apostila joão eustáquio - var e vec(1)
DESCRIPTION
temporaisTRANSCRIPT

C A P Í T U L O 7
MODELOS MULTIVARIADOS DE SÉRIES TEMPORAIS
7.1 Introdução
Após ter trabalhado nos capítulos anteriores com modelos univariados de séries
temporais procura-se, neste capítulo, abordar os modelos multivariados. Trataremos de
modelos que analisam duas ou mais séries temporais em conjunto tentando captar a
dinâmica temporal de cada uma e as relações dinâmicas entre elas.
Dentre as diversas abordagens multivariadas destacam-se os modelos VAR e
VAR Estrutural, para séries estacionárias, e análise de co-integração e o modelo de
correção de erro (VEC), para séries não estacionárias.
7.2 Modelo de Auto-regressão Vetorial (VAR)
7.2.1 Definição e Especificação
O modelo de auto-regressão vetorial (VAR ) é uma extensão do modelo auto-
regressivo ( AR ) para mais de uma série. Conceitualmente, é um modelo multi-
equacional composto de uma equação para cada variável em que cada equação é função
de valores defasados daquela variável e de valores defasados das outras variáveis do
sistema.
Um modelo VAR tem duas dimensões: a) número de variáveis = k e b) número
de defasagens = p . Considerando três séries temporais, e , e temos
um modelo dado por,
tt XW , tZ 1=p
)1(VAR
(7.1) ⎪⎩
⎪⎨
⎧
++++=++++=++++=
−−−
−−−
−−−
ttttt
ttttt
ttttt
ZXWZZXWX
ZXWW
31331321313
21231221212
11131121111
εθθθαεθθθαεθθθα
Em forma matricial, podemos escrever
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡+
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡+
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡=
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
−
−
−
t
t
t
t
t
t
t
t
t
ZXW
ZXW
3
2
1
1
1
1
333231
232221
131211
3
2
1
εεε
θθθθθθθθθ
ααα
.
que pode ser representado por
ttt YY εθα ++= −11 , (7.2)
que é a notação matricial para um . É interessante observar as relações
dinâmicas captadas pelo sistema (7.1). Por exemplo,
)1(VAR
11θ representa o efeito de 1−tW

João Eustáquio de Lima 2DER/UFV
sobre , na presença e . Já tW 1−tX 1−tZ 12θ representa o efeito de sobre , dado
e , ou o efeito de sobre , dado e . Um choque em por meio
de
1−tX tW
1−tW 1−tZ tX 1+tW tW tZ tW
t1ε tem efeito contemporâneo sobre . No período seguinte, este efeito se torna
e afeta que no período seguinte se torna e afeta , e assim
sucessivamente. Em um modelo estacionário este efeito do choque desaparece após
alguns períodos.
tW
1−tW tX 1−tX tW
O modelo para as variáveis e é definido por )2(VAR tt XW , tZ
⎪⎩
⎪⎨
⎧
+++++++=+++++++=
+++++++=
−−−−−−
−−−−−−
−−−−−−
tttttttt
tttttttt
tttttttt
ZXWZXWZZXWZXWX
ZXWZXWW
32362352341331321313
22262252241231221212
12162152141131121111
εθθθθθθαεθθθθθθα
εθθθθθθα
que em termos matriciais fica
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡+
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡+
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡+
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡=
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
−
−
−
−
−
−
t
t
t
t
t
t
t
t
t
t
t
t
ZXW
ZXW
ZXW
3
2
1
2
2
2
363534
262524
161514
1
1
1
333231
232221
131211
3
2
1
εεε
θθθθθθθθθ
θθθθθθθθθ
ααα
..
que pode ser escrito como
tttt YYY εθθα +++= −− 2211 . (7.3)
No modelo VAR todas as variáveis são consideradas endógenas e determinadas
de forma dinâmica pelos valores defasados. Tem-se uma equação para cada variável em
função de seus valores defasados e dos valores defasados das outras variáveis.
Generalizando, um com variáveis é representado, em forma matricial,
por
)( pVAR k
tptpttt YYYY εθθθα +++++= −−− .......2211 (7.4)
em que é um vetor de variáveis endógenas, tY 1 xk ,jtY − pj ,........,3,2,1= são vetores
de variáveis defasadas, 1 xk α é um vetor de interceptos, 1 xk iθ ,
são matrizes de coeficientes a serem estimados e
pi ,........,3,2,1=
kxk tε é um vetor de erros
aleatórios com média zero,
1 xk
0)( =tE ε , e matriz de variâncias e covariâncias
. Σ=)( 'ttE εε
A equação (7.4) pode ser escrita de forma mais compacta fazendo uso do
operador de defasagem , isto é, L
ttp
pttt YLYLLYY εθθθα +++++= .......221
ttp
p YLLLI εαθθθ +=−−−− ).......( 221
ttYL εα +=Θ )( , (7.5)

João Eustáquio de Lima 3DER/UFV
em é um polinômio matricial de ordem )(LΘ p em . L
O modelo VAR é simples e operacional. O estimador de MQO pode ser aplicado
a cada equação individualmente e fornece estimativas não tendenciosas e consistentes.
As variáveis a serem incluídas no VAR são definidas pelo modelo econômico e
todas são consideradas endógenas. No entanto, a equação (7.4) pode conter variáveis
tipicamente exógenas ou determinísticas como tendência e dummies.
O modelo VAR também pode ser definido como uma forma reduzida de um
modelo estrutural de equações simultâneas dinâmicas. Esta idéia ficará clara quando
analisarmos o modelo VAR estrutural. Por enquanto, vamos definir e analisar o VAR
como uma forma reduzida sem se preocupar com sua relação com um modelo
estrutural. Ou seja, sem se preocupar com as restrições para identificar o VAR com um
modelo estrutural. Vamos analisar primeiro uma forma reduzida irrestrita ou VAR não
identificado.
7.2.2 Condições de Estabilidade
Um modelo estável é aquele em que o efeito de um choque (inovação)
eventualmente desaparece ao longo do tempo voltando as variáveis ao equilíbrio de
longo prazo (estado estacionário).
Considere um modelo ( )pVAR em k variáveis como na equação (7.4)
tptpttt YYYY εθθθα +++++= −−− L2211 .
Aplicando o operador de defasagem, temos
ttp
pttt YLYLLYY εθθθα +++++= L221
( ) tttp
p YLLLI εαθθθ +=−−−− L221
Para o VAR ser estável ou estacionário todas as raízes da equação característica kp
0221 =−−−− p
p LLLI θθθ L (7.6)
devem ser , em módulo. Se a solução fornecer uma raiz unitária uma ou mais
variáveis são não estacionárias e o modelo não deve ser estimado na forma como se
apresenta em (7.4). O número de raízes é igual a kp sendo o número de variáveis e
1>
k
p o número de defasagens.
Em um modelo estável:
a) efeitos de choques (inovações) eventualmente desaparecem ao longo do tempo; o
modelo volta ao equilíbrio;
b) Os impactos de choques são finitos e calculáveis;
c) Um modelo estável é estacionário.

João Eustáquio de Lima 4DER/UFV
Considere, como exemplo, um ( )1VAR com 2 variáveis em que
, (Judge et al, 1988). Assim, ⎥⎦
⎤⎢⎣
⎡=
297,0232,0461,0008,0
1θ
0297,0232,0461,0008,0
1001
=⎥⎦
⎤⎢⎣
⎡−⎥
⎦
⎤⎢⎣
⎡L
0297,01232,0461,0008,01
=−−−−
LLLL
( )( ) ( )( ) 0232,0461,0297,01008,01 =−−− LLL
( )209152,0
418304,0305,0305,0
0104576,0305,010106952,0002376,0008,0297,01
2
2
22
−+±
=
=−−
=−+−−
L
LLLLLL
877,41 −=L e . 961,12 =L
Como e , o VAR é estável. 1|| 1 >L 12 >L
Com base na análise de estabilidade devemos proceder da seguinte maneira:
1. Ser o VAR é estacionário (estável), proceder análise com variáveis em nível.
2. Se o VAR não é estacionário, existem raízes unitárias. Neste caso, devemos
analisar cointegração:
a) Se as variáveis são não estacionárias mas cointegradas, estimar e analisar um
(modelo de correção de erro vetorial). Um é um VAR com as
restrições de cointegração entre as variáveis que possui dinâmica de curto
prazo e ajuste para o equilíbrio.
VEC VEC
b) Se as variáveis não são cointegradas ajustar o VAR em diferença.
7.2.3 Estimação
O modelo VAR é de especificação simples e fácil de ser estimado. As variáveis
explicativas são todas pré determinadas e o método dos mínimos quadrados ordinários
(MQO) aplicados em cada equação fornece estimadores consistentes e eficientes, dado
erros com média zero, variância constante e não auto-correlacionados. Se os erros são
normalmente distribuídos o método de máxima verossimilhança fornece estimadores
iguais aos do MQO. Para se chegar a um modelo adequado para análise existem vários
procedimentos relacionados com determinação do número de defasagens e testes de
especificação. Observa-se que as variáveis explicativas são as mesmas em todas as
equações e que todas elas têm o mesmo número de lags. Conceitualmente, poderíamos

João Eustáquio de Lima 5DER/UFV
ter um VAR incompleto (com restrições) com diferentes defasagens para as equações.
No entanto, isto não é comum. Certamente não se dispõe de teoria para dar suporte às
restrições de exclusão de lags e, por outro lado, mesmo que a defasagem não seja
significativa sua manutenção não prejudica as propriedades do estimador e pode
aumentar o poder de previsão do modelo uma vez que estão sendo consideradas toda a
dinâmica de inter-relações entre as variáveis.
7.2.4 Definição da ordem do VAR
No caso univariado a definição da ordem do modelo AR é feita com base na
função de autocorrelação parcial. Para o VAR esta função são matrizes e a escolha da
ordem pela análise dessas matrizes não é simples. A alternativa é usar testes e critérios.
1. Teste de Razão de Verossimilhança
Este teste compara o valor da função de verossimilhança de um modelo de p
lags com um modelo com lags. Inicia-se com um p-máximo pré-estabelecido e
testa sequencialmente até rejeitar a hipótese nula. É um teste de restrições em que se
compara um modelo restrito com um irrestrito. Supondo que os coeficientes de um
VAR(p) relacionados com as variáveis defasadas sejam dados pela matriz
1−p
[ ]pAAAA L21= o teste de razão de verossimilhança consiste em testar
seqüencialmente as seguintes hipóteses, iniciando com um p razoavelmente alto
designado por (Lütkepohl, 1993): maxp
0: contra 0: max1max0 ≠= pp AHAH ,
0 que dado ,0: contra 0: max1max11max0 =≠= −− ppp AAHAH ,
0 que dado ,0: contra 0: 1maxmax2max12max0 ==≠= −−− pppp AAAHAH
M
0 que dado ,0: contra 0: 21maxmax1110 ====≠= − AAAAHAH pp L .
O teste é interrompido quando a hipótese nula for rejeitada e a ordem do VAR será pelo
p correspondente. A decisão do maxp pode ser baseada na freqüência dos dados. Para
dados mensais pode usar 12 lags e para dados trimestrais, 4 lags. O teste é semelhante
ao caso univariado. A diferença é que ao invés de usar a soma de quadrados dos
resíduos usa-se o determinante da matriz de variâncias e covariâncias dos resíduos, .
A estatística de teste é
|ˆ|Σ

João Eustáquio de Lima 6DER/UFV
(7.7) 2~|]ˆ|ln|ˆ|)[ln( rIRRcTLR χΣ−Σ−=
em que T é igual ao número de observações, é o número de parâmetros estimados no
modelo irrestrito,
c
r é o número de restrições dado pela quantidade de parâmetros que se
deixa de estimar no modelo restrito, e são as matrizes de varâncias e
covariâncias dos modelos irrestrito e restrito, respectivamente.
IRΣ̂ RΣ̂
O teste de razão de verossimilhança tende a indicar valor alto para o número de
lags do VAR e por isso é menos prático que os critérios de informação. Quando se
adiciona lags ao modelo o ajuste melhora e o valor da função de verossimilhança
aumenta e a razão de verossimilhança não capta adequadamente o custo de parâmetros
adicionais.
2. Critérios de Seleção
A determinação do número de defasagens pode se basear nos critérios de
informação que procuram um balanço entre ajuste do modelo e parcimônia em termos
de número de parâmetros. Eles se baseiam no valor máximo da função de
verossimilhança penalizada pelo número de parâmetros. Os critérios se diferenciam pela
penalidade aplicada por parâmetros adicionais. Tem-se os seguintes critérios
(Lütkepohl, 2006):
a) Critério de Akaike: ( )T
pkpAIC p
22|ˆ|ln +Σ= , (7.8)
b) Critério de Schwartz: ( )T
TpkpSC pln|ˆ|ln
2
+Σ= , (7.9)
c) Critério de Hannan-Quinn: ( ) 2lnln2|ˆ|ln pkT
TpHQ p +Σ= , (7.10)
em que = número de variáveis, T = tamanho da amostra,k p = o número de lags e =
matriz de variâncias e covariâncias dos resíduos. Ajusta-se o modelo para diferentes
valores de
pΣ
p e escolhe-se o que minimiza o critério. Segundo Lütkepohl e Krätzig
(2004), para existe uma relação entre os critérios dada por 16≥T
. (7.11) ( ) ( ) (AICpHQpSCp ≤≤ )
7.2.5 Testes de Avaliação do Modelo
Depois de definido o número apropriado de defasagens o modelo é estimado
e, em seguida, deve ser avaliado antes de ser usado em análises.
1. Testes de auto-correlação

João Eustáquio de Lima 7DER/UFV
O VAR estimado deve apresentar resíduos não auto-correlacionados ao longo do
tempo. Dentre as diferentes formas de analisar os resíduos a mais prática é aplicação de
testes estatísticos para os quais a hipótese nula é que os resíduos estimados não são
auto-correlacionados até o lag . h
a) Teste de Ljung-Box
Testa-se
phjEH
phjEH
jtt
jtt
>=≠′
>==′
−
−
,...,3,2,1 algum para ,0)(:
,...,3,2,1 todopara ,0)(:
1
0
εε
εε
Podem ser calculadas duas estatísticas:
(i) (7.12) ∑=
−−− ΣΣ′ΣΣ′=
h
jphkjjtrTQ
1
2)(
10
10 2~)ˆˆˆˆ( χ
(ii) ∑=
−−− ΣΣ′ΣΣ′
−=
h
jphkjjtr
hTTQ
1
2)(
10
10
22~)ˆˆˆˆ(1 χ (7.13)
em que significa traço da matriz, é a matriz de variâncias e covariâncias
estimada dos resíduos no tempo com os do tempo
) (tr jΣ̂
t jt − , é a matriz de variâncias e
covariâncias contemporânea, é a defasagem para a qual a correlação nos resíduos está
sendo avaliada, é o número de variáveis e T é o número de observações. As matrizes
de variâncias e covariâncias são dadas por e , em que
0Σ̂
h
k
∑+=
−− ′=Σ j
ˆT
jtjttT
1
1 ˆˆ εε ∑=
− ′=ΣT
tttT
1
10 ˆˆˆ εε
tε̂ é o vetor de resíduos do modelo VAR. A segunda estatística está ajustada para graus
de liberdade e é mais apropriada para amostras pequenas.
b) Teste de Breusch-Godfrey
Um teste alternativo para auto-correlação é o de multiplicador de Lagrange
onde se estima um VAR auxiliar dos resíduos em função das variáveis defasadas e dos
resíduos defasados representado por
ththttptpttt uYAYAYA ++++++++= −−−−−− εθεθεθε ˆ...ˆˆ...ˆ 22112211 (7.14)
e testa-se a hipótese 0...: 210 ==== hH θθθ contra 0 um menos pelo :1 ≠iH θ . Neste
modelo admite-se que os resíduos do VAR são auto-correlacionados. O teste é feito em
quatro etapas:
a) Estima-se o VAR dado por (7.14);
b) Estima-se um VAR restrito em que 0...21 ==== hθθθ , isto é, os resíduos não são
auto-correlacionados, dado por

João Eustáquio de Lima 8DER/UFV
;
(7.15)
Rtptpttt uYAYAYA ++++= −−− ...ˆ 2211ε
c) Constrói-se as matrizes de variâncias e covariâncias dos resíduos das equações (7.14)
e (7.15) definidas por
∑=
− ′=ΣT
tttIR uuT
1
1 ˆˆˆ
∑=
′−=ΣT
t
Rt
RtR uuT
1
1 ˆˆˆ
em que IR significa irrestrito e R restrito.
d) Calcula-se a estatística de teste dada por LM 2χ
. (7.16) 212~)]ˆˆ([)( hkRIRtrkThLM χ−ΣΣ−=
e compara com o valor da tabela com graus de liberdade. Se a hipótese nula não for
aceita há evidência de auto-correlação e a necessidade de acrescentar mais defasagens
no modelo VAR.
2hk
2. Teste de Normalidade
Testes de normalidade são, na maioria dos casos, baseados em medidas de
assimetria (terceiro momento em relação à média) e de curtose (quarto momento em
relação à média). A idéia básica é comparar os valores calculados com os da
distribuição normal que são assimetria igual a zero e curtose igual a três. Estas medidas
são definidas, para cada variável i , por
:iAssimetriaT
m
T
tit
i
∑== 1
3
3
ε̂ (7.17)
:iCurtoseT
m
T
tit
i
∑== 1
4
4
ε̂ (7.18)
em que tε̂ são resíduos padronizados, normalmente por uma decomposição de Choleski
da matriz de variância e covariância dos resíduos originais. Sob a hipótese nula de erros
normalmente distribuídos, a assimetria e a curtose dos resíduos têm distribuição normal
dadas por
)6,0(~)0( 3 NmT i −
)24,0(~)3( 4 NmT i − .
As estatísticas de teste são:

João Eustáquio de Lima 9DER/UFV
a) Para teste da assimetria conjunta: 23323 ~
6)ˆˆ(
kmmTS χ′
= (7.19)
b) Para teste da curtose conjunta: 24424 ~
24)3ˆ)(3ˆ(
kmmTS χ−′−′
= (7.20)
c) Para teste da assimetria e curtose conjunto: (7.21) 22
24
23 ~ kM SSJB χ+=
O EViews reporta o teste de assimetria e curtose para cada variável, o teste de
assimetria e curtose multivariado e o teste de Jarque-Bera para cada variável e para o
conjunto de variáveis.
3. Teste de heterocedasticidade condicional
O teste para verificar heterocedasticidade condicional ou efeito ARCH no
modelo VAR pode ser feito para cada variável ou em conjunto. Ambas as formas já
foram descritas no Capítulo 6.
7.2.6 Análises feitas com o VAR
Os modelos VAR com variáveis estacionárias permitem realizar as seguintes
análises com dados de séries temporais:
1. Analisar os efeitos de choques nas variáveis por meio de Função Impulso
Resposta (FIR)
2. Analisar a importância das variáveis para explicar a Variância do Erro de
Previsão de cada variável
3. Testar Causalidade de Granger
4. Fazer Previsões
5. Analisar relações contemporâneas (teoria) entre as variáveis com o VAR
Estrutural
As análises de impulso resposta e decomposição de variância servem para se
conhecer o sentido do fluxo de informação entre as variáveis. A função impulso
resposta mostra os efeitos de choques nas variáveis do sistema; possibilita calcular o
impacto (sinal e magnitude) dinâmico de mudança em uma variável sobre ela e sobre as
outras ao longo do tempo. A análise de decomposição de variância indica quanto da
variância do erro de previsão de uma variável pode ser atribuído a mudanças na própria
variável e nas outras do sistema. Os modelos VAR permitem, também, a análise de
relações de causalidade no sentido de Granger entre as variáveis e, de forma semelhante
aos modelos ARMA, podem ser usados para realizar previsões de valores futuros das
variáveis. A análise de relações contemporâneas procura relacionar o VAR com uma
forma estrutural que representa a teoria.

João Eustáquio de Lima 10DER/UFV
Os modelos VAR com variáveis integradas incorporam informações de curto e
longo prazo nas relações entre as séries temporais e são usados para análise de
cointegração, modelo de correção de erro, além das análises anteriormente
mencionadas.
Os modelos VAR podem também incorporar variáveis tipicamente exógenas
como dummies sazonais e tendência. Assim,
tptptttt YYYBXY εθθθ +++++= −−− L2211 (7.22)
em que B é uma matriz de coeficientes e X um vetor de variáveis exógenas podendo
incluir interceptos, dummies, tendência, variável climática ou qualquer outra de
natureza exógena.
A seguir vamos abordar as questões básicas relacionadas com função impulso
resposta, decomposição de variância, causalidade de Granger e VAR Estrutural. Não
será abordada a parte de previsões por ser uma simples extensão do que já foi visto para
os modelos ARMA.
7.2.7 Funções de Impulso-Resposta
Funções impulso resposta são funções de resposta do sistema a choques
(inovações) nas variáveis através dos erros aleatórios tε . Procura-se medir o efeito de
um choque unitário em uma variável no período t sobre todas variáveis em períodos
subseqüentes. Os coeficientes da função impulso resposta são os coeficientes )(∞VMA
obtido da inversão do . ( )pVAR
Seja um com as variáveis medidas em termos de desvios das médias, ( )pVAR
tptpttt YYYY εθθθ ++++= −−− L2211 .
Aplicando o operador de defasagem temos
( ) ttp
p YLLLI εθθθ =−−−− L221
( ) ttYL εθ = . (7.23)
Se o VAR é estacionário pode-se invertê-lo obtendo-se um )(∞VMA . Ou seja,
( ) ( ttt LMLY εεθ == −1 )
L+++= −− 2211 tttt MMY εεε (7.24)
em que são matrizes que fornecem os efeitos de choques nas variáveis do modelo. iM
Para melhor visualizar a FIR, considere um ( )pVAR estacionário com duas
variáveis. Logo podemos escreve-lo na forma de médias móveis

João Eustáquio de Lima 11DER/UFV
...1001
32
31
3.223.21
3.123.11
22
21
2.222.21
2.122.11
12
11
1.221.21
1.121.11
2
1
2
1 +⎥⎦
⎤⎢⎣
⎡⎥⎦
⎤⎢⎣
⎡+⎥
⎦
⎤⎢⎣
⎡⎥⎦
⎤⎢⎣
⎡+⎥
⎦
⎤⎢⎣
⎡⎥⎦
⎤⎢⎣
⎡+⎥
⎦
⎤⎢⎣
⎡⎥⎦
⎤⎢⎣
⎡=⎥
⎦
⎤⎢⎣
⎡
−
−
−
−
−
−
t
t
t
t
t
t
t
t
t
t
aaaa
aaaa
aaaa
YY
εε
εε
εε
εε
Pode-se verificar que a i-ésima coluna da matriz mede o efeito de um choque
unitário no i-ésimo componente do vetor de inovações no período sobre as
variáveis no período t .
kM
kt −
De forma mais específica, para um ( )1VAR a FIR pode ser definida da seguinte
maneira. Seja
ttt YY εθ += −11
Logo,
1011 εθ += YY
( )
21102
12
210112
εεθθ
εεθθ
++=
++=
YY
YY
( )
32112
103
13
321102
113
εεθεθθ
εεεθθθ
+++=
+++=
YY
YY
M
LL+++++= −−− 33
122
11101 ttttt
t YY εθεθεθεθ
. (7.25) it
t
i
itt YY −
−
=∑+= εθθ
1
0101
Como o VAR é estacionário, , 01 →iθ ∞→t e
, com , (7.26) it
t
i
ttY −
−
=∑= εθ
1
01 I=0
1θ
que é a representação do . Assim, observa-se que os efeitos são
relacionados com o parâmetro
)(∞VMA )1(VAR iM
1θ .
Com o calcula-se o efeito de choques em uma variável sobre ela e
sobre as outras do sistema. Pode-se racionar tanto em termos de choques em ,
, , etc., ou choques em
)(∞VMA
tt →−1
tt →− 2 tt →−3 1+→ tt , 2+→ tt , 3+→ tt , etc..
A interpretação da função impulso resposta é dada por
st
st MY
=∂∂ +
ε
em que o elemento de mostra o efeito de uma unidade de aumento na inovação
da variável no tempo sobre a variável i no tempo
ij sM
j t st + , mantendo-se constante

João Eustáquio de Lima 12DER/UFV
todas as outras inovações e tempos constantes. A Função Impulso Resposta é o gráfico
de jt
stiyε∂
∂ +, em função de que é um lapso de tempo ou defasagem. s
Os choques devem ser analisados de forma isolada. Por exemplo, para o ( )1VAR ,
32112
103
13 εεθεθθ +++= YY
e . 43122
113
104
14 εεθεθεθθ ++++= YY
Se e todos os erros para 00 =Y 1≠t forem iguais a zero, um choque no período 1
resulta em
13
112
114314
12
11113213
11112112
11011
0
0
0
εθεθθεθ
εθεθθεθ
εθεθεθεεθ
=+=+=
=+=+=
=+=+==+=
YY
YY
YYYY
M
Para um tempo t
, 11
1 εθ −= ttY
que é o efeito de um choque no período 1. Resta especificar em qual variável este
choque ocorre. Se for na variável 1, tem-se o efeito deste choque sobre ela e sobre as
outras.
7.2.8 Funções Impulso Resposta Ortogonalizadas
Seja um com 2 variáveis, ( )1VAR
ttt AYY ε+= −1
⎩⎨⎧
++=++=
−−
−−
tttt
tttt
YaYaYYaYaY
2122211212
1121211111
εε
em que 0)( =tE ε e Σ=′)( ttE εε . A matriz Σ é a matriz de variâncias e covariâncias
dos erros. Esta é constante ao longo do tempo (estacionariedade). Em geral esta matriz
não é diagonal, ou seja, existe correlação contemporânea entre os erros das diferentes
equações (variáveis). As inovações (choques) são contemporaneamente correlacionadas.
Um choque em no período representado por uma variação em 1Y t t1ε tem efeito
imediato sobre . Por exemplo, se 1Y 11 =tε no período 0=t e 0=tY para , 0<t 11 =tY .
Este choque não tem efeito imediato sobre . No período 2Y 1+t , o choque em afeta
pela primeira equação e pela segunda. Estes efeitos ocorrem nos períodos
, , etc. Então, um choque em uma variável em dado período desenvolve uma
tY1
11 +tY 12 +tY
2+t 3+t

João Eustáquio de Lima 13DER/UFV
reação em cadeia ao longo do tempo em todas as variáveis do sistema. As funções
impulso resposta calculam estes efeitos em cadeia.
O choque pode ser de uma unidade da variável ou de um desvio padrão ou de
qualquer valor definido. Se as variáveis têm unidades de medida diferentes é mais
indicado usar choque de um desvio padrão. Se as variáveis estão medidas nos
logarítmos os valores da função impulso reposta podem ser interpretados como
elasticidades. Normalmente a análise da FIR se prende ao valor da resposta ao choque
unitário, ao sinal e quantos períodos leva para o efeito do choque desaparecer. Para um
VAR estável a FIR eventualmente decresce até atingir zero.
No entanto, o fato de existir correlação contemporânea entre os erros impede
que se tenha o efeito puro/líquido de cada choque. Quando ocorre choque em uma
variável do sistema seu efeito se confunde com o efeito advindo da correlação dos erros
de outras variáveis. Não há como garantir que o choque ocorre em cada variável
isoladamente. Correlação entre os erros pode indicar que um choque em uma variável é
provável de ser acompanhado por choques nas outras no mesmo período.
Para contornar este problema é necessário transformar os erros em erros
ortogonais que terão matriz de variâncias e covariâncias diagonal. Esta operação pode
ser denominada de ortogonalização dos erros ou diagonalização da matriz de variâncias
e covariâncias. A base para esta operação está no conceito de decomposição de
matrizes.
7.2.9 Decomposição de matrizes
Uma matriz quadrada é definida positiva se: a) mxmA A for simétrica, e b) todas
as raízes características (autovalores) de A forem positivos. Alternativamente, A é
definida positiva se, para qualquer vetor 0≠b , 0>′bbA .
Propriedades importantes de matrizes definidas positivas incluem: a) todos os
autovalores são reais e positivos, e b) a matriz pode ser tranformada como PPA ′Λ= ,
em que é uma matriz diagonal com os autovalores de Λ A e P é uma matriz ortogonal
formada com os autovetores de A . Esta decomposição é denominada decomposição
espectral.
Existem diversas formas de decompor matrizes. Uma que tem grande aplicação
é a decomposição de Cholesky. Esta diz que, para uma matriz simétrica A , existe uma
matriz triangular inferior com uns na diagonal principal e uma matriz diagonal G tal
que . Se
L
LLGA ′= A é definida positiva so elementos da diagonal de são positivos e
podemos escrever
G
))(( ′=′= GLGLLGGLA , em que GL é triangular inferior

João Eustáquio de Lima 14DER/UFV
e a raiz quadrada é tomada elemento por elemento da diagonal. Pela relação LLGA ′=
tem-se que que é uma operação de diagonalização de GLALLAL =′=′ −−−− )()( 1111 A
(Tsay, 2005).
Esta operação pode ser aplicada no modelo VAR para gerar erros ortogonais
com matriz de variâncias e covariâncias diagonal e funções impulso resposta isentas do
problema de correlação entre os erros.
Dado o modelo
tptpttt YYYY εθθθ ++++= −−− L2211
com 0)( =tE ε e Σ=′)( ttE εε e sendo Σ uma matriz simétrica positiva definida, existe
uma matriz D não singular tal que DDG ′=Σ e que em que é uma
matriz diagonal.
GDD =′Σ −− )()( 11 G
No entanto, a operação de ortogonalização dos erros implica em transformar
todo o modelo. Sendo assim, multiplicando o modelo por 1−D , temos
tptpttt DYDYDYDYD εθθθ 1122
111
11 −−
−−
−−
−− ++++= L
(7.27) tptpttt vYDYDYDYD ++++= −−
−−
−−− θθθ 1
221
1111 L
tt Dv ε1−=
Pela decomposição de Cholesky o modelo transformado tem erros ortogonais pois
. GDDDEDDDEvvE tttttt =′Σ=′′=′′=′ −−−−−− 111111 )(][)( εεεε
Portanto a matriz de variâncias e covariâncias das inovações transformadas é
diagonal. As covariâncias entre os choques não existem e a variância de cada erro é
dada pelos elementos da diagonal. Se IG = os erros têm variância igual a unidade.
Invertendo-se o modelo para a representação de médias móveis obtém-se a FIR com
choques ortogonais.
O modelo transformado é denominado forma estrutural ou modelo estrutural.
Assim, da forma reduzida que é o VAR inicial obtém-se a forma estrutural pela
transformação dos erros com uma decomposição de Cholesky.
No entanto, deve-se observar que em (7.27) todos os termos do modelo foram
tranformados. Os coeficientes das variáveis defasadas são agora dados por ,
e fornecem os efeitos dos choques para diferentes defasagens. Contudo,
do lado esquerdo da equação o termo define relações contemporâneas entre as
variáveis e apresenta importantes implicações para as análises do VAR, implicações
estas inerentes na forma de ortogonalização dos erros.
iD θ1−
pi ,...,3,2,1=
tYD 1−

João Eustáquio de Lima 15DER/UFV
A seguir, mostra-se, através de um exemplo, baseado em Tsay (2005), que a
ortogonalização dos erros (diagonalização de Σ ) pela decomposição de Cholesky gera
uma forma estrutural recursiva nas variáveis do modelo e que as funções impulso
resposta são afetadas pela ordem em que as variáveis aparecem na análise. Seja o
modelo com duas variáveis na forma reduzida ( )1VAR
(7.28) ⎩⎨⎧
++−=+++=
−−
−−
tttt
tttt
arrrarrr
212112
112111
1.16.04.03.02.02.0
e . ⎥⎦
⎤⎢⎣
⎡+⎥
⎦
⎤⎢⎣
⎡⎥⎦
⎤⎢⎣
⎡−
+⎥⎦
⎤⎢⎣
⎡=⎥
⎦
⎤⎢⎣
⎡
−
−
t
t
t
t
t
t
aa
rr
rr
2
1
22
11
2
1 .1.16.03.02.0
4.02.0
⎥⎦
⎤⎢⎣
⎡=Σ
1112
Para a matriz de variâncias e covariâncias dada, a decomposição de Cholesky é obtida
com . Multiplicando o modelo por obtém-se
⎥⎦
⎤⎢⎣
⎡−
=−
15.0011D 1−D
⎥⎦
⎤⎢⎣
⎡⎥⎦
⎤⎢⎣
⎡−
+⎥⎦
⎤⎢⎣
⎡⎥⎦
⎤⎢⎣
⎡−⎥
⎦
⎤⎢⎣
⎡−
+⎥⎦
⎤⎢⎣
⎡⎥⎦
⎤⎢⎣
⎡−
=⎥⎦
⎤⎢⎣
⎡⎥⎦
⎤⎢⎣
⎡− −
−
t
t
t
t
t
t
aa
rr
rr
2
1
22
11
2
1
15.001
.1.16.03.02.0
15.001
4.02.0
15.001
15.001
e . ⎥⎦
⎤⎢⎣
⎡==′Σ −−
5.000211 GLL
Assim, o modelo estrutural fica
⎥⎦
⎤⎢⎣
⎡+⎥
⎦
⎤⎢⎣
⎡⎥⎦
⎤⎢⎣
⎡−
+⎥⎦
⎤⎢⎣
⎡=⎥
⎦
⎤⎢⎣
⎡+− −
−
t
t
t
t
tt
t
bb
rr
rrr
2
1
22
11
21
1 .95.07.03.02.0
3.02.0
5.0
(7.29) ⎩⎨⎧
++−+=+++=
−−
−−
ttttt
tttt
brrrrbrrr
2121112
112111
95.07.05.03.03.02.02.0
O modelo estrutural (7.29) apresenta uma forma recursiva. A relação contemporânea se
dá de para e não de para . A primeira variável afeta a segunda mas a segunda
não afeta a primeira, contemporaneamente. Isto acontece devido a: a) tipo de
decomposição usada (Cholesky), e b) a ordem das variáveis, vem antes de .
1r 2r 2r 1r
1r 2r
Mudando a ordem das variáveis no VAR, temos
⎩⎨⎧
+++=++−=
−−
−−
tttt
tttt
arrrarrr
112111
212112
3.02.02.01.16.04.0
e ⎥⎦
⎤⎢⎣
⎡+⎥
⎦
⎤⎢⎣
⎡⎥⎦
⎤⎢⎣
⎡ −+⎥
⎦
⎤⎢⎣
⎡=⎥
⎦
⎤⎢⎣
⎡
−
−
t
t
t
t
t
t
aa
rr
rr
1
2
21
12
1
2 .2.03.06.01.1
2.04.0
⎥⎦
⎤⎢⎣
⎡=Σ
2111

João Eustáquio de Lima 16DER/UFV
Agora a matriz triangular inferior para a decomposição de Cholesky é .
Pré-multiplicando o modelo por temos
⎥⎦
⎤⎢⎣
⎡−
=−
11011L
1−L
⎥⎦
⎤⎢⎣
⎡⎥⎦
⎤⎢⎣
⎡−
+⎥⎦
⎤⎢⎣
⎡⎥⎦
⎤⎢⎣
⎡ −⎥⎦
⎤⎢⎣
⎡−
+⎥⎦
⎤⎢⎣
⎡⎥⎦
⎤⎢⎣
⎡−
=⎥⎦
⎤⎢⎣
⎡⎥⎦
⎤⎢⎣
⎡− −
−
t
t
t
t
t
t
aa
rr
rr
2
1
21
12
1
2
1101
.2.03.06.01.1
1101
2.04.0
1101
1101
e . ⎥⎦
⎤⎢⎣
⎡==′Σ −−
100111 GLL
Agora a forma estrutural será dada por
. ⎩⎨⎧
+−++−=++−=
−−
−−
ttttt
tttt
crrrrcrrr
2121121
112112
8.08.00.12.01.16.04.0
O modelo estrutural apresenta uma forma recursiva porém com relação contemporânea
diferente em que (a primeira variável) afeta mas não afeta . A primeira
variável afeta a segunda mas a segunda não afeta a primeira, contemporaneamente. A
simples mudança na ordem das variáveis no modelo altera o sentido da relação
contemporânea (teoria) entre as variáveis e consequentemente as funções impulso
resposta e a decomposição de variância. A saída para este problema é: a) usar uma
ordem das variáveis que tenha boa justificativa tendo como base a teoria e
conhecimento do setor; b) usar outro tipo de decomposição; c) usar funções impulso
resposta generalizadas, e d) usar procedimento de estimação da matriz de relações
contemporâneas que seja compatível com a teoria e que forneça erros ortogonais para a
forma estrutural.
2r 1r 1r 2r
No processo de ortogonalização dos erros (diagonalização de ) ficou evidente
que os erros ortogonais são erros de um modelo estrutural que contém relações
contemporâneas entre as variáveis e que a todo VAR forma reduzida corresponde uma
forma estrutural que deve ser compatível com a teoria relativa ao estudo. Para melhor
entender a relação entre VAR (forma reduzida) e VAR Estrutural (forma estrutural)
pode-se fazer as seguintes observações:
Σ
a) A ortogonalização dos erros do modelo VAR (diagonalização de Σ ) conduz a uma
forma estrutural que tem como característica importante as relações contemporâneas
entre as variáveis.
b) A um com erro correlacionados corresponde um modelo estrutural com
erros não correlacionados. Erros estruturais são considerados não correlacionados.
( )pVAR
c) A decomposição de Cholesky gera relações contemporâneas recursivas de acordo
com a ordem em que as variáveis aparecem no modelo.

João Eustáquio de Lima 17DER/UFV
d) Mudando a ordem das variáveis no vetor que compõe o VAR, as relações
contemporâneas se alteram.
tY
e) Relações contemporâneas representam teoria. Assim, antes de estimar o modelo
deve-se certificar de que a estrutura recursiva tem respaldo na teoria.
f) As funções impulso resposta e decomposição de variância obtidas com decomposição
de Cholesky estão sujeitas à ordenação das variáveis.
g) Dada a matriz de variâncias e covariâncias Σ aplica-se a transformação de Cholesky
para obter a matriz de relações contemporâneas. Existem outras formas de obter esta
matriz com relações contemporâneas não recursivas. Esta é a idéia básica do VAR
Estrutural. Dada a estimativa de Σ , procura-se obter uma matriz de relações
contemporâneas que represente uma teoria mais flexível que a recursiva.
h) Deve-se observar que o processo de identificação do VAR (forma reduzida) para o
VAR Estrutural (forma estrutural) impõe naturalmente restrições na matriz de relações
contemporâneas. Não é possível estimar uma matriz cheia com relações entre todas as
variáveis. Será necessário definir restrições de exclusão que tenham respaldo na teoria e
dêem validade ao modelo.
i) A idéia básica do VAR Estrutural é estimar a matriz de relações contemporâneas com
o número mínimo de restrições e com relações teoricamente relevantes. Combina-se a
diagonalização de Σ com a matriz de relações contemporâneas especificada de acordo
com a teoria.
7.2.10 Decomposição da Variância do Erro de Previsão
Uma análise complementar à função impulso resposta é a decomposição da
variância do erro de previsão que procura determinar qual a percentagem da variância
do erro de previsão de uma variável que é devido a ela e qual percentagem é devido a
cada uma das outras variáveis do modelo ao longo do horizonte de previsão. Esta
análise fornece elementos para se inferir sobre causalidade ao longo de um período
temporal e sobre qual variável é mais exógena no sistema.
A análise se baseia nos desvios da previsão das variáveis. As previsões obtidas
com o modelo VAR contém dois elementos: o valor esperado para a variável e o choque
inesperado em cada equação. A decomposição de variância inicia com o cálculo da
variância do erro de previsão do VAR na forma de médias móveis, isto é, na foram
invertida . Assim, o erro de previsão h períodos à frente no modelo na
forma de é dado por
)(∞VMA )( pVAR
)(∞VMA
...)|( 2211 +Φ+Φ+=− −+−++++ hththththt TYEY εεε . (7.30)

João Eustáquio de Lima 18DER/UFV
O lado esquerdo de (7.30) é a diferença entre o valor observado do vetor de variáveis
endógenas no tempo e o valor previsto pelo VAR. O lado direito é a representação
dos erros de previsão. Observe que o erro de previsão corrente ou inovações
no modelo dependem de inovações passadas.
ht +
)(∞VMA
A análise precisa ser feita com or erros ortogonais. Assim, a equação (7.30)
pode ser expressa em termos de choques ortogonais por
...)|( 2211 +Ψ+Ψ+=− −+−++++ hththththt uuuTYEY . (7.31)
Denotando o ij-ésimo elemento de nΨ por nij ,ψ e considerando o erro de previsão da
variável temos k
......
...)|(
112,1
112,112,0111,1111,111,0
2
22111
++
++++++=−
+−
−+++−−++++
tyh
htyhtytyhhtyhtyhThT
u
uuuuuTyEy
ψ
ψψψψψ
Dado que os erros não são correlacionados a variância do erro de previsão da variável
é dada por
k
∑≠
−≠− +++++++=k
hkhkk h )...()...()( 211,1
211,1
211,0
2211,1
211,1
211,0
22 ψψψσψψψσσ (7.32)
Cada termo é interpretado como a contribuição da respectiva variável para a variância
do erro de previsão h períodos à frente da variável k . Dividindo ambos os lados por
obtém-se a contribuição percentual de cada variável (Lütkepohl e Krätzig, 2004,
Bueno, 2008).
)(2 hkσ
Deve-se lembrar que a ortogonalização dos erros estabelece relações
contemporâneas entre os erros de previsão da mesma forma que foi visto nas funções
impulso resposta e está diretamente ligada à pressuposição que é feita sobre as relações
contemporâneas entre as variáveis na identificação do VAR. Se for usada a
decomposição de Cholesky a ordem das variáveis é importante e oredens diferentes
fornecem decomposição de variância diferente.
A decomposição da variância do erro de previsão é, normalmente, apresentada
em forma de tabela que indica a precentagem do erro de previsão de uma variável que
pode ser atribuída a ela e a cada uma das outras do sistema períodos à frente depois
da inovação. Uma variável tipicamente exógena terá alta percentagem explicada por ela
própria por um longo período. Se uma variável é importante para a dinâmica temporal
de outra variável, um erro de previsão na primeira variável terá efeito sobre o erro de
previsão na segunda variável. A análise pode indicar, também, relações de causalidade
de Granger mostrando os impactos de mudanças e como as variáveis são relacionadas
ao longo de certo horizonte de tempo. Analisa-se, basicamente, o percentual da
variância do erro de previsão de uma variável que decorre dela e decada uma das outras,
h

João Eustáquio de Lima 19DER/UFV
se o percentual varia ao longo do horizonte e por quantos períodos uma variável
permanece importante para explicar outra.
7.3 VAR Estrutural
7.3.1 Introdução
Nesta parte vamos apresentar o modelo VAR Estrutural como uma extensão
lógica do VAR que foi definido como um modelo auto-regressivo vetorial capaz de
captar as características dinâmicas dos dados econômicos, como originalmente
especificado por Sims (1980). Após apresentar a especificação do modelo,
identificamos a necessidade de transformar a matriz de variâncias e covariâncias dos
erros para se ter choques ortogonais, isto é, não correlacionados, para a análise correta
das funções impulso resposta e decomposição da variância do erro de previsão.
Contudo, mesmo tendo erros ortogonais surge a dificuldade de como interpretar
as funções impulso resposta sem referência à teoria econômica, ou seja, fica difícil
interpretar o VAR sem referência a uma estrutura econômica específica.
Na seqüencia, vimos que a decomposição de Cholesky da matriz de variâncias e
covariâncias dos erros gera erros ortogonais, mas impõe uma estrutura recursiva nas
relações contemporâneas entre as variáveis uma vez que a transformação ocorre em
todo o modelo. Nesta estrutura a primeira variável do vetor não é,
contemporaneamente, afetada por nenhuma das outras, a segunda é afetada pela
primeira, a terceira é afetada pela primeira e pela segunda, e assim sucessivamente. A
variável mais exógena no modelo, isto é, a que não é afetada por nenhuma, vem
primeiro e a mais endógena, isto é, a que afetada por todas, vem por último na
ordenação.
tY
Dessa forma, a menos que exista uma justificativa teórica para esta estrutura
recursiva a análise dos efeitos de choques se torna arbitrária. Além disso, vimos que, em
geral, mudando a ordem das variáveis no vetor muda os resultados dos choques e,
logicamente, muda as relações contemporâneas. Surge o problema de como definir a
ordem das variáveis no modelo. Diante disto, Sims (1981) sugere estimar com várias
ordenações de variáveis e verificar a robustês dos resultados em relação à ordenação se
nenhuma ordem for sugerida pela teoria. Mas, esta não é uma solução prática.
tY
A incorporação da teoria para definir as relações contemporâneas entre as
variáveis como alternativa à relação recursiva conduz ao VAR Estrutural (SVAR), ou

João Eustáquio de Lima 20DER/UFV
VAR identificado como foi definido por Sims (1986), Bernanke (1986) e Shapiro e
Watson (1986).
Inicialmente o VAR foi definido como um modelo cujo objetivo era captar as
relações dinâmicas entre as variáveis e fazer previsões. Ele apresentava bom
desempenho para previsão, mas sofria críticas com relação a interpretação dos efeitos
dos choques devido seu caráter ateórico. Como interpretar as funções impulso resposta
sem uma referência à teoria econômica? Assim, avançou-se na idéia de que existe um
modelo estrutural por traz do VAR irrestrito. Como veremos adiante, o VAR passa a ser
considerado formalmente como uma Forma Reduzida (FR) para o qual existe uma
Forma Estrutural (FE) que especifica relações contemporâneas entre as variáveis de
acordo com a teoria. Greene (2003) salienta que assim a literatura “fecha um círculo”
porque a análise recente baseada no VAR com identificação estrutural se torna muito
semelhante à análise com modelos de equações simultâneos dinâmicos.
Considerar o VAR como uma FR de um modelo estrutural exige analisar o
problema da identificação em que se procura verificar se as informações da FR são
suficientes para identificar a FE. Diferentemente dos modelos de equações simultâneas
onde se pode estimar a FE, neste caso estima-se a FR e a partir dela se obtém os
parâmetros estruturais. Para isso é necessário impor restrições suficientes para
identificar a FE. A decomposição de Cholesky impõe número suficiente de restrições
mas gera uma estrutura recursiva na FE. Existem procedimentos mais flexíveis que
possibilitam identificar FE’s mais gerais que representam relações econômicas
coerentes com a teoria.
A relação entre VAR e VAR estrutural pode ser estabelecida de outra forma.
Alguns livros iniciam definindo um modelo estrutural tipo equações simultâneas
dinâmico, que é na verdade um VAR estrutural, e obtém a forma reduzida que é o VAR
padrão. Passa a descrever o VAR e depois volta a analisar o VAR Estrutural com ênfase
nas relações contemporâneas entre as variáveis e no problema da identificação. Alguns
chamam o Var Estrutural de sistema primitivo e o VAR de forma padrão (Enders,
1995). Outros livros definem primeiro o VAR como um modelo auto-regressivo vetorial
e, após caracterizar a nessecidade de decomposição da matriz de variâncias e
covariâncias dos erros para se ter choques ortogonais chega no VAR Estrutural
caracterizado pelas relações contemporâneas que aparecem entre as variáveis em
conseqüencia da decomposição. Esta é a abordagem que estamos seguindo. Neste
processo fica claro o problema da identificação do modelo estrutural através da forma
reduzida. Relacionado com o VAR forma reduzida existe um modelo estrutural sempre

João Eustáquio de Lima 21DER/UFV
que uma transformação é feita. A decomposição de Cholesky gera um VAR Estrutural
recursivo, mas outras formas são possíveis.
Erros estruturais são ortogonais por pressuposição e erros da forma reduzida são
correlacionados. A análise de impulso resposta e decomposição de variância que
mostram o efeito de inovação nas variáveis deve ser feita com choques estruturais.
Assim, a decomposição ortogonaliza os erros da forma reduzida e gera erros estruturais
que devem ser relacionados com um modelo estrutural que tenha base teórica.
7.3.2 Especificação
Nesta parte vamos apresentar a especificação do modelo VAR Estrutural (SVAR)
com ênfase na especificação da matriz de relações contemporâneas e nas restrições
necessárias para identificar o sistema estrutural (SVAR) a partir da forma reduzida
(VAR) de acordo com o procedimento de Bernanke (1986) que é uma alternativa à
especificação recursiva obtida com a decomposição de Cholesky. Em seguida, são
apresentados alguns exemplos de especificações encontradas em trabalhos publicados
ou em livro texto.
Do VAR para o SVAR
Considere um com variáveis estacionárias )( pVAR k
tptpttt YAYAYAY ε++++= −−− ...2211 (7.33)
em que é um vetor de variáveis endógenas, , tY 1kx iA pi ,...,3,2,1= são matrizes
de coeficientes e
kxk
tε é um vetor de erros com média zero e matriz de variâncias e
covariâncias , isto é
1kx
εΣ ),0(~ εε Σt . Os termos determinísticos (intercepto, tendência,
dummies e outras variáveis exógenas) foram suprimidos para simplificar a notação.
O processo (7.33) tem uma representação de médias móveis, , dada por )(∞MA
......332211 −−− +++= ttttt MMMY εεεε (7.34)
em que, , e ∑=
−=s
jjjss AMM
1
,...3,2,1=s kIM =0 .
Os coeficientes das matrizes , sM ,...3,2,1=s , fornecem as respostas das
variáveis a choques no sistema, constituindo as funções impulso resposta. Porém, como
os erros tε são contemporaneamente correlacionados esses coeficientes não refletem de
forma adequada os efeitos dos choques nas variáveis do sistema. Assim os erros de
(7.33) devem ser ortogonalizados de modo a apresentarem matriz de variâncias e
covariâncias diagonal (ausência de covariância). A ortogonalização consiste em uma

João Eustáquio de Lima 22DER/UFV
transformação dos erros em (7.33) gerando outro vetor de erros com matriz de
variâncias e covariâncias diagonal. No entanto, esta transformação envolve modificar
todo o modelo o que traz conseqüências para o relacionamento contemporâneo entre as
variáveis.
Dado εΣ simétrica e definida positiva, existe uma matriz P não singular tal que
é uma matriz diagonal. Multiplicando-se (7.33) por PP ′Σε P , tem-se,
tptpttt PYPAYPAYPAPY ε++++= −−− ...2211
ou
, (7.35) tptpttt uYAYAYAPY ++++= −−−*
2*21
*1 ...
que constitui um novo modelo, com novo erro tt Pu ε= e com o termo do lado
esquerdo que incorpora relações contemporâneas entre as variáveis do sistema.
tPY
O modelo (7.35) é um VAR Estrutural que permite análise de funções impulso
resposta ortogonais, decomposição da variância do erro de previsão e estimativas de
coeficientes de relações contemporâneas entre as variáveis. A matriz de variâncias e
coveriâncias dos erros estruturais em (7.35) é dada por
definição)por (diagonal )(
)()()(PPPPE
PPEuuEuCovVar
tt
ttttut
′Σ=′′==′′=′=Σ≡−
εεεεε
(7.36)
Relacionamos um VAR (equação 7.33) com um SVAR (equação 7.35).
Do SVAR para o VAR
De forma alternativa podemos definir um VAR a partir de um SVAR. Mudando
um pouco a notação, considere um modelo estrutural (SVAR) dado por
(7.37) tptpttt BuYAYAYAAY ++++= −−−*
2*21
*1 ...
em que vetor (k x 1) de variáveis do modelo, =tY
=A matriz (k x k) de relações contemporâneas entre as variáveis do modelo,
matrizes (k x k) de coeficientes que relacionam os valores == ),...,3,2,1(* piAi
defasados das variáveis com seus valores correntes,
=B matriz (k x k) de relações contemporâneas entre os erros estruturais , tu
vetor (k x 1) de erros/choques estruturais ortogonais com e =tu 0)( =tuE
uttuuE Σ=′)( (diagonal), e
é o número de variáveis. =k
Pré multiplicando-se (7.37) por 1−A , temos

João Eustáquio de Lima 23DER/UFV
tptpttt BuAYAAYAAYAAAYA 1*12
*2
11
*1
11 ... −−
−−
−−
−− ++++=
tptpttt YAYAYAY ε++++= −−− ...2211 . (7.38)
em que (7.38) é um VAR padrão e
tt BuA 1−=ε
ou tt BuA =ε . (7.39)
Observe que,
=tε erros/choques ou inovações do modelo VAR (forma reduzida) que
são correlacionados, e
erros/choques ou inovações estruturais que devem ser ortogonais =tu
(não correlacionados).
A matriz de variâncias e covariâncias dos erros da forma reduzida em (7.38) é dada por
′′Σ=′′′
=′′′=′=Σ≡−
−−−−
−−
1111
11
)(
)()()(
ABBAABuuBEA
ABuBuAEECovVar
utt
ttttt εεε ε (7.40)
Se for identidade, uΣ
′′=Σ −− 11 ABBAε . (7.41)
Identificação
O que mostramos anteriormente é que o VAR (equação 7.33 ou 7.38) é uma
forma reduzida do VAR Estrutural (equação 7.35 ou 7.37). O modelo estrutural não é
observável, mas a forma reduzida pode ser estimada. Realmente, a estratégia é,
primeiro, especificar e estimar o VAR, e depois estimar o VAR Estrutural e concentrar
na análise de funções impulso resposta, decomposição de variância e relações
contemporâneas entre as variáveis.
Para estimar o SVAR temos que resolver primeiro o problema de identificação.
A partir da estimativa do VAR será possível identificar o VAR Estrutural? Mais
especificamente, a partir da estimativa de εΣ̂ εΣ , será possível obter estimativas dos
coeficientes de A e B do modelo estrutural?
Para se ter identificação é preciso impor restrições nas matrizes A e B . O
número de restrições necessário para alcançar identificação depende da relação entre o
número de coeficientes estimados na forma reduzida e o número de coeficientes a serem
obtidos na forma estrutural; é um problema de número de incógnitas e de número de
equações (relações) semelhante à condição de ordem1 em equações simultâneas.
1 A condição de ordem é uma condição necessária; existe também a condição de posto.

João Eustáquio de Lima 24DER/UFV
O número de parâmetros do VAR forma reduzida que servem para identificar os
elementos das matrizes A e B é o número de coeficientes não redundantes da matriz de
variâncias e covariâncias . Os coeficientes das variáveis defasadas não contam.
Como é simétrica, temos
εΣ̂
εΣ̂ 22)1( 2 kkkk +=
+ coeficientes que é o número máximo de
elementos identificáveis em A e B . Se nosso modelo tem 3 variáveis, teremos
62
)13(3=
+ elementos em e só podemos identificar 6 elementos em εΣ̂ A e B ; se
nosso modelo tem 4 variáveis, teremos 102
)14(4=
+ elementos em e só podemos
identificar 10 elementos em
εΣ̂
A e B . Assim, temos:
Elementos a serem identificados: São elementos em 22k A e B ;
Elementos observados/estimados: São os 22
)1( 2 kkkk +=
+ valores da matriz de
variâncias e covariâncias dos erros ( ). εΣ̂
Identificação: Para identificar coeficientes desconhecidos a partir dos
valores de , será necessário impor
22k
2/)( 2 kk + εΣ̂ 2)1(
2)1(2 22 −
+=+
−kkkkkk
restrições nas matrizes A e B . Temos três situações com relação à condição de
identificação do sistema2:
a) Sistema exatamente identificado – quando o número de restrições em A e B for
igual a 2
)1(2 −+
kkk ,
b) Sistema super identificado – quando o número de restrições em A e B for
maior que 2
)1(2 −+
kkk ,
c) Sistema sub-identificado – quando o número de restrições em A e B for menor
que 2
)1(2 −+
kkk .
Para a maioria dos casos são usadas restrições de exclusão com zeros nas posições
que representam ausência de relação contemporânea, ou seja, nas posições de
coeficientes que não serão estimados. Estas restrições são definidas pela teoria. Além
disso, podemos definir A ou B como identidade e impor a restrição de que a matriz
tenha na diagonal principal, o que reduz o número de restrições necessárias. s1′
2 Podemos distinguir dois tipos de restrições: de curto prazo e de longo prazo. Vamos tratar aqui somente das restrições de curto prazo.

João Eustáquio de Lima 25DER/UFV
O sistema estrutural é estimável ou identificado quando for exatamente identificado
ou super identificado. Na modelagem de SVAR é comum considerar modelos
exatamente identificados, pois estes contêm o mínimo de restrições necessárias para
identificação.
Para sistemas super identificados existe um teste de razão de verossimilhança para
verificar a validade das restrições além do mínimo necessário. A hipótese nula é que as
restrições sãoválidas. A estatística de teste é dada por
2~|)ˆ|ln|~|(ln rTLR χΣ−Σ=
(7.42)
em que Σ~ e Σ̂ são as matrizes de variâncias e covariâncias restrita e irrestrita,
respectivamente, e r é o número de restrições a inimo.
Com base na equação 7.39 em que tt BuA
cima do m
=ε e dependendo das restrições
impostas, três tipos de modelos SVAR podem ser definidos (Lütkepohl e Krätzig,
2004): a) Modelo-A; b) Modelo-B, e c) Modelo-AB. Esta denominação é utilizada na
eratura e implementada pelos programas econométricos.
cont as entre as variáveis
diretamente pela matriz
lit
Modelo-A
Neste modelo a idéia é modelar as relações emporâne
A em (7.37) considerando kIB = , isto é,
tt uA =ε (7.43)
o que reduz o número de valores desconhecidos de 2k . Assim, o número mínimo de
restrições para identificação será 2
)1( −kk
go, temos que impor, no
mínimo, 6 restrições. A matriz
.
Por exemplo, em um sistema de 4 variáveis temos 16 elementos a serem
identificados. Os elementos estimados são 10 da matriz εΣ̂ . Lo
A teria a seguinte configuração
⎤
⎢⎢⎢⎢⎡
=323231
2221
11
000000
aaaaa
a
A .
recursivo, os zeros podem aparecer em posições diferentes fora da
iagonal principal.
⎥⎥⎥⎥
⎦⎣ 42434241 aaaa
Assim, o sistema é exatamente identificado. Se colocarmos quatro 1’s na diagonal
principal o sistema fica super identificado. Se a teoria indica um relacionamento
contemporâneo não
d

João Eustáquio de Lima 26DER/UFV
o
ente pelos choques da forma reduzida. A matriz
Modelo-B
Neste modelo, ao invés de modelar diretamente as relações contemporâneas
entre as variáveis, especifica-se as relações entre os erros identificand -se os choques
estruturais diretam A é considerada
o identidade, isto é, kIA = . Log
tt Bu=ε . (7.44)
Ou seja, os erros da forma reduzida são funções line s erros estrutur ro
míni
ares do ais. O núme
mo de restrições para identificação é, também, 2
)1( −kk . Neste caso, BB u ′Σ=Σε e,
.
sível considerar os dois tipos
amente e
se ku I=Σ , BB ′=Σε
Modelo-AB
De acordo com Amisano e Giannini (1997), é pos
de restrições simultane o modelo resultante será
tt uA = Bε . (7.45)
Como A e B têm por, no mínimo, 2k elementos cada, temos que im
222 k restrições para identificação.
Como exemplo, considere o odelo apresentado por Lütkepohl e Krätzig (2004)
envolvendo as variáveis produto ( tq ), t ) e moeda ( tm ). Os erros da
o denotados por ),,( ′= mt
it
qtt εεεε e os erros estruturais por
),,( ′= mt
LMt
IStt uuuu . De acordo com uma visão
)1()1( 22 −+=
+−
kkkkk
m
taxa de juros (
forma reduzida sã
a21−= εε
ão
i
keynesiana a relação entre os erros da
forma reduzida e os erros estruturais é dada por
que representa a curva IS ISt
it
qt uba 1112 +−= εε ,
LMt
mt
q uba 2223 +− ε que representa a curva LM tit
mt
mt ub33=ε que representa uma regra de oferta de moeda
A primeira equação representa um curva IS com um parâmetro negativo para inovação
na taxa de juros e um efeito de choque estrutural na própria IS; a segunda equação é
melhor entendida resolvendo a demanda por moeda em funç de inovações na taxa de
juros, ou seja, LMt
it
qt
mt u++= εβεβε 21 , de onde se tira que 1β deve ser positivo porque

João Eustáquio de Lima 27DER/UFV
mais moeda é necessário para um maior volume de transação e que 2β deve ser
negativo porque quanto mais alta a taxa de juros maior o custo de se reter moeda e,
consequentemente, menor quantidade de moeda será demandada. Por fim a terceira
equação postula que as inovações da base monetária são determinadas por choques
exógenos na oferta monetária. As três equações formam um m
scrito na forma
odelo AB que pode ser
tt BuA =ε e
⎢⎢⎡
=⎥⎥⎤
⎢⎢⎡
33
22
11
2321
12
0000
101
ε
C
tt ub
bb
aaa
⎥⎥⎥
⎦
⎤
⎢⎣⎥⎦⎢⎣ 00100
omo 3=k , é necessário um mínimo de 121(212 2 =+− kkk restrições em ) A e em
B para identificação do modelo. Com 3 uns e 3 zeros em A e 6 zeros em B a condição
gonal de B são estimativas dos
ios padrões dos erros estruturais (QMS, 2009).
ir m o
é satisfeita e o modelo é exatamente identificado.
Par fins de estimação, os softwares econométricos consideram o Modelo-AB
uma vez que os outros podem ser considerados casos especiais. O modelo mais comum
é o Modelo-AB em que A define as relações contemporâneas entre as variáveis e B é
diagonal. Na maioria dos softwares os elementos da dia
desv
Estimação de SVAR no EViews
Prime o te os que estimar um VAR padrão e, em seguida, solicitar a estimaçã
das matrizes A e B . Antes, porém, temos que criar as matrizes A e B com a opção
Object/New Object...editando-as com zero nas posições de exclusão e com “NA” nas
posições de coeficientes a serem estimados. Por exemplo,
⎢⎢⎡
=101001
NANANAA e , que representa um sistema recursivo com
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡=
100010001
B IB =⎥⎥⎥
⎦
⎤
⎢⎣
.
Ou,
e , que representa um sistema
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
=
10010001
01
NANANA
NANANA
A
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
=
NANA
NANA
B
000000000000

João Eustáquio de Lima 28DER/UFV
strutu z
turais.
do
Structural Factorization... e seleciona Matrix para
ecificar as restrições de identificação, depois Short-run pattern para indicar as
erem estimadas.
al do Brasil usado para prever
mo descrito em Bueno (2008). O
enas:
ominal;
994 a ma
âmetros estruturais
o Modelo-AB em que
e ral com relações contemporâneas não recursivas entre as variáveis e com matri
B diagonal cujos coeficientes são estimativas dos desvios padrões dos erros estru
Depois de criadas estas matrizes e estimado o VAR padrão, clica-se, na tela
VAR, a opção Proc/Estimate
esp
matrizes a s
Exemplo
Considere o modelo VAR 1 do Banco Cenr
inflação e determinar as relações entre as variáveis co
modelo inclui as seguintes variáveis endóg
camb = variação da taxa de câmbio n
juro = variação da taxa selic real;
livres = inflaçãodos preços livres, e
adm = inflação dos preços administrados.
Além disso, são incluídas 11 dummies mensais e uma dummy de tendência para o
período de desinflação (janeiro de 1995 a junho de 1998). Ao dados se referem ao
período de setembro de 1 io de 2007. O VAR foi estimado com 4 defasagens as
11 dummies e a tendência. Após estimar o VAR recuperamos os par
tt BuA =εd e B diagonal para duas situações: modelo recursivo
exatam entificado.
a mais endógena. Os coeficientes da
matriz B fornecem as estimativas dos desvios padrões dos erros estruturais. Na Tabela
7.3 encontram ativas do modelo.
o* de
juro camb adm li s
ente identificado e modelo não recursivo super-id
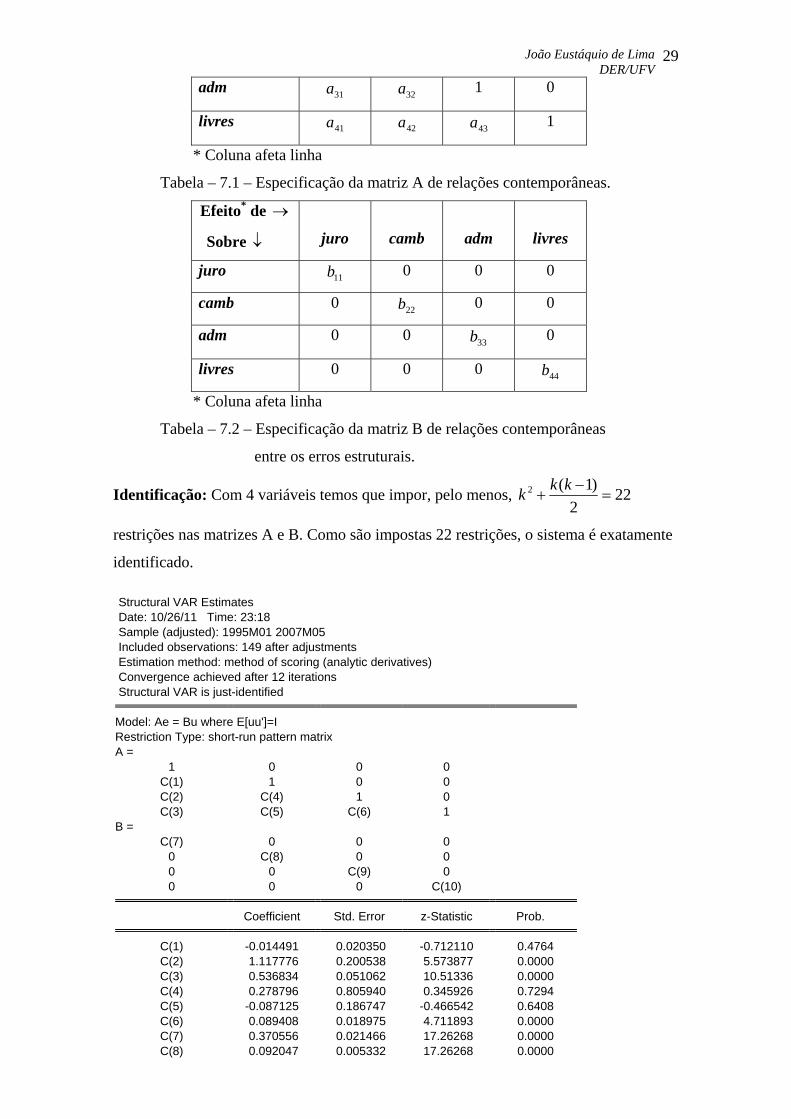
1. Modelo recursivo exatamente identificado
A Tabela 7.1 mostra a especificação da matriz A de relações contemporâneas
entre as variáveis e a Tabela 7.2 a especificação da matriz B para um modelo recursivo
em que juro é a variável mais exógena e livres
-se as estim
Efeit →
Sobre ↓
vre
juro 1 0 0 0
camb 21a 1 0 0
João Eustáquio de Lima 29DER/UFV
1 0 adm 31a 32a
livres a a a 1 41 42 43
* Coluna afeta linha
Tabel E pecifica a matriz A de relações contem
o* de
juro camb adm li s
a – 7.1 – s ção d porâneas.
Efeit →
Sobre ↓
vre
juro 11b 0 0 0
camb 0 22b 0 0
adm 0 0 0 33b
livres 0 0 0 b 44
* Coluna afeta linha
temporâneas
Com 4 variáveis temos que impor, pelo menos,
Tabela – 7.2 – Especificação da matriz B de relações con
entre os erros estruturais.
Identificação: 222
)1(2 =−
+kkk
restrições nas matrizes A e B. Como são impostas 22 restrições, o sistema é exatamente
07M05 r adjustments
alytic derivatives)
tura AR is just-identi
identificado. Structural VAR Estimates Date: 10/26/11 Time: 23:18 Sample (adjusted): 1995M01 20
Included observations: 149 afte Estimation method: method of scoring (an
vergence achieved after 12 iterations Con Struc
l V fied
Model: A u where E[uuRestricti e: short-run n matrix
C C C
B = C )
e = B ']=I on Typ patter
A = 1
C 0 0 0
(1) 1 C )
0 0 (2) (4 1
C ) 0
(3) (5) (6
1
(70
0 C(8)
0 0
0 0
0 0 C(9) 0 0 0 0 C(10)
Coefficient Std. Error z-Statistic Prob.
C(1) -0.014491 0.020350 -0.712110 0.4764 C(2) 1.117776 0.200538 5.573877 0.0000 C(3) 0.536834 0.051062 10.51336 0.0000 C(4) 0.278796 0.805940 0.345926 0.7294 C(5) C(6)
-0.087125 0.089408
0.186747 0.018975
-0.466542 4.711893
0.6408 0.0000
C(7) C(8)
0.370556 0.092047
0.021466 17.26268 0.0000 0.005332 17.26268 0.0000

João Eustáquio de Lima 30DER/UFV
C(9) 0.905538 0.052456 17.26268 0.0000 0.209741 0.012150 17.26268 0.0000 C(10)
Log likelihood -94.82972
Estimated A matrix: 0.000000 0.000000 0.000000
Estimated B matrix: 0.370556 0.000000 0.000000 0.000000 0.000000 0.092047 0.000000 0.000000
0.000000 0.000000 0.209741
1.000000 -0.014491 1.000000 0.000000 0.000000 1.117776 0.278796 1.000000 0.000000 0.536834 -0.087125 0.089408 1.000000
0.000000 0.000000 0.905538 0.000000 0.000000
ativas do modelo SVAR exatamente identificado. Tabela – 7.3 – Estim
A matriz A multiplicada pelo vetor de variáveis resulta em 4 equações,
+−++
+−=
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎡
−
−=
livresadmcambjuroadmcambjuro
cambjurojuro
livresadmcambjuro
A
089.0087.0537.0279.0118.1
014.0
1089.0087.001279.0118.1001014.00001
⎧+=
=
defasadostermosjurocambdefasadostermosjuro
t
t
014.0
o é que, a elevação
e 2.79%
na
s preços livres. São estas as
inform eve-se analisar as funções
puls
porâneas
entre as variá en 3 co ficientes d esma
especificada T bela 7. ntra estim s do .
to de
juro camb adm li s
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
+⎢⎣ 537.0
⎪⎪⎩
⎨
+−+−=+−−=
defasadostermosadmcambjurolivresdefasadostermoscambjuroadm
t
t
089.0087.0537.0 279.0118.1
Observe a forma recursiva do modelo. A interpretação desse resultad
de 10% na variável juro implica aumento no cambio de 0.14%, diminuição dos preços
administrados de 11.18% e diminuição nos preços livres de 5.37%,
contemporaneamente. Já o aumento de 10% na variável camb leva à redução d
nos preçosadministrados e elevação de 0.87% nos preços livres. A elevação de 10%
variável adm leva a uma diminuição de 0.89% no
⎪⎪
ações das relações contemporâneas. Em seguida, d
im o resposta e decomposição de variância.
2. Modelo não recursivo e super identificado
A Tabela 7.4 mostra a especificação da matriz A de relações contem
veis com ap as e iferentes de zero. A matriz B é a m
antes. Na a 5 enco m-se as ativa modelo
Efei →
Sobre ↓
vre
juro 1 0 0 0
camb 0 1 0 0

João Eustáquio de Lima 31DER/UFV
1 adm 31a 0 0
livres 41a 0 1 43a
* Coluna afeta linha
Tabela – 7.4 – Especificação da matriz A de relações con
Identificação: Com 4 variáveis temos que impor, pelo menos,
temporâneas.
222
2 =+k
restrições nas
)1( −kk
matrizes A e B. Como foram impostas 25 restrições, o sistema é super
Convergence achieved after 10 iterations
(3 degrees of freedom)
identificado. Structural VAR Estimates Date: 10/26/11 Time: 23:18 Sample (adjusted): 1995M01 2007M05 Included observations: 149 after adjustments Estimation method: method of scoring (analytic derivatives)
Structural VAR is over-identified
Model: Ae = Bu where E[uu']=Restrictio ype: short-run p rn matrix A =
C(1) 0 C
B = C
C 0 0 C(6) 0
I atte
n T
1 0 0 0 0 1 0 0
1 0 C(2) 0 (3) 1
(4) 0 0 0 0 (5) 0 0
0 0 0 C(7)
Coefficient Std. Error z-Statistic Prob.
C(1) 1.121816 0.200278 5.601286 0.0000 C(2) 0.535853 0.051056 10.49539 0.0000 C(3) 0.089659 0.018981 4.723558 0.0000 C(4) 0.370556 0.021466 17.26268 0.0000 C(5) 0.092204 0.005341 17.26268 0.0000 C(6) C(7)
0.905902 0.209894
0.052477 17.26268 0.0000 0.012159 17.26268 0.0000
Log likelihood -95.25140 LR test for over-identificChi-square(3)
ation: 0.843359 Probabil y 0.8391
it
Estimated A matrix:
0.000000 1.000000 0.000000
Estimated B matrix:
0.000000 0.000000 0.905902 0.000000
1.000000 0.000000 0.000000 0.000000 0.000000 1.000000 0.000000 0.000000 1.121816 0.535853 0.000000 0.089659 1.000000
0.370556 0.000000 0.000000 0.000000 0.000000 0.092204 0.000000 0.000000
0.000000 0.000000 0.000000 0.209894
abela – 7.5 – Estimativas do modelo SVAR super identificado. T

João Eustáquio de Lima 32DER/UFV
As estimativas fornecem 4 equações
⎪⎪⎨
⎧
+−==
=
defasadostermosjuroadmdefasadostermoscambdefasadostermosjuro
t
t
t
122.1
e
to de 10% na variável adm leva a uma
iminuição de 0.89% nos preços livres.
o-integração
de séries temporais pode se orientar pela seguinte estratégia:
a
o que “d” é
ár para tornar estacionária. Obtém-se e
enciada .
iado
e , três séries
⎪⎩ +−−= defasadostermosadmjurolivrest 089.0536.0
A interpretação desse resultado é que, a elevação de 10% na variável juro implica
diminuição dos preços administrados de 11.22% e diminuição nos preços livres d
5.36%, contemporaneamente. Já o aumen
⎪
d
7.4 Análise de c7.4.1 Introdução
A modelagem
A. Caso Univ riado
1. Se Y é uma série estacionária, usa-se um modelo ARMA(p,q).
2. Se tY é não estacionária, usa-se um m delo ARIMA(p,d,q), em a
ordem de diferenciação necess ia
t
tY td
t YZ ∆=
tZmodela-se a série difer
B. Caso Multivar
Sejam Y temporais e a seguinte relação de interesse ttt ZX
tttt ZXY εγβα +++= . (7.46)
Neste caso temos que cons
nível.
2. Se Z e são não
a)
Correção de Erro (MCE), na forma uni ou
multivariada, dado por J
uZXY ++∆+∆+=∆ ∑∑ ε̂λγβα (7.47)
iderar as seguintes possibilidades:
1. Se são estacionárias, podemos estimar (7.46) emttt ZXY e ,
ttt XY , estacionárias, temos duas situações:
Se ttt ZXY e , são não estacionárias, mas cointegradas, deve-se
ajustar um Modelo de
ttj
jtjj
jtjt −=
−=
− 100
J
1ˆ −tε em que são
b) -integradas, deve-se
ajustar (7.46) em primeiras
os resíduos da equação (7.46).
Se ttt ZXY e , são não estacionárias e não co
diferenças, isto é,

João Eustáquio de Lima 33DER/UFV
tttt vZXY +∆+∆+=∆ γβα . (7.48)
.4.2 Conceito de Co-integração
r relações de equilíbrio (relações de cointegração) entre
as
de maneira a garantir a relação de equilíbrio de longo prazo.
Suponha
7
A não estacionariedade de séries temporais é uma possível manifestação de uma
tendência estocástica nas séries. Do ponto de vista econométrico a não estacionariedade
é problemática porque ela gera regressão espúria e não permite o uso da teoria
assintótica para estimação e inferência. Ou seja, mesmo em amostras grandes o
estimador de MQO será inconsistente e os testes de t e F não são válidos. Para contornar
este problema temos que busca
as variáveis não estacionárias.
A idéia intuitiva de cointegração é que variáveis não estacionárias podem
caminhar juntas, isto é, podem ter trajetórias temporais interligadas, de forma que no
longo prazo apresentem relação de equilíbrio. A existência de uma relação de equilíbrio
de longo prazo tem, certamente, implicações para o comportamento de curto prazo das
variáveis; deverá haver algum mecanismo que influencia o comportamento d
variáveis no curto prazo
),0(~ , 21111 σεε iidYY tttt += −
e ),0(~ , 221 σεε iidXX tttt += − ,
sendo t1
22
ε e t2ε independentes. As variáveis tY e tX são passeios aleatórios e portanto
não estacionários. Ambas apresentam tendência estocástica Mesm não havendo
ão da existência de um relaç entre tY e tX , o ajuste de
ttt XY
. o
nenhum i ça ndica a ão
εβα ++= deverá mostrar: a) alto 2R , b) β̂ altamente significativo, c) baixa
estatística de Durbim-Watson indicando resíduos autocorrelacionados. Isto é esperado
por causa da tendência presente em cada variável. Este resultado indica regressão
espúria, caracterizada por relação forte entre as variáveis, devido a tendência estocástica
comum s duas séries, e erro não estacionário.
7.4.3 D e Co-integraçã
As séries são cointegradas de ordem (d , b), isto é,
3 bdCIYY ktt ,
com 0
d), e
à
efinição d o
ktttt YYYY ,...,,, 321
, 21 YY tt
),(~,...,,
db ≤≤ , se:
a) Todas as séries forem integradas de ordem “d”, I(

João Eustáquio de Lima 34DER/UFV
b) Existir uma combinação linear dessas variáveis,
YaYttt aYaYaZ ++= 2211 ktkt ++ ...33 ,
que sej
ito de outra forma, as variáveis3
dIYdIYdIYdI kttt
serão CI(d , b) se
ttt
a integrada de ordem (d-b).
D
1Y t )(~),...,(~ ),(~ ),(~ 32
)(~...33 ktkt2211 bdIYaYaYaYaZ −++++= .
O vetor [ ]′= kaaaaa ...321 é denominado “vetor de cointegração”. Este é um
conceito estatístico geral em que a combinação linear deve ser integrada de ordem
menor
quando a combinação
linear é , I(0). Temos, então, duas situações:
a) Quando b = d,
se
IddIYaYa ktktt
que d.
Os casos de interesse para as relações econômicas são
estacionária, isto é
),(~,...,,, 321 ddCIYYYY ktttt
211 YaYaZ tt )0(~)(~...332 −+++ .
b) Quando d = b = 1,
se
+=
)1,1(~,...,,, 321 CIYYYY ktttt
)0(~)11(~...332211 IIYaYaYaYaZ ktktttt −++++= .
À semelhança de Bueno (2008), outros autores afirmam que os casos mais
estudados e de maior interesse são aqueles em que as variáveis são integradas de ordem
um ou há algumas integradas de ordem 1 e outras de ordem zero.
7.4.4 Relação de Equilíbrio de Longo Prazo
lação XY 10
Considere )1(~ e I(1)~ ),1(~ IZXIY ttt e a re tZ2tt βββ ++= .
Esta relação estará em equilíbrio de longo prazo se 0210 =−−− ttt ZXY βββ . No
ocorre e o “desvio do equilíbrio” pode ser representado por
tttt ZXY 210
entanto, a relação exata não
βββε −−−= sendo que, para o equilíbrio existir e ter significado
econômico, o desvi lutuar o deve f em torno de zero. Isto significa que tε deve ser
)0(~ Itε com 0)( =tE εestacionário, isto é, .
Assim, com 3 Existe uma definição de co-integração mais abrangente apresentada por Campbell e Perron (1991) que não exige que as variáveis tenham a mesma ordem de integração (Ver Bueno, 2008).

João Eustáquio de Lima 35DER/UFV
)1(~ e I(1)~ ),1(~ IZXIY ttt e
)0(~210 IZXY tttt βββε −−−=
tem-se com vetor de co-integração )1,1(~ e , CIZXY ttt [ ]′−−−= 2101 ββββ .
Intuitivamente, a análise de cointegração consiste em verificar se as variáveis
guardam uma relação de equilíbrio de longo prazo, isto é, se elas possuem uma
dinâmica comum que faz com que elas caminhem juntas ao longo do tempo. As Figuras
7.1, 7.2, 7.3 e 7.4 mostram exemplos de séries que podem ser cointegradas. A Figura
7.1 mostra as séries do Indicador Boi Gordo ESALQ-BM&F de valor a prazo (azul) e
valor a vista (vermelho). As duas séries parecem ser não estacionárias mas,
cointegradas, pois caminham juntas ao longo do tempo.
Figura 7.1 – Indicador ESALQ-BM&F do Preço doBoi Gordo.
A Figura 7.2 apresenta os preços médios da arroba de boi gordo nos Estados de
São Paulo, Minas Gerais e Goiás que, também, podem ser cointegradas, pois
apresentam uma trajetória comum ao longo do tempo.
Na Figura 7.3 são mostrados os preços de café em três segmentos do mercado.
Tem-se o preço pago ao produtor brasileiro (PP), preço de exportação (PE) e o preço de
atacado nos Estados Unidos (PA). Aparentemente as séries apresentam tendência
estocástica (não estacionárias), mas podem ser cointegradas.

João Eustáquio de Lima 36DER/UFV
A Figura 7.4 apresenta dados sobre taxa de câmbio real efetiva (TC), oferta
monetária (M1), taxa nominal de juros (JN) e preço relativo agricultura/indústria (RP).
As séries podem ser não estacionárias e apresentarem ou não equilíbrio de longo prazo.
0
40
80
120
160
200
80 82 84 86 88 90 92 94 96 98 00 02
SP MG GO
Figura 7.2 - Preços médios da arroba de boi gordo nos Estados de São
Paulo, Minas Gerais e Goiás.
0
1,000
2,000
3,000
4,000
5,000
6,000
25 50 75 100 125
PP PE PA
Figura 7.3 - Preço de café pago ao produtor brasileiro (PP), preço de
exportação (PE) e preço de atacado nos Estados Unidos (PA).

João Eustáquio de Lima 37DER/UFV
0
1
2
3
4
5
6
7
8
1983 1984 1985 1986 1987 1988
M1 JN TC RP
Figura 7.4 - Taxa de câmbio real efetiva (TC), oferta monetária (M1),
taxa nominal de juros (JN) e preço relativo entre
agricultura e indústria (RP).
7.4.5 Número de Vetores de Cointegração
O vetor de co-integração é formado pelos coeficientes da relação de co-
integração (estacionária) que assegura o equilíbrio de longo prazo entre as séries. Os
vetores de cointegração não são únicos. Podem existir várias combinações lineares
estacionárias resultantes da existência de vários vetores de cointegração. A identificação
do número de vetores de cointegração tem implicações relevantes para a modelagem de
relações econômicas e para aplicação prática do conceito de cointegração.
O número de vetores de cointegração depende do número de variáveis
envolvidas. Tem-se:
a) Caso de 2 variáveis – Se e e )1(~ IYt )1(~ IX t )0(~10 IXY ttt ββε −−= ,
então, com vetor de co-integração . Neste caso,
existe somente
)1,1(~, CIXY tt [ ′−−= 101 βββ ]uma combinação linear estacionária que representa uma relação de
equilíbrio de longo prazo entre as variáveis.
b) Caso de k variáveis – Se e )1(~),...,1(~X ),1(~X ),1(~ 32 IXIIIY ktttt
)0(~...33221 IXXXY ktktttt ββββε −−−−−= , então,
com vetor de cointegração
)1,1(~,...,X ,X , 32 CIXY ktttt
[ ]′−−−= kββββ ...1 21 . Neste caso, pode-se

João Eustáquio de Lima 38DER/UFV
mostrar que existem até vetores de cointegração linearmente independentes. Ou
seja, podem existir de 1 até vetores de cointegração que representam relações de
equilíbrio de longo prazo entre as variáveis.
1−k
1−k
Deve-se observar que o vetor de cointegração aparece com o coeficiente da
primeira variável endógena igual a 1. Diz-se que o vetor está normalizado com relação a
esta variável. Este procedimento é definido pela natureza da relação econômica de
interesse e ajuda a identificar o vetor de cointegração.
7.4.6 Rank de Co-integração
O rank de cointegração ( r ) é o número de vetores de co-integração
linearmente independentes. Para k variáveis de mesma ordem de integração e
cointegradas, tem-se que 11 −≤≤ kr . O rank de cointegração é o número de relações
de cointegração importantes para manter o equilíbrio de longo prazo entre as variáveis.
7.4.7 Testes de Co-integração
Para testar a existência de cointegração entre variáveis, podemos distinguir os
seguintes casos:
1. Testes uniequacionais – Baseiam–se no ajustamento de uma relação entre as
variáveis. Temos que considerar:
a) Caso de 2 variáveis
b) Caso de mais de 2 variáveis
2. Testes multiequacionais – Baseiam-se no ajustamento de um modelo VAR
com as variáveis. Pode ser aplicado para duas ou mais variáveis.
7.4.7.1 Testes Uniequacionais
O teste mais utilizado, neste caso, é o de Engle-Granger que consiste em ajustar
uma relação entre as variáveis e realizar um teste de raiz unitária tipo Dickey-Fuller nos
resíduos da equação ajustada.
a) Caso de 2 variáveis
Considere duas séries econômicas e . Para que estas variáveis sejam
cointegradas deve existir uma combinação linear estacionária entre elas. Então, pode-se
tY tX

João Eustáquio de Lima 39DER/UFV
considerar a relação ttt XY εβα ++= e a combinação linear ttt XY βαε −−= . Se
)0(~ Itε , e são co-integradas. tY tX
Procedimento do Teste de Engle-Granger
1. Verificar a ordem de integração das variáveis: a) Se a ordem for a mesma, I(1)
ou I(2), por exemplo, continuar o teste; b) Se a ordem for diferente, pode-se concluir
que as variáveis não são cointegradas, e c) Se as variáveis são I(0) não há razão para
testar cointegração.
2. Estimar a relação ttt XY εβα ˆˆˆ ++=
3. Testar raiz unitária (não estacionariedade) nos resíduos tε̂ usando, por
exemplo, DF ou ADF. Ajusta-se
ttt v+=∆ −1ˆˆ εδε (DF) ou (ADF) t
p
iititt v+∆+=∆ ∑
−
=−−
1
11 ˆˆˆ εγεδε
e testa-se 0:0 =δH → tε̂ não estacionário; Y e X não cointegradas, contra
0:1 <δH → tε̂ estacionário; Y e X são cointegradas.
A equação de teste não deve conter intercepto nem tendência porque os resíduos
de MQO oscilam em torno de zero.
Um detalhe importante é que, devido ao fato de que tε̂ é estimado, as tabelas de
valores críticos de Dickey-Fuller não são apropriadas. Deve-se usar os valores críticos
de uma tabela específica adaptada para este teste (Tabela 7.6).
No caso de 2 variáveis cointegradas, existe uma relação de cointegração,
, e um único vetor de cointegração, ttt XY βαε ˆˆˆ −−= [ ]′−−= βαβ ˆˆ1 , dada a
normalização em relação a . tY
Exemplo: Teste de cointegração entre o preço de boi gordo em Goiás e em São ( tGO )
Paulo ( )tSP
1. Testes de raiz unitária (ADF) aplicados nas séries mensais de preços
indicaram que ambas são I(1).
2. A equação de cointegração estimada é dada por
, e tt SPGO 826,037,3^
+= 96,02 =R 98,0=DW
3. Teste de estacionariedade nos resíduos:
Estatística calculada = -9,766
Valor da tabela: 2=m , %1=α , fornece 90,3−=cτ

João Eustáquio de Lima 40DER/UFV
4. Conclusão: 90,3766,9 −=>−= ccalculado ττ , rejeita-se ; resíduo não tem
raiz unitária; resíduo é estacionário; preços de boi gordo de GO e SP são
0H
cointegrados.
A relação de cointegração é dada por e o vetor de
cointegração por
ttt SPGO 826,037,3^
−−=ε
[ ]′−−= 826,037,31β .
m = número de variáveis. Valores válidos para qualquer n (grande)
Fonte: DAVIDSON, R.; MACKINNON, J. G. Estimation and inference in econometrics. New York, Oxford University Press, 1993. 874p.
Tabela 7.6 – Valores Críticos para Teste de Co-integração de Engle-Granger.

João Eustáquio de Lima 41DER/UFV
b) Caso de mais de 2 variáveis
Os procedimentos do teste de co-integração de Engle-Granger para o
caso de mais de 2 variáveis são uma extensão do caso anterior. Temos que ajustar uma
relação entre as variáveis e testar raiz unitária nos resíduos. Em geral, a relação pode ser
com qualquer variável como dependente. Podem ocorrer incoerências quando se muda a
variável dependente. Sejam . Tem-se que
se
)1(~ e I(1)~ ),1(~ IZXIY ttt
)1,1(~ e , CIZXY ttt )0(~210 IZXY tttt βββε −−−= .
O vetor de co-integração é [ ]′−−−= 2101 ββββ .
No caso de mais de duas variáveis envolvidas, o teste de Engle-Granger
apresenta alguns problemas:
a) Pode-se ter uma ou mais relações de co-integração;
b) O teste de Engle-Granger só identifica uma relação;
c) O teste pode apresentar resultados diferentes dependendo de qual variável é
considerada dependente;
d) O teste de Engle-Granger não é capaz de identificar o rank de cointegração,
isto é, o número de vetores de cointegração.
Assim, no caso de mais de duas variáveis pode ser recomendável usar testes
multiequcionais.
7.4.7.2 Modelo de Correção de Erro (MCE)
Se as variáveis são cointegradas, a relação econômica de interesse deve ser
estimada de forma a incorporar um mecanismo que garanta o equilíbrio entre elas. Este
mecanismo é representado pelas relações de cointegração. Existe uma ou mais relações
de equilíbrio de longo prazo entre as variáveis, mas no curto prazo vai existir
desequilíbrio que é constantemente corrigido pelo erro tε̂ .
A dinâmica do desequilíbrio de curto prazo entre as variáveis é descrita por um
Modelo de Correção de Erro (MCE) que faz também a correção entre a dinâmica de
curto prazo e o comportamento de longo prazo.
Tendo concluído que as variáveis são cointegradas, a relação de interesse entre
elas deve ser estimada na forma de um MCE que, em geral, é dado por
. (7.49) tt
J
jjtt vXfY ++⎟⎟⎠
⎞⎜⎜⎝
⎛∆=∆ −
=−∑ 1
0
ε̂α
ttjtjttt vXXXY ++∆++∆+∆+=∆ −−−− 122110 ˆ... εαββββ , (7.50) Por exemplo,

João Eustáquio de Lima 42DER/UFV
em que =α coeficiente de ajustam é
corrigid
ento que representa a parcela do desequilíbrio que
a em cada período. No exemplo dos preços do boi gordo em São Paulo e Goiás,
Observando que 826,037,3 −−− −−= ttt SPGOε podemos escrever
)
de cointegração no períod
rto prazo das variáveis. Variações nos preços de GO e SP deve
po.
o MCE estimado é representado por
1
^^5138,0507,0179,0 −−∆+−=∆ ttt SPGO ε .
^
111
826,037,3(5138,0507,0179,0 11
^
−− −−−∆+−=∆ tttt SPGOSPGO ,
que mostra a relação o anterior afetando a relação entre as
variações de cu m oscilar
em torno dessa relação, mantendo-se o equilíbrio de longo prazo entre as variáveis.
O coeficiente -0,51 significa que 0,51 (51%) da discrepância do equilíbrio entre
os preços de boi gordo de Goiás e São Paulo é corrigida em cada período de tem
Mas, este processo é dinâmico; em todo período existe correção para o equilíbrio e
existe desequilíbrio. No longo prazo o equilíbrio prevalece.
7.4.7.3 Teste Multiequacional
( )1I , kYYY ,........,, 21 Suponha k variáveis e que a teoria, ou qualquer
onhecimento a priori, sugere uma relação de equilíbrio de longo prazo entre elas. c
Por exemplo:
a) =dQ quantidade demandada, =P preço, =R renda e =PS preço de um
produto substituto.
bel PSQd A teoria da demanda esta ece que ,( RPf ),= .
b) =1M oferta monetária, =PIB produto e =IIG =P inflação, taxa de juros.
relações dinâmicas entre estas A teoria macroeconômica estabelece
variáveis.
c) =PSP preço em São Paulo, =PMG preço em MG e =PGO preço em
Goiás.
O conceito de integração de mercado procura d lações de loefinir re ngo
ntre estes preços.
indica que es as. Estas combinações lineares governam o
mpo
prazo e
Se as variáveis são ( )1I , a existência de combinações lineares ( )0I entre elas
tas variáveis são cointegrad
co rtamento de longo prazo (equilíbrio) entre as variáveis. Em geral, existem

João Eustáquio de Lima 43DER/UFV
1−≤ kr combinações lineares independentes que são chamadas relações de co-
o e o problema é determinar o valor de integraçã r . Observa-se que:
a) Quando kr = , as variáveis são estacionárias (e não ( )1I );
b) Quando , não existe relação de longo prazo entre elas; 0=r
c) Se 11 ≤ r , existem de 1 até 1−k vetores de cointegração (ou−≤ k r combinações
estes de Cointegração de Johansen
Considere um com variáveis,
t YAYA
lineares independentes) e será de interesse determinar quantas e quais são estas relações.
O teste multiequacional para determinar o número de vetores de cointegração
(rank de cointegração) e estimar as relações de cointegração mais usado é o teste de
Johansen que tem como base um modelo VAR irrestrito (Johansen, 1988, 1991, 1992,
1995).
T
)( pVAR k
ttt YAYAY tptp ε+++++ −− 321 . (7.51)
À sem uller aume do, o test
= −− .......321
elhança do teste de Dickey-F e de Johansen se baseia em nta
um modelo transformado, denominado de VAR reparametrizado, que permite um
processo autorregressivo de ordem p e não somente de ordem um. A obtenção deste
modelo segue procedimento semelhante à derivação da equação de teste do Dickey-
Fuller Aumentado (ADF). Partindo-se de (7.51) obtém-se o VAR reparametrizado
representado por
ttptpttt YYYYY ε+Π+∆Γ++∆Γ+∆Γ=∆ −−−−−− 1)1(12211 ....... . (7.52)
em que
e
Para melhor entendimento da obtenção do VAR reparametrizado, que constitui a
a) Considere um delo V
∑+=
−=Γp
ijji A
1⎟⎟⎠
⎞⎜⎜⎝
⎛−Ι−=Ι−=Π ∑∑
==
p
iiK
p
ii AA
11.
equação básica do teste de Johansen, vamos considerar a derivação a partir dos modelos
)1(VAR , )2(VAR e )3(VAR , antes de generalizar para um )( pVAR :
mo AR(1) com k variáveis
YA tttY ε+= . −11
VAR reparametrizado, no caso, é dado por O

João Eustáquio de Lima 44DER/UFV
ttt YY ε+Π=∆ −1 , em que )( 1AI −−=Π .
Esta forma é obtida somando e subtraindo do lado direito da equação o vetor de
1 −−
variáveis defasadas 1−tY , isto é,
1− 11 −++= tt YAY ttt YY ε ,
ttttt YYAYY ε+−=− −−− 1111
ttt YIAY ε+−=∆ −11 )(
ttt YAIY ε+−−=∆ −11 )(
ttt YY ε+Π=∆ −1 , em que )( 1AI −−=Π
que é o VAR re o VAR(1parametrizado d ).
) Considere o modelo VAR(2) com variáveis
b k
tttt YAYAY ε++= −− 2211 .
VAR reparametrizado, no caso, é dado por O
tttt YYY ε+∆Γ+Π=∆ −− 111 , em que )]([ 21 AAI +−−=Π e .
Para obter esta forma, primeiro, some e (segunda matriz de coeficientes
−
21 A−=Γ
subtraia A 12 −tY
vezes o vetor de variáveis com uma defasagem)
122211 −−− 12−+++= ttttt AYAYAYAY tYε
ttttt YYAYAAY ε+−−+= −−− )()( 212121
tttt YAYAAY ε+∆−+= −− 12121 )(
Ag e subtraia
−−−−
ora, some 1−tY ,
1 )( 111212 −++∆− ttttt YYYAA+=t YAY ε
tttt YAYIAAY ε+∆−−+=∆ −− 12121 )(
tttt YAYAAIY ε+∆−+−−=∆ −− 12121 )]([
tttt YYY ε+∆Γ+Π=∆ −− 111 , em que )]([ 21 AAI +−−=Π e .
VAR (3),
21 A−=Γ
c) Para um
ttttt YAYAYAY ε+++= −−− 332211 ,

João Eustáquio de Lima 45DER/UFV
primeiro some e subtraia (terceira m icientes vezes o vetor de
ns)
YYAYA
23 −tYA atriz de coef
variáveis com duas defasage
tt AYAY ++= − ( 211 tttt ε+−− −−− )() 32323
ttttt YAYAAYAY ε+∆−++= −−− 2323211 )( .
A este resultado, some e subtraia 132 )( −+ tYAA ,
YAYAAY t AAAY tttt ε+∆−∆+−++= 3321 ))( −−− 23121 ( .
E, ome e subtraia
YAYAAYAAA
por fim, s 1−tY
t IY +−−=∆ ([ tttt ε+∆−∆+−+ −−− 231321321 )()]
ttttt YYYY ε+∆Γ+∆Γ+Π=∆ −−− 22111
em , 21 AA que =Π 3)]([ 321 AAAI ++−− )( +−=Γ e 32 A−=Γ .
) Observando a lógica do procedimento é fácil entender que a forma reparametrizada
d
do modelo )( pVAR
tptptttt YAYAYAYAY ε+++++= −−−− .......332211 ,
é dada por
ttptpttt YYYYY ε+Π+∆Γ++∆Γ+∆Γ=∆ −−−−−− 1)1(12211 ....... ,
em que
e
VAR reparametrizado apresenta-se em forma multivariada, mas é semelhante
inição, todos os termos da equação são estacionários, exceto
∑+=
−=Γp
ijji A
1⎟⎟⎠
⎞⎜⎜⎝
⎛−Ι−=Ι−=Π ∑∑
==
p
iiK
p
ii AA
11.
O
a equação de teste do Dickey-Fuller Aumentado (ADF). O desenvolvimento do teste de
Johansen inicia com as seguintes observações a respeito da equação do VAR
reparametrizado:
a) Por def 1−Π tY .
b) Para o sistema ser estacionário, 1−Π tY deve ser estacionário e pa o ra iss a
matriz Π deve apresentar estrutura tal que as combinações lineares sejam
estacionárias.
c) Então, a matriz Π controla as propriedades de estacionariedade do sistema.
bSe existirem com inações lineares estacionárias, as variáveis são
cointegradas. Inicialmente, o termo 1−Π tY representa k combinações

João Eustáquio de Lima 46DER/UFV
=Π
−
−
−
−
1
12
11
21
22221
1
1
Kt
t
t
KxKKKKK
K
K
t
Y
YY
YM
K
MMM
K
πππ
πππ
, combinações lineares.
d) Para as variáveis serem cointegradas as linhas de
lineares das variáveis, isto é,
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡ 1211 K πππ
⎪⎪⎩
⎪⎪⎨
⎧
+++
+++
=
−−−
−−−
1122111
1112121111
...
...
KtKKtKtK
KtKtt
YYY
YYY
πππ
πππ
L
L
k
Π não podem ser todas
linearmente independentes; elas têm que ser dependentes porque não se pode
ter k combinações lineares (relações de cointegração) para k variáveis
cointegradas.
e) Assim, Π deve ser singular, ou seja, 0)det( =Π e, então, o posto ou rank de
Π deve ser menor que k , rank k<Π)( e as variáveis sejam , para qu
co
f) rês possibilidades:
- significa u
integradas.
Temos, então, t
1ª) 0)( =Πrank :
q e 0=Π
- não há relação e coi d ntegração entre as variáveis; as variáveis
elo pode ser especificado em primeiras diferenças
- as linhas de
não são cointegradas e não existe mecanismo de correção de
erro.
- o mod VAR
2ª) krank =Π)( :
Π são linearmente independentes
as variáveis - existem k combinações lineares estacionárias d
- significa que as variáveis são estacionárias
- o modelo VAR pode ser estimado em nível
- A questão de cointegração não é pertinente
3ª) krrank <=Π)( : <0
exist - em r , r k<<0 , combinações lineares independentes
s
são I(1), existem
estacionária ;
- se as variáveis r relações de cointegração que
fornecem r vetores de cointegração;
- O termo 1−Π tY fornece as combinações lineares estacionárias.

João Eustáquio de Lima 47DER/UFV
a) A m m raízes características;
ra corre
Complementando, deve-se observar que:
atriz Π é de dimensão k xk e, portanto, te k
b) Para cada iz característica sponde um vetor característico;
c) O krrank <=Π)( , e r é o número de raízes características diferentes de 0;
primeiros r d) Os ve s mamtore característicos são os vetores de cointegração que for r
combinações lineares estacionárias independentes, e
e) Existem rks −= combinações lineares não estacionárias, mas que não são
ra mantimportantes pa er o equilíbrio de longo prazo entre as variáveis.
Se krrank <=Π)( , pode-se mostrar que existem matrizes kxrα e kxrβ tais que
kxrkxk α=Π
Substit na equação do VAR reparametrizado, obtém-se
que é o Modelo de Correção de Erro na forma multivariada denominado Modelo de
ue,
)('
rxkβ . )(
uindo
ttptpttt YYYYY εαβ ++∆Γ++∆Γ+∆Γ=∆ −−−−−− 1'
)1(12211 .......
Correção de Erro Vetorial (VEC). O VEC é um VAR (reparametrizado) com as
restrições de co-integração entre as variáveis. Tem-se q
1'
−tYβ = são as r relações de co-integração que definem a trajetória de longo
prazo (equilíbrio) entre as variáveis. São relações em nível.
α = m prazo.
Co
atriz de coeficientes de ajustamento para o equilíbrio de longo
iΓ = matrizes de coeficientes que definem a dinâmica de curto prazo.
mo ilustração, considere um exemplo com 3=k variáveis e matriz dada
por
Π
33323321141
32564418116116521
x⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
−−−
−−=Π
com raízes características 01 =λ , 4416,02 −=λ e 7928,03 −=λ . Assim, com duas
ntes e zero, raízes características difere d )( 2=Πran e exis
k tem 2 relações de
cointegração. Pode-se mostrar que,
322333
41100811
83418581
4121
32332114132564418116116521
⎢⎡ −−
xxx
⎥⎦
⎤⎢⎣
⎡−
−
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡−
−=
⎥⎥⎥
⎦
⎤
⎢⎢⎣ −−
−=Π
α β ′
Coefs. de ajustamento Vetores de co-integração.

João Eustáquio de Lima 48DER/UFV
iti Y −∆ΓO modelo VEC, desconsiderando os termos de diferença defasados, , será
1313
122 .4110
0811.8581 tt YY ⎥
⎥⎢⎢
⎥⎤
⎢⎡
−−
⎥⎥
⎢⎢ −=⎥
⎥⎢⎢∆ −
112 tY ⎤⎡⎡ −
323
1
8341
411
xtx
t
t
YY
Y
⎥⎦⎢⎣⎦⎣⎥⎦
⎤
⎢⎣
⎡−
⎥⎦
⎤
⎢⎣∆
∆
−
12131211
131211
23
4/1008/1
83418581
4121
xttt
ttt
x
YYYYYY
⎥⎦
⎤⎢⎣
⎡−++−
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡−
−=
−−−
−−−
( ) ( )( ) ( )( ) ( )⎪
⎩
⎪⎨
⎧
−+−=∆−−−=∆−+−−=∆
−−−−
−−−−
−−−−
131212113
13121211
131212111
4183814141858181
41418121
ttttt
ttttt
ttttt
YYYYYYYYYY
YYYYY
2
As expressões 1211 81 −− − tt YY e 1312 41 −− − tt YY são as relações de cointegração que
entram m cada equação.
este da Raiz Característica Máxima
número de raízes
características diferentes de zero na matriz
e
Teste do Traço e T
O procedimento de Johansen consiste em testar o
Π que corresponde ao número de relações e
vetores
ste teste considera como hipótese nula a existência de raízes características
vetores de cointegração) contra a alternativa de
ormal
> .
teste é da por
de cointegração entre as variáveis. São utilizados dois testes: Teste do Traço e
Teste da Raiz Característica Máxima.
1. Teste do Traço
0rE
diferentes de zero ( 0r 0rr > .
F mente,
00 : rH =
H
r
01 : rr
A estatística de da
∑+
−−=k
r
=iT
10
)ˆ1ln( λλ , (7.53)
é o número de observações e são a
estim da.
iTraço
em que T s raízes características obtidas da matriz iλ̂
Π a

João Eustáquio de Lima 49DER/UFV
2. Teste da Raiz Característica Máxima
O segundo teste tem como hipótese nula a existência de raízes características
gração) contra a alternativa de
0r
diferentes de zero ( 0r vetores de cointe 10 += rr .
ormal
e teste é
λλ . (7.54)
lizados em seqüência, de forma crescente, até que a hipótese
ula nã seja r itada. Para
F mente,
00 : rrH =
H 1: 01 += rr
e a estatística d
T )ˆ1ln( 10 +−−= rMax
Os testes são rea
0:0 =rH 0H significa que há um ou mais vetores n o eje , rejeitar
de cointegração, pelo teste do traço, e um pelo teste da raiz máxima. Para 1:0 =rH ,
rejeitar 0H significa que há d ais vetore e cointegração, pelo teste do traço, e
mais um pelo teste da raiz máxima. A Tabela 7.7 mostra como os testes d r
realizados.
ois ou m
evem se
Teste do Traço Teste da Raiz Máxima
s d
0H H1 Traçoλ 0H 1H Maxλ
0=r 1≥r ∑=
−−K
iiT
1)ˆ1ln( λ
0=r 1=r )ˆ1ln( 1λ−−T
1=r 2≥r ∑=
−−K
iiT
2
)ˆ1ln( λ 1=r 2=r )ˆ1ln( 2λ−−T
2=r 3≥r ∑=
−−K
iiT
3
)ˆ1ln( λ 2=r 3=r )ˆ1ln( 3λ−−T
... ... ... ... ... ...
1−= kr kr = )ˆ1ln( kT λ−− 1−= kr kr = )ˆ1ln( kT λ−−
Tab la 7.7 – Form Teste do Traço e da Raiz Máxima
e a Sequencial do

João Eustáquio de Lima 50DER/UFV
xemplo: Considere os preços médios mensais de boi gordo nos estados de São
aulo (SP), Minas Gerais (MG) e Goiás (GO) para o período de janeiro de 1980 a
iews:
. Analisar estacionariedade das séries:
ram que as séries são I(1).
te é baseado no modelo VAR, temos que
prim m as variáveis em
r as
pecificar lags...ok. Na tela da saída do VAR...View...Lag Structure...Lag
).
inhos para chegar no teste de cointegração:
atistics...Cointegration Test: Especificar
ia...ok.
de intercepto e tendência...ok.
nível.
Dev em
é a especificação de termos determinísticos.
intercepto e
E
P
setembro de 2002 (273 observações). Objetivos: a) Verificar a existência de
relação(ões) de equilíbrio de longo prazo entre os preços (cointegração), e b) Estimar
a(s) relação(ões) de cointegração.
Procedimento usando o EV
1
Análise gráfica e testes ADF indica
2. Definir a ordem do VAR: Como o tes
eiro estimar um VAR e definir sua ordem (número de lags). Co
nível estima-se um VAR e seleciona-se a ordem com base nos critérios de
informação.
Estimação: Quick...Estimate VAR...escolher opção Unrestrict VAR...especifica
variáveis...es
Length Criteria...ok.
Os critérios de FPE (final prediction error), Akaike, Schwarz e Hannan-Quinn
indicaram um VAR(2
3. Seqüência do teste no EViews:
a) No EViews temos três cam
(i) Quick... Group St
variáveis…ok…especificar lags e opção de intercepto e tendênc
(ii) Marcar as variáveis e clicar em show ou abrir como um grupo.
Depois clicar em View...Cointegration Test...Especificar lags e opção
de intercepto e tendência...ok.
(iii) Pela tela de saída do VAR clicar em View...Cointegration
Test...Especificar lags e opção
b) A especificação de lags deve ser coerente com a ordem do VAR em
e-se especificar um lag a menos para o teste porque a equação está
diferenças. Se a ordem do VAR for 2, especificado como 1 2, para o teste
especifica-se 1 1 (Figura 7.5).
c) Especificação da opção de intercepto e tendência (Figura 7.5):
Um grande problema do teste
Existem 5 possibilidades relacionadas com a presença de
tendência no nível das variáveis e/ou na equação de cointegração. Estes
termos afetam a distribuição da estatística de teste e, consequentemente, os

João Eustáquio de Lima 51DER/UFV
ções de cointegração não têm interceptos;
de cointegração têm interceptos;
Existem ou
de variáve pouco usados. O caso (i)
d
O kaike e Schwarz,
valores críticos. Os modelos possíveis são (Ver Eviews 7 - User’s Guide II, e
Bueno, 2008):
(i) As variáveis em nível não possuem tendência determinística e as
equa
(ii) As variáveis em nível não possuem tendência determinística e as
equações de cointegração têm interceptos;
(iii) As variáveis em nível possuem tendência linear e as equações de
cointegração têm interceptos;
(iv) As variáveis em nível e as equações de cointegração possuem
tendência linear e as equações
(v) As variáveis em nível têm tendência quadrática e as equações de
cointegração possuem tendência linear.
tros casos possíveis, mas estes são suficientes para evitar omissão
l relevante no teste. Os caso (i) e (v) são
se refere à situação em que todas as séries têm média zero e o caso (v) não
fornece boas previsões. O caso (ii) é usado quando as séries não apresentam
tendência e o (iii) quando as tendências são estocásticas (default). O caso
(iv) é quando existe tendência determinística nas séries.
) Resumo das Opções – Saída do EViews apresentada na Figura 7.6.
resumo indica, pelos critérios de log verossimilhança, A
a melhor opção. É comum o resumo não ser muito útil.

João Eustáquio de Lima 52DER/UFV
Figura 7.5 – Tela de especificação de lags e opção de intercepto e tendência

João Eustáquio de Lima 53DER/UFV
Figura 7.6 – Resumo das Opções de Intercepto e Tendência
d) Teste de Cointegração de Johansen – Saída do EViews na Figura 7.7.

João Eustáquio de Lima 54DER/UFV
Figura 7.7 – Saída do EViews para o Teste de Co-integração de Johansen

João Eustáquio de Lima 55DER/UFV
e) Estimação do VEC: O teste indica o número de relações de cointegração e
fornece estimativa dos vetores de cointegração e dos vetores de coeficientes
de ajustamento. Pode ser de interesse estimar o modelo VEC que incorpora as
restrições de cointegração. Para isto temos que entrar em
Quick...estimate VAR...,
escolher a opção de Vector Error Correction e especificar a mesma opção de
intercepto e tendência do teste, um lag a menos que o VAR e o número de
relações de cointegração (Figuras 7.8 e 7.9). Os resultados para uma e duas
relações de cointegração podem ser vistos nas saídas do EViews apresentadas
nas Figuras 7.10 e 7.11.
Figura 7.8 – Tela de especificação do Modelo VEC

João Eustáquio de Lima 56DER/UFV
Figura 7.9 – Tela de especificação do número de relações de cointegração e
opção de intercepto e tendência
4. Identificação das Estimativas das Relações de Cointegração
O teste de Johansen indica a existência de 2 relações de cointegração (Figura
7.7). Para melhor entendimento, vamos considerar a existência de 1 e de 2 relações.
a) Considerando Uma Relação de Cointegração:
A estimativa do vetor de cointegração, normalizado para Goiás, é
[ ]′−−= 153156,0431387,0390626,11β e a relação de longo prazo estimada é
dada por (preços em logaritmos)
SPMGGO 431387,0390626,1153156,0 −+= .
Neste caso, a identificação do termo de correção de erro que garante o equilíbrio de
longo prazo das variáveis é feita da seguinte forma (Figuras 7 ou 10)
[ ]⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
−−⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
−
−=′=Π
−
−
−
−−
CSP
MGGO
YYt
t
t
tt1
1
1
11 153,0431,0391,11044,0
333,0104,0
βα
[ ] 11111
13
11 153,0431,0391,1044,0
333,0104,0
xttt
x
tt SPMGGOYY −+−⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
−
−=′=Π −−−−− βα

João Eustáquio de Lima 57DER/UFV
13111
111
111
11
)153,0431,0391,1(044,0)153,0431,0391,1(333,0)153,0431,0391,1(104,0
xttt
ttt
ttt
tt
SPMGGOSPMGGOSPMGGO
YY⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
−+−−−+−−+−−
=′=Π
−−−
−−−
−−−
−− βα
São três relações sendo a primeira para a equação de preço de Goiás, a segunda
para Minas Gerais e a terceira para São Paulo. A relação de cointegração é a
mesma, o que muda é o coeficiente de ajustamento.
b) Considerando Duas Relações de Cointegração:
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
⎥⎦
⎤⎢⎣
⎡−
−−
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡−
−=′=Π
−
−
−
−−
CSP
MGGO
YYt
t
t
tt1
1
1
11 051,0993,010082,0949,001
117,0114,0473,0308,0
097,0238,0βα
131111
1111
1111
11
)051,0993,0(117,0)082,0949,0(114,0)051,0993,0(473,0)082,0949,0(308,0)051,0993,0(097,0)082,0949,0(238,0
xtttt
tttt
tttt
tt
SPMGSPGOSPMGSPGOSPMGSPGO
YY⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
+−+−−+−−−−+−+−−−
=′=Π
−−−−
−−−−
−−−−
−− βα
5. Estimativas do VEC
O VEC é o VAR reparametrizado com as restrições de cointegração.
a) Considerando 1 Relação de Cointegração (Figura 10):
⎪⎩
⎪⎨
⎧
−∆+∆−∆−=∆+∆+∆−∆−=∆−∆+∆−∆−=∆
−−−−
−−−−
−−−−
1111
1111
1111
044,0309,0002,0261,0333,0630,0091,0329,0104,0694,0040,0410,0
ttttt
ttttt
ttttt
VCSPMGGOSPVCSPMGGOMGVCSPMGGOGO
153,0431,0391,1 1111 −+−= −−−− tttt SPMGGOVC
b) Considerando 2 Relações de Co-integração (Figura 11):
⎪⎩
⎪⎨
⎧
++∆+∆−∆−=∆−+∆+∆−∆−=∆+−∆+∆−∆−=∆
−−−−−
−−−−−
−−−−−
11111
11111
11111
2117,01114,0422,0029,0307,02473,01308,0612,0086,0322,02097,01238,0599,0017,0371,0
tttttt
tttttt
tttttt
VCVCSPMGGOSPVCVCSPMGGOMGVCVCSPMGGOGO
⎩⎨⎧
+−=−−=
−−−
−−−
051,0993,02082,0949,01
111
111
ttt
ttt
SPMGVCSPGOVC

João Eustáquio de Lima 58DER/UFV
Figura 7.10 – Estimativa do VEC com uma Relação de Cointegração

João Eustáquio de Lima 59DER/UFV
Figura 7.11 – Estimativa do VEC com duas Relações de Cointegração
João Eustáquio de Lima 60DER/UFV
7.5 Análise de Causalidade de Granger
O teste de causalidade de Granger baseia-se na idéia de que se X causa Y , o
conhecimento de valores passados de X permitem melhores previsões de Y . Assim, o
termo causalidade, no sentido estatístico, não significa que uma variável é resultante do
efeito da outra, mas que uma variável precede a outra. Por isso, o próprio Granger
concorda que se trata de um teste de precedência temporal e não de causalidade no
sentido de uma relação de causa e efeito.
Considere duas séries temporais Y e X . Na prática, estamos interessados em
saber se X causa/precede Y , ou se Y causa/precede X , se as duas ocorrem
simultaneamente ou se não existe relação de causalidade entre as variáveis.
Formalmente, o teste de causalidade de Granger consiste em estimar as seguintes
regressões:
(7.55) ∑ ∑= =
−− +++=p
i
p
ititXiitYit XYY
1 110 εββα
. (7.56) ∑ ∑= =
−− +++=p
i
p
ititYiitXit YXX
1 120 εββγ
A equação (7.55) estabelece que valores correntes de Y estão relacionados a valores
passados de Y e a valores passados de X ; a equação (7.56) estabelece comportamento
semelhante para X . Se X não for importante para prever Y , os coeficientes Xiβ na
equação (7.55) devem ser estatisticamente iguais a zero, isto é, deve-se aceitar a
hipótese nula 0...: 210 ==== XpXXH βββ . De forma semelhante, se Y não for
importante para prever X , os coeficientes Yiβ na equação (7.56) devem ser
estatisticamente iguais a zero, isto é, deve-se aceitar a hipótese nula
0...: 210 ==== YpYH Y βββ . O teste desta hipótese é um teste de F das restrições nas
duas equações onde se compara um modelo restrito com um irrestrito.
Após estimação das equações (7.55) e (7.56), podemos ter quatro situações:
1. Causalidade unidirecional de X para Y ( ) - se os coeficientes
estimados em (7.55) para as variáveis defasadas forem conjuntamente
diferentes de zero e os coeficientes estimados em (7.56) para as variáveis
YX →
itX −

João Eustáquio de Lima 61DER/UFV
defasadas forem conjuntamente iguais a zero. Ou seja, rejeita-se a hipótese
nula em (7.55) e aceita-se em (7.56).
itY −
2. Causalidade unidirecional de Y para X ( ) - se os coeficientes
estimados em (7.56) para as variáveis defasadas forem conjuntamente
diferentes de zero e os coeficientes estimados em (7.55) para as variáveis
defasadas forem conjuntamente iguais a zero. Ou seja, rejeita-se a hipótese
nula em (7.56) e aceita-se em (7.55).
XY →
itY −
itX −
3. Causalidade bidirecional de X para Y e de Y para X ( ) - se os
coeficientes estimados em (7.55) para as variáveis defasadas forem
conjuntamente diferentes de zero e os coeficientes estimados em (7.56) para as
variáveis defasadas forem, também, conjuntamente diferentes de zero. Ou
seja, rejeita-se a hipótese nula em (7.55) e em (7.56).
YX ⇔
itX −
itY −
4. Ausência de Causalidade - se os coeficientes estimados em (7.55) para as
variáveis defasadas forem conjuntamente iguais a zero e os coeficientes
estimados em (7.56) para as variáveis defasadas forem, também,
conjuntamente iguais a zero. Ou seja, aceita-se a hipótese nula em (7.55) e
aceita-se em (7.56).
itX −
itY −
Um ponto importante no teste de causalidade de Granger é a determinação do
número de defasagens. Isto deve ser feito com critério porque o teste é muito sensível
ao número de defasagens usado. Um número pequeno de defasagens pode causar viés
de omissão de variáveis relevantes no modelo fazendo com que as estimativas dos
coeficientes das variáveis que permanecem sejam tendenciosas. Por outro lado, a
escolha de mais defasagens do que o necessário pode levar ao viés de inclusão de
variável irrelevante. A sugestão é usar os critérios de escolha AIC, SC para definir o
número ótimo de defasagens.
Outro ponto importante é que o teste só é válido para variáveis estacionárias.
Assim, o teste se concentra em relações de curto prazo desprezando a informação da
tendência de longo prazo comum a séries não estacionárias e co-integradas. Granger
mostra que se existe co-integração tem que existir causalidade de alguma forma entre as
variáveis. Engle e Granger (1987) propõe identificar relações de causalidade entre

João Eustáquio de Lima 62DER/UFV
variáveis não estacionárias, mas co-integradas, por meio de um Modelo de Correção de
Erro Vetorial (Modelo VEC)4.
O VEC explica mudanças nos valores correntes de uma variável com base em
mudanças defasadas da própria variável e das outras e de um termo de correção de erro.
Se duas variáveis Y e X são co-integradas parte da mudança corrente em Y , por
exemplo, pode ser o resultado de movimentos corretivos em X para que se atinja
novamente o equilíbrio de longo prazo de Y . Dessa forma, desde que Y e X sejam co-
integradas, isto é, possuem uma tendência comum, deverá existir causalidade entre elas
em alguma direção.
Para testar causalidade quando as variáveis são não estacionárias e co-
integradas utiliza-se um modelo VEC dado por
(7.57) ∑ ∑−
=
−
=−−− ++∆+∆+=∆
1
1
1
111110
p
i
p
ittitXiitYit uXYY εαβββ
(7.58) ∑ ∑−
=
−
=−−− ++∆+∆+=∆
1
1
1
121220
p
i
p
ittitYiitXit uYXX ηαβββ
em que 1−tε e 1−tη são valores defasados dos resíduos das equações de co-integração
ttt XY εγ += 1 e ttt YX ηγ += 2 , respectivamente. São termos de correção de erro
defasados obtidos da relação de co-integração. Os coeficientes )2,1( =iiα representam o
desvio da variável dependente do equilíbrio de longo prazo e e são erros não
correlacionados e com média zero. A existência de relações de co-integração entre as
variáveis sugere que deve existir causalidade de Granger em, pelo menos, uma direção.
Além de indicar a direção de causalidade o VEC possibilita distinguir entre causalidade
de curto e de longo prazo.
tu1 tu2
Nas equações (7.57) e (7.58), as variações na variável dependente são causadas
por variações passadas e pelo desequilíbrio em nível do período anterior. Assim, pode-
se testar a presença de causalidade de curto e de longo prazo. Considere, por exemplo, a
equação (7.57). Se os coeficientes estimados das variáveis defasadas são
estatisticamente significantes, em conjunto, então
itX −∆
X causa Y , no curto prazo. Esta
hipótese pode ser testada por um teste de F conjunto. Se o coeficiente do termo de
correção de erro, 1α , for significativo pelo teste t , existe causalidade de longo prazo de
4 Se as variáveis são não estacionárias e não co-integradas, deve-se fazer o teste padrão com as variáveis diferenciadas.

João Eustáquio de Lima 63DER/UFV
X para Y . Finalmente, o que se denomina de causalidade de Granger forte pode ser
examinado pelo teste de F conjunto da significância dos coeficientes Xiβ e de 1α .
Raciocínio semelhante deve ser feito com a equação (7.58) para determinar a direção de
causalidade.
Resumindo, a causalidade de Granger entre X e Y no modelo VEC
representado pelas equações (7.57) e (7.58) pode ser feita identificando-se três fontes de
causalidade representadas por:
1. Causalidade de Granger fraca ou causalidade de curto prazo – teste das
hipóteses conjuntas 0:0 =XiH β para todo , na equação (7.57) e teste de i
0:0H =Yiβ para todo , na equação (7.58) feito por um teste de Wald de
restrições. Se, por exemplo, rejeitarmos a primeira hipótese e aceitarmos a
segunda, concluímos que existe uma relação de causalidade unidirecional de
curto prazo de
i
X para Y .
2. Causalidade de Granger de longo prazo – teste de significância (teste t) dos
coeficientes do termo de correção de erro 1α e 2α . Se, por exemplo, 2α for
estatisticamente igual a zero, X não responde a desvios do equilíbrio de longo
prazo no período anterior (causados por Y ). Indica que X é fracamente
exógeno sugerindo causalidade unidirecional de longo prazo no sentido de X
para Y .
3. Causalidade de Granger forte – testes das hipóteses conjuntas (teste de Wald)
0 e 0: 10 == XiH βα para todo i na equação (7.57) e 0 e 0: 20 == YiH βα
para todo i na equação (7.58).
Como ressalta Bueno (2008, pg. 190), teste de causalidade de Granger não
significa teste de exogeneidade. Para que seja exógeno a , é necessário que não
seja afetado contemporaneamente por . O VAR convencional não permite que se faça
este tipo de teste.
tz ty tz
ty

João Eustáquio de Lima 64DER/UFV
Referências
1. AMISANO, G.; GIANNINI, C. Topics in Structural VAR Econometrics. 2nd ed.,
Berlin: Springer-Verlag, 1997.
2. BERNANKE, B. Alternative explanations of the money-income correlation.
Carnegie-Rochester Conference Series on public policy, North Holland,
Amsterdam, 1986.
3. BUENO, R. De Losso da S. Econometria de séries temporais. São Paulo: Cengage
Learning, 2008. 299p.
4. BRANDT, P. T. e WILLIAMS, J. T. Multiple time series models. London: Sage
Publications, 2007. 99p.
5. ENDERS, W. Applied econometric time series. New York: John Wiley, 1995.
433p.
6. JUDGE, G.G. et al. Introduction to the theory and practice of econometrics. 2nd.
Ed., New York: John Wiley, 1988. 1024p.
7. LÜTKEPOHL, H. New Introduction to multiple time series analysis. 2nd Edition.
New York: Springer-Verlag, 1993. 545p.
8. LÜTKEPOHL, H. e KRÄTZIG, M. (Ed.) Applied time series econometrics.
Cambridge: Cambridge University Press, 2004. 323p.
9. QMS. EViews 7 User’s Guide II. Irvine: QMS, 209.
10. SEDDIGHI, H. R.; LAWLER, K. A.; KATOS, A.V. Econometrics – A practical
approach. New York: Routledge, 2000. 396p.
11. SHAPIRO, M.; WATSON,M. W. Sources of business cycle fluctuations. NBER
Macroeconomics Annual 3, 111-156, 1988.
12. SIMS, C. A. Macroeconomics and reality. Econometrica v.48, p.1-48, 1980.
13. SIMS, C. A. An autoregressive index model for the U.S. 1948-1975. In J. Kmenta &
J.B. Ramsey (eds). Large-Scale Macro-Econometric Models. Amsterdam:
North-Holland, pp. 283-327, 1981.
14. SIMS, C. A. Are forecasting models usable for policy analysis? Quarterly Review,
Federal Reserve Bank of Minneapolis v.10, p.2-16, 1986.