nodal equivalente, através dacondição de equilíbrio nodal.
5.2.1 Equação do Método dos Elementos Finitos
Tal como se pode constatar na secção 4.2, página 19, a partir do desenvolvimento dostermos da equação do Teorema de Hamilton (3.21) para a laje moderadamente espessa, an-tes de se efectuarem as integrações por partes para a recuperação das equações de equilíbriono domínio e na fronteira, obteve-se
δU =
∫
Ω(mαβ δχαβ + vα δγα3) dΩ+
+
∫
Ωθγ,β
h3
12σαβ δθγ,α dΩ +
∫
Ωw,β hσαβ δw,α dΩ
(4.24)
δV =
∫
Ω
(mα δθα + p δw − θα
h3
12kθw δθα − w hkww δw
)dΩ+
+
∫
Γ
(mΓα δθα + pΓ δw
)dΓ
(4.29)
δK =
∫
Ω
(I2 θα δθα + I0 w δw
)dΩ . (4.32)
Introduzindo as definições anteriores no teorema de Hamilton (3.20), integrando porpartes em relação à variável t — ver (4.35) — e impondo δθα|t1 = δθα|t2 = 0 e δw|t1 =δw|t2 = 0, chega-se à equação do teorema adequada à formulação do MEF, para lajesmoderadamente espessas∫
Ω(mαβ δχαβ + vα γα3) dΩ +
∫
Ω
(θγ,β
h3
12σαβ δθγ,α + w,β hσαβ δw,α
)dΩ+
+
∫
Ω
(θαh3
12kθw δθα + w hkwwδw
)dΩ +
∫
Ω
(θα I2 δθα + w I0 δw
)dΩ−
−∫
Ω(mαδθα + pαδw) dΩ−
∫
Γ
(mΓαδθα + pΓαδw
)dΓ = 0 . (5.1)
Tendo como objectivo a obtenção da equação geral do MEF, é conveniente reescrever aequação anterior na forma matricial. Para tal, é necessário definir a aproximação do campode deslocamentos.
No MEF, o campo de deslocamentos é aproximado em cada elemento genérico, (e),usando funções contínuas, que podem ser descrita na forma matricial através de
u(e) = Ψ(e) d(e) , (5.2)
onde Ψ(e) é a matriz que armazena as funções de aproximação elementares e d(e) são osrespectivos deslocamentos nodais elementares generalizados definidos por
Ψ(e) =
Ψw(e) O O
O Ψθ(e) O
O O Ψθ(e)
, d(e) =
w(e)
θ(e)
1
θ(e)
2
. (5.3)

5.2. Descrição do Método dos Elementos finitos 33
Consequentemente, as variações e acelerações do campo de deslocamentos generaliza-dos, são, respectivamente,
δu(e) =Ψ(e) δd(e) (5.4a)
u(e) =Ψ(e) d(e) , (5.4b)
onde δd(e) é o vector de variações dos deslocamentos generalizados elementar e d(e) é ovector das acelerações generalizadas elementar, definidos, respectivamente, por
δd(e) =
δw(e)
δθ(e)
1
δθ(e)
2
, d(e) =
¨w(e)
¨θ(e)
1
¨θ(e)
2
. (5.5)
De seguida é feita uma análise separada de cada termo do primeiro membro da equa-ção (5.1).
Comece-se então por analisar o primeiro termo. Em notação matricial, esse termo podeser reescrito na forma ∫
Ω
(δχT m+ δγT v
)dΩ , (5.6)
onde
χ =
χ11
χ22
2χ12
, γ =
γ1
γ2
, (5.7)
m =
m11
m22
m12
, v =
v1
v2
. (5.8)
É de notar que, nesta dedução, se optou por separar as parcelas de flexão e de corte. Assim,tem-se
ǫ =
χ
γ
, σ =
m
v
, D =
[Df O
O Ds
](5.9)
onde
Df = Df
1 ν 0
ν 1 0
0 0 (1−ν)2
, Ds = Ds
[1 0
0 1
]. (5.10)
Substituindo as relações constitutivas,
m = Df χ, v = Ds γ, (5.11)
na expressão (5.6), tem-se
∫
Ω
(δχT Df χ+ δγT Ds γ
)dΩ. (5.12)

34 Formulação do Método dos Elementos Finitos Convencionais
Tendo em conta as aproximações do campo de deslocamentos (5.2), em cada elementogenérico, (e), as equações de compatibilidade (4.4) permitem relacionar o vector de cur-vaturas elementar, χ(e), e o vector de distorções elementar, γ(e), com os deslocamentosnodais elementares, através de
χ(e) = B(e)f d(e), γ(e) = B(e)
s d(e), (5.13)
onde as matrizes B(e)f e B
(e)s são dadas por
B(e)f = ∂f Ψ
(e), B(e)s = ∂sΨ
(e) , (5.14)
sendo ∂f e ∂s as matrizes dos operadores diferenciais associados às parcelas de flexão ecorte, respectivamente, definidas por
∂f =
0 ∂1 0
0 0 ∂2
0 ∂2 ∂1
, ∂s =
[∂1 1 0
∂2 0 1
]e ∂ =
∂f
∂s
. (5.15)
Substituindo agora as equações (5.2) e (5.13) na expressão (5.12), obtém-se, para umelemento genérico,
∫
Ω(e)
(∂f Ψ
(e) δd(e))T
D(e)f
(∂f Ψ
(e) d(e))
+(∂sΨ
(e) δd(e))T
D(e)s
(∂sΨ
(e) d(e))
dΩ(e). (5.16)
Sabendo que, (AB)T = BT AT e substituindo (5.14) na igualdade anterior, tem-se∫
Ω(e)
(δd(e)T B
(e)Tf D
(e)f B
(e)f d(e) + δd(e)T B(e)T
s D(e)s B(e)
s d(e))dΩ(e) . (5.17)
Tendo em conta que os termos δd(e)T e d(e) são constantes no domínio de cada elemento,colocam-se estes em evidência e fica-se com
δd(e)T
(∫
Ω(e)B
(e)Tf D
(e)f B
(e)f dΩ(e) +
∫
Ω(e)B(e)Ts D(e)
s B(e)s dΩ(e)
)d(e)
. (5.18)
Definindo as grandezas, K(e)ff e K
(e)ss , como sendo, respectivamente, a matriz de rigidez
de flexão elementar e a matriz de rigidez de corte elementar, dadas por
K(e)ff =
∫
Ω(e)B
(e)Tf D
(e)f B
(e)f dΩ(e), K(e)
ss =
∫
Ω(e)B(e)Ts D(e)
s B(e)s dΩ(e), (5.19)
e fazendoK(e)p = K
(e)ff +K(e)
ss , (5.20)
onde K(e)p corresponde à matriz de rigidez da laje elementar, obtém-se para o primeiro
termo do primeiro membro da equação (5.1), para um elemento genérico (e) do domínio,
δd(e)T K(e)p d(e). (5.21)

5.2. Descrição do Método dos Elementos finitos 35
Relativamente ao segundo termo do primeiro membro da equação (5.1), efectuando asua expansão tem-se
∫
Ω
(δθγ,α
h3
12σαβ θγ,β + δw,α hσαβ w,β
)dΩ =
=
∫
Ω
(h3
12(σ11 (δθ1,1 θ1,1 + δθ2,1 θ2,1) + σ12 (δθ1,1 θ1,2 + δθ2,1 θ2,2)+
+σ21 (δθ1,2 θ1,1 + δθ2,2 θ2,1)σ22 (δθ1,2 θ1,2 + δθ2,2 θ2,2))+
+h (σ11 δw,1 w,1 + σ12 δw,1 w,2 + σ21 δw,2 w,1 + σ22 δw,2 w,2)) dΩ =
=
∫
Ω
(h3
12(δθ1,1(σ11 θ1,1 + σ12 θ1,2) + δθ1,2(σ21 θ1,1 + σ22 θ1,2)+
+δθ2,1(σ11 θ2,1 + σ12 θ2,2) + δθ2,2(σ21 θ2,1 + σ22 θ2,2))+
+h (δw,1(σ11 w,1 + σ12 w,2) +w,2 (σ21 w,1 + σ22 w,2))) dΩ . (5.22)
Reescrevendo agora esta expressão em notação matricial, tem-se
∫
Ω
(h3
12
(δθ1,1 δθ1,2
[σ11 σ12
σ21 σ22
]θ1,1
θ1,2
+δθ2,1 δθ2,2
[σ11 σ12
σ21 σ22
]θ2,1
θ2,2
)+
+hδw,1 δw,2
[σ11 σ12
σ21 σ22
]w,1
w,2
)dΩ . (5.23)
Definindo o tensor das tensões de membrana, S, e o operador ∇ como sendo
S =
[σ11 σ12
σ21 σ22
]e ∇ =
∂1
∂2
, (5.24)
a expressão (5.23) fica
∫
Ω
(∇δθ1 ·
h3
12S∇θ1 +∇δθ2 ·
h3
12S∇θ2 +∇δw · hS∇w
)dΩ =
=
∫
Ω
(∇δθ1
∇δθ2
· h
3
12
[S O
O S
]∇θ1
∇θ2
+∇δw · hS∇w
)dΩ =
=
∫
Ω
∇δw
∇δθ1
∇δθ2
·
hS O O
O h3
12 S O
O O h3
12 S
∇w
∇θ1
∇θ2
dΩ .
(5.25)
Seja
∇w
∇θ1
∇θ2
=
∂1 0 0
∂2 0 0
0 ∂1 0
0 ∂2 0
0 0 ∂1
0 0 ∂2
w
θ1
θ2
= Lu (5.26)

36 Formulação do Método dos Elementos Finitos Convencionais
e
T =
hS O O
O h3
12 S O
O O h3
12 S
, (5.27)
então, para um elemento genérico (e), assumindo a aproximação do campo de deslocamen-tos (5.2), a expressão (5.25) reduz-se a
δd(e)T
∫
Ω(LΨ)(e)T T (LΨ(e)) dΩd(e). (5.28)
Admita-se que o tensor das tensões de membrana, S, depende linearmente de um parâmetrode carga, λ, designado por parâmetro de carga de tensões de membrana. Assim, S podeser escrito por S = −λS0, onde S0 é um tensor das tensões de membrana de referência.De igual forma tem-se T = −λT0. Assim, o segundo termo do primeiro membro daequação (5.1), para um elemento genérico (e) do domínio, pode escrever-se na forma
δd(e)T (−λ)G(e) d(e) , (5.29)
onde G(e) é a matriz de rigidez geométrica elementar dada por
G(e) =
∫
Ω(LΨ(e))T T0 (LΨ(e)) dΩ . (5.30)
O terceiro termo da equação (5.1), escrito em notação matricial toma a seguinte forma
∫
Ω
δw
δθ1
δθ2
T hkww 0 0
0 h3
12 kθw 0
0 0 h3
12 kθw
w
θ1
θ2
dΩ. (5.31)
Mais uma vez, assumindo a aproximação do campo de deslocamentos (5.2), e introduzindo
Kw =
hkww 0 0
0 h3
12 kθw 0
0 0 h3
12 kθw
, (5.32)
a expressão anterior, para um elemento genérico (e), toma a seguinte forma
δd(e)T
∫
ΩΨ(e)T K(e)
w Ψ(e) dΩd(e). (5.33)
Definindo2 K(e)w como sendo a matriz de rigidez de Winkler elementar dada por
K(e)w =
∫
ΩΨ(e)T K(e)
w Ψ(e) dΩ, (5.34)
o terceiro termo do primeiro membro da equação (5.1), para um elemento genérico (e) dodomínio, vem
δd(e)T K(e)w d(e) . (5.35)
2As designações Kw e ρ são utilizadas tanto para as equações de equilíbrio da elasticidade tridimen-sional como para a dedução da equação do MEF. Apesar de tomarem formas diferentes em cada uma dassituações, o conflito de notação é facilmente resolvido, visto que o sentido pretendido pode ser facilmenteinferido a partir do contexto em que a expressão se insere.

5.2. Descrição do Método dos Elementos finitos 37
Analisando agora o quarto termo do primeiro membro da equação (5.1), novamentetendo em conta (5.2), para um elemento genérico (e), o termo, em notação matricial,escreve-se∫
Ω
((Ψθ(e) δθ
(e)
α
)TI2
(Ψθ(e) ¨θ
(e)
α
)+(Ψw(e) δw(e)
)TI0
(Ψw(e) ¨w
(e)))
dΩ =
=
∫
Ω
(δθ
(e)T
α Ψθ(e)T I2 Ψθ(e) ¨θ
(e)
α + δw(e)T Ψw(e)T I0 Ψw(e) ¨w
(e))
dΩ. (5.36)
Seja
ρ =
I0 0 0
0 I2 0
0 0 I2
, M(e) =
∫
ΩΨ(e)T ρΨ(e) dΩ , (5.37)
onde2 ρ é a matriz de densidade mássica da laje e M(e) é a matriz de massa elementar.Assim, a expressão (5.36) resulta em
δd(e)T
∫
ΩΨ(e)T ρΨ(e) dΩ d(e) = δd(e)T M(e) d(e) . (5.38)
Por fim, analise-se os dois últimos termos em conjunto da equação (5.1). Em primeirolugar, é de salientar que na sua dedução irá assumir-se que todos os deslocamentos genera-lizados se encontram livres e assim considerar Γt = Γ e Γu = Ø, e só após a derivação dasequações governativas do elemento finito e sua assemblagem nas correspondentes matrizesglobais, se impõe as respectivas restrições aos deslocamentos. Deste modo, a assumpçãode que as componentes de todos os deslocamentos na fronteira Γ são livres é usada aquipara facilitar a exposição, não restringindo de qualquer modo a formulação.
Escrevendo então os dois últimos termos em notação matricial, estes ficam na forma
−∫
Ω
(δθT m+ δw p
)dΩ−
∫
Γt
(δθT mΓ + δw pΓ
)dΓt , (5.39)
onde
θ =
θ1
θ2
, m =
m1
m2
, mΓ =
mΓ
1
mΓ2
. (5.40)
Atendendo a (4.56), a expressão anterior, toma a seguinte forma
−∫
ΩδuT bdΩ−
∫
Γt
δuT t dΓt . (5.41)
Introduzindo agora a aproximação do campo de deslocamentos, em cada elemento genérico,(e), a expressão anterior resulta em
−∫
Ω(e)
(Ψ(e) δd(e)
)Tb(e)
dΩ(e) −∫
Γ(e)t
(Ψ δd(e)
)TtdΓ
(e)t =
= −∫
Ω(e)
δd(e)T Ψ(e)T b(e)
dΩ(e) −∫
Γ(e)t
δd(e)T Ψ(e)T tdΓ(e)t .
(5.42)
Tendo em conta novamente que o termo δd(e)T é constante no domínio e na fronteirade cada elemento, coloca-se este em evidência e fica-se com
−δd(e)T
(∫
Ω(e)
Ψ(e)T bdΩ(e) +
∫
Γ(e)t
Ψ(e)T t dΓ(e)t
). (5.43)

38 Formulação do Método dos Elementos Finitos Convencionais
Definindo as grandezas
f (e)Ω =
∫
Ω(e)Ψ(e)T b
(e)dΩ(e), f (e)Γ =
∫
Γ(e)Ψ(e)T t dΓ
(e)t , (5.44)
e fazendof (e) = f (e)Ω + f (e)Γ , (5.45)
obtém-se, para os dois últimos termos do primeiro membro da equação (5.1), para umdeterminado elemento genérico (e),
−δd(e)T f (e) . (5.46)
Reunindo os desenvolvimentos dos termos presentes no primeiro membro da equa-ção (5.1), i.e., reunindo (5.21), (5.29), (5.35), (5.38), (5.46), a equação fica escrita naforma
δd(e)T(K(e)p d(e) − λG(e) d(e) +K(e)
w d(e) +M(e) d(e) − f (e))= 0, ∀ δd(e) . (5.47)
As soluções da equação anterior são
δd(e)T = 0 ∨ K(e)p d(e) − λG(e) d(e) +K(e)
w d(e) +M(e) d(e) − f (e) = 0 . (5.48)
A equação elementar do método dos elementos finitos, para o caso da laje moderada-mente espessa, em fundação elástica, incluindo efeitos dinâmicos e análise geometricamentenão-linear, pode então ser escrita na forma
K(e)p d(e) − λG(e) d(e) +K(e)
w d(e) +M(e) d(e) = f (e) ⇔
⇔(K(e)p − λG(e) +K(e)
w
)d(e) +M(e) d(e) = f (e).
(5.49)
A equação resolvente do elemento é interpretada como uma condição de equilíbriodinâmico de forças nodais equivalentes.
Depois de formulado o elemento e estabelecida a respectiva equação resolvente (5.49), éefectuada a assemblagem do sistema de equações elementares, ou seja, os termos da matrizde rigidez da laje elementar, K
(e)p , da matriz geométrica elementar, G(e), da matriz de
rigidez de Winkler elementar, K(e)w , da matriz de massa elementar, M(e), e do vector de
forças nodais equivalentes do elemento, f (e), são adicionados, às componentes apropriadasdo vector e das matrizes globais respectivas da estrutura, ou seja, matriz de rigidez da laje,Kp, matriz geométrica, G, matriz de rigidez de Winkler, Kw, matriz de massa, M, e vectorde forças nodais equivalentes, f .
Para proceder à assemblagem é necessário conhecer a relação entre os deslocamentos no-dais elementares, d(e), e deslocamentos nodais globais, d. Estas operações são semelhantesquer para a matriz Kp, G, Kw ou M e podem ser traduzidas pelas definições
E =ne
Ae=1
E(e) (5.50a)
f =ne
Ae=1
f (e), (5.50b)
onde E representa uma das matrizes referidas, A representa o operador assemblagem,ver Hughes (2000, Capítulo 1, página 44), e ne corresponde ao número de elementos da

5.2. Descrição do Método dos Elementos finitos 39
malha. Efectuada a assemblagem de todas as matrizes elementares, e obtém-se o sistemaglobal
(Kp − λG+Kw)d+Md = f , ∀ δd . (5.51)
Este sistema de equações define as condições de equilíbrio das forças nodais equiva-lentes, impondo ponderadamente (ou de forma fraca) as condições de equilíbrio no domí-nio (2.4) e na fronteira estática (2.3a), estendidas de modo a incluírem as condições deequilíbrio nas fronteiras entre elementos.
5.2.2 Análise estática linear
Para a situação particular da análise estática e geometricamente linear, não se conside-ram os efeitos dinâmicos nem a possibilidade de instabilidade, i.e., o vector das aceleraçõesgeneralizadas, d, e o parâmetro de carga das tensões de membrana, λ, são nulas,
d = 0, λ = 0. (5.52)
Consequentemente, a equação do MEF correspondente ao sistema global, (5.51), reduz-sea
(Kp +Kw)d = f . (5.53)
Definindo a grandeza, K(e), como sendo
K(e) = K(e)p +K(e)
w , (5.54)
após a respectiva assemblagem, a equação (5.53) resume-se à forma clássica da equação doMEF
Kd = f , ∀ δd . (5.55)
As condições de fronteira cinemáticas são impostas em seguida. Para tal, cada grau deliberdade é classificado como livre (“free”)3, ou restringido (“restrained”). Neste caso, osistema de equações (5.55) pode ser simbolicamente reescrito na forma
[Kff Kfr
Krf Krr
] df
dr
=
ff
fr
+
0
r
. (5.56)
As reacções generalizadas por unidade de comprimento que surgem na fronteira cine-mática são agrupadas e dão origem a forças nodais equivalentes associadas aos graus deliberdade restringidos que equilibram o campo de tensões ao longo da fronteira cinemá-tica. Estas forças são reunidas no vector r e passam a ser, conjuntamente com o vectorde deslocamentos generalizados associados a graus de liberdade livres, df , as incógnitasdo problema. Sendo os deslocamentos dr conhecidos a priori, a resolução do sistema deequações (5.56) em ordem a essas mesmas incógnitas, conduz a
df =(Kff )−1 (ff −Kfr dr) (5.57a)
r =(Krf df +Krr dr)− fr . (5.57b)
Note-se que esta é apenas uma representação simbólica da resolução do sistema de equa-ções (5.56) pois, na prática, a inversa de Kff nunca é avaliada.
3A designação Kff é utilizada tanto para a parcela da matriz de rigidez associada à flexão como paraa matriz de rigidez total associada aos graus de liberdade livres. Apesar de tomar formas diferentes emcada uma das situações, o conflito de notação é facilmente resolvido, visto que o sentido pretendido podeser facilmente inferido a partir do contexto em que a expressão se insere.

40 Formulação do Método dos Elementos Finitos Convencionais
5.2.3 Análise de vibração livre
No problema da vibração livre tanto as forças aplicadas como o parâmetro de cargadas tensões de membrana são nulos. Assim tem-se
f = 0, λ = 0 , (5.58)
e por conseguinte a equação do MEF correspondente ao sistema global, (5.51), resulta em
(Kp +Kw)d+Md = 0 . (5.59)
Tendo em consideração (5.54), a equação anterior vem
Kd+Md = 0 . (5.60)
Admitindo uma separação de variáveis entre espaço e tempo, a solução, d(t), da equaçãodiferencial (5.60) é dada por
d(t) = d ei ω t
d(t) = i ω d ei ω t
d(t) = i2 ω2 d ei ω t .
(5.61)
onde d representa os deslocamentos nodais (independentes do tempo) e i é a unidadeimaginária. Fica-se assim com
Kd ei ω t −Mdω2 ei ω t = 0, (5.62)
ou seja,ei ω t = 0 ∨
(K− ω2 M
)d = 0 . (5.63)
A primeira condição conduz a uma solução trivial, que não é relevante para o problemaem questão, enquanto a segunda implica a resolução do problema de valores próprios
|K− ω2M| = 0. (5.64)
A imposição das condições de fronteira cinemáticas (homogéneas) conduz à eliminação dosgraus de liberdade restringidos. De acordo com a classificação dos mesmo, introduzida nasubsecção 5.2.2, o problema anterior é reescrito na forma
|Kff − ω2Mff | = 0, (5.65)
a partir do qual podem ser obtidas as frequências de vibração, ωn, da laje. As configuraçõesde cada modo podem ser obtidas através da determinação do vector próprio correspondentea cada valor próprio, ou seja, encontrar o vector df , não nulo, que resolve a equação (5.63)para um dado valor de ωn.
5.2.4 Análise linear de estabilidade
Para o caso particular da análise linear de estabilidade, não se consideram os efeitosdinâmicos nem as forças generalizadas aplicadas no plano médio da laje, e como tal tem-se
d = 0 , f = 0 . (5.66)

5.2. Descrição do Método dos Elementos finitos 41
Por conseguinte, a equação do MEF, (5.51) correspondente à análise linear de estabilidadetraduz-se em
(Kp +Kw) d− λGd = 0 ⇔ (K− λG)d = 0 . (5.67)
A resolução da equação anterior conduz ao problema de valores próprios
|K− λG| = 0 . (5.68)
Novamente, tal como efectuado na subsecção (5.2.3), a imposição das condições de fronteiracinemáticas (homogéneas) conduz à eliminação dos graus de liberdade restringidos e oproblema é reescrito na forma
|Kff − λGff | = 0 . (5.69)
Os valores próprios do problema correspondem aos parâmetros de carga das tensões demembrana críticos, λn, i.e., os parâmetros de carga de bifurcação aos quais estão associa-dos os diferentes modos de instabilidade. As configurações deformadas de cada modo deinstabilidade podem ser obtidas através da determinação do vector próprio correspondentea cada valor próprio.
De referir ainda que se o tensor das tensões de membrana de referência, S0, não forconhecido a priori em toda a laje, então será necessário efectuar uma análise estática lineara fim de determiná-lo. Este passo não foi necessário, visto que, para o caso analisado nestetrabalho, estes esforços são triviais (e constantes).
5.2.5 Consideração de eixos locais
Independentemente da geometria do elemento, as componentes do campo de desloca-mentos generalizado são sempre medidas no referencial global da malha em que o elementose insere, ou seja, no formato expresso pela equação elementar (5.49), os graus de liber-dade, d(e), estão orientados segundo os eixos globais. No entanto, em certas aplicaçõesparticulares, e.g., lajes enviesadas, é conveniente utilizar sistemas locais de coordenadasassociados a cada um dos nós dos elementos cujos graus de liberdade são reunidos no vectord(e)l . Para estas situações, em que os graus de liberdade de rotação locais não coincidi-
rem com os graus de liberdade de rotação globais, deve efectuar-se uma transformação decoordenadas.
Considere-se, por exemplo, K(e) d(e) = f (e) a equação de equilíbrio elementar escritano referencial global e K
(e)l d
(e)l = f
(e)l a mesma equação nos eixos locais pretendidos para
cada nó do elemento. Em princípio, não serão impostas restrições aos nós interiores doselementos. No entanto, a discussão aqui apresentada não exclui essa possibilidade.
Como se pode ver na Figura 5.1, o vector rotação, θ, pode ser expresso em qualquerum dos referenciais através de
θ = θα eα = θlα elα . (5.70)
Dadas as componentes θlα, de (5.70) vem
θα eα = θlα elα ⇔ θα eα · eβ = θlα e
lα · eβ ⇔
θα δαβ = θlα elα · eβ ⇔ θβ = θlα (e
lα · eβ) .
(5.71)
Assim,
θ1 = θl1 (el1 · e1) + θl2 (e
l2 · e1) (5.72a)
θ2 = θl1 (el1 · e2) + θl2 (e
l2 · e2) . (5.72b)

42 Formulação do Método dos Elementos Finitos Convencionais
e1
e2
el1
el2
θl1
θl2
θ1
θ2
Figura 5.1: Eixos locais e eixos globais.
Seja
el1 · e1 = el2 · e2 = n1 (5.73a)
el1 · e2 = −el2 · e1 = n2 , (5.73b)
substituindo (5.73) em (5.72) obtém-se, na forma matricial,θ1
θ2
=
[n1 −n2n2 n1
] θl1θl2
. (5.74)
A relação entre os dois conjuntos de graus de liberdade associados aos n nós do elementopode ser escrita na forma
d(e) = T(e)d(e)l , (5.75)
sendo T(e) a matriz de transformação elementar dada por
T(e) =
T(e)1 O · · · O
O T(e)2 · · · O
......
. . ....
O O · · · T(e)n
. (5.76)
e T(e)i é a matriz de transformação associada ao nó i, de dimensão (3× 3), definida por
T(e)i =
1 0 0
0 n1 −n20 n2 n1
∣∣∣∣∣∣∣i
, (5.77)
onde as componentes nα foram definidas através das expressões (5.73) e podem natural-mente variar consoante os nós do elemento. A relação entre os dois sistemas de equaçõeselementares pode ser obtida através de
K(e) d(e) = f (e) ⇔ T(e)TK(e)T(e)d(e)l = T(e)T f (e) ⇔ K
(e)l d
(e)l = f
(e)l , (5.78)
onde foram definidas as matrizes elementares
K(e)l = T(e)TK(e)T(e) e f
(e)l = T(e)T f (e) . (5.79)

Capítulo 6
Elementos Finitos Convencionais
6.1 Introdução
Na aplicação do MEF, o domínio é decomposto em elementos com geometria simplesde modo a viabilizar e facilitar as várias fases de aplicação do método. A utilização deelementos simples, como os triangulares e os quadrilaterais, facilita a representação dageometria, a definição das funções de aproximação e suas derivadas e a avaliação dasintegrações presentes na forma fraca do problema.
No presente capítulo serão discutidos alguns aspectos de implementação dos elementosconvencionais, como sejam as funções de interpolação e suas derivadas e a integraçãonumérica das grandezas elementares. São considerados os elementos triangulares de 3,6, 10, 15 e 21 nós, os elementos quadrilaterais Lagrangeanos de 4, 9, 16, 25 e 36 nós eSerendipianos de 8, 12, 16 e 20 nós.
6.2 Implementação
6.2.1 Funções de aproximação
A função de aproximação — quer para os elementos triangulares quer para o quadrila-terais — pode ser escrita no referencial global na forma genérica
f(x) =
n∑
i=1
Ψi(x)fi , (6.1)
onde n corresponde ao número de nós do elemento. A aproximação baseia-se em combi-nações lineares de funções polinomiais, definidas de modo a terem valor unitário num nó enulo nos restantes, i.e.,
Ψi(xj) = δij (6.2)
para assegurar que os coeficientes da aproximação, fi, representam o valor da função nosnós do elemento. Além disso, verifica-se ainda que
n∑
i=1
Ψi(x) = 1. (6.3)
No presente contexto, quando se pretende aumentar o grau da aproximação, é necessárioaumentar o número de nós do elemento, garantindo que se incluem na aproximação tantos
43

44 Elementos Finitos Convencionais
ξ21
ξ1
ξ31
ξ41
ξ51
ξ61
ξ2
ξ22
ξ32
ξ42
ξ52
ξ62
ξ1 ξ2
ξ21 ξ2 ξ1 ξ2
2
ξ31ξ2 ξ1 ξ
3
2
ξ41ξ2 ξ1 ξ
4
2
ξ51ξ2 ξ1 ξ
52
ξ1 ξ62ξ61 ξ2
ξ21 ξ2
2
ξ31ξ22
ξ21ξ32
ξ31ξ32
ξ41ξ32
ξ51ξ42
ξ41 ξ52
ξ51 ξ52
ξ31 ξ4
2
ξ41 ξ4
2
ξ21ξ52
ξ21ξ52
ξ21ξ52
ξ21ξ52
ξ51ξ22
ξ51ξ22
ξ51ξ22
ξ51ξ22
ξ21ξ42
ξ41ξ22
ξ61ξ22
ξ21ξ62
1
QL4
QL9
QL16
QL25
QL36
QS8
QS12
QS16
QS20
T3
T6
T10
T15
T21
Figura 6.1: Triângulo de Pascal para ξi1 ξj2.
termos quantos possíveis de grau inferior ao termo de maior grau, m, na aproximação (6.1).Para se saber qual o grau, m, que se está a usar na aproximação, usando um elemento comn nós, recorre-se ao triângulo de Pascal, representado na Figura 6.11.
Assim, o grau de aproximação num lado da fronteira do elemento com n nós, querseja triangular ou quadrilateral, é m = n − 1. O mesmo não sucede no domínio: numelemento triangular com n nós, se se admitir que a aproximação (6.1) é completa. Paradeterminar o grau no domínio do elemento, m, basta percorrer o Triângulo de Pascalpor linhas e contabilizar tantos monómios quanto o número de nós do elemento. Numelemento quadrilateral com n nós o processo para determinar o grau da aproximação é omesmo, acrescido da dificuldade da aproximação ser incompleta, i.e., não envolver todos osmonómios de grau correspondente ao maior grau envolvido na aproximação. Os monómioscorrespondentes ao maior grau da aproximação devem ser escolhidos de tal forma que nãose perca a simetria da aproximação, não dando maior importância aos monómios segundoξ1 de ξ2.
Na Figura 6.2 definem-se os 5 primeiros membros dos elementos finitos triangularestradicionais analisados neste capítulo.
Nos elementos quadrilaterais existem dois tipos de famílias: os Serendipianos, os ele-mentos sem nós interiores, e os Lagrangeanos, os elementos que os possuem. Esta distinçãodecorre da escolha das funções de aproximação, sabendo-se que, para a mesma ordem deaproximação, os elementos Lagrangianos têm melhor comportamento uma vez que recorremadicionalmente a nós interiores. No entanto, os Serendipianos exigem um esforço compu-
1Tendo em consideração as razões apresentadas na secção 6.2.2, as funções de aproximação serãodefinidas em função de um sistema de coordenadas locais, ξ.

6.2. Implementação 45
(a) T3. (b) T6. (c) T10.
(d) T15. (e) T21.
Figura 6.2: Elementos triangulares.
tacional menor. Nas Figuras 6.3 e 6.4 definem-se os 5 primeiros membros dos elementosquadrilaterais Serendipianos e Lagrangeanos, respectivamente, analisados neste capítulo.
As funções de aproximação anteriormente definidas podem ser utilizadas para interpolaruma qualquer função definida num domínio plano. Neste caso, são aplicadas à aproximaçãodo campo de deslocamentos generalizados dos elementos finitos, em que os coeficientes fida aproximação (6.1) passam a representar os deslocamentos nodais generalizados nos nósde cada elemento em que a estrutura foi discretizada no referencial global, ficando-se comas expressões
w(ξ) =n∑
i=1
Ψi(ξ)wi (6.4a)
θα(ξ) =
n∑
i=1
Ψi(ξ)θαi . (6.4b)
A condição de continuidade dos deslocamentos no domínio dos elementos é implicitamenteassegurada pelas funções de aproximação escritas no referencial mestre, uma vez que estassão contínuas no domínio de cada elemento. Na fronteira entre estes, a continuidade C0
fica automaticamente assegurada quando os nós de elementos adjacentes coincidem.
6.2.2 Elementos isoparamétricos
Ao gerar malhas de elementos finitos é por vezes necessário utilizar elementos com ge-ometria irregular e/ou com lados curvos para representar adequadamente a geometria daestrutura. No entanto, na definição deste tipo de elementos no referencial global, existem

46 Elementos Finitos Convencionais
(a) QL4. (b) QL9. (c) QL16.
(d) QL25. (e) QL36.
Figura 6.3: Elementos quadrilaterais Lagrangeanos.
(a) QS4. (b) QS8. (c) QS12.
(d) QS16. (e) QS20.
Figura 6.4: Elementos quadrilaterais Serendipianos.

6.2. Implementação 47
e1
e2
e1
e2
Ω(e) Ω(e)
Γ(e)
Γ(e)
x(ξ) =
9∑
i=1
ψi(ξ)xi
ξ(x) =?x = xα eα ξ = ξα eα
Figura 6.5: Exemplo de representação paramétrica de um elemento QL9.
várias dificuldades associadas. A primeira está relacionada com a complexidade das ex-pressões que se obtêm para as funções de aproximação, sujeitas às condições (6.1) e (6.2),a qual cresce substancialmente quando se aumenta o grau da aproximação e se generalizaa geometria do elemento. Por outro lado, torna-se inviável definir de uma maneira com-putacionalmente eficaz os limites dos integrais que definem cada um dos coeficientes dasmatrizes elementares e dos vectores das forças nodais equivalentes no referencial global.Por último, e mais importante, as condições (6.1) e (6.2) — impostas quando se escreveas funções de aproximação de grau superior no referencial global — deixam de ser sufi-cientes para garantir que as funções são coincidentes ao longo do lado partilhado peloselementos e consequentemente deixa de estar assegurada a continuidade das funções entreelementos, com excepção do elemento T3. Estas dificuldades são ultrapassadas definindoelementos com geometria simples num novo referencial independente do global, designa-dos de elementos-mestre, sobre os quais se definem de uma maneira simples e sistemáticaas funções de aproximação sujeitas às condições (6.1) e (6.2), sendo o elemento-mestreposteriormente mapeado sobre cada elemento da malha, recorrendo a uma convenientemudança de coordenadas, do sistema de coordenadas naturais, (ξ1, ξ2), para o sistema decoordenadas global, (x1, x2). A relação x(ξ) é sempre obtida da mesma forma para todosos elementos e pontos, caracterizando-se por ser sempre um polinómio. Contudo, a relaçãoξ(x) só é facilmente obtida para o elemento T3. Para todos os restantes elementos envolve,em geral, a resolução simbólica de um sistema de equações não-linear, pelo que — mesmoque esta relação exista — não é prático obtê-la explicitamente. Na Figura 6.5 apresenta-seum exemplo de representação paramétrica.
Assim, as funções de aproximação vão tomar expressões relativamente simples, as quaissão deduzidas uma única vez para cada tipo de elemento com um dado grau de aproxima-ção. A geração destas funções seguiu a metodologia descrita em Zienkiewicz et al. (2005,

48 Elementos Finitos Convencionais
ξ1
ξ1 = 0
ξ2
ξ2 = 0 ξ1 + ξ2 = 11
1
(a) Triângulo.
ξ1
ξ1 = +1ξ1 = −1
ξ2
ξ2 = +1
ξ2 = −1
1
1
11
(b) Quadrilátero.
Figura 6.6: Elementos-mestre.
Capítulo 4, página 103). Os limites dos integrais exigidos pela aplicação do método decálculo tornam-se também mais simples, visto serem iguais para uma dada topologia doelemento-mestre.
Nas aplicações bidimensionais são usados dois tipos de elemento-mestre: o triângulorectângulo de lado unitário e o elemento quadrado com lado igual a duas unidades, repre-sentados na Figura 6.6.
A aproximação dos deslocamentos continua a ser expressa na forma (6.4), com a di-ferença que as funções de aproximação estão agora definidas de forma paramétrica nosistema de coordenadas do elemento-mestre. Essas funções de aproximação são tambémusadas para mapear o elemento em qualquer zona da malha de elementos finitos (daí adesignação alternativa de funções de forma), sendo a mudança de coordenadas escrita deforma análoga à usada para aproximar os deslocamentos, i.e.
x(ξ) =
n∑
i=1
Ψi(ξ)xi , (6.5)
em que xi representa o vector posição do nó i do elemento com n nós, expresso no referencialglobal da malha. Em princípio, é possível usar diferentes expressões para as funções deaproximação do campo de deslocamentos generalizado e de mapeamento do elemento--mestre, sendo o elemento definido como isoparamétrico quando se usam as mesmas funçõespara os dois fins, sendo implicitamente garantida a continuidade dos deslocamentos entreelementos com os mesmos nós nos lados que partilham.
Estas são as principais vantagens na formulação dos elementos isoparamétricos quejustificam a sua corrente utilização.
6.2.3 Cálculo de integrais no domínio e na fronteira
Como já foi mencionado, uma das vantagens da transformação de coordenadas consistena simplificação dos limites de integração usados no cálculo das matrizes elementares evectores de forças elementares. Para calcular integrais de domínio em elementos-mestre

6.2. Implementação 49
tem-se ∫
Ω(e)
f dΩ(e) =
∫
Ω(e)
f(ξ) |J (ξ)|dΩ(e) , (6.6)
onde dΩ(e) = dx1 dx2, dΩ(e) = dξ1 dξ2 e |J (ξ)| estabelece a relação entre elementosde área no elemento mapeado e no elemento-mestre, correspondendo ao determinante damatriz Jacobiana de transformação de coordenadas (i.e. o Jacobiano). Sendo a matrizJacobiana definida por
J =
[∂x1∂ξ1
∂x1∂ξ2
∂x2∂ξ1
∂x2∂ξ2
,
](6.7)
então o Jacobiano vem
|J| = ∂x1∂ξ1
∂x2∂ξ2
− ∂x1∂ξ2
∂x2∂ξ1
. (6.8)
Para os elementos quadrilaterais, os integrais de domínio (6.6) são calculados numerica-mente, aplicando-se a regra de quadratura de Gauss-Legendre em cada direcção, i.e., ovalor do integral de uma função é dado pelo somatório dos valores da função em pontosespecíficos do domínio de integração, afectados pelos respectivos pesos:
∫
Ω(e)
f(ξ) |J (ξ)|dΩ(e) =
∫ 1
−1
∫ 1
−1f(ξ) |J (ξ)|dξ1 dξ2 ∼=
∼=M∑
i=1
M∑
j=1
f(ξi, ξj) |J (ξi, ξj)|wiwj =M2∑
i=1
f(ξi) |J (ξi)|wi , (6.9)
em que ξi e ξj definem os M pontos de integração em cada direcção e wi e wj os pesoscorrespondentes. Na última expressão o peso wi é o produto dos pesos em cada umadas direcções. O número de pontos de integração é escolhido atendendo ao grau das fun-ções integrandas, admitindo que são polinomiais. Tal só sucede para o caso particular demudanças de coordenadas em que o Jacobiano é constante. Apenas nessas situações oresultado proveniente da integração numérica é exacto. A razão de se recorrer à integraçãonumérica está essencialmente relacionada com a eficiência computacional ganha no pro-cesso de cálculo. Para diferentes tipos de elementos finitos quadrilaterais (Lagrangeanos eSerendipianos), encontra-se representada na Tabela 6.1, o grau das funções integrando emcada direcção, para o caso de |J| constante. Na Tabela 6.2 encontram-se os graus máximosdas funções polinomiais possíveis de integrar utilizando um determinado no de pontos deintegração, para a regra Gauss-Legendre. Desta forma, serão necessários n pontos, paraintegrar exactamente um polinómio de grau menor ou igual a gp = (2n − 1).
É por vezes conveniente que a totalidade ou parte das integrações presentes nas defini-ções de K
(e)p sejam efectuadas de forma aproximada, mesmo quando seria possível fazê-lo
exactamente, i.e., quando |J| = constante. As razões para este facto serão apresentadasno capítulo 7, secção 7.5, página 66.
Considere-se um elemento no qual |J| = constante. Designe-se por integração completa
a regra que conduziria à avaliação exacta dos integrais presentes na definição de K(e)p recor-
rendo ao menor número de pontos de integração possível. Então, chama-se (i) integração
selectiva quando a avaliação da parcela K(e)ss é efectuada através da redução de um ponto
de integração em cada direcção em relação à regra de integração completa e (ii) integração
reduzida quando ambas as parcelas da rigidez, K(e)ff e K
(e)ss , são reduzidos de um ponto em
cada direcção.

50 Elementos Finitos Convencionais
Tipo de quadrilátero no nós K(e)ff , K(e)
ss , K(e)w , M(e), G(e) fΩ(e)
QL
4 2 1
9 4 2
16 6 3
25 8 4
36 10 5
QS
8 4 2
12 6 3
16 8 4
20 10 5
Tabela 6.1: Grau das funções integrando (caso |J| = constante) em cada direcção paraelementos quadriláteros. No cálculo do vector de forças, fΩ(e), assumiu-se que b é constante.
n gpmáx = 2n− 1
1 1
2 3
3 5
4 7...
...
Tabela 6.2: Grau máximo do polinómio, gpmáx, que pode ser integrado exactamente usandoa regra de Gauss-Legendre com n pontos de integração.
No caso de elementos triangulares o integral de domínio toma a seguinte expressão
∫
Ω(e)
f(ξ) |J (ξ)|dΩ(e) =
∫ 1
0
∫ 1−ξ1
0f(ξ) |J (ξ)|dξ1 dξ2 ∼=
M∑
i=1
f(ξi) |J (ξi)|wi . (6.10)
Estes integrais são também calculados numericamente, encontrando-se na Tabela 6.3, ograu das funções integrando em cada direcção, quando |J| constante, para o caso dos ele-mentos triangulares. No entanto, existem diferentes regras de quadratura para domíniostriangulares, aplicáveis ao cálculo dos integrais, ver Cowper (1973). Na Tabela 6.4 encon-tram-se no de pontos de integração mínimo necessário para integrar as funções polinomiaisconsoante o seu grau.
Para os integrais de fronteira, é necessário definir o Jacobiano da transformação de umlado do elemento mapeado. Assim, tem-se
dΓ =√
dx21 + dx22 ,

6.2. Implementação 51
no nós K(e)ff , G(e) K
(e)ss , K(e)
w , M(e) fΩ(e)
3 0 2 1
6 2 4 2
10 4 6 3
15 6 8 4
21 8 10 5
Tabela 6.3: Grau das funções integrando (caso |J| = constante) para elementos triangula-res.
grau de precisão no mínimo de pontos de integração
1 1
2 3
3 4
4 6
5 7
6 12...
...
Tabela 6.4: Regras de integração dos elementos triangulares, ver Cowper (1973).
onde
dx1 =∂x1∂ξ
dξ
dx2 =∂x2∂ξ
dξ ,
logo
dΓ =
√(∂x1∂ξ
)2
+
(∂x2∂ξ
)2
dξ =
∥∥∥∥∂x(ξ)
∂ξ
∥∥∥∥ dξ . (6.12)
Deste modo, o integral ao longo da fronteira (Figura 6.7), toma a seguinte forma
∫
Γf dΓ =
∫ ξ1
ξ0
f (x(ξ))
√(∂x1∂ξ
)2
+
(∂x2∂ξ
)2
dξ =
∫ ξ1
ξ0
f (x(ξ))
∥∥∥∥∂x(ξ)
∂ξ
∥∥∥∥ dξ . (6.13)
No caso do elemento quadrilateral, o integral ao longo da fronteira toma as seguintesexpressões para os lados em que ξ1 = ξ1 = ±1 e ξ2 = ξ2 = ±1, respectivamente:
∫
Γ(e)
f dΓ(e) =
∫ 1
−1f(ξ1, ξ2)
√√√√(∂x1∂ξ2
∣∣∣∣ξ1=ξ1
)2
+
(∂x2∂ξ2
∣∣∣∣ξ1=ξ1
)2
dξ2
=
∫ 1
−1f(±1, ξ2)
√√√√(∂x1∂ξ2
∣∣∣∣ξ1=±1
)2
+
(∂x2∂ξ2
∣∣∣∣ξ1=±1
)2
dξ2
(6.14a)

52 Elementos Finitos Convencionais
x1
x2
Γ
Γ =
x1(ξ)
x2(ξ)
dx1
dx2
ξ0 < ξ < ξ1
Figura 6.7: Equações paramétricas de uma linha Γ.
∫
Γ(e)f dΓ(e) =
∫ 1
−1f(ξ1, ξ2)
√√√√(∂x1∂ξ1
∣∣∣∣ξ2=ξ2
)2
+
(∂x2∂ξ1
∣∣∣∣ξ2=ξ2
)2
dξ1
=
∫ 1
−1f(ξ1,±1)
√√√√(∂x1∂ξ1
∣∣∣∣ξ2=±1
)2
+
(∂x2∂ξ1
∣∣∣∣ξ2=±1
)2
dξ1 .
(6.14b)
O integral ao longo da fronteira dos lados do triângulo ξ1 = ξ1 = 0 ou ξ2 = ξ2 = 0,toma as seguintes expressões respectivamente:
∫
Γ(e)
f dΓ(e) =
∫ 1
0f(ξ1, ξ2)
√√√√(∂x1∂ξ2
∣∣∣∣ξ1=ξ1
)2
+
(∂x2∂ξ2
∣∣∣∣ξ1=ξ1
)2
dξ2
=
∫ 1
0f(0, ξ2)
√√√√(∂x1∂ξ2
∣∣∣∣ξ1=0
)2
+
(∂x2∂ξ2
∣∣∣∣ξ1=0
)2
dξ2
(6.15a)
∫
Γ(e)
f dΓ(e) =
∫ 1
0f(ξ1, ξ2)
√√√√(∂x1∂ξ2
∣∣∣∣ξ2=ξ2
)2
+
(∂x2∂ξ2
∣∣∣∣ξ2=ξ2
)2
dξ2
=
∫ 1
0f(ξ1, 0)
√√√√(∂x1∂ξ2
∣∣∣∣ξ2=0
)2
+
(∂x2∂ξ2
∣∣∣∣ξ2=0
)2
dξ2 .
(6.15b)
O integral ao longo do lado ξ2 = 1− ξ1 fica∫
Γ(e)
f dΓ(e) =
∫ 1
0f(ξ1, 1− ξ1) |J (ξ1, 1− ξ1)| dξ1 =
∫ 1
0f(ξ1, 0)
√√√√(∂x1∂ξ1
∣∣∣∣ξ2=1−ξ1
− ∂x1∂ξ2
∣∣∣∣ξ2=1−ξ1
)2
+
(∂x2∂ξ1
∣∣∣∣ξ2=1−ξ1
− ∂x2∂ξ2
∣∣∣∣ξ2=1−ξ1
)2
dξ1 .
(6.16)

6.2. Implementação 53
Apesar dos limites de integração dos integrais de fronteira do elemento triangular (6.15a)a (6.16) não corresponderem aos limites convencionais da regra de quadratura de Gauss--Legendre, estes ainda podem ser calculados por esta mesma regra recorrendo a uma trans-formação de coordenadas apropriada.
6.2.4 Cálculo das derivadas das funções de aproximação
O inconveniente da transformação de coordenadas surge na aplicação do cálculo de de-rivadas, quando se vai definir o campo de deformações compatível com a aproximação docampo de deslocamentos (6.4). Como as funções de aproximação deixam de estar expres-sas em coordenadas globais, torna-se necessário recorrer à derivada da função composta.Assim, o cálculo das derivadas das funções de aproximação, presentes em alguns termosda matriz B(e), é dado pelas expressões
∂Ψi(ξ)
∂x1=∂Ψi
∂ξ1
∂ξ1∂x1
+∂Ψi
∂ξ2
∂ξ2∂x1
(6.17a)
∂Ψi(ξ)
∂x2=∂Ψi
∂ξ1
∂ξ1∂x2
+∂Ψi
∂ξ2
∂ξ2∂x2
. (6.17b)
Os termos ∂Ψi
∂ξαsão triviais de calcular, tendo em conta que as funções de aproximação Ψi
estão escritas em coordenadas naturais. Para calcular os termos ∂ξα∂xβ
é necessário recorrer aoteorema da derivada da função definida implicitamente, uma vez que a inversão explícita datransformação de coordenadas nem sempre é possível e, mesmo que o fosse, a expressão queas funções de aproximação tomam poderia não facilitar o cálculo das respectivas derivadas.Invertendo a matriz Jacobiana da transformação, (6.7), obtém-se
J−1 =
[∂ξ1∂x1
∂ξ1∂x2
∂ξ2∂x1
∂ξ2∂x2
]=
1
|J|
[∂x2∂ξ2
−∂x1∂ξ2
−∂x2∂ξ1
∂x1∂ξ1
]. (6.18)
Um terceiro aspecto que interessa sublinhar é que o valor do Jacobiano, calculado emqualquer ponto do domínio, não deve ter valores próximos de zero, pois instabiliza o cálculoda inversa da matriz Jacobiana. Esta situação ocorre especialmente quando não se respeitaa sequência da numeração dos nós ao definir o mapeamento do elemento-mestre, quando oelemento-mestre é mapeado num elemento não convexo ou quando o mapeamento defineelementos muito distorcidos, com áreas tendencialmente nulas.
Esta formulação é usada para elementos isoparamétricos triangulares e quadrilaterais(Lagrangeanos e Serendipianos). Pode igualmente ser utilizada para outros elementos(não isoparamétricos), como o Heterosis, ver Hughes (2000), e o T6-3i, ver Campello et al.(2003).

54

Capítulo 7
Uma formulação de elementos mistosem coordenadas convectivas
7.1 Introdução aos MITC
No capítulo anterior foi revista a análise de lajes através de elementos finitos convenci-onais baseados na teoria de Reissner-Mindlin, cuja formulação assenta na aproximação docampo de deslocamentos generalizados. Um dos fenómenos mais gravosos que pode surgirneste contexto é o chamado shear-locking. Este fenómeno pode destruir por completo asolução, tornando muito pequenos (ou mesmo nulos) os valores calculados para o campo dedeslocamentos. Para atenuar este problema nos elementos convencionais, pode recorrer-seà integração reduzida e selectiva dos termos de rigidez. No entanto, quando este métodofoi adoptado inicialmente não existia uma total compreensão das integrações mencionadase esta técnica para resolver o problema do shear-locking foi inicialmente considerada comoum “truque” em vez de uma metodologia legítima (Hinton e Huang, 1986, página 412).
Elementos híbridos e mistos foram então introduzidos na tentativa de ultrapassar asdificuldades de shear-locking sem ter de recorrer a integrações selectiva e reduzida, porforma a que os elementos funcionem adequadamente em ambos os tipos de laje: espessase finas.
No presente capítulo começar-se-á por fazer uma revisão a sistemas de coordenadascovariantes e contravariantes. Posteriormente será apresentada uma formulação mista noscampos u, γ e λ
˜em coordenadas convectivas para lajes de Reissner-Mindlin. Esta for-
mulação fornecerá a base variacional para dois casos particulares abordados no presentetrabalho. Em primeiro lugar, conduz a uma forma geral da parcela da matriz de rigidez decorte, válida para todos os tipos de elementos MITC. Em segundo lugar, propõe uma jus-tificação consistente para a utilização da integração selectiva em elementos quadrilateraisconvencionais.
Por fim, serão discutidas as diferentes características de cada elemento MITC analisado.São considerados os elementos de laje MITC4p, MITC9p, MITC16p, MITC7p, MITC12pe os elementos de casca MITC4s, MITC9s e MITC16s.
7.2 Coordenadas covariantes e contravariantes
É muitas vezes conveniente expressar um tensor numa base de vectores não ortogonais.Este tipo de representação é particularmente útil e importante na análise de elementos
55

56 Uma formulação de elementos mistos em coordenadas convectivas
de casca. Para tal, é comum usar-se uma base covariante, definida através da base devectores covariantes gi, i = 1, 2, 3, e uma base contravariante, definida através da base devectores contravariantes gj , j = 1, 2, 3. Estas duas bases de vectores, não são, em geral,de comprimento unitário e caracterizam-se por satisfazer a seguinte relação
gi · gj = δji , (7.1)
onde δji corresponde ao símbolo (misto) de Kronecker, o que significa que a base de vectorescovariante é ortogonal à base de vectores contravariante. Além disso, as componentescovariantes relacionam-se com as contravariantes através da seguinte relação
gi = gij gj ou gi g
ij = gj , (7.2)
onde gij e gij representam, respectivamente, as componentes covariantes e contravariantesdo tensor da métrica. Em geral, primeiro define-se convenientemente a base covariante,sendo a base contravariante definida pela relação (7.1).
Em termos de notação, daqui em diante, sempre que é colocado o símbolo “˜”, sobreou sob um dado caracter, significa a grandeza respectiva é expressa relativamente a umsistema não-ortogonal de coordenadas. Neste caso, as componentes/coordenadas serãocovariantes ou contravariantes, respectivamente.
Tal como se mostra na Figura 7.1, um vector (tensor de 1aordem) pode ser escritonuma base ortogonal, definida pelos vectores eα, ou numa base não ortogonal, definidapelos vectores da base covariante gα ou da base contravariante gα:
x = xα eα = xα gα = xα gα , (7.3)
onde xα e xα são, respectivamente, as componentes contravariantes e covariantes do vectorx.
Por exemplo, da equação (7.3), é possível deduzir
xα gα = xα eα ⇔ xα g
α · eβ = xα eα · eβ ⇔ xα gα · eβ = xα δαβ ⇔ xβ = xα g
α · eβ , (7.4)
onde xβ = xα gα · eβ corresponde à lei que transforma as componentes covariantes de um
vector do referencial não ortogonal (local) no referencial ortogonal (global).Da mesma forma, um tensor de 2aordem pode ser escrito numa base ortogonal, ou
numa base não ortogonal definida pela base de vectores covariante ou contravariante. Porexemplo, o tensor das deformações pode ser expresso por:
ε = εij ei ⊗ ej , ε = εij gi ⊗ gj ou ε = εij gi ⊗ gj . (7.5)
Assim, a transformação do tensor do referencial local (base covariante) para o referencialglobal (base cartesiana) é dada por
εij gi ⊗ gj = εkl ek ⊗ el ⇔ εij g
i ⊗ gj em = εkl ek ⊗ el em ⇔εij g
i(gj · em
)= εkl ek (el · em) ⇔ εij
(gj · em
)gi = εkl ekδlm ⇔
εij(gj · em
) (gi · el
)= εkm (ek · el) ⇔ εij
(gj · em
) (gi · el
)= εkm δkl ⇔
εlm = εij(gj · em
) (gi · el
).
(7.6)
Note-se que as bases covariante e contravariante são usados da mesma forma que abase cartesiana, mas permitem uma maior generalidade, na representação e na utilizaçãode tensores, mostrando-se bastante vantajosas na presença de elementos distorcidos.

7.2. Coordenadas covariantes e contravariantes 57
x
x1
x2g1
g2
g1
g2
x1
x2
x1
x2
e1
e2
Figura 7.1: Representação das componentes de um vector genérico x na base ortogonal enas bases covariante e contravariante.
x1
x2
x1
x2
g1
g2
ξ1
ξ2
∂ x1∂ ξ1
∂ x1∂ ξ2
∂ x2∂ ξ1
∂ x2∂ ξ2
Figura 7.2: Significado físico das componentes da base covariante, gα.

58 Uma formulação de elementos mistos em coordenadas convectivas
No presente documento, usar-se-ão bases covariantes e contravariantes na formulaçãodos elementos MITC dos tipos shell e plate. Na Figura 7.2 é possível perceber o significadofísico de uma base covariante. Assim, pode escrever-se
gα =∂ x
∂ ξα= x,α , (7.7)
de onde se conclui que, em geral, as bases covariante e contravariante variam no domíniode cada elemento.
Note-se que x,α1 são as colunas da matriz Jacobiana J, i.e.,
J =
[∂x1∂ξ1
∂x1∂ξ2
∂x2∂ξ1
∂x2∂ξ2
]=
[x1,1 x1,2
x2,1 x2,2
]=[x,1 x,2
]=[g1 g2
]. (7.8)
Para conhecer os vectores da base contravariante,[g1 g2
], impõe-se
gi · gj = gi · gjk gk = δji . (7.9)
Realizando a expansão da expressão anterior e tendo em consideração (7.8), as componentesgαβ vêm dadas por
[g11 g12
g21 g22
]=
[x,1 ·x,1 x,2 ·x,1x,1 ·x,2 x,2 ·x,2
]−1
=(JT J
)−T. (7.10)
Atendendo à segunda definição em (7.2), fica-se em condições de conhecer a base contra-variante [
g1 g2]=(JT J
)−T[g1 g2] =
(JT J
)−TJ . (7.11)
7.3 Formulação de elementos finitos em coordenadas
convectivas
Em elementos de coordenadas genéricas, a representação da geometria do elemento edo campo de deslocamentos generalizado é efectuada parametricamente.
Considere-se então um elemento finito genérico — triangular ou quadrilateral — cujageometria é definida parametricamente através de
x = xα (ξ) eα + x3 (ζ) e3 , (7.12)
ou seja, agrupando num vector, tem-se na forma matricial
x =
x1 (ξ)
x2 (ξ)
x3 (ζ)
=
n∑i=1
ψi (ξ) x1i
n∑i=1
ψi (ξ) x2i
ζ
, ξ ∈ Ω e ζ ∈
[−h2,h
2
], (7.13)
onde n é o número de nós utilizados para representar a geometria do elemento, xαi corres-ponde à coordenada na direcção α do nó i e Ω representa o domínio do elemento mestre.
1Tal como indicado no capítulo 1, secção 1.4, página 4, no presente capítulo, ∂α ou (.),α denotam aderivada parcial em ordem à coordenada natural ξα.

7.3. Formulação de elementos finitos em coordenadas convectivas 59
Derivando agora cada uma das componentes do vector x definido na equação (7.13),tem-se
x,α = (xβ (ξ) eβ + x3 (ζ) e3),α = xβ,α (ξ) eβ , onde (.),α =∂(.)
∂ξα(7.14a)
x,3 = (xβ (ξ) eβ + x3 (ζ) e3),3 = x3,3 (ζ) e3 = e3 , onde (.),3 =∂(.)
∂ζ, (7.14b)
que pode ser escrito matricialmente por
x,α =n∑
i=1
ψi,α (ξ)
x1i
x2i
0
(7.15a)
x,3 =
0
0
1
. (7.15b)
O campo de deslocamentos2 destes elementos é definido por
u = x3 θα (ξ) eα + w (ξ) e3 , (7.16)
ou seja,
u =
x3 θ1 (ξ)
x3 θ2 (ξ)
w (ξ)
, (7.17)
onde
θα (ξ) =
p∑
i=1
ψθi (ξ) θαi = Ψθ (ξ) θα (7.18a)
w (ξ) =
q∑
i=1
ψwi (ξ) wi = Ψw (ξ) w , (7.18b)
em que p é o número de nós do elemento com o grau de liberdade correspondente à ro-tação, θα, e q é o número de nós do elemento com o grau de liberdade correspondente aodeslocamento transversal, w.
Derivando agora cada uma das componentes do vector u definido na equação (7.17),obtém-se
u,α = (x3 θβ (ξ) eβ + w (ξ) e3),α = x3 θβ,α (ξ) eβ + w,α (ξ) e3 (7.19a)
u,3 = (x3 θβ (ξ) eβ + w (ξ) e3),3 = θβ (ξ) eβ , (7.19b)
que pode ser escrito na forma,
u,α =
x3Ψθ,α (ξ) θ1
x3Ψθ,α (ξ) θ2
Ψw,α (ξ) w
(7.20a)
2Neste caso u designa o campo de deslocamentos do contínuo tridimensional e não o campo de deslo-camentos generalizados da laje.

60 Uma formulação de elementos mistos em coordenadas convectivas
u,3 =
Ψθ (ξ) θ1
Ψθ (ξ) θ2
0
. (7.20b)
Para a formulação mista dos elementos MITC será necessário avaliar as componentescovariantes da distorção a partir de u em certos pontos. Para o efeito, determinam-se ascomponentes do tensor das deformações em coordenadas covariantes através de
εij =1
2((x+ u) ,i · (x+ u) ,j −x,i ·x,j ) , (7.21)
onde o vector (x+u) corresponde à posição deformada e o vector x corresponde à posiçãoindeformada. Note-se que, no caso particular em que se considera
x (ξ, ζ) = ξα eα + ζ e3 , (7.22)
ou seja, xα = ξα e x3 = ζ, tem-se x,i (ξ, ζ) = ei. Assim, a equação (7.21) resume-se a
εij =1
2((ei + u,i ) · (ej + u,j )− ei · ej) =
1
2(ei ej + ei u,j +ej u,i+u,i u,j −ei ej)
=1
2(ui,j + uj,i + uk,i uk,j) ,
(7.23)
que corresponde ao tensor de Green-Lagrange.Tendo em conta (7.3), pode escrever-se o vector distorção, γ, numa base contravariante,
gα, através deγ = γα g
α . (7.24)
Assim, desprezando os termos não-lineares, as componentes covariantes da distorção sãodadas por
γα = 2εα3 = x,α ·u,3 +x,3 ·u,α . (7.25)
Substituindo (7.14) e (7.19) em (7.25) obtém-se
γα =(xβ,α (ξ) eβ) · (θγ (ξ) eγ) + e3 · (x3 θβ,α (ξ) eβ + w,α (ξ) e3)
=xβ,α (ξ) θγ (ξ) δβγ + w,α (ξ) = w,α (ξ) + xβ,α (ξ) θβ (ξ) .(7.26)
Em notação matricial, tem-se
γ =
γ1
γ2
=
w,1 +x1,1 θ1 + x2,1 θ2
w,2 +x1,2 θ1 + x2,2 θ2
. (7.27)
Substituindo (7.18) na expressão anterior, tem-se
γ1
γ2
=
[ψw1,1 . . . ψwq,1 x1,1ψ
θ1 . . . x1,1ψ
θp x2,1ψ
θ1 . . . x2,1ψ
θp
ψw1,2 . . . ψwq,2 x1,2ψθ1 . . . x1,2ψ
θp x2,2ψ
θ1 . . . x2,2ψ
θp
]
w1
...
wq
θ11...
θp1θ12...
θp2
. (7.28)

7.4. Formulação mista u-λ˜-γ 61
É ainda de salientar que, se a representação paramétrica do elemento for xα(ξ) = ξα,então as coordenadas convectivas coincidem com as cartesianas, os termos não diagonaisda matriz Jacobiana serão nulos e a matriz anterior degenera na matriz Bs usual:
Bs =
[∂ψw
1∂x1
. . .∂ψw
q
∂x1ψθ1 . . . ψθp 0 . . . 0
∂ψw1
∂x2. . .
∂ψwq
∂x20 . . . 0 ψθ1 . . . ψθp
]. (7.29)
Repare-se que (7.28) pode ser escrita na forma
γ1
γ2
=
[∂1 x1,1 x2,1
∂2 x1,2 x2,2
]
w
θ1
θ2
, (7.30)
onde ∂α = ∂∂ξα
. Sabendo que a matriz Jacobiana é definida por (6.7), e tendo em conside-ração que
x1,α∂(.)
∂x1+ x2,α
∂(.)
∂x2=∂(.)
∂x1
∂x1∂ξα
+∂(.)
∂x2
∂x2∂ξα
=∂(.)
∂ξα= ∂α(.) , (7.31)
a expressão (7.30) resume-se a
γ1
γ2
=
[x1,1 x2,1
x1,2 x2,2
][∂∂x1
1 0∂∂x2
0 1
]
w
θ1
θ2
= JT ∂s u , (7.32)
onde ∂s é o operador diferencial definido em (5.15). Por fim, definindo ∂s = JT ∂s tem-se
γ = ∂s u , (7.33)
onde
∂s =
[∂1 x1,1 x2,1
∂2 x1,2 x2,2
]. (7.34)
7.4 Formulação mista u-λ˜-γ
7.4.1 Introdução
Para formular elementos finitos baseados exclusivamente na aproximação de desloca-mentos generalizados, usou-se o Teorema de Hamilton que, para o caso da análise estática,degenera no PTV. Assumindo comportamento elástico linear, i.e., mαβ = Cαβγδ χγδ evα = Ds γα, a expressão correspondente ao PTV para lajes moderadamente espessas, podeser escrito de forma equivalente por δΠ = 0, onde Π = U − V e
U =1
2
∫
Ω(χαβmαβ + γα vα) dΩ e V =
∫
Ω(w p+ θαmα) dΩ+
∫
Γt
(w pΓ + θαm
Γα
)dΓt ,
sendo Π a energia potencial total, U a energia de deformação (incluindo apenas os ter-mos lineares) e V é o potencial total das cargas aplicadas (sem consideração de fundação

62 Uma formulação de elementos mistos em coordenadas convectivas
elástica). Note-se que a primeira variação de Π é dada por δΠ = δ(U − V ) = δU − δV .Assim,
δU = δ
(1
2
∫
Ω(χαβmαβ + γα vα) dΩ
)=
1
2
∫
Ωδ (χαβ Cαβγδ χγδ + γαDs γα) dΩ =
=1
2
∫
Ω(δχαβ Cαβγδ χγδ + χαβ Cαβγδ δχγδ + δγαDs γα + γαDs δγα) dΩ =
=1
2
∫
Ω(δχαβ Cαβγδ χγδ + χγδ Cαβγδ δχαβ + 2 δγαDs γα) dΩ
(7.35a)
δV = δ
(∫
Ω(w p+ θαmα) dΩ +
∫
Γt
(w pΓ + θαm
Γα
)dΓt
)=
=
∫
Ω(δw p+ δθαmα) dΩ +
∫
Γt
(δw pΓ + δθαm
Γα
)dΓt .
(7.35b)
Assim mostra-se que, para a análise estática, a estacionaridade da variação da energiapotencial total, δΠ, é equivalente ao PTV e à forma fraca do equilíbrio no domínio dafronteira. Na forma matricial, tem-se
Π(u) =1
2
∫
ΩǫT σ dΩ−
∫
ΩuT bdΩ−
∫
Γt
uT t dΓt , (7.36)
onde ǫ = ∂u e σ = D ǫ. A minimização de Π(u) conduz a
δΠ(u) = 0 ⇔∫
ΩδǫT σ dΩ−
∫
ΩδuT b dΩ−
∫
Γt
δuT t dΓt = 0 . (7.37)
Nesta formulação de elementos finitos baseados exclusivamente na aproximação de des-locamentos generalizados as relações constitutivas, as condições de compatibilidade, e ascondições de fronteira cinemáticas são satisfeitos exactamente, mas as equações de equilí-brio no domínio e na fronteira são apenas satisfeitas de forma ponderada. Além disso, paraa solução destes elementos finitos, as únicas variáveis são os deslocamentos generalizados,que devem cumprir as condições de fronteira cinemáticas e condições de continuidade dedeslocamentos generalizados interelementares, sendo o campo de deformações e tensõesgeneralizados obtidos directamente a partir do campo de deslocamentos generalizados.Contudo, existem outro tipo de formulações, que em muitos casos podem ser mais efecti-vas.
A formulação mista de elementos finitos pode ser deduzida a partir de princípios va-riacionais, podendo ser entendida como uma extensão do princípio da estacionaridade daenergia potencial total, onde as variáveis correspondem não só a deslocamentos como adeformações e/ou as tensões. De seguida, é apresentado um modelo de formulação mistobaseado nos campos de u, γ e λ
˜.
7.4.2 Formulação baseada em distribuições assumidas de γ
Considere-se o funcional modificado da energia potencial total, onde (apenas) a equaçãode compatibilidade, γ = ∂su, é relaxada, sendo a sua imposição efectuada de forma fracaatravés de multiplicadores de Lagrange no domínio ou em pontos na fronteira:
Π(u,λ,γ) = Π(u)−∫
ΩλΩT (γ − γDI) dΩ−
n∑
i=1
λΓi[(γ − γDI) · t
]∣∣ξ=ξi
, (7.38)

7.4. Formulação mista u-λ˜-γ 63
onde se impõe localmente que χ = ∂fu, σ = Dε, γDI = ∂s u, e onde n corresponde aonúmero de pontos onde se impõe que a projecção da distorção ponderada na direcção dovector tangencial à fronteira, t, seja nula, i.e., onde (γ−γDI)·t = 0, e ξi as coordenadas dostying points sobre a fronteira do elemento. DI é o acrónimo de Displacement Interpolation.Π(u,γ) é, assim, dado por
Π(u,γ) =1
2
∫
Ω(∂f u)
TDf (∂f u) dΩ +
1
2
∫
ΩγT Ds γ dΩ−
∫
ΩuT bdΩ−
∫
ΓuT t dΓ .
(7.39)A forma acima indicada não é a apropriada para o caso dos MITC, pois não está em funçãode coordenadas convectivas. Assim, houve necessidade de reescrever cada um dos termosenvolvendo γ e λ,
γ = γα eα = γα gα (7.40a)
γDI = γDIα eα = γDIα gα (7.40b)
λΩ = λΩα eα = λΩα gα (7.40c)
λΓi = λ˜Γ
i , (7.40d)
onde, exceptuando a equação (7.40d), na primeira igualdade as grandezas são escritosnum sistema cartesiano e na segunda igualdade num sistema não ortogonal (coordenadascovariantes e contravariantes, consoante índice seja superscrito ou subscrito). Note-se queγDI = ∂s u = JT ∂s u. Fazendo agora o produto das grandezas λΩ e γ, tem-se, e.g.,
λΩ · γ =(λΩα eα
)· (γα eα) =
(λβ gβ
)·(γΩα gα
)= λα γΩα = λ
˜· γΩ . (7.41)
Assim, tem-se
1
2
∫
ΩγT Ds γ dΩ =
1
2
∫
Ω
([g1 g2
]γ)T
Ds
([g1 g2
]γ)dΩ =
=1
2
∫
ΩγT[g1 g2
]TDs
[g1 g2
]γ dΩ
(7.42a)
∫
ΩλΩT (γ − γDI) dΩ =
∫
Ωλ˜ΩT (γ − γDI) dΩ (7.42b)
n∑
i=1
λΓi[(γ − γDI) · t
]∣∣ξ=ξi
=n∑
i=1
λ˜Γi
[(γ − γDI) · t
]∣∣∣ξ=ξi
. (7.42c)
Os vectores da base contravariante são definidos em 7.11.Considerem-se agora as aproximações elementares3
u = Ψu u (7.43a)
γ = Ψγ γ (7.43b)
λ˜Ω = Ψλ
˜ λ˜Ω . (7.43c)
3Note-se que neste capítulo se usou u em alternativa a d como utilizado no capítulo 5. Atendendoque existem mais duas aproximações (λ e γ) além da aproximação de deslocamentos u, para que existissecoerência entre as três aproximações optou-se pela notação u.

64 Uma formulação de elementos mistos em coordenadas convectivas
Note-se que, em (7.38) não surgem as derivadas de γ e λΩ, logo estas grandezas podemser descontínuas entre elementos. Tendo em consideração as equações (7.42) e introduzindo
Υ =
[tT Ψγ
]∣∣∣ξ=ξ1[
tT Ψγ]∣∣∣
ξ=ξ2...[
tT Ψγ]∣∣∣
ξ=ξn
, Λ =
[tT ∂sΨ
u]∣∣∣
ξ=ξ1[tT ∂sΨ
u]∣∣∣
ξ=ξ2...[
tT ∂sΨu]∣∣∣
ξ=ξn
, (7.44)
a discretização da variação do funcional Π conduz a
δΠ =δΠ−∫
Ωδλ˜ΩT (γ − γDI) dΩ−
∫
Ωλ˜ΩT (δγ − δγDI) dΩ−
−n∑
i=1
δλ˜Γi
[(γ − γDI) · t
]∣∣∣ξ=ξi
−n∑
i=1
λ˜Γi
[(δγ − δγDI) · t
]∣∣∣ξ=ξi
=δuT∫
Ω(∂f Ψu)
TDf (∂f Ψu) dΩ u+ δ γT
∫
Ω
([g1 g2
]Ψγ)T
Ds
([g1 g2
]Ψγ)dΩ γ
−δuT∫
ΩΨuTbdΩ− δuT
∫
Γt
ΨuT t dΓt − δλ˜T∫
ΩΨλ˜T Ψγ dΩ γT
+δλ˜T∫
ΩΨλ˜T(∂sΨu
)dΩ u− δ γT
∫
ΩΨγT Ψλ
˜ dΩ λ˜+ δuT
∫
Ω
(∂sΨu
)TΨλ˜ dΩ λ
˜− δλ
ΓTΥ γ + δλ
ΓTΛu− δ γ
TΥT λ
Γ+ δuT ΛT λ
ΓT= 0 .
(7.45)
Então,
δuT(∫
ΩBTfDfBf dΩ u+
∫
Ω
(∂sΨ
u)T
Ψλ˜dΩ λ
˜−∫
ΩΨuTbdΩ
−∫
Γt
ΨuT t dΓt +ΛT λ˜Γ
)+ δ γT
(∫
Ω
([g1 g2
]Ψγ)T
Ds
([g1 g2
]Ψγ)dΩ γ
−∫
ΩΨγTΨλ
˜dΩ λ˜−ΥT λ
˜Γ
)+ δλ˜ΩT(∫
ΩΨλ˜T(∂sΨ
u)dΩ u−
∫
ΩΨλ˜TΨγ dΩ γ
)
− δλ˜ΓT(Υ γ −Λu
)= 0 . (7.46)
Definindo
Kff =
∫
ΩBTfDfBf dΩ, Kγγ =
∫
Ω
([g1 g2
]Ψγ)T
Ds
([g1 g2
]Ψγ)dΩ, (7.47a)
Ksλ˜= diag
(∫
Ω
(∂sΨ
u)T
Ψλ˜dΩ, Λ
), Kγλ
˜= diag
(∫
ΩΨγTΨλ
˜dΩ, Υ)
(7.47b)
Kλ˜s = KT
sλ˜= diag
(∫
ΩΨλ˜T(∂sΨ
u)dΩ, ΛT
)(7.47c)
Kλ˜γ = KT
γλ˜= diag
(∫
ΩΨλ˜TΨγ dΩ, ΥT
)(7.47d)
f =
∫
ΩΨuTb dΩ +
∫
Γt
ΨuT t dΓt , λ˜=
λ˜Ω
λ˜Γ
, (7.47e)

7.4. Formulação mista u-λ˜-γ 65
e para as variações arbitrárias δu, δ γ e δλ˜, a equação (7.46) dá origem ao seguinte sistema
de equações: Kff O Ksλ
˜O Kγγ −Kγλ
˜Kλ˜s −Kλ
˜γ O
u
γλ˜
=
f
0
0
. (7.48)
O sistema de equações (7.48) possui a forma típica dos problemas associados a formu-lações mistas. Os pesos da aproximação associados aos multiplicadores de Lagrange nodomínio, λ
˜Ω, e fronteira, λ
˜Γ, representam as forças generalizadas duais das deformações
que se procura restringir.Sendo γ e λ
˜graus de liberdade internos, estes podem ser estaticamente condensados.
Da terceira equação obtém-se
Kλ˜s u−Kλ
˜γγ = 0 ⇔ γ = K−1
λ˜γ Kλ
˜s u . (7.49)
Usando (7.49) e a segunda equação (7.48), tem-se
Kγγγ −Kγλ
˜λ˜= 0 ⇔ λ
˜= K−1
γλ˜Kγγ
γ ⇔ λ˜= K−1
γλ˜Kγγ K
−1λ˜γ Kλ
˜s u . (7.50)
Da primeira equação, e usando (7.50), vem
Kff u+Ksλ˜λ˜= f ⇔ Kff u+Ksλ
˜K−1γλ˜KγγK
−1λ˜γ Kλ
˜s u = f ⇔
⇔(Kff +
(K−1λ˜γ Kλ
˜s
)TKγγ
(K−1λ˜γ Kλ
˜s
))u = f . (7.51)
Definindo a matriz
Kss =(K−1λ˜γ Kλ
˜s
)TKγγ
(K−1λ˜γ Kλ
˜s
), (7.52)
a equação (7.51) assume a forma(Kff +Kss
)u = f . (7.53)
Como se constata da expressão de (7.53), a forma final da formulação tradicional é muitosemelhante à que se obtém usando a formulação onde o vector distorção, γ, é directamenteaproximado. A única diferença é que em lugar de Kss se utiliza Kss. Assim, a formulaçãomista pode ser usada para interpretar a integração selectiva. Para o caso da integraçãoreduzida seria necessário enfraquecer também χ = ∂f u. Avaliando K−1
λ˜γ e Kλ
˜s, então Kss
pode ser escrito na forma
Kss =(K−1λ˜γ Kλ
˜s
)TKγγ
(K−1λ˜γ Kλ
˜s
)
=(K−1λ˜γ Kλ
˜s
)T ∫
Ω
([g1 g2
]Ψγ)T
Ds
([g1 g2
]Ψγ)dΩ
(K−1λ˜γ Kλ
˜s
)
=
∫
Ω
([g1 g2
]Ψγ K−1
λ˜γ Kλ
˜s
)TDs
([g1 g2
]Ψγ K−1
λ˜γ Kλ
˜s
)dΩ .
(7.54)
Note-se que o produto K−1λ˜γ Kλ
˜s é avaliado ao nível elementar apenas uma vez, pois não
depende da posição no interior do elemento. Definindo a grandeza
Bs =[g1 g2
]Ψγ K−1
λ˜γ Kλ
˜s , (7.55)

66 Uma formulação de elementos mistos em coordenadas convectivas
então, Kss resulta da avaliação de
Kss =
∫
ΩBTs DsBs dΩ . (7.56)
A utilização da formulação mista apresentada nesta secção está condicionada por umúnico critério: as aproximações elementares Ψu, Ψγ e Ψλ
˜ presentes nas expressões (7.43)dos campos u, γ e λ
˜, respectivamente, devem satisfazer o critério de estabilidade de
Ladyzhenskaya–Babuska–Brezzi (LBB), ver Brezzi e Fortin (1991).
7.5 Relação entre a formulação mista e a integração
selectiva
A integração selectiva em elementos quadrilaterais convencionais pode ser vista comoa integração completa de elementos com campos de distorção alternativos, Hinton e Hu-ang (1986), ou seja, existe uma equivalência entre a integração selectiva e a formulaçãomista (Malkus e Hughes, 1978).
Considere-se o elemento isoparamétrico Lagrangeano com (n× n) nós ou um elementoSerendipiano com 4(n − 1) nós, tal que o Jacobiano |J (ξ)| é constante, i.e., o elemento érectangular ou paralelogramo. Admita-se ainda que o operador constitutivo, Ds, tambémé constante.
Recorde-se que, para a avaliação da matriz de rigidez de corte se tem
Kss =
∫
ΩBTs DsBs dΩ =
∫
ΩBTs DsBs |J| dΩ , Ω = [−1, 1]2 . (7.57)
Tendo em conta que Bs é de grau (n − 1) em cada direcção, então a função integrandaBTs DsBs |J| é de grau 2(n − 1). Para que a integração de BT
s DsBs |J| seja efectuadade forma exacta em cada direcção, seriam necessários, de acordo com a Tabela 6.2, pelomenos n pontos de Gauss, uma vez que
2nG − 1 ≥ 2(n − 1) ⇔ nG ≥ n− 1
2⇒ nG ≥ n . (7.58)
Sabendo que a integração selectiva é efectuada através da consideração de (n − 1) pontosde Gauss em cada direcção para a avaliação de Kss, então
Kredss =
(n−1)2∑
i=1
[BTs DsBs
]∣∣ξ=ξi
|J| wi . (7.59)
Tal como visto na subsecção 7.4.2, na forma mista tem-se,
Kss =
∫
ΩBTs DsBs dΩ , (7.56)
ondeBs =
[g1 g2
]Ψγ K−1
λ˜γ Kλ
˜s . (7.55)
Admitindo que as coordenadas convectivas coincidem com as cartesianas, i.e., g1 ≡ e1 eg2 ≡ e2, então
[g1 g2
]≡ I, onde I é a matriz Identidade, e a expressão (7.55) toma a
formaBs = Ψγ K−1
λγ Kλs , (7.60)

7.5. Relação entre a formulação mista e a integração selectiva 67
onde Ψγ , Kλγ e Kλs são, respectivamente, os equivalentes de Ψγ , Kλ˜γ e Kλ
˜s em coorde-
nadas cartesianas.Considere-se novamente um elemento isoparamétrico QL com (n × n) nós ou um ele-
mento QS com 4(n− 1) nós, nas mesmas condições admitidas anteriormente, i.e., com |J|e Ds constantes.
Para este elemento, admita-se que
Ψλ =
[Φλ O
O Φλ
], (7.61)
onde4
Φλ =[Φλ1 Φλ2 . . . Φλ(n−1)2
]=[δ (ξ − ξ1) δ (ξ − ξ2) . . . δ
(ξ − ξ(n−1)2
)], (7.62)
em que ξi corresponde às coordenadas dos pontos de Gauss com a regra de (n−1)×(n−1)pontos. Assuma-se ainda que
Ψγ =
[Φγ O
O Φγ
], (7.63)
ondeΦγ =
[Φγ1 Φγ2 . . . Φγ
(n−1)2
], (7.64)
em que Φγi (ξ) são as funções de interpolação de grau (n − 2) em cada direcção, quesatisfazem a condição Φγi
(ξj)= δij e ξj corresponde novamente às coordenadas dos pontos
de Gauss com a regra de (n − 1) × (n − 1) pontos. As funções Φγi resultam do produtotensorial das funções Φi unidimensionais (1D) em cada direcção ξα, que valem uma unidadeno ponto de integração e zero nos restantes, e se encontram representadas na Figura 7.3.
Assim, cada uma das funções Φγi , de cada elemento, resulta do produto tensorial dasbases das funções de interpolação 1D em cada uma das direcções.
Definindo Kλγ na forma
Kλγ =
[K1λγ O
O K2λγ
](7.65)
e tendo em conta as aproximações para γ e λ, vem
(K1λγ
)ij=(K2λγ
)ij=
∫
Ωδ (ξ − ξi) Φ
γj (ξ) dΩ = Φγj (ξi) = δij , (7.66)
o que conduz a
Kλγ =
∫
ΩΨλT Ψγ dΩ ≡ I . (7.67)
Tem-se ainda que
Kλs =
∫
ΩΨλT Bs dΩ =
Bs|ξ=ξ1
Bs|ξ=ξ2...
Bs|ξ=ξ(n−1)2
(7.68)
4Note-se que o caracter δ é utilizado, neste documento, tanto para designar a variação de uma grandezacomo para designar a função de Dirac. Para esta situação e restante capítulo, pretende-se designar asegunda.

68 Uma formulação de elementos mistos em coordenadas convectivas
−1.0 −0.5 0.5 1.0
0.5
1.0
1.5
2.0
Φ1
(a) Função constante 1D.
−1.0 −0.5 0.5 1.0
0.5
1.0
Φ1
Φ2
(b) Funções lineares 1D.
−1.0 −0.5 0.5 1.0
−0.5
0.5
1.0
1.5
Φ1
Φ2
Φ3
(c) Funções quadráticas 1D.
−1.0 −0.5 0.5 1.0
−0.5
0.5
1.0
1.5
Φ1
Φ2
Φ3
Φ4
(d) Funções cúbicas 1D.
−1.0 −0.5 0.5 1.0
−0.5
0.5
1.0
1.5
Φ1
Φ2
Φ3
Φ4
Φ5
(e) Funções quárticas 1D.
Figura 7.3: Funções de interpolação unidimensionais, que valem uma unidade no ponto deintegração e zero nos restantes.
é uma matriz que armazena as matrizes Bs avaliados nos pontos de Gauss. Assim, aexpressão (7.60) vem
Bs =ΨγK−1λγ Kλs = Ψγ I−1
Bs|ξ=ξ1
Bs|ξ=ξ2...
Bs|ξ=ξ(n−1)2
=
=Φγ1 Bs|ξ=ξ1+Φγ2 Bs|ξ=ξ2
+ . . .+Φγ(n−1)2
Bs|ξ=ξ(n−1)2=
(n−1)2∑
i=1
Φγi Bs|ξ=ξi.
(7.69)

7.5. Relação entre a formulação mista e a integração selectiva 69
Então
Kss =
∫
ΩBTs DsBs dΩ =
∫
ΩBTs DsBs |J| dΩ =
=
Bs|ξ=ξ1
Bs|ξ=ξ2...
Bs|ξ=ξ(n−1)2
T
∫
Ω
[Φγ O
O Φγ
]TDs
[Φγ O
O Φγ
]|J| dΩ
Bs|ξ=ξ1
Bs|ξ=ξ2...
Bs|ξ=ξ(n−1)2
(7.70)
Tendo em conta que Φγ é de grau (n− 2) em cada direcção, então o termo ΦγT DsΦγ |J|
é de grau 2(n − 2), sendo necessários (n − 1) pontos para que seja integrada exactamenteem cada direcção, dado que
2nG − 1 ≥ 2(n− 2) ⇔ nG ≥ n− 3
2⇒ nG ≥ (n− 1) . (7.71)
Proceda-se então à integração de ΦγT DsΦγ |J| através da regra de Gauss, recorrendo a
(n−1)×(n−1) pontos. Recorde-se que o resultado desta integração numérica será exacto,visto ter-se admitido como pressuposto que |J| é constante. Deste modo, a expressão (7.70)pode ser reescrita na forma
Kss =
Bs|ξ=ξ1
Bs|ξ=ξ2...
Bs|ξ=ξ(n−1)2
T
(n−1)2∑
i=1
[ΨγT DsΨ
γ]∣∣
ξ=ξi|J|wi
Bs|ξ=ξ1
Bs|ξ=ξ2...
Bs|ξ=ξ(n−1)2
. (7.72)
Definindo o termo ΨγT DsΨγ como sendo dado por
ΨγT DsΨγ =
[ΦγT DsΦ
γ O
O ΦγT DsΦγ
], (7.73)
onde
ΦγT DsΦγ =
Φγ1 DsΦγ1 Φγ1 Ds Φ
γ2 . . . Φγ1 DsΦ
γ(n−1)
Φγ2 DsΦγ1 Φγ2 DsΦ
γ2 . . . Φγ2 DsΦ
γ(n−1)
......
. . ....
Φγ(n−1)DsΦγ1 Φγ(n−1)DsΦ
γ2 . . . Φγ(n−1)Ds Φ
γ(n−1)
, (7.74)

70 Uma formulação de elementos mistos em coordenadas convectivas
e notando que [ΦγmDsΦγn]|ξ=ξi
= Φγm (ξi) DsΦγn (ξi) = δmiDs δni = δmnDs, então
(n−1)2∑
i=1
[ΨγT DsΨ
γ]∣∣
ξ=ξi|J|wi =
=
w1 0 0 . . .
0 w2 0 . . .
0 0. . .
...... w(n−1)2
w1 0 0 . . .
0 w2 0 . . .
0 0. . .
...... w(n−1)2
Ds |J| . (7.75)
O resultado da expressão anterior, a menos de Ds |J|, para cada um dos elementos consi-derados, i.e., a matriz diagonal com o produto dos vários pesos, encontra-se na Tabela 7.1.
Assim, substituindo a expressão (7.75) em (7.72), esta última reduz-se a
Kss =
Bs|ξ=ξ1
Bs|ξ=ξ2...
Bs|ξ=ξ(n−1)2
T
w1 0 . . .
0 w2 0 . . .... 0
. . .
Ds |J|
Bs|ξ=ξ1
Bs|ξ=ξ2...
Bs|ξ=ξ(n−1)2
=
=
(n−1)2∑
i=1
[BTs DsBs
]∣∣ξ=ξi
|J| wi .
(7.76)
Reparando na igualdade entre as expressões (7.59) e (7.76) chega-se à conclusão queKredss = Kss, como se queria demonstrar. Ou seja, a integração selectiva dos elementos
isoparamétricos quadrilaterais consiste na sua formulação mista, admitindo determinadasaproximações para γ e λ.
7.6 Elementos MITC
7.6.1 Introdução
Estes elementos dividem-se em duas famílias: elementos de laje, designados por MITCpe elementos de casca, designados por MITCs. O elemento mais simples desta família —o MITC4 — foi apresentado por Dvorkin e Bathe (1984) para análise linear e não-linearde cascas. É uma elemento de 4 nós onde as deformações assumidas são lineares em cadauma das direcções. Um desenvolvimento da sua formulação e mais resultados numéricosdecorrentes da sua aplicação podem ser encontrados em Bathe e Dvorkin (1985). A suaconvergência foi demonstrada por Bathe e Brezzi (1985).
Apesar da formulação do MITC4 ser substancialmente diferente do elemento T1 apre-sentado por Hughes e Tezduyar (1981), pode mostrar-se que estes elementos são equivalen-tes para configurações rectangulares ou paralelogrâmicas, tal como mencionado em Hughes(2000):

7.6. Elementos MITC 71
Ele
men
to∫ Ω
ΨγTIΨγdΩ=
(n−1)2
∑ i=1
[ ΨγTIΨγ]∣ ∣
ξ=ξiwi
QL4,
QS4
diag(4)
QL9,
QS8
diag(1,1,1,1,1,1,1,1)
QL16
,Q
S12
diag
(25 81,40 81,25 81,40 81,64 81,40 81,25 81,40 81,25 81,25 81,40 81,25 81,40 81,64 81,40 81,25 81,40 81,25 81
)
QL25
,Q
S16
diag
(1
216
( 59−
6√30),49 216,49 216,
1
216
( 59−
6√30),49 216,
1 216
( 59+
6√30),
1
216
( 59+
6√30),49 216,49 216,...
...,
1 216
( 59+
6√30),
1 216
( 59+
6√30),49 216,
1 216
( 59−
6√30),49 216,49 216,
1 216
( 59−
6√30),...
...,
1 216
( 59−
6√30),49 216,49 216,
1 216
( 59−
6√30),49 216,
1
216
( 59+
6√30),
1 216
( 59+
6√30),49 216,49 216,...
...,
1 216
( 59+
6√30),
1 216
( 59+
6√30),49 216,
1 216
( 59−
6√30),49 216,49 216,
1 216
( 59−
6√30))
QL36
,Q
S20
diag
(7( 8251+598√
70)
405000
,567
5000,32( 322
+13√70)
50625
,567
5000,7( 8251+
598√
70)
405000
,567
5000,−
7( 598√70
−8251)
405000
,...
...,−32( 13√
70−
322)
50625
,−7( 598√70
−8251)
405000
,567
5000,32( 322
+13√70)
50625
,−32( 13√
70−
322)
50625
,16384
50625,...
...,−32( 13√
70−
322)
50625
,32( 322
+13√70)
50625
,567
5000,−
7( 598√70
−8251)
405000
,−32( 13√
70−
322)
50625
,...
...,−7( 598√70
−8251)
405000
,567
5000,7( 8251+
598√
70)
405000
,567
5000,32( 322
+13√70)
50625
,567
5000,7( 8251+
598√
70)
405000
)
Tab
ela
7.1:
Ava
liaçã
ode∫ Ω
ΨγTIΨγdΩ
.

72 Uma formulação de elementos mistos em coordenadas convectivas
Recently, Bathe e Dvorkin (1985) proposed a four-node plate element. It isimmediately apparent that this element is identical to T1 for rectangular con-figurations. Results presented in Bathe e Dvorkin (1986) indicated superiorityof their element over T1 in rhombic configurations, but these results provedto be in error. It has been subsequently established that the Bathe-Dvorkinelement is also identical to T1 in rhombic configurations.
O elemento MITC8s, não analisado no presente trabalho, foi proposto por Bathe eDvorkin (1986). Este elemento de 8 nós tem a particularidade de utilizar médias de defor-mações assumidas em determinados pontos na construção das suas matrizes elementares,não sendo claro na referência indicada como é que estas médias são avaliadas.
Posteriormente foram apresentados por Brezzi et al. (1989) os elementos MITC7p eMITC9p. Resultados numéricos destes elementos podem ser consultados em Bathe et al.(1989). Neste artigo foram ainda testadas variações destes elementos que dispensam autilização de restrições integrais. Este último conceito é explicitado mais à frente nestasecção.
A família completa dos elementos MITCp, incluindo os elementos MITC12p e MITC16p,e respectivos resultados teóricos para as taxas de convergência e sua verificação numérica,foram apresentados em Bathe et al. (1990).
O passo seguinte foi o desenvolvimento de elementos MITCs, efectuado por Bucaleme Bathe (1993), nomeadamente os elementos MITC9s e MITC16s. O objectivo desteselementos é a eliminação dos fenómenos de shear e membrane-locking na análise de cascas.Para tal são assumidos campos de deformações de corte e de membrana no domínio doselementos.
Um esquema alternativo para a distribuição dos tying points para o caso do MITC9sfoi proposto por Bathe et al. (2003).
No presente trabalho não foram considerados elementos de casca triangulares. Noentanto, Lee e Bathe (2004) propõem três alternativas distintas: um elemento de três nóse dois elementos de seis nós.
Alguns destes elementos de casca foram implementados no software comercial ADINA(2010).
Dos vários elementos de laje existentes, são aqui analisados os quadrilaterais MITC4p,o MITC9p, o MITC16p e os triangulares MITC7p e o MITC12p. Dos elementos de casca,será apenas analisada a parcela do comportamento à flexão dos quadrilaterais MITC9s eMITC16s. Note-se que os elementos MITC4p e MITC4s coincidem. A formulação efectu-ada anteriormente, na subsecção 7.4.2, é geral e válida para qualquer um dos elementos. Asprincipais distinções entre cada elemento descrito encontram-se ao nível das aproximaçõeselementares Ψu, Ψγ e Ψλ
˜.As funções de aproximação Ψγ são geradas de forma diferente, e apresentam formatos
distintos consoante o tipo de elemento. Para os elementos quadrilaterais, tem-se
Ψγ =
[Φγ1 O
O Φγ2
], (7.77)
enquanto que no caso dos elementos triangulares se utiliza
Ψγ =
[Φγ1
Φγ2
]. (7.78)

7.6. Elementos MITC 73
De igual modo, também as funções de aproximação Ψλ˜, para os elementos quadrilate-
rais, são da forma
Ψλ˜ =
[Φλ˜1 O
O Φλ˜2
], (7.79)
e para os triangulares são dadas por
Ψλ˜ =
[Φλ˜1
Φλ˜2
]. (7.80)
Consoante a definição de Ψλ˜, diferentes tipos de restrições são impostas:
(i) ao usar-se Φλ˜α
i = δ(ξ − ξαi ), onde δ(ξ − ξαi ) é a função de Dirac concentrada em ξαi ,as restrições integrais impostas no funcional (7.38) degeneram em restrições do tipopontual, pois ∫ +∞
−∞f (ξ) δ (ξ − ξi) dξ = f (ξi) . (7.81)
Obtém-se assim uma restrição discreta. Os pontos ξαi são por vezes designados portying points ou pontos de colocação.
(ii) caso se utilize a aproximação Φλ˜α = pα (ξ), onde pα (ξ) é uma função polinomialdefinida para a direcção α, obtém-se uma restrição integral.
É ainda de salientar que, o terceiro termo do segundo membro da equação (7.38),∑ni=1 λ
Γi
[(γ − γDI) · t
]∣∣ξ=ξi
, referente à imposição da projecção da distorção ponderadana direcção do vector tangencial nos pontos de tying localizados na fronteira ter de ser nula,apenas ser considerado nos MITCp triangulares, já que são os únicos elementos com tyingpoints sobre uma fronteira inclinada. Apesar de ser igualmente possível utilizar o termo emquestão para impor as restrições discretas nos MITCp quadrilaterais, tal não foi a opçãotomada. Neste caso optou-se por utilizar apenas o segundo termo do segundo membroda equação (7.38), dispondo-se os pontos de colocação ao longo das fronteiras paralelas àdirecção em relação à qual se está a calcular a distorção. É evidente que o resultado obtidoé exactamente o mesmo. Nos MITCs, não existem tying points na fronteira, como se verámais à frente na subsecção 7.6.4.
De seguida, serão expostos os vários elementos MITC e suas características, incluindograus de liberdade em cada nó, tying points e as várias funções de aproximação. No casodos elementos quadrilaterais, os tying points e as funções de aproximação Φλ
˜α e Φγα apenasserão apresentados para a direcção ξ1, uma vez que na direcção perpendicular todas estasgrandezas são idênticas, bastando trocar ξ1 por ξ2. Será ainda explicitada a forma comose obtiveram as várias funções e ilustrados alguns exemplos gráficos.
O MITC4, apesar de ser um elemento de laje (Bathe, 1996, página 429), neste tra-balho será incluído junto dos elementos de casca, visto as suas aproximações serem maissemelhantes às destes.
7.6.2 Elementos quadrilaterais de laje
Este tipo de elementos caracteriza-se por apresentar funções de aproximação do deslo-camento transversal, Ψw, diferentes das aproximações às rotações, Ψθ, uma vez que nemsempre existe o mesmo número de graus de liberdade (g.d.l.) em cada nó, i.e., os nós comg.d.l. associado ao deslocamento transversal nem sempre possuem os g.d.l. associados àsrotações e vice-versa.

74 Uma formulação de elementos mistos em coordenadas convectivas
Relativamente às funções de aproximação Ψλ˜, estas caracterizam-se por serem funções
de Dirac, associadas a restrições discretas, e funções polinomiais (monómios), sendo queestas últimas estão associadas às restrições integrais.
As funções de aproximação, Ψγ , são constituídas por monómios.Para estes elementos, os tying points encontram-se todos na fronteira dos elementos.A geometria destes elementos é representada usando as mesmas funções de interpolação
das rotações.
MITC9p
Para o elemento MITC9p, as funções de interpolação Ψw vão ser iguais às funçõesde forma do elemento QS8 e as funções de interpolação Ψθ iguais às do elemento QL9.As funções de aproximação Φγα são constituídas por cinco monómios e as funções deaproximação Φλ
˜α apresentam quatro funções Dirac concentradas nos quatro tying pointse um monómio. Estas funções são dadas, para a direcção ξ1 respectivamente por
Ψu =
ΨQS8 O O
O ΨQL9 O
O O ΨQL9
(7.82a)
Φγ1 =[1 ξ1 ξ2 ξ1ξ2 ξ22
](7.82b)
Φλ˜1 =
[δ (ξ − ξ1) δ (ξ − ξ2) δ (ξ − ξ3) δ (ξ − ξ4) 1
]. (7.82c)
Na Figura 7.4 encontra-se um resumo dos graus de liberdade associados a cada nó, dostying points na direcção ξ1 e dos espaços usados para geração das funções de aproximaçãoΨw e Ψθ, para o elemento MITC9p.
MITC16p
Para o elemento MITC16p, as funções de interpolação Ψθ vão ser iguais às funções deforma do elemento QL16, i.e., Ψθ = ΨQL16. No entanto, as funções de interpolação Ψw
não correspondem às funções de forma/interpolação de nenhum elemento convencional,visto não existir nenhuma aproximação baseada em treze nós. O espaço gerado para essasfunções de aproximação, resulta da intersecção dos espaços de aproximação dos elementosconvencionais T15 e QL16, tal como ilustra a Figura 7.5. As funções de aproximação Φγα
são constituídas por nove monómios — mais quatro que o MITC9p — e as funções deaproximação Φλ
˜α apresentam seis funções Dirac concentradas em cada tying point e trêsmonómios. As funções de aproximação, para o elemento MITC16p, na direcção ξ1, sãoentão dadas por
Ψu =
Ψw,M16p O O
O ΨQL16 O
O O ΨQL16
(7.83a)
Φγ1 =[1 ξ1 ξ2 ξ21 ξ1ξ2 ξ22 ξ21ξ2 ξ1ξ
22 ξ32
](7.83b)
Φλ˜1 =
[δ (ξ − ξ1) δ (ξ − ξ2) δ (ξ − ξ3) δ (ξ − ξ4) . . .
. . . δ (ξ − ξ5) δ (ξ − ξ6) 1 ξ1 ξ2
],
(7.83c)

7.6. Elementos MITC 75
ξ1
ξ1
ξ2
ξ2
Nó para interpolação de w e θα
Nó para interpolação apenas de θα
aa
a =√33
Ψw ∈ EQS8, EQS8 =1, ξ1, ξ2, ξ
21 , ξ1ξ2, ξ
22 , ξ
21ξ2, ξ1ξ
22
Ψθ ∈ EQL9, EQL9 =1, ξ1, ξ2, ξ
21 , ξ1ξ2, ξ
22 , ξ
21ξ2, ξ1ξ
22 ,
ξ21ξ22
1
1
2
2
3
3
4
4
5
6
7
8 9
tying points
Figura 7.4: Graus de liberdade associados a cada nó, tying points na direcção ξ1 e espaçosusados para geração das funções de aproximação Ψw e Ψθ, para o elemento MITC9p.
1
ξ1 ξ2
ξ1 ξ2ξ21
ξ31
ξ41 ξ4
2
ξ32
ξ22
ξ21 ξ2 ξ1 ξ2
2
ξ31ξ2 ξ1 ξ
3
2
ξ41ξ2 ξ1 ξ
4
2
ξ21 ξ22
ξ31 ξ2
2ξ21ξ32
ξ31ξ32
ξ41ξ32
ξ31 ξ42
ξ21ξ42ξ4
1ξ22
QL16
T15
Figura 7.5: Intersecção dos espaços de aproximação dos elementos convencionais T15 eQL16.

76 Uma formulação de elementos mistos em coordenadas convectivas
onde
Ψw,M16p =
[1
32(ξ1 − 1)(ξ2 − 1)
(10(ξ1 + 1)ξ2 + ξ1(9ξ1 + 10) + 9ξ22
). . .
. . . − 1
32(ξ1 + 1)(ξ2 − 1)
(9ξ21 − 10ξ1(ξ2 + 1) + ξ2(9ξ2 + 10)
). . .
. . .1
32(ξ1 + 1)(ξ2 + 1)
(10(ξ1 − 1)ξ2 + ξ1(9ξ1 − 10) + 9ξ22
)
. . . − 1
32(ξ1 − 1)(ξ2 + 1)
(−10(ξ1 + 1)ξ2 + ξ1(9ξ1 + 10) + 9ξ22
). . .
. . . − 9
32
(ξ21 − 1
)(ξ2 − 1)(3ξ1 + ξ2)
9
32(ξ1 + 1)
(ξ22 − 1
)(3ξ2 − ξ1) . . .
. . . − 9
32
(ξ21 − 1
)(ξ2 + 1)(3ξ1 + ξ2)
9
32(ξ1 − 1)
(ξ22 − 1
)(3ξ2 − ξ1) . . .
. . . − 9
32
(ξ21 − 1
)(ξ2 − 1)(ξ2 − 3ξ1) − 9
32(ξ1 + 1)
(ξ22 − 1
)(ξ1 + 3ξ2) . . .
. . . − 9
32
(ξ21 − 1
)(ξ2 + 1)(ξ2 − 3ξ1) − 9
32(ξ1 − 1)
(ξ22 − 1
)(ξ1 + 3ξ2) . . .
. . .(ξ21 − 1
) (ξ22 − 1
)].
(7.84)
Não foi possível encontrar na bibliografia consultada as treze funções de forma (7.84),tendo estas sido avaliadas simbolicamente (Wolfram Research, 2013).
Nas Figuras 7.6 é possível observar alguns exemplos de gráficos de funções Ψw,M16pi .
Na Figura 7.7 encontra-se um resumo dos graus de liberdade associados a cada nó, dostying points na direcção ξ1 e dos espaços usados para geração das funções de aproximaçãoΨw e Ψθ, para o elemento MITC16p. Note-se que o nó treze aparece duas vezes.
7.6.3 Elementos triangulares de laje
Estes elementos, tal como os anteriores, são do tipo laje e por isso também se caracte-rizam por apresentar funções de aproximação ao deslocamento transversal, Ψw, diferentesdas aproximações das rotações, Ψθ e os tying points encontram-se — também — na fron-teira dos elementos. Além disso, as funções de aproximação Ψλ
˜ também incluem funçõesde Dirac, associadas às restrições discretas, e funções polinomiais (monómios), associadasàs restrições integrais. Contudo, ao contrário dos quadrilaterais, nos elementos triangularesestas funções não se encontram dispostas na forma (7.79).
As funções de aproximação Ψγ são constituídas exclusivamente por monómios. Talcomo as funções de aproximação Ψλ
˜, também não apresentam o formato usual dos qua-drilaterais (7.77), mas antes a estrutura (7.78).
Saliente-se, mais uma vez, que os elementos triangulares se caracterizam por ter um ladoinclinado, ao qual é necessário ter especial atenção. Como visto anteriormente, para esteselementos é necessário considerar o termo
∑ni=1 λ
Γi
[(γ − γDI) · t
]∣∣ξ=ξi
na equação (7.38).A geometria destes elementos é representada usando as mesmas funções de interpolação
do deslocamento transversal.
MITC7p
Para o elemento MITC7p, as funções de interpolação Ψw vão coincidir com as funçõesde forma do elemento T6. Por outro lado, as funções de interpolação Ψθ não correspondem

7.6. Elementos MITC 77
(a) Função 2D, Ψw,M16p4 . (b) Função 2D, Ψw,M16p
12 .
(c) Função 2D, Ψw,M16p13 .
Figura 7.6: Algumas funções de interpolação Ψwi , para o MITC16p.
às funções de forma de nenhum elemento convencional, visto não existir nenhum com setenós. As funções de interpolação deste elemento são dadas por,
Ψu =
ΨT6 O O
O Ψθ,M7p O
O O Ψθ,M7p
(7.85a)
Ψγ =
[1 ξ1 ξ2 0 0 0 ξ1ξ2 ξ220 0 0 1 ξ1 ξ2 −ξ21 −ξ1ξ2
](7.85b)
Ψλ˜ =
[δ (ξ − ξ1) δ (ξ − ξ2) −
√22 δ (ξ − ξ3)
0 0√22 δ (ξ − ξ3)
. . .
. . .−
√22 δ (ξ − ξ4) 0 0 1 0
√22 δ (ξ − ξ4) −δ (ξ − ξ5) δ (ξ − ξ6) 0 1
],
(7.85c)

78 Uma formulação de elementos mistos em coordenadas convectivas
ξ1
ξ1
ξ1
ξ2
Nó para interpolação de w e θα
Nó para interpolação apenas de θα
Nó para interpolação apenas de w
aa
aa
a =√
35
Ψw ∈EQL16 ∩ ET15, EQL16 ∩ ET15 =1, ξ1, ξ2, ξ
21 ,
ξ1ξ2, ξ22 , ξ
31 , ξ
21ξ2, ξ1ξ
22 , ξ
32 , ξ2ξ
31 , ξ
21ξ
22 , ξ1ξ
32 , ξ
31ξ
22
Ψθ ∈EQL16, EQL16 =1, ξ1, ξ2, ξ
21 , ξ1ξ2, ξ
22 , ξ
31 , ξ
21ξ2,
ξ1ξ22 , ξ
32 , ξ2ξ
31 , ξ
21ξ
22 , ξ1ξ
32 , ξ
31ξ
22 , ξ
21ξ
32 , ξ
31ξ
32
1
1
2
2
3
3
4
4
5
5
6
6
7
8
9
10
11
12
13
13 14
1516
tying pointstying points
Figura 7.7: Graus de liberdade associados a cada nó, tying points na direcção ξ1 e espaçosusados para geração das funções de aproximação Ψw e Ψθ, para o elemento MITC16p.
onde
Ψθ,M7p = [(−ξ1 − ξ2 + 1)((3ξ1 − 2)ξ2 − 2ξ1 + 1) ξ1(−3ξ2(ξ1 + ξ2 − 1) + 2ξ1 − 1)
. . . ξ2(−3ξ1(ξ1 + ξ2) + 3ξ1 + 2ξ2 − 1) 4ξ1(3ξ2 − 1)(ξ1 + ξ2 − 1) . . .
. . . 4ξ1ξ2(3(ξ1 + ξ2)− 2) 4(3ξ1 − 1)ξ2(ξ1 + ξ2 − 1) − 27ξ1ξ2(ξ1 + ξ2 − 1)] . (7.86)
Tal como no elemento MITC16p, não foi possível encontrar na bibliografia consultadaas funções de forma (7.86) do MITC7p, tendo estas sido avaliadas simbolicamente (Wol-fram Research, 2013). Nas Figuras 7.8 é possível observar alguns exemplos de gráficos defunções Ψθ,M7p
i .Na Figura 7.9 encontra-se um resumo dos graus de liberdade associados a cada nó, dos
tying points e dos espaços usados para geração das funções de aproximação Ψw e Ψθ, parao elemento MITC7p.
MITC12p
Para o elemento MITC12p, as funções de interpolação Ψw vão coincidir com as funçõesde forma do elemento T10. Por outro lado — mais uma vez — as funções de interpolação

7.6. Elementos MITC 79
(a) Função 2D, Ψθ,M7p1 . (b) Função 2D, Ψθ,M7p
3 .
(c) Função 2D, Ψθ,M7p4 . (d) Função 2D, Ψθ,M7p
5 .
(e) Função 2D, Ψθ,M7p7 .
Figura 7.8: Algumas funções de interpolação Ψθi , para o MITC7p.

80 Uma formulação de elementos mistos em coordenadas convectivas
ξ1
ξ1
ξ2
ξ2
Nó para interpolação de w e θα
Nó para interpolação apenas de θαa
a
a = 13
b
b
b
b
b = 12−
√36
Ψw ∈ ET6, ET6 =1, ξ1, ξ2, ξ
21 , ξ1ξ2, ξ
22
Ψθ =1, ξ1, ξ2, ξ
21 , ξ1ξ2, ξ
22 , ξ1ξ2 (1− ξ1 − ξ2)
1
1
2
2
3
3
4
4
5
5
6
6
7
tying points
Figura 7.9: Graus de liberdade associados a cada nó, tying points e espaços usados parageração das funções de aproximação Ψw e Ψθ, para o elemento MITC7p.
Ψθ não correspondem às funções de forma de nenhum elemento convencional, visto nãoexistir nenhum com doze nós. As funções de interpolação deste elemento são dadas por,
Ψu =
ΨT10 O O
O Ψθ,M12p O
O O Ψθ,M12p
(7.87a)
Ψγ =
[1 ξ1 ξ2 ξ21 ξ1ξ2 ξ22 0 0 0 0 0 0 ξ21ξ2 ξ1ξ
22 ξ32
0 0 0 0 0 0 1 ξ1 ξ2 ξ21 ξ1ξ2 ξ22 −ξ31 −ξ21ξ2 −ξ1ξ22
]
(7.87b)
Ψλ˜ =
[δ (ξ − ξ1) δ (ξ − ξ2) δ (ξ − ξ3)
δ (ξ − ξ1) δ (ξ − ξ2) δ (ξ − ξ3). . .
. . .−
√22 δ (ξ − ξ4) −
√22 δ (ξ − ξ5) −
√22 δ (ξ − ξ6)√
22 δ (ξ − ξ4)
√22 δ (ξ − ξ5)
√22 δ (ξ − ξ6)
. . .
. . .δ (ξ − ξ7) δ (ξ − ξ8) δ (ξ − ξ9) 1 ξ1 ξ2 0 0 0
δ (ξ − ξ7) δ (ξ − ξ8) δ (ξ − ξ9) 0 0 0 1 ξ1 ξ2
],
(7.87c)

7.6. Elementos MITC 81
onde
Ψθ,M12p =
[1
2(ξ1 + ξ2 − 1)
((26ξ1 − 9)ξ22 + (ξ1 − 1)(26ξ1 − 9)ξ2 − 9(ξ1 − 1)ξ1 − 2
). . .
. . .1
2ξ1((9− 26ξ1)ξ
22 − (ξ1 − 1)(26ξ1 − 9)ξ2 + 9(ξ1 − 1)ξ1 + 2
). . .
. . .1
2ξ2((9− 26ξ1)ξ
22 − (ξ1 − 1)(26ξ1 − 9)ξ2 + 9(ξ1 − 1)ξ1 + 2
). . .
. . .− 9
4ξ1(4ξ2 − 1)(ξ1 + ξ2 − 1)(6ξ1 + 5ξ2 − 4) − 9
4ξ1ξ2(−5ξ1 + ξ2 + 1)(4ξ1 + 4ξ2 − 3)
9
4(4ξ1 − 1)ξ2(ξ1 + ξ2 − 1)(ξ1 + 6ξ2 − 2)
9
4ξ1(4ξ2 − 1)(ξ1 + ξ2 − 1)(6ξ1 + ξ2 − 2) . . .
. . .9
4ξ1ξ2(4ξ1 + 4ξ2 − 3)(−ξ1 + 5ξ2 − 1) − 9
4(4ξ1 − 1)ξ2(ξ1 + ξ2 − 1)(5ξ1 + 6ξ2 − 4) . . .
. . . 32ξ1ξ2(ξ1 + ξ2 − 1)(4ξ1 + 4ξ2 − 3) − 32ξ1(4ξ1 − 1)ξ2(ξ1 + ξ2 − 1) . . .
. . .− 32ξ1ξ2(4ξ2 − 1)(ξ1 + ξ2 − 1)] . (7.88)
Mais uma vez, não foi possível encontrar na bibliografia consultada as doze funçõesde forma (7.88), tendo estas sido novamente avaliadas simbolicamente (Wolfram Research,2013).
Nas Figuras 7.10 é possível observar alguns exemplos de gráficos de funções Ψθ,M12pi .
Na Figura 7.11 encontra-se um resumo dos graus de liberdade associados a cada nó,dos tying points e dos espaços usados para geração das funções de aproximação Ψw e Ψθ,para o elemento MITC12p. Note-se que o nó dez aparece duas vezes.
7.6.4 Elementos quadrilaterais de casca
Neste tipo de elementos as funções de aproximação do deslocamento transversal, Ψw,são iguais às funções de aproximações das rotações, Ψθ, ou seja, em cada nó existem sempretrês graus de liberdade, associados ao deslocamento transversal e rotação em cada umadas direcções. Deste modo, as funções de interpolação Ψu, para cada elemento MITCsquadrilátero, vão ser iguais às funções de forma/interpolação dos respectivos elementosconvencionais.
Ao contrário dos MITCp, onde todos os tying points se encontram na fronteira, nosMITCs os tying points encontram-se no interior do elemento (excepto no caso do MITC4).
Além disso, no caso dos MITCs, as funções Ψλ˜ são apenas funções de Dirac, às quais
estão associadas a restrições discretas.Relativamente às funções de aproximação, Ψγ , tal como nos MITCp quadrilaterais,
estas são da forma (7.77). No entanto, o modo como se obtêm é diferente.Para os MITCs quadrilaterais, as funções Ψγ são expressas através de funções tais que
Φγi (ξj) = δij , onde ξj são as coordenadas do ponto de colocação (ou tying) j em cadauma das direcções ξα. Como tal, são obtidas através do produto tensorial das funções deinterpolação unidimensionais em cada direcção ξα, representadas na Figura 7.3, que valemuma unidade num tying point e zero nos restantes, sendo o espaço gerado para cada umadas funções de Ψγ resultante do produto tensorial das bases destas funções 1D. Repare-seque estas funções são exactamente as mesmas que são utilizadas para gerar as funções deinterpolação Φγi utilizadas na formulação mista dos elementos isoparamétricos quadrilate-
rais. Contudo, apesar do modo de geração das funções Φγi ser o mesmo, nos elementosMITCs, o número de pontos de tying difere consoante a direcção e consequentemente as

82 Uma formulação de elementos mistos em coordenadas convectivas
(a) Função 2D, Ψθ,M12p1 . (b) Função 2D, Ψθ,M12p
2 .
(c) Função 2D, Ψθ,M12p7 . (d) Função 2D, Ψθ,M12p
8 .
Figura 7.10: Algumas funções de interpolação Ψθi , para o MITC12p.
funções Φγi não são as mesmas que as usadas no contexto dos elementos isoparamétricoscom integração selectiva.
Como Ψγ é expresso através de funções tais que Φγi (ξj) = δij e Ψλ˜ é apenas constituído
por funções Dirac, então, para os elementos MITCs, Kλ˜γ assume a forma especial
Kλ˜γ =
∫
ΩΨλ˜T Ψγ dΩ = I , (7.89)
tal como foi visto anteriormente na secção 7.5.A geometria destes elementos é representada usando as mesmas funções de interpolação
das rotações e do deslocamento transversal.
MITC4
Para o elemento MITC4, as funções de interpolação Ψu vão ser iguais às funções deforma do elemento QL4. As funções Φλ
˜α são constituídas por duas funções de Diracconcentradas nos tying points e as funções de Φγα resultam do produto tensorial da função

7.6. Elementos MITC 83
(e) Função 2D, Ψθ,M12p9 . (f) Função 2D, Ψθ,M12p
10 .
(g) Função 2D, Ψθ,M12p12 .
Figura 7.10: Algumas funções de interpolação Ψθi , para o MITC12p (Continuação).
constante na direcção α e de funções lineares na direcção perpendicular, i.e.,
Φγ1 ∈ L2(Ω), Φγ1 ∈ Span 1 ⊗ 1, ξ2 (7.90a)
Φγ2 ∈ L2(Ω), Φγ2 ∈ Span 1, ξ1 ⊗ 1 . (7.90b)
É de salientar que, as funções de interpolação 1D na Figura 7.3b não são unitárias nosextremos, onde se localizam os tying points para o MITC4, mas sim em pontos intermédios.Deste modo, a geração das funções de aproximação Φγαi deste elemento, resultaram doproduto tensorial das funções 1D representadas nas Figuras 7.3a e das funções de formaLagrangeanas lineares. Na Figura 7.12 encontra-se um gráfico de um exemplo de umafunção Φγαi .

84 Uma formulação de elementos mistos em coordenadas convectivas
ξ1
ξ1
ξ2
ξ2
Nó para interpolação de w e θα
Nó para interpolação apenas de θα
Nó para interpolação apenas de w
a
a
a = 13
b
b
c
c
cc
c =√
320
b = 14
Ψw ∈ ET10, ET10 =1, ξ1, ξ2, ξ
21 , ξ1ξ2, ξ
22 , ξ
31 , ξ
21ξ2,
ξ1ξ22 , ξ
32
Ψθ =1, ξ1, ξ2, ξ
21 , ξ2ξ1, ξ
22 , ξ
31 , ξ2ξ
21 , ξ
22ξ1, ξ
32 ,
ξ2ξ21(ξ2 + ξ1), ξ
22ξ1(ξ2 + ξ1)
1
1
2
2
3
3
4
4
5
5
6
6
7
7
8
8
9
9
10
10
11
12
tying points
Figura 7.11: Graus de liberdade associados a cada nó, tying points e espaços usados parageração das funções de aproximação Ψw e Ψθ, para o elemento MITC12p.
Figura 7.12: Função de interpolação Φγ11 , para o MITC4.

7.6. Elementos MITC 85
ξ1
ξ1
ξ2
ξ2
1
1
2
2
34
tying points
Nó para interpolação de w e θα
Ψw,Ψθ ∈ EQL4, EQL4 = 1, ξ1, ξ2, ξ1ξ2
Figura 7.13: Graus de liberdade associados a cada nó, tying points na direcção ξ1 e espaçosusados para geração das funções de aproximação Ψw e Ψθ, para o elemento MITC4.
Assim, para este elemento tem-se
Ψu =
ΨQL4 O O
O ΨQL4 O
O O ΨQL4
(7.91a)
Φγ1 =[12 (ξ2 − 1) 1
2 (ξ2 + 1)]
(7.91b)
Φλ˜1 =
[δ (ξ − ξ1) δ (ξ − ξ2)
]. (7.91c)
Na Figura 7.13 encontra-se um resumo dos graus de liberdade associados a cada nó, dostying points na direcção ξ1 e dos espaços usados para geração das funções de aproximaçãoΨw e Ψθ, para o elemento MITC4.
MITC9s
Para o elemento MITC9s, as funções de interpolação Ψu vão ser iguais às funçõesde forma do elemento QL9. As funções Φλ
˜α são constituídas por seis funções de Diracconcentradas nos tying points e as funções Φγα resultam do produto tensorial de funções

86 Uma formulação de elementos mistos em coordenadas convectivas
(a) Função Φγ11 . (b) Função Φγ1
3 .
Figura 7.14: Funções de interpolação Φγ1i , para o MITC9s.
lineares na direcção α e de funções quadráticas na direcção perpendicular, i.e.,
Φγ1 ∈ L2(Ω), Φγ1 ∈ Span1, ξ1 ⊗ 1, ξ2, ξ22
(7.92a)
Φγ2 ∈ L2(Ω), Φγ2 ∈ Span1, ξ1, ξ21 ⊗ 1, ξ2
. (7.92b)
Nas Figuras 7.3b e 7.3c encontram-se representadas as funções de interpolação 1D quegeraram as funções de aproximação Φγαi deste elemento, e na Figura 7.14 encontra-se arepresentação gráfica de exemplos dessas mesmas funções.
Assim, para este elemento tem-se
Ψu =
ΨQL9 O O
O ΨQL9 O
O O ΨQL9
(7.93a)
Φγ1 =
[1
4
(√3ξ1 − 1
)(√5− 5ξ2
)ξ2
1
2
(√3ξ1 − 1
) (5ξ22 − 1
). . .
. . .− 1
4
(√3ξ1 − 1
)ξ2
(5ξ2 +
√5)
− 1
4
(√3ξ1 + 1
)(√5− 5ξ2
)ξ2 . . .
. . . ,1
2
(√3ξ1 + 1
) (1− 5ξ22
) 1
4
(√3ξ1 + 1
)ξ2
(5ξ2 +
√5)]
(7.93b)
Φλ˜1 =
[δ (ξ − ξ1) δ (ξ − ξ2) δ (ξ − ξ3) δ (ξ − ξ4) δ (ξ − ξ5) δ (ξ − ξ6)
]. (7.93c)
Na Figura 7.15 encontra-se um resumo dos graus de liberdade associados a cada nó, dostying points na direcção ξ1 e dos espaços usados para geração das funções de aproximaçãoΨw e Ψθ, para o elemento MITC9s.
MITC16s
Para o elemento MITC16s, as funções de interpolação Ψu vão ser iguais às funções deforma/interpolação do elemento QL16. As funções Φλ
˜ são constituídas por doze funções

7.6. Elementos MITC 87
ξ1
ξ1
ξ2
ξ2
Nó para interpolação de w e θα
aa
b
ba =
√33
b =√
35
Ψw,Ψθ ∈ EQL9, EQL9 =1, ξ1, ξ2, ξ
21 , ξ1ξ2, ξ
22 , ξ
21ξ2,
ξ1ξ22 , ξ
21ξ
22
1
1
2
2
3
3
4
4
5
5
6
6
7
8 9
tying points
Figura 7.15: Graus de liberdade associados a cada nó, tying points na direcção ξ1 e espaçosusados para geração das funções de aproximação Ψw e Ψθ, para o elemento MITC9s.
de Dirac concentradas em cada tying point e as funções Φγα resultam do produto tensorialde funções quadráticas na direcção α e cúbicas na direcção perpendicular, i.e.,
Φγ1 ∈ L2(Ω), Φγ1 ∈ Span1, ξ1, ξ21 ⊗ 1, ξ2, ξ22 , ξ32
(7.94a)
Φγ2 ∈ L2(Ω), Φγ2 ∈ Span1, ξ1, ξ21 , ξ31 ⊗ 1, ξ2, ξ22
. (7.94b)
Nas Figuras 7.3c e 7.3d encontram-se representadas as funções de interpolação 1D quegeraram as funções de aproximação Φγαi deste elemento, e na Figura 7.16 encontra-se arepresentação gráfica de exemplos destas últimas.

88 Uma formulação de elementos mistos em coordenadas convectivas
(a) Função Φγ11 . (b) Função Φγ1
2 .
(c) Função Φγ15 . (d) Função Φγ1
7 .
Figura 7.16: Funções de interpolação Φγ1i , para o MITC16s.

7.6. Elementos MITC 89
Assim, para este elemento tem-se
Ψu =
ΨQL16 O O
O ΨQL16 O
O O ΨQL16
(7.95a)
Φγ1 =
[(√5− 5ξ1
)ξ1(c− ξ2)(c+ ξ2)(d − ξ2)
4 (d3 − c2d)
(√5− 5ξ1
)ξ1(c− ξ2)(d− ξ2)(d + ξ2)
4c(c − d)(c + d). . .
. . .
(√5− 5ξ1
)ξ1(c+ ξ2)(d− ξ2)(d + ξ2)
4c(c − d)(c + d)
(√5− 5ξ1
)ξ1(c− ξ2)(c+ ξ2)(d+ ξ2)
4 (d3 − c2d). . .
. . .
(1− 5ξ21
) (ξ22 − c2
)(d− ξ2)
2 (d3 − c2d)
(1− 5ξ21
)(c− ξ2)
(ξ22 − d2
)
2 (c3 − cd2). . .
. . .
(1− 5ξ21
)(c+ ξ2)
(ξ22 − d2
)
2 (c3 − cd2)
(1− 5ξ21
) (ξ22 − c2
)(d+ ξ2)
2 (d3 − c2d). . .
. . .ξ1(5ξ1 +
√5)(c− ξ2)(c + ξ2)(d− ξ2)
4d(c − d)(c+ d)
ξ1(5ξ1 +
√5)(c− ξ2)
(ξ22 − d2
)
4 (c3 − cd2). . .
. . .ξ1(5ξ1 +
√5)(c+ ξ2)
(ξ22 − d2
)
4 (c3 − cd2)
ξ1(5ξ1 +
√5)(c− ξ2)(c+ ξ2)(d+ ξ2)
4d(c − d)(c+ d)
]
(7.95b)
Φλ˜1 = [δ (ξ − ξ1) δ (ξ − ξ2) δ (ξ − ξ3) δ (ξ − ξ4) δ (ξ − ξ5) δ (ξ − ξ6) . . .
. . . δ (ξ − ξ7) δ (ξ − ξ8) δ (ξ − ξ9) δ (ξ − ξ10) δ (ξ − ξ11) δ (ξ − ξ12)] .
(7.95c)
Na Figura 7.17 encontra-se um resumo dos graus de liberdade associados a cada nó, dostying points na direcção ξ1 e dos espaços usados para geração das funções de aproximaçãoΨw e Ψθ, para o elemento MITC16s.
7.6.5 Integrações em elementos MITC
A avaliação das matrizes elementares dos elementos MITC quadrilaterais é efectuadaexactamente da mesma forma que nos elementos convencionais, excepto a avaliação da
matriz de rigidez de corte elementar, K(e)ss . Para os MITC, utiliza-se sempre o número
de pontos de integração mínimo tal que esta matriz seja sempre integrada exactamentequando |J| é constante.
Para os elementos MITC quadrilaterais, o número de pontos de integração mínimoé escolhido de acordo com a regra de quadratura de Gauss-Legendre em cada direcção,indicada na Tabela 6.2, dependendo do grau das funções integrandas, admitindo que sãopolinomiais, i.e., que o Jacobiano é constante. Para diferentes tipos de elementos finitosquadrilaterais MITC, encontra-se representada na Tabela 7.2, o grau das funções inte-grando em cada direcção, para o caso de |J| constante.
No caso de elementos triangulares MITC, a avaliação das várias matrizes elementares éefectuada de forma diferente dos elementos convencionais respectivos, tendo em considera-ção os diferentes graus da funções integrando. Na Tabela 7.3, encontram-se representadosos graus das funções integrando para os elementos finitos triangulares MITC. Recorde-seainda que as regras de integração são diferentes das usadas nos elementos quadrilaterais,sendo o número de pontos de integração mínimo escolhido de acordo com a Tabela 6.4.

90 Uma formulação de elementos mistos em coordenadas convectivas
ξ1
ξ1
ξ2
ξ2
Nó para interpolação de w e θα
aa
b
b
c
c
a =√
35
b =
√30−
√480
70
c =
√30+
√480
70
Ψw,Ψθ ∈ EQL16, EQL16 =1, ξ1, ξ2, ξ
21 , ξ1ξ2, ξ
22 , ξ
31 , ξ
21ξ2,
ξ1ξ22 , ξ
32 , ξ
31ξ2, ξ
21ξ
22 , ξ1ξ
32 , ξ
31ξ
32
1
1
2
2
3
3
4
4
5
5
6
6
7
7
8
8
9
9
10
10
11
11
12
12
13 14
1516
tying points
Figura 7.17: Graus de liberdade associados a cada nó, tying points na direcção ξ1 e espaçosusados para geração das funções de aproximação Ψw e Ψθ, para o elemento MITC16s.
Tipo de quadrilátero MITC no nós K(e)ss
MITCp
4 2
9 4
16 6
MITCs9 4
16 6
Tabela 7.2: Grau das funções integrandas (caso |J| = constante) em cada direcção paraelementos quadrilaterais MITC.
Tipo de triângulo MITC no nós K(e)ff , G(e) K
(e)ss K
(e)w , M(e) fΩ(e)
MITCp7 4 4 6 3
12 6 6 8 4
Tabela 7.3: Grau das funções integrandas (caso |J| = constante) para elementos triangu-lares MITC.

Capítulo 8
Resultados Numéricos
8.1 Introdução
A formulação dos elementos finitos convencionais foi apresentada no capítulo 5. Umaalternativa a esta abordagem são os elementos MITC, cuja apresentação para análise está-tica foi efectuada no capítulo 7. Após a implementação de ambos os tipos de elementos, éagora possível a sua aplicação a alguns exemplos numéricos. Para o efeito, foram efectuadastrês tipos de análises: estática, vibração livre e linear de estabilidade.
Antes disso, realizar-se-á um ensaio para atestar a qualidade dos elementos finitosem estudo, o denominado patch test. Este é um teste utilizado para garantir a validadedos elementos finitos, relativamente à convergência, robustez do algoritmo, estabilidadeda aproximação, compatibilidade (continuidade) dos elementos e à sua implementação noprograma de cálculo automático. A ideia fundamental consiste em verificar se os elementosconvergem para a solução exacta, testando a sua capacidade para reproduzir campos detensões generalizados constantes, uma vez que à medida que se refinam progressivamenteas malhas, as variações desses campos dentro dos elementos tendem a ser nulas e portantoa apresentarem valores constantes.
De seguida, analisar-se-á a eficiência de cada elemento e a qualidade das soluções apro-ximadas para uma laje rectangular moderadamente espessa (h/L = 0, 1) para cada tipo deanálise, comparando os valores numéricos obtidos a partir dos elementos em estudo comos valores exactos. Realizou-se também o teste de shear-locking para avaliar a retenção aocorte de cada um dos elementos.
Em termos de aplicação prática dos elementos em questão, estudar-se-á uma laje rec-tangular com dimensão (4×2), simplesmente apoiada no seu contorno (apoio do tipo hard),uma vez que se conhecem, ou é possível conhecer, as soluções exactas para os vários tiposde análise para esta laje, possibilitando a aferição da qualidade da aproximação obtida.Por forma a reduzir o custo computacional e o tempo de processamento dos dados, recor-rer-se-á a uma dupla simplificação de simetria, ficando-se assim com uma laje rectangularcom dimensão (2 × 1), com encastramentos deslizantes sobre os eixos de simetria (ver Fi-gura 8.1). A fim de adimensionalizar a espessura da laje, usou-se L = 2. Relativamente àspropriedades físicas da laje, adoptou-se E = 2× 108, ν = 0, 3 e h = 0, 20, excepto no testede shear-locking onde esta espessura h é variável, como se verá mais à frente neste capítulo.As unidades das grandezas referidas não são indicadas explicitamente, mas encontram-senum sistema coerente.
A geração das malhas de elementos finitos, quer as regulares, quer as distorcidas, foiefectuada com recurso ao software GMSH, ver Geuzaine e Remacle (2009). Na Figura 8.2
91

92 Resultados Numéricos
x1
x2
1
2
Figura 8.1: Laje analisada após dupla simplificação de simetria.
e 8.3, apresentam-se a título exemplificativo, respectivamente, as malhas regulares e dis-torcidas utilizadas para o elemento QL4/QS4 e MITC4p/MITC4s. As malhas regulares edistorcidas para os elementos triangulares podem ser obtidas através destas, pela divisãodos respectivos quadrilaterais.
8.2 Análise estática
Esta subsecção tem como objectivo a análise estática da laje quando sujeita a umcarregamento unitário uniformemente distribuído.
8.2.1 Patch Test
Para este tipo de análise serão efectuados patch tests para a flexão, corte e torção,sendo que em cada um destes os elementos deverão representar campos de momento flec-tor, esforço transverso e momento torsor constantes, respectivamente, ver Zienkiewicz et al.(2005, Capítulo 9, página 329). No presente caso, esta condição deve verificar-se indepen-dentemente da espessura da laje considerada. Além disso, deduziu-se ainda, para cada tipode teste, a solução exacta para o campo de deslocamentos transversal, com o objectivo decompará-lo com os valores numéricos obtidos com cada tipo de elemento e verificar tam-bém a resposta cinemática obtida. Deste modo, a partir do respectivo campo de esforçosimposto, e recorrendo às relações constitutivas, chega-se ao campo de deformações gene-ralizado. Introduzindo as equações de compatibilidade no domínio obtém-se um sistemade cinco equações diferenciais às três incógnitas w e θα. Note-se que, para o mencionadosistema ter solução, as deformações generalizadas devem cumprir as duas equações de in-tegrabilidade (4.55). Integrando este sistema — e introduzindo as respectivas condições defronteira cinemáticas — obtém-se a solução do problema.
Considerando uma laje rectangular de dimensões (a × b), para o patch test de fle-xão, aplicou-se um momento flector unitário distribuído uniformemente ao longo do bordox1 = a. Ao mesmo tempo restringiram-se os graus de liberdade do bordo x1 = 0 de talforma que os deslocamentos transversais dos nós extremos e as rotações segundo x1 aolongo desse bordo estivessem impedidos. É de salientar o facto de os deslocamentos trans-versais entre as extremidades e as rotações segundo x2 no bordo estarem livres, uma vezque a estrutura deve deformar livremente não gerando esforços de flexão nessa direcção.

8.2. Análise estática 93
(a) 1 × 2. (b) 2 × 8.
(c) 4 × 8. (d) 8 × 16.
(e) 16 × 32.
Figura 8.2: Discretização de malhas regulares no caso dos elementos de quatro nós.
Note-se ainda que este teste resulta da simplificação de simetria de uma laje simplesmenteapoiada apenas em dois pontos (pelo que se trataria de um mecanismo), sujeita à aplica-ção de uma par de momentos flectores, de igual intensidade e sentidos opostos, em cadaos dos bordos verticais. Na Figura 8.4a é possível observar o teste de flexão efectuado. Asolução exacta do campo de deslocamentos generalizado para este teste, aplicado à lajeconsiderada, é dada pelas expressões
w(x1, x2) =χ11
2
(νx2 (x2 − b)− x21
)(8.1a)
θ1(x1, x2) = χ11x1 (8.1b)
θ2(x1, x2) =χ11
2ν(b− 2x2) , (8.1c)
onde foi introduzida a curvatura de flexão, χ11, dada por
χ11 =mΓnn
Df (1− ν2). (8.2)
Para o patch test de esforço transverso, aplicou-se uma carga unitária uniformementedistribuída ao longo do bordo x1 = a, encastrou-se o bordo x1 = 0 e bloquearam-se as
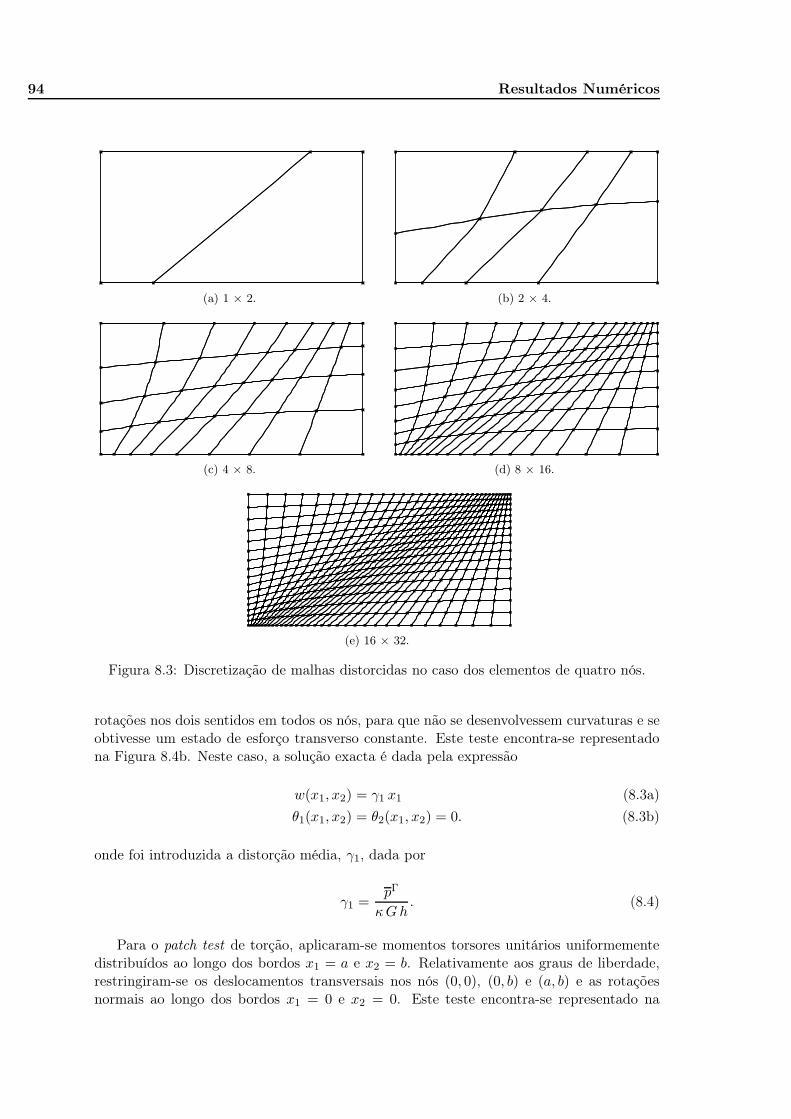
94 Resultados Numéricos
(a) 1 × 2. (b) 2 × 4.
(c) 4 × 8. (d) 8 × 16.
(e) 16 × 32.
Figura 8.3: Discretização de malhas distorcidas no caso dos elementos de quatro nós.
rotações nos dois sentidos em todos os nós, para que não se desenvolvessem curvaturas e seobtivesse um estado de esforço transverso constante. Este teste encontra-se representadona Figura 8.4b. Neste caso, a solução exacta é dada pela expressão
w(x1, x2) = γ1 x1 (8.3a)
θ1(x1, x2) = θ2(x1, x2) = 0. (8.3b)
onde foi introduzida a distorção média, γ1, dada por
γ1 =pΓ
κGh. (8.4)
Para o patch test de torção, aplicaram-se momentos torsores unitários uniformementedistribuídos ao longo dos bordos x1 = a e x2 = b. Relativamente aos graus de liberdade,restringiram-se os deslocamentos transversais nos nós (0, 0), (0, b) e (a, b) e as rotaçõesnormais ao longo dos bordos x1 = 0 e x2 = 0. Este teste encontra-se representado na

8.2. Análise estática 95
x1
x2
w = 0
w = 0
θ1 = 0 mΓ
nn
(a) Teste de flexão.
x1
x2
w = 0
w = 0
θα = 0 pΓ
(b) Teste de corte.
x1
x2
w = 0w = 0
w = 0
θ1 = 0
θ2 = 0
mΓ
nt
mΓ
nt
(c) Teste de torção.
Figura 8.4: Patch tests para uma laje de dimensões (a× b).
x1
x2
(0, 0)
(10, 0)
(10, 10)
(2, 2)
(8, 3)
(8, 7)(4, 7)
(0, 10)
10
10
(a) Elementos quadrilaterais.
x1
x2
(0, 0)
(10, 0)
(10, 10)
(2, 2)(8, 3)
(8, 7)(4, 7)
(0, 10)
10
10
(b) Elementos triangulares.
Figura 8.5: Geometria da malha utilizada nos patch tests.
Figura 8.4c. Para a solução exacta deste teste tem-se
w(x1, x2) = −χ12 x1 x2 (8.5a)
θ1(x1, x2) = χ12 x2 (8.5b)
θ2(x1, x2) = χ12 x1 , (8.5c)
onde foi introduzida a curvatura de torção, χ12, dada por
χ12 =mΓnt
Df (1− ν). (8.6)
Este conjunto de testes é usado, por exemplo, em Hinton e Huang (1986). Na realizaçãodestes testes, foi utilizada uma laje quadrada, de dimensões (10×10), constituída por 5 ou10 elementos distorcidos, consoante o elemento em consideração fosse um quadrilátero ouum triângulo, cuja geometria se encontra na Figura 8.5, e utilizou-se o módulo de elastici-dade E = 10, 92, coeficiente de Poisson ν = 0, 3 e espessura h = 0, 05. Na determinação

96 Resultados Numéricos
Lado do elementoIi
1 2 3 4 5 6
1 2 1 1 — — — —
1 2 3 1/3 4/3 1/3 — — —
1 2 3 4 1/4 3/4 3/4 1/4 — —
1 2 3 4 5 7/45 32/45 4/15 32/45 7/45 —
1 2 3 4 5 6 19/144 25/48 25/72 25/72 25/48 19/144
Tabela 8.1: Tabela de integrais Ii =∫ 1−1 ψi(ξ) dξ.
das forças nodais equivalentes à carga aplicada à estrutura em cada um dos testes, recor-reu-se ao programa Mathematica (Wolfram Research, 2013) para efectuar a integração dasfunções de forma ao longo dos bordos carregados com distribuições uniformes (o programaem MATLAB não contempla esta solicitação). A Tabela 8.1 resume os valores a partir dosquais é possível calcular as forças nodais equivalentes generalizadas, multiplicando posteri-ormente pelo Jacobiano apropriado. Note-se que, para elementos com quatro nós ao longodos lados, os valores apresentados na tabela 8.1 não coincidem com os indicados em Hintone Huang (1986).
A Tabela 8.2 resume os resultados obtidos nos vários patch tests para cada tipo deelemento convencional, consoante o tipo de integração utilizado.
O campo de deslocamentos transversal w(x1, x2) só é exacto para os elementos cujasfunções de aproximação possam reproduzir a solução exacta.
Segundo Hinton e Huang (1986, páginas 417 e 418), os esforços seriam exactos emtodos os elementos convencionais. No entanto, estas conclusões não foram corroboradas nopresente estudo. Da mesma forma, também os deslocamentos não foram exactos em todosos elementos.
Tal como é possível observar na Tabela 8.2, no teste de corte, todos os elementos passamno patch test, qualquer que seja o tipo de integração usada. Verificou-se também que, para aintegração completa, exceptuando o elemento QL4, os quadrilaterais Lagrangeanos passamem todos os patch test. No entanto, note-se que, nos teste de flexão e torção, quandose utilizou integração selectiva e reduzida, na grande maioria dos casos, os resultadosdos momentos e esforços transversos, respectivamente, passaram a ser exactos apenas nospontos de Gauss, com excepção dos elementos QL16 e QL36 para o teste de torção (quecontinuam a ser exactos em todos os pontos). Da mesma forma, em muitos casos, tambémos deslocamentos apenas passaram a ser exactos nos nós quando se fez integração selectivaou reduzida. No entanto, mais uma vez, os elementos QL16 e QL36 são excepção, masdesta vez pela negativa. Para o teste de flexão, no caso da integração selectiva e reduzida,ambos os elementos não apresentam os deslocamentos exactos sequer nos nós. Tal deve--se ao facto da matriz de rigidez elementar resultante para estes casos apresentar maisdo que três valores próprios nulos, correspondentes aos três movimentos de corpo rígido.Portanto, a não utilização da integração completa resulta num mecanismo associado a umsistema singular, obtendo-se, para este tipo de carregamento, deslocamentos transversaisarbitrários. Posteriormente constatou-se também que, no teste de torção, ao bloquear odeslocamento transversal de um dos lados onde se impôs condições de fronteira cinemáticas,

8.2. Análise estática 97
Tip
ode
elem
ento
nonó
sno
nós
dom
odel
o
Tip
ode
test
e
Fle
xão
Cor
teTor
ção
ndof
Reg
rade
inte
graç
ãondof
Reg
rade
inte
graç
ãondof
Reg
rade
inte
graç
ão
CS
RC
SR
CS
R
QL
48
20
6X
XX
17
925
70X
Xa,b
Xa,b
,c22
XX
X66
XX
aX
a,b
1652
150
XX
a,d
Xa,c
,d48
XX
X14
5X
XX
2589
260
XX
a,b
Xa,b
,c84
XX
X25
4X
Xa,b
Xa,b
3613
640
0X
Xa,d
Xa,c
,d13
0X
XX
393
XX
X
QS
820
55
17X
XX
51
1232
90
28X
XX
85
1644
125
39
XX
X11
9
2056
160
50
XX
X15
3
T
38
20
——
6X
——
17
——
625
70X
——
22X
——
66X
——
1052
150
X—
—48
X—
—14
5X
——
1589
260
X—
—84
X—
—25
4X
——
2113
640
0X
——
130
X—
—39
3X
——
Tab
ela
8.2:
Res
ulta
dos
dos
vários
patc
hte
sts
(flex
ão,
cort
ee
torç
ão),
cons
oant
eo
tipo
dein
tegr
ação
(com
plet
a,se
lect
iva
ere
duzi
da),
utili
zand
oca
datipo
deel
emen
toco
nven
cion
al,pa
raas
mal
has
daFig
ura
8.5,
para
uma
espes
sura
dela
jeh=
0,05
enú
mer
ode
grau
sde
liber
dade
(ndof)
enú
mer
ode
nós
para
cada
mod
elo
etipo
dete
ste.
aE
sforç
otr
ansv
erso
sóé
exact
onos
ponto
sde
Gauss
.bD
eslo
cam
ento
sóé
exact
onos
nós
dos
elem
ento
s.cM
om
ento
sflec
tor
eto
rsor
sósã
oex
act
os
nos
ponto
sde
Gauss
.dD
eslo
cam
ento
snão
são
sequer
exact
os
nos
nós
do
elem
ento
.

98 Resultados Numéricos
os elementos QL9 e QL25, passam a ter esforço transverso (fora dos pontos de integração)e deslocamento exacto em todos os pontos, qualquer que seja a integração usada.
Nos testes de flexão e torção (i) o momento a reproduzir é constante, logo o campo derotações deve ser linear e (ii) o esforço transverso é nulo, pelo que o campo de distorçõesdeve ser também nulo. Para satisfazer a equação de compatibilidade (4.4b), então o campode deslocamento transversal deve ser quadrático. Os elementos QS, o QL4 e o T3 nuncapassam os patch tests de flexão e torção, não sendo os esforços sequer exactos nos pontosde Gauss, nem a deformada sequer é simétrica, uma vez que os elementos QL4, T3 e osSerendipianos distorcidos angularmente, i.e., para distorções em que os elementos deixamde ser rectângulos ou paralelogramos, não são capazes de representar polinómios quadráti-cos. No capítulo 6, na Figura 6.1, página 44, encontram-se representados os monómios quecada elemento é capaz de representar, em malhas regulares. No caso de malhas distorcidasangularmente, os elementos Serendipianos apenas são capazes de representar exactamentepolinómios lineares, ver Bathe (1996, página 385, Tabela 5.1).
No caso do teste de corte a solução exacta do campo de deslocamento transversalé linear e as rotações são nulas. Como todos os elementos conseguem reproduzir estescampos, independentemente da sua distorção angular, então todos passam o teste de corte.
No entanto, os elementos que não passam nos patch tests também convergem paraa solução exacta e fornecem bons resultados para malhas muito refinadas, uma vez quecom o refinamento, o elemento tende para um paralelogramo e, portanto, tende a deixarde estar distorcido angularmente, passando novamente a ter capacidade para representar oque conseguia em malhas regulares/não distorcidas. Deste modo, pode dizer-se que o patchtest deixa de ser uma condição estritamente necessária quando se aplica um refinamentode grau elevado.
As conclusões extraídas para os elementos Lagrangeanos com integração completaverificam-se igualmente para os elementos triangulares respectivos.
A título de curiosidade, testou-se ainda os resultados dos testes dos elementos QS e oelemento QL4 para outros tipos de espessura e chegou-se à seguinte conclusão: que querno teste flexão quer no de torção, para uma espessura h = 500, os elementos QS passam opatch test ; o elemento QL4, no caso da flexão com integração completa ou reduzida, passao patch test e no caso da torção, para qualquer integração, o elemento passa o patch testpara h = 500. No entanto, estas espessuras já não tem significado físico, na medida emque a peça analisada deixa de ser laminar e a hipótese de Reissner-Mindlin deixa de fazersentido.
No caso dos elementos MITC, os resultados obtidos nos vários patch tests apresentam-sena Tabela 8.3.
No que diz respeito ao momento flector e esforço transverso, para todos estes elementos,ambos os esforços são sempre exactos, qualquer que seja o patch test, com excepção doMITC9p que não passa nos testes de flexão e torção, sendo que a diferença observada nosresultados para a solução exacta não é significativa. Este facto vem corroborar a afirmaçãojá feita no artigo Bathe et al. (1990, página 296). Relativamente a deslocamentos, comoexpectável, apenas o elemento MITC4 não apresenta a deformada exacta para o teste deflexão, uma vez que a solução exacta é quadrática e a aproximação de deslocamentos doelemento é linear. No entanto, os deslocamentos nos nós são exactos.

8.2. Análise estática 99
Tip
ode
elem
ento
nonó
sno
nós
dom
odel
o
Tip
ode
test
e
Fle
xão
Cor
teTor
ção
ndof
Res
ulta
dondof
Res
ulta
dondof
Res
ulta
do
MIT
Cp
48
20X
6X
17X
925
65
17X
61
1652
135
X33
X13
0X
735
90X
84X
86X
1282
190
X48
X18
5X
MIT
Cs
925
70X
22X
66X
1652
150
X48
X14
5X
Tab
ela
8.3:
Res
ulta
dos
dosvá
rios
patc
hte
sts
(flex
ão,co
rte
eto
rção
),ut
iliza
ndo
cada
tipo
deel
emen
toM
ITC
,par
aas
mal
hasda
Fig
ura
8.5,
para
uma
espes
sura
dela
jeh=
0,05
enú
mer
ode
grau
sde
liber
dade
(ndof)
enú
mer
ode
nós
para
cada
mod
elo
etipo
dete
ste.

100 Resultados Numéricos
8.2.2 Teste de Convergência
Tal como mencionado anteriormente, por forma a avaliar a eficiência de cada elemento ea qualidade da solução aproximada para a laje rectangular moderadamente espessa sujeitaa carga uniforme unitária, é necessário comparar os valores numéricos obtidos para a dadagrandeza a partir dos elementos em estudo com os valores exactos, que se encontram noapêndice B. Por se tratar de uma grandeza global, escolheu-se a energia de deformaçãopara o efeito.
Antes de avaliar a convergência dos resultados para cada elemento e respectivas taxas,é necessário definir as medidas de erro com que se vai trabalhar.
A energia de deformação associada ao campo u é definida por
U(u) =1
2
∫
ΩσT ε dΩ . (8.7)
Seja
a(u,v) =
∫
Ω(∂u)T D(∂v) dΩ , (8.8a)
(f ,v) =
∫
ΩvT f dΩ , (8.8b)
onde u representa a solução exacta.Seja uh a solução fornecida pelo MEF e a eh = u − uh a diferença entre as soluções.
Então,
a(u,uh) =(f ,uh)
a(uh,uh) =(f ,uh)
a(u− uh,uh) = 0 ⇔ a(eh,uh) = 0 , (8.9)
i.e., o erro é ortogonal à solução do MEF.Deste modo, tratando-se de um operador linear, pode escrever-se
a(u,u) =a(uh + eh,uh + eh) =
=a(uh,uh) + 2a(uh, eh) + a(eh, eh) ,(8.10)
Usando (8.9) conclui-se que a norma do erro é igual ao erro da norma:
a(eh, eh) = a(u,u) − a(uh,uh) , (8.11)
onde a(u,u) é avaliado directamente a partir da solução exacta e, e.g.,
a(uh,uh) =
∫
Ω(∂uh)
T D(∂uh) dΩ = dTKd . (8.12)
Tendo em conta que a norma da energia é dada por
‖u‖2E = a(u,u) ⇔ ‖u‖E =√a(u,u) , (8.13)
o quadrado da norma da energia irá corresponder ao dobro da energia de deformação:
U(u) =1
2a(u,u) =
1
2‖u‖2E . (8.14)

8.2. Análise estática 101
Assim,
a(eh, eh) = a(u,u)− a(uh,uh) ⇔1
2‖eh‖2E =
1
2‖u‖2E − 1
2‖uh‖2E ⇔
1√2‖eh‖E =
√U(u)− U(uh). (8.15)
Testaram-se, assim, malhas regulares para os vários tipos de elementos finitos conven-cionais fazendo variar a dimensão característica dos elementos, h, e avaliando a norma doerro associado à energia de deformação, ‖eh‖E = ‖u − uh‖E . Chegou-se à conclusão quea grandeza testada, para os elementos de maior ordem, apresentava já um erro bastantereduzido para malhas grosseiras, pelo que não era viável refinar uma vez que os respectivoserros eram já bastante próximos da ordem de grandeza da precisão da máquina, originandoflutuações indesejáveis nos resultados. Desta forma, foram então testadas cinco malhas,para cada um dos elementos, onde, para os de ordem superior, os gráficos não apresen-tam os resultados para algumas das malhas mais refinadas. A norma do erro da energia,‖u − uh‖E , em função da dimensão característica dos elementos, h, utilizando elementosquadrilaterais, Lagrangeanos e Serendipianos, e triangulares, para integração completa éapresentada na Figura 8.6.
Como seria de esperar, dado que as soluções obtidas são compatíveis, estas vão convergirmonotonicamente para a solução exacta pois U − Uh > 0. À medida que se aumentam ograu dos elementos finitos e se refina a malha, mais graus de liberdade vai ter o modeloe, consequentemente, maior será a sua deformação e energia associada, sendo menor oerro. No limite, com infinitos graus de liberdade, ter-se-ia U = Uh. No entanto, aocontrário da integração completa, quando se utiliza integração selectiva ou reduzida nãose garante que U − Uh > 0, pois os integrais presentes nas expressões (5.19) são avaliadosutilizando um menor número de pontos de integração do que se deveria, que correspondea um enfraquecimento da compatibilidade no domínio, como se demonstrou no capítulo 7,secção 7.5, página 66. Assim, sempre que se verificou a inequação Uh > U , usou-se o valorabsoluto da diferença U−Uh por forma a ser possível a sua representação gráfica em escalalogarítmica.
A regra de integração utilizada para a avaliar as contribuições de flexão e corte paraUh coincidiu sempre com a usada para avaliar Kff e Kss, respectivamente. Caso nãofosse seguido este critério, a energia devida ao corte apresentaria sempre um erro muitosignificativo.
Os resultados obtidos utilizando integração selectiva e reduzida são apresentados, res-pectivamente, nas Figuras 8.7 e 8.8.
Nos gráficos das Figuras 8.6, 8.7 e 8.8 é possível observar que os resultados tendemassimptoticamente para uma recta, cujo respectivo declive corresponde à taxa de conver-gência da energia de deformação dos elementos, i.e.,
‖u− uh‖E ≤ c hp (8.16)
onde c é uma constante, h representa a dimensão característica do elemento e p correspondeà taxa de convergência teórica dos elementos (na ausência de singularidades), que pode serobtida por recurso à expressão
p = k +m− 1 (8.17)
em que k corresponde ao grau máximo do polinómio completo da aproximação e m corres-ponde ao grau máximo presente no operador diferencial generalizado de equilíbrio, ∂∗, e de

102 Resultados Numéricos
10−1
100
10−8
10−7
10−6
10−5
10−4
10−3
QL4QL9QL16QL25QL36
‖u−uh‖ E
h
(a) Elementos quadrilaterais Lagrangeanos.
10−1
100
10−7
10−6
10−5
10−4
10−3
QS4QS8QS12QS16QS20
‖u−uh‖ E
h
(b) Elementos quadrilaterais Serendipianos.
10−1
100
10−8
10−7
10−6
10−5
10−4
10−3
T3T6T10T15T21
‖u−uh‖ E
h
(c) Elementos triangulares.
Figura 8.6: Erro associadado à energia de deformação para integração completa, no casode uma malha regular.
10−1
100
10−8
10−7
10−6
10−5
10−4
10−3
QL4QL9QL16QL25QL36
‖u−uh‖ E
h
(a) Erro associado aos elementos quadrilaterais La-grangeanos.
10−1
100
10−7
10−6
10−5
10−4
10−3
QS4QS8QS12QS16QS20
‖u−uh‖ E
h
(b) Erro associado aos elementos quadrilaterais Se-rendipianos.
Figura 8.7: Erro associadado à energia de deformação para integração selectiva, no casode uma malha regular.

8.2. Análise estática 103
10−1
100
10−9
10−8
10−7
10−6
10−5
10−4
10−3
QL4QL9QL16QL25QL36
‖u−uh‖ E
h
(a) Erro associado aos elementos quadrilaterais La-grangeanos.
10−1
100
10−7
10−6
10−5
10−4
10−3
QS4QS8QS12QS16QS20
‖u−uh‖ E
h
(b) Erro associado aos elementos quadrilaterais Se-rendipianos.
Figura 8.8: Erro associadado à energia de deformação para integração reduzida, no casode uma malha regular.
compatibilidade, ∂. Para lajes moderadamente espessas tem-se m = 1 e consequentementep = k.
Numa fase posterior, foram efectuados os mesmos testes e avaliações para 5 malhasdistorcidas, para cada um dos elementos convencionais. Os resultados de convergência sãoapresentados nas Figuras 8.9, 8.10 e 8.11.
Na Tabela 8.4 apresenta-se a taxa de convergência da energia de deformação obtidautilizando cada tipo de elemento, para os diferentes esquemas de integrações, consoante amalha é regular ou distorcida. No seu cálculo, foram utilizados pontos escolhidos criterio-samente por forma a obter-se o resultado o mais próximo possível do limite assimptótico,removendo-se influência de flutuações devido a erros numéricos.
De maneira geral, para este exemplo específico, nos elementos de menor grau a equa-ção (8.16) não se verifica para valores de h elevados, pois a solução está ainda longe daexacta, mas depois tendem assimptoticamente para a recta teórica. Quando os elementossão de grau mais elevado, a taxa de convergência teórica é atingida logo nas malhas menosrefinadas e, provavelmente, os últimos resultados correspondentes a malhas mais refinadasjá são afectados por alguns erros numéricos associados à precisão limitada da máquina,diminuindo o seu significado. Para as malhas distorcidas, com o mesmo tipo de integração,todos os elementos apresentam taxas de convergência ligeiramente inferiores, excepto paraos casos dos elementos QL e T de ordem mais elevada (QL25, QL36, T15 e T21), onde asdiferenças são significativas. Este facto está associado à dificuldade em obter estimativasprecisas da taxa de convergência para estes elementos. É ainda de salientar que, compa-rativamente aos resultados obtidos para malhas regulares, além das diferenças apontadasna taxa de convergência, o valor dos resultados para malhas distorcidas é menos preciso.
Analisando a Tabela 8.4 com mais detalhe, pode concluir-se que, aumentando a base dafunção de aproximação, i.e., aumentando a ordem do elemento, a solução melhora obtendo--se taxas de convergência superiores, excepto nos elementos quadrilaterais Serendipianose nos elementos QL36 e T21, para qualquer tipo de malha. Nos primeiros, a base totalda função de aproximação nunca ultrapassa o 3o grau, como se pode ver na Figura 6.1 dapágina 44, revelando-se não ser vantajoso um refinamento p a partir do elemento QS12.

104 Resultados Numéricos
10−1
100
10−8
10−7
10−6
10−5
10−4
10−3
QL4QL9QL16QL25QL36
‖u−uh‖ E
h
(a) Elementos quadrilaterais Lagrangeanos.
10−1
100
10−7
10−6
10−5
10−4
10−3
QS4QS8QS12QS16QS20‖u
−uh‖ E
h
(b) Elementos quadrilaterais Serendipianos.
10−1
100
10−8
10−7
10−6
10−5
10−4
10−3
T3T6T10T15T21
‖u−uh‖ E
h
(c) Elementos triangulares.
Figura 8.9: Erro associadado à energia de deformação para integração completa, no casode uma malha distorcida.
10−1
100
10−9
10−8
10−7
10−6
10−5
10−4
10−3
QL4QL9QL16QL25QL36
‖u−uh‖ E
h
(a) Erro associado aos elementos quadrilaterais La-grangeanos.
10−1
100
10−7
10−6
10−5
10−4
10−3
QS4QS8QS12QS16QS20‖u
−uh‖ E
h
(b) Erro associado aos elementos quadrilaterais Se-rendipianos.
Figura 8.10: Erro associadado à energia de deformação para integração selectiva, no casode uma malha distorcida.

8.2. Análise estática 105
10−1
100
10−9
10−8
10−7
10−6
10−5
10−4
10−3
QL4QL9QL16QL25QL36
‖u−uh‖ E
h
(a) Erro associado aos elementos quadrilaterais La-grangeanos.
10−1
100
10−7
10−6
10−5
10−4
10−3
QS4QS8QS12QS16QS20‖u
−uh‖ E
h
(b) Erro associado aos elementos quadrilaterais Se-rendipianos.
Figura 8.11: Erro associadado à energia de deformação para integração reduzida, no casode uma malha distorcida.
Tipo deelemento
no nós
Malha
Regular Distorcida
Integração Integração
completa selectiva reduzida completa selectiva reduzida
QL
4 0,91 1,00 1,00 0,71 0,94 0,95
9 1,96 2,00 2,01 1,75 1,92 1,94
16 2,94 2,91 3,09 2,58 2,71 2,69
25 3,37 3,25 4,03 2,62 3,18 2,40
36 3,13 2,84 3,45 1,83 1,92 1,81
QS
8 1,96 2,03 2,05 1,79 2,20 2,25
12 2,89 2,91 2,92 2,68 2,73 2,73
16 2,92 2,92 2,92 2,68 2,72 2,72
20 2,92 2,92 2,92 2,68 2,72 2,72
T
3 0,90 — — 0,53 — —
6 1,97 — — 1,71 — —
10 2,87 — — 2,50 — —
15 3,77 — — 2,65 — —
21 2,97 — — 2,57 — —
Tabela 8.4: Taxa de convergência para a energia de deformação dos diferentes elemen-tos convencionais com os diferentes tipos de integrações, utilizando malhas regulares edistorcidas, para o caso de estudo.

106 Resultados Numéricos
Relativamente ao pior comportamento do elemento QL36, comparativamente aos ele-mentos de ordem imediatamente inferior, QL25, em malhas regulares, este pode ser expli-cado pelos elevados erros numéricos já associados aos resultados. Em malhas distorcidas,tendo em conta a menor precisão dos resultados, este pode justificar-se, não pelos errosnuméricos, mas sim pelo facto de se usar a mesma regra de integração numérica, em ambosos elementos, no cálculo do vector de forças nodais equivalente. Por exemplo, no caso doQL36, as funções integrando são polinómios do 5o grau em cada direcção, sendo necessá-rios, de acordo com a regra de Gauss-Legendre, no mínimo, 3 × 3 pontos (2 × 3 − 1 = 5)para integrar numericamente a função. Nos elementos QL25, as funções integrando são po-linómios do 4o grau em cada direcção. No entanto, com 2×2 pontos não é possível integrarnumericamente estas funções (2× 2− 1 = 3), sendo também necessários os mesmos 3× 3pontos. Deste modo, nos elementos QL25 está-se a trabalhar com uma regra melhor quea estritamente necessária para integrar exactamente elementos não distorcidos, enquantonos QL36 a integração é a estritamente necessária.
Nas malhas regulares o Jacobiano caracteriza-se por ser constante, e consequentemente,as funções integrando resultam em polinómios, permitindo uma integração numérica sem-pre exacta, desde que sejam usados pontos de Gauss em número suficiente ou superior,i.e., o resultado da integração é sempre o mesmo quer se utilize o número de pontos estri-tamente necessário para que seja ela exacta ou se utilizem mais pontos que os estritamentenecessários. Em contraste, quando as malhas são distorcidas o Jacobiano já não é cons-tante e a integração numérica deixa de ser exacta. Deste modo, o número de pontos deintegração utilizado torna-se relevante, tendo em conta que quanto mais pontos se utilizar,menos errada será a integração. Caso se tivesse recorrido a 4 × 4 pontos na integraçãopara o cálculo do vector de forças no elemento QL36, já se teria obtido uma energia dedeformação e uma taxa de convergência superiores à que se obteve utilizando o elementoQL25. O mesmo não sucede no caso dos elementos QL9 e QL16, i.e., o QL9, apesar deusar o mesmo número de pontos de integração (2×2) no cálculo do vector de forças nodaisequivalentes que o elemento QL16, não apresenta melhores resultados que o elemento ime-diatamente superior, uma vez que o erro de aproximação da função domina sobre o errode integração numérica.
Tendo em conta que, de elemento para elemento, o grau máximo do polinómio completoda função acresce de uma unidade, teoricamente, de acordo com (8.17), a taxa de conver-gência também deve aumentar uma unidade, com excepção dos elementos Serendipianos.Como se pode observar na Tabela 8.4, é possível verificar o facto anteriormente descritoprincipalmente nos elementos de menor ordem e nas malhas regulares. Para os elementosde grau superior, muitas vezes isso já não se verifica, uma vez que os erros resultantes sãode tal forma pequenos que começam a originar flutuações que afectam o cálculo da taxade convergência. É ainda de salientar que, os triângulos e os quadriláteros correspondentesapresentam taxas equivalentes entre si.
Relativamente às diferenças entre taxas de convergência para os vários tipos de inte-gração, estas são pequenas uma vez que se está a analisar uma laje com uma relação deL/h = 10. Como se verá na subsecção seguinte, estas diferenças acentuam-se à medidaque esta relação aumenta, ou seja, quando a laje deixa de ser moderadamente espessa epassa a ser fina. No entanto, mesmo assim, é notório uma maior precisão e uma ligeirasuperioridade no valor das taxas de convergência das integrações selectivas e reduzidasrelativamente à completa.
No caso dos elementos MITC, foram novamente testadas cinco malhas regulares, paracada um dos elementos MITC, shell e plate, fazendo variar a dimensão característica dos

8.2. Análise estática 107
10−1
100
10−8
10−7
10−6
10−5
10−4
10−3
MITC4pMITC9pMITC16pMITC7pMITC12p
‖u−uh‖ E
h
(a) Elementos MITC plate.
10−1
100
10−8
10−7
10−6
10−5
10−4
10−3
MITC4sMITC9sMITC16s
‖u−uh‖ E
h
(b) Elementos MITC shell.
Figura 8.12: Erro associadado à energia de deformação para malhas regulares.
10−1
100
10−8
10−7
10−6
10−5
10−4
10−3
MITC4pMITC9pMITC16pMITC7pMITC12p
‖u−uh‖ E
h
(a) Elementos MITC plate.
10−1
100
10−8
10−7
10−6
10−5
10−4
10−3
MITC4sMITC9sMITC16s
‖u−uh‖ E
h
(b) Elementos MITC shell.
Figura 8.13: Erro associadado à energia de deformação para malhas distorcidas.
elementos, h, e avaliando a norma do erro associado à energia de deformação, ‖u− uh‖E ,cujos resultados são apresentados na Figura 8.12.
Ao contrário dos elementos convencionais com integração completa, onde as soluçõesobtidas para a energia convergem sempre monotonicamente para a solução exacta, noselementos MITC, nem sempre isso acontece, i.e., nem sempre U −Uh > 0. Na formulaçãodeste tipo de elementos a compatibilidade no domínio não é localmente imposta, como noselementos convencionais com integração completa, mas sim apenas ponderadamente. Destemodo, a solução fornecida pelo MEF pode apresentar uma energia de deformação superiorà da solução exacta. Assim, sempre que a situação U − Uh > 0 se verificou, usaram-se osvalores absolutos por forma a ser possível a sua representação gráfica.
Numa segunda fase, foram efectuados os mesmos testes e avaliações para cinco ma-lhas distorcidas, para cada um dos elementos MITC. Os resultados são apresentados naFigura 8.13.
Nos gráficos da Figura 8.12 pode observar-se que os resultados também tendem assimp-toticamente para uma recta com declive de valor igual à taxa de convergência da energia de

108 Resultados Numéricos
Tipo de elemento no nósMalha
regular distorcida
MITCp
4 0,99 0,93
9 2,10 2,02
16 2,97 2,44
7 1,97 1,77
12 2,96 2,95
MITCs9 2,00 2,02
16 2,79 2,59
Tabela 8.5: Taxa de convergência para a energia de deformação dos elementos MITCutilizando malhas regulares e distorcidas, para o caso de estudo.
deformação dos elementos. Na Tabela 8.5 apresenta-se a taxa de convergência da energiade deformação obtida utilizando cada um dos elementos MITC, para malhas regulares edistorcidas. Tal como no caso dos elementos convencionais, no seu cálculo, foram utilizadospontos escolhidos criteriosamente por forma a obter-se o resultado o mais próximo possíveldo limite assimptótico, sem influência de erros de flutuação significativas.
Os elementos de menor grau demoram, novamente, a entrar na taxa de convergênciaao início, mas depois tendem assimptoticamente para a recta teórica, ao contrário doselementos de grau mais elevado que entram rapidamente na taxa de convergência e onde,provavelmente, os últimos resultados correspondentes a malhas mais refinadas possuem ummenor significado.
Da sua análise conclui-se que, aumentando a base da função de aproximação, i.e.,aumentando a ordem dos elementos quadrilaterais e triangulares, a solução melhora, ob-tendo-se taxas de convergência superiores. Note-se ainda que os elementos triangularesapresentam uma convergência muito semelhante à dos elementos quadrilaterais correspon-dentes. Tal como expectável, a taxa de convergência também aumenta uma unidade deelemento para elemento (quadrilaterais e triangulares), uma vez que o grau máximo dopolinómio completo da função acresce de uma unidade, estando de acordo com a expres-são (8.17). Para os elementos de grau superior, mais uma vez, isso nem sempre se verifica,uma vez que os erros resultantes são de tal forma pequenos que começam a originar flutu-ações que afectam o cálculo da taxa de convergência.
Tal como nos elementos convencionais, mais uma vez se verifica que os resultados nasmalhas distorcidas são menos precisos que os obtidos para as malhas regulares e prati-camente em todos os elementos as taxas de convergência são ligeiramente inferiores, comexcepção do elemento MITC9s (onde as taxas são 2,02 e 2,00, respectivamente). Anali-sando os resultados dos MITC shell em relação aos MITC plate correspondentes, em termosde convergência da energia de deformação, os primeiros apresentam taxas inferiores paramalhas regulares, e taxas iguais e superiores para malhas distorcidas.
Fazendo uma comparação directa entre as taxas de convergência de energia de defor-mação dos elementos MITC e convencionais, é possível constatar a partir das Tabelas 8.4e 8.5, que os elementos MITC, em geral, apresentam taxas superiores: QL4 e MITC4 ca-racterizam-se por resultados muito semelhantes, o MITC9p apresenta taxas superiores aoQL9, tal como os elementos triangulares, MITC7 e MITC12, relativamente aos elementos

8.2. Análise estática 109
10−1
100
100
h
w we
QL4 − int cmpQL4 − int selQL4 − int redMITC4sol exacta
Figura 8.14: Resultados obtidos para o deslocamento adimensional, w/we, a meio vão dalaje, utilizando os elementos MITC4 e QL4 recorrendo aos vários tipos de integração.
T6 e T10, respectivamente.No entanto, a taxa de convergência da energia de deformação não é o único critério
de comparação de desempenho dos elementos finitos. Procurou-se também comparar osdiagramas de esforços, o deslocamento transversal a meio vão e o custo computacionalobtidos pelos elementos de cada família.
No Apêndice A são apresentados alguns dos diagramas de esforços obtidos considerandouma espessura de h/L = 0, 025. Como se pode observar pela comparação das Figuras A.1a A.4 o elemento MITC4 apresenta melhores resultados na representação da componente doesforço transverso v1 que o elemento QL4, especialmente quando a malha é distorcida. Poroutro lado, o mesmo não acontece na representação da componente do tensor de momentos,m11. As Figuras A.5 a A.8 permitem constatar a semelhança na representação do momentoflector destes dois elementos, quer a malha seja regular ou distorcida.
Nas figuras A.9 a A.18 encontram-se representados mais exemplos dos resultados ob-tidos para a componente do esforço transverso, v1, que demonstram a vantagem dos ele-mentos MITC face aos elementos convencionais.
Quanto ao deslocamento adimensional, w/we, a meio vão da laje, obtiveram-se os resul-tados apresentados na Figura 8.14. Deste modo, verifica-se — para a espessura considerada— que o elemento QL4, recorrendo à integração completa apresenta resultados piores queo elemento MITC4. No entanto, quando se utiliza a integração selectiva, os resultadosdo deslocamento para o QL4 e MITC4 são praticamente coincidentes. Os resultados doelemento QL4, recorrendo à integração reduzida são ligeiramente mais próximos da soluçãoexacta. Idênticas conclusões seriam obtidas caso se efectuasse esta avaliação em termos daenergia de deformação, pois o gráfico resultante é semelhante.
A título exemplificativo, apresenta-se na Figura 8.15, a deformada da laje em análise,com simplificação de simetria, sujeita a carga uniformemente distribuída.
Com o intuito de aprofundar um pouco mais as vantagens e desvantagens dos elemen-tos, foram ainda calculados os tempos, por elemento, dispendidos pelo programa de cálculoa formar a matriz de rigidez, o vector de forças, a efectuar a rotação dos eixos para o re-ferencial local e a efectuar o seu espalhamento. Nas Figuras 8.16a e 8.16b apresentam-se,respectivamente, os resultados para uma malha regular e distorcida de 32 elementos. Épossível concluir pela sua observação que, à medida que se se aumenta a ordem do ele-

110 Resultados Numéricos
Figura 8.15: Deformada da laje em análise, com simplificação de simetria, sujeita a cargauniformemente distribuída, utilizando uma malha distorcida de 128 elementos MITC9p.
mento, dentro de cada família, obviamente o custo computacional é superior. As diferençasobtidas para as malhas regular e distorcida são insignificantes, pelo que se pode dizer queo custo computacional é o mesmo para ambas. Comparando os elementos convencionaisSerendipianos com os Lagrangeanos da mesma ordem, percebe-se que os primeiros necessi-tam de menos tempo para efectuar as operações de cálculo descritas. Quanto aos elementosMITC, quer nos quadrilaterais, quer nos triangulares, verifica-se um maior custo computa-cional relativamente aos elementos convencionais da mesma ordem. Dentro dos elementosMITC quadrilaterais, é de salientar o menor tempo de cálculo associado aos elementos decasca relativamente aos elementos de laje.
8.2.3 Teste de shear-locking
A maioria dos elementos finitos de laje de Reissner-Mindlin apresenta, em geral, umbom comportamento em lajes com uma relação de h/L ≥ 0, 1. No entanto, à medida queesta relação diminui, nem todos os elementos fornecem bons resultados. Um dos fenómenosque mais problemas provoca na utilização dos elementos finitos convencionais baseados nateoria de Reissner-Mindlin, é o chamado shear-locking. Este fenómeno corresponde a umasobrestimação da rigidez de corte do modelo dos elementos finitos relativamente à lajereal fina, que torna muito pequenos (ou mesmo nulos) os valores calculados para o campode deslocamentos, podendo destruir por completo a solução. Os elementos mistos foramintroduzidos neste contexto a fim de fundamentar a utilização da integração selectiva eultrapassar as dificuldades introduzidas pelo shear-locking.
Deste modo, avaliar-se-á a evolução do deslocamento vertical máximo (a meio vão dalaje), relativamente ao deslocamento teórico máximo exacto de uma laje fina, à medida quese diminui a relação h/L, de modo a compreender qual o comportamento dos elementosquando a espessura da laje tende para zero, i.e., a sua sensibilidade à retenção ao corte(shear-locking). Para o efeito, considerou-se a laje mencionada na subsecção 8.1. De acordocom a teoria de Kirchhoff, a solução exacta para o valor do deslocamento transversal noponto central da laje é dado por
we = 1, 012866305521 · 102 p b4
Df. (8.18)

8.2. Análise estática 111
0
0.01
0.02
0.03
0.04
0.05
0.06
QL4
QL9
QL16
QL25
QL36
QS
8
QS
12
QS
16
QS
20
T3
T6
T10
T15
T21
MIT
C4
MIT
C9p
MIT
C16p
MIT
C7p
MIT
C12p
MIT
C9s
MIT
C16s
T(s
)/E
lem
ento
QL
QS
T
MITCp Q
MITCp T
MITCs Q
(a) Malha regular.
0
0.01
0.02
0.03
0.04
0.05
0.06
QL4
QL9
QL16
QL25
QL36
QS
8
QS
12
QS
16
QS
20
T3
T6
T10
T15
T21
MIT
C4
MIT
C9p
MIT
C16p
MIT
C7p
MIT
C12p
MIT
C9s
MIT
C16s
T(s
)/E
lem
ento
QL
QS
T
MITCp Q
MITCp T
MITCs Q
(b) Malha distorcida.
Figura 8.16: Tempo de cálculo dispendido pelo programa, por elemento, na formação dasmatrizes de rigidez, dos vectores de forças, na rotação destes para o referencial local e seuespalhamento, para uma malha de 32 elementos dos 21 tipos de elementos em estudo, paraa laje rectangular simplesmente apoiada sujeita a carga uniforme unitária.

112 Resultados Numéricos
Nesta análise foi utilizada a malha regular constituída por 32 elementos representada naFigura 8.2c, no caso dos quadrilaterais, e 64 elementos no caso dos triangulares. Apesar doselementos analisados resultarem da implementação da teoria de Reissner-Mindlin, era ex-pectável que à medida que a espessura da laje fosse diminuindo, os resultados convergissempara as soluções fornecidos pela teoria de Kirchhoff.
Nos elementos convencionais, cuja formulação se baseia unicamente numa aproximaçãodo campo de deslocamentos, a integração completa das matrizes de rigidez conduz a umasobrestimação da rigidez do modelo dos elementos finitos relativamente à laje real. Comoa rigidez de corte é proporcional a h e a rigidez de flexão é proporcional a h3, quandoa relação h/L diminui, os termos de K
(e)ff tornam-se muito pequenos face aos de K
(e)ss .
Consequentemente, os deslocamentos do modelo de elementos finitos vão depender princi-palmente da deformabilidade por corte, ao contrário do que sucede na realidade, onde osdeslocamentos de uma laje fina dependem principalmente da deformabilidade por flexão eonde a distorção tende para zero. A este fenómeno de sobrestimação da rigidez de cortedá-se o nome de shear-locking.
Quando a integração da matriz de rigidez é efectuada numericamente, através da re-gra de Gauss-Legendre, a sobrestimação da rigidez existente na utilização de elementosconvencionais pode ser evitada reduzindo o número de pontos de integração utilizados. Aintegração reduzida, caracterizada por uma redução do número de pontos de Gauss uti-lizados no cálculo da rigidez tanto das parcelas de corte como das parcelas de flexão, fazdiminuir a rigidez da malha de elementos finitos, podendo até tornar a malha menos rígidado que a laje real. Além disso, pode tornar a matriz de rigidez global mal condicionada,causando o aparecimento de deslocamentos espúrios, ou mesmo singular. Para evitar omau condicionamento da matriz de rigidez global e minimizar o número de modos espú-rios, a integração reduzida não deve ser uniforme, afectando as duas parcelas da rigidez,mas selectiva, subintegrando apenas a parcela de corte, que é a principal responsável pelofenómeno de locking, e integrando exactamente a parcela de flexão.
Na Tabela 8.6 apresentam-se o número de valores próprios iguais a zero, corresponden-tes aos modos de energia nula, incluindo os três modos de corpo rígido, presentes numamatriz de rigidez elementar, mais os modos espúrios, para os vários elementos convencionaisquadrilaterais analisados. Da sua observação, é possível verificar que, para os elementosLagrangeanos, recorrendo às integrações selectiva e reduzida se obtêm sempre modos deenergia nula para além dos três movimentos de corpo rígido, sendo estes em número su-perior para a integração reduzida (7 modos). O elemento QL4 apresenta mais um modoespúrio que todos os outros Lagrangeanos, para a situação de integração selectiva. Em con-traste, recorrendo aos elementos Serendipianos apenas se obtêm os três modos de energianula correspondentes aos movimentos de corpo rígido, em qualquer uma das integrações,com excepção do elemento QS8 que apresenta um modo espúrio quando a sua matriz derigidez é integrada de forma reduzida.
No caso dos elementos triangulares não foi considerada outro tipo de integração paraalém da completa. Poderá eventualmente desenvolver-se uma justificação para a utili-zação de integração selectiva ou reduzida com base na formulação mista apresentada nocapítulo 7, secção 7.6, página 70, mas tal via não foi considerada neste trabalho.
A evolução do valor normalizado do deslocamento transversal máximo da laje, w/we,em função da relação L/h, para cada tipo de integração, encontra-se representada nasFiguras 8.17 e 8.18, para os elementos convencionais quadrilaterais Lagrageanos e Seren-dipianos, respectivamente.
Comece-se por analisar a família dos Lagrangeanos. Como se pode verificar nas Fi-

8.2. Análise estática 113
102
104
106
108
1010
−0.5
0
0.5
1
1.5
2
L
h
w we
CompletaSelectivaReduzidaExacta
(a) Elemento QL4.
101
102
103
104
0.9
0.95
1
1.05
1.1
1.15
L
h
w we
CompletaSelectivaReduzidaExacta
(b) Elemento QL4, ampliação.
101
102
103
104
105
106
107
108
0.9
0.95
1
1.05
1.1
1.15
L
h
w we
CompletaSelectivaReduzidaExacta
(c) Elemento QL9.
101
102
103
104
105
106
107
108
0.9
0.95
1
1.05
1.1
1.15
L
h
w we
CompletaSelectivaReduzidaExacta
(d) Elemento QL16.
101
102
103
104
105
106
107
108
0.9
0.95
1
1.05
1.1
1.15
L
h
w we
CompletaSelectivaReduzidaExacta
(e) Elemento QL25.
101
102
103
104
105
106
107
108
0.9
0.95
1
1.05
1.1
1.15
L
h
w we
CompletaSelectivaReduzidaExacta
(f) Elemento QL36.
Figura 8.17: shear-locking dos elementos QL.

114 Resultados Numéricos
Tipo de elemento no nósTipo de Integração
Completa Selectiva Reduzida
QL
4 3 5 7
9 3 4 7
16 3 4 7
25 3 4 7
36 3 4 7
QS
8 3 3 4
12 3 3 3
16 3 3 3
20 3 3 3
Tabela 8.6: Número de valores próprios iguais a zero, presentes numa matriz de rigidez ele-mentar, para os vários elementos convencionais quadrilaterais, para carregamento verticaluniformemente distribuído.
101
102
103
104
105
106
107
108
0
0.2
0.4
0.6
0.8
1
L
h
w we
CompletaSelectivaReduzidaExacta
(a) Elemento QS8.
102
104
106
108
1010
0
0.2
0.4
0.6
0.8
1
L
h
w we
CompletaSelectivaReduzidaExacta
(b) Elemento QS12.
102
104
106
108
1010
0
0.2
0.4
0.6
0.8
1
L
h
w we
CompletaSelectivaReduzidaExacta
(c) Elemento QS16.
102
104
106
108
1010
0
0.2
0.4
0.6
0.8
1
L
h
w we
CompletaSelectivaReduzidaExacta
(d) Elemento QS20.
Figura 8.18: shear-locking dos elementos QS, para malhas de 32 elementos.

8.2. Análise estática 115
101
102
103
104
0.9
0.95
1
1.05
1.1
1.15
L
h
w we
CompletaSelectivaReduzidaExacta
(a) Elemento QL4.
101
102
103
104
0.9
0.95
1
1.05
1.1
1.15
L
h
w we
CompletaSelectivaReduzidaExacta
(b) Elemento QL9.
Figura 8.19: shear-locking dos elementos QL4 e QL9, para malhas de 512 elementos.
guras 8.17a e 8.17b, a malha de 32 elementos constituída pelo elemento QL4, usandointegração reduzida e selectiva, converge para uma solução próxima da solução exacta dalaje fina. No entanto, usando estes dois tipos de integração, é possível melhorar a solução,sendo apenas necessário refinar a malha para que os resultados convirjam para uma soluçãomais próxima da exacta quando se aumenta a relação L/h. Em contraste, os resultadosobtidos com integração completa convergem para a solução nula, facto que pode ser ex-plicado pelo fenómeno de shear-locking. Na Figura 8.17c, que corresponde aos resultadosobtidos com o elemento QL9, é possível observar, quer na integração selectiva quer nareduzida, a convergência dos resultados para uma solução que praticamente coincide coma solução da laje fina. Na integração completa, os resultados, apesar de não convergiremexactamente para a mesma solução, já não apresentam vestígios de shear-locking para amalha considerada, bastando refiná-la para que ela convirja para a solução esperada.
Na Figura 8.19, correspondente ao mesmo problema mas utilizando uma malha com512 elementos, é evidente a melhoria dos resultados. No elemento QL4, apesar de continuara existir shear-locking quando se utiliza integração completa, para as restantes integraçõesos resultados convergem para a solução exacta da teoria de Kirchhoff, tal como sucede parao elemento QL9 utilizando qualquer uma das integrações.
Para o elemento QL16, QL25 e QL36 qualquer um dos tipos de integração converge parao resultado pretendido utilizando a malha de 32 elementos, não sendo visível a activaçãodo shear-locking e não existindo diferenças visíveis entre os resultados fornecidos por esteselementos, para uma relação L/h ≤ 105. Contudo, para espessuras muito finas os elementoscomeçam a apresentar resultados com um comportamento errático.
Os gráficos representados na Figura 8.18 permitem verificar que, contrariamente aosLagrangeanos, os elementos Serendipianos correspondentes são sensíveis ao fenómeno deshear-locking, sendo bem visível a sua activação para todos os elementos.
A partir do elemento QS12 os resultados tornam-se praticamente inalteráveis paravalores de L/h ≤ 103, não sendo vantajoso aumentar a ordem dos elementos e não existindodiferenças visíveis significativas entre os vários tipos de integração, para este exemplo.
Em resumo, é possível observar que as duas famílias de elementos quadrilaterais têmum comportamento fundamentalmente distinto quando se procede a refinamento do tipop:

116 Resultados Numéricos
102
104
106
108
1010
0
0.2
0.4
0.6
0.8
1
L
h
w we
T3T6T10T15T21Exacta
(a) Elementos T.
101
102
103
104
105
106
107
0.9
0.95
1
1.05
1.1
1.15
L
h
w we
T3T6T10T15T21Exacta
(b) Elementos T, ampliação.
Figura 8.20: shear-locking dos elementos triangulares, para malhas de 32 elementos.
(i) nos elementos Lagrangeanos o aumento do número de nós implica um acréscimo domáximo grau completo da função interpoladora e uma redução do efeito de shear-loc-king. Na verdade, a partir do QL9 este efeito não é visível nos resultados apresentadosdevido ao surgimento do comportamento errático em consequência da limitada pre-cisão da máquina utilizada.
(ii) nos elementos Serendipianos o aumento do número de nós não se traduz num acrés-cimo do máximo grau completo da função interpoladora a partir do QS12. Assim, énatural que não haja qualquer redução do efeito de shear-locking, tal como se verifi-cou.
Relativamente aos elementos triangulares, são apresentados na Figura 8.20 os resul-tados da evolução do deslocamento transversal adimensional máximo da laje, w/we, emfunção da relação L/h, usando integração completa nos vários elementos. Como seria deesperar, tendo em conta a sua simplicidade, verifica-se que o elemento T3 e T6 apresentammaus resultados, ou seja, não convergem para a solução da laje fina quando se diminui aespessura, sendo bem visível a activação do fenómeno de shear-locking. Da mesma formaque os elementos quadrilaterais, observa-se que a partir de determinado grau dos elementostriangulares, as suas soluções são muito idênticas e convergem todas para o resultado pre-tendido, até uma gama de valores da ordem L/h = 105, a partir do qual também começama fornecer comportamentos erráticos.
Após um refinamento da malha para 512 elementos, como mostram as Figuras 8.21e 8.22, o fenómeno shear-locking dá-se para relações de L/h superiores, relativamente aoque acontecia na malha de 32 elementos para os elementos Serendipianos e elementos T3e T6.
É assim possível concluir que, para a gama de valores L/h que precede o início docomportamento errático, utilizando uma malha de 32 elementos, o fenómeno de shear--locking apenas é activado nos elementos T3, T6 e QL4 utilizando integração completa enos quadrilaterais Serendipianos. Para os restantes elementos, com o aumento da relaçãoL/h, os resultados convergem para uma dada solução, próxima da exacta, consoante aordem do elemento, o número de elementos utilizados na malha (refinamento da malha)e do tipo de integração, i.e., a convergência dos resultados para a solução fornecida pelateoria de Kirchhoff é tão boa quanto se queira, consoante a malha utilizada para cadatipo de elemento e cada tipo de integração. Porém, suspeita-se que os restantes elementosconvencionais também sofram de retenção ao corte, mas para relações de L/h superiores àsque correspondem ao início do comportamento errático. Além disso, a relação de L/h parao qual se verifica a activação do shear-locking depende do refinamento utilizado da malha.

8.2. Análise estática 117
101
102
103
104
105
106
107
108
0
0.2
0.4
0.6
0.8
1
L
h
w we
CompletaSelectivaReduzidaExacta
(a) Elemento QS8.
102
104
106
108
1010
0
0.2
0.4
0.6
0.8
1
L
h
w we
CompletaSelectivaReduzidaExacta
(b) Elemento QS12.
102
104
106
108
1010
0
0.2
0.4
0.6
0.8
1
L
h
w we
CompletaSelectivaReduzidaExacta
(c) Elemento QS16.
102
104
106
108
1010
0
0.2
0.4
0.6
0.8
1
L
h
w we
CompletaSelectivaReduzidaExacta
(d) Elemento QS20.
Figura 8.21: shear-locking dos elementos quadrilaterais Serendipianos, para malhas de 512elementos.
102
104
106
108
1010
0
0.2
0.4
0.6
0.8
1
L
h
w we
T3T6T10T15T21Exacta
Figura 8.22: shear-locking dos elementos triangulares, para malhas de 512 elementos.

118 Resultados Numéricos
101
102
103
104
105
106
107
108
0.9
0.95
1
1.05
1.1
1.15
L
h
w we
MITC4pMITC9pMITC16pMITC7pMITC12pExact
(a) Elementos MITCp.
101
102
103
104
105
106
107
108
0.9
0.95
1
1.05
1.1
1.15
L
h
w we
MITC4sMITC9sMITC16sExacta
(b) Elementos MITCs.
Figura 8.23: shear-locking dos elementos MITC.
Quanto maior for o refinamento, menor será a dimensão característica do elemento emrelação à espessura e, consequentemente, mais próximo se estará das condições da teoriade Reissner-Mindlin. Assim, a activação do shear-locking ocorrerá para valores superioresda relação de L/h.
Para os elementos MITC plate e shell, a evolução do valor normalizado do deslocamentotransversal máximo da laje, w/we, em função da relação L/h, encontra-se representada naFigura 8.23.
Para o elemento MITC4, verifica-se que os resultados convergem para uma soluçãoligeiramente inferior à esperada — a solução de Kirchhoff. Apesar disso, é, mais umavez, possível melhorar esta solução, refinando a malha utilizada o suficiente para que osresultados convirjam para a solução exacta de laje fina quando se aumenta a relação L/h.É possível ainda observar nos dois gráficos da Figura 8.23, que para todos os elementos,MITC plate e shell, os resultados convergem para uma solução, não apresentando quais-quer vestígios de fenómenos de shear-locking. Para espessuras muito finas os elementostambém começam a apresentar resultados com um comportamento errático. Por fim, éainda de realçar o facto de todos os elementos apresentarem um comportamento errático apartir de valores de L/h ∼= 106, com excepção do elemento MITC4, que apenas começa areproduzir este tipo de comportamento ligeiramente mais tarde, dado a maior estabilidadede polinómios de menor ordem.
8.3 Análise de vibração livre
Nesta subsecção pretendeu-se realizar a análise de vibração livre da laje, i.e., determinaras suas frequências e os seus modos de vibração naturais.
Para a avaliação da eficiência de cada elemento e a qualidade da solução aproximadapara a análise de vibração livre da laje rectangular moderadamente espessa, verificou-se aconvergência dos valores numéricos referentes às frequências de vibração naturais, obtidosa partir dos elementos em estudo, relativamente à solução exacta. Os valores exactos dasfrequências de vibração de uma laje rectangular simplesmente apoiada em todo o contornosão dados, por exemplo, por Reddy (1999, página 374, secção 10.2.4, capítulo 10).

8.3. Análise de vibração livre 119
Modossimétricos
Número de semi-ondasR−M K
direcção x1 direcção x2
1 1 1 48,26959359 49,09629184
2 3 1 121,4438803 126,6236809
3 5 1 255,5571478 278,0486906
4 1 3 317,6151381 352,0299004
5 3 3 376,8942646 424,9091294
6 7 1 433,7113995 496,7231130
Tabela 8.7: Resultados obtidos para os valores exactos de frequências de vibração livreadimensionais, para uma laje moderadamente espessa (Reissner-Mindlin) e uma laje fina(Kirchhoff), rectangular (a = 2 b) simplesmente apoiada em todo o contorno, ν = 0, 3,h = b
10 , κ = 56 e ρ = 1.
É de notar que, devido à simplificação de simetria efectuada no programa de cál-culo, só se obtiveram resultados correspondentes aos modos de vibração simétricos. Paradeterminação dos modos anti-simétricos no programa seria necessário considerar a lajesimplesmente apoiada em todo o seu contorno, ao qual corresponderia uma malha comsimplificação de anti-simetria. Para obter os modos com componentes simétricas numa di-recção e anti-simétricas na outra direcção seria necessário impôr as condições de fronteiraadequadas correspondentes.
Os resultados obtidos para os vários elementos demonstram que os seis primeiros mo-dos de vibração livre apresentam configurações deformadas do tipo das apresentados nasFiguras 8.24. Pela sua observação obtêm-se os valores do número de semi-ondas em cadauma das direcções associados aos seis primeiros modos traçados pelo programa. A Ta-bela 8.7 apresenta os valores exactos de frequências de vibração, para a laje em estudo. Osresultados são dados para uma laje com propriedades idênticas à que gerou os resultadosobtidos no apêndice B, em função do parâmetro adimensional , definido através de
= ωexacto a2
√ρ h
Df. (8.19)
Como seria de esperar, os valores de frequência de vibração para lajes finas é supe-rior ao de lajes moderadamente espessas, uma vez que a primeira é mais rígida que asegunda. Comparando a hipótese de Kirchhoff relativamente à de Reissner-Mindlin, facil-mente se percebe que a imposição de fibras inicialmente perpendiculares ao plano médioda laje permanecerem rectas e perpendiculares após deformação do elemento estrutural émenos flexível que a hipótese de estas poderem rodar relativamente ao plano médio apósa deformação.
O número de modos de vibração vai ser equivalente ao número de graus de liberdadelivres do modelo adoptado. Por exemplo, as malhas de dois elementos de quatro nósapenas vão apresentar 6 modos de vibração, atendendo que só possuem 6 graus de liberdadelivres. Contudo, serão apenas aqui apresentados os gráficos correspondentes às taxas deconvergência para o modo fundamental de vibração, tendo em conta que o comportamentode cada elemento na aproximação aos restantes modos é semelhante ao revelado para omodo fundamental.

120 Resultados Numéricos
(a) Modo 1. (b) Modo 2.
(c) Modo 3. (d) Modo 4.
(e) Modo 5. (f) Modo 6.
Figura 8.24: Modos de vibração livre da laje simplesmente apoiada utilizando 512 elemen-tos MITC4.

8.3. Análise de vibração livre 121
10−1
100
10−10
10−9
10−8
10−7
10−6
10−5
10−4
10−3
10−2
10−1
100
Eω
QL4QL9QL16QL25QL36
h
(a) Elementos quadrilaterais Lagrangeanos.
10−1
100
10−9
10−8
10−7
10−6
10−5
10−4
10−3
10−2
10−1
100
Eω
QS4QS8QS12QS16QS20
h
(b) Elementos quadrilaterais Serendipianos.
10−1
100
10−10
10−9
10−8
10−7
10−6
10−5
10−4
10−3
10−2
10−1
100
Eω
T3T6T10T15T21
h
(c) Elementos triangulares.
Figura 8.25: Erro relativo na aproximação à frequência de vibração fundamental paramalhas regulares, utilizando os elementos convencionais.
Os resultados obtidos pelos vários elementos convencionais1 para as variações do errorelativo na aproximação à frequência de vibração fundamental, Eω, em função do tamanhocaracterístico da malha, h, estão representados nas Figuras 8.25.
Na vibração livre de uma laje, como o modelo dos elementos finitos é mais rígido queo real, os resultados das frequências vão convergir monotonicamente para a solução exactapois ω − ωexacto > 0. À medida que se aumenta a ordem dos elementos finitos e se refinamais a malha, mais graus de liberdade terá o modelo e, consequentemente, maior seráa flexibilidade do modelo e mais próximo estará este da solução exacta. No limite, cominfinitos graus de liberdade, ter-se-ia ω = ωexacto. No entanto, este facto nem sempre severificou. Tal como no teste de convergência, quando se utiliza integração selectiva (casodos elementos convencionais quadrilaterais), os integrais presentes nas expressões (5.19)são avaliados utilizando um menor número de pontos de integração do que se deveria. Porconseguinte, o princípio da minimização de energia não é cumprido integralmente, não se
1Para os elementos quadrilaterais, QL e QS, foi utilizada integração selectiva no cálculo das matrizeselementares da laje visto esta ser a que apresentou melhores resultados no teste de convergência. Para oselementos triangulares, T, usou-se integração completa, pelas razões expostas na secção 8.2.3.

122 Resultados Numéricos
garantindo que ω − ωexacto > 0. Sempre que ωexacto > ω, usaram-se os valores absolutospor forma a ser possível a sua representação gráfica.
Para que fosse possível a comparação da qualidade das aproximações feitas aos valoresdas frequências pelos vários elementos finitos em estudo, recorreu-se aos declives dos grá-ficos dos erros em função da dimensão característica dos elementos. Esse declive mede ataxa de variação do erro com o aumento do número de elementos, ou seja, a “velocidade”com que a aproximação converge para a solução exacta. A taxa de convergência teóricapara a frequência de vibração pode ser retirada da seguinte expressão, ver Hughes (2000,Capítulo 7, página 433),
‖uhi − ui‖m ≤ c hp λ(k+1)/mi (8.20)
onde h representa o tamanho característico do elemento, λi corresponde ao valor próprioexacto do modo i, c é uma constante independente de h e λi, e p é a taxa de convergênciateórica dos valores próprios dada por
p = 2 (k + 1−m) , (8.21)
em que k corresponde ao grau máximo do polinómio completo da aproximação e m cor-responde ao grau máximo do operador diferencial generalizado de equilíbrio, ∂∗, e decompatibilidade, ∂. Como visto anteriormente, para lajes moderadamente espessas tem-sem = 1 e consequentemente p = 2k. É ainda de salientar que o erro nas frequências é omesmo que o dos valores próprios (Hughes, 2000, Capítulo 7, página 434). Relativamente
ao termo λ(k+1)/mi da expressão (8.20), este sugere que a qualidade da aproximação às
frequências de vibração começa a deteriorar-se para os modos mais elevados.Na Tabela 8.8 são apresentados os resultados do cálculo as taxas de convergência, i.e.,
os declives das rectas obtidas para cada elemento e para cada modo. Novamente, no seucálculo, apenas foram utilizados pontos sem influência de erros numéricos.
A partir da Tabela 8.8, é possível constatar que o comportamento de cada elemento naaproximação aos restantes modos de vibração é semelhante.
Atendendo que, para todos os elementos, os erros relativos dos resultados diminuemà medida que se utilizam elementos de menor dimensão e consequentemente malhas maisrefinadas, é possível dizer que todos eles convergem para o mesmo valor.
Da observação da Figura 8.25 e da Tabela 8.8 pode concluir-se que, à medida quese aumenta a ordem do elemento, mais depressa os resultados convergem para o valorteórico, i.e., maior é o declive do gráfico e menores são os erros cometidos para a mesmadimensão característica. Como excepção, mais uma vez, temos os elementos quadrilateraisSerendipianos, onde a base total da função de aproximação, nunca ultrapassa o 3o grau,deixando de ser vantajoso um refinamento p a partir do elemento QS12.
Nos restantes elementos, tendo em conta que, de elemento para elemento, o grau má-ximo do polinómio completo da função acresce de uma unidade, teoricamente, de acordocom (8.21), a taxa de convergência deve aumentar duas unidades. Como se pode observarna Tabela 8.8, é possível verificar o facto anteriormente descrito, principalmente nos ele-mentos de menor ordem. Para os elementos de grau superior, por vezes podem existir errosnuméricos que afectam o cálculo da taxa de convergência. Além disso, é possível constatarque as taxas de convergência tendem para 2 no caso dos elementos QL4 e T3, para 4 nocaso do QL9, QS8 e T6, para 6 no caso do QL16, QS10 e T10, para 8 no caso de QL25 eT15, e para 10 no caso dos elementos QL36 e T21.
Na grande maioria dos casos, é também possível observar que, nos modos superiores,as taxas de convergência diminuem ligeiramente, à medida que aumenta o modo. Esteresultado também está previsto teoricamente (Hughes, 2000, Capítulo 7, página 434).

8.3. Análise de vibração livre 123
Tipo de elemento no nósModos
1 2 3 4 5 6
QL
4 2,08 2,14 2,39 2,22 2,33 2,05
9 3,97 3,93 3,90 3,90 3,89 3,67
16 5,95 5,94 5,84 5,78 5,78 5,72
25 7,97 7,90 7,74 7,72 7,77 7,66
36 6,39 9,86 9,63 9,63 9,69 9,53
QS
8 4,03 4,30 3,97 3,90 3,99 3,89
12 6,94 6,29 6,12 5,79 6,02 5,76
16 6,16 6,17 6,32 6,44 6,42 6,43
20 6,84 6,31 6,25 6,04 6,00 6,23
T
3 1,77 1,75 2,10 2,08 1,94 1,91
6 3,80 3,78 3,62 3,71 3,59 3,61
10 6,07 5,69 5,77 5,74 5,65 5,57
15 7,97 7,87 7,41 7,46 7,41 7,31
21 9,76 9,27 9,77 9,72 9,49 9,45
Tabela 8.8: Taxa de convergência das frequências de vibração, utilizando os elementosconvencionais, para o caso de estudo.
Os resultados obtidos pelos vários elementos MITC para as variações do erro rela-tivo na aproximação à frequência de vibração fundamental, Eω, em função do tamanhocaracterístico da malha, h, estão representados nas Figuras 8.26.
Como visto anteriormente, ao contrário dos elementos convencionais com integraçãocompleta, na formulação dos elementos MITC a compatibilidade é enfraquecida, pelo queo princípio da energia mínima também não é válido. Deste modo, as soluções obtidas paraestes elementos, não têm sempre de convergir por cima para a solução exacta.
Na Tabela 8.9 são apresentadas as taxas de convergência utilizando cada um dos tiposde elementos MITC.
Da análise da Tabela 8.9 e da Figura 8.26, conclui-se que, tal como sucedia no testede convergência da energia de deformação, aumentando a base da função de aproximação,i.e., aumentando a ordem dos elementos, a solução melhora obtendo-se taxas de conver-gência superiores. Assim, tal como acontece nos elementos convencionais, os resultadosdos elementos MITC tendem para a taxa de convergência teórica, apresentando uma evo-lução semelhante à medida que se aumenta a ordem do elemento. Note-se ainda que oselementos triangulares apresentam uma convergência muito semelhante à dos elementosquadrilaterais correspondentes.
Em todos os resultados até aqui apresentados foram incluídos os termos da inérciaassociada à rotação. Pretende-se agora fazer uma aferição da influência destes termos.Para tal, avaliar-se-á a evolução da frequência adimensionalisada à solução exacta da lajefina que não inclui os termos em causa, ω, à medida que se aumenta a relação L/h. AsFiguras 8.27 apresentam quatro situações, para cada um dos modos considerados: duasdelas correspondem à solução exacta utilizando a teoria de lajes finas, sendo que uma delas

124 Resultados Numéricos
10−1
100
10−10
10−9
10−8
10−7
10−6
10−5
10−4
10−3
10−2
10−1
100
Eω
MITC4pMITC9pMITC16pMITC7pMITC12p
h
(a) Elementos MITC plate.
10−1
100
10−10
10−9
10−8
10−7
10−6
10−5
10−4
10−3
10−2
10−1
100
Eω
MITC4sMITC9sMITC16s
h
(b) Elementos MITC shell.
Figura 8.26: Erro relativo na aproximação à frequência de vibração fundamental paramalhas regulares, utilizando os elementos MITC.
Tipo de elemento no nósModos
1 2 3 4 5 6
MITCp
4 2,03 2,16 2,45 2,35 2,35 2,05
9 3,94 3,90 3,83 3,68 3,79 3,81
16 6,17 5,99 5,49 5,69 5,69 5,42
7 3,94 3,87 3,59 3,68 3,74 3,62
12 5,48 5,93 5,85 5,86 5,68 5,63
MITCs9 3,97 3,94 3,91 3,90 3,90 3,73
16 5,20 5,94 5,84 5,78 5,78 5,72
Tabela 8.9: Taxa de convergência das frequências de vibração, utilizando os elementosMITC, para o caso de estudo.
inclui os termos de rotação de inércia e a outra não; os restantes dois casos dizem respeitoaos resultados obtidos para uma malha de 128 elementos, utilizando o elemento MITC16p,resultante da implementação da teoria de Reissner-Mindlin, incluindo ou não os termosmencionados, ou seja, considerando ou não a inércia I2, presente na expressão (5.37), iguala zero.
Era expectável que à medida que a espessura da laje fosse diminuindo, os resultadosconvergissem para a solução exacta de Kirchhoff. Além disso, como referido, os valores defrequência de vibração para lajes finas são superiores ao de lajes moderadamente espessas,independentemente da inclusão dos termos associados à inércia de rotação, uma vez que aprimeira é mais rígida que a segunda.
Comparando agora, para cada uma das teorias de laje, os resultados que têm emconsideração os termos em causa com os que não têm, é possível dizer que os primeirosapresentam uma frequência inferior para a mesma relação L/h. Esta situação justifica-sepelo facto de se considerar adicionalmente os termos associados à inércia de rotação. A

8.4. Análise linear de estabilidade 125
101
102
0.9
0.92
0.94
0.96
0.98
1
1.02
LajeR−M , Irot 6= 0LajeR−M , Irot= 0LajeK , Irot 6= 0LajeK , Irot= 0
Lh
ω
(a) Modo fundamental.
101
102
0.6
0.65
0.7
0.75
0.8
0.85
0.9
0.95
1
1.05
LajeR−M , Irot 6= 0LajeR−M , Irot= 0LajeK , Irot 6= 0LajeK , Irot= 0
Lh
ω
(b) Modo 6.
Figura 8.27: Frequências de vibração adimensionalisadas. No caso da modelação da lajeatravés da teoria de Reissner-Mindlin foi utilizada uma malha de 128 elementos MITC16p.
influência destes termos será tanto menor quanto mais fina for a laje, ou seja, a diferençados resultados considerando ou não os termos mencionados, diminui à medida que a relaçãoL/h aumenta, sendo essa diferença superior na teoria de lajes finas.
Fazendo agora uma comparação dos resultados obtidos para cada modo, a observaçãodas Figuras 8.27, permite constatar a semelhança das soluções para ambos os modos. Veri-fica-se que, para cada uma das teorias de laje (Reissner-Mindlin e Kirchhoff), as diferençasde inclusão ou não dos termos associados à inércia de rotação no sexto modo são muitoidênticas às obtidas para o modo fundamental. No entanto, a diferença entre resultadosde lajes finas e moderadamente espessas acentua-se nos modos superiores. Por exemplo,tal como se pode constatar na figura 8.27b, correspondente ao sexto modo, as segundasdemoram ligeiramente mais tempo a convergir para a solução das primeiras. Esta últimasituação resulta da maior dificuldade de representação dos modos superiores, e consequenteaumento dos erros.
No caso das lajes finas simplesmente apoiadas em todo o contorno, para uma relaçãoL/h = 10, o erro relativo de não considerar o termo da inércia de rotação é de 0,51% ,e para lajes moderadamente, para a mesma relação, tem-se um erro relativo de 0,24%,para o modo fundamental. Deste modo, pode concluir-se que, para o exemplo estudado,apenas fará sentido a inclusão destes termos quando for efectuada uma análise de vibraçãolivre em que se pretenda um erro inferior a esta ordem de grandeza. Caso contrário, a suainclusão é praticamente irrelevante, principalmente em lajes de Reissner-Mindlin.
No que diz respeito à utilização de cada uma das teorias, para a mesma relação deL/h = 10, a diferença relativa no uso de elementos baseados em Reissner-Mindlin em vezde Kirchhoff é de 1,7% com inclusão dos termos associados à inércia de rotação e de 1,9%no caso contrário, para o modo fundamental.
8.4 Análise linear de estabilidade
Pretendeu-se realizar uma análise linear de estabilidade da laje quando sujeita a umcarregamento de compressão bi-axial ao longo dos bordos, como o indicado na Figura 8.28.

126 Resultados Numéricos
x1
x2
a
b λ λ
ϑλ
ϑλ
Figura 8.28: Laje rectangular simplesmente apoiada sujeita a carga de compressão bi-axial.
A avaliação da eficiência e qualidade de cada elemento é efectuada através da compara-ção dos valores do parâmetro de carga associada aos pontos de bifurcação e que provocamos vários modos de instabilidade da laje, obtidos utilizando os vários elementos finitos emestudo, e os valores exactos, que se apresentam no apêndice C.
Mais uma vez, recorde-se que, devido à simplificação de simetria efectuada no pro-grama de cálculo, só se obtiveram resultados correspondentes aos modos de instabilidadesimétricos.
Apesar das equações governativas deste problema serem distintas das do problemade vibração livre, e consequentemente também os respectivos modos serem diferentes, asconfigurações deformadas dos modos de instabilidade são semelhantes às dos modos devibração livre, ver Figura 8.24, na medida em que os seis primeiros modos de vibraçãolivre apresentam o mesmo número de semi-ondas em cada uma das direcções.
Tal como na análise dinâmica, o termo de comparação da qualidade das aproximaçõesfeitas pelos elementos reside nos declives dos gráficos dos erros, neste caso do valor da cargade instabilidade, em função da dimensão característica da malha.
Constatou-se que, no caso dos elementos Lagrangeanos, a utilização de regras de inte-gração reduzida ou selectiva conduziram ao aparecimento de cargas e modos de instabili-dade espúrios. Estas soluções não possuem aparentemente qualquer significado físico. NaFigura 8.29 encontra-se representado um modo espúrio correspondente ao primeiro modoobtido pelo programa com integração selectiva para o elemento QL4. Constatou-se aindaque o surgimento destes modos está associado à combinação simultânea de dois factores:(i) a presença de derivadas parciais de primeira ordem na definição da matriz G(e) e (ii)a utilização de regras de integração que não seja a completa. Note-se que no problema davibração livre analisado na secção 8.3 esta questão não se colocou, pois na definição damatriz M(e) apenas intervêm as funções de aproximação e não as suas derivadas parciais.Nesse caso não se verificou a existência de qualquer modo espúrio.
Os resultados obtidos pelos vários elementos convencionais2 para as variações do erro
2Para os elementos quadrilaterais, QL e QS, foi utilizada integração selectiva no cálculo das matrizeselementares da laje visto esta ser a que apresentou melhores resultados no teste de convergência. Para oselementos triangulares, T, usou-se integração completa, pelas razões expostas na secção 8.2.3.

8.4. Análise linear de estabilidade 127
Figura 8.29: Modo espúrio correspondente ao primeiro modo de instabilidade obtido paraintegração selectiva do elemento QL4, para uma malha de 128 elementos.
relativo na aproximação das cargas de bifurcação associadas ao primeiro modo de insta-bilidade, Eλ, em função do tamanho característico da malha, h, estão representados nasFiguras 8.30. Tal como anteriormente justificado, os resultou apresentados na Figura 8.30anão correspondem ao primeiro modo obtido no programa para todas as malhas, mas simao modo fundamental. Deste modo, os gráficos obtidos para os elementos Lagrangeanosresultam de uma escolha criteriosa dos modos. Para os resultados obtidos dos elemen-tos Serendipianos este problema não se coloca, uma vez que para a integração selectivanão existem modos espúrios, ver Tabela 8.6, página 114. Na situação de não se efectuaresta selecção, os resultados obtidos para o erro da aproximação são os apresentados naFigura 8.31.
Caso não se pretenda efectuar esta selecção criteriosa dos modos obtidos no programa,deve recorrer-se à integração completa, no qual este problema não se verificou, uma vez quenão lhe estão associados modos espúrios. No entanto, como é de esperar, o erro de apro-ximação das cargas de instabilidade será superior ao que se obtém realizando integraçãoselectiva. Na Figura 8.32 encontram-se representados o gráfico correspondente ao erro re-lativo na aproximação da carga de bifurcação associada ao primeiro modo de instabilidade,para malhas regulares, utilizando integração completa, para os elementos Lagrangeanos.
Mais uma vez, para qualquer um dos tipos de integração, mesmo para a integraçãoselectiva, as cargas de bifurcação são superiores nos modelos de MEF porque estes sãomais rígidos que o modelo real. As excepções ocorrem apenas devido aos erros de precisãoda máquina. Através da comparação directa com os resultados obtidos para as integraçõescompleta e selectiva, verifica-se, através dos gráficos, uma menor precisão dos resultadosno primeiro caso.
Novamente, para comparar a qualidade das aproximações feitas aos valores das cargascríticas pelos vários elementos finitos em estudo, recorreu-se aos declives dos gráficos doserros em função da dimensão característica dos elementos.
A taxa de convergência teórica associada à carga crítica é a mesma que se obteve para

128 Resultados Numéricos
10−1
100
10−10
10−9
10−8
10−7
10−6
10−5
10−4
10−3
10−2
10−1
100
QL4QL9QL16QL25QL36
Eλ
h
(a) Elementos quadrilaterais Lagrangeanos.
10−1
100
10−10
10−9
10−8
10−7
10−6
10−5
10−4
10−3
10−2
10−1
100
QS4QS8QS12QS16QS20
Eλ
h
(b) Elementos quadrilaterais Serendipianos.
10−1
100
10−10
10−8
10−6
10−4
10−2
100
102
T3T6T10T15T21
Eλ
h
(c) Elementos triangulares.
Figura 8.30: Erro relativo na aproximação da carga de bifurcação associada ao primeiromodo de instabilidade, para malhas regulares, utilizando integração selectiva para os ele-mentos quadrilaterais e integração completa para os elementos triangulares.
10−1
100
10−10
10−9
10−8
10−7
10−6
10−5
10−4
10−3
10−2
10−1
100
h
QL4QL9QL16QL25QL36
Eλ
Figura 8.31: Erro relativo na aproximação da carga de bifurcação associada ao primeiromodo de instabilidade, para malhas regulares, utilizando integração selectiva, para os ele-mentos convencionais Lagrangeanos, sem escolha criteriosa dos modos.

8.4. Análise linear de estabilidade 129
10−1
100
10−10
10−8
10−6
10−4
10−2
100
102
h
QL4QL9QL16QL25QL36
Eλ
Figura 8.32: Erro relativo na aproximação da carga de bifurcação associada ao primeiromodo de instabilidade, para malhas regulares, utilizando integração completa, para oselementos convencionais Lagrangeanos.
a frequência própria na secção anterior 8.3, uma vez que ambos são problemas de valores evectores próprios, ver Hughes (2000, Capítulo 7, página 433). Deste modo, teoricamente ataxa deve corresponder a duas vezes o maior grau do polinómio completo da aproximação(p = 2k), começando a qualidade da aproximação a deteriorar-se para os modos maiselevados.
Na Tabela 8.10 encontram-se as taxas de convergência, obtidas para cada elemento epara cada modo, para o caso da integração selectiva dos elementos quadrilaterais e na Ta-bela 8.11 encontram-se as taxas de convergência, obtidas para os elementos Lagrangeanos,utilizando integração completa.
A partir da Tabela 8.10, verifica-se que o comportamento dos vários modos de instabi-lidade pode ser extrapolado do primeiro. Além disso, constata-se que os resultados destaanálise são similares aos obtidos na análise de vibração livre: à medida que se aumenta aordem do elemento, mais depressa os resultados convergem para o valor teórico e menoressão os erros cometidos para a mesma dimensão característica, sendo novamente excepçãoos elementos quadrilaterais Serendipianos, onde os resultados obtidos são os mesmos apartir do elemento QS12; os elementos tendem para as mesmas taxas de convergência quena análise de vibração.
Fazendo ainda uma comparação directa entre as taxas de convergência obtidas paraintegração selectiva e completa dos elementos Lagrangeanos, para cada tamanho caracte-rístico da malha e cada modo de instabilidade, a segunda integração apresenta uma taxade convergência ligeiramente inferior à primeira, como seria de esperar. Note-se que estadiferença de taxas de convergência seria superior caso se analisasse uma laje mais fina,pois, nessa situação, a retenção ao corte seria mais acentuada.
Analisando agora os erros cometidos por cada elemento MITC na aproximação à cargacrítica do primeiro modo de instabilidade, obtém-se o gráfico 8.33. Ao contrário dos elemen-tos convencionais, nos elementos MITC não é necessário realizar uma selecção criteriosados modos pois estes não têm qualquer modo espúrio. A utilização de regras de inte-gração exactas — quando o Jacobiano é constante — neste tipo de elementos, justifica ainexistência de modos espúrios de instabilidade.
Na Tabela 8.12 são apresentadas as taxas de convergência utilizando a cada um dostipos de elementos MITC.

130 Resultados Numéricos
Tipo de elemento no nósModos
1 2 3 4 5 6
QL
4 2,01 2,02 2,07 2,10 2,03 2,05
9 3,99 3,99 3,96 3,95 3,95 3,94
16 5,93 5,92 5,82 5,78 5,77 5,71
25 7,90 7,89 7,69 7,96 7,78 7,79
36 6,62 9,85 9,59 10,15 9,52 9,45
QS
8 3,99 4,03 4,00 3,93 4,03 3,97
12 6,07 6,06 6,08 6,00 5,94 5,95
16 5,91 6,07 6,13 5,58 5,19 5,16
20 6,07 6,17 6,28 5,95 5,87 6,41
T
3 1,96 1,91 1,95 2,01 1,97 1,91
6 3,97 3,96 3,94 3,95 3,93 3,92
10 5,96 5,97 5,96 5,97 5,96 5,93
15 7,82 7,84 7,80 7,81 7,78 7,79
21 8,96 9,78 9,66 10,05 9,61 9,50
Tabela 8.10: Taxa de convergência das cargas de bifurcação, utilizando os elementos con-vencionais, para o caso de estudo.
Tipo de elemento no nósModos
1 2 3 4 5 6
QL
4 2,01 2,02 2,05 2,06 2,02 2,03
9 3,94 3,93 3,91 3,90 3,90 3,89
16 5,61 5,77 5,69 5,64 5,64 5,50
25 7,61 7,69 7,48 7,63 7,79 7,77
36 9,00 9,65 9,38 9,63 9,46 9,33
Tabela 8.11: Taxa de convergência das cargas de bifurcação, utilizando os elementos con-vencionais Lagrangeanos, recorrendo à integração completa, para o caso de estudo.

8.4. Análise linear de estabilidade 131
10−1
100
10−10
10−9
10−8
10−7
10−6
10−5
10−4
10−3
10−2
10−1
100
MITC4pMITC9pMITC16pMITC7pMITC12p
Eλ
h
(a) Elementos MITC plate.
10−1
100
10−10
10−9
10−8
10−7
10−6
10−5
10−4
10−3
10−2
10−1
100
MITC4sMITC9sMITC16s
Eλ
h
(b) Elementos MITC shell.
Figura 8.33: Erro relativo na aproximação à cargas de bifurcação associada ao primeiromodo de instabilidade, para malhas regulares, utilizando os elementos MITC.
Tipo de elemento no nósModos
1 2 3 4 5 6
MITCp
4 2,12 2,27 2,07 2,10 2,10 2,13
9 3,92 3,87 3,87 3,85 3,75 3,91
16 5,95 5,86 5,80 5,81 5,94 5,10
7 3,95 3,91 3,76 3,63 3,66 3,51
12 6,18 6,13 5,83 6,04 5,35 5,29
MITCs9 3,96 3,93 3,91 3,93 3,93 3,70
16 5,89 5,92 5,82 5,78 5,76 5,71
Tabela 8.12: Taxa de convergência da cargas crítica do primeiro modo de instabilidade,utilizando os elementos MITC, para o caso de estudo.
Tal como nos elementos convencionais, os resultados dos elementos MITC nesta análisesão idênticos aos obtidos na análise de vibração livre: os resultados tendem para a taxa deconvergência teórica, apresentando uma evolução semelhante à medida que se aumenta aordem do elemento.

132

Capítulo 9
Considerações finais
9.1 Conclusões
Ao contrário das lajes finas, onde os campos de rotações, θα(x1, x2), são dependentesdo campo de deslocamento transversal, w(x1, x2), nas lajes moderadamente espessas essescampos são independentes uma vez que as distorções, γα(x1, x2), não não são nulas. As-sim, em lugar da deformada da laje ficar totalmente definida apenas conhecendo w(x1, x2),torna-se necessário aproximar de forma independente cada um dos campos, w(x1, x2) eθα(x1, x2). Por outro lado, na formulação dos elementos finitos deste tipo de lajes, ocampo de deslocamentos apenas tem de ser contínuo no domínio, não sendo necessário ga-rantir a continuidade das suas derivadas, tal como acontece nas lajes finas, o que permiteo uso de uma grande variedade de esquemas de interpolação/aproximação. Por esta razãoe pelo facto de não existir a necessidade de definir condições de fronteira específicas noscantos da laje, a formulação de elementos finitos da laje de Reissner-Mindlin é habitual-mente considerada mais simples de utilizar que a de Kirchhoff. Dada a sua simplicidadee facilidade de utilização, os modelos de elementos finitos para lajes espessas são os maisutilizados, mesmo em situações para as quais se pode deixar de considerar a laje comoespessa. Contudo, apesar da maioria dos elementos finitos de laje de Reissner-Mindlinapresentar, em geral, um bom comportamento em lajes cuja relação h/L ≥ 0, 1, à medidaque esta relação diminui, nem todos os elementos fornecem bons resultados.
Esta dissertação tem como objectivo o estudo de elementos finitos convencionais eMITC na análise estrutural de lajes espessas, incluindo a implementação e formulação devários elementos e comparação do seu comportamento em três tipos de análise.
Os elementos convencionais considerados neste trabalho são os elementos (i) triangu-lares de 3, 6, 10, 15 e 21 nós, (ii) os elementos quadrilaterais Lagrangeanos de 4, 9, 16,25 e 36 nós e (iii) os elementos quadrilaterais Serendipianos de 8, 12, 16 e 20 nós. Oselementos MITC aqui estudados são (i) os quadrilaterais de laje MITC4p, o MITC9p, oMITC16p, (ii) os triangulares de laje MITC7p e MITC12p e (iii) os quadrilaterais de cascaMITC4s, MITC9s e MITC16s. No caso destes últimos apenas foi analisado o comporta-mento à flexão. De notar que no caso dos elementos quadrilaterais mais simples há umacoincidência entre os dois elementos de cada uma das famílias convencional e MITC, i.e.,entre os elementos QL4 e QS4 e, também, os elementos MITC4p e MITC4s.
Foram efectuadas três tipos de análises: (i) estática, (ii) de vibração livre e (iii) linearde estabilidade.
Para alguns dos casos analisados foi possível encontrar a solução exacta na bibliografiaespecializada. Nos restantes casos, as soluções foram deduzidas:
133

134 Considerações finais
(i) determinação da solução exacta dos patch tests de lajes moderadamente espessas;(ii) dedução de fórmulas de cálculo para a energia de deformação total, de flexão/torção
e corte para laje rectangular simplesmente apoiada sujeita a uma carga no domínio;(iii) avaliação de cargas de instabilidade de uma laje rectangular simplesmente apoiada
sujeita a carga de compressão bi-axial, tendo em consideração a contribuição dostermos associados às rotações.
Houve alguns aspectos em relação à formulação dos elementos finitos estudados quenão se encontraram na bibliografia especializada, nomeadamente:
(i) dedução das equações de equilíbrio, incluindo efeitos dinâmicos, fundação elásticae análise geometricamente não-linear de forma consistente a partir das equações daelasticidade tridimensional. A definição dos esforços e carregamentos generalizadossurge, neste caso, de forma natural;
(ii) discretização da expressão do teorema de Hamilton e obtenção da equação do MEFem toda a sua generalidade, considerando análise estática, dinâmica e análise geome-tricamente não-linear. Particularização para as análises estática, de vibração livre elinear de estabilidade;
(iii) apresentação de uma formulação mista geral em coordenadas convectivas e sua apli-cação a elementos convencionais e elementos MITC. Esta formulação foi usada parajustificar a utilização da integração selectiva em elementos convencionais e deduzirde forma abrangente todos os elementos da família MITC;
(iv) determinação simbólica das funções de interpolação das rotações do MITC7p e doMITC12p.
A formulação mista de elementos finitos pode ser entendida como uma extensão doprincípio da estacionaridade da energia potencial total, onde as variáveis correspondemnão só a deslocamentos generalizados, como também a deformações generalizadas e tensõesgeneralizadas. Neste trabalho, é apresentado um modelo de formulação misto baseado noscampos de u, γ e λ
˜. A formulação mista efectuada conduziu a uma forma geral da
parcela da matriz de rigidez Kss, válida para todos os tipos de elementos MITC. Destemodo, chegou-se à conclusão que usar a formulação tradicional é muito semelhante a usar aformulação mista onde o vector distorção, γ, é directamente aproximado. A única diferençaé que em lugar de Kss se utiliza Kss.
Esta formulação mista permitiu ainda propor uma justificação consistente para a uti-lização da integração selectiva em elementos quadrilaterais convencionais. Conseguiu-sedemonstrar que para estes elementos Kred
ss = Kss, o que significa que a integração selectivanão é mais do que a formulação mista desses elementos admitindo determinadas funçõesde aproximação para γ e λ, ou seja, é o mesmo que integrar de forma completa mas con-siderando campos de distorção alternativos assumidos a priori. Apesar deste resultadoser conhecido para outros tipos de formulações alternativas, a dedução aqui apresentada édetalhada e original.
No entanto, apesar da integração selectiva dos elementos quadrilaterais convencionaister a mesma base variacional que os elementos MITC, as suas funções de aproximação a γ
e λ são diferentes. É de salientar que, por vezes, os primeiros apresentam modos espúrios,enquanto que tal não se verifica nos segundos. Desta forma, pode dizer-se que a formulaçãomista está condicionada pela escolha das funções de aproximação. Um elemento finito comformulação mista está bem dimensionado caso as aproximações elementares Ψu, Ψγ e Ψλ
˜presentes nas expressões (7.43) dos campos u, γ e λ
˜, respectivamente, satisfaçam o critério
de estabilidade LBB, ver Brezzi e Fortin (1991).Para comprovar a implementação dos elementos estudados, todos foram submetidos a
três patch tests: (i) flexão, (ii) corte e (iii) torção. Ao contrário do constatado por Hinton

9.1. Conclusões 135
e Huang (1986, páginas 417 e 418), nem os esforços, nem os deslocamentos transversaisobservados são exactos em todos os elementos convencionais, para todos os testes. O únicoteste onde tal se verificou, foi no de corte. Os elementos quadrilaterais Serendipianos eLagrangeano de 4 nós, nunca passam os restantes patch tests, uma vez que quando dis-torcidos angularmente deixam de ser capazes de representar soluções quadráticas, que éo caso da solução dos testes de flexão e torção. No entanto, para malhas muito refina-das, a distorção angular tende a desaparecer e, consequentemente, os elementos fornecembons resultados, convergindo para a solução exacta. Os elementos triangulares, tal comoos Lagrangeanos com integração completa, passam em todos os testes, com excepção doelemento T3. Para as integrações selectiva e reduzida, os Lagrageanos apresentam muitasvezes os esforços e deslocamentos apenas exactos, respectivamente, nos pontos de Gausse nós do elemento. A excepção ocorre nos elementos QL16 e QL36, que para o teste deflexão, utilizando integração selectiva e reduzida, não apresentam deslocamentos exactosnos nós, devido à activação de um modo espúrio que resultou em deslocamentos nodaisarbitrários. No entanto, tal não se verificou para os outros tipos de testes, i.e., para osoutros tipos de combinações carregamento/condições de fronteira cinemática. Pode assimconcluir-se que a activação dos modos espúrios depende não só do tipo de teste, comotambém da localização dos pontos de Gauss utilizados nas regras de integração que variade elemento para elemento.
Para a análise estática ainda se efectuaram mais dois testes numéricos: (i) análise daconvergência da energia de deformação no regime assimptótico e (ii) teste de shear-locking.
O primeiro teve como intuito a avaliação da eficiência do elemento, através de uma aná-lise da convergência da energia de deformação no regime assimptótico, quando o númerode elementos tende para infinito. Comparando directamente os resultados obtidos nas ma-lhas regulares e distorcidas, todos os elementos — convencionais e MITC — apresentaramtaxas de convergência um pouco melhores nas primeiras, tendo em conta que, devido àprecisão limitada da máquina, não é possível refinar o suficiente para que o Jacobiano, emmalhas distorcidas, seja praticamente constante em cada elemento e as integrações sejampraticamente exactas. Além disso, o valor dos resultados para malhas distorcidas é menospreciso. Quer os gráficos dos elementos convencionais, quer os dos elementos MITC, ten-dem assimptoticamente para uma recta cujo declive corresponde à taxa de convergênciada energia de deformação teórica, que para lajes moderadamente espessas é igual ao graumáximo do polinómio completo da aproximação. De maneira geral, para este exemplo,quando os elementos de menor ordem começam a tender para a taxa de convergência teó-rica, já os elementos de maior grau entraram em regime assimptótico. Pôde concluir-seque aumentando a ordem do elemento, a solução melhora, obtendo-se, de elemento paraelemento, taxas de convergência uma unidade superiores, uma vez que o grau máximo dopolinómio completo da função acresce de uma unidade. No entanto, nos elementos Seren-dipianos, demonstrou-se que não é vantajoso escolher um elemento de ordem superior aoQS12, visto a base total da função de aproximação nunca ultrapassar o 3o grau a partirdeste. Para os restantes elementos convencionais de maior ordem, o QL36 e T21, muitasvezes não se verifica este aumento unitário na taxa de convergência. Em malhas regulares,os erros resultantes são de tal forma pequenos que começam a originar flutuações que afec-tam o cálculo da taxa de convergência. Em malhas distorcidas, tendo em conta a menorprecisão dos resultados, a não verificação do aumento unitário nas taxas de convergênciade elemento para elemento pode justificar-se, não pela limitação de precisão, mas sim pelofacto de, para este tipo de malha, a integração não ser exacta e se usar a mesma regra deintegração numérica, em ambos os elementos, QL36 e QL25, no cálculo do vector de forças

136 Considerações finais
nodais equivalente. O mesmo não acontece em elementos de menor ordem visto que o errode aproximação domina sobre o erro de integração numérica.
Quanto às diferenças entre taxas de convergência para os vários tipos de integração doselementos convencionais, estas são pequenas uma vez que se analisou uma laje com umarelação de L/h = 10, que se considera como o limite entre a laje moderadamente espessae laje fina. Não obstante, nota-se uma maior precisão e uma ligeira superioridade no valordas taxas de convergência das integrações selectivas e reduzidas relativamente à completa.
Fazendo uma comparação directa entre as taxas de convergência de energia de de-formação dos elementos MITC e convencionais, verificou-se que os elementos MITC, emgeral, apresentam taxas ligeiramente superiores. Os elementos MITC apresentam também,melhores resultados para o deslocamento, comparativamente aos elementos convencionaiscom integração completa, e na representação do esforço transverso, em relação aos mesmoselementos com qualquer integração. Além disso, não possuem modos espúrios, como nocaso dos elementos convencionais quando se recorre a integrações selectivas ou reduzidas.
O segundo teste realizado para a análise estática consistiu em analisar a sensibilidadedos elementos ao fenómeno de retenção ao corte, o shear-locking. Assim, avaliou-se a evo-lução do valor normalizado do deslocamento transversal máximo da laje, w/we, em funçãoda relação L/h. Da sua análise foi possível constatar que, o fenómeno de shear-lockingapenas surge nos elementos convencionais T3, T6 e QL4 utilizando integração completa enos quadrilaterais Serendipianos, para a malha considerada (32 elementos). No entanto,suspeita-se que a activação deste fenómeno não se verificou nos restantes elementos conven-cionais pois esta apenas aconteceria após o surgimento do comportamento errático, ondeos erros de precisão dominam os resultados. Além disso, verificou-se ainda que para umamalha mais refinada de 512 elementos, utilizando integração completa nos elementos T6 enos Serendipianos o fenómeno de shear-locking se activa para relações de L/h superioresàs que se verificaram utilizando uma malha de 32 elementos. Este fenómeno pode ser ex-plicado pelo facto de os elementos, após refinamento da malha, apresentarem uma maiorrelação espessura/dimensão característica, de tal forma que tendem a comportar-se comoelementos moderadamente espessos, mais próximo da teoria de Reissner-Mindlin. Nos ele-mentos MITC não se verificou qualquer vestígio de activação de shear-locking, mesmo parao elemento de menor ordem, MITC4, e, ao contrário dos convencionais, este fenómeno nãodeve surgir após os erros numéricos. Para estes elementos e para os convencionais onde nãose deu activação da retenção ao corte, verificou-se que, quando a relação L/h aumenta, osresultados convergem para uma dada solução, próxima da exacta, consoante a ordem doelemento, o número de elementos utilizados na malha (refinamento da malha) e o tipo deintegração. Assim, pode dizer-se que, para esses elementos, a convergência dos resultadospara a solução fornecida pela teoria de Kirchhoff é tão boa quanto se queira, dependendodo refinamento da malha utilizada para cada tipo de elemento e cada tipo de integração.Para os elementos de maior ordem, no caso dos elementos convencionais quadrilaterais La-grangeanos e triangulares, recorrendo a qualquer tipo de integração, e MITC, e utilizandouma malha de 32 elementos, neste caso específico, as diferenças nos resultados não sãovisíveis até uma relação da ordem de L/h ≤ 105. A partir de certo ponto, os elementoscomeçam a apresentar resultados com um comportamento errático associado à precisão li-mitada da máquina. No caso dos elementos Serendipianos de maior ordem, também existe,para este exemplo, uma grande semelhança nos resultados, para as várias integrações, atéuma relação de L/h ≤ 103, a partir da qual é visível a activação do fenómeno de shear-loc-king. Esta activação é mais acentuada, convergindo mais rapidamente para o valor nulode deslocamento transversal, no caso da integração completa. Para espessuras muito finas,

9.1. Conclusões 137
começam também a fornecer resultados com comportamento errático.Pode, portanto, concluir-se que, na utilização dos elementos MITC, nunca existe a
possibilidade de acontecer shear-locking, ao contrário dos elementos convencionais ondeé necessário recorrer, em algumas situações, a integrações diferentes da completa, paraobter melhores resultados, ou a grandes refinamentos da malha, para evitar que a retençãoao corte surja para relações de L/h reduzidas. A qualidade da sua aproximação apenasdepende do grau do elemento e do refinamento da malha que se usa.
Para a análise de vibração livre, verificou-se também a convergência dos valores numéri-cos referentes às frequências de vibração naturais, obtidos a partir dos elementos em estudo,para a solução exacta. Relativamente aos gráficos dos erros de aproximação às frequênciasde vibração, quer os dos elementos convencionais, quer os dos elementos MITC, tendemnovamente assimptoticamente para uma recta cujo declive corresponde à taxa de conver-gência de vibração teórica, que para lajes moderadamente espessas é igual a duas vezes ograu máximo do polinómio completo da aproximação. Para cada modo, pode concluir-seque aumentando a ordem do elemento, a solução melhora, obtendo-se, de elemento paraelemento, taxas de convergência duas unidades superiores, uma vez que o grau máximodo polinómio completo da função acresce de uma unidade. Contudo, mais uma vez noselementos Serendipianos, demonstrou-se que não é vantajoso escolher um elemento de or-dem superior ao QS12, visto a base total da função de aproximação nunca ultrapassar o 3o
grau. Além disso, nos modos superiores, as taxas de convergência têm, de maneira geral,tendência a diminuir ligeiramente, à medida que o modo aumenta, o que se pode justificarpela maior dificuldade de representação desses modos, o que está de acordo com as esti-mativas teóricas. Ao contrário do que é habitual na bibliografia especializada, na presenteformulação, para além dos habituais termos da inércia associada à translação, foram tam-bém considerados os respectivos termos associados à rotação. Assim, foi possível efectuarum estudo para avaliar a sua importância no comportamento da laje em vibração livre.Para cada uma das teorias de laje (fina e moderadamente espessa), verificou-se que essa in-fluência será tanto menor, quanto mais fina for a laje. Além disso, os valores de frequênciade vibração obtidos são inferiores, para a mesma relação h/L, quando se consideraram ostermos em causa, pois nessas situações o número de termos devidos à massa é superior. Nocaso específico do exemplo considerado, i.e., no caso de uma laje simplesmente apoiada emtodo o contorno, com uma relação de L/h = 10, apenas fará sentido a inclusão dos termosda inércia associada à rotação quando se efectuar uma análise de vibração livre em quese pretenda um erro relativo inferior a 0,5% para o modo fundamental, pelo que se podeconsiderar a sua influência praticamente irrelevante. Quanto à utilização de cada uma dasteorias de laje, para a mesma relação L/h = 10, a diferença relativa entre ambas, parao modo fundamental, é inferior a 2%, quer se inclua ou não os termos em questão. Estadiferença acentua-se nos modos superiores devido à maior dificuldade de representação domodo.
O problema da análise linear de estabilidade apresenta um formato semelhante aoproblema da análise de vibração livre: consiste na solução de um problema de valores evectores próprios generalizado. No entanto a matriz geométrica apresenta uma diferençafundamental em relação à matriz de massa: na sua definição aparecem primeiras derivadasdas funções de aproximação e não as funções de aproximação per se. Deste modo, na suagrande maioria, os resultados são similares entre si e os elementos tendem para as mesmastaxas de convergência teóricas. O comportamento dos elementos nos vários modos tambémpode ser extrapolado a partir do primeiro modo de instabilidade, apesar da qualidade daaproximação começar a deteriorar para os modos mais elevados. À medida que se aumenta

138 Considerações finais
a ordem do elemento, mais depressa os resultados convergem para o valor teórico e menoressão os erros cometidos para a mesma dimensão característica, sendo novamente excepçãoos elementos quadrilaterais Serendipianos, onde os resultados obtidos são os semelhantes apartir do elemento QS12. No entanto, quando se utiliza integração selectiva ou reduzida noselementos convencionais quadrilaterais, para esta análise, há necessidade de realizar umaselecção criteriosa dos modos que se obtêm, uma vez que à integração selectiva ou reduzidadestes elementos está associada uma activação dos modos espúrios. Caso se recorra aintegração completa, este problema deixa de existir mas a precisão dos resultados e taxasde convergência dos erros de aproximação são inferiores em relação à integração selectivaou reduzida. A diferença de resultados entre os dois tipos de integração será tanto maiorquanto mais fina for a laje. Deste modo, neste tipo de análise os elementos MITC revelamser vantajosos, não existindo preocupação com o tipo de integração utilizado nem com aescolha dos modos correctos, sem perda de precisão e qualidade dos resultados.
Em resumo, pode afirmar-se que os elementos MITC, apesar de envolverem um maiorcusto computacional, apresentam diversas vantagens em relação aos elementos convencio-nais:
(i) não sofrem de retenção ao corte;(ii) não apresentam modos espúrios;(iii) todos os elementos, com excepção do elemento MITC9p, passam o patch test de
flexão, corte e torção. No caso do MITC9p este teste é praticamente passado;(iv) a representação das componentes do esforço transverso em análise estática converge
mais rapidamente para a solução exacta;(v) apresentam uma taxa de convergência ligeiramente superior em termos de norma do
erro em energia.Estas conclusões permanecem válidas independentemente do grau de distorção da malhaconsiderada.
9.2 Desenvolvimentos Futuros
No âmbito de uma dissertação de mestrado, dada as limitações de extensão de ex-posição e tempo de que se dispõe, ficam sempre muitos outros aspectos por investigar.Seria importante, desde logo, realizar mais exemplos numéricos, que envolvam diferentesformas geométricas (lajes com aberturas, pontos angulosos, bordos enviesados), materiais,condições de apoio e solicitações (cargas concentradas, variações de temperatura lineares,assentamentos de apoio), que comprovem e testem a formulação e implementação realizadados vários elementos, e complementem as conclusões efectuadas.
Os elementos MITC aqui implementados não correspondem à totalidade dos existentes.Seria conveniente estudar também o comportamento de flexão do elemento MITC8s e doselementos triangulares de casca. Poder-se-ia estender a formulação mista aqui apresentadaao comportamento de membrana dos elementos MITC de casca.
Relativamente aos elementos convencionais, não foram abordados esquemas alternati-vos de integração da parcela de corte da matriz de rigidez para elementos triangulares.Poder-se-ia explorar a formulação mista apresentada nesse contexto.
No decurso da análise de estabilidade linear efectuada observou-se a presença de modosde instabilidade espúrios quando se recorreu a elementos Lagrangeanos com integraçãoreduzida ou selectiva. A explicação da sua origem, a contabilização do seu número eeventual forma de estabilização que eliminasse a sua presença seriam uma mais valia.

9.2. Desenvolvimentos Futuros 139
Por fim, talvez fosse ainda interessante considerar a conjugação dos elementos de lajetestados com elementos de grelha apropriados, a integração da equação do MEF no tempoe efectuar análises geometricamente e fisicamente não-lineares.

140

Apêndice A
Diagramas de esforços de lajerectangular simplesmente apoiadasujeita a carga uniforme
Neste apêndice são apresentados alguns dos diagramas de esforços de laje rectangularsimplesmente apoiada sujeita a carga uniforme, que se obtiveram utilizando os elementosMITC4, QL4, T6, MITC7p, QL9, MITC9s e MITC9p, no caso de malhas regulares edistorcidas.
141

142 Diagramas de esforços de laje rectangular simplesmente apoiada
(a)
Malh
ade
2elem
ento
s.(b
)M
alh
ade
32
elemen
tos.
(c)M
alh
ade
512
elemen
tos.
Figura
A.1:
Resultados
obtidospara
acom
ponente
doesforço
transversov1 ,
utilizandoo
elemento
QL4
comintegração
selectiva,no
casode
uma
malha
regular.
(a)
Malh
ade
2elem
ento
s.(b
)M
alh
ade
32
elemen
tos.
(c)M
alh
ade
512
elemen
tos.
Figura
A.2:
Resultados
obtidospara
acom
ponente
doesforço
transversov1 ,
utilizandoo
elemento
MIT
C4,
nocaso
deum
am
alharegular.

Diagramas de esforços de laje rectangular simplesmente apoiada 143
(a)
Malh
ade
2el
emen
tos.
(b)
Malh
ade
32
elem
ento
s.(c
)M
alh
ade
512
elem
ento
s.
Fig
ura
A.3
:R
esul
tado
sob
tido
spa
raa
com
pon
ente
does
forç
otr
ansv
ersov 1
,ut
iliza
ndo
oel
emen
toQ
L4
com
inte
graç
ãose
lect
iva,
noca
sode
uma
mal
hadi
stor
cida
.
(a)
Malh
ade
2el
emen
tos.
(b)
Malh
ade
32
elem
ento
s.(c
)M
alh
ade
512
elem
ento
s.
Fig
ura
A.4
:R
esul
tado
sob
tido
spa
raa
com
pon
ente
does
forç
otr
ansv
ersov 1
,utiliz
ando
oel
emen
toM
ITC
4,no
caso
deum
am
alha
dist
orci
da.

144 Diagramas de esforços de laje rectangular simplesmente apoiada
(a)
Malh
ade
2elem
ento
s.(b
)M
alh
ade
32
elemen
tos.
(c)M
alh
ade
512
elemen
tos.
Figura
A.5:
Resultados
obtidospara
acom
ponente
dotensor
de
mom
entosm
11 ,
utilizandoo
elemento
QL4
comintegração
selectiva,no
casode
uma
malha
regular.
(a)
Malh
ade
2elem
ento
s.(b
)M
alh
ade
32
elemen
tos.
(c)M
alh
ade
512
elemen
tos.
Figura
A.6:
Resultados
obtidospara
acom
ponente
dotensor
de
mom
entosm
11 ,
utilizandoo
elemento
MIT
C4,
nocaso
deum
am
alharegular.

Diagramas de esforços de laje rectangular simplesmente apoiada 145
(a)
Malh
ade
2el
emen
tos.
(b)
Malh
ade
32
elem
ento
s.(c
)M
alh
ade
512
elem
ento
s.
Fig
ura
A.7
:R
esul
tado
sob
tido
spa
raa
com
pon
ente
dote
nsor
de
mom
ento
sm
11,ut
iliza
ndo
oel
emen
toQ
L4
com
inte
graç
ãose
lect
iva,
noca
sode
uma
mal
hadi
stor
cida
.
(a)
Malh
ade
2el
emen
tos.
(b)
Malh
ade
32
elem
ento
s.(c
)M
alh
ade
512
elem
ento
s.
Fig
ura
A.8
:R
esul
tado
sob
tido
spa
raa
com
pon
ente
dote
nsor
de
mom
ento
sm
11,
utili
zand
oo
elem
ento
MIT
C4,
noca
sode
uma
mal
hadi
stor
cida
.

146 Diagramas de esforços de laje rectangular simplesmente apoiada
(a)
Malh
ade
4elem
ento
s.(b
)M
alh
ade
64
elemen
tos.
(c)M
alh
ade
1024
elemen
tos.
Figura
A.9:
Resultados
obtidospara
acom
ponente
doesforço
transversov1 ,
utilizandoo
elemento
triangularT
6com
integraçãoselectiva,
nocaso
deum
am
alharegular.
(a)
Malh
ade
4elem
ento
s.(b
)M
alh
ade
64
elemen
tos.
(c)M
alh
ade
1024
elemen
tos.
Figura
A.10:
Resultados
obtidospara
acom
ponente
doesforço
transversov1 ,
utilizandoo
elemento
MIT
C7p,
nocaso
deum
am
alharegular.

Diagramas de esforços de laje rectangular simplesmente apoiada 147
(a)
Malh
ade
4el
emen
tos.
(b)
Malh
ade
64
elem
ento
s.(c
)M
alh
ade
1024
elem
ento
s.
Fig
ura
A.1
1:R
esul
tado
sob
tido
spa
raa
com
pon
ente
does
forç
otr
ansv
ersov 1
,ut
iliza
ndo
oel
emen
totr
iang
ular
T6
com
inte
graç
ãose
lect
iva,
noca
sode
uma
mal
hadi
stor
cida
.
(a)
Malh
ade
4el
emen
tos.
(b)
Malh
ade
64
elem
ento
s.(c
)M
alh
ade
1024
elem
ento
s.
Fig
ura
A.1
2:R
esul
tado
sob
tido
spa
raa
com
pon
ente
does
forç
otr
ansv
erso
v 1,
utili
zand
oo
elem
ento
MIT
C7p
,no
caso
deum
am
alha
dist
orci
da.

148 Diagramas de esforços de laje rectangular simplesmente apoiada
(a)
Malh
ade
2elem
ento
s.(b
)M
alh
ade
32
elemen
tos.
(c)M
alh
ade
512
elemen
tos.
Figura
A.13:
Resultados
obtidospara
acom
ponente
doesforço
transversov1 ,
utilizandoo
elemento
QL9
comintegração
selectiva,no
casode
uma
malha
regular.
(a)
Malh
ade
2elem
ento
s.(b
)M
alh
ade
32
elemen
tos.
(c)M
alh
ade
512
elemen
tos.
Figura
A.14:
Resultados
obtidospara
acom
ponente
doesforço
transversov1 ,
utilizandoo
elemento
MIT
C9p,
nocaso
deum
am
alharegular.(a
)M
alh
ade
2elem
ento
s.(b
)M
alh
ade
32
elemen
tos.
(c)M
alh
ade
512
elemen
tos.
Figura
A.15:
Resultados
obtidospara
acom
ponente
doesforço
transversov1 ,
utilizandoo
elemento
MIT
C9s,
nocaso
deum
am
alharegular.

Diagramas de esforços de laje rectangular simplesmente apoiada 149
(a)
Malh
ade
2el
emen
tos.
(b)
Malh
ade
32
elem
ento
s.(c
)M
alh
ade
512
elem
ento
s.
Fig
ura
A.1
6:R
esul
tado
sob
tido
spa
raa
com
pon
ente
does
forç
otr
ansv
ersov 1
,ut
iliza
ndo
oel
emen
toQ
L9
com
inte
graç
ãose
lect
iva,
noca
sode
uma
mal
hadi
stor
cida
.
(a)
Malh
ade
2el
emen
tos.
(b)
Malh
ade
32
elem
ento
s.(c
)M
alh
ade
512
elem
ento
s.
Fig
ura
A.1
7:R
esul
tado
sob
tido
spa
raa
com
pon
ente
does
forç
otr
ansv
erso
v 1,
utili
zand
oo
elem
ento
MIT
C9p
,no
caso
deum
am
alha
dist
orci
da.
(a)
Malh
ade
2el
emen
tos.
(b)
Malh
ade
32
elem
ento
s.(c
)M
alh
ade
512
elem
ento
s.
Fig
ura
A.1
8:R
esul
tado
sob
tido
spa
raa
com
pon
ente
does
forç
otr
ansv
erso
v 1,
utili
zand
oo
elem
ento
MIT
C9s
,no
caso
deum
am
alha
dist
orci
da.

150

Apêndice B
Solução de laje rectangularsimplesmente apoiada sujeita a cargauniforme
Considere-se a laje rectangular moderadamente espessa representada na figura B.1de dimensões (a × b), rigidez de flexão, Df , constante, rigidez de corte, Ds, constante,coeficiente de Poisson, ν, simplesmente apoiada em todo o seu contorno e sujeita a umacarga uniforme, p.
Assumindo que o apoio é modelado através de condições do tipo hard, as condições defronteira para esta laje podem ser expressas na forma
w(x1, 0) =0, w(x1, b) = 0, w(0, x2) = 0, w(a, x2) = 0 (B.1a)
θ1(x1, 0) =0, θ1(x1, b) = 0, θ2(0, x2) = 0, θ2(a, x2) = 0 (B.1b)
m22(x1, 0) =0, m22(x1, b) = 0, m11(0, x2) = 0, m11(a, x2) = 0 . (B.1c)
Ao contrário da laje fina, a solução deste problema para lajes espessas não se encontradescrita em numerosas referências. Neste apêndice serão apresentadas as soluções em sériesimples e dupla para o problema referido. Estas encontram-se descritas em Marguerre eWoernle (1969, página 179, capítulo 16) e Reddy (1999, página 366, capítulo 10), respecti-vamente. Ambas são baseadas na expansão da solução em série de Fourier. Note-se que não
x1
x2
a
b
Figura B.1: Laje rectangular simplesmente apoiada.
151

152 Solução de laje rectangular simplesmente apoiada sujeita a carga uniforme
estão disponíveis na bibliografia valores numéricos (i) para todas as grandezas pretendidase/ou (ii) com o grau de precisão requerido para fazer as necessárias comparações com osresultados obtidos através da presente metodologia.
B.1 Série dupla
B.1.1 Solução
Tal como no caso da teoria de lajes finas, as soluções exactas para a teoria de lajesmoderadamente espessas podem ser obtidas, para lajes simplesmente apoiadas, usando asérie de Navier.
Todas as condições de fronteira expressas pelas equações (B.1) são satisfeitas pelasseguintes expansões:
w(x1, x2) =∞∑
m=1
∞∑
n=1
Wmn sen (αmx1) sen (βnx2) (B.2a)
θ1(x1, x2) =
∞∑
m=1
∞∑
n=1
Xmn cos (αmx1) sen (βnx2) (B.2b)
θ2(x1, x2) =∞∑
m=1
∞∑
n=1
Ymn sen (αmx1) cos (βnx2) , (B.2c)
ondeαm =
mπ
a, βn =
nπ
b(B.3)
e a e b correspondem às dimensões da laje rectangular. A carga também pode ser expandidaem séries de senos
p(x1, x2) =
∞∑
m=1
∞∑
n=1
Pmn sen (αmx1) sen (βnx2) , (B.4)
em que
Pmn =4
a b
∫ a
0
∫ b
0p(x1, x2) sen (αmx1) sen (βnx2) dx2 dx1 . (B.5)
No caso de a carga aplicada no domínio ser uniformemente distribuída com intensidadep, obtém-se
Pmn =16 p
π2mn. (B.6)
onde m e n inteiros ímpares.As (três) equações governativas do problema podem ser obtidas substituindo as equa-
ções de compatibilidade (4.4) nas relações constitutivas (4.50) e (4.53) o resultado nasequações de equilíbrio (4.37), sem considerar os termos associados à fundação elástica, àanálise geometricamente não-linear e à análise dinâmica. Substituindo as equações (B.2)e (B.4) nas referidas equações governativas, obtém-se as seguintes equações para os coefi-cientes Wmn, Xmn e Ymn:
s11 s12 s13
s12 s22 s23
s13 s23 s33
Wmn
Xmn
Ymn
=
Pmn
0
0
, (B.7)

B.1. Série dupla 153
onde as componentes sij são definidos por
s11 = Ds
(αm
2βn2)
(B.8a)
s12 = Dsαm (B.8b)
s22 = Df
(αm
2 +(1− ν)
2βn
2
)+Ds (B.8c)
s13 = Dsβn (B.8d)
s23 = Df
(ν +
(1− ν)
2
)αmβn (B.8e)
s33 = Df
(βn
2 +(1− ν)
2αm
2
)+Ds (B.8f)
A solução da equação (B.7) é dada, para cada m,n = 1, 2, ..., por
Wmn =b0bmn
Pmn, Xmn =b1bmn
Pmn, Ymn =b2bmn
Pmn , (B.9)
onde
bmn =s11b0 + s12b1 + s13b2, (B.10a)
b0 = s22s33 − s23s23, b1 =s23s13 − s12s33, b2 = s12s23 − s22s13 . (B.10b)
Substituindo agora os coeficientes obtidos da equação (B.9) nas equações (B.2), obtém--se a solução para w(x1, x2) e θα(x1, x2). Todas as restantes grandezas, como sejam, χαβ,γα, mαβ e vα, podem ser determinadas directamente a partir destas. Por exemplo, asexpressões para mαβ são dadas por:
m11(x1, x2) =−∞∑
m=1
∞∑
n=1
(DfαmXmn + νDfβnYmn) sen (αmx1) sen (βn x2) (B.11a)
m22(x1, x2) =−∞∑
m=1
∞∑
n=1
(νDfαmXmn +DfβnYmn) sen (αmx1) sen (βn x2) (B.11b)
m12(x1, x2) =(1− ν)
2Df
∞∑
m=1
∞∑
n=1
(βnXmn + νDfαmYmn) cos (αmx1) cos (βn x2) . (B.11c)
O valor preciso da energia de deformação da laje, U , assume especial importância naavaliação da convergência de elementos finitos, pois é uma medida de erro global. Nabibliografia consultada não foram encontrados valores para esta grandeza, pelo que seprocedeu à sua determinação. Dado o campo de deslocamentos generalizados, w(x1, x2) eθα(x1, x2), a energia de deformação pode ser avaliada através de
U =1
2
∫
ΩǫT D ǫdΩ . (B.12)
No entanto, atendendo a que as deformações generalizadas ǫ são dadas por séries duplas, asua avaliação numérica é muito complexa e a sua avaliação através de regras de quadratura éineficiente. Uma alternativa eficaz é tirar partido da relação entre a energia de deformação,

154 Solução de laje rectangular simplesmente apoiada sujeita a carga uniforme
U , e o potencial das forças exteriores, V . Na posição de equilíbrio, tem-se (ver Bathe (1996,página 86, exemplo 3.6, Capítulo 2))
U =1
2V =
1
2
∫
Ωp(x1, x2)w(x1, x2) dΩ . (B.13)
Apesar da função integrando se tornar mais simples, continua-se a ter um integral nodomínio. Desta forma, há necessidade de proceder a uma simplificação. Em geral, tem-sew(x1, x2) e p(x1, x2) definidos respectivamente por (B.2a) e (B.4). Substituindo estes naequação (B.13), obtém-se
U =1
2
∫
Ω
∞∑
m=1
∞∑
n=1
Pmn sen (αmx1) sen (βnx2)∞∑
i=1
∞∑
j=1
Wij sen (αix1) sen (βjx2) dΩ
=1
2
∞∑
m=1
∞∑
n=1
∞∑
i=1
∞∑
j=1
PmnWij
∫ a
0
∫ b
0sen (αmx1) sen (βnx2) sen (αix1) sen (βjx2) dx2 dx1
=1
2
∞∑
m=1
∞∑
n=1
∞∑
i=1
∞∑
j=1
PmnWij
∫ a
0sen (αmx1) sen (αix1) dx1
∫ b
0sen (βnx2) sen (βjx2) dx2
=1
2
∞∑
m=1
∞∑
n=1
∞∑
i=1
∞∑
j=1
Pmna
2δmiWij
b
2δnj
=1
2
a
2
b
2
∞∑
m=1
∞∑
n=1
PmnWmn .
(B.14)
Note-se que esta expressão da energia é mais simples, na medida em que corresponde a so-matórios de multiplicações de coeficientes. No entanto, tem o inconveniente de não separaras energias de deformação de flexão e corte. Caso se pretendesse avaliar separadamente ascomponentes Uf e Us, então o resultado é dado por
U = Uf + Us , (B.15)
onde
Uf =1
2
∫
ΩχT Df χdΩ
=1
2
a
2
b
2
∞∑
m=1
∞∑
n=1
Xmnαm
−YmnβnXmnβn + Ymnαm
T
Df
Xmnαm
−YmnβnXmnβn + Ymnαm
=Df
2
a
2
b
2
∞∑
m=1
∞∑
n=1
(X2mnα
2m + Y 2
mnβ2n + 2XmnYmnαmβnν
+(Xmnβn + Ymnαm)2 1− ν
2
),
(B.16a)

B.2. Série simples 155
Us =1
2
∫
ΩγT Ds γ dΩ
=1
2
a
2
b
2
∞∑
m=1
∞∑
n=1
Wmnαm +Xmn
Wmnβn + Ymn
TDs
Wmnαm +Xmn
Wmnβn + Ymn
=Ds
2
a
2
b
2
∞∑
m=1
∞∑
n=1
((Wmnαm +Xmn)
2 + (Wmnβn + Ymn)2).
(B.16b)
B.1.2 Resultados numéricos
Usando o software Mathematica (Wolfram Research, 2010) foi implementada a soluçãodescrita anteriormente. Os resultados são apresentados em formato adimensional, sendoválidos para coeficientes de Poisson ν = 0, 3, factor de corte κ = 5
6 e exclusivamente paraa relação entre vãos a
b = 2 e relação de espessura e menor vão hb = 0, 1, correspondente à
laje rectangular espessa.O deslocamento, w, e o momento m22 máximos ocorrem no centro da laje. No caso
da laje rectangular, ao contrário da laje quadrada, o momento flector m11 máximo nãoocorre no centro da laje mas sim em dois pontos situados sobre a recta x2 = b
2 e dispostossimetricamente em relação à recta x1 = a
2 . No entanto o momento flector m11 foi avaliadopara efeitos de comparação no centro da laje. O valor (absoluto) máximo do momento m12
ocorre nos quatro cantos da laje. Os resultados obtidos para estas grandezas, bem comopara a energia de deformação, Uf e Us, encontram-se na Tabela B.1. O valor (absoluto)máximo do esforço transverso v1 ocorre nos pontos (0, b2) e (a, b2), enquanto que o valor(absoluto) máximo do esforço transverso de v2 ocorre nos pontos (a2 , 0) e (a2 , b). Os seusvalores apenas foram apresentados na série simples, tendo em conta o elevado tempo queos resultados levam a convergir utilizando a solução em série dupla.
Como se pode verificar na Tabela B.1, este tipo de solução é ineficiente computaci-onalmente, tendo em conta que é necessário um grande número de termos para fazer oresultado convergir. Como tal, implementou-se a solução em série simples, sendo expectá-vel um incremento na eficiência.
B.2 Série simples
B.2.1 Solução
Na teoria de lajes moderadamente espessas as equações da laje no domínio, para o casoestático, sem fundação elástica, são
vα,α + p =0 (B.17a)
mαβ,β − vα +mα =0 (B.17b)
mαβ =Df ((1− ν)χαβ + ν χγγ δαβ) (4.49)
vα =κGhγα (4.52)
χαβ =1
2(θα,β + θβ,α) (4.4a)
γα =w,α + θα . (4.4b)

156 Solução de laje rectangular simplesmente apoiada sujeita a carga uniforme
w(a2,b2 )
=αpa4
Df
m11 (
a2,b2 )
=βpa2
m22 (
a2,b2 )
=γpa2
m12(0,0)
=δpa2
Uf=
p2a6
Df
Us=ζp2a4
Ds
mm
áx
α·10
4m
máx
β·10
2m
máx
γ·10
2m
máx
δ·102
mm
áx
·10
5m
máx
ζ·103
16,891684452
11,445450301
12,825198316
1−0,919832010
16,744985066
13,328516715
106,062409933
101,165340317
102,545509372
10−1,144422645
106,881243597
103,569311404
506,533761794
1001,158750487
1002,542073593
1000−1,156675205
206,881416312
503,573117598
1006,533756385
5001,158757358
5002,542077103
2000−1,156676134
506,881422546
5003,573151171
3006,533756946
10001,158757406
10002,542077128
5000−1,156676394
1006,881422612
10003,573151201
7006,533756965
20001,158757412
15002,542077130
7000−1,156676418
1506,881422614
18003,573151204
12006,533756967
25001,158757413
20002,542077131
10000−1,156676431
1806,881422615
25003,573151205
13006,533756967
27001,158757413
22002,542077131
15000−1,000000000
2006,881422615
27003,573151205
Tab
elaB
.1:R
esultadosobtidos
utilizandosérie
duplapara
osvalores
adimensionalizados
dew(a2,b2 ),
m11 (
a2,b2 ),
m22 (
a2,b2 ),
m12(0,0)
eUf
eUs
emlaje
rectangular(a
=2b)
simplesm
enteap
oiadasujeita
acarga
uniforme,ν=
0,3,h=
b10
eκ=
56.

B.2. Série simples 157
Derivando (B.17b) em ordem a α e substituindo o resultado em (B.17a) vem
mαβ,αβ +mα,α + p = 0 ⇔ mαβ,αβ + pef = 0 , (B.20)
onde pef é a carga efectiva aplicada no domínio, sendo a equação (B.20) correspondente aoequilíbrio de forças verticais efectivas (por unidade de área).
Substituindo (4.4a) e (4.4b) em (4.49) e (4.53), respectivamente, e os resultados em(B.17b) vem (em notação matricial)
m = Df χ, v = Ds γ, (5.11)
χ = ∂f u, γ = ∂s u , (B.21)
∂∗f m− v +m = 0 ⇔ ∂∗
f Df ∂f u−Ds ∂s u+m = 0 ⇔
⇔
0 0 0
∂1 0 ∂2
0 ∂2 ∂1
Df
θ1,1 + νθ2,2
νθ1,1 + θ2,21−ν2 (θ1,1 + θ2,2)
−Ds
w,1 + θ1
w,2 + θ2
+
m1
m2
= 0 . (B.22)
Assumindo m = 0 tem-sew,1
w,2
=
−θ1 + Df
Ds
(θ1,11 + νθ2,21 +
1−ν2 (θ1,11 + θ2,21)
)
−θ2 + Df
Ds
(θ1,12 + νθ2,22 +
1−ν2 (θ1,12 + θ2,22)
). (B.23)
Admitindo uma tranformação de coordenadas definida por
Φ =θα,α = θ1,1 + θ2,2 (B.24a)
Ψ =− θ1,2 + θ2,1 , (B.24b)
a equação (B.23) assume a forma
w,1
w,2
= −
θ1
θ2
+Df
Ds
Φ,1 − 1−ν
2 Ψ,2
Φ,2 +1−ν2 Ψ,1
, (B.25)
que corresponde ao equilíbrio de momentos em cada direcção.Assim,
∇w =w,11 + w,22 = −θ1,1 − θ2,2 +Df
Ds
(Φ,11 −
1− ν
2Ψ,21 +Φ,22 +
1− ν
2Ψ,12
)
=− Φ+Df
Ds∇Φ
(B.26a)
0 =w,12 − w,21 = −θ1,2 + θ2,1 −(Φ,12 −
1− ν
2Ψ,22 +Φ,21 +
1− ν
2Ψ,11
)
=Ψ− Df
Ds
1− ν
2∇Ψ .
(B.26b)
De (B.20), tem-se

158 Solução de laje rectangular simplesmente apoiada sujeita a carga uniforme
m11,11 +m12,12 +m21,21 +m22,22 + pef = 0
⇔ Df
χ11,11 + νχ22,11 + 2
1− ν
22χ12,12 + νχ11,22 + χ22,22
+ pef = 0
⇔ Df θ1,111 + νθ2,211 + (1− ν) (θ1,212 + θ2,112) + νθ1,122 + θ2,222+ pef = 0
⇔ Df θ1,111 + θ1,212 + θ2,112 + θ2,222+ pef = 0
⇔ Df
(θ1,1 + θ2,2),11 + (θ1,1 + θ2,2),22
+ pef = 0
⇔ Df Φ1,1 +Φ,22+ pef = 0 ⇔ Df∇Φ+ pef = 0 .
(B.27)
Substituindo o resultado da equação (B.27) na equação (B.26a) esta última fica
∇w = −Φ−pefDs
. (B.28)
As equações (de combinações de equilíbrio de momentos) (B.26) e a equação de equilí-brio de forças verticais (B.27) constituem as equações diferenciais de equilíbrio em funçãode w, Φ e Ψ.
Caso a laje seja fina, Df
Ds→ 0 e as equações anteriores escrevem-se na forma
∇w = −Φ (B.29)
0 = Ψ (B.30)
Df∇Φ+ pef = 0 , (B.31)
que corresponde à equação governativa das lajes finas. De (B.25), θα = −w,α.Assim, após a obtenção de w, Φ e Ψ é possível determinar todas as grandezas no
domínio da laje através de
θ1 =− w,1 +Df
Ds
(Ψ,1 −
1− ν
2Ψ,2
)(B.32a)
θ2 =− w,2 +Df
Ds
(Ψ,2 −
1− ν
2Ψ,1
)(B.32b)
χ11 =θ1,1 = −w,11 +Df
Ds
(Φ,11 −
1− ν
2Ψ,21
)(B.33a)
χ22 =θ2,2 = −w,22 +Df
Ds
(Φ,22 −
1− ν
2Ψ,12
)(B.33b)
2χ12 =θ1,2 + θ2,1 = 2
(−w,12 +
Df
Ds
(Φ,12 +
1− ν
4(Ψ,11 −Ψ,22)
))(B.33c)
γ1 = w,1 + θ1 =Df
Ds
(Φ,1 +
1− ν
2Ψ,2
)(B.34a)
γ2 = w,2 + θ2 =Df
Ds
(Φ,2 +
1− ν
2Ψ,1
). (B.34b)

B.2. Série simples 159
No caso da laje ser simplesmente apoiada (apoio simples tipo hard) sujeita a cargauniforme (Figura B.1) a solução em série simples para w, Φ e Ψ que cumpre as condiçõesde fronteira é dada por:
w(x1, x2) =
∞∑
m=1
w(x1) senmπx2b
(B.35a)
Φ(x1, x2) =
∞∑
m=1
Φ(x1) senmπx2b
(B.35b)
Ψ(x1, x2) =
∞∑
m=1
Ψ(x1) cosmπx2b
. (B.35c)
Seja
x1 =mπx1b
, x2 =mπx2b
, a =mπa
b, h2 =
Df
Ds, h2 =
mπ
b
2h, qm =
4 pefπm
,
(B.36)então, a solução pretendida é
w(x1) =qmDf
(b
mπ
)41 + h2 − 1
cosh a
(1 + h2 (cosh x1 + cosh (a− x1))
)+
1
2
(x1 senh (a− x1) + (a− x1) senh x1 tanh
(a
2
)) (B.37a)
Φ(x1) =qmDf
(b
mπ
)21− cosh x1 + senh x1 tanh
(a
2
)(B.37b)
Ψ(x1) =0 . (B.37c)
Em Φ(x1) foi usada a identidade tanh a2 = cos a−1
sena . Note-se ainda que, de (B.28), tem-se
Φ = −∇w +pefDs
, (B.38)
onde
∇w =pefDf
(b
n π
)2
(− tan a sinh x1 + cosh x1 − 1) sin (βn x2) . (B.39)
Tal como para a série dupla, na série simples a avaliação numérica da energia de deformaçãoda laje, U , pela equação (B.12) é ineficiente, sendo também possível recorrer o cálculo daenergia de deformação usando a relação entre a energia de deformação, U , e o potencialdas forças exteriores, V . Mais uma vez, usando (B.13) e atendendo a que a carga aplicadano domínio é uniforme, a avaliação explicita do integral, conduz a
U =1
2
∫
Ωp(x1, x2)w(x1, x2) dΩ =
1
2p
∫
Ωw(x1, x2) dΩ
=p
2
∞∑
m=1
[b5qm sin2
(πm2
)
π6m6(cosh a + 1)Df
(πam
(cosh a+ 2h2(cosh a+ 1) + 2 cosh a+ 3
)+
b(−(2h2 + 3) (2 sinh a)− a (cosh a− 1)
))].
(B.40)

160 Solução de laje rectangular simplesmente apoiada sujeita a carga uniforme
Caso se pretendesse avaliar separadamente as componentes Uf e Us, é necessário tambémavaliar explicitamente os integrais. No entanto, dada a grande extensão das expressõesresultantes para cada componente de energia de deformação, estas não serão expostasneste documento.
B.2.2 Resultados numéricos
Recorrendo novamente ao software Mathematica (Wolfram Research, 2010) foi imple-mentada a solução em série simples. Os resultados são apresentados no mesmo formatoque a série dupla e são válidos para as mesmas circunstâncias. Os resultados obtidos paraas grandezas w, mαβ, Uf e Us, encontram-se na Tabela B.2 e para vα na Tabela B.3.
Como se pode verificar pelas Tabelas B.2 e B.3, os resultados da série simples, no limite,são iguais aos resultados obtidos na série dupla. No entanto, a sua convergência exige ummenor número de termos, revelando-se mais eficiente computacionalmente. Note-se que asgrandezas w, Uf e Us são as que convergem mais rapidamente. Em contraste, o esforçotransverso e momento torsor convergem de forma mais lenta.

B.2. Série simples 161
w(a2,b 2)=αpa4
Df
m11
( a 2,b 2
) =βpa2
m22
( a 2,b 2
) =γpa2
m12(0,0)=δpa2
Uf=
p2a6
Df
Us=ζp2a4
Ds
mm
áx
α·1
04m
máx
β·1
02m
máx
γ·102
mm
áx
δ·102
mm
áx
·1
05m
máx
ζ·103
16,572266693
11,188861217
12,642147750
1−1,098204659
16,865535074
13,505200293
56,534605095
101,159215166
102,543602974
10−1,153882023
56,881284563
103,572332024
106,533901751
501,158761274
502,542090001
50−1,156563608
106,881410708
503,573144399
506,533757899
100
1,158756929
100
2,542075520
100
−1,156648226
256,881422508
100
3,573150352
100
6,533756851
500
1,158757409
500
2,542077118
1000
−1,156676161
506,881422611
500
3,573151198
300
6,533756963
700
1,158757412
700
2,542077126
8000
−1,156676439
756,881422614
1000
3,573151204
650
6,533756967
1100
1,158757413
1500
2,542077131
1800
0−1,156676443
100
6,881422615
1500
3,573151205
700
6,533756967
1300
1,158757413
2000
2,542077131
2000
0−1,156676443
110
6,881422615
1700
3,573151205
Tab
ela
B.2
:R
esul
tado
sob
tido
sut
iliza
ndo
série
sim
ples
para
osva
lore
sad
imen
sion
aliz
ados
dew(a2,b 2),m
11
( a 2,b 2
) ,m
22
( a 2,b 2
) ,m
12(0,0)
eUf
eUs
emla
jere
ctan
gula
r(a
=2b)
sim
ples
men
teap
oiad
asu
jeita
aca
rga
unifor
me,ν=
0,3,h=
b 10
eκ=
5 6.

162 Solução de laje rectangular simplesmente apoiada sujeita a carga uniforme
v1(0,b2) = ρ p a v2(
a2 , 0) = p a
mmáx ρ · 101 mmáx · 101
1 2,018869320 1 1,851610712
10 1,858430075 10 2,224162641
100 1,848478723 100 2,315018894
1000 1,848579000 1000 2,324137463
5000 1,848579973 5000 2,324948032
15000 1,848580009 25000 2,158757412
32000 1,848580013 70000 2,158757413
33000 1,848580013 100000 2,158757413
Tabela B.3: Resultados obtidos utilizando série simples para os valores adimensionalizadosde v1(0, b2 e v2(a2 , 0) em laje rectangular (a = 2 b) simplesmente apoiada sujeita a cargauniforme, ν = 0, 3, h = b
10 e κ = 56 .

Apêndice C
Solução de laje rectangularsimplesmente apoiada sujeita a cargade compressão bi-axial
A determinação de cargas de instabilidade em laje fina rectangular sujeita a compressãobi-axial é abordada, por exemplo, por Reddy (2007, capítulo 10, página 372). No entanto,os resultados aí apresentados não consideram a presença do terceiro termo do primeiromembro da equação de equilíbrio (4.37a), pelo que a parcela do sistema resolutivo associadaà análise linear de estabilidade então considerada não depende das rotações. Deste modo,houve necessidade de deduzir o sistema resolutivo que inclui todos os termos das equaçõesde equilíbrio.
Considere-se a mesma laje de dimensões (a × b), simplesmente apoiada definida noapêndice B. Assume-se uma distribuição de tensão de compressão bi-axial definida por
σ = λ
[−1 0
0 −ϑ
]= −λ
[1 0
0 ϑ
]= −λσ0. (C.1)
As condições de fronteira cinemáticas são satisfeitas se for, mais uma vez, assumida umasolução em série dupla da forma (B.2). Assim, desenvolvendo apenas o termo associadoao deslocamento vertical, w, proveniente do desenvolvimento dos termos não-lineares dadeformação quando se realiza a análise de estabilidade, obtém-se
(hσαβw,β),α =h (σ11 w,11 + σ12 w,12 + σ21 w,21 + σ22 w,22) = −λh (w,11 + σ w,22) =
=− λh
( ∞∑
m=1
∞∑
n=1
(−Wmn α
2m − σWmn β
2m
)sen (αmx1) sen (βnx2)
)=
=∞∑
m=1
∞∑
n=1
(λh(α2m + σ β2m
)Wmn sen (αmx1) sen (βnx2)
).
(C.2)
163

164 Solução de laje rectangular sujeita a carga de compressão bi-axial
Desenvolvendo agora os termos associados às rotações θα, tem-se
(h3
12σγβ θα,β
)
,γ
=h3
12(σ11 θα,11 + σ12 θα,21 + σ21 θα,12 + σ22 θα,22) =
=
∑∞m=1
∑∞n=1
(λ h3
12
(α2m + ϑβ2m
)Xmn cos (αmx1) sen (βnx2)
), α = 1
∑∞m=1
∑∞n=1
(λ h3
12
(α2m + ϑβ2m
)Ymn sen (αmx1) cos (βnx2)
), α = 2
(C.3)
Os termos dados por (C.2) e (C.3), referentes à carga axial, são agora subtraídos aos ter-mos da matriz do sistema de equações (B.7). Deste modo, obtém-se as seguintes equaçõespara os coeficientes Wmn, Xmn e Ymn:
s11 s12 s13
s12 s22 s23
s13 s23 s33
− λ
(α2m + ϑβ2n
)h 0 0
0 h3
12 0
0 0 h3
12
Wmn
Xmn
Ymn
=
0
0
0
, (C.4)
onde as componentes sij são definidos em (B.8), αm e βn definidas em (B.3). Deste modo,o problema anterior pode traduzir-se num problema de valores e vectores próprios, cujasolução fornece as cargas de bifurcação e as respectivas configurações deformadas.
As cargas de instabilidade associadas aos os oito primeiros modos de instabilidade sãofornecidas na Tabela C.1. Os resultados são dados para a relação ϑ = 1 e para uma lajecom propriedades idênticas à que gerou os resultados obtidos no apêndice B, em função doparâmetro adimensional k, definido através de
σcr = kDf
a3. (C.5)
Note-se que, devido à simplificação efectuada no modelo de cálculo, só interessa obteros resultados correspondentes aos modos de instabilidade simétricos exactos.

Solução de laje rectangular sujeita a carga de compressão bi-axial 165
ModoNúmero de semi-ondas
kdirecção x1 direcção x2
1 1 1 944,2946527
2 2 1 1473,100475
3 3 1 2298,995748
4 1 2 2915,027184
5 2 2 3353,608250
5 4 1 3353,608250
6 3 2 4044,182080
7 5 1 4563,607798
8 4 2 4935,611571
9 1 3 5524,982581
10 2 3 5861,603699
10 6 1 5861,603699
11 5 2 5971,148773
12 3 3 6396,711940
13 6 2 7096,470997
13 4 3 7096,470997
14 7 1 7192,105591
Tabela C.1: Resultados obtidos para os valores das cargas de bifurcação adimensionais,para uma laje rectangular (a = 2 b) simplesmente apoiada sujeita a carga de compressãobi-axial igual nas duas direcções, ν = 0, 3, h = b
10 e κ = 56 .

166

Bibliografia
ADINA (2010). Automatic Dynamic Incremental Nonlinear Analysis – Volume I: Theoryand Modeling Guide. ADINA R & D Inc. Relatório ARD 10–7.
Bathe, K.-J. (1996). Finite Element Procedures. Prentice Hall.
Bathe, K.-J. e F. Brezzi (1985). On the convergence of a four-node plate bending elementbased on Mindlin-Reissner plate theory and a mixed interpolation. Em The mathematicsof finite elements and applications V, páginas 491–503. Academic Press Inc.
Bathe, K.-J., F. Brezzi e S. W. Cho (1989). The MITC7 and MITC9 plate bendingelements. Computers & Structures, 32 (3–4), 797–814.
Bathe, K.-J., M. L. Bucalem e F. Brezzi (1990). Displacement and stress convergence ofour MITC plate bending elements. Engineering Computations, 7 (4), 291–302.
Bathe, K.-J. e E. N. Dvorkin (1985). A four-node plate bending element based on Min-dlin/Reissner plate theory and a mixed interpolation. International Journal for Nume-rical Methods in Engineering, 21 (2), 367–383.
Bathe, K.-J. e E. N. Dvorkin (1986). A formulation of general shell elements – the useof mixed interpolation of tensorial components. International Journal for NumericalMethods in Engineering, 22 (3), 697–722.
Bathe, K.-J., P.-S. Lee e J.-F. Hiller (2003). Towards improving the MITC9 shell element.Computers & Structures, 81 (8–11), 477–489.
Bishop, R. L. e S. I. Goldberg (1981). Tensor Analysis on Manifolds. Dover Publications,Inc.
Brezzi, F., K.-J. Bathe e M. Fortin (1989). Mixed–interpolated elements for Reissner–Mindlin plates. International Journal for Numerical Methods in Engineering, 28 (8),1787–1801.
Brezzi, F. e M. Fortin (1991). Mixed and Hybrid Finite Element Methods. Springer Seriesin Computational Methematics. Springer–Verlag, Nova Iorque.
Bucalem, M. L. e K.-J. Bathe (1993). Higher-order MITC general shell elements. Interna-tional Journal for Numerical Methods in Engineering, 36 (21), 3729–3754.
Campello, E. M. B., P. M. Pimenta e P. Wriggers (2003). A triangular finite shell elementbased on a fully nonlinear shell formulation. Computational Mechanics, 31 (6), 505–518.
167

168 Bibliografia
Cowper, G. R. (1973). Gaussian quadrature formulas for triangles. International Journalfor Numerical Methods in Engineering, 7 (3), 405–408.
de Arantes e Oliveira, E. R. (1999). Elementos da teoria da elasticidade. IST Press.
Dvorkin, E. N. e K.-J. Bathe (1984). A continuum mechanics based four-node shell elementfor general non-linear analysis. Engineering Computations, 1 (1), 77–88.
Ergatoudis, I., B. M. Irons e O. C. Zienkiewicz (1968). Curved, isoparametric, “quadrilate-ral” elements for finite element analysis. International Journal of Solids and Structures,4 (1), 31–42.
Fung, Y. C. e P. Tong (2001). Classical and computational solid mechanics, volume 1 ofAdvances Series in Engineering Science. World Scientific Publishing Co. Pte. Ltd.
Geuzaine, C. e J.-F. Remacle (2009). Gmsh: a three-dimensional finite element meshgenerator with built-in pre- and post-processing facilities. International Journal forNumerical Methods in Engineering, 79 (11), 1309–1331.
Hinton, E. e H. C. Huang (1986). A family of quadrilateral Mindlin plate elements withsubstitute shear strain fields. Computers & Structures, 23 (3), 409–431.
Huang, H. C. e E. Hinton (1984). A nine node Lagrangian Mindlin plate element withenhanced shear interpolation. Engineering Computations, 1 (4), 369–379.
Hughes, T. J. R. (2000). The Finite Element Method: Linear Static and Dynamic FiniteElement Analysis. Dover Publications, Inc, Mineola, Nova Iorque, EUA.
Hughes, T. J. R., R. L. Taylor e W. Kanok-Nukulchai (1977). A simple and efficient finiteelement for plate bending. International Journal for Numerical Methods in Engineering,11 (10), 1529–1543.
Hughes, T. J. R. e T. E. Tezduyar (1981). Finite elements based upon Mindlin platetheory with particular reference to the four–node isoparametric element. Journal ofApplied Mechanics, Transactions of the ASME, 48 (3), 587–596.
Lee, P.-S. e K.-J. Bathe (2004). Development of MITC isotropict triangular shell finiteelements. Computers & Structures, 82 (11–12), 945–962.
LNEC (1966). Vocabulário de teoria das estruturas. Relatório técnico, Laboratório Naci-onal de Engenharia Civil, Lisboa. Especificação E183-1966.
Malkus, D. S. e T. J. R. Hughes (1978). Mixed finite element methods–reduced andselective integration techniques: a unification of concepts. Computer Methods in AppliedMechanics and Engineering, 15 (1), 63–81.
Marguerre, K. e H.-T. Woernle (1969). Elastic Plates. Blaisdell Publishing Company.
MATLAB (2012). MATLAB, The Language of Technical Computing. The MathWorks Inc.Versão R2012a.
Melosh, R. J. (1963). Basis for derivation of matrices for the direct stiffness method.American Institute of Aeronautics and Astronautics (AIAA) Journal, 1 (7), 1631–1637.

Bibliografia 169
Mindlin, R. D. (1951). Influence of rotatory inertia and shear on flexural motions ofisotropic, elastic plates. Journal of Applied Mechanics, Transactions of the ASME, 18 (1),31–38.
Reddy, J. N. (1999). Theory and Analysis of Elastic Plates. Taylor & Francis, Filadélfia,EUA.
Reddy, J. N. (2007). Theory and Analysis of Elastic Plates. CRC Press, Taylor & FrancisGroup.
Reissner, E. (1945). The effect of transverse shear deformation on the bending of elasticplates. Journal of Applied Mechanics, Transactions of the ASME, 12 (2), A–69–A–77.
Szilard, R. (2004). Theories and Applications of Plate Analysis: Classical Numerical andEngineering Methods. John Wiley & Sons.
Tiago, Carlos (2009). Teoria de lajes. Comunicação privada.
Timoshenko, S. P. e S. Woinowsky-Krieger (1959). Theory of Plates and Shells. McGraw–Hill, segunda edição.
Wolfram Research, Inc. (2013). Mathematica Edition: Version 9.0. Wolfram Research,Inc., Champaign, Ilinóis.
Zienkiewicz, O. C. e E. Hinton (1976). Reduced integration, function smoothing and non-conformity in finite element analysis (with special reference to thick plates). Journal ofthe Franklin Institute, 302 (5–6), 443–461.
Zienkiewicz, O. C., R. L. Taylor e J. M. Too (1971). Reduced integration technique ingeneral analysis of plates and shells. International Journal for Numerical Methods inEngineering, 3 (2), 275–290.
Zienkiewicz, O. C., R. L. Taylor e J. Z. Zhu (2005). Finite Element Method: Its Basis andFundamentals, volume 1. Elsevier Butterworth–Heinemann, sexta edição.