aula 3 aula 3 – introdução à robótica móvel introdução à ... · aula 3 aula 3 –...
TRANSCRIPT
Aula 3 Aula 3 –– Introdução à Robótica MóvelIntrodução à Robótica Móvel
CinemáticaCinemáticaCinemáticaCinemática
Prof. Dr.Prof. Dr. Marcelo BeckerMarcelo Becker
EESC - USP
•• Introdução Introdução
• Cinemática
• Manobrabilidade e Workspace
Sumário da AulaSumário da Aula
EESC-USP © M. Becker 2008 2/90
• Manobrabilidade e Workspace
• Controle
• Exercícios Recomendados
• Bibliografia Recomendada
IntroduçãoIntrodução
• Modelagem Cinemática
– Descrição do comportamento mecânico do robô para poder melhor projetá-lo e controlá-lo.
EESC-USP © M. Becker 2008 3/90
– Similar à cinemática de Manipuladores Robóticos.
– É necessário verificar as similaridades e diferenças entre a modelagem de manipuladores robóticos e robôs móveis.
IntroduçãoIntrodução
• Modelagem Cinemática– Espaço de trabalho
• Para manipuladores, define as posições que podem ser atingidas por seus atuadores em
EESC-USP © M. Becker 2008 4/90
podem ser atingidas por seus atuadores em relação à sua posição fixa no ambiente.
• Para robôs móveis, define as possíveis atitudes que ele pode atingis em seu ambiente.

IntroduçãoIntrodução
• Modelagem Cinemática– Controlabilidade
• Para manipuladores, define o modo pelo qual o acionamento dos motores pode ser empregado
EESC-USP © M. Becker 2008 5/90
acionamento dos motores pode ser empregado para mudar de atitude no espaço de trabalho.
• Para robôs móveis, define os possíveis caminhos no espaço de trabalho. Deve considerar aspectos de Dinâmica, p.e.: um CG alto restringe o raio de curvatura admissível para se evitar capotamento.
IntroduçãoIntrodução
• Modelagem Cinemática– Estimativa de Posição
• Manipuladores Fixos possuem uma posição no ambiente definida. Desse modo, dados dos
EESC-USP © M. Becker 2008 6/90
ambiente definida. Desse modo, dados dos sensores fornecem boas estimativas da posição.
• Robôs móveis movem-se em seu ambiente, logo a posição não pode ser estimada apenas observando os dados dos sensores. São necessários algoritmos dedicados para essa (não trivial) tarefa.
IntroduçãoIntrodução
• Modelagem Cinemática– Passos necessários para a Modelagem
Cinemática: 1. Adotar uma notação com um sistema de
referências global {I} e outro acoplado no Robô
EESC-USP © M. Becker 2008 7/90
referências global {I} e outro acoplado no Robô Móvel {P};
2. Empregar um modelo simples de cinemática de locomoção:� Locomoção do robô é uma função de sua geometria
e dos comportamentos de suas rodas;
3. Limitações cinemáticas do robô são expressas em função das limitações individuais das rodas.
IntroduçãoIntrodução
• Modelagem Cinemática– Observa-se então que:
• O Robô pode mover-se no ambiente:– Não há como medir a exata posição dele– As posições tem de ser estimadas ao longo do tempo
EESC-USP © M. Becker 2008 8/90
– As posições tem de ser estimadas ao longo do tempo– Sujeito a erros (grande desafio...)
• Robô com rodas → entender como o comportamento das rodas influencia o comportamento do robô...
IntroduçãoIntrodução
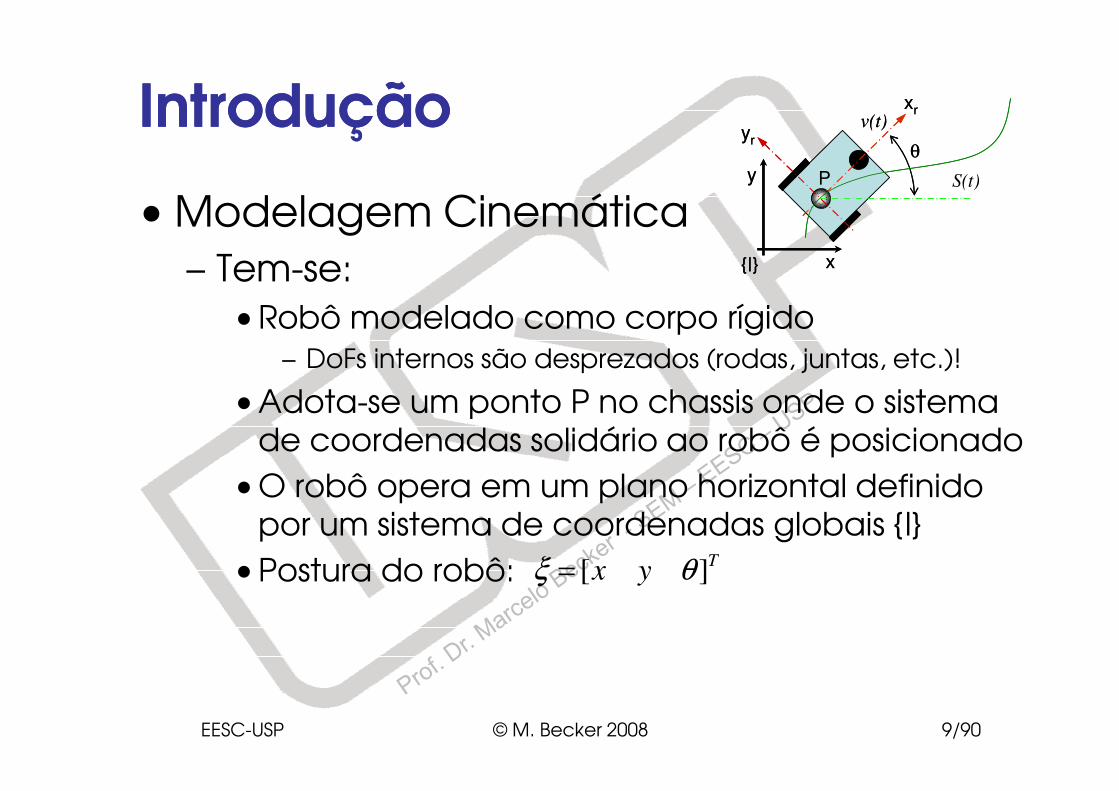
• Modelagem Cinemática– Tem-se:
• Robô modelado como corpo rígido– DoFs internos são desprezados (rodas, juntas, etc.)!
• Adota-se um ponto P no chassis onde o sistema
x
y
{I}
xr
yrv(t)
θ
S(t)
x
y
{I}
xr
yrv(t)
θ
S(t)P
EESC-USP © M. Becker 2008 9/90
• Adota-se um ponto P no chassis onde o sistema de coordenadas solidário ao robô é posicionado
• O robô opera em um plano horizontal definido por um sistema de coordenadas globais {I}
• Postura do robô: Tyx ][ θξ =
IntroduçãoIntrodução
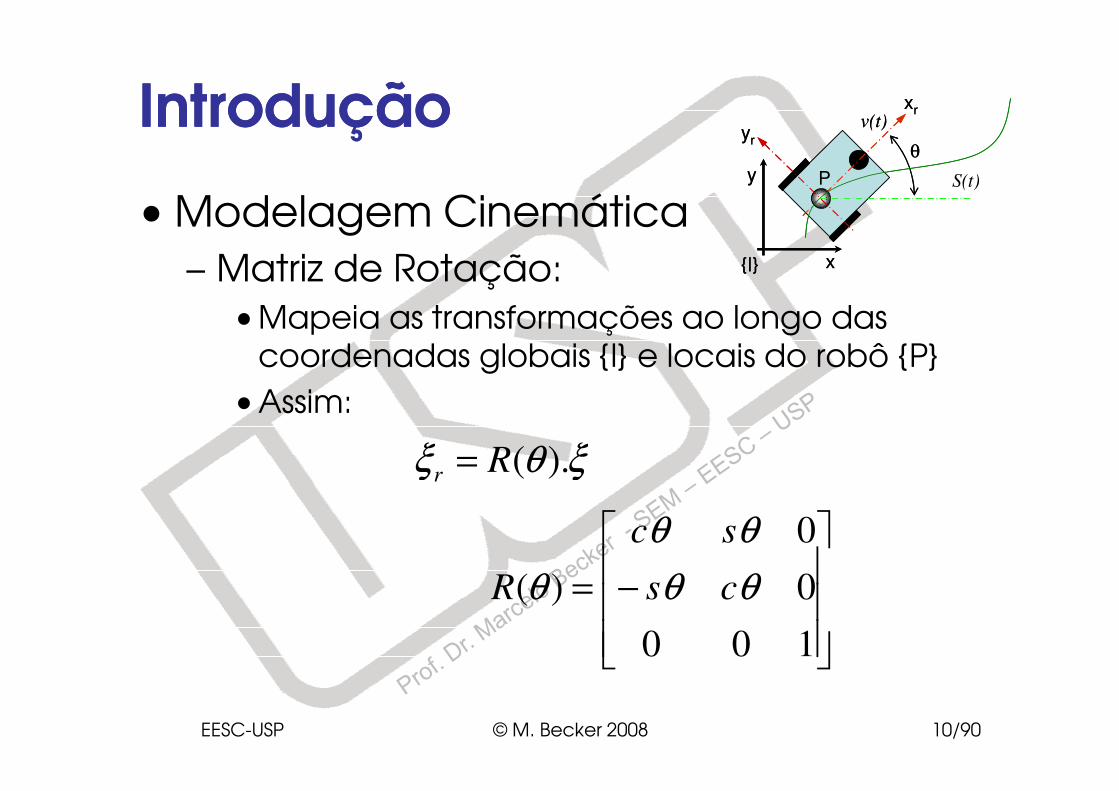
• Modelagem Cinemática– Matriz de Rotação:
• Mapeia as transformações ao longo das coordenadas globais {I} e locais do robô {P}
• Assim:
x
y
{I}
xr
yrv(t)
θ
S(t)
x
y
{I}
xr
yrv(t)
θ
S(t)P
EESC-USP © M. Becker 2008 10/90
• Assim:
ξθξ ).(Rr =
−=
100
0
0
)( θθ
θθ
θ cs
sc
R
IntroduçãoIntrodução
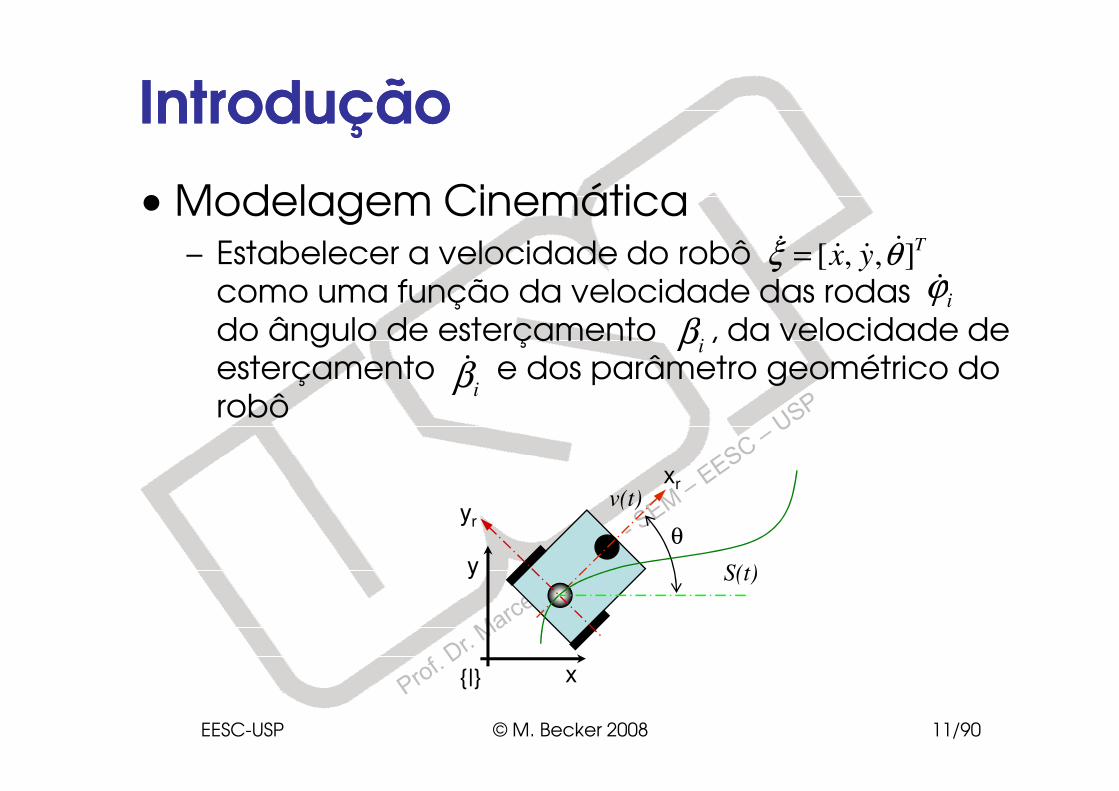
• Modelagem Cinemática– Estabelecer a velocidade do robô
como uma função da velocidade das rodas do ângulo de esterçamento , da velocidade de esterçamento e dos parâmetro geométrico do robô
Tyx ],,[ θξ &&&& =
iϕ&
iβ
iβ&
EESC-USP © M. Becker 2008 11/90
robôi
x
y
{I}
xr
yrv(t)
θ
S(t)
IntroduçãoIntrodução
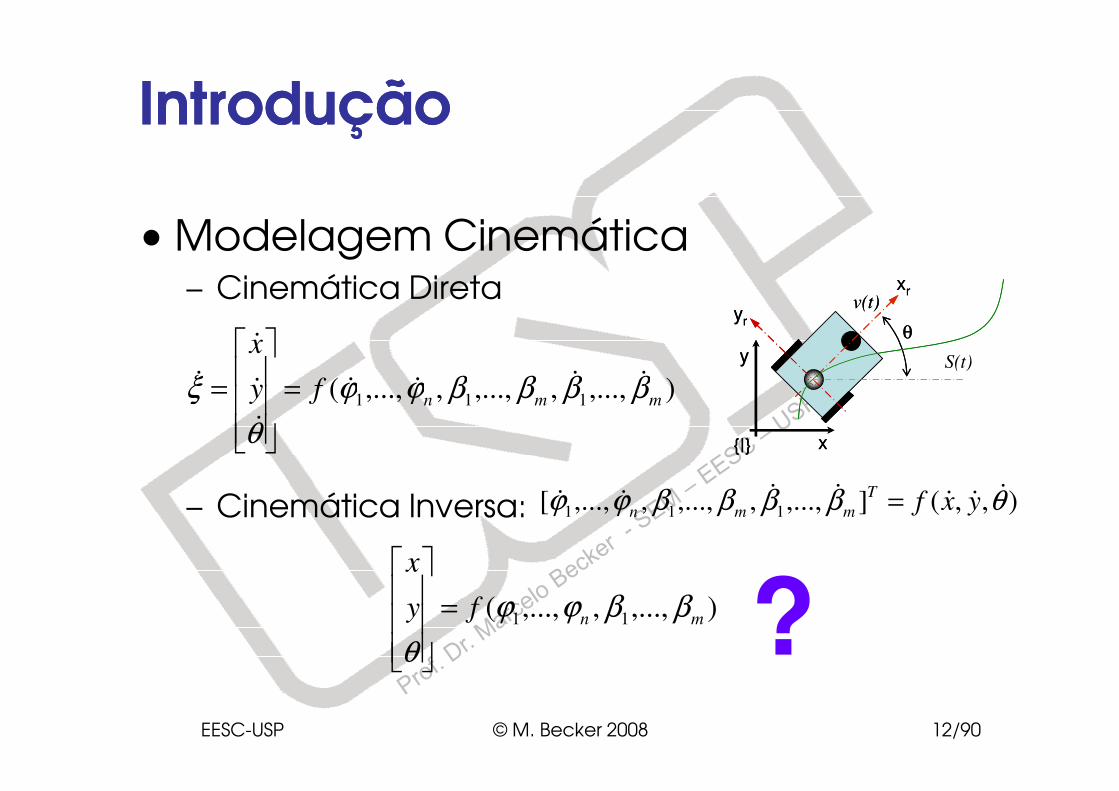
• Modelagem Cinemática– Cinemática Direta
),...,,,...,,,...,( 111 mmnfy
x
ββββϕϕξ &&&&&
&
& =
=y
xr
yrv(t)
θ
S(t)y
xr
yrv(t)
θ
S(t)
EESC-USP © M. Becker 2008 12/90
– Cinemática Inversa:
),...,,,...,,,...,( 111 mmnfy ββββϕϕ
θ
ξ &&&&
&
&& =
=
x{I} x{I}
),,(],...,,,...,,,...,[ 111 θββββϕϕ &&&&&&& yxfT
mmn =
),...,,,...,( 11 mnfy
x
ββϕϕ
θ
=
?
IntroduçãoIntrodução
• Cinemática Direta: – Dadas as posições dos atuadores,
computa-se a posição e orientação do robô no espaço de trabalho
• Cinemática Inversa:
EESC-USP © M. Becker 2008 13/90
• Cinemática Inversa:– Dadas as posições e orientações do robô
no espaço de trabalho, qual deve ser a movimentação dos atuadores para atingi-la?
IntroduçãoIntrodução
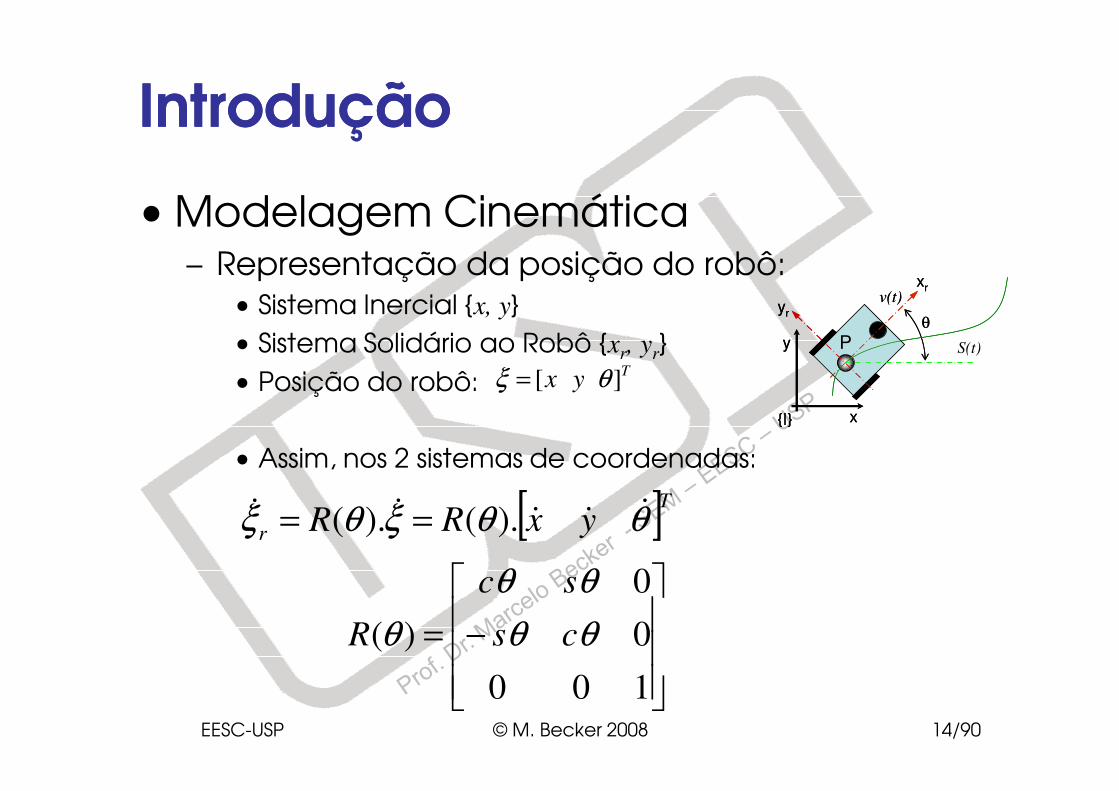
• Modelagem Cinemática– Representação da posição do robô:
• Sistema Inercial {x, y}• Sistema Solidário ao Robô {xr, yr}• Posição do robô: T
yx ][ θξ =
y
xr
yrv(t)
θ
S(t)y
xr
yrv(t)
θ
S(t)P
EESC-USP © M. Becker 2008 14/90
• Posição do robô:
• Assim, nos 2 sistemas de coordenadas:
x{I} x{I}
[ ]Tr yxRR θθξθξ &&&&& ).().( ==
−=
100
0
0
)( θθ
θθ
θ cs
sc
R
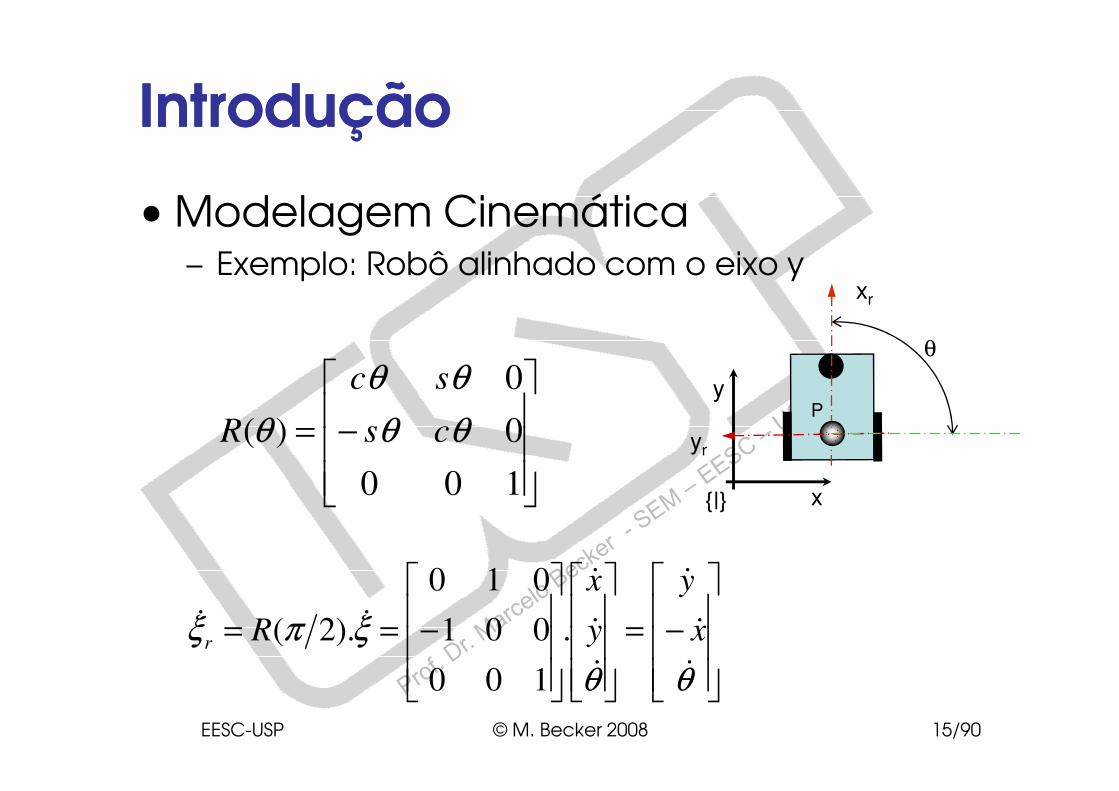
IntroduçãoIntrodução
• Modelagem Cinemática– Exemplo: Robô alinhado com o eixo y
y
xr
θ
0θθ sc
EESC-USP © M. Becker 2008 15/90
x
y
{I}
yr
−=
−==
θθ
ξπξ&
&
&
&
&
&
&& x
y
y
x
Rr .
100
001
010
).2(
−=
100
0
0
)( θθ
θθ
θ cs
sc
RP
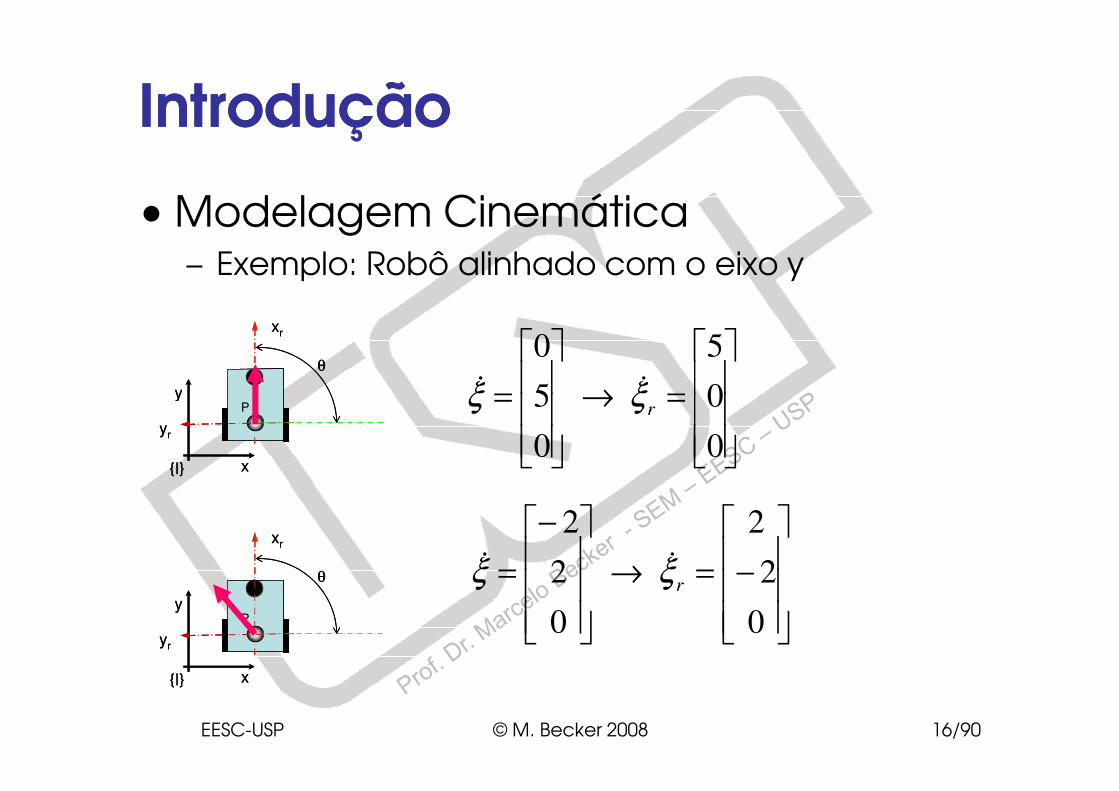
IntroduçãoIntrodução
• Modelagem Cinemática– Exemplo: Robô alinhado com o eixo y
=→
= 0
5
5
0
ξξ &&y
xr
θ
y
xr
θ
EESC-USP © M. Becker 2008 16/90
=→
=
0
0
0
5 rξξ &&
x
y
{I}
yr
P
x
y
{I}
yr
P
x
y
{I}
xr
yr
θ
P
x
y
{I}
xr
yr
θ
P
−=→
−
=
0
2
2
0
2
2
rξξ &&
•• Introdução Introdução
•• CinemáticaCinemática
• Manobrabilidade e Workspace
Sumário da AulaSumário da Aula
EESC-USP © M. Becker 2008 17/90
• Manobrabilidade e Workspace
• Controle
• Exercícios Recomendados
• Bibliografia Recomendada
CinemáticaCinemática
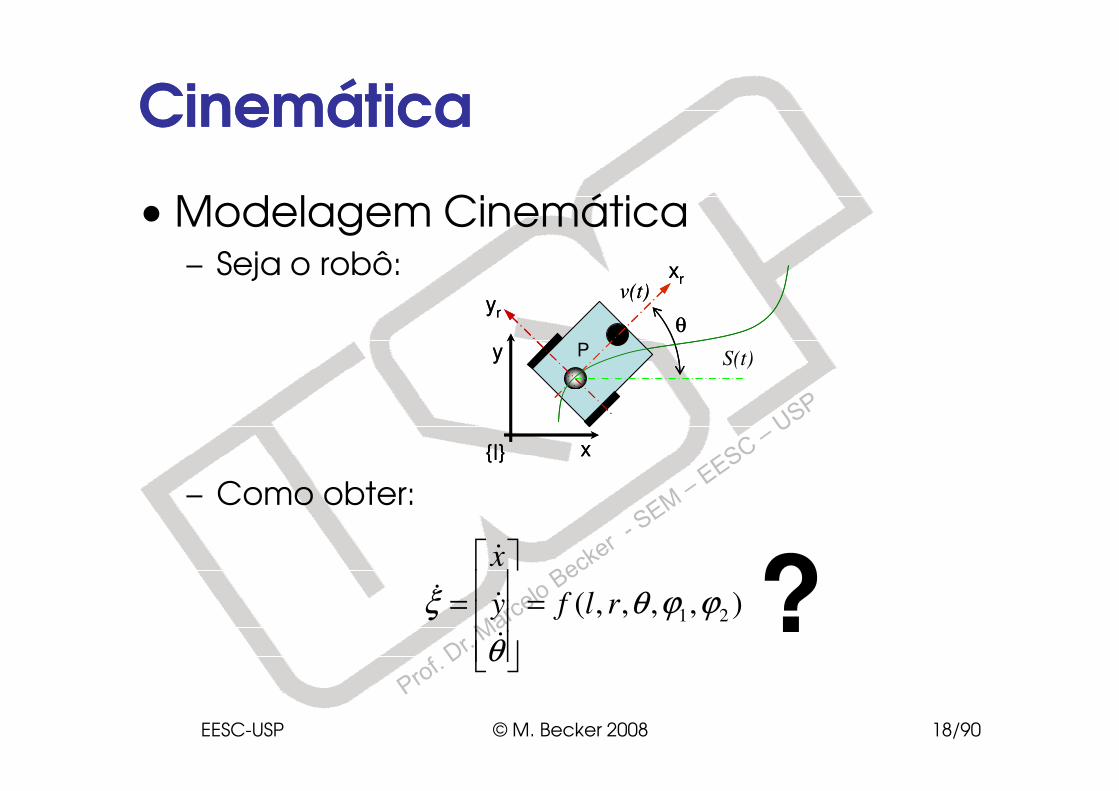
• Modelagem Cinemática– Seja o robô:
y
xr
yrv(t)
θ
S(t)y
xr
yrv(t)
θ
S(t)P
EESC-USP © M. Becker 2008 18/90
– Como obter:
x{I} x{I}
),,,,( 21 ϕϕθ
θ
ξ rlfy
x
=
=&
&
&
& ?
CinemáticaCinemática
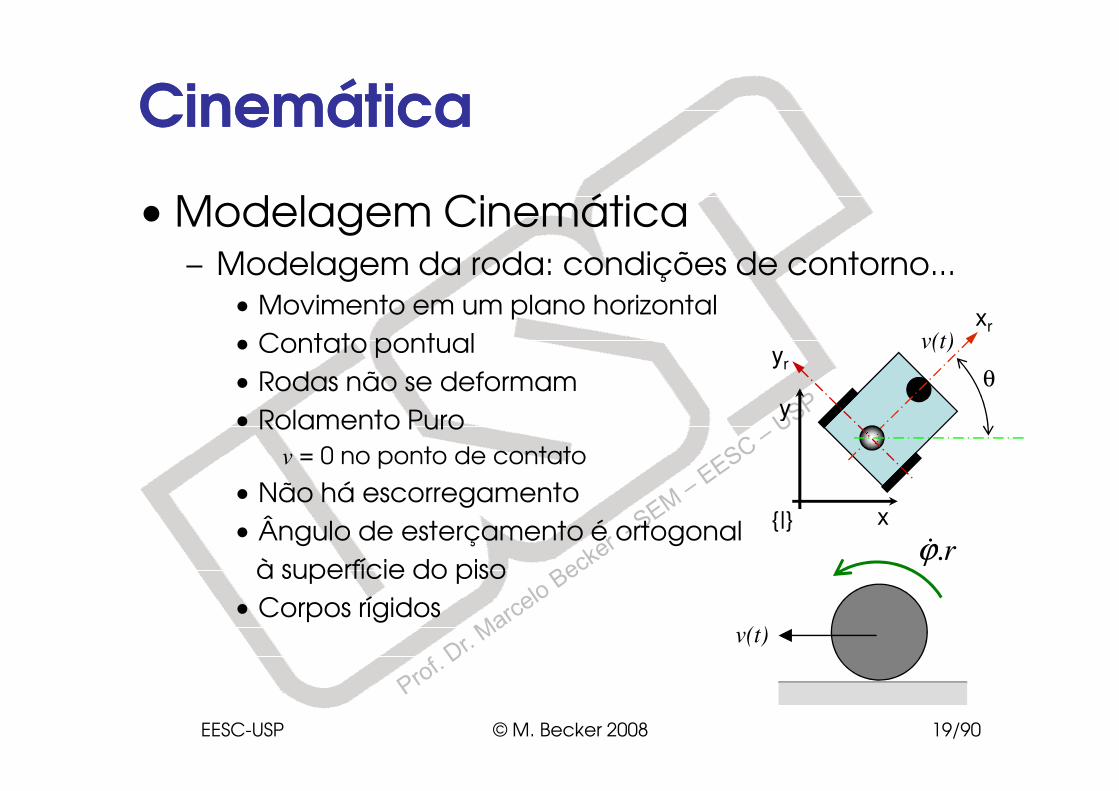
• Modelagem Cinemática– Modelagem da roda: condições de contorno...
• Movimento em um plano horizontal• Contato pontual• Rodas não se deformam
y
xr
yrv(t)
θ
EESC-USP © M. Becker 2008 19/90
• Rodas não se deformam• Rolamento Puro
v = 0 no ponto de contato
• Não há escorregamento• Ângulo de esterçamento é ortogonal
à superfície do piso• Corpos rígidos
x
y
{I}
v(t)
r.ϕ&
CinemáticaCinemática
• Modelagem Cinemática– Assim:
• Determina-se a contribuição de cada roda no sistema de referência local {P}. Obtém-se: rξ
EESC-USP © M. Becker 2008 20/90
• Determina-se a locomoção do robô no sistema de referências global {I} a partir do sistema loca {P}:
• Obter o modelo cinemático direto da velocidade do robô:
rR ξθξ && .)(1−=
[ ] ),,,,( 21 ϕϕθθξ rlfyxT
== &&&&

CinemáticaCinemática
• Exemplo:– Dadas as condições de contorno abaixo,
determine a velocidade de deslocamento do robô com acionamento diferencial no sistema inercial.
EESC-USP © M. Becker 2008 21/90
inercial.
x
y
{I}
xr
yrv(t)
θ
S(t)
x
y
{I}
xr
yrv(t)
θ
S(t)P
x = 2 m
y = 3 m
θ = π/2
Posição: srad
srad
/2
/4
2
1
=
=
ϕ
ϕ
&
&
Velocidade:
xr
P
2.l
rϕ1
.
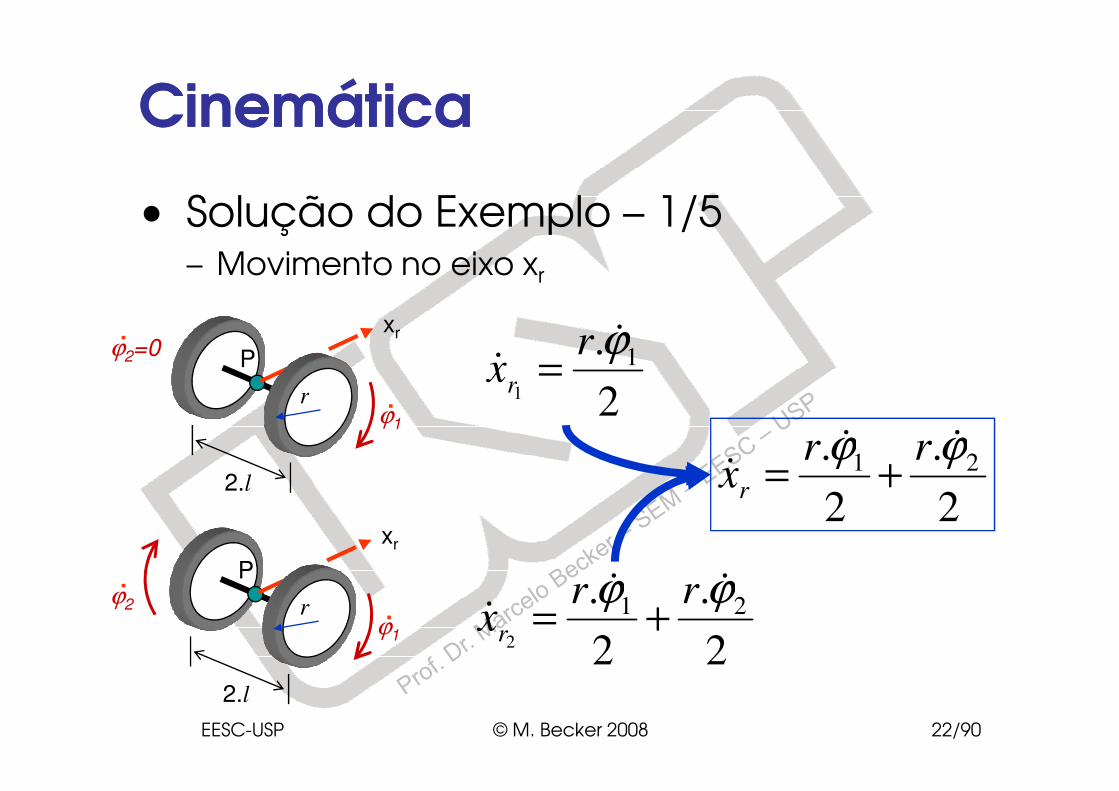
CinemáticaCinemática
• Solução do Exemplo – 1/5– Movimento no eixo xr
xr
P
r .
ϕ2=0.
2
. 1
1
ϕ&&
rxr =
EESC-USP © M. Becker 2008 22/90
2.l
rϕ1
.
xr
P
2.l
rϕ1
.ϕ2
.
21r
2
.
2
. 21
2
ϕϕ &&&
rrxr +=
2
.
2
. 21 ϕϕ &&&
rrxr +=
CinemáticaCinemática
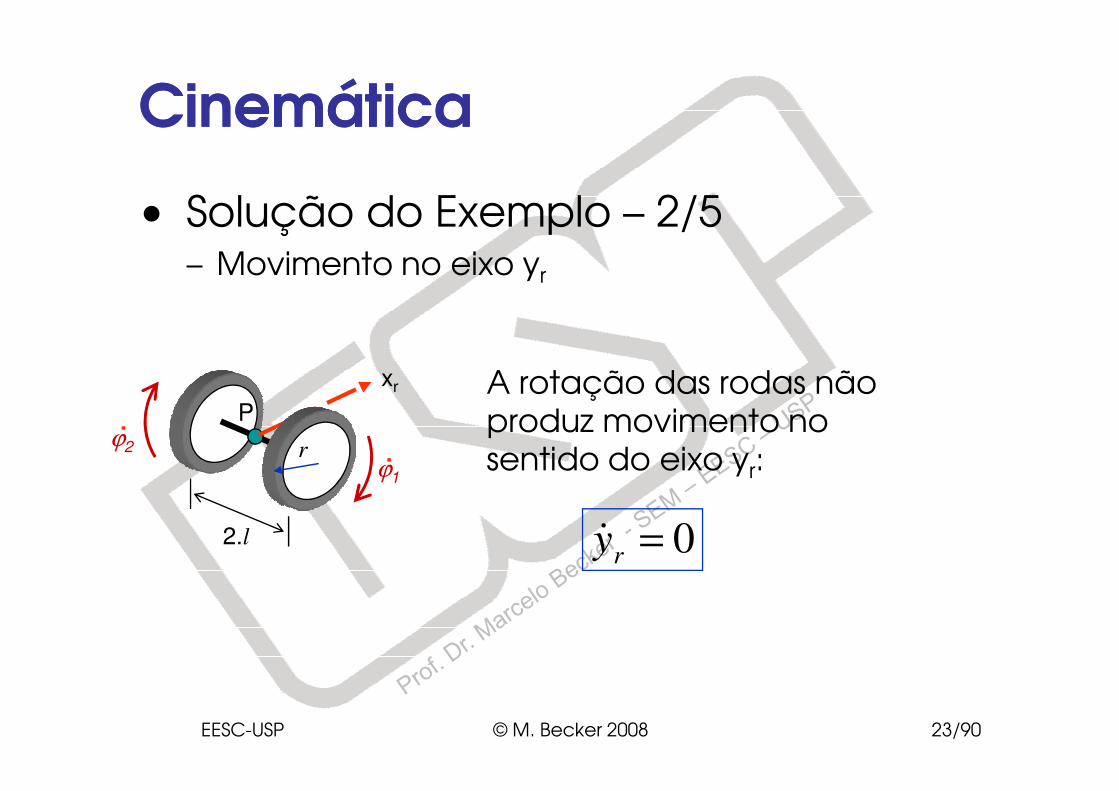
• Solução do Exemplo – 2/5– Movimento no eixo yr
xr A rotação das rodas não
EESC-USP © M. Becker 2008 23/90
P
2.l
rϕ1
.ϕ2
.
A rotação das rodas não produz movimento no sentido do eixo yr:
0=ry&

CinemáticaCinemática
• Solução do Exemplo – 3/5– Movimento no eixo θr
xr
P
r .
ϕ2=0.
l
r
.2
. 1
1
ϕϖ
&=
EESC-USP © M. Becker 2008 24/90
2.l
rϕ1
.
xr
P
2.l
rϕ2
.
l.21
l
r
.2
. 2
2
ϕϖ
&−=
l
r
l
rr
.2
.
.2
. 21 ϕϕθ
&&& −=
ϕ1=0.
CinemáticaCinemática
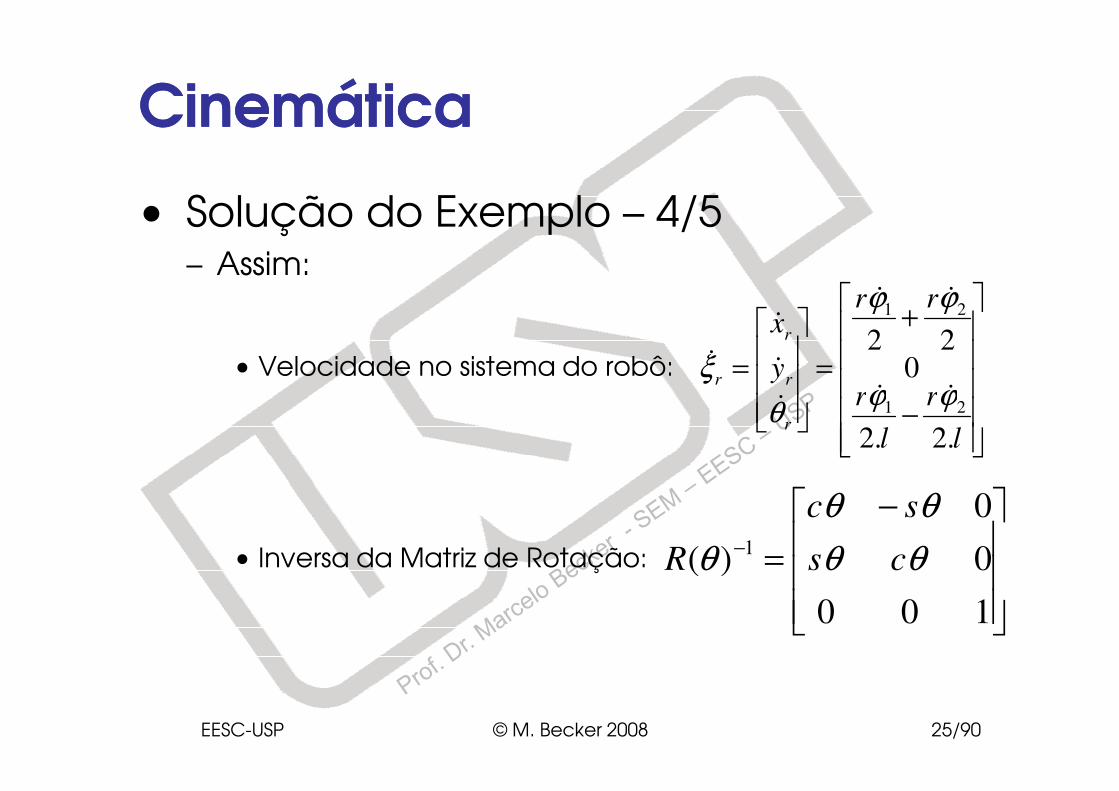
• Solução do Exemplo – 4/5– Assim:
• Velocidade no sistema do robô:
−
+
=
=rr
rr
y
x
r
r
r 022
21
ϕϕ
ϕϕ
θ
ξ&&
&&
&
&
&
&
EESC-USP © M. Becker 2008 25/90
• Inversa da Matriz de Rotação:
−
l
r
l
rr
.2.2
21 ϕϕθ
&&&
−
=−
100
0
0
)(1 θθ
θθ
θ cs
sc
R
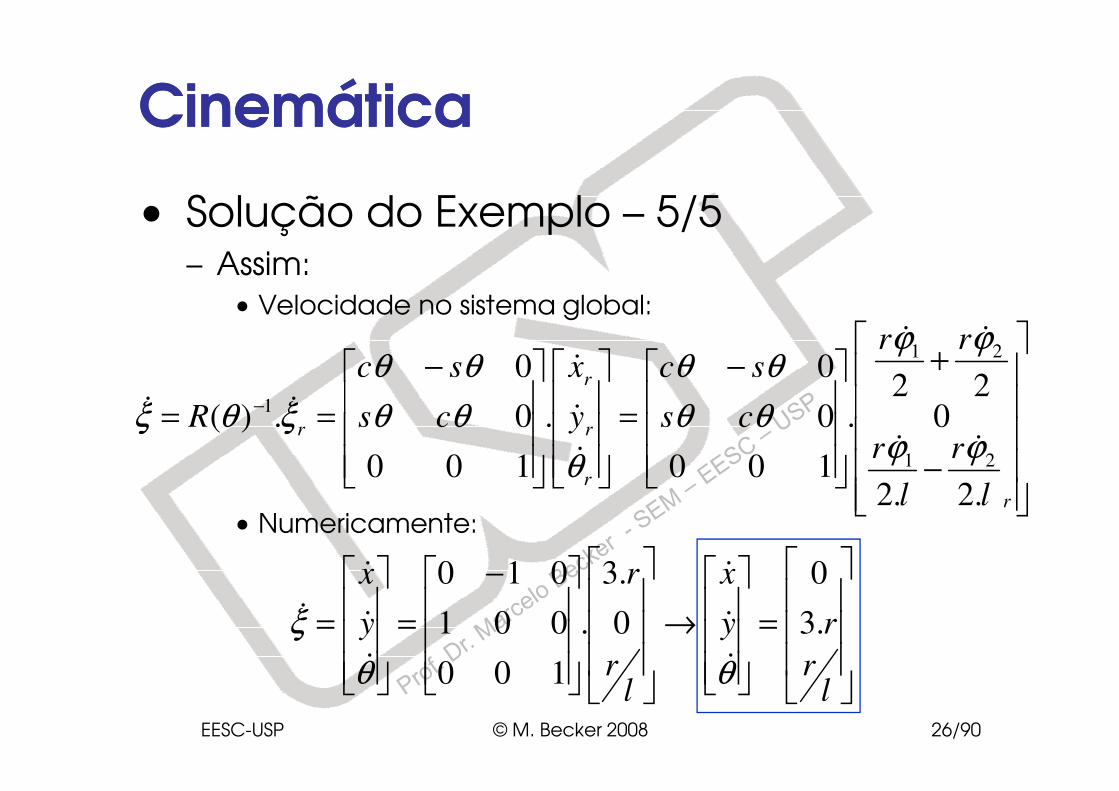
CinemáticaCinemática
• Solução do Exemplo – 5/5– Assim:
• Velocidade no sistema global:
+
−
=
−
== −
r
rrscxsc
2200
21
1
ϕϕ
θθ
θθ
θθ
θθ
ξθξ
&&
&
&&
EESC-USP © M. Becker 2008 26/90
• Numericamente:
−
=
== −
r
r
rr
l
r
l
rcsycsR
.2.2
022
.
100
0.
100
0.)(
21
1
ϕϕθθ
θ
θθξθξ&&
&
&&&
=
→
−
=
=
lr
ry
x
lr
r
y
x
.3
0
0
.3
.
100
001
010
θθ
ξ&
&
&
&
&
&
&

• Quais são as restrições existentes?– Cada tipo de roda impõe diferentes restrições ao
movimento;– Modelando as restrições, pode-se combiná-las
de modo a compreender o movimento do robô
CinemáticaCinemática
EESC-USP © M. Becker 2008 27/90
de modo a compreender o movimento do robô como um todo.
• Hipóteses:– O plano da roda permanece sempre vertical e
há apenas 1 ponto de contato com o solo;– Não há escorregamento lateral no ponto de
contato.
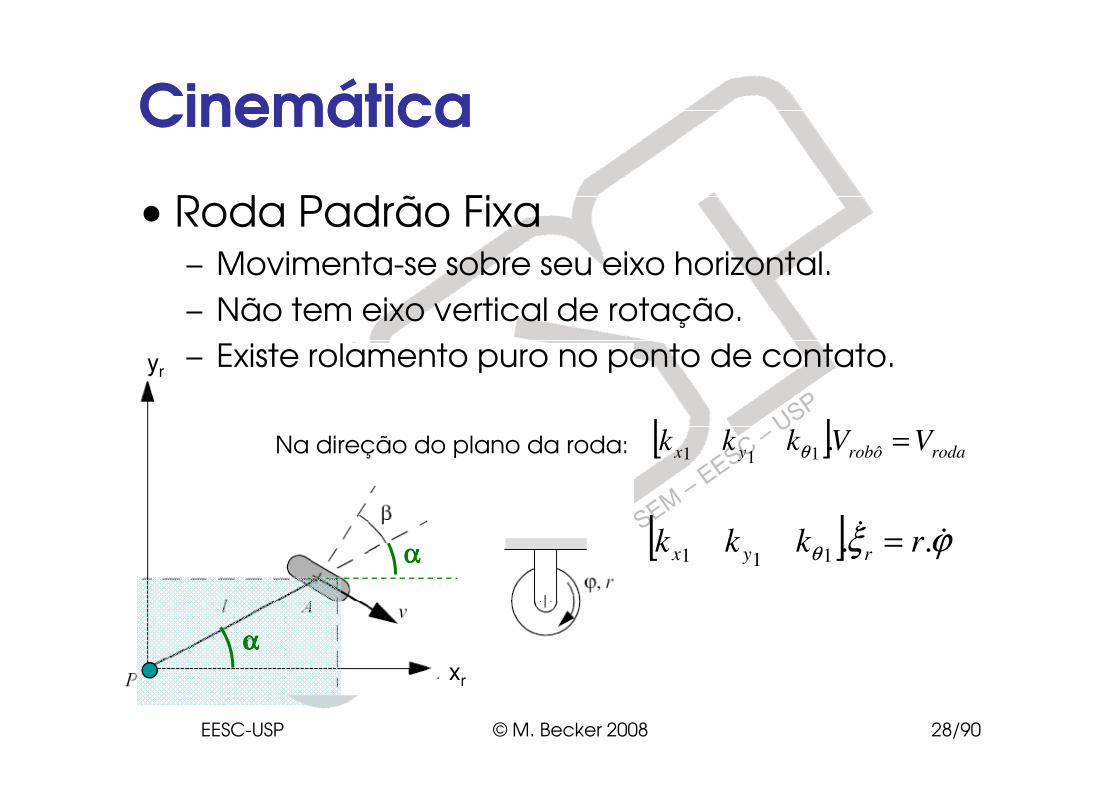
• Roda Padrão Fixa– Movimenta-se sobre seu eixo horizontal.– Não tem eixo vertical de rotação.– Existe rolamento puro no ponto de contato.yr
CinemáticaCinemática
EESC-USP © M. Becker 2008 28/90
xr
αααα [ ] ϕξθ&& ..
111rkkk ryx =
[ ] rodarobôyx VVkkk =.111 θ
αααα
Na direção do plano da roda:
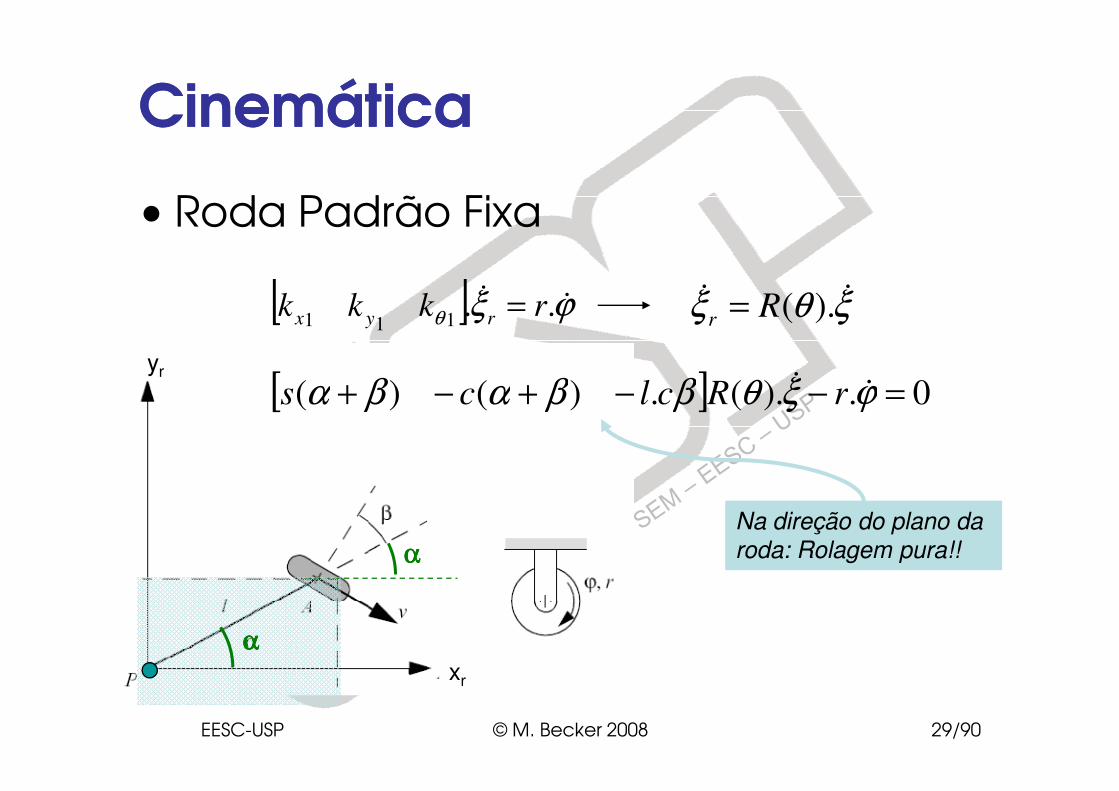
• Roda Padrão Fixa
yr
[ ] 0.).(.)()( =−−+−+ ϕξθββαβα && rRclcs
CinemáticaCinemática
ξθξ && ).(Rr =[ ] ϕξθ&& ..
111rkkk ryx =
EESC-USP © M. Becker 2008 29/90
xr
[ ] 0.).(.)()( =−−+−+ ϕξθββαβα && rRclcs
Na direção do plano da
roda: Rolagem pura!!αααα
αααα
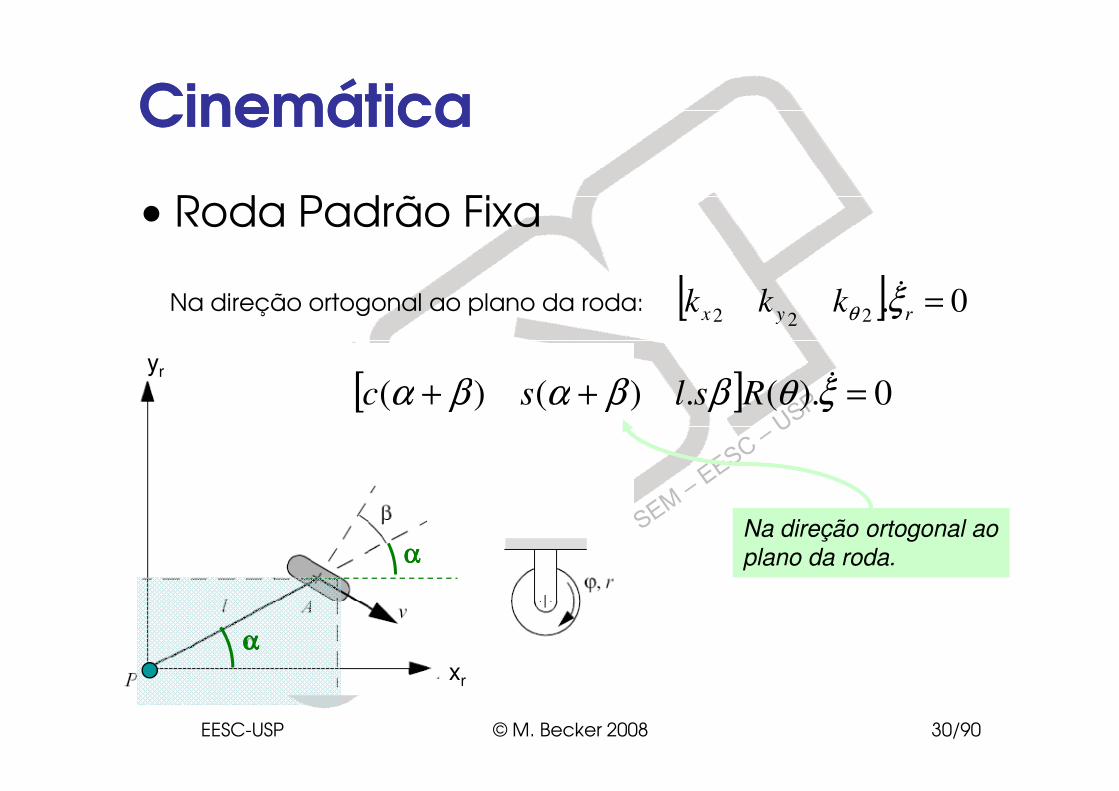
• Roda Padrão Fixa
yr
[ ] 0).(.)()( =++ ξθββαβα &Rslsc
CinemáticaCinemática
[ ] 0.222
=ryx kkk ξθ&Na direção ortogonal ao plano da roda:
EESC-USP © M. Becker 2008 30/90
xr
[ ] 0).(.)()( =++ ξθββαβα &Rslsc
Na direção ortogonal ao
plano da roda.αααα
αααα
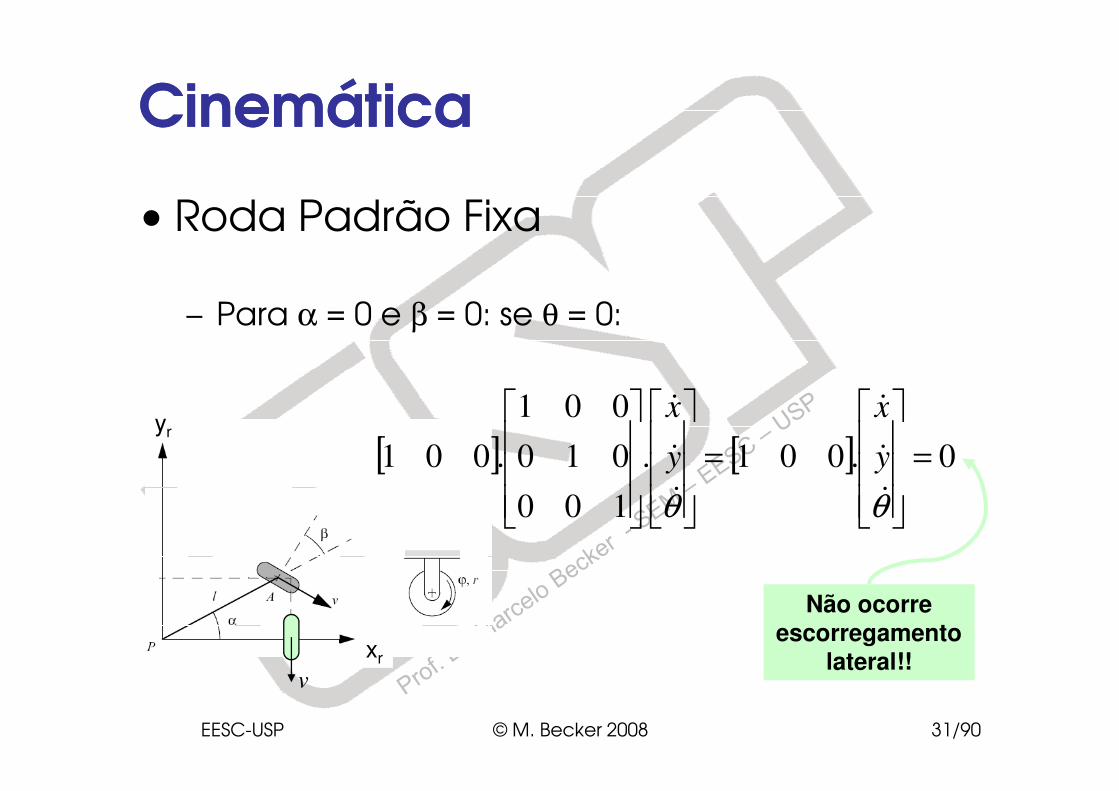
• Roda Padrão Fixa
– Para α = 0 e β = 0: se θ = 0:
001 && xx
CinemáticaCinemática
EESC-USP © M. Becker 2008 31/90
xr
yr
[ ] [ ] 0.001.
100
010
001
.001 =
=
θθ &
&
&
&
&
&
y
x
y
x
v
Não ocorre escorregamento
lateral!!
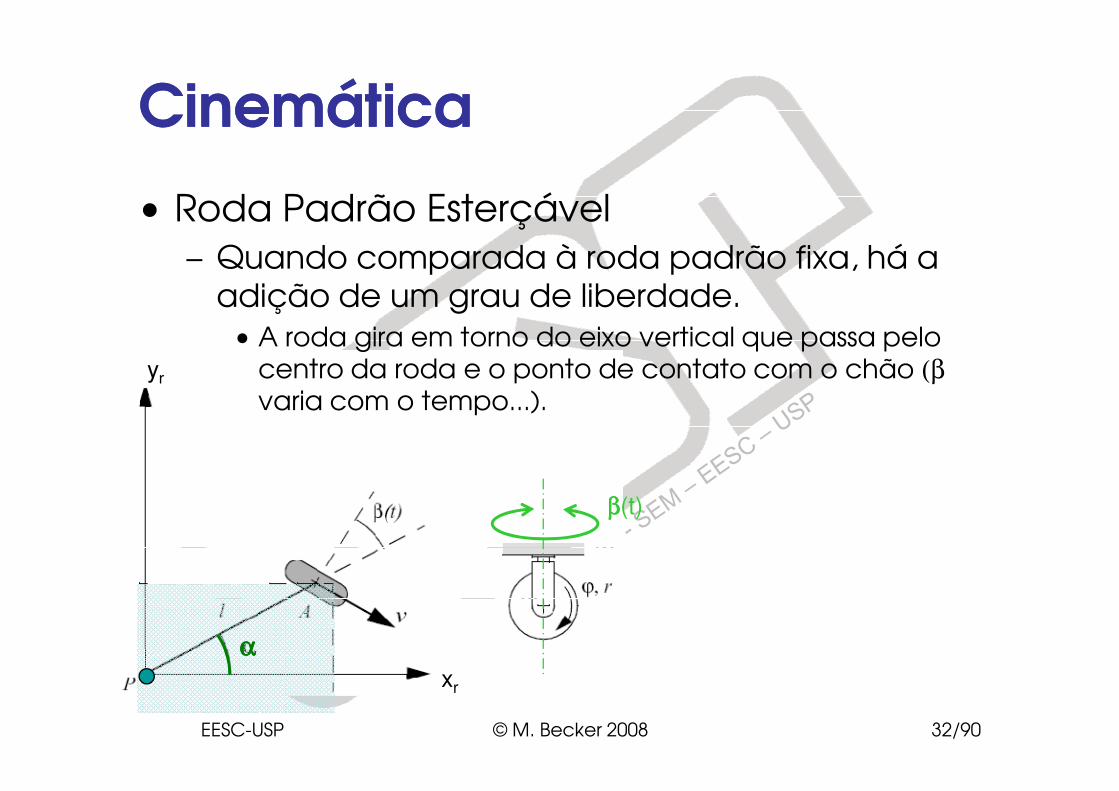
• Roda Padrão Esterçável– Quando comparada à roda padrão fixa, há a
adição de um grau de liberdade. • A roda gira em torno do eixo vertical que passa pelo
centro da roda e o ponto de contato com o chão (βvaria com o tempo...).
yr
CinemáticaCinemática
EESC-USP © M. Becker 2008 32/90
varia com o tempo...).
xr
αααα
ββββ(t)
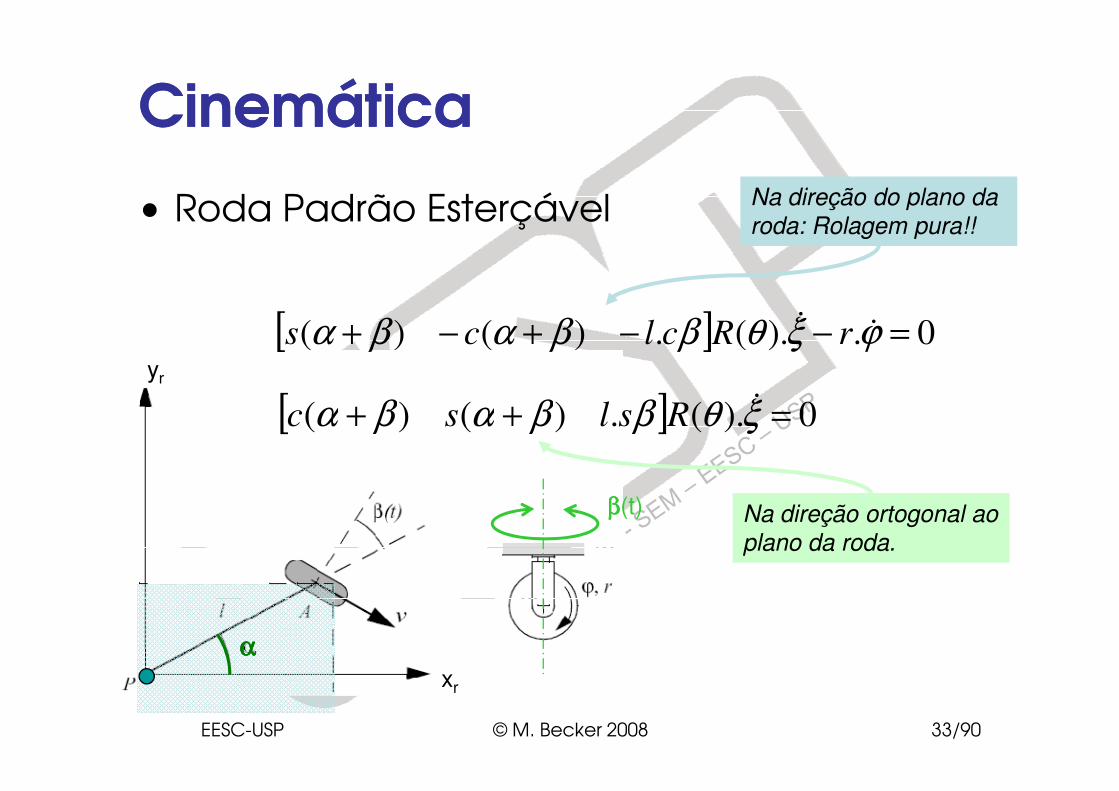
• Roda Padrão Esterçável
yr
[ ] 0.).(.)()( =−−+−+ ϕξθββαβα && rRclcs
[ ] 0).(.)()( =++ ξθββαβα &Rslsc
Na direção do plano da
roda: Rolagem pura!!
CinemáticaCinemática
EESC-USP © M. Becker 2008 33/90
xr
[ ] 0).(.)()( =++ ξθββαβα &Rslsc
Na direção ortogonal ao
plano da roda.
αααα
ββββ(t)
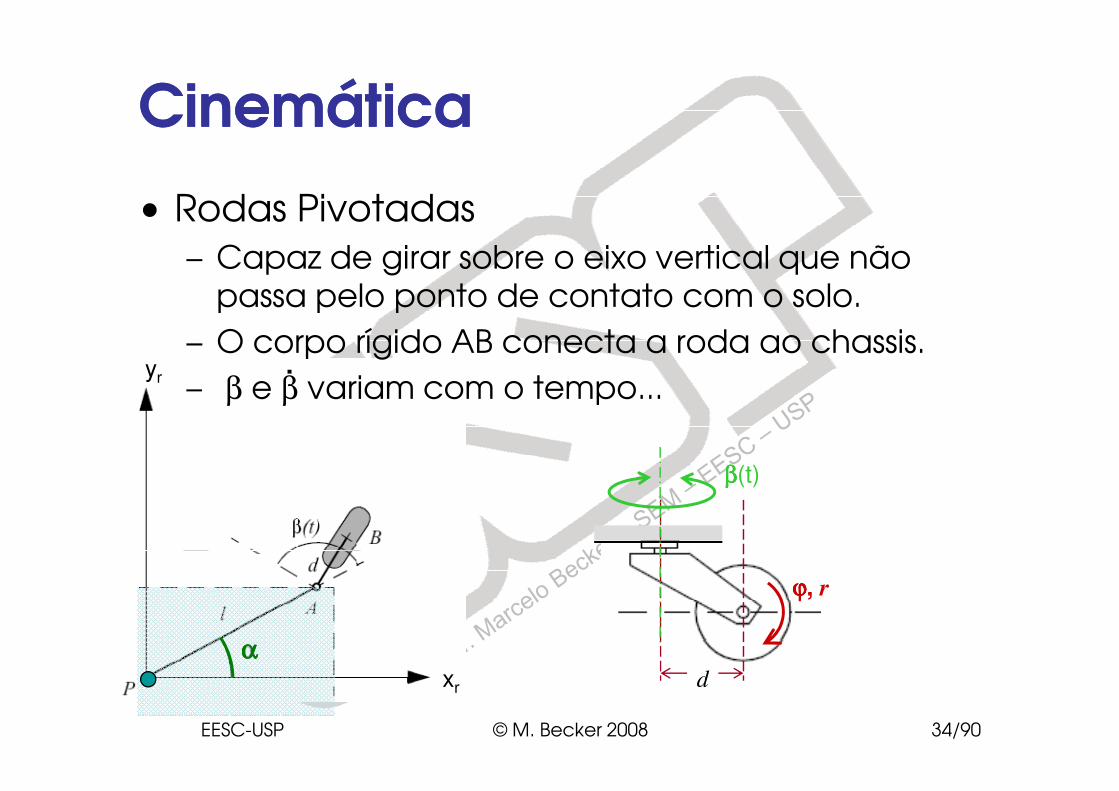
• Rodas Pivotadas– Capaz de girar sobre o eixo vertical que não
passa pelo ponto de contato com o solo.– O corpo rígido AB conecta a roda ao chassis.– β e β variam com o tempo...
yr
CinemáticaCinemática
.
EESC-USP © M. Becker 2008 34/90
– β e β variam com o tempo...
xr d
ϕϕϕϕ, r
αααα
ββββ(t)
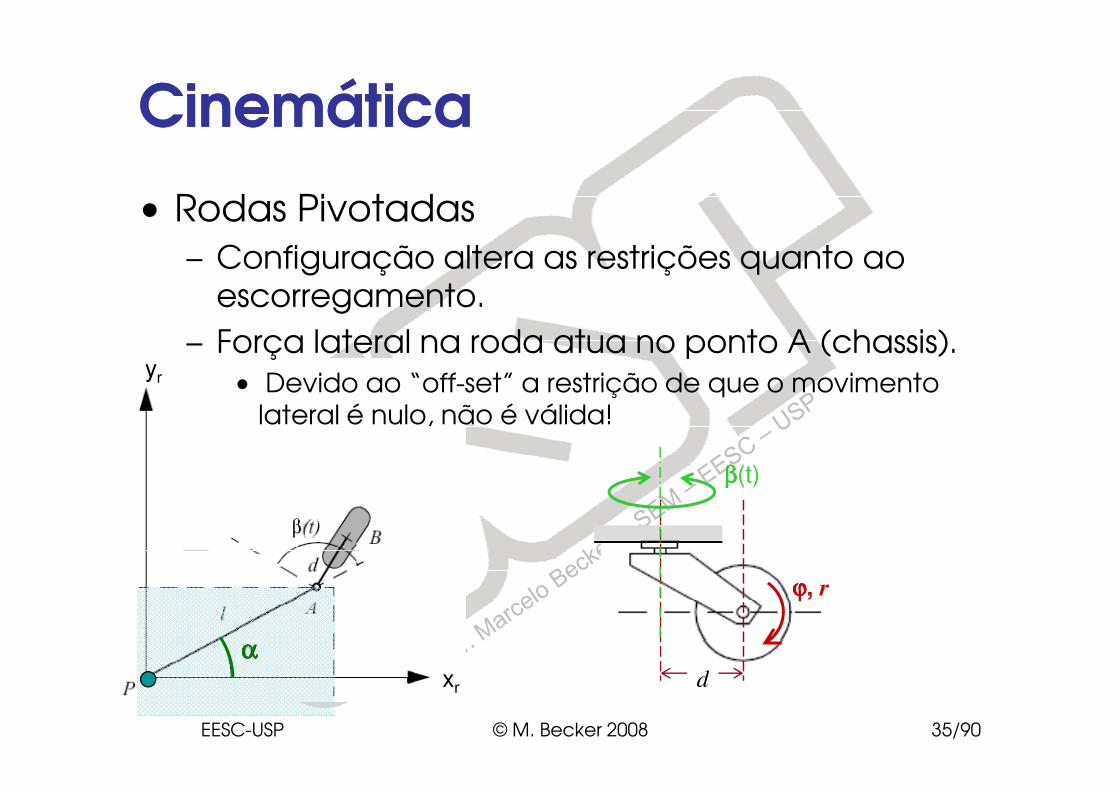
• Rodas Pivotadas– Configuração altera as restrições quanto ao
escorregamento.– Força lateral na roda atua no ponto A (chassis).
• Devido ao “off-set” a restrição de que o movimento yr
CinemáticaCinemática
EESC-USP © M. Becker 2008 35/90
• Devido ao “off-set” a restrição de que o movimento lateral é nulo, não é válida!
xr d
ϕϕϕϕ, r
αααα
ββββ(t)

• Rodas Pivotadas
yr
[ ] 0.).(.)()( =−−+−+ ϕξθββαβα && rRclcs
[ ] 0).(.)()( =++++ βξθββαβα && dRsldsc
CinemáticaCinemática
EESC-USP © M. Becker 2008 36/90
xr
[ ] 0).(.)()( =++++ βξθββαβα dRsldsc
ααααd
ϕϕϕϕ, r
ββββ(t)

• Rodas Pivotadas– Todo movimento ortogonal ao plano da roda é
compensado com um movimento equivalente e oposto
• Qualquer movimento lateral é permitido... yr
CinemáticaCinemática
EESC-USP © M. Becker 2008 37/90
• Provoca movimento do chassis...
xr
ααααd
ϕϕϕϕ, r
ββββ(t)
yr
CinemáticaCinemática
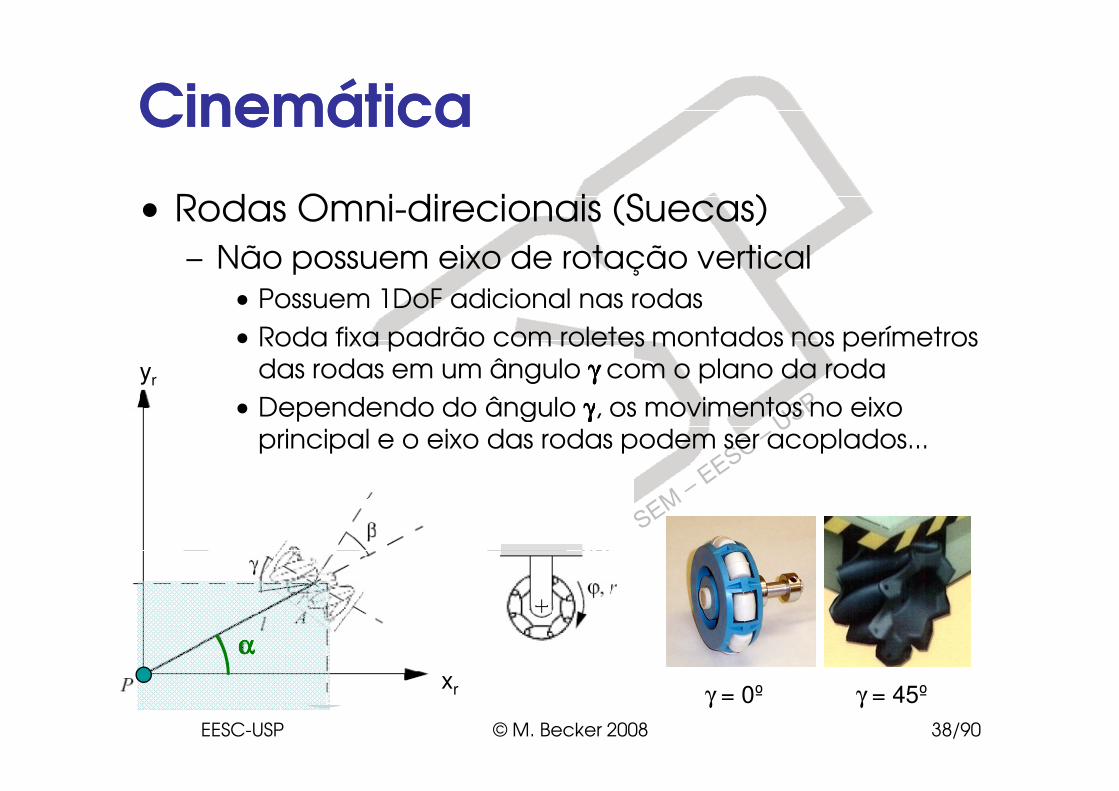
• Rodas Omni-direcionais (Suecas)– Não possuem eixo de rotação vertical
• Possuem 1DoF adicional nas rodas• Roda fixa padrão com roletes montados nos perímetros
das rodas em um ângulo γγγγ com o plano da roda• Dependendo do ângulo γγγγ, os movimentos no eixo
EESC-USP © M. Becker 2008 38/90
xr
αααα
• Dependendo do ângulo γγγγ, os movimentos no eixo principal e o eixo das rodas podem ser acoplados...
γ = 0º γ = 45º
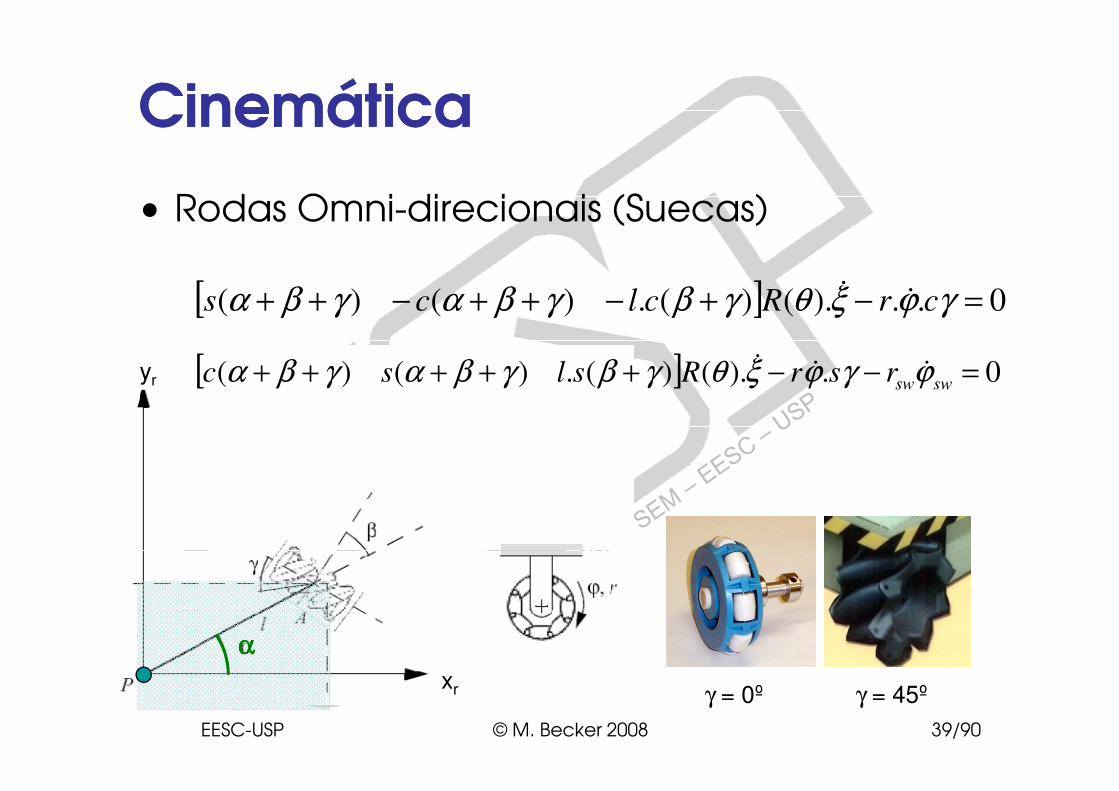
• Rodas Omni-direcionais (Suecas)
yr
[ ] 0..).()(.)()( =−+−++−++ γϕξθγβγβαγβα crRclcs &&
[ ] 0.).()(.)()( =−−+++++ swswrsrRslsc ϕγϕξθγβγβαγβα &&&
CinemáticaCinemática
EESC-USP © M. Becker 2008 39/90
xr
αααα
γ = 0º γ = 45º
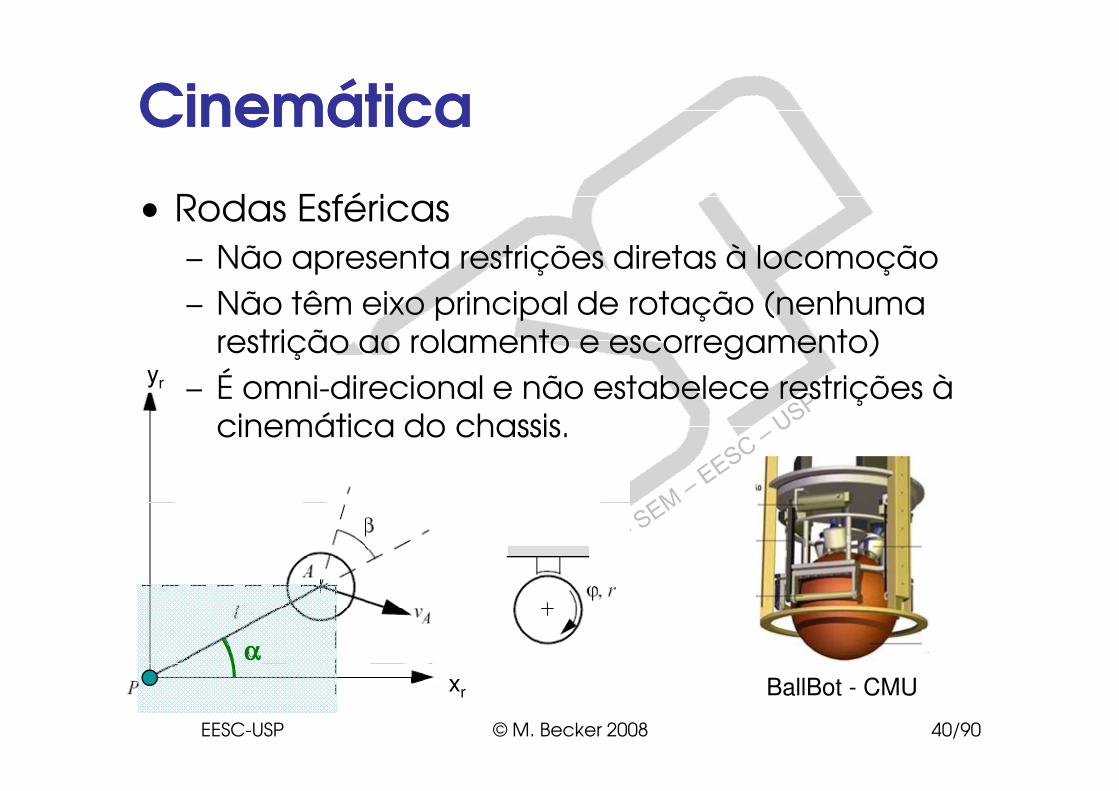
• Rodas Esféricas– Não apresenta restrições diretas à locomoção– Não têm eixo principal de rotação (nenhuma
restrição ao rolamento e escorregamento)– É omni-direcional e não estabelece restrições à yr
CinemáticaCinemática
EESC-USP © M. Becker 2008 40/90
– É omni-direcional e não estabelece restrições à cinemática do chassis.
xr
αααα
BallBot - CMU

• Rodas Esféricas
yr
[ ] 0.).(.)()( =−−+−+ ϕξθββαβα && rRclcs
[ ] 0).(.)()( =++ ξθββαβα &Rslsc
CinemáticaCinemática
EESC-USP © M. Becker 2008 41/90
xr
[ ] 0).(.)()( =++ ξθββαβα Rslsc
αααα
BallBot - CMU
CinemáticaCinemática
• Restrições Cinemáticas– Dado um robô com m rodas
• Cada roda (dependendo do tipo) pode ou não impor alguma restrição cinemática ao movimento do robô.
EESC-USP © M. Becker 2008 42/90
movimento do robô.• A posição das rodas no chassis do robô deve
ser levada em conta para verificar as restrições impostas
• Dica: atenção com as rodas padrão e esterçáveis!
Fixa Esterçável
• Restrições Cinemáticas– Qual é a manobrabilidade do robô
considerando a combinação da diferentes rodas?
• Supondo que se tem: N = N + N
CinemáticaCinemática
EESC-USP © M. Becker 2008 43/90
• Supondo que se tem: N = Nf + Ns
– βs(t) é o ângulo de esterçamento das Rodas Ns
– βf(t) é o ângulo de orientação das Rodas Nf
– Ambas rodas têm posições rotacionais ϕf(t) e ϕs(t) em torno do eixo horizontal que variam em função do tempo:
=
)(
)()(
t
tt
s
f
ϕ
ϕϕ

• Restrições Cinemáticas– Quanto ao Rolamento:
CinemáticaCinemática
0.).()( 21 =− ϕξθβ && JRJ s
EESC-USP © M. Becker 2008 44/90
• J1(βs): matriz com as projeções para todas as rodas de suas locomoções sobre os planos individuais
• J2: matriz diagonal N x N dos raios das rodas
=
)()(
1
1
1
ss
f
sJ
JJ
ββ
1 – Semelhante às equações obtidas para uma única roda.2 – Ao invés de valores, matrizes são empregadas...
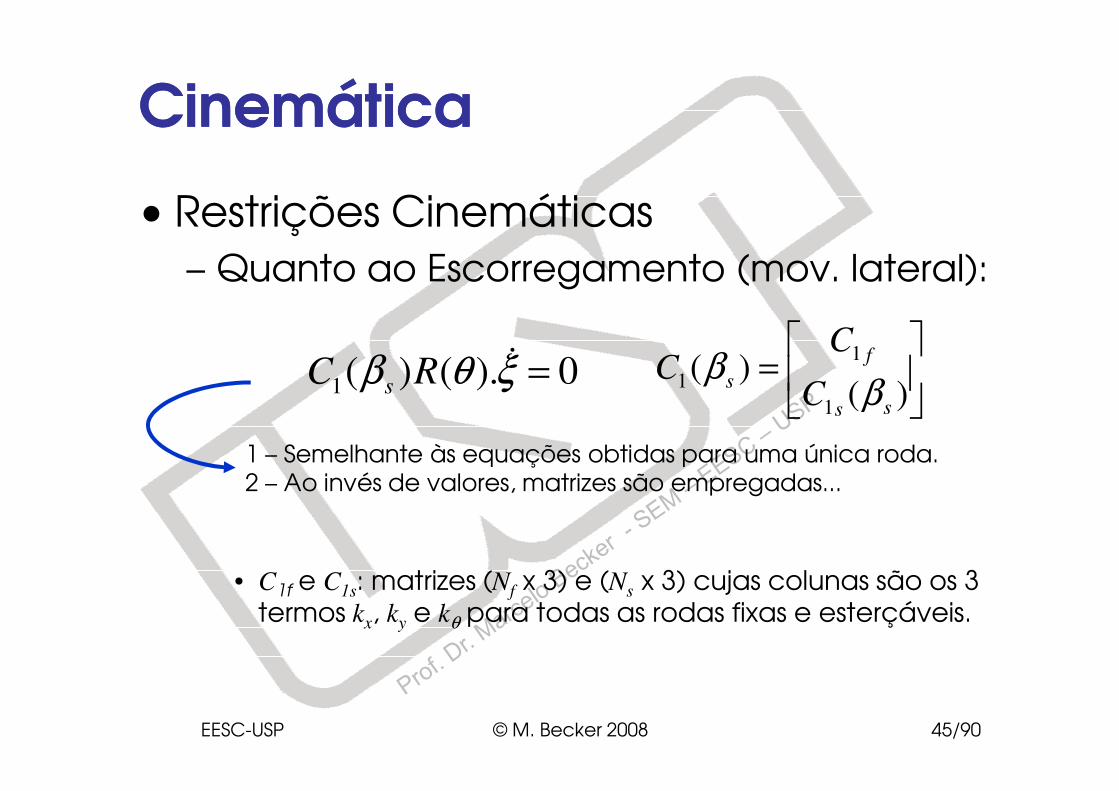
• Restrições Cinemáticas– Quanto ao Escorregamento (mov. lateral):
CinemáticaCinemática
=
)()(
1
1
1
s
f
sC
CC
ββ0).()(1 =ξθβ &RC s
EESC-USP © M. Becker 2008 45/90
• C1f e C1s: matrizes (Nf x 3) e (Ns x 3) cujas colunas são os 3 termos kx, ky e kθ para todas as rodas fixas e esterçáveis.
)(1 ssC β1 s
1 – Semelhante às equações obtidas para uma única roda.2 – Ao invés de valores, matrizes são empregadas...
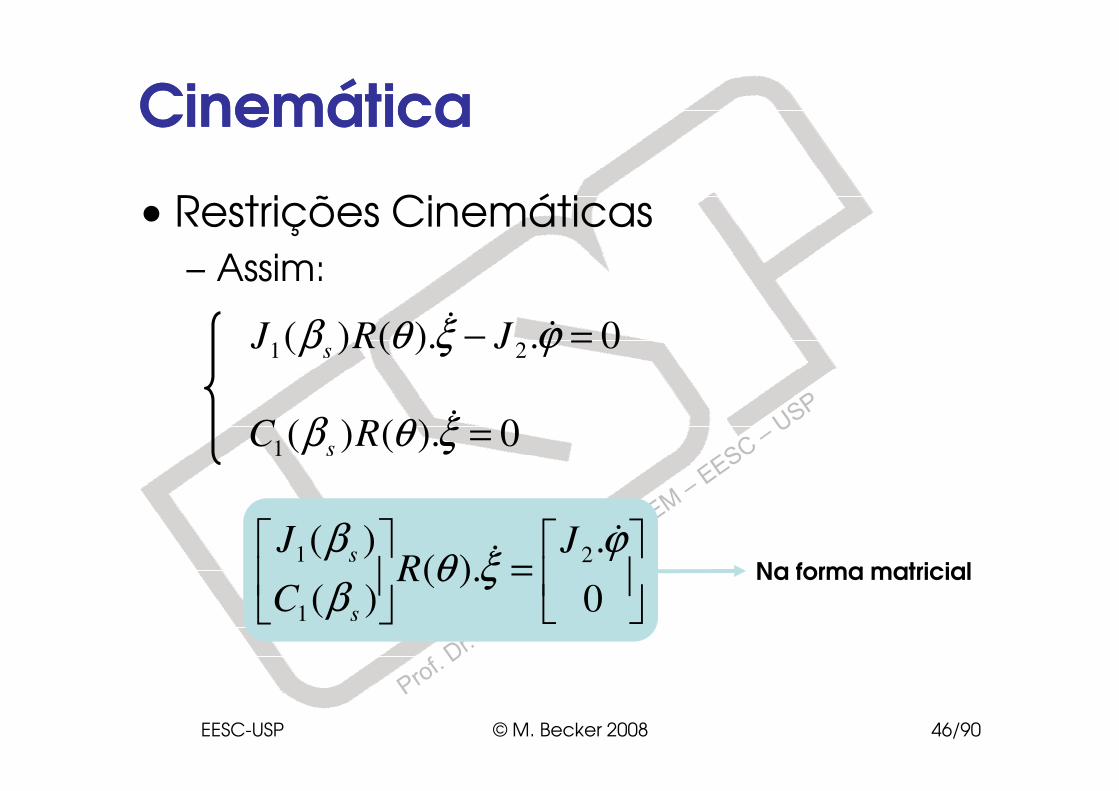
• Restrições Cinemáticas– Assim:
CinemáticaCinemática
0.).()( 21 =− ϕξθβ && JRJ s
EESC-USP © M. Becker 2008 46/90
0).()(1 =ξθβ &RC s
=
0
.).(
)(
)(2
1
1 ϕξθ
β
β &&
JR
C
J
s
sNa forma matricial
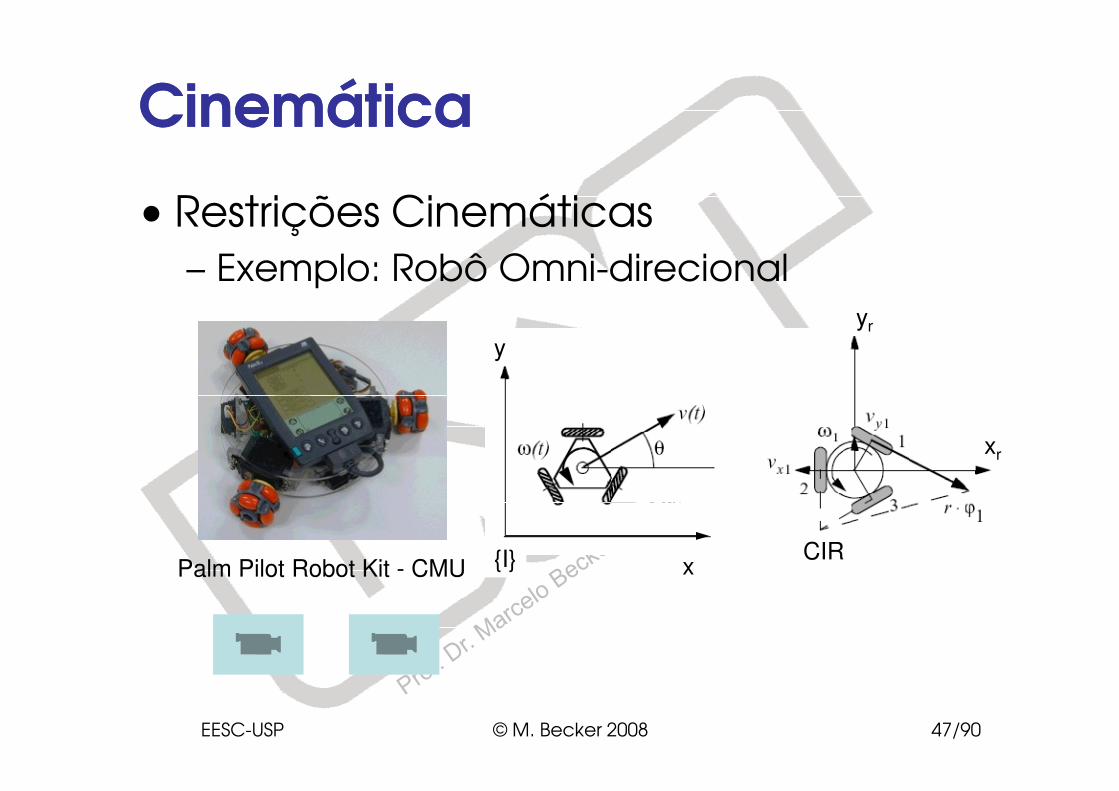
• Restrições Cinemáticas– Exemplo: Robô Omni-direcional
CinemáticaCinemática
yyr
EESC-USP © M. Becker 2008 47/90
Palm Pilot Robot Kit - CMU x{I}
xr
CIR

•• Introdução Introdução
•• CinemáticaCinemática
•• Manobrabilidade e Manobrabilidade e WorkspaceWorkspace
Sumário da AulaSumário da Aula
EESC-USP © M. Becker 2008 48/90
•• Manobrabilidade e Manobrabilidade e WorkspaceWorkspace
• Controle
• Exercícios Recomendados
• Bibliografia Recomendada

ManobrabilidadeManobrabilidade
• Manobrabilidade– É uma combinação de:
• Restrições ao movimento• DoFs adicionais obtidos através do esterçamento
– 3 rodas são suficientes para estabilidade
EESC-USP © M. Becker 2008 49/90
– 3 rodas são suficientes para estabilidade estática
• Rodas adicionais devem ser sincronizadas
– Equacionada através das equações anteriores:
• Grau de Mobilidade (δm), Grau de Esterçamento (δs) e Manobrabilidade (δM = δm + δs)
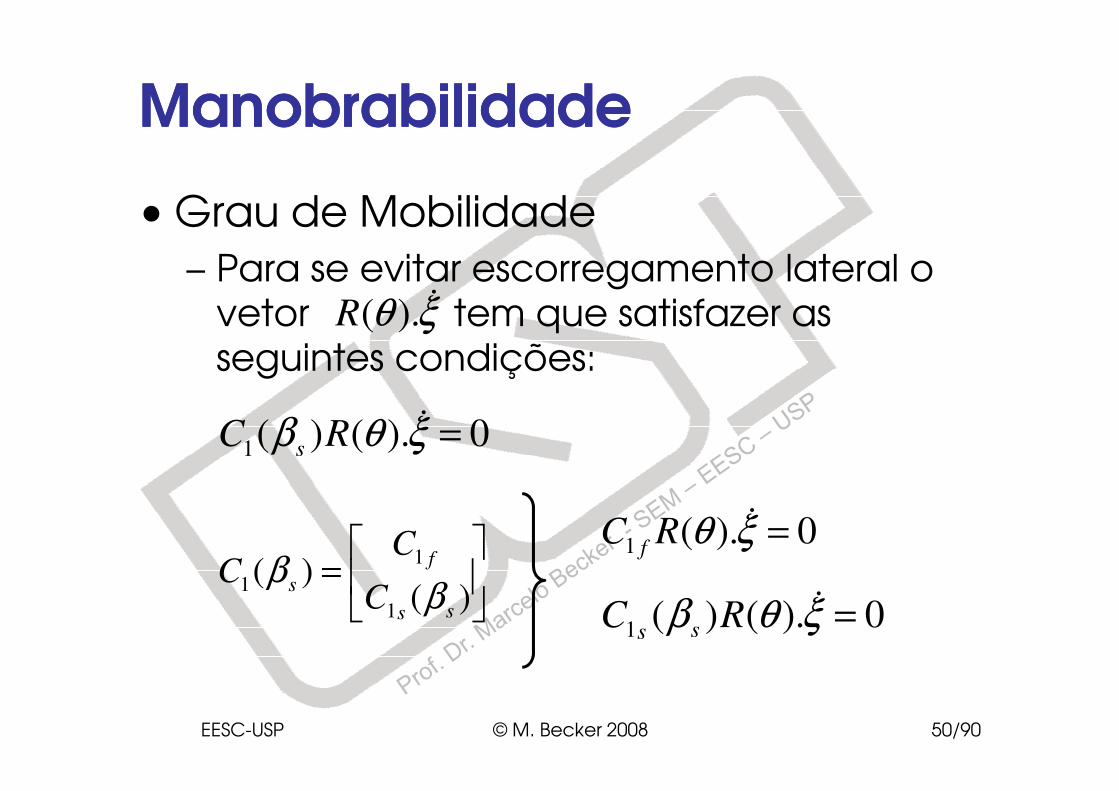
ManobrabilidadeManobrabilidade
• Grau de Mobilidade– Para se evitar escorregamento lateral o
vetor tem que satisfazer as seguintes condições:
ξθ &).(R
EESC-USP © M. Becker 2008 50/90
0).(1 =ξθ &RCf
0).()(1 =ξθβ &RC ss
=
)()(
1
1
1
ss
f
sC
CC
ββ
0).()(1 =ξθβ &RC s

ManobrabilidadeManobrabilidade
• Grau de Mobilidade– Matematicamente:
• deve pertencer ao espaço nulo da matriz de projeção
• Ou seja: para um vetor n em N, o espaço nulo
ξθ &).(R)(1 sC β
EESC-USP © M. Becker 2008 51/90
• Ou seja: para um vetor n em N, o espaço nulo de no espaço N é:
– Geometricamente: • Centro Instantâneo de Rotação (CIR)
0).(1 =nC sβ
)(1 sC β
ManobrabilidadeManobrabilidade
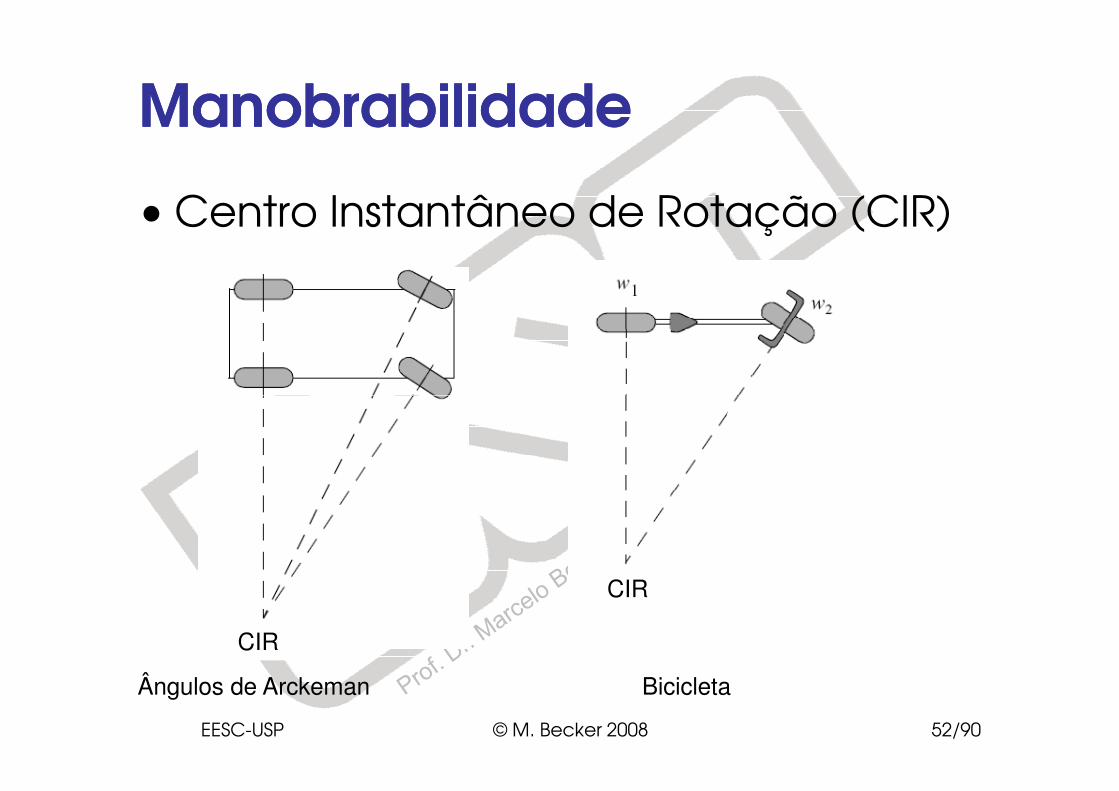
• Centro Instantâneo de Rotação (CIR)
EESC-USP © M. Becker 2008 52/90
Ângulos de Arckeman Bicicleta
CIR
CIR
ManobrabilidadeManobrabilidade
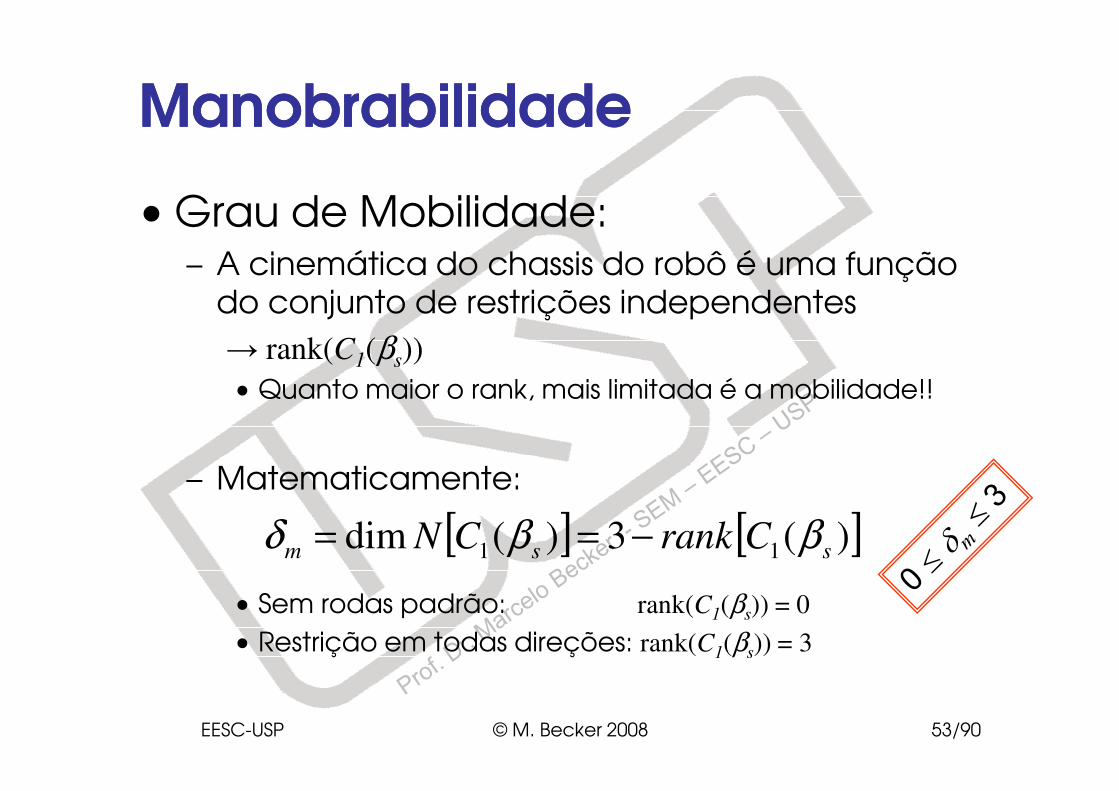
• Grau de Mobilidade:– A cinemática do chassis do robô é uma função
do conjunto de restrições independentes → rank(C1(βs))
• Quanto maior o rank, mais limitada é a mobilidade!!
EESC-USP © M. Becker 2008 53/90
• Quanto maior o rank, mais limitada é a mobilidade!!
– Matematicamente:
• Sem rodas padrão: rank(C1(βs)) = 0
• Restrição em todas direções: rank(C1(βs)) = 3
[ ] [ ])(3)(dim 11 ssm CrankCN ββδ −==
ManobrabilidadeManobrabilidade
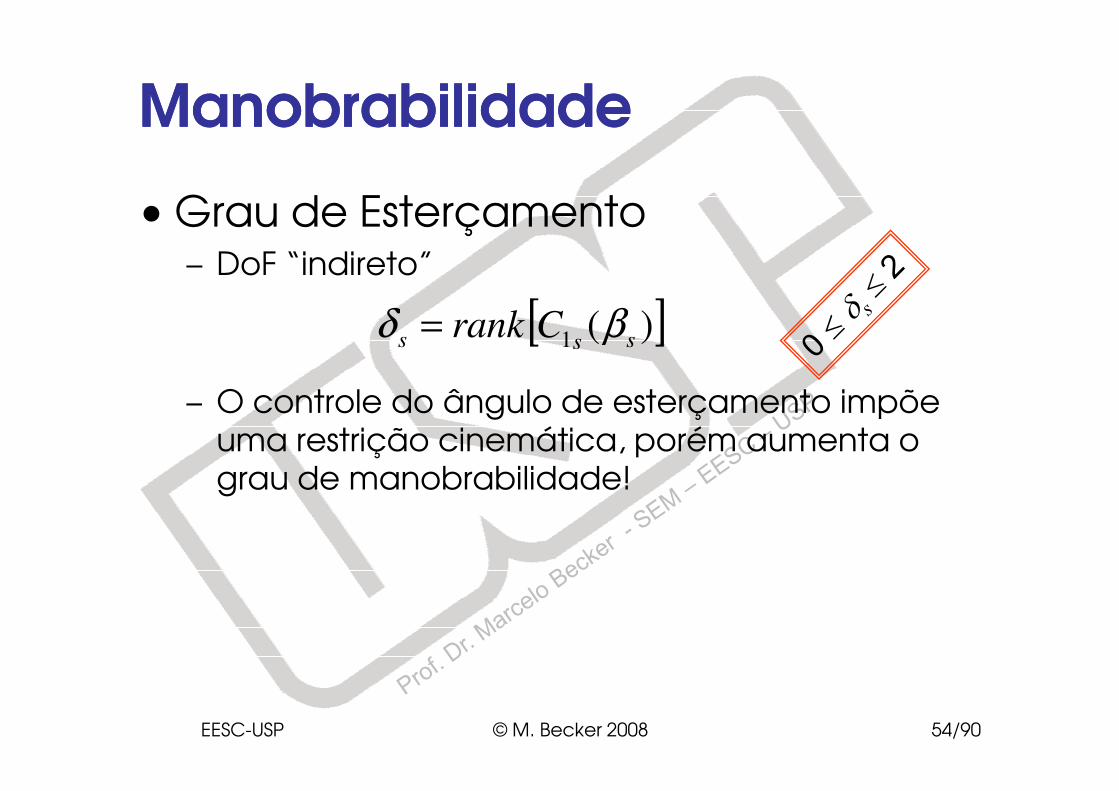
• Grau de Esterçamento– DoF “indireto”
– O controle do ângulo de esterçamento impõe
[ ])(1 sss Crank βδ =
EESC-USP © M. Becker 2008 54/90
– O controle do ângulo de esterçamento impõe uma restrição cinemática, porém aumenta o grau de manobrabilidade!
ManobrabilidadeManobrabilidade
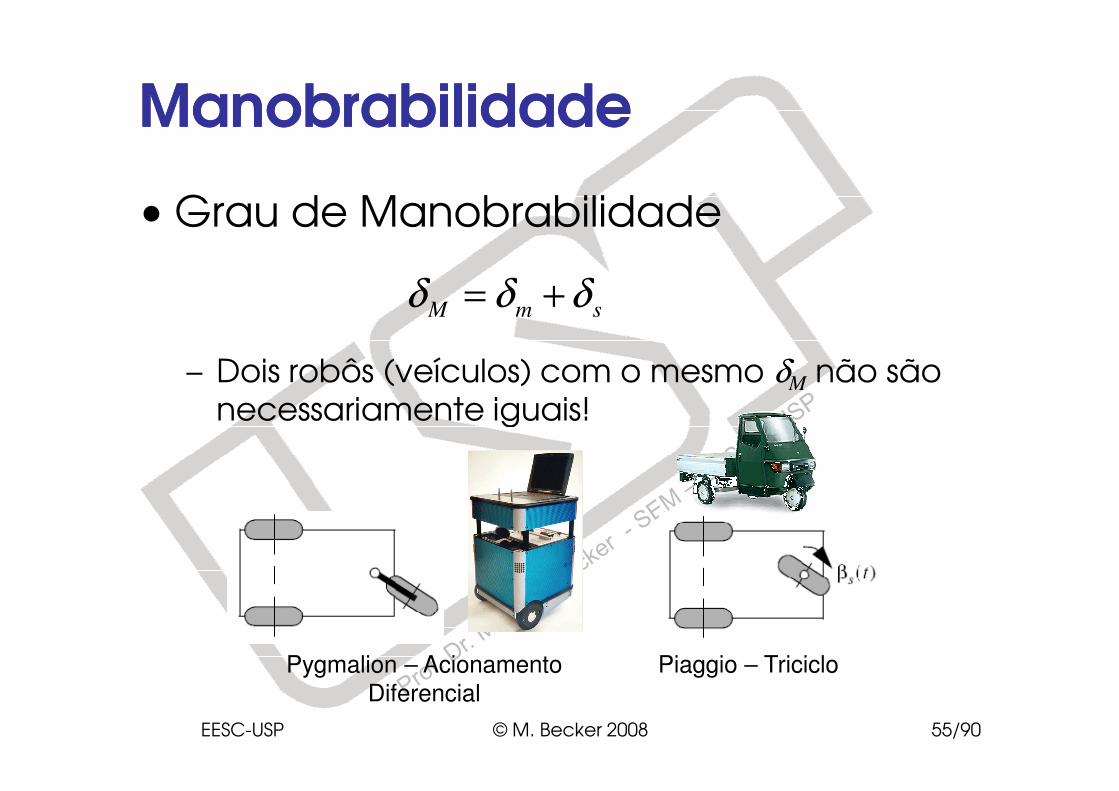
• Grau de Manobrabilidade
– Dois robôs (veículos) com o mesmo δM não são necessariamente iguais!
smM δδδ +=
EESC-USP © M. Becker 2008 55/90
necessariamente iguais!
Pygmalion – Acionamento Diferencial
Piaggio – Triciclo
ManobrabilidadeManobrabilidade
• Grau de Manobrabilidade– Para um robô com δM = 2, o CIR move-se ao
longo de uma linha– Para um robô com δM = 3, o CIR pode estar em
qualquer lugar no plano
EESC-USP © M. Becker 2008 56/90
qualquer lugar no plano– Ex.: Robô com acionamento Síncrono
δM = δm + δs = 1 + 1 = 2
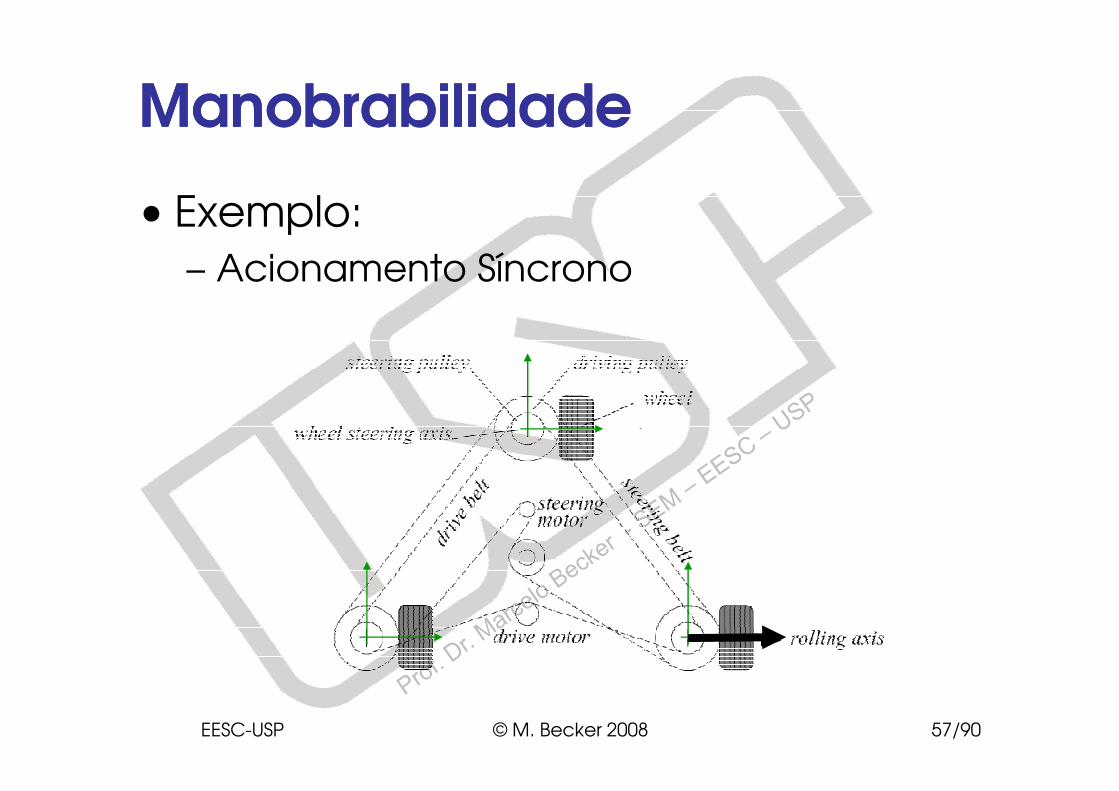
ManobrabilidadeManobrabilidade
• Exemplo:– Acionamento Síncrono
EESC-USP © M. Becker 2008 57/90
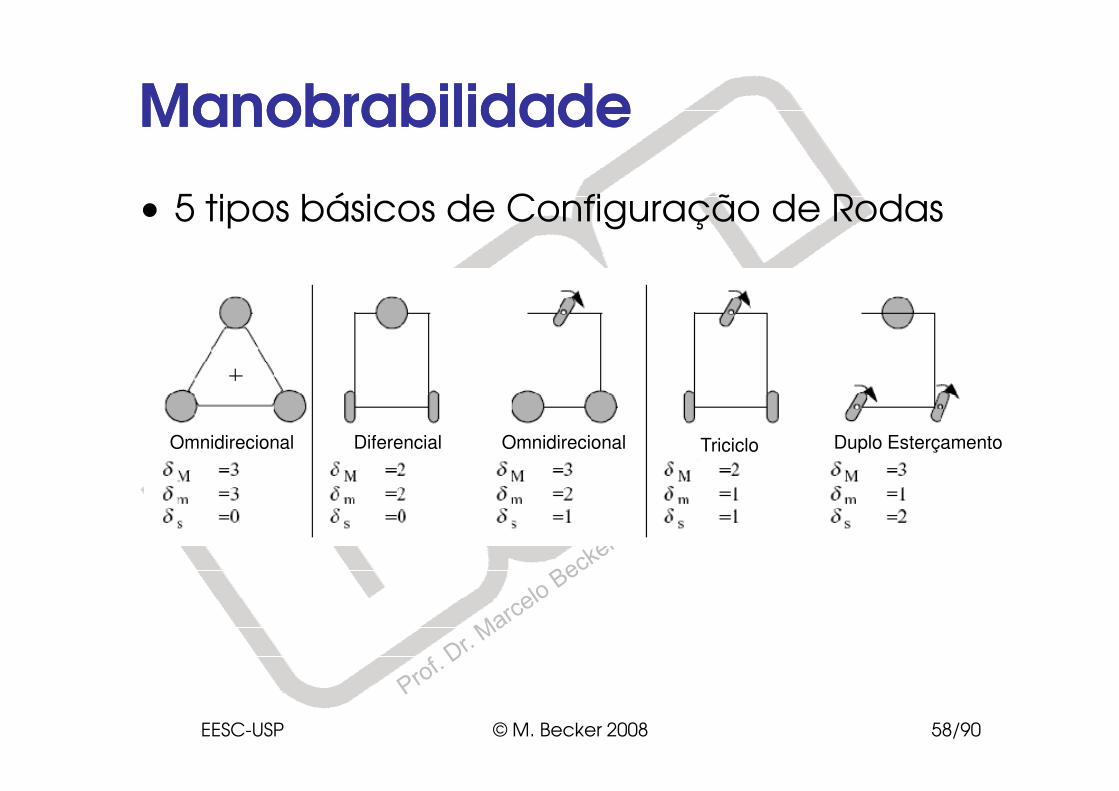
ManobrabilidadeManobrabilidade
• 5 tipos básicos de Configuração de Rodas
EESC-USP © M. Becker 2008 58/90
Omnidirecional Diferencial Triciclo Duplo EsterçamentoOmnidirecional

WorkspaceWorkspace
• Graus de Liberdade– Manobrabilidade é equivalente a DoF ?– Mas, qual o DoF no ambiente?
• Exemplo: Carros
EESC-USP © M. Becker 2008 59/90
– Workspace: área de trabalho• Como o robô pode se mover em sua área de
trabalho ?
– Differentiable Degrees of Freedom (DDoF): relacionado com a Mobilidade do Robô (δm)

WorkspaceWorkspace
• Graus de Liberdade– DoF: habilidade do robô atingir várias
posições– DDoF: habilidade do robô executar várias
trajetórias
EESC-USP © M. Becker 2008 60/90
trajetórias
– Exemplo:• Bicicleta: δM = δm + δs = 1 + 1 = 2 → DDoF = 1 e DoF = 3
• Omni-drive: δM = δm + δs = 1 + 1 = 2 → DDoF = 3 e DoF = 3
DoFDDoF m ≤≤ δ
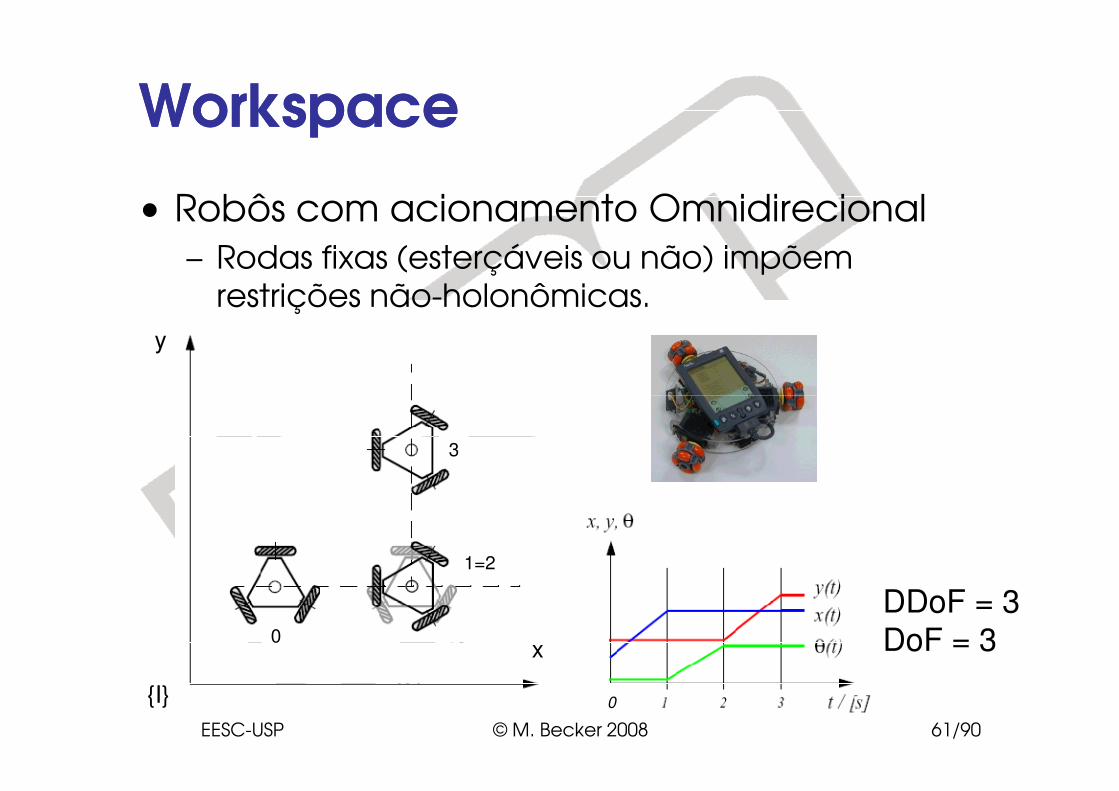
WorkspaceWorkspace
• Robôs com acionamento Omnidirecional– Rodas fixas (esterçáveis ou não) impõem
restrições não-holonômicas.y
EESC-USP © M. Becker 2008 61/90
x
{I}
0
1=2
3
0
DDoF = 3 DoF = 3
WorkspaceWorkspace
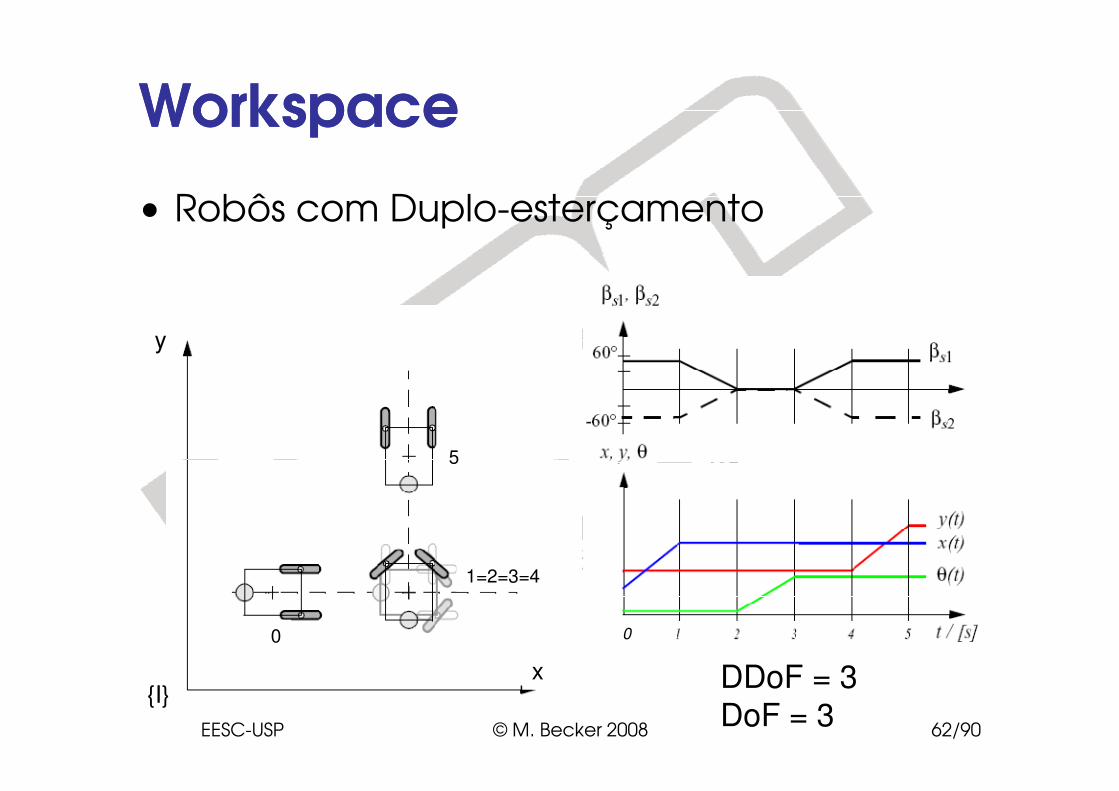
• Robôs com Duplo-esterçamento
y
EESC-USP © M. Becker 2008 62/90
0
1=2=3=4
5
x{I}
DDoF = 3 DoF = 3
0
•• Introdução Introdução
•• CinemáticaCinemática
•• Manobrabilidade e Manobrabilidade e WorkspaceWorkspace
Sumário da AulaSumário da Aula
EESC-USP © M. Becker 2008 63/90
•• Manobrabilidade e Manobrabilidade e WorkspaceWorkspace
•• ControleControle
• Exercícios Recomendados
• Bibliografia Recomendada
ControleControle
• Controle de Movimentação
– Objetivo: seguir a trajetória descrita pela posição e/ou perfis de velocidade em função do tempo.
EESC-USP © M. Becker 2008 64/90
–– Não podeNão pode--se empregar cinemática inversa em se empregar cinemática inversa em robôs nãorobôs não--holonômicosholonômicos.
– Muitos controladores não consideram a dinâmica do sistema → pequenas velocidades de locomoção.
ControleControle
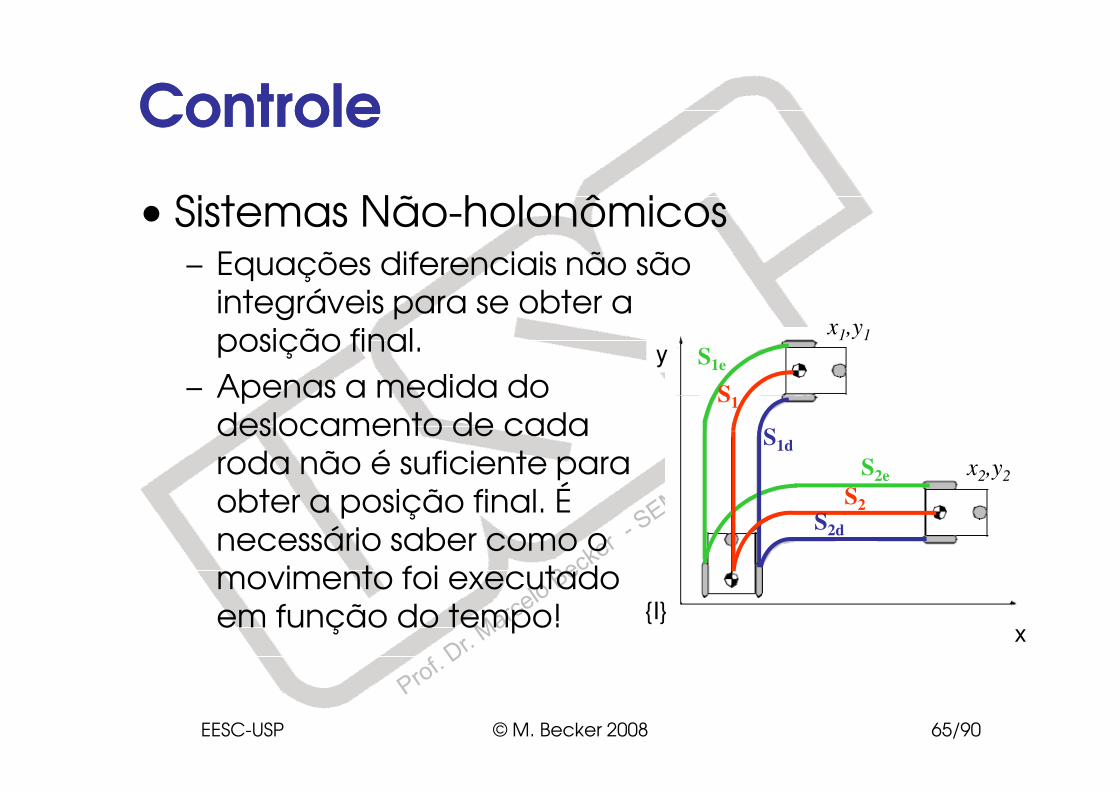
• Sistemas Não-holonômicos– Equações diferenciais não são
integráveis para se obter a posição final.
– Apenas a medida do y
x1,y1
S1e
S1
EESC-USP © M. Becker 2008 65/90
– Apenas a medida do deslocamento de cada roda não é suficiente para obter a posição final. É necessário saber como o movimento foi executado em função do tempo!
x{I}
x2,y2S2e
S1
S2
S1d
S2d
ControleControle
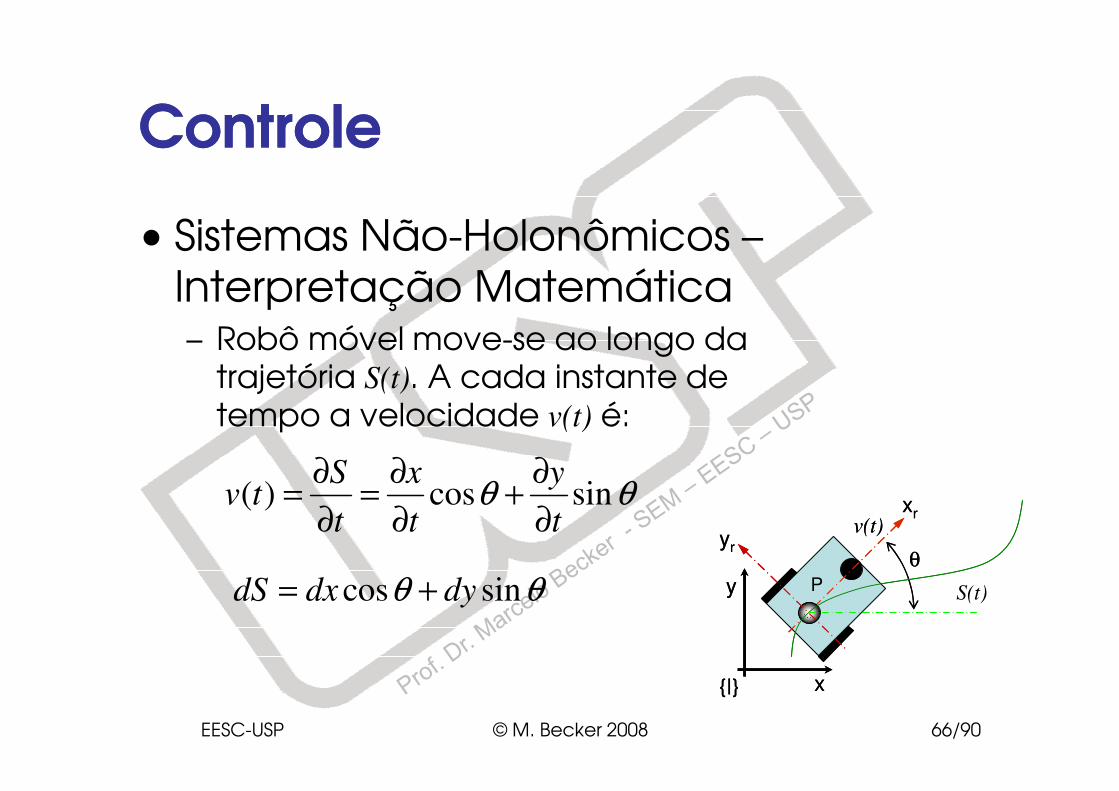
• Sistemas Não-Holonômicos –Interpretação Matemática– Robô móvel move-se ao longo da
trajetória S(t). A cada instante de tempo a velocidade é:
EESC-USP © M. Becker 2008 66/90
tempo a velocidade v(t) é:
x
y
{I}
xr
yrv(t)
θ
S(t)
x
y
{I}
xr
yrv(t)
θ
S(t)P
θθ sincos)(t
y
t
x
t
Stv
∂
∂+
∂
∂=
∂
∂=
θθ sincos dydxdS +=

ControleControle
• Sistemas Não-Holonômicos –Interpretação Matemática– A função v(t) é dita integrável
(holonômica) se há uma função trajetória que pode ser descrita
EESC-USP © M. Becker 2008 67/90
trajetória S(t) que pode ser descrita apenas por valores de x, y e θ.
x
y
{I}
xr
yrv(t)
θ
S(t)
x
y
{I}
xr
yrv(t)
θ
S(t)P
),,()( θyxStS =
ControleControle
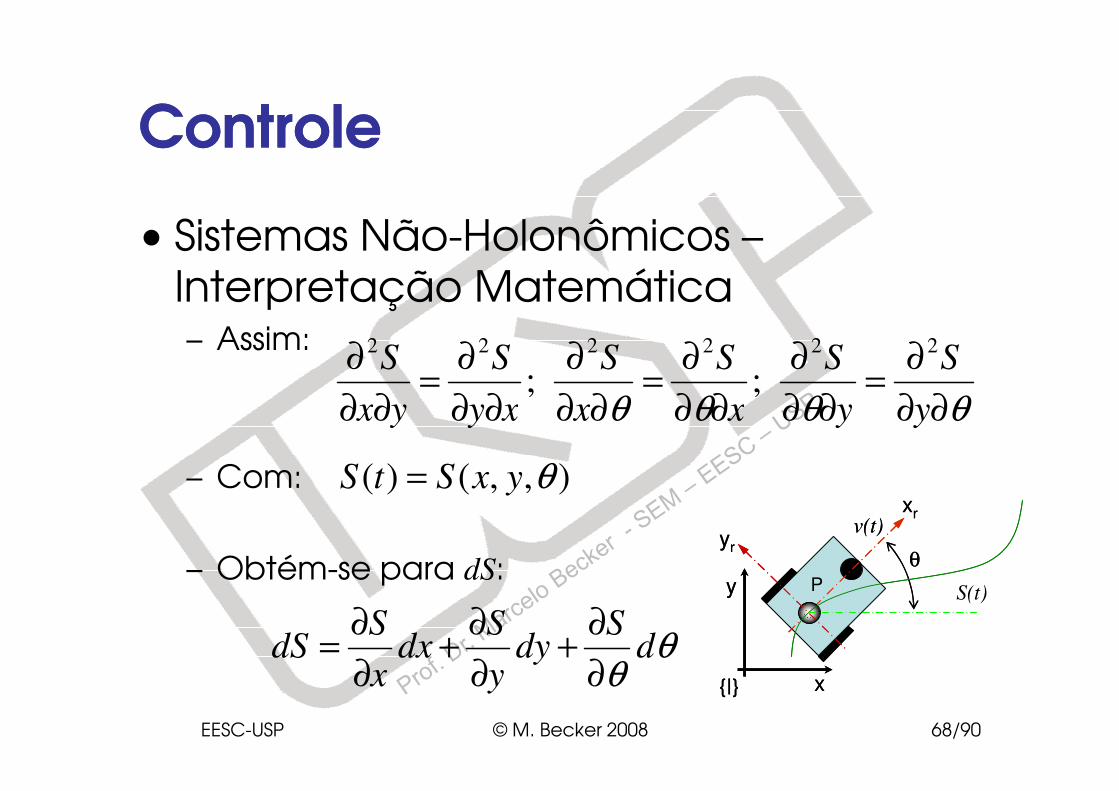
• Sistemas Não-Holonômicos –Interpretação Matemática– Assim:
θθθθ ∂∂
∂=
∂∂
∂
∂∂
∂=
∂∂
∂
∂∂
∂=
∂∂
∂
y
S
y
S
x
S
x
S
xy
S
yx
S222222
;;
EESC-USP © M. Becker 2008 68/90
– Com:
– Obtém-se para dS:
x
y
{I}
xr
yrv(t)
θ
S(t)
x
y
{I}
xr
yrv(t)
θ
S(t)P
),,()( θyxStS =
θθθθ ∂∂=
∂∂∂∂=
∂∂∂∂=
∂∂ yyxxxyyx;;
θθ
dS
dyy
Sdx
x
SdS
∂
∂+
∂
∂+
∂
∂=

Controle Controle
• Sistemas Não-Holonômicos –Interpretação Matemática– No caso de um robô onde: θθ sincos dydxdS +=
SSS ∂∂∂
EESC-USP © M. Becker 2008 69/90
– Comparando com:
– Encontra-se:
x
y
{I}
xr
yrv(t)
θ
S(t)
x
y
{I}
xr
yrv(t)
θ
S(t)P
θθ
dS
dyy
Sdx
x
SdS
∂
∂+
∂
∂+
∂
∂=
0;sin;cos =∂
∂=
∂
∂=
∂
∂
θθθ
S
y
S
x
S

Controle Controle
• Sistemas Não-Holonômicos –Interpretação Matemática– Observando a condição para holomicidade:
∂∂∂∂∂∂ SSSSSS222222
EESC-USP © M. Becker 2008 70/90
– Verifica-se que o 2º e o 3º termo na equação não são satisfeitos!!
0cos0sin ==− θθ e
θθθθ ∂∂
∂=
∂∂
∂
∂∂
∂=
∂∂
∂
∂∂
∂=
∂∂
∂
y
S
y
S
x
S
x
S
xy
S
yx
S222222
;;

Controle Controle
• Controle em Malha Aberta
y� Trajetória dividida em segmentos definidos em função de seu formato
• Segmentos de reta
EESC-USP © M. Becker 2008 71/90
x{I}
• Segmentos de reta• Arcos de circunferência
� Controle: calcular previamente uma trajetória suave baseada em segmentos de reta e arcos de circunferência
Controle Controle
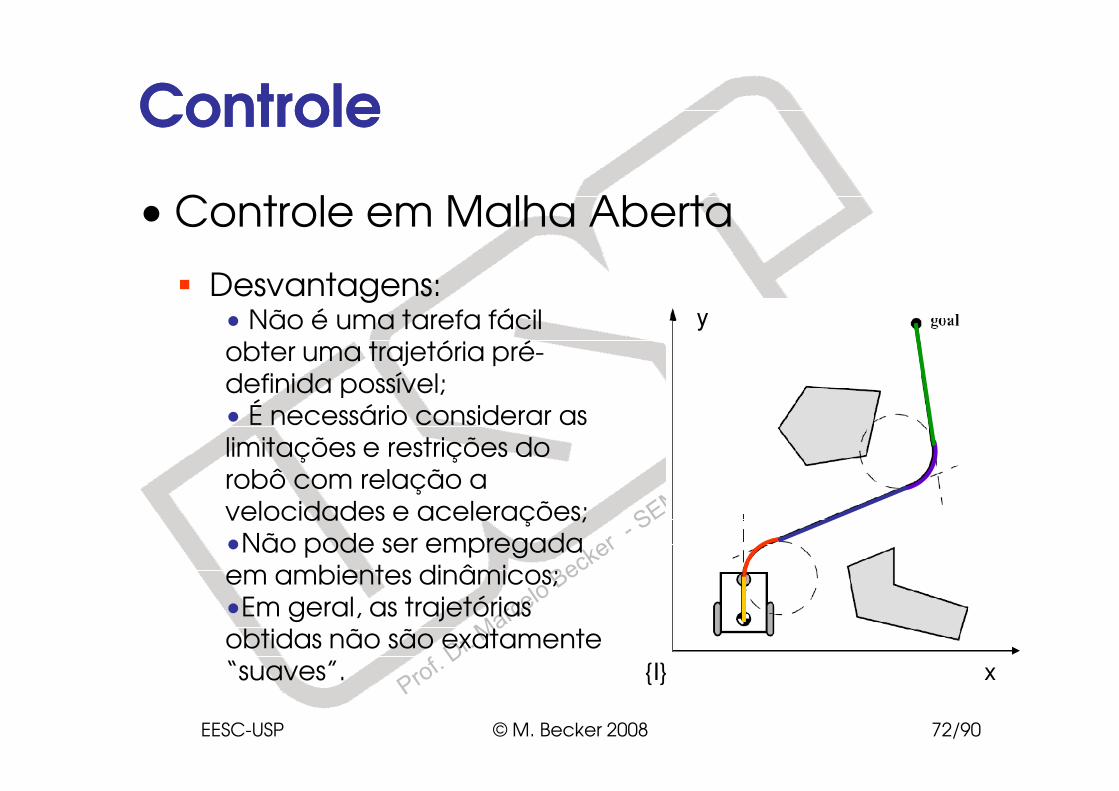
• Controle em Malha Aberta
y� Desvantagens:
• Não é uma tarefa fácil obter uma trajetória pré-definida possível;
EESC-USP © M. Becker 2008 72/90
x{I}
definida possível;• É necessário considerar as limitações e restrições do robô com relação a velocidades e acelerações;•Não pode ser empregada em ambientes dinâmicos;•Em geral, as trajetórias obtidas não são exatamente “suaves”.
Controle Controle
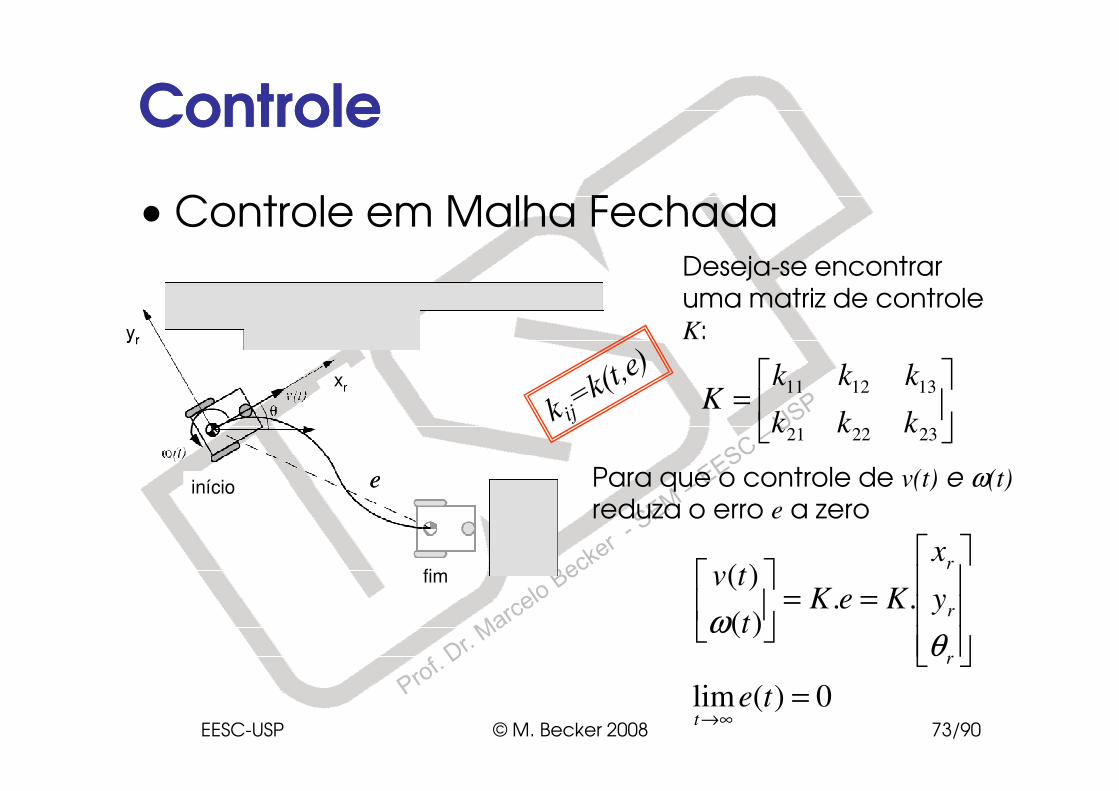
• Controle em Malha FechadaDeseja-se encontrar uma matriz de controle K:
=131211 kkk
Kxr
yr
xr
yr
EESC-USP © M. Becker 2008 73/90
=232221
131211
kkkK
início
fim
einício
fim
e Para que o controle de v(t) e ω(t)
reduza o erro e a zero
==
r
r
r
y
x
KeKt
tv
θω
..)(
)(
0)(lim =∞→
tet
yg = y
gol
ControleControle
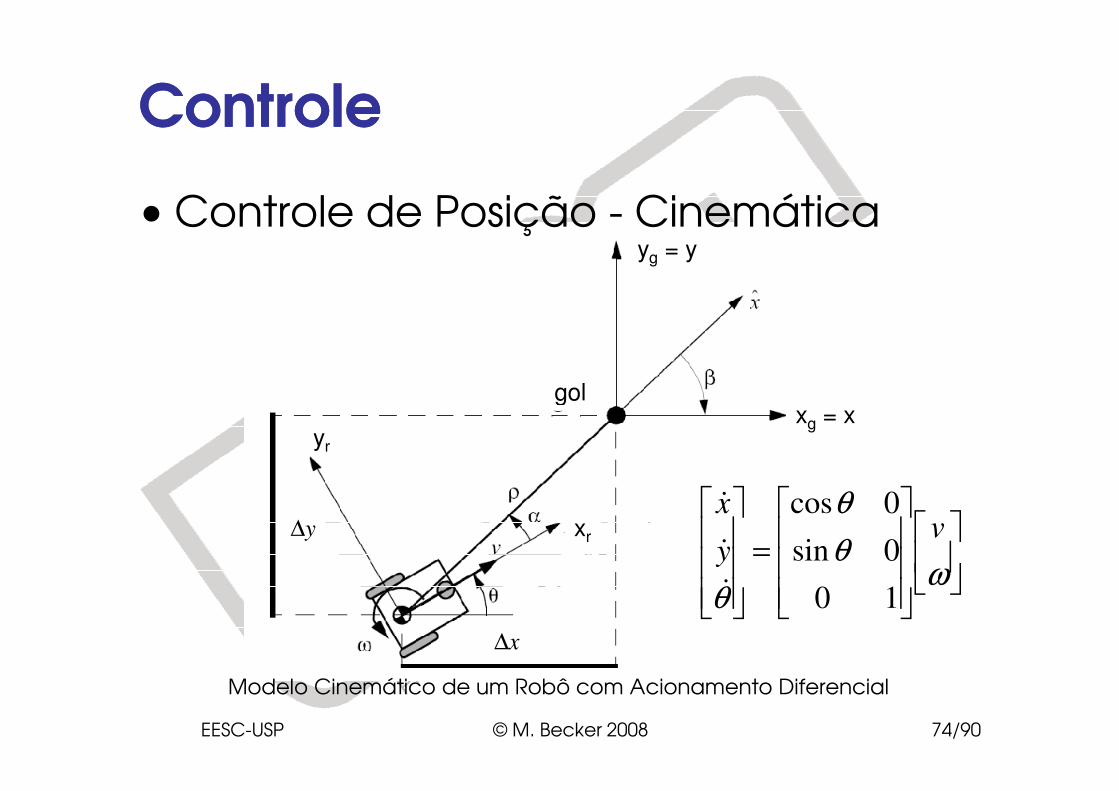
• Controle de Posição - Cinemática
EESC-USP © M. Becker 2008 74/90
xr
yr
xg = xgol
∆x
∆y
Modelo Cinemático de um Robô com Acionamento Diferencial
=
ωθ
θ
θ
vy
x
10
0sin
0cos
&
&
&
ControleControle
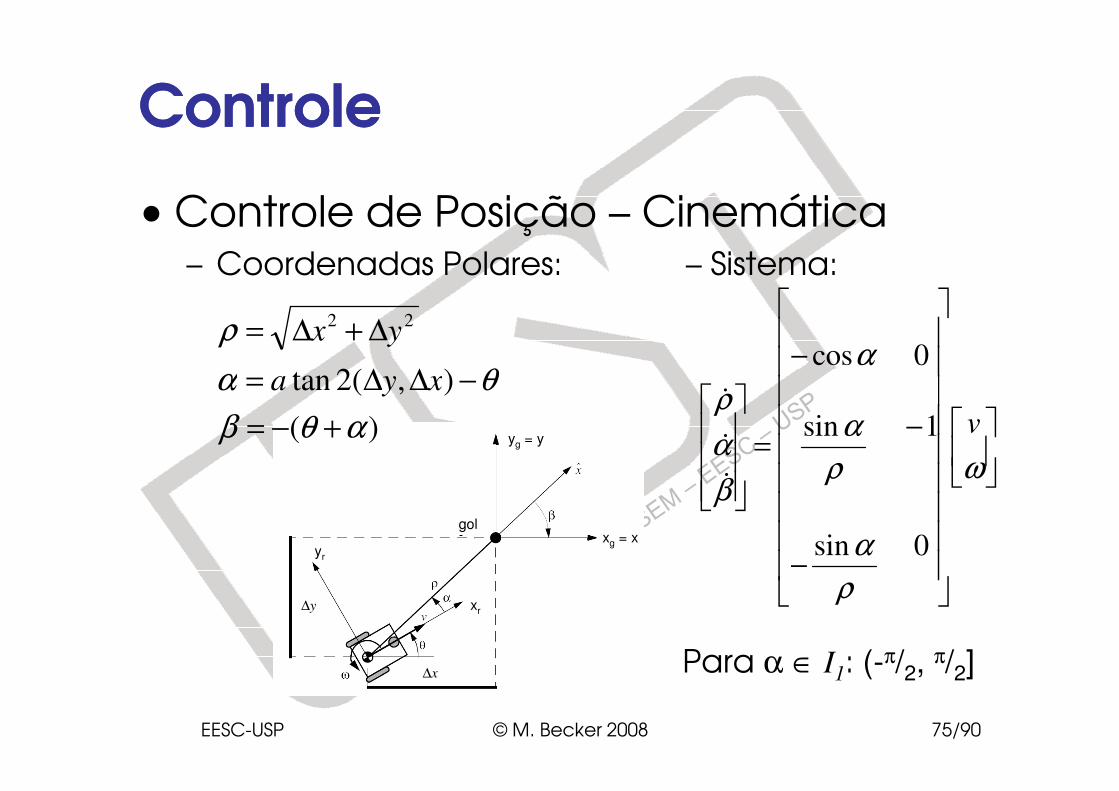
• Controle de Posição – Cinemática– Coordenadas Polares: – Sistema:
),(2tan
22
θα
ρ
−∆∆=
∆+∆=
xya
yx
−
α
ρ
0cos
&
EESC-USP © M. Becker 2008 75/90
xr
yr
yg = y
xg = xgol
∆x
∆y xr
yr
yg = y
xg = xgol
∆x
∆y
)(
),(2tan
αθβ
θα
+−=
−∆∆= xya
−
−=
ω
ρ
α
ρ
α
β
α
ρv
0sin
1sin
&
&
&
Para α ∈ I1: (-π/2, π/2]
ControleControle
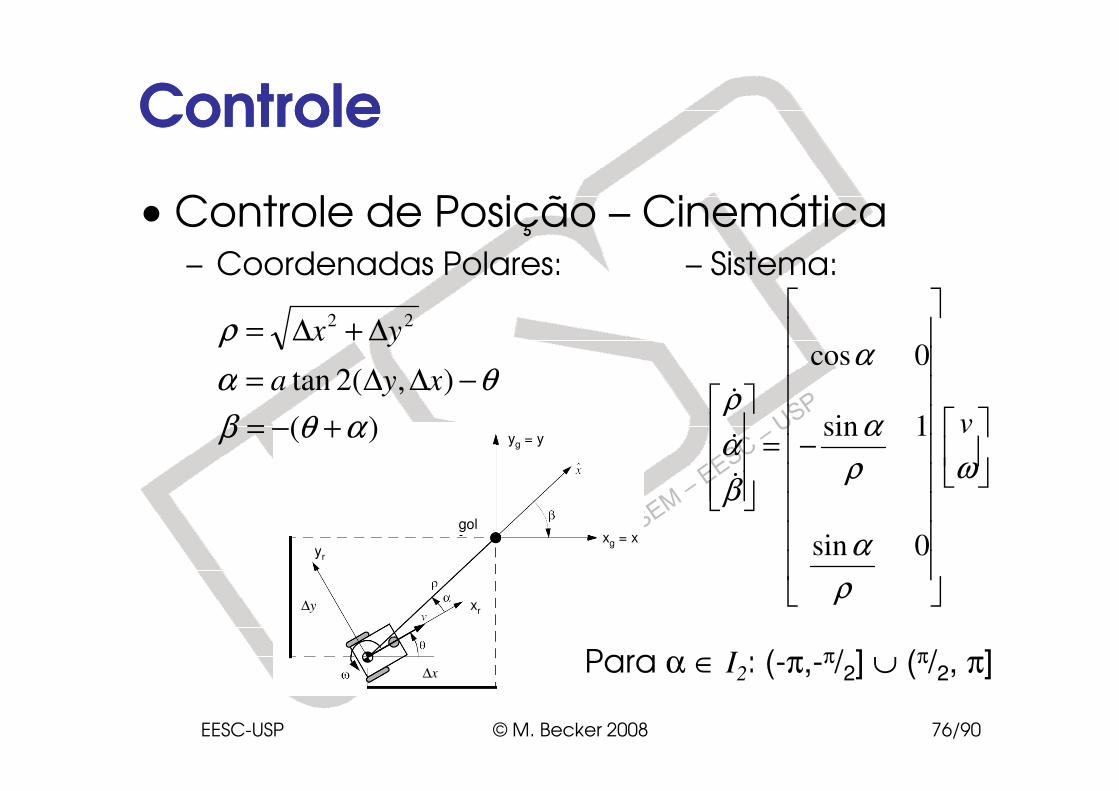
• Controle de Posição – Cinemática– Coordenadas Polares: – Sistema:
),(2tan
22
θα
ρ
−∆∆=
∆+∆=
xya
yx
α
ρ
0cos
&
EESC-USP © M. Becker 2008 76/90
xr
yr
yg = y
xg = xgol
∆x
∆y xr
yr
yg = y
xg = xgol
∆x
∆y
)(
),(2tan
αθβ
θα
+−=
−∆∆= xya
−=
ω
ρ
α
ρ
α
β
α
ρv
0sin
1sin
&
&
&
Para α ∈ I2: (-π,-π/2] ∪ (π/2, π]

Controle Controle
• Controle de Posição – Cinemática– Conclusões:
• A transformação de coordenadas é indefinida para x = y = 0. Nesse ponto o determinante da
EESC-USP © M. Becker 2008 77/90
para x = y = 0. Nesse ponto o determinante da Matriz Jacobiana da transformação é indefinido.
• Para α ∈ I1, a orientação do robô móvel aponta para a posição desejada (gol) e para α ∈ I2, a orientação é oposta à direção do gol.
Controle Controle
• Controle de Posição – Cinemática– Conclusões:
• Definindo-se adequadamente a orientação do robô em sua configuração inicial, sempre é
EESC-USP © M. Becker 2008 78/90
do robô em sua configuração inicial, sempre é possível ter-se α ∈ I1 para t = 0. Entretanto isso não significa que α ∈ I1 para todo instante t de tempo.

Controle Controle
• Controle de Posição – Cinemática– A Lei de Controle - Exemplo
• Sendo: ρρkv =
βαω βα kk +=
EESC-USP © M. Becker 2008 79/90
• O sistema de controle em malha fechada:
• Irá movimentar o robô para: (ρ,α,β)=(0,0,0)
−−
−
=
α
βαα
αρ
β
α
ρ
ρ
βαρ
ρ
sin
sin
cos
k
kkk
k
&
&
&
βαω βα kk +=

Controle Controle
• Controle de Posição – Cinemática– A Lei de Controle - Exemplo
• Premissas:
EESC-USP © M. Becker 2008 80/90
1 – O sinal de Controle v tem sempre o mesmo sentido (+ ou -);
2 – A direção de movimento é mantida positiva ou negativa durante o trajeto
3 – A manobra de aproximação final (“estacionar”) é realizada sempre sem inverter o movimento (não há “balizas”, etc.)
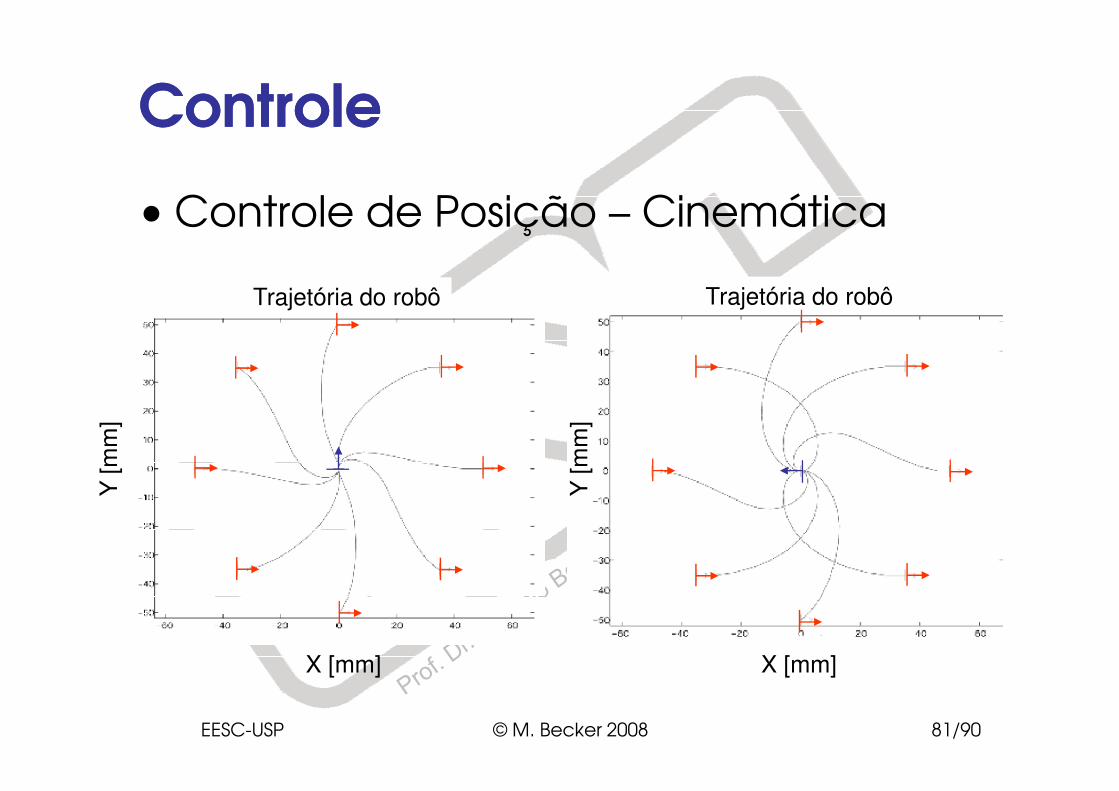
ControleControle
• Controle de Posição – Cinemática
Trajetória do robô Trajetória do robô
EESC-USP © M. Becker 2008 81/90
X [mm] X [mm]
Y [m
m]
Y [m
m]
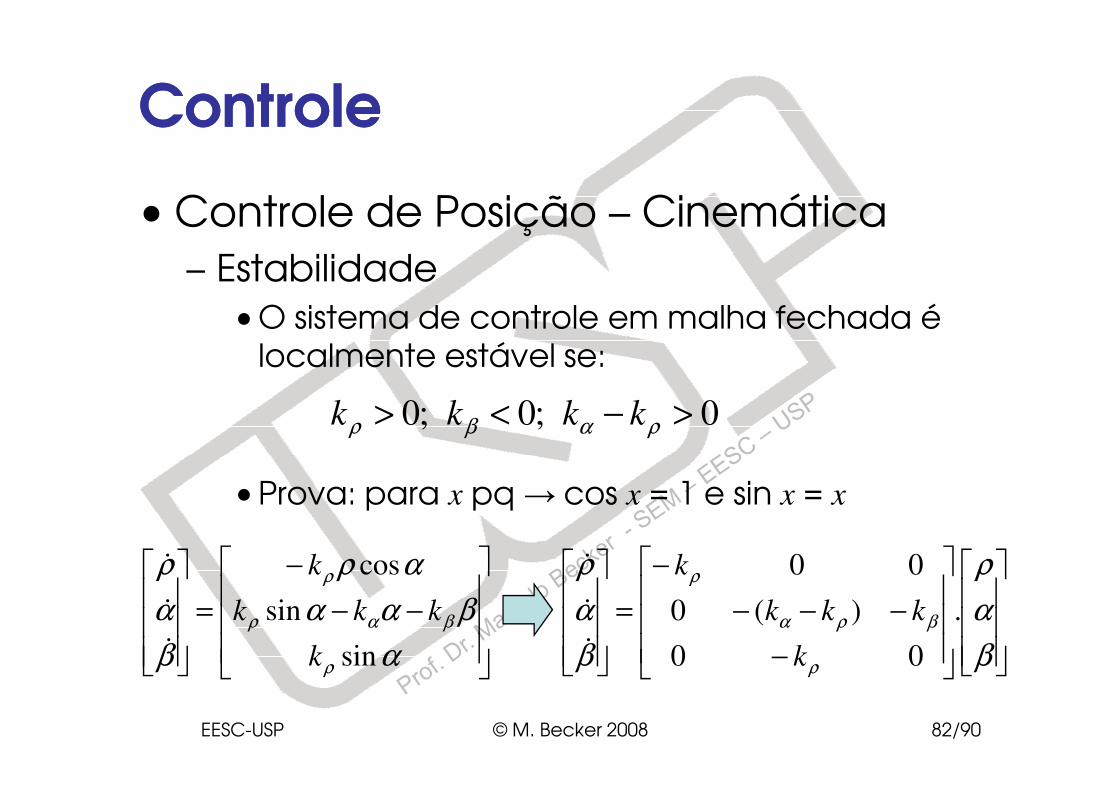
ControleControle
• Controle de Posição – Cinemática– Estabilidade
• O sistema de controle em malha fechada é localmente estável se:
0;0;0 >−<> kkkk
EESC-USP © M. Becker 2008 82/90
• Prova: para x pq → cos x = 1 e sin x = x
0;0;0 >−<> ραβρ kkkk
−−
−
=
α
βαα
αρ
β
α
ρ
ρ
βαρ
ρ
sin
sin
cos
k
kkk
k
&
&
&
−
−−−
−
=
β
α
ρ
β
α
ρ
ρ
βρα
ρ
.
00
)(0
00
k
kkk
k
&
&
&
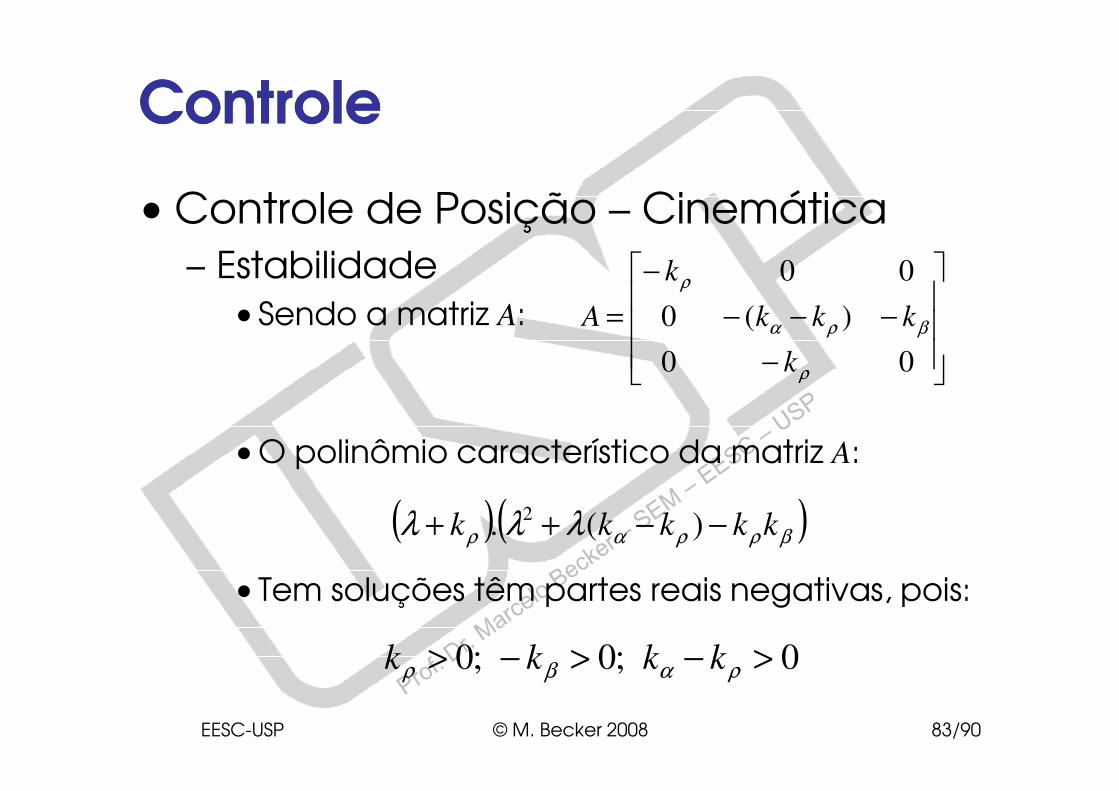
ControleControle
• Controle de Posição – Cinemática– Estabilidade
• Sendo a matriz A:
−
−−−
−
=
00
)(0
00
ρ
βρα
ρ
k
kkk
k
A
EESC-USP © M. Becker 2008 83/90
• O polinômio característico da matriz A:
• Tem soluções têm partes reais negativas, pois:
( )( )βρραρ λλλ kkkkk −−++ )(.2
0;0;0 >−>−> ραβρ kkkk

ControleControle
• Controle de Posição – Cinemática– Estabilidade
• Para um Controle RobustoControle Robusto de Posição do Robô, é recomendável aplicar uma condição forte de estabilidade que garanta que o robô
EESC-USP © M. Becker 2008 84/90
forte de estabilidade que garanta que o robô não alterará sua direção na aproximação final:
02
3
5;0;0 >−+<> ρβαβρ
πkkkkk
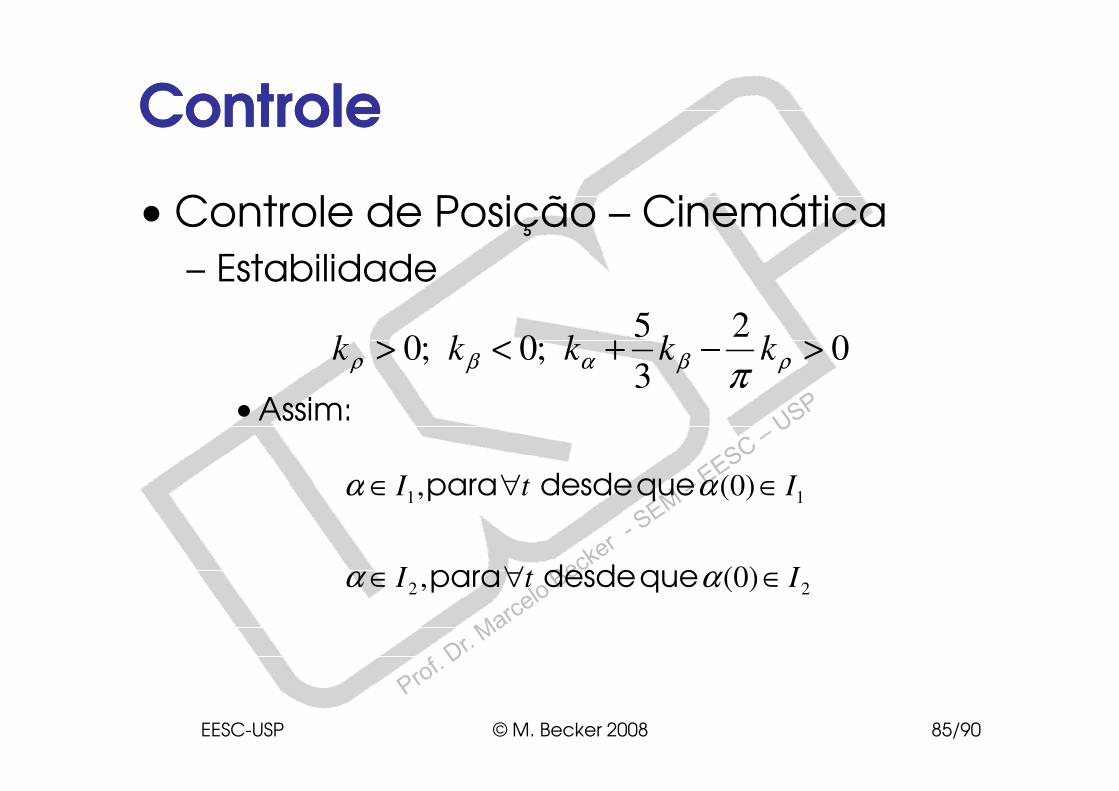
ControleControle
• Controle de Posição – Cinemática– Estabilidade
• Assim:
02
3
5;0;0 >−+<> ρβαβρ
πkkkkk
EESC-USP © M. Becker 2008 85/90
• Assim:
22
11
)0(,
)0(,
ItI
ItI
∈∀∈
∈∀∈
αα
αα
quedesdepara
quedesdepara
•• Introdução Introdução
•• CinemáticaCinemática
•• Manobrabilidade e Manobrabilidade e WorkspaceWorkspace
Sumário da AulaSumário da Aula
EESC-USP © M. Becker 2008 86/90
•• Manobrabilidade e Manobrabilidade e WorkspaceWorkspace
•• ControleControle
•• Exercícios RecomendadosExercícios Recomendados
• Bibliografia Recomendada
Exercícios RecomendadosExercícios Recomendados
•
EESC-USP © M. Becker 2008 87/90

•• Introdução Introdução
•• CinemáticaCinemática
•• Manobrabilidade e Manobrabilidade e WorkspaceWorkspace
Sumário da AulaSumário da Aula
EESC-USP © M. Becker 2008 88/90
•• Manobrabilidade e Manobrabilidade e WorkspaceWorkspace
•• ControleControle
•• Exercícios RecomendadosExercícios Recomendados
•• Bibliografia RecomendadaBibliografia Recomendada
Bibliografia RecomendadaBibliografia Recomendada
LIVROS
• Siegwart, R. and Nourbakhsh, I.R., 2004, Introduction to Autonomous Mobile Robots, 1st Edition, MIT Press, ISBN 0-262-19502-X
• Sandin, P. E., 2003, Robot Mechanisms and Mechanical
EESC-USP © M. Becker 2008 89/90
• Sandin, P. E., 2003, Robot Mechanisms and Mechanical Devices Illustrated, McGraw-Hill, ISBN 0-07-141200-X
SITES
• http://www.cs.cmu.edu/~pprk/• http://www.mobilerobots.org
Bibliografia RecomendadaBibliografia Recomendada
NOTAS DE AULA
• Siegwart, R. (ETHZ - Suíça): http://www.mobilerobots.org
EESC-USP © M. Becker 2008 90/90
http://www.mobilerobots.org
• Simões, A. S. (UNESP - Brasil):http://www.sorocaba.unesp.br/professor/assimoes/rm/index.html
• Zufferey, J-C. (EPFL - Suíça):http://moodle.epfl.ch/course/view.php?id=261