apostila controle - 19a - visualização da estabilidade relativa
TRANSCRIPT
8/6/2019 Apostila Controle - 19a - Visualização da Estabilidade Relativa
http://slidepdf.com/reader/full/apostila-controle-19a-visualizacao-da-estabilidade-relativa 1/27
Controle de Sistemas Mecânicos
Visualização da Estabilidade Relativa Visualização da Estabilidade Relativa
Visualização das Margens
�D
iagramas de Bode� Diagrama de Nyquist
� Diagrama de Nichols
Margem de Redução de Ganho
Correlação entre MF e fator de amortecimento
8/6/2019 Apostila Controle - 19a - Visualização da Estabilidade Relativa
http://slidepdf.com/reader/full/apostila-controle-19a-visualizacao-da-estabilidade-relativa 2/27
Controle de Sistemas Mecânicos
Vizualização das margens Vizualização das margens
As margens podem ser visualizadas
diretamente nos diagramas de Bode,Nyquist e Nichols.
8/6/2019 Apostila Controle - 19a - Visualização da Estabilidade Relativa
http://slidepdf.com/reader/full/apostila-controle-19a-visualizacao-da-estabilidade-relativa 3/27
Controle de Sistemas Mecânicos
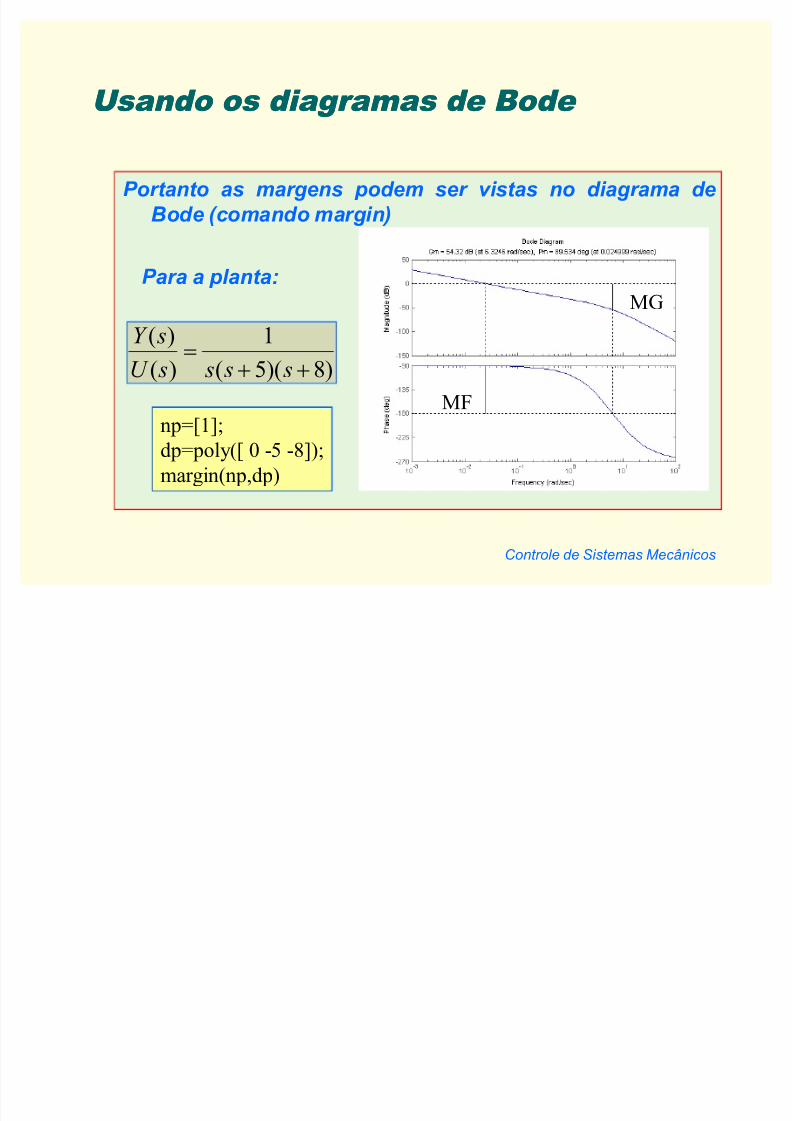
U sando os diagramas de Bode U sando os diagramas de Bode
P ortanto as margens podem ser vistas no diagrama de
Bode (comando margin)
( ) 1
( ) ( 5)( 8)
Y s
U s s s s!
np=[1];
d p=poly([ 0 -5 -8]);
margin(np,d p)
P ara a planta:
MF
MG
8/6/2019 Apostila Controle - 19a - Visualização da Estabilidade Relativa
http://slidepdf.com/reader/full/apostila-controle-19a-visualizacao-da-estabilidade-relativa 4/27
Controle de Sistemas Mecânicos
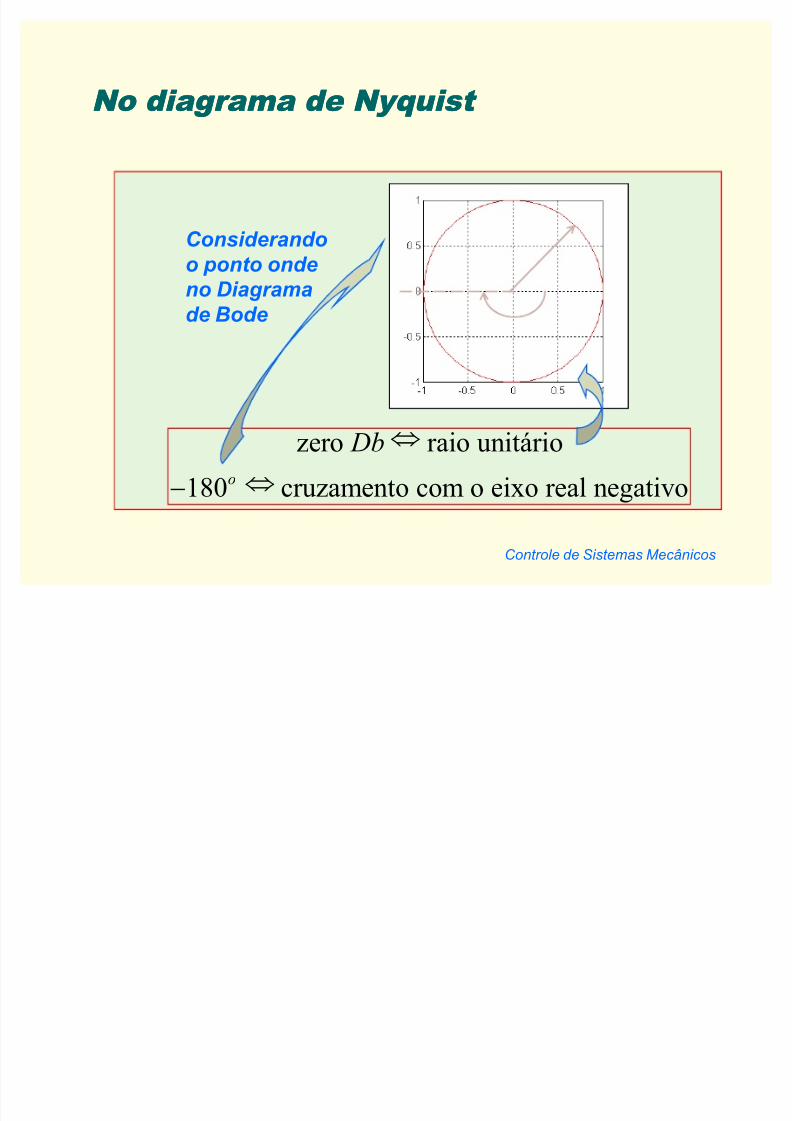
N o diagrama de Nyq uist N o diagrama de Nyq uist
zer o raio unitário
180 cr uzamento com o eixo r eal negativoo
Db �
�
Considerando
o ponto onde
no Diagrama
de Bode
8/6/2019 Apostila Controle - 19a - Visualização da Estabilidade Relativa
http://slidepdf.com/reader/full/apostila-controle-19a-visualizacao-da-estabilidade-relativa 5/27
Controle de Sistemas Mecânicos
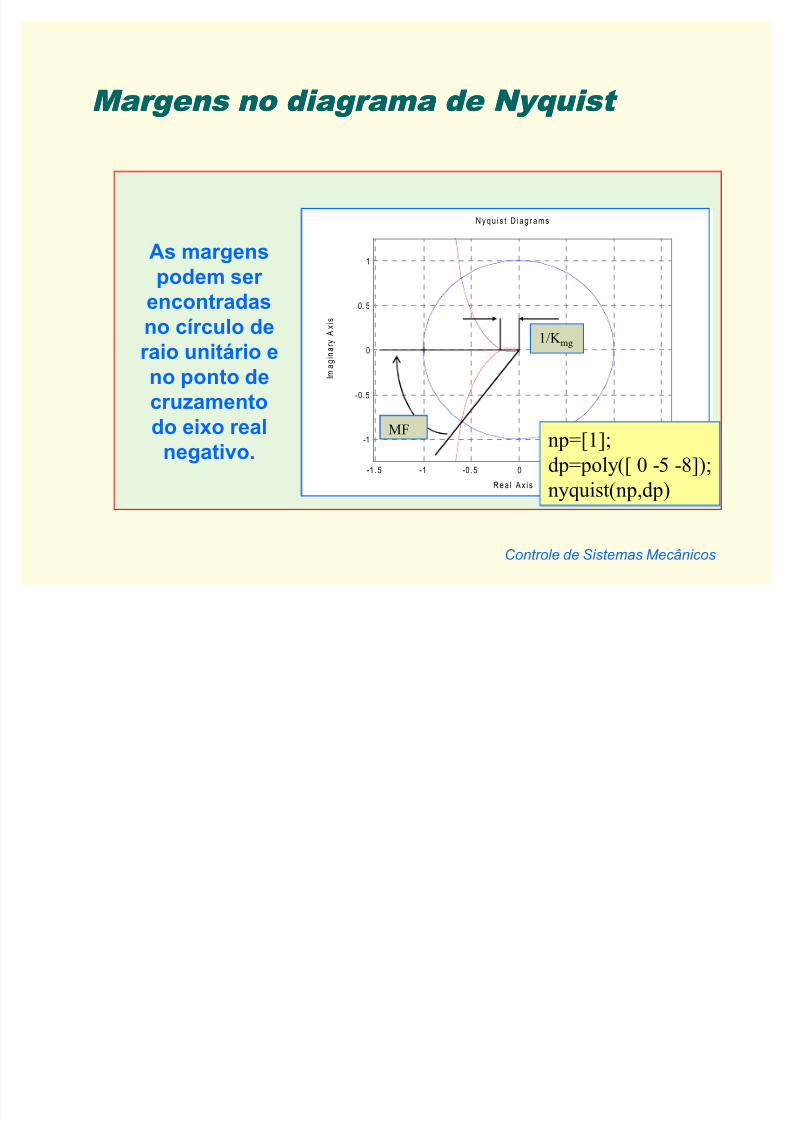
M argens no diagrama de Nyq uist M argens no diagrama de Nyq uist
Rea l A x i s
I m
a g i n a r y
A x i s
Ny qu i s t D iag r am s
-1.5 -1 -0 .5 0 0 .5 1 1.5
-1
-0.5
0
0. 5
1
MF
1/K mg
As margens
podem ser encontradas
no círculo de
raio unitário e
no ponto de
cruzamento
do eixo real
negativo.
np=[1];
d p=poly([ 0 -5 -8]);
nyquist(np,d p)
8/6/2019 Apostila Controle - 19a - Visualização da Estabilidade Relativa
http://slidepdf.com/reader/full/apostila-controle-19a-visualizacao-da-estabilidade-relativa 6/27
Controle de Sistemas Mecânicos
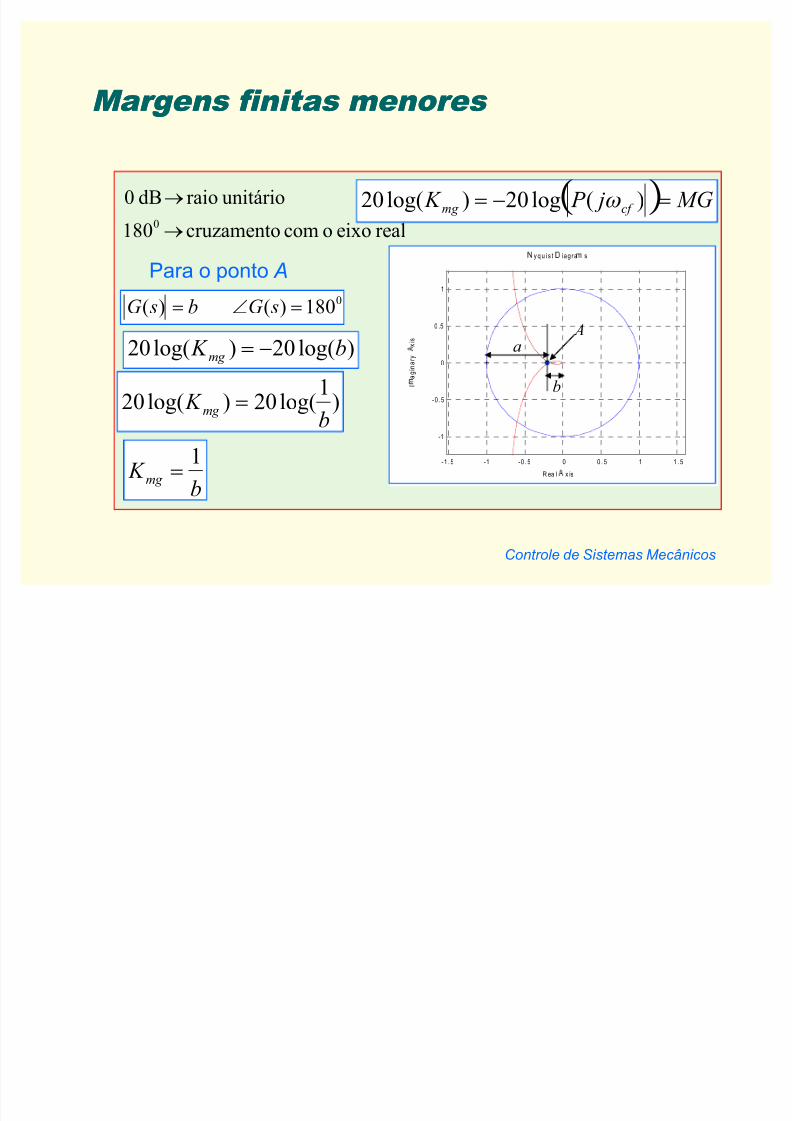
M argens finitas menores M argens finitas menores
R ea l
x is
I
¡
a g i n a r y
¢
x i s
£ y qu i s t ¤ iagra ¥ s
-1 . 5 -1 -0 . 5 0 0 . 5 1 1 . 5
-1
-0.5
0
0 .5
1
A
b
a
r ealeixoocomcr uzamento180
unitárioraiodB0
0 p
p
Para o ponto A0180)( )( !�! sGb sG
MG j P K cf mg !! )(log20)log(20 [
)log(20)log(20 b K m g !
)1
log(20)log(20b
K m g
!
b K
m g
1!

8/6/2019 Apostila Controle - 19a - Visualização da Estabilidade Relativa
http://slidepdf.com/reader/full/apostila-controle-19a-visualizacao-da-estabilidade-relativa 7/27
Controle de Sistemas Mecânicos
U sando o diagrama de N ichols U sando o diagrama de N ichols
As margens são visualizadas em um único
gráfico
np=[1];d p=poly([ 0 -5 -8]);
nichols(np,d p)
MF
MG
8/6/2019 Apostila Controle - 19a - Visualização da Estabilidade Relativa
http://slidepdf.com/reader/full/apostila-controle-19a-visualizacao-da-estabilidade-relativa 8/27
Controle de Sistemas Mecânicos
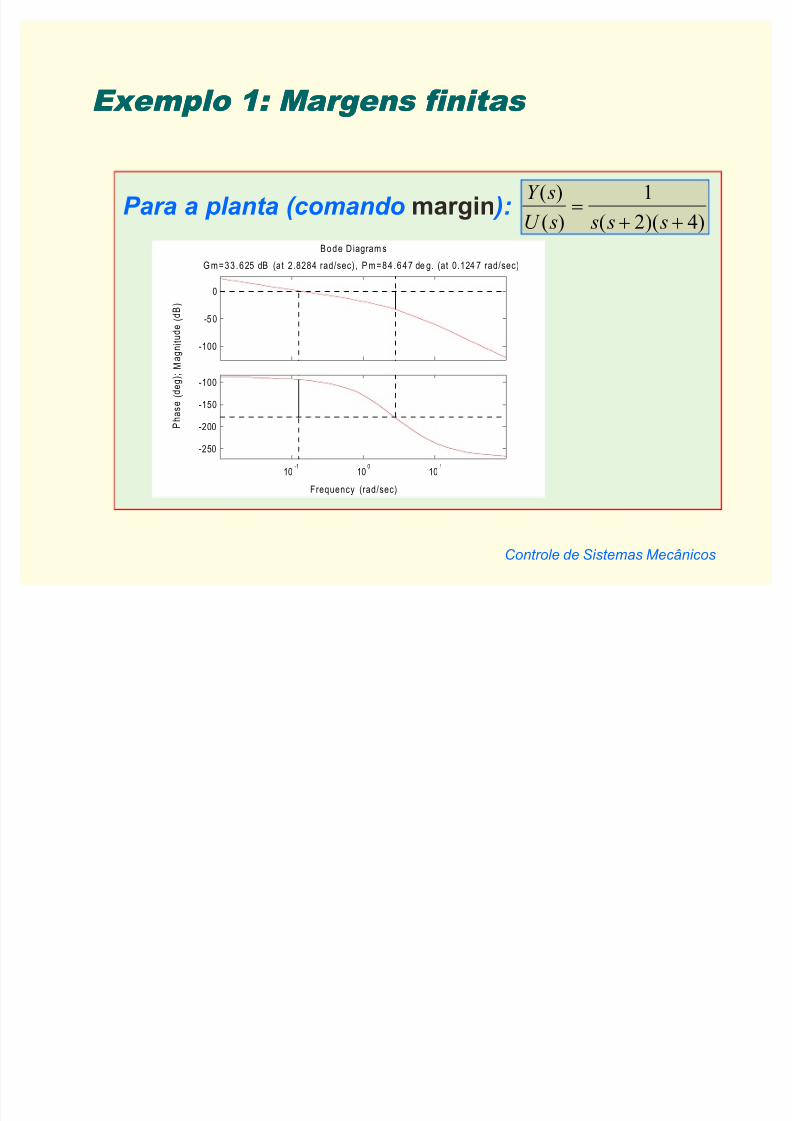
Exemplo 1: M argens finitas Exemplo 1: M argens finitas
P ara a planta (comando margin ):Y s
U s s s s
( )
( ) ( )( )!
1
2 4
Frequency (rad/sec)
P h a
s e
( d e g ) ; M
a g n i t u d e
( d B )
B o d e Diagram s
-100
-5 0
0
G m=33.625 dB (at 2.8284 rad/sec), P m=84.647 de g. (at 0.124 7 rad/sec)
10-1
100
101
-250
-200
-150
-100
8/6/2019 Apostila Controle - 19a - Visualização da Estabilidade Relativa
http://slidepdf.com/reader/full/apostila-controle-19a-visualizacao-da-estabilidade-relativa 9/27
Controle de Sistemas Mecânicos
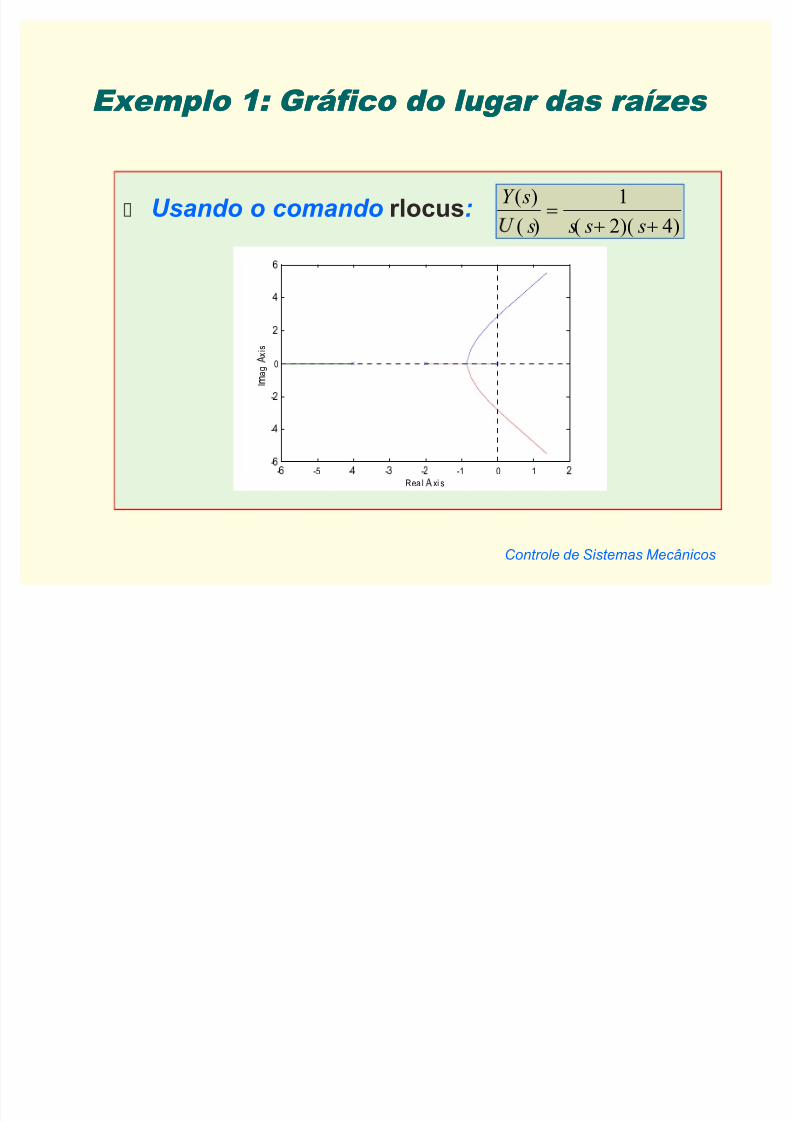
Exemplo 1: Gráfico do lugar das raízes Exemplo 1: Gráfico do lugar das raízes
U sando o comando rlocus:Y s
s s s s
( )
( ) ( )( )!
1
2 4
-¦
-5 -§
- ̈
-©
-1 0 1©
-¦
-§
-©
0
©
§
¦
Rea l
xi s
I
a g
x i s
8/6/2019 Apostila Controle - 19a - Visualização da Estabilidade Relativa
http://slidepdf.com/reader/full/apostila-controle-19a-visualizacao-da-estabilidade-relativa 10/27
Controle de Sistemas Mecânicos
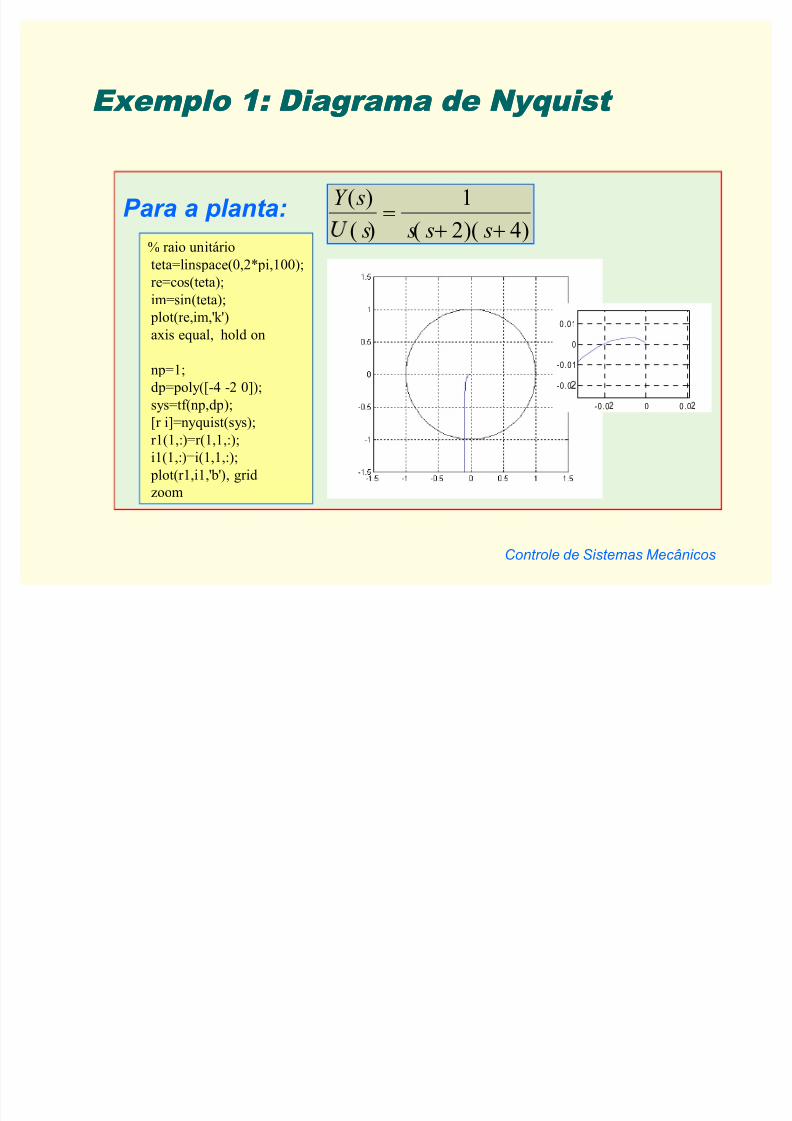
Exemplo 1: Diagrama de Nyq uist Exemplo 1: Diagrama de Nyq uist
P ara a planta:Y s
s s s s
( )
( ) ( )( )!
1
2 4
-0.0
0 0.0
-0.0
-0.01
0
0.01
% raio unitário
teta=lins pace(0,2* pi,100);
r e=cos(teta);
im=sin(teta);
plot(r e,im,'k')
axis equal, hold on
np=1;
d p=poly([-4 -2 0]);
sys=tf(np,d p);
[r i]=nyquist(sys);
r1(1,:)=r(1,1,:);
i1(1,:)=i(1,1,:);
plot(r1,i1,'b'), grid
zoom
8/6/2019 Apostila Controle - 19a - Visualização da Estabilidade Relativa
http://slidepdf.com/reader/full/apostila-controle-19a-visualizacao-da-estabilidade-relativa 11/27
Controle de Sistemas Mecânicos
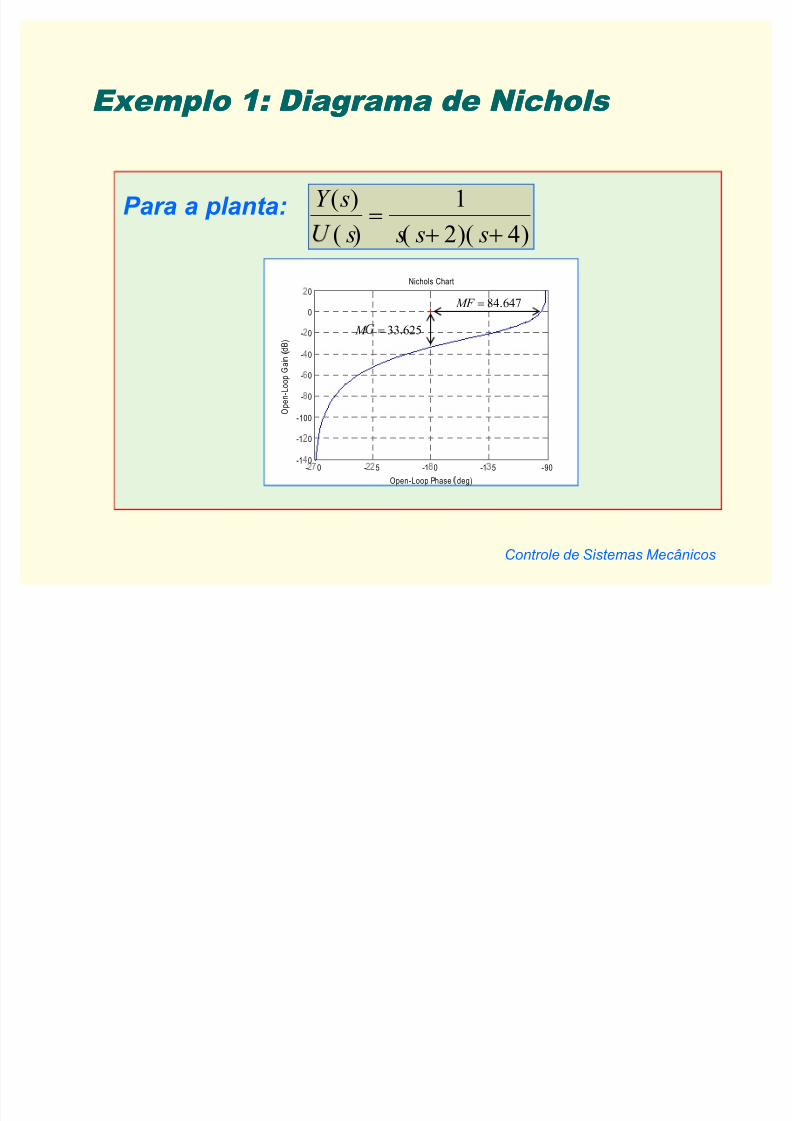
Exemplo 1: Diagrama de N ichols Exemplo 1: Diagrama de N ichols
P ara a planta: Y s
s s s s
( )
( ) ( )( )!
1
2 4
-
0 -
5 -1
0 -1
5 -90-1
0
-1
0
-100
-
0
-
0
-
0
-
0
0
0
Nichols Chart
Open-Loop Phase
deg)
O p e n -
L o o p G a i n
!
d B )
625.33! M "
647.84!MF
8/6/2019 Apostila Controle - 19a - Visualização da Estabilidade Relativa
http://slidepdf.com/reader/full/apostila-controle-19a-visualizacao-da-estabilidade-relativa 12/27
Controle de Sistemas Mecânicos
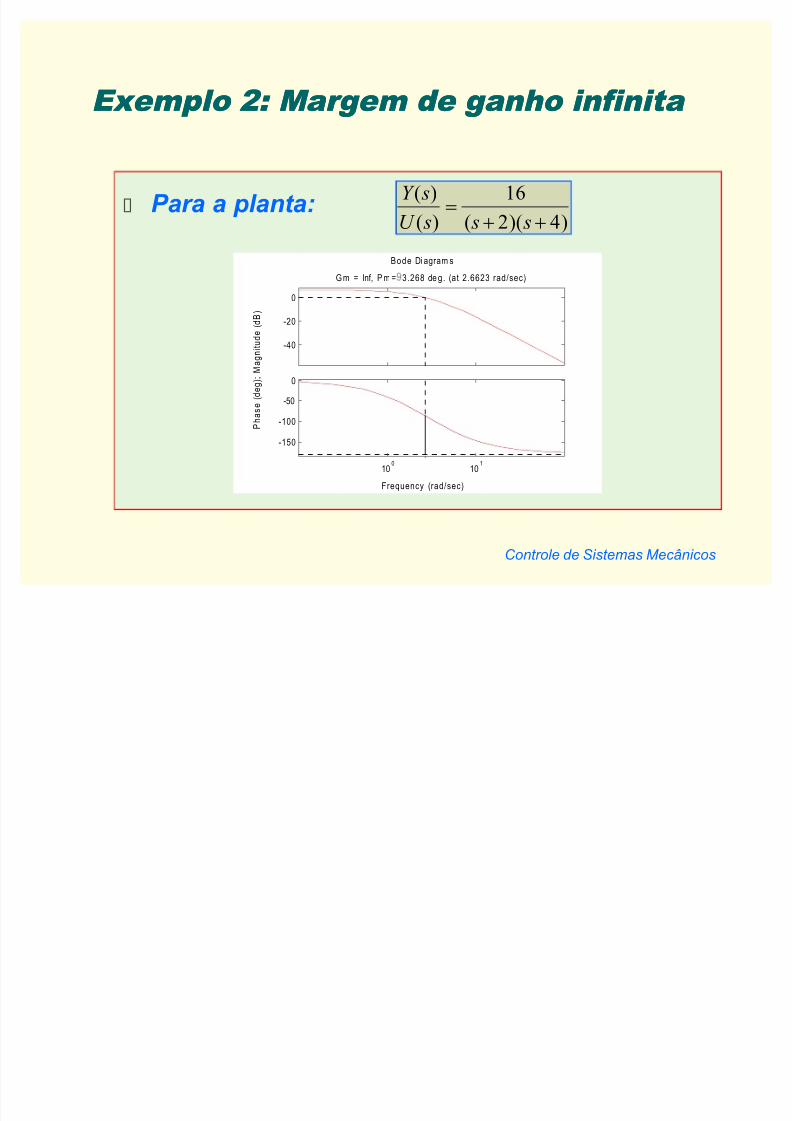
Exemplo 2: M argem de ganho infinita Exemplo 2: M argem de ganho infinita
P ara a planta:Y s
U s s s
( )
( ) ( )( )!
16
2 4
Frequency (rad/sec)
P h a
s e
( d e g ) ; M
a g n i t u d e
( d B )
B o d e Di agram s
-40
-20
0
G m = Inf, P m =#
3.268 de g . (a t 2.6623 rad/sec)
100
101
-150
-100
-50
0
8/6/2019 Apostila Controle - 19a - Visualização da Estabilidade Relativa
http://slidepdf.com/reader/full/apostila-controle-19a-visualizacao-da-estabilidade-relativa 13/27
Controle de Sistemas Mecânicos
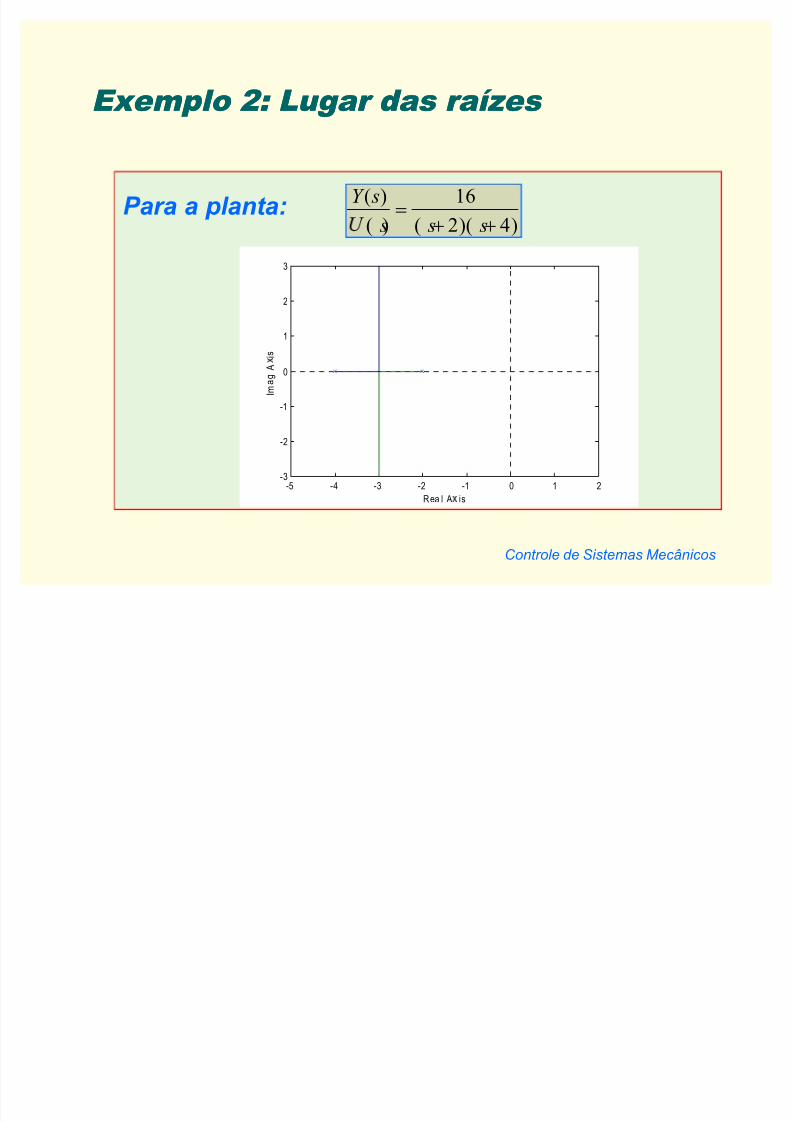
Exemplo 2: Lugar das raízes Exemplo 2: Lugar das raízes
P ara a planta:Y s
s s s
( )
( ) ( )( )!
16
2 4
-5 -4 -3 -2 -1 0 1 2-3
-2
-1
0
1
2
3
R ea l A$
is
I m
a g
A
%
i s
8/6/2019 Apostila Controle - 19a - Visualização da Estabilidade Relativa
http://slidepdf.com/reader/full/apostila-controle-19a-visualizacao-da-estabilidade-relativa 14/27
Controle de Sistemas Mecânicos
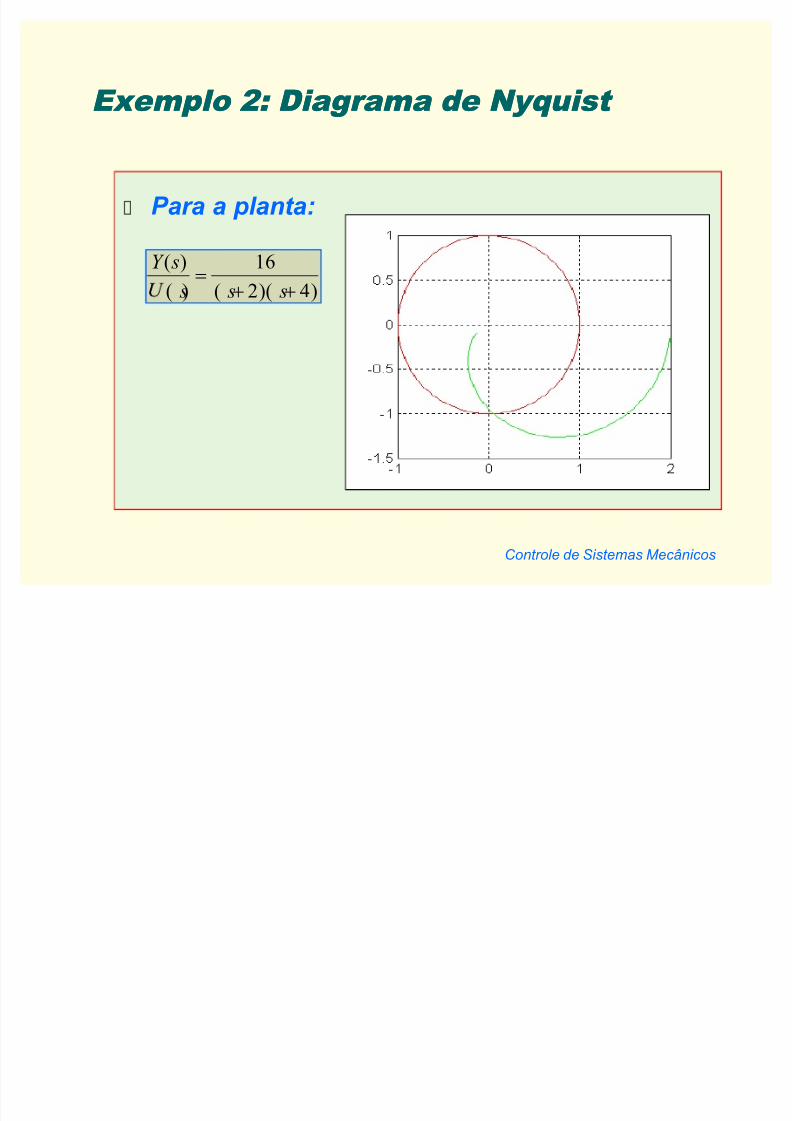
Exemplo 2: Diagrama de Nyq uist Exemplo 2: Diagrama de Nyq uist
P ara a planta:
Y s
s s s
( )
( ) ( )( )!
16
2 4
8/6/2019 Apostila Controle - 19a - Visualização da Estabilidade Relativa
http://slidepdf.com/reader/full/apostila-controle-19a-visualizacao-da-estabilidade-relativa 15/27
Controle de Sistemas Mecânicos
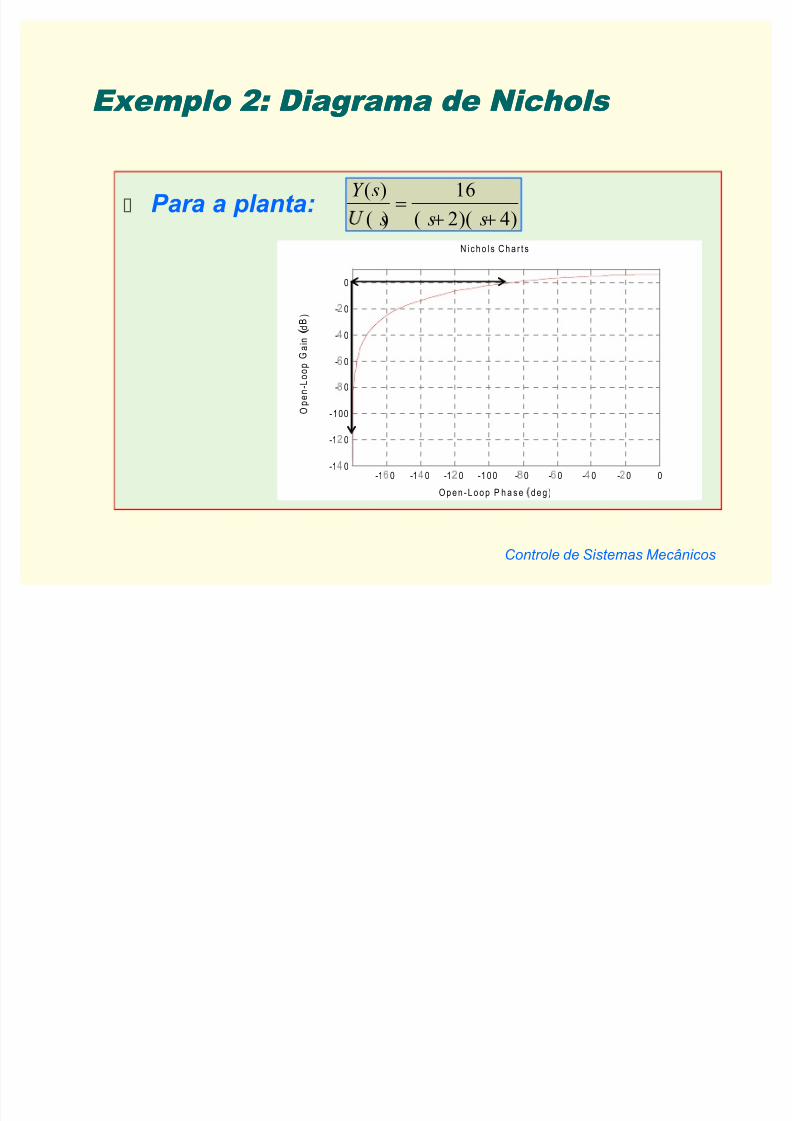
Exemplo 2: Diagrama de N ichols Exemplo 2: Diagrama de N ichols
P ara a planta:Y s
s s s
( )
( ) ( )( )!
16
2 4
O p e n - L o o p P h a s e & d e g )
O
p e n -
L o o p
G
a i n
'
d B )
N i c h o l s C h a r t s
-1(
0 -1)
0 -10
0 -1 0 0 -1
0 -(
0 -)
0 -0
0 0-1
)
0
-10
0
-100
-1
0
-(
0
-)
0
-0
0
0
8/6/2019 Apostila Controle - 19a - Visualização da Estabilidade Relativa
http://slidepdf.com/reader/full/apostila-controle-19a-visualizacao-da-estabilidade-relativa 16/27
Controle de Sistemas Mecânicos
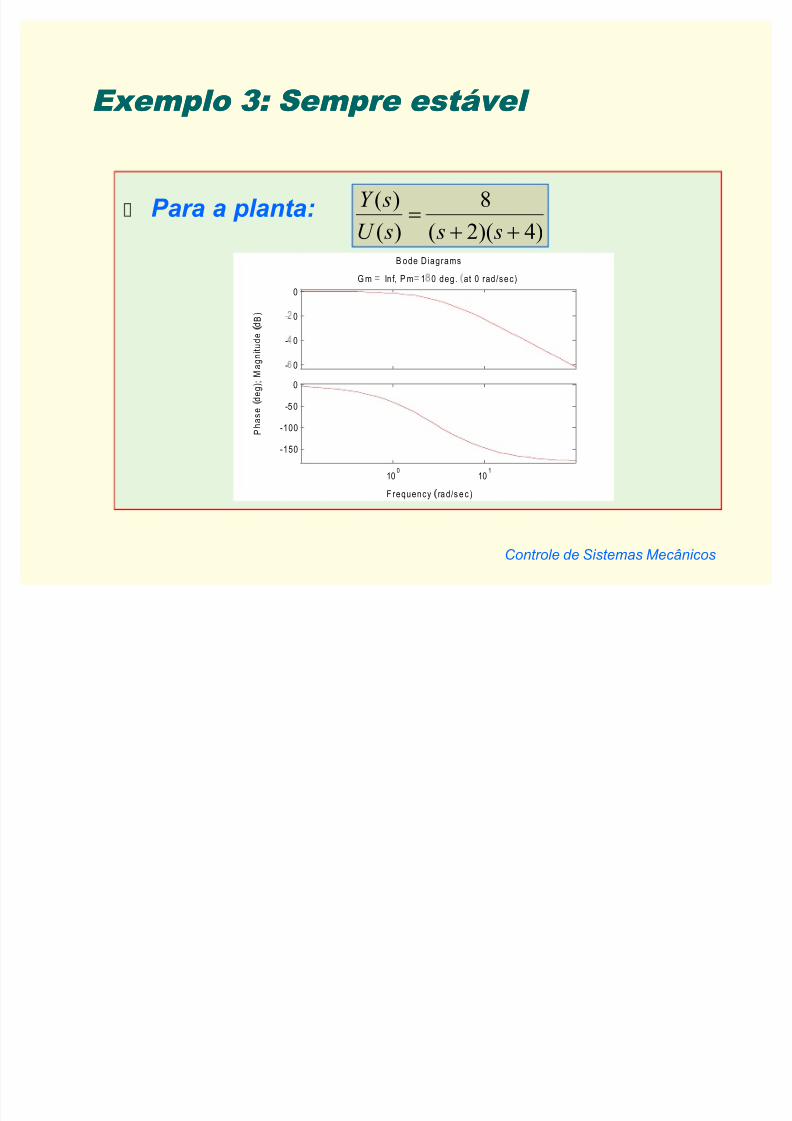
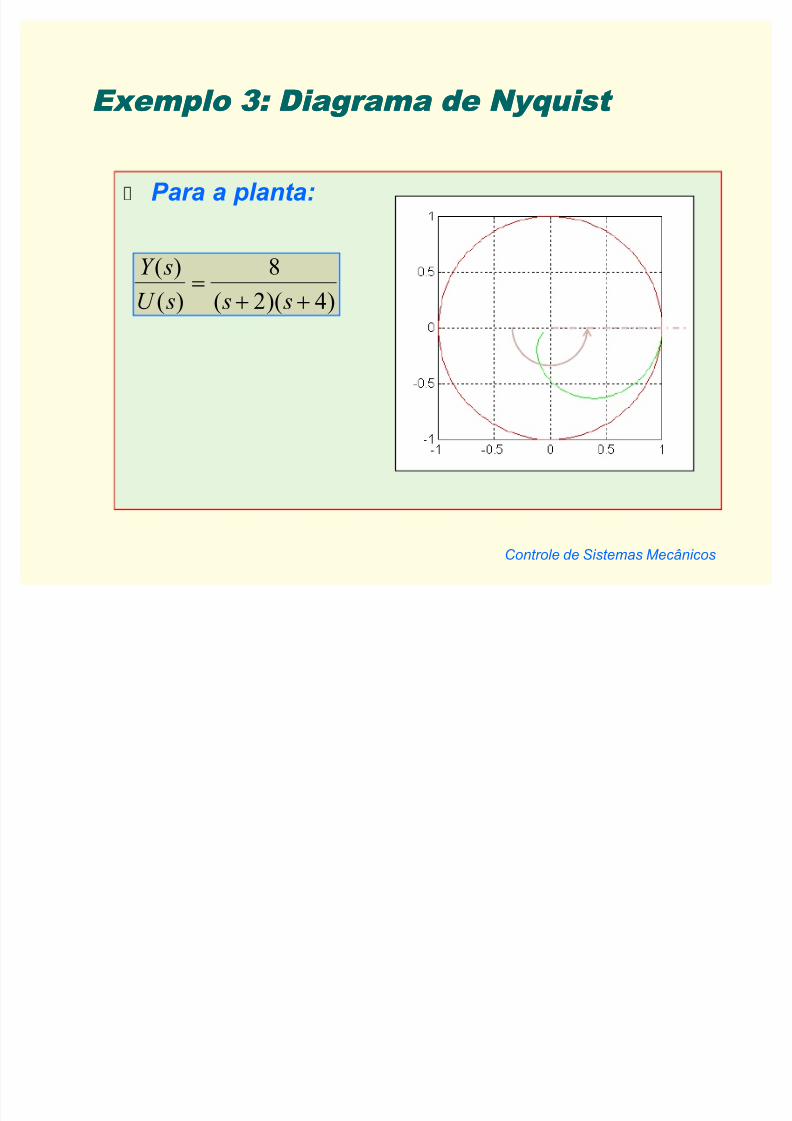
Exemplo 3: Sempre estável Exemplo 3: Sempre estável
P ara a planta:)4)(2(
8
)(
)(
!
s s sU
sY
F requency 2 rad /s e c )
P h a s
e
3
d e g ) ; M
a g n i t u d e
3
d B )
B ode Diagrams
-4
0
-5
0
-6
0
0G m
7
In f, P m7
18
0 deg. 2 at 0 rad /sec )
100
101
-150
-100
-50
0
8/6/2019 Apostila Controle - 19a - Visualização da Estabilidade Relativa
http://slidepdf.com/reader/full/apostila-controle-19a-visualizacao-da-estabilidade-relativa 17/27
Controle de Sistemas Mecânicos
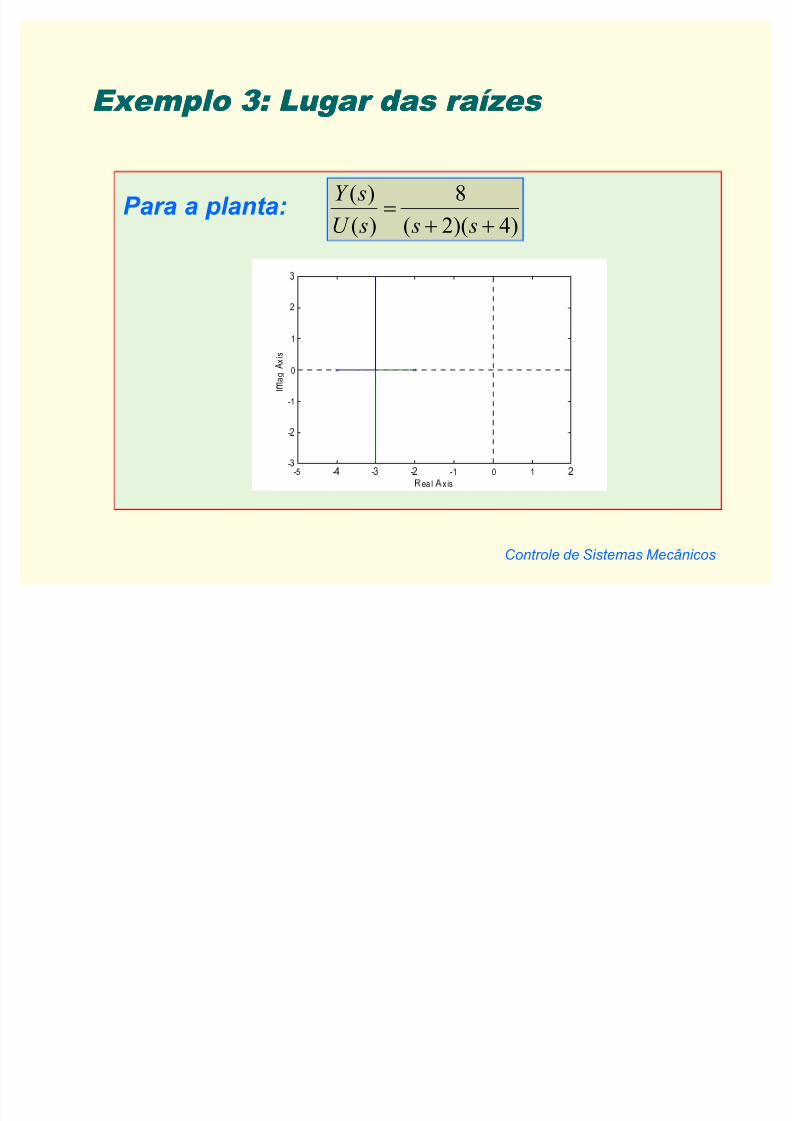
Exemplo 3: Lugar das raízes Exemplo 3: Lugar das raízes
P ara a planta:)4)(2(
8
)(
)(
!
s s sU
sY
-5 -9
-@
-A
-1 0 1A
-@
-A
-1
0
1
A
@
B ea lC
x is
I
D
a g
E
x i s
8/6/2019 Apostila Controle - 19a - Visualização da Estabilidade Relativa
http://slidepdf.com/reader/full/apostila-controle-19a-visualizacao-da-estabilidade-relativa 18/27
Controle de Sistemas Mecânicos
Exemplo 3: Diagrama de Nyq uist Exemplo 3: Diagrama de Nyq uist
P ara a planta:
Y sU s s s
( )( ) ( )( )
!
82 4
8/6/2019 Apostila Controle - 19a - Visualização da Estabilidade Relativa
http://slidepdf.com/reader/full/apostila-controle-19a-visualizacao-da-estabilidade-relativa 19/27
Controle de Sistemas Mecânicos
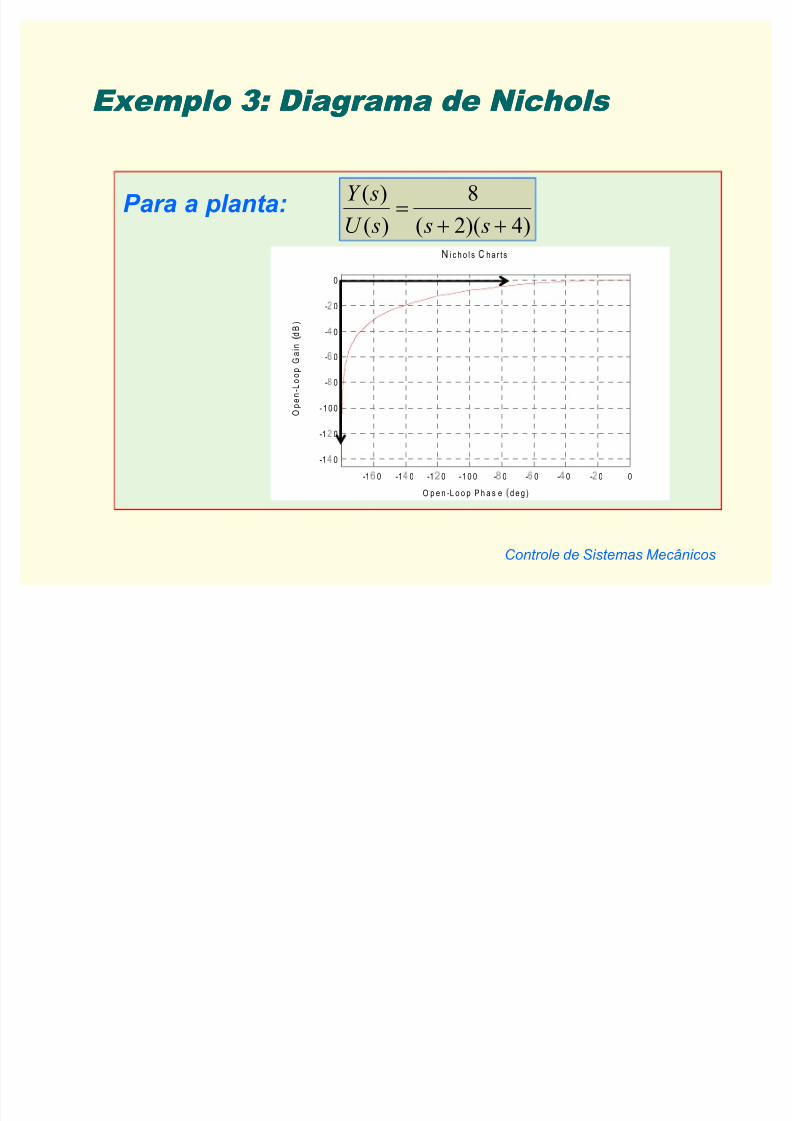
Exemplo 3: Diagrama de N ichols Exemplo 3: Diagrama de N ichols
P ara a planta:
O p e n -L o o p P h a s eF
d e g )
O
p e n -
L o o p
G
a i n
G
d B )
H i c h o l sI
h a r t s
-1P
0 -1Q
0 -1R
0 -1 0 0 -S
0 -P
0 -Q
0 -R
0 0
-1Q
0
-1R
0
-1 0 0
-S
0
-P
0
-Q
0
-R
0
0
)4)(2(
8
)(
)(
!
s s sU
sY
8/6/2019 Apostila Controle - 19a - Visualização da Estabilidade Relativa
http://slidepdf.com/reader/full/apostila-controle-19a-visualizacao-da-estabilidade-relativa 20/27
Controle de Sistemas Mecânicos
Exemplo 4: M argem de redução de Exemplo 4: M argem de redução de
ganho ganho
Para a planta cuja FT é
calcule a margem de ganho e margem de fase e justifique o resultado
2
3
3 6 4( )
1
s s s
s
!
8/6/2019 Apostila Controle - 19a - Visualização da Estabilidade Relativa
http://slidepdf.com/reader/full/apostila-controle-19a-visualizacao-da-estabilidade-relativa 21/27
Controle de Sistemas Mecânicos
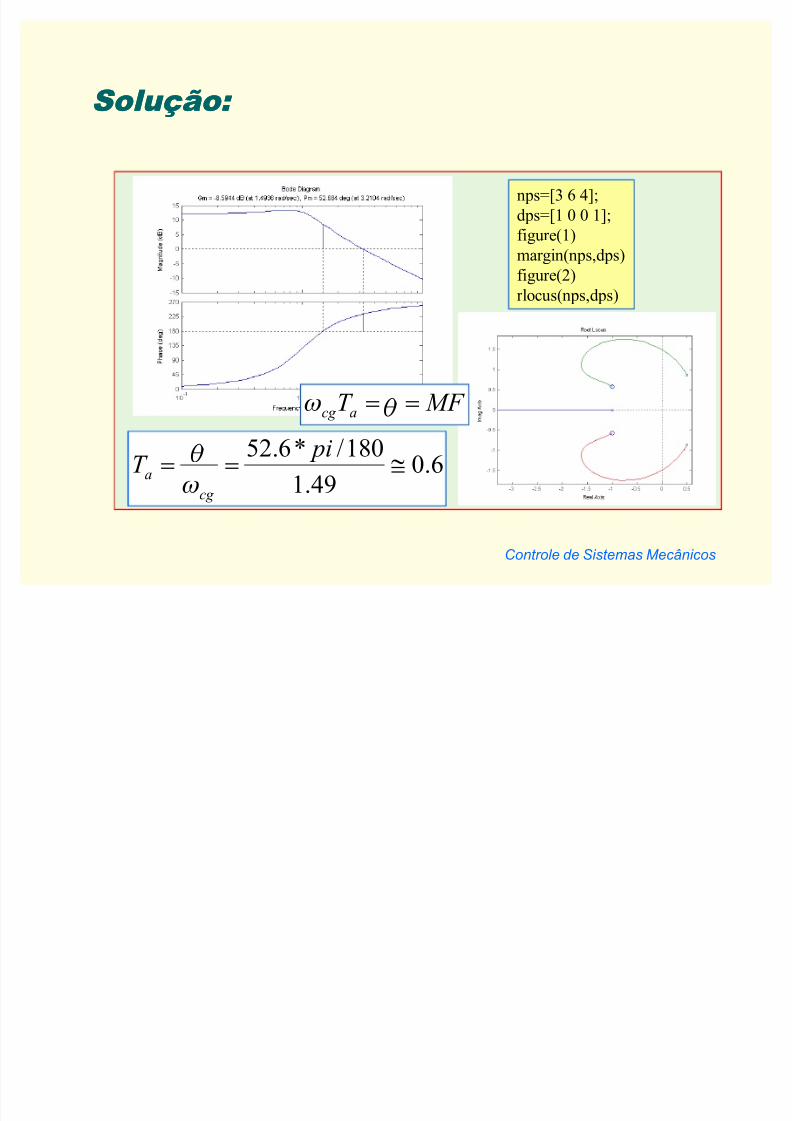
Solução: Solução:
nps=[3 6 4];
d ps=[1 0 0 1];
figur e(1)
margin(nps,d ps)
figur e(2)r locus(nps,d ps)
MF T acg
!! U[
6.049.1
180/*6.52$!!
piT
cg
a[
U

8/6/2019 Apostila Controle - 19a - Visualização da Estabilidade Relativa
http://slidepdf.com/reader/full/apostila-controle-19a-visualizacao-da-estabilidade-relativa 22/27
Controle de Sistemas Mecânicos
Solução: Solução:
k mg=0.371MG=20*log10(k mg);
MG= -8.6125
8/6/2019 Apostila Controle - 19a - Visualização da Estabilidade Relativa
http://slidepdf.com/reader/full/apostila-controle-19a-visualizacao-da-estabilidade-relativa 23/27
Controle de Sistemas Mecânicos
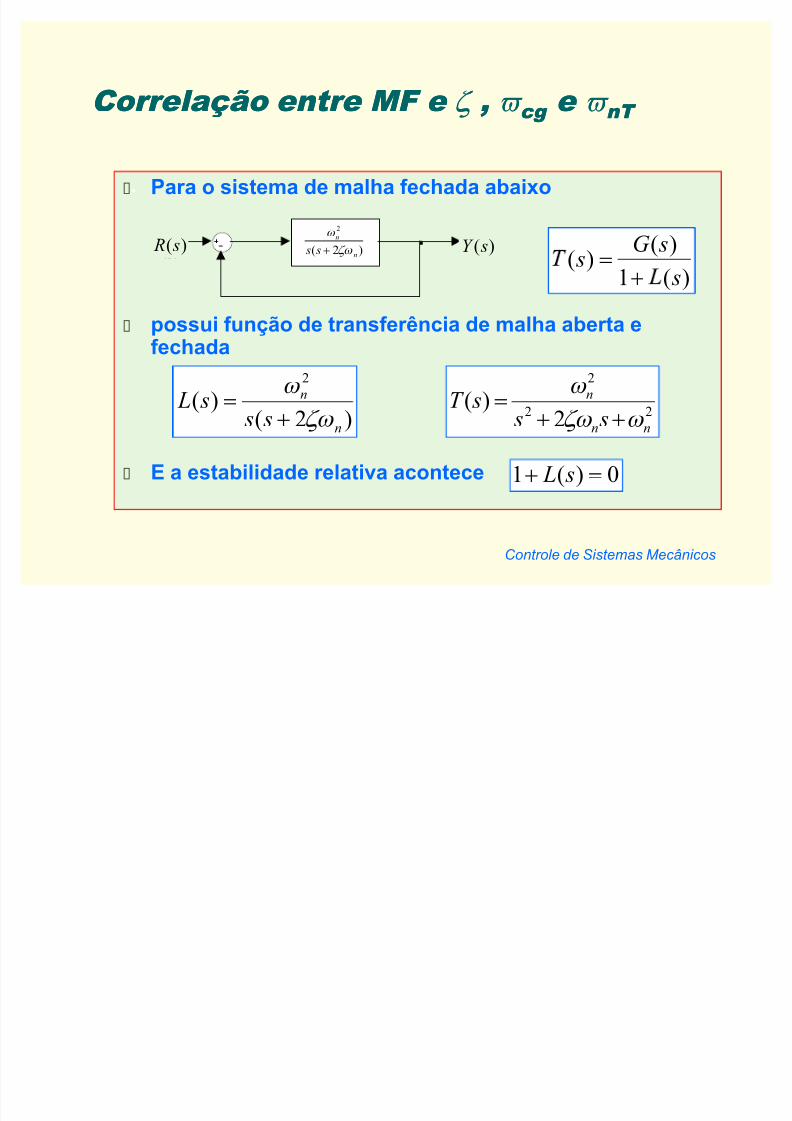
C orrelação entre MF e C orrelação entre MF e ^ ^ , , Z Z cg cg e e Z Z nT nT
Para o sistema de malha fechada abaixo
possui função de transferência de malha aberta efechada
E a estabilidade relativa acontece
1
O u t 1
0 s
s
1
I n 1)2(
2
n
n
s s ^[
[
)( s R )( sY
)2()(
2
n
n
s s s L
^ [
[
!
)(1
)()(
s
sG s
!
0)(1 ! s L
22
2
2)(
nn
n
s s sT
[ ^ [
[
!

8/6/2019 Apostila Controle - 19a - Visualização da Estabilidade Relativa
http://slidepdf.com/reader/full/apostila-controle-19a-visualizacao-da-estabilidade-relativa 24/27
Controle de Sistemas Mecânicos
C álculo do módulo e fase de G(j C álculo do módulo e fase de G(j Z Z ) )
Para s=jZ
Calculando o módulo e isolando as
freqüências tem-se
Calculando a fase tem-se
24 241 ^ ^ [ [ !ncg
1)( 
8/6/2019 Apostila Controle - 19a - Visualização da Estabilidade Relativa
http://slidepdf.com/reader/full/apostila-controle-19a-visualizacao-da-estabilidade-relativa 25/27
Controle de Sistemas Mecânicos
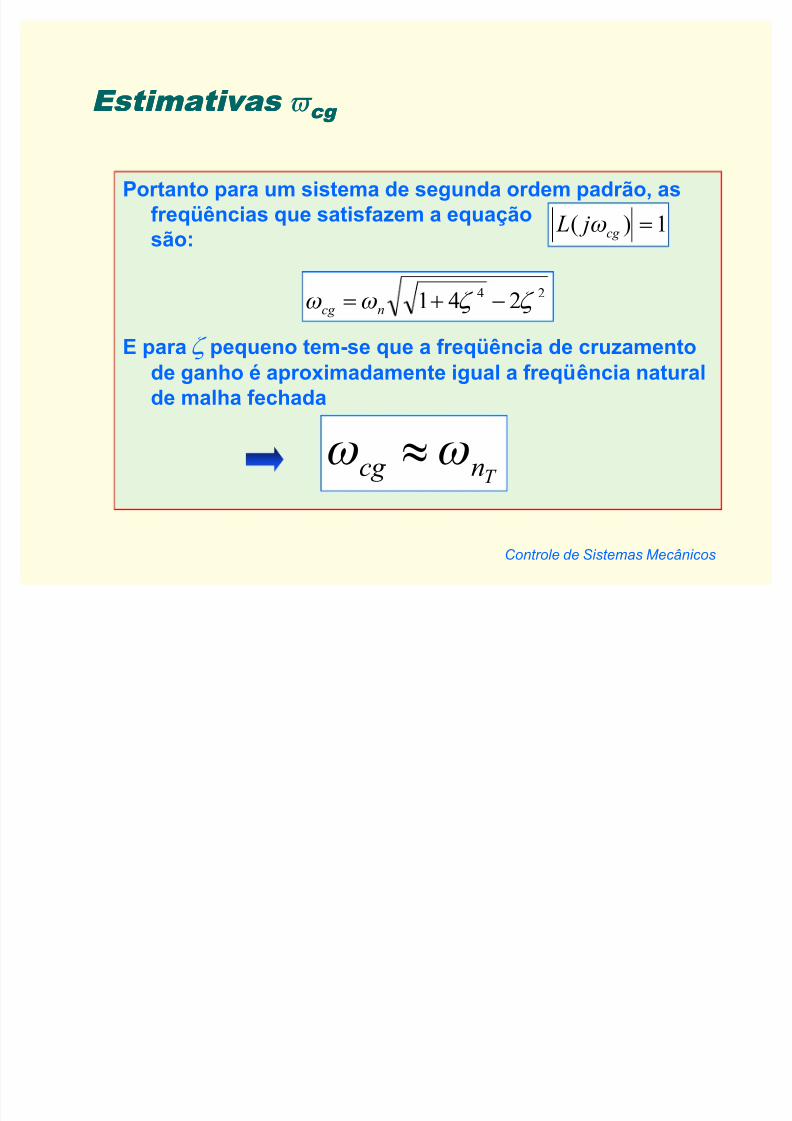
Estimativas Estimativas Z Z cg cg
Portanto para um sistema de segunda ordem padrão, as
freqüências que satisfazem a equação
são:
E para ^ pequeno tem-se que a freqüência de cruzamento
de ganho é aproximadamente igual a freqüência natural
de malha fechada
T ncg [ [ }
24241 ^ ^ [ [ !
ncg
1)( !cg j L [

8/6/2019 Apostila Controle - 19a - Visualização da Estabilidade Relativa
http://slidepdf.com/reader/full/apostila-controle-19a-visualizacao-da-estabilidade-relativa 26/27
Controle de Sistemas Mecânicos
C álculo da MF C álculo da MF
Portanto a MF será
Substituindo a fase de
Ou ainda
)(180 cg jMF [ �!
)( cg j[
^
^ ^
2
241tan90
24
1
!
MF
24
1
241
2tan
^ ^
^
!
MF

8/6/2019 Apostila Controle - 19a - Visualização da Estabilidade Relativa
http://slidepdf.com/reader/full/apostila-controle-19a-visualizacao-da-estabilidade-relativa 27/27