diego de freitas fagundes - coc.ufrj.br
TRANSCRIPT

MODELAGEM FÍSICA DE ESTRUTURAS OFFSHORE ASSENTES EM LEITO
MARINHO
Diego de Freitas Fagundes
Dissertação de Mestrado apresentada ao Programa
de Pós-Graduação em Engenharia Civil, COPPE,
da Universidade Federal do Rio de Janeiro, como
parte dos requisitos necessários à obtenção do
título de Mestre em Engenharia Civil.
Orientadores: Márcio de Souza Soares de Almeida
Maria Cascão Ferreira de Almeida
Rio de Janeiro
Setembro de 2010

MODELAGEM FÍSICA DE ESTRUTURAS OFFSHORE ASSENTES EM LEITO
MARINHO
Diego de Freitas Fagundes
DISSERTAÇÃO SUBMETIDA AO CORPO DOCENTE DO INSTITUTO
ALBERTO LUIZ COIMBRA DE PÓS-GRADUAÇÃO E PESQUISA DE
ENGENHARIA (COPPE) DA UNIVERSIDADE FEDERAL DO RIO DE JANEIRO
COMO PARTE DOS REQUISITOS NECESSÁRIOS PARA A OBTENÇÃO DO
GRAU DE MESTRE EM CIÊNCIAS EM ENGENHARIA CIVIL.
Examinada por:
_______________________________________________ Prof. Márcio de Souza Soares de Almeida, Ph.D.
________________________________________________ Prof.a Maria Cascão Ferreira de Almeida, D.Sc.
________________________________________________ Prof. Francisco de Rezende Lopes, Ph.D.
________________________________________________ Prof. Fernando Saboya Albuquerque Jr., D.Sc.
________________________________________________ Prof. Jose Renato Moreira da Silva de Oliveira, D.Sc.
RIO DE JANEIRO, RJ - BRASIL
SETEMBRO DE 2010

iii
Fagundes, Diego de Freitas
Modelagem Física de Estruturas Offshore Assentes em
Leito Marinho/ Diego de Freitas Fagundes. -Rio de
Janeiro: UFRJ/COPPE, 2010.
XX, 141 p. 29,7 cm
Orientadores: Márcio de Souza Soares de Almeida.
Maria Cascão Ferreira de Almeida
Dissertação (mestrado) – UFRJ/ COPPE/ Programa de
Engenharia Civil, 2010.
Referências Bibliográficas: p.126-133.
1. Interação Solo-Estrutura. 2. Argila mole 3.
Centrífuga Geotécnica. 4. Modelagem Física. 5.
Modelagem Numérica. I. Almeida, Márcio de Souza
Soares de et al. II. Universidade Federal do Rio de
Janeiro, COPPE, Programa de Engenharia Civil. II. Título.

iv
DEDICATÓRIA
A meus pais Gerson e Mariangela.
Engenheiros da minha vida.

v
AGRADECIMENTOS
Aos meus queridos pais, Gerson e Mariangela. Nenhuma conquista no mundo é
suficiente para retribuir o amor e incentivo que sempre pude buscar nos braços de vocês
tampouco suficientes para sarar esta saudade lancinante que sinto em meu peito todos os
dias por estar longe de vocês. Todas as conquistas de minha vida serão sempre
dedicadas a vocês, que sempre lutaram por mim e nunca me deixaram desistir dos meus
sonhos.
A Gabriela Hollmann, minha “Galega” amada, por ter compreendido que muitas
vezes este árduo caminho exige sacrifícios pessoais, por estar sempre ao meu lado em
todos os momentos, pelo companheirismo e amor.
Aos professores Márcio e Maria, pelos valiosos e inestimáveis ensinamentos.
Além do conhecimento transmitido, agradeço pelo o carinho e amizade com que me
acolheram desde o início de minha jornada acadêmica no Rio de Janeiro.
A toda equipe centrífuga geotécnica da COPPE, em especial ao Prof. José
Renato Oliveira e Julio Pequeno pela valiosíssima ajuda no entendimento e realização
dos ensaios centrífugos e pela amizade.
Aos técnicos do laboratório de geotecnia da COPPE, pela ajuda, presteza e
amizade, em especial para Mauro, Sérgio e Luiz Mário.
A todos amigos que conquistei ao longo destes quase 3 anos de COPPE, pelo
apoio incondicional, generosidade e amizade. Fica um agradecimento especial para
Alexandre Schuler e Silvana Vasconcelos amigos de longa data ao qual tenho muita
estima e carinho

vi
Resumo da Dissertação apresentada à COPPE/UFRJ como parte dos requisitos
necessários para a obtenção do grau de Mestre em Ciências (M.Sc.)
MODELAGEM FÍSICA DE ESTRUTURAS OFFSHORE ASSENTES EM LEITO
MARINHO
Diego de Freitas Fagundes
Setembro/2010
Orientadores: Márcio de Souza Soares de Almeida
Maria Cascão Ferreira de Almeida
Programa: Engenharia Civil
O presente trabalho apresenta um estudo de fundações rasas do tipo mudmats
utilizadas principalmente para apoiar equipamentos submarinos. O projeto otimizado
destas fundações maximiza a relação entre a capacidade de carga à compressão e a
resistência à extração. As normas internacionais, baseadas em teorias clássicas, muitas
vezes são limitadas e não atendem à complexidade dos projetos. A bibliografia ainda
não é conclusiva acerca dos fatores de capacidade de carga exatos para este tipo de
problema. Neste trabalho são efetuadas modelagens físicas e numéricas de mudmats
sólidos e perfurados, submetidos a carregamentos verticais centrados de instalação e
extração. O solo utilizado é uma argila marinha típica da Bacia de Campos na região
dos campos de Roncador. As modelagens físicas com centrífuga geotécnica de tambor
utilizaram a técnica de grumos com adição de sobrecarga temporária para a formação do
leito de solo com um gradiente de tensão crescente com a profundidade. As modelagens
numéricas foram realizadas com o programa PLAXIS v. 8.2. Os resultados forneceram
uma melhor compreensão do comportamento carga-deformação, da interação solo
estrutura, assim como uma contribuição para valores dos fatores de capacidade de carga.

vii
Abstract of Dissertation presented to COPPE/UFRJ as a partial fulfillment of the
requirements for the degree of Master of Science (M.Sc.)
PHYSICAL MODELING OF OFFSHORE STRUCTURES FOUNDED ON SEA BED
Diego de Freitas Fagundes
September/2010
Advisors: Márcio de Souza Soares de Almeida
Maria Cascão Ferreira de Almeida
Department: Civil Engineering
This work presents a study of shallow foundations usually known as mudmats
and used mainly to support offshore subsea equipments. The optimized design of these
foundations maximizes the ratio of the compressive load capacity and resistance to
extraction. International standards, based on classical theories, are often limited and do
not meet the complexity of the projects. The bibliography is not yet conclusive about
the load capacity factors for this particular problem. In this work physical and numerical
modelings have been performed of grillage and solids mudmats subjected to vertical
loads along both situations: installation and extraction. The soil is a marine clay typical
of the Roncador field at Campos basin. The physical modeling experiments have been
executed in the geotechnical centrifuge mini-drum at COPPE/UFRJ. The technique of
lumps has been used for the preparation of the soil models and a temporary overload has
been adopted for the development of a soil profile with increasing strength with depth.
The numerical models were done with the finite element program Plaxis v. 8.2. The
results provided a better understanding of load-deformation behavior of soil structure
interaction, as well as a contribution for the evaluation of the load capacity factors.

viii
SUMÁRIO
1 INTRODUÇÃO ................................................................................................ 1�
1.1 GENERALIDADES ............................................................................................... 1�
1.2 JUSTIFICATIVA .................................................................................................... 2�
1.3 OBJETIVO .............................................................................................................. 2�
1.4� A IMPORTÂNCIA DA MODELAGEM FÍSICA .................................................. 3�
1.5 CONTEÚDO ........................................................................................................... 4�
2 REVISÃO BIBLIOGRÁFICA .................................................................... 6�
2.1 INTRODUÇÃO ...................................................................................................... 6�
2.2� EXPLORAÇÃO E PRODUÇÃO SUBMARINA .................................................. 6�
2.2.1�POÇOS E ÁRVORES DE NATAL ........................................................................ 8�
2.2.2�LINHAS DE COLETA E INTERLIGAÇÃO ......................................................... 9�
2.2.3�EQUIPAMENTOS DE INTERLIGAÇÃO ........................................................... 10�
2.2.4�UNIDADE DE PRODUÇÃO E SISTEMAS DE ARMAZENAMENTO E
EXPORTAÇÃO ............................................................................................................. 13�
2.3 MUDMATS ............................................................................................................ 15�
2.4 FUNDAÇÕES SUPERFICIAIS ........................................................................... 16�
2.4.1 CAPACIDADE DE CARGA DE SAPATAS ASSENTES EM ARGILAS
SATURADAS ................................................................................................................ 16�
2.4.1.1 FATORES DE CORREÇÃO PARA FUDAÇÕES ENTERRADAS COM
PERFIL HOMOGÊNEO ................................................................................................ 17�
2.4.1.2 CAPACIDADE DE CARGA DE SAPATAS ASSENTES EM ARGILAS COM
TENSÃO CRESCENTE COM A PROFUNDIDADE .................................................. 18�
2.4.2 RESISTÊNCIA À EXTRAÇÃO –UPLIFT RESISTENCE ................................... 23�
2.5 MODELAGEM CENTRÍFUGA .......................................................................... 23�
2.5.1 FUNDAMENTOS ................................................................................................. 23�
2.5.2 TIPOS DE CENTRÍFUGAS ................................................................................. 27�
2.6�� CONSIDERAÇÕES FINAIS ................................................................................ 28�
3 EQUIPAMENTOS PARA ENSAIOS FÍSICOS EM
CENTRÍFUGA GEOTÉCNICA ........................................................................ 29�
3.1� INTRODUÇÃO .................................................................................................... 29�
3.2 SISTEMA DE AQUISIÇÃO DE DADOS ........................................................... 31�

ix
3.3 ATUADOR ANGULAR ....................................................................................... 36�
3.4 ATUADOR RADIAL ........................................................................................... 38�
3.5 MOTOR DE BASCULAR .................................................................................... 41�
3.6 MOTOR DE ROTAÇÃO ...................................................................................... 42�
3.7 CANAL DE AMOSTRAS .................................................................................... 45�
3.8 COLOCAÇÃO E RETIRADA DE AGUA DO CANAL ..................................... 49�
3.9 INSTRUMENTAÇÃO DO ENSAIO ................................................................... 50�
3.9. 1 CÉLULA DE CARGA VERTICAL .................................................................... 50�
3.9.2 TRANSDUTORES DE PORO-PRESSÃO (PPT) ................................................ 51�
3.9.3 TRANSDUTOR DE DESLOCAMENTO (LVDT) .............................................. 53�
3.9.4 FERRAMENTA PARA INVESTIGAÇÃO EM CENTRÍFUGA ....................... 53�
3.9.4.1 MINI-T-BAR ..................................................................................................... 54�
3.10� CONSIDERAÇÕES FINAIS ................................................................................ 56�
4 PROCEDIMENTOS DE ENSAIOS ....................................................... 57�
4.1 INTRODUÇÃO .................................................................................................... 57�
4.2� PROPRIEDADES DO SOLO ............................................................................... 57�
4.2.1 PARÂMETROS DO SOLO E DO MODELO CAM CLAY ................................ 61�
4.2.2�PREPARAÇÃO DA AMOSTRA PARA ENSAIOS CENTRÍFUGOS ............... 67�
4.3� CARACTERÍSTICAS DOS MODELOS ............................................................. 68�
4.4 DESCRIÇÃO DOS ENSAIOS ............................................................................. 72�
4.4.1 FASE DE ADENSAMENTO ................................................................................ 73�
FORAM SUJEITAS AO MESMO TEMPO DE ADENSAMENTO. .......................... 77�
4.4.2 FASE DE ATUAÇÃO DOS MODELOS ............................................................. 78�
4.4 PROCEDIMENTOS DE RETIRADA DE UMIDADE AO FINAL DO ENSAIO . 80�
4.4.4 DESCRIÇÃO DA FASE DE ATUAÇÃO DOS MODELOS ............................... 83�
4.5� CONSIDERAÇÕES FINAIS ................................................................................ 90�
5 APRESENTAÇÃO E DISCUSSÃO DOS RESULTADOS .......... 91�5.1� INTRODUÇÃO .................................................................................................... 91�
5.2 CARACTERIZAÇÃO DO PERFIL DE RESISTÊNCIA DO LEITO ................. 91�
5.2.1 - PREVISÃO DO PERFIL DE RESISTÊNCIA DO SOLO ATRAVÉS DE
PARÂMETROS DO MODELO CAM CLAY ................................................................ 94�
5.3� CAPACIDADE DE CARGA DOS MODELOS .................................................. 97�
5.3.1 INSTALAÇÃO DOS MODELOS ........................................................................ 97�

x
5.3.2 EXTRAÇÃO DOS MODELOS ............................................................................ 99�
5.3.3 FATORES DE CAPACIDADE DE CARGA – NC* ......................................... 104�5.3.3.1 COMPARAÇÃO DOS VALORES DE NC* COM OUTROS ESTUDOS ................. 107
5.3.4 FATORES DE CAPACIDADE DE CARGA NA EXTRAÇÃO – NC* ............ 109�
5.4� MECANISMOS DE RUPTURA ........................................................................ 111�
5.5�MODELAGEM NUMÉRICA ................................................................................ 113�
5.5.1 CONSIDERAÇÕES INICIAIS ........................................................................... 113�
5.5.2 RESULTADOS DAS MODELAGENS NUMÉRICAS .................................... 117�
6 CONCLUSÕES ............................................................................................. 123�
6.1� INTRODUÇÃO .................................................................................................. 123�
6.2� CONSIDERAÇÕES FINAIS .............................................................................. 123�
6.3� SUGESTÕES PARA FUTURAS PESQUISAS ................................................. 124�
REFERÊNCIAS BIBLIOGRÁFICAS ........................................................... 126�
ANEXO 1 - MONITORAMENTO DOS ENSAIOS CENTRÍFUGOS
DURANTE A FASE DE ADENSAMENTO ................................................ 134�
ANEXO 2 - RESULTADOS DAS ETAPAS DE ATUAÇÃO DOS
MODELOS MUDMATS...................................................................................... 139�

xi
LISTA DE FIGURAS
Figura 2. 1 - Exemplo de arranjo submarino para exploração de petróleo (Cortesia
Emerson Process Management, apud LAI, 2009) ............................................................ 8�
Figura 2. 2 - Exemplos de ANMs: vertical e horizontal (Cortesia de FMC Technologies)
........................................................................................................................................ 10�
Figura 2. 3 - Exemplos de PLETs................................................................................... 11�
Figura 2. 4- Exemplo de ILT .......................................................................................... 11�
Figura 2. 5 - Exemplos de PLEMs ................................................................................. 12�
Figura 2. 6 - Exemplos de manifolds .............................................................................. 13�
Figura 2. 7 - Unidades de produção/armazenamento. (COLLIAT, 2002) ..................... 14�
Figura 2. 8 - Fundação mudmat com estrutura de proteção para equipamentos
submarinos (FISHER e CATHIE, 2003) ........................................................................ 15�
Figura 2. 9 - Fator de correção DAVIS & BOOKER (1973), apud SALGADO (2008) 19�
Figura 2. 10 - Efeito da heterogeneidade na capacidade de carga, WHITE et al. (2005)
........................................................................................................................................ 20�
Figura 2. 11 - Correspondência entre a tensão inercial em um modelo e a tensão
gravitacional no protótipo (TAYLOR, 1995). ................................................................ 25�
Figura 2. 12 - Comparação da variação de tensões no modelo e no protótipo (TAYLOR,
1995). .............................................................................................................................. 25�
Figura 2. 13 – Exemplos de centrífugas geotécnicas: centrífuga de tambor do COFS/
UWA-Austrália (esquerda) e centrífuga de braço da UENF-Brasil (direita) ................. 27�
Figura 3. 1 – Centrifuga geotécnica da COPPE ............................................................. 30�
Figura 3. 2 – Antigo sistema de bordo de aquisição de dados (OLIVEIRA, 2005) ....... 31�
Figura 3. 3 – Diagrama esquemático do funcionamento da centrífuga .......................... 32�
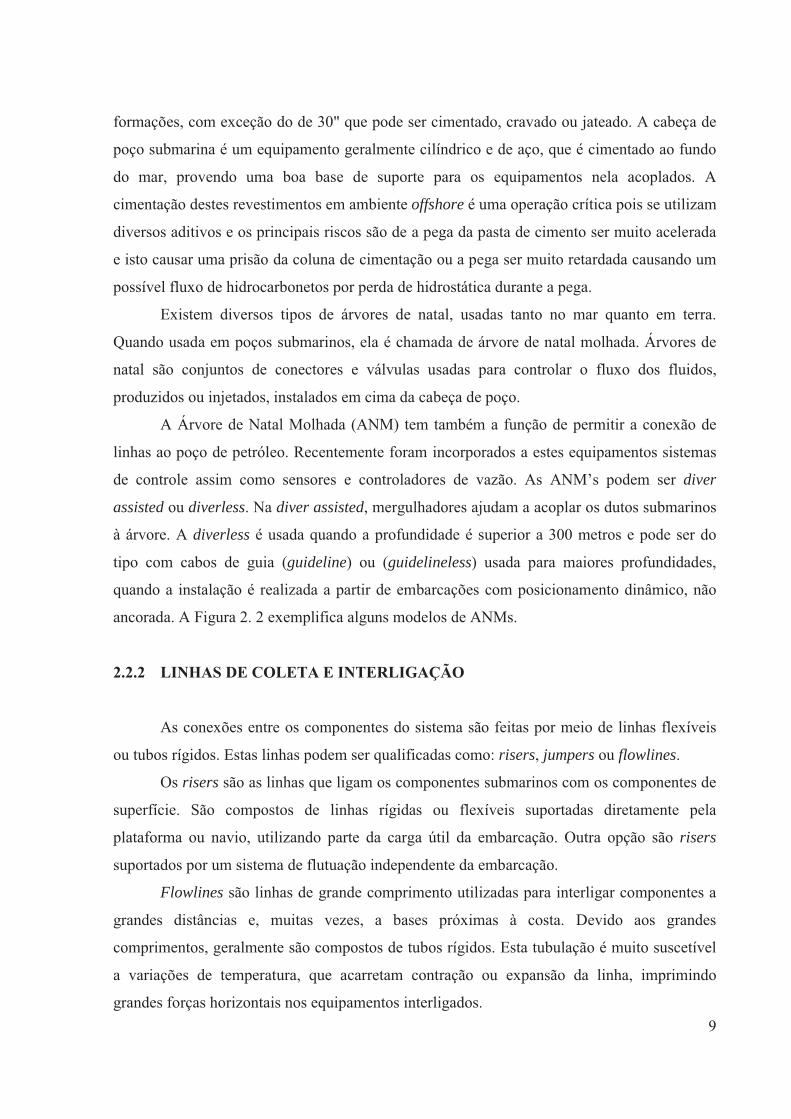
Figura 3. 4 - Backplane e conjunto de módulos ............................................................. 33�
Figura 3. 5 – Distanciômetro laser.................................................................................. 33�
Figura 3. 6 - Tela do programa de aquisição da centrífuga ............................................ 34�
Figura 3. 7 - Diagrama de blocos do sistema de aquisição............................................. 35�
Figura 3. 8 - Diagrama do circuito do filtro de segunda ordem ..................................... 35�
Figura 3. 9 – Movimentação do atuador angular ............................................................ 36�
Figura 3. 10 – Sistema de atuação angular desmontado, OLIVEIRA (2005) ................ 37�

xii
Figura 3. 11– Atuador angular modificado desmontado e projeto de adaptadores ........ 38�
Figura 3. 12 - Nova janela de programação de movimentos .......................................... 39�
Figura 3. 13 – Movimentação do atuador radial ............................................................. 39�
Figura 3.14 – Conjunto do atuador radial, OLIVEIRA (2005) ...................................... 40�
Figura 3. 15 – Eixos de rotação na posição vertical e horizontal ................................... 41�
Figura 3.16 – Seção transversal do conjunto de rotação da centrífuga. ......................... 42�
Figura 3.17 – Painel de Controle da Centrífuga da COPPE. .......................................... 43�
Figura 3.18 –Eixo de rotação e rolamentos .................................................................... 45�
Figura 3. 19 - Caixa de amostras concêntrica ................................................................. 46�
Figura 3. 20 – Vista superior da caixa de amostras ........................................................ 46�
Figura 3. 21 - Vista superior com detalhe dos vidros ..................................................... 47�
Figura 3. 22 – Caixas de amostra ................................................................................... 47�
Figura 3. 23 - Comparação entre caixas de amostras de paredes paralelas e
convergentes. .................................................................................................................. 48�
Figura 3. 24 - Seção transversal do canal de amostras – Medidas em mm. ....... 49�
Figura 3. 25 – Sistemas de controle de saída de água .................................................... 50�
Figura 3.26 – Transdutor de poro-pressão utilizado nos ensaios. .................................. 51�
Figura 3. 27 - Câmara de calibração de acrílico. ............................................................ 52�
Figura 3. 28 - Árvore de calibração. ............................................................................... 53�
Figura 3. 29 - Penetrômetro barra-T ou mini T-bar utilizado nos ensaios ..................... 55�
Figura 4. 1 - Localização do Campo de Roncador na Bacia de Campos (informações do
site PETROBRÁS em 18/01/2009, retiradas de Pequeno, 2010) ................................... 58�
Figura 4. 2 – Amostras extrudadas dos tubos de PVC ................................................... 59�
Figura 4. 3 – Aglomeração de invertebrados em pelets ................................................. 60�
Figura 4. 4 – Homogeneização manual das amostras de argila marinha ........................ 60�
Figura 4. 5 - Curva Granulométrica da Argila de Roncador .......................................... 61�
Figura 4. 6 - Gráfico � x lnp’ do adensamento hidrostático (PEQUENO, 2010) ........... 63�
Figura 4. 7 - Gráficos e x log�v’ de adensamento oedométrico (PEQUENO, 2010) ..... 63�
Figura 4. 8 – Gráfico de adensamento cv x log�v’ .......................................................... 64�
Figura 4. 9 – Tensão desvio x deformação específica dos ensaios CK0U (SA) ............. 65�
Figura 4. 10 - Linha de Estado Crítico (LEC), conforme PEQUENO, 2010 ................. 66�
Figura 4. 11 - Modelos dos mudmats (medidas em mm) ............................................... 69�

xiii
Figura 4. 12- Peças de conexão entre o modelo do mudmat e o atuador (medidas em
mm) ................................................................................................................................. 70�
Figura 4. 13 – Conjunto de equipamentos utilizados na etapa de atuação ..................... 71�
Figura 4. 14 – Peças de conexão entre modelo T-bar e o atuador (medidas em mm) .... 72�
Figura 4. 15 – Esquema do posicionamento dos PPT’s ................................................. 74�
Figura 4. 16 – Aspecto da camada de argila em grumos ................................................ 75�
Figura 4. 17 – Colocação de sobrecarga de areia sobre a camada de argila em grumos 75�
Figura 4. 18 - Camada de argila ao fim do adensamento ............................................... 77�
Figura 4. 19 – Mini T-bar durante atuação em voo ........................................................ 79�
Figura 4. 20 – Modelo durante atuação em voo ............................................................. 79�
Figura 4. 21 - Mini-amostrador para extração de solo em centrífuga ............................ 80�
Figura 4. 22 - Extrusão e fatiamento de amostra de solo natural adensado em centrífuga
........................................................................................................................................ 81�
Figura 4. 23 – Perfil de umidade relativa ao final de todos os ensaios realizados ......... 82�
Figura 4. 24 – Variação do peso especifico do solo ao longo da profundidade ............. 82�
Figura 4. 25 - Diagrama esquemático das etapas do ensaio 01 ...................................... 85�
Figura 4. 26 – Diagrama esquemático das etapas do ensaio 02 ..................................... 87�
Figura 4. 27 – Diagrama esquemático das etapas do ensaio 03 ..................................... 89�
Figura 5. 1 – Ensaios de investigação de Su com o mini T-bar nos sete ensaios ............ 92�
Figura 5. 2 - Média dos sete ensaios de investigação dos perfis de resistência.............. 93�
Figura 5. 3 - Su/�’v0 pelo logaritmo do OCR .................................................................. 94�
Figura 5. 4 – Gráfico log x log da razão [(Su/�'v0)SA/(Su/�'v0)NA] pelo OCR ................... 95�
Figura 5. 5 – Previsão através do modelo Cam clay e resultados dos ensaios centrífugos
........................................................................................................................................ 96�
Figura 5. 6 - Força medida na atuação dos modelos na instalação e inserção................ 97�
Figura 5. 7 – Tensão vertical calculada considerando a área efetiva dos modelos ........ 98�
Figura 5. 8 – Tensão vertical medida considerando a área plena dos modelos (A=B²) . 99�
Figura 5. 9 – Modelos dos mudmats: (a) antes da instalação; (b) durante a instalação e
abertura da cavidade; (c) ao final da extração, com sobrepeso residual de solo. ......... 100�
Figura 5. 10 – Força medida na atuação dos modelos na inserção e extração ............. 100�
Figura 5. 11 - Força medida na atuação dos modelos, com subtração do sobrepeso
residual na extração ...................................................................................................... 101�
Figura 5. 12 - Tensão vertical de instalação e de extração utilizando a área efetiva .... 102�

xiv
Figura 5. 13 - Tensão vertical de instalação e de extração utilizando a área total ....... 102�
Figura 5. 14 – Perfil de resistência na zona de atuação dos mudmats .......................... 105�
Figura 5. 15 – Nc* em função da taxas de perfuração .................................................. 107�
Figura 5. 16 – Fator de capacidade de carga em função da penetração (adaptado
GOUVERNEC & O’LOUGHLIN, 2006) .................................................................... 109�
Figura 5. 17 - Nc* de extração dos modelos em função da taxas de perfuração .......... 110�
Figura 5. 18 – Imagem do ensaio após atuação do modelo M02 ................................. 112�
Figura 5. 19 - Imagem do ensaio após atuação do modelo M01 .................................. 112�
Figura 5. 20 – Parâmetros do solo para o modelo do modelo no Plaxis ...................... 115�
Figura 5. 21 - Definição das dimensões do problema .................................................. 116�
Figura 5. 22 - Malha de elementos finitos .................................................................... 116�
Figura 5. 23 – Etapas de cálculo ................................................................................... 117�
Figura 5. 24 – Gráfico força x profundidade, das fases de inserção e de extração ...... 117�
Figura 5. 25 – Gráfico tensão vertical x profundidade, das fases de inserção e de
extração ......................................................................................................................... 118�
Figura 5. 26 – Deformação da malha de elementos finitos após a instalação do M01. 119�
Figura 5. 27 - Deformação da malha de elementos finitos após a extração M01 ......... 120�
Figura 5. 28 – Tensões cisalhantes geradas na inserção do mudmat ............................ 121�
Figura 5. 29 – Deslocamentos totais na instalação do mudmat .................................... 121�
Figura 5. 30 - Deslocamentos totais na extração do mudmat ....................................... 122�
Figura A1. 1 – Recalques medidos durante o adensamento no Ensaio 01 ................... 134�
Figura A1. 2 – Dissipação de poropressão medida no Ensaio 01 (1cm acima da base)135�
Figura A1. 3 - Dissipação de poropressão medida no Ensaio 01 (4cm acima da base) 135�
Figura A1. 4 - Recalques medidos durante o adensamento no Ensaio 02 .................... 136�
Figura A1. 5 - Dissipação de poropressão medida no Ensaio 02 (1cm acima da base) 136�
Figura A1. 6 - Dissipação de poropressão medida no Ensaio 02 (4cm acima da base) 137�
Figura A1. 7 - Recalques medidos durante o adensamento no Ensaio 03 .................... 137�
Figura A1. 8 - Dissipação de poropressão medida no Ensaio 03 (1cm acima da base) 138�
Figura A2. 1 – Força medida em função do tempo na atuação do modelo M01 .......... 139�
Figura A2. 2 - Força medida em função do tempo na atuação do modelo M02 .......... 140�
Figura A2. 3 - Força medida em função do tempo na atuação do modelo M03 .......... 140�
Figura A2. 4 - Força medida em função do tempo na atuação do modelo M04 .......... 141�

xv
Figura A2. 5 - Força medida em função do tempo na atuação do modelo M05 .......... 141�

xvi
LISTA DE TABELAS
Tabela 2. 1 - Constantes de regressão para o fator de correção de forma, adaptado
SALGADO (2008) ......................................................................................................... 18�
Tabela 2. 2 - Fator de forma em função do gradiente de tensão normalizado, adaptado
RANDOLPH et al. (2004) .............................................................................................. 22�
Tabela 2. 3 – Fator de forma para sapatas circulares em argilas com acréscimo de tensão
com a profundidade, adaptado MARTIN (2003) ........................................................... 22�
Tabela 2. 4 - Relações de escala em modelos centrífugos (STEWART, 1992). ............ 26�
Tabela 4. 1 - Resumo dos valores obtidos nos ensaios de adensamento (PEQUENO,
2010) ............................................................................................................................... 62�
Tabela 4. 2 - Relação dos CP’s para os ensaios triaxiais CK0U (SA) e (NA) ................ 64�
Tabela 4. 3 - Módulos de Elasticidade e Cisalhantes e razão Eu/Su, ............................... 66�
Tabela 4. 4 – Resumo dos parâmetros do modelo Clam-clay ........................................ 66�
Tabela 4. 5 – Programa de testes e dimensões dos modelos .......................................... 69�
Tabela 4. 6 – Resumo das atuações dos ensaios centrífugos .......................................... 83�
Tabela 4. 7 - Características de atuação dos modelos no ensaio 01 ............................... 84�
Tabela 4. 8 – Características de atuação dos modelos no ensaio 02 .............................. 86�
Tabela 4. 9 - Características de atuação dos modelos no ensaio 03 ............................... 88�
Tabela 5. 1 - Picos das tensões verticais na instalação e na extração dos modelos ...... 103�
Tabela 5. 2 - Nc* no pico da compressão estimado através do Su,eq ............................. 106�
Tabela 5. 3 - Nc* no pico da compressão com Su,eq e ajuste pelo fator de forma ssu .... 106�
Tabela 5. 4 - Nc* no pico de extração ........................................................................... 110�
Tabela 5. 5 - Relação entre a protótipo/modelo ........................................................... 114�
Tabela 5. 6 – Comparação dos resultados das modelagens física e numérica.............. 118�

xvii
LISTA DE SÍMBOLOS
β Coeficiente Angular da Envoltória da Trajetória de Tensões
γ Peso Específico do Solo
� Peso Específico do Solo
� volume específico na linha de estado crítico correspondente à pressão unitária
�’ Peso Específico Submerso do Solo
γa Peso Específico da Água
�sat Peso Específico Saturado do Solo
� Coeficiente Angular da Linha de Descompressão
λ Coeficiente Angular da Reta Virgem
� Inclinação da L.A.I. em e x lnp’
� Acréscimo Resistência Não Drenada por Unidade de Profundidade
σ’v Tensão Vertical efetiva
σ’v0 Tensão Vertical efetiva inicial
σ’vm Tensão de pré-adensamento
σ1 Tensão Principal
σc Tensão Confinante
σd Tensão Desviadora
σv Tensão Vertical Total
� Volume Específico
�’ coeficiente angular da envoltória de resistência
φ Ângulo de Atrito Interno do Solo
ω Velocidade Angular de Rotação
A Área Total da Fundação (seção plena)
a razão de resistência para um perfil normalmente adensado

xviii
Ae Área Efetiva da Fundação (com perfurações)
Ap Área das Perfurações
B Largura da Fundação
C1 Constante de Regressão
C2 Constante de Regressão
cc Índice de Compressão Oedométrica
cs Índice de Recompressão Oedométrica
cv Coeficiente de Adensamento Vertical
D Profundidade de enterramento da fundação
d Raio da Fundação
d* Raio equivalente para fundação quadrada (relação de perímetros)
dp Diâmetro da Perfuração
ds Comprimento da Saia
dsu Fator de Correção de Enterramento
dT-bar Diâmetro do mini T-bar
e Índice de Vazios
e0 Índice de Vazios Inicial
ecs índice de Vazios no Estado Crítico
Eref Módulo de Elasticidade Efetivo do Solo
Eu Módulo de Elasticidade Não Drenado
Eu50 Módulo de Elasticidade Secante Não Drenado (para 50% do σd)
F Fator Obtidos no Ábaco de DAVIS & BOOKER (1973)
f1 Freqüência de Rotação da Centrífuga
f2 Freqüência de Rotação do Motor
FR Fator F para Sapata Rugosa
FS Fator F para Sapata Lisa
G Módulo de Cisalhamento Elástico do Solo
g Aceleração da Gravidade Terrestre

xix
Gs Densidade Real dos Grãos
hm altura em escala de Modelo
hp Altura em escala de Protótipo
IP Índice de Plasticidade
K0 Coeficiente de Empuxo no Repouso
L Comprimento da Fundação
M Inclinação da L.E.C. em p’ x q
N Fator de Escala para Ensaios Centrífugos
Nb Fator de Barra
Nc Fator de Capacidade de Carga do Solo Devido Coesão
np Número de Perfurações
Nq Fator de Capacidade de Carga do Solo Devido Sobrecarga
N� Fator de Capacidade de Carga do Solo Devido Peso Própio
OCR Razão de Sobre-Adensamento
P Força
qult Capacidade de Carga da Fundação
R Taxa de Perfuração
r1 Raio da Centrífuga
r2 Raio do Motor
S Saturação
ssu Fator de Correção de Forma
Su Resistência Não Drenada do Solo
Su,eq Resistência Não drenada do Solo Equivalente
Su0 Resistência Não Drenada do Solo no Topo da Camada
T Fator Tempo de Terzaghi
tm Tempo em Escala de Modelo
tp Tempo em Escala de Protótipo
U Grau de Adensamento

xx
u Poro-Pressão
v Velocidade
V* Velocidade Normalizada
W Largura da Banda Efetiva
w Umidade
W’ Peso Submerso da Fundação
wL Limite de Liquidez
z Profundidade da Camada de Solo
zeq Profundidade Equivalente

1
CAPÍTULO �
INTRODUÇÃO
1.1 GENERALIDADES
As primeiras tentativas de perfuração e extração de petróleo no oceano ocorreram no
final do século 19, início do século 20. Grande parte das tentativas neste período não foi bem
sucedida devido à tecnologia limitada disponível. Operações offshore começaram a obter
maior taxa de sucesso e se estabeleceram no meio do século 20. Atualmente uma grande parte
do suprimento mundial de petróleo é proveniente de operações offshore. Este tipo de operação
offshore permite a exploração de reservas anteriormente inacessíveis e tornou-se
especialmente importante à medida que as reservas para exploração baseada em terra foram
tornando-se mais escassas.
Para a exploração e produção de petróleo em grandes profundidades, conta-se com
uma gama de equipamentos que formam um arranjo submarino. Estes equipamentos, em
grande parte se encontram apoiados no leito do solo marinho através de fundações rasas
chamadas mudmats. Pela importância destes equipamentos no sistema de produção e riscos
decorrentes de danos se faz necessário uma atenção especial ao projeto da capacidade de
carga deste tipo de fundação.
Infelizmente a exploração de petróleo offshore possui diversos riscos potenciais e
desvantagens. A principal preocupação sendo o derramamento de óleo. Um derramamento
causa impacto devastador na vida aquática e em todo ecossistema oceânico do mundo. Os
processos de produção e exploração, por si só já geram poluição e resíduos que devem ser
tratados adequadamente. Outra questão é o custo dos equipamentos e as conseqüências de
eventuais falhas ou danos estruturais que podem acarretar em uma parada na produção.

2
1.2 JUSTIFICATIVA
Embora, em comparação a outros tipos de fundações utilizadas no meio offshore, os
mudmats apresentem pequenas dimensões, sua importância é grande em função dos
equipamentos aos quais os mudmats dão suporte o que justifica a atenção e os cuidados que se
devem ter com este tipo de fundação. Um manifold, e.g., quando sujeito a falhas ou danos
estruturais pode acarretar uma parada na produção, pois reúne diversos poços de uma mesma
região. Tal interrupção causa um grande impacto ao sistema de produção e grandes perdas
econômicas e eventualmente ambientais.
As normas internacionais utilizadas para o cálculo deste tipo de fundações, e.g., API
RP 2A – Recommended Practice for Planning, Designing and Constructing Fixed Offshore
Platforms – Working Stress Design, são baseadas nas teorias clássicas para análise de
fundações rasas, as quais muitas vezes são limitadas e não atendem à complexidade e às
necessidades específicas dos projetos. A bibliografia ainda não é conclusiva acerca dos fatores
de capacidade de carga inseridos nas formulações clássicas de fundações superficiais
quadradas, com enterramentos rasos e um solo com perfil de resistência crescente com a
profundidade.
Desta forma, uma melhor compreensão dos aspectos associados à interação solo-
estrutura deste tipo de fundações se faz necessário, visando uma metodologia de projeto que
conduza a fundações otimizadas, seguras, que atendam às importantes demandas de
simplificação e facilidade nos processos de instalação, recuperação e funcionalidade durante
sua vida útil.
1.3 OBJETIVO
O projeto otimizado de uma fundação mudmat maximiza a relação entre a capacidade
de carga à compressão e a resistência à extração, o que pode ser alcançado pela adição de
perfurações nestas fundações (WHITE et al., 2005). Neste trabalho são efetuadas modelagens
físicas e numéricas de mudmats sólidos e perfurados com o objetivo de avaliar o desempenho
dos diferentes tipos de projetos. Os modelos utilizados são submetidos a carregamentos
verticais centrados, associados às etapas de instalação e extração. O solo utilizado na pesquisa
foi uma argila marinha típica da Bacia de Campos na região do campo de Roncador. As

3
modelagens físicas foram conduzidas por ensaios em centrífuga geotécnica de tambor,
utilizando a técnica de grumos com adição de sobrecarga para a formação do leito de solo
com características usualmente encontradas em campo. As modelagens numéricas foram
realizadas com o programa PLAXIS v. 8.2, específico para modelagem de problemas
geotécnicos e de interação solo estrutura.
Adicionalmente, este estudo objetiva contribuir para uma melhor compreensão do
comportamento carga-deformação de sapatas sólidas e perfuradas assentes em solos marinhos
argilosos e submetidas a carregamentos verticais centrados, aplicados nas etapas de instalação
e extração. Este trabalho também visa contribuir para uma melhor avaliação dos fatores de
capacidade de carga de fundações superficiais quadradas com enterramentos rasos e assentes
em solo com perfil de resistência crescente com a profundidade.
Este trabalho insere-se na linha de pesquisa de Modelagem Física com centrífuga
geotécnica da COPPE que, desde 1998, tem abordado problemas geotécnicos como a
contaminação de solos (GURUNG et al., 1998), estudos de interação solo-dutos (OLIVEIRA,
2005 e PACHECO, 2006) e estudos em rejeitos siltosos de minérios de ferro (MOTTA,
2008).
1.4 A IMPORTÂNCIA DA MODELAGEM FÍSICA
A modelagem física é uma importante ferramenta e vem sendo utilizada em
simulações cada vez mais eficientes e complexas de diversos problemas da engenharia. Por
outro lado, o crescente desenvolvimento das técnicas computacionais aliado aos custos
relativamente baixos dos sistemas informatizados têm tornado a modelagem numérica cada
vez mais viável.
Modelagens física e numérica, entretanto, possuem vantagens e desvantagens
dissociadas, e em geral se complementam. Enquanto a simulação numérica é perfeitamente
capaz de considerar escalas naturais sem restrições de orçamento, as hipóteses simplificadoras
e a limitação de parâmetros envolvidos podem resultar em pouca representatividade de
problemas reais, especialmente quando são complexos e difíceis de modelar
matematicamente. Já a modelagem física, não obstante possua muita flexibilidade, pode
padecer de distorções em seus resultados devido a efeitos de escala. Desta forma, cabe ao
engenheiro estabelecer os limites onde os investimentos em uma ou outra técnica são
justificáveis.

4
Na maioria das vezes os problemas da engenharia geotécnica possuem certo grau de
complexidade, permitindo uma melhor reflexão sobre as vantagens e desvantagens de
modelos físicos e numéricos e seus papéis complementares.
Na Geotecnia moderna a modelagem física tem se mostrado cada vez mais importante
e um ramo em especial que vem crescendo em importância é a modelagem centrífuga, por
possibilitar a simulação de diversas situações de interesse da engenharia com grande
economia de tempo e recursos.
A modelagem centrífuga vem potencializar as possibilidades da modelagem física,
principalmente por suas características peculiares. Os modelos centrífugos mantêm relações
de proporcionalidade inversa entre o campo inercial gerado e as dimensões do protótipo.
Dessa maneira, a técnica viabiliza a utilização de modelos menores e mais baratos. No
entanto, a grande vantagem desse método para a geotecnia reside na aceleração dos efeitos
dos fenômenos ligados ao adensamento. A escala de tempo no modelo para esses efeitos é
extremamente vantajosa, permitindo uma redução considerável em relação ao protótipo.
Outro assunto amplamente discutido é o efeito de escala em modelos físicos nesse tipo
de simulação. Diversos autores concluíram que, respeitados alguns limites de redução do
modelo, o efeito de escala, associado às dimensões das partículas de solo, pode ser
desconsiderado. Por exemplo, OVESEN (1979) apud OLIVEIRA (2005) coloca que, com
algumas exceções, dimensões estruturais da ordem de 20 a 30 vezes o tamanho das partículas
de solo envolvidas na análise são suficientes para evitar o efeito escala.
Em análises numéricas as limitações de escala também são aplicáveis uma vez que a
maioria dos modelos matemáticos é baseada na mecânica do contínuo, dificultando a
incorporação de efeitos de partícula, fundamentais no desenvolvimento de alguns fenômenos
geotécnicos.
Assim sendo, dados de monitoramento em escala natural, assim como de modelagem
física, devem ser usados para calibrar e comprovar a adequação de modelos conceituais,
aumentando significativamente a confiabilidade dos resultados obtidos, permitindo assim que
estes possam se aproximar o mais possível da realidade (RANDOLPH & HOUSE, 2001).
1.5 CONTEÚDO
Os estudos aqui desenvolvidos estão divididos em seis capítulos, descritos a seguir.

5
• Capítulo 2
Apresenta uma revisão bibliográfica comentada dos aspectos ligados ao tema central.
Teorias que envolvem a interação solo-estrutura de fundações rasas em solo marinho argiloso
são apresentadas. Aspectos da modelagem física em centrífuga geotécnica assim como a
modelagem numérica e as ferramentas computacionais que serão utilizadas também são
abordadas nesse capítulo.
• Capítulo 3
Descreve sucintamente a centrífuga geotécnica da COPPE e os equipamentos
necessários para a realização dos ensaios de modelagem física. O desenvolvimento dos novos
equipamentos e do novo sistema de aquisição de dados também é apresentado.
Capítulo 4
O capítulo 4 discorre sobre os procedimentos de ensaios que serão utilizados na
modelagem física e os parâmetros do solo. Detalhes do modelo a ser estudado na modelagem
centrífuga, assim como os procedimentos para a formação da camada sobre a qual o modelo
ficará assente, também são abordados.
Capítulo 5
Os resultados das modelagens são apresentados neste capítulo. Apresentam-se também
a avaliação geral dos resultados, as comparações dos resultados encontrados nas modelagens
físicas e numéricas e a discussão final.
Capítulo 6
Neste capítulo as conclusões alcançadas são apresentadas e são propostos futuros
trabalhos envolvendo os temas presentes nesta pesquisa.

6
CAPÍTULO �REVISÃO BIBLIOGRÁFICA
2.1 INTRODUÇÃO
Este capítulo tem como objetivo apresentar um resumo sobre os sistemas submarinos
de exploração e produção de petróleo, assim como uma revisão bibliográfica dos principais
tópicos abordados nesta pesquisa.
Apresentam-se inicialmente os equipamentos utilizados, tendo como foco principal os
equipamentos assentes na superfície do leito marinho em águas profundas.
A revisão dos conceitos dos mecanismos acerca dos problemas de fundações rasas em
solos argilosos, assim como uma visão geral de outros estudos relacionados a esta dissertação,
será também abordada.
Os conceitos que envolvem a modelagem física com centrífuga geotécnica são
apresentados ao final do capítulo.
2.2 EXPLORAÇÃO E PRODUÇÃO SUBMARINA
A exploração do petróleo passa por diversas etapas iniciando pela descoberta do
petróleo, normalmente perfurando-se poços de extensão (delimitação), para estimar as
dimensões da jazida. A seguir, perfuram-se os poços de desenvolvimento, que colocarão o
campo em produção. No entanto, isso só ocorre quando é constatada a viabilidade técnico-
econômica da descoberta, ou seja, se o volume de petróleo a ser recuperado justificar os altos
investimentos necessários à instalação de uma infra-estrutura de produção. A fase seguinte é
denominada completação, quando o poço é preparado para produzir. Uma tubulação de aço,

7
chamada coluna de revestimento, é introduzida no poço. Em torno dela, é colocada uma
camada de cimento, para impedir a penetração de fluidos indesejáveis e o desmoronamento
das paredes do poço. A operação seguinte é o canhoneio: um canhão especial desce pelo
interior do revestimento e, acionado da superfície, provoca perfurações no aço e no cimento,
abrindo furos nas zonas portadoras de óleo ou gás e permitindo o escoamento desses fluidos
para o interior do poço. Outra tubulação, de menor diâmetro (coluna de produção), é
introduzida no poço, para levar os fluidos até a superfície. Instala-se na boca do poço um
conjunto de válvulas conhecido como árvore-de-natal, para controlar a produção.
Algumas vezes, o óleo vem à superfície espontaneamente, impelido pela pressão
interna dos gases. Quando isso não ocorre, é preciso usar equipamentos para bombear os
fluidos. O bombeio mecânico em superfície terrestre é feito por meio do cavalo-de-pau, um
equipamento montado na cabeça do poço que aciona uma bomba colocada no seu interior.
Com o passar do tempo, alguns estímulos externos são utilizados para extração do petróleo.
Esses estímulos podem, por exemplo, ser injeção de gás ou de água, ou os dois
simultaneamente, e são denominados recuperação secundária. Dependendo do tipo de
petróleo, da profundidade e do tipo de rocha-reservatório, pode-se ainda injetar gás carbônico,
vapor, soda cáustica, polímeros e vários outros produtos, visando sempre aumentar a
recuperação de petróleo. O petróleo segue então para os separadores, onde o gás natural é
retirado. O óleo é tratado, separado da água salgada que geralmente contém, e armazenado
para posterior transporte às refinarias ou terminais. Já o gás natural é submetido a um
processo no qual são retiradas partículas líquidas, que vão gerar o gás liquefeito de petróleo
(GLP) ou gás de cozinha. Depois de processado, o gás é entregue para consumo industrial,
inclusive na petroquímica. Parte deste gás é re-injetado nos poços, para estimular a produção
de petróleo. A exploração submarina de petróleo, e de seus derivados, exige infra-estrutura
adicional, equipamentos e logística mais complexos quando comparada com a exploração em
terra.
Em geral, um sistema de produção marítimo pode ser dividido em alguns componentes
básicos, apresentados na Figura 2. 1. Estes componentes são descritos a seguir.

8
Figura 2. 1 - Exemplo de arranjo submarino para exploração de petróleo (Cortesia Emerson
Process Management, apud LAI, 2009)
2.2.1 POÇOS E ÁRVORES DE NATAL
Assim como na exploração terrestre, a exploração submarina utiliza poços para acessar
os reservatórios a partir do nível do solo. Um poço de petróleo pode ser basicamente de três
tipos: exploração, produção ou injeção. Por estes poços é escoada a produção e/ou injetados
fluidos para controle do poço ou do reservatório.
Um poço submarino é composto basicamente pela cabeça de poço e pela coluna de
produção. A coluna de produção é composta, geralmente, por revestimentos em tubos de aço
de 30", 20", 13 3/8" e 9 5/8", com extremidade superior no leito marinho e um revestimento
tipo liner de 7" com extremidade superior próxima à extremidade inferior do tubo de 9 5/8".
Todos estes revestimentos são cimentados para garantia do isolamento das diferentes
9
formações, com exceção do de 30" que pode ser cimentado, cravado ou jateado. A cabeça de
poço submarina é um equipamento geralmente cilíndrico e de aço, que é cimentado ao fundo
do mar, provendo uma boa base de suporte para os equipamentos nela acoplados. A
cimentação destes revestimentos em ambiente offshore é uma operação crítica pois se utilizam
diversos aditivos e os principais riscos são de a pega da pasta de cimento ser muito acelerada
e isto causar uma prisão da coluna de cimentação ou a pega ser muito retardada causando um
possível fluxo de hidrocarbonetos por perda de hidrostática durante a pega.
Existem diversos tipos de árvores de natal, usadas tanto no mar quanto em terra.
Quando usada em poços submarinos, ela é chamada de árvore de natal molhada. Árvores de
natal são conjuntos de conectores e válvulas usadas para controlar o fluxo dos fluidos,
produzidos ou injetados, instalados em cima da cabeça de poço.
A Árvore de Natal Molhada (ANM) tem também a função de permitir a conexão de
linhas ao poço de petróleo. Recentemente foram incorporados a estes equipamentos sistemas
de controle assim como sensores e controladores de vazão. As ANM’s podem ser diver assisted ou diverless. Na diver assisted, mergulhadores ajudam a acoplar os dutos submarinos
à árvore. A diverless é usada quando a profundidade é superior a 300 metros e pode ser do
tipo com cabos de guia (guideline) ou (guidelineless) usada para maiores profundidades,
quando a instalação é realizada a partir de embarcações com posicionamento dinâmico, não
ancorada. A Figura 2. 2 exemplifica alguns modelos de ANMs.
2.2.2 LINHAS DE COLETA E INTERLIGAÇÃO
As conexões entre os componentes do sistema são feitas por meio de linhas flexíveis
ou tubos rígidos. Estas linhas podem ser qualificadas como: risers, jumpers ou flowlines.
Os risers são as linhas que ligam os componentes submarinos com os componentes de
superfície. São compostos de linhas rígidas ou flexíveis suportadas diretamente pela
plataforma ou navio, utilizando parte da carga útil da embarcação. Outra opção são riserssuportados por um sistema de flutuação independente da embarcação.
Flowlines são linhas de grande comprimento utilizadas para interligar componentes a
grandes distâncias e, muitas vezes, a bases próximas à costa. Devido aos grandes
comprimentos, geralmente são compostos de tubos rígidos. Esta tubulação é muito suscetível
a variações de temperatura, que acarretam contração ou expansão da linha, imprimindo
grandes forças horizontais nos equipamentos interligados.

10
Figura 2. 2 - Exemplos de ANMs: vertical e horizontal (Cortesia de FMC Technologies)
Jumpers são as linhas que interligam equipamentos submarinos. No Brasil a grande
maioria destes componentes é do tipo flexível com vantagens quanto à facilidade de
instalação, fabricação independente da metrologia submarina adotada e baixa transmissão de
carregamentos para os equipamentos interligados, porém são bastante complexas e muitas
vezes possuem limitação de profundidade. Recentemente jumpers rígidos têm sido adotados
nas linhas de produção. Estes são fabricados geralmente em aço e a flexibilidade necessária
para seu funcionamento (para suportar a movimentação dos equipamentos) é dada por sua
geometria. O jumper rígido tem uma série de vantagens, como o baixo custo quando
comparado ao flexível e o fato de possuírem menores limitações de profundidade quando
comparados com os flexíveis. Entretanto o jumper rígido possui desvantagens: necessita
logística de fabricação incluindo metrologia submarina e fabricação de acordo com o
posicionamento exato dos equipamentos, dificuldade de instalação e a alta transmissão de
carregamentos horizontais, verticais e de momento para os equipamentos interligados.
2.2.3 EQUIPAMENTOS DE INTERLIGAÇÃO
Equipamentos de interligação são os componentes do sistema submarino de produção
que permitem a conexão, a transição e a multiplicação das linhas de coleta e de interligação.
Dentre os principais equipamentos, tem-se:

11
PLET – Pipeline End Termination – equipamentos de terminação de linha (Figura 2.
3). São equipamentos de final de linha, sendo utilizados para realizar a transição entre duas
linhas instaladas independentemente, geralmente uma linha rígida (um flowline) e uma
flexível (um jumper).
Figura 2. 3 - Exemplos de PLETs
ILT – In Line Tee – são equipamentos incorparados em um trecho do flowline,
incluindo uma bifurcação na linha, permitindo a conexão de linhas futuras (Figura 2. 4).
Figura 2. 4- Exemplo de ILT

12
PLEM – Pipeline End Manifold – são equipamentos similares aos PLETs, com
múltiplas saídas, permitindo a conexão entre mais de duas linhas. A Figura 2. 5 apresenta
exemplos de PLEMs, sendo o PLEM da esquerda instalado com MCV acoplado e o da direita
o PLEM e sua base sendo instalada.
Figura 2. 5 - Exemplos de PLEMs
Manifold – é uma estrutura metálica apoiada no fundo do mar e que acomoda válvulas
e acessórios que permitem que este esteja conectado à árvore de natal molhada, outros
sistemas de produção, de tubulações e risers. Manifolds submarinos são equipamentos de
passagem e de manobra da produção, onde o óleo é agrupado em um mesmo coletor. Este é
recomendado quando se reúnem diversos poços em uma mesma região e longe da plataforma
de processo, ganhando-se assim, com a redução do número de linhas flexíveis – dutos
submarinos – e de umbilicais de controle.
Em um manifold são acoplados de quatro a oito poços, que em um evento de falha
podem parar a produção de petróleo na região onde se encontra. Para reduzir este impacto, os
manifolds são construídos em módulos. São empregados tanto módulos de controle, como
módulos de válvulas (normalmente um módulo para cada dois poços). Cada módulo (MCVs)
pode ser retirado individualmente, reduzindo o impacto até que a falha seja reparada. Entre as

13
vantagens do seu uso destaca-se, a redução do custo do sistema, pois, ao invés de diversos
dutos ligando os poços individualmente à plataforma, se tem apenas um duto coletor, e
também a redução das cargas atuantes na plataforma. A Figura 2. 6 ilustra exemplos de
manifolds submarinos utilizados em grandes profundidades (acima de 400m).
Figura 2. 6 - Exemplos de manifolds
2.2.4 UNIDADE DE PRODUÇÃO E SISTEMAS DE ARMAZENAMENTO E
EXPORTAÇÃO
A unidade de produção de óleo e gás submarino consiste de uma plataforma, ou navio,
equipada com itens necessários para a produção e controle dos poços. (Figura 2. 1 e Figura 2.
7).

14
Inicialmente, durante a exploração de petróleo em águas rasas, as plataformas eram
fixas ao solo marinho. À medida que o petróleo passou a ser explorado a profundidades cada
vez maiores, as plataformas passaram a ser flutuantes gerando a necessidade da modificação
de embarcações para que estas funcionassem como unidades de produção. As linhas de
controle, assim como as linhas de coleta, são ligadas a estas unidades de produção. Assim
sendo, além do peso dos equipamentos necessários, a embarcação deve possuir flutuabilidade
suficiente para suportar as linhas que se ligam aos equipamentos submarinos.
Os produtos resultantes da unidade de produção podem ser escoados por meio de
navio ou por tubulação ligando a unidade de produção a um sistema de armazenamento.
Sistemas de exportação que utilizam tubulação permitem maior taxa de escoamento,
mas dependem da viabilidade de instalação de tubulação ligada à unidade de produção.
Exportação através de embarcações depende da disponibilidade de embarcações adequadas e
de sistemas de transferência seguros. Unidades de produção marítimas que não possuem
forma direta de escoamento devem armazenar a produção até que uma unidade de escoamento
retire e transporte a produção ao destino final. A Figura 2. 7 mostra os diferentes tipos de
unidades de produção e armazenamento mais empregados para exploração de petróleo
offshore.
Figura 2. 7 - Unidades de produção/armazenamento. (COLLIAT, 2002)

15
2.3 MUDMATS
Mudmat é o termo utilizado para descrever fundações rasas pré-fabricadas de aço de
pequeno porte que possuem uma área plana de aproximadamente 5 metros quadrados em
planta (Figura 2. 8). Mudmats são principalmente utilizados para apoiar estruturas de
equipamentos submarinos de interligação e linhas de coleta e interligação. Todos os
equipamentos submarinos, excetuando-se as ANMs, são assentados diretamente sobre o solo
marinho tendo os mudmats como sua fundação. As fundações das estruturas de equipamentos
submarinos são normalmente parte integrante da estrutura e são fabricados de chapas de aço
com sua seção plena ou perfurada tomando a forma semelhante a de uma grelha. Fundações
do tipo integrantes à estrutura favorecem as operações de instalação do equipamento em águas
profundas, pois a instalação da estrutura submarina pode ser concluída em uma única
operação.
Figura 2. 8 - Fundação mudmat com estrutura de proteção para equipamentos submarinos
(FISHER e CATHIE, 2003)
A carga sobre equipamentos submarinos compreende o peso próprio submerso e o
peso de conexões futuras, além de pequenas forças horizontais devidos às correntes marítimas

16
e de eventuais cargas aplicadas pelos equipamentos interconectados, e.g., devidas à expansão
térmica dos dutos (flowlines) ou transmitidas por jumpers rígidos. A utilização de saias se faz
necessária quando elevadas cargas horizontais estão presentes. Estas são basicamente uma
caixa invertida formada por chapas. No caso dos equipamentos de interligação, a fundação é
calculada de forma que o equipamento apresente estabilidade e pequeno recalque durante toda
a vida útil para possibilitar as futuras conexões.
A remoção e/ou a reutilização da estrutura do mudmat são desejáveis quando há a
desativação de um equipamento. Durante a extração, a estrutura é removida através do auxilio
de uma grua; e a resistência ao arrancamento do mudmat deve ser reduzida para facilitar este
processo. Portanto, se faz necessário que o projeto destas fundações vise à redução da
resistência à extração, facilitando assim o processo.
Um método de reduzir a capacidade de arrancamento de um mudmat é a introdução de
perfurações onde, ao invés de uma estrutura sólida, o mudmat forme um reticulado de
elementos em aço. As bases perfuradas oferecem benefícios adicionais. Em primeiro lugar, o
peso da estrutura é reduzido, diminuindo o custo de material e facilitando o manuseio na
instalação. Em segundo lugar, a estrutura é menos influenciada pelas forças hidrodinâmicas
durante a instalação, pois ondas e correntes marítimas podem passar através das perfurações.
2.4 FUNDAÇÕES SUPERFICIAIS
2.4.1 CAPACIDADE DE CARGA DE SAPATAS ASSENTES EM ARGILAS
SATURADAS
Para a grande maioria dos problemas de sapatas assentes em um depósito de argila
saturada (ou submersa) considerar-se o comportamento não drenado do material, adotando a
coesão do material igual à sua resistência não drenada constante com a profundidade e o
ângulo de atrito do material φ=0. Em funções destas considerações se tem Nq=1 e N�=0,
reduzindo a equação de capacidade de carga (TERZAGHI, 1943) para:
DSNq ucult ⋅+= 'γ (2.1)
Onde:
Su – resistência não drenada do solo
Nc – fator de capacidade de carga

17
γ’ – peso específico submerso do solo
D – profundidade do enterramento da fundação
O valor exato do fator de capacidade de carga para uma sapata corrida em um solo
puramente coesivo foi obtida por PRANDTL (1921) em TERZAGHI (1943), onde
Nc,faixa=2+� 5,14.
2.4.1.1 FATORES DE CORREÇÃO PARA FUDAÇÕES ENTERRADAS COM PERFIL
HOMOGÊNEO
Para o cálculo de capacidade de carga de fundações com condições diferentes da de
sapata corrida (plano deformação) observadas na solução Prandtl, e.g., sapatas quadradas,
circulares ou retangulares é possível inserir um fator de correção de forma ssu multiplicado ao
Nc=2+�. Outro fator que deve ser inserido é o fator de enterramento dsu referente à
contribuição da sobrecarga de solo, acima do nível da base da fundação, nos mecanismos de
ruptura do solo. Desta forma obtém-se a Equação (2.2)
( )DSdsq ususuult ⋅+⋅⋅⋅= '14,5 γ (2.2)
MEYERHOF (1951,1963), sugeriu para valores D/B<2,5:
���
���
�
+=
+=
BDd
LBs
su
su
2,01
2,01
(2.3)
BRINCH HANSEN (1970) recomenda diferentes valores para o fator de enterramento:
���
���
�
>+
≤+=
− 1;tan4,01
1;4,01
1
BDpara
BD
BDpara
LD
d su (2.4)
SALGADO et al. (2004) propuseram valores para os fatores de forma e de
enterramento, sendo os valores de forma corrigidos com constantes de regressão C1 e C2apresentadas na Tabela 2. 1:

18
���
���
�
+=
⋅++=
BDd
BDC
LBCs
su
su
27,01
1 21
(2.5)
Tabela 2. 1 - Constantes de regressão para o fator de correção de forma, adaptado SALGADO
(2008)
B/L C1 C2
1(círculo) 0.163 0.210
1(quadrado) 0.125 0.219
0.50 0.156 0.173
0.33 0.159 0.137
0.25 0.172 0.110
0.20 0.190 0.090
COX et al.(1961) obtiveram a exata solução para sapatas circulares rugosas
Nc,circle=6,05. Não existem soluções exatas para sapatas quadradas, porém existem valores
obtidos através de modelagem por elementos finitos, e.g., SALGADO et al. (2004) fixaram
valores entre 5,52 e 6,22, GOUVERNEC et al.(2005) encontraram a razão entre Nc,quadrado/
Nc,faixa=1,15, valor próximo ao proposto por SKEMPTON (1951) de Nc,quadrado/ Nc,faixa=1,2.
2.4.1.2 – CAPACIDADE DE CARGA DE SAPATAS ASSENTES EM ARGILAS COM
TENSÃO CRESCENTE COM A PROFUNDIDADE
Em geral, quando há uma deposição marinha ou fluvial, a resistência não drenada do
solo cresce com a profundidade, em conseqüência do adensamento provocado pelo peso
próprio das camadas superiores. Quando esse crescimento é linear pode-se escrever que a
capacidade ao cisalhamento não drenado de uma argila é dada por:
zSu ⋅+= ρ0u S (2.6)
Onde:
Su0 – coesão ou resistência não drenada da argila no nível da base da fundação
� – acréscimo da coesão ou resistência não drenada por unidade de profundidade

19
z – profundidade da camada de solo
A capacidade de carga para perfis de resistência crescentes com a profundidade pode
ser obtida através da Equação (2.7), onde Nc* fator de capacidade de carga modificado :
DSNq ucult ⋅+= '0* γ (2.7)
PINTO (1965) obteve para os fatores de capacidade de carga Nc, que devem ser
multiplicados por Su0, valores que variam em função do parâmetro adimensional p= Su0/ �b,onde b é a semi-largura da fundação.
DAVIS & BOOKER (1973) apresentam uma solução para este mesmo caso, em que a
capacidade de carga é calculada com:
( ) cucu
cuult NSNS
BFBNSFq ⋅��
�
���
����
�⋅
⋅+=��
�
�� �
��� ⋅+⋅= 0
00 4
141 ρρ (2.8)
Sendo F obtido através do ábaco da Figura 2. 9, onde FR é o fator para sapata rugosa e
FS o fator para sapata lisa.
Figura 2. 9 - Fator de correção DAVIS & BOOKER (1973), apud SALGADO (2008)
Comparando-se a Equação (2.1) (sem a contribuição do peso da sobrecarga) com a
Equação (2.8) conclui-se que a capacidade de carga para o caso de um depósito de solo com

20
resistência crescente com a profundidade pode ser estimado através da Equação (2.1)
corrigindo apenas o Su por um valor de Su,eq obtido através da Equação (2.9):
��
�
���
����
� ⋅+=��
�
���
����
� ⋅+=c
uuu
equ NBSFS
SBFS
441 00
0,
ρρ (2.9)
Neste mesmo raciocínio é possível estimar a profundidade na qual o valor de Su deve
ser utilizado na Equação (2.10).
c
uuequeq N
BFSFSS z
4)1( 00, +−=
−=
ρρ (2.10)
WHITE et al. (2005) apresentam um gráfico (Figura 2. 10) com um resumo dos
valores encontrados na literatura da influência do perfil de resistência heterogêneo na
capacidade de carga de sapatas circulares e sapatas corridas.
Figura 2. 10 - Efeito da heterogeneidade na capacidade de carga, WHITE et al. (2005)

21
DAVIS & BOOKER (1973) restringiram suas análises ao caso de sapatas corridas na
superfície da camada de solo. Na prática é comum inserir na equação fatores de forma,
enterramento e inclinação assim como a sobrecarga de solo devido ao enterramento:
00ult 4...q qN
NBSidsF c
cusususu +�
�
�
���
����
�+⋅= ρ (2.11)
Porém a dificuldade das soluções de problemas de fundações enterradas em solos com
o perfil de resistência crescente com a profundidade faz com que a literatura ainda não ofereça
equações precisas para estes fatores, sendo estes avaliados através dos poucos trabalhos
existentes. SALEÇON & MATAR (1982) observaram que o fator de forma de uma fundação
assente em um perfil de resistência crescente com a profundidade diminuía à medida que o
gradiente de tensão � aumenta com a profundidade.
Na Tabela 2. 2 RANDOLPH et al. (2004), apud SALGADO (2008), apresenta valores
para fatores de forma para fundações circulares através dos resultados de DAVIS E BOOKER
(1973) e MARTIN(2001). A Tabela 2.3 também apresenta os valores dos fatores de forma
obtidos por MARTIN (2003), através dos cálculos realizados com o software “ABC
program”, utilizando o ajuste dos mínimos quadrados pode ser obtido através da Equação
(2.12), onde B/L =1 para fundações circulares.
���
�
���
�
�
���
�
���
�
�
−
���
�
���
����
�+= 3,1
S353,0exp
3,2176,01 s509,0
u0
suBL
Bρ (2.12)
Entretanto, a Equação 2.12 é aplicável a sapatas circulares assentes na superfície. Para
razões de enterramento D/B < 0,5 e valores de �B/Su0 menores que 2, pode-se avaliar a
influência dos fatores de enterramento para perfis heterogêneos da mesma forma como
utilizado para perfis de resistência constantes com a profundidade. Com isso as constantes de
regressão para o fator de forma apresentados anteriormente na Tabela 2. 1, podem ser
utilizadas com boa aproximação dos valores.

22
BDC
BLBC 2509,0
u0
1su 3,1
S353,0exp
3,21 s +
���
�
���
�
�
���
�
���
�
�
−
���
�
���
����
�+=
ρ (2.13)
Tabela 2. 2 - Fator de forma em função do gradiente de tensão normalizado, adaptado
RANDOLPH et al. (2004)
�B/Su0 0 1 2 3 6 10 ssu 1.18 1.05 1.00 0.98 0.93 0.90
Tabela 2. 3 – Fator de forma para sapatas circulares em argilas com acréscimo de tensão com
a profundidade, adaptado MARTIN (2003)
�B/Su0 q bL, faixa F q bL, círculo ssu
0.00 5.14 1.00 6.05 1.18 0.10 5.33 1.03 6.15 1.15 0.20 5.51 1.06 6.26 1.14 0.50 5.97 1.13 6.54 1.09 1.00 6.61 1.23 6.95 1.05 2.00 7.60 1.35 7.63 1.00 4.00 9.13 1.49 8.74 0.96 6.00 10.42 1.57 9.69 0.93 8.00 11.58 1.62 10.56 0.91
10.00 12.66 1.66 11.37 0.90 12.00 13.69 1.68 12.13 0.89 15.00 15.14 1.70 13.21 0.87 20.00 17.40 1.72 14.89 0.86 22.50 18.48 1.72 15.69 0.85 25.00 19.54 1.72 16.47 0.84 30.00 21.58 1.71 17.98 0.83 35.00 23.54 1.70 19.43 0.83 50.00 29.16 1.65 23.54 0.81 60.00 32.72 1.63 26.14 0.80
100.00 46.17 1.53 35.88 0.78 150.00 61.97 1.45 47.17 0.76

23
2.4.2 RESISTÊNCIA À EXTRAÇÃO –UPLIFT RESISTENCE
As teorias clássicas sugerem que a capacidade de carga não drenada de resistência a
extração (levantamento) pode ser estimada através das mesmas equações clássicas utilizadas
para a compressão (GOURVENEC et al., 2009), através da Equação 2.14:
'* WSNq ucextraçãoult += (2.14)
Onde:
Nc* – fator de capacidade de carga modificado
Su – resistência não drenada do solo
W’ – peso submerso da fundação
Como citados nos itens anteriores fatores de forma e de enterramento utilizados para
correções do fator de capacidade de carga na compressão em função do enterramento e de
forma da fundação vem sendo refinados através de inúmeras pesquisas com modelagem física
e numérica. A bibliografia não é conclusiva sobre os valores dos fatores de correção sob
compressão e extração, indicando que os fatores de resistência a extração (tensão) são
menores ou similares aos valores obtidos na instalação (compressão). Alguns estudos, e.g.,
PUECH et al. (1993), em ensaios centrífugos para capacidade de carga final de compressão e
extração, apresentam valores obtidos semelhantes para mudmats com saia em argilas
sedimentares marinhas, assim como WATSON et al. (2000) cujos ensaios de centrífugos
fundações rasas com saia em caulim normalmente adensado apresentaram capacidades de
extração e compressão indistinguíveis. Por outro lado, outros estudos que defendem a redução
desta relação, e.g., (CLUKEY & MORRISON, 1993) propõem que apenas 80% dos valores
obtidos na compressão sejam utilizados na extração para fundação rasas com saias longas.
Esta dissertação visa também contribuir para os fatores na resistência à extração.
2.5 MODELAGEM CENTRÍFUGA
2.5.1 FUNDAMENTOS
A modelagem centrífuga representa hoje uma excelente ferramenta geotécnica, uma
vez que possibilita a análise de problemas reais utilizando o próprio solo como material.

24
Segundo TAYLOR (1995), a centrífuga geotécnica nada mais é do que um sofisticado aparato
onde amostras de solo podem ser testadas.
Toda modelagem geotécnica deve respeitar, além das considerações comuns a todas as
modelagens, dois aspectos fundamentais: solos são originalmente depositados em camadas,
assim sendo têm características estratificadas; e o comportamento do solo é função do estado
de tensões e da história de tensões, que variam com a profundidade. O grande interesse da
modelagem centrífuga geotécnica está exatamente em respeitar esses aspectos fundamentais
(OLIVEIRA, 2005).
Modelos de solo podem ser acelerados em uma centrífuga de modo a serem
submetidos a um campo inercial de aceleração radial que, desde que o modelo seja coerente,
simula o campo gravitacional terrestre, porém muitas vezes maior (SCHOFIELD, 1980). Uma
amostra de solo em uma caixa acelerada numa centrífuga tem a superfície livre de tensões e
um perfil de solo com um nível de tensões que aumenta diretamente com a profundidade a
uma taxa relacionada com o peso específico da amostra e com campo de aceleração criado.
Assim, em um modelo corretamente planejado, uma profundidade hm possui exatamente o
mesmo nível de tensões do protótipo, para uma mesma amostra de solo, a uma profundidade
hp, onde hp=Nhm e gN ⋅ é a aceleração da centrífuga. Essa é a lei básica de escala de modelos
centrífugos.
Para obter equivalência de tensões entre o modelo centrífugo e o protótipo, as
dimensões lineares devem ser reduzidas por um fator N, e o modelo acelerado em N vezes a
gravidade. Dessa forma, as tensões (inerciais) a uma profundidade z/N no modelo serão
idênticas às tensões (gravitacionais) a uma profundidade z no protótipo (Figura 2. 11).
Alguns efeitos de escala devem ser considerados. Pode-se assumir a gravidade da
Terra como sendo uniforme em termos práticos nas análises de comportamento de solos. No
entanto, quando utilizando a centrífuga na geração do alto campo gravitacional requerido em
modelagens físicas, há uma leve variação da aceleração ao longo do modelo (Figura 2. 12).
A variação das tensões ao longo da profundidade da caixa de amostra da centrífuga se
explica pois, a aceleração radial (ar= r2ω ) é proporcional ao raio e como o raio é variável ao
longo da profundidade da caixa da centrífuga, a aceleração também o será. Dessa forma a
aceleração na superfície do modelo é menor que na base do mesmo. Comparando as tensões
no modelo e no protótipo, a igualdade entre elas se dará à hm = 2/3 hp, conforme pode ser
observado na Figura 2. 12. Esse problema, aparentemente complexo, torna-se menor

25
adotando-se cuidados especiais na escolha do raio efetivo no qual o fator de escala N é
determinado. Nota-se que, em centrífugas de pequeno raio, o erro devido a esta não
linearidade é também pequeno, da ordem de 3% (CALLE, 2007 e MOTTA, 2008).
Figura 2. 11 - Correspondência entre a tensão inercial em um modelo e a tensão gravitacional
no protótipo (TAYLOR, 1995).
Figura 2. 12 - Comparação da variação de tensões no modelo e no protótipo (TAYLOR,
1995).

26
Dentre as principais vantagens da utilização de modelos centrífugos, a relação entre o
tempo de adensamento no protótipo e no modelo é a que traz mais benefícios. O fenômeno do
adensamento está diretamente relacionado com a dissipação de poro-pressão, sendo, portanto
um fenômeno de difusão.
O grau de adensamento é indicado pelo parâmetro adimensional Tv da teoria de
Terzaghi, que é o mesmo tanto para o modelo como para o protótipo, sendo diretamente
proporcional ao tempo no modelo (tm) e no protótipo (tp) e ao coeficiente de adensamento (cv).
22p
pv
m
mvv h
tch
tcT⋅
=⋅= (2.15)
Como hp=Nhm,, então:
pm tN
t 2
1= (2.16)
Isto significa que, por exemplo, 27 anos de fenômenos ligados à difusão no protótipo
podem ser simulados em 24 horas de ensaios centrífugos a 100 gravidades, incluindo o
adensamento do solo. Essa grande vantagem da modelagem centrífuga tem sido utilizada
largamente com excelentes resultados.
No entanto, cuidados especiais devem ser tomados para não generalizar essa conclusão
para todos os fenômenos ligados ao tempo. A fluência, por exemplo, não obedece à relação
(2.16), tendo os tempos do modelo e do protótipo os mesmos valores. Nessa dissertação, as
principais relações de escala estão apresentadas, de maneira resumida, na Tabela 2. 4.
Tabela 2. 4 - Relações de escala em modelos centrífugos (STEWART, 1992).
PARÂMETRO RELAÇÃO DE ESCALA MODELO / PROTÓTIPO
Gravidade N Comprimento 1/N Densidade 1 Massa 1/N3
Tensão 1 Deformação 1 Força 1/N2
Momento Fletor 1/N3
Tempo (difusão) 1/N2
Tempo (relaxação) 1

27
2.5.2 TIPOS DE CENTRÍFUGAS
Existem basicamente dois tipos de centrífugas: as de braço e as de tambor.
Centrífugas de braço têm porte maior e possuem uma cesta de balanço que permite que o solo
seja colocado na caixa de amostras na posição vertical enquanto a máquina está parada.
Quando iniciada a rotação, a cesta gira em torno do seu eixo de sustentação, procurando
naturalmente a inclinação de equilíbrio para a aceleração angular desejada. As centrífugas de
tambor são menores e, muito embora possuam a capacidade de bascular seu eixo para a
posição horizontal ou vertical, seu canal de amostras é rígido, não tendo movimento de
balanço, deixando apenas duas alternativas para colocação de solos na caixa de amostras:
grumos ou lama. A Figura 2. 13 ilustra os dois tipos de centrífugas geotécnicas.
Figura 2. 13 – Exemplos de centrífugas geotécnicas: centrífuga de tambor do COFS/ UWA-
Austrália (esquerda) e centrífuga de braço da UENF-Brasil (direita)
A técnica de grumos utilizada consiste no particionamento da amostra de solo em
pequenos pedaços que são cuidadosamente jogados dentro da caixa até que se forme uma
camada, onde o fechamento macro-vazios inseridos na amostra ocorrem durante o inicio do
adensamento. A segunda técnica consiste em inserir o material em consistência de lama
através de um condutor para dentro da caixa de amostras.
Para atender às particularidades dos estudos desta dissertação e também pelo
equipamento utilizado se tratar de uma centrífuga de tambor, a técnica de preparação do solo
escolhida foi a de grumos combinada com a aplicação de uma sobrecarga que será

28
apresentada com mais detalhes no Capítulo 4. O detalhamento da centrífuga geotécnica da
COPPE é apresentado no Capítulo 3.
2.6 CONSIDERAÇÕES FINAIS
O objeto de estudo desta dissertação é a interação solo-estrutura de fundações offshoreassentes no leito marinho. Sendo assim, de maneira a não estender desnecessariamente e
tornar superficial a revisão bibliográfica, optou-se por apresentar brevemente os equipamentos
que compõe o sistema de exploração e produção de petróleo e suas funções, enfatizando os
equipamentos apoiados no leito marinho através de fundações do tipo mudmats.
Foram abordadas posteriormente as teorias de capacidade de carga para fundações
superficiais em argilas. Aspectos relacionados à modificação do fator de capacidade de carga,
Nc, em função do perfil de resistência não drenada do solo, forma da fundação e enterramento
da mesma, foram apresentados.
Considerações resumidas sobre modelagem centrífuga foram levantadas, apontando-se
vantagens e desvantagens do processo na geotecnia moderna, bem como as principais relações
de escala. Alguns comentários foram tecidos acerca das distorções existentes no campo
inercial gerado pela rotação, especialmente em centrífugas de tambor de pequeno raio. Os
tipos de centrífugas existentes (tambor e braço) foram apresentadas.

29
CAPÍTULO 3
EQUIPAMENTOS PARA ENSAIOS FÍSICOS EM
CENTRÍFUGA GEOTÉCNICA
3.1 INTRODUÇÃO
Este capítulo apresenta os equipamentos já existentes bem como os desenvolvidos
para obtenção dos dados experimentais desse trabalho. Assim sendo, foi apresentado o
funcionamento da centrífuga geotécnica da COPPE, as modificações e inclusões efetuadas
neste equipamento para que os ensaios centrífugos fossem realizados. OLIVEIRA (2005)
apresenta um detalhamento do funcionamento do equipamento original, mas a necessidade de
um novo registro incluindo as modificações realizadas no equipamento se faz necessária. Este
registro facilita futuras manutenções e atualizações do equipamento.
A mini centrífuga geotécnica de tambor da COPPE-UFRJ (GURUNG et al., 1998) foi
fabricada APV Baker UK, sob a direção do G-Max Escócia pela empresa G-Max Scotland
Ltd, em 1995, no Laboratório de Geotecnia. O equipamento, mostrado na Figura 3. 1, possui
cerca de 1,7 m de comprimento, largura e altura, pesando 4,1 tonelada. O canal de amostras,
dentro do tambor giratório, possui diâmetro interno de 1,0 m e largura de 0,25 m, podendo
atingir 450g a 900 rpm, suportando uma carga máxima de 200 kg, o que significa uma
capacidade de carga total de 90 g ton. Todas as ligações entre os equipamentos de bordo
(giratório) e os equipamentos estacionários são feitas através de um dispositivo especial com
trinta e quatro escovas (34) chamados de anéis de deslizantes. Desse total, dez anéis são
destinados à alimentação (10) e vinte e quatro (24) destinados a sinais. Assim sendo, a
alimentação e a comunicação de todos os sistemas de bordo devem necessariamente passar
por esses anéis.

30
Ao longo dos seus 14 anos de operação a centrífuga geotécnica apresentou alguns
problemas que foram utilizados como elementos importantes para a melhoria da concepção
inicial do equipamento. Os principais problemas estavam relacionados com o antigo sistema
de aquisição de dados composto por um computador de bordo com uma placa mãe acoplado a
uma memória flash/ROM. A má qualidade na aquisição dos sinais gerados nos ensaios e
muitas vezes a perda de ensaios pela falha do sistema (interrompendo a aquisição de dados)
era um problema constante. Outro problema associado à má qualidade do sinal era a falta de
manutenção dos anéis de contato, slip-rings. A corrosão nos anéis formou uma fina camada
condutora sobre a superfície do suporte de plástico que isolam os todos os anéis. O calor
produzido durante a rotação permitiu que a superfície de plástico derretesse o suficiente para
incorporar definitivamente a camada de grafite-prata e, como resultado, a impedância, em
alguns casos caiu de 20 para 150 Ohms causando sérios problemas elétricos. Com a soma de
problemas que prejudicavam o ideal funcionamento equipamento, uma série de intervenções
significativas foram realizadas, como por exemplo, a substituição do sistema de aquisição de
dados onde todas as peças foram mudadas para um novo sistema modular, sem necessidade de
qualquer tratamento a bordo. A manutenção dos slip-rings, a implantação do novo sistema de
controle de drenagem da água assim como as modificações no sistema de atuação angular são
algumas melhorias detalhadas no decorrer deste capítulo.
Figura 3. 1 – Centrifuga geotécnica da COPPE

31
3.2 SISTEMA DE AQUISIÇÃO DE DADOS
O desenvolvimento das tecnologias de hardware e software torna essencial a
necessidade de atualizações dos equipamentos. No decorrer dos anos muitos problemas de
longo prazo têm sido observados e utilizados como elementos importantes para melhorar a
concepção original do equipamento. Entre as inúmeras atualizações efetuadas na centrífuga, a
implantação do novo sistema de aquisição de dados é a mais importante delas.
O sistema de aquisição de dados antigo era composto por um computador de bordo
com placa-mãe Industrial PC Products PCA-6143P, um processador Cyrix DX2-66 com 4mb
de memória RAM, duas saídas seriais (232 e 232/422/485), uma placa de aquisição de dados
CIO-DAS08 e uma placa de seleção de fontes G-Max Scotland Ltd. Todas as placas eram
conectadas a uma placa de base Advantech. Quatro placas de condicionamento de sinal e uma
placa de seleção de ganho Chiken Technologies Limited também compunham o sistema. A
principal característica da antiga placa-mãe era não possuir disco rígido, em substituição a ele
existia uma memória flash/rom com pequena capacidade que cumpria a finalidade de
armazenagem de dados. Um computador externo, controlava toda a aquisição de dados vinda
do Computador de Bordo. A Figura 3. 2 apresenta o antigo sistema de bordo de aquisição de
dados.
Figura 3. 2 – Antigo sistema de bordo de aquisição de dados (OLIVEIRA, 2005)

32
A troca do sistema de aquisição de dados substitui o computador de bordo (antigo
sistema) por um sistema de módulos onde os sinais são multiplexados e enviados para um
computador externo que faz o tratamento dos dados. Com isso se tem um ganho significativo
na rapidez e qualidade dos sinais, assim como a simplificação do sistema. Outra grande
vantagem é a liberação de anéis deslizantes para a instalação de novos equipamentos. A
Figura 3. 3 apresenta um diagrama esquemático do funcionamento dos sistemas de controle
da centrífuga geotécnica.
Sistema de atuação
Backplane e instrumentação
Console de Controle
Painel de Controle
Motor de rotação
Motor de bascular
Centrífuga
Inversor Controle de basculção
Controle de rotação
Controle atuação radial
Controle atuação angular
Aquisição de dados
Acionamento dreno e laser
Figura 3. 3 – Diagrama esquemático do funcionamento da centrífuga
O novo sistema de aquisição de dados é formado por oito módulos ANALOG
DEVICES, sendo sete módulos de ponte completa modelo 5B36-04, para strain gages e
transdutores de poropressão e um módulo de meia ponte modelo 5B38-05, utilizado para
potenciômetro. Um backplane modelo 5B08 – MUX (Figura 3. 4) possui um conjunto de 8
slots que recebe os módulos e realiza a multiplexação dos sinais oriundos dos equipamentos
utilizados e.g., células de carga, PPT’s (transdutor de poropressão). A multiplexação dos
sinais onboard dispensa a utilização do computador de bordo, a placa de aquisição de dados e
a placa de seleção de canais. A seleção de canais, aquisição de dados e o ganho dos sinais
medidos são realizados off board, por computador industrial ADVANTECH modelo IPC-
510-B/C. O sistema foi projetado com espera para uma inclusão futura de um segundo
backplane com a capacidade de multiplexação de mais oito módulos (sete módulos de ponte
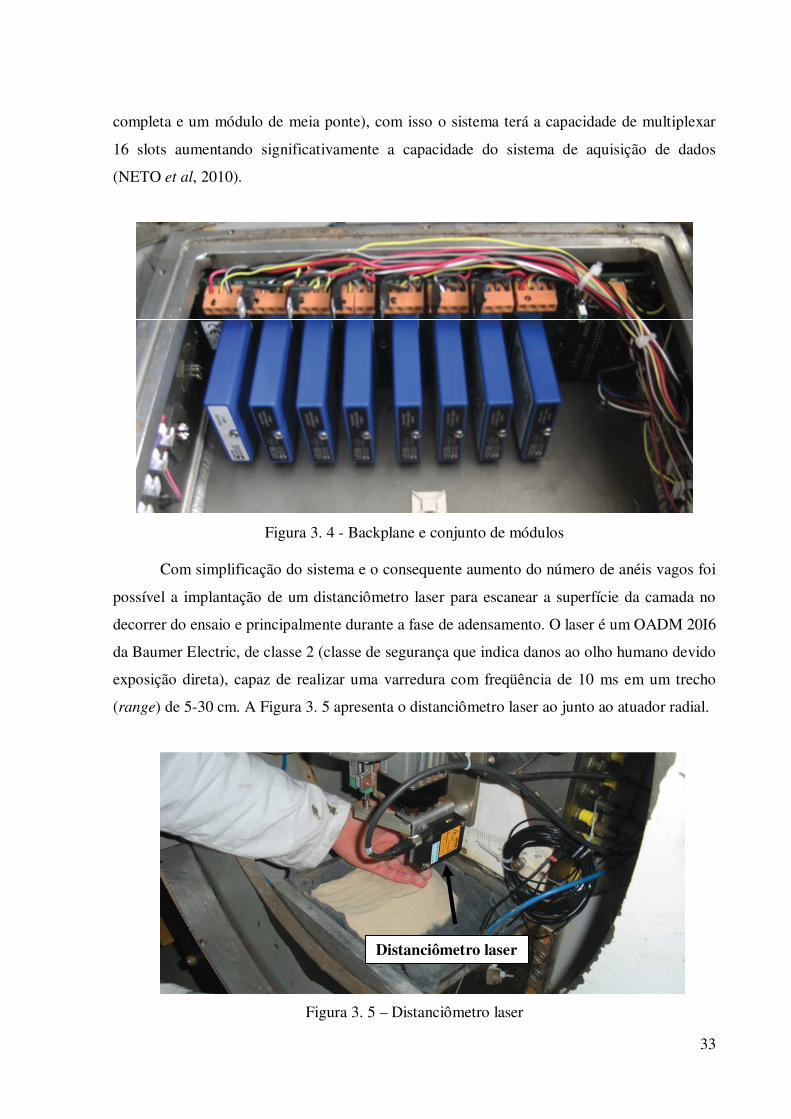
33
completa e um módulo de meia ponte), com isso o sistema terá a capacidade de multiplexar
16 slots aumentando significativamente a capacidade do sistema de aquisição de dados
(NETO et al, 2010).
Figura 3. 4 - Backplane e conjunto de módulos
Com simplificação do sistema e o consequente aumento do número de anéis vagos foi
possível a implantação de um distanciômetro laser para escanear a superfície da camada no
decorrer do ensaio e principalmente durante a fase de adensamento. O laser é um OADM 20I6
da Baumer Electric, de classe 2 (classe de segurança que indica danos ao olho humano devido
exposição direta), capaz de realizar uma varredura com freqüência de 10 ms em um trecho
(range) de 5-30 cm. A Figura 3. 5 apresenta o distanciômetro laser ao junto ao atuador radial.
Figura 3. 5 – Distanciômetro laser
Distanciômetro laser

34
O programa de aquisição de dados foi desenvolvido com a ferramenta LabWindows /
CVI da National Instruments, que é um compilador em linguagem C com um visual
semelhante à uma interface LabView ou Visual Basic. O programa abre uma janela onde é
necesário inserir o nome do arquivo que será salvo antes de começar a aquisição. A interface
do programa é simples e amigável e basta clicar no “Chanel” correspondente ao slot desejado
para observar o gráfico da aquisição em tempo real. Após o início da aquisição o programa
ordena a varredura sequencial de todos os canais e plota as leituras numa taxa de aquisição
default de 500 ms. O visual do programa de aquisição de dados é apresentado na Figura 3. 6.
Figura 3. 6 - Tela do programa de aquisição da centrífuga
O programa de aquisição de dados envia o comando de varredura dos módulos num
intervalo de 500ms fazendo também a seleção automática dos canais. Este sinal digital passa
através dos slip rings e chega ao blackplane onde os sinais dos sensores analógicos são
multiplexados. Do backplane retorna o sinal analógico, que passa pelos slip rings novamente
e logo após por um filtro de segunda ordem onde recebe tratamento de eventuais ruídos de
sinal. A Figura 3.7 apresenta o diagrama de blocos sistema de aquisição. Os sinais
provenientes das leituras do distanciômetro laser não passam pela multiplexação do
backplane, sendo que estes também recebem o tratamento de sinal através de um filtro de
segunda ordem (filtro analógico). Somado à este foi inserido no código da programação um

35
filtro digital com uma frequência de corte de 200Hz e uma rotina de programação onde a
leitura de referência em cada slot é a média de 10 leituras realizadas no intervalo de
aquisição. A Figura 3. 7 apresenta o diagrama de blocos do sistema de aquisição e a Figura 3.
8 uma visão esquemática do circuito do filtro de segunda ordem.
Figura 3. 7 - Diagrama de blocos do sistema de aquisição
R40
0
R1
16.2k
R2
16.2k
C1
10n
C210n
R3
32.4k
-Vcc
Vcc
-Vcc
Vcc
Ent1
CON2
12
0
Saida1
CON2
12
Saida
0
-
+
U2
TL081
3
26
7 14 5
-
+
U3
TL081
3
26
7 14 5
OffSet2
OffSet1
Entrada
Figura 3. 8 - Diagrama do circuito do filtro de segunda ordem

36
3.3 ATUADOR ANGULAR
O sistema de atuação angular da centrífuga é aquele que impõe deslocamentos ou
atuações laterais no modelo. Este sistema é solidarizado ao eixo de rotação da centrífuga,
desta forma, todo o movimento imposto ao atuador angular é relativo ao canal de amostra,
conforme mostra a Figura 3. 9.
con
tra-
pes
o
amo
stra
Figura 3. 9 – Movimentação do atuador angular
O antigo sistema de atuação angular era composto por um motor de corrente contínua
DC, uma engrenagem 1:308 e um tacômetro, todos da McLennan Servo Supplies (Figura 3.
10) solidarizados ao eixo de rotação. Este sistema somava limitações técnicas nos aspectos de
controle de posição e velocidade. A engrenagem utilizada possuía folga de 1º (um grau), o
que representa no fundo do canal de amostras um deslocamento livre de cerca de 9mm,
prejudicando a realização de movimentos cíclicos.

37
Figura 3. 10 – Sistema de atuação angular desmontado, OLIVEIRA (2005)
O controlador do motor DC era um Mini Maestro Drive da Control Techniques, que,
imediatamente após alimentar o motor com uma determinada corrente, recebia um sinal de
corrente de referencia gerado pelo movimento do tacômetro e girava solidário ao motor DC.
O controle da velocidade, isto é, a referência de tensão a ser fornecida ao controlador, era
feito através de um potenciômetro com controle digital. Para tanto, utilizava-se a saída digital-
analógica da placa de aquisição de dados Advantech PCL-818H do computador externo para
gerar uma tensão de referência para o controlador. A tensão de referência, que mantém uma
relação linear com a velocidade angular do atuador, era utilizada para monitorar a velocidade
de rotação. Desta forma o controle de velocidade dependia essencialmente da qualidade do
sinal de retorno do tacômetro, que não funcionava bem a baixas velocidades, sendo
extremamente sensível a oscilações de corrente e provocando variações importantes na tensão
de referência enviadas para o controlador.
Duas limitações eram fundamentais para solução deste problema: o espaço físico para
o conjunto e anéis deslizantes de reserva para os contatos. A solução ideal encontrada,
apresentada por OLIVEIRA (2005), foi a combinação de um motor de passo servo-controlado
associado a uma engrenagem 1:115 de folga mínima, i.e., 1’ (um arco minuto).
Com a reformulação no sistema de aquisição de dados e a conseqüente liberação de
anéis deslizantes, tornou-se possível a substituição do sistema de motor DC por um de motor
de passo. Foi necessária a utilização de adaptadores físicos para acoplar a nova engrenagem
de precisão à base do atuador angular (Figura 3.9). O antigo Mini-maestro foi substituído por
um controlador Driver Controler Zeta 6104 da Parker Hannifin.

38
Figura 3. 11– Atuador angular modificado desmontado e projeto de adaptadores (medidas em mm).
O antigo programa em Mat Lab 6.5, denominado [Turntable], utilizado no controle do
atuador radial, foi substituído por uma versão elaborada, com a ferramenta LabWindows /
CVI da National Instruments. O programa foi especificamente desenvolvido para atender às
modificações realizadas no atuador angular. A nova versão mantém a opção de movimentos
simples ou a programação de um conjunto de movimentos. Esse programa já incorpora as
constantes de calibração de posicionamento e de velocidade em função dos parâmetros
internos de referência de posição e velocidade do controlador. A Figura 3. 12 apresenta a
janela de programação de movimentos.
3.4 ATUADOR RADIAL
O sistema de atuação radial é aquele que permite a atuação do penperdicularmente em
relação à superfície da amostra. Este sistema funciona como um braço mecânico permitindo,
em vôo, um movimento de afastamento ou aproximação do objeto de interesse em relação ao
centro de rotação da centrífuga (Figura 3. 13).
Adaptador Motor/Base
Motor de passo
Tampa Engrenagem

39
Figura 3. 12 - Nova janela de programação de movimentos
con
tra-
pes
o
amos
tra
Figura 3. 13 – Movimentação do atuador radial

40
A composição se constitui de um motor de passo, acoplado a uma transmissão linear
com 100 mm de curso, controlado por um Driver Controler Zeta 6104, manufaturado pela
Parker Hannifin. O programa denominado [Painel de Controle] permite a introdução de um
comando único, ou uma seqüência deles, a serem executados pelo atuador (Figura 3.14). Esse
programa já incorpora as constantes de calibração de posicionamento e velocidade em função
dos parâmetros internos de referência de posição e velocidade do controlador.
Em função do sistema existente, o atuador radial apresenta grande confiabilidade e
precisão de movimentos e não sofreu nenhuma atualização.
(a) Conjunto atuador radial, câmera de vídeo no suporte móvel, LVDT e base.
(b) Atuador Radial (c) Conjunto montado na centrífuga
Figura 3.14 – Conjunto do atuador radial, OLIVEIRA (2005)

41
3.5 MOTOR DE BASCULAR
O movimento de bascular é realizado (com a centrífuga paralisada) por um motor
eletro-hidráulico capaz de virar o tambor giratório em até 90º, mudando o eixo de rotação da
posição vertical para a posição horizontal. Essa particularidade permite que o canal de
amostras seja trabalhado numa posição mais conveniente para o operador (posição
horizontal), sendo posteriormente basculado até sua posição vertical para o acionamento do
motor de rotação. A Figura 3. 15 mostra a centrífuga com o eixo de rotação em duas posições:
vertical e horizontal. O acionamento do motor de basculamento é feito através do Painel de
Controle utilizando-se dois botões, cada um girando o eixo do motor em um sentido. Dois
pares de sensores de fim de curso, estrategicamente posicionados em batentes, desligam o
motor quando a centrífuga atinge suas posições limites de repouso horizontal ou vertical, a
partir das quais não se pode mais avançar.
O motor de bascular recebeu uma retifica completa da caixa redutora e do motor
elétrico assim como um ajuste das folgas existentes e um alinhamento da correia que liga o
motor à polia do mancal de sustentação da centrífuga.
Figura 3. 15 – Eixos de rotação na posição vertical e horizontal

42
3.6 MOTOR DE ROTAÇÃO
O sistema de rotação é composto por um motor elétrico associado a um inversor de
potência Hitachi J300 IGBT Inverter, que controla a rotação da centrífuga com a precisão
necessária aos ensaios. O motor gira o tambor da centrífuga através de uma polia de borracha
com razão de transmissão de 1:3 (Figura 3.16). O inversor de potência fica alojado dentro do
painel de controle (Figura 3.17), sendo ligado e desligado através de dois botões posicionados
na face do painel especificamente para este fim. Existem ainda dois botões de parada de
emergência localizados um no painel de controle e outro na própria centrífuga. O
acionamento da parada de emergência não deve ser feito indiscriminadamente, pois impõe
uma rampa de desaceleração bem mais forte que a parada convencional, podendo expor
componentes e contatos a forças inerciais consideráveis.
Figura 3.16 – Seção transversal do conjunto de rotação da centrífuga.
A programação do inversor de potência é feita através de um pequeno visor digital
também posicionado na face do painel de controle. Esse visor tem três botões: um de seleção
de funções e outros dois de aumento e redução de valores.

43
(a) Fechado (b) Aberto
Figura 3.17 – Painel de Controle da Centrífuga da COPPE. As funções existentes no inversor constam do seu manual e são extremamente
específicas, não sendo abordadas aqui, com a exceção de duas: as funções [F2] e [D0]. Essas
duas funções são imprescindíveis para o acionamento do aparelho. A função [F2] é
responsável pela programação da freqüência de rotação desejada para o motor da centrífuga,
enquanto a função [D0] mostra a freqüência em que está o motor naquele exato momento.
Assim sendo, é possível acompanhar a aceleração gradual do motor de rotação em [D0] até
que ele atinja o valor programado em [F2]. A freqüência do motor está relacionada à
freqüência de rotação da centrífuga através das seguintes relações:
f1 → freqüência de rotação da centrífuga
f2 → freqüência de rotação do motor
r1 → raio da centrífuga
r2 → raio do motor
w1 → velocidade angular da centrífuga
a1 → aceleração inercial da centrífuga (na base do canal de amostras)
N → fator de escala
On/Off
Parada de emergência

44
g → aceleração da gravidade
Da construção do equipamento temos:
21 3 rr ⋅= (3.1)
Assim sendo,
12 3 ff ⋅= (3.2)
Como:
11 2 fw ⋅⋅= π (3.3)
( ) 12
11211 2 rfrwgNa ⋅⋅=⋅=⋅= π (3.4)
π⋅
⋅
=2
11
r
gN
f e π⋅
⋅
=2
3 12
r
gN
f (3.5)
Considerando o raio da centrífuga como r1 = 0,5m (base do canal de amostras), bem como g =
9,81 m/s2, vem:
Nf 115,22 = (3.6)
Dessa forma, para um fator de escala N, que significa uma aceleração inercial na base
do canal de amostras equivalente a N vezes o valor da gravidade, o valor a ser adotado para
freqüência do motor é de f2. A título de exemplo, para N = 100g, a freqüência do motor será f2
= 21,15 Hz.
Durante a tentativa de manutenção no sistema de bascular ocorreu um acidente que
acarretou uma intervenção em toda parte mecânica do equipamento. Inúmeras vezes durante o
conserto, a empresa contratada, deixou o equipamento tombar danificando o eixo de rotação,
que sustenta todo o peso do canal de amostra, e o conjunto de rolamentos utilizados no
movimento de rotação da centrífuga. Fez-se necessária a contratação de outra equipe para
realizar a troca dos rolamentos e a retificação do eixo de rotação. A Figura 3.18 mostra as
novas peças substituídas.

45
Figura 3.18 –Eixo de rotação e rolamentos
3.7 CANAL DE AMOSTRAS
O canal de amostras não é um sistema independente, mas é a parte do tambor giratório
ocupada pelo material. Possui raio interno de 500mm e altura de 250mm, podendo atingir
450g a 900rpm, suportando uma carga máxima de 90g-ton. A opção de se utilizar todo o canal
possibilita ensaiar uma amostra anelar com até 3m de circunferência, mais vantajosa no caso
de se executar diversos ensaios numa mesma amostra. As amostras anelares possuem uma
limitação de ensaio, referente à movimentação do atuador angular. Este só tem movimentação
livre de cerca de 135º, não possibilitando o uso em toda a extensão do canal.
Outra opção é reduzir a amostra a uma caixa com menores dimensões, proporcionando
um gasto menor de material e, principalmente, fazendo com que o atuador possa atuar em
toda a extensão da amostra. A caixa original de amostra possui o raio interno de 472mm, com
altura útil de 210mm, largura útil de 260mm e profundidade útil de 178mm.
Para os ensaios a serem realizados foi projetada nesta pesquisa uma caixa de amostras
de paredes convergentes, com dimensões de 613 mm x 247 mm x 185 mm. As Figura 3. 19 a
Figura 3. 21, mostram detalhes do projeto da nova caixa e a Figura 3.4 apresenta as duas
caixas juntas. A nova caixa foi produzida em alumínio com lateral removível e vidro interno.

46
Figura 3. 19 - Caixa de amostras concêntrica
Figura 3. 20 – Vista superior da caixa de amostras

47
Figura 3. 21 - Vista superior com detalhe dos vidros
Figura 3. 22 – Caixas de amostra
A caixa de amostras utilizada nos ensaios anteriores possui dimensões menores, o que
proporcionava um gasto reduzido de solo a ensaiar. A utilização da nova caixa concêntrica
embora exija uma maior quantidade de material devido às suas maiores dimensões, torna-se
vantajosa na medida em que permite a execução de diversos ensaios numa mesma amostra,
aumentando o controle de repetibilidade dos testes.
O vidro interno, projetado para a nova caixa, possibilita o acompanhamento visual
durante toda execução do ensaio através de câmera, colocada no interior da caixa de amostra

48
em frente à amostra ensaiada. Neste trabalho não foram realizadas este tipo de imagens e os
vidros foram retirados para um melhor aproveitamento da área da caixa.
A aceleração inercial gerada pela centrifugação atua radialmente no solo criando um
campo inercial concêntrico com o eixo de rotação. O formato da caixa adotado influência na
forma do campo inercial ao qual a amostra é submetida. A caixa utilizada anteriormente, com
paredes paralelas, cria duas áreas triangulares (marcadas em cinza mais escuro na Figura 3. 23
a) cujos processos de adensamento sofrem forte interferência das paredes laterais, reduzindo
inclusive a espessura de drenagem vertical. Em uma caixa com paredes convergentes (Figura
3. 23 b) não existe este problema, uma vez que as paredes são paralelas à direção da
aceleração não causando distorções.
Figura 3. 23 - Comparação entre caixas de amostras de paredes paralelas e convergentes.
Para que ocorra drenagem superior e inferior da camada de solo colocada dentro da
caixa de amostras, é preciso que exista uma camada drenante no fundo, ligada ao furo de
saída de água, que por sua vez se liga ao tubo de controle de saída de água do canal. No
entanto, também é necessário que a água acumulada no topo da amostra durante o
adensamento possa ser conduzida até o furo de saída de água. Para isso, foi instalado geotêxtil
BIDIM OP-60 no fundo e nas paredes laterais da caixa, permitindo que ocorra um fluxo de
saída de toda a água quando o acionamento da drenagem é efetuado.

49
3.8 COLOCAÇÃO E RETIRADA DE AGUA DO CANAL
A entrada de água no canal é feita através de dois recipientes posicionados a cerca de
2,20m de altura (em relação ao canal de amostras), um para água e outro para um
contaminante. Ambos os tubos passam por uma união hidráulica giratória, entrando por
dentro da centrífuga e saindo dentro do canal. A Figura 3. 24 mostra uma seção transversal do
canal de amostras com as indicações de entrada e saída de água do canal.
Figura 3. 24 - Seção transversal do canal de amostras – Medidas em mm.
O controle de retirada de água do canal de amostra era realizado através de um Stand-
pipe que ao ser acionado sofria um movimento rotacional. Um dos canais do antigo
multiplexador analógico comandava um pequeno motor atrelado a um tubo metálico através
de uma polia. Quando o tubo posicionava em direção ao centro de rotação, a água não podeia
sair enquanto estivesse em um nível inferior ao da boca do tubo, ao passo que, quando o tubo
voltava-se para a direção tangente a um círculo concêntrico com o eixo de rotação, a água
tinha livre saída. O Stand-pipe original frequentemente não respondia ao acionamento do
sistema, prejudicando a execução dos ensaios, além de ocupar um dos canais do antigo
multiplexador, reduzindo capacidade do mesmo.

50
O antigo Stand-pipe foi substituído por um sistema de drenagem com válvula
solenóide. Este novo sistema de controle de saída de água é independente do sistema de
multiplexação e possui simples acionamento através de uma chave on/off no console de
controle, reduzindo falhas e dando simplicidade a operação e manutenção do sistema. A
Figura 3. 25 (a) e (b) apresenta o stand-pipe original e o sistema de drenagem com válvula
solenoide, respectivamente.
(a) Stand-pipe (b) Vávula de drenagem
Figura 3. 25 – Sistemas de controle de saída de água
3.9 INSTRUMENTAÇÃO DO ENSAIO
3.9.1 CÉLULA DE CARGA VERTICAL
Para medição da força vertical durante a instalação e extração, foi utilizada uma célula
de carga Entran ELPM-T1M-50N-/X/C, alimentada com 10V DC, com capacidade de 125 N
dotada de compensação para temperatura e também para momentos fletores. Esta última
característica torna-se especialmente importante para a aplicação em questão, pois o momento
fletor atuante na haste é relativamente elevado, podendo facilmente interferir nos resultados.
A célula de carga foi posicionada o mais próximo possível do ponto de aplicação da
força para evitar o aumento do braço de alavanca e o conseqüente aumento do momento
fletor. No entanto, a colocação da célula junto ao modelo acabaria por permitir o contato da
instrumentação com o solo e a água durante o enterramento do modelo. Assim sendo, foi
encontrada uma posição ótima que conciliasse ambos os aspectos levantados, com o eixo da
célula posicionada a uma distancia superior a 90mm do eixo do modelo. Maiores detalhes dos
equipamentos de conexão da célula de carga com o atuador da centrífuga e o modelo serão
apresentados no capítulo 4

51
3.9.2 TRANSDUTORES DE PORO-PRESSÃO (PPT)
Foram utilizados transdutores de poro-pressão (PPT) miniaturizados do tipo DRUCK
PDCR-81 com pedra porosa aderida ao corpo do aparelho. Esses transdutores foram
escolhidos por apresentarem grande precisão e confiabilidade e por serem compatíveis com
uma alimentação de 5V DC.
Para a fixação do transdutor de poro-pressão na camada de solo, foi utilizada uma
torre delgada de alumínio que funciona como suporte, mantendo o instrumento em posição
fixa em relação ao fundo da caixa de amostras (Figura 3.26).
Sendo assim, a curva resultante da medição de dissipação de poro-pressões não será
exatamente uma “curva de Terzaghi”, tendo em vista que toda a camada recalca enquanto o
transdutor é mantido fixo (OLIVEIRA, 2005)
Figura 3.26 – Transdutor de poro-pressão utilizado nos ensaios.
Para saturação da pedra porosa foi estabelecido um critério de submersão por um
tempo mínimo de 48 horas, bem como especial cuidado para que o transdutor não permaneça
muito tempo fora d’água durante os procedimentos de montagem (menos de 30 minutos).
Para calibração do transdutor foi necessária a confecção de uma câmera especial de
acrílico, bem como a montagem de uma árvore de calibração. Esta última composta por um
filtro de linha com manômetro e regulador de capacidade de 7 bar, um filtro coalescente e um
regulador de precisão com capacidade de 1 bar.
geotextil
PPT 2
PPT 1

52
Para o procedimento ser o mais preciso possível, tornou-se necessário que o transdutor
fosse calibrado para a situação de uso, i.e., acoplado na centrífuga no mesmo canal (elétrico) a
ser usado no ensaio. Para fazer a leitura da pressão de ar atuante na câmera de acrílico, foi
acoplado um pressostato digital NORGREN HERION 33D, com capacidade de 100 kPa (1
bar) e precisão de 0,5 kPa.
Uma vez que a pedra porosa do transdutor de poro-pressão está aderida ao corpo do
aparelho, o procedimento teve que ser efetuado submerso. Dessa forma, o ar comprimido
injetado dentro da câmera pressiona a camada de água que, sendo considerada
incompressível, transmite integralmente a pressão aplicada à membrana instrumentada do
transdutor. A Figura 3. 27 mostra câmera de acrílico utilizada no procedimento de calibração
descrito acima. A Figura 3. 28 mostra os equipamentos que compõe a árvore de calibração.
Suporte do PPT
Câmara de acríllico
Pressostato
Ar comprimido(rosca 1/4 NPT)
(rosca 1/4 NPT)
Suporte PPT
PPTNA
o-ring
Figura 3. 27 - Câmara de calibração de acrílico.

53
Figura 3. 28 - Árvore de calibração.
3.9.3 TRANSDUTOR DE DESLOCAMENTO (LVDT)
Para monitorar a posição do atuador radial, e ter uma medida precisa da localização
dos modelos em relação ao fundo do canal de amostras durante o ensaio, foi acoplado na
lateral do eixo do atuador um transdutor de deslocamento retilíneo GEFRAN LTF100S com
curso elétrico útil de 100 mm e repetibilidade de 0,01 mm. A Figura 3.14 a mostra a LVDT
acoplada ao atuador radial.
3.9.4 FERRAMENTA PARA INVESTIGAÇÃO EM CENTRÍFUGA
O avanço da modelagem centrífuga levou à necessidade de um maior conhecimento
dos parâmetros de resistência das camadas utilizadas, levando à concepção de ensaios de
penetração em vôo (com a centrífuga em plena movimentação), com o objetivo de
caracterizar a variação da capacidade de suporte do solo com a profundidade.
As maiores dificuldades na execução de ensaios durante a operação das centrífugas
consistem na miniaturização das ferramentas e sua utilização em vôo. A principal ferramenta
utilizada em centrífuga é o penetrômetro barra-T (ou T-bar). Sua utilização é semelhante à do
cone, porém não necessita de correção da área, obtendo-se diretamente a resistência não
drenada, Su do solo (STEWART & RANDOLPH, 1994). Como sua área de ponta (uma barra
ao invés da ponta cônica) é bastante superior à do cone, sua utilização é restrita a solos com
baixa resistência ou há a necessidade de sistemas de reação capazes de aplicar forças elevadas

54
à sua cravação. O mini-CPT é utilizado em ensaios centrífugos realizados em areia ou em
solos de maior resistência. MOTTA (2008), utilizou o mini –CPT para avaliar o
comportamento de um rejeito de transição utilizando velocidades de cravação permitindo
relacionar valores de resistências medidas com as velocidades dos ensaios, definindo-se então
faixas de velocidades com comportamentos drenado, não-drenado e parcialmente drenado,
assim como o ângulo de atrito deste material. Neste estudo por se tratar de um solo argiloso e
de baixa resistência será utilizada o mini-T-bar visando a obtenção da resistência à penetração
e possibilitando assim, uma análise do perfil de resistência não-drenada da camada de solo
ensaiada e a estimativa da repetibilidade e reprodutibilidade dos diferentes ensaios a serem
realizados.
3.9.4.1 MINI-T-BAR
O mini penetrômetro Barra-T ou mini-T-bar é a ferramenta geotécnica que será
utilizada nos ensaios em argila marinha (baixa resistência).
O mini T-bar na realidade é a simples adaptação de uma barra cilíndrica, no lugar do
cone, na ponta do penetrômetro tradicional. A Figura 3. 29 apresenta um T-bar com
dimensões referentes a uma miniatura construída para um ensaio centrífugo a 100 gravidades.
A barra cilíndrica é empurrada contra o solo e a resistência à penetração medida por
uma célula de carga de alta sensibilidade situada imediatamente atrás da barra. Os resultados
são interpretados utilizando-se a solução plástica para o problema de uma pressão limite
atuando em um cilindro infinitamente longo, totalmente imerso no meio, empurrado contra
um solo coesivo. A expressão bastante simples (3.1) apresentada por STEWART &
RANDOLPH (1991) resulta dessas condições, onde P é a força por unidade de comprimento
atuante no cilindro, dT-bar o seu diâmetro, Su a resistência não-drenada do solo, e Nb o fator de
barra.
bbarTu
NdS
P=
⋅−
(3.1)
O fator de barra é dependente da rugosidade da superfície do cilindro, representada
pelo fator de aderência α. A relação entre o fator de aderência α e o fator de barra Nb não é
linear, sendo que os limites superior e inferior da solução plástica coincidem para uma

55
superfície perfeitamente rugosa (α→1), divergindo ligeiramente para valores muito baixos do
fator de aderência (α→0).
Figura 3. 29 - Penetrômetro barra-T ou mini T-bar utilizado nos ensaios
A solução plástica adotada desconsidera o fato de a barra ter um tamanho limitado, e
de uma pequena parte da área posterior não estar imersa no solo por ser ocupada pela haste da
ferramenta. No entanto, esses erros são considerados desprezíveis.
O mini T-bar tem sido utilizado não só em ensaios centrífugos, mas também em
ensaios de campo, especialmente em investigações offshore, foco desta pesquisa. A principal
vantagem do penetrômetro barra-T é a tentativa de combinar as vantagens do cone e da
palheta, e fornecer um perfil contínuo de resistência com valores de resistência ao
cisalhamento menos dependentes de correlações empíricas.
3.10 CONSIDERAÇÕES FINAIS
Apresentou-se a centrífuga de tambor da COPPE / UFRJ da maneira mais direta
possível. Por ser um equipamento bastante complexo, formado por um conjunto extenso de
mini T-bar
célula de carga

56
vários outros equipamentos menores de diversas origens e tipos, não existe um manual
unificado de usuário, em linguagem acessível, mas sim um grande número de manuais
independentes referentes a cada um dos sistemas instalados. Assim sendo, os dados reunidos
nesta dissertação e em trabalhos anteriores contribuem para importantes aspectos para o
entendimento e manuseio do equipamento. Além desse aspecto, muitas decisões de projeto
foram tomadas baseadas nas possibilidades e limitações da centrífuga, e precisam ficar claras
para o perfeito entendimento da matéria.
Algumas alterações também foram implementadas durante esta pesquisa nos
equipamentos e nos sistema de aquisição de dados, tendo ficado registradas de modo a
permitir futuras modificações e o manuseio correto desta ferramenta.
Os instrumentos de medição utilizados e as ferramentas de investigação geotécnicas
para ensaios centrífugos foram apresentadas.

57
CAPÍTULO �PROCEDIMENTOS DE ENSAIOS
4.1 INTRODUÇÃO
Este capítulo apresenta os procedimentos adotados nos ensaios de modelagem física
utilizando os equipamentos descritos nos Capítulos 3. Os ensaios foram realizados na
centrífuga geotécnica da COPPE utilizando-se uma argila marinha. Os procedimentos que
envolvem a avaliação de seus parâmetros, propriedades e preparação de amostra para os
ensaios centrífugos também são apresentados neste capítulo.
Um detalhamento dos procedimentos adotados para a realização de cada etapa dos
ensaios completa este capítulo.
4.2 PROPRIEDADES DO SOLO
Através do convênio entre o CENPES/PETROBRÁS e o Laboratório de Geotecnia da
COPPE/UFRJ foram cedidas pela empresa Geomecânica, por intermédio da PETROBRÁS,
amostras de argila marinha retiradas do Campo de Roncador. Esta área de atividades
petrolíferas (Figura 4. 1) localizando-se ao norte da Bacia de Campos, a cerca de 130 km do
Cabo de São Tomé,. O Campo de Roncador possui uma área de aproximadamente 110 km² e
encontra-se sob uma lâmina d’água que varia de 1500 a 1900 m.
O material cedido é constituído de amostras não aproveitadas nas campanhas de
caracterização do solo do campo de Roncador. Estas amostras foram retiradas em águas
profundas através do amostrador do tipo Kullemberg e armazenadas em tubos de PVC
vedados internamente com parafina e tampas lacradas. Devido ao tempo de coleta (dois anos
ou mais) e à perturbação decorrente do armazenamento, transporte e técnica de extração, as

58
amostras foram consideradas amolgadas e a umidade coletada na extração do material dos
tubos (valores entre 53 a 72%) como não representativos dos valores de campo. Esta questão
é, entretanto de pouca importância tendo em vista que a técnica de modelagem física usa
amostras reconstituídas, conforme será discutido adiante.
Figura 4. 1 - Localização do Campo de Roncador na Bacia de Campos (informações do site
PETROBRÁS em 18/01/2009, retiradas de Pequeno, 2010)
Juntamente com os tubos de amostras foram enviados os relatórios com as
características das amostras da mesma campanha de Roncador. A partir destes relatórios foi
possível avaliar a proximidade dos furos de amostragem e as semelhanças entre as
características de cada amostra. Após avaliação da semelhança dos dados de ensaio e
proximidade em campo, os furos escolhidos tiveram seus materiais extrudados dos tubos de
PVC e as amostras de solo colocadas em um único recipiente. As amostras utilizadas são
referentes aos furos K05 e K06 (relatórios técnicos Geomecânica/PETROBRÁS, 2009).
Foram descartadas as partes ressecadas de solo, com presença de material arenoso ou com
consistência de lama. A Figura 4. 2 apresenta os tubos de armazenagem da argila e algumas
amostras extrudadas.
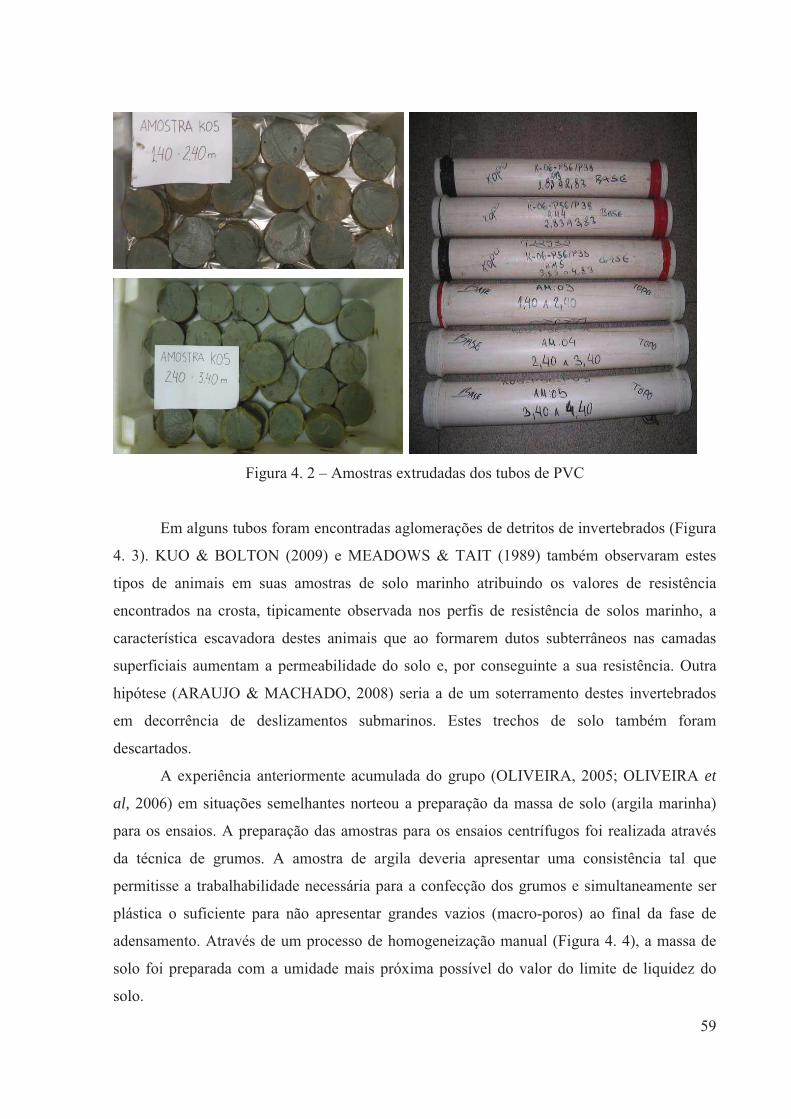
59
Figura 4. 2 – Amostras extrudadas dos tubos de PVC
Em alguns tubos foram encontradas aglomerações de detritos de invertebrados (Figura
4. 3). KUO & BOLTON (2009) e MEADOWS & TAIT (1989) também observaram estes
tipos de animais em suas amostras de solo marinho atribuindo os valores de resistência
encontrados na crosta, tipicamente observada nos perfis de resistência de solos marinho, a
característica escavadora destes animais que ao formarem dutos subterrâneos nas camadas
superficiais aumentam a permeabilidade do solo e, por conseguinte a sua resistência. Outra
hipótese (ARAUJO & MACHADO, 2008) seria a de um soterramento destes invertebrados
em decorrência de deslizamentos submarinos. Estes trechos de solo também foram
descartados.
A experiência anteriormente acumulada do grupo (OLIVEIRA, 2005; OLIVEIRA et al, 2006) em situações semelhantes norteou a preparação da massa de solo (argila marinha)
para os ensaios. A preparação das amostras para os ensaios centrífugos foi realizada através
da técnica de grumos. A amostra de argila deveria apresentar uma consistência tal que
permitisse a trabalhabilidade necessária para a confecção dos grumos e simultaneamente ser
plástica o suficiente para não apresentar grandes vazios (macro-poros) ao final da fase de
adensamento. Através de um processo de homogeneização manual (Figura 4. 4), a massa de
solo foi preparada com a umidade mais próxima possível do valor do limite de liquidez do
solo.

60
Figura 4. 3 – Aglomeração de invertebrados em pelets
Figura 4. 4 – Homogeneização manual das amostras de argila marinha

61
Devido à dificuldade de se coletar amostras de água dos campos de Roncador, a
umidade desejada foi obtida através da adição de água destilada. Para os estudos desta
dissertação, que envolve análises tensão deformação do solo, as possíveis influências desta
substituição nas características físico-químicas do material são de pequena relevância.
Foram realizadas nas amostras de argilas homogeneizadas ensaios de caracterização.
O material caracterizado indicou a presença de 1% de areia média, 5% de areia fina, 47% de
silte e 47% de argila (Figura 4. 5). A densidade real dos grãos (Gs) da argila é de 2,57. A
amostra apresentou Limite de Liquidez (wL) de 82% e Índice de Plasticidade (IP) de 59%.
0
10
20
30
40
50
60
70
80
90
100
0,001 0,01 0,1 1 10 100
Porc
enta
gem
que
Pas
sa
Diâmetro dos Grãos (mm)
Curva Granulométrica
0
10
20
30
40
50
60
70
80
90
100
Porc
enta
gem
Ret
ida
PEDREGULHOAREIAARGILA SILTE
GROSSOMÉDIOFINOGROSSAMÉDIAFINAABNT
PENEIRAS: 200 100 60 40 2030 10 8 4 3/8 3/4 1 1 1/2
Argila Marinha Roncador
Figura 4. 5 - Curva Granulométrica da Argila de Roncador
4.2.1 PARÂMETROS DO SOLO E DO MODELO CAM CLAY
Os parâmetros do solo, apresentados a seguir, foram utilizados nos cálculos que
envolvem a modelagem física, e.g., estimativa do comportamento do adensamento do solo e
cálculo da velocidade de atuação dos modelos, apresentados neste capitulo. Estes parâmetros
também serviram como entrada de dados das modelagens numéricas apresentadas no capítulo

62
6. Os parâmetros do modelo Cam clay foram utilizados para reproduzir uma estimativa da
resistência não drenada do solo a ser comparada com os resultados medidos em ensaios
centrífugos apresentados no capítulo 5.
Parte da massa de solo (citada no item anterior) foi utilizada para os ensaios
centrífugos e outra parte foi conduzida para uma campanha de ensaios de adensamento
oedométrico e ensaios triaxiais que serviram de objeto de estudos para o trabalho de
conclusão de curso de PEQUENO (2010). Além destes resultados, uma nova bateria de
ensaios foi realizada, a fim de complementar os resultados dos parâmetros Cam clayutilizados nesta dissertação.
As amostras reconstituídas usadas em células de adensamento cilíndricas, com 15 cm
de diâmetro e 30 cm de altura, seguiram os procedimentos apresentados por OLIVEIRA
(2005), atingindo-se uma tensão vertical máxima (ou de pré-adensamento de 50 kPa). Após o
fim do período de adensamento, foram retirados corpos de provas para a realização da
seguinte campanha de ensaios: um ensaio triaxial do tipo CIU (ensaio triaxial adensado não
drenado), três ensaios triaxiais do tipo CK0U (Ensaio triaxial não drenado adensado na
condição anisotrópica) com amostras normalmente adensadas, três CK0U com amostras sobre
adensadas, assim como dois ensaios de adensamento oedométrico (ensaios realizados por
PEQUENO, 2010).
Por meio de dois ensaios de adensamento oedométrico e um de adensamento
hidrostático foram obtidos os parâmetros e � usados nos modelos Cam-clay (ATKINSON &
BRANSBY, 1978). Estes parâmetros são retirados diretamente da inclinação da reta de
compressão virgem (coeficiente angular da reta virgem) nas curvas � x lnp’ do ensaio de
adensamento hidrostático (Figura 4. 6) e indiretamente através dos valores dos índices de
compressão cc e cs de curvas e x log�v’ (Figura 4. 7). A Tabela 4.1 apresenta o resumo dos
resultados obtidos por PEQUENO (2010). Avaliando os resultados de PEQUENO (2010) foi
possível obter o coeficiente de adensamento vertical cv do solo, apresentado na Figura 4. 8.
Tabela 4. 1 - Resumo dos valores obtidos nos ensaios de adensamento (PEQUENO, 2010)
Ensaio de Adensamento � k cc cs
Hidrostático 0,20 0,04 - -
Oedométrico CP1 0,22 0,05 0,51 0,12 CP2 0,22 0,04 0,52 0,10

63
Figura 4. 6 - Gráfico � x lnp’ do adensamento hidrostático (PEQUENO, 2010)
Figura 4. 7 - Gráficos e x log�v’ de adensamento oedométrico (PEQUENO, 2010)
Adensamento Hidrostático
Adensamento Oedométrico

64
Figura 4. 8 – Gráfico de adensamento cv x log�v’
Foram realizados ensaios do tipo CK0U com amostras normalmente adensadas
(OCR=1), e ensaios CK0U com amostras sobre-adensadas com razões de sobre-adensamento
(SA) de 1,8, 3 e 4. Para uma melhor definição dos valores dos parâmetros Cam clay, foram
realizados, além dos ensaios de PEQUENO (2010), mais dois ensaios triaxiais do tipo CK0U
em amostras sobre-adensadas, com a razão de sobre-adensamento de 2 e 3 (o valor de OCR=3
foi repetido pela incoerência dos resultados anteriores). A Tabela 4.2 apresenta um resumo
dos ensaios triaxiais. A Figura 4. 9 apresenta os resultados da tensão desvio pela deformação
específica obtidos nos ensaios CK0U sobre-adensados.
Tabela 4. 2 - Relação dos CP’s para os ensaios triaxiais CK0U (SA) e (NA)
CK0U CP OCR K0 �1 (kPa) �c (kPa) �d (kPa)
(N A) Pequeno (2010)
02 1 0,55 300 165 135 06 1 0,58 200 116 84 07 1 0,58 100 58 42
(S A) Pequeno (2010)
09 1,8 0,77 77,50 60 17,50 10 3 0,92 200 146,6 13,44 08 4 1,03 58,25 60 -1,75
(S A) Ensaios triaxiais complementares
11 2 0,77 77,5 60 17,50
12 3 0,92 160 146 14

65
Figura 4. 9 – Tensão desvio x deformação específica dos ensaios CK0U (SA)
O parâmetro � foi retirado com base nos dados dos ensaios triaxiais normalmente
adensados. Este parâmetro corresponde ao volume específico referente a p’ unitário na linha
de estado crítico (no espaço � x ln p’), obtido através da Equação 4.1
'ln p⋅−Γ= λυ (4.1)
A linha de estados críticos é apresentada na Figura 4. 10, observou-se boa
concordância entre os valores de � obtidos da inclinação da linha de estados críticos. O
parâmetro �, obtido foi de 3,10.
O módulo de elasticidade não-drenado secante para valor correspondente à 50% da
tensão desvio máxima (Eu50) foi obtido através da curva tensão desviadora versus deformação
específica axial dos ensaios triaxiais, permitindo então o cálculo do valor do módulo
cisalhante G= Eu/3 (ATKINSON & BRANSBY, 1978). Os valores de resistência não drenada
do solo também foram observados nos ensaios triaxiais e os valores da razão Eu/Su são
apresentados, junto com os parâmetros Eu e G, na Tabela 4.3. Estes valores de Eu serão
adotados nas modelagens numéricas apresentadas no capítulo 5.
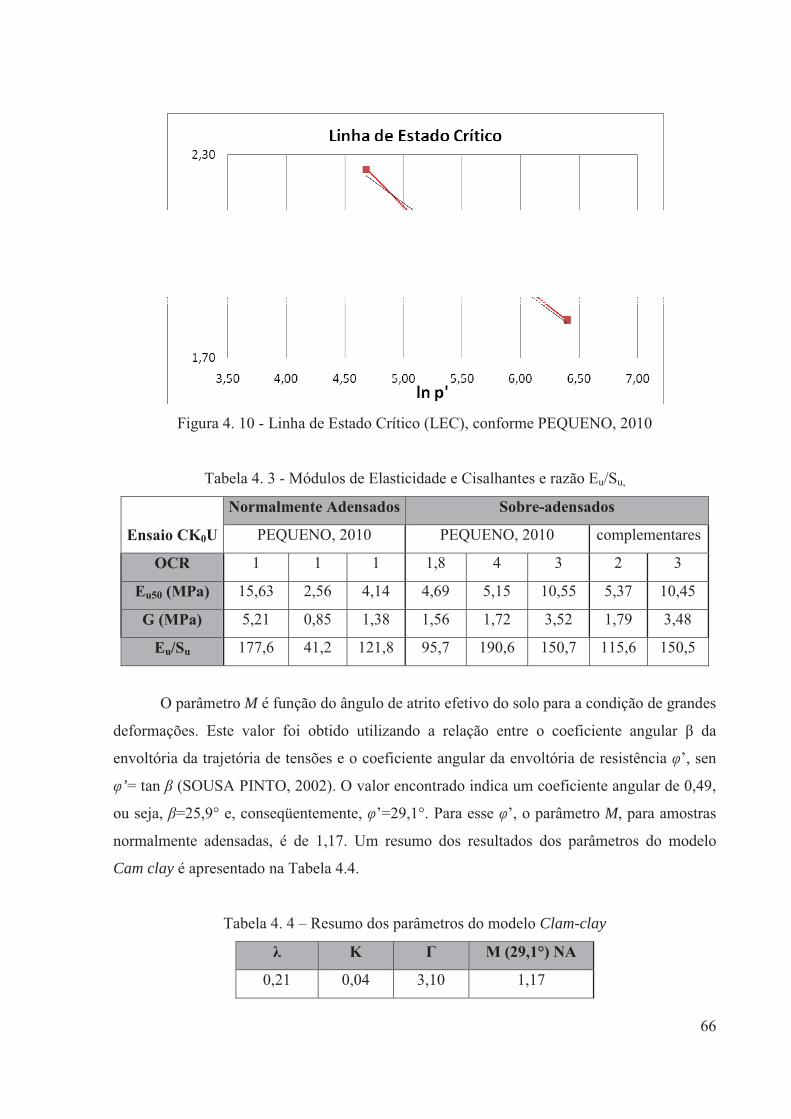
66
Figura 4. 10 - Linha de Estado Crítico (LEC), conforme PEQUENO, 2010
Tabela 4. 3 - Módulos de Elasticidade e Cisalhantes e razão Eu/Su,
Ensaio CK0U
Normalmente Adensados Sobre-adensados
PEQUENO, 2010 PEQUENO, 2010 complementares
OCR 1 1 1 1,8 4 3 2 3
Eu50 (MPa) 15,63 2,56 4,14 4,69 5,15 10,55 5,37 10,45
G (MPa) 5,21 0,85 1,38 1,56 1,72 3,52 1,79 3,48
Eu/Su 177,6 41,2 121,8 95,7 190,6 150,7 115,6 150,5
O parâmetro M é função do ângulo de atrito efetivo do solo para a condição de grandes
deformações. Este valor foi obtido utilizando a relação entre o coeficiente angular � da
envoltória da trajetória de tensões e o coeficiente angular da envoltória de resistência �’, sen
�’= tan (SOUSA PINTO, 2002). O valor encontrado indica um coeficiente angular de 0,49,
ou seja, =25,9° e, conseqüentemente, �’=29,1°. Para esse �’, o parâmetro M, para amostras
normalmente adensadas, é de 1,17. Um resumo dos resultados dos parâmetros do modelo
Cam clay é apresentado na Tabela 4.4.
Tabela 4. 4 – Resumo dos parâmetros do modelo Clam-clay� � � M (29,1°) NA
0,21 0,04 3,10 1,17

67
4.2.2 PREPARAÇÃO DA AMOSTRA PARA ENSAIOS CENTRÍFUGOS
Como citado nos capítulos anteriores, para a realização da modelagem física na
centrífuga geotécnica de tambor da COPPE fez-se necessário a escolher entre as técnicas de
lama ou grumos para a realização dos ensaios.
A técnica de lama consiste na colocação da amostra de solo em estado de lama, com a
centrífuga na posição (eixo) vertical, já em movimento, onde a lama é inserida através de um
funil em mangueira acoplada a uma união giratória e a outra mangueira que guia o material
até a caixa de amostra. O solo depositado em forma de lama possui a desvantagem de
necessitar de um maior tempo de adensamento e seu perfil de resistência não ser
representativo do perfil desejado para o tipo de depósito estudado. A resistência da camada de
solos formados através da técnica de lama possui um valor nulo no topo da camada que cresce
ao longo da profundidade e resulta em menores valores de resistência Su do que a técnica de
grumos. O perfil de resistência típico de regiões profundas é de, um valor de resistência inicial
que cresce ao longo da profundidade.
A solução encontrada para obter o perfil de resistência desejado foi o de confeccionar
a camada de argila com a técnica de grumos em conjunto com a inserção de uma sobrecarga
de areia durante a fase de adensamento. Os grumos de argila com uma umidade próxima do
limite de liquidez ficam com consistência suficiente para instalar a sobrecarga de areia. Este
procedimento resultada em uma camada final com um perfil de solo sobre-adensado, pois no
momento do ensaio de inserção e extração dos modelos a sobrecarga é retirada.
A técnica de grumos consiste no particionamento da amostra de solo em pequenos
pedaços (grumos) que são cuidadosamente jogados dentro da caixa, com o eixo da centrífuga
na posição horizontal, até que se forme uma camada. Esse processo insere macro-vazios entre
os grumos, além dos vazios existentes na estrutura do solo. Por isso mesmo todo o sistema
torna-se extremamente compressível dificultando o controle dos recalques.
Essa técnica foi descrita por MANIVANNAN et al. (1998) apud OLIVEIRA (2005),
como sendo de grande valia na simulação de aterros submersos construídos por deposição de
argila em blocos. Os autores também concluíram que o excesso de poro-pressões dentro dos
grumos de argila é maior que nos macro-vazios entre os grumos, e que a taxa de dissipação
das poro-pressões nos macro-vazios é maior que no interior dos grumos. Dessa forma, os
autores consideram que o comportamento de adensamento desse tipo de estrutura seja
constituído de um rápido colapso inicial, devido ao fechamento dos macro-vazios entre os

68
grumos, seguido de um comportamento de longo prazo, compatível com o adensamento
convencional da camada de argila. GHAHREMANI & BRENNAN (2009) observaram a
influência do formato e do tamanho dos grumos nas características de adensamento da
camada e na resposta da resistência ao arrancamento nos ensaios de interação solo-duto. A
metodologia padrão, adotada nesta pesquisa, para elaboração das camadas do solo na caixa de
modelos observou os seguintes detalhes: confecção dos grumos com uma colher buscando a
obtenção de grumos com tamanhos semelhantes, preparação da camada realizada sempre pelo
mesmo operador para garantir a repetibilidade no procedimento e, finalmente, que a umidade
do solo se encontrasse próxima ao do limite de liquidez do material.
4.3 CARACTERÍSTICAS DOS MODELOS
O material adotado para confecção dos modelos dos mudmats foi o alumínio, por
minimizar os efeitos da corrosão e ser leve. O peso específico do material é muito importante
no que diz respeito à capacidade máxima da célula de carga. Como todo o conjunto (modelo e
haste) é acelerado a N=100g (valor nominal do equipamento, válido para uma distância entre
o eixo de rotação e o fundo da caixa), os pesos se multiplicam impondo grandes esforços à
célula. Por outro lado, a adoção de uma célula com maior capacidade afeta diretamente a
precisão da medição, que deve ser a maior possível.
Os modelos dos mudmats foram fabricados em chapas de alumínio quadrada com
espessura de 3 mm. As chapas têm seção plena ou seção com perfurações circulares (Tabela
4. 5 e Figura 4. 11). Os modelos foram caracterizados pela: largura do modelo B; os diâmetros
das perfurações dp; a quantidade de furos feitos no modelo np; as larguras de banda efetivas Wcorrespondente a faixa formada pelo trecho não perfurado do material; a área da perfuração
Ap; a área efetiva dada pela subtração da área perfurada do valor da área da seção plena; a taxa
de perfuração R definida como a razão entre as áreas perfurada e a área da seção plena A.
Mudmats usuais possuem uma área em planta de aproximadamente 5m². Os valores
das dimensões dos modelos apresentados na Tabela 4.5 obedecem à relação de escala
modelo/protótipo de ensaios centrífugos simulando durante o ensaio as dimensões usuais de
protótipo deste tipo de estrutura.

69
Tabela 4. 5 – Programa de testes e dimensões dos modelos
ModeloLargura Diâmetro da
perfuração Número de furos
Largura da banda efetiva
Área Perfurada
Área efetiva
Taxa de perfuração
W (mm) dp (mm) np B (mm) Ap (mm²) Ae (mm²) R
M 01 30 - - - - 900 - M 02 24 - - - - 576 - M 03 30 2.5 16 4 78.54 821.46 0.087 M 04 30 3 16 3.6 113.1 786.90 0.126 M 05 30 7 4 5.33 153.94 746.06 0.171
Figura 4. 11 - Modelos dos mudmats (medidas em mm)
As mudmats são conectadas à célula de carga por uma haste (Figura 4. 12) partindo do
seu centro geométrico, indicado na Figura 4. 11. O projeto da haste tem três principais
objetivos: que a célula de carga fique distante o suficiente da lâmina d’água durante o ensaio;
ser o mais esbelta possível; e manter a célula de carga posicionada o mais próximo possível
do ponto de aplicação da força, evitando o aumento do braço de alavanca e o conseqüente
aumento do momento fletor. Assim sendo, foi encontrada uma posição ótima que conciliasse
os aspectos levantados, com o eixo da célula a uma distancia maior que 90 mm do eixo do
mudmat. Existe também uma peça de conexão (Figura 4. 12) que permite a união do conjunto
mudmat + haste + célula de carga ao atuador da centrífuga. Esta conexão possui liberdade de

70
movimento em seus extremos, permitindo o giro livre de uma extremidade da conexão sem a
interferência na outra. Um parafuso de ajuste fixa o conjunto no alinhamento desejado para o
ensaio. A Figura 4. 13 ilustra o conjunto utilizado para atuação do modelo do mudmat nos
ensaios centrífugos (medidas em mm).
Figura 4. 12- Peças de conexão entre o modelo do mudmat e o atuador (medidas em mm)

71
Figura 4. 13 – Conjunto de equipamentos utilizados na etapa de atuação
Para a investigação da resistência não drenada do solo foi utilizado um mini T-bar. O
projeto dos equipamentos utilizados nesta fase de atuação (haste, célula de carga e conexões)
segue os mesmo princípios supracitados para os modelos dos mudmats. A Figura 4. 14 ilustra
o conjunto utilizado para atuação da ferramenta de investigação da resistência não drenada do
solo, o mini T-bar, nos ensaios centrífugos (medidas em mm).
Mudmat
Haste
Célula de carga
Conexão
Atuador
LVDT
Laser Entrada
de água PPT’s

72
Figura 4. 14 – Peças de conexão entre modelo T-bar e o atuador (medidas em mm)
4.4 DESCRIÇÃO DOS ENSAIOS
Quatro ensaios de mudmats foram realizados nesta pesquisa. Cada de modelagem
física ensaio é composto por duas fases de execução. A primeira fase consiste na preparação

73
da amostra de solo, sua colocação na caixa de amostra e o adensamento da camada de argila
em vôo. A segunda fase consiste na atuação dos modelos. Na fase de atuação são realizados
ensaios com o mini T-bar para investigação da resistência não drenada do solo e as etapas de
atuação dos modelos mudmats. A seguir serão descritas estas duas fases dos ensaios e suas
etapas de execução.
4.4.1 FASE DE ADENSAMENTO
A fase de adensamento é dedicada à formação da camada de solo o mais próxima dos
perfis geotécnicos usualmente encontrados em depósitos marinhos profundos (RANDOLPH,
2004), ou seja, um perfil de solo tendo na superfície um valor inicial de Su e um gradiente de
tensão que torna o valor de Su crescente com a profundidade ao longo do perfil. A fase de
adensamento se divide em cinco etapas:
- Preparação do solo e preparação do equipamento;
- Preparação da camada com técnica de grumos;
- Colocação da sobrecarga de areia;
- Adensamento;
- Fim do adensamento e remoção da sobrecarga.
A primeira etapa consiste na preparação da camada de solo pré-homogeneizada, como
descrito no item 4.2.1. No dia anterior ao previsto para a realização do adensamento é
necessário que a massa de solo seja preparada para que sua umidade esteja o mais próximo
possível do valor do seu limite de liquidez, que é igual a 82%.
Na etapa de preparação do equipamento a caixa de amostras é revestida com um
geotextil que tem como objetivo propiciar a aceleração do processo de adensamento, fazendo
com que este não ocorra apenas verticalmente. Os transdutores de poro-pressão são
posicionados no centro da caixa e fixados através de uma torre, deixando-os a uma distância
de 10 mm e 40 mm do fundo da caixa. A seguir são verificados os funcionamentos de todos
os sistemas e instrumentação a serem usados durante o ensaio: válvula do dreno, laser,
sistema de aquisição de dados e controles dos motores de atuação. A Figura 4. 15 apresenta o
esquema do posicionamento dos transdutores de poro-pressão (PPT’s) na fase de preparação
da caixa de amostras.
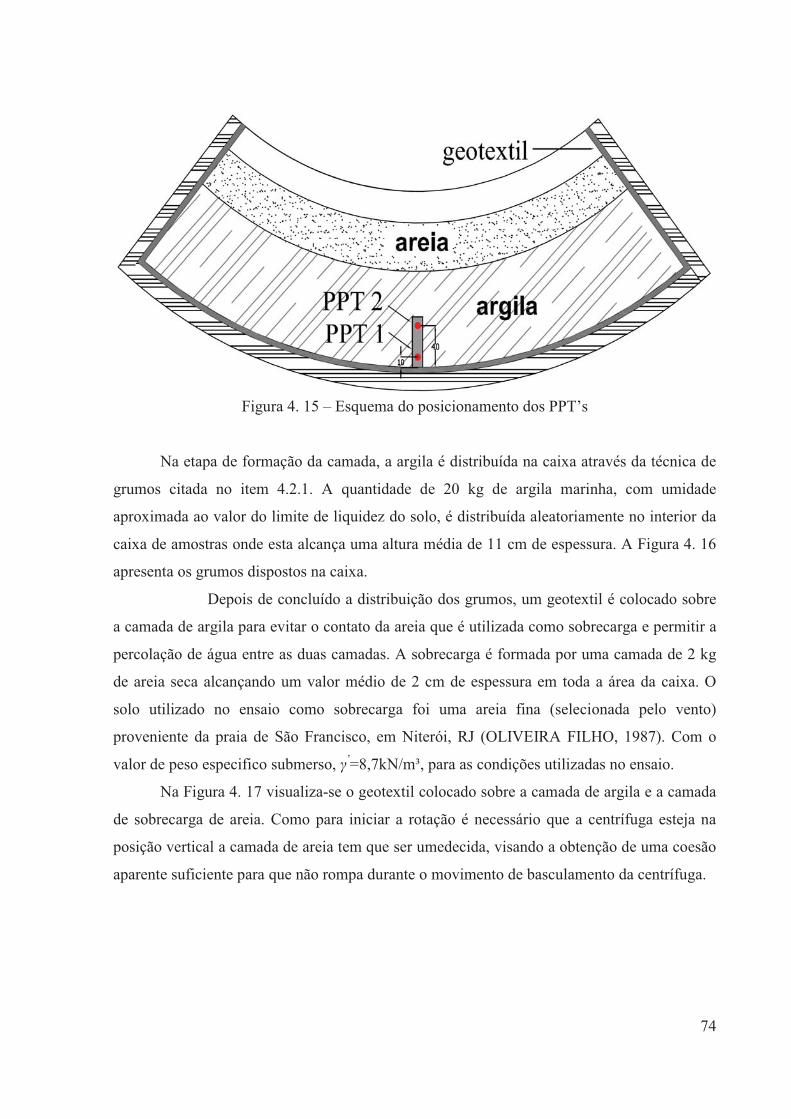
74
Figura 4. 15 – Esquema do posicionamento dos PPT’s
Na etapa de formação da camada, a argila é distribuída na caixa através da técnica de
grumos citada no item 4.2.1. A quantidade de 20 kg de argila marinha, com umidade
aproximada ao valor do limite de liquidez do solo, é distribuída aleatoriamente no interior da
caixa de amostras onde esta alcança uma altura média de 11 cm de espessura. A Figura 4. 16
apresenta os grumos dispostos na caixa.
Depois de concluído a distribuição dos grumos, um geotextil é colocado sobre
a camada de argila para evitar o contato da areia que é utilizada como sobrecarga e permitir a
percolação de água entre as duas camadas. A sobrecarga é formada por uma camada de 2 kg
de areia seca alcançando um valor médio de 2 cm de espessura em toda a área da caixa. O
solo utilizado no ensaio como sobrecarga foi uma areia fina (selecionada pelo vento)
proveniente da praia de São Francisco, em Niterói, RJ (OLIVEIRA FILHO, 1987). Com o
valor de peso especifico submerso, �’=8,7kN/m³, para as condições utilizadas no ensaio.
Na Figura 4. 17 visualiza-se o geotextil colocado sobre a camada de argila e a camada
de sobrecarga de areia. Como para iniciar a rotação é necessário que a centrífuga esteja na
posição vertical a camada de areia tem que ser umedecida, visando a obtenção de uma coesão
aparente suficiente para que não rompa durante o movimento de basculamento da centrífuga.

75
Figura 4. 16 – Aspecto da camada de argila em grumos
Figura 4. 17 – Colocação de sobrecarga de areia sobre a camada de argila em grumos
Com a centrífuga na posição vertical faz-se uma nova checagem do equipamento antes
do início do movimento de rotação da centrífuga (voo). Em ensaios mais sofisticados é

76
necessário fazer o cálculo do equilíbrio de momentos entre a caixa de ensaios e a caixa de
contrapeso, colocada diametralmente oposta à caixa de amostra. Entretanto em ensaios mais
simples, como os aqui relatados, basta usar um contrapeso de valor igual ao peso total da
caixa de amostra e do solo em seu interior. O contrapeso necessita ser estimado com a
máxima precisão possível, pois o funcionamento do equipamento desbalanceado durante
longos períodos e em grandes acelerações (100g) pode acarretar sérios problemas, tanto para
o equipamento, como para a segurança da equipe envolvida nos ensaios. Verificados todos os
equipamentos e o contrapeso, fecha-se a tampa da centrífuga e inicia-se a aceleração do
modelo.
O ensaio propriamente dito é todo realizado com a amostra submersa. Desta forma
para a colocação de água no sistema, a centrífuga é acelerada a 20g e então são adicionados 2
litros de água destilada. Com a conclusão desta fase a centrífuga é levada à aceleração de
100g, dando início à etapa de fechamento dos macro-poros e adensamento da camada de
argila.
A fase de adensamento é estimada através do coeficiente de adensamento do solo cv e
pode ser confirmada através da estabilização das poro-pressões medidas nos transdutores
alojados dentro da camada de argila. Os ensaios são submetidos a uma aceleração de 100g
durante um intervalo de tempo médio de 17 horas. Durante este período estima-se obter
aproximadamente 90% da dissipação do excesso de poro-pressão.
Concluído o período de adensamento, o equipamento é desacelerado para que a
sobrecarga de areia seja retirada, sendo então instalados os modelos e equipamentos,
utilizados na etapa de atuação. A centrífuga é desacelerada gradualmente de forma a evitar o
inchamento da camada que ocorre devido à redução brusca de pressão ao qual o solo estava
sujeito em consequência da aceleração imposta. Uma redução abrupta da aceleração pode
ocasionar a ruptura da camada de solo devido a rupturas internas provocadas pelo excesso de
pressão negativa durante a desaceleração da centrífuga. Através das propriedades do solo foi
estimada uma desaceleração escalonada de 30g em 30g, mantendo estes níveis de aceleração
por um período de 30 mim até a estabilização das poro-pressões. Ao chegar em 20g a válvula
de drenagem é aberta para a retirada da água do sistema. A centrífuga então é parada para a
retirada da sobrecarga e preparação da próxima fase do ensaio. A Figura 4. 18 apresenta a
camada após a conclusão da fase de adensamento e retirada da sobrecarga.
Foram utilizados os mesmos procedimentos na fase de adensamento dos três ensaios
realizados.

77
Figura 4. 18 - Camada de argila ao fim do adensamento
4.4.1.1 RESULTADOS DA FASE DE ADENSAMENTO DOS ENSAIOS
Os três ensaios centrífugos realizados utilizaram as mesmas técnicas de preparação,
umidades iniciais aproximadas e foram sujeitas ao mesmo tempo de adensamento.
Para este trabalho foi realizada uma estimativa previa do tempo de adensamento e
posteriormente, aferida através da estabilização das medidas do excesso de poropressão ao
longo do tempo observadas em tempo real pelos PPT’s. A experiência da equipe da centrífuga
geotécnica da COPPE-UFRJ em outros estudos envolvendo este solo e também solos
semelhantes ao estudado neste trabalho, assim como a observação de uma tendência de
dissipação das poropressões nas leituras em tempo real realizadas durante a execução dos
ensaios, levou a escolha de um tempo de adensamento de 17hs.
Para cv=1,5x10-8 m²/s (estimado através de ensaios triaxiais e de adensamento
oedomértrico), altura da camada drenante hm=5cm e tempo de adensamento de 17 horas foi
encontrado um grau de adensamento T=0,37, o que corresponde a uma taxa de adensamento
de 68% . Este valor, no entanto, é estimado com referência apenas à parcela de adensamento

78
vertical, porém à inserção de geotexteis nas laterais da caixa de amostra faz com que o
adensamento seja tridimensional. Assim sendo é de praxe estimar o tempo de dissipação das
poropressões através da tendência de estabilização dos valores observados nos medidores de
poropressão, (PPT) instalados em diferentes posições no fundo da caixa de amostras.
Os recalques decorrentes do adensamento do solo foram medidos através do sensor de
deslocamento laser.
Devido às falhas no sistema de aquisição de dados o armazenamento das leituras
referentes à saída de dados na fase de adensamento foram prejudicadas. A taxa de coleta de
informação dos sinais dos sensores é de 0,5 segundos e o tempo de amostragem é de 17 horas.
Porém, apenas 11hs de adensamento foram salvas, aparentemente pelo fato da placa de
aquisição de dados não possuir capacidade de armazenamento para este volume tão grande de
dados.
Os valores medidos ao longo do tempo no sensor de deslocamento e nos transdutores
de poropressão PPT 1 e PPT 2 são apresentados no Anexo 1.
O fato dos resultados acerca do correto comportamento do adensamento e da taxa de
dissipação das poropressoes não possam ser conclusivos não prejudica os resultados de
capacidade de carga de fundações rasas, foco deste trabalho, pois a resistência não drenada do
solo Su, que é dado fundamental, foi medida através das ferramentas de investigação para
centrífugas geotécnicas (mini T-bar).
4.4.2 FASE DE ATUAÇÃO DOS MODELOS
Com a conclusão da fase de adensamento dá-se início à fase de atuação (inserção e
extração) dos modelos na camada de argila. Primeiramente o modelo (mudmat ou mini T-bar)
é instalado e posicionado com o auxílio do motor angular em seu local de atuação pré-
estipulado. O funcionamento de todos os equipamentos e suas conexões é verificado, assim
como o contrapeso antes do início da aceleração. A centrífuga é levada a uma aceleração de
20g para colocação de 5 litros de água no sistema e em seguida é acelerada até 100g. Com a
estabilização deste nível de aceleração (100g), o comando de velocidade de atuação e o
deslocamento desejado são informados ao programa de atuação que comanda o motor radial e
a atuação é iniciada. Após a instalação e a extração do modelo, a centrífuga é novamente
desacelerada (segundo os procedimentos de desaceleração supracitados), a água é retirada do

79
sistema (ativando a válvula de drenagem), o equipamento é parado e iniciam-se os
procedimentos de preparação para a atuação de um próximo modelo. A Figura 4. 19 ilustra a
penetração do mini T-bar durante a realização do ensaio em vôo. A atuação de um modelo
mudmat é apresentada na Figura 4. 20. As etapas de atuação e o posicionamento específico de
cada ensaio serão apresentas posteriormente. Os resultados das etapas de atuação são
apresentados no Anexo II e no capítulo 5.
Figura 4. 19 – Mini T-bar durante atuação em voo
Figura 4. 20 – Modelo durante atuação em voo
Mini T-bar
Modelo
Célula
de carga

80
4.4.3 PROCEDIMENTOS DE RETIRADA DE UMIDADE AO FINAL DO ENSAIO
Ao final de todas as etapas de ensaio obtem-se o perfil de umidade do modelo
realizada. Um pedaço de 15 cm de tubo de PVC com 5 cm de diâmetro com sua borda inferior
chanfrada segundo um ângulo de 450 é empurrado para o interior do solo. Um pistão é
utilizado com a dupla função de criar a sucção necessária para a extração da amostra, bem
como empurrar o solo para fora do cilindro. A Figura 4. 21 mostra o dispositivo em aplicação
em uma camada de argila artificial recém adensada.
Figura 4. 21 - Mini-amostrador para extração de solo em centrífuga
Depois da introdução do tubo até o fundo da caixa e do posicionamento do pistão, o
testemunho é retirado integralmente. Após a extração, a amostra é fatiada a intervalos de 5
mm, permitindo uma definição bem mais precisa do perfil de umidade, principalmente em se
tratando de uma amostra adensada em centrífuga, cujas variações de parâmetros com a
profundidade podem ser bastante significativas. A Figura 4. 22 apresenta a extrusão da
amostra para fora do tubo e o seu consecutivo fatiamento.
Cada fatia foi levada ao forno de 1100C por 24 h ou até constância de peso para
determinação da umidade. Os perfis serão apresentados mais à frente.

81
Figura 4. 22 - Extrusão e fatiamento de amostra de solo natural adensado em centrífuga
4.4.3.1 RESULTADOS DOS PERFIS DE UMIDADE DO SOLO
A Figura 4. 23 ilustra os valores do perfil de umidade do solo retirado ao final dos
ensaios centrífugos segundo os procedimentos descritos no item anterior.
A característica dos perfis da Figura 4.23, de diminuição da umidade com a profundidade é o
que tipicamente se observa em camadas de solos homogêneos em protótipo (ATKINSON,
1981) e em modelos físicos em centrífuga (OLIVEIRA et al., 2006).
Segundo já mencionado neste capítulo os ensaios centrífugos foram realizados todos
com as amostra submersas, com isso pode-se considerar que este solo esteja com uma
saturação, S=100%. Desta forma é possível estimar o peso especifico saturado (�sat) através de
correlações com o índice de vazios (e) e a umidade do solo (w). A Figura 4. 24 apresenta o
peso específico do solo variando ao longo da profundidade da camada de solo.
Considerando-se que as amostras foram todas preparadas usando o mesmo
procedimento, a expectativa é que houvesse menor dispersão nos perfis de umidade e de peso
específico ao contrário do apresentado nas Figuras 4.23 e 4.24. Entretanto os resultados de
resistência não drenada do solo, parâmetro fundamental para fins deste estudo, apresentaram

82
parâmetros próximos e consistentes na faixa de profundidade de interesse de atuação dos
mudmats.
Figura 4. 23 – Perfil de umidade relativa ao final de todos os ensaios realizados
0
1
2
3
4
5
6
7
8
9
10
11
12
15 15,5 16 16,5 17 17,5
Prof
undi
dade
(mm
)
Peso especifico natural (kN/m³)
E01
E02
E03
Figura 4. 24 – Variação do peso especifico do solo ao longo da profundidade
83
4.4.4 DESCRIÇÃO DA FASE DE ATUAÇÃO DOS MODELOS
A seguir serão descritas as etapas de atuação realizadas em cada um dos três ensaios
centrífugos realizados. Os procedimentos para preparação e execução do ensaio foram
apresentados no item anterior.
Em cada ensaio centrífugo foram realizadas quatro atuações consistindo de ensaios T-
bar ou ensaios de atuação das mudmats. A Tabela 4. 6. Resume as atuações realizadas em
cada ensaio.
Tabela 4. 6 – Resumo das atuações dos ensaios centrífugos
Ensaio centrífugo Atuações realizadas
01 T-bar 01, T-bar 02, T-bar 03, T-bar 04
02 T-bar inicio, M02, M01, T-bar fim
03 T-bar, M03, M04, M05
4.4. 4.1 ETAPAS DE ATUAÇÃO DO ENSAIO 01
O ensaio 01 tinha como objetivo avaliar e validar a técnica utilizada para a formação
do leito de argila e investigar as características de adensamento e resistência deste solo. Neste
ensaio foi realizado um conjunto de cinco investigações do perfil de resistência em vôo com o
mini penetrômetro barra T (STEWART E RANDOLPH, 1991). ALMEIDA et all (2010)
apresentam boa consistência e repetibilidade nos valores de Su encontrados com este tipo de
ferramenta de investigação geotécnica vôo e resultados de ensaios triaxiais e Vane test. As
investigações foram realizadas em diferentes posições alcançando diferentes profundidades.
Para garantir um comportamento não drenado durante a instalação e extração dos mini T-bar,
os ensaios foram conduzidos a uma velocidade de 0,3 mm/s. FINNIE & RANDOLPH (1994)
e consideram que um valor de velocidade normalizada V* acima de 30 indica um

84
comportamento não drenado dominante e valores menores que 0,1 correspondem a condições
drenadas. Esta velocidade adimensional V* é obtida através da seguinte equação:
vbarT cdvV /* −⋅= (4.2)
Onde:
V* - Velocidade adimensional ou normalizada
v – velocidade de penetração do mini T-bar
dT-bar – diâmetro do mini T-bar
cv – coeficiente de adensamento do solo
Adotando um coeficiente de adensamento representativo de cv = 1,5 x10-8 m²/s e para
o comprimento do caminho de drenagem o valor do diâmetro do mini T-bar, dT-bar=5 mm, a
velocidade adimensional é V* =100.
A Tabela 4.7 e a Figura 4. 25 apresentam as características de atuação dos mini T-bar
em cada uma das etapas
Tabela 4. 7 - Características de atuação dos modelos no ensaio 01
Etapas Modelo
Profundidade
de instalação
Velocidade de
atuação
Posição em relação
ao eixo central
(mm) (mm/s) (°)
01 T-bar 01 34.08 0.3 5º (direita)
02 T-bar 02 48.20 0.3 20º (direita)
03 T-bar 03 31.11 0.3 5º (esquerda)
04 T-bar 04 52.13 0.3 20º (esquerda)

85
Figura 4. 25 - Diagrama esquemático das etapas do ensaio 01

86
4.4.4.2 ETAPAS DE ATUAÇÃO DO ENSAIO 02
No ensaio 02 foram utilizados dois modelos mudmats, ambos de seção plena mas com
áreas diferentes, ou seja ambos sem perfurações com o objetivo de avaliar a influência das
dimensões das sapatas na capacidade de carga dos modelos. Neste mesmo ensaio também
foram realizadas duas investigações do leito com o mini T-bar, um logo ao início da etapa de
atuação e outra após a atuação dos dois mudmats. O objetivo foi tanto avaliar se o perfil de
resistência apresentava característica semelhante em diferentes pontos da camada de solo e se
o perfil de resistência do leito sofria variações em função do tempo de transcorrido para
execução de todo o ensaio como verificar a repetibilidade dos valores encontrados com os
outros ensaios realizados. Para o cálculo da velocidade que garantiria um comportamento não
drenado durante a instalação e a extração dos mini T-bar e dos mudmats a velocidade de
atuação foi definida Equação 4.2, utilizando um cv = 1,5 x10-8 m²/s, e dT-bar=0,5 mm para os
mini T-bar. Para o cálculo da velocidade de atuação dos modelos substitui-se o valor do dT-bar
pela largura B do modelo mudmat. A velocidade adimensional utilizada em todas as atuações
foi de V*= 100.
Os modelos mudmats foram inseridos na camada de argila e permaneceram enterrados
durante um período de 20 minutos e então extraídos com a mesma velocidade de instalação.
Este tempo de repouso do mudmat no leito permitiu avaliar a dissipação do excesso de
poropressão gerado pela sobretensão imposta durante a instalação e também simular o período
de operação aos quais os protótipos estarão sujeitos ao longo de sua vida útil. A Tabela 4.8 e a
Figura 4. 26 apresentam as características de atuação dos modelos em cada uma das etapas.
Tabela 4. 8 – Características de atuação dos modelos no ensaio 02
Etapa Modelo
Profundidade
de instalação
Velocidade
de atuação
Posição em relação
ao eixo central
(mm) (mm/s) (°)
01 T-bar (início) 71.95 0.3 5º (direita)
02 M02 14.95 0.063 20º (direita)
03 M01 71.2 0.05 20º (esquerda)
04 T-bar (fim) 14.63 0.3 5º (esquerda)

87
Figura 4. 26 – Diagrama esquemático das etapas do ensaio 02

88
4.4.4.3 ETAPAS DE ATUAÇÃO DO ENSAIO 03
No ensaio 03 foram realizados três modelos mudmats de 30x30 mm e diferentes
arranjos de perfurações, a fim de avaliar a influência das perfurações na capacidade de carga
dos modelos. Neste mesmo ensaio também foi realizado uma investigação do leito com o
mini T-bar com o objetivo de avaliar a resistência não drenada do solo ao longo da
profundidade e aferir a repetibilidade dos valores obtidos nos outros ensaios realizados. Para o
cálculo da velocidade que garantiria um comportamento não drenado durante a instalação e a
extração dos mini T-bar e dos mudmats a velocidade de atuação foi definida segundo a
Equação 4.2, com cv = 1,5 x10-8 m²/s e dT-bar=0,5 mm para os mini T-bar. Para o cálculo da
velocidade de atuação dos modelos substitui-se o valor do dT-bar pela largura B do modelo
mudmat. A velocidade adimensional utilizada em todas as atuações foi de V*= 100.
Os modelos mudmats foram inseridos na camada de argila e permanecem enterrados
durante um período de 20 minutos e então extraídos com a mesma velocidade de instalação.
Este tempo de repouso do mudmat no leito permitiu avaliar a dissipação do excesso de
poropressão durante a instalação e também simular o período de operação ao quais os
protótipos estão sujeitos ao longo de sua vida útil. Este tempo de modelo corresponde a um
tempo de protótipo de aproximadamente 3 meses considerando N=80g. Apesar dos ensaios
terem sido conduzidos a uma aceleração correspondente a N=100g, este valor de fator de
escala só ocorre no fundo da caixa de amostra (raio máximo alcançado em relação ao eixo de
rotação da centrífuga). Como a instalação dos modelos é realizada a uma distância menor em
relação ao eixo da centrífuga o valor fator de escala mais adequado é de N80g. A Tabela 4. 9
e a Figura 4. 27 apresentam as características de atuação dos modelos em cada uma das
etapas.
Tabela 4. 9 - Características de atuação dos modelos no ensaio 03
Etapa Modelo
Profundidade
de instalação
Velocidade
de atuação
Posição em relação
ao eixo central
(mm) (mm/s) (°)
01 T-bar 72.25 0.3 10º (esquerda)
02 M 03 12.25 0.063 20º (esquerda)
03 M 04 15.1 0.05 20º (direita)
04 M 05 13.58 0.3 7º (direita)

89
Figura 4. 27 – Diagrama esquemático das etapas do ensaio 03
90
4.5 CONSIDERAÇÕES FINAIS
Primeiramente foi apresentado o campo de amostragem da argila marinha aqui
estudada e os procedimentos de preparação da amostra reconstituída utilizada nos ensaios
centrífugos e ensaios de laboratório convencionais (triaxiais e adensamento oedométrico)
Os parâmetros e propriedades geotécnicas da argila marinha reconstituída dos campos
de Roncador/RJ foram apresentados. Embora algumas incertezas em parâmetros do modelo
Cam-Clay tenham sido encontradas, os valores apresentados servem como subsídios para
serem utilizados como premissa de outras pesquisas, ficando também a sugestão do
refinamento destes parâmetros para aferição e conclusão a cerca dos mesmos.
Os mudmats estudados e os equipamentos utilizados na etapa de atuação foram
detalhados neste capítulo.
A técnica de grumos somada à utilização de uma sobrecarga temporária mostrou-se
eficiente para a reprodução dos perfis de resistência do solo crescente com a profundidade. Os
resultados encontrados para os perfis de umidades, considerando-se que as amostras foram
todas preparadas com o mesmo, mostram uma pequena dispersão
Um detalhamento dos procedimentos adotados para a realização de cada fase dos
ensaios completou este capítulo.

91
CAPÍTULO �
APRESENTAÇÃO E DISCUSSÃO DOS RESULTADOS
5.1 INTRODUÇÃO
Neste capítulo discutem-se os resultados de resistência não drenada obtidos nos
ensaios com o mini T-bar. Uma discussão dos valores obtidos nos ensaios centrífugos com os
modelos mudmats também é apresentada. A comparação entre os resultados das modelagens
físicas e numéricas encerra o capítulo.
5.2 CARACTERIZAÇÃO DO PERFIL DE RESISTÊNCIA DO LEITO
Como citado no capítulo 4, os ensaios de investigação com o mini T-bar serviram para
avaliar a resistência não drenada do solo ao longo da profundidade. Na Figura 5. 1 são
apresentadas as leituras de Su durante as fases de penetração e de extração do mini T-bar,
para as sete investigações realizadas. Para o cálculo da resistência não drenada utilizou-se a
seguinte equação proposta por STEWART & RANDOLPH (1991):
dN
P S
bu .
= (5.1)
Onde:
Su - resistência não drenada do solo
P - força por unidade de comprimento
dT-bar – diâmetro do T-bar
Nb – fator de barra

92
Os ensaios apresentam valores com grande similaridade no trecho que vai do topo do
leito até a profundidade em torno de 50 mm. Após este trecho, os ensaios que foram
executados até profundidades maiores apresentam variações em torno do seu valor médio. O
ensaio “Fim-E02” foi o único que apresentou uma tendência diferente, com valores maiores
em relação aos demais ensaios nos trechos acima de 40 mm. As diferenças nos valores
obtidos nos trechos mais profundos podem ser explicadas pelo aumento da resistência do solo
decorrente da proximidade com o fundo da caixa de amostras ou pela possível proximidade
do mini T-bar, no final atuação, aos PPT’s que se encontravam alojados no fundo da caixa em
sua parte central.
Figura 5. 1 – Ensaios de investigação de Su com o mini T-bar nos sete ensaios
No trecho inicial, em profundidades equivalentes entre 0 e 1dT-bar (profundidades entre
0 e 5mm), a resistência não drenada do solo apresenta um crescimento brusco, consistente
com a sobrecarga de areia utilizada durante a fase de adensamento, conforme será mostrado
utilizando as equações do modelo Cam-clay.
Deve-se também observar que o valor do fator de barra Nb=10,5, utilizado para toda a
camada de solo, é válido rigorosamente para os trechos mais profundos, onde os mecanismos
0
10
20
30
40
50
60
70
80
-10 -8 -6 -4 -2 0 2 4 6 8 10 12 14 16 18 20
De
pth
(mm
)
Su (kPa)
01-E01
02-E01
03-E01
04-E01
Inicío-E02
Fim-E02
E03

93
de ruptura já estão completamente desenvolvidos. Para valores superficiais recomenda-se uma
redução do fator de barra (OLIVEIRA et al, 2006 e BARBOSA-CRUZ & RANDOLPH,
2005). Nesta dissertação não será avaliado o valor do fator de barra ideal para os trechos mais
superficiais, pois, nas profundidades onde os cálculos dos modelos de mudmats foram
avaliados esta correção não é significativa.
A Figura 5. 2 apresenta uma curva com a média dos valores encontrados em todos os
ensaios realizados com o mini penetrômetro T-bar. Nesta figura também estão indicados o
trecho de enterramento médio onde os ensaios dos modelos mudmats foram realizados assim
como a zona de influência onde os mecanismos de ruptura são desenvolvidos. A literatura
indica valores de aproximadamente uma vez a dimensão da fundação abaixo do assentamento
da mesma para o limite das superfícies de ruptura em solos com perfil de resistência
homogêneo (Su constante). Para perfil com Su crescente com a profundidade, recomenda-se
(SALGADO, 2008) valores em torno da metade da dimensão da fundação abaixo da
profundidade de enterramento, entendendo-se que as superfícies de ruptura se desenvolvem
em profundidades mais próximas da superfície.
Figura 5. 2 - Média dos sete ensaios de investigação dos perfis de resistência
�
��
��
��
��
��
�
�
��
� � � � �� �� �� � �� ��
Pro
fun
did
ade
(mm
)
Su (kPa)
B = 30 mm
D - enterramento médio
�B - limite da superfície de ruptura
dT-bar
Valores médios de
todos os ensaios
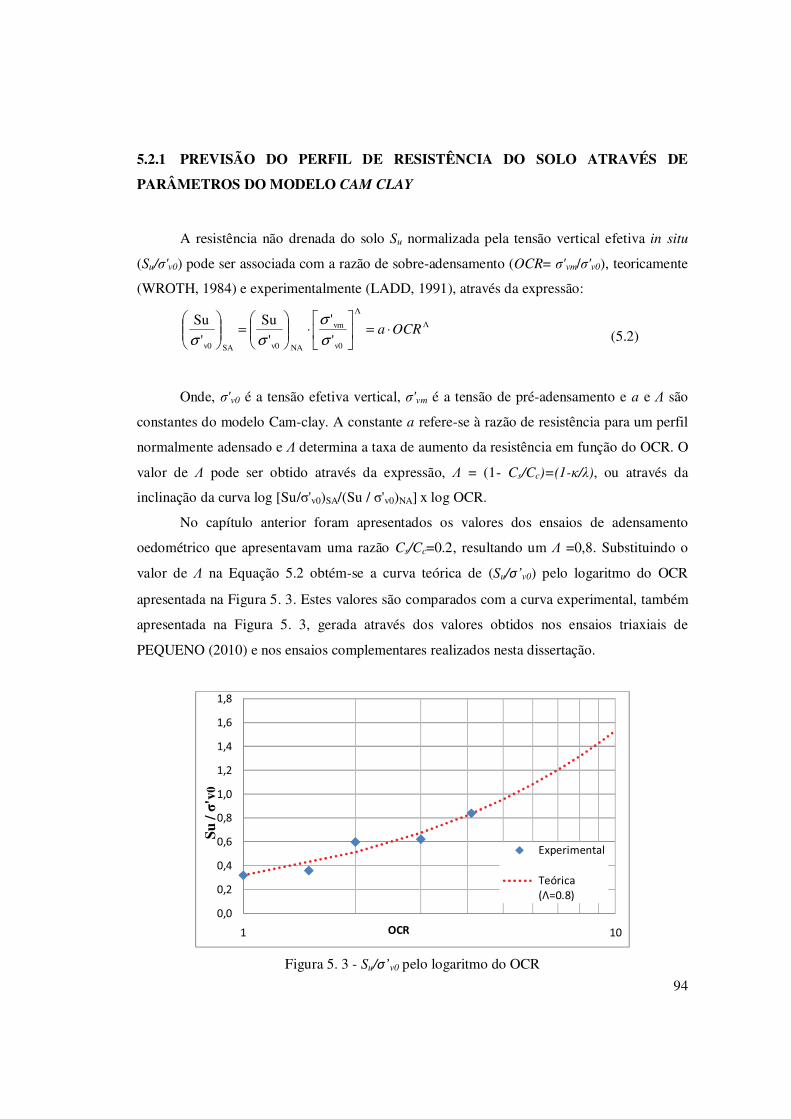
94
5.2.1 PREVISÃO DO PERFIL DE RESISTÊNCIA DO SOLO ATRAVÉS DE
PARÂMETROS DO MODELO CAM CLAY
A resistência não drenada do solo Su normalizada pela tensão vertical efetiva in situ
(Su/�'v0) pode ser associada com a razão de sobre-adensamento (OCR= �'vm/�'v0), teoricamente
(WROTH, 1984) e experimentalmente (LADD, 1991), através da expressão:
Λ
Λ
⋅=��
���
�⋅��
���
=��
���
OCRa
v0
vm
NAv0SAv0 '
'
'
Su
'
Su
σ
σ
σσ (5.2)
Onde, �'v0 é a tensão efetiva vertical, �'vm é a tensão de pré-adensamento e a e são
constantes do modelo Cam-clay. A constante a refere-se à razão de resistência para um perfil
normalmente adensado e determina a taxa de aumento da resistência em função do OCR. O
valor de pode ser obtido através da expressão, = (1- Cs/Cc)=(1-�/�), ou através da
inclinação da curva log [Su/�'v0)SA/(Su / �'v0)NA] x log OCR.
No capítulo anterior foram apresentados os valores dos ensaios de adensamento
oedométrico que apresentavam uma razão Cs/Cc=0.2, resultando um =0,8. Substituindo o
valor de na Equação 5.2 obtém-se a curva teórica de (Su/�’v0) pelo logaritmo do OCR
apresentada na Figura 5. 3. Estes valores são comparados com a curva experimental, também
apresentada na Figura 5. 3, gerada através dos valores obtidos nos ensaios triaxiais de
PEQUENO (2010) e nos ensaios complementares realizados nesta dissertação.
Figura 5. 3 - Su/�’v0 pelo logaritmo do OCR
���
���
���
��
���
���
���
���
��
���
� ��
Su / �'
v0
���
������������
���������������

95
Os valores teóricos da razão [(Su/�'v0)SA/(Su / �'v0)NA] representados em gráfico log x
log em função do OCR são apresentados na Figura 5. 4. Neste gráfico são apresentados
também os valores teóricos e experimentais, assim como uma retro-análise dos valores
experimentais, para um refinamento do valor de obtido através da inclinação da reta de
ajuste destes pontos. A inclinação da reta de ajuste define um novo valor para = 0,68.
Figura 5. 4 – Gráfico log x log da razão [(Su/�'v0)SA/(Su/�'v0)NA] pelo OCR
O novo valor de junto com a razão (Su/�'v0)NA obtidos dos ensaios triaxiais
normalmente adensados de PEQUENO (2010), a = 0,32, são as constantes do modelo Cam
clay.
A dificuldade no uso da Equação 5.2 diz respeito à incompleta dissipação do excesso
de poro-pressão. Assim sendo, tem-se um perfil de OCR desconhecido que interfere
diretamente nas condições de contorno da equação obtida com os parâmetros do modelo Cam
clay. Como discutido no capítulo anterior, a falha no armazenamento do sistema de aquisição
de dados não nos permite concluir se o tempo de adensamento foi suficiente para a
estabilização da dissipação do excesso de poropressões.
A Figura 5. 5 apresenta os valores de Su encontrados nos ensaios de investigação com
o mini T-bar. Este gráfico compara os valores estimados por meio da equação teórica do
modelo Cam clay (a=0,32) com os resultados observados nos ensaios centrífugos admitindo
total dissipação de poropressões (�'vm=1,8kPa).
���
���
����
��� ����
����
�� ������
��� �� �
�
���
������������
���������������
!"#����������

96
Outra hipótese do mal ajuste experimental-teórico, além da questão de incompleta
dissipação de poropressões, seria referente aos valores encontrados para as constantes do
modelo Cam clay utilizados na Equação 5.2. Avaliando a faixa de valores obtidos na
bibliografia para argilas naturais (MAYNE & KULHAWY, 1982; STEWART, 1992; CHEN,
2005) tem-se as faixas de valores de 0,65 < � < 0,8 e 0,17 < a < 0,24. MAYNE (2001) ainda
sugere que para argilas artificiais e solos remoldados sejam adotados valores próximos ao
limites inferiores destas faixas. Assim sendo conclui-se que o valor de =0,68 se mostra
dentro dos limites sugeridos na bibliografia, no entanto o valor da constante a=0,32 apresenta-
se fora desta faixa de valores.
A Figura 5. 5 apresenta também uma curva de Su do modelo Cam clay com a constante
a retroanalisada a fim de obter uma curva que melhor se ajuste aos valores dos ensaios de
mini T-bar, admitindo-se uma total dissipação de poropressões. Através da retroanálise
observa-se que o valor que melhor se ajusta é a=0,185, mantendo o valor de =0,68.
Figura 5. 5 – Previsão através do modelo Cam clay e resultados dos ensaios centrífugos

97
5.3 CAPACIDADE DE CARGA DOS MODELOS
5.3.1 INSTALAÇÃO DOS MODELOS
Os gráficos força versus tempo obtidos nos ensaios são apresentados no Anexo 2.
As variações das forças medidas ao longo da profundidade, durante a instalação dos
cinco modelos ensaiados, são apresentadas na Figura 5. 6.
Figura 5. 6 - Força medida na atuação dos modelos na instalação e inserção
Observa-se que para os mudmats maciços, conforme esperado, o modelo com maior
área acusa uma maior força de resposta do solo. Já os modelos perfurados tendem a reduzir a
resposta à penetração, à medida que sua taxa de perfuração aumenta, com exceção do modelo
M03 que apresentou uma força aproximada à medida na sapata maciça.
Normalizando a força medida em relação à área efetiva (área maciça – área perfurada)
obtém a tensão vertical durante a inserção do modelo (Figura 5. 7). A normalização da força
medida pela área efetiva apresenta valores superiores para o modelo perfurado M03 em
comparação ao modelo maciça M01, isto ocorre, pois ambos possuem forças semelhantes
0
2
4
6
8
10
12
14
16
0 5 10 15 20 25
Pro
fun
did
ade
(m
m)
Força (N)
M01
M02
M03
M04
M05

98
porem áreas distintas. O modelo perfurado M04 apresentou valores menores, porém próximos
aos do modelo M01. Já o modelo M05 apresentou valores menores que o modelo M02 mesmo
tendo dimensões maiores.
Figura 5. 7 – Tensão vertical calculada considerando a área efetiva dos modelos
Considerando-se a hipótese que as perfurações foram preenchidas por solo durante a
instalação, formando uma bucha de solo, a tensão vertical nos modelos será calculada como a
razão entre a força medida e a área da seção plena do modelo. A Figura 5. 8 apresenta os
novos valores de tensão calculados. A proximidade encontrada entre os valores dos modelos
M01 e M03 indica uma possível ocorrência de embuchamento em M03, que entre os modelos
é o que possui menor diâmetro nas perfurações e, por conseguinte menor área perfurada
(R=0,087). Já os outros modelos (R=0,126 para M04 e R=0,121 para M05) não apresentaram
a mesma tendência ao embuchamento. Vale ressaltar que a ocorrência do embuchamento é
função não só do diâmetro da perfuração mas também da umidade do solo e
consequentemente de sua resistência não drenada. Sendo assim modeloss com as mesmas
características, porém assentes em solos com umidade e Su diferentes do material aqui
estudado, podem apresentar um comportamento diferente do observado.
0
2
4
6
8
10
12
14
16
0 5 10 15 20 25 30
Pro
fund
idad
e (
mm
)
Tensão vertical - kPa
M01
M02
M03
M04
M05

99
Figura 5. 8 – Tensão vertical medida considerando a área plena dos modelos (A=B²)
5.3.2 EXTRAÇÃO DOS MODELOS
Como descrito no capítulo 4, os ensaios com os modelos mudmats consistiram numa
fase de instalação (penetração) do modelo, uma pausa para a dissipação das poropressões,
simulando um período pós-instalação do equipamento e, a extração do modelo do solo. Os
modelos foram inseridos até profundidades variando entre 12 e 15 mm, o que corresponde a
um enterramento de protótipo de aproximadamente 1,20 m, considerando um N80g (fator de
escala equivalente à distância entre o eixo de rotação da centrifuga e a profundidade de
atuação dos modelos). O período para a dissipação das poropressões, foi de, em média, 20
minutos, o que corresponde a um tempo de protótipo de aproximadamente 3 meses.
Nos ensaios realizados observou-se, ao final da etapa de extração, um sobrepeso de
solo resultante do rompimento das paredes da cavidade onde o modelo foi inserido. A Figura
5. 9 ilustra o modelo antes da inserção, a formação da cavidade devida à penetração do
modelo e o final da extração com o sobrepeso de solo, todas as etapas em voo.
0
2
4
6
8
10
12
14
16
0 5 10 15 20 25 30
Pro
fun
did
ade
(m
m)
Tensão vertical - kPa
M01
M02
M03
M04
M05

100
Figura 5. 9 – Modelos dos mudmats: (a) antes da instalação; (b) durante a instalação e
abertura da cavidade; (c) ao final da extração, com sobrepeso residual de solo.
Este sobrepeso interfere diretamente na força de extração medida pela célula de carga.
Desta forma dois gráficos foram traçados, um com os valores medidos no ensaio, que
agregam o sobrepeso na parcela de força durante a extração (Figura 5. 10), e outro subtraindo
a parcela de sobrepeso nas medidas da força (Figura 5. 11).
Figura 5. 10 – Força medida na atuação dos modelos na inserção e extração
0
2
4
6
8
10
12
14
16
-15 -10 -5 0 5 10 15 20 25
Pro
fun
did
ade
(m
m)
Força (N)
M02
M03
M04
M05
M01
Sobrepeso
residual
Formação da
cavidade
(a) (b) (c)
Instalação
Pausa
Extração
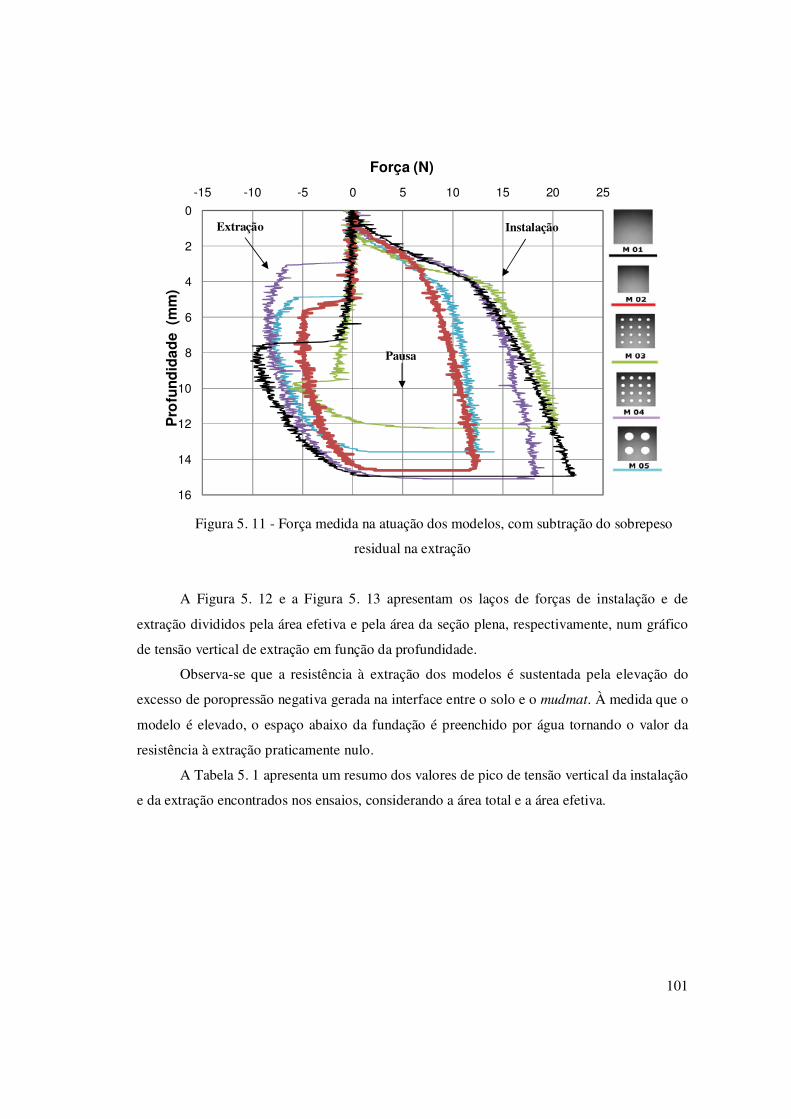
101
Figura 5. 11 - Força medida na atuação dos modelos, com subtração do sobrepeso
residual na extração
A Figura 5. 12 e a Figura 5. 13 apresentam os laços de forças de instalação e de
extração divididos pela área efetiva e pela área da seção plena, respectivamente, num gráfico
de tensão vertical de extração em função da profundidade.
Observa-se que a resistência à extração dos modelos é sustentada pela elevação do
excesso de poropressão negativa gerada na interface entre o solo e o mudmat. À medida que o
modelo é elevado, o espaço abaixo da fundação é preenchido por água tornando o valor da
resistência à extração praticamente nulo.
A Tabela 5. 1 apresenta um resumo dos valores de pico de tensão vertical da instalação
e da extração encontrados nos ensaios, considerando a área total e a área efetiva.
0
2
4
6
8
10
12
14
16
-15 -10 -5 0 5 10 15 20 25
Pro
fun
did
ade
(m
m)
Força (N)
M05
M04
M03
M02
M01
Instalação
Pausa
Extração

102
Figura 5. 12 - Tensão vertical de instalação e de extração utilizando a área efetiva
Figura 5. 13 - Tensão vertical de instalação e de extração utilizando a área total
Instalação
Pausa
Extração
Instalação
Pausa
Extração

103
Tabela 5. 1 - Picos das tensões verticais na instalação e na extração dos modelos
Área com seção plena (F/A) Área efetiva (F/Ae)
M01 M02 M03 M04 M05 M03 M04 M05
pico instalação (kPa) 24.6 21.4 22.5 20.3 13.8 24.6 23.2 16.8
pico extração (kPa) 10.8 9.4 6.4 9.6 8.7 7.1 11 10.6
extração/instalação (%) 43.90 43.93 28.44 47.29 63.04 28.85 47.41 63.09
Observa-se que os picos de tensão vertical mobilizadas nas extrações são
aproximadamente 44% daqueles mobilizados durante a instalação, com exceção dos modelos
M05, que apresenta valores na faixa dos 63%, e M03, com valores de aproximadamente 28%.
Os estudos de GOURVENEC et al. (2009) comparam a resistência à extração com a
capacidade de carga à compressão em fundações circulares rasas com saias, de razão de
comprimento da saia pelo diâmetro da fundação ds/d. Os resultados encontrados sugerem que
os valores das resistências à extração máximas são iguais a 30% dos valores previstos
teoricamente para a capacidade de carga à compressão para saias com ds/d=0,15, enquanto
este valor cresce para 70% para fundações com saias mais longas, com ds/d=0,3.
Apesar da diferença entre as geometrias dos modelos dos dois estudos, observa-se na
Tabela 5.1 que as relações entre extração e compressão obtidos no presente estudo estão nas
faixas de valores apresentados por GOURVENEC et al. (2009).
Os resultados aqui encontrados mostram também que o modelo M03 maximiza as
qualidades necessárias para a otimização de uma fundação offshore, pois reduz a resistência à
extração e não sofre redução na sua capacidade de carga à compressão em conseqüência da
sua redução de área liquida. Este comportamento pode ser explicado pelo possível
embuchamento das perfurações, como supracitado. Já o modelo M05, apesar de possuir baixa
resistência à extração, tem sua capacidade de carga à compressão (instalação) muito reduzida
em função da redução de sua área pelas perfurações. Na análise das fundações maciças sem
perfurações conclui-se que a redução nas dimensões não interfere na razão entre a capacidade
de carga à extração e à compressão. A variação entre os valores de pico de tensão na extração
de todos os modelos não apresentaram valores próximos em ambas as hipóteses (consideração
da área efetiva e da área total do modelo).

104
5.3.3 FATORES DE CAPACIDADE DE CARGA – Nc*
Como visto no capítulo 2 a capacidade de carga de uma fundação é função da
sobrecarga devida ao enterramento no solo, da resistência não drenada do solo e do fator de
capacidade de carga.
O valor de capacidade de carga clássico exato, obtido analiticamente, é de Nc= 2+�
5,14, para uma fundação corrida infinita (strip) em um solo homogêneo. COX et al.(1961)
obtiveram a solução teórica exata para sapatas circulares rugosas Nc,circle=6,05. Não existem
soluções exatas para sapatas quadradas, porém existem valores obtidos através de modelagem
por elementos finitos, e.g., SALGADO et al. (2004) fixaram valores entre 5,52 e 6,22,
GOUVERNEC et al.(2005) encontraram uma razão entre Nc,quadrada/ Nc,faixa=1,15, próximo
aos valores sugeridos por SKEMPTON (1951) de Nc,quadrada/ Nc,faixa =1,2.
Quanto aos perfis de solo estudados, com Su crescente com a profundidade, ainda não
foram encontradas soluções exatas para o Nc, porém inúmeros estudos através de modelagem
por elementos finitos e experimentais através de modelagem física vêm avaliando os valores
de Nc* modificado para diferentes formas da fundação (faixa, circular ou quadrada) em
função da heterogeneidade do solo e do nível de enterramento da mesma. Uma revisão destes
estudos foi apresentada no capítulo 2.
Uma contribuição para a avaliação dos valores do fator de capacidade de carga
modificado é apresentada neste item através dos resultados obtidos nos ensaios de modelagem
centrífuga.
Evidenciando o valor de Nc na Equação (2.7) apresentada no capítulo 2 tem-se:
0
'
u
ult*c S
Dq N
⋅+=
γ (5.2)
Dos ensaios realizados são conhecidos: a capacidade de carga da fundação ao longo da
profundidade através da razão entre as leituras de força e área efetiva da fundação (subtração
da área das perfurações da área total). O perfil adotado de resistência da argila ao longo da
profundidade foi estimado através da média das baterias de ensaios T-bar (Figura 5. 14). Para
uma maior precisão foram utilizados os valores correspondentes a uma linha de tendência da
média dos valores no trecho de influência onde foram realizadas as inserções dos mudmats.
Este trecho de influência foi escolhido levando em conta a profundidade abaixo da fundação
onde os mecanismos de ruptura ocorrem conforme já discutido no item 5.2.

105
Ao longo do enterramento do modelo é possível considerar a camada de solo acima da
fundação como sobrecarga γ’D. O peso específico do solo foi obtido através de medidas ao
fim de cada ensaio da umidade w do solo, massa específica � e o peso especifico real dos
grãos Gs, considerando a 100% de saturação do solo.
Como abordado no capítulo 2, ainda não existem estudos conclusivos sobre a
influência do enterramento da fundação e da heterogeneidade do solo no valor do fator de
capacidade de carga modificada Nc*. Para este estudo foram adotadas as considerações dos
estudos para o cálculo da profundidade equivalente (zeq, calculado através da Equação 2.10)
abaixo da fundação onde a resistência não drenada do solo é representativa (Su,eq) nos
mecanismos de ruptura e com este valor estimar o Su,eq utilizado junto ao fator de capacidade
de carga tradicional (Nc=5,14) sem correções. Para as considerações de cálculo o gradiente de
tensão utilizado �=0,103kPa/mm e Su0 =1,864kPa.
Figura 5. 14 – Perfil de resistência na zona de atuação dos mudmats
$�����������% �����&'�����(�
�
��
��
��
� � �
Prof
undi
dade
(mm
)
Su (kPa)
Su =1,864+0,103.z

106
Na Tabela 5. 2 são apresentados os valores de Nc* para todos os modelos considerando
a fundação como lisa e rugosa (F retirado da Tabela 2.9), e nos modelos perfurados
considerando tanto a área plena como a efetiva
Tabela 5. 2 - Nc* no pico da compressão estimado através do Su,eq
Área com seção plena Área efetiva
Nc* (com Sueq)
F M01 M02 M03 M04 M05 M03 M04 M05
rugosa 6.43 5.8 6.4 5.35 3.8 7 6.15 4.55
lisa 6.7 6 6.65 5.55 3.9 7.3 6.4 4.75
No capítulo 2 foram sugeridos fatores de correção para fundações circulares em
função da forma e do enterramento da mesma (ssu). Considerando-se que estes fatores possam
ser aplicados também a sapatas quadradas sem grande erro, foram calculados através da
Equação 2.12 os fatores de correção para as fundações aqui estudadas (ssu =1,25 para 30mm e
ssu =1,19 para 24mm). A correção dos valores de Nc* da Tabela 5. 2 pelo fator de correção ssu
é apresentada na Tabela 5. 3.
Tabela 5. 3 - Nc* no pico da compressão com Su,eq e ajuste pelo fator de forma ssu
Área com seção plena Área efetiva
Nc* (com Sueq e ssu)
F M01 M02 M03 M04 M05 M03 M04 M05
rugosa 5.144 4.87 5.12 4.28 3.04 5.6 4.92 3.64
lisa 5.36 5.04 5.32 4.44 3.12 5.84 5.12 3.8
No gráfico da Figura 5. 15 são indicados os valores de Nc* em função da taxa de
perfuração, considerando a fundação como rugosa e a área de influência com seção plena.
WHITE et al. (2005) também apresentam resultados de mudmats maciças e perfurados
instalados em argilas moles. Neste estudo é sugerida a utilização da seção plena da fundação
para avaliação do fator de capacidade de carga em função da taxa de perfuração.

107
Figura 5. 15 – Nc* em função da taxas de perfuração
As correções realizadas com as estimativas de Su,eq e ssu visam modificar o Nc de modo
a atender as influências de heterogeneidade do solo e enterramento da fundação. Espera-se
que ao se reduzir os valores de Nc* observado nos ensaios com estes fatores encontre-se o
valor de Nc = 5,14. Os valores encontrados para M01e M03 variam em torno de 1% do Nc e
5% menor para M02, apresentando uma boa coerência nos resultados lembrando que as
correções adotadas são para sapatas circulares. No gráfico observa-se uma tendência de
redução do fator de capacidade de carga com o aumento da taxa de perfuração com exceção
do modelo M03 que apresentou valores próximos aos modelos de seção plena, sugerindo um
possível embuchamento das perfurações durante a inserção. WHITE et al. (2005) também
apresentam a tendência da redução do Nc* com o aumento de R.
5.3.3.1 COMPARAÇÃO DOS VALORES DE Nc* COM OUTROS ESTUDOS
Neste item serão comparados os valores de Nc* dos mudmats maciços (sem
perfurações) com os resultados de outros estudos semelhantes encontrados na bibliografia.
Para isto, os resultados encontrados para as sapatas maciças do presente estudo foram
plotados na Figura 5. 16 juntamente com diversos estudos apresentados por GOUVERNEC &

108
O’LOUGHLIN (2006). Nesta figura a resistência à penetração é também apresentada em
termos do fator de capacidade de carga Nc*= qu/Su, e a normalização da penetração z pelo
diâmetro d (para as sapatas quadradas utilizou-se a relação entre perímetros sugerida por
WHITE et al. (2005), onde d=d*=4B/�). Os valores de Nc* aqui apresentados foram obtidos
sem nenhum fator de correção, calculados apenas pela razão entre a capacidade de carga do
solo qu e a resistência não drenada do solo Su, tomados pontualmente ao longo da
profundidade admitindo-se que os mecanismos de ruptura se iniciam em z/d*=0 e vão até
z/d*0,5.
Na Figura 5.16 são apresentados estudos realizados através de modelagem centrífuga e
análise por elementos finitos em argilas normalmente adensadas, com fundações do tipo:
Plates, fundações circulares superficiais (HU et al., 2001); Spudcans, sapatas em forma de
cone invertido utilizadas em fundações offshore (HOSSAIN et al., 2004); e Skirted foudations
fundações rasas circulares com saia estrutural (GOUVERNEC & O’LOUGHLIN, 2006).
Para todos os valores apresentados em penetrações z/d=1, Nc* entre 10 e 11,
mantendo-se constantes para penetrações maiores, indicando um comportamento de ruptura
profunda nestes trechos.
Para os mudmats maciços com z/d* de aproximadamente 0,5 (condição deste estudo)
foram encontrados valores de Nc* de 6,7 (M02) e 7,45 (M01). Estes valores são
razoavelmente próximos aos valores previstos por SKEMPTON (1951) e VESIC (1975) com
fatores de enterramento empíricos. Estes valores também são próximos aos resultados obtidos
nas modelagens centrífuga dos outros estudos com esta mesma razão de enterramento. Os
resultados encontrados de soluções por limite inferior em fundações rasas maciças
incorporadas a um eixo rígido e liso (HOULSBY & MARTIN, 2003) apresentam valores
entre 6,73 e 7,63 para fundações rugosas e lisas assentes na superfície e, para sapatas com
enterramento igual um diâmetro 7,45 a 7,98. Estes valores também são próximos aos
encontrados para os modelos deste estudo com z/d* � 0,5.
Os resultados de Nc* apresentados por WHITE et al. (2005) para mudmats quadrados
não perfurados (não apresentados na Figura 5.6) variam entre 6,75 e 7,25 para razões de
enterramento z/d* entre 0,11 e 0,17. Estes valores também apresentam bastante concordância
com os valores encontrados no presente estudo.

109
Figura 5. 16 – Fator de capacidade de carga em função da penetração (adaptado
GOUVERNEC & O’LOUGHLIN, 2006)
5.3.4 FATORES DE CAPACIDADE DE CARGA NA EXTRAÇÃO – Nc*
O fator de capacidade da carga na extração assim como na compressão pode ser obtido
através dos valores encontrados nos ensaios e substituindo na Equação 5.3, onde foi
evidenciado o fator de capacidade de carga da Equação 2.14:
u
extraçãoult
S
Wq ' N*
c
+= (5.3)
O valor da resistência à extração, q ultextração, foi estimado através da razão entre o pico
de força medida durante a extração e a área dos modelos. Os valores encontrados

110
considerando a área efetiva do modelo e as áreas da seção plena são apresentados na Tabela 5.
4:
Tabela 5. 4 - Nc* no pico de extração
Área com seção plena Área efetiva
Nc* M01 M02 M03 M04 M05 M03 M04 M05 4.10 3.65 2.35 4.1 3.55 2.6 4.3 4.6
A Figura 5. 17 apresenta os valores encontrados para os fatores de capacidade de carga
na extração considerando apenas a área efetiva da fundação. A utilização da área efetiva é
mais adequada na avaliação da resistência à extração, pois esta depende fundamentalmente da
área de contato na interface solo-mudmat.
Observa-se que os valores de Nc* na extração se mantêm constantes com o aumento
da taxa de perfuração e são de aproximadamente 4,0 (com exceção do modelo M03) diferente
dos valores de Nc* encontrados para inserção (compressão) que apresentavam uma tendência
à redução com o aumento da perfuração.
GOURVENEC et al. (2009) apresenta valores de Nc*=3,9, para fundações rasas com
saias curtas de razaõ ds/d=0,15. Estes valores se aproximam bastantes dos encontrados neste
estudo.
Figura 5. 17 - Nc* de extração dos modelos em função da taxas de perfuração
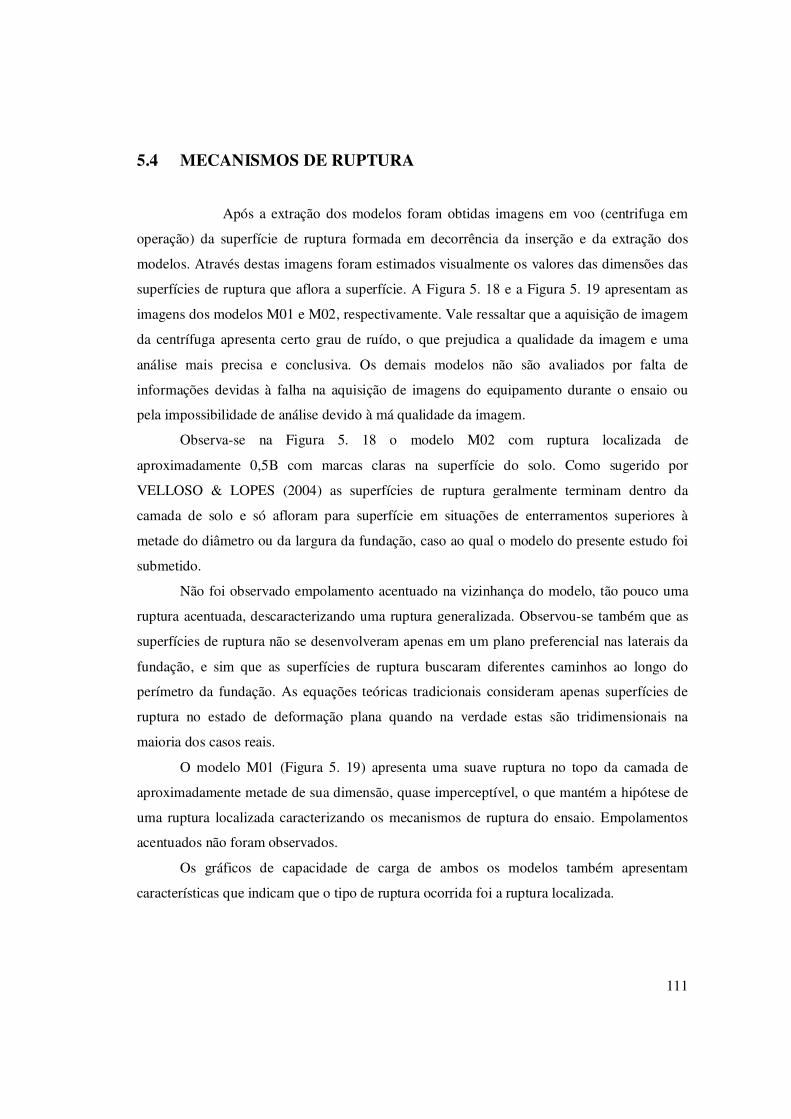
111
5.4 MECANISMOS DE RUPTURA
Após a extração dos modelos foram obtidas imagens em voo (centrifuga em
operação) da superfície de ruptura formada em decorrência da inserção e da extração dos
modelos. Através destas imagens foram estimados visualmente os valores das dimensões das
superfícies de ruptura que aflora a superfície. A Figura 5. 18 e a Figura 5. 19 apresentam as
imagens dos modelos M01 e M02, respectivamente. Vale ressaltar que a aquisição de imagem
da centrífuga apresenta certo grau de ruído, o que prejudica a qualidade da imagem e uma
análise mais precisa e conclusiva. Os demais modelos não são avaliados por falta de
informações devidas à falha na aquisição de imagens do equipamento durante o ensaio ou
pela impossibilidade de análise devido à má qualidade da imagem.
Observa-se na Figura 5. 18 o modelo M02 com ruptura localizada de
aproximadamente 0,5B com marcas claras na superfície do solo. Como sugerido por
VELLOSO & LOPES (2004) as superfícies de ruptura geralmente terminam dentro da
camada de solo e só afloram para superfície em situações de enterramentos superiores à
metade do diâmetro ou da largura da fundação, caso ao qual o modelo do presente estudo foi
submetido.
Não foi observado empolamento acentuado na vizinhança do modelo, tão pouco uma
ruptura acentuada, descaracterizando uma ruptura generalizada. Observou-se também que as
superfícies de ruptura não se desenvolveram apenas em um plano preferencial nas laterais da
fundação, e sim que as superfícies de ruptura buscaram diferentes caminhos ao longo do
perímetro da fundação. As equações teóricas tradicionais consideram apenas superfícies de
ruptura no estado de deformação plana quando na verdade estas são tridimensionais na
maioria dos casos reais.
O modelo M01 (Figura 5. 19) apresenta uma suave ruptura no topo da camada de
aproximadamente metade de sua dimensão, quase imperceptível, o que mantém a hipótese de
uma ruptura localizada caracterizando os mecanismos de ruptura do ensaio. Empolamentos
acentuados não foram observados.
Os gráficos de capacidade de carga de ambos os modelos também apresentam
características que indicam que o tipo de ruptura ocorrida foi a ruptura localizada.

112
Figura 5. 18 – Imagem do ensaio após atuação do modelo M02
Figura 5. 19 - Imagem do ensaio após atuação do modelo M01
Superfícies de ruptura tocando o topo da camada de argila
Superfícies de ruptura tocando o topo da camada de argila
113
5.5 MODELAGEM NUMÉRICA
A modelagem numérica nessa dissertação teve duas finalidades. A primeira, visa
fornecer uma idéia inicial dos mecanismos de ruptura envolvidos no problema, tendo-se assim
informações importantes para a avaliação das dimensões do modelo físico e do fator de escala
a ser utilizado nos ensaios centrífugos apresentados nos capítulos anteriores. Estas análises,
realizadas na fase inicial da pesquisa, não serão aqui apresentadas. A segunda finalidade,
apresentada neste item, visa à comparação entre os resultados das modelagens numéricas e
físicas, pois se sabe que as duas se complementam e um dos principais papéis da modelagem
física é a de validar modelos constitutivos usados em análises numéricas (RANDOLPH &
HOUSE, 2001 e OLIVEIRA, 2005).
As modelagens numéricas, utilizando o Método dos Elementos Finitos, foram
realizadas com o programa PLAXIS v. 8.2. (BRINKGREVE, 2002), específico para
modelagem de problemas geotécnicos e de interação solo-estrutura.
Pela dificuldade apresentada para a modelagem dos mudmats perfurados utilizando-se
uma ferramenta 2D, apenas os dois mudmats maciços foram estudados através da modelagem
numérica. Para a análise numérica do comportamento dos mudmats perfurados recomenda-se
uma análise 3-D.
Para o problema estudado, foi realizada uma análise em estado plano de deformação,
utilizando elemento triangular de 15 nós e o solo argiloso segundo um modelo elasto-plástico
com o critério de ruptura de Mohr-Coulomb. O cálculo foi realizado utilizando a opção de
cálculo plástico com malha atualizada.
5.5.1 CONSIDERAÇÕES INICIAIS
Como apresentado no capítulo 2, modelos de solo podem ser acelerados em uma
centrífuga de modo a serem submetidos a um campo inercial de aceleração radial que, desde
que o modelo seja coerente, simula o campo gravitacional terrestre, porém muitas vezes maior
(SCHOFIELD, 1980). Desta forma, para se obter equivalência de tensões entre o modelo
centrífugo e o protótipo a ser analisado na modelagem numérica, as dimensões e as
propriedades do solo devem ser corrigidas por um fator N segundo a Tabela 2.4. A Tabela 5. 5
apresenta a relação de escala entre modelo e protótipo considerando-se N=80g.

114
Tabela 5. 5 - Relação entre a protótipo/modelo
Parâmetros Modelagem física Modelagem numérica
Modelo Protótipo M01 M02 M01 M02
Largura B (m)
0.03 0.024 2.4 1.92
Prof. Penetração z (m)
0.01463 0.01495 1.17 1.2
Resist. não drenada Su0 (kPa)
1.864 1.864 1.864 1.864
Gradiente de tensão � (kPa/m)
103 103 1.29 1.29
Foram efetuadas análises em estado plano de deformação, utilizando o modelo Mohr-
Coulomb segundo um comportamento não-drenado, ou seja, o solo foi considerado como um
material puramente coesivo carregado instantaneamente e sem tempo de drenagem tendo em
vista seu baixo coeficiente de adensamento cv. Assim, o solo foi caracterizado através do seu
perfil de resistência ao cisalhamento não-drenada, Su, obtido através da média dos resultados
dos ensaios de investigação em centrífuga realizados com o mini T-bar e apresentados na
Figura 5. 14. O comportamento do solo de fundação foi representado nos modelos por Lei
Associativa da Teoria da Plasticidade, segundo o critério de escoamento para condição não-
drenada. Nesta condição, o ângulo de atrito interno do solo é considerado nulo e a coesão
igual à resistência não drenada do solo, e assim a formulação do critério de escoamento
plástico de Mohr-Coulomb recai na formulação do critério de Tresca.
Outro parâmetro de entrada utilizado neste tipo de modelo é o modulo de elasticidade
corrigido Eref, obtido através da seguinte equação:
( )
uref EE ⋅+
=3
12 ν (5.4)
onde:
Eref – módulo de elasticidade efetivo do solo
Eu – módulo de elasticidade do solo
– coeficiente do Poisson
O módulo de elasticidade do solo foi adotado segundo a relação Eu,50/Su apresentada
na Tabela 4.3 e o coeficiente de Poisson utilizado foi de 0,30 que é convertido pelo programa

115
em função do comportamento não drenado para um valor efetivo de 0,495. Os dados de
entrada dos parâmetros utilizados para a modelagem numérica são apresentados na Figura 5.
20.
Figura 5. 20 – Parâmetros do solo para o modelo do modelo no Plaxis
O modelo foi gerado centralizado no ponto [0,0] da área de cálculo. O solo modelado
foi delimitado entre os pontos [-25,0], [25,0], [25,-25], [-25,-25], totalizando uma área de 50
m de largura com 25 m de profundidade. Os deslocamentos horizontais foram impedidos nos
limites verticais do modelo assim como todos os deslocamentos verticais e horizontais
referentes à base do modelo. Estas condições de contorno encontram-se representadas na
Figura 5. 21.
Para evitar excesso de elementos e economizar tempo para o processamento dos
cálculos, a malha (Figura 5. 22) foi gerada de forma a permitir maior refinamento na região
onde se tem maior influência nos mecanismos de ruptura gerados.

116
Figura 5. 21 - Definição das dimensões do problema
A análise numérica foi dividida em 3 etapas, conforme mostrado na Figura 5. 23. A
primeira etapa da análise (Initial phase) calcula as tensões in situ no solo de fundação. A
segunda etapa (Phase 1) calcula o comportamento solo-estrutura devido à resposta do solo ao
deslocamento prescrito na inserção do mudmat. Por fim, a terceira etapa (Phase 2) calcula o
comportamento solo-estrutura devido à resposta do solo ao deslocamento prescrito na
extração do mudmat.
Figura 5. 22 - Malha de elementos finitos

117
Figura 5. 23 – Etapas de cálculo
5.5.2 RESULTADOS DAS MODELAGENS NUMÉRICAS
Os resultados das análises numéricas são apresentados a seguir. A Figura 5. 24
apresenta o gráfico da força, de um ponto escolhido no centro da fundação, em função do
deslocamento do mudmat.
Figura 5. 24 – Gráfico força x profundidade, das fases de inserção e de extração
%���
%�
%���
%��
%���
%���
�
%� %� %�� %�� %�� %�� %�� � �� �� �� �� �� � �
������
����
������
�����������
)��
)��

118
Por se tratar de uma modelagem do tipo plano deformação, para se obter a tensão do
solo (Figura 5. 25) faz-se necessário multiplicar o valor de força obtida, pela outra dimensão
da fundação, que em um problema de sapata quadrada é a própria dimensão B.
Figura 5. 25 – Gráfico tensão vertical x profundidade, das fases de inserção e de extração
Na Tabela 5. 6 são comparados os valores de inserção e de extração obtidos através
das modelagens física e numérica. Os valores de extração são os referentes à desconsideração
do sobrepeso sobre os modelos.
Tabela 5. 6 – Comparação dos resultados das modelagens física e numérica
M01 M02
M. fisíca M. numérica erro (%) M. fisíca M. numérica erro (%)
pico instalação
(kPa) 24.6 24.7 0.40 21.4 23.14 7.52
pico extração
(kPa) 10.8 24.77 56.40 9.4 22.9 58.95
extração/instalação
(%) 43.90 100.28 - 43.93 98.96 -
%���
%�
%���
%��
%���
%���
�
%�� %�� %�� � �� �� ��
������
����
������
���� �����!�"�#������$
)��
)��

119
Analisando os valores da Tabela 5. 6 observa-se uma boa concordância entre os
modelos físicos e numéricos quando se trata dos mecanismos de compressão (instalação),
porém para extração esta concordância entre as modelagens não é observada. Os resultados
obtidos na extração se explicam pelo fato de não se ter utilizado elemento de interface e
portanto os nós que compõe a malha de elementos finitos na interface entre a estrutura e o
solo se mantém ligados mesmo em grandes deslocamentos, ou seja o programa não consegue
simular a separação dos nós que representam a estrutura dos nós que representam o solo.
Outra limitação do programa é a impossibilidade de simular o efeito de sucção do solo, efeito
este fundamental para avaliação da resistência a extração. Desta forma a análise se torna
irrealista pois o contato entre a estrutura e o solo forma uma coesão aparente de ligação (plug)
formada durante a inserção do modelo e o período de relaxação. Quando a estrutura se
desloca no sentido da extração, para pequenos deslocamentos esta ligação deveria ser
rompida, porém isto não é observado na Figura 5. 27. Foi observada uma semelhança bastante
grande nas deformações das malhas do modelo M01 e M03, o que pode ser explicado pela
semelhança das características e condições de contorno diferenciando-se apenas em suas
dimensões. Com isso optou-se apenas pela apresentação da saída de dados do modelo M01.
Na Figura 5. 26 é apresentada a deformada da malha de elementos finitos após a inserção do
modelo M01.
Figura 5. 26 – Deformação da malha de elementos finitos após a instalação do M01

120
Na Figura 5. 27 é apresentada a malha deformada após a extração do modelo M01.
Observa-se que a estrutura continua unida à malha de elementos do solo mesmo após um
grande deslocamento.
Figura 5. 27 - Deformação da malha de elementos finitos após a extração M01
A Figura 5. 28 apresenta uma média das tensões cisalhantes na área onde foi realizado
o refinamento da malha e pode-se observar a formação das superfícies de ruptura
desenvolvidas semelhantes às descritas por TERZAGHI (1943). Observa-se também uma
concentração de tensões nas bordas da fundação.
A Figura 5. 29 e a Figura 5. 30 apresentam os deslocamentos totais dos mudmats
durante a instalação e a extração, respectivamente. Observa-se que a distância onde as cunhas
de ruptura tocam a superfície na modelagem numérica são semelhantes às observadas nas
modelagens físicas para este mesmo modelo, como descrito anteriormente no item 5.4.

121
Figura 5. 28 – Tensões cisalhantes geradas na inserção do mudmat
Figura 5. 29 – Deslocamentos totais na instalação do mudmat
B/2 B/2 B/2

122
Figura 5. 30 - Deslocamentos totais na extração do mudmat
B/2 B/2 B/2

123
CAPÍTULO �
CONCLUSÕES
6.1 INTRODUÇÃO
O objeto de estudo desta dissertação é a interação solo-estrutura de fundações offshore
assentes no leito marinho, tratando-se mais especificamente de mudmats sólidos e perfurados,
quadrados, com enterramentos rasos em um solo com perfil de resistência crescente com a
profundidade (típico de ambientes offshore). O foco principal da pesquisa se deu acerca da
capacidade de carga destas estruturas submetidas a carregamentos verticais de instalação e
extração utilizando-se para isso ferramentas de modelagem física e numérica.
6.2 CONSIDERAÇÕES FINAIS
Observou-se entre os mudmats sólidos que o modelo com maior área resultou em uma
maior força de resistência a cravação, conforme o esperado. Os modelos perfurados também
tendem a reduzir à sua reposta a penetração à medida que sua taxa de perfuração aumenta,
com exceção do modelo M03 (R=0,087) que apresentou uma força similar à medida na sapata
sólida dimensão externa. Normalizando a força medida em relação à área efetiva (área sólida
menos a área perfurada) observaram-se valores de tensões verticais superiores para o modelo
perfurado M03 em comparação ao modelo sólido M01. Uma hipótese para explicar este
comportamento foi o embuchamento das perfurações do modelo M03, em consequência do
pequeno diâmetro dos furos. O modelo perfurado M04 apresentou valores menores, porém
próximos aos do modelo M01. Já o modelo M05, mesmo possuindo área superior, apresentou
valores menores que o modelo M02.

124
Os resultados obtidos indicam que um projeto otimizado de mudmat visando
maximizar a razão entre a capacidade de carga à compressão e a resistência à extração da
fundação, deve buscar perfurações pequenas e bem distribuídas ao longo da área da seção
plena com uma taxa de perfuração R inferiores a 10%. Taxas de perfuração superiores a estes
valores podem reduzir muito a capacidade de carga sem um ganho proporcional na redução da
resistência à extração.
Já em termos de resistência a extração observou-se que a resistência mobilizada na
extração é de aproximadamente 45% da capacidade de carga mobilizada durante a instalação,
com exceção do Modelo M05 que apresenta valores na faixa dos 63% e o modelo M03 com
valores de aproximadamente 28%. A bibliografia não é conclusiva sobre a relação entre a
resistência a extração e a capacidade de carga de uma fundação, desta forma esta pesquisa
contribui para o refinamento destes valores e comparação com outros estudos, futuros ou já
existentes.
No que se refere aos estudos dos fatores de capacidade de carga (Nc) sobre a influência
do enterramento da fundação e da heterogeneidade do perfil de resistência do solo, ainda não
existem soluções exatas, porém inúmeros estudos através de modelagem por elementos finitos
e experimentais através de modelagem física vêm avaliando os valores de Nc modificado para
diferentes formas da fundação (faixa, circular ou quadrada) em função da heterogeneidade do
solo e do nível de enterramento da mesma. Observou-se que os valores dos fatores de
correção e enterramento assim como a utilização do valor de Su,eq, podem ser utilizados sem
grandes erros nos resultados encontrados. A comparação dos fatores de capacidades das
fundações sólidas sem perfurações com outros estudos mostraram que os resultados desta
pesquisa se mostram coerentes com os valores da bibliografia. Pode-se avaliar que os valores
de Nc diminuem com o aumento da taxa de perfuração quando as sapatas estão sujeitas a
compressão (instalação), diferente da tendência a valores constantes, obtidos na extração dos
mudmats em função da taxa de perfuração.
As modelagens numéricas foram realizadas com o programa PLAXIS v. 8.2 nos
mudmats sólidos mostraram-se bastante coerentes com os valores encontrados nas
modelagens físicas nas etapas de instalação, porém apresentaram discordância na etapa de
extração.
125
6.3 SUGESTÕES PARA FUTURAS PESQUISAS
Pela dificuldade apresentada para a modelagem dos mudmats perfurados, neste
trabalho foram avaliados apenas os mudmats de seção plena utilizando-se uma ferramenta 2D,
ficando como sugestão para futuras pesquisas a avaliação da interação solo-estrutura da das
sapatas perfuradas com uma ferramenta com a capacidade da geração de uma malha de
elementos finitos em 3D, e.g., Plaxis 3D Foundation.
A relação dos parâmetros do modelo Cam clay para amostras de argilas marinhas
reconstituídas obtidas através de ensaios triaxias e amostras de solo sujeitas a ensaios de
modelagem física centrífuga podem ser avaliadas com um maior número de ensaios, afim de
uma melhor compreensão dos valores adotados para a previsão da resistência de solos moles
de baixa capacidade de suporte. Recomenda-se que as amostras sejam adensadas na centrífuga
geotécnica através dos procedimentos descritos no presente trabalho e, posteriormente
encaminhadas para os ensaios triaxias.
Com a finalidade de uma maior compreensão dos mecanismos de interação solo-
estrutura de fundações perfuradas, sugere-se a realização de novas pesquisas avaliando outras
taxas de perfurações, assim como o formato das perfurações. Pode-se também inserir um
transdutor de poropressão na base da fundação para avaliar as pressões de contato e o efeito
da sucção do solo.
Ainda dentro desta mesma linha podem ser avaliados a capacidade de carga deste tipo
de fundações sujeitas a carregamentos combinados. A influência do uso de saias estruturais
em fundações submetidas a carregamentos horizontais, assim como na resistência a extração,
também pode ser estudado.
Por fim, são sugeridos estudos em modelagem física em centrífuga geotécnica para
outros tipos de fundações superficiais, e.g., caixões, spucans.

126
REFERÊNCIAS BIBLIOGRÁFICAS
ALMEIDA M.S.S.; OLIVEIRA, J.R.M.S.; MOTTA, H.P.G.; ALMEIDA, M.C.F. &
BORGES, R.G. (2010) “CPT and T-bar penetrometers for site investigation in
centrifuge tests” – Journal Soil and Rocks – No prelo
ATKINSON, J.H. & BRANSBY, P. L., 1978, “The Mechanics of Soils. An Introduction to
Critical State Soil Mechanics”. 1 ed. Londres, MacGraw-Hill.
BARBOSA-CRUZ, E.R. & RANDOLPH, M.F., 2005, “Bearing capacity and large
penetration of a cylindrical object at shallow embedment”. Proc. International
symposium on frontiersin offshore geotechnics ISFOG, Perth, pp. 615-621.
BRINKGREVE, R.B.J., 2002,“Finite Element code for Soil and Rock Analyses – PLAXIS –
2D user’s manual”. Rotterdam, Netherlands, Balkema.
CHEN, W., 2005, “Uniaxial behaviour of suction caissons in soft deposits in deepwater”. PhD
thesis, The University of Western Australia.
CALLE, J.A.C., 2007, “Comportamento geomecânico de resíduos sólidos urbanos”,
Dissertação de M.Sc., COPPE/UFRJ, Rio de Janeiro, RJ, Brasil.
COX, A.D., EASON, G., HOPKINS, H.G., 1961,“Axially symmetric plastic deformation in
soils”. Proc. R. Soc. London, pp. 254:1-45.
COLLIAT, J.L., 2002, “Anchors for Deepwater to Ultradeepwater Moorings”. In:
Proceedings of the Annual Offshore Technology Conference, Paper 14306, Houston,
Texas, pp. 6-9.

127
CLUKEY, E.C. & MORRISON, J., 1993, “A centrifuge and analytical study to evaluate
suction caissons for TLP applications in the Gulf of Mexico”, Design and Performance
of Deep Foundations: Piles and Piers in Soil and Soft Rock. ASCE Geotechnical
Special Publication, v.38, pp. 141-156.
DAVIS, E.H. & BOOKER, J.R., 1973, “The effect of increasing strength with depth on the
bearing capacity of clays”, Géotechnique v.23, n.4, pp. 551-563.
DOMINGOS, G.S., 2008, “O efeito tridimensional e de fluência nos recalques de fundações
em argila: O método de Skempton & Bjerrum revisitado”. Dissertação de M.Sc.,
COPPE/UFRJ, Rio de Janeiro, RJ, Brasil.
FINNIE, I.M.S. & RANDOLPH, M.F., 1994, “Punch-through and liquefaction induced
failure of shallow foundations on calcareous sediments”, Proceedings International
Conference on Behaviour of Off-Shore Structures – BOSS ’94, Boston, v.1, pp. 217-
230.
FISHER, R. & CATHIE, D., 2003, “Optimisation of gravity based design for subsea
applications”, Proc. ICOF, Dundee, pp. 283-296.
GHAHREMANI, M. & BRENNAN, A.J., 2009, “Consolidation of lumpy clay backfill over
buried pipelines”, Proc. Proc ASME, on 28th International Conference on Ocean,
Offshore and Arctic Engineering OMAE2009, Honolulu, Hawaii, USA, pp.1-7.
GOURVENEC, S.M., ACOSTA-MARTINEZ, H.E. & RANDOLPH, M.F., 2009,
“Experimental study of uplift resistance of shallow skirted foundations in clay under
transient and sustained concentric loading”. Géotechnique v.59, n.6, pp.525-537.
GOURVENEC, S.M. & O’LOUGHLIN, C.D., 2006, “Drum centrifuge tests of shallow
skirted foundations on soft clay”, Physical Modelling in Geotechnics – 6th ICPMG ’06,
pp.645-650.
128
GOURVENEC, S.M., RANDOLPH, M.F. & KINGSNORTH, O., 2005, “Undrained bearing
capacity of square and rectangular footings on clay”. Int. J. Geomech. V.6, n.3, pp. 147-
157.
GURUNG S. B., ALMEIDA M. S. S. & BICALHO K. V., 1998, “Migration of zinc through
sedimentary soil models”, Proc. of the International Conference Centrifuge 98, Tokyo, Vol. 1,
pp. 589-594.
HANSEN, J.B., 1970, “A revised and extended formula for a bearing capacity”, Danish
Geoteknisk Institut, Bulletin n.28, Copenhagen, pp. 5-11.
HOULSBY, G.T. & MARTIN, C.M., 2003, “Undrained bearing capacity factors for conical
footings on clay”. Géotechnique v.53, n.5, pp.513-520.
HOSSAIN, M.S., HU Y. & RANDOLPH, M.F., 2004, “Bearing behaviour of spudcan
foundation on uniform clay during deep penetration”, Proc. 23rd Int. Conf. on Offshore
Mech. and Arctic Eng. (OMAE), Vancouver, Canada,OMAE.
HU, Y., WATSON, P.G. & RANDOLPH, M.F., 2001, “Effect of interface friction on Nc
value for plate penetrometer”, J. Computer methods and Advances in Geomechanic,
pp.931-936.
KUO, M.Y-H. & BOLTON, M.D., 2009, “Soil Characterization of Deep Sea West African
Clays: Is Biology a Source of Mechanical Strength?”, Proc. International Offshore and
Polar Engineering Conference, ISOPE, Osaka, Japan, pp. 488-494.
LAI, H. S., 2009, “Análise estática de fundação rasa para manifolds submarinos”, Tese M.Sc.
COPPE/UFRJ, Rio de Janeiro, RJ, Brasil.
MAYNE, P. W., 2001, “Stress-strain-strength-flow parameters from enhanced in-situ tests”.
Proceedings of an International Conference on In-Situ Measurement of Soil Properties
& Case Histories (In-Situ 2001), Bali, Indonesia 27–47.

129
MAYNE, P. W. & KULHAWY, F. H., 1982, “K0-OCR relationships in soils. J. Geotech”.
Engng Div., ASCE 108, No. 6, 851–872.
MARTIN, C.M., 2001, “Vertical bearing capacity of skirted circular foundations on Tresca
soil”. Proc. 15th ICSMGE, Istanbul, v.1, pp.743-746.
MARTIN, C.M., 2003, “New software for rigorous bearing capacity calculations”, Proc. Int.
Conf. on Fndns, Dundee, pp.581-592.
MEADOWS, P.S. & TAIT, J., 1989, “Modification of sediment permeability and shear-
strength by 2 burrowing invertebrates.” Marine Biology, v. 101, n. 1, pp 75-82.
MEYRHOF, G.G., 1951, “The ultimate bearing capacity of foundations”, Geotechnique, v.2,
pp.301-332.
MEYRHOF, G.G., 1963, “Some recent research on the bearing capacity of foundations”,
Canadian Geotechnical Journal, v.1, n.1, pp.16-26.
MOTTA, H.P.G., 2008, “Comportamento de um rejeito de transição em centrífuga
geotécnica”, Tese de M.Sc., COPPE/UFRJ, Rio de Janeiro, RJ, Brasil.
NETO, J.L.S.; OLIVEIRA, J.R.M.S.; ALMEIDA, M.S.S.; FAGUNDES, D.F. & ALMEIDA ,
M.C.F. (2010) “Retrofits to COPPE Mini-Drum Geotechnical Centrifuge” –
International Conference on Physical Modelling in Geotechnics (ICPMG) – Zurique,
Suíça.
OLIVEIRA FILHO, W., 1987, “Considerações sobre ensaios Triaxiais em areias”, Tese de
M.Sc., COPPE/UFRJ, Rio de Janeiro, RJ, Brasil.

130
OLIVEIRA, J.R.M.S., 2005, “Modelagem centrífuga de um problema de interação solo-
estrutura”, Tese de D.Sc., COPPE/UFRJ, Rio de Janeiro, RJ, Brasil.
OLIVEIRA, J.R.M.S.; ALMEIDA, M.S.S.; ALMEIDA, M.C.F. & MARQUES, M.E.S.
(2006) “Undrained strength of very soft clay soils used in pipeline studies in the
centrifuge” – International Conference on Physical Modelling in Geotechnics (ICPMG)
– Hong Kong, China.
PACHECO, L.A., 2006, “Modelagem física e numérica de um duto enterrado em areia sujeito
a deslocamento lateral”, Tese de M.Sc., COPPE/UFRJ, Rio de Janeiro, RJ, Brasil.
PEQUENO, J.G.A., 2010, “Determinação de parâmetros de estado crítico do modelo Cam-
clay de argila marinha reconstituída do campo de roncador”, Projeto de graduação,
Escola Politécnica/UFRJ, Rio de Janeiro, RJ, Brasil.
PINTO, C. S., 1965, Capacidade de carga de argilas com coesão linearmente crescente com a
profundidade. Jornal de Solos, São Paulo, v.3, n. 1.
PRANDTL, L., 1921, “Eindringungsfestigkeit und festigkeit von schneiden”, Angew. Math.
U. Mech 1(15). (apud Randolf, 2005��
PUECH, A., IORIO, J-P., GARNIER, J. & FORAY, P., 1993, “Experimental study of suction
effects under mudmat type foundations”, Proc. Canadian Conference on Marine
Geotechnical Engineering, St. John’s, Newfoundland, v. 3, pp.1062-1080.
RANDOLPH, M.F., 2004, “Characterisation of soft sediments for offshore applications”,
Keynote lecture, Proc. 2nd Int. Conf. on Site Investigation, Porto. pp. 209-232.

131
RANDOLPH, M.F. & HOUSE, A.R. (2001) “The Complementary Roles of Physical and
Computational Modelling”, The International Journal of Physical Modelling in
Geotechnics, Vol. 1, nº 1, pp. 1-8.
RELATÓRIO TÉCNICO GEOMECÂNICA/PETROBRÁS, 2009, “Investigações
geotécnicos de bordo ao longo dos dutos de exportação do módulo 3 de Roncador- P-
55”, Programa de desenvolvimento do campo de Roncador – P-55, RL-3010.70-6500-
115-GMC-001.
RELATÓRIO TÉCNICO GEOMECÂNICA/PETROBRÁS, 2009, “Ensaios geotécnicos de
laboratório ao longo dos dutos de exportação do módulo 3 de Roncador- P-55”,
Programa de desenvolvimento do campo de Roncador – P-55, RL-3010.70-6500-115-
GMC-002.
ROSCOE, K.H. & BURLAND, P.B., 1968, “On the Generalised Stress-strain Behavior of
Wet Clay” In: Heyman, J., Leckie, F. A. (eds.), Engineering Plasticity, Cambridge,
University Press, pp. 535-609.
SALENÇON, J. & MATAR, M., 1982, “Bearing capacity of circular shallow foundations”, In
Foundation Engineering ed. G. Pilot. Paris: Presses de l’ENPC. pp. 159-168.
SALGADO, R., LYAMIN, A.V., SLOAN, S.W. & YU, H.S., 2004, “Twoand three-
dimensional bearing capacity of foundations in clay”, Geotechnique v.54, n.5, pp. 297-
306.
SALGADO, R., 2008, “The Engineering of Foundations”, McGraw-Hill, pp. 888-898.
SCHOFIELD, A.N., 1980, “Cambridge geotechnical centrifuge operations”, Géotechnique, v.
25, n.4, pp. 743-61.

132
SOUZA COSTA, R., 2005, “Um novo equipamento Triaxial para ensaios de solos na
condição de deformação plana”, Tese de D.Sc., COPPE/UFRJ, Rio de Janeiro, RJ,
Brasil.
SOUSA PINTO, C., 2002, “Curso Básico de Mecânica dos Solos”, 2ª Edição, Oficina de
Textos, São Paulo, Brasil.
STEWART, D.P. & RANDOLPH, M.F., 1991, “A new site Investigation tool for the
centrifuge”, Proceedings International Conference on Centrifuge Modelling –
Centrifuge ’91, Boulder/Colorado, pp. 531-538.
STEWART, D.P., 1992, “Lateral Loading of Piled Bridge Abutments due to Embankment
Construction”, Ph.D. Thesis, University of Western Australia.
STEWART D. P. & RANDOLPH M. F., 1994, “T-bar Penetration Testing in Soft Clay”,
Journal of Geotechnical Engineering Division – ASCE, Vol. 120, nº 12, pp. 2230-2235.
SKEMPTON, A.W., 1951, “The bearing capacity of clays” Proc. Building and Research
Congress, London 1, pp.180-189.
TAYLOR, R.N., 1995, “Geotechnical Centrifuge Technology”, Blackie Academic &
Professional, 1ed.
TERZAGHI, K., FRÖLICH, O.K., 1936, “Theorie der Setzung von Tonschichten”, F.
Deutiche, Viena, Austria.
TERZAGHI, K., 1943, “Theoretical Soil Mechanics”, New York: John Wiley & Sons.
VELLOSO, D.A. & LOPES, R.F., 2004, “Fundações - Critérios de projetos, investigação de
subsolo e fundação superficiais”, Ed. Oficina de textos,v.1, pp.226.

133
VESIC, A.S., 1975, “Bearing capacity of shallow foundations”, In Foundation Engineering
Handbook, Van Nostrand, NewYork, pp. 121-147.
WATSON, P.G., RANDOLPH, M.F. & BRANSBY, M.F., 2000, “Combined lateral and
vertical loading of caisson foundations”, Proc. Annual Offshore Tech. Conf., Houston,
Paper OTC 12195.
WOOD, D.M., 1990, “Soil Behavior and Critical State Soil Mechanics”, 1 ed.,Cambridge,
Cambridge University Press.

134
ANEXO �
MONITORAMENTO DOS ENSAIOS CENTRÍFUGOS DURANTE
A FASE DE ADENSAMENTO
As Figuras A1.1 à A1.8 apresentam, para cada ensaio, os valores dos recalques
medidos com o sensor de deslocamento laser ao longo do tempo e a dissipação do excesso de
poropressão ao longo do tempo medido nos transdutores PPT 1 e PPT 2.
• FASE DE ADENSAMENTO DO ENSAIO 01
Figura A1. 1 – Recalques medidos durante o adensamento no Ensaio 01
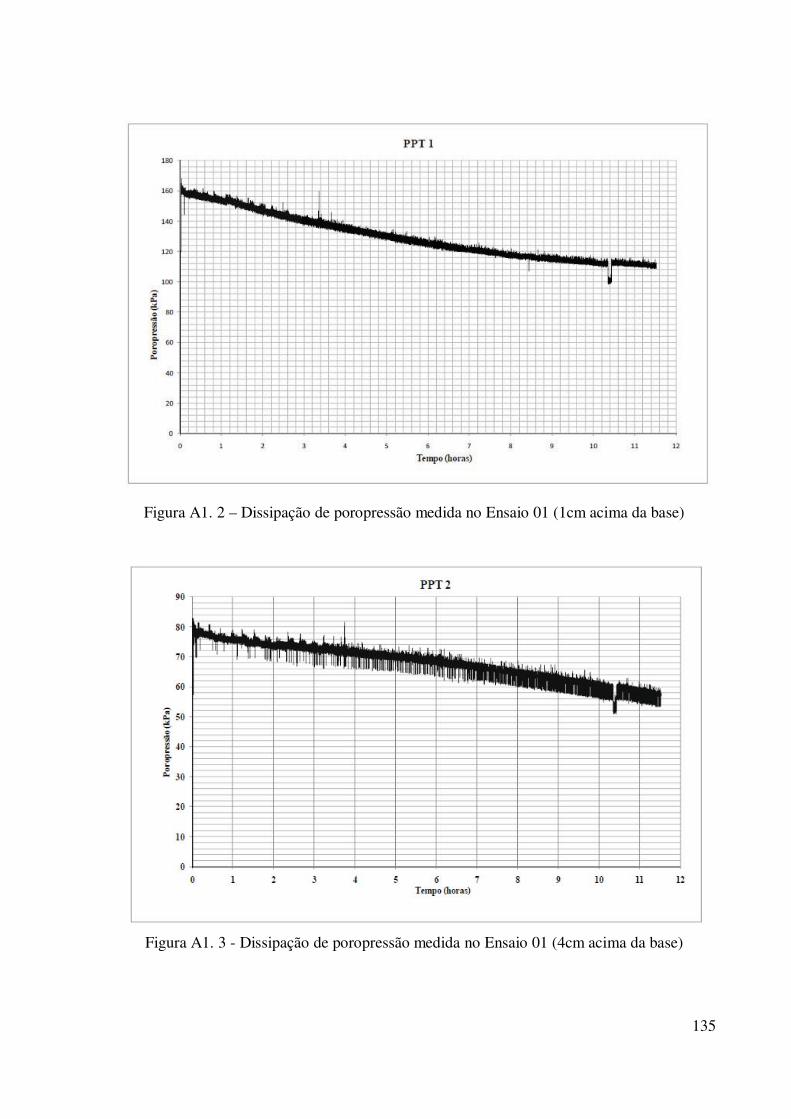
135
Figura A1. 2 – Dissipação de poropressão medida no Ensaio 01 (1cm acima da base)
Figura A1. 3 - Dissipação de poropressão medida no Ensaio 01 (4cm acima da base)

136
• FASE DE ADENSAMENTO DO ENSAIO 02
Figura A1. 4 - Recalques medidos durante o adensamento no Ensaio 02
Figura A1. 5 - Dissipação de poropressão medida no Ensaio 02 (1cm acima da base)

137
Figura A1. 6 - Dissipação de poropressão medida no Ensaio 02 (4cm acima da base)
• FASE DE ADENSAMENTO DO ENSAIO 03
Figura A1. 7 - Recalques medidos durante o adensamento no Ensaio 03

138
Figura A1. 8 - Dissipação de poropressão medida no Ensaio 03 (1cm acima da base)

139
ANEXO �
RESULTADOS DAS ETAPAS DE ATUAÇÃO DOS MODELOS
MUDMATS
As Figuras A2.1 à A2.5 ilustram os valores de força medidos ao longo do tempo de
atuação dos modelos de mudmats nos ensaio de 1 a 3.
Figura A2. 1 – Força medida em função do tempo na atuação do modelo M01

140
Figura A2. 2 - Força medida em função do tempo na atuação do modelo M02
Figura A2. 3 - Força medida em função do tempo na atuação do modelo M03

141
Figura A2. 4 - Força medida em função do tempo na atuação do modelo M04
Figura A2. 5 - Força medida em função do tempo na atuação do modelo M05