controle de trajetÓria de uma plataforma...
TRANSCRIPT

CONTROLE DE TRAJETÓRIA DE UMA PLATAFORMA STEWART PARA
SIMULAÇÃO DE TRANSFERÊNCIA DE CARGA FORA DE PORTO
Camilla Bacellar Mello
Dissertação de Mestrado apresentada ao
Programa de Pós-graduação em Engenharia
Mecânica, COPPE, da Universidade Federal do
Rio de Janeiro, como parte dos requisitos
necessários à obtenção do título de Mestre em
Engenharia Mecânica.
Orientador: Max Suell Dutra
Rio de Janeiro
Abril de 2011

ii

iii
Mello, Camilla Bacellar
Controle de Trajetória de uma Plataforma Stewart para
Simulação de Transferência de Carga Fora de Porto/
Camilla Bacellar Mello. - Rio de Janeiro: UFRJ/COPPE,
2011.
XVII, 114 p.: il.; 29,7 cm.
Orientador: Max Suell Dutra
Dissertação - UFRJ/ COPPE/ Programa de Engenharia
Mecânica, 2011.
Referências Bibliográficas: p. 103-107.
1. Plataforma Stewart. 2. Técnica de Controle. 3.
Transferência de Carga entre Navios I. Dutra, Max Suell.
II. Universidade Federal do Rio de Janeiro, COPPE,
Programa de Engenharia Mecânica. III. Título.
iv
Ao meu avô Hélio Bento: que seu
orgulho se concretize com meu
trabalho.

v
AGRADECIMENTOS
Ao meu marido Bernardo pela pasciência e compreensão nos momentos que estive
ausente me dedicanto a essa dissertação. Por não me deixar desanimar, por acreditar
sempre no meu melhor e principalmente pelo seu amor que me sustenta.
A minha filha Alice, que desde de dentro da minha barriga só me trouxe mais
motivação para trabalhar nesse projeto.
Aos meus pais agradeço pelo incentivo nos dias de euferia, pelo interesse durante o
percurso e pelo carinho nos momentos em que fraquejei. Obrigada por me trazerem
até aqui.
Aos meus irmãos Gabi, Duda, Rodrigo, Suenya, Renata e Claudemar pelas
experiências vividas e pelos conselhos oferecidos. Obrigada por poder contar sempre
com vocês.
Maria Clara, João Francisco e Bethânia que encheram meus finais de semana de
diversão e motivação.
Ao professor, orientador e amigo professor Max por acreditar em mim e estar sempre
disponível apesar do assunto. Obrigada por dividir seus conhecimentos, por me forçar
a dar sempre o meu melhor, pelas críticas e pela ajuda nos momentos ruins.
Aos professores do curso de Eng. Mecânica da Coppe, pelos ensinamentos e tempo.
A Capes e ao CNPq pelo suporte financeiro e a Finep pelo apoio ao projeto sem os
quais essa dissertação não teria suporte
Aos colegas do LABROB Magda, Omar, Alexandre, Elkin, Ivan, Professor Ricardo,
Alox, Hernan, sem vocês tudo seria mais difícil.
Ao clube da Luluzinha: Bianca, Ivana e Lohana vocês são peças fundamentais nessa
conquista. Obrigada pelas quartas-feiras motivantes.

vi
À secretaria acadêmica da mecânica nossa querida Verinha, Maysa, Bia e Tito que
continuem sempre com toda aquela alegria. Um abraço para todos.
Aos amigos que estiveram presentes na minha vida nesse período sem reclamar da
minha ausência e me incentivando a sempre melhorar.

vii
Resumo da Dissertação apresentada à COPPE/UFRJ como parte dos requisitos
necessários para a obtenção do grau de Mestre em Ciências (M.Sc.)
CONTROLE DE TRAJETÓRIA DE UMA PLATAFORMA STEWART PARA
SIMULAÇÃO DE TRANSFERÊNCIA DE CARGA FORA DE PORTO
Camilla Bacellar Mello
Abril/ 2011
Orientador: Max Suell Dutra
Programa: Engenharia Mecânica
Tendo em vista a crescente demanda no transporte marítimo em todo o mundo
a transferência de carga entre navios fora de porto objetiva reduzir custos e riscos em
operações portuárias. Este trabalho propõe o controle de trajetória de uma plataforma
Stewart para reprodução do spectro de movimentação de navios para esse
procedimento. Com base nas análises cinemática e dinâmica inversas do sistema é
proposto um simulador capaz de reproduzir os seis graus de liberdade do manipulador
paralelo. As seguintes técnicas de controle foram estudadas: PID, lógica fuzzy e
torque computado. Seus resultados foram comparados e analisados quanto a
utilização proposta.
viii
Abstract of Dissertation presented to COPPE/UFRJ as a partial fulfillment of the
requirements for the degree of Master of Science (M.Sc.)
TRAJECTORY CONTROL OF A STEWART PLATAFORM USED TO SIMULATE OFF-
SHORE CARGO TRANSFERING
Camilla Bacellar Mello
April/2011
Advisor: Max Suell Dutra
Department: Mechanical Engineering
Given the increasing demand on shipping all aroud the world, transfer cargo
between ships out of port areas aims to reduce costs and risks during port operations.
This paper aims to present a Stewart platform trajectory control in order to reproduce
ship's movements. A simulator capable of playing the manipulator’s six degrees of
freedom is proposed based on inverse kinematics’ and dynamics’ analysis. The
following control techniques were studied: PID, fuzzy and computed torque. Their
results were compared and analyzed for the proposed use.

ix
ÍNDICE
ÍNDICE IX
LISTA DE FIGURAS XII
LISTA DE TABELAS XV
LISTA DE TABELAS XV
LISTA DE SÍMBOLOS XVI
LISTA DE SÍMBOLOS XVI
GLOSSÁRIO XVII
1 INTRODUÇÃO 1
1.1 Motivação 2
1.2 Objetivo 4
1.3 Descrição da Dissertação 5
2 REVISÃO BIBLIOGRAFICA 7
2.1 Sistemas Robóticos 7
2.2 Manipuladores Paralelos 9
2.2.1 Comparação entre Manipuladores Paralelos e Seriais 9
2.2.2 Estado da Técnica dos Robôs Paralelos 11
2.2.3 Classificação dos Robôs Paralelos. 18
2.2.3.1 Manipuladores de 3 Graus de Liberdade. 19
2.2.3.2 Manipuladores de 4 Graus de Liberdade. 20
2.2.3.3 Manipuladores de 5 Graus de Liberdade. 21
2.2.3.4 Manipuladores de 6 Graus de Liberdade 22

x
3 MANIPULADOR TIPO PLATAFORMA DE STEWART E SUA
MODELAGEM 25
3.1 PLATAFORMA STEWART 25
3.1.1 Classificação do Manipulador Plataforma de Stewart 26
3.1.2 Geometria do Problema 27
3.2 ANÁLISE CINEMÀTICA 29
3.2.1 Cinemática Inversa 30
3.2.2 Cinemática Direta 33
3.2.3 Volume de Trabalho 33
3.2.4 Singularidades 35
3.3 DINÂMICA 38
3.3.1 Dinâmica Inversa 38
3.3.1.1 Análise dinâmica dos atuadores 39
3.3.1.2 Análise dinâmica da placa móvel 46
3.3.2 Simulação Dinâmica Inversa da Plataforma Stewart 48
3.3.2.1 Simulação 1 49
3.3.2.2 Simulação 2 52
3.3.2.3 Simulação 3 53
4 SIMULADOR VIRTUAL 56
4.1 Movimentos de Navios 56
4.1.1 Condições de Mar 58
4.2 Dados do CIAGA 59
4.3 Simulador 62
5 SISTEMA DE CONTROLE 66
5.1 Revisão Bibliográfica 67
5.2 Modelo da Planta 68
5.2.1 Análise do Modelo 71
5.3 Estratégias de Controle 74
5.3.1 Controle PID baseado na cinemática 74
5.3.2 Controle por Lógica Fuzzy 82
5.3.3 Controle de Torque Computado 88

xi
5.3.4 Simulação da estratégia de controle com dados reais 96
6 CONCLUSÕES E TRABALHOS FUTUROS 100
6.1 Trabalhos Futuros 101
7 REFERÊNCIAS BIBLIOGRÁFICAS 103
8 ANEXOS 108
8.1 Anexo A - Programação da cinemática inversa em Matematica© 108
8.2 Anexo B - Rotina de simulação dinâmica inversa em MATLAB© 110
8.3 Anexo D - Expressão iV (DASGUPTA, et al. 1998) 114

xii
Lista de Figuras
FIGURA 1 - PROJETO CONCEITUAL DE UM TERMINAL FLUTUANTE PARA GRANEL (NORDSTRÖMS
SELFUNLOADING SYSTEMS - MACGREGOR). ................................................................................... 3
FIGURA 2 - SITUAÇÕES DE RISCO............................................................................................................. 4
FIGURA 3 – MOVIMENTO EM 6 GRAUS DE LIBERDADE DE UM NAVIO. .................................................... 4
FIGURA 4 -ESQUEMÁTICO DO SISTEMA DE NAVIOS PARA TRANSFERÊNCIA DE CARGA FORA DE PORTO
(FRANÇA, ET AL., 2009)................................................................................................................... 5
FIGURA 5 - ELEMENTOS DE UM SISTEMA ROBÓTICO (LARA, 2008). ......................................................... 8
FIGURA 6 - EXEMPLOS DE ESTRUTURAS CINEMÁTICAS (A) ROBÔ DE ESTRUTURA SERIAL USADO EM
SOLDAGEM (KUKA ROBOTICS) (B) MANIPULADOR PARALELO COM 6 GRAUS DE LIBERDADE. .......... 9
FIGURA 7- POSSIVELMENTE O PRIMEIRO ROBÔ PARALELO PATENTEADO EM 1931
(US PATENT NO. 1,789,680). ......................................................................................................... 11
FIGURA 8 - (A) PROJETO ORIGINAL DE GOUGH PARA TESTES DE PNEUS DE AERONAVES (B) VERSÃO
MODERNA DO APARATO COM ATUADORES ELÉTRICOS (CORTESIA DE MIKE BEESON, DUNLOP
TYRES).......................................................................................................................................... 12
FIGURA 9 - PROJETO DE STEWART PARA SIMULADORES DE VÔO (MERLET, 2006). ................................ 13
FIGURA 10 - PRIMEIRO MODELO DE SIMULADOR CONSTRUIDO COM ARQUITETURA HEXAPODE (MELET,
2006). .......................................................................................................................................... 14
FIGURA 11 - SIMULADOR DE VÔO CAE 5000 (CANADIAN AVIATION ELECTRONICS LTD). ........................ 14
FIGURA 12 - SIMULADOR AUTOMOBILÍSTICO (TOYOTA). ....................................................................... 15
FIGURA 13 - ROBÔ DELTA FLEXPICKER IRB 340 (MERELT, 2006). ............................................................ 15
FIGURA 14 - APLICAÇÕES MÉDICAS PARA MANIPULADORES PARALELOS (WAPLER ET. AL. , 2003). ........ 16
FIGURA 15 - ESQUEMÁTICO DO MANIPULADOR POSICIONADOR DO TELESCÓPIO UKIRT (JOINT
ASTRONOMY CENTER). ................................................................................................................. 17
FIGURA 16 - SIMULADOR COM TRÊS GRAUS DE LIBERDADE PARA SITUAÇÕES DE RISCO EM NAVEGAÇÃO
(NMRI). ........................................................................................................................................ 17
FIGURA 17 - PLATAFORMA DE POSICIONAMENTO IMPLEMENTADA NO LAR-UNICAMP (OLIVEIRA, 2008).
.................................................................................................................................................... 18
FIGURA 18 - EXEMPLO DE MANIPULADOR PARALELO 3 GDL DE TRANSLAÇÃO, FLEXPICKER IRB 340
(MERLET , 2006). .......................................................................................................................... 19
FIGURA 19 - EXEMPLO DE MANIPULADOR PARALELO 3 GDL DE ROTAÇÃO, PULSO ESFÉRICO DE GOSSELIN
(MERLET, 2006). ........................................................................................................................... 19
FIGURA 20 - EXEMPLO DE MANIPULADOR PARALELO COM 3 GDL MISTO USADO EM SIMULADORES DE
CARROS (MERLET, 2006). ............................................................................................................. 20
FIGURA 21 - EXEMPLO DE MANIPULADOR PARALELO COM 4 GDL USADO COMO SIMULADOR DE VÔO
(MERLET, 2006). ........................................................................................................................... 21

xiii
FIGURA 22 - EXEMPLO DE MANIPULADOR PARALELO COM 5 GDL (MERLET, 2006). ............................... 21
FIGURA 23 - EXEMPLO DE MANIPULADOR PARALELO COM 6 GDL TIPO UPS (MERLET, 2006). ................ 22
FIGURA 24 - EXEMPLO DE MANIPULADOR PARALELO COM 6 GDL TIPO PUS, HEXAGLIDE (MERLET, 2006).
.................................................................................................................................................... 23
FIGURA 25 - EXEMPLO DE MANIPULADOR PARALELO COM SEIS GDL TIPO PUS, INRIA (MERLET, 2006). . 23
FIGURA 26 - EXEMPLOS DE MANIPULADOR PARALELO COM 6 GDL TIPO RUS (MERLET, 2006). .............. 24
FIGURA 27 - MANIPULADOR HEXÁPODE CONHECIDO COMO PLATAFORMA STEWART .......................... 25
FIGURA 28 - DIFERENTES TIPOS DE MPS QUANTO À GEOMETRIA (A)3-3 (B) 6-3 (C) 6-6 (LARA, 2008) ... 26
FIGURA 29 - ESQUEMÁTICO DO MPS (GONZALEZ, 2008) ....................................................................... 27
FIGURA 30 - GEOMETRIA DA PLATAFORMA STEWART. .......................................................................... 28
FIGURA 31 - ESQUEMÁTICO DOS VETORES PARA CINEMÁTICA INVERSA................................................ 31
FIGURA 32 - REPRESENTAÇÃO GRÁFICA DA CINEMÁTICA INVERSA EM WOLFRAM MATHEMATICA 7.0®. 32
FIGURA 33 - MPS E SEU VOLUME DE TRABALHO EM VISTA SUPERIOR E FRONTAL. ................................ 34
FIGURA 34 - ESQUEMÁTICO DO ATUADOR LINEAR ELÉTRICO (GONZALEZ, 2008). .................................. 39
FIGURA 35 - TRANSFORMAÇÃO DE SISTEMA DE COORDENADAS (GONZALEZ, 2008). ............................. 41
FIGURA 36 - FORÇAS ESTÁTICAS ATUANTES NO ATRUADOR. ................................................................. 43
FIGURA 37 - SUGESTÃO DE TRAJETÓRIA PARA SIMULAÇÃO 1 (GONZALEZ, 2008). .................................. 50
FIGURA 38 - DESLOCAMENTO E ROTAÇÃO DO CENTÓRIDE DA PLATAFORMA MÓVEL DURANTE
TRAJETÓRIA DA SIMULAÇÃO 1. .................................................................................................... 50
FIGURA 39 - VELOCIDADE E ACELERAÇÃO DO CENTRÓIDE DA PLACA MÓVEL DURANTE TRAJETÓRIA DA
SIMULAÇÃO 1. ............................................................................................................................. 51
FIGURA 40 - FORÇAS NOS ATUADORES PARA TRAJETÓRIA VERTICAL: SIMULAÇÃO 1 (A) RESULTADOS
OBTIDOS (B) RESULTADOS DE GONZALEZ (2008). ......................................................................... 51
FIGURA 41 - DESLOCAMENTO, VELOCIDADE E ACELERAÇÃO DO CENTRÓIDE DA PLACA MÓVEL DURANTE
TRAJETÓRIA DA SIMULAÇÃO 2. .................................................................................................... 52
FIGURA 42 - FORÇAS NOS ATUADORES PARA TRAJETÓRIA VERTICAL COM ROTAÇÃO EM X NA
SIMULAÇÃO 2. ............................................................................................................................. 53
FIGURA 43 - DESLOCAMENTO, VELOCIDADE E ACELERAÇÃO DO CENTRÓIDE DA PLACA MÓVEL DURANTE
TRAJETÓRIA NA SIMULAÇÃO 3. .................................................................................................... 54
FIGURA 44 - FORÇAS NOS ATUADORES PARA TRAJETÓRIA COM MOVIMENTAÇÃO NOS 6GDL NA
SIMULAÇÃO 3. ............................................................................................................................. 54
FIGURA 45 - SISTEMAS DE REFERÊNCIA NOS NAVIOS, (GONZALEZ, 2008). ............................................. 57
FIGURA 46 - DADOS PROVENIENTES DO SIMULADOR DE PASSADIÇO DO CIAGA. ................................... 60
FIGURA 47 - FFT DO SINAL DE HEAVE. ................................................................................................... 61
FIGURA 48 - FFT DO SINAL DE ROLL. ...................................................................................................... 61
FIGURA 49 - FFT DO SINAL DE PITCH. .................................................................................................... 62
FIGURA 50 - SOFTWARE DESENVOLVIDO PARA VERIFICAÇÃO DOS DADOS. ........................................... 63
FIGURA 51 – ARQUIVO COM DADOS DO CIAGA. .................................................................................... 64
xiv
FIGURA 52 - PLANTA DO MPS EM SIMMECHANICS MATLAB .................................................................. 69
FIGURA 53 - MODELO DO ATUADOR EM SIMMECHANICS MATLAB........................................................ 69
FIGURA 54 - MODELO FINAL DO ATUADOR EM SIMMECHANICS MATLAB. ............................................. 70
FIGURA 55 - ANÁLISE DE FORÇAS NO MODELO. .................................................................................... 71
FIGURA 56 - VISUALIZAÇÃO GEOMÉTRICA. ............................................................................................ 72
FIGURA 57 - RESULTADO DA ANÁLISE DE DINÂMICA DIRETA DO MODELO............................................. 73
FIGURA 58 - MALHA DE CONTROLE PID BASEADO NA CINEMÁTICA DO MPS. ........................................ 75
FIGURA 59 - MALHA DE CONTROLE PID BASEADO NA CINEMÁTICA DO MPS EM SIMULINK. .................. 76
FIGURA 60 - FERRAMENTA SISO DESIGN DO MATLAB PARA CONTROLADOR UNITÁRIO. ........................ 77
FIGURA 61 - FERRAMENTA SISO DESIGN DO MATLAB PARA CONTROLADOR PID. .................................. 78
FIGURA 62 - TRAJETÓRIA SENOIDAL COM 6 GRAUS DE LIBERDADE. ....................................................... 79
FIGURA 63 - ERROS DE POSICIONAMENTO DA PLACA MÓVEL PARA O ESQUEMA DE CONTROLE BASEADO
NA CINEMÁTICA. .......................................................................................................................... 80
FIGURA 64 - ERROS NOS ATUADORES E FORÇAS PARA O ESQUEMA DE CONTROLE BASEADO NA
CINEMÁTICA. ............................................................................................................................... 81
FIGURA 65 - ESQUEMÁTICO DO CONTROLADOR FUZZY. ........................................................................ 82
FIGURA 66 - FUNÇÕES DE PERTINÊNCIA RELACIONADAS AS ENTRADAS "ERRO DE POSIÇÃO" E
“VELOCIDADE DO ATUADOR”. ...................................................................................................... 83
FIGURA 67 - FUNÇÕES DE PERTINÊNCIA RELACIONADAS À "FORÇA EXERCIDA PELO ATUADOR". ........... 84
FIGURA 68 – EXEMPLO DE SITUAÇÕES POSSÍVEIS PARA A CRIAÇÃO DA TABELA DE REGRAS................... 85
FIGURA 69 - MALHA DE CONTROLE POR LÓGICA FUZZY DO MPS EM SIMULINK. ................................... 86
FIGURA 70 - ERROS DE POSICIONAMENTO DA PLACA MÓVEL PARA O ESQUEMA DE CONTROLE BASEADO
EM LÓGICA FUZZY. ....................................................................................................................... 87
FIGURA 71 - ERROS NOS ATUADORES E FORÇAS PARA O ESQUEMA DE CONTROLE BASEADO EM LÓGICA
FUZZY. ......................................................................................................................................... 88
FIGURA 72 - ESQUEMÁTICO DO CONTROLE DE TORQUE COMPUTADO (LEE ET AL., 2003). .................... 93
FIGURA 73 - MALHA DE CONTROLE DE TORQUE COMPUTADO DO MPS EM SIMULINK. ......................... 93
FIGURA 74 - ERRO DE POSICIONAMENTO DA PLACA MÓVEL PARA O ESQUEMA DE CONTROLE BASEADO
NA DINÂMICA. ............................................................................................................................. 94
FIGURA 75 - FORÇAS REQUERIDAS DOS ATUADORES PARA O ESQUEMA DE CONTROLE BASEADO NA
DINÂMICA. ................................................................................................................................... 95
FIGURA 76 - SINAIS ADQUIRIDOS PELO SIMULADOR DE NAVIOS DO CIAGA E CURVAS APROXIMADAS DOS
SEIS GDL DA EMBARCAÇÃO. ......................................................................................................... 97
FIGURA 77 - ACELERAÇÃO DOS SEIS GDL DA EMBARCAÇÃO. ................................................................. 97
FIGURA 78 - ERROS DE TRANSLAÇÃO E ROTAÇÃO PARA SIMULAÇÃO DE ESTADO DE MAR 4. ................. 98
FIGURA 79 - FORÇAS EXIGIDAS DOS ATUADORES PARA SIMULAÇÃO DE ESTADO DE MAR 4. .................. 99

xv
Lista de Tabelas
TABELA 1 - COMPARAÇÃO ENTRE MANIPULADORES SERIAIS E PARALELOS (LARA, 2008) 11
TABELA 2 - PARÂMETROS DA GEOMETRIA SELECIONADA 28
TABELA 3 - CARACTERÍSTICAS DO MPS 29
TABELA 4 - CARACTERÍSTICAS DO MPS EM ESTUDO 49
TABELA 5 - CLASSIFICAÇÃO DOS TIPOS DE MARES PELO TAMANHO DA ONDA 59
TABELA 6 - REGRAS DE IMPLICAÇÃO 85

xvi
Lista de Símbolos
i Índice referente do i-ésimo link, 1,2,...6i
p Vetor de translação da placa móvel
ia Vetor posição do i-ésimo vértice da placa móvel (referencial local)
ib Vetor posição do i-ésimo vértice da base
B
A Matriz de rotação da plataforma móvel no referencial inercial
iq B
A ia , Vetor posição do i-ésimo vértice da placa móvel (referencial inercial)
iS Vetor do i-ésimo atuador
iL Comprimento do i-ésimo atuador
is Vetor unitário direcional do i-ésimo atuador
p Velocidade de translação do centróide da placa móvel
Velocidade angular da placa móvel
p Aceleração de translação do centróide da placa móvel
Velocidade angular da placa móvel
iS Velocidade de translação do i-ésimo atuador
iS Aceleração de translação do i-ésimo atuador
i Velocidade angular do i-ésimo atuador
i Aceleração angular do i-ésimo atuador

xvii
Glossário
MPS - Manipulador plataforma Stewart;
GDL - Grau de liberdade;
TEU – Twenty-foot equivalent unit, um TEU representa a capacidade de carga de um
contêiner padrão intermodal, 20 pés (6,1 m) de comprimento e 8 pés (2,4 m) de
largura;
PID – Proporcional, integral e derivativo;
FFT – Fast Fourrier transform;
CG – Centro de gravidade;
IDP - Posicionamento dinâmico inteligente

1
1 INTRODUÇÃO
Sistemas mecânicos capazes de movimentar um corpo rígido em relação a um
referencial fixo são importantes em diversas aplicações. Um corpo rígido no espaço
pode movimentar-se de várias maneiras, com movimentos de translação e rotação.
Esses são chamados de Graus de Liberdade (GDL) do sistema. O número máximo de
GDL de um corpo rígido no espaço não pode exceder seis: três de translação em
direções mutuamente ortogonais e três de rotação em torno de cada eixo desse
sistema coordenado. A posição e a orientação do corpo rígido, também chamados de
pose, podem ser descritas por coordenadas generalizadas. Habitualmente são usadas
as coordenadas de um ponto e os ângulos que definem sua orientação, mas nada
impede que outro conjunto de parâmetros seja escolhido para definir de forma única a
pose do efetuador. Se existe a possibilidade de controlar um ou mais GDL do corpo
rígido através de sistemas mecânicos ou eletrônicos esse sistema pode ser chamado
de robô (MERLET, 2000).
Nos dias de hoje os robôs mais populares, tanto na indústria quanto na área
acadêmica, são aqueles que apresentam características antropomórficas, remetendo
muitas vezes a verdadeiros braços humanos. Conhecidos como robôs seriais, esses
são construídos por uma sucessão de elos conectados ao seu antecessor e sucessor
por meio de juntas com um ou mais graus de liberdade que permitem, por exemplo, a
rotação do corpo rígido em torno de um determinado eixo ou o movimento
translacional do elo. Apesar de atraente, a arquitetura desses manipuladores não é
interessante para toda e qualquer aplicação. Projetados para executar tarefas feitas
por humanos, os manipuladores seriais deviam ter uma boa manobrabilidade e bom
espaço de trabalho, mas sua relação da capacidade de carga com o seu peso é baixa.
Os robôs seriais quando submetidos a carregamentos têm tendência a apresentar
vibrações e flambagem de seus elos, comprometendo o desempenho dinâmico do
sistema. Nessas condições a rigidez do sistema é comprometida, acarretando em
uma menor precisão e capacidade de posicionamento. Por isso, embora a arquitetura
serial ainda seja predominante em robôs manipuladores, os modelos paralelos vêm
ganhando cada vez mais interesse.
Robôs paralelos são mecanismos com cadeias fechadas que apresentam bom
desempenho em termos de precisão, rigidez e capacidade de manipular cargas
pesadas (MERLET, 2006). O primeiro projeto de manipulador paralelo que se tem
registro data de 1931 (GWINNETT et. al., 1931), mas foi na década de 60 que Gough

2
e Whitehall desenvolveram essa tecnologia em uma máquina de teste para pneus
(GOUGH et al., 1962), seguidos por Stewart com seu simulador de vôo que deu a
relevância ao assunto. Dentre as diferentes aplicações de sistemas de posicionamento
modernos utilizando dispositivos robóticos paralelos podemos destacar: simuladores
de vôo, máquinas ferramentas, manipuladores cirúrgicos, sistemas de locomoção
bípedes, entre outros.
Pelo fato de ser constituído por uma base fixa ligada a uma única placa móvel
por vários atuadores, os manipuladores paralelos apresentam dificuldades
provenientes de suas cadeias fechadas. Por outro lado, essa disposição apresenta
vantagens frente aos robôs seriais quanto à rigidez, precisão e velocidade de
posicionamento e razão peso/carga. Suas principais desvantagens, no entanto,
referem-se ao espaço de trabalho limitado e à maior complexidade de seus
componentes mecânicos.
Capaz de reproduzir movimentos com seis GDL com grande precisão, o
manipulador paralelo conhecido como plataforma de Stewart torna-se uma ferramenta
conveniente para a reprodução do spectro de movimentos do mar quando se pensa
em movimentação de navios. Navios podem ser definidos como construções côncavas
e compridas, feitas de madeira, metal ou qualquer outro material que flutue em água e
geralmente são usados como meio de transporte (GONZALEZ, 2008).
Na presente dissertação se faz um estudo e análise do controle de trajetória de
um manipulador robótico paralelo aplicado à simulação de movimentos de navios.
Segundo GONZALEZ (2008), simuladores reproduzem fielmente os movimentos de
um modelo concreto e geralmente leva a representação de comportamentos ou
características fundamentais de um sistema físico ou abstrato que se estuda ou
analisa. Para controlar esse sistema de forma que o mesmo seja capaz de imitar
movimentos específicos, é essencial conhecer quais são suas características
cinemáticas e dinâmicas, suas limitações espaciais e finalmente de que forma podem
ser controlados os diferentes atuadores para realizar as diferentes trajetórias
planejadas.
1.1 Motivação
Diante da crescente demanda de transporte marítimo, navios cada vez maiores
estão sendo construídos solicitando o crescimento de portos em mesma escala. Em
2010, o maior navio transportador de container, o MSC Daniela, de 366 metros de
comprimento e capacidade nominal de 13.800 TEU, não aporta no Brasil devido às

3
restrições de tamanho e calado. Esse cenário parece cada vez mais comum não só no
país, mas em todo o mundo, exigindo obras caras de expansão portuária ou custos
altos com logística e transporte terrestre.
Uma solução para essa pendência é a transferência de cargas entre navios em
águas profundas. A mesma idéia tem sido utilizada em terminais de carga flutuantes
fora de porto para granel e líquidos, onde navios de grande porte descarregam em
terminais em alto mar nos quais navios de menor porte são então carregados e
seguem para diferentes destinos. O conceito desse projeto pode ser visto na Figura 1.
Figura 1 - Projeto conceitual de um terminal flutuante para granel (Nordströms Selfunloading Systems - MacGREGOR).
A manipulação de um corpo rígido de grande volume entre embarcações, como
no caso de containers, também é possível, porém trata-se de um procedimento mais
delicado devido à precisão exigida. Em última instância, vislumbra-se simular um
sistema controlado via software que tornará possível a transferência segura de cargas
pesadas entre duas embarcações em alto mar. Esse equipamento poderá revolucionar
o atual sistema de logística no Brasil e será adequado para atender a uma
necessidade futura do setor, reduzindo significativamente o tempo e os custos gerados
pelo desembarque tradicional. Essa nova medida, além de agilizar o processo e
reduzir os gastos com o transporte, poderá ser a solução para a esperada saturação
dos principais portos do país nos próximos anos.
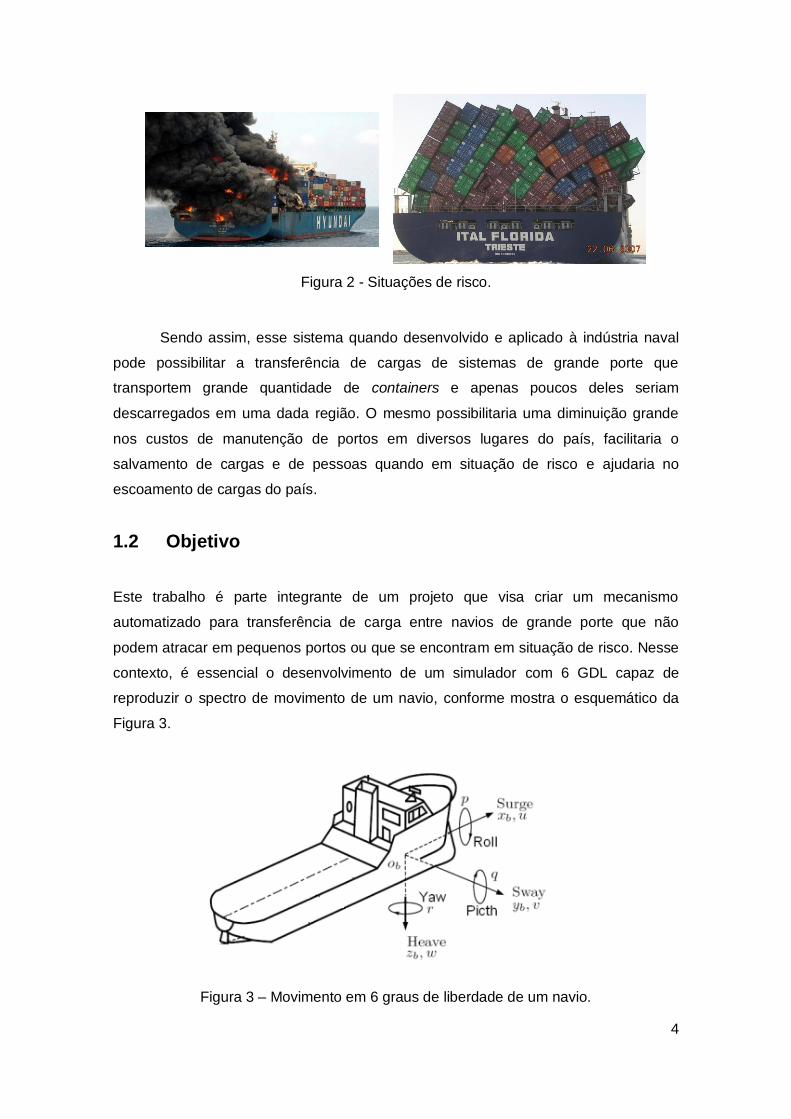
Além das vantagens acima citadas, em situações de risco como adernamento,
incêndios e desastres ambientais, como mostrados na Figura 2, o sistema seria de
extrema relevância no salvamento de carga mesmo durante um sinistro.
4
Figura 2 - Situações de risco.
Sendo assim, esse sistema quando desenvolvido e aplicado à indústria naval
pode possibilitar a transferência de cargas de sistemas de grande porte que
transportem grande quantidade de containers e apenas poucos deles seriam
descarregados em uma dada região. O mesmo possibilitaria uma diminuição grande
nos custos de manutenção de portos em diversos lugares do país, facilitaria o
salvamento de cargas e de pessoas quando em situação de risco e ajudaria no
escoamento de cargas do país.
1.2 Objetivo
Este trabalho é parte integrante de um projeto que visa criar um mecanismo
automatizado para transferência de carga entre navios de grande porte que não
podem atracar em pequenos portos ou que se encontram em situação de risco. Nesse
contexto, é essencial o desenvolvimento de um simulador com 6 GDL capaz de
reproduzir o spectro de movimento de um navio, conforme mostra o esquemático da
Figura 3.
Figura 3 – Movimento em 6 graus de liberdade de um navio.

5
Para o estudo detalhado do problema, o projeto conta com dois manipuladores
paralelos do tipo plataforma Stewart que devem trabalhar simultaneamente a fim de
reproduzir o comportamento de embarcações em diferentes condições de mar. A idéia
geral do sistema pode ser conferido na Figura 4.
Figura 4 -Esquemático do sistema de navios para transferência de carga fora de porto (FRANÇA, et al., 2009).
O objetivo final desse trabalho é controlar uma plataforma Stewart para que a
mesma seja capaz de reproduzir movimentos de navios em testes de transferência de
carga fora de porto. Para alcançar essa meta é ambicionado apresentar uma pesquisa
bibliográfica extensa sobre o manipulador, realizar um estudo detalhado da cinemática
e dinâmica inversa do sistema, testar os modelos obtidos através de um simulador
virtual e por fim propor uma técnica de controle adequada ao problema.
1.3 Descrição da Dissertação
Esta dissertação de mestrado será subdividida em seis capítulos, sendo no
primeiro capítulo apresentada a introdução, motivação do trabalho e principais
objetivos enfatizados na pesquisa.
O capítulo 2 trará uma revisão bibliográfica dos manipuladores paralelos. Serão
apresentadas suas principais características e justificativas pela escolha da
arquitetura, além do estado da técnica dessa tecnologia. Por fim, uma classificação
baseada nos graus de liberdade dos manipuladores paralelos será ilustrada com
exemplos práticos.
No capítulo 3 será abordada a modelagem matemática do problema.
Primeiramente será estudada sua cinemática inversa tendo em vista o controle de
trajetória, seu espaço de trabalho e suas singularidades. Feito isso, uma análise das

6
forças e torques envolvidos no processo será detalhada no estudo da dinâmica inversa
utilizando o método de Newton-Euler.
No capítulo 4 será proposto um simulador virtual para verificar os resultados
obtidos no capítulo anterior. Uma breve introdução sobre movimentos de navios será
apresentada e dados experimentais provenientes do simulador de embarcação
existente no CIAGA (Centro de Instrução Almirante Graça Aranha) serão analisados.
Tais dados servirão como entrada do simulador para análise das grandezas estudas
no capítulo anterior.
Um modelo da planta e as estratégias de controle utilizadas no seguimento de
trajetória de manipuladores paralelos do tipo Plataforma Stewart serão exposta no
capítulo 5. Será determinado qual a melhor opção para o problema estudado baseado
na precisão alcançada e no tempo computacional envolvido.
Finalmente no capítulo 6 são apresentadas as conclusões desse trabalho
assim como algumas propostas para trabalhos futuros na área.

7
2 REVISÃO BIBLIOGRAFICA
Na intenção de melhor compreender o alvo principal delineado deste trabalho,
este capítulo apresenta uma introdução sobre manipuladores paralelos. Para tanto, a
seção será dividida em duas partes. A primeira trata de forma geral os sistemas
robóticos, exemplificando e enumerando seus componentes. A segunda aborda
exclusivamente os manipuladores paralelos, aplicações reais da tecnologia suas
principais vantagens e uma classificação de acordo com os graus de liberdade do
modelo.
2.1 Sistemas Robóticos
Ainda hoje estudiosos e pesquisadores divergem sobre um conceito único a
respeito de "O que é um robô?". Segundo o Instituto Americano de Robótica (1979)
trata-se de "um manipulador reprogramável e multifuncional projetado para
movimentar materiais, partes, ferramentas ou outros aparelhos especializados através
de vários movimentos programados, a fim de realizar uma grande variedade de
tarefas". Essa é uma das definições mais abrangentes e aceitas no meio científico e
será utilizada no presente trabalho.
Um sistema robótico consiste normalmente dos seguintes elementos:
manipulador (sistema mecânico), atuadores, efetuador, sistema de controle e uma
malha de sensoriamento.
O manipulador mecânico é o que forma a estrutura do robô. Constituído por
links interligados através de articulações. Na Figura 5 é apresentado um manipulador
robótico do tipo serial onde o link da base é fixo e as articulações entre os links são
atuadas.
Os atuadores são encarregados pelo movimento de cada link. Existem diversos
tipos de atuadores, tais como motores elétricos, pistões hidráulicos e pneumáticos e
músculos artificiais. Na Figura 5 os links, ou também chamados braços do
manipulador, são acionados por motores redutores que aplicam torques capazes de
rodar cada braço promovendo os movimentos necessários para execução de uma
tarefa.
O efetuador é a parte do robô encarregada da manipulação de peças de
trabalho, ou qualquer que seja a função do robô. O efetuador pode ser visto como a
interface entre o manipulador mecânico e o ambiente de atuação do sistema.

8
O controlador é responsável por manipular as entradas do processo a fim de se
obter um comportamento desejado. Pode ser constituído de um simples esquema On-
Off de baixo nível a um controlador de alto nível baseado no modelo de um sistema de
controle inteligente. Encoders, tacômetros ou câmeras de vídeo são exemplos de
sensores utilizados para medir os movimentos do manipulador permitindo a
realimentação do sistema de controle, formando a malha de sensoriamento.
Figura 5 - Elementos de um sistema robótico (LARA, 2008).
Os manipuladores robóticos podem ser classificados em diferentes categorias
dependendo de vários critérios, dentre eles, o número de graus de liberdade, estrutura
cinemática, geometria do espaço de trabalho e características do movimento. No
presente trabalho será enfatizada a classificação de um manipulador robótico segundo
as suas cadeias cinemáticas. Nesse campo pode-se classificar um manipulador
robótico como serial, paralelo ou híbrido - que consiste na união dos dois anteriores.
Essa categorização leva em consideração a presença de cadeias cinemáticas abertas
ou fechadas, como será explicado no item seguinte. A Figura 6 apresenta exemplos
industriais de manipuladores do tipo paralelo e serial.

9
Figura 6 - Exemplos de estruturas cinemáticas (a) robô de estrutura serial usado em soldagem (KUKA Robotics) (b) manipulador paralelo com 6 graus de liberdade.
2.2 Manipuladores Paralelos
Um robô paralelo pode ser definido como um mecanismo constituído de
um efetuador com n graus de liberdade e de uma base fixa, interligados por, no
mínimo, duas cadeias cinemáticas fechadas independentes (MERLET, 2006).
Mecanismos redundantes, nos quais o número de atuadores é maior que o
número de graus de liberdade que controlam o efetuador, também podem ser
descritos pela definição anterior. Por esse motivo MERLET (2006) sugere
características que delimitam o estudo dos robôs paralelos. Essas características são:
• Ao menos duas cadeias cinemáticas suportam o efetuador. Cada uma dessas
cadeias cinemática deve ter ao menos um atuador;
• O número de atuadores é igual ao número de graus de liberdade do efetuador;
• A mobilidade do manipulador é zero com os atuadores sem movimento;
Essas considerações garantem que o número de atuadores seja mínimo, e que
o número de sensores necessários para fechar a malha de controle do mecanismo
também seja mínimo.
2.2.1 Comparação entre Manipuladores Paralelos e Seriais
Com intuito de justificar a arquitetura escolhida, serão apresentas as principais
diferenças entre manipuladores paralelos e os manipuladores seriais tidos como
convencionais.
No começo os robôs foram projetados para executar tarefas humanas, por isso
deviam ter uma boa manobrabilidade e bom espaço de trabalho, mas a relação da

10
capacidade de carga com o seu peso era baixa (DASGUPTA & MRUTHYUNJAYA,
2000). Autores como TANEV (2000) afirmam que o interesse pelos robôs paralelos
deu-se como uma solução para os problemas de pouca capacidade de carga e rigidez
que tinham os robôs de configuração serial.
Em termos mecânicos, os manipuladores seriais são constituídos por
atuadores nas suas partes móveis, implicando em massas e momentos de inércia
relativamente altos. Na sua maioria um atuador é fixo à base, sendo que os demais
são embarcados, ocasionando no aumento de inércia das partes móveis. Além disso,
cada junta suporta a massa das demais e dos segmentos subseqüentes. Por isso,
para garantir um mínimo de rigidez ao sistema, os elementos devem ser volumosos e
pesados, comprometendo o comportamento dinâmico da estrutura serial. Erros nas
juntas até o órgão terminal, somados à flexibilidade da estrutura, comprometem à
precisão do conjunto (VIANNA, 2002).
Nos manipuladores paralelos, todos os atuadores são montados próximos à
base, possibilitando assim uma possível redução da massa nas suas partes móveis,
implicando que os manipuladores paralelos apresentam características dinâmicas
melhores em relação aos seriais (MOLINA, 2008).
Outro conceito importante é a complacência de um robô. Em geral o efetuador
de um robô serial quando submetido a forças e torques externos sofre pequenas
modificações em sua pose devido a uma folga dos atuadores, vibração de seus
componentes ou deformação em seus links, entre outros. Essas grandezas não
podem ser quantificadas por sensores internos do robô e por isso não podem ser
corrigidas pela malha de controle, dai o nome complacência passiva. Em diversas
aplicações na indústria como, por exemplo, em máquinas ferramentas, essa
complacência é uma característica indesejada. Cadeias cinemáticas fechadas
possuem, em geral, rigidez mais elevada que as estruturas com cadeias abertas, e a
deformação proveniente da complacência passiva é facilmente medida no efetuador.
A Tabela 1 apresenta uma comparação qualitativa das características mecânicas e de
modelagem dos manipuladores com arquitetura serial e paralela, onde se pode
observar as principais diferenças entre essas duas arquiteturas, e as principais
vantagens e desvantagens na utilização das mesmas (LARA, 2008).
A partir das considerações apresentadas nesse capítulo, foi escolhido um
manipulador paralelo do tipo plataforma Stewart para reprodução do spectro de
movimentos de navios. Tendo em vista os GDL envolvidos e principalmente a precisão
desejada no controle de posição dentro do seu espaço de trabalho conclui-se que o
modelo é o mais adequado para o problema.

11
Tabela 1 - Comparação entre manipuladores seriais e paralelos (LARA, 2008).
2.2.2 Estado da Técnica dos Robôs Paralelos
Segundo BONEV (2003), o primeiro mecanismo paralelo que se tem registro
data de 1928. Trata-se da patente de GWINNETT (1931) para uma plataforma móvel
projetada para indústria de entretenimento. O aparato exibido na Figura 7 foi
desenvolvido para se movimentar durante a exibição de filmes, mas não chegou a ser
construído.
Figura 7- Possivelmente o primeiro robô paralelo patenteado em 1931 (US Patent No. 1,789,680).

12
Em 1947 GOUGH (1962) desenvolveu o que é hoje a arquitetura mais
conhecida para manipuladores paralelos: uma plataforma hexápode, com seis
atuadores lineares que ao modificarem seu comprimento imprimem movimentos de
rotação e translação à placa móvel. O aparato foi criado com o objetivo de testar
pneus sob o efeito do pouso de um avião, permitindo a aplicação de pequenas cargas
em diferentes direções através do acionamento independente de atuadores
hidráulicos.
No decorrer de seus trabalhos, GOUGH (1962) menciona mecanismos
hexápodes já existentes antes de seu projeto. Estruturas com seis atuadores lineares -
três verticais e três horizontais capazes de promover pequenos deslocamentos, foram
o ponto de partida de sua concepção. As mesas de simulação muti-eixo, como são
conhecidas, são confeccionadas por várias empresas até hoje. A novidade no projeto
de GOUGH (1962) foi o arranjo dos seis atuadores. Como o estudioso precisava de
uma gama de movimentos relativamente grande, ele optou por um posicionamento
simétrico em forma de octaedro. A máquina, exibida na Figura 8 foi construída em
1950, mas só ficou totalmente pronta para operação em 1954.
Figura 8 - (a) Projeto original de Gough para testes de pneus de aeronaves (b) Versão moderna do aparato com atuadores elétricos (Cortesia de Mike Beeson, Dunlop
Tyres).
Apesar disso, a utilização e popularização dos manipuladores paralelos só
ocorreu o quando o primeiro simulador de vôo foi construído. Durante a década de 60,
com o crescimento da indústria aeronáutica, os altos custos envolvidos nos
treinamentos de pilotos junto com a necessidade de testar novos equipamentos sem

13
levantar vôo, estimularam pesquisadores a estudarem sistemas com múltiplos graus
de liberdade que pudessem simular uma plataforma capaz de suportar altas cargas e
com uma dinâmica rápida, como no caso de uma cabine de avião. Motivado por esses
fatos, STEWART (1965) propôs um mecanismo com seis graus de liberdade para ser
usado como simulador de vôo. A configuração proposta por STEWART (1965), exibida
na Figura 9, apresenta alterações consideráveis em relação à configuração proposta
por GOUGH (1962).
Figura 9 - Projeto de Stewart para simuladores de vôo (MERLET, 2006).
Enquanto o projeto de STEWART (1965) não se mostrou muito interessante
em outras aplicações, a plataforma de GOUGH (1962) foi aplicada como solução em
diversos campos de estudo. Apesar disso, a plataforma do tipo hexápode é hoje
conhecida contraditoriamente como plataforma Stewart.
Em paralelo ao trabalho de STEWART (1965), no centro de pesquisa The
Franklin Institute Research na Filadélfia, CAPPEL (1967) surgiu com um manipulador
similar ao proposto por GOUGH (1962) enquanto estudava uma maneira para
melhorar a mesa de vibração redundante com seis graus de liberdade e sete
atuadores do laboratório. Segundo BONEV (2003), esse simulador de movimentos foi
o primeiro simulador de vôo baseado na estrutura de um hexápode octaedro. Sendo
resultado de um requisito da Sikorsky Aircraft Division dos Estados Unidos
especificado para projetar e construir um simulador de vôo de um helicóptero de seis
graus de liberdade. Sua foto pode ser observada na Figura 10.

14
Figura 10 - Primeiro modelo de simulador construido com arquitetura hexapode (MELET, 2006).
A utilização de cilindros hidráulicos convencionalmente utilizados para o
acionamento do mecanismo dificulta o controle de movimentos prescritos com
precisão. Mais recentemente têm se montado mecanismos eletromecânicos dotados
de servo motores, possibilitando um alto grau de precisão nos movimentos além de
exigir um sistema de controle mais simples. A exatidão de posicionamento e a
velocidade de performance em conjunto com a alta rigidez oferecida pela arquitetura
paralela tornaram esse tipo de manipulador atraente para as mais diferentes
aplicações como centros de usinagem, posicionamento de antenas astronômicas,
correção de foco em telescópios, entre outros.
A CAE, Candian Aviation Eletronics, empresa líder do mundo na construção de
simuladores de vôo e modelagem na aviação civil e militar, lançou em 2008 a mais
nova linha de simuladores de vôo CAE 7000 e CAE 5000, exibido na Figura 11. Esses
simuladores têm como característica inovadora o uso de cilindros elétricos, trocando
os sistemas hidráulicos originalmente utilizados em seus simuladores. Isso ofereceu
uma redução no custo de fabricação, um menor gasto de manutenção e ainda uma
melhora na precisão dos movimentos.
Figura 11 - Simulador de vôo CAE 5000 (Canadian Aviation Electronics Ltd).

15
Atualmente, inúmeros simuladores de movimento, e não apenas de vôo,
utilizam os princípios antes citados. Na Toyota foi desenvolvido um simulador
automobilístico que analisa o comportamento de um motorista ao dirigir sonolento ou
sob efeito de álcool. O simulador visto na Figura 12, é formado por uma cápsula de
sete metros de diâmetro onde se encontra um carro de frente para uma tela circular de
4,5 metros de altura. Os comandos do carro controlam a movimentação da plataforma
que pode se movimentar 35 metros em uma direção e 20 metros em outra a 90º. O
custo desse simulador foi de 86 milhões de dólares.
Figura 12 - Simulador automobilístico (Toyota).
Grandes fabricantes de robôs acreditam nas vantagens e oferecem produtos
para aplicações genéricas na indústria. O IRB 940 Tricept da ABB, um robô híbrido
com três graus de liberdade paralelos em conjunto com três graus de liberdade
seriados, e o F200i da FANUC que tem arquitetura hexápode e suporta até 100kg, são
dois exemplos já disponíveis no mercado. O Robô Delta, observado na Figura 13,
desenvolvido pela Asea Brown Boveri, tem utilidade nas atividades "pick and place".
Com três graus de liberdade translacionais se tornou popular em aplicações nas áreas
de embalagem, indústria farmacêutica, alimentícia, e de eletrônicos, entre outras.
Figura 13 - Robô Delta FlexPicker IRB 340 (MERELT, 2006).

16
As características da arquitetura proposta por GOUGH (1962) também
ajudaram a tornar esse tipo de plataforma atraente para procedimentos médicos. O
sistema oferece características que facilitam a sua utilização em cirurgias complexas,
tais como as realizadas no cérebro. A Figura 14 apresenta a utilização de uma
plataforma de Stewart para neuroendoscopia proposta por WAPLER et. al. (2003).
Também são amplamente utilizados tamanhos menores, nos casos que envolvem
nanotecnologia. Trata-se de uma aplicação que necessita de pouca movimentação e
muita precisão. Nessa área podemos destacar o endoscópio com dispositivo de
fixação ativo usando um robô com 3 graus de liberdade atuados por fios, construído
por WENDLANDT & SASTRY (1994). Outra aplicação médica para a estrutura
paralela é o uso na assistência de pessoas deficientes para a movimentação de seus
braços, como sugerido por ARAI et al. (1990).
Figura 14 - Aplicações médicas para manipuladores paralelos (WAPLER et. al. , 2003).
Além dos antes citados, inúmeros outros exemplos se beneficiaram das
vantagens oferecidas pelo modelo paralelo, introduzindo a novidade nas mais diversas
áreas. BOSSCHER et al. (2007) propõe um manipulador paralelo atuado por cabos a
ser utilizado na construção civil. SPECKERT (2008) sugere a utilização de dois
hexápodes trabalhando independentemente para testes de suspensão de veículos.
Outra aplicação diferente baseada na plataforma proposta por Gough é o robô tipo
escalador apresentado por ALMONACID et al. (2003), utilizado na inspeção de
tubulações. Para aplicações espaciais vale mencionar o hexápode desenvolvido pelo
Instituto Max Planck responsável por movimentar lentamente o telescópio UKIRT

17
(United Kingdom Infra-Red Telescope) em busca de foco. Seu esquemático pode ser
visto na Figura 15.
Figura 15 - Esquemático do manipulador posicionador do telescópio UKIRT (Joint Astronomy Center).
Na área naval, encontram-se simuladores recreativos de lanchas com movimento,
porém sem maiores compromissos com o real comportamento dinâmico das ondas.
Existem também os simuladores de ponte de comando para o treinamento de
tripulação. O NMRI, National Maritime Research Institute no Japão, desenvolveu um
simulador de ponte de comando para treinamento de tripulação em situações de risco
durante a navegação. Montado sobre uma plataforma com três graus de liberdade, o
aparato conta ainda com uma tela de 240º graus o que proporciona uma sensação de
realidade aos usuários. A Figura 16 ilustra o simulador.
Figura 16 - Simulador com três graus de liberdade para situações de risco em navegação (NMRI).

18
Com uma finalidade semelhante com a proposta na presente dissertação, foi
desenvolvida no Brasil, em um projeto de pesquisa envolvendo a UNICAMP/CENPES-
PETROBRAS, uma plataforma de simulação para movimentos aquáticos. Baseada no
projeto de Gough trata-se de um manipulador paralelo com capacidade para a
reprodução do spectro de movimentos do mar. É utilizado no processamento primário
de fluidos, basicamente na separação de gás, óleo e água (OLIVEIRA, 2008). A
plataforma é acionada hidraulicamente e controlada através de sistema FIELDPOINT
da National Instrument, por um programa computacional implementado em ambiente
LABVIEW. Uma foto do mecanismo pode ser vista na Figura 17.
Figura 17 - Plataforma de posicionamento implementada no LAR-UNICAMP (OLIVEIRA, 2008).
2.2.3 Classificação dos Robôs Paralelos.
Autores com trabalhos na área de robôs paralelos propõem diferentes formas
para classificá-los. MERLET (2006) apresenta uma classificação baseada no número
de graus de liberdade do sistema, enquanto KONG & GOSSELIN (2007) fazem uma
classificação baseada no tipo de mecanismos que os robôs paralelos apresentam. No
presente trabalho será adotada a classificação de MERLET (2006) como descrito a
seguir.

19
2.2.3.1 Manipuladores de 3 Graus de Liberdade.
Os manipuladores de três graus de liberdade estão subdivididos em três
grupos: manipuladores de translação, manipuladores de orientação e manipuladores
de graus de liberdade mistos.
O primeiro tipo de manipulador é usado na indústria em tarefas de pick-and-
place e em operações de máquina. O robô mais conhecido com três graus de
liberdade para translação é o robô Delta visto na Figura 18.
Figura 18 - Exemplo de manipulador paralelo 3 GDL de translação, FlexPicker IRB 340 (MERLET , 2006).
Já os manipuladores de orientação são capazes de realizar três rotações em
torno de um dado ponto apresentando uma alternativa aos pulsos utilizados nos robôs
seriais como efetuador. Um exemplo clássico é o pulso esférico de GOSSELIN et al.
(1990) onde três cadeias esféricas são utilizadas junto a atuadores de rotação com os
eixos convergentes ao centro da plataforma móvel conforme exibido na Figura 19.
Figura 19 - Exemplo de manipulador paralelo 3 GDL de rotação, pulso esférico de Gosselin (MERLET, 2006).

20
Os manipuladores mistos, por sua vez apresentam uma combinação dos três
graus de liberdade anteriores com translação ao longo do eixo vertical e rotação em
torno dos outros dois eixos mutuamente ortogonais. A Figura 20 ilustra um mecanismo
proposto por HUNT & LEE onde as juntas da base são de revolução enquanto as
juntas da plataforma móvel são juntas esféricas ligadas a atuadores prismáticos
possibilitando a alteração do comprimento dos links durante o processo.
Figura 20 - Exemplo de manipulador paralelo com 3 GDL misto usado em simuladores de carros (MERLET, 2006).
2.2.3.2 Manipuladores de 4 Graus de Liberdade.
Manipuladores capazes de realizar as três rotações e uma translação na
vertical. Segundo MERLET (2006) tal arquitetura não é teoricamente possível de ser
construída com os quatro links iguais a não ser que possua uma restrição mecânica
passiva, ou que os links tenham uma geometria específica ou ainda se os links forem
diferentes. Um exemplo para ilustrar tal mecanismo foi criado em 1975 por
Koevermans como simulador de vôo, onde uma restrição passiva garante não haver
translação que não no eixo vertical, pode ser visto na Figura 21.

21
Figura 21 - Exemplo de manipulador paralelo com 4 GDL usado como simulador de vôo (MERLET, 2006).
2.2.3.3 Manipuladores de 5 Graus de Liberdade.
Assim como no caso dos manipuladores com 4 GLD, robôs paralelos com 5
GDL também dependem de restrições passivas ou de uma geometria elaborada. São
estruturas interessantes para o ramo de máquinas ferramentas nas chamadas
"máquinas de 5 eixos", onde aparatos com 6 GDL não são totalmente necessários
uma vez que a rotação do fuso adiciona o grau de liberdade faltante. Exemplos de
robôs dessa classe com restrições passivas são apresentados na Figura 22.
Figura 22 - Exemplo de manipulador paralelo com 5 GDL (MERLET, 2006).
Nesses casos o elemento restritivo é interessante para a rigidez do sistema,
porém reduz a sua área de atuação devido à interferência do link. Como alternativa um

22
dos links atuados pode impedir a movimentação em um GDL da plataforma como
mostra o terceiro modelo da Figura 22.
2.2.3.4 Manipuladores de 6 Graus de Liberdade
Por fim, manipuladores com 6 graus de liberdade são capazes de se mover em
qualquer direção no espaço, efetuando translações e rotações em três direções
independentemente. Em termos de mobilidade, todos os mecanismos dessa classe
possuem a mesma característica, porém sua arquitetura de juntas determina algumas
particularidades. Por isso, a seguir serão apresentadas diferentes configurações e
suas distinções.
Seja P, U e S a abreviação de juntas prismática, universal e esférica
respectivamente, robôs tipo UPS tem seus links formados por uma junta universal,
uma junta prismática e finalmente uma junta esférica. São também conhecidos como
seis UPS, robô 6-6, hexápode. A Figura 23 ilustra um exemplo utilizado para simulador
de vôos. A plataforma móvel é conectada à base por seis cadeias cinemáticas
fechadas. O link é acoplado à base pela junta universal enquanto a parte superior é
conectada por juntas esféricas. O atuador prismático possibilita a mudança de
comprimento dos links durante a trajetória.
Figura 23 - Exemplo de manipulador paralelo com 6 GDL tipo UPS (MERLET, 2006).
Um detalhe interessante dessa arquitetura é que ela é muito menos suscetível
a questões de escala do que os manipuladores seriais. É a arquitetura mais popular e
já foi usada em diversos laboratórios e protótipos.
Vale mencionar que a direção de atuação das juntas prismáticas não é
importante e existem modelos, como o Hexaglide da Ecole Polytechnique Fédérale of

23
Zürich, em que a junta prismática se movimenta na horizontal. A Figura 24 exibe esse
modelo sendo utilizado como máquina ferramenta.
Figura 24 - Exemplo de manipulador paralelo com 6 GDL tipo PUS, Hexaglide (MERLET, 2006).
O robô tipo PUS, como o ilustrado na Figura 25 apresenta uma junta prismática
que atua na vertical conectada a um link de comprimento fixo por uma junta universal.
O outro extremo do link é acoplado a plataforma móvel por uma junta esférica. Essa
estrutura possui a vantagem de ter um centro de gravidade baixo, uma massa em
movimento leve e baixo risco de colisão entre os links se comparado com o modelo 6
UPS. O modelo exibido na Figura 25 é conhecido como INRIA, é utilizado na
confecção de lentes.
Figura 25 - Exemplo de manipulador paralelo com seis GDL tipo PUS, INRIA (MERLET, 2006).

24
Por fim, os robôs tipo RUS são baseados no modelo delta com três GDL. Esse
tipo de robô apresenta uma articulação de rotação seguida por uma junta universal e
finalmente uma junta esférica. A Figura 26 ilustra dois exemplos dessa arquitetura.
Figura 26 - Exemplos de manipulador paralelo com 6 GDL tipo RUS (MERLET, 2006).
Robôs de cadeias mistas são ainda citados por MERLET (2006). Essa
categoria engloba manipuladores existentes na literatura cujos princípios de atuação
não se encaixam em nenhuma das classificações antes feitas.

25
3 MANIPULADOR TIPO PLATAFORMA DE STEWART E
SUA MODELAGEM
Nesse capítulo será abordada a modelagem matemática e suas simplificações
para um manipulador do tipo plataforma Stewart. Primeiramente, será explorada sua
geometria, seguida por uma análise cinemática e finalmente um estudo sobre seu
comportamento dinâmico será apresentado de acordo com o objetivo proposto pela
dissertação.
3.1 PLATAFORMA STEWART
Apesar da estrutura a ser descrita ter sido primeiramente pensada por GOUGH
(1962), foi Stewart quem levou o crédito pela popularização do manipulador usado em
simuladores de vôos. O manipulador plataforma Stewart (MPS) é uma estrutura
cinemática paralela que pode ser usada para controlar ou gerar movimentos em seis
graus de liberdade. Tem aplicações em diferentes processos de manufatura e tarefas
de precisão.
O mecanismo consiste em uma placa estacionária (base), e uma placa móvel
(efetuador) que se conecta à base por seis elos. Cada elo é formado por um atuador
linear e duas juntas posicionadas nos extremos do atuador. Os mesmos são
organizados como um hexápode formando um octaedro. A Figura 27 ilustra o
mecanismo.
Figura 27 - Manipulador hexápode conhecido como plataforma Stewart

26
Cada um dos atuadores pode se movimentar de forma independente mudando
seu comprimento, mas para obter a pose desejada do efetuador é preciso uma
combinação dos comprimentos de todos os atuadores. Dessa forma se obtém a
transformação dos seis deslocamentos lineares em três movimentos de translação e
três movimentos de rotação da placa móvel. Devido à sua construção mecânica o
comprimento dos atuadores não pode ser mudado de forma totalmente independente
visto que poderia ocasionar danos nos próprios atuadores ou na estrutura mecânica
do manipulador (GONZALEZ, 2008).
3.1.1 Classificação do Manipulador Plataforma de Stewart
A plataforma de Stewart pode ter variações quanto à forma da placa móvel e
da base. Uma plataforma de Stewart é dita m-n, ou seja, existem m pontos articulados
na placa superior e n pontos articulados na base. A Figura 28 ilustra alguns exemplos.
Figura 28 - Diferentes tipos de MPS quanto à geometria (a)3-3 (b) 6-3 (c) 6-6 (LARA, 2008)
Quanto à escolha das articulações, o MPS pode ter diferentes configurações
entre elas 6-UPS e 6-SPS, onde cada nome é dado pelas siglas das juntas em inglês:
U (universal), P (prismatic) e S (spherical).
A plataforma selecionada como objeto de estudo dessa tese é simétrica e
classificada como 6-6 UPS, com ambas as placas hexagonais, semelhante à
apresentada na Figura 27. A escolha das articulações foi feita baseada nos graus de
liberdades do sistema. O número de GDL de um mecanismo, também conhecido como
mobilidade, é o número de parâmetros independentes necessários para especificar
completamente a sua configuração no plano ou no espaço. Segundo o critério de
Grübler (TSAI, 1999) a mobilidade de um sistema é dada pela equação (1).
1
( 1)j
GDL i f
i
n n j g I ( 1 )

27
Onde,
nGDL = Número de graus de liberdade do sistema;
λ = Graus de liberdade do espaço onde o mecanismo está
(λ=3 para o caso planar e λ=6 para o caso espacial);
n = Número de elos fixos do mecanismo incluindo a base e a parte móvel;
j = Número de juntas no mecanismo;
gi = Graus do movimento relativo por junta;
If = Número de graus de liberdade passivos do mecanismo.
Para o MPS com cadeias cinemáticas UPS, tem-se λ=6; n=14 (os dois
extremos das seis pernas, a plataforma móvel e a base), j1=6 dos atuadores lineares;
j2=6 das articulações universais de 2 graus de liberdade; j3=6 das articulações
esféricas de 3 graus de liberdade; logo j=18; If=0, pois não há grau de liberdade
passivo pela configuração cinemática. Substituindo os valores em (1):
6(14 18 1) (6 1 6 2 6 3) 0 6GDLn
No modelo SPS a plataforma móvel também possui seis graus de liberdade,
porém cada link pode ainda girar em torno de seu próprio eixo.
3.1.2 Geometria do Problema
Para os cálculos subseqüentes serão utilizados dois sistemas de coordenadas:
o primeiro denominado “inercial” localizado no centróide da placa fixa, e o segundo
chamado “local” centrado na placa móvel. Os sistemas são representados
respectivamente por (B) e (A) na Figura 29.
Figura 29 - Esquemático do MPS (GONZALEZ, 2008)

28
Os seis GDL do efetuador podem então ser matematicamente descritos. Os
três GDL relacionados com o deslocamento linear consistem no longitudinal, lateral e
vertical. Enquanto a movimentação angular é expressa pelos ângulos de Kardan com
respeito aos eixos x, y e z.
A base e a placa móvel do manipulador são polígonos hexagonais inscritos em
circunferências com raio Rb e Ra respectivamente. Os parâmetros que definem a
geometria do sistema são apresentados na Tabela 2. Na Figura 30, a visão superior
do sistema em suas condições iniciais permite a apresentação gráfica do modelo
geométrico do manipulador.
Figura 30 - Geometria da plataforma Stewart.
Onde,
Tabela 2 - Parâmetros da geometria selecionada
Símbolo Parâmetro
RA Raio da Placa móvel
θA Ângulo entre vértices da placa móvel
RB Raio da base
θB Ângulo entre vértices da base
Seja ia o vetor que descreve a posição da junta i do efetuador em respeito ao
referencial local (A) nas condições iniciais e é descrito pela equação (2).

29
cos( )
sin( )
0
A i xi
i A i yi
zi
R a
a R a
a
( 2 )
1
, 1,3,53
, 2,4,6
i A
i i A
ii
i
Para a base, ib descreve a posição da junta i da plataforma em respeito ao
referencial inercial (B) e é expresso em (3).
cos( )
sin( )
0
B i xi
i B i yi
zi
R b
b R b
b
( 3 )
1
, 1,3,53
, 2,4,6
i B
i i B
ii
i
Para a plataforma em estudo foi utilizado o dimensionamento proposto por
GONZALEZ (2008) a fim de replicar alguns resultados por eles obtidos nos capítulos
que seguem. A Tabela 3 apresenta grandezas antes discutidas para a caracterização
do manipulador.
Tabela 3 - Características do MPS.
RA 1 m RB 3 m
θA 3 / 5 rad θB / 20 rad
Lmin 0.55 m Lmax 0.95 m
3.2 ANÁLISE CINEMÀTICA
A cinemática trata dos aspectos geométricos e temporais relativos aos
movimentos do sistema, sem levar em consideração torques ou forças envolvidas no
processo. Nesta seção será feita uma análise da cinemática da plataforma paralela,
seu espaço de trabalho e as singularidades do problema. Tendo em vista que o
objetivo final da dissertação é simular o comportamento de navios em um

30
procedimento de transferência de carga fora de porto, será dada ênfase ao problema
inverso.
3.2.1 Cinemática Inversa
Quando se trata de controle de um robô geralmente são indicados pontos no
espaço para onde seu efetuador deve ir. Nesse caso, é conhecida a pose do
efetuador, ou seja, sua posição e orientação frente a um referencial inercial, e deseja-
se calcular uma configuração que a satisfaça. A cinemática inversa calcula a posição
de cada um dos atuadores que atende a essa condição. Essa abordagem é muito
utilizada em geração de trajetórias e aplicações de controle. Na literatura, autores
como MERLET (2004), LIU et al (1993), entre outros abordam esse tema para MPS.
Durante o trajeto a placa móvel apresenta rotações nos eixos , ,A A Ax y z em
relação ao sistema coordenado fixo (B). Determinadas pelos ângulos de Kardan
, , . Cada rotação é representada pela matriz (4), (5) e (6) respectivamente.
1 0 0
( , ) 0 cos sin ;
0 sin cos
x ( 4 )
cos 0 sin
( , ) 0 1 0 ;
sin 0 cos
y ( 5 )
cos sin 0
( , ) sin cos 0 ;
0 0 1
z ( 6 )
A matriz de orientação da placa móvel em relação ao sistema coordenado fixo
(B) é calculada multiplicando as matrizes de rotação na ordem mostrada na equação
(7):
( , ). ( , ). ( , )B
A z y x ( 7 )
Obtêm o seguinte resultado:

31
B
A
c c c s s c s c c s s s
c s c c s s s c s c s s
s c s c c
( 8 )
onde cos( )c e sin( )s .
Assumindo [ ]T
x y zp p p p como o vetor translação entre a base fixa e o
efetuador e analisando a Figura 31, pode-se descrever o vetor iS , que caracteriza o i-
ésimo atuador, como uma soma de vetores segundo a equação (9).
B
i A i iS a p b ( 9 )
Figura 31 - Esquemático dos vetores para cinemática inversa.
Como a grandeza de interesse nesse caso é o comprimento do atuador i , iL , e
sua direção is , basta calcular a distância euclidiana entre os vetores:
( , )B
i i A i iL S D a p b,
/i i is S L
2 2 2 2
11 12 21 22 31 32[( ) ] [( ) ] [( ) ]i xi yi xi xi yi yi xi yiL a r a r x b a r a r y b a r a r z ( 10 )
onde nmr é a componente da n-ésima linha e m-ésima coluna da matriz
B
A expressa
em (8). Desenvolvendo (10) tem-se:

32
2 2 2 2 2 2 2 2 2
11 12 21 22 31 32
11 12 21 22 31 32
( ) ( ) ( )
2( )( ) 2( )( ) 2( )
2( )
i xi yi xi yi xi yi xi yi
xi yi xi xi yi yi xi yi
xi yi
L x y z b b a r a r a r a r a r a r
a r a r x b a r a r y b a r a r z
xb yb
( 11 )
Substituindo (2), (3) e (8) em (11) e simplificando:
2 2 2 2 2 2
11 12 21 22
31 32
2( )( ) 2( )( )
2( ) 2( )
i b a xi yi xi xi yi yi
xi yi xi yi
L x y z R R a r a r x b a r a r y b
a r a r z xb yb ( 12 )
De posse da equação (12), dada uma determinada trajetória é possível calcular
o comprimento exigido de cada atuador em cada instante do trajeto. A equação (12) é
escrita seis vezes, uma para cada atuador, descrevendo assim o movimento da placa
móvel relativo à base fixa. Os valores negativos para o comprimento do atuador não
são fisicamente possíveis e quando a solução do problema é um número complexo a
localização da plataforma móvel não é atingível (LARA, 2008).
Com base nesses resultados foi implementado em WOLFRAM MATHEMATICA
7.0® um algoritmo para calcular o comprimento de cada atuador dada a pose do
efetuador. A representação é exibida graficamente. O programa encontra-se no Anexo
A.
Para uma plataforma com as características exibidas na tabela 3 e as
seguintes condições de posicionamento: 0.2 ; 0.2 ; 0.6x m y m z m ;
/ 4 ; / 6 ; /10rad rad rad . Na Figura 32 é apresentada um
desenho esquemático da configuração escolhida.
Figura 32 - Representação gráfica da cinemática inversa em WOLFRAM MATHEMATICA 7.0®.

33
3.2.2 Cinemática Direta
Ao contrário da cinemática inversa antes apresentada, a cinemática direta de
um manipulador paralelo não apresenta uma solução única. Os cálculos para
determinação da posição e orientação da placa móvel baseados no comprimento dos
atuadores são complexos e envolvem solução de um sistema com equações não
lineares. Apesar do método de Newton-Raphson ser amplamente usado para esse
problema, o mesmo possui um custo computacional elevado por suas repetitivas
iterações até que a solução convirja e ainda pode resultar em um loop infinito
dependendo da escolha dos valores iniciais. Isso é um impeditivo quando se trata de
solução em tempo real. GONZALEZ (2008) imerge nesse problema e relata as suas
dificuldades. Como esta dissertação tem como objetivo o controle de trajetória de um
MPS, a cinemática direta não será discutida com detalhes, e sua forma geral pode ser
expressa manipulando a equação (12) segundo a equação (13).
2 2 2 2 2
11 12 21 22
2
31 32
( , , , , , )
2( )( ) 2( )( )
2( ) 2( ) 0
b a
xi yi xi xi yi yi
xi yi xi yi i
f x y z x y z r r
a r a r x b a r a r y b
a r a r z xb yb L
( 13 )
onde ( 1,2,...6)i .
Vale ainda mencionar poucos dos vários trabalhos publicados nesta área. LIU
et al. (1993) propôs um algoritmo numérico que apresenta um sistema simultâneo de
três equações não lineares para simplificar a cinemática direta da plataforma Stewart
de seis GDL. NANUA et al. (1998) idealiza um estudo baseado em uma formulação
vetorial obtendo aproximadamente 30 equações, com um alto custo computacional.
JAKOBOVIC (2001), por sua vez, faz uma análise detalhada de convergência,
exatidão e velocidade de algoritmos de otimização para solução do problema. Para
finalizar, SADJADIAN et al. (2005) aplica um método baseado em redes neurais para
solucionar o problema da cinemática direta para um manipulador paralelo redundante.
3.2.3 Volume de Trabalho
A movimentação de um manipulador paralelo pode ser limitada por diversos
fatores, entre eles pode-se citar limitação mecânica de juntas passivas, colisão entre
elementos do robô, limitação física do curso do atuado,r entre outros. Para uma dada
aplicação é importante ter ciência do volume de trabalho na etapa de projeto,

34
assegurando que o mecanismo atende as necessidades do problema. Comparados
com os manipuladores seriais, o volume de trabalho de robôs paralelos são mais
limitados e sua determinação não é trivial devido à complexidade do mecanismo de
cadeias cinemáticas fechadas.
WOO et al. (1998) em sua proposta de um sistema de cinco barras para
sensação de força experimentada pelo usuário em um sistema mestre escravo, faz um
estudo do volume de trabalho para diferentes modelos de manipuladores paralelos,
incluindo a plataforma de Stewart, um sistema baseado em mecanismos pantográficos
e um modelo 3 PRPS.
Dentre os mais usuais volumes de trabalho indicados por MERLET (2000) foi
implementado o volume de trabalho de orientação constante, ou translacional. São
determinados todos os pontos possíveis do espaço cartesiano que podem ser
alcançados pelo centróide do efetuador , ,A A Ax y z com uma dada orientação. Para
tanto, foi utilizado o método de discretização no qual o espaço de trabalho é
preenchido por uma malha regular, cartesiana ou polar. Cada nó é então testado para
averiguar se o mesmo faz parte do volume de trabalho. Para uma plataforma com as
características conferidas na Tabela 3 foi encontrado o resultado exibido na Figura 33.
Figura 33 - MPS e seu volume de trabalho em vista superior e frontal.
Essa análise nos permite avaliar apenas em parte a abrangência do volume de
trabalho do MPS. Apesar da movimentação de um navio incluir rotação nos três eixos,
o volume de trabalho com orientação variável não será abordada aqui devido a sua
complexidade. Suas limitações serão abordadas em experimentos mais adiante, no
capítulo destinado ao simulador virtual.
35
3.2.4 Singularidades
O estudo da cinemática de um sistema mecânico leva inevitavelmente ao
problema de configurações singulares, que assim como o volume de trabalho, é um
fator limitante em seu desempenho. Essas configurações são definidas como aquelas
nas quais a matriz jacobiana i.e, a matriz que relaciona as velocidades de entrada com
as velocidades de saída do sistema, tem determinante nulo.
As singularidades podem representar configurações nas quais a mobilidade da
estrutura é reduzida, ou quando infinitas soluções são possíveis. Na proximidade de
configurações singulares, pequenos deslocamentos podem acarretar em uma
instabilidade do grupo, por isso devem ser evitadas.
Seja X x y z o vetor que contem a pose do efetuador e
1 2 3 4 5 6L L L L L L L o vetor que contem o comprimento de cada um dos
seis atuadores, então existe uma função F tal que:
( , ) 0F X L ( 14 )
F é uma função de dimensão seis e 0 um vetor 6x1 nulo. Diferenciando (14)
com relação ao tempo encontra-se a relação entre as velocidade de entrada e saída
do sistema segundo (15).
0X L ( 15 )
onde F
X e
F
L. M e N são ambas matrizes 6x6 e dependem de X e L , i.e,
( , )X L e ( , )X L . Como dito anteriormente, as singularidades ocorrem
em configurações onde ou M ou posseum deteminantes nulos. Segundo
GOSSELIN & ANGELES (1990) em um sistema de cadeia cinemática fechada cada
caso representa um significado físico:
• ( ) 0Det N - significa que existe um vetor velocidade de juntas L
não nulo para o
qual a plataforma móvel não se movimenta. Pode ser interpretada como uma perda da
mobilidade da estrutura, já que nessas configurações limites o efetuador não possui
mais todos os seus graus de liberdade. Geralmente ocorrem quando o manipulador
está em uma configuração na fronteira do seu volume de trabalho. SICILIANO (2009)

36
defende que esse tipo de singularidade não representa um verdadeiro fator limitante
do robô já que pode ser evitada impedindo que o manipulador alcance a fronteira do
seu volume de trabalho.
• ( ) 0Det M - significa que existe um vetor velocidade do efetuador X não nulo para
o qual a velocidade das juntas atuadas é nula. Mais clara nos manipuladores seriais,
esse tipo de singularidade adiciona graus de liberdade ao sistema possibilitando
movimentação do efetuador ainda que os atuadores não estejam operando. Isso
acarreta que pequenas perturbações possam gerar grandes mudanças no seu
posicionamento. Diferentemente da anterior, esse tipo de singularidade constitui um
sério problema no controle de trajetória já que pode estar em qualquer lugar do espaço
de trabalho, sendo mais difícil de evitá-la.
• ( ) 0Det N & ( ) 0Det M - essa terceira classificação provem de uma análise
ligeiramente diferente das duas anteriores, já que solicita parâmetros geométricos do
sistema.
Dito isso, seja is o vetor unitário na direção do i-ésimo atuador, i o vetor que
representa a velocidade angular do atuador, 1 2 3 4 5 6
T
L L L L L L L
o vetor
que representa o módulo das velocidades lineares dos atuadores na direção is , X o
vetor formado pela velocidade linear x y zp p p p e a taxa de variação angular
da placa móvel. No caso estudado nesta dissertação, derivando (9)
obtêm-se a relação entre as velocidades das juntas ativas com a velocidade linear e
angular da placa móvel segundo a equação (16).
( 1,2,...6)i i i i i iL s L s p q i ( 16 )
Onde .B
i A iq a .
Efetuando o produto escalar de ambos os lado da expressão pelo vetor unitário
is , o termo referente à velocidade angular de cada cilindro é eliminado segundo
mostra a equação (17).

37
. .[( ) ]i i i iL p s q s ( 17 )
De (17) conclui-se que:
1 1 1 1 1 1
6 6 6 6 6
0
0 6
L s q L s L
L s q L s L
( 18 )
Com o resultado exposto em (18) pode-se fazer as seguintes colocações:
• Como N é uma matriz diagonal, seu determinante só será nulo se ao menos um dos
atuadores tiver comprimento zero. Nesse caso, a direção dessa junta prismática é
indefinida, e por isso gera uma singularidade. Porém em manipuladores reais, seus
atuadores tem curso limitado maxL e
minL , e min 0L . Nesse caso, o primeiro tipo de
singularidade ocorre quando um ou mais de seus atuadores alcança um de seus
limites de curso, sendo ele máximo ou mínimo, o que corresponde a um ponto na
superfície do volume de trabalho do robô. Como ao menos um dos atuadores não
pode movimentar-se mais em uma certa direção, uma combinação de forças e
momentos aplicados ao efetuador pode não afetar os atuadores.
• A análise das singularidades provenientes de ( ) 0Det M é mais complicada pois
exige que se encontre as condições nas quais a matriz M é singular. MERLET (2008)
faz uma análise geométrica do problema baseado na teoria de Grassmann e conclui
que as singularidades são presentes nos seguintes casos:
o Os links do robô pertencem ao mesmo plano;
o Ao menos dois links são paralelos;
• Apesar de não se aplicar ao manipulador escolhido para esse estudo, vale mencionar
que o terceiro tipo de singularidade pode ocorrer quando as seguintes condições
geométricas são atendidas:
A B A BR R e ( 19 )

38
Com essa geometria, quando todos os atuadores possuírem o mesmo comprimento
assumirão uma configuração paralela permitindo que a plataforma móvel experimente
movimentos translacionais limitados ainda que os atuadores estejam parados.
3.3 DINÂMICA
Enquanto a cinemática descreve o movimento puro e simples do corpo, a
dinâmica explica esse movimento em função das forças e torques envolvidos no
processo. Pelas leis de Newton e Euler, as acelerações de um corpo estão
diretamente relacionadas com as forças e torques aplicados a ele. Sendo assim o
modelo dinâmico de um robô é essencial para avaliar as informações sobre os
esforços que o sistema exige ao executar uma dada trajetória. Junto a isso, a
modelagem dinâmica é particularmente importante no controle de um manipulador
paralelo já que essa arquitetura é preferida em aplicações nas quais exatidão em
posicionamento e boa performance dinâmica são requeridas.
Na literatura as pesquisas sobre dinâmica de um manipulador paralelo ainda
não se esgotaram. Apesar das já existentes formulações matemáticas, os resultados
apresentados são escassos em comparação com a vasta literatura sobre cinemática.
Dentro desse contexto, diferentes métodos têm sido aplicados para a obtenção do
modelo dinâmico do MPS, entre eles: método de Newton Euler, a formulação de
Lagrange e o princípio do trabalho virtual.
Novamente, o estudo do problema inverso é o mais apropriado para conhecer
as forças e torques experimentados pelos atuadores do manipulador durante uma
trajetória escolhida.
3.3.1 Dinâmica Inversa
Com base nos trabalhos de DASGUPTA & MRUTHYUNJAYA (2000), LEE et
al. (2003) e GONLAZEZ (2008), onde se apresentam análises da dinâmica inversa de
um manipulador paralelo pelo método de Newton Euler, a presente dissertação
desenvolve o estudo dinâmico do MPS dividido em três etapas: a primeira focada na
dinâmica dos atuadores onde o problema é decomposto em seis cadeias abertas e
são calculadas as forças de reação em cada link, a segunda dá destaque a dinâmica
da placa móvel para encontrar a totalidade das forças que atuam no sistema de malha
fechada, na terceira etapa são expostas simulações segundo os resultados obtidos.
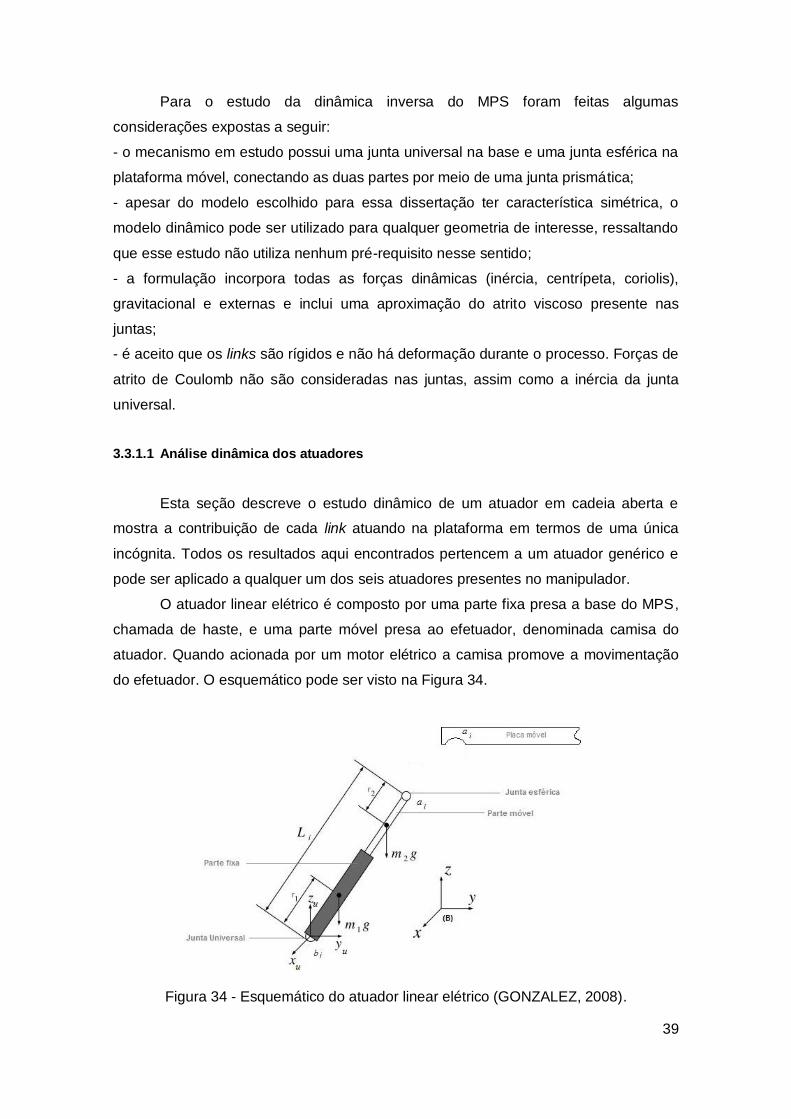
39
Para o estudo da dinâmica inversa do MPS foram feitas algumas
considerações expostas a seguir:
- o mecanismo em estudo possui uma junta universal na base e uma junta esférica na
plataforma móvel, conectando as duas partes por meio de uma junta prismática;
- apesar do modelo escolhido para essa dissertação ter característica simétrica, o
modelo dinâmico pode ser utilizado para qualquer geometria de interesse, ressaltando
que esse estudo não utiliza nenhum pré-requisito nesse sentido;
- a formulação incorpora todas as forças dinâmicas (inércia, centrípeta, coriolis),
gravitacional e externas e inclui uma aproximação do atrito viscoso presente nas
juntas;
- é aceito que os links são rígidos e não há deformação durante o processo. Forças de
atrito de Coulomb não são consideradas nas juntas, assim como a inércia da junta
universal.
3.3.1.1 Análise dinâmica dos atuadores
Esta seção descreve o estudo dinâmico de um atuador em cadeia aberta e
mostra a contribuição de cada link atuando na plataforma em termos de uma única
incógnita. Todos os resultados aqui encontrados pertencem a um atuador genérico e
pode ser aplicado a qualquer um dos seis atuadores presentes no manipulador.
O atuador linear elétrico é composto por uma parte fixa presa a base do MPS,
chamada de haste, e uma parte móvel presa ao efetuador, denominada camisa do
atuador. Quando acionada por um motor elétrico a camisa promove a movimentação
do efetuador. O esquemático pode ser visto na Figura 34.
Figura 34 - Esquemático do atuador linear elétrico (GONZALEZ, 2008).

40
O ponto ia , comum a parte superior do atuador e ao efetuador, tem sua
velocidade iS dada pela derivada temporal do vetor do i-ésimo link iS , descrito
anteriormente na equação (9). iS é descrita em termos da velocidade de translação p
e da velocidade angular da placa móvel segundo a equação (20). Pode também
ser representada em termos da velocidade de translação iL e angular
i do atuador
como mostra a equação (21).
i iS q p ( 20 )
i i i i i iS L s L s ( 21 )
A magnitude da velocidade na direção is do link, descreve a velocidade de
escorregamento entre as partes fixa e móvel do atuador. Representada por iL é dada
pela equação (22).
.i i iL s S ( 22 )
Aplicando o produto vetorial em ambos os lados da expressão (21) com o vetor
unitário is , utilizando a propriedade algébrica ( ) ( . ) ( . )a b c a c b a b c e assumindo
que não há rotação no eixo do link ( . 0i is ) a velocidade angular do link é expressa
pela equação (23).
/i i i is S L ( 23 )
A aceleração do ponto de conexão atuador-efetuador ia é a derivada temporal
da velocidade iS . Pode ser expressa em termos da aceleração de translação p e a
aceleração angular da placa móvel segundo (24), ou em relação às grandezas do
próprio atuador, como mostra a equação (25).
( )i i iS q q p ( 24 )
( ) 2i i i i i i i i i i i i iS L s L s L s A L s ( 25 )

41
Reescrevendo e simplificando (25) utilizando novamente a propriedade
( ) ( . ) ( . )a b c a c b a b c e sabendo que não há rotação do eixo do atuador, ou seja
. 0i is , encontra-se (26). A magnitude da componente da aceleração na direção do
atuador é dada pela equação (27).
[ . ] 2i i i i i i i i i i i iS L L s L s A L s ( 26 )
. .i i i i i iL s S L ( 27 )
Substituindo (27) em (26) e fazendo o produto vetorial por is encontra-se a
aceleração angular do ponto de conexão, segundo a equação (28).
( 2 ) /i i i i i iA s S L L ( 28 )
Seja 1
r e 2r a localização do centro de gravidade da haste e da camisa
respectivamente no referencial local (U') girado na direção do atuador e localizado na
base do mesmo é preciso transformar essas grandezas para o referencial (U) paralelo
ao referencial inercial (B), mas ainda localizado na base do atuador. Segundo o
trabalho de GONLAZEZ (2008), para tanto é preciso fazer uma transformação linear
como mostra a Figura 35.
Figura 35 - Transformação de sistema de coordenadas (GONZALEZ, 2008).

42
A matriz de rotação do i-ésimo atuador em relação ao sistema coordenado (U)
pode ser calculada segundo as equações (29), (30) e (31).
' ( , ). ( ', )u
u i i iz x ( 29 )
1tan ix ixi
iy iy
a b
a b ( 30 )
1cos izi
i
a
L ( 31 )
Assim,
1 ' 1.u
i u ir r ( 32 )
2 ' 2.( )u
i u i ir L r ( 33 )
O mesmo pode ser observado quanto ao momento de inércia das componentes
do atuador:
1 ' 1 '. .u u T
i u i u iI I ( 34 )
2
2 ' 2 2 '.[ (0,1,1)]u u T
i u i i u iI I m L diag ( 35 )
Dito isso, o cálculo da velocidade do centro de massa da haste e da camisa do
cilindro é apresentado pelas equações (36) e (37):
1 1( )i i ir r ( 36 )
2 2( )i i i i ir r L s ( 37 )
Derivando as equações (36) e (37), encontram-se as acelerações das partes
do atuador, conforme as equações (38) e (39).
1 1 1( )i i i i i ir A r r ( 38 )
2 2 2 1( ) 2i i i i i i i i i ir L s A r r L s ( 39 )

43
Com as velocidades e acelerações antes definidas é possível então descrever
a equação dinâmica de cada atuador. Segundo DASGUPTA & MRUTHYUNJAYA
(1998), as equações de movimento de cada link totalizam doze equações: três de
força e três de momento para parte fixa e para parte móvel do atuador, e treze
incógnitas: três forças e três momentos na junta prismática, três forças e um momento
na junta universal, além de três forças na junta esférica, ilustradas na Figura 36.
Considerando o momento total atuando na haste do atuador pela equação de
Euler encontra-se a expressão (40).
1 1 1 1 1 1 1 1 0i i i i i i i i ui i i pi pi im r r m r g I A I s r F M k ( 40 )
onde, ui representa a magnitude do momento na junta universal atuando no eixo do
atuador, piF o vetor força na junta prismática exercida pela haste na camisa do
atuador linear no ponto ir , piM é o vetor momento na junta prismática atuando na
parte superior do atuador, e o último termo da equação representa o momento
resultante do atrito viscoso na junta universal onde,
1i u ik ( 41 )
Figura 36 - Forças estáticas atuantes no atruador.

44
O mesmo se aplica para a camisa do atuador segundo a expressão (42).
2 2 2 2 2 2 2 2 0i i i i i i i i i si i pi pi im r r m r g I A I S F r F M k ( 42 )
Onde,
2 ( )i s ik ( 43 )
é o momento resultante do atrito viscoso da junta esférica e siF é a força da junta
esférica atuando no i-ésimo link.
Somando as equações (40) e (42) obtém-se a equação do atuador completo
conforme a equação (44).
1 1 1 2 2 2 1 2 1 2 1 2
1 2
( ) ( )
( ) 0
i i i i i i i i i
i i i i ui i i si i
m r r m r r m r m r g I I A
I I s S F k ( 44 )
Onde, 1 2i i ik k k . Reescrevendo (44):
ui i i si is S F C ( 45 )
Onde,
1 1 1 2 2 2 1 2 1 2
1 2 1 2
( )
( ) ( )
i i i i i i i
i i i i i i i i
C m r r m r r m r m r g
I I A I I k ( 46 )
A incógnita ui pode ser eliminada de (45) efetuando o produto vetorial dos
dois lados da equação por is , segundo as expressões (47) e (48).
i ui i i i si i is s s S F s C ( 47 )
[( . ) ]i i si i si i iL s F s F s C ( 48 )
Assim,

45
i isi i i
i
C sF f s
L ( 49 )
Onde,
.i i sif s F ( 50 )
é a componente da força na junta esférica na direção do link is . A equação (49)
expressa a força siF de cada atuador em termos de uma única incógnita if .
Por fim, considerando a parte móvel do atuador, a equação de Newton é
apresentada em (51).
2 2 2 0i pi si p i im g m r F F L s ( 51 )
onde o último termo modela a resistência viscosa presente na junta prismática. Como
a grandeza de interesse é a força exercida na junta prismática na direção axial, ao
efetuar o produto escalar da equação (51) por is obtém-se:
2 2. .( ) .i pi i i p i i sis F m s r g L s F ( 52 )
Assumindo,
2 2.( )i i i p iD m s r g L ( 53 )
.i i piF s F
( 54 )
pode-se reescrever (52) como
i i iF D f ( 55 )
A equação (55) denota a força do i-ésimo atuador em termos da variável de
força desconhecida if . De acordo com DASGUPTA & MRUTHYUNJAYA (1998b) para
o cálculo da força de interesse não há necessidade de considerar a equação de
Newton da haste do atuador a não ser pela força e momento de reação da junta
universal.

46
Feito isso, na próxima seção serão analisadas as forças e momentos atuantes
no efetuador do manipulador.
3.3.1.2 Análise dinâmica da placa móvel
Na seção anterior a força de reação da junta esférica siF foi expressa como
função da variável desconhecida if . Nessa seção, as equações de movimento da
placa móvel são expressas como seis equações lineares em termos das mesmas seis
incógnitas.
Seja AO o vetor posição do centro de gravidade da plataforma no sistema
coordenado local (A) quando a mesma inclui um carregamento. O vetor pode ser
expresso no sistema coordenado inercial (B) pela expressão (56)
B
B A AO O ( 56 )
Nesse caso a aceleração do centro de gravidade é expressa em (57) como
( )B B Ba O O p ( 57 )
O momento de inércia da plataforma, incluindo o carregamento, é também
expresso no referencia inercial em (58).
B B T
B A A AI I ( 58 )
Assumindo que possíveis forças e momentos externos atuam na plataforma
móvel, esses são representados por extF e extM no referencial local. Como
anteriormente esses vetores devem ser transformados para o referencial inercial pela
matriz de transformação B
A . Assim, a equação de Newton para plataforma móvel é
descrita pela equação (59).
6
1
0B
B A ext si
i
Ma Mg F F
( 59 )
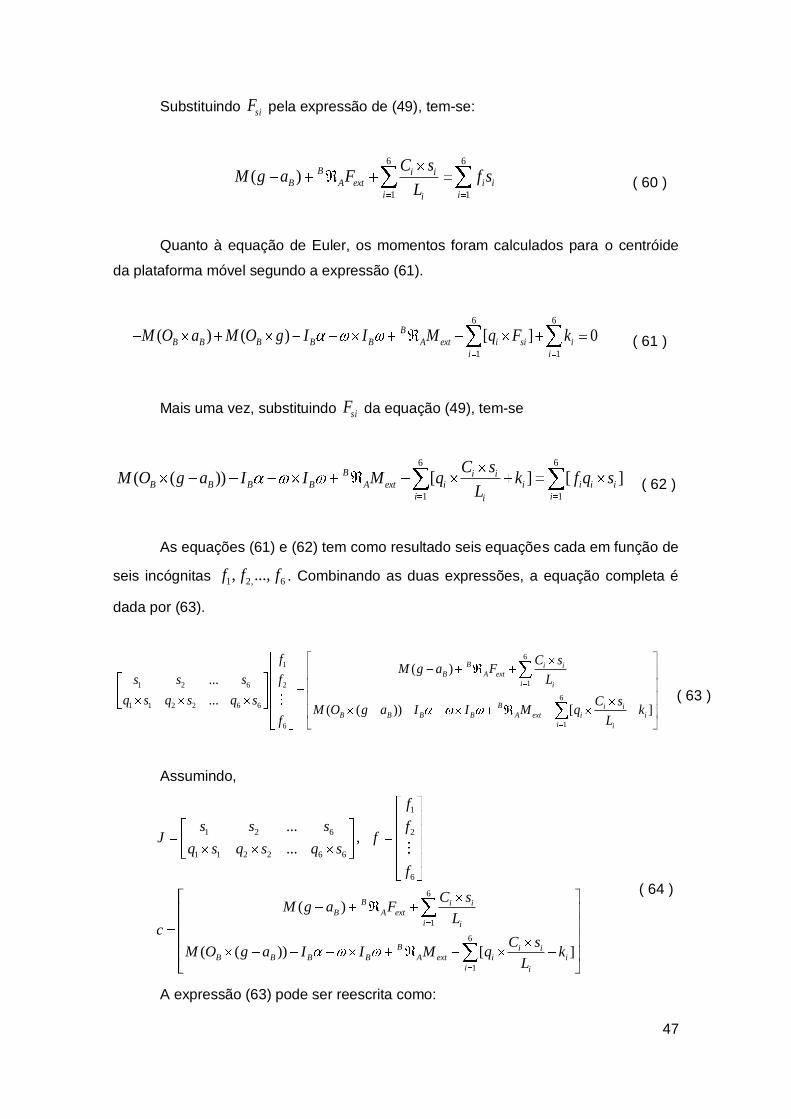
47
Substituindo siF pela expressão de (49), tem-se:
6 6
1 1
( ) B i iB A ext i i
i ii
C sM g a F f s
L ( 60 )
Quanto à equação de Euler, os momentos foram calculados para o centróide
da plataforma móvel segundo a expressão (61).
6 6
1 1
( ) ( ) [ ] 0B
B B B B B A ext i si i
i i
M O a M O g I I M q F k ( 61 )
Mais uma vez, substituindo siF da equação (49), tem-se
6 6
1 1
( ( )) [ ] [ ]B i iB B B B A ext i i i i i
i ii
C sM O g a I I M q k f q s
L ( 62 )
As equações (61) e (62) tem como resultado seis equações cada em função de
seis incógnitas 1 2, 6, ...,f f f . Combinando as duas expressões, a equação completa é
dada por (63).
61
11 2 6 2
61 1 2 2 6 6
16
( )...
...( ( )) [ ]
B i iB A ext
i i
B i iB B B B A ext i i
i i
f C sM g a F
Ls s s f
q s q s q s C sM O g a I I M q k
Lf
( 63 )
Assumindo,
1
1 2 6 2
1 1 2 2 6 6
6
6
1
6
1
...,
...
( )
( ( )) [ ]
B i iB A ext
i i
B i iB B B B A ext i i
i i
f
s s s fJ f
q s q s q s
f
C sM g a F
Lc
C sM O g a I I M q k
L
( 64 )
A expressão (63) pode ser reescrita como:

48
Jf c
( 65 )
O sistema linear (65) pode ser resolvido para f , e as forças exigidas como
entrada de cada atuador podem ser então calculadas pela equação expressa em (54).
F D f ( 66 )
onde 1 2 3 4 5 6F F F F F F F e
1 2 3 4 5 6D D D D D D D .
Vale observar que a matriz J é a transposta da matriz Jacobiana M discutida
na seção 3.2.4 sobre singularidades. Quando a matriz J é singular significa que na
dada configuração a força exercida pelos atuadores não é suficiente para suportar a
carga aplicada à plataforma. Como conseqüência há um ganho de um grau de
liberdade na plataforma.
De acordo com DASGUPTA & MRUTHYUNJAYA (1998a, 1998b), para o
controle de trajetória do manipulador paralelo basta determinar a força F exercida
pelos atuadores durante o processo segundo a equação (66). Porém, para
especificação do projeto mecânico as forças de restrição exercidas em cada junta
também são de interesse. Apesar de não fazer parte do escopo dessa dissertação,
nesse caso, após o cálculo de f as equações de cada link são desacopladas e cada
força pode então ser calculada separadamente.
3.3.2 Simulação Dinâmica Inversa da Plataforma Stewart
Nesta seção serão apresentadas simulações realizadas em MatLab© da
dinâmica de um MPS em diferentes cenários. Para tanto é necessário determinar as
características da plataforma em estudo. A geometria escolhida para a plataforma é
descrita na tabela 3. A fim de comparar os resultados obtidos com simulações
previamente estudadas na literatura, optou-se por utilizar as mesmas grandezas
utilizadas no trabalho de GONLAZEZ (2008) para as características da plataforma
segundo indicado na Tabela 4.
Foram realizadas três simulações: a primeira com movimento apenas
translacional na direção Z semelhante a realizada na dissertação de GONLAZEZ
(2008), com a finalidade de validar o modelo descrito na seção anterior. A segunda
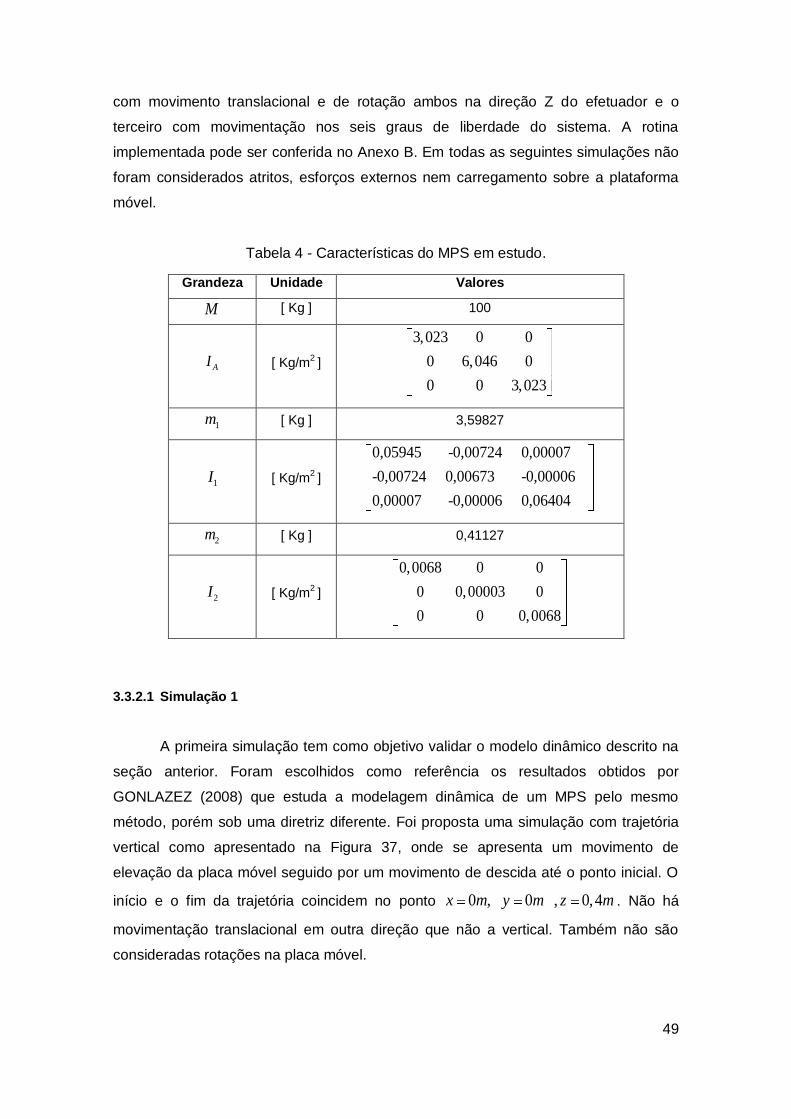
49
com movimento translacional e de rotação ambos na direção Z do efetuador e o
terceiro com movimentação nos seis graus de liberdade do sistema. A rotina
implementada pode ser conferida no Anexo B. Em todas as seguintes simulações não
foram considerados atritos, esforços externos nem carregamento sobre a plataforma
móvel.
Tabela 4 - Características do MPS em estudo.
Grandeza Unidade Valores
M [ Kg ] 100
AI [ Kg/m2 ]
3,023 0 0
0 6,046 0
0 0 3,023
1m [ Kg ] 3,59827
1I [ Kg/m2 ]
0,05945 -0,00724 0,00007
-0,00724 0,00673 -0,00006
0,00007 -0,00006 0,06404
2m [ Kg ] 0,41127
2I [ Kg/m2 ]
0,0068 0 0
0 0,00003 0
0 0 0,0068
3.3.2.1 Simulação 1
A primeira simulação tem como objetivo validar o modelo dinâmico descrito na
seção anterior. Foram escolhidos como referência os resultados obtidos por
GONLAZEZ (2008) que estuda a modelagem dinâmica de um MPS pelo mesmo
método, porém sob uma diretriz diferente. Foi proposta uma simulação com trajetória
vertical como apresentado na Figura 37, onde se apresenta um movimento de
elevação da placa móvel seguido por um movimento de descida até o ponto inicial. O
início e o fim da trajetória coincidem no ponto 0 , 0 , 0,4x m y m z m . Não há
movimentação translacional em outra direção que não a vertical. Também não são
consideradas rotações na placa móvel.

50
Figura 37 - Sugestão de trajetória para simulação 1 (GONZALEZ, 2008).
As informações de deslocamento, ângulos de rotação, velocidade e aceleração
linear e angular podem ser observadas nos gráficos a seguir:
Figura 38 - Deslocamento e rotação do centóride da plataforma móvel durante trajetória da simulação 1.

51
Figura 39 - Velocidade e aceleração do centróide da placa móvel durante trajetória da simulação 1.
Utilizando os mesmos parâmetros geométricos da plataforma de GONZALEZ
(2008) e ignorando o atrito viscoso das juntas, os valores de força encontrados para
cada um dos seis atuadores foram iguais, dado a simetria da plataforma e do
movimento.
Comparando com os resultados do autor, os valores encontrados são muito
semelhantes. Apesar de uma pequena discordância, as curvas apresentam o mesmo
comportamento e a mesma ordem de grandeza como pode ser examinado na Figura
40. Sendo assim o resultado alcançado é considerado validado.
Figura 40 - Forças nos atuadores para trajetória vertical: simulação 1 (a) Resultados obtidos (b) Resultados de GONZALEZ (2008).

52
O erro máximo encontrado entre os modelos foi de 2% do valor da força no
instante t=6 seg. A diferença pode ser atribuída ao fato de GONZALEZ (2008) calcular
as componentes x, y, z das forças do atuador e a magnitude da força resultante como
soma vetorial dessas componentes podendo gerar pequenas diferenças atribuídas ao
método de truncamento do MatLab.
3.3.2.2 Simulação 2
A segunda simulação tem como objetivo aproximar o movimento da plataforma
do movimento de um navio em condições de mar específicas. Uma discussão mais
detalhada sobre esse tópico será apresentada no próximo capítulo. Matematicamente
a trajetória escolhida tem características periódicas com deslocamento vertical e
pequenas rotações em torno do eixo de comprimento do navio. A Figura 41 ilustra a
escolha feita.
Figura 41 - Deslocamento, velocidade e aceleração do centróide da placa móvel durante trajetória da simulação 2.

53
O resultado encontrado pode ser observado na Figura 42.N. Forças com
magnitude de 290N foram alcançadas. Nesse caso observa-se que pela não simetria
do movimento as forças dos atuadores não são iguais em um dado instante de tempo.
Figura 42 - Forças nos atuadores para trajetória vertical com rotação em x na simulação 2.
3.3.2.3 Simulação 3
Por último, foi sugerida uma simulação que abrangesse todos os graus de
liberdade do sistema. Podendo representar uma condição de mar mais próxima do
real, apesar das frequências e amplitudes terem sido escolhidas sem base teórica na
movimentação de navios. A Figura 43 ilustra a escolha feita, enquanto a Figura 44
exibe os resultados alcançados.

54
Figura 43 - Deslocamento, velocidade e aceleração do centróide da placa móvel durante trajetória na simulação 3.
Figura 44 - Forças nos atuadores para trajetória com movimentação nos 6GDL na simulação 3.

55
A força máxima alcançada foi próxima a 450N e cada atuador teve um
comportamento diferente dos outros para seguir a trajetória desejada. Apesar dos
movimentos serem independentes a combinação desses movimentos deve ser
coordenada para não haver danos na estrutura do manipulador e garantir o
seguimento do trajeto definido.

56
4 SIMULADOR VIRTUAL
Tendo sido detalhadas as funcionalidades do mecanismo tipo plataforma de
Stewart e estudado os modelos de cinemática e dinâmica do sistema, se fez
necessário a criação de um simulador virtual que vinculasse essas informações
visualmente enquanto simulações de diferentes condições de mar reais fossem
apresentadas. Com esse objetivo, este capítulo apresentará primeiramente uma
introdução sobre a movimentação e GDL de um navio, seguido da aquisição de dados
de comportamento de embarcações em diferentes condições de mar e por fim um
simulador desenvolvido em LabView para movimentação de duas plataformas Stewart
nesses cenários.
4.1 Movimentos de Navios
Uma embarcação em movimento no mar se comporta como um corpo rígido no
espaço e tem seis graus de liberdade: três translacionais e três rotacionais. A
nomenclatura normalmente utilizada para navios e adotada nessa dissertação é:
Avanço ou Surge: translação no eixo X;
Deriva ou Sway: translação no eixo Y;
Afundamento ou Heave, translação no eixo Z;
Jogo ou Roll: rotação em torno do eixo X;
Caturro ou Pitch: rotação em torno do eixo Y;
Guinada ou Yaw: rotação em torno do eixo Z;
Com esses graus de liberdade é possível modelar qualquer posição do navio,
que deve ser levada em conta na hora de fazer os modelos matemáticos dos
manipuladores utilizados na operação de transferência de carga.
Para descrever os movimentos do navio é preciso escolher as coordenadas
que definem a translação e orientação do navio. PEREZ (2005) define essas
coordenadas usando dois tipos de sistema coordenados: uma referência inercial e
uma referência local, fixa no corpo do navio. Os sistemas coordenados para veículos
marinhos são apresentados na Figura 45 e sua orientação segue a regra da mão
direita.

57
Figura 45 - Sistemas de referência nos navios, (GONZALEZ, 2008).
O sistema inercial (n) é fixado na terra. O eixo xn positivo aponta para o Norte,
o eixo yn positivo aponta para o Leste e o eixo zn positivo aponta para o centro da
Terra. A origem do sistema On é localizada na superfície da água.
O sistema do corpo (b) é fixado no casco do navio. O eixo xb positivo aponta
para a proa, o eixo yb positivo aponta para o boreste (estibordo), o eixo zb segue a
regra de mão direita.
O sistema hidrodinâmico (h) não é fixado no casco do navio. Esse se move à
velocidade média do navio que segue um caminho. O plano xh-yh coincide com a
superfície da água. O eixo positivo xh aponta para a proa da embarcação. O eixo yh
positivo aponta para o boreste e o eixo zh positivo segue a regra de mão direita. Esse
sistema é considerado usualmente quando o navio viaja a uma velocidade constante
e, por tanto, os movimentos induzidos pelas ondas fazem com que o navio oscile em
relação ao sistema (h).
O sistema geométrico (g) é fixado no casco do navio. O eixo xg positivo aponta
para a popa, o eixo yg positivo aponta para o boreste, o eixo zg positivo aponta para
cima.
Cada sistema desses possui uma finalidade diferente. O Sistema geométrico
(g), por exemplo, é utilizado pelos arquitetos navais no projeto do navio para definir a
geometria do casco ou a localização da origem do corpo rígido. O sistema (h), por sua
vez, é usado para calcular as forças e movimentos e sua interação com o casco do

58
navio e as ondas. Esse parâmetro é importante para calcular as acelerações induzidas
pelas ondas sendo usado para calcular índices de rendimento ou conforto dos
passageiros. Nessa dissertação o sistema coordenado inercial (n), junto com o
sistema do corpo (b) serão utilizados para definir a pose do navio em um determinado
instante no tempo.
As operações do navio são realizadas em diferentes condições ambientais e
diferentes considerações são assumidas durante o estudo hidrodinâmico. O estudo da
dinâmica é separado em manobrabilidade (manoeuvring) e seguimento (seakeeping).
Manobrabilidade trata do movimento do navio em ausência de excitação. O movimento
resulta da ação de dispositivos de controle, superfícies de controle e unidades de
propulsão. A manobrabilidade é associada a mudanças da trajetória, paradas etc. O
seguimento está associado a ondas de excitação no movimento, enquanto o navio
mantém sua trajetória e sua velocidade constantes (GONZALEZ, 2008).
Apesar do projeto da qual a presente dissertação faz parte contemplar a
manobrabilidade pelo posicionamento dinâmico das embarcações durante o processo
de transferência de carga fora de porto, nesta dissertação será considerada como
movimentação do navio apenas o seguimento, focando somente na interferência das
condições do mar nas embarcações.
4.1.1 Condições de Mar
As condições de mar são ditadas pelas ondas do mar. As ondas oceânicas são
provocadas pelo vento que cria forças de pressão e fricção que perturbam o equilíbrio
da superfície dos oceanos. O vento transfere parte da sua energia para a água através
da fricção entre o vento e a água. Isso faz com que as partículas da superfície tenham
um movimento elíptico, que é uma combinação de ondas longitudinais (para frente e
para trás) e transversais (para cima e para baixo). As ondas do mar são aleatórias no
tempo e no espaço. Essas características são consideradas estocásticas.
O cálculo da força das ondas depende de fatores como o período da onda,
altura da onda, comprimento da boca e do calado da embarcação e a direção. Essas
características têm diferentes classificações como, por exemplo, os tipos de mares
que são apresentados na Tabela 5.

59
Tabela 5 - Classificação dos tipos de mares pelo tamanho da onda
(GONZALEZ, 2008).
4.2 Dados do CIAGA
O Centro de Instrução Almirante Graça Aranha, cooperador no projeto do qual
a presente dissertação faz parte, possui em suas dependências um simulador de
manobra de navios para treinamento de alunos e pessoal da marinha mercante do
Brasil. Trata-se de um simulador de passadiço que conta com uma tela em 180° para
visualização do cenário de navegação e os comandos presentes em uma embarcação
real, qualificado para simular os mais variados tipos de navios e instalações portuárias.
Essa tecnologia permite que sejam realizados ensaios de manobra de navios, tanto
em mar aberto como em águas restritas, constituindo-se em excelente auxílio na
implementação de alterações em instalações portuárias, assim como no estudo sobre
a possibilidade de utilização de determinados tipos de navios nesses portos.
Dentre os cursos ministrados no ambiente, destaca-se o curso de IDP que
utiliza uma tecnologia exclusiva: o algoritmo adaptativo – princípio de inteligência
artificial, tornando o sistema capaz de aprender o comportamento do navio e se
autocalibrar continuamente, proporcionando uma navegação ideal em quaisquer
condições de mar.
Com diversos modelos de navios e situações de mar em sua base de dados,
um exemplo da movimentação de um navio em seus sei graus de liberdade é exibido
na Figura 46. Essa trajetória é proveniente de uma simulação para o navio conteneiro
Panamax de 220 m de comprimento, 22 m de boca e 11 m de calado, com seus
motores desligados em mar 4. O navio encontra-se sob a influência de ventos Belford
ShortCrast com intensidade de 15 nós a 90°. A embarcação encontra-se a deriva em
águas com 30 m de profundidade.

60
Figura 46 - Dados provenientes do simulador de passadiço do CIAGA.
Além dessa simulação, foram feitos outros dois ensaios para diferentes
condições de mar, mantendo as condições iniciais, mas variando o estado de mar
entre 4 e 6. Cada ensaio durou 30 minutos e foram adquiridos 1800 pontos para cada
GDL numa taxa de 1 ponto/segundo. A saída resultante de cada ensaio é um arquivo
.txt codificado com diversas informações sobre a simulação.
Para as condições antes apresentadas e observando-se os dados adquiridos,
pode-se dizer que o navio teve um comportamento linear na direção y (Sway). Para o
movimento de Surge e Yaw nada se pode concluir sobre linearidade ou periodicidade,
enquanto o movimento de Heave, assim como os de Roll e Pitch, parecem prever um
comportamento periódico com adição de ruído. Para comprovar tal conclusão foram
calculadas componentes em frequência dos três sinais utilizando a transformada de
Fourrier FFT (Figura 47, Figura 48 e Figura 49 - FFT do sinal de Pitch.). Constatou-se
que os graus de liberdade possuem componentes periódicas bem definidas por picos
isolados em seus spectros, e que nenhum deles possui componentes com frequência
significante maior que 0,2 Hz.
Para outras condições de mar também testadas as características pouco se
alteram, a não ser pelas amplitudes e alguns pequenos deslocamentos no eixo da
frequência.
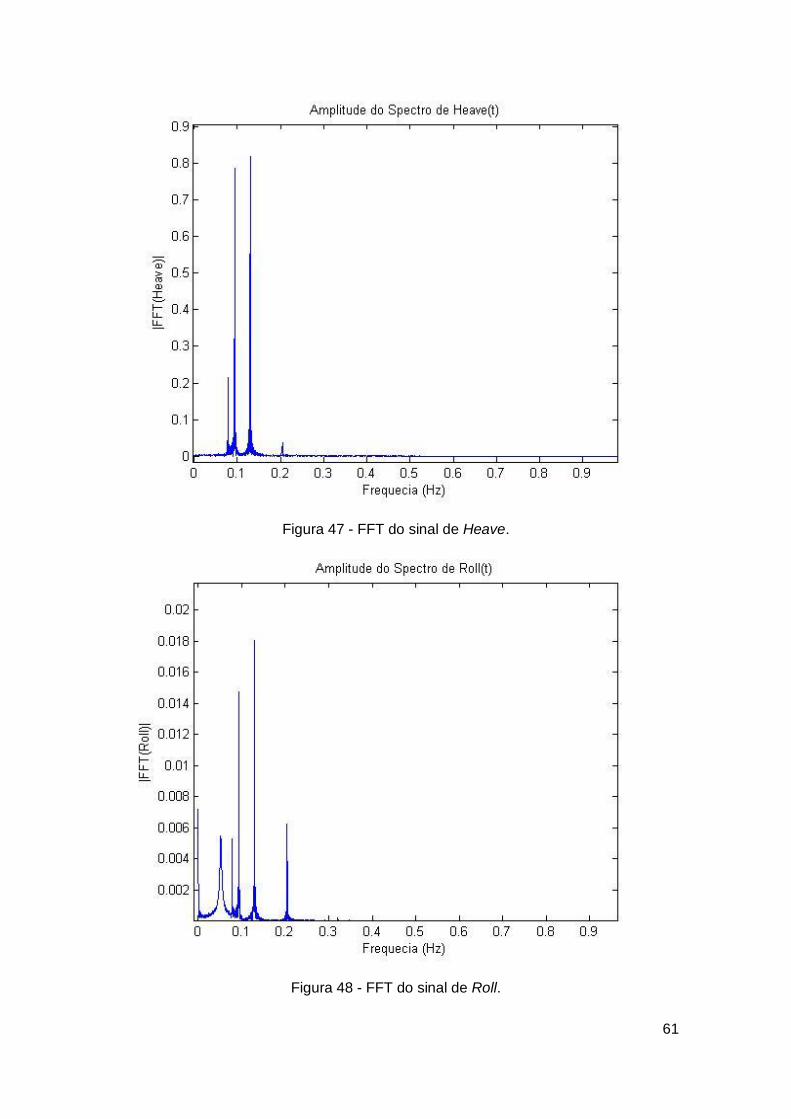
61
Figura 47 - FFT do sinal de Heave.
Figura 48 - FFT do sinal de Roll.
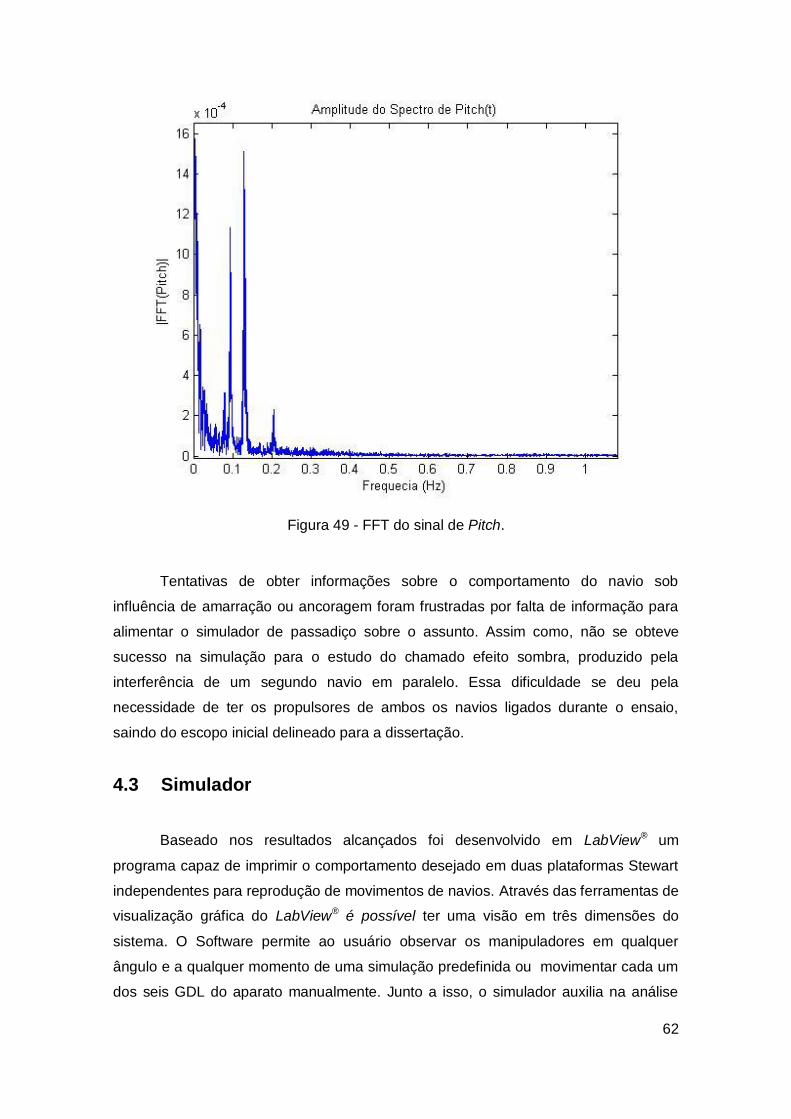
62
Figura 49 - FFT do sinal de Pitch.
Tentativas de obter informações sobre o comportamento do navio sob
influência de amarração ou ancoragem foram frustradas por falta de informação para
alimentar o simulador de passadiço sobre o assunto. Assim como, não se obteve
sucesso na simulação para o estudo do chamado efeito sombra, produzido pela
interferência de um segundo navio em paralelo. Essa dificuldade se deu pela
necessidade de ter os propulsores de ambos os navios ligados durante o ensaio,
saindo do escopo inicial delineado para a dissertação.
4.3 Simulador
Baseado nos resultados alcançados foi desenvolvido em LabView® um
programa capaz de imprimir o comportamento desejado em duas plataformas Stewart
independentes para reprodução de movimentos de navios. Através das ferramentas de
visualização gráfica do LabView® é possível ter uma visão em três dimensões do
sistema. O Software permite ao usuário observar os manipuladores em qualquer
ângulo e a qualquer momento de uma simulação predefinida ou movimentar cada um
dos seis GDL do aparato manualmente. Junto a isso, o simulador auxilia na análise

63
das grandezas dinâmicas através de gráficos para melhor compreensão do sistema. A
Figura 50 exibe as telas do programa desenvolvido.
Figura 50 - Software desenvolvido para verificação dos dados.
Da Figura 50, a numeração corresponde a: (1) campos onde usuário pode
determinar os dados físicos da das plataformas, nesses campos o usuário pode
determinar as características físicas da plataforma Stewart a ser simulada; (2) swicth
de escolha para trajetórias predefinidas ou manuais; (3) combo de seleção dentre as
trajetórias predefinidas provenientes do CIAGA; (4) comandos manuais para
movimentação manual dos 6 GDL da plataforma; (5) abas para escolha de
configurações, análise dinâmica e interferência do vento no guindaste (trabalhos
futuros); (6) gráficos em três dimensões para visualização do sistema em diferentes
ângulos; (7) switch de escolha para visualização das grandezas de lineares ou
angulares; (8) gráficos exibindo deslocamento linear/angular, forças nos atuadores,
taxa de variação de deslocamento linear/angular e aceleração angular/de translação.
Os itens 2, 3 e 4 são independentes para cada plataforma.

64
No o simulador virtual o usuário pode optar por movimentar as plataformas por
meio de trajetórias predefinidas ou configurá-las em tempo real. Os dados para
geração das trajetórias predefinidas que alimentam o sistema são provenientes do
simulador de navios do CIAGA. Os dados brutos foram decodificados e processados
para a aplicação no simulador virtual. Um arquivo .txt como o apresentado na Figura
51 foi gerado pelo simulador de passadiço dôo CIAGA para cada segundo de ensaio.
Um programa paralelo ao simulador virtual foi criado para interpretar os dados de
interesse e desprezar informações não importantes para essa etapa. As grandezas
exibidas na Figura 46, por exemplo, foram extraídas e foram calculadas em escala, o
que significa que as curvas de deslocamento linear (Surge, Sway e Heave) devem ter
seus valores multiplicados pelo comprimento do navio/plataforma.Todas as curvas
foram interpoladas usando o método linear em um intervalo de tempo de 100 ms
resultando em trajetórias contínuas para o simulador que é executado nesse intervalo
de tempo.
Figura 51 – Arquivo com dados do CIAGA.
Vale mencionar que o guindaste alocado na plataforma 1 é meramente
ilustrativo, servindo apenas como referências futuras como parte do projeto de
transferência de carga. O aparato não possui massa relevante e a interferência de seu
comportamento dinâmico na desenvoltura da plataforma não é contemplado na
presente dissertação. A placa do guindaste é capaz de seguir os movimentos da
plataforma 2 dentro do seu espaço de trabalho, porém seu seguimento de trajetória é
meramente geométrico sem levar em consideração as forças e acelerações envolvidas
no processo.
65
Como resultado alcançado, o desempenho do simulador mostrou-se concordante
com os resultados cinemáticos e dinâmicos do MPS antes apresentados. Foram
testadas as mesmas trajetórias simuladas no item 3.3.2 dessa dissertação e as curvas
exibidas foram semelhantes aos resultados obtidos anteriormente.
Para simulações de condições de mar reais, foi também verificado que não houve
saturação nas curvas de posicionamento dos atuadores. Comprovando que o
manipulador, com características segundo as apresentadas na tabela 3, trabalha
dentro do seu espaço de trabalho não excedendo os seus limites de curso e não
apresentando colisão entre os links. Nenhum pico abrupto foi detectado nos gráficos
de força garantindo o funcionamento do aparato fora dos pontos de singularidade do
problema.
Sendo assim, o simulador virtual é apresentado como um valioso instrumento para
o estudo de um MPS em qualquer condição de mar desejada. Tendo os dados para
alimentá-lo é possível fazer uma análise detalhada das forças experimentadas nos
atuadores, seu comportamento dentro volume de trabalho e as singularidades do
problema. Além disso, futuramente pode agregar informações sobre o guindaste de
transferência de carga no cenário desejado.

66
5 SISTEMA DE CONTROLE
A teoria de controle é um estudo interdisciplinar entre engenharia e matemática
que trata do comportamento de sistemas dinâmicos. Sendo a resposta desejada de
um sistema denominada referência, quando uma ou mais respostas do sistema segue
uma dada referência ao longo do tempo, o controlador é o responsável por manipular
as entradas do processo obtendo o comportamento desejado. Em outras palavras, o
sistema de controle é encarregado de relacionar o resultado da leitura dos elementos
medidos com a ação dos elementos atuados. Ao receber as informações dos sensores
para computar o estado atual do sistema, o controlador processa as informações e
executa cálculos e lógicas pré-definidas, também chamadas de lei de controle. A partir
daí, o controlador envia o resultado para os atuadores, de modo que a situação atual
do processo seja modificada e um ponto de operação próximo do desejado seja
atingido.
Como exposto em seção anterior, manipuladores paralelos são utilizados nas
mais diferentes finalidades. Para que esses robôs atendam de forma exata, rápida e
com confiabilidade seus objetivos é essencial uma estratégia de controle adequada
para cada sistema. No caso em estudo não é diferente. Na presente dissertação
procura-se um método para acionar os seis atuadores a fim de posicionar
corretamente a placa móvel da plataforma de Stewart dada uma trajetória desejada.
Para esse problema específico, será determinada uma posição e orientação da placa
móvel em relação à placa de base fixa em cada instante do tempo. Esses valores
desejados podem e devem mudar ao longo do tempo. O objetivo é controlar o modelo
da planta não-linear da plataforma de Stewart, onde as seis forças são as entradas da
planta, enquanto as saídas são os comprimentos e velocidades dos seis atuadores.
No estudo em questão, a trajetória apresenta características periódicas
referentes ao estado de mar e suas ondas, em conjunto com componentes aleatórias
provenientes do comportamento dinâmico do navio e interferências do meio. Baseado
nisso foram testados alguns controladores, avaliando-se os resultados em conjunto
com o custo computacional.
Neste capítulo será apresentada uma pequena revisão bibliográfica sobre o
assunto e, posteriormente será sugerido e validado um modelo virtual para representar
o manipulador durante as simulações. Serão então sugeridos três esquemas de
controle capazes de garantir o seguimento da placa móvel a uma trajetória. O primeiro
método será baseado unicamente no estudo cinemático, o segundo utiliza leis de

67
controle não lineares baseado na lógica fuzzy, enquanto o terceiro levará em conta as
grandezas dinâmicas do sistema.
5.1 Revisão Bibliográfica
O controle de um MPS é uma área de estudo ainda pouco explorada. Segundo
GHOBAKHLOO et al. (2006), controladores proporcional-integral-derivativo (PID) são
amplamente utilizados em sistemas de controle industrial sem a preocupação de
garantir um alto rendimento. Dos sistemas com um simples controle on-off aos mais
sofisticados, o importante é atender as necessidades de cada problema.
Para atuadores hidráulicos, OLIVEIRA (2008) propõe a utilização de um
controle do tipo PID para calcular o tempo de abertura dás válvulas on-off em uma
plataforma de simulação para movimentos aquáticos utilizada no processamento
primário de fluidos.
Considerando os atuadores eletromecânicos, LARA (2008) defende que a
dupla redução das forças produzidas pela dinâmica do manipulador, devido ao
parafuso sem fim D e de um redutor planetário N, reduzem a magnitude das forças
produzidas pela dinâmica do mecanismo do manipulador. Ao serem minimizados os
efeitos dinâmicos aumentando as reduções N e D, o sistema tende a ter um
comportamento linear. Conseqüentemente, o controle no espaço das juntas pode ser
realizado através de um controlador PID clássico, onde nesse caso, o desempenho do
controlador é adequado.
Na literatura, o controle baseado na dinâmica inversa, conhecido como controle
de torque computado, é um método popular quando se trata de posicionamento de um
manipulador paralelo. Essa estratégia de controle aponta bons resultados quando se
tem em mãos um modelo matemático fiel ao sistema. Porém as complicações e
simplificações envolvidas no processo de modelagem acarretam em erros inerentes
que podem comprometer o desempenho do controlador (LEE et al., 2003). Assim dito,
para atingir um alto desempenho no controle de trajetória de um manipulador paralelo
com seis GDLs são propostas técnicas de controle adaptativo.
Um controle adaptativo é resultante de modificações das leis de controle
durante o processo para compensar o fato dos parâmetros envolvidos serem variantes
no tempo ou detentores de incertezas. HONEGGER (1997) defende essa metodologia
ao controlar um modelo invertido no qual os atuadores se movem sobre trilhos.
Como opção aos controladores adaptativos, controladores robustos garantem
certa flexibilidade aos parâmetros sem necessidade de mudar as leis de controle. Ou
68
seja, controles robustos estão aptos a superarem pequenas diferenças entre o modelo
real da planta e o modelo nominal utilizado para o projeto. Nessa abordagem, LEE et
al. (2003) apresenta uma combinação do controle de torque computado com um
controle robusto do tipo H∞ .
Ainda no âmbito da não linearidade do MPS, SERRANO et al. (2008) sugere
um controlador em lógica fuzzy para minimizar os erros de posicionamento do
efetuador em seu espaço de trabalho. Uma rede neural artificial é proposta como
compensador para melhorar o desempenho do controlador fuzzy.
5.2 Modelo da Planta
Antes de se iniciar o estudo do controlador é preciso desenvolver um modelo
que será utilizado durante as simulações. Para criar o modelo da planta do
manipulador plataforma Stewart foi escolhido o SimMechanics do MatLab. O
SimMechanics oferece ferramentas de análise dinâmica que permitem um diagnóstico
detalhado do funcionamento do mecanismo, proporcionando modos de estudo em
cinemática, dinâmica direta e inversa, além de possibilitar a especificação do aparato e
analisar perturbações na trajetória de uma máquina através da linearização do seu
modelo.
Com base no trabalho de SMITH & WENDLANDT (2002) a plataforma de
Stewart foi dividida em três partes principais: a placa móvel, os atuadores e a base.
Cada uma das partes foi modelada separadamente e depois unidas fechando a cadeia
cinemática do manipulador, como pode ser visto na Figura 52. Cada componente é
iniciado com valores em um estado inicial de repouso da plataforma. Admite-se a
placa móvel como um corpo rígido e tem como parâmetros a localização e rotação do
centro de gravidade (CG), a localização das juntas de conexão com as camisas dos
atuadores, sua massa e sua matriz de inércia. A base, representada pelo símbolo de
terra, conta apenas com a localização fixa das juntas de conexão com as hastes dos
cilindros.
Já a modelagem dos cilindros detalha cada componente do atuador. Com os
recursos do SimMechanics foram selecionadas as juntas do atuador, suas
localizações e as massas e matrizes de inércia da haste e da camisa representadas
por corpos rígidos entre as juntas. Até o momento, no modelo utilizado neste trabalho
optou-se por uma junta universal na base, uma junta prismática entre as massas e
uma junta esférica na extremidade superior conforme ilustrado na Figura 53. Cada um

69
desses componentes tem suas localizações e rotações especificados para um instante
inicial.
Figura 52 - Planta do MPS em SimMechanics MatLab
Figura 53 - Modelo do atuador em SimMechanics MatLab.
Mediante alguns testes de controle foi atestado que a junta esférica não
apresenta um comportamento controlável. Sendo assim, optou-se por transferir o grau
de liberdade referente à rotação da camisa em torno de seu eixo à junta prismática,
resultando no seguinte modelo: juntas universais localizadas nas extremidades do
atuador em conjunto com uma junta com um grau de translação e um grau de rotação
em torno do seu eixo no próprio atuador. Na Figura 54 está ilustrado o novo modelo a
ser utilizado no trabalho.

70
Figura 54 - Modelo final do atuador em SimMechanics MatLab.
Pode-se dizer ainda que a junta com grau de liberdade translacional é a única
atuada do sistema e possui uma única entrada. Para o estudo do controle essa
entrada foi generalizada como força pois assim pode ser utilizada para qualquer
atuador seja esse hidráulico, pneumático ou elétrico. No caso em estudo, para o
atuador elétrico, a grandeza de interesse seria o torque/voltagem requeridos do motor,
mas como não se tem as especificações do modelo analisou-se a força. Além disso, a
junta é sensoriada quanto ao seu deslocamento e velocidade de translação para
realimentação da malha de controle.
Sendo assim, para uma dada trajetória serão calculadas as forças exigidas de
cada atuador, tais forças serão aplicadas ao modelo e segundo os erros provenientes
da diferença entre os valores desejados e as grandezas sensoriadas serão feitas
atualizações no sistema. Para todas as simulações seguintes foram usadas as
grandezas apresentadas nas Tabelas 3 e 4 para caracterizar a plataforma de Stewart.
Vale mencionar que todas as simulações foram feitas utilizando uma máquina
com as seguintes configurações: Pentium® Dual Core @ 2.50 GHz, Memória Ram
8Gb, sistema operacional de 64 bits com Windows Vista Ultimate
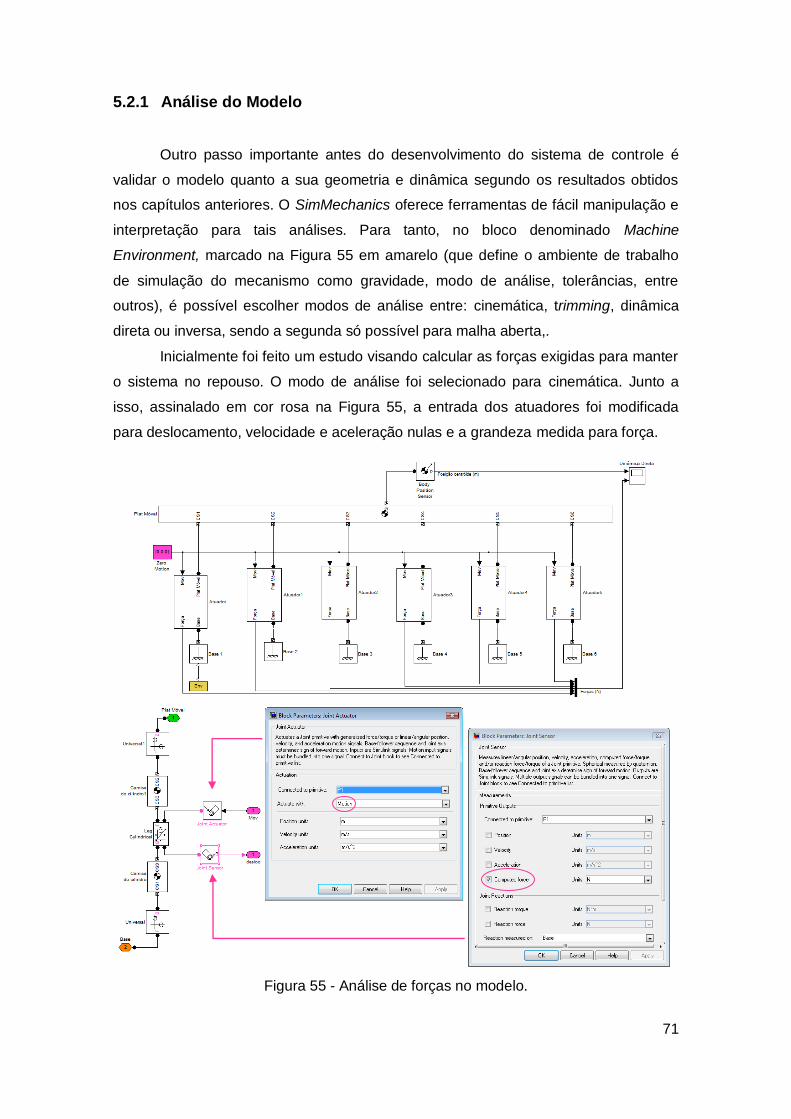
71
5.2.1 Análise do Modelo
Outro passo importante antes do desenvolvimento do sistema de controle é
validar o modelo quanto a sua geometria e dinâmica segundo os resultados obtidos
nos capítulos anteriores. O SimMechanics oferece ferramentas de fácil manipulação e
interpretação para tais análises. Para tanto, no bloco denominado Machine
Environment, marcado na Figura 55 em amarelo (que define o ambiente de trabalho
de simulação do mecanismo como gravidade, modo de análise, tolerâncias, entre
outros), é possível escolher modos de análise entre: cinemática, trimming, dinâmica
direta ou inversa, sendo a segunda só possível para malha aberta,.
Inicialmente foi feito um estudo visando calcular as forças exigidas para manter
o sistema no repouso. O modo de análise foi selecionado para cinemática. Junto a
isso, assinalado em cor rosa na Figura 55, a entrada dos atuadores foi modificada
para deslocamento, velocidade e aceleração nulas e a grandeza medida para força.
Figura 55 - Análise de forças no modelo.

72
Durante a simulação, o software possibilita visualizar o desenvolvimento da
simulação geometricamente. Como primeiro passo para validação, uma análise
superficial pode ser feita utilizando essa ferramenta. A Figura 56 mostra a
representação gráfica extraída do modelo pelo SimMechanics. Pode-se afirmar que a
estrutura do modelo está de acordo com o esperado. Porém essa análise não é
suficiente para validá-lo. Um estudo mais detalhado das forças envolvidas é
necessário para garantir que o modelo realmente represente o sistema em estudo.
Figura 56 - Visualização geométrica.
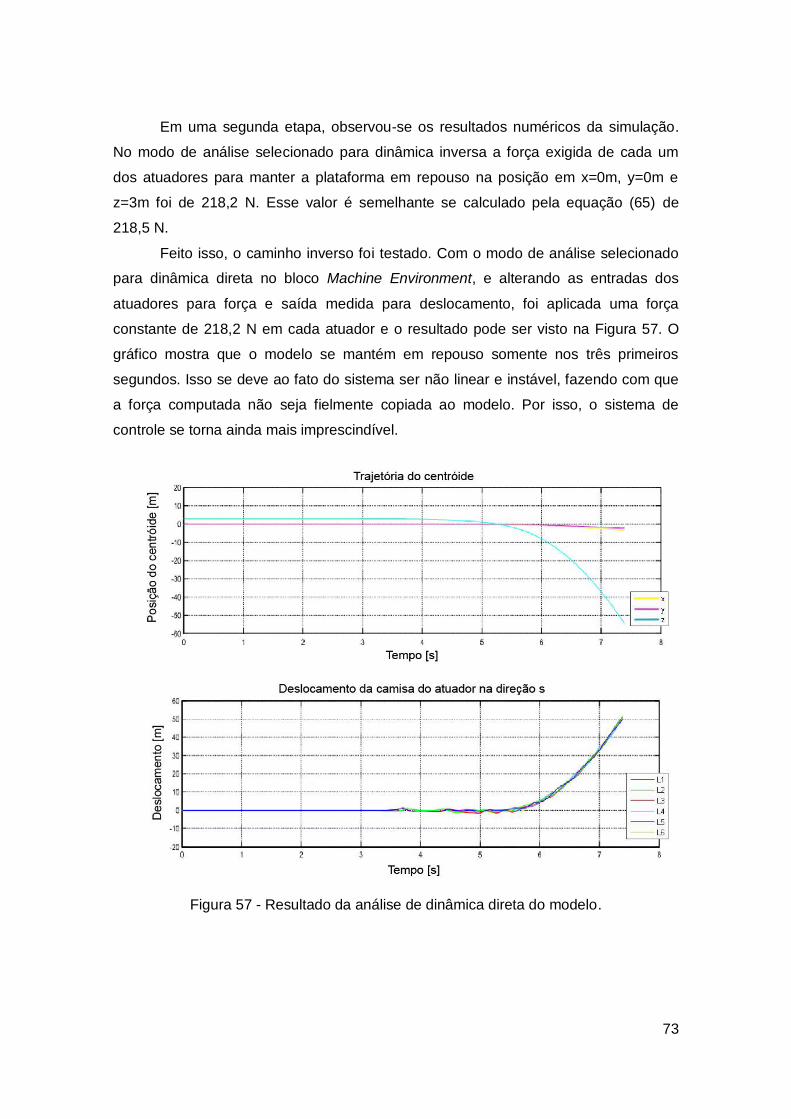
73
Em uma segunda etapa, observou-se os resultados numéricos da simulação.
No modo de análise selecionado para dinâmica inversa a força exigida de cada um
dos atuadores para manter a plataforma em repouso na posição em x=0m, y=0m e
z=3m foi de 218,2 N. Esse valor é semelhante se calculado pela equação (65) de
218,5 N.
Feito isso, o caminho inverso foi testado. Com o modo de análise selecionado
para dinâmica direta no bloco Machine Environment, e alterando as entradas dos
atuadores para força e saída medida para deslocamento, foi aplicada uma força
constante de 218,2 N em cada atuador e o resultado pode ser visto na Figura 57. O
gráfico mostra que o modelo se mantém em repouso somente nos três primeiros
segundos. Isso se deve ao fato do sistema ser não linear e instável, fazendo com que
a força computada não seja fielmente copiada ao modelo. Por isso, o sistema de
controle se torna ainda mais imprescindível.
Figura 57 - Resultado da análise de dinâmica direta do modelo.

74
5.3 Estratégias de Controle
Com o modelo validado, foram abordados três esquemas de controle para
seguimento de trajetória no problema em estudo. O primeiro, mais simples, utiliza um
controlador PID baseado apenas nos resultados da cinemática inversa, o segundo
considera as não linearidades do MPS aplica lógica fuzzy e o terceiro leva em
consideração as grandezas dinâmicas do manipulador.
Apesar dos manipuladores paralelos serem conhecidos por sua capacidade de
exatidão mesmo em movimentação rápidas os esquemas de controle abordados a
seguir não tiveram preocupação com acelerações e velocidades altas já que o
propósito da presente dissertação é a reprodução de movimentos de navios que
envolvem movimentação nos seis GDL em freqüências não maiores que 0,3 Hz,
conforme discutido na seção 4.4.
5.3.1 Controle PID baseado na cinemática
A abordagem mais simples para implementação de um controle de trajetória
em uma plataforma Stewart é a aplicação de forças aos atuadores proporcionais ao
erro de movimentação da placa superior. Para esse caso um controle do tipo PID,
comumente utilizado para sistemas lineares, pode ser aplicado em uma malha
fechada.
O controlador PID tem como base a realimentação do sistema através do
feedback, calcula o erro entre a sua variável controlada (medida no processo) e o seu
valor desejado (setpoint). Em função desse erro gera um sinal de controle, de forma a
eliminar esse desvio. O algoritmo PID usa o termo em três módulos distintos para
produzir a saída: o termo proporcional (P), o integral (I) e o derivativo (D) (CAMPOS,
2010). OU seja, a lei de um controle PID é uma combinação linear de uma variável
detectada por um sensor, a sua integral temporal, e sua primeira derivada.
O controlador PID baseado na cinemática da plataforma Stewart utiliza o erro
de posição dos links iE , suas velocidades e integrais (SMITH and WENDLANDT,
2002). A lei de controle para cada link i tem a forma:
0
t
i p i i i d iF K E K E dt K E
( 67 )

75
O controlador é aplicado às forças iF na direção do i-ésimo link em cada um
dos atuadores, e sabendo as coordenadas e rotação do centróide da placa móvel para
uma trajetória desejada, o erro é calculado subtraindo o comprimento do atuador
segundo resultado da equação (12) do comprimento do atuador medido pelos
sensores do modelo, segundo a expressão (68):
( )i i sensE L L
( 68 )
Assim, se iE é positivo significa que o comprimento link é menor que o
desejado, por isso iF deve ser de expansão. Se iE é negativo o comprimento link é
maior que o desejado, por isso iF deve ser de compressão. Por fim se iE é nulo, o
comprimento do link é exatamente igual ao comprimento necessário para que a placa
superior alcance a pose desejada, e iF depende apenas do erro residual proveniente
do termo integrativo.
Os reais, não negativos, pK , iK , e
dK são respectivamente os ganhos
proporcional, integral e derivativo que modulam os sinais de resposta medidas na lei
de controle. O primeiro termo é diretamente proporcional ao erro instantâneo do
comprimento do link e corrige de forma linear a atuação, o segundo termo é
proporcional à integral do erro e corrige pequenos desvios durante o processo e o
terceiro é proporcional à derivada do erro e interfere na velocidade que o link se
aproxima do seu tamanho ideal, evitando picos (overshoots) e oscilações durante o
processo.
Dito isso, o seguinte esquema de controle é proposto:
Figura 58 - Malha de controle PID baseado na cinemática do MPS.
Traduzindo para o Simulink temos o seguinte diagrama de blocos exibido na
Figura 59.
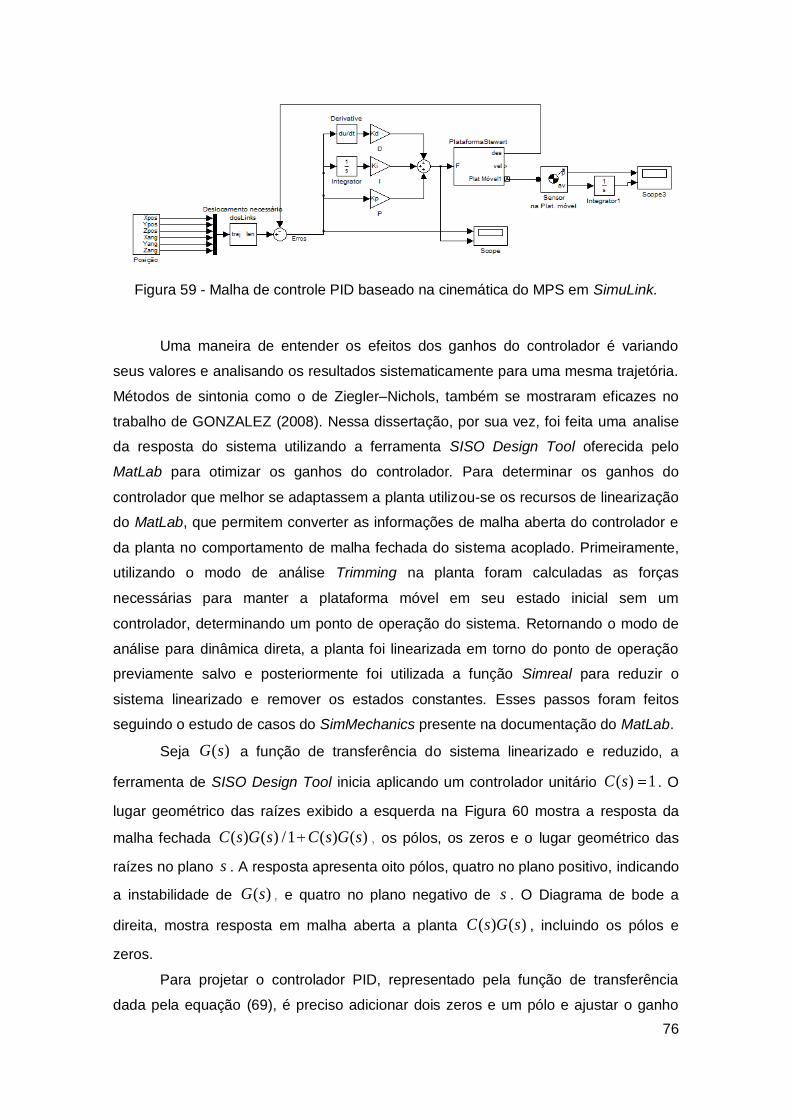
76
Figura 59 - Malha de controle PID baseado na cinemática do MPS em SimuLink.
Uma maneira de entender os efeitos dos ganhos do controlador é variando
seus valores e analisando os resultados sistematicamente para uma mesma trajetória.
Métodos de sintonia como o de Ziegler–Nichols, também se mostraram eficazes no
trabalho de GONZALEZ (2008). Nessa dissertação, por sua vez, foi feita uma analise
da resposta do sistema utilizando a ferramenta SISO Design Tool oferecida pelo
MatLab para otimizar os ganhos do controlador. Para determinar os ganhos do
controlador que melhor se adaptassem a planta utilizou-se os recursos de linearização
do MatLab, que permitem converter as informações de malha aberta do controlador e
da planta no comportamento de malha fechada do sistema acoplado. Primeiramente,
utilizando o modo de análise Trimming na planta foram calculadas as forças
necessárias para manter a plataforma móvel em seu estado inicial sem um
controlador, determinando um ponto de operação do sistema. Retornando o modo de
análise para dinâmica direta, a planta foi linearizada em torno do ponto de operação
previamente salvo e posteriormente foi utilizada a função Simreal para reduzir o
sistema linearizado e remover os estados constantes. Esses passos foram feitos
seguindo o estudo de casos do SimMechanics presente na documentação do MatLab.
Seja ( )G s a função de transferência do sistema linearizado e reduzido, a
ferramenta de SISO Design Tool inicia aplicando um controlador unitário ( ) 1C s . O
lugar geométrico das raízes exibido a esquerda na Figura 60 mostra a resposta da
malha fechada ( ) ( ) /1 ( ) ( )C s G s C s G s , os pólos, os zeros e o lugar geométrico das
raízes no plano s . A resposta apresenta oito pólos, quatro no plano positivo, indicando
a instabilidade de ( )G s , e quatro no plano negativo de s . O Diagrama de bode a
direita, mostra resposta em malha aberta a planta ( ) ( )C s G s , incluindo os pólos e
zeros.
Para projetar o controlador PID, representado pela função de transferência
dada pela equação (69), é preciso adicionar dois zeros e um pólo e ajustar o ganho

77
global. Os coeficientes do numerador, incluindo o ganho global, devem ser positivos. A
maneira mais fácil de garantir isso é ambos os zeros terem partes reais negativas. O
pólo deverá ocorrer em zero, correspondendo ao integrador.
2
1 2( )( )( )
d p iip d
K s K s KK s z s zC s K K s K
s s s ( 69 )
No processo de otimização do controlador sua resposta foi alterada a fim de
reprimir respostas indesejáveis e melhorar o feedback. Os objetivos básicos são obter
uma resposta de alto ganho em baixas freqüências para, dessa forma, conseguir
acompanhar o desempenho e diminuir a resposta para altas freqüências limitando a
sensibilidade do controlador a variações na planta e de ruído. Assumindo os
movimentos da plataforma em até 10Hz, sistema apresenta resposta firme até próximo
a esse valor em seguida decaindo a resposta para freqüências mais altas.
Figura 60 - Ferramenta SISO Design do MatLab para controlador unitário.

78
Encontraram-se os seguintes ganhos para o controlador 62 10 [ ]pK N m ,
510 [ . ]iK N m s e 35 10 [ . ]dK N s m para os quais os erros foram mínimos e o
gasto computacional foi aceitável. O lugar geométrico das raízes e o diagrama de
Bode para o controle pode ser observado na Figura 61.
Figura 61 - Ferramenta SISO Design do MatLab para controlador PID.
Por simetria o controlador PID atua da mesma forma em cada um dos
atuadores da plataforma. Projetando as configurações do PID para o comportamento
de uma atuador é possível otimizá-lo para os outros cinco.
Para um primeiro teste, foi simulado o controle para manter a plataforma no
seu estado inicial de repouso, ou seja 0x y e 3z . No regime

79
permanente a plataforma manteve sua posição com um erro de 10-4 m e 10-4 rad. Para
tanto foi aplicada a cada atuador uma força constante de 223, 9 N.
Em uma segunda etapa foi sugerida uma trajetória que envolve os seis graus
de liberdade com a maior frequência próxima a 0.5Hz para a movimentação horizontal
da placa, segundo os gráficos exibidos na Figura 62. Seus movimentos foram
garantidos dentro do seu espaço de trabalho.
Figura 62 - Trajetória senoidal com 6 graus de liberdade.

80
Os erros de posicionamento da placa superior encontrados têm ordem de
grandeza 10-2 tanto para o movimento de translação quanto para o de rotação. O
maior erro relativo ficou em 2% para os movimentos de rotação da placa superior. As
forças exigidas dos atuadores não passaram de 700N e os erros nos atuadores
alcançaram 2 cm, conforme ilustrado nas Figura 63 e Figura 64.
Figura 63 - Erros de posicionamento da placa móvel para o esquema de controle baseado na cinemática.

81
Figura 64 - Erros nos atuadores e forças para o esquema de controle baseado na cinemática.
Com a finalidade de manter a amplitude da trajetória porém mais rápida, a
frequência da aceleração foi dobrada e a amplitude foi quadruplicada. O erro de
rotação se manteve, porém o erro de translação triplicou e a máxima força requerida
chegou a 2000N. Em uma última análise a frequência foi multiplicada por 4 enquanto a
amplitude foi aumentada em seu quadrado. O erro de translação aumentou para 6,7%
e as forças atingiram 6000N. Essas análises dos erros comprovam que o controle
implementado não acompanha a dinâmica do sistema.

82
5.3.2 Controle por Lógica Fuzzy
Levando em consideração as não linearidades inerentes ao sistema foi
verificada a aplicação de um controlador baseado em lógica fuzzy para o MPS. Os
controladores baseados na lógica fuzzy possuem um conjunto de parâmetros que são
definidos pelo projetista baseando-se no conhecimento e experiência do problema, o
que é, sem dúvida, uma vantagem na hora da implementação do controlador. Um bom
conhecimento da dinâmica do problema é suficiente na maioria dos casos para realizar
tarefas de controle satisfatórias. Essa técnica permite adicionar o conhecimento de
experts na área para a melhoria do desempenho através do uso de regras na definição
do controlador. O estudo do sistema permite adquirir um amplo conhecimento sobre a
dinâmica e o comportamento em condições não triviais (LACHE, 2008), facilitando
uma implementação mais intuitiva do controlador.
O controlador fuzzy escolhido para o MPS se utiliza dos resultados obtidos na
presente dissertação. Assim como na estratégia de controle anterior o controlador age
sobre a força exercida em um atuador (iF ) e tem como entradas o erro de posição do
atuador ( iE ) a velocidade de deslizamento do mesmo (iv ). A seleção das entradas e
saídas do controlador também faz parte do seu processo de projeto. Optou-se por
utilizar funções de pertinência triangulares. A Figura 65 ilustra o esquemático do
controlador agora descrito.
Figura 65 - Esquemático do controlador fuzzy.
Para o controlador em estudo, o processo de sintonia foi feito a partir dos
resultados obtidos nas simulações anteriores e foi modificado num procedimento
contínuo de tentativa e erro. Outra característica importante do controlador é o método
de inferência fuzzy. Foi escolhido o tipo Mamdani devido ao seu amplo uso como
método em diversos controladores na literatura. Como técnica de defuzzificação foi

83
usada o centróide devido aos bons resultados obtidos nos primeiros testes do
controlador com essa metodologia.
Para a variável lingüística “Erro de Posição”, ne , foram utilizadas cinco funções
de pertinência triangulares limitadas de -2m até 2m, denominadas: Muito Negativo,
Negativo, Nulo, Positivo e Muito Positivo. Já para a variável lingüística “Velocidade do
Atuador”, nv , foram utilizadas três funções de pertinência triangulares limitadas de -
5m/s até 5m/s, denominadas: Negativo, Nula e Positivo. As funções de pertinência
podem ser observadas na Figura 66.
Figura 66 - Funções de pertinência relacionadas as entradas "Erro de Posição" e “Velocidade do Atuador”.

84
Assim como as entradas, a saída do controlador, a variável lingüística “Força
Exercida pelo Atuador”, nF , utilizou apenas funções de pertinência triangulares, no
caso cinco, limitadas de -5000N até 5000N, denominadas: Muito Negativa, Pouco
Negativa, Zero, Pouco Positiva, Muito Positiva. Esses valores limites foram
selecionados baseados nos resultados obtidos no estudo da dinâmica do MPS. As
funções de pertinência relacionadas a saída do controlador podem ser observadas na
Figura 67.
Figura 67 - Funções de pertinência relacionadas à "Força Exercida pelo Atuador".
Depois da definição da forma e dos limites dos conjuntos de pertinência das
variáveis lingüísticas, a tarefa subseqüente é a denominação das regras de
implicação, sendo essa uma das partes mais determinantes nos resultados. O
controlador baseado em lógica fuzzy permite inserir regras que correspondem ao
sentido comum da operação de posicionar a placa móvel no espaço. Em outras
palavras é possível criar regras facilmente com a informação e experiência que se tem
sobre a dinâmica do manipulador. Para esse problema em particular foi definido que o
erro é positivo quando o comprimento desejado do atuador é maior que o comprimento
real do atuador e negativo na situação contrária. Para a velocidade dos atuadores se
determinou que ela seja positiva quando o atuador se move na direção positiva do eixo
e negativa para a situação contrária.
Um exemplo da lógica usada para fazer a tabela de regras é observado na
Figura 68. Nota-se que em um dado momento da trajetória o atuador tem tamanho
menor que o necessário para posicionar a placa móvel na posição desejada, ou seja, o
"Erro de Posição" é positivo. Na situação (a) o atuador tem velocidade positiva e assim

85
uma força dita "Positiva" deve ser aplicada de modo que ele atinja a posição desejada.
Na situação (b), porém o atuador está se movimentando com velocidade negativa, ou
seja, no sentido contrário ao desejado, por isso uma força de maior magnitude na
direção oposta ao seu movimento, agora dita "Muito Positiva", deve ser aplicada para
que a placa móvel siga a trajetória definida.
Figura 68 – Exemplo de situações possíveis para a criação da tabela de regras.
A mesma lógica é aplicada quando o atuador tem comprimento maior que o
desejado e a entrada "Erro de Posição" é negativa. Caso a "Velocidade no Atuador"
seja positiva, uma força "Muito Negativa" deve ser aplicada. No caso do "Erro de
Posição" ser nulo a força a ser aplicada depende unicamente da direção eminente do
movimento. No caso exclusivo da "Velocidade no Atuador" também ser nula nenhuma
força deve ser aplicada. As regas completas para cada uma das coordenadas
generalizadas do manipulador estão determinadas na Tabela 6 onde é apresentada a
saída para cada umas das 15 combinações de regras possíveis representando o
conjunto fuzzy correspondente a variável de saída denominada “Força Exercida Pelo
Atuador”.
Tabela 6 - Regras de implicação.
Erro nos Atuadores
Muito
Negativo Negativo Nulo Positiva
Muito
Positiva
Ve
locid
ad
e n
os
Atu
ado
res
Negativa Muito
Negativa Negativa Positiva
Muito
Positiva
Muito
Positiva
Nulo Muito
Negativa Negativa Nula Positiva
Muito
Positiva
Positiva Muito
Negativa
Muito
Negativa Negativa Positiva
Muito
Positiva

86
Sendo assim, uma proposta de malha de controle fechada utilizando seis
controladores fuzzy independentes para cada atuador é exibida na Figura 69.
Figura 69 - Malha de controle por lógica fuzzy do MPS em SimuLink.
Considerando a metodologia aplicada ao esquema de controle anterior, no
primeiro teste foi simulado o controle para manter a plataforma no seu estado inicial de
repouso. No regime permanente a plataforma manteve sua posição com um erro de
8x10-4m e para tanto foram aplicadas aos atuadores uma força constante de 220,18 N.
Para a mesma trajetória com os 6 GDL proposta no esquema de controle
anterior, exibida na Figura 62, o maior erro de posicionamento da plataforma móvel
tem ordem de grandeza 10-2m (0,33% do valor máximo alcançado na trajetória) e de
rotação 3x10-2rad (5% do valor máximo alcançado durante a trajetória). A força
máxima requerida dos atuadores durante o processo foi de 1500N. Os resultados
podem ser observados nas Figura 70 e .
Os resultados aqui alcançados não podem ser diretamente comparados com
os resultados anteriores do PID já que o controlador aqui apresentado reproduz um
PD não linear. Porém, verificou-se que, não ter houve uma melhora substancial no
erro de posicionamento da placa. O tempo computacional consumido durante as
simulações anteriores impossibilitaram os testes para freqüências mais altas. Para 1
segundo de simulação foram necessários 18 minutos e 38 segundos. Junto a isso, as
oscilações em alta frequência presentes nas forças exercidas pelos atuadores durante
a trajetória são um indicativo que, dependendo do sistema eletro-eletrônico utilizado
no sistema real, os atuadores não sejam capazes de reproduzir tal comportamento ou
ainda que vibrações durante o processo possam comprometer a estrutura do aparato
físico.

87
Figura 70 - Erros de posicionamento da placa móvel para o esquema de controle baseado em lógica fuzzy.

88
Figura 71 - Erros nos atuadores e forças para o esquema de controle baseado em lógica fuzzy.
5.3.3 Controle de Torque Computado
Objetivando melhorar a exatidão da técnica de controle e o comportamento
dinâmico da plataforma é sugerida a utilização de um controle baseado na dinâmica
inversa do sistema. Considerando suas acelerações e as forças exigidas de cada
atuador e não apenas a trajetória desejada do centróide da placa móvel, o conhecido

89
controle de torque computado será aplicado ao problema. Segundo LEE, et al. (2003)
essa estratégia de controle apresenta resultados satisfatórios quando se tem em mãos
um modelo acurado do
manipulador. Porém, quando o modelo não representa fielmente o sistema, seu
desempenho é geralmente inaceitável.
Para adotar o torque computado foi preciso separar o sistema em linear e não
linear e fazer algumas aproximações. A matriz c , exibida na equação (64) pode ser
reescrita segundo a equação (70).
( ) ( , )M X X h X X JF
( 70 )
Sendo X o vetor de coordenadas generalizadas, ( )M X a matriz de inércia
que depende apenas da configuração da plataforma e ( , )h X X o termo não linear
incluído as forças de Coriolis, centrípetas e gravitacionais; dependente da posição e
velocidade do manipulador. Para cálculo dessas matrizes é preciso reescrever sF ,
apresentado na equação (49) como uma matriz em função apenas das grandezas
dinâmicas do centróide da plataforma móvel. De acordo com (DASGUPTA, et al.
1998), considerando p ia p a , a força experimentada pelas juntas esféricas de
cada atuador pode ser reescrita segundo a equação (71).
2 2 2
2 2
1 1 2 2
1 21 1 2 2
2 2 2 1 2
1. {( . ) . . }
1[ {( . ) } {( . ) }
( . )( ) ( . )( )
1{ ( . ) } . ( )( )]
si i p i i i p i p i
i
i ii p i p i p i p
i i i
i i p i i i i p i i
i i
i i i i i p i i i i p i i i
i
F m s a s r s a r a sL
m r m rs a s a s a s a
L L L
m ms r a s r s r a s r
L L
m r s r s s a s I I s a V s FL
( 71 )
A expressão completa de iV pode ser observada no Apêndice C.
A equação (71) para a força na junta esférica na parte superior do atuador
abrange o vetor pa em diferentes termos. Para incorporar essa expressão nas
equações de movimento da placa móvel, todos os termos de siF que dependem da

90
variável pa devem ser agrupados e expressos na forma matricial
i pQ a , onde iQ é
uma matriz 3x3 que depende dos parâmetros dos atuadores e da configuração da
plataforma. Para isso, duas regras algébricas se fazem uteis:
Regra 1:
1 2 1 2v v v v ( 72 )
ou seja, um produto vetorial a esquerda equivale a uma pré-multiplicação pela matriz
anti-simétrica 1v , dada por:
1 1
1 1 1
1 1
0
0
0
z y
z x
y x
v v
v v v
v v ( 73 )
Regra 2:
1 2 3 1 2 3 3 1 2 3 1 2( . ) ( ) ( ) ( )T T Tv v v v v v v v v v v v ( 74 )
onde 1v ,
2v e 3v são vetores 3x1 resultando 3 1( )Tv v em uma matriz 3x3.
As regras 1 e 2 oferecem uma forma consistente para transformar operações
algébricas entre vetores em simples multiplicações de matrizes, sendo assim possível
isolar o vetor pa em cada termo da equação (71) e reescrever siF na sua forma
compacta exibida na equação (75).
si i p i i iF Q a V s F ( 75 )
onde,
2 2 2 2
2 1 1 2 2 1 1 2 22 3 32 2
1 11 1 2 2 2 1 1 1 1 22
2 .1
1( ) ( )( ) ( )( ) ( )
Ti i i i i ii i i x
i i i
T T T Tii i i i i i i i i i i i i i i i
i i
s r m r m r m r m rQ m s s E
L L L
m rs r r s m s r s r m s r s r s I I s
L L
( 76 )

91
e 3 3xE
é uma matriz identidade 3x3. Substituindo
p ia p a na equação (75)
obtém-se:
( )si i i i i iF Q p q V s F ( 77 )
ou,
( )si i i i i i iF Q p Q q V s F ( 78 )
Usando a regra 1 descrita na equação (72) a expressão de siF se reduz a
si i i i i i iF Q p Qq V s F ( 79 )
Considerando a equação de movimento da plataforma móvel como feito no
estudo dinâmico do problema, substituindo siF na sua forma reduzida descrita na
equação (79) nas equações de Newton e Euler descritas nas equações (59) e (61)
respectivamente, obtém-se:
6 6
3 3
1 1
6 6
1 1
( )i B i i B
i i
B
A ext i i i
i i
Mg ME Q p MO Q q M O g
F V s F ( 80 )
6 62
3 3
1 1
6 6
1 1
( )
. [ ] ] ( )
T
B i i B B B B i i i
i i
B
B B B i i i A ext i i i
i i
MO q Q p I M O E O O q Q q
I MO O g q V k M q s F
( 81 )
Combinando as equações (80) e (81), as equações de dinâmica da plataforma
são obtidas na forma fechada como:
B
A ext
B
A ext
p FM h JF
M ( 82 )
Onde,

92
6 6
1 1
;plat i plat i
i i
M M M h h h ( 83 )
e
3 3
2
3 3
,(
i i iB
plat iTi i i i iB B B B
Q Q qME MOM M
Q q q Q qMO I M O E O O ( 84 )
{ ( ) },
{( . ) }
iB
plat i
i i iB B B
VM O gh h
q V kI MO O g ( 85 )
Como espaço de trabalho do MPS é relativamente pequeno, o vetor de
coordenadas X
e a matriz de inércia ( )M X
variam pouco, a matriz de inércia pode
ser considerada constante com a introdução de um erro de modelagem no sistema.
A lei que rege o controle baseado na dinâmica inversa é dada por
M hF F F ( 86 )
onde,
1
1
ˆ ˆ ˆ( ) ( ) ( )
ˆ ˆ( , )
M d p d d d i d
h
F J M X K X X K X X K X X dt
F J h X X ( 87 )
onde dX é o vetor que define a trajetória desejada do centróide da placa móvel e X̂ é
o vetor real do modelo.
A Figura 72 ilustra o princípio do controle por torque computado, onde o laço
interno computa a dinâmica inversa e faz o modelo se comportar como um sistema
linear. É valido ressaltar que o termo MF é responsável pela força de controle e é
usada para seguir a trajetória desejada, enquanto hF lineariza a planta cancelando o
termo não linear (LEE et al., 2003). Substituindo as expressões de (87) em (69)
encontra-se:
ˆ ˆˆ ˆ( ) ( ) ( )d p d d d i dMX h M X K X X K X X K X X dt h ( 88 )

93
O termo não linear h presente nos dois lados da equação se cancela
resultando na seguinte expressão:
0d p iE K E K E K Edt ( 89 )
onde ˆdE X X representa o erro e dK , pK , e
iK são determinados para que o
vetor erro se aproxime de zero assintoticamente.
Figura 72 - Esquemático do controle de torque computado (LEE et al., 2003).
Traduzindo para o Simulink temos o seguinte diagrama de blocos:
Figura 73 - Malha de controle de torque computado do MPS em SimuLink.
A calibração do PID foi feita de forma heurística e encontraram-se os seguintes
ganhos para o controlador 4 210 [ ]pK s
310[ ]iK s e 1500[ ]dK s para os quais
os erros e o custo computacional se equilibraram.

94
Repetindo a metodologia dos esquemáticos anteriores, no primeiro teste foi
simulado o controle para manter a plataforma no seu estado inicial de repouso. No
regime permanente a plataforma manteve sua posição com um erro de 10 -7m e para
tanto foi aplicada a cada atuador uma força constante de 218,15 N.
Para a mesma trajetória com os 6 GDL proposta no esquemas de controle
anteriores, exibida na Figura 62, os erros de posicionamento da plataforma móvel para
translação ficaram em torno de 10-5 m (0,001% do valor máximo alcançado na
trajetória) e para rotação foram de 10-4 rad (0,08% do valor máximo alcançado durante
a trajetória). A força máxima requerida dos atuadores durante o processo foi de 600N.
Os resultados podem ser observados através das Figura 74 e Figura 75.
Figura 74 - Erro de posicionamento da placa móvel para o esquema de controle baseado na dinâmica.

95
Figura 75 - Forças requeridas dos atuadores para o esquema de controle baseado na dinâmica.
Dobrando e quadruplicando a frequência da aceleração o erro se mantém na
mesma ordem de grandeza enquanto as forças atingiram 1500 N e 4000N,
respectivamente.
Esses resultados estão de acordo com o esperado: a magnitude das forças é
semelhante às das estratégias anteriores e o erro proveniente de maiores acelerações
não se altera consideravelmente quando são consideradas as grandezas dinâmicas do
sistema. Entretanto, o custo computacional é mais alto se comparado a estratégia de
controle baseada na cinemática do MPS. Os cálculos relacionados com a dinâmica
inversa, como o processamento das matrizes inversas, resultam em um
processamento mais lento do modelo.

96
5.3.4 Simulação da estratégia de controle com dados reais
Segundo a teoria da semelhança na transposição do modelo físico de escala
menor para o tamanho real nem todas as variáveis, como por exemplo a massa, a
velocidade e o atrito, se comportam de forma igual em escala, face ao modelo real
(CARNEIRO, 1996). Levando em consideração que os resultados até aqui alcançados
para o MPS serão extrapolados para navios com dimensões muitas vezes maiores
que o modelo, a estratégia de controle que apresentou melhores resultados para
reproduzir o comportamento do navio extraído do simulador de ponte de comando do
CIAGA foi a baseada no torque computado.
Considerando que os sinais do simulador consistem em 1800 pontos
adquiridos durante 30 minutos de ensaio. Em uma primeira simulação foram usados
os dados brutos interpolados com função spline em intervalos de 0.01 segundos.
Ainda assim, utilizando a diferenciação temporal numérica para cálculo da aceleração
do sistema, picos abruptos foram detectados comprometendo os resultados.
Para solucionar esse problema foram empregadas funções aproximadas aos
sinais adquiridos. Os sinais de Heave, Roll e Pitch foram aproximados por uma soma
de senos de acordo com o spectro exibido nas
Figura 47, 47 e 48 respectivamente. Já os sinais de Surge, Sway e Yaw tiveram suas
curvas aproximadas por polinômios utilizando a funcionalidade Basic Fitting do Matlab.
As curvas dos sinais adquiridos e as funções aproximadas dos seis GDL estão
traçadas nos gráficos a seguir exibidos na Figura 76.
A diferenciação para obtenção da serie temporal da aceleração foi efetuada
sobre as funções que representam os resultados aproximados, evitando picos
abruptos detectados na diferenciação numérica antes testadas. As funções
encontradas tratam-se de polinômios (o menor com grau 1) e somas de funções
trigonométricas, possuem segunda derivadas contínuas e suaves. As curvas das
acelerações dos seis GDL podem ser contempladas nos gráficos exibidos na Figura
77.
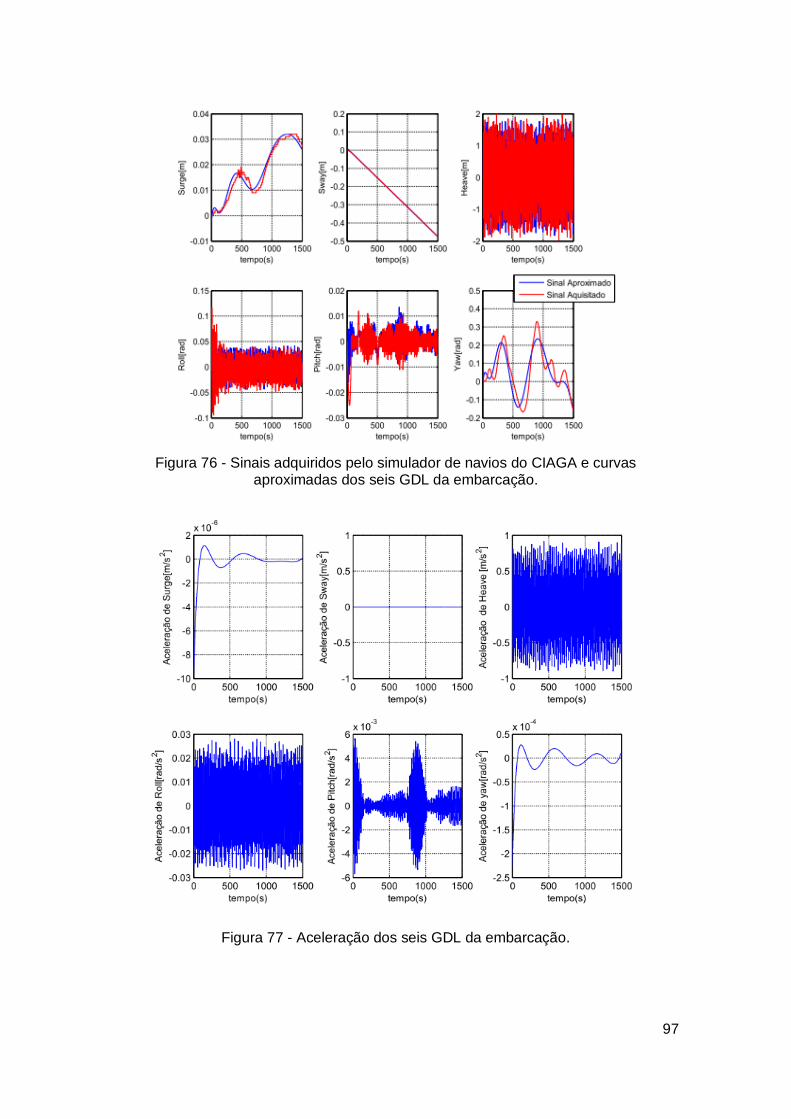
97
Figura 76 - Sinais adquiridos pelo simulador de navios do CIAGA e curvas aproximadas dos seis GDL da embarcação.
Figura 77 - Aceleração dos seis GDL da embarcação.

98
A partir dos resultados ilustrados anteriormente foi feita uma nova simulação
para validação da estratégia de controle sugerida nas condições de mar simuladas
pelo simulador do CIAGA. O ensaio durou em torno de 13 minutos e apresentou erros
de translação na ordem de 10-6m e de rotação de 10-5rad conforme pode-se verificar
através dos gráficos exibidos na Figura 78. As forças não ultrapassaram 450 N
durante o teste, esse resultado pode ser observado na Figura 79.
Figura 78 - Erros de translação e rotação para simulação de estado de mar 4.

99
Figura 79 - Forças exigidas dos atuadores para simulação de estado de mar 4.

100
6 Conclusões e Trabalhos Futuros
Este trabalho apresenta a plataforma de Stewart como uma ferramenta para
simular a movimentação de navios em diferentes condições de mar, sendo a
motivação maior usá-las em testes de transferência de carga entre embarcações fora
de porto. O objetivo maior da dissertação é demonstrar técnicas de controle eficazes
para o problema.
Como primeira conclusão, pode-se afirmar que a arquitetura paralela com seis
graus de liberdade leva vantagem frente a arquitetura serial. Apesar do volume de
trabalho mais restrito, a precisão alcançada pelo efetuador e a rigidez conferida do
sistema mecânico são os principais fatores para escolha do modelo. Assim, o controle
de posição do manipulador paralelo é mais simples se comparado ao modelo serial
por esses motivos.
Verificou-se que através do estudo cinemático do modelo, é possível observar que
o projeto da plataforma de Stewart apresenta grandes limitações quanto a seu espaço
de trabalho. Em uma breve análise do volume de trabalho de orientação constante foi
possível perceber que as restrições estão diretamente relacionadas com o curso dos
atuadores e a geometria do aparato. Além disso, ficou claro que, singularidades na
fronteira do volume de trabalho devem ser evitadas, porém singularidades em seu
interior não são facilmente detectadas.
O estudo da dinâmica mostra que as forças e torques exigidos pela plataforma
também são um fator limitante do projeto, sendo importante seu prévio conhecimento
ao escolher os atuadores capazes de efetuar tais esforços. Os resultados obtidos
foram validados quando confrontados com os trabalhos de (GONZALEZ, 2008) e
(DASGUPTA, et al., 1998).
A FFT dos graus de liberdade roll, pitch e heave apresentaram picos claros em
frequencias menores que 0.3Hz para condições de mar 4, 5 e 6. Em uma etapa
posterior, um simulador, desenvolvido em LabView, foi apresentado a fim de ensaiar a
plataforma de Stewart se movimentando a partir de dados reais sobre condições de
mar 4, 5 e 6 provenientes do simulador de ponte de comando do CIAGA. Pôde-se
então afirmar que a geometria e dimensões escolhidas possibilitam a livre
movimentação do aparato dentro do seu volume de trabalho para as trajetórias
selecionadas, afirmando assim a escolha do manipulador paralelo para representar
navios.
Sob o ponto de vista do controle de trajetória foi apresentado um modelo
desenvolvido em SimMechanics/MatLab para representar a plataforma no ambiente

101
de testes. O modelo, quando testado em seu estado de repouso, apresentou
resultados de forças e torques semelhantes aos alcançados no estudo dinâmico.
Foram então apresentadas três técnicas de controle: a primeira um controle PID
simples, baseado apenas na cinemática do problema; a segunda abordando a lógica
fuzzy; e a terceira com enfoque na dinâmica do modelo, tratando o torque computado.
Analisando os erros de translação e rotação do efetuador, em conjunto com as forças
exigidas pelos atuadores e o tempo de computação exigido no processo, a técnica de
controle que apresentou melhores resultados foi a baseada no torque computado.
Somando-se aos resultados anteriores, a estratégia de controle elegida foi
aplicada a plataforma de Stewart a fim que a mesma seguisse uma trajetória mais
próxima do spectro de um navio em águas profundas. Com os dados proveniente dos
ensaios realizados no simulador de ponte de comando do CIAGA, o controlador
baseado no torque computado apresentou resultados semelhantes às simulações
anteriores com erros de rotação e translação menores que 10 -5rad e 10-6m,
respectivamente.
Assim sendo, como conclusão final dessa dissertação pode-se dizer que a
plataforma Stewart replica de forma fiel a movimentação de uma embarcação em
águas profundas, quando seu sistema de controle envolve as grandezas dinâmicas do
problema. Dito isso, o aparato se apresenta como uma solução eficiente na
trasnferência de carga entre navios e quando aplicado à indústria naval vai possibilitar
maior flexibilidade no escoamento de cargas em sistemas de grande porte que
transportem grande quantidade de containers. O mesmo possibilitaria uma diminuição
nos custos de manutenção e novos investimentos desnecessários em portos de
diversos lugares do país e no mundo, e ainda facilitaria o salvamento de cargas e de
pessoas quando em situação de risco.
6.1 Trabalhos Futuros
Apesar dos grandes avanços alcançados no decorrer da dissertação,
comprovando a viabilidade de usar uma plataforma de Stewart na simulação de navios
durante o processo de transferência de carga fora de porto, alguns pontos não
abordados têm sua significância e devem ser considerados em trabalhos
subseqüentes. Primeiramente, um estudo detalhado da influência do guindaste na
plataforma seria de extrema importância tanto na questão estrutural quanto no âmbito
do controle da plataforma suporte. Questões como inércia do novo sistema e

102
acelerações relativas entre os corpos são apenas exemplos que precisam ser
validados quando se pensa em simulação de transferência de conteiners entre navios.
Sobre as entradas que alimentam o simulador, seria interessante realizar ensaios
em ambientes reais, como um tanque oceânico, quanto a interação entre os dois
navios envolvidos no processo. O chamado efeito sombra, e a influência de um navio
sobre o outro devem ser consideradas a fim de se obter dados mais próximos dos
encontrados na situação desejada. Tentativas de obter informações sobre o
comportamento do navio sob influência de amarração ou ancoragem foram frustradas
por falta de informação para alimentar o simulador de passadiço sobre o assunto.
Assim como, não se obteve sucesso na simulação para o estudo do chamado efeito
sombra, produzido pela interferência de um segundo navio em paralelo. Essa
dificuldade se deu pela necessidade de ter os propulsores de ambos os navios ligados
durante o ensaio, saindo do escopo inicial delineado para a dissertação.
Além disso, a estratégia de controle elegida deve ser aplicada a um modelo físico,
e não apenas virtual, a fim de verificar seu bom desempenho. Lembrando que o
aparato físico apresenta limitações por fatores mecânicos como a capacidade do
mecanismo manipulador de carga. Unido às questões acima sugeridas, a sintonia do
controlador deve levar em consideração fatores correspondentes à dinâmica do navio
e abordar mais detalhadamente técnicas de controle não-lineares para que se alcance
resultados mais próximos da situação real.

103
7 REFERÊNCIAS BIBLIOGRÁFICAS
ALMONACID, M., SALTARÉN, R. J., ARACIL, R., REINOSO, O., 2003, “Motion
Planning of a Climbing Parallel Robot”, IEEE Transactions on Robotics and
Automation, vol. 19, p. 485-489.
BONEV, I. A. 2003, The True Origins of Parallel Robots. Disponível em:
<http://www.parallemic.org/>.
BOSSCHER, P., WILLIAMS II, R. L., BRYSON, L. S., CASTRO-LACOUTURE, D.,
2007, "Cable-Suspended Robotic Contour Crafting System", Automation in
Construction, Vol. 17, p. 45–55.
CAMPOS, M. C. M. M., Teixeira, H. C. G., 2010, Controles Típicos de
Equipamentos e Processos Industriais, 2 ed. São Paulo, Blucher.
CAPPEL, K.L., 1967, "Motion Simulator," US Patent No. 3,295,224
CARNEIRO, F. L., 1996, Análise Dimensional e Teoria da Semelhança e dos
Modelos Físicos, 2 ed. Rio de Janeiro, UFRJ.
DASGUPTA B., MRUTHYUNJAYA, T.S., 1998a, “Closed-Form Dynamic Equations of
the General Stewart Platform through the Newton-Euler Approach", Machinery
Theory, vol. 33, n° 7, p. 993-1012.
DASGUPTA B., MRUTHYUNJAYA, T.S., 1998b, “A Newton-Euler Formulation for the
Inverse Dynamics of the Stewart Plataform Manipulator", Machinery Theory, vol. 33,
n° 8, p. 1135-1152.
DASGUPTA B., MRUTHYUNJAYA, T.S., 2000, “The Stewart Platform: a Review”,
Mechanical and Machinery Theory, vol. 35, p. 15-40.
FRANÇA, H. L., SILVA J. C. P. , LENGERKE O., FRANÇA F. M. G., DUTRA M. S.,
2009, "Um Sistema de Visão Artificial Para o Controle de Perseguição de Movimentos

104
de uma Embarcação por uma Plataforma Stewart", 2° Congreso Internacional de
Ingeniería Mecatrónica, UNAB Bucaramanga, Colombia.
FOSSEN, T.I., 1994, Guidance and Control of Ocean Marine Vehicles, 1 ed.,
Inglaterra, John Wiley And Sons Ltd.
GHOBAKHLOON, A., EGHTESAD, M., AZADI, M., 2006, "Position Control of a
Stewart-Gough Platform Using Inverse Dynamics Method with Full Dynamics", 9th
IEEE International Workshop on Advanced Motion Control, Iran.
GONZALEZ A., H., 2009, Projeto Mecatrônico de uma Plataforma Stewart para
Simulação dos Movimentos Nos Navios, Dissertação de M.Sc., COPPE/UFRJ, Rio
de Janeiro, RJ, Brasil.
GOSSELIN, C., ANGELES, J., 1990, "Singularity Analysis of Closed-Loop Kinematic
Chains", IEEE Transactions on Robotics And Automation, Vol. 6, Nº. 3.
GOUGH, V.E., WHITEHALL, S.G., 1962, “Universal Tire Test Machine”. 9th Int.
Technical Congress FISITA., v. 117, Maio, p. 117–135.
GWINNETT, J.E., 1931,"Amusement Device", United States Patent Nº US1789680.
HIBBLER, R. C., 2001, Dynamics, Engineering Mechanics, 9 ed. New Jersey,
Prentice-Hall.
HONEGGER, M., CODOUREY, A., BURDET, E.,1997, "Adaptive Control of the
Hexaglide, a 6 dof Parallel Manipulator", International Conference on Robotics and
Automation, Albuquerque, New Mexico.
JAKOBOVIC, D., JELENKOVIC, L., 2001, The Forward and Inverse Kinematics
Problems for Stewart Platform. Disponível em: <http://www.zemris.fer.hr/>
LARA, F. A., 2008, Ambiente de Simulação de Manipuladores Paralelos:
Modelagem, Simulação e Controle de uma Plataforma Stewart, Dissertação de
M.Sc., Universidade Estadual de Campinas, Campinas, SP, Brasil.
105
LARA, F. A., ROSARIO, J. M., SANCHEZ O. F. A., 2008, "Simulation Environment
Proposal, Analysis and Control of a Stewart Platform Manipulator", 7th Brazilian
Conference on Dynamics, Control and Applications, Presidente Prudente, SP,
Brasil.
LEE, S. H., SONG, J. B., CHOI W. C., HONG D., 2003, "Position Control of a Stewart
Platform Using Inverse Dynamics Control with a Proximate Dynamics", Mechatronics,
vol. 13, p. 605-619.
LIU, K., FITZGERALD, J. M., LEWIS, F. L., 1993, “Kinematic Analysis of a Stewart
Platform Manipulator”, IEEE Transactions on Industrial Electronics, vol. 40, n. 2,
April, p. 282-293.
MERLET, J. P., 2004, “Solving the Forward Kinematics of a Gough-Type Parallel
Manipulator with Interval Analysis”, The International Journal of Robotics Research,
Vol. 23, n. 3, March, p. 221-235.
MERLET, J. P., 2006, Parallel Robots, 2 ed. Netherlands, Springer.
NANUA, P., WALDRON, K. J., MURTHY, V., 1990, “Direct Kinematic Solution of a
Stewart Platform”, IEEE Transactions on Robotics and Automation, vol. 6, p. 438-
443.
OLIVEIRA, E., 2008, Prototipagem Rápida de Sistemas Mecatrônicos Baseada em
Instrumentação Virtual, Dissertação de M.Sc., Universidade Estadual de Campinas,
Campinas, SP, Brasil.
PARSONS, L., and Glass, J., 2004, "Recommendations for Creating Accurate
Linearized Models in Simulink," MATLAB Digest.
PEREZ, T., 2005, Ship Motion Control, 1 ed. Londres, Springer.
SADJADIAN H., TAGHIRAD H.D., FATEHI A., (2005) "Neural Networks Approaches
for Computing the Forward Kinematics of a Redundant Parallel Manipulator",
International Journal of Computational Intelligence, Vol. 2, n. 1, p. 40-47.

106
SERRANO, F., CABALLERO, A., YEN, K., BREZINA T., ,2007, "Control of a Stewart
Platform with Fuzzy Logic and Artificial Neural Network Compensation", 7th Congress
of Mechatronics, Warsaw, Poland.
SICILIANO, B. SCIAVICCO, L., VILLANI, L., ORIOLO, G., 2009, Robotics: Modeling,
Planning and Control, 1 ed. Inglaterra, Springer.
SMITH, N., WENDLANDT, J., 2002, "Creating a Stewart Platform Model Using
SimMechanics," MATLAB Digest.
SOARES, B.F.F., SILVA, F.S., NIGRI, I., MELLO, C.B., Meggiolaro, M.A., 2007,
“Master-Slave Servo-Bilateral Control of Direct Drive Electrical Manipulators”, 19th
International Congress of Mechanical Engineering, Brasilia, DF, Brasil
SPECKERT, M., DREßLER, K., 2008, "Simulation and Optimization of Suspension
Testing Systems", Mathematics in Industry, vol. 12, II, p. 254-258.
STEWART, D., 1965, “A platform with 6 degrees of freedom”, Institution of
Mechanical Engineers, Vol. 180, Pt. 1, n. 15, p. 371-386.
TANEV, T. K., 2000, “Kinematics of a Hybrid (Parallel-Serial) Robot Manipulator”,
Mechanical and Machinery Theory, vol. 35, p. 1183-1196.
TSAI, L., 1999, Robot Analysis: the Mechanics of Serial and Parallel Manipulators,
1 ed. EUA, Willey-Interscience.
VIANNA, F. L. V., 2002, Análise Cinemática de um Simulador de Movimentos de
Seis Graus de Liberdade do Tipo Estrutura Paralela, Dissertação de M.Sc.,
Pontificia Universidade Católica, Rio de Janeiro, RJ, Brasil.
WAPLER, M.; URBAN, V.; WEISENER, T., STALLKAMP, J.; DURR, M. & HILLER, A.
2003, "A Stewart Platform for Precision Surgery", Institute of Measurement and
Control, Vol. 25, n.4, p. 329–334.
WILSON, J.F., 2002, Dynamics of Offshore Structure, 2 ed. New York, Wiley.

107
WENDLANDT, J. M. & SASTRY, S. S. (1994), "Design and Control of a Simplified
Stewart Platform for Endoscopy", 33d conference on Decision and Control, Vol. 1, p.
357-362.
WOO, K. Y., JIN, B. D., KWON, D. S., 1998, "A 6 DOF Force-Reflecting Hand
Controller Using Five Bar Parallel Mechanism", IEEE International Conference on
Robotics and Automation, p.1597-1602.

108
8 Anexos
8.1 Anexo A - Programação da cinemática inversa em
Matematica©

109

110
8.2 Anexo B - Rotina de simulação dinâmica inversa em
MATLAB©
%% Simulação da Dinâmica de uma plataforma de Stewart % Projeto de tese de mestrado Camilla Mello % Novembro 2009
% nomenclatura segundo DASGUPTA e MRUTHYUNJAYA (1998) clear all clc close all entrada=3;
%% ------------------- Geometria ---------------------------- R_b=1; tetha_b=pi/10;
for i=1:6 if i==1 || i==3 || i==5 lambda(i)=i*pi/3-tetha_b/2; else lambda(i)=lambda(i-1)+tetha_b; end end
b=zeros(3,6); b(1,:)=R_b*cos(lambda); b(2,:)=R_b*sin(lambda); b(3,:)=zeros(1,6);
% %------------------Plataforma movel -----------------
R_a=0.8; %Raio da circunferencia que circunscreve a plataforma tetha_a=pi/10+pi/2; %Angulos entre vertices
for i=1:6 if i==1 || i==3 || i==5 lambda(i)=i*pi/3-tetha_a/2; else lambda(i)=lambda(i-1)+tetha_a; end end
% vertices da plataforma movel em repouso p=zeros(3,6); p(1,:)=R_a*cos(lambda); p(2,:)=R_a*sin(lambda); p(3,:)=zeros(1,6);
%% -------------------------------- Constatntes ---------------------
------
111
Ip=1*[3.023 0.00 0.00 ; 0.00 6.046 0.00;0.00 0.00 3.023];
%Matriz de inercia kg*mts^2 solidworks desidad=0.276 g/mm^3.Massa=100
Kg Id0=[0.05945 -0.00724 0.00007;-0.00724 0.00673 -0.00006;0.00007 -
0.00006 0.06404];%Matriz de inercia de la camisa del cilindro kg*mts^2
desidad=0.002 g/mm^3 Masa = 3.59827 kilogramos Iu0=[0.00608 0 0;0 0.00003 0;0 0 0.00608];
%Matriz de inercia de del vastago del cilindro kg*mts^2 desidad=0.002
g/mm^3 Masa = 0.41127 kilogramos md=3.5; mu=0.5; M=100; rd0=[0 0 0.15]';
%m distancia del vertice Bi hasta el centroide del piston ru0=[0 0 -0.2]'; R0=[0 0 0]';
% constantes referentes ao atrito Cu=0.0001; Cp=0.001; Cs=0.0002; % Cu=0; Cp=0; Cs=0; % Cu=1; Cp=1; Cs=1;
% Vetor aceleração da gravidade g=[0 0 -9.8]';
% grandezas externas Fext=[0 0 0]'; Mext=[0 0 0]';
%% ---------------------- Trajetória ---------------------------------
----
[tempo, t, tetha, v_t, w, a_t, alpha]=trajetoriaHernan(entrada);
%% -----------------------------Simulação-----------------------------
-----
for k=1:length(tempo) % Matriz de Rotação - Angulos de Euler Rx=[1 0 0; 0 cos(tetha(1,k)) -sin(tetha(1,k)); 0 sin(tetha(1,k))
cos(tetha(1,k))]; Ry=[cos(tetha(2,k)) 0 sin(tetha(2,k)); 0 1 0; -sin(tetha(2,k)) 0
cos(tetha(2,k))]; Rz=[cos(tetha(3,k)) -sin(tetha(3,k)) 0; sin(tetha(3,k))
cos(tetha(3,k)) 0; 0 0 1]; Rot=Rz*Ry*Rx;
for j=1:6
% Cinemática e Dinamica de cada link q(:,j)=Rot*p(:,j); % Vetor de cada vertice sem translação vert_a(:,j)=q(:,j)+t(:,k); %vetor de cada vertice com
traslação S(:,j)=vert_a(:,j)-b(:,j); % vetor de cada cilindro L(j)=norm(S(:,j)); %comprimento de cada cilindro s(:,j)=S(:,j)/L(j); %vetor unitário na direção de cada
cilindro

112
v_S(:,j)=cross(w(:,k),q(:,j))+v_t(:,k); %velocidade x y z no
ponto de conexão da plataforma com cada cilindro v_L(j)=dot(s(:,j),v_S(:,j)); %componete de deslizamento da
velocidade entre as partes do cilindro W(:,j)=cross(s(:,j),(v_S(:,j)/L(j))); %velocidade angular de
cada cilindro
a_S(:,j)=cross(alpha(:,k),q(:,j))+cross(w(:,k),cross(w(:,k),q(:,j)))+a
_t(:,k); %Aceleração no ponto de conexao da plataforma com cada
cilindro a_L(j)=dot(s(:,j),a_S(:,j))+L(j)*dot(W(:,j),W(:,j)); %
Aceleração de deslizamento entre as partes do cilindro A(:,j)=(cross(s(:,j),a_S(:,j))-2*v_L(j)*W(:,j))/L(j); %
Aceleração angular de cada cilindro
% aceleração e inercia de cada link % Sistema de coordenadas fixo Angtetha(j)=-atan2((vert_a(1,j)-b(1,j)),(vert_a(2,j)-b(2,j)));
%angulo para Rz Angfi con respecto a Bi Angphi(j)=-acos((vert_a(3,j))/L(j)); Rz2=[cos(Angtetha(j)) -sin(Angtetha(j)) 0; sin(Angtetha(j))
cos(Angtetha(j)) 0; 0 0 1]; Rx2=[1 0 0; 0 cos(Angphi(j)) -sin(Angphi(j)); 0 sin(Angphi(j))
cos(Angphi(j))]; T=Rz2*Rx2;
V(:,j)=[0 0 L(j)]; rd(:,j)=T*rd0; %posição do centro de gravidade da parte fixa
no referencial fixo ru(:,j)=T*[V(:,j)+ru0]; %posicao do centro de gravidade da
parte movel no referencial fixo
a_d(:,j)=cross(A(:,j),rd(:,j))+cross(W(:,j),cross(W(:,j),rd(:,j)));
a_u(:,j)=a_L(:,j)*s(:,j)+cross(A(:,j),ru(:,j))+cross(W(:,j),cross(W(:,
j),ru(:,j)))+2*v_L(:,j)*cross(W(:,j),s(:,j)); Id=T*Id0*T.'; Iu=T*[Iu0+mu*L(j)^2*[0 0 0; 0 1 0; 0 0 1]]*T.';
%equacao dinamica de cada link (Soma dos momentos=0) f(:,j)=Cs*(W(:,j)-w(:,k)); C(:,j)=md*cross(rd(:,j),a_d(:,j))+mu*cross(ru(:,j),a_u(:,j))-
cross((md*rd(:,j)+mu*ru(:,j)),g)-(Id+Iu)*A(:,j)-
cross(W(:,j),(Id+Iu)*W(:,j))+Cu*W(:,j)+f(:,j); K(:,j)=cross(C(:,j),s(:,j))/L(j); D(j)=mu*dot(s(:,j),(a_u(:,j)-g))+Cp*v_L(j);
C0(:,j)=[0 0 0]; K0(:,j)=[0 0 0]; D0(j)=0; end
% cinematica e dinamica da plataforma R=Rot*R0; a(:,k)=cross(alpha(:,k),R)+cross(w(:,k),cross(w(:,k),
R))+a_t(:,k); I=Rot*Ip*Rot.';
113
c=[Rot*Fext+M*(g-a(:,k))-sum(K.').'; M*cross(R,(g-a(:,k)))-
I*alpha(:,k)-cross(w(:,k),I*w(:,k))+Rot*Mext-sum((cross(q,K)-f).').']; H=[s; cross(q,s)]; sol(:,k)=inv(H)*c; F(:,k)=D'-sol(:,k);
% Animação
b(:,7)=b(:,1); vert_a(:,7)=vert_a(:,1);
figure(1) plot3(vert_a(1,:),vert_a(2,:), vert_a(3,:)), axis([-2 2 -2 2 0 1]) hold on plot3(b(1,:),b(2,:), b(3,:))
for j=1:6 line([b(1,j) vert_a(1,j)], [b(2,j) vert_a(2,j)], [b(3,j)
vert_a(3,j)]) axis([-0.6 0.6 -0.7 0.5 0 1.1]); hold on end pause(0.01) hold off end
% Gráficos figure plot(tempo,F), grid, Title('Força Exercida Pelos Atuadores'),
xlabel('Tempo [s]'), ylabel('F [N]'), legend('L1','L2','L3', 'L4',
'L5', 'L6')
figure subplot(3,2,1) plot(tempo,t),grid, Title('Deslocamento do centróide da placa
móvel'),ylabel('d [m]'), subplot(3,2,3) plot(tempo,v_t),grid, Title('Velocidade Linear'), ylabel('v [m/s]') subplot(3,2,5) plot(tempo,a_t),grid, Title('Aceleração Linear'), ylabel('a [m/s^2]'),
xlabel('Tempo [s]') subplot(3,2,2) plot(tempo,tetha),grid, Title('Rotação do centróide da placa móvel'),
ylabel('\phi [rad]'), subplot(3,2,4) plot(tempo,w),grid, Title('Velocidade Angular'), ylabel('\omega
[rad/s]'), subplot(3,2,6) plot(tempo,alpha),grid, Title('Aceleração Angular'), xlabel('Tempo
[s]'), ylabel('\alpha [rad/s^2]'), legend('x','y','z')

114
8.3 Anexo D - Expressão iV (DASGUPTA, et al. 1998)
1
1
2 1
3 2 1 1
4 2 1 2
5 1 1 3 2 2 4 1 2 2 1 2 1 1 2 2
( )
1. ( ).( )
1( 2 )
( )
( ) 2
( ) ( ) ( )
(
i i
i i i i i i i i i
i
i i i i
i
i i i i
i i i i i i i
i i i i i i i i i i i i s i i
i
U a
u s U S L s S L sL
U s U LL
U U r r
U u s U r r L
U m r U m r U I I U I I m r m r g C f
V 2 4 2 5
1. . )i i p i i i i i
i
m s U C L m s g s s UL