8 - análise e projeto de sistemas de controle por métodos...
TRANSCRIPT
1/125
8
Análise e Projeto de Sistemas de Controle por MétodosFrequenciais
2/125
Sumário
8.1. IntroduçãoResposta em Frequência
8.2. Diagramas de Bode8.3. Estabilidade, Margem de Ganho e Margem de Fase8.4. Relação entre Resposta Transitória de Malha Fechada e Resposta emFrequência de Malha Fechada
Taxa de Amortecimento e Resposta em Frequência de Malha FechadaVelocidade de Resposta e Resposta em Frequência de Malha Fechada
8.5. Relação entre Resposta Transitória de Malha Fechada e Resposta emFrequência de Malha Aberta
Taxa de Amortecimento a partir da Margem de FaseTempo de Assentamento e de Pico a partir da Resposta em Frequência deMalha Aberta
8.6. Características do Erro em Estado Estacionário a partir da Resposta emFrequência
Posição ConstanteVelocidade ConstanteAceleração Constante
8.7. Sistemas com Atraso no Tempo8.8. Obtendo Funções de Transferência Experimentalmente
3/125
Sumário
8.9. Resposta Transitória Através do Ajuste de Ganho
8.10. Controle Lag
8.11. Controle Lead
8.12. Controle Lead-Lag
4/125
1
8.1. Introdução
Objetivo:A partir da resposta em frequência de um sistema, obter um desempenhodesejado através do ajuste de ganho e de compensadores.
Métodos:Diagramas de Nyquist, de Nichols e de Bode.
Motivação:Vantagem nas seguintes situações:
1. Modelagem de funções de transferência a partir de dados físicos;
2. Projetar compensadores Lead com erro de estado estacionário e respostatransitória desejados;
3. Encontrar a estabilidade de sistemas não lineares;
4. Resolver ambiguidades ao esboçar o lugar das raízes de um sistema.
5/125
2
8.1. Introdução
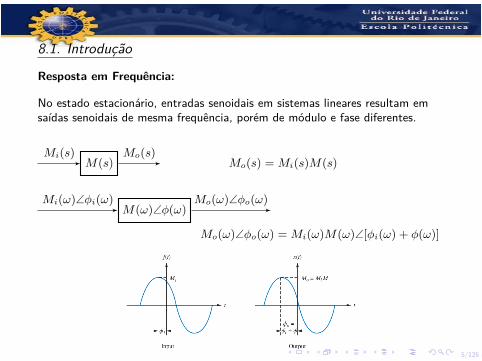
Resposta em Frequência:
No estado estacionário, entradas senoidais em sistemas lineares resultam emsaídas senoidais de mesma frequência, porém de módulo e fase diferentes.
M(s) Mo(s) = Mi(s)M(s)Mi(s) Mo(s)
M(ω)∠φ(ω)
Mo(ω)∠φo(ω) = Mi(ω)M(ω)∠[φi(ω) + φ(ω)]
Mi(ω)∠φi(ω) Mo(ω)∠φo(ω)

6/125
3
8.1. Introdução
G(s)R(s) = As+Bω
s2+ω2 C(s)
r(t) = A cosωt+B sinωt =√A2 +B2 cos[ωt− tan−1(B/A)]
A representação fasorial pode ser feita de três formas:
1. Forma polar: Mi∠φi , Mi =√A2 +B2 , φi = − tan−1(B/A) ;
2. Forma retangular: A− jB ;
3. Fórmula de Euler: Miejφi .

7/125
4
8.1. Introdução
Separação da solução forçada da resposta transitória:
C(s) = As+Bω
(s2 + ω2)G(s)
= As+Bω
(s+ jω)(s− jω)G(s)
= K1
s+ jω+ K2
s− jω + termos de fração parcial de G(s)
onde
K1 = As+Bω
s− jω G(s)∣∣∣∣s→−jω
= 12(A+ jB
)G(−jω) = 1
2Mie−jφiMGe
−jφG
= MiMG
2 e−j(φi+φG)
K2 = As+Bω
s+ jωG(s)
∣∣∣∣s→+jω
= 12(A− jB
)G(jω) = 1
2MiejφiMGe
jφG
= MiMG
2 ej(φi+φG) = K∗1
MG = |G(jω)| , φG = fase de G(jω)
8/125
5
8.1. Introdução
A resposta em estado estacionário corresponde aos termos da expansão emfrações parciais com os pólos da forma de onda do sinal de entrada:
Css(s) = K1
s+ jω+ K2
s− jω
=MiMG
2 e−j(φi+φG)
s+ jω+
MiMG2 ej(φi+φG)
s− jω
Pela transformada inversa de Laplace nós temos então:
c(t) = MiMG
(e−j(ωt+φi+φG) + ej(ωt+φi+φG)
2
)= MiMG cos(ωt+ φi + φG)
=(Mi∠φi
)(MG∠φG
)= Mo∠φo
A resposta em frequência de um sistema cuja função de transferência é G(s) é:
G(jω) = G(s)|s→jω
9/125
6
8.2. Diagramas de Bode
Seja a seguinte função de transferência:
G(s) = K(s+ z1)(s+ z2) . . . (s+ zk)sm(s+ p1)(s+ p2) . . . (s+ pn)
A resposta em amplitude e a resposta de fase são, respectivamente:
|G(jω)| = K|(s+ z1)||(s+ z2)| . . . |(s+ zk)||sm||(s+ p1)||(s+ p2)| . . . |(s+ pn)|
∣∣∣∣s→jω
∠G(jω) =∠(s+ z1) + ∠(s+ z2) + . . .+ ∠(s+ zk)− ∠(sm)− ∠(s+ p1)− ∠(s+ p2)− . . .− ∠(s+ pn)|s→jω
Para traçar o diagrama de Bode utilizamos a resposta em amplitude emdecibéis:
20 log10 |G(jω)| = 20 log10 K + 20 log10 |(s+ z1)|+ 20 log10 |(s+ z2)|+ . . .
+ 20 log10 |(s+ zk)| − 20 log10 |sm| − 20 log10 |(s+ p1)|
− . . .− 20 log10 |(s+ pn)||s→jω

10/125
7
8.2. Diagramas de Bode
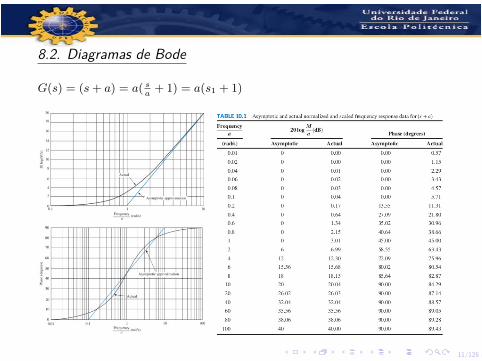
Cada um dos termos da resposta em amplitude e da resposta em fase pode sertratado individualmente e suas curvas podem ser adicionadas graficamenteformando então a resposta completa.Diagramas de Bode para G(s) = (s + a)
s = jω
G(jω) = (jω + a) = a(j ωa
+ 1)
11/125
8
8.2. Diagramas de Bode
G(s) = (s+ a) = a( sa
+ 1) = a(s1 + 1)

12/125
9
8.2. Diagramas de Bode
Diagramas de Bode para G(s) = (s + a)
Diagramas de Bode para G(s) = 1/(s + a)
G(s) = 1(s+a) = 1
a( sa
+1)

13/125
10
8.2. Diagramas de Bode
Diagramas de Bode para G(s) = s
Diagramas de Bode para G(s) = 1/s
14/125
11
8.2. Diagramas de Bode
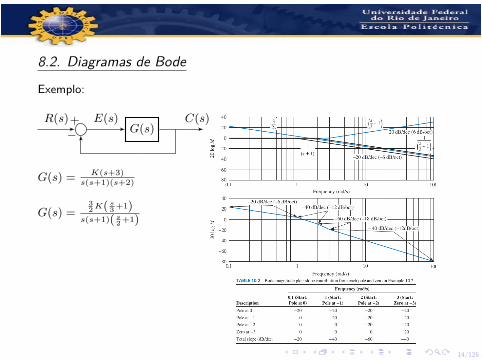
Exemplo:
+G(s)
R(s) E(s) C(s)−
G(s) = K(s+3)s(s+1)(s+2)
G(s) =32K( s
3 +1)s(s+1)( s
2 +1)
15/125
12
8.2. Diagramas de Bode
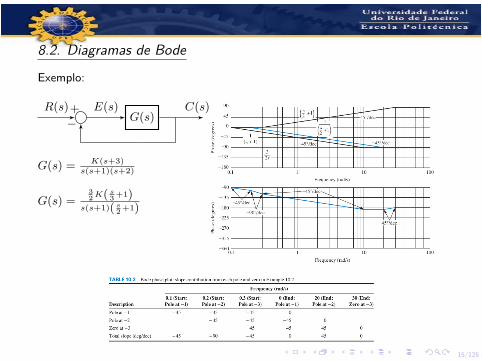
Exemplo:
+G(s)
R(s) E(s) C(s)−
G(s) = K(s+3)s(s+1)(s+2)
G(s) =32K( s
3 +1)s(s+1)( s
2 +1)
16/125
13
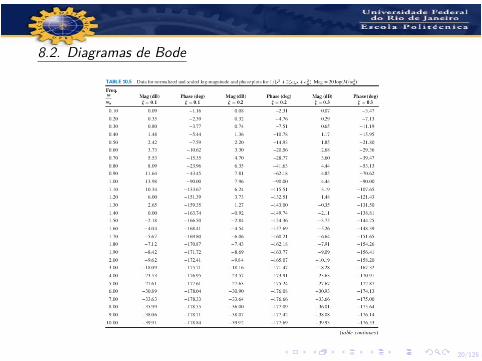
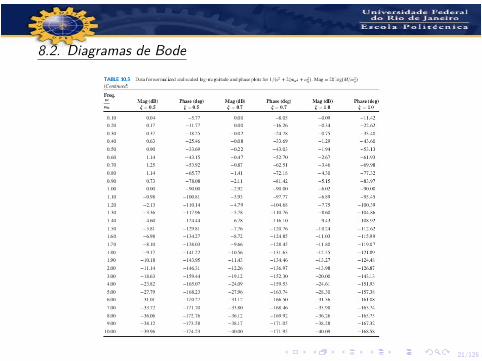
8.2. Diagramas de Bode
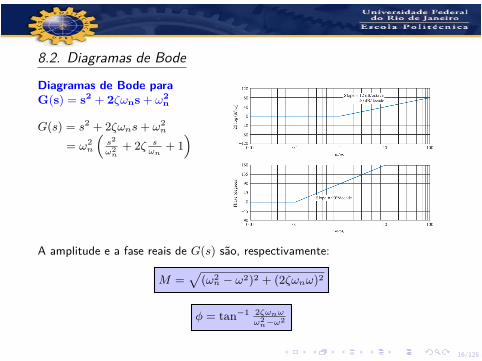
Diagramas de Bode paraG(s) = s2 + 2ζωns + ω2
n
G(s) = s2 + 2ζωns+ ω2n
= ω2n
(s2
ω2n
+ 2ζ sωn
+ 1)
A amplitude e a fase reais de G(s) são, respectivamente:
M =√
(ω2n − ω2)2 + (2ζωnω)2
φ = tan−1 2ζωnω
ω2n−ω2
17/125
14
8.2. Diagramas de Bode

18/125
15
8.2. Diagramas de Bode

19/125
16
8.2. Diagramas de BodeDiagramas de Bode para G(s) = s2 + 2ζωns + ω2
n
Diagramas de Bode para G(s) = 1/(s2 + 2ζωns + ω2n)
20/125
17
8.2. Diagramas de Bode
21/125
18
8.2. Diagramas de Bode
22/125
19
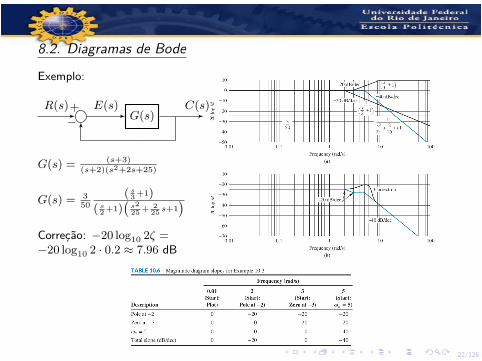
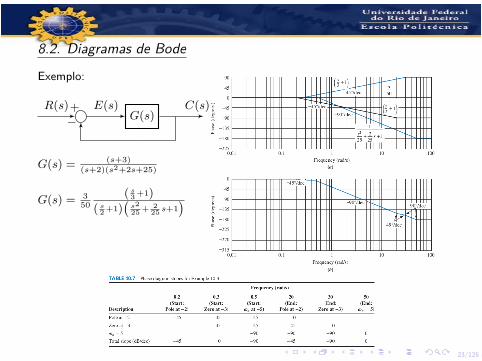
8.2. Diagramas de Bode
Exemplo:
+G(s)
R(s) E(s) C(s)−
G(s) = (s+3)(s+2)(s2+2s+25)
G(s) = 350
( s3 +1)
( s2 +1)
(s225 + 2
25 s+1)
Correção: −20 log10 2ζ =−20 log10 2 · 0.2 ≈ 7.96 dB
23/125
20
8.2. Diagramas de Bode
Exemplo:
+G(s)
R(s) E(s) C(s)−
G(s) = (s+3)(s+2)(s2+2s+25)
G(s) = 350
( s3 +1)
( s2 +1)
(s225 + 2
25 s+1)
24/125
21
8.2. Diagramas de Bode
Exercício:
+G(s) G(s) = (s+20)
(s+1)(s+7)(s+50)
R(s) E(s) C(s)−

25/125
22
8.2. Diagramas de Bode
Exercício:
+G(s)
R(s) E(s) C(s)−
G(s) = (s+20)(s+1)(s+7)(s+50)
G(s) = 235
( s20 +1)
(s+1)( s7 +1)( s
50 +1)
G(jω) = 235
( jω20 +1)
(jω+1)( jω7 +1)( jω
50 +1)
20 log10 |G(jω)| = 20 log10
∣∣∣∣ 235
( jω20 +1)
(jω+1)( jω7 +1)( jω
50 +1)
∣∣∣∣= 20 log10
∣∣ 235
∣∣+ 20 log10
∣∣ jω20 + 1
∣∣− 20 log10 |jω + 1|−20 log10
∣∣ jω7 + 1
∣∣− 20 log10
∣∣ jω50 + 1
∣∣

26/125
23
8.2. Diagramas de Bode
Exercício:
+G(s)
R(s) E(s) C(s)−
G(s) = (s+20)(s+1)(s+7)(s+50)
G(s) = 235
( s20 +1)
(s+1)( s7 +1)( s
50 +1)
G(jω) = 235
( jω20 +1)
(jω+1)( jω7 +1)( jω
50 +1)
∠G(jω) = ∠(jω20 + 1
)− ∠(jω + 1)− ∠
(jω7 + 1
)− ∠
(jω50 + 1
)= tan−1 ( jω
20 + 1)− tan−1(jω + 1)− tan−1 ( jω
7 + 1)
− tan−1 ( jω50 + 1
)
27/125
24
8.3. Estabilidade, Margem de Ganho e Margem de Fase
Através do diagrama de amplitude, somos capazes de determinar o valor deganho que garante que a amplitude seja menor que 0 dB (ganho unitário) nafrequência cuja fase é ±180o.
Exemplo: Utilize os diagramas de Bode para determinar o intervalo de K emque o sistema realimentado é estável.
+G(s) G(s) = K
(s+2)(s+4)(s+5)R(s) E(s) C(s)−
Uma vez que este sistema tem todos os seus pólos em malha aberta no semi-plano lateral esquerdo, o sistema em malha aberta é estável. Portanto,o sistema em malha fechada será estável se a resposta em frequência
tiver um ganho menor que o unitário quando a fase for 180o.
28/125
25
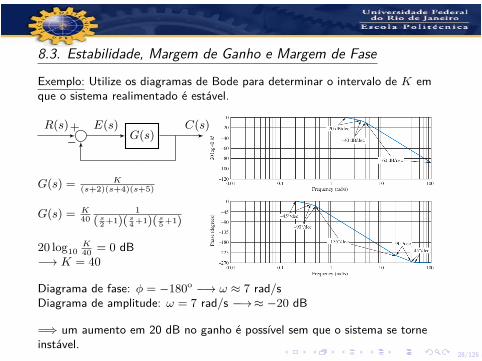
8.3. Estabilidade, Margem de Ganho e Margem de Fase
Exemplo: Utilize os diagramas de Bode para determinar o intervalo de K emque o sistema realimentado é estável.
+G(s)
R(s) E(s) C(s)−
G(s) = K(s+2)(s+4)(s+5)
G(s) = K40
1( s
2 +1)( s4 +1)( s
5 +1)
20 log10K40 = 0 dB
−→ K = 40
Diagrama de fase: φ = −180o −→ ω ≈ 7 rad/sDiagrama de amplitude: ω = 7 rad/s −→≈ −20 dB
=⇒ um aumento em 20 dB no ganho é possível sem que o sistema se torneinstável.

29/125
26
8.3. Estabilidade, Margem de Ganho e Margem de Fase
Exemplo: Utilize os diagramas de Bode para determinar o intervalo de K emque o sistema realimentado é estável.
+G(s) G(s) = K
(s+2)(s+4)(s+5)R(s) E(s) C(s)−
G(s) = K40
1( s
2 +1)( s4 +1)( s
5 +1)
20 log10Kmax
40 = 20 dB −→ Kmax = 400
Portanto, o intervalo de K em que o sistema realimentado se mantém estável é:
0 < K < 400

30/125
27
8.3. Estabilidade, a Margem de Ganho e Margem de Fase
Para determinar a margem de ganho, utilizamos o diagrama de fase paraencontrar a frequência ωGM cujo ângulo de fase seja ±180o. Em posse destafrequência, nos voltamos para o diagrama de amplitude e encontramos amargem de ganho correspondente GM , que é o ganho necessário para elevar acurva de amplitude até 0 dB (nesta frequência).
Para determinar a margem de fase, encontramos a frequência ωΦM onde oganho é 0 dB no diagrama de amplitude. A margem de fase ΦM é então adiferença entre o ganho de valor do ângulo de fase correspondente a estafrequência no diagrama de fase e 180o.
31/125
28
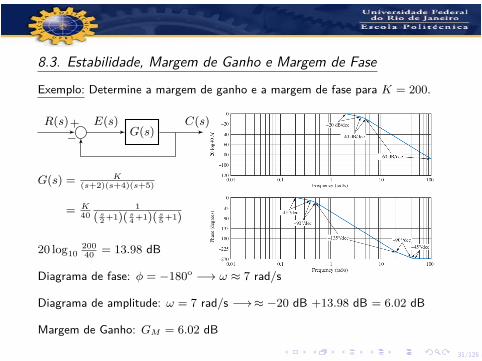
8.3. Estabilidade, Margem de Ganho e Margem de Fase
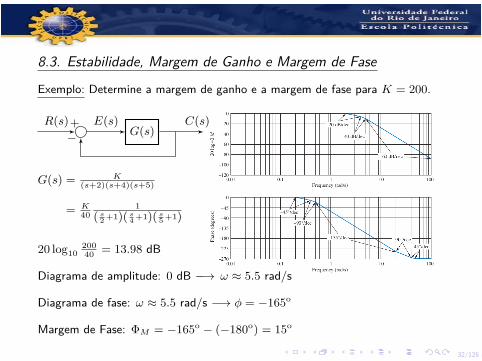
Exemplo: Determine a margem de ganho e a margem de fase para K = 200.
+G(s)
R(s) E(s) C(s)−
G(s) = K(s+2)(s+4)(s+5)
= K40
1( s
2 +1)( s4 +1)( s
5 +1)
20 log1020040 = 13.98 dB
Diagrama de fase: φ = −180o −→ ω ≈ 7 rad/s
Diagrama de amplitude: ω = 7 rad/s −→≈ −20 dB +13.98 dB = 6.02 dB
Margem de Ganho: GM = 6.02 dB
32/125
29
8.3. Estabilidade, Margem de Ganho e Margem de Fase
Exemplo: Determine a margem de ganho e a margem de fase para K = 200.
+G(s)
R(s) E(s) C(s)−
G(s) = K(s+2)(s+4)(s+5)
= K40
1( s
2 +1)( s4 +1)( s
5 +1)
20 log1020040 = 13.98 dB
Diagrama de amplitude: 0 dB −→ ω ≈ 5.5 rad/s
Diagrama de fase: ω ≈ 5.5 rad/s −→ φ = −165o
Margem de Fase: ΦM = −165o − (−180o) = 15o

33/125
30
8.3. Estabilidade, Margem de Ganho e Margem de Fase
Exemplo: Determine o intervalo de K em que o sistema realimentado é estável:
+G(s)
R(s) E(s) C(s)−
G(s) = K(s+5)(s+20)(s+50)
= K5000
1( s
5 +1)( s20 +1)( s
50 +1)
−180o −→ ω ≈ 36.7 rad/s
ω ≈ 36.7 rad/s −→ GM ≈ 25.6 dB
20 log10Kmax5000 = 25.6 dB
Kmax = 5000 · 10 25.620 −→ Kmax ≈ 95273 −→ 0 < K < 95273
34/125
31
8.3. Estabilidade, Margem de Ganho e Margem de Fase
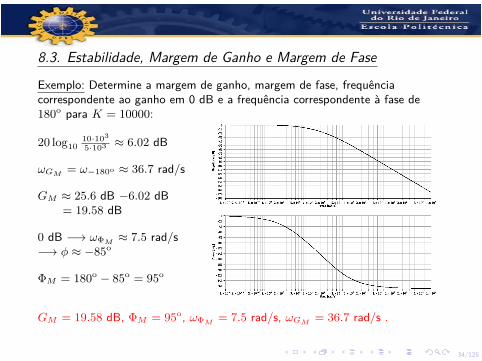
Exemplo: Determine a margem de ganho, margem de fase, frequênciacorrespondente ao ganho em 0 dB e a frequência correspondente à fase de180o para K = 10000:
20 log1010·103
5·103 ≈ 6.02 dB
ωGM = ω−180o ≈ 36.7 rad/s
GM ≈ 25.6 dB −6.02 dB= 19.58 dB
0 dB −→ ωΦM ≈ 7.5 rad/s−→ φ ≈ −85o
ΦM = 180o − 85o = 95o
GM = 19.58 dB, ΦM = 95o, ωΦM = 7.5 rad/s, ωGM = 36.7 rad/s .

35/125
32
8.4. Relação entre Resposta Transitória de Malha Fechadae Resposta em Frequência de Malha Fechada
Taxa de Amortecimento e Resposta em Frequência de Malha Fechada
+ ω2n
s(s+2ζωn)C(s)R(s) = T (s) = ω2
n
s2+2ζωns+ω2n
R(s) E(s) C(s)−
Amplitude da resposta em frequência em malha fechada:
M = |T (jω)| = ω2n√
(ω2n − ω2)2 + 4ζ2ω2
nω2

36/125
33
8.4. Relação entre Resposta Transitória de Malha Fechadae Resposta em Frequência de Malha Fechada
∂(M2)∂(ω2) =
−ω4n
[2(ω2
n − ω2)(−1) + 4ζ2ω2n
][(ω2n − ω2)2 + 4ζ2ω2
nω2]2 = 0
− 2(ω2n − ω2) + 4ζ2ω2
n = 0− ω2
n + ω2 + 2ζ2ω2n = 0
ωp = ωn√
1− 2ζ2
Mp = ω2n√
(ω2n − ω2
n + 2ζ2ω2n)2 + 4ζ2ω2
nω2n(1− 2ζ2)
= ω2n√
4ζ4ω4n + 4ζ2ω4
n − 8ζ4ω4n
= ω2n√
4ζ2ω4n − 4ζ4ω4
n
Mp = 12ζ√
1−ζ2
37/125
34
8.4. Relação entre Resposta Transitória de Malha Fechadae Resposta em Frequência de Malha Fechada
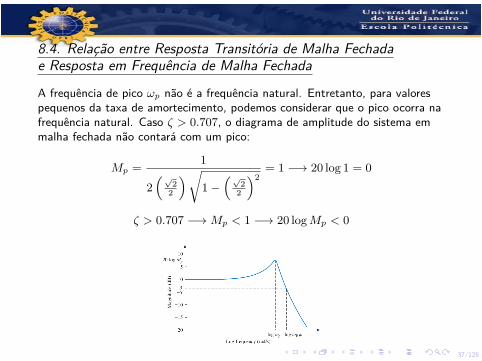
A frequência de pico ωp não é a frequência natural. Entretanto, para valorespequenos da taxa de amortecimento, podemos considerar que o pico ocorra nafrequência natural. Caso ζ > 0.707, o diagrama de amplitude do sistema emmalha fechada não contará com um pico:
Mp = 1
2(√
22
)√1−
(√2
2
)2= 1 −→ 20 log 1 = 0
ζ > 0.707 −→Mp < 1 −→ 20 logMp < 0

38/125
35
8.4. Relação entre Resposta Transitória de Malha Fechadae Resposta em Frequência de Malha Fechada
Velocidade de Resposta e Resposta em Frequência de Malha Fechada
A largura de banda ωBW da resposta em frequência de malha fechada pode serobtida através do tempo de assentamento, tempo de pico ou do tempo desubida da resposta no tempo. A largura de banda é definida aqui como afrequência na qual a curva do diagrama de amplitude é 3 dB menor que o valorna frequência zero.
A largura de banda de um sistema com dois pólos pode ser encontradadeterminando a frequência na qual M =
√2/2 (ou seja, −3 dB) na equação da
amplitude da resposta em frequência em malha fechada:
M =√
22 = ω2
n√(ω2n − ω2)2 + 4ζ2ω2
nω2
12 = ω4
n
(ω2n − ω2
BW)2 + 4ζ2ω2nω2
BW
39/125
36
8.4. Relação entre Resposta Transitória de Malha Fechadae Resposta em Frequência de Malha Fechada
ω4n − 2ω2
nω4BW + ω4
BW + 4ζ2ω2nω
2BW = 2ω4
n
ω4BW − 2ω2
n(1− 2ζ2)ω2BW = ω4
n[ω2BW − ω2
n(1− 2ζ2)]2 − ω4
n(1− 2ζ2)2 = ω4n[
ω2BW − ω2
n(1− 2ζ2)]2 = ω4
n
[1 + (1− 2ζ2)2] = ω4
n
(2− 4ζ2 + 4ζ4)
ω2BW − ω2
n(1− 2ζ2) = ω2n
√4ζ4 − 4ζ2 + 2
ω2BW = ω2
n
[(1− 2ζ2) +
√4ζ4 − 4ζ2 + 2
]ωBW = ωn
√(1− 2ζ2) +
√4ζ4 − 4ζ2 + 2
40/125
37
8.4. Relação entre Resposta Transitória de Malha Fechadae Resposta em Frequência de Malha Fechada
Para relacionar ωBW ao tempo de assentamento substituimos ωn = 4Tsζ
naequação anterior:
ωBW = 4Tsζ
√(1− 2ζ2) +
√4ζ4 − 4ζ2 + 2
Similarmente, para o tempo de pico substituimos ωn = π
Tp
√1−ζ2
:
ωBW = π
Tp
√1−ζ2
√(1− 2ζ2) +
√4ζ4 − 4ζ2 + 2

41/125
38
8.4. Relação entre Resposta Transitória de Malha Fechadae Resposta em Frequência de Malha Fechada
Não há uma relação precisa entre o tempo de subida e a taxa deamortecimento, então para os valores conhecidos ou desejados de Tr e ζpodemos obter o valor de ωn através do seguinte gráfico:
Por exemplo, suponha que ζ = 0.4 e Tr = 0.2 segundos. Através do gráficotemos que para ζ = 0.4, a ordenada Trωn é igual a 1.463, resultando nafrequência natural ωn = 1.463
0.2 = 7.315 rad/s. Substituindo os valores de ζ e ωnna equação da largura de banda, temos que ωBW = 10.05 rad/s.
42/125
39
8.4. Relação entre Resposta Transitória de Malha Fechadae Resposta em Frequência de Malha Fechada
Exemplo: Encontre a largura de banda em malha fechada de um sistema com20% de overshoot e 2 segundos de tempo de assentamento.
%OS = e−(ζπ/√
1−ζ2)· 100 −→ ζ = − ln(%OS/100)√
π2 + (ln(%OS/100))2
ζ = − ln(20/100)√π2 + (ln(20/100))2
= − ln(1/5)√π2 + (ln(1/5))2
= ln 5√π2 + ln2 5
ωBW = 4Tsζ
√(1− 2ζ2) +
√4ζ4 − 4ζ2 + 2
= 42 ·√π2 + ln2 5
ln 5
√√√√1− 2 ln2 5π2 + ln2 5
+
√4 ln4 5(
π2 + ln2 5)2 − 4 ln2 5
π2 + ln2 5+ 2
ωBW ≈ 5.79 rad/s

43/125
40
8.5. Relação entre Resposta Transitória de Malha Fechadae Resposta em Frequência de Malha Aberta
Taxa de Amortecimento a partir da Margem de Fase
A relação entre a margem de fase e a taxa de amortecimento nos permite obtero percentual de overshoot a partir margem de fase da resposta em frequênciade malha aberta.Seja um sistema de realimentação unitária cuja função em malha aberta seja
G(s) = ω2n
s(s+ 2ζωn)
Para calcularmos sua margem de fase, nós primeiramente encontramos afrequência na qual o módulo da resposta em frequência da função é igual a 1:
|G(jω)| = ω2n
| − ω2 + j2ζωnω|= 1
A frequência ω1 é então:
ω1 = ωn
√−2ζ2 +
√1 + 4ζ4
44/125
41
8.5. Relação entre Resposta Transitória de Malha Fechadae Resposta em Frequência de Malha Aberta
ω2n
| − ω2 + j2ζωnω|= 1√
ω4 + 4ζ2ω2nω2
1 = ω2n
ω41 + 4ζ2ω2
nω21 = ω4
n
(ω21 + 2ζ2ω2
n)2 − 4ζ4ω4n = ω4
n
(ω21 + 2ζ2ω2
n)2 = ω4n(1 + 4ζ4)
ω21 + 2ζ2ω2
n = ω2n
√1 + 4ζ4
ω21 = ω2
n
(−2ζ2 +
√1 + 4ζ4
)ω1 = ωn
√−2ζ2 +
√1 + 4ζ4

45/125
42
8.5. Relação entre Resposta Transitória de Malha Fechadae Resposta em Frequência de Malha Aberta
O ângulo de fase nesta frequência é:
∠G(jω1) = −90o − tan−1 ω1
2ζωn
= −90o − tan−1
√−2ζ2 +
√4ζ4 + 1
2ζ
A margem de fase ΦM é definida como a diferença entre este ângulo e −180o:
ΦM = 90o − tan−1
√−2ζ2 +
√4ζ4 + 1
2ζ
ΦM = tan−1 2ζ√−2ζ2 +
√4ζ4 + 1
46/125
43
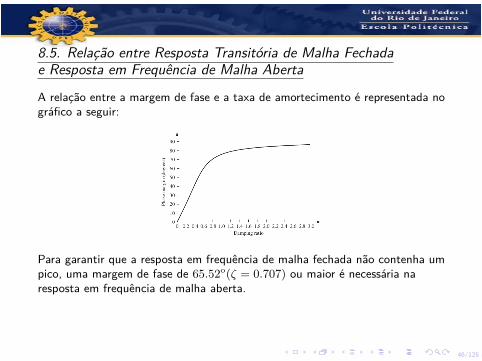
8.5. Relação entre Resposta Transitória de Malha Fechadae Resposta em Frequência de Malha Aberta
A relação entre a margem de fase e a taxa de amortecimento é representada nográfico a seguir:
Para garantir que a resposta em frequência de malha fechada não contenha umpico, uma margem de fase de 65.52o(ζ = 0.707) ou maior é necessária naresposta em frequência de malha aberta.
47/125
44
8.5. Relação entre Resposta Transitória de Malha Fechadae Resposta em Frequência de Malha Aberta
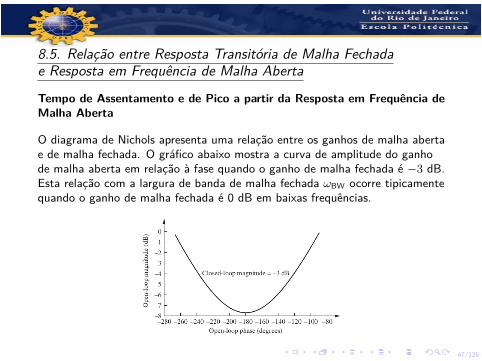
Tempo de Assentamento e de Pico a partir da Resposta em Frequência deMalha Aberta
O diagrama de Nichols apresenta uma relação entre os ganhos de malha abertae de malha fechada. O gráfico abaixo mostra a curva de amplitude do ganhode malha aberta em relação à fase quando o ganho de malha fechada é −3 dB.Esta relação com a largura de banda de malha fechada ωBW ocorre tipicamentequando o ganho de malha fechada é 0 dB em baixas frequências.

48/125
45
8.5. Relação entre Resposta Transitória de Malha Fechadae Resposta em Frequência de Malha Aberta
|T (jω1)| = 1 = ω2n√
(ω2n − ω2
1)2 + 4ζ2ω2nω2
1
(ω2n − ω2
1)2 + 4ζ2ω2nω
21 = ω4
n
ω41 − 2ω2
nω21 + 4ζ2ω2
nω21 = 0
ω1 = ωn√
2(1− 2ζ2)
|G(jω1)| = ω2n√
ω41 + 4ζ2ω2
nω21
= ω2n√
ω4n [2(1− 2ζ2)]2 + 8ζ2ω4
n(1− 2ζ2)
= 12√
1− 4ζ2 + 4ζ4 + 2ζ2 − 4ζ4= 1
2√
1− 2ζ2
ζ2 � 1 −→ |G(jω1)| = 12 −→ 20 log10
12 ≈ −6 dB
Nós podemos então considerar que a frequência ωBW corresponde à frequênciade malha aberta em que a amplitude esteja entre −6 e −7.5 dB se a faseestiver entre −135o e −225o.
49/125
46
8.5. Relação entre Resposta Transitória de Malha Fechadae Resposta em Frequência de Malha Aberta
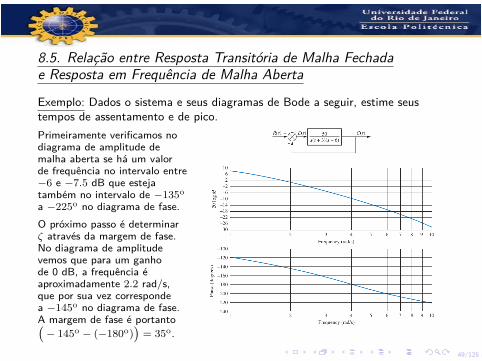
Exemplo: Dados o sistema e seus diagramas de Bode a seguir, estime seustempos de assentamento e de pico.Primeiramente verificamos nodiagrama de amplitude demalha aberta se há um valorde frequência no intervalo entre−6 e −7.5 dB que estejatambém no intervalo de −135o
a −225o no diagrama de fase.O próximo passo é determinarζ através da margem de fase.No diagrama de amplitudevemos que para um ganhode 0 dB, a frequência éaproximadamente 2.2 rad/s,que por sua vez correspondea −145o no diagrama de fase.A margem de fase é portanto(− 145o − (−180o)
)= 35o.
50/125
47
8.5. Relação entre Resposta Transitória de Malha Fechadae Resposta em Frequência de Malha Aberta
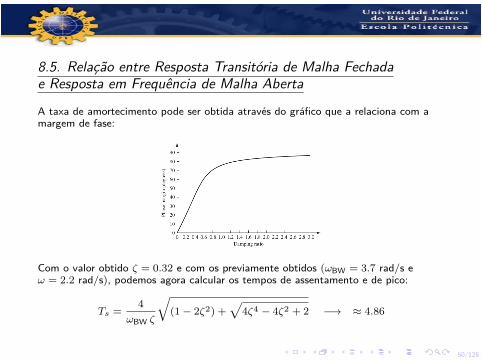
A taxa de amortecimento pode ser obtida através do gráfico que a relaciona com amargem de fase:
Com o valor obtido ζ = 0.32 e com os previamente obtidos (ωBW = 3.7 rad/s eω = 2.2 rad/s), podemos agora calcular os tempos de assentamento e de pico:
Ts =4
ωBW ζ
√(1− 2ζ2) +
√4ζ4 − 4ζ2 + 2 −→ ≈ 4.86
51/125
48
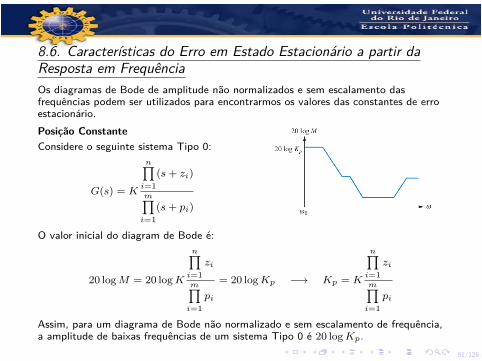
8.6. Características do Erro em Estado Estacionário a partir daResposta em FrequênciaOs diagramas de Bode de amplitude não normalizados e sem escalamento dasfrequências podem ser utilizados para encontrarmos os valores das constantes de erroestacionário.Posição ConstanteConsidere o seguinte sistema Tipo 0:
G(s) = K
n∏i=1
(s+ zi)
m∏i=1
(s+ pi)
O valor inicial do diagram de Bode é:
20 logM = 20 logK
n∏i=1
zi
m∏i=1
pi
= 20 logKp −→ Kp = K
n∏i=1
zi
m∏i=1
pi
Assim, para um diagrama de Bode não normalizado e sem escalamento de frequência,a amplitude de baixas frequências de um sistema Tipo 0 é 20 logKp.
52/125
49
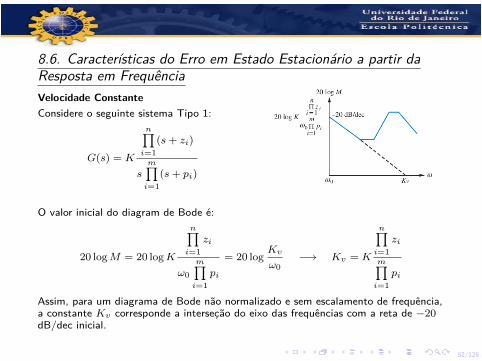
8.6. Características do Erro em Estado Estacionário a partir daResposta em FrequênciaVelocidade ConstanteConsidere o seguinte sistema Tipo 1:
G(s) = K
n∏i=1
(s+ zi)
sm∏i=1
(s+ pi)
O valor inicial do diagram de Bode é:
20 logM = 20 logK
n∏i=1
zi
ω0m∏i=1
pi
= 20 logKv
ω0−→ Kv = K
n∏i=1
zi
m∏i=1
pi
Assim, para um diagrama de Bode não normalizado e sem escalamento de frequência,a constante Kv corresponde a interseção do eixo das frequências com a reta de −20dB/dec inicial.
53/125
50
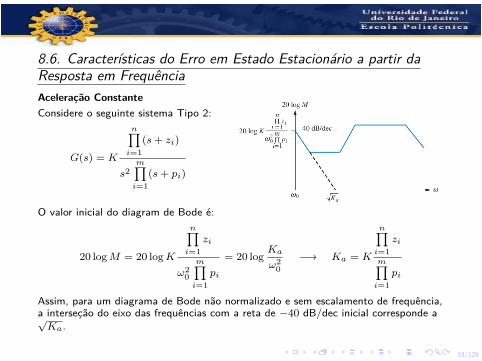
8.6. Características do Erro em Estado Estacionário a partir daResposta em FrequênciaAceleração ConstanteConsidere o seguinte sistema Tipo 2:
G(s) = K
n∏i=1
(s+ zi)
s2m∏i=1
(s+ pi)
O valor inicial do diagram de Bode é:
20 logM = 20 logK
n∏i=1
zi
ω20
m∏i=1
pi
= 20 logKa
ω20
−→ Ka = K
n∏i=1
zi
m∏i=1
pi
Assim, para um diagrama de Bode não normalizado e sem escalamento de frequência,a interseção do eixo das frequências com a reta de −40 dB/dec inicial corresponde a√Ka.
54/125
51
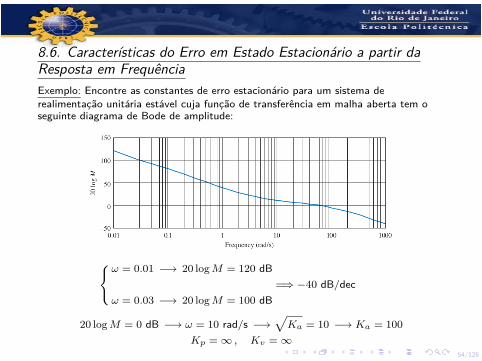
8.6. Características do Erro em Estado Estacionário a partir daResposta em FrequênciaExemplo: Encontre as constantes de erro estacionário para um sistema derealimentação unitária estável cuja função de transferência em malha aberta tem oseguinte diagrama de Bode de amplitude:
{ω = 0.01 −→ 20 logM = 120 dB
=⇒ −40 dB/decω = 0.03 −→ 20 logM = 100 dB
20 logM = 0 dB −→ ω = 10 rad/s −→√Ka = 10 −→ Ka = 100
Kp =∞ , Kv =∞

55/125
52
8.7. Sistemas com Atraso no TempoAs técnicas prévias de resposta em frequência podem ser utilizadas para lidar comsistemas com atraso no tempo se a resposta de fase for devidamente ajustada.Tipicamente o atraso no tempo reduz as margens de ganho e de fase, resultando emum aumento do percentual de overshoot ou na instabilidade da resposta em malhafechada.
+G(s) C(s) = R(s)G(s) c(t)
R(s) E(s) C(s)−
+G′(s) e−sTC(s) = R(s)G′(s) c(t− T )
R(s) E(s) C(s)−
Um sistema com atraso no tempo T pode ser representado em função de um sistemasem atraso no tempo equivalente:
G′(s) = e−sTG(s)
Ou em função da resposta em frequência:
G′(jω) = e−jωTG(jω) = |G(jω)|{∠− ωT + ∠G(jω)}
56/125
53
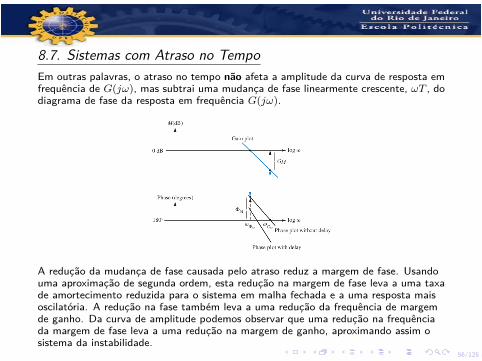
8.7. Sistemas com Atraso no TempoEm outras palavras, o atraso no tempo não afeta a amplitude da curva de resposta emfrequência de G(jω), mas subtrai uma mudança de fase linearmente crescente, ωT , dodiagrama de fase da resposta em frequência G(jω).
A redução da mudança de fase causada pelo atraso reduz a margem de fase. Usandouma aproximação de segunda ordem, esta redução na margem de fase leva a uma taxade amortecimento reduzida para o sistema em malha fechada e a uma resposta maisoscilatória. A redução na fase também leva a uma redução da frequência de margemde ganho. Da curva de amplitude podemos observar que uma redução na frequênciada margem de fase leva a uma redução na margem de ganho, aproximando assim osistema da instabilidade.
57/125
54
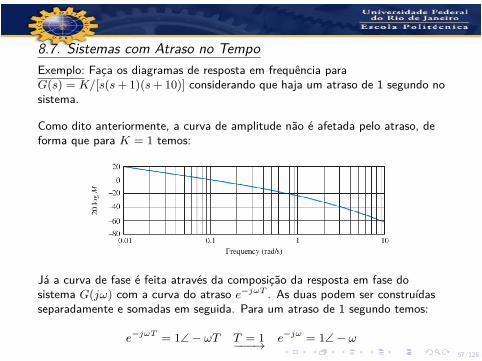
8.7. Sistemas com Atraso no TempoExemplo: Faça os diagramas de resposta em frequência paraG(s) = K/[s(s+ 1)(s+ 10)] considerando que haja um atraso de 1 segundo nosistema.
Como dito anteriormente, a curva de amplitude não é afetada pelo atraso, deforma que para K = 1 temos:
Já a curva de fase é feita através da composição da resposta em fase dosistema G(jω) com a curva do atraso e−jωT . As duas podem ser construídasseparadamente e somadas em seguida. Para um atraso de 1 segundo temos:
e−jωT = 1∠− ωT T = 1−−−→ e−jω = 1∠− ω
58/125
55
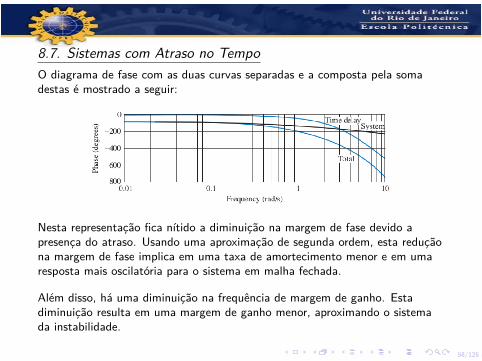
8.7. Sistemas com Atraso no TempoO diagrama de fase com as duas curvas separadas e a composta pela somadestas é mostrado a seguir:
Nesta representação fica nítido a diminuição na margem de fase devido apresença do atraso. Usando uma aproximação de segunda ordem, esta reduçãona margem de fase implica em uma taxa de amortecimento menor e em umaresposta mais oscilatória para o sistema em malha fechada.
Além disso, há uma diminuição na frequência de margem de ganho. Estadiminuição resulta em uma margem de ganho menor, aproximando o sistemada instabilidade.
59/125
56
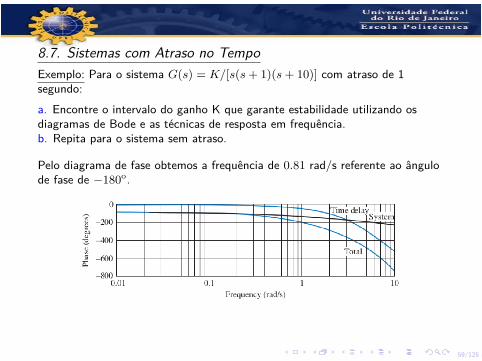
8.7. Sistemas com Atraso no TempoExemplo: Para o sistema G(s) = K/[s(s+ 1)(s+ 10)] com atraso de 1segundo:a. Encontre o intervalo do ganho K que garante estabilidade utilizando osdiagramas de Bode e as técnicas de resposta em frequência.b. Repita para o sistema sem atraso.
Pelo diagrama de fase obtemos a frequência de 0.81 rad/s referente ao ângulode fase de −180o.

60/125
57
8.7. Sistemas com Atraso no TempoEsta frequência de 0.81 rad/s corresponde, no diagrama de amplitude, a −20.39 dB.Logo a margem de ganho é de 20.39 dB.
20 logK
10= 20.39 −→ K = 10
20.3920 = 10.46
Portanto o sistema é estável para o intervalo 0 < K < 10.46.
Já para o sistema sem atraso, o ângulo de fase de −180o corresponde à frequência3.16 rad/s. Pelo diagrama de amplitude vemos que a margem de ganho é de 40.84dB, logo:
K = 1040.84
20 = 110.2O sistema sem atraso é estável para o intervalo 0 < K < 110.2.
61/125
58
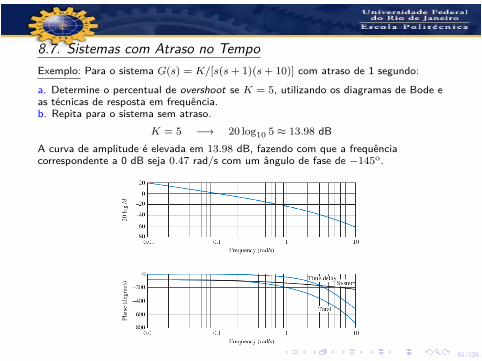
8.7. Sistemas com Atraso no TempoExemplo: Para o sistema G(s) = K/[s(s+ 1)(s+ 10)] com atraso de 1 segundo:
a. Determine o percentual de overshoot se K = 5, utilizando os diagramas de Bode eas técnicas de resposta em frequência.b. Repita para o sistema sem atraso.
K = 5 −→ 20 log10 5 ≈ 13.98 dBA curva de amplitude é elevada em 13.98 dB, fazendo com que a frequênciacorrespondente a 0 dB seja 0.47 rad/s com um ângulo de fase de −145o.
62/125
59
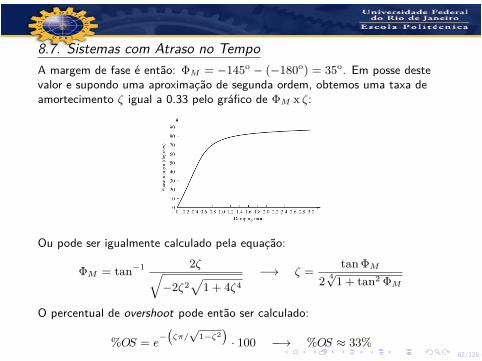
8.7. Sistemas com Atraso no TempoA margem de fase é então: ΦM = −145o − (−180o) = 35o. Em posse destevalor e supondo uma aproximação de segunda ordem, obtemos uma taxa deamortecimento ζ igual a 0.33 pelo gráfico de ΦM x ζ:
Ou pode ser igualmente calculado pela equação:
ΦM = tan−1 2ζ√−2ζ2
√1 + 4ζ4
−→ ζ = tan ΦM2 4√1 + tan2 ΦM
O percentual de overshoot pode então ser calculado:
%OS = e−(ζπ/√
1−ζ2)· 100 −→ %OS ≈ 33%
63/125
60
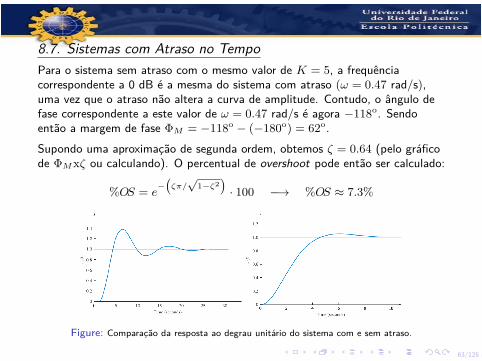
8.7. Sistemas com Atraso no TempoPara o sistema sem atraso com o mesmo valor de K = 5, a frequênciacorrespondente a 0 dB é a mesma do sistema com atraso (ω = 0.47 rad/s),uma vez que o atraso não altera a curva de amplitude. Contudo, o ângulo defase correspondente a este valor de ω = 0.47 rad/s é agora −118o. Sendoentão a margem de fase ΦM = −118o − (−180o) = 62o.Supondo uma aproximação de segunda ordem, obtemos ζ = 0.64 (pelo gráficode ΦMxζ ou calculando). O percentual de overshoot pode então ser calculado:
%OS = e−(ζπ/√
1−ζ2)· 100 −→ %OS ≈ 7.3%
Figure: Comparação da resposta ao degrau unitário do sistema com e sem atraso.

64/125
61
8.8. Obtendo Funções de Transferência ExperimentalmenteA determinação analítica da função de transferência de um sistema pode serdifícil. Os valores individuais dos componentes podem não ser conhecidos ou aconfiguração interna do sistema pode não ser acessível. Em tais casos, aresposta em frequência do sistema pode ser obtida experimentalmente e usadapara determinar a função de transferência. Para obter um diagrama de respostaem frequência experimentalmente, aplicamos um sinal senoidal na entrada dosistema e medimos na saída a amplitude e o ângulo de fase em estadoestacionário. Repetindo este processo para um número considerável defrequências obtemos dados suficientes para esboçarmos os diagramas deresposta em frequência. A resposta em amplitude é M(ω) = Mo(ω)Mi(ω) e aresposta em fase φ(ω) = φo(ω)− φi(ω). Uma vez que a resposta emfrequência é obtida, a função de transferência do sistema pode ser estimada apartir das frequências de corte e dos declives.

65/125
62
8.8. Obtendo Funções de Transferência Experimentalmente
Os diagramas de Bode são representações convenientes dos dados de respostaem frequência para estimarmos a função de transferência. Eles permitem quepartes da função de transferência sejam determinadas e, posteriormente, umnível maior de refinamento pode ser utilizado para identificar as partesremanescentes da função de transferência.
Os seguintes passos são orientações para o processo:1. A partir dos diagramas de Bode de amplitude e de fase, estime os pólos ezeros do sistema. Determine o tipo do sistema pelo declive inicial no diagramade amplitude. Veja a excursão da fase para ter uma ideia da diferença entre onúmero de pólos e o de zeros.2. Verifique se partes das curvas de amplitude e fase apresentam pólos ou zerosde primeira ou segunda ordem óbvios nos diagramas de resposta em frequência.
3. Verifique se há algum indicador de pico ou depressão no diagrama deresposta em amplitude que indique respectivamente um pólo ou zerosub-amortecido.
66/125
63
8.8. Obtendo Funções de Transferência Experimentalmente
4. Se qualquer resposta de pólos ou zeros puder ser identificada, sobreponha ascurvas de amplitude ou de fase com, respectivamente, retas de ±20 ou ±40dB/década ou ±45o/década, e estime as frequências de corte. Para pólos ouzeros de segunda ordem, estime a taxa de amortecimento e a frequêncianatural a partir das curvas padrão mostradas na Seção 2.5. Crie uma função de transferência de ganho unitário utilizando os pólos ezeros encontrados. Obtenha a resposta em frequência desta função detransferência e a subtraia da resposta em frequência anterior. Como resultadotemos uma resposta em frequência de complexidade reduzida a partir da qualreiniciamos o processo para extrair mais pólos e zeros do sistema original.Softwares como MATLAB facilitam muito este passo.
67/125
64
8.9. Resposta Transitória Através do Ajuste de Ganho
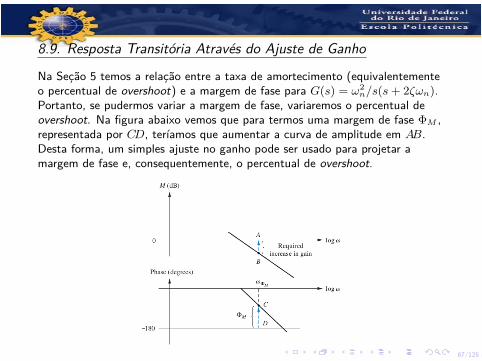
Na Seção 5 temos a relação entre a taxa de amortecimento (equivalentementeo percentual de overshoot) e a margem de fase para G(s) = ω2
n/s(s+ 2ζωn).Portanto, se pudermos variar a margem de fase, variaremos o percentual deovershoot. Na figura abaixo vemos que para termos uma margem de fase ΦM ,representada por CD, teríamos que aumentar a curva de amplitude em AB.Desta forma, um simples ajuste no ganho pode ser usado para projetar amargem de fase e, consequentemente, o percentual de overshoot.

68/125
65
8.9. Resposta Transitória Através do Ajuste de Ganho
Procedimento usando a resposta em frequência de malha aberta(supondo pólos de segunda ordem dominantes em malha fechada):1. Esboce os diagramas de Bode de amplitude e de fase para um valorconveniente de ganho.2. Utilizando as equações
ζ = − ln(%OS/100)√π2 + ln2(%OS/100)
, ΦM = tan−1 2ζ√−2ζ2 +
√1 + 4ζ4
,
determine a margem de fase necessária a partir do percentual de overshoot.3. Encontre a frequência ωΦM no diagrama de fase de Bode que leve à margemde fase CD (como mostrado na figura anterior).4. Altere o ganho em um valor AB para forçar que a curva de amplitude passepor 0 dB em ωΦM . O valor do ajuste de ganho é o ganho adicional necessáriopara produzir a margem de fase necessária.
69/125
66
8.9. Resposta Transitória Através do Ajuste de Ganho
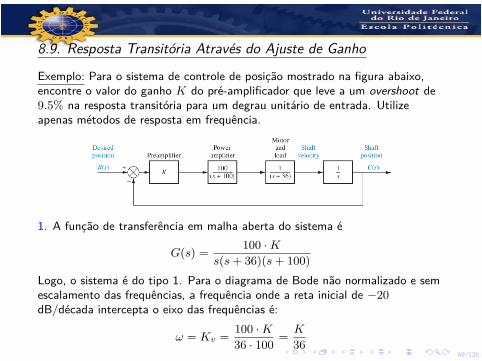
Exemplo: Para o sistema de controle de posição mostrado na figura abaixo,encontre o valor do ganho K do pré-amplificador que leve a um overshoot de9.5% na resposta transitória para um degrau unitário de entrada. Utilizeapenas métodos de resposta em frequência.
1. A função de transferência em malha aberta do sistema é
G(s) = 100 ·Ks(s+ 36)(s+ 100)
Logo, o sistema é do tipo 1. Para o diagrama de Bode não normalizado e semescalamento das frequências, a frequência onde a reta inicial de −20dB/década intercepta o eixo das frequências é:
ω = Kv = 100 ·K36 · 100 = K
36

70/125
67
8.9. Resposta Transitória Através do Ajuste de Ganho
Para uma amplitude de 0 dB em ω = 0.1 temos que K = 3.6.2. Determinando a margem de fase a partir do percentual de overshoot:
ζ = − ln(%OS/100)√π2 + ln2(%OS/100)
= − ln(9.5/100)√π2 + ln2(9.5/100)
≈ 0.6
ΦM = tan−1 2ζ√−2ζ2 +
√1 + 4ζ4
= tan−1 2 · 0.6√−2(0.6)2 +
√1 + 4(0.6)4
≈ tan−1 1.68 ≈ 59.2o
71/125
68
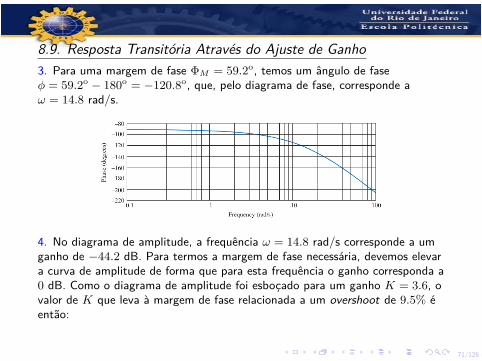
8.9. Resposta Transitória Através do Ajuste de Ganho3. Para uma margem de fase ΦM = 59.2o, temos um ângulo de faseφ = 59.2o − 180o = −120.8o, que, pelo diagrama de fase, corresponde aω = 14.8 rad/s.
4. No diagrama de amplitude, a frequência ω = 14.8 rad/s corresponde a umganho de −44.2 dB. Para termos a margem de fase necessária, devemos elevara curva de amplitude de forma que para esta frequência o ganho corresponda a0 dB. Como o diagrama de amplitude foi esboçado para um ganho K = 3.6, ovalor de K que leva à margem de fase relacionada a um overshoot de 9.5% éentão:
72/125
69
8.9. Resposta Transitória Através do Ajuste de Ganho
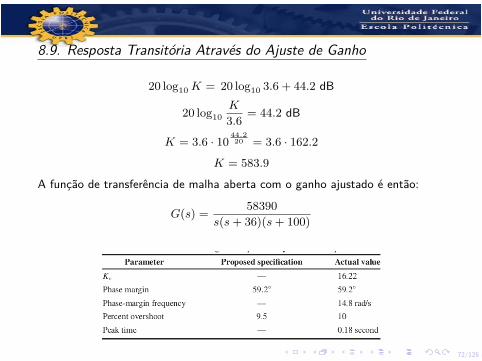
20 log10 K = 20 log10 3.6 + 44.2 dB
20 log10K
3.6 = 44.2 dB
K = 3.6 · 1044.2
20 = 3.6 · 162.2
K = 583.9
A função de transferência de malha aberta com o ganho ajustado é então:
G(s) = 58390s(s+ 36)(s+ 100)

73/125
70
8.9. Resposta Transitória Através do Ajuste de GanhoExemplo: Para o sistema de realimentação unitária com função de transferênciaem malha aberta
G(s) = K
s(s+ 50)(s+ 120)utilize técnicas de resposta em frequência para encontrar o valor de ganho Kque resulte em uma resposta ao degrau unitário em malha fechada com 20% deovershoot.
1. Pela função de transferência, sabemos que o sistema é do tipo 1, logo afrequência que intercepta o eixo das frequência no diagrama de amplitude é:
ω = Kv = K
50 · 120 = K
6000Para uma amplitude de 0 dB em ω = 0.1, temos K = 600.2. A taxa de amortecimento para 20% de overshoot é:
ζ = − ln(20/100)√π2 + ln2(20/100)
≈ 0.45

74/125
71
8.9. Resposta Transitória Através do Ajuste de GanhoTemos então a margem de fase:
ΦM = tan−1 2 · 0.45√−2(0.45)2 +
√1 + 4(0.45)4
≈ 47.6o
75/125
72
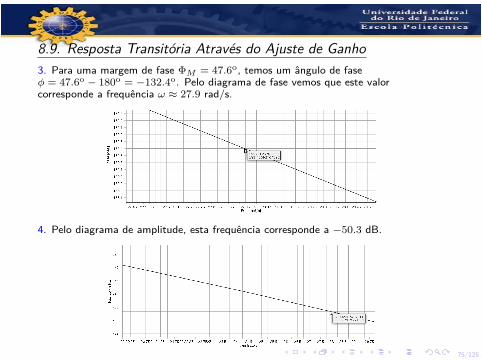
8.9. Resposta Transitória Através do Ajuste de Ganho3. Para uma margem de fase ΦM = 47.6o, temos um ângulo de faseφ = 47.6o − 180o = −132.4o. Pelo diagrama de fase vemos que este valorcorresponde a frequência ω ≈ 27.9 rad/s.
4. Pelo diagrama de amplitude, esta frequência corresponde a −50.3 dB.

76/125
73
8.9. Resposta Transitória Através do Ajuste de GanhoComo o diagrama de amplitude foi esboçado para um ganho K = 600, o valorde K que leva à margem de fase relacionada a um overshoot de 20% é:
20 log10 K = 20 log10 600 + 50.3 dB
20 log10K
600 = 50.3 dB
K = 600 · 1050.3
20
K ≈ 196404A função de transferência de malha aberta com o ganho ajustado é então:
G(s) = 196404s(s+ 50)(s+ 120)
77/125
74
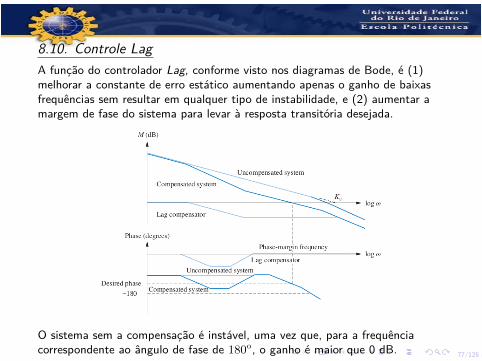
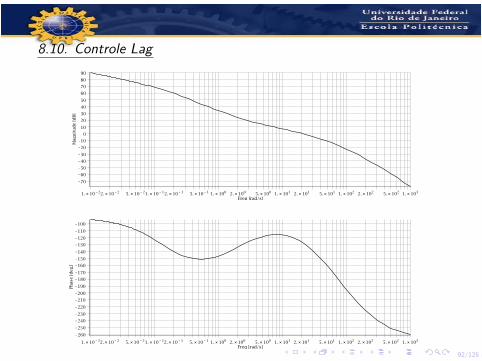
8.10. Controle LagA função do controlador Lag, conforme visto nos diagramas de Bode, é (1)melhorar a constante de erro estático aumentando apenas o ganho de baixasfrequências sem resultar em qualquer tipo de instabilidade, e (2) aumentar amargem de fase do sistema para levar à resposta transitória desejada.
O sistema sem a compensação é instável, uma vez que, para a frequênciacorrespondente ao ângulo de fase de 180o, o ganho é maior que 0 dB.
78/125
75
8.10. Controle LagO controlador Lag reduz o ganho de altas frequências, mas mantém inalteradoo ganho de baixas frequências. Portanto, o ganho de baixas frequências dosistema pode ser alto, levando a um maior Kv, sem tornar o sistema instável.A estabilização ocorre porque a compensação reduz o ganho para menos que 0dB na frequência referente ao ângulo de fase de 180o.Procedimento para o projeto do Controlador Lag :1. Ajuste o ganho K para o valor que satisfaça a especificação do erro deestado estacionário e esboçe os diagramas de Bode de amplitude e de fase paraeste valor de ganho.2. Encontre a frequência onde a margem de fase é de 5 a 12o maior que amargem de fase que resulta na resposta transitória desejada. Este passo visacompensar a possível contribuição, feita pelo controle Lag, de −5 a −12o defase na frequência da margem de fase.3. Selecione um controlador Lag cuja resposta em amplitude resulte em umdiagrama de amplitude composto que passe por 0 dB na frequênciadeterminada no passo 2, da seguinte forma: Esboce a assíntota de altasfrequências do controlador que resulta em 0 dB do sistema compensado nafrequência determinada.
79/125
76
8.10. Controle Lag
Desta forma, se o ganho nesta frequência é 20 logKPM, a assíntota de altasfrequências do controlador Lag deve ser ajustada para −20 logKPM. Selecionea frequência de corte superior de forma que ela esteja uma década abaixo dafrequência calculada no passo 2 e ajuste a assíntota de baixas frequências em 0dB. Conecte as assíntotas de altas e baixas frequências com uma reta de −20dB/década para localizar a menor frequência de corte.4. Reajuste o ganho K do sistema para compensar qualquer atenuação nocontrole Lag, de forma que a constante de erro estático (Kv) se mantenha amesma da encontrada no passo 1.
A função de transferência do controlador Lag é:
Gc(s) =s+ 1
T
s+ 1αT
onde α > 1.

80/125
77
8.10. Controle Lag
Figure: Diagrama de Bode do controlador Lag Gc(s) = (s + 0.1)/(s + 0.01).
A margem de fase é projetada no intervalo de altas frequências. As característicasatenuadoras desta região reduzem o ganho em malha aberta até 1 (0 dB) nafrequência da margem de fase. A resposta de fase do controlador terá um efeitomínimo no projeto da margem de fase nesta região.
81/125
78
8.10. Controle Lag
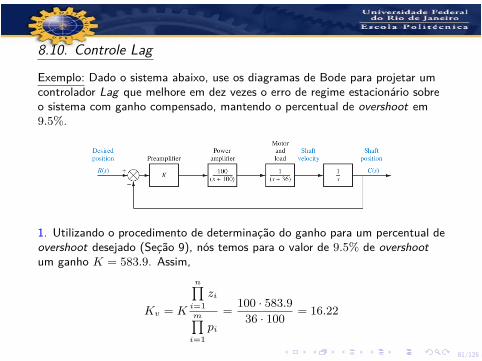
Exemplo: Dado o sistema abaixo, use os diagramas de Bode para projetar umcontrolador Lag que melhore em dez vezes o erro de regime estacionário sobreo sistema com ganho compensado, mantendo o percentual de overshoot em9.5%.
1. Utilizando o procedimento de determinação do ganho para um percentual deovershoot desejado (Seção 9), nós temos para o valor de 9.5% de overshootum ganho K = 583.9. Assim,
Kv = K
n∏i=1
zi
m∏i=1
pi
= 100 · 583.936 · 100 = 16.22
82/125
79
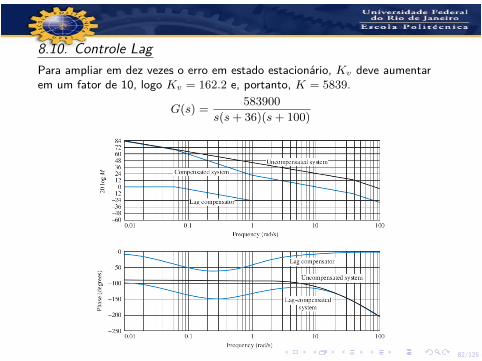
8.10. Controle LagPara ampliar em dez vezes o erro em estado estacionário, Kv deve aumentarem um fator de 10, logo Kv = 162.2 e, portanto, K = 5839.
G(s) = 583900s(s+ 36)(s+ 100)
83/125
80
8.10. Controle Lag
2. Para o percentual de overshoot de 9.5%, temos uma taxa de amortecimentoζ = 0.6 e uma margem de fase ΦM = 59.2o. Precisamos de uma margem defase que seja entre 5 a 12o maior que a calculada para compensar o acréscimoao ângulo de fase feito pelo controlador Lag. Escolhemos aumentar em 10o amargem de fase, ou seja, ΦM = 69.2o. Temos então um ângulo de faseφ = 69.2o − 180o = −110.8o e, pelo diagrama de fase, vemos que correspondeà frequência ω = 9.8 rad/s.Na frequência ω = 9.8 rad/s, o diagrama deve corresponder ao ganho de 0 dB.A amplitude nesta frequência é de 24 dB, portanto, o controle Lag deve (nestafrequência) fazer uma atenuação de −24 dB.
3. Para o projeto do controle Lag, começamos com a assíntota em −24 dB nodiagrama de amplitude. A frequência de corte superior é selecionada comosendo uma década abaixo da frequência ω calculada, ou seja, ωUB = 0.98rad/s. Traçamos a partir desta frequência até o ganho de 0 dB (da direita paraa esquerda), uma reta de inclinação de 20 dB/década. A frequência na qual areta encontra o ganho de 0 dB é a frequência de corte inferior, que, neste caso,é ωLB = 0.062 rad/s.
84/125
81
8.10. Controle Lag
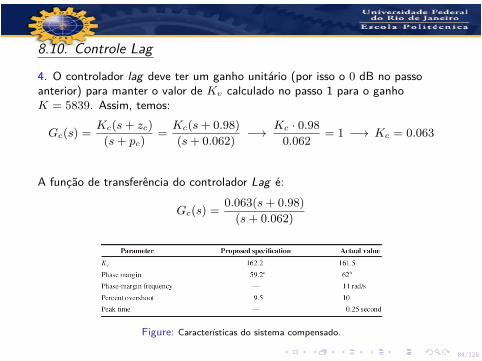
4. O controlador lag deve ter um ganho unitário (por isso o 0 dB no passoanterior) para manter o valor de Kv calculado no passo 1 para o ganhoK = 5839. Assim, temos:
Gc(s) = Kc(s+ zc)(s+ pc)
= Kc(s+ 0.98)(s+ 0.062) −→ Kc · 0.98
0.062 = 1 −→ Kc = 0.063
A função de transferência do controlador Lag é:
Gc(s) = 0.063(s+ 0.98)(s+ 0.062)
Figure: Características do sistema compensado.
85/125
82
8.10. Controle Lag
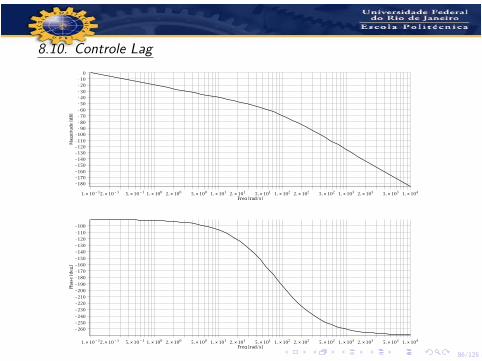
Exemplo: Projete um controlador Lag para o sistema
G(s) = K
s(s+ 50)(s+ 120)
que melhore em dez vezes o erro de estado estacionário, e com uma respostaao degrau de malha fechada com 20% de overshoot.Solução:1.1. A função de transferência em malha aberta G(s) apresenta 1 pólo em 0,portanto é um sistema do tipo 1. A frequência ω onde a reta inicial de −20 dB/década intercepta o eixo das frequências é igual a constante de velocidadesKv, que por sua vez é igual a:
Kv = K
50 · 120 = K
6000Escolhendo esta frequência como 0.1, temos K = 600.Os diagramas de Bode da função de transferência do sistema em malha abertapara este valor de K são mostrados a seguir.
86/125
83
8.10. Controle Lag

87/125
84
8.10. Controle Lag
1.2. Agora temos que determinar a margem de fase para o percentual deovershoot desejado. Começamos identificando a taxa de amortecimento:
ζ = − ln(%OS/100)√π2 + ln2(%OS/100)
= − ln(20/100)√π2 + ln2(20/100)
= 0.45
Em posse deste valor, calculamos a margem de fase:
ΦM = tan−1 2ζ√−2ζ2 +
√1 + 4ζ4
= 47.6o
1.3. Para a margem de fase calculada, devemos ter um ângulo de fase
φ = ΦM − 180o = −132.4o
que corresponde à frequência 27.9 rad/s no diagrama de fase.1.4. No diagrama de amplitude vemos que esta frequência corresponde a −50.3dB. Pra margem de fase de 47.6o, necessária para os 20% de overshoot,devemos ter uma amplitude de 0 dB nesta frequência de 27.9 rad/s.
88/125
85
8.10. Controle Lag
Portanto, devemos ajustar o ganho para forçar que a amplitude seja 0 dB emω = 27.9 rad/s.
20 log10 K = 20 log10 600 + 50.3
K = 600 · 1050.3
20 = 196404e, correspondentemente,
Kv = K/6000 = 32.734
1.5. Uma vez que o sistema é do tipo 1, sabemos que o erro de estadoestacionário é 0 pra entrada degrau, constante para rampa e infinito paraparábola. Então, considerando uma rampa de entrada, temos o erro:
ess = 1Kv
= 132.734
Contudo, para atendermos a demanda de um erro melhorado em 10 vezes (ouseja, 10 vezes menor), devemos ter um aumento em 10 vezes no valor de Kv:
e∗ss = ess10 = 1
10 ·Kv= 1
327.34
89/125
86
8.10. Controle Lag
Logo, K também deve aumentar 10 vezes. Assim, a função de transferência dosistema em malha aberta é:
G(s) = 1964040s(s+ 50)(s+ 120)
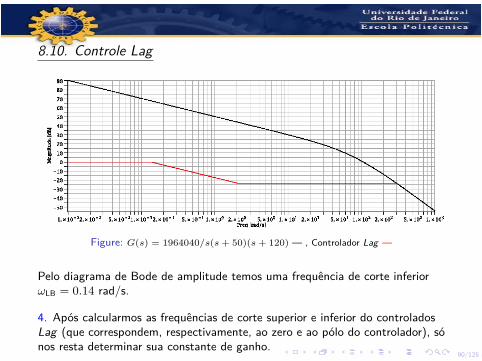
2. Para compensar a contribuição do controlador Lag ao ângulo de fase,somamos 10o à margem de fase (ΦM = 57.6o), resultando num ângulo de faseφ = −122.4o. No diagrama de fase a frequência correspondente a este ângulo éde ω = 20 rad/s.
3. No diagrama de amplitude, vemos que nesta frequência a amplitude é de23.5 dB. Ou seja, o controle Lag deve então fazer uma atenuação de −23.5 dBpara que esta frequência corresponda a 0 dB.Nós começamos o projeto do controle Lag ajustando a frequência de cortesuperior para uma década abaixo da frequência calculada: ωUB = 2 rad/s. Apartir deste valor nós traçamos uma reta de −20 dB/década até chegarmos a 0dB, determinando assim a frequência de corte inferior.
90/125
87
8.10. Controle Lag
Figure: G(s) = 1964040/s(s + 50)(s + 120) — , Controlador Lag —
Pelo diagrama de Bode de amplitude temos uma frequência de corte inferiorωLB = 0.14 rad/s.
4. Após calcularmos as frequências de corte superior e inferior do controladosLag (que correspondem, respectivamente, ao zero e ao pólo do controlador), sónos resta determinar sua constante de ganho.

91/125
88
8.10. Controle Lag
Glag(s) = K(s+ 2)(s+ 0.14)
Glag(s)|s→0 = 1 = K · 20.14 −→ K = 0.07
Glag(s) = 0.07(s+ 2)(s+ 0.14)
Esta é então a função de transferência do controlador Lag para o sistema emmalha aberta
G(s) = 1964040s(s+ 50)(s+ 120)
Os diagramas de Bode de amplitude e fase com a compensação são mostradosa seguir.
92/125
89
8.10. Controle Lag

93/125
90
8.11. Controle Lead
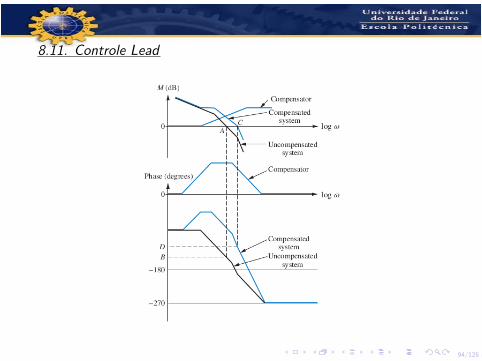
Para sistemas de segunda ordem, nós obtemos a relação entre a margem defase e o percentual de overshoot assim como a relação entre largura de bandaem malha fechada e outras especificações no domínio do tempo como tempode assentamento, tempo de pico e tempo de subida. Quando projetamos ocontrolador Lag para melhorar o erro de estado estacionário, nós desejávamosum efeito mínimo no diagrama de fase de forma a produzir uma mudançaimperceptível na resposta transitória. Entretanto, ao projetarmos o controladorLead com os diagramas de Bode, nós queremos alterar o diagrama de fase.Queremos aumentar a margem de fase para reduzir o percentual de overshoot eaumentar a frequência onde a curva de amplitude cruza 0 dB para realizar umaresposta transitória mais rápida.
O controlador Lead aumenta a largura de banda pelo aumento da frequênciaonde a curva de amplitude cruza o eixo das frequências. Ao mesmo tempo, acurva de fase é aumentada em altas frequências. Como resultado temos umamargem de fase maior (o que resulta em um percentual de overshoot menor) euma frequência da margem de fase maior (o que resulta em um tempo de picomenor).
94/125
91
8.11. Controle Lead
95/125
92
8.11. Controle Lead
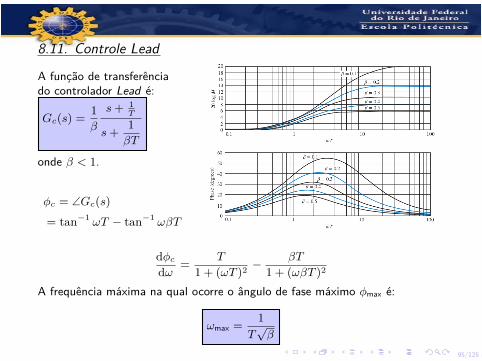
A função de transferênciado controlador Lead é:
Gc(s) = 1β
s+ 1T
s+ 1βT
onde β < 1.
φc = ∠Gc(s)= tan−1 ωT − tan−1 ωβT
dφcdω = T
1 + (ωT )2 −βT
1 + (ωβT )2
A frequência máxima na qual ocorre o ângulo de fase máximo φmax é:
ωmax = 1T√β
96/125
93
8.11. Controle Lead
Gc(s = jωmax) = 1β
jωmax + 1T
jωmax + 1βT
=j
1√β
+ 1
jβ + 1
|Gc(jωmax)| =1√β
φc = tan−1 ωT − tan−1 ωβT
tanφc = tan(tan−1 ωT − tan−1 ωβT )
= tan(tan−1 ωT )− tan(tan−1 ωβT )1 + tan(tan−1 ωT ) tan(tan−1 ωβT )
= ωT − ωβT1 + (ωT )(ωβT ) = ωT (1− β)
1 + ω2T 2β
tanφmax = ωmaxT (1− β)1 + ω2
maxT 2β= 1− β
2√β
φmax = tan−1 1− β2√β
= sin−1 1− β1 + β
97/125
94
8.11. Controle LeadProcedimento para o projeto do Controlador Lead :1. Encontre a largura de banda em malha fechada necessária para atender osrequisitos de tempo de assentamento, tempo de pico ou tempo de subida.
ωBW = ωn
√(1− 2ζ2) +
√4ζ4 − 4ζ2 + 2
ωBW = 4Tsζ
√(1− 2ζ2) +
√4ζ4 − 4ζ2 + 2
ωBW = π
Tp√
1− ζ2
√(1− 2ζ2) +
√4ζ4 − 4ζ2 + 2
2. Uma vez que o efeito em baixas frequências do controlador Lead é nulo,ajuste o ganho K do sistema não compensado para o valor que atenda orequisito de erro de estado estacionário.3. Esboçe os diagramas de Bode de amplitude e fase para este valor de ganhoe determine a margem de fase do sistema não compensado.
98/125
95
8.11. Controle LeadProcedimento para o projeto do Controlador Lead :4. Encontre a margem de fase exigida pela taxa de amortecimento oupercentual de overshoot. Em seguida, calcule a contribuição de fase adicionalque o controlador Lead deve prover para corrigir a redução de fase causadapelo sistema original.5. Determine o valor de β a partir da contribuição de fase requerida pelocontrolador Lead.
φc = tan−1 ωT − tan−1 ωβT
φmax = tan−1 1− β2√β
= sin−1 1− β1 + β
6. Determine a amplitude do controlador Lead na frequência do pico da curvade fase.
|Gc(jωmax)| =1√β

99/125
96
8.11. Controle LeadProcedimento para o projeto do Controlador Lead :7. Determine a nova frequência de margem de fase encontrando onde a curvade amplitude do sistema não compensado tem sinal oposto da curva deamplitude do controlador Lead na frequência do pico da curva de fase.8. Projete as frequências de corte do controlador Lead usando
Gc(s) = 1β
s+ 1T
s+ 1βT
ωmax = 1T√β
para encontrar T e as frequências de corte.9. Reajuste o ganho do sistema para compensar o ganho do controlador Lead.10. Confira a largura de banda para garantir que o requisito de velocidade dopasso 1 tenha sido cumprido.11. Faça uma simulação para checar todos os requisitos. Reprojete, senecessário, para atendê-los.
100/125
97
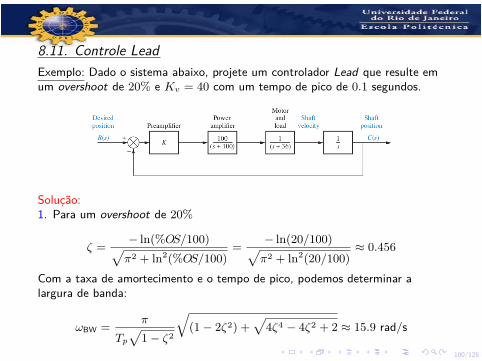
8.11. Controle LeadExemplo: Dado o sistema abaixo, projete um controlador Lead que resulte emum overshoot de 20% e Kv = 40 com um tempo de pico de 0.1 segundos.
Solução:1. Para um overshoot de 20%
ζ = − ln(%OS/100)√π2 + ln2(%OS/100)
= − ln(20/100)√π2 + ln2(20/100)
≈ 0.456
Com a taxa de amortecimento e o tempo de pico, podemos determinar alargura de banda:
ωBW = π
Tp√
1− ζ2
√(1− 2ζ2) +
√4ζ4 − 4ζ2 + 2 ≈ 15.9 rad/s

101/125
98
8.11. Controle Lead
2. Para um sistema do tipo 1, o erro de estado estacionário é ess = 1/Kv. Paraatender o requisito Kv = 40, o ganho K do sistema em malha aberta é obtidoda seguinte forma:
Kv = lims→0
s ·G(s) = lims→0
s · 100 ·Ks(s+ 36)(s+ 100) = 100 ·K
36 · 100
K = 36 ·Kv = 36 · 40
K = 1440
A função de transferência é então:
G(s) = 144000s(s+ 36)(s+ 100)
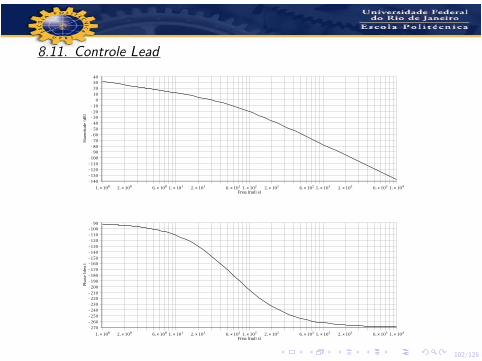
3. Os diagramas de Bode de amplitude e de fase do sistema não compensado émostrado a seguir.
102/125
99
8.11. Controle Lead
103/125
100
8.11. Controle LeadNo diagrama de amplitude, vemos que a frequência correpondente ao valor deganho 0 dB é de 30 rad/s. No diagrama de fase esta frequência corresponde aoângulo −146.5o. A margem de fase do sistema não compensado é então:
ΦM = −146.5o − (−180o) = 33.5o
4. A margem de fase necessária para um overshoot de 20% (ζ = 0.456) é de
ΦM = tan−1 = 2ζ√−2ζ2 +
√1 + 4ζ4
≈ 48.1o
Nós sabemos que o controlador Lead também aumentará a frequência damargem de fase, então adicionamos um fator de correção para compensar oângulo de fase menor do sistema não compensado nesta frequência de margemde fase maior. Como não sabemos qual o valor desta frequência, supomos umfator de correção de 10o. Assim, a contribuição de fase adicional necessária éde 48.1o − 33.5o + 10o = 24.6o.
104/125
101
8.11. Controle Lead5. A partir da contribuição de fase φmax = 24.6o, temos
φmax = sin−1 1− β1 + β
−→ β = 1− sinφmax
1 + sinφmax≈ 0.42
6. A amplitude do controlador Lead na frequência de pico da curva de fase é
|Gc(jωmax)| =1√β≈ 1.542 −→ 20 log10 1.542 ≈ 3.76 dB
7. Se escolhermos ωmax como a nova frequência da margem de fase, aamplitude do sistema não compensado deve diminuir em 3.76 dB nestafrequência de forma a chegar a 0 dB no sistema com o controle Lead. Porinspeção do diagrama de amplitude, vemos que o sistema não compensado temuma frequência ω = 38.9 rad/s no valor de amplitude −3.76 dB. A novafrequência de margem de fase é então ωmax = 38.9 rad/s.8. Com ωmax e β determinados podemos agora determinar T :
ωmax = 1T√β−→ T = 1
ωmax√β≈ 0.0397
105/125
102
8.11. Controle LeadAs frequências de corte inferior e superior são,
ωLB = 1T≈ 25.2 rad/s
ωUB = 1βT≈ 60.0 rad/s
9. A função de transferência do controlador Lead é
Gc(s) = 1β
s+ 1T
s+ 1βT
= 2.38 s+ 25.2s+ 60
A função de transferência com a adição do controlador Lead :
Gc(s)G(s) = 342720(s+ 25.2)s(s+ 36)(s+ 100)(s+ 60)
Os diagramas de amplitude e de fase são mostrados a seguir.

106/125
103
8.11. Controle Lead
107/125
104
8.11. Controle Lead10. Na Seção 5, nós vimos que podemos considerar que a frequência ωBW (damalha fechada) corresponde à frequência de malha aberta em que a amplitudeesteja entre −6 e −7.5 dB se a fase estiver entre −135o e −225o.No diagrama de amplitude vemos que para −7 dB temos uma frequência de66.6 rad/s (que no diagrama de fase corresponde a −164o), a qualconsideramos como sendo a largura de banda do sistema em malha fechada.Como este valor excede o valor calculado no primeiro passo, o requisito dotempo de pico foi cumprido.11. Agora checamos os resultados obtidos com os requisitados.
Kv = lims→0
s ·Gc(s)G(s) = 342720 · 25.236 · 100 · 60 = 39.984
No diagrama de amplitude vemos que a curva cruza 0 dB na frequência 38.8rad/s que, no diagrama de fase, corresponde ao ângulo de fase −134.5o. Amargem de fase é então ΦM = 45.5o. A taxa de amortecimento e o percentualde overshoot são, respectivamente:
ζ = tan ΦM2 4√1 + tan2 ΦM
≈ 0.42 , %OS = e−(ζπ/√
1−ζ2)· 100 ≈ 23.3%

108/125
105
8.11. Controle Lead
Figure: Resposta ao degrau unitário do sistema em malha fechada. Tp ≈ 0.073 s
O percentual de overshoot está acima do desejado e o tempo de picoadiantado. Se estas diferenças não forem aceitáveis, devemos reiniciar o projeto.
109/125
106
8.12. Controle Lead-Lag
Um controlador do tipo Lead-Lag pode ser feito por partes: o controlador Lagpode ser projetado para diminuir o ganho em altas frequências, estabilizar osistema e melhorar o erro de estado estacionário, e então projetar o controladorLead para obter os requisitos de margem de fase. Porém, é mais econômicouma única rede passiva que realize ambas as tarefas.A função de transferência do controlador Lead-Lag é:
Gc(s) = GLead(s)GLag(s) =
s+ 1T1
s+ γ
T1
s+ 1
T2
s+ 1γT1
onde γ > 1. As constantes α e β dos controladores Lag e Lead,respectivamente, são substituidas por este único valor γ.
110/125
106
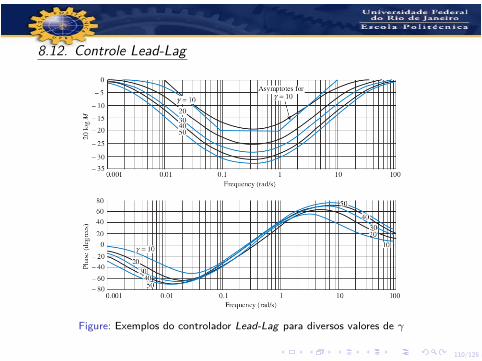
8.12. Controle Lead-Lag
Figure: Exemplos do controlador Lead-Lag para diversos valores de γ
111/125
107
8.12. Controle Lead-LagProcedimento para o projeto do Controlador Lead-Lag :1. Utilizando uma aproximação de segunda ordem, encontre a largura de bandaem malha fechada necessária para atender aos requisitos de tempo deassentamento, tempo de pico ou tempo de subida.
ωBW = ωn
√(1− 2ζ2) +
√4ζ4 − 4ζ2 + 2
ωBW = 4Tsζ
√(1− 2ζ2) +
√4ζ4 − 4ζ2 + 2
ωBW = π
Tp√
1− ζ2
√(1− 2ζ2) +
√4ζ4 − 4ζ2 + 2
2. Ajuste o ganho K para o valor requisitado pela especificação do erro deestado estacionário.3. Esboçe os diagramas de Bode de amplitude e de fase para este valor deganho.
112/125
108
8.12. Controle Lead-LagProcedimento para o projeto do Controlador Lead-Lag :4. Utilizando uma aproximação de segunda ordem, calcule a margem de fasenecessária para os requisitos de taxa de amortecimento ou de percentual deovershoot, usando:
ΦM = tan−1 2ζ√−2ζ2 +
√4ζ4 + 1
5. Selecione uma nova frequência de margem de fase próxima a ωBW.6. Na nova frequência de margem de fase, determine a quantidade adicional dafase do controlador Lead necessária para a margem de fase requisitada.Adicione uma pequena contribuição que será necessária após a inclusão docontrolador Lag.7. Projete o controlador Lag selecionando a frequência de corte superior umadécada abaixo da nova frequência de margem de fase. O projeto do controladorLag não é crítico, e qualquer projeto para uma margem de fase adequada serádeixado para o controlador Lead. O controlador Lag simplesmente forneceestabilização do sistema com o ganho necessário para a especificação do erroem estado estacionário.
113/125
109
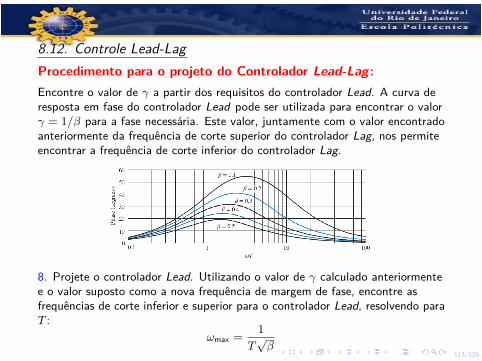
8.12. Controle Lead-LagProcedimento para o projeto do Controlador Lead-Lag :Encontre o valor de γ a partir dos requisitos do controlador Lead. A curva deresposta em fase do controlador Lead pode ser utilizada para encontrar o valorγ = 1/β para a fase necessária. Este valor, juntamente com o valor encontradoanteriormente da frequência de corte superior do controlador Lag, nos permiteencontrar a frequência de corte inferior do controlador Lag.
8. Projete o controlador Lead. Utilizando o valor de γ calculado anteriormentee o valor suposto como a nova frequência de margem de fase, encontre asfrequências de corte inferior e superior para o controlador Lead, resolvendo paraT :
ωmax = 1T√β
114/125
110
8.12. Controle Lead-Lag
Procedimento para o projeto do Controlador Lead-Lag :9. Verifique a largura de banda para assegurar que o requisito de velocidade noprimeiro passo seja atendido.10. Reprojete se as especificações de margem de fase ou de resposta transitórianão forem atendidas, conforme explicitadas por análises ou simulações.

115/125
111
8.12. Controle Lead-LagExemplo: Dado um sistema com realimentação unitária, ondeG(s) = K/[s(s+ 1)(s+ 4)], projete um controlador Lead-Lag passivoutilizando diagramas de Bode para obter um percentual de overshoot de13.25%, um tempo de pico de 2 segundos e Kv = 12.Solução:1. A taxa de amortecimento correspondente a um percentual de overshoot de13.25% é de:
ζ = − ln(%OS/100)√π2 + ln2(%OS/100)
≈ 0.541
Usando uma aproximação de segunda ordem, para um tempo de pico de 2segundos, precisamos de uma frequência de largura de banda:
ωBW = π
Tp√
1− ζ2
√(1− 2ζ2) +
√4ζ4 − 4ζ2 + 2 ≈ 2.285 rad/s
2. Para o valor especificado do erro de estado estacionário, temos que ajustar ovalor do ganho K para o valor necessário.
ess = 1Kv−→ Kv = lim
s→0s ·G(s) = K
1 · 4 = 12 −→ K = 48

116/125
112
8.12. Controle Lead-Lag3. Esboçamos os diagramas de Bode para o valor de K calculado em 2.
117/125
113
8.12. Controle Lead-Lag4. Utilizando uma aproximação de segunda ordem, para o percentual deovershoot de 13.25% (ζ = 0.541), a margem de fase necessária é de:
ΦM = tan−1 2ζ√−2ζ2 +
√4ζ4 + 1
≈ 55o
Pra esta margem de fase, temos um ângulo de fase φ = 55o − 180o = −125o,que no diagrama de fase corresponde à frequência ω = 0.52 rad/s.5. Agora temos que escolher uma nova frequência de margem de fase (quesubstitua a de 0.52 rad/s calculada acima) próxima do valor de largura debanda ωBW = 2.285 rad/s (calculada em 1).No diagrama de fase vemos que o ângulo de fase φ = −180o corresponde àfrequência ω = 2 rad/s. Escolhemos ω = 1.83 rad/s como a nova frequênciada margem de fase, que corresponde à fase φ = −176o (gráfico a seguir).
118/125
114
8.12. Controle Lead-Lag
6. Considerando que o controlador Lag faça uma contribuição de 5o, paratermos a margem de fase ΦM = 55o (correspondente ao ângulo de faseφ = −125o), a contribuição de fase do controlador Lead deve ser:
−125o = −176o − 5o + φLead −→ φLead = 56o
7. O controlador Lag nos permite manter o ganho K = 48 necessário paraKv = 12 sem ter que diminuí-lo para estabilizar o sistema.
119/125
115
8.12. Controle Lead-LagEnquanto o controlador Lag estabilizar o sistema, os parâmetros do projeto nãosão críticos, pois a margem de fase será projetada pelo controlador Lead. Destaforma, escolhemos o controlador Lag de forma que sua resposta de fase tenhaum mínimo efeito sobre a nova frequência de margem de fase. Escolhemos afrequência de corte superior do controlador Lag como sendo uma décadaabaixo da nova frequência de margem de fase, ou seja, ωUB = 0.183 rad/s.O próximo passo é determinar o valor do parâmetro γ. Pra isso nós utizamos arelação com o parâmetro β do controlador Lead. A função de transferência docontrolador Lead é:
GLead(s) = 1β
s+ 1T
s+ 1βT
= 1β
sT + 1sT + 1
β
−→ GLead(s∗) = 1β
s∗ + 1s∗ + 1
β
Esboçamos o diagrama de fase para a função de transferência normalizada comdiferentes valores de β (mostrado a seguir) e vemos que para obter os 56o defase devemos ter um β de aproximadamente 0.092. O parâmetro γ é então:γ = 1/β ≈ 10.87. Como escolhemos a frequência de corte superior como sendo0.183 rad/s (= 1/T2), a frequência de corte inferior é então:ωLB = 1/(γT2) = β/T2 ≈ 0.0168 rad/s.

120/125
116
8.12. Controle Lead-Lag
Figure: (β = 0.100 —), (β = 0.098 —), (β = 0.096 —), (β = 0.094 —), (β = 0.092 —), (β = 0.090—)
Função de transferência do controlador Lag :
GLag(s) = 1γ
s+ 1T2
s+ 1γT2
= 110.87 ·
(s+ 0.183)(s+ 0.0168)
8. Agora passamos ao projeto do controlador Lead, cuja função de trasferênciaé:
GLead(s) = γ(s+ 1
T1)
(s+ γT1
)

121/125
117
8.12. Controle Lead-LagPara a frequência ω = 1.83 rad/s, o sistema compensado com o controladorLag (GLag(s)G(s)) tem um ângulo de fase de −180o:
Usando os valores ωmax = 1.83 rad/s e β = 0.092, temos:
ωmax = 1T1√β−→ 1
T1= ωmax
√β ≈ 0.555 rad/s ,
e
γ
T1= 1βT1
≈ 6.033 rad/s
122/125
118
8.12. Controle Lead-LagTemos então a função de transferência do controlador Lead :
GLead(s) = γ(s+ 1
T1)
(s+ γT1
) = 10.87(s+ 0.555)(s+ 6.033) ,
E a do sistema completo:
GLead(s)GLag(s)G(s) = 48(s+ 0.183)(s+ 0.555)s(s+ 1)(s+ 4)(s+ 0.0168)(s+ 6.033)
9. A largura de banda do sistema em malha fechada é equivalente à frequênciaonde a resposta em amplitude do sistema em malha aberta é deaproximadamente −7 dB (seção 5). Da curva de amplitude obtemos um valorem torno de 3.03 rad/s. Como este valor é maior do que o requisitado, avelocidade de resposta desejada deve ser atendida.Os diagramas de amplitude e fase são mostrados a seguir. Também é mostradoo “zoom” na amplitude usado para determinar a frequência equivalente aovalor de ganho −7 dB.

123/125
119
8.12. Controle Lead-Lag
124/125
120
8.12. Controle Lead-Lag
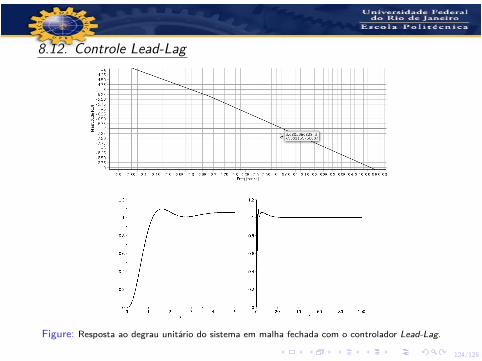
Figure: Resposta ao degrau unitário do sistema em malha fechada com o controlador Lead-Lag.
125/125
121
8.12. Controle Lead-Lag
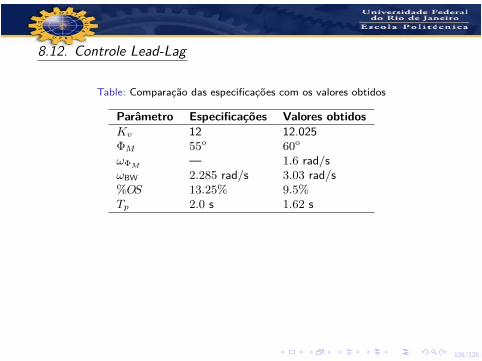
Table: Comparação das especificações com os valores obtidos
Parâmetro Especificações Valores obtidosKv 12 12.025ΦM 55o 60o
ωΦM — 1.6 rad/sωBW 2.285 rad/s 3.03 rad/s%OS 13.25% 9.5%Tp 2.0 s 1.62 s