aula 4 modelos de referência aquisição de dados ... · levantamentos o conjunto de operações...
TRANSCRIPT

Aula 4
Modelos de Referência
Aquisição de Dados (Levantamentos)
Prof. João Fernando C. da Silva
Departamento de Cartografia
UNIVERSIDADE ESTADUAL PAULISTA Campus de Presidente Prudente
Faculdade de Ciências e Tecnologia

Objetivos da Cartografia
Primeiro Objetivo da Cartografia
Representar a superfície física da Terra (SFT), de modo organizado e padronizado (sistematizado): Cartografia fundamental ou de base
Segundo Objetivo da Cartografia
Representar eventos e fenômenos (físicos ou não) que ocorrem na SFT ou em seu entorno:
Cartografia temática.
2 2 Introdução à Cartografia
EngeCart FCT/Unesp

• Vem se desenvolvendo desde o fim da 2a Guerra Mundial (1939-1945);
• Interesses militares e estratégicos governamentais;
• Cartografia sistemática mapeou todo o território nacional, em escalas de 1:50.000 a 1:250.000: – Diretoria do Serviço Geográfico do Exército (DSG) – Diretoria de Hidrografia e Navegação (DHN) – Instituto Cartográfico da Aeronáutica (ICA) – Fundação Instituto Brasileiro de Geografia e
Estatística (IBGE)
Cartografia Oficial Brasileira
3 3

Cartografia sistemática
Sistemática porque obedece a um sistema de leis e normas técnicas para construir cartas articuladas entre si, visando a cobertura de todo o território nacional.
Cartografia sistemática brasileira mapeou todo o território nacional na escala 1:1.000.000
(1mm≈1km ou 1cm≈10km).
1:500.000, 1:250.000, 1:100.000, 1:50.000 e 1:25.000 são as escalas oficiais da Cartografia Sistemática Nacional.
4 4

Requisitos Fundamentais
Modelos de referência
Observação/medição: exatidão, acurácia, precisão
Modelos de representação
Projeções cartográficas
Sistema de coordenadas
Comunicação visual (linguagem gráfica – símbolos e cores - e textual)
Sob as regras do conhecimento científico e tecnológico
5

Processo Cartográfico
6

distribuir os dados metodicamente em um meio (físico: papel; digital: monitor ou tela de
apresentação) - o mapa - representando o(s) fenômeno(s) ocorrido(s).
Através de simbologia própria e com a assistência de regras matemáticas
Ex.: relevo, vegetação, vias de circulação, edificações, divisas, hidrografia etc.
Função do cartógrafo
7
O objeto de interesse da Cartografia é a Terra, sua superfície, e subsuperfície, e os eventos que ocorrem nestes espaços e
ambientes.
Para conhecer os eventos é preciso observá-los e da observação são levantados os dados.
Os dados são armazenados, processados, analisados, classificados e representados.
O levantamento dos dados é feito na superfície ou cercanias da Terra.
A superfície da Terra é irregular.
8
... irregular, curva e fechada sobre si mesma.
Problema: difícil modelagem matemática.
Modelos de referência são proximações
Esfera (globo)
Elipsoide (revolução da elipse sobre o eixo menor)
Geoide
Formas ou modelos de representação
esférica: globo (todo o planeta)
ou plana (porção da Terra: mapa, carta, planta).
A verdadeira forma da Terra é...
9

Por quê é necessário definir uma superfície de referência para a
Terra?
Porque a SFT é irregular e, portanto, de difícil modelagem
matemática.
Para facilitar a modelagem (representação) matemática da SFT,
adota-se uma superfície regular:
Esfera ou elipsoide - modelo matemático – “planimetria”
E o geoide - modelo físico – “altimetria”
Superfície de referência
10 10

Por que planimetria e altimetria?
• Planimetria porque as posições de pontos na esfera
ou no elipsoide são bidimensionais e usualmente
representados em um plano (DC)
• Altimetria porque referem-se às altitudes de pontos
na SFT e.r.a. o geoide (NMM)
11

Pitágoras (528 a.C.): introduziu o conceito de forma esférica para o planeta
Modelo esférico
Primeiro Modelo de Referência: a Esfera.
Globo terrestre 12

Elipsoide de Revolução
Segundo Modelo de Referência
Modelo elipsoidal
13
Elipsóide de revolução é um esferóide construído a partir da rotação de uma elipse em torno de seu menor eixo.
13

a= semi-eixo maior
b= semi-eixo menor
f=(a-b)/a achatamento
O elipsóide de revolução é caracterizado pelo semi-eixo
maior (a) e pelo achatamento (f).
Por quê o ER é achatado nos pólos? Força centrífuga no equador
14 14

Gauss (1777-1855): geoide
Modelo de Referência para altimetria
15
Geóide é a superfície equipotencial constante arbitrariamente coincidente com o NMM, que se prolonga por sob os continentes. Assume-se que é a superfície irregular que mais se aproxima da verdadeira forma da Terra.
15

• Em geral, cada país, ou grupo de países, adota um sistema geodésico ao qual as cartas e mapas são referenciados por meio de coordenadas (parâmetros).
• O sistema geodésico é materializado (realizado) por um conjunto ou rede de pontos planimétricos e altimétricos, cujas coordenadas são referenciadas a um datum geodésico.
• O datum geodésico é definido por – um elipsóide de revolução (a,f),
– uma origem sobre o mesmo (,),
– e uma direção (azimute).
• O referencial (datum) altimétrico é dado por parâmetros relativos entre o ER e ao geoide.
Sistema e Datum Geodésicos
16

Relação existente entre a superfície topográfica (SFT), o elipsóide e o geóide para uma mesma porção da superfície
terrestre.
H = h – N (aproximação) h: altitude elipsoidal ou geométrica, obtida por rastreamento de satélites, H: altitude ortométrica, determinada por nivelamento geométrico, N: altura (ou ondulação) geoidal.
Altitudes geométrica (h) e ortométrica (H) e a ondulação geoidal (N)
17 17

Os parâmetros (a,f) de um elipsoide, bem como sua posição relativa ao geoide, definem um sistema geodésico (datum geodésico).
No Brasil, por muito tempo adotou-se o Sistema Geodésico Sul Americano - SAD 69, com as seguintes características:
SISTEMA ATUAL DO BRASIL: SIRGAS 2000: DA MESMA FORMA DO WGS-84 É GEOCÊNTRICO (COMPATIVEIS NA ORDEM DO CENTÍMETRO)
IMPORTANTE TER CONHECIMENTO SOBRE AS DIFERENÇAS
ENTRE UM SISTEMA GEOCÊNTRICO E UM REGIONAL!!!
SGB
18

19

20
Aquisição de Dados

Levantamentos
O conjunto de operações executadas na SFT para:
1. medir e determinar a forma e as dimensões da Terra (ou de
porções dela);
2. determinar a posição de pontos em um datum geodésico (ER e
seus cinco parâmetros fundamentais).
Tipos Levantamentos Geodésicos (E.R.) Levantamentos Topográficos (P.T.) Rastreamento de satélites, estações totais, teodolitos, níveis etc.
Os aerolevantamentos são operações executadas com os sistemas sensores (câmera fotogramétrica, sistemas de
varredura eletrônica, RADAR, LiDar) embarcados em aeronaves e, portanto, não têm contato direto com a SFT.
21 21

Levantamentos Geodésicos
- Conjunto de atividades de medições e observações que se destinam à determinação da forma e dimensões do nosso planeta (geóide e elipsóide).
- É a base para o estabelecimento do referencial geométrico necessário ao posicionamento dos elementos que compõem a paisagem territorial. - Obtenção de coordenadas tridimensionais na superfície terrestre ou próxima a ela (GNSS).
22

Levantamento Planimétrico
- Triangulação: é o procedimento em que se obtém figuras geométricas a partir de triângulos, justapostos
formados através da medição dos ângulos subtendidos por cada vértice.
- A triangulação consiste numa rede de triângulos construídos sobre uma superfície física e a sua utilização permite a obtenção das coordenadas dos pontos que formam os vértices dos triângulos com elevada precisão.
23

• Trilateração: é um processo de levantamento semelhante à triangulação, porém o que se mede são os lados dos triângulos.
• Poligonação: é um encadeamento de distâncias e ângulos medidos entre pontos adjacentes formando linhas poligonais ou polígonos.
medição de lados
Partindo de uma linha formada por dois pontos conhecidos, determinam-se novos pontos, até chegar a uma linha de pontos conhecidos.
24

A
B C
D
1
2
3 4 5
6
7
8
E
F
G
H 9
11
10
12
Triangulação:
Poligonação:
Coordenas
conhecidas:
controle de erros
25

Levantamento Altimétrico
• Nivelamento Geométrico: Processo de determinação
de altitudes de pontos, que utiliza níveis e miras graduadas.
• No nivelamento geométrico (ou direto), as diferenças de nível são determinadas com instrumentos que permitem determinar as alturas de leituras nestes pontos.
As diferenças entre os valores encontrados correspondem às diferenças de nível procuradas
26

A
B
Plano Horizontal
Vertical (l1) Vertical (l2)
Diferença de nível entre
l1 – l2
- Consiste em passar um plano horizontal sobre dois pontos (A e B), na superfície do terreno, e medir as distâncias verticais (l1 e l2) deste plano a estes pontos
27
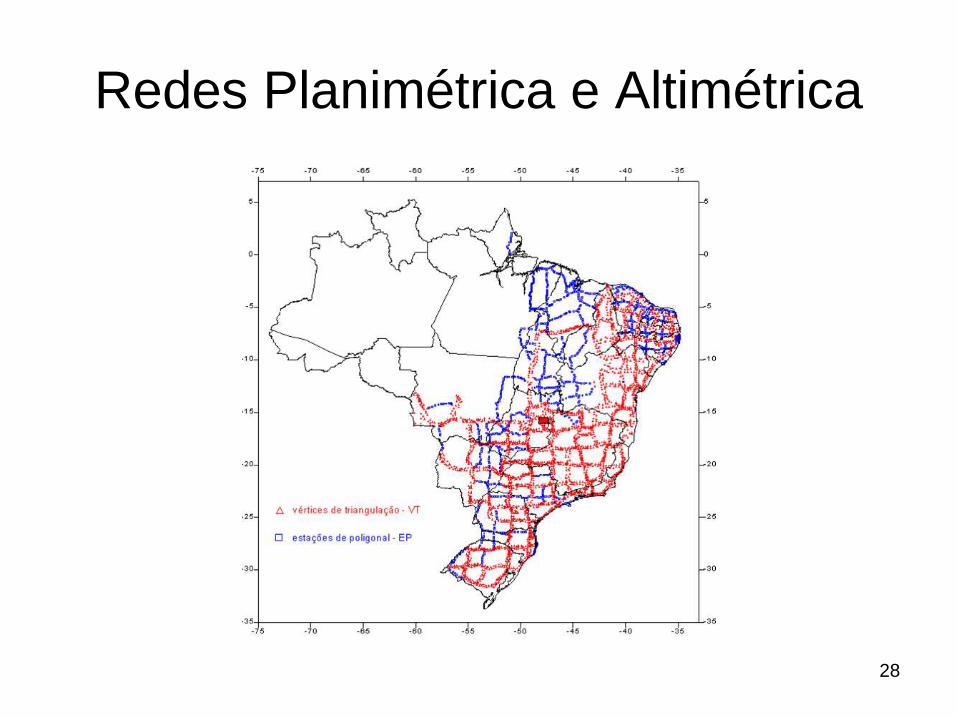
Redes Planimétrica e Altimétrica
28

Exemplo de
Nível
29

Exemplo de GPS
GPS Trimble 4600
GPS Reliance GPS Garmin
30 Introdução à Cartografia
EngeCart FCT/Unesp
30

• Nivelamento Trigonométrico: Baseia-se em relações
trigonométricas.
• É menos preciso que o geométrico, fornece apoio
altimétrico para os trabalhos topográficos.
• Usa-se um teodolito.
31

Levantamentos Topográficos
Operações através das quais se realizam medições, com a finalidade de se determinar a posição relativa de pontos da superfície da Terra no horizonte topográfico.
Os métodos clássicos da Topografia, baseiam-se fundamentalmente na medição de ângulos e distâncias recorrendo a instrumentos tais como estações totais, teodolitos e níveis.
32

Levantamentos Topográficos
“A topografia tem por finalidade a representação e descrição da superfície terrestre, em zonas suficientemente restritas para que se possa desprezar a sua curvatura.”
33
R = 6.371.000m tg (1”) ≈ 4,8481*10-6
(L/2) = R * tg(1”) ≈ 30 km L ≈ 60km.

Exemplos de Teodolitos e
Estação Total
34

35
Exemplo de uma planta topográfica

Posicionamento por GPS
O Sistema de Posicionamento Global, conhecido por GPS, é um sistema de radionavegação desenvolvido pelo Departamento de Defesa dos Estados Unidos da América (DoD – Department of Defense), visando ser o principal sistema de navegação das forças armadas americanas.
Devido à alta acurácia,
uma grande comunidade usuária emergiu dos mais variados segmentos da comunidade civil.
36

Este sistema apresenta vantagens sobre os métodos de posicionamento convencionais, tais como:
O GPS permite ao usuário, por meio do
recebimento de sinais de satélites artificiais, definir a
localização de um ponto qualquer sobre a superfície
terrestre ou próxima a ela.
- rapidez na obtenção de coordenadas;
- disponibilidade em quaisquer condições climáticas;
- não necessidade de visibilidade entre as estações
37

Métodos de Posicionamento
- Absoluto (Ponto isolado): Este método fornece uma precisão na ordem de 10 metros.
- Relativo: Utilizado para aplicações geodésicas de precisão. Dependendo da técnica utilizada (estático, cinemático ou dinâmico), é possível obter-se uma precisão na ordem do cm.
- Diferencial: As posições absolutas, obtidas com um receptor móvel, são corrigidas por um outro receptor fixo. Esses receptores comunicam-se através de link de rádio.
Precisão abaixo do metro
38

Exemplo de GPS
GPS Trimble 4600
GPS Reliance GPS Garmin
39

Superfície física
da Terra
Receptor recebe os
dados do satélite e
registra o tempo
(receptor e satélite).
Coordenadas do satélite
são fornecidas
juntamente com as
observações de tempo.
Com a distância entre o satélite e o receptor determinada em função da diferença de tempo e comprimento de onda, determinam-se as coordenadas do ponto onde está localizado o receptor.
40

Precisão na ordem de 10 metros!
Método de posicionamento absoluto
41

Precisão na ordem sub-métrica!
Estação Monitora
Usuário
Satélite GPS
Método de posicionamento diferencial
42

1 r 2
r
1 S
2 S
Coordenadas
conhecidas! Método mais preciso!!!
Método de posicionamento relativo: Estático
43

Método de Posicionamento Relativo: Cinemático
44
Levantamentos por Sistemas Sensores (Imageadores e não-imageadores)
• Os sensores remotos são equipamentos que captam e registram a energia refletida ou emitida pelos elementos da superfície terrestre.
• Dependendo de suas características, eles podem ser instalados em plataformas terrestres, áereas e orbitais.
• São exemplos de sensores as câmaras fotogramétricas e sistemas de varredura linear.
45

Quanto aos modelos operantes:
Ativos: Possuem sua própria fonte de radiação, a qual incide em um alvo, captando em seguida o seu reflexo.
Passivos: Registra irradiações diretas ou refletidas de fontes naturais. Dependem de uma fonte de radiação externa para que possam operar.
- Radar (radio detection and ranging); - Laser (light amplification by stimulated emission of radiation);
Ex.: - Câmera fotográfica (visível); - Sensores orbitais (IV, V, UV);
46

Quanto ao tipo de transformação sofrida pela radiação detectada:
Não imageador:
Imageador:
Não fornecem uma imagem da superfície sensoriada e sim registros na forma de dígitos ou gráficos.
Fornecem uma imagem da superfície observada no sistema de quadros ou no sistema de varredura (ótica ou eletrônica).
47

Câmeras fotogramétricas
O método de levantamento fotogramétrico utiliza como sensor
para fotografar a área de interesse
uma câmera fotogramétrica instalada em aeronaves
compondo faixas de fotos aéreas com especificações que permitam a construção de modelos estereoscópicos (modelo tridimensional).
forma sistemática
48

49
Câmeras aerofotogramétricas

Faixas compondo a trajetória de vôo
50

Devido a distorções originadas no processo de formação da foto,
Determinação das coordenadas da superfície terrestre através do processo fotogramétrico.
inclinação da fotografia, imperfeições das lentes, deslocamento devido ao relevo,
Correções devem ser realizadas a fim de considerar a fotografia confiável para o processo de medição.
Produtos gerados: original de restituição, ortofoto, MDT, mosaico, etc. 51

Restituidor analógico e pantógrafo
52

Estação Fotogramétrica Digital
53

54

Fotografia - visível
Fotografia – falsa cor
55

Fotografia Ortofoto
56
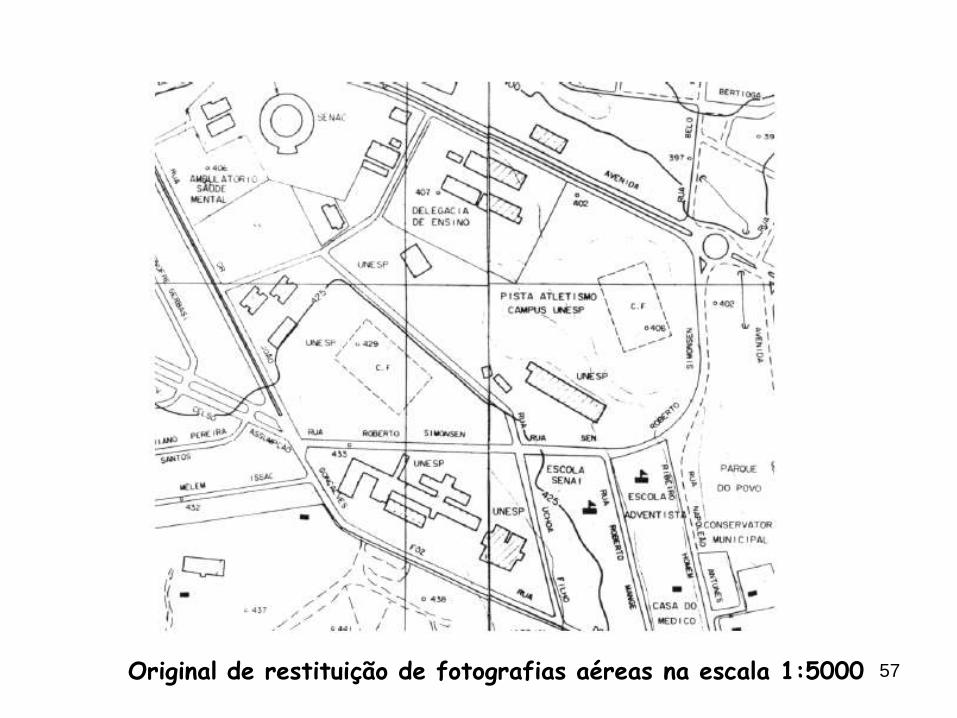
Original de restituição de fotografias aéreas na escala 1:5000 57

Foto Indice
58

Fotografia Carta
59

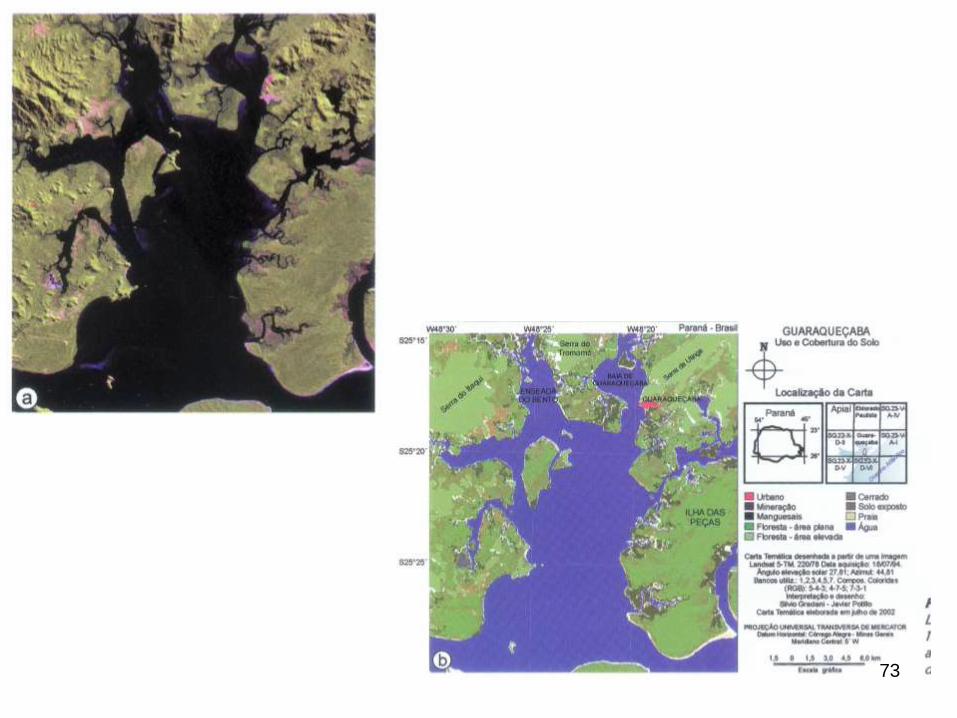
Sistema de varredura eletrônica
Os sistemas de varredura eletrônica geram as imagens formadas pelo movimento de varredura (scanning), à medida que a plataforma se desloca ao longo de sua trajetória.
60

Tais imagens possuem distorções oriundas de diferentes fontes: distorções radiométricas e geométricas;
Na correção radiométrica as técnicas utilizadas modificam os números digitais (ND) originais
para torná-los mais próximos dos valores que deveriam estar presentes na imagem
- Técnicas de processamento digital de imagens
61

A correção geométrica deve modelar os erros inerentes ao processo de aquisição das imagens
Altera a geometria da imagem com a finalidade de corrigir distorções produzidas:
Produtos gerados: imagens temáticas, ortoimagens.
Com a evolução desses sistemas:
pelo movimento de rotação da Terra ou por pequenas variações na altitude, atitude ou na velocidade da plataforma.
uso em diversas aplicações 62

63

Mancha
urbana
64

Landsat
• Monitoração: desmatamento
65

- Na década de 80, o governo brasileiro iniciou a idealização e implementação de um programa técnico-científico espacial brasileiro em parceria com a China.
- Lançado em outubro de 1999, o primeiro satélite do Programa CBERS apresenta a capacidade técnica de um sistema completo de Sensoriamento Remoto para observação da Terra, compatível com as necessidades atuais.
Satétile CBERS - (China-Brazil Earth Resources Satellite)
- Câmara CCD (High Resolution CCD Camera)
- Câmara IRMS (Infrared Multispectral Scanner)
- Câmara WFI (Wide Field Imager) 66

113 km 120 km
890 km WFI
IRMS CCD
67

resolução espacial de 260 m
Câmara WFI (Wide Field Imager)
Alto Rio Paraná e seus afluentes
68

Plano Piloto de Brasília e seu contorno gravado pelo Satélite CBERS em 08 de setembro de 2004.
Destaca-se o cinturão das cidades-satélites em plena expansão, bem como a presença de novos loteamentos.
resolução espacial de 20 m
Câmara CCD (High Resolution CCD Camera)
69

Resolução espacial de 80 m (160 m no canal termal)
Câmara IRMS (Infrared Multispectral Scanner)
Região do Rio Grande do Sul.
A água aparece em tons escuros, quase preto.
A vegetação é representada em verde e as áreas de solo exposto ou de vegetação bem esparsa está em tons amarelados ou róseos.
70

Câmera Pancromática de Alta Resolução (HRC - High Resolution Camera)
Resolução espacial de 2,7 m
Região: Mato Grosso
Datada: 26/09/2007
Município de Aripuanã
71

CBERS: Satélite Sino-Brasileiro
• Infravermelho, • RESOLUÇÃO ESPACIAL 80 m • LARGURA DA FAIXA IMAGEADA 120 Km • RESOLUÇÃO TEMPORAL 26 dias
• Queimadas
72
73

Sistemas de Microondas
O sistema de imageamento mais comum é o dos Radares de Visada Lateral.
Sendo um sistema ativo, não é afetado pelas variações diurnas na radiação refletida pela superfície do terreno:
Pode operar em condições de nebulosidade, uma vez que as nuvens são transparentes à radiação da faixa de microondas.
- podendo ser usado inclusive à noite
- diferentes condições climáticas
74

Radar
(RADio Detection And Ranging)
Amazônia
75 75

Radar Amazônia – RADAM
76 76

77 77

Revisão
• Conceito de Cartografia
• Objetivos da Cartografia
• Forma da Terra
• Processo cartográfico
• Levantamentos
• Sistemas sensores
78

Conclusão
• Cartografia tem um conceito amplo (engenharia) e um
conceito restrito (disciplina);
• O “amplo” produz dados para o “restrito”
• Objetivo: mapear e representar o objeto Terra;
• Superfície da Terra é irregular => superfície de
referência (modelagem matemática);
• Metodologia e tecnologia;
• Produtos: mapas, cartas, atlas, globos, ortofotocarta,
ortofotomosaico, bancos de dados, etc.
– PRÓXIMA AULA
79 79