curso de introdução às técnicas de sensoriamento remoto
TRANSCRIPT

CURSO DE INTRODUÇÃO ÀS TÉCNICAS DE
SENSORIAMENTO REMOTO
Belém, Novembro de 2007
CURSO DE INTRODUÇÃO ÀS TÉCNICAS DE
SENSORIAMENTO REMOTO
Apostila elaborada por:
ADRIANO VENTURIERI
Eng. Agr., M. Sc. em Sensoriamento Remoto; D. Sc. em Geografia
Novembro de 2007

SUMÁRIO
1 INTRODUÇÃO .....................................................................................................................7 2 PRINCÍPIOS FÍSICOS DE SENSORIAMENTO REMOTO ........................................11 2.1 CONCEITOS BÁSICOS....................................................................................................11 2.1.1 Elementos da fase de aquisição ....................................................................................12 2.1.2 Radiação eletromagnética.............................................................................................13 2.1.3 Espectro eletromagnético..............................................................................................15 2.2 CONCEITOS RADIOMÉTRICOS....................................................................................16 2.2.1 Comportamento espectral de alvos ..............................................................................19 2.2.2 Fontes de radiação eletromagnética.............................................................................21 2.2.3 Efeitos atmosféricos.......................................................................................................22 2.2.4 Geometria de aquisição.................................................................................................23 2.2.5 Superfícies dos alvos......................................................................................................23 3 COMPORTAMENTO ESPECTRAL DA VEGETAÇÃO..............................................25 3.1 COMPORTAMENTO ESPECTRAL DA VEGETAÇÃO ................................................25 3.1.1 Interação da REM com os dosséis vegetais .................................................................29 3.1.2 Particularidades sobre a aparência da vegetação em imagens orbitais ...................30 4 COMPORTAMENTO ESPECTRAL DOS SOLOS........................................................32 4.1 CARACTERÍSTICAS ESPECTRAIS DO SOLO.............................................................32 4.1.1 Umidade..........................................................................................................................33 4.1.2 Matéria orgânica ...........................................................................................................33 4.1.3 Granulometria ...............................................................................................................34 4.1.4 Óxidos de ferro ..............................................................................................................34 4.1.5 Mineralogia das argilas .................................................................................................34 4.1.6 Material de origem ........................................................................................................35 5 COMPORTAMENTO ESPECTRAL DE MINERAIS E ROCHAS .............................36 5.1 CARACTERÍSTICAS ESPECTRAIS DE MINERAIS E ROCHAS................................36 5.1.1 Rochas ígneas .................................................................................................................37 5.1.2 Rochas sedimentares .....................................................................................................37 5.1.3 Rochas metamórficas ....................................................................................................38 6 COMPORTAMENTO ESPECTRAL DA ÁGUA............................................................39 6.1 CARACTERÍSTICAS ESPECTRAIS DA ÁGUA............................................................39 6.2 COMPORTAMENTO ESPECTRAL DA ÁGUA.............................................................40 6.2.1 Propriedades ópticas da água.......................................................................................42 6.2.2 Absorção no meio aquático...........................................................................................44 6.2.3 O espalhamento no meio aquático ...............................................................................46 7 SENSORES E PRODUROS ...............................................................................................49 7.1 SISTEMA SENSOR...........................................................................................................49 7.2 CLASSIFICAÇÃO DOS SISTEMAS SENSORES ..........................................................49 7.2.1 Quanto à transformação sofrida pela radiação ..........................................................49 7.2.2 Quanto à fonte de energia.............................................................................................49 7.3 RESOLUÇÃO DO SISTEMA SENSOR...........................................................................50
3
7.4 PRINCIPAIS SISTEMAS SENSORES .............................................................................51 7.4.1 Sensores fotográficos .....................................................................................................51 7.4.2 Sensores de microondas (radar)...................................................................................52 7.4.3 Sensores ópticos .............................................................................................................53 7.4.3.1 Sistema Landsat............................................................................................................53 7.4.3.2 Sistema Spot .................................................................................................................56 7.4.3.3 Sistema Cbers ...............................................................................................................59 7.4.3.4 Sistema Ikonos..............................................................................................................61 7.4.3.5 Sistema Quickbird ........................................................................................................62 8 INTERPRETAÇÃO VISUAL DE DADOS ......................................................................65 8.1 NÍVEL DE DETALHES ....................................................................................................65 8.2 FASES DE EXECUÇÃO ...................................................................................................65 8.3 ELEMENTOS DE FOTOINTERPRETAÇÃO..................................................................66 8.3.1 Tonalidade (ou cor) .......................................................................................................66 8.3.2 Forma..............................................................................................................................66 8.3.3 Padrão (ou estrutura)....................................................................................................67 8.3.4 Textura ...........................................................................................................................67 8.3.5 Sombra............................................................................................................................67 8.4 FATORES CONDICIONANTES DOS PADRÕES..........................................................68 8.5 LIMITAÇÕES NA ANÁLISE VISUAL ...........................................................................68 8.6 COLORIMETRIA..............................................................................................................69 8.7 MÉTODOS DE INTERPRETAÇÃO VISUAL.................................................................69 8.7.1 Métodos intuitivos .........................................................................................................69 8.7.2 Método das chaves .........................................................................................................70 8.7.3 Método sistemático ........................................................................................................70 9 PROCESSAMENTO DE IMAGENS DIGITAIS.............................................................71 9.1 TÉCNICAS DE PRÉ-PROCESSAMENTO ......................................................................71 9.1.1 Correção atmosférica ....................................................................................................72 9.1.2 Correção radiométrica..................................................................................................72 9.1.3 Correção geométrica e registro de imagens ................................................................73 9.2 TÉCNICAS DE PROCESSAMENTO DE REALCE........................................................73 9.2.1 Ampliação linear de contraste ......................................................................................74 9.2.2 Razão de bandas espectrais ..........................................................................................74 9.2.3 Transformação por componentes principais ..............................................................75 9.2.4 Filtragem ........................................................................................................................76 9.3 TÉCNICAS DE SEGMENTAÇÃO ...................................................................................77 9.3.1 Detecção de descontinuidades ......................................................................................77 9.3.2 Agregamento de pixels ..................................................................................................78 9.4 TÉCNICAS DE CLASSIFICAÇÃO..................................................................................78 9.4.1 Classificação supervisionada ........................................................................................79 9.4.2 Classificação não supervisionada.................................................................................80 9.4.3 Classificação híbrida .....................................................................................................81 BIBLIOGRAFIAS CONSULTADAS...................................................................................82
4
LISTA DE FIGURAS
2.1 – Esquema representativo dos quatro elementos fundamentais das técnicas de sensoriamento remoto...............................................................................................................11 2.2 – Elementos da fase de aquisição. ......................................................................................13 2.3 – Flutuações dos campos elétrico (E) e magnético (M) de uma onda eletromagnética se propagando na direção Z. .........................................................................................................13 2.4 – Intensidade de energia solar no topo da atmosfera na superfície terrestre e de um corpo negro a 6000o K. .......................................................................................................................14 2.5 – Representação do espectro eletromagnético....................................................................15 2.6 – Representação gráfica dos possíveis ângulos de incidência sobre um alvo. ...................17 2.7 – Representação esquemática do conceito de Radiância medida através de um sensor remotamente localizado............................................................................................................18 2.8 – Gráfico contendo as curvas de Reflectância para alguns recursos naturais. ...................20 2.9 – Interação da REM com a estrutura de um objeto. ...........................................................21 2.10 – Variáveis geométricas de aquisição de dados que afetam as medidas de reflectância..23 2.11 – Comportamento da reflexão especular (a) e difusa (b) em uma superfície. ..................24 3.1 – Comportamento espectral de alguns alvos da superfície terrestre. ....................................25 3.2 – Seção transversal de uma folha mostrando os possíveis caminhos da luz incidente. ........27 3.3 – Curva de reflectância típica de uma folha verde. ..............................................................27 3.4 – Comportamento da energia sobre uma folha verde...........................................................28 4.1 – Efeito do tamanho da partícula sobre o comportamento espectral dos solos. .................32 4.2 – Curvas de reflectância típicas para alguns solos. ............................................................33 5.1 – Curvas de reflectância típicas para dois tipos de rochas. ................................................36 6.1 – Comportamento espectral da água em seus diferentes estados físicos............................39 6.2 – Sub-cena de uma composição colorida das bandas 3 (Vermelho), 4 (Verde) e 5 (Azul) do sensor Thematic Mapper que mostra a porção oeste do reservatório da Usina Hidroelétrica de Tucuruí, próximo á cidade de Novo Repartimento. ............................................................41 6.3 – Composição colorida dos canais 1 (azul), 2(verde) e 3 (vermelho) do sensor Thematic Mapper do satélite Landsat-5. ..................................................................................................41 6.4 – Relações entre as propriedades ópticas da água e a as propriedades biológicas, físicas, e químicas dos sistemas aquáticos...............................................................................................43 6.5 – Coeficiente de absorção da água pura. ............................................................................44 6.6 – Espectro de Absorção de Matéria Orgânica Dissolvida na Água....................................45 6.7 – Coeficiente de absorção da clorofila a diferentes concentrações. ...................................45 6.8 – Coeficiente de espalhamento da água pura......................................................................46 6.9 – Comportamento Espectral da água sob diferentes concentrações de sedimentos em suspensão e Composição colorido normal (TM1 (Azul), TM2 (Verde), TM3(Vermelho)). ...48 7.1 – Influência da resolução espacial na definição de imagens. .............................................50 7.2 – Imagens de diferentes resoluções radiométricas: a) 2 níveis de cinza e b) 32 níveis de cinza..........................................................................................................................................51 7.3 – Componentes básicos de um sistema fotográfico............................................................51 7.4 – Representação diagramática de um sistema de imageamento de radar. ..........................52 7.5 – Configuração dos satélites da série Landsat: a) 5; b) 7. ..................................................54 7.6 – Configurações dos satélites Spot. ....................................................................................57 7.7 – Configuração do satélite Cbers........................................................................................59 7.8 – Configuração do satélite Ikonos II...................................................................................61 7.9 – Configuração do satélite Quickbird.................................................................................63
5
8.1 – Processo aditivo (a) e subtrativo (b) de formação de cores.............................................69 9.1 – Sistema de coordenadas de uma imagem digital. ............................................................71 9.2 – Histograma de uma imagem e de sua versão com ampliação linear de contraste. ..........74 9.3 – Comportamento da transformação por componentes principais em uma distribuição bivariada. ..................................................................................................................................76 9.4 – Efeito dos filtros passa-alta (A) e passa-baixa (B) sobre imagens. .................................77 9.5 – Representação de uma imagem digital: normal (a) e temática (b). .................................79 9.6 – Espaço de atributos onde os círculos concêntricos representam a probabilidade de um pixel pertencer às classes A, B e C, enquanto as linhas espessas constituem os limites de decisão para individualização de tais classes. ..........................................................................79

6
LISTA DE TABELAS
1.1 – Missões de Sensoriamento Remoto Orbital em Operação e Planejadas até 2011.............9 7.1 – Características de Órbita dos Satélites Landsat...............................................................53 7.2 – Principais Características dos Sensores MSS e TM e ETM+..........................................55 7.3 – Características dos Satélites Spot. ...................................................................................57 7.4 – Principais Instrumentos Sensores do Satélite Spot..........................................................58 7.5 – Características dos Satélites Cbers. .................................................................................60 7.6 – Principais Instrumentos Sensores do Satélite Cbers........................................................60 7.7 – Características do Satélite Ikonos....................................................................................61 7.8 – Características do Sensor do Satélite Ikonos...................................................................62 7.9 – Característica do Satélite Quickbird. ...............................................................................63 7.10 – Característica do Sensor do Satélite Quickbird. ............................................................63

7
1 INTRODUÇÃO
O Brasil iniciou os investimentos na capacitação de profissionais e no desenvolvimento de infra-estrutura que viabilizasse a aplicação das técnicas de sensoriamento remoto ao final da década de 1960, com a implantação do Projeto Sensoriamento Remoto no Instituto de Pesquisas Espaciais. No início dos anos 70, todas as atividades concentraram-se na recepção e na utilização de imagens orbitais MSS dos satélites da série Landsat. Contudo, o conhecimento disponível naquela época restringia-se à viabilização da identificação de feições específicas existentes na superfície terrestre que, por sua vez, possibilitou a elaboração de mapas temáticos variados.
Em meados da década de 80, com o lançamento do sensor Thematic Mapper (TM) a bordo do satélite Landsat 4 e posteriormente do Landsat 5, uma nova fase do sensoriamento remoto teve inicio. Com uma resolução espacial mais fina e o maior número de faixas espectrais exploradas, em relação a seu antecessor MSS, o TM possibilitou novas aplicações das técnicas de sensoriamento remoto, incluindo não somente os mapeamentos temáticos como também, os estudos visando à quantificação de parâmetros biofísicos (por exemplo: biomassa florestal) mediante o uso dos dados radiométricos derivados das imagens geradas.
Independentemente do caráter acadêmico das atividades vinculadas ao uso das técnicas de sensoriamento remoto, muitos dos trabalhos eram fruto de dissertações de mestrado ou teses de doutorado. Nesta época também, começaram a surgir às primeiras empresas voltadas à aplicação dessa tecnologia para atender a demandas de mercado. Essas empresas passaram a vender serviços, explorando os conhecimentos que foram sendo adquiridos por instituições de pesquisa como o Instituto Nacional de Pesquisas Espaciais (INPE). Passaram também a desenvolver suas próprias soluções para problemas que foram surgindo como decorrência do atendimento de serviços cada vez mais sofisticados e específicos. Assim, o país passou a contar com inúmeras possibilidades de aplicação das técnicas de sensoriamento remoto, as quais vêm sofrendo até modificações de cunho conceitual. Os trabalhos que anteriormente se concentravam no uso de imagens orbitais ou de fotografias aéreas visando apenas o mapeamento de uma determinada feição ou classes de cobertura da superfície terrestre passaram a incluir a quantificação de parâmetros geofísicos e biofísicos, o que exigiu um aprofundamento dos conhecimentos dos princípios nos quais se baseiam as técnicas de sensoriamento remoto. Esse conhecimento faz-se cada vez mais necessário em função das novas possibilidades do uso de dados oriundos de sensores com resoluções espaciais cada vez mais finas e que estão possibilitando a realização de serviços considerados impossíveis de ser viabilizados através do uso dos sensores até então disponíveis como o MSS e TM. É o caso do sensor colocado a bordo do satélite IKONOS que tem como objetivo gerar imagens que possibilitem a identificação de objetos de dimensões em torno de de 4 a 5 metros, em faixas espectrais que vão do visível ao infravermelho próximo.
Abrem-se então novas possibilidades na aplicação de dados gerados a partir das técnicas de sensoriamento remoto, criando alternativas para o desenvolvimento e aplicação de outras técnicas, agora denominadas técnicas de geoprocessamento ou simplesmente geotecnologias. O sensoriamento remoto passa agora a uma outra etapa de sua história no país.
O objetivo desta publicação é fornecer algumas informações básicas sobre os princípios físicos nos quais se fundamentam as técnicas de sensoriamento remoto, apresentar os principais sistemas de coleta de dados, incluindo sistemas sensores fotográficos e eletro-ópticos, informar sobre as características espectrais dos principais recursos naturais, capacitar

8
os participantes na interpretação visual de imagens multiespectrais e informar sobre as principais possibilidades de aplicação das técnicas de Sensoriamento Remoto.
Um breve histórico sobre o sensoriamento remoto
O desenvolvimento inicial do sensoriamento remoto é cientificamente ligado ao desenvolvimento da fotografia e à pesquisa espacial. As fotografias aéreas foram o primeiro produto de sensoriamento remoto a ser utilizado, tanto é assim, que a fotogrametria e a fotointerpretação são termos muito anteriores ao termo sensoriamento remoto propriamente dito.
A primeira fotografia de que se tem notícia foi obtida por Daguerre e Niepce em 1839 e já em 1840 o seu uso estava sendo recomendado para levantamentos topográficos. O desenvolvimento nesta direção foi tão rápido, que já em 1858 o Corpo de Engenharia da França estava utilizando fotografias tomadas a partir de balões para o mapeamento topográfico de amplas áreas do território francês.
O advento do avião, simultaneamente ao desenvolvimento das câmaras fotográficas, filmes, etc. trouxeram um grande impulso às aplicações das fotografias para o levantamento de recursos naturais, visto que permitiu a obtenção de dados sob condições controladas e com a cobertura de áreas relativamente amplas. As primeiras fotografias aéreas foram tomadas em 1909 pelos irmãos Wright sobre o território italiano.
As fotografias aéreas coloridas se tornaram disponíveis a partir de 1930. Nesta mesma época já haviam iniciado os estudos para a produção de filmes sensíveis à radiação infravermelha. Com o início da 2a Grande Guerra começaram estudos sobre o processo de interação da radiação nessa faixa do espectro com os objetos com a finalidade de utilizar filmes infravermelhos para a detecção de camuflagem.
Em 1956 foram iniciadas as primeiras aplicações sistemáticas de fotografias aéreas como fonte de informação para o mapeamento de formações vegetais nos Estados Unidos da América. No Brasil, datam de 1958 as primeiras fotografias aéreas na escala 1:250.000 obtidas com o propósito de levantar as características da Bacia Terciária do Vale do Rio Paraíba como parte de um extenso programa de aproveitamento de seus recursos hídricos que culminou com a retificação de seu médio curso entre Jacareí e Cachoeira Paulista, e com a construção dos reservatório hidrelétrico de Paraibuna.
O termo sensoriamento remoto apareceu pela primeira vez na literatura científica em 1960 e significava simplesmente a aquisição de informações sem contato físico com os objetos. Desde então, esse termo tem abrigado tecnologia e conhecimentos extremamente complexos derivados de diferentes campos que vão desde a física, botânica passando pela engenharia eletrônica até a cartografia.
O campo de sensoriamento remoto representa a convergência de conhecimento derivado de duas grandes linhas de pesquisa. De um lado, como já foi dito, o sensoriamento remoto é tributário da aerofotogrametria e da fotointerpretação, de outro lado, seu progresso se deve muito à pesquisa espacial e aos avanços tecnológicos por ela induzidos, resultando em sensores mais sensíveis, regiões espectrais ampliadas, métodos radiométricos, etc.
Embora a radiação de microondas fosse conhecida desde o início do século e existissem sistemas de radar em operação desde a 2a Grande Guerra, apenas na década de 60 o uso de sistemas radares como sistemas de sensoriamento remoto se tornaram operacionais. O Brasil representa um dos exemplos pioneiros de utilização de dados de radar aerotransportados para o levantamento de recursos naturais. A partir de 1970 teve início o Projeto Radar na Amazônia (RADAM) que permitiu o levantamento de 8,5 milhões de Km2

9
do território nacional até o fim da década de 80. Esse levantamento foi feito pelo sistema GEMS (Goodyear Eletronic Mapping System) operando na banda X (Trevett,1986).
A década de 60, também, assistiu ao advento dos sistemas orbitais de sensoriamento remoto. Os primeiros sensores orbitais foram voltados para aplicações meteorológicas. Paralelamente houve também a utilização de câmaras fotográficas para a aquisição de fotografias da superfície terrestre durante as missões tripuladas da série Apolo. É assim que na década de 70 é lançado o primeiro satélite experimental de levantamento de recursos terrestres (Earth Resources Technology Satellite). Esse satélite, e o sensor multiespectral que leva a bordo tiveram tamanho sucesso, que o seu nome foi modificado para Landsat e se transformou no programa de sensoriamento remoto de mais longa duração já existente, com o 7o satélite da série lançado em 1999.
Em 1978 foi lançado o primeiro sistema orbital de radar, o SeaSat. Esse satélite, concebido para obter dados para o monitoramento da superfície oceânica manteve-se em operação por apenas 3 meses. Por razões controvertidas (informação classificada, alta taxa de dados para transmissão telemétrica, alta potência requerida para operação dos sensores, entre outras) fizeram com que dados orbitais de RADAR só voltassem a ser disponíveis na década de 90 com o lançamento do satélite soviético Almaz (1990), ERS-1 (1991), JERS-1 (1992) e RADARSAT (1995).
Atualmente, existe um grande número de satélites de sensoriamento remoto em operação e outros planejados para entrar em operação. Algumas dessas missões encontram-se resumidas na Tabela 1.1. Maiores detalhes sobre essas missões podem ser encontrados em Kramer (1996).
Tabela 1.1 – Missões de Sensoriamento Remoto Orbital em Operação e Planejadas até 2011.
Missão Lançamento País
Landsat-5 1984 USA Spot-2 1990 França IRS-1B 1991 Índia ERS-2 1995 ESA IRS-1C 1995 Índia Radarsat-1 1995 Canadá IRS-1D 1997 Índia Spot-4 1998 França CBERS-1 1999 Brasil/China EOS-AM1 1999 USA Ikonos-2 1999 USA IRS-P4 1999 Índia KITSAT-3 1999 Corea Landsat-7 1999 USA CBERS-1 1999 Brasil ADEOS-2 2000 Japão EOS-PM1 2000 USA EO-1 2000 USA EROS-A1 2000 Israel QuickBird-1 2000 USA OrbView-3 2000 USA ARIES 2001 Austrália EROS-A2 2001 Israel Envisat 2001 ESA
IRS-P6 2001 Índia QuickBird-2 2001 USA Radarsat-2 2001 Canadá OrbView-4 2001 USA ALOS 2002 Japão IRS-P5 2002 Índia LightSar 2002 USA Spot-5 2002 França CBERS 2 2003 Brasil/China CBERS 2B 2007 Brasil/China CBERS 3 2009 Brasil/China CBERS 4 2011 Brasil/China

10
Como pode se observado, o Brasil também se encontra arrolado entre países detentores de tecnologia para a aquisição de dados orbitais de sensoriamento. Em 1999, após 10 anos de desenvolvimento, o Brasil e a China lançaram com êxito relativo o satélite CBERS (China-Brazil Earth Resources Satellite). Esse satélite foi lançado com três sensores a bordo: uma câmara de amplo campo de visada (Wide Field Imager –WFI), uma camara CCD (Coupled-Charged Device) e um sistema de varredura infra-vermelho (IRMSS- Infrared Multispectral System).
Atualmente o Brasil está envolvido no projeto de mais duas missões de sensoriamento remoto de recursos terrestres: a missão SSR (Satélite de Sensoriamento Remoto) e a missão SABIA3 (Satélite Argentino-Brasileiro de Informações sobre Água, Alimento e Ambiente).
Além dessas perspectivas apresentadas há ainda aquelas referentes aos denominados “micro-satélites”, cujos objetivos variam segundo as mais variadas concepções adotadas. Como exemplo, destaca-se o SPIN-2, da União Soviética, dotado de resolução espacial de aproximadamente 2 m em seu modo pancromático.
11
2 PRINCÍPIOS FÍSICOS DE SENSORIAMENTO REMOTO
A definição clássica do termo sensoriamento remoto (SR) refere-se a um conjunto de técnicas destinado à obtenção de informação sobre objetos, sem que haja contato físico com eles. Para melhor compreender esta definição, faz-se necessário identificar os quatro elementos fundamentais das técnicas de SR, os quais podem ser representados através do esquema apresentado na Figura 2.1.
Fig. 2.1 – Esquema representativo dos quatro elementos fundamentais das técnicas de
sensoriamento remoto.
No centro do triângulo deste esquema, encontra-se a Radiação Eletromagnética (REM), que é o elemento de ligação entre todos os demais que se encontram nos vértices. São eles: a fonte de REM, que para o caso da aplicação das técnicas de sensoriamento remoto no estudo dos recursos naturais é o Sol (pode ser também a Terra para os sensores passivos de micro-ondas e termais, podem ser antenas de micro-ondas para os sistemas radares); o sensor, que é o instrumento capaz de coletar e registrar a REM refletida ou emitida pelo objeto, que também é denominado alvo, e que representa o elemento do qual se pretende extrair informação.
As técnicas de sensoriamento remoto evoluíram primariamente a partir de necessidades mlitares. A astronomia, a geofísica e a aerrofotogrametria clássica forneceram os elentos adicionais. Atualmente, essas técnicas estão sendo utilizadas para identificar, mapear e cadastrar os recursos naturais da Terra e controlar sua utilização pelo homem. Problemas correlatos, decorrentes da atividade humana (ocupação urbana, poluição e modificações ambientais), são também objeto do sensoriamento remoto.
Nos últimos quinze anos, as pesquisas em sensoriamento remoto orbital tem produzido ferramentas cada vez mais sofisticadas, ampliando a sua aplicabilidade a uma grande gama de problemas ecológicos, urbanos e recursos naturais. Nesse intervalo de tempo, o sensoriamento remoto demonstrou efetivamente e eficientemente a sua habilidade em registrar, de modo significativo, uma grande quantidade de fenômenos do nosso ambiente. Só mais recentemente, algumas aplicações passaram do campo da pesquisa científica para um nível operacional. Nesse contexto, a seguir é feita uma fundamentação teórica de alguns aspectos mais relevantes ligados aos princípios físicos do sensoriamento remoto.
2.1 CONCEITOS BÁSICOS
O termo sensoriamento remoto refere-se ao conjunto de atividades relacionadas com a aquisição, o processamento e a análise de dados coletados por sensores acoplados em
REM
Fonte
Sensor Alvo

12
plataformas como aeronaves (aviões) e espaçonaves (satélites), com o objetivo de estudar o ambiente terrestre, considerando o fluxo de energia radiante emitido e/ou refletido pelos alvos que compõem a sua superfície. Em outras palavras, o termo sensoriamento remoto está ligado ao método que utiliza a REM modificada ou produzida pelas propriedades físicas e químicas de alvos relacionados com recursos naturais e ambientais da Terra, como meio para obter informações destes alvos remotamente, isto é, sem a necessidade de entrar em contato físico com os mesmos.
Dentre os produtos gerados por sensores remotos destacam-se as fotografias aéreas e as imagens de satélite, os quais podem ser obtidos em várias escalas e faixas de radiação
2.1.1 Elementos da fase de aquisição
Considerando a metodologia para geração de informações na área de sensoriamento remoto no nível orbital, podem ser destacadas duas fases: a fase de Aquisição, relacionada com os processos de detecção e registro dos dados; e a fase de Análise, que compreende o tratamento e a interpretação dos dados obtidos.
No caso da fase de aquisição, pode-se identificar a participação de elementos cuja influência nas características dos dados obtidos deve ser bem compreendida de modo a possibilitar uma correta interpretação. Dentre tais elementos destacam-se a energia radiante, a fonte, o alvo, a trajetória e o sensor.
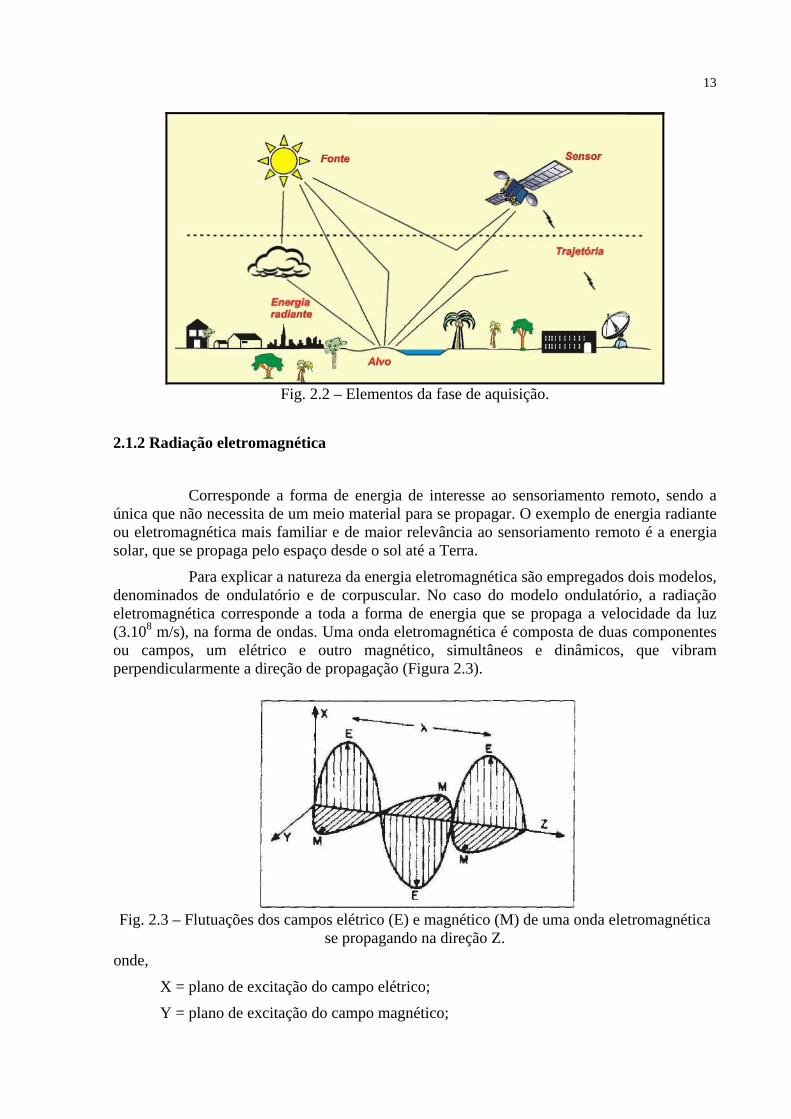
A atuação daqueles elementos em imagens coletadas a grandes altitudes pode ser visualizada esquematicamente na Figura 2.2. A energia radiante emitida pela fonte (sol), após atravessar a atmosfera (trajetória), irradia a superfície (alvo), sendo por ela refletida. Parte dessa energia atravessa novamente a atmosfera e é coletada pelo sistema sensor, onde é detectada e registrada.
O fluxo de radiação eletromagnética (REM) ao se propagar pelo espaço interage com os diferentes alvos da superfície terrestre, sendo por estes refletido, absorvido e mesmo reemitido. As variações que essas interações produzem no fluxo considerado, dependem fortemente das propriedades físico-químicas dos alvos irradiados e o fluxo resultante constitui uma valiosa fonte de informações a respeito dos mesmos. Tal constatação, tem motivado a criação de dispositivos, que, situados a grande distâncias dos alvos de interesse, podem detectar e registrar o fluxo de radiação eletromagnética provenientes destes. Assim, os dados obtidos, geralmente sob a forma de gráficos ou imagens, são então analisados por especialistas na busca de informações que auxiliem no desenvolvimento de projetos de pesquisa e controle de recursos naturais e meio ambiente da Terra.
13
Fig. 2.2 – Elementos da fase de aquisição.
2.1.2 Radiação eletromagnética
Corresponde a forma de energia de interesse ao sensoriamento remoto, sendo a única que não necessita de um meio material para se propagar. O exemplo de energia radiante ou eletromagnética mais familiar e de maior relevância ao sensoriamento remoto é a energia solar, que se propaga pelo espaço desde o sol até a Terra.
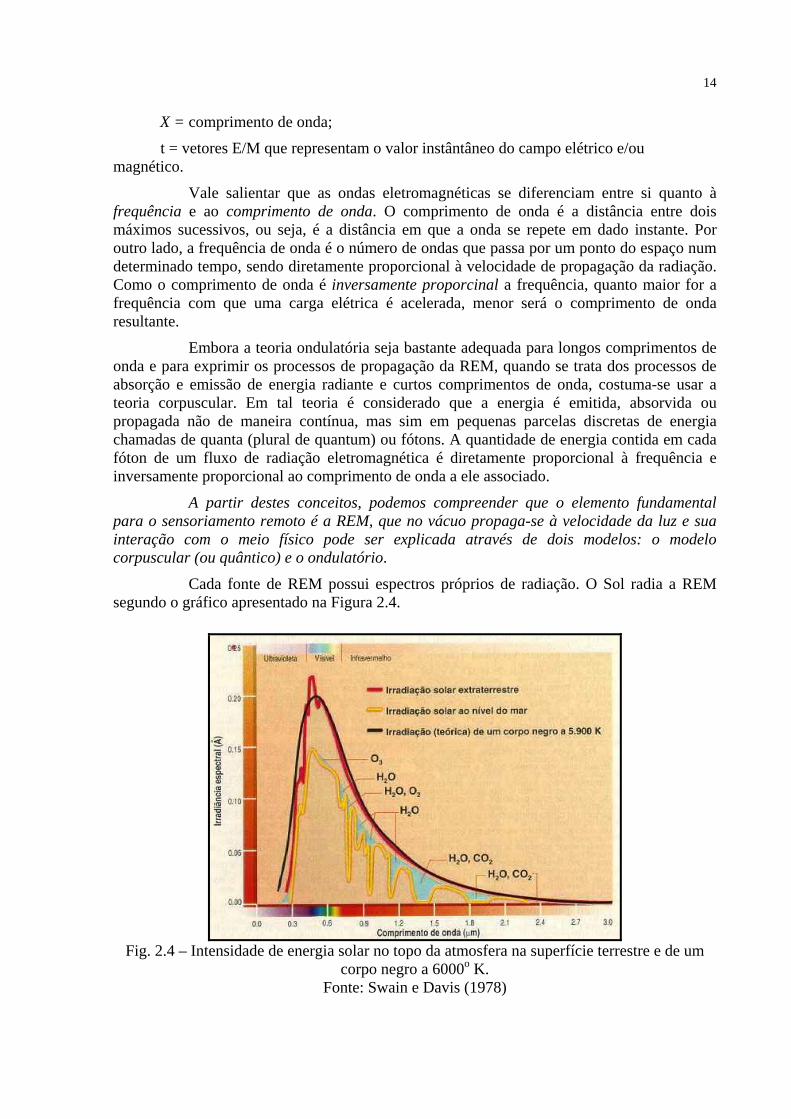
Para explicar a natureza da energia eletromagnética são empregados dois modelos, denominados de ondulatório e de corpuscular. No caso do modelo ondulatório, a radiação eletromagnética corresponde a toda a forma de energia que se propaga a velocidade da luz (3.108 m/s), na forma de ondas. Uma onda eletromagnética é composta de duas componentes ou campos, um elétrico e outro magnético, simultâneos e dinâmicos, que vibram perpendicularmente a direção de propagação (Figura 2.3).
Fig. 2.3 – Flutuações dos campos elétrico (E) e magnético (M) de uma onda eletromagnética se propagando na direção Z.
onde,
X = plano de excitação do campo elétrico;
Y = plano de excitação do campo magnético;
14
X = comprimento de onda;
t = vetores E/M que representam o valor instântâneo do campo elétrico e/ou magnético.
Vale salientar que as ondas eletromagnéticas se diferenciam entre si quanto à frequência e ao comprimento de onda. O comprimento de onda é a distância entre dois máximos sucessivos, ou seja, é a distância em que a onda se repete em dado instante. Por outro lado, a frequência de onda é o número de ondas que passa por um ponto do espaço num determinado tempo, sendo diretamente proporcional à velocidade de propagação da radiação. Como o comprimento de onda é inversamente proporcinal a frequência, quanto maior for a frequência com que uma carga elétrica é acelerada, menor será o comprimento de onda resultante.
Embora a teoria ondulatória seja bastante adequada para longos comprimentos de onda e para exprimir os processos de propagação da REM, quando se trata dos processos de absorção e emissão de energia radiante e curtos comprimentos de onda, costuma-se usar a teoria corpuscular. Em tal teoria é considerado que a energia é emitida, absorvida ou propagada não de maneira contínua, mas sim em pequenas parcelas discretas de energia chamadas de quanta (plural de quantum) ou fótons. A quantidade de energia contida em cada fóton de um fluxo de radiação eletromagnética é diretamente proporcional à frequência e inversamente proporcional ao comprimento de onda a ele associado.
A partir destes conceitos, podemos compreender que o elemento fundamental para o sensoriamento remoto é a REM, que no vácuo propaga-se à velocidade da luz e sua interação com o meio físico pode ser explicada através de dois modelos: o modelo corpuscular (ou quântico) e o ondulatório.
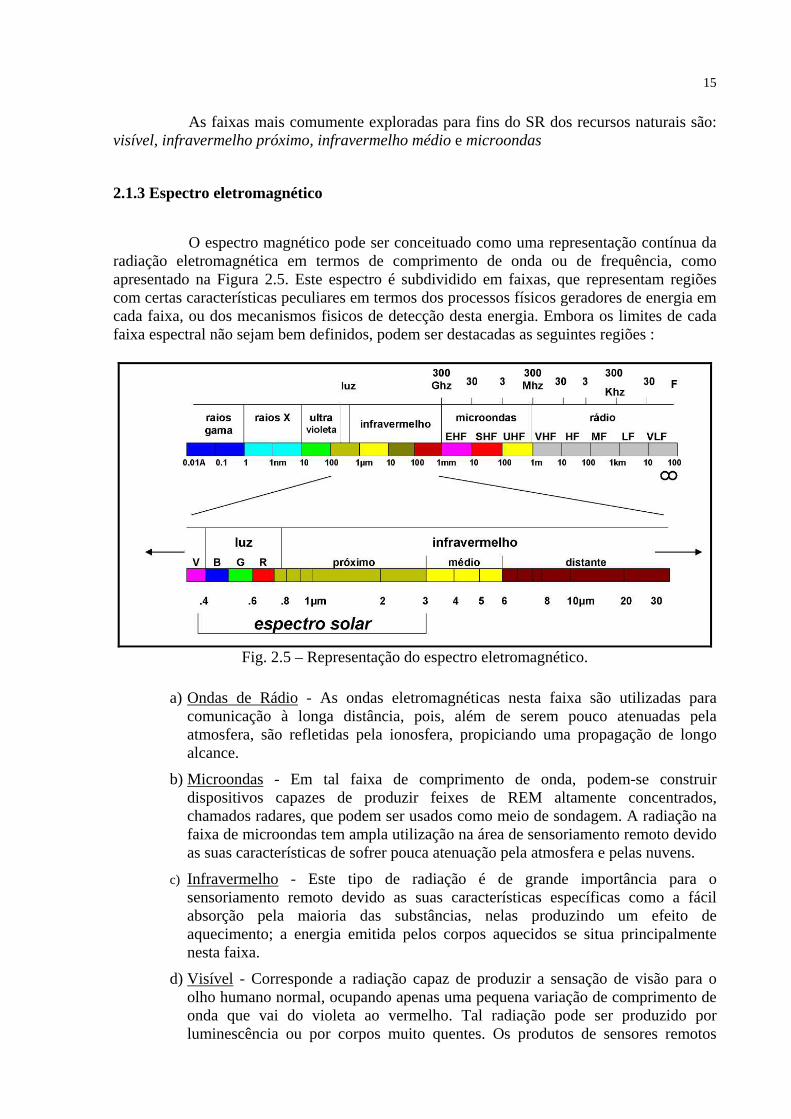
Cada fonte de REM possui espectros próprios de radiação. O Sol radia a REM segundo o gráfico apresentado na Figura 2.4.
Fig. 2.4 – Intensidade de energia solar no topo da atmosfera na superfície terrestre e de um
corpo negro a 6000o K. Fonte: Swain e Davis (1978)
15
As faixas mais comumente exploradas para fins do SR dos recursos naturais são: visível, infravermelho próximo, infravermelho médio e microondas
2.1.3 Espectro eletromagnético
O espectro magnético pode ser conceituado como uma representação contínua da radiação eletromagnética em termos de comprimento de onda ou de frequência, como apresentado na Figura 2.5. Este espectro é subdividido em faixas, que representam regiões com certas características peculiares em termos dos processos físicos geradores de energia em cada faixa, ou dos mecanismos fisicos de detecção desta energia. Embora os limites de cada faixa espectral não sejam bem definidos, podem ser destacadas as seguintes regiões :
Fig. 2.5 – Representação do espectro eletromagnético.
a) Ondas de Rádio - As ondas eletromagnéticas nesta faixa são utilizadas para
comunicação à longa distância, pois, além de serem pouco atenuadas pela atmosfera, são refletidas pela ionosfera, propiciando uma propagação de longo alcance.
b) Microondas - Em tal faixa de comprimento de onda, podem-se construir dispositivos capazes de produzir feixes de REM altamente concentrados, chamados radares, que podem ser usados como meio de sondagem. A radiação na faixa de microondas tem ampla utilização na área de sensoriamento remoto devido as suas características de sofrer pouca atenuação pela atmosfera e pelas nuvens.
c) Infravermelho - Este tipo de radiação é de grande importância para o sensoriamento remoto devido as suas características específicas como a fácil absorção pela maioria das substâncias, nelas produzindo um efeito de aquecimento; a energia emitida pelos corpos aquecidos se situa principalmente nesta faixa.
d) Visível - Corresponde a radiação capaz de produzir a sensação de visão para o olho humano normal, ocupando apenas uma pequena variação de comprimento de onda que vai do violeta ao vermelho. Tal radiação pode ser produzido por luminescência ou por corpos muito quentes. Os produtos de sensores remotos

16
obtidos na faixa do visível geralmente apresentam excelente correlação com a experiência visual do fotointérprete.
e) Ultravioleta - Esta faixa compreende uma extensa faixa do espectro eletromagnético e embora mostre um relativo potencial de aplicações em sensoriamento remoto, a forte atenuação atmosférica nesta faixa se apresenta como um grande obstáculo paraa sua utilização. É interessante notar que as películas fotográficas são mais sensíveis à radiação ultravioleta que à luz visível.
f) Raios-X - São gerados principalmente, pela parada ou freamento de elétrons de alta energia. Como fótons de alta energia, os raios-X são altamente penetrantes, sendo uma poderosa ferramenta em pesquisa sobre a estrutura da matéria; parte dos raios-X são muito utilizados na área médica.
g) Raios-Gama - Constituem as mais penetrantes das emissões de substâncias radiativas. Não existe, em princípio, limite superior para a frequência das radiações gama, embora ainda seja encontrada uma faixa superior de frequência conhecida como raios cósmicos.
As faixas que compreendem os raios-Gama, raios-X e rádio não são empregadas em sensoriamento remoto. A faixa espectral que se estende de 0,3 a 15,0 |µm, corresponde a amplitude aonde se situam a maioria dos experimentos em sensoriamento remoto. Tal região do espectro eletromagnético é conhecida por espectro óptico, pois nela os componentes ópticos de reflexão e refração, tais como, lentes, espelhos, prismas, etc., podem ser usados para coletar e reorientar a radiação.
2.2 CONCEITOS RADIOMÉTRICOS
Para que se possa compreender melhor como se viabiliza a aplicação das técnicas de SR no estudo dos recursos naturais, faz-se necessária a apresentação de pelo menos quatro parâmetros radiométricos. O primeiro deles, refere-se à Irradiância. Em termos bastante simplificados, a Irradiância representa a intensidade do fluxo radiante, proveniente de todas as direções, que atinge uma dada superfície. A Figura 2.7 ilustra o aspecto geométrico mencionado.
Vale salientar que neste fluxo radiante estão contidos todos os diversos comprimentos de onda que são radiados pela fonte, segundo suas próprias características, assim como apresentado na Figura 2.6 para a fonte Sol.
Assim que um determinado fluxo radiante atinge uma superfície, ele sofre três fenômenos: reflexão, transmissão e absorção. Estes fenômenos são dependentes das características físico-químicas do próprio objeto, que definem as intensidades de reflexão, transmissão e absorção da REM em cada comprimento de onda incidente no objeto.

17
Fig. 2.6 – Representação gráfica dos possíveis ângulos de incidência sobre um alvo.
Fonte: Ponzoni e Disperati (1995)
Imaginando então somente a porção refletida pelo objeto, um novo fluxo será originado em sentido contrário ao incidente, mas nas mesmas direções. A intensidade deste fluxo pode também ser quantificada e é expressa pela chamada Excitância.
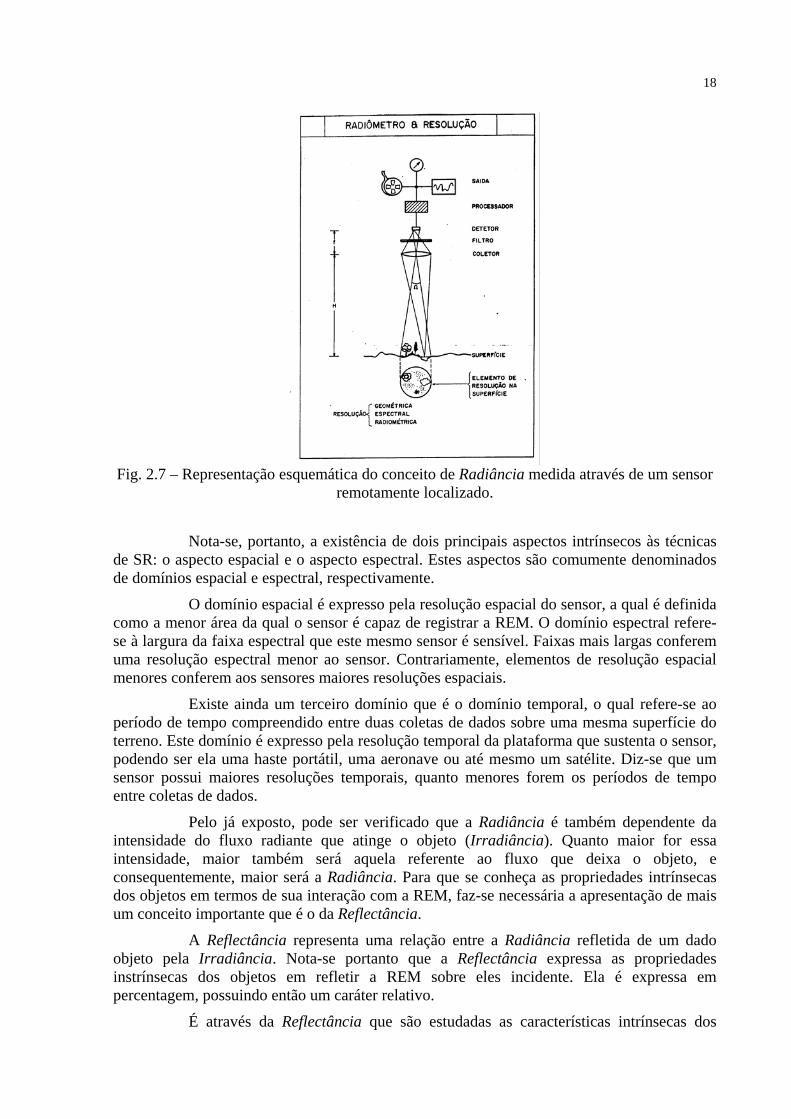
Parte deste fluxo refletido pelo objeto pode ser coletado por um sensor localizado remotamente. O termo “parte” refere-se a dois aspectos: um de ordem geométrica e outro de ordem espectral. O de ordem geométrica refere-se por sua vez ao fato de que não há instrumentos capazes de registrar a Excitância, uma vez que seria necessário o desenvolvimento de um sensor que envolvesse todo o objeto, o que comprometeria a incidência da REM. Evidentemente poderiam ser desenvolvidos métodos que permitissem sua estimativa, mas outra solução foi adotada. Para melhor compreender esta solução, a Figura 2.7 apresenta um esquema da trajetória da REM proveniente de um ponto da superfície de um objeto fictício.
Todo sensor possui uma abertura pela qual a REM refletida, ou emitida, pelos objetos passa em direção ao chamado “detetor”, que é o elemento que realmente “sente” a REM. Essa abertura possui dimensões variáveis e dependentes das características tecnológicas do instrumento ou da própria natureza das operações de coleta de dados. De qualquer forma, entre esta abertura e o ponto da superfície do objeto passa a ser definido um cone por onde trafega a REM. Esse cone é denominado de ângulo sólido.
Fica claro que somente a REM que estiver contida neste ângulo sólido será sentida pelo detetor, mas ao mesmo tempo, o sensor não observa somente um ponto na superfície e sim uma determinada área desta superfície, a qual é constituída por infinitos pontos. Assim, o que realmente é medido pelo sensor é a intensidade de todos os infinitos fluxos contidos nos ângulos sólidos dos pontos da área da qual ele é capaz de observar. Esta intensidade é denominada de Radiância. A Radiância é, portanto, a intensidade do fluxo radiante por unidade de ângulo sólido e seu conceito pode ser comparado ao conceito de brilho, ou seja, um objeto é considerado mais brilhante quanto maior for sua Radiância medida.
O aspecto espectral refere-se ao fato de que a composição espectral do fluxo que deixa a superfície sofre alterações que são dependentes das suas características físico-químicas. Assim, a Radiância medida por um sensor pode ser determinada para um intervalo específico de comprimentos de onda (região ou banda espectral).
No esquema apresentado na Figura 2.7, fica claro que o sensor “observa” instantaneamente uma determinada porção da superfície do terreno. A área desta superfície define o chamado elemento de resolução espacial (pixel). Desta área é registrado um único valor de Radiância para cada faixa ou região espectral que o sensor é capaz de perceber a REM refletida ou emitida pelos objetos contidos em seu elemento de resolução espacial.
18
Fig. 2.7 – Representação esquemática do conceito de Radiância medida através de um sensor
remotamente localizado.
Nota-se, portanto, a existência de dois principais aspectos intrínsecos às técnicas de SR: o aspecto espacial e o aspecto espectral. Estes aspectos são comumente denominados de domínios espacial e espectral, respectivamente.
O domínio espacial é expresso pela resolução espacial do sensor, a qual é definida como a menor área da qual o sensor é capaz de registrar a REM. O domínio espectral refere-se à largura da faixa espectral que este mesmo sensor é sensível. Faixas mais largas conferem uma resolução espectral menor ao sensor. Contrariamente, elementos de resolução espacial menores conferem aos sensores maiores resoluções espaciais.
Existe ainda um terceiro domínio que é o domínio temporal, o qual refere-se ao período de tempo compreendido entre duas coletas de dados sobre uma mesma superfície do terreno. Este domínio é expresso pela resolução temporal da plataforma que sustenta o sensor, podendo ser ela uma haste portátil, uma aeronave ou até mesmo um satélite. Diz-se que um sensor possui maiores resoluções temporais, quanto menores forem os períodos de tempo entre coletas de dados.
Pelo já exposto, pode ser verificado que a Radiância é também dependente da intensidade do fluxo radiante que atinge o objeto (Irradiância). Quanto maior for essa intensidade, maior também será aquela referente ao fluxo que deixa o objeto, e consequentemente, maior será a Radiância. Para que se conheça as propriedades intrínsecas dos objetos em termos de sua interação com a REM, faz-se necessária a apresentação de mais um conceito importante que é o da Reflectância.
A Reflectância representa uma relação entre a Radiância refletida de um dado objeto pela Irradiância. Nota-se portanto que a Reflectância expressa as propriedades instrínsecas dos objetos em refletir a REM sobre eles incidente. Ela é expressa em percentagem, possuindo então um caráter relativo.
É através da Reflectância que são estudadas as características intrínsecas dos
19
objetos em refletir a REM incidente, pois ela é dependente das suas propriedades físico-químicas. Este estudo é denominado de estudo do Comportamento espectral de alvos, cujos principais aspectos serão apresentados oportunamente.
2.2.1 Comportamento espectral de alvos
O termo Comportamento espectral de alvos tem sido atribuído pelos profissionais
que atuam na aplicação do SR no estudo dos recursos naturais, como ao estudo da Reflectância espectral destes recursos, quer sejam: vegetação, solos, minerais e rochas, água, etc.
Em termos mais abrangentes, estudar como um objeto se comporta espectralmente, deveria contemplar os três fenômenos já mencionados que ocorrem após a incidência da REM sobre um dado objeto: reflexão, transmissão e absorção. Assim, o comportamento espectral de um alvo só é plenamente compreendido quando são estudadas suas propriedades de refletir, transmitir e absorver a REM. Contudo, serão enfatizadas aqui as propriedades de reflexão dos alvos (recursos naturais), uma vez que a maioria dos sensores atualmente disponíveis para o estudo dos recursos naturais, utilizam a REM refletida por eles.
A caracterização de como e quanto um objeto reflete da REM pode ser feita em diversos níveis e formas. Nos primeiros estão incluídos os chamados níveis de aquisição de dados, os quais podem ser de laboratório, campo, aéreo e orbital. Em cada um destes níveis podem ser adotadas variadas formas, as quais incluem as chamadas geometrias de iluminação e de visada. A primeira refere-se ao posicionamento espacial da fonte de REM em relação ao objeto, enquanto que a segunda refere-se ao posicionamento espacial do sensor.
Os níveis e as formas condicionam as caracterizações tornando seus resultados específicos para as situações nas quais foram concebidos. Este fato torna imprescindível que em qualquer caracterização da Reflectância espectral de um objeto, sejam bem descritas as condições de iluminação e visada adotadas, tanto no que se refere aos domínios espacial, espectral, temporal e ainda das suas geometrias.
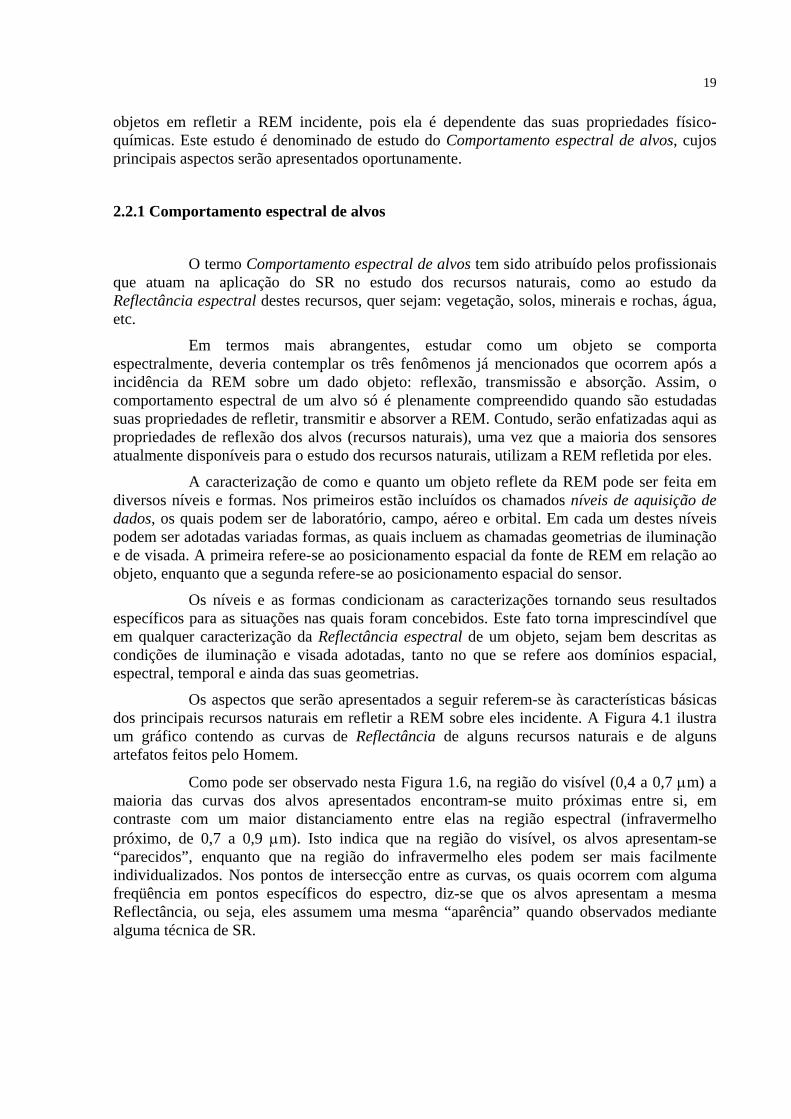
Os aspectos que serão apresentados a seguir referem-se às características básicas dos principais recursos naturais em refletir a REM sobre eles incidente. A Figura 4.1 ilustra um gráfico contendo as curvas de Reflectância de alguns recursos naturais e de alguns artefatos feitos pelo Homem.
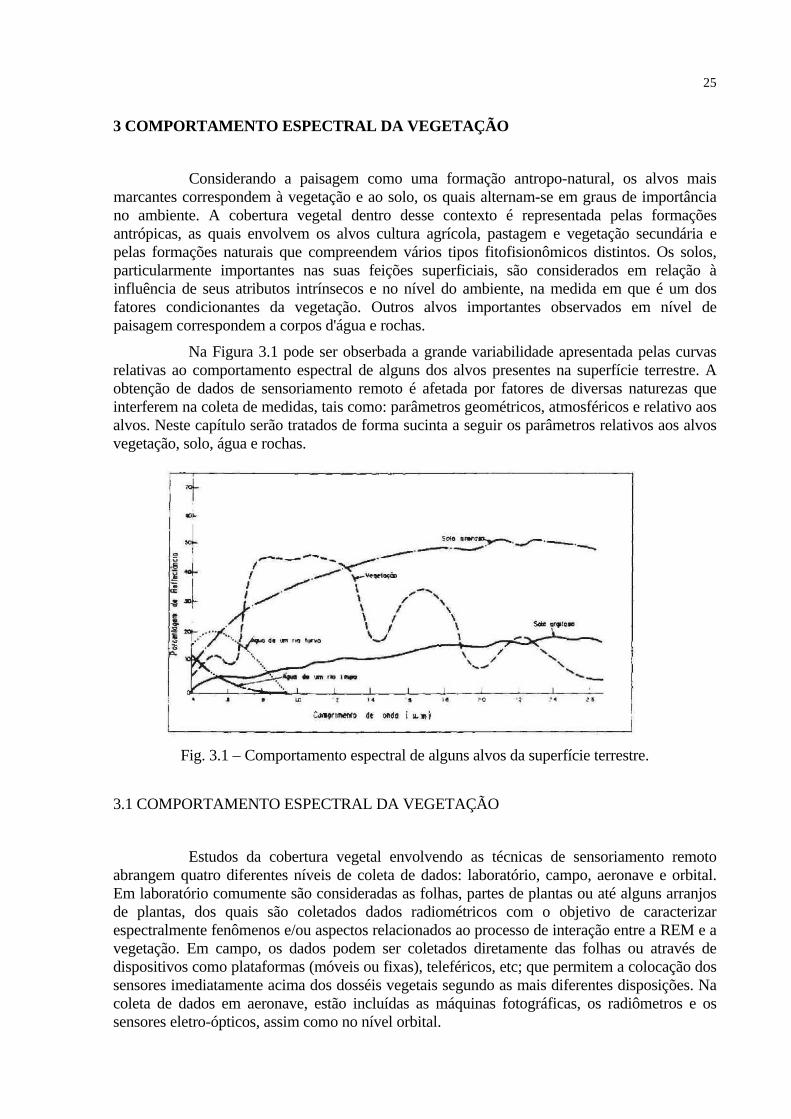
Como pode ser observado nesta Figura 1.6, na região do visível (0,4 a 0,7 µm) a maioria das curvas dos alvos apresentados encontram-se muito próximas entre si, em contraste com um maior distanciamento entre elas na região espectral (infravermelho próximo, de 0,7 a 0,9 µm). Isto indica que na região do visível, os alvos apresentam-se “parecidos”, enquanto que na região do infravermelho eles podem ser mais facilmente individualizados. Nos pontos de intersecção entre as curvas, os quais ocorrem com alguma freqüência em pontos específicos do espectro, diz-se que os alvos apresentam a mesma Reflectância, ou seja, eles assumem uma mesma “aparência” quando observados mediante alguma técnica de SR.
20
Fig. 2.8 – Gráfico contendo as curvas de Reflectância para alguns recursos naturais.
Estas curvas de Reflectância são curvas médias que somente ilustram as formas
típicas dos alvos apresentados refletirem a REM sobre eles incidente. Servem então somente de base para formar uma idéia da reflexão destes alvos, não sendo possível sua generalização, uma vez que também não foram fornecidas informações adicionais sobre as condições (geométricas e dos próprios alvos) adotadas quando foram geradas. Esta forma típica é geralmente referenciada com o termo Assinatura Espectral.
Através da análise de curvas como estas apresentadas na Figura 2.8, pode ser prevista a aparência de alvos em produtos de SR, tais como imagens orbitais e/ou fotografias aéreas. Esta aparência é expressa pela tonalidade (clara ou escura) assumida pelos alvos e dependendo do tipo de produto, ela ainda pode ser expressa pela cor e pela textura.
O conhecimento sobre o comportamento espectral de alvos é, portanto, fundamental para a extração de informações a partir de produtos de SR, quer sejam fotografias, ou imagens.
O estudo da interação da radiação eletromagnética com os alvos da superfície terrestre é realizado através da análise das propriedades espectrais dos mesmos. Quando um fluxo de REM irradia um objeto, podem acontecer três fenômenos : parte do fluxo é refletido; parte penetra no objeto, sendo progressivamente absorvido; e parte consegue atravessá-lo (transmitido), emergindo novamente para o espaço (Figura 2.9).

21
Fig. 2.9 – Interação da REM com a estrutura de um objeto.
onde,
</>i = fluxo incidente <f>a = fluxo absorvido
<pr = fluxo refletido <f)t = fluxo transmitido
Neste contexto, considerando-se a Lei de Conservação da Energia, pode-se escrever :
<Pi = <Pr+ <Pa+ <Pt
Em tal equação, as frações do segundo membro representam propriedades espectrais que são denominadas respectivamente de reflectância (p), absortância (a) e transmitância (x) do objeto; sendo assim, a equação assume a seguinte forma :
p + a + T = 1
Dentre aquelas propriedades espectrais, a mais relevante é a reflectância na medida em que este coeficiente assume uma maior importância sobre o ponto de vista do sensoriamento remoto.
2.2.2 Fontes de radiação eletromagnética
A energia refletida ou emitida pelos alvos naturais pode-se originar de fontes naturais como, o sol, a Terra, a radiatividade, etc., ou fontes artificiais como o radar e o laser. Dentre tais fontes, o sol é a fonte de REM mais importante utilizada na área de sensoriamento remoto.
Uma fonte de REM é caracterizada por um espectro de emissão que pode ser contínuo ou distribuído em faixas discretas. O sol, por exemplo, emite radiação distribuída continuamente numa faixa que vai da região dos raios-X até a região das microondas. Por outro lado, os radares e os lasers emitem radiação concentrada em estreitas faixas do espectro.
Dividindo-se os dois membros da equação anterior pelo fluxo incidente ((|)i), tem-se então :
22
Todo corpo com temperatura superior a zero grau absoluto ou zero Kelvin (0 K= -273,16°C) emite REM, sendo a quantidade de radiação emitida (exitância) proporcional a temperatura que o mesmo apresenta, sendo por isso denominada térmica. Como cada corpo possui características próprias de emissão térmica, o espectro da radiação emitida pelo mesmo será então particularizado.
Devido os diferentes materiais presentes na natureza não serem corpos negros ideais, parte da radiação incidente não é absorvida, sendo refletida ou mesmo transmitida. Desta forma, é necessário a definição de emissividade, que corresponde a razão de exitância de um corpo real pela exitância de um corpo negro, à mesma temperatura. Em outras palavras, a emissividade de um corpo caracteriza quanto este corpo se aproxima ou se afasta do padrão teórico de um corpo negro, sendo sempre menor que um.
2.2.3 Efeitos atmosféricos
A atmosfera promove degradação na qualidade dos dados de sensores remotos, que variam em função dos diferentes intervalos espectrais correspondentes às bandas dos sensores em operação. Dentre os parâmetros atmosféricos mais relevantes que interferem nas medições de reflectância, estão a umidade atmosférica, a presença de aerossóis e a turbulência.
O sinal registrado por detetores a bordo de aeronaves e satélites, geralmente corresponde ao fluxo de energia solar que interage com a atmosfera até atingir alvos terrestres e retorna ao sensor, interagindo novamente com a atmosfera. Isto proporciona que sejam adicionados ou subtraídos valores de brilho ao sensor, determinando que o sinal medido não coincida com a radiância do objeto visado.
No processo de atenuação promovido pelos elementos constituintes da atmosfera que ocorrem ao longo da trajetória que a REM percorre entre a fonte, o alvo e o sensor, são sentidos dois efeitos principais denominados de absorção e espalhamento. Os processos de absorção e espalhamento atuam subtraindo e adicionando, respectivamente, valores de brilho ao sinal coletado por sensores remotos a partir de alvos da superfície terrestre.
A absorção é um fenômeno de natureza quântica que depende da constituição da atmosfera. Assim, a REM ao se propagar pela atmosfera é absorvida pelo seus vários constituintes e dentre estes, o ozônio é o principal atenuador na região do visível, embora em muitos casos práticos, esta absorção pode ser desprezada por ser muito pequena. Existem ao longo de todo o espectro eletromagnético regiões onde a absorção atmosférica é relativamente pequena, sendo denominadas de janelas atmosféricas por causa de sua boa transmitâcia à REM. Portanto, essas são as regiões onde praticamente todas as atividades em sensoriamento remoto podem ser realizadas com maior facilidade.
O caráter aditivo do espalhamento atmosférico é o principal processo de introdução de distorções radiométricas em dados de sensoriamento remoto, sendo a sua magnitude inversamente proporcional ao comprimento de onda. Neste processo, a energia a energia solar incidente no topo da atmosfera que originalmente se propaga em uma direção bem definida, gerará um campo de luz difusa, que se propagará em todas as direções. Isto acarretará que a energia coletada por um sensor remoto não relacione-se apenas ao alvo de interesse, uma vez que a energia espalhada pela atmosfera e por outros alvos poderá atingir o sensor, mascarando parcial ou totalmente a informação desejada.
23
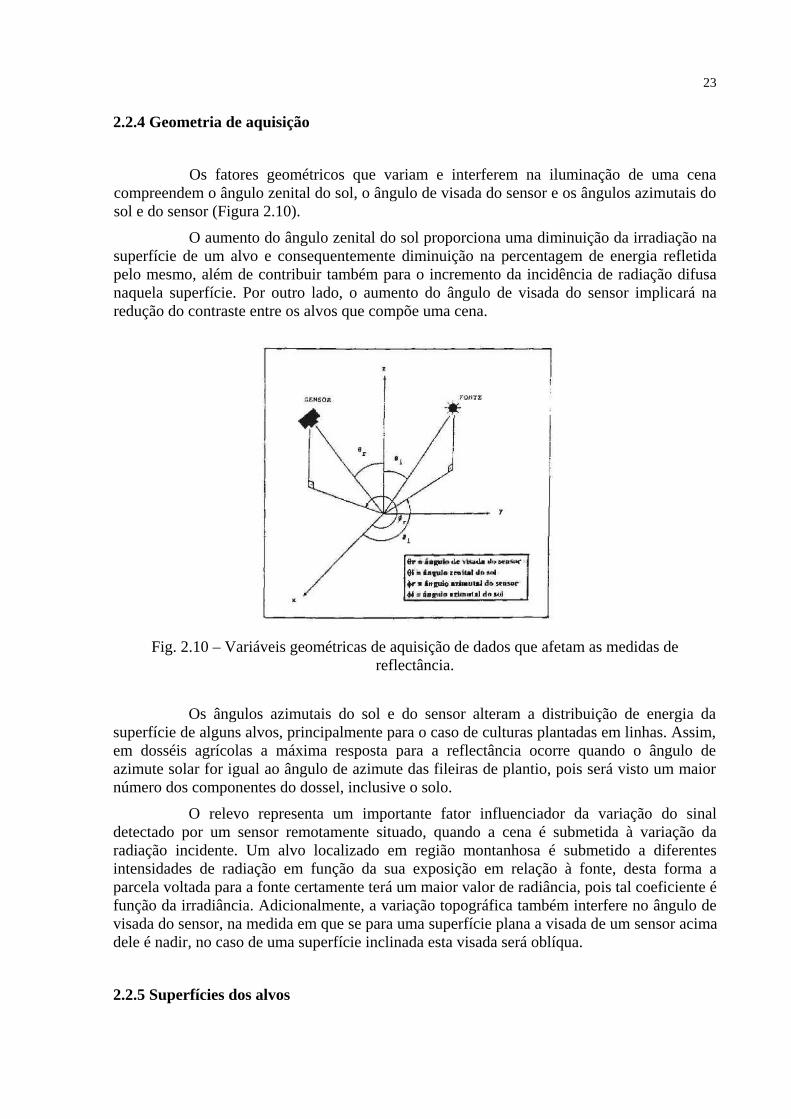
2.2.4 Geometria de aquisição
Os fatores geométricos que variam e interferem na iluminação de uma cena compreendem o ângulo zenital do sol, o ângulo de visada do sensor e os ângulos azimutais do sol e do sensor (Figura 2.10).
O aumento do ângulo zenital do sol proporciona uma diminuição da irradiação na superfície de um alvo e consequentemente diminuição na percentagem de energia refletida pelo mesmo, além de contribuir também para o incremento da incidência de radiação difusa naquela superfície. Por outro lado, o aumento do ângulo de visada do sensor implicará na redução do contraste entre os alvos que compõe uma cena.
Fig. 2.10 – Variáveis geométricas de aquisição de dados que afetam as medidas de
reflectância.
Os ângulos azimutais do sol e do sensor alteram a distribuição de energia da superfície de alguns alvos, principalmente para o caso de culturas plantadas em linhas. Assim, em dosséis agrícolas a máxima resposta para a reflectância ocorre quando o ângulo de azimute solar for igual ao ângulo de azimute das fileiras de plantio, pois será visto um maior número dos componentes do dossel, inclusive o solo.
O relevo representa um importante fator influenciador da variação do sinal detectado por um sensor remotamente situado, quando a cena é submetida à variação da radiação incidente. Um alvo localizado em região montanhosa é submetido a diferentes intensidades de radiação em função da sua exposição em relação à fonte, desta forma a parcela voltada para a fonte certamente terá um maior valor de radiância, pois tal coeficiente é função da irradiância. Adicionalmente, a variação topográfica também interfere no ângulo de visada do sensor, na medida em que se para uma superfície plana a visada de um sensor acima dele é nadir, no caso de uma superfície inclinada esta visada será oblíqua.
2.2.5 Superfícies dos alvos
24
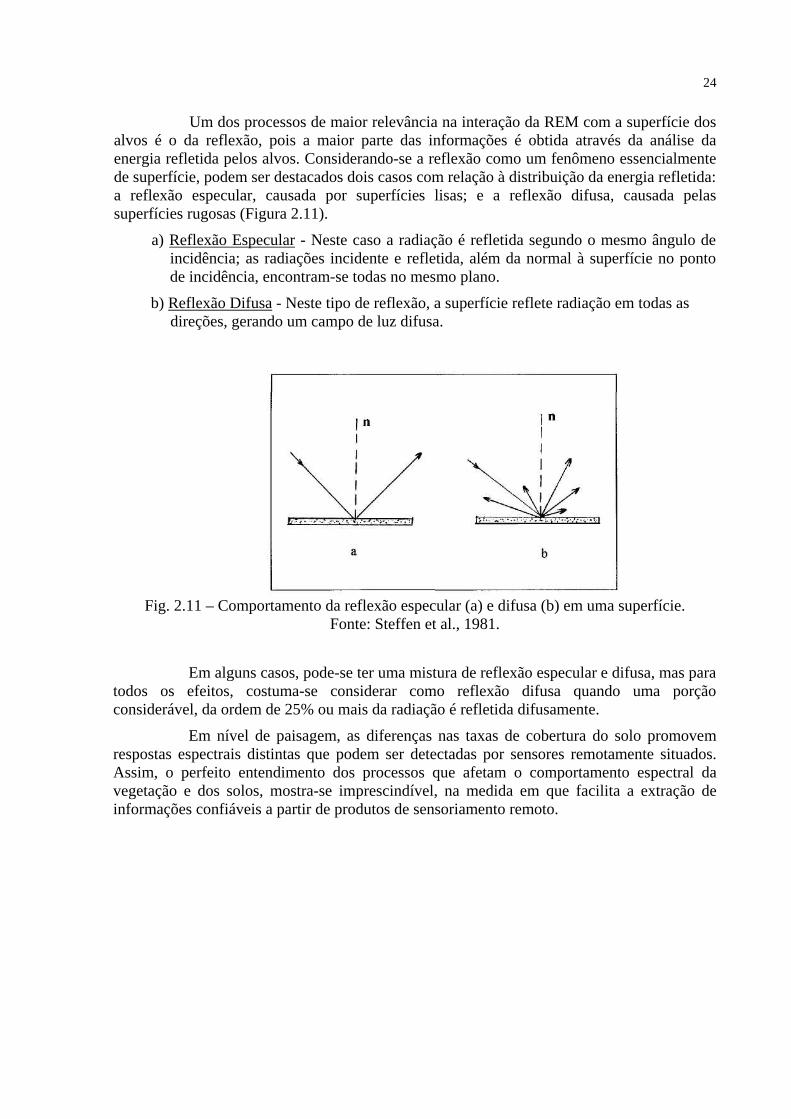
Um dos processos de maior relevância na interação da REM com a superfície dos alvos é o da reflexão, pois a maior parte das informações é obtida através da análise da energia refletida pelos alvos. Considerando-se a reflexão como um fenômeno essencialmente de superfície, podem ser destacados dois casos com relação à distribuição da energia refletida: a reflexão especular, causada por superfícies lisas; e a reflexão difusa, causada pelas superfícies rugosas (Figura 2.11).
a) Reflexão Especular - Neste caso a radiação é refletida segundo o mesmo ângulo de incidência; as radiações incidente e refletida, além da normal à superfície no ponto de incidência, encontram-se todas no mesmo plano.
b) Reflexão Difusa - Neste tipo de reflexão, a superfície reflete radiação em todas as direções, gerando um campo de luz difusa.
Fig. 2.11 – Comportamento da reflexão especular (a) e difusa (b) em uma superfície.
Fonte: Steffen et al., 1981.
Em alguns casos, pode-se ter uma mistura de reflexão especular e difusa, mas para todos os efeitos, costuma-se considerar como reflexão difusa quando uma porção considerável, da ordem de 25% ou mais da radiação é refletida difusamente.
Em nível de paisagem, as diferenças nas taxas de cobertura do solo promovem respostas espectrais distintas que podem ser detectadas por sensores remotamente situados. Assim, o perfeito entendimento dos processos que afetam o comportamento espectral da vegetação e dos solos, mostra-se imprescindível, na medida em que facilita a extração de informações confiáveis a partir de produtos de sensoriamento remoto.
25
3 COMPORTAMENTO ESPECTRAL DA VEGETAÇÃO
Considerando a paisagem como uma formação antropo-natural, os alvos mais marcantes correspondem à vegetação e ao solo, os quais alternam-se em graus de importância no ambiente. A cobertura vegetal dentro desse contexto é representada pelas formações antrópicas, as quais envolvem os alvos cultura agrícola, pastagem e vegetação secundária e pelas formações naturais que compreendem vários tipos fitofisionômicos distintos. Os solos, particularmente importantes nas suas feições superficiais, são considerados em relação à influência de seus atributos intrínsecos e no nível do ambiente, na medida em que é um dos fatores condicionantes da vegetação. Outros alvos importantes observados em nível de paisagem correspondem a corpos d'água e rochas.
Na Figura 3.1 pode ser obserbada a grande variabilidade apresentada pelas curvas relativas ao comportamento espectral de alguns dos alvos presentes na superfície terrestre. A obtenção de dados de sensoriamento remoto é afetada por fatores de diversas naturezas que interferem na coleta de medidas, tais como: parâmetros geométricos, atmosféricos e relativo aos alvos. Neste capítulo serão tratados de forma sucinta a seguir os parâmetros relativos aos alvos vegetação, solo, água e rochas.
Fig. 3.1 – Comportamento espectral de alguns alvos da superfície terrestre.
3.1 COMPORTAMENTO ESPECTRAL DA VEGETAÇÃO
Estudos da cobertura vegetal envolvendo as técnicas de sensoriamento remoto abrangem quatro diferentes níveis de coleta de dados: laboratório, campo, aeronave e orbital. Em laboratório comumente são consideradas as folhas, partes de plantas ou até alguns arranjos de plantas, dos quais são coletados dados radiométricos com o objetivo de caracterizar espectralmente fenômenos e/ou aspectos relacionados ao processo de interação entre a REM e a vegetação. Em campo, os dados podem ser coletados diretamente das folhas ou através de dispositivos como plataformas (móveis ou fixas), teleféricos, etc; que permitem a colocação dos sensores imediatamente acima dos dosséis vegetais segundo as mais diferentes disposições. Na coleta de dados em aeronave, estão incluídas as máquinas fotográficas, os radiômetros e os sensores eletro-ópticos, assim como no nível orbital.

26
A principal motivação dos estudos em vegetação envolvendo a aplicação das técnicas de sensoriamento remoto, fundamenta-se na compreensão da “aparência” que uma dada cobertura vegetal assume em um determinado produto de sensoriamento remoto, a qual é fruto de um processo complexo que envolve muitos parâmetros e fatores ambientais. Há de se considerar que um dossel é constituído por muitos elementos da própria vegetação, como folhas, galhos, frutos, flores, etc. Um fluxo de radiação incidente sobre qualquer um destes elementos estará sujeito a dois processos: espalhamento e absorção. O processo de espalhamento, por sua vez, pode ser dividido em dois sub-processos: reflexão e transmissão através do elemento. O destino do fluxo radiante incidente sobre um destes elementos é então dependente das características do fluxo (comprimentos de onda, ângulo de incidência e polarização) e das características físico-químicas destes mesmos elementos.
De todos os elementos constituintes da vegetação, a folha constitui o principal deles quando se considera o processo de interação descrito. Para uma melhor compreensão das características de reflectância da REM incidente sobre uma folha é necessário o conhecimento de sua composição química, principalmente tipo e quantidade de pigmentos fotossintetizantes, e de sua morfologia interna (distribuição e quantidade de tecidos, espaços intercelulares, etc). Uma folha típica é constituída de três tecidos básicos que são: epiderme, mesófilo fotossintético e tecido vascular. A folha é então coberta por uma camada de células protetoras epidérmicas, na qual muitas vezes desenvolve-se uma fina e relativamente impermeável superfície externa. Abaixo da epiderme encontra-se o mesófilo fotossintético, o qual por sua vez é freqüentemente subdividido numa camada ou em camadas de células paliçádicas alongadas, arranjadas perpendicularmente à superfície da folha, que formam o parênquima. As células do parênquima são ocupadas por seiva e protoplasma.
Esparsos através do mesófilo estão os espaços intercelulares cheios de ar, os quais se abrem para fora através dos estômatos. Esta rede de passagens de ar constitui a via de acesso pela qual o CO2 alcança as células fotossintéticas e o O2 liberado na fotossíntese retorna à atmosfera externa. Uma terceira característica estrutural da folha é o tecido vascular. A rede de tecidos do sistema vascular não serve somente para suprir a folha com água e nutrientes do solo, mas também constitui a passagem pela qual fluem os produtos da fotossíntese que são produzidos na folha, para as demais partes da planta. As estruturas das células que compõem os três tecidos das folhas são muito variáveis, dependendo da espécie e das condições ambientais.
O comportamento espectral de uma folha é função de sua composição, morfologia e estrutura interna. Desde que as características da folha são geneticamente controladas, existirão, portanto, diferenças no comportamento espectral entre grupos geneticamente distintos.
Levando em consideração o conceito da reflectância interna numa folha e os conhecimentos do espectro de absorção da clorofila, Willstatter e Stoll (1918), desenvolveram uma teoria sobre a trajetória da REM dentro de uma folha, a qual é válida até hoje. Os autores basearam sua teoria na estrutura interna das folhas e na reflectância potencial das superfícies. Segundo eles, a trajetória da REM se daria ao longo de vários meios, sendo estes compostos pela água, ar, membranas celulares, etc. Um mesmo feixe de radiação poderia passar, por exemplo, através de uma camada de água, que possui um índice de refração de 1,33, e em seguida atravessar um espaço preenchido com ar, que possui um índice de refração igual a 1. Além desta variação nos índices de refração dos diversos meios a serem atravessados, foi considerado que as células dos tecidos foliares, principalmente do mesófilo esponjoso, possuem uma estrutura irregular, sendo orientada espacialmente sob diversos ângulos. Willstatter e Stoll (1918) imaginaram as possíveis trajetórias da REM dentro de uma folha, como mostra a Figura 3.1
Uma pequena quantidade de luz é refletida das células da camada superficial. A
27
maior parte é transmitida para o mesófilo esponjoso, onde os raios incidem freqüentemente nas paredes celulares, sendo refletidos se os ângulos de incidência forem suficientemente grandes. Esta reflexão múltipla é essencialmente um processo aleatório no qual os raios mudam de direção dentro da folha. Dado o grande número de paredes celulares dentro da folha, alguns raios são refletidos de volta, enquanto outros são transmitidos através da folha. A espessura da folha é fator importante no caminho da REM, já que geralmente a transmitância é maior do que a reflectância para folhas finas, mas o inverso acontece com folhas grossas.
Fig. 3.2 – Seção transversal de uma folha mostrando os possíveis caminhos da luz incidente.
Fonte: Gates et al, 1965.
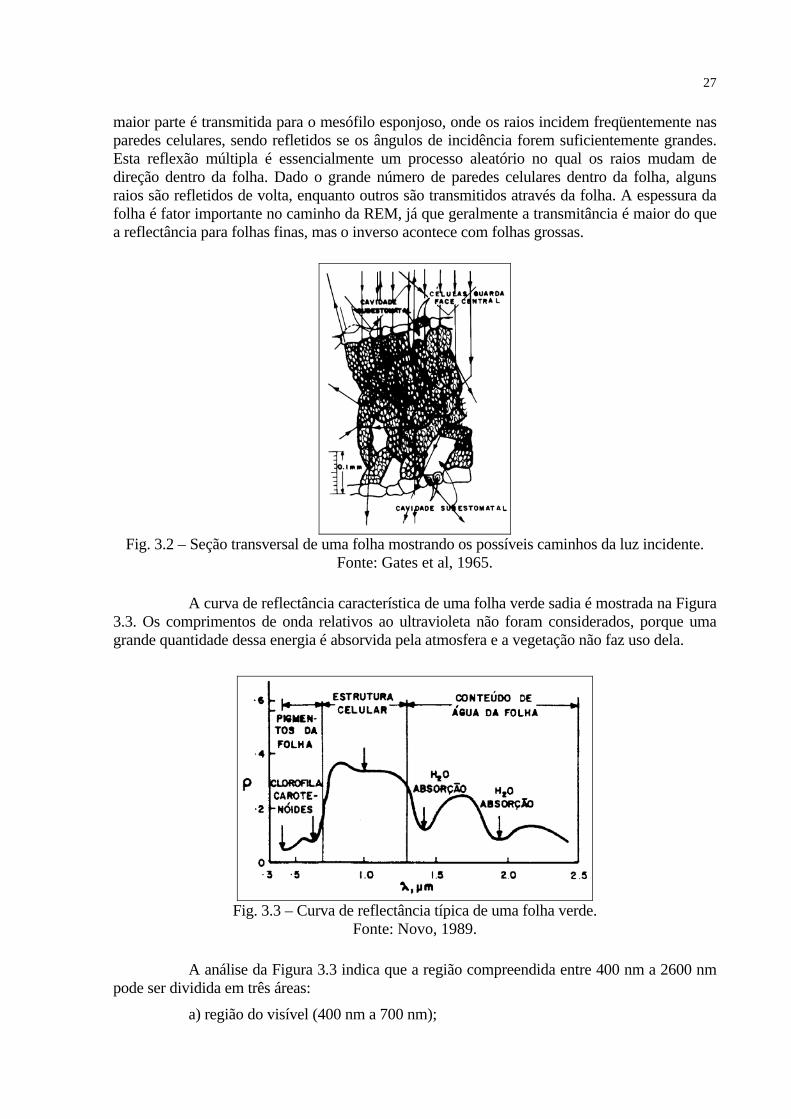
A curva de reflectância característica de uma folha verde sadia é mostrada na Figura 3.3. Os comprimentos de onda relativos ao ultravioleta não foram considerados, porque uma grande quantidade dessa energia é absorvida pela atmosfera e a vegetação não faz uso dela.
Fig. 3.3 – Curva de reflectância típica de uma folha verde.
Fonte: Novo, 1989.
A análise da Figura 3.3 indica que a região compreendida entre 400 nm a 2600 nm pode ser dividida em três áreas:
a) região do visível (400 nm a 700 nm);
28
b) região do infravermelho próximo (700 nm a 1300 nm);
c) região do infravermelho médio (1300 nm a 2600 nm).
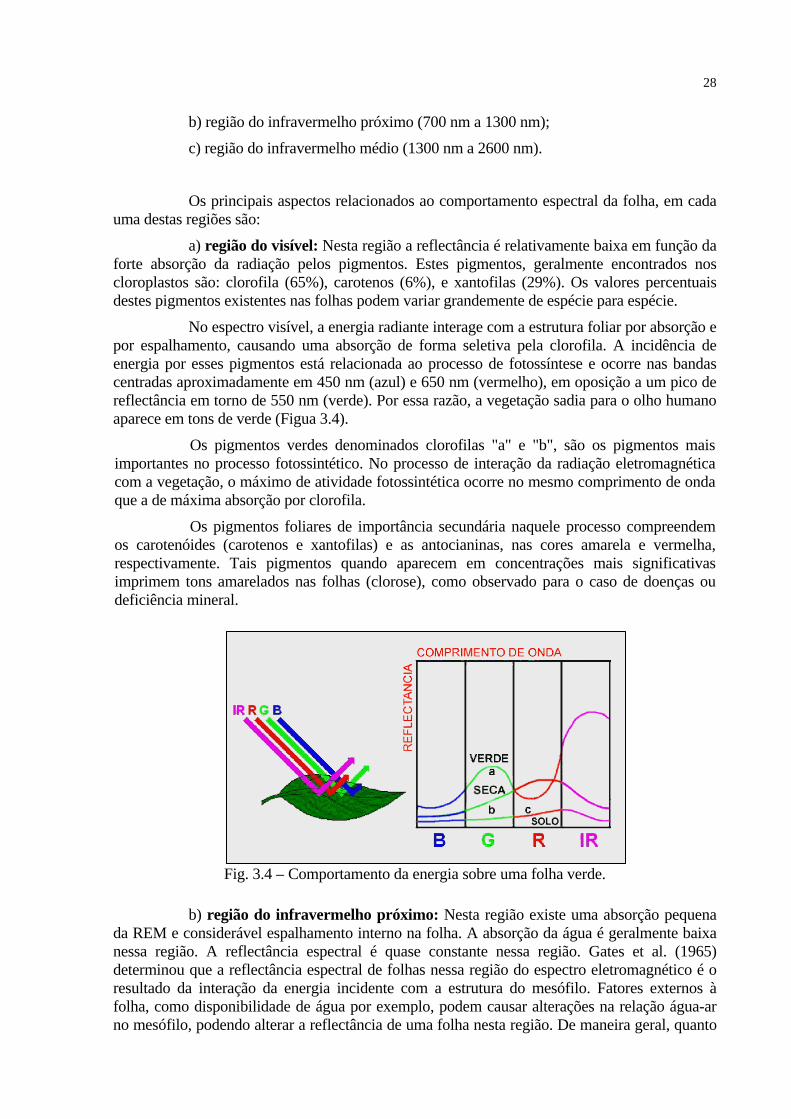
Os principais aspectos relacionados ao comportamento espectral da folha, em cada uma destas regiões são:
a) região do visível: Nesta região a reflectância é relativamente baixa em função da forte absorção da radiação pelos pigmentos. Estes pigmentos, geralmente encontrados nos cloroplastos são: clorofila (65%), carotenos (6%), e xantofilas (29%). Os valores percentuais destes pigmentos existentes nas folhas podem variar grandemente de espécie para espécie.
No espectro visível, a energia radiante interage com a estrutura foliar por absorção e por espalhamento, causando uma absorção de forma seletiva pela clorofila. A incidência de energia por esses pigmentos está relacionada ao processo de fotossíntese e ocorre nas bandas centradas aproximadamente em 450 nm (azul) e 650 nm (vermelho), em oposição a um pico de reflectância em torno de 550 nm (verde). Por essa razão, a vegetação sadia para o olho humano aparece em tons de verde (Figua 3.4).
Os pigmentos verdes denominados clorofilas "a" e "b", são os pigmentos mais importantes no processo fotossintético. No processo de interação da radiação eletromagnética com a vegetação, o máximo de atividade fotossintética ocorre no mesmo comprimento de onda que a de máxima absorção por clorofila.
Os pigmentos foliares de importância secundária naquele processo compreendem os carotenóides (carotenos e xantofilas) e as antocianinas, nas cores amarela e vermelha, respectivamente. Tais pigmentos quando aparecem em concentrações mais significativas imprimem tons amarelados nas folhas (clorose), como observado para o caso de doenças ou deficiência mineral.
Fig. 3.4 – Comportamento da energia sobre uma folha verde.
b) região do infravermelho próximo: Nesta região existe uma absorção pequena da REM e considerável espalhamento interno na folha. A absorção da água é geralmente baixa nessa região. A reflectância espectral é quase constante nessa região. Gates et al. (1965) determinou que a reflectância espectral de folhas nessa região do espectro eletromagnético é o resultado da interação da energia incidente com a estrutura do mesófilo. Fatores externos à folha, como disponibilidade de água por exemplo, podem causar alterações na relação água-ar no mesófilo, podendo alterar a reflectância de uma folha nesta região. De maneira geral, quanto

29
mais lacunosa for a estrutura interna foliar, maior será o espalhamento interno da radiação incidente, e consequentemente, maior será também a reflectância;
c) região do infravermelho médio: A absorção devido à água líquida predomina na reflectância espectral das folhas na região do infravermelho próximo. Considerando a água líquida, esta apresenta na região em torno de 2000 nm, uma reflectância geralmente pequena, sendo menor do que 10% para um ângulo de incidência de 65o e menor do que 5% para um ângulo de incidência de 20o. A água absorve consideravelmente a REM incidente na região espectral compreendida entre 1300 nm a 2000 nm. Em termos mais pontuais, a absorção da água se dá em 1100 nm; 1450 nm; 1950 nm; 2700 nm e 6300 nm.
3.1.1 Interação da REM com os dosséis vegetais
Todas as discussões apresentadas até o momento referiram-se ao estudo das propriedades espectrais de folhas isoladas, mas a aplicação das técnicas de sensoriamento remoto no estudo da vegetação inclui a necessidade de compreender o processo de interação entre a REM e os diversos tipos fisionômicos de dosséis (florestas, culturas agrícolas, formações de porte herbáceo, etc).
Uma vez que a folha é o principal elemento da vegetação sob o ponto de vista do processo de interação com a REM, espera-se que muito do que foi exposto referente às características de reflectância das folhas, também seja válido para os dosséis. De fato, quando comparadas as curvas de reflectância de uma folha verde sadia com as medições espectrais de dosséis, estas apresentam formas muito semelhantes. Essa semelhança permite que os padrões de reflectância apresentados pelos dosséis vegetais em imagens multiespectrais possam ser previstos. Assim, por exemplo, espera-se que em imagens referentes à região do visível os dosséis apresentem tonalidade escura devido à baixa reflectância da REM, em função da ação dos pigmentos fotossintetizantes; em imagens da região do infravermelho próximo, estes mesmos dosséis deverão apresentar-se com tonalidade clara e em imagens do infravermelho médio espera-se tons de cinza intermediários entre o escuro das imagens do visível e o claro daquelas do infravermelho próximo.
A distribuição espacial dos elementos da vegetação, bem como a suas densidades e orientações, definem a arquitetura da vegetação. A distribuição espacial depende de como foram arranjadas as sementes no plantio (no caso de vegetação cultivada), do tipo de vegetação existente e do estágio de desenvolvimento das plantas. Em vários modelos de reflectância da vegetação um dossel é considerado como sendo composto por vários sub-dosséis, arranjados regularmente no solo (plantios em fileiras, por exemplo) ou arranjados aleatoriamente, segundo uma distribuição específica. Para um dossel ou sub-dossel homogêneo, assume-se que a densidade dos elementos da vegetação é uniforme, o que é caracterizado pelo Índice de Área Foliar (IAF), que representa a razão entre a área do elemento e a área no terreno. O IAF é um dos principais parâmetros da vegetação e é requerido em modelos de crescimento vegetal e de evapotranspiração; é ainda relacionado à biomassa.
Outro parâmetro que define a arquitetura do dossel é a Distribuição Angular Foliar (DAF). É caracterizada por uma função de densidade de distribuição f(θl, ψl), onde θl e ψl são a inclinação e o azimute da folha, respectivamente. Por conseguinte f(θl, ψl)dθl dψl é a fração de área foliar sujeita aos ângulos de inclinação θl e θl+dθl, e os ângulos azimutais ψl e ψl+dψl. A DAF varia consideravelmente entre os tipos de vegetação. Os dosséis são normalmente descritos por um dos seguintes seis tipos de distribuições: planófila, erectófila, plagiófila, extremófila, uniforme e esférica.

30
Estes parâmetros arquitetônicos afetam qualitativamente a reflectância da vegetação. Na região do visível, uma vez que muito da energia incidente sobre uma folha é absorvida, com o aumento do número de folhas, isto é, com o aumento do IAF, mais e mais energia será absorvida pela vegetação. Assim que o IAF atingir um determinado valor (aproximadamente compreendido entre 2 e 3), muito da radiação incidente é interceptada e absorvida pelas folhas e um permanente aumento do IAF não influenciará a reflectância da vegetação. Por conseguinte, a reflectância na região do visível decresce quase que exponencialmente com o aumento do IAF até atingir um valor próximo de 0, quando o IAF assume valores entre 2 e 3. Na região do infravermelho próximo, uma vez que a absorção é mínima, o aumento do IAF implica no aumento do espalhamento e no conseqüente aumento da reflectância da vegetação, até que o IAF atinja valores compreendidos entre 6 e 8.
Um dos efeitos da DAF sobre a reflectância da vegetação refere-se à sua influência na probabilidade de falhas através do dossel como uma função dos ângulos zenital solar e de visada.
A orientação das fileiras de uma cultura agrícola, por exemplo, exerce menos influência na região do infravermelho do que na região do visível devido ao menor efeito das sombras, uma vez que as folhas são praticamente transparentes nesta região espectral.
Um outro efeito da arquitetura do dossel sobre sua reflectância ocorre quando os elementos da vegetação não se encontram uniformemente distribuídos. Supondo que ao invés de estarem uniformemente distribuídas no dossel, as folhas estivessem agrupadas, este agrupamento apresentaria dois efeitos principais: ele aumentaria a probabilidade de ocorrência de lacunas através de toda a extensão do dossel, que por sua vez, aumentaria a influência do espalhamento dos elementos deste mesmo dossel, localizados nas camadas mais próximas ao solo.
3.1.2 Particularidades sobre a aparência da vegetação em imagens orbitais
Pelo exposto pode-se, portanto, constatar nas imagens que na região do visível um
dossel vegetal apresenta valores de reflectância relativamente baixos devido à ação dos pigmentos fotossintetizantes que absorvem a REM para a realização da fotossíntese, na região do infravermelho próximo que estes valores apresentam-se elevados devido ao espalhamento interno sofrido pela REM em função da disposição da estrutura morfológica da folha, aliado ainda ao espalhamento múltiplo entre as diferentes camadas de folhas e, finalmente, que no infravermelho médio tem-se uma nova queda destes valores, devido a presença de água no interior da folha. De fato, estes fatores influentes não atuam isoladamente. Em cada uma das regiões espectrais todos os fatores exercem sua influência concomitantemente. Assim, por exemplo, os níveis baixos de reflectância na região do visível, esperados para uma cobertura vegetal, não se devem exclusivamente à absorção dos pigmentos existentes nas folhas, mas também às sombras que se projetam entre as folhas, as quais são dependentes da geometria de iluminação, da Distribuição Angular das Folhas (DAF) e da rugosidade do dossel em sua camada superior (topo do dossel). Sobre esses efeitos discorreremos oportunamente.
Vale salientar que o que é efetivamente medido pelo sensor colocado em órbita terrestre é a radiância espectral. Como cada sensor de cada banda espetral, na qual tal sensor é apto a coletar a REM refletida pelos objetos possui sua própria sensibilidade, isso implica num “desbalanceamento” entre as radiâncias espectrais medidas. Esse desbalanceamento pode ocasionar diferenças de brilho de um mesmo objeto entre as bandas, ora subestimando-o, ora superestimando-o. Isso pode explicar, por exemplo, que apesar da queda da reflectância
31
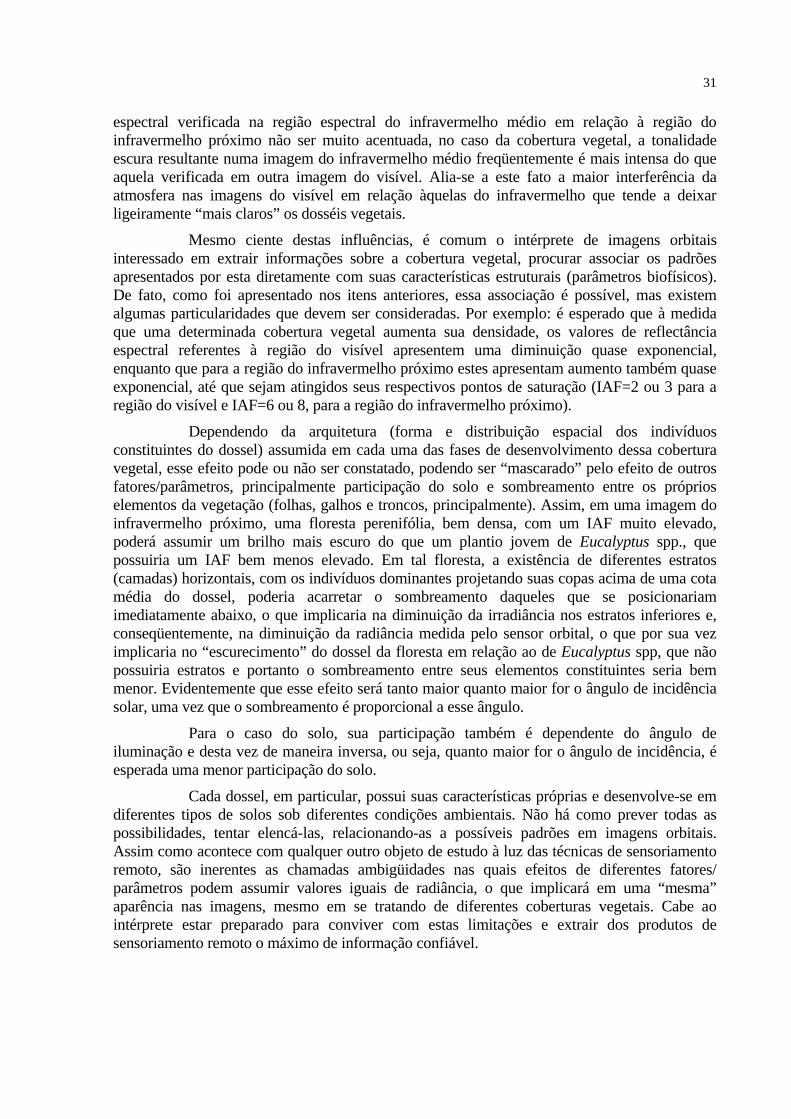
espectral verificada na região espectral do infravermelho médio em relação à região do infravermelho próximo não ser muito acentuada, no caso da cobertura vegetal, a tonalidade escura resultante numa imagem do infravermelho médio freqüentemente é mais intensa do que aquela verificada em outra imagem do visível. Alia-se a este fato a maior interferência da atmosfera nas imagens do visível em relação àquelas do infravermelho que tende a deixar ligeiramente “mais claros” os dosséis vegetais.
Mesmo ciente destas influências, é comum o intérprete de imagens orbitais interessado em extrair informações sobre a cobertura vegetal, procurar associar os padrões apresentados por esta diretamente com suas características estruturais (parâmetros biofísicos). De fato, como foi apresentado nos itens anteriores, essa associação é possível, mas existem algumas particularidades que devem ser consideradas. Por exemplo: é esperado que à medida que uma determinada cobertura vegetal aumenta sua densidade, os valores de reflectância espectral referentes à região do visível apresentem uma diminuição quase exponencial, enquanto que para a região do infravermelho próximo estes apresentam aumento também quase exponencial, até que sejam atingidos seus respectivos pontos de saturação (IAF=2 ou 3 para a região do visível e IAF=6 ou 8, para a região do infravermelho próximo).
Dependendo da arquitetura (forma e distribuição espacial dos indivíduos constituintes do dossel) assumida em cada uma das fases de desenvolvimento dessa cobertura vegetal, esse efeito pode ou não ser constatado, podendo ser “mascarado” pelo efeito de outros fatores/parâmetros, principalmente participação do solo e sombreamento entre os próprios elementos da vegetação (folhas, galhos e troncos, principalmente). Assim, em uma imagem do infravermelho próximo, uma floresta perenifólia, bem densa, com um IAF muito elevado, poderá assumir um brilho mais escuro do que um plantio jovem de Eucalyptus spp., que possuiria um IAF bem menos elevado. Em tal floresta, a existência de diferentes estratos (camadas) horizontais, com os indivíduos dominantes projetando suas copas acima de uma cota média do dossel, poderia acarretar o sombreamento daqueles que se posicionariam imediatamente abaixo, o que implicaria na diminuição da irradiância nos estratos inferiores e, conseqüentemente, na diminuição da radiância medida pelo sensor orbital, o que por sua vez implicaria no “escurecimento” do dossel da floresta em relação ao de Eucalyptus spp, que não possuiria estratos e portanto o sombreamento entre seus elementos constituintes seria bem menor. Evidentemente que esse efeito será tanto maior quanto maior for o ângulo de incidência solar, uma vez que o sombreamento é proporcional a esse ângulo.
Para o caso do solo, sua participação também é dependente do ângulo de iluminação e desta vez de maneira inversa, ou seja, quanto maior for o ângulo de incidência, é esperada uma menor participação do solo.
Cada dossel, em particular, possui suas características próprias e desenvolve-se em diferentes tipos de solos sob diferentes condições ambientais. Não há como prever todas as possibilidades, tentar elencá-las, relacionando-as a possíveis padrões em imagens orbitais. Assim como acontece com qualquer outro objeto de estudo à luz das técnicas de sensoriamento remoto, são inerentes as chamadas ambigüidades nas quais efeitos de diferentes fatores/ parâmetros podem assumir valores iguais de radiância, o que implicará em uma “mesma” aparência nas imagens, mesmo em se tratando de diferentes coberturas vegetais. Cabe ao intérprete estar preparado para conviver com estas limitações e extrair dos produtos de sensoriamento remoto o máximo de informação confiável.
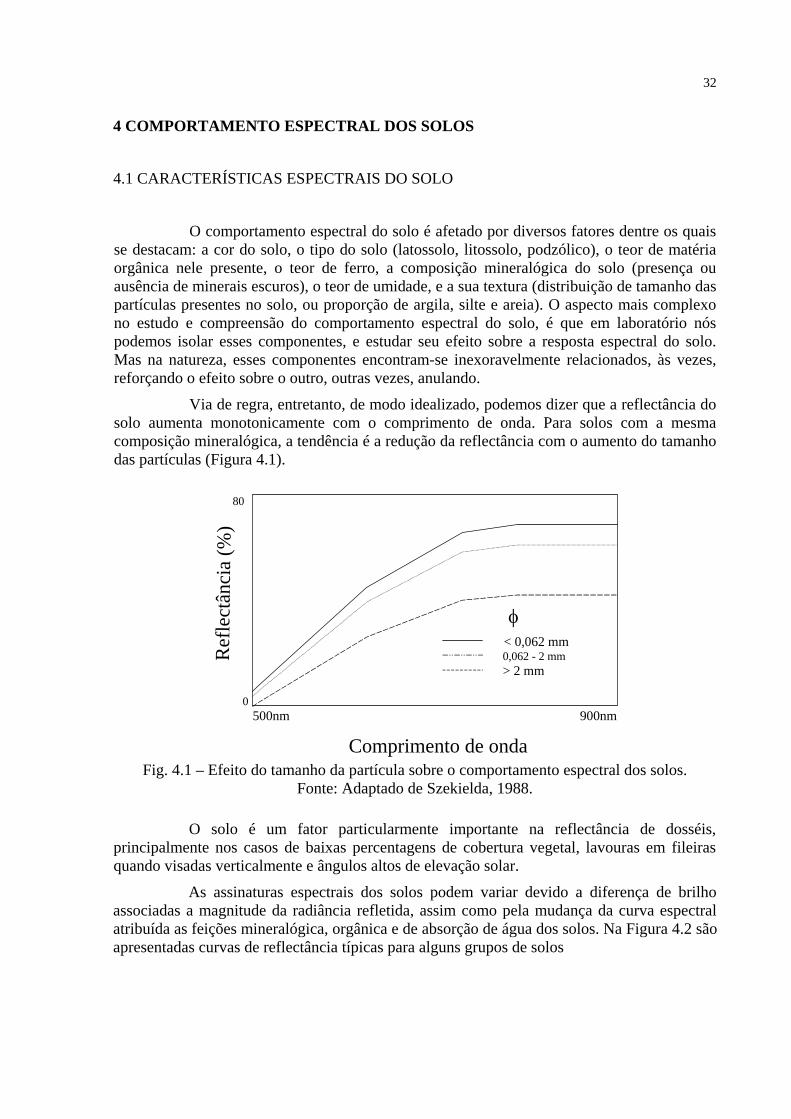
32
4 COMPORTAMENTO ESPECTRAL DOS SOLOS
4.1 CARACTERÍSTICAS ESPECTRAIS DO SOLO
O comportamento espectral do solo é afetado por diversos fatores dentre os quais se destacam: a cor do solo, o tipo do solo (latossolo, litossolo, podzólico), o teor de matéria orgânica nele presente, o teor de ferro, a composição mineralógica do solo (presença ou ausência de minerais escuros), o teor de umidade, e a sua textura (distribuição de tamanho das partículas presentes no solo, ou proporção de argila, silte e areia). O aspecto mais complexo no estudo e compreensão do comportamento espectral do solo, é que em laboratório nós podemos isolar esses componentes, e estudar seu efeito sobre a resposta espectral do solo. Mas na natureza, esses componentes encontram-se inexoravelmente relacionados, às vezes, reforçando o efeito sobre o outro, outras vezes, anulando.
Via de regra, entretanto, de modo idealizado, podemos dizer que a reflectância do solo aumenta monotonicamente com o comprimento de onda. Para solos com a mesma composição mineralógica, a tendência é a redução da reflectância com o aumento do tamanho das partículas (Figura 4.1).
φ< 0,062 mm
> 2 mm0,062 - 2 mm
500nm 900nm
Comprimento de onda
0
80
Ref
lect
ânci
a (%
)
Fig. 4.1 – Efeito do tamanho da partícula sobre o comportamento espectral dos solos.
Fonte: Adaptado de Szekielda, 1988.
O solo é um fator particularmente importante na reflectância de dosséis, principalmente nos casos de baixas percentagens de cobertura vegetal, lavouras em fileiras quando visadas verticalmente e ângulos altos de elevação solar.
As assinaturas espectrais dos solos podem variar devido a diferença de brilho associadas a magnitude da radiância refletida, assim como pela mudança da curva espectral atribuída as feições mineralógica, orgânica e de absorção de água dos solos. Na Figura 4.2 são apresentadas curvas de reflectância típicas para alguns grupos de solos
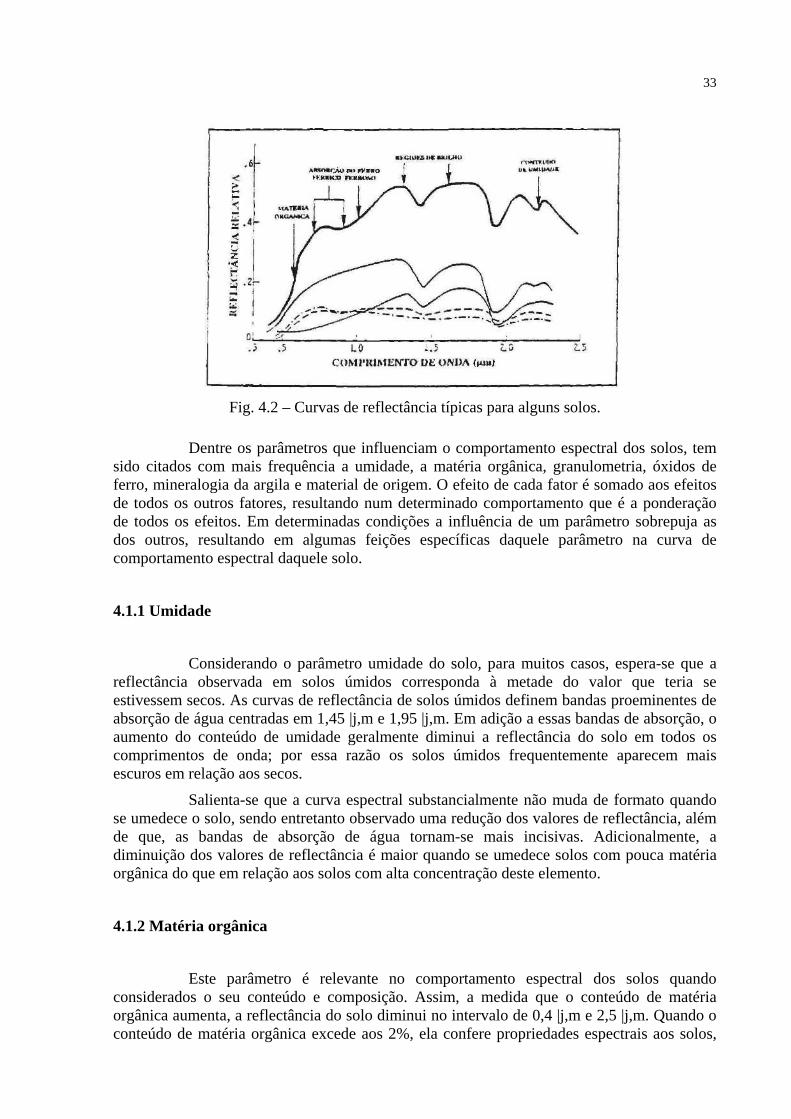
33
Fig. 4.2 – Curvas de reflectância típicas para alguns solos.
Dentre os parâmetros que influenciam o comportamento espectral dos solos, tem
sido citados com mais frequência a umidade, a matéria orgânica, granulometria, óxidos de ferro, mineralogia da argila e material de origem. O efeito de cada fator é somado aos efeitos de todos os outros fatores, resultando num determinado comportamento que é a ponderação de todos os efeitos. Em determinadas condições a influência de um parâmetro sobrepuja as dos outros, resultando em algumas feições específicas daquele parâmetro na curva de comportamento espectral daquele solo.
4.1.1 Umidade
Considerando o parâmetro umidade do solo, para muitos casos, espera-se que a reflectância observada em solos úmidos corresponda à metade do valor que teria se estivessem secos. As curvas de reflectância de solos úmidos definem bandas proeminentes de absorção de água centradas em 1,45 |j,m e 1,95 |j,m. Em adição a essas bandas de absorção, o aumento do conteúdo de umidade geralmente diminui a reflectância do solo em todos os comprimentos de onda; por essa razão os solos úmidos frequentemente aparecem mais escuros em relação aos secos.
Salienta-se que a curva espectral substancialmente não muda de formato quando se umedece o solo, sendo entretanto observado uma redução dos valores de reflectância, além de que, as bandas de absorção de água tornam-se mais incisivas. Adicionalmente, a diminuição dos valores de reflectância é maior quando se umedece solos com pouca matéria orgânica do que em relação aos solos com alta concentração deste elemento.
4.1.2 Matéria orgânica
Este parâmetro é relevante no comportamento espectral dos solos quando considerados o seu conteúdo e composição. Assim, a medida que o conteúdo de matéria orgânica aumenta, a reflectância do solo diminui no intervalo de 0,4 |j,m e 2,5 |j,m. Quando o conteúdo de matéria orgânica excede aos 2%, ela confere propriedades espectrais aos solos,
34
enquanto que em concentrações inferiores a 2%, torna-se menos efetiva no mascaramento dos efeitos dos outros constituintes do solo. O aumento do teor de matéria orgânica promove principalmente uma redução da reflectância na região do visível.
Os constituintes orgânicos, tais como os ácidos húmico e fúlvico, além de componentes não específicos, incluindo resídos de plantas em decomposição, influenciam a reflectância do solo em diferentes graus, embora a contribuição de cada um seja difícil de quantificar.
4.1.3 Granulometria
O tamanho e a forma das partículas, bem como, o tamanho e a forma dos agregados do solo podem influir na reflectância do solo de várias maneiras. Em experimentos de laboratório verificou-se que à medida em que se diminui o tamanho das partículas há um aumento exponencial na reflectância em todos os comprimentos de onda entre 0,4 |j,m e 1,0 |j,m, principalmente para as partículas menores que 0,4 mm de diâmetro.
O efeito do tamanho das partículas constituintes do solo na reflectância é bastante variável, sendo em geral observado que o aumento da reflectância é proporcional ao aumento da concentração de areia no solo, isto é, os solos com características superficiais mais arenosas apresentaram reflectância mais alta.
A despeito de nos solos de textura arenosa a redução do tamanho das partículas promover um aumento da reflectância, nos casos de solos com textura média a fina isto não é observado, pois tais parâmetros apresentam correlação direta. Isto deve-se ao fato que nos solos de textura média a fina haver formação de agregados estáveis em água, o que cria uma superfície diferente daquela formada por grãos simples dos solos arenosos.
4.1.4 Óxidos de ferro
Este parâmetro é muito importante para solos tropicais altamente intemperizados. O tipo e a quantidade relativa de óxidos de ferro influenciam as cores em solos vermelhos e amarelos, os quais são ricos em argilas sesquioxídicas.
O conteúdo de óxidos de ferro livre no solo em termos de influência espectral é significativo tanto no visível quanto no infravermelho, porém a significância é maior com o aumento do comprimento de onda. A presença de compostos de ferro origina as bandas de absorção em 0,7 |j,m, 0,9 |j,m e 1,0 |j,m, sendo a intensidade das mesmas proporcionais a concentração destes compostos.
4.1.5 Mineralogia das argilas
Nos espectros dos minerais de argila dos grupos da montmorilonita e caulinita, as principais feições devem-se a presença de água. As bandas de absorção muito fortes em 1,4 |j,m e 2,2 |j,m devem-se a água confinada típica das montmorilonitas, enquanto a forte banda de hidroxila centrada em 1,4 |j,m é típica da reflectância da caulinita. Para ambos os grupos de argila ocorre uma redução geral na reflectância com a diminuição do comprimento de onda
35
a partir de 0,7 |j,m.
Os sesquióxidos, típicos de solos altamente intemperizados, apresentam espectros de reflectância dominados pelo ferro férrico e ocasionalmente por hidróxidos.
4.1.6 Material de origem
As curvas de reflectância para solos desenvolvidos de calcários, de argilitos e de arenitos exibem formas contrastantes, devido as características de seus materiais de origem serem diferentes. Por exemplo, as intensidades de reflectância para rochas ígneas diminuem progressivamente a partir das formas ácidas, para as intermediárias, as básicas e as ultrabásicas. Portanto, áreas geográficas de material de origem similares podem ser melhor estudadas separadamente quando se objetiva relacionar a reflectância com outros parâmetros do solo.
Além dos já citados parâmetros influenciadores da resposta espectral de solos, podem ser destacados ainda a cor, a estrutura, a rugosidade superficial, presença de fragmentos grosseiros, encrostamento, ocorrência de sombras, e práticas culturais.
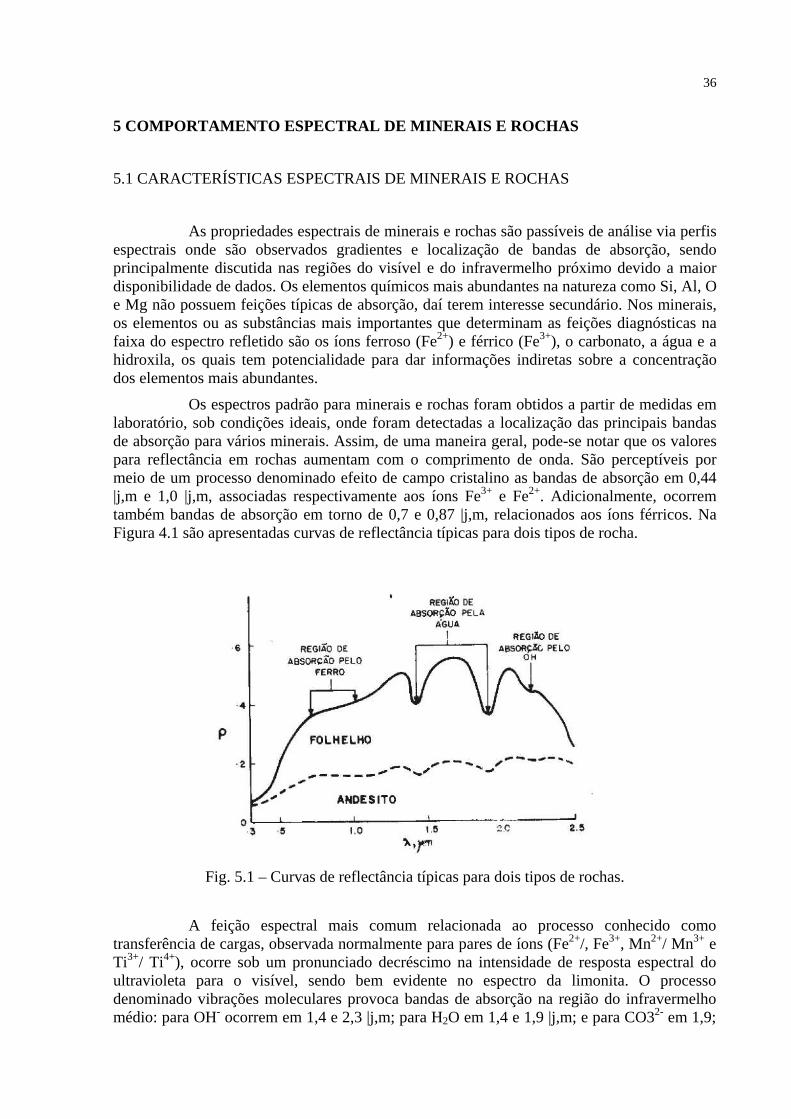
36
5 COMPORTAMENTO ESPECTRAL DE MINERAIS E ROCHAS
5.1 CARACTERÍSTICAS ESPECTRAIS DE MINERAIS E ROCHAS
As propriedades espectrais de minerais e rochas são passíveis de análise via perfis espectrais onde são observados gradientes e localização de bandas de absorção, sendo principalmente discutida nas regiões do visível e do infravermelho próximo devido a maior disponibilidade de dados. Os elementos químicos mais abundantes na natureza como Si, Al, O e Mg não possuem feições típicas de absorção, daí terem interesse secundário. Nos minerais, os elementos ou as substâncias mais importantes que determinam as feições diagnósticas na faixa do espectro refletido são os íons ferroso (Fe2+) e férrico (Fe3+), o carbonato, a água e a hidroxila, os quais tem potencialidade para dar informações indiretas sobre a concentração dos elementos mais abundantes.
Os espectros padrão para minerais e rochas foram obtidos a partir de medidas em laboratório, sob condições ideais, onde foram detectadas a localização das principais bandas de absorção para vários minerais. Assim, de uma maneira geral, pode-se notar que os valores para reflectância em rochas aumentam com o comprimento de onda. São perceptíveis por meio de um processo denominado efeito de campo cristalino as bandas de absorção em 0,44 |j,m e 1,0 |j,m, associadas respectivamente aos íons Fe3+ e Fe2+. Adicionalmente, ocorrem também bandas de absorção em torno de 0,7 e 0,87 |j,m, relacionados aos íons férricos. Na Figura 4.1 são apresentadas curvas de reflectância típicas para dois tipos de rocha.
Fig. 5.1 – Curvas de reflectância típicas para dois tipos de rochas.
A feição espectral mais comum relacionada ao processo conhecido como transferência de cargas, observada normalmente para pares de íons (Fe2+/, Fe3+, Mn2+/ Mn3+ e Ti3+/ Ti4+), ocorre sob um pronunciado decréscimo na intensidade de resposta espectral do ultravioleta para o visível, sendo bem evidente no espectro da limonita. O processo denominado vibrações moleculares provoca bandas de absorção na região do infravermelho médio: para OH- ocorrem em 1,4 e 2,3 |j,m; para H2O em 1,4 e 1,9 |j,m; e para CO32- em 1,9;
37
2,0; 2,16; 2,35; e 2,55 Lim.
Assim, no comportamento espectral das rochas, a maioria dos seus minerais formadores não mostram feições diagnósticas que permitam uma identificação segura das mesmas. O outro empecilho é a presença de minerais opacos que atenuam a resposta espectral e obliteram feições diagnósticas. Além destes fatores, as feições diagnósticas das rochas podem estar associadas a produtos de alteração, apenas indiretamente relacionados com a mineralogia primária. Embora todos os fatores tratados anteriormente dificultem o caráter discriminatório das rochas, a razão principal para que a análise espectral seja empregada na discriminação destes alvos baseia-se em que tais fatores tendem a variar de acordo com as grandes classes litológicas.
As rochas de acordo com o seu material de origem são estratificada em ígneas, metamórficas e sedimentares, sendo tal classificação também empregada para descrever os processos ligados as características espectrais das mesmas.
5.1.1 Rochas ígneas
Resultantes do resfriamento e solidificação de magma sobre a superfície terrestre sob pressões elevadas. Este grupo de acordo com o teor de SiO2 que possui pode ser subdividido nos tipos Ácida (SiO2 > 66%), Intermediária (SiO2=66-52), Básica (SiO2 = 52-45%) e Ultrabásica(< 45%).
a) Rochas Ácidas - possuem baixa absorção da REM incidente, alta transparência, alta refletividade de seus minerais félsicos (quartzo e feldspato) e pouca presença de opacos. As feições de absorção mais evidentes são ligadas ao processos de vibração moleculares para H2O e OH-. As bandas de aborção de Fe2+ e Fe3+ são pouco evidentes pela baixa concentração de minerais máficos.
b) Rochas Intermediárias - As bandas de absorção de H2O e OH- são menos evidentes, baixa concentração de minerais máficos e devido aos maiores teores de magnetita, a reflectância em geral tende a diminuir.
c) Rochas Básicas - apresentam-se geralmente mais refletivas que os dois tipos anteriores pela redução da concentração de opacos; as feições ligadas aos íons de Fe são aqui mais evidentes.
d) Rochas Ultrabásicas - devido as características de suas substâncias constituintes, ocorre proporcionalmente a maior reflectância efetiva, pois a concentração de opacos é baixa; as feições férricas e ferrosas são bastante pronunciadas.
5.1.2 Rochas sedimentares
São originadas a partir de processos de sedimentação à superfície da litosfera, em temperatura e pressão comparativamente mais baixas que outros grupos de rochas. Nestas rochas é comum a presença de bandas de absorção ligadas aos íons Fe2+ centradas em 0,9 |j,m, além das exibidas pela H2O, OH- e CO32- no intervalo de 1,9 a 2,5 |j,m, sendo a de maior intensidade observada em 2,3 |j,m.
Quando ocorre presença de material argiloso e carbonoso, o contraste entre as feições espectrais tende a ser minimizada, além de provocar redução geral da reflectância de

38
maneira análoga a presença de magnetita em rochas ígneas.
5.1.3 Rochas metamórficas
Derivadas de rochas pré-existentes por mudanças mineralógicas, químicas, texturais, etc., em resposta à mudanças de pressão e temperatura no interior da crosta terrestre. Mostra padrões não usuais de comportamento quando comparadas as outros grupos de rochas devido a sua natureza mais cristalina, favorecendo assim que sejam produzidas absorções mais bem definidas.
Nos casos em que sejam observadas a ausência dessas feições, há um forte indício da presença de substâncias opacas como grafita, magnetita ou mais comumente material carbonáceo. Em tais rochas podem ocorrer bandas de absorção para H2O e OH- em 1,4 e 1,9 \im, e para CO3
2- de 2,2 a 2,3 \im.
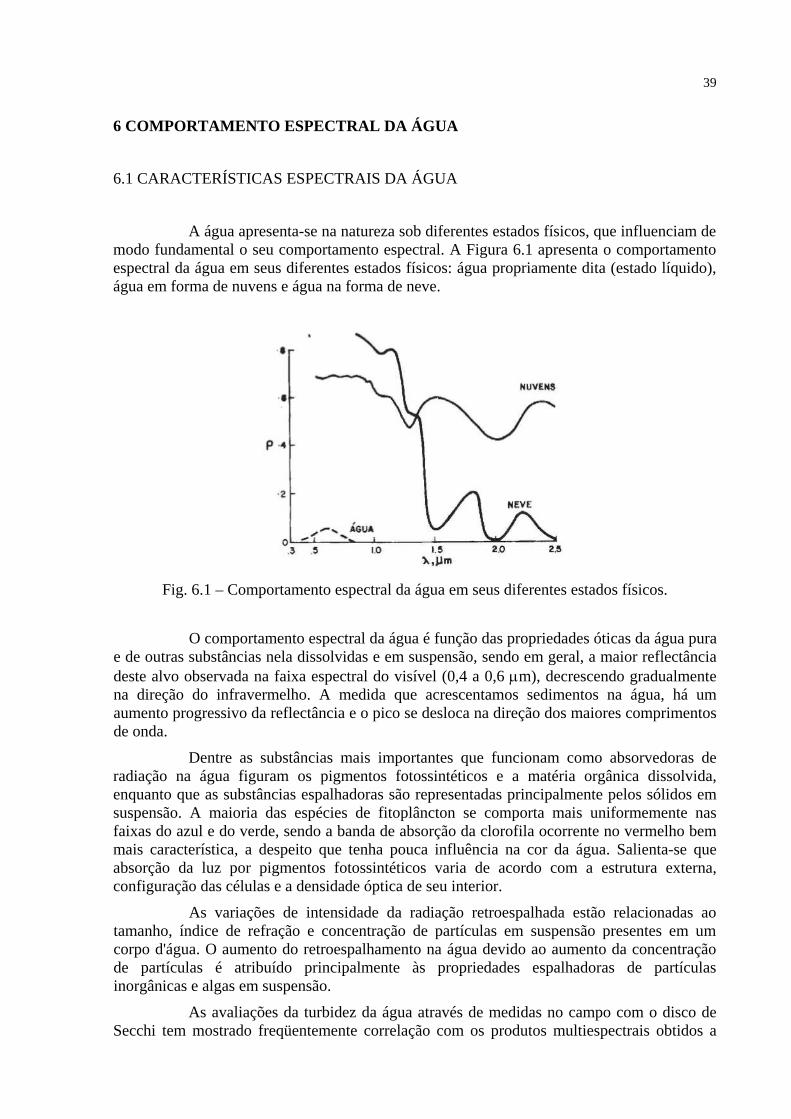
39
6 COMPORTAMENTO ESPECTRAL DA ÁGUA
6.1 CARACTERÍSTICAS ESPECTRAIS DA ÁGUA
A água apresenta-se na natureza sob diferentes estados físicos, que influenciam de modo fundamental o seu comportamento espectral. A Figura 6.1 apresenta o comportamento espectral da água em seus diferentes estados físicos: água propriamente dita (estado líquido), água em forma de nuvens e água na forma de neve.
Fig. 6.1 – Comportamento espectral da água em seus diferentes estados físicos.
O comportamento espectral da água é função das propriedades óticas da água pura e de outras substâncias nela dissolvidas e em suspensão, sendo em geral, a maior reflectância deste alvo observada na faixa espectral do visível (0,4 a 0,6 µm), decrescendo gradualmente na direção do infravermelho. A medida que acrescentamos sedimentos na água, há um aumento progressivo da reflectância e o pico se desloca na direção dos maiores comprimentos de onda.
Dentre as substâncias mais importantes que funcionam como absorvedoras de radiação na água figuram os pigmentos fotossintéticos e a matéria orgânica dissolvida, enquanto que as substâncias espalhadoras são representadas principalmente pelos sólidos em suspensão. A maioria das espécies de fitoplâncton se comporta mais uniformemente nas faixas do azul e do verde, sendo a banda de absorção da clorofila ocorrente no vermelho bem mais característica, a despeito que tenha pouca influência na cor da água. Salienta-se que absorção da luz por pigmentos fotossintéticos varia de acordo com a estrutura externa, configuração das células e a densidade óptica de seu interior.
As variações de intensidade da radiação retroespalhada estão relacionadas ao tamanho, índice de refração e concentração de partículas em suspensão presentes em um corpo d'água. O aumento do retroespalhamento na água devido ao aumento da concentração de partículas é atribuído principalmente às propriedades espalhadoras de partículas inorgânicas e algas em suspensão.
As avaliações da turbidez da água através de medidas no campo com o disco de Secchi tem mostrado freqüentemente correlação com os produtos multiespectrais obtidos a
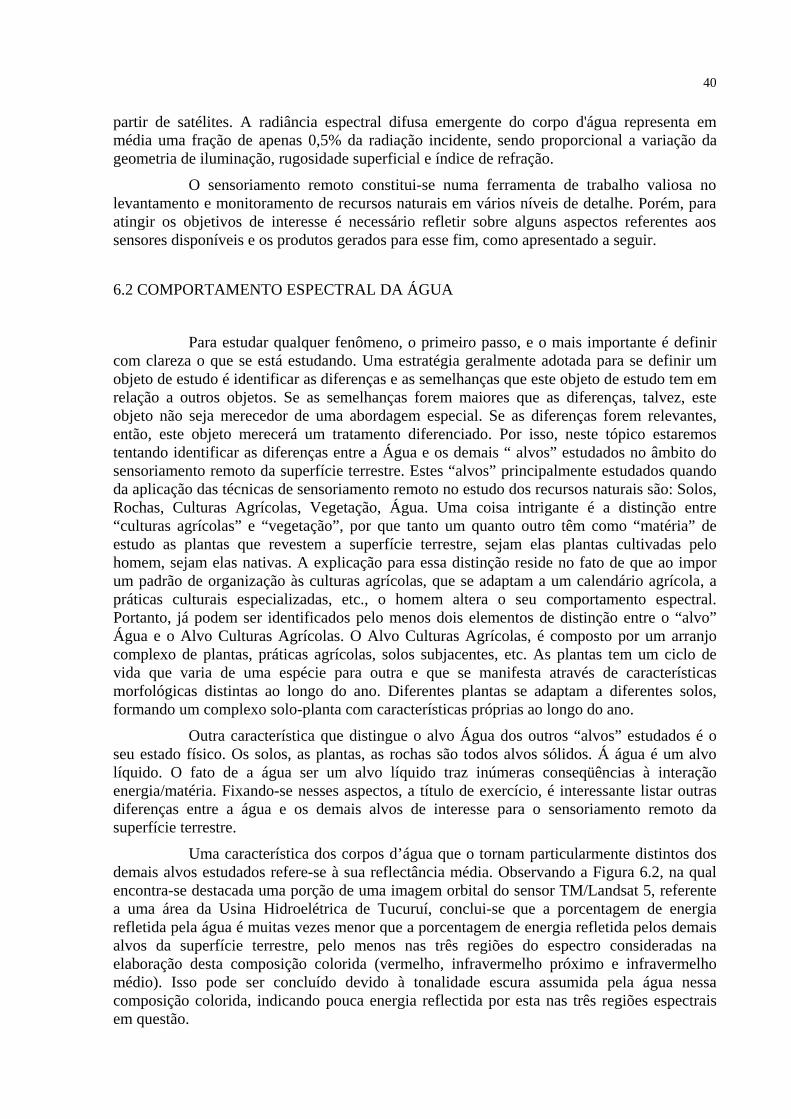
40
partir de satélites. A radiância espectral difusa emergente do corpo d'água representa em média uma fração de apenas 0,5% da radiação incidente, sendo proporcional a variação da geometria de iluminação, rugosidade superficial e índice de refração.
O sensoriamento remoto constitui-se numa ferramenta de trabalho valiosa no levantamento e monitoramento de recursos naturais em vários níveis de detalhe. Porém, para atingir os objetivos de interesse é necessário refletir sobre alguns aspectos referentes aos sensores disponíveis e os produtos gerados para esse fim, como apresentado a seguir.
6.2 COMPORTAMENTO ESPECTRAL DA ÁGUA
Para estudar qualquer fenômeno, o primeiro passo, e o mais importante é definir com clareza o que se está estudando. Uma estratégia geralmente adotada para se definir um objeto de estudo é identificar as diferenças e as semelhanças que este objeto de estudo tem em relação a outros objetos. Se as semelhanças forem maiores que as diferenças, talvez, este objeto não seja merecedor de uma abordagem especial. Se as diferenças forem relevantes, então, este objeto merecerá um tratamento diferenciado. Por isso, neste tópico estaremos tentando identificar as diferenças entre a Água e os demais “ alvos” estudados no âmbito do sensoriamento remoto da superfície terrestre. Estes “alvos” principalmente estudados quando da aplicação das técnicas de sensoriamento remoto no estudo dos recursos naturais são: Solos, Rochas, Culturas Agrícolas, Vegetação, Água. Uma coisa intrigante é a distinção entre “culturas agrícolas” e “vegetação”, por que tanto um quanto outro têm como “matéria” de estudo as plantas que revestem a superfície terrestre, sejam elas plantas cultivadas pelo homem, sejam elas nativas. A explicação para essa distinção reside no fato de que ao impor um padrão de organização às culturas agrícolas, que se adaptam a um calendário agrícola, a práticas culturais especializadas, etc., o homem altera o seu comportamento espectral. Portanto, já podem ser identificados pelo menos dois elementos de distinção entre o “alvo” Água e o Alvo Culturas Agrícolas. O Alvo Culturas Agrícolas, é composto por um arranjo complexo de plantas, práticas agrícolas, solos subjacentes, etc. As plantas tem um ciclo de vida que varia de uma espécie para outra e que se manifesta através de características morfológicas distintas ao longo do ano. Diferentes plantas se adaptam a diferentes solos, formando um complexo solo-planta com características próprias ao longo do ano.
Outra característica que distingue o alvo Água dos outros “alvos” estudados é o seu estado físico. Os solos, as plantas, as rochas são todos alvos sólidos. Á água é um alvo líquido. O fato de a água ser um alvo líquido traz inúmeras conseqüências à interação energia/matéria. Fixando-se nesses aspectos, a título de exercício, é interessante listar outras diferenças entre a água e os demais alvos de interesse para o sensoriamento remoto da superfície terrestre.
Uma característica dos corpos d’água que o tornam particularmente distintos dos demais alvos estudados refere-se à sua reflectância média. Observando a Figura 6.2, na qual encontra-se destacada uma porção de uma imagem orbital do sensor TM/Landsat 5, referente a uma área da Usina Hidroelétrica de Tucuruí, conclui-se que a porcentagem de energia refletida pela água é muitas vezes menor que a porcentagem de energia refletida pelos demais alvos da superfície terrestre, pelo menos nas três regiões do espectro consideradas na elaboração desta composição colorida (vermelho, infravermelho próximo e infravermelho médio). Isso pode ser concluído devido à tonalidade escura assumida pela água nessa composição colorida, indicando pouca energia reflectida por esta nas três regiões espectrais em questão.

41
Fig. 6.2 – Sub-cena de uma composição colorida das bandas 3 (Vermelho), 4 (Verde) e 5 (Azul) do sensor Thematic Mapper que mostra a porção oeste do reservatório da Usina
Hidroelétrica de Tucuruí, próximo á cidade de Novo Repartimento.
Mesmo se observando a água na região do visível, em que há um maior volume de energia disponível para interagir com o corpo d’água, a porcentagem de energia refletida pelos corpos d’água é relativamente menor que aquela refletida pelos demais alvos. A Figura 6.3 representa uma composição das bandas 1 (azul), 2 (verde), 3 (vermelho) do sensor Thematic Mapper do satélite Landsat 5 após sofrer processamento para realçar as diferenças de cor da água do reservatório de Barra Bonita, Estado de São Paulo.
Fig. 6.3 – Composição colorida dos canais 1 (azul), 2(verde) e 3 (vermelho) do sensor
Thematic Mapper do satélite Landsat-5.
O que se observa nessa composição é que muitas das massas de água do reservatório de Barra Bonita, apesar de a cena ter sido realçada para ampliar ao máximo o contraste do corpo d’água (o que provocou a saturação dos demais alvos), apresentam porcentagens de reflectância muito baixas, associadas ao preto. Os corpos d’água se distinguem, portanto, dos demais alvos por apresentarem, em geral, baixas porcentagens de reflectância, o que implica em baixas radiâncias, e portanto, baixa probabilidade de que as diferenças detectadas pelos sensores estejam acima do ruído do sensor, para a maioria dos
Água

42
sensores de primeira e segunda geração e para a maioria dos sensores de alvos terrestres, como é o caso dos sensores TM/Landsat e HRV/SPOT.
A diferença mais crucial entre o estudo do comportamento espectral da água e dos demais alvos é que, quando se estuda o comportamento de uma rocha, o que se busca é conhecer as propriedades daquela rocha, mas quando se estuda o comportamento da água, o que se busca conhecer não é a “água-objeto-em-si-mesmo”, mas os componentes que se encontram nela dissolvidos ou nela suspensos. Portanto, o estudo do comportamento espectral da água, é usado como indicador do comportamento de um sistema muito mais complexo que é o sistema áquático.
Todas essas diferenças tiveram conseqüência no estudo do comportamento espectral da água. A primeira conseqüência foi a de que durante muitos anos não existiam instrumentos suficientemente sensíveis que permitissem detectar diferenças sutis na porcentagem refletida pêlos diferentes corpos d’água. Enquanto as pessoas saiam pelos campos medindo a reflectância dos solos, das rochas, das plantas sob as mais diferentes condições, um ou outro pesquisador tentava desenvolver diferentes arranjos experimentais para tentar medir a energia refletida pela água.
As dificuldades para estudar o comportamento espectral da água sempre foram tantas que estudar água se tornou um assunto paradoxalmente árido, levando a que muitos começassem, mas poucos permanecessem entusiasmados com a empreitada após sucessivos resultados pouco satisfatórios.
Analisando a bibliografia sobre o assunto observa-se que as pesquisas nesse campo seguiram duas tendências básicas. De um lado existem numerosos trabalhos experimentais realizados principalmente pela comunidade ligada a sistemas aquáticos continentais, e por outro lado numerosos trabalhos de simulação e modelagem matemática, realizados por pessoas oriundas da comunidade de oceanógrafos físicos.
Essas diferenças de abordagem deste alvo, fez com que a metodologia de aquisição de dados, a nomenclatura, os conceitos utilizados, etc., sejam bastante específicos para o alvo água. Pôr isso, antes de nos aventurarmos pelo estudo do comportamento espectral da água, teremos que nos deter um pouco no estudo de alguns conceitos básicos.
6.2.1 Propriedades ópticas da água
As propriedade ópticas da água apresentam grande variabilidade no tempo e no espaço em decorrência das propriedades gerais da água. Existe uma forte conexão entre as propriedades ópticas da água e os constituintes da água, e é essa conexão que torna importante a óptica hidrológica e que indica perspectivas otimistas ao sensoriamento remoto de sistemas aquáticos. A Figura 6.4 resume algumas dessas conexões.

43
Espalhamento Absorção
Não Seletivo•Particulas > 700nmSeletivo•Partículas < 700nm
Seletivo•moléculas d’água•fitoplâncton•substâncias húmicas•sais dissolvidos
Atenuação
Qualidade da Radiação
Quantidade da Radiação
Fluxo Ascendente
Fig. 6.4 – Relações entre as propriedades ópticas da água e a as propriedades biológicas, físicas, e químicas dos sistemas aquáticos.
Como se pode observar na Figura 6.4, tem-se de um lado, o fluxo de energia
incidente sobre um dado corpo d´agua. Esta energia pode alcançar a superfície como um campo de luz direcional, segundo um dado ângulo de incidência e também como um campo de luz difusa oriundo da interação da radiação com a atmosfera. O espectro de radiação que interessa aos processos vitais dos sistemas aquáticos é a radiação conhecida por fotossintéticamente ativa, ou seja, aquela que vai proporcionar a energia necessária para que ocorra a fotossíntese. Essa radiação encontra-se compreendida entre 400 nm e 700 nm.
A radiação que atinge a superfície da água, tanto a difusa, quanto a direta, é parcialmente refletida pela água e parcialmente transmitida através da interface ar/água. A proporção da energia que é transmitida ou refletida pela água varia amplamente em função de fatores que serão discutidos oportunamente. A maior parte, entretanto, da energia incidente sobre o corpo d’água é transmitida pela interface ar/água e fica então a ação de dois processos: a absorção e ao espalhamento. A absorção e o espalhamento são duas propriedade ópticas inerentes da água, por que seus coeficientes variam apenas com as propriedade do meio aquático e não com as propriedades do campo de luz incidente. O espalhamento pode ser seletivo ou não seletivo e é provocado pela própria água e pelas partículas em suspensão na água. A absorção é sempre seletiva e depende dos componentes dissolvidos e em suspensão na água. Estas propriedades serão tratadas mais em detalhe nos próximos tópicos.
O fato é que ao penetrar na coluna d’água a radiação sofre alterações quantitativas e qualitativas, ou seja, a quantidade de energia inicial vai sendo atenuada a medida que o feixe é transmitido para as camadas mais profundas. Esta atenuação é seletiva e o decaimento da potência é exponencial, ou seja, diminui rapidamente nos primeiros metros e depois mais e mais lentamente, até o limite da zona eufótica. Portanto a quantidade e qualidade da luz

44
submersa a cada nível da coluna d´agua está em íntima relação com a composição da água e com seus componentes físicos, químicos e biológicos.
6.2.2 Absorção no meio aquático
A absorção de luz no meio aquático é decorrente da presenças de quatro componentes básicos: a própria água, substâncias dissolvidas na água (substância amarela ou matéria orgânica dissolvida), biota fotossintetizadora (fitoplâncton e macrófitas quando presentes) e partículas não vivas (partículas orgânicas mortas e partículas inorgânicas).
Na Figura 6.5 pode-se observar a variação espectral do coeficiente de absorção da água. Através de sua análise pode-se constatar que até em torno de 450 nm, a absorção pela água pura é desprezível e que praticamente toda energia que atravessa a interface ar/água atravessa em quase toda sua totalidade os primeiros metros.
0
0,5
1
1,5
2
2,5
280 380 480 580 680 780 880
Comprimento de onda (nm)
Coe
ficie
nte
de a
bsor
ção
(m-1 )
Fig. 6.5 – Coeficiente de absorção da água pura.
Fonte: Adaptado de Kirk, 1995.
A presença de matéria orgânica dissolvida (gilvin ou substância amarela) é um dos componentes responsáveis pelo aumento do coeficiente de absorção da água. As propriedades de absorção dessas substâncias podem ser determinadas a partir do espectro de absorção de água natural filtrada com filtro de porosidade entre 0, 2 µm e 0,4 µm usando cubas de 5cm a 10cm. A Figura 6.6 ilustra o espectro de absorção por matéria orgânica dissolvida em um lago.
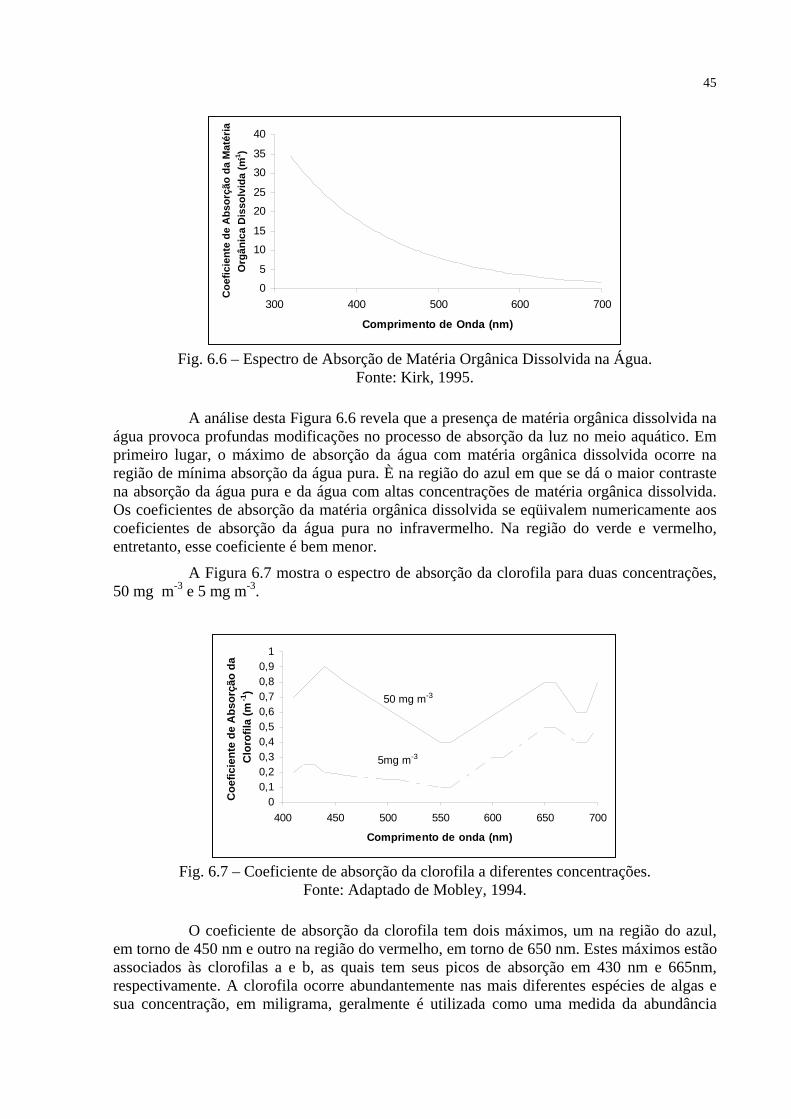
45
0
5
10
15
20
25
30
35
40
300 400 500 600 700
Comprimento de Onda (nm)
Coe
ficie
nte
de A
bsor
ção
da M
atér
iaO
rgân
ica
Dis
solv
ida
(m-1
)
Fig. 6.6 – Espectro de Absorção de Matéria Orgânica Dissolvida na Água.
Fonte: Kirk, 1995.
A análise desta Figura 6.6 revela que a presença de matéria orgânica dissolvida na água provoca profundas modificações no processo de absorção da luz no meio aquático. Em primeiro lugar, o máximo de absorção da água com matéria orgânica dissolvida ocorre na região de mínima absorção da água pura. È na região do azul em que se dá o maior contraste na absorção da água pura e da água com altas concentrações de matéria orgânica dissolvida. Os coeficientes de absorção da matéria orgânica dissolvida se eqüivalem numericamente aos coeficientes de absorção da água pura no infravermelho. Na região do verde e vermelho, entretanto, esse coeficiente é bem menor.
A Figura 6.7 mostra o espectro de absorção da clorofila para duas concentrações, 50 mg m-3 e 5 mg m-3.
00,10,20,30,40,50,60,70,80,9
1
400 450 500 550 600 650 700
Comprimento de onda (nm)
Coe
ficie
nte
de A
bsor
ção
da
Clo
rofil
a (m
-1)
50 mg m-3
5mg m-3
Fig. 6.7 – Coeficiente de absorção da clorofila a diferentes concentrações.
Fonte: Adaptado de Mobley, 1994.
O coeficiente de absorção da clorofila tem dois máximos, um na região do azul, em torno de 450 nm e outro na região do vermelho, em torno de 650 nm. Estes máximos estão associados às clorofilas a e b, as quais tem seus picos de absorção em 430 nm e 665nm, respectivamente. A clorofila ocorre abundantemente nas mais diferentes espécies de algas e sua concentração, em miligrama, geralmente é utilizada como uma medida da abundância

46
fitoplâncton. As concentrações de clorofila para os vários tipos de água podem variar de 0, 01 mg m-3 em águas oceânicas claras até 10 mg m-3 em regiões muito produtiva.
A presenças de partículas orgânicas e inorgânicas na água também aumentam o seu coeficiente de absorção. Essas partículas em geral apresentam espectro de absorção semelhante ao da matéria orgânica dissolvida, mas sua magnitude é bem menor, variando entre 0,3 m-1 a 1,5 m-1 em condições de águas bastante túrbidas.
6.2.3 O espalhamento no meio aquático
O espalhamento no meio aquático é provocado pela própria água e pelas partículas vivas e não vivas em suspensão na água. A Figura 6.8 permite observar a variação espectral do coeficiente de espalhamento da água.
0
10
20
30
40
50
60
400 450 500 550 600
Comprimento de onda (nm)
Coe
ficie
nte
de e
spal
ham
ento
x
10 -4
(m-1
)
Fig. 6.8 – Coeficiente de espalhamento da água pura.
Fonte: Adaptado de Mobley, 1994.
Através da análise da Figura 6.8 pode-se constatar que o máximo espalhamento da luz pelo corpo d´agua limpa se dá na região do azul. A forma geral do espalhamento pela água caracteriza –se por uma redução exponencial do espalhamento em direção a comprimento de ondas mais longos. A forma do espalhamento é semelhante ao espalhamento molecular de Rayleigh. Entretanto a teoria não se aplica a líquidos, visto que neste caso, as moléculas de água não são livres para oscilar como as moléculas na atmosfera. Em líquidos, entretanto, a oscilação contínua e aleatória de moléculas provoca flutuações aleatórias de densidade e portanto em sua constante dielétrica. A interação da luz com essas descontinuidades e não com as moléculas individuais é que seria responsável pelo espalhamento da água pura. À semelhança do espalhamento de Rayleigh para gases, o espalhamento da água pura varia com o inverso da quarta potência do comprimento de onda (b ~1/λ4).
As águas naturais contém uma quantidade variável de partículas de tamanhos variáveis (desde moléculas pequenas entre 0,1 nm e 1 nm, até grandes moléculas de tamanhos em torno de 10 nm, e vírus de dimensões ao redor de 100 nm, até animais e peixes.
O material particulado encontrado na coluna d’água possui duas origens distintas: biológica e física. As partículas de importância ótica são as bactérias, o fitoplâncton, o zooplâncton os quais crescem se reproduzem e morrem, dando origem a partículas orgânicas .

47
As partículas inorgânicas tem sua origem no intemperismo das rochas e solos. As partículas inorgânicas geralmente são as que mais afetam as propriedades óticas da água.
As partículas orgânicas ocorrem em diversas formas tais como: Vírus, colóides, bactérias, fitoplâncton, detritos orgânicos, zooplâncton. Embora individualmente vírus e colóides não são espalhadores eficientes de luz visto que suas dimensões são menores do que os comprimentos de onda do visível. Entretanto, estudos recentes mostram que estas partículas, devido à grande concentração com que ocorrem na água, contribuem significativamente para o retro-espalhamento (Mobley, 1994). Estudos recentes também demonstram que as bactérias, cujas dimensões variam entre 0,2 a 1,0 µm de diâmetro, ocorrem em grandes concentrações em água natural (1011 a 1013 m-3) e que são os mais importantes micro-organismos a contribuir para o espalhamento por partículas.
O fitoplâncton ocorre em uma grande diversidade de espécies, tamanhos, formas e concentrações. O tamanho das células fitoplanctônicas pode variar entre 1µm e 200µm. Essas partículas são em geral muito maiores do que o comprimento de onda e são espalhadores eficientes da luz.
Estudos relatados por Kirk (1996) as partículas responsáveis pela maior proporção do espalhamento no meio aquático possuem diâmetros maiores do que 2 µm., ou seja muito maiores que os comprimentos de onda com que interagem.
O espalhamento por partículas maiores que o comprimento de onda da radiação incidente é geralmente explicado pela teoria de Mie (Mobley, 1994, Kirk, 1996) e pôr mecanismos de difração da luz. A principal diferença entre o espalhamento por partículas grandes em relação ao espalhamento pôr partículas pequenas, é que o primeiro é não seletivo, ou seja, é constante para os diferentes comprimentos de onda. Além disso, o espalhamento por partículas grandes é predominante na região frontal.
Como o espalhamento é proporcional também ao número de partículas no meio aquático, e como para um mesmo peso de partículas, há maior número de partículas pequenas , em geral, partículas finas resultam em maiores coeficientes de espalhamento.
A Figura 6.9a mostra o comportamento espectral de um corpo d´água sujeito a concentrações variáveis de sólidos em suspensão. O que se observa é um aumento da reflectância da água em todos os comprimentos de onda. A região mais sensível entretanto, é a região compreendida entre o verde e o vermelho. Isso faz com que em composições coloridas, rios com alta concentração de sólidos em suspensão apresentem a cor amarela, conforme a Figura 6.9 b.

48
450 nm 550 nm 750 nm 950 nm
SSC (mg/l)6
5
4
3
2
1
1 - 02 - 353 - 1054 - 2105 - 3506 - 590FRB (%)
0
14
a
b Fig. 6.9 – Comportamento Espectral da água sob diferentes concentrações de sedimentos em
suspensão e Composição colorido normal (TM1 (Azul), TM2 (Verde), TM3(Vermelho)).
Na Figura 6.9b pode-se observar que a água do rio Madeira tem altas concentrações de partículas em suspensão. A quantificação da quantidade existente nessa exata data requereria , entretanto, calibração das imagens em campo. Observando a mesma figura, podemos verificar que a lagoa ao lado, tem cor tendendo para o marron, ou seja, reflectancia no verde e vermelho, mas inferior àquela do rio. Este padrão permite o levantamento de duas hipóteses: a concentração de sólidos é menor na lagoa (em decorrência da decantação); a lagoa tem alta concentração de matéria orgânica dissolvida. Tais hipóteses só podem ser comprovadas em campo, ou com a análise de imagens hiperespectrais.
49
7 SENSORES E PRODUROS
7.1 SISTEMA SENSOR
Em linhas gerais um sistema sensor é constituído pelo coletor móvel, sistema de dispersão, sistema de detecção (detetores) e processador de sinal (unidade eletrônica). A energia, na forma de REM emitida e/ou refletida por um alvo, é inicialmente recebida pelo coletor, passa para o detetor após ser filtrada pelo sistema de dispersão e finalmente é encaminhada para a unidade eletrônica, que a transforma num sinal eletrônico de modo que possa ser lido e registrado através de um medidor.
A função básica de um coletor, que pode ser uma lente, espelho ou antena, é captar a REM emitida e/ou refletida pelos alvos que compõem uma cena. Por outro lado, o sistema de dispersão, presente geralmente em sensores ópticos, objetiva selecionar a faixa espectral de interesse, sendo para isso utilizado prismas, grades de dispersão ou filtros.
Os detetores visam transformar a REM em uma outra forma de energia, comumente um sinal elétrico diretamente proporcinal à radiância do alvo imageado. As substâncias constituintes de um detetor normalmente apresentam efeito fotoelétrico por ocasião da incidência da REM e de acordo com os mecanismos físicos envolvidos no processo de transformação de tal radiação em sinal eletrônico, os detetores podem ser classificados nos tipos térmicos e quânticos.
A unidade eletrônica é constituída basicamente por um amplificador que aumenta um nível do sinal e por um processador de sinal que transforma o sinal elétrico que recebe em um formato passível de ser interpretado, seja na forma digital ou analógica.
7.2 CLASSIFICAÇÃO DOS SISTEMAS SENSORES
7.2.1 Quanto à transformação sofrida pela radiação
a) Sensores Imageadores - São aqueles que fornecem imagens das superfícies observadas, tais como as câmaras fotográficas.
b) Sensores Não Imageadores - Neste caso os dados coletados são registrados sempre na forma de gráficos ou tabelas, como no caso dos radiômetros.
7.2.2 Quanto à fonte de energia
a) Sensores Ativos - Possuem uma fonte própria de radiação, como observado para os
radares.
b) Sensores Passivos - Necessitam de uma fonte externa de radiação para operarem, que quase sempre é o sol, como ocorre para os sensores ópticos.
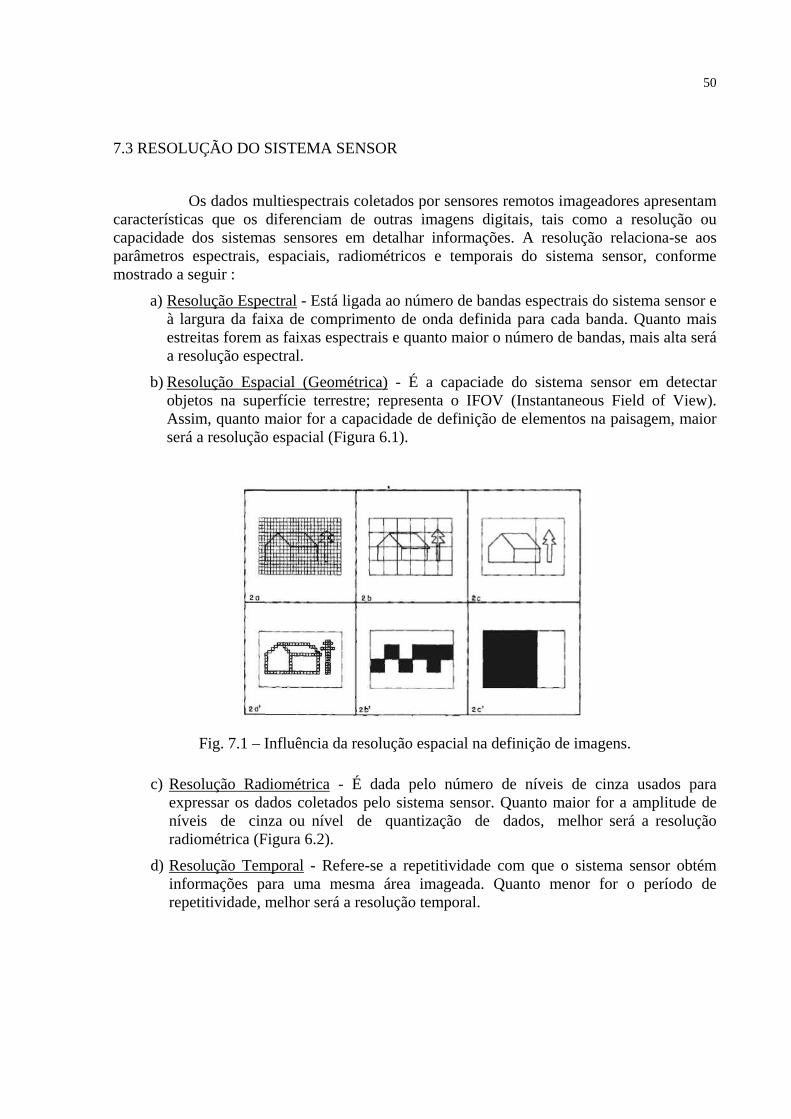
50
7.3 RESOLUÇÃO DO SISTEMA SENSOR
Os dados multiespectrais coletados por sensores remotos imageadores apresentam características que os diferenciam de outras imagens digitais, tais como a resolução ou capacidade dos sistemas sensores em detalhar informações. A resolução relaciona-se aos parâmetros espectrais, espaciais, radiométricos e temporais do sistema sensor, conforme mostrado a seguir :
a) Resolução Espectral - Está ligada ao número de bandas espectrais do sistema sensor e à largura da faixa de comprimento de onda definida para cada banda. Quanto mais estreitas forem as faixas espectrais e quanto maior o número de bandas, mais alta será a resolução espectral.
b) Resolução Espacial (Geométrica) - É a capaciade do sistema sensor em detectar objetos na superfície terrestre; representa o IFOV (Instantaneous Field of View). Assim, quanto maior for a capacidade de definição de elementos na paisagem, maior será a resolução espacial (Figura 6.1).
Fig. 7.1 – Influência da resolução espacial na definição de imagens.
c) Resolução Radiométrica - É dada pelo número de níveis de cinza usados para
expressar os dados coletados pelo sistema sensor. Quanto maior for a amplitude de níveis de cinza ou nível de quantização de dados, melhor será a resolução radiométrica (Figura 6.2).
d) Resolução Temporal - Refere-se a repetitividade com que o sistema sensor obtém informações para uma mesma área imageada. Quanto menor for o período de repetitividade, melhor será a resolução temporal.
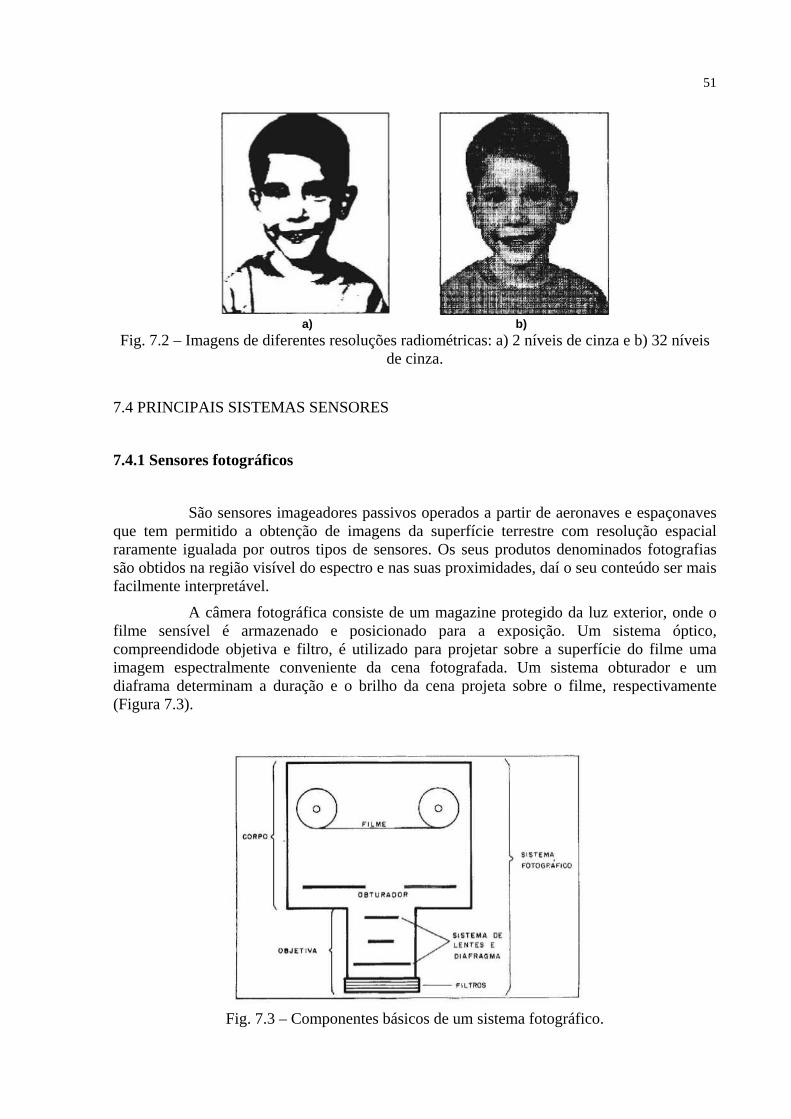
51
a) b) Fig. 7.2 – Imagens de diferentes resoluções radiométricas: a) 2 níveis de cinza e b) 32 níveis
de cinza. 7.4 PRINCIPAIS SISTEMAS SENSORES
7.4.1 Sensores fotográficos
São sensores imageadores passivos operados a partir de aeronaves e espaçonaves que tem permitido a obtenção de imagens da superfície terrestre com resolução espacial raramente igualada por outros tipos de sensores. Os seus produtos denominados fotografias são obtidos na região visível do espectro e nas suas proximidades, daí o seu conteúdo ser mais facilmente interpretável.
A câmera fotográfica consiste de um magazine protegido da luz exterior, onde o filme sensível é armazenado e posicionado para a exposição. Um sistema óptico, compreendidode objetiva e filtro, é utilizado para projetar sobre a superfície do filme uma imagem espectralmente conveniente da cena fotografada. Um sistema obturador e um diaframa determinam a duração e o brilho da cena projeta sobre o filme, respectivamente (Figura 7.3).
Fig. 7.3 – Componentes básicos de um sistema fotográfico.

52
Os filmes fotográficos são detectores que respondem a quantidade de energia radiante ou exposição que recebem. Após o processamento (revelação), a resposta do filme à exposição recebida é representada pela sua densidade óptica. Os filmes fotográficos utilizados em sensoriamento remoto são o preto e branco, colorido e infravermelho falsa cor, sendo que a sua escolha está condicionada a atender ao objetivo de interesse.
7.4.2 Sensores de microondas (radar)
São sensores imageadores ativos, sendo que o termo "radar" corresponde a uma sigla proveniente de Radio Detetion and Ranging. O princípio básico de operação de um radar é a emissão de um sinal que sendo refletido por um objeto distante, retorna ao sensor onde é processado para a extração do tempo decorrido entre a emissão e a recepção do mesmo. O sinal emitido pelos radares se propagam à velocidade da luz, sendo os pulsos, na maioria dos radares, emitidos a frequências bastantes altas, da ordem de 3 GHz, e duração aproximada de 10-6 s. A Figura 7.4 apresenta, de forma esquematizada, o funcionamento de um sistema de imageamento radar.
Fig. 7.4 – Representação diagramática de um sistema de imageamento de radar.
Os componentes básicos de um sistema radar são: antena transmissora/ receptora, receptor, detector e registrador. A antena transmissora produz pulsos de energia a intervalos regulares, que são enviados a direção perpendicular ao deslocamento da plataforma que transporta o sistema sensor. A energia é então refletida pela superfície imageada e retorna à antena, que neste instante encontra-se sincronizada para recebê-la (antena receptora). Esta energia refletida é convertida em um sinal passível ser amplificado, que é então transferido para o receptor, posteriormente atingindo o detector que produz um sinal elétrico passível de ser registrado em filmes ou fitas magnéticas (registrador). A imagem resultante será função do sinal de retorno, ou seja , a densidade registrada no filme irá variar ponto a pointo com a rugosidade do terreno, umidade e outros parâmetros.
Entre as vantagens intrínsecas ao radar citam-se a capacidade de poder operar a noite, pois é um sensor ativo, e sob praticamente qualquer condição atmosférica, mesmo em
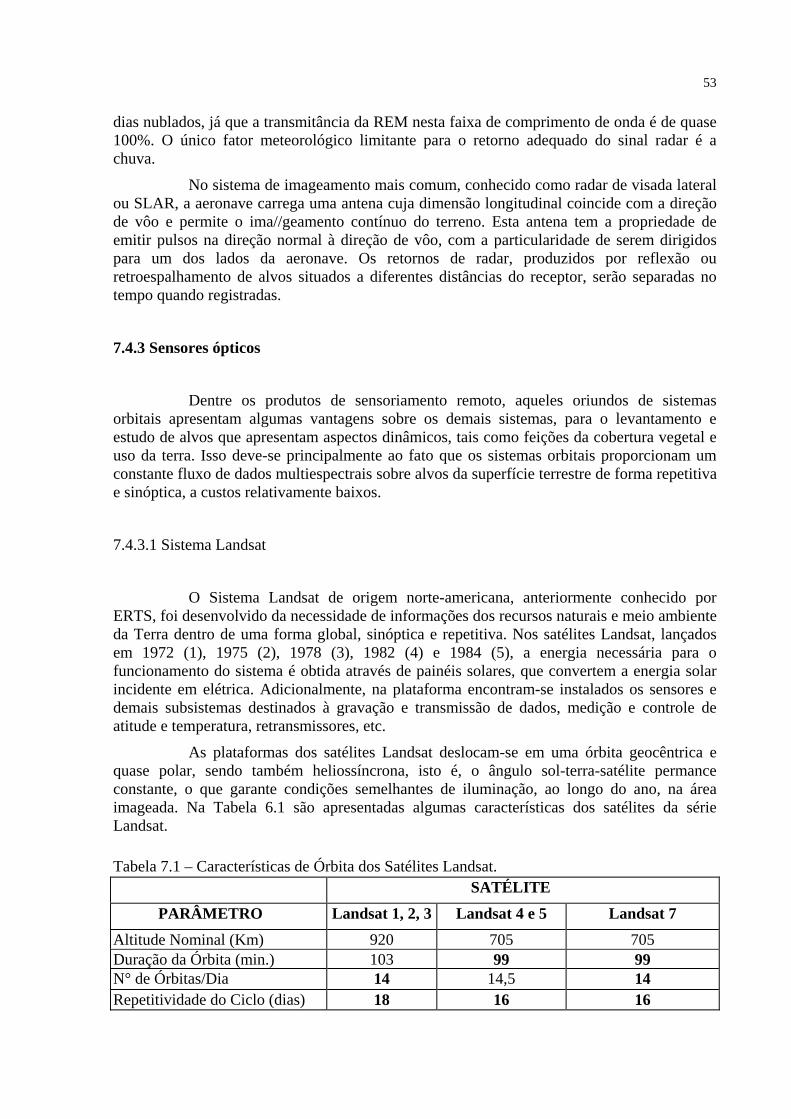
53
dias nublados, já que a transmitância da REM nesta faixa de comprimento de onda é de quase 100%. O único fator meteorológico limitante para o retorno adequado do sinal radar é a chuva.
No sistema de imageamento mais comum, conhecido como radar de visada lateral ou SLAR, a aeronave carrega uma antena cuja dimensão longitudinal coincide com a direção de vôo e permite o ima//geamento contínuo do terreno. Esta antena tem a propriedade de emitir pulsos na direção normal à direção de vôo, com a particularidade de serem dirigidos para um dos lados da aeronave. Os retornos de radar, produzidos por reflexão ou retroespalhamento de alvos situados a diferentes distâncias do receptor, serão separadas no tempo quando registradas.
7.4.3 Sensores ópticos
Dentre os produtos de sensoriamento remoto, aqueles oriundos de sistemas orbitais apresentam algumas vantagens sobre os demais sistemas, para o levantamento e estudo de alvos que apresentam aspectos dinâmicos, tais como feições da cobertura vegetal e uso da terra. Isso deve-se principalmente ao fato que os sistemas orbitais proporcionam um constante fluxo de dados multiespectrais sobre alvos da superfície terrestre de forma repetitiva e sinóptica, a custos relativamente baixos.
7.4.3.1 Sistema Landsat
O Sistema Landsat de origem norte-americana, anteriormente conhecido por ERTS, foi desenvolvido da necessidade de informações dos recursos naturais e meio ambiente da Terra dentro de uma forma global, sinóptica e repetitiva. Nos satélites Landsat, lançados em 1972 (1), 1975 (2), 1978 (3), 1982 (4) e 1984 (5), a energia necessária para o funcionamento do sistema é obtida através de painéis solares, que convertem a energia solar incidente em elétrica. Adicionalmente, na plataforma encontram-se instalados os sensores e demais subsistemas destinados à gravação e transmissão de dados, medição e controle de atitude e temperatura, retransmissores, etc.
As plataformas dos satélites Landsat deslocam-se em uma órbita geocêntrica e quase polar, sendo também heliossíncrona, isto é, o ângulo sol-terra-satélite permance constante, o que garante condições semelhantes de iluminação, ao longo do ano, na área imageada. Na Tabela 6.1 são apresentadas algumas características dos satélites da série Landsat. Tabela 7.1 – Características de Órbita dos Satélites Landsat.
SATÉLITE
PARÂMETRO Landsat 1, 2, 3 Landsat 4 e 5 Landsat 7
Altitude Nominal (Km) 920 705 705 Duração da Órbita (min.) 103 99 99 N° de Órbitas/Dia 14 14,5 14 Repetitividade do Ciclo (dias) 18 16 16

54
Os três primeiros satélites deste sistema possuiam dois tipos de sistemas sensores: um imageador multiespectral de varredura (Multispectral Scanner System-MSS) com quatro bandas espectrais e um sistema de televisão (RBV), sendo três canais nos Landsat 1 e 2 e um canal no Landsat 3. Por outro lado, nos Landsat 4 e 5, o sistema de televisão foi substituído por um novo e mais moderno sensor denominado Mapeador Temático (Thematic Mapper-TM), com sete bandas espectrais. O Landsat7 é o mais recente satélite em operação do programa Landsat, financiado pelo Governo norte-mericano. O novo satélite foi lançado em abril de 1999, com um novo sensor a bordo denominado ETM+ (Enhanced Thematic Mapper Plus). Uma imagem LANDSAT 7 ETM+ é composta por 8 bandas espectrais que podem ser combinadas em inúmeras possibilidades de composições coloridas e opções de processamento. Entre as principais melhorias técnicas, se comparado com satélite Landsat 5, destacam-se a adição de uma banda espectral (banda Pancromática) com resolução de 15 m, perfeitamente registrada com as demais bandas, melhorias nas características geométricas e radiométricas, e o aumento da resolução espacial da banda termal para 60 m. Esses avanços tecnológicos permitem qualificar o LANDSAT 7 como sendo o satélite mais interessante para a geração de imagens de satélites com aplicações diretas até a escala 1:25.000, em áreas rurais principalmente, mesmo em grandes extensões de território, como acontece freqüentemente no Brasil.
Na Figura 7.5 podem ser visualizadas a configuração dos satélites Landsat, enquanto na Tabela 7.2 são descritas as principais características dos sensores MSS, TM e ETM+.
Fig. 7.5 – Configuração dos satélites da série Landsat: a) 5; b) 7.
Fonte: Engesat, 2004.

55
25 Tabela 7.2 – Principais Características dos Sensores MSS e TM e ETM+.
NC=Nível de Cinza
O sensor MSS fez parte de todos os satélites da série e foi mantido no Landsat 5 apenas para dar tempo aos países portadores de estações receptoras de adaptarem seus sistemas de recepção para as imagens TM, evitando assim, causar prejuízos na continuidade de seus projetos de aplicação.
No satélite Landsat a varredura pelo sistema imageador é perpendicular a trajetória da plataforma, sendo conseguida a partir de um espelho oscilante. O sistema permite
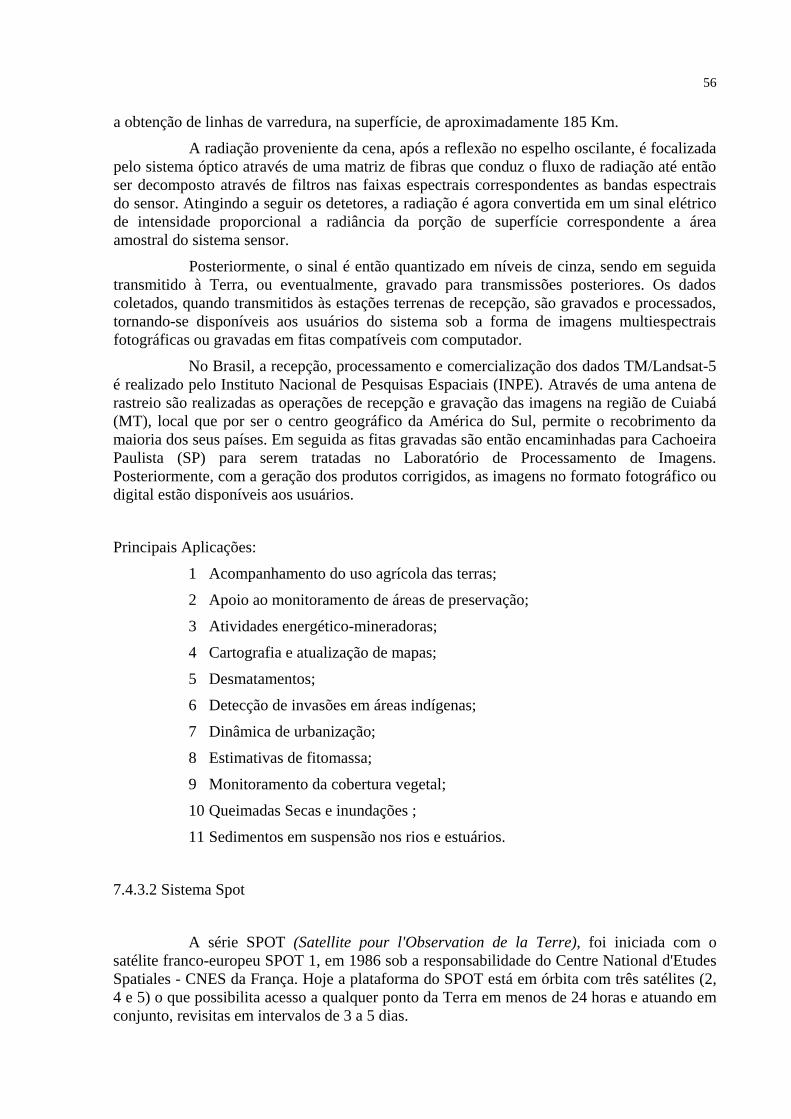
56
a obtenção de linhas de varredura, na superfície, de aproximadamente 185 Km.
A radiação proveniente da cena, após a reflexão no espelho oscilante, é focalizada pelo sistema óptico através de uma matriz de fibras que conduz o fluxo de radiação até então ser decomposto através de filtros nas faixas espectrais correspondentes as bandas espectrais do sensor. Atingindo a seguir os detetores, a radiação é agora convertida em um sinal elétrico de intensidade proporcional a radiância da porção de superfície correspondente a área amostral do sistema sensor.
Posteriormente, o sinal é então quantizado em níveis de cinza, sendo em seguida transmitido à Terra, ou eventualmente, gravado para transmissões posteriores. Os dados coletados, quando transmitidos às estações terrenas de recepção, são gravados e processados, tornando-se disponíveis aos usuários do sistema sob a forma de imagens multiespectrais fotográficas ou gravadas em fitas compatíveis com computador.
No Brasil, a recepção, processamento e comercialização dos dados TM/Landsat-5 é realizado pelo Instituto Nacional de Pesquisas Espaciais (INPE). Através de uma antena de rastreio são realizadas as operações de recepção e gravação das imagens na região de Cuiabá (MT), local que por ser o centro geográfico da América do Sul, permite o recobrimento da maioria dos seus países. Em seguida as fitas gravadas são então encaminhadas para Cachoeira Paulista (SP) para serem tratadas no Laboratório de Processamento de Imagens. Posteriormente, com a geração dos produtos corrigidos, as imagens no formato fotográfico ou digital estão disponíveis aos usuários.
Principais Aplicações:
1 Acompanhamento do uso agrícola das terras;
2 Apoio ao monitoramento de áreas de preservação;
3 Atividades energético-mineradoras;
4 Cartografia e atualização de mapas;
5 Desmatamentos;
6 Detecção de invasões em áreas indígenas;
7 Dinâmica de urbanização;
8 Estimativas de fitomassa;
9 Monitoramento da cobertura vegetal;
10 Queimadas Secas e inundações ;
11 Sedimentos em suspensão nos rios e estuários.
7.4.3.2 Sistema Spot
A série SPOT (Satellite pour l'Observation de la Terre), foi iniciada com o satélite franco-europeu SPOT 1, em 1986 sob a responsabilidade do Centre National d'Etudes Spatiales - CNES da França. Hoje a plataforma do SPOT está em órbita com três satélites (2, 4 e 5) o que possibilita acesso a qualquer ponto da Terra em menos de 24 horas e atuando em conjunto, revisitas em intervalos de 3 a 5 dias.
57
Os satélites da família SPOT operam com sensores ópticos, em bandas do visível, infravermelho próximo e infravermelho médio. Com o lançamento do SPOT 5, ocorrido em maio de 2002, a missão inaugurou a possibilidade de aquisição de imagens orbitais tridimensionais graças a sua capacidade de visada lateral de até 27° (estereoscopia cilíndrica) e também conseguiu melhorar a resolução espacial do canal pancromático para 5 metros. A figura 7.6 apresenta a configuração dos satélites Spot. A tabela 7.3 apresenta as características dos satélites Spot e a tabela 7.4 apresenta os principais instrumentos sensores.
Fig. 7.6 – Configurações dos satélites Spot.
Fonte: Engesat, 2004. Tabela 7.3 – Características dos Satélites Spot.
Missão Satellite pour l'Observation de la Terre (SPOT) Instituição
Responsável Centre National d'Etudes Spatiales - CNES
País/Região Estabelecido por iniciativa do governo francês em 1978, com a participação da Suécia, Bélgica e Itália.
Satélite SPOT-1 SPOT-2 SPOT-3 SPOT-4 SPOT-5 Lançamento 22/02/1986 22/01/1990 26/09/1993 24/03/1998 04/05/2002
Situação Atual
Inativo (nov/2003)
Ativo Inativo (14/11/1996)
Ativo Ativo
Órbita Circular,
heliossíncrona e polar
Circular, heliossíncrona
e polar
Circular, heliossíncrona
e polar
Circular, heliossíncrona
e polar
Circular, heliossíncrona e
polar Altitude 823 km 823 km 823 km 832 km 832 km
Inclinação 98° 98° 98° 98° 98° Tempo de
Duração da Órbita
101,4 min 101,4 min 101,4 min 101,4 min 101,4 min
Horário de Passagem
10:30 A.M. 10:30 A.M. 10:30 A.M. 10:30 A.M. 10:30 A.M.
Período de Revi sita
26 dias 26 dias 26 dias 26 dias 26 dias
Instrumentos Sensores
HRV HRV HRV HRVIR e VEGETATION
HRG, HRS VEGETATION2

58
Tabela 7.4 – Principais Instrumentos Sensores do Satélite Spot.
Sensor Bandas
Espectrais Resolução Espectral
Resolução Espacial
Resolução Temporal
Faixa Imageada
PAN 0,50- 0,73um 10m XS1 0,50-0,59|im XS2 0,61 - 0,68|im
HRV (com opção de visada lateral)
XS3 0,78 - 0,89|im
20 m 26 dias 60 x 60 km
Monoespectral 0,61 -0,68|im lOm B1 0,50-0,59|im B2 0,61 - 0,68|im B3 0,78 - 0,89|im
HRVIR
MIR 1,58- l,75|im
20 m 26 dias 60 x 60 km
PAE SUPERMODE
0,48-0,71|im 5m
B1 0,50-0,59|im B2 0,61 - 0,68|im B3 0,78 - 0,89|im
HRG
SWIR 1,58- l,75|im
10m
26 dias 60 x 60 km
HRS (gera pares
estereoscópicos)
PA 0,49 - 0,69|im 10m 26 dias 120x600km
B0 0,43 - 0,47|im B2 0,61 - 0,68|im B3 0,78 - 0,89|im
VEGETATION e
VEGETATION 2 MIR 1,58- l,75|im
1km 24 horas 2.250 km
Principais Aplicações:
• Impacto das atividades humanas sobre o meio ambiente;
• Monitoramento de fenômenos naturais;
• Acompanhamento do uso agrícola das terras;
• Apoio ao monitoramento de áreas de preservação;
• Atividades energético-mineradoras;
• Cartografia e atualização de mapas;
• Desmatamentos;
• Dinâmica de urbanização;
• Estimativas de fitomassa;
• Monitoramento da cobertura vegetal;
• Queimadas;
• Secas e inundações;
• Sedimentos em suspensão nos rios e estuários.
59
7.4.3.3 Sistema Cbers
O programa CBERS (China-Brazil Earth Resources Satellite ou Satélite Sino-Brasileiro de Recursos Terrestres) mantém dois satélites de observação terrestre em órbita: o CBERS-1 e o CBERS-2, lançados na China. Os satélites são equipados com sensores de diferentes resoluções espaciais que podem cobrir o planeta em menos de 5 dias e ao mesmo tempo produzir informações mais detalhadas em uma visada mais estreita. O CBERS carrega câmeras para observação óptica e um sistema de coleta de dados ambientais. É um sistema único pois mantém em órbita instrumentos sensores que combinam características especialmente adequadas às diversas escalas temporais e espaciais, necessárias ao monitoramento e à preservação do ecossistema.
O sistema de coleta de dados é destinado à retransmissão, em tempo real, de dados ambientais coletados em Terra e transmitidos ao satélite por meio de pequenas estações autônomas. Os dados provenientes das diversas estações, localizados em vários pontos do Planeta, são dirigidos ao mesmo tempo às centrais de processamento e usuários finais, por meio de transmissões em freqüências diferentes.
Em 14 de outubro de 1999, ocorreu o lançamento do primeiro Satélite CBERS, utilizando-se o foguete Longa Marcha 4B, a partir da Base de Lançamento de Taiyuan, e o segundo satélite foi lançado em 21 de outubro de 2003. As equipes técnicas de ambos os países concluíram estudos de viabilidade para a construção de mais dois satélites da família CBERS, o CBERS-3 e o CBERS-4, com a substituição da atual câmara CCD por outra com resolução de 5 metros. O lançamento do CBERS-3 está previsto para ocorrer em 2008 e o CBERS-4 em 2010. A figura 7.7 apresenta a configuração do satélite Cbers. A tabela 7.5 apresenta as características dos satélites CBERS e a tabela 7.6 apresenta os principais instrumentos sensores.
Fig. 7.7 – Configuração do satélite Cbers.
Fonte: Engesat, 2004.
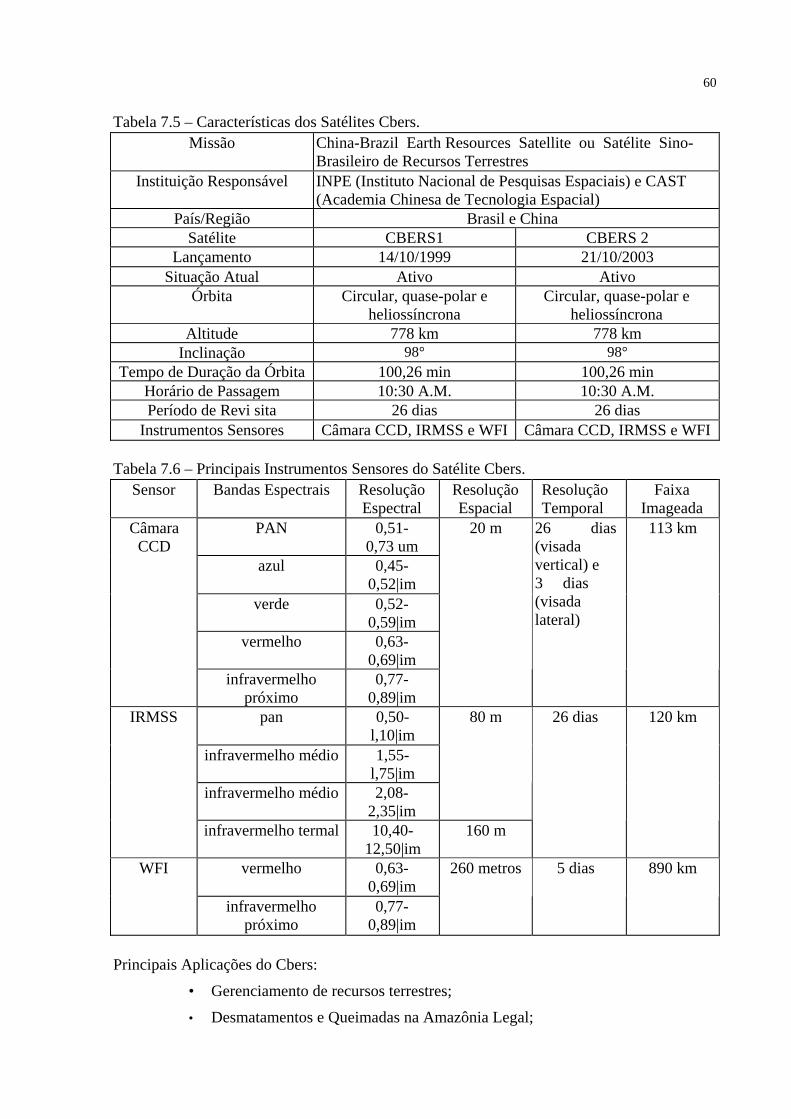
60
Tabela 7.5 – Características dos Satélites Cbers.
Missão China-Brazil Earth Resources Satellite ou Satélite Sino-Brasileiro de Recursos Terrestres
Instituição Responsável INPE (Instituto Nacional de Pesquisas Espaciais) e CAST (Academia Chinesa de Tecnologia Espacial)
País/Região Brasil e China Satélite CBERS1 CBERS 2
Lançamento 14/10/1999 21/10/2003 Situação Atual Ativo Ativo
Órbita Circular, quase-polar e heliossíncrona
Circular, quase-polar e heliossíncrona
Altitude 778 km 778 km Inclinação 98° 98°
Tempo de Duração da Órbita 100,26 min 100,26 min Horário de Passagem 10:30 A.M. 10:30 A.M. Período de Revi sita 26 dias 26 dias
Instrumentos Sensores Câmara CCD, IRMSS e WFI Câmara CCD, IRMSS e WFI Tabela 7.6 – Principais Instrumentos Sensores do Satélite Cbers.
Sensor Bandas Espectrais Resolução Espectral
Resolução Espacial
Resolução Temporal
Faixa Imageada
PAN 0,51-0,73 um
azul 0,45-0,52|im
verde 0,52-0,59|im
vermelho 0,63-0,69|im
Câmara CCD
infravermelho próximo
0,77-0,89|im
20 m 26 dias (visada vertical) e 3 dias (visada lateral)
113 km
pan 0,50-l,10|im
infravermelho médio 1,55-l,75|im
infravermelho médio 2,08-2,35|im
80 m IRMSS
infravermelho termal 10,40-12,50|im
160 m
26 dias 120 km
vermelho 0,63-0,69|im
WFI
infravermelho próximo
0,77-0,89|im
260 metros 5 dias 890 km
Principais Aplicações do Cbers:
• Gerenciamento de recursos terrestres;
• Desmatamentos e Queimadas na Amazônia Legal;
61
• Monitoramento ambiental, particularmente de florestas, meio físico e hidrologia.
7.4.3.4 Sistema Ikonos
O satélite Ikonos II, operado pela Space Imaging, foi lançado em 24 de setembro de 1999, sendo o primeiro satélite comercial de alta resolução com capacidade de imageamento de 1 metro. Seu sistema sensor capta imagens no modo pancromático e multiespectral. Adicionalmente, há a possibilidade de combinação de imagens preto e branco com dados multiespectrais para a geração de imagens coloridas, facilitando assim a interpretação visual e substituindo em grande parte dos casos, o uso de fotografias aéreas. A figura 7.8 apresenta a configuração do satélite Ikonos. A tabela 7.7 apresenta as principais características do satélite Ikonos II e a tabela 7.8 apresenta as características do sensor.
Fig. 7.8 – Configuração do satélite Ikonos II.
Fonte: Engesat, 2004. Tabela 7.7 – Características do Satélite Ikonos.
Missão IKONOS-II Instituição Responsável Space Imaging
País/Região Estados Unidos Satélite IKONOS-II
Lançamento 24/09/1999 Situação Atual Ativo
Órbita Heliossíncrona Altitude 681 km
Inclinação 98,1° Tempo de Duração da Órbita 98 min
Horário de Passagem 10:30 A.M. Instrumentos Sensores PANCROMÁTICO E MULTIESPECTRAL
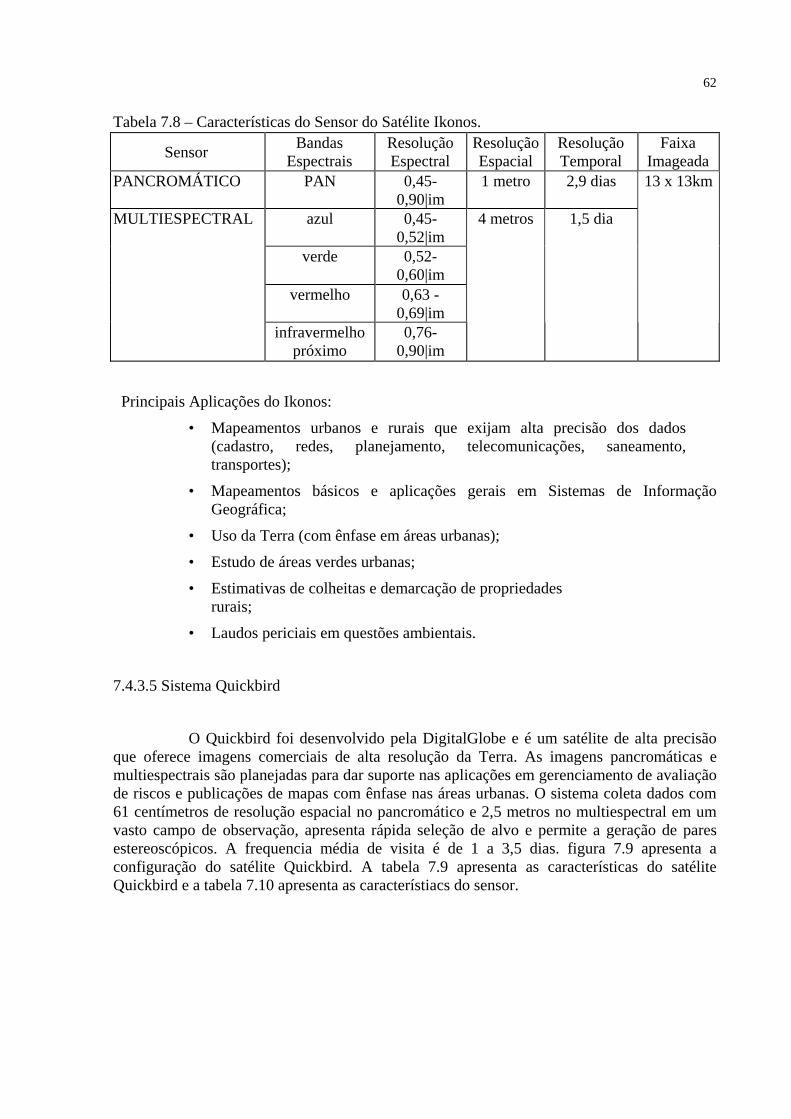
62
Tabela 7.8 – Características do Sensor do Satélite Ikonos.
Sensor Bandas
Espectrais Resolução Espectral
Resolução Espacial
Resolução Temporal
Faixa Imageada
PANCROMÁTICO PAN 0,45-0,90|im
1 metro 2,9 dias
azul 0,45-0,52|im
verde 0,52-0,60|im
vermelho 0,63 -0,69|im
MULTIESPECTRAL
infravermelho próximo
0,76-0,90|im
4 metros 1,5 dia
13 x 13km
Principais Aplicações do Ikonos:
• Mapeamentos urbanos e rurais que exijam alta precisão dos dados (cadastro, redes, planejamento, telecomunicações, saneamento, transportes);
• Mapeamentos básicos e aplicações gerais em Sistemas de Informação Geográfica;
• Uso da Terra (com ênfase em áreas urbanas);
• Estudo de áreas verdes urbanas;
• Estimativas de colheitas e demarcação de propriedades rurais;
• Laudos periciais em questões ambientais.
7.4.3.5 Sistema Quickbird
O Quickbird foi desenvolvido pela DigitalGlobe e é um satélite de alta precisão que oferece imagens comerciais de alta resolução da Terra. As imagens pancromáticas e multiespectrais são planejadas para dar suporte nas aplicações em gerenciamento de avaliação de riscos e publicações de mapas com ênfase nas áreas urbanas. O sistema coleta dados com 61 centímetros de resolução espacial no pancromático e 2,5 metros no multiespectral em um vasto campo de observação, apresenta rápida seleção de alvo e permite a geração de pares estereoscópicos. A frequencia média de visita é de 1 a 3,5 dias. figura 7.9 apresenta a configuração do satélite Quickbird. A tabela 7.9 apresenta as características do satélite Quickbird e a tabela 7.10 apresenta as característiacs do sensor.
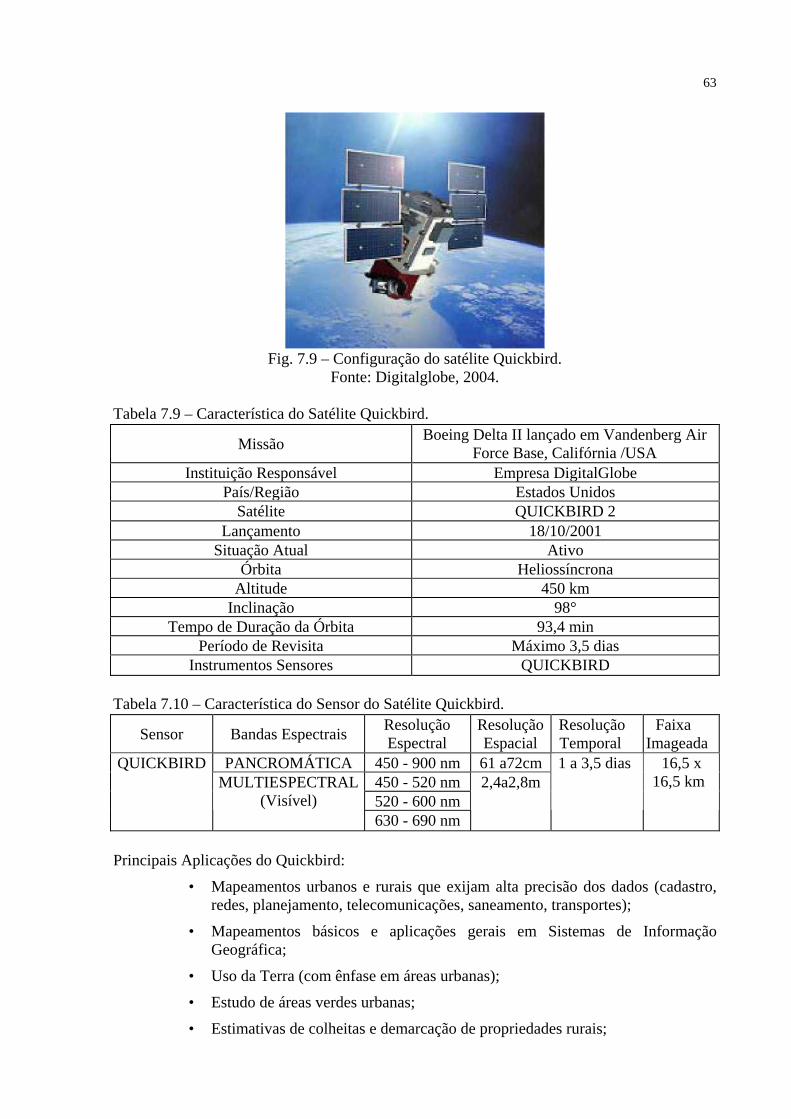
63
Fig. 7.9 – Configuração do satélite Quickbird.
Fonte: Digitalglobe, 2004. Tabela 7.9 – Característica do Satélite Quickbird.
Missão Boeing Delta II lançado em Vandenberg Air
Force Base, Califórnia /USA Instituição Responsável Empresa DigitalGlobe
País/Região Estados Unidos Satélite QUICKBIRD 2
Lançamento 18/10/2001 Situação Atual Ativo
Órbita Heliossíncrona Altitude 450 km
Inclinação 98° Tempo de Duração da Órbita 93,4 min
Período de Revisita Máximo 3,5 dias Instrumentos Sensores QUICKBIRD
Tabela 7.10 – Característica do Sensor do Satélite Quickbird.
Sensor Bandas Espectrais Resolução Espectral
Resolução Espacial
Resolução Temporal
Faixa Imageada
PANCROMÁTICA 450 - 900 nm 61 a72cm 450 - 520 nm 520 - 600 nm
QUICKBIRD MULTIESPECTRAL
(Visível) 630 - 690 nm
2,4a2,8m 1 a 3,5 dias 16,5 x
16,5 km
Principais Aplicações do Quickbird:
• Mapeamentos urbanos e rurais que exijam alta precisão dos dados (cadastro, redes, planejamento, telecomunicações, saneamento, transportes);
• Mapeamentos básicos e aplicações gerais em Sistemas de Informação Geográfica;
• Uso da Terra (com ênfase em áreas urbanas);
• Estudo de áreas verdes urbanas;
• Estimativas de colheitas e demarcação de propriedades rurais;

64
• Laudos periciais em questões ambientais.
A análise dos dados contidos em produtos de sensores remotos corresponde a etapa crucial para a geração de informações de interesse. Dentre os métodos de análise desses dados, a interpretação visual será tratada no próximo capítulo.

65
8 INTERPRETAÇÃO VISUAL DE DADOS
A análise visual baseia-se na identificação das feições de interesse a partir da associação da acuidade visual do fotointérprete, com o entendimento das características dos produtos e com o conhecimento prévio referente ao tema de estudo. Esta análise pode ser realizada a partir de dados originais e/ou processados digitalmente.
8.1 NÍVEL DE DETALHES
Em função dos objetivos dos trabalhos de mapeamento, faz-se necessário a definição do nível de detalhes que precisa ser atingido. De modo geral, o detalhamento é englobado em três diferentes níveis :
a) Regional - Refere-se a escalas menores que 1 : 100.000.
b) Semi-Detalhe - Empregado geralmente para escalas de 1 : 50.000.
c) Detalhe - Relacionado a escalas maiores que 1 : 25.000.
Definido o nível de detalhes do mapeamento, é necessário avaliar a resolução dos sistemas sensores disponíveis de modo a selecionar o produto a ser interpretado. Para a extração de informações referentes à vegetação, a partir da análise visual de produtos fotográficos, deve-se levar em conta que : o comportamento espectral da vegetação reflete as variações sazonais apresentadas pelas espécies, em especial pelos períodos seco e úmido; o produto selecionado permite a detecção das características de reflectância e absorção da REM apresentada pelo alvo em questão, no comprimento de onda do referido produto; e que a resolução espacial dos sensores determina as limitações às escalas de trabalho. Assim, como pré-requisito para o início dos trabalhos referentes à aquisição de informações através de produtos de sensores remotos faz-se necessário a seleção da época da tomada da cena, do produto a ser analisado e da escala de trabalho.
8.2 FASES DE EXECUÇÃO
O desenvolvimento da análise visual de imagens de sensores remotos se processa em três etapas distintas :
a. Fotoleitura - Corresponde à fase de reconhecimento ou identificação de feições ou objetos presentes na cena e precede qualquer análise referente aos parâmentros determinantes das feições.
b) Fotoanálise - Favorece o estudo das relações entre as características de interesse ao tema de estudo. Inicia-se a interação do analisador da imagem com os padrões e características da cena.
c) Fotointerpretação - Permite a extração de informações da cena, a partir da associação das características das feições extraídas ao raciocínio lógico dedutivo e indutivo. Baseia-se fundamentalmente na experiência e conhecimento do fotointérprete ao tema de estudo.

66
8.3 ELEMENTOS DE FOTOINTERPRETAÇÃO
A menor superfície contínua e homogênea distinguível em uma imagem fotográfica (independente da resolução espacial e escala) e passível de repetição, constitui um elemento de reconhecimento ou fotointerpretação. Dentre eles são importantes a tonalidade, a forma, o padrão, a textura e a sombra. Esses elementos podem ser assim definidos :
8.3.1 Tonalidade (ou cor)
Constitui o primeiro elemento considerado em uma análise visual e possibilita a
partir da sua diferenciação nos produtos fotográficos, a extração de várias feições de interesse na cena. É associada à variação (matiz) de tons de cinza identificada pelo olho humano, em uma amplitude que varia do preto ao branco, porém limitada até duas dezenas de tons. Para os sensores ópticos, a tonalidade de cinza pode estar relacionada com a quantidade de energia refletida e/ou emitida, enquanto que no caso de imagens de radar, diz respeito à intensidade do sinal de retorno.
Em produtos coloridos, a tonalidade está associada às variações de cores, que se apresentam com níveis de intensidade distintos entre si; no caso do olho humano, podem estar associadas a identificação de milhares de combinação de cores. As cores em produtos fotográficos, que podem ser naturais ou falsa-cor, são resultantes do comprimento de onda, da sensibilidade dos filmes e da inclusão de filtros.
Salienta-se que a identificação de feições/objetos somente através dos atributos de tonalidade de cinza ou cor, só é segura apenas em casos muito específicos. Assim, tais atributos nunca devem ser utilizados isoladamente como parâmetro discriminatório ou como meio absoluto de identificação, a menos que as fotografias tenham sido correlacionadas com as feições observadas no campo.
8.3.2 Forma
Corresponde a expressão da disposição espacial de elementos fotográficos com propriedades comuns, isto é, os elementos de uma mesma classe organizados em estruturas bem ou mal definidas, resultam em formas identificáveis. Este elemento leva em consideração, também, o referencial utilizado pelas imagens (cujas visadas são feitas sobre a cena), a resolução espacial do sensor e a escala dos produtos, que determinam as formas visíveis.
O atributo de forma baseia-se nos aspectos geométricos das feições analisadas, permitindo principalmente a distinção entre os aspectos naturais e os de origem antrópica, pois estes últimos são geralmente caracterizados pela retilinearidade. Assim, nos produtos de sensores remotos, a forma da vegetação apresenta aspecto variável segundo o seu tipo e idade, porém com a particularidade da vegetação natural estar relacionada à áreas de contornos irregulares, enquanto as áreas cultivadas assumirem formas regulares ou em faixas.

67
8.3.3 Padrão (ou estrutura)
Corresponde ao atributo que exprime ou define o padrão de organização no espaço dos elementos texturais, ou seja, é determinado pela união ou extensão de formas. Desta forma, é possível distinguir estruturas segundo a disposição dos elementos de modo sequencial e aleatório. No caso do modo sequencial (organizado) a combinação das feições lineares resulta em padrões geométricos definidos, enquanto no modo aleatório (desorganizado) a distribuição ocorre sob padrões geométricos extremamente complexos e de difícil definição.
8.3.4 Textura
É proveniente do arranjo de elementos iguais ou similares que estão em conjunto em uma mesma área, ou seja, representa a imagem de conjunto formada pela disposição das menores feições que conservam a sua identidade. É definida pelo aspecto físico, provocado na visão humana, do aglomerado de elementos.
É evidente que com a variação da resolução espacial e da escala é possível chegar a casos extremos, onde a textura fotográfica observada em um produto de alta resolução e grande escala, pode ser avaliada como um elemento de textura em um produto de baixa resolução espacial e pequena escala.
A textura é um importante indicador da composição da floresta em fotografias de pequena escala e das características de árvores individuais em fotografias de grande escala. Em fotografias de escala intermediária, a combinação de textura e padrão (arranjo espacial de elementos discretos) pode ajudar o fotointérprete a determinar a composição das espécies, bem como a estrutura de um "stand".
8.3.5 Sombra
As sombras, para o caso das imagens que registram a energia solar refletida, são resultantes da iluminação oblíqua (pelo sol) sobre áreas que apresentam rugosidades no terreno. Assim relaciona-se aos ângulos de elevação e azimute solar e com o ângulo de visada do sensor, favorecendo preponderantemente impressões de relevo.
No caso de mosaicos de radar de visada lateral, as sombras estão relacionadas a ausência de sinal de retorno. A presença de sombras constitui um dos elementos fundamentais para os casos de imagens fotográficas que não apresentam o recurso da estereoscopia, pois conferem a estes tipos de imagens a noção de relevo ou morfologia do terreno.
Adicionalmente, devem ser consideradas no processo de análise visual os critérios de tamanho, elemento diretamente associado à escala do produto e às dimensões reais do alvo no terreno; e de posição geográfica ou regional, que define-se pelo conhecimento por parte do analista do produto, da área e de suas características gerais.
68
8.4 FATORES CONDICIONANTES DOS PADRÕES
A partir das definições de textura e estrutura fotográfica apresentadas pode-se verificar que existe uma relação íntima entre tais elementos e as estruturas da superfície terrestre (naturais ou antrópicas). Deste modo, o conhecimento pelo fotointérprete dos principais fatores controladores das citadas textura e estrutura fotográficas são indispensáveis.
a) Morfogenéticos - São responsáveis pela elaboração das formas de relevo e drenagem. A modelagem do terreno é função da sua estrutura e dos agentes modeladores externos (erosões marinha, fluvial, eólica, antrópica, etc.) e internos (processos tectônicos).
b) Litológicos - Dependem das propriedades físico-químicas dos materiais rochosos, tais como, resistência à erosão, permeabilidade, plasticidade, ruptibilidade, solubilidade e tropia.
c) Deformacionais - São fatores resultantes das deformações sofridas pelos materiais rochosos, tectônica ou atectonicamente.
d) Antrópicos - Resultam das modificações da superfície natural da Terra em consequência das atividades construtivas ou destrutivas do homem na paisagem.
e) Estado da Vegetação - O estado fenológico e a própria existência da vegetação natural implicam na geração e controle da textura e estrura fotográfica, as vezes de forma peculiar, impedindo ou dificultando a análise de feições ou objetos de interesse.
8.5 LIMITAÇÕES NA ANÁLISE VISUAL
Mesmo de posse dos elementos de fotointerpretação, alguns produtos de sensores remotos apresentam algumas limitações à extração de informações a partir da análise visual, como as que se seguem :
a) Falta de Estereoscopia - Esta limitação impossibilita a visão tridimensional da cena a partir da análise visual do produto fotográfico, como é o caso das imagens TM/Landsat.
b) Resolução Espacial Grosseira - Limita a detecção de alvos que apresentam dimensões espaciais compatíveis com o elemento de resolução do sensor e/ou daqueles que tem contraste espectral intenso com relação à sua vizinhança.
c) Interferência Atmosférica - A degradação dos dados orbitais promovida pela atmosfera atua de forma diferenciada em função do posicionamento no espectro eletromagnético da banda espectral do sensor.
d) Contraste Espectral Baixo - Característica observada entre alguns alvos sob determinadas condições.
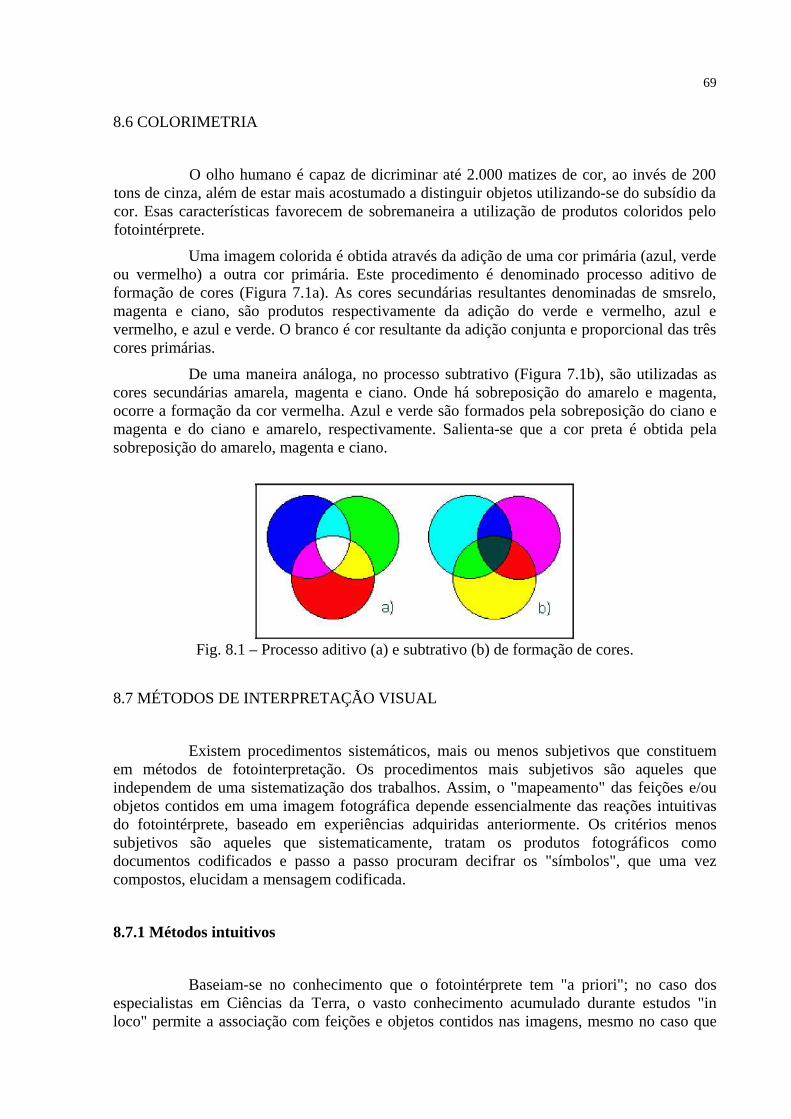
69
8.6 COLORIMETRIA
O olho humano é capaz de dicriminar até 2.000 matizes de cor, ao invés de 200 tons de cinza, além de estar mais acostumado a distinguir objetos utilizando-se do subsídio da cor. Esas características favorecem de sobremaneira a utilização de produtos coloridos pelo fotointérprete.
Uma imagem colorida é obtida através da adição de uma cor primária (azul, verde ou vermelho) a outra cor primária. Este procedimento é denominado processo aditivo de formação de cores (Figura 7.1a). As cores secundárias resultantes denominadas de smsrelo, magenta e ciano, são produtos respectivamente da adição do verde e vermelho, azul e vermelho, e azul e verde. O branco é cor resultante da adição conjunta e proporcional das três cores primárias.
De uma maneira análoga, no processo subtrativo (Figura 7.1b), são utilizadas as cores secundárias amarela, magenta e ciano. Onde há sobreposição do amarelo e magenta, ocorre a formação da cor vermelha. Azul e verde são formados pela sobreposição do ciano e magenta e do ciano e amarelo, respectivamente. Salienta-se que a cor preta é obtida pela sobreposição do amarelo, magenta e ciano.
Fig. 8.1 – Processo aditivo (a) e subtrativo (b) de formação de cores.
8.7 MÉTODOS DE INTERPRETAÇÃO VISUAL
Existem procedimentos sistemáticos, mais ou menos subjetivos que constituem em métodos de fotointerpretação. Os procedimentos mais subjetivos são aqueles que independem de uma sistematização dos trabalhos. Assim, o "mapeamento" das feições e/ou objetos contidos em uma imagem fotográfica depende essencialmente das reações intuitivas do fotointérprete, baseado em experiências adquiridas anteriormente. Os critérios menos subjetivos são aqueles que sistematicamente, tratam os produtos fotográficos como documentos codificados e passo a passo procuram decifrar os "símbolos", que uma vez compostos, elucidam a mensagem codificada.
8.7.1 Métodos intuitivos
Baseiam-se no conhecimento que o fotointérprete tem "a priori"; no caso dos especialistas em Ciências da Terra, o vasto conhecimento acumulado durante estudos "in loco" permite a associação com feições e objetos contidos nas imagens, mesmo no caso que
70
sejam de áreas desconhecidas, pois desenvolveram critérios próprios e particulares para a interpretação. Tais critérios não deixam de ser uma variação do método das Chaves que será tratado a seguir.
8.7.2 Método das chaves
Está baseado no estudo comparativo, isto é, apoia-se na fotoleitura (reconhecimento dos elementos texturais de interesse); fotoanálise (discriminação das estruturas, formas, tonalidades de cinja e/ou cores); e fotointerpretação (comparação dos dados "lidos e analisados" com aqueles de feições ou qualquer outro elemento previamente conhecido).
O emprego deste método é vantajoso nos casos em que não há necessidade de interpretações aprofundadas (predominando a fotoleitura e a fotoanálise), e busca-se a formação de um banco de dados. Este banco de dados conterá apenas dados facilmente identificáveis que não impliquem na tentativa de descoberta de modelos de fenômenos.
8.7.3 Método sistemático
Relaciona-se ao estudo das propriedades estruturais das feições e/ou objetos contidos nas imagens fotográficas para a definição de um modelo de um fenômeno, sendo baseado na fotoleitura (reconhecimentodos elementos texturais de interesse-símbolos); fotoanálise (reconhecimento das leis e da complexidade de organização dos elementos texturais de interesse-código); e fotointerpretação (estabelecimento das relações entre a imagem fotográfica e o modelo do fenômeno registrado no terreno-elucidação da imagem codificada). A escolha do método de interpretação visual mais adequado é uma função da complexidade das informações que precisam ser obtidas a partir das imagens fotográficas.
As análises que envolvem produtos de sensoriamento remoto muitas vezes são afetadas por fatores diversos que atuam prejudicando a extração de informações. Para maximizar a extração destas informações a partir de produtos digitais, aplicam-se as técnicas de processamento de imagens, as quais serão tratadas a seguir.
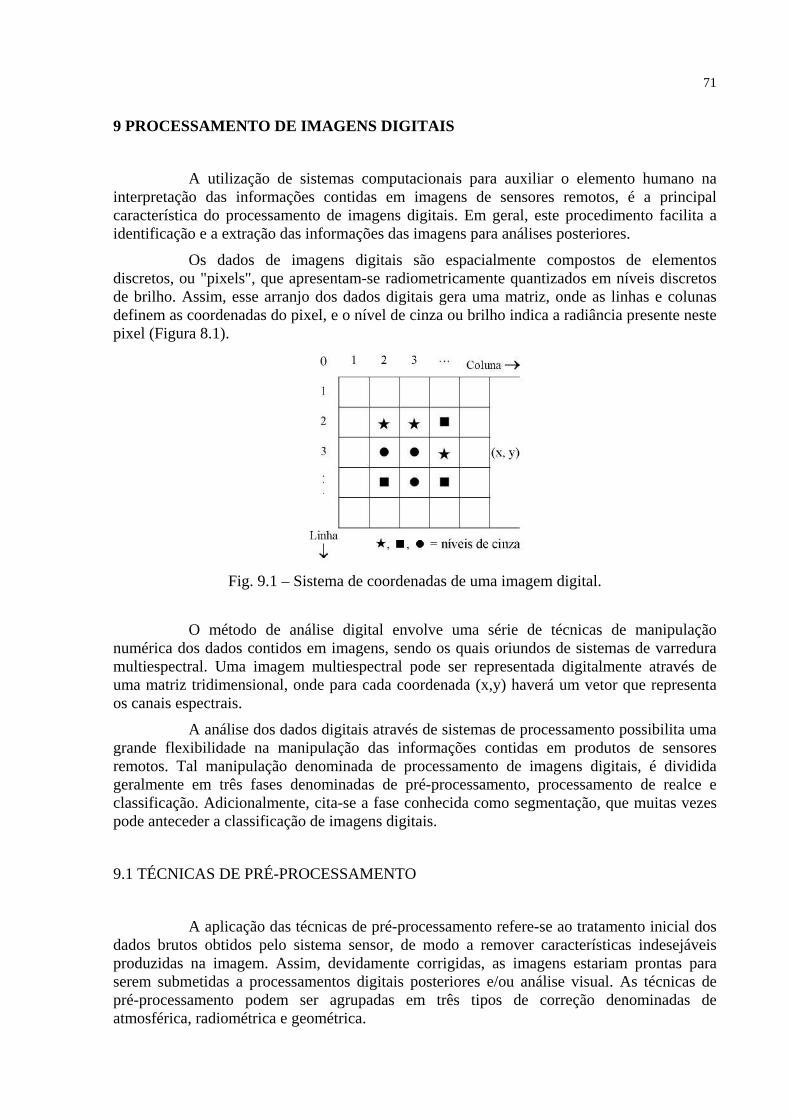
71
9 PROCESSAMENTO DE IMAGENS DIGITAIS
A utilização de sistemas computacionais para auxiliar o elemento humano na interpretação das informações contidas em imagens de sensores remotos, é a principal característica do processamento de imagens digitais. Em geral, este procedimento facilita a identificação e a extração das informações das imagens para análises posteriores.
Os dados de imagens digitais são espacialmente compostos de elementos discretos, ou "pixels", que apresentam-se radiometricamente quantizados em níveis discretos de brilho. Assim, esse arranjo dos dados digitais gera uma matriz, onde as linhas e colunas definem as coordenadas do pixel, e o nível de cinza ou brilho indica a radiância presente neste pixel (Figura 8.1).
Fig. 9.1 – Sistema de coordenadas de uma imagem digital.
O método de análise digital envolve uma série de técnicas de manipulação numérica dos dados contidos em imagens, sendo os quais oriundos de sistemas de varredura multiespectral. Uma imagem multiespectral pode ser representada digitalmente através de uma matriz tridimensional, onde para cada coordenada (x,y) haverá um vetor que representa os canais espectrais.
A análise dos dados digitais através de sistemas de processamento possibilita uma grande flexibilidade na manipulação das informações contidas em produtos de sensores remotos. Tal manipulação denominada de processamento de imagens digitais, é dividida geralmente em três fases denominadas de pré-processamento, processamento de realce e classificação. Adicionalmente, cita-se a fase conhecida como segmentação, que muitas vezes pode anteceder a classificação de imagens digitais.
9.1 TÉCNICAS DE PRÉ-PROCESSAMENTO
A aplicação das técnicas de pré-processamento refere-se ao tratamento inicial dos dados brutos obtidos pelo sistema sensor, de modo a remover características indesejáveis produzidas na imagem. Assim, devidamente corrigidas, as imagens estariam prontas para serem submetidas a processamentos digitais posteriores e/ou análise visual. As técnicas de pré-processamento podem ser agrupadas em três tipos de correção denominadas de atmosférica, radiométrica e geométrica.
72
9.1.1 Correção atmosférica
Apesar da correção dos efeitos atmosféricos ser bastante complexa, os dados espúreos que acompanham a cena, oriundos principalmente dos efeitos de espalhamento, podem ser minimizados a partir da aplicação de algumas técnicas. Em geral os modelos matemáticos são mais precisos, sendo porém de difícil implementação, pois exigem parâmetros atmosféricos obtidos na data e hora da aquisição das imagens por estações meteorológicas com equipamentos de radiosondagem.
As técnicas opcionais de correção baseiam-se na associação dos dados da imagem com o comportamento espectral teórico e/ou medido no campo por radiômetros. Dentre essas técnicas, citam-se o Método de Subtração do Pixel (Objeto) Escuro e o Método do Histograma.
O método de correção pela subtração do pixel escuro, de implementação simples, consiste em subtrair um determinado valor digital de uma imagem multiespectral baseando-se em alvos que teoricamente deveriam apresentar valor de reflectância nulo, tais como, sombra de relevo e água límpida e profunda (lagos). Através de uma inspeção dos valores dos pixels que compõem esses alvos, é observado se os mesmos registram valores acima de zero, o que deverá ser atribuído à contribuição aditiva da atmosfera. Assim, os valores de nível de cinza diferentes de zero relacionados às amostras selecionadas, são então subtraídos de toda a cena.
Nas situações em que os alvos tomados como base para aplicação do método de subtração do pixel escuro não são disponíveis, ou quando presentes mostram-se inadequados, o método do histograma é uma alternativa relevante. Tal técnica de atenuação dos efeitos atmosféricos permite ao usuário selecionar o valor digital referente a turbidez atmosférica diretamente do histograma de frequência dos níveis de cinza de uma determinada imagem digital. Isto baseia-se no fato que o histograma dos níveis de cinza de dadas bandas espectrais, em particular as bandas do espectro visível, apresentarem geralmente um aumento brusco na frequência de pixels a partir de algum nível digital, sendo este valor associado supostamente ao espalhamento atmosférico naquela referida banda.
9.1.2 Correção radiométrica
As imagens digitais podem apresentar degradações radiométricas em linhas ou pixels isolados em função de desajustes na calibração de detetores, de erros esporádicos na transmissão de dados e de outros problemas de instrumentação. Nestes casos, os pixels afetados por ruídos radiométricos normalmente apresentam o valor de nível de cinza igual a zero, indicando perda de dados, ou o valor máximo, indicando saturação.
As principais degradações radiométricas são representadas pelo "stripping", as linhas com dados ruins ("dropped lines") e os ruídos em pixels isolados. O "stripping" é caracterizado por um padrão sistemático de faixas horizontais com abruptas mudanças de brilho, originadas por diferenças nas respostas do conjunto de detetores de uma mesma banda. A degradação aleatória definida como linhas com dados ruins consiste na perda parcial ou total de informação para uma linha de uma determinada banda, devido a problemas de saturação do detetor, assim como na aquisição, registro, transmissão ou processamento de dados em terra. Por outro lado, os ruídos em pixels isolados representam degradações pontuais com distribuição aleatória em uma imagem.

73
A função dos programas de correção radiométrica é minimizar diferenças entre os níveis de cinza registrados por um conjunto de detetores. De implementação simples, as técnicas de remoção de ruídos baseiam-se na análise do desvio de cada pixel em relação a sua vizinhança, objetivando a detecção de dados defeituosos. Para esse tipo de análise, um pixel ou linha com ruído pode ser então substituída pelo pixel ou linha vizinha mais próxima sem problemas, ou por um nível de cinza interpolado entre a sua vizinhança.
9.1.3 Correção geométrica e registro de imagens
As fontes de distorções geométricas em imagens orbitais podem ser atribuídas a fatores como a rotação e curvatura da Terra; erros de instrumentação; padrão de varredura e campo de visada em sensores; distorção panorâmica; e variações de altitude, atitude e velocidade da plataforma. De um modo geral, em qualquer produto orbital fornecido aos usuários, as correções geométricas necessárias já encontram-se processadas com base nas informações registradas pelos instrumentos a bordo da plataforma, sendo as mesmas enviadas às estações de recepção no momento do imageamento.
As imagens de sensores remotos são sujeitas a uma série de distorções espaciais, não possuindo precisão cartográfica quanto ao posicionamento dos objetos, superfícies ou fenômenos nelas apresentados. Dessa forma, torna-se necessário aplicar correções, de modo a reorganizar os pixels da imagem em relação a um determinado sistema de projeção cartográfica. A uniformidade obtida é possibilitada pelo fato que os pixels em questão podem ser reorganizados para o sistema de projeção cartográfica de uma carta ou mapa da mesma área imageada, a ser tomado como referência. Através de tal processo denominado de georreferenciamento, os pixels estariam agora individualizados em termos de coordenadas geográficas e não apenas no sistema de linhas e colunas.
As técnicas de georreferenciamento baseadas no método de reamostragem por interpolação diferenciam-se basicamente pelo número de pixels vizinhos usados no cálculo do valor do nível de cinza de um pixel da grade corrigida. Dentro dessa abordagem, citam-se as técnicas de alocação do vizinho mais próximo, interpolação bilinear e interpolação por convolução cúbica, que utilizam um, quatro e dezesseis pixels vizinhos, respectivamente.
Há casos em que, adicionalmente, busca-se sobrepor imagens de maneira que fiquem perfeitamente coincidentes no espaço, sendo necessário que as mesmas sofram um tipo de transformação espacial. Assim, é realizado um processo de alinhamento geométrico que pode ser efetuado em duas ou mais imagens, ou seja, o ajuste do sistema de coordenadas da imagem ao sistema equivalente de outra, cobrindo a mesma área. O registro de imagens se faz necessário nos casos em que se deseja realizar análise comparativa de imagens mul ti temporais, combinar imagens de diferentes sensores sobre a mesma área, ou ainda justapor imagens.
9.2 TÉCNICAS DE PROCESSAMENTO DE REALCE
As técnicas de realce de imagens tem como objetivo melhorar a qualidade visual de toda a imagem, ou de feições específicas, a partir da alteração das relações de brilho ou níveis de cinza dos pixelas originais. Assim, são aplicados algoritmos que atuam reduzindo o volume de dados e realçando os alvos de interesse para inspeção visual, ou ocasionalmente
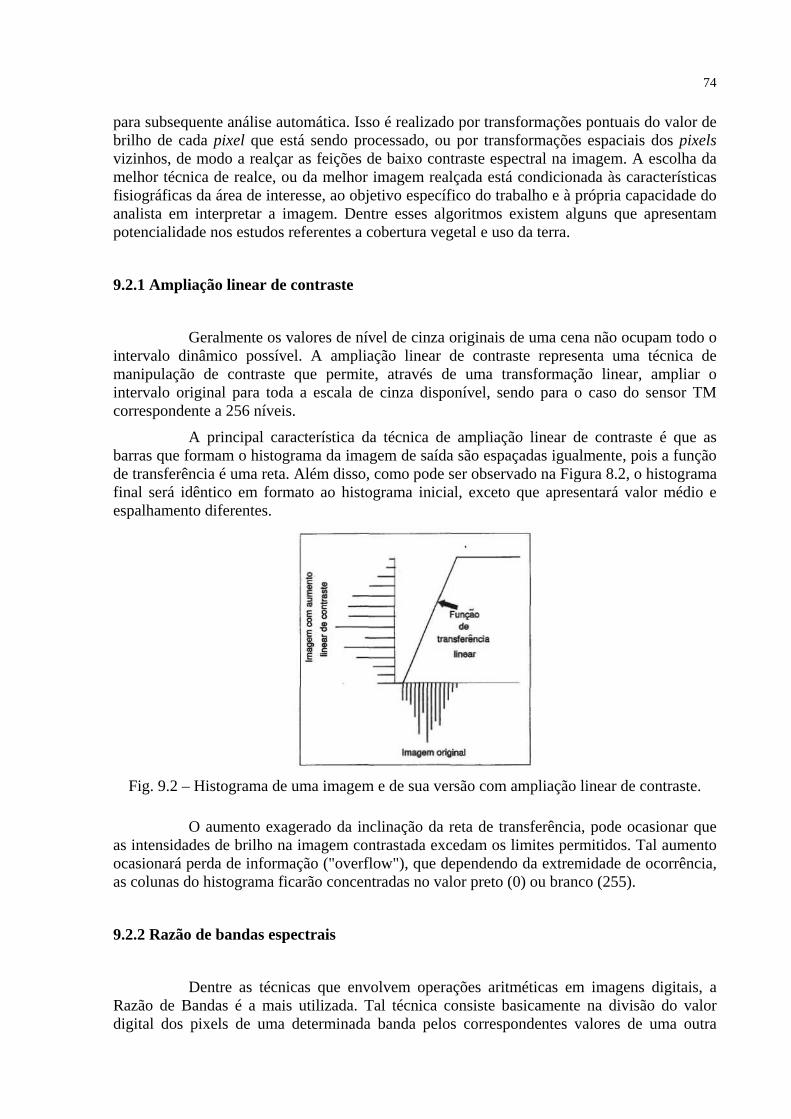
74
para subsequente análise automática. Isso é realizado por transformações pontuais do valor de brilho de cada pixel que está sendo processado, ou por transformações espaciais dos pixels vizinhos, de modo a realçar as feições de baixo contraste espectral na imagem. A escolha da melhor técnica de realce, ou da melhor imagem realçada está condicionada às características fisiográficas da área de interesse, ao objetivo específico do trabalho e à própria capacidade do analista em interpretar a imagem. Dentre esses algoritmos existem alguns que apresentam potencialidade nos estudos referentes a cobertura vegetal e uso da terra.
9.2.1 Ampliação linear de contraste
Geralmente os valores de nível de cinza originais de uma cena não ocupam todo o intervalo dinâmico possível. A ampliação linear de contraste representa uma técnica de manipulação de contraste que permite, através de uma transformação linear, ampliar o intervalo original para toda a escala de cinza disponível, sendo para o caso do sensor TM correspondente a 256 níveis.
A principal característica da técnica de ampliação linear de contraste é que as barras que formam o histograma da imagem de saída são espaçadas igualmente, pois a função de transferência é uma reta. Além disso, como pode ser observado na Figura 8.2, o histograma final será idêntico em formato ao histograma inicial, exceto que apresentará valor médio e espalhamento diferentes.
Fig. 9.2 – Histograma de uma imagem e de sua versão com ampliação linear de contraste.
O aumento exagerado da inclinação da reta de transferência, pode ocasionar que
as intensidades de brilho na imagem contrastada excedam os limites permitidos. Tal aumento ocasionará perda de informação ("overflow"), que dependendo da extremidade de ocorrência, as colunas do histograma ficarão concentradas no valor preto (0) ou branco (255).
9.2.2 Razão de bandas espectrais
Dentre as técnicas que envolvem operações aritméticas em imagens digitais, a Razão de Bandas é a mais utilizada. Tal técnica consiste basicamente na divisão do valor digital dos pixels de uma determinada banda pelos correspondentes valores de uma outra

75
banda.
Ao efetuar uma razão entre bandas, os quocientes variam em um intervalo que compreende valores reais contínuos. Para discretização desses valores multiplica-se os quocientes por um ganho e adiciona-se a ele um "offset", cujos valores ideais variam de acordo com a imagem e o tipo de "ratio". Esses valores devem atribuir à imagem resultante respectivamente, uma maior variância possível sem saturá-la, e uma média próxima daquela do intervalo máximo dos valores digitais da imagem.
Na Razão de Bandas, utiliza-se o seguinte algoritmo de transformação : Vi = A Va/Vb + B
onde, Vi = valor do pixel resultante A = ganho Va = valor do pixel da banda "a" B = "offset" Vb = valor do pixel da banda "b"
Salienta-se que a razão entre bandas tende a atenuar os efeitos multiplicativos relativos a topografia e enfatizar feições da curva espectral de alvos específicos. Entretanto, esta técnica ainda que adicionalmente reduza a dimensão dos dados, apresenta algumas desvantagens como perder as características espaciais da cena pela atenuação do sombreamento do relevo e minimizar a discriminação de alvos com comportamento gradiente semelhante, além de perder as informações originais. Devido as suas particularidades intrínsecas, a Razão de Bandas é bastante utilizada na determinação dos chamados índices de vegetação, como o NDVI (Normalizated Difference Vegetation Index).
9.2.3 Transformação por componentes principais
Normalmente, as imagens multiespectrais apresentam uma certa redundância entre bandas adjacentes, fato este indesejável, pois, em composições coloridas, diminui a eficiência de exposição das cores. A alta similaridade visual e numérica de dados multiespectrais pode originar-se da correlação espectral natural, do sombreamento topográfico e da sobreposição espectral entre bandas adjacentes. Neste contexto, a Transformação por Componentes Principais tem como função principal determinar a extensão de correlação entre bandas de uma mesma imagem e removê-la através de uma transformação matemática apropriada.
Tal técnica de transformação envolve uma rotação e uma translação num hipotético espaço de atributos espectrais, produzindo novas variáveis conhecidas como componentes ou eixos (Figura 8.3). Desta forma, o conteúdo de informação de uma imagem é redistribuído de tal maneira que a primeira imagem formada concentrará a maior parte da variância total e portanto o maior contraste. A medida em que vão sendo geradas novas imagens sem nenhuma correlação entre si, as feições espectrais serão progressivamente menos significantes.
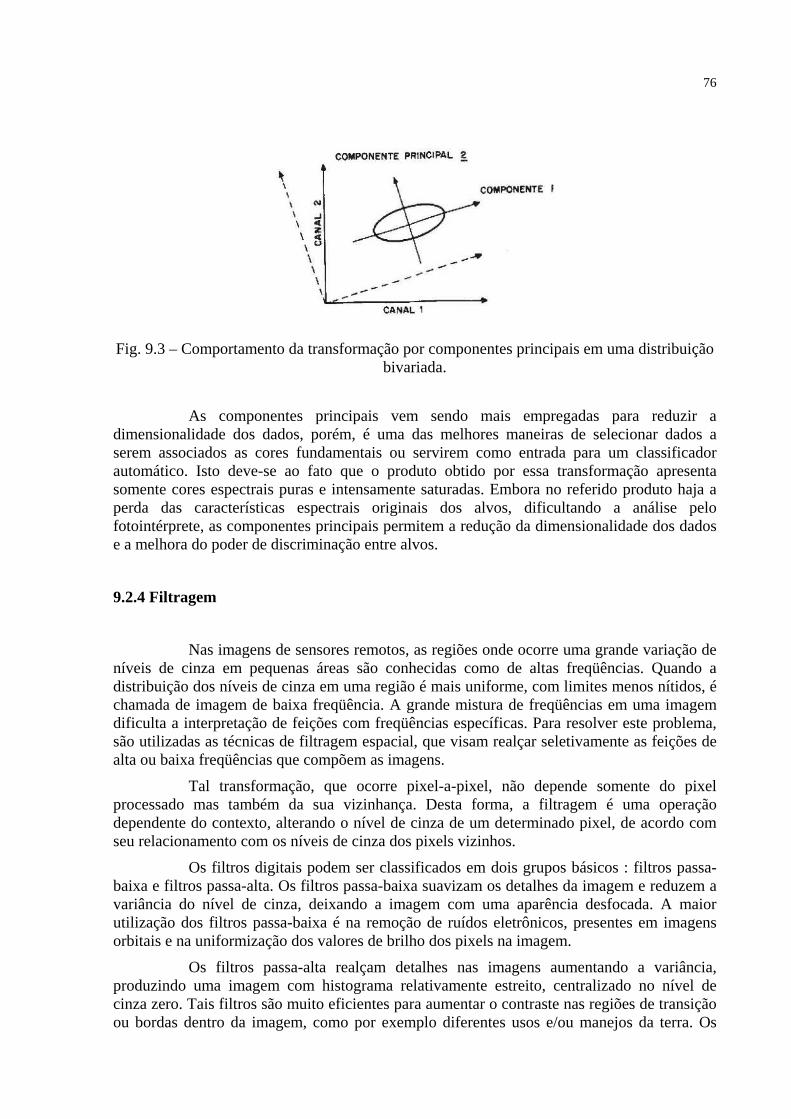
76
Fig. 9.3 – Comportamento da transformação por componentes principais em uma distribuição
bivariada.
As componentes principais vem sendo mais empregadas para reduzir a dimensionalidade dos dados, porém, é uma das melhores maneiras de selecionar dados a serem associados as cores fundamentais ou servirem como entrada para um classificador automático. Isto deve-se ao fato que o produto obtido por essa transformação apresenta somente cores espectrais puras e intensamente saturadas. Embora no referido produto haja a perda das características espectrais originais dos alvos, dificultando a análise pelo fotointérprete, as componentes principais permitem a redução da dimensionalidade dos dados e a melhora do poder de discriminação entre alvos.
9.2.4 Filtragem
Nas imagens de sensores remotos, as regiões onde ocorre uma grande variação de níveis de cinza em pequenas áreas são conhecidas como de altas freqüências. Quando a distribuição dos níveis de cinza em uma região é mais uniforme, com limites menos nítidos, é chamada de imagem de baixa freqüência. A grande mistura de freqüências em uma imagem dificulta a interpretação de feições com freqüências específicas. Para resolver este problema, são utilizadas as técnicas de filtragem espacial, que visam realçar seletivamente as feições de alta ou baixa freqüências que compõem as imagens.
Tal transformação, que ocorre pixel-a-pixel, não depende somente do pixel processado mas também da sua vizinhança. Desta forma, a filtragem é uma operação dependente do contexto, alterando o nível de cinza de um determinado pixel, de acordo com seu relacionamento com os níveis de cinza dos pixels vizinhos.
Os filtros digitais podem ser classificados em dois grupos básicos : filtros passa-baixa e filtros passa-alta. Os filtros passa-baixa suavizam os detalhes da imagem e reduzem a variância do nível de cinza, deixando a imagem com uma aparência desfocada. A maior utilização dos filtros passa-baixa é na remoção de ruídos eletrônicos, presentes em imagens orbitais e na uniformização dos valores de brilho dos pixels na imagem.
Os filtros passa-alta realçam detalhes nas imagens aumentando a variância, produzindo uma imagem com histograma relativamente estreito, centralizado no nível de cinza zero. Tais filtros são muito eficientes para aumentar o contraste nas regiões de transição ou bordas dentro da imagem, como por exemplo diferentes usos e/ou manejos da terra. Os
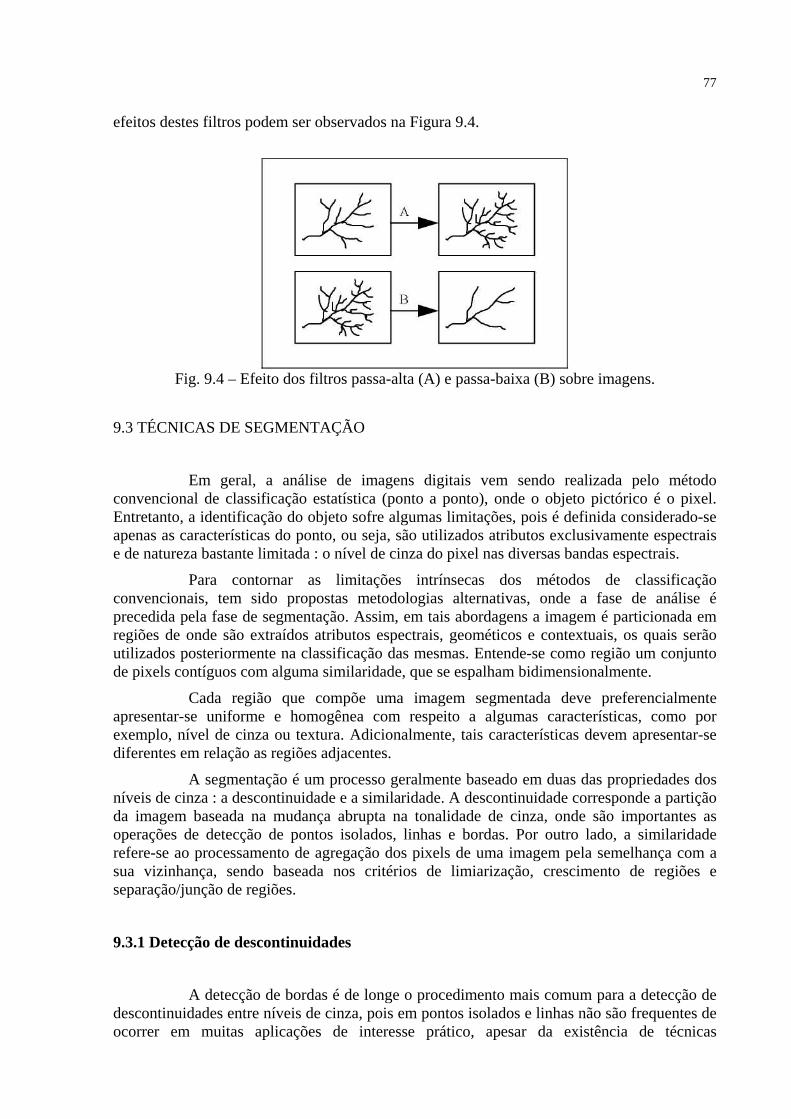
77
efeitos destes filtros podem ser observados na Figura 9.4.
Fig. 9.4 – Efeito dos filtros passa-alta (A) e passa-baixa (B) sobre imagens.
9.3 TÉCNICAS DE SEGMENTAÇÃO
Em geral, a análise de imagens digitais vem sendo realizada pelo método convencional de classificação estatística (ponto a ponto), onde o objeto pictórico é o pixel. Entretanto, a identificação do objeto sofre algumas limitações, pois é definida considerado-se apenas as características do ponto, ou seja, são utilizados atributos exclusivamente espectrais e de natureza bastante limitada : o nível de cinza do pixel nas diversas bandas espectrais.
Para contornar as limitações intrínsecas dos métodos de classificação convencionais, tem sido propostas metodologias alternativas, onde a fase de análise é precedida pela fase de segmentação. Assim, em tais abordagens a imagem é particionada em regiões de onde são extraídos atributos espectrais, geométicos e contextuais, os quais serão utilizados posteriormente na classificação das mesmas. Entende-se como região um conjunto de pixels contíguos com alguma similaridade, que se espalham bidimensionalmente.
Cada região que compõe uma imagem segmentada deve preferencialmente apresentar-se uniforme e homogênea com respeito a algumas características, como por exemplo, nível de cinza ou textura. Adicionalmente, tais características devem apresentar-se diferentes em relação as regiões adjacentes.
A segmentação é um processo geralmente baseado em duas das propriedades dos níveis de cinza : a descontinuidade e a similaridade. A descontinuidade corresponde a partição da imagem baseada na mudança abrupta na tonalidade de cinza, onde são importantes as operações de detecção de pontos isolados, linhas e bordas. Por outro lado, a similaridade refere-se ao processamento de agregação dos pixels de uma imagem pela semelhança com a sua vizinhança, sendo baseada nos critérios de limiarização, crescimento de regiões e separação/junção de regiões.
9.3.1 Detecção de descontinuidades
A detecção de bordas é de longe o procedimento mais comum para a detecção de descontinuidades entre níveis de cinza, pois em pontos isolados e linhas não são frequentes de ocorrer em muitas aplicações de interesse prático, apesar da existência de técnicas

78
combinadas para a detecção de todas estas feições.
A detecção de bordas corresponde a um método de segmentação de imagens baseado na descontinuidade dos níveis de cinza e/ou textura entre os limites dos diferentes objetos que compõem uma imagem. Desta forma, uma borda separará duas regiões relativamente uniformes quando os objetos ou regiões detectadas exibem alguma uniformidade interna com respeito as propriedades da imagem e contrastam com a sua vizinhança. Salienta-se que as técnicas para a detecção de qualquer tipo de descontinuidade em imagens baseiam-se geralmente na aplicação de máscaras ou filtros.
9.3.2 Agregamento de pixels
Dentre as operações de agregamento de pixels, a limiarização constitui-se em uma
técnica simples e eficiente na segmentação de imagens, a qual envolve atributos do pixel como o nível de cinza e propriedades locais do mesmo.
Para uma imagem que apresente objetos brilhantes sob um fundo escuro, a separação entre estas duas regiões de brilho poderá ser definida pela aplicação de um limiar tal que todos os pixels menores ou iguais ao limiar serão atribuídos a um "cluster" e os pixels restantes a um segundo "cluster". Um dos procedimentos mais fáceis para seleção do limiar conveniente, consiste em examinar o histograma de níveis de cinza e então posicionar o limiar na depressão entre os picos de moda dominantes.
A técnica referida como crescimento de regiões consiste em agrupar pixels com características similares dentro de regiões contíguas. O mais simples desses procedimentos corresponde a agregação de pixels baseada na similaridade entre as propriedades como o nível de cinza e textura de um conjunto de pixels em relação a sua vizinhança.
No método de separação de regiões a imagem a ser particionada é tomada como segmento inicial, sendo então sucessivamente dividida em segmentos menores na medida em que for constatado que o mesmo não seja suficientemente homogêneo. Nas situações onde seja apenas utilizada a operação de separação de regiões, é provável que a partição final contenha regiões adjacentes com propriedades idênticas. Assim, para contornar esse problema e maximizar o resultado da segmentação, é utilizado de forma combinada as operações de fusão e divisão de regiões. A fusão de um par de regiões adjacentes com as distribuições de intensidade de tons de cinza suficientemente similares permite que se reduza a "artificialidade" do processo de segmentação.
9.4 TÉCNICAS DE CLASSIFICAÇÃO
A classificação de imagens digitais consiste em identificar nas mesmas, os diferentes alvos, fenômenos ou feições que apresentam padrões espectrais similares e atribuí-los a uma determinada classe ou tema. Uma hipótese básica subjacente ao processo classificatório reside no fato de que os diferentes alvos terrestres apresentam comportamento espectrais distintos em faixas específicas do espectro eletromagnético, possibilitando a formação de um espaço de atributos que permite a identificação dos mesmos. Na Figura 8.5 é apresentada a representação de uma imagem digital em sua forma normal (níveis de cinza) e a sua correspondente imagem temática.
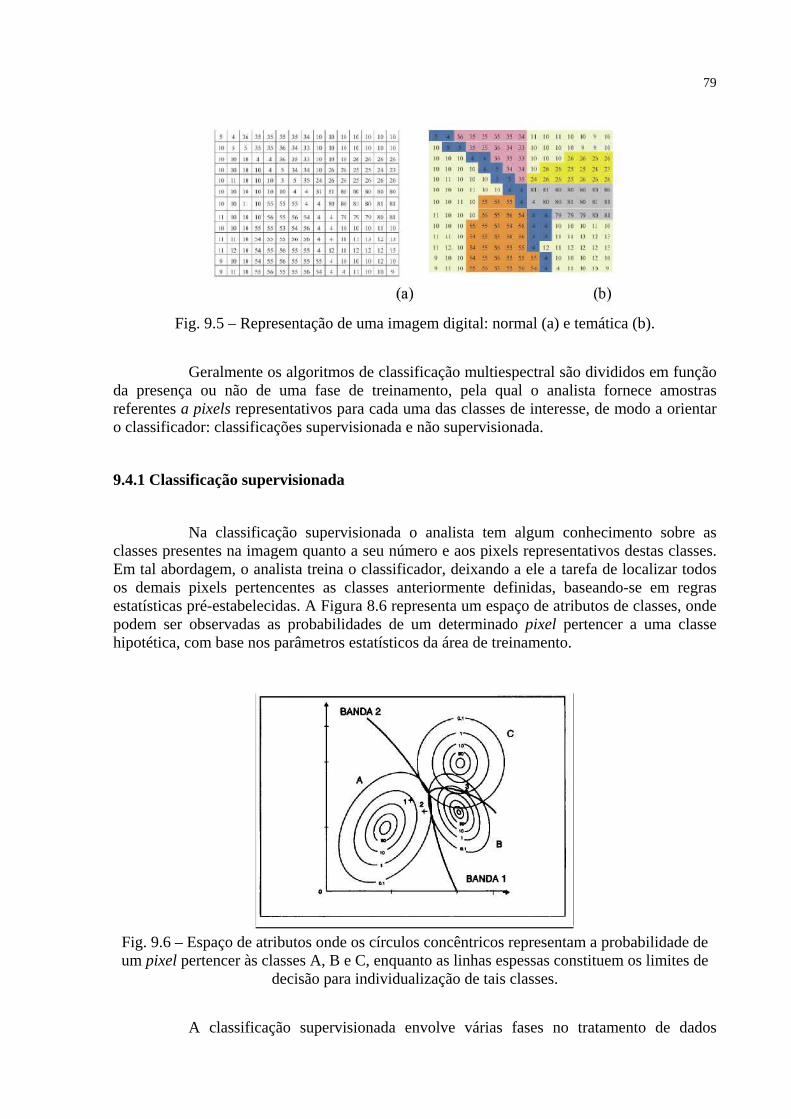
79
Fig. 9.5 – Representação de uma imagem digital: normal (a) e temática (b).
Geralmente os algoritmos de classificação multiespectral são divididos em função da presença ou não de uma fase de treinamento, pela qual o analista fornece amostras referentes a pixels representativos para cada uma das classes de interesse, de modo a orientar o classificador: classificações supervisionada e não supervisionada.
9.4.1 Classificação supervisionada
Na classificação supervisionada o analista tem algum conhecimento sobre as classes presentes na imagem quanto a seu número e aos pixels representativos destas classes. Em tal abordagem, o analista treina o classificador, deixando a ele a tarefa de localizar todos os demais pixels pertencentes as classes anteriormente definidas, baseando-se em regras estatísticas pré-estabelecidas. A Figura 8.6 representa um espaço de atributos de classes, onde podem ser observadas as probabilidades de um determinado pixel pertencer a uma classe hipotética, com base nos parâmetros estatísticos da área de treinamento.
Fig. 9.6 – Espaço de atributos onde os círculos concêntricos representam a probabilidade de um pixel pertencer às classes A, B e C, enquanto as linhas espessas constituem os limites de
decisão para individualização de tais classes.
A classificação supervisionada envolve várias fases no tratamento de dados

80
multiespectrais, tais como: seleção de áreas de treinamento (supervisionamento); definição pelo analisador do comportamento espectral das amostras (áreas de treinamento); e classificação da cena, através das amostras fornecidas pelo analista.
Dentre os classificadores que exigem a fase de treinamento tem-se o Método da Máxima Verossimilhança (Maxver ou "Maximum Likelihood"). O Maxver é um algoritmo estatístico que consiste em classificar a imagem ponto a ponto, usando o critério de máxima verossimilhança a partir das classes fornecidas pelo analista. Esse critério baseia-se em associar o padrão à classe para a qual ele tenha a maior probabilidade de pertencer, considerando as suas características ou atributos. Devido a complexidade relativa da base estatística, para que a classificação seja suficientemente precisa, é necessário um número razoável de pixels (maior que uma centena) para cada conjunto de treinamento.
A probabilidade de um pixel da imagem pertencer a qualquer uma das classes anteriormente definidas será baseado em um limiar introduzido no sistema pelo analista. Um fator relevante para este classificador ter um bom desempenho corresponde a necessidade de que as áreas de treinamento sejam amostras homogêneas das classes envolvidas, ao mesmo tempo em que contemplem toda a variabilidade inerente à classe.
9.4.2 Classificação não supervisionada
Esta técnica é utilizada quando não há nenhum tipo de conhecimento sobre a área imageada, por exemplo, quando não se dispõe de dados prévios sobre o número de classes presentes na cena de interesse. Tal abordagem de classificação corresponde a uma técnica de segmentação de imagens onde as mesmas são divididas em classes não conhecidas, ou seja, o algoritmo define as classes com base em regras estatísticas.
A classificação não supervisionada baseia-se em uma análise de agrupamento onde são identificadas no espaço de atributos, nuvens ou "clusters" formadas por pixels espectralmente similares. Para aplicação desse classificador deve-se primeiramente especificar um número de nuvens de pixels ou classes esperadas, apesar de o número atual ou ótimo não ser conhecido. Posteriormente, observa-se quais das concentrações de pixels obtidas devem ser tratadas como grupos distintos, atribuindo-se um limiar, cujo valor é definido pelo analista.
Dentre os algoritmos de classificação não supervisionada, o K-Médias é o mais comumente utilizado. Esse algoritmo determina o agrupamento natural dos dados em K dimensões no espaço, onde "K" corresponde ao número de bandas espectrais e/ou imagens envolvidas. Assume-se que cada nuvem de pixels gerada é representativa da distribuição de probabilidade de uma determinada classe.
Inicialmente o algoritmo define um vetor média para cada classe, sendo em seguida, os pixels da amostragem avaliados individualmente com relação a cada uma destas médias, de modo a agrupar os pixels mais similares digitalmente. Esse procedimento é contínuo até que não ocorra mudança significativa nos vetores de média das classes e/ou posicionamento dos pixels na classificação, ou ainda, atinja um número máximo fixado de iterações. Com a conclusão da fase de avaliação por agrupamento, todos os pixels da imagem serão classificados em função da máxima verossimilhança.
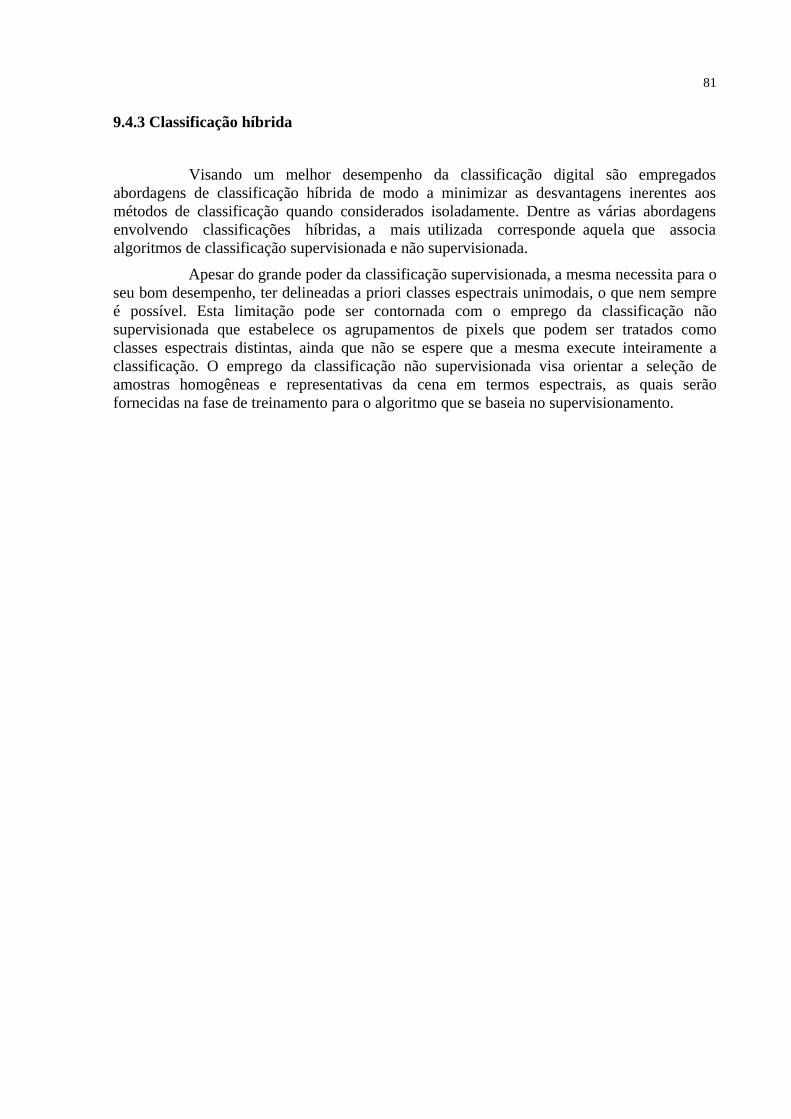
81
9.4.3 Classificação híbrida
Visando um melhor desempenho da classificação digital são empregados abordagens de classificação híbrida de modo a minimizar as desvantagens inerentes aos métodos de classificação quando considerados isoladamente. Dentre as várias abordagens envolvendo classificações híbridas, a mais utilizada corresponde aquela que associa algoritmos de classificação supervisionada e não supervisionada.
Apesar do grande poder da classificação supervisionada, a mesma necessita para o seu bom desempenho, ter delineadas a priori classes espectrais unimodais, o que nem sempre é possível. Esta limitação pode ser contornada com o emprego da classificação não supervisionada que estabelece os agrupamentos de pixels que podem ser tratados como classes espectrais distintas, ainda que não se espere que a mesma execute inteiramente a classificação. O emprego da classificação não supervisionada visa orientar a seleção de amostras homogêneas e representativas da cena em termos espectrais, as quais serão fornecidas na fase de treinamento para o algoritmo que se baseia no supervisionamento.
BIBLIOGRAFIAS CONSULTADAS
BOWKER, D. E.; DAVIS, R. E.; MYRICK, D. L.; STACY, K.; JONES, W. T. Spectral reflectances of natural targets for use in remote sensing studies. Washington, DC: NASA, 1985. 181 p. (NASA Reference Publication-1139).
CHAVEZ JR., P. S. An improved dark-object subtraction technique for atmospheric scattering correction of mul ti spectral data. Remote Sensing of Environment, v. 24, n. 3, p. 459-479, Mar. 1988.
CRACKNEEL, A. P. Editorial: geographical information systems. International Journal of Remote Sensing, v. 7, n. 6, p. 721-722, June 1986.
CRÓSTA, A. P. Processamento digital de imagens de sensoriamento remoto. Campinas, SP: UNICAMP, 1992. 170 p.
GAUSMAN, H. W. Leaf reflectance of near-infrared. Photogrammetric Engineering and Remote Sensing, v.40, n. 2, p.183-191, Feb. 1974.
GAUSMAN, H. W.; ALLEN, W. A.; WIEGAND, C. L.; ESCOBAR, D. E.; RODRIGUEZ, R. R.; RICHARDSON, A. J. The leaf-mesophyles of twenty crops, their light spectra, and optical and geometrical parameters. Washington, D. C.: Departament of Agriculture, Mar. 1973. 59 p. (Technical Bulletin, 1465).
GERBERMANN, A. H.; NEHER, D. D. Reflectance of varying mixtures of a clay soil and sand. Photogrammetric Engineering and Remote Sensing, v. 45, n. 6, p. 1145-1151, June 1979.
GOEL, N. S. Inversion of canopy reflectance models for estimation of biophysical parameters from reflectance data. In : ASRAR, G. ed. Theory and applications of optical remote sensing. Washington, DC: NASA, 1989. cap. 6, p. 205-251.
GONZALEZ, R. C.; WINTZ, P. Image segmentation. In:______. Digital image processing. 2 ed. Reading, MA: Addison-Wesley, 1987. cap. 7, p.331-390.
HARALICK, R. M.; SHAPIRO, L. G. Image segmentation techniques. Computer Vision, Graphics, and Image Processing, v. 29, n. 1, p. 100-132, Jan. 1985.
HOFFER, R. M. Biological and physical considerations in applying computer-aided analysis techniques to remote sensor data. In : SWAIN, P. H.; DAVIS, S. M. ed. Remote sensing : the quantitative approach. West Lafayette, IN: Mc Graw-Hill, 1978. cap.5, p. 227-289.
HUETE, A. R. Soil influences in remotely sensed vegetation-canopy spectra. In : ASRAR, G. ed. Theory and applications of optical remote sensing. Washington, DC: NASA, 1989. cap. 4, p. 107-141.
83
IRONS, J. R.; WEISMILLER, R. A.; PETERSEN, G. W. Soil reflectance. In : ASRAR, G. ed. Theory and applications of optical remote sensing. Washington, DC: NASA, 1989. cap. 3, p. 66-106.
JENSEN, J. R. Introductory digital image processing. Englewood Clifs, NJ: Prentice-Hall, 1986. 379 p.
MENESES, P. R.; ASSAD, E. D.; SANO, E. E. Introdução ao processamento de imagens digitais de satélites de sensoriamento remoto. Brasília: Universidade de Brasília. 1991. 96 p.
MOREIRA, M. A. Fundamentos do sensoriamento remoto e metodologias de aplicação. São José dos Campos: INPE. 2001.
MYERS, V. I. Remote sensing applications in agriculture. In : American Society of Photogrammetry. Manual of Remote Sensing. Falls Church, VI: 1983. 2 ed. v.2, cap.33, p. 2111-2228.
NOVO, E. M. L. Sensoriamento remoto: princípios e aplicações. São Paulo: Edgard Blücher, 1989. 308 p.
RICHARDS, J. A. Remote sensing digital image analysis: an introduction. Berlim: Springer-Verlag, 1986. 281p.
SCHOWENGERDT, R. A. Techniques for image processing and classification in remote sensing. Orlando, FL: Academic Press, 1983. 249 p.
STEFFEN, C. A.; LORENZZETTI, J. A.; STECH, J. L.; SOUZA, R. C. M. Sensoriamento remoto: princípios físicos, sensores e produtos e sistema Landsat. São José dos Campos: INPE, 1981, 81 p. (INPE-2226-MD/013).
VENEZIANI, P. Interpretação visual de dados : roteiro de estudos e definições fundamentais. São José dos Campos: INPE, 1988.
VENTURIERI, A . A dinâmica da ocupação pioneira na rodovia transamazônica: uma abordagem de modelos de paisagem. (Tese de Doutorado) Universidade Estadual de São Paulo, dez. 2003. Rio Claro, 167 p.
VENTURIERI, A. Segmentação de imagens e lógica nebulosa para treinamento de uma rede neural artificial para caracterização do uso da terra na região de Tucurui, Pará. (Dissertação de Mestrado) – INPE, São José dos Campos, 1996.