cÁlculo iv - engenharia de computação - pdf
TRANSCRIPT
CÁLCULO
DIFERENCIAL
E
INTEGRAL IV
---- Guia de Aulas Guia de Aulas Guia de Aulas Guia de Aulas ----
- Noções Gerais e Aplicações --- NoNoçções Gerais e Aplicaões Gerais e Aplicaçções ões --
Elaborado pelo Elaborado pelo Elaborado pelo Elaborado pelo Prof. Arnaldo Stochiero Prof. Arnaldo Stochiero Prof. Arnaldo Stochiero Prof. Arnaldo Stochiero
- Engenharia de Computação --- Engenharia de ComputaEngenharia de Computaçção ão --
2012
Elaborado pelo Elaborado pelo Elaborado pelo Elaborado pelo Prof. Arnaldo Stochiero Prof. Arnaldo Stochiero Prof. Arnaldo Stochiero Prof. Arnaldo Stochiero
- Eu também, Alexa . Com ele nós vamos aprender muitas lições de Cálculo .
- Diego, quando eu aprender a ler, vou estudar neste livro do vovô. E você ?
O Curso de Engenharia de ComputaçãoCom o curso, você será capaz de projetar e construir computadores, periféricos e outros sistemas que integrem hardware e software. O engenheiro de computação atua aplicando as tecnologias da
computação na solução de problemas da sociedade. Apesar do foco na computação, o curso contempla uma formação básica dos aspectos físicos, suficiente para que o engenheiro de
computação possa trabalhar harmoniosamente em equipe com outros profissionais da engenharia. De uma forma geral, o profissional egresso do curso será capaz de desempenhar as seguintes tarefas: concepção de novas formas de aplicação das tecnologias, bem como a incorporação
destas às estratégias organizacionais; planejamento e gerência dos serviços e recursos de tecnologia da informação; projeto e desenvolvimento de sistemas integrados de hardware e
software.
O que você irá estudarVocê irá estudar como utilizar a Matemática, a Ciência da Computação, a Física e as tecnologias
modernas no apoio à construção de produtos e serviços seguros, confiáveis e de relevância àsociedade. Além disso, sua formação irá torná-lo capaz de projetar, construir, testar e manter
software no apoio à construção ou incorporado a produtos e serviços, principalmente os que, além do próprio sistema computacional, requeiram a interação com o ambiente ou com dispositivos físicos. Os conteúdos mais relevantes estudados ao longo do curso são: matemática discreta e
contínua; mecânica, termodinâmica, eletromagnetismo, óptica e suas aplicações à Engenharia de Computação; técnicas de programação de computadores; sistemas lógicos e arquiteturas de
ambientes computacionais; abstração, representação, organização e recuperação da informação; metodologia de desenvolvimento de sistemas; sistemas dinâmicos, controle e automação; ciências
do ambiente; aspectos éticos e sociais relacionados à Engenharia de Computação.
Campo de pesquisaArquitetura de Ambientes Computacionais. Computação Paralela e Distribuída. Computação
Móvel e Redes Sem Fio. Inteligência Artificial. Jogos Digitais. Otimização de Sistemas. Processamento Digital de Sinais/Imagens/Vídeo. Redes de Computadores. Sistemas Distribuídos.
Automação. Telecomunicações.
VISÃO PANORÂMICA DA ENGENHARIA DE COMPUTAÇÃO
Prof
. Ar
nald
o S
toch
iero
Os primeiros indícios rudimentares do Cálculo Diferencial e Integral têm suas origens na Antiguidade, porém, somente a partir de Isaac Newton (1643-1727) e Gottfried Wilhelm Leibniz (1646-1716), esse monumental capí-tulo da Matemática conseguiu deflagrar seu processo evolutivo. A genialidade desses dois baluartes da ciência moderna trouxe à baila tão maravilhosa obra que por si mesma já seria suficiente para consagrar indelevelmente a capacidade cria-dora do gênero humano.
Nos últimos trezentos anos, muitos matemáticos trabalharam e vêm trabalhando no aprimoramento da estruturação teórica do Cálculo, perseguindo sempre os atalhos inteligentes da sistematização. As brilhantes contribui-ções de Leonhard Euler (1707-1783), Jean le Rond d’Alembert (1717-1783), Joseph Louis Lagrange (1736-1813), Pierre Simon Laplace (1749-1827), Carl Friedrich Gauss (1777-1855), Augustin Louis Cauchy (1789-1857), Nikolai IvanovitchLobatchevski (1793-1856) , Bernhard Riemann (1826-1866) , Richard Dedekind (1831-1916), Oliver Heaviside (1850-1925), bem como as de vários outros luminares, vêm promovendo esse ordenamento sistêmico tão importante para o de-senvolvimento desse campo científico e suas ressonâncias em todas as ramificações da atividade tecnológica e social .
Os objetivos que nos levam a realizar este trabalho visam tão somente a torná-lo um compêndio utilitá-rio, contemplando nossos alunos com um acessório matemático funcional que, acoplado à bibliografia recomendada, se-guramente irá robustecer os pré-requisitos indispensáveis às disciplinas de Cálculo, Física, Estatística, Eletricidade, Me-cânica e demais outras das áreas profissionalizantes.
Para formatá-lo, empenhamo-nos na utilização de uma linguagem clara, sucinta e elucidativa, capaz de levar o aluno a consolidar um aproveitamento desejável . Considerando que a própria gênese das engenharias nos reco-menda navegar numa órbita pragmatista do conhecimento, o desenvolvimento teórico destas lições de cálculo desprende-se de rigorismos e formalismos muitas vezes incômodos e fastidiosos para o iniciante. Em contrapartida, já nas primei-ras páginas das explanações, o leitor perceberá nossa insistente recorrência aos apelos geométricos como legítimos teste-munhos visuais de cada afirmativa apresentada, configurando-se aí a indisfarçável intenção de buscar no harmonioso aca-salamento da álgebra com a geometria a argamassa ideal para a fixação duradoura do aprendizado .
Diante da profusão de gráficos e figuras, ainda que sejamos censurados pelo uso abusivo desses recur-sos geométricos, sentimo-nos bem mais próximos da legítima finalidade de esclarecer e dirimir as dúvidas mais frequen-tes dos alunos, confiando aos detalhes visuais aqueles lances sigilosamente guardados nas entrelinhas da maioria dos textos didáticos. Para garantir uma nitidez mais apurada nessas ilustrações, bem como as posições mais adequadas das figuras, utilizamos com providencial frequência o sistema algébrico computacional Maple e, eventualmente, o sistema Matlab R12, aprimorando significativamente a assimilação dos espaços bi e tridimensionais. Tal estratégia harmoniza-se com os preceitos básicos de uma aprendizagem segura e consistente, desde que sincronizada nas ações de construir as resoluções e discutir os resultados encontrados .
Como recomendação final, sugerimos ter sempre presente a magistral observação formulada por Carl Friedrich Gauss : “Em verdade, o que proporciona o máximo prazer àqueles que estudam seriamente esta ciência não éo conhecimento e sim a aprendizagem; não é a posse, mas a aquisição; não é a meta alcançada, mas o ato de atingi-la.”
Tenhamos ainda sempre em conta o nobre e paternal aconselhamento formulado por Albert Einstein em suas costumeiras palestras dirigidas aos jovens estudantes : “Jamais considerem seus estudos como uma obrigação, mas como uma oportunidade invejável para aprender a conhecer a influência libertadora da beleza do reino do espírito, para seu próprio prazer pessoal e para proveito da comunidade à qual seu futuro trabalho pertencer . ”
O autor .
P R E Â M B U L O P R E Â M B U L O
S u m á r i o
Unidade 3 - CURVAS PARAMETRIZADAS 3.1. Funções escalares, funções vetoriais e curvas parametrizadas ... 37 3.2. Aplicações ao movimento ........................................................... 47 3.3. Movimento no espaço : vetor tangente unitário e vetor normal .... 56
Unidade 2 - INTEGRAIS MÚLTIPLAS 2.1. Definição e interpretação geométrica da integral dupla ............. 9 2.2. Integral dupla em coordenadas cartesianas ............................... 122.3. Integral dupla em coordenadas polares ...................................... 19 2.4. Aplicações : centro de massa e momento de inércia .................... 24 2.5. Integral tripla em coordenadas cartesianas ............................... 27 2.6. Coordenadas cilíndricas e coordenadas esféricas ....................... 29
Unidade 4 - INTEGRAIS DE LINHA 4.1. Campos escalares e campos vetoriais. Operadores diferenciais ... 61 4.2. Integral de linha ou integral curvilínea de uma função escalar .. 734.3. Integral de linha ou integral curvilínea de uma função vetorial .
Trabalho realizado por um campo vetorial .................................. 764.4. Teorema de Green ........................................................................ 784.5. Campos vetoriais conservativos . Independência do caminho ..... 85
Unidade 5 - INTEGRAIS DE SUPERFÍCIE 5.1. Integral de superfície de uma função escalar .............................. 935.2. Integral de superfície de uma função vetorial ............................. 985.3. Teorema de Gauss ....................................................................... 1045.4. Teorema de Stokes ...................................................................... 114
Questões adicionais diversificadas ............................................................ 122
Unidade 1 - CURVAS EM COORDENADAS POLARES 1.1. Conversão das coordenadas retangulares em polares ................. 1 1.2. Equações polares da reta, do círculo e outras curvas clássicas .. 1
Referências Bibliográficas ........................................................................ 129

Coordenadas polares. . Constitui um sistema referencial criado por Isaac Newton , dotado de dois elementos
bem simples : um ponto fixo O denominado polo e uma reta fixa OX denominada eixo polar .
A cada par de números reais ( r , qqqq ) podemos associar um único ponto P de um plano . A recíproca não é verda-
deira, pois, conforme veremos adiante, um ponto P do plano pode associar-se a mais de um par de valores reais ( r , qqqq ) :
r : medida algébrica do segmento OP ( raio vetor de P)
qqqq : medida do ângulo XOP , geralmente dada em radianos(argumento de P)Coordenadas polares do ponto P
0 X
P
θr Notações : P ( r , qqqq ) ou P = ( r , qqqq ) .
Alguns autores costumam inverter a ordem : P ( qqqq , r )
Advertência : Existem várias situações nas quais é conveniente admi-tir a variação da coordenada angular qqqq no intervalo( 0 , + :::: ) ou mesmo em ( - ∞∞∞∞ , +:::: ) , como, por exemplo, no tratamento de curvas espiraladas .
Exemplos:
0 X
PM
N
θ
7 4 2 5P : 4, ou 4, ou 4, ou 4, ou 4, ou ...
3 3 3 3 3
π π π π π − − − −
5 3 3M : 3, ou 3, ou 3, ou 3, ou 3, ou ...
2 2 2 2 2
π π π π π − − − −
( ) ( ) ( ) ( ) ( ) ( )N : 2, 0 ou 2, 2 ou 2, ou 2, ou 2, 3 ou 2, 3 ou ...π π π π π− − − − − −
a cada par ( r , θθθθ ) um único ponto P
a cada ponto P um único par ( r , θθθθ )Conclusão :
- Apesar da inexistência da biunivocidade, em muitas ocasiões a utilização do sistema polar apresenta inúmeras vanta-gens sobre o sistema cartesiano, sobretudo na simplificação de equações de grande importância na área da engenha-ria, no estudo de equações paramétricas de trajetórias, no enxugamento de expressões voltadas para as leis e fenôme-nos físicos que, tratados pelos processos elementares da álgebra, tornam os cálculos extremamente fastidiosos e, não raramente, impraticáveis .
Sistema polar associado ao sistema cartesiano. . Consideremos o polo coincidente com a origem do sistema car-tesiano e o eixo polar coincidente com o semieixo positivo OX :
0 X
Y
θ
( ) ( )P x, y P r,θ↔
r
A
2 2 2 2 2x r cosx y r r x y
y r sen
θθ
=⇒ + = ∴ = ± + =
Das relações trigonométricas do triângulo retângulo AOP , tiramos :
Portanto, sendo a equação cartesiana de uma curva do plano, sua equação no sistema polar será
( )f x, y 0=( )f r cos , r sen 0 .θ θ =
Equação polar da reta .
0 X
( )P r,θ
( )Q d ,α
d
αθ
r
d : distância do polo à reta dadaαααα : ângulo da normal com o eixo polarP ( r, θθθθ ) : ponto genérico da reta
Como o triângulo QOP é retângulo, resulta :
( )r cos dθ α− =
Isaac Newton(1643-1727)
x
y
x r cos y r sen ytg arc tg
y r sen x r cos x
θ θ θ θθ θ
=⇒ = = ∴ = =
CCÁÁLCULO DIFERENCIAL E INTEGRAL IV LCULO DIFERENCIAL E INTEGRAL IV -- Roteiro SinRoteiro Sinóóptico ptico --
-- Cursos de Engenharia Cursos de Engenharia --
1.1. Conversãodas coordenadasretangulares em coordenadaspolares.
Unidade 1 - CURVAS EM COORDENADAS POLARES
11
( não verdadeira )
1.2. Equaçõespolares da reta ,docírculo e outras curvasclássicas.
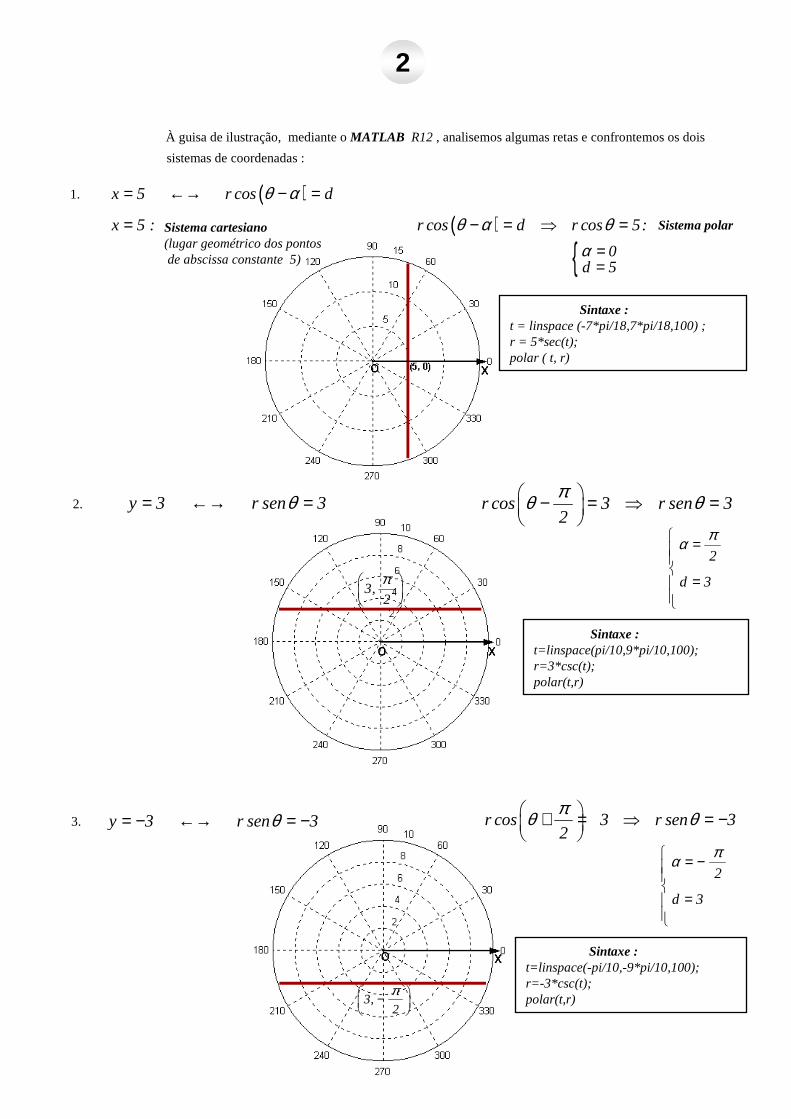
À guisa de ilustração, mediante o MATLAB R12, analisemos algumas retas e confrontemos os dois
sistemas de coordenadas :
1. ( )x 5 r cos dθ α= ←→ − =
( )x 5 : r cos d r cos 5:θ α θ= − = ⇒ = Sistema polar
2. y 3 r sen 3θ= ←→ =
Sintaxe :t = linspace (-7*pi/18,7*pi/18,100) ;r = 5*sec(t);polar ( t, r)
{ 0d 5α =
=
r cos 3 r sen 32
πθ θ − = ⇒ =
2
d 3
πα =
=
Sintaxe : t=linspace(pi/10,9*pi/10,100);r=3*csc(t);polar(t,r)
3. y 3 r sen 3θ= − ←→ = − r cos 3 r sen 32
πθ θ + = ⇒ = −
2
d 3
πα = −
=
Sintaxe :t=linspace(-pi/10,-9*pi/10,100);r=-3*csc(t);polar(t,r)
Sistema cartesiano(lugar geométrico dos pontosde abscissa constante 5)
3,2
π
3,2
π −
22

a 0
0
r R ,
r R
αθ
= = = ∀ ∈
∴ =
ℝ
Equação polar do círculo .
a) Caso geral :
0 X
( )P r,θ
( )C a,αa
α θ
r
a : raio vetor do centro do círculo dadoαααα : argumento do centroR : raio do círculoP ( r, θθθθ ) : ponto genérico do círculo
A equação polar do círculo será obtida mediante a aplicação da lei dos cossenos no triângulo COP :
( )2 2 2R r a 2 r a cosθ α= + − −
R
b) O círculo passa pelo polo :
0 X
( )P r,θ
( )C a,αa
αθ
rR
( )( )
( )
2 2 2
2
a R R r R 2 r R cos
r 2 r R cos
r 2 R cos
θ α
θ α
θ α
= ⇒ = + − −
= −
∴ = −
c) O círculo passa pelo polo e tem centro no eixo polar :
0 X
( )P r,θ
( )C R, 0θr
R( )a R
r 2 R cos 00
r 2 R cos
θα
θ
=⇒ = − =
∴ =
d) O círculo tem centro no polo :
( )0 C 0, 0≡ X
( )P r,θ
r R=θ
Equação polar do caracol de Pascal . Alguns autores mantêm a denominação limaçon, palavra francesa que sig-nifica caracol . Trata-se do lugar geométrico dos pontos M e M ’ de um plano cujas distâncias a um ponto móvel P é constante :
a) Caso geral : Seja um círculo que contém o polo, centro C e diâmetro OA = a .O triângulo retângulo POA nos permite escrever
OP OA cos a cosθ θ= =ponto M : r OP PM r a cos b
ponto M ' : r OP PM ' r a cos b
θθ
= + ⇒ = + = − ⇒ = −
Portanto, a equação polar do caracol de Pascal é
r a cos b , sendo a b .θ= ± >
P
A
M '
C
M
θ
33
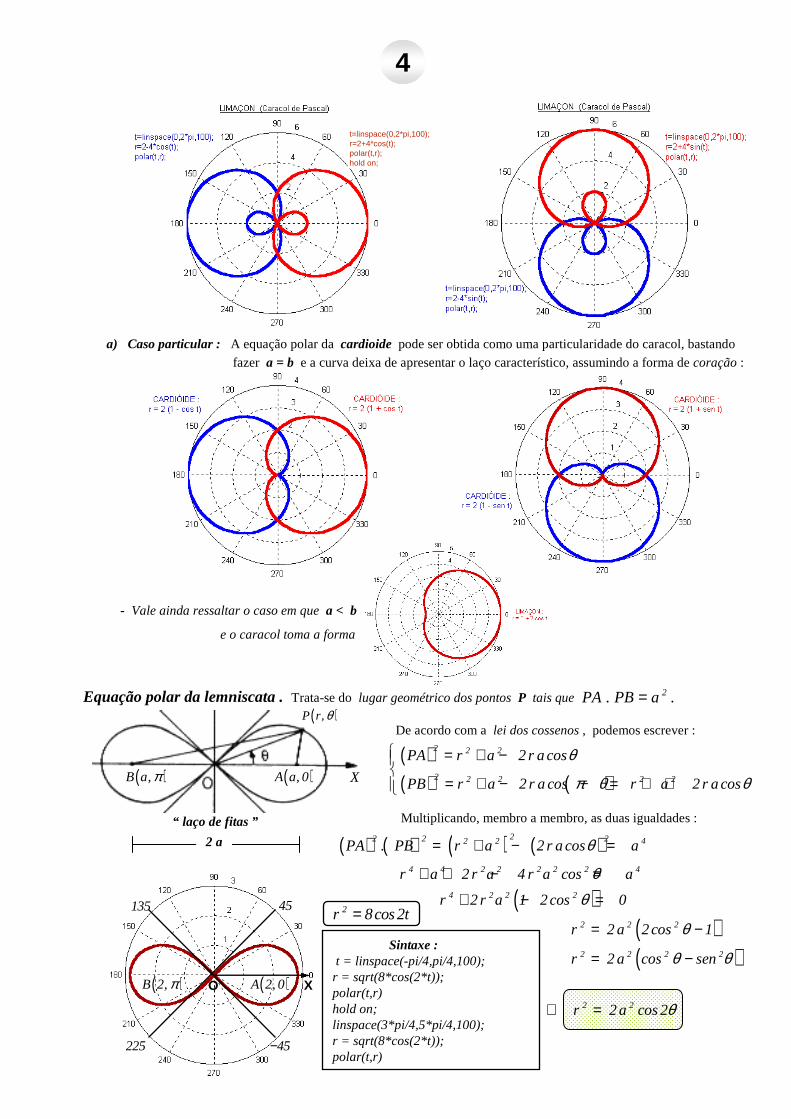
a) Caso particular : A equação polar da cardioide pode ser obtida como uma particularidade do caracol, bastando
fazer a = b e a curva deixa de apresentar o laço característico, assumindo a forma de coração :
- Vale ainda ressaltar o caso em que a < b
e o caracol toma a forma
Equação polar da lemniscata . Trata-se do lugar geométrico dos pontos P tais que 2PA . PB a .=( )P r,θ
( )A a, 0( )B a,π X
2 a
De acordo com a lei dos cossenos , podemos escrever :
( )( ) ( )
2 2 2
2 2 2 2 2
PA r a 2 r a cos
PB r a 2 r a cos r a 2 r a cos
θ
π θ θ
= + −
= + − − = + +
Multiplicando, membro a membro, as duas igualdades :
( ) ( ) ( ) ( )
( )( )( )
22 2 22 2 4
4 4 2 2 2 2 2 4
4 2 2 2
2 2 2
2 2 2 2
2 2
PA . PB r a 2 r a cos a
r a 2 r a 4 r a cos a
r 2 r a 1 2cos 0
r 2 a 2cos 1
r 2 a cos sen
r 2 a cos 2
θ
θθ
θ
θ θ
θ
= + − =
+ + − =
+ − =
= −
= −
∴ =
“ laço de fitas ”
Sintaxe :t = linspace(-pi/4,pi/4,100);r = sqrt(8*cos(2*t));polar(t,r)hold on;linspace(3*pi/4,5*pi/4,100);r = sqrt(8*cos(2*t));polar(t,r)
( )A 2, 0( )B 2,π
45135
45−225
2r 8cos2t=
t=linspace(0,2*pi,100);r=2+4*cos(t);polar(t,r);hold on;
O X
44
OM OP . cosOM PQ. sen .cos
OP PQ. sen
ou
r 2 a .sen .cos
r a sen 2
θθ θ
θ
θ θ
θ
=⇒ = =
=
∴ =
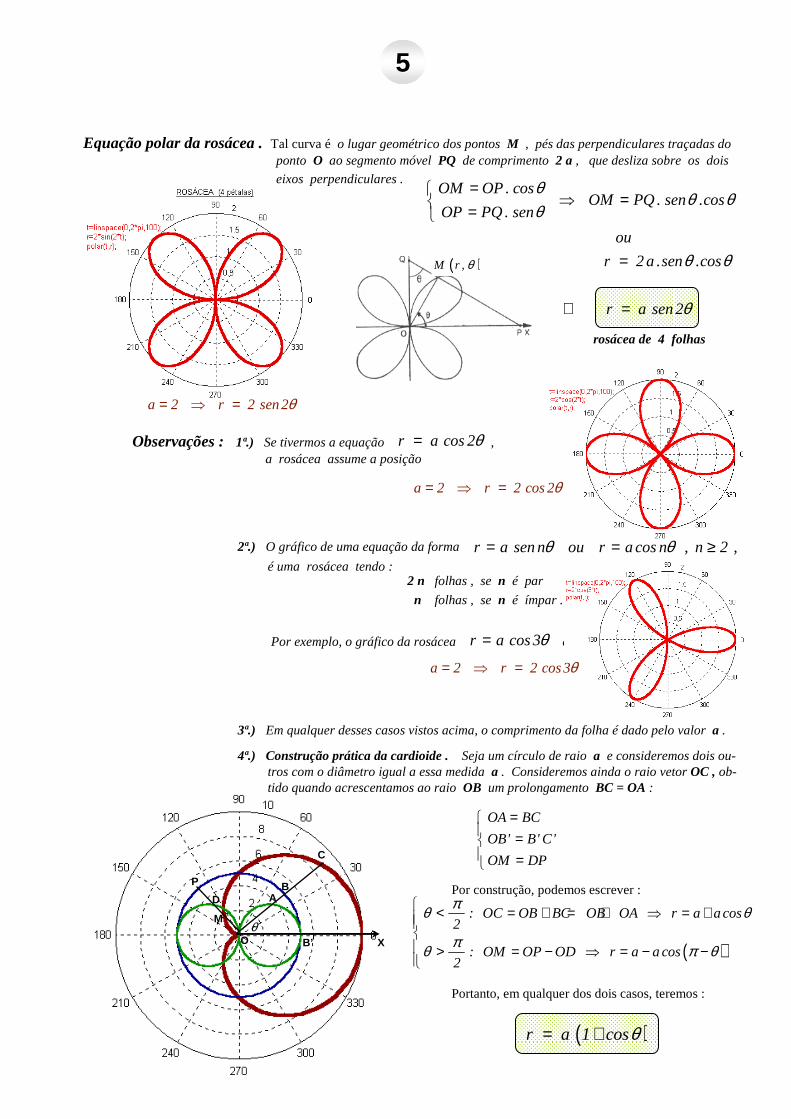
Equação polar da rosácea . Tal curva éo lugar geométrico dos pontos M , pés das perpendiculares traçadas do ponto O ao segmento móvel PQ de comprimento 2 a , que desliza sobre os dois
eixos perpendiculares .
rosácea de 4 folhas
( )M r , θ
Observações : 1ª.) Se tivermos a equação , a rosácea assume a posição
r a cos 2θ=
2ª.) O gráfico de uma equação da forma
é uma rosácea tendo :2 n folhas , se n é par
n folhas , se n é ímpar .
Por exemplo, o gráfico da rosácea é
r a sen n ou r a cos n , n 2 ,θ θ= = ≥
r a cos 3θ=
3ª.) Em qualquer desses casos vistos acima, o comprimento da folha é dado pelo valor a .
4ª.) Construção prática da cardioide . Seja um círculo de raio a e consideremos dois ou-tros com o diâmetro igual a essa medida a . Consideremos ainda o raio vetor OC , ob-tido quando acrescentamos ao raio OB um prolongamento BC = OA :
OA BC
OB' B' C'
OM DP
= = =
Por construção, podemos escrever :
( )
: OC OB BC OB OA r a acos2
: OM OP OD r a a cos2
πθ θ
πθ π θ
< = + = + ⇒ = + > = − ⇒ = − −
Portanto, em qualquer dos dois casos, teremos :
( )r a 1 cosθ= +
a 2 r 2 sen2θ= ⇒ =
a 2 r 2 cos 2θ= ⇒ =
a 2 r 2 cos3θ= ⇒ =
O X
AB
C
B’
P
D
Mθ
55

Problemasilustrativos
1. Escrever a equação polar de cada uma das curvas expressas no sistema cartesiano :
Resolução: Basta aplicar as relações trigonométricas correspondentes :a ) x 3 0− =x 3 0 r cos 3 .θ− = ⇒ =
2 2 2b ) x y 2x 0 r 2r cos 0 ou r 2 cosθ θ+ − = ⇒ − = =
( ) ( ) ( )22 2 2 2 2 4 2 2 2 2 2 2c ) x y 2a x y r 2a r cos sen ou r 2a cos 2θ θ θ+ = − ⇒ = − =( lemniscata )
2 2d ) 2 x y 1 2r cos sen 1 ou r sen2 1θ θ θ= ⇒ = =
( reta vertical )
( círculo )
( hipérbole )
2. Escrever a equação cartesiana de cada uma das curvas expressas no sistema polar :
Resolução: Basta aplicar as relações trigonométricas correspondentes :a ) r 3=2 2 2 2x y 3 x y 9+ = ⇒ + =
b ) r sen 4 0 y 4θ − = ⇒ =
( )( )
2 2 2 2 2
22 2 2 2
c ) r 1 cos r r r cos x y x y x
x y x x y
θ θ= + ⇒ = + ⇒ + = + +
∴ + − = +( cardioide )
( ) ( )
3
332 2 2 2 2 22
d ) r sen 2 r 2 cos sen ou r 2r sen r cos
x y 2xy ou x y 4x y
θ θ θ θ θ= ⇒ = =
∴ + = + =
( círculo )
( reta horizontal )
( rosácea de 4 folhas )
( )
2 2
22 2 2
2
4e ) r r r cos 4 x y x 4
1 cos
x y 4 x 16 8x x
y 8x 16
θθ
= ⇒ + = ⇒ + + =+
+ = − = − +
∴ = − +
( parábola )
3. Escrever a equação polar do círculo de centro C (2, 0) , contendo o ponto
Resolução:
5 , .3
π
( )2 2 2 2 2a 2R r a 2ra cos : R r 4 4r cos
0θ α θ
α=
= + − − ⇒ = + − =Como o círculo passa pelo ponto , teremos e , então, 5 , .
3
π
2 1R 25 4 20 19
2= + − ⋅ =
2 2r 4 4r cos 19 r 4r cos 15 .θ θ+ − = ∴ − =
4. Determinar as coordenadas polares dos pontos de interseções de cada par de curvas abaixo :
r 1a )
r 1 cosθ=
= +Resolução :
r 11 cos 1 cos 0
r 1 cos 2
πθ θ θθ
=⇒ + = ⇒ = ∴ = ± = +
Então, os pontos são 1, e 1,2 2
π π −
r 3cos 1 3b ) 3 cos 1 cos cos : ,
r 1 cos 2 3 2 3
θ π πθ θ θ θθ
= ⇒ = + ⇒ = ∴ = ± ± = +
66
r 1a )
r 1 cosθ=
= +
r 3cosb )
r 1 cos
θθ
= = +
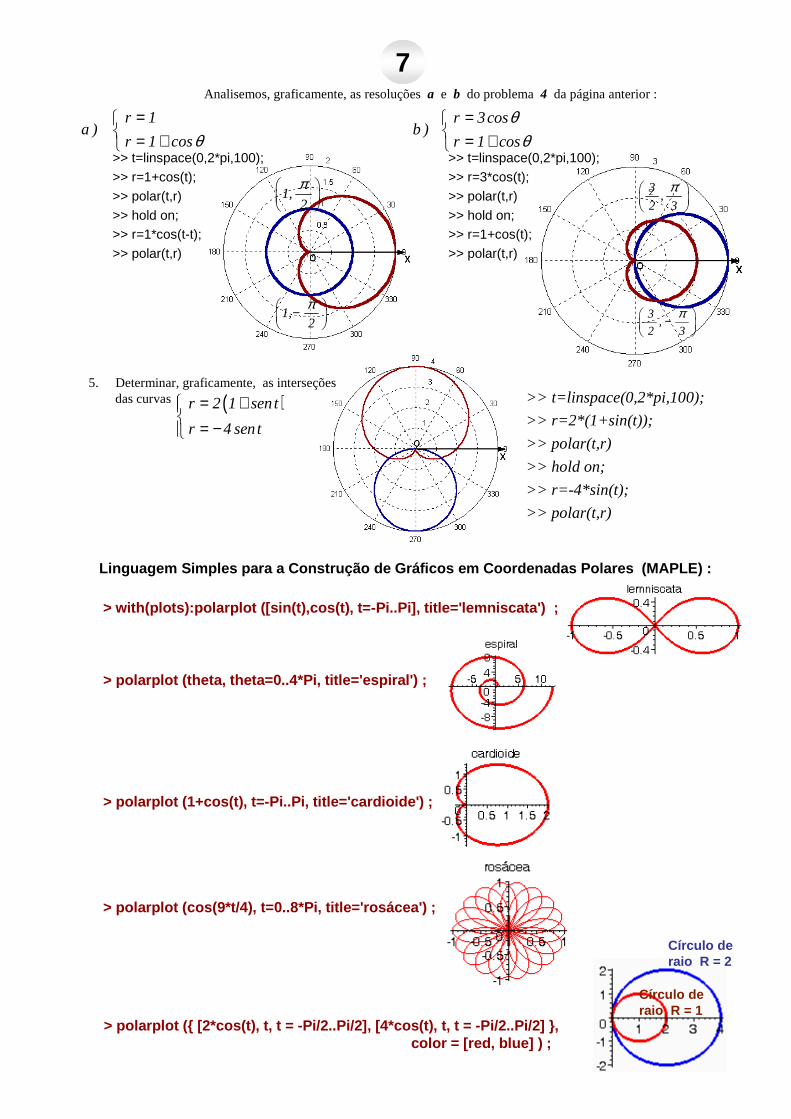
Analisemos, graficamente, as resoluções a e b do problema 4 da página anterior :
>> t=linspace(0,2*pi,100);
>> r=1+cos(t);
>> polar(t,r)
>> hold on;>> r=1*cos(t-t);
>> polar(t,r)
1,2
π
1,2
π −
3,
2 3
π
3,
2 3
π −
>> t=linspace(0,2*pi,100);
>> r=3*cos(t);
>> polar(t,r)
>> hold on;>> r=1+cos(t);
>> polar(t,r)
5. Determinar, graficamente, as interseçõesdas curvas ( )r 2 1 sent
r 4 sent
= +
= −
>> t=linspace(0,2*pi,100);
>> r=2*(1+sin(t));
>> polar(t,r)
>> hold on;
>> r=-4*sin(t);
>> polar(t,r)
77
> with(plots):polarplot ([sin(t),cos(t), t=-Pi..Pi], title='lemniscata') ;
> polarplot (theta, theta=0..4*Pi, title='espiral') ;
> polarplot (1+cos(t), t=-Pi..Pi, title='cardioide') ;
> polarplot (cos(9*t/4), t=0..8*Pi, title='rosácea') ;
Linguagem Simples para a Construção de Gráficos em Coordenadas Polares (MAPLE) :
cardioide
> polarplot ({ [2*cos(t), t, t = -Pi/2..Pi/2], [4*co s(t), t, t = -Pi/2..Pi/2] }, color = [red, blue] ) ;
Círculo deraio R = 2
Círculo deraio R = 1

( )M r, θ
Problemaspropostos
1. Em cada item abaixo, calcular a distância AB :5
a ) A 3, e B 4 , Resp. : 53 6
b ) A 4, e B 2, 286 6
π π
π π
− −
2. Escrever a equação polar da reta que passa pelo ponto sendo perpendicular ao raio vetor do ponto A .Determinar o ponto onde a reta corta o eixo polar .
A 4, ,4
π
3. Escrever a equação polar da reta que contém o ponto sendo perpendicular ao eixo polar .
4. Determinar as interseções da reta com
a) o eixo polar
b) a reta
θ (círculo de raio a)O
Sugestão : Utilizar a lei dos cossenos .
( )Resp. : r . cos 4 ; 4 2 , 04
πθ − =
26, ,
3
π
Resp. : r . cos 3 0θ + =
2r . cos r . sen 4 0θ θ+ − =( )Resp. : 2, 0
4,2
π
2
πθ =
5. Escrever a equação polar do círculo cujo centro é sendo o raio R = 5 . C 3, ,6
π −
2Resp. : r 6 r cos 16 06
πθ + − − =
6. Escrever a equação polar do círculo de centro passando pelo polo .C 5, ,4
π −
Resp. : r 10 cos4
πθ = − −
7. Determinar a equação polar do círculo de centro sendo tangente ao eixo polar .C 4, ,2
π −
Resp. : r 8 senθ= −
8. Pelo ponto fixo O de um círculo de diâmetro a , traça-se uma secante variável s que corta o círculo num segun-do ponto P . Sobre a secante s , considera-se PM = OP . Determinar o lugar geométrico do ponto M .
A X
s P Resp. : r 2a cosθ=
9. Sejam O e A os extremos de um diâmetro fixo do círculo, tal que AO = 2a . Seja t a tangente ao círculo no ponto A . Pelo ponto O traçamos uma secante móvel s que determina os pontos B e C no círculo e na reta t , respectivamente . Consideremos D o pé da perpendicular de B a AO . Determinar o lugar geométrico do ponto M ( r , θθθθ ) tal que : a) OM = MB ; b) OM = BD .
A X
B
OD
s Resp. : a ) r a cos
b ) r a sen 2
θ
θ
=
=
: círculo
: rosácea de 4 folhas
( )M r, θ
88

2.1. Integral dupla : definição, interpretaçãogeométricae cálculo ..
Tal como já ocorrera no capítulo das funções de várias variáveis independentes, o estudo das inte-grais múltiplas (duplas e triplas) também busca, como objetivo maior, a ampliação dos conceitos e aplicações das integrais simples, trazendo-os para o espaço tridimensional . Portanto, toda esta Unidade acabará por constituir uma simples extensão daqueles malabarismos já executados nos Cálculos I, II e III, tanto no aspecto conceitual quanto no operacional .
D
X
Y
Z
0
( )i i iP x , yix∆
iy∆
Seja uma função z = f (x, y) , definida e con-tínua num dado domínio fechado D e conside-remos o produto
( )i i i iV f P . x . y= ∆ ∆( volume do paralelepípedo elementar )
Consideremos ainda a soma desses produtos
denominada soma integral de Riemannda função f , no domínio D .
( )i
n
i i ii 1
A
f P . x . y ,=
∆
∆ ∆∑ �����
( )i i iP x , y , z
Definição . A integral dupla da função f , no domínio D , é o limite da somaintegral , quando se tal limite existir :
i ix 0 e y 0 ,∆ → ∆ →
( ) ( )
( )i
n
i i i in
i 1D
n
i iA 0
i 1
f x, y .dx .dy lim f x , y . x . y
ou
lim f P . A ,
→ ∞ =
∆ → =
= ∆ ∆
∆
∑∫∫
∑
sendo no número de retângulos do domínio e a área do retângulo elementar (genérico) desse domínio .
iA∆
Propriedades : Analogamente ao que foi feito no estudo das integrais simples, demonstram-se :
1ª.)
2ª.)
3ª.)
4ª.) Se então
( ) ( )D D
k . f x, y .dx .dy k f x, y .dx .dy .=∫∫ ∫∫
( ) ( ) ( ) ( )D D D
f x, y g x, y . dx .dy f x, y .dx .dy g x, y .dx .dy .± = + ∫∫ ∫∫ ∫∫
( ) ( ) ( )1 2D D D
f x, y . dx .dy f x, y .dx .dy f x, y .dx .dy .= +∫∫ ∫∫ ∫∫
( ) ( ) ( )f x, y g x, y , x, y D ,≥ ∀ ∈
( ) ( )D D
f x, y . dx .dy g x, y .dx .dy .≥∫∫ ∫∫
z = f (x, y)
Unidade 2 - INTEGRAIS MÚLTIPLAS
CCÁÁLCULO DIFERENCIAL E INTEGRAL IV LCULO DIFERENCIAL E INTEGRAL IV -- Roteiro SinRoteiro Sinóóptico ptico --
-- Cursos de Engenharia Cursos de Engenharia --
99
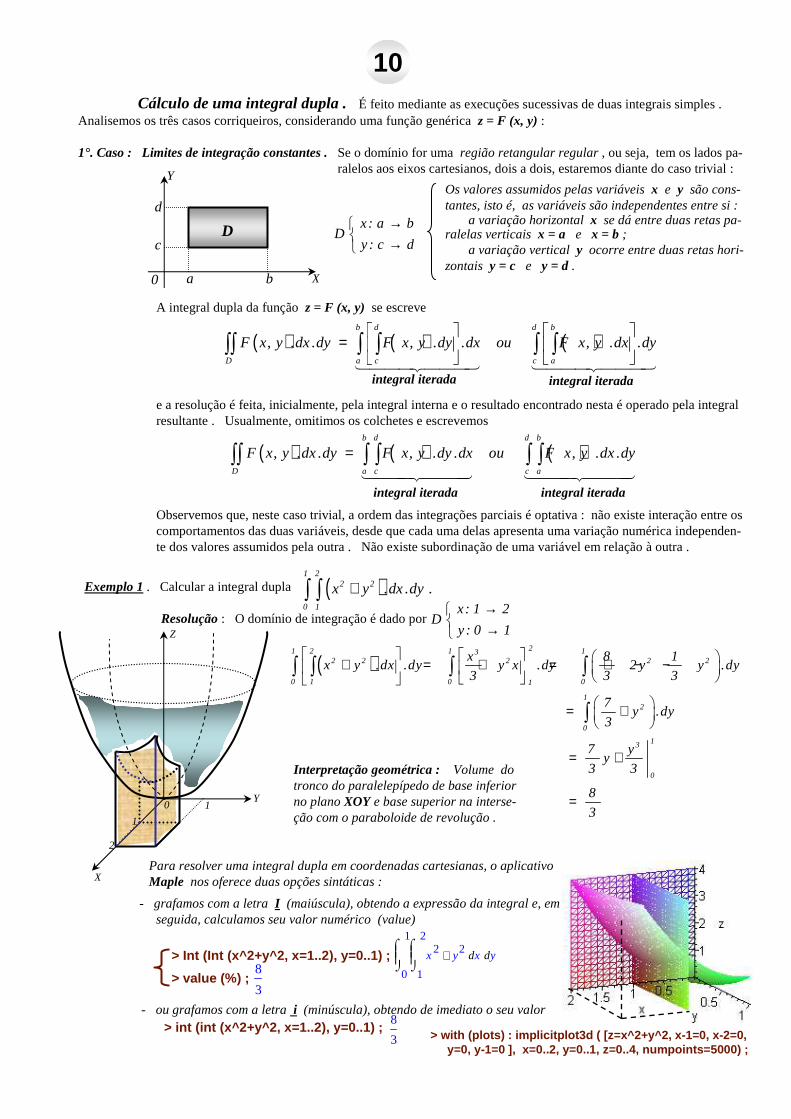
Cálculo de uma integral dupla . É feito mediante as execuções sucessivas de duas integrais simples . Analisemos os três casos corriqueiros, considerando uma função genérica z = F (x, y):
1°. Caso : Limites de integração constantes . Se o domínio for uma região retangular regular , ou seja, tem os lados pa-ralelos aos eixos cartesianos, dois a dois, estaremos diante do caso trivial :
X
Y
0 a b
c
dx: a b
Dy: c d
→ →
Os valores assumidos pelas variáveis x e y são cons-tantes, isto é, as variáveis são independentes entre si :
a variação horizontal x se dá entre duas retas pa-ralelas verticais x = a e x = b ;
a variação vertical y ocorre entre duas retas hori-zontais y = c e y = d .
A integral dupla da função z = F (x, y) se escreve
( ) ( ) ( )b d d b
D a c c a
F x, y .dx .dy F x, y .dy .dx ou F x, y .dx .dy
=
∫∫ ∫ ∫ ∫ ∫��������� ���������
integral iterada integral iterada
e a resolução é feita, inicialmente, pela integral interna e o resultado encontrado nesta é operado pela integral resultante . Usualmente, omitimos os colchetes e escrevemos
( ) ( ) ( )b d d b
D a c c a
F x, y .dx .dy F x, y .dy .dx ou F x, y .dx .dy=∫∫ ∫ ∫ ∫ ∫��������� ���������
integral iteradaintegral iterada
Observemos que, neste caso trivial, a ordem das integrações parciais é optativa : não existe interação entre os comportamentos das duas variáveis, desde que cada uma delas apresenta uma variação numérica independen-te dos valores assumidos pela outra . Não existe subordinação de uma variável em relação à outra .
Exemplo 1. Calcular a integral dupla
Resolução: O domínio de integração é dado por
( )1 2
2 2
0 1
x y .dx .dy .+∫ ∫x: 1 2
Dy: 0 1
→ →
( )21 2 1 13
2 2 2 2 2
0 1 0 01
12
0
13
0
8 1xx y .dx .dy y x .dy 2 y y .dy
3 3 3
7y .dy
3
7 yy
3 3
8
3
+ = + = + − −
= +
= +
=
∫ ∫ ∫ ∫
∫
X
Z
Y
1
2
10
Interpretação geométrica : Volume dotronco do paralelepípedo de base inferior no plano XOY e base superior na interse-ção com o paraboloide de revolução .
D
Para resolver uma integral dupla em coordenadas cartesianas, o aplicativo Maple nos oferece duas opções sintáticas :
> Int (Int (x^2+y^2, x=1..2), y=0..1) ; d⌠
⌡0
1
d⌠
⌡1
2
+ x2
y2
x y
> value (%) ;
> int (int (x^2+y^2, x=1..2), y=0..1) ;
8
3
8
3
- grafamos com a letra I (maiúscula), obtendo a expressão da integral e, em seguida, calculamos seu valor numérico (value)
- ou grafamos com a letra i (minúscula), obtendo de imediato o seu valor
> with (plots) : implicitplot3d ( [z=x^2+y^2, x-1=0, x-2=0,y=0, y-1=0 ], x=0..2, y=0..1, z=0..4, numpoints=50 00) ;
1010
D
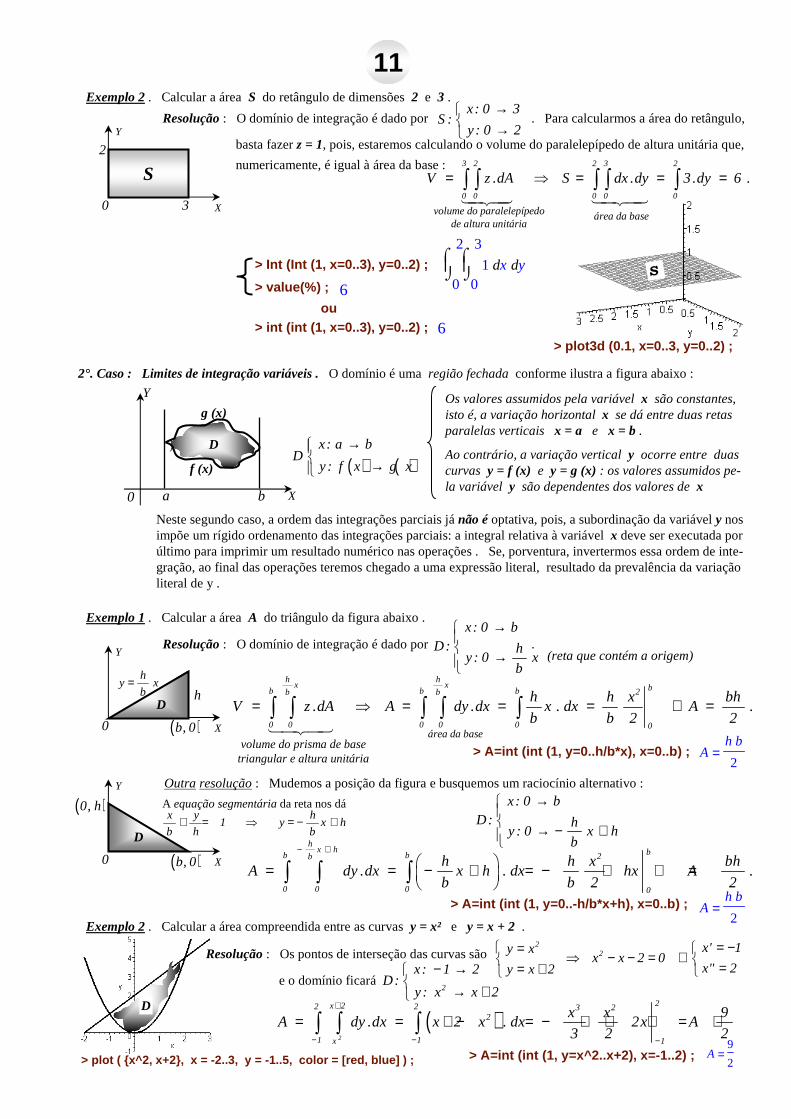
Exemplo 2. Calcular a área S do retângulo de dimensões 2 e 3 .
Resolução: O domínio de integração é dado por . Para calcularmos a área do retângulo,
basta fazer z = 1, pois, estaremos calculando o volume do paralelepípedo de altura unitária que,
numericamente, é igual à área da base :S
X
Y
0 3
2
x: 0 3S :
y : 0 2
→ →
3 2 2 3 2
0 0 0 0 0
V z .dA S dx .dy 3 .dy 6 .= ⇒ = = =∫ ∫ ∫ ∫ ∫����� �����
volume do paralelepípedode altura unitária
> Int (Int (1, x=0..3), y=0..2) ;
> value(%) ;
ou > int (int (1, x=0..3), y=0..2) ;
d⌠⌡0
2
d⌠⌡0
3
1 x y
6
6> plot3d (0.1, x=0..3, y=0..2) ;
2°. Caso : Limites de integração variáveis . O domínio é uma região fechada conforme ilustra a figura abaixo :
X
Y
0 a b
( ) ( )x: a b
Dy: f x g x
→ →
Os valores assumidos pela variável x são constantes, isto é, a variação horizontal x se dá entre duas retas paralelas verticais x = a e x = b .
Ao contrário, a variação vertical y ocorre entre duas curvas y = f (x) e y = g (x) : os valores assumidos pe-la variável y são dependentes dos valores de x
Neste segundo caso, a ordem das integrações parciais jánão éoptativa, pois, a subordinação da variável y nos impõe um rígido ordenamento das integrações parciais: a integral relativa à variável x deve ser executada por último para imprimir um resultado numérico nas operações . Se, porventura, invertermos essa ordem de inte-gração, ao final das operações teremos chegado a uma expressão literal, resultado da prevalência da variação literal de y .
Exemplo 1. Calcular a área A do triângulo da figura abaixo .
Resolução : O domínio de integração é dado por .
X
Y
0 ( )b, 0
h
x: 0 bD: h
y : 0 xb
→ →
h hx x bb b b 2b b
0 0 0 0 0 0
h h x bhV z .dA A dy .dx x . dx A .
b b 2 2= ⇒ = = = ∴ =∫ ∫ ∫ ∫ ∫�����
f (x)
g (x)
D
hy x
b=
(reta que contém a origem)
volume do prisma de basetriangular e altura unitária
Outra resolução: Mudemos a posição da figura e busquemos um raciocínio alternativo :
X
Y
0
x y h1 y x h
b h b+ = ⇒ = − +
( )b, 0
( )0, h A equação segmentária da reta nos dá x: 0 bD: h
y : 0 x hb
→ → − +h
x h bb b 2b
0 0 0 0
h h x bhA dy .dx x h . dx hx A .
b b 2 2
− +
= = − + = − + ∴ = ∫ ∫ ∫
Exemplo 2. Calcular a área compreendida entre as curvas y = x² e y = x + 2 .
Resolução: Os pontos de interseção das curvas são
e o domínio ficará
22 x' 1y x
x x 2 0x" 2y x 2
= − = ⇒ − − = ∴ == +
2
x: 1 2D:
y : x x 2
− →
→ +
( )2
2x 22 2 3 22
1 1x 1
x x 9A dy .dx x 2 x . dx 2x A
3 2 2
+
− − −
= = + − = − + + ∴ = ⋅∫ ∫ ∫
D
> plot ( {x^2, x+2}, x = -2..3, y = -1..5, color = [red, blue] ) ;
> A=int (int (1, y=0..h/b*x), x=0..b) ; = Ah b
2
> A=int (int (1, y=0..-h/b*x+h), x=0..b) ; = Ah b
2
= A9
2> A=int (int (1, y=x^2..x+2), x=-1..2) ;
S
D
1111
área da base
área da base
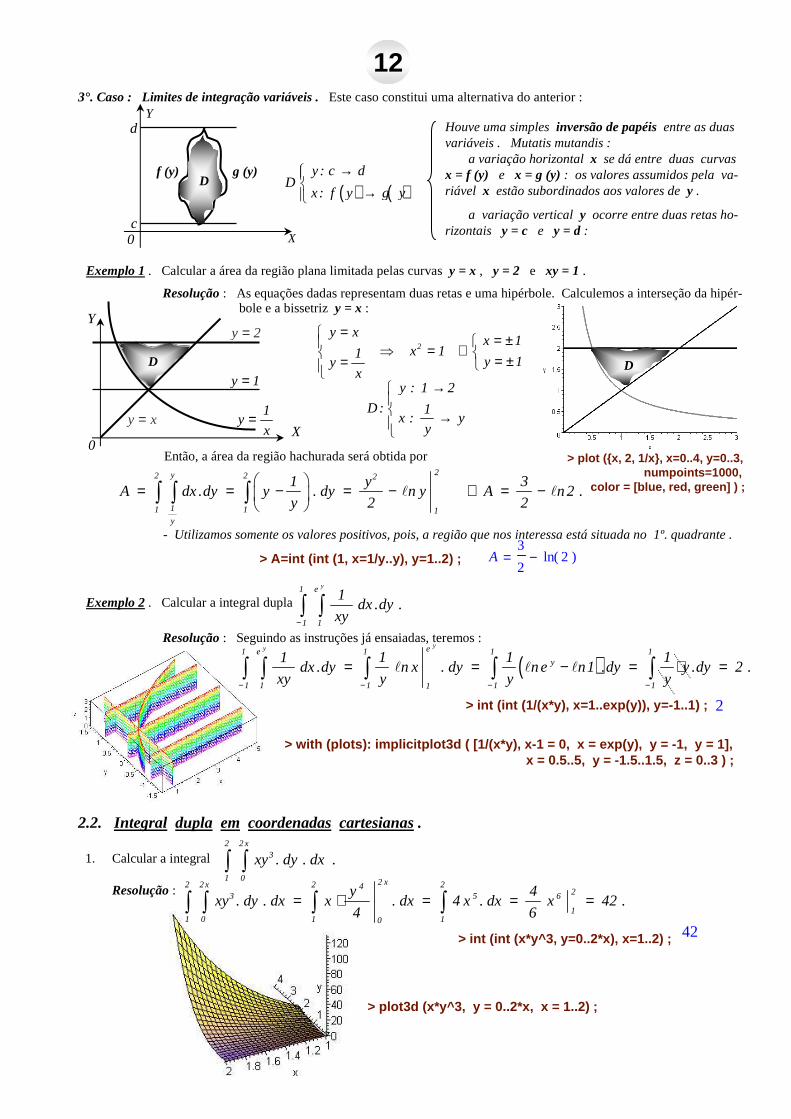
Houve uma simples inversão de papéisentre as duas variáveis . Mutatis mutandis :
a variação horizontal x se dá entre duas curvas x = f (y) e x = g (y) : os valores assumidos pela va-riável x estão subordinados aos valores de y .
a variação vertical y ocorre entre duas retas ho-rizontais y = c e y = d :
3°. Caso : Limites de integração variáveis . Este caso constitui uma alternativa do anterior :
X
Y
0c
d
( ) ( )y : c d
Dx: f y g y
→ →
f (y) g (y)D
Exemplo 1. Calcular a área da região plana limitada pelas curvas y = x , y = 2 e xy = 1 .
Resolução: As equações dadas representam duas retas e uma hipérbole. Calculemos a interseção da hipér-bole e a bissetrizy = x :
X
2y2 2 2
11 1 1y
1 y 3A dx .dy y . dy n y A n 2 .
y 2 2
= = − = − ∴ = −
∫ ∫ ∫ ℓ ℓ
Y
0
y x=1
yx
=
y 2=
D2
y xx 1
x 11y 1y
x
= = ±⇒ = ∴ = ±=
- Utilizamos somente os valores positivos, pois, a região que nos interessa está situada no 1º. quadrante .
y 1= y : 1 2
D: 1x : y
y
→ →
Então, a área da região hachurada será obtida por
Exemplo 2. Calcular a integral dupla
Resolução: Seguindo as instruções já ensaiadas, teremos :
y1 e
1 1
1dx .dy .
xy−∫ ∫
( )yy e1 e 1 1 1
y
1 1 1 1 11
1 1 11dx .dy n x . dy ne n1 .dy y .dy 2 .
xy y y y− − − −
= = − = ⋅ =∫ ∫ ∫ ∫ ∫ℓ ℓ ℓ
1. Calcular a integral
Resolução:
2 2x3
1 0
xy . dy . dx .∫ ∫2 x2 2x 2 24
23 5 6
11 0 1 10
y 4xy . dy . dx x . dx 4 x . dx x 42 .
4 6= ⋅ = = =∫ ∫ ∫ ∫
> plot ({x, 2, 1/x}, x=0..4, y=0..3,numpoints=1000,
color = [blue, red, green] ) ;
> A=int (int (1, x=1/y..y), y=1..2) ; = A − 3
2( )ln 2
> int (int (1/(x*y), x=1..exp(y)), y=-1..1) ; 2
> with (plots): implicitplot3d ( [1/(x*y), x-1 = 0, x = exp(y), y = -1, y = 1], x = 0.5..5, y = -1.5..1.5, z = 0..3 ) ;
> int (int (x*y^3, y=0..2*x), x=1..2) ; 42
> plot3d (x*y^3, y = 0..2*x, x = 1..2) ;
D
D
1212
2.2. Integral dupla em coordenadascartesianas.
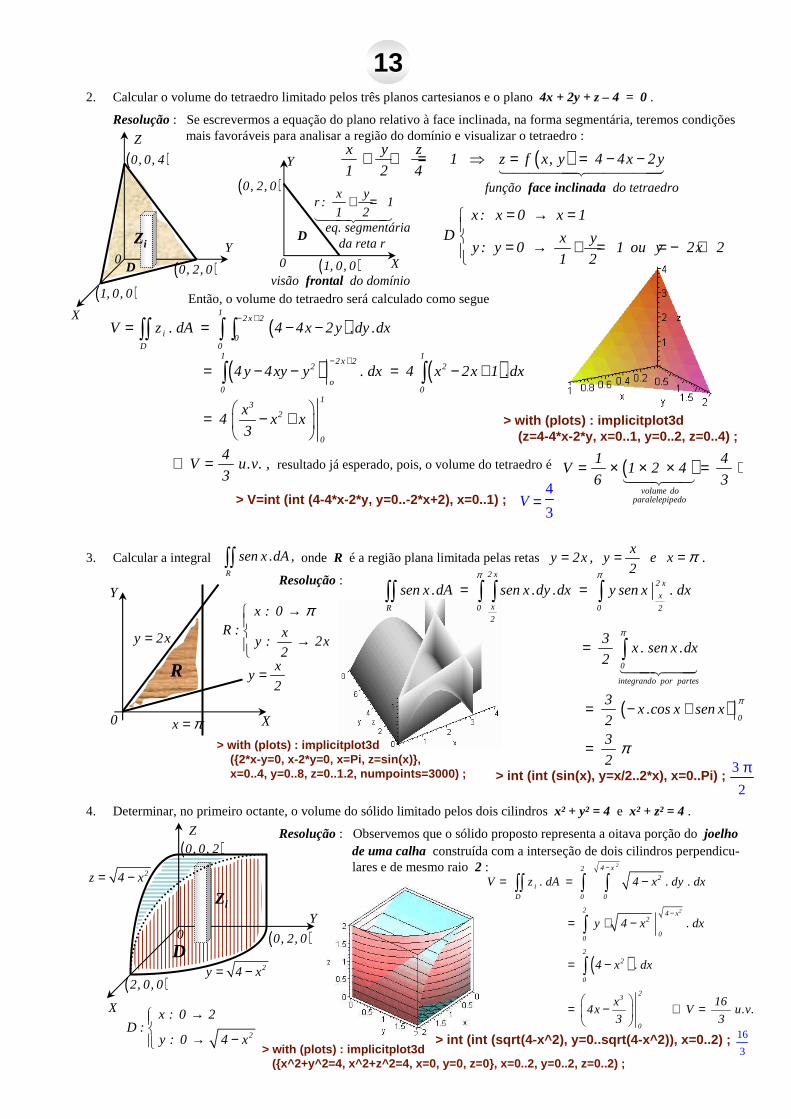
2. Calcular o volume do tetraedro limitado pelos três planos cartesianos e o plano 4x + 2y + z – 4 = 0 .
Resolução: Se escrevermos a equação do plano relativo à face inclinada, na forma segmentária, teremos condições mais favoráveis para analisar a região do domínio e visualizar o tetraedro :
( )x y z1 z f x, y 4 4x 2y
1 2 4+ + = ⇒ = = − −
�������������
( )1, 0, 0
( )0, 2, 0
( )0, 0, 4
X
Y
Z
D X
Y
D
0 ( )1, 0, 0
( )0, 2, 0 função face inclinada do tetraedro
visão frontal do domínio
Zi
0
x: x 0 x 1D x y
y : y 0 1 ou y 2x 21 2
= → = = → + = = − +
x yr : 1
1 2+ =
�������eq. segmentária
da reta r
Então, o volume do tetraedro será calculado como segue
( )
( ) ( )
12x 2
i 0D 0
1 12x 2
2 2
o0 0
13
2
0
V z . dA 4 4x 2y .dy .dx
4 y 4xy y . dx 4 x 2x 1 .dx
x4 x x
3
4V u.v. ,
3
− +
− +
= = − −
= − − = − +
= − +
∴ =
∫∫ ∫ ∫
∫ ∫
resultado já esperado, pois, o volume do tetraedro é ( )volume do
paralelepipedo
1 4V 1 2 4
6 3= × × × = ⋅
�����
> V=int (int (4-4*x-2*y, y=0..-2*x+2), x=0..1) ; = V4
3
> with (plots) : implicitplot3d (z=4-4*x-2*y, x=0..1, y=0..2, z=0..4) ;
3. Calcular a integral onde R é a região plana limitada pelas retas
Resolução:
X
Y
0
xy
2=
x π=
y 2x=
R
x : 0R : x
y : 2x2
π→ →
( )
2
2
4 x22
i
D 0 0
2 4 x2
00
22
0
23
0
V z . dA 4 x . dy . dx
y 4 x . dx
4 x . dx
16x4x V u.v.
3 3
−
−
= = −
= ⋅ −
= −
= − ∴ =
∫∫ ∫ ∫
∫
∫
R
sen x .dA ,∫∫x
y 2x , y e x .2
π= = =
4. Determinar, no primeiro octante, o volume do sólido limitado pelos dois cilindros x² + y² = 4 e x² + z² = 4 .
Resolução: Observemos que o sólido proposto representa a oitava porção do joelho de uma calha construída com a interseção de dois cilindros perpendicu-lares e de mesmo raio 2 :
( )2, 0, 0
( )0, 2, 0
( )0, 0, 2
Z
X
Y0
2
x : 0 2D :
y : 0 4 x
→
→ −
D
Zi
2y 4 x= −
2z 4 x= −
> with (plots) : implicitplot3d ({2*x-y=0, x-2*y=0, x=Pi, z=sin(x)}, x=0..4, y=0..8, z=0..1.2, numpoints=3000) ;
> with (plots) : implicitplot3d ({x^2+y^2=4, x^2+z^2=4, x=0, y=0, z=0}, x=0..2, y=0 ..2, z=0..2) ;
> int (int (sin(x), y=x/2..2*x), x=0..Pi) ;3 π2
> int (int (sqrt(4-x^2), y=0..sqrt(4-x^2)), x=0..2) ; 16
3
1313
( )
2 x2 x
xxR 0 0 22
0
integrando por partes
0
sen x .dA sen x .dy .dx y sen x . dx
3x . sen x .dx
2
3x .cos x sen x
23
2
π π
π
π
π
= =
=
= − +
=
∫∫ ∫ ∫ ∫
∫�������
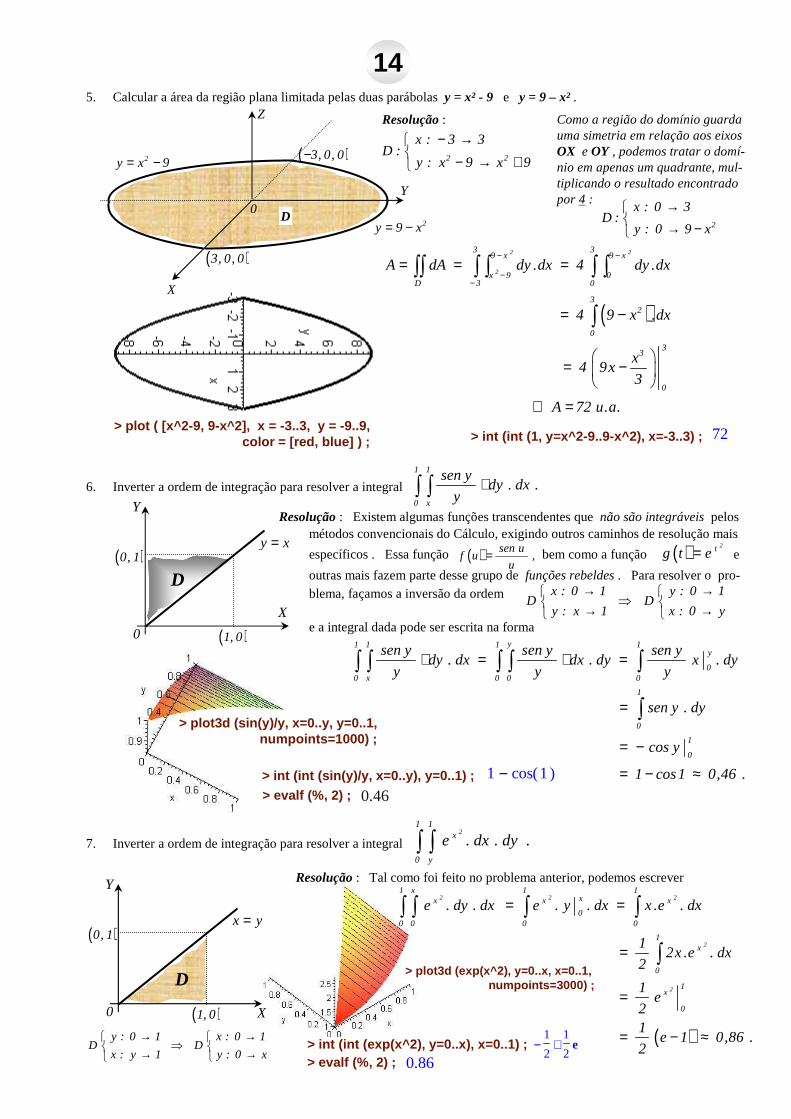
6. Inverter a ordem de integração para resolver a integral
Resolução: Existem algumas funções transcendentes que não são integráveispelos métodos convencionais do Cálculo, exigindo outros caminhos de resolução mais
específicos . Essa função bem como a função e
outras mais fazem parte desse grupo de funções rebeldes. Para resolver o pro-blema, façamos a inversão da ordem
e a integral dada pode ser escrita na forma
5. Calcular a área da região plana limitada pelas duas parábolas y = x² - 9 e y = 9 – x².
Resolução:
( )3, 0, 0
( )3, 0, 0−
X
Y
Z
D0
( )
2 2
2
3 39 x 9 x
x 9 0D 3 0
32
0
33
0
A dA dy .dx 4 dy .dx
4 9 x .dx
x4 9x
3
A 72 u.a.
− −
−−
= = =
= −
= −
∴ =
∫∫ ∫ ∫ ∫ ∫
∫
2 2
x : 3 3D :
y : x 9 x 9
− →
− → +
Como a região do domínio guarda uma simetria em relação aos eixos OX e OY , podemos tratar o domí-nio em apenas um quadrante, mul-tiplicando o resultado encontrado por 4 :
2
x : 0 3D :
y : 0 9 x
→ → −
2y 9 x= −
2y x 9= −
> plot ( [x^2-9, 9-x^2], x = -3..3, y = -9..9,color = [red, blue] ) ; > int (int (1, y=x^2-9..9-x^2), x=-3..3) ; 72
X
Y
0
y x=
Dx : 0 1 y : 0 1
D Dy : x 1 x : 0 y
→ → ⇒ → →
1 1
0 x
sen ydy . dx .
y⋅∫ ∫
( )1, 0
( ) sen uf u ,
u= ( ) 2tg t e=( )0, 1
y1 1 1 1y
00 x 0 0 0
1
0
1
0
sen y sen y sen ydy . dx dx . dy x . dy
y y y
sen y . dy
cos y
1 cos1 0,46 .
⋅ = ⋅ =
=
= −
= − ≈
∫ ∫ ∫ ∫ ∫
∫
7. Inverter a ordem de integração para resolver a integral
Resolução: Tal como foi feito no problema anterior, podemos escrever
21 1
x
0 y
e . dx . dy .∫ ∫
X
Y
0
x y=
D
( )1, 0
( )0, 1
y : 0 1 x : 0 1D D
x : y 1 y : 0 x
→ → ⇒ → →
( )
2 2 2
2
2
1 x 1 1xx x x
00 0 0 0
1x
0
1x
0
e . dy . dx e . y . dx x .e . dx
12x .e . dx
2
1e
21
e 1 0,86 .2
= =
=
=
= − ≈
∫ ∫ ∫ ∫
∫
> int (int (sin(y)/y, x=0..y), y=0..1) ; − 1 ( )cos 1> evalf (%, 2) ; 0.46
> plot3d (sin(y)/y, x=0..y, y=0..1, numpoints=1000) ;
> plot3d (exp(x^2), y=0..x, x=0..1,numpoints=3000) ;
> int (int (exp(x^2), y=0..x), x=0..1) ; − + 1
2
1
2e
> evalf (%, 2) ; 0.86
1414
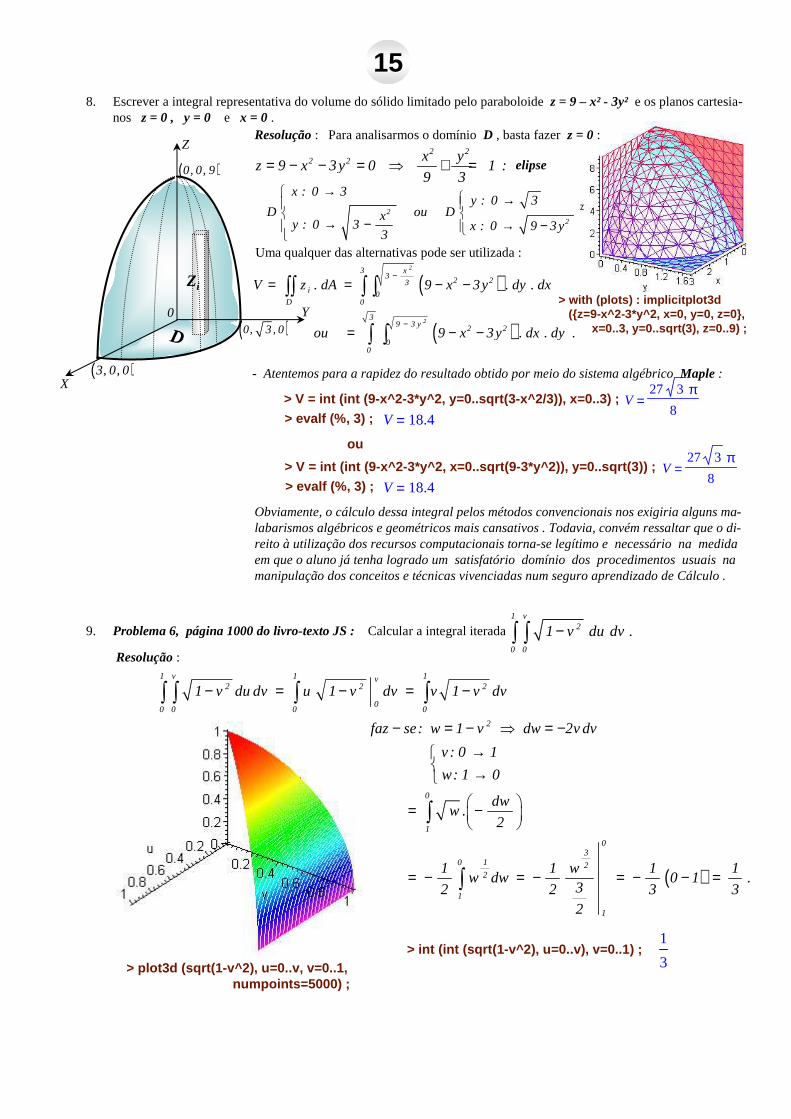
( )0, 3 , 0
8. Escrever a integral representativa do volume do sólido limitado pelo paraboloidez = 9 – x² - 3y²e os planos cartesia-nos z = 0 , y = 0 e x = 0 .
( )0, 0, 9
X
Y
Z
0
D
Resolução: Para analisarmos o domínio D , basta fazer z = 0 :
( )3, 0, 0
2 22 2 x y
z 9 x 3y 0 1 :9 3
= − − = ⇒ + = elipse
22
x : 0 3y : 0 3
D ou Dxy : 0 3 x : 0 9 3y
3
→ →
→ − → − Uma qualquer das alternativas pode ser utilizada :
( )
( )
2
2
3 x3 2 23
i 0D 0
39 3 y 2 2
00
V z . dA 9 x 3y . dy . dx
ou 9 x 3y . dx . dy .
−
−
= = − −
= − −
∫∫ ∫ ∫
∫ ∫
Zi> with (plots) : implicitplot3d
({z=9-x^2-3*y^2, x=0, y=0, z=0}, x=0..3, y=0..sqrt(3), z=0..9) ;
- Atentemos para a rapidez do resultado obtido por meio do sistema algébrico Maple :
> V = int (int (9-x^2-3*y^2, y=0..sqrt(3-x^2/3)), x =0..3) ; = V27 3 π
8> evalf (%, 3) ; = V 18.4
ou
> V = int (int (9-x^2-3*y^2, x=0..sqrt(9-3*y^2)), y =0..sqrt(3)) ;> evalf (%, 3) ;
= V27 3 π
8 = V 18.4
Obviamente, o cálculo dessa integral pelos métodos convencionais nos exigiria alguns ma-labarismos algébricos e geométricos mais cansativos . Todavia, convém ressaltar que o di-reito à utilização dos recursos computacionais torna-se legítimo e necessário na medida em que o aluno já tenha logrado um satisfatório domínio dos procedimentos usuais na manipulação dos conceitos e técnicas vivenciadas num seguro aprendizado de Cálculo .
9. Problema 6, página 1000 do livro-texto JS : Calcular a integral iterada
Resolução:
1 v2
0 0
1 v du dv .−∫ ∫
( )
1 v 1 1v2 2 2
00 0 0 0
2
0
1
03
10 22
1
1
1 v du dv u 1 v dv v 1 v dv
faz se: w 1 v dw 2v dv
v: 0 1
w: 1 0
dww .
2
1 1 w 1 1w dw 0 1 .
32 2 3 32
− = − = −
− = − ⇒ = −→
→
= −
= − = − = − − =
∫ ∫ ∫ ∫
∫
∫
> plot3d (sqrt(1-v^2), u=0..v, v=0..1,numpoints=5000) ;
> int (int (sqrt(1-v^2), u=0..v), v=0..1) ;1
3
1515
x
D
y e dA ,∫∫
X
Y
( )0 0, 0 ( )6, 0
( )2, 4
yx : 6 y
D 2y : 0 4
→ − →
6 y4 46 yx x xy
2yD 0 02
y46 y 2
0
y e dA y e dx dy y e dy
y e e dy
−−
−
= =
= −
∫∫ ∫ ∫ ∫
∫
6 2e 9 e 4 .= − −
y : 0 2D
x : 0 2y
→ →
2 y2 22 y2 2
i 0D 0 0 0
12 02 2
0 4v d v
03
4
V z . dA 4 y dx dy 4 y x dy
4 y 2y dy v dv
y : 0 2
v: 4 0
2v
316
V u.v.3
= =
= = − = −
= − − − = −
→ →
= −
∴ =
∫∫ ∫ ∫ ∫
∫ ∫��� ���
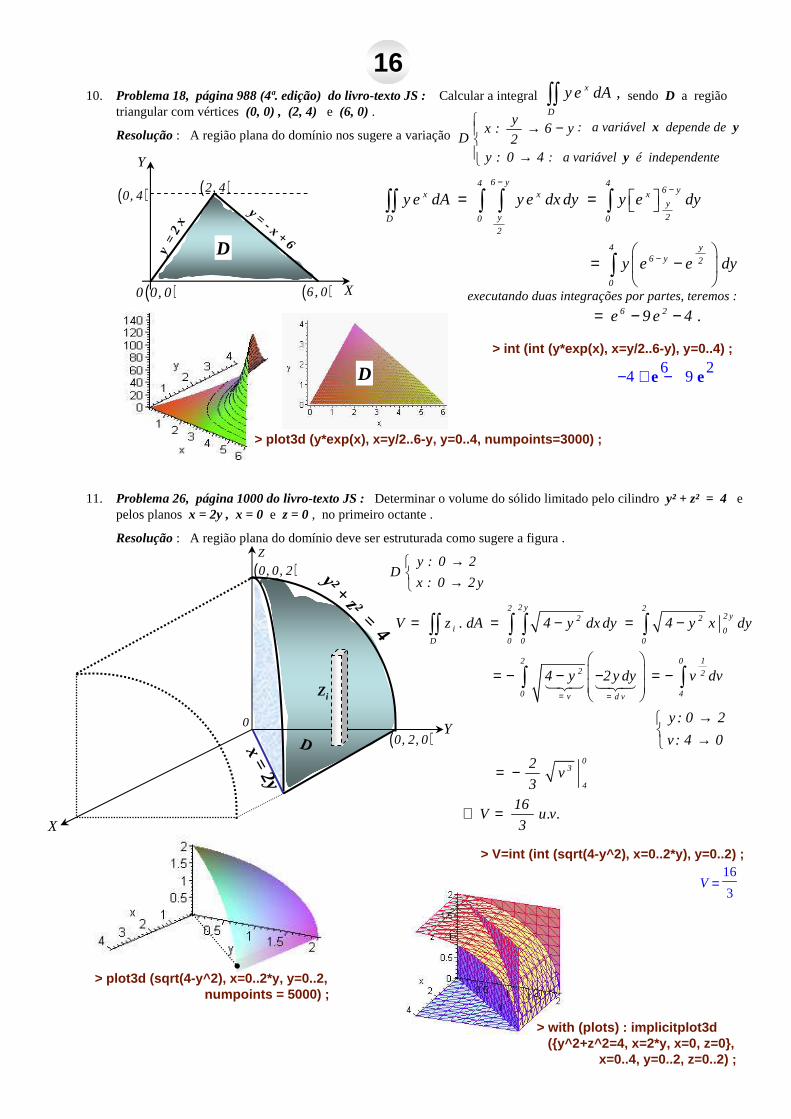
10. Problema 18, página 988 (4ª. edição) do livro-texto JS : Calcular a integral sendo D a região triangular com vértices (0, 0) , (2, 4) e (6, 0) .
Resolução: A região plana do domínio nos sugere a variação
y =
2 x
y = - x + 6
( )0, 4
: a variável x depende de y
: a variável y é independente
executando duas integrações por partes, teremos :
11. Problema 26, página 1000 do livro-texto JS : Determinar o volume do sólido limitado pelo cilindro y² + z² = 4 e pelos planos x = 2y , x = 0 e z = 0, no primeiro octante .
Resolução : A região plana do domínio deve ser estruturada como sugere a figura .
( )0, 2, 0
( )0, 0, 2
Y
Z
0
D
Zi
x = 2y
y² + z² = 4
X
D
D
> int (int (y*exp(x), x=y/2..6-y), y=0..4) ;
− + − 4 e6
9 e2
> plot3d (y*exp(x), x=y/2..6-y, y=0..4, numpoints=3 000) ;
> plot3d (sqrt(4-y^2), x=0..2*y, y=0..2, numpoints = 5000) ;
> with (plots) : implicitplot3d ({y^2+z^2=4, x=2*y, x=0, z=0},
x=0..4, y=0..2, z=0..2) ;
> V=int (int (sqrt(4-y^2), x=0..2*y), y=0..2) ;
= V16
3
1616
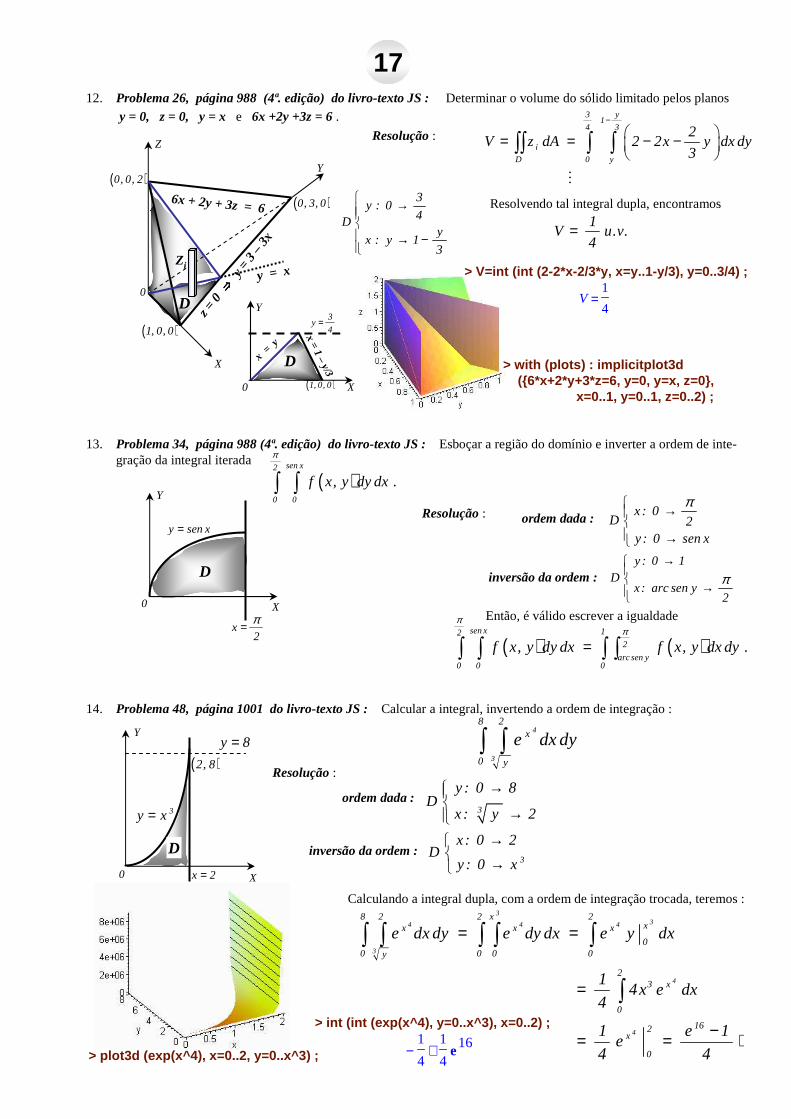
12. Problema 26, página 988 (4ª. edição) do livro-texto JS : Determinar o volume do sólido limitado pelos planos
y = 0, z = 0, y = x e 6x +2y +3z = 6 .
Resolução:
y = x
6x + 2y + 3z = 6
( )1, 0, 0
( )0, 3, 0
( )0, 0, 2
0
Y
X
Z
D
3y : 0
4Dy
x : y 13
→ → −
X
Y
0
D
z = 0
⇒⇒⇒⇒
y = 3
–3x
x = y
x = 1 –y/3
( )1, 0, 0
3y
4=
Zi
3 y1
4 3
i
D 0 y
2V z dA 2 2x y dx dy
3
−
= = − − ∫∫ ∫ ∫
⋮
Resolvendo tal integral dupla, encontramos1
V u.v.4
=
( )sen x2
0 0
f x, y dy dx .
π
∫ ∫
0
Y
X
y sen x=
x2
π=
D
x : 0D 2
y : 0 sen x
π → →
y : 0 1D
x: arc sen y2
π→
→
Então, é válido escrever a igualdade
( ) ( )sen x 12
2
arc sen y0 0 0
f x, y dy dx f x, y dx dy .
ππ
=∫ ∫ ∫ ∫
4
3
8 2x
0 y
e dx dy∫ ∫
0
Y
X
3y x=
x 2=
D
y 8=( )2, 8
3
y : 0 8D
x: y 2
→
→
3
x : 0 2D
y : 0 x
→
→
Calculando a integral dupla, com a ordem de integração trocada, teremos :3
34 4 4
3
4
4
8 2 2 x 2xx x x
00 0 0 0y
23 x
0
162x
0
e dx dy e dy dx e y dx
14x e dx
4
1 e 1e
4 4
= =
=
−= = ⋅
∫ ∫ ∫ ∫ ∫
∫
> V=int (int (2-2*x-2/3*y, x=y..1-y/3), y=0..3/4) ;
= V1
4
> with (plots) : implicitplot3d ({6*x+2*y+3*z=6, y=0, y=x, z=0},
x=0..1, y=0..1, z=0..2) ;
> int (int (exp(x^4), y=0..x^3), x=0..2) ;
− + 1
4
1
4e16
> plot3d (exp(x^4), x=0..2, y=0..x^3) ;
13. Problema 34, página 988 (4ª. edição) do livro-texto JS : Esboçar a região do domínio e inverter a ordem de inte-gração da integral iterada
Resolução: ordem dada :
inversão da ordem :
14. Problema 48, página 1001 do livro-texto JS : Calcular a integral, invertendo a ordem de integração :
Resolução:
ordem dada :
inversão da ordem :
1717
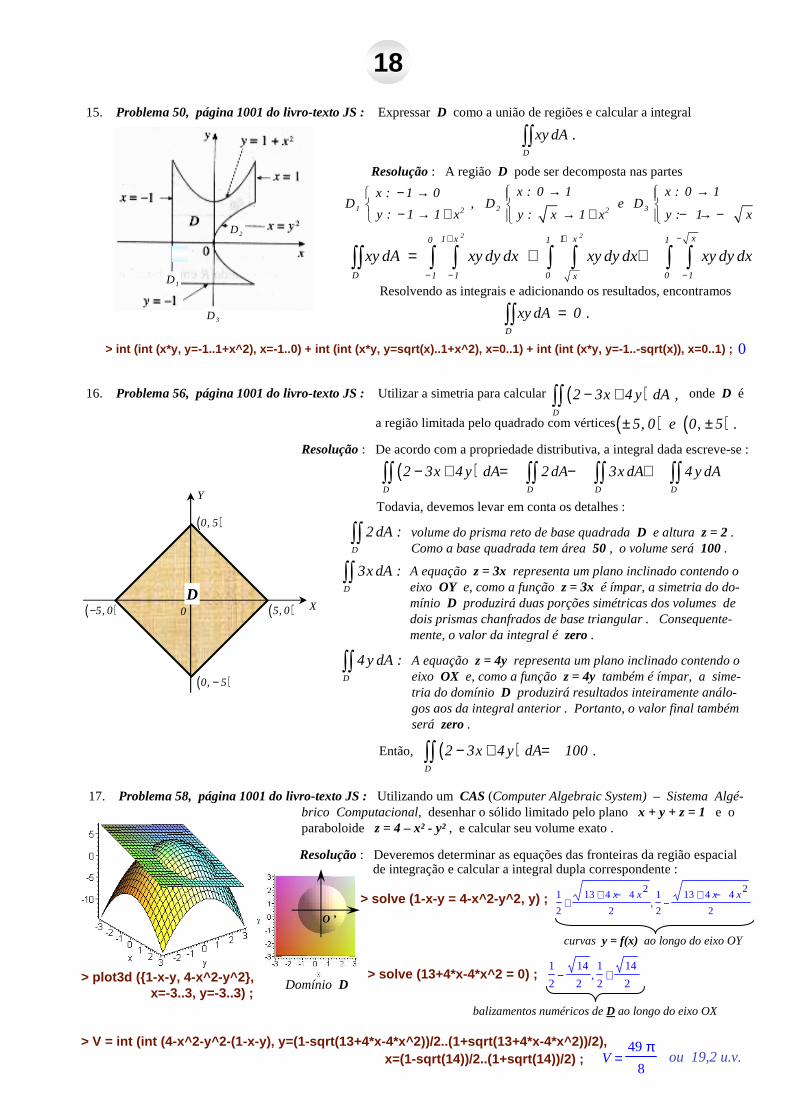
15. Problema 50, página 1001 do livro-texto JS : Expressar D como a união de regiões e calcular a integral
1 2 32 2
x : 0 1 x : 0 1x : 1 0D , D e D
y : 1 1 x y : x 1 x y : 1 x
→ → − →
− → + → + − → −
D
xy dA .∫∫Resolução: A região D pode ser decomposta nas partes
1D
2D
3D
2 2 x1 x 1 x0 1 1
D 1 1 0 0 1x
xy dA xy dy dx xy dy dx xy dy dx−+ +
− − −
= + +∫∫ ∫ ∫ ∫ ∫ ∫ ∫Resolvendo as integrais e adicionando os resultados, encontramos
D
xy dA 0 .=∫∫
16. Problema 56, página 1001 do livro-texto JS : Utilizar a simetria para calcular onde D é
a região limitada pelo quadrado com vértices
( )D
2 3x 4 y dA ,− +∫∫( ) ( )5, 0 e 0, 5 .± ±
Resolução: De acordo com a propriedade distributiva, a integral dada escreve-se :
( )5, 0( )5, 0−
( )0, 5−
( )0, 5
X
Y
0
( )D D D D
2 3x 4 y dA 2 dA 3x dA 4 y dA− + = − +∫∫ ∫∫ ∫∫ ∫∫Todavia, devemos levar em conta os detalhes :
D
2 dA :∫∫ volume do prisma reto de base quadrada D e altura z = 2 . Como a base quadrada tem área 50 , o volume será100 .
D
3x dA :∫∫ A equaçãoz = 3x representa um plano inclinado contendo o eixo OY e, como a função z = 3x é ímpar, a simetria do do-mínio D produzirá duas porções simétricas dos volumes de dois prismas chanfrados de base triangular . Consequente-mente, o valor da integral ézero .
D
4 y dA :∫∫ A equaçãoz = 4y representa um plano inclinado contendo o eixo OX e, como a função z = 4y também é ímpar, a sime-tria do domínio D produzirá resultados inteiramente análo-gos aos da integral anterior . Portanto, o valor final também será zero .
Então, ( )D
2 3x 4 y dA 100 .− + =∫∫
D
> int (int (x*y, y=-1..1+x^2), x=-1..0) + int (int (x*y, y=sqrt(x)..1+x^2), x=0..1) + int (int (x*y, y =-1..-sqrt(x)), x=0..1) ; 0
> plot3d ({1-x-y, 4-x^2-y^2}, x=-3..3, y=-3..3) ;
17. Problema 58, página 1001 do livro-texto JS : Utilizando um CAS (Computer Algebraic System) – Sistema Algé-brico Computacional, desenhar o sólido limitado pelo plano x + y + z = 1 e o paraboloide z = 4 – x² - y², e calcular seu volume exato .
Resolução: Deveremos determinar as equações das fronteiras da região espacial de integração e calcular a integral dupla correspondente :
Domínio D
> solve (1-x-y = 4-x^2-y^2, y) ; , + 1
2
+ − 13 4x 4 x2
2 −
1
2
+ − 13 4x 4 x2
2
curvas y = f(x) ao longo do eixo OY
> solve (13+4*x-4*x^2 = 0) ; , − 1
2
14
2 +
1
2
14
2
> V = int (int (4-x^2-y^2-(1-x-y), y=(1-sqrt(13+4*x -4*x^2))/2..(1+sqrt(13+4*x-4*x^2))/2), x=(1-sqrt(14))/2..(1+sqrt(14))/2) ; = V
49 π8
ou 19,2 u.v.
O ’
balizamentos numéricos de D ao longo do eixo OX
1818
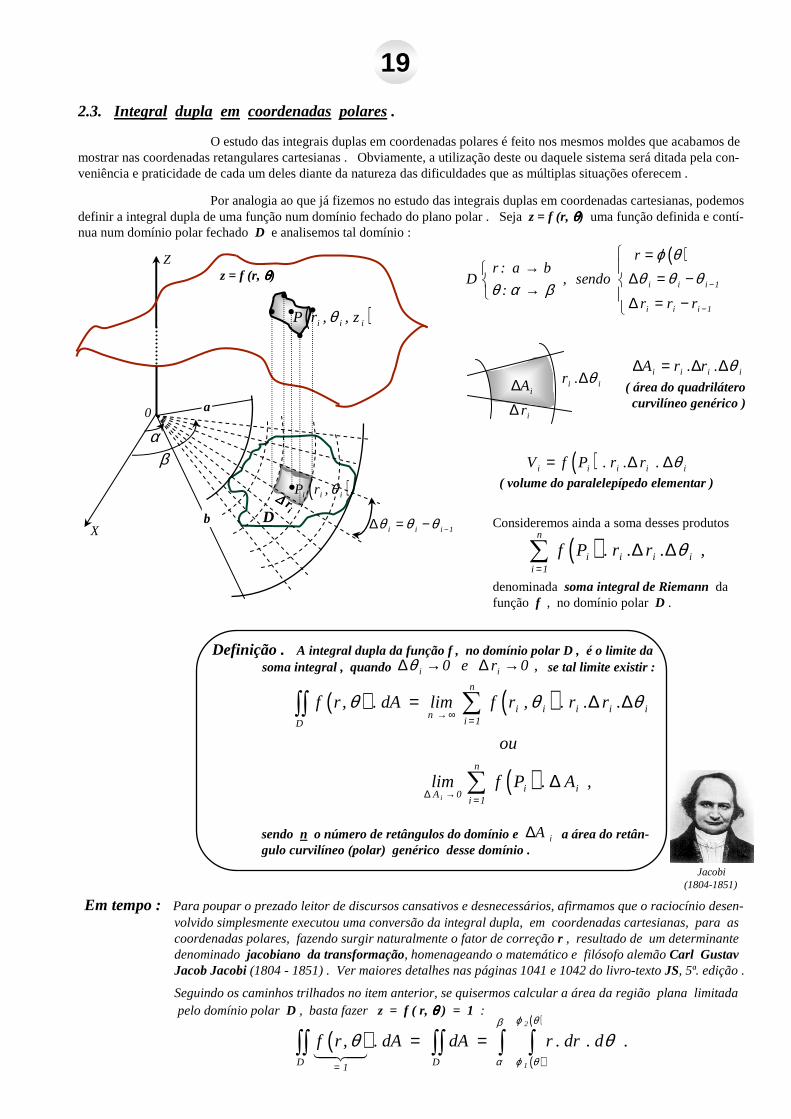
2.3. Integral dupla em coordenadaspolares.
O estudo das integrais duplas em coordenadas polares é feito nos mesmos moldes que acabamos de mostrar nas coordenadas retangulares cartesianas . Obviamente, a utilização deste ou daquele sistema será ditada pela con-veniência e praticidade de cada um deles diante da natureza das dificuldades que as múltiplas situações oferecem .
Por analogia ao que já fizemos no estudo das integrais duplas em coordenadas cartesianas, podemos definir a integral dupla de uma função num domínio fechado do plano polar . Seja z = f (r, θθθθ) uma função definida e contí-nua num domínio polar fechado D e analisemos tal domínio :
X
Z
0 a
b
αβ
( )i i iP r ,θ
( )i i iP r , , zθ
z = f (r, θθθθ)
i i i 1θ θ θ −∆ = −
∆∆∆∆ ri
( )i i i i iV f P . r . r . θ= ∆ ∆( volume do paralelepípedo elementar )
Consideremos ainda a soma desses produtos
denominada soma integral de Riemannda função f , no domínio polar D .
( )n
i i i ii 1
f P . r . r . ,θ=
∆ ∆∑D
( )i i i 1
i i i 1
rr : a b
D , sendo:
r r r
ϕ θθ θ θ
θ α β −
−
=→
∆ = − → ∆ = −
ir∆
i ir . θ∆iA∆
i i i iA r . r . θ∆ = ∆ ∆( área do quadrilátero curvilíneo genérico )
Definição . A integral dupla da função f , no domínio polar D , é o limite da soma integral , quando se tal limite existir :i i0 e r 0 ,θ∆ → ∆ →
( ) ( )
( )i
n
i i i i in
i 1D
n
i iA 0
i 1
f r , . dA lim f r , . r . r .
ou
lim f P . A ,
θ θ θ→ ∞ =
∆ → =
= ∆ ∆
∆
∑∫∫
∑
sendo no número de retângulos do domínio e a área do retân-gulo curvilíneo (polar) genérico desse domínio .
iA∆
Em tempo : Para poupar o prezado leitor de discursos cansativos e desnecessários, afirmamos que o raciocínio desen-volvido simplesmente executou uma conversão da integral dupla, em coordenadas cartesianas, para as coordenadas polares, fazendo surgir naturalmente o fator de correção r , resultado de um determinante denominado jacobiano da transformação, homenageando o matemático e filósofo alemão Carl GustavJacob Jacobi (1804 - 1851) . Ver maiores detalhes nas páginas 1041 e 1042 do livro-texto JS, 5ª. edição .
Seguindo os caminhos trilhados no item anterior, se quisermos calcular a área da região plana limitada pelo domínio polar D , basta fazer z = f ( r, θθθθ ) = 1 :
Jacobi (1804-1851)
( )( )
( )2
1D D1
f r , . dA dA r . dr . d .ϕ θβ
α ϕ θ
θ θ=
= =∫∫ ∫∫ ∫ ∫�����
1919
> Int ( Int ( (r^2*(cos(theta)+sin(theta) )+r^3 ), r = 0..2), theta = 0..2*Pi ) ;
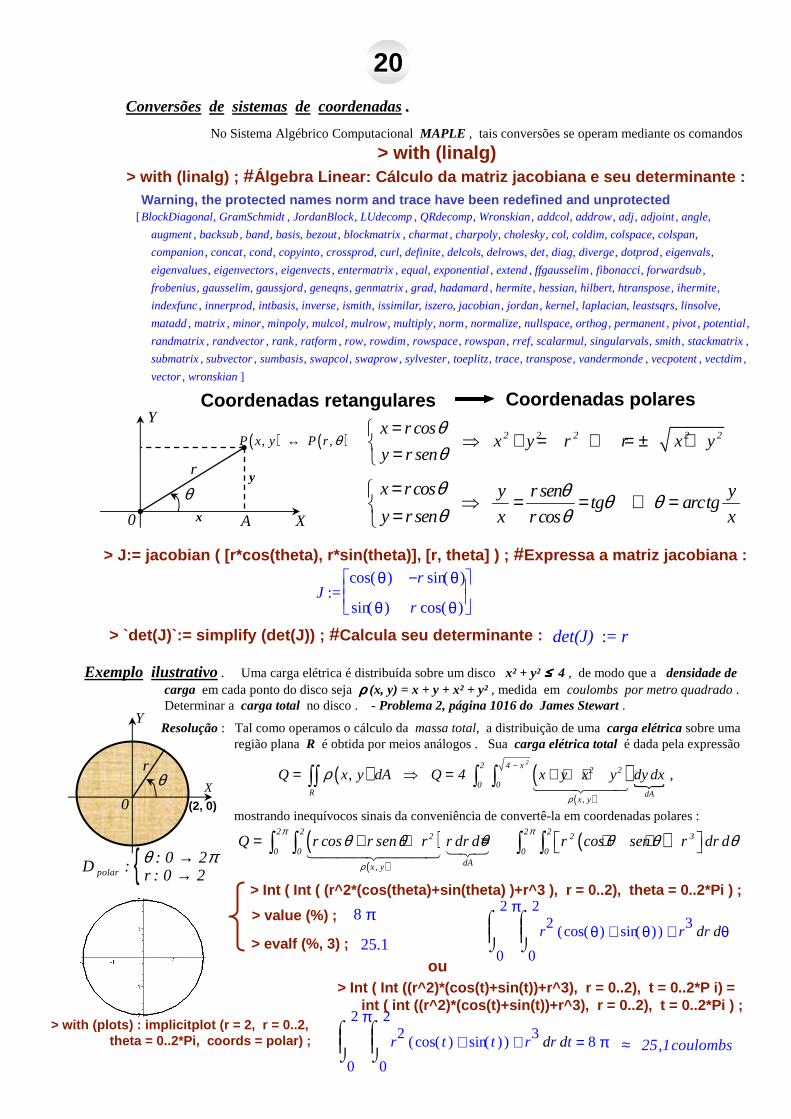
Conversõesde sistemasde coordenadas. .
No Sistema Algébrico Computacional MAPLE , tais conversões se operam mediante os comandos
> with (linalg)> with (linalg) ; #Álgebra Linear: Cálculo da matriz jacobiana e seu de terminante :
Coordenadas retangulares Coordenadas polares
0 X
Y
θ
( ) ( )P x, y P r,θ↔
r
A
2 2 2 2 2x r cosx y r r x y
y r sen
θθ
=⇒ + = ∴ = ± + =
x
yx rcos y rsen y
tg arctgy rsen x rcos x
θ θ θ θθ θ
=⇒ = = ∴ = =
> J:= jacobian ( [r*cos(theta), r*sin(theta)], [r, t heta] ) ; #Expressa a matriz jacobiana :
:= J
( )cos θ −r ( )sin θ
( )sin θ r ( )cos θ
> `det(J)`:= simplify (det(J)) ; #Calcula seu determinante : := det(J) r
Exemplo ilustrativo . Uma carga elétrica é distribuída sobre um disco x² + y²≤≤≤≤ 4 , de modo que a densidade de carga em cada ponto do disco seja ρρρρ (x, y) = x + y + x² + y², medida em coulombs por metro quadrado.Determinar a carga total no disco . - Problema 2, página 1016 do James Stewart .
Resolução : Tal como operamos o cálculo da massa total, a distribuição de uma carga elétrica sobre umaregião plana R é obtida por meios análogos . Sua carga elétrica totalé dada pela expressão
mostrando inequívocos sinais da conveniência de convertê-la em coordenadas polares :
( ) ( )( )�
22 4 x 2 2
0 0R dA
x, y
Q x, y dA Q 4 x y x y dy dx ,
ρ
ρ−
= ⇒ = + + +∫∫ ∫ ∫ �������
0X
Y
θr
( )( )
( )2 2 2 22 2 3
0 0 0 0dAx, y
Q r cos r sen r r dr d r cos sen r dr dπ π
ρ
θ θ θ θ θ θ = + + = + + ∫ ∫ ∫ ∫������������
> evalf (%, 3) ;
> value (%) ;
ou
25,1coulombs≈
BlockDiagonal GramSchmidt JordanBlock LUdecomp QRdecompWronskian addcol addrow adj adjoint angle, , , , , , , , , , ,[
augment backsub band basis bezout blockmatrix charmat charpoly cholesky col coldim colspace colspan, , , , , , , , , , , , ,
companion concat cond copyinto crossprod curl definite delcols delrows det diag diverge dotprod eigenvals, , , , , , , , , , , , , ,
eigenvalues eigenvectors eigenvects entermatrix equal exponential extend ffgausselim fibonacci forwardsub, , , , , , , , , ,
frobenius gausselim gaussjord geneqns genmatrix grad hadamard hermite hessian hilbert htranspose ihermite, , , , , , , , , , , ,
indexfunc innerprod intbasis inverse ismith issimilar iszero jacobian jordan kernel laplacian leastsqrs linsolve, , , , , , , , , , , , ,
matadd matrix minor minpoly mulcol mulrow multiply norm normalize nullspace orthog permanent pivot potential, , , , , , , , , , , , , ,
randmatrix randvector rank ratform row rowdim rowspace rowspan rref scalarmul singularvals smith stackmatrix, , , , , , , , , , , , ,
submatrix subvector sumbasis swapcol swaprow sylvester toeplitz trace transpose vandermonde vecpotent vectdim, , , , , , , , , , , ,
vector wronskian, ]
Warning, the protected names norm and trace have been re defined and unprotected
> Int ( Int ((r^2)*(cos(t)+sin(t))+r^3), r = 0..2) , t = 0..2*P i) =int ( int ((r^2)*(cos(t)+sin(t))+r^3), r = 0..2), t = 0..2*Pi ) ;
(2, 0)
{polar: 0 2D :
r : 0 2θ π→
→
> with (plots) : implicitplot (r = 2, r = 0..2, theta = 0..2*Pi, coords = polar) ;
2020
d⌠
⌡0
2 π
d⌠
⌡0
2
+ r2
( ) + ( )cos θ ( )sin θ r3
r θ8 π
25.1
= d⌠
⌡0
2 π
d⌠
⌡0
2
+ r2
( ) + ( )cos t ( )sin t r3
r t 8 π
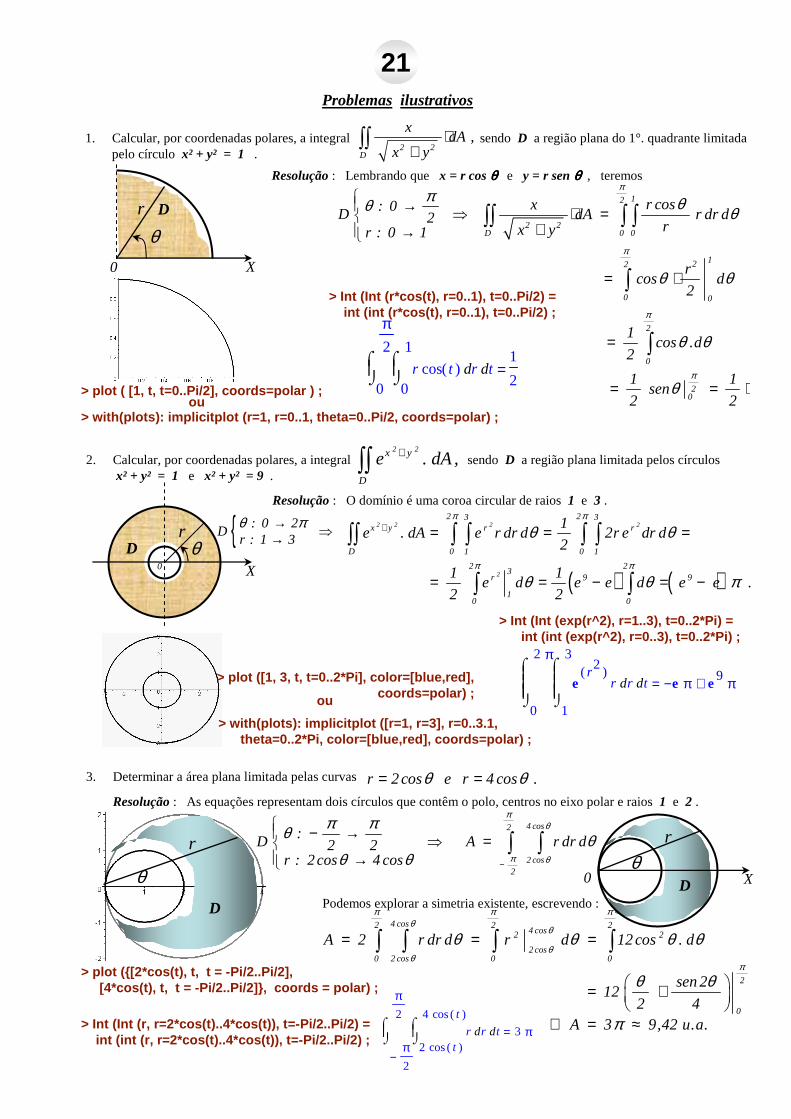
Problemasilustrativos
1. Calcular, por coordenadas polares, a integral sendo D a região plana do 1°. quadrante limitada pelo círculo x² + y² = 1 .
Resolução: Lembrando que x = r cos θθθθ e y = r sen θθθθ , teremos
2 2D
xdA ,
x y⋅
+∫∫
X0
r
θ
: 0D 2r : 0 1
πθ → ⇒ →
12
2 2D 0 0
122
0 0
2
0
20
r cosxdA r dr d
rx y
rcos d
2
1cos .d
2
1 1sen
2 2
π
π
π
π
θ θ
θ θ
θ θ
θ
⋅ =+
= ⋅
=
= = ⋅
∫∫ ∫ ∫
∫
∫
2. Calcular, por coordenadas polares, a integral sendo D a região plana limitada pelos círculos x² + y² = 1 e x² + y² = 9 .
Resolução: O domínio é uma coroa circular de raios 1 e 3 .
2 2x y
D
e . dA,+∫∫
D
X0
rθD
{ : 0 2D
r : 1 3θ π→
⇒→
( ) ( )
2 2 2 2
2
2 23 3x y r r
D 0 1 0 1
2 23
r 9 9
10 0
1e . dA e r dr d 2r e dr d
2
1 1e d e e d e e .
2 2
π π
π π
θ θ
θ θ π
+ = = =
= = − = −
∫∫ ∫ ∫ ∫ ∫
∫ ∫
3. Determinar a área plana limitada pelas curvas
Resolução : As equações representam dois círculos que contêm o polo, centros no eixo polar e raios 1 e 2 .
r 2cos e r 4 cos .θ θ= =
X0
r
θD
4 cos2
2 cos2
:D A r dr d2 2r : 2cos 4 cos
πθ
π θ
π πθ θθ θ −
− → ⇒ = →
∫ ∫
Podemos explorar a simetria existente, escrevendo :
4 cos2 2 24 cos2 2
2 cos0 2 cos 0 0
2
0
A 2 r dr d r d 12cos . d
sen 212
2 4A 3 9,42 u.a.
π π πθ
θ
θθ
π
θ θ θ θ
θ θ
π
= = =
= +
∴ = ≈
∫ ∫ ∫ ∫
> plot ( [1, t, t=0..Pi/2], coords=polar ) ;
> Int (Int (r*cos(t), r=0..1), t=0..Pi/2) = int (int (r*cos(t), r=0..1), t=0..Pi/2) ;
= d⌠⌡0
π2
d⌠⌡0
1
r ( )cos t r t1
2
> plot ([1, 3, t, t=0..2*Pi], color=[blue,red],coords=polar) ;
> Int (Int (exp(r^2), r=1..3), t=0..2*Pi) = int (int (exp(r^2), r=0..3), t=0..2*Pi) ;
= d⌠
⌡
0
2 π
d⌠
⌡
1
3
e( )r
2r r t − + e π e
9 π
> plot ({[2*cos(t), t, t = -Pi/2..Pi/2],[4*cos(t), t, t = -Pi/2..Pi/2]}, coords = polar) ;
> Int (Int (r, r=2*cos(t)..4*cos(t)), t=-Pi/2..Pi/2 ) = int (int (r, r=2*cos(t)..4*cos(t)), t=-Pi/2..Pi/2) ;
= d⌠⌡
−π2
π2
d⌠⌡
2 ( )cos t
4 ( )cos t
r r t 3 π
D
r
θ
> with(plots): implicitplot (r=1, r=0..1, theta=0..P i/2, coords=polar) ;ou
ou
> with(plots): implicitplot ([r=1, r=3], r=0..3.1,theta=0..2*Pi, color=[blue,red], coords=polar) ;
2121
> with (plots): implicitplot3d ( {z=sqrt(x^2+y^2), x ^2+y^2-3*y=0}, x = -3..3, y = -3..4, z = 0..3, numpoints = 100 00 ) ;
θ
rD
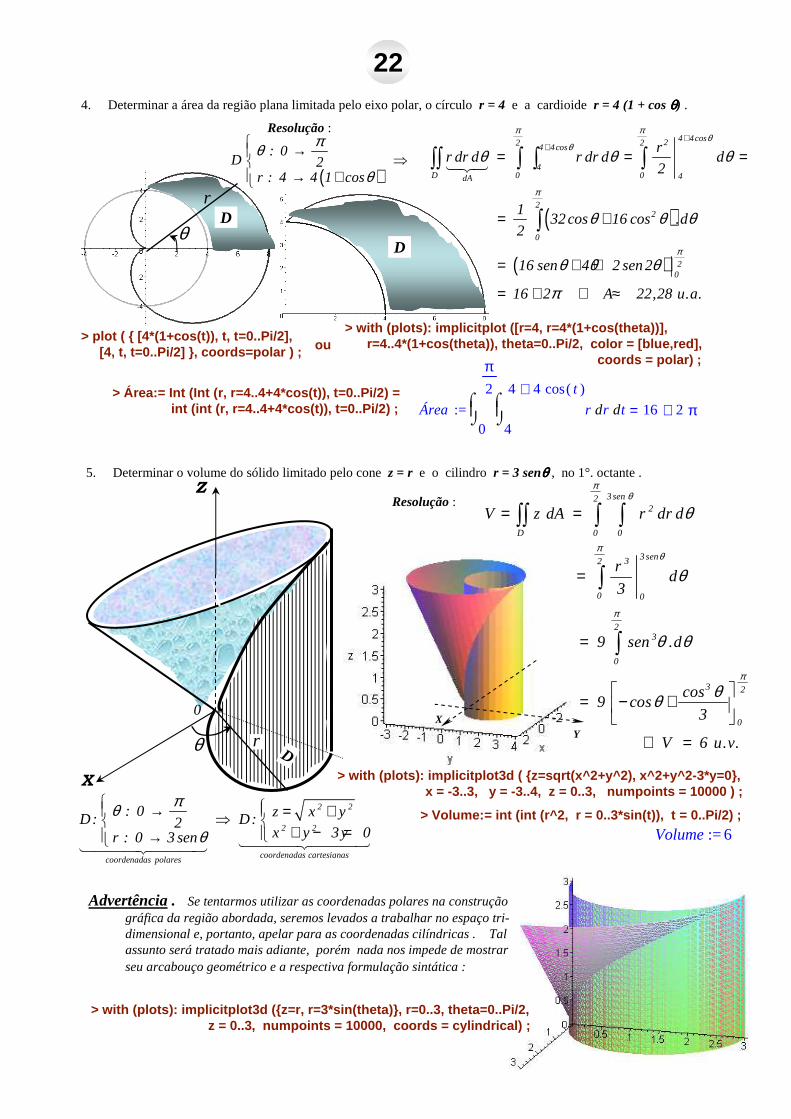
4. Determinar a área da região plana limitada pelo eixo polar, o círculo r = 4 e a cardioider = 4 (1 + cos θθθθ) .
Resolução:
( ): 0
D 2r : 4 4 1 cos
πθ
θ
→ ⇒ → +
( )
( )
4 4cos22 24 4cos
4D 0 0 4dA
22
0
20
rr dr d r dr d d
2
132cos 16 cos .d
2
16 sen 4 2 sen 2
16 2 A 22,28 u.a.
π πθ
θ
π
π
θ θ θ
θ θ θ
θ θ θ
π
++
= = =
= +
= + +
= + ∴ ≈
∫∫ ∫ ∫ ∫
∫
���
5. Determinar o volume do sólido limitado pelo cone z = r e o cilindro r = 3 senθθθθ , no 1°. octante .
Resolução:
0
rθ D
2 2
2 2
coordenadas cartesianascoordenadas polares
: 0 z x yD: D:2x y 3y 0r : 0 3 sen
πθ
θ
→ = +⇒ + − = → ������������������
3sen22
D 0 0
3sen32
0 0
23
0
3 2
0
V z dA r dr d
rd
3
9 sen .d
cos9 cos
3
V 6 u.v.
πθ
πθ
π
π
θ
θ
θ θ
θθ
= =
=
=
= − +
∴ =
∫∫ ∫ ∫
∫
∫
> plot ( { [4*(1+cos(t)), t, t=0..Pi/2],[4, t, t=0..Pi/2] }, coords=polar ) ;
> Área:= Int (Int (r, r=4..4+4*cos(t)), t=0..Pi/2) = int (int (r, r=4..4+4*cos(t)), t=0..Pi/2) ; := Área = d
⌠⌡0
π2
d⌠⌡4
+ 4 4 ( )cos t
r r t + 16 2 π
Z
X
XY
> Volume:= int (int (r^2, r = 0..3*sin(t)), t = 0 ..Pi/2) ;
:= Volume 6
D
ou> with (plots): implicitplot ([r=4, r=4*(1+cos(theta) )],
r=4..4*(1+cos(theta)), theta=0..Pi/2, color = [blue ,red], coords = polar) ;
Advertência. Se tentarmos utilizar as coordenadas polares na construção gráfica da região abordada, seremos levados a trabalhar no espaço tri-dimensional e, portanto, apelar para as coordenadas cilíndricas . Tal assunto será tratado mais adiante, porém nada nos impede de mostrar seu arcabouço geométrico e a respectiva formulação sintática :
> with (plots): implicitplot3d ({z=r, r=3*sin(theta) }, r=0..3, theta=0..Pi/2, z = 0..3, numpoints = 10000, coords = cylindrical) ;
2222
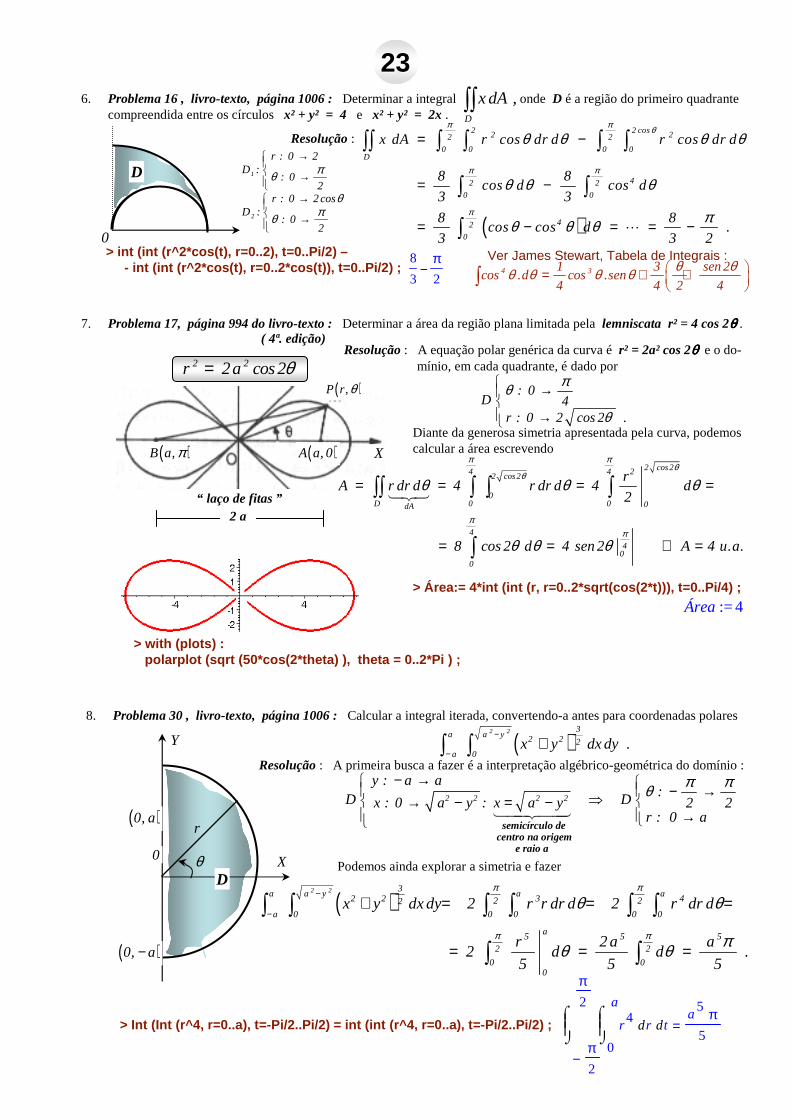
7. Problema 17, página 994 do livro-texto : Determinar a área da região plana limitada pela lemniscata r² = 4 cos 2θθθθ .
Resolução: A equação polar genérica da curva ér² = 2a² cos 2θθθθ e o do-mínio, em cada quadrante, é dado por
: 0D 4
r : 0 2 cos 2 .
πθ
θ
→ →
2 cos224 42 cos2
0D 0 0 0dA
4
40
0
rA r dr d 4 r dr d 4 d
2
8 cos 2 d 4 sen 2 A 4 u.a.
π πθ
θ
ππ
θ θ θ
θ θ θ
= = = =
= = ∴ =
∫∫ ∫ ∫ ∫
∫
���
8. Problema 30 , livro-texto, página 1006 : Calcular a integral iterada, convertendo-a antes para coordenadas polares
Resolução: A primeira busca a fazer é a interpretação algébrico-geométrica do domínio :
( )P r,θ
( )A a, 0( )B a,π X
2 a“ laço de fitas ”
Diante da generosa simetria apresentada pela curva, podemos calcular a área escrevendo
2 2r 2a cos2θ=
( )2 2 3
a a y 2 2 2
a 0x y dx dy .
−
−+∫ ∫
2 2 2 2
y : a a:D Dx : 0 a y : x a y 2 2
r : 0 a
π πθ− → − →⇒ → − = −
→�������
semicírculo decentro na origem
e raio aX
Y
0
Dθ
r
Podemos ainda explorar a simetria e fazer
( )2 2 3
a a y a a2 2 3 42 22
a 0 0 0 0 0
a5 5 52 2
0 00
x y dx dy 2 r r dr d 2 r dr d
r 2 a a2 d d .
5 5 5
π π
π π
θ θ
πθ θ
−
−+ = = =
= = =
∫ ∫ ∫ ∫ ∫ ∫
∫ ∫
( )0, a
( )0, a−
( 4ª. edição)
> with (plots) :polarplot (sqrt (50*cos(2*theta) ), theta = 0..2*Pi ) ;
> Área:= 4*int (int (r, r=0..2*sqrt(cos(2*t))), t=0 ..Pi/4) ;
:= Área 4
> Int (Int (r^4, r=0..a), t=-Pi/2..Pi/2) = int (int (r^4, r=0..a), t=-Pi/2..Pi/2) ; = d⌠
⌡
−π2
π2
d⌠
⌡
0
a
r4
r ta
5 π5
6. Problema 16 , livro-texto, página 1006 : Determinar a integral onde D é a região do primeiro quadrante compreendida entre os círculos x² + y² = 4 e x² + y² = 2x .
Resolução:
D
x dA ,∫∫
D
0( )
2 2 cos2 22 2
0 0 0 0D
42 2
0 0
42
0
x dA r cos dr d r cos dr d
8 8cos d cos d
3 3
8 8cos cos d .
3 3 2
π π θ
π π
π
θ θ θ θ
θ θ θ
πθ θ θ
= −
= −
= − = = −
∫∫ ∫ ∫ ∫ ∫
∫ ∫
∫ ⋯
> int (int (r^2*cos(t), r=0..2), t=0..Pi/2) –- int (int (r^2*cos(t), r=0..2*cos(t)), t=0..Pi/2) ; −
8
3
π2
1
2
r : 0 2D :
: 02
r : 0 2cosD :
: 02
πθ
θπθ
→ →
→ →
Ver James Stewart, Tabela de Integrais :4 31 3 sen 2
cos .d cos .sen4 4 2 4
θ θθ θ θ θ = + + ∫
2323

A massa totalda lâmina será dada por sendo a
função contínua em R .
As medidas dos momentos de massa da lâmina, em relação aos eixos cartesianos, são :
2.4. Aplicaçõesda integral dupla : : centro de massae momento de inércia . .
Além das ilustrações do cálculo de áreas e volumes já estudadas, a integral dupla apresenta interes-santes aplicações em diversas áreas da engenharia, da economia, da estatística e probabilidades . Sua utilidade nos cálculos de centro de massa e momento de inércia, por exemplo, é bastante explorada . Excetuando-se alguns casos especiais, as in-tegrais simples permitem determinar essas grandezas somente para regiões planas homogêneas, ao passo que as integrais duplas são capazes de efetuar esses cálculos também para lâminas não homogêneas .
Suponhamos uma lâmina com a forma de uma região fechada R, no plano XOY , e seja
a medida da densidade de área da lâmina num ponto qualquer do i-ésimo retângulo de
área e massa
( )i ix , yρ( )i ix , y
A∆ ( )i i im x , y . A .ρ= ∆
( ) ( )n
i in
i 1 R
M lim x , y A x , y .dA ,ρ ρ→ ∞ =
= ∆ =∑ ∫∫ρ
( ) ( )
( ) ( )
n
x i i in
i 1 Rn
y i i in
i 1 R
M lim y x , y A y x , y .dA
M lim x x , y A x x , y .dA
ρ ρ
ρ ρ
→ ∞ =
→ ∞ =
= ∆ =
= ∆ =
∑ ∫∫
∑ ∫∫
As coordenadas do centro de massa da lâmina são dadas por( )x , yy xM M
x e y .M M
= =
X
Y
0ix
iy
Momento de inércia de uma partícula de massa m , em relação a um eixo t :
m
dt ( )2 2
tI m d kg m= −
sistema de npartículas :n
2t i i
i 1
I m d=
= ∑
Então, os momentos de inérciada distribuição contínua de massapela superfície da lâmina, em re-lação aos eixos cartesianos, são :
( ) ( )
( ) ( )
n2 2
x i i in
i 1 Rn
2 2y i i i
ni 1 R
I lim y x , y A y x, y dA
I lim x x , y A x x, y dA
ρ ρ
ρ ρ
→ ∞ =
→ ∞ =
= ∆ =
= ∆ =
∑ ∫∫
∑ ∫∫
e o momento de inércia , em relação à origem (ou ao eixo OZ) , é
( ) ( ) ( ) ( )n
2 2 2 20 i i i i
ni 1 R
I lim x y x , y A x y x, y dAρ ρ→ ∞ =
= + ∆ = +∑ ∫∫�����������momento polar de inércia
Em tempo : É fácil concluir que 0 x yI I I .= +
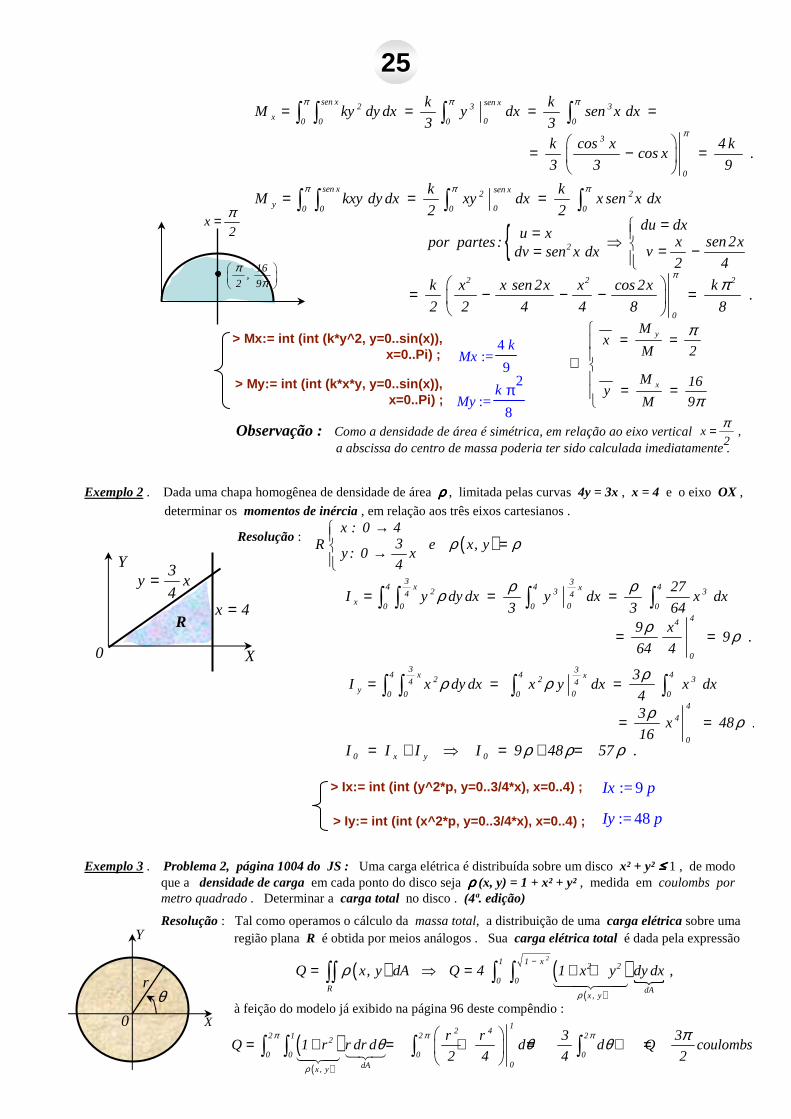
Exemplo 1. Determinar a massa e o centro de massa da chapa cuja forma é a região plana limitada pela curva y = sen x
e o eixo OX, de x = 0 a x = ππππ . A densidade de área varia com a distância ao eixo OX .
Resolução:
0 X
Yy sen x=
R
{ ( )x : 0R e x, y k yy : 0 sen x
π ρ→ =→sen x2
sen x 2
0 0 0 00
0
y kM ky dy dx k dx sen x dx
2 2
k x sen 2x k.
2 2 4 4
π π π
π π
= = = =
= − =
∫ ∫ ∫ ∫π
d : raio de rotação da partícula em torno do eixo t
> M:= Int (Int (k*y, y=0..sin(x)), x=0..Pi) = int ( int (k*y, y=0..sin(x)), x=0..Pi) ; := M = d⌠⌡0
πd
⌠⌡0
( )sin x
k y y xk π4
2424
sen x sen x2 3 3x 00 0 0 0
3
0
k kM ky dy dx y dx sen x dx
3 3k cos x 4 k
cos x .3 3 9
π π π
π
= = = =
= − =
∫ ∫ ∫ ∫
{sen x sen x2 2
y 00 0 0 0
2
2 2 2
0
k kM kxy dy dx xy dx x sen x dx
2 2du dxu x
x sen 2xpor partes :vdv sen x dx
2 4
k x x sen 2x x cos 2x k.
2 2 4 4 8 8
π π π
ππ
= = =
== ⇒ = −=
= − − − =
∫ ∫ ∫ ∫
y
x
Mx
M 2
M 16y
M 9
π
π
= =
∴
= =
Observação : Como a densidade de área é simétrica, em relação ao eixo vertical a abscissa do centro de massa poderia ter sido calculada imediatamente .
x ,2
π=
x2
π=
16,
2 9
ππ
Exemplo 2. Dada uma chapa homogênea de densidade de área ρρρρ , limitada pelas curvas 4y = 3x , x = 4 e o eixo OX , determinar os momentos de inércia , em relação aos três eixos cartesianos .
Resolução:
0 X
Y 3y x
4=
Rx 4=
( )x : 0 4
3R e x, yy : 0 x
4
ρ ρ→ = →
3 34 x 4 4x2 3 34 4
x 00 0 0 044
0
27I y dy dx y dx x dx
3 3 649 x
9 .64 4
ρ ρρ
ρ ρ
= = =
= =
∫ ∫ ∫ ∫
3 34 x 4 4x2 2 34 4
y 00 0 0 04
4
0
3I x dy dx x y dx x dx
43
x 48 .16
ρρ ρ
ρ ρ
= = =
= =
∫ ∫ ∫ ∫
0 x y 0I I I I 9 48 57 .ρ ρ ρ= + ⇒ = + =
Exemplo 3. Problema 2, página 1004 do JS : Uma carga elétrica é distribuída sobre um disco x² + y²≤≤≤≤ 1 , de modo que a densidade de carga em cada ponto do disco seja ρρρρ (x, y) = 1 + x² + y², medida em coulombs por metro quadrado. Determinar a carga total no disco . (4ª. edição)
Resolução: Tal como operamos o cálculo da massa total, a distribuição de uma carga elétrica sobre umaregião plana R é obtida por meios análogos . Sua carga elétrica totalé dada pela expressão
à feição do modelo já exibido na página 96 deste compêndio :
( ) ( )( )�
21 1 x 2 2
0 0R dA
x, y
Q x, y dA Q 4 1 x y dy dx ,
ρ
ρ−
= ⇒ = + +∫∫ ∫ ∫ �������
0 X
Y
θr
( )( )
12 4
2 1 2 22
0 0 0 00dAx, y
r r 3 3Q 1 r r dr d d d Q coulombs
2 4 4 2
π π π
ρ
πθ θ θ = + = + = ∴ =
∫ ∫ ∫ ∫��������
> My:= int (int (k*x*y, y=0..sin(x)), x=0..Pi) ; := My
k π2
8
> Mx:= int (int (k*y^2, y=0..sin(x)), x=0..Pi) ; := Mx
4 k
9
> Iy:= int (int (x^2*p, y=0..3/4*x), x=0..4) ;
> Ix:= int (int (y^2*p, y=0..3/4*x), x=0..4) ; := Ix 9 p
:= Iy 48p
2525

Exemplo 4. Problema 12, página 1016 do JS : Determinar o centro de massa da lâmina que ocupa o l°. quadrante do disco x² + y²≤≤≤≤ 1 , quando sua densidade, em qualquer ponto, for proporcional ao quadrado da distância do ponto à origem .
Resolução: ( ) ( )
( )
12 2 2 32
0 0
1 42 2x 0 0 0
1 42 2y 0 0 0
y x
kx, y k x y k r M k r dr d
8k k
M k r sen dr d sin d5 5k k
M k r cos dr d cos d5 5
M M 8 8x , y , ,
M M 5 5
π
π π
π π
πρ θ
θ θ θ θ
θ θ θ θ
π π
= + = ⇒ = =
= = =
= = =
∴ = = ⋅
∫ ∫
∫ ∫ ∫
∫ ∫ ∫0 X
Y
θr
Exemplo 5. Problema 18, página 1016 do JS : Considere um ventilador quadrado com pás de comprimento 2 e seja o
canto inferior esquerdo a origem . Se a densidade das pás for verificar o que é mais
difícil fazer : girar as pás em torno do eixo OX ou do eixo OY .
Resolução: O momento de inérciade uma partícula, num movimento de rotação, desempenha uma função
semelhante ao da massadessa partícula num movimento linear : tais entidades nos permitem calcular a grandeza da resistência ao movimento, tanto para iniciá-lo quanto para cessá-lo .Portanto, no problema em tela, basta calcular os momentos de inércia em relação aos dois eixos e verificar qual dos resultados é maior :
( ) xx, y 1 ,
10ρ = +
22
2 2 22x 0 0 0
02
3 432 2 22 2
y 0 0 00
y x
8 8 x 88x xI y 1 dy dx 1 dx x
10 3 10 3 20 15
x x 92x xI x 1 dy dx 2 x dx 2
10 10 3 40 15
I I ,
= + = + = + =
= + = + = + =
∴ >
∫ ∫ ∫
∫ ∫ ∫
sendo necessário, portanto, o empenho de uma força maior para girar as pás em torno do eixo OY .
( )x , y
X0
Y
x
2
xI m y=
2yI m x=
y
x y>
> My:= int (int (k*r^4*cos(t), r=0..1), t=0..Pi/2) ;
> Mx:= int (int (k*r^4*sin(t), r=0..1), t=0..Pi/2) ; := Mxk
5
:= Myk
5
> Iy:= int (int (x^2*(1+x/10), y=0..2), x=0..2) ;
> Ix:= int (int (y^2*(1+x/10), y=0..2), x=0..2) ; := Ix88
15
:= Iy92
15
Ix:= int (int (y^2*(1+x/10), y = 0..2), x = 0..2) ;Ix:= int (int (y^2*(1+x/10), y = 0..2), x = 0..2) ;Ix:= int (int (y^2*(1+x/10), y = 0..2), x = 0..2) ;Ix:= int (int (y^2*(1+x/10), y = 0..2), x = 0..2) ;
IyIyIyIy:= int (int (x^2*(1+x/10), y = 0..2), x = 0..2) ;:= int (int (x^2*(1+x/10), y = 0..2), x = 0..2) ;:= int (int (x^2*(1+x/10), y = 0..2), x = 0..2) ;:= int (int (x^2*(1+x/10), y = 0..2), x = 0..2) ;
Recomendaçãoútil : Até agora, em todas as operações efetuadas com o aplicativo Maple, executamos uma sentença de cada vez, passo a passo . Todavia, se preferirmos digitar todo o comando sintático num único pacote, objetivando maior agilidade nas operações, basta selecionar todas as sentenças, aplicar um “copiar” e transportá-las para o aplicativo Maple mediante um “colar” ( paste ) . Clicando enter ao final da última sentença, os resultados surgirão na mesma ordem estabelecida .
> Ix:= int (int (y^2*(1+x/10), y = 0..2), x = 0..2) ;> Ix:= int (int (y^2*(1+x/10), y = 0..2), x = 0..2) ;> Ix:= int (int (y^2*(1+x/10), y = 0..2), x = 0..2) ;> Ix:= int (int (y^2*(1+x/10), y = 0..2), x = 0..2) ;
> > > > IyIyIyIy:= int (int (x^2*(1+x/10), y = 0..2), x = 0..2) ;:= int (int (x^2*(1+x/10), y = 0..2), x = 0..2) ;:= int (int (x^2*(1+x/10), y = 0..2), x = 0..2) ;:= int (int (x^2*(1+x/10), y = 0..2), x = 0..2) ;
88888888Ix := Ix := Ix := Ix := --------------------
15151515
92929292IyIyIyIy := := := := --------------------
15 15 15 15
⇒
- Para importar os resultados obtidos na tela do Maple , basta clicar Edit , Select All e Copy as Maple Texte, após colá-los na página de trabalho, aplicar os ar-remates desejados: cores, fontes, dimensões e outros . Neste exemplo, utilizamos Arial Unicode MS , 10 .
2626

2.5. Integral tripla em coordenadascartesianas.
Tal como tratamos as integrais duplas na resolução de problemas que envolvem funções de duas va-riáveis independentes, definiremos as integrais triplas para aplicá-las nas funções de três variáveis independentes . Trata-se, portanto, de uma inevitável extensão das integrais duplas que, por sua vez, consistem na extensão das integrais simples .
Seja uma função definida e contínua num domínio fechado D :
O cálculo de uma integral tripla é feito mediante as execuções sucessivas de três integrais simples .
( )u f x, y, z=
( ) ( )i
n n
i i i i i i i in V 0
i 1 i 1D
f x, y,z dV lim f x , y , z x y z ou lim u V .→ ∞ ∆ →= =
= ∆ ∆ ∆ ∆∑ ∑∫∫∫
Exemplo 1. Calcular a integral21 1 x 1 y
0 0 2 yx dz dy dx .
− +
∫ ∫ ∫Resolução : Desmontando, ordenadamente, o novelo de integração proposto, chegaremos ao resultado
( )
( ) ( )
( )
2 21 1 x 1 y 1 1 x 1 1 x1 y 2
2 y0 0 2 y 0 0 0 01 x
31 2
00
1 3 22
0
12 5
1 4
00
x dz dy dx x z dy dx x 1 y 2y dy dx
xyxy xy dx
3
xx x 1 x x 1 x dx
3
1 1 x x 1 1 1x x dx
3 3 2 5 3 2 5
1
10
− + − −+
−
= = + − =
= + −
= − + − − −
= − = − = −
=
∫ ∫ ∫ ∫ ∫ ∫ ∫
∫
∫
∫
Exemplo 2. Calcular a integralx z
2 2
0 z 0
ycos dy dx dz .
z
π π
∫ ∫ ∫Resolução:
{ {
x zx z
2 2 2 2
0 z 0 0 z0
2 2 2 2z0 z 0
2
0
20
y ycos dy dx dz z sen dx dz
z z
z sen x dx dz z cos x dz
z cos z dz
u z du dzintegrando por partesdv cos z dz v sen z
z sen z cos z
0 0 1 1 0,57 .2 2
π π π π
π π π π
π
π
π π
=
= = −
=
= =⇒= =
= +
= + − − = − ≈
∫ ∫ ∫ ∫ ∫
∫ ∫ ∫
∫
> Int (Int (Int (x, z=2*y..1+y^2), y=0..1-x), x=0.. 1) = int (int (int (x, z=2*y..1+y^2), y=0..1- x), x=0..1) ;
= d⌠⌡0
1
d⌠⌡0
− 1 x
d⌠⌡2 y
+ 1 y2
x z y x1
10
> Int (Int (Int (cos(y/z), y=0..x*z), x=z..Pi/2), z =0..Pi/2) = int (int (int (cos(y/z), y=0..x*z), x=z ..Pi/2), z=0..Pi/2) ;
= d⌠
⌡
0
π2
d⌠
⌡
z
π2
d⌠
⌡
0
x z
cos
y
zy x z − + 1
π2
> evalf (%, 3) ; = 0.571 0.57ou
2727
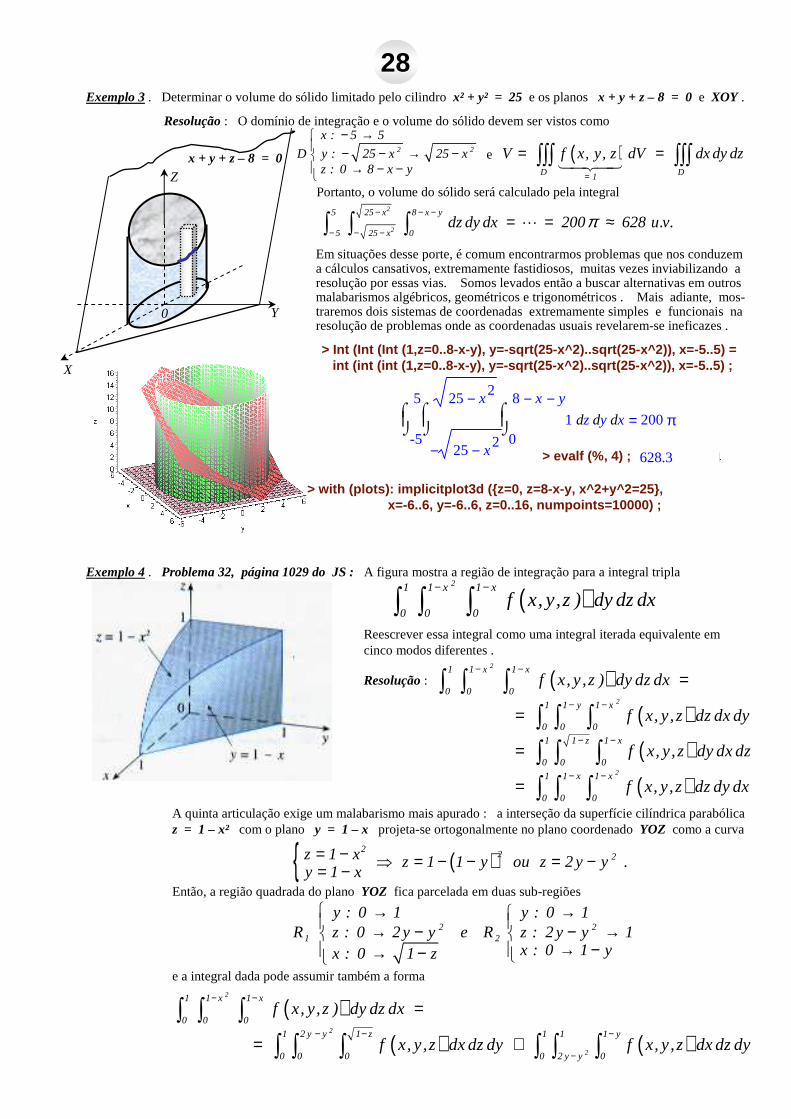
Resolução: O domínio de integração e o volume do sólido devem ser vistos como
e
Portanto, o volume do sólido será calculado pela integral
X
Y
Z
0
2
2
5 25 x 8 x y
5 25 x 0dz dy dx 200 628 u.v.π
− − −
− − −= = ≈∫ ∫ ∫ ⋯
Em situações desse porte, é comum encontrarmos problemas que nos conduzem a cálculos cansativos, extremamente fastidiosos, muitas vezes inviabilizando a resolução por essas vias. Somos levados então a buscar alternativas em outros malabarismos algébricos, geométricos e trigonométricos . Mais adiante, mos-traremos dois sistemas de coordenadas extremamente simples e funcionais na resolução de problemas onde as coordenadas usuais revelarem-se ineficazes .
Exemplo 4. Problema 32, página 1029 do JS : A figura mostra a região de integração para a integral tripla
x + y + z – 8 = 0
( )21 1 x 1 x
0 0 0f x, y,z ) dy dz dx
− −
∫ ∫ ∫Reescrever essa integral como uma integral iterada equivalente em cinco modos diferentes .
Resolução: ( )( )( )( )
2
2
2
1 1 x 1 x
0 0 0
1 1 y 1 x
0 0 0
1 1 z 1 x
0 0 0
1 1 x 1 x
0 0 0
f x, y,z ) dy dz dx
f x, y,z dz dx dy
f x, y,z dy dx dz
f x, y,z dz dy dx
− −
− −
− −
− −
=
=
=
=
∫ ∫ ∫∫ ∫ ∫∫ ∫ ∫∫ ∫ ∫
A quinta articulação exige um malabarismo mais apurado : a interseção da superfície cilíndrica parabólica z = 1 – x² com o plano y = 1 – x projeta-se ortogonalmente no plano coordenado YOZ como a curva
{ ( )2
2 2z 1 x z 1 1 y ou z 2 y y .y 1 x
= − ⇒ = − − = −= −Então, a região quadrada do plano YOZ fica parcelada em duas sub-regiões
2 21 2
y : 0 1 y : 0 1R z : 0 2 y y e R z : 2 y y 1
x : 0 1 yx : 0 1 z
→ → → − − → → − → −
e a integral dada pode assumir também a forma
( )( ) ( )
2
2
2
1 1 x 1 x
0 0 0
1 2 y y 1 z 1 1 1 y
0 0 0 0 2 y y 0
f x, y,z ) dy dz dx
f x, y,z dx dz dy f x, y,z dx dz dy
− −
− − −
−
=
= +
∫ ∫ ∫∫ ∫ ∫ ∫ ∫ ∫
Exemplo 3. Determinar o volume do sólido limitado pelo cilindro x² + y² = 25 e os planos x + y + z – 8 = 0 e XOY .
2 2
x : 5 5
D y : 25 x 25 xz : 0 8 x y
− → − − → − → − −
( )D D1
V f x, y, z dV dx dy dz
=
= =∫∫∫ ∫∫∫�����
> Int (Int (Int (1,z=0..8-x-y), y=-sqrt(25-x^2)..sq rt(25-x^2)), x=-5..5) = int (int (int (1,z=0..8-x-y), y=-sqrt(25-x^2)..sqrt (25-x^2)), x=-5..5) ;
= d⌠⌡-5
5
d⌠⌡
− − 25 x2
− 25 x2
d⌠⌡0
− − 8 x y
1 z y x 200π
= 628.3 628.4> evalf (%, 4) ;
> with (plots): implicitplot3d ({z=0, z=8-x-y, x^2+y ^2=25}, x=-6..6, y=-6..6, z=0..16, numpoints=10000) ;
2828
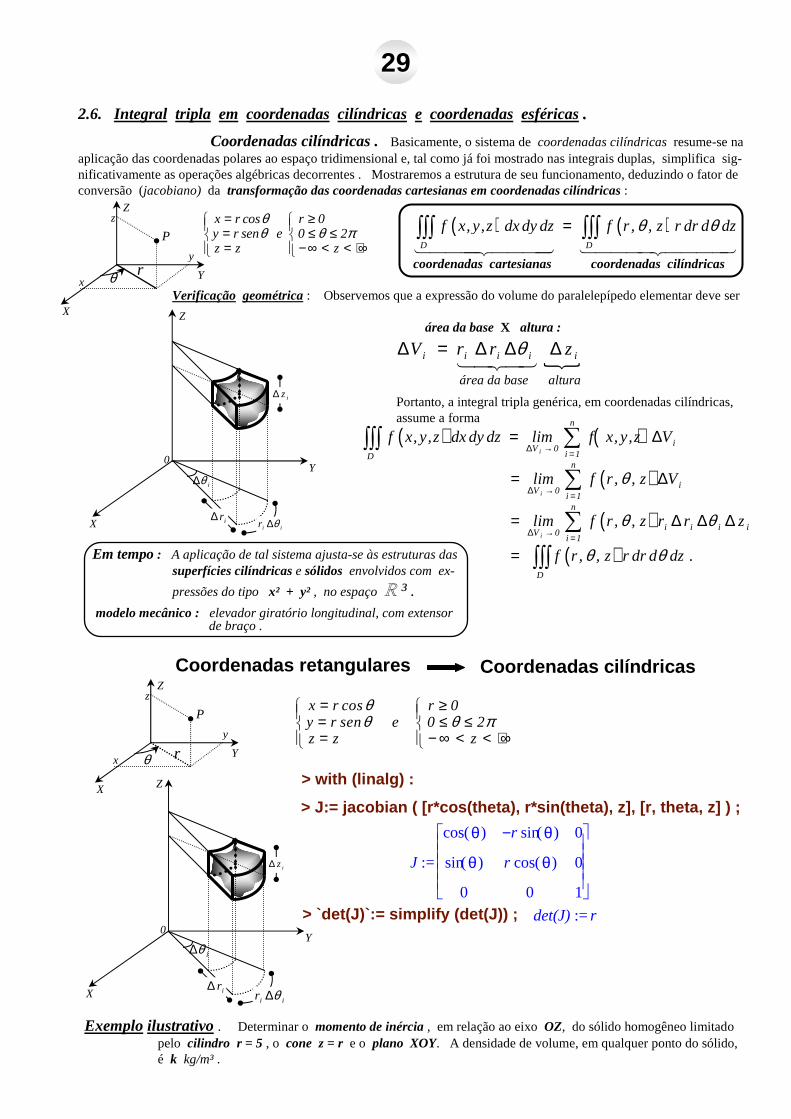
2.6. Integral tripla em coordenadascilíndricas e coordenadasesféricas. .
Coordenadas cilíndricas . Basicamente, o sistema de coordenadas cilíndricasresume-se na aplicação das coordenadas polares ao espaço tridimensional e, tal como já foi mostrado nas integrais duplas, simplifica sig-nificativamente as operações algébricas decorrentes . Mostraremos a estrutura de seu funcionamento, deduzindo o fator de conversão (jacobiano) da transformação das coordenadas cartesianas em coordenadas cilíndricas:
( ) ( )D D
f x, y,z dx dy dz f r , , z r dr d dzθ θ=∫∫∫ ∫∫∫����������� �����������coordenadas cartesianas coordenadas cilíndricas
Verificação geométrica: Observemos que a expressão do volume do paralelepípedo elementar deve ser
área da base X altura :
X
Y
Z
0
iθ∆
ir∆i ir θ∆
iz∆
�i i i i iV r r zθ∆ = ∆ ∆ ∆�����área da base altura
Portanto, a integral tripla genérica, em coordenadas cilíndricas,assume a forma
( ) ( )
( )
( )
( )
i
i
i
n
iV 0
i 1Dn
iV 0
i 1n
i i i iV 0
i 1
D
f x, y,z dx dy dz lim f x, y,z V
lim f r, , z V
lim f r, , z r r z
f r , , z r dr d dz .
θ
θ θ
θ θ
∆ → =
∆ → =
∆ → =
= ∆
= ∆
= ∆ ∆ ∆
=
∑∫∫∫
∑
∑
∫∫∫Em tempo: A aplicação de tal sistema ajusta-se às estruturas das superfícies cilíndricas e sólidos envolvidos com ex-
pressões do tipo x² + y², no espaço ℝ ³ .modelo mecânico : elevador giratório longitudinal, com extensor
de braço .
x r cos r 0y r sen e 0 2z z z
θθ θ π
= ≥ = ≤ ≤ = −∞ < < + ∞
Z
X
Yr
P
θx
y
z
x r cos r 0y r sen e 0 2z z z
θθ θ π
= ≥ = ≤ ≤ = − ∞ < < + ∞
Z
X
Yr
P
θx
y
z
Coordenadas retangulares Coordenadas cilíndricas
> with (linalg) :
> J:= jacobian ( [r*cos(theta), r*sin(theta), z], [r , theta, z] ) ;
> `det(J)`:= simplify (det(J)) ;
:= J
( )cos θ −r ( )sin θ 0
( )sin θ r ( )cos θ 0
0 0 1
:= det(J) r
X
Y
Z
0
iθ∆
ir∆i ir θ∆
iz∆
Exemploilustrativo . Determinar o momento de inércia , em relação ao eixo OZ, do sólido homogêneo limitado pelo cilindro r = 5 , o cone z = r e o plano XOY. A densidade de volume, em qualquer ponto do sólido, é k kg/m³.
2929
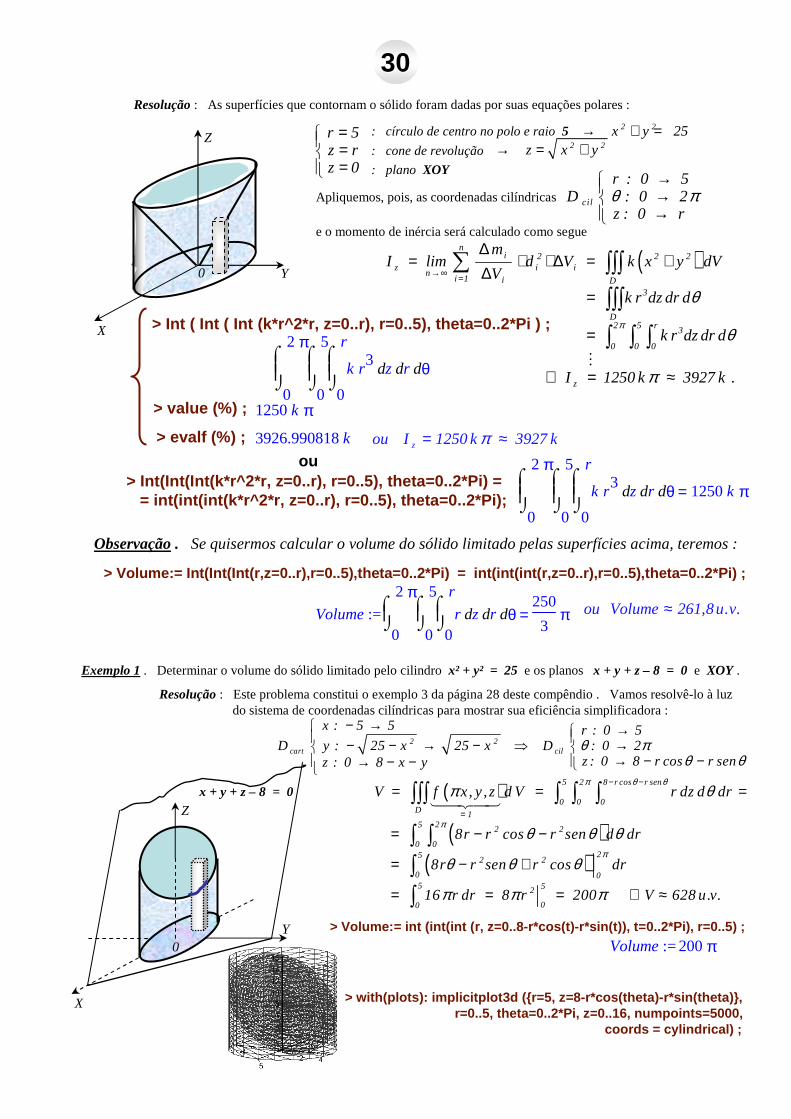
> evalf (%) ;
> Int ( Int ( Int (k*r^2*r, z=0..r), r=0..5), theta =0..2*Pi ) ;
> value (%) ;
Resolução: As superfícies que contornam o sólido foram dadas por suas equações polares :
r 5z rz 0
= ==
: círculo de centro no polo e raio 5
: cone de revolução
: plano XOY
2 2x y 25→ + =2 2z x y→ = +
X
Y
Z
0
Apliquemos, pois, as coordenadas cilíndricas
e o momento de inércia será calculado como segue
cil
r : 0 5D : 0 2
z : 0 rθ π
→ →→
( )n
i 2 2 2z i i
ni 1 i D
3
D2 5 r 3
0 0 0
z
mI lim d V k x y dV
V
k r dz dr d
k r dz dr d
I 1250 k 3927 k .
π
θ
θ
π
→∞ =
∆= ⋅ ⋅ ∆ = +
∆=
=
∴ = ≈
∑ ∫∫∫
∫∫∫
∫ ∫ ∫⋮d
⌠
⌡0
2 π
d⌠
⌡0
5
d⌠
⌡0
r
k r3
z r θ
1250k π
3926.990818k zou I 1250 k 3927 kπ= ≈ou
Observação. Se quisermos calcular o volume do sólido limitado pelas superfícies acima, teremos :
> Volume:= Int(Int(Int(r,z=0..r),r=0..5),theta=0..2 *Pi) = int(int(int(r,z=0..r),r=0..5),theta=0..2*P i) ;
:= Volume = d⌠⌡0
2 πd
⌠⌡0
5
d⌠⌡0
r
r z r θ250
3π ou Volume 261,8u.v.≈
> Int(Int(Int(k*r^2*r, z=0..r), r=0..5), theta=0..2 *Pi) = = int(int(int(k*r^2*r, z=0..r), r=0..5), theta=0..2 *Pi); = d
⌠
⌡0
2 π
d⌠
⌡0
5
d⌠
⌡0
r
k r3
z r θ 1250k π
Exemplo 1. Determinar o volume do sólido limitado pelo cilindro x² + y² = 25 e os planos x + y + z – 8 = 0 e XOY .
Resolução : Este problema constitui o exemplo 3 da página 28 deste compêndio . Vamos resolvê-lo à luz do sistema de coordenadas cilíndricas para mostrar sua eficiência simplificadora :
2 2cart cil
x : 5 5 r : 0 5D y : 25 x 25 x D : 0 2
z : 0 8 r cos r senz : 0 8 x yθ π
θ θ
− → → − − → − ⇒ → → − − → − −
X
Y
Z
0
x + y + z – 8 = 0
> Volume:= int (int(int (r, z=0..8-r*cos(t)-r*sin(t )), t=0..2*Pi), r=0..5) ;
:= Volume 200π
( )
( )( )
5 2 8 r cos r sen
0 0 0D 15 2 2 2
0 025 2 2
0 05 52
00
V f x, y,z d V r dz d dr
8r r cos r sen d dr
8r r sen r cos dr
16 r dr 8 r 200 V 628 u.v.
π θ θ
π
π
π θ
θ θ θ
θ θ θ
π π π
− −
=
= = =
= − −
= − +
= = = ∴ ≈
∫∫∫ ∫ ∫ ∫
∫ ∫∫∫
�����
> with(plots): implicitplot3d ({r=5, z=8-r*cos(thet a)-r*sin(theta)},r=0..5, theta=0..2*Pi, z=0..16, numpoints=5000,
coords = cylindrical) ;
3030
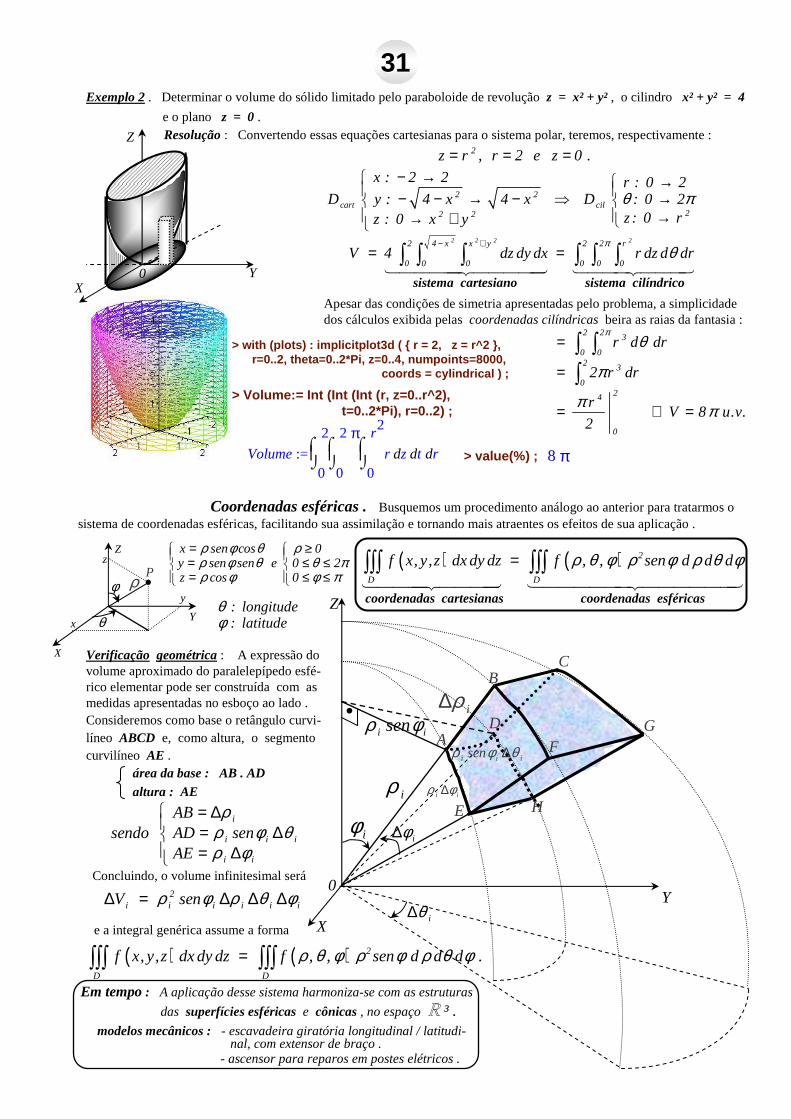
Exemplo 2. Determinar o volume do sólido limitado pelo paraboloide de revolução z = x² + y², o cilindro x² + y² = 4
e o plano z = 0 .Resolução: Convertendo essas equações cartesianas para o sistema polar, teremos, respectivamente :
2 2cart cil
22 2
x : 2 2 r : 0 2D y : 4 x 4 x D : 0 2
z : 0 rz : 0 x yθ π
− → → − − → − ⇒ → →→ +
XY
Z
0
2 2 2 22 4 x x y 2 2 r
0 0 0 0 0 0V 4 dz dy dx r dz d dr
πθ
− += =∫ ∫ ∫ ∫ ∫ ∫������������� ���������
sistema cartesiano sistema cilíndrico
Apesar das condições de simetria apresentadas pelo problema, a simplicidade dos cálculos exibida pelas coordenadas cilíndricas beira as raias da fantasia :
2 2 3
0 02 3
024
0
r d dr
2 r dr
rV 8 u.v.
2
πθ
π
π π
=
=
= ∴ =
∫ ∫∫
Coordenadas esféricas . Busquemos um procedimento análogo ao anterior para tratarmos o sistema de coordenadas esféricas, facilitando sua assimilação e tornando mais atraentes os efeitos de sua aplicação .
( ) ( ) 2
D D
f x, y,z dx dy dz f , , sen d d dρ θ φ ρ φ ρ θ φ=∫∫∫ ∫∫∫����������� ���������������coordenadas cartesianas coordenadas esféricas
x sen cos 0y sen sen e 0 2z cos 0
ρ φ θ ρρ φ θ θ πρ φ φ π
= ≥ = ≤ ≤ = ≤ ≤
Z
X
Y
ρ P
θx
y
z
φ: longitude: latitude
θφ
iφ∆iφiρ
i isenρ φ
iθ∆Y
X
Z
iρ∆
i i isenρ φ θ∆
i iρ φ∆
0
.
E
FG
H
A
BC
D
Verificação geométrica: A expressão do volume aproximado do paralelepípedo esfé-rico elementar pode ser construída com as medidas apresentadas no esboço ao lado .Consideremos como base o retângulo curvi-líneo ABCD e, como altura, o segmento curvilíneo AE .
área da base : AB . ADaltura : AE
i
i i i
i i
ABsendo AD sen
AE
ρρ φ θρ φ
= ∆ = ∆ = ∆
Concluindo, o volume infinitesimal será2
i i i i i iV senρ φ ρ θ φ∆ = ∆ ∆ ∆
Em tempo: A aplicação desse sistema harmoniza-se com as estruturas
das superfícies esféricas e cônicas , no espaço ℝ ³ .modelos mecânicos : - escavadeira giratória longitudinal / latitudi-
nal, com extensor de braço .- ascensor para reparos em postes elétricos .
( ) ( ) 2
D D
f x, y,z dx dy dz f , , sen d d d .ρ θ φ ρ φ ρ θ φ=∫∫∫ ∫∫∫
2z r , r 2 e z 0 .= = =
e a integral genérica assume a forma
> with (plots) : implicitplot3d ( { r = 2, z = r^2 }, r=0..2, theta=0..2*Pi, z=0..4, numpoints=8000,
coords = cylindrical ) ;
> Volume:= Int (Int (Int (r, z=0..r^2), t=0..2*Pi), r=0..2) ;
:= Volume d⌠⌡0
2
d⌠⌡0
2 πd
⌠⌡0
r2
r z t r > value(%) ; 8 π
3131
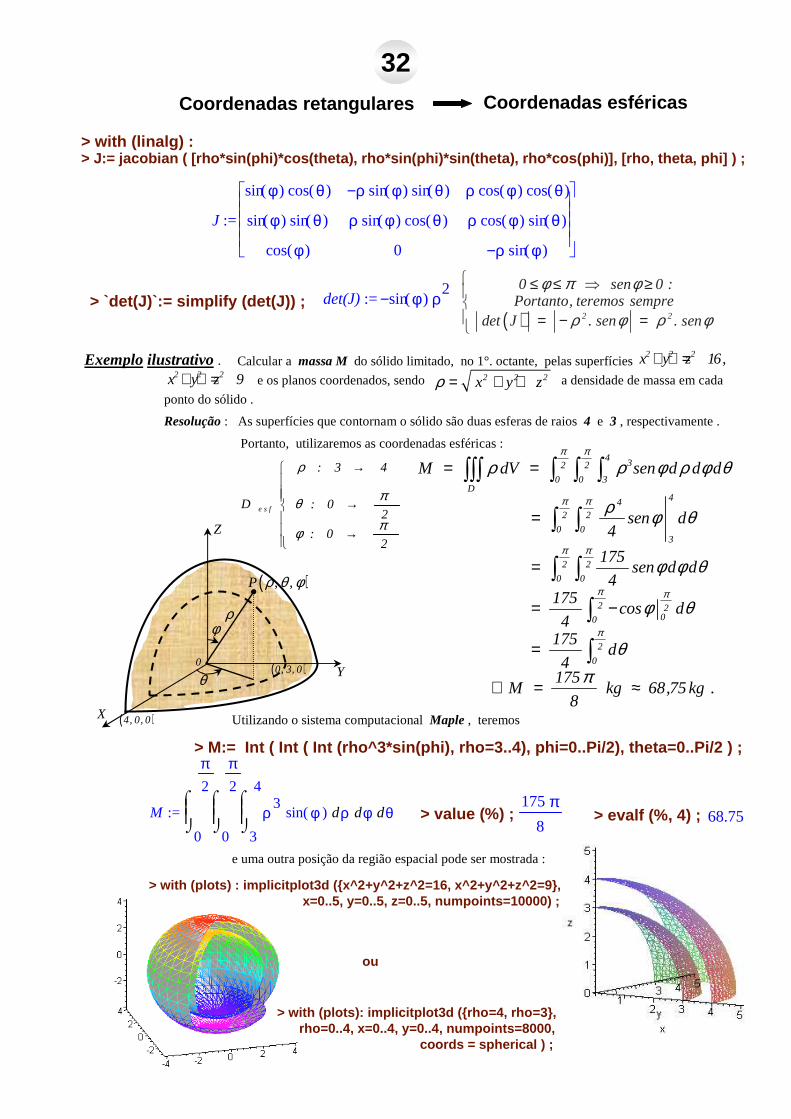
4 32 2
0 0 3D
442 2
0 03
2 2
0 0
2 200
2
0
M dV sen d d d
sen d4
175sen d d
4175
cos d4
175d
4175
M kg 68,75kg .8
π π
π π
π π
π π
π
ρ ρ φ ρ φ θ
ρ φ θ
φ φ θ
φ θ
θπ
= =
=
=
= −
=
∴ = ≈
∫∫∫ ∫ ∫ ∫
∫ ∫
∫ ∫
∫
∫
Coordenadas retangulares Coordenadas esféricas
> with (linalg) :> J:= jacobian ( [rho*sin(phi)*cos(theta), rho*sin(p hi)*sin(theta), rho*cos(phi)], [rho, theta, phi] ) ;
> `det(J)`:= simplify (det(J)) ;
Exemploilustrativo .
:= J
( )sin φ ( )cos θ −ρ ( )sin φ ( )sin θ ρ ( )cos φ ( )cos θ
( )sin φ ( )sin θ ρ ( )sin φ ( )cos θ ρ ( )cos φ ( )sin θ
( )cos φ 0 −ρ ( )sin φ
:= det(J) − ( )sin φ ρ2
Calcular a massa M do sólido limitado, no 1°. octante, pelas superfícies
e os planos coordenados, sendo a densidade de massa em cada
ponto do sólido .
Resolução: As superfícies que contornam o sólido são duas esferas de raios 4 e 3 , respectivamente .
Portanto, utilizaremos as coordenadas esféricas :
2 2 2x y z 16,+ + =2 2 2x y zρ = + +
X
Y
Z
0
θ
φρ
( )0, 3, 0
( )4, 0, 0
( )P , ,ρ θ φ
e s f
: 3 4
D : 02
: 02
ρ
πθπφ
→ → →
( ) 2 2
0 sen 0 :Portanto, teremos sempre
det J . sen . sen
φ π φ
ρ φ ρ φ
≤ ≤ ⇒ ≥ = − =
> M:= Int ( Int ( Int (rho^3*sin(phi), rho=3..4), phi=0..Pi/2), theta=0..Pi/2 ) ;
> value (%) ; > evalf (%, 4) ;175π
868.75
2 2 2x y z 9+ + =
:= M d⌠
⌡
0
π2
d⌠
⌡
0
π2
d⌠
⌡
3
4
ρ3
( )sin φ ρ φ θ
> with (plots) : implicitplot3d ({x^2+y^2+z^2=16, x^ 2+y^2+z^2=9}, x=0..5, y=0..5, z=0..5, numpoints=10000) ;
Utilizando o sistema computacional Maple , teremos
e uma outra posição da região espacial pode ser mostrada :
ou
> with (plots): implicitplot3d ({rho=4, rho=3}, rho=0..4, x=0..4, y=0..4, numpoints=8000,
coords = spherical ) ;
3232
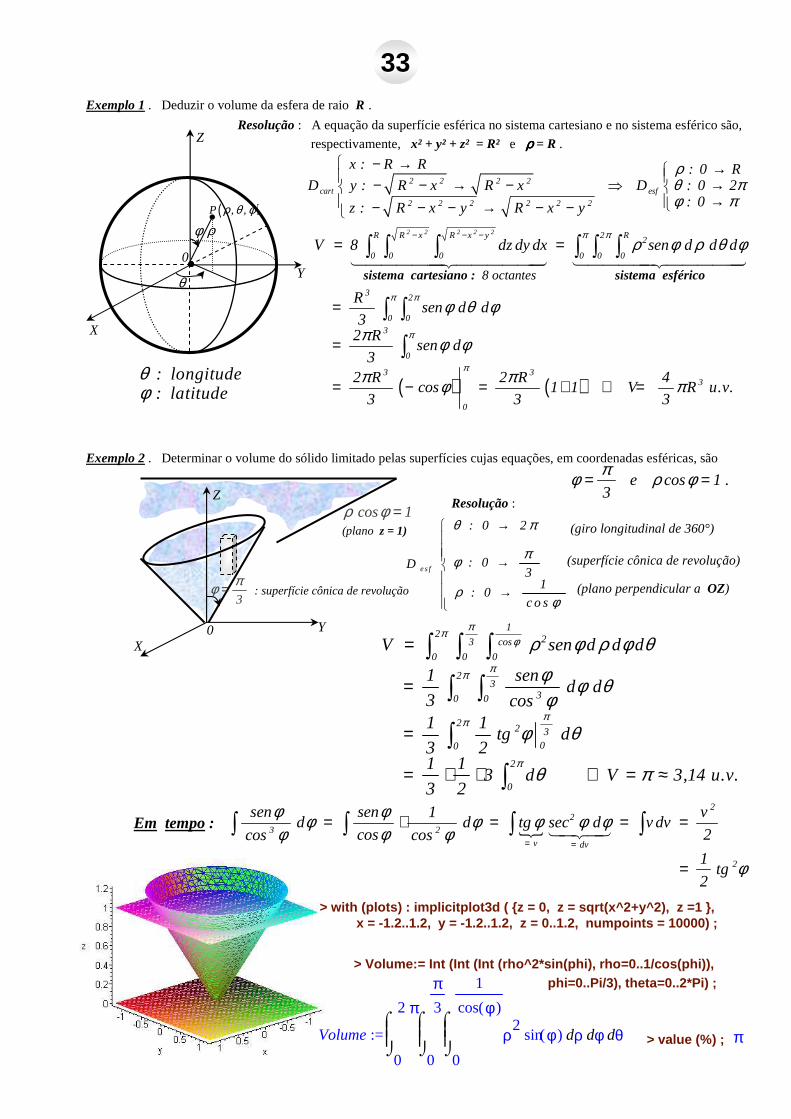
Exemplo 2. Determinar o volume do sólido limitado pelas superfícies cujas equações, em coordenadas esféricas, são
e cos 1 .3
πφ ρ φ= =
X
Y
Z
0
3
πφ = : superfície cônica de revolução
cos 1ρ φ =(plano z = 1)
Resolução:
e s f
: 0 2
: 0D3
1: 0
c o s
θ π
πφ
ρφ
→ → →
12 23 cos
0 0 0
23
30 0
2 2 300
2
0
V sen d d d
1 send d
3 cos1 1
tg d3 21 1
3 d V 3,14 u.v.3 2
ππφ
ππ
ππ
π
ρ φ ρ φ θφ φ θφ
φ θ
θ π
=
=
=
= ⋅ ⋅ ∴ = ≈
∫ ∫ ∫
∫ ∫
∫
∫
Em tempo: �
22
3 2
v dv
2
sen sen v1d d tg sec d v dv
cos 2cos cos
1tg
2
φ φφ φ φ φ φφφ φ
φ
= =
= ⋅ = = =
=
∫ ∫ ∫ ∫�����
> Volume:= Int (Int (Int (rho^2*sin(phi), rho=0..1/ cos(phi)), phi=0..Pi/3), theta=0..2*Pi) ;
:= Volume d⌠
⌡0
2 π
d⌠
⌡0
π3
d⌠
⌡0
1
( )cos φ
ρ2
( )sin φ ρ φ θ > value (%) ; π
> with (plots) : implicitplot3d ( {z = 0, z = sqrt( x^2+y^2), z =1 },x = -1.2..1.2, y = -1.2..1.2, z = 0..1.2, numpoi nts = 10000) ;
(giro longitudinal de 360°)
(superfície cônica de revolução)
(plano perpendicular a OZ)
Exemplo 1. Deduzir o volume da esfera de raio R .
Resolução: A equação da superfície esférica no sistema cartesiano e no sistema esférico são,
respectivamente, x² + y² + z² = R² e ρρρρ = R .
2 2 2 2cart esf
2 2 2 2 2 2
x : R R : 0 RD y : R x R x D : 0 2
: 0z : R x y R x y
ρθ πφ π
− → → − − → − ⇒ → → − − − → − −
X
Y
Z
0
2 2 2 2 2R R x R x y 2 R 2
0 0 0 0 0 0V 8 dz dy dx sen d d d
π πρ φ ρ θ φ
− − −= =∫ ∫ ∫ ∫ ∫ ∫��������������� �������������
sistema cartesiano : 8 octantes sistema esférico
( ) ( )
3 2
0 03
0
3 33
0
Rsen d d
32 R
sen d3
2 R 2 R 4cos 1 1 V R u.v.
3 3 3
π π
π
π
φ θ φ
π φ φ
π πφ π
=
=
= − = + ∴ =
∫ ∫
∫
θ
φ( )P , ,ρ θ φ
ρ
: longitude: latitude
θφ
3333
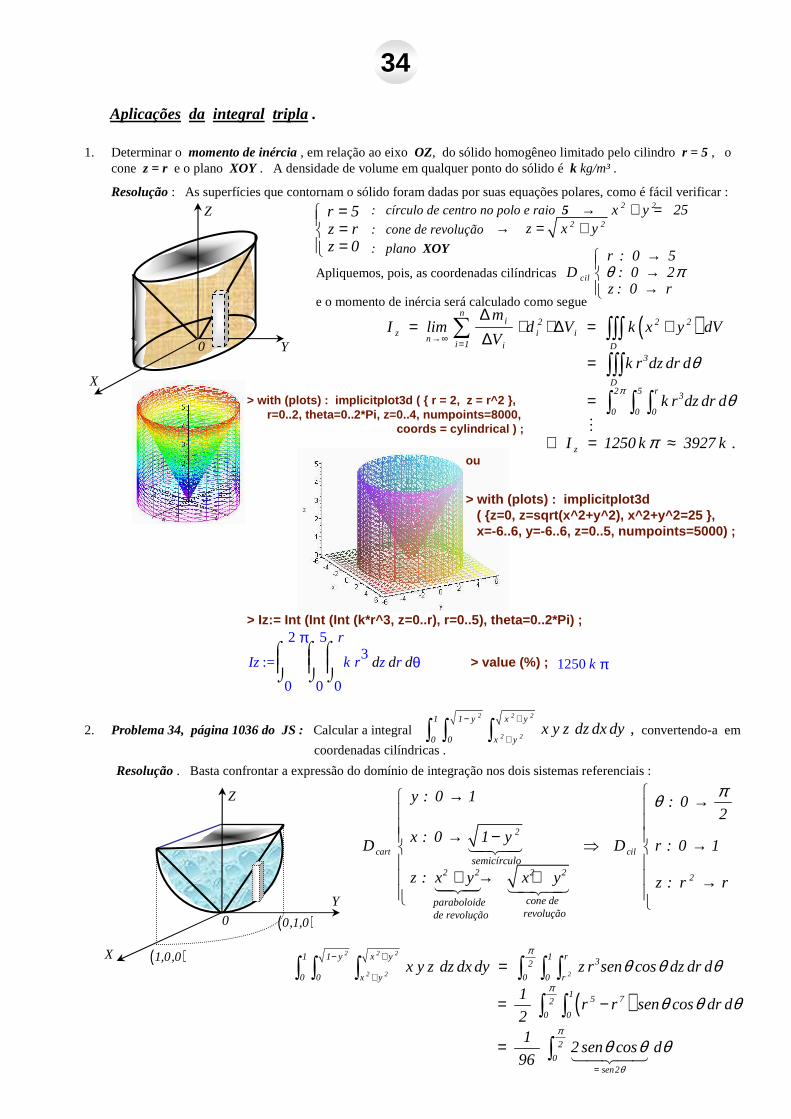
Aplicaçõesda integral tripla .
1. Determinar o momento de inércia , em relação ao eixo OZ, do sólido homogêneo limitado pelo cilindro r = 5 , o cone z = r e o plano XOY . A densidade de volume em qualquer ponto do sólido é k kg/m³.
Resolução: As superfícies que contornam o sólido foram dadas por suas equações polares, como é fácil verificar :
r 5z rz 0
= ==
: círculo de centro no polo e raio 5
: cone de revolução
: plano XOY
2 2x y 25→ + =2 2z x y→ = +
X
Y
Z
0
Apliquemos, pois, as coordenadas cilíndricas
e o momento de inércia será calculado como segue
cil
r : 0 5D : 0 2
z : 0 rθ π
→ →→
( )n
i 2 2 2z i i
ni 1 i D
3
D2 5 r 3
0 0 0
z
mI lim d V k x y dV
V
k r dz dr d
k r dz dr d
I 1250 k 3927 k .
π
θ
θ
π
→∞ =
∆= ⋅ ⋅ ∆ = +
∆=
=
∴ = ≈
∑ ∫∫∫
∫∫∫
∫ ∫ ∫⋮
> with (plots) : implicitplot3d ( {z=0, z=sqrt(x^2+y^2), x^2+y^2=25 }, x=-6..6, y=-6..6, z=0..5, numpoints=5000) ;
> Iz:= Int (Int (Int (k*r^3, z=0..r), r=0..5), thet a=0..2*Pi) ;
:= Iz d⌠
⌡0
2 π
d⌠
⌡0
5
d⌠
⌡0
r
k r3
z r θ > value (%) ; 1250k π
2. Problema 34, página 1036 do JS : Calcular a integral convertendo-a em
coordenadas cilíndricas .
2 2 2
2 2
1 1 y x y
0 0 x yx y z dz dx dy ,
− +
+∫ ∫ ∫
Resolução. Basta confrontar a expressão do domínio de integração nos dois sistemas referenciais :
2
cart cil
2 2 2 22
y : 0 1 : 02
x : 0 1 yD D r : 0 1
z : x y x y z : r r
πθ→ → → − ⇒ →
+ → + →
�����
����� �����
semicírculo
paraboloidede revolução
cone derevolução
X
Y
Z
0
( )1,0,0
( )0,1,0
( )
2 2 2
2 2 2
1 1 y x y 1 r 32
0 0 x y 0 0 r
1 5 72
0 0
2
0sen2
x y z dz dx dy z r sen cos dz dr d
1r r sen cos dr d
21
2 sen cos d96
π
π
π
θ
θ θ θ
θ θ θ
θ θ θ
− +
+
=
=
= −
=
∫ ∫ ∫ ∫ ∫ ∫
∫ ∫
∫ �����
> with (plots) : implicitplot3d ( { r = 2, z = r^2 }, r=0..2, theta=0..2*Pi, z=0..4, numpoints=8000,
coords = cylindrical ) ;
ou
3434
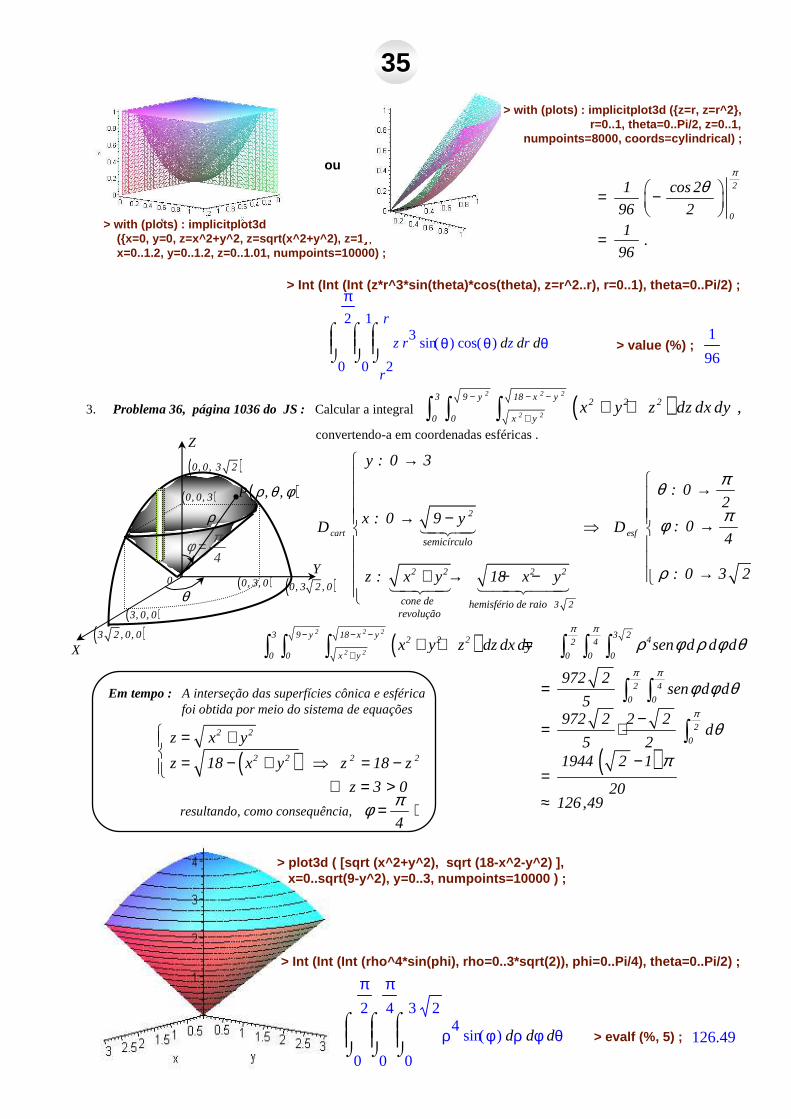
2
0
1 cos 2
96 21
.96
π
θ = −
=> with (plots) : implicitplot3d
({x=0, y=0, z=x^2+y^2, z=sqrt(x^2+y^2), z=1}, x=0..1.2, y=0..1.2, z=0..1.01, numpoints=10000) ;
> Int (Int (Int (z*r^3*sin(theta)*cos(theta), z=r^2 ..r), r=0..1), theta=0..Pi/2) ;
d⌠
⌡0
π2
d⌠
⌡0
1
d⌠
⌡
r2
r
z r3
( )sin θ ( )cos θ z r θ > value (%) ;1
96
3. Problema 36, página 1036 do JS : Calcular a integral
convertendo-a em coordenadas esféricas .
( )2 2 2
2 2
3 9 y 18 x y 2 2 2
0 0 x yx y z dz dx dy ,
− − −
++ +∫ ∫ ∫
2
cart esf
2 2 2 2
y : 0 3
: 02
x : 0 9 y : 0D D4
: 0 3 2z : x y 18 x y
πθπφ
ρ
→ → → − →⇒
→ + → − −
�����
����� �������
semicírculo
hemisfério de raio cone derevolução
3 2
X
Y
Z
0
θ
4
πφ =
ρ
( )0, 3 2 , 0( )0, 3, 0
( )P , ,ρ θ φ
( )3, 0, 0
( )3 2 , 0, 0
( )0, 0, 3 2
( )0, 0, 3
( )2 2 2
2 2
3 9 y 18 x y 3 22 2 2 42 4
0 0 x y 0 0 0x y z dz dx dy sen d d d
π π
ρ φ ρ φ θ− − −
++ + =∫ ∫ ∫ ∫ ∫ ∫
( )
2 4
0 0
2
0
972 2sen d d
5972 2 2 2
d5 2
1944 2 1
20126,49
π π
π
φ φ θ
θ
π
=
−= ⋅
−=
≈
∫ ∫
∫
Em tempo : A interseção das superfícies cônica e esféricafoi obtida por meio do sistema de equações
( )2 2
2 2 2 2
z x y
z 18 x y z 18 z
z 3 0
= +
= − + ⇒ = −∴ = >
resultando, como consequência, 4
πφ = ⋅
> plot3d ( [sqrt (x^2+y^2), sqrt (18-x^2-y^2) ], x=0..sqrt(9-y^2), y=0..3, numpoints=10000 ) ;
> Int (Int (Int (rho^4*sin(phi), rho=0..3*sqrt(2)), phi=0..Pi/4), theta=0..Pi/2) ;
d⌠
⌡0
π2
d⌠
⌡0
π4
d⌠
⌡0
3 2
ρ4
( )sin φ ρ φ θ > evalf (%, 5) ; 126.49
> with (plots) : implicitplot3d ({z=r, z=r^2},r=0..1, theta=0..Pi/2, z=0..1,
numpoints=8000, coords=cylindrical) ;
ou
3535
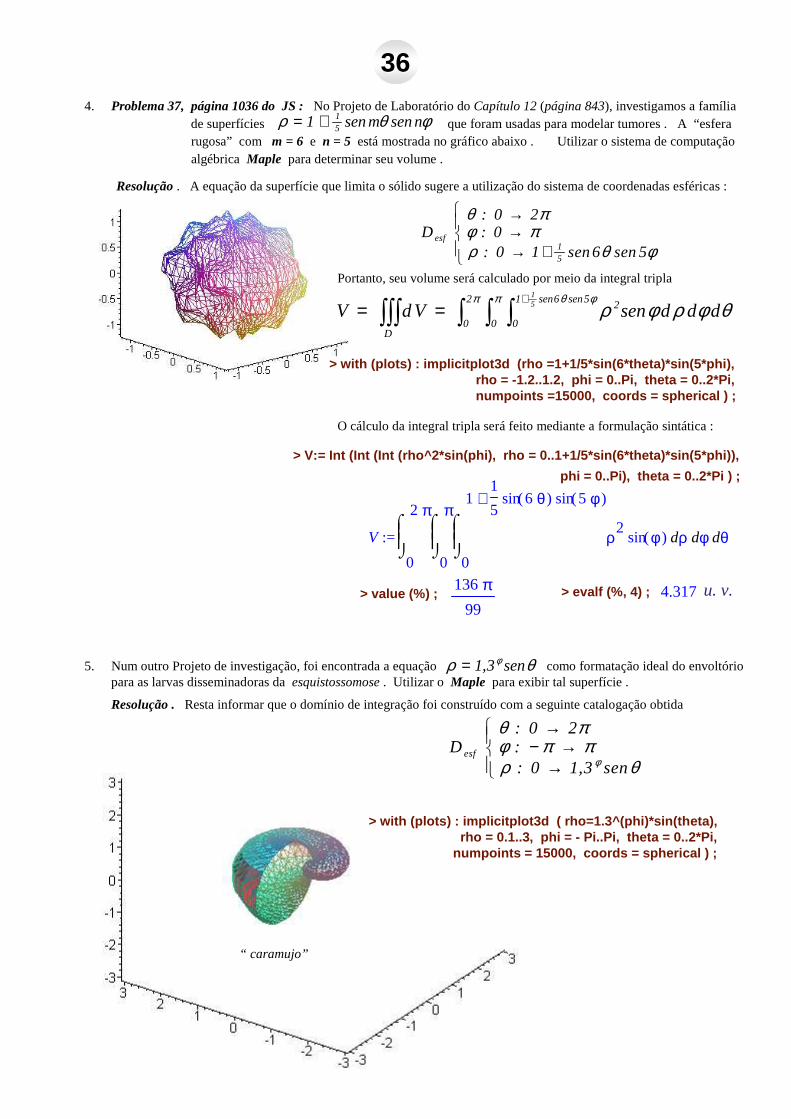
4. Problema 37, página 1036 do JS : No Projeto de Laboratório do Capítulo 12(página 843), investigamos a família de superfícies que foram usadas para modelar tumores . A “esfera rugosa” com m = 6 e n = 5 está mostrada no gráfico abaixo . Utilizar o sistema de computação algébrica Maple para determinar seu volume .
151 sen m sen nρ θ φ= +
Resolução. A equação da superfície que limita o sólido sugere a utilização do sistema de coordenadas esféricas :
esf15
: 0 2D : 0
: 0 1 sen 6 sen 5
θ πφ πρ θ φ
→ → → +
152 1 sen6 sen5 2
0 0 0D
V d V sen d d dπ π θ φ
ρ φ ρ φ θ+
= =∫∫∫ ∫ ∫ ∫
Portanto, seu volume será calculado por meio da integral tripla
> V:= Int (Int (Int (rho^2*sin(phi), rho = 0..1+1/5 *sin(6*theta)*sin(5*phi)),
phi = 0..Pi), theta = 0..2*Pi ) ;
> value (%) ;
> with (plots) : implicitplot3d (rho =1+1/5*sin(6*th eta)*sin(5*phi), rho = -1.2..1.2, phi = 0..Pi, theta = 0..2*Pi,numpoints =15000, coords = spherical ) ;
:= V d⌠
⌡0
2 π
d⌠
⌡0
π
d⌠
⌡0
+ 11
5( )sin 6θ ( )sin 5φ
ρ2
( )sin φ ρ φ θ
136π99
4.317 u. v.
O cálculo da integral tripla será feito mediante a formulação sintática :
5. Num outro Projeto de investigação, foi encontrada a equação como formatação ideal do envoltório para as larvas disseminadoras da esquistossomose . Utilizar o Maple para exibir tal superfície .
Resolução . Resta informar que o domínio de integração foi construído com a seguinte catalogação obtida
1,3 senφρ θ=
esf
: 0 2D :
: 0 1,3 senφ
θ πφ π πρ θ
→ − → →
“ caramujo”
> with (plots) : implicitplot3d ( rho=1.3^(phi)*sin (theta), rho = 0.1..3, phi = - Pi..Pi, theta = 0..2*Pi,
numpoints = 15000, coords = spherical ) ;
> evalf (%, 4) ;
3636

3.1. Funçõesescalares, funçõesvetoriais e curvas parametrizadas..
Unidade 3 - CURVAS PARAMETRIZADAS
CCÁÁLCULO DIFERENCIAL E INTEGRAL IV LCULO DIFERENCIAL E INTEGRAL IV -- Roteiro SinRoteiro Sinóóptico ptico --
-- Cursos de Engenharia Cursos de Engenharia --
3737
Nesta terceira unidade do curso, estaremos abordando alguns tópicos da denominada Geometria Diferencial, tratando o estudo das entidades geométricas associado aos elementos do Cálculo Diferencial e Integral . Originariamente, a Geometria Diferencial clássica preocupava-se apenas com as propriedades locais das curvas e superfícies, vale dizer, visava tão-somente o comportamento dessas curvas e superfícies na vizinhança de um ponto, limitando-se ao espaço euclidiano .
Após as teorias de Riemann, em meados do século XIX, tal estudo estendeu-se aos espaços não euclidianos,
propiciando os avanços na linguagem matemática que suportam inúmeras aplicações da Física e das teorias da relatividade .
Em se tratando de uma abordagem inicial, nesta unidade estaremos particularmente interessados nos aspectos clássicos do assunto, atendo-nos à teoria das curvas e superfícies associada aos conceitos e operações do Cálculo Diferencial
e Integral, valendo-nos das brilhantes contribuições legadas por Gauss. Fixemos o conceito de uma função escalarem ℝ ³:
D D
(x, y, z) f (x, y, z)
ℝFunção escalar é uma lei de correspondência
tal que, a cada ponto (x, y, z) ∈ D , D , correspondeum único número real f (x, y, z) .
X
Y
Zℝ
X
z
y
Exemplos: ( ) ( ) ( )2 3
x 2
1. f x, y,z 3x z 5xyz : y 3 f 2, 3,1 12 30 42
z 1
== − = − ⇒ − = − − = =
( ) ( ) ( ) ( )x 1
2. f x, y,z n x 2yz cos x y z : y 1 f 1, 1,0 0 1 1
z 0
π=
= + + − + = − ⇒ − = + = =
ℓ
f f f f
3f : D ,⊂ →ℝ ℝ
Analogamente, conceituamos uma função vetorial em ℝ ³ :D D
Função vetorial é uma lei de correspondência que associa a imagem de cada ponto
(x, y, z) , do domínio D D , ao vetor f : D D →→ VV
X
Y
Z
X
z
y
Exemplos:
( )x, y,z1 2 3v f i f j f k= + +
� � � � Sejam funções
escalares de e seja V V o
conjunto de vetores desse espaço
1 2 3f , f e f
ℝ ³
1 2 3v f i f j f k de ³ .= + +� � � �
ℝ
v�( ) ( )1. v 3xy i x 2z j x yz k ,= − + + −
� � � � ( )( )( )
1
2
3
f x, y,z 3xy
f x, y,z x 2z
f x, y,z x yz
=
= − − = −
( )x 22. v e i sen xy j n x yz z k ,= + − − +� � � �
ℓ sendo
( )( )( ) ( )
( )( )( ) ( )
x1 1
2 2
233
f x, y,z e f 1, , 2 e
f x, y,z sen xy f 1, , 2 0
f 1, , 2 n 5 2f x, y,z n x yz z
πππ π
= − = = ⇒ − = − = − += − − +
ℓℓ
f f
Por exemplo, o ponto (2, -1, 5) v 6 i 12 j 7 k= − − +� � � �
( )v e i n 5 2 kπ= − +� � �
ℓ( )1, , 2π −
V V
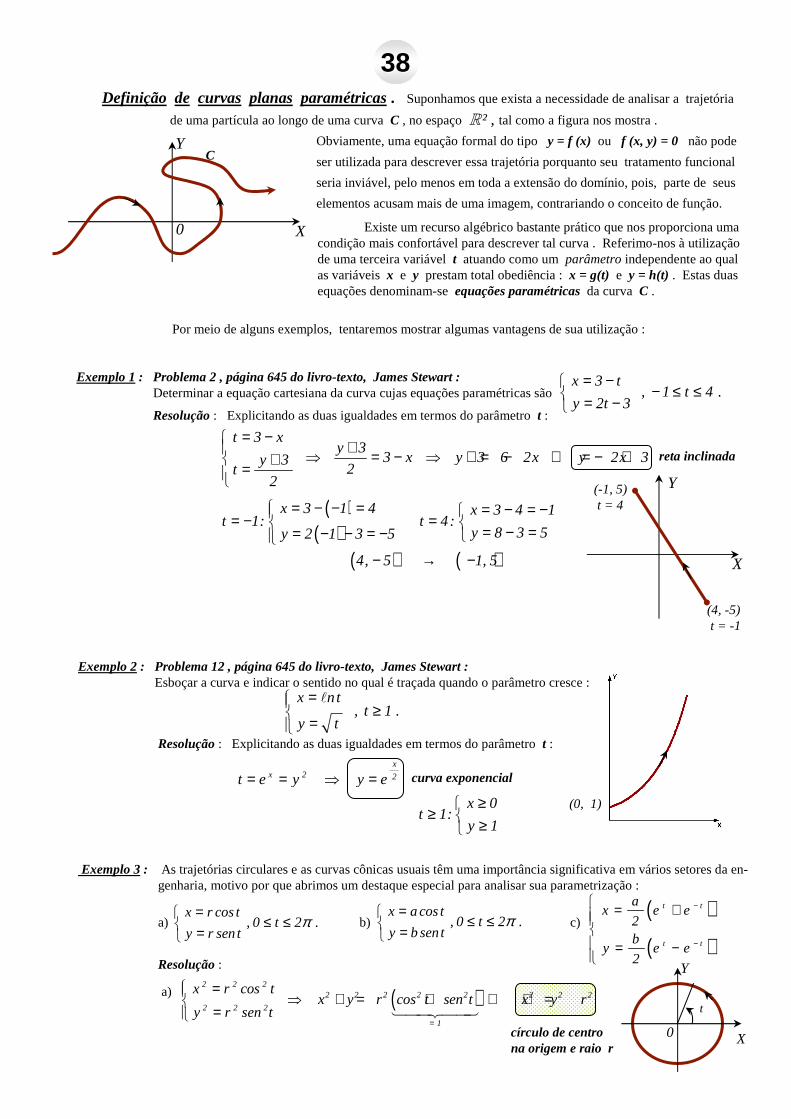
3838Definição de curvas planas paramétricas. Suponhamos que exista a necessidade de analisar a trajetória
de uma partícula ao longo de uma curva C , no espaço tal como a figura nos mostra .
Obviamente, uma equação formal do tipo y = f (x) ou f (x, y) = 0 não pode
ser utilizada para descrever essa trajetória porquanto seu tratamento funcional
seria inviável, pelo menos em toda a extensão do domínio, pois, parte de seus
elementos acusam mais de uma imagem, contrariando o conceito de função.
² ,ℝ
X
Y
0 Existe um recurso algébrico bastante prático que nos proporciona uma condição mais confortável para descrever tal curva . Referimo-nos à utilização de uma terceira variável t atuando como um parâmetro independente ao qual as variáveis x e y prestam total obediência : x = g(t) e y = h(t) . Estas duas equações denominam-se equações paramétricas da curva C .
C
Por meio de alguns exemplos, tentaremos mostrar algumas vantagens de sua utilização :
Exemplo 1: Problema 2 , página 645 do livro-texto, James Stewart :Determinar a equação cartesiana da curva cujas equações paramétricas são
Resolução: Explicitando as duas igualdades em termos do parâmetro t :
x 3 t, 1 t 4 .
y 2t 3
= −− ≤ ≤ = −
t 3 xy 3
3 x y 3 6 2x y 2x 3y 32t
2
= − +⇒ = − ⇒ + = − ∴ = − + +=
reta inclinada
( )( )
( ) ( )
x 3 1 4 x 3 4 1t 1: t 4 :
y 8 3 5y 2 1 3 5
4, 5 1, 5
= − − = = − = −= − = = − == − − = − − → −
(4, -5)t = -1
(-1, 5)t = 4
Exemplo 2: Problema 12 , página 645 do livro-texto, James Stewart :Esboçar a curva e indicar o sentido no qual é traçada quando o parâmetro cresce :
Resolução: Explicitando as duas igualdades em termos do parâmetro t :
x nt, t 1 .
y t
= ≥=
ℓ
xx 2 2t e y y e= = ⇒ = curva exponencial
x 0t 1:
y 1
≥≥ ≥
(0, 1)
Y
X
Exemplo 3: As trajetórias circulares e as curvas cônicas usuais têm uma importância significativa em vários setores da en-genharia, motivo por que abrimos um destaque especial para analisar sua parametrização :
a) b) c)
Resolução:
a)
x r cos t, 0 t 2 .
y r sentπ
= ≤ ≤ =
x acos t, 0 t 2 .
y b sentπ
= ≤ ≤ =
( )
( )
t t
t t
ax e e
2b
y e e2
−
−
= + = −
( )2 2 2
2 2 2 2 2 2 2 2
2 2 2
1
x r cos tx y r cos t sen t x y r
y r sen t=
=⇒ + = + ∴ + =
= �������
X
Y
0
t
círculo de centrona origem e raio r
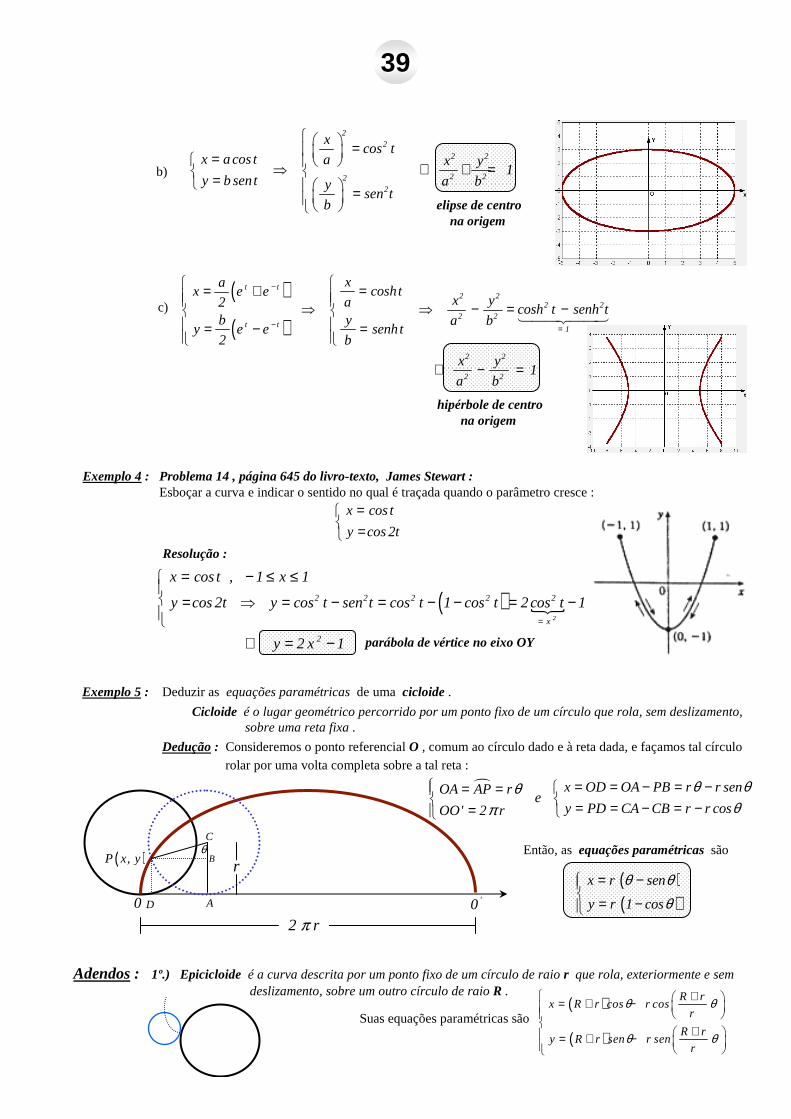
b)
22
2 2
2 22
2
xcos t
x a cos t a x y1
y b sent a bysen t
b
= = ⇒ ∴ + = = = elipse de centro
na origem
c)( )
( )
t t2 2
2 22 2
t t 1
2 2
2 2
xacoshtx e e
x ya2 cosh t senh tb y a b
y e e senht2 b
x y1
a b
−
− =
== + ⇒ ⇒ − = −
= − =
∴ − =
�������
hipérbole de centrona origem
Exemplo 4: Problema 14 , página 645 do livro-texto, James Stewart :Esboçar a curva e indicar o sentido no qual é traçada quando o parâmetro cresce :
Resolução :
x cos t
y cos 2t
= =
( ) �2
2 2 2 2 2
x
2
x cos t , 1 x 1
y cos 2t y cos t sen t cos t 1 cos t 2cos t 1
y 2 x 1
=
= − ≤ ≤ = ⇒ = − = − − = −
∴ = − parábola de vértice no eixo OY
Exemplo 5: Deduzir as equações paramétricasde uma cicloide .
Cicloide é o lugar geométrico percorrido por um ponto fixo de um círculo que rola, sem deslizamento, sobre uma reta fixa .
Dedução: Consideremos o ponto referencial O , comum ao círculo dado e à reta dada, e façamos tal círculo rolar por uma volta completa sobre a tal reta :
0 '0
r( )P x, y B
2 p r
� x OD OA PB r r senOA AP re
y PD CA CB r r cosOO' 2 r
θ θθθπ
= = − = −= = = = − = −=
Então, as equações paramétricas são
( )( )
x r sen
y r 1 cos
θ θθ
= −
= −
Adendos: 1º.) Epicicloideé a curva descrita por um ponto fixo de um círculo de raio r que rola, exteriormente e sem deslizamento, sobre um outro círculo de raio R .
Suas equações paramétricas são( )
( )
R rx R r cos r cos
r
R ry R r sen r sen
r
θ θ
θ θ
+ = + −
+ = + −
C
AD
θ
3939

Para encontrarmos as equações paramétricas, basta fazer R = 4 r :
e substituindo-se cos 3q e sen 3q em função de cosq e senq , tais equa-ções paramétricasse apresentam como
A epicicloide para a qual se tem R = r é uma cardioidee, nesse caso, o polígono epicicloidal tem um único ciclo, começando e terminando no mesmo ponto do círculo suporte .
x 3 r cos r cos 3
y 3 r sen r sen 3
θ θθ θ
= + = −
2º.) Hipocicloideé a curva que se obtém quando o rolamento é feito interiormente e sem deslizamento .
Suas equações paramétricassão análogas às da epicicloide, bastando substituir r por - r :
( )
( )
R rx R r cos r cos
r
R ry R r sen r sen
r
θ θ
θ θ
− = − +
− = − − A hipocicloide correspondente ao caso R = 4 r representa uma curva de quatro ciclos e, como o rola-mento é interior, a curva apresenta quatro pontos singulares (pontos de reversão ou cúspides) . Tal fi-gura denomina-se astroide ou asteroideou ainda tetracúspide , sendo as duas primeiras denominações decorrentes do fato de ser esta curva a evolvente de uma família de elipses que, como sabemos, represen-tam as trajetórias dos astros .
3 3
3 3
x 4 r cos x R cosou
y 4 r sen y R sen
θ θθ θ
= =
= =
e sua equação cartesiana é .2 2 2
3 3 3x y R+ =
x 2 r cos r cos 2
y 2 r sen r sen 2
θ θθ θ
= − = −
Suas equações paramétricassão obtidas por
Utilizando a linguagem MATLAB R12 , analisar a parametrizaçãoda função do exemplo 2 da página 38, construindo seu gráfico de acordo com a respectiva sintaxe: x
2x nt
, t 1 y ey t
= ≥ ⇒ ==
ℓ
x
2y e :
x linspace(0,6,100 );
y exp( x / 2 );
plot( x, y )
==
=
x nt, t 1 :
y t
t linspace(1,100,100 );
x log( t );
y sqrt( t );
plot( x, y )
= ≥=
= = =
ℓ
ou
4040
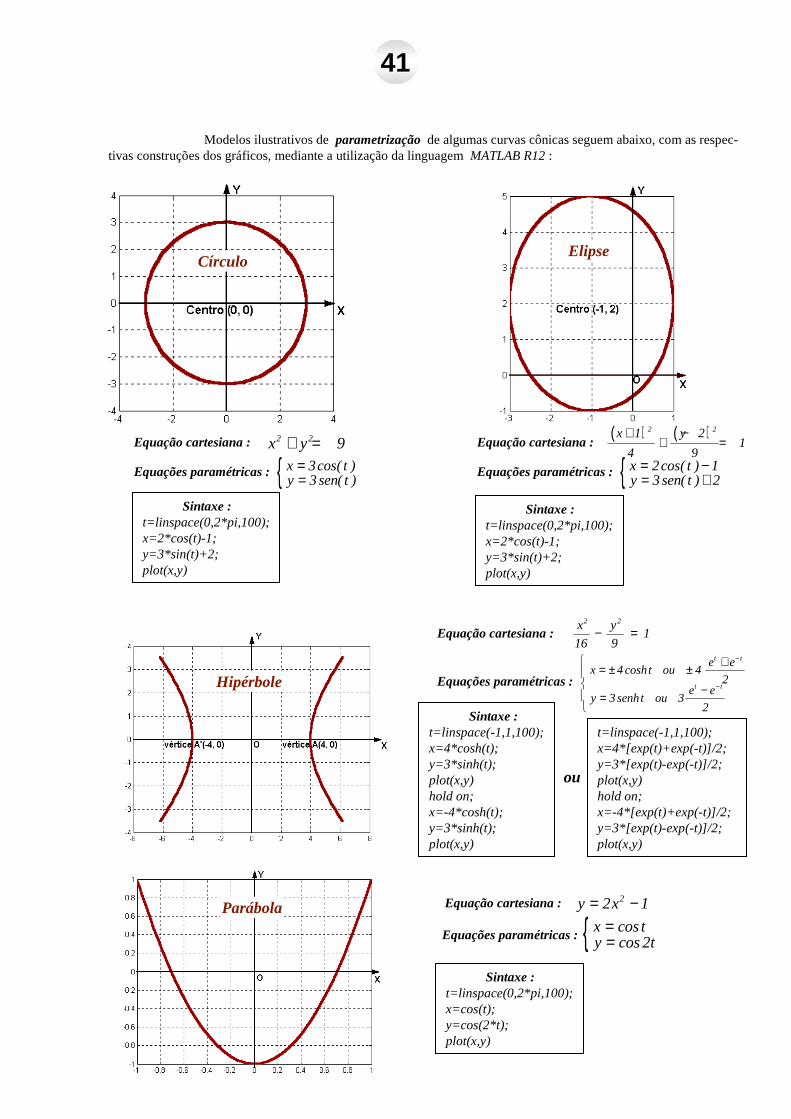
Sintaxe : t=linspace(0,2*pi,100);x=cos(t);y=cos(2*t);plot(x,y)
Equações paramétricas :{ x cos ty cos 2t
==
Equação cartesiana : 2y 2x 1= −
Sintaxe : t=linspace(-1,1,100);x=4*cosh(t);y=3*sinh(t);plot(x,y)hold on;x=-4*cosh(t);y=3*sinh(t);plot(x,y)
Equações paramétricas :
t t
t t
e ex 4 cosht ou 4
2e e
y 3senht ou 32
−
−
+= ± ± − =
Equação cartesiana :2 2x y
116 9
− =
Parábola
Elipse
Sintaxe : t=linspace(0,2*pi,100);x=2*cos(t)-1;y=3*sin(t)+2;plot(x,y)
Equações paramétricas :{ x 2cos( t ) 1y 3 sen( t ) 2
= −= +
Equação cartesiana :( ) ( )2 2x 1 y 2
14 9
+ −+ =
Modelos ilustrativos de parametrização de algumas curvas cônicas seguem abaixo, com as respec-tivas construções dos gráficos, mediante a utilização da linguagem MATLAB R12 :
Círculo
Sintaxe : t=linspace(0,2*pi,100);x=2*cos(t)-1;y=3*sin(t)+2;plot(x,y)
Equações paramétricas :{ x 3cos( t )y 3 sen( t )
==
Equação cartesiana : 2 2x y 9+ =
Hipérbole
ou
t=linspace(-1,1,100);x=4*[exp(t)+exp(-t)]/2;y=3*[exp(t)-exp(-t)]/2;plot(x,y)hold on;x=-4*[exp(t)+exp(-t)]/2;y=3*[exp(t)-exp(-t)]/2;plot(x,y)
4141
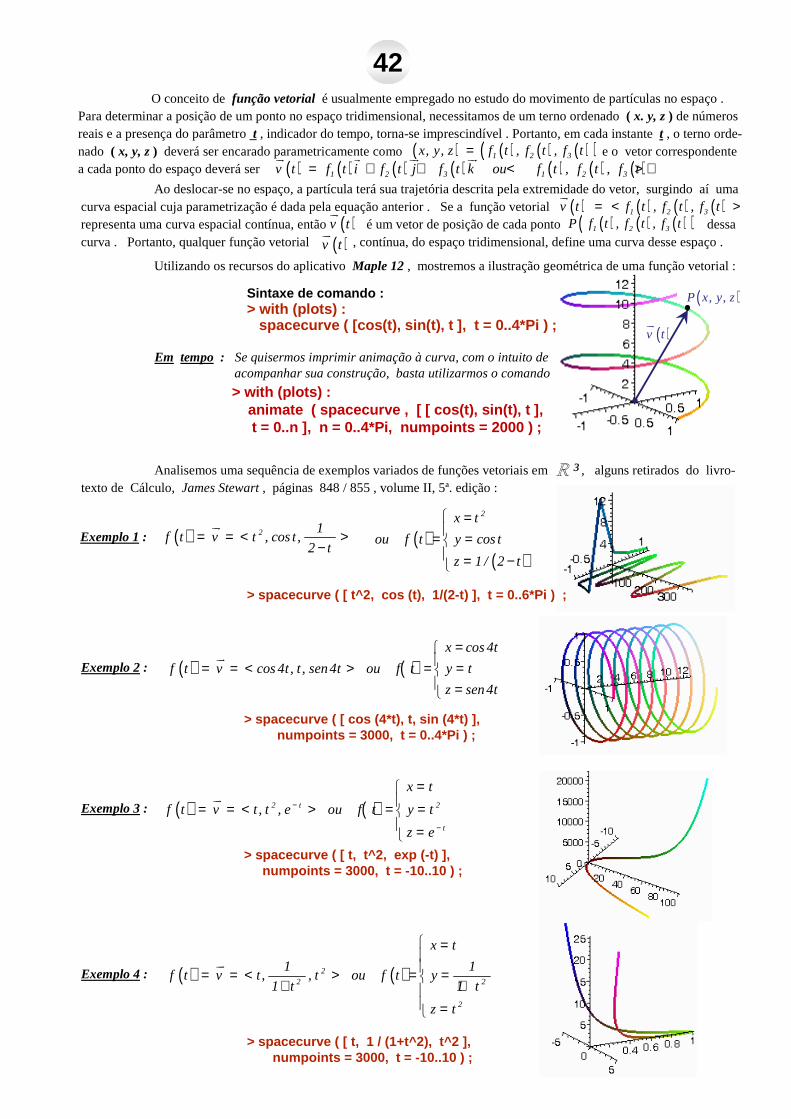
4242O conceito de função vetorial é usualmente empregado no estudo do movimento de partículas no espaço .
Para determinar a posição de um ponto no espaço tridimensional, necessitamos de um terno ordenado ( x. y, z) de números reais e a presença do parâmetro t , indicador do tempo, torna-se imprescindível . Portanto, em cada instante t , o terno orde-nado ( x, y, z) deverá ser encarado parametricamente como e o vetor correspondente a cada ponto do espaço deverá ser
( ) ( ) ( ) ( )( )1 2 3x, y, z f t , f t , f t=( ) ( ) ( ) ( ) ( ) ( ) ( )1 2 3 1 2 3v t f t i f t j f t k ou f t , f t , f t= + + < > ⋅� � � �
Ao deslocar-se no espaço, a partícula terá sua trajetória descrita pela extremidade do vetor, surgindo aí uma curva espacial cuja parametrização é dada pela equação anterior . Se a função vetorial representa uma curva espacial contínua, então é um vetor de posição de cada ponto dessa curva . Portanto, qualquer função vetorial , contínua, do espaço tridimensional, define uma curva desse espaço .
Utilizando os recursos do aplicativo Maple 12 , mostremos a ilustração geométrica de uma função vetorial :
( ) ( ) ( ) ( )1 2 3v t f t , f t , f t= < >�
( )v t�
( ) ( ) ( )( )1 2 3P f t , f t , f t
( )v t�
( )v t�
> with (plots) :spacecurve ( [cos(t), sin(t), t ], t = 0..4*Pi ) ;
( )P x, y, zSintaxe de comando :
Analisemos uma sequência de exemplos variados de funções vetoriais em , alguns retirados do livro-texto de Cálculo, James Stewart, páginas 848 / 855 , volume II, 5ª. edição :
ℝ ³
Exemplo 1: ( ) 2 1f t v t , cos t,
2 t= = < >
−
�
> spacecurve ( [ t^2, cos (t), 1/(2-t) ], t = 0..6 *Pi ) ;
Exemplo 2: ( ) ( )x cos 4t
f t v cos 4t, t , sen4t ou f t y t
z sen4t
== = < > = = =
�
> spacecurve ( [ cos (4*t), t, sin (4*t) ], numpoints = 3000, t = 0..4*Pi ) ;
Exemplo 3: ( ) ( )2 t 2
t
x t
f t v t , t , e ou f t y t
z e
−
−
== = < > = = =
�
> spacecurve ( [ t, t^2, exp (-t) ], numpoints = 3000, t = -10..10 ) ;
Exemplo 4: ( ) ( )22 2
2
x t
1 1f t v t , , t ou f t y
1 t 1 t
z t
== = < > = =+ + =
�
> spacecurve ( [ t, 1 / (1+t^2), t^2 ], numpoints = 3000, t = -10..10 ) ;
> with (plots) :animate ( spacecurve , [ [ cos(t), sin(t), t ],t = 0..n ], n = 0..4*Pi, numpoints = 2000 ) ;
Em tempo : Se quisermos imprimir animação à curva, com o intuito de acompanhar sua construção, basta utilizarmos o comando
( )( )
2x t
ou f t y cos t
z 1 / 2 t
== = = −
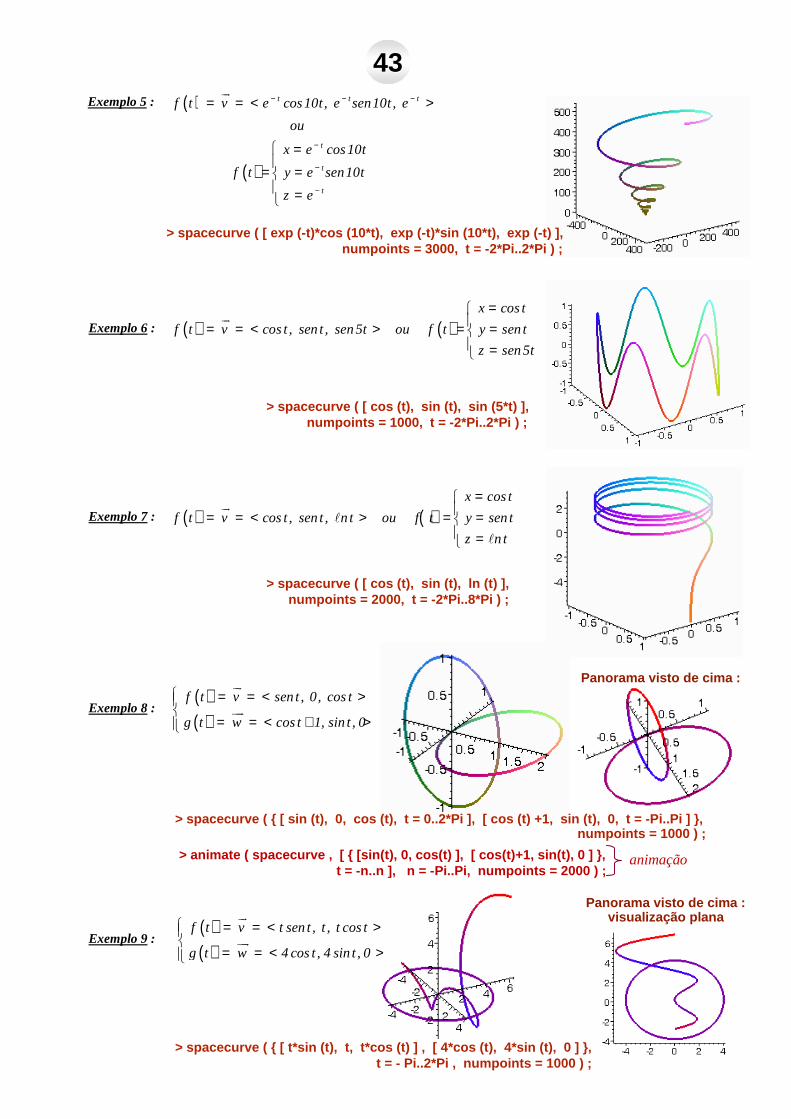
4343Exemplo 5: ( )
( )
t t t
t
t
t
f t v e cos10t, e sen10t , e
ou
x e cos10t
f t y e sen10t
z e
− − −
−
−
−
= = < >
=
= = =
�
> spacecurve ( [ exp (-t)*cos (10*t), exp (-t)*sin (10* t), exp (-t) ], numpoints = 3000, t = -2*Pi..2*Pi ) ;
Exemplo 6: ( ) ( )x cos t
f t v cos t , sen t , sen5t ou f t y sen t
z sen5t
== = < > = = =
�
> spacecurve ( [ cos (t), sin (t), sin (5*t) ], numpoints = 1000, t = -2*Pi..2*Pi ) ;
Exemplo 7: ( ) ( )x cos t
f t v cos t , sen t , n t ou f t y sen t
z n t
== = < > = = =
�ℓ
ℓ
> spacecurve ( [ cos (t), sin (t), ln (t) ], numpoints = 2000, t = -2*Pi..8*Pi ) ;
Exemplo 8:
> spacecurve ( { [ sin (t), 0, cos (t), t = 0..2*Pi ], [ cos (t) +1, sin (t), 0, t = -Pi..Pi ] }, numpoints = 1000 ) ;
( )( )
f t v sen t , 0, cos t
g t w cos t 1, sin t , 0
= = < >
= = < + >
�
�
Exemplo 9:( )( )
f t v t sen t , t , t cos t
g t w 4 cos t , 4 sin t , 0
= = < >
= = < >
�
�
> spacecurve ( { [ t*sin (t), t, t*cos (t) ] , [ 4* cos (t), 4*sin (t), 0 ] },t = - Pi..2*Pi , numpoints = 1000 ) ;
Panorama visto de cima :visualização plana
Panorama visto de cima :
> animate ( spacecurve , [ { [sin(t), 0, cos(t) ], [ cos(t)+1, sin(t), 0 ] }, t = -n..n ], n = -Pi..Pi, numpoints = 2000 ) ;
animação
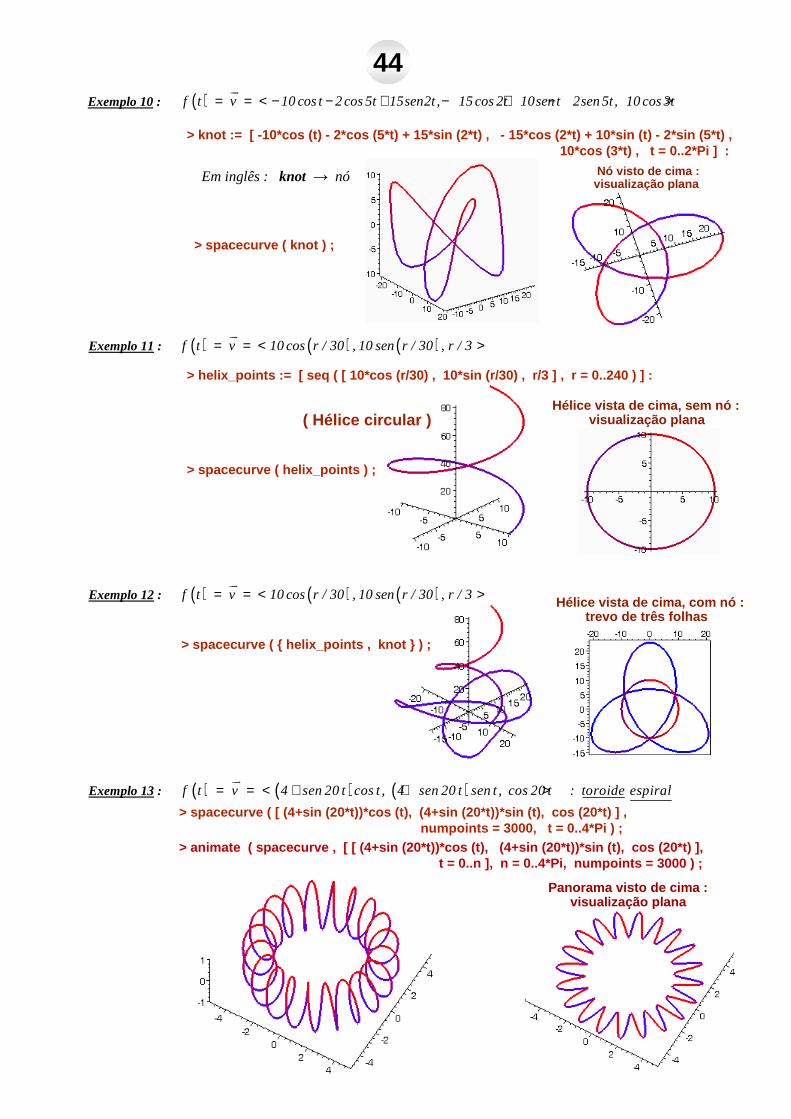
4444Exemplo 10: ( )f t v 10 cos t 2cos 5t 15sen2t , 15cos 2t 10sen t 2sen5t, 10 cos 3t= = < − − + − + − >
�
> knot := [ -10*cos (t) - 2*cos (5*t) + 15*sin (2*t) , - 15*cos (2*t) + 10*sin (t) - 2*sin (5*t) ,10*cos (3*t) , t = 0..2*Pi ] :
> spacecurve ( knot ) ;
Em inglês : knot → nó
Exemplo 11: ( ) ( ) ( )f t v 10 cos r / 30 , 10 sen r / 30 , r / 3= = < >�
> helix_points := [ seq ( [ 10*cos (r/30) , 10*sin (r /30) , r/3 ] , r = 0..240 ) ] :
> spacecurve ( helix_points ) ;
Exemplo 12: ( ) ( ) ( )f t v 10 cos r / 30 , 10 sen r / 30 , r / 3= = < >�
> spacecurve ( { helix_points , knot } ) ;
Exemplo 13: ( ) ( ) ( )f t v 4 sen 20 t cos t , 4 sen 20 t sen t , cos 20 t : toroide espiral= = < + + >�
( Hélice circular )
Hélice vista de cima, com nó :trevo de três folhas
Hélice vista de cima, sem nó :visualização plana
Nó visto de cima :visualização plana
> spacecurve ( [ (4+sin (20*t))*cos (t), (4+sin (20*t) )*sin (t), cos (20*t) ] , numpoints = 3000, t = 0..4*Pi ) ;
Panorama visto de cima :visualização plana
> animate ( spacecurve , [ [ (4+sin (20*t))*cos (t), (4+sin (20*t))*sin (t), cos (20*t) ],t = 0..n ], n = 0..4*Pi, numpoints = 3000 ) ;
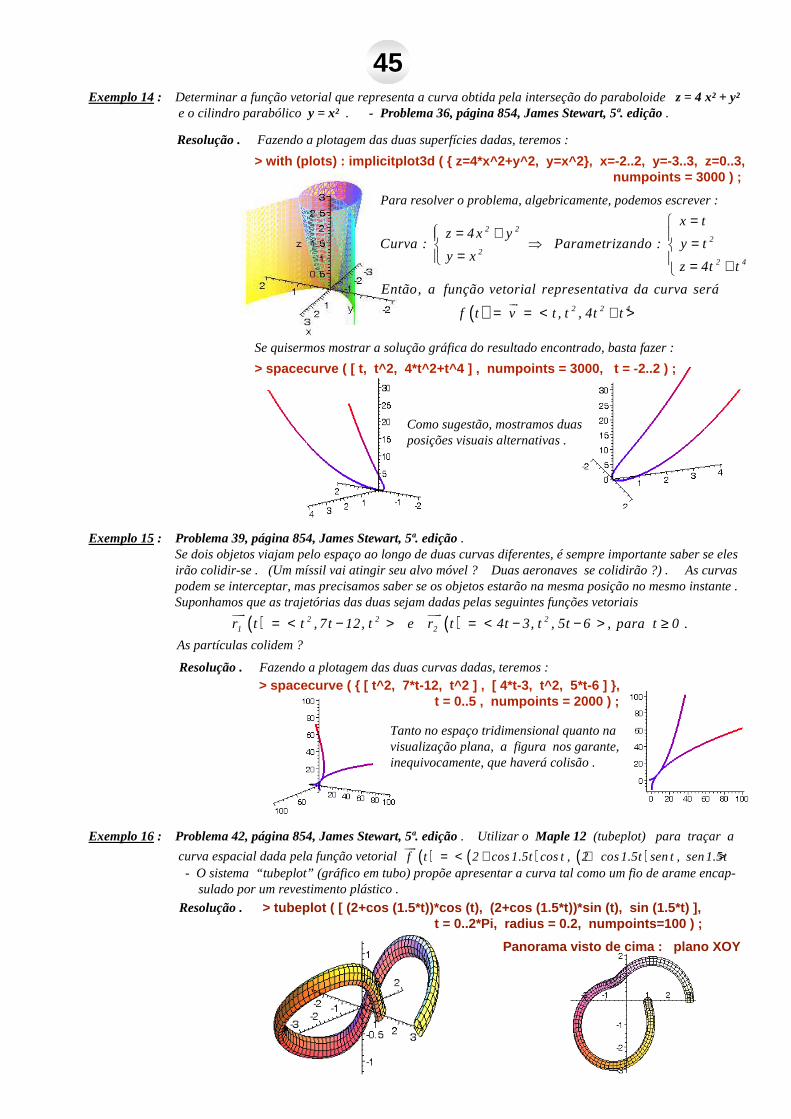
> spacecurve ( { [ t^2, 7*t-12, t^2 ] , [ 4*t-3, t^2, 5*t-6 ] },t = 0..5 , numpoints = 2000 ) ;
4545
> spacecurve ( [ t, t^2, 4*t^2+t^4 ] , numpoints = 3000, t = -2..2 ) ;
Exemplo 14: Determinar a função vetorial que representa a curva obtida pela interseção do paraboloidez = 4 x² + y²e o cilindro parabólico y = x² . - Problema 36, página 854, James Stewart, 5ª. edição .
( )
2 22
22 4
2 2 4
x tz 4x y
Curva : Parametrizando : y ty x
z 4t t
Então, a função vetorial representativa da curva será
f t v t , t , 4t t
= = +
⇒ = = = +
= = < + >�
Resolução . Fazendo a plotagem das duas superfícies dadas, teremos :
> with (plots) : implicitplot3d ( { z=4*x^2+y^2, y= x^2}, x=-2..2, y=- 3..3, z=0..3, numpoints = 3000 ) ;
Para resolver o problema, algebricamente, podemos escrever :
Se quisermos mostrar a solução gráfica do resultado encontrado, basta fazer :
Como sugestão, mostramos duasposições visuais alternativas .
Exemplo 15: Problema 39, página 854, James Stewart, 5ª. edição . Se dois objetos viajam pelo espaço ao longo de duas curvas diferentes, é sempre importante saber se eles irão colidir-se . (Um míssil vai atingir seu alvo móvel ? Duas aeronaves se colidirão ?) . As curvas podem se interceptar, mas precisamos saber se os objetos estarão na mesma posição no mesmo instante . Suponhamos que as trajetórias das duas sejam dadas pelas seguintes funções vetoriais
( ) ( )2 2 21 2r t t , 7t 12, t e r t 4t 3, t , 5t 6 , para t 0 .= < − > = < − − > ≥� �
As partículas colidem ?
Resolução . Fazendo a plotagem das duas curvas dadas, teremos :
Tanto no espaço tridimensional quanto navisualização plana, a figura nos garante, inequivocamente, que haverá colisão .
Exemplo 16: Problema 42, página 854, James Stewart, 5ª. edição . Utilizar o Maple 12 (tubeplot) para traçar a
curva espacial dada pela função vetorial- O sistema “tubeplot” (gráfico em tubo) propõe apresentar a curva tal como um fio de arame encap-
sulado por um revestimento plástico .
> tubeplot ( [ (2+cos (1.5*t))*cos (t), (2+cos (1.5*t) )*sin (t), sin (1.5*t) ],t = 0..2*Pi, radius = 0.2, numpoints=100 ) ;
( ) ( ) ( )f t 2 cos 1.5t cos t , 2 cos 1.5t sen t , sen1.5t= < + + >�
Resolução .
Panorama visto de cima : plano XOY
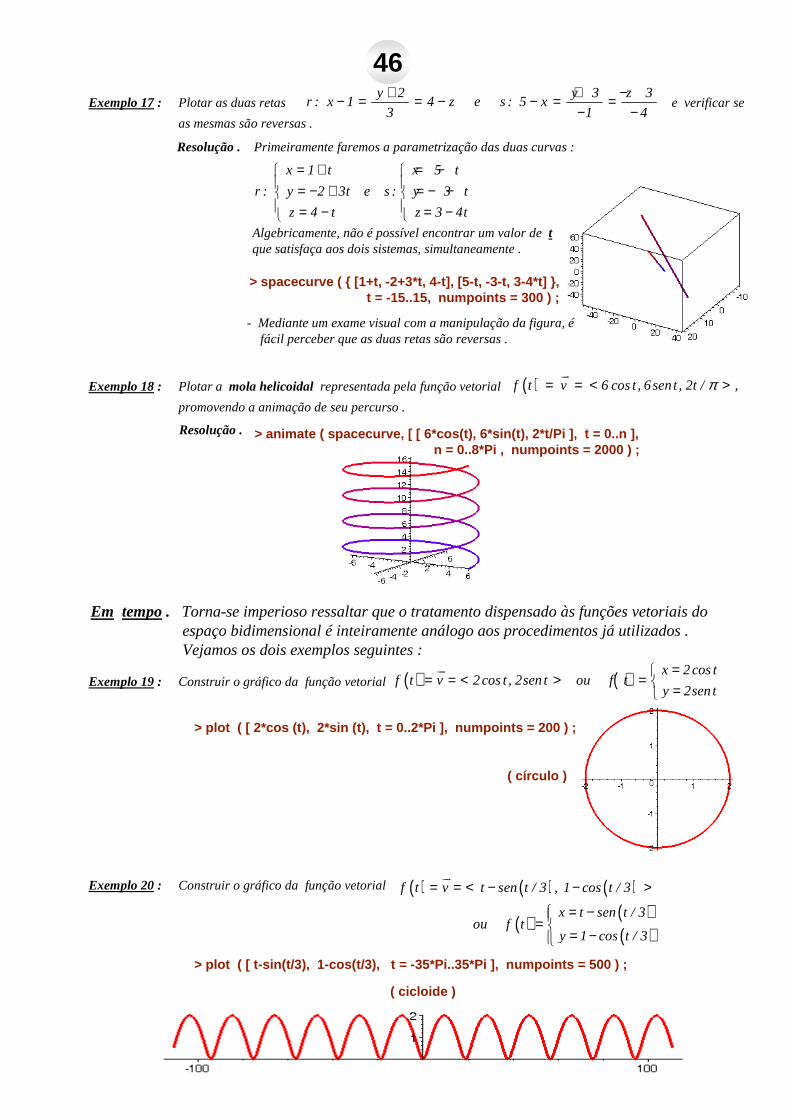
4646Exemplo 17: Plotar as duas retas e verificar se
as mesmas são reversas .
y 2 y 3 z 3r : x 1 4 z e s : 5 x
3 1 4
+ + −− = = − − = =− −
Resolução . Primeiramente faremos a parametrização das duas curvas :
x 1 t x 5 t
r : y 2 3t e s : y 3 t
z 4 t z 3 4t
= + = − = − + = − − = − = −
> spacecurve ( { [1+t, -2+3*t, 4-t], [5-t, -3-t, 3- 4*t] },t = -15..15, numpoints = 300 ) ;
- Mediante um exame visual com a manipulação da figura, éfácil perceber que as duas retas são reversas .
Exemplo 18: Plotar a mola helicoidal representada pela função vetorial
promovendo a animação de seu percurso .
( )f t v 6 cos t , 6sent , 2t / ,π= = < >�
Resolução . > animate ( spacecurve, [ [ 6*cos(t), 6*sin(t), 2*t/ Pi ], t = 0..n ],n = 0..8*Pi , numpoints = 2000 ) ;
Em tempo. Torna-se imperioso ressaltar que o tratamento dispensado às funções vetoriais do espaço bidimensional é inteiramente análogo aos procedimentos já utilizados . Vejamos os dois exemplos seguintes :
Exemplo 19: Construir o gráfico da função vetorial ( ) ( ) x 2cos tf t v 2cos t , 2sen t ou f t
y 2sen t
== = < > = =
�
> plot ( [ 2*cos (t), 2*sin (t), t = 0..2*Pi ], num points = 200 ) ;
( círculo )
Exemplo 20: Construir o gráfico da função vetorial ( ) ( ) ( )
( ) ( )( )
f t v t sen t / 3 , 1 cos t / 3
x t sen t / 3ou f t
y 1 cos t / 3
= = < − − >
= −= = −
�
> plot ( [ t-sin(t/3), 1-cos(t/3), t = -35*Pi..35 *Pi ], numpoints = 500 ) ;
( cicloide )
Algebricamente, não é possível encontrar um valor de t que satisfaça aos dois sistemas, simultaneamente .
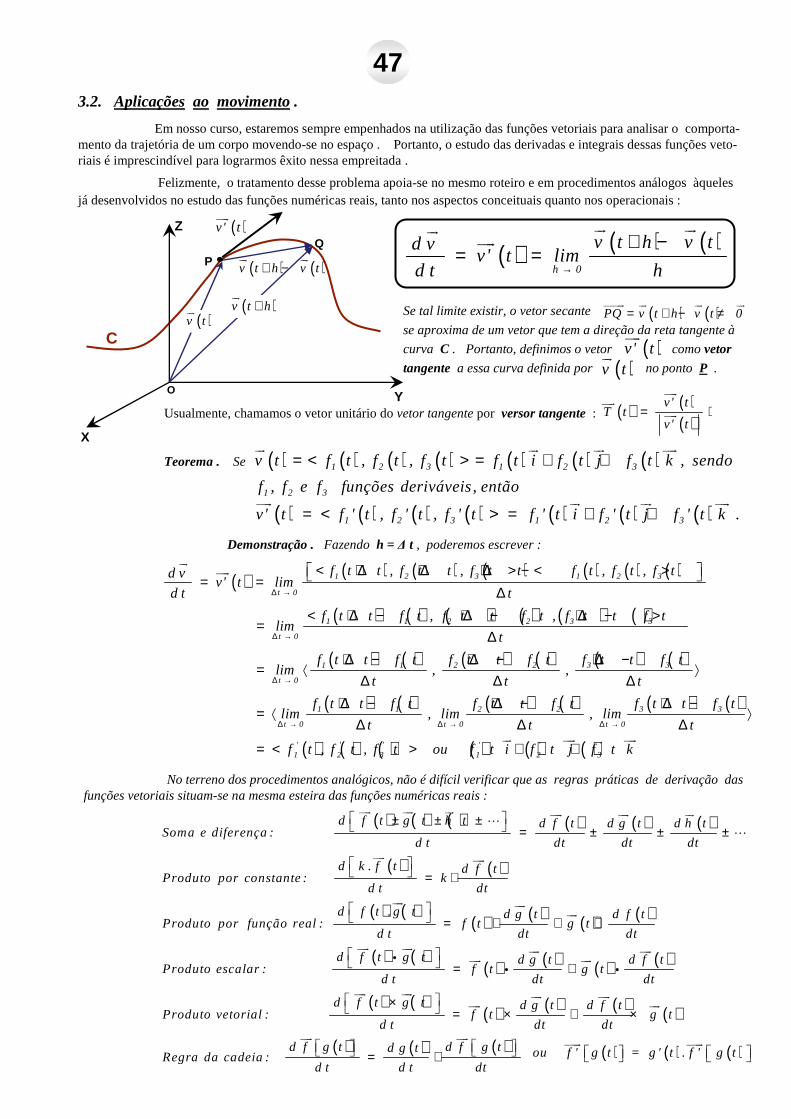
( )v' t�
47473.2. Aplicaçõesao movimento.
Em nosso curso, estaremos sempre empenhados na utilização das funções vetoriais para analisar o comporta-mento da trajetória de um corpo movendo-se no espaço . Portanto, o estudo das derivadas e integrais dessas funções veto-riais é imprescindível para lograrmos êxito nessa empreitada .
Felizmente, o tratamento desse problema apoia-se no mesmo roteiro e em procedimentos análogos àqueles já desenvolvidos no estudo das funções numéricas reais, tanto nos aspectos conceituais quanto nos operacionais :
O
P
Q
X
Y
Z
C( )v t� ( )v t h+
�
( ) ( )v t h v t+ −� � ( ) ( ) ( )
h 0
v t h v td vv' t lim
d t h→
+ −= =
� ���
Se tal limite existir, o vetor secante
se aproxima de um vetor que tem a direção da reta tangente à
curva C . Portanto, definimos o vetor como vetor
tangente a essa curva definida por no ponto P .
( ) ( )PQ v t h v t 0= + − ≠� � � �
( )v' t�
( )v t�
Usualmente, chamamos o vetor unitário do vetor tangentepor versor tangente: ( ) ( )( )
v' tT t
v' t= ⋅�
��
Teorema . Se ( ) ( ) ( ) ( ) ( ) ( ) ( )1 2 3 1 2 3
1 2 3
v t f t , f t , f t f t i f t j f t k , sendo
f , f e f funções deriváveis, então
= < > = + +� � � �
( ) ( ) ( ) ( ) ( ) ( ) ( )1 2 3 1 2 3v' t f ' t , f ' t , f ' t f ' t i f ' t j f ' t k .= < > = + +� � � �
Demonstração . Fazendo h = ∆ t , poderemos escrever :
( ) ( ) ( ) ( ) ( ) ( ) ( )
( ) ( ) ( ) ( ) ( ) ( )
( ) ( ) ( ) ( ) ( ) ( )
( ) ( ) ( ) ( )
1 2 3 1 2 3
t 0
1 1 2 2 3 3
t 0
1 1 2 2 3 3
t 0
1 1 2 2
t 0 t 0
f t t , f t t , f t t f t , f t , f td vv' t lim
d t t
f t t f t , f t t f t , f t t f tlim
t
f t t f t f t t f t f t t f tlim , ,
t t t
f t t f t f t t f tlim , lim , lim
t t
∆ →
∆ →
∆ →
∆ → ∆ →
< + ∆ + ∆ + ∆ > − < > = =∆
< + ∆ − + ∆ − + ∆ − >=
∆+ ∆ − + ∆ − + ∆ −
= ⟨ ⟩∆ ∆ ∆
+ ∆ − + ∆ −= ⟨
∆ ∆
��
( ) ( )
( ) ( ) ( ) ( ) ( ) ( )
3 3
t 0
' ' ' ' ' '1 2 3 1 2 3
f t t f t
t
f t , f t , f t ou f t i f t j f t k
∆ →
+ ∆ −⟩
∆
= < > + +� � �
No terreno dos procedimentos analógicos, não é difícil verificar que as regras práticas de derivação das funções vetoriais situam-se na mesma esteira das funções numéricas reais :
( ) ( ) ( ) ( ) ( ) ( )
( ) ( )
( ) ( )( ) ( ) ( ) ( )
( ) ( )
d f t g t h t d f t d g t d h tSoma e diferença :
d t dt dt dt
d k . f t d f tProduto por constante : k
d t dt
d f t . g t d g t d f tProduto por função real : f t g t
d t dt dt
d f t g tProduto escalar :
± ± ± = ± ± ±
= ⋅
= ⋅ + ⋅
� � � � � �⋯
⋯
� �
� ��
� �i
( ) ( ) ( ) ( )
( ) ( )( ) ( ) ( ) ( )
( ) ( ) ( )
d g t d f tf t g t
d t dt dt
d f t g t d g t d f tProduto vetorial : f t g t
d t dt dt
d f g t d f g td g tRegra da cadeia :
d t d t dt
= +
× = × + ×
= ⋅
� �� �
i i
� � � �� �
� �
( ) ( ) ( )ou f ' g t = g ' t . f ' g t � �

4848À guisa de ilustração, faremos a verificação dessa última operação, deixando a cargo do prezado leitor a
prazerosa incumbência de demonstrar as demais, reavivando habilidades e destrezas já adquiridas anteriormente :
( ) ( ) ( ) ( ) ( ) ( )
( ) ( )n ota ção de La gran ge
d f g t d f d f dS eja g t = . E n tão , f ' ' t
d t d t d d t
f ' g t g ' t .
λ λ λλ λ λλ
∈ = = ⋅ = ⋅
= ⋅
� � ��
ℝ�������
�
Exemplo 1: Dada a função vetorial determinar :
a) a função derivada de b) o vetor tangente de no ponto de parâmetro t = 1 , vale dizer, ponto P ( 1, ln 2, 3 ) .c) o versor tangente nesse ponto .
3v = < 2t - t, n 2t , 3t ,>�
ℓ
v .�
v ,�
Resolução . a ) ( ) 2 1v' t = < 6 t - 1, , 3
t>
�
b ) ( )t 1 v' 1 = < 5 , 1 , 3= ⇒ >�
c ) ( ) ( )( )
v' 1 1T 1 < 5 , 1 , 3
35v' 1= = >
�
�
- Utilizemos o Sistema Computacional Maple 12 :
> with (plots) : > spacecurve ( [ 2*t^3-t, ln(2*t), 3*t ], t=0..5, axes=normal, title= Curva C`) ;
> display (CurvaC, Campo, title = `A Curva C e se u campode vetores tangentes` ) ;
> C:= ( [ 2*t^3-t, ln(2*t), 3*t ] ) ;
> dC:= diff (C, t ) ;
> fieldplot3d ( [ 6*t^2-1, 1/t, 3 ], t = 0..5, y = -1..1, z = 0..6, grid = [5,5,5], title = `Campo de vetores tangentes a C`) ; # O comando
para visualizar um campo de vetores éfieldplot3d ( [ f (x,y,z) ], x = a..b, y = c..d, z = e..f ) .
Como as coordenadas do campo (x, y, z) dependem da variável t,
a sintaxe utilizada acima está rigorosamente correta .
:= C [ ], , − 2 t3
t ( )ln 2 t 3 t
:= dC
, , − 6 t
21
1
t3
[ ], ,5 1 3> subs ( t = 1, dC ) ;
> CurvaC:= spacecurve ( [ 2*t^3-t, ln(2*t), 3*t], t = 0..5, axes = normal ) :
> Campo:= fieldplot3d ( [ 6*x^2-1, 1/y, 3 ], x = 0..5, y = -1..1, z = 0..6, grid = [5,5,5] ) :
Com o objetivo de liberar o caminho para as próximas incursões, mostremos desde logo que :
Sendo diferenciável e então ( )v t�
( ) ( )v t c constante ,=�
( ) ( )v' t v t , t dom v' .⊥ ∀ ∈� � �
Demonstração. Se podemos escrever :( )v t c ,=�
( ) ( ) ( )( ) ( ) ( )2
22
d v t v t d cv t v t v t c 0
dt dt
= = ⇒ = =
� �i� � �
i
Mas, ( ) ( ) ( )
( ) ( )( ) ( )2
Derivada do produto escalar : v' v v v' 2 v v'
d v t v t d v t d v t d cv t v t 0
dt dt dt dt+ =
= + = =
� � � �i i
� � � �i � �
i i�����������������
( ) ( ) ( ) ( ) ( ) ( )condição de ortogonalidade
2 v t v' t 0 v t v' t 0 v t v ' t .= ⇒ = ∴ ⊥� � � � � �
i i���������
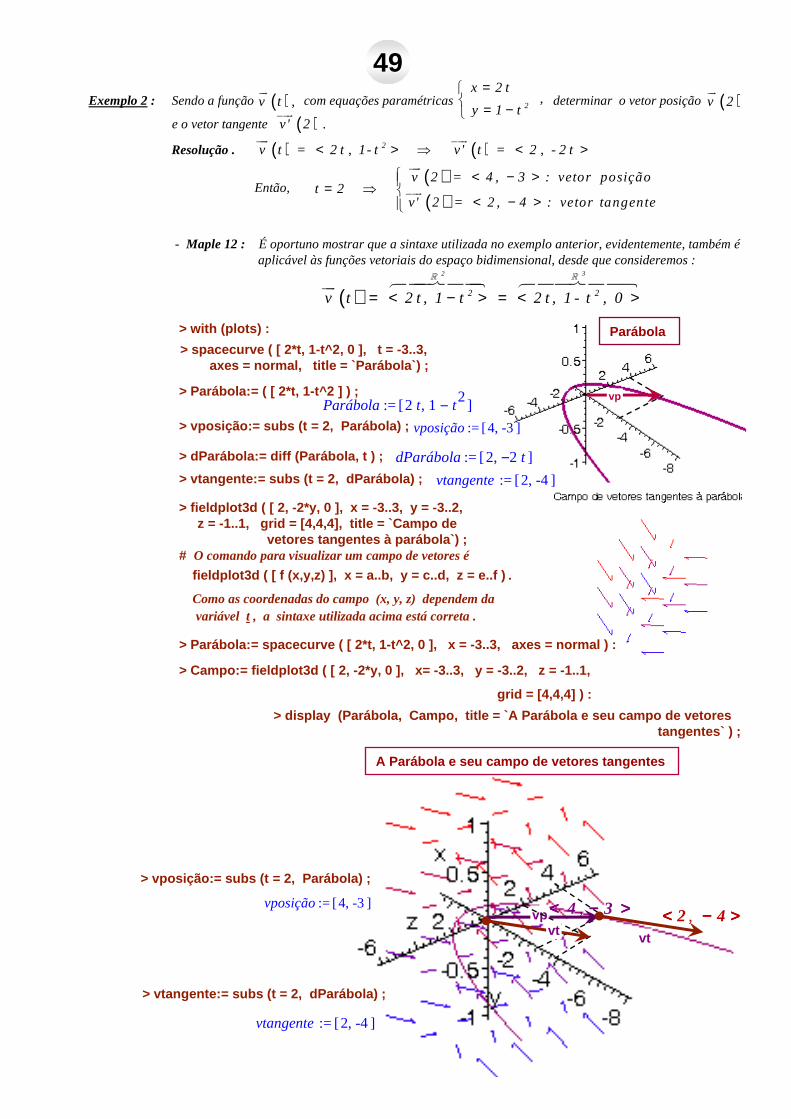
( )2 3
2 2v t 2 t , 1 t 2 t , 1 - t , 0= < − > = < >ℝ ℝ������� ��������
4949Exemplo 2: Sendo a função com equações paramétricas determinar o vetor posição
e o vetor tangente
Resolução .
( )( )
v 2 = 4 , 3 : vetor posiçãot 2
v' 2 = 2 , 4 : vetor tangente
< − >= ⇒ < − >
�
�
( )v t ,�
2
x 2 t,
y 1 t
=
= −( )v 2�
( )v' 2 .�
( ) ( )2v t = 2 t , 1- t v' t = 2 , - 2 t< > ⇒ < >� �
Então,
- Maple 12 : É oportuno mostrar que a sintaxe utilizada no exemplo anterior, evidentemente, também éaplicável às funções vetoriais do espaço bidimensional, desde que consideremos :
> with (plots) :
> spacecurve ( [ 2*t, 1-t^2, 0 ], t = -3..3, axes = normal, title = `Parábola`) ;
> display (Parábola, Campo, title = `A Parábola e seu campo de vetores tangentes` ) ;
> Parábola:= ( [ 2*t, 1-t^2 ] ) ;
> dParábola:= diff (Parábola, t ) ;
> fieldplot3d ( [ 2, -2*y, 0 ], x = -3..3, y = -3 ..2,z = -1..1, grid = [4,4,4], title = `Campo de
vetores tangentes à parábola`) ; # O comando para visualizar um campo de vetores é
fieldplot3d ( [ f (x,y,z) ], x = a..b, y = c..d, z = e..f ) .
Como as coordenadas do campo (x, y, z) dependem davariável t, a sintaxe utilizada acima está correta .
> Parábola:= spacecurve ( [ 2*t, 1-t^2, 0 ], x = - 3..3, axes = normal ) :
> Campo:= fieldplot3d ( [ 2, -2*y, 0 ], x= -3..3, y = -3..2, z = -1..1,
grid = [4,4,4] ) :
:= Parábola [ ],2 t − 1 t2
:= dParábola [ ],2 −2 t
> vposição:= subs (t = 2, Parábola) ; := vposição [ ],4 -3
> vtangente:= subs (t = 2, dParábola) ; := vtangente [ ],2 -4
A Parábola e seu campo de vetores tangentes
> vposição:= subs (t = 2, Parábola) ;
:= vposição [ ],4 -3
> vtangente:= subs (t = 2, dParábola) ;
:= vtangente [ ],2 -4
vp ,4 3< − >< − >< − >< − >vt
,2 4< − >< − >< − >< − >vt
vp
Parábola
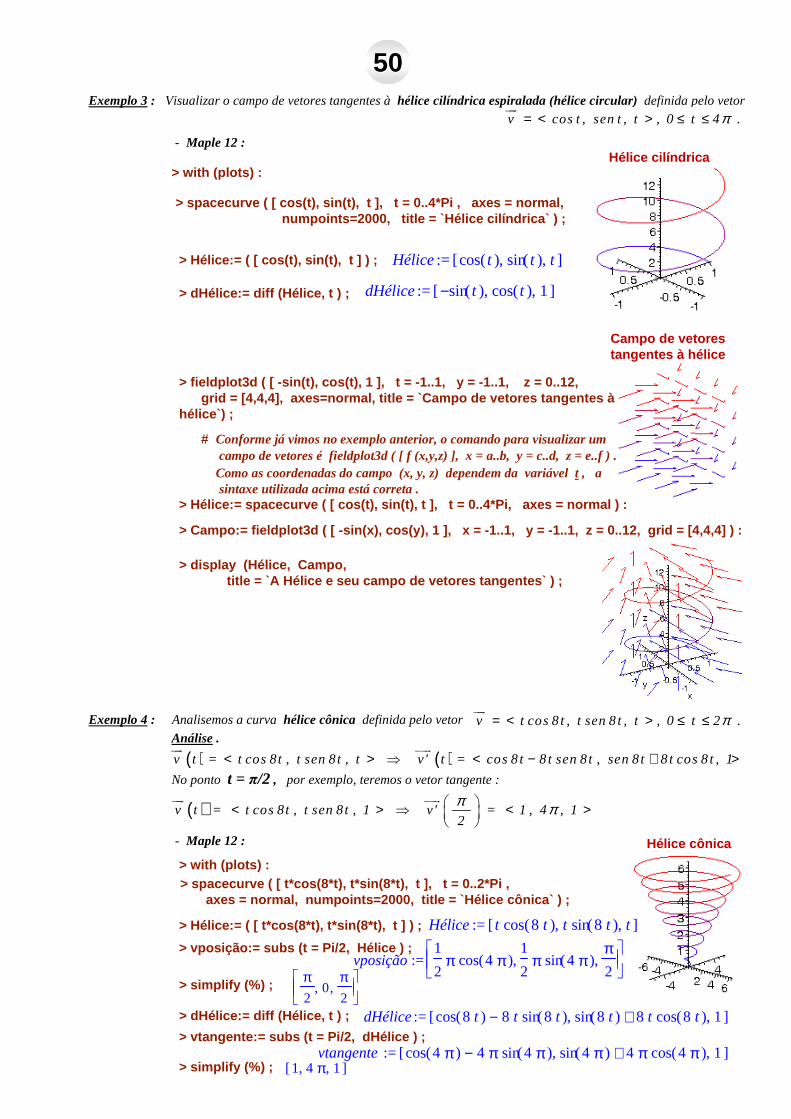
5050Exemplo 3: Visualizar o campo de vetores tangentes àhélice cilíndrica espiralada (hélice circular) definida pelo vetor
v cos t , sen t , t , 0 t 4 .π= < > ≤ ≤�
> with (plots) :
> spacecurve ( [ cos(t), sin(t), t ], t = 0..4*Pi , axes = normal, numpoints=2000, title = `Hélice cilíndrica` ) ;
> Hélice:= ( [ cos(t), sin(t), t ] ) ;
> dHélice:= diff (Hélice, t ) ;
- Maple 12 :Hélice cilíndrica
> display (Hélice, Campo, title = `A Hélice e seu campo de vetores tangentes` ) ;
> fieldplot3d ( [ -sin(t), cos(t), 1 ], t = -1..1 , y = -1..1, z = 0..12,grid = [4,4,4], axes=normal, title = `Campo de vetor es tangentes à
hélice`) ;
# Conforme já vimos no exemplo anterior, o comando para visualizar umcampo de vetores é fieldplot3d ( [ f (x,y,z) ], x = a..b, y = c..d, z = e..f ) .Como as coordenadas do campo (x, y, z) dependem da variável t, asintaxe utilizada acima está correta .
> Hélice:= spacecurve ( [ cos(t), sin(t), t ], t = 0..4*Pi, axes = normal ) :
> Campo:= fieldplot3d ( [ -sin(x), cos(y), 1 ], x = -1..1, y = -1..1, z = 0..12, grid = [4,4,4] ) :
:= Hélice [ ], ,( )cos t ( )sin t t
:= dHélice [ ], ,− ( )sin t ( )cos t 1
Campo de vetorestangentes à hélice
Exemplo 4: Analisemos a curva hélice cônica definida pelo vetor
Análise. v t cos 8 t , t sen 8 t , t , 0 t 2 .π= < > ≤ ≤�
> with (plots) :> spacecurve ( [ t*cos(8*t), t*sin(8*t), t ], t = 0..2*Pi ,
axes = normal, numpoints=2000, title = `Hélice côni ca` ) ;
> Hélice:= ( [ t*cos(8*t), t*sin(8*t), t ] ) ;
> dHélice:= diff (Hélice, t ) ;
> vtangente:= subs (t = Pi/2, dHélice ) ;
( ) ( )v t = t cos 8t , t sen 8t , t v' t = cos 8 t 8 t sen 8t , sen 8t8 t cos 8 t , 1< > ⇒ < − + >� �
No ponto t = π/2 , por exemplo, teremos o vetor tangente :
( )v t = t cos 8t , t sen 8t , 1 v' = 1 , 4 , 12
π π < > ⇒ < >
� �
- Maple 12 : Hélice cônica
:= Hélice [ ], ,t ( )cos 8t t ( )sin 8 t t
:= dHélice [ ], , − ( )cos 8t 8 t ( )sin 8 t + ( )sin 8 t 8 t ( )cos 8t 1
:= vtangente [ ], , − ( )cos 4π 4 π ( )sin 4π + ( )sin 4π 4 π ( )cos 4π 1> simplify (%) ; [ ], ,1 4 π 1
> vposição:= subs (t = Pi/2, Hélice ) ; := vposição
, ,
1
2π ( )cos 4π
1
2π ( )sin 4π
π2
> simplify (%) ;
, ,
π2
0π2
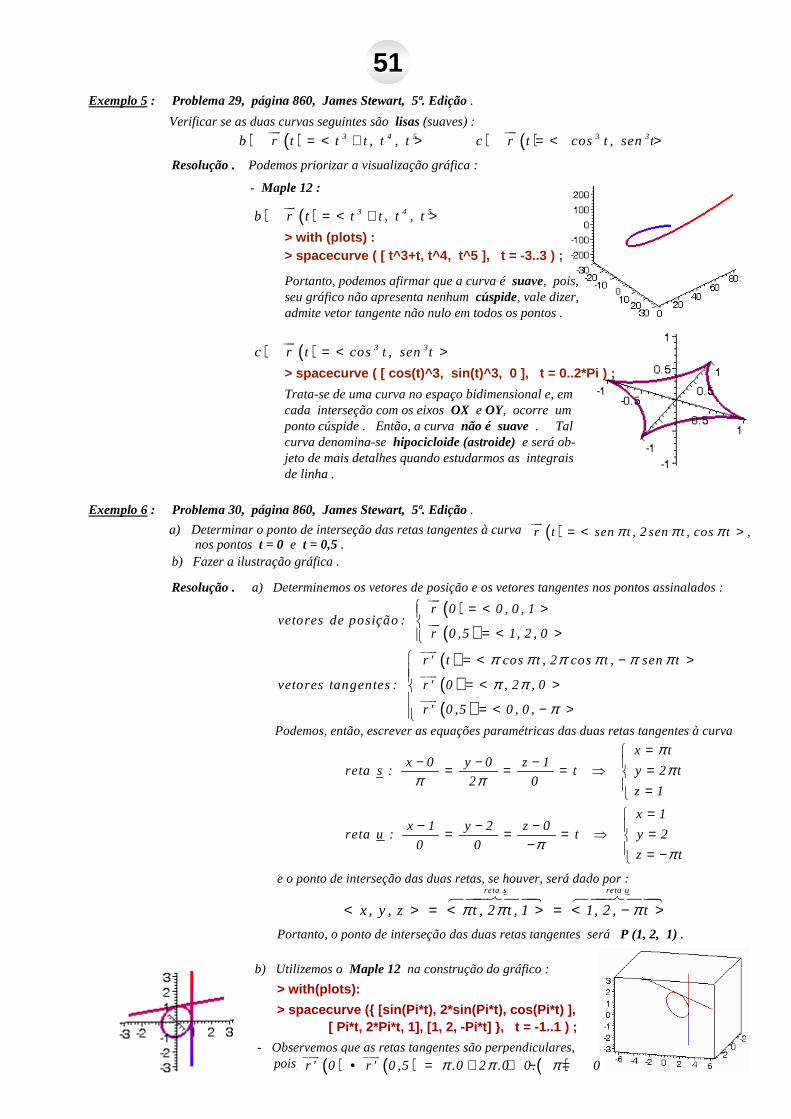
reta s reta u
x , y , z t , 2 t , 1 1, 2 , tπ π π< > = < > = < − >������� �������
5151Exemplo 5: Problema 29, página 860, James Stewart, 5ª. Edição .
Verificar se as duas curvas seguintes são lisas(suaves) :
Resolução . Podemos priorizar a visualização gráfica :
) ( ) ) ( )3 4 5 3 3b r t t t , t , t c r t cos t , sen t= < + > = < >� �
> with (plots) :> spacecurve ( [ t^3+t, t^4, t^5 ], t = -3..3 ) ;
- Maple 12 :
Hélice cônica
) ( ) 3 4 5b r t t t , t , t= < + >�
Portanto, podemos afirmar que a curva ésuave, pois, seu gráfico não apresenta nenhum cúspide, vale dizer, admite vetor tangente não nulo em todos os pontos .
) ( ) 3 3c r t cos t , sen t= < >�
> spacecurve ( [ cos(t)^3, sin(t)^3, 0 ], t = 0. .2*Pi ) ;
Trata-se de uma curva no espaço bidimensional e, em cada interseção com os eixos OX e OY, ocorre um ponto cúspide . Então, a curva não é suave . Talcurva denomina-se hipocicloide (astroide) e será ob-jeto de mais detalhes quando estudarmos as integrais de linha .
Exemplo 6: Problema 30, página 860, James Stewart, 5ª. Edição .
a) Determinar o ponto de interseção das retas tangentes à curva nos pontos t = 0 e t = 0,5 .
b) Fazer a ilustração gráfica .
( )r t sen t , 2 sen t , cos t ,π π π= < >�
Resolução . a) Determinemos os vetores de posição e os vetores tangentes nos pontos assinalados :
( )( )( )( )( )
r 0 0 , 0 , 1vetores de posição :
r 0 ,5 1, 2 , 0
r ' t cos t , 2 cos t , sen t
vetores tangentes : r ' 0 , 2 , 0
r ' 0 ,5 0 , 0 ,
π π π π π π
π π
π
= < >
= < >
= < − > = < >
= < − >
�
�
�
�
�
Podemos, então, escrever as equações paramétricas das duas retas tangentes à curva
x tx 0 y 0 z 1
reta s : t y 2 t2 0
z 1
x 1x 1 y 2 z 0
reta u : t y 20 0
z t
ππ
π π
ππ
=− − − = = = ⇒ =
==
− − − = = = ⇒ =− = −
e o ponto de interseção das duas retas, se houver, será dado por :
Portanto, o ponto de interseção das duas retas tangentes seráP (1, 2, 1) .
b) Utilizemos o Maple 12 na construção do gráfico :
> with(plots):
> spacecurve ({ [sin(Pi*t), 2*sin(Pi*t), cos(Pi*t) ] ,[ Pi*t, 2*Pi*t, 1], [1, 2, -Pi*t] }, t = -1..1 ) ;
- Observemos que as retas tangentes são perpendiculares, pois, ( ) ( ) ( )r ' 0 r ' 0 ,5 .0 2 .0 0. 0π π π• = + + − =
� �
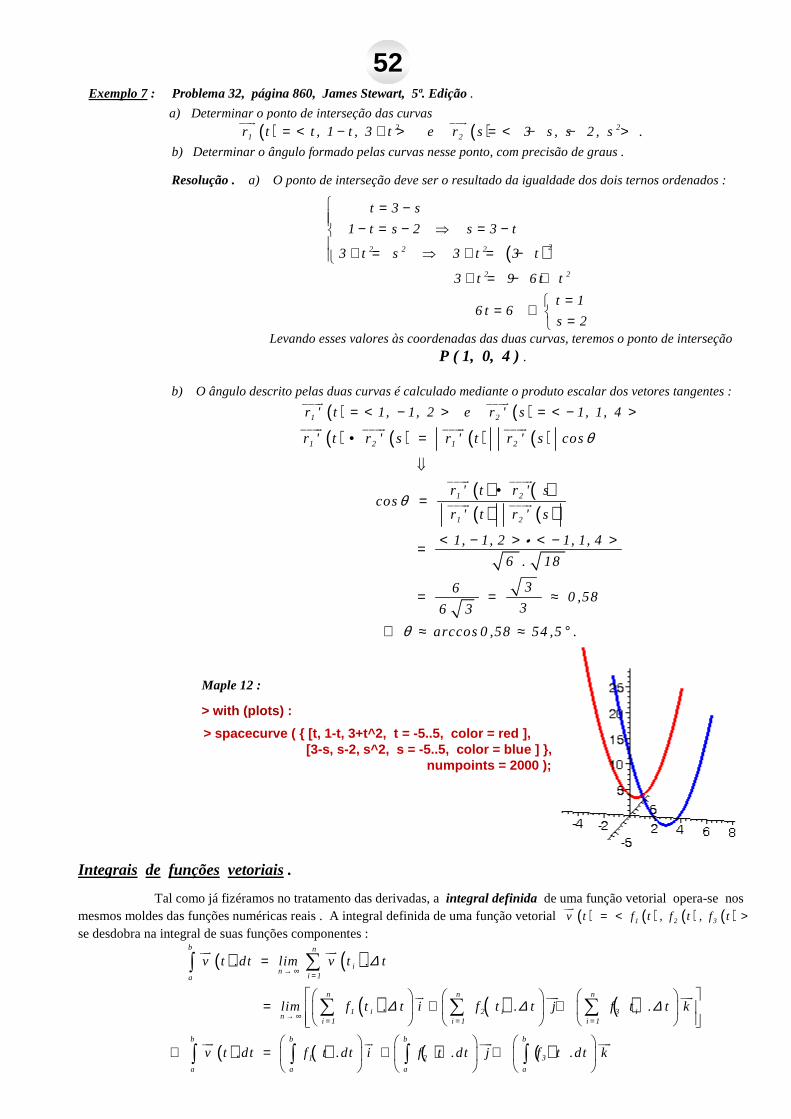
( ) ( )
( ) ( ) ( )
( ) ( ) ( ) ( )
b n
in
i 1a
n n n
1 i 2 i 3 in
i 1 i 1 i 1
b b b b
1 2 3
a a a a
v t .dt lim v t . t
lim f t . t i f t . t j f t . t k
v t .dt f t .dt i f t .dt j f t .dt k
∆
∆ ∆ ∆
→ ∞ =
→ ∞ = = =
=
= + +
∴ = + +
∑∫
∑ ∑ ∑
∫ ∫ ∫ ∫
� �
� � �
� � � �
5252Exemplo 7: Problema 32, página 860, James Stewart, 5ª. Edição .
a) Determinar o ponto de interseção das curvas
b) Determinar o ângulo formado pelas curvas nesse ponto, com precisão de graus .
( ) ( )2 21 2r t t , 1 t , 3 t e r s 3 s , s 2 , s .= < − + > = < − − >� �
Resolução . a) O ponto de interseção deve ser o resultado da igualdade dos dois ternos ordenados :
( ) 22 2 2
2 2
t 3 s
1 t s 2 s 3 t
3 t s 3 t 3 t
3 t 9 6 t t
t 16 t 6
s 2
= − − = − ⇒ = − + = ⇒ + = −
+ = − +=
= ∴ =Levando esses valores às coordenadas das duas curvas, teremos o ponto de interseção
P ( 1, 0, 4 ) .
b) O ângulo descrito pelas duas curvas é calculado mediante o produto escalar dos vetores tangentes :
( ) ( )1 2r ' t 1, 1, 2 e r ' s 1, 1, 4= < − > = < − >� �
( ) ( ) ( ) ( )
( ) ( )( ) ( )
1 2 1 2
1 2
1 2
r ' t r ' s r ' t r ' s cos
r ' t r ' scos
r ' t r ' s
1, 1, 2 1, 1, 4
6 . 18
360 ,58
36 3
arccos 0 ,58 54 ,5 .
θ
θ
θ
• =
⇓
•=
< − > < − >=
= = ≈
∴ ≈ ≈ °
� � � �
� �
� �
i
Maple 12 :
> with (plots) :
> spacecurve ( { [t, 1-t, 3+t^2, t = -5..5, color = red ], [3-s, s-2, s^2, s = -5..5, color = blue ] },
numpoints = 2000 );
Integrais de funções vetoriais.
Tal como já fizéramos no tratamento das derivadas, a integral definida de uma função vetorial opera-se nos mesmos moldes das funções numéricas reais . A integral definida de uma função vetorial se desdobra na integral de suas funções componentes :
( ) ( ) ( ) ( )1 2 3v t f t , f t , f t= < >�
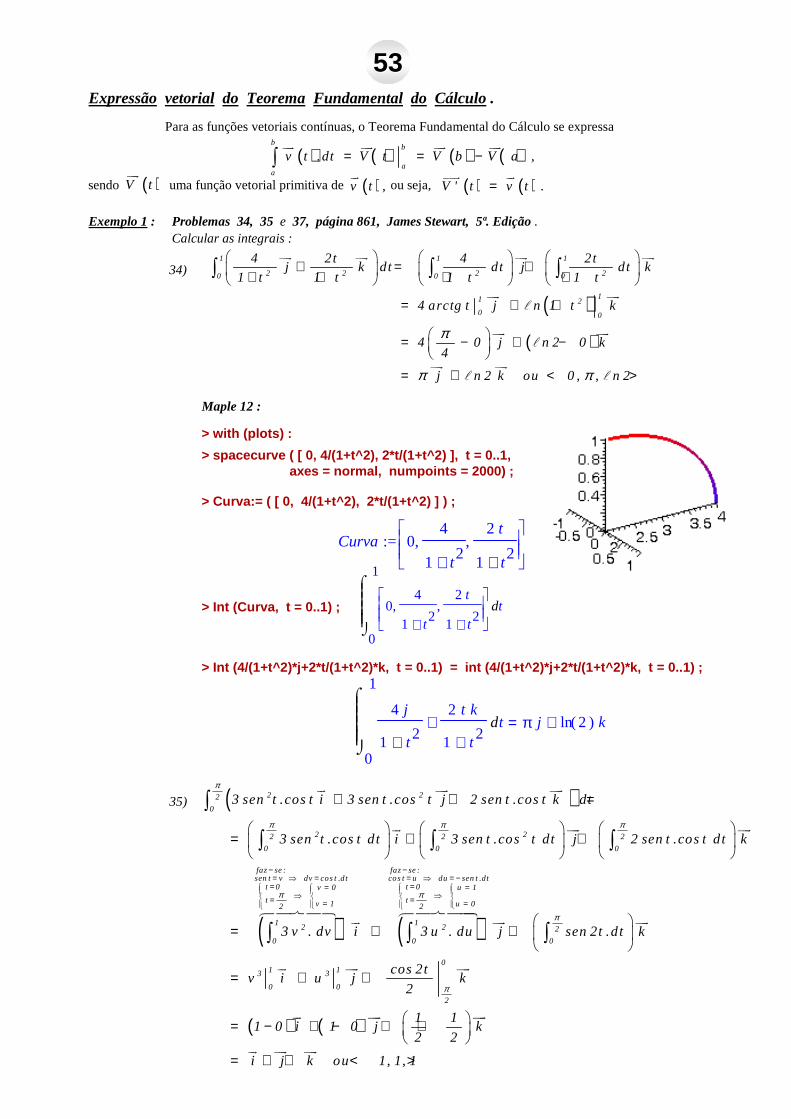
5353Expressãovetorial do Teorema Fundamental do Cálculo .
Para as funções vetoriais contínuas, o Teorema Fundamental do Cálculo se expressa
( ) ( ) ( ) ( )b
b
aa
v t .dt V t V b V a ,= = −∫� � � �
sendo uma função vetorial primitiva de ou seja,( )V t�
( )v t ,�
( ) ( )V ' t v t .=� �
Exemplo 1: Problemas 34, 35 e 37, página 861, James Stewart, 5ª. Edição .Calcular as integrais :
34)
( )
( )
1 1 1
2 2 2 20 0 0
11 2
0 0
4 2t 4 2tj k dt dt j dt k
1 t 1 t 1 t 1 t
4 arctg t j n 1 t k
4 0 j n 2 0 k4
j n 2 k ou 0 , , n 2
π
π π
+ = + + + + +
= + +
= − + −
= + < >
∫ ∫ ∫� � � �
� �ℓ
� �ℓ
� �ℓ ℓ
Maple 12 :
> with (plots) :
> spacecurve ( [ 0, 4/(1+t^2), 2*t/(1+t^2) ], t = 0 ..1, axes = normal, numpoints = 2000) ;
> Curva:= ( [ 0, 4/(1+t^2), 2*t/(1+t^2) ] ) ;
:= Curva
, ,04
+ 1 t2
2 t
+ 1 t2
> Int (Curva, t = 0..1) ; d
⌠
⌡
0
1
, ,04
+ 1 t2
2 t
+ 1 t2
t
> Int (4/(1+t^2)*j+2*t/(1+t^2)*k, t = 0..1) = in t (4/(1+t^2)*j+2*t/(1+t^2)*k, t = 0..1) ;
35) ( )
( )
2 22
0
2 22 2 2
0 0 0
faz se :sen t v dv cos t .d t
t 0 v 0
t v 12
1 2
0
3 sen t .cos t i 3 sen t .cos t j 2 sen t .cos t k dt
3 sen t .cos t dt i 3 sen t .cos t dt j 2 sen t .cos t dt k
3 v . dv i
π
π π π
π
−= ⇒ =
= = ⇒ = =
+ + =
= + +
=
∫
∫ ∫ ∫
∫
� � �
� � �
������ ( )
( ) ( )
faz se :cos t u du sen t .dt
t 0 u 1
t u 02
1 2 2
0 0
01 13 3
0 0
2
3 u . du j sen 2t .dt k
cos 2tv i u j k
2
1 11 0 i 1 0 j k
2 2
i j k ou 1, 1, 1
π
π
π
−= ⇒ = −= = ⇒ = =
+ +
= + +
= − + − + +
= + + < >
∫ ∫������
� �
� � �
� � �
� � �
= d
⌠
⌡
0
1
+ 4 j
+ 1 t2
2 t k
+ 1 t2
t + π j ( )ln 2 k
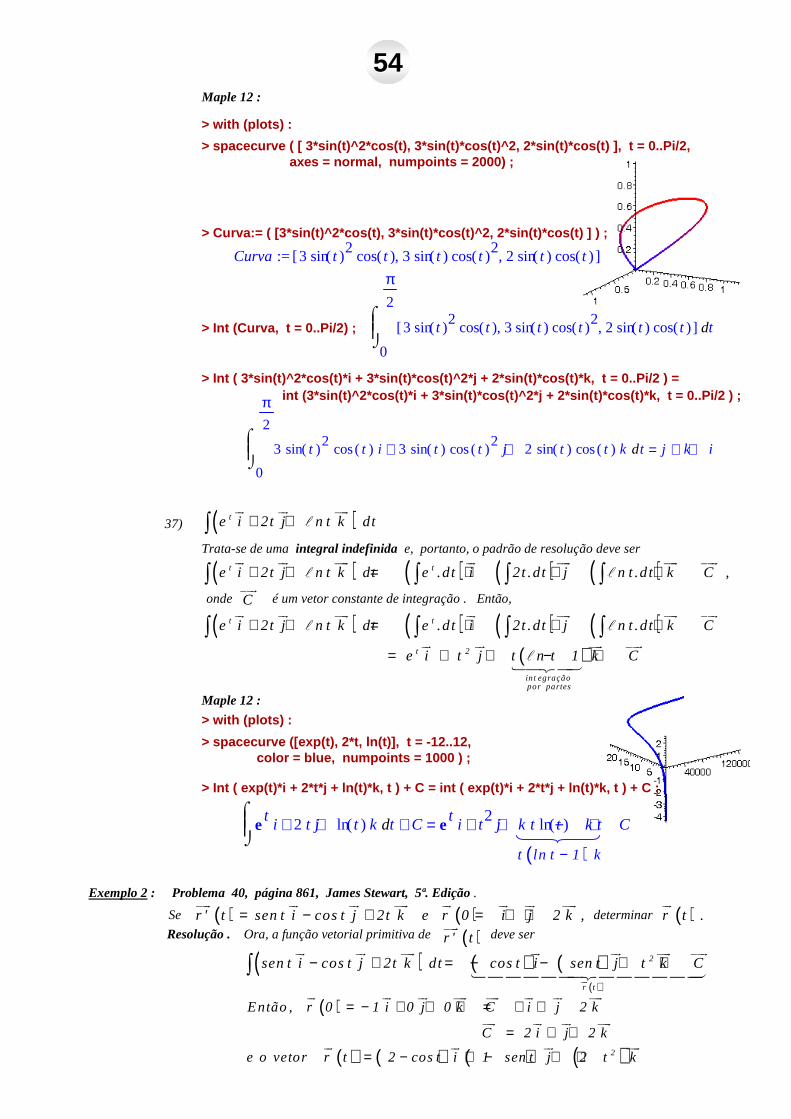
( )t ln t 1 k−
5454
37) ( )te i 2t j n t k dt+ +∫� � �
ℓ
Trata-se de uma integral indefinida e, portanto, o padrão de resolução deve ser
( ) ( ) ( ) ( )t te i 2t j n t k dt e .dt i 2t .dt j n t .dt k C ,+ + = + + +∫ ∫ ∫ ∫� � � � � � �
ℓ ℓ
onde é um vetor constante de integração . Então, C�
Exemplo 2: Problema 40, página 861, James Stewart, 5ª. Edição .
Se determinar ( ) ( )r ' t sen t i cos t j 2t k e r 0 i j 2 k ,= − + = + +� � � � � � � �
( )r t .�
Resolução . Ora, a função vetorial primitiva de deve ser( )r ' t�
( ) ( ) ( )( )
2
r t
sen t i cos t j 2t k dt cos t i sen t j t k C− + = − − + +∫�
� � � � � � �
���������������
( )
( ) ( ) ( ) ( )2
Então , r 0 1 i 0 j 0 k C i j 2 k
C 2 i j 2 k
e o vetor r t 2 cos t i 1 sen t j 2 t k
= − + + + = + +
= + +
= − + − + +
� � � � � � � �
� � � �
� � � �
Maple 12 :
> with (plots) :
> spacecurve ( [ 3*sin(t)^2*cos(t), 3*sin(t)*cos(t)^ 2, 2*sin(t)*cos(t) ], t = 0..Pi/2, axes = normal, numpoints = 2000) ;
> Curva:= ( [3*sin(t)^2*cos(t), 3*sin(t)*cos(t)^2, 2*sin(t)*cos(t) ] ) ;
> Int (Curva, t = 0..Pi/2) ;
> Int ( 3*sin(t)^2*cos(t)*i + 3*sin(t)*cos(t)^2*j + 2*sin(t)*cos(t)*k, t = 0..Pi/2 ) = int (3*sin(t)^2*cos(t)*i + 3*sin(t)*cos(t)^2*j + 2* sin(t)*cos(t)*k, t = 0..Pi/2 ) ;
:= Curva [ ], ,3 ( )sin t2
( )cos t 3 ( )sin t ( )cos t2
2 ( )sin t ( )cos t
d⌠
⌡0
π2
[ ], ,3 ( )sin t2
( )cos t 3 ( )sin t ( )cos t2
2 ( )sin t ( )cos t t
= d⌠
⌡0
π2
+ + 3 ( )sin t2
( )cos t i 3 ( )sin t ( )cos t2
j 2 ( )sin t ( )cos t k t + + j k i
Maple 12 :
> Int ( exp(t)*i + 2*t*j + ln(t)*k, t ) + C = int ( exp(t)*i + 2*t*j + ln(t)*k, t ) + C ;
> spacecurve ([exp(t), 2*t, ln(t)], t = -12..12,color = blue, numpoints = 1000 ) ;
( ) ( ) ( ) ( )( )
t t
t 2
int egraçãopor partes
e i 2t j n t k dt e .dt i 2t .dt j n t .dt k C
e i t j t n t 1 k C
+ + = + + +
= + + − +
∫ ∫ ∫ ∫� � � � � � �
ℓ ℓ� � � �
ℓ�����
= + d⌠
⌡ + + e
ti 2 t j ( )ln t k t C + + − + e
ti t
2j k t ( )ln t k t C
> with (plots) :

( ) ( ) ( )( )
2
d r td r t r tComo 0 , resulta : r t const .R .
d t d t
= = =
�� �i �
( )r t .�
5555Maple 12 :
> spacecurve ( { [ (2-cos(t)), (1-sin(t)), (2+t^2) ], [ sin(t), -cos(t), 2*t ] },t = -2*Pi..2*Pi, numpoints = 2000 ) ;
> with (plots) :
> Int ( sin(t)*i - cos(t)*j + 2*t*k, t ) = int ( si n(t)*i - cos(t)*j + 2*t*k, t ) ;
= d⌠⌡ − + ( )sin t i ( )cos t j 2 t k t − − + i ( )cos t j ( )sin t k t
2
Desmembrando as duas funções vetoriais, teremos :
> spacecurve ( [ (2-cos(t)), (1-sin(t)), (2+t^2) ],t = -2*Pi..2*Pi ) ;
> spacecurve ( [ sin(t), -cos(t), 2*t ],t = -2*Pi..2*Pi ) ;
( )r ' t .�
As duas curvas vistas de cima : ( )r t .�
( )r ' t .�
Exemplo 3: Problema 50, página 861, James Stewart, 5ª. Edição .
Se uma curva apresenta o vetor de posição sempre perpendicular ao vetor tangente mos-
trar que tal curva se desenvolve ao longo de uma superfície esféricacom centro na origem .
( )r t�
( )r ' t ,�
Demonstração. ( ) ( ) ( ) ( ) ( ) ( )produto escalar
r t r ' t r t r ' t r t r ' t cos 02
π⊥ ⇒ = =� � � � � �
i�����
De acordo com a derivação do produto escalar de dois vetores, podemos escrever :
( ) ( )( ) ( ) ( ) ( ) ( ) ( )
0 , por hipótese
d r t r tr t r ' t r t r ' t 2 r t .r ' t 0
d t=
= + = =
� �i � � � � � �
i i�����
Por via de consequência, se o vetor posição tem módulo constante R , somos
levados a concluir que, no espaço tridimensional, tal vetor descreve uma superfície es-
férica de raio
( )r t�
( )r t R .=�
X
Y
Z
R
O
Se quisermos apreciar a construção ritmada das curvas, basta seguir o comando :
> animate ( spacecurve , [ { [ 2-cos(t), (1-sin(t)), (2+t^2) ], [ sin(t), -cos(t), 2*t ] },t = -n..n ], n = -2*Pi..2*Pi, numpoints = 2000 ) ;

cujo módulo é sendo s o com-
primento do arco que mede, sobre a curva, a distância da par-
tícula a um ponto fixo dada . A taxa de variação da distância,
em relação ao tempo (rapidez), é dada pelo módulo do vetor ve-
locidade . Tal como acontece no sistema bidimensional, a ace-
leração da partícula é dada pela derivada da velocidade :
( ) dsv t r ' r ' ,
dt= =
�i
56563.3. Movimentono espaço: vetor tangente e vetor normal .
Neste último item da Unidade 3 mostraremos, mediante ilustrações resolvidas, a imprescindível utilização dos vetores tangente e normal no estudo do movimento de uma partícula que se move ao longo de uma curva C no espaço .
Suponhamos um vetor de posição de uma partícula movendo-se na trajetória C , num dado instante t .
Pelo que vimos nas páginas anteriores, sabemos que o vetor é tangente à curva C , orientado na direção do
deslocamento instantâneo da partícula . Portanto, o vetor representa o vetor velocidade da partícula, no instante t :
( )r t�
( ) ( )r ' t v t=� �
O
PQ
X
Y
Z
C( )r t� ( )r t h+
�
( ) ( )r t h r t+ −� �
( ) ( )r ' t v t=� �
( )v t�
( ) ( ) d rv t r ' t
d t= =
�� �
( ) ( ) ( )a t v' t r '' t= =� � �
Exemplo 1: Seja a função vetorial plana, definida pela equação e, portanto, re-
presentando uma trajetória circular com centro na origem . Supondo positivo o sentido da trajetória, ana-
lisar a velocidade e a aceleração do movimento .
( )r t R cos wt , R sen wt= < >�
Resolução . As equações paramétricas x = R cos wte y = R sen wtnos levam ao vetor velocidade :
( ) ( ) ( )d rv t r ' t Rw sen wt , Rw cos wt v t Rw
d t= = = < − > ⇒ =
�� � �
Como se vê, o módulo da velocidade é constante e a velocidade angular a
vv w .
R= =
�
O vetor aceleração será ( ) ( ) ( )
( ) ( )
2 2
2
a t v' t r '' t Rw cos wt , Rw sen wt
ou
a t w r t
= = = < − − >
= −
� � �
� �
O módulo da aceleração também é constante, pois, deno-
minada aceleração centrípeta . A Segunda Lei de Newton nos assegura que o vetor acele-
ração centrípeta tem o sentido voltado para a origem :
O vetor oposto representa a aceleração centrífuga .
2 2a w r w R ,= − =� �
2
sentido contrárioao do vetor r
F m a m w r= = −�
� � �
�����
( )v t�
( )a t�
Adendo . Se imprimirmos valores numéricos à questão anterior, por exemplo, R = 2 m e w = 3, virá :
( ) ( )v t 6 sen 3t , 6 cos 3t v t 6 m / s= < − > ⇒ =� �
( ) 2a t 18 cos 3t , 18 sen 3t a 18 m / s= < − − > ⇒ =� �
Maple 12 :
> C:= [ 2*cos (3*t), 2*sin (3*t) ] ;
> vtangente:= diff (C, t ) ;
> velocidade:= sqrt ( (-6)^2 ) ;
:= C [ ],2 ( )cos 3t 2 ( )sin 3 t
:= vtangente [ ],−6 ( )sin 3 t 6 ( )cos 3t
:= velocidade 6> vaceleração:= diff (C, t$2 ) ;
:= vaceleração [ ],−18 ( )cos 3t −18 ( )sin 3t
> aceleração:= sqrt ( (-18)^2 ) ; := aceleração 18 > plot ( [ 2*cos (3*t), 2*sin (3*t), t = 0..2*Pi /3 ] ) ;
( )a t−�

5757Se quisermos dar um tratamento tridimensional ao problema, basta repetir o que já mostramos anteriormente :
> with (plots) :
> spacecurve ( [ 2*cos (3*t), 2*sin (3*t), 0 ], t = 0..2*Pi / 3 ) ;
- Os cálculos da velocidade e da aceleração seguem os mesmos padrões .
Exemplo 2: Problema 6, página 877, James Stewart, 5ª. edição .
Determinar a velocidade, a aceleração e a rapidez da partícula cuja função posição é dada pelo vetor
( )r t sen t , 2 cos t , no ponto t6
π= < > = ⋅�
( ) ( ) ( )
( )
6
6
3v t r ' t cos t , 2 sen t v , 1
2
3 7v 1 1,32 m / s
4 2
π
π
= = < − > ⇒ = < − >
= + = ≈
� � �
�
( ) ( ) ( )
( )
6
26
1a t v ' t sen t , 2 cos t a , 3
2
13a 1,80 m / s
2
π
π
= = < − − > ⇒ = < − − >
= ≈
� � �
�
Resolução . Basta seguir o roteiro resolutivo já mostrado :
É fácil perceber que a equação dada representa uma elipse :
2 2x sen tx sen t x y
1yy 2 cos t 1 4cos t
2
== ⇒ ⇒ + = = =
Maple 12 :
> Elipse:= [ sin (t), 2*cos (t) ] ;
> vvelocidade:= diff (Elipse, t ) ;
> velocidade:= sqrt ( 3/4 +1 ) ;
> plot ( [ sin (t), 2*cos (t), t = 0..2*Pi ] ) ;
:= Elipse [ ],( )sin t 2 ( )cos t
:= vtangente [ ],( )cos t −2 ( )sin t
> subs (t = Pi/6, vvelocidade) ;
,
cos
π6
−2
sin
π6
> eval (%) ;
,
3
2-1
:= velocidade7
2> evalf (%, 3) ; 1.32
> vaceleração:= diff (Elipse, t$2 ) ; := vaceleração [ ],− ( )sin t −2 ( )cos t
> subs (t = Pi/6, vaceleração) ;
,−
sin
π6
−2
cos
π6
> eval (%) ;
,
-1
2− 3
> aceleração:= sqrt ( 1/4 +3 ) ;
:= aceleração13
2> evalf (%, 3) ; 1.80
( )a t� ( )v t
�
3, 1
2
−
1, 3
2 − −
1, 3
2
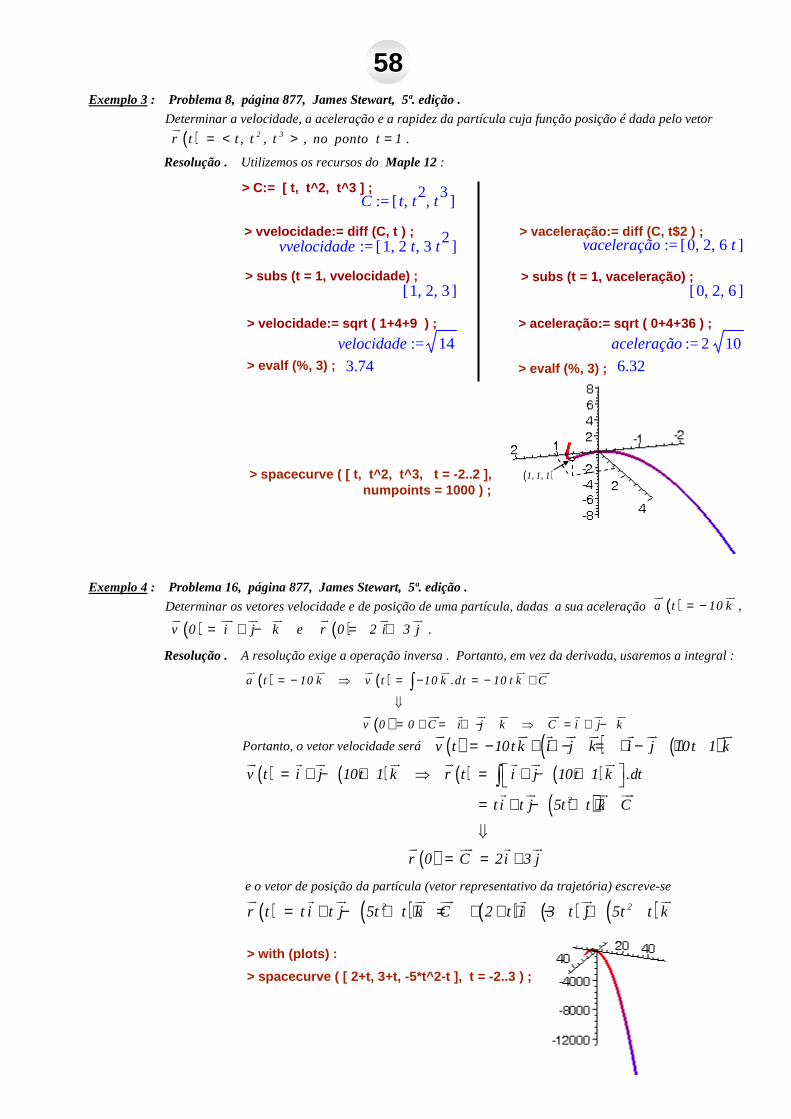
5858Exemplo 3: Problema 8, página 877, James Stewart, 5ª. edição .
Determinar a velocidade, a aceleração e a rapidez da partícula cuja função posição é dada pelo vetor
( ) 2 3r t t , t , t , no ponto t 1 .= < > =�
Resolução . Utilizemos os recursos do Maple 12 :
> C:= [ t, t^2, t^3 ] ;
> vvelocidade:= diff (C, t ) ;
> velocidade:= sqrt ( 1+4+9 ) ;
> subs (t = 1, vvelocidade) ;
> evalf (%, 3) ;
> vaceleração:= diff (C, t$2 ) ;
> subs (t = 1, vaceleração) ;
> aceleração:= sqrt ( 0+4+36 ) ;
> evalf (%, 3) ;
:= C [ ], ,t t2
t3
:= vvelocidade [ ], ,1 2 t 3 t2
[ ], ,1 2 3
:= velocidade 14
3.74
:= vaceleração [ ], ,0 2 6t
[ ], ,0 2 6
:= aceleração 2 10
6.32
> spacecurve ( [ t, t^2, t^3, t = -2..2 ], numpoints = 1000 ) ;
( )1, 1, 1
Exemplo 4: Problema 16, página 877, James Stewart, 5ª. edição .
Determinar os vetores velocidade e de posição de uma partícula, dadas a sua aceleração
( ) ( )v 0 i j k e r 0 2 i 3 j .= + − = +� � � � � � �
( )a t 10 k ,= −� �
Resolução . A resolução exige a operação inversa . Portanto, em vez da derivada, usaremos a integral :
( ) ( )
( )
a t 10 k v t 10 k .dt 10 t k C
v 0 0 C i j k C i j k
= − ⇒ = − = − +
⇓
= + = + − ⇒ = + −
∫� � � � � �
� � � � � � � � �
Portanto, o vetor velocidade será ( ) ( ) ( )v t 10t k i j k i j 10t 1 k= − + + − = + − +� � � � � � � �
( ) ( ) ( ) ( )( )
( )
2
v t i j 10t 1 k r t i j 10t 1 k .dt
t i t j 5t t k C
r 0 C 2i 3 j
= + − + ⇒ = + − +
= + − + +
⇓
= = +
∫� � � � � � � �
� � � �
� � � �
e o vetor de posição da partícula (vetor representativo da trajetória) escreve-se
( ) ( ) ( ) ( ) ( )2 2r t t i t j 5t t k C 2 t i 3 t j 5t t k= + − + + = + + + − +� � � � � � � �
> spacecurve ( [ 2+t, 3+t, -5*t^2-t ], t = -2..3 ) ;
> with (plots) :
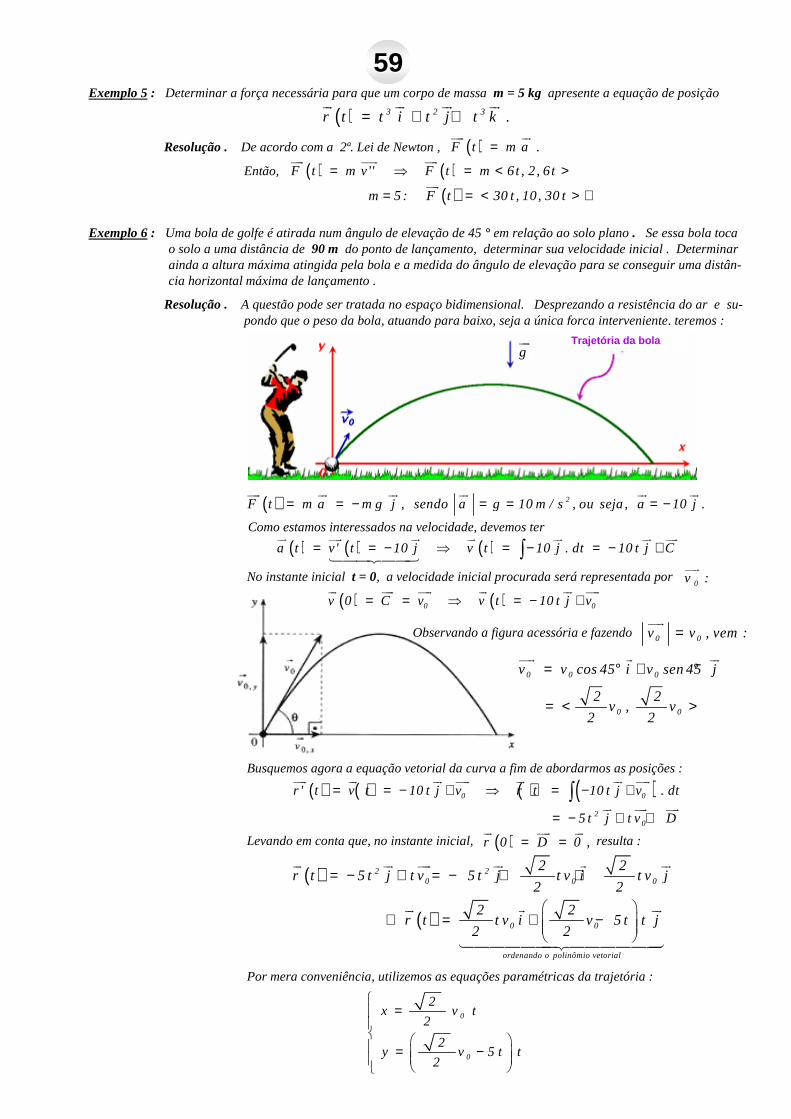
5959Exemplo 5: Determinar a força necessária para que um corpo de massa m = 5 kg apresente a equação de posição
( ) 3 2 3r t t i t j t k .= + +� � � �
Resolução . De acordo com a 2ª. Lei de Newton ,
Então,
( )F t m a .=� �
( ) ( )( )
F t m v'' F t m 6t , 2, 6t
m 5 : F t 30 t , 10, 30 t
= ⇒ = < >
= = < > ⋅
� � �
�
Exemplo 6: Uma bola de golfe é atirada num ângulo de elevação de 45° em relação ao solo plano. Se essa bola toca o solo a uma distância de 90 m do ponto de lançamento, determinar sua velocidade inicial . Determinarainda a altura máxima atingida pela bola e a medida do ângulo de elevação para se conseguir uma distân-cia horizontal máxima de lançamento .
Resolução . A questão pode ser tratada no espaço bidimensional. Desprezando a resistência do ar e su-pondo que o peso da bola, atuando para baixo, seja a única força interveniente, teremos :
( ) 2F t m a m g j , sendo a g 10 m / s , ou seja , a 10 j .= = − = = = −� � � � � �
Trajetória da bola
Como estamos interessados na velocidade, devemos ter
( ) ( ) ( )a t v' t 10 j v t 10 j . dt 10 t j C= = − ⇒ = − = − +∫� � � � � � �
�������
No instante inicial t = 0, a velocidade inicial procurada será representada por0v :�
( ) ( )0 0v 0 C v v t 10 t j v= = ⇒ = − +� � � � � �
0 0 0
0 0
v v cos 45 i v sen 45 j
2 2v , v
2 2
= ° + °
= < >
� � �
Observando a figura acessória e fazendo
Busquemos agora a equação vetorial da curva a fim de abordarmos as posições :
( ) ( ) ( ) ( )0 0
20
r ' t v t 10 t j v r t 10 t j v . dt
5 t j t v D
= = − + ⇒ = − +
= − + +
∫� � � � � � �
� � �
Levando em conta que, no instante inicial, resulta :
0 0v v , vem :=�
( )r 0 D 0 ,= =� � �
( )
( )
2 20 0 0
0 0
ordenando o polinômio vetorial
2 2r t 5 t j t v 5 t j t v i t v j
2 2
2 2r t t v i v 5 t t j
2 2
= − + = − + +
∴ = + −
� � � � � �
� � �
���������������
Por mera conveniência, utilizemos as equações paramétricas da trajetória :
0
0
2x v t
2
2y v 5 t t
2
=
= −
g�
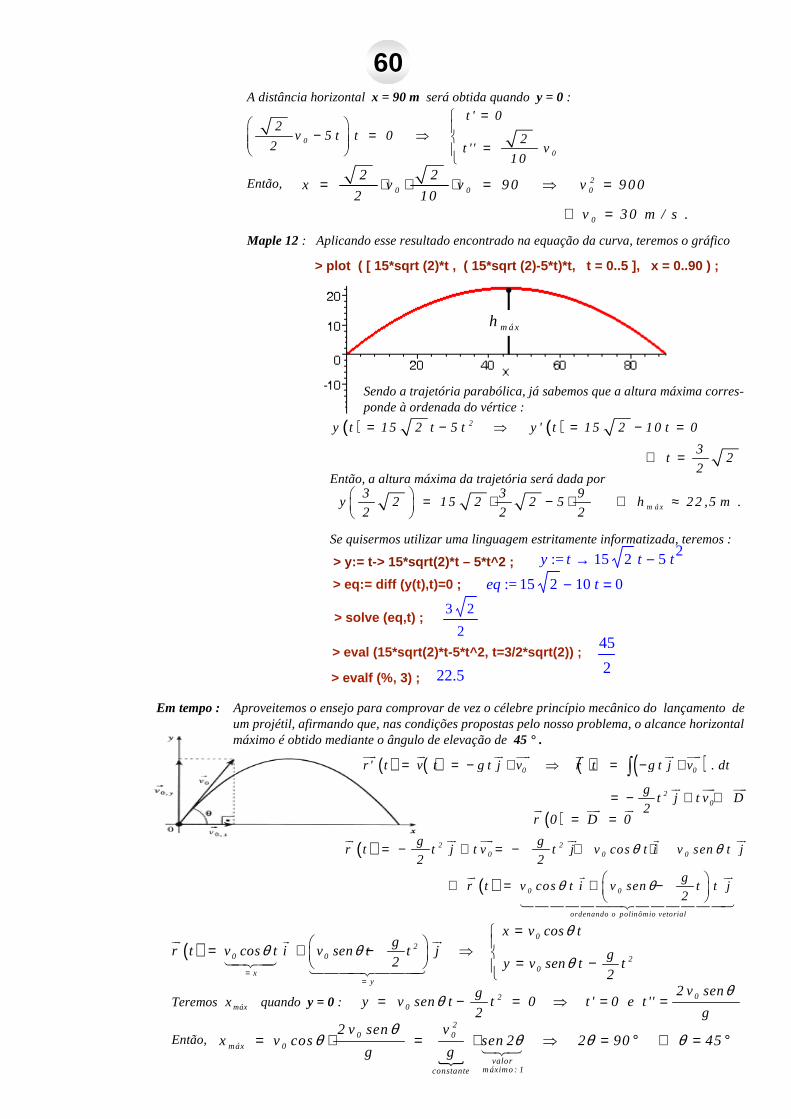
6060A distância horizontal x = 90 m será obtida quando y = 0 :
0
0
t ' 02
v 5 t t 0 22 t '' v10
= − = ⇒ =
Então, 20 0 0
0
2 2x v v 90 v 900
2 10v 30 m / s .
= ⋅ ⋅ ⋅ = ⇒ =
∴ =
Maple 12 : Aplicando esse resultado encontrado na equação da curva, teremos o gráfico
> plot ( [ 15*sqrt (2)*t , ( 15*sqrt (2)-5*t)*t, t = 0..5 ], x = 0..90 ) ;
m áxh
Sendo a trajetória parabólica, já sabemos que a altura máxima corres-ponde à ordenada do vértice :
( ) ( )2y t 15 2 t 5 t y ' t 15 2 10 t 0
3t 2
2
= − ⇒ = − =
∴ =Então, a altura máxima da trajetória será dada por
m áx
3 3 9y 2 15 2 2 5 h 22 ,5 m .
2 2 2 = ⋅ − ⋅ ∴ ≈
> y:= t-> 15*sqrt(2)*t – 5*t^2 ;
Se quisermos utilizar uma linguagem estritamente informatizada, teremos :
:= y → t − 15 2 t 5 t2
> eq:= diff (y(t),t)=0 ; := eq = − 15 2 10t 0
> solve (eq,t) ;3 2
2
> eval (15*sqrt(2)*t-5*t^2, t=3/2*sqrt(2)) ;45
2> evalf (%, 3) ; 22.5
Em tempo : Aproveitemos o ensejo para comprovar de vez o célebre princípio mecânico do lançamento de um projétil, afirmando que, nas condições propostas pelo nosso problema, o alcance horizontal máximo é obtido mediante o ângulo de elevação de 45 ° .
( ) ( ) ( ) ( )0 0
20
r ' t v t g t j v r t g t j v . dt
gt j t v D
2
= = − + ⇒ = − +
= − + +
∫� � � � � � �
� � �
( )r 0 D 0= =� � �
( )
( )
2 20 0 0
0 0
ordenando o polinômio vetorial
g gr t t j t v t j v cos t i v sen t j
2 2g
r t v cos t i v sen t t j2
θ θ
θ θ
= − + = − + +
∴ = + −
� � � � � �
� � �
���������������
( )0
20 0 2
0xy
x v cos tg
r t v cos t i v sen t t j g2 y v sen t t2
θθ θ
θ=
=
= = + − ⇒ = −
� � �
��������������
Teremos quando y = 0 : máxx 020
2 v sengy v sen t t 0 t ' 0 e t ''
2 g
θθ= − = ⇒ = =
Então,
�
20 0
máx 0
valormáximo : 1constante
2 v sen vx v cos sen 2 2 90 45
g g
θθ θ θ θ= ⋅ = ⋅ ⇒ = ° ∴ = °
���
Unidade 4 - INTEGRAIS DE LINHA
CCÁÁLCULO DIFERENCIAL E INTEGRAL IV LCULO DIFERENCIAL E INTEGRAL IV -- Roteiro SinRoteiro Sinóóptico ptico --
-- Cursos de Engenharia Cursos de Engenharia --
6161
Esta sexta unidade abre o início da fase culminante do Cálculo Vetorial . Em textos de tratamento teórico mais avançado é comum encontrarmos maior detalhamento e rigor na exposição deste assunto e, neste caso, sua deno-minação pertinente muda-se para Análise Vetorial .
O alvo predominante nessas explanações é a entidade matemática vetor e, portanto, grande parte doque for tratado no capítulo terá como suportes algébricos, geométricos e físicos o conceito desse extraordinário ente abstrato,bem como suas propriedades e operações . Na página 1052, nosso livro-texto inicia o assunto afirmando :
“ Os vetores podem representar campos de velocidade, como correntes oceânicas, velocidade do vento durante um tornado ou o fluxo de ar passando por um aerofólio inclinado.”
Após afirmar que “ os campos vetoriais são funções que associam vetores a pontos do espaço”,o autor sintetiza as incursões que serão efetuadas nas páginas seguintes utilizando-se de três tópicos básicos :
- Integral de linha : usada para determinar o trabalho executado por um campo de força agindo sobreum objeto que se move ao longo de uma curva .
- Integral de superfície : utilizada para determinar a taxa de vazão de um fluido através de uma superfície .
- Redimensionamento do Teorema Fundamental do Cálculo :estabelece conexões entre esses novos tipos de integrais e aquelas já estudadas (sim-ples, duplas e triplas), ampliando o alcance do Teorema Fundamental do Cálculo medi-ante a análise de três teoremas :
* Teorema de Green (George Green - 1793/1841)
* Teorema de Stokes
* Teorema de Gauss (da divergência)
4.1. Camposescalarese camposvetoriais. Operadoresdiferenciais.
George Gabriel Stokes(1819 – 1903)
Carl Friedrich Gauss(1777 – 1855)
OPERADORESDIFERENCIAIS
Existe uma entidade vetorialde grande utilidade nas inúmeras aplicações do Cálculo Vetorial . Trata-se de um vetor simbólico gerador de algumas funções escalares e vetoriais (conceitos já mostrados na página 37 des-te compêndio) que serão tratadas nas próximas páginas . Referimo-nos ao operador del, representado por e definido
por
recebendo também a denominação de operador nabla(por semelhança com antigo instrumento musical), atled (a palavra deltaescrita ao contrário) ou ainda vetor simbólico de Hamilton (1805-1865) . Tal operador aplica as derivadas parciais do que lhe segue, enquadrando-se nas propriedades operacionais dos vetores .
Passemos agora ao estudo de alguns conceitos instrumentais de grande importância no desenvolvi-
mento teórico e no painel das aplicações práticas contidas nas unidades restantes deste nosso curso :
i j k ,x y z
∂ ∂ ∂∇ = + +∂ ∂ ∂
� � � �∇�
GRADIENTE de uma Função Escalar . Dada uma função escalar f (x, y, z), o cam-
po vetorial gradiente (ou função vetorial gradiente) de f é definido por
( ) f f ff x, y,z i j k
x y z
∂ ∂ ∂∇ = + +∂ ∂ ∂
� � � �
Exemplos: ( ) ( ) ( ) ( )3 2 2 2 3 3 21. f x, y,z x y z 5y 2z 5 f x, y,z 3x y z i 2x yz 5 j x y 2 k= + − − ⇒ ∇ = + + + −� � � �
( ) ( ) ( )x y z x y z2. f x, y,z e f x, y,z e i z j y k+ += ⇒ ∇ = + +� � � �
2 2 23. r x i y j z k e r r x y z , calcular r .= + + = = + + ∇� � � � � �
Sendo
( ) f ff x, y i j
x y
∂ ∂∇ = +∂ ∂
� � �ou
campo vetorial em ℝ² campo vetorial em ℝ³

> restart : with (linalg) :'grad (f,[x,y])' = [ Diff (f,x), Diff (f,y) ] ;
'grad (f,[x,y,z] )' = [ Diff (f,x), Diff (f,y), Diff (f ,z) ] ;
grad (f (x,y,z), vector ([x,y,z] ) ) ;
( )2 2 2
r x x r y r z; ;
x r y r z rx y z
x y z 1 1r i j k x i y j z k r
r r r r r
∂ ∂ ∂= = = =∂ ∂ ∂+ +
∇ = + + = + + =� � � � � � � �
Teorema . Sendo dada uma superfície de equação f (x, y, z) = C , o vetor é normal a ela em cada um de seuspontos (x, y, z) .
f∇�
Verificação : Por ocasião do estudo da derivada direcional de uma função z = f (x, y), já cuidáramos des-sa demonstração e desenvolvêramos algumas ilustrações físicas e geométricas. Todavia, umarecapitulação sempre nos ajuda a reforçar o domínio do assunto .
Sendo f (x, y, z) = 0 a equação da superfície S , sua diferencial total nos dáf f f
df dx dy dz 0 ,x y z
∂ ∂ ∂= + + =∂ ∂ ∂
( )d r : vetor direcional da derivada de f
vetor gradiente de f
f f fi j k dx i dy j dz k 0 .
x y z
∂ ∂ ∂+ + + + = ∂ ∂ ∂ �
� � � � � �i���������
�������������
igualdade esta que pode ser escrita na forma de um produto escalar de dois vetores:
6262
f d r 0 f d r f S .∇ = ⇒ ∇ ⊥ ⇒ ∇ ⊥� � � � �
i
O produto escalar nulo revela a ortogonalidade dos dois vetores que, associada aofato de o vetor ser tangente à superfície S , nos conduz à tese :
Comentário adicional . Na esteira de tudo que já vimos acerca do vetor gradiente, podemos acrescentar ainda inú-meras aplicações em mecânica dos fluidos, eletromagnetismo, campo eletrostático, potencial elétrico, pesquisas me-teorológicas, calorimetria e muitas outras áreas da engenharia . Permite determinar as taxas de variações direcio-nais, anulando-se nos pontos de máximo, de mínimo e de sela, atuando tanto nos campos escalares quanto nos cam-pos vetoriais . Recomendamos ao prezado leitor uma revisão das páginas 88 a 98 do compêndio de Cálculo III .
d r�
Para informatizar esse tratamento (Maple), deveremos utilizar o pacote Álgebra Linear:
= ( ):-linalg grad ,f [ ],x y
,
∂∂x
f∂∂y
f
ou
= ( ):-linalg grad ,f [ ], ,x y z
, ,
∂∂x
f∂∂y
f∂∂z
f
ou, ainda mais simplesmente,
, ,
∂∂x
( )f , ,x y z∂∂y
( )f , ,x y z∂∂z
( )f , ,x y z
( ) 3 21. f x, y,z x y z 5y 2z 5= + − −
Sendo
( ) x y z2. f x, y,z e+=
> f:= (x,y,z)-> x^3*y^2*z+5*y-2*z-5 ;
grad (f (x,y,z), vector ( [x,y,z] ) ) ;
:= f → ( ), ,x y z + − − x3
y2
z 5 y 2 z 5
[ ], ,3 x2
y2
z + 2 x3
y z 5 − x3
y2
2
> f:= (x,y,z)-> exp(x+y*z) ;
grad (f (x,y,z), vector ( [x,y,z] ) ) ;
:= f → ( ), ,x y z e( ) + x y z
[ ], ,e( ) + x y z
ze( ) + x y z
y e( ) + x y z
2 2 23. r x i y j z k e r r x y z , calcular r .= + + = = + + ∇� � � � � �
> f:= (x,y,z)-> sqrt (x^2+y^2+z^2) ;
grad (f (x,y,z), vector ( [x,y,z] ) ) ;
:= f → ( ), ,x y z + + x2
y2
z2
, ,x
+ + x2
y2
z2
y
+ + x2
y2
z2
z
+ + x2
y2
z2
Resolvendo os três problemas da página anterior, resulta :
rou r
r∇ = ⋅
��
�

6363Propriedadesdo Gradiente:
G.1 ) ( ) ( )a f a f ,∇ = ∇� �
sendo a constante .
( ) ( ) ( ) ( )
( )
a f a f a fa f i j k
x y z
a f a f a fi j k
x y z
a f
∂ ∂ ∂∇ = + +
∂ ∂ ∂∂ ∂ ∂= + +
∂ ∂ ∂
= ∇
� � � �
� � �
�
Verificação:
G.2 ) ( )f g f g∇ ± = ∇ ± ∇� � �
( ) ( ) ( ) ( )f g f g f gf g i j k
x y z
f g f g f gi j k
x x y y z z
f g
∂ ± ∂ ± ∂ ±∇ ± = + +
∂ ∂ ∂
∂ ∂ ∂ ∂ ∂ ∂ = ± + ± + ± ∂ ∂ ∂ ∂ ∂ ∂
= ∇ ± ∇
� � � �
� � �
� �
Verificação:
> g:= (x,y,z)-> a*f(x,y,z) ;
grad (a*f(x,y,z), vector ([x,y,z])) ;
:= g → ( ), ,x y z a ( )f , ,x y z
, ,a
∂
∂x
( )f , ,x y z a
∂
∂y
( )f , ,x y z a
∂
∂z
( )f , ,x y z
( ) ( )ou a f a f∇ = ∇� �
- Utilizando o sistema computa-cional Maple, esta e as demais propriedades são demonstra-das nos moldes da anterior .
G.3 ) ( )f g f g g f∇ = ∇ + ∇� � �
( ) f g g f f g g f f g g ff g i j k
x y z
g g g f f ff i j k g i j k f g g f
x y z x y z
∂ + ∂ ∂ + ∂ ∂ + ∂∇ = + +∂ ∂ ∂
∂ ∂ ∂ ∂ ∂ ∂= + + + + + = ∇ + ∇ ∂ ∂ ∂ ∂ ∂ ∂
� � � �
� � � � � � � �
Verificação:
G.4 )2
f g f f g
g g
∇ − ∇∇ =
� ��
Verificação: Basta seguir o roteiro de derivação de uma função quociente, sendo, portanto, análoga à anterior .
G.5 ) ( ) ( ) ( )ff g g ou f ' g g
g
∂∇ = ∇ ∇ ∂
� � �
( ) ( ) ( ) ( )
( )
( )
f g f g f gf g i j k
x y z
f g f gC om o , pela reg ra da cadeia , vem :
x g x
f g f g f gf g i j k
g x g y g z
f g g g fi j k g
g x y z g
∂ ∂ ∂ ∇ = + + ∂ ∂ ∂
∂ ∂ ∂ =∂ ∂ ∂
∂ ∂ ∂ ∂ ∂ ∂∇ = + + ∂ ∂ ∂ ∂ ∂ ∂
∂ ∂ ∂ ∂ ∂= + + = ∇ ∂ ∂ ∂ ∂ ∂
� � � �
� � � �
� � � �
Verificação:
Resolução: Fazendo podemos escrever
2. Calcular utilizando a quinta propriedade G.5 .
1. Determinar o gradiente da função módulo do vetor posição de um ponto (x, y, z) ,
Resolução:
3r ,∇�
Problemasilustrativosr x i y j z k .= + +� � � �
( )2 2 2 2 2 2 2 2 2
2 2 2
2x 2 y 2z2 2 2
2 x y z 2 x y z 2 x y z
1
x y z
r r x y z r i j k
1x i y j z k r
r
+ + + + + +
+ +
= = + + ⇒ ∇ = + +
= + + =
� � � � �
� � � �
( ) 3 3g r r e f g g r ,= = = =�
( ) ( )3
2
2
r f g f ' g g
3g g
13r r 3 r r
r
∇ = ∇ = ∇
= ∇
= ⋅ =
� � �
�
� �
> restart : with (linalg) :
> g:= (x,y,z) -> sqrt (x^2+y^2+z^2) ;
> f:= g^3 ;
[ ], ,3 + + x2
y2
z2
x 3 + + x2
y2
z2
y 3 + + x2
y2
z2
z
:= g → ( ), ,x y z + + x2
y2
z2
:= f g3
> grad (f (x,y,z), vector ( [x,y,z] ) ) ;
3ou r 3r r∇ =� �
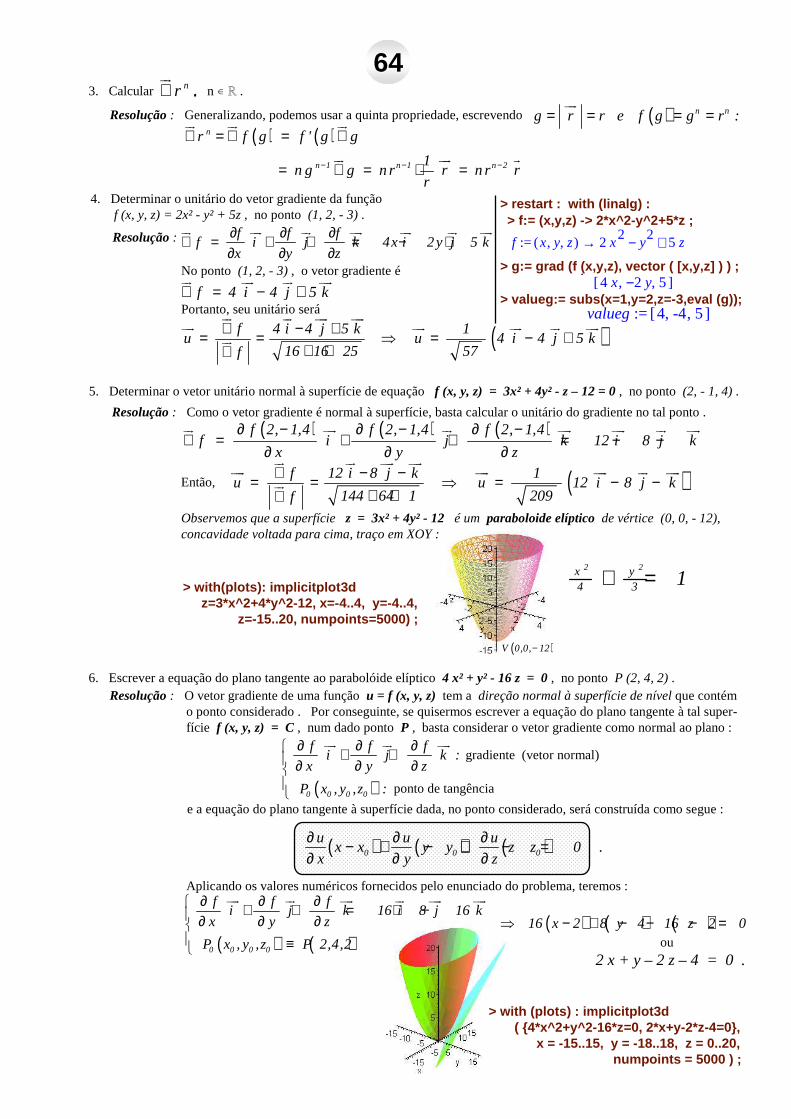
64643. Calcular , n ∊ ℝ .
Resolução: Generalizando, podemos usar a quinta propriedade, escrevendo
( ) ( )n
n 1 n 1 n 2
r f g f ' g g
1n g g n r r n r r
r− − −
∇ = ∇ = ∇
= ∇ = ⋅ =
� � �
� � �
nr .∇�
( ) n ng r r e f g g r := = = =�
f f ff i j k 4x i 2y j 5 k
x y z
∂ ∂ ∂∇ = + + = − +∂ ∂ ∂
� � � � � � �
4. Determinar o unitário do vetor gradiente da funçãof (x, y, z) = 2x² - y² + 5z ,no ponto (1, 2, - 3) .
Resolução:
No ponto (1, 2, - 3) , o vetor gradiente é .
Portanto, seu unitário seráf 4 i 4 j 5 k∇ = − +
� � � �
( )f 4 i 4 j 5 k 1u u 4 i 4 j 5 k
16 16 25 57f
∇ − += = ⇒ = − ++ +∇
� � � �� � � � �
�
5. Determinar o vetor unitário normal à superfície de equação f (x, y, z) = 3x² + 4y² - z – 12 = 0, no ponto (2, - 1, 4) .
2 2x y4 3 1+ =
Resolução: Como o vetor gradiente é normal à superfície, basta calcular o unitário do gradiente no tal ponto .
( ) ( ) ( )f 2, 1,4 f 2, 1,4 f 2, 1,4f i j k 12 i 8 j k
x y z
∂ − ∂ − ∂ −∇ = + + = − −
∂ ∂ ∂
� � � � � � �
( )f 12 i 8 j k 1u u 12 i 8 j k
144 64 1 209f
∇ − −= = ⇒ = − −+ +∇
� � � �� � � � �
�Então,
Observemos que a superfície z = 3x² + 4y² - 12 é um paraboloide elíptico de vértice (0, 0, - 12), concavidade voltada para cima, traço em XOY :
( )V 0,0, 12−
> with(plots): implicitplot3d z=3*x^2+4*y^2-12, x=-4..4, y=-4..4,
z=-15..20, numpoints=5000) ;
> f:= (x,y,z) -> 2*x^2-y^2+5*z ;> restart : with (linalg) :
:= f → ( ), ,x y z − + 2 x2
y2
5 z
> g:= grad (f (x,y,z), vector ( [x,y,z] ) ) ;[ ], ,4 x −2 y 5
> valueg:= subs(x=1,y=2,z=-3,eval (g)); := valueg [ ], ,4 -4 5
( )0 0 0 0
f f fi j k :
x y z
P x , y ,z :
∂ ∂ ∂ + + ∂ ∂ ∂
� � �
( ) ( ) ( )0 0 0
u u ux x y y z z 0 .
x y z
∂ ∂ ∂− + − + − =∂ ∂ ∂
6. Escrever a equação do plano tangente ao parabolóide elíptico 4 x² + y² - 16 z = 0 , no ponto P (2, 4, 2) .Resolução: O vetor gradiente de uma função u = f (x, y, z) tem a direção normal à superfície de nível que contém
o ponto considerado . Por conseguinte, se quisermos escrever a equação do plano tangente à tal super-fície f (x, y, z) = C , num dado ponto P , basta considerar o vetor gradiente como normal ao plano :
gradiente (vetor normal)
ponto de tangência
e a equação do plano tangente à superfície dada, no ponto considerado, será construída como segue :
Aplicando os valores numéricos fornecidos pelo enunciado do problema, teremos :
( ) ( )( ) ( ) ( )
0 0 0 0
f f fi j k 16 i 8 j 16 k
x y z 16 x 2 8 y 4 16 z 2 0
P x , y ,z P 2,4,2
∂ ∂ ∂ + + = + − ∂ ∂ ∂ ⇒ − + − − − = ≡
� � � � � �
ou
2 x + y – 2 z – 4 = 0 .
> with (plots) : implicitplot3d( {4*x^2+y^2-16*z=0, 2*x+y-2*z-4=0},
x = -15..15, y = -18..18, z = 0..20, numpoints = 5000 ) ;

6565
0 0 0x x y y z z x 2 y 4 z 2 x 2 y 4 z 2ou
u u u 16 8 16 2 1 2x y z
− − − − − − − − −= = ⇒ = = = =∂ ∂ ∂ − −∂ ∂ ∂
��������������������
Resolução: Neste caso, o vetor gradiente será utilizado para direcionar a reta e, como o ponto dado também lhe per-tence, resulta :
equações simétricas simplificadas
7. Escrever as equações simétricas da reta normal à superfície do problema anterior, no ponto indicado .
equações simétricas
Resolução: Basta mostrar que as duas superfícies têm um plano tangente comum, no ponto dado . Para tanto, apósverificar que o ponto P é comum, torna-se suficiente mostrar que os parâmetros diretores dos dois veto-res gradientes são proporcionais :
8. Mostrar que as duas superfícies f (x, y, z) = x² + 4y² - 4z² - 4 = 0 e g (x, y, z) = x² + y² + z² - 6x – 6y + 2z + 10 = 0 são tangentes no ponto P (2, 1, 1) .
( ) ( ) ( )
( ) ( ) ( )
f 2 ,1,1 f 2 ,1,1 f 2 ,1,1f i j k 4 i 8 j 8 k
x y z
g 2,1,1 g 2,1,1 g 2,1,1g i j k 2 i 4 j 4 k
x y z
∂ ∂ ∂∇ = + + = + −
∂ ∂ ∂∂ ∂ ∂
∇ = + + = − − +∂ ∂ ∂
� � � � � � �
� � � � � � �
Portanto, os dois gradientes têm a mesma direção, ou seja, o plano tangente é comum .
4 8 82 :
2 4 4
−= = = −− −
> with(plots): implicitplot3d ({x^2+4*y^2-4*z^2-4=0, x^2+y^2+z^2-6*x-6*y+2*z+10=0 },
x=-20..20, y=-10..10, z=-10..10, numpoints=10000) ;
1. Calcular : Resp.:
9. O potencial elétrico, em qualquer ponto (x, y) de um plano dado é em MKS .Determinar a taxa de variação máxima do potencial V , no ponto
Resolução: O vetor gradiente nos dá a direção da razão de variação máxima e seu módulo expressa sua medida :
max
V 0, V 0,4 4
V i j 0 i 2 j 2 jx y
dVV 2 volts / metro
dD
π π ∂ ∂ ∇ = + = − = −∂ ∂
∴ = ∇ =
� � � � � �
�
( ) 2 xV f x, y e . cos 2y volts ,−= =
10. A temperatura de um sólido é dada pela função em qualquer um de
seus pontos, no sistema CGS . Determinar a razão de variação máxima da temperatura, no ponto P (3, - 2, 2) .
Resolução: Tal como no problema anterior, teremos : graus / centímetro
4 3a) r b) r−∇ ∇� �
P 0, .4
π
( ) 2 2 2
60T f x , y ,z graus ,
x y z 3= =
+ + +
max
dTT 1,53
dD = ∇ =
�
Problemaspropostos2 5a) 4r r b) 3r r−−� �
2. Sendo f (x, y, z) = sen x², calcular Resp.: f∇�
2f 2x cos x i∇ =� �
3. Sendo calcular Resp.: ( ) ( )2 2 2f x,y,z n x y z ,= + +ℓ f∇�
2
2 r
r
�
�
4. Em cada caso abaixo, determinar o vetor unitário normal à superfície dada, no respectivo ponto indicado :
( ) ( )
( ) ( )
2 2
2 2
z x y 1a ) Resp.: n 2 i 4 j k
P 1,2,5 21
x z 8 1b ) Resp. : n i k
P 2,0,2 2
= + = + −
+ = = +
� � � �
� � �
> plot3d (exp(-2*x)*cos(2*y),x=-3..3, y=-5..5,
numpoints=10000) ;
( ) ( )
( )
x 3y z 5 0 Re sp.:
1c )P 1,1,1 n i 3 j k
11
x 4d ) Resp.: n i
P 4,1,3
+ + − = = + +
= =
� � � �
� �

6666
7. Escrever a equação cartesiana do plano tangente à superfície f (x, y, z) = x² + y² + z² - 6x – 6y + 2z + 10 = 0 noponto P (2, 1, 1) . Resp.: x + 2 y – 2 z – 2 = 0
5. Mostrar que as duas superfícies f (x, y, z) = xy + yz – 4xz = 0 e g (x, y, z) = 5x – y – 3z² = 0 são ortogonais no ponto P (1, 2, 1) .
6. Determinar a direção segundo a qual a função z = x² + y² + xy cresce mais rápido no ponto P (- 1, 1) . Calcular o valor da razão de variação nessa direção . Resp.:
m ax
dzf i j ; 2
d v
∇ = − + =
� � ��
8. Mostrar que a equação do plano tangente à superfície no ponto é2 2 2
2 2 2
x y z1 ,
a b c− − = ( )0 0 0P x , y , z ,
0 0 02 2 2
x x y y z z1 .
a b c− − =
31 2 ff fv
x y z
∂∂ ∂∇ = + +
∂ ∂ ∂
� �i
���������( )1 2 3v i j k f i f j f k
x y z
∂ ∂ ∂∇ = + + + + ∂ ∂ ∂
� � � � � � � �i i
�����������������������ou
DIVERGÊNCIA de uma Função Vetorial . Dada uma função vetorial
o campo escalar divergência (ou função escalar divergente) de é definido por
produto escalar de dois vetores em ℝ³
( ) ( ) ( )1 2 3v f x, y,z i f x, y,z j f x, y,z k ,= + +� � � �
v�
campo escalar em ℝ³
Exemplos: ( ) ( )1. v 3xy i x 2z j x yz k ,= − + + −� � � � ( )
( )( )
1
2
3
f x , y , z 3 xy
f x , y , z x 2 z
f x , y , z x yz
=
= − − = −
( )x 22. v e i sen xy j n x yz z k ,= + − − +� � � �
ℓ sendo
( )( )( ) ( )
x1
2
23
f x , y ,z e
f x , y ,z sen xy
f x , y ,z n x yz z
= =
= − − + ℓ
sendo
Então, 31 2 ff fv 3y 0 y 2y
x y z
∂∂ ∂∇ = + + = + − =
∂ ∂ ∂
� �i
No ponto P (3, 5, -2) , por exemplo, a divergência de é10 . v�
x31 22
ff f y 2zv e x cos xy
x y z x yz z
∂∂ ∂ −∇ = + + = + +∂ ∂ ∂ − +
� �i
No ponto P (0, -7, -1) , a divergência de é11/6 .
Se tivéssemos considerado o ponto P (0, 3/2, 1/2) , por exemplo, a divergência seria 0 . v�
Interpretação físico-geométrica da divergência : Por definição, o divergente de uma função vetorial resume-se num pro-duto escalar de dois vetores e, portanto, constitui-se num gerador de campos escalares . Essa linguagem vetorialproduz importantíssimas aplicações nas áreas de fluxos elétricos, mecânicos e magnéticos, compressibilidade defluidos, forças gravitacionais e outras áreas da engenharia . Imaginemos a correnteza de um rio, a água passan-do através de uma rede de pesca esticada : medir a taxa da corrente de água que atravessa a rede, ou seja, o volu-me do fluido que passa, por unidade de tempo, significa calcular o fluxo através da superfície da rede. Analoga-mente, podemos calcular fluxos elétricos e magnéticos .
O conceito matemático da divergência nos permite caracterizar o com-portamento de um campo vetorial num ponto do espaço, a partir do valor encontrado no produto escalar . Quan-do o fluxo que sai de uma determinada região é maior do que a quantidade de fluido que entra, a divergência épositiva , significando que a velocidade das partículas desse fluido divergem (afastam-se de um dado ponto) , por unidade de volume numa unidade de tempo : tal região apresenta uma fonte de fluxo . Caso contrário, ouseja, quando o fluido converge para a tal região (quantidade que entra é maior do que a que sai), dizemos que aregião é um sorvedouro (ou sumidouro) e o valor encontrado será negativo . Se a divergência for nula, dize-mos que o campo vetorial ésolenoidal , vale dizer, as partículas ficam muito próximas entre si, lembrando osanéis espiralados de uma bobina . Um fenômeno análogo ocorre num campo elétrico , onde a densidade de linhas de força que entram ou saem apresenta o seguinte quadro :
E�
E 0
E 0
E 0
∇ > ⇒
∇ < ⇒
∇ = ⇒
� �i
� �i
� �i
fonte
sumidouro ou poço
campo solenoidal

6767Ilustrações:
1. Mostrar que em todos os pontos do domínio de a função é solenoidal . ( )2 3 2v xy ï x y j 2y z k= + − +� � � �
2. Determinar o valor de p tal que seja um campo solenoidal. Resp. : p = 2v px i 3 py j 4z k= − +� � � �
3. Se determinar no ponto P (0, 0, -1) . x y zv e i e j 3 k ,= + +� � � �
( )v ,∇ ∇� � �
i ( )Resp.: v i j k∇ ∇ = + +� � � � � �
i
Para trabalhar com tais operadores, deveremos utilizar o pacote Álgebra Linear:
= ( ):-linalg diverge ,f [ ], ,x y z
+ +
∂
∂x
f
∂
∂y
f
∂
∂z
f
( ) ( )1. v 3xy i x 2z j x yz k ,= − + + −� � � �
( )( )( )
1
2
3
f x, y,z 3xy
f x, y,z x 2z
f x, y,z x yz
=
= − − = −
( )x 22. v e i sen xy j n x yz z k ,= + − − +� � � �
ℓ
( )( )( ) ( )
x1
2
23
f x, y,z e
f x, y,z sen xy
f x, y,z n x yz z
= =
= − − + ℓ
sendo
:= f [ ], ,3 x y − − x 2 z − x y z
:= divf 2 y
:= valuedivf 10
sendo
> f:= vector ([exp(x), sin(x*y), -ln(x-y*z+z^2)]) ;
divf:= diverge ( f, [x,y,z] ) ;
valuedivf:= subs (x=0, y=-7, z=-1, divf) ;
:= f [ ], ,ex ( )sin x y − ( )ln − + x y z z
2
:= divf + − ex
( )cos x y x− + y 2 z
− + x y z z2
:= valuedivf + e0 5
6simplify(%) ; 11
6
Então, teremos :
Propriedadesda Divergência:
D.1 ) ( ) ( )a v a v ,∇ = ∇� � � �i i sendo a constante .
( ) ( ) ( ) ( )
( )
1 2 3
31 2
a f a f a fa v
x y z
a fa f a f
x y z
a v
∂ ∂ ∂∇ = + +
∂ ∂ ∂∂∂ ∂
= + +∂ ∂ ∂
= ∇
� �i
� �i
Verificação:
D.2 ) ( ) 1 2 3
1 2 3
v f i f j f kv w v w ,
w g i g j g k
= + +∇ ± = ∇ ± ∇ = + +
� � � �� � � � � � �i i i � � � �
( ) ( ) ( ) ( )1 1 2 2 3 3
3 31 2 1 2
f g f g f g¨v w
x y z
f gf f g g
x y z x y z
v w
∂ ± ∂ ± ∂ ±∇ ± = + +
∂ ∂ ∂
∂ ∂ ∂ ∂ ∂ ∂ = + + ± + + ∂ ∂ ∂ ∂ ∂ ∂
= ∇ ± ∇
� � �
� � � �i i
Verificação:
sendo
Ilustração . Mostrar que em todos os pontos do domínio de a função é solenoidal .
( )2 3 2v xy ï x y j 2y z k= + − +� � � �
> v:= vector ( [x*y^2, x-y^3, 2*y^2*z] ) ;
divv:= diverge ( v, [x,y,z] ) ;
:= v [ ], ,x y2 − x y
32 y
2z
:= divv 0
> restart : with (linalg) :‘diverge (f,[x,y,z])’ = [Diff (f,x) + Diff (f,y) + Dif f (f,z)] ;
> f:= vector ( [3*x*y, -x-2*z, x-y*z] ) ;divf:= diverge ( f, [x,y,z] ) ;valuedivf:= subs (x=3, y=5, z=-2, divf) ;

6868
D.3 ) ( ) ( ) ( )f v f v f v ,∇ = ∇ + ∇� � � � � �i i i
( ) ( ) ( ) ( )1 2 3
31 21 2 3
f f f f f ff v
x y z
ff ff f ff f f f f f
x x y y z z
∂ ∂ ∂∇ = + +
∂ ∂ ∂∂∂ ∂∂ ∂ ∂= + + + + +
∂ ∂ ∂ ∂ ∂ ∂
� �iVerificação:
sendo f é uma função escalar .
( ) ( )
31 21 2 3
ff f f f ff f f f
x y z x y z
f v f v
∂ ∂ ∂ ∂ ∂ ∂= + + + + + ∂ ∂ ∂ ∂ ∂ ∂
= ∇ + ∇� � � �i i
1. Sendo mostrar que :r x i y j z k ,= + +� � � �
Problemaspropostos
( )( )( )( )
2 2
3 3
1
a) r 3
b) r r r 4r
c) r r 5r
d ) r r 6r
2e) r r
r−
∇ =
∇ =
∇ =
∇ =
∇ =
� �i� � �i� �i� �i
� �i
( ) ( )
( )( )
( ) ( ) ( )
( )
n n
3
2
2
3
f ) r r n 3 r
3g) r r
4
h) r r 10 r
i ) f r r 3 f r f ' r r
j ) r r 0
−
−
∇ = +
∇ ∇ =
∇ ∇ =
∇ = +
∇ =
� �i
� �i
� � � �i i
� �i� �i
2. Sendo calcular no ponto P(1, 1, 1) . Resp. : 3 ex y yz xzv e i e j e k ,= + +� � � �
v∇� �i
3. Calcular o gradiente da divergência de no ponto P(1, 1, 1) .x y yz xzv e i e j e k ,= − +� � � �
( ) ( )Resp. : v e 3 i j k∇ ∇ = + −� � � � � �
i
4. Calcular a divergência do gradiente da função escalar no ponto P(1, 1, 1) .( ) x yzf x,y,z e ,= Resp. : 3 e
5. Mostrar que : ( ) ( )1
23 310
a ) r r r b ) x y z 2 x y3
∇ = ∇ ∇ = � � � �i i
6. Determinar o valor de p tal que seja um campo solenoidal. Resp. : p = 2v px i 3 py j 4z k= − +� � � �
7. Se determinar no ponto P (0, 0, -1) . x y zv e i e j 3 k ,= + +� � � �
( )v ,∇ ∇� � �
i ( )Resp.: v i j k∇ ∇ = + +� � � � � �
i
> v:= vector ( [exp(x), exp (y*z), 3] ) ;
divv:= diverge ( v, [x,y,z] ) ;
:= v [ ], ,ex
e( )y z
3
:= divv + ex
ze( )y z
g:= grad (divv, vector ( [x,y,z] ) ) ;
( )ou v i j k∇ ∇ = + +� � � � � �
i
valueg:= subs ( x=0, y=0, z=-1, eval (g) ) ;
:= g [ ], ,ex
z2
e( )y z
+ e( )y z
z ye( )y z
:= valueg [ ], ,e0
e0
e0
simplify (%) ; [ ], ,1 1 1
- Ainda como estímulo adicional, mostremos as resoluções informatizadas dos dois últimos :
> restart: with (linalg):'diverge (v,[x,y,z] )‘ = [ Diff(v,x)+Diff(v,y)+Diff( v,z) ] ;
= ( ):-linalg diverge ,v [ ], ,x y z
+ +
∂
∂x
v
∂
∂y
v
∂
∂z
v
6. Determinar o valor de p tal que seja um campo solenoidal. v px i 3 py j 4z k= − +� � � �
> v:= vector ( [p*x,-3*p*y,4*z] ) ; := v [ ], ,p x −3 p y 4 z
divv:= diverge (v, [x,y,z] ) ; := divv − 4 2peq:= 4-2*p=0 ; := eq = − 4 2p 0solve (eq, p) ; 2
7. Se determinar no ponto P (0, 0, -1) . x y zv e i e j 3 k ,= + +� � � �
( )v ,∇ ∇� � �
i

6969
ou
( ) ( ) ( )1 2 3v f x, y,z i f x, y,z j f x, y,z k ,= + +� � � �
Exemplos: ( ) ( )1. v 3xy i x 2z j x yz k ,= − + + −� � � � ( )
( )( )
1
2
3
f x, y,z 3xy
f x, y,z x 2z
f x, y,z x yz
=
= − − = −
sendo
ROTACIONAL de uma Função Vetorial . Dada uma função vetorial
o campo vetorial rotacional (ou função vetorial rotacional) de é definido por v�
( ) ( ) ( )
( ) ( )
i j k
v 2 z i 0 1 j 3x 1 kx y z
3xy x 2z x yz
2 z i j 3x 1 k .
∂ ∂ ∂∇× = = − + − + − −∂ ∂ ∂
− − −
= − − − +
� �
� � � � �
� � �No ponto P (3, -5, -2) , por exemplo, teremos :
v 4 i j 10 k .∇ × = − −� � � � �
2. Calcular r ,∇×� � ( )
( )( )
1
2
3
f x, y,z x
f x, y,z y
f x, y,z z
=
= =
sendo
i j k
r 0 i 0 j 0 k r 0 :x y z
x y z
∂ ∂ ∂∇× = = + + ∴ ∇× =∂ ∂ ∂
� �
� � � � � � � �
r x i y j z k ,= + +� � � �
Neste exemplo, em qualquer ponto P (x, y, z) do campo , o rotacional é o vetor nulo . Quando tal acontece, dizemos que o campo é irrotacional ou conservativo.
r�
Interpretação físico-geométrica do rotacional : Vimos que a divergência de um campo vetorialé uma operação de deri-vada escalar (taxa de variação)que mede o fluxo de entrada ou de saída, por unidade de volume. Analogamen-te, o rotacional analisa e mede a circulação de um campo de vetores no espaço . Sendo um produto vetorial de dois vetores, o rotacional constitui-se num gerador de campos vetoriais . Também aqui, tal linguagem vetorialnos leva a entender inúmeros fundamentos das diversas áreas da engenharia .
O rotacionalnos permite analisar o movimento do fluido ao longo dacircunferência de um disco circular, perpendicular ao vetor normal ,supondo-se o disco tendendo a um ponto . O rotacional atinge seuvalor máximo quando sua direção e sentido forem os mesmos de .Da cinemática, sabemos que a velocidade angular de uma partícula emmovimento giratório é representada por um vetor , de direção orto-gonal ao plano de rotação e sentido positivo .
n�
n�
w�
O módulo de é igual ao da velocidade angular de rotação
sendo a velocidade tangencial da partícula P e d sua distância ao eixo de rotação.Considerando como vetor de posição de P em relação a um sistema referencial,
com a origem O sobre o eixo de rotação, podemos escrever :
w�
,v
w ou v w dd
= =
�� � �
v�
r�θ
,
d r sen v w d w r sen v w r
ou v w r
θ θ= ⇒ = = ⇒ = ×
= ×
� � � � � � � �
� � �
sendo esta última forma de grande utilidade para a determinação da velocidade em qualquer ponto do disco . Ora, imprimindo a linguagem do rotacional nesse movimento, levando em conta o tratamento cartesiano (por ter a mesma direção e sentido do eixo OZ) e , teremos :
v�
r x i y j z k= + +� � � � w w k=
� �
3 32 1 2 1f ff f f fv i j k
y z z x x y
∂ ∂∂ ∂ ∂ ∂∇× = − + − + − ∂ ∂ ∂ ∂ ∂ ∂
� � � � �
�������������������������1 2 3
i j k
vx y z
f f f
∂ ∂ ∂∇× =∂ ∂ ∂
� � �
� �
���������produto vetorial dedois vetores em ℝ ³
campo vetorial em ℝ ³

7070
( )0 0 0 0
2 2 .
0w w
x y z x y z
i j k
v v w r w k v wx y z
wy wx
∂ ∂ ∂= ∇ × = ∇ × × = = ∴ ∇ × =∂ ∂ ∂
−���������
� � �
� � � � � � � � �
�����rot
Portanto, num movimento de rotação de um corpo rígido, o rotacional da velocidade é um vetor com a direção do eixo de rotação e módulo igual ao dobro do módulo da velocidade angular .
v wy i wx j= − +� � �
Observação: Um campo vetorial denomina-se campo vetorial conservativo se representa o gradiente de alguma função escalar, vale dizer, se existir alguma função escalar f tal queNesse caso, a função f diz-se função potencial de . Nem todos os campos vetoriais são conservati-vos, mas aqueles que o são aparecem com grande frequência nas aplicações da física como, por exemplo,o campo gravitacional de Newton .
.v f= ∇� �
v�
TeoremadeClairaut . Se f é uma função escalar de três variáveis, com derivadas parciais de segunda ordem contínuas, então ( ) .f 0∇× ∇ =
� � �
v�
Demonstração.
Corolário . Desde que o campo vetorial é conservativo . Podemos então concluir :
Se um campo vetorial é conservativo, então seu rotacional é o vetor nulo .,f v∇ =
� �v�
- A recíproca desse teorema não é irrestritamente verdadeira . Consultar página 1090 do JS :“ Tal recíproca é válida se o domínio for simplesmente conexo, isto é, não apresentar furos.”
( ) .2 2 2 2 2 2
0 0 0
i j k
f f f f f ff i j k 0
x y z y z z y z x x z x y y x
f f f
x y z
= = =
∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂∇ × ∇ = = − + − + − = ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂∂ ∂ ∂
� � �
� � � � � �
������� ������� �������
Problemasilustrativos
1. Mostrar que a divergência do rotacional de um campo vetorial é nula .
Demonstração: Seja o campo vetorial com derivadas parciais de segunda ordem contínuas
.
v m i n j p k ,= + +� � � �
( )i j k
v i j kx y z x y z
m n p
∂ ∂ ∂ ∂ ∂ ∂∇ ∇× = + + ∂ ∂ ∂ ∂ ∂ ∂
� � �
� � � � � �i i
2 2 2 2 2 2
p n m p n mi j k i j k
x y z y z z x x y
p n m p n m0 .
x y x z y z y x z x z y
∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂= + + − + − + − ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂
∂ ∂ ∂ ∂ ∂ ∂= − + − + − =∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂
� � � � � �i
> restart : with (linalg) :
> curlf:= curl ( f, [x, y, z] ) ;> f:= vector ( [-w*y, w*x, 0] ) ; := f [ ], ,−w y w x 0
:= curlf [ ], ,0 0 2w 2 .ou v w∇ × =� �
> restart : with (linalg) :f:= vector ( [-w*y, w*x, 0] ) ;curlf:= curl ( f, [x, y, z] ) ;
f := [-w y, w x, 0]curlf := [0, 0, 2 w]
Apelando para o aplicativo Maple , teremos :
Propriedadesdo Rotacional:
R.1 ) ( ) ( )a v a v ,∇× = ∇ ×� � � �
sendo a constante .
R.2 ) ( )v w v w∇× ± = ∇× ± ∇×� � � � � � �
R.3 ) ( ) ( ) ( )f v f v f v ,∇× = ∇ × + ∇ ×� � � � � �
sendo f é uma função escalar .
- Tais propriedades são inteiramenteanálogas àquelas estudadas para a di-vergência . À guisa de recapitulação,deixamos ao prezado leitor a grata in-cumbência de verificá-las .

71712. Mostrar que é um campo irrotacional .
Demonstração: Seja o campo escalar f (x, y, z) , com derivadas parciais de segunda ordem contínuas .
( )22 2 2 2 2
i j k
ff f f f ff i j k 0
x y z y z z y z x x z x y y x
f f f
x y z
∂∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂∇ × ∇ = = − + − + − = ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂∂ ∂ ∂
� � �
� � � � � �
f∇�
1 H
c t
∂−∂
�1 E
c t
∂∂
�
( ) ( )2 2
2 2 2 2
1 E 1 Ha ) E b ) H
c t c t
∂ ∂∇× ∇× = − ∇× ∇× = −∂ ∂
� �� � � � � �
Demonstração: Sejam os vetores com derivadas parciaisde segunda ordem contínuas .
1 2 3 1 2 3E e i e j e k e H h i h j h k ,= + + = + +� � � � � � � �
( )rot E 31 2
2 22 2 2 23 32 1 2 1
3 2
i j k
1 H 1a ) E
c t c x y z
hh h
t t t
h h1 h h h hi j k
c y t z t z t x t x t y t
h1 h
c t y z
∂ ∂ ∂ ∂∇× ∇× = ∇× − = − ∂ ∂ ∂ ∂ ∂∂ ∂
∂ ∂ ∂
∂ ∂∂ ∂ ∂ ∂= − − + − + − ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂
∂∂ ∂= − −∂ ∂ ∂
�
� � �
�� � � �
�������
� � �
31 2 1
1 Erot H
c t
2
2 2
hh h hi j k
z x x y
1 1 E 1 E
c t c t c t
∂= −∂
∂∂ ∂ ∂+ − + − ∂ ∂ ∂ ∂
∂ ∂ ∂= − − = − ⋅ ∂ ∂ ∂
��
� � �
�����������������������
� �
Mutatis mutandis, demonstra-se o item b) .
3. Problema 36, página 1095 do livro-texto, James Stewart : As equações de Maxwell relacionam o campo elétrico E e o campo magnético H quando variam com o tempo, numaregião que não contenha nem carga nem corrente, obedecendo as relações abaixo
div E = 0 div H = 0
rot E = rotH =
onde c é a velocidade da luz . Use essas equações para provar o seguinte :
Para trabalhar com tais operadores no aplicativo Maple, deveremos utilizar o pacote Álgebra Linear:> restart : with (linalg) :
curlf:= curl ( f, [x, y, z] ) ;
> valuecurlf:= subs ( x=3, y=-5, z=-2, eval (curlf) ) ;
( ) ( )1. v 3xy i x 2z j x yz k ,= − + + −� � � �
( )( )( )
1
2
3
f x, y,z 3xy
f x, y,z x 2z
f x, y,z x yz
=
= − − = −
sendo
> curlf:= curl ( f, [x, y, z] ) ;> f:= vector ( [3*x*y, -(x+2*z), x-y*z] ); := f [ ], ,3 x y − − x 2 z − x y z
:= curlf [ ], ,− + z 2 -1 − − 1 3 x
:= valuecurlf [ ], ,4 -1 -10
2. Calcular r ,∇×� � ( )
( )( )
1
2
3
f x, y,z x
f x, y,z y
f x, y,z z
=
= =
sendo r x i y j z k ,= + +� � � �
> curlf:= curl ( f, [x, y, z] ) ;
> f:= vector ( [x, y, z] ); := f [ ], ,x y z
:= curlf [ ], ,0 0 0 : campo irrotacional ou conservativo.

Ilustrações :
1. A função é harmônica :
2. Se a função f (r) = r³ não é harmônica :
Problema 2, página 63 deste compêndio :
7272
1. Sendo calcular :
Problemaspropostos
r x i y j z k ,= + +� � � �
( )
( )( )
3
4
a ) r Resp. : 0
b ) f r r 0
c ) r r 0
d ) r r 0
−
∇×
∇×
∇×
∇×
� � �
� � �
� � �
� � �
2. Sendo calcular ( ) 2 3f x, y,z x y z ,= ( )f .∇× ∇� �
Resp. : 0�
3. Calcular a divergência do rotacional de 2 2v x z i x y j x y z k . Resp. : 0= − +� � � �
4. Assinalar as notações desprovidas de significado operacional matemático :
( ) ( ) ( )( ) ( ) ( )( ) ( ) ( )
a ) v d ) f g ) v
b ) f e ) u h ) u
c ) f f ) u i ) r
∇ ∇ ∇ ∇ ∇ ∇×
∇ ∇ ∇ ∇ ∇ ∇×
∇× ∇ ∇× ∇ ∇× ∇×
� � � � � � � �i
� � � � � � � �i i i i� � � � � � � �
i
Resp.: d, e, f, g
5. Calcular no ponto P (1, 1, 1) , sendo v ,∇×� �
2 2v x i y z j x z k . Re sp. : 2 i j= − + −� � � � � �
6. Calcular : ( ) ( )x ya ) e Resp.: 0 b ) n r r Resp.: 0+∇× ∇ ∇×� � � � � �
ℓ
7. Se determinar o valor de p tal que o campo vetorial seja irrotacional .v y i 2 p x j 3 z k ,= + +� � � � 1
Resp.: p =2
8. Provar que é irrotacional . x y zv e i e j e k= + +� � � �
ConceituaçãoAdicional . O cálculo da divergência do gradiente de um campo escalar revela um outro operador
diferencial, denominado laplaciano, de larga aplicação em vários setores da física .Seja uma função escalar f (x, y, z) e calculemos ( )f :∇ ∇
� �i
( )2 2 2
22 2 2
operador de 2ª . ordem
f f f f f ff i j k i j k ou ou
x y z x y z x y z
∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂∇ ∇ = + + + + = + + ∇ ∇ ∇ ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂
� � � � � � � � � �i i i
���������
- O operador laplaciano constitui o suporte matemático da equação de Laplace ,imprescindível em inúmeras questões de mecânica, eletromagnetismo e outras áreas .Se uma função escalar satisfaz a equação de Laplace, para qualquer ponto de seu domínio, nós a chamamos de
função harmônica .
22 22
2 2 2
ff f0 ,
x y z
∂∂ ∂∇ = + + =∂ ∂ ∂
( ) xf x, y,z e cos y=22 2
x x
2 2 2
ff fe cos y e cos y 0 0 .
x y z
∂∂ ∂+ + = − + =∂ ∂ ∂
2 2 2r x i y j z k e r r x y z ,= + + = = + +� � � � �
( )3 2 3r 3 r r 3 r r r 12 r 0 .∇ = ⇒ ∇ = ∇ = ≠� � � �
i�������������
Ver problema 1 – i , página 68

7373
4.2. Integraldelinha ou Integral curvilíneadeuma funçãoescalar. Massadeum fio em ℝ² .
Basicamente, uma integral de linha (ou integral curvilínea) se resume numa extensão natural do con-ceito de integral definida, constituindo-se numa operação mais abrangente, mais funcional e até mais confortável que esta . A sistematização da teoria das integrais de linha data de menos de dois séculos, pois, foram desenvolvidas para socorrer,ma-tematicamente, os desafios da termodinâmica e eletromagnetismo na revolução industrial . Na unidade seguinte, estudare-mos as integrais de superfície que, analogamente, representam a extensão das integrais duplas .
Quando calculamos uma integral definida , a operação se efetua ao longo do eixo OX ,
ao passo que, numa integral de linha, a integração se dará ao longo de uma curva qualquer de ℝ ² ou ℝ ³ :
( )b
a
f x .dx∫
( )
( )
b
a
C
f x .dx :
f x, y .ds :
∫
∫
opera-se ao longo do eixo OX
opera-se ao longo de uma curva qualquer S
is∆
ix∆
iy∆C
( ) ( ) ( ) ( )�
( ) ( ) ( )
( ) ( ) ( )�
2 2 2 22i i i
comprimento aproximadodo arco AB
2 2 23i i i i
2 2 2
comprimento aproximadodo arco AB
: s x y ds dx dy
ou : s x y z
ds dx dy dz
∆
∆ = ∆ + ∆ ⇒ = +
∆ = ∆ + ∆ +
⇓
= + +
ℝ�������
ℝ
�����������
X
Y
Z
0
( )z f x, y=
A
B
( )
( ) ( )
( )
2 2
C C
2
C
altura lateralda sup erficie comprimento da curva C
cilíndrica
Supondo z f x, y constante :
dx dyf x, y .ds f x, y . dx
dx dx
ou
dyf x, y 1 . dx
dx
= =
= ⋅ +
= ⋅ +
∫ ∫
∫ ��������������
C
Se utilizarmos uma parametrização para expressar a curva C , teremos :( )( ) ( ) ( ) ( )
2 2b
C a
x g t dg dh, a t b , f x, y .ds f g t , h t . . dt
dt dty h t
= ≤ ≤ = + = ∫ ∫
- Tal como uma integral simples, uma integral de linha pode ser encarada como uma área : área lateral de uma superfície cilíndrica .
Ilustração : Seja C : x² + y² = 4 . Calcular
Resolução : Trata-se de uma curva circular fechada e, portanto, a área lateral da superfície correspondente deve ser encarada como um cilindro de revolução :
Cds .∫�
Y
Z
(0 , 0, 1)
O
(2 , 0, 0)
(-2 , 0, 0)
: z 1α =
X
( )2
2
2C C 2
1
2
20
2
0
C
xf x , y .ds ds 2 1 . dx
4 x
24 dx
4 x
x8 arc sen
2
8 02
ds 4 .
π
π
−=
− = = + −
= ⋅−
=
= −
∴ =
∫ ∫ ∫
∫
∫
����� �
�
- Observemos que o valor encontrado representa ocomprimento do círculo e também a área lateral do cilindro de altura h = 1 :
Cds 2 r .π=∫�
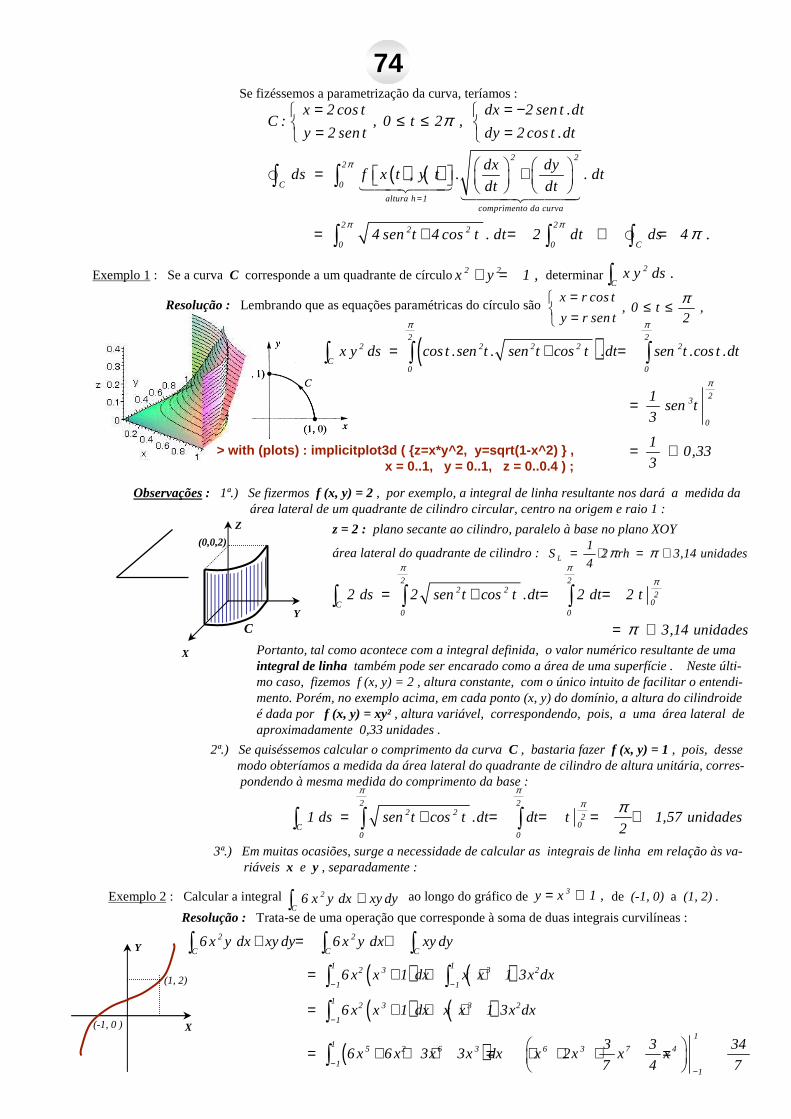
( )2 22 2 2 2 2
C0 0
23
0
x y ds cos t .sen t . sen t cos t .dt sen t .cos t .dt
1sen t
3
10,33
3
π π
π
= + =
=
= ≅
∫ ∫ ∫
7474Se fizéssemos a parametrização da curva, teríamos :
( ) ( )2 2
2
C 0
altura h 1comprimento da curva
2 22 2
0 0 C
x 2 cos t dx 2 sen t .dtC : , 0 t 2 ,
y 2 sen t dy 2 cos t .dt
dx dyds f x t , y t . . dt
dt dt
4 sen t 4 cos t . dt 2 dt ds 4 .
π
π π
π
π
=
= = − ≤ ≤ = =
= +
= + = ∴ =
∫ ∫
∫ ∫ ∫
����������������
�
�
Exemplo 1: Se a curva C corresponde a um quadrante de círculo determinar
Resolução : Lembrando que as equações paramétricas do círculo são
2 2x y 1 ,+ = 2
Cx y ds .∫
x r cos t, 0 t ,
y r sen t 2
π=≤ ≤ =
Observações: 1ª.) Se fizermos f (x, y) = 2 , por exemplo, a integral de linha resultante nos dará a medida daárea lateral de um quadrante de cilindro circular, centro na origem e raio 1 :
X
Y
Z
C
(0,0,2)z = 2 : plano secante ao cilindro, paralelo à base no plano XOY
área lateral do quadrante de cilindro : L
1S 2 rh 3,14 unidades
4π π= ⋅ = ≅
2 22 2
20C
0 0
2 ds 2 sen t cos t .dt 2 dt 2 t
3,14 unidades
π ππ
π
= + = =
= ≅
∫ ∫ ∫
Portanto, tal como acontece com a integral definida, o valor numérico resultante de uma integral de linha também pode ser encarado como a área de uma superfície . Neste últi-mo caso, fizemos f (x, y) = 2 , altura constante, com o único intuito de facilitar o entendi-mento. Porém, no exemplo acima, em cada ponto (x, y) do domínio, a altura do cilindroideé dada por f (x, y) = xy², altura variável, correspondendo, pois, a uma área lateral de aproximadamente 0,33 unidades .
2ª.) Se quiséssemos calcular o comprimento da curva C , bastaria fazer f (x, y) = 1 , pois, dessemodo obteríamos a medida da área lateral do quadrante de cilindro de altura unitária, corres-pondendo à mesma medida do comprimento da base :
2 22 2 2
0C0 0
1 ds sen t cos t .dt dt t 1,57 unidades2
π ππ π= + = = = ≅∫ ∫ ∫
3ª.) Em muitas ocasiões, surge a necessidade de calcular as integrais de linha em relação às va-riáveis x e y , separadamente :
( ) ( )( ) ( )
( )
2 2
C C C
1 12 3 3 2
1 1
1 2 3 3 2
1
11 5 2 6 3 6 3 7 4
11
6 x y dx xy dy 6 x y dx xy dy
6 x x 1 dx x x 1 3x dx
6 x x 1 dx x x 1 3x dx
3 3 346 x 6 x 3x 3x dx x 2x x x
7 4 7
− −
−
−−
+ = +
= + + +
= + + +
= + + + = + + + =
∫ ∫ ∫
∫ ∫
∫
∫
Exemplo 2: Calcular a integral ao longo do gráfico de de (-1, 0) a (1, 2) .
Resolução : Trata-se de uma operação que corresponde à soma de duas integrais curvilíneas :
2
C6 x y dx xy dy+∫
3y x 1 ,= +
X
Y
(1, 2)
(-1, 0 )
> with (plots) : implicitplot3d ( {z=x*y^2, y=sqrt( 1-x^2) } ,x = 0..1, y = 0..1, z = 0..0.4 ) ;

7575
- Se tivéssemos utilizado a parametrização, teríamos :3 2
x t dx dt 1 x 1
1 t 1y t 1 dy 3t dt
= = − ≤ ≤ ⇒ ⇒ − ≤ ≤= + =
( ) ( )( ) ( )
( )
1 12 2 3 3 2
C 1 1
1 2 3 3 2
1
1 5 2 6 3
1
1
6 3 7 4
1
6 x y dx xy dy 6t t 1 dt t t 1 3t dt
6t t 1 dt t t 1 3t dt
6t 6t 3t 3t dt
3 3t 2t t t
7 4
34
7
− −
−
−
−
+ = + + +
= + + +
= + + +
= + + +
=
∫ ∫ ∫
∫
∫
Exemplo 3: Calcular a integral sendo a curva C a hélice tridimensional
Resolução : Como a equação da curva já foi dada na forma paramétrica, resulta :
e a integral pode ser escrita
( )C
xy z ds ,+∫x 3cos t
y 3 sen t 0 t 2 .
z 2t
π=
= ≤ ≤ =
dx 3 sen t dt
dy 3 cos t dt
dz 2 dt
= − = =
( ) ( ) ( ) ( )
( ) ( )
2 2 2 2
C 0
2 2 2
0
1
xy z ds 9 sent cos t 2 t 3 sent 3cos t 2 dt
9 sen t cos t 2 t 9 sen t cos t 4 dt
π
π
=
+ = + − + +
= + + +
∫ ∫
∫ �������
( )2
0
sen 2t
2
2
0
2
2
913 2 sent cos t 2 t dt
2
9 cos 2t13 t
2 2
913 0 4
2
4 13
π
π
π
π
=
= +
− = ⋅ +
= ⋅ +
=
∫ �������
Exemplo 4: Um fio é colocado na forma de um semicírculo com raio de 2 unidades . Se a densidade de massa linearnum ponto genérico é diretamente proporcional à sua distância do diâmetro, determinar a massadesse fio .
Resolução : Já vimos que a parametrização do círculo é feita como segue
2- 2
x 2cos t dx 2 sent dt0 t
y 2 sent dy 2cos t dtπ
= = − ≤ ≤ = =
y k yρ ρ∝ ⇒ = ( k : coeficiente de proporcionalidade)
( )
( )
2 2
C0
0
0
m x, y ds 2k sent 4 cos t 4 sen t dt
2 k sent . 2 dt
4 k ` cos t
m 8 k unidades de massa .
π
π
π
ρ= = +
=
= −
∴ =
∫ ∫
∫
- Para construir o gráfico da hélice cilíndrica espiralada , analisar a sequência mos-trada nas páginas 42 ou 50 deste compêndio .

76764.3. Integraldelinha ou Integral curvilíneadeuma funçãovetorial . Trabalhorealizadopor um
campovetorial nosespaçosℝ ² e ℝ ³ .
Nas integrais simples, exploramos os requisitos didáticos clássicos envolvidos com os conceitos in-
tuitivos de áreas e volumes . Agora, estaremos empenhados em fazer da idéia de trabalho mecânico o guia das articulações
das integrais de linha no campo vetorial .
Consideremos uma força variável onde são funções contínuas, e formulemos uma expressão do trabalho realizado quando o ponto de aplicação de move-se ao longo de uma dada curva suave C com equações paramétricas
supondo que tal movimento se processe no sentido definido pelos valores crescentes do parâmetro t (sentido positivo) .
( ) ( ) ( ) ( )1 2 3F x, y,z f x, y,z i f x, y,z j f x, y,z k ,= + +� � � �
1 2 3f , f e fF�
( )( )( )
x g t
y h t , a t b ,
z k t
=
= ≤ ≤ =
F�
( ) ( )
i i
i 1 2 3 i i i
1 i 2 i 3 i
W F r
ou
W f i f j f k x i y j z k
f x f y f z
= ∆
= + + ∆ + ∆ + ∆
= ∆ + ∆ + ∆
� �i
� � � � � �i
O trabalho total W , realizado ao longo de toda a curva suave C , será
( )i
n
in
i 1n
in
i 1ou nr 0
1 i 2 i 3 in
i 1
lim F r
W lim W ou
lim f x f y f z
→∞ =
→ ∞ =
∆ →→∞ =
∆= = ∆ + ∆ + ∆
∑
∑
∑�
� �i
Dividimos a curva C em n subintervalos infinitesimais tais que i 1 i iP P r 0 ,− = ∆ →� �
Escrevendo tais expressões na linguagem das integrais curvilíneas, resultam :
nC
in
i 11 2 3C
F d rW lim W
f dx f dy f dz→∞ =
= =
+ +
∫∑
∫
� �i : expressão vetorial
: expressão cartesiana
Obviamente, se a curva C pertencer ao espaço bidimensional, teremos :
nC
in
i 11 2C
F d rW lim W
f dx f dy→ ∞ =
= =
+
∫∑
∫
� �i : expressão vetorial
: expressão cartesiana
sendo o vetor deslocamento infinitesimal i i i ir x i y j z k .∆ = ∆ + ∆ + ∆� � � �
F�ir∆
�Se o subintervalo é suficientemente pequeno, a força variável pode ser
considerada constante nesse subintervalo e o trabalho Wi realizado por nesse subin-
tervalo será expresso pelo produto escalar
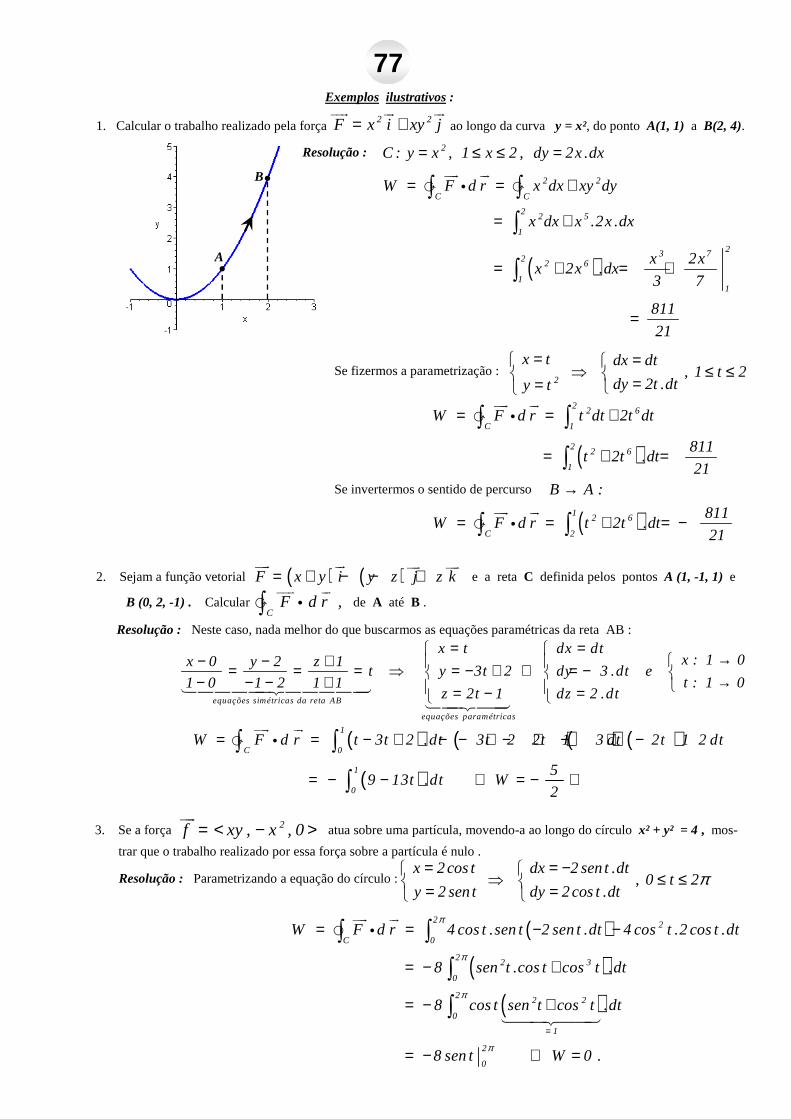
7777
1. Calcular o trabalho realizado pela força ao longo da curva y = x², do ponto A(1, 1) a B(2, 4).
Resolução :
2 2F x i xy j= +� � �
A
B
2C : y x , 1 x 2 , dy 2x .dx= ≤ ≤ =
( )
2 2
C C
2 2 5
1
23 72 2 6
11
W F d r x dx xy dy
x dx x .2x .dx
x 2xx 2x .dx
3 7
811
21
= = +
= +
= + = +
=
∫ ∫
∫
∫
� �i� �
Exemplos ilustrativos:
( )
2 2 6
C 1
2 2 6
1
W F d r t dt 2t dt
811t 2t .dt
21
= = +
= + =
∫ ∫
∫
� �i�
Se fizermos a parametrização :2
x t dx dt, 1 t 2
dy 2t .dty t
= = ⇒ ≤ ≤ ==
Se invertermos o sentido de percurso B A :→
( )1 2 6
C 2
811W F d r t 2t .dt
21= = + = −∫ ∫
� �i�
2. Sejam a função vetorial e a reta C definida pelos pontos A (1, -1, 1) e
B (0, 2, -1) . Calcular de A até B .
( ) ( )F x y i y z j z k= + − − +� � � �
CF d r ,∫� �i�
equações simétricas da reta AB
equações paramétricas
x t dx dtx : 1 0x 0 y 2 z 1
t y 3t 2 dy 3 .dt et : 1 01 0 1 2 1 1
z 2t 1 dz 2 .dt
= = →− − + = = = ⇒ = − + ∴ = − →− − − + = − =
��������������������
Resolução : Neste caso, nada melhor do que buscarmos as equações paramétricas da reta AB :
( ) ( )( ) ( )
( )
1
C 0
1
0
W F d r t 3t 2 .dt 3t 2 2t 1 3 dt 2t 1 2 dt
59 13t .dt W
2
= = − + − − + − + − + −
= − − ∴ = − ⋅
∫ ∫
∫
� �i�
3. Se a força atua sobre uma partícula, movendo-a ao longo do círculo x² + y² = 4, mos-
trar que o trabalho realizado por essa força sobre a partícula é nulo .
2f xy , x , 0= < − >�
Resolução : Parametrizando a equação do círculo :
( )
( )( )
2 2
C 0
2 2 3
0
2 2 2
0
1
2
0
W F d r 4 cos t .sen t 2 sen t .dt 4 cos t .2 cos t .dt
8 sen t .cos t cos t .dt
8 cos t sen t cos t .dt
8 sen t W 0 .
π
π
π
π
=
= = − −
= − +
= − +
= − ∴ =
∫ ∫
∫
∫
� �i
�������
�
x 2cos t dx 2 sen t .dt, 0 t 2
y 2 sen t dy 2cos t .dtπ
= = − ⇒ ≤ ≤ = =

Demonstração . A demonstração mais rigorosa deste teorema envolve requisitos teóricos além dos propósitos pragmáticos do nosso curso . Todavia, podemos nos aventurar na abordagem de casos mais simples que se apresentam sempre nas situações práticas :
78784. Dado o campo vetorial sendo C o contorno positivo da região D limitada pelas curvas
calcular
( ) 2F x 1 i x y j ,= + +� � �
Resolução . a) Utilizando a parametrização já estudada, podemos construir :
{ {( ) ( )
1
1
22
2 22 2
C 0 00
x t dx dtC : , 0 t 2y 0 dy 0
tF d r x 1 .dx x y.dy t 1 .dt t .0 .0 t 4
2
= =⇒ ≤ ≤= =
= + + = + + = + =
∫ ∫ ∫� �i�
y x ,= y 0 e x y 2 ,= + = F d r .∫� �i�
{ {( ) ( ) ( )
2
2
1 2
C 214 3 2
2
x t dx dtC : , 2 t 1y 2 t dy dt
F d r t 1 .dt t 2 t . dt
t 2t t 19t
4 3 2 12
= =⇒ ≥ ≥= − = −= + + − −
= − + + = −
∫ ∫� �i�
{ {( )
3
2
3
0 2 5
C 106 4
2
1
dx 2t.dtx tC : , 1 t 0dy dty t
F d r t 1 .2t.dt t .dt
t t 5t
6 23 3
== ⇒ ≥ ≥=== + +
= + + = −
∫ ∫� �i� Então,
C
19 5 3F d r 4
12 3 4= − − = ⋅∫
� �i�
2C : y 2 x= −
3C : y x=
D
1C : y 0=
- Todavia, existe um teorema que nos permite relacionar uma integral de linha, ao longo de uma curva fechada sim-ples C , com uma integral dupla, numa região plana D cercada pela curva C :
4.4. Teoremade Green.Tal teorema nos permitirá relacionar uma integral de linha, ao longo de uma curva fechada simples C ,
e uma integral dupla numa dada região plana D, simplesmente conexa (sem buracos), cercada pela curva C . A figura abaixo ilustra esse fato :
DC
Orientação positiva : sentido anti-horário .Se a curva C for tratada como uma função vetorial
a região D estará sempre à esquerda do andarilho .
Orientação negativa : sentido horário .
( ) ( ) ( )C : r t M t i N t j , a t b ,= + ≤ ≤� � �
Teorema . Seja C uma curva plana simples, fechada, contínua e orientada positivamente, deli-mitando uma região plana D . Se M e N são funções contínuas e têm derivadas par-ciais de primeira ordem contínuas, sobre uma região aberta contendo D , então
C C D
N MF d r M dx N dy dA .
x y
∂ ∂= + = − ∂ ∂ ∫ ∫ ∫∫� �i�
- É oportuno salientar a frequência com que ocorre o uso
das notações , indicando a integral de li-
nha da curva fechada C , com a orientação positiva .C C
ou∫ ∫� �
( )1, 1
X
Y
0 a b
( ) ( )1 2
x : a bD
y: f x f x
→ →
C 1 : y = f1 (x)
D ( )
( )
( ) ( )( )
( )( ) ( )( )( )( ) ( )( ) ( )
2
1
2
1
b f x
a f xD
b f x
f xa
b
2 1a
b b
2 1a a
M MdA dy .dx
y y
M x, y .dx
M x, f x M x, f x .dx
M x, f x .dx M x, f x .dx 1
∂ ∂⋅ = ⋅∂ ∂
=
= −
= −
∫∫ ∫ ∫
∫
∫
∫ ∫
C 2 : y = f2 (x)
C 3 C 4
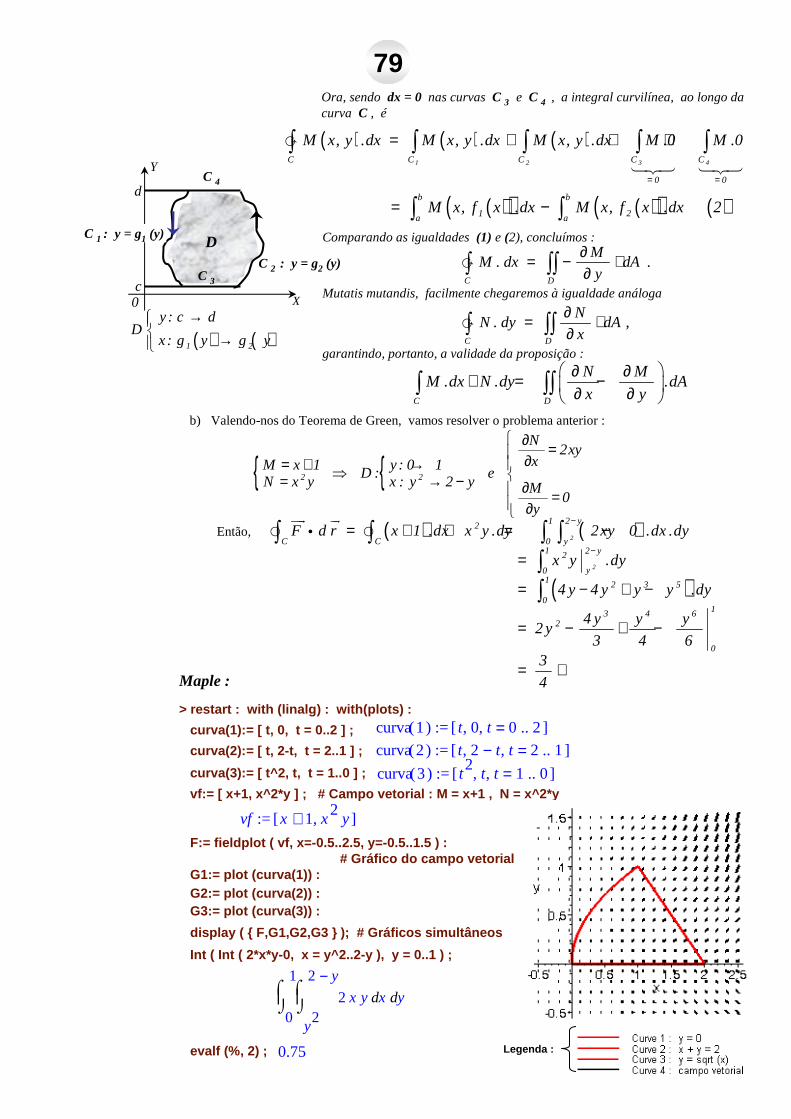
> restart : with (linalg) : with(plots) :
curva(1):= [ t, 0, t = 0..2 ] ;
curva(2):= [ t, 2-t, t = 2..1 ] ;
curva(3):= [ t^2, t, t = 1..0 ] ;
vf:= [ x+1, x^2*y ] ; # Campo vetorial : M = x+1 , N = x^2*y
F:= fieldplot ( vf, x=-0.5..2.5, y=-0.5..1.5 ) : # Gráfico do campo vetorial
G1:= plot (curva(1)) :G2:= plot (curva(2)) :G3:= plot (curva(3)) :
display ( { F,G1,G2,G3 } ); # Gráficos simultâneos
Int ( Int ( 2*x*y-0, x = y^2..2-y ), y = 0..1 ) ;
evalf (%, 2) ;
7979
b) Valendo-nos do Teorema de Green, vamos resolver o problema anterior :
{ {2 2
N2xy
xM x 1 y : 0 1D : eN x y x : y 2 y M
0y
∂ = ∂= + →⇒ = → − ∂ = ∂
Ora, sendo dx = 0 nas curvas C 3 e C 4 , a integral curvilínea, ao longo da curva C , é
( ) ( ) ( )
( )( ) ( )( ) ( )
1 2 3 4C C C C C
0 0
b b
1 2a a
M x, y .dx M x, y .dx M x, y .dx M .0 M .0
M x, f x .dx M x, f x .dx 2
= =
= + + +
= −
∫ ∫ ∫ ∫ ∫
∫ ∫
��� ���
�
Comparando as igualdades (1) e (2), concluímos :
C D
MM . dx dA .
y
∂= − ⋅∂∫ ∫∫�
X
Y
0c
d
( ) ( )1 2
y : c dD
x: g y g y
→ →
DC 1 : y = g1 (y)
C 2 : y = g2 (y)
Mutatis mutandis, facilmente chegaremos à igualdade análoga
C D
NN . dy dA ,
x
∂= ⋅∂∫ ∫∫�
garantindo, portanto, a validade da proposição :
C D
N MM .dx N .dy .dA
x y
∂ ∂+ = − ∂ ∂ ∫ ∫∫
C 3
C 4
Então, ( ) ( )
( )
2
2
1 2 y2
C C 0 y1 2 y2
y01 2 3 5
013 4 6
2
0
F d r x 1 .dx x y .dy 2xy 0 .dx .dy
x y .dy
4 y 4 y y y .dy
4 y y y2 y
3 4 63
4
−
−
= + + = −
=
= − + −
= − + −
= ⋅
∫ ∫ ∫ ∫∫∫
� �i� �
:= ( )curva 1 [ ], ,t 0 = t .. 0 2
:= ( )curva 2 [ ], ,t − 2 t = t .. 2 1
:= ( )curva 3 [ ], ,t2
t = t .. 1 0
:= vf [ ], + x 1 x2
y
d⌠⌡0
1
d⌠⌡
y2
− 2 y
2 x y x y
0.75 Legenda :
Maple :

8080Em tempo: Aproveitemos o ensejo para instituir uma expressão vetorialpara o Teorema de Green :
Sejam uma região plana D , sua curva fronteira C e as funções M (x, y) e N (x, y) satisfazendo as condições do teorema de Green . Podemos então considerar o campo vetorial .
Sua integral de linhaé e seu rotacional éF M i N j= +� � �
( )C
Drot F
F d r F k dA= ∇ ×∫ ∫∫�
� � � � �i i
������
C CF d r M dx N dy= +∫ ∫� �i� �
� � � �0 0 00
i j k
0 M N M N 0 N Mrot F F i j k i j k
x y z y z x y z x x y
M N 0 = = ==
∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂= ∇× = = + + − − − = − ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂
� � �
� � � � � � � � �
pressar o Teorema de Green na forma
( ) N M N Mrot F k F k k k
x y x y
∂ ∂ ∂ ∂= ∇× = − = − ∂ ∂ ∂ ∂
� � � � � � �i i iO produto escalar nos permitirá ex-
c) Mostremos uma terceira resolução do problema em pauta, mediante essa tal expressão vetorial:
( ) 2
2
i j k
F x 1 i x y j rot F F 2xy kx y z
x 1 x y 0
∂ ∂ ∂= + + ⇒ = ∇× = =∂ ∂ ∂+
� � �
� � � � � � �
Então ,
2
1 2 y
C 0 yD D
3F d r rot F k dA 2xy .dA 2xy .dx .dy
4
−= = = = = ⋅∫ ∫∫ ∫∫ ∫ ∫
� � � �i i ⋯�
2. Problema 2, página 1087 do livro-texto JS : Calcular a integral de linha círculo com centro na origem e raio 1 , por dois métodos :a) diretamente (ou método convencional) .b) utilizando o Teorema de Green .
2 2
Cy dx x dy , C : x y 1 ,− + =∫�
Resoluções .a) Parametrizando a curva C , teremos :
{ {x cos t dx sent dt, 0 t 2y sent dy cos t dt π= = −⇒ ≤ ≤= =
( ) ( )2 2
2 2 2
C0 0
2
0
y dx x dy sent sent cos t dt sen t cos t dt
t 2
π π
π π
− = − − = − +
= − = −
∫ ∫ ∫�
b) Apreciemos agora o poder simplificador do teorema de Green : ( ) ( )
2
C D D
1
x yy dx x dy dA 2 dA 2 .
x yπ π
π=
∂ − ∂ − = − = − = − ∂ ∂
∫ ∫∫ ∫∫����
(1, 0)D
C
-- Sugerimos ao leitor resolver esse problema utilizando também a expressão vetorial do teorema .
> restart : with(linalg) : with(plots) :curva:= [ cos(t), sin(t), t=0..2*Pi ] ; # Tratamen to vetorial da curva :
x = cos(t) , y = sin(t)
vf:= [ y, -x ] ; # Campo vetorial : M = y , N = -x
Int (Int (-1-1, y=-sqrt(1-x^2)..sqrt(1-x^2)), x=-1.. 1) == int (int (-1-1, y=-sqrt(1-x^2)..sqrt(1-x^2)), x=- 1..1)
:= curva [ ], ,( )cos t ( )sin t = t .. 0 2π := vf [ ],y −x
= d⌠⌡-1
1
d⌠⌡
− − 1 x2
− 1 x2
-2 y x −2 π
Maple :
d) A resolução do problema 3, página 77 , nos mostra :
2
2
i j k
F xy i x j rot F F 3x kx y z
xy x 0
∂ ∂ ∂= − ⇒ = ∇× = = −∂ ∂ ∂
−
� � �
� � � � � � �
Então ,2
2
2 4 x
C 2 4 xD
F d r rot F k dA 3x .dy .dx 0−
− − −= = − = = ⋅∫ ∫∫ ∫ ∫
� � � �i i ⋯�

8181
Como outra opção de cálculo, poderíamos também aplicar o operador diferencial rotacional :
2 2
2
2
i j k
2 y 2 yrot F F k k 0
x y z 1 x 1 x
y2 y .arctg x 0
1 x
∂ ∂ ∂= ∇ × = = − =∂ ∂ ∂ + +
+
� � �
� � � � � �
e concluir que a função vetorial dada é um campo conservativo .
3. Aplicar o Teorema de Green para calcular a integral curvilínea onde C é
a hipocicloide(astroide)
2
2C
ydx 2y arctg x . dy ,
1 x⋅ +
+∫�2 2
3 3x y 1 .+ =
Resolução .2
22
2
M 2 yy
M y 1 x M N1 x
N 2 y y xN 2 y arctan x
x 1 x
∂ = = ∂ + ∂ ∂ ⇒ ⇒ =+ ∂ ∂ ∂ == ∂ +
Advertência. Se tentássemos resolver o problema pelo processo convencional, encontraríamos terríveis impli-cações algébricas .
Círculo fixo
Círculo móvel
( )N Mx yC C D
0
F . d r M dx Ndy .dA 0 .∂ ∂∂ ∂
=
= + = − =∫ ∫ ∫∫� �
������ �
> F:= fieldplot ( vf, x=-2..2, y=-2..2 ) : # Gráfi co do campo vetorial
> G:= plot (curva) : # Gráfico da curva
> display ({F,G}) ; # Plotagem simultânea do campo e da curva
- sentidos contrários -
- Se invertermos a orientação do campovetorial , o resultado final mudará de sinal :
> vf:= - [ y, -x ] ; # M = - y, N = x
= d⌠⌡-1
1
d⌠⌡
− − 1 x2
− 1 x2
2 y x 2 π
- mesmo sentido -
Observação. Nunca é demais lembrar que poderíamos ter calculado a integral dupla na região D seguindo os padrões já estudados na unidade 2 deste compêndio :
21 x1 12
2
0 0 0
2 22
0 0
x : 0 1D 4 2 dy dx 8 1 x dx
y : 0 1 xfaz se : x sen dx cos d
sen 28 cos d 8 2
2 4
π πθ θ θ
θ θθ π
−→⇒ − = − − → −
− = ⇒ =
= − = − + = −
∫ ∫ ∫
∫
4. Sejam Se R é a região delimitada pelo círculo unitário C , de centro na ori-
gem, mostrar que
Justificar o motivo pelo qual o teorema de Green não é aplicável aqui.
2 2 2 2
y xM e N
x y x y= = − ⋅
+ +
CR
N MM dx N dy dA .
x y
∂ ∂+ ≠ − ∂ ∂ ∫ ∫∫�
Demonstração.2 2 2 2
y xM e N
x y x y= = − ⋅
+ +
{ {x cos t dx sent dt, 0 t 2y sent dy cos t dt π= = −⇒ ≤ ≤= =
(1, 0)
RC
rθ
0
A parametrização nos permite escrever :
( ) ( )2 2
2 2
C0 0
sent cos tM dx N dy sent dt cos t dt sen t cos t dt 2 .
1 1
π π
π+ = − − = − + = −∫ ∫ ∫�
Por outro lado ( )
2 2
22 2
N M x y
x y x y
∂ ∂ −= = ⇒∂ ∂ +
CR
` 0
N MdA 0 M dx N dy .
x y=
∂ ∂− = ≠ + ∂ ∂ ∫∫ ∫�������
�
Justificativa : As funções M e N não são contínuas
na origem (centro da região circular unitária) .
Portanto, não são contínuas em toda a região
R e o teorema de Green não se aplica.

8282
( ) 3r t cos t i sen t j , 0 t 2 .π= + ≤ ≤� � �
5. Problema 14, página 1074 do livro-texto JS, 4ª. edição : Utilizando o teorema de Green, com orientação positiva,
calcular a integral de linha sendo C a fronteira da região contida entre os
círculos x² + y² = 1 e x² + y² = 9 .
( ) ( )3 3 3 3
Cx y dx x y dy ,− + +∫�
Resolução. 23 3
2 23 3
2
M3y N MM x y y 3x 3y
NN x y x y3xx
∂ = − ∂ ∂ = − ∂⇒ ⇒ − = + ∂= + ∂ ∂ =∂
r
θD
Sendo a região D uma coroa circular, optemos pelo sistema polar :
{ ( )2 3
2 2 2
D 0 1
: 0 2D 3 x y dA 3r r dr d 120 .r : 1 3
πθ π θ π→ ⇒ + = =→ ∫∫ ∫ ∫
Orientação positiva :
Região D sempre à esquerda da
linha de percurso do andarilho . 0
Y
X
D
{ {( ) ( ) ( )
( )
{ {
1
2
2 21
03 3 3 3
C 20
4 3 4 3
2
2
33
C 1
2 23
x cos t dx sent dtC : x y 1 , t : 2 0y sent dy cos t dt
M dx N dy cos t sen t sent dt cos t sen t cos t dt
sen t cos t . sent cos t sen t .cos t dt
x t dx dtC : , t : 1 3y 0 dy 0
M dx N dy t dt 20
xC : x y 9
π
π
π= = −+ = ⇒ →= =
+ = − − + +
= − + +
= =⇒ →= =
+ = =
+ =
∫ ∫
∫
∫ ∫
⋮
�
�
{ {( )( ) ( )
( )
{ {
3
4
23 3 3 3
C 02
4 3 4 3
0
4
13
C 3
3cos t dx 3 sent dt, t : 0 2y 3sent dy 3cos t dt
M dx N dy 27 cos t 27sen t 3 sent dt 27 cos t 27sen t 3cos t dt
81 sen t cos t . sent cos t sen t .cos t dt
x t dx dtC : , t : 3 1y 0 dy 0
M dx N dy t dt 20
π
π
π= = −⇒ →= =
+ = − − + +
= − + +
= =⇒ →= =
+ = = −
∫ ∫
∫
∫ ∫
⋮
�
�
Em tempo: Julgamos de extrema importância atentarmos para algumas considerações de pormenores e sutilezas que rodeiam este importante capítulo que ora estudamos . Os efeitos simplificadores do teorema de Green devem ser destacados como precioso suporte no cálculo de uma integral curvilínea e o proble-ma que acabamos de resolver presta-se a confirmá-lo irrefutavelmente . Se tentarmos resolvê-lo me-diante os recursos convencionais das parametrizações, iremos encarar uma tarefa mais longa e can-sativa :
r
θD
0
Y
X 1C
2C3C
4C
Ufa !!!Que tarefa estafante !!!
Portanto, é fácil perceber que a tentativa de calcular a integral dada pelas trilhas da parametrização nos coloca em situações bastante indigestas :
( ) ( )3 3 3 31 2 3 4C
x y dx x y dy C C C C 120 .π− + + = + + + =∫���������
�
Cruzes !!!Outra vez ???
? ? ?
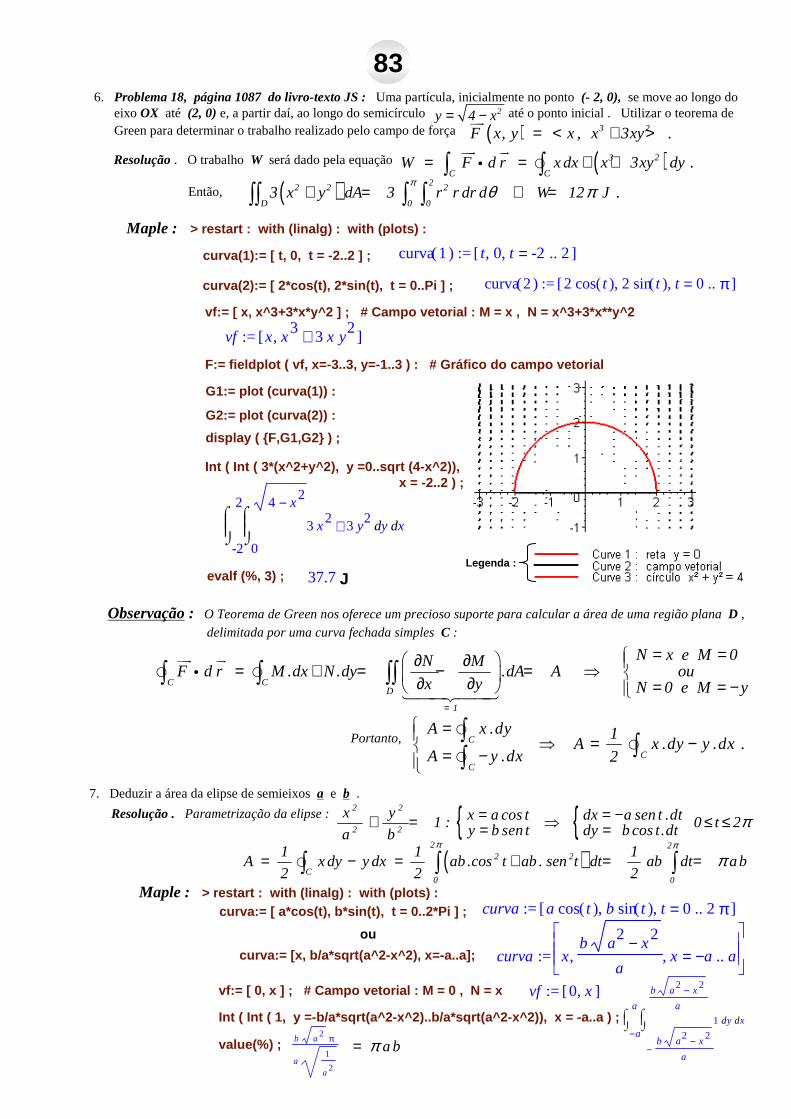
8383
Observação: O Teorema de Green nos oferece um precioso suporte para calcular a área de uma região plana D , delimitada por uma curva fechada simples C :
C CD
1
N x e M 0N MF d r M .dx N.dy .dA A ou
x y N 0 e M y=
= = ∂ ∂ = + = − = ⇒ ∂ ∂ = = −∫ ∫ ∫∫� �i
�������� �
Portanto, C
CC
A x .dy 1A x .dy y .dx .
A y .dx 2
=⇒ = − = −
∫∫∫
��
�
7. Deduzir a área da elipse de semieixosa e b .
Resolução . Parametrização da elipse : { {2 2
2 2
x y x a cos t dx a sen t .dt1 : 0 t 2y b sen t dy b cos t.dta bπ= = −+ = ⇒ ≤ ≤= =
( )2 2
2 2
C0 0
1 1 1A x dy y dx ab.cos t ab . sen t dt ab dt ab
2 2 2
π π
π= − = + = =∫ ∫ ∫�
6. Problema 18, página 1087 do livro-texto JS : Uma partícula, inicialmente no ponto (- 2, 0), se move ao longo do eixo OX até (2, 0) e, a partir daí, ao longo do semicírculo até o ponto inicial . Utilizar o teorema de Green para determinar o trabalho realizado pelo campo de força
2y 4 x= −( ) 3 2F x, y x , x 3xy .= < + >
�
Resolução. O trabalho W será dado pela equação ( )( )
3 2
C C22 2 2
D 0 0
W F d r x dx x 3xy dy .
3 x y dA 3 r r dr d W 12 J .π
θ π
= = + +
+ = ∴ =∫ ∫
∫∫ ∫ ∫
� �i �
Então,
F:= fieldplot ( vf, x=-3..3, y=-1..3 ) : # Gráfico do campo vetorial
G1:= plot (curva(1)) :
display ( {F,G1,G2} ) ;
curva(1):= [ t, 0, t = -2..2 ] ;
vf:= [ x, x^3+3*x*y^2 ] ; # Campo vetorial : M = x , N = x^3+3*x**y^2
curva(2):= [ 2*cos(t), 2*sin(t), t = 0..Pi ] ;
G2:= plot (curva(2)) :
:= ( )curva 1 [ ], ,t 0 = t .. -2 2
:= ( )curva 2 [ ], ,2 ( )cos t 2 ( )sin t = t .. 0 π
:= vf [ ],x + x3
3 x y2
Int ( Int ( 3*(x^2+y^2), y =0..sqrt (4-x^2)),x = -2..2 ) ;
d⌠
⌡-2
2
d⌠
⌡0
− 4 x2
+ 3 x2
3 y2
y x
evalf (%, 3) ; 37.7JLegenda :
> restart : with (linalg) : with (plots) :Maple :
curva:= [ a*cos(t), b*sin(t), t = 0..2*Pi ] ;
vf:= [ 0, x ] ; # Campo vetorial : M = 0 , N = x
Int ( Int ( 1, y =-b/a*sqrt(a^2-x^2)..b/a*sqrt(a^2- x^2)), x = -a..a ) ;
:= curva [ ], ,a ( )cos t b ( )sin t = t .. 0 2π
:= vf [ ],0 x
d⌠⌡
−a
a
d⌠⌡
−b − a
2x
2
a
b − a2
x2
a
1 y x
value(%) ; b a2 π
a1
a2
a bπ=
curva:= [x, b/a*sqrt(a^2-x^2), x=-a..a];
ou
:= curva
, ,x
b − a2
x2
a = x .. −a a
> restart : with (linalg) : with (plots) :Maple :

84848. Problema 20, página 1074 do livro-texto JS, 4ª. edição : Determinar a área da região plana limitada pela curva
cuja equação vetorial é ( ) 3r t cos t i sen t j , 0 t 2 .π= + ≤ ≤� � �
( ) ( )
( )
C2 2
2 2 4 2 2 2 2
0 02 2
22
0 0
1A x dy y dx
21 1
3 sen t cos t sen t dt 3 sen t cos t sen t 1 cos t dt2 2
1 1 3sen t dt sen 2t dt
2 4 2 4 4A 2,35 u.a.
π π
π π π π π
= −
= + = + −
= + = + =
∴ ≈
∫
∫ ∫
∫ ∫
�Resolução .
9. Deduzir a área da hipocicloide (astroide de raio a)
Dedução. Tal como as deduções anteriores, teremos :
3
3x a cos t , 0 t 2 .y a sen t
π = ≤ ≤ =
( )2
2 2 4 2 2 4
C0
222 2
0
1 1A x dy y dx 3a sen t cos t 3a cos t sen t dt
2 2
3asen t cos t dt
2
π
π
= − = +
=
∫ ∫
∫
�
( )
222 2
0
222
0
22 2
0
3a4 sen t cos t dt
8
3asen 2t d 2t
16
3a 2t sen4t 3aA
16 2 4 8
π
π
π π
=
=
= − ∴ = ⋅
∫
∫
0
10. Problema 22, página 1087 do livro-texto JS : Seja D a região limitada por um caminho simples fechado C no
plano XOY . Utilizar o teorema de Green para provar que as coordenadas do centroide de D são
sendo A a área de D .
( )x , y2 2
C C
1 1x x dy e y y dx ,
2A 2A= = −∫ ∫� �
Demonstração. Desenvolvendo as integrais curvilíneas pelo teorema de Green, teremos
( ) ( )
( ) ( )
2
2
CD D
2
2
CD D
x 0 11 1x dy dA x dA x
2A 2A x y A
y0 11 1y dx dA y dA y
2A 2A x y A
∂ ∂ = − = =
∂ ∂ ∂∂ − = − − = = ∂ ∂
∫ ∫∫ ∫∫
∫ ∫∫ ∫∫
�
�
Em tempo: Procedimento análogo nos leva a desenvolver as expressões dos momentos de inércia de uma lâmina plana, com densidade constante ρρρρ (x, y) = k , limitada por uma curva simples fechada, em relação aos eixos cartesianos :
3x C
3y C
I y dx3
I x dy3
ρ
ρ
= − =
∫
∫
�
�

No Cálculo II estudamos o Teorema Fundamental do Cálculo que acaba se resumindo na igualdade
sendo a função f contínua no intervalo real Considerando agora o vetor gradiente
de uma função de duas ou de três variáveis como derivada def , podemos estabelecer a versão do Teorema Fundamental do Cálculo para as integrais curvilíneas :
85854.5. Camposvetoriais conservativos. Independênciado caminho.
( ) ( )f f f f ff x, y i j ou f x, y, z i j k
x y x y z
∂ ∂ ∂ ∂ ∂∇ = + ∇ = + +∂ ∂ ∂ ∂ ∂
� � � � � � �[ ]a, b .
( ) ( ) ( )b
af x .dx F b F a ,= −∫
( ) ( )C C
F d r f d r f r b f r a = ∇ = − ∫ ∫� � � � � �i i
Em seguida, apresentaremos um resumo sinóptico do conteúdo dessas páginas mencionadas e uma sugestiva coletânea de exemplos ilustrativos :
- Sugerimos ao leitor estudar, atentamente, as páginas 1072/1079 do livro-texto JS .
Tipos de curvas : Tipos de regiões :
A B
Sendo dadas as curvas tais que
1 2 3 4C C C C
F d r F d r F d r F d r ,= = = =∫ ∫ ∫ ∫� � � � � � � �i i i i ⋯
1 2 3 4C , C , C , C ,…
todas elas cumprindo a trajetória de A até B , podemos estabelecer as seguintes conclusões :
4C
3C
2C
1C
1ª. ) A integral , da posição A até a posição B, independe do caminho .
2ª. ) é um campo conservativo (o resultado permanece o mesmo, não importandoa forma do caminho) .
C
F d r∫� �i
F�
Teorema . Se é contínua numa região conexa
aberta D , então a integral curvilínea é independente do caminho se,
e somente se, é conservativo,
ou seja, para alguma função escalar f .
( ) ( ) ( )F x, y M x, y i N x, y j= +� � �
C
F d r∫� �i
F�
( ) ( )F x, y f x, y= ∇� �
- A demonstração mais rigorosa pode ser estudada e analisada no livro-texto e outros compêndios . Em nossas aulas, a exiguidade de tempo nos impõe a busca de atalhos teóricos conducentes ao pro-cedimento pragmático voltado para os conceitos e fenômenos inerentes às disciplinas tecnológicasque integram a grade curricular do curso .
Em síntese, o teor desse teorema enunciado pode ser tratado pela igualdade
( ) ( )( )2 2
1 1
x , y
x , yC
F d r f x, y ,=∫� �i sendo f : função potencial de
oupotencial escalar de F
�F�

Como resulta :
mostrando que
o resultado depende unicamente das posições de A e B , não importando a
forma da trajetória desse percurso .
8686Teorema . Se é uma diferencial total, ou seja, se existe “ f ” tal que
então é um campo de forças conservativo .
( ) ( )1 1 1 2 2 2A x , y , z e B x , y , z ,= =
F�F d r
� �i F d r d f ,=
� �i
Demonstração . Com efeito, se podemos escrever :F d r d f ,=� �i
( ) ( )B B BAA A
F d r d f f f B f A .= = = −∫ ∫� �i
( ) ( )B
2 2 2 1 1 1AF d r f x , y , z f x , y , z ,= −∫� �i
Corolário . Se é um campo conservativo e C é uma curva fechada simples, então F�
B
A CF d r F d r 0 .= =∫ ∫� � � �i i�
Demonstração . Com efeito,
Então,
( ) ( )2 2 2 1 1 1A B x , y , z x , y , z .≡ ⇒ =
( ) ( )B
2 2 2 1 1 1AF d r f x , y , z f x , y , z 0 .= − =∫� �i
DC
A ≡≡≡≡ B
Definição . Se existe uma função f , tal que dizemos que f é um potencial escalar de
ou uma função potencial de .
F f ,= ∇� �
F�
F�
Teorema . Se tem potencial escalar, então é um campo de forças conservativo .F�
F�
Demonstração . Com efeito, se então
Sendo poderemos escrever
F f ,= ∇� � f f f
F i j k .x y z
∂ ∂ ∂= + +∂ ∂ ∂
� � � �
d r dx i dy j dz k ,= + +� � � �
f f fF d r dx dy dz d f
x y z
∂ ∂ ∂= + + =∂ ∂ ∂
� �i (diferencial total)
Portanto, é um campo de forças (ou campo vetorial) conservativo .F�
Diante dessa sequência de conceitos e teoremas, chegamos à conclusão que as três afirmativas abaixo se equivalem no teor de seu conteúdo :
1ª. ) constitui um campo vetorial conservativo .
2ª. ) tem potencial escalar (corresponde a afirmar que é um vetor gradiente) .
3ª. ) é irrotacional ( ) .
F�
F�
F�
F�
F 0∇ × =� � �
Na esteira dessas conclusões, acrescentaremos outras duas consequências imediatas :
4ª. ) Teorema . Se é um campo de forças conservativo, então o trabalho realizado por ao longo
de qualquer caminho C , de A até B, é igual à diferença dos potenciais A e B : F�
F�
( )
( )
( ) ( )2 2 2
1 1 1
x , y ,z
2 2 2 1 1 1
x , y , z
W F d r f x , y , z f x , y , z .= = −∫� �i
5ª. ) Como consequência do primeiro teorema dessa série, se fizermos na igualdade
teremos
2
2
M f
y y x M N
y xN f
x x y
∂ ∂= ∂ ∂ ∂ ∂ ∂⇒ = ⋅ ∂ ∂∂ ∂ = ∂ ∂ ∂
f fM e N
x y
∂ ∂= =∂ ∂
( ) ( ) ( )F x, y M x, y i N x, y j ,= +� � �
Portanto, se a integral curvilínea é independente do caminho, então
C
F d r∫� �i
M N
y x
∂ ∂= ⋅∂ ∂

8787A recíproca dessa última proposição é falsa . Todavia, torna-se verdadeira se impusermos as restrições de o domínio D ser uma região simplesmente conexa( sem buracos: toda curva fechada C em D contém somente pontos de D ) .
Sintetizando: Teorema . Se têm derivadas parciais primeiras contínuas
numa região simplesmente conexa D , então a integral curvilínea
é independente do caminho em D se, e somente se,
( ) ( )M x, y e N x, y
( ) ( )C
M x, y dx N x, y dy+∫M N
y x
∂ ∂= ⋅∂ ∂
Corolário . Se têm derivadas parciais primeiras contínuas
numa região simplesmente conexa D e então é
um campo conservativo .
( ) ( )M x, y e N x, yM N
,y x
∂ ∂=∂ ∂
F�
ProblemasProblemas ilustrativosilustrativos
1. Problema 8, página 1079 do livro-texto JS :
Verificar se é um campo vetorial conservativo . Caso o seja, determinar a função potencial escalar f , tal que
( ) ( ) 2F x, y 1 2xy n x i x j= + + +� � �
ℓF f .= ∇� �
Resolução . Para fazer tal verificação, podemos aplicar o último corolário acima :
( ) ( ) 2F x, y 1 2xy n x i x j M i N jM
2x M Ny 2x FN y x2xx
= + + + = +∂ = ∂ ∂∂ ⇒ = = ∴ ∂ ∂ ∂ =∂
� � � � �ℓ
�constitui um campo conservativo .
Como outra opção de cálculo, poderíamos também aplicar o operador diferencial rotacional :
( )2
i j k
F 0 i 0 j 2x 2x k 0x y z
1 2xy n x x 0
∂ ∂ ∂∇ × = = + + − =∂ ∂ ∂
+ +
� � �
� � � � � �
ℓe concluir que a função vetorial dada é um campo conservativo .
Na construção da função potencial escalar f , utilizaremos o processo da integração parcial :
( ) ( ) ( ) ( )( ) ( ) ( ) ( )
2
2 2
f x, yM 1 2y n x f x, y 1 2xy n x dx x y x n x g y
xf x, y
N x g' y x g' y 0 g y Cy
∂= = + + ⇒ = + + = + + ∂ ∂
= = + = ⇒ = ⇒ =∂
∫ℓ ℓ ℓ
Portanto, a função potencial escalar de éF�
( ) 2f x, y x y x n x C : f F .= + + ∇ =� �
ℓ
e a função potencial escalar f(x, y) será dada pela soma dos termos comuns e não comuns, semrepetição. No exercício acima, poderíamos ter feito :
Observação . Na construção da função potencial escalar de podemos também lançar mão de um proce-dimento bastante simples, consistindo nos seguintes passos :
F�
( ) 2f x, y x y x n x C .= + +ℓ
( )2 2
C C C
F d r 1 2xy n x, x dx, dy 1 2xy n x dx x dy = < + + > < > = + + + ∫ ∫ ∫� �i ℓ i ℓ
Calculamos as integrais ( ) 2 2
2 2
1 2xy n x dx x x y x n x x x y x n x
x dy x y
+ + = + + − = +
=
∫
∫
ℓ ℓ ℓ

88882. Problema 11, página 1080 do livro-texto JS :
A figura mostra o campo vetorial
e três curvas que começam em (1, 2) e terminam em (3, 2) .
a) Explicar por que tem o mesmo valor para as três curvas .
b) Determinar esse valor comum .
( ) 2 2F x, y 2xy, x 2xy i x j= < > = +� � �
C
F d r∫� �i
Resolução. a) O domínio D é uma região simplesmente conexa , M(x, y) = 2xy
e N(x, y) = x² admitem derivadas parciais primeiras contínuas e
Então, é um campo conservativo
e independe do caminho .
( )2
2
2 2
2xy dx x yf x, y x y C
x dy x y
= ⇒ = + =
∫
∫Portanto, a função potencial escalar de é
Então,
F�
( ) 2f x, y x y C : f F .= + ∇ =� �
M N2x .
y x
∂ ∂= =∂ ∂
( )F x, y�
C
F d r∫� �i
b) Calculemos a função potencial f , tal que f F :∇ =� �
( ) ( )C
F d r f 3, 2 f 1, 2 18 2 16 .= − = − =∫� �i
Em tempo : Como se trata de um campo conservativo, nesse último item b podemos arbitrar uma trajetória qualquer (por exemplo, a reta determinada pelos dois pontos dados) e calcular a integral de linha mediante a parametrização dessa reta :
{ {x 1 y 2 x 2t 1 dx 2 dtt , 0 t 1y 2 dy 02 0
− − = + == = ⇒ ⇒ ≤ ≤= =
Então, ( ) ( ) ( )
( ) ( )
122
C C 0
11
2
00
F d r 2xy dx x dy 2 2t 1 .2 .2 dt 2t 1 .0
16 t 8 dt 8 t 8 t 16 .
= + = + + +
= + = + =
∫ ∫ ∫
∫
� �i
3. Problema 12, página 1080 do livro-texto JS :a) Dada a função determinar uma função f tal que
b) Utilizar o item a para calcular sobre o semicírculo superior que começa em (0, 1) e acaba em (2, 1) .
( ) ( )F x, y y i x 2y j ,= + +� � �
F f .= ∇� �
C
F d r∫� �i
Resolução. a)
( )( ) 2
2
y dx x yf x, y x y y C
x 2y dy xy y
= ⇒ = + + + = +
∫
∫ A função dada é um campo conservativo e independe do caminho.
4. Problema 18, página 1067 , 4ª. edição do livro-texto JS :a) Dada a função determinar uma função f tal que
b) Utilizar o item a para calcular sobre a curva ( ) z 2 zF x, y, z 4xe i cos y j 2x e k ,= + +
� � � �F f .= ∇� �
( )( )
( )2, 12
0, 1C
F d r xy y 3 1 2 .= + = − =∫� �i
Resolução. a)
( )
z 2 z
2 z
2 z 2 z
4xe dx 2x e
cos y dy sen y f x, y, z 2x e sen y C
2x e dz 2x e
=
= ⇒ = + + =
∫
∫
∫ A função dada é um campo conservativo e independe do caminho.
b) Consequentemente, a integral de linha será calculada por
C
F d r∫� �i ( ) 2 4C : r t t i t j t k , 0 t 1 .= + + ≤ ≤
� � � �

8989
5. Problema 20, página 1067, 4ª. edição do livro-texto JS :
Mostre que a integral de linha independe do caminho e calcule-a sobre
qualquer trajetória de (1, 1) a (3, 2) .
( ) ( )2 3 3 4 2
C
2y 12x y dx 4xy 9x y dy− + −∫
b) Desde que a integral de
linha será calculada por
( )( ) ( ) ( )t 0 r 0 0, 0, 0
: Do ponto 0, 0, 0 ao ponto 1, 1, 1t 1 r 1 1, 1, 1
= ⇒ = < > = ⇒ = < >
�
�
Demonstração. Podemos provar tal proposição construindo a função potencial escalar da função vetorial ou, então, invocando o teorema e respectivo corolário da página 140 deste compêndio .Ora, como as derivadas parciais primeiras de M e N são contínuas, numa região simplesmente conexa, basta verificar que
3 2M N4 y 36 x y
y x
∂ ∂= − = ⋅∂ ∂
Portanto, tratando-se de um campo vetorial conservativo, a integral dada, em qualquer trajetória, écalculada mediante as imagens da função potencial escalar :
( )2 4 3
2 4 3
2 4 3
M dx 2xy 3x yf x, y 2xy 3x y
N dy 2xy 3x y
= −
⇒ = − = −
∫
∫Cálculoda integral : ( ) ( ) ( ) ( )2 3 3 4 2
C
2y 12x y dx 4xy 9x y dy f 3, 2 f 1, 1 1919 .− + − = − = −∫
6. Problema 22, página 1080 do livro-texto JS :Determinar o trabalho realizado pelo campo vetorial de força movendo umobjeto do
ponto P(1, 1) a Q(4, - 2) . ( )
2
2
y 2yF x, y i j
xx= −
� � �
Resolução. A função potencial f , se existir, será obtida por
( )
22 2
2
2
yM dx y x dx
x yf x, y
x2y yN dy dy
x x
−= = −
⇒ = −
= − = −
∫ ∫
∫ ∫: campo vetorial conservativo .
Então, qualquer que seja a trajetória entre os dois pontos dados, o trabalho realizado é
( )
( )4, 22
C 1, 1
yT F d r 1 1 0 .
x
−
= = − = − + =∫� �i
( ) ( )C
F d r f 1, 1, 1 f 0,0, 0 2e sen1 .= − = +∫� �i
7. Se é uma força constante, provar que o trabalho realizado ao longo de uma curva arbitrária, com extremidades P
e Q , é expresso pelo produto escalar
F�
F PQ .� �i
Demonstração. É fácil mostrar que é um campo de forças conservativo :
( )2 1 2 1 2 1
F x, y, z c i c j c k c, c, c : força constanteHPQ Q P x x , y y , z z
= + + = < > = − = < − − − >
� � � �
�
{T W F PQ=� �i
F�
c dx c x
c dy c y
c dz c z
=
= =
∫
∫
∫
Então, a função potencial escalar éf(x, y, z) = cx + cy + cze a integral de
linha correspondente pode ser escrita
( )
( )
( ) ( )( ) ( ) ( )
2 2 2
1 1 1
x , y , z
2 2 2 1 1 1
x , y , z
2 1 2 1 2 1
W F d r f x , y , z f x , y , z
c x x c y y c z z
F PQ
= = −
= − + − + −
=
∫� �i
� �i

90908. Problema 27, página 1080 do livro-texto JS :
Mostrar que, se um campo vetorial é conservativo e P, Q e R têm derivadas
parciais de primeira ordem contínuas, então
( )F x, y, z P i Q j R k= + +� � � �
P Q P R Q R, e
y x z x z y
∂ ∂ ∂ ∂ ∂ ∂= = = ⋅∂ ∂ ∂ ∂ ∂ ∂
Demonstração. Por hipótese, já sabemos que e, como tais funções P, Q e R são deriváveis, teremos :
( ) ( )f x, y, z F x, y, z P i Q j R kH
P, Q e R
∇ = = + +
� � � � �
têm derivadas parciais primeiras contínuas
P Q P R Q RT , e
y x z x z y
∂ ∂ ∂ ∂ ∂ ∂= = = ∂ ∂ ∂ ∂ ∂ ∂f f f
P , Q , Rx y z
∂ ∂ ∂= = =∂ ∂ ∂
2 2 2
2
2 2 2
2
2 2 2
2
P f Q f R f
x x x y x x zx
P f Q f R f
y y x y y y zy
P f Q f R f
z z x z z y z z
∂ ∂ ∂ ∂ ∂ ∂= = =∂ ∂ ∂ ∂ ∂ ∂ ∂∂
∂ ∂ ∂ ∂ ∂ ∂= = =∂ ∂ ∂ ∂ ∂ ∂ ∂∂
∂ ∂ ∂ ∂ ∂ ∂= = =∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂
Como o Teorema de Clairautjá mostrou que a ordem em que são escritas as diferenciais dosdenominadores é optativa, concluímos : P Q P R Q R
, ey x z x z y
∂ ∂ ∂ ∂ ∂ ∂= = = ⋅∂ ∂ ∂ ∂ ∂ ∂
9. Se onde g , h e k são funções contínuas, mostrar que é um campo
vetorial conservativo .F�
( ) ( ) ( ) ( )F x, y, z g x i h y j k z k ,= + +� � � �
Demonstração. Sendo contínuas, as funções g , h e k são integráveis :
Obviamente, tais funções primitivas G , H e K sãoderiváveis e, portanto, é possível estabelecer uma fun-ção potencial escalar de :
( ) ( ) ( ) ( ){H F x, y, z g x i h y j k z k ,= + +� � � �
( ) ( ){T f x, y, z escalar tal que f x, y, z F∃ ∇ =� � ( ) ( )
( ) ( )
( ) ( )
g x dx G x
h y dy H y
k z dz K z
=
= =
∫
∫
∫
sendo g , h e k funções contínuas
F�
( ) ( ) ( ) ( )f x, y, z G x H y K z= + + e, portanto, é um campo vetorial conservativo .F�
10. Problema 33, página 1080 do livro-texto JS :
Seja a) Mostrar que
b) Mostrar que não éindependente do caminho .
( ) 2 2
y i x jF x, y
x y
− += ⋅+
� �� P Q
y x
∂ ∂= ⋅∂ ∂
Demonstração. a)
( ) ( )P Q, x, y 0, 0
y x
∂ ∂⇒ = ∀ ≠
∂ ∂
C
F d r∫� �i
b) Não podemos afirmar que a integral curvilínea independe do caminho no domínio D , pois, a origem (0, 0) constitui um buraco em D : a função não existe nesse ponto .De fato, se atendermos a sugestão inscrita no enunciado do problema, encontraremos resul-tados numéricos diferentes . Portanto, também neste episódio o teorema da página 87 des-te compêndio permanece forte e confiável, pois, a região D não é simplesmente conexa .
F�
(1, 0)
DC
( ) ( )
( ) ( )
2 2 2 2 2
2 22 2 2 2 2 2
2 2 2 2 2
2 22 2 2 2 2 2
y P x y 2y y xP
x y y x y x y
y Q x y 2x y xQ
x y x x y x y
∂ − − + −= − ⇒ = =+ ∂ + +
∂ + − −= ⇒ = =+ ∂ + +

919111. Problema 3, página 81 deste compêndio : O teorema citado nos permite resolver o problema como segue :
é um campo vetorial conservativo.
( )
( )( ) ( )
2 2
1 1
B x , y
2 2 1 1
A x , y
F d r f x , y f x , y 0 ,
po is , A B .
= − =
≡
∫� �i
Então,
F�
12. Problema 34, página 1081 do livro-texto JS :a) Suponha que seja um campo vetorial quadrado inverso, ou seja, para alguma constan-
te c , onde
Determinar o trabalho realizado por ao mover um objeto, de um ponto a um ponto em função das
distâncias desses pontos à origem .
F� ( ) 3
c rF r
r=
�� �
�
Resolução. De acordo com os dados fornecidos pelo problema, podemos escrever :
r x i y j z k .= + +� � � �
( )
( )
( ) ( )2 2 2
1 1 1
x , y , z
2 2 2 1 1 1
x , y , z
2 2 2 2 2 21 22 2 2 1 1 1
2 1
1 2 1 2
W F d r f x , y , z f x , y , z
c c c c
d dx y z x y zd d1 1
W c ou W cd d d d
= = −
− −= − = −+ + + +
−∴ = − = ⋅ ⋅
∫� �i
F�
1P 2P ,
1 2d e d
( ) ( ) ( )( )
( )
( )
332 2 2 2
2 2 21 1 1 1 1 1 1 1
2 2 22 2 2 2
2 2 2 2
c x i y j z kc rF r ou F x, y, z
r x y z
P x , y , z d x y z
P x , y , z d x y z
+ += =
+ + = + + ⇒
= + +
� � ��� � �
�
É fácil mostrar que um campo vetorial quadrado inverso é conservativo :
( )2 2 2
32 2 2 2 K
13 22
3 2 2 22
c xdx faz se : x y z u du 2x dx
x y z
c du c c u ccu du
12 2 2 rx y zu2
=
−−
= − + + = ⇒ =+ +
−−= = = ⋅ = =+ +−
∫
∫ ∫
�����
�
Analogamente,
Como não devemos considerar termos repetidos na soma, resulta e então ( ) ( )
3 32 2 2 2 2 22 2
c y c z cdy dz
rx y z x y z
−= = ⋅
+ + + +∫ ∫ �
( ) cf x, y, z ,
r
−= �
onde C é a hipocicloide(astroide)
2
2C
ydx 2y arctg x . dy ,
1 x⋅ +
+∫�2 2
3 3x y 1 .+ =
Resolução . 22
2
2
M 2 yy
M y 1 x M N1 x
N 2 y y xN 2 y arctan x
x 1 x
∂ = = ∂ + ∂ ∂ ⇒ ⇒ =+ ∂ ∂ ∂ == ∂ +
Círculo fixo
Círculo móvel
13. Se uma força variável desloca uma partícula sobre uma curva C do espaço, mostrar que o trabalho realizado por essa força corresponde, numericamente, à variação da energia cinéticada partícula .
( ) ( ) ( ) ( )( ) ( ) ( ) ( )( )
1 2 3
1 2 3
F x, y, z f x, y, z i f x, y, z j f x, y, z k :
v x, y, z v x, y, z i v x, y, z j v x, y, z k :
Hip r x, y, z x i y j z k :
d rd r dt v dt , tempo t
d t
= + + = + + = + +
= =
� � � �
� � � �
� � � �
�� �
F�
força variável F�
vetor velocidade v�
vetor posição da partícula
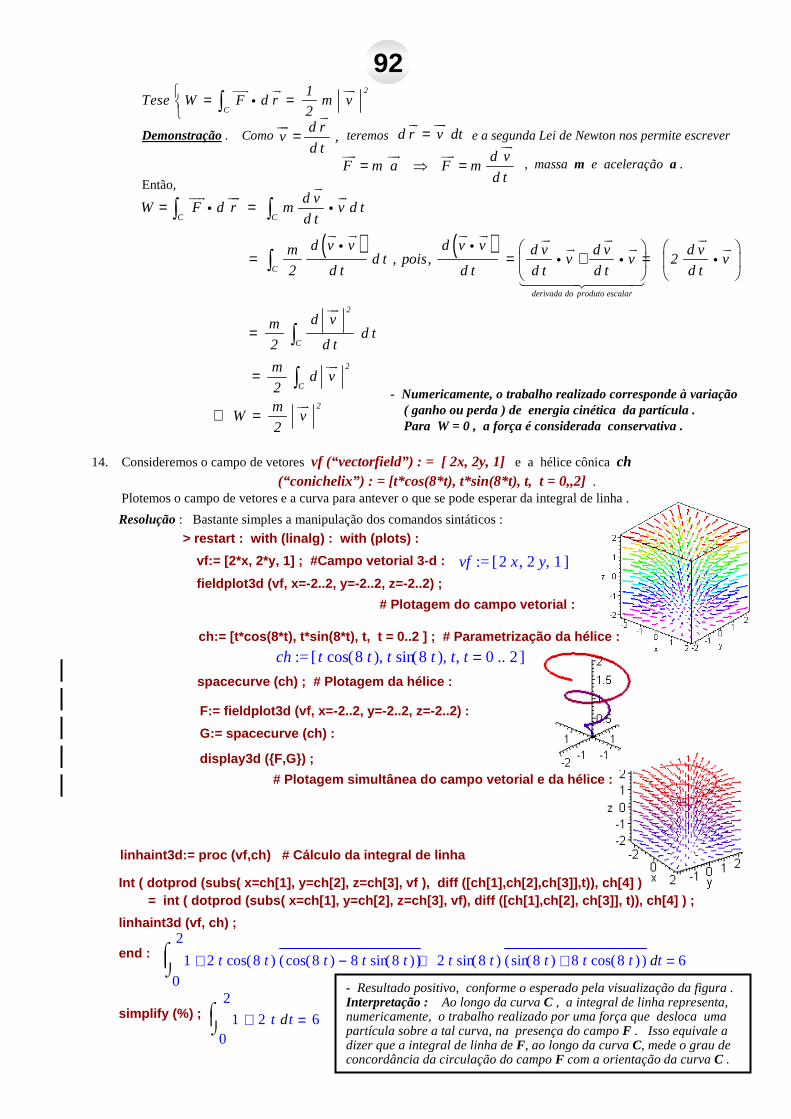
92922
C
1Tese W F d r m v
2 = = ∫
� � �i
( ) ( )C C
C
derivada do produto escalar
2
C
2
C
2
d vW F d r m v d t
d t
d v v d v vm d v d v d vd t , pois, v v 2 v
2 d t d t d t d t d t
d vmd t
2 d t
md v
2m
W v2
= =
= = + =
=
=
∴ =
∫ ∫
∫
∫
∫
�� � �i i
� � � � � � �i i � � �
i i i
���������
�
�
�
d vF m a F m
d t= ⇒ =
�� � �
Demonstração. Como teremos e a segunda Lei de Newton nos permite escrever
, massa m e aceleração a .
d rv ,
d t=�
�d r v dt=� �
Então,
- Numericamente, o trabalho realizado corresponde à variação ( ganho ou perda ) de energia cinética da partícula . Para W = 0 , a força é considerada conservativa .
Resolução: Bastante simples a manipulação dos comandos sintáticos :
14. Consideremos o campo de vetores vf (“vectorfield”) : = [ 2x, 2y, 1] e a hélice cônica ch(“conichelix”) : = [t*cos(8*t), t*sin(8*t), t, t = 0,,2] .
Plotemos o campo de vetores e a curva para antever o que se pode esperar da integral de linha .
> restart : with (linalg) : with (plots) :
vf:= [2*x, 2*y, 1] ; #Campo vetorial 3-d :
fieldplot3d (vf, x=-2..2, y=-2..2, z=-2..2) ;
# Plotagem do campo vetorial :
ch:= [t*cos(8*t), t*sin(8*t), t, t = 0..2 ] ; # P arametrização da hélice :
spacecurve (ch) ; # Plotagem da hélice :
F:= fieldplot3d (vf, x=-2..2, y=-2..2, z=-2..2) :
G:= spacecurve (ch) :
display3d ({F,G}) ;
# Plotagem simultânea do campo vetorial e da hélice :
linhaint3d:= proc (vf,ch) # Cálculo da integral de linha
Int ( dotprod (subs( x=ch[1], y=ch[2], z=ch[3], vf ), diff ([ch[1],ch[2],ch[3]],t)), ch[4] ) = int ( dotprod (subs( x=ch[1], y=ch[2], z=ch[3], v f), diff ([ch[1],ch[2], ch[3]], t)), ch[4] ) ;
simplify (%) ;
- Resultado positivo, conforme o esperado pela visualização da figura . Interpretação : Ao longo da curva C , a integral de linha representa, numericamente, o trabalho realizado por uma força que desloca uma partícula sobre a tal curva, na presença do campo F . Isso equivale a dizer que a integral de linha de F, ao longo da curva C, mede o grau de concordância da circulação do campo F com a orientação da curva C .
:= vf [ ], ,2 x 2 y 1
:= ch [ ], , ,t ( )cos 8t t ( )sin 8t t = t .. 0 2
end :
linhaint3d (vf, ch) ;
= d⌠⌡0
2
+ + 1 2 t ( )cos 8t ( ) − ( )cos 8t 8 t ( )sin 8 t 2 t ( )sin 8t ( ) + ( )sin 8 t 8 t ( )cos 8t t 6
= d⌠⌡
0
2
+ 1 2 t t 6
|||||

( ) ( )
( )
( )
X Y
X Z
Y Z
22
S S
2 2
S
2 2
S
z zf x , y , z dS f x , y , g x , y 1 dA
x y
ou
y yf x , h x , z , z 1 dA
x z
ou
x xf k y , z , y , z 1 dA
y z
∂ ∂ = + + ∂ ∂
∂ ∂ = + + ∂ ∂
∂ ∂ = + + ∂ ∂
∫∫ ∫∫
∫∫
∫∫
5.1. Integral de superfície de uma função escalar.
Comentário adicional : Entendemos que, para estabelecer um fechamento convincente dessas afirmativas, convém justificar
a presença da expressão representativa da área da superfície S ,
no desenvolvimento da integral de superfície da função f .
( ) ( ) ( )( )
( )2
XY 1
y xb
S R a y x
f x, y, z dS f x, y dA f x, y dy dx .= =∫∫ ∫∫ ∫ ∫
Em paralelo ao estudo da integral de linha, podemos instituir o conceito de integral de superfície deuma função dada f , bastando para isso um estudo mais atento dos conceitos e comentários contidos nas páginas 1017 e 1106 do nosso livro-texto J. S., 5ª. edição. Inevitavelmente, seremos arremessados às expressões abaixo
onde representam as projeções ortogonais da superfície dada S: z = g(x, y) sobre os planos XOY,
XOZ e YOZ , respectivamente, sendo notória a analogia entre a área da superfície,
sobre o plano XOY , e o comprimento de uma curva no plano,
( )22
D
z zA S 1 dA ,
x y
∂ ∂ = + + ∂ ∂ ∫∫
2b
a
dyL 1 dx .
d x = + ∫
Advertência : Se considerarmos
poderemos escrever :
( ) ( ) ( )2 22 2
z z z zf x, y, z 1 f x, y, g x, y 1 f x, y ,
x y x y
∂ ∂ ∂ ∂ + + = + + = ∂ ∂ ∂ ∂
Em síntese, a integral de superfície representa uma generalização da integral dupla, pois, nesta, a integração efetua-se numa superfície R do plano XOY, ao passo que, na integral de superfície, a integração é aplicada sobre uma superfície qualquer S do espaço tridimensional .
22
D
z z1 dA ,
x y
∂ ∂ + + ∂ ∂ ∫∫
A figura ao lado nos ajudará a confirmar, de maneira inquestionável, o seguinte detalhe : se a superfície S é contínua em todo o domínio D e possui derivadas parciais contínuas na vizinhança do ponto P , a porção ∆S da superfície dada é aproximadamente congruente com o retângulo ∆T que caracteriza uma porção do plano tangente à superfície S , no ponto P .
Portanto, a relação é uma decorrência imediata
do que foi dito e a integral de superfície da função f , sobre a superfície
S se define como
A 0 A 0lim S lim T
∆ → ∆ →∆ = ∆
- Tal procedimento, aliás, vem sendo utilizado desde os nossos primeiros passos na assimilação do conceito de integral definida, vale dizer, sem-pre considerando as aproximações de figuras geométricas, com alguns componentes curvilíneos, em confronto com outras constituídas apenas por segmentos retilíneos .
( ) ( ) ( )n n
i i i i i i i iA 0 A 0
i 1 i 1S
f x, y, z dS lim f x , y , z S lim f x , y , z T∆ → ∆ →= =
= ∆ = ∆∑ ∑∫∫
iP iT∆
iS∆
( )i ix , y
X Y X Z Y ZS , S e S
Unidade 5 - INTEGRAIS DE SUPERFÍCIE
CCÁÁLCULO DIFERENCIAL E INTEGRAL IV LCULO DIFERENCIAL E INTEGRAL IV -- Roteiro SinRoteiro Sinóóptico ptico --
-- Cursos de Engenharia Cursos de Engenharia --
9393
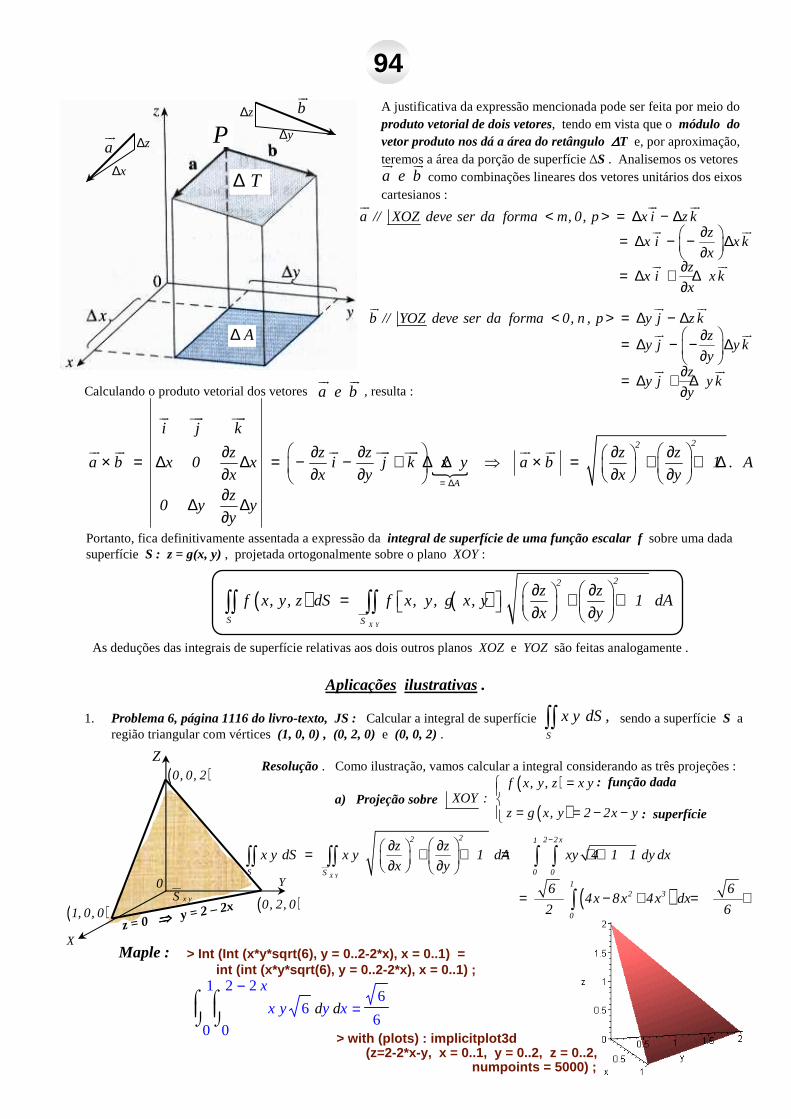
A justificativa da expressão mencionada pode ser feita por meio do produto vetorial de dois vetores, tendo em vista que o módulo do vetor produto nos dá a área do retângulo ∆∆∆∆T e, por aproximação, teremos a área da porção de superfície ∆S . Analisemos os vetores
como combinações lineares dos vetores unitários dos eixos cartesianos : a e b� �
P
T∆
a // XOZ deve ser da forma m, 0, p x i z kz
x i x kx
zx i x k
x
< > = ∆ − ∆∂ = ∆ − − ∆ ∂
∂= ∆ + ∆∂
� � �
� �
� �
x∆
z∆a�
b // YOZ deve ser da forma 0, n , p y j z kz
y j y ky
zy j y k
y
< > = ∆ − ∆ ∂= ∆ − − ∆ ∂ ∂= ∆ + ∆∂
� � �
� �
� �
b�
z∆
y∆
Calculando o produto vetorial dos vetores , resulta :a e b� �
�
22
A
i j k
z z z z za b x 0 x i j k x y a b 1 . A
x x y x yz
0 y yy
= ∆
∂ ∂ ∂ ∂ ∂ × = ∆ ∆ = − − + ∆ ∆ ⇒ × = + + ∆ ∂ ∂ ∂ ∂ ∂ ∂∆ ∆∂
� � �
� � � � � � �
A∆
Portanto, fica definitivamente assentada a expressão da integral de superfície de uma função escalar f sobre uma dada superfície S : z = g(x, y) , projetada ortogonalmente sobre o plano XOY :
( ) ( )X Y
22
S S
z zf x, y, z dS f x, y, g x, y 1 dA
x y
∂ ∂ = + + ∂ ∂ ∫∫ ∫∫
As deduções das integrais de superfície relativas aos dois outros planos XOZ e YOZ são feitas analogamente .
Aplicaçõesilustrativas.
1. Problema 6, página 1116 do livro-texto, JS : Calcular a integral de superfície sendo a superfície S a região triangular com vértices (1, 0, 0) , (0, 2, 0) e (0, 0, 2) . S
x y dS ,∫∫
X
Y
Z
( )1, 0, 0( )0, 2, 0
( )0, 0, 2
0x yS
z = 0 ⇒⇒⇒⇒ y = 2 – 2x
Resolução . Como ilustração, vamos calcular a integral considerando as três projeções :
a) Projeção sobre( )
( )
f x, y, z x yXOY :
z g x, y 2 2x y
=
= = − −
( )X Y
22 2 2x1
S 0 0S1
2 3
0
z zx y dS x y 1 dA xy 4 1 1 dy dx
x y
6 64x 8x 4x dx
2 6
− ∂ ∂ = + + = + + ∂ ∂
= − + = ⋅
∫∫ ∫∫ ∫ ∫
∫
: função dada
: superfície
> Int (Int (x*y*sqrt(6), y = 0..2-2*x), x = 0..1) = int (int (x*y*sqrt(6), y = 0..2-2*x), x = 0..1) ;
Maple :
= d⌠
⌡0
1
d⌠
⌡0
− 2 2x
x y 6 y x6
6> with (plots) : implicitplot3d
(z=2-2*x-y, x = 0..1, y = 0..2, z = 0..2,numpoints = 5000) ;
9494
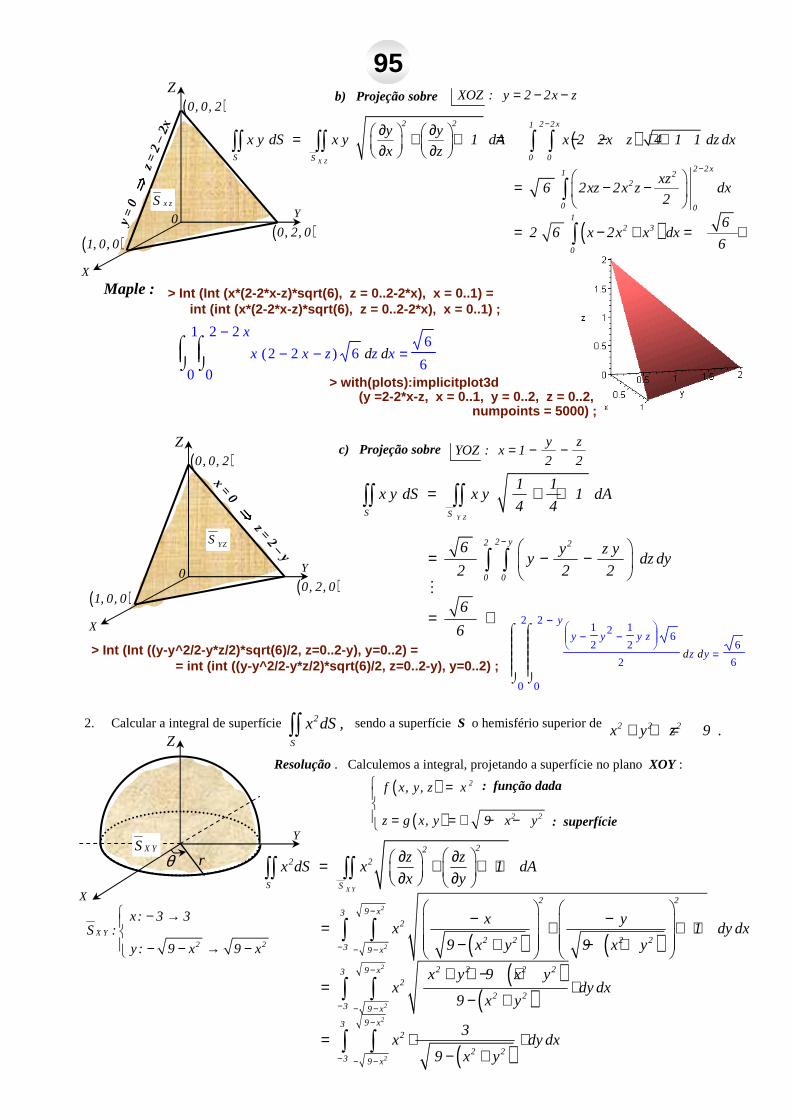
X
Y
Z
( )1, 0, 0( )0, 2, 0
( )0, 0, 2
0x zS
y =
0 ⇒⇒⇒⇒
z =
2 –
2x
b) Projeção sobre XOZ : y 2 2x z= − −
( )
( )
X Z
2 2 2 2x1
S 0 0S2 2x1 2
2
0 01
2 3
0
y yx y dS x y 1 dA x 2 2x z 4 1 1 dz dx
x z
xz6 2xz 2x z dx
2
62 6 x 2x x dx
6
−
−
∂ ∂ = + + = − − + + ∂ ∂
= − −
= − + = ⋅
∫∫ ∫∫ ∫ ∫
∫
∫
> Int (Int (x*(2-2*x-z)*sqrt(6), z = 0..2-2*x), x = 0..1) = int (int (x*(2-2*x-z)*sqrt(6), z = 0..2-2*x), x = 0..1) ;
Maple :
= d⌠⌡0
1
d⌠⌡0
− 2 2x
x ( ) − − 2 2x z 6 z x6
6> with(plots):implicitplot3d
(y =2-2*x-z, x = 0..1, y = 0..2, z = 0..2,numpoints = 5000) ;
c) Projeção sobrey z
YOZ : x 12 2
= − −
Y ZS S
2 y2 2
0 0
1 1x y dS x y 1 dA
4 4
6 y z yy dz dy
2 2 2
6
6
−
= + +
= − −
= ⋅
∫∫ ∫∫
∫ ∫⋮
X
Y
Z
( )1, 0, 0( )0, 2, 0
( )0, 0, 2
0
YZS
x = 0 ⇒⇒⇒⇒z = 2 – y
> Int (Int ((y-y^2/2-y*z/2)*sqrt(6)/2, z=0..2-y), y =0..2) = = int (int ((y-y^2/2-y*z/2)*sqrt(6)/2, z=0..2-y), y =0..2) ;
= d
⌠
⌡
0
2
d
⌠
⌡
0
− 2 y
− − y
1
2y
2 1
2y z 6
2z y
6
6
( ) ( )( )
( )
( )
X Y
2
2
2
2
2
2
222 2
S S
2 29 x3
2
2 2 2 23 9 x
2 2 2 29 x32
2 23 9 x
9 x32
2 23 9 x
z zx dS x 1 dA
x y
x yx 1 dy dx
9 x y 9 x y
x y 9 x yx dy dx
9 x y
3x dy dx
9 x y
−
− − −
−
− − −−
− − −
∂ ∂ = + + ⋅ ∂ ∂
− − = + + ⋅ − + − +
+ + − += ⋅
− +
= ⋅ ⋅− +
∫∫ ∫∫
∫ ∫
∫ ∫
∫ ∫
2. Calcular a integral de superfície sendo a superfície S o hemisfério superior de
Resolução. Calculemos a integral, projetando a superfície no plano XOY :
2
S
x dS ,∫∫ 2 2 2x y z 9 .+ + =
X
Y
Z
X YSθ r
( )
( )
2
2 2
f x, y, z x
z g x, y 9 x y
= = = + − −
: função dada
: superfície
X Y
2 2
x: 3 3S :
y : 9 x 9 x
− → − − → −
9595
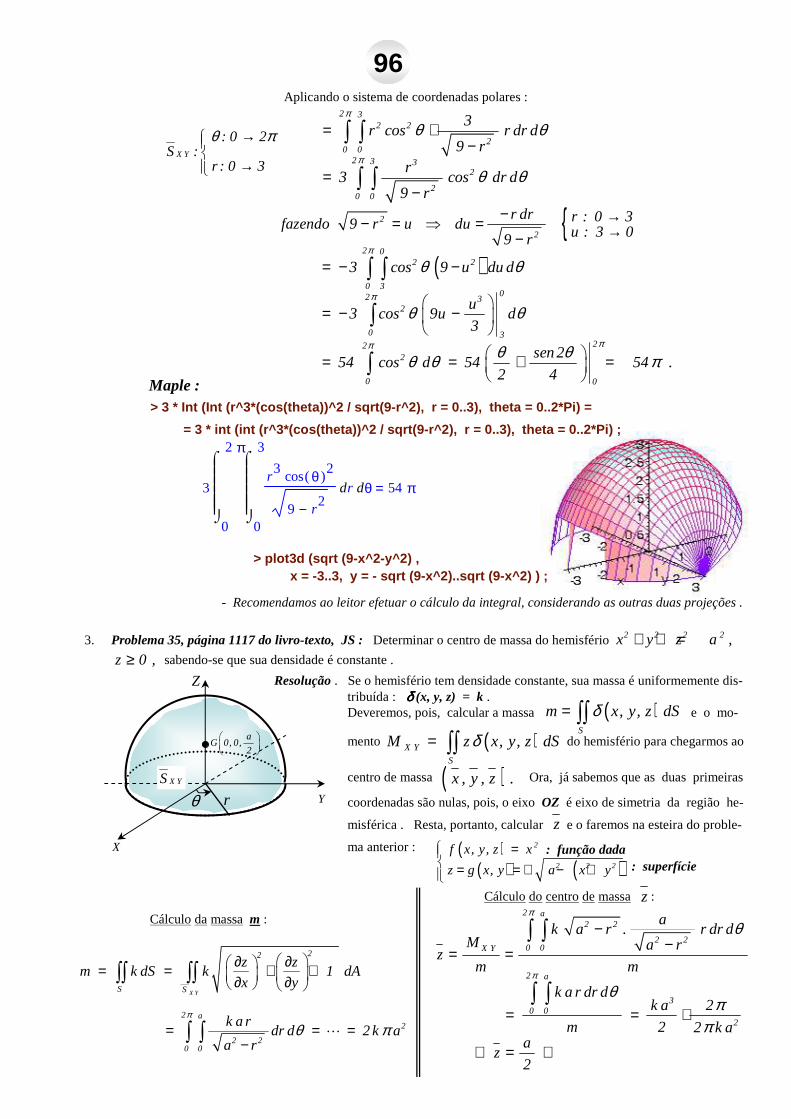
Aplicando o sistema de coordenadas polares :2 3
2 2
20 0
2 3 32
20 0
3r cos r dr d
9 rr
3 cos dr d9 r
π
π
θ θ
θ θ
= ⋅−
=−
∫ ∫
∫ ∫
{2
2
r dr r : 0 3fazendo 9 r u du u : 3 09 r
− →− = ⇒ = →−
X Y
: 0 2S :
r : 0 3
θ π→
→
( )2 0
2 2
0 302 3
2
0 322
2
0 0
3 cos 9 u du d
u3 cos 9u d
3
sen 254 cos d 54 54 .
2 4
π
π
ππ
θ θ
θ θ
θ θθ θ π
= − −
= − −
= = + =
∫ ∫
∫
∫
- Recomendamos ao leitor efetuar o cálculo da integral, considerando as outras duas projeções .
Maple :> 3 * Int (Int (r^3*(cos(theta))^2 / sqrt(9-r^2), r = 0..3), theta = 0..2*Pi) =
= 3 * int (int (r^3*(cos(theta))^2 / sqrt(9-r^2), r = 0..3), theta = 0..2*Pi) ;
= 3 d
⌠
⌡
0
2 π
d
⌠
⌡
0
3
r3
( )cos θ 2
− 9 r2
r θ 54 π
> plot3d (sqrt (9-x^2-y^2) ,x = -3..3, y = - sqrt (9-x^2)..sqrt (9-x^2) ) ;
Resolução. Se o hemisfério tem densidade constante, sua massa é uniformemente dis-tribuída : δδδδ (x, y, z) = k .Deveremos, pois, calcular a massa e o mo-
mento do hemisfério para chegarmos ao
centro de massa Ora, já sabemos que as duas primeiras
coordenadas são nulas, pois, o eixo OZ é eixo de simetria da região he-
misférica . Resta, portanto, calcular e o faremos na esteira do proble-
ma anterior : ( )( ) ( )
2
2 2 2
f x, y, z x
z g x, y a x y
= = = + − +
: função dada: superfície
3. Problema 35, página 1117 do livro-texto, JS : Determinar o centro de massa do hemisfério
sabendo-se que sua densidade é constante .
2 2 2 2x y z a ,+ + =z 0 ,≥
X
Y
Z
X YS
θ r
( )S
m x, y, z dSδ= ∫∫( )X Y
S
M z x, y, z dSδ= ∫∫( )x , y , z .
z
aG 0, 0,
2
Cálculodamassam :
X Y
22
S S
2 a2
2 20 0
z zm k dS k 1 dA
x y
k a rdr d 2 k a
a r
π
θ π
∂ ∂ = = + + ∂ ∂
= = =−
∫∫ ∫∫
∫ ∫ ⋯
Cálculodo centrodemassa :z2 a
2 2
2 20 0X Y
2 a
30 0
2
ak a r . r dr d
M a rz
m m
k a r dr dk a 2
m 2 2 k aa
z2
π
π
θ
θπ
π
−−= =
= = ⋅
∴ = ⋅
∫ ∫
∫ ∫
9696

4. Problema 36, página 1117 do livro-texto, JS : Determinar a massa de um funil fino com o formato do cone
sendo sua função densidade ( ) 2 2z g x, y x y , 1 z 4 ,= = + ≤ ≤ ( )x, y, z 10 z .ρ = −
X
Y
Z
0
superfície cônicade revolução
θr
Resolução. O funil tem densidade variável, sua massa não éuniformemente distribuída :
( )( )
2 2
2 2
x, y, z 10 z 10 x y
z g x, y x y
ρ = − = − +
= = +
: função dada
: superfícieProjetemos a superfície no plano XOY e apliquemos o sistema polar :
{ 2 2' 'x y
: 0 21 z 4 e g g 1 2r : 1 4θ π→≤ ≤ ⇒ + + =→
( ) ( )2 4
S 0 12
0
m x, y, z dS 2 10 r r dr d
54 2 d m 108 2 .
π
π
ρ θ
θ π
= = −
= ∴ =
∫∫ ∫ ∫
∫
Resolução. a) Já vimos que o momento de inércia de um sistema de partículas, em relação a um dado eixo t ,
é dado por sendo a distância de cada ponto ao eixo considerado .
Portanto,
5. Problema 37, página 1117 do livro-texto, JS : a) Formular uma expressão integral para o momento de inércia , em torno do eixo OZ, de uma folha fina no for-
mato de uma superfície S se a função densidade éρρρρ .b) Determinar o momento de inércia do funil do problema anterior .
ZI
idn
2t i i
ni 1
I lim m d ,→ ∞ =
= ∑
ZI
( ) ( ) ( )2 2 2Z Z
S S
I d x, y, z dS ou x y x, y, z dS .ρ ρ= +∫∫ ∫∫
( ) ( ) ( ) ( )( ) ( )
( )
2 2 2 2 2 2Z
S S2 2 2 2
S2 4
3 4
0 1
I x y x, y, z dS x y 10 x y dS
x y 10 x y 2 dA
2 10 r r dr d
43292 .
5
π
ρ
θ
π
= + = + − +
= + − +
= −
=
∫∫ ∫∫
∫∫
∫ ∫⋮
b) O momento de inércia do funil seráZI
6. Problema 38, página 1117 do livro-texto, JS : A superfície cônica tem densidade constante k . Determinar seu centro de gravidade e o momento de inércia em torno do eixo OZ .
X
Y
Z
0
superfície cônicade revolução
θr
Resolução. O cone tem densidade constante, sua massa é uniformemente distribuída :
( )( ) 2 2
x, y, z k
z g x, y x y
ρ = = = +
: função dada
: superfície
Projetemos a superfície no plano XOY e apliquemos o sistema polar :
{ 2 22 2 2 2 ' 'x y
: 0 20 z x y a e g g 1 2r : 0 aθ π→≤ = + ≤ ⇒ + + =→�������
2 2 2z x y , 0 z a ,= + ≤ ≤
= r²
X YS S
2 a2
0 0
m k dS k 2 dA
2 k r dr d m 2 k a .π
θ π
= =
= ∴ =
∫∫ ∫∫
∫ ∫
A massa m da superfície cônica é dada por
Também aqui, o centro de gravidadeserá pois, a densidade é constante . Então, ( )0 , 0 , z ,2 a
2 3
X Y S 0 02
2k z dS 2 k r dr d 2 k aM 2a3zm m m 32 k a
π
θ π
π= = = = =
∫∫ ∫ ∫2 a
G 0 , 0 , .3
∴
2 aG 0 , 0 , .
3
9797
' 'x y
2 2
2x r cosg cos e g sen
r2 x y
θ θ θ= = = =+

Momento de inércia : ( ) ( )2 2 2 2Z
S S S2 a
3
0 0
4Z
I x y x, y, z dS r k dS 2 k r dA
2 k r dr d
2I k a .
2
π
ρ
θ
π
= + = =
=
∴ =
∫∫ ∫∫ ∫∫
∫ ∫
Maple :
> sqrt (2) * k * Int ( Int ( r^3, r = 0..a ), th eta = 0..2*Pi ) =
= sqrt (2) * k * Int (Int ( r^3, r = 0..a ), th eta = 0..2*Pi ) ;
= 2 k d⌠
⌡0
2 π
d⌠
⌡0
a
r3
r θ2 k a
4 π2
> with (plots):implicitplot3dz = sqrt(x^2+y^2), x = -3..3,
y = -3..3, z = 0..3) ;
Simulação : a = 3
5.2. Integral de superfície de uma função vetorial .Nas unidades anteriores vimos as integrais simples, duplas e triplas sendo definidas em regiões de
duas e três dimensões . Assim como estudamos as integrais de linha, atuando ao longo de curvas bi e tridimensionais, vimos também a possibilidade de considerar uma outra modalidade de integral (integral de superfície) de uma função escalar, ope-rando sobre uma dada superfície S , ocasião em que observamos o quanto a integral de uma superfície e a área dessa mesma superfície guardam uma relação bastante semelhante àquela existente entre a integral de linha e o comprimento da curva .
Nos próximos parágrafos estudaremos essa mesma integral de superfície, porém aplicada a umafun-ção vetorial e, por via de consequência, os desdobramentos teóricos resultantes dessa análise nos conduzirão aos teoremas de Gausse de Stokes, pilares básicos do tratamento dos fluxos elétricos, mecânicos e magnéticos . Voltamos a repetir, o encaminhamento de nosso curso estará sempre inclinado para raciocínios algébricos e geométricos, intuitivos e dedutivos, perseguindo sempre os resultados práticos e compatíveis com os conceitos físicos e as disciplinas tecnológicas que compõem o conteúdo programático dos cursos de engenharia .
Façamos algumas considerações sobre uma dada superfície plana S e sua projeção ortogonal sobre um outro plano :
S
β
αn α
�
n β
�θ
Sβ
n α
�: vetor unitário normal ao plano αααα
n β
�: vetor unitário normal ao plano ββββ
s :
s :
medida da área S
medida da área Sβ
Da Trigonometria, concluímos :
s s cosθ=
Apliquemos agora esses conceitos iniciais aos planos cartesianos :
S
n α
�n β
�θ
Projeções ortogonais de uma área plana S sobre os planos coordenados :
S
n�
x yS
n�
: vetor unitário do gradiente
Consequências :
x y
x z
y z
s s cos
s s cos
s s cos
γ
β
α
= = =
x zS
y zS
i�
k�
j�
X
Y
Z
A área S está contida num plano normal ao vetor n�
Convenções :ângulo formado por e : n
�i�
αângulo formado por e : n
�j�
βângulo formado por e : n
�k� γ
9898

( )
( )S
S
F F n ds ,
ouF F n ds ,
φ
φ
=
=
∫∫
∫∫
� � �i
� � �i�
Orientação convencional de uma superfície:
Seja S uma superfície aberta :
SP
n�
A representação algébrica da superfície é
z = f (x, y) : forma explícita
F (x, y, z) = 0 : forma implícita
F :+ face positivada superfície ( face voltada para osentido do vetor gradiente da função, no pontoconsiderado P )
F :− face negativada superfície ( face voltada para osentido oposto do vetor gradiente da função, no ponto considerado P )
Se S é uma superfície fechada :
n�
F :+ face positivada superfície é sua face externa
face negativada superfície é sua face internaF :−
Fluxo de um vetor : Seja S : f(x, y, z) = 0 uma superfície contínua de áreas , de modo que cada um de seus pontos P seja definido por um único vetor . Apliquemos em P o vetor unitário :
F�
n�
fn
f
∇=∇
��
� : vetor unitário do gradiente
SP
n�F
�
θ
Definição 1 . Chama-se fluxo de através da superfície S , no ponto P , o produto
sendo se o sentido de é de
F�
( )F F n ds ,φ =� � �
i
F 0 ,φ <�
F�
F F+ −→
F 0 ,φ >�
F�
F F− +→se o sentido de é de
Advertência : Outra representação desse fluxo pode ser dada na forma F F d S ,φ =� � �
ionde é um campo vetorial definido sobre uma superfície orientada S .F�
Poderemos então, a partir de agora, considerar equivalentes as duas expressões
( ) .F F d S F n d sφ = =� � � � �
i i
Integral de superfície de uma função vetorial .S
F�
θ
n�
i�
k�
j�
XY
Z
ds
x yd s dx dy=
A integral de superfície de uma função vetorial ,
através de uma superfície S , também denominada
fluxo através de S , é definida por F�
F�
se S é aberta
se S é fechada
9999

100100Cálculo da integral de superfície . De acordo com a situação problemática apresentada, ana-
lisamos a conveniência da escolha de um dos três planos cartesianos XOY , XOZ ou YOZ onde projetar a superfície Spara desenvolver o cálculo da integral . Evidentemente, há situações em que a ocorrência de simetrias permite uma op-ção aleatória por qualquer um desses planos ou por dois ou, ainda, por apenas um deles .
a) Projetando a superfície S sobre o plano XOY :
( )
( )x y
x y
S S
d s ds cos dx dy , pois n , kdx dy
Como n k n k cos cos n k cos dsn k
F nPortanto, F n ds dx dy
n k
γ γ
γ γ γ
= = =
= = ⇒ = ⇒ =
=∫∫ ∫∫
� �∡
� � � � � �i i � �
i� �
� � ii � �
i
b) Projetando a superfície S sobre o plano XOZ :
( )
( )x z
x z
S S
d s ds cos dx dz , pois n , jdx dz
Como n j n j cos cos n j cos dsn j
F nPortanto, F n ds dx dz
n j
β β
β β β
= = =
= = ⇒ = ⇒ =
=∫∫ ∫∫
� �∡
� � � � � �i i � �
i� �
� � ii � �
i
c) Projetando a superfície S sobre o plano YOZ : Mutatis mutandis, ( )y z
S S
F nF n ds dy dz
n i=∫∫ ∫∫
� �� � ii � �
i
( )S
F n ds∫∫� �i1. Calcular a integral , sendo e a superfície S é o hemisfério superior
Aplicações elucidativas. . A seguir, alguns exemplos ilustrativos :
F x i y j z k= + +� � � �
X
Y
Z
2 2 2x y z 4 .+ + =
Resolução .n�
F�
( )
( )
2 2 2 2 2
2 2 2
S : x y z 4 z f x, y 4 x y
ou f x, y, z x y z 4 0
+ + = ⇒ = = − −
= + + − =
2 2 2
f 2x i 2y j 2z k F zn n k
2 2f 2 x y z
∇ + += = = ⇒ =∇ + +
� � � � �� � �
i�
( ) ( )
( )
X Y X Y X Y
X Y
2
S S S S
2 2S
dx dy x, y, z dx dy dx dyF n ds F n x, y, z F
z2 zn k2
4dx dy
4 x y
< > = = < > =
=− +
∫∫ ∫∫ ∫∫ ∫∫
∫∫
� � � � �i i i� �
i
Cabe aqui a aplicação do sistema polar para integrais duplas : 2 2
20 0
4r dr d
4 r
π
θ=−
∫ ∫
θ r
2
2
r drfaz se 4 r v dv e v : 2 0
4 r
−− − = ⇒ = →−
2 20
0 2 0
4 dv d 4 2 d 16 .π π
θ θ π= − = − − =∫ ∫ ∫
- Sugerimos ao leitor a resolução da integral, projetando a superfície nos outros dois planos coordenados, devendo encontrar o mesmo resultado numérico .
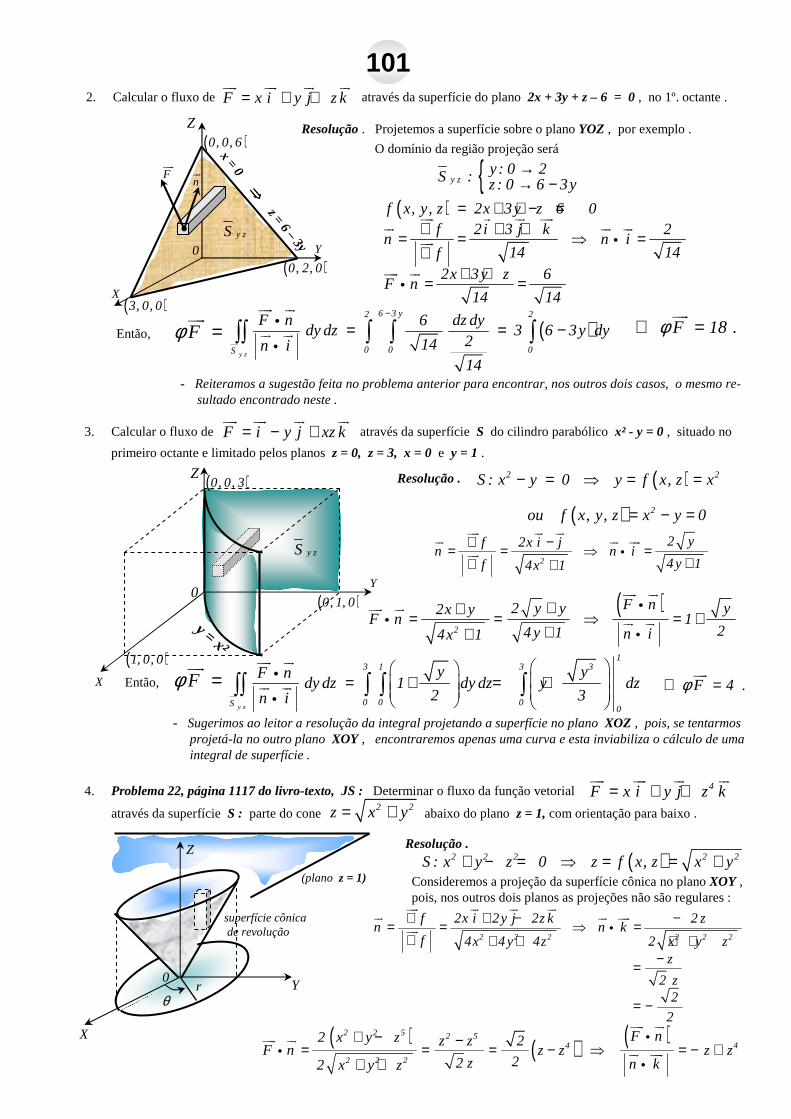
101101
( )y z
6 3 y2 2
0 0 0S
F n dz dy6dy dz 3 6 3y dy
214n i14
−
= = −∫∫ ∫ ∫ ∫� �i� �i
2. Calcular o fluxo de através da superfície do plano 2x + 3y + z – 6 = 0 , no 1º. octante. F x i y j z k= + +� � � �
Resolução. Projetemos a superfície sobre o plano YOZ , por exemplo .
O domínio da região projeção será
{y zy: 0 2S : z : 0 6 3y
→→ −
( )f x, y, z 2x 3y z 6 0f 2i 3 j k 2
n n i14 14f
2x 3y z 6F n
14 14
= + + − =∇ + += = ⇒ =∇
+ += =
� � � �� � �
i�
� �i
Então, Fφ =�
F 18 .φ∴ =�
- Reiteramos a sugestão feita no problema anterior para encontrar, nos outros dois casos, o mesmo re-sultado encontrado neste .
3. Calcular o fluxo de através da superfície S do cilindro parabólico x² - y = 0 , situado no
primeiro octante e limitado pelos planos z = 0, z = 3, x = 0 e y = 1 .
F i y j xz k= − +� � � �
X
Y
Z
y z
133 1 3
0 0 0S0
y yF ndy dz 1 dy dz y dz
2 3n i
= + = +
∫∫ ∫ ∫ ∫� �i� �i
Resolução . ( )
( )
2 2
2
S : x y 0 y f x, z x
ou f x, y, z x y 0
− = ⇒ = =
= − =
2
2 yf 2x i jn n i
4y 1f 4x 1
∇ −= = ⇒ =+∇ +
� � �� � �
i�
( )1, 0, 0
( )0, 1, 0
( )0, 0, 3
y zS
( )2
F n2 y y y2x yF n 1
24 y 1 n i4x 1
++= = ⇒ = +++
� �i� �
i � �i
Então, Fφ =�
F 4 .φ∴ =�
0
y = x²
- Sugerimos ao leitor a resolução da integral projetando a superfície no plano XOZ , pois, se tentarmos projetá-la no outro plano XOY , encontraremos apenas uma curva e esta inviabiliza o cálculo de uma integral de superfície .
4. Problema 22, página 1117 do livro-texto, JS : Determinar o fluxo da função vetorial
através da superfície S : parte do cone abaixo do plano z = 1, com orientação para baixo .
4F x i y j z k= + +� � � �
2 2z x y= +
X
Y
Z
0
superfície cônicade revolução
(plano z = 1)
θr
Resolução .
( )2 2 2 2 2S : x y z 0 z f x, z x y+ − = ⇒ = = +
2 2 2 2 2 2
f 2x i 2y j 2z k 2 zn n k
f 4x 4y 4z 2 x y zz
2 z2
2
∇ + − −= = ⇒ =∇ + + + +
−=
= −
� � � �� � �
i�
( ) ( ) ( )2 2 5 2 54 4
2 2 2
F n2 x y z z z 2F n z z z z
22 z n k2 x y z
+ − −= = = − ⇒ = − ++ +
� �i� �
i � �i
Consideremos a projeção da superfície cônica no plano XOY , pois, nos outros dois planos as projeções não são regulares :
X
Y
Z
( )3, 0, 0
( )0, 2, 0
( )0, 0, 6
0y zS
x = 0 ⇒⇒⇒⇒z = 6 –
3y
n�F
�

102102
( )x y
12 21 3 64
0 0 0S 0
F n r rdx dy r r r dr d d
3 6 3n k
π π πθ θ
− = − − + = − =
∫∫ ∫ ∫ ∫� �i
� �i
Fφ =�
Levando em conta a orientação negativa recomendada e a pertinência do sistema polar para essa situação, teremos :
( )2 2z x y r= + =
5. Uma carga elétrica positiva pontual q situa-se na origem de coordenadas e gera um campo vetorial que, segundo a
Lei de Coulomb , em cada ponto do espaço existe o vetor força
sendo o vetor dirigido ao longo da superfície e a distância de cada ponto à origem .
Mostrar que o fluxo do campo vetorial através de uma superfície esférica de raio R e centro na origem é
( ) 3
qF x, y, z k r , k constante ,
r=
� ��
r x i y j z k= + +� � � �
r�
4 k q .π
Em tempo: Se quisermos ajustar essas operações aos padrões das resoluções anteriores, basta seguir o roteiro
Demonstração .
( )2
2 2 2 2 2 2 2 2S : x y z R r f x, y, z x y z R 0+ + = = ⇒ = + + − =�
r
2 2 2 2 2 2
f 2x i 2y j 2z k x i y j z k r zn n k
f r r4x 4y 4z x y z
=
∇ + + + += = = = ⇒ =∇ + + + +
�
�������� � � � � � � �� � �
i� � �
F n =� �i
( ) 2S S
2S
rqF n dS k n dS
rr
k q rn dS
rr
=
=
∫∫ ∫∫
∫∫
�� � �i i��
��i��
Fφ =�
Cálculo do fluxo no hemisfério superior :
( ) 3
qF x, y, z k r , k constante ,
r=
� ��
r x i y j z k= + +� � � �
r�
r�
S : superefície esférica de centro na origem e raio R =
Então, o fluxo será calculado como segue :
Os vetores são unitários e de mesma direção, pois, a superfície é esférica :r
e nr
��
�
2
2S
4 R
k q1 dS
rπ=
= ∫∫������
Fφ∴ =�
4 k q .π
2
3 4 2 2 2 2
rq r k q F n k qk r k q
r n k r R x yr r r
= = ⇒ = − −
�� � �� ii � � � �� � �
i
( )
{
2S S
2 R
2 2 2 2 20 0S
2 2
2 2
2 R
0 0
k q q rF n dS k n
r rr
k q dx dy k q r dr d
r rR x y R r2r dr r : 0 RR r v dv v : R 02 R r
k qdv d
r2 R k q
2 k qr
π
π
θ
θ
π π
=
= =− − −
− →− = ⇒ = →−=
= =
∫∫ ∫∫
∫∫ ∫ ∫
∫ ∫
�� � �i i� ��
� �
�
�
Fφ =�
Haja vista a simetria existente entre as regiões hemisféricas, ofluxo no hemisfério inferior também apresentará o mesmo re-sultado e, portanto, o fluxo total do campo através da super-fície esférica será
total F 4 k q .φ π=�
: área da superfície esférica
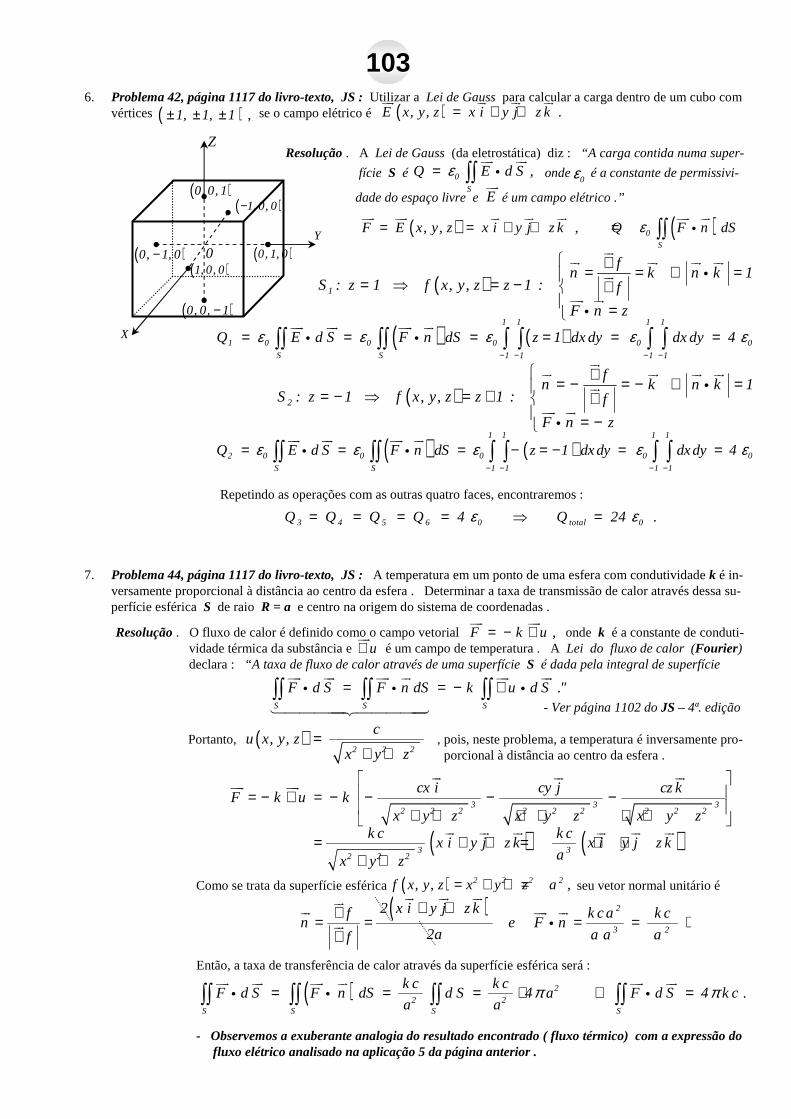
103103
X
Y
ZResolução. A Lei de Gauss (da eletrostática) diz : “A carga contida numa super-
fície S é onde é a constante de permissivi-
dade do espaço livre e é um campo elétrico .”
( )1
fn k n k 1
S : z 1 f x, y, z z 1 : f
F n z
∇= = ∴ == ⇒ = − ∇ =
�� � � �
i�
� �i
0
6. Problema 42, página 1117 do livro-texto, JS : Utilizar a Lei de Gauss para calcular a carga dentro de um cubo com vértices se o campo elétrico é( )1, 1, 1 ,± ± ±
( )1, 0, 0
( )E x, y, z x i y j z k .= + +� � � �
0
S
Q E d S ,ε= ∫∫� �i
0εE�
( ) ( )0
S
F E x, y, z x i y j z k , Q F n dSε= = + + = ∫∫� � � � � � �
i
( )1, 0, 0−
( )0, 1, 0( )0, 1, 0−
( )0, 0, 1−
( )0, 0, 1
( ) ( )1 1 1 1
1 0 0 0 0 0
S S 1 1 1 1
Q E d S F n dS z 1 dx dy dx dy 4ε ε ε ε ε− − − −
= = = = = =∫∫ ∫∫ ∫ ∫ ∫ ∫� � � �i i
( )2
fn k n k 1
S : z 1 f x, y, z z 1 : f
F n z
∇= − = − ∴ == − ⇒ = + ∇ = −
�� � � �
i�
� �i
( ) ( )1 1 1 1
2 0 0 0 0 0
S S 1 1 1 1
Q E d S F n dS z 1 dxdy dxdy 4ε ε ε ε ε− − − −
= = = − = − = =∫∫ ∫∫ ∫ ∫ ∫ ∫� � � �i i
Repetindo as operações com as outras quatro faces, encontraremos :
3 4 5 6 0 total 0Q Q Q Q 4 Q 24 .ε ε= = = = ⇒ =
7. Problema 44, página 1117 do livro-texto, JS : A temperatura em um ponto de uma esfera com condutividade k é in-versamente proporcional à distância ao centro da esfera . Determinar a taxa de transmissão de calor através dessa su-perfície esférica S de raio R = a e centro na origem do sistema de coordenadas .
Resolução . O fluxo de calor é definido como o campo vetorial onde k é a constante de conduti-vidade térmica da substância e é um campo de temperatura . A Lei do fluxo de calor (Fourier) declara : “A taxa de fluxo de calor através de uma superfície S é dada pela integral de superfície
F k u ,= − ∇� �
u∇�
S S S
F d S F n dS k u d S ."= = − ∇∫∫ ∫∫ ∫∫� � � � � �i i i
�������������
Portanto, ( )2 2 2
cu x, y, z
x y z=
+ +, pois, neste problema, a temperatura é inversamente pro-porcional à distância ao centro da esfera .
( ) ( )3 3 3
2 2 2 2 2 2 2 2 2
3 32 2 2
cx i cy j cz kF k u k
x y z x y z x y zk c k c
x i y j z k x i y j z kax y z
= − ∇ = − − − − + + + + + +
= + + = + ++ +
� � �� �
� � � � � �
Como se trata da superfície esférica seu vetor normal unitário é( ) 2 2 2 2f x, y, z x y z a ,= + + =
( ) 2
3 2
2 x i y j z kf k ca k cn e F n
2a a a af
+ +∇= = = = ⋅∇
� � ��� � �
i�
Então, a taxa de transferência de calor através da superfície esférica será :
( ) 22 2
S S S S
k c k cF d S F n dS d S 4 a F d S 4 k c .
a aπ π= = = ⋅ ∴ =∫∫ ∫∫ ∫∫ ∫∫
� � � � � �i i i
- Observemos a exuberante analogia do resultado encontrado ( fluxo térmico) com a expressão do fluxo elétrico analisado na aplicação 5 da página anterior .
- Ver página 1102 do JS – 4ª. edição

1041045.3. Teoremade Gauss.
n�
F�
S R S R
F n dS F dV ou F d S div F dV= ∇ =∫∫ ∫∫∫ ∫∫ ∫∫∫� � � � � � �i i i� �
F�
F�
Demonstração . A demonstração mais encontrada nos textos de Cálculo compatibiliza-se in-teiramente com a apresentada pelo nosso autor, J S , página 1111, 4ª. edição :
( ) ( ) ( )
( )R R R R
S S S
S
Seja F f x, y, z i g x, y, z j h x, y, z k .f g h
Então, div Fx y z
f g hdiv F d V dV dV dV
x y z
F d S F n dS f i g j h k n dS
f i n dS g j n dS
= + +∂ ∂ ∂= + +∂ ∂ ∂
⇓∂ ∂ ∂= + +∂ ∂ ∂
⇓= = + +
= +
∫∫∫ ∫∫∫ ∫∫∫ ∫∫∫
∫∫ ∫∫ ∫∫
∫∫
� � � �
�
�i
� � � � � � � �i i i
� � � �i i
S S
h k n dS+∫∫ ∫∫� �i
Para arrematar a demonstração, basta mostrar a veracidade das três relações
S R
S R
S R
ff i n dS dV
x
gg j n dS dV
y
hh k n dS dV
z
∂=∂
∂=∂
∂=∂
∫∫ ∫∫∫
∫∫ ∫∫∫
∫∫ ∫∫∫
� �i
� �i
� �i
- Observe que a sequência dos lances de demonstração guarda uma esmerada analogia com a do Teorema de Green . Portanto, seguindo o roteiro do livro-texto, chegaremos ao desfecho final .
Exemplos ilustrativos:
1. Aplicar o teorema da divergência para calcular , sendo
e S é a superfície da região delimitada
pelos planos
S
F n dS∫∫� �i
( )2F y sen x i y z j x 3z k= + + +� � � �
x 1 , y 1 e z 1 .= ± = ± = ±Resolução :
( )2
i j kF y cos x 2yz 3x y z
F y sen x i y z j x 3z k
∂ ∂ ∂∇ = + +⇒ ∇ = + +∂ ∂ ∂
= + + +
� � � �� �i� � � �
e S é uma superfície cúbica de aresta 2 , centro na origem .X
Z
0( )1, 0, 0
( )1, 0, 0−
( )0, 1, 0( )0, 1, 0−
( )0, 0, 1−
( )0, 0, 1
Y
Também denominado Teorema da divergência ou, como preferem alguns autores europeus, Teorema de Ostrogradsky(1801-1862, matemático russo que o publicou em 1826) , tal teorema estabelece o fluxo de um campo veto-rial sobre uma superfície fechada S que atua como fronteira de uma região tridimensional R .
Essa tal superfície fechada S pode ser uma superfície esférica, um elipsoide, um tetraedro, um cubo ou qualquer superfície fechada mais complicada . O teorema é demonstrável para quaisquer situações que sejam compatíveis com as restrições impostas para sua aplicabilidade : admitir integrais triplas em R , admitir integrais de superfície em S , orientação convencional positiva para S . Todavia, o aprofundamento teórico exigido para tanto nos leva a omitir sua de-monstração para o caso genérico, porém nos acende o interesse em apresentá-la apenas para aquelas regiões cuja natureza recaia nos moldes geométricos de maior utilidade em nosso curso e que já tenham sido objeto de nossos estudos .
Seja R uma região em três dimensões, delimitada por uma superfície S , e denotemos por o vetor normal unitário exterior a S , em (x, y, z) . Se é uma função vetorial dotada de de-rivadas parciais contínuas em R , então
isto é, o fluxo de sobre S é igual à integral tripla da divergência de sobre R .

105105Então, ( )
( )
( ) ( )
1 1 1
R 1 1 11 1
12
11 11 1 1
12
11 1 1
1
1 R
F dV y cos x 2yz 3 dz dy dx
yz cos x yz 3z dy dx
2y cos x 6 dy dx y cos x 6 y dx
12 dx F dV 24
− − −
−− −
−− − −
−
∇ = + +
= + +
= + = +
= ∴ ∇ =
∫∫∫ ∫ ∫ ∫
∫ ∫
∫ ∫ ∫
∫ ∫∫∫
� �i
� �i
Significado físico : Taxa de variação do fluxo que sai (sen-tido para fora: + 24 u³/t ), com a velocidade : fonte .F
�
> vf:= [ y*sin(x), y^2*z, x+3*z ] ; #Campo vetori al :
> F:= fieldplot3d ( vf, x=-2..2, y=-2..2, z=-2..2 ) : #Plotagem do campo vetorial F :
> G:= plot3d ({-1,1}, x=-1..1, y=-1..1) : #Plotag em da superfície S :
> display3d ({F,G}) ; #Plotagens simultâneas :
> Int (Int (Int (diverge(vF(x,y,z), [x,y,z]), z=-1. .1), y=-1..1), x=-1..1) ;
:= vf [ ], ,y ( )sin x y2
z + x 3 z> vF:= (x,y,z) -> [ y*sin(x), y^2*z, x+3*z ] ; #F luxo de F
(função vetorial) sobre a superfície S : := vF → ( ), ,x y z [ ], ,y ( )sin x y
2z + x 3 z
d⌠⌡-1
1
d⌠⌡-1
1
d⌠⌡-1
1
+ + 3 y ( )cos x 2 y z z y x> value(%) ; 24
> restart : with (linalg) : with (plots) :Maple 10 :
2. Determinar o fluxo de através da superfície do plano 2x + 3y + z – 6 = 0 , no 1º. octante .
Mostremos a resolução do problema 2, página 101, por meio do teorema de Gauss .
F x i y j z k= + +� � � �
Resolução :
( ) ( ) ( )x y zF 3 : divergência
x y z
∂ ∂ ∂∇ = + + =
∂ ∂ ∂
� �i
( )
( )
S R2
3 2 x 6 2 x 3 y3
0 0 02
3 2 x3
0 0
3 2
0
F F n dS F dV
3 .dz .dy .dx
3 6 2x 3y .dy .dx
23 x 4x 6 .dx
33 6 18 18 F 18 .
− − −
−
∅ = = ∇
=
= − − = − +
= − + ∴ ∅ =
∫∫ ∫∫∫
∫ ∫ ∫
∫ ∫∫
� � � � �i i
�
�
F x i y j z kx y z
S : 2x 3y z 6 0 ou 1 : plano inclinado3 2 6
= + + + + − = + + =
� � � �
Maple 10 :> restart : with (linalg) : with (plots) :
> vf:= [ x,y,z ] ; := vf [ ], ,x y z
> vF:= ( x,y,z ) -> [ x,y,z ] ; := vF → ( ), ,x y z [ ], ,x y z
> F:= fieldplot3d ( vf, x=0..3, y=0..2, z=0..6 ) :
> G:= plot3d ( 6-2*x-3*y, x=0..3, y=0..2-2/3*x ) :
> display 3d ( { F,G } ) ;
> int (int (int (diverge ( vF(x,y,z), [x,y,z] ), z = 0..6-2*x-3*y ), y = 0..2-2/3*x ), x = 0..3 ) ; 18
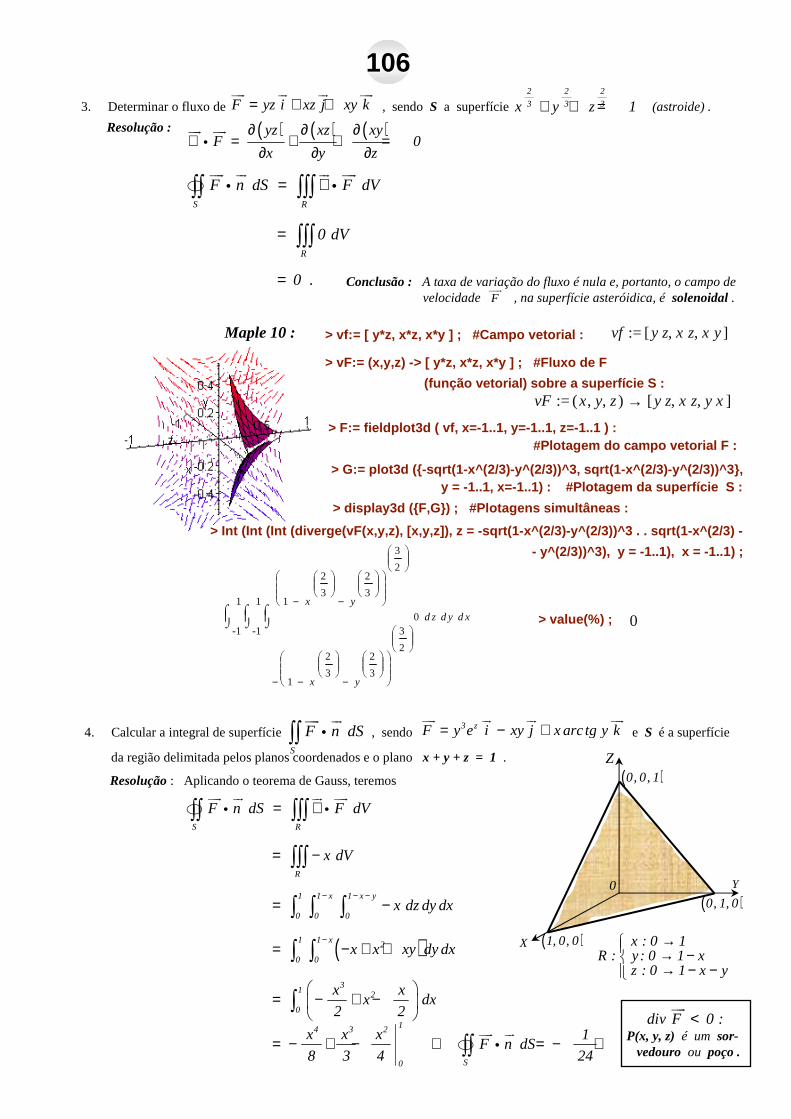
1061063. Determinar o fluxo de , sendo S a superfície (astroide) .F yz i xz j xy k= + +
� � � � 2 2 2
3 3 3x y z 1+ + =Resolução : ( ) ( ) ( )yz xz xy
F 0x y z
∂ ∂ ∂∇ = + + =
∂ ∂ ∂
� �i
S R
R
F n dS F dV
0 dV
0 .
= ∇
=
=
∫∫ ∫∫∫
∫∫∫
� � � �i i�
Conclusão : A taxa de variação do fluxo é nula e, portanto, o campo de velocidade , na superfície asteróidica, ésolenoidal. F
�
> vf:= [ y*z, x*z, x*y ] ; #Campo vetorial :
> F:= fieldplot3d ( vf, x=-1..1, y=-1..1, z=-1..1 ) : #Plotagem do campo vetorial F :
> G:= plot3d ({-sqrt(1-x^(2/3)-y^(2/3))^3, sqrt(1-x ^(2/3)-y^(2/3))^3}, y = -1..1, x=-1..1) : #Plotagem da superfície S :
> display3d ({F,G}) ; #Plotagens simultâneas :
> Int (Int (Int (diverge(vF(x,y,z), [x,y,z]), z = - sqrt(1-x^(2/3)-y^(2/3))^3 . . sqrt(1-x^(2/3) -
- y^(2/3))^3), y = -1..1), x = -1..1) ;
> vF:= (x,y,z) -> [ y*z, x*z, x*y ] ; #Fluxo de F
(função vetorial) sobre a superfície S :
> value(%) ;
:= vf [ ], ,y z x z x y
:= vF → ( ), ,x y z [ ], ,y z x z y x
d⌠⌡
-1
1
d⌠⌡
-1
1
d⌠⌡
−
− − 1 x
2
3y
2
3
3
2
− − 1 x
2
3y
2
3
3
2
0 z y x 0
Maple 10 :
4. Calcular a integral de superfície , sendo e S é a superfície
da região delimitada pelos planos coordenados e o plano x + y + z = 1 . S
F n dS∫∫� �i
3 zF y e i xy j x arc tg y k= − +� � � �
Resolução: Aplicando o teorema de Gauss, teremos
( )
S R
R
1 1 x 1 x y
0 0 0
1 1 x 2
0 0
31 2
0
14 3 2
S0
F n dS F dV
x dV
x dz dy dx
x x xy dy dx
x xx dx
2 2
x x x 1F n dS
8 3 4 24
− − −
−
= ∇
= −
= −
= − + +
= − + −
= − + − ∴ = − ⋅
∫∫ ∫∫∫
∫∫∫
∫ ∫ ∫
∫ ∫
∫
∫∫
� � � �i i
� �i
�
�
X
Y
Z
( )1, 0, 0
( )0, 1, 0
( )0, 0, 1
0
x : 0 1R : y : 0 1 x
z : 0 1 x y
→ → −→ − −
div F 0 :<�
P(x, y, z) é um sor-vedouro ou poço .
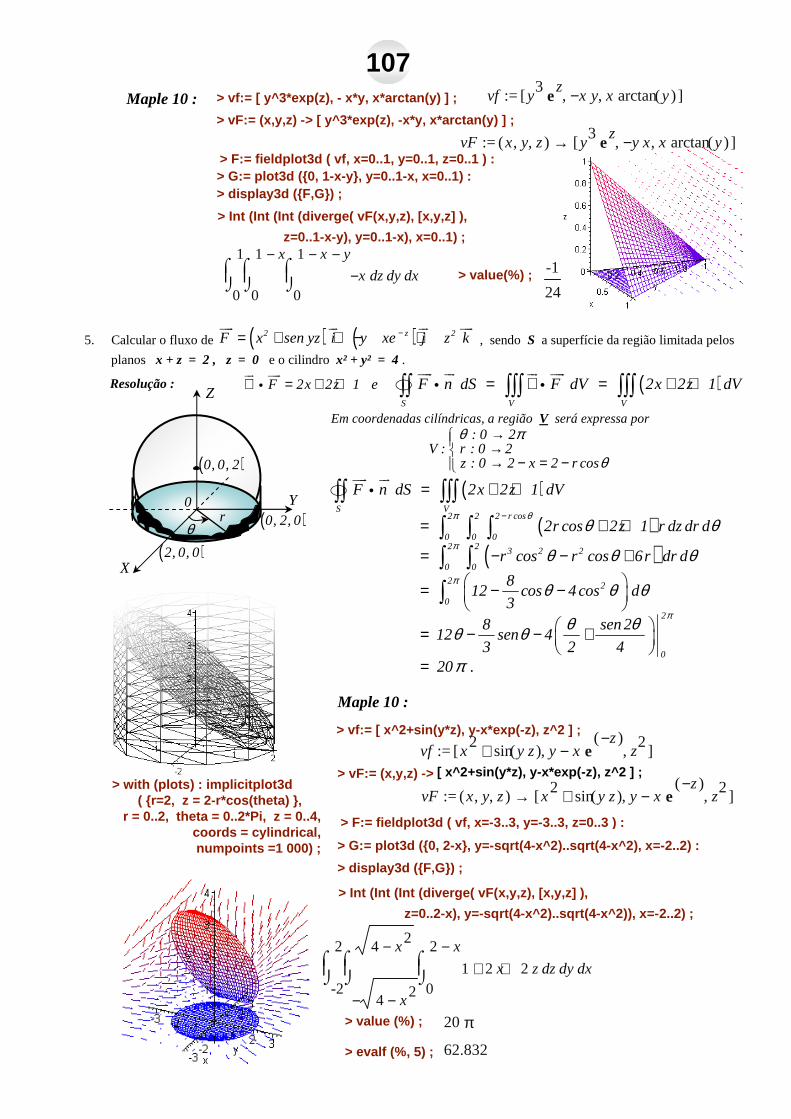
107107> vf:= [ y^3*exp(z), - x*y, x*arctan(y) ] ;
> F:= fieldplot3d ( vf, x=0..1, y=0..1, z=0..1 ) : > G:= plot3d ({0, 1-x-y}, y=0..1-x, x=0..1) :> display3d ({F,G}) ;
> vF:= (x,y,z) -> [ y^3*exp(z), -x*y, x*arctan(y) ] ;
:= vF → ( ), ,x y z [ ], ,y3
ez −y x x ( )arctany
:= vf [ ], ,y3
ez −x y x ( )arctany
> Int (Int (Int (diverge( vF(x,y,z), [x,y,z] ),
z=0..1-x-y), y=0..1-x), x=0..1) ;
d⌠⌡0
1
d⌠⌡0
− 1 x
d⌠⌡0
− − 1 x y
−x z y x -1
24> value(%) ;
Maple 10 :
5. Calcular o fluxo de , sendo S a superfície da região limitada pelos
planos x + z = 2 , z = 0 e o cilindro x² + y² = 4 .
( ) ( )2 z 2F x sen yz i y xe j z k−= + + − +� � � �
X
Resolução :
Y
Z
0
θr
F 2x 2z 1 e∇ = + +� �i ( )
S V V
F n dS F dV 2x 2z 1 dV= ∇ = + +∫∫ ∫∫∫ ∫∫∫� � � �i i�
( )2, 0, 0
( )0, 2, 0
( )0, 0, 2
Em coordenadas cilíndricas, a região V será expressa por: 0 2
V : r : 0 2z : 0 2 x 2 r cos
θ π
θ
→ →→ − = −
( )
( )( )
S V2 2 2 r cos
0 0 02 2 3 2 2
0 0
2 2
0
2
0
F n dS 2x 2z 1 dV
2r cos 2z 1 r dz dr d
r cos r cos 6r dr d
812 cos 4 cos d
38 sen 2
12 sen 43 2 4
20 .
π θ
π
π
π
θ θ
θ θ θ
θ θ θ
θ θθ θ
π
−
= + +
= + +
= − − + = − −
= − − +
=
∫∫ ∫∫∫
∫ ∫ ∫∫ ∫
∫
� �i�
> vf:= [ x^2+sin(y*z), y-x*exp(-z), z^2 ] ;
> F:= fieldplot3d ( vf, x=-3..3, y=- 3..3, z=0..3 ) :
> G:= plot3d ({0, 2-x}, y=-sqrt(4-x^2)..sqrt(4-x^2) , x=-2..2) :
> display3d ({F,G}) ;
> vF:= (x,y,z) ->
> Int (Int (Int (diverge( vF(x,y,z), [x,y,z] ),
z=0..2-x), y=-sqrt(4-x^2)..sqrt(4-x^2)), x=-2..2) ;
> value (%) ;
[ x^2+sin(y*z), y-x*exp(-z), z^2 ] ;
> evalf (%, 5) ;
:= vf [ ], , + x2
( )sin y z − y x e( )−z
z2
:= vF → ( ), ,x y z [ ], , + x2
( )sin y z − y x e( )−z
z2
20 π
62.832
Maple 10 :
d⌠⌡-2
2
d⌠⌡
− − 4 x2
− 4 x2
d⌠⌡0
− 2 x
+ + 1 2x 2 z z y x
> with (plots) : implicitplot3d ( {r=2, z = 2-r*cos(theta) },
r = 0..2, theta = 0..2*Pi, z = 0..4,coords = cylindrical,numpoints =1 000) ;
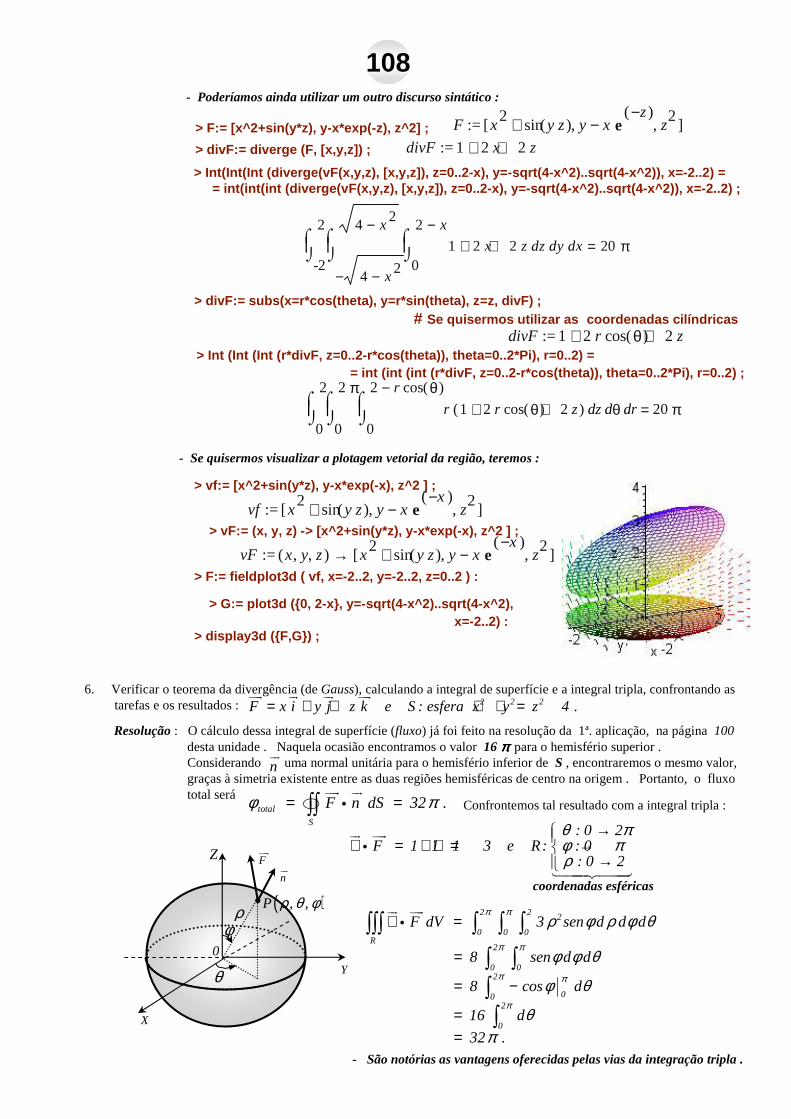
108108
> divF:= diverge (F, [x,y,z]) ;
> F:= [x^2+sin(y*z), y-x*exp(-z), z^2] ;
:= divF + + 1 2x 2 z
- Se quisermos visualizar a plotagem vetorial da região, teremos :
> vf:= [x^2+sin(y*z), y-x*exp(-x), z^2 ] ;
> F:= fieldplot3d ( vf, x=-2..2, y=-2..2, z=0..2 ) :
> G:= plot3d ({0, 2-x}, y=-sqrt(4-x^2)..sqrt(4-x^2) , x=-2..2) :
> display3d ({F,G}) ;
> vF:= (x, y, z) -> [x^2+sin(y*z), y-x*exp(-x), z^2 ] ;
:= vf [ ], , + x2
( )sin y z − y x e( )−x
z2
:= vF → ( ), ,x y z [ ], , + x2
( )sin y z − y x e( )−x
z2
6. Verificar o teorema da divergência (deGauss), calculando a integral de superfície e a integral tripla, confrontando as tarefas e os resultados : 2 2 2F x i y j z k e S : esfera x y z 4 .= + + + + =
� � � �
Resolução: O cálculo dessa integral de superfície (fluxo) já foi feito na resolução da 1ª. aplicação, na página 100 desta unidade . Naquela ocasião encontramos o valor 16 ππππ para o hemisfério superior .Considerando uma normal unitária para o hemisfério inferior de S , encontraremos o mesmo valor, graças à simetria existente entre as duas regiões hemisféricas de centro na origem . Portanto, o fluxo total será
Confrontemos tal resultado com a integral tripla :
n�
total
S
F n dS 32 .φ π= =∫∫� �i�
: 0 2F 1 1 1 3 e R: : 0
: 0 2
θ πφ πρ
→∇ = + + = →→
� �i
�������coordenadas esféricas
2 2 2
0 0 0R
2
0 02
002
0
F dV 3 sen d d d
8 sen d d
8 cos d
16 d
32 .
π π
π π
π π
π
ρ φ ρ φ θ
φ φ θ
φ θ
θπ
∇ =
=
= −
==
∫∫∫ ∫ ∫ ∫
∫ ∫∫∫
� �i
- São notórias as vantagens oferecidas pelas vias da integração tripla .
:= F [ ], , + x2
( )sin y z − y x e( )−z
z2
> Int(Int(Int (diverge(vF(x,y,z), [x,y,z]), z=0..2- x), y=-sqrt(4-x^2)..sqrt(4-x^2)), x=-2..2) = = int(int(int (diverge(vF(x,y,z), [x,y,z]), z=0..2- x), y=-sqrt(4-x^2)..sqrt(4-x^2)), x=-2..2) ;
= d⌠⌡-2
2
d⌠⌡
− − 4 x2
− 4 x2
d⌠⌡0
− 2 x
+ + 1 2 x 2 z z y x 20 π
> divF:= subs(x=r*cos(theta), y=r*sin(theta), z=z, divF ) ; # Se quisermos utilizar as coordenadas cilíndricas
:= divF + + 1 2 r ( )cos θ 2 z> Int (Int (Int (r*divF, z=0..2-r*cos(theta)), thet a=0..2*Pi), r=0..2) =
= int (int (int (r*divF, z=0..2-r*cos(theta)), thet a=0..2*Pi), r=0..2) ;
= d⌠⌡0
2
d⌠⌡0
2 πd
⌠⌡0
− 2 r ( )cos θr ( ) + + 1 2 r ( )cos θ 2 z z θ r 20π
X
Y
Z
n�
F�
θ
ρφ
( )P , ,ρ θ φ
0
- Poderíamos ainda utilizar um outro discurso sintático :
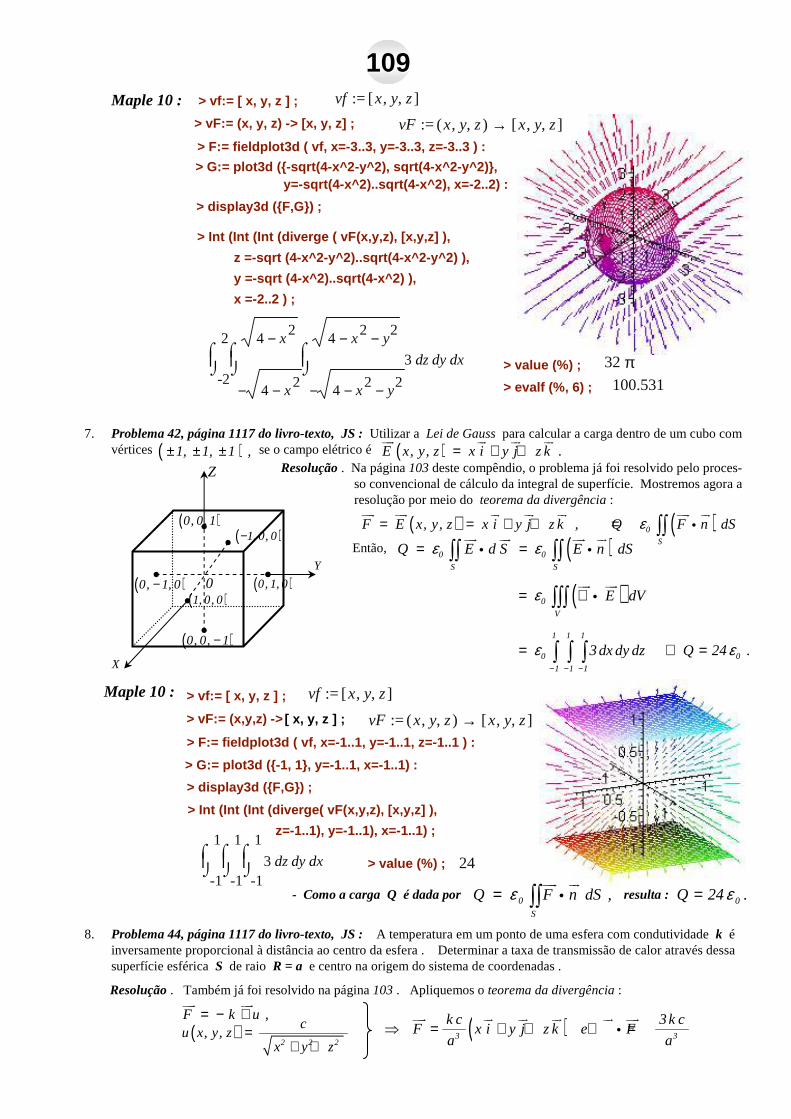
109109> vf:= [ x, y, z ] ;
> F:= fieldplot3d ( vf, x=-3..3, y=-3..3, z=-3..3 ) :
> G:= plot3d ({-sqrt(4-x^2-y^2), sqrt(4-x^2-y^2)}, y=-sqrt(4-x^2)..sqrt(4-x^2), x=-2..2) :
> display3d ({F,G}) ;
> vF:= (x, y, z) -> [x, y, z] ;
:= vf [ ], ,x y z
:= vF → ( ), ,x y z [ ], ,x y z
> Int (Int (Int (diverge ( vF(x,y,z), [x,y,z] ),
z =-sqrt (4-x^2-y^2)..sqrt(4-x^2-y^2) ),
y =-sqrt (4-x^2)..sqrt(4-x^2) ),
x =-2..2 ) ;
d⌠⌡-2
2
d⌠⌡
− − 4 x2
− 4 x2
d⌠⌡
− − − 4 x2
y2
− − 4 x2
y2
3 z y x > value (%) ;
> evalf (%, 6) ;
32 π100.531
Maple 10 :
X
Y
Z Resolução. Na página 103deste compêndio, o problema já foi resolvido pelo proces-so convencional de cálculo da integral de superfície. Mostremos agora a resolução por meio do teorema da divergência:
0
7. Problema 42, página 1117 do livro-texto, JS : Utilizar a Lei de Gauss para calcular a carga dentro de um cubo com vértices se o campo elétrico é( )1, 1, 1 ,± ± ±
( )1, 0, 0
( )E x, y, z x i y j z k .= + +� � � �
( )
( )
0 0
S S
0
V
1 1 1
0 0
1 1 1
Q E d S E n dS
E dV
3dx dy dz Q 24 .
ε ε
ε
ε ε− − −
= =
= ∇
= ∴ =
∫∫ ∫∫
∫∫∫
∫ ∫ ∫
� � � �i i
� �i
( )1, 0, 0−
( )0, 1, 0( )0, 1, 0−
( )0, 0, 1−
( )0, 0, 1 ( ) ( )0
S
F E x, y, z x i y j z k , Q F n dSε= = + + = ∫∫� � � � � � �
i
Então,
> vf:= [ x, y, z ] ;
> F:= fieldplot3d ( vf, x=-1..1, y=-1..1, z=-1..1 ) :
> G:= plot3d ({-1, 1}, y=-1..1, x=-1..1) :
> display3d ({F,G}) ;
> vF:= (x,y,z) ->
> Int (Int (Int (diverge( vF(x,y,z), [x,y,z] ),
z=-1..1), y=-1..1), x=-1..1) ;
[ x, y, z ] ;
:= vf [ ], ,x y z
:= vF → ( ), ,x y z [ ], ,x y z
> value (%) ;d⌠⌡-1
1
d⌠⌡-1
1
d⌠⌡-1
1
3 z y x 24
- Como a carga Q é dada por resulta : 0Q 24 .ε=0
S
Q F n dS ,ε= ∫∫� �i
Maple 10 :
8. Problema 44, página 1117 do livro-texto, JS : A temperatura em um ponto de uma esfera com condutividade k éinversamente proporcional à distância ao centro da esfera . Determinar a taxa de transmissão de calor através dessa superfície esférica S de raio R = a e centro na origem do sistema de coordenadas .
Resolução. Também já foi resolvido na página 103 . Apliquemos o teorema da divergência:
F k u ,= − ∇� �
( )3 3
k c 3k cF x i y j z k e F
a a⇒ = + + ∇ =� � � � � �
i( )2 2 2
cu x, y, z
x y z=
+ +
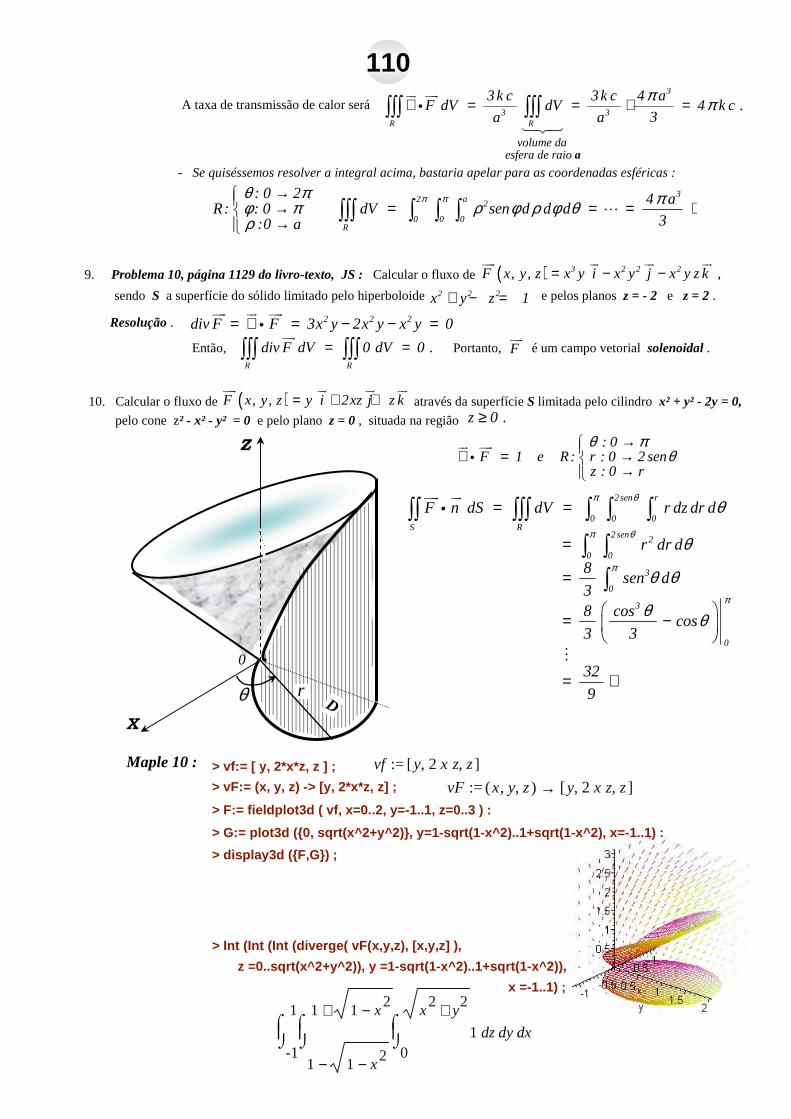
110110A taxa de transmissão de calor será
3
3 3R R
3k c 3k c 4 aF dV dV 4 k c .
3a a
π π∇ = = ⋅ =∫∫∫ ∫∫∫� �i
���volume da
esfera de raio a
- Se quiséssemos resolver a integral acima, bastaria apelar para as coordenadas esféricas :
32 a 2
0 0 0R
: 0 2 4 aR: : 0 dV sen d d d
3:0 a
π πθ π πφ π ρ φ ρ φ θρ
→ → = = = ⋅→
∫∫∫ ∫ ∫ ∫ ⋯
2 2 2div F F 3x y 2x y x y 0= ∇ = − − =� � �
i
9. Problema 10, página 1129 do livro-texto, JS : Calcular o fluxo de
sendo S a superfície do sólido limitado pelo hiperboloide e pelos planos z = - 2 e z = 2 .
Resolução.
F�
( ) 3 2 2 2F x, y, z x y i x y j x y z k ,= − −� � � �
R R
div F dV 0 dV 0 .= =∫∫∫ ∫∫∫�
2 2 2x y z 1+ − =
Então, Portanto, é um campo vetorial solenoidal.
2sen r
0 0 0S R
2sen 2
0 0
3
0
3
0
F n dS dV r dz dr d
r dr d
8sen d
38 cos
cos3 3
32
9
π θ
π θ
π
π
θ
θ
θ θ
θ θ
= =
=
=
= −
= ⋅
∫∫ ∫∫∫ ∫ ∫ ∫
∫ ∫∫
� �i
⋮
: 0F 1 e R: r : 0 2 sen
z : 0 r
θ πθ
→∇ = →→
� �i
10. Calcular o fluxo de através da superfície S limitada pelo cilindro x² + y² - 2y = 0,
pelo cone z² - x² - y² = 0 e pelo plano z = 0 , situada na região
( )F x, y, z y i 2xz j z k= + +� � � �
z 0 .≥
> vf:= [ y, 2*x*z, z ] ;
> F:= fieldplot3d ( vf, x=0..2, y=-1..1, z=0..3 ) :
> G:= plot3d ({0, sqrt(x^2+y^2)}, y=1-sqrt(1-x^2).. 1+sqrt(1-x^2), x=-1..1) :
> display3d ({F,G}) ;
> vF:= (x, y, z) -> [y, 2*x*z, z] ;
:= vf [ ], ,y 2 x z z
:= vF → ( ), ,x y z [ ], ,y 2 x z z
Maple 10 :
> Int (Int (Int (diverge( vF(x,y,z), [x,y,z] ),
z =0..sqrt(x^2+y^2)), y =1-sqrt(1-x^2)..1+sqrt(1-x^ 2)),
x =-1..1) ;
d⌠⌡-1
1
d⌠⌡
− 1 − 1 x2
+ 1 − 1 x2
d⌠⌡0
+ x2
y2
1 z y x
0
rθ D
Z
X

111111
d⌠⌡-1
1
d⌠⌡
− 1 − 1 x2
+ 1 − 1 x2
d⌠⌡0
+ x2
y2
1 z y x
⌠
⌡
-1
1
− 2 2 − 1 x2
2
− 2 2 − 1 x2 − 1 x
2
2− + =
1
2x
2( )ln − + 1 − 1 x
2 − 2 2 − 1 x2 + 2 2 − 1 x
2
2
+ 2 2 − 1 x2 − 1 x
2
2 − + +
1
2x
2 ( )ln + + 1 − 1 x2 + 2 2 − 1 x
2 + xd
> value (%) ;
- Para desfazer esse imbróglio, utilizaremos as coordenadas cilíndricas na região D :
> value (%) ;
cil
: 0D r : 0 2 cos
z : 0 r
θ πθ
→ →→
2 2cart
2 2
x : 1 1
D y : 1 1 x 1 1 x
z : 0 x y
− → − − → + − → +
d⌠⌡-1
1
d⌠⌡
− 1 − 1 x2
+ 1 − 1 x2
d⌠⌡0
+ x2
y2
1 z y x
> Int ( Int ( Int (1*r, z=0..r), r=0..2*sin (theta) ), theta=0..Pi ) ;
e escrevemos a integral no novo sistema :
d⌠⌡0
πd
⌠⌡0
2 ( )sin θd
⌠⌡0
r
r z r θ32
93.56> evalf (%, 3) ;
( pois , são ortogonais )
11. Problema 23, página 1130 do livro-texto, JS : Se é um vetor constante, provar que a�
S
a n dS 0 .=∫∫� �i
Demonstração .
S
Hip . a c i c j c k
Tese . a n dS 0
= + +
=∫∫
� � � �
� �i S R
R
0
a n dS a dV
c c cdV 0 .
x y z=
= ∇
∂ ∂ ∂= + + = ∂ ∂ ∂
∫∫ ∫∫∫
∫∫∫
� � � �i i
�������
12. Problema 24, página 1130 do livro-texto, JS :
Se provar que ( )F x, y, z x i y j z k ,= + +� � � �
�������������( )
S
1V R F n dS .
3= ∫∫
� �i
�����������HipóteseTese
Demonstração. O volume V(R) é dado por
De acordo com o teorema da divergência , podemos escrever :
( )R
V R dV .= ∫∫∫
( )S R
R R
1 1F n dS F dV
3 31
3 dV dV V R .3
= ∇
= = =
∫∫ ∫∫∫
∫∫∫ ∫∫∫
� � � �i i e, como resulta :x y z
F 3 ,x y z
∂ ∂ ∂∇ = + + =∂ ∂ ∂
� �i
13. Problema 25, página 1130 do livro-texto, JS : Supondo que R e S satisfaçam as condições do teorema da diver-gência e que as funções escalares e componentes do campo vetorial tenham derivadas parciais de segunda ordem contínuas, provar que
Demonstração.
e F∇ ∇×� � �
S
rot F d S 0 .=∫∫� �i
( ) ( )
( )S S R
R
R
rot F d S rot F n dS rot F dV
F dV
0 dV 0
= = ∇
= ∇ ∇ ×
= =
∫∫ ∫∫ ∫∫∫
∫∫∫
∫∫∫
� � � � � �i i i
� � �i

11211214. Problema 29, página 1130 do livro-texto, JS : Supondo que R e S satisfaçam as condições do teorema da diver-
gência e que f seja uma função escalar com derivadas parciais contínuas, provar que
S R
f n dS f dV .= ∇∫∫ ∫∫∫� �
Essa superfície e a integral tripla da função vetorial são vetores definidos integrando cada função componente .
Sugestão : Comece aplicando o teorema da divergência a onde é um vetor constante arbitrário . F f c ,=� �
c�
Demonstração. Atendendo à recomendação de aplicar o teorema de Gauss a sendo f c ,� ( )c c i j k := + +
� � � �
( ) ( )S R
f c n dS f c dV .= ∇∫∫ ∫∫∫� � � �i i
Mas, de acordo com as propriedades do produto escalar de dois vetores, podemos escrever
( ) ( ) ( ) ( ) ( ) ( )
0c f
f c f c f cf c n c f n e f c
x y zf f f c c c
c c c f f fx y z x y z
c f== ∇
∂ ∂ ∂= ∇ = + +
∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂= + + + + + ∂ ∂ ∂ ∂ ∂ ∂
= ∇� �i
� � �� � � � � �i i i
��������� ������������ �i
Então, e, como é um vetor constante, resulta ( ) ( )S R
c f n dS c f dV= ∇∫∫ ∫∫∫� � � �i i c
�
S R S R
c f n dS c f dV ou f n dS f dV .= ∇ = ∇∫∫ ∫∫∫ ∫∫ ∫∫∫� � � �
15. Problema 30, página 1130 do JS : Um sólido ocupa a região R com superfície S e está imerso num líquido com den-sidade constante . Consideremos um sistema de coordenadas onde o plano XOY coincida com a superfície do líqui-do e valores positivos de z sejam medidos para baixo, entrando para dentro do líquido . Então a pressão na profundi-dadez é p = ρρρρ g z , onde g é a aceleração da gravidade. A força de empuxo total sobre o sólido, devida à distribuição de pressão, é dada pela integral de superfície onde é o vetor normal apontando para fora .
Utilizar o resultado do problema anterior para mostrar que sendo W o peso do líquido deslocado pelo
sólido ( é direcionado para baixo porque z está direcionado para baixo ) .
ρ
S
F n dSρ= − ∫∫� �
n�
F W k ,= −� �
F�
Demonstração. De acordo com a tese da proposição anterior, podemos escrever :
( )S R R
R RRR R
W : força peso
F p n dS p dV g z dV
mg k dV g dV k gV k gV k W k .
V
ρ
ρ ρ ρ
=
= − = − ∇ = − ∇ =
= − = − = − = − = −
∫∫ ∫∫∫ ∫∫∫
∫∫∫ ∫∫∫
� � � �
� � � � �
�����
Princípio de Arquimedes : A força de empuxo sobre o corpo é igual ao peso do líquido deslocado .
16. Uma carga elétrica positiva pontual q situa-se na origem de coordenadas e gera um campo vetorial que, segundo a
Lei de Coulomb , em cada ponto do espaço existe o vetor força sendo
o vetor dirigido ao longo da superfície e a distância de cada ponto à origem .
Mostrar que o fluxo do campo vetorial através de uma superfície esférica de raio R e centro na origem é
( ) 3
qF x, y , z k r , k constante ,
r=
� ��
r x i y j z k= + +� � � �
r�
4 k q .πResolução . Mostremos ainda a resolução do problema 5, página 102, por meio do teorema de Gauss :
Ora, sendo a divergência e a superfície esférica, apliquemos o sistema de coordenadas esféricas :
3
3k qF
r∇ =� �i �
( )
32 R 22
3 30 0 0 0 0
2
0 0
3kq R 3kqF sen .d .d .d sen .d
3r r
kq cos d
2kq .2F 4 kq .
π π π π
ππ
ρ ϕ ρ ϕ θ ϕ θ
ϕ θπ
π
∅ = ⋅ = ⋅ ⋅
= − ⋅=
∴ ∅ =
∫ ∫ ∫ ∫ ∫
∫
�� �
�
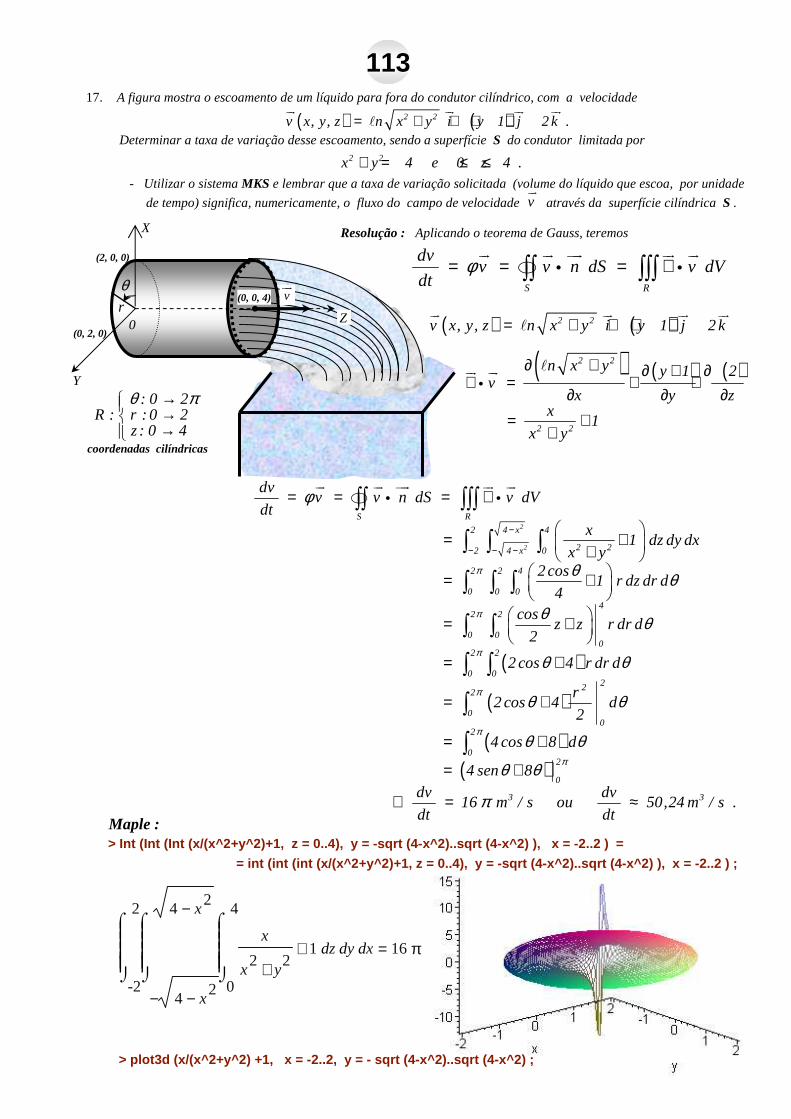
113113
Y
0
: 0 2R : r : 0 2
z : 0 4
θ π→ →→
X
coordenadas cilíndricas
θr
(0, 2, 0)
(2, 0, 0)
(0, 0, 4) v�
Z
Resolução : Aplicando o teorema de Gauss, teremos
( ) ( )2 2v x, y, z n x y i y 1 j 2 k .= + + + +� � � �
ℓ
2 2x y 4 e 0 z 4 .+ = ≤ ≤
S R
dvv v n dS v dV
dtφ= = = ∇∫∫ ∫∫∫� � � � �
i i�
( ) ( )
( ) ( ) ( )
2 2
2 2
2 2
v x, y, z n x y i y 1 j 2 k
n x y y 1 2v
x y zx
1x y
= + + + +
∂ + ∂ + ∂∇ = + +
∂ ∂ ∂= +
+
� � � �ℓ
ℓ� �i
v�
17. A figura mostra o escoamento de um líquido para fora do condutor cilíndrico, com a velocidade
Determinar a taxa de variação desse escoamento, sendo a superfície S do condutor limitada por
- Utilizar o sistema MKS e lembrar que a taxa de variação solicitada (volume do líquido que escoa, por unidade
de tempo) significa, numericamente, o fluxo do campo de velocidade através da superfície cilíndrica S .
( )
( )
( )( )
2
2
S R
2 4 x 4
2 22 4 x 0
2 2 4
0 0 0
42 2
0 00
2 2
0 022
2
00
2
0
0
dvv v n dS v dV
dtx
1 dz dy dxx y
2cos1 r dz dr d
4cos
z z r dr d2
2 cos 4 r dr d
r2 cos 4 d
2
4 cos 8 d
4 sen 8
π
π
π
π
π
φ
θ θ
θ θ
θ θ
θ θ
θ θ
θ θ
−
− − −
= = = ∇
= + +
= +
= +
= +
= +
= +
= +
∫∫ ∫∫∫
∫ ∫ ∫
∫ ∫ ∫
∫ ∫
∫ ∫
∫
∫
� � � � �i i�
2
3 3dv dv16 m / s ou 50,24 m / s .
dt dt
π
π∴ = ≈
> Int (Int (Int (x/(x^2+y^2)+1, z = 0..4), y = -s qrt (4-x^2)..sqrt (4-x^2) ), x = -2..2 ) =
= int (int (int (x/(x^2+y^2)+1, z = 0..4), y = -sq rt (4-x^2)..sqrt (4-x^2) ), x = -2..2 ) ;
Maple :
= d
⌠
⌡
-2
2
d
⌠
⌡
− − 4 x2
− 4 x2
d
⌠
⌡
0
4
+ x
+ x2
y2
1 z y x 16 π
> plot3d (x/(x^2+y^2) +1, x = -2..2, y = - sqrt (4 -x^2)..sqrt (4-x^2) ;

114114
F�
( )
( )C
S
CS
F d r F n dS
ouF d r rot F n dS
= ∇×
=
∫ ∫∫
∫ ∫∫
� � � � �i i
� � � �i i
�
�
F�
Em tempo: : O teorema de Green constitui uma particularidade do teorema de Stokes . Para mostrá-lo, basta apli-car este último numa superfície S do plano XOY, por exemplo, situação em quen k :=
� �
A integral de linha do campo vetorial , ao longo da curva fronteira C orientada positivamente,é igual à integral de superfície do componente normal do rotacional de sobre S .
( ) ( )
( )
( )
XY
XY
XY
CS S
S
CS
F nF d r F n dS dx dy
n k
F kdx dy
k k
F d r F k dx dy
∇×= ∇× =
∇×=
∴ = ∇×
∫ ∫∫ ∫∫
∫∫
∫ ∫∫
� � �i� � � � �
i i � �i
� � �i
� �i
� � � � �i i
�
�- expressão vetorial rotacional do teorema de Green -
Comentárioadicional : O teorema de Stokes nos propicia ensaiar uma interpretação física do rotacional de . Seja P o ponto central de um disco circular plano S , de raio R , e representemos por C acurva fronteira de S :
Se representar um campo de velocidade de um fluido, a integral curvilínea
representarásua circulação ao longo da curva C , ou seja, nos fornecerá a tendência média do fluido circular ao longo da curva .No ponto P , a igualdade acima nos permite escrever
relação que nos informa acerca do movimento do fluido ao longo da curva circular C , quando o disco tende a reduzir-se
ao ponto P . Nesse caso, como têm a mesma direção, a circulação ao longo da fronteira C adquire seu
valor máximo : é máximo .
F�
rot F�
n�
RP
C
( ) �2
CS R
F d r rot F n dSπ=
=∫ ∫∫� � � �i i�
F�
CF d r∫� �i�
( ) 2 CR 0P
1rot F n lim F d r ,
Rπ→ = ∫
� � � �i i�
rot F e n� �
Prot F // n rot F n ⇒ � � � �
i
O sistema de pás mecânicas giratórias ao lado é uma boa ilustração da situação proposta : trata-se de um medidor de rotacional , onde um campo de velocidade atuando sobre as pás faz com que a roda gire em torno de seu eixo . Se é um vetor unitário dirigido segundo o eixo de rotação, o movimento giratório das pás será mais rápido quando
n�
rot F // eixo .�
rot F n 0 :rot F n 0 :rot F n 0 :
><=
� �i� �i� �i
as pás giram no sentido positivo (anti-horário) giram no sentido negativo (horário)a circulação é nula e as pás não giram (campo vetorial irrotacional)
5.4. Teoremade Stokes. .
Trata-se de uma ampliação do Teorema de Green , vale dizer, estabelece uma relação entre uma integral de superfície sobre uma dada superfície tridimensional S e uma integral em torno da curva tridimensional fechada C que contorna a superfície S . Tal curva C denomina-se bordo ou contorno de S .
Podemos afirmar que o Teorema de Stokestransforma uma integral de linha numa integral de superfície e vice-versa, sendo demonstrável para quaisquer situações que sejam compatíveis com as restrições impostas para sua aplicabi-lidade : a superfície S deve ser contínua, orientada, e sua fronteira C deve ser simples, fechada, com orientação convencio-nal positiva . Tendo em vista o envolvimento teórico extremamente avançado exigido pela demonstração genérica , optamos por nos preocupar apenas com algumas de suas importantes aplicações .
Se a curva fronteira C delimita a superfície S , então
n�
Pás mecânicas
Eixo derotação

115115Aplicaçõesilustrativas:
1. Analisar as propriedades rotacionais do campo vetorial sendo m, n e p constantes dadas .
Análise : Todos os vetores do campo têm o mesmo módulo, a mesma direção e o mesmo sentido . Portanto, um
medidor de rotacional, inserido num ponto arbitrário desse campo, não acusará movimento giratório :
F m i n j p k ,= + +� � � �
F�
i j k
rot F F 0 Fx y z
m n p
∂ ∂ ∂= ∇× = = ∴∂ ∂ ∂
� � �
� � � � �é irrotacional .
2. Se mostrar que é irrotacional .
Demonstração .
( ) ( ) ( )z zF x, y, z y i x e j 1 y e k ,= + + + +� � � �
F�
z z
z z
i j k
rot F F e i k k e i 0x y z
y x e 1 y e
∂ ∂ ∂= ∇× = = + − − =∂ ∂ ∂
+ +
� � �
� � � � � � � �
3. Utilizar o teorema de Stokespara calcular , sendo
e S é a superfície do plano x + y + z = 1 , no l°. octante .
Resolução.
( )S
rot F n dS∫∫� �i ( ) 2 2 2F x, y, z y i z j x k= + +
� � � �
X
Y
Z
( )1, 0, 0
( )0, 1, 0
( )0, 0, 1
0
2 2 2F y i z j x k= + +� � � �
( )S : x y z 1 f x, y, z x y z 1+ + = ∴ = + + −
( ) ( )
2 2 2
1
f i j k 1n n k
3 3f
i j k
F 2z i 2x j 2y kx y z
y z x
2 x y z2z 2x 2y 2F n
3 3 3
=
∇ + += = ⇒ =∇
∂ ∂ ∂∇× = = − − −∂ ∂ ∂
− + +− − −∇× = = = −
� � � �� � �
i�
� � �
� � � � �
������ � �
i
Então, ( ) ( )1 1 x 1
0 0 0S
12
0
dy dx2F n dS 2 1 x dx
133
x2 x
21 .
−∇× = − = − −
= − −
= −
∫∫ ∫ ∫ ∫� � �
i
Observação . Se calcularmos por meio da integral de linha, teremos :
sendo
A integral de linha total será
2 2 2
C CF d r y dx z dy x dz ,= + +∫ ∫� �i� �
1
2
3
C : y x 1C : z y 1 ,C : z x 1
= − + = − + = − +
( ) ( )0 0 12 2 2
C 1 1 0
1 1 1F d r t 1 dt t 1 dt t dt 1 .
3 3 3= − + + − + + − = − − − = −∫ ∫ ∫ ∫
� �i�
1 2 3
x t x 0 x tC : y t 1 , 1 t 0, C : y t , 1 t 0, C : y 0 , 0 t 1 .
z 0 z t 1 z t 1
= = = = − + ≥ ≥ = ≥ ≥ = ≤ ≤ = = − + = − +
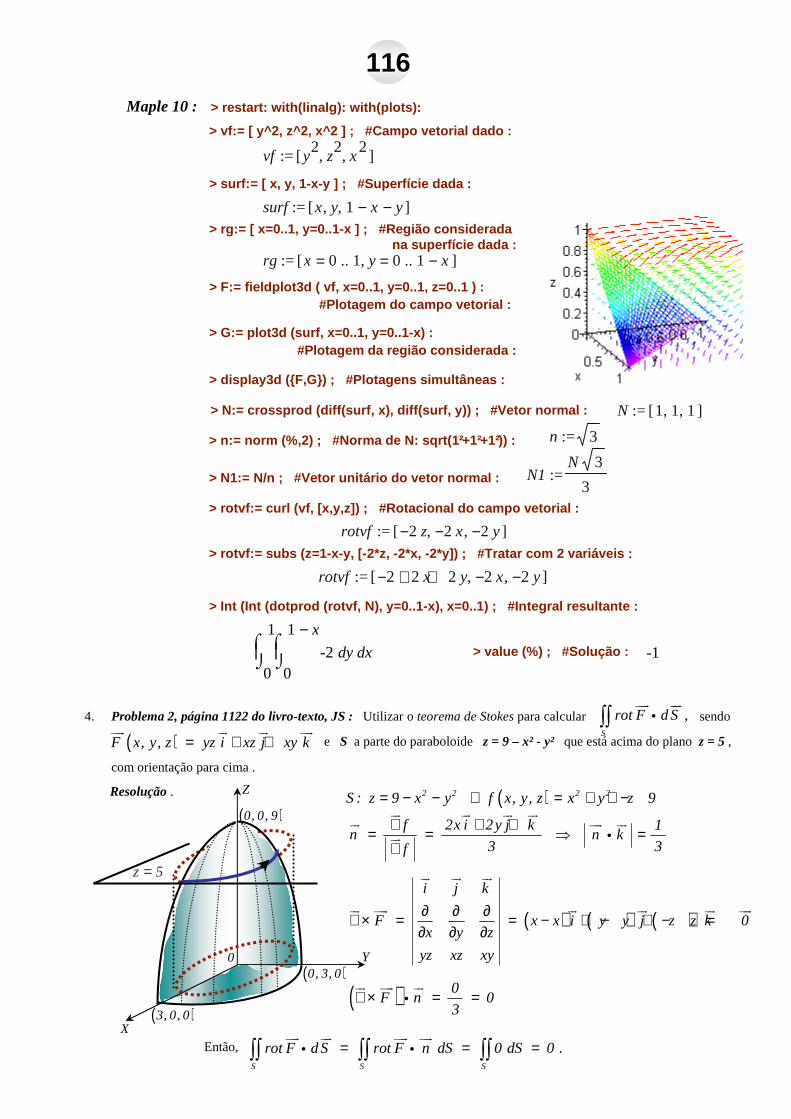
116116
Maple 10 : > restart: with(linalg): with(plots):
> vf:= [ y^2, z^2, x^2 ] ; #Campo vetorial dado :
> F:= fieldplot3d ( vf, x=0..1, y=0..1, z=0..1 ) : #Plotagem do campo vetorial :
> G:= plot3d (surf, x=0..1, y=0..1-x) :#Plotagem da região considerada :
> display3d ({F,G}) ; #Plotagens simultâneas :
> surf:= [ x, y, 1-x-y ] ; #Superfície dada :
:= vf [ ], ,y2
z2
x2
:= surf [ ], ,x y − − 1 x y> rg:= [ x=0..1, y=0..1-x ] ; #Região considerada
na superfície dada : := rg [ ], = x .. 0 1 = y .. 0 − 1 x
> N:= crossprod (diff(surf, x), diff(surf, y)) ; # Vetor normal :
> n:= norm (%,2) ; #Norma de N: sqrt(1²+1²+1²)) :
> N1:= N/n ; #Vetor unitário do vetor normal :
> rotvf:= curl (vf, [x,y,z]) ; #Rotacional do camp o vetorial :
> rotvf:= subs (z=1-x-y, [-2*z, -2*x, -2*y]) ; #Tr atar com 2 variáveis :
> Int (Int (dotprod (rotvf, N), y=0..1-x), x=0..1) ; #Integral resultante :
:= N [ ], ,1 1 1
:= n 3
:= N1N 3
3
:= rotvf [ ], ,−2 z −2 x −2 y
:= rotvf [ ], ,− + + 2 2x 2 y −2 x −2 y
d⌠⌡0
1
d⌠⌡0
− 1 x
-2 y x > value (%) ; #Solução : -1
4. Problema 2, página 1122 do livro-texto, JS : Utilizar o teorema de Stokespara calcular sendo
e S a parte do paraboloidez = 9 – x² - y² que está acima do plano z = 5 ,
com orientação para cima .
S
rot F d S ,∫∫� �i
z 5=
( )F x, y, z yz i xz j xy k= + +� � � �
Resolução.
( )0, 3, 0
( )0, 0, 9
X
Y
Z
0
( )3, 0, 0
( )2 2 2 2S : z 9 x y f x, y, z x y z 9= − − ∴ = + + −
( ) ( ) ( )
( )
f 2x i 2y j k 1n n k
3 3f
i j k
F x x i y y j z z k 0x y z
yz xz xy
0F n 0
3
∇ + += = ⇒ =∇
∂ ∂ ∂∇× = = − + − + − =∂ ∂ ∂
∇× = =
� � � �� � �
i�
� � �
� � � � � �
� � �i
Então,S S S
rot F d S rot F n dS 0 dS 0 .= = =∫∫ ∫∫ ∫∫� � � �i i
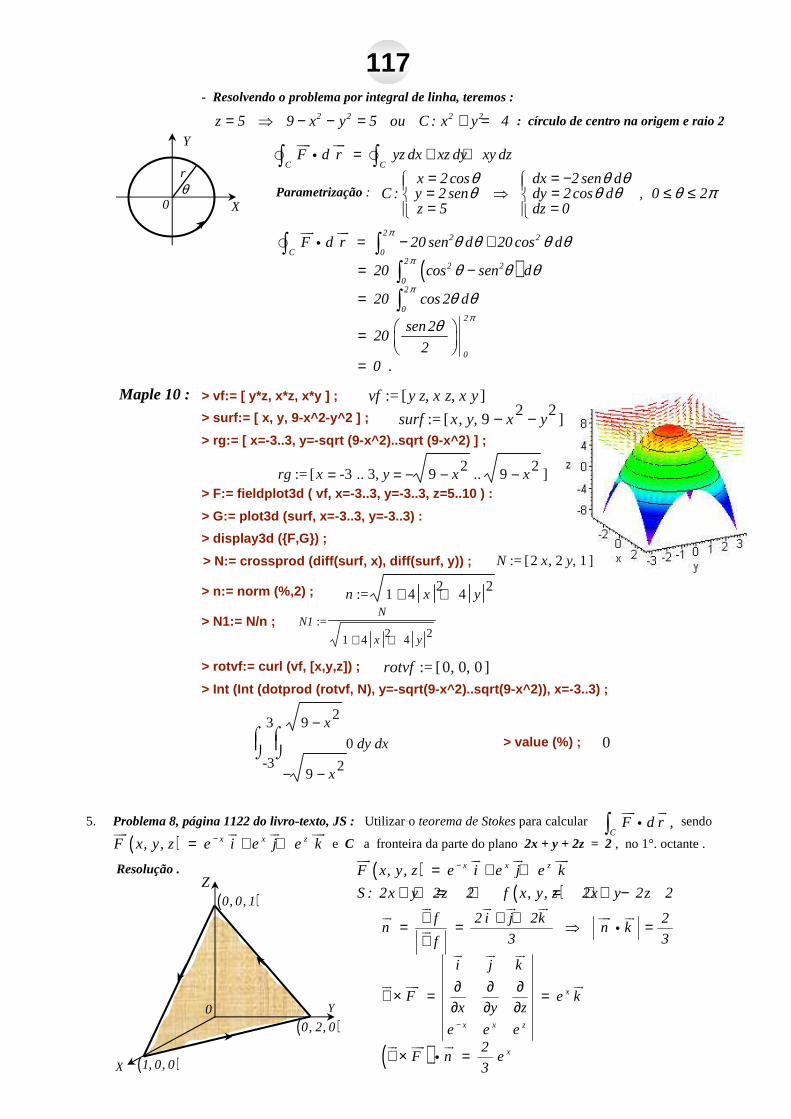
117117- Resolvendo o problema por integral de linha, teremos :
2 2 2 2z 5 9 x y 5 ou C : x y 4= ⇒ − − = + = : círculo de centro na origem e raio 2
X
Y
0
rθ
C CF d r yz dx xz dy xy dz= + +∫ ∫� �i� �
x 2cos dx 2 sen dC : y 2 sen dy 2cos d , 0 2
z 5 dz 0
θ θ θθ θ θ θ π
= = − = ⇒ = ≤ ≤ = =
( )
2 2 2
C 02 2 2
02
02
0
F d r 20 sen d 20 cos d
20 cos sen d
20 cos 2 d
sen220
20 .
π
π
π
π
θ θ θ θ
θ θ θ
θ θ
θ
= − +
= −
=
=
=
∫ ∫∫∫
� �i�
Parametrização:
5. Problema 8, página 1122 do livro-texto, JS : Utilizar o teorema de Stokespara calcular sendo
e C a fronteira da parte do plano 2x + y + 2z = 2 , no 1°. octante .C
F d r ,∫� �i
( ) x x zF x, y, z e i e j e k−= + +� � � �
Resolução .
X
Y
Z
( )1, 0, 0
( )0, 2, 0
( )0, 0, 1
0
( )S : 2x y 2z 2 f x, y, z 2x y 2z 2+ + = ∴ = + + −
( )
x
x x z
x
f 2 i j 2k 2n n k
3 3f
i j k
F e kx y z
e e e2
F n e3
−
∇ + += = ⇒ =∇
∂ ∂ ∂∇× = =∂ ∂ ∂
∇× =
� � � �� � �
i�
� � �
� � �
� � �i
( ) x x zF x, y, z e i e j e k−= + +� � � �
> vf:= [ y*z, x*z, x*y ] ;
> F:= fieldplot3d ( vf, x=-3..3, y=-3..3, z=5..10 ) :
> G:= plot3d (surf, x=-3..3, y=-3..3) :
> display3d ({F,G}) ;
> surf:= [ x, y, 9-x^2-y^2 ] ;
> rg:= [ x=-3..3, y=-sqrt (9-x^2)..sqrt (9-x^2) ] ;
> N:= crossprod (diff(surf, x), diff(surf, y)) ;
> n:= norm (%,2) ;
> N1:= N/n ;
> rotvf:= curl (vf, [x,y,z]) ;
> Int (Int (dotprod (rotvf, N), y=-sqrt(9-x^2)..sqrt (9-x^2)), x=-3..3) ;
> value (%) ;
:= vf [ ], ,y z x z x y
:= surf [ ], ,x y − − 9 x2
y2
:= rg [ ], = x .. -3 3 = y .. − − 9 x2 − 9 x
2
:= N [ ], ,2 x 2 y 1
:= n + + 1 4 x2
4 y2
:= N1N
+ + 1 4 x2 4 y
2
:= rotvf [ ], ,0 0 0
d⌠⌡-3
3
d⌠⌡
− − 9 x2
− 9 x2
0 y x 0
Maple 10 :
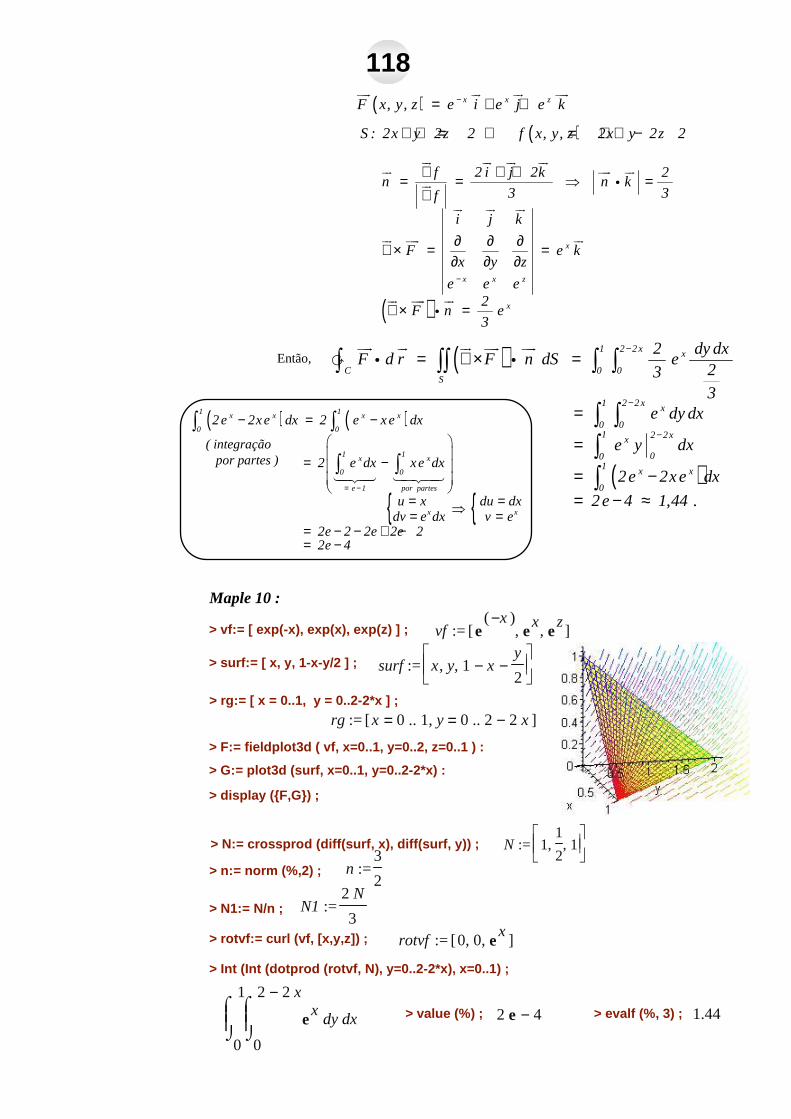
118118
( ) ( )
{ {
1 1x x x x
0 0
1 1x x
0 0
e 1 por partes
x x
2e 2xe dx 2 e xe dx
2 e dx xe dx
u x du dxdv e dx v e
2e 2 2e 2e 22e 4
= −
− = − = −
= =⇒= == − − + −= −
∫ ∫
∫ ∫����� �����
( )S : 2x y 2z 2 f x, y, z 2x y 2z 2+ + = ∴ = + + −
( )
x
x x z
x
f 2 i j 2k 2n n k
3 3f
i j k
F e kx y z
e e e2
F n e3
−
∇ + += = ⇒ =∇
∂ ∂ ∂∇× = =∂ ∂ ∂
∇× =
� � � �� � �
i�
� � �
� � �
� � �i
( ) x x zF x, y, z e i e j e k−= + +� � � �
Então, ( )
( )
1 2 2x x
C 0 0S
1 2 2x x
0 01 2 2xx
001 x x
0
2 dy dxF d r F n dS e
233
e dy dx
e y dx
2e 2xe dx
2e 4 1,44 .
−
−
−
= ∇× =
=
=
= −= − ≈
∫ ∫∫ ∫ ∫
∫ ∫∫∫
� � � � �i i�
( integração por partes )
> vf:= [ exp(-x), exp(x), exp(z) ] ;
> F:= fieldplot3d ( vf, x=0..1, y=0..2, z=0..1 ) :
> G:= plot3d (surf, x=0..1, y=0..2-2*x) :
> display ({F,G}) ;
> surf:= [ x, y, 1-x-y/2 ] ;
> rg:= [ x = 0..1, y = 0..2-2*x ] ;
> N:= crossprod (diff(surf, x), diff(surf, y)) ;
> n:= norm (%,2) ;
> N1:= N/n ;
> rotvf:= curl (vf, [x,y,z]) ;
> Int (Int (dotprod (rotvf, N), y=0..2-2*x), x=0..1) ;
> value (%) ;
:= vf [ ], ,e( )−x
ex
ez
:= surf
, ,x y − − 1 x
y
2
:= rg [ ], = x .. 0 1 = y .. 0 − 2 2 x
:= N
, ,1
1
21
:= n3
2
:= N12 N
3 := rotvf [ ], ,0 0 e
x
d⌠
⌡0
1
d⌠
⌡0
− 2 2x
ex
y x − 2 e 4 > evalf (%, 3) ; 1.44
Maple 10 :

119119
( ) ( ) ( ) ( )
2 2 2
x 2 y 2 z 2
2 2 2 2
f 2x i 2y j 2z k x i y j z k zn n k
2 2f 2 x y z
i j k
F 2y i 2z j 2x kx y z
x z y x z y
2 xy yz xzF n xy y 4 x y x 4 x y
2
∇ + + + += = = ⇒ =∇ + +
∂ ∂ ∂∇× = = + +∂ ∂ ∂+ + +
+ +∇× = = + − + + − +
� � � � � � �� � �
i�
� � �
� � � � �
� � �i
6. Problema 17, página 1122 do livro-texto, JS : Utilizando o teorema de Stokes, calcular o trabalho realizado pelo cam-
po de força quando uma partícula se move sob sua in-
fluência ao redor da borda da parte da esfera que está no primeiro octante, na direção anti-horária
quando vista de cima .
( ) ( ) ( ) ( )x 2 y 2 z 2F x, y, z x z i y x j z y k= + + + + +� � � �
2 2 2x y z 4+ + =
Resolução .
X
Y
Z
n�
F�
θ r
( )2 2 2 2 2 2S : x y z 4 f x, y, z x y z 4+ + = ∴ = + + −( ) ( ) ( ) ( )x 2 y 2 z 2F x, y, z x z i y x j z y k= + + + + +
� � � �
Aplicando as coordenadas polares poderemos escrever :{ {x r cos dx r sen d: 0 ,2 y r sen dy r cos dr : 0 2
π θ θ θθθ θ θ
= = −→ → ⇒ = =→
( )( )
CS
2 2 2 22
0 0 2
222
0 0 2
W F d r F n dS
r dr dr sen cos r sen 4 r r cos 4 r
4 r
22r
sen cos 2r sen 2r cos r dr d4 r
π
π
θθ θ θ θ
θ θ θ θ θ
= = ∇×
= + − + −−
= + + −
∫ ∫∫
∫ ∫
∫ ∫
� � � � �i i�
( )
2 2 22 2
0 0 0 0
2
0
20
2r sen r dr d 2r sen dr d
16sen d
316
cos3
16
3
π π
π
π
θ θ θ θ
θ θ
θ
=
=
= −
=
∫ ∫ ∫ ∫
∫
32
2 2
0 0 02
2
0
2
0
2 r 32sen cos dr d sen cos d ,
34 r16
sen2 d3
16 cos 2
3 216
3
π π
π
π
θ θ θ θ θ θ
θ θ
θ
=−
=
= −
=
∫ ∫ ∫
∫
após fazer :
( )
( )
2
2
2 02 2
0 22
2 2
0
r dr4 r u du
4 r
r2r dr 2 u 4 du
4 r
2 u 4 du
32
3
−− = ⇒ =−
− − − = − −
= − −
=
∫ ∫
∫
2 2 22 2
0 0 0 0
2
0
20
2r cos r dr d 2r cos dr d
16cos d
316
sen3
16
3
π π
π
π
θ θ θ θ
θ θ
θ
=
=
=
=
∫ ∫ ∫ ∫
∫
Portanto, o trabalho total realizado será16 16 16
W W 16 J3 3 3
= + + ∴ =( sistema MKS )
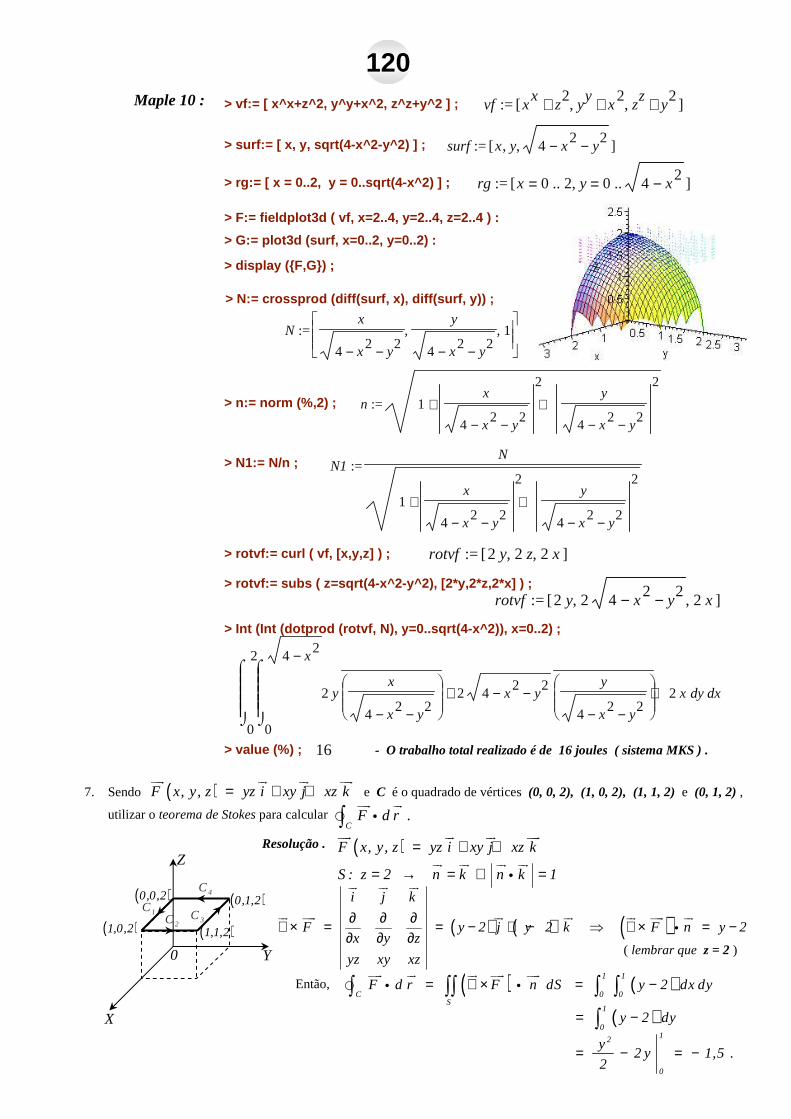
120120> vf:= [ x^x+z^2, y^y+x^2, z^z+y^2 ] ;
> F:= fieldplot3d ( vf, x=2..4, y=2..4, z=2..4 ) :
> G:= plot3d (surf, x=0..2, y=0..2) :
> display ({F,G}) ;
> surf:= [ x, y, sqrt(4-x^2-y^2) ] ;
> rg:= [ x = 0..2, y = 0..sqrt(4-x^2) ] ;
:= vf [ ], , + xx
z2 + y
yx
2 + zz
y2
:= surf [ ], ,x y − − 4 x2
y2
:= rg [ ], = x .. 0 2 = y .. 0 − 4 x2
> N:= crossprod (diff(surf, x), diff(surf, y)) ;
> n:= norm (%,2) ;
:= N
, ,x
− − 4 x2
y2
y
− − 4 x2
y2
1
:= n + + 1x
− − 4 x2
y2
2y
− − 4 x2
y2
2
Maple 10 :
> N1:= N/n ; := N1N
+ + 1x
− − 4 x2
y2
2y
− − 4 x2
y2
2
> rotvf:= curl ( vf, [x,y,z] ) ;
> rotvf:= subs ( z=sqrt(4-x^2-y^2), [2*y,2*z,2*x] ) ;
> Int (Int (dotprod (rotvf, N), y=0..sqrt(4-x^2)), x =0..2) ;
:= rotvf [ ], ,2 y 2 z 2 x
:= rotvf [ ], ,2 y 2 − − 4 x2
y2
2 x
d
⌠
⌡
0
2
d
⌠
⌡
0
− 4 x2
+ + 2 y
x
− − 4 x2
y2
2 − − 4 x2
y2
y
− − 4 x2
y2
2 x y x
> value (%) ; 16 - O trabalho total realizado é de 16 joules ( sistema MKS ) .
7. Sendo e C é o quadrado de vértices (0, 0, 2), (1, 0, 2), (1, 1, 2) e (0, 1, 2) ,
utilizar o teorema de Stokes para calcular
( )F x, y, z yz i xy j xz k= + +� � � �
CF d r .∫� �i�
Resolução .
X
Y
Z
( )1,0,2 ( )1,1,2
( )0,1,2( )0,0,21C
2C 3C
4C
( )F x, y, z yz i xy j xz k= + +� � � �
S : z 2 n k n k 1= → = ∴ =� � � �
i
( ) ( ) ( )i j k
F y 2 j y 2 k F n y 2x y z
yz xy xz
∂ ∂ ∂∇ × = = − + − ⇒ ∇ × = −∂ ∂ ∂
� � �
� � � � � � �i
Então, ( ) ( )
( )
1 1
C 0 0S
1
012
0
F d r F n dS y 2 dx dy
y 2 dy
y2 y 1,5 .
2
= ∇ × = −
= −
= − = −
∫ ∫∫ ∫ ∫
∫
� � � � �i i�
0 ( lembrar que z = 2)
121121
Observação . Se desenvolvermos o cálculo por meio das integrais curvilíneas, teremos
1 2 3 4
x t x 1 x t x 0C : y 0 , 0 t 1 C : y t , 0 t 1 C : y 1 , 1 t 0 C : y t , 1 t 0
z 2 z 2 z 2 z 2
= = = = = ≤ ≤ = ≤ ≤ = ≥ ≥ = ≥ ≥ = = = =
teremos :1 2 3 4
1 0
C C C C 0 112
0
0 dt t dt 2dt 0 dt t dt 2dt
t2t 1,5 .
2
+ + + = +
= − = −
∫ ∫ ∫ ∫ ∫ ∫CF d r =∫� �i�
> vf:= [ y*z, x*y, x*z ] ;
> F:= fieldplot3d ( vf, x=0..1, y=0..1, z=2..4 ) :
> G:= plot3d (surf, x=0..1, y=0..1) :
> display ({F,G}) ;
> surf:= [ x, y, 2 ] ;
> rg:= [ x = 0..1, y = 0..1, z=2 ] ;
:= vf [ ], ,y z x y x z
:= surf [ ], ,x y 2
:= rg [ ], , = x .. 0 1 = y .. 0 1 = z 2
> N:= crossprod (diff(surf, x), diff(surf, y)) ;
> n:= norm (%,2) ;
> N1:= N/n ;
> rotvf:= curl (vf, [x,y,z]) ;
> Int (Int (dotprod (rotvf, N), y=0..1), x=0..1) ;
:= N [ ], ,0 0 1
:= n 1
:= N1 N
:= rotvf [ ], ,0 − y z − y z
> rotvf:= subs (z=2, [0, y-z, y-z] ) ; := rotvf [ ], ,0 − y 2 − y 2
d⌠⌡0
1
d⌠⌡0
− 1 x
− y 2 y x
> evalf (%, 3) ; -1.50
Maple 10 :
Reportando a uma outra linguagem paralela, podemos construir a resolução :
> restart : with (linalg) :
> f := vector ( [y*z,x*y,x*z] ) ; := f [ ], ,y z x y x z
> curlf := curl ( f, [x,y,z] ) ; := curlf [ ], ,0 − y z − y z
> with (VectorCalculus) ;&x * + - . <,> <|> AddCoordinatesArcLengthBasisFormatBinormalCrossProdCrossProductCurl CurvatureD Del, , , , , , , , , , , , , , , , ,[
DirectionalDiffDivergenceDotProdDotProductFlux GetCoordinateParametersGetCoordinatesGradientHessianJacobian, , , , , , , , , ,
LaplacianLineIntMapToBasisNablaNorm NormalizePathIntPrincipalNormalRadiusOfCurvatureScalarPotential, , , , , , , , , ,
SetCoordinateParametersSetCoordinatesSurfaceIntTNBFrameTangentTangentLineTangentPlaneTangentVectorTorsion, , , , , , , , ,
VectorVectorFieldVectorPotentialWronskiandiff evalVFint limit series, , , , , , , , ]
> DotProd (<0,y-z,y-z>, <0,0,1>) ; − y z ou y - 2
> Int (Int (y-2, x=0..1), y=0..1) = int (int (y-2, x=0..1), y=0..1) ;
= d⌠⌡0
1
d⌠⌡0
1
− y 2 x y-3
2
122122Questõesadicionais diversificadas
Identificar as superfícies quádricas expressas pelas equações abaixo, determinar os respectivos centros geo-métricos e plotar os gráficos :
) ( )) ( )) ( )
2 2 2
2 2 2
2 2
a 16 x 36 y 9z 64x 18z 71 0 Resp.: elipsoide, centro 2, 0, -1b 9x 36 y 4z 360 y 24z 828 0 hiperboloide de uma folha, centro 0, 5, -3c 4x 9 y 16 x 54 y 12z 77 0 paraboloide hiperbólico,ponto de sela -2, 3, 1
+ + − + − =+ − − − + =− + + + − =
3ª. Questão. Uma certa quantidade de gás obedece à lei Utilizando o conceito de derivada total, calcular a taxa de variação da temperatura T (em °C), no instante em que o volume V de gás é120 m³ e a pressãoP é 8 N/m². Sabe-se que o volume cresce à razão de 2 m³/s e a pressão decresce à taxa de 0,1 N/m²/s .
PV 10T .=
Resp.: 0,4 º C/s
2ª. Questão.
) ( ) ( )a z f x, y arccos x y= = +Determinar, algébrica e graficamente, o domínio de cada função abaixo :
Modelo de resolução :
Condição de existência da função :y x 1
cos z x y 1 x y 1y x 1
≤ − += + ⇒ − ≤ + ≤ ≥ − −
Então, o domínio da função é ( ){ }x, y | 1 x y 1∈ − ≤ + ≤ℝ
) ( ) 2 2b z f x, y x 4 4 y= = − + −
( ){ }2 2 2Resp.: x, y | x 4 0 e 4 y 0∈ − ≥ − ≥ℝ
4ª. Questão. Uma piscina tri-retangular tem dimensões 12 m , 4 m e 3 m , tais medidas sujeitas a erros de 3 cm , 1 cm e 1 cm , respectivamente . Utilizando a diferencial total, avaliar o erro possível no cálculo da diagonal .
x = 12 m
y = 4 m
z = 3 mDResp.: dD 0,033m≈
5ª. Questão.
( )
' 'x y
v
v
1 1 1f 1, f 1, i f 1, j 2 j
dz 1 2 2 2f 1, u , sendo 1dv 2 u i j2
∇ = + = = ∇ = −
� � � �
� �i � � �
Consideremos a função no ponto e um vetor direcional
Utilizando produto escalar de dois vetores, calcular a derivada de f , no ponto dado, segundo a direção de - Fazer a ilustração gráfica do resultado encontrado .
( ) ( )z f x, y x . n 2y ,= = ℓ1
1, ,2
v i j .= −� � �
v .�
X
Y
0 v�
( )1, 1−
( )1, 0
( )0 , 1−
Numericamente, a derivada direcional é dada pelo produto escalardo vetor gradiente pelo vetor unitário da direção :
O valor da derivada direcional será vdz 1 2
f 1, u 2dv 2 2
= ∇ = − = −
� �i
z 2 j∇ =� �
dz2
dv= −
dz2 :
dv∴ = − projeção escalar do vetor gradiente sobre o vetor direção
Resolução ilustrativa :
1ª. Questão.
) ( ) ) ( )
) ) )
2 2
2
2 2
2 2 2
2c f x, y 1 x 1 y d f x, y
y x 55 x y 5
e z f z g zx yy x 1 x y 16
= − + − =− −
−= = =−− − + −
6ª. Questão. Utilizando o produto escalar de dois vetores, calcular a derivada da função no ponto P (2, 0),
segundo a direção do vetor Ilustrar, graficamente, a resolução . 31
v i j .2 2
= −� � �
2 yz x .e ,=
> plot3d (arccos (x+y),x = -3..3, y = -3..3) ;
dzResp.: 2,96
dv≈ −
13ª. Questão. Dada a integral seguir as instruções abaixo : 23 9 x 2
2 20 0 0
1dz dy dx ,
x y
−⋅ ⋅ ⋅
+∫ ∫ ∫a ) esboçar a região do domínio .b ) escrever a integral em coordenadas cilíndricas.c ) resolvê-la .
12ª. Questão.
Escrever, em coordenadas esféricas, os limites de integração da integral sendo D
a região sólida limitada pelas superfícies
( )D
f r , , . d V ,θ ϕ∫∫∫2 2 2x y z 1, y x , z 0 e y 0 .+ + = = = =
15ª. Questão.
Dada a integral seguir as instruções abaixo : 21 1 x
0 02 x .dy .dx ,
−
∫ ∫a ) esboçar a região do domínio .b ) inverter a ordem de integração .c ) resolvê-la .
14ª. Questão. Inverter a ordem de integração em ( )y 6
22
0 2 yf x, y .dx .dy .
+
∫ ∫
16ª. Questão. Utilizar coordenadas cilíndricaspara calcular o volume do sólido limitado pelo cone pelo
cilindro e pelos planos coordenados, no 1º. octante .
2 2 2z x y ,= +2 2x y 4+ =
7ª. Questão. O período T de um pêndulo simples é dado pela equação sendo L o comprimento e g
aceleração da gravidade . Utilizando a diferencial total, determinar a variação de g , para L = 100 cm ,
∆ L = 0,05 cm, T = 2 s e ∆ T = 0,01 s .
LT 2 ,
gπ=
8ª. Questão. Num cilindro circular, o raio da base decresce à razão de 0,1 dm/s e a altura, à razão de 0,02 dm/s . Calcular a velocidade de decrescimento do volume, no momento em que o raio é4 dm e a altura é6 dm.
9ª. Questão. Determinar a taxa de variação máxima da função no ponto ( 0, 3 ) . xz y .e ,=
10ª. Questão. Sendo calcular ( ) ( )x yF x, y e n x y ,−= + ℓ F Fx y
x y
∂ ∂⋅ − ⋅ ⋅∂ ∂
17ª. Questão. Calcular o volume do sólido limitado pelas superfícies cujas equações cilíndricas são 2z 4 r , r 1e z 0 .
= − ==
11ª. Questão. O potencial elétrico, em qualquer ponto de um plano XOY , é dado por Se a medida é dada em metros, determinar a direção e o valor da taxa de variação máxima de V , no ponto
( )V n x sen 2 y volts .= +ℓ
( )61, π
123123
18ª. Questão. Utilizando integração dupla, calcular o volume do tetraedro limitado pelos planos cartesianos e o plano inclinado expresso pela equação3x 8 y 24z 24 0 .+ + − =
Resp.: V 4 u.v.=
19ª. Questão. Inverter a ordem de integração e resolver a integral dupla
X0
Y
0 y
5 sen xdx dy
x
π π
∫ ∫y = x y π=
x π=
D
Resp.: 10
Resp.: 0
m á x
dVResp.: 2 volts / m
dv =
2219π
Resp.: dg = - -9,36 cm/s20
≈
3dVResp.: 16 dm /s
dt≈ −
m á x
dzResp.: 10 3,16
dv = ≈
2Resp.:
3
Resp.: 3π
( ) ( )x x
3 42 2
0 0 3 2 x 6Resp.: f x, y .dy .dx f x, y .dy .dx
−+∫ ∫ ∫ ∫
( )x
124 2
0 0 0Resp.: f r , , .r .sen .dr .d .d
π
θ ϕ ϕ ϕ θ∫ ∫ ∫
4Resp.: V
3
π=
9Resp.: V
8
π=

20ª. Questão. Mediante o sistema de coordenadas polares, calcular a integral dupla sendo
sendo R a região plana limitada pela curva 2 2x y 4 .+ =2 2
R
ydA ,
x y⋅
+∫∫Resp.: 0
21ª. Questão. Calcular a massa M do “pilão” não homogêneo, limitado pelas três
superfícies Em cada ponto
do sólido, a densidade de massa é
- Utilizar coordenadas cilíndricas, levando em conta que
2 2z x y= +
( ) 2 2 3x, y x y kg / m .ρ = +
X
Y
Z
0
θ r ( )0, 3( )0, 3−
( )3, 0
486Resp. : M kg 305,2 kg
5π= ≈
2 2x y 9 ,+ =
i
ni
in ii 1 DouV 0
MM lim V dV kg .
V∆
∆∆ ρ
∆→ ∞=
→
= ⋅ =∑ ∫∫∫
e z 0 .=
124124
22ª. Questão. Escrever a integral em coordenadas polares, e resolvê-la .
Utilizando coordenadas esféricas, calcular o volume comum à esfera r = 3 e ao cone φ = π/3 .
( )22 4 y
2 2
0 0x y .dx .dy ,
−+∫ ∫
O potencial elétrico V , num ponto (x, y) , é dado por Mostrar
que, no ponto o potencial é estacionário , qualquer que seja a direção considerada .
( ) 3 2 2V x, y x 3x 4xy y .= + + +2 4
, ,3 3
−
23ª. Questão.
24ª. Questão.
25ª. Questão. Determinar o momento de inércia, em relação ao eixo OZ, do sólido homogêneo limitado pelo cilindro r = 3,o paraboloidez = r² e o plano z = 0 . Em qualquer ponto do sólido, a densidade éδ kg/m³ .
26ª. Questão. Utilizando coordenadas esféricas, calcular o volume de uma cunha esférica, de raio R , limitada por dois planos diametrais formando entre si um ângulo de π/3 rad .
27ª. Questão. Dada a função vetorial calcular .2 2v x z i x y j x y z k ,= − +� � � � ( )rot v∇
� �i
Determinar o parâmetro p de modo que o campo de velocidades
seja conservativo ( vale dizer, irrotacional ) .
( ) ( ) ( )3 2 2v x , y , z p x y z , p 2 x , 1 p x z= − − −�
Determinar o valor de p tal que seja um campo solenoidal.v px i 3py j 4z k= − +� � � �
30ª. Questão. Verificar se o campo vetorial é conservativo .2 2 3 3 2F 3 x y z i 2 x y z j x y k= + +� � � �
Resp.: rot F 0 F= ⇒� � �
é um campo vetorial conservativo .
Resp.: 0
Resp.: p 4=
Resp.: p 2=
Sendo verificar se o campo representa uma fonte , um
poço ou um solenoide.
( ) 2 2v x, y, z x z, x y , x y z ,= −�
rot v�
Resp.: rot v 0 v= ⇒� � �
é um campo vetorial solenoidal .
Aplicando o teorema de Green, determinar o trabalho realizado pelo campo de forças
para deslocar uma partícula ao longo da trajetória
circular no sentido anti-horário . - Sistema MKS -( ) ( )3 3 3 3F x y i x y j= − + +
� � �
2 2x y 4 ,+ =
X0
Y 2 2x y 4+ =
( )2, 0− ( )2, 0θ
r
coordenadas polares
{2 2
x : 2 2 : 0 2D : D : r : 0 2y : 4 x 4 xθ π− → →⇒ →− − → −
coordenadas cartesianas
Resp.: W 24 J ou W 75,39 Jπ= =
28ª. Questão.
29ª. Questão.
31ª. Questão.
32ª. Questão.
Resp.: 2π
Resp.: 9π
O ZResp.: I 243δ π=
32R esp.: V R
9π=
Aplicando o teorema de Green , calcular a integral curvilínea sendo C
o círculo( )
Cxy dx x y dy ,+ +∫�
X
Y
0θr
2 2x y 1 .+ =
( )C
Resp.: xy dx x y dy .π+ + =∫�
{ : 0 2R: r : 0 1θ π→
→coordenadas polares
33ª. Questão.
125125
34ª. Questão. Aplicando o teorema de Green , calcular o trabalho realizado pelo campo de forças
ao deslocar uma partícula ao longo da trajetória mostrada na figura .
( )2
2
yF x, y i 2yarctg x j
1 x= +
+
� � �
X0
2y x=
Y
y x=
DResp.: W 0 .=
Verificar se, no ponto P ( 3, - 2, 1 ) , o campo vetorial de forças representa uma fonte , um poço ou um solenoide.
F 2x i 6 y j 4z k= − +� � � �
Resp. : O campo de forças, em qualquer ponto do espaço, é solenoidal .
Mostrar que o campo vetorial é conservativo .x y zv e i e j e k= + +
� � � �
Conclusão : rot v 0 v= ⇒� � �
O campo de forças desloca uma partícula ao longo da trajetória triangular
fechada, tal como mostra a figura . Utilizando o teorema de Green, calcular o trabalho realizado .( ) ( )2F 2x y i 3y 4x j= + + −
� � �
X
Y
0 ( )2, 0
14Resp.: W 4,66
3= − ≈ − ⋅
x: 0 21
y : 0 x2
→ →
( )2, 1
R
3C
2C
1C
região R :
Sendo calcular a área A da elipse 9x² + 16y² - 144 = 0 .C
1A x dy y dx ,
2= −∫�
X0
Y
( )4, 0− ( )4, 0
θrA
Resp.: A 12 37 ,68 u .a .π= ≈
36ª. Questão.
37ª. Questão.
38ª. Questão.
40ª. Questão. Mediante o Teorema de Green , verificar se o campo vetorial
constitui um campo conservativo ao longo da astroide de equações paramétricas
( )2
2
yF x, y , 2y arctg x
1 x= < >
+
�
3
3x co s t , 0 t 2 .y sen t
π = ≤ ≤ =
0
Portanto, o campo vetorial é conservativo.
( )N M
x yC D
0
Verificação : F . d r .dA 0 .∂ ∂∂ ∂
=
= − =∫ ∫∫� �
������
F�
39ª. Questão. Mostrar que o trabalho realizado pela força ao longo dessa elipse, énulo . ( ) 2 2F x, y y , x ,= < >�
35ª. Questão.
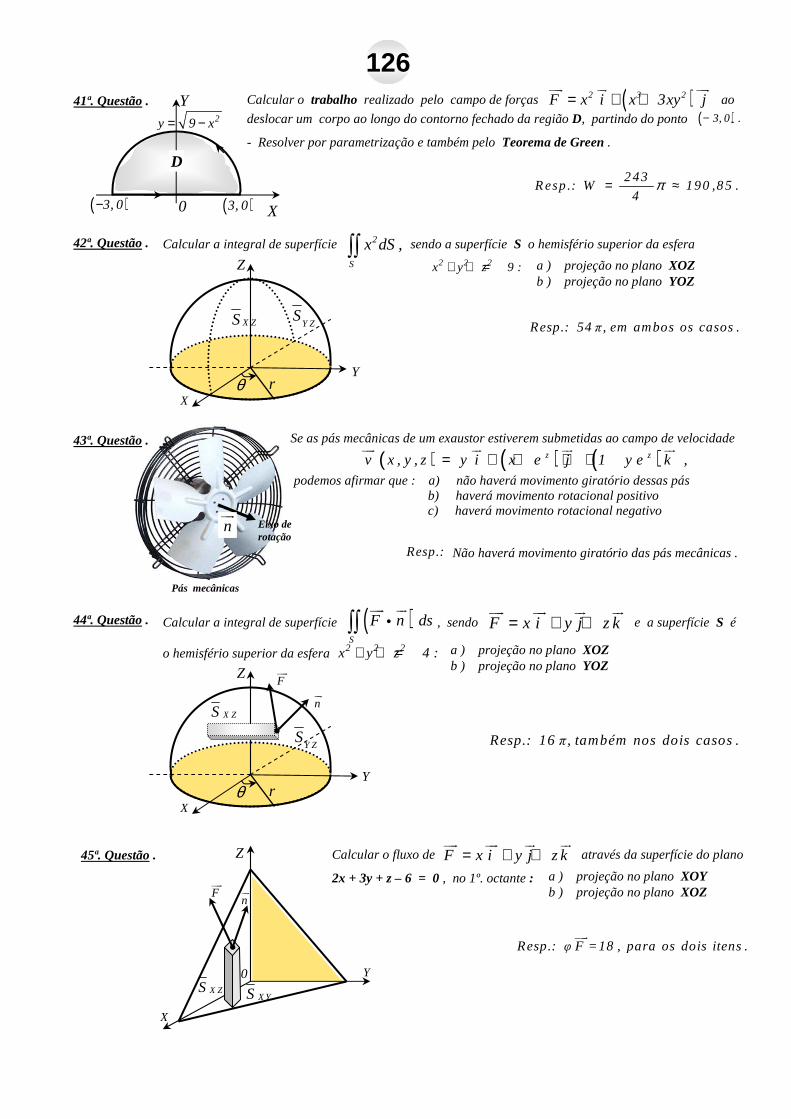
41ª. Questão. Calcular o trabalho realizado pelo campo de forças ao
deslocar um corpo ao longo do contorno fechado da região D, partindo do ponto . ( )2 3 2F x i x 3xy j= + +
� � �
( )3, 0 .−2y 9 x= −
X
Y
0( )3, 0− ( )3, 0
D- Resolver por parametrização e também pelo Teorema de Green.
243R esp.: W 190 ,85 .
4π= ≈
126126
42ª. Questão.
Resp.: 54π , em ambos os casos .
Resp.:
Calcular a integral de superfície sendo a superfície S o hemisfério superior da esfera 2
S
x dS ,∫∫2 2 2x y z 9 :+ + =
X
Y
Z
θ r
a ) projeção no plano XOZb ) projeção no plano YOZ
Se as pás mecânicas de um exaustor estiverem submetidas ao campo de velocidade
podemos afirmar que :
( ) ( ) ( )z zv x , y , z y i x e j 1 y e k ,= + + + +� � � �
a) não haverá movimento giratório dessas pásb) haverá movimento rotacional positivoc) haverá movimento rotacional negativo
Não haverá movimento giratório das pás mecânicas .
n�
Pás mecânicas
Eixo derotação
Resp.: 16π, também nos dois casos .
Calcular a integral de superfície , sendo e a superfície S é
o hemisfério superior da esfera 2 2 2x y z 4 :+ + = a ) projeção no plano XOZb ) projeção no plano YOZ
( )S
F n ds∫∫� �i F x i y j z k= + +
� � � �
Calcular o fluxo de através da superfície do plano
2x + 3y + z – 6 = 0 , no 1º. octante:
F x i y j z k= + +� � � �
a ) projeção no plano XOYb ) projeção no plano XOZ
Resp.: φ F =18 , para os dois itens .�
X ZS Y ZS
X
Y
Z
0
X YS
n�F
�
X ZS
X
Y
Z
θ r
X ZS
Y ZS
n�
F�
43ª. Questão.
44ª. Questão.
45ª. Questão.
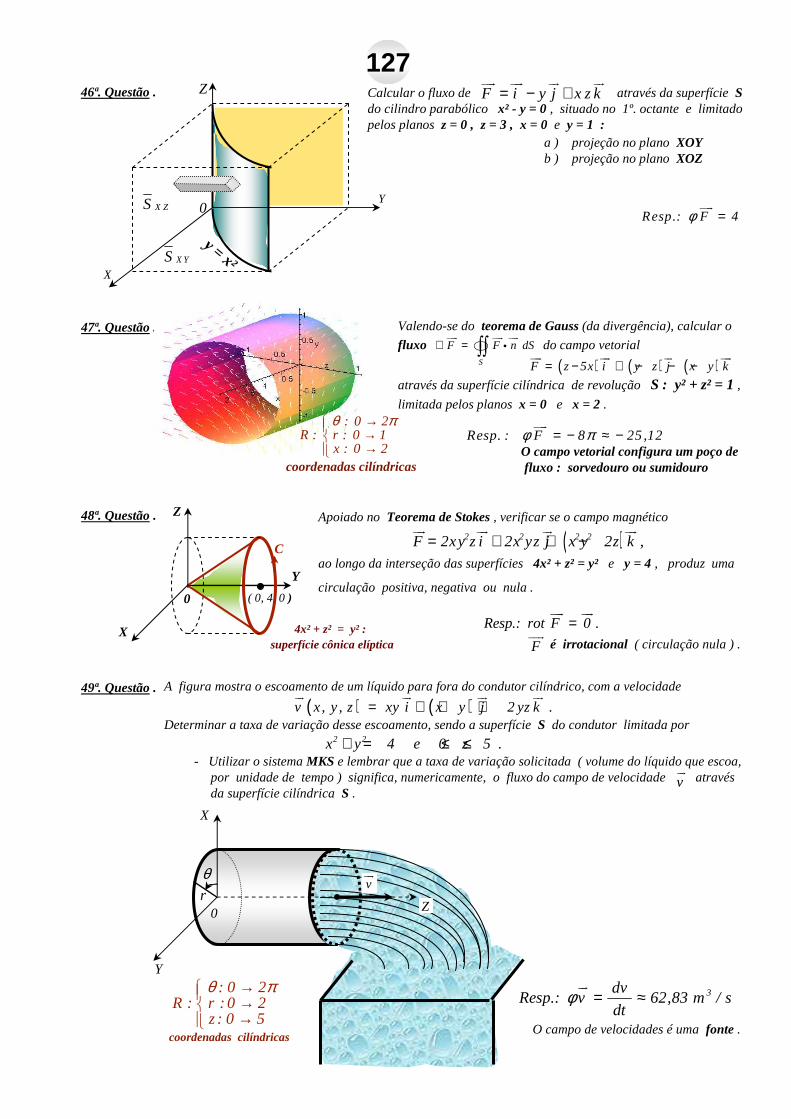
Calcular o fluxo de através da superfície S do cilindro parabólico x² - y = 0 , situado no 1º. octante e limitado pelos planos z = 0 , z = 3 , x = 0 e y = 1 :
F i y j x z k= − +� � � �
a ) projeção no plano XOYb ) projeção no plano XOZ
Resp.: F 4φ =�
47ª. Questão. Valendo-se do teorema de Gauss (da divergência), calcular o
fluxo do campo vetorial
através da superfície cilíndrica de revolução S : y² + z² = 1, limitada pelos planos x = 0 e x = 2 .
S
F F n dS∅ = ∫∫� � �
i�( ) ( ) ( )F z 5x i y z j x y k= − + − − −
� � � �
Resp. : F 8 25,12φ π= − ≈ −�: 0 2
R : r : 0 1x : 0 2
θ π→ →→
coordenadas cilíndricasO campo vetorial configura um poço defluxo : sorvedouro ou sumidouro
Apoiado no Teorema de Stokes , verificar se o campo magnético
ao longo da interseção das superfícies 4x² + z² = y² e y = 4, produz uma
circulação positiva, negativa ou nula .
( )2 2 2 2F 2xy z i 2x yz j x y 2z k ,= + + −� � � �
0
Y
Z
( 0, 4, 0)
X 4x² + z² = y² :superfície cônica elíptica
C
Resp.: rot F 0 .=� �
F�
é irrotacional ( circulação nula ) .
A figura mostra o escoamento de um líquido para fora do condutor cilíndrico, com a velocidade
Determinar a taxa de variação desse escoamento, sendo a superfície S do condutor limitada por
- Utilizar o sistema MKS e lembrar que a taxa de variação solicitada ( volume do líquido que escoa, por unidade de tempo ) significa, numericamente, o fluxo do campo de velocidade através da superfície cilíndrica S .
Y
0
: 0 2R : r : 0 2
z : 0 5
θ π→ →→
( ) ( )v x, y , z xy i x y j 2 yz k .= + + +� � � �
2 2x y 4 e 0 z 5 .+ = ≤ ≤
X
coordenadas cilíndricas
v�
θr
v�
Z
3dvResp.: v 62,83 m / s
dtφ = ≈�
O campo de velocidades é uma fonte .
X
Y
Z
X ZS 0
y = x²X YS
12712746ª. Questão.
48ª. Questão.
49ª. Questão.
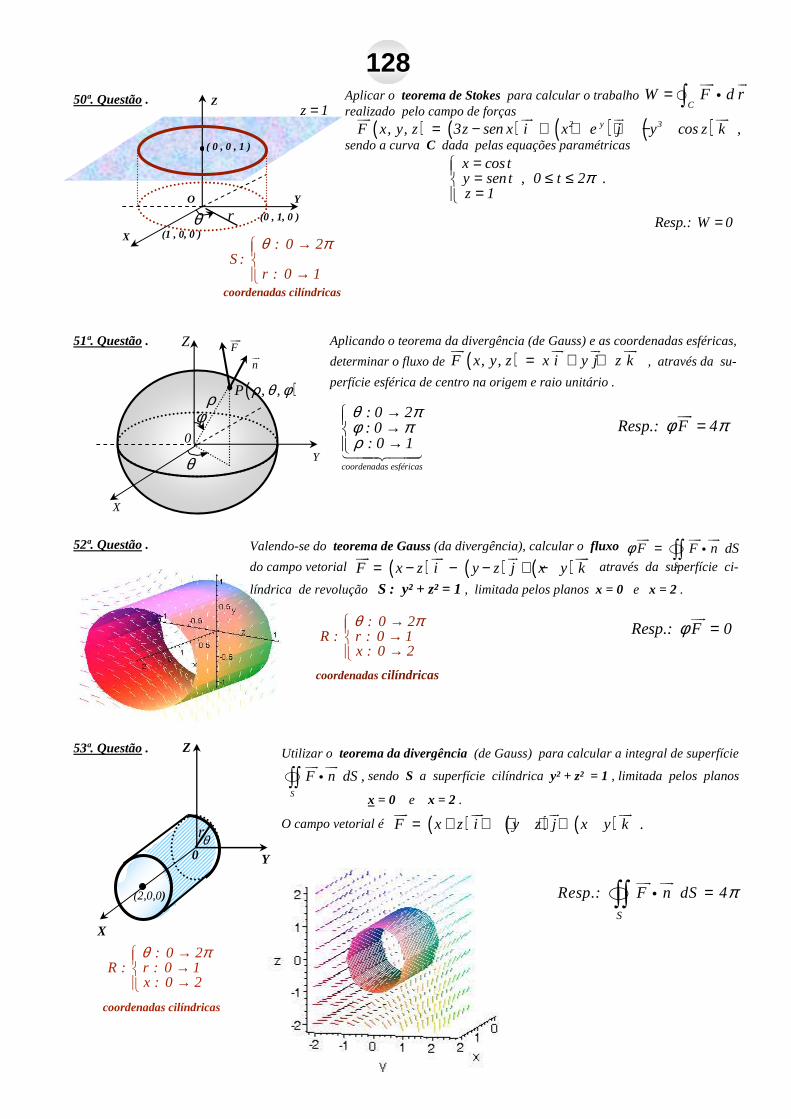
Valendo-se do teorema de Gauss (da divergência), calcular o fluxo
do campo vetorial através da superfície ci-
líndrica de revolução S : y² + z² = 1, limitada pelos planos x = 0 e x = 2 .
50ª. Questão.
51ª. Questão.
Aplicar o teorema de Stokespara calcular o trabalho realizado pelo campo de forças
sendo a curva C dada pelas equações paramétricas( ) ( ) ( ) ( )2 y 3F x, y, z 3z sen x i x e j y cos z k ,= − + + + −
� � � �C
W F d r= ∫� �i�
(1 , 0, 0 )
(0 , 1, 0 ) r
x costy sent , 0 t 2 .z 1
π= = ≤ ≤=
: 0 2S :
r : 0 1
θ π→
→coordenadas cilíndricas
X
Y
Z
( 0 , 0 , 1 )
O
z 1=
θ Resp.: W 0=
Aplicando o teorema da divergência (de Gauss) e as coordenadas esféricas,
determinar o fluxo de , através da su-
perfície esférica de centro na origem e raio unitário .
( )F x, y, z x i y j z k= + +� � � �
coordenadas esféricas
: 0 2: 0: 0 1
θ πφ πρ
→ →→�������
X
Y
Z
n�
F�
θ
ρφ
( )P , ,ρ θ φ
0Resp.: F 4φ π=
�
52ª. Questão.
S
F F n dSφ = ∫∫� � �
i�( ) ( ) ( )F x z i y z j x y k= − − − + −
� � � �
: 0 2R : r : 0 1
x : 0 2
θ π→ →→
coordenadas cilíndricas
Resp.: F 0φ =�
53ª. Questão. Utilizar o teorema da divergência(de Gauss) para calcular a integral de superfície
sendo S a superfície cilíndrica y² + z² = 1 , limitada pelos planos
x = 0 e x = 2 .
O campo vetorial é ( ) ( ) ( )F x z i y z j x y k .= + + + + +� � � �
S
F n dS ,∫∫� �i�
X
0 Y
Z
: 0 2R : r : 0 1
x : 0 2
θ π→ →→
rθ
coordenadas cilíndricas
(2,0,0)
S
Resp.: F n dS 4π=∫∫� �i�
128128
Referências Bibliográficas
1. ANTON , Howard - Cálculo, um novo horizonte, 2 volumes- Bookman Companhia Editora, 1999
12. SYMON , Keith R. - Mechanics- Addison Wesley Publishing Company, Inc., 1965
13. W. G. , McLean ; E. W. , Nelson - Theory and Problems of Engineering Mechanics- Editora McGraw-Hill do Brasil Ltda., 1970
14. ZILL , Dennis G. - Equações Diferenciais com Aplicações em Modelagem - Pioneira Thomson Learning, 2003
129129
2. DACORSO NETO , César - Elementos de Análise Vetorial- Companhia Editora Nacional, 1971
Prof
. Ar
nald
o S
toch
iero
3. HIMONAS , Alex ; HOWARD , Alan - Cálculo, Conceitos e Aplicações - LTC – Livros Técnicos e Científicos Editora
S. A., 2005
4. KAPLAN , Wilfred ; DONALD, J. Lewis - Cálculo e Álgebra Linear, 4 volumes - LTC – Livros Técnicos e Científicos Edi-
tora S. A. e Editora Universidade de Brasília, 1973
5. KREYSZIG , Erwin - Advanced Engineering Mathematics, 3 volumes - LTC – Livros Técnicos e Científicos Editora S. A., 2009
6. LUCINI , Manuel - Lecciones sobre Teoría de la Mecánica y sus Aplicaciones- Editora Labor S. A., Barcelona, 1965
7. PISKUNOV , N. - Cálculo Diferencial e Integral, 2 volumes - Lopes da Silva Editora, Porto, 1972
8. QUINET , J. - Matemática Superior, 6 tomos - Editora Globo, 1969
9. SIMMONS , George F. - Cálculo com Geometria Analítica, 2 volumes- Editora McGraw-Hill do Brasil Ltda., 1987
10. STEWART , James - Cálculo, 2 volumes - Pioneira Thomson Learning, 2006
11. SWOKOWSKI , Earl W. - Cálculo com Geometria Analítica, 2 volumes- Makron Books do Brasil Editora Ltda., 1994