análise dinâmica de vigas de euler-bernoulli e de
TRANSCRIPT

UNIVERSIDADE FEDERAL DO PARANÁ
EDUARDO HENRIQUE VIECILLI MARTINS DE MELLO
ANÁLISE DINÂMICA DE VIGAS DE EULER-BERNOULLI E
DE TIMOSHENKO COM O MÉTODO DAS DIFERENÇAS FINITAS
CURITIBA
2014

EDUARDO HENRIQUE VIECILLI MARTINS DE MELLO
ANÁLISE DINÂMICA DE VIGAS DE EULER-BERNOULLI E
DE TIMOSHENKO COM O MÉTODO DAS DIFERENÇAS FINITAS
Trabalho Final de Curso apresentado ao Curso deEng. Civil, Setor de Tecnologia da UniversidadeFederal do Paraná, como requisito parcial à obten-ção de título de Bacharel em Engenharia Civil.
Orientador: Prof. Marcos Arndt
Coorientador: Prof. José AntonioMarques Carrer
CURITIBA
2014

TERMO DE APROVAÇÃO
EDUARDO HENRIQUE VIECILLI MARTINS DE MELLO
ANÁLISE DINÂMICA DE VIGAS DE EULER-BERNOULLI E
DE TIMOSHENKO COM O MÉTODO DAS DIFERENÇAS FINITAS
Trabalho Final de Curso aprovado pelo Curso de Eng. Civil, Setor de Tecnologia da UniversidadeFederal do Paraná, como requisito parcial à obtenção de título de Bacharel em Engenharia Civil.
Orientador:Prof. Marcos Arndt, D.Sc.
Universidade Federal do Paraná
Coorientador:Prof. José Antonio Marques Carrer, D.Sc.
Universidade Federal do Paraná
Prof. Roberto Dalledone Machado, D.Eng.Universidade Federal do Paraná
CURITIBA
02 de dezembro de 2014
AGRADECIMENTOS
Agradeço à minha mãe pelo apoio e carinho, não só durante a elaboração deste
trabalho, mas durante toda minha vida.
Agradeço ao prof. José Antonio Marques Carrer que desde 2010 dispendeu sua aten-
ção com minhas dúvidas, me orientou na iniciação científica a partir de 2011 e foi parte
fundamental neste trabalho. Também pela oportunidade de utilizar os métodos numéricos e
que em muitas vezes que estava preocupado me contagiou com sua paciência.
Agradeço ao Raphael Fernando Scuciato, que muito me ensinou sobre programação
e foi indispensável para a conclusão deste trabalho.
Agradeço ao prof. Marcos Arndt por aceitar ser meu orientador neste trabalho e ao
prof. Roberto Dalledone Machado, por aceitar o convite para partipar da banca de avaliação.
Agradeço a todos os amigos feitos ao longo do curso, que me auxiliaram com ideias
e discussões para escrever este texto.
Agradeço às amigas dos outros cursos, pelo grande incentivo e cobrança para a elabo-
ração deste trabalho e por terem proporcionando conversas relaxantes sobre os mais variados
temas.

RESUMO
Este trabalho apresenta um estudo relativo à análise dinâmica de vigas regidas pelas teoriasde Euler-Bernoulli e de Timoshenko. São considerados os quatro tipos mais comuns de vigas -biapoiada, biengastada, engastada-apoiada e em balanço - sujeitos à ação de um carregamentouniformemente distribuído no espaço e atuando continuamente no tempo. É discutida autilização dos Métodos Numéricos para problemas de engenharia e, particularmente, o Métododas Diferenças Finitas. Este método é utilizado para a solução numérica dos problemas eos algoritmos necessários para a implementação são apresentados. Para as vigas de Euler-Bernoulli, as respostas numéricas são comparadas com as soluções analíticas; para as vigas deTimoshenko, as respostas numéricas são comparadas com a analítica, disponível somente paraa viga biapoiada. As respostas relativas às duas teorias são comparadas entre si, possibilitando,assim, verificar que tipo de diferença pode ocorrer entre elas. Conclui-se que há diferençastanto nas flechas como nas frequências, que crescem à medida que a altura da seção aumenta,mantendo o vão da viga constante. Também conclui-se que o Método das Diferenças Finitasapresenta bons resultados para as duas teorias.
Palavras-chave: Teoria de Euler-Bernoulli. Teoria de Timoshenko. Análise dinâmica de vigas.Método das Diferenças Finitas.

ABSTRACT
This paper presents a study concerning the dynamic analysis of beams governed by Euler-Bernoulli and Timoshenko theories. The four most common types of beams - pinned-pinned;fixed-fixed; fixed-pinned and fixed-free - are considered, under a uniformly distributed dynamicload in space, that acts continuously in time. The use of Numerical Methods in engineeringproblems is discussed, particularly the Finite Difference Method. This method is used forthe numerical solution of both problems and the algorithms needed for the implementationare developed. For Euler-Bernoulli beams, the numerical solutions are compared with theanalytical ones; for Timoshenko beams, the numerical results are compared with the analyticalones, only available for pinned-pinned beams. The results from both theories are comparedwith each other, allowing, therefore, to verify what differences can occur between them. Onecan conclude that differences, not only on the deflection but also on the frequency, appearand growth up with the increase of the section height for a fixed length of the beam. Also,the Finite Difference Method can provide reliable results for both theories.
Keywords: Euler-Bernouli beam theory. Timoshenko beam theory. Dynamic analysis ofbeams. Finite Difference Method.

LISTA DE FIGURAS
FIGURA 1 – APOIO SIMPLES . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
FIGURA 2 – ARTICULAÇÃO . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13FIGURA 3 – ENGASTE. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
FIGURA 4 – TIPO DE VÍNCULOS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13FIGURA 5 – VIGA BIAPOIADA . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14FIGURA 6 – VIGA BIENGASTADA. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14FIGURA 7 – VIGA ENGASTADA E APOIADA . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14FIGURA 8 – VIGA EM BALANÇO . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14FIGURA 9 – TRECHO DE VIGA . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
FIGURA 10 – ETAPAS ENVOLVIDAS NA UTILIZAÇÃO DE MÉTODOSNUMÉRICOS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
FIGURA 11 – PONTOS FORA DO DOMÍNIO DO ESPAÇO NA VIZINHANÇADE i = 1 E DE i = n. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
FIGURA 12 – VIGA BIAPOIADA DISCRETIZADA . . . . . . . . . . . . . . . . . . . . . . . . . 42FIGURA 13 – VIGA BIENGASTADA DISCRETIZADA. . . . . . . . . . . . . . . . . . . . . . . 43FIGURA 14 – VIGA ENGASTADA-APOIADA DISCRETIZADA. . . . . . . . . . . . . . . . . 44FIGURA 15 – VIGA ENGASTADA-LIVRE DISCRETIZADA . . . . . . . . . . . . . . . . . . . 45FIGURA 16 – DESLOCAMENTOS PARA OS 4 TIPOS DE VIGAS
ANALISADAS - SOLUÇÃO ANALÍTICA E NUMÉRICA - TEORIADE EULER-BERNOULLI . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 55
FIGURA 17 – DESLOCAMENTOS DO PONTO CENTRAL PARA VIGASBIAPOIADAS PARA AS QUATRO SEÇÕES ANALISADAS -TEORIA DE TIMOSHENKO . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 59
FIGURA 18 – DESLOCAMENTOS DO PONTO CENTRAL PARA VIGASBIAPOIADAS PARA AS QUATRO SEÇÕES ANALISADAS . . . . . . . . . 60
FIGURA 19 – DESLOCAMENTOS DO PONTO CENTRAL PARA VIGASBIENGASTADAS PARA AS QUATRO SEÇÕES ANALISADAS. . . . . . . 61
FIGURA 20 – DESLOCAMENTOS DO PONTO CENTRAL PARA AS VIGASENGASTADA-APOIADA PARA AS QUATRO SEÇÕESANALISADAS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 62
FIGURA 21 – DESLOCAMENTOS PARA O PONTO DA EXTREMIDADELIVRE PARA VIGAS EM BALANÇO PARA AS QUATROSEÇÕES ANALISADAS. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 63
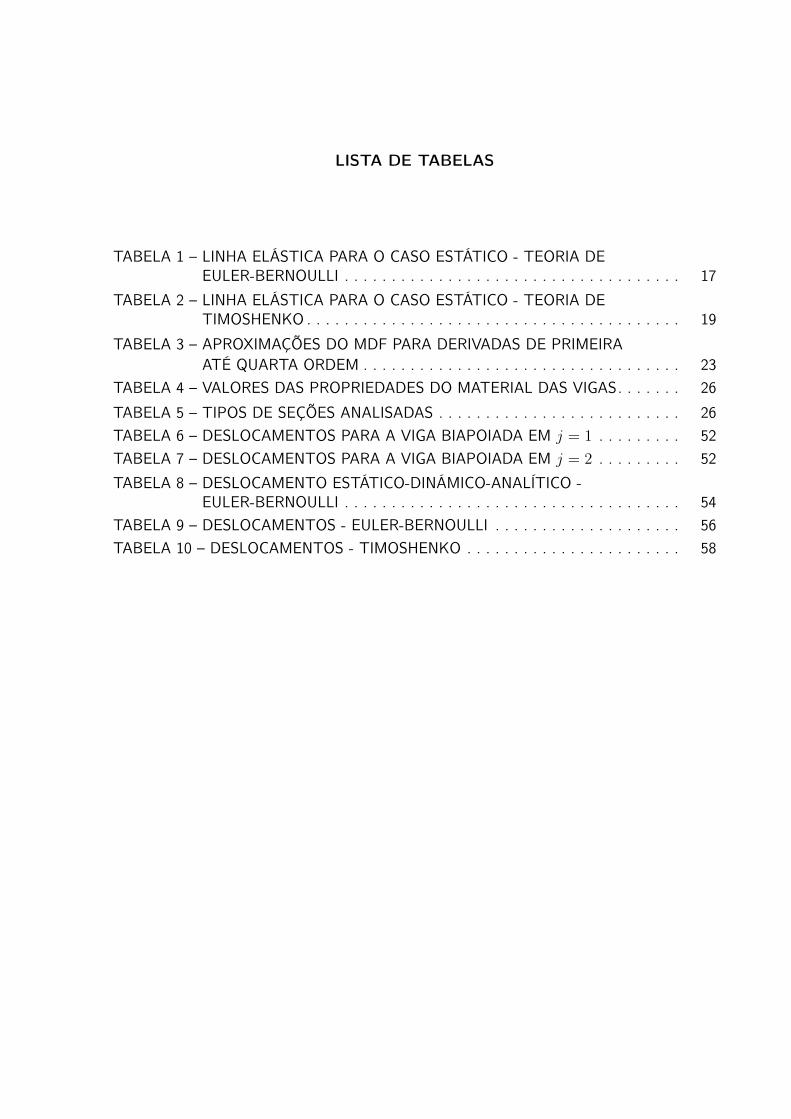
LISTA DE TABELAS
TABELA 1 – LINHA ELÁSTICA PARA O CASO ESTÁTICO - TEORIA DEEULER-BERNOULLI . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
TABELA 2 – LINHA ELÁSTICA PARA O CASO ESTÁTICO - TEORIA DETIMOSHENKO . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
TABELA 3 – APROXIMAÇÕES DO MDF PARA DERIVADAS DE PRIMEIRAATÉ QUARTA ORDEM . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
TABELA 4 – VALORES DAS PROPRIEDADES DO MATERIAL DAS VIGAS. . . . . . . 26
TABELA 5 – TIPOS DE SEÇÕES ANALISADAS . . . . . . . . . . . . . . . . . . . . . . . . . . 26TABELA 6 – DESLOCAMENTOS PARA A VIGA BIAPOIADA EM j = 1 . . . . . . . . . 52TABELA 7 – DESLOCAMENTOS PARA A VIGA BIAPOIADA EM j = 2 . . . . . . . . . 52
TABELA 8 – DESLOCAMENTO ESTÁTICO-DINÁMICO-ANALÍTICO -EULER-BERNOULLI . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 54
TABELA 9 – DESLOCAMENTOS - EULER-BERNOULLI . . . . . . . . . . . . . . . . . . . . 56TABELA 10 – DESLOCAMENTOS - TIMOSHENKO . . . . . . . . . . . . . . . . . . . . . . . 58

SUMÁRIO
1 INTRODUÇÃO . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 101.1 OBJETIVOS. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
2 REVISÃO BIBLIOGRÁFICA . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 122.1 TEORIA DE VIGAS. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 122.1.1 Teoria de Euler-Bernoulli . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 152.1.2 Teoria de Timoshenko . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
2.2 MÉTODOS NUMÉRICOS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 202.2.1 Método das Diferenças Finitas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
3 MÉTODOS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 253.1 VIGAS ANALISADAS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
3.2 SOLUÇÕES ANALÍTICAS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 263.2.1 Euler Bernoulli . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
3.3 EQUACIONAMENTO NUMÉRICO . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 303.3.1 Solução Numérica - Teoria de Euler-Bernoulli . . . . . . . . . . . . . . . . . . . . . . . . . 303.3.2 Solução Numérica - Teoria de Timoshenko . . . . . . . . . . . . . . . . . . . . . . . . . . . 353.3.3 Algoritmos - Fluxogramas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 413.3.3.1 Algoritmos para a Teoria de Euler-Bernoulli . . . . . . . . . . . . . . . . . . . . . . . . . 413.3.3.2 Algoritmos para a Teoria de Timoshenko . . . . . . . . . . . . . . . . . . . . . . . . . . . 463.4 MATERIAIS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 513.5 NOMENCLATURA ADOTADA . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51
3.6 DETERMINAÇÃO DOS INCREMENTOS ∆x E DO ∆t . . . . . . . . . . . . . . . . . . . 514 RESULTADOS. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 54
5 CONCLUSÃO . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 64
REFERÊNCIAS. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 66

10
1 INTRODUÇÃO
As vigas são elementos presentes na engenharia civil. Logo, o conhecimento de
seu comportamento é importante. A Resistência dos Materiais apresenta a teoria básica
para conhecer os deslocamentos e esforços envolvidos em cada situação (HIBBELER, 2010).
Geralmente, a teoria apresentada para a cálculo dos deslocamentos de vigas é a Teoria de
Euler-Bernoulli, também chamada de teoria clássica, como apresentado em Beer et al. (2003),
Hibbeler (2010), Nash (1982) e Popov (1978).
Porém a teoria clássica não leva em consideração os efeitos do cisalhamento na de-
formação da viga (BORGES, 1996). Assim, a Teoria de Timoshenko, que leva em conta estas
deformações, se mostra como uma teoria superior à clássica (SORIANO; LIMA, 2003). Esta
teoria utiliza, dentre outros parâmetros, o coeficiente corretivo κ, dependente da geometria
da seção transversal, que é introduzido para compensar o fato de que a tensão cisalhante real
e a correspondente a distorção não são uniformes (BORGES, 1996).
No desenvolvimento do trabalho, serão apresentadas as teorias e suas soluções para
carregamentos estático e dinâmicos, considerando aplicação de cargas distribuídas uniforme-
mente ao longo de toda a extensão da viga.
1.1 OBJETIVOS
O objetivo principal deste trabalho é efetuar análises de vigas, empregando as teorias
de Euler-Bernoulli e de Timoshenko, sujeitas à ação de um carregamento uniformemente dis-
tribuído no espaço e atuando instantânea e continuamente no tempo, mostrando as diferenças
entre elas.
Para a solução numérica dos problemas pretende-se empregar o Método das Diferenças
Finitas (MDF), que resolve de maneira aproximada equações diferenciais (CUNHA, 2000).

11
Para a aplicação deste método, serão utilizados programas computacionais na lingua-
gem FORTRAN, desenvolvidos pelo autor, que são diferentes para cada teoria e para cada
viga analisada. Assim, outro objetivo é a obtenção dos algoritmos que serão base para cada
um dos programas a serem desenvolvidos. Depois, pretende-se testar os resultados numéricos
com as soluções analíticas disponíveis.
Uma vez testados os algoritmos, pode-se realizar a comparação dos resultados obtidos
e procurar as diferenças e semelhanças entre os resultados proporcionados pelas duas teorias.
Como as soluções analíticas considerando carregamento estático para as duas teorias
são conhecidas, também vai se procurar a diferença entre o carregamento estático e dinâmico
em cada teoria.
A seguir será apresentado um breve resumo a respeito das teorias estudadas, bem
como considerações sobre vigas, sobre métodos numéricos e a uma descrição do Método das
Diferenças Finitas.

12
2 REVISÃO BIBLIOGRÁFICA
2.1 TEORIA DE VIGAS
Vigas são geralmente elementos prismáticos retos longos. Na maioria dos casos, as
forças atuantes nelas são perpendiculares ao seu eixo, provocando somente flexão e cisalha-
mento. Quando as forças não estão em ângulo reto com o eixo da viga, podem produzir
também esforços axiais. (BEER et al., 2003).
As vigas são elementos comuns em estruturas de pontes, torres, construções, etc. Há
numerosas estruturas que só foram viabilizadas devido ao conhecimento e aplicação da teoria
de vigas.
O carregamento de um viga pode ser com cargas externas distribuídas, forças externas
concentradas, momentos ou qualquer combinação destes (CRAIG, 2003). Quando a força
distribuída tiver valor constante sobre parte da viga, diz-se que a força é uniformemente
distribuída sobre aquela parte. (BEER et al., 2003).
Ao aplicar um carregamento, forças reativas surgem nos suportes das vigas, em reação
às cargas aplicadas (CRAIG, 2003). Os suportes podem também ser chamados de vínculos
(CAMPANARI, 1985) e abaixo são apresentados três deles:
a) Apoio simples: impede somente o deslocamento perpendicular ao plano de apoio,
introduzindo uma única força nesta direção e permitindo a rotação. Quando
estiver na extremidade, irá impor deslocamento e momento fletor nulos.
FIGURA 1 – APOIO SIMPLESFONTE: Campanari (1985)

13
b) Articulação: impede o deslocamento em qualquer direção do plano, introduzindo
assim uma força numa direção qualquer, mas permite rotação. Se for esco-
lhido um sistema de eixos de ortogonais, a articulação poderá ntroduzir duas
componentes de força. Quando estiver na extremidade, suas restrições serão de
deslocamento e momento fletor nulos.
FIGURA 2 – ARTICULAÇÃOFONTE: adaptado de Campanari (1985)
c) Engaste: impede qualquer deslocamento ou rotação no plano, ou seja, o deslo-
camento e a rotação para este tipo de vínculo serão nulos.
FIGURA 3 – ENGASTEFONTE: adaptado de Campanari (1985)
Hibbeler (2010) define estes apoios, respectivamente, de rolete, pino externo e apoio
fixo. Apresenta ainda acoplamentos com cabos, com apoio liso e com pino interno. O grupo
destes seis apoios são os mais comuns e estão ilustrados na figura 4.
FIGURA 4 – TIPO DE VÍNCULOSFONTE: adaptado de Hibbeler (2010)

14
Conforme a localização e os tipos de apoios, pode-se nomear as vigas como segue
(BEER et al., 2003) e (CAMPANARI, 1985). A distância L representada nas figuras é o vão.
a) Vigas biapoiadas: constituídas de uma única barra, com as duas extremidades
vinculadas.
L
FIGURA 5 – VIGA BIAPOIADAFONTE: adaptado de Campanari (1985)
b) Vigas biengastadas: constituídas de uma barra retilínea com engaste nas duas
extremidades.
L
FIGURA 6 – VIGA BIENGASTADAFONTE: adaptado de Campanari (1985)
c) Vigas engastada e apoiada: constituídas de uma barra retilínea com engaste
numa das extremidades e um apoio simples ou articulação na outra.
L
FIGURA 7 – VIGA ENGASTADA E APOIADAFONTE: adaptado de Campanari (1985)
d) Vigas em balanço ou engastada: constituídas de uma barra retilínea com engaste
numa das extremidades e a outra livre.
L
FIGURA 8 – VIGA EM BALANÇOFONTE: adaptado de Campanari (1985)

15
A distância L representada nas figuras é o vão.
As vigas podem ser projetadas considerando os critérios de resistência dos materiais
constituintes ou pela limitação da deflexão máxima (BEER et al., 2003).
Deformações excessivas podem alterar a aparência e a eficiência de uma estrutura,
além de causar desconforto ou medo para os seus ocupantes e usuários. As mais severas con-
sequências, no entanto, são devidas aos danos locais, como fissuração de elementos estruturais
e não-estruturais ou rotação excessiva (LIMA; FONTES; LIMA, 2003)
Para o cálculo das deflexões existem algumas teorias, dentre elas a teoria de Euler-
Bernoulli e a de Timoshenko. A teoria de Euler-Bernoulli, ou teoria clássica, considera somente
os efeitos do momento fletor, enquanto a de Timoshenko considera também a deformação
oriunda do esforço cortante (RAO, 2004).
2.1.1 Teoria de Euler-Bernoulli
As hipóteses para a teoria clássica são apresentadas por vários autores como Beer et
al. (2003) Nash (1982) e Hibbeler (2010). Podem ser expressas como:
a) A viga é prismática e possui um eixo central reto, coincidente com o eixo x (ver
figura 9);
b) A seção transversal da viga possui pelo menos um eixo de simetria, coincidente
com o eixo de y (ver figura 9) ;
c) Todas as cargas atuam no plano de simetria (plano x-y) (ver figura 9);
d) As seções perpendiculares ao eixo x permanecem planas após a deformação;
e) O material é admitido como elástico, isotrópico e homogêneo;
f) As deformações transversais são pequenas.
Com estas hipóteses, pode-se chegar à equação estática, apresentada por Hibbeler
(2010).

16
d2y
dx2=M
EI(1)
onde: y = y(x) = deslocamento no ponto x,
M = M(x) = momento fletor em torno do eixo z, variando ao longo do eixo x,
E = módulo de elasticidade,
I = momento de inércia de área da seção em relação ao eixo z.
A figura 9 apresenta os sentidos positivos considerados.
q
MV
MV
y
x
FIGURA 9 – TRECHO DE VIGAFONTE: adaptado de Hibbeler (2010)
Adicionalmente à eq.(1), as seguintes equações são também utilizadas. Elas calculam
a rotação [eq.(2)], o esforço cortante [eq.(3)] e a carga distribuída [eq.(4)] (TIMOSHENKO;
YOUNG; WEAVER, 1974):dy
dx=
θ
EI(2)
d3y
dx3= − V
EI(3)
d4y
dx4=
q
EI(4)
onde: θ = θ(x) ângulo de rotação da seção transversal em x,
V = V (x) = esforço cortante em x
q = q(x) = carregamento distribuído no ponto x.
A solução da eq.(4) se dá com integração direta e os valores das constantes de
integração são obtidos com as condições de contorno. As condições de contorno são dadas
pelas restrições dos apoios ou pela extremidade livre, como já mencionado. Estas integrações

17
resultam nas equações da tabela 1, encontradas no trabalho de Fleischfresser (2012).
TABELA 1 – LINHA ELÁSTICA PARA O CASO ESTÁTICO - TEORIA DE EULER-BERNOULLI
Tipo de viga Equação para o deslocamento
Biapoiada y(x) =q
24EI
(x4 − 2Lx3 + L3x
)Biengastada y(x) =
q
24EI
(x4 − 2Lx3 + L2x2
)Engastada-Apoiada y(x) =
q
48EI
(2x4 − 5Lx3 + 3L2x2
)Em balanço y(x) =
q
24EI
(x4 − 4Lx3 + 6L2x2
)FONTE: adaptado de Fleischfresser (2012)
Para o caso dinâmico, Rao (2004) apresenta:
EI∂4y
∂x4+ ρA
∂2y
∂t2= q (5)
onde: y = y(x, t) = deflexão no ponto x no tempo t,
q = q(x, t) = carga no ponto x no tempo t,
ρ = densidade do material da viga,
A = área da seção transversal da viga.
As igualdades nas eq.(2), eq.(3) e eq.(4) permanecem válidas, mas as derivadas
passam a ser parciais.
Como no caso estático, as condições de contorno são necessárias para a solução
analítica, mas não suficientes, pois o tempo também é uma variável. Logo, as condições
iniciais, envolvendo os valores y e y = dydt
no início da análise (t = 0), completam os requisitos
para a solução. As condições inicias dependem de cada caso. Neste trabalho são analisadas
vigas com as condições iniciais nulas e suas soluções estão no item 3.2.1.

18
2.1.2 Teoria de Timoshenko
A hipótese de que as seções transversais permanecem planas e normais à linha neutra
na teoria clássica corresponde a desprezar a deformação do esforço cortante na deflexão da viga.
Mas esta deformação nem sempre pode ser desprezada (SORIANO; LIMA, 2003). A teoria
de Timoshenko para vigas considera os efeitos da inércia à rotação e dos efeitos cortantes
no cálculo da deflexão e por isso é considerada mais acurada (TIMOSHENKO; YOUNG;
WEAVER, 1974) e considerada hierarquicamente superior (SORIANO; LIMA, 2003).
Para o caso estático, a formulação é dada pelas seguintes equações (BORGES, 1996):
κGA
(dφ
dx− d2y
dx2
)= q (6)
EId2φ
dx2= κGA
(φ− dy
dx
)(7)
onde : q = q(x) = carga distribuída no ponto x,
y = y(x) = deslocamento do ponto x,
φ = φ(x) = rotação da seção localizada no ponto x,
κ = fator de cisalhamento,
A = área da seção transversal,
G = módulo de elasticidade transversal,
ρ = densidade do material da viga,
E = módulo de elasticidade,
I = momento de inércia de área da seção transversal.
O fator de cisalhamento, κ, surge pelo fato da formulação considerar tensão cisalhante
constante ao longo da seção transversal. Para uma distribuição parabólica de tensões e seção
retangular, κ = 5/6 (FEODOSIEV, 1980 apud SORIANO; LIMA, 2003).
O momento fletor e o esforço cortante podem ser calculados como (RAO, 2004):
M = EIdφ
dx(8)

19
V = κGA
(dy
dx− φ)
(9)
A solução para o caso estático pode ser obtida analiticamente e está resumida na
tabela 2.
TABELA 2 – LINHA ELÁSTICA PARA O CASO ESTÁTICO - TEORIA DE TIMOSHENKO
Tipo de viga Equação para o deslocamento
Biapoiada y(x) =q
24EI
(x4 − 2Lx3 + L3x
)+
q
2κGA
(Lx− x2
)Biengastada y(x) =
q
24EI
(x4 − 2Lx3 + L2x2
)+
q
2κGA
(Lx− x2
)Engastada-Apoiada y(x) =
q
48EI
(2x4 − 5Lx3 + 3L2x2
)+
qDf
48EI
(Lx3 − 3L2x2
)−
q
2κGA
(x2 + 2CfLx
)Em balanço y(x) =
q
24EI
(x4 − 4Lx3 + 6L2x2
)+
q
2κGA
(Lx− x2
)FONTE: Carrer et al. (2013)
Os termos Cf e Df que aparecem na tabela 2 podem ser calculados de acordo com
as eqs.(10) e (11).
Cf = −12EI + 5κGAL2
24EI + 8κGAL2(10)
Df = − 3EI
3EI + κGAL2(11)
Observa-se que os primeiros termos à direita das igualdades na tabela 2 correspondem
aos deslocamentos obtidos pela teoria de Euler-Bernoulli, apresentados na tabela 1.
Para o caso dinâmico, tem-se as seguintes equações (RAO, 2004):
−κAG(∂φ
∂x− ∂2y
∂x2
)+ q = ρA
∂2y
∂t2(12)
EI∂2φ
∂x2− κAG
(φ− ∂y
∂x
)= ρI
∂2φ
∂t2(13)

20
onde : q = q(x, t) = carga distribuída no ponto x no tempo t,
y = y(x, t)= deslocamento do ponto x no tempo t,
φ = φ(x, t) = rotação da seção localizada no ponto x no tempo t.
As igualdades nas eq.(8) e eq.(9) permanecem válidas, mas as derivadas passam a
ser parciais.
Bem como para a teoria de Euler-Bernoulli, a solução depende das condições de
contorno e inicias. Durante esta revisão bibliográfica, a única solução analítica encontrada foi
a solução para a viga simplesmente apoiada, publicada por Carrer et al. (2013).
2.2 MÉTODOS NUMÉRICOS
A solução de problemas de engenharia segue, de maneira geral, os mesmos princípios
das ciências. Ao formular um problema, chega-se a equações que o descrevem, podendo
ser: equações não-lineares, equações integrais, equações diferencias parciais, dentre outras.
Para problemas mais simples, sua solução pode ser obtida analiticamente. Quando isto não é
possível, recorre-se aos métodos numéricos (KAW; KALU, 2009).
Utilizar métodos numéricos envolve várias fases, representadas na figura 10.
FIGURA 10 – ETAPAS ENVOLVIDAS NA UTILIZAÇÃO DE MÉTODOS NUMÉRICOSFONTE: RUGGIERO e LOPES (1996)

21
Não é raro que os resultados finais estejam distantes do previsto, mesmo seguindo os
passos acima. Os resultados dependem também da precisão dos dados de entrada, da forma
como estes dados são representados no computador e das operações numéricas efetuadas
(RUGGIERO; LOPES, 1996).
De uma maneira geral, os dados de entrada contém uma imprecisão inerente, pois
representam medidas obtidas com o uso de equipamentos específicos. A representação dos
dados e as operações numéricas efetuadas também podem acrescentar erros, pois a represen-
tação de números em uma máquina tem um número finito de dígitos e há mudança de base
numérica, o que acarreta em erros de arredondamento ou truncamento (RUGGIERO; LOPES,
1996).
Dentre os métodos numéricos disponíveis, existem: os métodos diretos e indiretos para
sistemas de equações lineares; os métodos para sistemas de equações não-lineares, como o
Método de Newton e o das Secantes; e os métodos para equações diferenciais ordinárias, como
o Método das Diferenças Finitas e os de Runge-Kutta (CUNHA, 2000). Existem também: o
Método dos Elementos Finitos, Método dos Elementos de Contorno e o Método dos Elementos
Discretos (HUAMAN, 2009).
Para este trabalho é utilizado o Método das Diferenças Finitas. Assim, é apresentado
a seguir uma discussão sobre ele.
2.2.1 Método das Diferenças Finitas
O Método das Diferenças Finitas (MDF) resolve numericamente equações diferen-
cias através da aproximação do operador diferencial por quocientes de números finitos. A
ferramenta matemática básica na definição destas aproximações é a série de Taylor (CUNHA,
2000).
No MDF, o domínio do problema, contínuo, é substituído por uma série de pontos
discretos, ou nós, nos quais são calculadas as incógnitas do problema. Essa substituição do
contínuo pelo discreto é denominada de discretização (ALVES; CARRER, 2007).
Uma vez efetuada a discretização do domínio do problema, aplica-se o MDF para a

22
determinação das incógnitas. As derivadas, que aparecem na equação original, são substituídas
(ou aproximadas) por fórmulas discretas de diferenças. A aplicação dessas fórmulas aos pontos
do domínio discretizado gera, geralmente, um sistema de equações algébricas, cuja solução
fornece os valores das incógnitas do problema nesses pontos discretos (ALVES; CARRER,
2007).
A série de Taylor representa uma função por uma série de potências, num dado
intervalo (THOMAS et al., 2002).
De acordo com Thomas et al. (2002), dada uma função y(x), que tem derivadas até
a ordem n+ 1 numa dada vizinhança, sua expansão da série de Taylor é:
y(x+ α) = y(x) + αdy
dx+α2
2!
d2y
dx2+ . . .+
αn
n!y(n)(x) +
αn+1
(n+ 1)!y(n+1)(ξ) (14)
onde ξ está entre x e x + α . O último termo da expressão acima representa o erro da
aproximação de y(x+ α) pelos n+ 1 primeiros termos da série de Taylor.
1 Tomando n = 1 e α = h na eq.(14), tem-se a fórmula progressiva para a aproxi-
mação da derivada e seu erro:
dy
dx=y(x+ h)− y(x)
h− h
2
d2y
dx2(ξ) (15)
De modo análogo, tomando α = −h na eq.(14), mantendo n = 1, obtém-se a
fórmula regressiva e seu erro:
dy
dx=y(x)− y(x− h)
h+h
2
d2y
dx2(ξ) (16)
Tomando n = 2 e fazendo α = h e α = −h na eq.(14), obtém-se, respectivamente:
y(x+ h) = y(x) + hdy
dx+h2
2
d2y
dx2+h3
3!
d3y
dx3(ξ) (17)
e
y(x− h) = y(x)− hdy
dx+h2
2
d2y
dx2− h3
3!
d3y
dx3(ξ) (18)
1Esta dedução é uma transcrição do que consta no livro de Cunha (2000).

23
Subtraindo a eq.(18) da eq.(17), obtém-se a fórmula centrada para a aproximação da
derivada e seu erro:dy
dx=y(x+ h)− y(x− h)
2h− h2
3!
d2y
dx2(ξ) (19)
Deve ser observado que o erro envolvido na aproximação da derivada pela eq.(19) é
da ordem de h2, enquanto nas aproximações progressivas e regressivas é da ordem de h.
Seguindo os mesmos princípios pode-se chegar a uma expressão para o cálculo de
aproximações para a segunda derivada. Tomando α = h e α = −h, mas com n = 3 na
eq.(14), temos:
y(x+ h) = y(x) + hdy
dx+h2
2
d2y
dx2+h3
3!
d3y
dx3+h4
4!
d4y
dx4(ξ) (20)
e
y(x− h) = y(x)− hdy
dx+h2
2
d2y
dx2− h3
3!
d3y
dx3+h4
4!
d4y
dx4(ξ) (21)
Somando as eq.(20) e eq.(21) e explicitando d2ydx2 , chega-se a:
d2y
dx2=y(x+ h)− 2y(x) + y(x− h)
h2− h2
12
d4y
dx4(ξ) (22)
Analogamente, pode-se chegar nas expressões para as derivadas de ordem três e qua-
tro, apresentadas na tabela 3. Nesta tabela também está o resumo do exposto anteriormente,
sendo que para a primeira derivada é apresentada somente a diferença centrada.
TABELA 3 – APROXIMAÇÕES DO MDF PARA DERIVADAS DE PRIMEIRA ATÉ QUARTA ORDEM
Derivada Aproximação pelo MDF
dy
dx
y(x+ h)− y(x− h)
2h
d2y
dx2y(x+ h)− 2y(x) + y(x− h)
h2
d3y
dx3y(x+ 2h)− 2y(x+ h) + 2y(x− h)− y(x+ 2h)
2h3
d4y
dx4y(x+ 2h)− 4y(x+ h) + 6y(x)− 4y(x− h) + y(x+ 2h)
h4
FONTE: O Autor (2014)

24
Smith (2004) apresenta a aplicação do Método das Diferenças Finitas para equações
diferenciais parciais. As igualdades da tabela 3 permanecem válidas, porém com o denominador
de cada fração representando a variável na qual a derivada parcial é avaliada.

25
3 MÉTODOS
Neste trabalho é aplicado o Método das Diferenças Finitas para a solução de vigas
sujeitas a carregamento distribuído sobre todo o comprimento da viga. Este carregamento é
aplicado instantaneamente, ou seja, de forma abrupta.
Para medir a qualidade da soluções numéricas obtidas, estas serão comparadas com
as soluções analíticas disponíveis.
As características das vigas analisadas são apresentadas no item 3.1. As soluções
analíticas e numéricas, nos itens 3.2 e 3.3. As condições iniciais para todas as análises serão
sempre nulas, ou seja:
y(x, 0) = 0 e∂y
∂t
∣∣∣∣t=0
= 0 (23)
φ(x, 0) = 0 e∂φ
∂t
∣∣∣∣t=0
= 0 (24)
representando, respectivamente: deslocamento, velocidade da translação, o ângulo de rotação
da seção e a taxa de variação deste.
Para a teoria de Euler-Bernoulli a eq.(24) não se aplica, pois o ângulo de rotação é
obtido diretamente pela eq.(2).
3.1 VIGAS ANALISADAS
Neste trabalho serão analisadas 4 tipos de vigas: biapoiada, biengastada, engastada
e apoiada e em balanço. O comprimento da viga em balanço é de 2 metros e para os outros
três tipo, 4 metros. O carregamento distribuído será igual a q = 10.000 N/m para todas as
análises.
Supôs-se que o material constituinte delas é o mesmo e possui as características
apresentadas na tabela 4.

26
TABELA 4 – VALORES DAS PROPRIEDADES DO MATERIAL DAS VIGAS
Propriedade Sigla Unidade Valor
Densidade ρ kg/m3 7.800
Módulo de elasticidade longitudinal E N/m2 210.000.000.000
Módulo de elasticidade transversal G N/m2 77.000.000.000
FONTE: O Autor (2014)
Para cada tipo de viga, serão simuladas quatro seções transversais diferentes, partindo
de uma mais esbelta e concluindo com uma mais espessa. Espera-se, assim, avaliar a influência
do esforço cortante nas deformações para cada configuração. As seções analisadas serão
sempre retangulares e terão sempre a mesma base, b. Na Tabela 5, as seções analisadas e as
propriedades dependentes delas.
TABELA 5 – TIPOS DE SEÇÕES ANALISADAS
Seção b (m) h (m) Área (m2) Inércia (m4)
1 0,20 0,30 0,06 0,00045000
2 0,20 0,45 0,09 0,00151875
3 0,20 0,60 0,12 0,00360000
4 0,20 0,75 0,15 0,00703125
FONTE: O Autor (2014)
3.2 SOLUÇÕES ANALÍTICAS
Dadas as configurações de vigas analisadas, a solução analítica pode ser calculada.
Para a teoria de Euler-Bernoulli os quatro tipo estudados possuem solução analítica disponível.
Já para a teoria de Timoshenko, somente foi encontrada solução para a viga biapoiada, no
artigo de (CARRER et al., 2013).

27
3.2.1 Euler Bernoulli
Os passos para a obtenção da solução para a linha elástica não considerando os efeitos
dinâmicos pode ser encontrada em Hibbeler (2010) e utilizam a integração direta da equação
diferencial.
Já a solução para o caso dinâmico envolve separação de variáveis e pode ser en-
contrada em Rao (2004) e Graff (1991). O artigo de Carrer, Mansur e Vanzuit (2010) se
baseia nestes livros e apresenta também as raízes para as frequências naturais. Abaixo uma
transcrição do trecho do artigo.
Pode-se impor para a solução da função y(x, t) a seguinte igualdade:
y(x, t) =∞∑n=1
Wn(x)qn(t) (25)
onde Wn(x) é o n-ésimo modo de vibração e qn(t) é a função genérica do tempo.
Os valores dos modos de vibração e da frequência são calculados para cada tipo
de viga analisada. Os cálculos utilizam carga distribuída constante. A frequência pode ser
calculada como abaixo:
ω2n = β4
n
EI
ρA(26)
onde : ωn = frequência natural no n-ésimo modo de vibração,
βn = constantes que dependem do tipo de viga analisada
Assim, a solução é obtida para:
Viga Biapoiada
Modo de Vibração: Wn(x) = Cn sen (βnx) (27)
Frequência natural: βn =nπ
L(28)
qn(t) =4q
EIL
1− cosωnt
β5n
para n ímpar (29)
onde Cn é a constante de integração para o modo de vibração. Na solução particular, esta

28
constante foi incorporada nas constantes oriundas da solução da função genérica do tempo,
qn(t).
O termo bn da eq.(29) é calculado com a eq.(30).
bn =L
2(30)
Viga Biengastada
Modo de Vibração: Wn(x) = Cn [(senh βnx− sen βnx)− δn (cosh βnx− cos βnx)] (31)
onde:
δn =senh βnL− sen βnL
cosh βnL− cos βnL(32)
Frequência natural: cos βnL cosh βnL = 1 (33)
sendo que as primeiras raízes da eq.(33) são:
β1L = 4, 730041; β2L = 7, 853205; β3L = 10, 995608; β4L = 14, 137165
A função genérica do tempo pode ser calculada com a eq.(34).
qn(t) =2q
EIbn
(senh βnL sen βnL
cosh βnL− cos βnL− 1
)1− cosωnt
β5n
(34)
O termo bn pode ser calculado com a eq.(35).
bn =− cos βnL (sen βnL− 2 senh βnL) + cosh βnL (senh βnL− 2 sen βnL)
2βn−
δn (sen βnL− senh βnL)2
βn+
δ2n [2βnL+ cos βnL (sen βnL− 2 senh βnL) + cosh βnL (senh βnL− 2 senh βnL)]
2βn
(35)
Viga Engastada-Apoiada
Modo de Vibração: Wn(x) = Cn [(sen βnx− senh βnx)− δn (cos βnx− cosh βnx)] (36)

29
onde:
δn =sen βnL− senh βnL
cos βnL− cosh βnL(37)
Frequência natural: tg βnL = tgh βnL (38)
sendo que as primeiras raízes da eq.(38) são:
β1L = 3, 926602; β2L = 7, 068583; β3L = 10, 210176; β4L = 14, 351768
A função genérica do tempo pode ser calculada com a eq.(39).
qn(t) =2q
EIbn
(1− senh βnL sen βnL
cosh βnL− cos βnL
)1− cosωnt
β5n
(39)
onde bn pode ser calculado com a eq.(35).
Viga Engastada-Livre
Modo de Vibração: Wn(x) = Cn [(sen βnx− senh βnx)− δn (cos βnx− cosh βnx)] (40)
onde:
δn =sen βnL+ senh βnL
cos βnL+ cosh βnL(41)
Frequência natural: cos βnL cosh βnL = −1 (42)
sendo que as primeiras raízes da eq.(42) são:
β1L = 1, 875104; β2L = 4, 694091; β3L = 7, 854757; β4L = 10, 995541
A função genérica do tempo pode ser calculada com a eq.(43).
qn(t) =2q
EIbn
1− cosωnt
β5n
(43)
onde bn pode ser calculado com a eq.(35).

30
3.3 EQUACIONAMENTO NUMÉRICO
Para a aplicação do Método das Diferenças Finitas é necessário a discretização do
domínio do problema. Para este trabalho a discretização será feita, como esperado, para o
tempo e o espaço.
No espaço, a viga será discretizada em pontos igualmente espaçados de ∆x. O
contador do espaço será a letra i, que varia de 1, representando o início da viga, até n,
representando o fim da viga. No tempo, a discretização empregará intervalos iguais a ∆t. O
contador para o tempo será a letra j, podendo variar de 0, representando o início da análise,
até τ , representando o fim da análise. O tempo final da análise pode ser calculado como
T = τ∆t.
Neste trabalho, o contador para o espaço está sobrescrito à variável e o contador do
tempo, superescrito. A implementação numérica permite que a carga distribuída possa variar
no tempo e no espaço.
3.3.1 Solução Numérica - Teoria de Euler-Bernoulli
A teoria de Euler-Bernoulli, para o caso dinâmico, está representada na eq.(5), que
é:
EI∂4y
∂x4+ ρA
∂2y
∂t2= q
As derivadas parciais apresentadas na equação podem ser substituídas pelas aproxi-
mações apresentada na tabela 3 do item 2.2.1 - Método das Diferenças Finitas. Assim, as
derivadas tornam-se:∂4y
∂x4=yji+2 − 4yji+1 + 6yji − 4yji−1 + yji−2
(∆x)4(44)
∂2y
∂t2=yj+1i − 2yji + yj−1i
(∆t)2(45)

31
Substituindo as eq.(44) e eq.(45) na equação anterior (5) , resulta em:
EIyji+2 − 4yji+1 + 6yji − 4yji−1 + yji−2
(∆x)4+ ρA
yj+1i − 2yji + yj−1i
(∆t)2= q (46)
As condições inicias são fornecidas, ou seja, os deslocamentos no tempo 0 (j = 0)
são valores conhecidos. Assim, deve ser calculado o deslocamento para o próximo passo de
tempo. Rearranjando a eq.(46), chega-se a:
yj+1i =
(∆t)2
ρA
[q − EI
(∆x)4(yji+2 − 4yji+1 + 6yji − 4yji−1 + yji−2
)]+ 2yji − y
j−1i (47)
que é a equação geral para o cálculo dos deslocamentos de uma viga sujeita a um carregamento
dinâmico, segundo a teoria clássica.
A equação utiliza o deslocamento de cinco pontos no j-ésimo passo de tempo, sendo
eles os pontos de i−2 até i+2 e um deslocamento do passo de tempo anterior para o i-ésimo
ponto. Dois problemas surgem. Um deles é que para o cálculo do primeiro passo de tempo, o
valor a ser calculado é y1i , o que resulta em j = 0. Ao fazer isso, o último termo da eq.(47)
fica com valor fora do domínio do tempo, ou seja, y−1i .
O segundo problema é o aparecimento dos pontos i + 2 e i − 2, que extrapolam o
comprimento da viga. Seja, por exemplo, uma viga biapoiada de comprimento L discretizada
com n pontos para a representação da malha de diferenças finitas, conforme figura 11.
nn-1n-2 n+1 n+21 2 30-1
FIGURA 11 – PONTOS FORA DO DOMÍNIO DO ESPAÇO NA VIZINHANÇA DE i = 1 E DE i = n.FONTE: O Autor (2014)
O ponto i = 1 e i = n representam os apoios que, para vigas biapoiadas, tem
deslocamentos nulos e constantes no tempo, dispensando seu cálculo. Assim, o cálculo inicia
em i = 2 e vai até i = n − 1. Para o ponto i = 2, o termo yji−2 da eq.(47) resulta em yj0 e

32
para i = n− 1, surge o termo yjn+1, extrapolando em ambos os casos os limites da viga
Para contornar estes problemas foram utilizadas, respectivamente, as condições ini-
ciais e as condições de contorno. As condições inicias são que os deslocamentos iniciais são
nulos para todos os pontos e a viga está em repouso, ou seja:
y0i = 0
y0i =∂yji∂t
∣∣∣∣∣j=0
= 0
∀i (48)
Conforme apresentada no item 2.2.1 - Método das Diferenças Finitas, a derivada da
segunda igualdade da eq.(48) pode ser aproximada por:
∂yji∂t
∣∣∣∣∣j=0
=yj+1i − yj−1i
2∆t(49)
Da eq.(48) e da eq.(49), tem:
∂yji∂t
∣∣∣∣∣j=0
=yj+1i − yj−1i
2∆t= 0
y0+1i − y0−1i = 0
y1i = y−1i ∀i (50)
O que resolve a ‘fuga’ do domínio do tempo.
Para solucionar o problema dos pontos fora da viga, recorre-se às condições de con-
torno, que variam para cada tipo de apoio, como mostrado no item 2.1 - TEORIA DE VIGAS.
As condições de contorno se aplicam aos extremos da viga, que é onde se localizam os apoios,
ou seja: para o primeiro e o último ponto do domínio da viga. Como as vigas serão discreti-
zadas em n pontos, os pontos em que se aplicam as condições de contorno são o primeiro e
o n-ésimo.
Das vigas analisadas, são três as condições de contorno das extremidades, indicadas
a seguir:
Apoio simples

33
O apoio simples não apresenta resistência a momentos fletores. Assim, o momento
fletor neste tipo de apoio é sempre nulo (M = 0). Como apresentada na eq.(1), o momento
na teoria clássica é:∂2y
∂x2=M
EI
Substituindo pela aproximação dada pelo MDF e considerando o momento nulo para
este apoio, temos:∂2y
∂x2=yji+1 − 2yji + yji−1
(∆x)2=M
EI= 0
∴ yji+1 − 2yji + yji−1 = 0, i = 1 ou i = n (51)
Substituindo por i = 1 e i = n, chega-se á:
yj2 − 2yj1 + yj0 = 0
yjn+1 − 2yjn + yjn−1 = 0(52)
Mas de acordo com a condições de contorno , yj1 = yjn = 0 o que resulta em,
yj0 = −yj2
yjn+1 = −yjn−1
∀j (53)
tornando conhecidos os valores que extrapolam o domínio do espaço.
Engaste
O engaste se caracteriza por impedir deslocamentos e rotações. Assim, conforme
apresentada no item 2.1, temos para estes apoios:
yj = 0
yj = 0
∀j (54)
Como apresentada na eq.(2), a rotação na teoria clássica é:
∂y
∂x=
θ
EI

34
Substituindo pela aproximação dada pelo MDF e já considerando a rotação nula,
temos:∂y
∂x=yji+1 − y
ji−1
2∆x=
θ
EI= 0
yji+1 − yji−1 = 0
Estas condições só são válidas para o engaste, que se localiza nos extremos da viga, ou seja,
para os pontos i = 1 e i = n. Assim,
yj0 = yj2
yjn+1 = yjn−1
∀j (55)
tornando conhecidos os valores dos pontos fora do domínio do espaço.
Extremidade livre
A extremidade livre apresenta momento e esforço cortante nulos. As equações da
teoria clássica que apresentam estas propriedades são:
∂2y
∂x2=M
EI
∂3y
∂x3= − V
EI
Para o momento nulo, pode ser realizada a mesma substituição feita para o apoio
simples:
∂2y
∂x2=yji+1 − 2yji + yji−1
(∆x)2=M
EI= 0
∴ yji+1 − 2yji + yji−1 = 0, i = 1 ou i = n (56)
Substituindo por i = 1 e i = n, chega-se á:
yj0 = −yj2 + 2yj1
yjn+1 = 2yjn − yjn−1
(57)

35
Para o esforço cortante, podemos substituir a derivada parcial pela aproximação apre-
sentada no item 2.2.1 - Método das Diferenças Finitas, obtendo:
∂3y
∂x3=yji+2 − 2yji+1 + 2yji−1 − y
ji−2
2(∆x)3= − V
EI= 0
∴ yji+2 − 2yji+1 + 2yji−1 − yji−2 = 0
Como estas condições só são válidas para os extremos, o valor de i é i = 1 ou i = n.
Assim:
yj3 − 2yj2 + 2yj0 − yj−1 = 0 (58)
yjn+2 − 2yjn+1 + 2yjn−1 − yjn−2 = 0 (59)
Substituindo nesta equação a relação da eq.(57) e isolando os termos fora do domínio,
chega-se á:
yj−1 = 4yj1 − 4yj2 + yj3 (60)
yjn+2 = 4yjn − 4yjn−1 + yjn−2 (61)
Ao contrário dos apoio simples e do engaste, o deslocamento da extremidade livre
precisa ser calculado, o que envolve dois pontos a frente e dois pontos atrás na malha. Por
isso as relações da eq.(60) e eq.(61) são necessárias.
Todas as substituições se encontram no item 3.3.3.
3.3.2 Solução Numérica - Teoria de Timoshenko
A teoria de Timoshenko está representada nas eq.(6) e eq.(7), que permitem calcular
o deslocamento e a rotação da seção transversal. Já as eq.(12) e eq.(13), são as anteriores
avaliadas ao longo do tempo. Assim, a exemplo do realizado para a teoria de Euler-Bernoulli,
foi implementada a solução numérica dos casos dinâmicos.
As derivadas parciais das equações eq.(12) e (13), reapresentadas abaixo, foram subs-

36
tituídas pelas aproximações fornecidas pelo método das diferenças finitas.
−κAG(∂φ
∂x− ∂2y
∂x2
)+ q = ρA
∂2y
∂t2
EI∂2φ
∂x2− κAG
(φ− ∂y
∂x
)= ρI
∂2φ
∂t2
Os termos a serem substituídos são:
∂φ
∂x=φji+1 − φ
ji−1
2(∆x)(62)
∂2ω
∂x2=yji+1 − 2yji + yji−1
(∆x)2(63)
∂2ω
∂t2=yj+1i − 2yji + yj−1i
(∆t)2(64)
∂2φ
∂x2=φji+1 − 2φj
i + φji−1
(∆x)2(65)
∂ω
∂x=yj1+1 − y
j1−1
2(∆x)(66)
∂2φ
∂t2=φj+1i − 2φj
i + φj−1i
(∆t)2(67)
Substituindo na equação eq.(12) as igualdades dadas pelas eq.(62), eq.(63) e eq.(64),
obtem-se:
−κAG
(φji+1 − φ
ji−1
2(∆x)−yji+1 − 2yji + yji−1
(∆x)2
)+ q = ρA
yj+1i − 2yji + yj−1i
(∆t)2(68)
Lembrando que φ = φ(x, t) = φji e substituindo na equação eq.(13) as igualdades
dadas pelas equações eq.(65), eq.(66) e eq.(67), obtemos:
EIφji+1 − 2φj
i + φji−1
(∆x)2− κAG
(φji −
yj1+1 − yj1−1
2(∆x)
)=
ρIφj+1i − 2φj
i + φj−1i
(∆t)2
(69)

37
As condições iniciais, ou seja para t = 0 (ou j = 0), são dados conhecidos. Assim,
as incógnitas das eq.(68) e eq.(69) são as que possuem o índice j + 1. Isolando estes termos
temos, da primeira equação:
yj+1i = (∆t)2
[−κGρ
(φji+1 − φ
ji−1
2(∆x)−yji+1 − 2yji + yji−1
(∆x)2
)+q(x, t)
ρA
]+
+2yji − yj−1i
(70)
E da segunda, obtemos:
φj+1i = (∆t)2
[E
ρ
φji+1 − 2φj
i + φji−1
(∆x)2− κAG
ρI
(φji −
yj1+1 − yj1−1
2(∆x)
)]+
+2φji − φ
j−1i
(71)
As equações eq.(70) e eq.(71) são as equações gerais para o cálculo do deslocamento
e rotação de uma seção de acordo com a teoria de Timoshenko.
A eq.(70) utiliza, para o j-ésimo passo de tempo, três valores de deslocamento e dois
valores da rotação, entre os pontos i− 1 e i+ 1. Também utiliza o valor do deslocamento no
passo de tempo j−1. Similar ao encontrado no equacionamento para Euler-Bernoulli , para o
tempo inicial, j = 0, é necessário o valor de yj−1i = y−1i , que não está contido no domínio do
tempo. Além disso, para i = 1 e i = n, o valor do deslocamento necessário não está contido
no domínio do espaço.
Estes dois problemas podem ser contornados recorrendo também as condições iniciais
e as de contorno de cada viga analisada.
As condições iniciais são que a viga está em repouso, logo os deslocamentos e as
rotações são nulas no tempo t = 0. Ou seja:
y0i = 0
φ0i = 0
y0i =∂yji∂t
∣∣∣∣∣j=0
= 0
φ0i =
∂φji
∂t
∣∣∣∣∣j=0
= 0
∀i (72)

38
Conforme apresentado no item 2.2.1, a terceira igualdade das condições iniciais pode
ser substituída por:
∂yji∂t
∣∣∣∣∣j=0
=y0+1i − y0−1i
2∆t= 0
Que resulta em:
y−1i = y1i ∀i (73)
Resolvendo a ‘fuga’ do domínio do tempo para o cálculo dos deslocamentos.
A eq.(71) utiliza, para o j-ésimo passo de tempo, dois valores de deslocamento e três
valores da rotação, entre os pontos i−1 e i+ 1. Também utiliza o valor da rotação no tempo
j − 1. Para o tempo j = 0, é necessário o valor de φj−1i = φ−1i , que não está contido no
domínio do tempo. Além disso, para i = 1 e i = n, o valor da rotação necessária não está
contido no domínio do espaço.
Estes dois problemas podem, novamente, ser contornados recorrendo às condições
iniciais e às de contorno de cada viga analisada.
As condições iniciais foram apresentadas na eq.(72). A quarta igualdade desta equa-
ção pode ser substituída com a equação apresentada no item 2.2.1, obtendo:
∂φji
∂t
∣∣∣∣∣j=0
=φ0+1i − φ0−1
i
2∆t= 0
Que resulta em:
φ−1i = φ1i ∀i (74)
Resolvendo a fuga do domínio do tempo para o cálculo das rotações.
Para os problemas que extrapolam o domínio do espaço, deve-se recorrer às condições
de contorno, que variam para cada apoio, como mostrado no item 2.1 - TEORIA DE VIGAS.
As condições de contorno se aplicam aos extremos da viga, ou seja, para o primeiro e o último
ponto da discretização. Como as vigas serão dividas em n pontos, os pontos que se aplicam
as condições de contorno são o primeiro e o n-ésimo.
Das vigas analisadas, são três as condições de contorno das extremidades. Cada uma

39
apresenta uma consideração diferente, apresentadas a seguir.
Apoio Simples
O apoio simples possui momento e deslocamentos nulos. Como apresentado na eq.(8),
o momento é dado por:
M = EI∂φ
∂x
Rearranjando, substituindo pelo MDF e considerando que o momento é nulo temos:
∂φ
∂x=φji+1 − φ
ji−1
2∆x=M
EI= 0
φji+1 − φ
ji−1 = 0
φji+1 = φj
i−1, i = 1 ou i = n (75)
Mas o apoio simples não impede a rotação da seção. Assim, apesar de o cálculo do
deslocamento não ser necessário para o ponto i = 1 e para o ponto i = n, o cálculo para
a rotação da seção nestes pontos precisa ser feito. Analisando a eq.(71), percebe-se que o
cálculo da rotação envolve o valor do deslocamento de dois pontos adjacentes, um de cada
lado, faltando a informação de um deslocamento para os extremos.
Os termos yji+1 e yji−1 são utilizados no cálculo de φj+1i . Quando i = 1 ou i = n,
os termos extrapolam o domínio do espaço. Estes dois termos apareceram ao substituir a
derivada parcial de primeira ordem da rotação em relação ao espaço na eq.(7) pela diferença
centrada do MDF [eq.(19)]. Mas existe mais de uma maneira de substituir a derivada de
primeira ordem. Como apresentada no item 2.2.1 - Método das Diferenças Finitas, temos
a diferença progressiva [eq.(15)] e a diferença regressiva [(eq.(16)], que utilizam o valor do
ponto e o valor do ponto seguinte ou anterior, respectivamente. Assim, foi utilizado estas
substituições ao invés da diferença centrada, apesar do erro envolvido crescer. Para o apoio
simples em i = 1 é utilizada a diferença progressiva e para o apoio em i = n a diferença
regressiva.
O item 3.3.3 apresenta a substituição feita.
Engaste

40
O engaste se caracteriza por deslocamentos e rotações restritos. Como não há defor-
mações inicias nas análises, eles são nulos. Assim, temos para este tipo de apoio:
yji = 0
φji = 0
para i = 1 ou i = n (76)
A rotação e o deslocamento para os pontos i = 1 ou i = n estão definidos pelas
condições de contorno, devendo ser calculado os valores para os pontos de i = 2 até i = n−1.
Como discutido anteriormente, o cálculo do i-ésimo ponto envolve os pontos i − 1 e i + 1.
Assim, o engaste não extrapola o domínio do espaço e dispensa qualquer mudança na equação
geral, exceto para o primeiro passo de tempo, mostrado nas eq.(73) e eq.(74).
Extremidade livre
A extremidade livre apresenta momento e esforço cortante nulos. As equações da
teoria de Timoshenko que apresentam estas propriedades são:
M = EI∂φ
∂x
V = κAG
(∂y
∂x− φ)
Rearranjando, substituindo pelas aproximações do MDF e considerando o valor nulo
de momento, temos:∂φ
∂x=φji+1 − φ
ji−1
2∆x=M
EI= 0
φji+1 − φ
ji−1 = 0
φji+1 = φj
i−1, i = 1 ou i = n (77)
já apresentada na eq.(75). Igualmente, para o esforço cortante nulo, temos:
V = κAG
(∂y
∂x− φ)
= κAG
(yji+1 − y
ji−1
2(∆x)2− φj
i
)= 0
yji+1 − yji−1
2(∆x)2− φj
i = 0

41
∴yji−1 = 2(∆x)2φj
i + yji+1 , para i = 1
yji+1 = −2(∆x)2φji + yji−1 , para i = n
(78)
Assim, quando no cálculo do deslocamento da extremidade livre pela eq.(70), o valor
do ponto que extrapola o domínio do espaço deve ser substituído por uma das igualdades
apresentadas.
3.3.3 Algoritmos - Fluxogramas
Para facilitar as considerações feitas para os pontos que extrapolam o domínio do
tempo, a ideia principal dos códigos foi transcrita.
3.3.3.1 Algoritmos para a Teoria de Euler-Bernoulli
Os códigos seguintes se basearam na eq.(47) e nas igualdades do item 3.3.1 - Solução
Numérica - Teoria de Euler-Bernoulli.

42
Viga Biapoiada
A viga biapoiada analisada contém os apoios nas extremidades e vão L, conforme
figura 12. Nela estão apresentadas também a discretização no espaço, a numeração dos nós
e a distância ∆x entre eles.
1 2 3 i i+1 n-2 n-1 n. . . . . .i-1
Δx Δx Δx Δx Δx Δx
L
FIGURA 12 – VIGA BIAPOIADA DISCRETIZADAFONTE: O Autor (2014)
Tendo como base a eq.(47) e utilizando as relações apresentadas nas eq.(50) e eq.(53)
quando necessário, pode-se chegar ao seguinte código para o cálculo dos deslocamentos de
uma viga biapoiada:
Para j = 0, fazer:
Para i = 2, fazer:
yj+1i =
(∆t)2
2ρA
[EI
(∆x)4
(yji+2 − 4yji+1 + 5yji − 4yji−1
)]+ yji
Para i = 3 até i = n− 2, fazer:
yj+1i =
(∆t)2
2ρA
[EI
(∆x)4
(yji+2 − 4yji+1 + 6yji − 4yji−1 + yji−2
)]+ yji
Para i = n− 1, fazer:
yj+1i =
(∆t)2
2ρA
[EI
(∆x)4
(−4yji+1 + 5yji − 4yji−1 + yji−2
)]+ yji
De j = 1 até j = τ , fazer:
Para i = 2, fazer:
yj+1i =
(∆t)2
ρA
[EI
(∆x)4
(yji+2 − 4yji+1 + 5yji − 4yji−1
)]+ 2yji − y
j−1i
Para i = 3 até i = n− 2, fazer:
yj+1i =
(∆t)2
ρA
[EI
(∆x)4
(yji+2 − 4yji+1 + 6yji − 4yji−1 + yji−2
)]+ 2yji − y
j−1i
Para i = n− 1, fazer:
yj+1i =
(∆t)2
ρA
[EI
(∆x)4
(−4yji+1 + 5yji − 4yji−1 + yji−2
)]+ 2yji − y
j−1i

43
Viga Biengastada
A viga biengastada analisada contém os apoios nas extremidades e vão L, conforme
figura 13. Nela estão apresentadas também a discretização no espaço, a numeração dos nós
e a distância ∆x entre eles.
1 2 3 i i+1 n-2 n-1 n. . . . . .i-1
Δx Δx Δx Δx Δx Δx
L
FIGURA 13 – VIGA BIENGASTADA DISCRETIZADAFONTE: O Autor (2014)
Tendo como base a eq.(47) e utilizando as relações apresentadas nas eq.(50) e eq.(55)
quando necessário, pode-se chegar ao seguinte código para o cálculo dos deslocamentos de
uma viga biengastada:
Para j = 0, fazer:
Para i = 2, fazer:
yj+1i =
(∆t)2
2ρA
[EI
(∆x)4
(yji+2 − 4yji+1 + 7yji − 4yji−1
)]+ yji
Para i = 3 até i = n− 2, fazer:
yj+1i =
(∆t)2
2ρA
[EI
(∆x)4
(yji+2 − 4yji+1 + 6yji − 4yji−1 + yji−2
)]+ yji
Para i = n− 1, fazer:
yj+1i =
(∆t)2
2ρA
[EI
(∆x)4
(−4yji+1 + 7yji − 4yji−1 + yji−2
)]+ yji
De j = 1 até j = τ , fazer:
Para i = 2, fazer:
yj+1i =
(∆t)2
ρA
[EI
(∆x)4
(yji+2 − 4yji+1 + 7yji − 4yji−1
)]+ 2yji − y
j−1i
Para i = 3 até i = n− 2, fazer:
yj+1i =
(∆t)2
ρA
[EI
(∆x)4
(yji+2 − 4yji+1 + 6yji − 4yji−1 + yji−2
)]+ 2yji − y
j−1i
Para i = n− 1, fazer:
yj+1i =
(∆t)2
ρA
[EI
(∆x)4
(−4yji+1 + 7yji − 4yji−1 + yji−2
)]+ 2yji − y
j−1i

44
Viga Engastada-Apoiada
Outra tipo de viga analisada foi a engastada-apoiada, sendo que o engaste se encontra
na extremidade esquerda, no ponto i = 1, e o apoio simples na extremidade direita, no ponto
i = n, representado na figura 14.
1 2 3 i i+1 n-2 n-1 n. . . . . .i-1
Δx Δx Δx Δx Δx Δx
L
FIGURA 14 – VIGA ENGASTADA-APOIADA DISCRETIZADAFONTE: O Autor (2014)
Tendo como base a eq.(47) e utilizando as relações apresentadas nas eq.(50), eq.(53) e
eq.(55) quando necessário, pode-se chegar ao seguinte código para o cálculo dos deslocamentos
deste tipo de viga.
Para j = 0, fazer:
Para i = 2, fazer:
yj+1i =
(∆t)2
2ρA
[EI
(∆x)4
(yji+2 − 4yji+1 + 7yji − 4yji−1
)]+ yji
Para i = 3 até i = n− 2, fazer:
yj+1i =
(∆t)2
2ρA
[EI
(∆x)4
(yji+2 − 4yji+1 + 6yji − 4yji−1 + yji−2
)]+ yji
Para i = n− 1, fazer:
yj+1i =
(∆t)2
2ρA
[EI
(∆x)4
(−4yji+1 + 5yji − 4yji−1 + yji−2
)]+ yji
De j = 1 até j = τ , fazer:
Para i = 2, fazer:
yj+1i =
(∆t)2
ρA
[EI
(∆x)4
(yji+2 − 4yji+1 + 7yji − 4yji−1
)]+ 2yji − y
j−1i
Para i = 3 até i = n− 2, fazer:
yj+1i =
(∆t)2
ρA
[EI
(∆x)4
(yji+2 − 4yji+1 + 6yji − 4yji−1 + yji−2
)]+ 2yji − y
j−1i
Para i = n− 1, fazer:
yj+1i =
(∆t)2
ρA
[EI
(∆x)4
(−4yji+1 + 5yji − 4yji−1 + yji−2
)]+ 2yji − y
j−1i

45
Viga Engastada-Livre
A viga engastada-livre possui a extremidade da esquerda, no ponto i = 1, engastada
e a da direita, no ponto i = n, em balanço, conforme figura 15. Nela estão apresentadas
também a discretização no espaço, a numeração dos nós e a distância ∆x entre eles.
1 2 3 i i+1 n-2 n-1 n. . . . . .i-1
Δx Δx Δx Δx Δx Δx
L
FIGURA 15 – VIGA ENGASTADA-LIVRE DISCRETIZADAFONTE: O Autor (2014)
Tendo como base a eq.(47) e utilizando as relações das eq.(50), eq.(55) e eq.(57)
quando necessário, pode-se chegar ao seguinte código para o cálculo de seus deslocamentos.
Para j = 0, fazer:
Para i = 2, fazer:
yj+1i =
(∆t)2
2ρA
[EI
(∆x)4
(yji+2 − 4yji+1 + 7yji − 4yji−1
)]+ yji
Para i = 3 até i = n− 2, fazer:
yj+1i =
(∆t)2
2ρA
[EI
(∆x)4
(yji+2 − 4yji+1 + 6yji − 4yji−1 + yji−2
)]+ yji
Para i = n− 1, fazer:
yj+1i =
(∆t)2
2ρA
[EI
(∆x)4
(−2yji+1 + 5yji − 4yji−1 + yji−2
)]+ yji
Para i = n, fazer:
yj+1i =
(∆t)2
2ρA
[EI
(∆x)4
(2yji − 4yji−1 + 2yji−2
)]+ yji
De j = 1 até j = τ , fazer:
Para i = 2, fazer:
yj+1i =
(∆t)2
ρA
[EI
(∆x)4
(yji+2 − 4yji+1 + 7yji − 4yji−1
)]+ 2yji − y
j−1i
Para i = 3 até i = n− 2, fazer:
yj+1i =
(∆t)2
ρA
[EI
(∆x)4
(yji+2 − 4yji+1 + 6yji − 4yji−1 + yji−2
)]+ 2yji − y
j−1i
Para i = n− 1, fazer:
yj+1i =
(∆t)2
ρA
[EI
(∆x)4
(−2yji+1 + 5yji − 4yji−1 + yji−2
)]+ 2yji − y
j−1i
Para i = n, fazer:
yj+1i =
(∆t)2
ρA
[EI
(∆x)4
(2yji − 4yji−1 + 2yji−2
)]+ 2yji − y
j−1i

46
3.3.3.2 Algoritmos para a Teoria de Timoshenko
Os códigos seguintes se basearam nas eq.(70) e eq.(71) e nas igualdades apresentadas
no item 3.3.2 - Solução Numérica - Teoria de Timoshenko. A discretização segue a mesma
das figuras 12, 13, 14 e 15 e por isso não foram representadas novamente.

47
Viga Biapoiada
Tendo como base as eqs.(70) e (71) e utilizando as relações apresentadas nas eq.(73),
eq.(74), eq.(75) e substituindo a diferença centrada pela diferença progressiva ou regressiva,
quando necessário, pode-se chegar ao seguinte fluxograma:
Para j = 0, fazer:
Para i = 1, fazer:
φj+1i =
(∆t)2
2
[E
ρ
(φji+1 − 2φji + φji−1
(∆x)2
)− κAG
ρI
(φji −
yji+1 − yji
∆x
)]+ φji
Para i = 2 até i = n− 1, fazer:
yj+1i =
(∆t)2
2
[−κGρ∆x
(φji+1 − φ
ji−1
2−yi+1 − 2yji + yji−1
∆x
)+
q
ρA
]+ yji
φj+1i =
(∆t)2
2
[E
ρ(∆x)2
(φji+1 − 2φji + φji−1
)− κAG
ρI
(φji −
yji+1 − yji−1
2∆x
)]+ φji
Para i = n, fazer:
φj+1i =
(∆t)2
2
[E
ρ(∆x)2
(φji+1 − 2φji + φji−1
)− κAG
ρI
(φji −
yji − yji−1
∆x
)]+ φji
De j = 1 até j = τ , fazer:
Para i = 1, fazer:
φj+1i = (∆t)2
[E
ρ(∆x)2
(φji+1 − 2φji + φji−1
)− κAG
ρI
(φji −
yji+1 − yji
∆x
)]+ 2φji − φ
j−1i
Para i = 2 até i = n− 1, fazer:
yj+1i = (∆t)2
[−κGρ∆x
(φji+1 − φ
ji−1
2−yi+1 − 2yji + yji−1
∆x
)+
q
ρA
]+ 2yji − y
j−1i
φj+1i = (∆t)2
[E
ρ(∆x)2
(φji+1 − 2φji + φji−1
)− κAG
ρI
(φji −
yji+1 − yji−1
2∆x
)]+2φji−φ
j−1i
Para i = n, fazer:
φj+1i = (∆t)2
[E
ρ(∆x)2
(φji+1 − 2φji + φji−1
)− κAG
ρI
(φji −
yji − yji−1
∆x
)]+ 2φji −φ
j−1i

48
Viga Biengastada
Tendo como base as eqs.(70) e (71) e utilizando as relações apresentadas nas eq.(73) e
eq.(74) quando necessário, pode-se chegar ao seguinte código para o cálculo dos deslocamentos
e rotação de uma viga biengastada:
Para j = 0, fazer:
Para i = 2 até i = n− 1, fazer:
yj+1i =
(∆t)2
2
[−κGρ∆x
(φji+1 − φ
ji−1
2−yji+1 − 2yji + yji−1
∆x
)+
q
ρA
]+ yji
φj+1i =
(∆t)2
2
[E
ρ(∆x)2
(φji+1 − 2φji + φji−1
)− κAG
ρI
(φji −
yji+1 − yji−1
2∆x
)]+ φji
De j = 1 até j = τ , fazer:
Para i = 2 até i = n− 1, fazer:
yj+1i = (∆t)2
[−κGρ∆x
(φji+1 − φ
ji−1
2−yji+1 − 2yji + yji−1
∆x
)+
q
ρA
]+ 2yji − y
j−1i
φj+1i = (∆t)2
[E
ρ(∆x)2
(φji+1 − 2φji + φji−1
)− κAG
ρI
(φji −
yji+1 − yji−1
2∆x
)]+2φji−φ
j−1i

49
Viga Engastada-Apoiada
Outra tipo de viga analisada foi a engastada-apoiada, sendo que o engaste se encontra
na extremidade esquerda, no ponto i = 1, e o apoio simples na extremidade direita, no ponto
i = n.
Tendo como base as eqs.(70) e (71) e utilizando as relações apresentadas nas eq.(73),
eq.(74) e eq.(75) quando necessário, pode-se chegar ao seguinte código:
Para j = 0, fazer:
Para i = 2 até i = n− 1, fazer:
yj+1i =
(∆t)2
2
[−κGρ∆x
(φji+1 − φ
ji−1
2−yi+1 − 2yji + yji−1
∆x
)+
q
ρA
]+ yji
φj+1i =
(∆t)2
2
[E
ρ(∆x)2
(φji+1 − 2φji + φji−1
)− κAG
ρI
(φji −
yji+1 − yji−1
2∆x
)]+ φji
Para i = n, fazer:
φj+1i =
(∆t)2
2
[E
ρ(∆x)2
(φji+1 − 2φji + φji−1
)− κAG
ρI
(φji −
yji − yji−1
∆x
)]+ φji
De j = 1 até j = τ , fazer:
Para i = 2 até i = n− 1, fazer:
yj+1i = (∆t)2
[−κGρ∆x
(φji+1 − φ
ji−1
2−yi+1 − 2yji + yji−1
∆x
)+
q
ρA
]+ 2yji − y
j−1i
φj+1i = (∆t)2
[E
ρ(∆x)2
(φji+1 − 2φji + φji−1
)− κAG
ρI
(φji −
yji+1 − yji−1
2∆x
)]+2φji−φ
j−1i
Para i = n, fazer:
φj+1i = (∆t)2
[E
ρ(∆x)2
(φji+1 − 2φji + φji−1
)− κAG
ρI
(φji −
yji − yji−1
∆x
)]+ 2φji −φ
j−1i

50
Viga Engastada-Livre
O quarto tipo de viga analisada foi a engastada-livre, que possui a extremidade da
esquerda, no ponto i = 1, engastada e a extremidade da direita, no ponto i = n, em balanço.
Tendo como base as eqs.(70) e (71) e utilizando as relações apresentadas nas eq.(73),
eq.(74), eq.(77) e eq.(78) quando necessário, pode-se chegar ao seguinte código:
Para j = 0, fazer:
Para i = 2 até i = n− 1, fazer:
yj+1i =
(∆t)2
2
[−κGρ∆x
(φji+1 − φ
ji−1
2−yi+1 − 2yji + yji−1
∆x
)+
q
ρA
]+ yji
φj+1i =
(∆t)2
2
[E
ρ(∆x)2
(φji+1 − 2φji + φji−1
)− κAG
ρI
(φji −
yji − yji−1
∆x
)]+ φji
Para i = n, fazer:
yj+1i =
(∆t)2
2
[2κG
ρ(∆x)2
(∆xφji − y
ji + yji−1
)+
q
ρA
]+ yji
φj+1i =
(∆t)2
2
[2E
ρ(∆x)2
(−φji + φji−1
)]+ φji
De j = 1 até j = τ , fazer:
Para i = 2 até i = n− 1, fazer:
yj+1i = (∆t)2
[−κGρ∆x
(φji+1 − φ
ji−1
2−yi+1 − 2yji + yji−1
∆x
)+
q
ρA
]+ 2yji − y
j−1i
φj+1i = (∆t)2
[E
ρ(∆x)2
(φji+1 − 2φji + φji−1
)− κAG
ρI
(φji −
yji+1 − yji−1
2∆x
)]+2φji−φ
j−1i
Para i = n, fazer:
yj+1i = (∆t)2
[2κG
ρ(∆x)2
(∆xφji − y
ji + yji−1
)+
q
ρA
]+ 2yji − y
j−1i
φj+1i = (∆t)2
[2E
ρ(∆x)2
(−φji + φji−1
)]+ 2φji − φ
j−1i

51
3.4 MATERIAIS
O único material necessário para esta análise é um computador com software capaz
de compreender a linguagem FORTRAN. O conhecimento da linguagem também é necessário
e pode ser obtido consultando Chapman (2007).
Neste trabalho foi utilizado o Intel Visual Fortran Compiler XE 12.0 e precisão dupla
para todas as variáveis reais.
3.5 NOMENCLATURA ADOTADA
Para organizar as análises, foi elaborada uma codificação para as seções e para o tipo
de apoio das vigas. As seções são numeradas como na tabela 5. Como a base é mantida
constante a nomenclatura representa: Seção 1 - altura de 30 cm; Seção 2 - altura de 45 cm;
Seção 3 - altura de 60 cm; Seção 4 - altura de 75 cm. Os tipo de vigas são denominados por
YY, sendo o primeiro representante do tipo de apoio na extremidade esquerda e o segundo,
na extremidade direita. Cada Y pode assumir os seguintes valores: A - simplesmente apoiada;
E - engaste; L - extremidade livre. Assim, as vigas analisadas se chamam: AA - simplesmente
apoiada; EE - biengastada; EA - engastada-apoiada ; EL - engastada-livre (em balanço).
3.6 DETERMINAÇÃO DOS INCREMENTOS ∆x E DO ∆t
A determinação dos intervalos de tempo e de espaço afeta a qualidade de resposta.
Se os intervalos forem muito grandes, o MDF falha e resultados ruins são obtidos. De forma
geral, devem ser escolhidos valores pequenos para ∆x e ∆t, isto é, deve-se adotar uma boa
discretização.

52
A primeira viga simulada foi a biapoiada de acordo com a teoria de Euler-Bernoulli.
Porém, mesmo utilizando intervalos pequenos, a resposta encontrada não correspondeu à
solução analítica.
Assim, foram calculados os valores de deslocamentos dos primeiros 3 pontos para a
viga biapoiada.
As equações utilizadas são as mesmas apresentadas no item 3.3.1 - Solução Numérica
- Teoria de Euler-Bernoulli e resumidas no item 3.3.3 - Algoritmos - Fluxogramas. Com o auxílio
do fluxograma apresentado, chega-se aos seguintes valores:
TABELA 6 – DESLOCAMENTOS PARA A VIGA BIAPOIADA EM j = 1
Ponto (i) Deslocamento(y1i )
2∆t2
2ρAq
3∆t2
2ρAq
4∆t2
2ρAq
FONTE: O Autor (2014)
TABELA 7 – DESLOCAMENTOS PARA A VIGA BIAPOIADA EM j = 2
Ponto (i) Deslocamento(y2i )
2∆t2
ρAq
(2− EI
ρA
∆t2
∆x2
)
3∆t2
ρAq
(2 +
EI
ρA
∆t2
∆x2
)
4∆t2
ρAq
(2 +
EI
ρA
∆t2
∆x2
)FONTE: O Autor (2014)
Como a carga vai ser aplicada de cima para baixo, é de se esperar que a deformação
da viga se de nesta direção também. Dos termos apresentados, o único que pode apresentar
valor negativo é o deslocamento para o ponto i = 2 para o segundo passo de tempo, j = 2,
devido à subtração envolvida. Partindo da premissa que este deslocamento não possa ser

53
negativo, tem-se:
∆t2
ρAq
(2− EI
ρA
∆t2
∆x4
)≥ 0
2− EI
ρA
∆t2
∆x4≥ 0
EI
ρA
∆t2
∆x4≤ 2
∴∆t2
∆x4≤ 2
ρA
EI
(79)
A eq.(79) estabelece uma relação entre os intervalos de tempo e espaço utilizados.
Como somente seções retangulares são utilizadas, pode-se substituir a área A e a inércia da
seção I, como abaixo:
∆t2
∆x4≤ 2
ρA
EI= 2
ρbhEbh3
12
= 24ρ
Eh2(80)
Assim, com os dados apresentados na Tabela 4 , adotou-se para ∆x = 0, 04m e
∆t = 0, 00000025s, atendendo a eq.(80).
Com estes intervalos adotados não houveram problemas para as outras simulações.

54
4 RESULTADOS
Os deslocamentos apresentados aqui para as vigas AA, EE, EA sempre serão relativos
ao ponto central e para a viga EL será o ponto da extremidade livre. Para as vigas AA, EE e
EL os pontos representados coincidem com os pontos de deslocamento máximo.
Primeiramente foi feita uma comparação entre as soluções numéricas e as analíticas
para a análise dinâmica das vigas de Euler-Bernoulli, utilizando um tipo de seção. Os gráficos
na figura 16 apresentam visualmente os resultados obtidos ao simular vigas com a Seção 4.
Os valores obtidos pelo MDF apresentam boa concordância com os valores obtidos
pela solução analítica. A tabela 9 apresenta os deslocamentos numéricos e dinâmicos para
os primeiros passos de tempo, mostrando a proximidade dos valores obtidos. Apesar de o
intervalo de tempo ser ∆t = 0, 0625s, os cálculos foram realizados com ∆t = 2, 5x10−7s.
Na tabela 8 foi feita uma comparação com os valores obtidos para a situação dinâmica
e a estática. A primeira coluna dela diz a qual viga pertencem os deslocamentos; a segunda,
o deslocamento obtido através da fórmula da estática; a terceira, o deslocamento fornecido
pela solução analítica da equação dinâmica; a quarta, o deslocamento obtido das simulações;
as duas últimas, o quociente entre o deslocamento dinâmico e o estático.
É importante observar que o deslocamento dinâmico, analítico e numérico, é aproxi-
madamente duas vezes o deslocamento estático. Esta diferença acontece pois o carregamento
age de forma abrupta ao longo da viga, situação que raramente acontece na prática.
TABELA 8 – DESLOCAMENTO ESTÁTICO-DINÁMICO-ANALÍTICO - EULER-BERNOULLI
Tipo de vigaEstático (Est) Dinâmico (Din) Numérico (Num)
(Din)/(Est) (Num)/(Est)(10−3 mm) (10−3 mm) (10−3 mm)
AA 22,575 45,300 45,151 2,01 2,00
EE 4,515 9,140 9,152 2,02 2,03
EA 9,030 17,922 17,936 1,98 1,99
EL 13,545 27,463 27,462 2,03 2,03
FONTE: O Autor (2014)

55
0
0.0
02
0.0
04
0.0
06
0.0
08
0.0
1
0 5
10
15
20
25
30
35
Deslocamento (mm)
Tem
po (
ms)
b) V
iga
EE
- S
eção
4 -
b =
20c
m e
h =
75c
m
Sol
. Num
éric
aS
ol. A
nalít
ica
0
0.0
05
0.0
1
0.0
15
0.0
2
0.0
25
0.0
3
0 5
10
15
20
25
30
35
Deslocamento (mm)T
empo
(m
s)
d) V
iga
EL
- S
eção
4 -
b =
20c
m e
h =
75c
m
Sol
. Num
éric
aS
ol. A
nalít
ica
0
0.0
1
0.0
2
0.0
3
0.0
4
0.0
5
0 5
10
15
20
25
30
35
Deslocamento (mm)
Tem
po (
ms)
a) V
iga
AA
- S
eção
4 -
b =
20c
m e
h =
75c
m
Sol
. Num
éric
aS
ol. A
nalít
ica
0
0.0
05
0.0
1
0.0
15
0.0
2
0 5
10
15
20
25
30
35
Deslocamento (mm)
Tem
po (
ms)
c) V
iga
EA
- S
eção
4 -
b =
20c
m e
h =
75c
m
Sol
. Num
éric
aS
ol. A
nalít
ica
FIGURA 16 – DESLOCAMENTOS PARA OS 4 TIPOS DE VIGAS ANALISADAS - SOLUÇÃO ANALÍTICAE NUMÉRICA - TEORIA DE EULER-BERNOULLI
FONTE: O Autor (2014)

56
TABEL
A9–DES
LOCAMEN
TOS-EU
LER-BER
NOULL
I
Deslocamento
(10−3mm)
Tempo
(ms)
VigaAA
VigaEE
VigaEA
VigaEL
Analítica
Num
érica
Analítica
Num
érica
Analítica
Num
érica
Analítica
Num
érica
0,000
0,000
0,000
0,000
0,000
0,000
0,000
0,000
0,000
0,063
0,021
0,017
0,018
0,017
0,018
0,017
0,017
0,017
0,125
0,085
0,067
0,069
0,068
0,069
0,068
0,068
0,068
0,188
0,191
0,149
0,146
0,145
0,147
0,147
0,148
0,148
0,250
0,339
0,255
0,259
0,256
0,259
0,257
0,243
0,243
0,313
0,529
0,403
0,426
0,425
0,417
0,416
0,388
0,388
0,375
0,760
0,603
0,655
0,653
0,631
0,630
0,606
0,606
0,438
1,033
0,858
0,938
0,937
0,899
0,897
0,898
0,897
0,500
1,346
1,171
1,259
1,260
1,214
1,214
1,275
1,273
0,563
1,699
1,533
1,615
1,614
1,568
1,567
1,715
1,714
0,625
2,091
1,938
2,004
2,005
1,959
1,956
2,207
2,206
0,688
2,522
2,391
2,416
2,417
2,388
2,388
2,764
2,762
0,750
2,991
2,896
2,832
2,833
2,850
2,847
3,390
3,387
0,813
3,496
3,441
3,238
3,242
3,328
3,327
4,062
4,058
0,875
4,038
4,021
3,641
3,643
3,810
3,811
4,768
4,765
0,938
4,614
4,621
4,055
4,058
4,298
4,297
5,479
5,477
1,000
5,224
5,231
4,480
4,484
4,798
4,798
6,174
6,174
1,063
5,867
5,864
4,911
4,914
5,315
5,315
6,879
6,878
1,125
6,541
6,522
5,344
5,349
5,846
5,844
7,594
7,593
1,188
7,246
7,203
5,785
5,788
6,388
6,388
8,317
8,317
1,250
7,979
7,908
6,235
6,239
6,947
6,947
9,050
9,049
1,313
8,740
8,634
6,679
6,685
7,529
7,527
9,783
9,785
1,375
9,527
9,380
7,093
7,099
8,139
8,138
10,519
10,520
1,438
10,339
10,166
7,464
7,474
8,767
8,765
11,295
11,294
1,500
11,174
10,995
7,795
7,804
9,397
9,395
12,119
12,115
1,563
12,030
11,860
8,087
8,096
10,017
10,018
12,977
12,973
1,625
12,906
12,761
8,335
8,347
10,627
10,626
13,869
13,863
1,688
13,801
13,682
8,533
8,545
11,228
11,227
14,762
14,759
1,750
14,712
14,619
8,688
8,702
11,812
11,814
15,654
15,651
1,813
15,638
15,578
8,819
8,831
12,369
12,369
16,556
16,549
1,875
16,577
16,554
8,932
8,943
12,896
12,899
17,453
17,449
1,938
17,527
17,532
9,018
9,031
13,399
13,401
18,322
18,317
2,000
18,487
18,508
9,064
9,076
13,888
13,889
19,148
19,146
FONTE:
OAutor
(2014)

57
Os deslocamentos dinâmicos obtidos pela teoria de Timoshenko de forma numérica
carecem de soluções analíticas para comparação, exceto para vigas biapoiadas. A solução
analítica é apresentada por Carrer et al. (2013). A comparação entre a solução analítica e
a numérica para as vigas biapoiadas está representada na figura 17. Percebe-se que para as
quatro seções analisadas a resposta numérica é bem próxima da solução analítica.
Comparou-se então, para todos os tipos de vigas e seções, os resultados obtidos pela
teoria de Timoshenko com os da teoria de Euler-Bernoulli, para avaliar as diferenças entre eles.
As figuras 18, 19, 20 e 21 representam qualitativamente os resultados. A escala
temporal é a mesma para todos eles, mas, para possibilitar a visualização, a escala dos deslo-
camentos é diferente para cada caso.
A figura 18 apresenta o deslocamento do ponto central para vigas biapoiadas para as
quatro seções analisadas. Percebe-se que para a Seção 1 há pouquíssima diferença entre as
duas soluções.
A figura 19 apresenta o deslocamento do ponto central para vigas biengastadas para
as quatro seções analisadas. Já a figura 20 apresenta o deslocamento do ponto central para
vigas engastadas na extremidade esquerda e apoiadas na extremidade direita para as quatro
seções analisadas. Concluindo, a figura 21 apresenta o deslocamento do ponto na extremidade
livre para vigas engastadas e em balanço para as quatro seções analisadas.
Assim, conforme a altura da viga aumenta, dois aspectos podem ser observados: o
deslocamento máximo para Timoshenko é maior que o da teoria clássica mas a frequência
daquele é menor, pois leva mais tempo para atingir o deslocamento máximo.
Como feito para a Teoria de Euler-Bernoulli, pode-se fazer uma comparação entre os
deslocamentos estáticos e dinâmicos máximos. A tabela 10 apresenta esta comparação.
A primeira coluna da tabela 10 indica o tipo de viga analisada; a segunda, o tipo de
seção; a terceira, o deslocamento estático do ponto central, exceto para a viga em balaNço,
que representa o ponto da extremidade livre; a quarta , os máximos valores obtidos durante a
análise. A quinta coluna apresenta o quociente entre os deslocamentos estático e o dinâmico
máximos.
Pode-se perceber que, exceto para a viga em balanço, todos os deslocamentos con-

58
siderando o efeito dinâmico ficaram próximos do dobro do deslocamento estático.
TABELA 10 – DESLOCAMENTOS - TIMOSHENKO
Tipo de viga Seção Estático (10−3 mm) Numérico (10−3 mm) (Numérico)/(Estático)
AA 1 357,93 706,78 1,97
AA 2 107,98 215,38 1,99
AA 3 46,69 93,52 2,00
AA 4 24,65 49,47 2,01
EE 1 75,74 151,24 2,00
EE 2 24,37 49,09 2,01
EE 3 11,42 23,18 2,03
EE 4 6,59 13,48 2,04
EA 1 147,26 292,18 1,98
EA 2 45,91 92,11 2,01
EA 3 20,71 41,72 2,01
EA 4 11,49 23,19 2,02
EL 1 212,94 432,36 2,03
EL 2 63,57 133,80 2,10
EL 3 27,10 59,14 2,18
EL 4 14,06 31,97 2,27
FONTE: O Autor (2014)

59
0
0.0
5
0.1
0.1
5
0.2
0.2
5
0 5
10
15
20
25
30
35
Deslocamento (mm)
Tem
po (
ms)
b) S
eção
2 -
b =
20c
m e
h =
45c
m
Sol
. Num
éric
aS
ol. A
nalít
ica
0
0.0
1
0.0
2
0.0
3
0.0
4
0.0
5
0 5
10
15
20
25
30
35
Deslocamento (mm)
Tem
po (
ms)
d) S
eção
4 -
b =
20c
m e
h =
75c
m
Sol
. Num
éric
aS
ol. A
nalít
ica
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0 5
10
15
20
25
30
35
Deslocamento (mm)
Tem
po (
ms)
a) S
eção
1 -
b =
20c
m e
h =
30c
m
Sol
. Num
éric
aS
ol. A
nalít
ica
0
0.0
2
0.0
4
0.0
6
0.0
8
0.1
0 5
10
15
20
25
30
35
Deslocamento (mm)
Tem
po (
ms)
c) S
eção
3 -
b =
20c
m e
h =
60c
m
Sol
. Num
éric
aS
ol. A
nalít
ica
FIGURA 17 – DESLOCAMENTOS DO PONTO CENTRAL PARA VIGAS BIAPOIADAS PARA ASQUATRO SEÇÕES ANALISADAS - TEORIA DE TIMOSHENKO
FONTE: O Autor (2014)
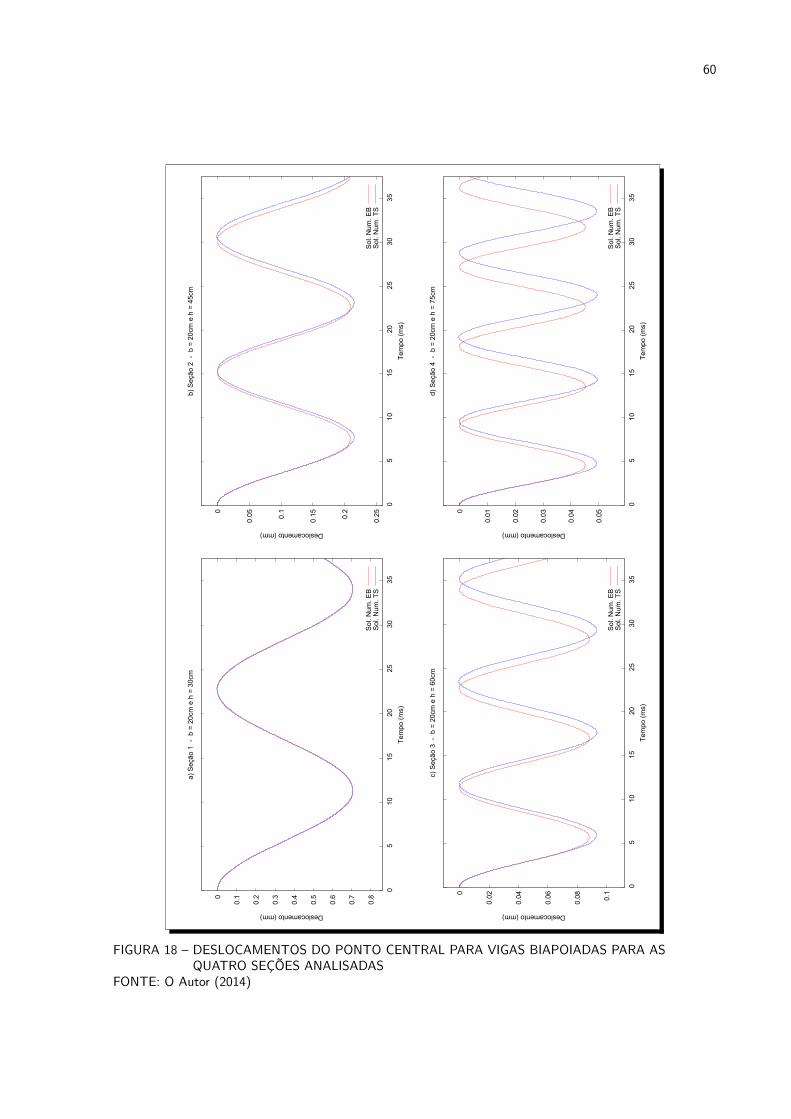
60
0
0.0
5
0.1
0.1
5
0.2
0.2
5
0 5
10
15
20
25
30
35
Deslocamento (mm)
Tem
po (
ms)
b) S
eção
2 -
b =
20c
m e
h =
45c
m
Sol
. Num
. EB
Sol
. Num
. TS
0
0.0
1
0.0
2
0.0
3
0.0
4
0.0
5
0 5
10
15
20
25
30
35
Deslocamento (mm)
Tem
po (
ms)
d) S
eção
4 -
b =
20c
m e
h =
75c
m
Sol
. Num
. EB
Sol
. Num
. TS
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0 5
10
15
20
25
30
35
Deslocamento (mm)
Tem
po (
ms)
a) S
eção
1 -
b =
20c
m e
h =
30c
m
Sol
. Num
. EB
Sol
. Num
. TS
0
0.0
2
0.0
4
0.0
6
0.0
8
0.1
0 5
10
15
20
25
30
35
Deslocamento (mm)
Tem
po (
ms)
c) S
eção
3 -
b =
20c
m e
h =
60c
m
Sol
. Num
. EB
Sol
. Num
. TS
FIGURA 18 – DESLOCAMENTOS DO PONTO CENTRAL PARA VIGAS BIAPOIADAS PARA ASQUATRO SEÇÕES ANALISADAS
FONTE: O Autor (2014)

61
0
0.0
1
0.0
2
0.0
3
0.0
4
0.0
5
0 5
10
15
20
25
30
35
Deslocamento (mm)
Tem
po (
ms)
b) S
eção
2 -
b =
20c
m e
h =
45c
m
Sol
. Num
. EB
Sol
. Num
. TS
0
0.0
02
0.0
04
0.0
06
0.0
08
0.0
1
0.0
12
0.0
14
0 5
10
15
20
25
30
35
Deslocamento (mm)
Tem
po (
ms)
d) S
eção
4 -
b =
20c
m e
h =
75c
m
Sol
. Num
. EB
Sol
. Num
. TS
0
0.0
2
0.0
4
0.0
6
0.0
8
0.1
0.1
2
0.1
4
0.1
6
0.1
8 0
5 1
0 1
5 2
0 2
5 3
0 3
5
Deslocamento (mm)
Tem
po (
ms)
a) S
eção
1 -
b =
20c
m e
h =
30c
m
Sol
. Num
. EB
Sol
. Num
. TS
0
0.0
05
0.0
1
0.0
15
0.0
2
0.0
25
0 5
10
15
20
25
30
35
Deslocamento (mm)
Tem
po (
ms)
c) S
eção
3 -
b =
20c
m e
h =
60c
m
Sol
. Num
. EB
Sol
. Num
. TS
FIGURA 19 – DESLOCAMENTOS DO PONTO CENTRAL PARA VIGAS BIENGASTADAS PARA ASQUATRO SEÇÕES ANALISADAS
FONTE: O Autor (2014)

62
0
0.0
2
0.0
4
0.0
6
0.0
8
0.1
0 5
10
15
20
25
30
35
Deslocamento (mm)
Tem
po (
ms)
b) S
eção
2 -
b =
20c
m e
h =
45c
m
Sol
. Num
. EB
Sol
. Num
. TS
0
0.0
05
0.0
1
0.0
15
0.0
2
0.0
25
0 5
10
15
20
25
30
35
Deslocamento (mm)
Tem
po (
ms)
d) S
eção
4 -
b =
20c
m e
h =
75c
m
Sol
. Num
. EB
Sol
. Num
. TS
0
0.0
5
0.1
0.1
5
0.2
0.2
5
0.3
0.3
5 0
5 1
0 1
5 2
0 2
5 3
0 3
5
Deslocamento (mm)
Tem
po (
ms)
a) S
eção
1 -
b =
20c
m e
h =
30c
m
Sol
. Num
. EB
Sol
. Num
. TS
0
0.0
1
0.0
2
0.0
3
0.0
4
0 5
10
15
20
25
30
35
Deslocamento (mm)
Tem
po (
ms)
c) S
eção
3 -
b =
20c
m e
h =
60c
m
Sol
. Num
. EB
Sol
. Num
. TS
FIGURA 20 – DESLOCAMENTOS DO PONTO CENTRAL PARA AS VIGAS ENGASTADA-APOIADAPARA AS QUATRO SEÇÕES ANALISADAS
FONTE: O Autor (2014)

63
0
0.0
2
0.0
4
0.0
6
0.0
8
0.1
0.1
2
0.1
4
0 5
10
15
20
25
30
35
Deslocamento (mm)
Tem
po (
ms)
b) S
eção
2 -
b =
20c
m e
h =
45c
m
Sol
. Num
. EB
Sol
. Num
. TS
0
0.0
05
0.0
1
0.0
15
0.0
2
0.0
25
0.0
3
0.0
35
0 5
10
15
20
25
30
35
Deslocamento (mm)
Tem
po (
ms)
d) S
eção
4 -
b =
20c
m e
h =
75c
m
Sol
. Num
. EB
Sol
. Num
. TS
0
0.1
0.2
0.3
0.4
0.5
0 5
10
15
20
25
30
35
Deslocamento (mm)
Tem
po (
ms)
a) S
eção
1 -
b =
20c
m e
h =
30c
m
Sol
. Num
. EB
Sol
. Num
. TS
0
0.0
1
0.0
2
0.0
3
0.0
4
0.0
5
0.0
6
0 5
10
15
20
25
30
35
Deslocamento (mm)
Tem
po (
ms)
c) S
eção
3 -
b =
20c
m e
h =
60c
m
Sol
. Num
. EB
Sol
. Num
. TS
FIGURA 21 – DESLOCAMENTOS PARA O PONTO DA EXTREMIDADE LIVRE PARA VIGAS EMBALANÇO PARA AS QUATRO SEÇÕES ANALISADAS
FONTE: O Autor (2014)

64
5 CONCLUSÃO
De maneira geral, a solução com o Método das Diferenças Finitas para as duas teorias
analisadas se mostrou eficiente.
Para a teoria de Euler-Bernoulli as soluções numéricas ficaram bem próximas da
solução analítica, como mostrado na figura 16 e na tabela 8.
A avaliação para a teoria de Timoshenko se deu de maneira indireta pelas figuras 18,
19, 20 e 21 e pela tabela 10. As figuras mostram que as duas teorias apresentam deslocamentos
semelhantes, principalmente até a metade do primeiro período, dada a proximidade das linhas
dos gráficos. Ao longo do tempo, as pequenas diferenças se acumulam e se tornam mais
aparentes. Surgem também diferenças nas frequências de vibração entre as teorias.
Já a tabela 10, ao mostrar que a relação entre os deslocamento dinâmico e estático
fica próxima de dois, também serve como uma medida da qualidade da solução numérica para
a teoria de Timoshenko. A relação entre os deslocamentos ficou muito próxima da relação
encontrada para a teoria de Euler-Bernoulli, que possui solução analítica.
Como citado por Kaw e Kalu (2009), os métodos numéricos servem para resolver
problemas que nem sempre possuem solução analítica. Assim, o Método das Diferenças Finitas
provou ser útil na solução numérica destas equações diferencias, como no caso da teoria de
Timoshenko, que não possui solução analítica para três dos quatro casos analisados.
Objetivando o dimensionamento de vigas de concreto armado, devem ser determi-
nados os momentos fletores máximos e esforços cortantes. Como todos os deslocamentos
são calculados, os esforços podem ser obtidos de maneira relativamente simples através das
eq.(1) e eq.(3) para Euler-Bernoulli ou eq.(8) e eq.(9) para a Teoria de Timoshenko, sendo as
derivadas substituídas pelas aproximações do Método das Diferenças Finitas.
Apesar de terem sido estudadas quatro tipos de vigas com apoios nas extremidades, a
consideração de vigas contínuas pode ser facilmente implementada nos algoritmos das soluções
numéricas. A inserção de apoios intermediários restringe o deslocamento dos pontos que os

65
contém, dispensando seus cálculos. Nos algoritmos, basta excluir estes pontos do cálculo .
Com base na experiência adquirida ao longo do desenvolvimento deste trabalho, pode-
se propor, como sugestão de trabalho futuro, a solução de problemas de vigas sobre base
elástica, assim como a consideração de outros tipos de carregamentos, a saber: cargas con-
centradas; cargas, concentradas ou não, com variação no tempo; cargas impulsivas.

66
REFERÊNCIAS
ALVES, L. M.; CARRER, J. A. M. Introdução aos Métodos Aproximados emEngenharia. [S.l.], 2007. Disponível em: <http://lucasmaximoalves.files.wordpress.com/2009/09/introducao-aos-metodos-aproximados-para-a-engenharia.doc>.
BEER, F. P.; JR, E. R. J.; DEWOLF, J. T.; MAZUREK, D. F. Mecânica dos Materiais.5. ed. [S.l.]: McGraw Hill Brasil, 2003.
BORGES, M. S. de S. Análise do Efeito da Deformabilidade por Cisalhamentona Flexão de Vigas - Formulação Geral do Problema e Determinação doCoeficiente de Cisalhamento. Tese (Doutorado) — COPPE - UFRJ, 1996.
CAMPANARI, F. A. Teoria das Estruturas. 1. ed. Rio de Janeiro: Guanabara Dois, 1985.
CARRER, J.; FLEISCHFRESSER, S.; GARCIA, L.; MANSUR, W. Dynamic analysis oftimoshenko beams by the boundary element method. Engineering Analysis withBoundary Elements, Elsevier, 2013.
CARRER, J.; MANSUR, W.; VANZUIT, R. Dynamic analysis of euler-bernoulli beams bythe boundary element method. International Journal for Numerical Methods inEngineering, Wiley, 2010.
CHAPMAN, S. J. Fortran 95-2003 for Scientists and Engineers. 3. ed. New York:McGraw-Hill, 2007.
CRAIG, J. R. R. Mecânica dos Materiais. 2. ed. Rio de Janeiro: LTC, 2003.
CUNHA, M. C. C. Métodos Numéricos. 2. ed. Campinas: Unicamp, 2000.
FEODOSIEV, S. Resistencia de Materiales. Moscou: MIR, 1980.
FLEISCHFRESSER, S. A. Uma Formulação do Método dos Elementos de Contornopara a Análise de Vigas de Timoshenko. Tese (Doutorado) — UFPR, 2012.
GRAFF, K. F. Wave Motion in Elastic Solids. 1. ed. New York: Dover Publications, Inc.,1991.
HIBBELER, H. B. Resistência dos Materiais. 7. ed. São Paulo: Pearson Education doBrasil, 2010.
HUAMAN, C. J. A. Simulação 3D pelo Método dos Elementos Discretos de Refluxode Material de Sustentação de Fraturas em Poços de Petróleo. Dissertação(Mestrado) — PUC-RIO, 2009.
KAW, A.; KALU, E. E. Numerical Methods with Applications (Abridged Edition). 2.ed. [Arlington, Va]: National Science Foundation, 2009.

67
LIMA, P. R. L.; FONTES, C. M. A.; LIMA, J. M. F. Análise não-linear da deflexão devigas de concreto armado. Sitientibus, n. 28, 2003. Disponível em: <www2.uefs.br/sitientibus/pdf/28/analise\_nao\_linear\_da\_deflexao\_de\_vigas.pdf>.
NASH, W. A. Resistência dos Materiais. 2. ed. São Paulo: McGraw-Hill, 1982.
POPOV, E. P. Introdução à Mecânica dos Sólidos. 1. ed. São Paulo: Edgar-Blücher,1978.
RAO, S. S. Mechanical Vibrations. 4. ed. New Jersey: Prentice Hall, 2004.
RUGGIERO, M. A. G.; LOPES, V. L. d. R. Cálculo Numérico: Aspectos Teóricos eComputacionais. 2. ed. Rio de Janeiro: Makron Books, 1996.
SMITH, G. D. Numerical Solution of Partial Differential Equations. 3. ed. Oxford:Clarendon Press, 2004.
SORIANO, H. L.; LIMA, S. D. S. Método de Elementos Finitos em Análise deEstruturas. 1. ed. São Paulo: Editora da Universidade de São Paulo, 2003.
THOMAS, G. B.; FINNEY, R. L.; WEIR, M. D.; GIORDANO, F. R. Cálculo. 10. ed. SãoPaulo: Addison Wesley, 2002.
TIMOSHENKO, S.; YOUNG, D. H.; WEAVER, J. W. Vibration Problems in Engineering.1. ed. Rio de Janeiro: Guanabara Dois, 1974.