conteúdomar/matematicaiigestao2016.17/... · 2017-05-23 · diz-nos que o veículo efectuou o...
TRANSCRIPT

Conteúdo
4 Derivadas de Funções reais de variável real 3
1 Função derivada . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31.1 Taxa de variação média de uma função . . . . . . . . . . . . . . . . . 31.2 Taxa de variação instantânea de uma função. Função derivada . . . 51.3 Derivadas laterais . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
2 Derivadas de algumas funções elementares. Regras de derivação . . . . . . . 112.1 Derivadas de algumas funções elementares . . . . . . . . . . . . . . . 11
Funções constantes . . . . . . . . . . . . . . . . . . . . . . . . 11Funções potência . . . . . . . . . . . . . . . . . . . . . . . . . 11Funções exponenciais . . . . . . . . . . . . . . . . . . . . . . . 12Funções logaritmicas . . . . . . . . . . . . . . . . . . . . . . . 13Funções trigonométricas directas . . . . . . . . . . . . . . . . 14
2.2 Derivadas de somas, produtos e divisões de funções . . . . . . . . . . 142.3 Derivada da função composta . . . . . . . . . . . . . . . . . . . . . . 152.4 Derivada da função inversa . . . . . . . . . . . . . . . . . . . . . . . 16
3 Teoremas relativos a funções deriváveis . . . . . . . . . . . . . . . . . . . . . 174 Derivadas de ordem superior . . . . . . . . . . . . . . . . . . . . . . . . . . . 185 Derivada da função implícita . . . . . . . . . . . . . . . . . . . . . . . . . . 196 Aplicações das derivadas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
6.1 Limite do quociente de dois in�nitésimos - regra de L'Hôpital . . . . 206.2 Estudo do grá�co de uma função . . . . . . . . . . . . . . . . . . . . 22
6.2.1 Intervalos de monotonia, pontos críticos . . . . . . . . . . . 22Extremos de uma função. . . . . . . . . . . . . . . . . . . . . 22Estudo dos pontos críticos. Intervalos de monotonia de uma
função. . . . . . . . . . . . . . . . . . . . . . . . . 236.2.2 Concavidades e pontos de in�exão . . . . . . . . . . . . . . 256.2.3 Assíntotas . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
6.3 Problemas de optimização . . . . . . . . . . . . . . . . . . . . . . . . 29
5 Integrais de Funções reais de variável real 33
1 Áreas de regiões planas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 331.1 Cálculo aproximado de áreas . . . . . . . . . . . . . . . . . . . . . . 341.2 Aplicação do cálculo de áreas: consumo de energia eléctrica . . . . . 35
2 Função área . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 363 Função primitiva. Integral inde�nida de uma função . . . . . . . . . . . . . 374 Primitivação de algumas funções elementares . . . . . . . . . . . . . . . . . 395 Integral de�nida . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 39
5.1 Propriedades das integrais de�nidas . . . . . . . . . . . . . . . . . . 405.2 Justi�cação da forma
∫ ba f(x)dx para a integral de�nida . . . . . . . 41
5.3 Teorema fundamental do cálculo . . . . . . . . . . . . . . . . . . . . 416 Técnicas de integração . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 42
1

2 Conteúdo
6.1 Primitivação por substituição . . . . . . . . . . . . . . . . . . . . . . 426.2 Primitivação por partes . . . . . . . . . . . . . . . . . . . . . . . . . 44
7 Integrais impróprias . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 45
6 Funções reais de duas variáveis reais 49
1 Introdução . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 492 Representação grá�ca de funções no espaço . . . . . . . . . . . . . . . . . . 493 Curvas de nível . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 534 Sequências de pontos no plano . . . . . . . . . . . . . . . . . . . . . . . . . . 545 Funções contínuas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 556 Derivadas parciais . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 56
6.1 Derivadas parciais de segunda ordem . . . . . . . . . . . . . . . . . . 596.2 Derivação da função composta (regra da cadeia) . . . . . . . . . . . 60
7 Problemas de optimização . . . . . . . . . . . . . . . . . . . . . . . . . . . . 617.1 Classi�cação dos pontos críticos . . . . . . . . . . . . . . . . . . . . . 63
Conteúdo Mário Abrantes

Capítulo 4
Derivadas de Funções reais de
variável real
No capítulo anterior estudámos funções reais de uma variável real. Dada uma funçãoy = f(x), que representa uma relação entre duas grandezas, estamos interessados emesclarecer quantitativamente e qualitativamente essa relação.
Figura 56
Queremos saber quais os valores de x para os quais seanula f(x) (pontos a, c, e, g na �gura 56), ou nos quaisatinge valores extremos relativos, máximos ou mínimos(pontos b, d, f). É importante sabermos também emque intervalos de valores de x a função cresce (inter-valo [b, d], por exemplo), decresce (intervalo [d, f ], porexemplo), e a sua taxa de variação com x nos váriospontos desses intervalos (i.e., com que rapidez varia afunção ao longo de cada intervalo). Queremos tambémconhecer os pontos em que a função é estacionária (pon-tos a, b, d, f). A representação grá�ca pode dar-nos in-formação importante, mas carece de rigor se for obtidaapenas por marcação de uma quantidade maior ou menor de pontos num referencial. Nestecapítulo vamos estudar o operador de derivação de funções, que nos vai permitir obter comrigor a informação acima referida. Mais ainda, este operador vai revelar-se fundamentalpara (i) resolver problemas de optimização e para (ii) formalizar alguns problemas práti-cos, na forma de equações diferenciais, cujas soluções são funções que relacionam grandezasrelevantes para obter respostas a esses problemas.
1 Função derivada
Vamos de�nir a função derivada f ′(x) de uma função f(x).
1.1 Taxa de variação média de uma função
Na �gura 57 está representada a relação entre a distância d percorrida por um automóvel,em quilómetros (km), e o tempo t de duração do percurso, em horas (h), numa viagem queliga dois pontos que distam entre si 80 quilómetros. Da observação do grá�co, podemosobter a seguinte informação.
- A viagem durou 4h;
- Na primeira hora de viagem, o automóvel percorreu 25km;
3

4 1. Função derivada
- Passadas duas horas de viagem, o automóvel percorreu 60km. Isto signi�ca queo automóvel andou mais depressa na segunda hora (da hora 1 para a hora 2) doque na primeira, já que nesta segunda hora percorreu 35km, contra os 25km daprimeira hora (da hora 0 para a hora 1). O grá�co traduz a maior velocidadena segunda hora, sendo mais íngreme no intervalo [1, 2] de t do que no intervalo[0, 1];
- Do instante t = 2 para o instante t = 3, a distância entre o automóvel e o pontode partida diminuiu para 35km, o que signi�ca que o automóvel voltou para trás.
- Do instante t = 3 para o instante t = 4, o automóvel retomou o percurso nosentido do ponto de chegada.
Figura 57
Deve notar-se que a forma do grá�co na �-gura 57, não signi�ca que o carro andou asubir e a descer. O que ela representa éapenas a distância a que o automóvel se en-contra do ponto de partida, nos vários mo-mentos da viagem. O percurso que liga ospontos de partida e chegada pode ter qual-quer forma, podendo até a estrada ser �umarecta�.
Consideremos agora a �gura 58. O segmento derecta que une os pontos (d, t) = (0, 0) e (d, t) =(2, 60) representa a distância em função do temporespeitante a outro automóvel, que partindo no mesmo instante que o automóvel referidono grá�co da �gura 57, se encontra no mesmo ponto do trajecto ao �m de 2h de via-gem. Designemos por automóvel A o automóvel correspondente ao grá�co não linear e porautomóvel B o automóvel correspondente ao grá�co linear.
Figura 58
O facto de o grá�co ser linear para o automóvel B,diz-nos que o veículo efectuou o percurso com umritmo (velocidade) constante, i.e., percorrendo dis-tâncias iguais em intervalos de tempo iguais. Recor-demos que se um objecto se desloca a uma velocidadeconstante, o valor da velocidade é dado por
velocidade =distância percorrida
tempo gasto a percorrer a distância
sendo as unidades km/h (quilómetros por hora), sea distância vier expressa em quilómetros e o tempoem horas. Assim, se o velocímetro do nosso carroindica 75km/h, sabemos que se mantivermos esseritmo percorreremos 75km a cada hora que passa. No caso da �gura 58, temos que avelocidade constante vB a que se desloca o automóvel B é:
vB =60
2= 30km/h.
Esta velocidade é designada por velocidade média do automóvel A no intervalo de tempo[0, 2], e representa a velocidade constante a que se deve deslocar um automóvel que, saindoao mesmo tempo que o automóvel A, esteja no mesmo ponto do percurso ao �m de duashoras de viagem. O valor de vB representa o declive da recta representada na �gura 58. Ovalor de vB designa-se por taxa de variação média da distância com o tempo, relativa aoautomóvel A. De um modo geral, temos a seguinte de�nição.
Capítulo 4. Derivadas de Funções reais de variável real Mário Abrantes

1. Função derivada 5
Dada uma função f(x), designa-se por taxa de variação médiade f com x, no intervalo [a, b], o quociente
f(b)− f(a)
b− a.
Exemplo 1. Considere-se o grá�co na �gura 57.
1. Quais as velocidades médias do automóvel nos intervalos [0, 1], [1, 2], [1, 3], [3, 4]?
2. A que velocidade constante se deve deslocar um automóvel, de modo que comecee termine a viagem nos mesmos instantes que o automóvel A?
Solução1. A velocidade média referente a um intervalo de tempo com início no instante t0 e �mno instante t1, é dada por v[t0,t1] = d(t1)−f(t0)
t1−t0 . Temos então:
v[0,1] =d(1)− d(0)
1− 0=
25− 0
1= 25km/h
v[1,2] =d(2)− d(1)
2− 1=
60− 25
1= 35km/h
v[2,3] =d(3)− d(2)
3− 2=
35− 60
1= −25km/h
v[4,3] =d(4)− d(3)
4− 3=
80− 35
1= 45km/h
Notar que a velocidade média v[2,3] é negativa, porque a distância do veículo ao ponto departida diminui entre os instantes t = 2 e t = 3.2. A velocidade constante neste enunciado é precisamente a velocidade média do veículo Ano intervalo [0, 4].
v[0,4] =d(4)− d(0)
4− 0=
80− 0
4= 20km/h.
Um automóvel que parta ao mesmo tempo que o automóvel A, e que chegue tambémao mesmo tempo que o automóvel A ao local de destino, fazendo todo o percurso comvelocidade constante, deve deslocar-se à velocidade de 20km/h.
Vídeo 1. Signi�cado de uma média numérica.[]
1.2 Taxa de variação instantânea de uma função. Funçãoderivada
Na �gura 58 podemos veri�car que, nas primeiras duas horas de viagem, o automóvel sedesloca mais rapidamente na segunda hora do que na primeira, porque o grá�co aparecemais inclinado no intervalo de tempo [1, 2] do que no intervalo [0, 1]. Comparando a incli-nação da curva com inclinação da recta aí representada, podemos dizer que no intervalo detempo [0, 1] a velocidade do automóvel é inferior à velocidade média, sendo-lhe superior nointervalo [1, 2]. Suponhamos agora que calculamos a velocidade média usando instantes detempo muito próximos � em vez de intervalos como [0, 2], usamos, por exemplo, [1.99, 2]. Na�gura 59 representamos algumas rectas cujos declives foram calculados desta forma. Comoos pontos estão muito próximos, são praticamente indistinguíveis à nossa vista, parecendosó um ponto.
Capítulo 4. Derivadas de Funções reais de variável real Mário Abrantes

6 1. Função derivada
Figura 59
São válidas a seguintes obervações.-A velocidade é maior numa vizinhança pequena doponto c, do que em vizinhanças pequenas dos pontosa e b. Isto signi�ca que se no instante a o condutordo automóvel olhar para o velocímetro1, lê um valormenor que o correspondente ao instante c;-Para instantes muito próximos dos instantes d e f ,o automóvel está praticamente parado. Isto tem sen-tido porque em ambos os instantes o automóvel temque parar para inverter a marcha;- Para instantes próximos de e, a velocidade do auto-móvel tem sinal negativo (correspondente ao decliveda recta traçada). Isto signi�ca que nas proximidades do instante e, o automóvel está adiminuir a distância que o separa do ponto de partida.
O ponto que pretendemos estabelecer a seguir é que, por muito próximos que estejam os doisinstantes usados para calcular a velocidade média, o valor obtido para esta pode ser signi�-cativamente diferente da velocidade que o automóvel atinge em pontos intermédios a essesdois instantes. Veja-se, por exemplo, a velocidade média de 30km/h correspondente aosinstantes t = 0 e t = 2, na �gura 58, que é menor que a velocidade em pontos do intervalo[1.6, 1.7].
Figura 60
Uma forma de calcularmos a velocidade num ins-tante concreto de tempo, é sugerida pela �gura 60.Nela está representado o grá�co de uma função ge-nérica f(x) que, se quisermos, podemos considerarque exprime uma distância em função do tempo x.Fixemos um ponto no eixo das abcissas, x0, e cal-culemos a taxa de variação média da função usandoeste ponto e um outro ponto, x1. Obtemos
f(x1)− f(x0)
x1 − x0.
Este valor representa o declive da recta que une ospontos
(x0, f(x0)
)e(x1, f(x1)
). Consideremos agora esta taxa de variação média usando
o ponto �xo x0 e pontos de uma sequência numérica, cada vez mais próximos deste:
f(x2)− f(x0)
x2 − x0
f(x3)− f(x0)
x3 − x0
· · ·
Estas taxas correspondem aos declives de uma sequência de retas, conforme mostra a�gura. Podemos perguntar o seguinte: se esta sequência de números x1, x2, x3, . . . usadospara calcular as variações médias convergir para o ponto que mantemos �xo, x0, a sequênciade retas correspondentes converge para uma �recta limite�? Fazendo a pergunta de outraforma, existe o limite
limx→x0
f(x)− f(x0)
x− x0?
1Dispositivo no tablier do carro que indica a velocidade a que este se desloca.
Capítulo 4. Derivadas de Funções reais de variável real Mário Abrantes

1. Função derivada 7
Se este limite existir, o seu valor diz-se derivada da função f(x) no ponto x0 e representao declive da recta tangente à curva no ponto x0 (a recta r, na �gura). Escreve-se
f ′(x0) = limx→x0
f(x)− f(x0)
x− x0. (4.1)
Registamos esta noção importante.
Dada uma função f(x) e um ponto x0 do seu domínio, a
derivada da função no ponto x0, que se escreve f ′(x0),se existir, representa o declive da recta tangente ao
gráfico da função f(x) no ponto x0.
Dado que a derivada da função no ponto x0 corresponde a
uma taxa de variação calculada com pontos �tão próximos
quanto se queira� (não há maior proximidade do que a
atingida por meio do limite), f ′(x0) designa-se por taxa
de variação instantânea da função f(x) no ponto x0.
Exercício 1. Calcular a derivada da função f(x) = x2 no ponto x = 2.Resolução
f ′(2) = limx→2
f(x)− f(2)
x− 2= lim
x→2
x2 − 22
x− 2= lim
x→2
(x+ 2)(x− 2)
x− 2= lim
x→2(x+ 2) = 4.
Sabemos que m = f ′(2) = 4 é o declive da recta tangente ao grá�co de f(x) no pontox = 2. Podemos determinar a equação desta recta, sabendo que ela contém o ponto(x, y) =
(2, f(2)
)= (2, 4). Obtemos (ver �gura 61)
y = 4x+ b
Cálculo de b: 4 = 4× 2 + b⇔ b = −4
Equação da recta: y = 4x− 4
Exercício 2. Calcular a derivada da função f(x) = x3 no ponto x = 0.Resolução
f ′(0) = limx→0
f(x)− f(0)
x− 0= lim
x→0
x3 − 03
x− 0= lim
x→0
x3
x= lim
x→0x2 = 0.
Sabemos que m = f ′(0) = 0 é o declive da recta tangente ao grá�co de f(x) no pontox = 0. Podemos determinar a equação desta recta, sabendo que ela contém o ponto(x, y) =
(0, f(0)
)= (0, 0). Obtemos (ver �gura 62)
y = 0x+ b = b
Cálculo de b: 0 = 0× 0 + b⇔ b = 0
Equação da recta: y = 0 (a recta coincide com o eixo dox xx)
Capítulo 4. Derivadas de Funções reais de variável real Mário Abrantes

8 1. Função derivada
Figura 61
Figura 62
Torna-se mais cómodo calcular a derivada de um função num ponto se dermos outra formaà fórmula 4.1. Fazendo h = x− x0 (ver �gura 60), temos x = x0 + h e podemos escrever afórmula 4.1 do modo
f ′(x0) = limh→0
f(x0 + h)− f(x0)
h. (4.2)
Nesta fórmula só aparece uma expressão envolvendo a letra x, que é x0, enquanto na fór-mula 4.1 aparecem duas, x e x0. Para além disto, eliminamos a subtracção no denominadorque aparece na fórmula 4.1.
Vídeo 2. Forma da expressão de cálculo da derivada.[]
Exemplo 2. Usando a fórmula 4.2 para calcular a derivada de f(x) = x2 no ponto x = 2(ver o exercício 1), temos
f ′(2) = limh→0
f(2 + h)− f(2)
h= lim
h→0
(2 + h)2 − 22
h
= limh→0
22 + 2× 2h+ h2 − 22
h= lim
h→0
2× 2h+ h2
h
= limh→0
(2× 2 + h) = 4.
É importante interpretar o signi�cado de f ′(2) = 4 obtido neste exemplo. A primeira coisaa ter presente, é que a derivada é o limite duma taxa de variação média
limx→x0
f(x)− f(x0)
x− x0,
sendo que a taxa de variação média envolve uma divisão. O quociente q da divisão def(x)− f(x0) por x− x0, dá-nos a quantidade de variação de f(x)− f(x0) por unidade dex − x0, no intervalo de�nido por x e x0 (é isto que o quociente de uma divisão signi�ca:a quantidade da grandeza no dividendo por cada unidade da quantidade da grandeza nodivisor). O que o limite desta variação média faz
f ′(x0) = limx→x0
f(x)− f(x0)
x− x0,
é estabelecer o limite da sequência de quocientes que se obtém calculando as taxas de va-riação média para intervalos em x cada vez mais pequenos. A informação que a expressãof ′(2) = 4 nos dá, é que se calcularmos taxas de variação médias de f(x) = x2 envolvendo oponto x0 = 2 e um outro ponto x, o valor dessas taxas aproxima-se tanto mais de 4 quanto
Capítulo 4. Derivadas de Funções reais de variável real Mário Abrantes

1. Função derivada 9
mais próximo esse outro ponto x estiver de x0 = 2.
É imediato veri�car que, se quisermos calcular a derivada de f(x) = x2 noutro pontodiferente de x = 2, por exemplo no ponto x = 3, basta repetir os cálculos efectuados noexercício 2, usando x = 3:
f ′(3) = limh→0
f(3 + h)− f(3)
h= lim
h→0
(3 + h)2 − 32
h
= limh→0
32 + 2× 3h+ h2 − 32
h= lim
h→0
2× 3h+ h2
h
= limh→0
(2× 3 + h) = 6.
Podemos obter uma função f ′(x) que nos permita calcular o valor da derivada em qualquer
ponto sem repetir os cálculos acima. Basta efectuá-los uma só vez, trocando o ponto 3pelo ponto genérico x:
f ′(x) = limh→0
f(x+ h)− f(x)
h= lim
h→0
(x+ h)2 − x2
h
= limh→0
x2 + 2xh+ h2 − x2
h= lim
h→0
2xh+ h2
h
= limh→0
(2x+ h) = 2x.
A função f ′(x) = 2x diz-de função derivada de f(x) = x2. É agora imediato obter o valorda derivada de f(x) = x2 em qualquer ponto. Por exemplo:
f ′(2) = 2× 2 = 4 f ′(−3) = 2× (−3) = −6.
A interpretação da função f ′(x) = 2x obtida acima é a seguinte (ver �gura 61):
• Para valores de x < 0 a expressão 2x é negativa. Isto signi�ca que, para valoresnegativos de x a função f(x) = x2 é decrescente, e decresce de forma tão maisacentuada quanto menor (mais para a esquerda na recta real) é o valor de x;
• Para valores de x > 0 a expressão 2x é positiva. Isto signi�ca que, para valorespositivos de x a função f(x) = x2 é crescente, e cresce de forma tão mais acentuadaquanto maior (mais para a direita na recta real) é o valor de x.
Em resumo, podemos dizer o seguinte.
Dada uma função y = f(x), a expressão f ′(x) representa uma
nova função de x, cujo domínio é o conjunto de todos
os pontos em que a função f(x) tem derivada finita.
Atribuindo a x diferentes valores x1, x2, · · · , vêm para
f ′(x) determinados valores, f ′(x1), f ′(x2), · · · , que são as de-rivadas de f(x) nesses pontos. A função f ′(x) diz-se funçãoderivada de f(x), ou simplesmente derivada de f(x), e pode
ainda ser representada pelas notações
y′ ,dy
dx, f ′(x) , etc.
A derivada de f(x) num ponto x0, pode escrever-se:
y′|x=x0 ,
(dy
dx
)x=x0
, f ′(x0) , etc.
Capítulo 4. Derivadas de Funções reais de variável real Mário Abrantes

10 1. Função derivada
Exercício 3. Considerar a função f(x) =√x. Calcular a função derivada f ′(x).
Resolução
f ′(x) = limh→0
f(x+ h)− f(x)
h= lim
h→0
√x+ h−
√x
h
= limh→0
(√x+ h−
√x)
h
(√x+ h+
√x)
(√x+ h+
√x)
(porquê?)
= limh→0
(x+ h)− xh(√x+ h+
√x)
(porquê?)
= limh→0
h
h× (√x+ h+
√x)
= limh→0
1√x+ h+
√x
=1√
x+√x
=1
2√x
1.3 Derivadas laterais
O limite na fórmula 4.2 pode não existir (o que signi�ca que a função f ′(x) não está de�nidano ponto x0) mas, apesar disso, existir algum dos limites laterais
limh→0+
f(x0 + h)− f(x0)
h(4.3)
limh→0−
f(x0 + h)− f(x0)
h. (4.4)
Cada um destes limites designa-se por derivada lateral de f(x) no ponto x0, sendo oprimeiro a derivada lateral de f(x) à direita no ponto x0, que se escreve f ′+(x0), e o outroa derivada lateral de f(x) à esquerda no ponto x0, que se escreve f ′−(x0). Uma funçãoé derivável num ponto x0 se, e somente se, existem e são iguais nesse ponto as derivadaslaterais.
Exemplo 3. A função representada na �gura 63 não tem derivada no ponto x = 2, porqueas derivadas laterais no ponto são distintas.
f ′−(2) = limh→0−
f(2 + h)− f(2)
h= lim
h→0−
1− 1
h= lim
h→0−
0
h= 0
f ′+(2) = limh→0+
f(2 + h)− f(2)
h= lim
h→0−
(2 + h)− 2
h= lim
h→0−
h
h= lim
h→0−1 = 1
Figura 63Figura 64
Capítulo 4. Derivadas de Funções reais de variável real Mário Abrantes

2. Derivadas de algumas funções elementares. Regras de derivação 11
Figura 65
De um modo geral, podemos dizer o seguinte.
Se uma função f(x) é derivável no ponto x0, então ela é
'lisa' nesse ponto, i.e., o ponto x0 não é um ponto angu-loso (ponto x = 2 da figura 63, por exemplo) ou um ponto
cuspidal (ponto x = 0 da figura 65, por exemplo)
2 Derivadas de algumas funções elementares. Re-gras de derivação
Vamos agora determinar as derivadas de algumas funções elementares e apresentar algu-mas regras de derivação que nos dizem, por exemplo, como calcular a função derivada deuma soma ou de um produto de funções. Ficaremos em condições de poder determinarfacilmente a função derivada de um grande número de funções, que é depois usada paraestudar a variação da função num dado conjunto de pontos � recordar a introdução destecapítulo, na página 4.
2.1 Derivadas de algumas funções elementares
Funções constantes
f(x) = k, k ∈ R.
f ′(x) = limh→0
f(x+ h)− f(x)
h= lim
h→0
k − kh
= limh→0
0
h= 0
Como se pode veri�car, a derivada duma função constante é nula em qualquer ponto doseu domínio.
Exemplo 4.
f(x) =1
2f ′(x) =
(1
2
)′= 0
f(x) = log10 12 f ′(x) = (log10 12)′ = 0 notar que log10 12 é um número
f(x) = e−2 f ′(x) =(e−2)′
= 0 notar que e−2 é um número
Funções potência
f(x) = xr, r ∈ Rf ′(x) = rxr−1
Capítulo 4. Derivadas de Funções reais de variável real Mário Abrantes

12 2. Derivadas de algumas funções elementares. Regras de derivação
Exemplo 5. Dedução da fórmula da derivada de f(x) = xn, sendo n um número inteiropositivo.
Sabemos que
(x+ h)n =n∑k=0
(n
k
)xn−khk = xn +
(n
1
)xn−1h+
(n
2
)xn−2h2 + · · ·+
(n
n− 1
)xhn−1 + hn,
com (n
k
)=
n!
(n− k)!k!.
Podemos escrever
f ′(x) = limh→0
f(x+ h)− f(x)
h= lim
h→0
(x+ h)n − xn
h
= limh→0
((n
1
)xn−1 +
(n
2
)xn−2h+
(n
3
)xn−3h2 + · · ·+
(n
n− 1
)xhn−2 + hn−1
)
=
(n
1
)xn−1 = nxn−1
Exemplo 6.
f(x) = 5√x f ′(x) =
(x
15
)′=
1
5x
15−1 =
1
5x−
45
f(x) = x−4 f ′(x) =(x−4
)′= −4x−4−1 = −4x−5
f(x) = x4 f ′(x) =(x4)′
= 4x4−1 = 4x3
Funções exponenciais
f(x) = ax, a > 0, a 6= 1
f ′(x) = ax ln a
Prova.
f ′(x) = limh→0
f(x+ h)− f(x)
h= lim
h→0
ax+h − ax
h
= limh→0
axah − 1
h= ax lim
h→0
ah − 1
h
Vamos calcular o limite limh→0
ah−1h . Designando ah − 1 por t, temos
ah − 1 = t⇔ ah = 1 + t⇔ h = loga(1 + t).
Podemos escrever, notando que se h→ 0 também t→ 0,
limh→0
ah − 1
h= lim
t→0
t
loga(1 + t)
= limt→0
1
loga
(1 + 1
1t
) 1t
=1
limt→0
loga
(1 + 1
1t
) 1t
=1
loga e= ln a
Capítulo 4. Derivadas de Funções reais de variável real Mário Abrantes

2. Derivadas de algumas funções elementares. Regras de derivação 13
Notar que se a = e temos,
(ex)′ = ex ln e = ex,
o que mostra que a fórmula para a derivada duma exponencial de base a é mais simplesquando se tem a = e (e ≈ 2.72).
Exemplo 7.
f(x) = 2x f ′(x) = (2x)′ = 2x ln 2
f(x) = 0.34x f ′(x) = (0.34x)′ = 0.34x ln 0.34
f(x) = (√
7)x f ′(x) =(
(√
7)x)′
= (√
7)x ln√
7
Sabendo que 0.34x > 0 (porquê?) e que ln 0.34 < 0 (porquê?), temos (0.34x)′ < 0, paraqualquer valor de x. Como se interpreta este resultado?
Funções logaritmicas
f(x) = loga |x| , a > 0, a 6= 1
f ′(x) =1
x ln a
Prova.
f ′(x) = limh→0
f(x+ h)− f(x)
h= lim
h→0
loga |x+ h| − loga |x|h
= limh→0
1
hloga
∣∣∣∣1 +h
x
∣∣∣∣ .Notar que loga |x+ h| − loga |x| = loga
∣∣∣∣x+ h
x
∣∣∣∣ = loga
∣∣∣∣1 +h
x
∣∣∣∣ .Temos então
f ′(x) = limh→0
loga
∣∣∣∣1 +h
x
∣∣∣∣ 1h = limh→0
loga
∣∣∣∣1 +h
x
∣∣∣∣ xhx
= limh→0
loga
(∣∣∣∣1 +h
x
∣∣∣∣ xh) 1
x
= loga
limh→0
[1 +
1xh
] xh
1x
= loga e1x =
1
xloga e =
1
x ln a
Notar que se a = e temos, (loge |x|
)′=
1
x ln e=
1
x,
o que mostra que a fórmula para a derivada dum logaritmo de base a mais simples quandose tem a = e (e ≈ 2.72).
Exemplo 8.
f(x) = log10 |x| f ′(x) = (log10 |x|)′ =1
x ln 10
f(x) = log0.34 |x| f ′(x) = (log0.34 |x|)′ =1
x ln 0.34
f(x) = ln(x) f ′(x) = (lnx)′ =1
x, x > 0
Capítulo 4. Derivadas de Funções reais de variável real Mário Abrantes

14 2. Derivadas de algumas funções elementares. Regras de derivação
Funções trigonométricas directas
f(x) = sen(x) f ′(x) = cos(x)
f(x) = cos(x) f ′(x) = −sen(x)
Prova. Dedução da fórmula da derivada da função sen(x).
Vamos usar a fórmula sen(p)− sen(q) = 2sen(p−q
2
)cos(p+q
2
).
f ′(x) = limh→0
f(x+ h)− f(x)
h= lim
h→0
sen(x+ h)− sen(x)
h= lim
h→0
2sen(h2
)cos(
2x+h2
)h
= limh→0
sen(h2
)h2
limh→0
cos
(2x+ h
2
)
Como limh→0
sen(h2
)h2
= 1 e limh→0
cos
(2x+ h
2
)= cos
(2x
2
)= cos(x), temos
f ′(x) = cos(x)
Notar que as igualdades (sen(x))′ = cos(x) e (cos(x))′ = −sen(x) são válidas se o ângulox vier em radianos (ver exercício 6)
2.2 Derivadas de somas, produtos e divisões de funções
Teorema 1. Sejam f, g : D → R duas funções deriváveis no ponto genérico x. Valem asseguintes regras de derivação.
1. (f ± g)′(x) = f ′(x)± g′(x)
2. (fg)′(x) = f ′(x)g(x) + f(x)g′(x)
3.
(f
g
)′(x) =
f ′(x)g(x)− f(x)g′(x)
g2(x), g(x) 6= 0.
Prova. 1. Prova-se a regra da derivada de uma adição de funções. A prova para ocaso da subtracção é análoga.
(f + g)′(x) = limh→0
(f(x+ h) + g(x+ h))− (f(x) + g(x))
h
= limh→0
(f(x+ h)− f(x)) + (g(x+ h)− g(x))
h
= limh→0
f(x+ h)− f(x)
h+ limh→0
g(x+ h)− g(x)
h
= f ′(x) + g′(x)
2.
(fg)′(x) = limh→0
f(x+ h)g(x+ h)− f(x)g(x)
h
= limh→0
f(x+ h)g(x+ h)− f(x)g(x+ h) + f(x)g(x+ h)− f(x)g(x)
h
= limh→0
(f(x+ h)− f(x)
hg(x+ h)
)+ limh→0
(f(x)
g(x+ h)− g(x)
h
)= f ′(x)g(x) + f(x)g′(x)
Capítulo 4. Derivadas de Funções reais de variável real Mário Abrantes

2. Derivadas de algumas funções elementares. Regras de derivação 15
3.
(f/g)′(x) = limh→0
f(x+ h)/g(x+ h)− f(x)/g(x)
h
= limh→0
f(x+ h)g(x)− f(x)g(x+ h)
g(x+ h)g(x)h
= limh→0
f(x+ h)g(x)− f(x)g(x) + f(x)g(x)− f(x)g(x+ h)
g(x+ h)g(x)h
= limh→0
f(x+h)−f(x)h g(x)− f(x)g(x+h)−g(x)
h
g(x+ h)g(x)
=f ′(x)g(x)− f(x)g′(x)
g2(x)
Exemplo 9.
f(x) = 3x− 2ex f ′(x) = (3x− 2ex)′ = (3x)′ − (2ex)′ = 3− ((2)′ex + 2(ex)′) = 3− 2ex
f(x) = xsen(x) f ′(x) =(xsen(x)
)′= (x)′sen(x) + x(sen(x))′ = sen(x) + xcos(x)
f(x) =x
sen(x)f ′(x) =
(x
sen(x)
)′=
(x)′sen(x)− x(sen(x))′
sen2(x)=
sen(x)− xcos(x)
sen2(x)
Exercício 4. Usando as fórmulas para as derivadas de sen(x) e cos(x), obter as derivadasdas funções trigonométricas seguintes.
f(x) = tg(x) =sen(x)
cos(x)
f(x) = cotg(x) =cos(x)
sen(x)
f(x) = sec(x) =1
cos(x)
f(x) = cosec(x) =1
sen(x)
2.3 Derivada da função composta
Teorema 2. Sejam f : A→ R e g : B → R duas funções, com f(A) ⊂ B e a ∈ A, tal queb = f(a) (ver �gura 66). Se existem f ′(a) e g′(b), então g ◦f : A→ R é derivável em x = ae tem-se
(g ◦ f)′(a) = f ′(a)g′(b) = f ′(a)g′(f(a)
). (4.5)
Se na fórmula (4.5) substituirmos a por um ponto genérico x, obtemos a fórmula
(g ◦ f)′(x) = f ′(x)g′(f(x)
).
A expressão g′(f(x)
)determina-se em dois passos: (i) Calcula-se primeiro g′(x); (ii)
substitui-se nesta expressão a variável x por f(x). Também se pode indicar das formas
(g ◦ f)′(x) = f ′(x)g′(f(x)
)ou
(g ◦ f)′(x) = f ′(x)g′(u)|u=f(x).
Capítulo 4. Derivadas de Funções reais de variável real Mário Abrantes

16 2. Derivadas de algumas funções elementares. Regras de derivação
Esta fórmula para a derivada da função composta, também se designa por regra da cadeia.
A variável u acima é muda, ou seja, substitui x, derivando-se g(u) em ordem a u, paraevitar uma expressão do tipo g′(x)|x=f(x) (qual o inconveniente no uso desta expressão?).
Figura 66
Exercício 5. Sejam f = x2 e g = ex duas funções. Determinar
1. (g ◦ f)(x) 2. (g ◦ f)′(x) 3. (g ◦ f)′(−2).
Resolução
1. (g ◦ f)(x) = g(f(x)
)= g
(x2)
= ex2.
2. (g ◦ f)′(x) = f ′(x)g′(f(x)
)= (x2)′(eu)′|u=x2 = 2xex
2.
3. (g ◦ f)′(−2) = 2(−2)e(−2)2 = −4e4.
Exercício 6. Escrever a fórmula para derivada de sen(x) se x vem em graus.
2.4 Derivada da função inversa
Na �gura 67 está representada uma recta de declive m = 2. Trocando o papel dos eixos doreferencial, i.e., considerando como eixo dos xx o eixo dos yy e como eixo dos yy o eixo dosxx, a mesma recta �ca neste novo referencial com o declive m = 1
2 . Consideremos agora a�gura 68. Observa-se o seguinte.
1. A função f(x) = x2 aí representada é bijectiva no intervalo [0,+∞[.
2. Admite, por isso, uma função inversa, na restrição [0,+∞[ do seu domínio. Po-demos ler do grá�co que, por exemplo, f(2) = 4 e por isso f−1(4) = 2.
3. A recta tangente ao grá�co no ponto de abcissa x = 2, cuja equação é y = 4x−4,tem declive m = 4. Isto signi�ca que f ′(2) = 4.
4. Como o grá�co de f−1 se obtém do grá�co de f trocando os papéis dos eixos doreferencial, podemos a�rmar que o valor da derivada de f−1 no ponto x = 4 ém = 1
4 , i.e., (f−1
)′(4) =
1
f ′(2).
Podemos generalizar este resultado da seguinte forma.
Teorema 3. Seja f uma função invertível numa vizinhança do ponto x = a e derivávelnesse ponto. Então, a derivada da função inversa f−1 no ponto b = f(a) é dada por(
f−1)′
(b) =1
f ′(a).
Capítulo 4. Derivadas de Funções reais de variável real Mário Abrantes

3. Teoremas relativos a funções deriváveis 17
Figura 67 Figura 68: f(x) = x2, f−1(x) =√x, x ≥ 0.
Exercício 7. Calcular a derivada da função f−1(x), sendo f(x) = ex.ResoluçãoSe x = a é um ponto genérico do domínio de f(x) = ex, então a sua imagem por f é ea.Pelo teorema 3, podemos escrever
(f−1
)′(ea) =
1
f ′(a)=
1
ea, (4.6)
uma vez que f ′(x) = (ex)′ = ex. Como a função inversa de f(x) = ex é f−1(x) = ln(x), e(f−1(x)
)′= 1
x , podemos escrever
(ln(x)
)′(ea) =
1
ea,
em concordância com o resultado que �gura na expressão (4.6).
3 Teoremas relativos a funções deriváveis
O resultado seguinte diz-nos que uma função derivável num ponto é contínua nesse ponto.
Teorema 4. Se existe f ′(a), então f é contínua no ponto x = a.
A a�rmação recíproca deste teorema é falsa, i.e., uma função pode ser contínua num pontoe não ser aí derivável. Por exemplo, a função representada na �gura 63, pg. 10, é contínuano ponto x = 2, apesar de não ter derivada neste ponto.
Apresenta-se de seguida o teorema de Rolle (sobre os zeros da derivada).
Teorema 5. Seja f uma função contínua no intervalo [a, b], derivável no intervalo (a, b),tal que f(a) = f(b). Então, existe um ponto c ∈ [a, b] tal que f ′(c) = 0.
O teorema seguinte é o teorema dos crescimentos �nitos, de Lagrange.
Teorema 6. Seja f uma função contínua no intervalo [a, b] e derivável no intervalo (a, b).Então, existe um ponto c ∈ (a, b) tal que
f(b)− f(a)
b− a= f ′(c).
Capítulo 4. Derivadas de Funções reais de variável real Mário Abrantes

18 4. Derivadas de ordem superior
4 Derivadas de ordem superior
Até agora falámos de derivadas de primeira ordem. Dada um função f(x), a sua funçãoderivada representa-se por qualquer uma das formas
f ′(x) oudf(x)
dxou
d
dxf(x)
Exemplo 10.
(x4)′ = 4x3
dx4
dx= 4x3
dsen(x)
dx= cos(x)
d
dxln(x) =
1
x
Se derivarmos a derivada f ′(x) de uma função f(x), obtemos a derivada de segunda ordem,ou derivada segunda, de f(x). A função derivada segunda de uma função f(x) representa-sepor qualquer uma das formas
f ′′(x) oud2f(x)
dx2ou
d2
dx2f(x)
Exemplo 11.
d2x4
dx2=d(4x3)
dx= 12x2
d2sen(x)
dx2=dcos(x)
dx= −sen(x)
d2
dx2ln(x) =
d
dx
1
x= − 1
x2
Este conceito de derivação sucessiva estende-se à derivada de qualquer ordem, podendofalar-se de derivada de ordem três, ou terceira derivada, derivada de ordem quatro, ouquarta derivada, · · · , derivada de ordem n, ou derivada n-ésima de uma função f(x).Quando se usa a notação com linhas, f ′, f ′′, · · · , é costume, se a ordem é maior que 3, usarnotação romana em vez das linhas, ou colocar entre parênteses curvos o número de linhasem notação árabe.
Exemplo 12.
f iv ou f (4) para a quarta derivada
fv ou f (5) para a quinta derivada
etc.
Da mesma forma que a primeira derivada nos dá informação sobre a variação de f , asegunda derivada f ′′ dá-nos informação sobre a variação de f ′, a terceira derivada dá-nosinformação sobre a variação de f ′′, etc.
Capítulo 4. Derivadas de Funções reais de variável real Mário Abrantes

5. Derivada da função implícita 19
5 Derivada da função implícita
Uma função diz-se representada na forma implícita, se a fórmula que a representa não tema forma de uma equação resolvida em ordem a y, i.e., y = f(x).
Exemplo 13.
y = 3x+ 2 forma explícita da equação de uma recta
y − 3x = 2 uma forma implícita da equação da mesma recta
y − 3x− 2 = 0 outra forma implícita da equação da mesma recta
Exemplo 14.
y = x2 − 3x+ 2 forma explícita de uma função quadrática
2− y = 3x− x2 uma forma explícita da função anterior
Exemplo 15. A equação y2 = 3x− 1 representa implicitamente duas funções:
y = ±√
3x− 1.
A forma implícita geral das funções é F (x, y) = 0 e salienta que o primeiro membro não éconstituido apenas pela variável y.
Na prática deparamo-nos por vezes com funções na forma imlícita, podendo não ser fácil,ou ser mesmo impossível, escrevê-las na forma explícita. Apesar disto é possível obter aderivada y′ da função assim representada sem ser necessário obter previamente a sua formaexplícita.
Exercício 8. Calcular a derivada y′ da função implícita y − 2x = 3.ResoluçãoSe temos duas funções iguais f(x) = g(x), então os grá�cos também são iguais, pelo queos declives das rectas tangentes são, em cada ponto x = a, os mesmos. Por consequência,as derivadas também são iguais e podemos escrever
f(x) = g(x)⇒ f ′(x) = g′(x).
Como a expressão y−2x = 3 exprime a igualdade das funções y−2x e 3, podemos escrever
(y − 2x)′ = (3)′ ⇒ y′ − 2 = 0⇒ y′ = 2.
Note-se que por y depender de x, a derivada de y em ordem a x é y′. O resultado obtidopara y′ é o mesmo que se obtém resolvendo previamente a equação em ordem a y, o quedá y = 2x + 3, e depois derivando ambos os membros em ordem a x, o que dá y′ = 2.Salientamos que não foi necessário explicitar a função para obter a sua derivada.
Exercício 9. Obter a equação da recta tangente à circunferência x2 + y2 = 4, no ponto(x, y) = (
√2,√
2) (ver �gura 69).ResoluçãoA circunferência tem centro na origem (0, 0) do referencial e raio igual a 2. Começamospor veri�car que o ponto (x, y) = (
√2,√
2) é um ponto da circunferência, substituindoestas coordenadas na equação e mostrando que a igualdade é veri�cada.
(√
2)2 + (√
2)2 = 4⇔ 2 + 2 = 4.
Capítulo 4. Derivadas de Funções reais de variável real Mário Abrantes

20 6. Aplicações das derivadas
Para obter a recta procurada, y = mx + b, precisamos de calcular o valor de y′ no ponto(√
2,√
2). Para isso derivamos a função implícita x2 + y2 = 4 para obter y′.
(x2 + y2)′ = (4)′ ⇒ 2x+ 2yy′ = 0⇒ y′ = −xy.
O valor de y′ no ponto (x, y) = (√
2,√
2) é −√
2√2
= −1. Ficamos a saber que a equaçãoda recta tangente é y = −x + b. Resta-nos calcular o valor de b. Como a recta contém oponto (x, y) = (
√2,√
2), temos√
2 = −√
2 + b⇔ b = 2√
2.
A equação da recta tangente procurada é y = −x+ 2√
2.
Figura 69 Figura 70
Exercício 10. Obter a equação da recta tangente ao grá�co da função que contém o ponto(x, y) = (−1,−1), representada na equação y2 = x4, (ver �gura 70).ResoluçãoA equação y2 = x4 representa duas funções, y = ±x2. Vamos obter as derivadas dasfunções representadas implicitamente por esta equação.
(y2)′ = (x4)′ ⇒ 2yy′ = 4x3 ⇒ y′ =2x3
y.
Para obter a recta procurada, y = mx + b, precisamos de calcular o valor de y′ no ponto(x, y) = (−1,−1).
m =2(−1)3
−1= 2.
Ficamos a saber que a equação da recta tangente é y = 2x+ b. Resta-nos calcular o valorde b. Como a recta contém o ponto (x, y) = (−1,−1), temos
−1 = −2 + b⇔ b = 1.
A equação da recta tangente procurada é y = 2x+ 1.
6 Aplicações das derivadas
6.1 Limite do quociente de dois in�nitésimos - regra de L'Hôpital
O resultado seguinte, conhecido por regra de l'Hôpital 2, permite resolver certos limitesde quocientes, lim
x→af(x)g(x) , em que ou lim
x→af(x) = 0 e lim
x→ag(x) = 0, ou lim
x→af(x) = ∞ e
limx→a
g(x) =∞.
2Do matemático francês Guillaume François Antoine, que deteve, de entre outros, o título nobiliárquicode marquês de L'Hôpital (povoação - actualmente uma cidade - localizada no nordeste de França).
Capítulo 4. Derivadas de Funções reais de variável real Mário Abrantes

6. Aplicações das derivadas 21
Proposição 7. Sejam f e g funções deriváveis num intervalo aberto I, excepto, possivel-mente, num ponto a ∈ I. Suponhamos que g′(x) 6= 0, para todo o x 6= a no intervalo I.Vale o seguinte.
1. Se limx→a
f(x) = limx→a
g(x) = 0 e limx→a
f ′(x)g′(x) = L (podendo ser L ∈ R ou L = ±∞),
então
limx→a
f(x)
g(x)= lim
x→a
f ′(x)
g′(x)= L.
2. Se limx→a
f(x) = limx→a
g(x) = ∞ e limx→a
f ′(x)g′(x) = L (podendo ser L ∈ R ou L = ±∞),
então
limx→a
f(x)
g(x)= lim
x→a
f ′(x)
g′(x)= L.
Exemplo 16.
1. Sejam f(x) = x e g(x) = ex − 1. Suponha-se que queremos calcular limx→0
xex−1 .
Temos limx→0
f(x) = 0 = limx→0
g(x). As funções f, g são ambas deriváveis em R, logosão deriváveis em qualquer intervalo aberto contendo o ponto x = 0. Além disto,g′(x) = (ex−1)′ = ex é não nula em R, logo é não nula numa vizinhança do pontox = 0. Podemos aplicar a regra de L'Hôpital.
limx→0
x
ex − 1= lim
x→0
(x)′
(ex − 1)′= lim
x→0
1
ex= 1.
2. A regra pode ser aplicada sucessivas vezes. Consideremos o limite
limx→2
(x− 2)2
−ex−2 + x− 1,
sendo limx→2
(x − 2)2 = 0 e limx→2
(−ex−2 + x − 1) = 0. Usemos a regra de L'Hôpital
para o calcular.
limx→2
(x− 2)2
−ex−2 + x− 1= lim
x→2
((x− 2)2
)′(−ex−2 + x− 1
)′ = limx→2
2(x− 2)
−ex−2 + 1.
Note-se que continuamos a ter um esquema de limites do tipo 00 . Aplicando mais
uma vez a regra, temos
limx→2
2(x− 2)
−ex−2 + 1= lim
x→2
(2(x− 2)
)′(−ex−2 + 1
)′ = limx→2
2
−ex−2=
2
−1= −2.
3. A regra de L'Hôpital enunciada na proposição 7, pode ser estendida ao caso emque o ponto limite a é ±∞. Suponha-se, por exemplo, que queremos calcular
limx→+∞
xln(x) .Temos lim
x→+∞x = lim
x→+∞ln(x) = +∞, o que con�gura um esquema de
limites do tipo ∞∞ . Apliquemos a regra de L'Hôpital.
limx→+∞
x
ln(x)= lim
x→+∞
(x)′
(ln(x))′= lim
x→+∞
11x
= limx→+∞
x = +∞.
Podemos concluir que, quando x → +∞, a função x vai crescendo `mais rapida-mente' que a função ln(x), a ponto de a sequência dos resultados das divisões dosvalores que as funções assumem, à medida que x cresce, `tender' para in�nito.
Capítulo 4. Derivadas de Funções reais de variável real Mário Abrantes

22 6. Aplicações das derivadas
6.2 Estudo do grá�co de uma função
A derivada é uma ferramenta muito útil para o estudo do grá�co de uma função num dadointervalo do seu domínio.
6.2.1 Intervalos de monotonia, pontos críticos
Extremos de uma função. Consideremos a �gura 71.
Figura 71
O ponto x = c do domínio de f(x)diz-se ponto de máximo relativo oudemáximo local da função, porqueexiste uma vizinhança do ponto,]c−ε, c+ε[, tal que em nenhum dosseus pontos a função assume umvalor maior que f(c). Diz-se quea função tem um máximo local oumáximo relativo no ponto c. Porconsiderações do mesmo tipo, ospontos b e d dizem-se pontos demínimo relativo ou de mínimo local de f(x), assumindo a função um mínimo local oumínimo relativo em cada um desses pontos. O valor de uma função f(x) num ponto u doseu domínio diz-se um máximo absoluto da função, se em nenhum outro ponto do domínioa função assume um valor superior a f(u). O valor de uma função f(x) num ponto v doseu domínio diz-se um mínimo absoluto da função, se em nenhum outro ponto do domínioa função assume um valor inferior a f(v). Os valores que uma função assume em pontosde máximo/mínimo, absolutos ou relativos, dizem-se extremos da função. O ponto x = fna �gura, não é um ponto de extremo da função porque não pertence ao domínio de f(x).
Exemplo 17.
• Seja g(x) a restrição da função f(x) ao intervalo ]a, e[ (�gura 71). O ponto e é umponto de máximo absoluto de g, sendo os pontos a e c pontos de máximo relativo.O ponto d é um ponto de mínimo absoluto de g, sendo b um ponto de mínimorelativo. f(e) é o máximo absoluto da restrição e f(d) o seu mínimo absoluto.f(a), f(c) são máximos relativos de g, sendo f(b), f(d) mínimos relativos.
• Todos os pontos do domínio de f(x) = 2 são pontos de máximo/mínimo relativose máximo/mínimo absolutos. Porquê?
Dada a formula f(x) de uma função, estamos interessados em determinar os pontos deextremo de f(x) usando processos analíticos, ou seja, fazendo cálculos. Podemos usaruma calculadora grá�ca para, inspeccionando o grá�co obtido, obtermos as abcissas destespontos. Mas a calculadora grá�ca não permite, em geral, conhecer estes valores com aprecisão fornecida por métodos analíticos.
Exemplo 18. Usar a calculadora grá�ca para obter o grá�co da função (x−1000)(x−0.5).Consegue-se visualizar o grá�co de modo a identi�car o ponto de mínimo absoluto da funçãoou os pontos onde esta se anula?
Observando a �gura 71, veri�camos que os pontos de extremo são pontos em que:
- A derivada da função, f ′(x), é nula (caso dos pontos b e c);
- A derivada da função, f ′(x), não existe, i.e., não se pode calcular (caso dos pontosd e e).
Capítulo 4. Derivadas de Funções reais de variável real Mário Abrantes

6. Aplicações das derivadas 23
Vale a seguinte de�nição.
Um ponto x0 do domínio de uma função f(x) designa-se por
ponto crítico da função, se f ′(x0) = 0, ou se f ′(x0) não
está definido.
Exemplo 19. Calcular os pontos críticos da função f(x) = x2+1x+1 .
Resolução
• Começamos por determinar f ′(x).
f ′(x) =(x2 + 1)′(x+ 1)− (x2 + 1)(x+ 1)′
(x+ 1)2=
2x(x+ 1)− (x2 + 1)
(x+ 1)2=x2 + 2x− 1
(x+ 1)2.
• Agora determinamos os pontos do domínio de f tais que f ′(x) = 0. Recordemosque um quociente A
B é igual a zero quando A = 0 e B 6= 0 (porquê?).
f ′(x) = 0 ⇔ x2 + 2x− 1
(x+ 1)2= 0 ⇔ x2 + 2x− 1 = 0 ∧ (x+ 1)2 6= 0.
x2 + 2x− 1 = 0 ⇔ x = −1 +√
2 ∨ x = −1−√
2 e (x+ 1)2 6= 0 ⇒ x 6= −1
Anotamos que a derivada se anula em dois pontos do domínio de f(x): x =−1±
√2.
• Por �m, determinamos os pontos do domínio de f em que não existe f ′(x). Re-cordemos que um cociente A
B não se pode determinar se (i) Uma das expressões A,B, não se pode calcular, ou se (ii) B = 0. No caso da expressão de f ′(x), ambasas partes do cociente, x2 +2x−1 e (x+1)2, se podem calcular para qualquer valorde x. Restam os casos em que (x + 1)2 = 0. Mas os valores de x que veri�camesta igualdade não pertencem ao domínio de f(x), logo não são pontos críticos dafunção.
• Conclusão: a função tem dois pontos críticos, x = −1±√
2.
Uma vez calculados os pontos críticos, queremos saber em quais deles a função tem extre-mos. É o que vamos ver de seguida.
Estudo dos pontos críticos. Intervalos de monotonia de uma função. Em termosgerais, uma função f(x) muda de sinal num ponto x0 do seu domínio, i.e., assume um certosinal `à esquerda' do ponto, e o sinal oposto `à direita do ponto', em pontos em que (i)f(x) é nula (ponto a da �gura 72); (ii) f(x) é descontínua (ponto b da �gura 72).
Figura 72
O sinal da função é o mesmo para todos os pontos do seudomínio situados entre cada par de pontos de mudançade sinal. No caso da derivada f ′(x) de uma função f(x),o seu sinal é o mesmo para qualquer ponto do seu do-mínio situado entre dois pontos críticos consecutivos,podendo f ′(x) ser nula em algum desses intervalos (sig-ni�cando que a função f(x) é aí constante). Designa-sepor intervalo de monotonia de uma função f(x), todoo intervalo de�nido por dois seus pontos críticos conse-cutivos. Vale o seguinte.
Capítulo 4. Derivadas de Funções reais de variável real Mário Abrantes

24 6. Aplicações das derivadas
O comportamento de f ′(x) num intervalo de monotonia é um
dos três seguintes: (i) f ′(x) é nula em todos os pontos
do intervalo; (ii) f ′(x) é positiva em todos os pontos do
intervalo; (iii) f ′(x) é negativa em todos os pontos do
intervalo.
Num intervalo de monotonia, a função f(x) é (i)
crescente, se f ′(x) > 0; (ii) decrescente, se f ′(x) < 0;(iii) constante, se f ′(x) = 0.
Exercício 11. Estudar o comportamento da função do exemplo 19, indicando os intervalosde monotonia, os pontos de extremos e os valores extremos da função.Resolução (ver tabela 4.1)
• Os dois pontos críticos x = −1±√
2 de�nem sobre a recta real os três intervalosde monotonia, ]−∞,−1−
√2[ , ]− 1−
√2,−1 +
√2[ e ]− 1 +
√2,+∞[ (ver a
primeira linha da tabela). Notar que x = −1−√
2 ≈ −2.41 e x = −1+√
2 ≈ 0.41.
• Dentro de cada intervalo de monotonia o sinal de f ′(x) é o mesmo para todos ospontos, ou então f ′(x) = 0. Determinamos o sinal correspondente a cada intervalousando um ponto qualquer que lhe pertença.
− 3 ∈ ]−∞,−1−√
2[ f ′(−3) =(−3)2 + 2(−3)− 1
(−3 + 1)2= 0.5 > 0
0 ∈ ]− 1−√
2,−1 +√
2[ f ′(0) =02 + 2× 0− 1
(+1)2= −1 < 0
0.5 ∈ ]− 1 +√
2,+∞[ f ′(0.5) =(0.5)2 + 2(0.5)− 1
(0.5 + 1)2≈ 0.1 > 0
Estes valores para o sinal de f ′(x) estão marcados na segunda linha da tabela.
• A variação de f(x) em cada intervalo está marcada na terceira linha da tabela: osímbolo ↗ signi�ca que a função é crescente no intervalo; o símbolo ↘ signi�caque a função é decrescente no intervalo. A função não é constante em nenhum dosintervalos. Estão também indicados os valores que a função assume nos pontoscríticos.
• Como a função é crescente à esquerda do ponto −1 −√
2, é decrescente à suadireita e está de�nida no ponto, então ela atinge aí um máximo local, que éde aproximadamente −4.82. Como a função é decrescente à esquerda do ponto−1 +
√2 e crescente à sua direita, então ela atinge aí um mínimo local, que é de
aproximadamente 0.83. Os extremos locais de f(x) são pois, aproximadamente,−4.82 e 0.83.
Tabela 4.1
−∞ −1−√
2 −1 +√
2 +∞sinal de f ′ + | − | +
variação de f ↗ ≈ −4.83 ↘ ≈ 0.83 ↗M m
O teorema seguinte é um critério para determinar a natureza de um ponto crítico c tal quef ′(c) = 0, usando o valor da segunda derivada da função no ponto.
Capítulo 4. Derivadas de Funções reais de variável real Mário Abrantes

6. Aplicações das derivadas 25
Teorema 8. Seja f uma função derivável no intervalo (a, b) e c ∈ (a, b) tal que f ′(c) = 0.Se f admite derivada de segunda ordem f ′′ em (a, b), então: (i) se f ′′(c) < 0, c é ponto demínimo relativo de f ; (ii) se f ′′(c) > 0, c é ponto de máximo relativo de f .
Exemplo 20. A derivada segunda da função do exemplo 19 é (veri�car)
f ′′(x) =
(x2 + 1
x+ 1
)′′=
4
(x+ 1)3.
Calculando o valor da derivada segunda nos pontos críticos de derivada nula −1 ±√
2,obtemos,
f ′′(−1−√
2) =4
(−1−√
2 + 1)3≈ −1.41 < 0 mínimo local
f ′′(−1 +√
2) =4
(−1 +√
2 + 1)3≈ 1.41 > 0 máximo local.
6.2.2 Concavidades e pontos de in�exão
Se o grá�co de uma função tem as formas mostradas nas �guras 73 e 74, dizemos que tema concavidade voltada para cima, no caso da �gura 73, ou que tem a concavidade voltadapara baixo, no caso da �gura 74. A orientação da concavidade está relacionada com osvalores da derivada segunda, e constitui informação relevante para se perceber o grá�co dafunção.
Figura 73 Figura 74
Vale o seguinte resultado.
Teorema 9. Seja f uma função que admite segunda derivada f ′′ no intervalo (a, b).
1. Se f ′′(x) < 0 no intervalo (a, b), então o grá�co da função f tem a concavidadevoltada para baixo nesse intervalo.
2. Se f ′′(x) > 0 no intervalo (a, b), então o grá�co da função f tem a concavidadevoltada para cima nesse intervalo.
Exemplo 21. Seja f(x) = x3. A segunda derivada de f é f ′′(x) = (3x2)′ = 6x. f ′′ énegativa para valores de x menores que zero e positiva para valores de x maiores que zero.Pelo teorema 9 o grá�co de f tem a concavidade voltada para baixo no intervalo (−∞, 0)e voltada para cima no intervalo (0,+∞) (ver �gura 62).
Para conhecermos os intervalos em que o grá�co de uma função tem a orientação deconcavidade constante, precisamos de determinar os seguintes pontos:
(a) Os pontos em que f ′′ se anula. Alguns destes pontos podem ser pontos de in�exão.Um ponto c diz-se ponto de in�exão do grá�co de uma função, se f ′′(c) = 0 e seo sinal de f ′′ é diferente 'antes' e 'depois' do ponto (ver �gura 75).
Capítulo 4. Derivadas de Funções reais de variável real Mário Abrantes

26 6. Aplicações das derivadas
(b) Os pontos em que f ′′ não existe.
Figura 75
Exercício 12.
1. A função y = x3 tem um ponto de in�exão em x = 0, uma vez que a segundaderivada y′′ = 6x é aí nula e o sinal de y′′ muda de negativo para positivo noponto (ver �gura 62).
2. A função y = x4 tem a segunda derivada y′′ = 12x2 nula no ponto x = 0, mas osinal de y′′ não muda neste ponto. Então x = 0 não é ponto de in�exão da função.
3. A segunda derivada da função y = x23 não existe no ponto x = 0, uma vez que
y′′ = −29x− 4
3 não se encontra de�nida neste ponto. No entanto este não é umponto em que a orientação da concavidade do grá�co mude (ver �gura 65).
Exemplo 22. Considerar a funcão no exemplo 19. Determinar os intervalos em que aorientação da concavidade do grá�co da função é constante.ResoluçãoA segunda derivada da função é
f ′′(x) =4
(x+ 1)3.
Não existem pontos tais que f ′′(x) = 0 (porquê?). Logo, os únicos pontos onde a orientaçãoda concavidade pode mudar, são aqueles onde não está de�nida f ′′(x). A derivada segundanão está de�nida apenas no ponto x = −1. A orientação da concavidade é uma só nointervalo ] −∞,−1[ e uma só no intervalo ] − 1,+∞[. Vamos veri�car se é a mesma nosdois intervalos, ou se é diferente. Para isso determinamos os sinais respectivos de f ′′,escolhendo um ponto qualquer para cada um destes intervalos.
− 2 ∈ ]−∞,−1[ f ′′(−2) =4
(−2 + 1)3= −4 < 0 concavidade voltada para baixo
0 ∈ ]− 1,+∞[ f ′′(0) =4
(0 + 1)3= 4 > 0 concavidade voltada para cima
O ponto x = −1 é um ponto em que a orientação da concavidade muda. Podemos usar ainformação sobre concavidades para obter uma versão mais completa da tabela 4.1.
6.2.3 Assíntotas
Uma assíntota do grá�co de uma função f é uma recta com a qual o grá�co da função seconfunde numa situação limite. As assíntotas podem ser horizontais, verticais ou oblíquas.
• Uma assíntota horizontal é uma recta da forma y = b, tal que limx→+∞
f(x) = b ou
limx→−∞
f(x) = b (ver �gura 76).
Capítulo 4. Derivadas de Funções reais de variável real Mário Abrantes

6. Aplicações das derivadas 27
Tabela 4.2
−∞ −1−√
2 −1 −1 +√
2 +∞sinal de f ′ | + | − | − | + |
variação de f | ↗ −4.82 ↘ − ↘ 0.83 ↗ |sinal de f ′′ | − | − | + | + |
concavidades de f | ∩ | ∩ | ∪ | ∪ |M m
• Uma assíntota vertical é uma recta da forma x = a, tal que limx→a−
f(x) = ∞ ou
limx→a+
f(x) =∞ (ver �gura 77).
• Uma assíntota oblíqua é uma recta da forma y = mx + b, com m 6= 0, tal quelim
x→+∞
(f(x)− (mx+ b)
)= 0 ou lim
x→−∞
(f(x)− (mx+ b)
)= 0 (ver �gura 77).
Figura 76
Figura 77
Exemplo 23.
1. A função y = ex tem a assíntota horizontal y = 0, uma vez que limx→−∞
ex = 0.
2. A função y = ln(x) tem a assíntota vertical x = 0, uma vez que limx→0+
ln(x) = −∞.
3. Vamos determinar as assíntotas oblíquas da função x2+2x−1x . Procuramos a equa-
ção de uma recta na forma y = mx+ b. Começamos por calcular m.
Por ser limx→∞
(f(x)− (mx+ b)
)= 0 temos lim
x→∞
(f(x)
x− mx+ b
x
)= 0
e podemos escrever limx→∞
f(x)
x= m
Usando esta relação com a função dada, temos
m = limx→∞
f(x)
x= lim
x→∞
x2 + 2x− 1
x2= lim
x→∞
(1 +
2
x− 1
x2
)= 1.
A assíntota oblíqua que procuramos é da forma y = x + b. Usamos a fórmulalim
x→−∞
(f(x)− (mx+ b)
)= 0 para calcular b.
b = limx→∞
(f(x)−mx) = limx→∞
(x2 + 2x− 1
x− x
)
= limx→∞
(x2 + 2x− 1− x2
x
)= lim
x→∞
(2x− 1
x
)= 2.
Capítulo 4. Derivadas de Funções reais de variável real Mário Abrantes

28 6. Aplicações das derivadas
A assíntota oblíqua obtida é y = x + 2 (utilizar uma calculadora grá�ca paraveri�car que a função tem a assíntota oblíqua calculada).
Exercício 13. Determinar as assíntotas da função no exemplo 19.Resolução
1. Assíntotas horizontais. Procuramos uma equação da forma y = b.
limx→∞
f(x) = limx→∞
x2 + 1
x+ 1=∞.
A função não tem assíntotas horizontais.
2. Assíntotas verticais. Procuramos uma equação da forma x = a. Como a funçãoé da forma A
B e A e B são polinómios, procuramos valores de x para os quais setenha B = x+ 1 = 0. O único valor para o qual isto se veri�ca é x = −1.
limx→−1−
x2 + 1
x+ 1= −∞, lim
x→−1+
x2 + 1
x+ 1= +∞.
A função tem uma assíntota vertical: x=-1.
3. Assíntotas oblíquas. Procuramos uma equação da forma y = mx + b. Vamoscalcular m.
m = limx→∞
f(x)
x= lim
x→∞
x2 + 1
x2 + x= lim
x→∞
1 + 1/x2
1 + 1/x= 1
Como m 6=∞ a função tem assíntotas oblíquas. Como o valor do limite é igual a1, quer x tenda para +∞ ou para −∞, então existe apenas uma assíntota oblíqua.Vamos calcular o parâmero b.
b = limx→∞
(f(x)−mx) = limx→∞
(x2 + 1
x+ 1− x
)
= limx→∞
x2 + 1− x2 − xx+ 1
= limx→∞
1− xx+ 1
= −1
A função tem uma assíntota oblíqua: y = x− 1.
A informação sobre as assíntotas da função e os dados na tabela 4.2, são su�cientes parafazer o esboço do grá�co da função, que está na �gura 78.
Figura 78
Capítulo 4. Derivadas de Funções reais de variável real Mário Abrantes

6. Aplicações das derivadas 29
6.3 Problemas de optimização
Consideremos o seguinte problema.
Exercício 14. De todos os triângulos rectângulos cuja medida da hipotenusa é igual a8m, quais os que têm maior área?
Na �gura 79 estão representados triângulos rectângulos cuja hipotenusa tem medida 8.Podemos suspeitar que não têm áreas iguais. Queremos encontrar aqueles que têm áreamáxima. A área de um triângulo de base b e altura h é dada por
A =bh
2,
(�gura 80). Encontrar os triângulos rectângulos de área máxima, consiste em determinaros valores de b, h para os quais A é máxima.
Figura 79
Figura 80
Para tal podemos escrever A em função apenas de uma das variáveis b, h usando a relaçãob2 + h2 = 82, que exprime o teorema de Pitágoras. Por ser
b =√
82 − h2,
temos
A =bh
2⇔ A =
√82 − h2h
2.
Para calcular os máximos de A derivamos a função em ordem a h.
A′ =
(√82 − h2h
2
)′=
1
2
(√82 − h2h
)′=
1
2
((√
82 − h2)′h+√
82 − h2)
=1
2
(− 2h
2√
82 − h2h+
√82 − h2
)=
1
2
(− h2
√82 − h2
+√
82 − h2
).
Podemos agora determinar os pontos críticos, i.e., os valores de h no domínio de A paraos quais A′(h) é nula ou não é de�nida.
A′ = 0⇔ 1
2
(− h2
√82 − h2
+√
82 − h2
)= 0
⇔ − h2
√82 − h2
+√
82 − h2 = 0⇔ h2
√82 − h2
=√
82 − h2 ⇔ h2 = 82 − h2
⇔ h2 = 32⇔ h = ±√
32
Como h representa um comprimento, tomamos o ponto crítico h =√
32. Veri�camos tam-bém que a derivada A′(h) não existe se h = ±8. Sabemos agora que a variação de A(h)
Capítulo 4. Derivadas de Funções reais de variável real Mário Abrantes

30 6. Aplicações das derivadas
é do mesmo tipo nos pontos do intervalo ] − 8,√
32[ e nos pontos do intervalo ]√
32, 8[.Como 0 ∈]− 8,
√32[ e A′(0) > 0, e também 6 ∈]
√32, 8[ e A′(6) < 0, sabemos que a função
cresce no intervalo à esquerda de h =√
32 e decresce no intervalo à direita de h =√
32, oque faz deste ponto um ponto de máximo absoluto da função A(h). Podemos concluir quea área dos triângulos rectângulos cuja hipótenusa tem medida 8m é máxima quando a sua
altura h é igual a√
32m e a sua base b é igual a√
82 − (√
32)2 =√
32m.
Um problema do tipo do que acabámos de resolver designa-se por problema de optimi-zação. Os problemas de optimização costumam ter os seguintes dados: (i) uma funçãoque se quer optimizar (i.e., minimizar ou maximizar), dita função objectivo do problema� no problema acima, a função objectivo é a função área A; (ii) um conjunto de relaçõesauxiliares que envolvem as variáveis da função objectivo, ditas restrições do problema � oproblema acima tem uma só restrição, que é 82 = b2 +h2. No problema acima a optimiza-ção consistiu em maximizar (calcular valores máximos) a função objectivo. No problemaseguinte, a optimização consiste em minimizar (calcular valores mínimos) a função objec-tivo.
Exercício 15. O produto xy de dois números inteiros positivos é igual a 60. Determinarx e y de modo que a sua soma S = x+ y seja mínima.ResoluçãoPretendemos minimizar a função S = x + y. Esta é a função objectivo do problema. Éfácil veri�carmos que a soma de dois números inteiros positivos cujo produto é 60 dependedos números escolhidos.
x = 1, y = 60 S = 1 + 60 = 61
x = 2, y = 30 S = 2 + 30 = 32
x = 15, y = 4 S = 15 + 4 = 19
A restrição é a relação xy = 60 que envolve as variáveis x e y da função objectivo. Podemosescrever x = 60
y , �cando a função objectivo na foma S = y + 60y (ver �gura 81). Vamos
minimizar S. Para tal começamos por determinar S′.
S′ =
(y +
60
y
)′= 1− 60
y2.
De seguida determinamos os pontos críticos de S. Veri�camos que S′ = 0⇔ 1− 60y2
= 0⇔y2 = 60⇔ y = ±
√60. Como y é positivo, temos y =
√60. Veri�camos também que S′ não
é de�nida se y = 0. Com esta informação, podemos a�rmar que o sinal de S′ é o mesmoem todos os pontos do intervalo ]0,
√60[ e nos pontos do intervalo ]
√60, 60[ da variável y,
sendo S′ negativa no primeiro intervalo e positiva no segundo. O ponto y =√
60 é pois umponto de mínimo local (mínimo absoluto, se considerarmos apenas valores positivos de y� ver �gura 81. Em conclusão, podemos a�rmar que o par de números positivos x, y , cujoproduto é igual a 60 e a soma é mínima, é dado por y =
√60 e x = 60/y = 60/
√60 =
√60.
Capítulo 4. Derivadas de Funções reais de variável real Mário Abrantes

6. Aplicações das derivadas 31
Figura 81
A natureza dos problemas enunciados nos exercícios 14 e 15 não é alterada se trocarmos asletras b e h, no exercício 14, e as letras x e y, no exercício 15. É esta simetria relativamenteàs variáveis envolvidas que justi�ca que seja b = h, na solução do problema 14, e x = y, nasolução do problema 15. Esta simetria não acontece entre as variáveis envolvidas na funçãoobjectivo do problema seguinte, que envolve um cilíndro de volume V = πr2h, sendo afunção objectivo A = 2πr2 + 2πrh.
Exercício 16. Determinar as dimensões de uma lata cilíndrica com tampa, de volume V ,de forma que a área da sua superfície exterior seja mínima.
Capítulo 4. Derivadas de Funções reais de variável real Mário Abrantes


Capítulo 5
Integrais de Funções reais de variável
real
1 Áreas de regiões planas
A área de uma região plana é um número não negativo associado ao tamanho da região. So-bre as áreas das regiões A e B na �gura 82, dizemos que A tem uma área superior a B. Mascomo se atribui um valor de área a uma dada região plana?
Figura 82
Para o fazer precisamos de ter um região de referência, cujaárea tenha valor igual a 1, com a qual comparamos a regiãoque queremos valiar. A região de referência é um quadradocujo lado mede 1 unidade de comprimento (ver �gura 83).Se a unidade de comprimento for o metro, então de�ne-se aárea do quadrado como sendo 1 metro quadrado (1m2), sea unidade de comprimento for o centímetro, então de�ne-se a área do quadrado como sendo 1 centímetro quadrado(1cm2), etc. Uma vez de�nida desta forma uma unidadepara a área, torna-se fácil veri�carmos que a área de umrectângulo de lados b e h é dada por bh, e que a área deum triângulo rectângulo de catetos b e h é igual a bh
2 (cf. �gura 84).
Figura 83: Área = bh = 6.Figura 84: Área = bh/2 = 3.
Podemos também veri�car que bh2 é a área de qualquer triângulo cujas altura e base tenham
medidas respectivamente h e b. Observando a �gura 85, podemos determinar a área dotriângulo ACE subtraindo à área do rectângulo ABDE, de lados com medidas b e h, asoma das áreas dos triângulos rectângulos ABC e CDE.
33

34 1. Áreas de regiões planas
Figura 85
Área ACE = Área ABDE −(Área ABC + Área CDE
)= bh−
(h(b− x)
2+xh
2
)= bh− bh
2=bh
2
1.1 Cálculo aproximado de áreas
Figura 86
Consideremos o problema de determinar a área de umaregião plana de�nida pela representação do grá�co deuma função f(x) e o eixo dos xx, num dado intervalo[a, b]. Como exemplo, tomemos região de�nida pela funçãof(x) = ln(x) e o eixo das abcissas, no intervalo [1, 3] (cf.a �gura 86). Seja A a área dessa região. Podemos obteruma aproximação desta área determinando um minorantem e um majorante M para o valor de A. Um majorantepode obter-se somando as áreas dos dois rectângulos mar-cados na �gura 87. Como os rectângulos têm alturas ln(3)e ln(2), e têm ambos largura 1, a soma dos valores das suasáreas é ln(2) + ln(3) ≈ 1.80.
Figura 87 Figura 88
Um majorante melhor pode obter-se usando mais rectângulos, como mostra a �gura 88,da qual se obtém o majorante
M = ln(1.5) + ln(2) + ln(2.5) + ln(3) ≈ 3.11.
Figura 89
Por um procedimento semelhante, podemos obter um mi-norante para o valor da área, como está exempli�cado na�gura 89. Obtemos m = ln(2) + ln(2.5) + ln(3) ≈ 2.01.
Capítulo 5. Integrais de Funções reais de variável real Mário Abrantes

1. Áreas de regiões planas 35
Podemos escrever 2.10 ≤ A ≤ 3.11.Esta estimativa podetambém ser melhorada usando mais rectângulos para cal-cular m e M .
1.2 Aplicação do cálculo de áreas: con-sumo de energia eléctrica
A �gura 90 representa uma placa com as característicaseléctricas de um certo dispositivo. Entre essas caracterís-ticas podemos ler o valor da potência eléctrica, 1200w. O `w' signi�ca watt, que é aunidade de potência eléctrica. Uma vez ligado este dispositivo à corrente, a empresa quefornece energia contabiliza o consumo atendendo a dois factores: a potência do aparelho,em watts, e o tempo que este �ca ligado, em horas. A unidade de energia correspondenteé o watt.hora.
Figura 90
Figura 91
Assim, se o dispositivo estiver ligado 1h, o consumo é de 1200wh, que se lê 1200 watt-hora,ou 1.2kwh, que se lê 1.2 quilowatt-hora. Se o dispositivo estiver ligado 2h, o consumoenergético é × tempo = 1200 × 2 = 2400Wh = 2.4kwh. O custo do consumo de energiaé calculado multiplicando o valor da energia consumida pelo preço do kwh, que em 2017ronda os 0.15e.
Exercício 17. Uma pessoa chega a casa e liga os seguintes dispositivos eléctricos:
• uma lâmpada de 100w e um aquecedor de 1200w, das 19h às 21h;
• apenas um aquecedor de 1200w, das 21h às 24h;
• apenas a lâmpada de 100w, das 24h à 01h.
Sabendo que o preço do kwh (`Quilowatt-hora') é 0.15e, qual a despesa tida no consumode energia eléctrica das 19h às 01h?ResoluçãoA �gura 91 contém um grá�co que representa o consumo em função do tempo. Fazendouso desta informação, obtemos os seguintes valores para a energia consumida.
das 19h às 21h: lâmpada de 100w+ aquecedor de 1200w
Energia = (100 + 1200)w × 2h = 2600Wh
das 21h às 24h: aquecedor de 1200w
Energia = 1200w × 3h ≈ 3600wh
das 24h à 01h: lâmpada de 100w
Energia = 100w × 1h ≈ 100wh
Notar que a energia calculada, por envolver o produto da potência eléctrica pelo tempo,corresponde à soma das áreas dos rectângulos na �gura. A energia total consumida é de6300wh ou 6.3kwh, cujo custo é igual a 6.3× 0.15 ≈ 0.95e.
Capítulo 5. Integrais de Funções reais de variável real Mário Abrantes

36 2. Função área
2 Função área
Seja A(x) a função que determina a área da região do plano de�nida pelo grá�co de umafunção f(x) e o eixo dos xx, no intervalo [0, x] (�gura 92), sendo x variável e f(x) contínuano intervalo [0, x]. Vamos mostrar que a relação entre a função área A(x) e a função f(x)é A′(x) = f(x), i.e.
A′(x) = lim∆x→0
A(x+ ∆x)−A(x)
∆x= f(x). (5.1)
Figura 92 Figura 93
Para tal, consideremos a região correspondente ao intervalo [a, a + ∆x], sombreada na�gura 93. Se o valor de ∆x for su�ciente pequeno, o grá�co de f(x) pode considerar-selinear neste intervalo, o que nos permite aproximar, em termos do valor da área, a regiãosombreada na �gura 93 pelo trapézio na �gura 94.
Figura 94
A área do trapézio é aproximadamente A(a + ∆x) − A(a), eobtém-se somando as áreas do triângulo e do rectângulo na �gura94.
A(a+ ∆x)−A(a) ≈ Área do trapézio
= Área do triângulo + Área do rectângulo
= ∆xf(a+ ∆x)− f(a)
2+ ∆xf(a)
= ∆xf(a+ ∆x) + f(a)
2.
Substituindo este valor aproximado para A(a + ∆x) − A(a) nafórmula 5.1, temos
A′(a) = lim∆x→0
A(a+ ∆x)−A(a)
∆x
= lim∆x→0
∆x(f(a+ ∆x) + f(a))
2∆x
= lim∆x→0
f(a+ ∆x) + f(a)
2=
2f(a)
2= f(a).
Veri�cámos que A′(a) = f(a). Como a é um ponto qualquer noqual f(x) é contínua, podemos escrever A′(x) = f(x) para qualquer ponto x no qual f(x)seja contínua.
Capítulo 5. Integrais de Funções reais de variável real Mário Abrantes

3. Função primitiva. Integral indefinida de uma função 37
Exemplo 24. Seja f(x) = 2x (�gura 95). Queremos determinar a fórmula da funçãoA(x) que nos dá a área da região de�nida pelo grá�co da função e o eixo das abcissas, nointervalo [0, x]. Sabemos que A′(x) = f(x). Usando apenas esta condição, qualquer umadas três funções seguintes é candidata a ser A(x).
A(x) = x2
A(x) = x2 − 2
A(x) = x2 + π
De um modo geral, qualquer função da forma x2+C, sendo C uma constante real qualquer,é candidata ser a função A(x). Como escolher a função pretendida? Podemos usar maisuma condição, para além de A′(x) = f(x), que é A(0) = 0. A validade desta condição éimediata, sabendo que A(0) representa a área da região correspondente ao intervalo [0, 0],ou seja a área de uma região de área nula.
A(0) = 0⇔ 02 + C = 0⇔ C = 0.
A função pretendida é pois A(x) = x2. Vamos testar esta função, calculando A(3). Estevalor representa a área do triângulo cuja base tem medida 3, sendo a sua altura f(3) =2 × 3 = 6 (ver a �gura 95). A área deste triângulo é igual a 9, o que con�rma o valorA(3) = 32 = 9.
Figura 95Figura 96
Exemplo 25. Seja f(x) = x2 (�gura 96). Queremos determinar a fórmula da funçãoA(x) que nos dá a área da região de�nida pelo grá�co da função e o eixo das abcissas, nointervalo [1, x]. Sabemos que A′(x) = f(x), i.e., A′(x) = x2. Analogamente ao exercícioanterior, podemos escrever A(x) = x3
3 + C, com C ∈ R. Para determinar C usamos a
condição A(1) = 0, de que resulta 13
3 + C = 0⇔ C = −13
3 e A(x) = x3
3 −13 . Usando esta
última expressão podemos escrever A(3)−A(1) = 33
3 −13 = 8
3 .
3 Função primitiva. Integral inde�nida de uma fun-ção
Na sequência dos exemplos da secção anterior, vale a seguinte de�nição.
Dada uma função f(x), diz-se função primitiva de f(x) no
intervalo [a, b], toda a função F (x) tal que F ′(x) = f(x)para todo x ∈ [a, b].
Capítulo 5. Integrais de Funções reais de variável real Mário Abrantes

38 3. Função primitiva. Integral indefinida de uma função
Exemplo 26. Seja f(x) = 1x . As funções F1(x) = ln |x| e F2(x) = ln |x| − 3 são ambas
funções primitivas de f(x). É imediato veri�car que a sua diferença é uma constante,F1(x)− F2(x) = 3.
Vale o seguinte resultado.
Teorema 10. Se F1 e F2 são duas primitivas de f(x) no intervalo [a, b], então a suadiferença neste intervalo é uma constante.
Prova. Se F1 e F2 são duas primitivas de f(x), então F ′1 = F ′2 = f(x), o que implica queF1 − F2 seja uma constante, dado que (F1 − F2)′ = F ′1 − F ′2 = f(x)− f(x) = 0.
Este enunciado signi�ca que se conhermos uma primitiva F (x) da função f(x), entãoqualquer outra primitiva pode ser escrita como F (x) +C, sendo C uma constante. Se umafunção tiver uma primitiva, então tem in�nitas primitivas.
Se F (x) é uma primitiva da função f(x) no intervalo [a, b],então a expressão F (x) + C, com C ∈ R, diz-se integral
indefinida de f(x) no intervalo [a, b], e representa
a família de todas as funções primitivas de f(x).Escreve-se ∫
f(x)dx = F (x) + C.
Deve �car claro que o signi�cado da expressão∫f(x)dx = F (x) + C
é
F ′(x) = f(x).
De forma equivalente podemos escrever
(∫f(x)dx
)′= f(x)
ou ∫F ′(x)dx = F (x) + C.
Exemplo 27.
1.
∫2dx = 2x+ C, porque (2x)′ = 2
2.
∫2xsen(x2)dx = −cos(x2) + C, porque
(−cos(x2)
)′= (x2)′sen(x2) = 2xcos(x2)
3.
∫2
xdx = 2 ln |x|+ C, porque (2 ln |x|)′ = 2(ln|x|)′ = 2
x
Capítulo 5. Integrais de Funções reais de variável real Mário Abrantes

4. Primitivação de algumas funções elementares 39
4 Primitivação de algumas funções elementares
Nas expressões que se seguem, u representa uma função qualquer de x e C representa umparâmetro real.
1.
∫adx = ax+ C, sendo a uma constante.
2.
∫u′undx =
un+1
n+ 1+ C, n ∈ R, n 6= −1
3.
∫u′
udx = ln |u|+ C
4.
∫u′eudx = eu + C
5.
∫u′sen(u)dx = −cos(u) + C
6.
∫u′cos(u)dx = sen(u) + C
7.
∫u′
1 + u2= arctg(u) + C = −arccotg(u) + C
8.
∫u′√
1− u2= arcsen(u) + C = −arccos(u) + C
5 Integral de�nida
O cálculo de áreas efectuado nos exemplos 24 e 25 pode ser resumido da seguinte maneira:determinou-se a integral inde�nida A(x) da função f(x) envolvida e depois calculou-se adiferença de valores assumidos pela função A(x) nos dois extremos do intervalo correspon-dente.
Exemplo 24: Área = A(3)−A(0) = 32 + C − (02 + C) = 32 − 02 = 9
Exemplo 25: Área = A(3)−A(1) =33
3+ C −
(13
3+ C
)=
33
3− 13
3=
8
3.
Note-se que é irrelevante o valor de C, uma vez que o parâmetro é anulado na subtracção.Uma forma de indicar estas diferenças entre valores de primitivas é o seguinte.
Exemplo 24: Área = A(3)−A(0) =
∫ 3
02xdx = x2
∣∣∣30
= 32 − 02 = 9
Exemplo 25: Área = A(3)−A(1) =
∫ 3
1x2dx =
x3
3
∣∣∣31
=33
3− 13
3=
8
3.
Vale a seguinte de�nição.
Dada uma função f(x) e uma sua primitiva F (x) no
intervalo [a, b], chama-se integral definida de f(x) no
intervalo [a, b] à expressão∫ ba f(x)dx, sendo∫ b
af(x)dx = F (x)
∣∣∣ba
= F (b)− F (a).
Capítulo 5. Integrais de Funções reais de variável real Mário Abrantes

40 5. Integral definida
Exemplo 28. Dada a função sen(x), a integral de�nida∫ π
0sen(x)dx = −cos(x)
∣∣∣π0
= −cos(π)− (−cos(0)) = −(−1)− (−1) = 2,
representa a área da região sombreada na �gura 97. A integral∫ 2π
πsen(x)dx = −cos(x)
∣∣∣2ππ
= −cos(2π)− (−cos(π)) = −1− (1) = −2,
representa o simétrico da área da região sombreada na �gura 98. A integral∫ 2π
0sen(x)dx = −cos(x)
∣∣∣2π0
= −cos(2π)− (−cos(0)) = −1− (−1) = 0,
representa a soma das duas integrais anteriores.
Figura 97 Figura 98
No caso geral o valor da integral∫ ba f(x)dx é igual à soma das áreas das regiões corres-
pondentes aos intervalos em que f(x) tem valor positivo ou nulo, subtraidos da soma dasáreas das regiões correspondentes aos intervalos em que f(x) tem valor negativo ou nulo.
5.1 Propriedades das integrais de�nidas
1.
∫ b
akf(x)dx = k
∫ b
af(x)dx, se k é constante
2.
∫ b
a
(f(x)± g(x)
)dx =
∫ b
af(x)dx±
∫ b
ag(x)dx,
se as integrais no segundo membro existem
3.
∫ b
af(x)dx =
∫ c
af(x)dx+
∫ b
cf(x)dx,
sendo c ∈ [a, b]
4. Se f(x) ≤ g(x) no intervalo [a, b], então∫ b
af(x)dx ≤
∫ b
ag(x)dx
5. Se m ≤ f(x) ≤M no intervalo [a, b], então m ≤∫ b
af(x)dx ≤M
6. Teorema da média: Se f(x) é contínua no intervalo no intervalo [a, b],
então existe c ∈ [a, b] tal que∫ b
af(x)dx = (b− a)f(c).
A propriedade 5 pode ser usada para calcular um valor aproximado de uma integral de�-nida, tal como foi mostrado na secção 1.1, pg. 34.
Capítulo 5. Integrais de Funções reais de variável real Mário Abrantes

5. Integral definida 41
5.2 Justi�cação da forma∫ ba f(x)dx para a integral de�nida
Consideremos a �gura 99. Nela está representado o grá�co de uma função f(x) e estámarcado o intervalo [a, b] no eixo das abcissas. O segmento correspondente a este intervaloestá dividido em n partes iguais, cada uma de medida ∆x = b−a
n . A área da região de�nidapelo grá�co da função e pelo eixo das abcissas neste intervalo, é aproximadamente igual àsoma das áreas dos n rectângulos aí representados,
Área ≈ f(x1)∆x+ f(x2)∆x+ f(x3)∆x+ · · ·+ f(xn−1)∆x+ f(xn)∆x =
=n∑k=1
f(xk)∆x.
Figura 99 Figura 100
É fácil, no entanto, convencermo-nos de que esta é uma aproximação por execesso do valorexacto da área, porque as regiões junto dos cantos superiores esquerdos dos rectângulosestão fora da região de�nida pelo grá�co e pelo eixo das abcissas no intervalo [a, b]. Au-mentando o número de rectângulos esta 'região em excesso' �ca mais pequena e obtemosuma melhor aproximação para a área, como é sugerido pela �gura 100. Se continuarmos aaumentar o número de rectângulos, vamos obtendo aproximações cada vez melhores parao valor exacto da área. Vale a seguinte de�nição.
Se existir o limite
L = limn→+∞
n∑k=1
f(xk)∆x,
diz-se que a função f(x) é integrável sobre o intervalo
[a, b] e o valor de L diz-se integral definida de f(x) no
intervalo [a, b]. Escreve-se
limn→+∞
n∑k=1
f(xk)∆x =
∫ b
af(x)dx.
A notação∫ ba f(x)dx traduz a existência do limite acima referido, sendo que o símbolo `
∫'
remete para `∑
' e a partícula `dx' remete para a largura `∆x' dos rectângulos.
5.3 Teorema fundamental do cálculo
Nos exemplos da secção 2, pg. 36, calculámos áreas de regiões de�nidas por grá�cos defunções usando as primitivas das funções envolvidas para determinar integrais de�nidas,
Capítulo 5. Integrais de Funções reais de variável real Mário Abrantes

42 6. Técnicas de integração
∫ ba f(x)dx. Mas nem todas as áreas de�nidas por grá�cos de funções se podem calcularusando as primitivas dessas funções, pela razão de que nem todas as funções admitem umafunção primitiva.
Figura 101
Como exemplo, consideremos a função da �gura 101.Claramente podemos calcular a área A(t) de�nida pelográ�co da função e o eixo das abcissas no intervalo [0, x],x ≥ 0. Temos
A(x) =
∫ x
0f(t)dt =
{0 , x < 3
x− 3 , x > 3,
dado que se x < 3 a função é nula e se x > 3 a regiãocom área não nula é um rectângulo de largura x − 3 ealtura 1. No entanto a função f(x) não tem uma funçãoprimitiva F (x) em nenhum intervalo [0, x] contendo oponto x = 3, porque teria que ser F ′(x) = f(x) e pode mostrar-se que toda a funçãoderivada nos pontos em que é de�nida é contínua, sendo f(x) decontínua no ponto x = 3.Resumindo, não existe uma função cuja derivada seja f(x).
O que podemos dizer, usando como base este exemplo, é que a integral∫ ba f(x)dx pode
existir mas não ser calculável usando primitivação. O resultado seguinte diz-nos que bastaf(x) ser contínua para ter uma função primitiva F (x).
Teorema 11. Se f(x) é contínua no intervalo [a, b], então existe uma função F (x) derivávelem ]a, b[, tal que F ′(x) = f(x).
Sempre que uma função f(x) tem uma primitiva F (x) num dado intervalo, podemos calcu-lar áreas ou, mais geralmente, integrais de�nidas envolvendo a função, usando a primitivaF (x) (ver a secção 5, pg. 39). Isto é garantido pelo seguinte teorema.
Teorema 12. (Teorema fundamental do Cálculo) Se uma função f(x), integrável sobre ointervalo [a, b], possui uma primitiva F (x) nesse intervalo, então∫ b
af(x)dx = F (x)
∣∣∣ba
= F (b)− F (a).
6 Técnicas de integração
A operação de integração é, em geral, mais difícil que a operação de derivação. Nesta secçãovamos estudar duas técnicas de primitivação, designadas primitivação por substituição eprimitivação por partes. O propósito mais geral de ambos os métodos é o cálculo de umaprimitiva que não conhecemos usando primitivas já conhecidas.
6.1 Primitivação por substituição
Seja por exemplo a integral I =∫ √
1− xdx. É imediato veri�carmos a semelhança destaexpressão com
∫ √xdx, cuja solução sabemos ser 1
2√x
+ C. Vamos transformar a integral
I de modo a que �que do tipo∫ √
xdx. Começamos por fazer a substituição u = 1 − x.Derivamos agora ambos os membros desta igualdade em ordem a x,
u′ = (1− x)′ ⇔ u′ = −1.
Capítulo 5. Integrais de Funções reais de variável real Mário Abrantes

6. Técnicas de integração 43
Substituindo u′ por dudx , podemos escrever
du
dx= −1 ⇔ dx = −du.
Substituimos agora as expressões em x no integral I, de modo a obter um integral navariável u.
I =
∫ √1− xdx =
∫ √u(−du) =
∫−√udu = −
∫ √udu
Esta substituição permitiu transformar a integral∫ √
1− xdx na integral −∫ √
udu que,por ser do tipo de
∫ √xdx, já conseguimos resolver,
−∫ √
udu = − 1
2√u
+ C.
Revertendo agora este resultado em u para a expressão em x correspondente, temos
I = − 1
2√
1− x+ C.
A justi�cação do que se fez neste exemplo é a seguinte.
1. Começamos por substituir na integral I a expressãof(x) =√
1− x por√u, com
u = x − 1. Chamemos g(u) à função obtida. g(u) =√u é a função f(x) `disfar-
çada', porque sabemos que se �zermos u = 1− x em g(u) obtemos f(x).
2. Trocamos também dx por duu′ . Resulta a integral∫
g(u)du
u′=
∫g(u)
u′du.
3. Resolvendo a integral∫ g(u)
u′ du obtemos∫g(u)
u′du = G(u) + C.
4. Sabemos, pelo signi�cado da integral inde�nida, que G′(u) = g(u)u′ . Derivando
G(u) em ordem a x, usando a regra da derivada da função composta, temosdG(u)dx = G′(u)u′, sendo G′(u) a derivada de G(u) em ordem a u e u′ a derivada
de u em ordem a x. Por ser G′(u) = g(u)u′ , podemos escrever
dG(u)
dx=g(u)
u′u′ = g(u).
Como g(u) representa f(x), veri�camos que G(u) é uma primitiva de f(x), subs-tituindo u pela expressão em x correspondente.
Exercício 18. Calcular a integral I =∫
5x√
1− x2dx, usando a substituição u = 1− x2.ResoluçãoTemos u′ = du
dx = (1 − x2)′ = −2x ⇔ dx = du−2x . Fazendo a substituição em I para
obtermos uma integral na variável u, �ca
I =
∫5x√udu
−2x=
∫5x
−2x
√udu =
∫−5
2
√udu = −5
2
∫ √udu,
cuja solução é
I = −5
2
∫ √udu = −5
2
u32
32
+ C = −5
3(1− x2)
32 + C.
Capítulo 5. Integrais de Funções reais de variável real Mário Abrantes

44 6. Técnicas de integração
6.2 Primitivação por partes
A técnica de primitivação por partes permite resolver algumas integrais do tipo∫f(x)g(x)dx,
cuja solução sabemos não poder ser obtida da forma∫f(x)g(x)dx =
∫f(x)dx
∫g()dx.
Para começo, sejam u e v duas funções de x. Sabemos que
(uv)′ = u′v + uv′.
Integrando ambos os membros desta expressão, obtemos∫(uv)′dx =
∫u′vdx+
∫uv′dx,
que pode ainda ser escrita na forma
uv =
∫u′vdx+
∫uv′dx.
Podemos resolver esta igualdade em ordem a cada um dos integrais, o que dá∫u′vdx = uv −
∫uv′dx (5.2)∫
uv′dx = uv −∫u′vdx. (5.3)
Estas duas fórmulas podem ser usadas para resolver integrais do tipo∫f(x)g(x)dx, identi-
�cando f e g com u′ e v, ou com u e v′, e usando o segundo membro da igualdade escolhidapara calcular a integral inicial, esperando que a integral que aí aparece seja mais simplesque a integral que pretendemos calcular. Este é, em geral, o propósito deste método.
Exemplo 29. Primitivar por partes as integrais
1.∫xexdx
2.∫exsen(x)dx
3.∫ln(x)dx.
Resolução
1.∫xexdx
Seja u = x, v′ = ex. Estamos a escolher a fórmula 5.3 acima. Para escrevermos osegundo membro precisamos de determinar u′ e v. Temos u′ = 1, v = ex. Usandoa fórmula 5.3, temos∫
xexdx = xex −∫exdx = xex − ex + C,
ou ∫xexdx = xex − ex + C.
2. I =∫exsen(x)dx
Seja u′ = ex, v = sen(x). Estamos a escolher a fórmula 5.2 acima. Para escre-vermos o segundo membro precisamos de determinar u e v′. Temos u = ex, v′ =cos(x). Usando a fórmula 5.2, temos
I =
∫exsen(x)dx = exsen(x)−
∫excos(x)dx.
Capítulo 5. Integrais de Funções reais de variável real Mário Abrantes

7. Integrais impróprias 45
A integral que aparece no segundo membro não é mais simples que a integralinicial. Mas usamos este exemplo para mostrar a versatilidade do método, calcu-lando também por partes esta segunda integral. Escolhemos novamente a fórmula5.2. Seja I1 =
∫excos(x)dx e u′ = ex, v = cos(x). Temos u = ex, v′ = −sen(x).
Usando a fórmula 5.2, temos∫excos(x)dx = excos(x) +
∫exsen(x)dx.
Subsituindo o segundo membro desta expressão na expressão da integral I, temos
I =
∫exsen(x)dx = exsen(x)−
(excos(x) +
∫exsen(x)dx
)=exsen(x)− excos(x)−
∫exsen(x)dx.
Passando a integral do segundo para o primeiro membro, �ca∫exsen(x)dx+
∫exsen(x)dx = exsen(x)− excos(x)
⇔ 2
∫exsen(x)dx = exsen(x)− excos(x)
e por �m ∫exsen(x)dx =
1
2
(exsen(x)− excos(x)
)+ C.
3.∫ln(x)dx
Como ln(x) = 1.ln(x), podemos fazer u′ = 1, v = ln(x). Estamos a escolher afórmula 5.2 acima. Para escrevermos o segundo membro precisamos de determinaru e v′. Temos u = x, v′ = 1
x . Usando a fórmula 5.2, temos
∫ln(x)dx = x ln(x)−
∫x
1
xdx = x ln(x)−
∫1dx = x ln(x)− x+ C
ou ∫ln(x)dx = x ln(x)− x+ C.
7 Integrais impróprias
Consideremos o problema de calcular a área da região delimitada pelo grá�co da funçãof(x) = 1/x2 e o eixo das abcissas, no intervalo [1, b], com b ≥ 1 (�gura 102). Obtém-se
∫ b
11/x2dx = −1/x
∣∣∣b1
= −1/b+ 1.
Se b = 2, por exemplo, o valor da área é −1/2 + 1 = 1/2, se b = 5 o valor da área é−1/5 + 1 = 4/5 , etc.
Capítulo 5. Integrais de Funções reais de variável real Mário Abrantes

46 7. Integrais impróprias
Figura 102Figura 103
Tem interesse averiguar como evolui o valor da área se formos aumentando b. Em parti-cular, será �nita ou in�nita a área obtida quando b tende para in�nito? A região corres-pondente está sombreada na �gura 103 e o seu valor é dado pelo limite
limb→+∞
∫ b
11/x2dx = lim
b→+∞
(−1/b+ 1
)= 1.
Este resultado é curioso porque signi�ca que a região, apesar de ilimitada, tem área �nita.Um modo de expressarmos a integral e a operação de limite de uma forma mais compactaé escrever ∫ +∞
11/x2dx
para signi�car
limb→+∞
∫ b
11/x2dx.
Este é um exemplo de uma integral imprópria de 1a espécie. Vale a seguinte de�nição.
Uma integral∫ ba f(x)dx diz-se integral imprópria de 1a
espécie, se b = +∞, ou a = −∞, ou ambas.
Figura 104 Figura 105
Consideremos agora o problema de calcular a área da região delimitada pelo grá�co dafunção f(x) = 1/x2 e o eixo das abcissas, no intervalo [−1, 1] (�gura 104). Obtém-se∫ 1
−11/x2dx = −1/x
∣∣∣1−1
= −1/1− (−1/(−1)) = −1− 1 = −2.
Capítulo 5. Integrais de Funções reais de variável real Mário Abrantes

7. Integrais impróprias 47
Não é este o resultado que esperávamos, uma vez que a região envolvida não tem partesabaixo do eixo das abcissas, o que signi�ca que o valor da integral deveria ser não negativo.O problema com este resultado, que utiliza o teorema fundamental do cálculo (ver teorema12, pg. 42), é que este teorema supõe que a função integranda é limitada no intervalode integração, o que não acontece com a função 1/x2 no intervalo [−1, 1], dado que estatem uma assíntota vertical no ponto x = 0 (também se diz que a função explode no pontox = 0).
Como calcular o valor duma área numa situação deste tipo? Uma forma de o fazer estásugerida na �gura 105. Vamos calcular a área respeitante ao intervalo [0, 1] e depoismultiplicá-la por 2 para obter a área pretendida. Como o ponto x = 0 é um ponto em quea função é ilimitada, em vez de calcularmos a integral
∫ 10 1/x2dx, calculamos a integral∫ 1
b 1/x2dx, sendo b um valor um pouco maior que zero:∫ 1
b1/x2dx = −1/x
∣∣∣1b
= −1 + 1/b.
Agora fazemos b tender para zero:
limb→0+
∫ 1
b1/x2dx = lim
b→0+
(−1 + 1/b
)= +∞.
Veri�camos que a área tem um valor in�nito positivo, o que é bem diferente de ter ovalor negativo obtido acima. Uma integral em que a função é ilimitada em algum pontodo intervalo de integração, diz-se integral imprópria de 2a espécie. Valem as seguintesde�nições.
Uma integral∫ ba f(x)dx diz-se integral imprópria de 2a
espécie, se f(x) é ilimitada em algum ponto do intervalo
[a, b].
Uma integral∫ ba f(x)dx diz-se integral imprópria de 3a
espécie, se é simultaneamente de 1a espécie e de 2a
espécie.
Capítulo 5. Integrais de Funções reais de variável real Mário Abrantes


Capítulo 6
Funções reais de duas variáveis reais
1 Introdução
Até agora estudámos funções com uma só variável independente, y = f(x). Neste capítulovamos estudar funções de duas variáveis independentes, z = f(x, y).
Exemplo: função de produção de Cobb-Douglas. Uma função de produção é umafunção de duas variáveis independentes,
Q = f(L,K),
usada como modelo matemático para a quantidade máxima de produto Q obtida numcerto processo produtivo, com os factores de produção L, respeitante à quantidade de mãode obra (trabalho pago no processo de produção) e K, respeitante ao capital (edifícios,ferramentas, maquinaria, etc), usando uma dada tecnologia e respeitante a um período detempo especí�co. Há vários tipos de funções de produção, sendo um deles a função deprodução de Cobb-Douglas, que é da forma
Q = ALαKβ,
sendo A > 0, α > 0 e β > 0 constantes determinadas pela tecnologia utilizada. Se for,por exemplo, Q = 50L0.2K0.5, veri�ca-se que duplicando a quantidade de mão de obrae o capital investido não se duplica a produtividade, dado que Q = 50(2L)0.2(2K)0.5 =(2)0.750L0.2K0.5 < 2 × 50L0.2K0.5. Isto acontece porque temos α + β < 1, caso qem quese diz que a função de produção tem retornos decrescentes de escala (se α + β = 1 diz-seque a função de produção tem retornos constantes de escala, e se α + β > 1 diz-se que afunção de produção tem retornos crescentes de escala).
2 Representação grá�ca de funções no espaço
A representação grá�ca de funções de duas variáveis, z = f(x, y), requer um referencialcom três eixos que não estejam contidos no mesmo plano. Como dispomos apenas deuma folha de papel ou de um écran de computador (ambos bidimensionais), o melhor quepodemos fazer é simular profundidade visula nas �guras obtidas (�guras 106, 107). Osistema de referência xyz divide o espaço em 8 partes (�gura 107), sendo cada uma delasdesignada por octante. O octante correspondente a x, y, x > 0 costuma designar-se porprimeiro octante, não tendo os restantes octantes designações especiais.
49
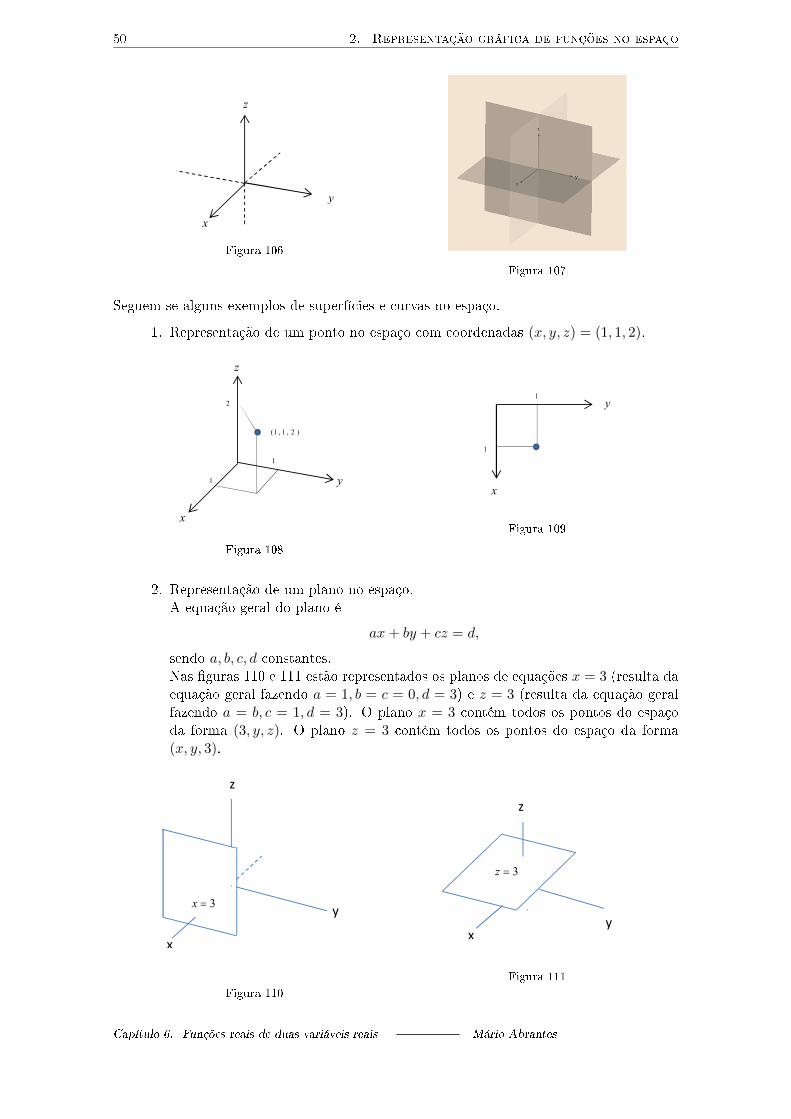
50 2. Representação gráfica de funções no espaço
Figura 106
Figura 107
Seguem-se alguns exemplos de superfícies e curvas no espaço.
1. Representação de um ponto no espaço com coordenadas (x, y, z) = (1, 1, 2).
Figura 108
Figura 109
2. Representação de um plano no espaço.A equação geral do plano é
ax+ by + cz = d,
sendo a, b, c, d constantes.Nas �guras 110 e 111 estão representados os planos de equações x = 3 (resulta daequação geral fazendo a = 1, b = c = 0, d = 3) e z = 3 (resulta da equação geralfazendo a = b, c = 1, d = 3). O plano x = 3 contém todos os pontos do espaçoda forma (3, y, z). O plano z = 3 contém todos os pontos do espaço da forma(x, y, 3).
Figura 110
Figura 111
Capítulo 6. Funções reais de duas variáveis reais Mário Abrantes

2. Representação gráfica de funções no espaço 51
A �gura 112 contém a parte do plano 2x+ y+ 2z = 2 que se situa no 1o octante.Podemos determinar os pontos em que o plano intersecta os eixo coordenados.Fazendo na equação x = y = 0 obtemos z = 1, que correspondem às coordenadasdo ponto (x, y, z) = (0, 0, 1) de intersecção do plano com o eixo dos zz. Analoga-mente, fazendo na equação x = z = 0 determina-se o ponto de intersecção do planocom o eixo dos yy, (x, y, z) = (0, 2, 0); fazendo na equação y = z = 0 determina-seo ponto de intersecção do plano com o eixo dos xx, (x, y, z) = (1, 0, 0).
Figura 112
3. Representação de uma esfera no espaço.A equação geral de uma esfera no espaço, de centro no ponto (a, b, c) e raio r, é
(x− a)2 + (y − b)2 + (z − c)2 = r2,
sendo a, b, c números reais.
Figura 113 Figura 114
Na �gura 113 está representada uma esfera de centro na origem do referencialxyz e raio 2. Na �gura 114 representa-se a intersecção da esfera x2 + y2 + z2 = 4com o plano z = 1. Os pontos comuns a estas duas superfícies são aqueles cujascoordenadas x, y, z satisfazem ambas as equações{
x2 + y2 + z2 = 4
z = 1
e correspondem à circunferência representada na �gura. Substituindo z por 1 naequação da esfera obtemos
x2 + y2 + 12 = 4⇔ x2 + y2 = 3,
que representa a projecção dos pontos da circunferência, de raio√
3, no plano xy.Os pontos da circunferência satisfazem o sistema de equações{
x2 + y2 = 3
z = 1.
Capítulo 6. Funções reais de duas variáveis reais Mário Abrantes

52 2. Representação gráfica de funções no espaço
4. Elipsóide.A equação geral de um elipsóide de centro na origem é
x2
a2+y2
b2+z2
c2= 1,
sendo a, b, c números reais positivos (�gura 115).
Figura 115: 1
Uma esfera é um elipsóide. Por exemplo, a esfera de centro na origem e raio r éum caso particular do elipsóide em que a = b = c = r. A equação geral de umelipsóide de centro no ponto (u, v, w) é
(x− u)2
a2+
(y − v)2
b2+
(z − w)2
c2= 1.
5. Cilindro de secção circular.Na �gura 116 está representada a intersecção de um cilindro de secção circularx2 + z2 = r2 com o plano y = 1, de que resulta a circunferência na �gura 117{
x2 + z2 = r2
y = 1.
Figura 116Figura 117
A equação do cilindro não envolve a variàvel y, o que signi�ca que se variarmos acoordenada y de um ponto sobre o cilindro (deslocação paralela ao eixo dos yy),as coordenadas x, z não alteram os seus valores.
1https://brilliant.org/problems/a-charged-ellipsoid/.
Capítulo 6. Funções reais de duas variáveis reais Mário Abrantes

3. Curvas de nível 53
6. Cone de secção circular.Na �gura 118 está representado o cone de secção circular z =
√x2 + y2. Apenas
pontos com coordenada z não negativa podem satisfazer a equação, razão pelaqual o grá�co está `acima' do plano xy, à excepção do ponto (0, 0, 0).
Figura 118: 2
Figura 119
Na �gura 119 está representado o cone de secção circular z2 = x2 + y2. Notar que estaequação representa implicitamente as duas superfícies z = ±
√x2 + y2.
3 Curvas de nível
Curvas de nível de uma superfície z = f(x, y) são curvas no plano xy, cada uma delascorrespondendo à projecção neste plano das curvas sobre a superfície cujos pontos têm amesma coordenada z.
Figura 120
Como exemplo temos representadas na �gura 120, à esquerda, algumas curvas de nível dasemiesfera z =
√4− x2 − y2, representada na parte direita da �gura. Sobre a semiesfera
encontram-se as circunferências que resultam da sua intersecção com vários planos do tipoz = k. São a projecções destas circunferências no plano xy que correspondem às curvas
2http://www.okclipart.com/Math-Clip-Art-Cone30clxtprwg/
Capítulo 6. Funções reais de duas variáveis reais Mário Abrantes

54 4. Sequências de pontos no plano
de nível da semiesfera. Formalmente obtemos estas curvas fazendo z = k na fórmula dasemiesfera
k =√
4− x2 − y2,
e veri�cando que se obtém a equação
x2 + y2 = 4− k2,
que representa uma família de circunferências de centro na origem e raio√
4− k2, sendok ≥ 0 um parâmetro real. As curvas de nível são uma forma de representar uma superfíciez = f(x, y) num referencial xy.
4 Sequências de pontos no plano
Uma sequência de pontos no plano corresponde a uma in�nidade ordenada de pares denúmeros reais
(x1, y1), (x2, y2), · · · , (xn, yn), · · ·sendo (xn, yn), o termo geral da sequência, um par de expressões na variável n. Substituindo-se n por um número inteiro positivo k obtém-se o termo de ordem k da sequência. Podemosrepresentar o conjunto ordenado formado por todos os termos da sequência por
((xn, yn)
).
Exemplo 30. Na �gura 121 estão representados os primeiros três termos da sequência determo geral (xn, yn) = (1/n, 0):
(1, 0), (1/2, 0), (1/3, 0), · · · .
Figura 121Figura 122
É imediato veri�car que se �zermos n→∞ os pontos marcados se aproximam da origemdo referencial (0, 0), situando-se a uma distância deste que tende para zero. Escrevemos
limn→∞
(1/n, 0) = (0, 0).
Vale a seguinte de�nição.
O ponto (a, b) é o limite da sequência (xn, yn) quando ntende para infinito, e escreve-se
limn→∞
(xn, yn) = (a, b),
se, e somente se, limn→∞
xn = a e limn→∞
yn = b.
No caso das sequências de números reais convergentes, (un), os seus pontos situam-se sobrea recta real em torno do ponto limite da sequência. Já os termos das sequências conver-gentes de pontos no plano,
((xn, yn)
), podem aproximar-se do ponto do limite segundo
in�nitas direcções (�gura 122).
Capítulo 6. Funções reais de duas variáveis reais Mário Abrantes

5. Funções contínuas 55
5 Funções contínuas
Diz-se que o limite da função f(x, y) no ponto (a, b) é L, e escreve-se
lim(x,y)→(a,b)
f(x, y) = L,
se a sequência de valores da função(f(xn, yn)
)tende para o número real L, qualquer que
seja a sequência de pontos (xn, yn)→ (a, b) considerada.
Na �gura 123 está representada a função
f(x, y) =
{0, x, y > 0
1, n.c.
Esta função toma o valor 1 em todos os pontos do plano xy, excepto nos pontos do primeirooctante, nos quais toma o valor 0.
Figura 123
Podemos veri�car que não existe o
lim(x,y)→(0,0)
f(x, y).
Se este limite existisse teria que ser independente da sequência de pontos (xn, yn)→ (0, 0)escolhida. Acontece que se escolhermos uma sequência de pontos situados sobre o eixo dosxx, convergente para (0, 0), seja (xn, yn) = (1/n, 0) o seu termo geral, temos
lim(x,y)→(0,0)
f(x, y) = 1,
já que a função toma o valor 1 para todos os pontos da sequência. No entanto, se escolher-mos uma sequência de pontos situados sobre a recta y = x, convergente para (0, 0), seja(xn, yn) = (1/n, 1/n) o seu termo geral, temos
lim(x,y)→(0,0)
f(x, y) = 0,
já que a função toma o valor 0 em todos os pontos da sequência.
Dizemos que uma função f(x, y) é contínua no ponto (a, b) do
seu domínio se, e somente se,
lim(x,y)→(a,b)
f(x, y) = f(a, b).
Capítulo 6. Funções reais de duas variáveis reais Mário Abrantes

56 6. Derivadas parciais
Esta de�nição implica que, para que uma função f(x, y) seja contínua num ponto (a, b),não só deve existir o lim
(x,y)→(a,b)f(x, y), como o valor deste limite deve ser igual ao valor
f(a, b) que a função assume no ponto.
Figura 124
A função f(x, y) representada na �gura 123 não é contínua no ponto (0, 0) porque, comose viu acima, não existe o lim
(x,y)→(0,0)f(x, y). Já a função f(x, y) representada na �gura 124
não é contínua no ponto (0, 0) porque, apesar de existir o lim(x,y)→(0,0)
f(x, y) = 1, este não é
igual ao valor da função no ponto (0, 0), que é f(0, 0) = 3.
6 Derivadas parciais
Na �gura 125 está representada a intersecção do parabolóide circular z = 4− x2 − y2 como plano x = 1.
Figura 125
Da intersecção do parabolóide e do plano, resulta a parábola representada nas �guras �gura125 e 126, {
z = 4− x2 − y2
x = 1
cuja projecção no plano xz é mostrada na �gura 125. Todos os pontos (x, y, z) destaparábola são da forma (1, y, z), uma vez que se encontram no plano x = 1.
Capítulo 6. Funções reais de duas variáveis reais Mário Abrantes

6. Derivadas parciais 57
Figura 126Figura 127
Podemos localizar o ponto (1, x, y) no qual a parábola atinge o valor máximo, escrevendoa expressão de z em função de y{
z = 4− x2 − y2
x = 1⇒ z = 4− 12 − y2 ⇔ z = 3− y2,
e calculando depois o extremo da função. Por meio da derivada
dz
dy= (3− y2)
′y = −2y, (6.1)
obtemos o ponto crítico y = 0, no qual a curva tem ummáximo local de valor z = 3. No casode o plano que intersecta o parabolóide ser x = k, com k diferente de 1, o procedimentopara determinar o máximo da parábola resultante seria o mesmo. Salientamos que nocálculo da derivada apresentado na expressão (6.1), a função z(x, y) é derivada em ordema y, tomando-se x como constante. Uma derivada deste tipo diz-se derivada parcial emordem a y.
Dada a função f(x, y), define-se a função derivada parcial
de z(x, y) em ordem y, e representa-se por
fy ou∂f
∂y,
a função que se obtém derivando a expressão f(x, y) em
ordem à variável y, considerando x constante:
∂f
∂y= lim
h→0
f(x, y + h)− f(x, y)
h.
De forma análoga se de�ne a derivada parcial de uma função z(x, y) em ordem à variávelx. Neste caso �xa-se a variável y, variando apenas x e z.
Dada a função f(x, y), define-se a função derivada parcial
de z(x, y) em ordem x, e representa-se por
fx ou∂f
∂x,
a função que se obtém derivando a expressão f(x, y) em
ordem à variável x, considerando y constante:
∂f
∂x= lim
h→0
f(x+ h, y)− f(x, y)
h.
Capítulo 6. Funções reais de duas variáveis reais Mário Abrantes

58 6. Derivadas parciais
Na �gura 128 está representada a intersecção do parabolóide circular z = 4− x2 − y2 como plano y = 1. A parábola resultante está representada também nas �guras 129 e 130,dizendo esta última respeito à projecção da parábola no plano yz.
Figura 128
Todos os pontos (x, y, z) desta parábola são da forma (x, 1, z), uma vez que se encontramno plano y = 1.
Figura 129Figura 130
As derivadas parciais, por representarem derivadas de curvas, fornecem os declives dasrectas situadas nos planos de intersecção envolvidos, tangentes às curvas nos pontos ondesão calculadas. Dada uma função f(x, y):
1. A derivada parcial em ordem a x, fx, calculada no ponto (x0, y0), também se dizderivada parcial de f(x, y) na direcção do eixo dos xx, no ponto (x0, y0).
2. A derivada parcial em ordem a y, fy, calculada no ponto (x0, y0), também se dizderivada parcial de f(x, y) na direcção do eixo dos yy, no ponto (x0, y0).
As derivadas parciais dão-nos informação sobre a variação das funções f(x, y) nas direcçõescorrespondentes.
Exercício 19. Caracterizar a variação da função z = 4− x2 − y2 no ponto (x, y) = (1, 1),na direcção do eixo dos xx (�gura 128).
Capítulo 6. Funções reais de duas variáveis reais Mário Abrantes

6. Derivadas parciais 59
ResoluçãoCalculamos a derivada parcial da função em ordem a x:
zx = (4− x2 − y2)′x = −2x.
Agora determinamos o valor desta derivada no ponto (x, y) = (1, 1):
zx(1, 1) = −2 < 0.
Como a derivada é negativa a função é decrescente no ponto (x, y) = (1, 1), na direcção doeixo dos xx. Podemos veri�car que a recta tangente à curva que resulta da intersecção doparabolóide e do plano y = 1 (�gura 128) tem declive negativo.
Exemplo 31. Calculo de algumas derivadas parciais.
1. z = 2xy − 3x+ 4y + 5x2y zx = (2xy − 3x+ 4y + 5x2y)′x
= (2xy)′x − (3x)
′x + (4y)
′x + (5x2y)
′x = 2y − 3 + 0 + 10xy
= 2y − 3 + 10xy
2. z = 2e3x+4y zy = (2e3x+4y)′y = 2(3x+ 4y)
′ye
3x+4y = 8e3x+4y
3. z = ln(3x+ 4y) zy = (ln(3x+ 4y))′y =
(3x+ 4y)′y
3x+ 4y=
4
3x+ 4y
4. z =2x
y + y2zx = (
2x
y + y2)′x =
1
y + y2(2x)
′x) =
2
y + y2
5. z = sen(xy) zx = (sen(xy))′x = (xy)
′xcos(xy) = ycos(xy)
6. z = y 3√
2x− 6y zy = (y 3√
2x− 6y)′y = (y)
′y
3√
2x− 6y + y( 3√
2x− 6y)′y
= 3√
2x− 6y + y1
3(2x− 6y)
′y(2x− 6y)−2/3
= 3√
2x− 6y − 2y(2x− 6y)−2/3
6.1 Derivadas parciais de segunda ordem
As derivadas parciais de segunda ordem de uma função f(x, y) são:
fxx ou ∂2f/∂x2 Derivada parcial de segunda ordem, em ordem à variável x
fyy ou ∂2f/∂y2 Derivada parcial de segunda ordem, em ordem à variável y
fxy ou ∂2f/∂y∂x e fyx ou ∂2f/∂x∂y
Derivadas de segunda ordem cruzadas, ou mistas.
Exemplo 32. Determinar as derivadas de segunda ordem da função z = 2xy2 − 3x2y.Resolução
Derivadas de 1a ordem
zx = (2xy2 − 3x2y)′x = 2y2 − 6xy zy = (2xy2 − 3x2y)
′y = 4xy − 3x2
Derivadas de 2a ordem
zxx = (zx)′x = (2y2 − 6xy)
′x = −6y zyy = (zy)
′y = (4xy − 3x2)
′y = 4x
zxy = (zx)′y = (2y2 − 6xy)
′y = 4y − 6x zyx = (zy)
′x = (4xy − 3x2)
′x = 4y − 6x
Capítulo 6. Funções reais de duas variáveis reais Mário Abrantes

60 6. Derivadas parciais
Neste exemplo veri�ca-se zxy = zyx. Esta igualdade não acontece por acaso, como indicao seguinte resultado.
Teorema 13. (de Schwarz) Dada uma função f(x, y), se fxy e fyx são contínuas numaregião aberta3 do plano, então fxy = fyx em todos os pontos dessa região.
6.2 Derivação da função composta (regra da cadeia)
Dada uma função f(x, y), consideremos o caso em que as variáveis x e y representam duasfunções da variável t, por exemplo
f(x, y) = 2x+ 3y
x = 5t
y = 4t2 + 1
Querendo conhecer df/dt, podemos substituir as expressões em t para x e y na expressãode f(x, y), obtendo uma expressão em t para f(x, y), e em seguida derivar em ordem a tessa expressão. No caso do exemplo acima obtemos
f(x, y) = 2(5t) + 3(4t2 + 1) = 12t2 + 10t+ 3
df/dt = (12t2 + 10t+ 3)′ = 24t+ 10.
Pode porém calcular-se esta derivada sem a obtenção prévia da expressão em t para afunção f(x, y), usando a regra de derivação da função composta, enunciada a seguir.
Teorema 14. Se x(t) e y(t) são funções deriváveis e se f(x, y) tem derivadas de 1a ordemcontínuas no ponto (x(t), y(t)), então
df
dt=dx
dt
∂f
∂x+dy
dt
∂f
∂y. (6.2)
Apliquemos este resultado às funções apresentadas acima. Começamos por calcular asderivadas do segundo membro da fórmula (6.2).
dx/dt = 5; dy/dt = 8t; ∂f/∂x = 2; ∂f/∂y = 3.
Substituindo estas expressões na fórmula (6.2), con�rmamos o resultado obtido acima paradf/dt
df
dt=dx
dt
∂f
∂x+dy
dt
∂f
∂y⇔ df
dt= 5× 2 + 8t× 3 = 24t+ 10.
A regra da cadeia pode ser estendida ao caso em que x e y dependem de várias variáveis.Por exemplo, se x e y dependem das variáveis u, v,
f(x, y)
x(u, v)
y(u, v)
,
temos
∂f
∂u=∂x
∂u
∂f
∂x+∂y
du
∂f
∂y(6.3)
∂f
∂v=∂x
∂v
∂f
∂x+∂y
∂v
∂f
∂y(6.4)
3Reagião aberta do plano, é uma porção do plano tal que todos os seus pontos são todos pontos interiores� por exemplo, um círculo ao qual é retirada a circunferência que é a sua fronteira.
Capítulo 6. Funções reais de duas variáveis reais Mário Abrantes

7. Problemas de optimização 61
Exemplo 33. Utilizar a regra da cadeia para obter a derivada parcial de 1a ordem ∂z/∂v,sendo
z = ln(xy)
x = 2u− 3v
y = uv
ResoluçãoComeçamos por determinar as derivadas do segundo membro da fórmula (6.4).
∂x/∂v = −3 ∂y/∂v = u ∂f/∂x =1
x∂f/∂y =
1
y.
Substituindo estas derivadas na fórmula (6.4) obtemos
∂f
∂v=∂x
∂v
∂f
∂x+∂y
∂v
∂f
∂y⇔ ∂f
∂v=−3
x+u
y.
Como queremos determinar ∂f∂v , estamos interessados numa expressão nas variáveis u, v.
Para a obtermos basta substituir x, y pelas correspondentes expressões em u, v
∂f
∂v=−3
x+u
y=
−3
2u− 3v+
u
uv=
−3
2u− 3v+
1
v.
7 Problemas de optimização
O cálculo de extremos relativos de funções reais de duas variáveis, f(x, y), faz-se por umprocesso semelhante ao que vimos para o caso de funções reais de uma variável, f(x).No grá�co da �gura 131 estão indicados alguns pontos (x, y, z) de extremo da funçãorespectiva.
Figura 131
Valem as seguintes de�nições.
Capítulo 6. Funções reais de duas variáveis reais Mário Abrantes

62 7. Problemas de optimização
Uma função f(x, y) tem um máximo relativo [mínimo relativo]
no ponto (a, b) do seu domínio, sse existe um círculo
centrado em (a, b) tal que, para todos os pontos interiores
do círculo (x, y) se tem
f(a, b) ≥ f(x, y)[f(a, b) ≤ f(x, y)
].
Uma função f(x, y) tem um máximo absoluto [mínimo absoluto]
no ponto (a, b) do seu domínio, sse para todos os pontos
(x, y) do domínio da função se tem
f(a, b) ≥ f(x, y)[f(a, b) ≤ f(x, y)
].
Basta uma função ser contínua num conjunto fechado (i.e., um conjunto que contém todosos seus pontos de fronteira) e limitado, para ter aí extremos absolutos.
Teorema 15. Se f(x, y) é contínua no conjunto fechado e limitado S ⊂ R2, então f(x, y)tem máximo e mínimo absolutos em S.
Na �gura 131 estão representadas duas rectas tangentes à função f(x, y) em dois dos seuspontos de extremo. Para cada caso, uma das rectas tem os seus pontos com coordenada xconstante (é paralela ao plano zy) e a outra tem os seus pontos com coordenada y constante(é paralela ao plano zx). Ambas são paralelas ao plano xy. O declive da primeira representaa derivada parcial fy, sendo fx o declive da segunda. Sendo as rectas paralelas ao planoxy, ambas as derivadas parciais são nulas. Vale o seguinte teorema.
Teorema 16. Se f(x, y) tiver um extremo relativo no ponto (x, y) = (a, b) e se as derivadasparciais de primeira ordem fx, fy existirem nesse ponto, então fx(a, b) = fy(a, b).
De�ne-se ponto crítico de uma função f(x, y) da seguinte forma.
O ponto (a, b) diz-se ponto crítico da função f(x, y), sse
fx(a, b) = 0 e fy(a, b) = 0, ou se alguma das derivadas
parciais fx(a, b), fy(a, b) não existe.
Os pontos críticos são pontos onde a função pode ter, eventualmente, extremos.
Exemplo 34. Cálculo dos pontos críticos da parábola z = 4− x2 − y2 (�g 128).∂z∂x = 0
∂z∂y = 0
⇔
(4− x2 − y2
)′x
= 0(4− x2 − y2
)′y
= 0
⇔
−2x = 0
−2y = 0⇔
x = 0
y = 0
Obtemos o ponto crítico (x, y) = (0, 0).
Exemplo 35. Cálculo dos pontos críticos do cone z =√x2 + y2 (�g 118).
∂z∂x = 0
∂z∂y = 0
⇔
(√
x2 + y2)′x
= 0(√x2 + y2
)′y
= 0
⇔
x√x2+y2
= 0
y√x2+y2
= 0
Para que se veri�quem as duas equações, deve ser x = y = 0. Mas no ponto (x, y) = (0, 0)nenhuma das duas derivadas parciais está de�nida (porquê?). Obtemos o ponto crítico(x, y) = (0, 0).
Capítulo 6. Funções reais de duas variáveis reais Mário Abrantes

7. Problemas de optimização 63
7.1 Classi�cação dos pontos críticos
Uma vez determinados os pontos críticos de uma função f(x, y), devemos classi�cá-los,i.e., veri�car se são pontos de máximo ou mínimo relativos, ou se são pontos de sela �pontos em que ambas as derivadas parciais são nulas, mas que não são pontos de extremoda função (�gura 132).
Figura 132
A classi�cação dos pontos críticos, no caso em que as derivadas de primeira e segundaordem no ponto existem e são contínuas, é feita usando o seguinte resultado.
Teorema 17. Se f(x, y) tiver derivadas de segunda ordem contínuas nos pontos de umcírculo centrado no ponto crítico (a, b), considerando o discriminante
D(x, y) = fxxfyy − f2xy,
veri�ca-se que:
1. Se D(a, b) > 0 e fxx < 0, então (a, b) é ponto de máximo relativo da função;
2. Se D(a, b) > 0 e fxx > 0, então (a, b) é ponto de mínimo relativo da função;
3. Se D(a, b) < 0, então (a, b) é ponto de sela da função;
4. Se D(a, b) = 0, nada se pode concluir.
Exemplo 36. Vamos classi�car o ponto crítico obtido no exemplo 34. Temos
zxx = (−2x)x = −2 zyy = (−2y)y = −2 zxy = (−2x)y = 0,
e
D(x, y) = (−2)(−2)− 0 = 4 D(0, 0) = 4 > 0 zxx(0, 0) = −2 < 0.
Por ser D(0, 0) > 0 e zxx(0, 0) < 0 o ponto é um ponto de máximo local, o que con�rma ainformação que se retira da �gura 128.
Capítulo 6. Funções reais de duas variáveis reais Mário Abrantes