cap tulo 3 vibra˘c~ao amortecida e acoplada de part...
TRANSCRIPT

Capıtulo 3
Vibracao amortecida eacoplada de partıculas
O amortecimento e um mecanismo de retardo capaz de reduzir a ampli-tude de vibracao de um sistema. Em um amortecedor mecanico classico, aforca de retardo associado ao amortecedor e diretamente proporcional a ve-locidade do corpo sujeito ao amortecimento [1]. Neste capıtulo, estudaremosapenas o caso para baixas velocidades, pois nesta situacao apenas a viscosi-dade do fluido e levado em consideracao. Em altas velocidades, o regime deturbulencia tambem deve ser levado em conta [1]. Desta forma, para obteruma representacao matematica da forca de amortecimento F (v) para baixasvelocidades, realizamos uma expansao em series de Taylor da F (v) em tornode v0 = 0:
F (v) = F0 + v
(dF
dv
)v0=0
+1
2!v2
(d2F
dv2
)v0=0
+ . . . (3.1)
em que os termos igual ou maior que v2 podem ser desprezados, pois saosignificativos apenas para velocidade elevadas. A forca F0 e zero quando oamortecedor esta em repouso (v0 = 0). Assim, a forca de amortecimentopara baixas velocidades pode ser escrita como:
F (v) = v
(dF
dv
)v0=0
= −bv (3.2)
em que b = −(dF/dv)v0=0 e uma constante associada ao amortecimento. Osinal negativo indica que F e uma forca de retardo. Nas secoes que seguem,usaremos o resultado 3.2 para simular o amortecimento.
1

2 CAPITULO 3. VIBRACAO AMORTECIDA E ACOPLADA
3.1 Vibracao amortecida
O modelo fısico mais simples de um sistema massa-mola amortecido e re-presentado na figura 3.1. Consideraremos um corpo de massa m posicionadosobre uma superfıcie sem atrito e preso na extremidade de uma mola, comconstante elastica k, e de um amortecedor, com constante b. Tanto a molaquanto o amortecedor estao presos em uma parede rıgida imovel.
m
k
Parede
fixa
F(t)
b
Figura 3.1: Sistema massa-mola amortecido.
Pela segunda lei de Newton, a equacao geral do movimento e dada por:
md2x
dt2= F (t)− kx− bdx
dt, (3.3)
em que F (t) e a forca externa responsavel pela excitacao do sistema. Parasimular o modelo, vamos usar as mesmas grandezas do capıtulo anterior:m = 1, 0 kg e k = 25 N/m. Nas proximas secoes, analisaremos o modeloamortecido da vibracao realizada com excitacao unitaria e a vibracao forcada.Em todos os casos, a equacao 3.3 sera resolvida com o metodo de Runge-Kutta de quarta ordem (ode4) com passo fixo de 0,001.
3.1.1 Excitacao com impulso unitario
Um corpo em vibracao amortecida e excitado por um impulso unitariopode operar em tres regimes: subamortecido, criticamente amortecido e su-peramortecido. Cada um destes regimes pode ser identificado pelo fator deamortecimento viscoso ζ [2]:
ζ =b
2mω0
, (3.4)

3.1. VIBRACAO AMORTECIDA 3
em que ω0 e frequencia natural de vibracao. Quando ζ < 1, o regime deoperacao e subamortecido. Isto significa que o corpo possui movimentoperiodico em torno do ponto de equilıbrio com reducao exponencial da am-plitude de oscilacao ate o movimento cessar completamente. Para ζ > 1, omovimento e classificado como superamortecido. Neste caso, o movimentonao e periodico e o corpo cessa o movimento na primeira passagem pelo pontode equilıbrio. Quando ζ = 1, o sistema esta no limiar dos regimes anterio-res, sendo classificado como regime criticamente amortecido. Fisicamente, omovimento neste caso e similar ao movimento no regime superamortecido.
Com os valores adotados para m e k, usaremos b = 1, 10 e 100 kg/s parasimular os regimes subamortecido, criticamente amortecido e superamorte-cido, respectivamente. O diagrama utilizado para resolver o modelo e similarao do capıtulo anterior. A unica diferenca e a insercao de um bloco de ganhoentre os blocos “Integrator” e “Integrator1 ”, seguido de um bloco somador.Veja a figura 3.2.
Figura 3.2: Diagrama para solucao da equacao 3.3.
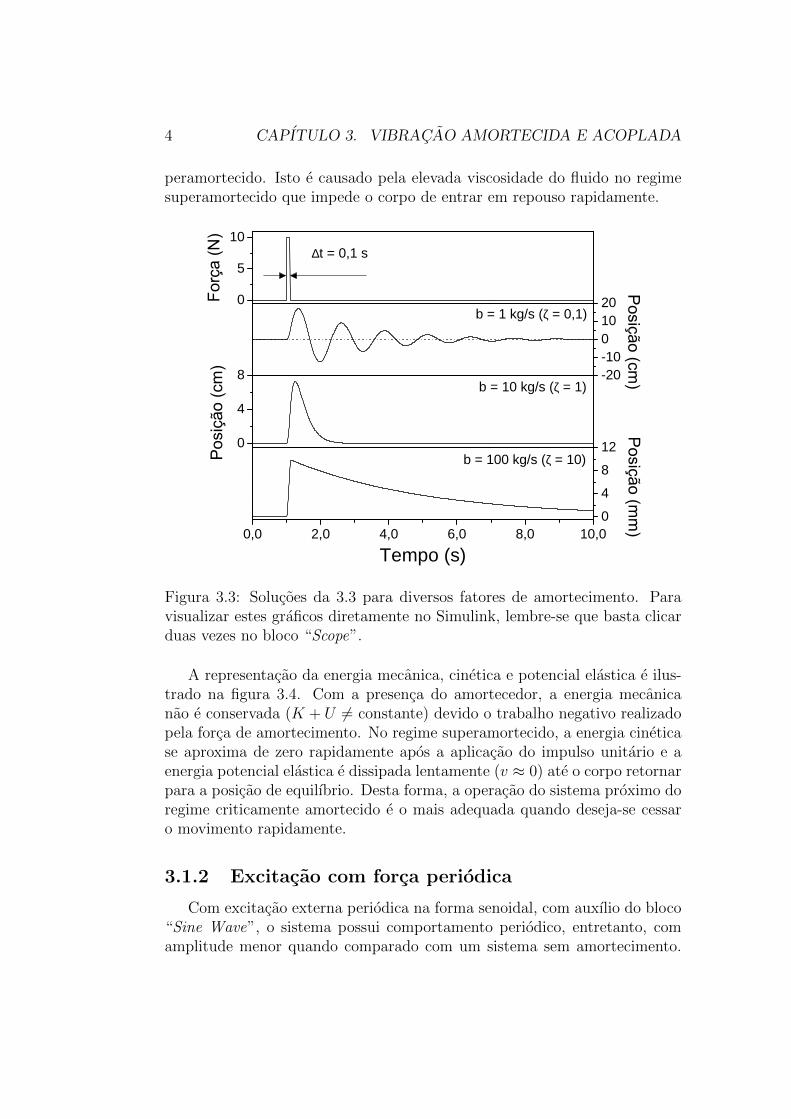
Os resultados apresentados na fig. 3.3 foram simulados com a aplicacao deum impulso unitario I = F∆t = 1, 0 Ns e largura de 0,1 s para 0 ≤ t ≤ 10 s.Observe que alem da mudanca no comportamento qualitativo das solucoes,ha tambem mudancas na amplitude maxima de cada regime de operacao.Com o aumento do fator de amortecimento viscoso, a amplitude maxima devibracao reduziu de 17 cm, no regime subamortecido, para 7,3 e 1,0 cm nosregimes criticamente amortecido e superamortecido, respectivamente. No en-tanto, o sistema entra em repouso mais rapidamente no regime criticamenteamortecimento em comparacao ao mesmo modelo operando em regime su-
4 CAPITULO 3. VIBRACAO AMORTECIDA E ACOPLADA
peramortecido. Isto e causado pela elevada viscosidade do fluido no regimesuperamortecido que impede o corpo de entrar em repouso rapidamente.
05
1 0
- 2 0- 1 001 02 0
048
0 , 0 2 , 0 4 , 0 6 , 0 8 , 0 1 0 , 00481 2
∆t = 0 , 1 s
�
�����
����
b = 1 k g / s ( ζ = 0 , 1 )
�
�
b = 1 0 k g / s ( ζ = 1 )
�� �������� �������
�� �
�����
�
b = 1 0 0 k g / s ( ζ = 1 0 )
� �
T e m p o ( s )Figura 3.3: Solucoes da 3.3 para diversos fatores de amortecimento. Paravisualizar estes graficos diretamente no Simulink, lembre-se que basta clicarduas vezes no bloco “Scope”.
A representacao da energia mecanica, cinetica e potencial elastica e ilus-trado na figura 3.4. Com a presenca do amortecedor, a energia mecanicanao e conservada (K + U 6= constante) devido o trabalho negativo realizadopela forca de amortecimento. No regime superamortecido, a energia cineticase aproxima de zero rapidamente apos a aplicacao do impulso unitario e aenergia potencial elastica e dissipada lentamente (v ≈ 0) ate o corpo retornarpara a posicao de equilıbrio. Desta forma, a operacao do sistema proximo doregime criticamente amortecido e o mais adequada quando deseja-se cessaro movimento rapidamente.
3.1.2 Excitacao com forca periodica
Com excitacao externa periodica na forma senoidal, com auxılio do bloco“Sine Wave”, o sistema possui comportamento periodico, entretanto, comamplitude menor quando comparado com um sistema sem amortecimento.

3.2. VIBRACAO ACOPLADA LIVRE 5
0
5
1 0
0 , 00 , 20 , 40 , 6
0 , 0
0 , 1
0 , 2
0 , 5 1 , 0 1 , 5 2 , 0 2 , 5 3 , 00 , 02 , 04 , 06 , 0
�
��
������
�
∆t = 0 , 1 s
U
KU
�
b = 1 k g / s ( ζ = 0 , 1 )
��� �������
E m e c
b = 1 0 k g / s ( ζ = 1 )
���
�����
��
�
K�
b = 1 0 0 k g / s ( ζ = 1 0 )
�� ��������
T e m p o ( s )Figura 3.4: Energia cinetica do sistema massa-mola amortecido em diversosregimes de operacao.
A excitacao periodica foi implementada no diagrama da figura 3.2. A fi-gura 3.5 apresenta a animacao do problema com a frequencia de excitacaooperando no valor da ressonancia (5 rad/s). Entretanto, devido a presencado amortecimento, a amplitude de oscilacao entra em regime estacionario.O comportamento da forca elastica (Fe) indica que a amplitude maxima deoscilacao e x = Fe/k = 10/25 = 0, 4 m. A amplitude da forca externa foimantida em 2,0 N. O codigo desta animacao nao e apresentado e fica comoexercıcio para o leitor, considerando que ha poucas mudancas em relacao aocodigo apresentado no capıtulo anterior.
3.2 Vibracao acoplada livre
A vibracao acoplada e um problema fundamental em muitas areas dafısica e engenharia como, por exemplo, no estudo de ondas elasticas emsolidos e a simulacao de suspensao veicular [2, 3]. Os estudos das proximassecoes serao direcionados para a obtencao de um modelo capaz de simularuma suspensao veicular passiva. Consideremos o modelo geral apresentadopela figura 3.6. Dois corpos de massas m1 e m2 estao conectados entre si em

6 CAPITULO 3. VIBRACAO AMORTECIDA E ACOPLADA
0 5 10 15-10
-5
0
5
10
Tempo (s)
For
ça (
N)
-2 -1.5 -1 -0.5 0 0.5 1-2
-1
0
1
2
Fext Fe Fa
Posição x (m)
Pos
ição
y (
m)
0 5 10 15-10
-5
0
5
10
Tempo (s)
For
ça (
N)
-2 -1.5 -1 -0.5 0 0.5 1-2
-1
0
1
2
Fext Fe Fa
Posição x (m)
Pos
ição
y (
m)
Figura 3.5: Partıcula em movimento harmonico amortecido com excitacaoforcada. As figuras mostram 2/100 quadros gerados na animacao. As curvasem preto, azul e vermelho representam os valores da forca elastica (Fe), forcaexterna (Fext) e forca de amortecimento (Fa), respectivamente.
uma parede rıgida e estatica por meio de molas e constantes k1 e k2 e amor-tecedores b1 e b2. O movimento de ambas as massas e representada pelasequacoes 3.5 e 3.6. As variaveis x1 e x2 representam as deformacoes das mo-las 1 e 2, respectivamente. E comum dizer que este modelo possui dois grausde liberdade (duas posicoes). Para demonstra-las, considere o diagrama deforcas apresentado na figura 3.7. Neste exemplo, a forca externa e aplicadasobre a massa m2, no entanto, poderia ser aplicada sobre a massa m1 ou nasduas massas simultaneamente. Outro caso, que sera usado para simular asuspensao automotiva, e a vibracao da base onde a mola 1 esta presa. Nestecaso precisamos alterar os dois ultimos termos da equacao 3.5. Faremos istoem breve.
m1
k1
Parede
fixa
F(t)
b1
m2
k2
b2
Figura 3.6: Sistema massa-mola acoplado.
m1d2x1dt2
= −k2(x1 − x2)− b2d
dt(x1 − x2)− k1x1 − b1
dx1dt, (3.5)

3.2. VIBRACAO ACOPLADA LIVRE 7
m2d2x2dt2
= F (t)− k2(x2 − x1)− b2d
dt(x2 − x1), (3.6)
m1 m2
– k1x1
– b1dx1/dt – b2d(x1 – x2)/dt
– k2(x1 – x2) – k2(x2
– x1)
– b2d(x2 – x1)/dt
F(t)
Figura 3.7: Diagrama de forcas no sistema massa-mola acoplado. Os vetoresem vermelho, azul e preto representa, respectivamente, as forcas elastica, deamortecimento e externa.
O diagrama de blocos deste modelo e representado pela figura 3.8. Oexemplo apresenta a excitacao causada por um impulso de 5,0 Ns (50 Naplicados durante 0,1 s). Para simular este modelo foram escolhidos valoresarbitrarios para a constantes: m1 = 0,5 kg (m−1
1 = 2 kg−1), m2 = 0,25 kg(m−1
2 = 4 kg−1), b1 = 1,0 kg/s, b2 = 3,0 kg/s, k1 = 10 N/m e k2 = 5,0 N/m.A demonstracao deste diagrama fica como exercıcio para o leitor. A dicageral e abrir e separar todos os termos das equacoes 3.5 e 3.6 para facilitar aorganizacao dos blocos.
Para iniciar os estudos deste modelo, analisaremos a vibracao livre (asconstantes de amortecimento sao nulas). Para isso, basta retirar os blocosGain 2 (b2), Gain 5 (b2) e Gain 7 (b1) do diagrama da figura 3.8 ou sim-plesmente adicionar um ganho nulo. A deformacao das molas em funcao dotempo sem a atuacao dos amortecedores e apresentada na figura 3.9. Umadas propriedades deste sistema e a conservacao da energia apos a aplicacaodo impulso externo. A energia mecanica deve ser constante.
Neste problema e esperado que o sistema massa-mola oscile periodica-mente; desta forma, a solucao geral (no modo estacionario) pode ser repre-sentada pelas equacoes:
x1(t) = A1eiωt (3.7)
x2(t) = A2eiωt (3.8)
em que ω e a frequencia natural de oscilacao e apenas a solucao real trazinformacao real. Substituindo as equacoes 3.7 e 3.8 nas equacoes 3.5 e 3.6,assumindo F = 0 (sem forca externa e sem amortecimento), obtemos asfrequencias ω1 = ±
√10 rad/s e ω2 = ±
√40 rad/s que representam, respec-
tivamente, as frequencias dos modos simetrico e antisimetrico [4]. O modosimetrico ocorre quando as partıculas se deslocam no mesmo sentido e o modoantisimetrico e obtido quando as partıculas oscilam em sentidos opostos. O

8 CAPITULO 3. VIBRACAO AMORTECIDA E ACOPLADA
To Workspace4
v1
To Workspace3
v2
To Workspace2
x1
To Workspace1
x2To Workspace
F
Step1
Step
Scope1
Scope
Integrator71s
Integrator61s
Integrator51s
Integrator41s
Integrator31s
Integrator21s
Integrator1
1s
Integrator
1s
Gain8
10
Gain7
1
Gain6
5
Gain5
3
Gain4
2
Gain3
5
Gain2
3
Gain1
4
Gain
50
Derivative1
du/dt
Derivative
du/dt
Sistema para resolver a mola 1
Sistema para resolver a mola 2
Acoplamento da mola 1 com a mola 2 (influência de 2 sobre 1)
Acoplamento da mola 2 com a mola 1(influência de 1 sobre 2)
Figura 3.8: Diagrama de blocos para o sistema massa-mola acoplado. Osistema e excitado por um impulso unitario.
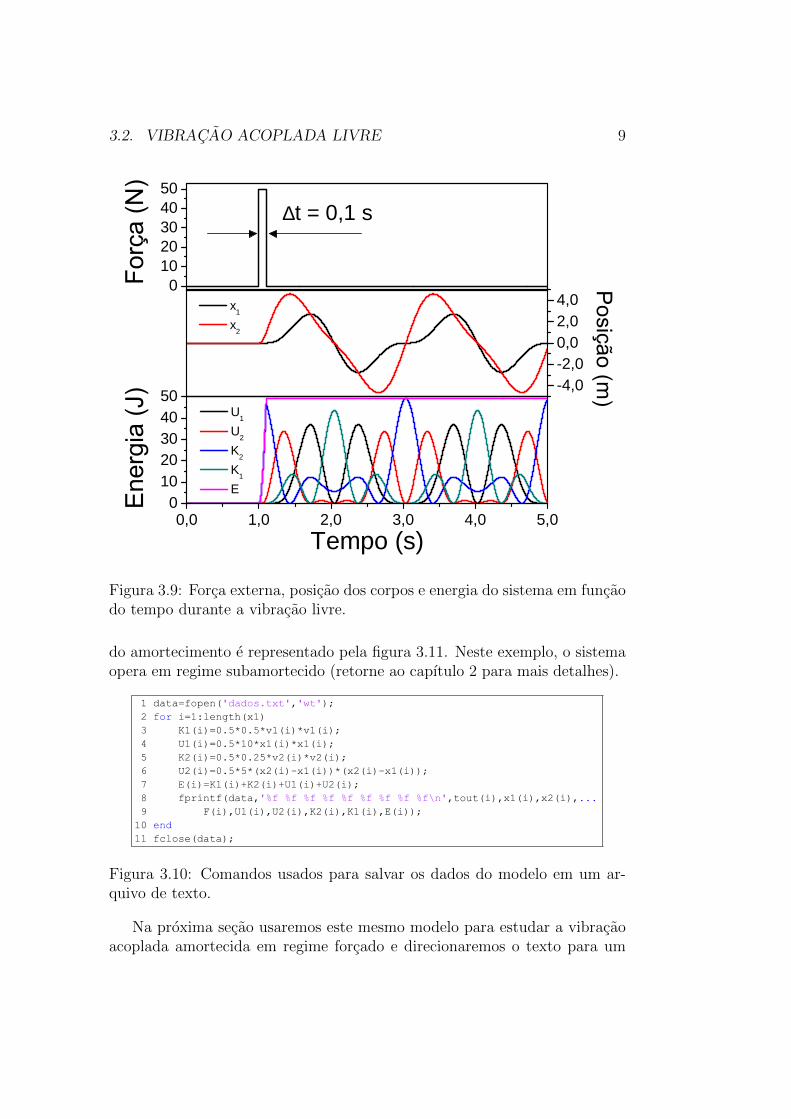
exemplo apresentado opera em modo simetrico. Para o conjunto operar emmodo antisimetrico, aplique uma forca sobre o bloco 1 com sentido opostoao da forca aplicada sobre o bloco 2 (exercıcio para o leitor). Para salvar osvalores das energias potencial elastica, cinetica e mecanica da figura 3.9 emum arquivo de texto, usamos os comandos apresentados na figura 3.10 emum arquivo .M. Note que a deformacao da mola 2 e calculada em relacao aposicao do corpo 1, logo U2 = k2(x2− x1)2/2. Um exemplo de vibracao livrecom tres molas pode ser acessado na ref. [5].
Observe que por se tratar de um sistema isolado (apos a aplicacao da forcaexterna), a energia mecanica e conservada. Treine o cerebro: como exercıcio,investigue cada curva da figura 3.9 e tente compreender o movimento dosistema a partir da energia de cada corpo. A solucao com a incorporacao
3.2. VIBRACAO ACOPLADA LIVRE 9
01 02 03 04 05 0
- 4 , 0- 2 , 00 , 02 , 04 , 0
0 , 0 1 , 0 2 , 0 3 , 0 4 , 0 5 , 00
1 02 03 04 05 0
�
��
�����
�
∆ t = 0 , 1 s�
���������� �
x 1 x 2
�
����
�����
T e m p o ( s )
U 1 U 2 K 2 K 1 E
Figura 3.9: Forca externa, posicao dos corpos e energia do sistema em funcaodo tempo durante a vibracao livre.
do amortecimento e representado pela figura 3.11. Neste exemplo, o sistemaopera em regime subamortecido (retorne ao capıtulo 2 para mais detalhes).
Figura 3.10: Comandos usados para salvar os dados do modelo em um ar-quivo de texto.
Na proxima secao usaremos este mesmo modelo para estudar a vibracaoacoplada amortecida em regime forcado e direcionaremos o texto para um
10 CAPITULO 3. VIBRACAO AMORTECIDA E ACOPLADA
01 02 03 04 05 0
- 1 , 00 , 01 , 02 , 03 , 0
0 , 0 1 , 0 2 , 0 3 , 0 4 , 0 5 , 005
1 01 52 02 5
�
��
�����
�∆ t = 0 , 1 s
�
���������� �
x 1 x 2
�
����
�����
T e m p o ( s )
U 1 U 2 K 2 K 1 E
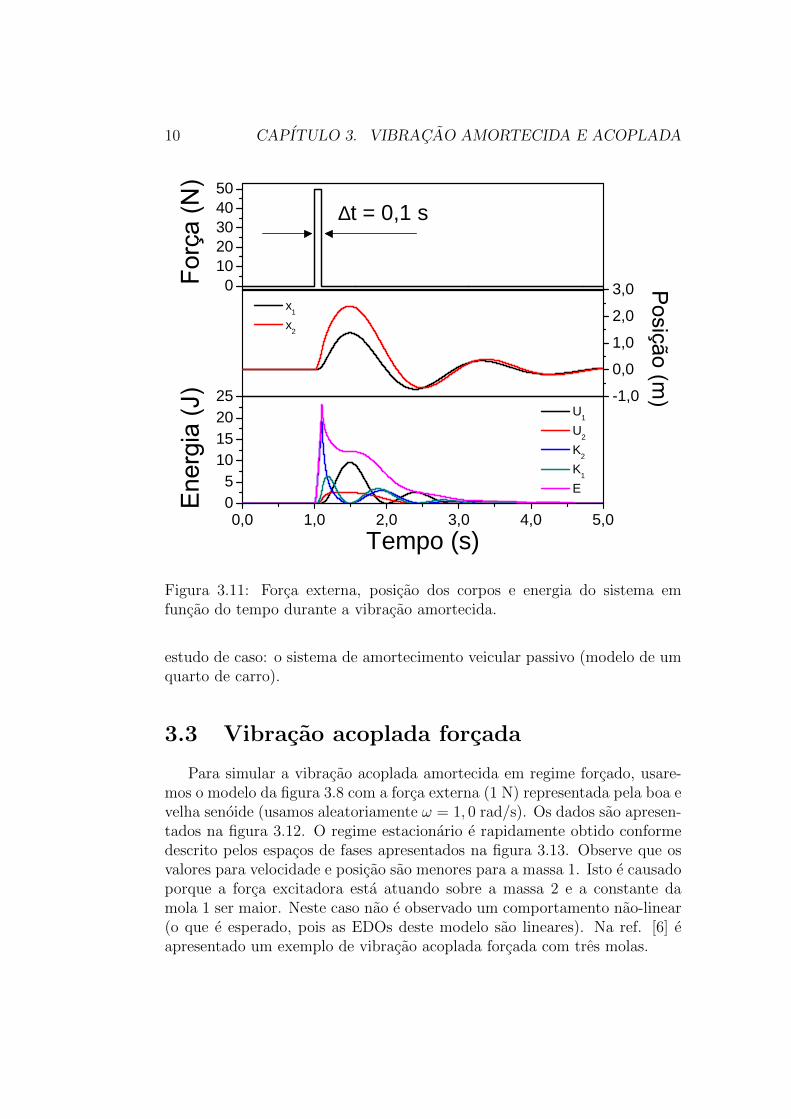
Figura 3.11: Forca externa, posicao dos corpos e energia do sistema emfuncao do tempo durante a vibracao amortecida.
estudo de caso: o sistema de amortecimento veicular passivo (modelo de umquarto de carro).
3.3 Vibracao acoplada forcada
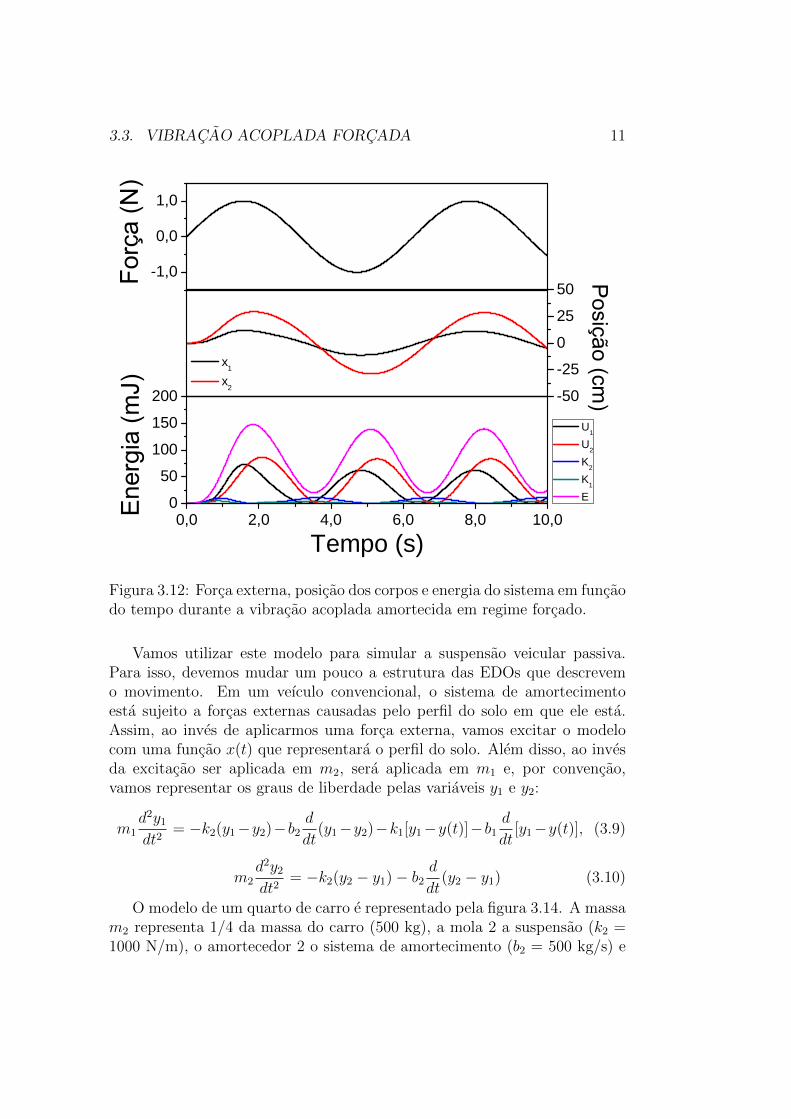
Para simular a vibracao acoplada amortecida em regime forcado, usare-mos o modelo da figura 3.8 com a forca externa (1 N) representada pela boa evelha senoide (usamos aleatoriamente ω = 1, 0 rad/s). Os dados sao apresen-tados na figura 3.12. O regime estacionario e rapidamente obtido conformedescrito pelos espacos de fases apresentados na figura 3.13. Observe que osvalores para velocidade e posicao sao menores para a massa 1. Isto e causadoporque a forca excitadora esta atuando sobre a massa 2 e a constante damola 1 ser maior. Neste caso nao e observado um comportamento nao-linear(o que e esperado, pois as EDOs deste modelo sao lineares). Na ref. [6] eapresentado um exemplo de vibracao acoplada forcada com tres molas.
3.3. VIBRACAO ACOPLADA FORCADA 11
- 1 , 00 , 01 , 0
- 5 0- 2 502 55 0
0 , 0 2 , 0 4 , 0 6 , 0 8 , 0 1 0 , 00
5 01 0 01 5 02 0 0
�
��
�����
��
���� �������
x 1 x 2
�
�����
���
��
T e m p o ( s )
U 1 U 2 K 2 K 1 E
Figura 3.12: Forca externa, posicao dos corpos e energia do sistema em funcaodo tempo durante a vibracao acoplada amortecida em regime forcado.
Vamos utilizar este modelo para simular a suspensao veicular passiva.Para isso, devemos mudar um pouco a estrutura das EDOs que descrevemo movimento. Em um veıculo convencional, o sistema de amortecimentoesta sujeito a forcas externas causadas pelo perfil do solo em que ele esta.Assim, ao inves de aplicarmos uma forca externa, vamos excitar o modelocom uma funcao x(t) que representara o perfil do solo. Alem disso, ao invesda excitacao ser aplicada em m2, sera aplicada em m1 e, por convencao,vamos representar os graus de liberdade pelas variaveis y1 e y2:
m1d2y1dt2
= −k2(y1−y2)−b2d
dt(y1−y2)−k1[y1−y(t)]−b1
d
dt[y1−y(t)], (3.9)
m2d2y2dt2
= −k2(y2 − y1)− b2d
dt(y2 − y1) (3.10)
O modelo de um quarto de carro e representado pela figura 3.14. A massam2 representa 1/4 da massa do carro (500 kg), a mola 2 a suspensao (k2 =1000 N/m), o amortecedor 2 o sistema de amortecimento (b2 = 500 kg/s) e

12 CAPITULO 3. VIBRACAO AMORTECIDA E ACOPLADA
- 3 0- 1 5
01 53 0
- 3 0 - 2 0 - 1 0 0 1 0 2 0 3 0- 3 0- 1 501 53 0
�
�
Veloc
idade
(cm/
s)
∆�������
��
����������� �������
Velocidade (cm/s)
�
���������� ������ ��
��������������� �������
��
Figura 3.13: Espaco de fase de cada uma das massas do modelo acoplado. Oeixo horizontal fornece a deformacao de cada uma das molas.
a massa m1 o pneu (50 kg). A mola 1 (k1 = 135000 N/m) e o amortecedor 1(b1 = 1400 kg/s) representam as propriedades do pneu (que tambem atuamcomo suspensao e amortecedor, respectivamente). Estes valores foram esco-lhidos arbitrariamente, mas com alguma proximidade dos valores reais. Odiagrama de blocos e apresentado na figura 3.15. A regiao delimitada emvermelho e verde representam a equacao 3.9 e a regiao delimitada em azula equacao 3.10. Este modelo e similar ao diagrama da figura 3.8. A unicadiferenca e o metodo de excitacao, que esta no perfil do solo, causada pelasoma de dois blocos “Sine Wave”, sendo um bloco com a funcao seno regu-lar (amplitude de 0,04 m) e o outro bloco com a funcao seno com degraus(amplitude de 0,025 m). A combinacao destes dois blocos resulta em umsolo irregular capaz de provocar excitacoes bruscas no sistema. Para inseriro perfil de degrau na funcao seno, clique duas vezes sobre o bloco e digite“1”em “Sample time”. Este comando produzira um degrau a cada 1,0 s comamplitude igual ao valor medio da funcao seno neste intervalo. Para produzirdegraus com largura de 2,0 s, por exemplo, digite 2 e assim por diante.

3.3. VIBRACAO ACOPLADA FORCADA 130
,7 m
0,3
m m
1
m2
k1 b
1
b2
k2
Figura 3.14: Modelo de um quarto de carro.
Figura 3.15: Diagrama de blocos para o modelo de um quarto de carro.

14 CAPITULO 3. VIBRACAO AMORTECIDA E ACOPLADA
Observe que o sistema de equacoes fornece o deslocamento dos corposem relacao ao ponto de equilıbrio da respectiva mola, conforme mostra afigura 3.13; desta forma, e necessario realizar um offset dos dados numericospor meio de dois blocos “Step” na saıda dos sinais y1 e y2. Para os centrosdas massas 1 e 2, foram atribuıdos offsets de 0,3 e 0,7 m, respectivamente,conforme mostra a figura 3.14. Estes valores tambem foram escolhidos arbi-trariamente. Note que a funcao degrau comeca inicialmente em zero. Parainiciar a animacao com os respectivos offsets incluıdos, clique duas vezes nobloco e digite 0 em “Step time”. A solucao do diagrama da figura 3.15 e apre-sentada na figura 3.14 (lado direito). Os dados mostram que, nas condicoesdo modelo, a deformacao da massa m2 e mais suave. Para confeccionar aanimacao, usaremos os dados da figura 3.14.
3.4 Animacao
Para simular o modelo e necesario exportar os dados numericos para oprompt de comando do MatLab. Este procedimento foi realizado com o bloco“To workspace”, conforme mostra a figura 3.15. As molas e os amortecedoresforam desenhados com o procedimento do capıtulo anterior, mas com algumasadaptacoes na determinacao da constante Hmin. Devido a insercao da basedo sistema e a espessura da massa m2 (veja o lado esquerdo da figura 3.14),foi necessario realizar mais um deslocamento nos dados y1 e y2 de 0,3 e 0,2m, respectivamente. As dimensoes do modelo sao apresentadas na figura3.16, onde w1 e a funcao y(t) que descreve o solo (veja a figura 3.15). Avelocidade horizontal do carro inserida no modelo e 1,0 m/s (considerandoMRU); no entanto, a percepcao visual desta velocidade depende de diversosfatores como velocidade de processamento, memoria e placa de vıdeo.
A dimensao longitudinal total da mola 2, conforme mostra a figura 3.15,e dada por (y2+0,2)− (w1+0,2) = 2× 0, 05 + 4nw, em que n e o numero deespiras e w e o numero de catetos da figura 2.14. Assim,
w =1
4n(y2 − w1 − 1/10) =
1
40n(10y2 − 10w1 − 1) (3.11)
A constante Hmin e dada quando a mola atinge a tracao maxima, i.e.,quando a diferenca y2−w1 e maxima. No MatLab e possıvel determinar estevalor com a funcao max():
Hmin = C1
4n[max(y2 − w1)− 1/10] = C
1
40n[10max(y2 − w1)− 1] (3.12)
em que C deve obedecer o criterio da equacao 2.10. Similarmente, as

3.4. ANIMACAO 15
y 2 + 0
,2
w1 +
0,2
m2
m1
b1
k1
b2
k2
0,1
m
y 1 + 0
,3
0,4 m
0,8 m
0,1
m
0,1 m
P2
p2
p1
P1
0,05
m
Figura 3.16: Dimensoes do modelo.
equacoes para simular a mola 1 sao dadas por:
w =1
4n(y1 − y2 − 1/10) =
1
40n(10y1 − 10y2 − 1) (3.13)
Hmin = C1
4n[max(y1 − y2)− 1/10] = C
1
40n[10max(y1 − y2)− 1] (3.14)
As dimensoes P e p dos amortecedores sao determinados quando a molaatinge a deformacao maxima. Este procedimento e realizado com o auxılioda funcao min():
P1 = p1 = min(y1 − w2)− 1/20 =1
20[20min(y1 − y2)− 1] (3.15)
P2 = p2 = min(y2 − w1)− 1/20 =1
20[20min(y2 − w1)− 1] (3.16)
As demais dimensoes do modelo (blocos e base) sao intuitivas. Tanto es-tas dimensoes quanto a forma como as equacoes 3.11−3.16 foram inseridas no

16 CAPITULO 3. VIBRACAO AMORTECIDA E ACOPLADA
modelo ficarao como exercıcio para o leitor. O codigo pode ser conferido no fi-nal deste capıtulo. A animacao foi separada em tres regioes: (i) 1 grafico paraapresentacao da animacao, (ii) 1 grafico para apresentar a posicao da massa1 em funcao do tempo e (iii) 1 grafico para apresentar a posicao da massa2 em funcao do tempo. Para inserir essas regioes, foi utilizado o comandosubplot() com quatro regioes. Os subplot(2,2,1) e subplot(2,2,3)
foram sobrepostos e utilizados para apresentar a animacao do modelo. Parasobrepor os graficos, foi utilizado o comando subplot(2,2,[1 3]). Ossubplot(2,2,2) e subplot(2,2,4) foram utilizados para apresentar ocomportamento das massas m1 (M na animacao) e m2 (m na animacao), res-pectivamente. O codigo esta separado em duas partes. A primeira possui umloop de 1 ate 11. Neste intervalo, a animacao apresenta apenas o solo (funcaow1). Da iteracao 12 em diante, o modelo e inserido na animacao. Todos oselementos presentes na animacao foram nomeados por constantes (d1...d12,c1...c8, b1...b15, t1 e t2) que foram chamadas ao final do codigo com o comandoset() com a seguinte estrutura: set([ ],'Visible','off'). Este co-mando apaga todos os elementos presentes na iteracao i. Isto e necessariopara evitar a sobreposicao dos elementos da iteracao i com os da iteracao i+1.Observe que isso e feito apenas com os dados do subplot(2,2,[1 3]). Oresultado final da animacao e apresentada na figura 3.17. A animacao com-pleta esta disponıvel na ref. [7].
Tempo (s)0 5 10 15 20
Pos
icao
de
M (
m)
1.02
1.03
1.04
1.05
1.06
Tempo (s)0 5 10 15 20
Pos
icao
de
m (
m)
0.48
0.5
0.52
0.54
0.56
0.58
0.6
Posicao (m)8 8.2 8.4 8.6 8.8
Pos
icao
(m
)
-0.2
0
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
1.8
m
M
Figura 3.17: Animacao do modelo de 1/4 de carro.

Referencias Bibliograficas
[1] H. Moyses Nussenzveig, Curso de Fısica Basica (Editora Blucher, SaoPaulo, 2002).
[2] J. L. Meriam L. G. Kraige, Mecanica para Engenharia - Dinamica (LTC,Rio de Janeiro, 2013).
[3] S. M. Rezende, Materiais e Dispositivos Eletronicos (Editora Livrariada Fısica, Sao Paulo, 2014).
[4] S. T. Thornton, J. B. Marion, Dinamica Classica de Partıculas e Siste-mas (Cengage Learning, Sao Paulo, 2011).
[5] Diego Duarte, Vibracao livre de dois osciladores acoplados, Canal noYouTube, https://youtu.be/OWKl6t-z6EI.
[6] Diego Duarte, Vibracao forcada de dois osciladores acoplados, Canal noYouTube, https://youtu.be/rAY7aaD9Msw.
[7] Diego Duarte, Simulacao de uma suspensao veicular com MATLAB/Si-mulink, Canal no YouTube, https://youtu.be/8YYw_9sK2fs.
17