71327
DESCRIPTION
aTRANSCRIPT
UNIVERSIDADE FEDERAL DE VIÇOSA – UFVDEPARTAMENTO DE ENGENHARIA ELÉTRICA -DEL
CURSO DE ENGENHARIA ELÉTRICA
ROTEIRO DE AULA PRÁTICA DE MODELAGEM – ELT 430Aula Prática : 01 – Sistemas Mecânicos
Hugo Henrique Rodrigues de Oliveira 71327
Modelo matemático do sistema
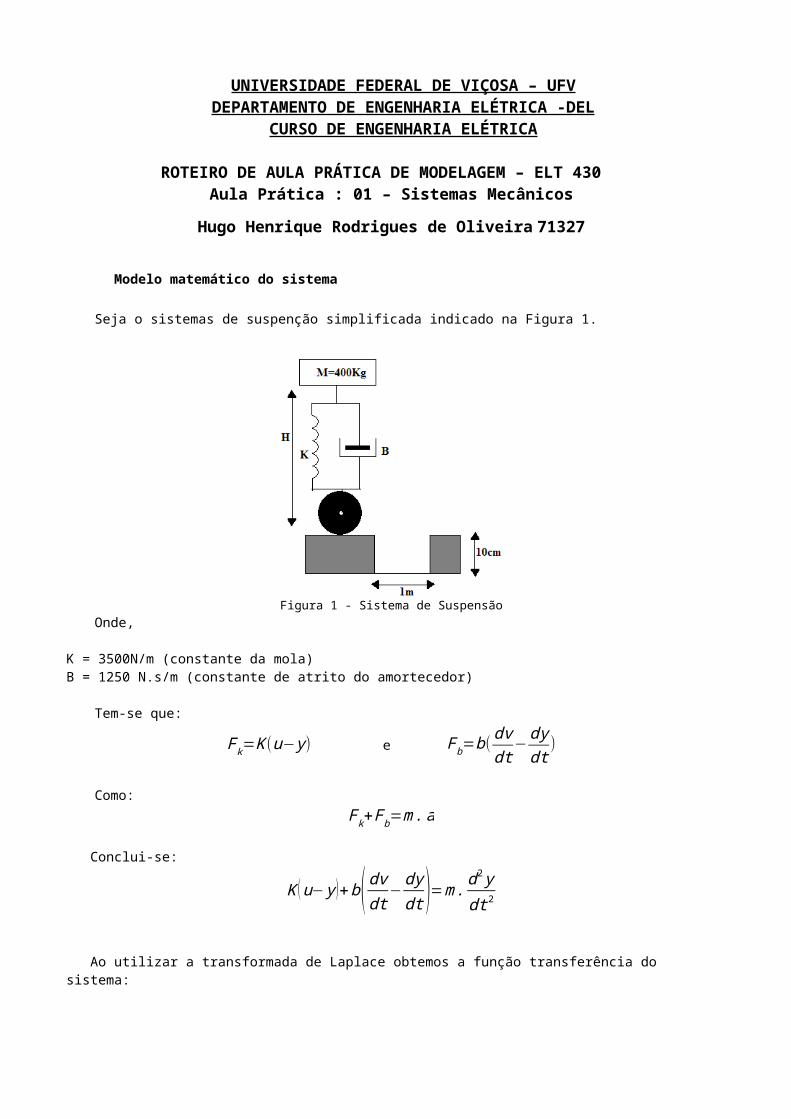
Seja o sistemas de suspenção simplificada indicado na Figura 1.
Figura 1 - Sistema de SuspensãoOnde,
K = 3500N/m (constante da mola)B = 1250 N.s/m (constante de atrito do amortecedor)
Tem-se que:
F k=K (u− y ) e Fb=b (dvdt
−dydt
)
Como:F k+Fb=m.a
Conclui-se:
K (u− y )+b( dvdt −dydt )=m . d2 ydt2
Ao utilizar a transformada de Laplace obtemos a função transferência do sistema:
Y (s )U (S)
= K+b . sm .s2+b . s+k
Deste modo, substituindo as variáveis dadas:

Y (s )U (S)
= 1250+3500. s400. s2+1250. s+3500
Para o amortecedor em boas condições
Y (s )U (S)
= 400+3500. s400. s2+400. s+3500
Para o amortecedor velho
Comportamento do veículo ao passar pelo buraco
Na Figura 2 é possível observar os resultados das simulações do comportamento do veículo ao passar pelo buraco à 36Km/h, 72Km/h e 108Km/h respectivamente:
Figura 2 - Resultados das simulações do comportamento do veículo ao passar pelo buraco à 36Km/h, 72Km/h e 108Km/h
Já na Figura 3 é possível observar os resultados das mesmas simulações, mas utilizando o amortecedor velho.
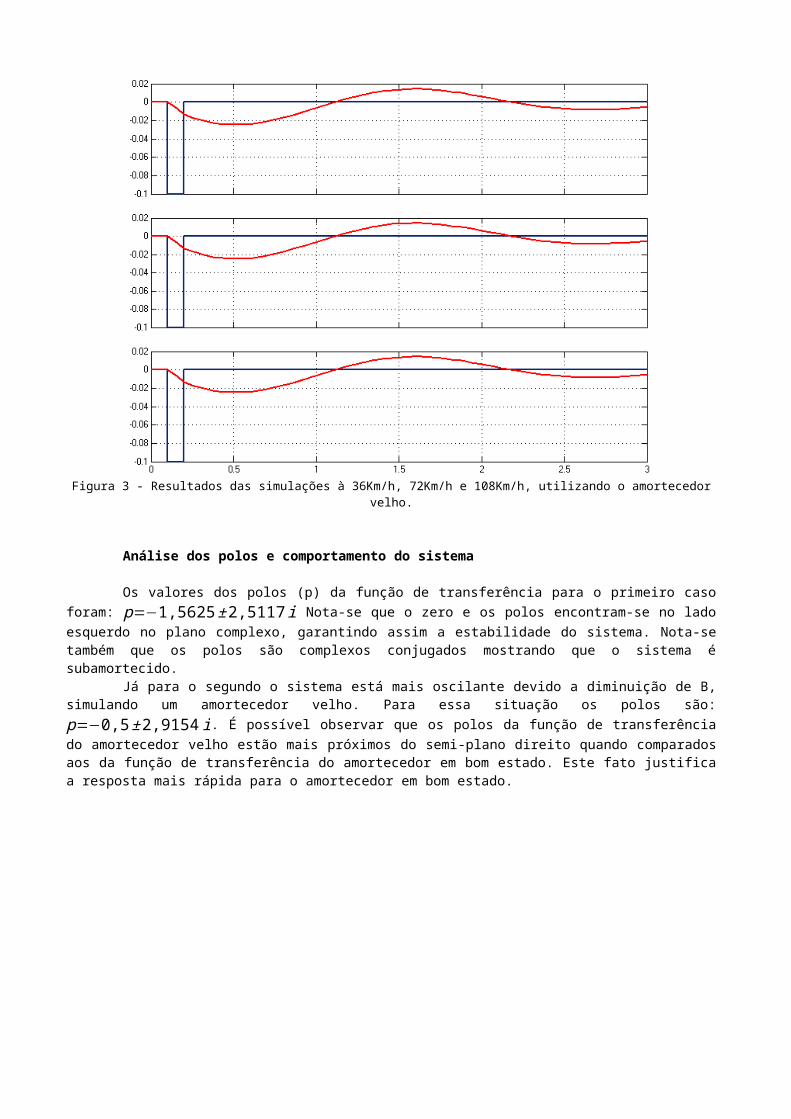
Figura 3 - Resultados das simulações à 36Km/h, 72Km/h e 108Km/h, utilizando o amortecedor velho.
Análise dos polos e comportamento do sistema
Os valores dos polos (p) da função de transferência para o primeiro caso foram: p=−1,5625±2,5117 i Nota-se que o zero e os polos encontram-se no lado esquerdo no plano complexo, garantindo assim a estabilidade do sistema. Nota-se também que os polos são complexos conjugados mostrando que o sistema é subamortecido.
Já para o segundo o sistema está mais oscilante devido a diminuição de B, simulando um amortecedor velho. Para essa situação os polos são: p=−0,5±2,9154 i. É possível observar que os polos da função de transferência do amortecedor velho estão mais próximos do semi-plano direito quando comparados aos da função de transferência do amortecedor em bom estado. Este fato justifica a resposta mais rápida para o amortecedor em bom estado.