apostila_sistema de controle em tempo discreto
DESCRIPTION
Apostila de Sistemas de controleTRANSCRIPT

Universidade Federal de Minas Gerais – UFMG
Escola de Engenharia
Departamento de Mecânica - DEMEC
EMA166 – Sistema de Controle em Tempo
Discreto
Notas de Aula
Introdução ao Controle de Sistemas em Tempo
Discreto
Autor: Prof. Dr. Lázaro Valentim Donadon
Fevereiro de 2010

ii
Prefácio
Ementa:
Amostragem de Sinais contínuos; Transformada Z; Modelos Discretos; Espaço de
Estados discreto; Análise de Sistemas Discretos; Controladores PID digital; Métodos de
projeto de controladores em tempo discreto, Realimentação de Estado e Observadores
de Estado.
Programa:
Semana: Data: Assunto:
1 Introdução ao controle de sistemas em tempo discreto
2 Transformada Z
3 Função de Transferência em Tempo Discreto – Parte I
4 Função de Transferência em Tempo Discreto – Parte II
5 Aula de Exercícios
6 1ª Prova
7 Projeto de Controladores por Métodos Clássicos
8 Exercícios
9 Formulação por Matrizes de Estado
10 Controlabilidade e Observabilidade
11 2ª Prova
11 09/06 Alocação de Pólos, realimentação e observadores de estado
12 16/06 Exercícios – Matlab
13 23/06 Observadores de ordem reduzida
14 30/06 Exercícios
15 Exercícios adicionais
16 3ª Prova
Critérios de Avaliação:
1ª Prova 30%, 2ª Prova 30%, 3ª Prova 30%, listas de exercício 10%
Bibliografia:
K. Ogata. Discrete-Time Control Systems. Prentice Hall, 2nd
Edition. 1994.
G.F. Franklin, J.D. Powell, and M.L. Workman. Digital Control of Dynamic Systems.
Addison-Wesley, 3rd
Edition. 1998.
C.L. Phillips, H.T. Charles. Digital control system analysis and design. 3rd
Edition
Englewood Cliffs, N. J.: Prentice - Hall, c1995.

iii
Sumário
1 INTRODUÇÃO AO CONTROLE DE SISTEMAS EM TEMPO DISCRETO 1
1.1 INTRODUÇÃO ........................................................................................................................ 1 1.2 SISTEMAS DE CONTROLE EM TEMPO DISCRETO........................................................................ 1 1.3 TIPOS DE SINAIS .................................................................................................................... 5 1.4 AMOSTRAGEM DE SINAIS CONTÍNUOS..................................................................................... 6
1.4.1 Teoria da Amostragem – Tratamento empírico ................................................................. 6 1.4.2 Não unicidade de sinais amostrados................................................................................. 8
1.5 EXERCÍCIOS PROPOSTOS...................................................................................................... 10
2 TRANSFORMADA Z ....................................................................................... 11
2.1 MÉTODO DA TRANSFORMADA Z .......................................................................................... 11 2.1.1 Transformada Z ............................................................................................................. 11 2.1.2 Transformada Z de funções elementares ......................................................................... 11 2.1.3 Propriedades da Transformada Z ................................................................................... 13 2.1.4 Principais Transformadas Z ........................................................................................... 16 2.1.5 Principais Propriedades da Transformadas Z ................................................................ 16
2.2 TRANSFORMADA Z INVERSA ................................................................................................ 16 2.2.1 Método de expansão em frações parciais ....................................................................... 17 2.2.2 Método computacional - Matlab..................................................................................... 20
2.3 EXERCÍCIOS RESOLVIDOS .................................................................................................... 20 2.4 EXERCÍCIOS PROPOSTOS...................................................................................................... 22
3 FUNÇÃO DE TRANSFERÊNCIA EM TEMPO DISCRETO ....................... 23
3.1 AMOSTRAGEM IMPULSIVA ................................................................................................... 23 3.2 CIRCUITO DATA-HOLD ....................................................................................................... 24
3.2.1 Segurador de Ordem Zero (ZOH)................................................................................... 25 3.2.2 Segurador de primeira ordem (FOH) ............................................................................. 26 3.2.3 Funções de Transferência em Tempo Discreto com ZOH ................................................ 27 3.2.4 Resposta em Freqüência do ZOH ................................................................................... 28
3.3 FUNÇÃO DE TRANSFERÊNCIA PULSADA ............................................................................... 29 3.3.1 Transformada Z de FTs incluindo o amostrador ............................................................. 30 3.3.2 Função de Transferência em Cascata ............................................................................. 31 3.3.3 Função de transferência em malha fechada .................................................................... 32 3.3.4 Função de transferência em malha fechada de controladores digitais ............................. 33 3.3.5 Função de transferência pulsada de um controlador PID digital .................................... 33 3.3.6 Simulação de sistemas em tempo discreto ....................................................................... 37 3.3.7 Realização de Controladores digitais e filtros digitais .................................................... 38 3.3.8 Resposta ao Impulso Finita e Infinita ............................................................................. 40
3.4 EXERCÍCIOS RESOLVIDOS .................................................................................................... 42 3.5 EXERCÍCIOS PROPOSTOS...................................................................................................... 44
4 PROJETO DE CONTROLADORES POR MÉTODOS CLÁSSICOS .......... 46
4.1 MAPEAMENTO ENTRE PLANO Z E PLANO S ........................................................................... 46 4.2 ANÁLISE DE ESTABILIDADE DE SISTEMAS NO PLANO Z ......................................................... 50 4.3 RESPOSTA TRANSIENTE ....................................................................................................... 51 4.4 MÉTODO DE PROJETO BASEADO NO LUGAR DAS RAÍZES ........................................................ 52 4.5 PROJETO DE CONTROLADORES PID ..................................................................................... 59
4.5.1 Ziegler-Nichols malha fechada....................................................................................... 59 4.5.2 Ziegler-Nichols Malha Aberta ........................................................................................ 61
4.6 CONTROLADOR TIPO “DEAD BEAT”..................................................................................... 61 4.7 EXERCÍCIOS RESOLVIDOS .................................................................................................... 62 4.8 EXERCÍCIOS PROPOSTOS...................................................................................................... 64

iv
5 FORMULAÇÃO POR MATRIZES DE ESTADO.......................................... 66
5.1 INTRODUÇÃO À FORMULAÇÃO DE ESTADO ........................................................................... 66 5.2 NOMENCLATURA DE ESPAÇO DE ESTADOS ........................................................................... 67 5.3 REPRESENTAÇÃO DE ESPAÇO DE ESTADOS DISCRETOS.......................................................... 67
5.3.1 Forma Canônica Controlável ......................................................................................... 67 5.3.2 Forma Canônica Observável ......................................................................................... 68 5.3.3 Forma Canônica Diagonal ............................................................................................ 68 5.3.4 Forma Canônica de Jordan ........................................................................................... 69 5.3.5 Não unicidade das matrizes de estado ............................................................................ 69
5.4 SIMULANDO UM SISTEMA NA FORMA DE ESTADO DISCRETO .................................................. 70 5.5 PASSANDO DE MATRIZES DE ESTADO PARA FT .................................................................... 70 5.6 DISCRETIZAÇÃO DE MATRIZES DE ESTADO CONTÍNUAS ....................................................... 71 5.7 EXERCÍCIOS RESOLVIDOS .................................................................................................... 74 5.8 EXERCÍCIOS PROPOSTOS...................................................................................................... 77
6 CONTROLABILIDADE E OBSERVABILIDADE ........................................ 78
6.1 INTRODUÇÃO ...................................................................................................................... 78 6.2 CONTROLABILIDADE ........................................................................................................... 78 6.3 CONTROLABILIDADE DE SAÍDA ............................................................................................ 80 6.4 OBSERVABILIDADE ............................................................................................................. 81 6.5 COMENTÁRIOS GERAIS SOBRE CONTROLABILIDADE E OBSERVABILIDADE .............................. 84
6.5.1 Princípio da dualidade................................................................................................... 84 6.5.2 Condições de controlabilidade e observabilidade em termos de Funções de Transferência 85 6.5.3 Efeito da discretização ................................................................................................... 87
6.6 EXERCÍCIOS RESOLVIDOS .................................................................................................... 87 6.7 EXERCÍCIOS PROPOSTOS...................................................................................................... 88
7 PROJETO DE CONTROLADORES VIA ALOCAÇÃO DE PÓLOS ........... 90
7.1 INTRODUÇÃO ...................................................................................................................... 90 7.2 FÓRMULA DE ACKERMANN ................................................................................................. 91 7.3 FORMAS ALTERNATIVAS PARA O GANHO K........................................................................... 92 7.4 CONTROLE POR REALIMENTAÇÃO DE ESTADO...................................................................... 94 7.5 OBSERVADORES DE ESTADO ................................................................................................ 97
7.5.1 Observadores de Estado de Ordem Completa ................................................................. 97 7.5.2 Comentários sobre estimador de estado ....................................................................... 100 7.5.3 Estimadores de Ordem Reduzida .................................................................................. 103
7.6 RESUMO DA METODOLOGIA PARA PROJETO DE CONTROLADORES ....................................... 109 7.7 EXERCÍCIOS RESOLVIDOS .................................................................................................. 111 7.8 EXERCÍCIOS PROPOSTOS.................................................................................................... 117
8 PROJETOS ..................................................................................................... 119
8.1 PÊNDULO INVERTIDO ........................................................................................................ 120 8.2 SUSPENSÃO ATIVA PARA ¼ DE VEÍCULO ............................................................................ 121 8.3 CONTROLE NÃO COLOCADO ............................................................................................... 122 8.4 PROJETO DE FILTROS DIGIAIS ............................................................................................ 123
9 REFERÊNCIAS BIBLIOGRÁFICAS ........................................................... 124

1
Capítulo 1
1 Introdução ao Controle de Sistemas em Tempo Discreto
Neste item, será apresentado os equipamentos utilizados em sistemas de
controle, isto é, será descrito brevemente os componentes necessários para se
implementar um sistema de controle em tempo real.
1.1 Introdução
Aqui, serão tratados sistemas lineares e invariantes no tempo em que o
controle de sistemas em tempo discreto é entendido como a implementação de sistemas
de controle utilizando placas de aquisição de dados capazes de medir uma determinada
quantidade de sinais analógicos, processá-los e devolvê-los ao meio ambiente.
1.2 Sistemas de controle em tempo discreto
Um sistema de controle em tempo contínuo em realimentação pode ser
reresentado como na Figura 1.1, neste caso, todos os sinais envolvidos são sinais
contínuos e o sistema de controle e a planta podem ser escritos no domínio de Laplace.
Figura 1.1: Exemplo de um sistema de controle em tempo contínuo
Já os sistemas de controle em tempo discreto envolvem a discretização de uma
ou mais variáveis do processo de controle. Normalmente, a implementação de um
sistema de controle em tempo discreto envolve a utilização de um computador em
conjunto com uma placa de aquisição de dados para a implementação do controlador.
Sendo assim, está implícito no método que ocorra pelo menos uma passagem do tempo
contínuo para o tempo discreto, denominada discretização ou amostragem do sinal, e
uma passagem do tempo discreto para o tempo contínuo, chamada de reconstrução.
A implementação em tempo real de controle para um sistema de controle em
tempo discreto em realimentação onde o controlador é implementado em tempo discreto
pode ser observado na Figura 1.2.
2
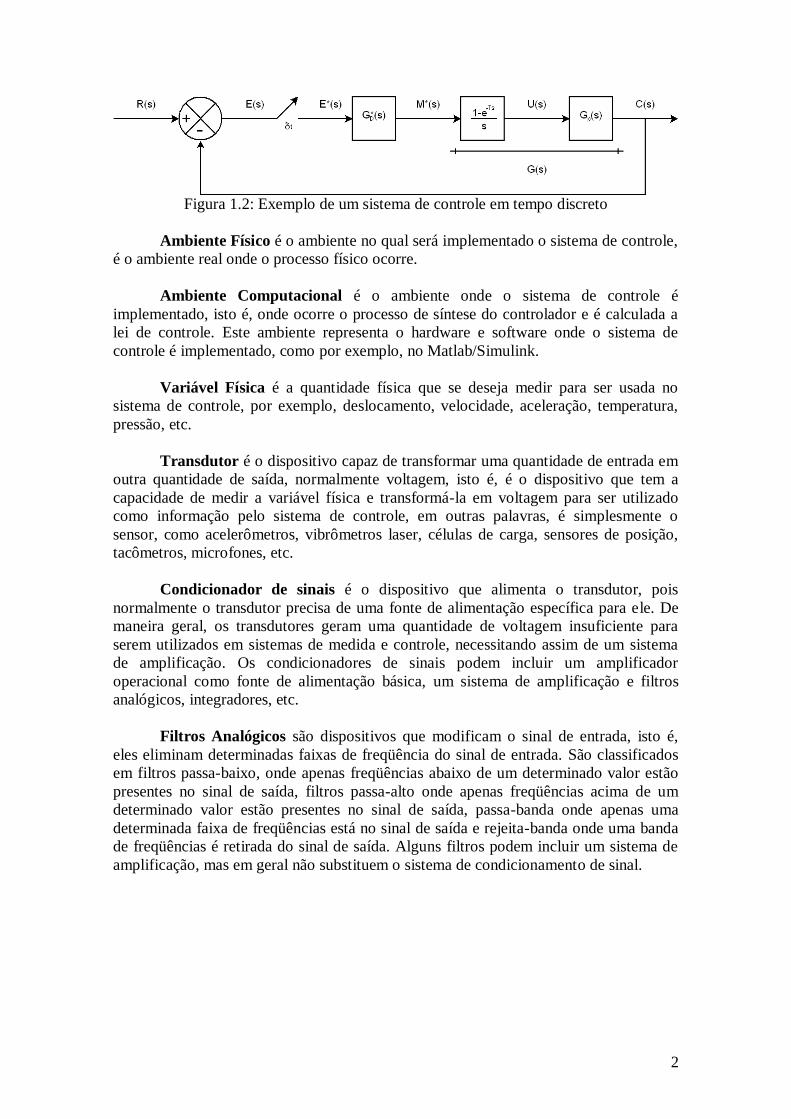
Figura 1.2: Exemplo de um sistema de controle em tempo discreto
Ambiente Físico é o ambiente no qual será implementado o sistema de controle,
é o ambiente real onde o processo físico ocorre.
Ambiente Computacional é o ambiente onde o sistema de controle é
implementado, isto é, onde ocorre o processo de síntese do controlador e é calculada a
lei de controle. Este ambiente representa o hardware e software onde o sistema de
controle é implementado, como por exemplo, no Matlab/Simulink.
Variável Física é a quantidade física que se deseja medir para ser usada no
sistema de controle, por exemplo, deslocamento, velocidade, aceleração, temperatura,
pressão, etc.
Transdutor é o dispositivo capaz de transformar uma quantidade de entrada em
outra quantidade de saída, normalmente voltagem, isto é, é o dispositivo que tem a
capacidade de medir a variável física e transformá-la em voltagem para ser utilizado
como informação pelo sistema de controle, em outras palavras, é simplesmente o
sensor, como acelerômetros, vibrômetros laser, células de carga, sensores de posição,
tacômetros, microfones, etc.
Condicionador de sinais é o dispositivo que alimenta o transdutor, pois
normalmente o transdutor precisa de uma fonte de alimentação específica para ele. De
maneira geral, os transdutores geram uma quantidade de voltagem insuficiente para
serem utilizados em sistemas de medida e controle, necessitando assim de um sistema
de amplificação. Os condicionadores de sinais podem incluir um amplificador
operacional como fonte de alimentação básica, um sistema de amplificação e filtros
analógicos, integradores, etc.
Filtros Analógicos são dispositivos que modificam o sinal de entrada, isto é,
eles eliminam determinadas faixas de freqüência do sinal de entrada. São classificados
em filtros passa-baixo, onde apenas freqüências abaixo de um determinado valor estão
presentes no sinal de saída, filtros passa-alto onde apenas freqüências acima de um
determinado valor estão presentes no sinal de saída, passa-banda onde apenas uma
determinada faixa de freqüências está no sinal de saída e rejeita-banda onde uma banda
de freqüências é retirada do sinal de saída. Alguns filtros podem incluir um sistema de
amplificação, mas em geral não substituem o sistema de condicionamento de sinal.

3
Figura 1.3: Exemplo de curva em freqüência de um filtros ideais. Passa-baixo. Passa-
alta, Rejeita-banda ou Notch e Passa-banda
Multiplexador Analógico normalmente é parte integrante da placa de aquisição
de sinais e é o dispositivo que conecta os canais de entrada da placa de aquisição de
dados ao circuito “Sample and hold”. Normalmente uma placa de aquisição de sinais
contém vários canais de entrada e apenas um multiplexador analógico.
Circuito Sample-and-Hold é dispositivo que faz a amostragem, sample, e
mantém o sinal amostrado por um determinado período de tempo, hold. Este dispositivo
é aquele que o usuário tem a escolha do tempo de discretização.
Conversor Analógico Digital é o dispositivo que realmente realiza o processo
de amostragem e quantificação do sinal analógico, isto é, a saída do conversor A/D é
um sinal binário, normalmente o multiplexador analógico e circuito sample-and-hold
são partes integrantes do conversor A/D.
Figura 1.4: Componentes básicos de um sistema de medida
Demultiplexador é dispositivo que conecta a saída de dados da placa de
aquisição de sinais com os respectivos canais de saída. Esta conexão é sincronizada com
o respectivo tempo de amostragem.
Conversor Digital Analógico é o dispositivo que transforma uma entrada
digital, neste caso um número binário, em uma saída analógica.
Hold ou segurador é um dispositivo que mantém o sinal de saída do conversor
D/A seguindo uma determinada função, isto é, o hold mais comum é o Zero-Order Hold
(ZOH), segurador de ordem zero, ele mantém o sinal constante como apresentado
abaixo. Este dispositivo é parte integrante do conversor D/A, Figura 1.5.

4
Figura 1.5: sinal contínuo e sinal contínuo com segurador de ordem zero
Filtro de reconstrução é um filtro analógico adicionado na saída do conversor
D/A com o intuito de eliminar as “escadas” feitas pelo segurador. Este filtro pode ser
eliminado do processo se necessário.
Sistema de condicionamento do atuador é um dispositivo parecido com o
condicionador apresentado anteriormente e serve para alimentar, filtrar e amplificar o
sinal que será enviado ao atuador.
Atuador é o dispositivo responsável por implementar a lei de controle no
sistema físico, isto é, é o dispositivo que implementa fisicamente a lei de controle.
Figura 1.6: Componentes básicos de um sistema de atuação
Exemplo 1.1: Controle de temperatura de uma autoclave
Figura 1.7: Sistema de controle de temperatura em uma autoclave
Exemplo 1.2: Montagem experimental de um sistema de controle

5
Figura 1.8: Sistema de controle detalhado
1.3 Tipos de sinais
Sinais em analógico em tempo contínuos são sinais contínuos definidos em
qualquer instante de tempo cuja amplitude varia continuamente neste intervalo. Figura
1.9(a).
Sinal em tempo contínuo quantizado é um sinal cuja amplitude só pode
assumir valores pré-determinados. Figura 1.9(b).
Sinais discretizados são sinais que só podem assumir valores em determinados
instantes de tempo. Figura 1.9(c).
Sinais discretizados e quantizados são sinais discretizados que só podem
assumir determinados valores de amplitude. Figura 1.9(d).
(a) Sinal contínuo (b) Sinal contínuo quantizado
(c) Sinal discretizado (d) Sinal discretizado quantizado
Figura 1.9: Tipos de sinais

6
A Figura 1.9(a) representa um sinal analógico qualquer, enquanto que a Figura
1.9(d) representa um sinal visto por um sistema de aquisição de dados, isso significa
que existirão erros entre a passagem de um sinal contínuo para um sinal discreto. Aqui o
termo sinal contínuo ser referirá sempre ao sinal da Figura 1.9(a) enquanto que um sinal
discreto ou em tempo discreto a um sinal igual ao da Figura 1.9(d).
Controle de sistemas em tempo discreto envolverá uma ou mais variáveis que só
podem ser acessadas ou lidas em determinados instantes de tempo através de um
processo de amostragem.
1.4 Amostragem de sinais contínuos
Este item será explicado como a amostragem de um sinal contínuo deve ser feito
sem que haja perda de informação ou se cometa erros durante este processo.
O Processo de Amostragem de sinais contínuos substitui o sinal em tempo
contínuo por uma seqüência de valores em tempo discreto. Este processo normalmente é
seguido por um processo de quantização do sinal discreto.
1.4.1 Teoria da Amostragem – Tratamento empírico
A amostragem ou discretização de um sinal analógico é feita seguindo um
determinado tempo de amostragem T, em segundos, ou freqüência de amostragem fa,
dada em Hz. Sendo que,
fa
1T (1.1)
Então, a amostragem é dada pela seguinte relação,
k
kTt)t(xkTx k=0, 1, 2 ... (1.2)
onde o delta de Dirac,, extrai o valor da função no instante em que t = kT.
(a) sinal contínuo (b) Sinal amostrado
Figura 1.10: Sinal contínuo e sinal amostrado

7
Para que um sinal contínuo possa ser corretamente discretizado, ele deve
obedecer às regras imposta por Fourier, isto é, a maior freqüência contida no sinal a ser
amostrado deverá obrigatoriamente ser menor que metade da freqüência de amostragem
fa que é conhecida como freqüência de Nyquist fN. De modo geral, para uma boa
aplicação de sistemas de controle, deve ser considerado pelo menos de 4 a 6 pontos por
período da maior freqüência a ser amostrada para que o sistema de controle possa
funcionar adequadamente.
Exemplo 1.3: Supor um sinal analógico com apenas uma freqüência igual a 400 Hz. Se
a amostragem for feita com uma freqüência de amostragem fa = 1600 Hz. Pede-se:
a) Qual o tempo de amostragem?
Solução:
O tempo de amostragem T é dados por,
ms625.01600
1
fa
1T
b) Quantos pontos por período?
Solução:
Como o sinal contínuo tem f = 400 Hz e a amostragem foi feita em 1600
Hz, então o número de pontos por período é dado por,
Número de pontos por período n = 1600/400 = 4.
c) Gráfico do sinal correto vs sinal amostrado
Figura 1.11: Sinal correto e sinal amostrado
Exemplo 1.4: Supondo um sistema massa-mola com m=0.5 kg e k = 100.000 N/m que
será simulado em tempo discreto por uma senóide com freqüências de 65 e 85 Hz. Qual
deverá ser o tempo de amostragem mínimo supondo 6 pontos por período?
Solução:
Para 6 pontos por período,
F = 65 Hz, então, ms57.265
1
6
1T

8
F = 85 Hz, então, ms96.185
1
6
1T
s/rad21.447m
kn significando que Hz18.71
2
21.447f n
, então
ms35.218.71
1
6
1T
Desta forma, terá de ser amostrado com o menor T, então, 1.96 ms.
Exemplo 1.5: Supondo um sistema G(s) como abaixo. Qual deverá ser o tempo de
amostragem mínimo para uma simulação utilizando uma entrada degrau unitário?
25s26s2s
15s5)s(G
23
Solução:
O primeiro passo neste caso é calcular as raízes do denominador ou calcular os
pólos do sistema, neste caso, os pólos são dados por:
s1 = -1, s2,3 = -0.54.975i
Deve ser lembrado que o par de pólos complexo é dado por,
dn2,1 is com 2
nd 1 (1.3)
Chegando a = 0.1 e n = 5 rad/s. O pólo real pode ser considerado um pólo
com amortecimento = 1 e n = 1 rad/s. Portanto, considerando 6 pontos por período,
ms25
2
6
1T
Figura 1.12: Resposta em tempo contínuo e tempo discreto
1.4.2 Não unicidade de sinais amostrados

9
Supondo a Figura 1.13, observe que se a senoide de 400 Hz for amostrada com T
= 2 ms isso representa uma freqüência de amostragem fa = 500 Hz e uma freqüência de
Nyquist fN = 250 Hz. O sinal original de 400 Hz se rebate em Nyquist, representando
uma freqüência aparente de 100 Hz.
Figura 1.13: Sinal contínuo e sinal amostrado incorretamente
Desta forma, não se pode amostrar um sinal cuja freqüência seja maior que a
freqüência de Nyquist, para evitar este problema, os sinais devem ser filtrados por um
filtro passa baixo para eliminar todas as freqüências do sinal acima de Nyquist.
Além disso, significa que uma vez o sinal tenha sido amostrado, não é mais
possível recupera-lo completamente devido ao problema de amostragem. Por isso, a
discretização do sinal deve ser feita com muito cuidado para obter o resultado final
desejado.
Em geral, o tempo de discretização será limitado pela capacidade da placa de
aquisição de sinais, isto é, as placas possuem uma capacidade limitada em velocidade de
processamento, isso na prática irá limitar a velocidade de aquisição.

10
1.5 Exercícios Propostos
Exercício 1.1: Calcular o tempo de amostragem mínimo para simular o sistema de 2ª
ordem dado abaixo para uma entrada senoidal com freqüência = 50 radl/s, supondo 6
pontos por período.
10000s20s
100)s(G
2
Exercício 1.2: Calcular o tempo de amostragem mínimo para simular o sistema de 1ª
ordem dado abaixo para uma entrada senoidal com freqüência = 50 radl/s e para a
entrada degru unitário, supondo 6 pontos por período.
1s10
1)s(G

11
Capítulo 2
2 Transformada Z
Neste capítulo, será abordada a transformada e a transformada inversa Z para
sinais contínuos e discretos.
2.1 Método da Transformada Z
O método da Transformada Z, transforma equações diferenciais temporais em
equações algébricas no domínio discreto. Aqui, serão tratados sinais e sistemas lineares
com parâmetros invariantes no tempo. Será assumido que o tempo de amostragem T
seja escolhido de tal forma a possibilitar a reconstrução do sinal temporal original,
significando que não haverá erros de processamento de sinais. Para iniciar, deve-se
considerar que a discretização de um sinal temporal contínuo é dada por,
k
kTt)t(xkTx (2.1)
Aqui deve ser comentado que a equação acima transforma um sinal contínuo em
um sinal discreto independente do teorema da amostragem apontado no capítulo 1. Isto
significa apenas que a reconstrução do sinal em tempo contínuo será possível apenas se
o tempo de amostragem foi escolhido apropriadamente.
2.1.1 Transformada Z
A transformada Z de uma função temporal contínua x(t), onde t representa
apenas o eixo positivo de tempo, para um tempo de amostragem T será definida por,
0k
kzkTxkTxZtxZzX (2.2)
2.1.2 Transformada Z de funções elementares
Função Degrau Unitário definido como
0t0
0t1)t(1tx
Solução: Aplicando a definição,
321
0k
k zzz1z)t(1ZtxZzX
Fazendo,

12
1Gzzzzz
Gzzz1G 4321321
Portanto,
1z1
1
1z
zGz)1z(GzzGG1G
z
G
Então,
1z
z
z1
1zzz1z1ZtxZzX
1
321
0k
k
Note que esta série convergirá se |z| >1.
Função Rampa Unitária definida por:
0t0
0tttx
Solução: Aplicando a definição,
321
0k
k z3z2zTkTzkTZtZzX
Fazendo,
4321
4323211
321
zzzzGz
1z
z3z2zz3z2zG)z1(
z3z2zG
Comparando com o exemplo do degrau unitário, então,
212z1
1
1z
zGG
z
1z1
1z
z
Portanto,
221
1321
0k
k
1z
Tz
z1
Tzz3z2z1TkTzkTZtZzX
Função Polinomial na forma
0t0
t0atx
k
com a constante.
Solução: Aplicando a definição,
az
z
az1
1zazaaz1zaaZzX
1
33221
0k
kkk
Utilizando o mesmo princípio do exemplo anterior,
33221 zazaaz1G
Portanto,
1zazaazzazaaz1G)az1( 33221332211
Então,
az
z
az1
1G1G)az1(
1
1
Finalmente,
az
z
az1
1zazaaz1zaaZzX
1
33221
0k
kkk

13
Função Exponencial na forma:
0t0
t0etx
at
Solução: Aplicando a definição,
3aT32aT21aT
0k
kakTakTat zezeze1zeeZeZzX
Comparando com a solução do exemplo anterior, é fácil notar que a = e-aT
, então,
aT1aT
0k
kakTakTat
ez
z
ze1
1zeeZeZzX
Função Senoidal definida como:
0t0
t0tsintx
Solução: Sabendo-se que,
tjtj eej2
1tsin
Aplicando a definição,
tjtjtjtj eZeZj2
1ee
j2
1ZtsinZzX
Observe que aqui se aplicou duas propriedades da transformada Z, que foi a
multiplicação por uma constante e a propriedade da soma.
Então, pela transformada Z da exponencial,
1Tcosz2z
Tsinz
zTcosz21
Tsinz
zzee1
zee
j2
1
ze1
1
ze1
1
j2
1ee
j2
1ZtsinZtxZ
221
1
21TjTj
1TjTj
1Tj1Tj
tjtj
2.1.3 Propriedades da Transformada Z
Multiplicação por uma constante: )z(aX)t(xaZ)t(axZ
Linearidade: )kT(g)kT(f)kT(x então )z(G)z(F)z(X
Multiplicação por ak: )za(X)kT(xaZ 1k
Prova:
)za(Xza)kT(xz)kT(xa)kT(xaZ 1
0k
k1
0k
kkk
Translação no tempo ou translação real,
)z(Xz)nTt(xZ n (2.3)
Prova:

14
0k
nkn
0k
k
z)nTkT(xz
z)nTkT(x)nTt(xZ
Definindo m = k-n, então,
nm
mn z)mT(xz)nTt(xZ
Como x(mT) para m<0 por definição é igual a zero,
)z(Xzz)mT(xz)nTt(xZ n
0m
mn
Além disso,
1n
0k
kn z)kT(x)z(Xz)nTt(xZ
Prova
1n
0k
kn
1n
0m
mnn
1n
0m
mn
0m
mn
nm
mn
0k
nkn
0k
k
z)kT(x)z(Xz
z)mT(xz)z(Xz
z)mT(xzz)mT(xzz)mT(xz
z)nTkT(xz
z)nTkT(x)nTt(xZ
Exemplo 2.1: Achar a transformada Z do degrau unitário quando o degrau é
aplicado 4 períodos de amostragem depois, isto é, para k = 4.
Solução: como a transformada Z do degrau unitário começando em k = 0 é dada
por,
1z
z1ZtxZzX
O problema pede,
T4txZzX
Utilizando o teorema da translação no tempo,
1z
z)z(Xzz)mT(xz)T4t(xZ
44
0m
m4
Neste caso, deve ser notado que z-4
significa um atraso de tempo de 4 sem
considerar qual foi o atraso de tempo utilizado, isto é, o tempo de amostragem T.
Translação complexa,
aT
0k
kaT
0k
kakTat zeXze)kT(xze)kT(x)t(xeZ
(2.4)

15
Exemplo 2.2: Encontrar a transformada Z de atte
Solução: como a transformada de t, rampa unitária é dada por,
)z(X1z
Tz
z1
TztZzX
221
1
Então, pelo teorema da translação complexa,
2aT
aT
21aT
1aTat
1ze
Tze
ze1
zeTteZzX
Teorema do valor inicial: Se x(t) possui uma transformada X(z) e se )z(Xlimz
existe, então o valor inicial x(0) é dado por,
)z(Xlim)0(xz
(2.5)
Prova: Como a transformada z de uma seqüência de números é dada por,
321
0k
k z)T3(xz)T2(xz)T(x)0(xz)kT(x)kT(xZzX
Fazendo z tender ao infinito, sobra apenas x(0).
Teorema do valor final: Supondo que x(kT) onde x(0) = 0 para todo k<0, tenha
a transformada X(z) e todos os pólos de X(z) estejam dentro do circulo de raio unitário
com exceção de um pólo simples em z = 1, isto é a condição de estabilidade que será
apresentada mais à frente. Então, o valor final de x(kT) pode ser expresso por,
)z(Xz1lim)kT(xlim 1
1zk
(2.6)
Prova: Sabendo-se que pela definição da transformada Z,
0k
kzkTxzXkTxZ
Então,
0k
k1 zTkTxzXzTkTxZ
Subtraindo um do outro,
)z(Xz)z(XzTkTxzkTx 1
0k
k
0k
k
Aplicando o limite quando z tende à unidade,
)z(Xz1limzTkTxzkTxlim 1
1z0k
k
0k
k
1z
Como foi assumido que x(k) = 0 para k < 0 então, o lado esquerdo da equação
acima torna-se,
0k
0k
kk
0k
k
0k
k
1z
)TkT(xkTx
1)TkT(x1kTxzTkTxzkTxlim
Expandindo o somatório,

16
)k(xlim)(x
)1(x)2(x)0(x)1(x)1(x)0(x)TkT(xkTx
k
0k
Então,
)z(Xz1lim)k(xlim 1
1zk
2.1.4 Principais Transformadas Z
X(s) x(t) X(kT) X(z)
1 1 (t) (kT) 1
2 s
1
1(t) 1(kT) 1z1
1
3 as
1
ate akTe 1aTze1
1
4 2s
1 t kT
21
1
z1
Tz
5 22s
tsin kTsin
21
1
zTcosz21
Tsinz
6 22s
s
tcos kTcos
21
1
zTcosz21
Tcosz1
2.1.5 Principais Propriedades da Transformadas Z
X(s) x(t) X(kT) X(z)
1 st0e)s(X
)tt(x 0 )nTkT(x )z(Xz n
2 st0e)s(X )tt(x 0 )nTkT(x
1n
0k
kn z)kT(x)z(Xz
3 X(s+a) )t(xe at )kT(xe akT aTzeX
4 )s(sXlims
x(0) x(0) )z(Xlimz
5 )s(sXlim0s
x() x() )z(Xz1lim 1
1z
2.2 Transformada Z inversa
Como apresentado anteriormente, quando sinais contínuos são amostrados, a sua
reconstrução não é única, isto é, parte do sinal pode ter sido perdida devido ao teorema
da amostragem. Por exemplo, o sinal apresentado na Figura 2.1, como o sinal amostrado
gera apenas os pontos discretos, qual o sinal real?

17
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1-2
-1.5
-1
-0.5
0
0.5
1
1.5
2
Figura 2.1: Sinal amostrado e suas possíveis reconstruções
Assim, a transformada Z de x(kT) ou x(t) gera um único X(z), desde que
especificado o tempo de amostragem T. Por sua vez, a transformada inversa de X(z)
gera um único x(kT), mas resta saber se este x(kT) representa a resposta esperada para
x(t), assim pode-se dizer que a transformada inversa de X(z) pode não gerar um único
x(t).
2.2.1 Método de expansão em frações parciais
Alguns métodos podem ser utilizados para encontrar a transformada z inversa,
nesta parte será abordado o método de expansão em frações parciais que consiste em
expandir X(z) em frações na forma mais simples possível e utilizar a tabela de
transformada Z para encontrar a sua representação em tempo contínuo.
Deve ser lembrado que pólos puramente reais representam a resposta de
exponenciais enquanto que pólos complexos conjugados representam a resposta de
exponenciais complexas ou senos e cossenos.
Exemplo 2.3: Encontrar a transformada z inversa de 1
1
az1
z)z(X
Solução: Nas tabelas de transformada Z não se encontra a função acima, porém,
fazendo,
1
1
az1
1)z(Yz)z(X
Utilizando a tabela de transformada z, tem-se que,
k
1
11 aaz1
1Z)z(YZ
Porém, o desejado é,
T)1k(111 a)TkT(y)z(YzZ)z(XZ
Assim,

18
0k0
,3,2,1ka)TkT(y)kT(y
T)1k(
Para encontrar a transformada z inversa de X(z), deve-se notar que X(z) é dada
da seguinte forma,
n1n
1n
1
n
m1m
1m
1
m
0
azazaz
bzbzbzb)z(X
com m ≤ n (2.7)
Ou ainda,
n
n
1
1
n
m
)1mn(
1
)mn(
0
zaza1
zbzbzb)z(X
(2.8)
Colocando na forma de pólos e zeros,
n21
m210
pzpzpz
zzzzzzb)z(X
(2.9)
Supondo que todos os pólos são pólos não repetidos, então, a melhor expansão
será na forma,
n
n
2
2
1
1
pz
a
pz
a
pz
a
z
)z(X
(2.10)
Se houver pólos repetidos, supondo um pólo duplo e nenhum outro pólo real, a
expansão poderá ser na forma,
1
2
2
1
1
pz
c
pz
c
z
)z(X
(2.11)
Exemplo 2.4: Supondo que a transformada z seja na forma
1z2z2z
2zz)z(X
23
2
As raízes do denominador, que são os pólos, são dadas por, 1, 3j12
1 ,
portanto, um pólo real e um par de pólos complexos conjugados, sendo assim, fazendo,
1zz1z
aazaaazaa
1zz
aza
1z
a
1zz1z
2zz)z(X
2
31321
2
21
2
321
2
2
Portanto, montando o sistema matricial para a solução,
2
3
4
2
1
1
101
111
011
a
a
a
2
1
1
a
a
a
101
111
0111
3
2
1
3
2
1
Então,

19
21
2
21
1
1
1
2222
2
zz1
z2
zz1
z3
z1
z4
1zz
2
1zz
z3
1z
4
1zz
2z3
1z
4
1zz1z
2zz)z(X
Para o primeiro termo,
TkT14)kT(x)kT(14)kT(yz1
4)z(Y)z(Xz
1
1
Para o segundo termo, deve-se notar que,
21
1
zTcosz21
TsinztsinZ
Aplicando o teorema da translação complexa,
2aT21aT
1aTakT
zeTcosze21
TsinzekTsineZ
(2.12)
Então, comparando os denominadores, 212aT21aT zz1zeTcosze21
Significando que kTaT2 11e , e consequentemente, kTaT 11e e
2 1Tcos , portanto, 3T . Como 23Tsin . Então,
21
1
2aT21aT
1aTkT
zz1
z
2
3
zeTcosze21
TsinzekT
3sin1Z
Significando que,
kT3
sin32)kT(xzz1
z3kT
3sin
3
23Z)z(X
21
1
Para a terceira parte, utilizando a resposta anterior e sabendo que,
kT3
sin3
34)kT(y
zz1
z2kT
3sin
3
22Z)z(Y)z(Xz
21
11
Então, pelo teorema da translação temporal,
TkT3
sin3
34)kT(x
Portanto, a solução final fica,
TkT3
sin3
34kT
3sin32TkT14)kT(x
Mesma solução, mas agora completando o quadrado do termo de segunda
ordem. Então,
21
11
1
1
22
2
zz1
z3
21z3
z1
z4
1zz
2z3
1z
4
1zz1z
2zz)z(X
Como,
2aT21aT
1aTakT
zeTcosze21
Tcosze1kTcoseZ
(2.13)
Substituindo os termos já calculados acima,

20
21
1
2aT21aT
1aT
zz1
z2
11
zeTcosze21
Tcosze1
Portanto,
kT3
sin3
2
6
11kT
3cos1
zz1
z6
1
zz1
z2
11
zz1
z3
21
kTkT
21
1
21
1
21
1
Reunindo a resposta com os devidos atrasos temporais,
TkT3
sin9
3TkT
3cos3TkT14)kT(x
2.2.2 Método computacional - Matlab
O método apresentado aqui pode ser implementado em qualquer software, ele
consiste em calcular a resposta do sistema ao delta de Kronecker, neste caso, a resposta
será numérica, e em alguns casos a reconstrução pode ser retirada facilmente.
Exemplo 2.5: Calcular a transformada Z inversa de,
1z2z
z2z
1z
2zz)z(X
2
2
2
No Matlab digitar: num=[1 2 0]; % numerador
den=[1 -2 1]; % denominador
u=[1 zeros(1,30)]; % delta de Kronecker
x=filter(num,den,u) % resposta ao delta de Kronecker
Solução encontrada. x =
Columns 1 through 12
1 4 7 10 13 16 19 22 25 28 31 34
Columns 13 through 24
37 40 43 46 49 52 55 58 61 64 67 70
Columns 25 through 31
73 76 79 82 85 88 91
Neste caso, a seqüência de valores é dada por 1k3)k(x , k=0, 1, 2, .....
2.3 Exercícios Resolvidos
Exemplo 2.6: Encontrar a transformada Z de,

21
0t0
0ttcos)t(x
Solução: Sabendo-se que 2
eetcos
tjtj e que,
1t
tj
ze1
1eZ
e
1t
tj
ze1
1eZ
Então,
1Tcosz2z
Tcoszz
ze1
1
ze1
1
2
1tcosZ
2
2
1t1t
Exemplo 2.7: Encontrar a transformada Z do sinal que tem a seguinte representação em
Laplace,
1ss
1)s(X
Neste caso, expandindo em frações parciais,
1s
1
s
1
1ss
1)s(X
Das tabelas de transformada de laplace inversa, tem-se que,
t1 e1)s(XL t ≥ 0
Então a transformada Z fica,
)ez)(1z(
z)e1(
ze1
1
z1
1e1Z)s(XZ
T
1T
1T1
t
Exemplo 2.8: Encontrar a transformada Z da função definida na figura abaixo,
assumindo tempo de amostragem T = 1 segundo.
0 1 2 3 4 5 6 7 80
0.2
0.4
0.6
0.8
1
t
x(t
)
Figura 2.2: sinal a ser discretizado
Observe que há algumas possíveis soluções, pois x(t) pode ser escrita como a
soma de 3 impulsos devidamente defasados com o degrau unitário defasado de 4
instantes de tempo,
)4kT(1)3kT(75.0)2kT(5.0)1kT(25.0)kT(x
Aplicando a transformada Z em cada termo,
21
51
1
4321
z14
zz
z1
z
4
z3
2
z
4
z)kT(xZ
Ou então, como uma reta iniciando em 0 menos uma reta negativa iniciando em
4,

22
)T4kT(4
1kT
4
1)kT(x
Aplicando a transformada Z em cada termo,
21
51
21
5
21
1
z14
zz
z1
z
4
1
z1
z
4
1)kT(xZ
2.4 Exercícios Propostos
Exercício 2.1: Obter a transformada Z de,
a) ate1a
1)t(x
b) at2et)t(x
c) 0 1 2 3 4 5 6 7 8
0
0.2
0.4
0.6
0.8
1
t
x(t
)
Exercício 2.2: Considerando a seguinte função de transferência discreta,
211
1
z4.0z3.11z1
z)z(X
Determinar:
a) Valor inicial x(0);
b) Valor final x(∞);
c) A transformada Inversa;
Exercício 2.3: (Prova 2007) Calcular a Transformada Z do sinal apresentado abaixo,

23
Capítulo 3
3 Função de transferência em tempo discreto
Este capítulo trata da forma adequada de transformar uma função de
transferência em laplace em uma função de transferência na transformada Z.
3.1 Amostragem impulsiva
Considerando um sinal x(t) que será amostrado por um amostrador, conhecido
como sampler, de tal modo que a intervalos de tempo T, conhecido como tempo de
amostragem ou tempo de discretização, ocorra uma leitura, este sinal é dado pela Figura
3.1, e pode ser representado por,
0k
* )kTt()kT(x)t(x (3.1)
Figura 3.1: Amostrador impulsivo
Supondo que não são medidos tempos negativos, devido à causalidade, então a
equação acima pode ser expandida como,
)kTt()kT(x)Tt()T(x)t()0(x)t(x*
Observe que o representa um trem de impulsos e, uma das formas de entender
o fenômeno da amostragem é que o sinal x(t) modula o trem de impulsos para formar o
sinal amostrado conforme apresentado pela Figura 3.2.

24
Figura 3.2 : Amostrador impulsivo como um modulador
Agora aplicando a Transformada de Laplace no sinal amostrado,
)T2t(L)T2(x)Tt(L)T(x)t(L)0(x)t(xL)s(X **
Sabendo-se que a Transformada de laplace de um impulso defasado de a é,
ase)at(L
Então,
0k
kTsTs2Ts* e)kT(xe)T2(xe)T(x)0(x)s(X
Comparando com a definição da transformada Z,
0k
kzkTxkTxZtxZzX
Observa-se que,
zlnT
1szeTs (3.2)
Então,
0k
k
zlnT
1s
* zkTx)s(X (3.3)
O lado direito desta equação é a definição de transformada Z da seqüência x(t),
então,
)z(X)s(Xzln
T
1s
*
(3.4)
Desta forma,
)z(XzlnT
1X*
3.2 Circuito Data-Hold
A saída de um amostrador é um trem de impulsos, mas em alguns casos isso não
é desejável, e o necessário seria um sinal contínuo. A transformação de um sinal na
forma de trem de impulsos em um sinal contínuo pode ser feito por um circuito tipo
Data-Hold, que nada mais é do que o processo de se obter um sinal contínuo x(t) de
uma seqüência discreta x(kT).

25
O circuito Data-Hold nada mais é do que um interpolador, isto é, ele gera ou
mantém um sinal entre dois impulsos seguindo uma interpolação polinomial na forma,
01
1n
1n
n
n aaaa)kT(h
onde h(kT+) é a saída do circuito data-hold. Assumindo x(kT) como o sinal que
passará pelo circuito, neste caso, h(kT) deve ser igual a x(kT) para que os sinais sejam
os mesmos, então,
)kT(xaaa)kT(h 1
1n
1n
n
n
3.2.1 Segurador de Ordem Zero (ZOH)
A forma mais simples de interpolação é fazendo n=0, que representa um circuito
de ordem zero dado por,
)kT(x)kT(h (3.5)
Na Figura 3.3:, observa-se o resultado de um segurador de ordem zero.
Figura 3.3: Exemplo de sinal amostrado com uma reconstrução utilizando o ZOH
O ZOH mantém o sinal anterior até que um novo sinal apareça, então,
)kT(x)tkT(h
Significando que a saída do circuito será igual à entrada até que ocorra outro
sinal de entrada, então,
)T3t(1)T2t(1)T2(x)tT2(h2k
)T2t(1)Tt(1)T(x)tT(h1k
)Tt(1)t(1)0(x)t(h0k
Então a resposta temporal do ZOH será definida como,
0k
)T)1k(t(1)kTt(1)kT(x
)T2t(1)Tt(1)T(x)Tt(1)t(1)0(x)t(h
Como a Transformada de Laplace do degrau unitário atrasada de kT é dada por,
s
e)kTt(1L
kTs
Então a Transformada de Laplace da resposta do ZOH torna-se,
0k
kTsTs
0k
Ts1kkTs
e)kT(xs
e1
s
e
s
e)kT(x)s(H (3.6)
Como,

26
0k
kTs* e)kT(x)s(X
Então,
)s(Xs
e1)s(H *
Ts (3.7)
Consequentemente, a função de transferência o ZOH é dada por,
s
e1
)s(X
)s(H)s(G
Ts
*ZOH
(3.8)
3.2.2 Segurador de primeira ordem (FOH)
Fazendo n=1, que representa um circuito de primeira ordem dado por,
)kT(xa)kT(h 1
Aplicando a condição que,
)T)1k((x)T)1k((h
Então,
)T)1k((x)kT(xTa)T)1k((h 1
Portanto,
T
)T)1k((x)kT(xa1
Consequentemente, a equação do segurador de primeira ordem fica,
)kT(xT
)T)1k((x)kT(x)kT(h
(3.9)
Como o FOH utiliza uma extrapolação linear utilizando o valor anterior e o atual
para predizer o valor do próximo e, além disso, o valor h(kT) deve ser igual a x(kT).
então,
)T(xT
)T2(xT
1)T2(xT
)T(x)T2(x)T2(h2k
)0(xT
)T(xT
1)T(xT
)0(x)T(x)T(h1k
)0(xT
1)0(xT
)T(x)0(x)(h0k
Que pode ser expressa convenientemente como,
)T)1k((xT
)kT(xT
1)kT(h
(3.10)
Fica difícil escrever a equação sem assumir uma entrada conhecida, utilizando
uma entrada degrau unitário para x(t),
)Tt(1T
t)t(1
T
t1)t(h
Somando e subtraindo 1(t-T),
)Tt(1)Tt(1T
Tt)t(1
T
t1)t(h
Aplicando a transformada de Laplace em cada um dos termos da equação acima,

27
2
TsTsTs
22 Ts
1Tse1e
s
1e
Ts
1
Ts
1
s
1)s(H
Agora, a transformada de Laplace da entrada x*(t) do FOH é,
0kTs
kTs*
e1
1e)kT(1)s(X
Então a função de transferência do segurador de primeira ordem FOH fica,
2
2Ts
*FOHTs
1Tse1
)s(X
)s(H)s(G
(3.11)
Um exemplo do FOH é dado na Figura 3.4:.
Figura 3.4: FOH de um sinal qualquer
3.2.3 Funções de Transferência em Tempo Discreto com ZOH
Supondo que antes da função G(s) há um ZOH, então a convolução de G(s) com
o ZOH é dada por,
)s(Gs
e1)s(X
Ts (3.12)
Fazendo,
)s(Ge)s(G)s(Ge1s
)s(Ge1)s(G
s
e1)s(X 1
Ts
11
TsTsTs
Pegando apenas o último termo,
)s(Ge)s(X 1
Ts
1
Aplicando o teorema da convolução,
t
0
101 d)(g)t(g)t(x
onde,
)s(GL)t(g
TteL)t(g
1
1
1
Ts1
0
Então,
t
0
11 d)(g)Tt()t(x
Como o delta tem a propriedade de extrair o valor da função,
)Tt(g)t(x 11
Além disso, Z[g1(t)]=G1(Z), então, por definição,

28
)z(Gz)Tt(gZ)t(xZ 1
1
11
Porém, o desejado é,
s
)s(GZz1)z(Gz1)z(Gz)z(G
)t(xZ)t(gZ)s(Ge)s(GZ)z(X
1
1
1
1
1
1
111
Ts
1
Portanto, a função de transferência discreta da planta G(s) com o ZOH fica,
s
)s(GZz1)z(X 1 (3.13)
No caso do FOH preceder a função G(s), tem-se
)s(GTs
1Tse1)s(X
2
2Ts
Utilizando o mesmo resultado do ZOH,
)s(GTs
1TsZz1
)s(GTs
1Tse1Z)z(X
2
21
2
2Ts
(3.14)
Exemplo 3.1: Obter a transformada Z de,
1s
1
s
e1)s(X
Ts
Solução: Como representa um ZOH,
1T
1T
1T1
11
1Ts
ze1
ze1
ze1
1
z1
1z1
1s
1
s
1Zz1
1s
1
s
1Zz1
1s
1
s
e1Z)z(X
3.2.4 Resposta em Freqüência do ZOH
A função de transferência do ZOH é dada por,
s
e1G
Ts
ZOH
A resposta em freqüência, que é o diagrama de bode, pode ser encontrada
substituindo s por j,
2/T
2/TsinTe
j2
eee2
j2
eee2
j2
e12
j
e1)j(G
Tj2/1Tj2/1Tj2/1Tj2/1
Tj2/1Tj2/1Tj2/1TjTj
ZOH
Nas figuras abaixo, s representa a freqüência de Nyquist, isto é a máxima
freqüência que o sinal ainda pode ser reconstruído adequadamente. Caso o sinal
amostrado apresente freqüências acima da freqüência de Nyquist o sinal discretizado
apresentará erro de aliasing.

29
(a) (FRF) (b) diagrama de Bode
Figura 3.5: Resposta em freqüência do ZOH
O ZOH pode ser entendido como um filtro de reconstrução do sinal amostrado e
ele não é um filtro passa-baixo ideal. Como a magnitude muda com a freqüência,
atenuando o sinal a medida que a freqüência aumenta, o ZOH distorce o sinal, isto é, ele
altera a amplitude e a fase do sinal de saída.
3.3 Função de Transferência Pulsada
A função de transferência, FT, pulsada é a função de transferência em Laplace
envolvendo o amostrador. Supondo que um sistema cuja resposta ao impulso seja h(t)
tenha a entrada x(t) e a saída seja y(t), cujas transformadas de Laplace são H(s), X(s) e
Y(s) respectivamente. Pelo teorema da convolução tem-se,
t
0
t
0
dhtxdxth)t(x*)t(hty
Que no domínio de Laplace é dada por,
)s(X)s(H)s(Y
Adicionando um amostrador em x(t), este é dado por,
0k0k
* kTt)kT(xkTt)t(x)t(x
Aplicando esta entrada no sistema, tem-se que a resposta y(t) será a combinação
de cada impulso gerado por x*(t) em h(t), sendo assim,

30
kTt0)nT(x)nTt(h
kTx)kTt(hT2x)T2t(hTx)Tt(h0x)t(h)t(y
k
0n
Amostrando também a saída do sistema, tem-se a Soma de Convolução dada
por,
)kT(x*)kT(h)nT(h)nTkT(x)nT(x)nTkT(h)kT(y0n0n
(3.15)
O procedimento feito até aqui é exatamente o que ocorre na Figura 3.6. Deve-se
notar que H(z) é a resposta do sistema ao delta de Kronecker, pois se,
0k0
0k1)kT()kT(x
Então,
1z)kT(x)kT(Z)z(X0k
k
Significando que Y(z) = H(z) se a entrada for um impulso.
Figura 3.6 : Sistema em tempo contínuo com amostradores
3.3.1 Transformada Z de FTs incluindo o amostrador
Em sistemas em tempo discreto, alguns sinais do sistema são amostrados
enquanto outros continuam representados em tempo contínuo, que é exatamente o que
ocorre na Figura 3.6. Sendo assim, será útil calcular a função de transferência pulsada
contendo amostradores em várias posições.
Note que na Figura 3.6, a função de transferência Y(s) é dada por,
)s(X)s(H)s(Y *
A Transformada de Laplace Inversa de Y(s) é dada por,
0k
t
0 0k
t
0
**1
)kT(x)kTt(hd)kT()(x)t(h
d)(x)t(h)s(X)s(HL)t(y
Aplicando a transformada Z,
0n
n
0k
z)kT(x)kTnT(h)z(Y
Fazendo m = n - k,

31
)z(X)z(H
z)kT(xz)mT(h
z)kT(x)mT(h)z(Y
k
0k
m
0m
0m
mk
0k
Significando que,
)s(X)s(H)s(X)s(H)s(Y *****
Aplicando transformada Z, torna-se,
)z(H)z(X
)z(Y)z(X)z(H)z(Y (3.16)
3.3.2 Função de Transferência em Cascata
Considerando o sistema apresentado na Figura 3.7(a), supondo que os
amostradores estão sincronizados. Neste caso, observa-se que,
)s(U)s(H)s(Y
)s(X)s(G)s(U
*
*
Como mostrado no item anterior, encontra-se,
)s(X)s(G)s(H)s(Y)s(U)s(H)s(Y
)s(X)s(G)s(U ****
***
***
Aplicando a Transformada Z, obtém-se a função de transferência,
)Z(G)z(H)z(X
)z(Y)z(X)z(G)z(H)z(Y (3.17)
Porém, aplicando o mesmo método na Figura 3.7(b), neste caso tem-se que,
)s(X)s(HG)s(X)s(G)s(H)s(Y **
Que resulta em,
)s(X)s(HG)s(Y ***
Cuja transformada Z é dada por,
)z(HG)z(X
)z(Y (3.18)
Nota-se claramente que,
)Z(G)z(H)z(HG
Figura 3.7 :Sistemas em cascata

32
Exemplo 3.2: Encontrar a função de transferência discreta em cascata do
sistema apresentado na Figura 3.7 (note que não há ZOH) supondo,
as
1)s(G
e
bs
1)s(H
Para a Figura 3.7(a) tem-se,
1bT1aT ze1
1
ze1
1
bs
1Z
as
1Z)Z(G)z(H
)z(X
)z(Y
Para a Figura 3.7(b) tem-se,
1bT1aT
1bTaT
ze1ze1
zee
ab
1
bsas
ab
ab
1Z
bs
1
as
1Z)Z(HG
)z(X
)z(Y
Este exemplo mostra claramente que ambos são diferentes.
3.3.3 Função de transferência em malha fechada
Como mencionado anteriormente, a amostragem pode ocorrer em qualquer etapa
do processo de controle. Supondo um sistema em malha fechada como o descrito na
Figura 3.8.
Figura 3.8: sistema em malha fechada envolvendo amostador
Consequentemente,
)s(E)s(HG)s(R)s(E)s(G)s(H)s(R)s(E **
Que pode ser reescrito utilizando FT pulsada para todos os termos como,
)s(GH1
)s(R)s(E)s(E)s(HG)s(R)s(E
*
******
Como,
)s(E)s(G)s(C ***
Então, a função de transferência pulsada de malha fechada é dada por,
)s(GH1
)s(G
)s(R
)s(C
)s(GH1
)s(R)s(G)s(E)s(G)s(C
*
*
*
*
*
*****
Aplicando a transformada Z, encontra-se a função de transferência discreta em
malha fechada,
)z(GH1
)z(G
)z(R
)z(C

33
3.3.4 Função de transferência em malha fechada de controladores digitais
Na prática, o controlador será um controlador digital e a planta será em tempo
contínuo. Neste caso haverá um amostrador que discretiza o sinal através do conversor
A/D quando o sinal entra em uma placa controladora ou no sistema que realiza o
controlador, como um controlador lógico programável – CLP, que normalmente é
implementado em tempo discreto. Após a realização do controlador, o sinal de controle
gerado é enviado para o conversor D/A que normalmente possui um ZOH para
implementar a lei de controle em tempo contínuo. Um caso como o apresentado aqui
sem levar em conta as funções de transferência dos conversores A/D e D/A é dado na
Figura 3.9.
Figura 3.9: sistema em malha fechada envolvendo amostador
No caso, a função de transferência em malha fechada é dada por,
)s(E)s(G)s(G)s(C)s(E)s(G)s(G)s(C **
D
****
D
Aplicando a transformada Z,
)z(E)z(G)z(G)z(C D
Como,
)z(C)z(R)z(G)z(G)z(C)z(C)z(R)z(E D
Chegando a,
)z(G)z(G1
)z(G)z(G
)z(R
)z(C
D
D
3.3.5 Função de transferência pulsada de um controlador PID digital
A resposta de um controlador PID no domínio do tempo é dada por,
)t(e
dt
dTdt)t(e
T
1)t(eK)t(u d
t
0i
(3.19)
onde e(t) é a entrada do controlador dada pela diferença da resposta da planta e pela
referência a ser seguida, K é o ganho proporcional, Ti é a constante de tempo do
controle integral e Td a constante de tempo do controle proporcional.
Para se obter a função de transferência pulsada do controlador PID, é necessário
realizar a discretização da resposta temporal. A integral será aproximada pela soma
trapezoidal e a derivada será aproximada pela derivada da interpolação utilizando 2
pontos. Assim,

34
T
T)1k(e)kT(eT
2
)kT(eT)1k(e
2
)T2(e)T(e
2
)T(e)0(e
T
T)kT(eK)kT(u
d
i
Ou então,
T)1k(e)kT(eT
T
2
)hT(eT)1h(e
T
T)kT(eK)kT(u d
k
1hi
Para resolver o problema, deve-se primeiro notar que,
1i
0h
h
1
k
ih
z)h(x)z(Xz1
1)h(xZ
Prova: esta transformada é comprovada fazendo,
)k(x)1i(x)i(x)h(x)k(y~k
ih
A transformada Z de cada um dos termos utilizando a propriedade da translação
real, k)1i(i z)k(xz)1i(xz)i(x)z(Y
~
Porém, observe que, definindo,
k)1i(i z)k(xz)1i(xz)i(x)z(X~
E da definição de transformada Z,
21
0k
k z)2(xz)1(x)0(xz)k(x)]k(x[Z)z(X
Então, obtêm-se,
1i
0h
hz)h(x)z(X)z(X~
Por outro lado,
)z(X~
z1
1)z(Y
~)z(X
~)z(Y
~z)z(Y
~)k(x)1k(y~)k(y~
1
1
Pois a transformada Z de x(k) que começa em k = i é )z(X~
, finalmente,
1i
0h
h
11
k
ih
z)h(x)z(Xz1
1)z(X
~
z1
1)z(Y
~)h(xZ
Voltando ao problema original utilizando o resultado acima e assumindo a
causalidade, isto é, que para o tempo t = 0 não há resposta do erro,
)z(Ez1
1)0(E)z(E
z1
1)hT(eZ
11
k
1h
)z(Ez1
z)0(E)z(E
z1
1z)T1h(eZ
1
1
1
1k
1h
Agora, para
)z(Ez)T1k(eZ
)z(E)kT(eZ
1
Então, a transformada Z do controlador PID é dada por,
)z(Ez)z(E
T
T)z(E
z1
z
z1
1
2
1
T
T)z(EK)z(U 1d
1
1
1
i

35
Resultando em,
1d
1
1
i
z1T
T
z1
z1
T2
T1K
)z(E
)z(U (3.20)
Rearranjando os termos,
1
D1
IP
1d
1
ii
z1Kz1
KK
z1T
T
z1
1
T
T
T2
T1K
)z(E
)z(U
Onde
2
KK
T2
KTKK I
i
p ganho proporcional
i
IT
KTK ganho integral
T
KTK D
D ganho derivativo
A equação acima é referenciada como sendo a forma em posição.
Exemplo 3.3: Comparar a resposta ao degrau unitário do sistema abaixo considerando o
sistema com e sem o controlador PID digital, ou comparar a resposta em malha fechada
e em malha aberta, na forma como apresentado na Figura 3.10.
Figura 3.10 : sistema em malha fechada envolvendo amostador
Assumindo que o tempo de amostragem T é de 1 segundo, os ganhos do
controlador sejam KP = 1, KI=0.2, KD = 0.2 e que a planta seja dada por,
1ss
1G p
Solução: Primeiro deve-se calcular a função de transferência pulsada entre o
ZOH e a planta. A convolução da planta e o ZOH é dada por,
1ss
1
s
e1GG
s
pZOH
Aplicando a transformada de Z,
1T21
11TTT1
2
1
2
1s
pZOH
ze1z1
zzTee1e1Tz1
1ss
1Zz1
1ss
1Zz1
1ss
1
s
e1ZGGZ
Esta transformada foi obtida através de tabela de transformação. Item 13 fazendo
a = 1. Para comparar com o resultado do Exemplo 2.7, deve-se lembrar que naquele
1
D1
IP z1K
z1
KK
11
21
z1z3679.01
z2642.0z3679.0
R(z)
+ -

36
ponto estava-se trabalhando com sinais, que são as respostas, e não as Funções de
Transferência como tratadas aqui. No Exemplo 2.7, a resposta é a convolução da FT
com entrada. Agora substituindo os valores de T = 1 e simplificando, obtêm-se,
11
21
pZOHz3679.01z1
z2642.0z3679.0)z(GGGZ
A função de transferência do controlador PID é dada por
1
21
1
2
D
1
DPDIP
1
D1
IPD
z1
z2.0z4.14.1
z1
zKzK2KKKK
z1Kz1
KK)z(G
)z(E
)z(M
Agora a função de transferência em malha fechada é dada por,
4321
4321
321
4321
321
4321
11
21
1
21
11
21
1
21
D
D
z0528.0z6642.0z5906.1z8528.11
z0528.0z2963.0z1452.0z5151.0
z3679.0z7358.1z3679.21
z0528.0z2963.0z1452.0z5151.01
z3679.0z7358.1z3679.21
z0528.0z2963.0z1452.0z5151.0
z3679.01z1
z2642.0z3679.0
z1
z2.0z4.14.11
z3679.01z1
z2642.0z3679.0
z1
z2.0z4.14.1
)z(G)z(G1
)z(G)z(G
)z(R
)z(C
Programa em Matlab:
clear all;close all;clc % planta sem o sistema de controle discreto % significando que a simulação é tempo contínuo num=[1]; % numerador contínuo den=[1 1 0]; % denominador contínuo figure('Color',[1 1 1]) step(num,den) % resposta ao degrau % Planta controlada com PID digital numd=[0 0.5151 -0.1452 -0.2963 0.0528]; dend=[1 -1.8528 1.5906 -0.6642 0.0528]; kT=[0:1:40]; % vetor de tempo discreto com T=1 r=ones(1,41); % criação do degrau unitário c=filter(numd,dend,r); % simulação do sistema figure('Color',[1 1 1]);plot(kT,c,'ko',kT,c,'k-') title('Unit-Step Response');xlabel('kT [s]');ylabel('Output C')

37
(a) sem controle (b) controlado
Figura 3.11: Resposta do sistema
3.3.6 Simulação de sistemas em tempo discreto
Uma função de transferência em tempo discreto pode ser representada por,
n
1n
1
n
m
1mn
1
mn
0
n
n
1
1
n
m
1mn
1
mn
0
azaz
bzbzb
zaza1
zbzbzb
)z(X
)z(Y
n m (3.21)
Que também pode ser expressa na forma de pólos e zeros,
n21
m210
pzpzpz
zzzzzzb
)z(X
)z(Y
n m (3.22)
Observe que,
n
n
1
1
m
m
1
10
zaza1
zbzbb
)z(X
)z(Y
(3.23)
Que pode ser reescrita como,
)z(Xzbzbb)z(Yzaza1 m
m
1
10
n
n
1
1
Aplicando a transformada inversa de Z, obtém-se,
)mTkT(xb)TkT(xb)kT(xb
)nTkT(ya)T2kT(ya)TkT(ya)kT(y
m10
n21
Significando que a resposta atual y(kT) é obtida fazendo,
)mTkT(xb)TkT(xb)kT(xb
)nTkT(ya)T2kT(ya)TkT(ya)kT(y
m10
n21
(3.24)
Deve ser lembrado que para kT < 0 a resposta do sistema será zero, isto é y(-T)
= 0 devido à condição de causalidade.
Exemplo 3.4: Calcular a resposta ao degrau unitário em tempo discreto com T = 0.5s
para o sistema dado em tempo contínuo,
21s
s)s(G
Solução: Aplicando a transformada Z na função de transferência G(s) com um
ZOH na entrada,
38
2
1
2
11
1s
1Zz1
1s
s
s
1Zz1
s
)s(GZz1)z(G
Das tabelas de transformada Z,
21
21
21
1
21T
1T
2
z3679.0z2131.11
z3033.0z3033.0)z(G
)z(U
)z(Y
z3679.0z2131.11
z3033.0
ze1
zTe
1s
1Z
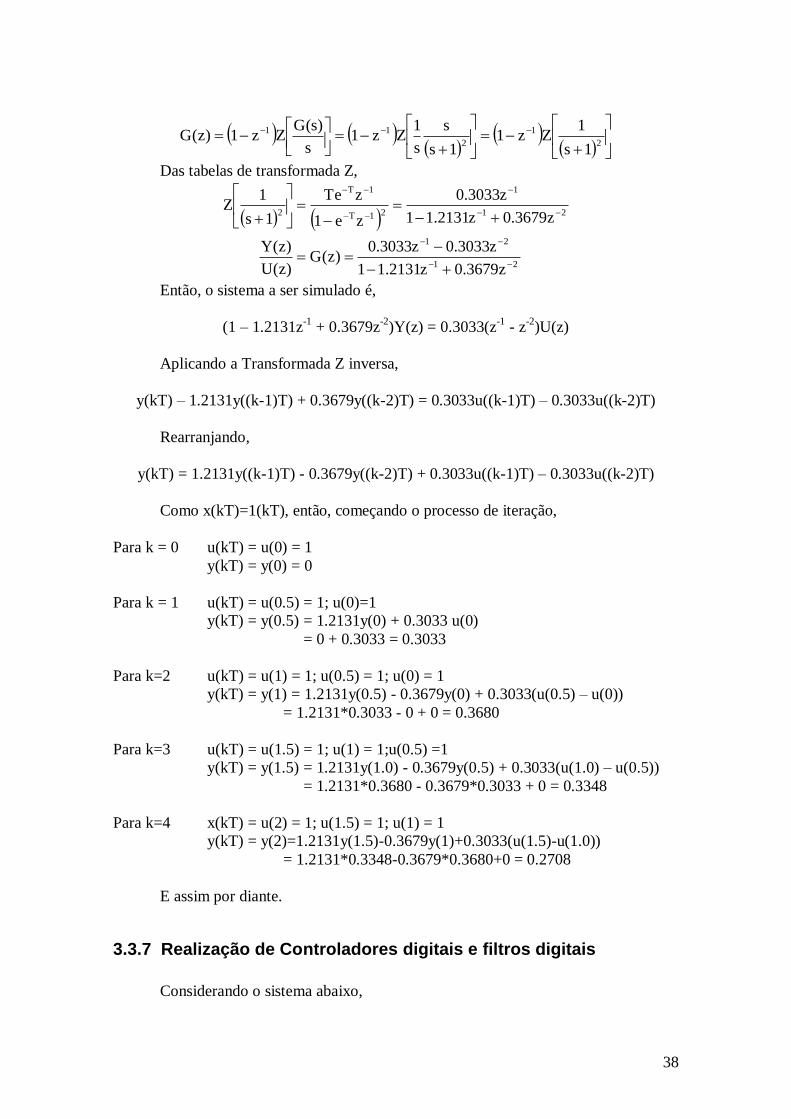
Então, o sistema a ser simulado é,
(1 – 1.2131z-1
+ 0.3679z-2
)Y(z) = 0.3033(z-1
- z-2
)U(z)
Aplicando a Transformada Z inversa,
y(kT) – 1.2131y((k-1)T) + 0.3679y((k-2)T) = 0.3033u((k-1)T) – 0.3033u((k-2)T)
Rearranjando,
y(kT) = 1.2131y((k-1)T) - 0.3679y((k-2)T) + 0.3033u((k-1)T) – 0.3033u((k-2)T)
Como x(kT)=1(kT), então, começando o processo de iteração,
Para k = 0 u(kT) = u(0) = 1
y(kT) = y(0) = 0
Para k = 1 u(kT) = u(0.5) = 1; u(0)=1
y(kT) = y(0.5) = 1.2131y(0) + 0.3033 u(0)
= 0 + 0.3033 = 0.3033
Para k=2 u(kT) = u(1) = 1; u(0.5) = 1; u(0) = 1
y(kT) = y(1) = 1.2131y(0.5) - 0.3679y(0) + 0.3033(u(0.5) – u(0))
= 1.2131*0.3033 - 0 + 0 = 0.3680
Para k=3 u(kT) = u(1.5) = 1; u(1) = 1;u(0.5) =1
y(kT) = y(1.5) = 1.2131y(1.0) - 0.3679y(0.5) + 0.3033(u(1.0) – u(0.5))
= 1.2131*0.3680 - 0.3679*0.3033 + 0 = 0.3348
Para k=4 x(kT) = u(2) = 1; u(1.5) = 1; u(1) = 1
y(kT) = y(2)=1.2131y(1.5)-0.3679y(1)+0.3033(u(1.5)-u(1.0))
= 1.2131*0.3348-0.3679*0.3680+0 = 0.2708
E assim por diante.
3.3.7 Realização de Controladores digitais e filtros digitais
Considerando o sistema abaixo,

39
n
n
1
1
m
m
1
10
zaza1
zbzbb
)z(X
)z(Y
A sua representação em diagramas de bloco, ou utilizando o Simulink do
Matlab, é dada na Figura 3.12, esta realização é conhecida como padrão, pois o sistema
pode ser alterado para se obter outras realizações.
Figura 3.12 : Função de transferência
Exemplo 3.5: Implementar em Simulink o exemplo da Figura 3.10. Utilizando funções
de transferência para o controlador e para a planta e finalmente a função de
transferência de malha fechada.
Solução: a função de transferência da planta é dada por,
21
21
z3679.0z3679.11
z2642.0z3679.0)z(G
Função de transferência do controlador PID digital,
1
21
PIDz1
z2.0z4.14.1)z(G
Para implementar esta função de transferência da planta e do controlador utiliza-
se o bloco denominado “Discrete Filter”, mas poderia ser utilizado os blocos “Discrete
Transfer Fcn” ou “Discrete Zero-Pole”. A implementação do sistema está apresentada
na Figura 3.13:.
Figura 3.13: Diagrama de blocos implementado em Simulink utilizando funções de
transferência

40
Para a implementação da função de transferência de malha fechada, optou-se
pela expansão em blocos ao invés de se utilizar função de transferência, para tanto,
deve-se observar que a função de transferência de malha fechada é dada por,
4321
4321
z0528.0z6642.0z5906.1z8528.11
z0528.0z2963.0z1452.0z5151.0
)z(R
)z(C
Observe que neste caso, observa-se que o termo b0 é zero, pois sua
representação é,
4
4
3
3
2
2
1
1
4
3
3
3
2
2
1
10MF
zazazaza1
zbzbzbzbb)z(G
Para este caso, a solução se encontra na Figura 3.14.
Figura 3.14 : Diagrama de blocos implementado em Simulink utilizando atrasadores
3.3.8 Resposta ao Impulso Finita e Infinita
Observe que filtros ou funções de transferência na forma digital podem ser
classificados de acordo com a duração da resposta ao impulso, isto é, têm-se os
chamados filtros IIR, Infinite Impulse Response, e FIR, Finite Impulse Response.
Como apresentado anteriormente, considera-se uma função de transferência na forma,
n
n
1
1
m
m
1
10
zaza1
zbzbb
)z(X
)z(Y
Que pode ser representada em termos de equação de diferenças na forma,
)T)mk((xb)T)1k((xb)kT(xb
)T)nk((ya)T)2k((ya)T)1k((ya)kT(y
m10
n21
A forma acima é conhecida como Filtro IIR, cuja resposta é composta dos
atrasos na entrada e na saída da função de transferência. Supondo que os termos ai
sejam todos iguais a zeros, neste caso tem-se,
)T)mk((xb)T)1k((xb)kT(xb)kT(y m10

41
Significando que a resposta da planta é composta apenas dos atrasos da entrada,
este tipo de resposta é conhecida como filtro FIR. Que em termos da transformada Z é
dada por,
m
m
1
10 zbzbb)z(Y (3.25)
Este tipo de resposta é interessante, pois não apresenta pólos. FIR provém do
fato que a resposta será composta por um número finito de atrasos de tempo da entrada.
Exemplo 3.6: Transformar a função de transferência abaixo que está na forma IIR para
a forma FIR e calcular a resposta ao degrau unitário.
1
1
z5.01
z6.02)z(G
Para transformar a resposta acima para forma FIR, deve-se dividir o numerador
pelo denominador, ou então, calcular a resposta ao impulso.
clear all;close all;clc % denifindo os dados da planta num=[2 -0.6]; den=[1 0.5]; x=[1 zeros(1,10)]; y=filter(num,den,x)
Uma alternativa para ao “x=[1 zeros(1,10)];” e “y=filter(num,den,x)” seria utilizar
direto a resposta ao impulso discreto “y=dimpulse(num,den)”
Y = Columns 1 through 8 2.0000 -1.6000 0.8000 -0.4000 0.2000 -0.1000 0.0500 -0.0250 Columns 9 through 11 0.0125 -0.0063 0.0031
Tomando apenas os valores abaixo de z-7
, então, a forma FIR fica,
7654321
1
1
z025.0z05.0z1.0z2.0z4.0z8.0z6.12
z5.01
z6.02)z(G
)z(X
)z(Y
Esta é a diferença principal entre uma representação IIR e FIR, em geral a FIR
representa apenas a parte da resposta IIR.
Cuja equação de diferenças fica,
)T)7k((x025.0)T)6k((x05.0)T)5k((x1.0)T)4k((x2.0
)T)3k((x4.0)T)2k((x8.0)T)1k((x6.1)kT(x2)kT(yFIR
Enquanto que a forma IIR é dada por,
)T)1k((x6.0)T)k((x2)T)1k((y5.0)kT(yIIR
Resposta ao degrau unitário – FIR Resposta ao degrau unitário – IIR
k=0 y(0) = 2x(0) = 2*1 = 2.0 y(0) = 2x(0)= 2.0

42
k=1 y(1) = 2x(1)-1.6x(0) = 2*1-1.6*1 = 0.4 y(1) = -0.5y(0)+2x(1)-0.6x(0) 0.4
k=2 y(2) = 2-1.6+0.8 = 1.2 y(2) = -0.5y(1)+2x(2)-0.6x(1) 1.2
k=3 y(3) = 2-1.6+0.8-0.4 = 0.8 y(3) = -0.5y(2)+2x(3)-0.6x(2) 1.0
k=4 y(3) = 2-1.6+0.8-0.4+0.2 = 1.0 y(4) = -0.5y(3)+2x(4)-0.6x(3) 0.9
k=5 y(3) = 2-1.6+0.8-0.4+0.2-0.1 = 0.9 y(5) = -0.5y(4)+2x(5)-0.6x(4) 0.95
k=6 y(3) = 2-1.6+0.8-0.4+0.2-0.1+0.05 = 0.95 y(6) = -0.5y(5)+2x(6)-0.6x(5) 0.925
k=7 y(3) = 2-1.6+0.8-0.4+0.2-0.1+0.05-0.025 = 0.925 y(7) = -0.5y(6)+2x(7)-0.6x(6) 0.9375
k=8 y(3) = 2-1.6+0.8-0.4+0.2-0.1+0.05-0.025 = 0.925 y(8) = -0.5y(7)+2x(8)-0.6x(7) 0.9312
k=9 y(3) = 2-1.6+0.8-0.4+0.2-0.1+0.05-0.025 = 0.925 y(9) = -0.5y(8)+2x(9)-0.6x(8) 0.9328
k=10 y(3) = 2-1.6+0.8-0.4+0.2-0.1+0.05-0.025 = 0.925 y(10) = -0.5y(9)+2x(10)-0.6x(9) 0.9336
3.4 Exercícios Resolvidos
Exemplo 3.7: Calcular a resposta de tsin na forma discreta para uma freqüência de 1
Hz utilizando 8 pontos por período. Utilizar a equação na forma recursiva.
Solução: Para a senóide na forma, t2sin)t(y , com T = 1/(8*1) = 0.125 s.
Calculando a Transformada Z,
1Tcosz2z
Tsinz)kT(yZ)t(yZ
2
Como = 2, então
sin 2T = sin(20.125) = 0.7071
cos 2T = cos(20.125) = 0.7071
Assim, tem-se,
21
1
zz4142.11
z7071.0
)z(U
)z(Y
Aplicando a Transformada Z inversa,
)z(Uz7071.0)z(Yzz4142.11 121
)T)1k((u7071.0)T)2k((yT)1k((y4142.1)kT(y
Para gerar a senóide, deve-se aplicar a resposta ao impulso, isto é u(0) = 1 e
u(kT) = 0 para k ≥ 1, então
Para k = 0 y(0) = 0
K = 1 y(0.125) = 0.7071u(0) = 0.7071
K = 2 y(0.250) = 1.4142y(0.125) = 1
K = 3 y(0.375) = 1.4142y(0.250) - y(0.125) = 0.7071
K = 4 y(0.500) = 1.4142y(0.375) - y(0.250) = 0

43
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 2-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
Impulse Response
Tempo [s] (sec)
Am
plitu
de
Exemplo 3.8: Encontrar a FT de malha fechada em tempo discreto para o
seguinte sistema,
Solução: Montando as seguintes equações,
E(s) = R(s) – H(s)C(s) (I)
C(s) = P(s)X*(s) (II)
X(s)=G(s)E*(s) (III)
A primeira equação não está na forma satisfatória para aplicar a transformação
para FT pulsada, pois não contém nenhum sinal amostrado. O ideal é deixar do lado
direito somente sinais amortrados, então, combinando a 1ª equação com a 2ª equação,
E(s) = R(s) – H(s)P(s)X*(s) (IV)
Aplicando a transformação para FT pulsada em (III),
[X(s)]*=[G(s)E*(s)]* X*(s)=G*(s)E*(s) (V)
Para (IV)
[E(s)]* = [R(s)]* – [H(s)P(s)X*(s)]*
E*(s) = R*(s) – HP*(s)X*(s) (VI)
Combinando (V) e (VI), encontra-se a função de transferência pulsada em malha
fechada,
)s(*HP)s(*G1
)s(*P)s(*G
)s(*R
)s(*C
Aplicando a Transformada Z, encontra-se a função de transferência discreta em
malha fechada,
)z(HP)z(G1
)z(P)z(G
)z(R
)z(C
44
3.5 Exercícios Propostos
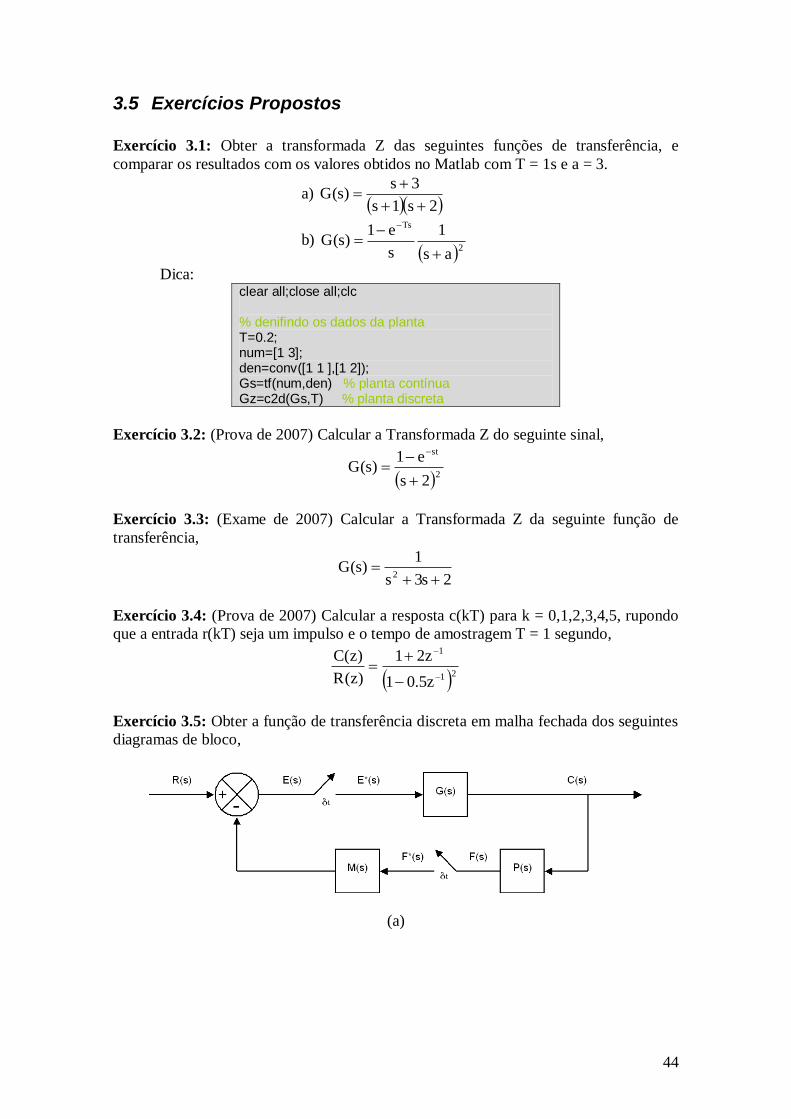
Exercício 3.1: Obter a transformada Z das seguintes funções de transferência, e
comparar os resultados com os valores obtidos no Matlab com T = 1s e a = 3.
a) 2s1s
3s)s(G
b) 2
Ts
as
1
s
e1)s(G
Dica: clear all;close all;clc % denifindo os dados da planta T=0.2; num=[1 3]; den=conv([1 1 ],[1 2]); Gs=tf(num,den) % planta contínua Gz=c2d(Gs,T) % planta discreta
Exercício 3.2: (Prova de 2007) Calcular a Transformada Z do seguinte sinal,
2
st
2s
e1)s(G
Exercício 3.3: (Exame de 2007) Calcular a Transformada Z da seguinte função de
transferência,
2s3s
1)s(G
2
Exercício 3.4: (Prova de 2007) Calcular a resposta c(kT) para k = 0,1,2,3,4,5, rupondo
que a entrada r(kT) seja um impulso e o tempo de amostragem T = 1 segundo,
21
1
z5.01
z21
)z(R
)z(C
Exercício 3.5: Obter a função de transferência discreta em malha fechada dos seguintes
diagramas de bloco,
(a)

45
(b)
Exercício 3.6: (Prova de 2007) Calcular a função de transferência em malha fechada do
seguinte diagrama de blocos,
Exercício 3.7: (Exame de 2007) Calcular a função de transferência em malha fechada
do seguinte diagrama de blocos,

46
Capítulo 4
4 Projeto de controladores por métodos clássicos
4.1 Mapeamento entre plano Z e plano S
A estabilidade absoluta e relativa de sistemas lineares com parâmetros
invariantes no tempo em se tratando de sistemas de controle em malha fechada em
tempo contínuo são determinados pelos pólos de malha fechada no plano S. Sabendo-se
que os pólos complexos estão em pares conjugados conforme,
2
nndn2,1 1jjs (4.1)
Figura 4.1: Pólo complexo no plano complexo S
A estabilidade é relacionada com a parte real dos pólos no plano s, e o sistema é
classificado conforme:
Se todos os pólos possuem 0s , o sistema é Assintoticamente Estável;
Se pelo menos 1 pólo possui 0s e os demais pólos forem 0s , o
sistema é Marginalmente Estável;
Se pelo menos 1 pólo possui 0s , o sistema é Instável;
Quando a amostragem é incorporada no processo, a relação que rege a
transformação do plano complexo S para o plano discreto Z é dada por,
zlnT
1szeTs (4.2)

47
onde T é o tempo de amostragem, s a raiz complexa no plano S e z a raiz complexa no
plano Z.
Como a raiz s possui uma parte real e uma parte imaginária,
js
Então, TjTjTTs eeeez
Como a exponencial complexa é dada por,
TsinjTcose Tj
Significando que esta parte é repetida a cada 2k, significando que freqüências
que são múltiplas inteiras da freqüência de amostragem 2/T são mapeadas na mesma
região no plano Z, de acordo com a Figura 4.2, pois,
k2TjTTjTjTTs eeeeeez (4.3)
Figura 4.2: Faixas periódicas no plano complexo e a correspondente região no plano
discreto, onde s corresponde à freqüência de amostragem.
Além disso, o lado esquerdo do plano S possui parte real negativa, significando
que,
1ez T (4.4)
Então todo o lado esquerdo do plano complexo é localizado no plano Z dentro
de um círculo de raio unitário, o eixo j é mapeado exatamente em cima do circulo e o
lado direito do plano S é mapeado fora do circulo de raio unitário.
Além disso, quanto menor o tempo de discretização mais próximo do círculo de
raio unitário encontra-se a raiz. Isto ocorre porque se T tende para zero então eT
tende
para 1.
Observa-se pela equação de transformação que raízes com a mesma parte real,
mas com parte imaginária diferente localizam-se em forma de círculo no plano
complexo, de acordo com a Figura 4.3. Isto também significa que a parte real dá a
distância da origem no plano z, isto é, o raio.

48
Figura 4.3: Localização das raízes complexas com a mesma parte real no plano discreto.
No caso de raízes complexas com a mesma parte imaginária, elas encontram-se
na forma de retas inclinadas de de acordo com a Figura 4.4.
Figura 4.4: Localização das raízes complexas com a mesma parte imaginária no plano
discreto.
Para traçar as curvas de fator de amortecimento constante, basta lembrar que um
pólo complexo é,
dn
2
nn j1js
Aplicando a transformação,
s
d
s
d
2dn
2j1
2
jTs eeez
Consequentemente,
s
d
21
2
ez e s
d2zangle
Assim, a magnitude de z decresce e o ângulo aumenta quando d, que é a
freqüência natural amortecida, aumenta. Caracterizando assim uma espiral logarítmica.
Note que para uma dada relação d/s, a magnitude de z torna-se apenas uma função do
fator de amortecimento . A representação da curva com fator de amortecimento
constante é dada na Figura 4.5.

49
Figura 4.5: Representação das curvas de fator de amortecimento constante.
Note que se a espiral de fator de amortecimento constante está no segundo ou
terceiro quadrante do plano S, lado real negativo, então a espiral decai para dentro do
circulo no plano Z. Se ela estiver no primeiro ou quarto quadrante, lado real positivo,
que neste caso corresponderia a um caso com fator de amortecimento negativo,
corresponderia a uma espiral crescendo para fora do circulo de raio unitário.
Além disso, deve- se notar que à medida que a freqüência aumenta, ela passa de
uma banda para outra, sendo assim, só é necessário representar a primeira parte, que
corresponde a 0 ≤ ≤ 1/2s, Figura 4.6, a parte correspondente de -1/2s ≤ ≤ 0 é
uma imagem espelho para a parte de baixo.
A curva para freqüência n constante, são círculos no plano S que são
perpendiculares às curvas de fator de amortecimento constante, assim, a sua
representação é dada na Figura 4.6, onde /T é s/2.
-1 -0.8 -0.6 -0.4 -0.2 0 0.2 0.4 0.6 0.8 10
0.2
0.4
0.6
0.8
1
0.9
0.8
0.70.6
0.5
0.4
0.3
0.2
0.1
/T
/T
0.9/T
0.8/T
0.7/T
0.6/T0.5/T
0.4/T
0.3/T
0.2/T
0.1/T
Figura 4.6: Representação das curvas de freqüência natural constante e fator de
amortecimento constante.
Esta abordagem apresentada acima foi feita para determinar qual a região dos
pólos e zeros desejados para as funções de transferência em tempo discreto. Então a
partir dos gráficos anteriores pode-se determinar a região desejada dos pólos e zeros
discretos de acordo com a Figura 4.7.

50
Figura 4.7: Localização das raízes complexas desejadas no plano discreto.
Aqui deve ser mencionado que se um sistema em tempo contínuo possui um par
de pólos na forma s = - ± j1 no plano s, e for feita uma amostragem tal que 1 >
1/2s em que s = 2/T, sendo T o tempo de amostragem, significando que este par de
pólos complexo possui freqüência natural maior que a freqüência de Nyquist, ele cairá
fora da primeira faixa de valores, mas como mencionado anteriormente, ele será
transportado para dentro do circulo de raio unitário do plano Z como se estivesse
posicionado no plano S em s = - ± j(1 - s). Este caso significa que ele não poderá
mais ser reconstruído em tempo contínuo, pois violou o teorema da amostragem.
4.2 Análise de Estabilidade de Sistemas no plano Z
Como mencionado anteriormente, para que um sistema seja assintoticamente
estável no plano complexo S, os pólos deverão obrigatoriamente possuir a parte real
negativa, que significa no plano Z estar localizado dentro do circulo de raio unitário,
sendo assim,
Assintoticamente estável, todos os pólos deverão apresentar 1z .
Para que um sistema seja marginalmente estável no plano complexo S, o
sistema deverá possuir pelo menos 1 pólo com a parte real nula e os demais
pólos possuírem parte real negativa, assim, marginalmente estável, pelo menos 1
pólo em 1z e os demais com 1z ;
Para que o sistema seja instável no plano complexo S, ele deve possuir pelo
menos 1 pólo com parte real positiva, que no plano Z corresponde à parte
localizada fora do circulo de raio unitário, assim, instável, pelo menos 1 pólo
apresentando 1z .
Exemplo 4.1: Considerando o sistema em malha fechada apresentado abaixo,
determinar a estabilidade para K = 1 e um tempo de amostragem T = 1s.
1ss
1)s(Gp

51
Solução: Calculando a convolução do ZOH com a planta,
1T21
11TTT1
2
1
2
1s
pZOH
ze1z1
zzTee1e1Tz1
1ss
1Zz1
1ss
1Zz1
1ss
1
s
e1ZGGZ
Esta transformada foi obtida através de tabela de transformação. Item 13.
fazendo a = 1. Agora substituindo os valores de T = 1 e simplificando, obtêm-se,
11
21
pZOHz3679.01z1
z2642.0z3679.0)z(GGGZ
Como a função de transferência em malha fechada é dada por,
21
21
11
21
11
21
z6321.0z1
z2642.0z3679.0
z3679.01z1
z2642.0z3679.011
z3679.01z1
z2642.0z3679.01
)z(KG1
)z(KG
)z(R
)z(C
Então, calculando as raízes do denominador, que são os pólos, encontra-se,
6181.0j5.0z 2,1
Pegando o valor absoluto,
7950.06181.05.0z22
2,1
Como o valor é menor que 1, significa que o sistema é assintoticamente estável.
4.3 Resposta Transiente
Algumas aplicações de controle envolvem a melhora da resposta transitória do
sistema segundo alguns critérios. A resposta transitória aparece na resposta do sistema
quando ocorre alguma mudança de excitação, esta mudança pode ser do regime
permanente para um outro regime permanente ou simplesmente quando o sistema sai do
repouso.
As especificações para a resposta transiente envolvem normalmente os seguintes
parâmetros apresentados na Figura 4.8,
1. Tempo de atraso td (Delay time) é o tempo requerido para que a resposta do
sistema alcance metade da resposta em regime permanente. Este parâmetro
está relacionado com a velocidade de resposta do sistema.
2. Tempo de subida tr (Rise Time) é o tempo requerido para que a resposta do
sistema suba de 10% para 90% ou de 5% para 95% da resposta em regime

52
permanente. Observe que se um sistema possui um tempo de atraso baixo,
isto é, ele demore bastante para responder a uma mudança de excitação, mas
ocorre uma subida rápida, o tr será pequeno ao passo que o td será grande.
3. Tempo de pico tp (Peak Time) é o tempo requerido para que a resposta do
sistema atinja o primeiro pico de sobresinal.
4. Máximo sobresinal Mp (Maximun Overshoot) é o pico máximo de sinal
acima da referência a ser atingida, isto é, se a referência for a resposta ao
degrau unitário e o sistema não apresentar erro estacionário, é o pico acima
da amplitude 1. Por ser um fator que depende da excitação, costuma-se
utilizar um percentual de sobresinal definido como,
%100)(c
)(c)t(calsinsobredemporcentage
5. Tempo de estabilização ts (Settling Time) é o tempo necessário para a
resposta do sistema alcance e permaneça dentro de uma porcentagem da
resposta em regime permanente, usualmente 2%.
Figura 4.8: Resposta ao degrau de um sistema com os parâmetros de projeto.
Observe que nem todas as especificações são aplicadas a todos os sistemas, isto
é, se um sistema for superamortecido ou se for um sistema de primeira ordem ou se
todas as raízes forem puramente reais negativas, não ocorrerá o sobre sinal e nem o
tempo de pico.
4.4 Método de Projeto baseado no lugar das raízes
O método de projeto de controladores baseado no lugar das raízes é baseado no
fato que a resposta do sistema é baseada nos pólos dominantes do sistema em malha
fechada. O modo mais simples de alocá-los é utilizar um controlador proporcional em
malha fechada conforme apresentada na Figura 4.9.

53
Figura 4.9: Sistema de malha fechada com controlador proporcional.
O sistema em malha fechada possui a resposta dada por,
)z(KG1
)z(KG
)z(R
)z(C
onde K representa o ganho do controlador proporcional.
O denominador ou equação característica é dado por,
0)z(KG1
Que pode ser reescrita como,
0pzpzpz
zzzzzzK1
n21
m21
O método do lugar das raízes é baseado em dar valores para K na equação cima
e encontrar os pólos correspondentes desejados. Interessante notar que,
K
1
pzpzpz
zzzzzz
n21
m21
Exemplo 4.2: Supondo que o sistema seja dado por,
T
Ts
pZOHez
e1
1s
1
s
e1ZGGZ
E o controlador seja na forma integral dada por,
1z
zK
z1
K)z(G I1
ID
Investigar a influencia do ganho KI e do tempo de amostragem T para a
estabilidade do sistema. Supondo que o sistema seja amostrado com os seguintes
tempos T = 0.5s, 1s e 2s.
Solução: A função de transferência em malha fechada é dada por,
T
T
IPZOHDez
e1
1z
zKGGZ)z(G)z(G
Então,
TTT
I
2
T
I
eze1e1Kz
ze1K
)z(G1
)z(G
)z(R
)z(C
Substituindo o valor de T = 0.5s,

54
Programa feito em Matlab:
clear all;close all;clc % tempo de amostragem T = 0.5; % Definição da planta num=[(1-exp(-T)) 0]; den=conv([1 -1],[1 -exp(-T)]); % Empacotando sys=tf(num,den,T) % aplicação do método do lugar das raízes rlocus(sys);zgrid
Transfer function: 0.3935 z ---------------------- z^2 - 1.607 z + 0.6065 Sampling time: 0.5
Transfer function: 0.6321 z ---------------------- z^2 - 1.368 z + 0.3679 Sampling time: 1
Transfer function: 0.8647 z ---------------------- z^2 - 1.135 z + 0.1353 Sampling time: 2
Figura 4.10: Lugar das raízes para T = 0.5s

55
Figura 4.11: Lugar das raízes para T = 1s
Figura 4.12: Lugar das raízes para T = 2s
Exemplo 4.3: Observar a influência da variação dos parâmetros do controlador
PID para o seguinte sistema,
)5s(1s
1)s(G p
Aplicando a transformada na convolução da planta com o ZOH,

56
1T51T
2TT5T61T5T
1T51T
1T11T511T1T5
1T51T1
1
1
1s
pZOH
ze1ze120
zee5e4zee54
ze1ze120
ze1z1ze1z15ze1ze14
ze120
1
ze14
1
z15
1z1
5s20
1
1s4
1
s5
1Zz1
5s1ss
1Zz1
5s1ss
1
s
e1ZGGZ
O primeiro passo é calcular
clear all;close all;clc % Planta contínua num=1; % numerador den=[conv([1 1],[1 5])]; % denominador Gs=tf(num,den) % empacotando % Planta discreta T=0.1; % tempo de amostragem b1=(4-5*exp(-T)+exp(-5*T)); b2=(4*exp(-6*T)-5*exp(-5*T)+exp(-T)); numd=[0 b1 b2]/20; % numerador a1=-exp(-T)-exp(-5*T); a2=exp(-6*T); dend=[1 a1 a2]; % denominador Gz=tf(numd,dend,T) % empacotando figure('Color',[1 1 1]) step(Gs,Gz) legend('Contínuo','Discreto') % diagrama de bode para escolher Kp figure;rlocus(Gz);zgrid;set(gcf,'Color',[1 1 1])
0 1 2 3 4 5 60
0.02
0.04
0.06
0.08
0.1
0.12
0.14
0.16
0.18
0.2
Step Response
Time (sec)
Am
plitu
de
Contínuo
Discreto
Root Locus
Real Axis
Ima
gin
ary
Ax
is
-1 -0.8 -0.6 -0.4 -0.2 0 0.2 0.4 0.6 0.8 1
-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
0.1/T
0.2/T
0.3/T
0.4/T0.5/T
0.6/T
0.7/T
0.8/T
0.9/T
/T
0.1/T
0.2/T
0.3/T
0.4/T0.5/T
0.6/T
0.7/T
0.8/T
0.9/T
/T
0.1
0.20.30.40.50.60.70.80.9
System: Gz
Gain: 0
Pole: 0.607
Damping: 1
Overshoot (%): 0
Frequency (rad/sec): 5
System: Gz
Gain: 10
Pole: 0.734 + 0.206i
Damping: 0.705
Overshoot (%): 4.38
Frequency (rad/sec): 3.85
System: Gz
Gain: 50
Pole: 0.648 - 0.538i
Damping: 0.241
Overshoot (%): 45.8
Frequency (rad/sec): 7.14

57
Figura 4.13: Resposta do sistema considerando tempo contínuo e discreto e lugar das
raízes
Calculando a resposta do sistema com o controlador proporcional,
% fechando a malha - Controle porporcional Kp Sys1=feedback(2*Gz,1) % ganho Kp = 2 Sys2=feedback(10*Gz,1) % ganho Kp = 10 Sys3=feedback(50*Gz,1) % ganho Kp = 50 figure('Color',[1 1 1]);step(Sys1,Sys2,Sys3) legend('K_P = 2','K_P = 10','K_P = 50')
Figura 4.14: Respostadas do sistema controlado para vários valores de Kp

58
% Controle PD % Kp = 50 , Kd = 0 Kp=50;Kd=0;Ki=0; num=[Kp+Kd+Ki -(Kp+2*Kd) +Kd];den=[1 -1 0]; GPIDz=tf(num,den,T) sysMA=GPIDz*Gz sysMF1=feedback(sysMA,1) % Kp = 50 , Kd = 10 Kp=50;Kd=10;Ki=0; num=[Kp+Kd+Ki -(Kp+2*Kd) +Kd];den=[1 -1 0]; GPIDz=tf(num,den,T) sysMA=GPIDz*Gz sysMF2=feedback(sysMA,1) % Kp = 50 , Kd = 50 Kp=50;Kd=50;Ki=0; num=[Kp+Kd+Ki -(Kp+2*Kd) +Kd]; den=[1 -1 0]; GPIDz=tf(num,den,T) sysMA=GPIDz*Gz sysMF3=feedback(sysMA,1) figure('Color',[1 1 1]) step(sysMF1, sysMF2, sysMF3,3) legend('K_D = 0','K_D = 10','K_D = 50')
% Controle PID % Kp = 50 , Kd = 50 , Ki = 0 Kp=50;Kd=50;Ki=0; num=[Kp+Kd+Ki -(Kp+2*Kd) +Kd];den=[1 -1 0]; GPIDz=tf(num,den,T) sysMA=GPIDz*Gz sysMF4=feedback(sysMA,1) % Kp = 50 , Kd = 50 , Ki = 2 Kp=50;Kd=50;Ki=2; num=[Kp+Kd+Ki -(Kp+2*Kd) +Kd];den=[1 -1 0]; GPIDz=tf(num,den,T) sysMA= GPIDz*Gz sysMF5=feedback(sysMA,1) % Kp = 50 , Kd = 50 , Ki = 10 Kp=50;Kd=50;Ki=10; num=[Kp+Kd+Ki -(Kp+2*Kd) +Kd];den=[1 -1 0]; GPIDz=tf(num,den,T) sysMA=GPIDz*Gz sysMF6=feedback(sysMA,1) % Kp = 50 , Kd = 50 , Ki = 40 Kp=50;Kd=50;Ki=40; num=[Kp+Kd+Ki -(Kp+2*Kd) +Kd]; den=[1 -1 0]; GPIDz=tf(num,den,T) sysMA=GPIDz*Gz sysMF7=feedback(sysMA,1) figure('Color',[1 1 1]) step(sysMF4,sysMF5,sysMF6,sysMF7,5) legend('K_I = 0','K_I = 2','K_I = 10','K_I = 40')
Figura 4.15: Respostadas do sistema controlado para vários valores de Kd, mantendo o
valor de Kp = 50.
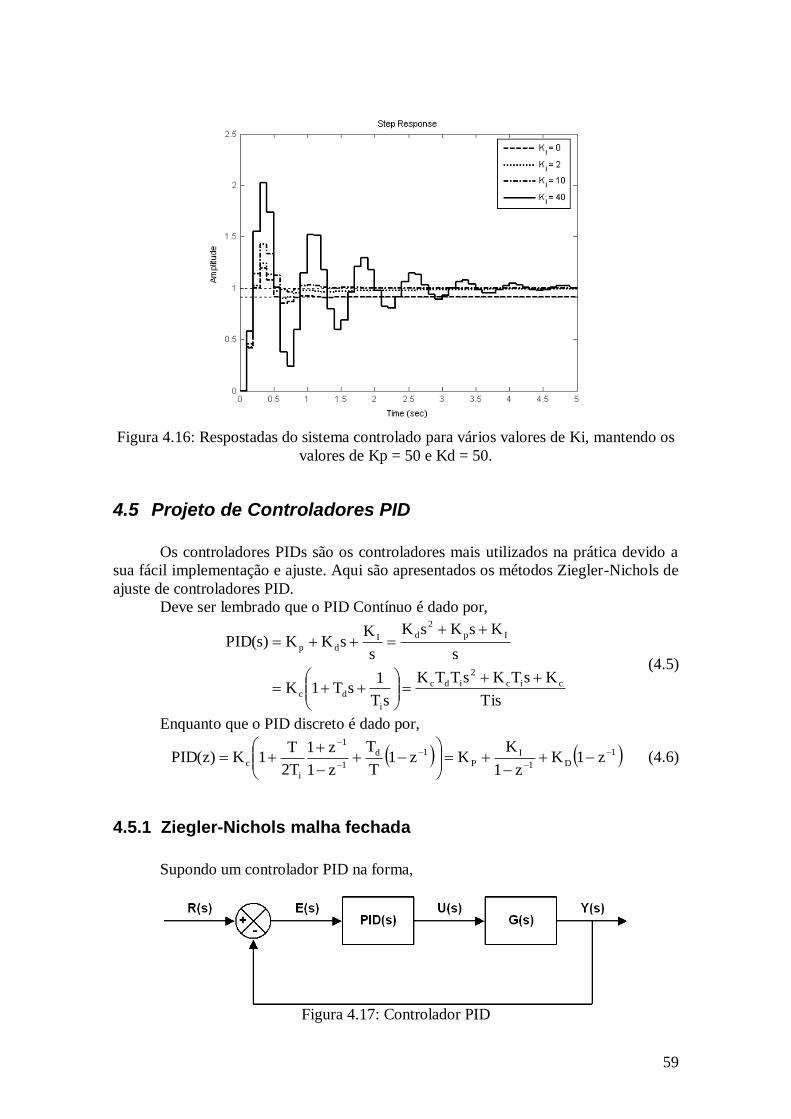
59
Figura 4.16: Respostadas do sistema controlado para vários valores de Ki, mantendo os
valores de Kp = 50 e Kd = 50.
4.5 Projeto de Controladores PID
Os controladores PIDs são os controladores mais utilizados na prática devido a
sua fácil implementação e ajuste. Aqui são apresentados os métodos Ziegler-Nichols de
ajuste de controladores PID.
Deve ser lembrado que o PID Contínuo é dado por,
Tis
KsTKsTTK
sT
1sT1K
s
KsKsK
s
KsKK)s(PID
cic
2
idc
i
dc
Ip
2
dIdp
(4.5)
Enquanto que o PID discreto é dado por,
1
D1
IP
1d
1
1
i
c z1Kz1
KKz1
T
T
z1
z1
T2
T1K)z(PID
(4.6)
4.5.1 Ziegler-Nichols malha fechada
Supondo um controlador PID na forma,
Figura 4.17: Controlador PID

60
Para aplicar o método Ziegler-Nichols de malha fechada deve-se primeiro
encontrar qual o ganho proporcional Kp, com o ganho integral Ki e o ganho Kd iguais a
zero, que torna o sistema de malha fechada marginalmente estável, isto é, pelo menos
um dos pólos do sistema de malha fechada deve ser puramente imaginário no plano
complexo S, que no plano discreto Z significa tem módulo 1 ou estar em cima do
círculo de raio unitário. Este ganho Kp passa a ser chamado de ganho crítico Kcr.
O sistema apresentado na Figura 4.17, fazendo o PID somente Kp, o sistema de
malha fechada é dado por,
Kp)z(G1
Kp)z(G
)z(R
)z(Y
Para o calculo do ganho crítico, pelo menos um dos pólos da equação acima
deve possuir parte real igual a zero.
Root Locus
Real Axis
Ima
gin
ary
Ax
is
-3 -2 -1 0 1 2 3-5
-4
-3
-2
-1
0
1
2
3
4
5
System: Gs
Gain: 4.5
Pole: 0.00145 + 3.63i
Damping: -0.0004
Overshoot (%): 100
Frequency (rad/sec): 3.63
System: Gs
Gain: 4.47
Pole: -0.00302 - 3.63i
Damping: 0.000832
Overshoot (%): 99.7
Frequency (rad/sec): 3.63
Root Locus
Real Axis
Ima
gin
ary
Ax
is
-1 -0.8 -0.6 -0.4 -0.2 0 0.2 0.4 0.6 0.8 1-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
0.1/T
0.2/T
0.3/T
0.4/T0.5/T
0.6/T
0.7/T
0.8/T
0.9/T
/T
0.1/T
0.2/T
0.3/T
0.4/T0.5/T
0.6/T
0.7/T
0.8/T
0.9/T
/T
0.1
0.2
0.3
0.40.50.60.70.8
0.9
System: Gz
Gain: 3.35
Pole: 0.807 + 0.59i
Damping: 0.000454
Overshoot (%): 99.9
Frequency (rad/sec): 3.15
System: Gz
Gain: 3.35
Pole: 0.807 - 0.59i
Damping: 0.000454
Overshoot (%): 99.9
Frequency (rad/sec): 3.15
Figura 4.18: Lugar das Raízes no plano complexo S e no plano discreto Z
O segundo passo consiste em traçar a resposta ao degrau do sistema
realimentado pelo ganho crítico Kcr. Desta resposta é retirado o tempo de oscilação Tu.
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 50
0.5
1
1.5
Step Response
Time (sec)
Am
plitu
de
Tempo de
Oscilação Tu
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5
0
0.5
1
1.5
Step Response
Time (sec)
Am
plitu
de
Tempo de
oscilação Tu
Figura 4.19: Resposta ao degrau do sistema realimentado com Kcr
Agora os parâmetros do controlador podem ser ajustados de acordo com a tabela
abaixo.

61
Tabela 4-1: Ajustes do controlador PID para o método Ziegler-Nichols malha fechada.
Tipo do controlador Kc Ti Td
P 0,5 Kcr -- --
PI 0,45.Kcr Tu/1,2 ---
PID 0,6.Kcr 0,5Tu 0,125Tu
4.5.2 Ziegler-Nichols Malha Aberta
O método Ziegler-Nichols em malha aberta pode ser aplicado quando a curva de
resposta ao degrau unitário de entrada apresentar o aspecto de um S. Essa curva de
resposta ao degrau unitário pode ser gerada experimentalmente ou a partir de uma
simulação dinâmica da planta.
Figura 4.20: Resposta ao degrau unitário
A curva com o formato em S pode ser caracterizada por duas constantes, o atraso
L e a constante de tempo T. O atraso e a constante de tempo são determinados
desenhando-se uma linha tangente no ponto de inflexão da curva com o formato de S e
determinando-se a interseção da linha tangente com o eixo do tempo. O ajuste do
controlador PID, segundo este método, introduz no sistema dois zeros em -1/L se o
projeto for feito em tempo contínuo.
Tabela 4-2: Ajustes do controlador PID para o método Ziegler-Nichols malha aberta.
Tipo de controlador Kc Ti Td
P T/L 0
PI 0,9T/L L/0,3 0
PID 1,2T/L 2L 0,5L
4.6 Controlador Tipo “Dead Beat”

62
Uma resposta tipo “Dead Beat” é aquela em que o sistema apresenta o menor
tempo de estabilização possível, sem erro estacionário e sem apresentar oscilações
durante o transiente. Então, se um sistema de controle for projetado para que a resposta
do sistema de malha fechada apresente uma resposta tipo “dead beat”, o controlador
que gerou esta resposta recebe o nome de controlador “dead beat”.
Figura 4.21: Diagrama de blocos de um sistema de controle utilizando controlador
“Dead Beat”
Supondo o sistema de controle em malha fechada com o apresentado na Figura
4.21, cuja malha fechada é dada por,
)z(G)z(G1
)z(G)z(G
)z(R
)z(C
D
D
Para que o sistema em malha fechada tenha uma resposta “dead beat”,
necessariamente a malha fechada deve ser na forma,
N
N
1N
1
N
0N
N
1
10z
azazazazaa)z(F
)z(R
)z(C
(4.7)
onde N deve ser maior ou igual a ordem do sistema G(z). Observe que F(z) não deve
conter potencias positiva de z, pois significaria que o sistema seria não causal. Além
disso, o sistema em malha fechada é representado por um sistema cujos pólos são todos
iguais a zero.
4.7 Exercícios Resolvidos
Exemplo 4.4: Um sistema de controle em tempo contínuo possui pólos em malha
fechada com freqüência natural n = 5 rad/s e fator de amortecimento = 0.7 e
freqüência natural n = 10 rad/s e fator de amortecimento = 0.5, com tempo de
amostragem T=0.1s. Quais seriam os pólos do sistema de controle em malha fechada
em tempo discreto?
Solução: com as informações dadas acima, o sistema terá dois pólos complexos
conjugados formados por, 2
nd 1jnjns
Então,
5707.3j5.37.015j57.0s 2
2,1
6603.8j55.0110j105.0s 2
4,3
Passando para tempo discreto, Tsez
Então,

63
2463.0j6602.0ez 5707.3j5.31.0
2,1
4620.0j3929.0ez 6603.8j51.0
4,3
Exemplo 4.5: Curiosidades de raízes complexas:
Raízes discretas puramente reais positivas:
z = 0.5 s = fa(-0.631)
São originadas de raízes puramente reais no plano s.
Raízes discretas puramente reais negativas
z = -0.5 s = fa(-0.631j)
São raízes cujas frequencias correspondem a fa/2. Pois,
21.3fafa631.0fa22
n [rad/s]
Significando que a amostragem foi feita erradamente, pois dividindo n por 2,
]Hz[521.0fafn
Isto mostra que o teorema da amostragem foi aplicado errado
Exemplo 4.6: Verificar no plano Z, como ficam os pólos e zeros do seguinte sistema
contínuo amostrado com fa = 100 Hz,
22
2
400s8s
400)s(G
Observe que neste caso, a freqüência natural n = 20 rad/s e fator de
amortecimento = 0.2.
clear all;close all;clc % Dados contínuos sn=0.2; % fator de amortecimento wn=2*pi*10; % frequencia natural % Empacotando Gs=tf(100,[1 2*sn*wn wn^2]) % calculando os pólos damp(Gs) % lugar das raízes figure;pzmap(Gs);sgrid % Dados discretos fa=100; % frequencia de amostragem T=1/fa; % tempo de discretização % passando para tempo discreto Gz=c2d(Gs,T) % calculando os pólos damp(Gz) % lugar das raízes figure;pzmap(Gz);zgrid
Transfer function:
100
--------------------
s^2 + 25.13 s + 3948

64
Eigenvalue Damping Freq. (rad/s)
-1.26e+001 + 6.16e+001i 2.00e-001 6.28e+001
-1.26e+001 - 6.16e+001i 2.00e-001 6.28e+001
Transfer function:
0.004459 z + 0.004096
---------------------
z^2 - 1.44 z + 0.7778
Sampling time: 0.01
Eigenvalue Magnitude Equiv. Damping Equiv. Freq. (rad/s)
7.20e-001 + 5.09e-001i 8.82e-001 2.00e-001 6.28e+001
7.20e-001 - 5.09e-001i 8.82e-001 2.00e-001 6.28e+001
4.8 Exercícios Propostos
Exercício 4.1: Para o sistema abaixo, quais seriam os pólos em tempo discreto?
100s10s
100)s(G
2
Exercício 4.2: Para o Exemplo 4.1, encontrar quais os valores que K em tempo
discreto que tornam o sistema em malha fechada um sistema assintoticamente estável,
marginalmente estável e instável?
Exercício 4.3: Para o sistema em tempo contínuo abaixo, pede-se:
a) Encontrar um ajuste para o controlador PID para o sistema em tempo
discreto utilizando os métodos Ziegle-Nichols de malha aberta e
malha fechada;
b) Fazer ajustes finos para encontrar o melhor resultado possível;
c) Quais as freqüências naturais e fatores de amortecimento para os três
casos?

65
3s2s1s
2)s(G
e
30s
30)s(H
Para resolver este problema deve-se assumir que há um amostrador em X(s) e
um ZOH em U(s).

66
Capítulo 5
5 Formulação por Matrizes de Estado
A representação em forma de Matrizes de Estado é um das principais
ferramentas de simulação de sistemas, e elas são formuladas diretamente no domínio em
tempo contínuo ou discreto e não envolvem transformações para Laplace ou
transformada Z.
5.1 Introdução à formulação de estado
Considerando um sistema massa-mola-amortecedor na forma,
)t(u)t(ky)t(yc)t(ym
Que pode ser reescrito como,
m
)t(u)t(y)t(y2)t(y 2
nn
Definindo uma variável como,
)t(y)t(x)t(y)t(x 11
Definindo outra variável como,
)t(y)t(x)t(x)t(y)t(x 212
Substituindo na equação original e deixando somente uma variável com a
derivada temporal, então,
m
)t(u)t(x)t(x2)t(x 1
2
n2n2
Agora, escrevendo um sistema na seguinte forma,
)t(um/1
0
)t(x
)t(x
2
10
)t(x
)t(x
2
1
n
2
n2
1
Ainda está faltando a resposta y(t) do sistema, que é dada por,
)t(u0)t(x
)t(x01)t(y
2
1
Que pode ser escrito da seguinte maneira,
)t(Du)t(Cx)t(y
)t(Bu)t(Ax)t(x
A forma acima é conhecida como forma de estado. Como observado, a
transformação para a formulação de espaço de estados consistiu em transformar uma
equação de segunda ordem em duas equações de primeira ordem. Generalizando, a
transformação de espaço de estados consiste em transformar um sistema de equações de
ordem n para um sistema de primeira ordem de 2n equações, tornando assim, mais
simples a sua solução.

67
5.2 Nomenclatura de Espaço de Estados
Vetor de estado x(t) é o vetor de ordem n que contém todos os estados.
Vetor de saída y(t) é o vetor de ordem m que contém todas as respostas.
Vetor de entrada u(t) é o vetor de ordem r que contém todas as entradas.
Matriz de estado A é a matriz de ordem n×n que contém os autovalores e os
autovetores do sistema.
Matriz de entrada B é a matriz de ordem n×r da entrada.
Matriz de saída C é a matriz de ordem m×n da saída.
Matriz de transmissão direta D é matriz de ordem m×r que correlaciona
diretamente a entrada com a saída.
Então,
1rrm1nnm1m
1rrn1nnn1n
)t(uD)t(xC)t(y
)t(uB)t(xA)t(x
A representação em diagramas de bloco do sistema acima é dada por,
Figura 5.1: Representação em diagrama de blocos para tempo contínuo.
5.3 Representação de Espaço de Estados discretos
A formulação de espaço de estados discretos é dada por,
)k(Du)k(Cx)k(y
)k(Hu)k(Gx)1k(x
(5.1)
Nota-se que as matrizes C e D não mudaram, significando que são as mesmas
matrizes de sistemas em tempo contínuo.
Agora, supondo um sistema discreto cuja função de transferência é dada por,
n
n
1
1
n
n
1
10
zaza1
zbzbb
)z(U
)z(Y
Esta FT pode ser representada de várias maneiras em espaço de estados, pois a
formulação de estado não é única.
5.3.1 Forma Canônica Controlável

68
A forma canônica controlável é dada por,
)k(u
1
0
0
0
)k(x
)k(x
)k(x
)k(x
aaaa
1000
0100
0010
)1k(x
)1k(x
)1k(x
)1k(x
n
1n
2
1
12n1nnn
1n
2
1
)k(ub
)k(x
)k(x
)k(x
babbabbab)k(y 0
n
2
1
01101n1n0nn
Se a matriz G for uma matriz de posto cheio, isto é, o determinante é diferente
de zero, o sistema é controlável, caso contrário, significa que pelo menos 1 dos estados
não é controlável. A controlabilidade significa que o sistema pode ser alterado de
qualquer estado para qualquer estado em um período de tempo finito.
5.3.2 Forma Canônica Observável
A forma canônica observável é dada por,
)k(u
bab
bab
bab
bab
)k(x
)k(x
)k(x
)k(x
a100
a000
a001
a000
)1k(x
)1k(x
)1k(x
)1k(x
011
022
01n1n
0nn
n
1n
2
1
1
2
1n
n
n
1n
2
1
)k(ub
)k(x
)k(x
)k(x
100)k(y 0
n
2
1
Para o sistema ser completamente observável, a matriz G deve ser uma matriz de
posto cheio. A observabilidade significa que todos os estados do sistema podem ser
observados ou medidos.
5.3.3 Forma Canônica Diagonal
Expandindo a FT em frações parciais tal que,
n
n
2
2
1
10
pz
c
pz
c
pz
cb
)z(U
)z(Y
Então, a forma canônica diagonal é dada por,

69
)k(u
1
1
1
)k(x
)k(x
)k(x
p00
0
0p0
00p
)1k(x
)1k(x
)1k(x
n
2
1
n
2
1
n
2
1
)k(ub
)k(x
)k(x
)k(x
ccc)k(y 0
n
2
1
n21
onde pi representa os pólos do sistema.
5.3.4 Forma Canônica de Jordan
A forma canônica de jordan é usada quando se deseja representar o sistema na
forma diagonal mas existem pólos repetidos. Supondo que o pólo p1 é repetido m vezes,
então,
)k(u
1
1
__
1
0
0
)k(x
)k(x
_______
)k(x
)k(x
)k(x
p0
0p
]0[
]0[
p000
01p0
001p
)1k(x
)1k(x
_______
)1k(x
)1k(x
)1k(x
n
1m
m
2
1
n
1m
1
1
1
n
1m
m
2
1
)k(ub
)k(x
)k(x
)k(x
ccc)k(y 0
n
2
1
n21
5.3.5 Não unicidade das matrizes de estado
A representação de estado não é única, isto é, para um mesmo sistema na forma
de função de transferência pode haver várias representações de estado. Por exemplo,
supondo que um sistema seja observável e controlável, definições que serão apresentada
mais à frente, então haverá uma representação na forma canônica controlável e
observável.
Para exemplificar, supondo o sistema na seguinte forma de estado,
)k(Du)k(Cx)k(y
)k(Hu)k(Gx)1k(x
Supondo uma transformação tal que,

70
)k(xP)k(x
onde a matriz P é de ordem n×n, mesma ordem da matriz G. Então,
)k(Du)k(xCP)k(y
)k(Hu)k(xGP)1k(xP
Que pode ser reescrito como,
)k(Du)k(xCP)k(y
)k(HuP)k(xGPP)1k(x 11
Agora definindo,
GPPG 1 , CPC e HPH 1
Então,
)k(Du)k(xC)k(y
)k(uH)k(xG)1k(x
Que é exatamente da mesma forma que o sistema original. Se a matriz P for a
matriz dos autovetores da matriz G, então o sistema será diagonalizado, caso isso não
seja possível, a matriz resultante será a matriz de Jordan.
5.4 Simulando um sistema na forma de estado discreto
Nesta parte, supõe-se que o sistema seja linear e invariante no tempo, na forma,
)k(Du)k(Cx)k(y
)k(Hu)k(Gx)1k(x
Pegando apenas os estados do sistema, para o instante inicial têm-se,
)0(Hu)0(Gx)1(x
Para o instante seguinte,
)1(Hu)0(GHu)0(xG
)1(Hu)0(Hu)0(GxG
)1(Hu)1(Gx)2(x
2
Para o instante seguinte,
)2(Hu)1(GHu)0(HuG)0(xG
)2(Hu)1(Hu)0(GHu)0(xGG
)2(Hu)2(Gx)3(x
23
2
Fazendo isso para k instantes,
1k
0j
1jkk )j(HuG)0(xG)k(x k = 1, 2, 3 ... (5.2)
Substituindo este resultado em y(k),
)k(Du)j(HuG)0(xGC)k(y1k
0j
1jkk
k = 1, 2, 3 ... (5.3)
5.5 Passando de Matrizes de Estado para FT
Supõe-se o sistema na forma,

71
)k(Du)k(Cx)k(y
)k(Hu)k(Gx)1k(x
Aplicando transformada Z, obtém-se,
)z(DU)z(CX)z(Y
)z(HU)z(GX)0(zx)z(zX
Supondo condições iniciais nulas,
)z(HUGzI)z(X)z(HU)z(XGzI)z(HU)z(GX)z(zX1
Substituindo em Y(z),
)z(UDHGzIC)z(DU)z(HUGzIC)z(Y11
Como a função de transferência pulsada é a relação dada por Y(z)/U(z),
DHGzIC)z(U
)z(Y 1
(5.4)
Observe que se Y(z)/U(z) é uma matriz mr.
5.6 Discretização de Matrizes de Estado Contínuas
Em se tratando de sistemas em tempo discreto, pode-se converter diretamente de
matrizes de estado contínuas para matrizes de estado discretas. Porem é necessário fazer
uma revisão de matrizes antes de mostrar o processo de discretização.
Em se tratando de matrizes há alguns cuidados a serem tomados e algumas
definições a serem compreendidas. Começando com,
0k
kkkk22At
!k
tAtA
!k
1tA
!2
1AtIe
Diferenciando esta solução em relação ao tempo, para isso a derivada é feita
termo a termo, encontra-se,
AeAeedt
d AtAtAt
Agora, três relações importantes,
Iee AtAt BtAttBA eee se AB = BA BtAttBA eee se AB ≠ BA
Agora, obtendo a resposta para matrizes de estado contínuas, isto é,
)t(Bu)t(Ax)t(x
Que pode ser reescrita como,
)t(Bu)t(Ax)t(x
Agora pré-multiplicando por e-At
,
)t(Bue)t(xedt
d)t(Ax)t(xe AtAtAt
Integrando1 de 0 a t,
t
0
AAt d)(Bue)0(x)t(xe
Que pode ser rearranjada como,
1 Deve ser lembrado que a integral da derivada é a própria função aplicada os limites de integração.

72
t
0
tAAt d)(Bue)0(xe)t(x (5.5)
A equação acima representa a solução para um sistema na forma de estado
contínuo. Para a solução completa, basta substituir os estados x(t) em,
)t(Du)t(Cx)t(y
Para fazer o mesmo para um sistema discreto, tem-se que,
)kT(Hu)kT(Gx)T)1k((x)t(Bu)t(Ax)t(x
Para que possa ser utilizada a solução de um sistema contínuo para encontrar a
solução de um sistema discreto, assume-se que a entrada u(t) entre um período e outro
de amostragem é constante, isto é, que há um ZOH, então,
)kT(u)t(u kT ≤ t < kT+T
Então, a solução,
t
0
tAAt d)(Bue)0(xe)t(x
Para o tempo kT, substitui-se t por kT,
kT
0
AAkTAkT d)(Buee)0(xe)kT(x
Para o tempo (k+1)T, substitui-se t por (k+1)T,
T1k
0
AT1kAT1kA d)(Buee)0(xe)T)1k((x
Agora fazendo,
kT
0
kTAAkTAT
T1k
0
T1kAT1kAAT d)(Bue)0(xeed)(Bue)0(xe)kT(xe)T)1k((x
Simplificando2,
T1k
kT
AT1kAAT
kT
0
AAkTAT
T1k
0
AT1kAAkTATT1kAAT
d)(Buee)kT(xe
d)(Bueeed)(Buee)0(xeee)kT(xe)T)1k((x
Supondo agora o ZOH, então, o tempo entre kT e (k+1)T pode ser substituído
por 0 e T dentro da integral, pois o que vai variar é apenas u() que é considerado
constante. Então,
T
0
AATAT d)(Buee)kT(xe)T)1k((x
Aplicando a transformação de variável onde = T-,
T
0
AAT d)(Bue)kT(xe)T)1k((x
Que representa a solução da equação de estado discreta na forma,
)kT(Hu)kT(Gx)T)1k((x
Que neste caso, tem-se que para encontrar estas matrizes discretas,
necessariamente,
2 Deve ser lembrado que
T1kAAkTAT eee

73
ATeG e BdeH
T
0
A
(5.6)
Pelas equações acima, verifica-se claramente que as matrizes discretas são
dependentes do tempo de amostragem.
A solução para y(kT) é dada simplesmente por,
)kT(Du)kT(Cx)kT(y
Se a matriz A for não singular, então
BAIeBIeABdeH 1ATAT1
T
0
A
(5.7)
Exemplo 5.1: Considerando o sistema abaixo, encontrar a representação de estado
discreto e a expressão para função de transferência discreta para T = 1 s.
21
2
2
2 asas
b
s2s
1
)2s(s
1)s(G
Solução: O primeiro passo é encontrar uma representação de estado para o
sistema, utilizando a forma canônica controlável,
)t(x
)t(x01)t(y
)k(u1
0
)t(x
)t(x
20
10
)t(x
)t(x
2
1
2
1
2
1
Como foi visto, para as matrizes discretas têm-se3,
1353.00
4323.01
e0
e12
11
eGT2
T2AT
Outra forma de encontrar a matriz G é fazendo,
2s
10
2ss
1
s
1
AsIeL1At
Cuja transformada de laplace inversa é dada por,
t2
t21At
e0
e12
11
2s
10
2ss
1
s
1
Le
Então,
3
0k
kkkk22At
!k
tAtA
!k
1tA
!2
1AtIe

74
4323.0
2838.0
e12
1
2
1eT
2
1
1
0
e12
10
2
1eT
2
1T
1
0d
e0
e12
11
BdeH
T2
T2
T2
T2
T
02
2T
0
A
Desta forma, o sistema discreto na forma de matrizes de estado é dado por,
)k(x
)k(x01)k(y
)k(u4323.0
2838.0
)k(x
)k(x
1353.00
4323.01
)1k(x
)1k(x
2
1
2
1
2
1
Para a representação em FT discreta,
1353.0z1353.1z
1485.0z2838.00
4323.0
2838.0
1353.00
4323.01
10
01z01
DHGzIC)z(G)z(U
)z(Y
2
1
1
O mesmo problema pode ser resolvido utilizando o Matlab,
clear all;close all;clc % Planta contínua num=1; % numerador den=[conv([0 0 1],[1 2 0])]; % denominador % Transformando para matrizes de Estado [A,B,C,D]=tf2ss(num,den) % discretizando as matrizes T=1; [G,H]=c2d(A,B,T) % voltando para TF discreta [numd,dend]=ss2tf(G,H,C,D)
Observe que neste caso, as matrizes de estado não estão na forma canônica, mas
o resultado em Função de Transferência deve ser exatamente o mesmo.
5.7 Exercícios Resolvidos
Exemplo 5.2: Para o sistema abaixo, converter para matrizes de estado discretas
utilizando o Matlab,
10s6325.10s6325.1s
2s)s(G
23
clear all;close all;clc

75
% denifindo os dados da planta T=0.1; num=[1 2]; den=conv([1 2*0.1*sqrt(10) 10],[1 1]); % Funções de Transferencia Gs=tf(num,den) % planta contínua Gz=c2d(Gs,T) % planta discreta % Matrizes de Estado [A,B,C,D]=tf2ss(num,den) MEs=ss(A,B,C,D) % empacotando MEz=c2d(MEs,T) % Matrizes de estado discreta
Exemplo 5.3: Para uma suspensão ativa representando ¼ de veículo, escrever as
matrizes de estado contínuas supondo que o distúrbio da via seja w(t).
Neste caso, as matrizes que regem o comportamento dinâmico do sistema são
dadas por,
Massa Suspensa,
)t(uxxkxxcxm NSSNSSSS
Masssa Não-Suspensa,
)t(u)t(wkxkxxkxxcxm PNPSNSSNSNN
Que na forma matricial fica,
)t(u)t(wk
)t(u
x
x
kkk
kk
x
x
cc
cc
x
x
m0
0m
pP
S
PSS
SS
P
S
SS
SS
P
S
N
S
Este caso representa um sistema MIMO, duas entradas e duas saídas. Definindo
as variáveis de estado iniciando pelos deslocamentos,
S1S1 xxxx e N2N2 xxxx
Para as velocidades,
S13 xxx e N24 xxx
Com as definições acima, as equações de estado são dadas por,
31 xx
42 xx
S
21
S
S
43
S
S
3m
)t(uxx
m
kxx
m
cx
)t(um
1)t(w
m
kx
m
kxx
m
kxx
m
cx
NN
P2
N
P12
N
S
34
N
S
4
Que na forma matricial fica,

76
w
u
m
k
m
1
0m
100
00
x
x
x
x
m
c
m
c
m
kk
m
k
m
c
m
c
m
k
m
k1000
0100
x
x
x
x
N
P
N
S
4
3
2
1
N
S
N
S
N
PS
N
S
S
S
S
S
S
S
S
S
4
3
2
1
De forma geral, se for sempre assumido que o vetor de estado se inicia com
deslocamentos e depois as velocidades, as matrizes de estado podem ser dadas a partir
das matrizes dinâmicas como,
)}t(F{)}t(X]{K[)}t(X]{C[)}t(X]{M[
Sendo que o vetor de estado,
)t(X
)t(X)t(X
E as matrizes de estado,
UF]M[
]0[X
C]M[K]M[
I]0[X
111
A resposta do sistema deve ser dada pelo que se deseja medir, supondo que seja
necessário medir os deslocamentos e velocidades,
w
u
00
00
00
00
x
x
x
x
1000
0100
0010
0001
y
y
y
y
4
3
2
1
4
3
2
1
Caso seje necessário medir apenas o deslocamento da massa suspensa,
w
u00
x
x
x
x
0001y
4
3
2
1
1
Exemplo 5.4:Para o sistema abaixo, encontrar as matrizes de estado.
As equações de movimento na forma matricial são dadas por,
33
322
211
3
2
1
323
3212
21
3
2
1
3
2
1
uF
uuF
uuF
x
x
x
kkk0
kkkk
0kk
x
x
x
m00
0m0
00m
Portanto, as matrizes de estado podem ser dadas como,

77
3
2
1
3
2
1
33
222
111
6
5
4
3
2
1
3
32
3
3
2
3
2
21
2
2
1
2
1
1
6
5
4
3
2
1
u
u
u
F
F
F
m
100
m
100
m
1
m
100
m
10
0m
1
m
100
m
1000000
000000
000000
x
x
x
x
x
x
000m
kk
m
k0
000m
k
m
kk
m
k
0000m
k
m
k100000
010000
001000
x
x
x
x
x
x
5.8 Exercícios Propostos
Exercício 5.1: Para a FT abaixo, escrever a representação em matrizes de estado na
forma canônica controlável, observável e diagonal para,
a) 3s2ss
1s)s(G
para T = 0.1 s;
b) 2s5s4s
1)s(G
23 para T = 0.1 s;
Exercício 5.2: Supondo o seguinte sistema dinâmico,
Supondo, m1 = m2 = m3 = 0.5 kg, k1 = k2 = k3 = k4 = 10.000 N/m, c2 = c3 =
50 Ns/m, determinar utilizando o Matlab,
a) Equação de movimento matricial
b) Matrizes de estado contínuas;
c) Matrizes de estado discretas;
d) Freqüências naturais e modos de vibrar;
e) Resposta em freqüência, diagrama de bode;
f) Resposta ao Impulso contínua e discreta.
Exercício 5.3: (Prova 2007) Considerando o sistema abaixo, escrever a forma canônica
controlável e observável,
5.0zz
5.0z2)z(G
2

78
Capítulo 6
6 Controlabilidade e Observabilidade
6.1 Introdução
A controlabilidade se refere à capacidade do sistema ter seu estado alterado de
qualquer estado para qualquer outro estado. De modo geral significa que o sistema pode
ser controlado.
A observabilidade significa que o sistema pode ter seus estados observados, em
outras palavras, o sistema pode ser inteiramente medido, significando que qualquer tipo
de informação pode ser conseguida.
6.2 Controlabilidade
Um sistema de controle é dito ser de estado completamente controlável se é
possível transferir o sistema de um estado qualquer para outro estado desejável qualquer
em um período finito de tempo utilizando uma lei de controle sem restrições. Para um
sistema discreto, a controlabilidade significa que o sistema pode ser transferido de um
estado qualquer x(kT) para um estado final x(kT) utilizando no máximo n períodos de
amostragem. Considerando um sistema em espaço de estados discretos na forma,
)k(Hu)k(Gx)1k(x
Sua solução temporal é dada por,
)T)1k((Hu)T(HuG)0(HuG)0(xG
)j(HuG)0(xG)kT(x
2k1kk
1k
0j
1jkk
k = 1, 2, 3 ... (6.1)
Esta solução pode ser rearranjada para os primeiros n instatnes de tempo como,
)0(u
)2n(u
)1n(u
HGGHH)0(xG)n(x 1nn
onde n é a dimensão da matriz G. Como a dimensão de H é n1 e cada coluna da matriz
[H GH ... Gn-1
H] é n1, então a dimensão da matriz é nn para o caso de uma única
entrada u(k), caso a entrada seja um vetor de dimensão 1r, então a matriz é de
dimensão nnr, significando que, dada uma lei de controle u(k), para alterar o estado do
sistema de x(0) para x(n) a matriz necessariamente precisa obedecer à seguinte relação,
nHGGHHposto 1n (6.2)
Esta matriz é conhecida como matriz de controlabilidade. Caso o posto da matriz
de controlabilidade seja menor que n, não significa que o sistema é incontrolável, mas

79
significa que pelo menos um dos estados não pode ser controlado, isto é, parte do
sistema pode ser controlado e parte não.
Dever ser notado que a controlabilidade de estado independe da saída, isto é, a
controlabilidade de estado é independente das matrizes C e D.
Exemplo 6.1: Verificar se os sistemas abaixo são de estado completamente
controláveis.
Sistema 1:
)k(u3
2
)k(x
)k(x
20
01
)1k(x
)1k(x
2
1
2
1
Solução: Construindo a matriz de controlabilidade,
63
22
3
2
20
01
3
2GHH
Não é necessário calcular o posto da matriz de controlabilidade, pois é só
observar se as linhas são linearmente independentes, neste caso, o posto = 2, então o
sistema é completamente controlável.
Sistema 2:
)k(u0
2
)k(x
)k(x
20
01
)1k(x
)1k(x
2
1
2
1
Solução: Construindo a matriz de controlabilidade,
00
22
0
2
20
01
0
2GHH
Neste caso, claramente o sistema possui posto = 1, significando que o sistema
não é completamente controlável.
Sistema 3:
)k(u
)k(u
12
00
03
00
10
)1k(x
)1k(x
)1k(x
)1k(x
)1k(x
50000
15000
00200
00120
00012
)1k(x
)1k(x
)1k(x
)1k(x
)1k(x
2
1
5
4
3
2
1
5
4
3
2
1
Solução: Construindo a matriz de controlabilidade,
HGHGHGGHH 432
Como a solução é mais complicada, utiliza-se o matlab para resolver o
problema,
clear all;close all;clc % definindo matriz G G=[-2 1 0 0 0 0 -2 1 0 0 0 0 -2 0 0 0 0 0 -5 1 0 0 0 0 -5] % definindo matriz H

80
H=[0 1;0 0;3 0;0 0;2 1] % Construindo matriz de Controlabilidade CO=ctrb(G,H) rank(CO)
Como o posto = 5, que é a dimensão da matriz G, então o sistema é de estado
completamente controlável.
Sistema 4:
)k(u
)k(u
00
12
00
03
10
)1k(x
)1k(x
)1k(x
)1k(x
)1k(x
50000
15000
00200
00120
00012
)1k(x
)1k(x
)1k(x
)1k(x
)1k(x
2
1
5
4
3
2
1
5
4
3
2
1
Solução: Construindo a matriz de controlabilidade,
HGHGHGGHH 432
Como a solução é mais complicada, utiliza-se o matlab para resolver o
problema,
clear all;close all;clc % definindo matriz G G=[-2 1 0 0 0 0 -2 1 0 0 0 0 -2 0 0 0 0 0 -5 1 0 0 0 0 -5] % definindo matriz H H=[0 1;3 0;0 0;2 1;0 0] % Construindo matriz de Controlabilidade CO=ctrb(G,H) rank(CO)
Como o posto = 3 que é menor que a dimensão da matriz G, então o sistema não
é de estado completamente controlável.
6.3 Controlabilidade de saída
Em muitas implementações práticas de sistemas de controle, é desejável
controlar a saída do sistema e não necessariamente todos os estados do sistema. Neste
caso, deve ser lembrado que a resposta do sistema é dada por,
)T)1k((CHu)T(HuCG)0(xCG
)kT(Du)j(HuG)0(xGC)kT(y
1kk
1k
0j
1jkk
k = 1, 2, 3 ... (6.3)
Esta solução pode ser rearranjada para os primeiros n instantes de tempo como,

81
)0(u
)2n(u
)1n(u
HCGCGHCH)0(xCG)n(y 1nn
Significando que para a saída ser completamente controlável, o posto da matriz
precisa ser m, que é a dimensão da matriz C, isto é,
mHCGCGHCHposto 1n (6.4)
Caso esteja presente a matriz D, a condição de controlabilidade completa de
saída é dada por,
mHCGCGHCHDposto 1n (6.5)
Dever ser notado que a controlabilidade de saída é dependente de todas as
matrizes que compõe o sistema, isto é, a controlabilidade de saída é dependente das
matrizes G, H, C e D.
6.4 Observabilidade
Um sistema é dito completamente observável se todo estado inicial x(0) pode
ser determinado a partir da observação da saída y(kT) em um período finito de tempo.
Observabilidade completa significa que, dado y(0), y(T), y(2T), ..., é possível
determinar x1(0), x2(0), ..., xn(0). Utilizando esta definição, então dado um sistema na
forma,
)k(Cx)k(y
)k(Hu)k(Gx)1k(x
Sua resposta é dada por,
1k
0j
1jkk )j(HuG)0(xGC)kT(y k = 1, 2, 3 ... (6.6)
Fazendo a resposta para os n primeiros instantes de tempo,
)0(xCG)1n(y
)0(CGx)1(y
)0(Cx)0(y
1n
)0(x
CG
CG
C
)1n(y
)1(y
)0(y
1n
Consequentemente, com os primeiros n instantes de tempo, deve ser possível
determinar os estados iniciais x1(0), x2(0), ..., xn(0). Note que y(kT) é um vetor de
dimensão m1, portanto a simulação acima possui nm equações todas envolvendo os
estados iniciais. Para obter um conjunto único de estados iniciais, deve necessariamente
existir n equações lineares independentes, isso significa necessariamente que a matriz
nmn,
n
CG
CG
C
posto
1n
(6.7)
Esta matriz é conhecida como matriz de observabilidade. Normalmente, esta
equação não é usada, mas a equação transposta dela dada por,

82
nCGCGCpostoH1nHH
onde H representa a hermitiana, que é o conjugado transposto. Observe que a
observabilidade é independente da matriz de entrada B.
Exemplo 6.2: Considerando os sistemas abaixo, verificar a observabilidade.
Sistema 1:
)k(x
)k(x51)k(y
)k(x
)k(x
20
01
)1k(x
)1k(x
2
1
2
1
2
1
Encontrando a matriz de observabilidade,
10
1
5
1
5
1
20
01
5
1CGC HHH
Como se observa, a matriz de observabilidade tem posto 2 que é a mesma ordem
da matriz G, então o sistema é completamente observável.
Sistema 2:
)k(x
)k(x10)k(y
)k(x
)k(x
20
01
)1k(x
)1k(x
2
1
2
1
2
1
Encontrando a matriz de observabilidade,
2
0
1
0
1
0
20
01
1
0CGC HHH
Como se observa, a matriz de observabilidade tem posto 1 que é menor que
ordem da matriz G, então o sistema não é completamente observável.
Sistema 3:
)k(x
)k(x
)k(x
)k(x
)k(x
01110
10111
)k(y
)k(y
)k(x
)k(x
)k(x
)k(x
)k(x
30000
13000
00200
00120
00012
)1k(x
)1k(x
)1k(x
)1k(x
)1k(x
5
4
3
2
1
2
1
5
4
3
2
1
5
4
3
2
1
Como o sistema definido acima é um sistema de alta ordem, difícil de ser feito,
utiliza-se o Matlab,

83
clear all;close all;clc % definindo matriz G G=[-2 1 0 0 0 0 -2 1 0 0 0 0 -2 0 0 0 0 0 -3 1 0 0 0 0 -3] % definindo matriz C C=[1 1 1 0 1 0 1 1 1 0] % Construindo matriz de Controlabilidade OB=obsv(G,C) rank(OB)
Como o posto da matriz de observabilidade é 5 que é a mesma dimensão da
matriz G, então o sistema é completamente observável.
Sistema 4:
)k(x
)k(x
)k(x
)k(x
)k(x
00110
10111
)k(y
)k(y
)k(x
)k(x
)k(x
)k(x
)k(x
30000
13000
00200
00120
00012
)1k(x
)1k(x
)1k(x
)1k(x
)1k(x
5
4
3
2
1
2
1
5
4
3
2
1
5
4
3
2
1
Como o sistema definido acima é um sistema de alta ordem, difícil de ser feito,
utiliza-se o Matlab,
clear all;close all;clc % definindo matriz G G=[-2 1 0 0 0 0 -2 1 0 0 0 0 -2 0 0 0 0 0 -3 1 0 0 0 0 -3] % definindo matriz C C=[1 1 1 0 1 0 1 1 0 0] % Construindo matriz de Controlabilidade OB=obsv(G,C) rank(OB)

84
Como o posto da matriz de observabilidade é 4 que é menor que a dimensão da
matriz G, então o sistema não é completamente observável.
6.5 Comentários gerais sobre controlabilidade e observabilidade
Nesta parte, será feito alguns comentários sobre a controlabilidade e
observabilidade de sistemas em tempo discreto.
6.5.1 Princípio da dualidade
Como a transformação para espaço de estados não é única, então há uma
transformação de uma forma para outra, a qual será útil quando se deseja obter uma
forma canônica de estado.
Supondo um sistema na forma,
)k(Du)k(Cx)k(y
)k(Hu)k(Gx)1k(x
Para transformá-lo na forma canônica controlável, aplica-se uma matriz de
transformação T na forma,
MWT e )k(xT)k(x
onde M é a matriz de controlabilidade dada por,
HGGHHM 1n
e a matriz W é dada por,
0001
001a
01aa
1aaa
W
1
3n2n
12n1n
Aplicando esta transformação no sistema, encontra-se,
)k(Du)k(xCT)k(y
)k(HuT)k(xGTT)1k(x 11
onde o sistema definido acima está na forma canônica controlável.
Para transformá-lo na forma canônica observável, aplica-se,
1HWNQ
e )k(xQ)k(x
onde N é a matriz de observabilidade dada por,
H1nHHHH HGCGCN
Aplicando esta transformação no sistema, encontra-se,
)k(Du)k(xCQ)k(y
)k(HuQ)k(xGQQ)1k(x 11
Interessante notar que se o sistema está na forma canônica controlável dada por,

85
)k(uD)k(xC)k(y
)k(uH)k(xG)1k(x
(6.8)
Para se obter a forma canônica observável, basta fazer,
)k(uD)k(xH)k(y
)k(uC)k(xG)1k(x
H
H
(6.9)
Esta equação demostra o princípio da dualidade
6.5.2 Condições de controlabilidade e observabilidade em termos de Funções de Transferência
Em se tratando de funções de transferência, não deve haver cancelamentos entre
pólos e zeros das plantas, isso significará que este estado será não observável e não
controlável. Este tipo de situação pode ocorrer em sistemas em série, onde os zeros de
uma planta são os pólos da outra. Como em alguns casos o desejável é realizar o
controle entre as duas, isso não será possível.
Exemplo 6.3: Verificar a controlabilidade e observabilidade do sistema abaixo.
16.0zz
2.0z
)z(U
)z(Y2
Escrevendo na forma canônica observável,
)k(x
)k(x10)k(y
)k(u1
2.0
)k(x
)k(x
11
16.00
)1k(x
)1k(x
2
1
2
1
2
1
Verificando a controlabilidade,
8.01
16.02.0
1
2.0
11
16.00
1
2.0GHH
Verificando que o sistema não é completamente controlável. Agora, verificando
a observabilidade,
11
10
1
0
116.0
10
1
0CGC HHH
Verificando que o sistema é completamente observável.
Agora fazendo os mesmos testes só que escrevendo na forma controlável,
)k(x
)k(x12.0)k(y
)k(u1
0
)k(x
)k(x
116.0
10
)1k(x
)1k(x
2
1
2
1
2
1
Verificando a controlabilidade,
11
10
1
0
116.0
10
1
0GHH

86
Verificando que o sistema é completamente controlável Agora, verificando a
observabilidade,
2.01
16.02.0
1
2.0
11
16.00
1
2.0CGC HHH
Verificando que o sistema não é completamente observável.
A explicação provém do seguinte fato, fatorando o denominado da FT,
2.0z8.0z
2.0z
16.0zz
2.0z
)z(U
)z(Y2
Neste caso, verifica-se que há um zero cancelando um pólo. Outro fato a ser
notado neste exemplo é o princípio da dualidade. Como o sistema escrito na forma de
estado não é única, o cancelamento de pólos e zeros acarreta hora em quebra da
controlabilidade hora em quebra da observabilidade. Isto irá depender da forma como o
sistema está escrito.
Exemplo 6.4: Verificar que o sistema não é observável,
)k(x
)k(x
)k(x
154)k(y
)k(u
1
0
0
)k(x
)k(x
)k(x
6116
100
010
)1k(x
)1k(x
)1k(x
3
2
1
3
2
1
3
2
1
Para a observabilidade,
111
575
664
1
5
4
2561
60110
3660
1
5
4
610
1101
600
1
5
4
CGCGC HH2HHH
Cujo determinante é zero, mostrando que o posto da matriz de observabilidade é
menor que a dimensão da matriz G assim, o sistema não é completamente observável.
Porém, o sistema é controlável. Agora escrevendo o seu opositor, isto é, transpondo as
matrizes,
)k(x
)k(x
)k(x
100)k(y
)k(u
1
5
4
)k(x
)k(x
)k(x
610
1101
610
)1k(x
)1k(x
)1k(x
3
2
1
3
2
1
3
2
1
O sistema será observável, mas não controlável. De novo a presença do principio
da dualidade. Este fato provém do cancelamento entre um pólo por um zero, observe
que a FT é dada por,
3z2z1z
4z1z
6z11z6z
4z5zHGzIC
)z(U
)z(Y23
21
Observando que um pólo é cancelado por um zero.

87
6.5.3 Efeito da discretização
Quando um sistema sofre uma discretização, isto é, quando um sistema é
passado de tempo contínuo para tempo discreto, dependendo da taxa de amostragem T
empregada, poderá haver cancelamento entre pólos e zeros. Para exemplificar,
considera-se o sistema abaixo,
)t(x
)t(x01)t(y
)t(u1
0
)t(x
)t(x
01
10
)t(x
)t(x
2
1
2
1
2
1
Cujas matrizes de controlabilidade e observabilidade em tempo contínuo são
dadas por,
01
10ABB e
10
01CAC HHH
Significando que para tempo contínuo o sistema é completamente controlável e
observável. Aplicando a discretização, encontra-se,
)k(x
)k(x01)k(y
)k(uTsin
Tcos1
)k(x
)k(x
TcosTsin
TsinTcos
)1k(x
)1k(x
2
1
2
1
2
1
A questão será, há algum valor de T para qual o sistema perderá controlabilidade
e observabilidade? Para responder a esta questão, faz-se,
TsinTcos2TsinTsin
Tcos21TcosTcos1GHH
2
Para que não tenha controlabilidade, faz-se o determinante igual a zero,
chegando a,
0Tcos1Tsin2
Significando que para T = n a matriz de controlabilidade será de posto menor
que a dimensão da matriz G, mostrando que o sistema será de estado não
completamente controlável.
O mesmo fato pode ser verificado através da matriz de observabilidade,
Tsin0
Tcos1CGC HHH
Fisicamente, o que ocorreu foi que se pretende observar e controlar uma
freqüência que é exatamente igual à Nyquist, por isso não foi possível controlá-la.
6.6 Exercícios Resolvidos
Exemplo 6.5: Verificar para que valores de a, b, c e d o sistema é completamente
controlável e observável.

88
)k(x
)k(xdc)k(y
)k(ub
a
)k(x
)k(x
3.14.0
10
)1k(x
)1k(x
2
1
2
1
2
1
Solução: a matriz de controlabilidade,
b3.1a4.0b
ba
b
a
3.14.0
10
b
aGHH
Calculando o determinante e, para que o sistema seje completamente
controlável, o determinante deve ser diferene de zero, então,
0bab3.1a4.0 22
Para a matriz de observabilidade,
d3.1cd4.0
dc
3.14.0
10dc
dc
CG
C
Portanto,
0d4.0cb3.1c 22
Como os valores de a, b, c e d não podem ser valores complexos, tem-se a
resposta como,
6.7 Exercícios Propostos
Exercício 6.1: Para a FT abaixo, escrever a representação em matrizes de estado na
forma canônica controlável, observável e diagonal utilizando as transformações.
3s2ss
1s)s(G
para T = 0.1 s;
Exercício 6.2: Determinar para quais valores de a o sistema é completamente
observável e controlável.

89
a) 1zazz
1z)z(G
23
b) 1z3z
1az)z(G
2
c) 1z3z
1z2az)z(G
2
2

90
Capítulo 7
7 Projeto de Controladores via Alocação de Pólos
7.1 Introdução
A alocação de pólos é uma técnica parecida com a técnica do lugar das raízes, a
qual consiste em realizar uma realimentação de saída para realocar ou ajustar os pólos
de malha fechada. Porém a técnica do lugar das raízes é baseada na alocação apenas dos
pólos dominantes do sistema em malha fechada, que são os pólos com a menor parte
real possível. Já a técnica de alocação de pólos posiciona todos os pólos do sistema em
malha fechada através de uma realimentação de estado.
Como será feita uma realimentação de estado, considera-se que os estados estão
disponíveis, caso não estejam, eles necessitam ser estimados através de um estimador de
estado que será visto mais adiante, além disso, o sistema é de estado completamente
controlável.
Sendo assim, dado o sistema na forma,
)k(Du)k(Cx)k(y
)k(Hu)k(Gx)1k(x
A realimentação de estado será dada por4, para um regulador,
)k(Kx)k(u (7.1)
onde K representa um vetor de ganhos de realimentação se u(k) for uma única lei de
controle, caso haja várias leis de controle, K será uma matriz.
Figura 7.1: Diagrama de blocos de um sistema de controle por realimentação de estado
para um regulador.
Assim, o sistema em malha fechada é dado por,
)k(Du)k(Cx)k(y
)k(xHKG)k(HKx)k(Gx)k(Hu)k(Gx)1k(x
Portando, a dinâmica do sistema realimentado será dada por,
HKGG~
(7.2)
4 Se a referência a ser seguida é zero, o sistema de controle é denominado de regulador, caso contrário, o
sistema de controle é denominado controlador.

91
Portanto, deve-se especificar os pólos do sistema de malha fechada através dos
pólos de G-HK da seguinte forma,
n21 pzpzpzG~
zIdet (7.3)
Para encontrar os valores do vetor ou matriz de ganho K deve-se resolver esta
equação. Porém, ela pode ser complicada dependendo da ordem do sistema, para isso
criou-se a fórmula abaixo.
7.2 Fórmula de Ackermann
Esta fórmula permite encontrar o ganho do controlador de realimentação de
estado facilmente. Para a sua dedução inicia-se expandindo a equação característica de
malha fechada,
0z
zzzz
pzpzpzHKGzIdet
n1n
2n
2
1n
1
n
n21
(7.4)
Utilizando o teorema de Cayley-Hamilton que diz que G~
deve satisfazer sua
própria equação característica, isto é, substituindo G~
no lado direito no lugar de z,
0G~
IG~
G~
G~
G~
n1n
2n
2
1n
1
n
Agora fazendo as multiplicações para G~
,
1n1nnnn
223
23
223
2233
22
2222
G~
HKHKGGHKGG~
G~
HKG~
GHKHKGG
HKGG~
HKHKGGHKHKGG
HKG~
HKGG~
HKHKGGHKGHKGG
HKGG~
HKGHKGHKGHKGHKGG~
G~
HKGHKGHKGHKGHKG
HKHKGGHKGHKGG~
HKGG~
II
Então, a equação pode ser reescrita como,
1n1nn
2
2n1nn
n2
2n1nn
G~
HKHKGG
G~
HKGHKGHKGIG~
G~
G~
I
Expandindo os termos e rearranjando na forma,
1n1n
2n1n
n2
2n1nn
n2
2n1nn
G~
HKHKGG~
HKGHKHK
GGGIG~
G~
G~
I
Observando que do lado esquerdo é G~
e a primeira linha do lado direito é
(G),
1n1n
2n1n G~
HKHKGG~
HKGHKHKGG~
Que pode ser escrito como,

92
0
K
G~
KG~
KK
G~
KG~
KK
HGGHHGG~
2n
3n2n
1n
2n1n
1n
Observa-se que a matriz HGGHH 1n é a matriz de controlabilidade,
rearranjnado na forma,
GHGGHH
K
G~
KG~
KK
G~
KG~
KK
11n2n
3n2n
1n
2n1n
Observando que sobrou apenas o ganho do controlador K na n-ésima linha, e ele
pode ser extraído multiplicando ambos os lados por um vetor composto por [0 0 0 1],
assim,
GHGGHH100
K
G~
KG~
KK
G~
KG~
KK
100
11n
2n
3n2n
1n
2n1n
Então, tem-se que,
GHGGHH100K11n (7.5)
Esta é a Fórmula de Ackermann para a determinação do ganho de realimentação
de estado.
7.3 Formas alternativas para o ganho K
A fórmula de Ackermann é uma excelente alternativa para o cálculo do ganho K
por ser de fácil implementação computacional, contudo existem alternativas à sua
utilização, como se verá a seguir.
1. Comparação direta: Este método consiste em substituir diretamente os
coeficientes do ganho K dentro da equação característica,
0zzzz
pzpzpzHKGzI
n1n
2n
2
1n
1
n
n21
Porém, só é de fácil aplicação quando a ordem do sistema é baixa.
2. Outra forma do cálculo do ganho K é através de,
1
111n1nnn
1
111n1nnn
MWaaa
TaaaK
onde,

93
HGGHHM 1n e
0001
001a
01aa
1aaa
W
1
3n2n
12n1n
Quando este modo for aplicado, se o sistema estiver na forma canônica
controlável, a matriz transformação T torna-se a identidade, facilitando a aplicação do
método.
3. Se os pólos desejados pi para o sistema em malha fechada forem distintos,
pode-se aplicar a seguinte relação diretamente,
1
n21111K
onde,
HpGi
ii
com i = 1 ... n
Se a resposta desejada for “dead beat”, significando que pi = 0, então,
HG i
i
com i = 1 ... n
Exemplo 7.1: Considerando o sistema abaixo,
)k(u1
0
)k(x
)k(x
116.0
10
)1k(x
)1k(x
2
1
2
1
Cujos pólos do sistema são,
8.0z
2.0z016.0zz
1z16.0
1zGzI
1
12
Deseja-se que os pólos de malha fechada sejam,
5.0j5.0z 2,1
Solução: O primeiro passo é verificar se o sistema é de estado completamente
controlável. Então, a matriz de controlabilidade é,
11
10
1
0
116.0
10
1
0GHH
Significando que o sistema é de estado completamente controlável. Aplicando a
definição, isto é, resolvendo a seguinte equação,
12
2
21
21
K16.0zK1zK1zK16.0
1z
KK1
0
116.0
10
z0
0zHKGzI
Como a equação característica do sistema em malha fechda precisa ser igual ao
polinômio com os novos pólos, que é dado por,
5.0zz5.0j5.0z5.0j5.0zz 2
Por comparação,
234.0KKK 21
Agora aplicando a fórmula de Ackermann para encontrar o ganho da
realimentação de estado,

94
GGHH10K1
Para (z), que é o novo polinômio característico,
5.0zz5.0j5.0z5.0j5.0zz 2
Portanto,
234.010
015.0
116.0
10
116.0
10
11
1010K
21
Solução utilizando o Matlab, clear all;close all;clc % Matrizes do sistema G=[0 1;-0.16 -1] H=[0;1] % Vetor dos novos polos im=sqrt(-1); P=[0.5+im*0.5 0.5-im*0.5] % Utilizando Fórnula de Ackermann K=acker(G,H,P) % Forma alternativa K=place(G,H,P)
Root Locus
Real Axis
Imagin
ary
Axis
-1 -0.8 -0.6 -0.4 -0.2 0 0.2 0.4 0.6 0.8 1-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
0.1/T
0.2/T
0.3/T
0.4/T0.5/T
0.6/T
0.7/T
0.8/T
0.9/T
/T
0.1/T
0.2/T
0.3/T
0.4/T0.5/T
0.6/T
0.7/T
0.8/T
0.9/T
/T
0.1
0.2
0.3
0.40.50.60.70.8
0.9
System: Gma
Gain: 0
Pole: -0.2
Damping: 0.456
Overshoot (%): 20
Frequency (rad/sec): 3.53
System: Gma
Gain: 0
Pole: -0.8
Damping: 0.0709
Overshoot (%): 80
Frequency (rad/sec): 3.15
Root Locus
Real Axis
Imagin
ary
Axis
-1 -0.8 -0.6 -0.4 -0.2 0 0.2 0.4 0.6 0.8 1
-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
0.1/T
0.2/T
0.3/T
0.4/T0.5/T0.6/T
0.7/T
0.8/T
0.9/T
/T
0.1/T
0.2/T
0.3/T
0.4/T0.5/T
0.6/T
0.7/T
0.8/T
0.9/T
/T
0.1
0.2
0.30.40.50.60.70.8
0.9
System: Gmf
Gain: 0
Pole: 0.5 + 0.5i
Damping: 0.404
Overshoot (%): 25
Frequency (rad/sec): 0.858System: Gmf
Gain: 0
Pole: 0.5 - 0.5i
Damping: 0.404
Overshoot (%): 25
Frequency (rad/sec): 0.858
(a) Pólos originais (b) Pólos realocados
Figura 7.2: Lugar das raízes do sistema sem controle e controlado
7.4 Controle por Realimentação de Estado
Supondo o seguinte sistema,
)k(Du)k(Cx)k(y
)k(Hu)k(Gx)1k(x
Quando há uma referência a ser seguida, a lei de controle será dada por,
)k(Kx)k(rk)k(u 0 (7.6)
onde r(k) é uma referência a ser seguida e k0 é uma constante para ajustar a resposta
controlada do sistema para que não ocorra erro estacionário, isto significa que se a

95
referencia a ser seguida for o degrau unitário então a saída deverá ser tal que y()1.
Então, o ganho k0 precisa ser ajustado. Substituindo a lei de controle no sistema
encontra-se,
)k(Du)k(Cx)k(y
)k(rHk)k(xHKG)k(Kx)k(rkH)k(Gx)1k(x 00
Neste caso, a dinâmica do sistema é dada por G – HK, que é a mesma dinâmica
apresentada para um regulador. Desta forma, as mesmas fórmulas para calcular o ganho
K podem ser aplicadas.
Figura 7.3: Controle por realimentação de estado.
Exemplo 7.2: Dado o sistema baixo.
)k(x
)k(x01)k(y
)k(u1
0
)k(x
)k(x
116.0
10
)1k(x
)1k(x
2
1
2
1
2
1
E os pólos de malha fechada sejam,
5.0j5.0z 2,1
Solução: Para o ganho K,
234.010
015.0
116.0
10
116.0
10
11
1010K
21
Agora basta encontrar o ganho k0 para que o sistema em malha fechada não
apresente erro estacionário. Para isso, encontra-se a FT do sistema,
H~
G~
zIC)z(G)z(R
)z(Y 1
Onde, neste caso,
15.0
10232.0
1
0
116.0
10HKGG
~ e HkH
~0
Portanto,
5.0zz
k
1
0k
1z5.0
1z01H
~G~
zIC)z(G)z(U
)z(Y2
00
11
Para o erro estacionário5,
5 Deve ser lembrado que Y(z)=G(z)U(z), com R(z) sendo a entrada degrau unitário.

96
15.011
k
z1
1
5.0zz
kz1lim)z(Yz1lim)k(ylim 0
12
01
1z
1
1zk
Portanto,
5.0k 0
A solução utilizando o Matlab fica, clear all;close all;clc % Matrizes do sistema G=[0 1;-0.16 -1]; H=[0;1]; C=[1 0];D=0; T=1; % sistema em malha aberta empacotado Gma=ss(G,H,C,D,T) % Vetor dos novos polos im=sqrt(-1); P=[0.5+im*0.5 0.5-im*0.5] % Calculando ganho K K=acker(G,H,P) K=place(G,H,P) % sistema em malha fechada Gf=G-H*K; Hf=0.5*H; Gmf=ss(Gf,Hf,C,D,T) % cálculo da resposa ao degrau step(Gma,Gmf,30) legend('Gma','Gmf')
0 5 10 15 20 25 300
0.2
0.4
0.6
0.8
1
1.2
1.4
Step Response
Time (sec)
Am
plit
ude
Gma
Gmf

97
Figura 7.4:Resposta ao degrau unitário do sistema sem controle e malha fechada com o
controlador
7.5 Observadores de Estado
No início deste capítulo, foi apresentada a realimentação de estado, onde se
admitia que os estados do sistema estavam disponíveis. Porém, nem sempre isso é
possível, já que em muitas aplicações de sistemas de controle, mede-se apenas algumas
variáveis de saída, sendo assim, nem todos os estados estão disponíveis para serem
utilizados na realimentação de estados.
Neste caso, deve-se criar um estimador de estado que pode ser de ordem
completa, em que todos os estados são estimados, ou de ordem mínima, em que apenas
os estados não medidos são estimados, ou de ordem reduzida, em que os estados não
medidos e alguns dos estados medidos são estimados.
Os estados do sistema serão estimados com base nas entradas e nas saídas
disponíveis do sistema, isto é, através da entrada u(k) e da saída y(k). Será “projetado”
um novo sistema tal que os estados deste novo sistema sejam os estados do sistema a ser
controlado, ver Figura 7.5, onde )k(x~ representa a estimativa dos estados da planta
original. Como é previsto que será utilizada a saída do sistema, dever ser notado que a
condição de observabilidade deve ser obedecida.
Figura 7.5: Sistema de controle por realimentação de estados junto com observador de
estado.
7.5.1 Observadores de Estado de Ordem Completa
Então, considerando um sistema, cujos estados x(k) não podem ser medidos,
dado por,
)k(Cx)k(y
)k(Hu)k(Gx)1k(x
Supondo que os estados do sistema acima podem ser aproximados pelos estados
do seguinte sistema,
)k(x~C)k(y~
)k(Hu)k(x~G)1k(x~
(7.7)
onde as matrizes G, H, C e D são as mesmas matrizes de estado do sistema cujos
estados não podem ser medidos. Na prática, estas matrizes precisam ser estimadas,

98
assunto que não será abordado aqui. Além disso, tem-se que a resposta dos dois
sistemas deve ser a mesma, isto significa que a diferença das respostas deve tender a
zero com o passar das iterações, isto é,
0)k(y~)k(ylimk
Uma forma de fazer com que isso ocorra é pela introdução de um sistema de
controle, pois se as entradas e as saídas forem iguais e as matrizes de estado são as
mesmas, isso significa que os estados são os mesmos, então o sistema utilizado para a
estimação de estados deve ser dado por,
)k(x~C)k(y~)k(y~)k(yK)k(Hu)k(x~G)1k(x~ e
(7.8)
onde Ke é um controlador introduzido para garantir que os dois sistemas se comportem
da mesma forma.
Figura 7.6: Sistema de controle por realimentação de estados junto com observadores de
estado completo.
O sistema do estimador de estado completo pode ser reescrito substituindo
)k(x~C)k(y~ ,
)k(x~C)k(y~)k(yK)k(Hu)k(x~CKG)1k(x~ ee
(7.9)
Observe que a matriz do sistema é dada por (G-KeC) e para um sistema de
controle por realimentação de estado é dada por (G-HK). Então, do princípio da
dualidade entre a forma canônica controlável e observável, o vetor de ganho Ke do
observador de estado pode ser encontrado da mesma forma que o vetor de ganho K,
pois,
0zzzz
pzpzpzHKGzI
n1n
2n
2
1n
1
n
n21
Agora, a expressão torna-se,

99
0zzzz
pzpzpzCKGzI
n1n
2n
2
1n
1
n
n21
HH
e
H
Significando que o ganho de estado era dado por, utilizando a fórmula de
Ackermann,
GHGGHH100K11n
Então, o ganho do estimador de estado pode ser dado por,
1
0
0
CG
CG
C
GK
1
1n
e
(7.10)
Deve-se notar que a fórmula para o cálculo do vetor de ganho do observador de
estado depende da inversa da matriz de observabilidade.
Exemplo 7.3: Supondo o sistema,
)k(x
)k(x10)k(y
)k(u1
0
)k(x
)k(x
11
16.00
)1k(x
)1k(x
2
1
2
1
2
1
Projetar um observador de estado completo para que o estimador de estado tenha
pólos em,
5.0j5.0z 2,1
Solução: O polinômio característico para o observador,
5.0zz5.0j5.0z5.0j5.0zz 2
E o ganho do observador,
2
34.0
1
0
11
10
34.22
32.034.0
1
0
11
16.0010
10
10
015.0
11
16.00
11
16.00
1
0
CG
CGK
1
12
1
e
Para se utilizar o comando “acker” ou “place” do Matlab, deve ser lembrado que
o que está sendo calculado está conjugado transposto, então,
clear all;clc;close all % Matrizes do sistema G=[0 -0.16;1 -1] C=[0 1] % Vetor dos novos polos im=sqrt(-1); P=[0.5+im*0.5 0.5-im*0.5]

100
% utilizando acker Gt=G'; Ct=C'; K=acker(Gt,Ct,P); Ke=K'
7.5.2 Comentários sobre estimador de estado
Definindo que o erro da estimativa de estado seja,
)k(x~)k(x)k(e (7.11)
Agora subtraindo ambos os sistemas,
)k(x~)k(xCKG
)k(CxK)k(x~CK)k(x~)k(xG
)k(yK)k(Hu)k(x~CKG)k(Hu)k(Gx)1k(x~)1k(x
e
ee
ee
Portanto,
)k(eCKG)1k(e e (7.12)
Significando que o comportamento do erro do estimador vai depender da
posição dos pólos da equação característica G-KeC. Normalmente, os pólos do
observador devem ser escolhidos de 2 a 5 vezes mais rápido que os pólos da planta a ser
estimada, isto é, com uma freqüência de 2 a 5 vezes maior. Porém, em aplicações
práticas, se a resposta da planta for contaminada com ruído, deve utilizar uma
estimativa mais lenta.
Exemplo 7.4: Supondo o sistema,
)k(x
)k(x
)k(x
010)k(y
)k(u
1
0
0
)k(x
)k(x
)k(x
1.12.05.0
100
010
)1k(x
)1k(x
)1k(x
3
2
1
3
2
1
3
2
1
Projetar um controlador de estado e um observador de estado para a resposta ao
degrau unitário supondo,
Raízes do controlador: 0.5±j0.5 e 0.5 25.0zz5.1zP 23
Raízes do observador: 0.3±j0.5 e 0.3 102.0z52.0z9.0zP 23
Solução: Observe que as raízes da planta são dadas por,
6.0j8.0z
5.0z05.0z2.0z1.1z
0
1.1z2.05.0
1z0
01z
0GzI
2,1
123
Que podem ser melhor compreendidas através da passagem para tempo
contínuo,

101
zlnT
1sez Ts
Portanto, assumindo T = 1 s, as raízes em tempo contínuo são dadas por,
6435.0js
1416.3j6931.0s
4,3
2,1
Portanto o par complexo representa um pólo marginalmente estável, já a nova
posição, 0.5±j0.5 e 0.5 representa,
7854.0j3466.0s5.0j5.0z
6931.0s5.0z
3,23,2
11
Iniciando pela verificação da controlabilidade e observabilidade do sistema,
Controlabilidade:
01.11.11
1.110
100
HGGHH 2
Observabilidade:
1.110
2.001
5.000
CGCGC HH2HHH
Portanto, o sistema é de estado completamente controlável e observável.
Root Locus
Real Axis
Imagin
ary
Axis
-1 -0.8 -0.6 -0.4 -0.2 0 0.2 0.4 0.6 0.8 1
-1
-0.5
0
0.5
1
0.1/T
0.2/T
0.3/T
0.4/T0.5/T
0.6/T
0.7/T
0.8/T
0.9/T
/T
0.1/T
0.2/T
0.3/T
0.4/T0.5/T
0.6/T
0.7/T
0.8/T
0.9/T
/T
0.10.2
0.30.40.50.60.70.80.9
System: Gpp
Gain: 0
Pole: 0.5 + 0.5i
Damping: 0.404
Overshoot (%): 25
Frequency (rad/sec): 0.858
System: Gpp
Gain: 0
Pole: 0.5 - 0.5i
Damping: 0.404
Overshoot (%): 25
Frequency (rad/sec): 0.858
System: Gpp
Gain: 0
Pole: 0.5
Damping: 1
Overshoot (%): 0
Frequency (rad/sec): 0.693
Root Locus
Real Axis
Imagin
ary
Axis
-1 -0.8 -0.6 -0.4 -0.2 0 0.2 0.4 0.6 0.8 1-1.5
-1
-0.5
0
0.5
1
1.5
0.1/T
0.2/T
0.3/T
0.4/T0.5/T0.6/T
0.7/T
0.8/T
0.9/T
/T
0.1/T
0.2/T
0.3/T
0.4/T0.5/T0.6/T
0.7/T
0.8/T
0.9/T
/T
0.10.2
0.30.40.50.60.70.80.9
System: Gpp
Gain: 0
Pole: 0.3 - 0.5i
Damping: 0.464
Overshoot (%): 19.3
Frequency (rad/sec): 1.16
System: Gpp
Gain: 0
Pole: 0.3 + 0.5i
Damping: 0.464
Overshoot (%): 19.3
Frequency (rad/sec): 1.16
System: Gpp
Gain: 0
Pole: 0.3
Damping: 1
Overshoot (%): 0
Frequency (rad/sec): 1.2
Figura 7.7: Justificativa para as alocações dos pólos do controlador e observador
Projeto do Controlador,
4.08.075.0)G(HGGHH100K12
Projeto do Observador,
54.0
2.0
204.1
1
0
0
CG
CG
C
GK
1
2
e
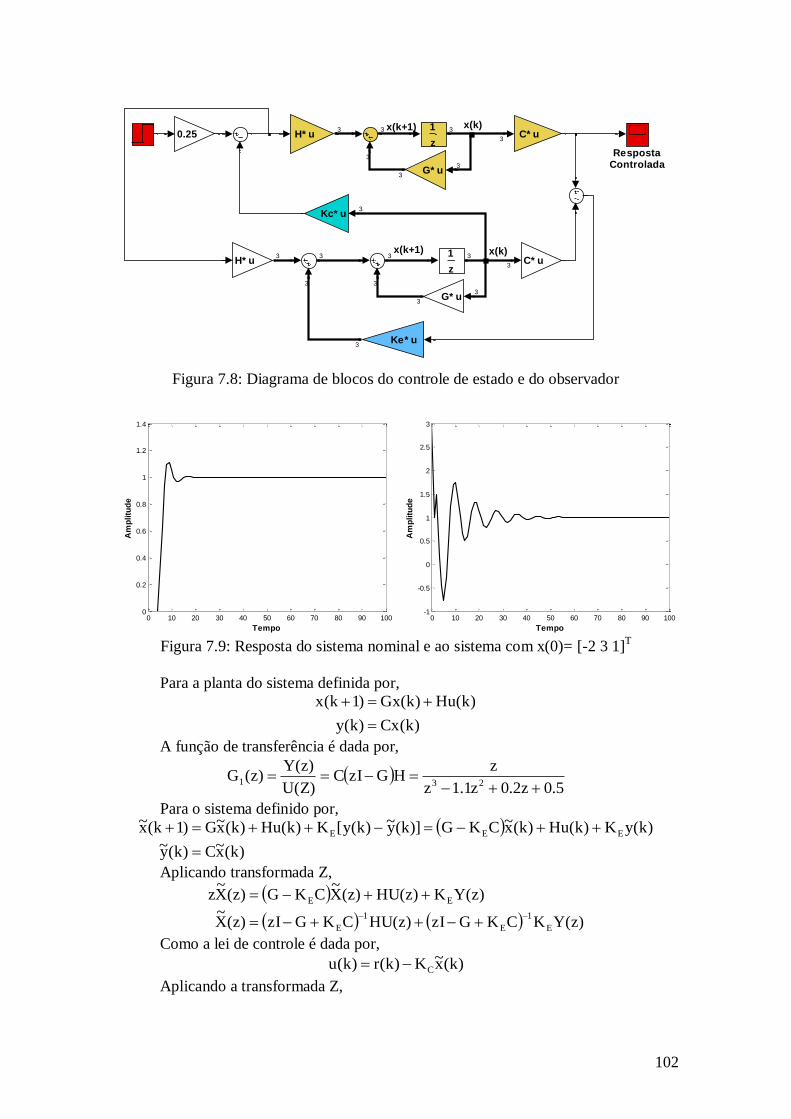
102
x(k+1) x(k)
x(k+1) x(k)
0.25z
1
RespostaControlada
Ke* u
Kc* u
H* u
H* u
G* u
G* u
z
1C* u
C* u3
3
3
3
3
33
3
3
3
3
3
3
333
3
3
Figura 7.8: Diagrama de blocos do controle de estado e do observador
0 10 20 30 40 50 60 70 80 90 1000
0.2
0.4
0.6
0.8
1
1.2
1.4
Am
plitu
de
Tempo 0 10 20 30 40 50 60 70 80 90 100
-1
-0.5
0
0.5
1
1.5
2
2.5
3
Am
plitu
de
Tempo Figura 7.9: Resposta do sistema nominal e ao sistema com x(0)= [-2 3 1]
T
Para a planta do sistema definida por,
)k(Cx)k(y
)k(Hu)k(Gx)1k(x
A função de transferência é dada por,
5.0z2.0z1.1z
zHGzIC
)Z(U
)z(Y)z(G
231
Para o sistema definido por,
)k(x~C)k(y~)k(yK)k(Hu)k(x~CKG)]k(y~)k(y[K)k(Hu)k(x~G)1k(x~ EEE
Aplicando transformada Z,
)z(YKCKGzI)z(HUCKGzI)z(X~
)z(YK)z(HU)z(X~
CKG)z(X~
z
E
1
E
1
E
EE
Como a lei de controle é dada por,
)k(x~K)k(r)k(u C
Aplicando a transformada Z,

103
)z(YKCKGzI)z(HUCKGzIKc)z(R
)z(X~
K)z(R)z(U
E
1
E
1
E
C
Definindo,
102.0z52.0z9.0z
8622.0z3561.1z959.0KCKGzIKcG
102.0z52.0z9.0z
153.0z72.0z4.0HCKGzIKcG
23
2
E
1
E3
23
21
E2
Então,
)z(Y
G1
G)z(R
G1
1)z(U)z(YG)z(UG)z(R)z(U
2
3
2
32
Através da equação acima, observa-se que o sistema em malha fechada pode ser
resumido a,
0.25
RespostaControlada
z
z -1.1z +0.2z+0.53 2
Planta
0.959z -1.356z+0.86222
z -1.3z +1.24z+0.0513 2
ControladorRealimentação
z -0.9z +0.52z-0.1023 2
z -1.3z +1.24z+0.0513 2
ControladorAvanço
Figura 7.10: Sistema em malha fechada
Substituindo em Y(z)=G1(z)U(z),
312
1
2
31
2
1
GGG1
G
)z(R
)z(Y)z(Y
G1
GG)z(R
G1
G)z(Y
Que substituindo os valores chega-se a,
25.0zz5.1z
z
)z(R
)z(Y23
Observe que houve cancelamento de pólos e zeros e no final, os pólos são os
pólos estipulados pela realimentação de estado.
Para o ajuste do ganho Ko para eliminar o erro estacionário,
25.0K125.015.11
K
z1
1
25.0zz5.1z
zkz1lim)z(Yz1lim)k(ylim
0
0
123
01
1z
1
1zk
7.5.3 Estimadores de Ordem Reduzida
Na prática, alguns estados do sistema são medidos, significando que nem todos
os estados devem ser estimados. Além disso, a medida do estado pode não ser precisa.
Nestes casos, utiliza-se observadores de ordem reduzida ou de ordem mínima.
Supondo n estados x(k) do sistema e a saída y(k) do sistema seja de ordem m.
Como a saída é uma combinação linear dos estados, correlacionado pela matriz C, então
o observador de ordem reduzida será de ordem n-m.
Escrevendo o vetor de estado em duas partes,

104
)k(x
)k(x)k(x
b
a (7.13)
onde xa(k) é a parte do vetor de estado que pode ser diretamente medida e de ordem m,
xb(k) a parte que precisa ser estimada e de ordem n-m. Então o sistema pode ser
reescrito como,
)k(x)k(y)k(x
)k(x0I)k(y
)k(uH
H
)k(x
)k(x
GG
GG
)1k(x
)1k(x
a
b
a
b
a
b
a
bbba
abaa
b
a
(7.14)
Desta forma, a equação de estado contendo a dinâmica dos estados que são
conhecidos é dada por,
)k(uH)k(xG)k(xG)1k(x ababaaaa (7.15)
Que pode ser rearranjada como,
)k(xG)k(uH)k(xG)1k(x babaaaaa (7.16)
A parte restante, que representa a dinâmica dos estados não medidos, é dada por,
)k(uH)k(xG)k(xG)1k(x bbbbabab (7.17)
Como a equação de estado para o observador de estado de ordem completa é
dada por,
)k(x~C)k(y~)k(Hu)k(x~G)1k(x~
Comparando com a equação de estado dos estados não medidos na seguinte
forma,
)k(uH)k(xG)k(xG)1k(x bababbbb (7.18)
E a saída do observador de estado completo,
)k(x~C)k(y~
Comparando com,
)k(xG)k(uH)k(xG)1k(x babaaaaa (7.19)
O projeto do observador de ordem mínima ou de ordem reduzida pode ser
encontrado comparando a equação de estado do observador de ordem completada dada
por,
)k(x~C)k(y~
)k(Hu)k(x~G)1k(x~
(7.20)
Comparada com,
)k(uH)k(xG)k(xG)1k(x bababbbb (7.21)
)k(xG)k(uH)k(xG)1k(x babaaaaa (7.22)
Onde observa-se que,
Observador de ordem completa Observador de ordem mínima
)k(x~ )k(x~b
G Gbb
Hu(k) Gbaxa(k) + Hbu(k)

105
y(k) Xa(k+1) - Gaaxa(k) - Hau(k)
C Gab
Ke ordem n×m Ke ordem (n-m)×m
Utilizando a tabela acima, através do projeto do observador de ordem completa
que é dado por,
)k(yK)k(Hu)k(x~CKG)1k(x~ ee
O projeto do observador de ordem mínima ou de ordem reduzida é dado por,
)k(uH)k(xG)1k(xK
)k(uH)k(xG)k(x~GKG)1k(x~
aaaaae
babababebbb
Substituindo xa(k) = y(k), pois são os estados medidos,
)k(uH)k(yG)1k(yK
)k(uH)k(yG)k(x~GKG)1k(x~
aaae
bbababebbb
Rearranjando,
)k(uHKH)k(yGKG
)1k(yK)k(x~GKG)1k(x~
aebaaeba
ebabebbb
O problema em utilizar a equação acima está no fato de ter que medir y(k+1).
Então, uma forma mais conveniente de expressar a equação acima é fazendo,
)k(uHKH)k(yGKGKGKG
)k(yK)k(x~GKG
)k(uHKH)k(yGKG
)k(yKGKG)k(yK)k(x~GKG
)k(uHKH)k(yGKG)k(x~GKG)1k(yK)1k(x~
aebaaebaeabebb
ebabebb
aebaaeba
eabebbebabebb
aebaaebababebbeb
Definindo,
)k(~)k(xK)k(x~)k(yK)k(x~ aebeb
Pode-se escrever o sistema como,
)k(yGKGKGKG
)k(uHKH)k(GKG)1k(~
aaebaeabebb
aebabebb
A equação acima descreve a dinâmica do observador de estado de ordem
mínima ou ordem reduzida. O erro do observador pode ser definido como,
)k(x~)k(x)k(~)k()k(e bb
Que se torna,
)k(uH)k(xG)1k(xK
)k(uH)k(xG)k(x~GKG
)k(uH)k(xG)k(xG)1k(x~)1k(x
aaaaae
babababebb
bababbbbb
Rearranjando,
)k(uH)k(xG)1k(xK
)k(x~GK)k(x~)k(xG)1k(x~)1k(x
aaaaae
babebbbbbb
Substituindo a equação de xa(k+1),

106
)k(uH)k(xG)k(uH)k(xG)k(xGK
)k(x~GK)k(x~)k(xG)1k(x~)1k(x
aaaaababaaae
babebbbbbb
Que simplificando encontra-se,
)k(x)k(x~GK)k(x~)k(xG)1k(x~)1k(x bbabebbbbbb
Que se reduz a,
)k(eGKG)k(eGK)k(eG)1k(e abebbabebb
Portanto, a equação característica do erro do observador de ordem mínima ou de
ordem reduzida é dada por,
0GKGzI abebb
Assim, o projeto do observador de ordem reduzida é feito escolhendo os pólos
desejados para a equação acima, utilizando a fórmula de Ackerman, conforme,
1
0
0
GG
GG
G
GK
1
1n
bbab
bbab
ab
bbe
(7.23)
Sendo que n agora é a ordem da matriz Gbb.
Figura 7.11: Diagrama de blocos do controlador de estado e do observador de ordem
mínima ou de ordem reduzida
Exemplo 7.5: Supondo o seguinte sistema,
)k(Cx)k(y~)k(Hu)k(Gx)1k(x
Com,
10
2.01G ,
2.0
02.0H e 01C

107
Projetar um controlador de estado para que os pólos do sistema em malha
fechada sejam estabelecidos em
Z1,2 = 0.6 j0.4
Assumir que apenas o primeiro estado x1(k) pode ser medido. Projetar um
observador de ordem mínima para que o erro do observador seja do tipo “Dead-Beat”.
Determinar a Função de Transferência de realimentação do sistema de controle.
Solução: Iniciando pela verificação da observabilidade e controlabilidade do
sistema,
2.02.0
6.002.0
2.0
02.0
10
2.01
2.0
02.0GHH
2.00
11
0
1
12.0
01
0
1CGC TTT
Novo polinômio característico para a realimentação de estado,
52.0z2.1z4.0j6.0z4.0j6.0zz 2
Fórmula de Ackermann para a realimentação de estado,
2.38
10
0152.0
10
2.012.1
10
2.01
2.02.0
6.002.010
GGHH10K
21
1
Desta forma, a lei de controle é dada por,
)k(x~)k(y
2.38)k(x~)k(x
2.38)k(Kx)k(u22
1
Para encontrar o observador de ordem mínima, deve-se separar o sistema
segundo,
10
2.01
GG
GGG
bbba
abaa e
2.0
02.0
H
HH
b
a
Como o observador deve ter comportamento Dead-Beat, o polinômio
característico é dado por6,
0zz
Aplicando Ackermann para o ganho do observador de ordem mínima,
5)1()2.0)(1(1GGK 11
abbbe
A equação de estado do observador de ordem mínima,
)k(yGKGKGKG
)k(uHKH)k(GKG)1k(~
aaebaeabebb
aebabebb
Substituindo os valores,
)k(y5)k(u1.0
)k(y)1)(5(05)2.0)(5(1
)k(u)02.0)(5(2.0)k()2.0)(5(1)1k(~
Só está faltando os estados não estimados dado por,
6 O polinômio característico para dead beat deve ser da ordem a ser utilizada, como neste caso precisa-se
estimar apenas um estado, o polinômio característico é apenas z.

108
)k(~)k(y5)k(~)k(yK)k(x~ e2
E a equação da lei de controle,
)k(x~2.3)k(y8)k(u 2
Estas últimas três equações definem o sistema de controle. Combinando as duas
últimas,
)k(~2.3)k(y24
)k(~)k(y52.3)k(y8)k(u
Se esta equação é verdade,
)1k(~2.3)1k(y24)1k(u
Substituindo a equação do observador,
)k(y16)1k(y24)k(u32.0)1k(u
)k(y5)k(u1.02.3)1k(y24)1k(u
Para a função de transferência do controlador, aplica-se a transformada Z na
equação anterior,
)z(Y16)z(zY24)z(U32.0)z(zU
Chegando a,
32.0z
16z24
)z(Y
)z(U)z(GD
A função de transferência da planta,
1z2z
02.0z02.0
2.0
02.0
10
2.01
z0
0z01
DHGzIC)z(U
)z(Y)z(G
2
1
1
P
Step Scope
0.02z+0.02
z -2z+12
Planta
Ko
Gain
24z-16
z+0.32
Controlador
Figura 7.12: Diagrama de blocos do sistema em malha fechada
A equação característica do sistema em malha fechada, assumindo que a
resposta seja C(z) e a referência a ser seguida R(z), pode ser encontrada através do
diagrama de blocos, Figura 7.12, dada por,
z52.0z2.1z
0064.0z0264.0z02.0K
)z(G)z(G1
)z(GK
)z(R
)z(C23
2
o
DP
Po
Para que o sistema não tenha erro estacionário,

109
0606.6K132.0
0528.0K
z1
1
z52.0z2.1z
0064.0z0264.0z02.0Kz1lim)z(Cz1lim)k(clim
oo
123
2
o1
1z
1
1zk
Notar que a equação característica do sistema em malha fechada é dada por,
0z52.0z2.1z2
Representando os mesmos pólos escolhidos para o fechamento da malha.
Justificativa para a escolha dos pólos do controlador em z1,2 = 0.6 j0.4. Os
pólos originais são z1,2 = 1, que são pólos marginalmente estáveis, porém, passando os
pólos escolhidos para tempo contínuo encontra-se s1,2 = - 0.327 j0.588, representando
N = 0.6728 rad/s e fator de amortecimento = 0.486. Isto foi feito assumindo T = 1s.
7.6 Resumo da Metodologia para Projeto de Controladores
A metodologia a ser seguida será baseada na hipótese mais provável de ser
encontrada na prática, isto é, supõe-se que o sistema a ser controlado é um sistema em
tempo contínuo.
1. Estabelecer quais são os pólos do sistema a ser controlado;
a. Se Função de Transferência, os pólos são as raízes do denominador;
0)s(D)s(D
)s(N)s(G
b. Se Matrizes de Estado, os pólos são os autovalores da matriz de
estado,
)t(Du)t(Cx)t(y
)t(Bu)t(Ax)t(x
0AsI
c. Encontar os valores de amortecimento e freqüência natural dados na
forma, 2
nd2,1 1jnjns
2. Com base na maior freqüência presente no sistema, estabelecer o tempo de
amostragem e discretizar o sistema,
maxf
1
10
1a
6
1T
3. Verificar a Controlabilidade e Observabilidade, supondo que a ordem da
matriz G seja n,
a. Controlabilidade,
n)CO(postoHGGHHCO 1n
b. Observabilidade,

110
n)OB(posto
CG
CG
C
OB
1n
4. Escolher os novos pólos do sistema controlado supondo,
TsezzlnT
1s
5. Calcular o vetor de realimentação de estado,
a. Novo polinômio característico, com zn os sendo os novos pólos
desejados dados por,
n1n
2n
2
1n
1
n
n21
zzzz
zzzzzzz
b. Vetor de realimentação,
GHGGHH100K11n
c
c. Ajustar o ganho estático Ko para que não ocorra erro estacionário da
resposta controlada se necessário.
6. Projeto do vetor de controle do estimador de ordem completa,
a. Equação do observador,
)k(x~C)k(y~)k(y~)k(yK)k(Hu)k(x~G)1k(x~ e
b. Projeto do vetor de ganho,
1
0
0
CG
CG
C
GK
1
1n
e
c. Escrever a lei de controle supondo,
i. Regulador: )k(x~K)k(u c
ii. Controlador: )k(rK)k(x~K)k(u 0c
7. Projetar o vetor de realimentação do estimador de ordem reduzida fazendo,
a. Reescrevendo a planta na forma,
)k(x)k(y)k(x
)k(x0I)k(y
)k(uH
H
)k(x
)k(x
GG
GG
)1k(x
)1k(x
a
b
a
b
a
b
a
bbba
abaa
b
a
b. Projetando o vetor de ganho na forma, com n sendo a ordem de Gbb,

111
1
0
0
GG
GG
G
GK
1
1n
bbab
bbab
ab
bbe
c. Escrever a equação do observador de ordem reduzida na forma,
)k(yGKGKGKG
)k(uHKH)k(GKG)1k(~
aaebaeabebb
aebabebb
d. Escrever a equação dos estados estimados na forma,
)k(xK)k(~)k(x~ aeb
e. Escrever a lei de controle supondo,
i. Regulador:
)k(x~
)k(yK)k(u
b
c
ii. Controlador: )k(rK)k(x~
)k(yK)k(u 0
b
c
8. Escrever o sistema final na forma sistema-controlador-observador e verificar
a resposta controlada.
7.7 Exercícios Resolvidos
Exemplo 7.6: Para o sistema abaixo, projetar um controle por realimentação de estado
em tempo discreto para o sistema abaixo,
100s2s
50)s(G
2
Sabendo-se que o desejado para o sistema acima seria que o seu fator de
amortecimento fosse 2/2 e sua freqüência natural fosse 20 rad/s.
Solução: Passando o sistema para tempo discreto, precisa-se saber qual a freqüência
natural do sistema, por análise simples, verifica-se que ela é de 10 rad/s, portanto a
maior freqüência será de 20 rad/s. Sendo assim, escolhe-se T = 0.05 s. Agora,
discretizando o sistema, atravéz de tabelas é fácil verificar que,
100s2s
99
992
1
100s2s
1s
2
1Z
z12
z1
100s2s
1s2
1
s2
1Zz1)s(G
s
e1Z)z(G
221
1
2
1Ts
Comparando com os items 16 e 17 da tabela de transformada, a = 1 e 99 ,
então,
9048.0z672.1z
05727.0z05923.0)s(G
s
e1Z)z(G
2
Ts

112
Transformando para matrizes de estado, utilizando a forma canônica observável,
pois a matriz C é na forma unitária,
)k(x
)k(x10)k(y
)k(u05923.0
05727.0
)k(x
)k(x
672.11
9048.00
)1k(x
)1k(x
2
1
2
1
2
1
Para os novos pólos do sistema em tempo contínuo,
1421.14j1421.142
212020
2
2js
2
dn2,1
Passando para tempo discreto,
3203.0j3749.0eez )05.0)1421.14j1421.14(sT
2,1
Projetando o controle via realimentação de estado, matriz de controlabilidade,
1563.05923.0
0536.05727.0
05923.0
05727.0
672.11
9048.00
05923.0
05727.0GHH
Novo polinômio característico,
9048.0z672.1z)3203.0j3749.0z)(3203.0j3749.0z()z( 2
Aplicando Ackerman,
2331.85878.7
10
012431.0
672.11
9048.007498.0
672.11
9048.00
1563.05923.0
0536.05727.010
GGHH10K
21
1
Desta forma, a lei de controle é dada por,
)k(x
)k(x2331.85878.7)k(Kx)k(u
2
1
Exemplo 7.7: Para o sistema acima, projetar um sistema de controle em realimentação
utilizando um estimador tipo “Dead Beat” para o observador de estado de ordem
reduzida.
Solução: Observa-se que neste caso, a posição da matriz C está diferente da formulação
proposta. Comparando as equações do observador de ordem reduzida e a equação do
sistema, observa-se que,
672.11
9048.00
GG
GGG
aaab
babb e
05923.0
05727.0
H
HH
a
b
Como o observador deve ter comportamento Dead-Beat, o polinômio
característico é dado por,
0zz
Aplicando Ackermann,
0)1()1)(0(1GGK 11
abbbe

113
Significando que o observador de ordem reduzida não pode ser aplicado. Porém,
a transformação para matrizes de estado não é única, aplicando a seguinte
transformação,
)k(x
)k(x
10
11
)k(xn
)k(xn
10
11T
2
1
2
1
O sistema fica,
)k(xn
)k(xn
10
1110)k(y
)k(u05923.0
05727.0
10
11
)k(xn
)k(xn
10
11
672.11
9048.00
10
11
)1k(xn
)1k(xn
2
1
1
2
1
1
2
1
Chegando a,
)k(xn
)k(xn10)k(y
)k(u05923.0
1165.0
)k(xn
)k(xn
672.01
2328.01
)1k(xn
)1k(xn
2
1
2
1
2
1
A resposta do novo sistema e do sistema antigo é exatamente a mesma,
significando que os dois sistemas são os mesmos. Agora, aplicando o método,
1)1()1)(1(1GGK 11
abbbe
A equação de estado do observador de ordem mínima,
)k(yGKGKGKG
)k(uHKH)k(GKG)1k(~
aaebaeabebb
aebabebb
Substituindo os valores,
)k(y9048.0)k(u0573.0
)k(y)672.0)(1(2328.01)1)(1(1
)k(u)05923.0)(1(1165.0)k()1)(1(1)1k(~
Só está faltando os estados não estimados dado por,
)k(~)k(y)k(~)k(yK)k(nx~ e1
Neste ponto deve ser lembrado que o que está sendo estimado é xn1(k) não
x1(k) como necessário para o controlador, porém da relação de transformação utilizada,
)k(xn
)k(xn
10
11
)k(xn
)k(xn
10
11
)k(x
)k(x
10
11T
2
1
2
1
1
2
1
Significando que x2(k) = xn2(k), mas x1(k) = xn1(k)+xn2(k) = xn1(k)+x2(k),
assim, a lei de controle fica,
)k(xn
)k(nx~6453.05878.7
)k(xn
)k(xn)k(nx~2331.85878.7)k(Kx)k(u
2
1
2
21
Estas últimas três equações definem o sistema de controle. Combinando as duas
últimas,

114
)k(~5878.7)k(y2331.8
)k(x6453.0)k(~)k(y5878.7
)k(xn6453.0)k(nx~5878.7)k(u
2
21
Se esta equação é verdade, então,
)1k(~5878.7)1k(y2331.8)1k(u
Substituindo a equação do observador,
)k(y8654.6)k(u4348.0)1k(y2331.8
)k(y9048.0)k(u0573.05878.7)1k(y2331.8
)1k(~5878.7)1k(y2331.8)1k(u
Para a função de transferência do controlador, aplica-se a transformada Z na
equação anterior,
)z(Y8654.6)z(zY2331.8)z(U4348.0)z(zU
Chegando a,
4348.0z
8654.6z2331.8
)z(Y
)z(U)z(GD
A função de transferência da planta original,
9048.0z672.1z
05727.0z05923.0)z(G
2P
A equação característica do sistema em malha fechada, assumindo que a
resposta seja C(z) e a referência a ser seguida R(z), pode ser encontrada através de,
0002473.0z2428.0z7494.0z
0249.0z08302.0z05923.0K
)z(G)z(G1
)z(GK
)z(R
)z(C23
2
o
DP
Po
Para que o sistema não tenha erro estacionário,
9533.2K14936.0
1671.0K
z1
1
0002473.0z2428.0z7494.0z
0249.0z08302.0z05923.0Kz1lim
)z(Cz1lim)k(clim
oo
123
2
o1
1z
1
1zk
Exemplo 7.8: Supondo o seguinte sistema, com T = 1s,
)k(x
)k(x
)k(x
001)k(y
)k(u
1
1
1
)k(x
)k(x
)k(x
2.086.036.3
2.036.186.3
2.036.186.2
)1k(x
)1k(x
)1k(x
3
2
1
3
2
1
3
2
1
a) Determinar se o sistema é completamente observável e controlável;
b) Implementar uma realimentação para posicionar os pólos em,
Z1,2 = 0.5 i0.5 e Z3 = 0.1
c) Implementar um estimador para os estados não estimados para que este
apresente resposta deadbeat.
Solução: Iniciando pela controlabilidade e observabilidade,

115
93.37.21
43.37.21
73.17.11
HGGHH 2 e
34.0212.2602.3
2.036.186.2
001
CGCGC HH2HHH
Portanto, sistema completamente controlável e observável. Para calcular o vetor
de realimentação de estado, o novo polinômio característico é dado por,
05.0z6.0z1.1zz 23
Então o vetor de realimentação de estado,
1.066.016.1GHGGHH100K12
c
Para a determinação do observador de ordem reduzida, deve-se fazer,
2.086.0
2.036.1
36.3
86.3
2.036.186.2
GG
GGG
bbba
abaa e
1
11
H
HH
a
b
O polinômio para o observador deve ser deadbeat, então,
2zz
O vetor de controle do observador,
1
1
1
0
GG
GGK
1
bbab
ab
bbe
A equação de estado do observador de ordem mínima,
)k(yGKGKGKG
)k(uHKH)k(GKG)1k(~
aaebaeabebb
aebabebb
Substituindo os valores,
)k(u3P)k(y2P)k(1P)k(y1
1)k(
05.0
00)1k(~
A outra equação necessária,
)k(y1
1)k(~)k(xK)k(~)k(x~ aeb
Figura 7.13: Diagrama de blocos do sistema de controle com estimador de ordem
mínima

116
Exemplo 7.9: Supondo o sistema apresentado no Exemplo 7.4, projetar um observador
de estado de ordem mínima para os estados que não são medidos. Supor resposta
DeadBeat para o observador, utilizando o mesmo controlador proposto no exemplo.
)k(x
)k(x
)k(x
010)k(y
)k(u
1
0
0
)k(x
)k(x
)k(x
1.12.05.0
100
010
)1k(x
)1k(x
)1k(x
3
2
1
3
2
1
3
2
1
Solução: O primeiro passo é verificar qual a saída que é medida, no caso a saída
x2(k). Então é necessário reescreve o sistema na seguinte forma,
)k(u
1
0
0
)k(x
)k(x
)k(x
1.15.02.0
001
100
)1k(x
)1k(x
)1k(x
3
1
2
3
1
2
Nesta nova configuração,
)k(x)k(x 2a ;
)k(x
)k(x)k(x
3
1
b
0Gaa ; 10Gab ;
2.0
1G ba ;
1.15.0
00G bb
0Ha ;
1
0H b
Ainda do Exemplo 7.4, o ganho do controlador,
4.08.075.0Kc
O ganho do observador de estado mínimo pode ser encontrado através da
equação do erro dada por,
)k(eGKG)1k(e abebb
Como foi especificada resposta tipo deadbeat, então,
2zz
Aplicando a fórmula de ackerman,
1.1
0
1
0
GG
GGK
1
bbab
ab
bbe
A construção do diagrama de blocos segue através das seguintes equações,
)k(u3P)k(y2P)k(~1P
)k(yGKGKGKG
)k(uHKH)k(~GKG)1k(~
aaebaeabebb
aebabebb
Substituindo os valores,
)k(u1
0)k(y
2.0
1
)k(~)k(~
05.0
00
)1k(~)1k(~
)k(u3P)k(y2P)k(~1P)1k(~
2
1
2
1

117
A segunda equação a ser utilizada,
)k(yK)k(~)k(xK)k(~)k(x~ eaeb
Substituindo os valores,
)k(y1.1
0
)k(~)k(~
)k(x~)k(x~
2
1
3
1
Finalmente a terceira equação,
)k(x~)k(x
)k(x~
K)k(rK
)k(x
)k(x
)k(x
K)k(rK)k(u
3
2
1
c0
3
2
1
c0
Substituindo os valores,
)k(x~)k(x
)k(x~
4.08.075.0)k(rK)k(u
3
2
1
0
Chegando a,
x(k+1) x(k)
n(k+1) n(k)
x~(k)
0.25z
1
RespostaControlada
Kc* u
P3* u
H* u
Ke2* uP2* u
P1* u
G* u
z
1
C* u
3
3
3
3
3
33
2
2
222
2
2
2
2
2
2 3
3
2
Figura 7.14: Diagrama de blocos do sistema de controle com estimador de ordem
mínima
7.8 Exercícios Propostos
Exercício 7.1: (Prova 2007) Para o sistema abaixo, pede-se,
)1k(x
)1k(x01)k(y
)k(u5.0
1
)k(x
)k(x
05.0
11
)1k(x
)1k(x
2
1
2
1
2
1
a) Verificar se o sistema é Controlável;
b) Projetar um sistema de controle via realimentação de estado para que os
novos pólos do sistema sejam posicionados em, 3.015.02,1 jz
c) Supondo uma entrada degrau r(k), calcular qual o ganho k0 para que não
haja erro estacionário;

118
Exercício 7.2: (Prova 2007) Para o sistema do Exercício 7.1, pede-se,
a) Verificar se o sistema é Observável;
b) Projetar um observador de ordem completa para que este apresente resposta
tipo DeadBeat;
c) Colocar as equações necessárias e desenhar o diagrama de blocos da planta –
observador de ordem completa – realimentação de estado para uma resposta
ao degrau unitário;
Exercício 7.3: (Prova 2007) Para o sistema abaixo, pede-se,
)1k(x
)1k(x01)k(y
)k(u5.0
1
)k(x
)k(x
75.05.0
2.01
)1k(x
)1k(x
2
1
2
1
2
1
a) Projetar um observador de ordem mínima para o estado que não é medido,
para que este apresente uma resposta tipo DeadBeat;
b) Escrever as equações necessárias e desenhar o diagrama de blocos planta -
observador de ordem mínima – realimentação de estado supondo que o
sistema seja um regulador.
Exercício 7.4: (Exame 2007) Para o sistema abaixo pede-se,
)1k(x
)1k(x10)k(y
)k(u2
1
)k(x
)k(x
02
11
)1k(x
)1k(x
2
1
2
1
2
1
a) Verificar se o sistema é Controlável e Observável;
b) Projetar um sistema de controle via realimentação de estado para que os
novos pólos do sistema sejam posicionados em, 5.0j5.0z 2,1 ;
c) Projetar um observador de ordem reduzida para o estado que não é medido,
supor resposta deadbeat para o observador de ordem reduzida;
d) Escrever as equações necessárias e o diagrama de blocos para o conjunto
sistema-controlador-observador de ordem reduzida supondo que o sistema de
controle seja um Regulador.

119
Capítulo 8
8 Projetos
Nesta parte, será apresentada uma seqüência de projetos interessantes de
sistemas mecânicos envolvendo sistemas de controle em tempo discreto. Para a
implementação dos sistemas de controle, necessariamente deverá ser seguido os
seguintes passos,
1. Modelagem matemática; onde o aluno deverá assumir todas
as condições necessárias para o equacionamento do sistema,
tais como posição dos sensores e atuadores, se há atrito,
linearização, etc.
2. Equações na forma de função de transferência e de Espaço
de Estados ambos em tempo contínuo e tempo discreto;
onde o aluno deverá optar por uma das formas para a
transformação de tempo contínuo para tempo discreto.
Além disso, deve-se especificar qual o tempo de
amostragem e explicar a sua escolha;
3. Apresentar o sistema em diagrama de blocos; nesta parte
será apresentado o diagrama de blocos contendo planta e
sistema de controle separadamente, pode ser feita em
Simulink;
4. Implementação do sistema de controle, explicando a sua
escolha e detalhando o procedimento de cálculo;
5. Apresentação dos resultados contendo distúrbio e lei de
controle;

120
8.1 Pêndulo Invertido
Implementar um sistema de controle para que a massa suspensa do pêndulo
invertido apresentado na Figura 8.1 fique em equilíbrio na posição vertical. Sabendo-se
que M = 2 Kg, L = 0.5 m e m = 0.1 kg.
Figura 8.1: Pêndulo invertido.
O problema está resolvido por realimentação de estado no Ogata, página 596.
Implementar um controlador PID para que o desempenho do sistema controlado seja
parecido com o já implementado.

121
8.2 Suspensão Ativa para ¼ de veículo
Implementar um sistema de controle em ¼ de suspensão veicular, Figura 8.2,
para que a massa suspensa da suspensão apresente a menor aceleração possível.
Sabendo-se que Ms = 250 Kg, Ks = 5.000 N/m, Cs = 250 Ns/m, Mn = 25 kg e Kp =
100.000 N/m.
Figura 8.2: Suspensão de ¼ de veículo.
Para a implementação do sistema de controle, assumir que apenas a aceleração é
medida, mas verificar a aceleração e deslocamento da massa suspensa. O objetivo aqui é
manter a aceleração da massa suspensa igual a zero, portanto o sistema de controle é um
regulador.
Distúrbios da via a serem considerados
a) Entrada degrau com 100 mm de altura;
b) Entrada ½ circunferência de 150 mm de raio;
Deve ser lembrado que os distúrbios da via são relacionados com o tempo,
simular para 40 km/h e 100 km/h.

122
8.3 Controle não colocado
Supondo o sistema apresentado na Figura 8.3, o objetivo e minimizar o
deslocamento da massa M3, com um controlador posicionado entre as massas M1 e M2
e um outro controlador posicionado entre as massas M2 e M3.
Figura 8.3: Sistema de 3GDL para controle não colocado.
Objeivo é investigar sistemas de controle “colocado” e “não colocado”.
Considerar que M1 = M2 = M3 = 0.5 Kg, K1 = K2 = K3 = 10 KN/m. Excitação é um
impulso dado na massa M3.

123
8.4 Projeto de Filtros Digiais
Apresentar o projeto de filtros digitais contendo os seguintes passos:
a) O que são filtros digitais;
b) Para que são utilizados;
c) Influência dos pólos e zeros;
d) Tipos de Filtros digitais;
e) Projetos de cada Tipo;
f) Resposta em Freqüência;
O aluno deverá fazer uma implementação computacional exemplificando a
utilização de filtros digitais;
124
9 Referências Bibliográficas
K. Ogata. Discrete-Time Control Systems. 2nd Ed. Prentice Hall, 1994.
G.F. Franklin, J.D. Powell, and M.L. Workman. Digital Control of Dynamic Systems.
Addison-Wesley, 3rd
Edition. 1998.
C.L. Phillips, H.T. Charles. Digital control system analysis and design. 3rd
Edition
Englewood Cliffs, N. J.: Prentice - Hall, c1995.
C.H. Houpis, G.B. Lamont. Control Systems. Theory, Hardware, Software. 2nd
Ed.
McGraw-Hill, 1992.
J.J. Distefano III, A. R. Stubberud. Schaum’s Outline of Theory and Problems of
Feedback and Control Systems. 2nd
Ed., Schaum’s Outline Series, McGraw-Hill.
1990.