
UNIVERSIDADE FEDERAL DE SÃO JOÃO DEL-REI
PRÓ-REITORIA DE PESQUISA
CENTRO FEDERAL DE EDUCAÇÃO TECNOLÓGICA DE
MINAS GERAIS
DIRETORIA DE PESQUISA E PÓS-GRADUAÇÃO
PROGRAMA DE PÓS-GRADUAÇÃO EM ENGENHARIA ELÉTRICA
MODELAGEM DE PEQUENOS SINAIS DOS CONVERSORES
CC-CC ĆUK, SEPIC E ZETA NÃO ISOLADOS BASEADOS NA
CÉLULA DE COMUTAÇÃO DE TRÊS ESTADOS OPERANDO
EM MODO DE CONDUÇÃO CONTÍNUA
São João del-Rei, julho de 2017
Aluno: José Augusto da Rocha Carvalho
Orientador: Prof. Dr. Fernando Lessa Tofoli

UNIVERSIDADE FEDERAL DE SÃO JOÃO DEL-REI
PRÓ-REITORIA DE PESQUISA
CENTRO FEDERAL DE EDUCAÇÃO TECNOLÓGICA DE
MINAS GERAIS
DIRETORIA DE PESQUISA E PÓS-GRADUAÇÃO
por
José Augusto da Rocha Carvalho
Dissertação apresentada à Banca Examinadora designada pelo
Colegiado do Programa de Pós-Graduação em Engenharia
Elétrica. Associação Ampla entre a Universidade Federal de São
João del-Rei e o Centro Federal de Educação Tecnológica de
Minas Gerais, como requisito parcial para a obtenção de título
de Mestre em Engenharia Elétrica.
Área de Concentração: Modelagem e Controle de Sistemas
Linha de Pesquisa: Sistemas de Controle
Orientador: Prof. Dr. Fernando Lessa Tofoli
São João del-Rei, julho de 2017

Dedico este trabalho a Deus e a minha família.

II
AGRADECIMENTOS
Primeiramente agradeço a Deus pelo dom da vida e por todas as graças e bênçãos que
me deste. Agradeço também por Ele ter me dado saúde, força e sabedoria para que eu pudesse
dedicar-me ao mestrado, por ter colocado em minha jornada diversas pessoas que de forma
direta ou indiretamente me ajudaram neste processo.
Aos meus Pais agradeço pelo carinho e apoio durante esta caminhada, desde ao ensinar
a andar até os dias de hoje sempre me mostrando um amor incondicional para comigo e meu
irmão. Ao meu irmão agradeço principalmente pelo apoio e pela amizade, não só durante este
processo, mas pela minha vida inteira. Sem eles, nada seria possível.
Agradeço ao meu orientador, Fernando, pela dedicação, apoio e incentivo para comigo.
Agradeço pelas respostas rápidas nos e-mails, por esta sempre à disposição a ajudar.
Agradeço ao Programa de Pós-Graduação em Engenharia Elétrica da UFSJ por me
acolher, e a todos servidores, professores e alunos pela amizade, serviço e carrinho.
Não posso deixar de agradecer a todos os professores e servidores que eu tive durante
minha vida, desde o primário até o mestrado, da faxineira ao professor, sem o carinho e
dedicação deles, chegar aonde cheguei seria impossível.
A todos meus amigos pelo apoio.
Ao Ministério das Universidades Renovadas (MUR) que conheci durante o mestrado,
agradeço por me mostrar onde que deve estar nossa maior prioridade, e agradeço também
pelas amizades sinceras adquiridas.
À Coordenação de Aperfeiçoamento de Pessoal de Nível Superior (CAPES) pelo apoio
financeiro.

III
J. A. R. Carvalho, “Modelagem de Pequenos Sinais dos Conversores CC-CC Ćuk, SEPIC e
Zeta Não Isolados Baseados Na Célula de Comutação de Três Estados Operando em Modo de
Condução Contínua”, São João del-Rei, UFSJ, 136p., 2017.
A célula de comutação de três estados (three-state switching cell – 3SSC) é composta
por duas células de comutação de dois estados, contendo assim dois interruptores ativos, dois
interruptores passivos e um autotransformador. Dentre suas características promissoras
comparadas aos conversores clássicos, podem-se citar: redução da corrente nos interruptores
pela metade; diminuição das perdas por comutação; amplitude das ondulações da corrente de
saída reduzidas, elementos magnéticos projetados para uma frequência de operação igual ao
dobro da frequência de comutação dos interruptores, reduzindo-se o tamanho, peso e volume.
Nesse contexto, este trabalho visa apresentar a modelagem de pequenos sinais para os
conversores CC-CC Ćuk, SEPIC e Zeta 3SSC em modo de condução contínua utilizando a
técnica de modelagem do interruptor PWM (pulse width modulation – modulação por largura
de pulso). Por se tratarem de topologias distintas dos conversores CC-CC clássicos, a análise
de pequenos sinais justifica-se diante da obtenção de modelos CA e CC para as novas
estruturas baseadas na 3SSC. Assim, o método do interruptor PWM mostra-se uma técnica
simples e direta se comparada com as outras abordagens existentes na literatura, pois é
baseada somente na análise de circuitos elétricos. Utilizando o artifício da varredura em
frequência (AC Sweep), disponível na maioria dos softwares de simulação computacional de
circuitos elétricos, são validadas as funções de transferências para toda a faixa de variação da
razão cíclica (0<D<1). Deve-se ressaltar que essas expressões são importantes para o controle
em malha fechada dos conversores, como é o caso das técnicas de controle em modo tensão e
corrente média.
Palavras-chave: célula de comutação de três estados, conversores CC-CC, modelo do
interruptor PWM, modelagem de pequenos sinais, conversor Ćuk, conversor SEPIC,
conversor Zeta.

IV
J. A. R. Carvalho, “Small-Signal Modeling of DC-DC Ćuk, SEPIC and Zeta Converters
Based on The Three-State Switching Cell in Continuous Conduction Mode”, São João del-
Rei, UFSJ, 136p., 2017.
The three-state switching cell (3SSC) is composed by two two-state switching cells,
employing two active switches, two diodes, and one autotransformer. Among its prominent
characteristics compared with the classical converters, it is possible to mention: the current
stresses are reduced by a half; switching losses are reduced; minimization of current and
voltage ripples; magnetics are designed for twice the switching frequency, with consequent
reduction of size, weight, and volume. Within this context, this work presents the small-signal
modeling of the 3SSC dc-dc Ćuk, SEPIC and Zeta converters in continuous conduction mode
employing the PWM (pulse width modulation) switch mode. Since such structures are not
identical to the classical dc-dc converters, the small-signal modeling is justified by the
possibility to obtain the ac and dc models for novel structures based on the 3SSC. Thus, the
PWM switch model consists in a simple and straightforward approach if compared with other
techniques that exist in literature, as it is based on the analysis of electric circuits. By
employing ac sweep, which is typically available in circuit simulation software, it is possible
to validate the transfer functions for the entire range of the duty cycle (0<D<1). It is worth to
mention that the aforementioned expressions are quite important for the implementation of the
closed-loop control system e.g. when voltage mode control or average current mode control
are used.
Keywords: three-state switching cell, dc-dc converters, PWM switch model, small-signal
modeling, Ćuk converter, SEPIC converter, Zeta converter.

Lista
Lista
Lista
Lista
Capí
1.1
1.2
1.3
Capí
2.1
2.2
2.3
2.4
2.5
2.6
a de Figuras
a de Tabelas
a de Abrevia
a de Símbol
tulo 1 Intro
Justifica1 -
Objetivo2 -
Estrutura3 -
tulo 2 Revi
Conside1 -
Convers2 -
Célula d3 -
Técnicas4 -
Modelag5 -
2.5.1 - Prop
2.5.2 - Mod
2.5.3 - Mod
2.5.4 - Efei
Metodol6 -
2.6.1 - Com
2.6.2 - Com
2.6.3 - Com
2.6.4 - Con
2.6.5 - Con
s .................
s .................
aturas e Sig
os ..............
odução Gera
ativas do Tra
os do Traba
a do Trabal
são Bibliog
rações Inici
sores CC-CC
de Comutaçã
s Empregad
gem Utiliza
priedades d
delo CC do
delo CA do
ito das Perd
logia de Sin
mpensador T
mpensador T
mpensador T
ntrole em M
ntrole em M
..................
..................
glas .............
..................
al ................
abalho........
lho .............
ho ..............
gráfica ........
iais .............
C ................
ão de Três E
das na Mode
ndo O Mod
o Interrupto
Interruptor
Interruptor
das em Cond
ntonia de Co
Tipo 1 ........
Tipo 2 ........
Tipo 3 ........
Modo Tensão
Modo Corren
SUMÁR
...................
...................
...................
...................
...................
...................
...................
...................
...................
...................
...................
Estados ......
elagem de P
delo do Inter
or PWM .....
r PWM .......
r PWM .......
dução e Tem
ontroladores
...................
...................
...................
o .................
nte Média ...
RIO
...................
...................
...................
...................
...................
...................
...................
...................
...................
...................
...................
...................
Pequenos Si
rruptor PWM
...................
...................
...................
mpo de Arm
s Utilizando
...................
...................
...................
...................
...................
...................
...................
...................
...................
...................
...................
...................
...................
...................
...................
...................
...................
inais de Con
M ...............
...................
...................
...................
mazenament
o O Fator k .
...................
...................
...................
...................
...................
..................
..................
..................
..................
..................
..................
..................
..................
..................
..................
..................
..................
nversores E
..................
..................
..................
..................
to ...............
..................
..................
..................
..................
..................
..................
V
............... X
......... XVII
........... XIX
............ XX
................ 1
................ 1
................ 3
................ 3
................ 5
................ 5
................ 5
................ 9
Estáticos . 12
.............. 15
.............. 16
.............. 19
.............. 20
.............. 21
.............. 23
.............. 24
.............. 25
.............. 27
.............. 28
.............. 31
V
X
I
X
X
9
2
6
9
0
4
5
7
8

2.7
Capí
em M
3.1
3.2
3.3
3.4
3.5
3.6
Capí
4.1
4.2
2.6.5.1 -
2.6.5.2 -
Conside7 -
tulo 3 Anál
MCC ..........
Conside1 -
Modelo 2 -
3.2.1 - Ten
3.2.2 - Ten
Modelo 3 -
3.3.1 - Ten
3.3.2 - Ten
Modelo 4 -
Modelo 5 -
Conside6 -
tulo 4 Mod
Conside1 -
Modelag2 -
4.2.1 - Aná
4.2.2 - Aná
4.2.2.1 -
4.2.2.2 -
4.2.2.3 -
4.2.2.4 -
4.2.2.5 -
Malha Inte
Malha Exte
rações Fina
lise do Inte
..................
rações Inici
do Interrup
nsão vCP e C
nsão e Corre
do Interrup
nsão VAP e C
nsão e Corre
CC do Inte
CA do Inte
rações Fina
elagem do C
rações Inici
gem de Pequ
álise CC .....
álise CA .....
Determina
Determina
Determina
Determina
Determina
erna de Corr
erna de Ten
ais ...............
rruptor PW
..................
iais .............
ptor PWM e
orrente IA ..
ente Instantâ
ptor PWM e
Corrente IA ..
ente Instantâ
rruptor PW
erruptor PW
ais ...............
Conversor C
iais .............
uenos Sinai
..................
..................
ção de vo(s)
ção de vo(s)
ção da Impe
ção da Impe
ção de vo(s)
rente...........
nsão ............
...................
WM Associa
...................
...................
em Modo de
...................
âneas nos T
em Modo de
...................
âneas nos T
WM ..............
WM ..............
...................
CC-CC Ćuk
...................
is ................
...................
...................
)/vi(s) .........
)/d(s) ..........
edância de E
edância de
)/iL(s) .........
...................
...................
...................
ado À Célul
...................
...................
e Não Sobre
...................
Terminais do
e Sobreposiç
...................
Terminais do
...................
...................
...................
k .................
...................
...................
...................
...................
...................
...................
Entrada Zi(s
Saída Zo(s).
...................
...................
...................
...................
la de Comu
...................
...................
eposição .....
...................
o Interrupto
ção .............
...................
o Interrupto
...................
...................
...................
...................
...................
...................
...................
...................
...................
...................
s) ................
...................
...................
..................
..................
..................
utação de Tr
..................
..................
..................
..................
or PWM .....
..................
..................
or PWM .....
..................
..................
..................
..................
..................
..................
..................
..................
..................
..................
..................
..................
..................
VI
.............. 32
.............. 33
.............. 34
rês Estados
.............. 36
.............. 36
.............. 36
.............. 37
.............. 39
.............. 42
.............. 42
.............. 44
.............. 47
.............. 48
.............. 50
.............. 52
.............. 52
.............. 53
.............. 54
.............. 56
.............. 56
.............. 58
.............. 60
.............. 61
.............. 62
I
2
4
s
6
6
6
7
9
2
2
4
7
8
0
2
2
4
6
6
8
0
2

4.3
4.4
4.5
Capí
5.1
5.2
5.3
5.4
4.2.2.6 -
Validaçã3 -
4.3.1 - Ope
4.3.2 - Ope
Projeto d4 -
4.4.1 - Con
4.4.2 - Con
4.4.2.1 -
4.4.2.1 -
Conside5 -
tulo 5 Mod
Conside1 -
Modelag2 -
5.2.1 - Aná
5.2.2 - Aná
5.2.2.1 -
5.2.2.2 -
5.2.2.3 -
5.2.2.4 -
5.2.2.5 -
5.2.2.6 -
Validaçã3 -
5.3.1 - Ope
5.3.2 - Ope
Projeto d4 -
Determina
ão da Mode
eração em M
eração em M
do Sistema
ntrole em M
ntrole em M
Malha de C
Malha de T
rações Fina
elagem do C
rações Inici
gem de Pequ
álise CC .....
álise CA .....
Determina
Determina
Determina
Determina
Determina
Determina
ão da Mode
eração em M
eração em M
do Sistema
ção de iL(s)
elagem de P
Modo de Nã
Modo de Sob
de Controle
Modo Tensão
Modo de Cor
Corrente .....
Tensão .......
ais ...............
Conversor C
iais .............
uenos Sinai
..................
..................
ção de vo(s)
ção de vo(s)
ção da Impe
ção da Impe
ção de vo(s)
ção de iL(s)
elagem de P
Modo de Nã
Modo de Sob
de Controle
)/d(s) ..........
Pequenos Sin
ão Sobrepos
breposição
e .................
o .................
rrente Médi
...................
...................
...................
CC-CC SEP
...................
is ................
...................
...................
)/vi(s) .........
)/d(s) ..........
edância de E
edância de
)/iL(s) .........
)/d(s) ..........
Pequenos Sin
ão Sobrepos
breposição
e .................
...................
nais do Con
sição (D<0,5
(D>0,5) .....
...................
...................
a ................
...................
...................
...................
PIC 3SSC ...
...................
...................
...................
...................
...................
...................
Entrada Zi(s
Saída ZO(s)
...................
...................
nais do Con
sição (D<0,5
(D>0,5) .....
...................
...................
nversor Ćuk
5) ...............
...................
...................
...................
...................
...................
...................
...................
...................
...................
...................
...................
...................
...................
...................
s) ................
..................
...................
...................
nversor SEP
5) ...............
...................
...................
..................
k 3SSC em M
..................
..................
..................
..................
..................
..................
..................
..................
..................
..................
..................
..................
..................
..................
..................
..................
..................
..................
..................
PIC 3SSC em
..................
..................
..................
VII
.............. 63
MCC ..... 64
.............. 64
.............. 66
.............. 68
.............. 68
.............. 72
.............. 72
.............. 74
.............. 78
.............. 79
.............. 79
.............. 79
.............. 80
.............. 82
.............. 82
.............. 85
.............. 87
.............. 88
.............. 90
.............. 90
m MCC 91
.............. 91
.............. 93
.............. 95
I
4
4
6
8
8
2
2
4
8
9
9
9
0
2
2
7
8
0
0
3

5.5
Capí
6.1
6.2
6.3
6.4
6.5
5.4.1 - Con
5.4.2 - Con
5.4.2.1 -
5.4.2.1 -
Conside5 -
tulo 6 Mod
Conside1 -
Modelag2 -
6.2.1 - Aná
6.2.2 - Aná
6.2.2.1 -
6.2.2.2 -
6.2.2.3 -
6.2.2.4 -
6.2.2.5 -
6.2.2.6 -
Validaçã3 -
6.3.1 - Ope
6.3.2 - Ope
Projeto d4 -
6.4.1 - Con
6.4.2 - Con
6.4.2.1 -
6.4.2.2 -
Conside5 -
ntrole em M
ntrole em M
Malha de C
Malha de T
rações Fina
elagem do C
rações Inici
gem de Pequ
álise CC .....
álise CA .....
Determina
Determina
Determina
Determina
Determina
Determina
ão da Mode
eração em M
eração em M
do Sistema
ntrole em M
ntrole em M
Malha de C
Malha de T
rações Fina
Modo Tensão
Modo Corren
Corrente .....
Tensão .......
ais ...............
Conversor C
iais .............
uenos Sinai
..................
..................
ção de vo(s)
ção de vo(s)
ção da Impe
ção da Impe
ção de vo(s)
ção de iL(s)
elagem de P
Modo de Nã
Modo de Sob
de Controle
Modo Tensão
Modo Corren
Corrente .....
Tensão .......
ais ...............
o .................
nte Média ...
...................
...................
...................
CC-CC Zeta
...................
is ................
...................
...................
)/vi(s) .........
)/d(s) ..........
edância de E
edância de
)/iL(s) .........
)/d(s) ..........
Pequenos Sin
ão Sobrepos
breposição
e .................
o .................
nte Média ...
...................
...................
...................
...................
...................
...................
...................
...................
a ................
...................
...................
...................
...................
...................
...................
Entrada Zi(s
Saída Zo(s).
...................
...................
nais do Con
sição (D<0,5
(D>0,5) .....
...................
...................
...................
...................
...................
...................
...................
...................
...................
...................
...................
...................
...................
...................
...................
...................
...................
...................
s) ................
...................
...................
...................
nversor Zeta
5) ...............
...................
...................
...................
...................
...................
...................
...................
..................
..................
..................
..................
..................
..................
..................
..................
..................
..................
..................
..................
..................
..................
..................
..................
a em MCC
..................
..................
..................
..................
..................
..................
..................
..................
VIII
.............. 95
.............. 99
.............. 99
............ 102
............ 106
............ 107
............ 107
............ 107
............ 108
............ 109
............ 109
............ 111
............ 114
............ 114
............ 116
............ 116
............ 117
............ 118
............ 120
............ 121
............ 122
............ 125
............ 125
............ 128
............ 131
I
5
9
9
2
6
7
7
7
8
9
9
4
4
6
6
7
8
0
2
5
8

IX
Capítulo 7 Conclusão Geral .................................................................................................... 132
Referências Bibliográficas ...................................................................................................... 134

X
LISTA DE FIGURAS
Figura 1.1 – Etapas de funcionamento de uma fonte chaveada genérica. .................................. 1
Figura 2.1 – Conversor CC-CC buck. ........................................................................................ 6
Figura 2.2 – Conversor CC-CC boost. ....................................................................................... 6
Figura 2.3 – Conversor CC-CC buck-boost. .............................................................................. 7
Figura 2.4 – Conversor CC-CC Ćuk. ......................................................................................... 7
Figura 2.5 – Conversor CC-CC SEPIC. ..................................................................................... 7
Figura 2.6 – Conversor CC-CC Zeta. ......................................................................................... 8
Figura 2.7 – Célula de comutação de dois estados. .................................................................... 8
Figura 2.8 – Estados e modos de operação da célula de dois estados [14]. ............................... 8
Figura 2.9 – Conversor CC-CC Push-Pull isolado [14]. .......................................................... 10
Figura 2.10 – Célula de comutação de três estados [14]. ......................................................... 10
Figura 2.11 – Representação do funcionamento da célula de três estados [14]. ...................... 11
Figura 2.12 – Inversão bilateral da célula de três estados [14]. ................................................ 11
Figura 2.13 – Conversores CC-CC não isolados empregando a célula de comutação de dois
estados [14]. .............................................................................................................................. 12
Figura 2.14 – Conversores CC-CC não isolados utilizando a célula de comutação de três
estados [14]. .............................................................................................................................. 13
Figura 2.15 – Interruptor PWM genérico [3]. .......................................................................... 16
Figura 2.16 – Correntes instantâneas no interruptor PWM genérico [20]................................ 17
Figura 2.17 – Tensões no interruptor PWM genérico desconsiderando a ondulação da corrente
ic(t) [20]. ................................................................................................................................... 18
Figura 2.18 – Tensões no interruptor PWM genérico considerando a ondulação da corrente
ic(t) [20]. ................................................................................................................................... 18
Figura 2.19 – Modelo CC do interruptor PWM [3]. ................................................................. 20
Figura 2.20 – Modelo CA do interruptor PWM [3]. ................................................................ 21
XI
Figura 2.21 – Interruptor PWM com elementos parasitas [3]. ................................................. 22
Figura 2.22 – Modelo genérico do interruptor PWM com inclusão de elementos parasitas [3].
.................................................................................................................................................. 22
Figura 2.23 – Compensador tipo 1. .......................................................................................... 24
Figura 2.24 – Diagrama de Bode do compensador tipo 1 [13]................................................. 25
Figura 2.25 – Compensador tipo 2. .......................................................................................... 25
Figura 2.26 – Diagrama de Bode do compensador tipo 2 [13]................................................. 26
Figura 2.27 – Compensador tipo 3. .......................................................................................... 27
Figura 2.28 – Diagrama de Bode do compensador tipo 3 [13]................................................. 28
Figura 2.29 – Diagrama de blocos do sistema de controle de um conversor CC-CC genérico
em modo tensão. ....................................................................................................................... 29
Figura 2.30 – Diagrama de blocos do sistema de controle de um conversor CC-CC em modo
corrente média. ......................................................................................................................... 31
Figura 3.1 – Célula de três estados para análise do interruptor PWM. .................................... 36
Figura 3.2 – Estágios de operação da 3SSC para a análise do interruptor PWM em modo de
não sobreposição. ..................................................................................................................... 37
Figura 3.3 – Tensão vcp e corrente ia nas células que compõem a 3SSC em modo de não
sobreposição. ............................................................................................................................ 38
Figura 3.4 – Tensões e correntes instantâneas nos terminais do interruptor PWM em modo de
não sobreposição. ..................................................................................................................... 39
Figura 3.5 – Tensão e corrente instantâneas e médias nos terminais do interruptor PWM modo
de não sobreposição. ................................................................................................................. 40
Figura 3.6 – Estágios de operação da 3SSC para a análise do interruptor PWM em modo de
sobreposição. ............................................................................................................................ 42
Figura 3.7 – Tensão vcp e corrente ia nas células que compõem a 3SSC em modo de
sobreposição. ............................................................................................................................ 43

XII
Figura 3.8 – Tensão e corrente instantâneas nos terminais do interruptor PWM modo de
sobreposição. ............................................................................................................................ 44
Figura 3.9 – Tensão e corrente instantâneas e médias nos terminais do interruptor PWM modo
de sobreposição. ....................................................................................................................... 45
Figura 3.10 – Modelo CC do interruptor PWM da célula de comutação de três estados......... 48
Figura 3.11 – Modelo CA do interruptor PWM da célula de comutação de três estados com a
razão cíclica constante. ............................................................................................................. 49
Figura 3.12 – Modelo CA do interruptor PWM da célula de comutação de três estados. ....... 49
Figura 3.13 – Modelo CA do interruptor PWM da célula de comutação de três estados. ....... 50
Figura 4.1 – Conversor Ćuk 3SSC com inversão bilateral. ...................................................... 53
Figura 4.2 – Modelo CA do interruptor PWM, sem os elementos parasitas. ........................... 53
Figura 4.3 – Conversor Ćuk 3SSC associado ao modelo CA do interruptor PWM. ................ 54
Figura 4.4 – Conversor Ćuk 3SSC associado ao modelo CC do interruptor PWM. ................ 54
Figura 4.5 – Conversor Ćuk 3SSC associado ao modelo CA do interruptor PWM para a
obtenção de vo(s)/vi(s). .............................................................................................................. 57
Figura 4.6 – Conversor Ćuk 3SSC associado ao modelo CA do interruptor PWM para a
obtenção de vo(s)/d(s). .............................................................................................................. 58
Figura 4.7 – Circuito equivalente do conversor Ćuk 3SSC associado ao modelo CA do
interruptor PWM com as fontes de tensão em curto-circuito e fontes de corrente em circuito
aberto para a obtenção de Zo(s). ............................................................................................... 61
Figura 4.8 – Diagramas de Bode de ganho e fase do conversor Ćuk 3SSC operando em modo
de não sobreposição. ................................................................................................................. 66
Figura 4.9 – Diagramas de Bode de ganho e fase do conversor Ćuk 3SSC operando em modo
de sobreposição. ....................................................................................................................... 67
Figura 4.10 – Diagramas de Bode de ganho e fase de FTLAscv(s) do conversor Ćuk 3SSC em
MCC para projeto do controlador em modo tensão. ................................................................ 69
Figura 4.11 – Diagramas de Bode de ganho e fase do compensador em modo tensão para o
conversor Ćuk 3SSC em MCC. ................................................................................................ 70

XIII
Figura 4.12 – Diagramas de Bode de ganho e fase da função de transferência de laço aberto
compensada (FTLAccv(s)) em modo tensão para o conversor Ćuk 3SSC em MCC. ................ 70
Figura 4.13 – Comportamento do sistema de controle em modo tensão do conversor Ćuk
3SSC em MCC diante de degraus de carga. ............................................................................. 71
Figura 4.14 – Diagramas de Bode de ganho e fase de FTLAsci(s) do conversor Ćuk 3SSC em
MCC para projeto do controlador em modo de corrente média. .............................................. 73
Figura 4.15 – Diagramas de Bode de ganho e fase da função de transferência do compensador
de tensão em modo corrente média para o conversor Ćuk 3SSC em MCC. ............................ 74
Figura 4.16 – Diagramas de Bode de ganho e fase da função de transferência de laço aberto da
corrente compensada (FTLAcci(s)) em modo corrente média para o conversor Ćuk 3SSC em
MCC. ........................................................................................................................................ 74
Figura 4.17 – Diagramas de Bode de ganho e fase de FTLAscv(s) do conversor Ćuk 3SSC em
MCC para projeto do controlador em modo de corrente média. .............................................. 75
Figura 4.18 – Diagramas de Bode de ganho e fase da função de transferência do compensador
de tensão em modo de corrente média para o conversor Ćuk 3SSC em MCC. ....................... 77
Figura 4.19 – Diagramas de Bode de ganho e fase da função de transferência de laço aberto
com compensação (FTLAccv(s)) em modo corrente média para o conversor Ćuk 3SSC em
MCC. ........................................................................................................................................ 77
Figura 4.20 – Comportamento do sistema de controle em modo corrente média do conversor
Ćuk 3SSC em MCC diante de degraus de carga. ..................................................................... 78
Figura 5.1 – Conversor SEPIC 3SSC com inversão bilateral................................................... 80
Figura 5.2 – Conversor SEPIC 3SSC associado ao modelo CA do interruptor PWM............. 80
Figura 5.3 – Conversor SEPIC 3SSC associado ao modelo CC do interruptor PWM. ............ 81
Figura 5.4 – Conversor SEPIC 3SSC associado ao modelo CA do interruptor PWM para a
obtenção de vo(s)/vi(s). .............................................................................................................. 83
Figura 5.5 – Conversor SEPIC 3SSC associado ao modelo CA do interruptor PWM para a
obtenção de vo(s)/d(s). .............................................................................................................. 85

XIV
Figura 5.6 – Circuito equivalente do conversor SEPIC 3SSC associado ao modelo CA do
interruptor PWM com as fontes de tensão em curto-circuito e fontes de corrente em circuito
aberto para a obtenção de Zo(s). ............................................................................................... 88
Figura 5.7 – Diagramas de Bode de ganho e fase do conversor SEPIC 3SSC operando em
modo de não sobreposição. ....................................................................................................... 93
Figura 5.8 – Diagramas de Bode de ganho e fase do conversor SEPIC 3SSC operando em
modo de sobreposição, D>0,5. ................................................................................................. 95
Figura 5.9 – Diagramas de Bode de ganho e fase de FTLAscv(s) do conversor SEPIC 3SSC em
MCC para projeto do controlador em modo tensão. ................................................................ 96
Figura 5.10 – Diagramas de Bode de ganho e fase do compensador em modo tensão para o
conversor SEPIC 3SSC em MCC. ............................................................................................ 98
Figura 5.11 – Diagramas de Bode de ganho e fase da função de transferência de laço aberto da
tensão compensada (FTLAccv(s)) em modo tensão para o conversor SEPIC 3SSC em MCC. . 98
Figura 5.12 – Comportamento do sistema de controle em modo tensão do conversor SEPIC
3SSC em MCC diante de degraus de carga. ............................................................................. 99
Figura 5.13 – Diagramas de Bode de ganho e fase de FTLAsci(s) do conversor SEPIC 3SSC
em MCC para projeto do controlador da malha de corrente média. ....................................... 100
Figura 5.14 – Diagramas de Bode de ganho e fase da função de transferência do compensador
de corrente em modo corrente média para o conversor SEPIC 3SSC em MCC. ................... 102
Figura 5.15 – Diagramas de Bode de ganho e fase da função de transferência de laço aberto da
corrente compensada (FTLAcci(s)) em modo corrente média para o conversor SEPIC 3SSC em
MCC. ...................................................................................................................................... 102
Figura 5.16 – Diagramas de Bode de ganho e fase de FTLAscv(s) do conversor SEPIC 3SSC
em MCC para projeto do controlador da malha de tensão. .................................................... 104
Figura 5.17 – Diagramas de Bode de ganho e fase da função de transferência do compensador
de tensão em modo corrente média para o conversor SEPIC 3SSC em MCC. ...................... 105
Figura 5.18 – Diagramas de Bode de ganho e fase da malha externa com compensador
(FTLAccv(s)) em modo corrente média para o conversor SEPIC 3SSC em MCC. ................. 105

XV
Figura 5.19 – Comportamento do sistema de controle em modo corrente média do conversor
SEPIC 3SSC em MCC diante de degraus de carga. ............................................................... 106
Figura 6.1 – Conversor Zeta 3SSC com inversão bilateral. ................................................... 107
Figura 6.2 – Conversor Zeta 3SSC associado ao modelo CA do interruptor PWM. ............. 108
Figura 6.3 – Conversor Zeta 3SSC associado ao modelo CC do interruptor PWM. ............. 109
Figura 6.4 – Conversor Zeta 3SSC associado ao modelo CA do interruptor PWM para a
obtenção de vo(s)/vi(s). ............................................................................................................ 110
Figura 6.5 – Conversor Zeta 3SSC associado ao modelo CA do interruptor PWM para a
obtenção de vo(s)/d(s). ............................................................................................................ 112
Figura 6.6 – Circuito equivalente do conversor Zeta 3SSC associado ao modelo CA do
interruptor PWM com as fontes de tensão em curto-circuito e fontes de corrente em circuito
aberto para a obtenção de Zout(s). ........................................................................................... 115
Figura 6.7 – Diagramas de Bode de ganho e fase do conversor Zeta 3SSC operando em modo
de não sobreposição. ............................................................................................................... 119
Figura 6.8 – Diagramas de Bode de ganho e fase do conversor Zeta 3SSC em modo de
sobreposição. .......................................................................................................................... 121
Figura 6.9 – Diagramas de Bode de ganho e fase de FTLAscv(s) do conversor Zeta 3SSC em
MCC para projeto do controlador em modo tensão. .............................................................. 123
Figura 6.10 – Diagramas de Bode de ganho e fase do compensador em modo tensão para o
conversor Zeta 3SSC em MCC. ............................................................................................. 124
Figura 6.11 – Diagramas de Bode de ganho e fase da função de transferência de laço aberto da
tensão compensada (FTLAccv(s)) em modo tensão para o conversor Zeta 3SSC em MCC. ... 124
Figura 6.12 – Comportamento do sistema de controle em modo tensão do conversor Zeta
3SSC em MCC diante de degraus de carga. ........................................................................... 125
Figura 6.13 – Diagramas de Bode de ganho e fase de FTLAsci(s) do conversor Zeta 3SSC em
MCC para projeto do controlador em modo de corrente média. ............................................ 126
Figura 6.14 – Diagramas de Bode de ganho e fase da função de transferência do compensador
da malha interna em modo corrente média para o conversor Zeta 3SSC em MCC. .............. 127

XVI
Figura 6.15 – Diagramas de Bode de ganho e fase da função de transferência de laço aberto da
corrente compensada (FTLAcci(s)) em modo corrente média para o conversor Zeta 3SSC em
MCC. ...................................................................................................................................... 127
Figura 6.16 – Diagramas de Bode de ganho e fase de FTLAscv(s) do conversor Zeta 3SSC em
MCC para projeto do controlador em modo de corrente média. ............................................ 129
Figura 6.17 – Diagramas de Bode de ganho e fase da função de transferência do compensador
da malha externa em modo corrente média para o conversor Zeta 3SSC em MCC. ............. 130
Figura 6.18 – Diagramas de Bode de ganho e fase da função de transferência de laço aberto da
tensão compensada (FTLAccv(s)) em modo corrente média para o conversor Zeta 3SSC em
MCC. ...................................................................................................................................... 130
Figura 6.19 – Comportamento do sistema de controle em modo corrente média do conversor
Zeta 3SSC em MCC diante de degraus de carga. ................................................................... 131
XVII
LISTA DE TABELAS
Tabela 4.1 – Parâmetros do conversor Ćuk 3SSC operando em modo de não sobreposição
(D<0,5). .................................................................................................................................... 65
Tabela 4.2 – Parâmetros do conversor Ćuk 3SSC operando em modo de sobreposição
(D>0,5). .................................................................................................................................... 66
Tabela 4.3 – Parâmetros da malha de controle em modo tensão para o conversor Ćuk 3SSC
em MCC. .................................................................................................................................. 69
Tabela 4.4 – Elementos do circuito do compensador em modo tensão para o conversor Ćuk
3SSC em MCC. ........................................................................................................................ 70
Tabela 4.5 – Parâmetros da malha interna de controle em modo corrente média para o
conversor Ćuk 3SSC em MCC. ................................................................................................ 72
Tabela 4.6 – Elementos do circuito do compensador da malha interna em modo corrente
média para o conversor Ćuk 3SSC em MCC. .......................................................................... 73
Tabela 4.7 – Parâmetros da malha interna de controle em modo corrente média para o
conversor Ćuk 3SSC em MCC. ................................................................................................ 75
Tabela 4.8 – Elementos do circuito do compensador, malha externa em modo corrente média
para o conversor Ćuk 3SSC em MCC. ..................................................................................... 76
Tabela 5.1 – Parâmetros do conversor SEPIC 3SSC operando em modo de não sobreposição
(D<0,5). .................................................................................................................................... 92
Tabela 5.2 – Parâmetros do conversor SEPIC 3SSC operando em modo de sobreposição
(D>0,5). .................................................................................................................................... 94
Tabela 5.3 – Elementos do circuito do compensador em modo tensão para o conversor SEPIC
3SSC em MCC. ........................................................................................................................ 97
Tabela 5.4 – Elementos do circuito do compensador da malha interna em modo corrente
média para o conversor SEPIC 3SSC em MCC. .................................................................... 101
Tabela 5.5 – Elementos do circuito do compensador, malha externa em modo corrente média
para o conversor SEPIC 3SSC em MCC. ............................................................................... 104

XVIII
Tabela 6.1 – Parâmetros do conversor Zeta 3SSC operando em modo de não sobreposição
(D<0,5). .................................................................................................................................. 118
Tabela 6.2 – Parâmetros do conversor Zeta 3SSC operando em modo de sobreposição
(D>0,5). .................................................................................................................................. 120
Tabela 6.3 – Parâmetros da malha de controle em modo tensão para o conversor Zeta 3SSC
em MCC. ................................................................................................................................ 122
Tabela 6.4 – Elementos do circuito do compensador em modo tensão para o conversor Zeta
3SSC em MCC. ...................................................................................................................... 123
Tabela 6.5 – Parâmetros da malha interna de controle em modo corrente média para o
conversor Zeta 3SSC em MCC. ............................................................................................. 126
Tabela 6.6 – Elementos do circuito do compensador da malha interna em modo corrente
média para o conversor Zeta 3SSC em MCC. ........................................................................ 127
Tabela 6.7 – Parâmetros da malha interna de controle em modo corrente média para o
conversor Zeta 3SSC em MCC. ............................................................................................. 128
Tabela 6.8 – Elementos do circuito do compensador, malha externa em modo corrente média
para o conversor Zeta 3SSC em MCC. .................................................................................. 129

XIX
LISTA DE ABREVIATURAS E SIGLAS
2SSC – two-state switching cell (célula de comutação de dois estados);
3SSC – three-state switching cell (célula de comutação de três estados);
CA – corrente alternada;
CC – corrente contínua;
CI – circuito integrado;
LIT – sistema linear invariante no tempo;
MCC – modo de condução contínua;
MCD – modo de condução descontínua;
MCR – modo de condução crítica;
MNC – conversor multinível em corrente;
PI – controlador proporcional-integral;
PID – controlador proporcional-integral-derivativo;
PSIM – software para simulação de circuitos utilizando eletrônica de potência (software for
power electronics simulation – Powersim);
PWM – pulse width modulation (modulação por largura de pulso);
SEPIC – single-ended primary-inductance converter (conversor com uma única indutância
primária);
TBJ – transistor bipolar de junção;
ZCS – zero current switching (comutação sob corrente nula);
ZVS – zero voltage switching (comutação sob tensão nula);

XX
LISTA DE SÍMBOLOS
C1, C2, C3 – capacitores do compensador;
Co, C1 – capacitores do estágio de potência do conversor CC-CC;
Cv(s), Ci(s) – função de transferência do compensador;
D – razão cíclica;
D’ – complemento da razão cíclica;
D1 e D2 – diodos;
Fm(s) – função de transferência no domínio da frequência;
FTLAccv(s) – função de transferência de laço aberto da malha de tensão compensada;
FTLAscv(s) – função de transferência de laço aberto da malha de tensão não compensada;
FTLAcci(s) – função de transferência de laço aberto da malha de corrente em modo corrente
média compensada;
FTLAsci(s) – função de transferência de laço aberto da malha de corrente em modo corrente;
FTMFi(s) – função de transferência de malha fechada de corrente em modo corrente média;
G – Ganho estático;
Gv(s) – função de transferência da planta de tensão;
Gi(s) – função de transferência da planta de corrente;
Hv(s) – função de transferência do elemento de medição da amostra da tensão de saída;
Hi(s) – função de transferência do elemento de medição da amostra da corrente do indutor;
Ic1, Ic2 – correntes médias nos terminais comuns no interruptor PWM 1 e 2, respectivamente;
Ii – corrente média de entrada;
Ime – parâmetro modulado que depende do tipo de acionamento da base de um TBJ;
Io – corrente média de saída;
IT1, IT2 – correntes médias que circulam nos enrolamentos 1 e 2 do autotransformador,
respectivamente;
L, L1, L2 – indutores do estágio de potência do conversor CC-CC;

XXI
M – margem de fase;
P – defasagem provocado pelo sistema;
Po – potência de saída;
R1, R2, R3 – resistores do compensador;
Re – resistência associada ao interruptor PWM, definida em função de RSE e R;
R – resistência de carga;
RCO, RC1 – resistência série equivalente dos capacitores de filtro;
RL1, RL2 – resistência série equivalente dos indutores de filtro;
S1, S2 – interruptores controlados;
T1, T2 – enrolamentos do autotransformador com tap central;
Ts – período de comutação;
V1, V2 – tensões empregadas para auxiliar nas modelagens dos conversores CC-CC;
Vap – tensão média entre os terminais ativo e passivo do interruptor PWM;
Vap1, Vap2 – tensões médias entre os terminais ativo e passivo dos interruptores PWM 1 e 2,
respectivamente;
Vcp – tensão média entre os terminais comum e passivo do interruptor PWM;
Vi – tensão média de entrada;
Vm – amplitude de pico a pico da onda dente de serra ou triangular (portadora);
Vo – tensão média de saída;
Vref – tensão de referência;
VT1, VT2 – tensões médias nos enrolamentos 1 e 2 do autotransformador;
Zi(s) – função de transferência da impedância de entrada do conversor;
Zo(s) – função de transferência da impedância de saída do conversor;
a, p, c – terminais ativo, passivo e comum do interruptor PWM, respectivamente;
d – razão cíclica com perturbação de pequeno sinal;

XXII
d(s) – razão cíclica com perturbação de pequeno sinal no domínio da frequência; – perturbação de pequeno sinal aplicada à razão cíclica;
fc , fci, fcv – frequência de cruzamento;
fp1, fp2, fp3 – frequências dos polos alocados no compensador;
fs – frequência de comutação;
fz, fz1, fz2 – frequências dos zeros alocados no compensador;
ia – corrente no terminal ativo com perturbação de pequeno sinal; – perturbação de pequeno sinal na corrente do terminal ativo;
ic – corrente no terminal comum com perturbação de pequeno sinal;
– perturbação de pequeno sinal na corrente do terminal comum;
ic1(s), ic2(s) – correntes no terminais comuns 1 e 2 com perturbação de pequeno sinal no
domínio da frequência, respectivamente;
iCapC1, iCapCo – correntes nos capacitores Co e C1;
iL1(s) – corrente no indutor com perturbação de pequeno sinal no domínio da frequência;
iL1(s)/d(s) – função de transferência que analisa o comportamento da corrente no indutor
frente a perturbações da razão cíclica;
k – fator utilizado na alocação de polos e zeros dos compensadores que constituem o sistema
de controle de um conversor estático;
rd – resistência de condução do diodo;
rm – resistência modulada;
rt – resistência de condução do transistor;
vap – tensão entre os terminais ativo e passivo com perturbação de pequeno sinal;
vap1(s), vap2(s) – tensões entre os terminais ativo e passivo nos interruptores PWM 1 e 2 com
perturbação de pequeno sinal no domínio da frequência, respectivamente;
vcp – tensão entre os terminais comum e passivo com perturbação de pequeno sinal;
XXIII
vcp1(s), vcp2(s) – tensões entre os terminais comum e passivo nos interruptores PWM 1 e 2 com
perturbação de pequeno sinal no domínio da frequência, respectivamente;
– perturbação de pequeno sinal na tensão entre os terminais ativo e passivo;
– Perturbação de pequeno sinal na tensão entre os terminais comum e passivo;
vg(s), ig(s) – amostras de tensão e corrente com perturbação de pequeno sinal no domínio da
frequência, respectivamente;
v1 e v2 – tensões auxiliares para o equacionamento dos circuitos;
– perturbação de pequeno sinal na tensão de entrada;
vi(s) – tensão de entrada com perturbação de pequeno sinal no domínio da frequência;
vo(s) – tensão de saída com perturbação de pequeno sinal no domínio da frequência;
vo(s)/d(s) – função de transferência que analisa o comportamento da tensão de saída frente a
perturbações da razão cíclica;
vo(s)/iL1(s) – função de transferência que analisa o comportamento da tensão de saída frente a
perturbações da corrente no indutor;
vo(s)/vi(s) – função de transferência que analisa o comportamento da tensão de saída frente a
perturbações da tensão de entrada;
vT1(s), vT2(s) – tensões nos enrolamentos 1 e 2 do autotransformador com perturbação de
pequeno sinal no domínio da frequência, respectivamente;
α – avanço de fase;
α , β , χ , δ , ε , φ e ϕ – Parâmetros para simplificação das expressões das funções de
transferência;
∆IL – ondulação da corrente no indutor;
∆Vo – ondulação da tensão de saída.

1.1 -
com
é fac
situa
possu
trans
(indu
forne
altern
com
conv
um p
XIX
o adv
integ
desen
simu
JUSTIFIC
Em divers
amplitude r
cilmente rea
ação é mais
uem uma es
Os conver
sistor-diodo
utores e c
ecimento/bl
Como na
nada, é com
um retifica
versores CC
papel signifi
CA
F
Tanto o us
com o dese
vento dos
grados, com
nvolviment
ulações com
CATIVAS D
sas aplicaçõ
regulada. E
alizada atrav
s complica
strutura com
rsores CC-
) operando
capacitores)
loqueio de e
maioria do
mum encon
ador [2], con
C-CC são am
icativo na so
A
Figura 1.1 – E
so quanto a
envolvimen
semicondut
mponentes q
o de comp
mputacionais
INTR
DO TRABA
es, é necess
Em sistemas
vés do uso d
da, pois ex
mplexa comp
CC são sis
como inte
), que têm
energia para
os locais o f
ntrar em equ
nforme mos
mplamente e
ociedade co
Retificador
Etapas de fun
criação des
nto tecnológ
tores, e em
que são ess
putadores c
s, facilitando
CAPÍTUL
RODUÇÃO
ALHO
sário modifi
s de corrent
do transform
xige o uso
mparada aos
stemas form
erruptores e
m como o
a uma fonte
fornecimen
uipamentos
strado na Fi
empregados
ontemporân
ncionamento
stes convers
gico e indus
m 1960 com
senciais par
cada vez m
o o projeto
LO 1
O GERAL
ficar um dad
e alternada,
mador. Já em
de conver
transformad
mados por
e por elem
objetivo au
de saída [1
nto de energ
s eletrônicos
igura 1.1. C
s em várias
nea [1].
Conversor C
de uma font
sores foram
strial, princi
m o surgime
ra a concep
mais rápido
e desenvolv
do nível de t
, a elevação
m sistemas d
rsores estát
dores.
semicondut
mentos arma
uxiliar a f
].
gia elétrica
s conversor
Com isso, po
s aplicações
CC-CC
e chaveada g
impulsiona
palmente n
ento do tran
pção dos co
os, permiti
vimento de
tensão para
o ou reduçã
de corrente
ticos de po
tores de po
azenadores
fonte de e
se baseia e
res CC-CC
ode-se obse
s cotidianas
Vo
genérica.
ados no fina
na década de
nsistor e do
onversores
iu-se a rea
circuitos el
1
outro valor
o da tensão
contínua, a
otência que
otência (par
de energia
entrada no
em corrente
associados
ervar que os
e possuem
o
al do século
e 1950 com
os circuitos
[3]. Com o
alização de
etrônicos.
1
r
o
a
e
r
a
o
e
s
s
m
o
m
s
o
e

2
Dentre as topologias clássicas não isoladas, têm-se os conversores buck, boost, buck-
boost, Ćuk, SEPIC e Zeta [4]. Entretanto, todas estas topologias quando operam em altas
potências apresentam certas limitações, sendo necessária uma alta robustez dos elementos
semicondutores, encarecendo-os e muitas vezes aumentando a dimensão de seus dissipadores
de calor. Com isto, foram propostos em [5] os conversores CC-CC baseados na célula de
comutação de três estados (3SSC), a qual representa uma alternativa ao exigir menores
esforços de corrente nos elementos semicondutores. Além disso, tem-se a redução das
dimensões dos elementos passivos, que operam em uma frequência correspondente ao dobro
da frequência de comutação do interruptor.
No âmbito dos conversores utilizando a célula de comutação de três estados, foram
desenvolvidos vários trabalhos na literatura. Em [6], foi comparado o conversor buck 3SSC
com a estrutura convencional, o qual apresenta como vantagens o fato da corrente de entrada
não ser descontínua em modo de sobreposição dos interruptores controlados; a ondulação
menor na corrente no indutor; menor esforço dos interruptores; redução do tamanho, peso e
volume dos elementos magnéticos. Já em [7], esse mesmo conversor em modo de condução
contínua (MCC) foi analisado comparando os modos de ausência (D<0,5) e presença de
sobreposição (D>0,5) no funcionamento dos interruptores, demonstrando-se que a análise
matemática para uma mesma topologia é distinta para as duas condições supracitadas.
O conversor Ćuk 3SSC foi analisado em [8] somente na região de não sobreposição
(D<0,5), obtendo-se os esforços dos componentes, a modelagem de pequenos sinais para toda
a faixa operação e implementação de um sistema de controle associado a um conversor CA-
CC com alto fator de potência.
Em [3], são determinados os modelos de pequenos sinais para os conversores buck,
boost e buck-boost utilizando a célula de comutação de três estados, comprovando-se que as
mesmas funções de transferência podem ser utilizadas nos dois modos de operação da 3SSC.
Para a modelagem de conversores CC-CC, usualmente é utilizado o método de espaços
de estados médio, sendo um tópico amplamente conhecido na literatura [9]. Porém, o uso
dessa técnica requer uma quantidade considerável de manipulações matemáticas de forma
simbólica, especialmente para os conversores Ćuk, SEPIC e Zeta, que são sistemas de quarta
ordem. Já a técnica do modelo do interruptor PWM proposta em [10] consiste em uma
abordagem simples e direta que visa à obtenção de suas respectivas funções de transferência a

partir
traba
1.2 -
conv
MCC
aos c
•
cond
•
em so
•
por s
1.3 -
detal
conv
tamb
contí
no C
para
3SSC
mesm
frequ
r da ótica d
alho.
OBJETIV
Este traba
versores CC
C.
De forma
conversores
realizar a
dução contín
validar as
oftwares de
implemen
simulação.
ESTRUTU
Este traba
lhadamente
No Capítu
versores CC
bém o méto
ínua, juntam
Capitulo 3, é
a célula de
Na sequên
C em modo
mos modelo
uência. Por
da análise d
VOS DO TR
alho tem p
C-CC Ćuk, S
específica,
:
modelagem
nua utilizand
expressões
e simulação
ntar o sistem
URA DO T
alho está e
a seguir.
ulo 2, aprese
C-CC, focan
odo de mo
mente com
é realizado
três estados
ncia, é realiz
o de condu
os utilizand
r fim, apres
de circuitos
RABALHO
por objetiv
SEPIC e Ze
este trabalh
m de pequen
do o interru
s obtidas po
de circuitos
ma de contr
TRABALHO
estruturado
enta-se uma
do-se nas c
odelagem u
a metodolo
um estudo
s.
zada a mod
ução contín
o recursos
sentam-se r
s elétricos
O
vo apresent
eta baseados
ho pretende
nos sinais pa
uptor PWM;
or meio do r
s elétricos;
role dos con
O
na forma
a revisão bib
células de co
utilizando o
ogia de cont
sobre as ca
delagem de p
nua utilizan
de simulaçã
resultados
[6] [11], ju
tar a mode
s na 3SSC u
e expor as se
ara os conv
;
recurso de v
nversores em
de cinco c
bliográfica,
omutação d
o interrupto
trole nos m
aracterística
pequenos si
ndo o inter
ão computa
referentes
ustificando a
elagem de
utilizando o
eguintes con
versores sup
varredura em
m modo ten
capítulos, o
que descrev
de dois e trê
r PWM em
modos tensão
s do método
inais dos co
rruptor PW
acional por
à implemen
assim o seu
pequenos
o interrupto
ntribuições
pracitados e
m frequênc
nsão e corr
os quais sã
eve uma intr
ês estados. D
m modo de
o e corrente
o do interru
onversores b
WM. São va
meio da va
ntação do
3
u uso neste
sinais dos
or PWM em
em relação
m modo de
ia existente
rente média
ão descritos
rodução aos
Descreve-se
e condução
e média. Já
uptor PWM
baseados na
alidados os
arredura em
sistema de
3
e
s
m
o
e
e
a
s
s
e
o
á
M
a
s
m
e

4
controle do conversor operando em modo tensão e corrente média. As modelagens dos
conversores Ćuk, SEPIC e Zeta são descritas nos Capítulos 4, 5 e 6, respectivamente.
Finalmente, no Capítulo 7 são discutidos os principais resultados e contribuições
resultantes da realização deste trabalho, apresentando-se inclusive propostas para a
continuidade do mesmo.

2.1 -
conv
junta
três e
conv
as téc
do fa
2.2 -
termi
valor
e com
do flu
deno
são d
boos
básic
Zeta
uma
fonte
[12].
interr
CONSIDE
Este capí
versores CC
amente com
estados.
Apresenta
versores está
cnicas de co
ator k.
CONVER
Os conver
inais de ent
res [4]. Sua
mponentes
uxo de ener
Quando o
ominados is
ditas não is
t e buck-bo
cos se apres
[1].
O convers
tensão méd
es de alimen
É constitu
ruptor contr
ERAÇÕES
ítulo tem p
C-CC, apr
m suas caract
am-se també
áticos, desta
ontrole nos
RSORES CC
rsores CC-C
trada para o
s estruturas
armazenado
rgia entre se
os converso
solados, enq
soladas. Ex
oost, que são
sentam com
sor buck, ch
dia de saíd
ntação chav
uído na Fi
rolado S1; u
REVIS
INICIAIS
por objetiv
esentando
terísticas, b
ém as técni
acando-se a
modos tens
C-CC
CC são disp
outro nível
são gerada
ores de ene
eus terminai
ores CC-CC
quanto as d
xistem três
o sistemas d
mo sistemas
hamado tam
a menor qu
veada e para
gura 2.1 p
um indutor
CAPÍTUL
SÃO BIBLI
S
vo expor u
as princip
bem como q
icas utiliza
a metodolog
são e corren
positivos qu
nos termin
as a partir da
ergia (indut
is.
C possuem
demais estru
estruturas
de segunda
de quarta
mbém de ab
ue a tensão
a controle de
por uma fo
de filtro L;
LO 2
IOGRÁFIC
uma revisã
pais topolo
questões ine
das para m
gia do interr
nte média ut
ue ajustam o
nais de saída
a associação
or e capaci
m em sua to
uturas que
básicas não
ordem; out
ordem, que
baixador, é
de entrada
e velocidad
nte de tens
; um diodo
CA
ão bibliográ
ogias encon
rentes às cé
modelagem d
ruptor PWM
tilizando o c
o nível de t
a, reduzindo
o de interru
tor), permit
opologia um
não empreg
o isoladas
tros três con
e são as top
utilizado q
a [4]. Geral
e de motore
são contínu
de roda liv
áfica relaci
ntradas na
élulas de co
de pequeno
M. Por fim,
critério de e
tensão ou c
o ou elevan
uptores ativo
tindo assim
um transform
gam esse c
de convers
nversores n
pologias Ću
quando se d
lmente, é u
es de corren
ua na entra
vre D; um c
5
ionada aos
literatura,
mutação de
os sinais de
expõem-se
estabilidade
corrente nos
ndo os seus
os, passivos
m o controle
mador, são
componente
sores: buck,
não isolados
k, SEPIC e
deseja obter
tilizado em
nte contínua
ada Vi; um
capacitor de
5
s
,
e
e
e
e
s
s
s
e
o
e
,
s
e
r
m
a
m
e

6
filtro de saída C, e uma carga representada por um resistor R, na qual é aplicada a tensão de
saída . Considerando a operação em MCC, tem-se que o ganho estático G é dado por:
o
i
VD
V= (2.1)
Vi Co R
L
D
S
Figura 2.1 – Conversor CC-CC buck.
Para o conversor boost ou elevador, a tensão de saída Vo é maior que a tensão de entrada
Vi [4], sendo utilizado muitas vezes na correção de fator de potência [12]. Seu circuito
mostrado na Figura 2.2 consiste em um interruptor , um diodo , um indutor , um capacitor
, uma fonte de tensão contínua na entrada Vi, e a resistência de carga R. Sua estrutura
diferencia-se do conversor buck apenas pela mudança na posição dos seus componentes. Na
equação (2.2), encontra-se o seu ganho estático em MCC.
1
1o
i
V
V D=
− (2.2)
Vi Co R
L
D
S
Figura 2.2 – Conversor CC-CC boost.
O conversor buck-boost é conhecido como abaixador-elevador, operando de modo que a
tensão de saída Vo pode ser menor ou maior que a tensão de entrada Vi, o que depende
somente do valor da razão cíclica [4]. Esse conversor é representado pelo circuito de potência
da Figura 2.3, sendo que sua topologia consiste em uma associação dos conversores buck e
boost. Conforme se pode observar na equação do seu ganho estático em (2.3), o conversor
opera em modo abaixador (Vo<Vi) se D<0,5; para D>0,5, o conversor opera em modo
elevador (Vo>Vi).

7
1
o
i
V D
V D=
− (2.3)
Vi Co RL
DS
Figura 2.3 – Conversor CC-CC buck-boost.
O conversor de acumulação capacitiva, conhecido na literatura por conversor Ćuk,
também opera como elevador e abaixador de tensão, sendo representado na Figura 2.4,
diferenciando-se dos conversores anteriores por possuir em sua estrutura mais elementos
passivos, isto é, dois indutores e dois capacitores [1].
Vi Co R
L1 L2C1
DS
Figura 2.4 – Conversor CC-CC Ćuk.
A principal característica do conversor SEPIC é o fato de operar como elevador e
abaixador de tensão, possuindo na entrada uma característica de fonte de corrente e na saída
característica de fonte de tensão, sendo representado pelo circuito elétrico da Figura 2.5.
Vi Co R
L1
L2
C1
D
S
Figura 2.5 – Conversor CC-CC SEPIC.
O conversor Zeta é uma topologia bastante semelhante aos conversores SEPIC e Ćuk
como mostra a Figura 2.6, diferenciando-se apenas na posição relativa dos componentes [1].
8
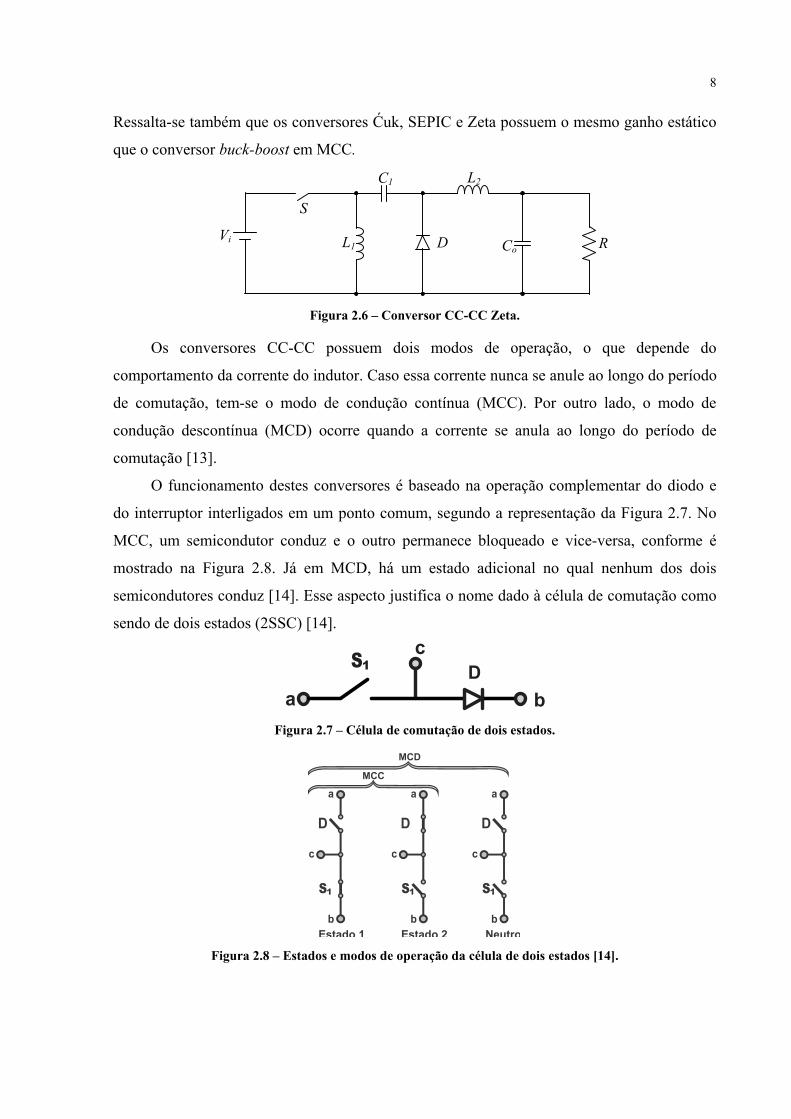
Ressalta-se também que os conversores Ćuk, SEPIC e Zeta possuem o mesmo ganho estático
que o conversor buck-boost em MCC.
Vi Co RL1
L2C1
D
S
Figura 2.6 – Conversor CC-CC Zeta.
Os conversores CC-CC possuem dois modos de operação, o que depende do
comportamento da corrente do indutor. Caso essa corrente nunca se anule ao longo do período
de comutação, tem-se o modo de condução contínua (MCC). Por outro lado, o modo de
condução descontínua (MCD) ocorre quando a corrente se anula ao longo do período de
comutação [13].
O funcionamento destes conversores é baseado na operação complementar do diodo e
do interruptor interligados em um ponto comum, segundo a representação da Figura 2.7. No
MCC, um semicondutor conduz e o outro permanece bloqueado e vice-versa, conforme é
mostrado na Figura 2.8. Já em MCD, há um estado adicional no qual nenhum dos dois
semicondutores conduz [14]. Esse aspecto justifica o nome dado à célula de comutação como
sendo de dois estados (2SSC) [14].
Dc
a b Figura 2.7 – Célula de comutação de dois estados.
Figura 2.8 – Estados e modos de operação da célula de dois estados [14].

2.3 -
desen
dos e
isto a
volum
reduç
tensã
ZCS
aume
este p
como
multi
assoc
nova
origi
magn
comu
semi
push
diodo
circu
contí
consi
indut
most
CÉLULA
A busca d
nvolviment
elementos r
aumentam-s
me dos diss
ção dos esfo
As estraté
ão nula ou Z
(Zero Cur
ento da freq
problema, h
o de conve
iníveis em
ciação de in
as topologia
Os conve
inalmente e
néticos, pel
utação do i
condutores
-pull mostr
os retificad
uito, é real
ínua, um est
Pode-se s
iderando q
tâncias de
trada na Fig
DE COMU
do aumento
o de divers
reativos bas
se as perda
sipadores de
orços de ten
égias para re
ZVS (Zero
rrent Switch
quência de
há soluções
ersores está
corrente (M
nterruptores
as, conhecid
ersores base
m [5] como
lo fato de
interruptor,
. Essa célu
rado na Fig
dores D1 e
lizada uma
tágio interm
substituir o
que o mesm
magnetizaç
gura 2.10, se
UTAÇÃO D
o da densid
as novas to
eia-se na el
s por comu
e calor. Ass
nsão e corre
edução das
Voltage Sw
hing) [14],
comutação
como assoc
áticos, gera
MNC). Para
e/ou conve
das como co
eados na c
o uma alter
operarem
além de e
ula é conceb
gura 2.9, se
D2; e um
a conversão
mediário de
o transform
mo seja ide
ção. Com
endo definid
DE TRÊS E
dade de po
opologias. U
levação do
utação no se
sim, para qu
ente nos com
perdas são
witching) e
[15]. Essa
o, mas as p
ciação em p
ando outras
a o uso em
ersores em s
onversores m
célula de co
rnativa visa
com uma
exigirem m
bida a part
endo const
transforma
o CC-CA-C
tensão alter
mador com
eal e com
isto, tem-s
da entre os t
ESTADOS
otência dos
Uma solução
valor da fre
emicondutor
ue este méto
mponentes [
conhecidas
técnicas de
s técnicas m
perdas por c
paralelo tant
s topologia
tensões ele
série, a parti
multiníveis e
omutação d
ando à redu
frequência
menores esfo
ir do circui
tituída por:
ador com p
CA-CC, ha
rnada e uma
m tap cent
relação de
se a célula
terminais a-
conversore
o utilizada
equência de
r, sendo nec
odo obtenha
[14].
como técni
e comutação
minimizam
condução p
to de dispos
as conhecid
evadas, utili
ir das quais
em tensão [
de três esta
ução das dim
com o do
orços de co
ito do conv
dois interr
ponto médio
avendo na
a saída com
tral por um
e espiras u
a de comut
-b-c [14] [1
es estáticos
para reduzi
e comutação
cessário o a
a êxito, é im
nicas de com
o sob corren
m as perdas
persistem. P
sitivos semi
das como c
izam-se as
se podem o
[14].
ados foram
mensões de
obro da fre
orrente nos
versor CC-C
ruptores S1
o (tap cent
entrada u
m tensão con
m autotran
unitária, equ
tação de tr
5].
9
resulta no
ir o volume
o, mas com
aumento do
mportante a
mutação sob
nte nula ou
através do
Para mitigar
icondutores
conversores
técnicas de
obter outras
m propostos
e elementos
quência de
s elementos
CC isolado
e S2; dois
tral). Neste
uma tensão
ntínua [14].
nsformador,
uivalente a
rês estados
9
o
e
m
o
a
b
u
o
r
s
s
e
s
s
s
e
s
o
s
e
o
,
a
s

10
Figura 2.9 – Conversor CC-CC Push-Pull isolado [14].
Analisando a Figura 2.10, nota-se que a célula de comutação de três estados é formada
basicamente por duas células de comutação de dois estados e um autotransformador com tap
central. Conforme a Figura 2.11, seu funcionamento baseia-se entre dois modos de operação,
sendo que o primeiro, denominado modo principal de operação, caracteriza-se pela mudança
direta entre os estados; o segundo modo de operação, dito secundário, apresenta uma mudança
indireta entre um estado e outro, transitando pelo estado neutro. O modo principal
corresponde a MCC, enquanto o modo secundário representa o MCD [14]. Ressalta-se, que
para um valor de razão cíclica menor que 0,5 em modo de condução contínua, a célula de três
estados opera somente com os estados 1 e 2, não havendo condução simultânea dos
interruptores. Já com razão cíclica maior que 0,5, os comandos dos interruptores estão
sobrepostos.
Figura 2.10 – Célula de comutação de três estados [14].
Em [5] e [14], chegam-se a várias combinações possíveis da célula de três estados,
resultando nas células A, B, C, D e E. Em [14], é realizada a análise dos ganhos estáticos do
conversor buck 3SSC empregando as diversas configurações, sendo que os conversores
gerados a partir da célula do tipo B possuem característica semelhantes aos conversores
clássicos empregando a célula de comutação de dois estados para toda a faixa de variação da

11
razão cíclica. Dessa forma, ressalta-se que apenas os conversores baseados na célula B são
analisados no decorrer deste trabalho.
Figura 2.11 – Representação do funcionamento da célula de três estados [14].
Como as operações dos interruptores S1-D2 e S2-Di são complementares, tem-se na
célula de três estados a inversão bilateral de polaridade, sem prejuízos à característica da
topologia original [14], conforme é visto na Figura 2.12.
Figura 2.12 – Inversão bilateral da célula de três estados [14].
Ao se substituir a célula de comutação de dois estados nos conversores CC-CC não
isolados mostrados na Figura 2.13 pela 3SSC, obtêm-se os conversores mostrados na Figura
2.14. Nota-se que a Figura 2.13 é uma variação das estruturas apresentadas anteriormente, em
que se destaca a presença da célula de dois estados.

+
-VI
+
-
VI
R
+
-
Vo
Figu
2.4 -
CON
um s
•
plena
[17];
•
utiliz
prove
•
mode
mode
conh
norm
sendo
D
S
a
b
c
a) bu
Co
L2
L1
d) Ću
ura 2.13 – Co
TÉCNICA
NVERSOR
De acordo
sistema gené
modelos t
amente con
;
modelos t
zados para
enientes de
modelos t
elado são
elos previam
Os model
hecimento p
malmente em
o que há vá
L
Co+
uck
D
S
c
a
b
uk
onversores CC
AS EMPRE
RES ESTÁT
o com [16],
érico:
tipo caixa b
nhecida, sen
tipo caixa
obtenção
experiment
tipo caixa c
parcialmen
mente descr
los tipo ca
prévio de p
mpregados p
ários trabalh
R
+
-
Vo
+
-VI
C1
+
-
VI
C-CC não iso
EGADAS
TICOS
as seguinte
branca: nes
ndo que tod
preta: a es
do modelo
tos;
cinza: são a
nte conhecid
ritos.
aixa preta s
parâmetros
para relacio
hos publicad
L
D
S
b
c
a
b) boos
L1
D
S
c
b
a
e) SEPI
olados empre
NA MODE
es abordage
ste tipo de
dos os parâm
strutura físi
o, utilizando
aqueles em
das. São c
são caracte
do sistema
onar variáve
dos neste âm
Co
+
-
+
st
L2
Co
C1
+
-
V
IC
gando a célul
ELAGEM
ens podem s
modelagem
metros são
ica do siste
o assim ap
m que as in
considerado
erizados po
a. No âmbi
eis como a
mbito [18].
R
Vo
R
+
-
VI
+
-
Vo
R
Vo
+
-
VI
C1
la de comuta
DE PEQU
ser emprega
m, a estrutur
condizentes
ema e o fu
penas dado
formações
os como ca
r não nece
ito dos con
tensão de s
L
Co
+
c) buck-boo
S
L1
D
a
b
c
f) Zeta
ação de dois e
UENOS SI
adas na mo
ura física do
s com o sen
uncionamen
os de entra
sobre o sis
aso interme
essitarem d
nversores C
saída e a ra
12
S
D
a
b
c
ost
L2
Co R
+
-
Vo
estados [14].
INAIS DE
delagem de
o sistema é
ntido físico
nto não são
ada e saída
stema a ser
ediário dos
de qualquer
CC-CC, são
azão cíclica,
2
E
e
é
o
o
a
r
s
r
o
,

13
É importante destacar que os modelos tipo caixa branca também são conhecidos como
modelos estruturais/físicos, enquanto os modelos tipo caixa cinza e caixa preta são ditos
comportamentais [18]. Como as estruturas dos conversores CC-CC são conhecidas, neste
trabalho é utilizada a abordagem do tipo caixa branca.
T2
LT1
S1 S2
D2D1 Co
+
-VI
R
+
-
Vo
a
b
c
a) buck
T2
T1
L
S2S1
D1 D2
Co
+
-VI
R
+
-
Vo
a
b
c
b) boost
T2
L
S1
T1
D1Co
S2
D2R
+
-VI
Vo
c
+
-
a
b
c) buck-boost
L1
L2 T2
S2
T1
S1
D1 D2Co
C1
+
-VI
R
+
-
Vo
a
c
b d) Ćuk
D1 D2
L1
T2
T1
S2S1+
-V1
Co
L2
Ro
C
+
-
+
Vo
b
a
c
e) SEPIC
L1
T2
D1
S2S1
D2
T1
L2
Co
+
-V1
C Ro
+
-
Vo
a
b
c
+
f) Zeta
Figura 2.14 – Conversores CC-CC não isolados utilizando a célula de comutação de três estados [14].

14
Para se adotar uma estratégia de controle adequada, é necessário conhecer as funções de
transferência em malha aberta. Os conversores CC-CC possuem uma característica não linear
variante no tempo [18], o que dificulta a obtenção das equações que representam o sistema.
Na literatura, existem diversas formas de se contornar este problema, sendo que as mais
conhecidas são:
• modelagem por circuito médio equivalente;
• modelagem pela evolução do espaço de estados;
• modelagem pela evolução média de espaço de estado;
• modelagem por circuito canônico equivalente;
• modelagem discreta;
• modelagem por amostra;
• modelagem do interruptor PWM;
• modelagem do interruptor QRC.
É importante ressaltar que todas essas abordagens geralmente resultam em um mesmo
modelo. Por sua vez, as técnicas de modelagem de valores médios (modelo médio do espaço
de estados, circuito médio e do interruptor PWM) tem por objetivo facilitar a obtenção das
expressões das funções de transferência dos conversores, pois não é necessário considerar as
diferentes etapas de operação de comutação dos semicondutores, obtendo-se assim um
circuito equivalente invariante e contínuo no tempo para o conversor [18]. Com isso, os
conversores podem ser linearizados em torno de um ponto de operação.
A primeira técnica adotada para modelagem de conversores envolve a obtenção de um
circuito médio [10], sendo que essa abordagem é bastante satisfatória na modelagem de
conversores. Essa técnica baseia-se no equacionamento e obtenção de expressões relacionadas
com as tensões e correntes médias para o desenvolvimento de um circuito equivalente. Com o
circuito equivalente obtido, realizam-se as análises CC e CA, sendo consideradas as
perturbações inerentes aos circuitos para a análise CA [10].
Como uma das abordagens mais utilizadas [9] [18], a modelagem de espaço de estados
médio permite também o controle em malha fechada. Esta técnica resulta em um modelo
linear para o estágio de potência com filtro de saída, o qual é validado para pequenas
perturbações representando assim uma linearização em torno do ponto de operação [19]. Esta

técni
quan
os co
inver
pode
exem
predo
na se
2.5 -
graça
geram
reduz
[20],
interr
torna
comp
o mé
que p
mais
traba
pertu
corre
ica represen
ntidade cons
onversores Ć
rsão de matr
A modela
e ser empreg
mplo, aos
ominanteme
A técnica
equência.
MODELA
Conforme
as à associa
m uma osci
zir o nível d
sendo repr
A operaç
ruptores at
a-se necessá
portamento
étodo de mo
permite obte
Outra cara
de um int
alho, o que é
Para uma
urbação pelo
espondente.
nta a evol
siderável de
Ćuk, SEPIC
rizes 4×4.
gem por es
gada em sis
conversor
ente oscilat
do interrup
AGEM UTI
e foi apresen
ação de do
ilação inter
de tensão na
resentada na
ão dos con
ivos dos c
ário o conh
dinâmico f
odelagem u
er o modelo
acterística d
erruptor ati
é o caso das
melhor com
o sinal (^),
ução do v
e manipulaç
C e Zeta, qu
paço de est
stemas com
res do tip
ório.
ptor PWM, a
ILIZANDO
ntado anteri
ois interrupt
na permitin
a saída. Esta
a Figura 2.7
nversores s
onversores
hecimento d
frente a peq
utilizando o
o de forma a
dessa técnic
ivo, sendo a
s estruturas
mpreensão d
enquanto u
valor médio
ções matem
ue são sistem
tados médio
uma peque
po ressona
a qual é uti
O O MODE
iormente, os
tores: um c
ndo assim o
a associação
7.
se deve à
CC-CC e,
do modelo
quenas pertu
interruptor
a linearizar
ca é o fato
assim uma
baseadas na
das expressõ
um valor mé
o das variá
máticas, esp
mas de qua
o possui um
ena ondulaç
ante [19],
ilizada neste
ELO DO IN
s conversor
controlado e
o uso dos e
o recebe o n
variação d
para proje
matemático
urbações. O
r PWM, sen
o sistema e
de se pode
característi
a 3SSC [3].
ões subsequ
édio é repre
áveis, mas
ecificament
rta ordem, e
ma limitação
ão, não pod
que exi
e trabalho, é
NTERRUPT
res CC-CC c
e outro não
lementos pa
nome de “in
da razão cí
etar um co
o que retrat
objetivo de
ndo uma téc
m um ponto
er utilizá-la
ica de extre
uentes, repre
esentado po
seu uso r
te quando s
exigindo re
o de aplicaç
dendo ser ap
ibem com
é revisada e
TOR PWM
clássicos sã
o controlad
assivos par
nterruptor P
íclica D ap
ompensador
te adequad
esta seção é
cnica simpl
o de operaç
a em conve
ema import
esenta-se um
or uma letra
15
requer uma
se analisam
ealização de
ção, pois só
plicada, por
mportamento
em detalhes
M
ão possíveis
o, os quais
a elevar ou
PWM” [11],
plicada aos
r adequado,
amente seu
é apresentar
les e direta,
ão.
ersores com
tância neste
ma pequena
a maiúscula
5
a
m
e
ó
r
o
s
s
s
u
,
s
,
u
r
,
m
e
a
a

16
2.5.1 - PROPRIEDADES DO INTERRUPTOR PWM
O interruptor PWM presente nos conversores CC-CC, conforme descrito anteriormente,
é constituído pelos terminais ativo ( ), passivo ( ) e comum ( ) [20], [21], conforme a Figura
2.7. Porém, pode-se representar o interruptor PWM de forma genérica e efetiva de acordo
com a Figura 2.15.
Figura 2.15 – Interruptor PWM genérico [3].
sendo:
D – razão cíclica;
D’=1-D – razão cíclica complementar.
Analisando a operação do interruptor PWM em MCC, destaca-se o fato da corrente no
terminal comum ic ser diferente de zero em qualquer instante de tempo ( 0ci t≠ ∀ ).
Extrapolando a análise para as outras variáveis [20], tem-se:
1. Quando o interruptor ativo estiver conduzindo no intervalo D.TS, independentemente da
estrutura do conversor, tem-se:
( ) ( )a ci t i t= (2.4)
( ) ( )ap cpv t v t= (2.5)
2. Quando o interruptor ativo estiver bloqueado no intervalo D’.TS, independentemente da
estrutura do conversor, tem-se:
( ) 0ai t = (2.6)
( ) 0cpv t = (2.7)
Resumindo, têm-se as expressões (2.8) e (2.9):

17
( ) ( ) ; 0
0;c s
as s
i t t D Ti t
D T t T
≤ ≤ ⋅= ⋅ ≤ ≤
(2.8)
( ) ( ) ; 0
0;ap s
cps s
v t t D Tv t
D T t T
≤ ≤ ⋅= ⋅ ≤ ≤
(2.9)
As grandezas de maior interesse para os conversores CC-CC são os valores médios das
tensões e correntes [10]. Assim, é de extrema importância obter os respectivos valores médios
deles para uma melhor análise do comportamento CC e CA dos conversores frente a pequenas
perturbações. Para a simplificação da análise do comportamento CA, considera-se que as
grandezas envolvidas variam com frequência bastante inferior que à frequência de comutação,
simplificando assim a análise.
Em um conversor PWM em MCC, podem-se expressar as correntes médias Ia e Ic
através da relação corresponde à razão cíclica associada a uma perturbação de pequenos
sinais:
a cI d I= ⋅ (2.10)
sendo:
ˆd D d= + (2.11)
A relação expressa pela equação (2.10) pode ser obtida pela inspeção da Figura 2.16, na
qual se têm as formas de onda das correntes instantâneas nos terminais ativo e comum do
interruptor PWM.
Figura 2.16 – Correntes instantâneas no interruptor PWM genérico [20].
As formas de onda das tensões vap(t) e vcp(t) são mostradas na Figura 2.17 e Figura 2.18,
considerando e desprezando a ondulação da corrente no terminal comum, respectivamente.

18
Figura 2.17 – Tensões no interruptor PWM
genérico desconsiderando a ondulação da corrente
ic(t) [20].
Figura 2.18 – Tensões no interruptor PWM
genérico considerando a ondulação da corrente ic(t)
[20].
A ondulação da tensão vap(t) se deve à resistência série equivalente do capacitor (Rse),
que absorve uma corrente pulsante com amplitude de pico a pico igual ao valor máximo da
amplitude da corrente do terminal comum. Ao se desconsiderar a ondulação de corrente no
terminal comum do interruptor PWM e considerando apenas a corrente média Ic que é
efetivamente absorvida pelo capacitor, obtém-se amplitude da ondulação rv da tensão apv
dada por:
r e cv R I= ⋅ (2.12)
Na expressão (2.12), a resistência Re é uma função da resistência série do capacitor de
filtro (Rse) e da resistência de carga (R) [10]. Para determinar do valor de Re, deve-se analisar
o caminho percorrido pela corrente média Ic no circuito do conversor [3]. Para os conversores
boost e buck-boost, a corrente média Ic é absorvida pela resistência série equivalente do
capacitor de filtro que se encontra em paralelo com a carga R . Nesse último caso, o
parâmetro Re é dado pela expressão (2.13).
/ /e SER R R= (2.13)
Analisando o conversor Ćuk, nota-se que a corrente média é absorvida somente pelo
capacitor, sendo que a resistência Re é igual à resistência série do capacitor de filtro:
e SER R= (2.14)

19
Portanto, para efetivamente definir o valor assumido pela resistência Re, deve-se realizar
uma análise do circuito do conversor a ser modelado.
Observando as formas de onda das tensões na Figura 2.17 em que se desconsidera a
ondulação da corrente ic(t), pode-se definir vcp(t) através das equações (2.15) e (2.16),
respectivamente, considerando ou desprezando a resistência série do capacitor Re .
( ')cp ap c eV d V I R D= ⋅ − ⋅ ⋅ (2.15)
cp apV d V= ⋅ (2.16)
2.5.2 - MODELO CC DO INTERRUPTOR PWM
Admitindo-se uma razão cíclica constante (d=D) e que as correntes e as demais
variáveis sofrem uma pequena perturbação, oriundas de alguma variação da tensão de entrada
ou da carga do conversor, obtém-se a expressão (2.17).
( ) ( )a a c cI î D I î+ = ⋅ + (2.17)
De posse das expressões (2.10) e (2.17) desprezando as demais perturbações (îa e îc),
após algumas manipulações matemáticas obtém-se:
a cI D I= ⋅ (2.18)
De modo análogo para as tensões, supondo que sofram uma perturbação de pequena
amplitude, obtém-se:
'cp ap e cv D v D D R i= ⋅ − ⋅ ⋅ ⋅ (2.19)
sendo:
ˆap ap apv V v= + (2.20)
ˆcp cp cpv V v= + (2.21)
Por meio das equações (2.18) e (2.19), obtém-se a Figura 2.19, a qual representa o
circuito equivalente do modelo CC do interruptor PWM.

20
Figura 2.19 – Modelo CC do interruptor PWM [3].
2.5.3 - MODELO CA DO INTERRUPTOR PWM
Para o modelo CA, devem-se considerar todas as pequenas perturbações de sinais
necessárias para se conseguir os modelos do interruptor PWM. Com isso, todos os elementos
(d, ia, ic, vap e vcp) devem sofrer influência das pequenas perturbações ( d , îa, îc, apv e cpv ).
Logo, as considerações feitas na seção anterior são desprezadas.
Desprezando os termos em que as perturbações se multiplicam, juntamente após
algumas manipulações matemáticas, obtém-se a seguinte relação das correntes nos terminais
ativo e comum:
a c ci D i I d= ⋅ + ⋅ (2.22)
De modo similar, as tensões vap e vcp são dadas por (2.23) e (2.24), respectivamente.
( ') ( ')cp ap c e c e D c ev D v I R d i R D d V I R D= ⋅ + ⋅ ⋅ − ⋅ ⋅ + ⋅ − ⋅ ⋅ (2.23)
' [ ( ') ]cpap c e ap c e
v dv i R D V I D D R
D D= + ⋅ ⋅ − + ⋅ − ⋅ ⋅ (2.24)
sendo:
( ')D ap c eV V I R D D= + ⋅ ⋅ − (2.25)
Pela inspeção das equações (2.22) a (2.25), obtém-se o modelo CA do interruptor PWM
da Figura 2.20.
Pode-se notar que simplificando e desconsiderando as perturbações na Figura 2.20,
obtém-se a Figura 2.19. Logo, o modelo CA do interruptor PWM também pode ser utilizado
na análise CC, uma vez que d=D, ic=Ic e a tensão da fonte não apresenta perturbações.

21
Figura 2.20 – Modelo CA do interruptor PWM [3].
2.5.4 - EFEITO DAS PERDAS EM CONDUÇÃO E TEMPO DE ARMAZENAMENTO
Os modelos representados pela Figura 2.15, Figura 2.19 e Figura 2.20 não incluem
aspectos como os efeitos das perdas em condução e o tempo de armazenamento associado aos
transistores bipolares. Porém, devido à flexibilidade do modelo, é permitida a inclusão desses
aspectos reais através de elementos parasitas no circuito elétrico.
Define-se tempo de armazenamento como o intervalo necessário para retirar e/ou
neutralizar os portadores estocados no coletor e na base para um transistor bipolar [22]. Por
sua vez, os MOSFETs apresentam tempo de armazenamento desprezível [20]. Com isto, a
perturbação da razão cíclica pode ser dada pela expressão:
cef
me
id d
I= − (2.26)
sendo que o termo Ime da expressão (2.26) é um parâmetro modulado que depende do tipo de
comando de base do transistor.
Substituindo-se (2.26) em (2.22) e (2.24), têm-se:
ca c c
me
Ii D i I d
I
= − ⋅ + ⋅
(2.27)
'cp m Dap e c
v r Vv R D i d
D D D = + ⋅ + ⋅ − ⋅
(2.28)
sendo que o termo rm é denominado resistência modulada e definido por (2.29) como:
Dm
me
Vr
I= (2.29)
Entretanto, sabe-se que geralmente D>>Ic/Ime [6] e, assim, a expressão (2.27) pode ser
reescrita como:

22
a c ci D i I d= ⋅ + ⋅ (2.30)
Admitindo a presença dos elementos parasitas (resistência de condução do transistor rt,
resistência do diodo de roda livre rd e a resistência série do capacitor de filtro de saída RSE,
obtém-se o modelo do interruptor PWM mostrado na Figura 2.21.
Figura 2.21 – Interruptor PWM com elementos parasitas [3].
Analisando um ponto de operação específico para o interruptor PWM da Figura 2.21,
encontra-se a expressão (2.31).
( )' 'cp ap c e c t c dV D V I D R I r D I r= ⋅ − ⋅ ⋅ − ⋅ − ⋅ ⋅ (2.31)
Admitindo-se uma perturbação de pequeno sinal na razão cíclica ( ˆd D d= + ) na
equação (2.31), obtém-se:
cp Dap c c
v Vv i r d
D D
= + ⋅ − ⋅
(2.32)
sendo que a resistência parasita rc e a tensão VD são expressas por (2.33) e (2.34),
respectivamente.
' 'c m t d er r D r D r D D R= + ⋅ + ⋅ + ⋅ ⋅ (2.33)
( ') ( )D ap e c d t cV V D D R I r r I= + − ⋅ ⋅ + − ⋅ (2.34)
Logo, a partir das expressões (2.31) a (2.34), obtém-se um modelo genérico para o
interruptor PWM incluindo elementos parasitas segundo a Figura 2.22.
Figura 2.22 – Modelo genérico do interruptor PWM com inclusão de elementos parasitas [3].

2.6 -
FAT
lança
pelo
relaç
[24].
no t
contr
saída
ou m
tensã
médi
refer
estra
cance
que a
sistem
polos
realim
cruza
e au
contr
trans
propo
quais
METODO
TOR K
Os sistem
amento de f
pâncreas [2
ção a variaç
Os conver
empo, exig
rolada para
a de um con
modo corrent
No contro
ão de saída
ia emprega
rencial de co
Para o pr
atégia clássi
elamento d
apresente em
ma de prim
s e zeros de
A técnica
mentação p
amento de g
umentando
roladores, d
sferência e,
Em amba
orcional-int
s devem ser
OLOGIA D
mas de cont
foguetes até
23]. O cont
ções que po
rsores estáti
gem do co
um valor d
nversor CC-
te média [2
ole em mod
é realiment
duas malha
orrente para
rojeto e sin
ica de canc
de polos e z
m torno da
meira ordem,
evidamente
por meio d
por meio d
ganho e a m
para alta
diferenciado
principalme
as as metod
tegral (PI)
r devidamen
DE SINTO
trole estão
é o process
trolador tem
odem ocorre
icos, mesmo
ontrolador u
desejada e g
-CC geralme
5].
do tensão, é
tada e comp
as de contro
a a malha in
ntonia dos
elamento d
zeros tem c
frequência
, adicionand
alocados, to
do fator k é
de amplific
margem de f
as frequênc
os pelo nú
ente, a carac
dologias de
e proporcio
nte sintoniza
ONIA DE
presentes e
so de regula
m por finalid
er e alterar
o se compo
uma marge
garantindo s
ente é realiz
é utilizada
parada com
ole em casc
nterna de co
compensad
de polos e z
como objeti
a de cruzam
do um polo
ornando ass
uma ferram
cadores op
fase desejad
cias [26].
úmero de p
cterística de
e controle
onal-integra
ados em tor
CONTRO
em diversa
ação de açú
dade melho
o comporta
ortando com
em de fase
sua estabilid
zado por me
uma única
uma referê
cata, sendo
ntrole da co
dores analó
zeros ou o
ivo o condi
mento um co
o na origem,
sim o conjun
menta matem
peracionais
das, reduzind
Basicamen
polos e zer
e defasagem
supracitada
al-derivativo
rno de uma
OLADORE
s aplicaçõe
úcar no san
orar o desem
amento das
mo sistemas
e positiva,
dade [3]. O
eio de duas
malha de
ncia fixa. O
que a malh
orrente [12]
ógicos, gera
método do
cionamento
omportamen
, juntamente
nto estável [
mática que
para se o
do o ganho
nte, utiliza
ros de sua
m do sistema
as, controla
o (PID) pod
região de op
ES UTILIZ
es cotidiana
ngue human
mpenho do
variáveis d
não lineare
ajustando
O controle d
técnicas: m
controle, se
O controle p
ha externa
.
almente em
fator k. O
o do sistem
nto próximo
te com um c
[12].
sintetiza as
obter a freq
em baixas
am-se três
respectiva
a.
adores cláss
dem ser uti
peração.
23
ZANDO O
as, desde o
no realizado
sistema em
de interesse
es variantes
a variável
da tensão de
modo tensão
endo que a
por corrente
fornece um
mprega-se a
método de
ma de forma
o ao de um
conjunto de
s malhas de
quência de
frequências
s tipos de
função de
sicos como
ilizados, os
3
O
o
o
m
e
s
l
e
o
a
e
m
a
e
a
m
e
e
e
s
e
e
o
s

comp
méto
modo
comp
2.6.1
O
minim
fase r
expre
se a d
Como nes
pensadores
odo do fator
Na sequên
o tensão e
pensadores
1 - COMPE
O compens
mizando o e
Ressalta-s
requerido, r
A função
essas por (2
Analisand
defasagem c
ste trabalho
por cancela
r k é utilizad
ncia, são a
e corrente m
que podem
ENSADOR
sador tipo
erro em reg
se que este c
resultando e
de transfer
2.36) e (2.37
do o diagram
constante e
analisam-s
amento de p
do.
apresentadas
média com
ser utilizad
TIPO 1
1, mostrad
gime perman
Figura
compensado
em um fator
rência deste
7), respectiv
ma de Bode
uma atenua
se converso
polos e zero
s as metod
m base no
dos.
do na Fig
nente.
2.23 – Comp
or é utilizad
r k unitário.
1k =
e compensa
vamente.
1
( )vC sR
=
1
2cf Rπ=
⋅ ⋅
e para o com
ação de -20
ores CC-CC
os torna-se m
dologias de
fator k, ju
gura 2.23,
ensador tipo
do sempre em
1
ador e sua
1
1
C s⋅ ⋅
1 1
1
R C⋅
mpensador d
dB/década
C de quarta
mais comple
projeto do
untamente c
apresenta
1.
m casos em
frequência
do tipo 1 na
no ganho d
ordem, a s
exa, sendo q
os compens
com os trê
um polo
m que não há
de cruzam
a Figura 2.2
do sistema.
24
sintonia dos
que assim o
sadores em
ês tipos de
na origem
á avanço de
(2.35)
mento fc são
(2.36)
(2.37)
24, destaca-
4
s
o
m
e
m
e
)
o
)
)
-

2.6.2
e pos
polo
contr
regim
frequ
O valor do
2 - COMPE
O controla
ssuindo um
e o zero s
rolador ofer
me permane
A função
uências não
Figura 2
o capacitor
ENSADOR
ador tipo 2
m dos polos
são alocado
rece uma m
ente reduzid
o de transf
nulas do ze
2.24 – Diagra
empregado
C
TIPO 2
apresenta u
localizado n
os de acord
melhor respo
do [26].
Figura
ferência de
ero e do pol
( )vC ss
=
ama de Bode
no compen
1
1
2 c
Cfπ
=⋅ ⋅
um zero e d
na origem d
do com a f
osta dinâmic
2.25 – Comp
esse comp
lo são repre
1 1
1
(
s
R C C
+⋅ ⋅ +
do compensa
nsador é dad
1
1
cf G R⋅ ⋅
ois polos, s
devido à pr
frequência d
ca comparad
ensador tipo
ensador é
sentadas po
1 2
2 2 1
s C R
C s R C
⋅ ⋅+ ⋅ ⋅
ador tipo 1 [1
do por:
endo repres
esença de u
de cruzame
do ao contr
2.
dada por
or (2.40) e (2
2)C⋅
13].
sentado na F
um integrad
ento e o fa
rolador tipo
(2.39), en
2.41).
25
(2.38)
Figura 2.25
dor. O outro
ator k. Esse
1 e erro de
nquanto as
(2.39)
5
)
5
o
e
e
s
)

cruza
fator
parâm
se qu
defas
fc.
No compe
amento fc, e
r k acima d
metro k é da
Os valores
Analisand
ue ocorre u
sagem sofre
ensador tipo
enquanto o
da frequênc
ado por:
s dos compo
do o diagram
uma região
e um crescim
Figura 2
pf
o 2, o zero d
polo deve
cia de cruz
onentes do c
2C
ma de Bode
o de ganho
mento de -9
2.26 – Diagra
1
2zf Rπ=
⋅ ⋅
12 2p
C
Rπ+=
⋅ ⋅
deve ser ins
e ser alocad
zamento. Pa
tg2
kα= +
circuito são
2
1
2 cfπ=
⋅ ⋅ ⋅
1 2 (C C k= ⋅
2 2
kR
fπ=
⋅ ⋅
e para o com
o constante
90° e se torn
ama de Bode
2 1
1
R C⋅
2
2 1 2
C
R C C
+⋅ ⋅
serido em um
do em uma
ara obter o
45º+
o dados pela
1
1
G k R⋅ ⋅ ⋅
2 1)k −
1c
k
f C⋅
mpensador d
entre as fr
na próxima
do compensa
m fator k ab
frequência
o avanço de
as equações
do tipo 2 na
frequências
a 0° para fr
ador tipo 2 [1
baixo da fre
a correspond
de fase α re
(2.43) a (2
a Figura 2.2
fz e fp2, se
requências m
13].
26
(2.40)
(2.41)
equência de
dente a um
equerido, o
(2.42)
.45).
(2.43)
(2.44)
(2.45)
26, destaca-
endo que a
maiores que
6
)
)
e
m
o
)
)
)
)
-
a
e

2.6.3
na or
frequ
(2.50
corre
inser
avan
3 - COMPE
O compen
rigem e dois
A função
uências de a
0).
Diferentem
espondente
rido em um
nço de fase α
ENSADOR
nsador tipo
s pares do ti
o de transf
alocação do
( )
( )o
i
v s
v s
mente do c
a um fator
ma frequênci
α nesse caso
TIPO 3
3 (Figura 2
ipo polo-zer
Figura
ferência de
os zeros e d
1 1
(1
(
s
s R C
+ ⋅=⋅ ⋅
2zf
pf
compensado
k abaix
ia k acim
o é dado pel
k
2.27) aprese
ro [26].
2.27 – Comp
esse compe
dos polos nã
1 2
2 2
) (1C R
C s R
⋅ ⋅ ++ + ⋅
1 2zf π=
⋅ ⋅
212 (Rπ
=⋅ ⋅
12 2p
C
Rπ+=
⋅ ⋅
3 2pfπ
=⋅ ⋅
or tipo 2, a
xo da frequ
ma da frequ
la expressão
4k tg
α = +
enta uma aç
ensador tipo
ensador é d
ão nulos co
3 3
2 1 2) (1
C R s
C C
+ ⋅ ⋅ +⋅ ⋅ ⋅
2 1
1
R C⋅
3 3
1
)R C+ ⋅
2
2 1 2
C
R C C
+⋅ ⋅
3 3
1
R C⋅
aloca-se um
uência de co
uência de co
o (2.51).
2
45º+
ção integral
3.
dada por (
orrespondem
3 1
3 3
)
1
C R s
R C s
⋅ ⋅+ ⋅ ⋅
m zero dupl
orte. Por su
orte [26]. O
l, pois poss
(2.46), sen
m às equaçõ
)s
lo em uma
ua vez, o po
O fator k em
27
sui um polo
ndo que as
ões (2.47) a
(2.46)
(2.47)
(2.48)
(2.49)
(2.50)
frequência
olo duplo é
m relação ao
(2.51)
7
o
s
a
)
)
)
)
)
a
é
o
)
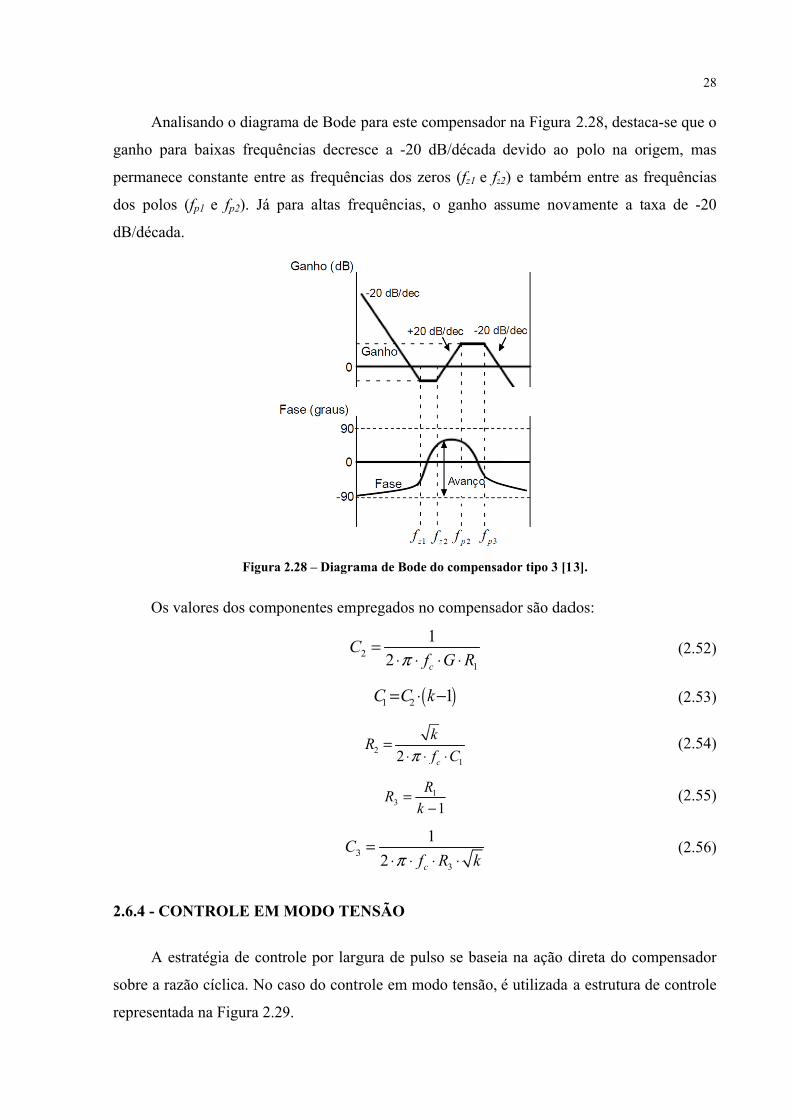
ganh
perm
dos p
dB/d
2.6.4
sobre
repre
Analisand
ho para baix
manece cons
polos (fp1 e
década.
Os valores
4 - CONTR
A estratég
e a razão cí
esentada na
do o diagram
xas frequên
stante entre
e fp2). Já pa
Figura 2
s dos compo
ROLE EM M
gia de contr
clica. No ca
Figura 2.29
ma de Bode
ncias decre
as frequên
ara altas fr
2.28 – Diagra
onentes emp
C
3C
MODO TE
role por larg
aso do cont
9.
para este c
esce a -20
ncias dos ze
requências,
ama de Bode
pregados no
2 2C
fπ=
⋅ ⋅
(1 2C C k= ⋅
2 2R
π=
⋅ ⋅
3
RR
k=
−
32 cfπ
=⋅ ⋅
ENSÃO
gura de pul
trole em mo
ompensado
dB/década
eros (fz1 e fz
o ganho a
do compensa
o compensa
1
1
cf G R⋅ ⋅
)1k−
1c
k
f C⋅
1
1
R
−
3
1
R k⋅ ⋅
lso se basei
odo tensão,
r na Figura
devido ao
2) e também
ssume nova
ador tipo 3 [1
ador são dad
a na ação d
é utilizada
2.28, desta
polo na or
m entre as
vamente a t
13].
dos:
direta do co
a estrutura
28
aca-se que o
rigem, mas
frequências
taxa de -20
(2.52)
(2.53)
(2.54)
(2.55)
(2.56)
ompensador
de controle
8
o
s
s
0
)
)
)
)
)
r
e

29
Cv(s) Fm(s)-
Hv(s)
VOVCVref Gv(s)
dCv(s) Fm(s)-
Hv(s)
VOVCVref Gv(s)
d
Figura 2.29 – Diagrama de blocos do sistema de controle de um conversor CC-CC genérico em modo
tensão.
Para o desenvolvimento do projeto do compensador considerando o fator k, deve-se
adotar o seguinte procedimento [26]:
- Passo 1: Esboçar o diagrama de Bode da função de transferência de laço aberto sem
compensador (FTLAscv(s)), dada pela expressão (2.57).
( ) ( ) ( ) ( )scv v m vFTLA s G s F s H s= ⋅ ⋅ (2.57)
sendo:
• Gv(s) – função de transferência da tensão de saída em relação com a razão cíclica;
• Fm(s) – função de transferência do modulador PWM, dada por:
1
( )mm
F sV
= (2.58)
• Vm – amplitude de pico a pico da onda dente de serra ou triangular (portadora);
• Hv(s) – função de transferência do sensor de tensão de saída, dada por:
( ) refv
o
VH s
V= (2.59)
• Vref – valor de referência da tensão de saída;
• Vo – tensão média desejada na saída do conversor.
- Passo 2: Determinar a frequência de cruzamento de ganho fc desejada, de modo que esse
parâmetro seja menor ou igual a um quarto da frequência de comutação do conversor (fs),
evitando assim os efeitos da comutação em alta frequência no sinal de controle;
- Passo 3: Estabelecer a margem de fase M desejada entre os valores de 30º a 90º, sendo 60º
considerado adequado;
- Passo 4: Determinar o ganho requerido ao compensador por meio do valor assumido pela
magnitude da função de transferência de laço aberto na frequência de corte escolhida,

30
estabelecendo assim que o controlador leve o sistema a um ganho unitário em malha fechada.
Para a obtenção do ganho, substitui-se o valor da frequência de cruzamento em
FTLAscv(s), obtendo-se o valor correspondente e substituindo-o na seguinte expressão:
2010dBG
G = (2.60)
sendo:
• GdB – valor do ganho em decibéis encontrado a partir do ganho da FTLAscv(s);
• G – valor do ganho absoluto empregado para se encontrar os componentes do
compensador.
- Passo 5: Encontrar o avanço de fase solicitado ao compensador, determinado de acordo com
a expressão (2.61), sendo M a margem de fase desejada e P a defasagem provocada pelo
sistema.
90M Pα = − − (2.61)
- Passo 6: Selecionar o tipo de compensador a ser utilizado, adotando as seguintes condições:
• compensador tipo 1: quando não existir a necessidade de avanço de fase;
• compensador tipo2: se o avanço de fase for menor que 90º;
• compensador tipo 3: quando o avanço de fase se encontrar entre 90º e 180º.
- Passo 7: Calcular o fator k a partir da expressão (2.35), (2.42) ou (2.51) para o compensador
tipo 1, 2 ou 3, respectivamente.
- Passo 8: Alocar os zeros e polos do compensador e, a partir de um valor arbitrário de um dos
componentes, dimensionar os demais elementos do compensador, conforme foi deduzido nas
seções anteriores do seguinte modo:
• Compensador tipo 1: equação (2.38);
• Compensador tipo 2: equações (2.43) a (2.45);
• Compensador tipo 3: equações (2.52) a (2.56).
- Passo 9: Traçar o diagrama de Bode da função de transferência do compensador Cv(s).
- Passo 10: Traçar o diagrama de Bode da função de transferência de malha laço aberto com
compensação FTLAccv(s), utilizando a expressão (2.62).
( ) ( ) ( )ccv scv vFTLA s FTLA s C s= ⋅ (2.62)

31
- Passo 11: Verificar por meio de simulação computacional se os requisitos do projeto foram
atendidos.
2.6.5 - CONTROLE EM MODO CORRENTE MÉDIA
O controle em modo corrente média é uma alternativa interessante, pois apresenta uma
inerente proteção contra sobrecorrente, possibilita o paralelismo de conversores, possui
imunidade a ruídos e proporciona uma frequência de comutação constante. Porém, requer um
sensor adicional se comparado ao controle em modo de tensão [27].
A estratégia de controle se baseia em duas malhas. A primeira malha interna tem por
objetivo controlar a corrente no indutor, enquanto a malha externa controla a tensão de saída,
como mostra a Figura 2.30
Cv(s) 1+Ci(s) Fm(s) Gi(s)
He(s) Hi(s) Ci(s)
Z(s)
Malha de Corrente--
Hv(s)
Malha de Tensão
d IL1 VOVC IrefVref Cv(s) 1+Ci(s) Fm(s) Gi(s)
He(s) Hi(s) Ci(s)
Z(s)
Malha de Corrente--
Hv(s)
Malha de Tensão
d IL1 VOVC IrefVref
Figura 2.30 – Diagrama de blocos do sistema de controle de um conversor CC-CC em modo corrente
média.
em que:
• Gi(s) – função de transferência da corrente do indutor em relação com a razão cíclica;
• Fm(s) – função de transferência do modulador PWM, expressa pela equação (2.58);
• Hi(s) – função de transferência do sensor de corrente, expressa geralmente em forma de
ganho proporcional;
• He(s) – função de transferência para testar a robustez da malha de corrente devido ao
efeito da comutação do interruptor, dada por:
( )2
21e
z z z
s sH s
Qω ω≈ + +
⋅ (2.63)
z sfω π= ⋅ (2.64)

32
2zQ
π= − (2.65)
• Ci(s) – função de transferência do compensador de corrente;
• Cv(s) – função de transferência do compensador de tensão;
• Z(s) – função de transferência da tensão de saída pela corrente do indutor;
• Hv(s) – função de transferência do sensor de tensão, representada pela equação (2.59).
Para desenvolver o projeto do compensador considerando o fator k, deve-se projetar
inicialmente a malha interna de corrente e, na sequência, a malha de controle de tensão,
adotando-se o seguinte roteiro segundo as recomendações de [27].
2.6.5.1 - MALHA INTERNA DE CORRENTE
- Passo 1: Traçar o diagrama de Bode da função de transferência de laço aberto sem
compensador (FTLAsci(s)), dada por (2.66).
( ) ( ) ( ) ( ) ( )sci i i m eFTLA s G s H s F s H s= ⋅ ⋅ ⋅ (2.66)
- Passo 2: Escolher a frequência de cruzamento de ganho fci desejada de tal forma que seja
menor ou igual a um quarto da frequência de comutação do conversor ( ).
- Passo 3: Estabelecer a margem de fase M desejada entre 20º e 40º, sendo 30º considerado
um valor adequado.
- Passo 4: Determinar o ganho do compensador através do valor assumido pela função de
transferência de laço aberto na frequência de corte.
Para a obtenção do ganho, deve-se proceder de forma análoga à seção 2.6.4,
substituindo o valor da frequência de cruzamento em FTLAsci(s), obtendo-se o valor
correspondente e substituindo-o na expressão (2.67).
2010dBG
G = (2.67)
- Passo 5: Encontrar o avanço de fase requerido para o controlador, determinado de acordo
com a expressão (2.61).
- Passo 6: Selecionar o tipo de compensador a ser utilizado, adotando-se as seguintes
condições:
• compensador tipo 1: quando não existir a necessidade de avanço de fase;

33
• compensador tipo2: se o avanço de fase for menor que 90º;
• compensador tipo 3: quando o avanço de fase se encontrar entre 90º e 180º.
- Passo 7: Calcular o fator k a partir da expressão (2.35), (2.42) ou (2.51) para o compensador
tipo 1, 2 ou 3, respectivamente
- Passo 8: Alocar os zeros e polos do compensador, dimensionando os componentes do
compensador a partir de um valor arbitrário do resistor R1 e das seguintes equações:
• compensador tipo 1: equação (2.38);
• compensador tipo 2: equações (2.43) a (2.45);
• compensador tipo 3: equações (2.52) a (2.56).
- Passo 9: Traçar o diagrama de Bode da função de transferência do compensador Ci(s).
- Passo 10: Traçar o diagrama de Bode da função de transferência de laço aberto com
compensação FTLAcci(s) utilizando a seguinte expressão (2.68).
( ) ( ) ( ) ( ) ( ) ( )cci i i i m eFTLA s C s G s H s F s H s= ⋅ ⋅ ⋅ ⋅ (2.68)
A partir do diagrama de blocos do sistema de controle da Figura 2.30, tem-se que a
função de transferência em malha fechada da malha interna é dada por (2.69).
( ) ( ) ( )( ) ( ) ( ) ( ) ( )1
m ii
i i i m e
F s G sFTMF s
C s G s H s F s H s
⋅=
+ ⋅ ⋅ ⋅ ⋅ (2.69)
2.6.5.2 - MALHA EXTERNA DE TENSÃO
- Passo 1: Esboçar o diagrama de Bode da função de transferência de laço aberto sem
compensador (FTLAscv(s)), dada por:
( ) ( ) ( ) ( ) ( )( )1scv i v iFTLA s FTMF s Z s H s C s= ⋅ ⋅ ⋅ + (2.70)
- Passo 2: Escolher a frequência de cruzamento de ganho fcv desejada. Para desacoplar as
malhas deve-se garantir uma malha de tensão mais lenta que a malha de corrente. Logo, fcv
deve ser escolhido entre 10 a 30 Hz.
- Passo 3: Estabelecer a margem de fase M desejada entre 45º e 90º, sendo 60º considerado
um valor adequado.
- Passo 4: Determinar o ganho requerido do compensador, procedendo da mesma maneira que

na se
- Pas
- Pas
nece
que 9
180º,
- Pas
tipo
- Pas
comp
comp
adota
- Pas
- Pas
comp
- Pas
atend
2.7 -
desen
conv
estad
de c
vanta
•
•
eção 2.6.4.
sso 5: Encon
sso 6: Sele
ssidade de a
90º; adota-s
, tem-se o c
sso 7: Calcu
1, 2 ou 3, re
sso 8: Alo
pensador p
pensador tip
am-se as ex
sso 9: Traça
sso 10: Traç
pensação FT
sso 11: Veri
didos.
CONSIDE
Neste cap
nvolviment
versores CC
dos presente
Apresento
conversores
agens em re
menores e
redução do
ntrar o avan
ecionar o ti
avanço de f
se o compe
compensado
ular o fator k
espectivame
car os zero
por meio d
po 1; (2.43)
xpressões (2
ar o diagram
çar o diagra
TLAccv(s), u
ccvFTLA
ificar por m
ERAÇÕES
pítulo, foram
o desse tr
C-CC clássic
e em suas es
ou-se també
s resultante
elação à célu
esforços de c
o tamanho,
nço de fase r
po de com
fase, utiliza-
ensador tipo
or tipo 3.
k a partir da
ente.
os e polos
de um val
) a (2.45) p
.52) a (2.56
ma de Bode d
ama de Bod
utilizando a
( ) ( )vs C s=
meio de simu
FINAIS
m abordado
abalho. Ini
cos, destaca
struturas.
ém a origem
es. Dentro
ula de comu
corrente no
peso e volu
requerido, d
mpensador a
-se o compe
o 2; quando
a expressão
do compen
lor arbitrár
para o comp
6).
do compens
de da funçã
seguinte ex
) ( )iFTMF s⋅
ulação com
os alguns a
icialmente,
ando-se tam
m da célula d
das carac
utação de do
s interrupto
ume dos ele
de acordo co
a ser utiliza
ensador tipo
o o avanço
o (2.35), (2.4
nsador, dim
rio do resi
pensador tip
sador Cv(s).
o de transfe
xpressão (2.7
) ( ) vZ s H⋅ ⋅
mputacional,
aspectos rel
são revisi
mbém o uso
de comutaç
cterísticas d
ois estados:
ores;
ementos mag
om a expres
ado, sendo:
o 1; se o ava
de fase se
42) ou (2.51
mensionando
istor R1, s
po 2; para o
.
erência de m
71);
( ) ((1 is C⋅ +
se os requi
levantes pa
itados conc
o da célula
ção de três e
da 3SSC,
gnéticos;
ssão (2.61).
quando nã
anço de fase
e encontrar
1) para o co
o os comp
sendo: (2.3
o compensa
malha laço
( ))s
isitos do pro
ara a comp
ceitos perti
de comutaç
estados e as
ressaltam-s
34
ão existir a
e for menor
entre 90º e
ompensador
ponentes do
38) para o
ador tipo 3,
aberto com
(2.71)
ojeto foram
preensão do
inentes aos
ção de dois
s topologias
se algumas
4
a
r
e
r
o
o
,
m
)
m
o
s
s
s
s

35
• apenas parte da energia é diretamente entregue da fonte para a carga por meio dos
interruptores, sendo que o restante é diretamente transferido por meio de elementos passivos
como o autotransformador e os diodos.
A modelagem de conversores estáticos utilizando o método do interruptor PWM
mostra-se uma abordagem simples e direta, visto que se baseia na substituição do conjunto
transistor-diodo por um modelo equivalente, cuja análise utiliza essencialmente conceitos
básicos de circuitos elétricos. Como resultado, tem-se a linearização do modelo torno em
torno da região de operação, o que exige a comprovação experimental e/ou simulação para
sua devida validação.
Por fim, são descritas as técnicas de controle em modo tensão e corrente média,
baseando-se na metodologia do fator k para sintonia dos compensadores. Essa estratégia
fundamenta-se na alocação de zeros e polos a um fator k de aproximação, garantido um
comportamento em torno da frequência de cruzamento similar ao de um sistema de primeira
ordem.

AN
3.1 -
a qua
aos c
most
depe
é rea
pertu
corre
3.2 -
e 3ª
cond
NÁLISE DO
CONSIDE
Este capítu
al é realizad
conversores
trada na Fig
Através da
ndendo da r
alizada separ
Para uma
urbação pelo
espondente.
MODELO
A 3SSC o
etapas da F
dução simult
O INTERRU
ERAÇÕES
ulo consiste
da de manei
s CC-CC c
gura 3.1, que
Figura 3.1 –
a análise do
região de op
radamente p
melhor com
o sinal (^),
O DO INTE
opera para D
Figura 3.2)
tânea dos se
UPTOR PW
DE TRÊ
INICIAIS
e na análise
ira semelha
clássicos, s
e por sua ve
c
Vcp
ic
– Célula de trê
o circuito, p
peração, mo
para cada re
mpreensão d
enquanto u
ERRUPTOR
D<0,5 com a
e com o blo
emiconduto
CAPÍTUL
WM ASSO
ÊS ESTAD
S
e do interrup
ante ao traba
ão investig
ez é compos
T2
S1
T1
D1
c1
ês estados pa
percebe-se q
odo de sobr
egião de op
das expressõ
um valor mé
R PWM E
a ação comp
oqueio dos
ores ativos.
LO 3
OCIADO À
DOS EM M
ptor PWM a
alho propos
gadas as pr
sta por dois
S2
D2
a
p
ia
c2
1
ara análise do
que o compo
reposição e
eração.
ões subsequ
édio é repre
M MODO
plementar d
dois semic
CÉLULA
CC
associado à
sto em [10].
ropriedades
interruptor
Vap
o interruptor
ortamento d
não sobrepo
uentes, repre
esentado po
DE NÃO S
dos interrup
ondutores S
DE COMU
à célula de tr
. De forma
invariante
res PWM.
PWM.
do converso
osição. Log
esenta-se um
or uma letra
SOBREPO
ptores S1-D2
S1 e S2, não
36
UTAÇÃO
rês estados,
semelhante
s da 3SSC
or é alterado
go, a análise
ma pequena
a maiúscula
OSIÇÃO
e S2-D1 (1ª
o havendo a
6
,
e
C
o
e
a
a
ª
a

37
T2
S1
T1
D1
S2
D2
c
a
p
Vcp
ia
c2
c1
ic
Vap
T2
S1
T1
D1
S2
D2
c
a
p
Vcp
c2
c1
ic
Vap
1ª Etapa 2ª Etapa
3ª Etapa 4ª Etapa
T2
S1
T1
D1
S2
D2
c
a
p
Vap
Vcp
c2
c1
ic
T2
S1
T1
D1
S2
D2
c
a
p
Vap
Vcp
c2
c1
ic
ia
ia ia
Figura 3.2 – Estágios de operação da 3SSC para a análise do interruptor PWM em modo de não
sobreposição.
3.2.1 - TENSÃO VCP E CORRENTE IA
De modo a descrever o comportamento da tensão entre os terminais ativo e comum e a
corrente no terminal ativo, utiliza-se a Figura 3.3. Observa-se que tanto a tensão vcp quanto a
corrente ia possuem comportamentos diferentes daqueles analisados na célula de dois estados,
o que se deve ao fato da 3SSC ser formada por duas células de dois estados. Durante a 1ª e a
3ª etapas, o par S2-D1 conduz enquanto S1-D2 permanece bloqueado, de modo que a corrente ia
é idêntica à corrente ia2 durante este intervalo de tempo. Já durante a 2ª e 4ª etapas, observa-se
o bloqueio dos dois interruptores S1 e S2 e, portanto, o valor da corrente ia é nulo.
Analisando a tensão vcp, nota-se por meio da simples inspeção do circuito durante a 1ª e
3ª etapas que o valor da tensão vcp é a metade do valor da tensão reversa do diodo em
bloqueio. Já para a 2ª e 4ª etapas, os dois diodos estão em condução, sendo que a tensão vcp
assume um valor nulo.

38
Figura 3.3 – Tensão vcp e corrente ia nas células que compõem a 3SSC em modo de não sobreposição.
A corrente ia e a tensão vap são apresentadas matematicamente como:
( )
( )
( ) ( )
( )
2
1
, 0
0,2
2 1,
2 22 1
0,2
a s
ss
a sa s
s s
i t t D T
TD T t
i t DTi t t T
DT t T
< < ⋅ ⋅ < <= ⋅ +
< < ⋅
⋅ + ⋅ < <
(3.1)
( )
( )
( ) ( )
( )
2
1
, 02
0,2
2 1,
2 2 22 1
0,2
cps
ss
cpcp s
s
s s
v tt D T
TD T t
v tv t DT
t T
DT t T
< < ⋅
⋅ < <= ⋅ + < < ⋅ ⋅ + ⋅ < <
(3.2)
Tempo (s)
ia
ia1
ia2
Tempo (s)
vcp
vcp1
vcp2
T/2 TD.TT.(1-2D)/2
0
0
D.T T.(1-2D)/2

39
Como o sinal de comando do interruptor S2 é defasado de 180° em relação ao
interruptor S1, pode-se considerar o comportamento das variáveis com uma frequência igual
ao dobro da frequência de comutação.
3.2.2 - TENSÃO E CORRENTE INSTANTÂNEAS NOS TERMINAIS DO
INTERRUPTOR PWM
Considerando agora as tensões entre os terminais a-p e c-p, bem como as correntes nos
terminais a e c, tem-se a Figura 3.4 para o intervalo de tempo correspondente a 0<t<DTs.
Figura 3.4 – Tensões e correntes instantâneas nos terminais do interruptor PWM em modo de não
sobreposição.
Analisando a Figura 3.3, percebe-se que a corrente ic apresenta valor igual ao dobro da
corrente ia para a 1ª e 3ª etapas, sendo nula na 2ª e 4ª etapas. Já a tensão vcp corresponde à
metade do valor da tensão vap na 1ª e 3ª etapas, sendo nula na 2ª e 4ª etapas.
Descrevendo as relações citadas anteriormente, têm-se as equações (3.3) e (3.4), as
quais apresentam o valor de ia em função de ic e a vcp em relação a vap.
( )( )
, 02
0,2
cs
a
ss
i tt D T
i tT
D T t
< < ⋅=
⋅ < <
(3.3)
Tempo (s)
vap
vcp
Tempo (s)
ic
ia
TD.TD.T T.(1-2D)/2 T.(1-2D)/2
0
0
T/2

40
( )( )
, 02
0,2
ap
cp
v tt D T
v tT
D T t
< < ⋅=
⋅ < <
(3.4)
As grandezas de maior interesse para os conversores CC-CC são os valores médios de
tensões e correntes [10]. Assim, é de extrema importância determiná-los para realizar a
análise do comportamento CC e CA dos conversores frente a pequenas perturbações.
Os valores assumidos pela tensão vap possuem certa peculiaridade, pois esses terminais
são geralmente conectados a uma fonte de tensão ou a um capacitor de filtro, sendo que
ambos possuem uma resistência parasita em série. Considerando esse parâmetro, obtém-se um
comportamento oscilatório na tensão vap devido à resistência série do capacitor absorver uma
corrente pulsante com amplitude de pico a pico igual ao valor máximo da amplitude da
corrente do terminal comum. Desprezando-se a ondulação de corrente no terminal comum do
interruptor PWM e considerando apenas a corrente média Ic que é efetivamente absorvida
pelo capacitor, obtém-se a ondulação vr da tensão vap dada por:
r e cv R I= ⋅ (3.5)
A Figura 3.5 representa as tensões e correntes instantâneas e médias nos terminais do
interruptor PWM.
a) Tensão vap e corrente ia b) Tensão vcp e corrente ic
Figura 3.5 – Tensão e corrente instantâneas e médias nos terminais do interruptor PWM modo de não sobreposição.
Ten
são
v cp(V
)C
orre
nte
i c (A
)

41
Realizando a comparação dos valores médios de ia(t) em função de ic(t) e vcp(t) em
relação a vap(t), tem-se:
( ), 0
2
0,2
cs
as
It D T
i tT
D T t
< < ⋅= ⋅ < <
(3.6)
( )( )1
, 02
0,2
ap rs
cp
ss
V V Dt D T
v tT
D T t
− ⋅ −< < ⋅=
⋅ < <
(3.7)
Aplicando a definição de valor médio para a corrente ia, tem-se:
( )0,5
0
1
0,5
sT
a as
I i t dtT
⋅
= ⋅⋅
( ) 0,5
0
1 10
0, 5 2 0,5
s s
s
D T Tc
as s D T
i tI dt dt
T T
⋅ ⋅
⋅
= ⋅ + ⋅⋅ ⋅
1
0,5 2c
a ss
II D T
T= ⋅ ⋅ ⋅
⋅
a cI D I= ⋅ (3.8)
Determinando o valor médio da tensão Vcp e aplicando a definição de valor médio,
tem-se:
( )0,5
0
1
0,5
sT
cp cps
V v t dtT
⋅
= ⋅⋅
( ) ( ) 0,5
0
11 10
0,5 2 0,5
s s
s
D T Tap r
cps s D T
v t V DV dt dt
T T
⋅ ⋅
⋅
− ⋅ −= ⋅ + ⋅
⋅ ⋅
( )11
0, 5 2ap r
cp ss
V V DV D T
T
− ⋅ − = ⋅ ⋅ ⋅⋅
( )1cp ap rV V V D D = − ⋅ − ⋅ (3.9)
Ressalta-se que essas características são invariantes independentemente da topologia do
conversor CC-CC baseado na célula de três estados operando em modo de não sobreposição.
O único parâmetro que se altera é a tensão Vr, pois depende da resistência re que varia de
circuito para circuito segundo (3.5).

3.3 -
Figur
some
contr
3.3.1
termi
nota-
de trê
cond
corre
etapa
ia ser
MODELO
c
Vcp
ic
c
Vcp
ic
ra 3.6 – Estág
A 3SSC o
ente na 2ª
rolados na 1
1 - TENSÃO
Caracteriz
inal a, tem-
-se que amb
ês estados o
dução simul
entes ia1 e ia
a, há a inver
rá idêntica à
O DO INTE
1ª Et
3ª Et
p
T2
S1
T1
D1
a
c1
ia
T2
S1
T1
D1
a
c1
ia
gios de opera
opera para D
e 4ª etapas
1ª e 3ª etapa
O VAP E CO
zando o co
-se a Figura
bas apresent
operando em
ltânea dos i
a2. Já duran
rsão de tais
à corrente d
ERRUPTOR
tapa
tapa
S2
D2
a
c2
S2
D2
c2
ção da 3SSC
D>0,5 com
s da Figura
as, mas não
ORRENTE
mportamen
a 3.7. Anali
tam formato
m modo de
nterruptore
nte a 2ª etap
estados de
do interrupto
R PWM E
V
c
V
Vap
Vap
para a análi
m a ação co
a 3.6. Há c
ocorre o bl
E IA
nto da tens
isando o co
o diferente
não sobrepo
s S1 e S2. L
pa, o par S2-
comutação
or que cond
M MODO
T2
S1
T1
D1
c
Vcp
ic
T2
S1
T1
D1
c
Vcp
ic
2
4
se do interru
mplementar
condução s
oqueio simu
ão entre o
omportamen
daquele da
osição. Dur
Logo, o valo
-D1 conduz
o, sendo que
uzir.
DE SOBR
S2
D2
a
p
ia
c2
c1
S2
D2
a
p
c2
c1
2ª Etapa
4ª Etapa
ia
ptor PWM e
r dos interr
imultânea d
ultâneo ness
s terminais
nto da tensã
célula de d
rante a 1ª e
or da corren
e o par S1-D
e em ambos
REPOSIÇÃ
Vap
Vap
em modo de s
ruptores S1-
dos dois in
se modo.
s a-c e a c
ão vap e da
dois estados
3ª etapas, o
nte ia será
D2 é bloque
s os estágios
42
O
obreposição.
-D2 e S2-D1
nterruptores
corrente no
corrente ia,
e da célula
observa-se a
a soma das
eado. Na 4ª
s a corrente
2
1
s
o
,
a
a
s
ª
e
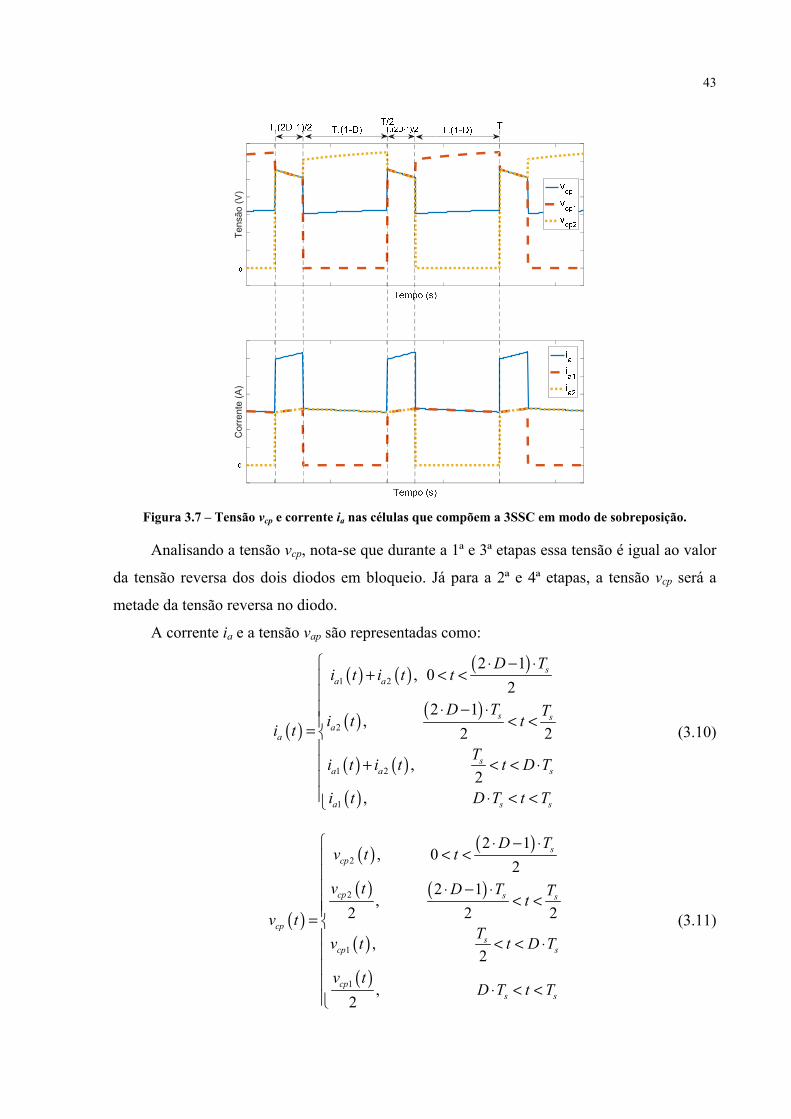
43
Figura 3.7 – Tensão vcp e corrente ia nas células que compõem a 3SSC em modo de sobreposição.
Analisando a tensão vcp, nota-se que durante a 1ª e 3ª etapas essa tensão é igual ao valor
da tensão reversa dos dois diodos em bloqueio. Já para a 2ª e 4ª etapas, a tensão vcp será a
metade da tensão reversa no diodo.
A corrente ia e a tensão vap são representadas como:
( )
( ) ( ) ( )
( ) ( )
( ) ( )( )
1 2
2
1 2
1
2 1, 0
22 1
,2 2
,2
,
sa a
s sa
a
sa a s
a s s
D Ti t i t t
D T Ti t t
i t
Ti t i t t D T
i t D T t T
⋅ − ⋅+ < <
⋅ − ⋅
< <= + < < ⋅ ⋅ < <
(3.10)
( )
( ) ( )
( ) ( )
( )( )
2
2
1
1
2 1, 0
22 1
,2 2 2
,2
,2
scp
cp s s
cp
scp s
cps s
D Tv t t
v t D T Tt
v tT
v t t D T
v tD T t T
⋅ − ⋅< <
⋅ − ⋅
< <= < < ⋅ ⋅ < <
(3.11)
Ten
são
(V)
Cor
rent
e (A
)

frequ
não
estad
3.3.2
INTE
a cor
assum
tensã
Figu
quais
Constata
uência igual
sobreposiçã
dos, sendo q
2 - TENSÃO
ERRUPTO
Analisan
rrente ic apr
me um valo
ão vap na 1ª
ura 3.8 – Ten
Descreven
s descrevem
a-se que o
l ao dobro
ão devido à
que o sinal d
O E CO
OR PWM
ndo a Figura
resenta valo
or idêntico à
e 3ª etapas,
nsão e corren
ndo as relaç
m o valor de
comportam
da frequênc
à associação
de comando
ORRENTE
a 3.3, perce
or igual ao d
à ic na 1ª e
assumindo
te instantâne
ções citadas
e ia em funçã
mento das v
cia de comu
o dos dois
o de S2 é def
E INSTA
ebe-se atrav
dobro da co
3ª etapa. Já
o para a 2ª e
eas nos termin
s anteriorm
ão de ic e vc
variáveis in
utação. Tal
interruptor
fasado em 1
ANTÂNEA
vés de uma
orrente ia pa
á a tensão v
4ª etapa um
nais do interr
mente, têm-s
cp em relaçã
stantâneas
fato també
res associad
180° de S1.
S NOS
simples insp
ara o 2º e 4
cp apresenta
m valor idên
ruptor PWM
e as equaçõ
ão a vap.
está associ
ém ocorre n
dos às célu
TERMIN
peção de ci
4º estágios,
a a metade
ntico à tensã
M modo de sob
ões (3.12) e
44
iado a uma
no modo de
ulas de dois
NAIS DO
ircuitos que
enquanto ia
do valor da
ão vap.
breposição.
e (3.13), as
4
a
e
s
O
e
a
a
s

45
( )( ) ( )
( ) ( )
2 1, 0
22 1
,2 2 2
sc
a
c s s
D Ti t t
i ti t D T T
t
⋅ − ⋅< <= ⋅ − ⋅ < <
(3.12)
( )( ) ( )
( ) ( )
2 1, 0
22 1
,2 2 2
sap
cpt
ap s
D Tv t t
v tv t D T T
t
⋅ − ⋅< <= ⋅ − ⋅ < <
(3.13)
Conforme foi mencionado anteriormente, as grandezas de maior interesse para os
conversores CC-CC são os valores médios de tensões e correntes [10]. Devido à resistência
série do capacitor absorver uma corrente pulsante com amplitude de pico a pico igual ao valor
máximo da amplitude da corrente do terminal comum, obtém-se um comportamento
oscilatório da tensão vap. Desprezando a ondulação da corrente no terminal comum do
interruptor PWM e considerando apenas a corrente média Ic que é efetivamente absorvida
pelo capacitor, obtém-se a ondulação vr da tensão vap dada por:
r e cv R I= ⋅ (3.14)
A Figura 3.9 mostra as tensões e correntes instantâneas e médias nos terminais do
interruptor PWM.
a) Tensão vap e corrente ia b) Tensão vcp e corrente ic
Figura 3.9 – Tensão e corrente instantâneas e médias nos terminais do interruptor PWM modo de sobreposição.
Tempo (s)Com ondulaçãoSem ondulaçãoMédia geral
Tempo (s)
0
0
T.(2D-1)/2 T.(1-D) T.(1-D)T
Vap
-VrD'
VrD'
T.(2D-1)/2T/2
Tempo (s)InstantâneaMédia geral
Tempo (s)
0
0
T.(2D-1)/2T.(1-D)
T/2T.(1-D) T
T.(2D-1)/2

46
Comparando o valor médio referente a cada período de tempo da corrente no terminal
a em função de ic, obtém-se:
( )
( )
2 1, 0
22 1
,2 2 2
sc
a
sc s
D TI t
ID TI T
t
⋅ − ⋅< <= ⋅ − ⋅ < <
(3.15)
Aplicando agora essa comparação para Vcp em relação a Vap, tem-se:
( ) ( )
( ) ( )
2 11 , 0
21 2 1
,2 2 2
sap r
cp
ap r s s
D TV V D t
VV V D D T T
t
⋅ − ⋅− ⋅ − < <= − ⋅ − ⋅ − ⋅ < <
(3.16)
O valor médio da corrente Ia pode ser determinado como:
( )0,5
0
1
0,5
sT
a as
I i t dtT
⋅
= ⋅⋅
( )
( )
2 10,52
2 10
2
1 1
0,5 0,5 2
s
s
s
D TT
ca c
s s D T
II I dt dt
T T
⋅ − ⋅⋅
⋅ − ⋅
= ⋅ + ⋅⋅ ⋅
( ) ( )2 11 1
10,5 2 0,5 2
s ca c s
s s
D T II I D T
T T
⋅ − ⋅= ⋅ ⋅ + ⋅ ⋅ − ⋅
⋅ ⋅
( ) ( )12 1 1a c s
s
I I T D DT
= ⋅ ⋅ ⋅ ⋅ − + −
a CI D I= ⋅ (3.17)
Analogamente, o valor médio Vcp é dado por:
( )0,5
0
1
0,5
sT
cp cps
V v t dtT
⋅
= ⋅⋅
( )( )
( )( )
2 10,52
2 10
2
11 11
0, 5 0, 5 2
s
DT
ap r
cp ap r
Ds s
V V DV V V D dt dt
T T
⋅ −⋅
⋅ −
− ⋅ −= − ⋅ − ⋅ + ⋅
⋅ ⋅
( ) ( ) ( ) ( )12 11 1
1 10,5 2 0,5 2
ap r
cp ap rs s
V V DDV V V D D T
T T
− ⋅ −⋅ − = ⋅ − ⋅ − ⋅ + ⋅ ⋅ − ⋅ ⋅ ⋅

tamb
que s
insta
dois
para
são c
da ra
3.4 -
sendo
com
Ic, po
Ressalta-s
bém são inv
se altera é a
De acord
antâneas nos
modos de
as duas reg
capazes de
azão cíclica.
MODELO
Sumarizan
o:
Outra man
um transfor
Comparan
Considera
ode-se obter
cpVT
=
se que essa
variantes in
a tensão vr, p
do com as
s terminais
operação d
giões sendo
representar
.
O CC DO IN
ndo as equa
neira de in
rmador isol
ndo (3.19) c
ando o term
r o circuito
`
1ap r
s
V VT
⋅ −
cpV =
as caracterís
ndependente
pois depend
s análises
do interrup
da 3SSC. Po
o que, porta
o converso
NTERRUP
ações encont
cV
nterpretar a
ador. Assim
com (3.22),
N
N
mo da queda
equivalente
( )1rV D ⋅ − ⋅
(ap rV V= − ⋅
sticas para
emente da t
de da resistê
previament
ptor PWM
orém, os va
anto, os me
or adequada
PTOR PWM
tradas anter
(a
cp ap
I D
V V V
=
= −
' 1D = −
r eV R=
equação (3
m, tem-se a
p p
s s
N V
N V=
obtém-se:
1p
s
N V
N D V= =
de tensão e
e da Figura
(2sT D⋅ ⋅ −
( )1 D D− ⋅
a operação
topologia d
ência re conf
te desenvo
apresentam
alores médi
smos mode
amente ao l
M
riormente, t
)'c
r
I
V D D
⋅
⋅ ⋅
D−
cI⋅
3.19) consi
relação de t
s
p
I
I=
ap c
cp a
V I
V I=
em Vcp refe
3.10.
) ( )1 1 D− + −
o em modo
do converso
forme (3.14
olvidas, as
m caracterís
os dessas v
elos CC e C
longo de to
em-se:
ste em esta
transformaç
rente à resi
)
o de não so
or. O único
4).
tensões e
sticas distin
variáveis sã
CA de pequ
da a faixa d
abelecer um
ção:
istência Re e
47
(3.18)
obreposição
o parâmetro
e correntes
ntas para os
ão idênticos
uenos sinais
de variação
(3.19)
(3.20)
(3.21)
ma analogia
(3.22)
(3.23)
e à corrente
7
)
o
o
s
s
s
s
o
)
)
)
a
)
)
e

mesm
Ress
3.5 -
e vcp
form
envo
se a
equa
(3.27
mode
mane
Figura 3
Nota-se
mas equaçõ
alta-se tamb
MODELO
Para o mo
p) sofrem in
ma a simpl
olvidas varia
Existem
razão cíclic
ações:
Derivando
7).
Através da
elo CA com
eira semelha
3.10 – Modelo
que, aplican
ões represen
bém que ess
O CA DO IN
odelo CA, d
nfluência de
lificar a an
am com um
duas situaç
ca constante
cV
o ambos os
as equações
m razão cíc
ante ao mod
a
Vap
o CC do inter
ndo as leis b
ntadas por
se arranjo é
NTERRUP
deve-se cons
e suas respe
nálise do
ma frequênci
ções para a a
e e as tensõ
I
cpcpV v D+ =
lados das e
ˆcpv
s (3.26) e (3
clica consta
delo CC, res
p
Ia
1:D
rruptor PWM
básicas de c
(3.19), val
é similar ao
PTOR PWM
siderar que
ectivas peq
comportam
ia muito infe
análise CA
ões e corren
(a aI i D+ = ⋅
( apapV v⋅ +
equações (3
ai D= ⋅
( ˆapD v= ⋅ −
3.27), pode-
ante do inte
sultando na
D.D’.R
M da célula d
circuitos elé
idando assi
modelo CC
M
todos os pa
quenas pertu
mento CA,
ferior à frequ
do interrup
nte sofrend
( )c cI i+
) ( )ccI i− +
3.24) e (3.2
ci⋅
)ˆ'e cR D i⋅ ⋅
-se represen
erruptor PW
a Figura 3.1
cIc
Re
Vcp
e comutação
étricos à Fig
im o mode
C da célula d
arâmetros d
urbações ( d
considera-s
uência de co
tor PWM. N
o perturbaç
'eR D ⋅ ⋅
25), obtém-s
ntar um circu
WM da célu
1.
de três estad
gura 3.10, o
elo CC do
de dois estad
do circuito (
d , îa, îc, apv
se que as
omutação.
No primeiro
ções. Assim
se as relaçõ
uito equival
ula de três
48
dos.
obtêm-se as
interruptor.
dos.
(d, ia, ic, vap
ape cpv ). De
grandezas
o caso, tem-
m, têm-se as
(3.24)
(3.25)
ões (3.26) e
(3.26)
(3.27)
lente para o
estados de
8
s
.
p
e
s
-
s
)
)
e
)
)
o
e

49
a c
p
ia
1:D
ic
D.D’.Re
vap
vcp
Figura 3.11 – Modelo CA do interruptor PWM da célula de comutação de três estados com a razão cíclica
constante.
Já para o segundo caso, todos os parâmetros são perturbados, obtendo-se as seguintes
equações:
( ) ( )ˆˆ ˆa a c cI i D d I i+ = + ⋅ + (3.28)
( ) ( ) ( ) ( ) ˆ ˆˆˆ ˆ 1cp cp ap ap c c eV v D d V v I i R D d + = + ⋅ + − + ⋅ ⋅ − + (3.29)
Desprezando os termos em que as perturbações se multiplicam, juntamente após
algumas manipulações matemáticas, obtém-se a seguinte relação das correntes nos terminais
ativo e o comum:
a c ci D i I d= ⋅ + ⋅ (3.30)
De modo similar, as tensões vap e vcp são dadas por (3.31) e (3.32), respectivamente.
( ) ˆˆˆ ˆ 1cp ap e c Dv D v D R D i d V= ⋅ − ⋅ ⋅ − ⋅ + ⋅ (3.31)
sendo:
( ')D ap c eV V I R D D= + ⋅ ⋅ − (3.32)
Interpretando a parcela de Ic em (3.30) como uma fonte de corrente e a tensão VD em
(3.31) como uma fonte de tensão, sendo que ambas sofrem interferência com a perturbação da
razão cíclica e, adaptando-se o modelo CA com razão cíclica constante, tem-se a Figura 3.12.
a c
p
ia
1:D
ic
D.D’.Re
vapvcp
d.Vd
d.Ic
Figura 3.12 – Modelo CA do interruptor PWM da célula de comutação de três estados.

refer
são s
3.6 -
célul
da co
regiã
as va
estad
opera
temp
sobre
quan
um e
perce
tensã
tensã
Outra man
rida ao lado
Figura 3
Ressalta-s
semelhantes
CONSIDE
Neste cap
la de três es
orrente ia,
ão de operaç
ariáveis vcp e
dos. Tal fato
ando assim
po distintos
Comparan
eposição em
nto a tensão
esforço men
Comparan
ebe-se que
ão vcp são nu
ão vcp equiv
neira de rep
primário do
a i
v
3.13 – Modelo
se que ambo
s às respecti
ERAÇÕES
pítulo, foram
stados e tam
comprova-s
ção, isto é, m
e ia possuem
o se deve à
com uma f
para cada e
ndo-se o co
m relação a
têm seu va
nor de corren
ndo agora a
enquanto a
ulas, a 3CC
valente à me
presentar a
o transform
ia
ap
d.Ic
d.Vd__D
d.Vd__D
o CA do inter
os os model
ivas represe
FINAIS
m abordado
mbém para o
se que o co
modo de so
m uma dinâ
célula de tr
frequência c
etapa de ope
omportamen
ao caso da c
alor reduzid
nte no inter
a célula de
a 2SSC apre
CS em modo
etade da corr
Figura 3.12
mador, result
p
1:D
rruptor PWM
los CC e CA
entações da
os alguns a
o processo d
omportamen
obreposição
âmica difere
rês estados s
com o dobro
eração.
nto da ten
célula de d
do pela meta
rruptor e no
dois estad
esenta um i
o de sobrepo
rrente ic e da
2 consiste e
tando na Fig
M da célula d
A de pequen
célula de do
aspectos re
de modelag
nto do conv
e não sobre
ente quando
ser formada
o da frequên
são vcp e d
dois estados
ade no mod
diodo.
dos com o m
intervalo de
osição apre
a tensão vap,
em reposicio
gura 3.13.
ic
D.D’.Re
vcp
e comutação
nos sinais da
ois estados.
levantes pa
em. Com a
versor é alt
eposição. O
comparada
a por duas c
ncia de com
da corrente
, observa-se
do de não so
modo de so
e tempo em
senta um va
, respectivam
onar a font
c
de três estad
a célula de t
ara a comp
análise da t
terado depe
Observa-se ta
as com a cél
células de d
mutação e in
e ia no mo
e que tanto
obreposição
obreposição
m que a cor
alor de corr
amente. Log
50
e de tensão
dos.
três estados
preensão da
tensão vcp e
endendo da
ambém que
lula de dois
ois estados,
ntervalos de
odo de não
o a corrente
o, indicando
o da 3SSC,
rrente ia e a
rente ia e da
go, na 3SSC
0
o
s
a
e
a
e
s
,
e
o
e
o
,
a
a
C

51
tem-se uma redução da corrente do diodo (analisando a corrente ic) e da tensão máxima do
interruptor (analisando a tensão vcp).
Mesmo que a célula de três estados apresente uma dinâmica diferente em relação às
duas regiões de operação, os valores médios da corrente ia e da tensão vcp são similares.
Assim, o modelo do interruptor PWM aplicado à célula de três estados resulta em um arranjo
semelhante àquele da célula de dois estados, conforme mostra a Figura 2.20 e Figura 3.12.
Assim, pode-se realizar a modelagem de pequenos sinais de um conversor CC-CC
baseado na 3SSC através do interruptor PWM proposto em [10] por meio de uma das
seguintes possibilidades:
• considerar que a 3SSC é composta por duas células de dois estados, com a presença de
dois interruptores PWM;
• considerar que a 3SSC é análoga a uma célula de comutação de dois estados operando
com o dobro da frequência de comutação.

4.1 -
repre
o mo
[28],
prete
• g
• v
entra
• v
cíclic
• Z
• Z
• v
no in
• i
razão
teóric
D<0,
consi
PWM
modo
CONSIDE
Este capít
esentar o co
odelo do int
Como a 3
isso possib
ende-se obte
ganho estáti
vo(s)/vi(s) –
ada;
vo(s)/d(s) –
ca;
Zi(s) – funç
Zo(s) – funç
vo(s)/iL(s) –
ndutor;
iL(s)/d(s) –
o cíclica.
Prosseguin
cos com a p
,5 (modo de
Deve-se r
iste em ded
M, validand
Por fim, te
o tensão e e
MODE
ERAÇÕES
tulo consist
onversor Ću
erruptor PW
SSC pode s
bilita a util
er as seguin
ico;
– função de
função de t
ão de transf
ção de trans
– função de
função de
ndo com o
planta por
e não sobrep
essaltar que
duzir as prin
o-as para to
em-se o pro
em modo co
ELAGEM
INICIAIS
te no desen
uk baseado n
WM.
ser concebid
ização do m
ntes relações
transferênc
transferênci
ferência da
ferência da
transferênc
transferênci
processo d
simulação,
posição) e D
e a principa
ncipais funç
odas as regiõ
ojeto dos sis
orrente médi
CAPÍTUL
DO CONV
S
nvolviment
na célula 3S
da a partir d
modelo do
s:
cia da tensão
ia da tensão
impedância
impedância
cia da tensã
ia da corren
da validação
a análise é
D>0,5 (mod
al contribui
ções de tran
ões da razão
stemas de co
ia.
LO 4
VERSOR C
to de um m
SSC do tipo
de duas célu
interruptor
o de saída f
o de saída em
a de entrada
a de saída;
ão de saída
nte no indu
o, que cons
realizada p
do de sobrep
ção em rela
nsferência u
o cíclica.
ontrole do c
CC-CC ĆUK
modelo de
o B operand
ulas de com
PWM prop
frente a pert
m relação a
a;
frente a per
utor em rela
siste na com
para duas co
posição).
ação ao trab
utilizando o
conversor Ć
K
pequenos
do em MCC
mutação de d
posto em [1
turbações d
a perturbaçõ
erturbações
ação a pertu
mparação do
ondições de
balho propo
modelo do
Ćuk 3SSC em
52
sinais para
C utilizando
dois estados
10]. Assim,
da tensão de
ões da razão
da corrente
urbações da
os modelos
e operação:
osto em [8]
interruptor
m MCC em
2
a
o
s
,
e
o
e
a
s
:
]
r
m

4.2 -
vanta
um ú
entra
prese
a pro
elem
elem
estad
MODELA
O conver
agens, pode
único estág
ada e na sa
ença de qua
Na Figura
opriedade da
Considera
mentos paras
Fi
Aplicando
mentos paras
dos [6], obté
AGEM DE
rsor Ćuk c
em-se citar:
io de proce
aída [8]. Co
atro element
a 2.14 é apre
a inversão b
V
Figura
ando també
sitas, tem-se
igura 4.2 – M
o o modelo
sitas às dua
ém-se a Figu
PEQUENO
clássico foi
: redução d
essamento d
omo desvan
tos passivos
esentado o c
bilateral à F
Vi
L1
a 4.1 – Conve
ém o mode
e a Figura 4.
Modelo CA do
o CA do in
s células de
ura 4.3.
OS SINAIS
i originalm
das perdas p
de potência
ntagem, ap
s em sua est
conversor Ć
igura 2.12,
L
ersor Ćuk 3S
elo CA do
.2.
o interruptor
nterruptor P
e comutação
S
mente propo
por conduçã
a com carac
presenta um
trutura [1].
Ćuk 3SSC e
tem-se a Fi
L2
Co
D1 D2
S1 S2
SC com inver
interruptor
PWM, sem o
PWM repre
o de dois e
osto em 19
ão nos inter
cterística de
ma maior co
mpregando
gura 4.1.
R
C1
rsão bilateral
r PWM da
os elementos p
esentado pe
stados prese
977 [29].
rruptores; p
e fonte de
omplexidad
o a célula B.
l.
a Figura 2.
parasitas.
ela Figura 4
entes na cé
53
Entre suas
presença de
corrente na
de devido à
. Aplicando
20 sem os
4.2 sem os
élula de três
3
s
e
a
à
o
s
s
s

54
Vi
L1 L2
R
C1
Co
RCO
RC1
RL2RL1
D 1IC.d
D 1 IC.d
Vd.d__D
Vd.d__D
Vd.d__D
Vd.d__D
Figura 4.3 – Conversor Ćuk 3SSC associado ao modelo CA do interruptor PWM.
Empregando técnicas associadas às leis de circuitos elétricos para a Figura 4.3, é
possível obter as funções de transferências essenciais para a realização do controle de
operação do conversor em malha fechada. Para isto, deve-se iniciar com a análise CC,
prosseguindo assim para a análise CA.
4.2.1 - ANÁLISE CC
Para análise CC do conversor Ćuk 3SSC deve-se realizar algumas considerações no
estudo do modelo CA do interruptor PWM mostrado na Figura 4.3:
1. A razão cíclica é constante e igual a D, sendo ˆ 0d = ;
2. O capacitor encontra-se em circuito aberto;
3. O indutor é representado apenas por sua respectiva resistência intrínseca;
4. A tensão de entrada é substituída pelo seu valor médio Vi;
Vi
VO+
-
D 1 D 1
VT VT
Ic1 Ic2
Ic2.DIc1.D
R
Vap+
-
+
-+
-
RL2RL1
Figura 4.4 – Conversor Ćuk 3SSC associado ao modelo CC do interruptor PWM.

55
Com isto, obtém-se o circuito da Figura 4.4, representando assim o conversor Ćuk
3SSC associado ao modelo CC do interruptor PWM. Realizando a análise do circuito da
Figura 4.4, chega-se à seguinte expressão:
1 2 1 2 0c c o c cI I I D I D I− − − + ⋅ + ⋅ = (4.1)
Pela relação do transformador (VT), tem-se:
1 2c c cI I I= = (4.2)
A corrente média de saída é dada por:
oo
VI
R= (4.3)
Determina-se a corrente Ic por meio da substituição das equações (4.2) e (4.3) em (4.1),
resultando em:
( )2 1
o
c
V
RID
−=
⋅ − (4.4)
Aplicando a lei de Kirchhoff das tensões à malha de Vi, Vo e Vap, pode-se escrever:
1 1 2i L L L o o apV R I R I V V= ⋅ − ⋅ − − (4.5)
Isolando Vap em (4.5), obtém-se:
1 22ap L c L o o iV R I D R I V V= − ⋅ ⋅ ⋅ − ⋅ − − (4.6)
Realizando as análises das malhas, encontram-se as expressões (4.7) e (4.8).
12i c L T ap apV I D R V D V V= − ⋅ ⋅ ⋅ + + ⋅ − (4.7)
12i c L T ap apV I D R V D V V= − ⋅ ⋅ ⋅ − + ⋅ − (4.8)
Isolando VT em (4.7), resulta em:
( ) 11 2T i ap L cV V D V R I D= + − ⋅ + ⋅ ⋅ ⋅ (4.9)
Manipulando as equações (4.7), (4.8) e (4.9) obtém-se a expressão que representa o
ganho estático em (4.10).
( )
( ) ( )2 22 1
1
1o
i L L
R D DV
V R R D R D
⋅ ⋅ −=
+ ⋅ − + ⋅ (4.10)

56
Ressalta-se que, eliminando os componentes parasitas da expressão (4.10), a expressão
do ganho estático torna-se idêntica àquela do conversor CC-CC Ćuk clássico operando em
MCC.
Isolando a tensão de saída na equação (4.10), e substituindo-a em (4.4) e (4.6), obtém-
se:
( ) ( )
( ) ( )2
2 22 1
1
1i L
ap
L L
V R R DV
R R D R D
− ⋅ + ⋅ −=
+ ⋅ − + (4.11)
( ) ( )2 2
2 12 1i
c
L L
V DI
R R D R D
− ⋅= ⋅ + ⋅ − +
(4.12)
4.2.2 - ANÁLISE CA
Considera-se a Figura 4.3 para a análise do comportamento CA do conversor Ćuk
3SSC, a partir da qual são obtidas às funções de transferências vo(s)/vi(s), vo(s)/d(s), Zo(s),
Zi(s), vo(s)/iL1(s) e iL1(s)/d(s) conforme o desenvolvimento matemático apresentado na
sequência.
4.2.2.1 - DETERMINAÇÃO DE vo(s)/vi(s)
Considerando a razão cíclica constante isto é d=0, enquanto a tensão de entrada sofre
pequenas perturbações ( ˆi i iv V v= + ) no circuito da Figura 4.3, pode-se obter assim a função de
transferência da tensão de saída frente a pequenas perturbações na tensão de entrada,
vo(s)/vi(s). Simplificando o circuito da Figura 4.3 com as condições supracitadas, tem-se a
Figura 4.5.
Pela relação de espiras do transformador (vT), obtém-se (4.13).
1 2c c ci i i= = (4.13)
Aplicando a lei de Kirchhoff das correntes para os seguintes nós, têm-se:
• potencial v1:
1 2
2 2
01
o o
LCo
o
v v v v
R L s RRC s
−− − + =⋅ ++
⋅
(4.14)
• potencial v2:

57
2 2 1
1 1 2 2
2 0ic
L L
v v v vi
L s R L s R
− −+ + ⋅ =⋅ + ⋅ +
(4.15)
• Potencial ( 1 ov v+ ): ( )1
11
2 1 01 1
o o oc
Co Co
v v v vi D
R R RC s C s
++ + − ⋅ ⋅ − =+ +
⋅ ⋅
(4.16)
vi
L1 L2
R
C1
Co
RCO
RC1
RL2RL1
D 1 D 1
vT
+
-
+
-
+
-
+
-
vT +
-
+
-
vO
ic2ic1
D.ic2 D.ic1
v2 v1
v1 + vo
Figura 4.5 – Conversor Ćuk 3SSC associado ao modelo CA do interruptor PWM para a obtenção de
vo(s)/vi(s).
Pela relação dos transformadores do modelo do interruptor PWM, têm-se as expressões
(4.17) e (4.18).
( ) ( ) ( )2 1
1T o
o
v v v vv v
D
− − += − + (4.17)
( ) ( ) ( )2 1
1T o
o
v v v vv v
D
+ − += − + (4.18)
Organizando as expressões anteriores e realizando algumas manipulações algébricas,
obtém-se a função de transferência da tensão de saída frente a perturbações na tensão de
entrada como sendo dada por:
( ) ( ) ( )1 1
4 3 20 1 2 3 4
1 1 1( )
( )C O COo
i
D R D C R s C R sv s
v s s s s sα α α α α⋅ ⋅ − ⋅ ⋅ ⋅ + ⋅ ⋅ ⋅ +
=⋅ + ⋅ + ⋅ + ⋅ +
(4.19)
sendo:
( )0 1 1 2O COC C L L R Rα = ⋅ ⋅ ⋅ ⋅ + (4.20)
( ) 1 1 1 2 5 1O CO COC L L C R R L R Rα α= ⋅ ⋅ + ⋅ + ⋅ + ⋅ ⋅ (4.21)

58
( ) ( )222 1 1 2 1 6 7 8 1L LC L R R R D Dα α α α= ⋅ ⋅ + + ⋅ + ⋅ + ⋅ − (4.22)
( ) ( )2 23 10 11 1 1 21 L LD D C R R Rα α α= ⋅ − + ⋅ + ⋅ ⋅ + (4.23)
( ) ( )2 24 2 11L LR R D D Rα = + ⋅ − + ⋅ (4.24)
( ) ( )2 25 2 1 1 1 2 11C L L CL R D R L R D Rα = ⋅ ⋅ − + + ⋅ + ⋅ (4.25)
( )6 2 2 2O L CO CO LL C R R R R Rα = + ⋅ ⋅ + ⋅ + (4.26)
( ) ( )7 1 1 1 1 1 1 1O CO C L CC R R L C R R C L Rα = ⋅ + ⋅ + ⋅ ⋅ + ⋅ ⋅ (4.27)
( )8 1 2 1 2 1 9C O COC L R C L R R Cα α= ⋅ ⋅ + ⋅ ⋅ + + ⋅ (4.28)
( )9 1 2 2C CO L CO LR R R R R Rα = ⋅ ⋅ + + ⋅ (4.29)
( ) ( )10 1 1 2 2 2 2C L O CO L CO LC R R R C R R R R R Lα = ⋅ ⋅ + + ⋅ ⋅ + + ⋅ + (4.30)
( )11 1 1 1 1L O CO CR C R R C R Lα = ⋅ ⋅ + + ⋅ + (4.31)
4.2.2.2 - DETERMINAÇÃO DE vo(s)/d(s)
Considerando a tensão de entrada constante ( ˆ 0iv = ) e a razão cíclica sofrendo pequenas
perturbações ( ˆd D d= + ) na Figura 4.3, pode-se obter a função de transferência da tensão de
saída em relação à razão cíclica para o conversor Ćuk 3SSC em MCC.
Assim, para a determinação de vo(s)/d(s) pode-se obter o circuito da Figura 4.6 a partir
da Figura 4.3.
L1 L2
R
C1
Co
RCO
RC1
RL2RL1
D 1IC.d
D 1IC.d
vT
+
-
+
-
+
-
+
-
vT
ic2ic1
D.ic2 D.ic1
v2 v1
v1 + vo
Vd.dD__Vd.dD__ Vd.d
D__Vd.dD__
Figura 4.6 – Conversor Ćuk 3SSC associado ao modelo CA do interruptor PWM para a obtenção de
vo(s)/d(s).

59
Através da análise da Figura 4.4, pode-se afirmar que:
• as correntes no terminal comum dos dois pares de diodo transistor são iguais, sendo que
a expressão (4.32) é verdadeira;
• a diferença de potencial entre os terminais e nos dois interruptores é a mesma,
validando a expressão (4.33).
1 2c c cI I I= = (4.32)
1 2 1 2implica
ap ap ap D D DV V V V V V= = ⎯⎯⎯→ = = (4.33)
Pela relação de espiras do transformador (vT), pode-se definir:
1 2 cc ci i i= = (4.34)
Aplicando a lei de Kirchhoff dos nós para o potencial v1, obtém-se:
1 2
2 2
01
o o
LCo
o
v v v v
R L s RRC s
−− − + =⋅ ++
⋅
(4.35)
Já para o nó com potencial v2, tem-se:
2 2 1
1 1 2 2
2 0cL L
v v vi
L s R L s R
−+ + ⋅ =⋅ + ⋅ +
(4.36)
Agora, para o potencial ( 1 ov v+ ), chega-se a:
( )1
11
2 1 2 01 1
o o oc c
Co Co
v v v vi D I d
R R RC s C s
++ + + ⋅ ⋅ − + ⋅ ⋅ =+ +
⋅ ⋅
(4.37)
A relação dos dois transformadores do modelo do interruptor PWM é dada por (4.38) e
(4.39).
( ) ( ) ( )2 1
1T o d
o
v v v v Vd v v
D D
− − += ⋅ − + (4.38)
( ) ( ) ( )2 1
1T o d
o
v v v v Vd v v
D D
+ − += ⋅ − + (4.39)
Para se definir o ponto de operação do conversor associado ao modelo CA do
interruptor PWM deve-se analisar o circuito da Figura 4.4, obtendo as seguintes expressões:

60
( ) ( )
( ) ( )2
2 1
2 2
1
1
i L
D
L L
V R R DV
R R D R D
− ⋅ + ⋅ −=
+ ⋅ − + (4.40)
( ) ( )
2 1
2 22 1i
c
L L
V DI
R R D R D
− ⋅= ⋅ + ⋅ − +
(4.41)
Organizando as expressões anteriores e realizando algumas manipulações algébricas,
obtém-se a função de transferência da tensão de saída frente a perturbações na tensão de
entrada como sendo (4.42).
( ) ( )2
1 1 1 2 3
4 3 20 1 2 3 4
1( )
( )d CO Oo
k s R C C L s sv s
d s s s s s
χ χ χα α α α α
⋅ + ⋅ ⋅ ⋅ ⋅ ⋅ ⋅ − ⋅ +=
⋅ + ⋅ + ⋅ + ⋅ + (4.42)
Sendo que os termos auxiliares do denominador são expressos pelas equações (4.20) a
(4.31), enquanto os do numerador são dados por:
( ) ( )2 2
2 11i
d
L L
R Vk
R R D D R
⋅=+ ⋅ − + ⋅
(4.43)
( ) ( ) 21 2 11L CR R D D Rχ = + ⋅ − − ⋅ (4.44)
( ) ( )222 1 1 1 1 2 1 11C C L LD L C R R R R D Rχ χ = ⋅ − ⋅ ⋅ + ⋅ ⋅ − + ⋅ (4.45)
( ) ( )2 23 2 11L LR R D R Dχ = + ⋅ − − ⋅ (4.46)
4.2.2.3 - DETERMINAÇÃO DA IMPEDÂNCIA DE ENTRADA Zi(s)
Considerando a razão cíclica constante (d=0) e a tensão de entrada sofrendo pequenas
perturbações ( ˆi i iv V v= + ) na Figura 4.3, pode-se obter a função de transferência que relaciona
a tensão de entrada e a corrente de entrada, ou seja, a impedância de entrada Zi(s).
Simplificando o circuito para se determinar a impedância de entrada, constata-se que a
estrutura é similar àquela da análise vo(s)/vi(s) na Figura 4.5.
Com isso, é possível escrever algebricamente a corrente de entrada do circuito:
2
1 1
ii
L
v vi
L s R
−=⋅ +
(4.47)
Substituindo os resultados encontrados na dedução de vo(s)/vi(s) em (4.47), isso resulta
na impedância de entrada do sistema em (4.48), sendo que os termos auxiliares do numerador
são definidos pelas equações (4.20) a (4.31), enquanto os termos do denominador são

61
definidos na sequência:
( )
4 3 20 1 2 3 4
3 2 21 2 1 2
( )
( )i
i O CO
v s s s s s
i s C C L R R s s s D
α α α α αδ δ
⋅ + ⋅ + ⋅ + ⋅ +=⋅ ⋅ ⋅ + ⋅ + ⋅ + ⋅ +
(4.48)
( ) ( ) 21 1 2 2 1O CO L C COC L C R R R D R R Rδ = ⋅ + ⋅ ⋅ + + ⋅ ⋅ + (4.49)
( ) ( )2 22 1 2 1L C O COC R R D R C D R Rδ = ⋅ + + ⋅ + ⋅ ⋅ + (4.50)
4.2.2.4 - DETERMINAÇÃO DA IMPEDÂNCIA DE SAÍDA Zo(s)
Para determinar a relação entre a tensão de saída e a corrente de saída, por sua vez
correspondente à impedância de saída Zo(s), deve-se considerar um curto-circuito às fontes de
tensão e um circuito aberto para as fontes de corrente. Simplificando o circuito, tem-se a
Figura 4.7.
L1 L2
R
C1
Co
RCO
RC1
RL2RL1
D 1 D 1
vT
+
-
+
-
+
-
+
-
vT
ic2ic1
D.ic2 D.ic1
vg
ig
v2 v1
v1 + vg
Figura 4.7 – Circuito equivalente do conversor Ćuk 3SSC associado ao modelo CA do interruptor PWM
com as fontes de tensão em curto-circuito e fontes de corrente em circuito aberto para a obtenção de Zo(s).
Pela relação de espiras do transformador (vT), tem-se:
1 2c c ci i i= = (4.51)
Aplicando a lei de Kirchhoff das correntes para os nós, têm-se:
• potencial v1:
1 2
2 2
01
g gg
LCo
o
v v v vi
R L s RRC s
−− − + + =⋅ ++
⋅
(4.52)
• potencial v2:

62
2 2 1
1 1 2 2
2 0cL L
v v vi
L s R L s R
−+ + ⋅ =⋅ + ⋅ +
(4.53)
• potencial ( 1 gv v+ ):
( )1
11
2 1 01 1
g g gc g
Co Co
v v v vi D i
R R RC s C s
++ + + ⋅ ⋅ − − =
+ +⋅ ⋅
(4.54)
A relação dos dois transformadores do modelo do interruptor PWM é dada em (4.55) e
(4.56).
( ) ( ) ( )2 1
1
T g
g
v v v vv v
D
− − += − + (4.55)
( ) ( ) ( )2 1
1
T g
g
v v v vv v
D
+ − += − + (4.56)
Organizando as expressões anteriores e realizando algumas manipulações algébricas,
chega-se a:
( ) ( )3 2
1 1 2 1 2 3
4 3 20 1 2 3 4
1( )
( )O COo
o
R C R s C L L s s sv s
i s s s s s
ε ε εα α α α α
⋅ ⋅ ⋅ + ⋅ ⋅ ⋅ ⋅ + ⋅ + ⋅ +=
⋅ + ⋅ + ⋅ + ⋅ + (4.57)
Os termos auxiliares são expressos pelas equações (4.20) a (4.24), bem como por (4.58)
a (4.60).
( ) ( )2 21 1 2 1 1 2 1 2 11C L C LC L R D L R R D L Rε = ⋅ ⋅ ⋅ − + ⋅ + ⋅ + ⋅ (4.58)
( ) ( ) ( )2 22 22 1 2 1 1 2 1 2 11 1C L L L CD L L D C R R D R R R Dε = ⋅ + ⋅ − + ⋅ ⋅ ⋅ − + ⋅ + ⋅ (4.59)
( )2 23 2 11L LR D D Rε = ⋅ − + ⋅ (4.60)
4.2.2.5 - DETERMINAÇÃO DE vo(s)/iL(s)
A determinação da função de transferência da tensão de saída em relação à corrente no
indutor ocorre considerando que a corrente do indutor sofre pequenas perturbações
oriundas das perturbações da fonte de tensão da entrada. Logo, o circuito para se determinar
vo(s)/iL1(s) é análogo àquele empregado na análise de vo(s)/vi(s) na Figura 4.5. Escrevendo a
corrente do indutor , tem-se:
21
1 1
iL i
l
v vi i
L s R
−= =⋅ +
(4.61)

63
Substituindo na expressão (4.61) os resultados encontrados na modelagem de vo(s)/vi(s),
juntamente com algumas manipulações algébricas, obtém-se (4.62). Os termos auxiliares são
expressos pelas equações (4.49) a (4.50).
( ) ( ) ( )
( )1 1
3 2 21 1 2 1 2
1 1 1( )
( )C O COO
L O CO
D R D C R s C R sv s
i s C C L R R s s s Dδ δ⋅ ⋅ − ⋅ ⋅ ⋅ + ⋅ ⋅ ⋅ +
=⋅ ⋅ ⋅ + ⋅ + ⋅ + ⋅ +
(4.62)
4.2.2.6 - DETERMINAÇÃO DE iL(s)/d(s)
A função de transferência da corrente no indutor em relação à razão cíclica iL(s)/d(s) é
determinada através da consideração de pequenas perturbações na corrente do indutor e na
razão cíclica. Logo, a estrutura do circuito é similar ao utilizado para determinar o vo(s)/d(s),
Figura 4.6. A corrente do indutor L1 é dada:
21
1 1L
L
vi
L s R= −
⋅ + (4.63)
Substituindo na expressão (4.63) os resultados encontrados na modelagem de vo(s)/d(s)
e com as devidas manipulações algébricas, chega-se a:
( )3 2
1 2 3 414 3 2
0 1 2 3 4
( )
( )idL
k s s si s
d s s s s s
φ φ φ φα α α α α
⋅ ⋅ + ⋅ + ⋅ +=
⋅ + ⋅ + ⋅ + ⋅ + (4.64)
Os termos auxiliares são expressos pelas equações (4.20) a (4.31) e (4.65) a (4.73).
( )
( ) ( )2 22 1
1
1i
id
L L
V Dk
R R D R D
⋅ −=
+ ⋅ − + ⋅ (4.65)
( ) ( )1 1 2 2 1O CO L CC C L R R R R R Dφ = ⋅ ⋅ ⋅ + ⋅ + + ⋅ (4.66)
( )2 5 1 2 6LD C R Rφ φ φ= ⋅ + ⋅ + ⋅ (4.67)
( )3 7 2 8LD R Rφ φ φ= ⋅ + + ⋅ (4.68)
( )4 22 LD R Rφ = ⋅ ⋅ + (4.69)
( ) ( ) 5 2 1 1 2 2O CO C O L CO COC L R R C R C R R R R R Lφ = ⋅ ⋅ + + ⋅ ⋅ ⋅ ⋅ + + ⋅ + (4.70)
( ) ( ) 6 2 1 2O CO C L COL C R R D R R R Rφ = + ⋅ ⋅ + ⋅ + ⋅ + (4.71)
( ) 7 2 2 2O CO L CO LL C R R R R Rφ = + ⋅ ⋅ + ⋅ + (4.72)
( ) ( )8 1 2 12L C O COC R R D R C D R Rφ = ⋅ + + ⋅ ⋅ + ⋅ ⋅ + (4.73)

4.3 -
ĆUK
inten
simu
comp
técni
repre
sendo
ressa
verif
• D
mesm
• D
vo(s)/
modo
há d
sobre
simu
4.3.1
3SSC
4.1.
simu
4.1 s
VALIDAÇ
K 3SSC EM
O objetivo
nção de uso
ulação comp
Neste trab
putacional,
ica, são tra
esentado na
o possível
altar que a
ficado:
D<0,5, em
ma etapa de
D>0,5, em
Assim, es
/vi(s), vo(s)
o de operaç
dois roteiros
eposição na
Ressalta-s
ulações são d
1 - OPERA
Como não
C, o conver
Os diagram
ulado para o
ão apresent
ÇÃO DA M
M MCC
o da valida
o [16]. Sen
putacional o
balho, o pro
isto é, atrav
çados os d
a simulação
comparar
3SSC poss
que os in
e operação;
que os inter
ssa análise
/d(s), vo(s)/
ção da 3SSC
s de projeto
a análise do
se novamen
desenvolvid
ÇÃO EM M
o existe pro
rsor foi sim
mas de Bod
o ponto de o
tados na Fig
MODELAG
ação de um
ndo assim,
ou mesmo ex
ocesso de va
vés do recu
diagramas d
o pelo conv
os resultad
ui duas con
terruptores
rruptores co
tem como
/io(s), vi(s)/
C de maneir
o completam
conversor b
nte que este
das com o s
MODO DE
cedimento
mulado segu
de das funçõ
operação em
gura 4.8 (a)
GEM DE
m modelo é
é importa
xperimenta
alidação ser
urso de varr
de Bode em
versor, e pa
dos obtidos
ndições de
controlado
ontrolados c
objetivo d
/ii(s), vo(s)/
ra idêntica
mente disti
buck 3SSC.
trabalho nã
oftware PSI
E NÃO SOB
de projeto d
undo o pont
ões de trans
m modo de n
a (f).
PEQUENO
é verificar s
nte compar
lmente do s
rá realizado
redura em f
m termos de
ara as expre
s das duas
operação, p
os não cond
conduzem s
demonstrar
/iL(s) e iL(s
a [3], uma
intos para o
ão visa a an
IM®.
BREPOSIÇ
detalhado n
to de opera
sferência pa
não sobrepo
OS SINAIS
se este pod
rar os resu
sistema com
o somente p
frequência (
e módulo e
essões obtid
situações.
para as qua
duzem simu
imultaneam
que as fun
)/d(s) são v
vez que em
os modos d
nalise exper
ÇÃO (D<0,
na literatura
ção arbitrár
ra o modelo
osição (D<0
S DO CON
de ser aceit
ultados forn
m o modelo
por meio de
(AC Sweep)
e fase para
das na anál
Novamen
ais o mode
ultaneamen
mente.
nções de tr
válidas par
m [7] se dem
de não sobr
rimental, se
,5)
a para o con
rio definido
o teórico e o
0,5) definido
64
NVERSOR
o dada sua
necidos por
teórico.
e simulação
). Com esta
o sistema,
lise teórica,
te, deve-se
lo deve ser
nte em uma
ransferência
ra qualquer
monstra que
reposição e
endo que as
nversor Ćuk
o na Tabela
o conversor
o na Tabela
4
R
a
r
o
a
,
,
e
r
a
a
r
e
e
s
k
a
r
a

65
Tabela 4.1 – Parâmetros do conversor Ćuk 3SSC operando em modo de não sobreposição (D<0,5).
Parâmetro Valor
Tensão de entrada Vi=100 V
Tensão de saída Vo=75 V
Potência de saída Po=1000 W
Resistência de saída R=5,625 Ω
Frequência de comutação fs=40 kHz
Razão cíclica D=0,4286
Ondulação da corrente nos indutores ∆IL1=2 A
∆IL2=2 A
Ondulação da tensão dos capacitores ∆VC1=15 V
∆VCo=375 mV
Capacitância de saída, C0 Co=16,67 µF
Capacitância C1 C1=9,52 µF
Indutância L1 L1=536 µH
Indutância L2 L2= 536 µH
Resistências internas dos capacitores RC = 0,01 Ω
Resistências internas dos indutores RL = 0,01 Ω
(a) vo(s)/vi(s) (b) vo(s)/d(s)
(c) vi(s)/ii(s) (d) vo(s)/io(s)
Am
plitu
de (
dB)
Fas
e (°
)
Am
plitu
de (
dB)
Fas
e (°
)
Am
plitu
de (
dB)
Fas
e (°
)
Am
plitu
de (
dB)
Fas
e (°
)

66
(e) vo(s)/iL(s) (f) iL(s)/d(s) Figura 4.8 – Diagramas de Bode de ganho e fase do conversor Ćuk 3SSC operando em modo de não
sobreposição.
Analisando os diagramas obtidos na Figura 4.8, destaca-se que as curvas teóricas
apresentam comportamento praticamente idêntico àquele obtidos por simulação com o
software PSIM®.
4.3.2 - OPERAÇÃO EM MODO DE SOBREPOSIÇÃO (D>0,5)
De maneira análoga ao modo de não sobreposição (D<0,5), o modo de sobreposição
(D>0,5) foi definido segundo o ponto de operação da Tabela 4.2.
Tabela 4.2 – Parâmetros do conversor Ćuk 3SSC operando em modo de sobreposição (D>0,5).
Parâmetro Valor
Tensão de entrada Vi=50 V
Tensão de saída Vo=150 V
Potência de saída Po=1000 W
Resistência de saída R=22,5 Ω
Frequência de comutação fs=40 kHz
Razão cíclica D=0,75
Ondulação da corrente nos indutores ∆IL1=2 A
∆IL2=2 A
Ondulação da tensão dos capacitores ∆VC1=15 V
∆VCo=1,5 V
Capacitância de saída, C0 Co=4,16 µF
Capacitância C1 C1=8,33 µF
Indutância L1 L1=468 µH
Indutância L2 L2= 468 µH
Resistências internas dos capacitores RC = 0,01 Ω
Resistências internas dos indutores RL = 0,01 Ω
Am
plitu
de (
dB)
Fas
e (°
)
Am
plitu
de (
dB)
Fas
e (°
)

67
(a) vo(s)/vi(s) (b) vo(s)/d(s)
(c) vi(s)/ii(s) (d) vo(s)/io(s)
(e) vo(s)/iL(s) (f) iL(s)/d(s) Figura 4.9 – Diagramas de Bode de ganho e fase do conversor Ćuk 3SSC operando em modo de
sobreposição.
Comparando-se os diagramas de Bode de ganho e fase na Figura 4.9 (a) a (f), constata-
se que todas as funções de transferência teóricas conseguem representar o comportamento do
conversor Ćuk 3SSC em MCC. Portanto, pode-se concluir que o modelo é válido para toda a
faixa de variação da razão cíclica (0≤D≤1).
Am
plitu
de (
dB)
Fas
e (°
)
Am
plitu
de (
dB)
Fas
e (°
)
Am
plitu
de (
dB)
Fas
e (°
)
Am
plitu
de (
dB)
Fas
e (°
)
Am
plitu
de (
dB)
Fas
e (°
)
Am
plitu
de (
dB)
Fas
e (°
)

4.4 -
refer
casos
da te
nomi
de co
sinai
4.4.1
estru
Tabe
utiliz
•
com
•
como
•
com
PROJETO
Nesta seç
rentes aos m
s, emprega-
No intuito
ensão de saí
inal e vice-v
ontrole sup
is do conver
1 - CONTR
Utilizando
utura de con
ela 4.1, adot
Para calcu
za-se a expr
função de
os parâmetr
G
função de
o valor da a
valor da te
Na Tabela
outros parâ
O DO SIST
ção, são ap
métodos de
-se o método
o de verifica
ída em rela
versa. Ressa
pracitados, m
rsor.
ROLE EM M
o o roteiro p
ntrole da F
tam-se os se
ular a funç
ressão (2.57
transferênc
ros definido
( ) ( 2VG ss
=
e transferên
amplitude da
ensão de ref
a 4.3, encon
âmetros para
TEMA DE C
resentados
controle em
o do fator k
ar a robuste
ação à varia
alta-se que
mas sim ex
MODO TE
proposto em
Figura 2.29,
eguintes pro
ão de trans
), sendo nec
cia Gv(s), de
os na Tabela
(3259
6432
s
s
⋅ +
+ ⋅ +
cia do mod
a forma de o
ferência Vref
ntram-se os
a o projeto d
CONTROL
dois exem
m modo ten
k para o con
ez do sistem
ação periódi
esta seção n
xemplificar
ENSÃO
m 2.6.4 para
, bem com
ocedimento
sferência de
cessário con
efinida atra
a 4.1:
) (6
7
6 10
5,542 10
s+ ⋅ ⋅
+ ⋅
dulador de
onda portad
f.
parâmetros
do sistema d
LE
mplos de pr
nsão e mod
nversor Ćuk
ma de contro
ica da carga
não tem com
a importân
controle em
o os parâm
do roteiro b
e laço aber
nsiderar:
vés da relaç
) (2
2
5974
4234
s s
s
− ⋅
⋅ +
PWM Fm(s
dora Vm;
essenciais
de controle
rojeto e res
do corrente
3SSC em M
ole, é analis
a de 100%
mo objetivo
ncia da mo
m modo ten
metros do c
baseado na t
rto não com
ção (4.42) e
)81,12 10
4 1, 293s
+ ⋅
⋅ +
s), definida
para obter F
.
sultados de
média. Em
MCC.
sado o com
para 50% d
o comparar
odelagem de
nsão, juntam
conversor d
técnica do f
mpensada (
e representa
)810⋅
por (2.59)
FTLAscv(s),
68
e simulação
m ambos os
mportamento
da potência
os métodos
e pequenos
mente com a
efinidos na
fator k:
FTLAscv(s))
ada a seguir
(4.74)
, utilizando
juntamente
8
o
s
o
a
s
s
a
a
)
r
)
o
e

69
Tabela 4.3 – Parâmetros da malha de controle em modo tensão para o conversor Ćuk 3SSC em MCC.
Parâmetro Especificação
Amplitude da forma de onda portadora Vm=10 V
Tensão de referência Vref =5 V
Frequência de cruzamento em zero fcv=100 Hz
Margem de fase M=85°
Ganho requerido para o controlador G=0,4877
Avanço de fase necessário α=2,317°
Fator k k=1
Substituindo os dados da Tabela 4.3 em (2.57) a (2.59), pode-se obter o diagrama de
Bode para a função transferência de laço aberto FTLAscv(s) representado na Figura 4.10.
Figura 4.10 – Diagramas de Bode de ganho e fase de FTLAscv(s) do conversor Ćuk 3SSC em MCC para
projeto do controlador em modo tensão.
A frequência de cruzamento em malha aberta fcv determinada na Tabela 4.3 é
geralmente escolhida com uma limitação máxima de um quarto da frequência de comutação.
Como o sistema do conversor apresenta um pequeno pico de ressonância próximo a 1 kHz,
foi escolhida uma frequência que se distância desse pico de forma a evitar a instabilidade.
-100
-50
0
50
100
101 102 103 104 105-180
0
180
360
FTLASCV
Gv
Diagrama de Bode
Frequência (Hz)

70
Ressalta-se também que quando o avanço de fase necessário é próximo de zero, é escolhido o
compensador tipo 1.
Dimensionando-se os elementos para o compensador tipo 1 de forma a manter o fator k
especificado segundo a Tabela 4.3, é utilizada a expressão (2.38), cujos elementos são
definidos na Tabela 4.4.
Tabela 4.4 – Elementos do circuito do compensador em modo tensão para o conversor Ćuk 3SSC em
MCC.
Componente Valor
R1 1 kΩ
C1 3,26 µF
Substituindo-se os valores da Tabela 4.4 na expressão (2.36), obtém-se a função de
transferência do compensador tipo 2 representada por (4.75). De posse dessa função de
transferência, é possível a representação do controlador através do diagrama de Bode
conforme a Figura 4.11.
( ) 3
1
3,26 10vC ss−=
⋅ ⋅ (4.75)
Utilizando a expressão (2.62), podem ser traçados os diagramas de Bode de ganho e
fase da função de transferência de laço aberto compensada FTLAccv(s), como é observado na
Figura 4.12.
Figura 4.11 – Diagramas de Bode de ganho e fase
do compensador em modo tensão para o conversor
Ćuk 3SSC em MCC.
Figura 4.12 – Diagramas de Bode de ganho e fase
da função de transferência de laço aberto
compensada (FTLAccv(s)) em modo tensão para o
conversor Ćuk 3SSC em MCC.
10
20
30
40
50
60
10-1 100 101-91
-90.5
-90
-89.5
-89
Diagrama de Bode
Frequência (Hz)
-150
-100
-50
0
50
101 102 103 104 105-360
-180
0
180
360
Diagrama de Bode
Frequência (Hz)

71
De acordo com a inspeção do diagrama de Bode, obtém-se os seguintes parâmetros:
100 Hzcvf = (4.76)
82,7ºM = (4.77)
Além disso, a taxa de crescimento em torno da nova frequência de cruzamento de ganho
∆fc foi calculada, sendo:
18,9 dB décadacfΔ = − (4.78)
Averiguando o desempenho do sistema controlado através de simulação utilizando o
software PSIM®, foi obtida a resposta representada pela Figura 6.12 (a), que mostra o
comportamento da tensão de saída frente a degraus periódicos de carga de 5,625 Ω para 11,5
Ω e vice-versa.
(a) Forma de onda da tensão de saída (b) Visualização detalhada da resposta do sistema
Figura 4.13 – Comportamento do sistema de controle em modo tensão do conversor Ćuk 3SSC em MCC
diante de degraus de carga.
A análise detalhada da Figura 4.13 (b) permite constatar que:
• para o degrau de carga positivo, tem-se sobressinal de 36% e tempo de acomodação de
0,9 ms com tolerância de 2%.
• para o degrau de carga negativo, tem-se sub-sinal de 26,6% e tempo de acomodação de
1,3 ms com tolerância de 2%.
De modo geral, pode-se inferir que o sistema é estável, embora a resposta seja
oscilatória com sobressinal significativo. Isso se justifica em virtude da presença de um zero
no semiplano direito do plano complexo da função vo(s)/d(s), sendo que esses sistemas ao
serem perturbados podem apresentar resposta oscilatória. Assim, todos os conversores CC-CC
Ten
são
(V)
Ten
são
(V)

72
baseados na célula de três estados são sistemas de fase não mínima, à exceção do conversor
buck 3SSC.
4.4.2 - CONTROLE EM MODO DE CORRENTE MÉDIA
Essa estratégia se baseia em duas malhas associadas ao controle da corrente do indutor e
da tensão de saída. Utilizando o roteiro proposto na seção 2.6.5, bem como o diagrama de
blocos da Figura 2.30, podem-se considerar os parâmetros da Tabela 4.2 e adotam-se os
passos descritos na sequência.
4.4.2.1 - MALHA DE CORRENTE
A função de transferência de laço aberto sem compensador (FTLAsci(s)) é representada
pela equação (2.66), sendo dependente da: função de transferência Gi(s)=iL1(s)/d(s)
representada para o conversor em (4.64); valor da corrente de referência; função de
transferência do sensor de corrente Hi(s); e amplitude da forma de onda portadora Vm. Esses
parâmetros são definidos na Tabela 4.5.
Por fim, a função de transferência para testar a robustez da malha de corrente He(s) é
dada pelas equações (2.63) a (2.65), enquanto a função de transferência do modulador de
PWM Fm(s) é definida em (2.58).
Os parâmetros necessários para a função de transferência de laço aberto sem
compensação FTLAsci(s) são definidos na Tabela 4.5, enquanto o respectivo diagrama de Bode
é representado na Figura 4.14.
Tabela 4.5 – Parâmetros da malha interna de controle em modo corrente média para o conversor Ćuk
3SSC em MCC.
Parâmetro Especificação
Amplitude da forma de onda portadora Vm=10 V
Corrente de referência Iref=5 A
Função transferência do sensor de corrente Hi=0,2381
Frequência de cruzamento em zero fci=6 kHz
Margem de fase Mi=30°
Ganho requerido para o controlador G=2,8127

73
Avanço de fase necessário α=63,6°
Fator k k=4,265
Figura 4.14 – Diagramas de Bode de ganho e fase de FTLAsci(s) do conversor Ćuk 3SSC em MCC para
projeto do controlador em modo de corrente média.
A frequência de cruzamento de ganho fci é limitada de forma que seja menor ou igual a
um quarto da frequência de comutação do conversor, evitando assim os efeitos da comutação
em alta frequência. Tanto o valor da frequência de cruzamento quanto o valor da margem de
fase requerida ao sistema compensado se encontram definidas na Tabela 4.5. Ressalta-se que
quando o avanço de fase necessário é menor que 90º, é recomendado o uso do compensador
tipo 2 [26].
Os elementos do compensador dados pela Tabela 4.6 são dimensionados de forma que
as frequências do zero e polo não nulo se distanciem em um fator k2 através das expressões
(2.43) a (2.45).
Tabela 4.6 – Elementos do circuito do compensador da malha interna em modo corrente média para o
conversor Ćuk 3SSC em MCC.
Componente Valor
R1 1 kΩ
R2 3,69 kΩ
C1 37,9 nF
C2 2,2 nF
Am
plitu
de (
dB)
Fas
e (d
eg)

74
Utilizando a expressão (2.39) e aplicando os valores definidos na Tabela 4.6, obtém-se a
função de transferência do compensador tipo 2 em (4.79). Assim, tem-se a representação na
forma do diagrama de Bode da Figura 4.15.
( ) 10 2 5
0,0001131 1
2,494 10 4,007 10i
sC s
s s− −
⋅ +=⋅ ⋅ + ⋅ ⋅
(4.79)
Figura 4.15 – Diagramas de Bode de ganho e fase
da função de transferência do compensador de
tensão em modo corrente média para o conversor
Ćuk 3SSC em MCC.
Figura 4.16 – Diagramas de Bode de ganho e fase
da função de transferência de laço aberto da
corrente compensada (FTLAcci(s)) em modo
corrente média para o conversor Ćuk 3SSC em
MCC.
Utilizando a expressão (2.68), pode-se representar a função de transferência de malha
aberto compensada, FTLAcci(s), na forma de diagrama de Bode da Figura 4.16. De acordo
com a inspeção do diagrama de Bode, obtém-se os seguintes parâmetros:
6 kHzcif = (4.80)
30ºM = (4.81)
Além disso, a taxa de decrescimento em torno da nova frequência de cruzamento de
ganho ∆fc é calculada como sendo:
22,8 dB décadacfΔ = − (4.82)
4.4.2.1 - MALHA DE TENSÃO
A função de transferência de laço aberto sem compensador (FTLAscv(s)) expressa por
(2.70) depende de:

75
• função de transferência de malha fechada da corrente, dada por (2.69);
• tensão de referência da saída;
• função de transferência da tensão de saída em relação à corrente do indutor L1
(Z(s)=vo(s)/iL1(s)), dada por (4.62).
Estes parâmetros são definidos na Tabela 4.7, enquanto o diagrama de Bode é
representado na Figura 4.17.
Tabela 4.7 – Parâmetros da malha interna de controle em modo corrente média para o conversor Ćuk
3SSC em MCC.
Figura 4.17 – Diagramas de Bode de ganho e fase de FTLAscv(s) do conversor Ćuk 3SSC em MCC para
projeto do controlador em modo de corrente média.
Para este estudo, a frequência de cruzamento é escolhida de forma que seja menor ou
igual a um quarto da frequência pulsante da corrente de entrada (120 Hz) [26], isto é, menor
Am
plitu
de (
dB)
Fas
e (d
eg)
Parâmetro Especificação
Tensão de referência Vref =5 V
Função transferência do sensor de tensão Hv(s)=0,333
Frequência de cruzamento em zero fcv=30 Hz
Margem de fase M=90°
Ganho requerido para o controlador G=0,9547
Avanço de fase necessário α=3,7078°
Fator k k=1,067

76
que 30 Hz. Os valores da frequência de cruzamento, da margem de fase do sistema e a
margem requerida pelo compensador são definidos na Tabela 4.7. Ressalta-se que quando o
avanço de fase necessário é menor que 90º, é recomendado o uso do compensador tipo 2 [26].
Utilizando a equação (2.42) para calcular o fator k para o compensador tipo 2 e,
dimensionando os componentes do controlador utilizando as equações (2.43) a (2.45), obtém-
se os resultados da Tabela 4.8.
Tabela 4.8 – Elementos do circuito do compensador, malha externa em modo corrente média para o
conversor Ćuk 3SSC em MCC.
Componente Valor
R1 1 kΩ
R2 7,86 kΩ
C1 720 nF
C2 5,208 µF
Substituindo os parâmetros da Tabela 4.8 na equação (2.39), obtém a função de
transferência do controlador em (4.83), sendo o diagrama de Bode do compensador ilustrado
na Figura 4.18.
( ) 5 2
0,00566 1
2,948 10 0,005928v
sC s
s s−
⋅ +=⋅ ⋅ + ⋅
(4.83)
Na Figura 4.19, é traçado o diagrama de Bode da função de transferência de malha
aberto compensada FTLAccv(s).

77
Figura 4.18 – Diagramas de Bode de ganho e fase
da função de transferência do compensador de
tensão em modo de corrente média para o
conversor Ćuk 3SSC em MCC.
Figura 4.19 – Diagramas de Bode de ganho e fase
da função de transferência de laço aberto com
compensação (FTLAccv(s)) em modo corrente média
para o conversor Ćuk 3SSC em MCC.
De acordo com a inspeção do diagrama de Bode, obtém-se os seguintes parâmetros:
30 Hzcvf = (4.84)
90ºM = (4.85)
Além disso, a taxa de crescimento em torno da nova frequência de cruzamento de ganho
∆fc foi calculada como sendo:
20,39 dB décadacfΔ = − (4.86)
Através de simulações com o software PSIM®, foi analisado o desempenho do sistema
de controle frente a degraus periódicos de carga de 22,5 Ω para 45 Ω e vice-versa.
Analisando de forma mais minuciosa o comportamento da tensão de saída na Figura
6.19 considerando uma tolerância de 2% obtém-se:
• para o degrau de carga positivo, tem-se sobressinal de 40,7% e tempo de acomodação
de 20,8 ms.
• para o degrau de carga negativo, sub-sinal de 28,6% e tempo de acomodação de 28,6
ms.
Sobretudo, nota-se que o sistema é estável e a resposta não é oscilatória, o que é
possível graças à utilização de um sistema de controle composto por duas malhas em cascata.
Am
plitu
de (
dB)
Fas
e (d
eg)
Am
plitu
de (
dB)
Fas
e (d
eg)

Figu
4.5 -
na cé
do in
que e
simu
Assim
seja,
malh
a exe
dinâm
comp
sistem
corre
de co
2
(a) Forma d
ura 4.20 – Co
CONSIDE
A modela
élula de com
nterruptor P
exista uma m
As funçõe
ulações real
m, é possív
não sobrep
Posteriorm
ha fechada e
emplificar o
mica satisfa
parada a ou
ma impede
ente média
ontrole ness
0 0.10
100
200
0 0.10
10
20
30
de onda da ten
omportament
ERAÇÕES
agem de peq
mutação de
WM propo
maior comp
es de transfe
lizadas pel
vel represen
posição e sob
mente, são r
em modo te
o uso das fu
atória, sendo
utros conve
uma frequ
fornece um
se caso.
0.2 0.3
Tempo (s)
Tensão de saíd
0.2 0.3
Tempo (s)
Corrente no Indu
nsão de saída
to do sistema
em MCC
FINAIS
quenos sina
e três estado
sto em [10]
plexidade as
erência obti
lo software
ntar os conv
breposição
realizados o
ensão e em m
unções de tra
o que o con
ersores [3],
uência de cr
ma resposta
0.4 0
a
0.4 0
tor
a (b
de controle e
C diante de de
ais desenvol
os em modo
mostra-se
ssociada ao
idas são com
e PSIM®,
versores pa
dos sinais d
o desenvolvi
modo corre
ansferência
ntrole em m
uma vez q
ruzamento m
não oscilat
.5
.5
Ten
são
(V)
Cor
rent
e(A
)
b) Visualizaçã
em modo cor
egraus de car
lvida para o
o de conduç
uma técnica
sistema, qu
mparadas co
resultando
ara os dois m
de comando
imento e o p
ente média p
. Em ambos
modo tensão
que o pico
maior. Por
tória, embor
Cor
rent
e (A
)
ão detalhada
rente média d
rga.
o conversor
ção contínu
a simples, d
ue é de quar
om as curva
em comp
modos de o
o dos interru
projeto do s
para o conv
s os casos, o
o apresenta
de ressonâ
sua vez, o
ra sejam ne
a da resposta
do conversor
r CC-CC Ć
ua utilizando
direta e efet
rta ordem ne
as obtidas p
portamentos
operação da
uptores cont
sistema de c
versor Ćuk,
obtém-se um
resposta m
ância aprese
controle em
ecessárias d
78
do sistema
r Ćuk 3SSC
uk baseado
o o modelo
iva, mesmo
esse caso.
por meio de
s idênticos.
a 3SSC, ou
trolados.
controle em
de maneira
ma resposta
mais lenta se
entado pelo
m modo de
duas malhas
8
o
o
o
e
.
u
m
a
a
e
o
e
s

5.1 -
repre
utiliz
interr
Obtê
de sa
em re
funçã
frent
indut
5.2 -
[30].
eleva
propr
comp
quatr
a sua
Aplic
o mo
célul
resul
CONSIDE
Este capít
esentar o c
zando o mod
O process
ruptor PWM
êm-se assim
aída frente a
elação a per
ão de trans
te a perturb
tor em relaç
MODELA
O convers
Entre sua
ador ou ab
riedades de
plexidade s
ro elemento
a modelagem
O conver
cando-se a p
Considera
odelo CA d
las de comu
lta na Figura
MODELA
ERAÇÕES
tulo consist
conversor S
delo do inte
so de model
M nas duas
m o ganho es
a perturbaçõ
rturbações d
ferência da
bações da c
ção a pertur
AGEM DE
sor SEPIC
as vantagen
baixador; e
e fonte de
e comparad
os passivos
m e, por con
rsor SEPIC
propriedade
ando as resi
do interrupt
utação de d
a 5.2.
AGEM DO
INICIAIS
te no desen
SEPIC base
erruptor PW
lagem é sem
células de c
stático e as
ões da tensã
da razão cíc
a impedânci
corrente no
bações da r
PEQUENO
foi proposto
ns, podem-s
entrada com
e tensão. P
da aos conv
em sua estr
nsequência,
C 3SSC em
e da inversã
stências int
tor PWM s
dois estados
CAPÍTUL
CONVER
S
nvolviment
eado na cé
WM.
melhante àq
comutação d
seguintes e
ão de entrad
clica; funçã
ia de saída;
o indutor, e
razão cíclica
OS SINAIS
o como ele
se citar: si
m caracterí
Porém, esta
versores bu
rutura, isto
, o controle
mpregando
ão bilateral (
ternas dos e
sem os elem
s presentes n
LO 5
RSOR CC-C
to de um m
élula 3SSC
quele do Ca
de dois esta
expressões:
da; função d
ão de transfe
; função de
e a função
a.
S
evador de te
implicidade
ística de f
as vantagen
uck, boost e
é, dois indu
em malha f
a célula
(Figura 2.12
elementos pa
mentos para
na célula d
CC SEPIC
modelo de
do tipo B
apítulo 4, u
ados para rep
função de t
de transferên
erência da im
transferênc
de transfer
ensão para
; capacidad
fonte de c
ns são aco
e buck-boos
utores e doi
fechada [1].
B é mostr
2), tem-se a
assivos do c
asitas na Fi
e três estad
3SSC
pequenos
B operando
utilizando o
presentar a
transferênci
ncia da tens
impedância
cia da tensã
rência da c
altas tensõe
de de traba
corrente e
ompanhadas
st, pois a ut
is capacitore
.
rado na Fi
a Figura 5.1
conversor e
igura 4.2 pa
dos da Figu
79
sinais para
o em MCC
modelo do
3SSC [28].
ia da tensão
são de saída
de entrada;
ão de saída
corrente no
es em 1977
alhar como
saída com
s da maior
tilização de
es, dificulta
igura 2.14.
.
e, aplicando
ara as duas
ura 5.1, isso
9
a
C
o
.
o
a
;
a
o
7
o
m
r
e
a
.
o
s
o

80
Vi
C1
L1 L2
COR
+
-
D1 D2
S1 S2
Figura 5.1 – Conversor SEPIC 3SSC com inversão bilateral.
Empregando técnicas associadas às leis de circuitos elétricos para a Figura 5.2, é
possível obter as funções de transferência essenciais para a realização do controle de operação
do conversor em malha fechada.
Vi
L1 L2
R
C1
Co
RCO
RC1
RL2RL1
D 1IC.d
D 1 IC.d
Vd.dD__Vd.dD__ Vd.d
D__Vd.dD__
Figura 5.2 – Conversor SEPIC 3SSC associado ao modelo CA do interruptor PWM.
5.2.1 - ANÁLISE CC
Para a análise CC do conversor SEPIC 3SSC, deve-se adotar algumas considerações no
modelo CA do interruptor PWM mostrado na Figura 5.2:
1. A razão cíclica é constante e igual a D, sendo ˆ 0d = ;
2. O capacitor encontra-se em circuito aberto;
3. O indutor é representado por sua respectiva resistência intrínseca, mas no caso de um
elemento ideal é representado apenas por um curto-circuito;
4. A tensão de entrada é substituída por seu valor médio Vi.

81
Vi
VO+
-
D 1 D 1
VT VT
Ic1 Ic2
Ic2.DIc1.D
R
Vap+
-
+
-+
-
RL2RL1
Figura 5.3 – Conversor SEPIC 3SSC associado ao modelo CC do interruptor PWM.
Por meio das considerações anteriores, obtém-se o circuito da Figura 5.3, representando
assim o conversor SEPIC 3SSC associado ao modelo CC do interruptor PWM. Realizando a
análise do circuito da Figura 5.3, chegam-se às seguintes expressões:
1 2 1 2 0c c o c cI I I D I D I− − − + ⋅ + ⋅ = (5.1)
Pela relação de espiras do transformador (VT), tem-se:
1 2c c cI I I= = (5.2)
A corrente média de saída é dada por:
oo
VI
R= (5.3)
Substituindo as equações (5.2) e (5.3) em (5.1), obtém-se a corrente Ic (5.4).
( )2 1
o
c
V
RID
= −⋅ −
(5.4)
Aplicando a lei de Kirchhoff das tensões na malha composta por Vi, Vo e Vap, tem-se a
equação (5.5).
1 1 2i L L L o o apV R I R I V V= ⋅ − ⋅ − − (5.5)
Isolando Vap em (5.5), obtém-se:
1 22ap L c L o o iV R I D R I V V= − ⋅ ⋅ ⋅ − ⋅ − − (5.6)
Realizando a análise das malhas, encontram-se as expressões (5.7) e (5.8).

82
12i c L T ap apV I D R V D V V= − ⋅ ⋅ ⋅ + + ⋅ − (5.7)
12i c L T ap apV I D R V D V V= − ⋅ ⋅ ⋅ − + ⋅ − (5.8)
Isolando VT em (5.7) resulta em:
( ) 11 2T i ap L cV V D V R I D= + − ⋅ + ⋅ ⋅ ⋅ (5.9)
Manipulando as expressões (5.6), (5.8) e (5.9), obtém-se a expressão que representa o
ganho estático em (5.10).
( )
( ) ( )2 22 1
1
1o
i L L
R D DV
V R R D R D
⋅ ⋅ −=
+ ⋅ − + ⋅ (5.10)
Ressalta-se que, eliminando os componentes parasitas da expressão (5.10), a expressão
do ganho estático torna-se idêntica àquela do conversor CC-CC SEPIC clássico operando em
MCC.
Isolando a tensão de saída na equação (5.10) e substituindo-a em (5.4) e (5.6), obtém-se:
( ) ( )
( ) ( )2
2 22 1
1
1i L
ap
L L
V R R DV
R R D R D
− ⋅ + ⋅ −=
+ ⋅ − + (5.11)
( ) ( )2 2
2 12 1i
c
L L
V DI
R R D R D
− ⋅= ⋅ + ⋅ − +
(5.12)
5.2.2 - ANÁLISE CA
Considera-se a Figura 5.2 para a análise do comportamento CA do conversor SEPIC
3SSC, a partir da qual são obtidas às funções de transferências vo(s)/vi(s), vo(s)/d(s), Zo(s),
Zi(s), vo(s)/iL1(s) e iL1(s)/d(s) conforme o desenvolvimento matemático apresentado na
sequência.
5.2.2.1 - DETERMINAÇÃO DE vo(s)/vi(s)
Para a análise da função de transferência da tensão de saída frente a pequenas
perturbações na tensão de entrada vo(s)/vi(s), deve-se considerar a razão cíclica constante,
(d=0) e a tensão de entrada sofrendo pequenas perturbações ( ˆi i iv V v= + ). Isso resulta no
circuito representado na Figura 5.4.

83
vi
L1 L2
R
C1
Co
RCO
RC1
RL2RL1
D 1 D 1
vT
+
-
+
-
+
-
+
-
vT
+
-
+
-
vO
ic2ic1
D.ic2 D.ic1 icapc1
ioicapco
Figura 5.4 – Conversor SEPIC 3SSC associado ao modelo CA do interruptor PWM para a obtenção de
vo(s)/vi(s).
Realizando a análise das correntes no nó comum à carga R, ao capacitor Co e aos dois
transformadores do modelo do interruptor PWM, tem-se:
( ) ( )1 2 01 0c c o capci i D i i+ ⋅ − + + = (5.13)
Pela relação de espiras do transformador (vt), obtém-se:
1 2c c ci i i= = (5.14)
Além disso, a corrente de saída io é dada por.
oo
vi
R= (5.15)
A corrente do capacitor de saída (icapc0) pode ser representada pela equação (5.16).
0 1o
capc
Coo
vi
RC s
=+
⋅
(5.16)
Por sua vez, a corrente do capacitor C1 (icapc1) é dada por (5.17).
( ) ( )1 1 1 2 2 2
1
11
1i L L L L
capc
C
v i R L s i R L si
RC s
− ⋅ + ⋅ − ⋅ + ⋅=
+⋅
(5.17)
Aplicando a lei de Kirchhoff das correntes para o nó do indutor L2, da carga (R) e dos
capacitores C1 e Co, tem-se:
2 1 0L o capc capci i i i=− + − (5.18)

84
Analisando o nó comum dos indutores L1 e L2 e do transformador, obtém-se a relação
(5.19).
1 1 2 2L c c Li i i i= + + (5.19)
Definindo a tensão entre os terminais a e p através da análise da malha composta por vi,
vo e vap, tem-se a expressão (5.46).
( ) ( )1 1 1 2 2 2ap L L L L o iv i L s R i L s R v v= ⋅ ⋅ + + ⋅ ⋅ + − − (5.20)
Realizando agora a análise para as malhas contendo vi, vap e vT, encontram-se:
( ) ( )1 1 1 1i L L T apv i L s R v v D= ⋅ ⋅ + + − ⋅ − (5.21)
( ) ( )1 1 1 1i L L T apv i L s R v v D= ⋅ ⋅ + − − ⋅ − (5.22)
Isolando vT em (5.21), tem-se:
( ) ( )1 1 11T ap i L Lv v D v i L s R= ⋅ − + − ⋅ ⋅ + (5.23)
Organizando as expressões anteriores e realizando algumas manipulações algébricas,
obtém-se a função de transferência da tensão de saída frente a perturbações na tensão de
entrada como sendo dada por (5.24).
( ) ( ) ( )2
1 2 1
4 3 20 1 2 3 4
1 1( )
( )CO Oo
i
D R R C s C L s s Dv s
v s s s s s
βα α α α α
− ⋅ ⋅ + ⋅ ⋅ ⋅ ⋅ ⋅ + ⋅ +=
⋅ + ⋅ + ⋅ + ⋅ + (5.24)
sendo:
( )0 1 1 2O COC C L L R Rα = ⋅ ⋅ ⋅ ⋅ + (5.25)
( )1 1 1 2 2 5 1 6OC L L C L Lα α α= ⋅ ⋅ + ⋅ ⋅ + ⋅ (5.26)
( ) ( ) 222 7 8 1 2 1 2 1 11 L L O L COD D C L R R C R R R Lα α α= ⋅ + ⋅ − + ⋅ ⋅ + ⋅ ⋅ ⋅ + + (5.27)
( ) ( )223 1 1 1 1 10 1 1 21L O CO C L LR C R R C R L D D C R Rα α= ⋅ ⋅ + + ⋅ + ⋅ + ⋅ − + ⋅ ⋅ (5.28)
( ) ( )2 24 2 11L LR R D D Rα = + ⋅ − + ⋅ (5.29)
( ) ( ) ( )2
5 1 1 11C CO C CO L COR R R R R D R R Rα = ⋅ + + ⋅ ⋅ − + ⋅ + (5.30)
( ) ( ) ( )2 26 1 21CO C L COR R D D R R R Rα = ⋅ ⋅ − + ⋅ + ⋅ + (5.31)
( ) ( )7 1 1 1 1 1 1 1O CO C L CC R R L C R R C L Rα = ⋅ + ⋅ + ⋅ ⋅ + ⋅ ⋅ (5.32)

85
( ) ( )8 1 1 2 1 2 1 9C O COC R L L R R C R R L Cα α= ⋅ ⋅ + ⋅ + + ⋅ + ⋅ + ⋅ (5.33)
( ) ( )9 1 2 1 2 1C CO L CO L CO L CR R R R R R R R R Rα = ⋅ + + ⋅ ⋅ + ⋅ ⋅ + (5.34)
( ) ( )10 1 1 1 2 1 2 2 2 2C L L C L O CO L CO LC R R R R R R C R R R R R Lα = ⋅ ⋅ + + + ⋅ + ⋅ ⋅ + + ⋅ + (5.35)
( )1 1 2 1L CC R D Rβ = ⋅ + ⋅ (5.36)
5.2.2.2 - DETERMINAÇÃO DE vo(s)/d(s)
A função de transferência da tensão de saída em relação à razão cíclica é determinada
através da análise do conversor SEPIC 3SSC associado ao modelo CA do interruptor PWM
na Figura 5.2, adotando-se as seguintes considerações:
1. A tensão de entrada deve ser constante, ou seja, ˆ 0iv = ;
2. A razão cíclica sofre pequenas perturbações, isto é, ˆd D d= + ,
L1 L2
R
C1
Co
RCO
RC1
RL2RL1
D 1IC.d
D 1
IC.d
vT
+
-
+
-+
-
+
-
vT
ic2ic1
D.ic2 D.ic1
+
-
+
-
vap
icapc1
ioicapco
+
-
+
-
vO
Vd.dD__Vd.dD__ Vd.d
D__Vd.dD__
Figura 5.5 – Conversor SEPIC 3SSC associado ao modelo CA do interruptor PWM para a obtenção de
vo(s)/d(s).
Assim, para a determinação de vo(s)/d(s) pode-se obter o circuito da Figura 5.5 a partir
da Figura 5.2.
Através da análise da equação (5.2), a qual define que as correntes no ponto comum dos
dois interruptores são iguais, a expressão (5.37) torna-se verdadeira.
1 2c c cI I I= = (5.37)
Analisando a Figura 5.3, percebe-se que as diferenças de potencial entre os terminais a e
p nos dois interruptores são iguais, sendo que (5.38) torna-se válida.
implica1 2 1 2ap ap ap D D DV V V V V V= = ⎯⎯⎯→ = = (5.38)

86
Analisando o nó da carga e dos dois transformadores, obtém-se a expressão (5.39).
( ) ( ) ( )1 2 0 1 21 0c c o capc c ci i D i i d I I+ ⋅ − + + + ⋅ + = (5.39)
Pela relação de espiras do transformador (vT), pode-se definir:
1 2c c ci i i= = (5.40)
Define-se a corrente de saída através da equação (5.41).
oo
vi
R= (5.41)
A corrente do capacitor de saída (icapc0) é representada pela expressão (5.42).
0 1o
capc
Coo
vi
RC s
=+
⋅
(5.42)
Por sua vez, a corrente no capacitor C1 (icapc1) é dada por (5.43).
( ) ( )1 1 1 2 2 2
1
11
1L L L L
capc
C
i R L s i R L si
RC s
− ⋅ + ⋅ − ⋅ + ⋅=
+⋅
(5.43)
Através da lei de Kirchhoff das correntes para o nó do indutor L2, da carga e dos
capacitores C1 e Co, tem-se a seguinte expressão:
2 1 0L o capc capci i i i=− + − (5.44)
Para os indutores L1 e L2 e o transformador, tem-se:
1 1 2 2L c c Li i i i= + + (5.45)
Define-se a tensão entre os terminais a e p como sendo a soma de VD, vo e vap, obtendo-
se:
( ) ( )1 1 1 2 2 2D
ap L L L L o
Vv i L s R i L s R v d
D= ⋅ ⋅ + + ⋅ ⋅ + − + ⋅ (5.46)
Realizando a análise das malhas associadas a vi, vap e vT, encontram-se as equações
(5.47) e (5.48).
( ) ( )1 1 1 1 0DL L T ap
Vi L s R v v D d
D⋅ ⋅ + + − ⋅ − + ⋅ = (5.47)

87
( ) ( )1 1 1 1 0DL L T ap
Vi L s R v v D d
D⋅ ⋅ + − − ⋅ − + ⋅ = (5.48)
Isolando vT em (5.47), obtém-se a relação (5.49).
( ) ( )1 1 11 DT ap i L L
Vv v D v i L s R d
D= ⋅ − + − ⋅ ⋅ + − ⋅ (5.49)
Para se definir o ponto de operação do conversor associado ao modelo CA do
interruptor PWM deve-se analisar o circuito da Figura 5.3, obtendo as seguintes expressões:
( ) ( )
( ) ( )2
2 1
2 2
1
1
i L
D
L L
V R R DV
R R D R D
− ⋅ + ⋅ −=
+ ⋅ − + (5.50)
( ) ( )
2 1
2 22 1i
c
L L
V DI
R R D R D
− ⋅= ⋅ + ⋅ − +
(5.51)
Organizando as expressões anteriores e após algumas manipulações algébricas, obtém-
se a função de transferência da tensão de saída em relação à razão cíclica em (5.52).
( ) ( )3 2
1 1 2 1 2 3
4 3 20 1 2 3 4
1( )
( )d O COo
k C R s C D L L s s sv s
d s s s s s
χ χ χα α α α α
− ⋅ ⋅ ⋅ + ⋅ ⋅ ⋅ ⋅ ⋅ − ⋅ + ⋅ −=
⋅ + ⋅ + ⋅ + ⋅ + (5.52)
Além disso, para facilitar a representação matemática, utilizam-se os termos auxiliares
dados pelas equações (5.25) a (5.35), bem como os seguintes termos:
( ) ( )2 2
2 11i
d
L L
V Rk
R R D R D
⋅=+ ⋅ − + ⋅
(5.53)
( ) ( ) ( ) ( ) 2
1 1 2 1 2 1 2 1 2 11 L L C LC D R R L L D L R D R L Rχ = ⋅ − ⋅ + ⋅ + − ⋅ ⋅ + ⋅ + ⋅ (5.54)
( ) ( ) ( ) ( )2
2 1 1 1 2 1 2 1 1 1 21L L C L C L LD D L C R R D R D R R C R R Rχ = ⋅ ⋅ + ⋅ ⋅ + ⋅ − − ⋅ + ⋅ ⋅ + + (5.55)
( ) ( )2 23 2 11L LR R D R Dχ = + ⋅ − − ⋅ (5.56)
5.2.2.3 - DETERMINAÇÃO DA IMPEDÂNCIA DE ENTRADA ZI(S)
A função de transferência que relaciona a tensão de entrada e a corrente de entrada
corresponde à impedância de entrada Zi(s), sendo determinada através da análise do conversor
SEPIC 3SSC considerando a razão cíclica constante (d=0) na Figura 5.2. Logo, o circuito para
se determinar a impedância de entrada é análogo àquele empregado na análise de vo(s)/vi(s) na

88
Figura 5.4.
Com isto, utilizando os resultados encontrados para a modelagem do vo(s)/vi(s), obtém-
se a impedância de entrada em (5.57), sendo que os termos auxiliares são dados pelas
expressões (5.25) a (5.35) e (5.58) a (5.60).
4 3 2
0 1 2 3 42 3 2
0 1 2
( )
( )i
i
v s s s s s
i s D s s s D
α α α α αδ δ δ
⋅ + ⋅ + ⋅ + ⋅ +=+ ⋅ + ⋅ + ⋅ +
(5.57)
( )0 1 2O COC C L R Rδ = ⋅ ⋅ ⋅ + (5.58)
( ) ( ) ( ) 2 21 1 2 2 11O CO L C COC L C R R D R D R R Rδ = ⋅ + ⋅ ⋅ ⋅ − + + ⋅ ⋅ + (5.59)
( ) ( )2 2 22 1 2 11 L C O COC R D R D R C D R Rδ = ⋅ ⋅ − + + ⋅ + ⋅ ⋅ + (5.60)
5.2.2.4 - DETERMINAÇÃO DA IMPEDÂNCIA DE SAÍDA ZO(s)
Para determinar a relação entre a tensão de saída e a corrente de saída, por sua vez
correspondente à impedância de saída Zo(s), deve-se aplicar um curto-circuito às fontes de
tensão e abrir as fontes de corrente, como mostra a Figura 5.6. Assim, nota-se a inserção dos
potenciais nos três nós v1, v2 e (v1+vg).
L1 L2
RC1
Co
RCO
RC1
RL2RL1
D 1 D 1
vT
+
-
+
-
+
-
+
-
vT
ic2ic1
D.ic2 D.ic1
vg
ig
v2 v1
v1 + vg
Figura 5.6 – Circuito equivalente do conversor SEPIC 3SSC associado ao modelo CA do interruptor
PWM com as fontes de tensão em curto-circuito e fontes de corrente em circuito aberto para a obtenção
de Zo(s).
Pela relação de espiras do transformador, tem-se:
1 2c c ci i i= = (5.61)

89
Aplicando a lei de Kirchhoff das correntes ao nó com potencial v1, obtém-se a relação
(5.62).
1 2 1
2 21
1
01 1
g gg
LCo C
o
v v v v vi
R L s RR RC s C s
−− − + + + =⋅ ++ +
⋅ ⋅
(5.62)
Analogamente para potencial v2, tem-se:
2 2 1
1 1 2 2
2 0cL L
v v vi
L s R L s R
−+ + ⋅ =⋅ + ⋅ +
(5.63)
Por fim, pode-se obter a seguinte expressão para o nó com potencial (v1+vg):
( )2 1 01
g gc g
Coo
v vi D i
R RC s
+ − ⋅ ⋅ − − =+
⋅
(5.64)
Pela relação dos dois transformadores do modelo do interruptor PWM, têm-se (5.65) e
(5.66).
( ) ( ) ( )2 1
1
T g
g
v v v vv v
D
− − += − + (5.65)
( ) ( ) ( )2 1
1
T g
g
v v v vv v
D
+ − += − + (5.66)
Realizando as devidas manipulações, chega-se a:
( ) ( ) 1 1 2 1 2 3
4 3 20 1 2 3 4
1( )
( )
O COo
o
R C R s s s C L L sv s
i s s s s s
ε ε εα α α α α
⋅ ⋅ ⋅ + ⋅ ⋅ ⋅ ⋅ ⋅ ⋅ + + + =⋅ + ⋅ + ⋅ + ⋅ +
(5.67)
Ressalta-se que os termos auxiliares são definidos pelas equações (5.25) a (5.35) e
(5.68) a (5.70).
( )2 21 2 1 1 1 2 1 11C L L CL R D R L R L R Dε = ⋅ ⋅ − + + ⋅ + ⋅ ⋅ (5.68)
( ) ( ) ( )222 1 1 1 1 1 1 2 2 1 1 21C L C L L LD C R R L D C R R L C R Rε = ⋅ ⋅ ⋅ + + − ⋅ ⋅ ⋅ + + ⋅ ⋅ (5.69)
( )2 23 2 11L LR D D Rε = ⋅ − + ⋅ (5.70)

90
5.2.2.5 - DETERMINAÇÃO DE vo(s)/iL(s)
A determinação da função de transferência da tensão de saída em relação à corrente no
indutor ocorre considerando que a corrente do indutor sofre pequenas perturbações
oriundas das perturbações da fonte de tensão da entrada.
Substituindo pelas expressões encontradas na modelagem vo(s)/vi(s) e realizando
algumas manipulações algébricas, tem-se (5.71), sendo que os termos auxiliares são expressos
pelas equações (5.36) e (5.58) a (5.60).
( ) ( ) ( )2
1 2 1
2 3 21 0 1 2
1 1( )
( )CO Oo
L
D R R C s C L s s Dv s
i s D s s s D
βδ δ δ
− ⋅ ⋅ + ⋅ ⋅ ⋅ ⋅ ⋅ + ⋅ +=
+ ⋅ + ⋅ + ⋅ + (5.71)
5.2.2.6 - DETERMINAÇÃO DE iL(s)/d(s)
Para determinar a função de transferência da corrente no indutor em relação à razão
cíclica iL(s)/d(s), deve-se considerar pequenas perturbações na corrente do indutor e na razão
cíclica, logo a estrutura do circuito é similar ao utilizado para determinar o vo(s)/d(s).
Utilizando as expressões encontradas na modelagem de vo(s)/d(s) e realizando as
devidas manipulações, chega-se a relação de corrente do indutor L1 pela razão cíclica:
( )3 2
1 2 3 414 3 2
0 1 2 3 4
( )
( )idL
k s s si s
d s s s s s
φ φ φ φα α α α α
⋅ ⋅ + ⋅ + ⋅ +=
⋅ + ⋅ + ⋅ + ⋅ + (5.72)
Novamente, as equações (5.25) a (5.35) são empregadas como termos auxiliares,
juntamente com (5.73) a (5.82).
( )
( ) ( )2 22 1
1
1i
id
L L
V Dk
R R D R D
⋅ −=
+ ⋅ − + ⋅ (5.73)
( ) 1 1 2 5 1 1O C CO C COC C L D R R R R Rφ φ= ⋅ ⋅ ⋅ + ⋅ ⋅ + + ⋅ (5.74)
( ) ( ) ( )2 1 2 1 6 2 7 2C O CO LC L R R C L R R D R Rφ φ φ= ⋅ ⋅ + + + ⋅ ⋅ + ⋅ + ⋅ + (5.75)
( ) ( )3 2 8 9 2LL D R Rφ φ φ= + ⋅ + ⋅ + (5.76)
( )4 22 LD R Rφ = ⋅ ⋅ + (5.77)

5.3 -
SEPI
comp
verif
vo(s)/
•
mesm
•
etapa
softw
traça
mode
5.3.1
potên
arbitr
simu
5.1 s
8φ =
VALIDAÇ
IC 3SSC E
Neste trab
putacional,
ficar a eficá
/iL(s) e iL(s)
D<0,5, em
ma etapa de
D>0,5, em
a de operaçã
Ressalta-s
ware PSIM®
ados os dia
elado.
1 - OPERA
Como não
ncia do con
rário definid
Os diagram
ulado para o
ão apresent
6 OCφ = ⋅
7φ
(1C R R= ⋅ ⋅
φ
ÇÃO DA M
EM MCC
balho o pro
isto é, atrav
ácia das fu
)/d(s) deduz
m que os in
e operação;
m que os int
ão.
se ainda que
® através d
agramas de
ÇÃO EM M
o existe um
nversor SEP
do na Tabel
mas de Bod
o ponto de o
tados na Fig
5φ =
( 1CR R R⋅ ⋅
1 2C L= ⋅ +
)1 2C LR R+ +
(9 1 2LC Rφ = ⋅
MODELAG
cesso de va
vés do recur
unções de t
zidas na seçã
nterruptores
terruptores c
e este trabal
do recurso
Bode em
MODO DE
procedime
PIC 3SSC, o
la 5.1.
de das funçõ
operação em
gura 5.7 (a)
( )COR R= +
)2CO LR R+ +
( 2O LC R+ ⋅ +
1 2C LR R⋅ +
)2 1CD R+ ⋅ +
GEM DE
alidação ser
rso de varre
transferênci
ão anterior,
s controlado
controlados
lho não à vi
de varredu
termos de
E NÃO SOB
ento de proj
o conversor
ões de trans
m modo de n
a (f).
( )2LR R⋅ +
2CO LR R+ ⋅ +
) (1CD R R⋅ ⋅
(O CC R R⋅ ⋅
(OC D R+ ⋅ ⋅
PEQUENO
rá realizado
edura em fre
a vo(s)/vi(s)
em virtude
os não con
s conduzem
isa analise e
ura em freq
módulo e
BREPOSIÇ
jeto detalha
r foi simula
sferência pa
não sobrepo
1C COR R R+ ⋅ ⋅
)COR R+
)2CO LR R+ +
)COR R+
OS SINAIS
o somente p
equência (A
), vo(s)/d(s)
e das duas co
duzem simu
simultanea
experimenta
quência (AC
fase para
ÇÃO (D<0,
ado na litera
ado segundo
ra o modelo
osição (D<0
2LR
2CO LR R⋅
S DO CON
por meio de
AC Sweep).
), vo(s)/io(s)
ondições de
multaneamen
amente em u
al, sendo em
C Sweep).
o sistema
,5)
atura para o
o o ponto d
o teórico e o
0,5) definido
91
(5.78)
(5.79)
(5.80)
(5.81)
(5.82)
NVERSOR
e simulação
De forma a
), vi(s)/ii(s),
e operação:
nte em uma
uma mesma
mpregado o
Assim, são
simulado e
o estágio de
de operação
o conversor
o na Tabela
1
)
)
)
)
)
R
o
a
,
a
a
o
o
e
e
o
r
a
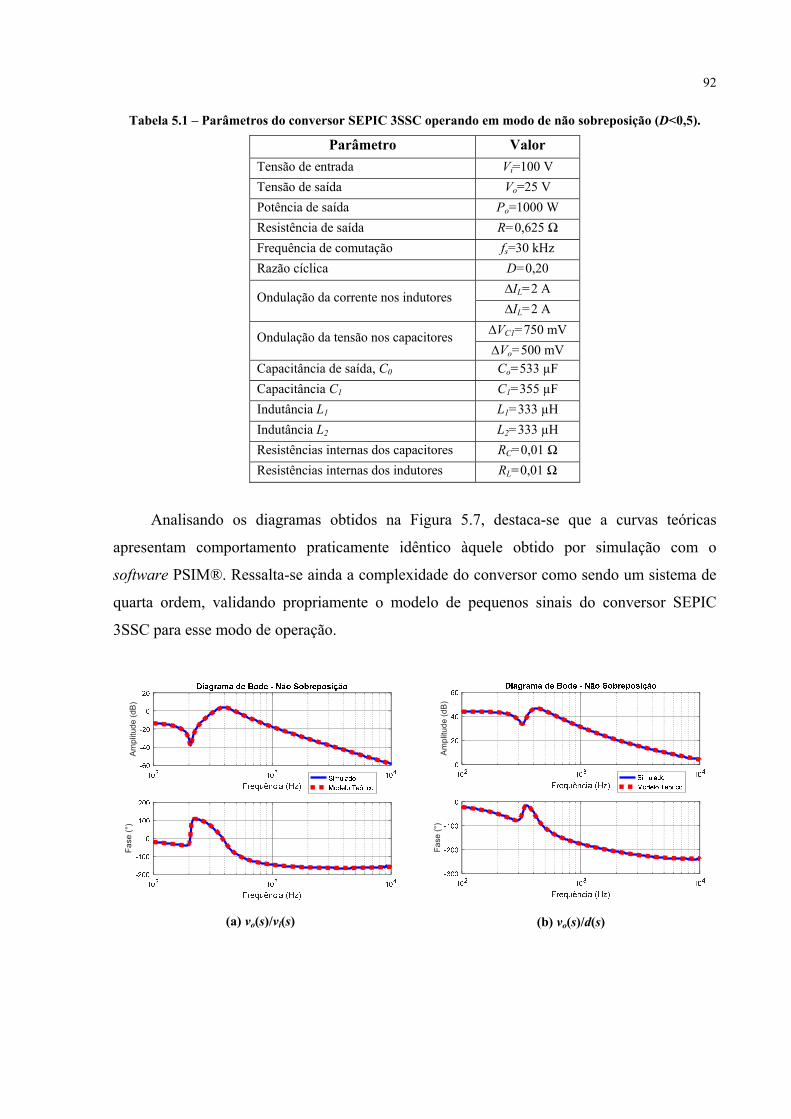
92
Tabela 5.1 – Parâmetros do conversor SEPIC 3SSC operando em modo de não sobreposição (D<0,5).
Parâmetro Valor
Tensão de entrada Vi=100 V
Tensão de saída Vo=25 V
Potência de saída Po=1000 W
Resistência de saída R=0,625 Ω
Frequência de comutação fs=30 kHz
Razão cíclica D=0,20
Ondulação da corrente nos indutores ∆IL=2 A
∆IL=2 A
Ondulação da tensão nos capacitores ∆VC1=750 mV
∆Vo=500 mV Capacitância de saída, C0 Co=533 µF
Capacitância C1 C1=355 µF
Indutância L1 L1=333 µH
Indutância L2 L2=333 µH
Resistências internas dos capacitores RC=0,01 Ω
Resistências internas dos indutores RL=0,01 Ω
Analisando os diagramas obtidos na Figura 5.7, destaca-se que a curvas teóricas
apresentam comportamento praticamente idêntico àquele obtido por simulação com o
software PSIM®. Ressalta-se ainda a complexidade do conversor como sendo um sistema de
quarta ordem, validando propriamente o modelo de pequenos sinais do conversor SEPIC
3SSC para esse modo de operação.
(a) vo(s)/vi(s) (b) vo(s)/d(s)
Am
plitu
de (
dB)
Fas
e (°
)
Am
plitu
de (
dB)
Fas
e (°
)

93
(c) vi(s)/ii(s) (d) vo(s)/io(s)
(e) vo(s)/iL1(s) (f) iL1(s)/d(s)
Figura 5.7 – Diagramas de Bode de ganho e fase do conversor SEPIC 3SSC operando em modo de não
sobreposição.
5.3.2 - OPERAÇÃO EM MODO DE SOBREPOSIÇÃO (D>0,5)
De maneira análoga ao modo de não sobreposição (D<0,5), é considerado o ponto de
operação da Tabela 5.2.
Verificando os diagramas de Bode da Figura 5.8 (a) a (f), nota-se que novamente as
funções de transferência obtidas pela modelagem teórica conseguem representar de maneira
satisfatória o conversor SEPIC 3SSC simulado. Com isto, é validado o modelo em modo de
sobreposição segundo o ponto de operação da Tabela 5.2. Portanto, pode-se concluir que o
modelo teórico obtido para conversor SEPIC 3SSC em MCC é válido para toda a faixa de
variação da razão cíclica (0≤D≤1).
Am
plitu
de (
dB)
Fas
e (°
)
Am
plitu
de (
dB)
Fas
e (°
)
Am
plitu
de (
dB)
Fas
e (°
)
Am
plitu
de (
dB)
Fas
e (°
)

94
Tabela 5.2 – Parâmetros do conversor SEPIC 3SSC operando em modo de sobreposição (D>0,5).
Parâmetro Valor
Tensão de entrada Vi=100 V
Tensão de saída Vo=150 V
Potência de saída Po=1000 W
Resistência de saída R=22,5 Ω
Frequência de comutação fs=30 kHz
Razão cíclica D=0,6
Ondulação da corrente nos indutores ∆IL=2 A
∆IL=2 A
Ondulação da tensão nos capacitores ∆VC1=15 V
∆Vo=7,5 V
Capacitância de saída, C0 Co=17,8 µF
Capacitância C1 C1=88,8 µF
Indutância L1 L1=1 mH
Indutância L2 L2=1 mH
Resistências internas dos capacitores RC = 0,01 Ω
Resistências internas dos indutores RL = 0,01 Ω
(a) vo(s)/vi(s) (b) vo(s)/d(s)
(c) vi(s)/ii(s) (d) vo(s)/io(s)
Am
plitu
de (
dB)
Fas
e (°
)
Am
plitu
de (
dB)
Fas
e (°
)
Am
plitu
de (
dB)
Fas
e (°
)
Am
plitu
de (
dB)
Fas
e (°
)

F
5.4 -
refer
casos
da te
nomi
5.4.1
contr
os se
- Pas
(FTL
depe
• f
conv
• f
• f
Am
plitu
de (
dB)
Fas
e (°
)
Figura 5.8 – D
PROJETO
Nesta seç
rentes aos m
s, emprega-
No intuito
ensão de saí
inal e vice-v
1 - CONTR
Utilizando
role em mo
eguintes pas
sso 1: Diag
LAscv(s)).
A função
ndente de:
função de t
versor vo(s)/d
função de tr
função de tr
(e) vo(s)/iL(sDiagramas de
O DO SIST
ção, são ap
métodos de
-se o método
o de verifica
ída em rela
versa.
ROLE EM M
o os parâm
odo tensão, j
ssos do rotei
grama de B
de transfe
transferênci
d(s);
ransferência
ransferência
s) e Bode de gan
s
TEMA DE C
resentados
controle em
o do fator k
ar a robuste
ação à varia
MODO TE
metros defin
juntamente
iro baseado
Bode da fun
erência de
ia Gv(s), qu
a do modula
a do sensor
nho e fase do
sobreposição
CONTROL
dois exem
m modo ten
k para o con
ez do sistem
ação periódi
ENSÃO
nidos na Ta
com a estr
o na técnica
nção de tra
laço abert
ue relaciona
ador PWM
da tensão d
conversor SE
o, D>0,5.
LE
mplos de pr
nsão e mod
nversor SEP
ma de contro
ica da carga
abela 5.1, o
rutura do co
do fator k:
ansferência
o é dada p
a a tensão
dada por Fm
de saída Hv(s
Am
plitu
de (
dB)
Fas
e (°
)
(f) iL(sEPIC 3SSC o
rojeto e res
do corrente
IC 3SSC em
ole, é analis
a de 100%
o roteiro pr
ontrole da F
de laço ab
pela expres
de saída co
m(s);
s).
s)/d(s) operando em
sultados de
média. Em
m MCC.
sado o com
para 50% d
roposto em
Figura 2.29,
berto não c
ssão (2.57)
om a razão
95
modo de
e simulação
m ambos os
mportamento
da potência
2.6.4 para
, adotam-se
compensada
), a qual é
o cíclica do
5
o
s
o
a
a
e
a
é
o

96
A função de transferência Gv(s) é representada para o conversor SEPIC 3SSC em MCC
por (5.52) e definida conforme os parâmetros da Tabela 5.1 em (5.84). A função de
transferência do modulador PWM é dada por (2.58), dependendo exclusivamente da
amplitude da forma de onda portadora Vm, sendo:
Vm=10 V (5.83)
( ) ( ) ( ) ( )( ) ( )
5 4 2 6
2 6 2 6
0, 484 1,87 10 1,24 10 242 4,14 10
2140 5,04 10 931 6,03 10V
s s s sG s
s s s s
− ⋅ + ⋅ ⋅ − ⋅ ⋅ + ⋅ + ⋅=
+ ⋅ + ⋅ ⋅ + ⋅ + ⋅ (5.84)
Já a função de transferência do sensor de tensão Hv(s) é definida pela expressão (2.59), a
qual depende da tensão de referência Vref , sendo:
Vref =5 V (5.85)
Com isto, pode-se obter o diagrama de Bode para a função transferência de laço aberto
FTLAscv(s), representado pela Figura 5.9.
- Passo 2: A frequência de cruzamento em malha aberta fcv geralmente é escolhida como
sendo no máximo um quarto da frequência de comutação. Porém, como este conversor
apresenta um pico de ressonância em 200 Hz, se for escolhida uma frequência próxima deste
ponto pode-se levar o sistema à instabilidade. Assim, é desejável escolher a frequência de
cruzamento abaixo da frequência de ressonância, resultando em:
fcv=40 Hz (5.86)
Figura 5.9 – Diagramas de Bode de ganho e fase de FTLAscv(s) do conversor SEPIC 3SSC em MCC para
projeto do controlador em modo tensão.
- Passo 3: Adota-se uma margem de fase M=90º.
-50
0
50
101 102 103 104 105 10690
180
270
360FTLASCV
Gv
Diagrama de Bode
Frequência (Hz)

97
- Passo 4: Analisando o diagrama de Bode da função de transferência de laço aberto
FTLAscv(s) representado na Figura 5.9, obtém-se o ganho do sistema para a frequência de
corte fcv = 40 Hz. Utilizando a expressão (2.60), encontra-se o ganho requerido para o
controlador:
G=0,3253 (5.87)
- Passo 5: Para calcular o avanço de fase necessário, emprega-se a expressão (2.61), a qual
requer a defasagem natural provocada pelo sistema na frequência de corte. Esse valor é obtido
através da análise da curva de fase do diagrama de Bode da FTLAscv(s) na Figura 5.9, sendo
que no caso P = - 6,893°. Obtém-se assim o valor do avanço de fase requisitado para o
controlador:
α = M – P – 90° = 8,64° (5.88)
- Passo 6: Como o avanço de fase necessário é menor 90º, é recomendado o uso do
compensador tipo 2 [26].
- Passo 7: O fator k para o compensador tipo 2 é calculado por (2.42), resultando em:
8,64
45 1,1642
k tg° = + ° =
(5.89)
- Passo 8: Os elementos do compensador tipo 2 são obtidos pelas expressões (2.43) a (2.45),
cujos valores são mostrados na Tabela 5.3.
Tabela 5.3 – Elementos do circuito do compensador em modo tensão para o conversor SEPIC 3SSC em
MCC.
Componente Valor
R1 1 kΩ
R2 1,24 kΩ
C1 3,7 µF
C2 10,5 µF
- Passo 9: Substituindo-se os valores da Tabela 5.3 na expressão (2.39), obtém-se a função de
transferência do compensador tipo 2, sendo representada por (5.90). De posse dessa função de
transferência, é possível a representação do controlador através do diagrama de Bode
conforme a Figura 5.10.
( ) 5 2
0,00463 1
4,967 10 0,01423v
sC s
s s−
⋅ +=⋅ ⋅ + ⋅
(5.90)

98
Figura 5.10 – Diagramas de Bode de ganho e fase
do compensador em modo tensão para o conversor
SEPIC 3SSC em MCC.
Figura 5.11 – Diagramas de Bode de ganho e fase
da função de transferência de laço aberto da tensão
compensada (FTLAccv(s)) em modo tensão para o
conversor SEPIC 3SSC em MCC.
Na Figura 5.10, nota-se que o controlador possui características bem próximas de um
compensador do tipo 1, uma vez que o valor de k é próximo da unidade e o avanço requerido
pelo controlador é pequeno.
- Passo 10: Utilizando a expressão (2.62), podem ser traçados os diagramas de Bode de ganho
e fase da função de transferência de laço aberto compensada FTLAccv(s), como é observado na
Figura 5.11.
De acordo com a inspeção do diagrama de Bode, obtém-se os seguintes parâmetros:
40 Hzcf = (5.91)
90ºM = (5.92)
Além disso, a taxa de crescimento em torno da nova frequência de cruzamento de ganho
∆fc foi calculada, sendo:
17,8 dB décadacfΔ = − (5.93)
- Passo 11: Utilizando o software PSIM®, com o intuito de realizar simulações averiguando o
desempenho do projeto do sistema de controle em modo tensão para o conversor SEPIC 3SSC
em MCC, foi obtida a resposta representado na Figura 5.12 (a), que mostra o comportamento
da tensão de saída frente a degraus periódicos de carga, de 20 Ω para 40 Ω e vice-versa. Nota-
se que o sistema é estável, embora a resposta aos degraus de carga seja oscilatória, visto que
este é um sistema de fase não mínima.
-40
-20
0
20
40
100 101 102 103-90
-85
-80
Diagrama de Bode
Frequência (Hz)
-150
-100
-50
0
50
101 102 103 104 105 1060
90
180
270
360
Diagrama de Bode
Frequência (Hz)

99
(a) Forma de onda da tensão de saída (b) Visualização detalhada da resposta do sistema
Figura 5.12 – Comportamento do sistema de controle em modo tensão do conversor SEPIC 3SSC em
MCC diante de degraus de carga.
Além disso, realizando uma análise minuciosa da Figura 5.12 (b), obtém-se os seguintes
resultados:
• para o degrau de carga positivo, tem-se sobressinal de 38% e tempo de acomodação de 10
ms com tolerância de 2%.
• para o degrau de carga negativo, tem-se sobressinal de 28% e tempo de acomodação de 5
ms com tolerância de 2%.
5.4.2 - CONTROLE EM MODO CORRENTE MÉDIA
Essa estratégia se baseia em duas malhas associadas ao controle da corrente do indutor e
da tensão de saída. Utilizando o roteiro proposto na seção 2.6.5, bem como o diagrama de
blocos da Figura 2.30, podem-se considerar os parâmetros da Tabela 5.2 e adotar os passos
seguintes:
5.4.2.1 - MALHA DE CORRENTE
- Passo 1: Diagrama de Bode da função de transferência de laço aberto sem compensador
(FTLAsci(s)).
A função de transferência de laço aberto é representada pela equação (2.66), sendo
dependente de:
Ten
são
(V)

100
• função de transferência Gi(s), que relaciona a corrente do indutor com a razão cíclica do
conversor iL1(s)/d(s), dado pela equação (5.72);
• corrente de referência, dada pela expressão (5.94);
• função de transferência do sensor de corrente Hi(s) segundo (5.95);
• função de transferência do modulador PWM dada por Fm(s) em (2.58), sendo que a
amplitude da forma de onda portadora Vm é dada em (5.96).
• função de transferência para testar a robustez da malha de corrente He(s), definida por
(2.63) a (2.65).
5ArefI = (5.94)
0, 4545iH = (5.95)
10VmV = (5.96)
Assim, é possível obter o diagrama de Bode para a função transferência de laço aberto
não compensada FTLAscv(s) na Figura 5.13.
Figura 5.13 – Diagramas de Bode de ganho e fase de FTLAsci(s) do conversor SEPIC 3SSC em MCC para
projeto do controlador da malha de corrente média.
- Passo 2: Para eliminar os efeitos da comutação em alta frequência no sinal de controle, deve-
se escolher a frequência de cruzamento de ganho fci desejada de forma que seja menor ou
igual a um quarto da frequência de comutação do conversor, com isto, é escolhido o valor
referente a um sexto da frequência de comutação.
5kHzcif = (5.97)
-50
0
50
100
101 102 103 104 105 106-360
-180
0
180
360
540FTLASCi
Gi
Diagrama de Bode
Frequência (Hz)

101
- Passo 3: A margem de fase M requerida ao sistema compensado é dada por:
30M = ° (5.98)
- Passo 4: Para se obter o ganho do compensador, deve-se substituir o valor da frequência de
cruzamento em FTLAsci(s) e aplicar o resultado na expressão (2.60), obtendo-se assim (5.99).
2,6178G = (5.99)
- Passo 5: Encontrar o avanço de fase requerido para o controlador, o qual é determinado de
acordo com a expressão (2.61), sendo que P é a defasagem provocada pelo sistema definida
na análise do diagrama de fase da Figura 5.13 no ponto da frequência de corte. Assim, a
equação (5.100) fornece o avanço requerido.
90 68,75M Pα = − − ° = ° (5.100)
- Passo 6: Como o avanço de fase necessário é menor 90º, é recomendado o uso do
compensador tipo 2 [26].
- Passo 7: O fator kpara o compensador tipo 2 é calculado por (2.42). Assim, tem-se:
68,75
45 5,33182
k tg° = + ° =
(5.101)
- Passo 8: Os elementos do compensador tipo 2 são obtidos pelas expressões (2.43) a (2.45),
cujos valores são mostrados na Tabela 5.4.
Tabela 5.4 – Elementos do circuito do compensador da malha interna em modo corrente média para o
conversor SEPIC 3SSC em MCC.
Componente Valor
R1 1 kΩ
R2 2,71 kΩ
C1 62,55 nF
C2 2,28 nF
- Passo 9: Para traçar o diagrama de Bode do compensador, deve-se substituir os valores da
Tabela 5.4 na expressão (2.39), obtendo-se a função de transferência do compensador tipo 2
representada por (5.102) na Figura 5.14.
( ) 10 2 5
0,0001697 1
3,87 10 6,483 10i
sC s
s s− −
⋅ +=⋅ ⋅ + ⋅ ⋅
(5.102)

102
Figura 5.14 – Diagramas de Bode de ganho e fase
da função de transferência do compensador de
corrente em modo corrente média para o
conversor SEPIC 3SSC em MCC.
Figura 5.15 – Diagramas de Bode de ganho e fase
da função de transferência de laço aberto da
corrente compensada (FTLAcci(s)) em modo
corrente média para o conversor SEPIC 3SSC em
MCC.
- Passo 10: Para traçar o diagrama de Bode da função de transferência de malha laço aberto
com compensação FTLAcci(s), deve-se utilizar a expressão (2.68), resultando na Figura 5.15.
De acordo com a inspeção do diagrama de Bode, obtém-se os seguintes parâmetros:
5 kHzcif = (5.103)
30ºM = (5.104)
Além disso, a taxa de crescimento em torno da nova frequência de cruzamento de ganho
∆fc foi calculada, sendo:
19,05 dB décadacfΔ = − (5.105)
5.4.2.1 - MALHA DE TENSÃO
- Passo 1: Diagrama de Bode da função de transferência de laço aberto sem compensador
(FTLAscv(s)), dada por (2.70), sendo dependendo: da função de transferência de malha fechada
da corrente, representado pela equação (2.69); do ganho do sensor da tensão de saída Hv(s); e
da função de transferência da tensão de saída em relação à corrente do indutor L1
Z(s)=vo(s)/iL1(s).
A tensão de referência Vref é atribuída em (5.106) e o ganho do sensor de tensão na saída
é dado em (5.107).
-50
0
50
100
101 102 103 104 105 106-90
-45
0
Diagrama de Bode
Frequência (Hz)
-50
0
50
100
101 102 103 104 105 1060
90
180
270
360
Diagrama de Bode
Frequência (Hz)

103
5 VrefV = (5.106)
5 100vH = (5.107)
Substituindo os valores da Tabela 5.2 e da Tabela 5.4 em (5.71) e em (2.69), obtém-se
então o diagrama de Bode da função de transferência de laço aberto sem compensação
(FTLAscv(s)) na Figura 5.16.
- Passo 2: Para eliminar distorções na entrada e garantir uma malha de tensão mais lenta que a
malha de corrente, a frequência de cruzamento de ganho fcv pode ser escoliada como sendo
menor ou igual a 30 Hz. Logo, a frequência fcv é escolhida de acordo com (5.108).
25 Hzcvf = (5.108)
- Passo 3: A margem de fase M desejada é escolhida através da expressão (5.109).
90vM = ° (5.109)
- Passo 4: O valor do ganho do compensador deve ser obtido através do valor assumido pelo
ganho da função de transferência de laço aberto do conversor na frequência de cruzamento
escolhida, utilizando a equação (2.60), obtendo assim o valor do ganho (5.110).
0,9115vG = (5.110)
- Passo 5: O avanço de fase requerido para o controlador, é determinado de acordo com a
expressão (5.111).
90 4,393M Pα = − − ° = ° (5.111)
- Passo 6: Como o avanço de fase é menor que 90º, escolhe-se então o compensador tipo 2
[26].
- Passo 7: Utiliza-se a equação (2.42) para calcular o fator k para o compensador tipo 2. A
equação (5.112) apresenta o fator k a ser utilizado para este controlador.
4,393
tg 45 1,072
k° = + ° =
(5.112)
- Passo 8: Alocar os zeros e polos do compensador, dimensionando os componentes do
compensador, utilizando as equações (2.43) a (2.45), obtendo os resultados da Tabela 5.5.

104
Figura 5.16 – Diagramas de Bode de ganho e fase de FTLAscv(s) do conversor SEPIC 3SSC em MCC para
projeto do controlador da malha de tensão.
Tabela 5.5 – Elementos do circuito do compensador, malha externa em modo corrente média para o
conversor SEPIC 3SSC em MCC.
Componente Valor
R1 1 kΩ
R2 6,4 kΩ
C1 1,07 µF
C2 6,48 µF
- Passo 9: Para obter o diagrama de Bode do compensador Cv(s), deve-se substituir os valores
da Tabela 5.5 na equação (2.39), sendo neste caso melhor representado por (5.113). Com isto,
representa-se o diagrama de Bode na Figura 5.17.
( ) 5 2
0,006874 1
4,446 10 0,007541v
sC s
s s−
⋅ +=⋅ ⋅ + ⋅
(5.113)
Nota-se que o controlador possui características bem próximas de um compensador do
tipo 1, uma vez que o valor de k é próximo da unidade e o avanço requerido pelo controlador
é pequeno.
- Passo 10: Finalmente, de posse todos os requisitos necessários para traçar o diagrama de
Bode da função de transferência de malha laço aberto com compensação FTLAccv(s), utiliza-se
a expressão (2.71) para obter a Figura 5.18.
-100
-50
0
50
102 104 106 108-270
-180
-90
0
FTLASCV
Gv
Diagrama de Bode
Frequência (Hz)

105
Figura 5.17 – Diagramas de Bode de ganho e fase
da função de transferência do compensador de
tensão em modo corrente média para o conversor
SEPIC 3SSC em MCC.
Figura 5.18 – Diagramas de Bode de ganho e fase
da malha externa com compensador (FTLAccv(s))
em modo corrente média para o conversor SEPIC
3SSC em MCC.
De acordo com a inspeção do diagrama de Bode, obtém-se os seguintes parâmetros:
25 Hzcvf = (5.114)
90ºM = (5.115)
Além disso, a taxa de crescimento em torno da nova frequência de cruzamento de ganho
∆fc foi calculada, sendo:
20,26 dB décadacfΔ = − (5.116)
- Passo 11: Realizando simulações com o software PSIM®, é possível verificar o desempenho
do projeto do sistema de controle em modo corrente para o conversor SEPIC 3SSC em MCC,
Assim, a resposta do sistema é representada na Figura 5.19 (a), que mostra o comportamento
da tensão de saída frente a degraus periódicos de carga, de 20 Ω para 40 Ω e vice-versa.
Por meio da análise minuciosa da Figura 5.19-(b), obtém-se os seguintes resultados para o
controle da tensão de saída:
• para o degrau de carga positivo, tem-se sobressinal de 37% e tempo de acomodação de
28 ms com tolerância de 2%.
• para o degrau de carga negativo, tem sub-sinal de 26,7% e tempo de acomodação de 32
ms com tolerância de 2%.
-40
-20
0
20
40
100 101 102 103-90
-89
-88
-87
-86
-85
Diagrama de Bode
Frequência (Hz)
-200
-150
-100
-50
0
50
102 104 106 108-360
-270
-180
-90
0
Diagrama de Bode
Frequência (Hz)

Figur
basea
mode
mesm
nesse
as ex
simu
pratic
os do
coma
proje
SEPI
mant
degra
estab
Ten
são
(V)
Cor
rent
e (A
)
(a) Forma
ra 5.19 – Com
CON5.5 -
A modela
ados na célu
elo do inter
mo que exi
e caso.
Ignorando
xpressões t
ulações real
camente so
ois modos d
ando dos int
De forma
eto do sistem
IC 3SSC. N
tendo a ten
aus de car
bilidade rela
de onda da te
mportamento
NSIDERAÇ
agem de p
ula de comu
rruptor PWM
ista uma m
o os elemen
teóricas são
lizadas com
obrepostos. A
de operação
terruptores
a semelhant
ma de contr
Nas duas situ
nsão de saí
rga. Porém,
ativa da ten
ensão de saíd
o do sistema d
em MCC
ÇÕES FINA
pequenos si
utação de tr
M proposto
maior compl
ntos parasita
o deduzidas
m o softwa
Assim, é po
o da 3SSC,
controlados
te ao capítu
role em mo
uações de c
ída constan
, no modo
nsão de saíd
da
de controle em
C diante de de
AIS
inais desen
rês estados
em [10] mo
lexidade as
as dos semi
s e compa
are PSIM®
ossível repr
ou seja, nã
s.
ulo anterior
odo tensão e
controle o s
nte diante d
o de tensão
da, devido
(b) Visualiza
m modo corre
egraus de car
nvolvida pa
em modo d
ostra-se um
sociada ao
condutores
radas com
®, sendo q
resentar o c
ão sobrepos
r, foram re
e em modo
istema foi c
da aplicaçã
o diminui-s
ao fato do
Ten
são
(V)
Cor
rent
e (A
)
ção detalhad
ente média do
rga.
ara o conv
de condução
a técnica sim
sistema, qu
para as fun
as curvas
que os diag
omportame
ição e sobre
ealizados o
corrente m
capaz de atu
ão de pertu
se a veloci
sistema ser
da da resposta
do conversor S
versor CC-C
o contínua u
mples, diret
ue é de qu
nções de tra
obtidas po
agramas de
ento do con
reposição do
desenvolvi
média para o
uar de form
urbações po
idade para
r de fase n
106
a do sistema
SEPIC 3SSC
CC SEPIC
utilizando o
ta e efetiva,
uarta ordem
ansferência,
or meio de
Bode são
nversor para
os sinais de
imento e o
o conversor
ma desejada,
or meio de
garantir a
ão mínima.
6
C
o
,
m
,
e
o
a
e
o
r
,
e
a
.

6.1 -
conv
mode
realiz
varre
realiz
médi
6.2 -
tamb
estru
modo
mais
utiliz
empr
CONSIDE
O desenvo
versor Zeta
elagem de
zados de fo
edura em fre
De forma
zado o proj
ia, verifican
MODELA
O convers
bém como u
utura pode tr
o similar ao
complexid
zação de qu
Aplicando
regando a c
MODE
ERAÇÕES
olvimento d
baseado na
pequenos
forma idênt
equência.
a ressaltar
eto do siste
ndo assim os
AGEM DE
sor Zeta clá
uma estrutur
rabalhar co
o conversor
dade se co
atro elemen
o a propried
élula B repr
Figura
ELAGEM D
S INICIAIS
deste capítu
a célula 3SS
sinais qua
ica ao proc
r a importân
ema de cont
s modelos e
PEQUENO
ssico pode-
ra dual do c
mo abaixad
SEPIC, o c
omparado a
ntos passivo
dade da inv
resentado n
Vi
L1
a 6.1 – Conve
CAPÍTUL
DO CONV
S
ulo é simila
SC do tipo
anto a val
cedimento
ncia das fu
trole do con
encontrados
OS SINAIS
-se ser visto
conversor SE
dora (D<0,5
conversor Z
aos convers
os em sua es
versão bilat
na Figura 2.1
C1
ersor Zeta 3S
LO 6
VERSOR C
ar aos capí
B operando
idação das
anterior uti
nções de tr
nversor em
s com a plan
S
o como um
EPIC [31]. D
5) ou como
eta é um sis
sores buck
strutura [1].
teral (Figur
14, tem-se a
L2
CO
D1 D2
S1
SC com inver
C-CC ZET
tulos 4 e 5
o em MCC
s funções d
ilizando o
ransferência
modo tensã
nta simulada
conversor b
Dependend
elevadora d
stema de qu
, boost e
a 2.12) no
a Figura 6.1
R+
-
S2
rsão bilateral
TA
5, abrangen
C. Tanto o p
de transfer
interruptor
as e exemp
ão e em mo
a.
buck-boost-
do da razão c
de tensão (D
uarta ordem
buck-boost
conversor
.
al.
107
ndo agora o
processo de
rências são
PWM e a
lificá-las, é
do corrente
buck [1] ou
cíclica, esta
D>0,5). De
m, possuindo
t, devido à
Zeta 3SSC
7
o
e
o
a
é
e
u
a
e
o
à
C

108
Considerando as resistências série dos elementos passivos do conversor, e aplicando o
modelo CA do interruptor PWM sem os elementos parasitas da Figura 4.2 para as duas
células de comutação de dois estados presentes na célula de três estados [6] na Figura 6.1,
tem-se a Figura 6.2.
Vi
L1L2
R
C1
Co
RCO
RC1
RL2RL1
D 1IC.d
D 1IC.d
Vd.dD__Vd.dD__ Vd.d
D__Vd.dD__
Figura 6.2 – Conversor Zeta 3SSC associado ao modelo CA do interruptor PWM.
Adotando como base o modelo da Figura 6.2, é possível obter as funções de
transferência de pequenos sinais empregando técnicas associadas às leis de circuitos elétricos.
Inicia-se com a análise CC, prosseguindo assim para análise CA.
6.2.1 - ANÁLISE CC
A análise CC do conversor Zeta 3SSC é realizada de maneira similar ao conversor
SEPIC, devendo-se adotar algumas considerações ao modelo CA do interruptor PWM
mostrado na Figura 6.2:
1. A razão cíclica é constante e igual a D, sendo ˆ 0d = ;
2. O capacitor encontra-se em circuito aberto;
3. O indutor é representado apenas por sua respectiva resistência intrínseca;
4. A tensão de entrada é substituída pelo seu valor médio Vi;
Com isto, obtém-se o circuito da Figura 6.3, representando assim o conversor Zeta
3SSC associado ao modelo CC do interruptor PWM. Comparando-o com a Figura 4.4 e
Figura 5.3, que representam o modelo CC para o conversor SEPIC e Ćuk 3SSC
respectivamente, nota-se que os circuitos são idênticos, não havendo necessidade de refazer
os cálculos.

109
Vi
VO+
-
D 1 D 1
VT VT
Ic1 Ic2
Ic2.DIc1.D
R
Vap+
-
+
-+
-
RL2RL1
Figura 6.3 – Conversor Zeta 3SSC associado ao modelo CC do interruptor PWM.
Logo, tem-se a corrente Ic, a tensão Vap e o ganho estático nas equações (6.1) a (6.3),
respectivamente.
( ) ( )( )2 2
2 12 1i
c
L L
V DI
R R D R D
− ⋅=⋅ + ⋅ − +
(6.1)
( ) ( )
( ) ( )2
2 22 1
1
1i L
ap
L L
V R R DV
R R D R D
− ⋅ + ⋅ −=
+ ⋅ − + (6.2)
( )
( ) ( )2 22 1
1
1o
i L L
R D DV
V R R D R D
⋅ ⋅ −=
+ ⋅ − + ⋅ (6.3)
6.2.2 - ANÁLISE CA
As funções de transferência vo(s)/vi(s), vo(s)/d(s), Zo(s), Zi(s), vo(s)/iL1(s) e iL1(s)/d(s) são
determinadas através da análise do comportamento CA do conversor Zeta 3SSC em relação à
Figura 6.2. O desenvolvimento matemático necessário é apresentado na sequência.
6.2.2.1 - DETERMINAÇÃO DE vo(s)/vi(s)
Para análise da função de transferência da tensão de saída frente a pequenas
perturbações na tensão de entrada (vo(s)/vi(s)), deve-se considerar:
• Razão cíclica constante, d=0, e;
• Tensão de entrada sofrendo pequenas perturbações ( )ˆi i iv V v= + .

110
Aplicando as condições representadas acima na Figura 6.2, obtém-se o circuito
representado na Figura 6.4.
vT
+
-
+
-
+
-
+
-
vT
+
-
+
-
vO
ic2ic1
D.ic2 D.ic1
v2 v1
v1 + vo
L1L2
R
C1
Co
RCO
RC1
RL2RL1
D 1 D 1
vi
Figura 6.4 – Conversor Zeta 3SSC associado ao modelo CA do interruptor PWM para a obtenção de
vo(s)/vi(s).
Pela relação de espiras do transformador (vT), tem-se:
1 2c c ci i i= = (6.4)
Aplicando a lei de Kirchhoff das correntes no nó com potencial v1, obtém-se:
1 2
2 2
01
o o
LCo
o
v v v v
R L s RRC s
−− − + =⋅ ++
⋅
(6.5)
De forma semelhante para o nó com potencial v2, tem-se:
2 2 1
1 1 2 2
2 0ic
L L
v v v vi
L s R L s R
− −+ + ⋅ =⋅ + ⋅ +
(6.6)
Finalmente para o nó (v1+vo), chega-se a:
( )1
11
2 1 01 1
o o o ic
Co Co
v v v v vi D
R R RC s C s
+ −+ + − ⋅ ⋅ − =+ +
⋅ ⋅
(6.7)
Para a relação de espiras dos dois transformadores do modelo do interruptor, tem-se
(6.8) e (6.9).
( ) ( ) ( )2 1
1T o
o
v v v vv v
D
− − += − + (6.8)
( ) ( ) ( )2 1
1T o
o
v v v vv v
D
+ − += − + (6.9)

111
Organizando as expressões anteriores e realizando algumas manipulações algébricas,
obtém-se a função de transferência da tensão de saída frente a perturbações na tensão de
entrada como sendo dada por (6.10).
( ) ( )2
1 1 1
4 3 20 1 2 3 4
1 1( )
( )O COo
i
D R C R s C L s s Dv s
v s s s s s
βα α α α α
⋅ ⋅ ⋅ ⋅ + ⋅ ⋅ ⋅ + ⋅ + −=
⋅ + ⋅ + ⋅ + ⋅ + (6.10)
sendo:
( )0 1 1 2O COC C L L R Rα = ⋅ ⋅ ⋅ ⋅ + (6.11)
( ) 1 1 1 2 5 1O CO COC L L C R R L R Rα α= ⋅ ⋅ + ⋅ + ⋅ + ⋅ ⋅ (6.12)
( ) ( )222 1 1 2 1 6 7 8 1L LC L R R R D Dα α α α= ⋅ ⋅ + + ⋅ + ⋅ + ⋅ − (6.13)
( ) ( )2 23 10 11 1 1 21 L LD D C R R Rα α α= ⋅ − + ⋅ + ⋅ ⋅ + (6.14)
( ) ( )2 24 2 11L LR R D D Rα = + ⋅ − + ⋅ (6.15)
( ) ( )2 25 2 1 1 1 2 11C L L CL R D R L R D Rα = ⋅ ⋅ − + + ⋅ + ⋅ (6.16)
( )6 2 2 2O L CO CO LL C R R R R Rα = + ⋅ ⋅ + ⋅ + (6.17)
( ) ( )7 1 1 1 1 1 1 1O CO C L CC R R L C R R C L Rα = ⋅ + ⋅ + ⋅ ⋅ + ⋅ ⋅ (6.18)
( )8 1 2 1 2 1 9C O COC L R C L R R Cα α= ⋅ ⋅ + ⋅ ⋅ + + ⋅ (6.19)
( )9 1 2 2C CO L CO LR R R R R Rα = ⋅ ⋅ + + ⋅ (6.20)
( ) ( )10 1 1 2 2 2 2C L O CO L CO LC R R R C R R R R R Lα = ⋅ ⋅ + + ⋅ ⋅ + + ⋅ + (6.21)
( )11 1 1 1 1L O CO CR C R R C R Lα = ⋅ ⋅ + + ⋅ + (6.22)
( )1 1 1 1 1L CC R R Dβ = ⋅ + ⋅ − (6.23)
6.2.2.2 - DETERMINAÇÃO DE vo(s)/d(s)
A função de transferência da tensão de saída em relação à razão cíclica é determinada
através da análise do conversor Zeta 3SSC associado ao modelo CA do interruptor PWM na
Figura 6.2, assumindo que a tensão de entrada deve ser constante ( )ˆ 0iv = e a razão cíclica
sofre pequenas perturbações ( )ˆd D d= + .
Utilizando a Figura 6.2 e as condições supracitadas, obtém-se a Figura 6.5 para a

112
determinação de vo(s)/d(s).
L1 L2
R
C1
Co
RCO
RC1
RL2RL1
D 1IC.d
Vd.dD__Vd.dD__
D 1IC.d
vT
+
-
+
-
+
-
+
-
vT
+
-
+
-
vO
ic2ic1
D.ic2 D.ic1
v2 v1
v1 + vo
Vd.dD__Vd.dD__
Figura 6.5 – Conversor Zeta 3SSC associado ao modelo CA do interruptor PWM para a obtenção de
vo(s)/d(s).
Através da análise da análise CC do conversor, nota-se que as correntes no ponto
comum dos dois interruptores são iguais. Logo, a expressão (6.24) torna-se verdadeira.
1 2c c cI I I= = (6.24)
Estendendo esta análise para a diferença de potencial entre os terminais a e p dos dois
interruptores, a expressão (6.25) também torna-se verdadeira.
implica1 2 1 2ap ap ap D D DV V V V V V= = ⎯⎯⎯→ = = (6.25)
Pela relação de espiras do transformador (vT), tem-se:
1 1c c ci i i= = (6.26)
Aplicando a lei de Kirchhoff das correntes para:
• nó com potencial v1:
1 2
2 2
01
o o
LCo
o
v v v v
R L s RRC s
−− − + =⋅ ++
⋅
(6.27)
• nó com potencial v2:
2 2 1
1 1 2 2
2 0cL L
v v vi
L s R L s R
−+ + ⋅ =⋅ + ⋅ +
(6.28)
• nó com potencial (v1+vo):

113
( )1
11
2 1 2 01 1
o o oc c
Co Co
v v v vi D I d
R R RC s C s
++ + + ⋅ ⋅ − + ⋅ ⋅ =+ +
⋅ ⋅
(6.29)
Pela relação de espiras dos dois transformadores do modelo do interruptor, tem-se
(6.30) e (6.31).
( ) ( ) ( )2 1
1T o D
o
v v v v Vd v v
D D
− − += ⋅ − + (6.30)
( ) ( ) ( )2 1
1T o D
o
v v v v Vd v v
D D
+ − += ⋅ − + (6.31)
Para se definir o ponto de operação do conversor associado ao modelo CA do
interruptor PWM, deve-se analisar o circuito da Figura 6.3, obtendo as seguintes expressões:
( ) ( )
( ) ( )2
2 1
2 2
1
1
i L
D
L L
V R R DV
R R D R D
− ⋅ + ⋅ −=
+ ⋅ − + (6.32)
( ) ( )
2 1
2 22 1i
c
L L
V DI
R R D R D
− ⋅= ⋅ + ⋅ − +
(6.33)
Organizando as expressões anteriores e após algumas manipulações algébricas, obtém-
se a função de transferência da tensão de saída em relação à razão cíclica em (6.34).
( ) ( )2
1 1 1 2 3
4 3 20 1 2 3 4
1( )
( )d CO Oo
k s R C C L s sv s
d s s s s s
χ χ χα α α α α
⋅ + ⋅ ⋅ ⋅ ⋅ ⋅ ⋅ − ⋅ +=
⋅ + ⋅ + ⋅ + ⋅ + (6.34)
Os termos auxiliares do denominador são dados pelas equações (6.11) a (6.22),
enquanto os termos do numerador são dados por:
( ) ( )2 2
2 11i
d
L L
R Vk
R R D D R
⋅=+ ⋅ − + ⋅
(6.35)
( ) ( ) 21 2 11L CR R D D Rχ = + ⋅ − − ⋅ (6.36)
( ) ( )222 1 1 1 1 2 1 11C C L LD L C R R R R D Rχ χ = ⋅ − ⋅ ⋅ + ⋅ ⋅ − + ⋅ (6.37)
( ) ( )2 23 2 11L LR R D R Dχ = + ⋅ − − ⋅ (6.38)

114
6.2.2.3 - DETERMINAÇÃO DA IMPEDÂNCIA DE ENTRADA Zi(s)
A função de transferência da impedância de entrada Zi(s), a qual relaciona a tensão de
entrada e a corrente de entrada, é determinada através da análise do conversor Zeta 3SSC
considerando:
• Razão cíclica constante (d=0), e;
• Tensão de entrada sofrendo pequenas perturbações ( )ˆi i iv V v= + .
Logo, utiliza-se o mesmo circuito da análise vo(s)/vi(s) da Figura 6.4.
Para a corrente de entrada do circuito, tem-se:
2i ci D i= ⋅ ⋅ (6.39)
Substituindo em (6.39) as expressões encontradas na modelagem de vo(s)/vi(s) e
organizando o resultado, tem-se em (6.40) a impedância de entrada do sistema. Os parâmetros
do numerador são definidos pelas equações (6.11) a (6.22), enquanto os termos do numerador
são definidos por (6.40) a (6.43).
4 3 2
0 1 2 3 43 2 2
0 1 3
( )
( )i
i
v s s s s s
i s s s s D
α α α α αδ δ δ
⋅ + ⋅ + ⋅ + ⋅ +=⋅ + ⋅ + ⋅ +
(6.40)
( ) ( ) 20 1 1 2O COC C L L R R Dδ = ⋅ ⋅ + ⋅ + ⋅ (6.41)
( ) ( ) 21 1 1 2 1 1 2O CO C L L COC D L L C R R R R R R Rδ = ⋅ ⋅ + + ⋅ ⋅ + + + ⋅ + (6.42)
( ) ( )22 1 1 2 1L L C O COD C R R R R C R Rδ = ⋅ ⋅ + + + + ⋅ + (6.43)
6.2.2.4 - DETERMINAÇÃO DA IMPEDÂNCIA DE SAÍDA Zo(s)
Para determinar a impedância de saída Zo(s) como a relação entre a tensão e a corrente
de saída, considera-se um curto-circuito nas fontes de tensão e as fontes de corrente como
sendo um circuito aberto, como mostra a Figura 6.6.

115
vg
ig
L1 L2
R
C1
Co
RCO
RC1
RL2RL1
D 1 D 1
vT
+
-
+
-
+
-
+
-
vT
ic2ic1
D.ic2 D.ic1
v2 v1
v1 + vg
Figura 6.6 – Circuito equivalente do conversor Zeta 3SSC associado ao modelo CA do interruptor PWM
com as fontes de tensão em curto-circuito e fontes de corrente em circuito aberto para a obtenção de Zo(s).
Analisando o funcionamento do transformador vT, tem-se a expressão (6.44).
1 2c c ci i i= = (6.44)
Aplicando a lei de Kirchhoff dos nós para o ponto com potencial v1, obtém-se:
1 2
2 2
01
g gg
LCo
o
v v v vi
R L s RRC s
−− − + + =⋅ ++
⋅
(6.45)
Para o nó com potencial v2, tem-se:
2 2 1
1 1 2 2
2 0cL L
v v vi
L s R L s R
−+ + ⋅ =⋅ + ⋅ +
(6.46)
Agora, para o nó com potencial (v1+vo), chega-se a:
( )1
11
2 1 01 1
g g gc g
Co Co
v v v vi D i
R R RC s C s
++ + − ⋅ ⋅ − − =
+ +⋅ ⋅
(6.47)
As relações de espiras dos dois transformadores do interruptor PWM são dadas em
(6.48) e (6.49).
( ) ( ) ( )2 1
1
T g
g
v v v vv v
D
− − += − + (6.48)
( ) ( ) ( )2 1
1
T g
g
v v v vv v
D
+ − += − + (6.49)
Realizando as devidas manipulações, chega-se a:

116
( ) ( )3 2
1 1 2 1 2 3
4 3 20 1 2 3 4
1( )
( )O COo
o
R C R s C L L s s sv s
i s s s s s
ε ε εα α α α α
⋅ ⋅ ⋅ + ⋅ ⋅ ⋅ ⋅ + ⋅ + ⋅ +=
⋅ + ⋅ + ⋅ + ⋅ + (6.50)
Ressalta-se que os termos auxiliares do denominador estão definidos em (6.11) a (6.22),
enquanto os termos do numerador são dados por (6.51) a (6.53).
( ) ( )2 21 1 2 1 1 2 1 2 11C L C LC L R D L R R D L Rε = ⋅ ⋅ ⋅ − + ⋅ + ⋅ + ⋅ (6.51)
( ) ( ) ( )2 22 22 1 2 1 1 2 1 2 11 1C L L L CD L L D C R R D R R R Dε = ⋅ + ⋅ − + ⋅ ⋅ ⋅ − + ⋅ + ⋅ (6.52)
( )2 23 2 11L LR D D Rε = ⋅ − + ⋅ (6.53)
6.2.2.5 - DETERMINAÇÃO DE vo(s)/iL(s)
Para determinar a função de transferência da tensão de saída em relação à corrente no
indutor L1, deve-se considerar que a corrente do indutor sofre pequenas perturbações oriundas
somente das perturbações da fonte de tensão da entrada. Logo, a estrutura de circuito
resultante é similar àquela utilizada para determinar vo(s)/vi(s) na Figura 6.4. Determinando a
corrente do indutor L1, tem-se a equação (6.54).
21
1 1
iL
L
v vi
L s R
−=⋅ +
(6.54)
Substituindo em (6.54) as expressões encontradas na modelagem vo(s)/vi(s) e com as
devidas manipulações algébricas, tem-se (6.55).
( ) ( )2
1 1 1
3 21 0 1 2
1 1( )
( )O COO
L
R C R s C L s s Dv s
i s s s s D
βϕ ϕ ϕ
⋅ ⋅ ⋅ + ⋅ ⋅ ⋅ + ⋅ + −=
⋅ + ⋅ + ⋅ + (6.55)
sendo:
( )0 1 2O COC C L R Rϕ = ⋅ ⋅ ⋅ + (6.56)
( ) ( ) 1 1 2 2 1 2 1O CO L C L C COC L C R R R D R R D R Rϕ = ⋅ + ⋅ ⋅ + + ⋅ + + ⋅ ⋅ (6.57)
( ) ( )2 1 2 1L C O COC R R D R C D R Rϕ = ⋅ + + ⋅ + ⋅ ⋅ + (6.58)
6.2.2.6 - DETERMINAÇÃO DE iL(s)/d(s)
Para determinar a função de transferência da corrente no indutor em relação à razão

cíclic
cíclic
Figur
realiz
dada
(6.69
6.3 -
ZET
mane
funçõ
dedu
ca (iL(s)/d(s
ca. Logo, o
ra 6.5. Dete
Substituin
zando as de
a em (6.60).
As variáve
9).
5φ =
VALIDAÇ
TA EM MC
Realiza-se
eira idêntic
ões de tran
uzidas na seç
s)), deve-se
circuito é a
erminando a
ndo as exp
evidas man
Li
d
eis auxiliare
1φ
(2OC L R= ⋅ ⋅
6φ =
φ
8φ =
ÇÃO DA M
CC
e a varredu
ca ao reali
nsferência
ção anterior
considerar p
análogo aqu
a corrente d
pressões en
ipulações, a
1
0
( )
( )idL
ks
d s sα=
⋅
es se encont
(idkR
=
1 OC C L= ⋅ ⋅
2 Dφ =
3φ =
φ
)COR R C+ +
2 OL C R+ ⋅
7 2 OL Cφ = +
(1 LC R R= ⋅ +
MODELAG
ura em freq
zado nos c
vo(s)/vi(s),
r.
pequenas p
uele ao util
do indutor L
11
L
vi
L s
−=⋅
ncontradas
a relação da
( 31
4 31
d s
s s
φ φα
⋅ ⋅ ++ ⋅ +
ntram expres
() (2
1
1i
L
V
R R
⋅
+ ⋅ −
( )2 COL R R⋅ +
(5 1D Cφ⋅ + ⋅
(7D Rφ= ⋅ +
(4 2 D Rφ = ⋅ ⋅
1 1C OC R C⋅ ⋅
(COR R D⋅ + ⋅
2O CO LR R⋅ ⋅
2 2L CD R+ ⋅ ⋅
GEM DE
quência par
capítulos a
vo(s)/d(s),
erturbações
izado para
L1, tem-se a
2
1L
v
R+
na modela
a corrente d
22 3
22 3
s s
s
φ φα α⋅ + ⋅
+ ⋅ +
ssas pelas e
))2
1
1
L
D
D R
−
− + ⋅
) ( 2LR R⋅ + +
( )2 6LR R φ+ ⋅
)2 8LR R φ+ ⋅
)2LR R+
(2L COR R⋅ ⋅
)1 2C LR R⋅ + ⋅
(2 COR R+ ⋅ +
)1C OC D+ ⋅
PEQUENO
ra o proce
anteriores, v
vo(s)/io(s),
s na corrente
determinar
equação (6.
agem de vo
do indutor L
)4
4s
φα
+⋅ +
quações (6.
2D
)1CR D+ ⋅
6φ
)R R R+ + ⋅
( )COR R+
)2LR+
( )COR R⋅ +
OS SINAIS
sso de vali
verificando
vi(s)/ii(s),
e do indutor
o vo(s)/d(s)
.59).
o(s)/d(s) em
L1 pela razã
.11) a (6.22
2COR L+
S DO CON
idação do
o a represe
vo(s)/iL(s)
117
r e na razão
) segundo a
(6.59)
m (6.59) e
ão cíclica é
(6.60)
2) e (6.61) a
(6.61)
(6.62)
(6.63)
(6.64)
(6.65)
(6.66)
(6.67)
(6.68)
(6.69)
NVERSOR
modelo de
entação das
e iL(s)/d(s)
7
o
a
)
e
é
)
a
)
)
)
)
)
)
)
)
)
R
e
s
)

118
A validação analisar também o comportamento nas duas regiões de operação:
sobreposição e sobreposição. É importante destacar que este trabalho é dedicado à validação
através do software PSIM®, mas não experimentalmente.
6.3.1 - OPERAÇÃO EM MODO DE NÃO SOBREPOSIÇÃO (D<0,5)
Como não existe procedimento de projeto na literatura para o conversor Zeta 3SSC, o
conversor é simulado segundo o ponto de operação arbitrário definido na Tabela 6.1.
Tabela 6.1 – Parâmetros do conversor Zeta 3SSC operando em modo de não sobreposição (D<0,5).
Parâmetro Valor
Tensão de entrada Vi=100 V
Tensão de saída Vo=50 V
Potência de saída Po=1000 W
Resistência de saída R=2,5 Ω
Frequência de comutação fs=40 kHz
Razão cíclica D=0,333
Ondulação da corrente nos indutores ∆IL1=2 A
∆IL2=2 A
Ondulação da tensão dos capacitores ∆VC1=10 V
∆VCo=0,5 V
Capacitância de saída, C0 Co=25 µF
Capacitância C1 C1=16,7 µF
Indutância L1 L1=208 µH
Indutância L2 L2=208 µH
Resistências internas dos capacitores RC=0,01 Ω
Resistências internas dos indutores RL=0,01 Ω
Os diagramas de Bode das funções de transferência para o modelo teórico e o conversor
simulado para o ponto de operação em modo de não sobreposição (D<0,5) definido na Tabela
6.1 são apresentados na Figura 6.7 (a) a (f). Destaca-se que a curvas teóricas apresentam
comportamento praticamente idêntico àquele obtido por simulação com o software PSIM®.
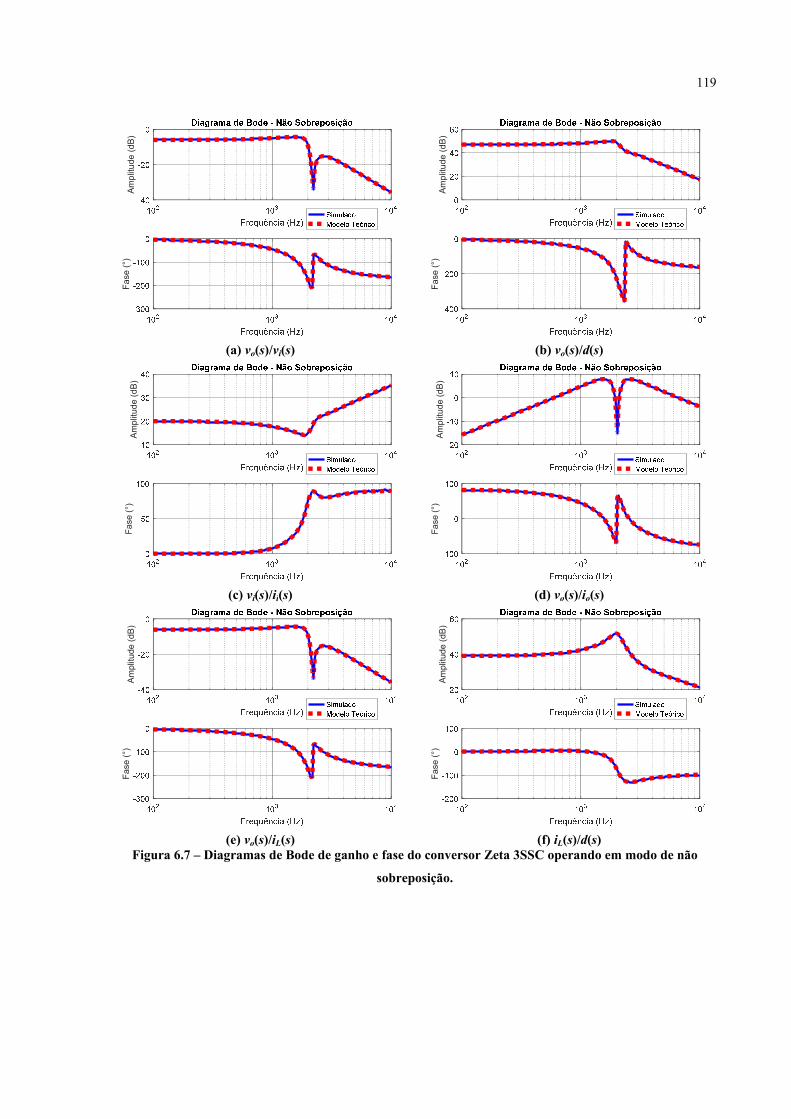
119
(a) vo(s)/vi(s) (b) vo(s)/d(s)
(c) vi(s)/ii(s) (d) vo(s)/io(s)
(e) vo(s)/iL(s) (f) iL(s)/d(s) Figura 6.7 – Diagramas de Bode de ganho e fase do conversor Zeta 3SSC operando em modo de não
sobreposição.
Am
plitu
de (
dB)
Fas
e (°
)
Am
plitu
de (
dB)
Fas
e (°
)
Am
plitu
de (
dB)
Fas
e (°
)
Am
plitu
de (
dB)
Fas
e (°
)
Am
plitu
de (
dB)
Fas
e (°
)
Am
plitu
de (
dB)
Fas
e (°
)

120
6.3.2 - OPERAÇÃO EM MODO DE SOBREPOSIÇÃO (D>0,5)
De maneira semelhante ao modo de não sobreposição (D<0,5), o modo de sobreposição
(D>0,5) utiliza a Tabela 6.2, a qual estabelece o ponto de operação arbitrário para o
conversor.
Tabela 6.2 – Parâmetros do conversor Zeta 3SSC operando em modo de sobreposição (D>0,5).
Parâmetro Valor
Tensão de entrada Vi=75 V
Tensão de saída Vo=150 V
Potência de saída Po=1000 W
Resistência de saída R=22,5 Ω
Frequência de comutação fs=40 kHz
Razão cíclica D=0,667
Ondulação da corrente nos indutores ∆IL1=2 A
∆IL2=2 A
Ondulação da tensão dos capacitores ∆VC1=30 V
∆VCo=1,5 V
Capacitância de saída, C0 Co=2,08 µF
Capacitância C1 C1=3,7 µF
Indutância L1 L1=1,3 mH
Indutância L2 L2=1,3 mH
Resistências internas dos capacitores RC=0,01 Ω
Resistências internas dos indutores RL=0,01 Ω
Analisando os diagramas de Bode da Figura 6.8 (a) a (f), novamente pode-se concluir
que o modelo de pequenos sinais teórico fornece uma representação fiel do conversor em
modo de sobreposição conforme o ponto de operação da Tabela 6.2, sendo as curvas teóricas
aproximadamente iguais às obtidas por simulação. Portanto, pode-se inferir que o modelo
teórico obtido para conversor Zeta 3SSC em MCC é válido para toda a faixa de variação da
razão cíclica (0≤D≤1).

Fi
6.4 -
com
Am
plitu
de (
dB)
Fas
e (°
)A
mpl
itude
(dB
)F
ase
(°)
Am
plitu
de (
dB)
Fas
e (°
)
igura 6.8 – Di
PROJETO
Nesta seçã
controle em
(a) vo(s)/vi(
(c) vi(s)/ii(s
(e) vo(s)/iL(siagramas de
O DO SIST
ão, é projet
m modo tens
(s)
s)
s) Bode de ganh
TEMA DE C
tado para o
são e modo
ho e fase do c
CONTROL
conversor
corrente m
conversor Zet
LE
Zeta 3SSC
média utilizan
Am
plitu
de (
dB)
Fas
e (°
)A
mpl
itude
(dB
)F
ase
(°)
Am
plitu
de (
dB)
Fas
e (°
)
(b) vo(s
(d) vo(s
(f) iL(sta 3SSC em m
em modo
ndo o métod
s)/d(s)
s)/io(s)
s)/d(s) modo de sobr
de conduçã
do do fator
121
reposição.
ão contínua
k.
1
a

122
No intuito de verificar a robustez do sistema de controle, é analisado o comportamento
da tensão de saída em relação a variação periódica da carga de 100% para 50% da potência
nominal e vice-versa.
6.4.1 - CONTROLE EM MODO TENSÃO
Utilizando a estratégia de controle da Figura 2.29 juntamente o roteiro relatado em 2.6.4
e os parâmetros do conversor dadas pela Tabela 6.1 para o controle em modo tensão, tem-se
os passos descritos a seguir.
A função de transferência Gv(s) é definida para o conversor Zeta 3SSC em MCC através
de (6.34) e representada com os parâmetros definidos na Tabela 6.1 em (6.70), sendo esta
equação de extrema importância para a função transferência de laço aberto FTLAscv(s). Os
outros parâmetros essenciais para FTLAscv(s) encontram-se na Tabela 6.3.
( ) ( ) ( )( ) ( )
6 2 8
2 4 8 2 8
7166 4 10 3923 1,92 10
1,3 10 1,52 10 3003 1,62 10V
s s sG s
s s s s
⋅ + ⋅ ⋅ − ⋅ + ⋅=
+ ⋅ ⋅ + ⋅ ⋅ + ⋅ + ⋅ (6.70)
Tabela 6.3 – Parâmetros da malha de controle em modo tensão para o conversor Zeta 3SSC em MCC.
Parâmetro Especificação
Amplitude da forma de onda portadora Vm=10 V
Tensão de referência Vref=5 V
Frequência de cruzamento em zero fcv=50 Hz
Margem de fase M=90°
Ganho requerido para o controlador G=0,4469
Avanço de fase necessário α=2,25°
Fator k k=1,1
Substituindo as equações os dados da Tabela 6.3 em (2.57) a (2.59) pode-se obter o
diagrama de Bode para a função transferência de laço aberto sem compensação FTLAscv(s),
representado pela Figura 6.9.
Conforme visto na Tabela 6.3, a frequência de cruzamento em malha aberta fcv é
geralmente escolhida com uma limitação máxima de um quarto da frequência de comutação.
Como o sistema do conversor apresenta um pequeno pico de ressonância próximo a 2 kHz,

123
escolhe-se uma frequência que se distância deste ponto, caso contrário isso pode levar o
sistema a instabilidade. Ressalta-se também que quando o avanço de fase necessário é
próximo de 0º, é utilizado o compensador tipo 1 [26].
Figura 6.9 – Diagramas de Bode de ganho e fase de FTLAscv(s) do conversor Zeta 3SSC em MCC para
projeto do controlador em modo tensão.
De forma a garantir as especificações na Tabela 6.3, são dimensionados os elementos do
compensador tipo 1 através da expressão (2.38), cujos componentes são especificados na
Tabela 6.4.
Tabela 6.4 – Elementos do circuito do compensador em modo tensão para o conversor Zeta 3SSC em
MCC.
Componente Valor
R1 1 kΩ
C1 7,12 µF
Substituindo os valores da Tabela 6.4 na expressão (2.36), obtém-se a função de
transferência do compensador tipo 1 em (6.71). A Figura 6.10 representa o diagrama de Bode
do controlador.
( ) 3
1
7,122 10vC ss−=
⋅ (6.71)
Utilizando a expressão (2.59), é possível traçar o diagrama de Bode de ganho e fase da
função de transferência de laço aberto compensada FTLAccv(s) na Figura 6.11.
-150
-100
-50
0
50
102 104 106-180
0
180
360FTLASCV
Gv
Diagrama de Bode
Frequência (Hz)

124
Figura 6.10 – Diagramas de Bode de ganho e fase
do compensador em modo tensão para o
conversor Zeta 3SSC em MCC.
Figura 6.11 – Diagramas de Bode de ganho e fase
da função de transferência de laço aberto da
tensão compensada (FTLAccv(s)) em modo tensão
para o conversor Zeta 3SSC em MCC.
De acordo com a inspeção do diagrama de Bode, obtém-se os seguintes parâmetros:
50 Hzcf = (6.72)
87,8ºM = (6.73)
Além disso, a taxa de crescimento em torno da nova frequência de cruzamento de ganho
∆fc foi calculada, sendo:
19,8 dB décadacfΔ = − (6.74)
Averiguando o desempenho do sistema controlado, o qual é realizado utilizando o
software PSIM®, tem-se a resposta representada pela Figura 6.12 (a), que mostra o
comportamento da tensão de saída frente a degraus periódicos de carga, de 20 Ω para 40 Ω e
vice-versa.
Analisando detalhadamente a Figura 6.12-(b), obtém-se os seguintes resultados:
• Para o degrau de carga positivo, tem-se sobressinal de 40% e tempo de acomodação de
1,4 ms com tolerância de 2%.
• Para o degrau de carga negativo, tem-se sub-sinal de 28% e tempo de acomodação de
1,6 ms com tolerância de 2%.
10
20
30
40
10-1 100-91
-90.5
-90
-89.5
-89
Diagrama de Bode
Frequência (Hz)
-300
-200
-100
0
100
102 104 106-360
0
360
Diagrama de Bode
Frequência (Hz)

125
(a) Forma de onda da tensão de saída (b) Visualização detalhada da resposta do sistema
Figura 6.12 – Comportamento do sistema de controle em modo tensão do conversor Zeta 3SSC em MCC
diante de degraus de carga.
6.4.2 - CONTROLE EM MODO CORRENTE MÉDIA
Utilizando o roteiro proposto na seção 2.6.5 juntamente com o diagrama da Figura 2.30,
é realizado o projeto do sistema em duas etapas: a malha interna tem por objetivo controlar a
corrente do indutor, enquanto a malha externa controla a tensão de saída. Assumindo os
parâmetros do conversor na Tabela 6.2, adotam-se os passos seguintes.
6.4.2.1 - MALHA DE CORRENTE
A função de transferência de laço aberto sem compensador (FTLAsci(s)) é representada
pela equação (2.66), sendo dependente de:
• Função de transferência Gi(s), que relaciona a corrente do indutor com a razão cíclica do
conversor iL1(s)/d(s) segundo a equação (6.60);
• Função de transferência do sensor de corrente Hi(s);
• Função de transferência do modulador de PWM Fm(s), segundo (2.58); e
• Função de transferência para testar a robustez da malha de corrente He(s), dada pelas
equações (2.63) a (2.65).
Os parâmetros necessários para obter a função de transferência de laço aberto sem
compensador (FTLAsci(s)) são definidos na Tabela 6.5, sendo que seu diagrama de Bode é
representado pela Figura 6.13.
Ten
são
(V)
Ten
são
(V)

126
O valor da frequência de cruzamento definido na Tabela 6.5 é escolhido de forma que
seja menor ou igual a um quarto da frequência de comutação do conversor evitando assim os
efeitos da comutação em alta frequência. Os valores da margem de fase M do sistema e
requerido pelo compensador também são definidos na Tabela 6.5. Ressalta-se que quando o
avanço de fase necessário é menor que 90º, é recomendado o uso do compensador tipo 2 [26].
Tabela 6.5 – Parâmetros da malha interna de controle em modo corrente média para o conversor Zeta
3SSC em MCC.
Parâmetro Especificação
Amplitude da forma de onda portadora Vm=10 V Corrente de referência Iref =5 A Função transferência do sensor de corrente Hi=0,3614 Frequência de cruzamento em zero fci= ,667 kHz Margem de fase Mi=30° Ganho requerido para o controlador G=4,1988 Avanço de fase necessário α=68,74° Fator k k=5,3289
Figura 6.13 – Diagramas de Bode de ganho e fase de FTLAsci(s) do conversor Zeta 3SSC em MCC para
projeto do controlador em modo de corrente média.
Dimensionando os elementos do compensador de forma que as frequências do zero e
polo não nulo se distanciem em um fator k2 através das expressões (2.43) a (2.45), obtêm-se
os valores mostrados na Tabela 6.6.
-50
0
50
101 102 103 104 105 106-180
0
180
360FTLASCi
Gi
Diagrama de Bode
Frequência (Hz)

127
Tabela 6.6 – Elementos do circuito do compensador da malha interna em modo corrente média para o
conversor Zeta 3SSC em MCC.
Componente Valor
R1 1 kΩ
R2 4,35 kΩ
C1 1,067 nF
C2 29,23 nF
Utilizando a expressão (2.39) e aplicando os valores definidos na Tabela 6.6, obtém-se a
função de transferência do compensador tipo 2 em (6.75), que possibilita a sua representação
na forma de diagrama do Bode na Figura 6.14.
( ) 10 2 5
0,0001272 1
1,357 10 3,03 10i
sC s
s s− −
⋅ +=⋅ ⋅ + ⋅ ⋅
(6.75)
Por fim, utilizando a expressão (2.68), pode-se representar a função de transferência de
malha aberto com compensação FTLAcci(s) na forma do diagrama do Bode da Figura 6.15.
Nota-se que os parâmetros de frequência de cruzamento por zero e a margem de fase do
sistema são alcançados com êxito.
Figura 6.14 – Diagramas de Bode de ganho e fase
da função de transferência do compensador da
malha interna em modo corrente média para o
conversor Zeta 3SSC em MCC.
Figura 6.15 – Diagramas de Bode de ganho e fase
da função de transferência de laço aberto da
corrente compensada (FTLAcci(s)) em modo
corrente média para o conversor Zeta 3SSC em
MCC.
De acordo com a inspeção do diagrama de Bode, obtém-se os seguintes parâmetros:
6,667 kHzcif = (6.76)
30ºM = (6.77)
-20
0
20
40
60
Am
plit
ud
e (
dB
)
101 102 103 104 105 106-90
-45
0
Fa
se (
de
g)
Diagrama de Bode
Frequência (Hz)

128
Além disso, a taxa de crescimento em torno nova frequência de cruzamento de ganho
∆fc foi calculada, sendo:
19,8 dB décadacfΔ = − (6.78)
6.4.2.2 - MALHA DE TENSÃO
A função de transferência de laço aberto sem compensador (FTLAscv(s)) expressa pela
equação (2.70) depende da tensão de referência e da função de transferência da tensão de
saída em relação à corrente do indutor Li (Z(s)=vo(s)/iL1(s)), dada por (6.55).
Os parâmetros restantes são definidos na Tabela 6.7, enquanto o respectivo diagrama de
Bode é representado pela Figura 6.16.
O valor da frequência de cruzamento definido na Tabela 6.7 é escolhido de forma que
seja menor ou igual a 30 Hz. Os valores da margem de fase M do sistema e requerido pelo
compensador também são definidas na Tabela 6.7. Ressalta-se que, quando o avanço é
próximo de 0º, é recomendado o uso do compensador tipo 1 [26].
Tabela 6.7 – Parâmetros da malha interna de controle em modo corrente média para o conversor Zeta
3SSC em MCC.
Parâmetro Especificação
Tensão de referência Vref =5 V
Função transferência do sensor de tensão Hv(s)=0,5
Frequência de cruzamento em zero fcv=30 Hz
Margem de fase M=90°
Ganho requerido para o controlador G=0,9646
Avanço de fase necessário α=1,85°
Fator k k=1,0
Utilizando a equação (2.42) para calcular o fator k para o compensador tipo 1 e
dimensionando os componentes do controlador, utilizando a equação (2.38), obtém-se os
resultados presentes na Tabela 6.8.

129
Figura 6.16 – Diagramas de Bode de ganho e fase de FTLAscv(s) do conversor Zeta 3SSC em MCC para
projeto do controlador em modo de corrente média.
Tabela 6.8 – Elementos do circuito do compensador, malha externa em modo corrente média para o
conversor Zeta 3SSC em MCC.
Componente Valor
R1 1 kΩ
C1 5,5 µF
O processo para obter o diagrama de Bode do compensador Cv(s) se inicia com a
substituição dos valores da Tabela 6.8 na equação (2.36), obtendo-se assim (6.79) e a Figura
6.17.
( ) 3
1
5,5 10vC sx s−=
⋅ (6.79)
Traçando agora o diagrama de Bode da função de transferência de malha aberto com
compensação FTLAccv(s) por meio da expressão (2.71), obtém-se a Figura 6.18. De acordo
com a inspeção do diagrama de Bode, obtêm-se os seguintes parâmetros:
30 Hzcvf = (6.80)
88,1ºM = (6.81)
-100
-50
0
50
Am
plitu
de (
dB)
102 104 106 108-90
0
90
180
Fas
e (d
eg)
FTLASCV
Gv
Diagrama de Bode
Frequência (Hz)

130
Além disso, a taxa de crescimento em torno da nova frequência de cruzamento de ganho
∆fc foi calculada, sendo:
20,34 dB décadacfΔ = − (6.82)
Figura 6.17 – Diagramas de Bode de ganho e fase
da função de transferência do compensador da
malha externa em modo corrente média para o
conversor Zeta 3SSC em MCC.
Figura 6.18 – Diagramas de Bode de ganho e fase
da função de transferência de laço aberto da
tensão compensada (FTLAccv(s)) em modo
corrente média para o conversor Zeta 3SSC em
MCC.
Através de simulações com o software PSIM®, é analisado o desempenho do
controlador, sendo que a Figura 6.19 (a) mostra a tensão de saída e a corrente no indutor L1
frente a degraus periódicos de carga, de 22,5 Ω para 45 Ω e vice-versa.
Analisando de forma mais minuciosa o comportamento da tensão de saída, Figura 6.19-
(b), obtém-se:
• para o degrau de carga positivo, tem-se sobressinal de 44% e tempo de acomodação de
17 ms com tolerância de 2%.
• para o degrau de carga negativo, tem sub-sinal de 28% e tempo de acomodação de 24,7
ms com tolerância de 2%.
10
20
30
40
50
10-1 100 101-91
-90.5
-90
-89.5
-89
Diagrama de Bode
Frequência (Hz)
-100
-50
0
50
101 102 103 104 105-180
-90
0
90
Diagrama de Bode
Frequência (Hz)

Figu
6.5 -
neste
teóric
pelo
dois
e pro
uma
mode
para
Ten
são
(V)
Cor
rent
e (A
)
(a) Forma
ura 6.19 – Co
CONSIDE
Novament
e capitulo
cas encontr
software P
modos de o
Exemplifi
ojeto de con
resposta co
Finalment
elagem são
cada região
de onda da te
omportament
ERAÇÕES
te se observ
desenvolvid
radas com
PSIM®, am
operação da
cando o uso
ntrole em m
ompatível co
te, pode-se
válidas pa
o de operaçã
ensão de saíd
to do sistema
em MCC
FINAIS
va a pratici
do para o
resultados
mbos os res
3SSC.
o destas fun
modo tensão
om o compo
e afirmar
ra toda a fa
ão do conve
da
de controle e
C diante de de
idade e efi
conversor
computacio
sultados apr
nções de tra
o e em mod
ortamento e
que as fu
aixa de var
ersor.
(b) Visualiza
em modo cor
egraus de car
caz do mod
Zeta 3SSC
onais, atrav
resentam co
ansferências
do corrente
esperado.
funções de
iação da ra
Ten
são
(V)
Cor
rent
e (A
)
ção detalhad
rente média d
rga.
delo do int
C. Compara
és do diagr
omportamen
s, foi realiza
média para
transferên
azão cíclica,
da da resposta
do conversor
terruptor PW
ando estas
rama de Bo
ntos idêntic
ado o desen
a o converso
ncias encon
, pois foram
131
a do sistema
r Zeta 3SSC
WM, sendo
expressões
ode obtidas
cos para os
nvolvimento
or, obtendo
ntradas na
m validadas
1
o
s
s
s
o
o
a
s

132
CAPÍTULO 7
CONCLUSÃO GERAL
Este trabalho apresentou a modelagem de pequenos sinais dos conversores CC-CC Ćuk,
SEPIC e Zeta não isolados baseados na célula de comutação de três estados (three-state
switching cell – 3SSC) operando no modo de condução contínua. Esta célula é composta
basicamente por: dois interruptores ativos, dois interruptores passivos e um
autotransformador, podendo ser entendida como a associação de duas células de comutação
de dois estados. Dentre suas principais características, tem-se a redução da corrente dos
interruptores pela metade; e a frequência nos elementos passivos é o dobro da frequência de
comutação dos interruptores, reduzindo as dimensões dos componentes magnéticos.
Partindo da premissa que a célula de três estados é composta por duas células de dois
estados, realizou-se a modelagem de pequenos sinais por meio do interruptor PWM [10],
substituindo cada célula pelo respectivo modelo do interruptor PWM. Constata-se que esta
metodologia é uma ferramenta simples, direta e eficaz para encontrar as funções de
transferências pertinentes a cada conversor, se comparada a outras técnicas utilizadas na
literatura, pois utilizado estritamente uma análise de circuitos elétricos. Verifica-se também
que as funções de transferência para os conversores 3SSC são idênticas aqueles dos
conversores CC-CC clássicos não isolados.
Verificando os resultados no processo de validação, pode-se afirmar que a técnica
proposta por Vorpérian na década de 1990 [10] é adequada para representar os conversores
baseados na célula de três estados. Isso se justifica uma vez que todas as funções de
transferências deduzidas são capazes de representar o comportamento de seus conversores
para os dois modos de operação da 3SSC: não sobreposição (0<D<0,5) e sobreposição
(0,5<D<1). Assim, as curvas dos diagramas de Bode obtidos por simulação são idênticas
àquelas fornecidas pelas expressões teóricas.
O projeto do sistema de controle em modo tensão para os três conversores somente é
possível estabelecendo uma frequência de cruzamento reduzida. Tal fato se deve à presença
de um zero no semiplano direito da função de transferência, caracterizando assim um sistema
de fase não mínima, o qual ao ser incitado com uma perturbação pode ocasionar uma resposta
oscilatória [32].
Os resultados obtidos para o projeto do sistema de controle em modo corrente média
para os três conversores mostram a atuação adequada dos controladores, com uma resposta

133
satisfatória da corrente do indutor e da tensão de saída, frente a perturbações por meio de
degraus de carga de forma rápida e não oscilatória.
Para possíveis continuações do trabalho, têm-se as seguintes sugestões:
• análises quantitativa e qualitativa dos conversores CC-CC Ćuk, SEPIC e Zeta 3SSC em
modo de condução contínua e descontínua;
• validação experimental dos modelos de pequenos sinais dos conversores 3SSC;
• utilização dos conversores supracitados como pré-reguladores de fator de potência;
• desenvolvimento da modelagem de pequenos sinais para todos os conversores CC-CC
não isolados baseados na 3SSC operando em MCD.

134
REFERÊNCIAS BIBLIOGRÁFICAS
[1] I. Barbi e D. C. Martins, Conversores CC-CC Básicos Não-Isolados, 2a Edição. Edição
dos Autores, 2006.
[2] J. Qian e F. C. Lee, “Charge pump power-factor-correction technologies. I. Concept
and principle”, IEEE Trans. Power Electron., vol. 15, no 1, p. 121–129, 2000.
[3] W. H. Maciel, “Modelagem de pequenos sinais de conversores CC-CC não isolados
baseados na célula de comutação de três estados operando em modo de condução
contínua”, Dissertação de Mestrado em Engenharia Elétrica, Universidade Federal de
São João del-Rei, 2016.
[4] M. H. Rashid, Eletrônica de Potência - Dispositivos, circuitos e aplicações, 4a Edição.
Pearson Education do Brasil, 2015.
[5] G. V. T. Bascopé e I. Barbi, “Novo Conversor CC-CC PWM Não Isolado com Célula
de Três Estados De Comutação”, in XIII Congresso Brasileiro de Automática, 2000, p.
778–783.
[6] J. P. R. Balestero, F. L. Tofoli, G. V. Torrico-Bascope, e F. J. M. de Seixas, “A DC–
DC Converter Based on the Three-State Switching Cell for High Current and Voltage
Step-Down Applications”, IEEE Trans. Power Electron., vol. 28, no 1, p. 398–407, jan.
2013.
[7] J. P. R. Balestero, F. L. Tofoli, C. Mendes de Seixas, G. Victor Torrico Bascopé, e F.
José Mendes de Seixas, “Comparative analysis between overlapping and non-
overlapping operation modes for the PWM buck converter using the three-state
switching cell”, Int. J. Electron., vol. 101, no 4, p. 553–568, abr. 2014.
[8] J. de O. Pacheco, “Conversor ca-cc Ćuk baseado na célula de comutação de três
estados com correção de fator de potência aplicado em carregador de banco de
baterias”, Dissertação de Mestrado em Engenharia Elétrica. Universidade Federal do
Ceará, 2014.
[9] R. D. Middlebrook e S. Cuk, “A general unified approach to modelling switching
converter power stages”, Proc. IEEE Power Electron. Spec. Conf., no December 2012,
p. 18–34, 1976.

135
[10] V. Vorpérian, “Simplified Analysis of Pwm Converters Using Model of Pwm Switch
Part I: Continuous Conduction Mode”, IEEE Trans. Aerosp. Electron. Syst., vol. 26, no
3, p. 490–496, 1990.
[11] R. Tymerski e V. Vorperian, “Generation and classification of PWM DC-to-DC
converters”, IEEE Trans. Aerosp. Electron. Syst., vol. 24, no 6, p. 743–754, 1988.
[12] A. L. Batschauer, “Apostila da Disciplina de Controle de Conversores Estáticos”,
Universidade do Estado de Santa Catarina, 2012. [Online]. Available at:
http://www.joinville.udesc.br/portal/professores/batschauer/materiais/Apostila_CCE_v
7__simobologia_.pdf. [Acessado: 28-abr-2017].
[13] J. I. L. Seguel, “Projeto de um sistema fotovoltaico autônomo de suprimento de energia
usando técnica MPPT e controle digital”, Dissetação de Mestrado, Universidade
Fedearal de Minas Gerais, 2009.
[14] J. P. R. Balestero, “Conversor buck utilizando célula de comutação de três estados”,
Dissertação de Mestrado em Engenharia Elétrica. Universidade Estadual Paulista
(UNESP), 2006.
[15] G. V. T. Bascopé, “Nova família de conversores CC-CC PWM não isolados utilizando
células de comutação de três estados”, Florianópolis, SC, 2001.
[16] L. A. Aguirre, Introdução à identificação de sistemas -Técnicas lineares e não lineares
aplicadas a sistemas: Teoria e Aplicação, 4a edição. Belo Horizonte: Editora UFMG,
2015.
[17] C. Garcia, Modelagem e simulação de processos industriais e de sistemas
eletromecânicos. EDUSP, 2005.
[18] G. R. Bezerra, “Modelagem e controle do conversor CC-CC Buck-Boost usando
técnicas paramétricas de identificação”, Dissertação de Mestrado em Engenharia
Elétrica. Universidade Federal do Ceará, 2015.
[19] M. Z. Youssef e P. K. Jain, “Modeling techniques of resonant converters: merits and
demerits”, in Canadian Conference on Electrical and Computer Engineering 2004
(IEEE Cat. No.04CH37513), p. 241–244.
[20] V. Vorpérian, R. Tymerski, e F. C. Y. Lee, “Equivalent Circuit Models for Resonant
and PWM Switches”, IEEE Trans. Power Electron., vol. 4, no 2, p. 205–214, 1989.

136
[21] H. J. N. Spruijt e D. M. OSullivan, “PWM-Switch Modeling of DC-DC Converters”,
IEEE Trans. Power Electron., vol. 10, no 6, p. 659–665, 1995.
[22] W. M. Polivka, P. R. K. Chetty, e R. D. Middlebrook, “State-Space Average modelling
of converters with parasitics and storage-time modulation”, in 1980 IEEE Power
Electronics Specialists Conference, 1980, p. 119–143.
[23] N. S. Nise, Engenharia de Sistemas de Controle, 6a edição. LTC, 2006.
[24] K. Ogata, Engenharia de Controle Moderno, 5a Edição. Perason Prentice Hall, 2010.
[25] W. Tang, F. C. Lee, e R. B. Ridley, “Small-Signal Modeling of Average Current-Mode
Control”, IEEE Trans. Power Electron., vol. 8, no 2, p. 112–119, 1993.
[26] H. Venable, “The K factor: A new mathematical tool for stability analysis and
synthesis”, Proc. Powercon 10, p. 1–10, 1983.
[27] G. C. Silveira, “Conversor cc-cc boost baseado na célula de comutação de três estados
para alimentação de inversores com divisor capacitivo”, Dissertação de Mestrado em
Engenharia Elétrica. Universidade Federal do Ceará, 2011.
[28] G. V. T. Bascope e I. Barbi, “Generation of a family of non-isolated DC-DC PWM
converters using new three-state switching cells”, in Power Electronics Specialists
Conference, 2000. PESC 00. 2000 IEEE 31st Annual, 2000, vol. 2, p. 858–863 vol.2.
[29] S. M. Cuk, “Modelling, Analysis, and Design of Switching Converters”, PhD Thesis.
CALTECH, Pasadena, CA, 1977.
[30] R. Massey e E. Snyder, “High voltage single-ended DC-DC converter”, in 1977 IEEE
Power Electronics Specialists Conference, 1977, p. 156–159.
[31] J. J. Jozwik e M. K. Kazimierczuk, “Dual sepic PWM switching-mode DC/DC power
converter”, IEEE Trans. Ind. Electron., vol. 36, no 1, p. 64–70, 1989.
[32] D. Levy, “Análise e controle de sistemas de fase não-mínima e de sistemas com tempo
morto”, Monografia em Engenharia Eletrônica e de Computação, Universidade Federal
do Rio de Janeiro, 2009.







