disc.: sistemas microprocessados
TRANSCRIPT

Disc.: Sistemas MicroprocessadosCurso Técnico em Eletrônica
Prof. Paulo Demantova
1Sistemas Microprocessados - Prof: Demantova

1. Objetivo da Disciplina:
Sistemas Microprocessados - Prof: Demantova
2
Apresentar características e conceitos deum sistema microprocessado e compreender ofuncionamento de um microcontroladoratravés do estudo de um tipo específico.

2. O Computador Digital:
Sistemas Microprocessados - Prof: Demantova
3
As transformações entre grandeza analógica e digital é feita através de interfaces.

Sistemas Microprocessados - Prof: Demantova
4
CPU
Unidade de
Memória
Unidade deE/S
PeriféricosdeE/S
Programas eDados
CPU – Possui em seu interior toda a estrutura para que asinformações possam ser transportadas e processadas, deforma lógica ou aritmética, automaticamente peloprograma.
2.1 Computador Digital - Blocos:

Sistemas Microprocessados - Prof: Demantova
5
CPU
Unidade de
Memória
Unidade deE/S
PeriféricosdeE/S
Programas eDados
2.1 Computador Digital - Blocos:
Unidade de Memória – armazena os dados e o programa aser executado, assim como resultados parciais e informações.Todas as grandezas estão na forma binária.

Sistemas Microprocessados - Prof: Demantova
6
CPU
Unidade de
Memória
Unidade deE/S
PeriféricosdeE/S
Programas eDados
Unidade de E/S – Manipulam eletricamente as informaçõesde forma a compatibilizar o formato entre computador eperiférico.
2.1 Computador Digital - Blocos:

Sistemas Microprocessados - Prof: Demantova
7
CPU
Unidade de
Memória
Unidade deE/S
PeriféricosdeE/S
Programas eDados
Periféricos de E/S – São dispositivos ou placas que enviamou recebem informações do computador. Adequam asinformações de maneira que o ser humano possa gerá-lasou interpretá-las de modo mais fácil.
2.1 Computador Digital - Blocos:

Sistemas Microprocessados - Prof: Demantova
8
Unidade Lógica e
Aritmética
Unidade de Controle
Conjunto de Registradores
CPU
UC – Busca na memória o código da próxima instrução a serexecutada, a identifica e gera os sinais necessários paracontrolar os blocos internos e externos a CPU. Propicia oautomatismo no funcionamento do computador.
2.2 CPU - Blocos:

Sistemas Microprocessados - Prof: Demantova
9
Unidade Lógica e
Aritmética
Unidade de Controle
Conjunto de Registradores
CPU
ULA – De acordo com a instrução executada esta unidaderecebe em seus registradores de entrada os operandos e umcomando dizendo qual tipo de operação deve ser executada.
2.2 CPU - Blocos:

Sistemas Microprocessados - Prof: Demantova
10
Unidade Lógica e
Aritmética
Unidade de Controle
Conjunto de Registradores
CPU
CR – Fornece a estrutura necessária para o armazenamentode operandos e resultados parciais. Também armazenainformações de configuração de hardware da CPU. Sãonormalmente implementados como flip-flops.
2.2 CPU - Blocos:
Sistemas Microprocessados - Prof: Demantova
11
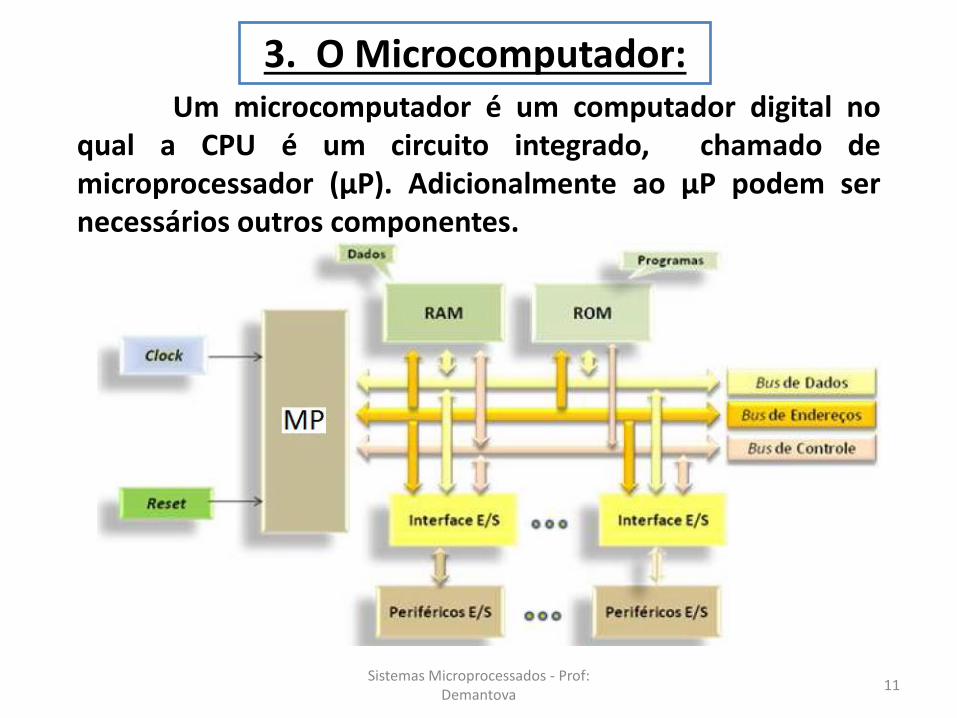
Um microcomputador é um computador digital noqual a CPU é um circuito integrado, chamado demicroprocessador (μP). Adicionalmente ao μP podem sernecessários outros componentes.
3. O Microcomputador:
Sistemas Microprocessados - Prof: Demantova
12
4. O Microprocessador:
Um microprocessador incorpora as funções de umaunidade central de processamento (CPU) em um único circuitointegrado. É um dispositivo programável que aceita dadosdigitais como entrada, processa de acordo com seu conjunto deinstruções, e fornece resultados. Microprocessadores operamcom números e símbolos representados no sistema binário.

Microcontroladores - Prof: Demantova 13
Princípio de Funcionamento:
Micropro-cessador Memória
1
2
3
1- MP solicita a próxima instrução2- MP recebe uma instrução3- MP decodifica, executa a instrução e volta ao passo 1
4.1 Sistema Microprocessado:

Sistemas Microprocessados - Prof: Demantova
14
4.1 Sistema Microprocessado:
Sistemas Microprocessados - Prof: Demantova
15
4.2 Circuito de Clock:
• Tem como função gerar um sinal oscilante entre nível0 e 1 com freqüência e fase constante. Como oprocessador é basicamente uma máquina síncronaeste gerará todos os seus sinais sincronizados com osníveis alto, baixos, subidas e descidas do sinal declock.
• O clock pode ser gerado por osciladores internos devalor fixo, drives internos através de um cristalexterno ou o uso de um gerador externo de clock.Limites máximos e mínimos devem ser respeitados.

Sistemas Microprocessados Prof: Demantova
16
4.2 Circuito de Clock :

Sistemas Microprocessados - Prof: Demantova
17
4.2 Circuito de Clock :
Ciclo de Clock – consiste de um período do clock, baseadono qual o processador executa cada passo interno.

Sistemas Microprocessados - Prof: Demantova
18
4.2 Circuito de Clock :
Ciclo de Máquina – é cada uma das operações básicas queo µP pode executar. Sua execução é determinada pelainstrução que está no momento sendo executada. Suaduração varia de entre microprocessadores.

Sistemas Microprocessados - Prof: Demantova
19
4.2 Circuito de Clock :
Ciclo de Instrução – é o conjunto de ciclos de máquinanecessários para a busca e execução de uma instrução.Varia de acordo com a complexidade da instrução.

Sistemas Microprocessados - Prof: Demantova
20
4.3 Circuito de Reset:
• É responsável por ativar o pino de Reset no momento que aalimentação da CPU é ativada (automático) e permitir que ousuário a qualquer momento possa fazer com que o sistemavolte a condição inicial (manual). Dependendo do µP podeser ativo em zero ou um.
Exemplo de circuito para RST ativo em
nível alto.

Sistemas Microprocessados - Prof: Demantova
21
4.3 Circuito de Reset:
• A duração do reset deve ser suficiente para que ooscilador se estabilize mais uma margem de clocksdefinida pelo fabricante.
• Durante o reset registros e pinos de saída podem terestados indeterminados.
• Após o reset os principais registros terão conteúdospadrões de acordo com o fabricante.
• Entre as principais condições definidas após o ciclo demáquina de reset é a inicialização do registro deendereçamento de instruções (PC) para o valor inicialpadrão.

Sistemas Microprocessados - Prof: Demantova
22
4.4 Barramentos:
• Barr. de Endereços – Conjunto de pinos/sinais físicosunidirecionais que são gerados pelo uP para endereçar aposição de memória ou periférico a ser acessado. O númerode pinos está ligado a capacidade de memória do uP.
• Barr. de Dados – Conjunto de pinos bidirecionais quepermitem que as informações endereçadas das memóriasou periféricos possam sair ou chegar ao uP, dependendo se ainstrução é de escrita ou leitura.
• Barr. de Controle – Sinais de saída do uP que servem paraindicar aos blocos externos que tipo de evento estáocorrendo no momento. Quando de entrada indica que umserviço está sendo solicitado ao uP.

Sistemas Microprocessados - Prof: Demantova
23
4.5 Ciclos de Máquina:
• Opcode Fetch – Chamado de busca de instrução, é oprimeiro ciclo após o reset, e sempre o primeiro ciclo decada instrução. Coloca nos pinos de endereço o valor dePC e seleciona a leitura de memória de programa. Emseguida copia o valor presente nos pinos de dados(instrução) para ser decodificado.

Sistemas Microprocessados - Prof: Demantova
24
4.5 Ciclos de Máquina:
• Memory Read – Operação de leitura em memóriasimilar ao Opcode Fetch. As diferenças são que oendereço colocado no barramento foi gerado pelainstrução atual, e que o dado lido será usado comooperando pela instrução atual e não decodificado.
• Memory Write – Operação de escrita em memória onde o endereço foi gerado pela instrução atual e o dado será fornecido para a memória pelo uP. O dado foi fornecido como operando da instrução ou obtido como resultado da execução da mesma.

Sistemas Microprocessados - Prof: Demantova
25
4.6 Memórias:
São implementadas com circuitos integrados jáfabricados para este fim , minimizando assim as ligações.

5. O MICROCONTROLADOR:
Microcontroladores - Prof: Demantova 26
Def.: É um microcomputador encapsulado em um CI que pode conter, além da CPU, memórias RAM, ROM, Interfaces de E/S, circuitos de clock e reset, etc.
Conseqüências da compactação:- Diminuição do custo.- Capacidade de processamento menor.- Ênfase em minimizar recursos de externos.- Aplicação mais específica.

Microcontroladores - Prof: Demantova 27
Def.: São utilizados em aplicações nas quais não há a necessidade da flexibilidade de interfaceamento e é executado um único software (firmware).
Componentes que podem ser incorporados:- Conversores A/D e D/A.- PWM.- Contadores e Temporizadores.- Interfaces Seriais.- Memórias: ROM, EPROM, EEPROM, FLASH, RAM.
5. O MICROCONTROLADOR:

5.1 MODELO HIPOTÉTICO:
Microcontroladores - Prof: Demantova 28

5.2 MODO DE OPERAÇÃO:
Microcontroladores - Prof: Demantova 29

5.5 EXEMPLO DE CONJ. DE INSTRUÇÕES:
Microcontroladores - Prof: Demantova 30

5.6 NIVEIS DE LINGUAGEM DEPROGRAMAÇÃO:
Microcontroladores - Prof: Demantova 31

5.7 FAMÍLIAS DE MICROCONTROLADORES:
Microcontroladores - Prof: Demantova 32
• MCS51 - Intel e outras empresas.• M68HC11 – Motorola.• Z8 – Zilog.• COP8 – National.• PIC – Microchip.• AVR – Atmel.

Microcontroladores - Prof: Demantova
• CPU de 8 Bits
• ROM Interna
• RAM Interna
• Temporizadores / Contadores
• Controlador de Interrupção
• Interfaces Paralelas de 8 Bits
• Interface Serial
6. CARACTERÍSTICAS DO 8051:
33

Microcontroladores - Prof: Demantova
ModeloRAM
(bytes)Timer
CounterSerial
Não Volátil (bytes)
Pinos E/S Outros
8031 128 2 1 X 32
8032 256 2 1 X 32
8051 128 2 1 4k ROM 32
8052 256 3 1 8k ROM 32
87C51 128 2 1 4k EPROM 32
87C52 256 3 1 8k EPROM 32
89C51 128 2 1 4k Flash 32
89C52 256 3 1 8k Flash 32
AT89S51 128 2 1 4k Flash ISP 32 Watchdog, 33MHz
AT89S52 256 3 1 8k Flash ISP 32 Watchdog, 33MHz
AT89S53 256 3 1 12k Flash ISP 32 Watchdog, SPI, 24MHz
AT89S8252 256 3 18k Flash ISP
2k EEPROM32
Watchdog, SPI, 0 à 24MHz
AT89C1051 128 2 1 1k Flash 15
AT89C2051 128 2 1 2k Flash 15
AT89C4051 128 2 1 4k Flash 15
6.1 A FAMÍLIA 8051:
34

Microcontroladores - Prof: Demantova
6.2 PINAGEM – 8051:
AT89C51(DIP40) AT89C1051(DIP20)
35
Microcontroladores - Prof: Demantova
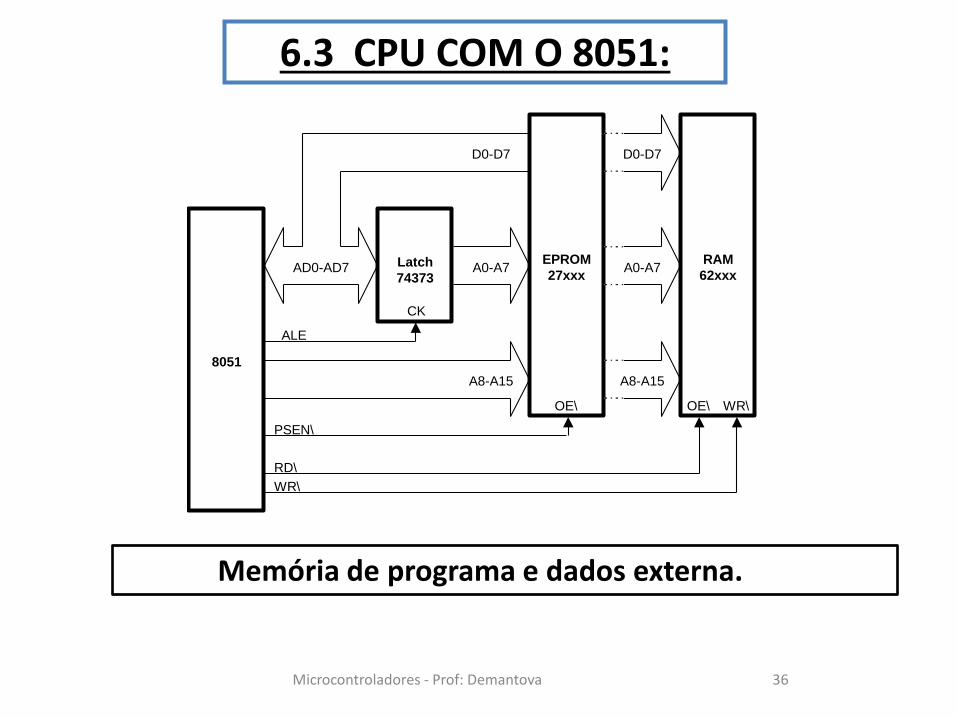
6.3 CPU COM O 8051:
8051
Latch
74373
EPROM
27xxx
RAM
62xxx
D0-D7
A0-A7
A8-A15
D0-D7
A0-A7
A8-A15
AD0-AD7
ALE
PSEN\
RD\
WR\
CK
OE\ OE\ WR\
36
Memória de programa e dados externa.

Microcontroladores - Prof: Demantova
6.3 CPU COM O 8051:
8051
Latch
74373
EPROM
27xxx
RAM
62xxx
D0-D7
A0-A7
A8-A15
D0-D7
A0-A7
A8-A15
AD0-AD7
ALE
PSEN\
RD\
WR\
CK
OE\ OE\ WR\
Os sinais AD0~AD7, A8~A15, PSEN\, RD\, e WR\ serãoativados automaticamente de acordo com a instruçãoexecutada.
37

Microcontroladores - Prof: Demantova
6.3 CPU COM O 8051:
Machine Cycles:
A machine cycle consists of a sequence of 6
states, numbered S1 through S6. Each state time lasts
for two oscillator periods. Thus a machine cycle takes 12
oscillator periods or 1ms if the oscillator frequency is
12MHz.
Each state is divided into a Phase 1 half and a
Phase 2 half. Normally two program fetches are
generated during each machine cycle, even if the
instruction being executed doesn’t require it. If the
instruction being executed doesn’t need more code
bytes, the CPU simply ignores the extra fetch, and
the Program Counter is not incremented.
38

Microcontroladores - Prof: Demantova
6.3 CPU COM O 8051:
39

ALE
PSEN\
Port 0
Port 2 A8-A15 A8-A15
A0-A7 A0-A7Instrução
6.4 Ciclo de Leitura na ROM Externa:

ALE
PSEN\
Port 0
Port 2 P2.0-P2.7 / A8-A15 (DPH) A8-A15 (PCH)
A0-A7(Ri / DPL)
Dado
RD\
Instr.A0-A7(PCL)
6.5 Ciclo de Leitura na RAM Externa:

ALE
PSEN\
Port 0
Port 2 P2.0-P2.7 / A8-A15 (DPH) A8-A15 (PCH)
A0-A7(Ri / DPL)
Dado
WR\
Instr.A0-A7(PCL)
6.6 Ciclo de Escrita na RAM Externa:

Microcontroladores - Prof: Demantova
8051
Latch
74373
EPROM
27xxx
RAM
62xxx
D0-D7
A0-A7
A8-A15
D0-D7
A0-A7
A8-A15
AD0-AD7
ALE
PSEN\
RD\
WR\
CK
OE\ OE\ WR\
PSEN\ RD\ WR\ Função1 1 1 Nenhum Acesso Externo1 1 0 Escrita na Memória de Dados1 0 1 Leitura da Memória de Dados0 1 1 Leitura da Memória de Programa
43
6.7 SINAIS DE CONTROLE NO 8051:

44
6.9. CPU COM O 80C32:

Elaborado por Gilson Yukio Sato 45
7. CPU COM O 89S52:

Microcontroladores - Prof: Demantova
8. ORGANIZAÇÃO DE MEMÓRIA NO 8051:
Área de Memória de Programa
O 8051 possui áreas de memória que se diferenciam quanto a função e modo de acesso:
46

Microcontroladores - Prof: Demantova
Área de Ram Interna\Externa
RAM
INTERNA
REGISTROS
ESPECIAIS
00H
FFH
RAM
EXTERNA
0000H
FFFFH
RD\
WR\
BANCOS DE
REGISTROS
REGISTROSENDEREÇÁVEIS
POR BIT
RAM DE
USO GERAL
1FH20H
2FH30H
7FH80H
00H
7FH
47
8. ORGANIZAÇÃO DE MEMÓRIA NO 8051:

Microcontroladores - Prof: Demantova 48
8. ORGANIZAÇÃO DE MEMÓRIA NO 8051:

Microcontroladores - Prof: Demantova
8. 1 BANCOS DE REGISTROS:
End. Registro End. Registro End. Registro End. Registro
00H R0 08H R0’ 10H R0” 18H R0\
01H R1 09H R1’ 11H R1” 19H R1\
02H R2 0AH R2’ 12H R2” 1AH R2\
03H R3 0BH R3’ 13H R3” 1BH R3\
04H R4 0CH R4’ 14H R4” 1CH R4\
05H R5 0DH R5’ 15H R5” 1DH R5\
06H R6 0EH R6’ 16H R6” 1EH R6\
07H R7 0FH R7’ 17H R7” 1FH R7\
49

Microcontroladores - Prof: Demantova
8. 2 ENDEREÇOS BIT/BYTE ENDEREÇÁVEIS:
End. ByteEndereço do Bit
bit 7 bit 6 bit 5 bit 4 bit 3 bit 2 bit 1 bit 0
20H 07H 06H 05H 04H 03H 02H 01H 00H
21H 0FH 0EH 0DH 0CH 0BH 0AH 09H 08H
22H 17H 16H 15H 14H 13H 12H 11H 10H
23H 1FH 1EH 1DH 1CH 1BH 1AH 19H 18H
24H 27H 26H 25H 24H 23H 22H 21H 20H
25H 2FH 2EH 2DH 2CH 2BH 2AH 29H 28H
26H 37H 36H 35H 34H 33H 32H 31H 30H
27H 3FH 3EH 3DH 3CH 3BH 3AH 39H 38H
28H 47H 46H 45H 44H 43H 42H 41H 40H
29H 4FH 4EH 4DH 4CH 4BH 4AH 49H 48H
2AH 57H 56H 55H 54H 53H 52H 51H 50H
2BH 5FH 5EH 5DH 4CH 5BH 5AH 59H 58H
2CH 67H 66H 65H 64H 63H 62H 61H 60H
2DH 6FH 6EH 6DH 6CH 6BH 6AH 69H 68H
2EH 77H 76H 75H 74H 73H 72H 71H 70H
2FH 7FH 7EH 7DH 7CH 7BH 7AH 79H 78H
50

Microcontroladores - Prof: Demantova
8. 3 REGISTROS DE FUNÇÃO ESPECIAL:
•PC – Program Counter• PSW (D0H) – Program Status Word• SP (81H) – Stack Pointer• A (E0H) e B (F0H)• DPH (83H) e DPL (82H)• P0 (80H), P1 (90H), P2(A0H) e P3(B0H)• IE (A8H) – Interrupt Enable e IP (B8H) – Interrupt Priority• PCON (87H) – Power Control• TCON (88H) – Timer Control e TMOD (89H) – Timer Mode• TH1 (8DH), TL1 (8BH), TH0 (8CH) e TL0 (8AH)• SCON (98H) – Serial Control e SBUF (99H) – Serial Buffer
51

Microcontroladores - Prof: Demantova
8. 4 Reg. de Função. Esp. Bit Endereçáveis:
RegistroEndereços Individuais dos Bits
bit 7 bit 6 bit 5 bit 4 bit 3 bit 2 bit 1 bit 0
P0 87H 86H 85H 84H 83H 82H 81H 80H
P1 97H 96H 95H 94H 93H 92H 91H 90H
P2 A7H A6H A5H A4H A3H A2H A1H A0H
P3 B7H B6H B5H B4H B3H B2H B1H B0H
A E7H E6H E5H E4H E3H E2H E1H E0H
B F7H F6H F5H F4H F3H F2H F1H F0H
TCONTF1 TR1 TF0 TR0 IE1 IT1 IE0 IT0
8FH 8EH 8DH 8CH 8BH 8AH 89H 88H
SCONSM1 SM2 SM3 REN TB8 RB8 T1 R1
9FH 9EH 9DH 9CH 9BH 9AH 99H 98H
IEEA ES ET1 EX1 ET0 EX0
AFH ACH ABH AAH A9H A8H
IPPS PT1 PX1 PT0 PX0
BCH BBH BAH B9H B8H
PSWCY AC F0 RS1 RS0 OV P
D7H D6H D5H D4H D3H D2H D0H
52
Microcontroladores - Prof: Demantova
8. 5 RAM INTERNA DE USO GERAL:
• 80 POSIÇÕES DE MEMÓRIA CONSECUTIVAS ENTRE O ENDEREÇO 30H E 7FH.
• ÁREA DE MEMÓRIA DE ENDEREÇAMENTO EXTERNOENTRE OS ENDEREÇOS DE 0000H A FFFFH.
8. 6 RAM EXTERNA:
53

Microcontroladores - Prof: Demantova
8. 7 ESTRUTURA INTERNA SIMPLIFICADA DE UM TERMINAL DO PORT 1:
54

Microcontroladores - Prof: Demantova
Observações:• Existem instruções que fazem a leitura do valor lógico
presente no terminal enquanto outras o valor dasaída Q do flip-flop.
• A porta P0 não possui o resistor de pull-up.• Quando de uma operação de escrita a porta se
comporta com um latch.• Existem características de corrente máxima para
cada pino de uma porta e para toda a porta (8 bits)do microcontrolador, devendo estas seremrespeitadas simultaneamente.
55
8. 7 ESTRUTURA INTERNA SIMPLIFICADA DE UM TERMINAL DO PORT 1:
Microcontroladores - Prof: Demantova
8.8 AS PORTAS DO 8051:
56
- P0, P1, P2, and P3 são os SFR latches das Portas 0, 1, 2,and 3.
- Escrevendo um bit “1” ou “0” no SFR (P0, P1, P2, or P3)faz o pino ir para “1” ou “0”.
- Quando usado como entrada o estado externo no pinoestará presente no respectivo SFR.
- Todas as 4 portas são bidirecionais. Consistem de umlatch, um driver de saída e um buffer de entrada.

Microcontroladores - Prof: Demantova
8.8 AS PORTAS DO 8051:
57
- Os drivers de saída das portas 0 e 2, e os buffers de entrada da porta 0, são usadas quando necessário acesso a memória externa.
- Porta 0 fornece o byte baixo do endereço multiplexado com o dado a ser escrito ou lido.
- Port 2 fornece o byte alto do endereço de 16 bits, se o endereço possui 16 bits. Caso contrário os pinos da porta P2 continuam a refletir o conteúdo SFR.

Microcontroladores - Prof: Demantova 58
• Os pinos da porta 3 são multifuncionais. • Funções alternativas:
- P3.0 RxD (serial input port)- P3.1 TxD (serial output port)- P3.2 INT0 (external interrupt)- P3.3 INT1 (external interrupt)- P3.4 T0 (Timer/Counter 0 external input)- P3.5 T1 (Timer/Counter 1 external input)- P3.6 WR (external Data Memory write strobe)- P3.7 RD (external Data Memory read strobe)
Obs: As funções alternativas só podem ser ativadas se o bit correspondente no SFR éstá em “1”.
8.8 AS PORTAS DO 8051:

Microcontroladores - Prof: Demantova 59
9. APS – Gravador - USBasp
• Baseado no gravador de http://www.fischl.de/usbasp/

Microcontroladores - Prof: Demantova 60
9. APS – Gravador - USBasp

Microcontroladores - Prof: Demantova 61
• Layout aproximado. Verificar alterações sugeridas em aula.
9. APS – Gravador - USBasp