universidade federal do cearÁ centro de tecnologia departamento de ... · universidade federal do...
TRANSCRIPT

UNIVERSIDADE FEDERAL DO CEARÁ
CENTRO DE TECNOLOGIA
DEPARTAMENTO DE ENGENHARIA HIDRÁULICA E AMBIENTAL
PROGRAMA DE PÓS-GRADUAÇÃO EM ENGENHARIA CIVIL
ANTONIO CARLOS DE SOUZA
INFLUÊNCIA DE MANOBRAS DE VÁLVULAS NA IDENTIFICAÇÃO DE
VAZAMENTOS EM REDES DE DISTRIBUIÇÃO DE ÁGUA UTILIZANDO DADOS
TRANSIENTES E ALGORITMO GENÉTICO
FORTALEZA
2016
ANTONIO CARLOS DE SOUZA
INFLUÊNCIA DE MANOBRAS DE VÁLVULAS NA IDENTIFICAÇÃO DE
VAZAMENTOS EM REDES DE DISTRIBUIÇÃO DE ÁGUA UTILIZANDO DADOS
TRANSIENTES E ALGORITMO GENÉTICO
Dissertação de Mestrado apresentada ao
Programa de Pós-Graduação em Engenharia
Civil do Departamento de Engenharia
Hidráulica e Ambiental da Universidade
Federal do Ceará como requisito parcial para
obtenção do Título de Mestre em Engenharia
Civil.
Área de concentração: Recursos Hídricos.
Orientador: Prof. Dr. John Kenedy de Araújo
FORTALEZA
2016

Dados Internacionais de Catalogação na Publicação
Universidade Federal do Ceará
Biblioteca de Pós-Graduação em Engenharia - BPGE
S713i Souza, Antonio Carlos de.
Influência de manobras de válvulas na identificação de vazamentos em redes de distribuição de
água utilizando dados transientes e algoritmo genético / Antonio Carlos de Souza. – 2016.
109 f. : il. color. , enc. ; 30 cm.
Dissertação (mestrado) – Universidade Federal do Ceará, Centro de Tecnologia, Departamento de
Engenharia Hidráulica e Ambiental, Programa de Pós-Graduação em Engenharia Civil: Recursos
Hídricos, Fortaleza, 2016.
Área de Concentração: Recursos Hídricos.
Orientação: Prof. Dr. John Kenedy de Araújo.
1. Recursos hídricos. 2. Água - Desperdício. 3. Transitórios hidráulicos. I. Título.
CDD 627
INFLUÊNCIA DE MANOBRAS DE VÁLVULAS NA IDENTIFICAÇÃO DE
VAZAMENTOS EM REDES DE DISTRIBUIÇÃO DE ÁGUA UTILIZANDO
DADOS TRANSIENTES E ALGORITMO GENÉTICO.
Dissertação de Mestrado apresentada ao
Programa de Pós-Graduação em
Engenharia Civil do Departamento de
Engenharia Hidráulica e Ambiental da
Universidade Federal do Ceará como
requisito parcial para obtenção do Título
de Mestre em Engenharia Civil.
Aprovada em: 12/02/2016

A minha querida Mãe.
Maria Vitória (in memoriam).

AGRADECIMENTOS
A Deus por mais uma vez ter me dado a oportunidade de subir mais um degrau em minha
vida.
Ao Prof. Dr. John Kenedy, meu orientador, pela dedicação, paciência e apoio na elaboração
desta pesquisa. Agradeço principalmente pelos conhecimentos adquiridos na disciplina de
Hidráulica Transiente e durante toda a pesquisa.
Ao prof. Dr. Marco Aurélio Holanda de Castro, Ph.D., por fazer parte também desta
caminhada, quando ministrou disciplinas fundamentais durante o Mestrado e ao prof. Dr. Luís
Henrique Magalhães Costa, pela presença na banca examinadora muito obrigado pelas
contribuições.
As minhas tias (Ana Lina, Conceição, Tereza e Providência) que sempre me incentivaram e
investiram em minha educação, hoje estou colhendo bons frutos.
A minha esposa Elivanilce, e aos meus filhos Elias Davi e Ana Luiza pelo amor e
compreensão.
Á UFC e ao IFCE pela oportunidade da realização desta pesquisa.
Aos amigos do Mestrado e amigos da Profissão pelo incentivo, amizade e bons momentos
vivenciados.
Aos professores do Departamento de Engenharia Hidráulica e Ambiental - DEHA, pela
atenção e dedicação durante o Mestrado.

“Gigantes são os mestres nos ombros dos
quais me elevei.”
Issac Newton

RESUMO
No processo de abastecimento de água por meio de redes de distribuição de água podem
acontecer perdas do recurso hídrico associadas a várias causas, tais como: vazamentos, erros
de medição e consumos não autorizados. Com o avanço da informática modelos matemáticos
cada vez mais complexos têm possibilitado o surgimento de técnicas avançadas nas questões
relacionadas ao projeto e dimensionamento ótimo de redes de distribuição de água, incluindo,
por exemplo, a técnica de identificação de vazamentos. O método empregado na solução do
problema inverso é a utilização de dados transientes para calibração do vazamento por meio
do algoritmo genético (MTI-AG) e para solução das equações diferenciais parciais do
movimento para escoamento do transiente é usado o método das características (MOC). Nas 3
redes em estudo é analisado o efeito da severidade do transiente provocada por mudanças no
tipo de manobra de válvula, onde várias simulações foram feitas e comparados os resultados
com as condições permanentes iniciais, mostrando a eficiência do método empregado.
Palavras-chave: Vazamento. Transiente. Manobra de válvula. Algoritmo genético.

ABSTRACT
In the water supply through water distribution systems might occurred waste of hydro
resource which might be related to several causes, such as: leaks, metering mistakes or non-
authorized consumption. Due to advances in information technology, mathematical models
even more complex have made the development of some advanced techniques possible,
focusing on projecting and developing excellent water distribution systems, including a
technique to detect leaks, for example. The method which was chosen to solve the inverse
problem was by using Transient Data for calibrating water leak through Genetic Algorithm,
and also the Characteristics Method was chosen to solve partial differential equations of the
movement in the unsteady flow of water. In this respect, the effect of severity of transient,
caused by changes in the kind of the maneuver of valve, was analyzed based on three water
distribution systems, where several simulations were made and the results were compared to
initial permanent conditions, proving that way the efficiency of the method which was used.
Keywords: Leak. Transient. Maneuver of valve. Geneticalgorith.

LISTA DE FIGURAS
Figura 1- Fluxograma de classificação dos vazamentos............................................................ ...................25
Figura 2 - Algoritmo genético típico.............................................................................................................32
Figura 3- Mutação simples para codificação binária.....................................................................................37
Figura 4 - Fluxograma do AG padrão........................................................................... ................................41
Figura 5 - Classificação dos escoamentos.....................................................................................................44
Figura 6 - Linhas Características no plano x-t..............................................................................................52
Figura 7- Definição da malha de discretização do método das
características.................................................................................................................................................53
Figura 8 - Esquema de uma seção interna s de uma tubulação i...................................................................56
Figura 9 - Esquema de um reservatório de nível constante...........................................................................57
Figura 10- Esquema de um reservatório de nível constante localizado a
jusante........................................................................................................................... ................................58
Figura 11 - Esquema de um nó de consumo genérico M.............................................................................59
Figura 12 - Manobra 1.................................................................................................. ...............................66
Figura 13- Manobra 2.............................................................................. ....................................................66
Figura 14 - Manobra 3................................................................................................... ..............................67
Figura 15 - Manobra 4.................................................................................................................................67
Figura16 - Manobra 5..................................................................................................... ............................68
Figura 17 - Manobra 6.................................................................................................. .............................68
Figura18- Rede 1........................................................................................ ................................................71
Figura 19 - Cargas Hidráulicas Transientes no nó 4 (2L/s).......................................................................75
Figura 20- Rede 2......................................................................................................................................75
Figura 21 - Cargas Hidráulicas Transientes no nó 2 (10L/s)....................................................................79
Figura 22 - Cargas Hidráulicas Transientes no nó 6 (10L/s).....................................................................80
Figura 23 - Rede 3........................................................................................................... ..........................81
Figura 24 - Cargas Hidráulicas Transientes no nó 2 (5L/s).......................................................................88
Figura 25 - Cargas Hidráulicas Transientes no nó 12 (5L/s).....................................................................88
Figura 26 - Cargas Hidráulicas Transientes no nó 17 (5L/s)....................................................................88
LISTA DE TABELAS
Tabela 1 - Principais ações de um plano para um controle de perdas de água..........................................22
Tabela 2 - Índice de Perdas de Faturamento Total por Região..................................................................24
Tabela 3 – Restrições da ABNT................................................................................................... .............28
Tabela 4 - Propriedades dos fluidos e suas unidades.................................................................................29
Tabela 5 - Tipos de seleção.............................................................................. ..........................................35
Tabela 6 - Parâmetros dos Algoritmos Genéticos comuns para todas as simulações................................70
Tabela 7 - Características físicas da Rede 1.............................................................................................72
Tabela 8 - Demandas nos nós da rede1.................................................................................................... .72
Tabela 9 - Vazões iniciais em estado permanente da Rede 1....................................................................73
Tabela 10 - Cargas iniciais em estado permanente da Rede 1...................................................................73
Tabela 11- Características físicas da Rede 2.............................................................................................76
Tabela 12 - Demandas nos nós da rede 2..................................................................................................76
Tabela 13-Vazões iniciais em estado permanente da rede 2.....................................................................78
Tabela 14 - Cargas iniciais em estado permanente da Rede 2..................................................................78
Tabela 15 - Características da rede 3.........................................................................................................82
Tabela 16 - Demandas nos nós da Rede 3.................................................................................................83
Tabela 17 - Vazões iniciais em estado permanente da Rede 3..................................................................85
Tabela 18- Cargas iniciais em estado permanente da Rede 3...................................................................86
Tabela 19- Estimativa Preliminar e Final de Vazamentos: Manobra 1: nó 4 (2L/s).................................90
Tabela 20- Estimação Preliminar e Final de Vazamentos: Manobra 2 : nó 4 (2L/s).................................90
Tabela 21 - Estimativa Preliminar e Final de Vazamentos: Manobra 1 : 4 (5L/s).....................................91
Tabela 22- Estimação Preliminar e Final de Vazamentos: Manobra 2: 4 (5L/s)........................................91
Tabela 23 - Estimativa Preliminar e Final de Vazamentos: Manobra 3: 2 (10L/s).....................................92
Tabela 24 – Estimativa Preliminar e Final de Vazamentos: Manobra 4: 2 (10L/s)...................................92
Tabela 25 - Estimativa Preliminar e Final de Vazamentos: Manobra 3 : 6 (10L/s)....................................92
Tabela 26 – Estimativa Preliminar e Final de Vazamentos: Manobra 4: 6 (10L/s)....................................93
Tabela 27- Estimativa Preliminar e Final de Vazamentos: Manobra 3: 2 e 6 (10L/s)................................93
Tabela 28 – Estimativa Preliminar e Final de Vazamentos: Manobra 4: 2 e 6 (10L/s).............................93
Tabela 29 - Estimativa Preliminar e Final de Vazamentos: Manobra 5: 2 (5L/s).......................................95
Tabela 30 – Estimativa Preliminar e Final de Vazamentos: Manobra 6: 2 (5L/s)......................................95
Tabela 31 - Estimativa Preliminar e Final de Vazamentos: Manobra 5: 12 (5L/s).....................................96
Tabela 32 - Estimativa Preliminar e Final de Vazamentos: Manobra 6: 12 (5L/s).....................................96
Tabela 33 - Estimativa Preliminar e Final de Vazamentos: Manobra 5: 17 (5L/s).....................................97
Tabela 34 – Estimativa Preliminar e Final de Vazamentos: Manobra 6: 17 (5L/s)....................................97
Tabela 35 - Estimativa Preliminar e Final de Vazamentos: Manobra 5: 2 e 12 (5L/s)...............................98
Tabela 36- Estimativa Preliminar e Final de Vazamentos: Manobra 6: 2 e 12 (5L/s)................................98
Tabela 37 – Estimativa Preliminar e Final de Vazamentos: Manobra 5: 2 e 17 (5L/s).............................99
Tabela 38 - Estimativa Preliminar e Final de Vazamentos: Manobra 6: 2 e 17 (5L/s)...............................99
Tabela 39 – Estimativa Preliminar e Final de Vazamentos: Manobra 5: 12 e 17 (5L/s).........................100
Tabela 40 - Estimativa Preliminar e Final de Vazamentos: Manobra 6: 12 e 17 (5L/s)...........................100
Tabela 41 – Estimativa Preliminar e Final de Vazamentos: Manobra 5: 2, 12 e 17 (5L/s)......................101
Tabela 42 - Estimativa Preliminar e Final de Vazamentos: Manobra 6: 2, 12 e 17 (5L/s)........................101
LISTA DE SÍMBOLOS
C Linha de característica negativa
C Linha de característica positiva
Parâmetro adimensional que depende das propriedades elásticas do conduto
% Taxa percentual
Razão de Poisson [adimensional]
[ L ] Unidade de comprimento
[ M] Unidade de massa
[ T ] Unidade de tempo
∂ Derivada parcial
∑ Somatório
A área [L2]
a Celeridade [L/T]
aj Celeridade corrigida [L/T]
B constante auxiliar [T.L-2]
c1 Cromossomo filho 1
c2 Cromossomo filho 2
D Diâmetro [L]
E Módulo de elasticidade de Young [M.L-1.T-2]
e Espessura da parede [L]
f Fator de atrito [adimensional]
g Aceleração da gravidade [L/T2]
H Carga hidráulica [ L]
Hi,jc Carga hidráulica calculada [L]
Hi,jm Carga hidráulica medida [L]
i Número do nó que contém vazamento real
IA Índice de Acerto
IALVi Índice de Aceitação do Local de Vazamento
K Módulo de elasticidade volumétrica do fluido [M.L-1.T-2]
NC Número de soluções
NG Número de gerações
NL Número de locais de medida na rede [adimensional]

p1 Cromossomo pai 1
p2 Cromossomo pai 2
pc Probabilidade de cruzamento
pm Probabilidade de mutação
Q Vazão [L3/T]
R Constante do termo de atrito [T2.L-5]
TS Duração do transitório [T]
x Distância [L]
γ Peso específico [M.L-2.T-2]
z Cota topográfica [L]
λ Operador do MOC
ρ Massa específica [M.L-3.T0]
τ Tensão de Cisalhamento [M.L-1.T-1]
Ѵ Viscosidade cinemática [M0. L2T-1]
Cd Coeficiente de descarga (adimensional)
LISTA DE SIGLAS E ABREVIATURAS
ABNT
AG
CAGECE
CECOP
EDO
EDP
ETA
FORTRAN
IPFT
MOC
MTI-AG
SCADA
SISCOPE
SNIS
Associação Brasileira de Normas Técnicas
Algoritmo Genético
Companhia de Água e Esgoto do Ceará
Centro de Controle Operacional
Equação Diferencial Ordinária
Equação Diferencial Parcial
Estação de Tratamento de Água
FORmulaTRANSlation
Índice de Perdas de Faturamento Total
Método Das Características
Método Transiente Inverso com Algoritmo Genético
Supervisory, Control And Data Aquisition
Sistema de Gestão de Informações para Combate a Perdas
Sistema Nacional de Informações sobre Saneamento
SUMÁRIO
1 INTRODUÇÃO ....................................................................................................... 17
1.1 Justificativa ............................................................................................................... 18
1.2 Objetivos.................................................................................................................. 19
1.2.1 Objetivo Geral .......................................................................................................... 19
1.2.2 Objetivo Específico .................................................................................................. 19
1.3 Organização de Dissertação ..................................................................................... 19
2 REVISÃO BIBLIOGRÁFICA .............................................................................. 21
2.1 Descrição das Perdas de Água .................................................................................. 27
2.1.1 Perdas Físicas e Não Físicas .................................................................................... 28
2.1.2 Análise de Alguns Índices ....................................................................................... 29
2.1.3 Índice de Perdas de Faturamento Total Por Região e Estado ................................... 30
2.1.4 Classificação dos Vazamentos .................................................................................. 31
2.2 Métodos de Detecção de Vazamentos ....................................................................... 32
2.3 Ações de Combate às perdas de Água no Ceará ...................................................... 33
2.4 Redes de Abastecimento de Água ............................................................................. 34
2.5 Propriedades dos Fluidos .......................................................................................... 35
2.6 Algoritmos Genéticos ................................................................................................ 36
2.6.1 Introdução ............................................................................................................... 36
2.6.2 Analogia com a Biologia ......................................................................................... 37
2.6.3 Estrutura dos Algoritmos Genéticos ..................................................................... 38
2.6.4 Representação dos Parâmetros .............................................................................. 39
2.6.4.1 Representação Binária ............................................................................................... 39
2.6.4.2 Representação Real ................................................................................................... 41
2.6.5 Operadores Genéticos............................................................................................. 41
2.6.5.1 Seleção ...................................................................................................................... 41
2.6.5.2 Cruzamento................................................................................................................ 42
2.6.5.3 Mutação .................................................................................................................... 44
2.6.6 Função Objetivo ...................................................................................................... 45
2.6.7 Vantagens dos Algoritmos Genéticos .................................................................... 46
2.6.8 Algumas Aplicações e Fluxograma do AG ........................................................... 47
2.6.9 Algumas pesquisas relacionadas ao Estudo .......................................................... 49
3 ITIPOS DE ESCOAMENTOS ................................................................................ 51
4 ESCOAMENTO TRANSIENTE EM TUBULAÇÕES ....................................... 53
4.1 Golpe de Aríete ....................................................................................................... 53
4.2 Equações do Transiente Hidráulico .......................................................................... 54
4.2.1 Cálculo da celeridade .............................................................................................. 57
4.2.2 Método das Características .................................................................................... 57
4.2.3 Condições de Contorno ........................................................................................... 62
4.2.3.1 Seção Interna ............................................................................................................. 63
4.2.3.2 Reservatório de Nível Constante a Montante ........................................................... 64
4.2.3.3 Reservatório de nível constante a Jusante ................................................................. 64
4.2.3.4 Nó de consumo ou demanda ..................................................................................... 65
4.3 Modelos Hidráulicos ................................................................................................ 67
5 METODOLOGIA.................................................................................................. 68
5.1 Definição do Problema Inverso ............................................................................... 68
5.2 Tipos de Solução do Problema Inverso .................................................................... 68
5.3 Formulação do Problema Inverso ............................................................................ 69
5.4 As Estratégias de Resolução...................................................................................... 70
5.5 Condições Iniciais ..................................................................................................... 70
5.6 Manobras de Válvulas ............................................................................................. 70
5.7 O Parâmetro Vazamento ........................................................................................... 74
5.8 Índices Para Calibração ........................................................................................... 75
5.9 Programas............................................ ...................................................................... 76
5.10 Parâmetros do AG...................................................................................................... 76
5.11 Redes Hidráulicas....................................................................................................... 76
5.11.1 Rede 1......................................................................................... 76
5.11.2 Procedimento Metodológico para Rede 1............................................................. 77
5.11.3 Rede 2..................................................................................................................... 79
5.11.4 Procedimento Metodológico para Rede 2............................................................... 83
5.11.5 Rede 3.................................................................................................................. 86
5.11.6 Procedimento Metodológico para Rede 3............................................................ 90
6 RESULTADOS e DISCURSSÕES....................................................................... 95
7 CONCLUSÃO ....................................................................................................... 108
8 REFERÊNCIAS......................................................................................................

17
1 INTRODUÇÃO
As elevadas perdas de água tornaram-se um dos maiores problemas dos sistemas de
abastecimento brasileiros. Contribuem para tal situação, entre outros motivos, a baixa
capacidade institucional e de gestão dos sistemas; a pouca disponibilidade de recursos para
investimentos, sobretudo em ações de desenvolvimento tecnológico na rede de distribuição e
na operação dos sistemas; a cultura do aumento da oferta e do consumo individual, sem
preocupações com a conservação e o uso racional; e as decisões pragmáticas de ampliação da
carga hidráulica e extensão das redes até áreas mais periféricas dos sistemas, para
atendimento aos novos consumidores, sem os devidos estudos de engenharia.
Rede de distribuição é a unidade do sistema de abastecimento de água constituída por
tubulações, órgãos acessórios, reservatórios, bombas etc. instalados em logradouros públicos,
e que tem por finalidade fornecer, em regime contínuo (24h por dia), água potável em
quantidade, qualidade e pressão adequadas a múltiplos consumidores (residenciais,
comerciais, industriais e de serviços) localizados em uma cidade, vila ou outro tipo de
aglomeração urbana.
Ao longo de uma rede de distribuição ocorre uma perda de carga e de pressão, devido
principalmente, ao atrito nas tubulações e aos acessórios utilizados. Outros fatores que podem
provocar uma queda na pressão em parte do sistema são: as perdas por vazamentos, o
entupimento de tubulações, o aumento nas taxas de consumo e, até mesmo, as ligações
irregulares.
As perdas em sistemas de distribuição de água representam um percentual
significativo do volume de água captado, tratado e distribuído para o consumo. Estas perdas
podem ser classificadas como físicas ou não físicas. As perdas não físicas estão relacionadas
com o processo de comercialização da água consumida pela população: são erros na medição,
usuários não cadastrados, ligações clandestinas; e um volume efetivamente consumido e não
faturado. Já as perdas físicas representam o volume de água que é realmente perdido,
principalmente através de vazamentos ao longo do sistema de distribuição de água.
Um sistema moderno de abastecimento de água é composto por vários elementos,
entre eles, citam-se tubulações, bombas, reservatórios, válvulas, dispositivos de controle, etc.
Por se tratar de sistemas um sistema bastante complexo, deve-se entender seus componentes
estático e dinâmico quando em funcionamento. A realização de manobras em alguns destes
elementos ou até mesmo uma queda repentina de energia podem provocar o surgimento de

18
ondas de pressão que se propagam por todo o sistema, podendo provocar o colapso deste. A
esse fenômeno dá-se o nome de transiente hidráulico.
O presente estudo aborda uma calibração do parâmetro vazamento, mediante rotinas
computacionais com aplicação da análise transiente de 3 redes de distribuição de água,
provocada por manobras da válvulas.
1.1 Justificativa
O problema de vazamento em canalizações foi estudado inicialmente por volta de
1920, por meio da indústria petrolífera, pois os seus produtos petróleo e derivados eram
transportados em longas tubulações e um vazamento em potencial representa riscos ao meio
ambiente e a operação. Foram usados para tanto, técnicas de geofonamento, radares de
penetração ou profundidade, traçadores de odores e radioatividade e outros métodos físicos de
detecção, relativamente confiáveis, mas muito onerosos.
Durante décadas, cientistas e pesquisadores desenvolveram técnicas para detecção de
vazamentos para contrapor estes métodos, por intermédio de modelos matemáticos de
calibração relativamente simples, menos onerosos, entretanto, confiáveis e que podem ter
grande valor econômico na sua escolha.
Os estudos envolvendo fenômenos transientes hidráulicos em redes de abastecimento
de água até poucas décadas eram desprezados em projetos e inúmeros acidentes provocados
por transientes hidráulicos aconteceram por causa de tal desprezo. Numa rede de distribuição
hidráulica os escoamentos são variáveis no tempo e o espaço. Portanto, os modelos
desenvolvidos em regime permanente, onde se utiliza as equações de Bernoulli e da
continuidade para obter as soluções para o problema, não são aplicáveis, pois há uma variação
da pressão e vazão em função do tempo.
19
1.2 Objetivos
1.2.1 Objetivo Geral
Essa pesquisa tem por objetivo analisar a influência de manobras de válvulas na
identificação e detecção de vazamentos em 3 redes de distribuição de água mediante rotinas
computacionais com aplicação do AG no intuito minimizar a função objetivo obtida da
análise transiente inversa que consiste na comparação das cargas transientes medidas com as
cargas calculadas por um modelo matemático.
1.2.2 Objetivos Específicos
a) Calcular as cargas transientes para as 3 redes, baseado no método das características;
b) Usar o método transiente inverso associada ao algoritmo genético, para identificar os
vazamentos nas simulações;
c) Estabelecer uma análise comparativa dos resultados usando o transiente quando este
for provocado por uma manobra suave e por uma manobra brusca;
d) Comentar os resultados obtidos pela aplicação do MTI-AG
e) Identificar os vazamentos isolados e simultâneos nas 3 redes
1.3 Organização da Dissertação
Esta pesquisa compõe-se de oito capítulos, onde o presente capítulo oferece uma
introdução ao tema, seus objetivos e justificativa.
O capítulo 2 engloba a revisão bibliográfica, onde a mesma trata sobre Descrição das
perdas de Água, Métodos de Detecção de Vazamentos, Ações de Combate às perdas de Água,
Redes de Abastecimento de Água, Propriedades dos Fluidos e Algoritmos Genéticos.
O capítulo 3 explica os tipos de Escoamentos
O capítulo 4 traz o fenômeno do Golpe de Aríete e as Equações Fundamentais do
Método das Características
O capítulo 5 trata da Metodologia aplicada na identificação dos Vazamentos, a
formulação do Problema inverso e Estratégias de solução, juntamente com as manobras de
válvulas que causaram o fenômeno transiente.
20
O capítulo 6 apresenta os resultados obtidos na identificação dos vazamentos nas 3
redes em estudo com as simulações e discussão dos resultados.
O capítulo 7 apresenta a conclusão da pesquisa e traz também algumas sugestões para
futuras pesquisas.
As referências bibliográficas são encontradas no capítulo 8.
21
2 REVISÃO BIBLIOGRÁFICA
2.1 Descrição das Perdas de Água
No processo de abastecimento de água por meio de redes de distribuição podem
acontecer perdas do recurso hídrico associados a variadas causas, tais como: vazamentos,
erros de medição e consumos não autorizados. Essas perdas trazem impactos negativos para o
meio ambiente, para a receita e para os custos de produção das empresas. Neste sentido, o
nível de perdas de água constitui um índice relevante para medir a eficiência dos prestadores
em atividades como distribuição, planejamento, investimentos e manutenção.
2.1.1 Perdas Físicas e Não Físicas
O controle de perdas de água em sistemas de abastecimento de água constitui a
principal atividade operacional que deve ser desenvolvida por uma empresa de saneamento
básico, pois o seu controle está diretamente relacionado com a receita e a despesa da empresa.
Além disso, se considerarmos que a água está se tornando um recurso cada vez mais escasso,
devido à poluição dos mananciais de abastecimento, o controle de perdas torna-se de
fundamental importância.
Perdas segundo Azevedo Neto (1998) é a diferença entre o volume de água produzido
nas Estações de Tratamento de Água (ETA) e o total dos volumes medidos nos hidrômetros,
ou seja, índice de perdas é a porcentagem do volume produzido que não é faturada pela
concessionária dos serviços.
As perdas de Água podem ser de dois tipos:
a) Perdas Físicas ou Reais: Representam a água que efetivamente não chega ao
consumidor, devido aos vazamentos no próprio sistema, ou à utilização na operação
do sistema (lavagem de filtros e reservatórios ou manutenção e reparo da tubulação);
b) Perdas Não Físicas ou Aparentes: Representam a água consumida que não é medida e,
portanto, não faturada.
Os termos “perdas físicas” e “perdas não físicas”, empregadas no Brasil,
respectivamente, expressam o mesmo conteúdo dos termos “perdas reais” e “perdas
aparentes”, mais adotadas no cenário internacional. Do ponto de vista do significado dos
conceitos que tais expressões representam, entende-se como mais adequado o uso dos termos
“perdas reais” e “perdas aparentes”.
22
Um programa de redução de perdas é fundamentado em uma série de ações corretivas
voltadas para a redução das perdas físicas (reais) e não físicas (aparentes). As ações corretivas
são compostas de atividades, estando estipuladas as metas a serem cumpridas no transcorrer
do desenvolvimento do programa. As principais ações que devem fazer parte de um plano
para o controle de perdas são apresentadas na tabela abaixo. Para cada ação, devem ser
estimados o custo total, o benefício anual e a recuperação da água.
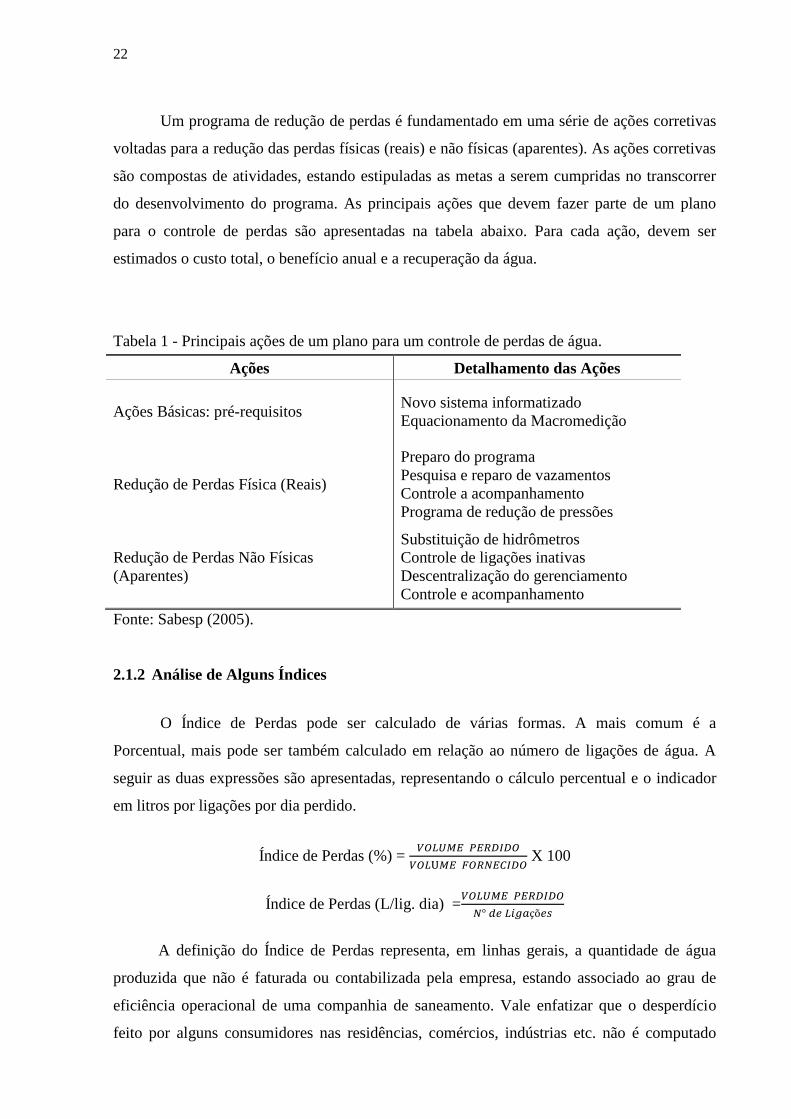
Tabela 1 - Principais ações de um plano para um controle de perdas de água.
Ações Detalhamento das Ações
Ações Básicas: pré-requisitos Novo sistema informatizado
Equacionamento da Macromedição
Redução de Perdas Física (Reais)
Preparo do programa
Pesquisa e reparo de vazamentos
Controle a acompanhamento
Programa de redução de pressões
Redução de Perdas Não Físicas
(Aparentes)
Substituição de hidrômetros
Controle de ligações inativas
Descentralização do gerenciamento
Controle e acompanhamento
Fonte: Sabesp (2005).
2.1.2 Análise de Alguns Índices
O Índice de Perdas pode ser calculado de várias formas. A mais comum é a
Porcentual, mais pode ser também calculado em relação ao número de ligações de água. A
seguir as duas expressões são apresentadas, representando o cálculo percentual e o indicador
em litros por ligações por dia perdido.
Índice de Perdas (%) = 𝑉𝑂𝐿𝑈𝑀𝐸 𝑃𝐸𝑅𝐷𝐼𝐷𝑂
𝑉𝑂𝐿U𝑀𝐸 𝐹𝑂𝑅𝑁𝐸𝐶𝐼𝐷𝑂 X 100
Índice de Perdas (L/lig. dia) =𝑉𝑂𝐿𝑈𝑀𝐸 𝑃𝐸𝑅𝐷𝐼𝐷𝑂
𝑁° 𝑑𝑒 𝐿𝑖𝑔𝑎çõ𝑒𝑠
A definição do Índice de Perdas representa, em linhas gerais, a quantidade de água
produzida que não é faturada ou contabilizada pela empresa, estando associado ao grau de
eficiência operacional de uma companhia de saneamento. Vale enfatizar que o desperdício
feito por alguns consumidores nas residências, comércios, indústrias etc. não é computado

23
como perda, sob o ponto de vista técnico, pois este consumo se dá após a medição no
hidrômetro. Quando se compara os indicadores de perdas de água do Brasil com os padrões
de países desenvolvidos, observa-se que ainda há um relevante nível de ineficiência na
produção e no abastecimento de água potável, apesar dos avanços conseguidos até o
momento.
A média das perdas de faturamento total no Brasil em 2013 foi de 39,07% acima da
média dos países desenvolvidos, que é de 15%. O quadro é ainda mais preocupante porque a
maior parte das empresas não mede suas perdas de água reais e aparentes de maneira
consistente. Entre as causas do nível atual de perdas, destacam-se:
a) Falta de investimento em manutenção e reabilitação das redes;
b) Necessidade de adoção das tecnologias requeridas para o monitoramento das redes e
da produção;
c) Incentivos limitados para melhorias na gestão;
d) Definição de preços que em alguns casos não refletem o grau de escassez do recurso
hídrico.
2.1.3 Índice de Perdas de Faturamento Total Por Região e Estado
Nesta sessão é apresentada a análise da situação das perdas no Brasil em 2013, baseada
nas informações oficiais reportadas pelas empresas de saneamento ao SNIS, utilizando-se 2
níveis de desagregação: regional e estadual.
a) Regional: O índice de perdas de faturamento total, o qual mostra uma visão geral do
nível de perdas em um sistema de abastecimento (avalia a porcentagem de água não
faturada), foi de 39,07% para o Brasil em 2013. As regiões Sul, Centro-Oeste e
Sudeste exibiram um desempenho melhor ao da média nacional, com índices de
34,68%; 35,22% e 36,09%, respectivamente. Os piores desempenhos, ou seja, aqueles
com maiores níveis de perdas de faturamento total pertencem ao Nordeste e Norte,
com valores acima da média, como mostra a tabela 3.

24
Tabela 2 - Índice de Perdas de Faturamento Total por Região.
Região IPFT (%)
Norte 60,59
Nordeste 45,03
Sudeste 36,09
Centro-Oeste 35,22
Sul 34,68
Fonte: GO Associados
b) Estadual: Ao avaliar a situação das perdas em relação ao índice de perdas de
faturamento total, os estados que ocupam os primeiros lugares em termos de bom
desempenho são: Paraná (22,5%), Espírito Santo (23,6%), Ceará (26,7%), Santa
Catarina (26,7%) e Tocantins (26,9%), com uma diferença importante em relação a
média do Brasil que é de 39,07%.Conforme pesquisa apontada pelo SNIS, os estados
que precisam de maior atenção na redução de perdas são: Roraima (64,6%),
Amazonas (72,6%) e Amapá (76,5%).
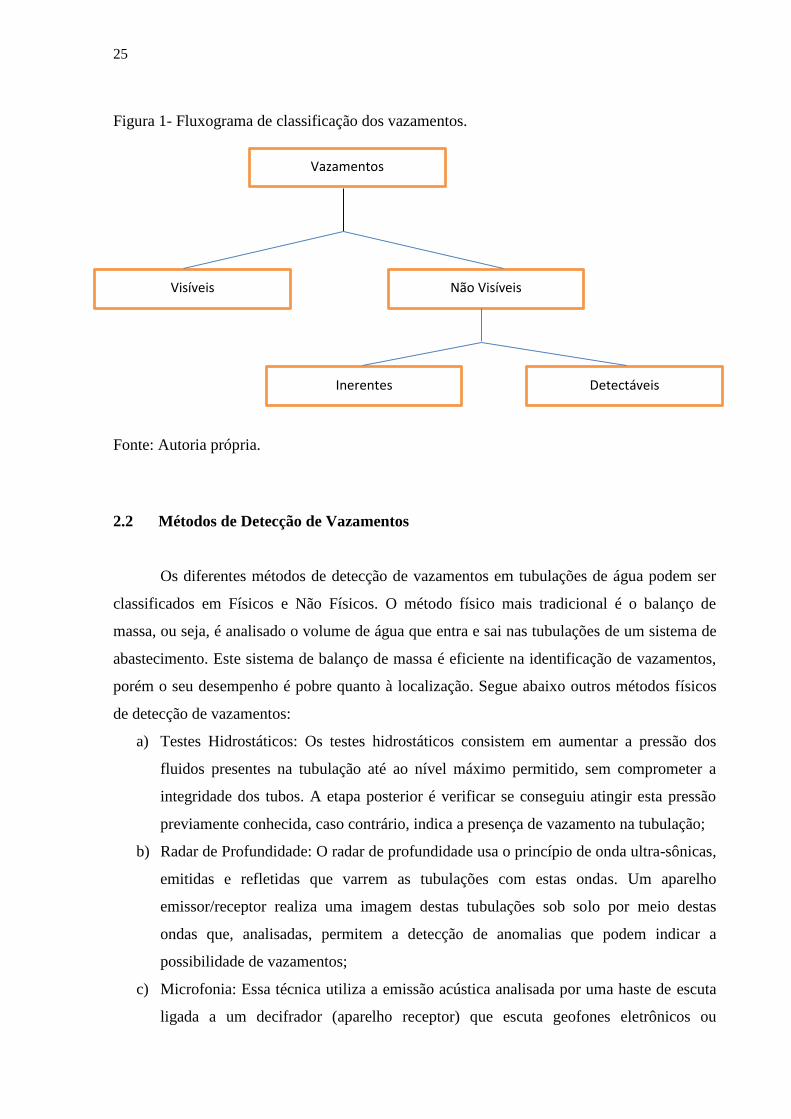
2.1.4 Classificação dos Vazamentos
Segundo Tardelli Filho (2006) os vazamentos são classificados em dois tipos: Visíveis e
Não Visíveis
Os Vazamentos Visíveis são facilmente notados pela população, que notifica a
companhia de saneamento. Portanto, o reparo é normalmente feito em um curto espaço de
tempo. Os Vazamentos Não Visíveis não afloram à superfície, infiltram-se na terra, formando
fluxos internos no solo. Portanto, leva-se um longo tempo para localizá-los e consertá-los,
uma vez que são necessárias inspeções especiais através de equipamentos de pesquisa
acústica para sua detecção.
Entretanto, nem todos os vazamentos Não Visíveis são detectáveis através dos
equipamentos de pesquisa atualmente disponíveis. Aquelas vazões muito baixas, que
geralmente ocorrem nas juntas e nos estágios iniciais dos processos de corrosão, representam
o que se denomina “vazamentos inerentes” do sistema de distribuição de água. O fluxograma
abaixo resume a classificação mais comum dos vazamentos.
25
Figura 1- Fluxograma de classificação dos vazamentos.
Fonte: Autoria própria.
2.2 Métodos de Detecção de Vazamentos
Os diferentes métodos de detecção de vazamentos em tubulações de água podem ser
classificados em Físicos e Não Físicos. O método físico mais tradicional é o balanço de
massa, ou seja, é analisado o volume de água que entra e sai nas tubulações de um sistema de
abastecimento. Este sistema de balanço de massa é eficiente na identificação de vazamentos,
porém o seu desempenho é pobre quanto à localização. Segue abaixo outros métodos físicos
de detecção de vazamentos:
a) Testes Hidrostáticos: Os testes hidrostáticos consistem em aumentar a pressão dos
fluidos presentes na tubulação até ao nível máximo permitido, sem comprometer a
integridade dos tubos. A etapa posterior é verificar se conseguiu atingir esta pressão
previamente conhecida, caso contrário, indica a presença de vazamento na tubulação;
b) Radar de Profundidade: O radar de profundidade usa o princípio de onda ultra-sônicas,
emitidas e refletidas que varrem as tubulações com estas ondas. Um aparelho
emissor/receptor realiza uma imagem destas tubulações sob solo por meio destas
ondas que, analisadas, permitem a detecção de anomalias que podem indicar a
possibilidade de vazamentos;
c) Microfonia: Essa técnica utiliza a emissão acústica analisada por uma haste de escuta
ligada a um decifrador (aparelho receptor) que escuta geofones eletrônicos ou
Vazamentos
Detectáveis Inerentes
Visíveis Não Visíveis

26
mecânicos (aparelho emissores) fixos em diversos locais ao longo das tubulações.
Estes aparelhos usam o princípio da correlação ruído e vazamento. Por meio de
análises de gráficos de frequência das ondas, a presença de picos de ruídos indica a
possibilidade de vazamento em um trecho da rede compreendido pela distância entre
dois geofones sucessivos instalados;
d) Traçadores de Radioatividade: Os traçadores de radioatividade consistem na colocação
de materiais radioativos nos fluidos das tubulações. Após esta colocação os locais
onde se encontram as tubulações são varridos por aparelhos detectores e medidores de
emissões radioativas, e uma leitura anormal destas emissões indica a presença de
vazamentos.
Os métodos não físicos se baseiam em modelos matemáticos que necessitam da
aquisição de dados da rede. Com o advento da difusão da informática e desenvolvimento de
softwares que utilizam sistemas SCADA, o surgimento destes modelos foi facilitado, estes
sistemas permitem o controle e supervisão de dados adquiridos de forma remota por meio de
sensores de leitura localizados em pontos específicos das tubulações. Os dados dos sistemas
SCADA são interpretados por estes softwares, permitindo uma obtenção, em tempo real, de
valores variáveis como vazão e a pressão.
Um exemplo de concessionária de distribuição de água, que utiliza sistemas em
SCADA, é a CAGECE (Companhia de Água e Esgoto do Ceará) que, em 1999, adotou o
sistema automatizado de controle e operação, o CECOP (Centro de Controle Operacional)
para as regiões de Fortaleza, Caucaia e Maracanaú. O uso de softwares que utilizam dados de
sistema SCADA facilitou o desenvolvimento de modelos matemáticos para localização e
quantificação de vazamentos em redes de distribuição que usam dados transientes na solução
de um problema inverso, no qual necessita de obtenção de valores de vazão e pressão em
curtos espaços de tempo em um ponto da rede de distribuição.
2.3 Ações de Combate às perdas de Água no Ceará
A Cagece busca reduzir suas perdas de água, por meio de várias ações, como o
programa de caça-vazamentos e o combate a fraudes.
A Cagece busca investir continuamente em prevenção de perdas de água. Entre as
ações desenvolvidas estão as do Programa de Caça-Vazamentos, cujo objetivo é identificar e
solucionar vazamentos ocultos. Em 2014, a Cagece percorreu 4.932 km por meio do
programa Caça-Vazamentos, no total de 99 cidades no estado do Ceará, na tentativa de

27
encontrar vazamentos ou fraudes nas redes de distribuição de água, que não são possíveis de
se enxergar a olho nu.
As equipes do Caça-vazamentos trabalham com equipamentos de alta tecnologia para
a detecção de vazamentos e fraudes como: loggers de ruídos, geofones eletrônicos, hastes de
escuta e VGOs. O procedimento padrão adotado é de verificar se há vazamentos na rede, caso
exista, a equipe técnica responsável por aquele local é acionada e o problema é analisado e
resolvido.
Além do Programa Caça-vazamentos, a Cagece possui ainda um sistema de telemetria
por meio de estações piezométricas (que medem a pressão) instaladas em pontos críticos e
estratégicos de baixa e alta pressão. Esse sistema age como um gerenciador de pressões na
rede, ele foi implantado com o objetivo de evitar que haja perdas de água no sistema de
distribuição. Além dessas ações, a Companhia conta também com o Sistema de Gestão de
Informações para Combate a Perdas (SISCOPE) que foi desenvolvido com intuito de analisar
e verificar toda a usabilidade da água que passa pelo sistema de abastecimento do Ceará.
2.4 Redes de Abastecimento de Água
Um sistema de distribuição de água é o conjunto de tubulações, acessórios,
reservatórios, bombas etc., que tem a finalidade de atender, dentro de condições sanitárias, de
vazão e pressão convenientes, a cada um dos diversos pontos de consumo de uma cidade ou
setor de abastecimento (PORTO, 1999).
Dimensionar uma rede de distribuição de água significa determinar os diâmetros das
tubulações a fim de satisfazer todas as condições de funcionamento da rede, como pressões
nos nós, a perda de carga, vazão. Para facilitar o estudo de uma rede de distribuição de água,
podemos dizer que ela é formada por dois tipos de canalizações: A Principal e a Secundária.
a) Principal: São as tubulações de maior diâmetro cuja finalidade é abastecer às redes
secundárias
b) Secundária: São as tubulações de menor diâmetro cuja função é abastecer diretamente
os pontos de consumo do sistema de abastecimento de água.
De acordo com a disposição dos condutos principais e o sentido de escoamento nas
tubulações secundárias, as redes são classificadas como: Rede Ramificada e Rede Malhada.
a) Rede Ramificada: As tubulações divergem a partir de um ponto inicial e onde se pode
estabelecer um sentido de escoamento;
28
b) Rede Malhada: As tubulações formam malhas ou anéis, divergem e convergem, e
onde se ponde abastecer qualquer ponto do sistema por mais de um caminho.
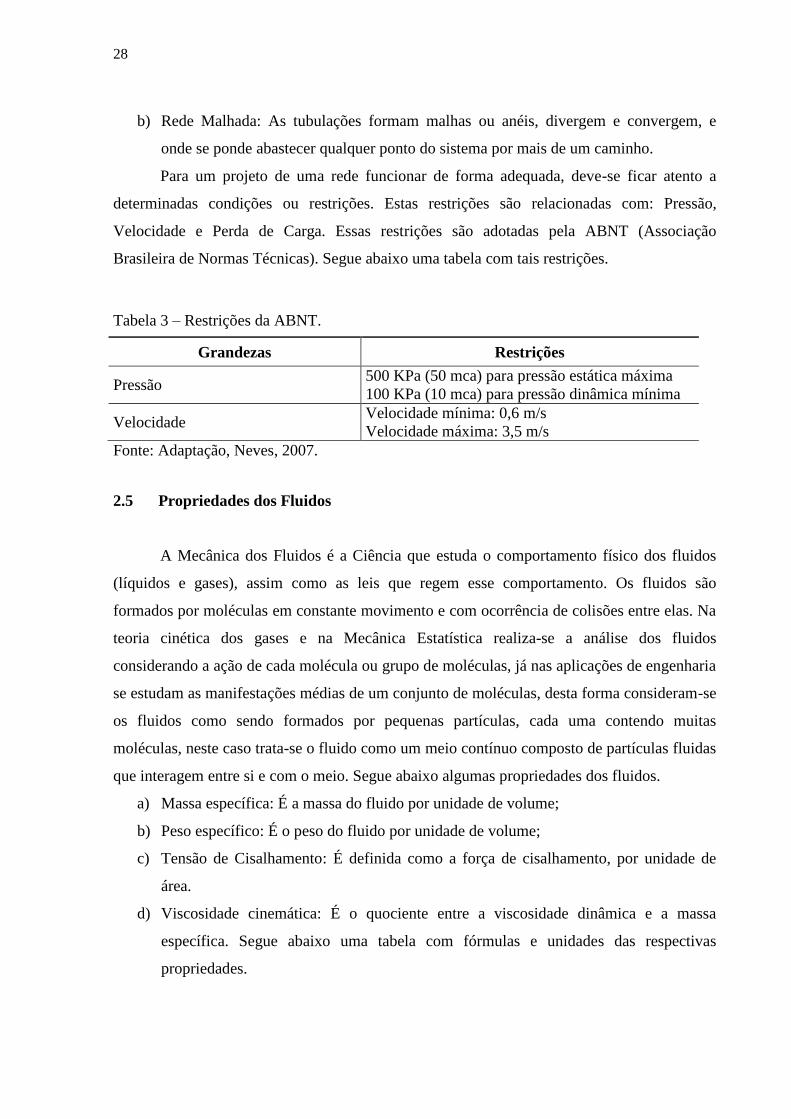
Para um projeto de uma rede funcionar de forma adequada, deve-se ficar atento a
determinadas condições ou restrições. Estas restrições são relacionadas com: Pressão,
Velocidade e Perda de Carga. Essas restrições são adotadas pela ABNT (Associação
Brasileira de Normas Técnicas). Segue abaixo uma tabela com tais restrições.
Tabela 3 – Restrições da ABNT.
Grandezas Restrições
Pressão 500 KPa (50 mca) para pressão estática máxima
100 KPa (10 mca) para pressão dinâmica mínima
Velocidade Velocidade mínima: 0,6 m/s
Velocidade máxima: 3,5 m/s
Fonte: Adaptação, Neves, 2007.
2.5 Propriedades dos Fluidos
A Mecânica dos Fluidos é a Ciência que estuda o comportamento físico dos fluidos
(líquidos e gases), assim como as leis que regem esse comportamento. Os fluidos são
formados por moléculas em constante movimento e com ocorrência de colisões entre elas. Na
teoria cinética dos gases e na Mecânica Estatística realiza-se a análise dos fluidos
considerando a ação de cada molécula ou grupo de moléculas, já nas aplicações de engenharia
se estudam as manifestações médias de um conjunto de moléculas, desta forma consideram-se
os fluidos como sendo formados por pequenas partículas, cada uma contendo muitas
moléculas, neste caso trata-se o fluido como um meio contínuo composto de partículas fluidas
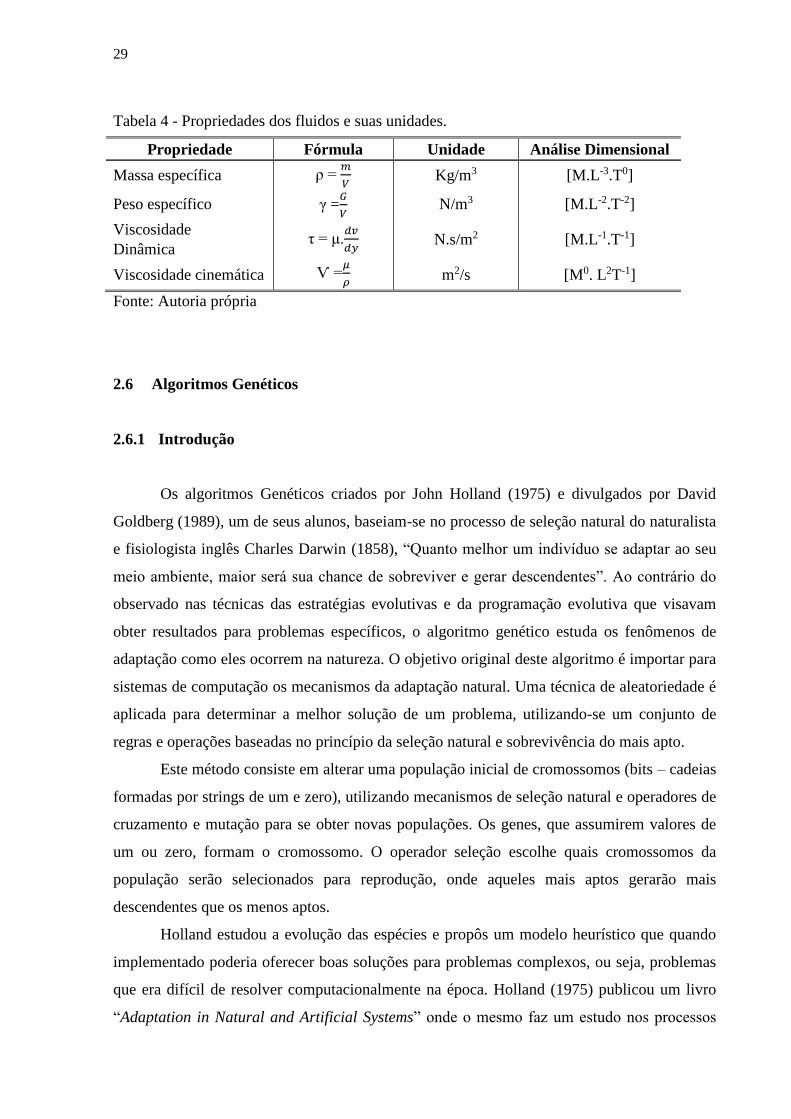
que interagem entre si e com o meio. Segue abaixo algumas propriedades dos fluidos.
a) Massa específica: É a massa do fluido por unidade de volume;
b) Peso específico: É o peso do fluido por unidade de volume;
c) Tensão de Cisalhamento: É definida como a força de cisalhamento, por unidade de
área.
d) Viscosidade cinemática: É o quociente entre a viscosidade dinâmica e a massa
específica. Segue abaixo uma tabela com fórmulas e unidades das respectivas
propriedades.
29
Tabela 4 - Propriedades dos fluidos e suas unidades.
Propriedade Fórmula Unidade Análise Dimensional
Massa específica ρ = 𝑚
𝑉 Kg/m3 [M.L-3.T0]
Peso específico γ =𝐺
𝑉 N/m3 [M.L-2.T-2]
Viscosidade
Dinâmica τ = μ.
𝑑𝑣
𝑑𝑦 N.s/m2 [M.L-1.T-1]
Viscosidade cinemática Ѵ =𝜇
𝜌 m2/s [M0. L2T-1]
Fonte: Autoria própria
2.6 Algoritmos Genéticos
2.6.1 Introdução
Os algoritmos Genéticos criados por John Holland (1975) e divulgados por David
Goldberg (1989), um de seus alunos, baseiam-se no processo de seleção natural do naturalista
e fisiologista inglês Charles Darwin (1858), “Quanto melhor um indivíduo se adaptar ao seu
meio ambiente, maior será sua chance de sobreviver e gerar descendentes”. Ao contrário do
observado nas técnicas das estratégias evolutivas e da programação evolutiva que visavam
obter resultados para problemas específicos, o algoritmo genético estuda os fenômenos de
adaptação como eles ocorrem na natureza. O objetivo original deste algoritmo é importar para
sistemas de computação os mecanismos da adaptação natural. Uma técnica de aleatoriedade é
aplicada para determinar a melhor solução de um problema, utilizando-se um conjunto de
regras e operações baseadas no princípio da seleção natural e sobrevivência do mais apto.
Este método consiste em alterar uma população inicial de cromossomos (bits – cadeias
formadas por strings de um e zero), utilizando mecanismos de seleção natural e operadores de
cruzamento e mutação para se obter novas populações. Os genes, que assumirem valores de
um ou zero, formam o cromossomo. O operador seleção escolhe quais cromossomos da
população serão selecionados para reprodução, onde aqueles mais aptos gerarão mais
descendentes que os menos aptos.
Holland estudou a evolução das espécies e propôs um modelo heurístico que quando
implementado poderia oferecer boas soluções para problemas complexos, ou seja, problemas
que era difícil de resolver computacionalmente na época. Holland (1975) publicou um livro
“Adaptation in Natural and Artificial Systems” onde o mesmo faz um estudo nos processos
30
evolutivos. O trabalho de Holland apresenta os algoritmos genéticos como uma metáfora para
os processos evolutivos, de forma que ele pudesse estudar a adaptação e a evolução no mundo
real, simulando-a dentro de computadores. Entretanto, os algoritmos genéticos transcenderam
o papel originalmente imaginado por Holland e transformaram-se em uma ferramenta de uso
disseminado pelos cientistas da computação.
Holland usou cromossomos binários, cujos genes eram zeros e uns. Esta limitação foi
abolida por muitos pesquisadores, mas ainda até hoje muitos dos cientistas ainda usam
representação binária, mesmo quando existem outras que podem se mostrar mais adequadas
para a resolução do problema em questão. Os GAs são técnicas probabilísticas, e não técnicas
determinísticas. Assim sendo, um GA com a mesma população inicial e o mesmo conjunto de
parâmetros pode encontrar soluções diferentes a cada vez que é executado. Os GAs são em
geral programas simples que necessitam somente de informações locais ao ponto avaliado
(relativas à adequabilidade deste ponto como solução do problema em questão), não
necessitando de derivadas ou qualquer outra informação adicional.
Desde então o algoritmo genético de Holland começou a se expandir por toda a
comunidade cientifica, gerando uma série de aplicações que puderam ajudar a resolver
problemas extremamente importantes que talvez não fossem abordados de outra maneira.
2.6.2 Analogia com a Biologia
Os termos empregados no Algoritmo Genético (AG’s) são adaptados da conceituação
biológica, segue abaixo uma lista que explica alguns termos encontrados na literatura:
a) Cromossomo e Genoma: Na biologia, genoma é o conjunto completo de genes de um
organismo. Um genoma pode ter vários cromossomos. Nos AG’s, os dois representam
a estrutura de dados que codifica uma solução para um problema, ou seja, um
cromossomo ou genoma representa um simples ponto no espaço de busca;
b) Gene: Na biologia, é a unidade de hereditariedade que é transmitida pelo cromossomo
e que controla as características do organismo. Nos AG’s, é um parâmetro codificado
que representa uma variável de decisão no cromossomo, ou seja, um elemento do
vetor que representa o cromossomo;
c) Indivíduo: Um simples membro da população. Nos AG’s, um indivíduo é uma
possível solução para o problema;
d) Genótipo: Na biologia, representa a composição genética contida no genoma. Nos
AG’s, representa a informação contida no cromossomo ou genoma;

31
e) Fenótipo: Nos AG’s, representa o objeto, estrutura ou organismo construído a partir
das informações do genótipo. É o cromossomo decodificado. Por exemplo, considere
que o cromossomo codifica parâmetros como as dimensões das vigas em um projeto
de construção de um edifício, ou as conexões e pesos de uma Rede Neural. O fenótipo
seria o edifício construído ou a Rede Neural;
f) Alelo: Na biologia, representa uma das formas alternativas de um gene. Nos AG’s,
representa os valores que o gene pode assumir. Por exemplo, um gene que representa o
parâmetro cor de um objeto poderia ter o alelo azul, preto, verde, etc;
g) Epistasia: Interação entre genes do cromossomo, isto é, quando um valor de gene
influencia o valor de outro gene. Problemas com alta Epistasia são de difícil solução
por AG’s.
2.6.3 Estrutura dos Algoritmos Genéticos
A otimização matemática é uma área da ciência computacional que busca responder à
pergunta “o que é o melhor?” para problemas em que a qualidade de uma resposta pode ser
medida por um número. Estes problemas aparecem em praticamente todas as áreas do
conhecimento: negócios, ciências físicas, químicas e biológicas, engenharia, economia e
administração.
As técnicas de busca e otimização, geralmente apresentam:
a) Um espaço de busca, onde estão todas as possíveis soluções do problema;
b) Uma função objetivo (algumas vezes chamada de função de aptidão na literatura de
AG’s), que é utilizada para avaliar as soluções produzidas, associando a cada uma
delas um valor.
O primeiro passo de um AG típico é a geração de uma “população inicial de
cromossomos” que é formada por um conjunto aleatório de cromossomos que representam
possíveis soluções do problema a ser resolvido. Durante o “processo evolutivo”, esta
população é avaliada e cada cromossomo recebe uma nota (denominada de “aptidão” no
jargão da literatura de AG’s), refletindo a qualidade da solução que ele representa.
Em geral, os cromossomos mais aptos são selecionados e os menos aptos são
descartados (Darwinismo). Os “membros” selecionados podem sofrer modificações em suas
características fundamentais através dos “operadores” de crossover (cruzamento ou
recombinação) e “mutação”, gerando descendentes para a próxima geração. Este processo é
repetido até que uma solução satisfatória seja encontrada. Veja a figura 4.
32
Seja S(t) a população de cromossomos na geração t.
t 0
inicializarS(t)
avaliarS(t)
enquanto o critério de parada não for satisfeito faça
tt +1
selecionarS(t) a partir de S(t-1)
aplicar cruzamento sobre S(t)
aplicar mutação sobre S(t)
avaliarS(t)
fim enquanto
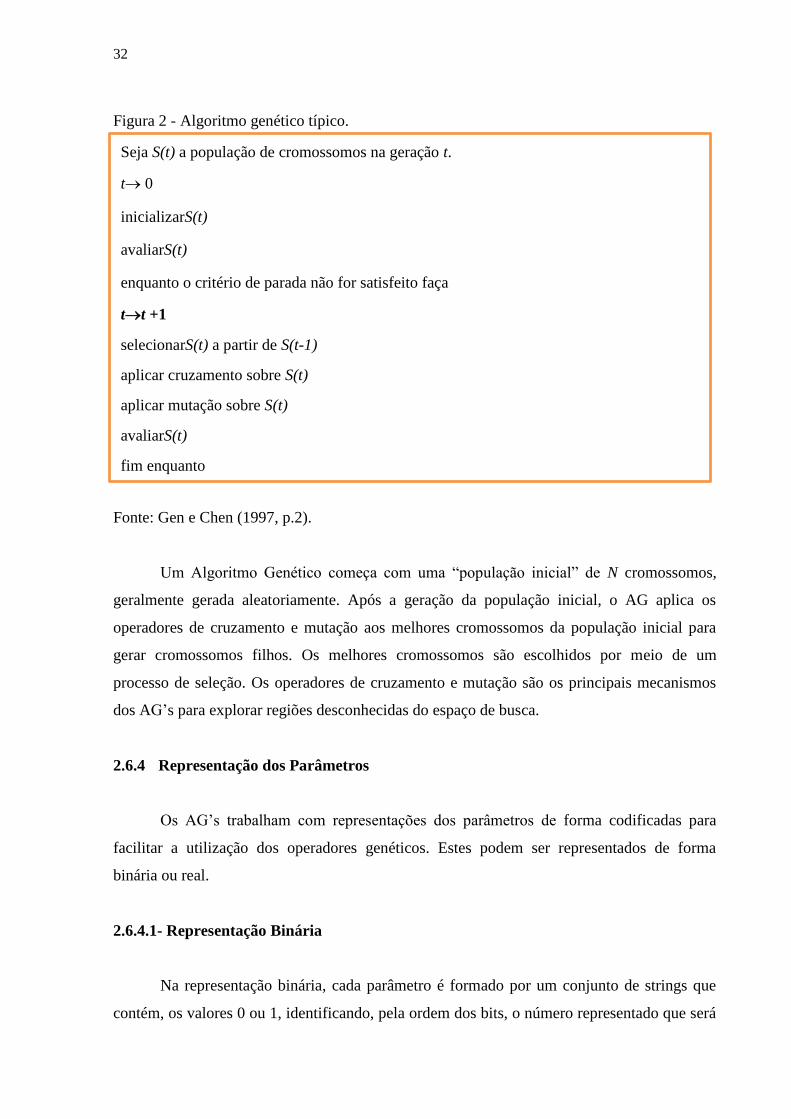
Figura 2 - Algoritmo genético típico.
Fonte: Gen e Chen (1997, p.2).
Um Algoritmo Genético começa com uma “população inicial” de N cromossomos,
geralmente gerada aleatoriamente. Após a geração da população inicial, o AG aplica os
operadores de cruzamento e mutação aos melhores cromossomos da população inicial para
gerar cromossomos filhos. Os melhores cromossomos são escolhidos por meio de um
processo de seleção. Os operadores de cruzamento e mutação são os principais mecanismos
dos AG’s para explorar regiões desconhecidas do espaço de busca.
2.6.4 Representação dos Parâmetros
Os AG’s trabalham com representações dos parâmetros de forma codificadas para
facilitar a utilização dos operadores genéticos. Estes podem ser representados de forma
binária ou real.
2.6.4.1- Representação Binária
Na representação binária, cada parâmetro é formado por um conjunto de strings que
contém, os valores 0 ou 1, identificando, pela ordem dos bits, o número representado que será
33
decodificado posteriormente. Na representação binária um filho pode apresentar uma
determinada característica, atributos recebidos apenas de um dos pais. Isto é, uma vantagem
com relação a representação real já que essa característica fornece a diversidade nas gerações.
Segundo Gambale (2000, p.51) Se V é um conjunto de inteiros que varia no intervalo
de {0,1,...,2l-1} então pode-se codificá-lo usando a representação binária da seguinte forma: e
= [b0 ,...bl], com l “bits’, onde bini {0,1} de tal forma que:
l
i
i
ibin1
12V 2.1
Se V {m, m + 1, ..., m + 2l – 1} então pode-se codificar a variável V – m da mesma
forma.
As operações com números binários podem ser compreendida da seguinte forma:
Representação de número na base dois: Escrever um número inteiro em binário, isto é,
na base dois, não apresenta problema. Cada posição digital representará uma potência de dois,
da mesma forma que nos números decimais, cada posição representa uma potência de dez.
Assim, 23.457 significa:
2x104 + 3x103+ 4x102 + 5x101 + 7x100.
Na base dois, a base usada nos computadores binários, o número 110101 representa:
1x25 + 1x24 + 0x23 + 1x22+ 0x21+ 1x20 = (53)decimal;
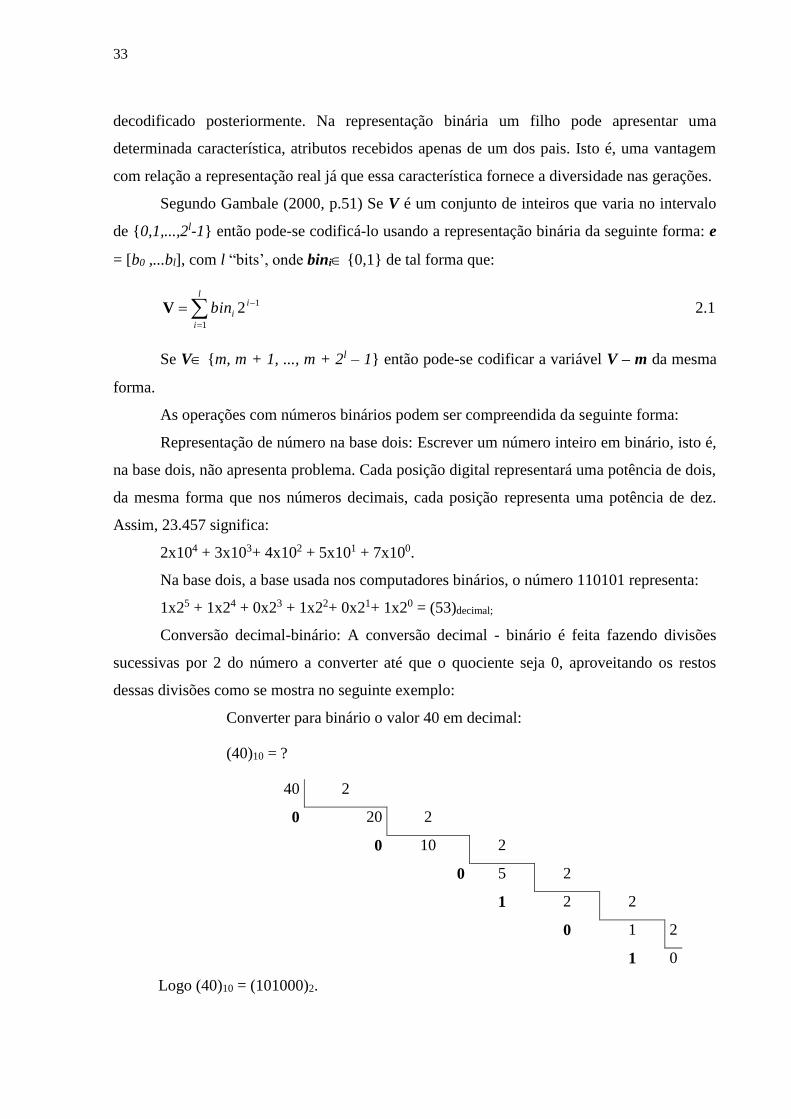
Conversão decimal-binário: A conversão decimal - binário é feita fazendo divisões
sucessivas por 2 do número a converter até que o quociente seja 0, aproveitando os restos
dessas divisões como se mostra no seguinte exemplo:
Converter para binário o valor 40 em decimal:
(40)10 = ?
40 2
0 20 2
0 10 2
0 5 2
1 2 2
0 1 2
1 0
Logo (40)10 = (101000)2.
34
A representação binária é historicamente importante, uma vez que foi utilizada nos
trabalhos pioneiros de Holland (1975). É a representação tradicional, sendo fácil de utilizar e
manipular, como também é simples de analisar teoricamente. Contudo, se um problema tem
parâmetros contínuos e o usuário quer trabalhar com boa precisão numérica, ele precisará
armazenar cromossomos longos na memória.
Para cada ponto decimal acrescentado na precisão, é necessário adicionar 3,3 bits na
cadeia. Se 8 casas decimais forem necessárias, 8 x 3,3 27 bits serão utilizados para cada
parâmetro. Quando há muitos parâmetros, obtêm-se cadeias de bits que podem fazer o
algoritmo convergir vagarosamente. Por exemplo, mutação nos primeiros bits do gene afeta
mais a aptidão que mutação nos últimos bits do gene.
2.6.4.2 Representação Real
A representação real pode ser feita de diversas formas, geralmente com cromossomos
para cada parâmetro armazenado como um número real. Na representação real um indivíduo
filho terá necessariamente, para cada cromossomo uma mistura de carcterísticas dos pais,
diferentes da representação binária, em que um indivíduo pode herdar características de
apenas um dos pais. Uma vantagem de representação real é a facilidade de criar novos
operadores. Muitos pesquisadores têm se mostrado favoráveis à representação binária.
2.6.5 Operadores Genéticos
Os operadores genéticos é que transformam a população por intermédio de sucessivas
gerações, estendendo a busca até chegar a um resultado satisfatório. Um algoritmo genético
padrão evolui, em suas sucessivas gerações, mediante o uso de três operadores básicos:
seleção, cruzamento e mutação.
2.6.5.1 Seleção
A seleção é o processo que separa os indivíduos menos aptos e, portanto que serão
descartados dos indivíduos mais aptos que sofrerão cruzamento ou recombinação e mutação,
compondo assim uma nova geração de possíveis soluções. Na literatura podem ser
encontrados diversos mecanismos de seleção, como mostra a tabela abaixo:
35
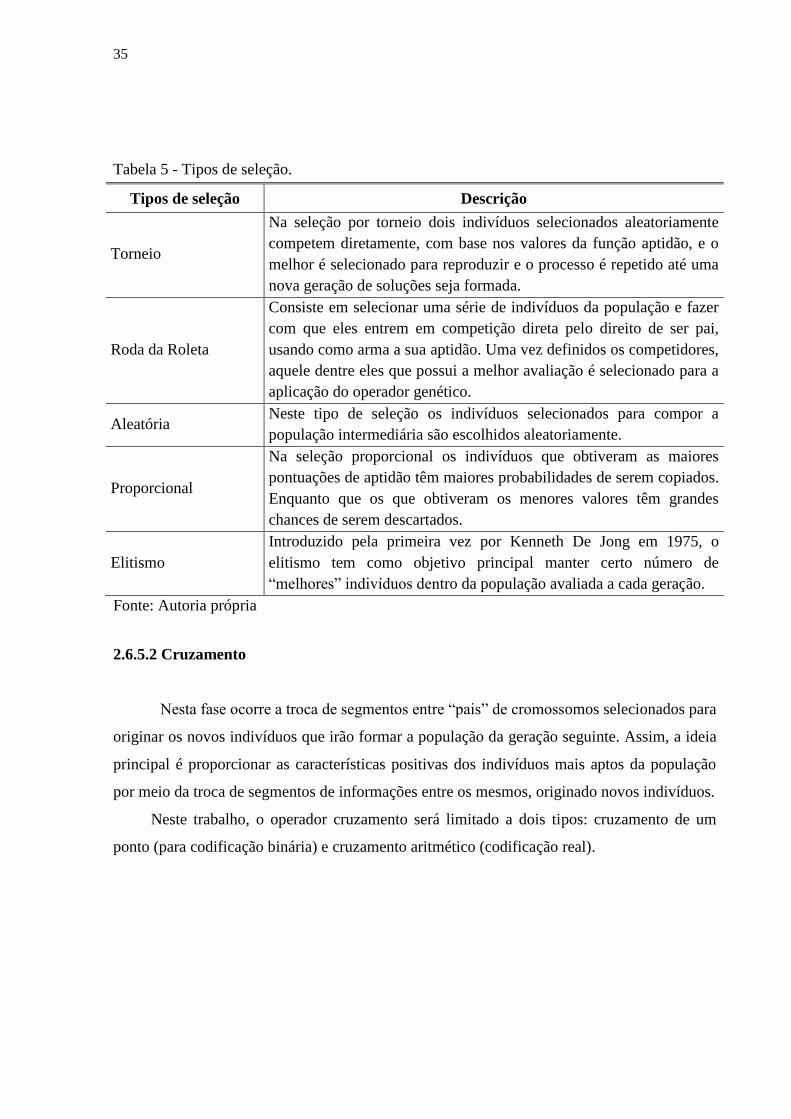
Tabela 5 - Tipos de seleção.
Tipos de seleção Descrição
Torneio
Na seleção por torneio dois indivíduos selecionados aleatoriamente
competem diretamente, com base nos valores da função aptidão, e o
melhor é selecionado para reproduzir e o processo é repetido até uma
nova geração de soluções seja formada.
Roda da Roleta
Consiste em selecionar uma série de indivíduos da população e fazer
com que eles entrem em competição direta pelo direito de ser pai,
usando como arma a sua aptidão. Uma vez definidos os competidores,
aquele dentre eles que possui a melhor avaliação é selecionado para a
aplicação do operador genético.
Aleatória Neste tipo de seleção os indivíduos selecionados para compor a
população intermediária são escolhidos aleatoriamente.
Proporcional
Na seleção proporcional os indivíduos que obtiveram as maiores
pontuações de aptidão têm maiores probabilidades de serem copiados.
Enquanto que os que obtiveram os menores valores têm grandes
chances de serem descartados.
Elitismo
Introduzido pela primeira vez por Kenneth De Jong em 1975, o
elitismo tem como objetivo principal manter certo número de
“melhores” indivíduos dentro da população avaliada a cada geração.
Fonte: Autoria própria
2.6.5.2 Cruzamento
Nesta fase ocorre a troca de segmentos entre “pais” de cromossomos selecionados para
originar os novos indivíduos que irão formar a população da geração seguinte. Assim, a ideia
principal é proporcionar as características positivas dos indivíduos mais aptos da população
por meio da troca de segmentos de informações entre os mesmos, originado novos indivíduos.
Neste trabalho, o operador cruzamento será limitado a dois tipos: cruzamento de um
ponto (para codificação binária) e cruzamento aritmético (codificação real).

36
Cruzamento de Um Ponto
O operador cruzamento é aplicado a cada par de cromossomos pais gerando dois
cromossomos filhos com uma probabilidade pc. Seja ap = (b1, b2, ..., bNC) o primeiro pai e
''
2
'
1
' ,...,,NCp
bbba o segundo pai. Um número inteiro Jx é gerado aleatoriamente entre 1 e NB
– 1 (NB é o número de bits no cromossomo) e os strings dos pais são separados na posição Jx:
NBJxJxp bbbbba ,...,,...,, 121 2.2
''
1
''
2
'
1
' ,...,,...,,NB
bbbbba JxJxp 2.3
Produzindo, pela troca da segunda parte, os dois filhos f
a e '
fa :
''
21 ,...,,...,,1 NBJx
bbbbba Jxf 2.4
NBJxf bbbbbaJx
,...,,...,, 1
''''
21 2.5
A escolha do ponto de corte não é constante em toda a população, ou seja, para cada
par de pais um novo número inteiro Jx é gerado aleatoriamente. Não ocorrendo o cruzamento,
os filhos serão iguais aos pais (isto permite que algumas soluções sejam preservadas). É
prática comum utilizar probabilidade de cruzamento entre 60% e 100%.
Cruzamento Aritmético
Os operadores convencionais de cruzamento (cruzamento de n pontos e uniforme) são
resultados das adaptações dos operadores utilizados para representação binária. Estes
operadores funcionam bem na representação binária, mas na representação real eles
basicamente trocam valores dos genes e, portanto, não criam informações novas (i.e., novos
números reais), neste caso melhor é usar os operadores aritméticos.
Os operadores aritméticos realizam algum tipo de combinação linear entre os
cromossomos pais. Dentre os vários tipos de cruzamento existentes na literatura de AG’s, este
trabalho adota o cruzamento aritmético. O cruzamento aritmético foi proposto por
Michalewicz (1994) e é uma combinação linear entre dois vetores.
Sejam p1 e p2 os cromossomos pais representados por:
l
l
ppp
ppp
222212
112111
,...,,p
,...,,p
2.6

37
onde: pij.
Os cromossomos filhos c1 e c2 são produzidos da seguinte forma:
212
211
pp1c
p1pc
2.7
onde:ci e é um número aleatoriamente gerado no intervalo [0,1].
2.6.5.3 Mutação
Após a operação de cruzamento, o operador de mutação é aplicado, com uma
probabilidade pm, em cada cromossomo filho gerado. A mutação consiste em fazer alterações,
geralmente pequenas, nos valores de um ou mais genes num dado cromossomo.
A mutação melhora a diversidade dos cromossomos na população, por outro lado,
destrói informação contida no cromossomo, logo, deve ser utilizada uma probabilidade de
mutação pequena, mas suficiente para assegurar a diversidade. Esta probabilidade geralmente
está no intervalo pm [0,001; 0,05].
Existem outros tipos de Mutação, porém este trabalho descreve apenas dois: Mutação
Simples e Mutação Uniforme.
Mutação Simples:
Em cromossomos binários a mutação simples inverte os valores de bits, ou seja, muda
o valor de um dado bit de 1 para 0 ou de 0 para 1. A figura 2.5 apresenta um exemplo em que
dois bits do primeiro filho e um bit do segundo sofrem mutação (bits estes que passaram no
teste de probabilidade).
Figura 3- Mutação simples para codificação binária.
Antes filho1 (0010101011010010101100)
filho2 (0011111010100000111111)
Depois filho1 (0010001011010010111100)
filho2 (0011111010000000111111)

38
Mutação Uniforme
A mutação uniforme é um dos vários tipos de operadores de mutação existentes
aplicados a cromossomos de representação real. A mutação uniforme é a simples substituição
de um gene individual por um número aleatório. A mutação é aplicada para cada gene
individual com uma probabilidade pm. Dado um cromossomo p, com o j-ésimo gene
selecionado para mutação, é produzido um cromossomo c da seguinte forma:
contrário caso
se ,,
ip
jibaUc
ii
i 2.8
Onde ai e bi representam os limites do intervalo permitido para o gene ci; e U(ai,bi) representa
um número aleatório de uma distribuição uniforme no intervalo [ai,bi].
2.6.6 Função Objetivo
Há na literatura inúmeras formas de proceder-se ao ajuste entre os parâmetros medidos
e calculados. Há funções objetivos que levam em consideração várias medidas tais como:
cargas hidráulicas, vazões nos tubos, demandas e custos. Estas medidas são aglomeradas na
função objetivo através da definição de pesos que servem como indicadores dos respectivos
graus de influência da medida no processo de otimização.
Para o processo de calibração proposto neste estudo, utilizando-se o Método
Transiente Inverso em conjunto com um Algoritmo Genético, serão necessárias medidas de
cargas hidráulicas em um ou mais nós da rede hidráulica durante um certo intervalo de tempo.
A ideia de trabalhar somente com cargas hidráulicas tem o objetivo de justificar a eficiência
dos processos inversos ao mesmo tempo em que simplifica a construção da função objetivo.
A identificação dos parâmetros é baseada na minimização da soma dos desvios
absolutos e pode ser expressa pelo erro quadrático F:
NL
i
TS
j
c
ji
m
ji HHF1 1
2
,, 2.9
onde: TS = duração do transitório[T]
NL = número de locais de medida na rede [adimensional]
Hi,jm = carga hidráulica medida [L]
Hi,jc = carga hidráulica calculada [L]
i= 1, 2, ... , NL e j = 1, 2, ...,

39
2.6.7 Vantagens dos Algoritmos Genéticos
Os Algoritmos Genéticos têm sido empregados em problemas complicados de
otimização, em que, muitas vezes, os métodos de busca convencional falham. Algumas
vantagens dos AG’s são:
a) Funcionam tanto com parâmetros contínuos como discretos ou uma combinação deles;
b) Realizam pesquisas simultâneas em várias regiões do espaço de busca, pois trabalham
com uma população e não com um único ponto;
c) Utilizam informações de custo ou recompensa e não derivadas ou outro conhecimento
auxiliar;
d) Otimizam um número grande de variáveis;
e) Otimizam parâmetros de funções objetivos com superfícies complexas e complicadas,
reduzindo a incidência de mínimos locais;
f) Adaptam-se bem a computadores paralelos;
g) Trabalham com uma codificação do conjunto de parâmetros e não com os próprios
parâmetros;
h) Fornecem uma lista de parâmetros ótimos e não uma simples solução;
i) Trabalham com dados gerados experimentalmente e são tolerantes a ruídos e dados
incompletos;
j) São fáceis de serem implementados em computadores;
k) São modulares e portáteis, ou seja, o mecanismo de evolução é separado da
representação particular do problema considerado. Assim, eles podem ser transferidos
de um problema para outro;
l) São flexíveis para trabalhar com restrições arbitrárias e otimizar múltiplas funções
com objetivos conflitantes;
m) São também facilmente hibridizados com outras técnicas e heurísticas.

40
2.6.8 Algumas Aplicações e Fluxograma do AG
São vastas as aplicações do método AG, tais como:
a) Otimização de funções matemáticas de múltiplos parâmetros – superfícies, com
número elevado de máximos/mínimos locais;
b) Problemas combinatórios, como roteamento, escalas de tráfego e agendas, horários;
c) Problemas de otimização de custos diversos;
d) Problemas de economia, previsão de mercados etc;
e) Inteligência artificial;
f) Programação evolutiva (programas geram programas);
g) Otimização de estruturas de concreto armado;
h) Redes de distribuição de água.
O primeiro passo de um AG típico é a geração de uma “população inicial de
cromossomos” que é formada por um conjunto aleatório de cromossomos que representam
possíveis soluções do problema a ser resolvido. Durante o “processo evolutivo”, esta
população é avaliada e cada cromossomo recebe uma nota (denominada de “aptidão” no
jargão da literatura de AG’s), refletindo a qualidade da solução que ele representa.
Em geral, os cromossomos mais aptos são selecionados e os menos aptos são
descartados (Darwinismo). Os “membros” selecionados podem sofrer modificações em suas
características fundamentais através dos “operadores” de crossover (cruzamento ou
recombinação) e “mutação”, gerando descendentes para a próxima geração. Este processo é
repetido até que uma solução satisfatória seja encontrada. Segue abaixo um fluxograma do
AG.

41
Figura 4 - Fluxograma do AG padrão.
Não
Sim
Fonte: Autoria própria.
Iniciar
Inicialização da População
Avaliação da Função Aptidão
Seleção
Operadores Genéticos
Substituição da População
Avaliação da Função Aptidão
Critério de
Convergência
Fim
42
2.6.9 Algumas pesquisas relacionadas ao Estudo
Neste item descrevem-se alguns trabalhos que envolvem a análise de redes hidráulicas
com fluxo transiente pela solução do problema inverso de maneira direta ou indireta, com o
uso de Algoritmos Genéticos.
Chaudhry (1987) analisou o fluxo transiente por meio do Método das Características
(MOC) com transformação de equações diferenciais parciais não lineares em equações
ordinárias, mediante a transformação de linearização, mas embutindo uma estabilidade que é
resolvida por meio da condição de Courant .
Pudar e Liggett (1992) desenvolveram uma técnica de localização de vazamentos
através de comparação de dados de vazão e pressão observados com os calculados em regime
permanente em um nó ou poucos nós. Eles informaram também, que o modelo de localização
e quantificação dos vazamentos depende da precisão das pressões medidas, da quantidade e
locais destas medições e do conhecimento prévio dos fatores de atrito das tubulações.
Reis, Porto e Chaudhry (1997) aplicaram um algoritmo genético (AG) no problema de
localização ótima de válvulas de controle em uma rede de abastecimento de água, visando à
redução de vazamentos. O estudo levou em consideração a demanda da rede, elevação dos
reservatórios e o número de válvulas de controle de pressão.
Em um modelo para detecção de vazamento, Covas, Ramos e Almeida (2000),
desprezando e energia cinética dentro do tubo, a diferença de cota entre o tubo e o vazamento
e a velocidade de percolação no solo da água, utilizaram-se da equação geral de descarga por
orifícios para quantização dos vazamentos, procurando o vazamento por meio de um método
direto sob três pontos de vista, onde o primeiro usa o MOC, o segundo usa análise de Fourier
para examinar a oscilação de frequência da onda de pressão e o terceiro busca o vazamento
com dados transientes pelo método transiente inverso.
Mpesha, Chaudhry e Gassman (2002) desenvolveram um método direto para
localização de vazamento e sua quantificação pela análise do estado não permanente do fluxo
provocado pela abertura e fechamento de uma válvula. O sistema analizado era formado por
um reservatório a jusante, conectado a um tubo com válvula à motante, utilizaram neste
estudo o MOC para descrever e calcular o fluxo transiente. Reproduziram os diagramas de
pressão e vazão em frequências pelo método de transformada rápida de Fourier, onde os picos
de frequêcias dos sistemas com vazamentos e sem vazamentos foram comparados para
localização do vazamento mediante recursos computacionais.

43
Araújo (2013) desenvolveu um método para estimar parâmetros de uma rede
hidráulica, a partir de dados de carga obtidos em regime transiente. As condições permanentes
são desconhecidas e obtidas pelo MOC aplicadas na solução das equações do escoamento
trasiente no tubo. Aplicou a solução inversa através do MTI, junto com o AG para otimização
de parâmetros que devam ser estimados, como rugosidades, diâmetros e quantificação e
identificação de vazamentos. Para isso foi empregada uma rede exemplo de abastecimento de
água, onde foi produzido o evento transiente pela abertura e fechamento de uma válvula em
um dos nós da rede.

44
3 TIPOS DE ESCOAMENTOS
Para uma descrição completa dos escoamentos, segue abaixo um fluxograma.
Figura 5 - Classificação dos escoamentos.
Fonte: Autoria própria.
a) Quanto à direção da trajetória:
Laminar: Ocorre quando as partículas de um fluido movem-se ao longo de
trajetórias bem definidas, apresentando lâminas ou camadas (daí o nome laminar)
cada uma delas preservando suas características no meio. Este escoamento ocorre
geralmente a baixas velocidades;
Turbulento: Ocorre quando as partículas do fluido não se movem ao longo de
trajetórias bem definidas, as partículas descrevem trajetórias irregulares, com
movimento aleatório, produzindo uma transferência de quantidade de movimento
entre regiões de massa líquida.
b) Quanto à variação no tempo:
Permanente: Neste tipo de escoamento as propriedades do fluido não variam no
tempo, como por exemplos a velocidade e pressão.
𝑑𝑝
𝑑𝑡 = 0
𝑑𝑣
𝑑𝑡 = 0
Não-Permanente ou Transitório: Ocorre quando as propriedades do fluido em cada
ponto apresentam variação com o tempo.
Escoamento dos Fluidos
Quanto à direção
da trajetória
Quanto à variação
na trajetória
Quanto ao
movimento de
rotação
Quanto à variação
no tempo
Quanto à
dependência
espacial
45
c) Quanto à variação na trajetória:
Uniforme: Todos os pontos da mesma trajetória possuem a mesma velocidade,
ocorre, por exemplo, em líquidos sob pressão constante em longas tubulações;
Variado: Todos os pontos da mesma trajetória possuem velocidades diferentes,
ocorre, por exemplo, no golpe de aríete.
d) Quanto ao movimento de Rotação:
Rotacional: Ocorre quando as partículas de um fluido, numa certa região
apresentam rotação em relação a um eixo qualquer;
Irrotacional: Ocorre quando as partículas de um fluido, numa certa região não
apresentam rotação em relação a um eixo qualquer.
e) Quanto à dependência espacial:
Unidimensional: Sua propriedade se exprime em apenas uma dimensão, além do
tempo.
V= f(x,t)
Bidimensional: A velocidade é função das duas coordenadas x e y.
V= f(x,y,t)
Tridimensional: A velocidade é função de x,y e z
V= f(x,y,z,t)
46
4 ESCOAMENTO TRANSIENTE EM TUBULAÇÕES
Dá-se o nome de Transiente ou Transitório hidráulico ao regime variado que ocorre
durante a passagem de um regime permanente para outro regime permanente, sendo que
qualquer alteração no movimento do fluido gera o fenômeno.
Neste estudo, a perturbação no movimento do fluido será ocasionada pela mudança de
manobra, provocando um regime transitório que, posteriormente, passará a um novo regime
de permanência. Existem outras condições de contorno que podem provocar transientes, tais
como: Partidas ou paradas de bombas, variação nas demandas e alteração do nível de água de
um reservatório.
4.1 Golpe de Aríete
Denominamos golpe de aríete à variação da pressão acima e abaixo do valor de
funcionamento normal dos condutos forçados, em consequência das mudanças de velocidades
da água, decorrentes de manobras dos registros de regulagem das vazões.
O termo Golpe de Aríete foi forjado pelos pesquisadores franceses, que assimilaram o
som rítmico produzido pelas sucessivas ondas de pressão que atingiam um registro de gaveta
ao som das batidas de um aríete ao arrombar portas e muralhas de fortificações. O aríete é
uma antiga máquina de guerra, usada até o século XV, consistindo basicamente de um tronco
de madeira pendurado em um pórtico; o tronco, impulsionado por vários soldados, era
arremessado seguidas vezes contra a porta ou muralha a ser arrombada. A palavra aríete é de
origem latina, aries, arietis, que significa carneiro.
Uma aplicação positiva do fenômeno do Golpe de Aríete, talvez a única, é o
dispositivo denominado Carneiro Hidráulico, muito usado em propriedades rurais para
recalcar a água.
Os efeitos danosos do Golpe de Aríete, infelizmente, são mais numerosos: rompimento
de tubulação por excesso de pressão, implosão de tubulação por diminuição de pressão
(separação da coluna líquida), rotação reversa de bomba, com risco de queima do motor
elétrico, disparo de turbina, com risco de grave acidente por rompimento do rotor,
rompimento da tubulação por fadiga, pela ocorrência de um elevado número de solicitações
periódicas de alta frequência.
O fenômeno transiente pode ser analisado considerando dois tipos de modelos: o
modelo da coluna rígida e o modelo da coluna elástica. A teoria da coluna rígida tem como

47
características que os fluidos são incompressíveis, os condutos rígidos e hipótese
unidimensional. Esse modelo tem como consequências um modelo mais simplificado,
equações mais simples, porém com cálculo mais longe da realidade física. A aplicação para
este modelo se resume aos cálculos simples de manobras muito simples e estabilidade de
chaminés de equilíbrio.
Por outro lado, o modelo da coluna elástica apresenta como hipóteses: fluido
compressível, condutos elásticos e direção unidimensional. As consequências desse sistema
apresentam um modelo mais complexo; equações mais complexas e um cálculo mais próximo
da realidade física. Esse modelo tem como aplicações o cálculo do golpe de aríete e cavitação.
Nesse trabalho, a utilização do modelo elástico é o mais adequado.
A análise dos transientes nos sistemas hidráulicos é baseada nas equações da
continuidade e da conservação da quantidade de movimento. Essas equações que descrevem o
fenômeno transiente são equações diferenciais parciais com presença de termos não lineares,
que podem inviabilizar uma solução analítica explícita. Portanto, embora as equações sejam
conhecidas há algum tempo, as simplificações assumidas na obtenção e resolução dessas
equações, levam a resultados que nem sempre reproduzem satisfatoriamente os efeitos
observados experimentalmente.
4.2 Equações do Transiente Hidráulico
O modelo hidráulico representa uma descrição matemática das características de um
sistema hidráulico, sendo o caso de estudo desta pesquisa 3 redes de abastecimento de água.
Para entender os seus processos dinâmicos em geral usam-se equações diferenciais e a sua
solução permite que sejam encontradas as respostas destes sistemas.
O método numérico mais utilizado na resolução de escoamentos transientes é ainda o
Método das Características. Uma vez que as características representam seu curso de ondas ou
perturbações que se deslocam, esse é o método mais apropriado para analisar sistemas
hiperbólicos CHAUNDHRY (1987). O Método das Características apresenta uma série de
vantagens sobre os outros métodos para resolução de golpe de aríete, tais como critério de
estabilidade bem definido, solução explícita e procedimento por aproximações relativamente
simples.
Os transientes hidráulicos em condutos forçados são regidos pelas equações da
Continuidade e da Quantidade de Movimento. Segundo Neiva (2000) apud Righetto (1972);

48
Chaudhry (1987), para a obtenção dessas equações, algumas hipóteses são necessárias para o
desenvolvimento da teoria:
1. O escoamento na tubulação é considerado unidimensional, com distribuição de
pressão e velocidade uniforme na seção transversal;
2. O módulo de elasticidade do material da tubulação é constante, e as deformações da
tubulação, em decorrência da variação da pressão, são consideradas pequenas e podem
ser regidas pela lei de HooKe (Modelo Elástico Linear);
3. O módulo de elasticidade volumétrica do líquido é constante, sendo a variação de seu
volume unitário proporcional ao aumento ou diminuição da pressão;
4. Em qualquer circunstância, a água conserva o seu estado líquido, sem ocorrência da
vaporização;
5. A carga cinética é desprezível em relação às demais;
6. As expressões para o cálculo da perda de carga em regime permanente são
consideradas válidas na condição de regime não permanente.
O fluxo transiente em um conduto forçado é regido pelas equações diferenciais
parciais não lineares abaixo, onde a primeira é a conservação de massa e a segunda
conservação de momento.
4.1
4.2
Onde:
H é a carga piezométrica
Q é a vazão volumétrica
A é a área da seção transversal do tubo
a é a celeridade da onda de pressão
D é o diâmetro interno da tubulação
f é o fator de atrito de Darcy-Weisbach
g é a aceleração da gravidade
x é a distância
t o tempo
02
x
H
gA
a
t
H
02
||
DA
QQf
x
HgA
t
Q

49
Para resolver sistemas de equações diferenciais torna-se necessário um método
numérico e condições de contorno apropriadas. Alguns métodos numéricos podem ser
encontrados na literatura, entre eles, têm-se os seguintes: método das características, método
do contorno integral, método dos volumes finitos, método dos elementos finitos, método
espectral e método das diferenças finitas.
Nesta pesquisa será usado o Método das Características, onde sua preferência se
justifica pelo fato do fenômeno transiente seguir uma lei de propagação de ondas que associa
o tempo t com a posição x definida ao longo da canalização através da celeridade. A vantagem
desse método é apresentar a possibilidade de obter equações explícitas para determinação das
cargas H e vazões Q, quando utilizamos a aproximação de 1ª Ordem como solução das
equações características.
Segundo LESSA (1984), uma solução explícita para essas equações diferenciais
parciais não está disponível. Numa solução explícita, as variáveis dependentes H e Q são
expressas em termos de variáveis independentes x e t, de modo que os valores de H e Q
podem ser calculados para qualquer valor de x e t. Numa solução numérica, a solução destas
equações é obtida para valores discretos de x e t, ou seja, valores conhecidos de H e Q num
dado instante.
Será utilizado o modelo da coluna elástica através do método das características como
ferramenta de modelagem do fenômeno transiente pelo fato do mesmo considerar os efeitos
elásticos da água em um conduto.
4.2.1 Cálculo da celeridade
As ondas de pressão do golpe de aríete são do tipo elástico, cuja celeridade afetiva de
propagação é expressa em termos de propriedades físicas do fluido e da tubulação.
Halliwell apud Chaudhry (1987) apresenta uma expressão geral para o cálculo da
velocidade da onda:
4.3
Onde:
: É um parâmetro adimensional que depende das propriedades elásticas do conduto
EK
Ka
1

50
E : Módulo de elasticidade de Young da parede do conduto
K : Módulo de elasticidade volumétrica do fluido
ρ: Massa específica do fluido
Existem várias expressões que calculam o parâmetro para diferentes condições dos
condutos. Neste trabalho, os condutos serão considerados como elásticos de paredes finas. A
expressão é a seguinte:
4.4
Onde:
D: diâmetro do conduto
e: espessura da parede
: razão de Poisson (adimensional)
4.2.2 Método das Características
As equações (4.1) e (4.2) representam matematicamente o transiente hidráulico e
através dela é possível calcular os valores da vazão Q e da carga piezométrica H ao longo da
tubulação x e do tempo t.
As equações (4.1) e (4.2) podem ser reescritas como:
4.5
4.6
Aplicando uma combinação linear das equações (4.5) e (4.6), tem-se que:
4.7
Logo, segue-se que:
4.8
5,01'e
D
02
||1
DA
QQf
x
HgA
t
QL
02
2
t
HgA
x
QaL
021 LLL
0||2
2
t
HgA
x
QaQQ
DA
f
x
HgA
t
Q

51
ou
4.9
Assim,
4.10
Tendo em vista que ),( txQQ e ),( txHH são soluções das equações (4.5) e (4.6), então
as derivadas totais podem ser escritas como:
4.11
4.12
O multiplicador 𝜆 pode ser definido como:
4.13
Utilizando as equações (4.10), (4.11) e (4.12), as equações características tornam-se:
4.14
4.15
4.16
4.17
0||2
2
t
HgA
x
QaQQ
DA
f
x
HgA
t
Q
0||2
12
DA
f
x
H
t
HgA
x
Qa
t
Q
0
dt
dx
x
Q
t
Q
dt
dQ
0
dt
dx
x
H
t
H
dt
dH
adt
dxa
112
0||2
DA
f
dt
dH
a
gA
t
Q
adt
dx
0||2
DA
f
dt
dH
a
gA
t
Q
adt
dx

52
Observa-se que a equação (4.14) é valida para adtdx , e que a equação (4.16) é
valida para adtdx . Na realidade, segundo RIGHETTO (1972), as equações (4.14) e
(4.16) são as mesmas equações fundamentais, estando a primeira associada com a equação
(4.15) e a segunda associada com a equação (4.17).
As equações (4.15) e (4.17) representam no plano yx, duas linhas retas com
declividades, como se pode observar pela Figura 4.1. Essas linhas retas são chamadas de
linhas características, daí o nome Método das Características. A reta de inclinação c1 é
chamada característica positiva e a reta de inclinação c1 é a característica negativa, sendo
convenientemente chamada de C e C respectivamente.
Desta forma, discretizando-se o domínio x e o tempo t em intervalos, uma
solução numérica pode ser obtida.
Figura 6 - Linhas Características no plano x-t.
Fonte: Araújo (2003).
A malha de discretização acima permite o cálculo da vazão PQ e carga PH no tempo
00 tt a partir das vazões e cargas a montante Qp , Hm e jusante Qj, Hj conforme as equações
características C e
C . Na figura abaixo, tem-se os pontos JM , e P que correspondem,
respectivamente, aos pontos de coordenadas ji tx ,1 , ji tx ,1 , 1, ji tx . Onde i representa um
ponto na malha de discretização e t é o tempo. A Eq. (4.14) é usada para relacionar os valores
de PH e PQ com o par de valores Hm e Qm e a Eq. (4.14) para relacionar PH e PQ com JH e
JQ .

53
Figura 7- Definição da malha de discretização do método das características.
Fonte: Araújo (2003).
A aproximação de1ª ordem para as equações (4.14) a (4.16), sugeridas por Araújo
(2003) são:
4.18
para: adtdx /
4.19
para: adtdx /
Onde:
4.20
4.21
As constantes R e B são, respectivamente, constante do termo de atrito e constante
auxiliar. Quando o termo de atrito torna-se consideravelmente grande como, por exemplo, em
tubos rugosos com pequenos diâmetros, torna-se necessário uma aproximação de 2ª Ordem
para estabilização e melhor calibração do modelo.
Integrando as equações (4.18) e (4.19) ao longo de MP e JP, respectivamente, da
figura 9:
4.22
0||: dtQRQBdQdHC
0||: dtQRQBdQdHC
gA
aB
22gDA
faR
0:
P
M
P
M
P
M
dtQQRdQBdHC

54
4.23
Os dois primeiros termos das equações (4.22) e (4.23) podem ser facilmente avaliados,
entretanto o terceiro termo destas, representando perdas por atrito, apresenta certa dificuldade,
pois não se conhece explicitamente a variação de Q com t. De acordo com Wyliee
Streeter(1978), citado por Araújo (2003) uma técnica de primeira ordem sugerida é
suficientemente viável e precisa. Usando esta técnica para o termo do atrito, as equações
(4.22) e (4.23) tornam-se:
4.24
4.25
Com a aproximação do termo do atrito:
4.26
para C
4.27
para C
Segundo Araújo (2003) esse método é conhecido como explícito e produz usualmente
resultados satisfatórios em aplicações na engenharia. Entretanto, se o termo do atrito tornar-se
muito grande, a aproximação de primeira ordem pode produzir resultados instáveis. Para tais
casos, um método previsor-corretor ou uma aproximação de segunda ordem devem ser usados
para evitar instabilidade.
A teoria desenvolvida será válida se o fluxo transiente não flutuar muito distante do
estado permanente por um longo período de tempo.
0:
P
J
P
J
P
J
dtQQRdQBdHC
0 :
MMMPMp QtQRQQBHHC
0 - :
JJJPJP QtQRQQBHHC
tQQdtQQ MM
P
M
MM
tQQdtQQ JJ
P
J
JJ

55
4.2.3 Condições de Contorno
Um sistema hidráulico complexo é dividido em trechos contínuos, os quais são
interligados pelas condições de contorno em cada extremidade. Nas seções desses trechos
contínuos, chamadas seções internas, as funções que relacionam as diversas grandezas não
possuem descontinuidades, sendo seu comportamento descrito pelas equações (4.18) e (4.19).
Porém, como explicitado anteriormente, nos contornos apenas uma equação característica é
possível de ser utilizada, assim, uma ou mais equações relacionando Q e/ou H com o tempo
devem ser fornecidas para solucionar o problema.
As equações características positiva (4.18) e negativa (4.19) são válidas apenas para as
seções internas do conduto. Portando, para as seções de montante e jusante do tubo, onde
apenas uma equação característica é possível de ser utilizada, uma ou mais equações
relacionando Q e/ou H com o tempo devem ser fornecidas para solucionar o problema. Tal ou
tais equações são denominadas Condições de Contorno ou de Fronteira. Essas condições
devem ser expressas por relações matemáticas que representem, da maneira mais realística
possível, o escoamento nessas seções durante o transiente hidráulico. Assim, qualquer
equipamento, acessório ou mudança nas características existentes são condições de contorno
potenciais, devendo ser usadas em conjunto com a equação característica respectiva para se
determinar o transiente hidráulico.
O método das características providencia um meio sistemático de cálculo das
condições transientes em uma tubulação. Cada trecho é dividido em 1N segmentos de
comprimento x com N seções. No início de cada trecho (primeira seção) e ao término do
trecho (última seção) uma equação de contorno e uma equação característica são necessárias.
Nos nós interiores (1 < i < N), ambas as equações características são empregadas. Aplicando
este esquema de discretização, obtêm-se equações para as diversas seções de uma rede
hidráulica.
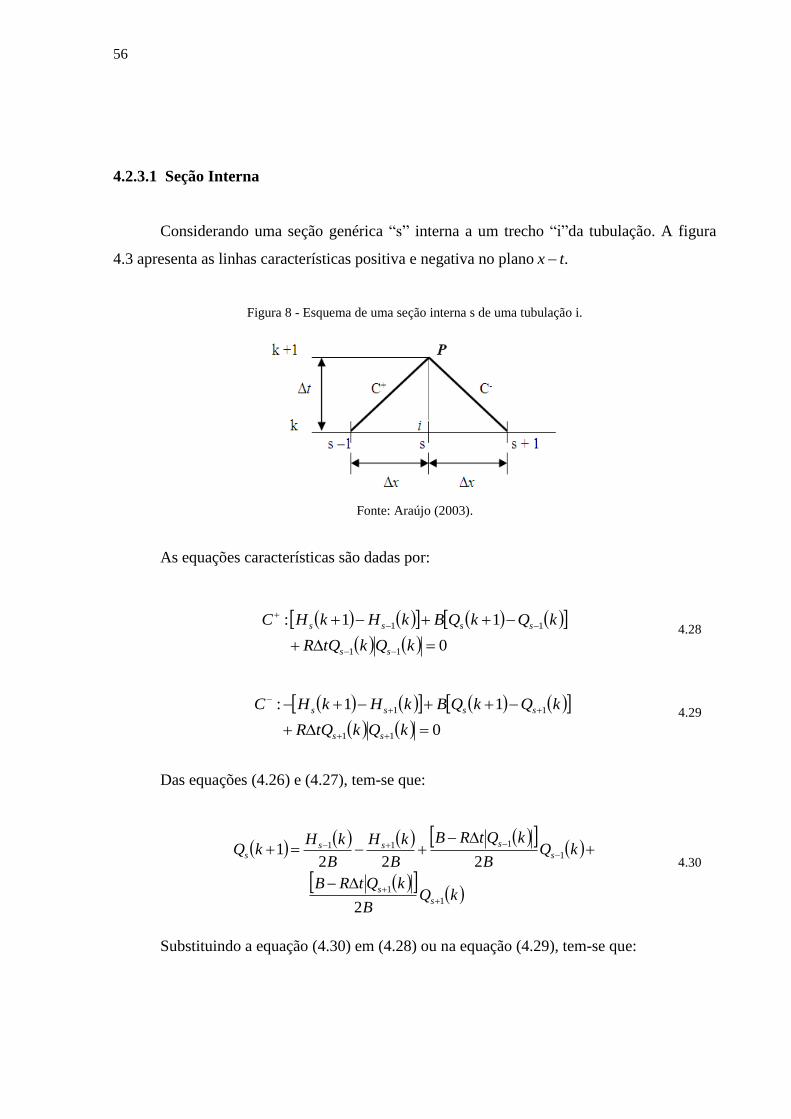
56
4.2.3.1 Seção Interna
Considerando uma seção genérica “s” interna a um trecho “i”da tubulação. A figura
4.3 apresenta as linhas características positiva e negativa no plano .tx
Figura 8 - Esquema de uma seção interna s de uma tubulação i.
Fonte: Araújo (2003).
As equações características são dadas por:
4.28
4.29
Das equações (4.26) e (4.27), tem-se que:
4.30
Substituindo a equação (4.30) em (4.28) ou na equação (4.29), tem-se que:
0
11:
11
11
kQktQR
kQkQBkHkHC
ss
ssss
0
11:
11
11
kQktQR
kQkQBkHkHC
ss
ssss
kQ
B
kQtRB
kQB
kQtRB
B
kH
B
kHkQ
s
s
s
ssss
1
1
1
111
2
2221

57
4.31
4.2.3.2 Reservatório de Nível Constante a Montante
Considerando um reservatório de nível constante localizado à montante de uma
tubulação genérica, tem-se que:
Figura 9 - Esquema de um reservatório de nível constante
Fonte: Araújo (2003).
A equação característica negativa é dada por:
4.32
No contorno, tem-se que:
4.33
Das equações (4.30) e (4.31), tem-se que:
4.34
kQ
kQtRB
kQkQtRBkHkH
kH
s
s
s
ssss
1
1
1
111
2
2221
0
11:
22
2121
kQktQR
kQkQBkHkHC
constante 1 11 HkH
kQB
kQtRB
B
kH
B
HkQ 2
2211 1

58
4.2.3.3 Reservatório de nível constante a Jusante
Considerando um reservatório de nível constante localizado à jusante de uma
tubulação genérica, tem-se que:
Figura 10- Esquema de um reservatório de nível constante localizado a jusante
Fonte: Araújo (2003).
A equação característica positiva é dada por:
4.35
Contorno:
4.36
Através das equações(4.35)e (4.36), tem-se que:
4.37
4.2.3.4 Nó de consumo ou demanda
Considere um nó de consumo genérico M com vazão de demanda igual a MEXTQ , e duas
tubulações i e j representando as tubulações que chegam (conjunto N1 – sentido positivo) e as
tubulações que saem (conjunto N2– sentido negativo) do nó 𝑀 respectivamente (figura 4.6).
0
11:
11
11
kQktQR
kQkQBkHkHC
NN
NNNN
constante 1 NN HkH
kQB
kQtRB
B
kH
B
HkQ N
NNNN 1
111
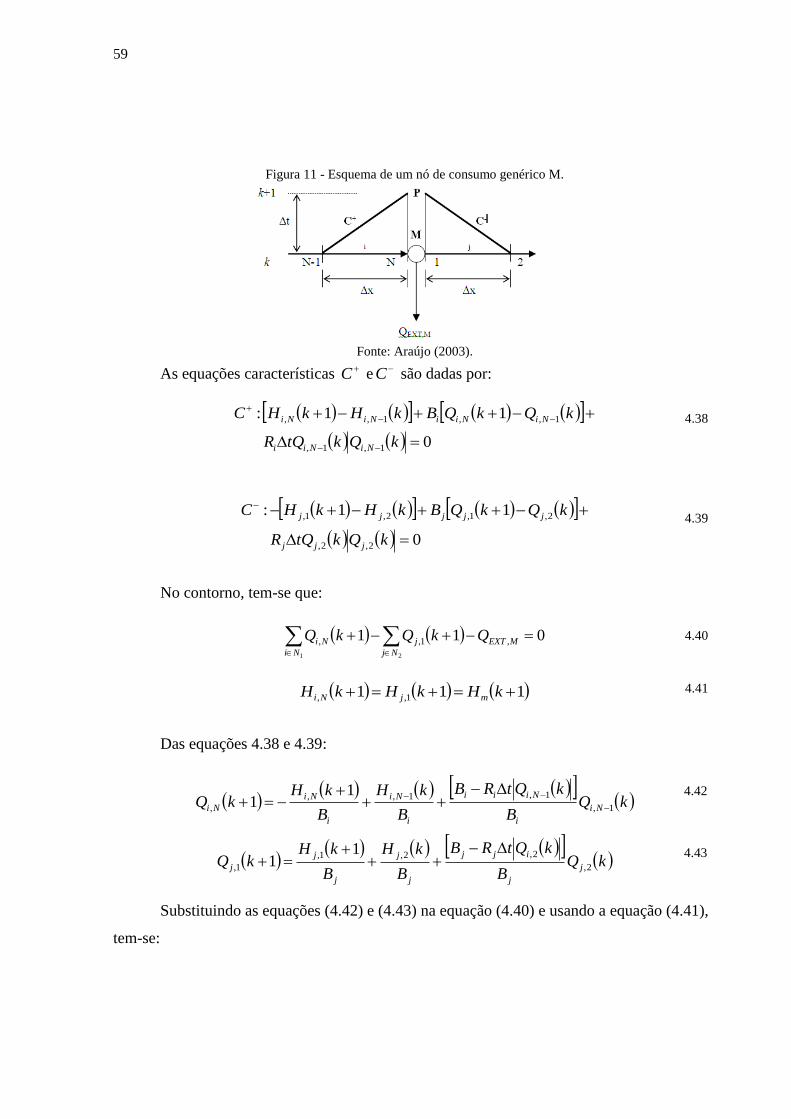
59
Figura 11 - Esquema de um nó de consumo genérico M.
Fonte: Araújo (2003).
As equações características C e C são dadas por:
4.38
4.39
No contorno, tem-se que:
4.40
4.41
Das equações 4.38 e 4.39:
4.42
4.43
Substituindo as equações (4.42) e (4.43) na equação (4.40) e usando a equação (4.41),
tem-se:
0
11:
1,1,
1,,1,,
kQktQR
kQkQBkHkHC
NiNii
NiNiiNiNi
0
11:
2,2,
2,1,2,1,
kQktQR
kQkQBkHkHC
jjj
jjjjj
011 ,1,,
21
MEXT
Nj
j
Ni
Ni QkQkQ
111 1,, kHkHkH mjNi
kQB
kQtRB
B
kH
B
kHkQ Ni
i
Niii
i
Ni
i
Ni
Ni 1,
1,1,,
,
11
kQB
kQtRB
B
kH
B
kHkQ j
j
ijj
j
j
j
j
j 2,
2,2,1,
1,
11
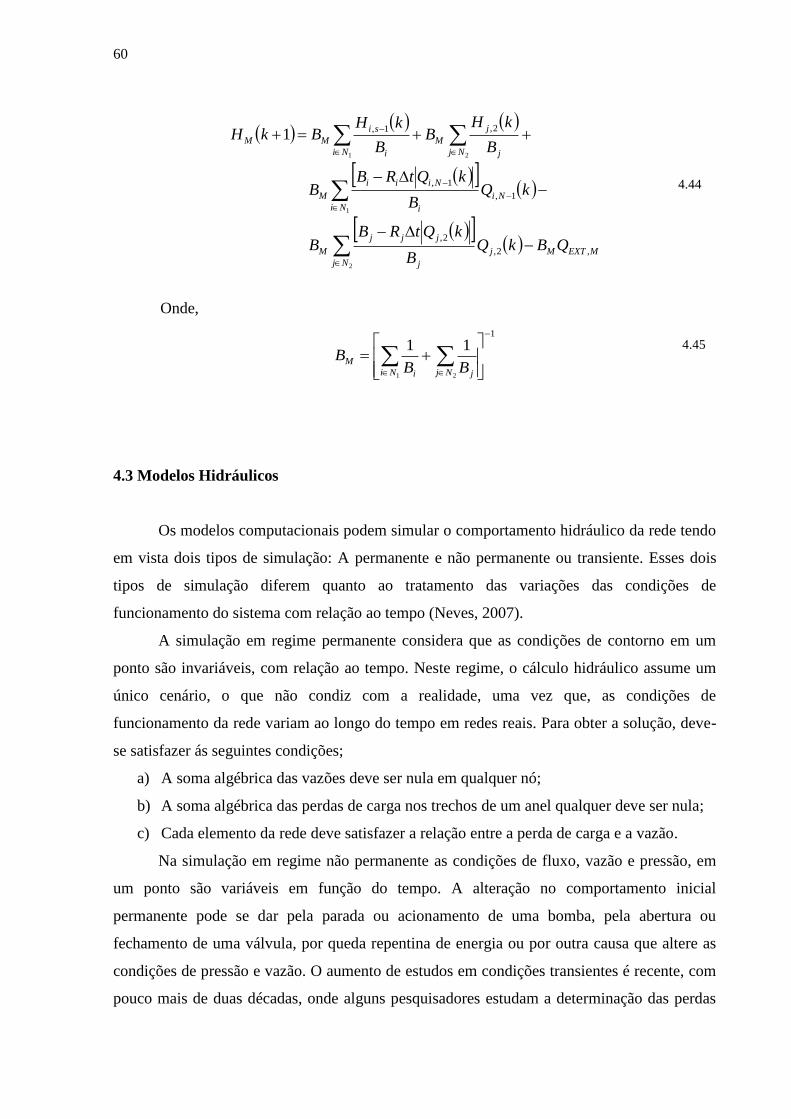
60
4.44
Onde,
4.45
4.3 Modelos Hidráulicos
Os modelos computacionais podem simular o comportamento hidráulico da rede tendo
em vista dois tipos de simulação: A permanente e não permanente ou transiente. Esses dois
tipos de simulação diferem quanto ao tratamento das variações das condições de
funcionamento do sistema com relação ao tempo (Neves, 2007).
A simulação em regime permanente considera que as condições de contorno em um
ponto são invariáveis, com relação ao tempo. Neste regime, o cálculo hidráulico assume um
único cenário, o que não condiz com a realidade, uma vez que, as condições de
funcionamento da rede variam ao longo do tempo em redes reais. Para obter a solução, deve-
se satisfazer ás seguintes condições;
a) A soma algébrica das vazões deve ser nula em qualquer nó;
b) A soma algébrica das perdas de carga nos trechos de um anel qualquer deve ser nula;
c) Cada elemento da rede deve satisfazer a relação entre a perda de carga e a vazão.
Na simulação em regime não permanente as condições de fluxo, vazão e pressão, em
um ponto são variáveis em função do tempo. A alteração no comportamento inicial
permanente pode se dar pela parada ou acionamento de uma bomba, pela abertura ou
fechamento de uma válvula, por queda repentina de energia ou por outra causa que altere as
condições de pressão e vazão. O aumento de estudos em condições transientes é recente, com
pouco mais de duas décadas, onde alguns pesquisadores estudam a determinação das perdas
MEXTM
Nj
j
j
jjj
M
Ni
Ni
i
Niii
M
Nj j
j
M
Ni i
si
MM
QBkQB
kQtRBB
kQB
kQtRBB
B
kHB
B
kHBkH
,2,
2,
1,
1,
2,1,
2
1
21
1
1
21
11
Nj jNi i
MBB
B

61
de carga dos condutos durante um evento transiente, outros se concentram na determinação e
detecção de vazamentos.
62
5 METODOLOGIA
5.1 Definição do Problema Inverso
Os vários métodos aplicados na análise de redes de distribuição de água visando não
apenas à calibração, mas outras finalidades enquadram-se sob duas formas de abordagem, o
problema direto e o inverso. No direto, as demandas e as demais características físicas da rede
são conhecidas e desejam-se calcular as cargas hidráulicas nos nós e as vazões nos tubos. No
problema inverso, diferentemente do problema direto, não se dispõe das referidas
informações. Há alguns dados disponíveis de carga hidráulicas em poucos nós e desejam-se
calcular ou estimar alguns parâmetros da rede, tais como: fatores de atrito, rugosidades,
diâmetros, demandas, identificação e localização de vazamentos. O problema inverso trata,
portanto, as características da rede como variáveis.
De forma geral, a solução dos problemas inversos é feita por meio de métodos diretos
e indiretos. Nos métodos inversos diretos, busca-se resolver diretamente as equações
considerando os parâmetros como variáveis dependentes. Nos métodos inversos indiretos,
utiliza-se um processo iterativo, onde os parâmetros variam e a simulação é repetida até
reproduzir uma solução satisfatória. Os métodos indiretos são mais utilizados em razão da
simplicidade de formulação matemática e do fato de serem menos sensíveis a erros nos dados
de entrada.
5.2 Tipos de Solução do Problema Inverso
Segundo Neuman (1973), os métodos de resolução do problema inverso podem ser
divididos em diretos e indiretos. A aproximação direta tem como critério minimizar os erros
gerados na resolução das equações, de uma maneira não iterativa. No método indireto, busca-
se minimizar o erro residual existente entre os dados calculados e estimados de forma
iterativa. O método de tentativa e erro é considerado por SUN (1994) como a forma mais
antiga de resolução do problema inverso.
A solução direta trata os parâmetros como variáveis dependentes de um problema
inverso com especificação das suas condições de contorno. O método procura a minimização
dos resíduos das soluções das equações diferenciais que definem o problema. Estes resíduos
provêm das diferenças entre as soluções encontradas destas equações com os valores dos
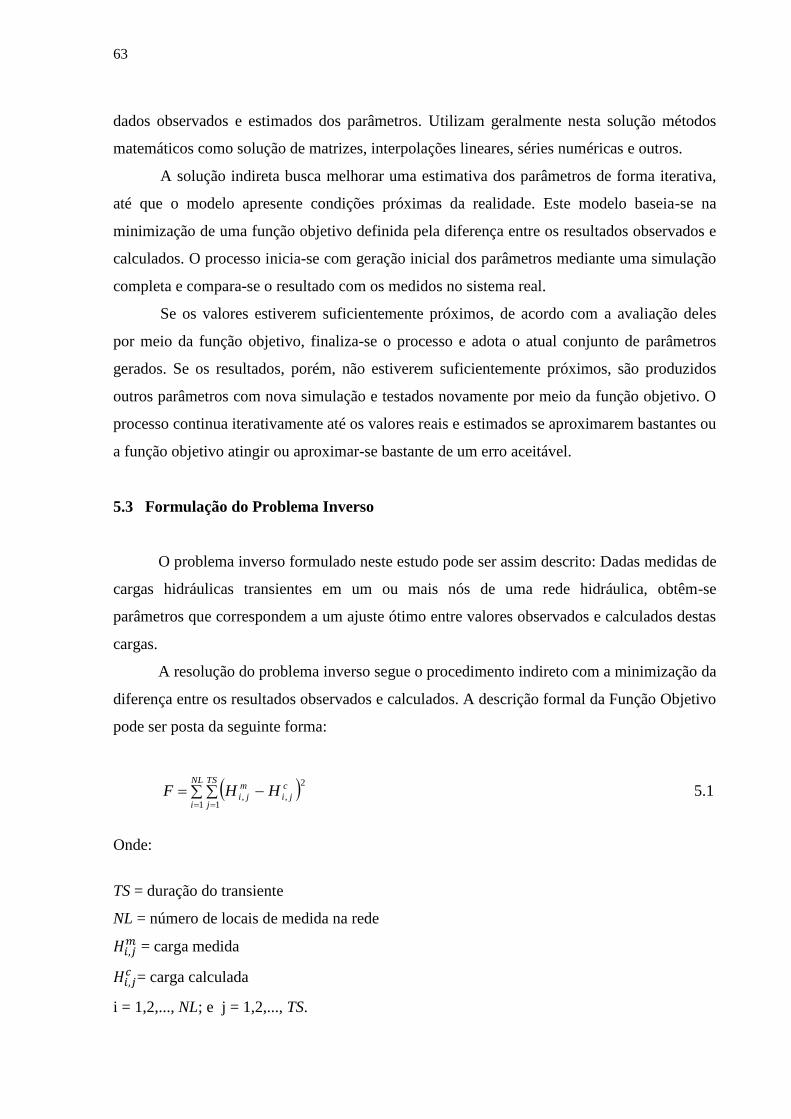
63
dados observados e estimados dos parâmetros. Utilizam geralmente nesta solução métodos
matemáticos como solução de matrizes, interpolações lineares, séries numéricas e outros.
A solução indireta busca melhorar uma estimativa dos parâmetros de forma iterativa,
até que o modelo apresente condições próximas da realidade. Este modelo baseia-se na
minimização de uma função objetivo definida pela diferença entre os resultados observados e
calculados. O processo inicia-se com geração inicial dos parâmetros mediante uma simulação
completa e compara-se o resultado com os medidos no sistema real.
Se os valores estiverem suficientemente próximos, de acordo com a avaliação deles
por meio da função objetivo, finaliza-se o processo e adota o atual conjunto de parâmetros
gerados. Se os resultados, porém, não estiverem suficientemente próximos, são produzidos
outros parâmetros com nova simulação e testados novamente por meio da função objetivo. O
processo continua iterativamente até os valores reais e estimados se aproximarem bastantes ou
a função objetivo atingir ou aproximar-se bastante de um erro aceitável.
5.3 Formulação do Problema Inverso
O problema inverso formulado neste estudo pode ser assim descrito: Dadas medidas de
cargas hidráulicas transientes em um ou mais nós de uma rede hidráulica, obtêm-se
parâmetros que correspondem a um ajuste ótimo entre valores observados e calculados destas
cargas.
A resolução do problema inverso segue o procedimento indireto com a minimização da
diferença entre os resultados observados e calculados. A descrição formal da Função Objetivo
pode ser posta da seguinte forma:
NL
i
TS
j
c
ji
m
ji HHF1 1
2
,, 5.1
Onde:
TS = duração do transiente
NL = número de locais de medida na rede
𝐻𝑖,𝑗𝑚 = carga medida
𝐻𝑖,𝑗𝑐 = carga calculada
i = 1,2,..., NL; e j = 1,2,..., TS.
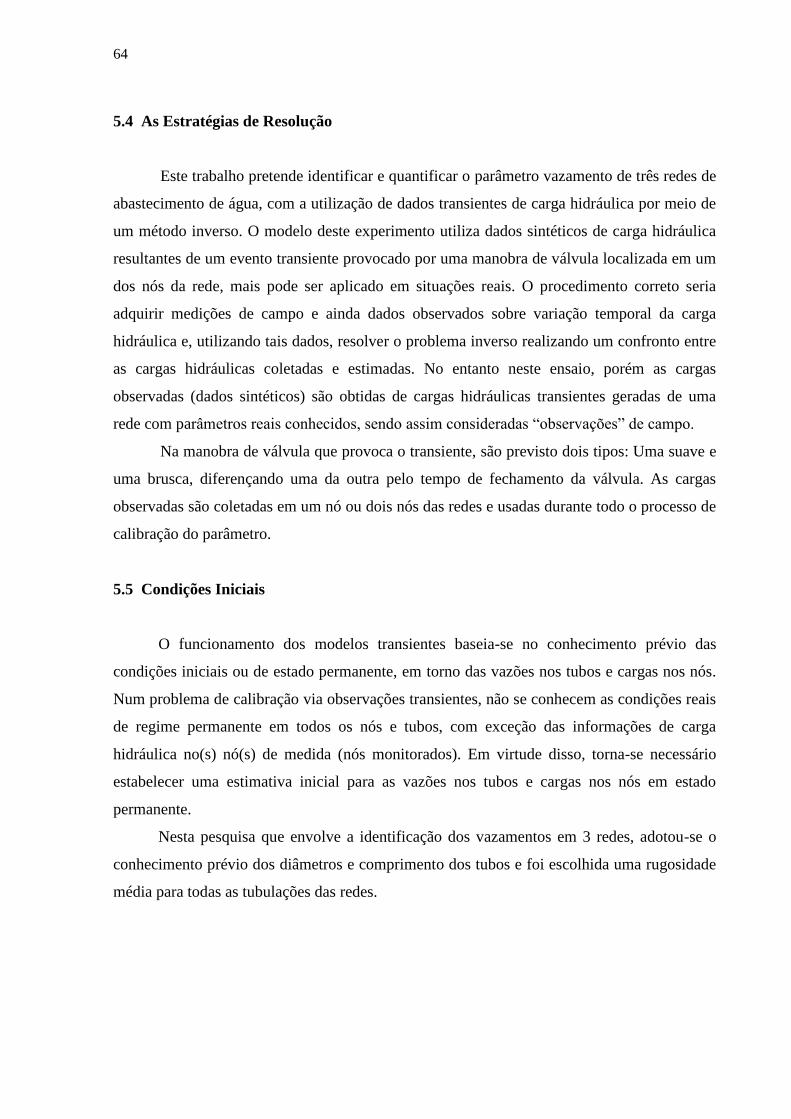
64
5.4 As Estratégias de Resolução
Este trabalho pretende identificar e quantificar o parâmetro vazamento de três redes de
abastecimento de água, com a utilização de dados transientes de carga hidráulica por meio de
um método inverso. O modelo deste experimento utiliza dados sintéticos de carga hidráulica
resultantes de um evento transiente provocado por uma manobra de válvula localizada em um
dos nós da rede, mais pode ser aplicado em situações reais. O procedimento correto seria
adquirir medições de campo e ainda dados observados sobre variação temporal da carga
hidráulica e, utilizando tais dados, resolver o problema inverso realizando um confronto entre
as cargas hidráulicas coletadas e estimadas. No entanto neste ensaio, porém as cargas
observadas (dados sintéticos) são obtidas de cargas hidráulicas transientes geradas de uma
rede com parâmetros reais conhecidos, sendo assim consideradas “observações” de campo.
Na manobra de válvula que provoca o transiente, são previsto dois tipos: Uma suave e
uma brusca, diferençando uma da outra pelo tempo de fechamento da válvula. As cargas
observadas são coletadas em um nó ou dois nós das redes e usadas durante todo o processo de
calibração do parâmetro.
5.5 Condições Iniciais
O funcionamento dos modelos transientes baseia-se no conhecimento prévio das
condições iniciais ou de estado permanente, em torno das vazões nos tubos e cargas nos nós.
Num problema de calibração via observações transientes, não se conhecem as condições reais
de regime permanente em todos os nós e tubos, com exceção das informações de carga
hidráulica no(s) nó(s) de medida (nós monitorados). Em virtude disso, torna-se necessário
estabelecer uma estimativa inicial para as vazões nos tubos e cargas nos nós em estado
permanente.
Nesta pesquisa que envolve a identificação dos vazamentos em 3 redes, adotou-se o
conhecimento prévio dos diâmetros e comprimento dos tubos e foi escolhida uma rugosidade
média para todas as tubulações das redes.

65
5.6 Manobras de Válvulas
As válvulas são acessórios operacionais usadas para abrir, fechar ou regular a
passagem de água pelas tubulações. Podem estar situadas em diversas posições da linha e são
de diversos tipos e podem ser acionadas manualmente, por motores elétricos, comados
hidráulicos ou pneumáticos ou ainda por efeito do próprio líquido em função de pressão e
velocidade, quando se denominam válvulas automáticas.
Quando se realiza uma manobra de válvula e a vazão é alterada em função do tempo,
efeitos transitórios se manifestam por conta da variação de pressão provocada pela manobra
de válvula.
No Brasil, segundo Azevedo Neto algumas válvulas também são conhecidas como
“registros”, num uso inadequado da palavra (já que não registram nada). Deve-se ressaltar
ainda que a importância do estudo das manobras de válvulas no fenômeno transiente ocorre
em virtude da relação existente entre o intervalo de tempo de variação de vazão provocado
pela válvula e a variação da pressão ou da carga hidráulica. Portanto, podem-se controlar
pressões especificando manobras adequadas de válvulas.
Com o objetivo de analisar o efeito da severidade do transiente na identificação dos
vazamentos, foram selecionados 6 manobras de válvula, sendo que cada rede possui 2. Uma
manobra de válvula é caracterizada pela relação entre o coeficiente de abertura ou fechamento
relativo em função do tempo t.

66
Na primeira manobra, temos o seguinte processo: A válvula encontra-se totalmente
aberta no tempo t=0s e fecha-se linearmente após o tempo t=60s.
Figura 12 - Manobra 1.
Na segunda manobra, após o tempo t= 0s, a válvula fecha-se linearmente até o tempo
t=5s, e permanece fechada.
Figura 13- Manobra 2.
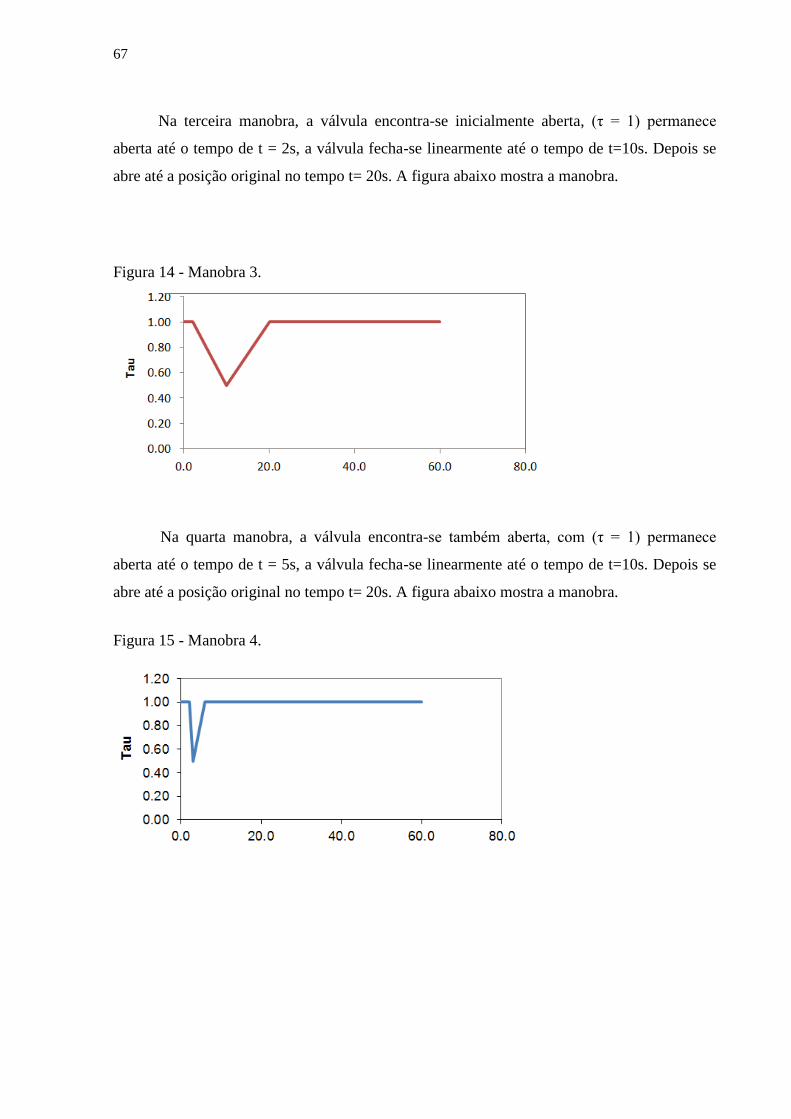
67
Na terceira manobra, a válvula encontra-se inicialmente aberta, (τ = 1) permanece
aberta até o tempo de t = 2s, a válvula fecha-se linearmente até o tempo de t=10s. Depois se
abre até a posição original no tempo t= 20s. A figura abaixo mostra a manobra.
Figura 14 - Manobra 3.
Na quarta manobra, a válvula encontra-se também aberta, com (τ = 1) permanece
aberta até o tempo de t = 5s, a válvula fecha-se linearmente até o tempo de t=10s. Depois se
abre até a posição original no tempo t= 20s. A figura abaixo mostra a manobra.
Figura 15 - Manobra 4.
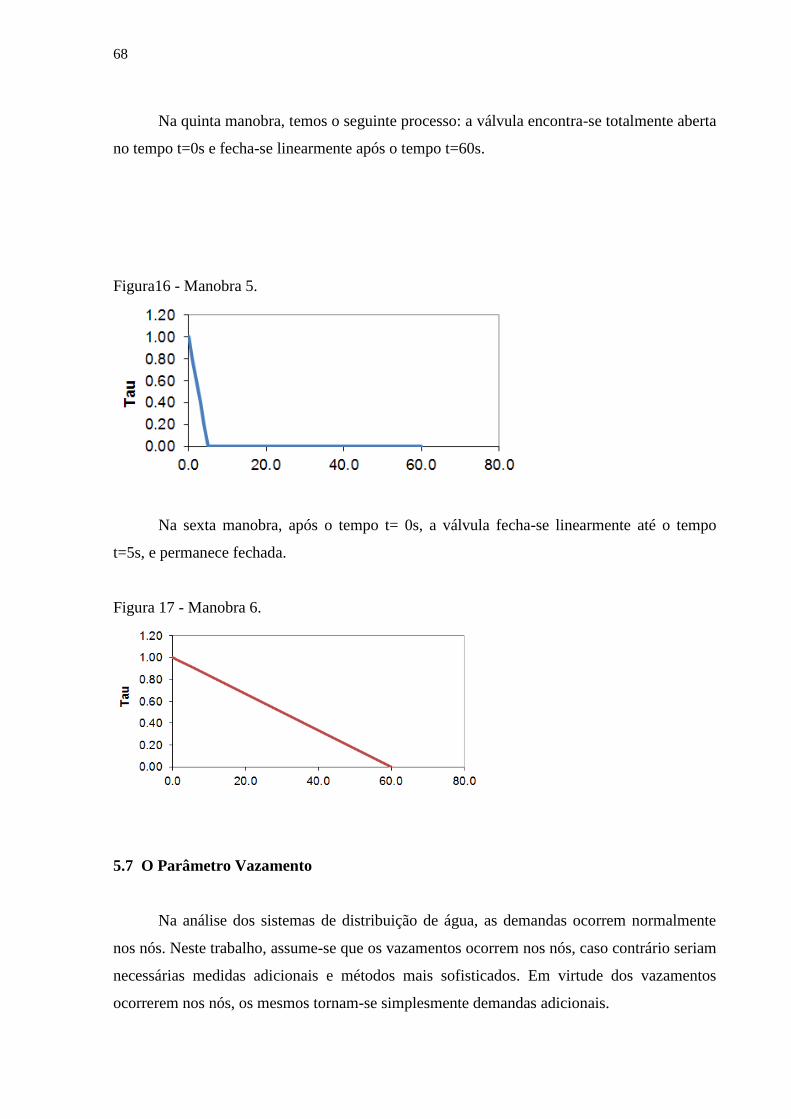
68
Na quinta manobra, temos o seguinte processo: a válvula encontra-se totalmente aberta
no tempo t=0s e fecha-se linearmente após o tempo t=60s.
Figura16 - Manobra 5.
Na sexta manobra, após o tempo t= 0s, a válvula fecha-se linearmente até o tempo
t=5s, e permanece fechada.
Figura 17 - Manobra 6.
5.7 O Parâmetro Vazamento
Na análise dos sistemas de distribuição de água, as demandas ocorrem normalmente
nos nós. Neste trabalho, assume-se que os vazamentos ocorrem nos nós, caso contrário seriam
necessárias medidas adicionais e métodos mais sofisticados. Em virtude dos vazamentos
ocorrerem nos nós, os mesmos tornam-se simplesmente demandas adicionais.

69
Fisicamente, um vazamento funciona como um orifício descarregando livremente na
atmosfera. Desprezando a energia cinética no interior do tubo, o vazamento, Qv, pode ser
calculado pela equação do orifício:
VVVdV zHgACQ 2 5.3
onde:
Cd : Coeficiente de descarga
AV : Área do orifício
HV : Carga hidráulica no nó do vazamento
zV : Cota do nó do vazamento
QV: Vazão de vazamento
g: Aceleração da gravidade
5.8 Índices Para Calibração
A identificação será desenvolvida em dois passos. No primeiro passo, realizam-se
simulações com a finalidade de apontar os nós mais promissores para a ocorrência do(s)
vazamento(s) descartando aqueles com vazamento desprezível. O segundo passo mantém os
vazamentos em locais promissores como os ainda desconhecidos a serem identificados. Como
critério para descartar vazamentos desprezíveis, utilizou-se o Índice de Aceitação do Local de
Vazamento, IALV expresso por Araújo (2003, p.75):
100%
1
NN
i
V
V
i
i
i
Q
QIALV 5.4
onde:
Qvi : vazamento no nó i e
NN : número total de nós suspeitos de vazamentos.

70
Para avaliar o grau de acerto na localização e quantificação de vazamento nos nós,
usa-se o Índice de Acerto (IA), expresso por Araújo (2003, p.77):
1001%
real
v
estimado
v
real
v
i
ii
Q
QQIA 5.5
onde:
ivQ : vazamento no no i
i : número do nó que contém vazamento real.
5.9 Programas
O programa utilizado nesse trabalho foi desenvolvido por Araújo (2003) na linguagem
FORTRAN (FORmulaTRANslation), que em português significa tradução de fórmulas e é
uma linguagem de alto nível, desenvolvida entre 1954 e 1958 por John Backus. O programa
para essa pesquisa se divide em três: O primeiro programa realiza o cálculo das cargas e
vazões iniciais para o estado permanente com o auxílio do Método das Características. O
segundo programa refere-se ao modelo hidráulico para o cálculo das cargas hidráulicas
transientes por meio do Método das Características. O terceiro usa o AG como ferramenta de
otimização para identificar os vazamentos.
5.10 Parâmetros do AG
Os parâmetros do AG aplicado para o processo de calibração para todas as redes estão
representados na tabela abaixo:
Tabela 6 - Parâmetros dos Algoritmos Genéticos comuns para todas as simulações.
Representação dos parâmetros Real
Função Objetivo Quadrado da diferença de Cargas
População de soluções, NC: 20
Número de gerações, NG: 10
Tipo de cruzamento: Aritmético
Probabilidade de cruzamento, pc: 100%
Tipo de mutação: Uniforme
Probabilidade de mutação, pm: 0,5 %
Fonte: Autoria própria

71
5.11 Redes Hidráulicas
5.11.1 Rede 1
A rede 1 é simples, porém representa uma situação real. A aplicação do procedimento
MTI-AG não impõe restrição ao tamanho da rede. As cargas hidráulicas transientes
observadas e as condições iniciais de regime permanente foram obtidas a partir de condições
transientes usando o MOC. A figura abaixo mostra a rede 1 que contém 5 tubos, 1
reservatório de carga constante (nó 1), 4 nós de demandas e uma válvula de controle (nó 5).
Figura18- Rede 1.
Legenda:
( ) nº do tubo
[ ] nº do nó
As variáveis do problema são: topografia do terreno, diâmetro do tubo (D),
rugosidades das tubulações (ε), demandas nodais e nível do reservatório. As características
físicas e as demandas nos nós são apresentadas nas tabelas abaixo:

72
Tabela 7 - Características físicas da Rede 1.
Tabela 8 - Demandas nos nós da rede1.
Nó Demandas (L/s)
1 100.0
2 -40.0
3 -20.0
4 -30.0
5 -10.0
A coluna (4) da tabela apresenta os valores iniciais da celeridade nos tubos. Esses
valores correspondem às seguintes características: espessura da parede do tubo, e’ = 10mm;
razão de Poisson, 𝜐′= 0,25; módulo de elasticidade do material do tubo, E = 120 GPa; módulo
de elasticidade da água, K = 2,19 GPa; massa específica da água, 𝜌 = 999 kg/m3. Para um
sistema de dois ou mais condutos, é necessário que o mesmo intervalo de tempo seja usado
para todos os condutos tal que as condições de contorno nas junções possam ser usadas. Este
intervalo de tempo deverá ser selecionado de forma a obedecer à condição de estabilidade de
Courant (Δx > a Δt). Entretanto, para evitar interpolação, Δt deve ser escolhido de maneira a
satisfazer a seguinte equação (CHAUDHRY, 1987).
Δ𝑡 =𝐿𝑖
𝑎𝑖𝑛𝑖 ( 1 até N) 6.1
TUBO L (m) D (m) a (m/s) aj (m/s) ε (mm)
1 300,0 0,40 1156,6 1500,0 0,30
2 305,0 0,10 1374,9 1525,0 0,30
3 215,0 0,30 1217,4 2150,0 0,30
4 215,0 0,10 1374,9 2150,0 0,30
5 215,0 0,25 1251,7 2150,0 0,30

73
Onde ni é um número inteiro e igual ao número de trechos no qual o i-ésimo conduto é
dividido; Li é o comprimento do i-ésimo conduto; ai é a celeridade do i-ésimo conduto e N é o
número de tubos no sistema. Como a celeridade não é precisamente conhecida, ajustes
menores nos seus valores são aceitáveis. A coluna (5 da tabela 8) apresenta os valores da
celeridade ajustados.
O evento transiente do sistema causado pela manobra da válvula de controle no nó 5
foi simulado para cada manobra com seu respectivo tempo de duração do transiente. O
intervalo de tempo, t, para a simulação computacional foi de 0,1s.
As Vazões iniciais nos tubos e as cargas iniciais nos tubos correspondem às condições
iniciais em regime permanente foram determinadas através do modelo computacional que
calcula o transiente pelo método das características. Para a rede 1, são:
Tabela 9 - Vazões iniciais em estado permanente da Rede 1.
Tubo s/vaz. vaz.nó 4(2L/s) vaz.nó 4(5L/s)
1 0,100000 0,102000 0,105000
2 0,027362 0,028274 0,029643
3 0,027362 0,028274 0,009643
4 0,032638 0,033726 0,035358
5 0,002638 0,001726 0,000358
Fonte: Autoria própria.
Tabela 10 - Cargas iniciais em estado permanente da Rede 1.
Número de Nós s/vaz. vaz.nó 4(2L/s) vaz.nó 4(5L/s)
1 75,00 75,00 75,00
2 74,53 74,51 74,48
3 24,14 20,73 15,42
4 24,13 20,72 15,40
5 24,13 20,72 15,40
Fonte: Autoria própria.

74
5.11.2 Procedimento Metodológico para Rede 1
A identificação do(s) nó(s) de vazamento(s) e sua magnitude serão desenvolvidas em
dois passos: O primeiro (estimativa preliminar) tem a finalidade de apontar os locais de
ocorrência de vazamento(s), descartando aquele(s) desprezíveis, para nós com IALV muito
baixo. Nesta etapa somente o IALV é investigado, pois não se sabe onde se encontra o
vazamento e sua magnitude. No segundo passo (estimativa final), mantêm-se os vazamentos
em locais promissores como desconhecidos a serem identificados. O índice de acerto (IA) é
ressaltado na estimação final e os seus valores são próximos de 100% comprovando a
eficiência do método.
O desempenho do método é verificado na estimação final por meio do somatório dos
vazamentos estimados dos nós (Qv) e o valor estimado da vazão de vazamento no nó ou nós
promissores restantes. Quando mais próximos o valor do somatório e os valores estimados do
nó ou nós promissores restantes forem da vazão ou vazões de vazamentos reais, melhor será o
desempenho do modelo.
Na rede 1 será analisado os resultados encontrados pelo MTI-AG para identificar os
vazamentos nos nós 4(2L/s) e 4(5L/s) com a variação dos tipos de manobra de válvula, para
os dois casos (manobra 1 e manobra 2), verificando assim a influência do efeito da severidade
do transiente provocada por essa mudança de manobra.
O problema inverso é posto da seguinte forma:
a) A carga no nó 1 é constante e conhecida igual a 75.00 m;
b) As demandas nos nós são conhecidas, conforme tabela 9;
c) Os diâmetros e rugosidades dos tubos são conhecidos;
d) As cargas hidráulicas no nó 5 são conhecidas (cargas observadas);
e) Os locais e áreas de vazamentos são desconhecidas.
As cargas hidráulicas transientes “observadas” para o nó 4 para os dois tipos de
manobras de válvulas podem ser visualizadas na figura 21:

75
Figura 19 - Cargas Hidráulicas Transientes no nó 4 (2L/s).
Fonte: Autoria própria.
5.11.3 Rede 2
A rede 2 possui 11 tubos, 1 reservatório de carga constante (nó 1), 1 nó de demanda
constante (nó 7) e 1 válvula de controle (nó 4). As cargas hidráulicas transientes observadas e
as condições iniciais de regime permanente foram obtidas a partir de condições transientes
usando o MOC. A figura abaixo mostra a rede 2.
Figura 20- Rede 2.
0,0
5,0
10,0
15,0
20,0
25,0
30,0
0,0 10,0 20,0 30,0 40,0 50,0 60,0
Car
ga H
idrá
ulic
a (m
)
Tempo (s)
manobra 1
manobra 2

76
Legenda:
( ) nº do nó
[ ] nº do tubo
As variáveis do problema são: topografia do terreno, diâmetro do tubo (D),
rugosidades das tubulações (ε), demandas nodais e nível do reservatório. As características
físicas e as demandas nos nós são apresentadas nas tabelas abaixo:
Tabela 11- Características físicas da Rede 2.
TRECHO L (m) D (m) a (m/s) aj (m/s) ε (mm)
1 1300,0 0,250 1251,7 1300,0 0,30
2 650,0 0,250 1251,7 1300,0 0,30
3 650,0 0,200 1289,0 1300,0 0,30
4 130,0 0,200 1289,0 1300,0 0,30
5 650,0 0,250 1251,7 1300,0 0,30
6 650,0 0,250 1251,7 1300,0 0,30
7 650,0 0,200 1289,0 1300,0 0,30
8 1250,0 0,150 1329,9 1250,0 0,30
9 1250,0 0,250 1251,7 1250,0 0,30
10 650,0 0,150 1329,9 1300,0 0,30
11 650,0 0,250 1251,7 1300,0 0,30
Tabela 12 - Demandas nos nós da rede 2.
Nó Demandas (L/s)
1 0,0
2 0,0
3 0,0
4 -58,0
5 0,0
6 0,0
7 0,0
77
A coluna (4) da tabela apresenta os valores iniciais da celeridade nos tubos. Esses
valores correspondem às seguintes características: espessura da parede do tubo, e’ = 10mm;
razão de Poisson, 𝜐′= 0,25; módulo de elasticidade do material do tubo, E = 120 GPa; módulo
de elasticidade da água, K = 2,19 GPa; massa específica da água, 𝜌 = 999 kg/m3. Para um
sistema de dois ou mais condutos, é necessário que o mesmo intervalo de tempo seja usado
para todos os condutos tal que as condições de contorno nas junções possam ser usadas. Este
intervalo de tempo deverá ser selecionado de forma a obedecer à condição de estabilidade de
Courant (Δx > a Δt). Entretanto, para evitar interpolação, Δt deve ser escolhido de maneira a
satisfazer a seguinte equação (CHAUDHRY, 1987).
Δ𝑡 =𝐿𝑖
𝑎𝑖𝑛𝑖 ( 1 até N) 6.2
Onde ni é um número inteiro e igual ao número de trechos no qual o i-ésimo conduto é
dividido; Li é o comprimento do i-ésimo conduto; ai é a celeridade do i-ésimo conduto e N é o
número de tubos no sistema. Como a celeridade não é precisamente conhecida, ajustes
menores nos seus valores são aceitáveis. A coluna (5) apresenta os valores da celeridade
ajustados.
O evento transiente do sistema causado pela manobra da válvula de controle no nó 4
foi simulado para cada manobra com seu respectivo tempo de duração do transiente. O
intervalo de tempo, t, para a simulação computacional foi de 0,1s.
As Vazões iniciais nos tubos e as cargas iniciais nos tubos correspondem às condições
iniciais em regime permanente foram determinadas através do modelo computacional que
calcula o transiente pelo método das características. Para a rede 2 são:

78
Tabela 13-Vazões iniciais em estado permanente da rede 2.
Tubo s/vaz. Vaz.nó2 vaz.nó6 Vaz.nós 2 e 6
1 0,025466 0,030262
0,029432
0,034286
2 0,032535 0,037738 0,038568 0,043714
3 0,008643 0,011240 0,008831 0,011723
4 0,004012 0,002149 0,006542 0,005223
5 0,030097 0,029352 0,031721 0,030787
6 0,027903 0,028648 0,026279 0,027213
7 0,000883 0,000983 0,007405 0,007372
8 0,000883 0,000983 0,002596 0,002628
9 0,003794 0,004212 0,003356 0,003770
10 0,004677 0,005195 0,005952 0,006397
11 0,019214 0,021304 0,023785 0,025593
Fonte: Autoria própria
Tabela 14 - Cargas iniciais em estado permanente da Rede 2.
Número de Nós s/vaz. Vaz.nó2 vaz.nó6 Vaz.nós 2 e 6
1 30,00 30,00 30,00 30,00
2 28,39 27,75 27,87 27,14
3 28,71 28,28 28,20 27,70
4 27,28 26,70 26,64 25,98
5 28,24 27,71 27,50 26,89
6 28,24 27,71 27,26 26,66
7 28,28 27,76 27,53 26,94
Fonte: Autoria própria.
5.11.4 Procedimento Metodológico para Rede 2
A identificação do(s) nó(s) de vazamento(s) e sua magnitude serão desenvolvidas em
dois passos: O primeiro (estimativa preliminar) tem a finalidade de apontar os locais de
ocorrência de vazamento(s), descartando aquele(s) desprezíveis, para nós com IALV muito
baixo. Nesta etapa somente o IALV é investigado, pois não se sabe onde se encontra o
vazamento e sua magnitude. No segundo passo (estimativa final), mantêm-se os vazamentos
em locais promissores como desconhecidos a serem identificados. O índice de acerto (IA) e

79
ressaltado na estimação final e os seus valores são próximos de 100% comprovando a
eficiência do método.
O desempenho do método é verificado na estimação final por meio do somatório dos
vazamentos estimados dos nós (Qv) e o valor estimado da vazão de vazamento no nó ou nós
promissores restantes. Quando mais próximos o valor do somatório e os valores estimados do
nó ou nós promissores restantes forem da vazão ou vazões de vazamentos reais, melhor será o
desempenho do modelo.
Na rede 2 será analisado os resultados encontrados pelo MTI-AG para identificar os
vazamentos no nós 2 e 6 com a variação dos tipos de manobra de válvula, para os dois casos
(manobra 3 e manobra 4), verificando assim a influência do efeito da severidade do transiente
provocada por essa mudança de manobra.
O problema inverso é posto da seguinte forma:
a) A carga no nó 1 é constante e conhecida igual a 30,00m;
b) As demandas nos nós são conhecidas, conforme tabela 6.11;
c) Os diâmetros e rugosidades dos tubos são conhecidos;
d) As cargas hidráulicas no nó 4 são conhecidas (cargas observadas);
e) Os locais e áreas de vazamentos são conhecidos.
As cargas hidráulicas transientes “observadas” para os nós 2 e 6 para os dois tipos de
manobras de válvulas podem ser visualizadas nas figuras abaixo:
Figura 21 - Cargas Hidráulicas Transientes no nó 2 (10L/s).
Fonte: Autoria própria.
0,0
10,0
20,0
30,0
40,0
50,0
60,0
0,0 10,0 20,0 30,0 40,0 50,0 60,0
Car
ga H
idrá
ulic
a (m
)
Tempo (s)
manobra 4
manobra 3
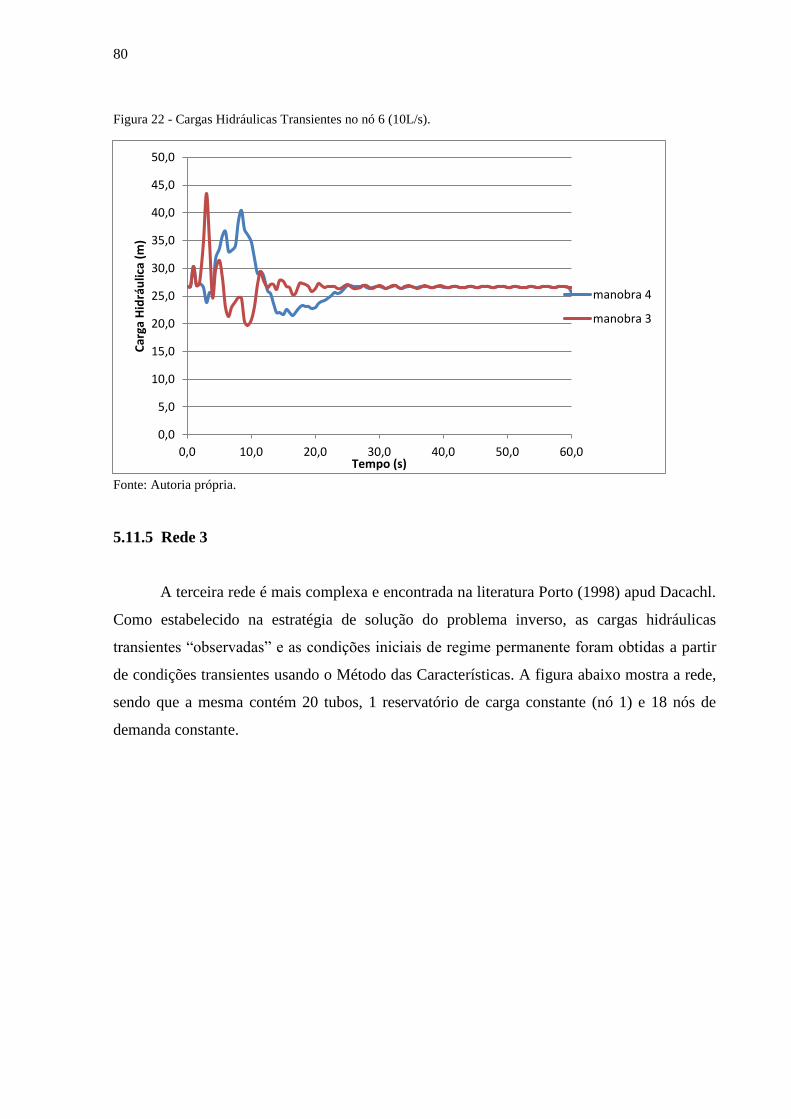
80
Figura 22 - Cargas Hidráulicas Transientes no nó 6 (10L/s).
Fonte: Autoria própria.
5.11.5 Rede 3
A terceira rede é mais complexa e encontrada na literatura Porto (1998) apud Dacachl.
Como estabelecido na estratégia de solução do problema inverso, as cargas hidráulicas
transientes “observadas” e as condições iniciais de regime permanente foram obtidas a partir
de condições transientes usando o Método das Características. A figura abaixo mostra a rede,
sendo que a mesma contém 20 tubos, 1 reservatório de carga constante (nó 1) e 18 nós de
demanda constante.
0,0
5,0
10,0
15,0
20,0
25,0
30,0
35,0
40,0
45,0
50,0
0,0 10,0 20,0 30,0 40,0 50,0 60,0
Car
ga H
idrá
ulic
a (m
)
Tempo (s)
manobra 4
manobra 3
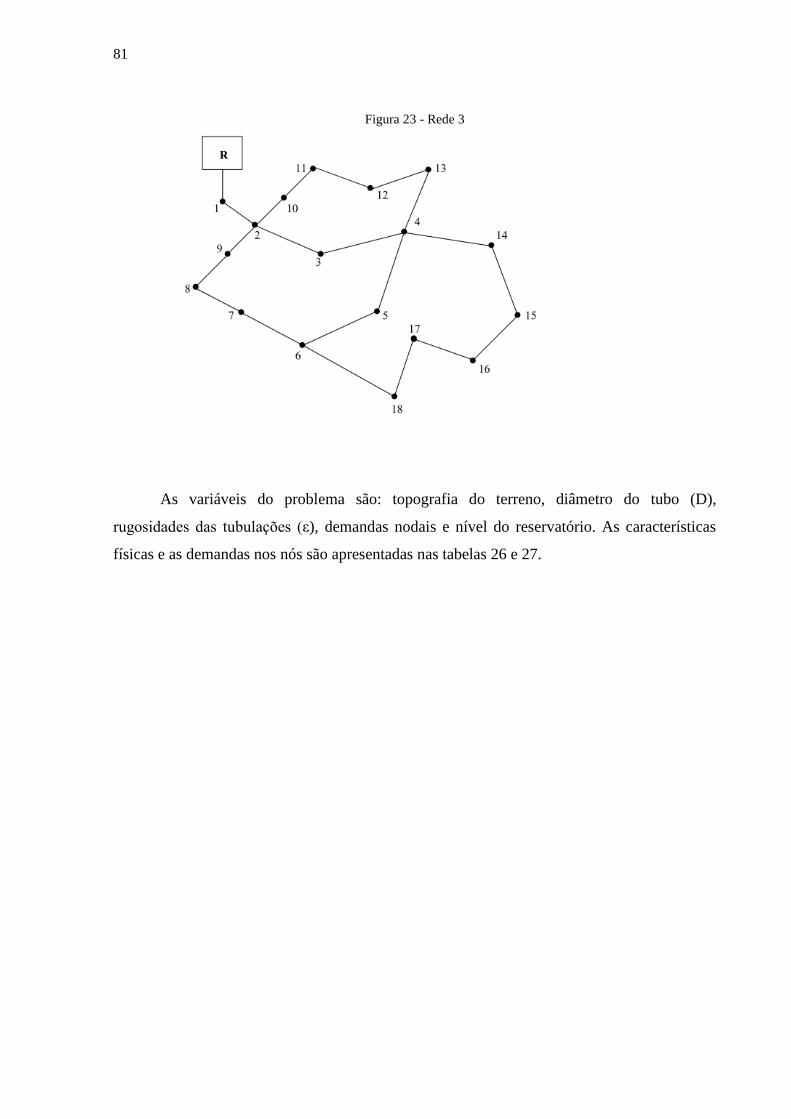
81
Figura 23 - Rede 3
As variáveis do problema são: topografia do terreno, diâmetro do tubo (D),
rugosidades das tubulações (ε), demandas nodais e nível do reservatório. As características
físicas e as demandas nos nós são apresentadas nas tabelas 26 e 27.

82
Tabela 15 - Características da rede 3.
TRECHO L (m) D (m) a (m/s) aj (m/s) ε (mm)
1 324,0 0,300 1217,4 1080,0 0,50
2 124,0 0,250 1251,7 1240,0 0,50
3 184,0 0,250 1251,7 1840,0 0,50
4 206,0 0,150 1329,9 2060,0 0,50
5 103,0 0,150 1329,9 1030,0 050
6 202,0 0,150 1329,9 1010,0 0,50
7 134,0 0,150 1329,9 1340,0 0,50
8 227,0 0,200 1289,0 1135,0 0,50
9 167,0 0,200 1289,0 835,0 0,50
10 166,0 0,125 1351,8 830,0 0,50
11 152,0 0,125 1351,8 760,0 0,50
12 168,0 0,100 1374,9 840,0 0,50
13 177,0 0,100 1374,9 885,0 0,50
14 225,0 0,100 1374,9 112,0 0,50
15 254,0 0,150 1329,9 846,7 0,50
16 263,0 0,125 1351,8 876,7 0,50
17 133,0 0,100 1374,9 133,.0 0,50
18 321,0 0,100 1374,9 107,0 0,50
19 105,0 0,125 1351,8 105,0 0,50
20 169,0 0,150 13299 845,0 0,50
Fonte: Autoria própria.,
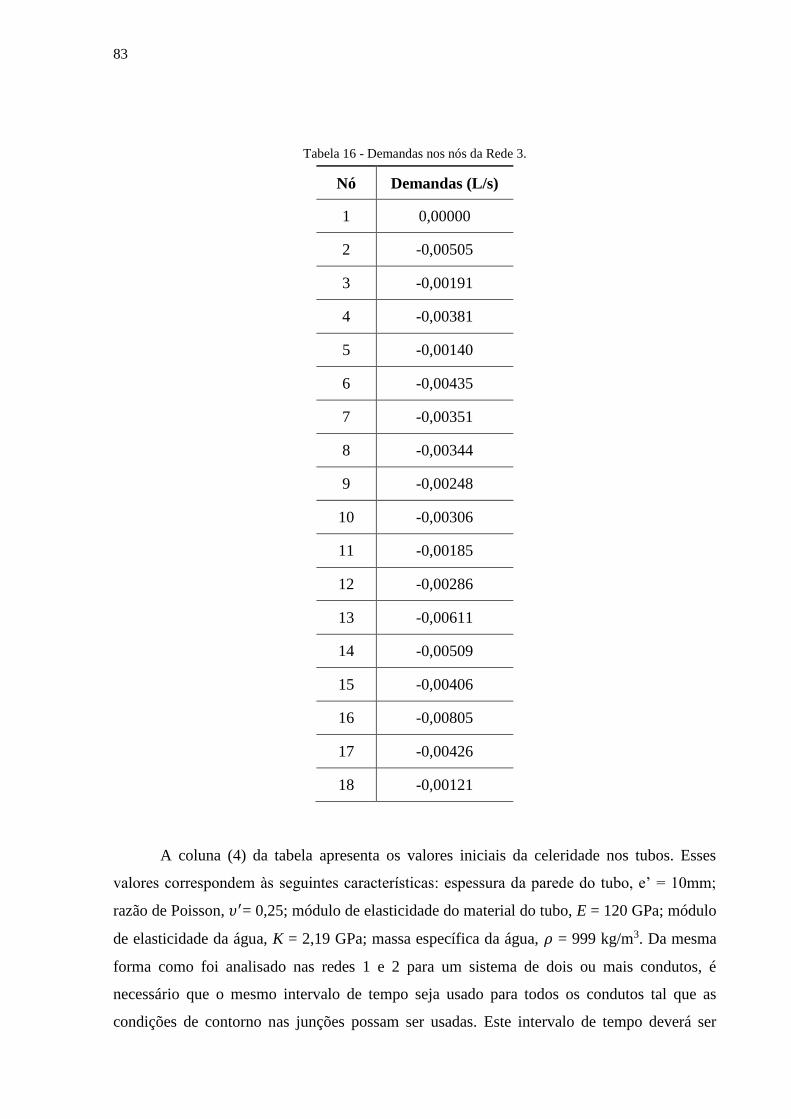
83
Tabela 16 - Demandas nos nós da Rede 3.
Nó Demandas (L/s)
1 0,00000
2 -0,00505
3 -0,00191
4 -0,00381
5 -0,00140
6 -0,00435
7 -0,00351
8 -0,00344
9 -0,00248
10 -0,00306
11 -0,00185
12 -0,00286
13 -0,00611
14 -0,00509
15 -0,00406
16 -0,00805
17 -0,00426
18 -0,00121
A coluna (4) da tabela apresenta os valores iniciais da celeridade nos tubos. Esses
valores correspondem às seguintes características: espessura da parede do tubo, e’ = 10mm;
razão de Poisson, 𝜐′= 0,25; módulo de elasticidade do material do tubo, E = 120 GPa; módulo
de elasticidade da água, K = 2,19 GPa; massa específica da água, 𝜌 = 999 kg/m3. Da mesma
forma como foi analisado nas redes 1 e 2 para um sistema de dois ou mais condutos, é
necessário que o mesmo intervalo de tempo seja usado para todos os condutos tal que as
condições de contorno nas junções possam ser usadas. Este intervalo de tempo deverá ser
84
selecionado de forma a obedecer à condição de estabilidade de Courant (Δx > a Δt).
Entretanto, para evitar interpolação, Δt deve ser escolhido de maneira a satisfazer a seguinte
equação (CHAUDHRY, 1987).
Δ𝑡 =𝐿𝑖
𝑎𝑖𝑛𝑖 ( 1 até N) 6.3
Onde ni é um número inteiro e igual ao número de trechos no qual o i-ésimo conduto é
dividido; Li é o comprimento do i-ésimo conduto; ai é a celeridade do i-ésimo conduto e N é o
número de tubos no sistema. Como a celeridade não é precisamente conhecida, ajustes
menores nos seus valores são aceitáveis. A coluna (5 da tabela 26) apresenta os valores da
celeridade ajustados.
O evento transiente do sistema causado pela manobra da válvula de controle no nó 4
foi simulado para cada manobra com seu respectivo tempo de duração do transiente. O
intervalo de tempo, t, para a simulação computacional foi de 0,1s.
As Vazões iniciais nos tubos e as cargas iniciais nos tubos correspondem às condições
iniciais em regime permanente foram determinadas através do modelo computacional que
calcula o transiente pelo método das características. Para a rede 3 as Vazões iniciais e Cargas
iniciais são apresentadas nas tabelas 28 e 29.

85
Tabela 17 - Vazões iniciais em estado permanente da Rede 3.
Fonte: Autoria própria.
Tubo s/vaz. Vaz.nó2 vaz.nó12 Vaz.nó17
1 0,062500 0,067500 0,067500 0,067500
2 0,032581 0,032581 0,034883 0,035629
3 0,030671 0,030671 0,032973 0,033719
4 0,008714 0,008714 0,008490 0,010821
5 0,007314 0,007314 0,007090 0,009421
6 0,006652 0,006652 0,006896 0,008514
7 0,010162 0,010162 0,010406 0,012024
8 0,013602 0,013602 0,013846 0,015464
9 0,016082 0,016082 0,016326 0,017944
10 0,008788 0,008787 0,011242 0,008877
11 0,005728 0,005728 0,008182 0,005817
12 0,003878 0,003878 0,006332 0,003967
13 0,001018 0,001018 0.001528 0,001107
14 0,005093 0,005093 0,007638 0,005003
15 0,013054 0,013054 0,013035 0,014085
16 0,007964 0,007964 0,007945 0,008995
17 0,003904 0,003904 0,003885 0,004935
18 0,004146 0,004146 0,004166 0,003115
19 0,008406 0,008406 0,008426 0,012375
20 0,009616 0,009616 0,009635 0,013585
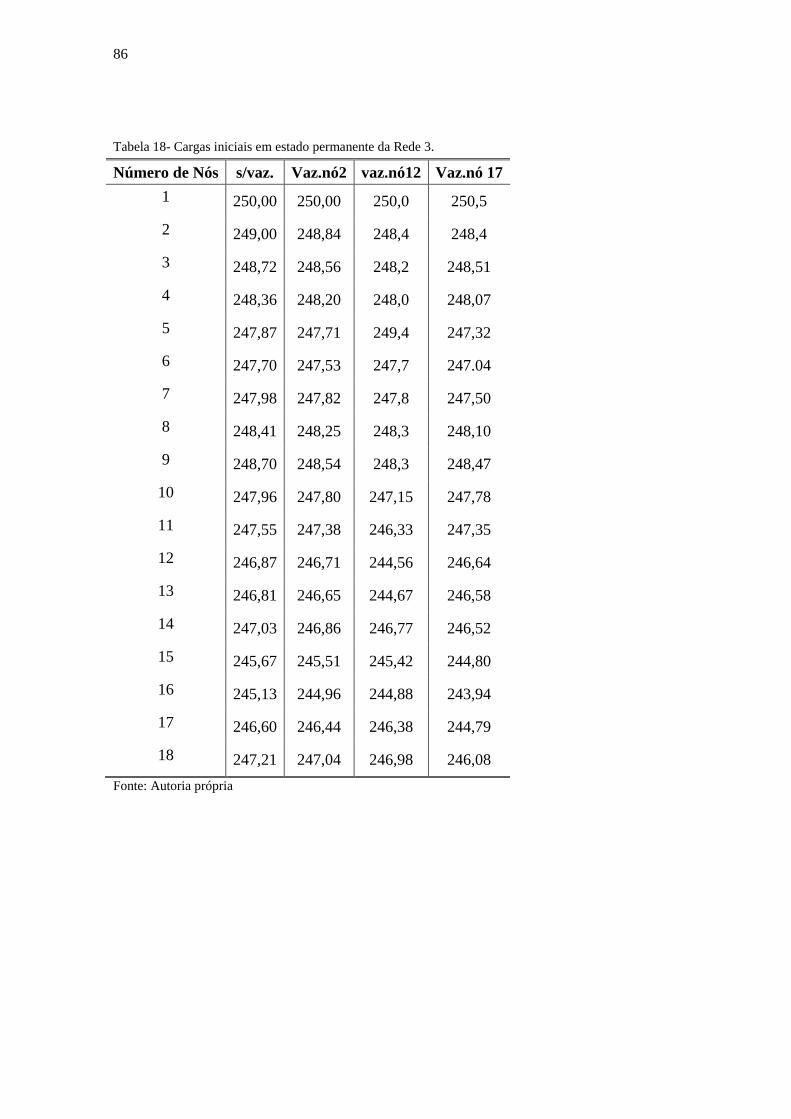
86
Tabela 18- Cargas iniciais em estado permanente da Rede 3.
Fonte: Autoria própria
Número de Nós s/vaz. Vaz.nó2 vaz.nó12 Vaz.nó 17
1 250,00 250,00 250,0 250,5
2 249,00 248,84 248,4 248,4
3 248,72 248,56 248,2 248,51
4 248,36 248,20 248,0 248,07
5 247,87 247,71 249,4 247,32
6 247,70 247,53 247,7 247.04
7 247,98 247,82 247,8 247,50
8 248,41 248,25 248,3 248,10
9 248,70 248,54 248,3 248,47
10 247,96 247,80 247,15 247,78
11 247,55 247,38 246,33 247,35
12 246,87 246,71 244,56 246,64
13 246,81 246,65 244,67 246,58
14 247,03 246,86 246,77 246,52
15 245,67 245,51 245,42 244,80
16 245,13 244,96 244,88 243,94
17 246,60 246,44 246,38 244,79
18 247,21 247,04 246,98 246,08
87
5.11.6 Procedimento Metodológico para Rede 3
A identificação do(s) nó(s) de vazamento(s) e sua magnitude serão desenvolvidas em
dois passos: O primeiro (estimativa preliminar) tem a finalidade de apontar os locais de
ocorrência de vazamento(s), descartando aquele(s) desprezíveis, para nós com IAVL muito
baixo. Nesta etapa somente o IAVL é investigado, pois não se sabe onde se encontra o
vazamento e sua magnitude. No segundo passo (estimativa final), mantêm-se os vazamentos
em locais promissores como desconhecidos a serem identificados. O índice de acerto (IA) e
ressaltado na estimação final e os seus valores são próximos de 100% comprovando a
eficiência do método.
O desempenho do método é verificado na estimação final por meio do somatório dos
vazamentos estimados dos nós (Qv) e o valor estimado da vazão de vazamento no nó ou nós
promissores restantes. Quando mais próximos o valor do somatório e os valores estimados do
nó ou nós promissores restantes forem da vazão ou vazões de vazamentos reais, melhor será o
desempenho do modelo.
Na rede 3 será analisado os resultados encontrados pelo MTI-AG para identificar os
vazamentos no nós 2, 12 e 17, com a variação dos tipos de manobra de válvula, para os dois
casos (manobra e manobra 6), verificando assim a influência do efeito da severidade do
transiente provocada por essa mudança e comparar os resultados com as condições iniciais do
regime permanente.
O problema inverso é posto da seguinte forma:
a) A carga no nó 1 é constante e conhecida igual a 250,00m;
b) As demandas nos nós são conhecidas, conforme tabela 6.21;
c) Os diâmetros e rugosidades dos tubos são conhecidos;
d) As cargas hidráulicas no nó 12 são conhecidas (cargas observadas);
e) Os locais e áreas de vazamentos são conhecidos.
As cargas hidráulicas transientes “observadas” para os nós 2,12 e 17 para os dois tipos
de manobras de válvulas podem ser visualizadas nas figuras abaixo:

88
Figura 24 - Cargas Hidráulicas Transientes no nó 2 (5L/s).
Fonte: Autoria própria.
Figura 25 - Cargas Hidráulicas Transientes no nó 12 (5L/s).
Fonte: Autoria própria.
246,8
247,0
247,2
247,4
247,6
247,8
248,0
248,2
248,4
248,6
248,8
0,0 10,0 20,0 30,0 40,0 50,0 60,0
Car
ga H
idrá
ulic
a (m
)
Tempo (s)
manobra 5
manobra 6
241,0
242,0
243,0
244,0
245,0
246,0
247,0
248,0
249,0
250,0
0,0 10,0 20,0 30,0 40,0 50,0 60,0
Car
ga H
idrá
ulic
a (m
)
Tempo (s)
manobra 5
manobra 6

89
Figura 26 - Cargas Hidráulicas Transientes no nó 17 (5L/s).
Fonte: Autoria própria.
245,5
246,0
246,5
247,0
247,5
248,0
248,5
0,0 10,0 20,0 30,0 40,0 50,0 60,0
Car
ga H
idrá
ulic
a (m
)
Tempo (s)
manobra 5
manobra 6

90
6 RESULTADOS E DISCURSSÕES
Os resultados das simulações serão apresentados no formato de tabelas e em seguida
discutidos, sendo que para identificação dos vazamentos e eficiência da calibração foi usado
os índices de aceitação de vazamentos e de acerto, conforme Araújo, 2003.
Em todos os casos das simulações será analisado o efeito da severidade do transiente
provocada por mudanças no tipo de manobra da válvula.
Segue abaixo as tabelas com os comentários referentes às simulações que consistiram
no maior valor da função objetivo de 5 a 10 processamentos do AG realizados, usando
diferentes conjuntos de números aleatórios a partir de sementes diversas.
6.1 Simulações para Rede 1
Simulação 1: Vazamento no nó 4 (2L/s)
Tabela 19- Estimativa Preliminar e Final de Vazamentos: Manobra 1: nó 4 (2L/s).
Estimativa Preliminar Estimativa Final
Nó
AV (m2) QV (L/s) AV (m2) QV (L/s)
Estimado Estimado IALV
(%) Real Estimado Real Estimado
IALV
(%) IA (%)
2 0,000008 0,30 12,4 0,000000 0,000000 0,00 0,00 0,0 -
3 0,000010 0,20 8,2 0,000000 0,000000 0,00 0,00 0,0 -
4 0,000097 1,95 79,6 0,000099 0,000097 1,99 1,95 100 97,9
QV - - - - - 1,99 1,95 - -
Fonte: Autoria própria.
Tabela 20- Estimação Preliminar e Final de Vazamentos: Manobra 2 : nó 4 (2L/s).
Estimativa Preliminar Estimativa Final
Nó
AV (m2) QV (L/s) AV (m2) QV (L/s)
Estimado Estimado IALV
(%) Real Estimado Real Estimado
IALV
(%) IA (%)
2 0,000005 0,19 8,6 0,000000 0,000000 0,00 0,00 0,0 -
3 0,000004 0,08 3,6 0,000000 0,000000 0,00 0,00 0,0 -
4 0,000096 1,93 87,7 0,000099 0,000098 1,99 1,97 100 98,9
QV - - - - - 1,99 2,01 - -
Fonte: Autoria própria.

91
Simulação 2: Vazamento no nó 4 (5L/s)
Tabela 21 - Estimativa Preliminar e Final de Vazamentos: Manobra 1 : 4 (5L/s).
Estimativa Preliminar Estimativa Final
Nó
AV (m2) QV (L/s) AV (m2) QV (L/s)
Estimado Estimado IALV
(%) Real Estimado Real Estimado
IALV
(%) IA (%)
2 0,000009 0,34 5,03 0,000000 0,000000 0,00 0,00 0,0 -
3 0,000090 1,56 23,08 0,000000 0,000000 0,00 0,00 0,0 -
4 0,000280 4,86 71,9 0,000288 0,000286 5,00 4,97 100 99,4
QV - - - - - 5,00 4,97 - -
Fonte: Autoria própria
Tabela 22- Estimação Preliminar e Final de Vazamentos: Manobra 2: 4 (5L/s).
Estimativa Preliminar Estimativa Final
Nó
AV (m2) QV (L/s) AV (m2) QV (L/s)
Estimado Estimado IALV
(%) Real Estimado Real Estimado
IAL
V
(%)
IA
(%)
2 0,000006 0,23 3,9 0,000000 0,000000 0,00 0,00 0,0 -
3 0,000050 0,87 15,0 0,000000 0,000000 0,00 0,00 0,0 -
4 0,000270 4,7 81,0 0,000286 0,000286 5,00 4,97 100 99,4
QV - - - - 5,00 4,97 - - Fonte: Autoria própria.
As Tabelas 12 e 13 apresentam os resultados da estimativa preliminar e final para as
manobras 1 e 2 na identificação do vazamento. Na estimativa inicial da manobra 1 o nó 4
possui IALV de 79,6% e para manobra 2, o IALV vale 87,7% e os demais nós 2 e 3 com
IALV’S de 12,4% e 8,2% para a primeira manobra; 8,6% e 3,6% para a segunda manobras
são eliminados. Na estimativa final para manobra 1 o nó 4 possui IA de 97,9% e para
manobra 2 de 98,9%, logo a manobra 2 possui um desempenho melhor em relação a manobra
1.
Para simulação 2 as tabelas 14 e 15 apresentam os resultados da estimativa preliminar
e final para as manobras 1 e 2 na identificação do vazamento. Na estimativa inicial da
manobra 1 os nós 2 e 3 possuem IALV’S iguais a 5,03% e 23,08%, para manobra 2 esses
mesmos nós possuem IALV’S iguais a 3,9% e 15,0%, logo são eliminados, pois são de
valores baixos. Na estimativa preliminar das manobras 1 o nó 4 possui IALV igual a 71,9% e
para manobra 2 é de 81,0%. Na estimativa final para ambas manobras o índice de acerto é
igual a 99,4%, comprovando a eficiência do método transiente inverso.

92
6.2 Simulações para Rede 2
Simulação 3: Vazamento no nó 2 (10L/s)
Tabela 23 - Estimativa Preliminar e Final de Vazamentos: Manobra 3: 2 (10L/s).
Estimativa Preliminar Estimativa Final
Nó
AV (m2) QV (L/s) AV (m2) QV (L/s)
Estimado Estimado IALV
(%) Real Estimado Real Estimado
IALV
(%)
IA
(%)
2 0,000349 8,13 70,9 0,000429 0,000420 10,00 9,79 100 97,9
3 0,000070 1,64 14,3 0,000000 0,000000 0,00 0,00 - -
5 0,000034 0,79 6,9 0,000000 0.000000 0,00 0,00 - -
6 0,000037 0,86 7,5 0,000000 0,000000 0,00 0,00 - -
7 0,000002 0,05 0,4 0,000000 0,000000 0,00 0,00 - -
QV - - - - - 10,00 9,97 - -
Fonte: Autoria própria.
Tabela 24 – Estimativa Preliminar e Final de Vazamentos: Manobra 4: 2 (10L/s).
Estimativa Preliminar Estimativa Final
Nó
AV (m2) QV (L/s) AV (m2) QV (L/s)
Estimado Estimado IALV
(%) Real Estimado Real Estimado
IALV
(%)
IA
(%)
2 0,000351 8,18 65,1 0,000429 0,000426 10,00 9,93 100 99,3
3 0,000084 1,98 15,8 0,000000 0,000000 0,00 0,00 - -
5 0,000003 0,07 0,5 0,000000 0,000000 0,00 0,00 - -
6 0,000077 1,79 14,2 0,000000 0,000000 0,00 0,00 - -
7 0,000023 0,54 4,3 0,000000 0,000000 0,00 0,00 - -
QV - - - - - 10,00 9,93 - -
Fonte: Autoria própria.
Simulação 4: Vazamento no nó 6 (10L/s)
Tabela 25 - Estimativa Preliminar e Final de Vazamentos: Manobra 3 : 6 (10L/s).
Estimativa Preliminar Estimativa Final
Nó
AV (m2) QV (L/s) AV (m2) QV (L/s)
Estimado Estimado IALV
(%) Real Estimado Real Estimado
IALV
(%)
IA
(%)
2 0,000025 5,84 39,9 0,000000 0,000000 0,00 0,00 - -
3 0,000020 0,47 3,2 0,000000 0,000000 0,00 0,00 - -
5 0,000017 0,39 2,7 0,000000 0,000000 0,00 0,00 - -
6 0,000329 7,6 52 0,000432 0,000407 9,90 9,40 100 94,9
7 0,000014 0,32 2,2 0,000000 0,000000 0,00 0,00 - -
QV - - - - - 9,90 9,40 - -
Fonte: Autoria própria.
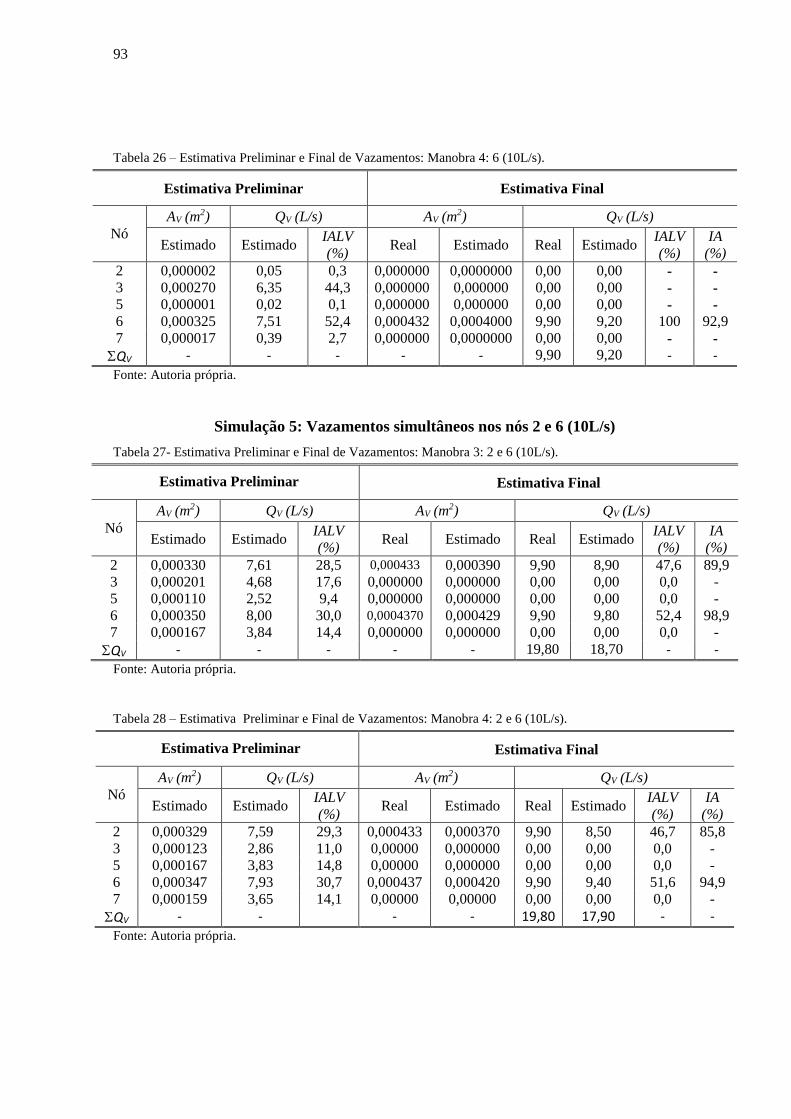
93
Tabela 26 – Estimativa Preliminar e Final de Vazamentos: Manobra 4: 6 (10L/s).
Estimativa Preliminar Estimativa Final
Nó
AV (m2) QV (L/s) AV (m2) QV (L/s)
Estimado Estimado IALV
(%) Real Estimado Real Estimado
IALV
(%)
IA
(%)
2 0,000002 0,05 0,3 0,000000 0,0000000 0,00 0,00 - -
3 0,000270 6,35 44,3 0,000000 0,000000 0,00 0,00 - -
5 0,000001 0,02 0,1 0,000000 0,000000 0,00 0,00 - -
6 0,000325 7,51 52,4 0,000432 0,0004000 9,90 9,20 100 92,9
7 0,000017 0,39 2,7 0,000000 0,0000000 0,00 0,00 - -
QV - - - - - 9,90 9,20 - -
Fonte: Autoria própria.
Simulação 5: Vazamentos simultâneos nos nós 2 e 6 (10L/s)
Tabela 27- Estimativa Preliminar e Final de Vazamentos: Manobra 3: 2 e 6 (10L/s).
Estimativa Preliminar Estimativa Final
Nó
AV (m2) QV (L/s) AV (m2) QV (L/s)
Estimado Estimado IALV
(%) Real Estimado Real Estimado
IALV
(%)
IA
(%)
2 0,000330 7,61 28,5 0,000433 0,000390 9,90 8,90 47,6 89,9
3 0,000201 4,68 17,6 0,000000 0,000000 0,00 0,00 0,0 -
5 0,000110 2,52 9,4 0,000000 0,000000 0,00 0,00 0,0 -
6 0,000350 8,00 30,0 0,0004370 0,000429 9,90 9,80 52,4 98,9
7 0,000167 3,84 14,4 0,000000 0,000000 0,00 0,00 0,0 -
QV - - - - - 19,80 18,70 - -
Fonte: Autoria própria.
Tabela 28 – Estimativa Preliminar e Final de Vazamentos: Manobra 4: 2 e 6 (10L/s).
Estimativa Preliminar Estimativa Final
Nó
AV (m2) QV (L/s) AV (m2) QV (L/s)
Estimado Estimado IALV
(%) Real Estimado Real Estimado
IALV
(%)
IA
(%)
2 0,000329 7,59 29,3 0,000433 0,000370 9,90 8,50 46,7 85,8
3 0,000123 2,86 11,0 0,00000 0,000000 0,00 0,00 0,0 -
5 0,000167 3,83 14,8 0,00000 0,000000 0,00 0,00 0,0 -
6 0,000347 7,93 30,7 0,000437 0,000420 9,90 9,40 51,6 94,9
7 0,000159 3,65 14,1 0,00000 0,00000 0,00 0,00 0,0 -
QV - - - - 19,80 17,90 - -
Fonte: Autoria própria.

94
As Tabelas 20 e 21 apresentam os resultados da estimativa preliminar e final dos
vazamentos para as manobras 3 e 4 na identificação do vazamento no nó 2 (2L/s). Na
estimação preliminar para ambas manobras o nó 2 é promissor e os demais são descartados
pelo fato de possuírem IALV’S baixos. Para manobra 3 o IALV do nó 2 vale 70,9% e para
manobra 4 é de 65,1%. Na estimação final a manobra 4 possui IA de 99,3%
As Tabelas 22 e 23 apresentam os resultados da estimação preliminar e final para
identificar o vazamento no nó 6 da rede 2. Para a manobra 3, os nós 2,3,5 e 7 são eliminados e
apresentam IALV’S iguais a 39,9%; 3,2%; 2,7% e 2,2%, para a manobra 4 esses mesmos nós
também são eliminados e apresentam IALV’S iguais a 0,3%; 44,3%, 0,1% e 2,7%. Para
estimativa final ambas manobras apresentaram IALV’S iguais a 100%, sendo que a manobra
3 apresentou maior índice de acerto em relação a manobra 4.
Na simulação 5 as tabelas 24 e 25 apresentam neste caso uma análise da identificação
de vazamentos simultâneos nos nós 2 e 6 para a rede 2 das manobras 3 e 4. Na estimativa
inicial da manobra 3 os nós 3, 5 e 7 que possuem IALV’S iguais a 17,6%;9,4% e 14,4% são
eliminados, para a manobra 4 também esses nós são descartados e apresentam IALV’S iguais
a 11,0%;14,8% e 14,1. Os nós 2 e 6 são apontados como promissores nas duas manobras por
apresentarem altos IALV’S e são iguais a 28,5%; 30,0% para a manobra 3 e 29,3%; 30,7%
para a manobra 2. No segundo passo na identificação dos vazamentos para a manobra 3 o nó
2 possui IALV igual a 47,6% e o nó 6 possui IALV igual a 52,4% ,para a manobra 4 esses nós
possuem IALV’S iguais a 46,7% e 51,6%, respectivamente. De acordo com os resultados
apresentados a manobra 3 possui maior desempenho e é mais eficiente.
Observa-se também de acordo com os resultados das simulações que os índices de
acertos para vazamentos simultâneos são inferiores em relação ao um vazamento isolado,
porém a manobra 3 (suave) apresentou um desempenho melhor na identificação dos
vazamentos.

95
6.3 Simulações para Rede 3
Simulação 6: Vazamento no nó 2 (5L/s)
Tabela 29 - Estimativa Preliminar e Final de Vazamentos: Manobra 5: 2 (5L/s).
Estimação Preliminar Estimativa Final
Nó
AV (m2) QV (L/s) AV (m2) QV (L/s)
Estimado Estimado IALV
(%) Real Estimado Real Estimado
IALV
(%)
IA
(%)
2 0.0000200 1,39 14,2 0,000212 0,000209 14,80 14,59 100 98,6 3 0.0000080 0,56 1,9 0,000000 0,000000 0,00 0,00 0,0 - 4 0.0000120 0,64 2,9 0,000000 0,000000 0,00 0,00 0,0 - 5 0.0000121 0,54 2,9 0,000000 0,000000 0,00 0,00 0,0 -
0.0000040 0,28 6,9 0,000000 0,000000 0,00 0,00 0,0 -
0.0000115 0,40 0,9 0,000000 0,000000 0,00 0,00 0,0 -
0.0000060 0,42 11,9 0,000000 0,000000 0,00 0,00 0,0 -
0.0000040 0,28 11,9 0,000000 0,000000 0,00 0,00 0,0 -
0.0000060 0,28 1,4 0,000000 0,000000 0,00 0,00 0,0 -
0.0000124 0,42 2,9 0,000000 0,000000 0,00 0,00 0,0 -
0.0000100 0,70 2,3 0,000000 0,000000 0,00 0,00 0,0 -
0.0000130 0,10 3,1 0,000000 0,000000 0,00 0,00 0,0
0.0000040 0,28 0,9 0,000000 0,000000 0,00 0,00 0,0 -
0.0000130 0,10 3,1 0,000000 0,000000 0,00 0,00 0,0 -
0.0000040 0,28 0,9 0,000000 0,000000 0,0 0,00 0,0 -
0.0000090 0,62 2,1 0,000000 0,000000 0,00 0,00 0,0 -
QV - - - - - 14,8 13,6 - -
Fonte: Autoria própria.
Tabela 30 – Estimativa Preliminar e Final de Vazamentos: Manobra 6: 2 (5L/s).
Estimativa Preliminar Estimativa Final
Nó
AV (m2) QV (L/s) AV (m2) QV (L/s)
Estimado Estimado IALV
(%) Real Estimado Real Estimado
IALV
(%)
IA
(%)
2 0,0000183 1,27 12,8 0,000212 0,000211 14,8 14,73 100 99,5 3 0,0000100 0,69 6,9 0,000000 0,000000 0,0 0,00 0,0 - 4 0,0000109 0,76 7,6 0,000000 0,000000 0,0 0,00 0,0 - 5 0,0000111 0,77 7,8 0,000000 0,000000 0,0 0,00 0,0 -
0,0000030 0,21 2,1 0,000000 0,000000 0,0 0,00 0,0 -
0,0000123 0,86 8,6 0,000000 0,000000 0,0 0,00 0,0 -
0,0000050 0,35 3,5 0,000000 0,000000 0,0 0,00 0,0 -
0,0000090 0,63 6,3 0,000000 0,000000 0,0 0,00 0,0 -
0,0000070 0,49 4,9 0,000000 0,000000 0,0 0,00 0,0 -
0,0000080 0,56 5,6 0,000000 0,000000 0,0 0,00 0,0 -
0,0000100 0,70 7,1 0,000000 0,000000 0,0 0,00 0,0 -
0,0000113 0,90 9,1 0,000000 0,000000 0,0 0,00 0,0
0,0000020 0,13 1,3 0,000000 0,000000 0,0 0,00 0,0 -
0,0000120 0,83 8,3 0,000000 0,000000 0,0 0,00 0,0 -
0,0000030 0,21 2,1 0,000000 0,000000 0,0 0,00 0,0 -
0,0000080 0,55 5,5 0,000000 0,000000 0,0 0,00 0,0 -
QV - - - - - 14,8 13,90 - -
Fonte: Autoria própria

96
Simulação 7: Vazamento no nó 12 (5L/s)
Tabela 31 - Estimativa Preliminar e Final de Vazamentos: Manobra 5: 12 (5L/s).
Estimativa Preliminar Estimativa Final
Nó
AV (m2) QV (L/s) AV (m2) QV (L/s)
Estimado Estimado IALV
(%) Real Estimado Real Estimado
IALV
(%)
IA
(%)
2 0,000023 1,27 3,6 0,000000 0,000000 0,00 0,0 0,0 - 3 0,000043 1,50 4,3 0,000000 0,000000 0,00 0,0 0,0 - 4 0,000025 1,35 3,9 0,000000 0,000000 0,00 0,0 0,0 - 5 0,000006 0,39 1,1 0,000000 0,000000 0,00 0,0 0,0 -
0,000007 0,49 1,4 0,000000 0,000000 0,0 0,0 0,0 -
0,000008 0,58 1,7 0,000000 0,000000 0,0 0,0 0,0 -
0,000015 0,99 2,8 0,000000 0,000000 0,0 0,0 0,0 -
0,000027 2,18 6,3 0,000000 0,000000 0,0 0,0 0,0 -
0,000005 0,65 1,9 0,000000 0,000000 0,0 0,0 0,0 -
0,000037 2,76 7,9 0,000000 0,000000 0,0 0,0 0,0 -
0,000140 12,1 34,7 0,000173 0,000168 11,98 11,63 100 97,1
0,000017 1,28 3,7 0,000000 0,000000 0,0 0,0 0,0 -
0,000042 7,32 21,0 0,000000 0,000000 0,0 0,0 0,0 -
0,000021 0,56 1,6 0,000000 0,000000 0,0 0,0 0,0 -
0,000023 0,9 2,6 0,000000 0,000000 0,0 0,0 0,0 -
0,000009 0,49 1,4 0,000000 0,000000 0,0 0,0 0,0 -
QV - - - - 11,9 11,63 - -
Fonte: Autoria própria.
Tabela 32 - Estimativa Preliminar e Final de Vazamentos: Manobra 6: 12 (5L/s).
Estimativa Preliminar Estimativa Final
Nó AV (m2) QV (L/s) AV (m2) QV (L/s)
Estimado Estimado IALV
(%) Real Estimado Real Estimado
IALV
(%)
IA
(%)
2 0,000021 1,47 4,4 0,000000 0,000000 0,0 0,0 0,0 - 3 0,000023 1,60 4,8 0,000000 0,000000 0,0 0,0 0,0 - 4 0,000015 1,05 3,1 0,000000 0,000000 0,0 0,0 0,0 - 5 0,000007 0,49 1,4 0,000000 0,000000 0,0 0,0 0,0 -
0,000007 0,49 1,4 0,000000 0,000000 0,0 0,0 0,0 -
0,000007 0,48 1,4 0,000000 0,000000 0,0 0,0 0,0 -
0,000014 0,98 2,9 0,000000 0,000000 0,0 0,0 0,0 -
0,000017 1,18 3,5 0,000000 0,000000 0,0 0,0 0,0 -
0,000008 0,55 1,6 0,000000 0,000000 0,0 0,0 0,0 -
0,000037 2,56 7,6 0,000000 0,000000 0,0 0,0 0,0 -
0,000160 11,1 33,0 0,000173 0,000170 11,98 11,77 100 98,2
0,000017 1,18 3,5 0,000000 0,000000 0,0 0,0 0,0 -
0,000012 8,32 24,8 0,000000 0,000000 0,0 0,0 0,0 -
0,000011 0,76 2,3 0,000000 0,000000 0,0 0,0 0,0 -
0,000013 0,9 2,3 0,000000 0,000000 0,0 0,0 0,0 -
0,000007 0,49 1,6 0,000000 0,000000 0,0 0,0 0,0 -
QV - - - - 11,98 11,77 - -
Fonte: Autoria própria

97
Simulação 8: Vazamento no nó 17 (5L/s)
Tabela 33 - Estimativa Preliminar e Final de Vazamentos: Manobra 5: 17 (5L/s).
Estimativa Preliminar Estimativa Final
Nó AV (m2) QV (L/s) AV (m2) QV (L/s)
Estimado Estimado IALV
(%) Real Estimado Real Estimado
IALV
(%)
IA
(%)
2 0,000003 0,21 0,6 0,000000 0,000000 0,0 0,0 0,0 - 3 0,000011 0,77 2,4 0,000000 0,000000 0,0 0,0 0,0 - 4 0,000013 0,91 2,8 0,000000 0,000000 0,0 0,0 0,0 - 5 0,000001 0,07 0,2 0,000000 0,000000 0,0 0,0 0,0 -
0,000008 0,56 1,7 0,000000 0,000000 0,0 0,0 0,0 -
0,000003 0,21 0,6 0,000000 0,000000 0,0 0,0 0,0 -
0,000004 0,28 0,9 0,000000 0,000000 0,0 0,0 0,0 -
0,000014 0,98 3,1 0,000000 0,000000 0,0 0,0 0,0 -
0,000015 1,04 3,3 0,000000 0,000000 0,0 0,0 0,0 -
0,000008 5,58 17,5 0,000000 0,000000 0,0 0,0 0,0 -
0,000004 0,28 0,9 0,000000 0,000000 0,0 0,0 0,0 -
0,000002 0,01 0,03 0,000000 0,000000 0,0 0,0 0,0 -
0,000042 2,92 9,1 0,000000 0,000000 0,0 0,0 0,0 -
0,000013 0,90 2,8 0,000000 0,000000 0,0 0,0 0,0 -
0,000005 3,46 10,8 0,000000 0,000000 0,0 0,0 0,0 -
0,000200 13,8 43,3 0.000214 0,000210 14,82 14,55 100 98,2
QV - - - - 14,82 14,55 - -
Fonte: Autoria própria.
Tabela 34 – Estimativa Preliminar e Final de Vazamentos: Manobra 6: 17 (5L/s).
Estimativa Preliminar Estimativa Final
Nó AV (m2) QV (L/s) AV (m2) QV (L/s)
Estimado Estimado IALV
(%) Real Estimado Real Estimado
IALV
(%)
IA
(%)
2 0,000004 0,20 0,6 0,000000 0,000000 0,0 0,0 0,0 - 3 0,000012 0,67 2,1 0,000000 0,000000 0,0 0,0 0,0 - 4 0,000014 0,92 2,9 0,000000 0,000000 0,0 0,0 0,0 - 5 0,000002 0,16 0,5 0,000000 0,000000 0,0 0,0 0,0 -
0,000006 0,66 2,1 0,000000 0,000000 0,0 0,0 0,0 -
0,000005 0,31 0,9 0,000000 0,000000 0,0 0,0 0,0 -
0,000005 0,38 1,2 0,000000 0,000000 0,0 0,0 0,0 -
0,000024 0,98 3,1 0,000000 0,000000 0,0 0,0 0,0 -
0,000015 1,34 4,3 0,000000 0,000000 0,0 0,0 0,0 -
0,000005 5,58 17,9 0,000000 0,000000 0,0 0,0 0,0 -
0,000005 0,38 1,2 0,000000 0,000000 0,0 0,0 0,0 -
0,000002 0,31 0,9 0,000000 0,000000 0,0 0,0 0,0 -
0,000032 1,92 6,2 0,000000 0,000000 0,0 0,0 0,0 -
0,000013 0,90 2,9 0,000000 0,000000 0,0 0,0 0,0 -
0,000015 3,56 11,4 0,000000 0,000000 0,0 0,0 0,0 -
0,000188 12,8 41,1 0.000214 0,0002080 14,82 14,41 100 97,2
QV - - - - - 14,82 14,41 - -
Fonte: Autoria própria

98
Simulação 9: Vazamentos simultâneos nos nós 2 e 12 (5L/s)
Tabela 35 - Estimativa Preliminar e Final de Vazamentos: Manobra 5: 2 e 12 (5L/s).
Estimativa Preliminar Estimativa Final
Nó AV (m2) QV (L/s) AV (m2) QV (L/s)
Estimado Estimado IALV
(%) Real Estimado Real Estimado
IALV
(%)
IA
(%)
2 0,0000189 1,28 11,0 0.000213 0.000198 14,87 13,82 100 93,3 3 0,0000100 0,03 0,26 0,000000 0,000000 0,0 0,0 0,0 - 4 0,0000180 0,17 1,46 0,000000 0,000000 0,0 0,0 0,0 - 5 0,0000060 0,66 5,69 0,000000 0,000000 0,0 0,0 0,0 -
0,0000080 0,72 6,2 0,000000 0,000000 0,0 0,0 0,0 -
0,0000130 0,53 4,6 0,000000 0,000000 0,0 0,0 0,0 -
0,0000090 0,98 8,4 0,000000 0,000000 0,0 0,0 0,0 -
0,0000120 1,00 8,6 0,000000 0,000000 0,0 0,0 0,0 -
0,0000250 0,90 7,8 0,000000 0,000000 0,0 0,0 0,0 -
0,0000090 0,89 7,8 0,000000 0,000000 0,0 0,0 0,0 -
0,0000159 1,32 11,4 0,000173 0,000169 11,97 11,70 100 97,7
0,0000110 0,73 6,3 0,000000 0,000000 0,0 0,0 0,0 -
0,0000130 0,73 6,3 0,000000 0,000000 0,0 0,0 0,0 -
0,0000040 0,51 4,4 0,000000 0,000000 0,0 0,0 0,0 -
0,0000120 0,46 3,9 0,000000 0,000000 0,0 0,0 0,0 -
0,0000070 0,98 8,4 0,000000 0,000000 0,0 0,0 0,0 -
QV - - - - - 26,84 25,52 - -
Fonte: Autoria própria.
Tabela 36- Estimativa Preliminar e Final de Vazamentos: Manobra 6: 2 e 12 (5L/s).
Estimativa Preliminar Estimativa Final
Nó AV (m2) QV (L/s) AV (m2) QV (L/s)
Estimado Estimado IALV
(%) Real Estimado Real Estimado
IALV
(%)
IA
(%)
2 0,0000200 1,39 10,4 0.000213 0.00021 14,87 14,66 100 98,6 3 0,0000200 0,02 0,1 0,000000 0,00000 0,0 0,0 0,0 - 4 0,0000170 0,18 1,3 0,000000 0,00000 0,0 0,0 0,0 - 5 0,0000080 0,56 4,2 0,000000 0,00000 0,0 0,0 0,0 -
0,0000090 0,62 4,7 0,000000 0,00000 0,0 0,0 0,0 -
0,0000120 0,83 6,2 0,000000 0,00000 0,0 0,0 0,0 -
0,0000070 0,88 6,4 0,000000 0,00000 0,0 0,0 0,0 -
0,0000110 1,10 8,2 0,000000 0,00000 0,0 0,0 0,0 -
0,0000280 1,10 8,2 0,000000 0,00000 0,0 0,0 0,0 -
0,0000070 0,79 5,9 0,000000 0,00000 0,0 0,0 0,0 -
0,0000169 1,42 10,6 0,000173 0,00170 11,97 11,76 100 98,2
0,0000120 0,83 6,2 0,000000 0,00000 0,0 0,0 0,0 -
0,0000120 0,83 6,2 0,000000 0,00000 0,0 0,0 0,0 -
0,0000030 0,91 6,8 0,000000 0,00000 0,0 0,0 0,0 -
0,0000110 0,46 3,4 0,000000 0,00000 0,0 0,0 0,0 -
0,0000070 0,99 7,4 0,000000 0,00000 0,0 0,0 0,0 -
QV - - - - - 26,84 26,42 -
Fonte: Autoria própria.

99
Simulação 10: Vazamentos simultâneos nos nós 2 e 17 (5L/s)
Tabela 37 – Estimativa Preliminar e Final de Vazamentos: Manobra 5: 2 e 17 (5L/s).
Estimativa Preliminar Estimativa Final
Nó AV (m2) QV (L/s) AV (m2) QV (L/s)
Estimado Estimado IALV
(%) Real Estimado Real Estimado
IALV
(%)
IA
(%)
2 0,0000178 1,24 10,9 0,000213 0,000199 14,86 14,54 100 97.8 3 0,0000200 0,03 0,3 0,000000 0,000000 0,0 0,0 0,0 - 4 0,0000170 0,08 0,7 0,000000 0,000000 0,0 0,0 0,0 - 5 0,0000080 0,76 6,7 0,000000 0,000000 0,0 0,0 0,0 -
0,0000090 0,62 5,5 0,000000 0,000000 0,0 0,0 0,0 -
0,0000120 0,63 5,6 0,000000 0,000000 0,0 0,0 0,0 -
0,0000070 0,78 6,9 0,000000 0,000000 0,0 0,0 0,0 -
0,0000110 0,90 8,0 0,000000 0,000000 0,0 0,0 0,0 -
0,0000280 1,00 8,8 0,000000 0,000000 0,0 0,0 0,0 -
0,0000070 0,89 7,9 0,000000 0,000000 0,0 0,0 0,0 -
0,0000169 0,32 2,9 0,000000 0,000000 0,0 0,0 0,0 -
0,0000120 0,83 7,3 0,000000 0,000000 0,0 0,0 0,0 -
0,0000120 0,83 7,3 0,000000 0,000000 0,0 0,0 0,0 -
0,0000030 0,91 8,1 0,000000 0,000000 0,0 0,0 0,0 -
0,0000110 0,46 4,1 0,000000 0,000000 0,0 0,0 0,0 -
0,0000147 1,01 8,9 0,000214 0,000192 14,82 13,29 100 89,7
QV - - - - - 29,68 27,83 - -
Fonte: Autoria própria.
Tabela 38 - Estimativa Preliminar e Final de Vazamentos: Manobra 6: 2 e 17 (5L/s).
Estimativa Preliminar Estimativa Final
Nó AV (m2) QV (L/s) AV (m2) QV (L/s)
Estimado Estimado IALV
(%) Real Estimado Real Estimado
IALV
(%)
IA
(%)
2 0,0000150 1,05 9 0,000213 0,000198 14,86 13,82 100 93,0 3 0,0000200 0,04 0,3 0,000000 0,000000 0,0 0,0 0,0 - 4 0,0000170 0,07 0,6 0,000000 0,000000 0,0 0,0 0,0 - 5 0,0000080 0,86 7,4 0,000000 0,000000 0,0 0,0 0,0 -
0,0000090 0,66 5,6 0,000000 0,000000 0,0 0,0 0,0 -
0,0000120 0,66 5,6 0,000000 0,000000 0,0 0,0 0,0 -
0,0000070 0,58 4,9 0,000000 0,000000 0,0 0,0 0,0 -
0,0000110 0,80 6,9 0,000000 0,000000 0,0 0,0 0,0 -
0,0000280 1,00 8,6 0,000000 0,000000 0,0 0,0 0,0 -
0,0000070 0,99 8,5 0,000000 0,000000 0,0 0,0 0,0 -
0,0000169 0,42 3,6 0,000000 0,000000 0,0 0,0 0,0 -
0,0000120 0,93 7,9 0,000000 0,000000 0,0 0,0 0,0 -
0,0000120 0,93 7,9 0,000000 0,000000 0,0 0,0 0,0 -
0,0000030 0,71 6,1 0,000000 0,000000 0,0 0,0 0,0 -
0.0000110 0,56 4,8 0,000000 0,000000 0,0 0,0 0,0 -
0.0000203 1,40 12,0 0,000214 0,000208 14,82 14,40 100 97,2
QV - - - - - 29,68 28,22 - -
Fonte: Autoria própria

100
Simulação 11: Vazamentos simultâneos nos nós 12 e 17 (5L/s)
Tabela 39 – Estimativa Preliminar e Final de Vazamentos: Manobra 5: 12 e 17 (5L/s).
Estimativa Preliminar Estimativa Final
Nó
AV (m2) QV (L/s) AV (m2) QV (L/s)
Estimado Estimado IALV
(%) Real Estimado Real Estimado
IALV
(%)
IA
(%)
2 0,0000150 1,00 8,8 0,000000 0,000000 0,0 0,0 0,0 - 3 0,0000123 0,86 7,6 0,000000 0,000000 0,0 0,0 0,0 - 4 0,0000100 0,70 6,2 0,000000 0,000000 0,0 0,0 0,0 - 5 0,0000080 0,56 4,9 0,000000 0,000000 0,0 0,0 0,0 - 6 0,0000090 0,62 5,5 0,000000 0,000000 0,0 0,0 0,0 - 7 0,0000113 0,79 7,0 0,000000 0,000000 0,0 0,0 0,0 - 8 0,0000070 0,49 4,3 0,000000 0,000000 0,0 0,0 0,0 - 9 0,0000110 0,77 6,8 0,000000 0,000000 0,0 0,0 0,0 -
10 0,0000108 0,75 6,6 0,000000 0,000000 0,0 0,0 0,0 - 11 0,0000070 0,28 2,5 0,000000 0,000000 0,0 0,0 0,0 - 12 0,0000169 1,17 10,4 0,000174 0,000170 12,04 11,76 100 97,6 13 0,0000120 0,83 7,4 0,000000 0,000000 0,0 0,0 0,0 - 14 0,0000120 0,21 1,9 0,000000 0,000000 0,0 0,0 0,0 - 15 0,0000030 0,12 1,0 0,000000 0,000000 0,0 0,0 0,0 -
16 0,0000110 0,76 6,7 0,000000 0,000000 0,0 0,0 0,0 - 17 0,0000190 1,31 11,6 0.000215 0,000192 14,89 13,29 100 89,2
QV - - - - - 26,93 25,05 - -
Fonte: Autoria própria.
Tabela 40 - Estimativa Preliminar e Final de Vazamentos: Manobra 6: 12 e 17 (5L/s).
Estimativa Preliminar Estimativa Final
Nó
AV (m2) QV (L/s) AV (m2) QV (L/s)
Estimado Estimado IALV
(%) Real Estimado Real Estimado
IALV
(%)
IA
(%)
2 0,0000120 0,86 7,9 0,000000 0,000000 0,0 0,0 0,0 - 3 0,0000103 0,86 7,9 0,000000 0,000000 0,0 0,0 0,0 - 4 0,0000110 0,70 6,5 0,000000 0,000000 0,0 0,0 0,0 - 5 0,0000060 0,56 5,2 0,000000 0,000000 0,0 0,0 0,0 - 6 0,0000080 0,62 5,7 0,000000 0,000000 0,0 0,0 0,0 - 7 0,0000133 0,79 7,3 0,000000 0,000000 0,0 0,0 0,0 - 8 0,0000090 0,49 4,5 0,000000 0,000000 0,0 0,0 0,0 - 9 0,0000130 0,77 7,1 0,000000 0,000000 0,0 0,0 0,0 -
10 0,0000103 0,75 6,9 0,000000 0,000000 0,0 0,0 0,0 - 11 0,0000090 0,28 2,6 0,000000 0,000000 0,0 0,0 0,0 - 12 0,0000150 1,04 9,6 0,000174 0,000169 12,04 11,69 100 91,6 13 0,0000110 0,83 7,7 0,000000 0,000000 0,0 0,0 0,0 - 14 0,0000130 0,21 1,9 0,000000 0,000000 0,0 0,0 0,0 - 15 0,0000050 0,12 1,1 0,000000 0,000000 0,0 0,0 0,0 -
16 0,0000112 0,76 7,0 0,000000 0,000000 0,0 0,0 0,0 - 17 0,0000171 1,18 10,9 0.000215 0,000189 14,89 13,08 100 87,8
QV - 10,82 - - - 26,93 24,77 - -
Fonte: Autoria própria
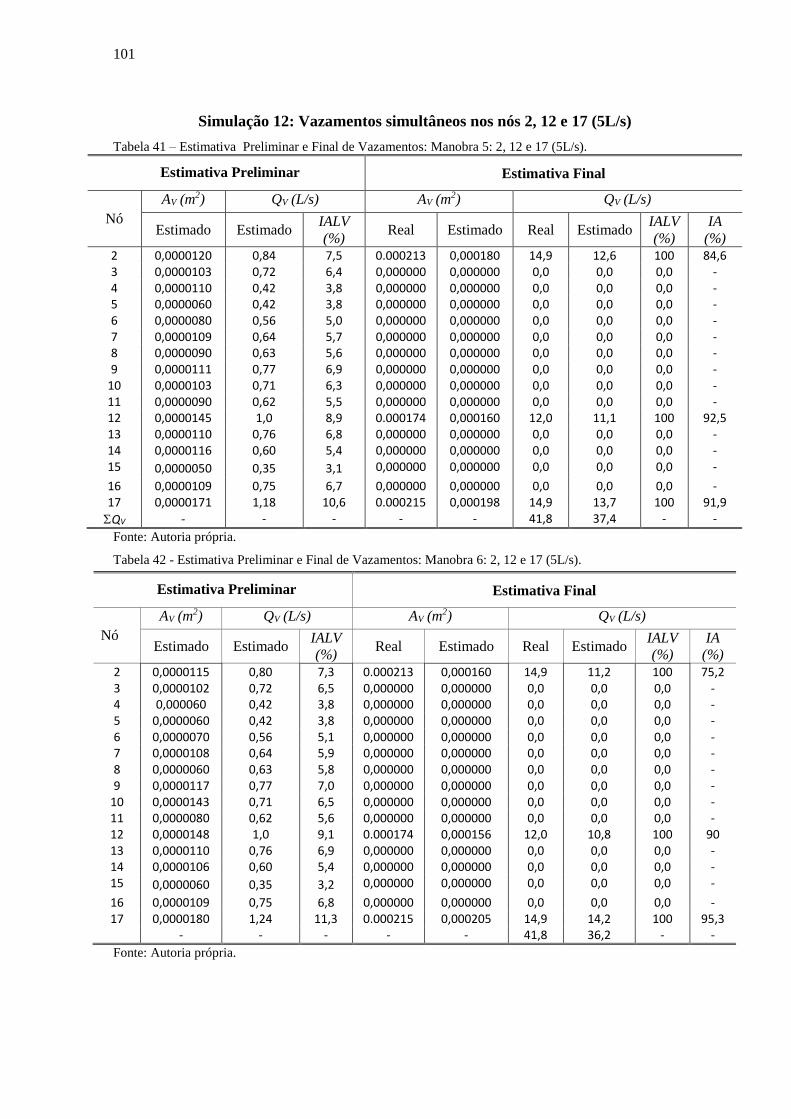
101
Simulação 12: Vazamentos simultâneos nos nós 2, 12 e 17 (5L/s)
Tabela 41 – Estimativa Preliminar e Final de Vazamentos: Manobra 5: 2, 12 e 17 (5L/s).
Estimativa Preliminar Estimativa Final
Nó
AV (m2) QV (L/s) AV (m2) QV (L/s)
Estimado Estimado IALV
(%) Real Estimado Real Estimado
IALV
(%)
IA
(%)
2 0,0000120 0,84 7,5 0.000213 0,000180 14,9 12,6 100 84,6 3 0,0000103 0,72 6,4 0,000000 0,000000 0,0 0,0 0,0 - 4 0,0000110 0,42 3,8 0,000000 0,000000 0,0 0,0 0,0 - 5 0,0000060 0,42 3,8 0,000000 0,000000 0,0 0,0 0,0 - 6 0,0000080 0,56 5,0 0,000000 0,000000 0,0 0,0 0,0 - 7 0,0000109 0,64 5,7 0,000000 0,000000 0,0 0,0 0,0 - 8 0,0000090 0,63 5,6 0,000000 0,000000 0,0 0,0 0,0 - 9 0,0000111 0,77 6,9 0,000000 0,000000 0,0 0,0 0,0 -
10 0,0000103 0,71 6,3 0,000000 0,000000 0,0 0,0 0,0 - 11 0,0000090 0,62 5,5 0,000000 0,000000 0,0 0,0 0,0 - 12 0,0000145 1,0 8,9 0.000174 0,000160 12,0 11,1 100 92,5 13 0,0000110 0,76 6,8 0,000000 0,000000 0,0 0,0 0,0 - 14 0,0000116 0,60 5,4 0,000000 0,000000 0,0 0,0 0,0 - 15 0,0000050 0,35 3,1 0,000000 0,000000 0,0 0,0 0,0 -
16 0,0000109 0,75 6,7 0,000000 0,000000 0,0 0,0 0,0 - 17 0,0000171 1,18 10,6 0.000215 0,000198 14,9 13,7 100 91,9
QV - - - - - 41,8 37,4 - -
Fonte: Autoria própria.
Tabela 42 - Estimativa Preliminar e Final de Vazamentos: Manobra 6: 2, 12 e 17 (5L/s).
Estimativa Preliminar Estimativa Final
Nó
AV (m2) QV (L/s) AV (m2) QV (L/s)
Estimado Estimado IALV
(%) Real Estimado Real Estimado
IALV
(%)
IA
(%)
2 0,0000115 0,80 7,3 0.000213 0,000160 14,9 11,2 100 75,2 3 0,0000102 0,72 6,5 0,000000 0,000000 0,0 0,0 0,0 - 4 0,000060 0,42 3,8 0,000000 0,000000 0,0 0,0 0,0 - 5 0,0000060 0,42 3,8 0,000000 0,000000 0,0 0,0 0,0 - 6 0,0000070 0,56 5,1 0,000000 0,000000 0,0 0,0 0,0 - 7 0,0000108 0,64 5,9 0,000000 0,000000 0,0 0,0 0,0 - 8 0,0000060 0,63 5,8 0,000000 0,000000 0,0 0,0 0,0 - 9 0,0000117 0,77 7,0 0,000000 0,000000 0,0 0,0 0,0 -
10 0,0000143 0,71 6,5 0,000000 0,000000 0,0 0,0 0,0 - 11 0,0000080 0,62 5,6 0,000000 0,000000 0,0 0,0 0,0 - 12 0,0000148 1,0 9,1 0.000174 0,000156 12,0 10,8 100 90 13 0,0000110 0,76 6,9 0,000000 0,000000 0,0 0,0 0,0 - 14 0,0000106 0,60 5,4 0,000000 0,000000 0,0 0,0 0,0 - 15 0,0000060 0,35 3,2 0,000000 0,000000 0,0 0,0 0,0 -
16 0,0000109 0,75 6,8 0,000000 0,000000 0,0 0,0 0,0 - 17 0,0000180 1,24 11,3 0.000215 0,000205 14,9 14,2 100 95,3
- - - - - 41,8 36,2 - -
Fonte: Autoria própria.

102
Tabelas 30 e 31 apresentam os resultados da estimativa preliminar e final dos
vazamentos para a manobra 5 e manobra 6. Na simulação preliminar da manobra 5 o nó 2
apresenta IALV de 14,2%, logo possui uma grande probabilidade de vazamento, pois os
demais são eliminados por apresentarem baixos IALV’S. Na simulação preliminar da
manobra 6 o nó 2 apresenta novamente um alto IALV no valor de 12,8% em relação as
demais nós. Na estimação final ambas manobras possuem IALV’S iguais a 100%, sendo que
na manobra 6 a vazão estimada chega mais próxima da real em relação a manobra 5, logo a
manobra 6 possui maior desempenho por possui um maior índice de acerto na estimação final.
As Tabelas 32 e 33 apresentam os resultados da estimação preliminar e final dos
vazamentos para a manobra 5 e manobra 6. Na simulação preliminar da manobra 5 o nó 12
apresenta IALV de 34,7%, logo possui uma grande probabilidade de vazamento, pois os
demais são eliminados por apresentarem baixos IALV’S. Na simulação preliminar da
manobra 6 o nó 12 apresenta novamente um alto IALV de 33,0 % em relação as demais nós.
Na estimação final ambas manobras possuem IALV’S iguais a 100%, pois todos os demais
são eliminados no primeiro passo, isso mostra que o método é eficiente na identificação dos
vazamentos para ambas manobras. Na estimação final da manobra 5 o nó 12 possui IA igual a
97,1% e na estimativa final da manobra 6 o nó 12 apresenta IA igual a 98,2% , logo a
manobra 6 possui maior eficiência na localização do vazamento.
Na simulação 8 as tabelas 34 e 35 apresentam os resultados da estimação preliminar e
final dos vazamentos para a manobra 5 e manobra 6. Na simulação para a manobra 5 o IALV
para o nó 17 vale 43,3% e para a manobra 6 é de 41,10%, sendo que ambas manobras
possuem IALV’S iguais a 100% na estimação final. Todos os demais nós na estimação inicial
para ambas manobras são eliminados, pois possuem IALV’S muito baixos. De acordo com os
resultados das duas tabelas acima a manobra 5 se mostrou mais eficiente, pois possui maior
IA.
Na identificação dos nós simultâneos 2 e 12 as Tabelas 36 e 37 apresentam os
resultados da estimação preliminar e final dos vazamentos para a manobra 5 e manobra 6. Na
simulação preliminar para ambas manobras os nós 2 e 12 possuem altos IALV’S em relação
aos demais que são baixos, para a manobra 5 os nós 2 e 12 apresentam IALV’S iguais a
11,0% e 11,4%, respectivamente, para a manobra 6 os nós 2 e 12 apresentam IALV’S iguais a
10,4% e 10,6% respectivamente. Na estimação final para a manobra 5 o nó 2 apresenta IA de
93,3% e o nó 12 de 97,7%, para a manobra 6 o nó 2 apresenta IA igual a 98,6% e o nó 12 de
99,2%, neste caso para os dois vazamentos simultâneos temos índices de acertos maiores na
manobra 6.
As Tabelas 38 e 39 apresentam os resultados da estimação preliminar e final dos
vazamentos para a manobra 5 e manobra 6 para identificar os vazamentos simultâneos nos
nós 2 e 17 da rede 3. Na simulação preliminar para ambas manobras os nós 2 e 17 possuem
altos IALV’S em relação aos demais que são baixos, para a manobra 5 os nós 2 e 17
apresentam IALV’S iguais a 10,9% e 8,9%, respectivamente, para a manobra 6 os nós 2 e 17
apresentam IALV’S iguais a 9,0% e 12% respectivamente. Na estimação final a manobra 5

103
apresenta maior IA para o nó 2, no entanto apresenta menor IA para o nó 17, sendo que para
ambas o método transiente inverso é eficiente.
As Tabelas 40 e 41 apresentam os resultados da estimação preliminar e final dos
vazamentos para a manobra 5 e manobra 6 para identificar os vazamentos simultâneos no nós
12 e 17 da rede 3. Na simulação preliminar para ambas manobras os nós 12 e 17 possuem
altos IALV’S em relação aos demais que são baixos, para a manobra 5 os nós 12 e 17
apresentam IALV’S iguais a 10,4% e 11,6%, respectivamente, para a manobra 6 os nós 12 e
17 apresentam IALV’S iguais a 9,6% e 10,9% respectivamente. Na estimação final para a
manobra 5 o nó 12 apresenta IA de 97,6% e o nó 17 de 89,2%, para a manobra 6 o nó 12
apresenta IA igual a 91,6% e o nó 17 de 87,8%, neste caso para os dois vazamentos
simultâneos temos índices de acertos maiores na manobra 5.
Na simulação 12 as Tabelas 42 e 43 apresentam os resultados da estimação preliminar
e final dos vazamentos para a manobra 5 e manobra 6 para identificar os vazamentos
simultâneos no nós 2, 12 e 17 da rede 3. Em ambas manobras na estimação os nós apresentam
IALV’S iguais a 100% o que comprova a eficiência do método empregado na identificação
dos vazamentos. Na estimação inicial da manobra 5 o nó 2 possui IALV igual a 7,5%, o nó 12
apresenta IALV igual a 8,9% e o nó 17 IAVL igual a 10,6%, já na estimação final da manobra
6 o nó 2 possui IALV igual a 7,3%, o nó 12 apresenta IALV igual a 9,1% e o nó 17 IAVL
igual a 11,3%. Os nós 2 e 12 possuem maior IA na manobra 5 e são iguais a 84,6% e 92,5%,
já o nó 17 possui maior IA na manobra 6 e é igual a 95,3%. O método MTI-AG mais uma vez
se mostra eficiente em localizar vazamentos, mais neste caso observamos que os índices de
acertos para localizar 3 vazamentos simultâneos são menores dos índices de acertos para
localizar 2 vazamentos simultâneos, ou seja o método é um pouco inferior. O procedimento
de identificação proposto, mais uma vez, mostra-se eficiente em localizar e atribuir
magnitudes dos dois vazamentos existentes na rede.

104
7 CONCLUSÃO
Esta pesquisa se propôs a estudar a influência de manobras de válvulas na
identificação de vazamentos em redes de distribuição de água. As válvulas são acessórios
operacionais usadas para abrir, fechar ou regular a passagem de água pelas tubulações. Em
uma situação real os sistemas hidráulicos estão sujeitos à ocorrência de transientes, uma
vez que qualquer mudança em uma das condições de contorno do sistema pode provocar
transientes hidráulicos, neste caso o efeito transitório é produzido por uma manobra de
válvula.
Entende-se por transiente hidráulico como aquele escoamento pouco compressível que
não respeita um regime estacionário, em outras palavras um transiente hidráulico é o
estado não permanente de escoamento em que o fluxo varia de um estado permanente para
outro estado permanente de características hidráulicas diferentes.
Inicialmente foram resolvidas as equações do escoamento transiente, através da
transformação de uma EDP em uma EDO, usando o Método das Características e na
solução do problema inverso foram feitas várias simulações em 3 redes exemplos, usando
dados transientes e o Algoritmo Genético, ou seja o MTI-AG. O método utiliza dados
sintéticos obtidos das 3 redes com parâmetros conhecidos, com intuito de obter as cargas
transientes dos nós, que serão considerados como medidos e em seguida é realizada uma
análise transiente inversa que consiste na comparação das cargas transientes medidas com
as cargas calculadas, através de uma função objetivo.
Nesta pesquisa a identificação dos vazamentos foram feitas em 3 redes com seis
manobras, onde as manobras: 2, 3 e 6 são suaves e as manobras 1, 4 e 5 são bruscas e em
todas as simulações foram analisadas a influência da severidade do transiente, através da
mudança de manobras de válvulas.
Os resultados encontrados nas simulações com o uso do MTI-AG se mostrou eficiente
na busca da identificação de vazamentos em redes simples e complexas, sendo que o tipo
de manobra influenciou nos resultados das estimações, sendo que a manobra suave se
mostrou mais eficaz na identificação de tais vazamentos, levando a uma boa calibração,
no entanto os índices de acertos vão diminuindo conforme a quantidade de nós com
vazamentos.
O uso do AG é uma ferramenta eficiente empregada em estudos de redes de
abastecimento de água e mostrou-se adequado ao problema proposto, produzindo

105
resultados satisfatórios para identificação de vazamentos. Com base nos resultados
apresentados recomendam-se outros estudos na busca da identificação de vazamentos,
como por exemplo: Identificação de vazamentos onde o transiente é provocado por
parada ou partida de bombas, alteração do nível do reservatório, abertura ou fechamento
de turbinas, ou ainda comparar o método do MTI-AG com outras técnicas de Otimização.

106
8 REFERÊNCIAS
ARAÚJO, J. K. Calibração de redes de distribuição de água pelo método inverso
aplicado à escoamento transiente. 2003. 166 p. Tese (Doutorado)-Escola de Engenharia de
São Carlos, Universidade de São Paulo, São Carlos, 2003.
ASSAN, A. E. Método dos elementos finitos: primeiros passos. 2. ed. São Paulo: Editora
Unicamp. 2003.
ALEXANDRE, Adriano Ricardo Almeida. Identificação de Vazamentos em Redes de
Distribuição de Água por meio do algoritmo Genético com Dados Transientes.
2005.136f. Dissertação (Mestrado)- Universidade Federal do Ceará.
AZEVEDO NETO, J. M. “Manual de Hidráulica”, Editora Edgard Blucher, São Paulo,
2008.
BOYCE, W.E.; DIPRIMA, R.C. Equações diferenciais elementares e problemas de
valores de contorno. LTC, 1989.
BAPTISTA, MARCIO BENEDITO; LARA, MARCIA, “Fundamentos de Engenharia
Hidráulica”, Editora UFMG, Minas Gerais, 2003.
CHAPRA, Steven C.; CANALE, Raymond P. Métodos Numéricos para Engenharia. 5. ed.
São Paulo: Editora McGraw- Hill, 2008.
CHAUDHRY,M. H. Applied hydraulic transients. New York: Van Nostrand Reinhold,
1987.
CHEUNG, P. B. (2001). Investigação dos métodos clássicos de calibração de redes
hidráulicas. 2001. 132 p. Dissertação (Mestrado)-Universidade Federal de Mato Grosso do
Sul, Campo Grande, 2001.
COSTA, M.G. Calibração do Coeficiente de Rugosidades de Tubulações em Redes de
Distribuição de Água com redes neurais. Fortaleza. 103p. Dissertação de Mestrado.
Universidade Federal do Ceará, 2008.
COVAS, Dínia I.C; Almeida, A Betãnio; Ramos, Helena, M . Leak location in pipe systems
using pressure surges. In: INTERNACIONAL CONFERENCE ON PRESSURE
SURGES, 2000, Hagur, Proceedings of….Hagur : BHR group, 2000.

107
GAMBALE, S. R. Aplicação de algoritmo genético na calibração de rede de água. 2000.
266p. Dissertação (Mestrado)-Escola Politécnica, Universidade de São Paulo, São Paulo,
2000.
GALIZA, R.V.P. Calibração de Rugosidades de Tubulações de Redes de Distribuição de
Água, via Método Transiente Inverso com Aplicação de Algoritmo Genético. 2009.190f.
Dissertação (Mestrado)- Universidade Federal do Ceará.
GEN,M., CHENG, R-Genetic algorithms and engineering design. John Wiley & Sons,
INC, 1997.
GO ASSOCIADOS- Perdas de Água: Desafios ao Avanço do Saneamento Básico e à
Escassez Hídrica- São Paulo, 2015.
HOLLAND.J.H. Adaptation in Natural and Artificial systems, Mt Press, 1975.
KOELLE, E. Transientes Hidráulicos em Instalações de Condutos Forçados. Tese de
Livre Docência, EPUSP, São Paulo, 1983.
KOELLE, E, (1983). Transientes Hidráulicos em Instalações de condutos forçados,
aplicações em Engenharia. Apostila de Escola Politécnica da Universidade de São Paulo
LESSA, R. C. Transientes hidráulicos em sistemas complexos de adução de água.
Dissertação (Mestrado)-EESC/USP, São Paulo, 1984.
LEÃO, Joãosué de Arêa. Influência de Manobras de Válvulas na identificação das
Rugosidades em Tubulações de Redes de Distribuição de Água. 2014. 123f. Dissertação (
Mestrado)- Universidade Federal do Ceará.
MAIA JUNIOR, José V.F. Comparação de métodos de dimensionamento em redes de
distribuição de água. 2012.144f. Dissertação (Mestrado)-Universidade Federal do Ceará,
Fortaleza, 2012
MARTIN, C. Samuel. Representação de características de máquinas hidráulicas.
intercâmbio internacional sobre transientes hidráulicos e cavitação. São Paulo: CTH/EPUSP,
1982.
MENDONÇA, Laura Cruz de. Estudo dos transientes hidráulicos em ma instalação de
bombeamento. Dissertação (Mestrado)-EESC/USP, São Paulo, 1986.

108
MOTA, Henrique Jorge Souza. Dimensionamento Econômico de Redes de Distribuição de
Água Aplicando Algoritmo Genético. 2007. 208f. Dissertação (Mestrado)- Universidade
Federal do Ceará.
MICHALEWICZ, Z.-Genetic algorithms + data structures = evolution programs, Second
Edition, Springer- Verlag, Berlin, Germany, 1994
NETO, M.F. Alencar. Otimização de Redes de Distribuição de Água Por Algoritmos
Genéticos. 2003. 179f. Dissertação (Mestrado)-Universidade Federal do Ceará, Fortaleza,
2003.
NEVES, C. L. Calibração de parâmetros de modelos hidráulicos de redes de distribuição
de água. 2007.Dissertação (Mestrado)-Faculdade de Tecnologia, Universidade de Brasília,
Brasília, 2007.
NEUMAN, S- Calibration of distributed parameter groundwater flow models viewed as
a multiple- objective decision process under uncertainty. Water Resources Research, v.9,
n. 4,
PEGOLLO, C. A. G. Modelos matemáticos em engenharia: motivando a pesquisa e a
integração. São José dos Campos: Instituto Tecnológico da Aeronáutica, 2005.
PORTO, R. M. Hidráulica básica. São Carlos: EESC, 1998.
PUDAR, Ranko S, LIGGETT, James A.Leaks in pipe networks. Journal of Hydraulic
Engineering, v.118, n. 7, 1992
RIGHETTO, AntonioMarozzi. Considerações sobre o Golpe de Aríete em instalações
hidráulicas. Dissertação (Mestrado)-EESC/USP, São Paulo, 1972.
ROCHA, Valder Adriano Gomes de Matos. Avaliação de Calibração de Redes Hidráulicas
usando o Método Iterativo do Gradiente Hidráulico Alternativo (MIGHA) Aplicado a
Escoamento Transiente. 2013. 151f. Tese (Doutorado)- Universidade Federal do Ceará.
ROCHA, Valder Adriano Gomes de Matos. Calibração de Coeficientes de Rugosidades de
Redes de Distribuição de Água usando o Método Iterativo do Gradiente Hidráulico
(MIGHA) .2008. 168f. Dissertação (Mestrado)- Universidade Federal do Ceará.
SABESP- Apostila do Curso de Pesquisa de Vazamentos – MNEP. Sabesp, São Paulos,
2010
SILVA, R. R. da. Estudo e aplicação de um algoritmo genético compacto usando elitismo
e mutação.2008.158 p. Dissertação (Mestrado)-Universidade Federal Tecnológica Federal do
Paraná, Curitiba, 2008.

109
SILVA, Alysson Cesar Azevedo. Calibração Automática de Rugosidades de Tubulações
em Sistemas de Distribuição de Água com Aplicação de Algoritmos Genéticos. 2006.
176f. Dissertação ( Mestrado)- Universidade Federal do Ceará.
SUN, N.Z. (1994) – Inverse Problemas in Groundwater Modeling. Dordrecht, Kluwer
Academic Publishers
SOARES, A. K. Calibração de modelos de redes de distribuição de água para
abastecimento considerando vazamentos e demandas dirigidas pela pressão. 2003. 153p.
Dissertação (Mestrado)-Escola de Engenharia de São Carlos, Universidade de São Paulo, São
Carlos, 2003.
TAVARES, P. R. L. et al. Calibração da condutividade hidráulica horizontal utilizando o
método iterativo do gradiente hidráulico. CONGRESSO BRASILEIRO DE ÁGUAS
SUBTERRÂNEAS, 16., E ENCONTRO NACIONAL DE PERFURADORES DE POÇOS,
17., 2010.
TSUTIYA, M. T. Abastecimento de água. Departamento de Engenharia Hidráulica e
Sanitária da Escola Politécnica da Universidade de São Paulo. São Paulo, 2004. 643p.
TADELLI , Filho, J. Controle e Redução de Perdas. In TSUTYIA, M.T. (org),
Abastecimento de Água. 3ª Ed. São Paulo: Escola Politécnica de Universidade de São Paulo.
VELHO, H. F. Campos. Problemas inversos: conceitos básicos e aplicações. ENCONTRO
DE MODELAGEM COMPUTACIONAL, 4., 2001, Nova Friburgo. Anais... São Carlos:
SBMAC, 2001. p. 63-79.
VIANA, Francisco Marques. A Influência de Manobras de Válvulas na Identificação do
Fator de Atrito em Tubulações de Rede de Distribuição de Água. 83f. dissertação (
Mestrado)- Universidade Federal do Ceará.
WYLIE, Evan B.; STREETER, Victor L. Fluid transients. New York: McGraw-Hilli, 1978.
ZILL, D.G.; GULLEN, M. R. Equações Diferenciais. v.1 e v. 2. Pearson, 2006.