cadeias cinemáticas
TRANSCRIPT
DEMEC‐UFPE 24/05/2013
Prof. José Maria Bezerra 1
Prof. José Maria Bezerra – DEMEC/UFPE
Cadeias Cinemáticas eImposição de Movimento
Prof. José Maria
M E C A N I S M O S
Prof. José Maria Bezerra – DEMEC/UFPE
Conceitos Iniciais
Estudo cinemático dos diversos componentes mecânicos
sistemas articulados; cames e excêntricos; catracas e sistemas intermitentes; engrenagens e polias; correntes e correias.
OBS.:Fundamenta-se na cinemática do movimento, contrastando com o projeto dinâmico-estrutural que tem como base a obtenção de esforços internos e externos a partir da análise do mecanismo.
DEMEC‐UFPE 24/05/2013
Prof. José Maria Bezerra 2
Prof. José Maria Bezerra – DEMEC/UFPE
Histórico
Revolução Industrial
Mecânica Fina
Robótica
Mecatrônica
Nano-robôs
Prof. José Maria Bezerra – DEMEC/UFPE
Movimentos
Movimentos do Corpo Rígido
Movimento Plano Translação
RetilíneaCurvilínea
Rotação
Movimento Combinado
DEMEC‐UFPE 24/05/2013
Prof. José Maria Bezerra 3
Prof. José Maria Bezerra – DEMEC/UFPE
Movimentos do Corpo Rígido
Movimentos
Prof. José Maria Bezerra – DEMEC/UFPE
Movimentos do Corpo Rígido
Movimento Helicoidal
Movimentos
DEMEC‐UFPE 24/05/2013
Prof. José Maria Bezerra 4
Prof. José Maria Bezerra – DEMEC/UFPE
Movimentos do Corpo Rígido
Movimento Esférico
Movimentos
Prof. José Maria Bezerra – DEMEC/UFPE
Mecanismos
Mecanismo Combinação de corpos rígidos e resistentes
que, efetuando movimentos relativos entre si possibilitam a transformação de um movimento em outro.
Transformação
UNIFORME UNIFORME
NÃO-UNIFORME NÃO-UNIFORME
DEMEC‐UFPE 24/05/2013
Prof. José Maria Bezerra 5
Prof. José Maria Bezerra – DEMEC/UFPE
Mecanismos
Máquina
Conjunto de mecanismos destinados a transmitir força de uma fonte de potência contra uma resistência a ser superada.
Prof. José Maria Bezerra – DEMEC/UFPE
Mecanismos
Classificação dos Mecanismos
Quanto ao Tipo (Franz Releaux)
Mecanismos de parafuso Mecanismos de barras Mecanismos de roda (incluindo as engrenagens) Mecanismos de cames Mecanismos de catraca (ou intermitentes) Órgãos de tração/compressão
DEMEC‐UFPE 24/05/2013
Prof. José Maria Bezerra 6
Prof. José Maria Bezerra – DEMEC/UFPE
Mecanismos
Classificação dos Mecanismos
Quanto à Geometria
Planos Esféricos Espaciais
Prof. José Maria Bezerra – DEMEC/UFPE
Mecanismos
Classificação Geométrica
Planos
DEMEC‐UFPE 24/05/2013
Prof. José Maria Bezerra 7
Prof. José Maria Bezerra – DEMEC/UFPE
Mecanismos
Esféricos
Classificação Geométrica
Prof. José Maria Bezerra – DEMEC/UFPE
Mecanismos
Classificação Geométrica
Espaciais

DEMEC‐UFPE 24/05/2013
Prof. José Maria Bezerra 8
Prof. José Maria Bezerra – DEMEC/UFPE
Coordenadas Generalizadas
Simplificação da AnáliseA configuração de um sistema mecânico com um número
finito de pontos materiais ou corpos rígidos pode ser
expressa por um número finito de variáveis reais
chamadas coordenadas generalizadas.
1 2 3( , , ,..., )nx x x xA
By2
y1
x1 x2
Prof. José Maria Bezerra – DEMEC/UFPE
Coordenadas Generalizadas
RestriçõesEstabelecimento de vínculos (restrições), que impõem limitações aos deslocamentos.
A
B
(a)
t
A
B
(b)
t
l
DEMEC‐UFPE 24/05/2013
Prof. José Maria Bezerra 9
Prof. José Maria Bezerra – DEMEC/UFPE
Coordenadas Generalizadas
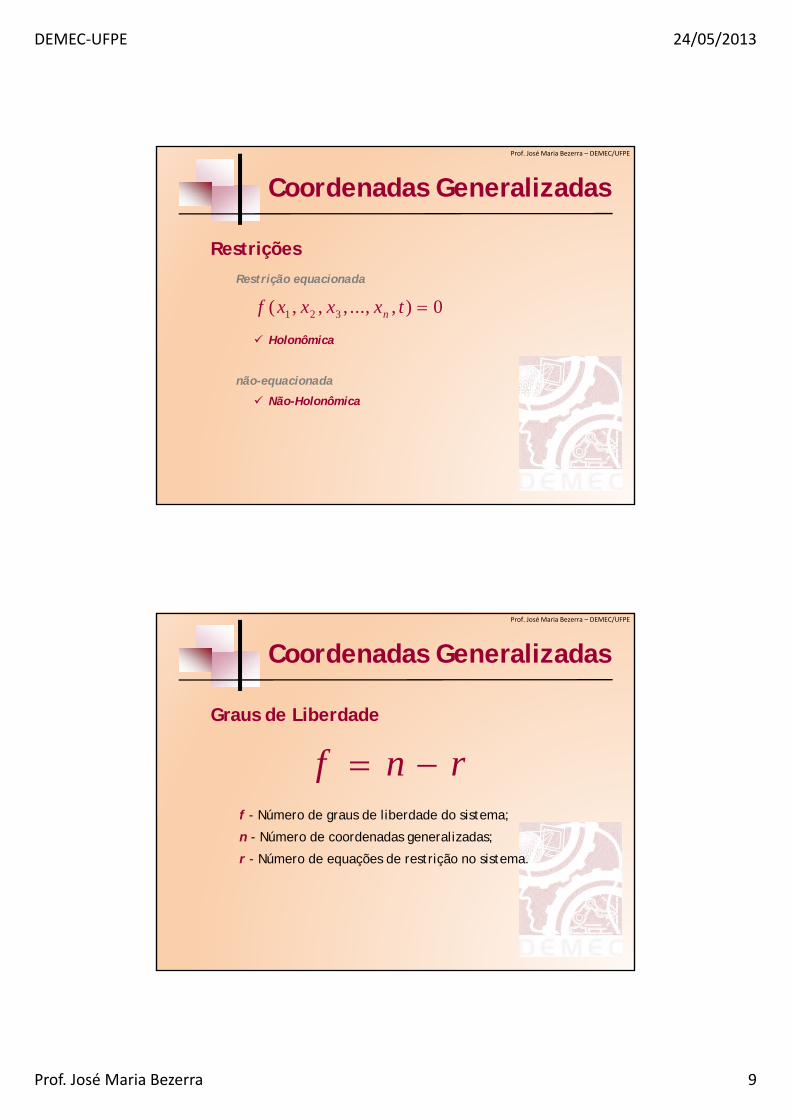
Restrições
Restrição equacionada
Holonômica
não-equacionada
Não-Holonômica
1 2 3( , , , ..., , ) 0nf x x x x t
Prof. José Maria Bezerra – DEMEC/UFPE
Coordenadas Generalizadas
Graus de Liberdade
f - Número de graus de liberdade do sistema;
n - Número de coordenadas generalizadas;
r - Número de equações de restrição no sistema.
f n r
DEMEC‐UFPE 24/05/2013
Prof. José Maria Bezerra 10
Prof. José Maria Bezerra – DEMEC/UFPE
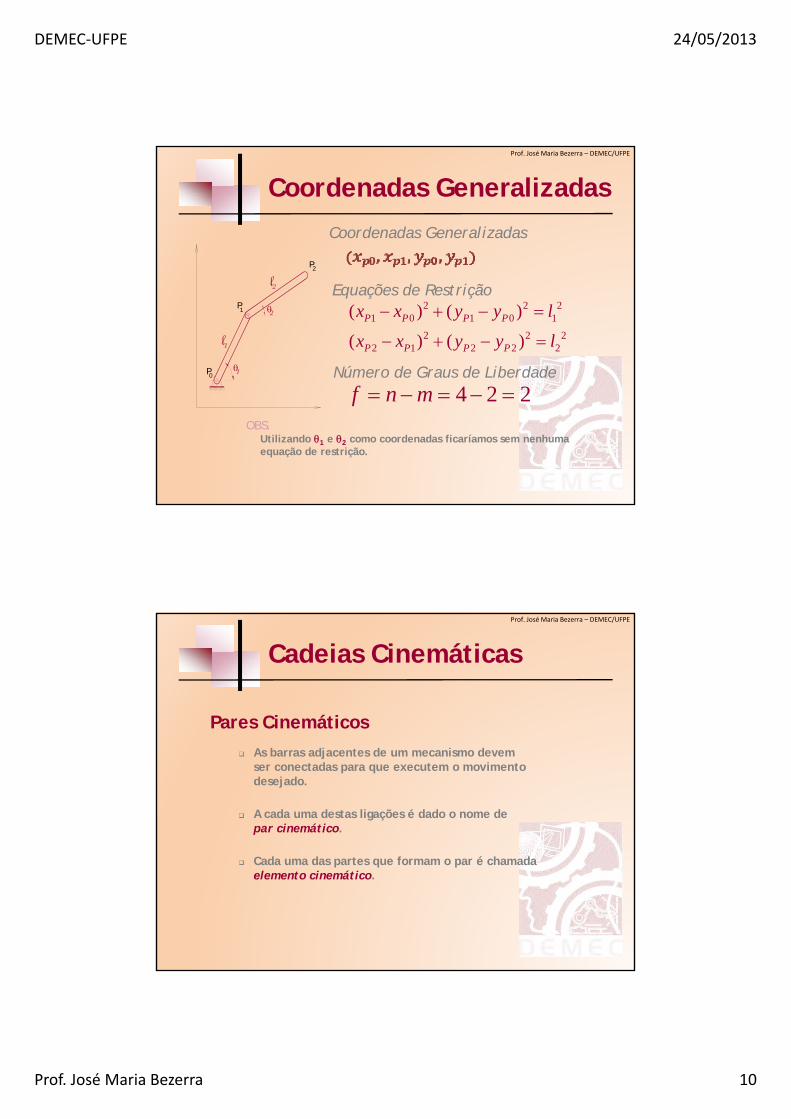
Coordenadas Generalizadas
OBS.Utilizando 1 e 2 como coordenadas ficaríamos sem nenhuma equação de restrição.
P
l
1
2
1
l21
P2
P0
2 2 21 0 1 0 1
2 2 22 1 2 2 2
( ) ( )
( ) ( )
P P P P
P P P P
x x y y l
x x y y l
4 2 2f n m
Coordenadas Generalizadas
Equações de Restrição
Número de Graus de Liberdade
Prof. José Maria Bezerra – DEMEC/UFPE
Cadeias Cinemáticas
Pares Cinemáticos
As barras adjacentes de um mecanismo devemser conectadas para que executem o movimentodesejado.
A cada uma destas ligações é dado o nome depar cinemático.
Cada uma das partes que formam o par é chamadaelemento cinemático.
DEMEC‐UFPE 24/05/2013
Prof. José Maria Bezerra 11
Prof. José Maria Bezerra – DEMEC/UFPE
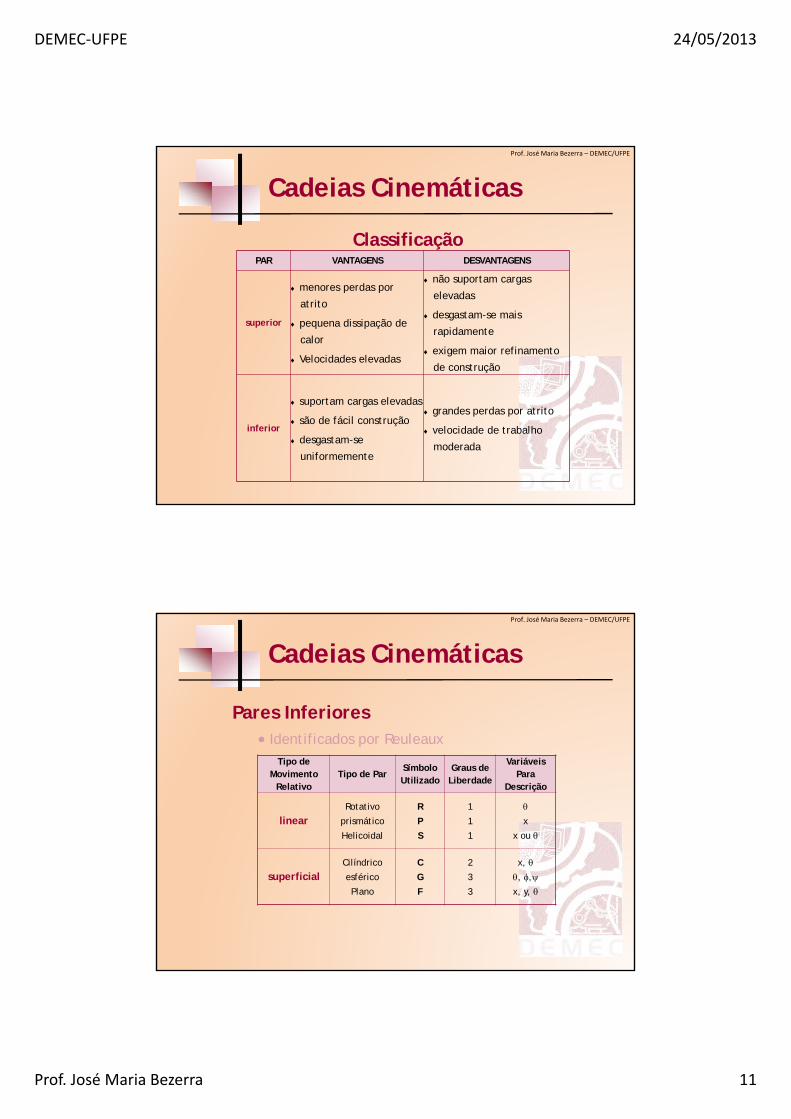
Cadeias Cinemáticas
ClassificaçãoPAR VANTAGENS DESVANTAGENS
superior
menores perdas por
atrito
pequena dissipação de
calor
Velocidades elevadas
não suportam cargas
elevadas
desgastam-se mais
rapidamente
exigem maior refinamento
de construção
inferior
suportam cargas elevadas
são de fácil construção
desgastam-se
uniformemente
grandes perdas por atrito
velocidade de trabalho
moderada
Prof. José Maria Bezerra – DEMEC/UFPE
Cadeias Cinemáticas
Pares Inferiores Identificados por Reuleaux
Tipo de Movimento
RelativoTipo de Par
Símbolo Utilizado
Graus de Liberdade
Variáveis Para
Descrição
linearRotativo
prismático
Helicoidal
R
P
S
1
1
1
x
x ou
superficialCilíndrico
esférico
Plano
C
G
F
2
3
3
x,
, ,
x, y,
DEMEC‐UFPE 24/05/2013
Prof. José Maria Bezerra 12
Prof. José Maria Bezerra – DEMEC/UFPE
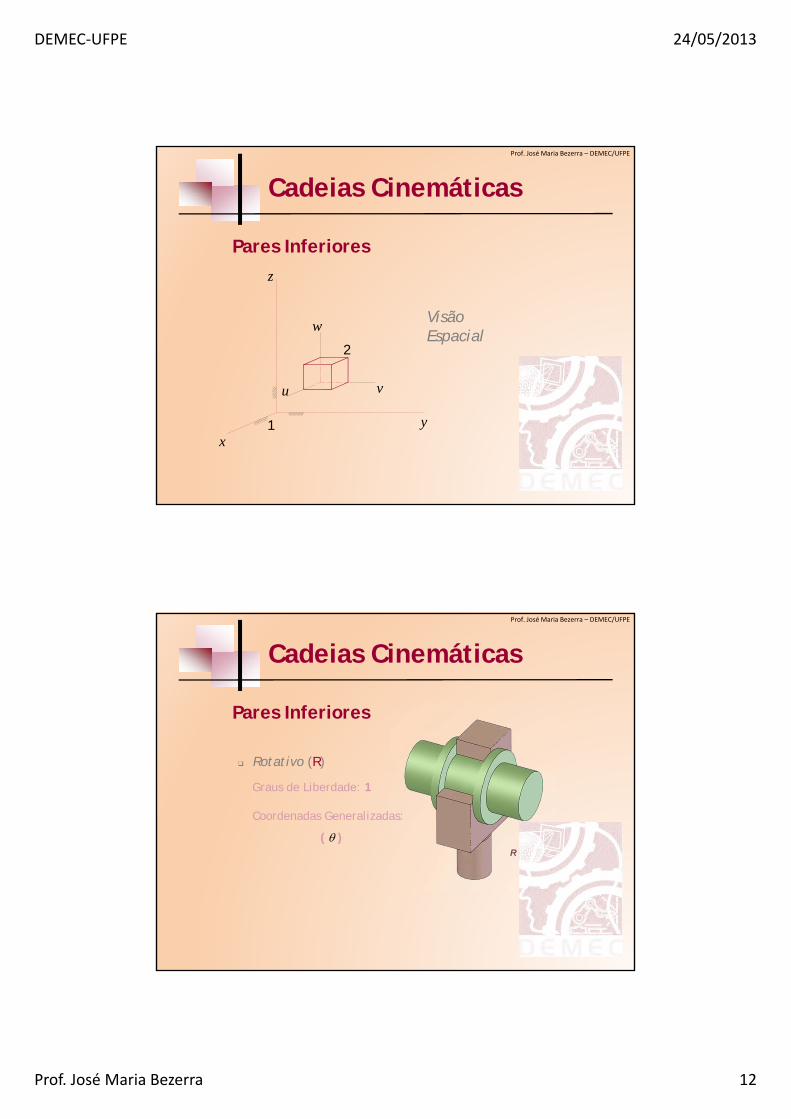
Cadeias Cinemáticas
Pares Inferiores
2
1
vu
w
z
yx
VisãoEspacial
Prof. José Maria Bezerra – DEMEC/UFPE
Cadeias Cinemáticas
Pares Inferiores
Rotativo (R)
Graus de Liberdade: 1
Coordenadas Generalizadas:
( )

DEMEC‐UFPE 24/05/2013
Prof. José Maria Bezerra 13
Prof. José Maria Bezerra – DEMEC/UFPE
Cadeias Cinemáticas
Pares Inferiores
Prismático (P)
Graus de Liberdade: 1
Coordenadas Generalizadas:
( x )
Prof. José Maria Bezerra – DEMEC/UFPE
Cadeias Cinemáticas
Pares Inferiores
Helicoidal (S)
Graus de Liberdade: 1
Coordenadas Generalizadas:
( x ou )

DEMEC‐UFPE 24/05/2013
Prof. José Maria Bezerra 14
Prof. José Maria Bezerra – DEMEC/UFPE
Cadeias Cinemáticas
Pares Inferiores
Cilíndrico (C)
Graus de Liberdade: 2
Coordenadas Generalizadas:
( x , )
Prof. José Maria Bezerra – DEMEC/UFPE
Cadeias Cinemáticas
Pares Inferiores
Esférico (G)
Graus de Liberdade: 3
Coordenadas Generalizadas:
( , , )

DEMEC‐UFPE 24/05/2013
Prof. José Maria Bezerra 15
Prof. José Maria Bezerra – DEMEC/UFPE
Cadeias Cinemáticas
Pares Inferiores
Par Plano (F)
Graus de Liberdade: 3
Coordenadas Generalizadas:
( x , y , )
Prof. José Maria Bezerra – DEMEC/UFPE
Cadeias Cinemáticas
Barra — Elemento Rígido na Cadeia
Classificação
Binária — dois elementos cinemáticos
Ternária — três elementos cinemáticos
Quaternária — quatro elementos cinemáticos
DEMEC‐UFPE 24/05/2013
Prof. José Maria Bezerra 16
Prof. José Maria Bezerra – DEMEC/UFPE
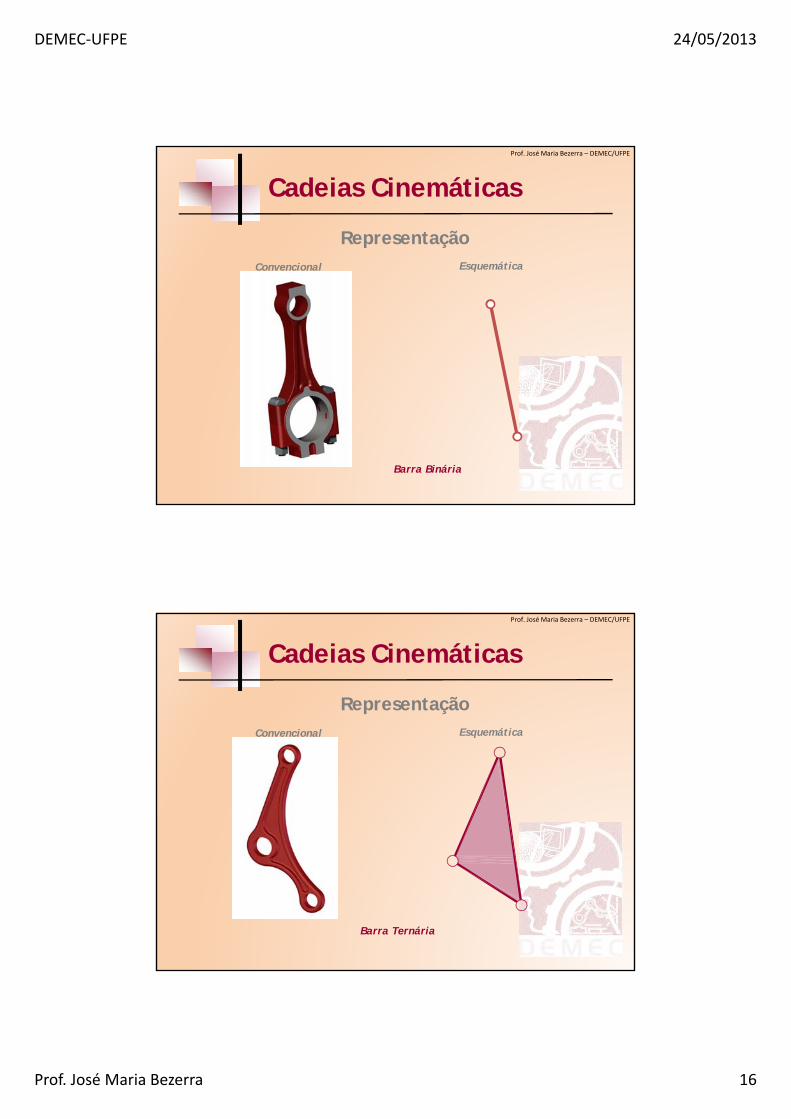
Cadeias Cinemáticas
RepresentaçãoConvencional Esquemática
Barra Binária
Prof. José Maria Bezerra – DEMEC/UFPE
Cadeias Cinemáticas
RepresentaçãoConvencional Esquemática
Barra Ternária
DEMEC‐UFPE 24/05/2013
Prof. José Maria Bezerra 17
Prof. José Maria Bezerra – DEMEC/UFPE
Cadeias Cinemáticas
RepresentaçãoConvencional Esquemática
Barra Ternária Linear
Prof. José Maria Bezerra – DEMEC/UFPE
Cadeias Cinemáticas
Mais Representações Esquemáticas
(a) (b) (c)
(d) (e) (f)
DEMEC‐UFPE 24/05/2013
Prof. José Maria Bezerra 18
Prof. José Maria Bezerra – DEMEC/UFPE
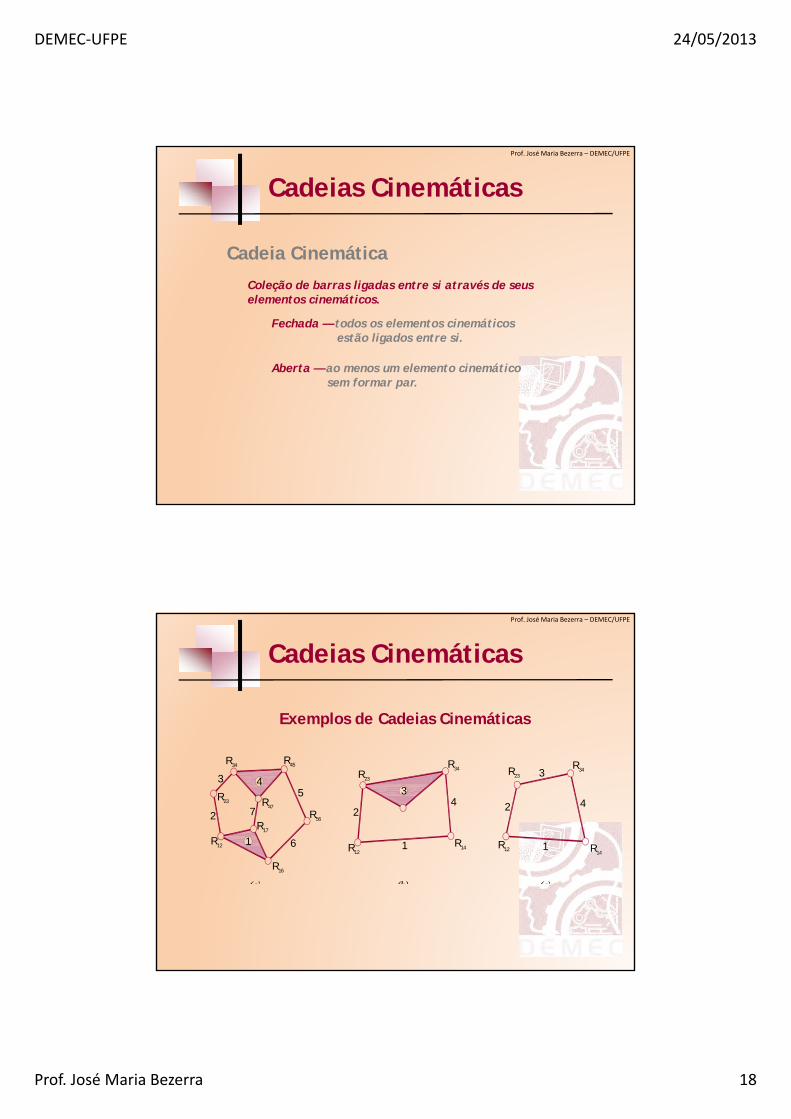
Cadeias Cinemáticas
Cadeia Cinemática
Coleção de barras ligadas entre si através de seus elementos cinemáticos.
Fechada — todos os elementos cinemáticos estão ligados entre si.
Aberta — ao menos um elemento cinemático sem formar par.
Prof. José Maria Bezerra – DEMEC/UFPE
Cadeias Cinemáticas
Exemplos de Cadeias Cinemáticas
(a) (b) (c)
1
4
2
35
6
7
R34R45
R56
R16
R12
R23 R47
R17
1
24
3
R14
R34
R23
R121
2 4
3
R14
R34R23
R12
DEMEC‐UFPE 24/05/2013
Prof. José Maria Bezerra 19
Prof. José Maria Bezerra – DEMEC/UFPE
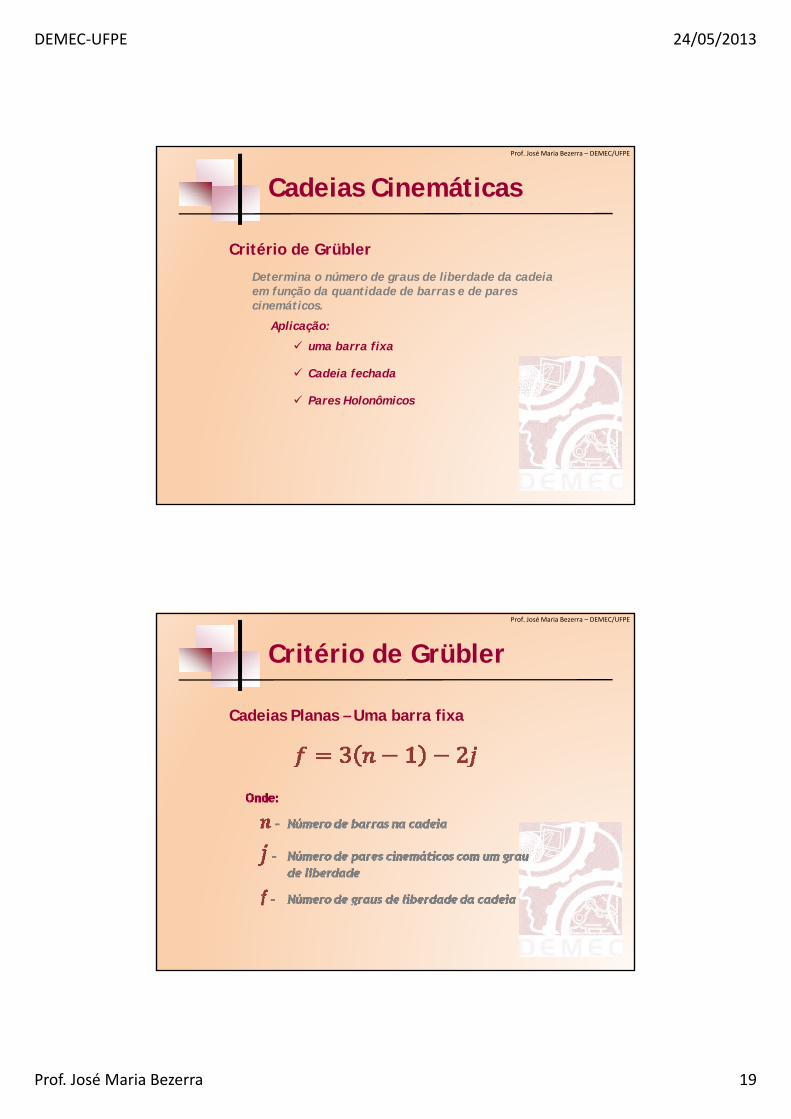
Cadeias Cinemáticas
Determina o número de graus de liberdade da cadeia em função da quantidade de barras e de pares cinemáticos.
Aplicação:
uma barra fixa
Cadeia fechada
Pares Holonômicos
Critério de Grübler
Prof. José Maria Bezerra – DEMEC/UFPE
Critério de Grübler
Cadeias Planas – Uma barra fixa
DEMEC‐UFPE 24/05/2013
Prof. José Maria Bezerra 20
Prof. José Maria Bezerra – DEMEC/UFPE
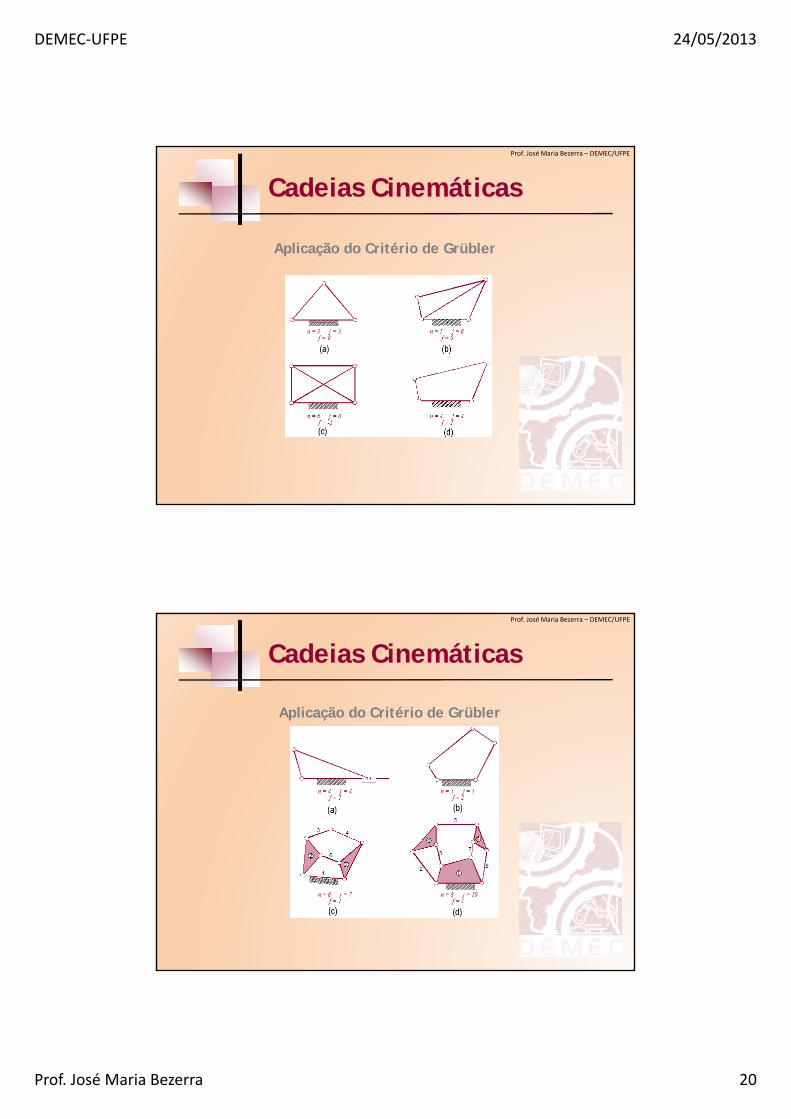
Cadeias Cinemáticas
Aplicação do Critério de Grübler
Prof. José Maria Bezerra – DEMEC/UFPE
Cadeias Cinemáticas
Aplicação do Critério de Grübler
DEMEC‐UFPE 24/05/2013
Prof. José Maria Bezerra 21
Prof. José Maria Bezerra – DEMEC/UFPE
Cadeias Impostas
Cadeias com um grau de liberdadeForçando f = 1 na equação de Grübler, vamos obter:
OBS.
Para que “j” seja inteiro, é necessário que“n” seja par.
Prof. José Maria Bezerra – DEMEC/UFPE
Cadeias Impostas
Possíveis Cadeias Impostas
Aplicando as equações anteriores:
n 2 4 6 8 10 ...
j 1 4 7 10 13 ...
OBS.
Perceba que a primeira cadeia não pode ser fechada.
DEMEC‐UFPE 24/05/2013
Prof. José Maria Bezerra 22
Prof. José Maria Bezerra – DEMEC/UFPE
Cadeias Impostas
Expressões para Cadeias ImpostasSeja k o número de elementos cinemáticos na barra demaior ordem. O número total de barras na cadeia será:
Onde np (p = 1,2,3,..,k) representa a quantidade de barras contendo p elementos na cadeia.
O número total de elementos cinemáticos na cadeia será:
Prof. José Maria Bezerra – DEMEC/UFPE
Cadeias Impostas
E a quantidade de pares cinemáticos será então:
Considerações Geométricas impõem ainda:
Sendo k o número de elementos cinemáticos da barra de maior ordem.