capÍtulo iv sistemas de controlo e aquisiÇÃo de …varandas/capitulo4.pdf · recolha da...
TRANSCRIPT

CAPÍTULO IV
SISTEMAS DE CONTROLO E AQUISIÇÃO DE DADOS
4.1. INTRODUÇÃO
O aumento da complexidade dos dispositivos experimentais1,2 e o advento das Tecnologias da
Informação conduziram à introdução progressiva dos microprocessadores nos Laboratórios e
à utilização cada vez mais frequente dos sistemas computarizados de controlo e aquisição de
dados, adiante designados pelo acrónimo SCAD.
Estes sistemas possuem vantagens significativas:
Funcionam sem a presença de um operador, o que possibilita a monitorização
computarizada do funcionamento da experiência vinte e quatro horas por dia;
Possibilitam a execução de procedimentos pré-definidos em caso de detecção de avarias ou
falhas nos sistemas auxiliares de operação (energia, refrigeração, vácuo....);
Podem permitir a operação remota do dispositivo experimental através da Internet3;
Podem controlar e medir um número muito elevado (teoricamente infinito) de grandezas,
num intervalo de tempo muito pequeno4;
1 Vulgarmente designados por experiências ou máquinas. 2 Neste livro usaremos o termo “dispositivo experimental” para designar o hardware que constitui um sistema experimental (como, por exemplo, um acelerador de partículas ou um tokamak) e o termo “experiência” para designar um conjunto de actos experimentais realizados num dispositivo experimental. 3 A implementação deste procedimento exige cuidados adicionais no controlo de segurança e uma definição clara das operações que podem ser realizadas remotamente. 4 Por exemplo, uma experiência de plasmas de fusão pode funcionar durante alguns milisegundos (por exemplo, as descargas do ISTTOK duram 40 ms) ou centenas de segundos (por exemplo, as descargas do TRIAM-2M duram 7200 s, enquanto as descargas do ITER durarão apenas 300 s).
1
Permitem obter medidas com maior precisão da que é conseguida com sistemas analógicos;
Possibilitam o arquivo de toda a história da operação da experiência e o tratamento
posterior da parte dos dados experimentais que é relevante para a compreensão do
fenómeno que está a ser estudado.
O controlo envolve, geralmente, a segurança das pessoas e dos bens materiais
(instalações e componentes do próprio dispositivo experimental), a operação atempada e
eficiente de todas as componentes do dispositivo experimental e do sistema de controlo e
aquisição de dados e a alteração em tempo real de parâmetros de operação do dispositivo
experimental em função da evolução dos resultados que vão sendo medidos.5
A aquisição de dados inclui o condicionamento dos sinais fornecidos pelos sensores e
transdutores do dispositivo experimental e a sua digitalização, tratamento e arquivo numa
base de dados, distribuida ou central.
4.2. DESCRIÇÃO GERAL DE UM SISTEMA DE CONTROLO E AQUISIÇÃO DE
DADOS
Um sistema de controlo e aquisição de dados é composto por:
Um conjunto de microprocessadores, que podem ser computadores convencionais e/ou
placas dedicadas para o barramento (“bus”) a utilizar6 (Figura 4.1);
Figura 4.1 – Placa VME com um microprocessador Motorola 68030
5 O chamado controlo em tempo real ou controlo com retroacção. 6 Existem no Mercado microprocessadores Intel e Motorola implementados em placas para os barramentos mais utilizados em instrumentação digital.
2

Instrumentação de temporização, controlo e aquisição de dados (Figura 4.2);
Uma interface de ligação do computador à instrumentação (barramento);
Um ou mais bastidores (“crates”) (Figura 4.3);
Sistema operativo;
Software de operação.
Figura 4.2 – Módulo de aquisição de dados para o “bus” VME
Figura 4.3 – Bastidor do “bus” VME
3

4.3. ARQUITECTURA DE UM SISTEMA DE CONTROLO E AQUISIÇÃO DE
DADOS
Os primeiros sistemas de controlo e de aquisição de dados foram projectados numa filosofia
centralizadora, com um único computador central7 ligado a um ou mais bastidores, com uma
separação quase completa entre a instrumentação dedicada ao controlo e à aquisição dos
resultados experimentais (Figura 4.4).
Microprocessador
CRATEComputador
Crate
Crate
Osciloscópio
Aparelho 1
Aparelho 2
Figura 4.4 – Três configurações típicas de um sistema central de controlo e aquisição de dados, baseados num computador convencional (à esquerda), numa placa com um microprocessador (ao centro) e num osciloscópio
digital (à esquerda)
Os actuais sistemas de aquisição de dados são projectados numa filosofia
descentralizada, utilizando os progressos da Teoria da Informação. Os computadores e a
instrumentação de controlo e aquisição de dados estão distribuidos pelo “campus” do
dispositivo experimental e ligados por uma rede local (LAN, acrónimo de “Local Area
Network”), implementada através de cabos coaxiais ou de fibras ópticas e de protocolos de
comunicações (Figura 4.5). Cada conjunto de instrumentação de cálculo, temporização,
controlo e aquisição de dados existente num dado local do “campus” é designado por sub-
sistema ou nó do SCAD. Normalmente, existe um nó que exerce as funções de supervisor do
sistema de controlo e aquisição de dados. Este nó é designado por principal ou supervisor
(“master”). Esta arquitectura tem várias vantagens:
Permite o desenvolvimento autónomo de um novo nó, sem interferir com o funcionamento
do sistema global;
Uma avaria num nó não implica, na maioria dos casos, a paragem de todo o sistema;
A determinação dos resultados experimentais é mais rápida, dado os vários programas de
recolha da informação e os algoritmos de cálculo dos resultados podem correr em
simultâneo em vários computadores;
7 Especialmente vocacionado para o funcionamento em tempo real.
4
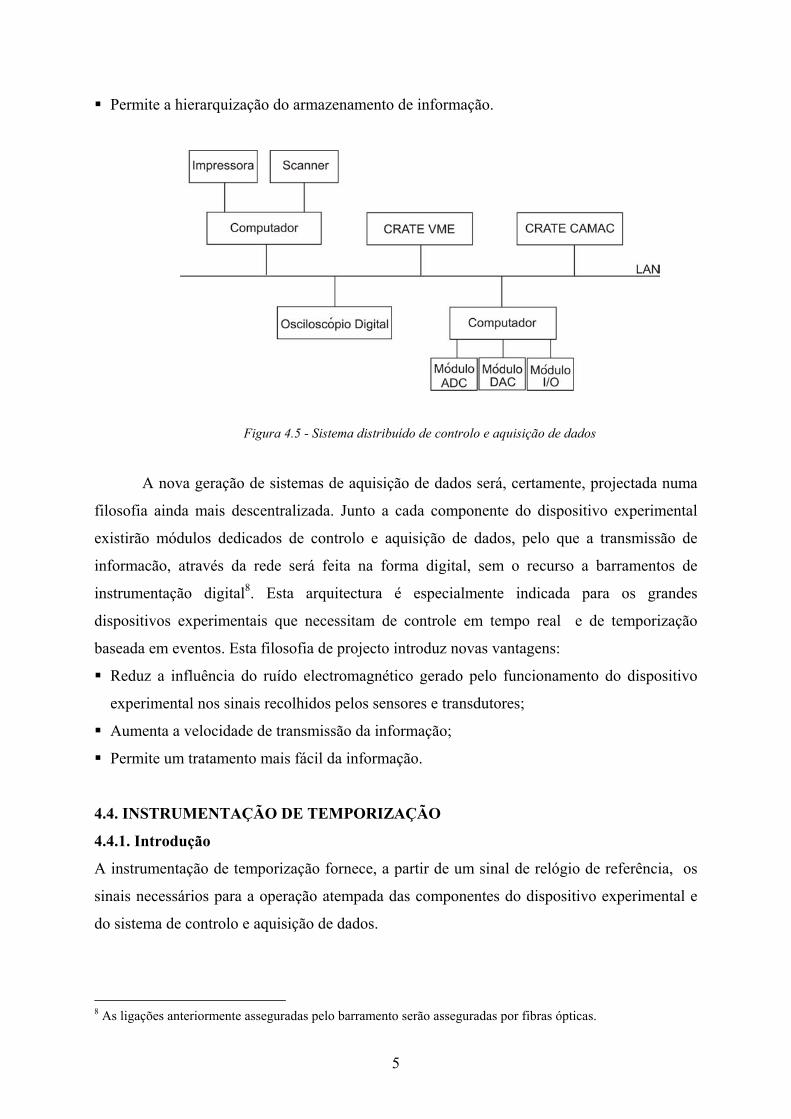
Permite a hierarquização do armazenamento de informação.
Figura 4.5 - Sistema distribuído de controlo e aquisição de dados
A nova geração de sistemas de aquisição de dados será, certamente, projectada numa
filosofia ainda mais descentralizada. Junto a cada componente do dispositivo experimental
existirão módulos dedicados de controlo e aquisição de dados, pelo que a transmissão de
informacão, através da rede será feita na forma digital, sem o recurso a barramentos de
instrumentação digital8. Esta arquitectura é especialmente indicada para os grandes
dispositivos experimentais que necessitam de controle em tempo real e de temporização
baseada em eventos. Esta filosofia de projecto introduz novas vantagens:
Reduz a influência do ruído electromagnético gerado pelo funcionamento do dispositivo
experimental nos sinais recolhidos pelos sensores e transdutores;
Aumenta a velocidade de transmissão da informação;
Permite um tratamento mais fácil da informação.
4.4. INSTRUMENTAÇÃO DE TEMPORIZAÇÃO
4.4.1. Introdução
A instrumentação de temporização fornece, a partir de um sinal de relógio de referência, os
sinais necessários para a operação atempada das componentes do dispositivo experimental e
do sistema de controlo e aquisição de dados.
8 As ligações anteriormente asseguradas pelo barramento serão asseguradas por fibras ópticas.
5
As primeiras unidades de temporização eram analógicas e usavam cabos coaxiais de
comprimentos diferentes e interruptores analógicos para definir as linhas de atraso entre os
sinais. Depois estas unidades passaram a usar a tecnologia digital.
4.4.2. Arquitectura de uma Unidade de Temporização
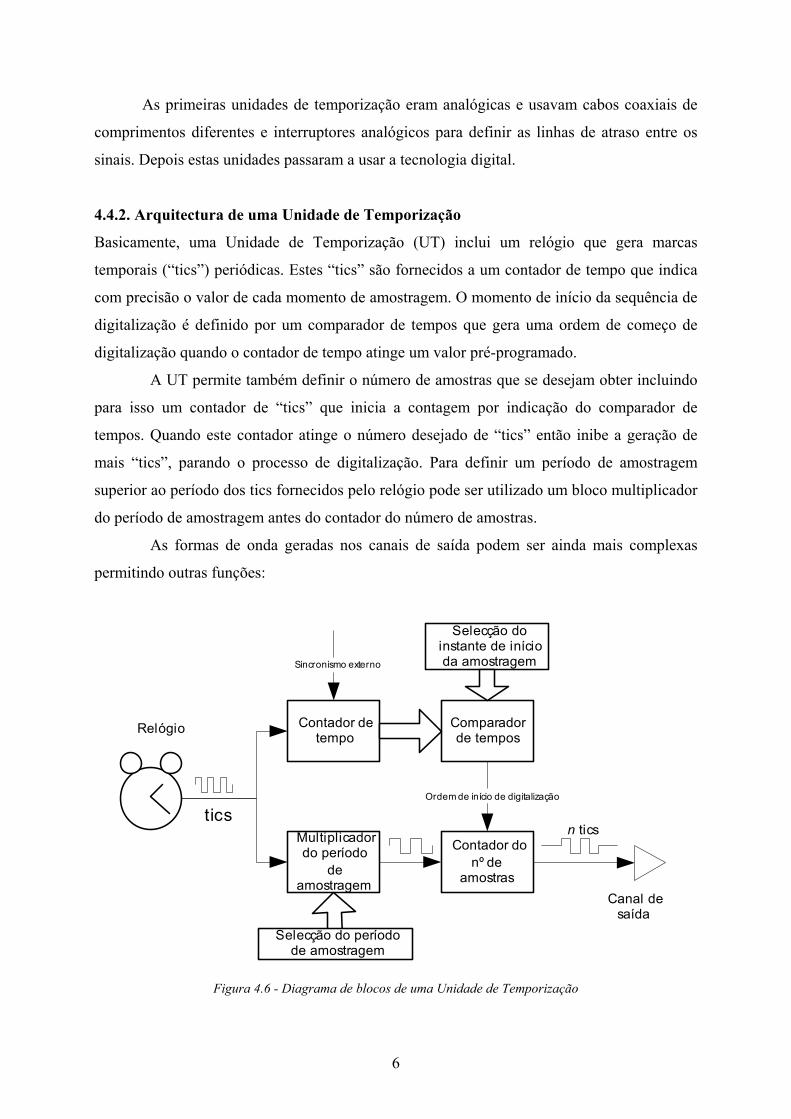
Basicamente, uma Unidade de Temporização (UT) inclui um relógio que gera marcas
temporais (“tics”) periódicas. Estes “tics” são fornecidos a um contador de tempo que indica
com precisão o valor de cada momento de amostragem. O momento de início da sequência de
digitalização é definido por um comparador de tempos que gera uma ordem de começo de
digitalização quando o contador de tempo atinge um valor pré-programado.
A UT permite também definir o número de amostras que se desejam obter incluindo
para isso um contador de “tics” que inicia a contagem por indicação do comparador de
tempos. Quando este contador atinge o número desejado de “tics” então inibe a geração de
mais “tics”, parando o processo de digitalização. Para definir um período de amostragem
superior ao período dos tics fornecidos pelo relógio pode ser utilizado um bloco multiplicador
do período de amostragem antes do contador do número de amostras.
As formas de onda geradas nos canais de saída podem ser ainda mais complexas
permitindo outras funções:
Contador detempo
Comparadorde tempos
Selecção doinstante de inícioda amostragem
Multiplicadordo período
deamostragem
Contador donº de
amostras
Selecção do períodode amostragem
Ordem de início de digitalização
Relógio
Canal desaída
ticsn tics
Sincronismo externo
Figura 4.6 - Diagrama de blocos de uma Unidade de Temporização
6
a) Conjuntos de impulsos de relógio de frequências múltiplas e sinais de início/fim
para a aquisição de dados;
b) Sinais gerados em momentos predefinidos para a sincronização da operação dos
sistemas associados;
c) Sequências de sinais de abertura de duração variável para funções de controlo.
A Unidade de Temporização pode incluir vários canais de saída sincronizados pelo
mesmo relógio de modo a controlar simultaneamente vários Gravadores de Transientes9. A
utilização de várias unidades de temporização geograficamente distribuídas num grande
dispositivo experimental permite um grande aumento no número de canais disponíveis. No
entanto os relógios locais de cada UT terão de ser sincronizados em relação a um relógio
global de modo a não haver perca de sincronismo. Esta operação pode ser efectuada pela
distribuição do valor do relógio global através de um barramento eléctrico ou óptico, por
comunicações radioeléctrica10, ou ópticas11.
4.5. INSTRUMENTAÇÃO DE CONTROLO
A instrumentação de controlo fornece, a partir de ficheiros digitais gerados num
microprocessador, os sinais eléctricos que vão definir os parâmetros de funcionamento de
várias componentes do dispositivo experimental.
Esta instrumentação de controlo é baseada em: (i) conversores digital-analógicos
(DAC, acrónimo de “Digital-to-Analog Converter”), componentes que tranformam um
ficheiro digital em sinais analógicos; e (ii) linhas digitais de controlo.
A instrumentação de controlo inclui:
Unidades de Conversão Digital-Analógica, as quais geram sinais analógicos a medida que
recebem a informação digital de um computador;
Geradores de Formas de Onda, unidades de conversão digital-analógica que, por terem
memória própria, podem funcionar sem ligação directa ao computador que gera a
informação digital;
Unidades de Entrada/Saida (Input/Output) (I/O), que geram e recebem sinais de estado dos
componentes (ligado ou desligado).
9 Ver secção 4.6. 10 Como, por exemplo, o GPS. 11 Como, por exemplo, um laser de comunicações.
7

4.6. INSTRUMENTAÇÃO DE AQUISIÇÃO DE DADOS
4.6.1. Introdução
A instrumentação de aquisição de dados é baseada em conversores analógico-digital (ADC,
acrónimo de “Analog-to-Digital Converter”) que procede à digitalização do sinal analógico de
entrada.
Existem dois tipos de unidades de aquisição de dados, Gravadores de Transientes e
Digitalizadores, consoante a unidade possua ou não memória própria. Nos Gravadores de
Transientes os ficheiros resultantes da digitalização dos sinais analógicos são armazenados
inicialmente na memória própria da unidade e posteriormente enviados para a memória local
do bastidor onde está inserida a unidade ou para a base de dados central do SCAD, Nos
Digitalizadores, o resultado da digitalização é enviado em tempo real, através do “bus” do
bastidor, para as memórias do SCAD.
4.6.2. Gravador de Transientes
Um Gravador de Transientes é caracterizado pelos seguintes parâmetros:
Número de canais de entrada, tipo de ligações de entrada (simples ou diferenciais), modo
de funcionamento (independente ou multiplexado) e tensões máxima e mínima que os
sinais analógicos podem ter;
Resolução (8, 12, 16 ou 20 bites);
Frequência máxima de amostragem (em Amostragens por Segundo)12;
Memória (em Bytes ou Palavras);
Tipo de relógio (interno ou externo);
Modo de disparo (por hardware, software ou externo).
O tipo de ligações, simples ou diferencial, que devemos usar tem a ver com o facto
do sinal analógico que pretendemos digitalizar estar referido, respectivamente, a “massa” do
sistema ou ser fluctuante. O modo de funcionamento, independente13 ou multiplexado14,
depende do tipo de aplicação pretendido e da filosofia de projecto adoptada tendo em
consideração a relação entre a frequência máxima de amostragem da unidade e do ADC.
Quando a primeira é muito menor que a segunda pode interessar que dois ou mais canais de
entrada partilhem a utilização do mesmo conversor analógico-digital.
12 Existem no mercado módulos com 1 GSPS. 13 Um modulo dificilmente tem mais de 16 canais independentes. 14 Existem módulos que possuem 64 canais multiplexados.
8
A memória de um gravador de transientes também pode estar organizada de uma
forma independente por canal de entrada ou por blocos que são partilhados por vários canais.
Esta memória pode ser estática ou dinâmica15.
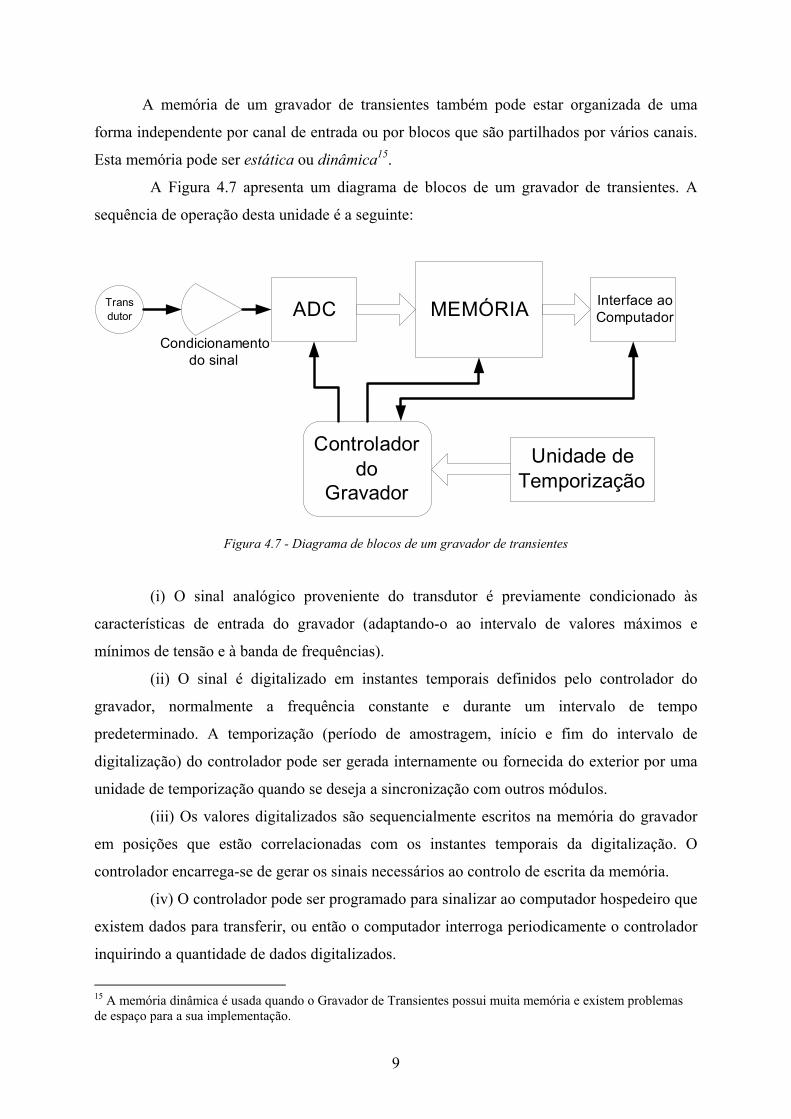
A Figura 4.7 apresenta um diagrama de blocos de um gravador de transientes. A
sequência de operação desta unidade é a seguinte:
Transdutor ADC MEMÓRIA Interface ao
Computador
Controladordo
Gravador
Unidade deTemporização
Condicionamentodo sinal
Figura 4.7 - Diagrama de blocos de um gravador de transientes
(i) O sinal analógico proveniente do transdutor é previamente condicionado às
características de entrada do gravador (adaptando-o ao intervalo de valores máximos e
mínimos de tensão e à banda de frequências).
(ii) O sinal é digitalizado em instantes temporais definidos pelo controlador do
gravador, normalmente a frequência constante e durante um intervalo de tempo
predeterminado. A temporização (período de amostragem, início e fim do intervalo de
digitalização) do controlador pode ser gerada internamente ou fornecida do exterior por uma
unidade de temporização quando se deseja a sincronização com outros módulos.
(iii) Os valores digitalizados são sequencialmente escritos na memória do gravador
em posições que estão correlacionadas com os instantes temporais da digitalização. O
controlador encarrega-se de gerar os sinais necessários ao controlo de escrita da memória.
(iv) O controlador pode ser programado para sinalizar ao computador hospedeiro que
existem dados para transferir, ou então o computador interroga periodicamente o controlador
inquirindo a quantidade de dados digitalizados.
15 A memória dinâmica é usada quando o Gravador de Transientes possui muita memória e existem problemas de espaço para a sua implementação.
9

(v) Em ambos os casos o computador pode iniciar um ciclo de transferência de dados
da memória do gravador para a sua memória. Se a memória do gravador permitir a leitura e
escrita simultânea, o processo de digitalização pode continuar ininterrupto, caso contrário este
processo é interrompido pelo controlador do gravador que cede ao computador o controlo da
memória.
Os sinais quantificados devem resultar de uma digitalização com parâmetros de
conversão adequadamente definidos, de modo a garantir perdas desprezáveis de informação.
Esses parâmetros são a resolução mínima de discretização do valor do sinal, a frequência de
amostragem (a qual deve obedecer ao teorema de Nyquist), e outros parâmetros de avaliação
da integridade dos sinais, tais como, a não-linearidade, a relação sinal-ruído, a distorção
harmónica, a resposta impulsional, etc. Por fim, mas não menos importante, o valor temporal
do momento de amostragem deve ser determinado com exactidão para cada amostra,
especialmente quando se pretende correlacionar adequadamente vários parâmetros.
4.7. BARRAMENTOS
4.7.1. Introdução
A taxa de transmissão de dados num canal de comunicações está limitada a um valor máximo
que é característico da tecnologia utilizada para o transporte da informação. Podemos obter
taxas de transmissão superiores numa dada tecnologia colocando vários canais em paralelo
entre o emissor e o receptor. Deste modo a taxa de transmissão de dados total é a soma de
todas as parciais.
Se o suporte físico de transporte de dados de um canal de transmissão é uma linha
eléctrica então é designado por barramento série. Se são colocadas várias linhas em paralelo,
esse conjunto é designado por barramento paralelo. Em ambos os casos os dados são
decompostos na unidade de informação mínima (bite) e uma sequência ordenada desses bites
é enviada por cada linha. Cada bite é espaçado de um intervalo de tempo normalmente
constante.
Os barramentos paralelos estão limitados no número de linhas que se podem utilizar
devido aos erros que ocorrem numa linha resultantes das transições de estado simultâneas nas
várias linhas de transmissão a partir de uma dada frequência e que pioram com o aumento do
número de linhas. Assim o ganho resultante de colocar linhas em paralelo diminui face a uma
limitação tecnológica que é desprezável nos barramentos série, os quais, por isso, permitem
taxas de transferência por linha superiores. Actualmente as melhores performances obtêm-se
10
com barramentos mistos que são compostos por um número reduzido de barramentos série em
paralelo utilizando uma tecnologia que evita a influência mútua entre as linhas.
4.7.2. Barramentos de instrumentação digital
Os barramentos mais usados em instrumentação digital são:
RS-232 (usado na ligação dos computadores aos seus periféricos);
GP-IB (usado no controlo de instrumentação laboratorial);
CAMAC (utilizado nas grandes experiências de Física dos anos 70 e 80);
VME (usado nos anos 90);
VXI (variante do VME com melhor blindagem electromagnética);
PCI (compatível com os Computadores Pessoais com processadores Intel);
FASTBUS (usado em Física das Altas Energias).
As diferenças entre estes barramentos resultam de:
o Diferentes velocidades de transmissão de informação (Mbits/segundo);
o Dimensões dos módulos;
o Acesso à norma;
o Tipo de transmissão da informação (sincrono ou assincrono; série ou paralelo);
o Dimensão máxima das Palavras
O RS-232 é um barramento série usado, principalmente, na ligação de computadores
(CE) aos seus periféricos (TE), e que permite a ligação a cada porto de um único dispositivo
ao computador.
O GP-IB (IEEE-488) é um barramento paralelo que foi desenvolvido para
ultrapassar as limitações do RS-232 em aplicações de teste e medida. Ainda hoje é muito
usado nos Laboratórios quando pretendemos controlar, automaticamente, a operação de
instrumentação clássica até um máximo de 32 equipamentos: por exemplo, osciloscópios,
multímetros, geradores de sinais, fontes de alimentação e analisadores espectrais. Este
barramento permite a transferência de palavras de 8 bites, com uma taxa máxima de 1MB/s.
O CAMAC (acrónimo de “Computer Automated Measurement And Control”) é um
barramento sincrono e paralelo, que permite a transferência de dados de 24 bites, com uma
banda passante de 3 MB/s. Este barramento foi muito utilizado nos anos sessenta e setenta do
século passado.
O VME (acrónimo de “VERSA Module Eurocards”) é um barramento paralelo e
assincrono que permite a co-existência de vários microprocessadores e a transferência de
11
dados de 8, 16 ou 32 bites, com uma taxa máxima de 40 a 320 MB/s, dependente da variante
do VME. Este barramento foi muito usado desde os anos oitenta noventa até a actualidade.
O VXI (acrónimo de “VMEbus eXtensions for Instrumentation”) é um barramento
projectado a partir do VME para aplicações computarizadas de teste e medida, através da
adição de sinais para temporização precisa, possibilidade de sincronismo entre os vários
módulos ligados ao barramento e a gestão integrada de recursos.
O PCI é um barramento paralelo e síncrono, desenvolvido inicialmente para aspectos
de multimédia, placas gráficas, controladores de discos e de placas de rede em computadores
pessoais. Este barramento permite a transferência de dados de 32 ou 64 bites, com uma taxa
máxima de 133 MB/s.
O PXI (acrónimo de “PCIbus with eXtensions for Instrumentation”) é um barramento
desenvolvido a partir do PCI, com algumas características mais adequadas para
instrumentação: (i) existência de um relógio de referência de 10 MHz; (ii) existência de linhas
de disparo que permitem iniciar e finalisar as medições em momentos específicos e
sincronisar as medidas realizadas por dois ou mais módulos; (iii) existência de fichas
adicionais que possibilitam a passagem entre módulos de sinais digitais e analógicos de até 42
Volts.
4.8. SISTEMAS OPERATIVOS
Os sistemas operativos mais adequados para a utilização de instrumentação digital são:
OS-9
Vx-Work
Linux
RT Linux
Solaris
Os sistemas operativos OS-9 e Vx-Works foram muito usados na operação dos sistemas
de controlo e aquisição de dados baseados nos microprocessadores da família 68000 da
Motorola.
Actualmente, o Linux e o RT-Linux são mais usados. Tratam-se de duas versões do
UNIX especialmente adequadas para teste e medida, sendo o RT-Linux particularmente
adequado para a operação em tempo real.
O Solaris é o sistema operativos dos SCADs baseados em estações de trabalho da “SUN
Computers”.
12
4.9. SOFTWARE
Na implementação de um sistema de aquisição de dados podemos considerar três níveis de
software:
• Software de muito baixo nível, desenvolvido, em Assembler ou C, pelos projectistas dos
módulos para a definição das suas funções e dos modos de operação;
• Software para implementação de cada módulo no sistema de controlo e aquisição de dados.
Este software é, normalmente, desenvolvido pelos autores do SCAD, utilizando as
linguagens C, C++ e Pascal;
• Software para utilização do SAD na aplicação concreta. Este software é, normalmente,
desenvolvido pelo utilizador, na linguagem mais adequada para a aplicação concreta e aos
seus conhecimentos de informatica (Fortran, C, DADISP, IDL, Mathematica,…..)
13