universidade estadual paulista “jÚlio de mesquita … · 4.3 calibração da ... trator acoplado...
TRANSCRIPT

UNIVERSIDADE ESTADUAL PAULISTA “JÚLIO DE MESQUITA FILHO”
FACULDADE DE CIÊNCIAS AGRONÔMICAS
CÂMPUS DE BOTUCATU
DESENVOLVIMENTO E VALIDAÇÃO DE UM SISTEMA
ELETROMECÂNICO PARA DETERMINAÇÃO DO TORQUE NAS
RODAS MOTRIZES DE TRATORES AGRÍCOLAS
DIEGO AUGUSTO FIORESE
Tese apresentada à Faculdade de Ciências
Agronômicas da Unesp - Câmpus de
Botucatu, para obtenção do título de doutor
em Agronomia (Energia na Agricultura)
BOTUCATU-SP
Abril - 2014

UNIVERSIDADE ESTADUAL PAULISTA “JÚLIO DE MESQUITA FILHO”
FACULDADE DE CIÊNCIAS AGRONÔMICAS
CÂMPUS DE BOTUCATU
DESENVOLVIMENTO E VALIDAÇÃO DE UM SISTEMA
ELETROMECÂNICO PARA DETERMINAÇÃO DO TORQUE NAS
RODAS MOTRIZES DE TRATORES AGRÍCOLAS
DIEGO AUGUSTO FIORESE
Orientador: Professor Doutor Kléber Pereira Lanças
Tese apresentada à Faculdade de Ciências
Agronômicas da Unesp - Câmpus de
Botucatu, para obtenção do título de doutor
em Agronomia (Energia na Agricultura)
BOTUCATU-SP
Abril - 2014



III
DEDICATÓRIAS
Às forças Divinas que fortalecem a vida no
planeta Terra, e desta forma propiciam à
realização de todos os trabalhos técnicos e
científicos.
Dedico com imensa gratidão à minha mãe,
Clarice Candiago Fiorese, pelo incansável
apoio durante todas as etapas dedicadas ao
trabalho e estudos, e pela imensa
compreensão frente à distância dos membros
de sua família, ao saber que o propósito é nos
tornarmos pessoas com alto nível
educacional.
Ao meu Pai, Gelson Fiorese (in
memorian)... Sua ausência forçada me faz
refletir o quão bela é a vida, mesmo
enfrentando as maiores dificuldades. Com
certeza estás olhando por sua família,
guiando-nos para o melhor caminho.
Aos irmãos Flávia Fiorese, Flávio
Henrique Fiorese e Eduarda Fiorese, pela
confiança e pelo apoio dado durante todo
tempo.
Dedico ainda a todos que, de forma direta
ou indireta, participaram e colaboraram para
a realização de cada uma das etapas deste
estudo.

IV
AGRADECIMENTOS
Aos pais, amigos, parentes e colegas, pelo apoio e incentivo ao crescimento didático e profissional,
especialmente à minha família pela presença em diversos momentos, bem como sua compreensão
pela ausência ao longo dos anos dedicados à evolução intelectual.
À Faculdade de Ciências Agronômicas da Universidade Estadual Paulista “Júlio de Mesquita Filho”
- FCA/UNESP, em especial ao Programa de Pós-Graduação em Energia na Agricultura e ao
Departamento de Engenharia Rural.
A uma distinta pessoa e profissional, Prof. Dr. Kléber Pereira Lanças, orientador, amigo, conselheiro,
e verdadeiro entusiasta do potencial científico de nosso país, especialmente para o setor de máquinas agrícolas. Agradeço, principalmente, a confiança depositada ao longo dos últimos anos.
À Capes, pela concessão da bolsa de estudos e apoio financeiro para publicações e participação em eventos.
Ao NEMPA - Núcleo de Ensaios de Máquinas e Pneus Agroflorestais e seus membros, composto
por professores, pós-graduandos, técnicos, estagiários e demais, que como uma verdadeira família sempre manteve o espírito de equipe.
Ao colega, Engenheiro Mecânico André Bender da UFSM, por uma grande amizade formada em anos passados e que, pelo presente, colocou-se à disposição voluntariamente, para aplicação de seus
conhecimentos técnicos em Engenharia.
Aos senhores membros da banca examinadora, pelo gentil aceite na avaliação deste trabalho, e pela honrada presença, contribuindo com correções, sugestões e demais comentários.
À todos os professores que, de forma sucinta ou detalhada, lançaram as diretrizes para o alcance do sucesso, neste, e em outros trabalhos.
Agradeço à minha noiva Francielle Morelli Ferreira pelo apoio, grande companheirismo, conselhos e pela compreensão acerca das dificuldades enfrentadas.
Aos colegas de trabalho e amigos, Emanuel R. Spadim, Indiamara Marasca, Luiz Balestrin, Marcelo
S. Denadai, Prof. Dr. Saulo P. S. Guerra, Prof. Dr. Paulo R. Arbex, Prof. Fabrício Campos Masiero, Guilherme Oguri, Felipe de Córdova Machado, Fernando Camargo, João Vitor Testa, Gabriel Lyra,
Renato Guedes Ramos, Murilo B. Martins, Marília Hellmeister, Edward Victor Aleixo, Prof. Thiago
Machado, Thiago Hendler, Gustavo Montanha, Prof. Fernando Henrique Campos, Bárbara Barreto Fernandes, Éric Cunha, Miguel Osório Pascucci, Jefferson Sandi, Fellippe Damasceno, Lucas
Doimo, José Renato Leite Barbosa, Walter Puga e Ronilson de Souza Santos, que colaboraram
significativamente nos trabalhos realizados.
Ao amigo Sandro Lugão e a STB Aeronáutica, parceiros no desenvolvimento dos componentes
mecânicos.
Aos colegas de lar e amigos, Laerte Pivetta, Tiago Zoz, Ismael Fernando, João Vitor Testa, Edward
Victor Aleixo e Vinícius, pela parceria e amizade.
A todos os funcionários do Departamento de Engenharia Rural e da Fazenda Experimental da FCA.

V
EPÍGRAFE
“Nada façais por contenda ou por vanglória,
mas por humildade; cada um considere
os outros superiores a si mesmo.”
(Filipenses, 2:3)

VI
SUMÁRIO
Página
LISTA DE TABELAS.............................................................................................................VIII
LISTA DE FIGURAS........... ...................................................................................................... X
LISTA DE APÊNDICES ........................................................................................................XIV
RESUMO.............................. ....................................................................................................... 1
SUMMARY……………….. ....................................................................................................... 3
INTRODUÇÃO.............. ...................................................................................................... 5
REVISÃO BIBLIOGRÁFICA ............................................................................................. 7
2.1 Projeto de componentes e de máquinas agrícolas ............................................................ 7
2.2 Motores de combustão interna ciclo Diesel ..................................................................... 8
2.2.1 Reserva de torque ................................................................................................... 9
2.3 Tratores agrícolas ........................................................................................................... 11
2.3.1 Transmissões dos tratores ..................................................................................... 12
2.3.2 Distribuição de forças no trator ............................................................................ 13
2.3.3 Rodados motrizes e pneus agrícolas para tratores ................................................ 16
2.3.4 Deformação dos pneus e raio dos rodados ........................................................... 17
2.4 Teoria da tração.......... .................................................................................................... 18
2.4.1 Interação rodado-superfície trativa ....................................................................... 18
2.4.2 Teorias preditivas para tração ............................................................................... 21
2.4.3 Eficiência trativa ................................................................................................... 24
2.5 Ensaios de tratores e rodados ......................................................................................... 28
2.5.1 Ensaios dinamométricos ....................................................................................... 29
2.5.2 Ensaios de tração .................................................................................................. 30
2.5.3 Ensaios de rodados e de torque ............................................................................. 33
2.5.4 Instrumentação para aquisição de dados............................................................... 36
MATERIAL E MÉTODOS ................................................................................................ 38
3.1 Fases de projeto do torsiômetro ..................................................................................... 39
3.2 Projeto e simulações virtuais.......................................................................................... 40
3.3 Construção do torsiômetro (protótipo) ........................................................................... 40
3.4 Trator utilizado...............................................................................................................41
3.4.1 Ensaios de deformação dos pneus traseiros .......................................................... 43
3.4.2 Ensaios da tomada de potência (TDP) do trator em dinamômetro ....................... 45
3.4.3 Relação de transmissão e tração bruta teórica do trator........................................ 46

VII
3.5 Instrumentação utilizada para ensaios de tração ............................................................ 47
3.6 Unidade Móvel para Ensaio na Barra de Tração - UMEB............................................. 52
3.7 Ensaios para validação do torsiômetro........................................................................... 53
3.7.1 Pistas de ensaio ..................................................................................................... 53
3.7.2 Marchas ensaiadas e rotação de trabalho do trator ............................................... 54
3.7.3 Delineamento experimental para o fator marcha .................................................. 55
3.7.4 Delineamento experimental para o fator TDA ligada e desligada ........................ 55
3.7.5 Delineamento experimental para o fator superfície trativa ................................... 56
3.7.6 Obtenção das máximas eficiências ....................................................................... 56
3.7.7 Parâmetros avaliados e procedimento de cálculos ................................................ 57
RESULTADOS E DISCUSSÃO ........................................................................................ 58
4.1 Resultados do projeto (virtual) ....................................................................................... 58
4.1.1 Custo de desenvolvimento do torsiômetro ........................................................... 64
4.2 Resultados construtivos do torsiômetro ......................................................................... 64
4.3 Calibração da célula de carga......................................................................................... 68
4.4 Calibração do torsiômetro .............................................................................................. 68
4.5 Resultados dos ensaios preliminares .............................................................................. 69
4.5.1 Deformação vertical dos pneus traseiros .............................................................. 69
4.5.2 Ensaio dinamométrico via TDP ............................................................................ 71
4.5.3 Relação de transmissão e tração bruta e líquida teórica do trator ......................... 72
4.5.4 Primeiros ensaios de tração e obtenção de torque pelo torsiômetro ..................... 73
4.6 Resultados dos ensaios de tração em pista ..................................................................... 75
4.6.1 Fator marcha (velocidade de deslocamento) ........................................................ 75
4.6.1.1 Torque e potência ......................................................................................... 75
4.6.1.2 Coeficiente de tração líquida (CTL) ............................................................. 79
4.6.1.3 Eficiência trativa (ET) .................................................................................. 81
4.6.2 Fator TDA ligada e desligada ............................................................................... 84
4.6.2.1 Torque e potência ......................................................................................... 85
4.6.3 Fator superfície trativa .......................................................................................... 87
4.6.4 Máximas potências e eficiência ............................................................................ 89
CONCLUSÕES............. ..................................................................................................... 91
REFERÊNCIAS BIBLIOGRÁFICAS ................................................................................ 92
APÊNDICE........................... ................................................................................................... 101
VIII
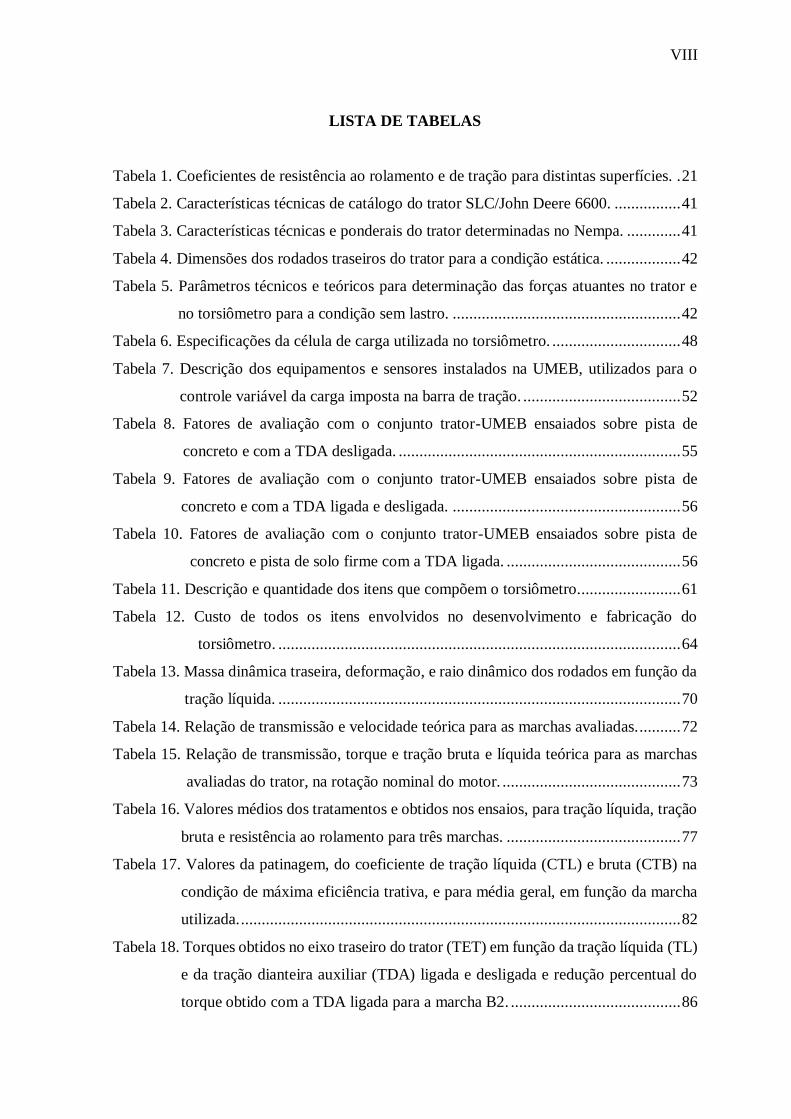
LISTA DE TABELAS
Tabela 1. Coeficientes de resistência ao rolamento e de tração para distintas superfícies. . 21
Tabela 2. Características técnicas de catálogo do trator SLC/John Deere 6600. ................ 41
Tabela 3. Características técnicas e ponderais do trator determinadas no Nempa. ............. 41
Tabela 4. Dimensões dos rodados traseiros do trator para a condição estática. .................. 42
Tabela 5. Parâmetros técnicos e teóricos para determinação das forças atuantes no trator e
no torsiômetro para a condição sem lastro. ....................................................... 42
Tabela 6. Especificações da célula de carga utilizada no torsiômetro. ............................... 48
Tabela 7. Descrição dos equipamentos e sensores instalados na UMEB, utilizados para o
controle variável da carga imposta na barra de tração. ...................................... 52
Tabela 8. Fatores de avaliação com o conjunto trator-UMEB ensaiados sobre pista de
concreto e com a TDA desligada. .................................................................... 55
Tabela 9. Fatores de avaliação com o conjunto trator-UMEB ensaiados sobre pista de
concreto e com a TDA ligada e desligada. ....................................................... 56
Tabela 10. Fatores de avaliação com o conjunto trator-UMEB ensaiados sobre pista de
concreto e pista de solo firme com a TDA ligada. .......................................... 56
Tabela 11. Descrição e quantidade dos itens que compõem o torsiômetro......................... 61
Tabela 12. Custo de todos os itens envolvidos no desenvolvimento e fabricação do
torsiômetro. ................................................................................................. 64
Tabela 13. Massa dinâmica traseira, deformação, e raio dinâmico dos rodados em função da
tração líquida. ................................................................................................. 70
Tabela 14. Relação de transmissão e velocidade teórica para as marchas avaliadas........... 72
Tabela 15. Relação de transmissão, torque e tração bruta e líquida teórica para as marchas
avaliadas do trator, na rotação nominal do motor. ........................................... 73
Tabela 16. Valores médios dos tratamentos e obtidos nos ensaios, para tração líquida, tração
bruta e resistência ao rolamento para três marchas. .......................................... 77
Tabela 17. Valores da patinagem, do coeficiente de tração líquida (CTL) e bruta (CTB) na
condição de máxima eficiência trativa, e para média geral, em função da marcha
utilizada. .......................................................................................................... 82
Tabela 18. Torques obtidos no eixo traseiro do trator (TET) em função da tração líquida (TL)
e da tração dianteira auxiliar (TDA) ligada e desligada e redução percentual do
torque obtido com a TDA ligada para a marcha B2. ......................................... 86

IX
Tabela 19. Máximas potências encontradas, na TDP (PTDP), no eixo traseiro (PET) e na
barra de tração (PBT) para quatro marchas. ..................................................... 89
Tabela 20. Máximas eficiências encontradas, considerando as máximas potências obtidas na
tomada de potência (PTDP), no eixo traseiro (PET), e na barra de tração
(PBT). ............................................................................................................. 89
X
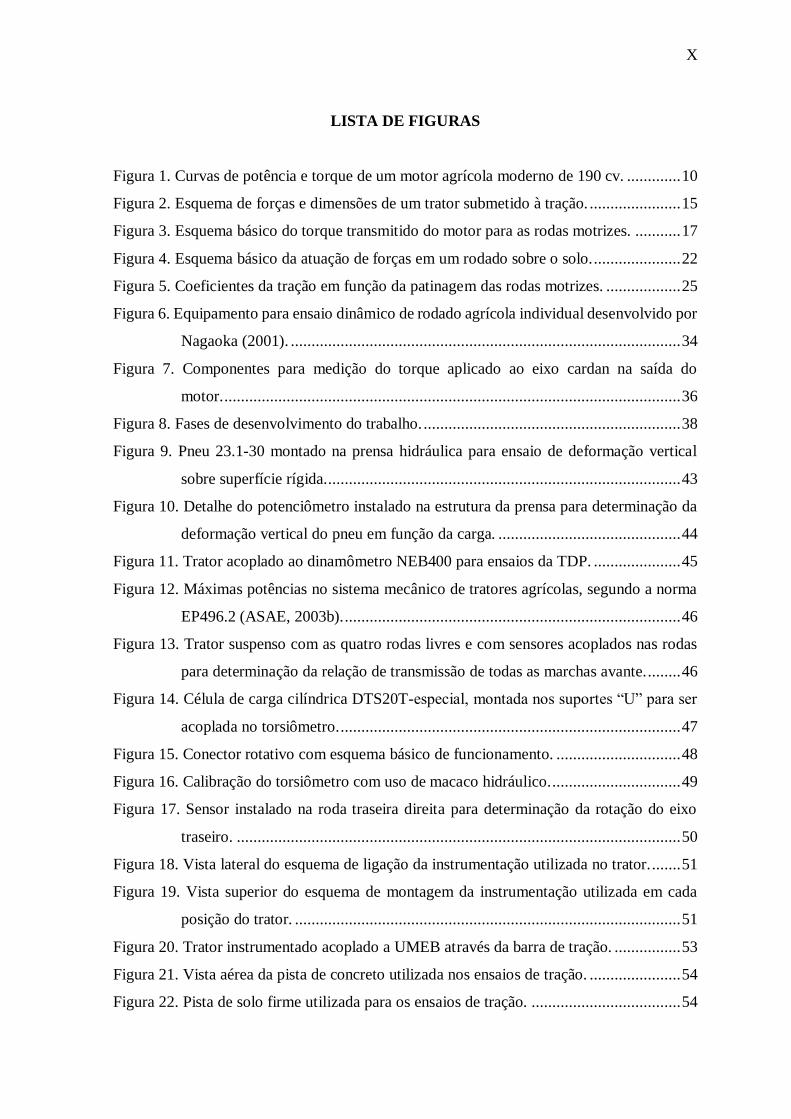
LISTA DE FIGURAS
Figura 1. Curvas de potência e torque de um motor agrícola moderno de 190 cv. ............. 10
Figura 2. Esquema de forças e dimensões de um trator submetido à tração. ...................... 15
Figura 3. Esquema básico do torque transmitido do motor para as rodas motrizes. ........... 17
Figura 4. Esquema básico da atuação de forças em um rodado sobre o solo. ..................... 22
Figura 5. Coeficientes da tração em função da patinagem das rodas motrizes. .................. 25
Figura 6. Equipamento para ensaio dinâmico de rodado agrícola individual desenvolvido por
Nagaoka (2001). .............................................................................................. 34
Figura 7. Componentes para medição do torque aplicado ao eixo cardan na saída do
motor. .............................................................................................................. 36
Figura 8. Fases de desenvolvimento do trabalho. .............................................................. 38
Figura 9. Pneu 23.1-30 montado na prensa hidráulica para ensaio de deformação vertical
sobre superfície rígida. ..................................................................................... 43
Figura 10. Detalhe do potenciômetro instalado na estrutura da prensa para determinação da
deformação vertical do pneu em função da carga. ............................................ 44
Figura 11. Trator acoplado ao dinamômetro NEB400 para ensaios da TDP. ..................... 45
Figura 12. Máximas potências no sistema mecânico de tratores agrícolas, segundo a norma
EP496.2 (ASAE, 2003b). ................................................................................. 46
Figura 13. Trator suspenso com as quatro rodas livres e com sensores acoplados nas rodas
para determinação da relação de transmissão de todas as marchas avante. ........ 46
Figura 14. Célula de carga cilíndrica DTS20T-especial, montada nos suportes “U” para ser
acoplada no torsiômetro. .................................................................................. 47
Figura 15. Conector rotativo com esquema básico de funcionamento. .............................. 48
Figura 16. Calibração do torsiômetro com uso de macaco hidráulico. ............................... 49
Figura 17. Sensor instalado na roda traseira direita para determinação da rotação do eixo
traseiro. ........................................................................................................... 50
Figura 18. Vista lateral do esquema de ligação da instrumentação utilizada no trator. ....... 51
Figura 19. Vista superior do esquema de montagem da instrumentação utilizada em cada
posição do trator. ............................................................................................. 51
Figura 20. Trator instrumentado acoplado a UMEB através da barra de tração. ................ 53
Figura 21. Vista aérea da pista de concreto utilizada nos ensaios de tração. ...................... 54
Figura 22. Pista de solo firme utilizada para os ensaios de tração. .................................... 54

XI
Figura 23. Desenhos dos principais componentes mecânicos do torsiômetro. ................... 59
Figura 24. Desenho do torsiômetro montado, elaborado a partir do princípio do braço de
alavanca........................................................................................................... 60
Figura 25. Visão explodida dos componentes do torsiômetro. .......................................... 60
Figura 26. Vista lateral do sistema montado, detalhando dimensões e ângulos (dimensões
em mm). .......................................................................................................... 61
Figura 27. Representação da atuação de forças no torsiômetro ao centro da roda motriz. .. 62
Figura 28. Representação em plano cartesiano do formato geométrico que representa a
atuação de forças no torsiômetro ao centro da roda motriz. .............................. 62
Figura 29. Peças usinadas e rolamentos aguardando montagem. ....................................... 65
Figura 30. Detalhe do acoplamento entre a flange do eixo traseiro esquerdo do trator, e a
flange do eixo do torsiômetro. ......................................................................... 65
Figura 31. Detalhe do acoplamento e o centro da roda montado entre as flanges. ............. 66
Figura 32. Centro da roda preso axialmente entre as flanges interna e externa através dos
rolamentos e porca M100................................................................................. 66
Figura 33. Aperto final da porca M100, aplicando carga axial nos rolamentos interno e
externo, e nas flanges interna e externa. ........................................................... 67
Figura 34. Torsiômetro com a parte mecânica e eletrônica montadas no rodado traseiro
esquerdo, de forma completa, e pronto para os ensaios. ................................... 67
Figura 35. Calibração da célula de carga ligada ao conector rotativo para obtenção do fator
de conversão a ser utilizado pelo sistema de aquisição de dados....................... 68
Figura 36. Resultados da calibração do torsiômetro com duas retas, sendo uma com o torque
real (conhecido) aplicado na roda, e outra com o torque calculado obtido pelo
produto entre força da célula de carga do torsiômetro (Fcc), do braço de alavanca
do torsiômetro e o seno do ângulo de torque (Sen 53,17°). ............................... 69
Figura 37. Deformação vertical em função da carga atuante sobre o pneu (individual) para
pressão de insuflagem de 124,1 kPa. ................................................................ 70
Figura 38. Curvas de consumo, potência e torque na TDP obtidas nos ensaios
dinamométricos. .............................................................................................. 71
Figura 39. Trator travado com torsiômetro montado, para teste estático de resistência e
funcionalidade executando tração com velocidade de deslocamento zero. ........ 73
Figura 40. Teste de campo, para verificar a funcionalidade e resistência da parte mecânica
do torsiômetro e a para verificar a mobilidade do trator.................................... 74

XII
Figura 41. Histograma da distribuição obtida nas medições de torque no eixo traseiro. .... 74
Figura 42. Tração bruta (TB) e tração líquida (TL) em função do torque no eixo para marcha
B1. .................................................................................................................. 76
Figura 43. Tração bruta (TB) e líquida (TL) em função do torque no eixo para marcha
B2. .................................................................................................................. 76
Figura 44. Tração bruta (TB) e tração líquida (TL) em função do torque no eixo para marcha
C1. .................................................................................................................. 77
Figura 45. Potência no eixo traseiro (PET) e na barra de tração (PBT) em função da
patinagem para a marcha B1. ........................................................................... 78
Figura 46. Potência no eixo traseiro (PET) e na barra de tração (PBT) em função da
patinagem para a marcha B2. ........................................................................... 78
Figura 47. Potência no eixo traseiro (PET) e na barra de tração (PBT) em função da
patinagem para a marcha C1. ........................................................................... 79
Figura 48. Potência no eixo traseiro (PET) em função do coeficiente de tração líquida para
as três marchas. ............................................................................................... 80
Figura 49. Potência na barra de tração (PBT) em função do coeficiente de tração líquida para
as três marchas. ............................................................................................... 80
Figura 52. Eficiência trativa para pista de concreto, em função da patinagem. .................. 81
Figura 53. Eficiência trativa em função do coeficiente de tração líquida para as três marchas.
........................................................................................................................ 83
Figura 54. Eficiência trativa em função do coeficiente de tração bruta. ............................. 83
Figura 55. Potência obtida no eixo traseiro do trator para as três marchas sobre pista de
concreto e com a TDA desligada em função da rotação do motor. .................... 84
Figura 56. Torque no eixo traseiro do trator, em função da tração líquida (TL), para a
condição de TDA ligada e desligada com a marcha B2. ................................... 85
Figura 57. Potência no eixo traseiro do trator, em função da tração líquida (TL), para a
condição de TDA ligada e desligada com a marcha B2. ................................... 85
Figura 58. Redução do torque no eixo traseiro em função da tração líquida, utilizando a TDA
ligada, comparativamente ao torque com a TDA desligada. ............................. 87
Figura 59. Torque no eixo traseiro para pista de concreto e de solo firme com a TDA ligada,
em função da carga na barra de tração para a marcha B2.................................. 88

XIII
Figura 60. Potências obtidas no eixo e na barra de tração, em pista de concreto e de solo
firme, com a TDA ligada, em função da tração líquida (TL), para a marcha
B2. .................................................................................................................. 88

XIV
LISTA DE APÊNDICES
APÊNDICE 1. Desenhos detalhados do eixo principal do torsiômetro. ........................... 102
APÊNDICE 2. Desenhos detalhados da flange interna. ................................................. 103
APÊNDICE 3. Desenhos detalhados da flange externa. ................................................. 104
APÊNDICE 4. Desenhos detalhados do braço de alavanca móvel. ................................ 105
APÊNDICE 5. Desenhos detalhados da base para apoio da célula de carga. .................. 106
APÊNDICE 6. Desenhos detalhados da chapa fixadora para transporte. ........................ 107
APÊNDICE 7. Desenhos detalhados da porca M80. ...................................................... 108
APÊNDICE 8. Desenhos detalhados da porca M100. .................................................... 109
APÊNDICE 9. Desenhos detalhados da chapa lateral para suporte da célula de carga. ... 110
APÊNDICE 10. Desenhos detalhados do braço da flange externa.................................. 111
APÊNDICE 11. Desenhos detalhados do suporte da célula de carga montado. .............. 112
APÊNDICE 12. Desenhos detalhados do torsiômetro, montado e em corte. .................. 113
APÊNDICE 13. Desenhos detalhados em 3D do torciômetro explodido. ....................... 114
APÊNDICE 14. Simulação em software específico para posterior usinagem. ................. 115
APÊNDICE 15. Resultados da simulação da força torcional limite aplicado ao eixo. ..... 116

1
RESUMO
As transmissões dos tratores agrícolas transferem energia do motor
para as rodas motrizes, e o torque disponível nos rodados é convertido em tração bruta, que
é responsável por vencer a resistência ao rolamento do trator e pela tração disponível
(líquida) na barra de tração do trator. Este trabalho teve por objetivo desenvolver um sistema
eletromecânico para determinação do torque no eixo das rodas motrizes de tratores agrícolas,
denominado torsiômetro, e validá-lo através de ensaios de tração com auxílio de um carro
dinamométrico equipado com instrumentação eletrônica para aquisição de dados. A pesquisa
foi conduzida no Núcleo de Ensaios de Máquinas e Pneus Agroflorestais (NEMPA) da
Faculdade de Ciências Agronômicas (FCA/UNESP), Botucatu-SP. O protótipo foi
concebido utilizando programas computacionais específicos para projeto mecânico, e
construído para ser instalado no eixo traseiro de tratores agrícolas de até 90 kW. O
torsiômetro foi confeccionado com estrutura metálica, apta a resistir a grandes demandas de
torque, podendo ser adaptado a qualquer outro trator com características similares, de igual
ou menor potência. O dispositivo baseia-se em um braço de alavanca (momento torsor), onde
obtém-se os valores de força com uma célula de carga e os valores de torque por uma equação
matemática. Após a conclusão do projeto e construção do protótipo, foram realizadas
avaliações funcionais e de resistência, e em seguida realizaram-se ensaios de tração em pista,
para sua validação. Nos ensaios em pista, foram realizadas as avaliações em duas superfícies
(concreto e solo firme), três marchas, oito cargas na barra de tração e com a tração dianteira
auxiliar (TDA) ligada e desligada. Os resultados obtidos para validar o equipamento foram
analisados estatisticamente através de equações de regressão, com destaque para a

2
linearidade entre o torque no eixo e a tração líquida, obtendo-se uma máxima eficiência
trativa de 91%, em pista de concreto, com 4,3% de patinagem, não havendo diferença
significativa entre as marchas avaliadas. Na carga mais alta (30 kN), a distribuição de torque
foi de aproximadamente 70% nas rodas traseiras e 30% nas rodas dianteiras, e a demanda de
torque foi maior em pista de solo firme, quando comparada com pista de concreto. As
máximas eficiências foram de 95% entre a potência no eixo traseiro e a TDP, 92% entre a
potência na barra de tração e o eixo traseiro, e 88% entre a potência na barra de tração e a
potência na TDP. Os resultados dos ensaios permitiram a validação do torsiômetro, sendo
possível utilizá-lo para a avaliação de tratores agrícolas nas mais diversas condições
operacionais.

3
DEVELOPMENT AND VALIDATION OF AN ELECTROMECHANICAL SYSTEM
FOR DETERMINING THE TORQUE ON DRIVE WHEELS OF AGRICULTURAL
TRACTORS. Botucatu, 2014. 116 f.
Tese (Doutorado em Agronomia/Energia na Agricultura) - Faculdade de Ciências
Agronômicas, Universidade Estadual Paulista.
Author: DIEGO AUGUSTO FIORESE
Adviser: KLÉBER PEREIRA LANÇAS
SUMMARY
The transmissions of agricultural tractors transfer the engine power
to the drive wheels and the torque, available in the rotated, is converted into gross traction,
which is responsible for overcoming the rolling resistance of the tractor and for the net
traction on the drawbar. Based on these premises, this research aims to develop an
electromechanical system, which we designate “torque meter” or “torque transducer”, to
determine the torque and power on the axle of the driving wheels in agricultural tractors, and
validate it through traction tests, with the support of a dynamometer car, and electronic
instrumentation for data acquisition. The work was conducted at the Agro Forestry Machine
and Tire Testing Center (NEMPA) at the College of Agronomic Sciences, São Paulo State
University (FCA/UNESP), Botucatu-SP, Brazil. The torque meter was developed using
specific software for mechanical design, and was built to be installed on rear axle of tractors
of up to 90kW. The equipment was made with robust metal structure, able to withstand high
demands of torque, and possible to be adapted to any tractor with similar features with equal
or less power, simply by meeting the dimensional peculiarities of each model. The torque
meter is based on a lever arm (torsional moment) from which it is obtained the strength
values with a load cell and the torque values using a mathematical equation. After
completion of the development and construction of the prototype, the functional and
resistance evaluations were conducted and followed by dynamic tests for the validation of
the torque meter. During traction tests, it was performed evaluations on two surfaces
(concrete and firm soil), three gears, up to eight drawbar pull and evaluations with the wheel
assist drive on and off. The results for the validation of the equipment were statistically
analyzed using regression equations, highlighting the linearity between the axle torque and
the net traction, obtaining the maximum tractive efficiency of 91% on concrete surface with

4
4,3% of slip and no significant difference between the assessed gears. At the highest loading
(30kN), the torque distribution was approximately 70% on the rear wheels and 30% on the
front wheels, and the demand torque was greater on firm soil as compared to the concrete
track. The maximum efficiencies were 95% of the power on the rear axle and the PTO, 92%
of the drawbar power and rear axle, and 88% of the drawbar power and PTO. The testing
results allowed the validation of the torque meter, making it possible the usage for the
assessment of agricultural tractors in several operating conditions.
________________________
Keywords: torque meter, traction, tractor test, axle power, tractive efficiency.

5
INTRODUÇÃO
Para executar sua principal função, que é a transmissão de força de
tração, os tratores agrícolas dependem diretamente do torque do motor, o qual é
multiplicado, e na maioria dos modelos é transmitido mecanicamente até as rodas motrizes
através do conjunto de transmissão do trator, onde se incluem a embreagem, a caixa de
mudança de marchas, o diferencial e as reduções finais.
Existem perdas ao longo dessas transmissões que reduzem a
eficiência do sistema. Sabendo-se o torque desenvolvido pelo motor e a relação de
transmissão de uma determinada marcha, é possível estimar a velocidade e o torque recebido
pelos eixos motrizes, considerando as perdas existentes em todo o trajeto da potência até os
pneus, previstas por teorias ou normas técnicas. Porém, são considerações e valores teóricos,
que apresentam aproximações e erros.
Poucos trabalhos com medição direta de torque nos eixos motrizes
de tratores agrícolas têm sido realizados, tanto em pistas de ensaio como em campo. A maior
ênfase tem sido para ensaios com rodados individuais e que utilizam equipamentos
específicos.
Ao avaliar a força na barra de tração, a velocidade do trator e
calculando-se a potência disponível na barra de tração, é possível detectar quais são as
condições de trabalho que oferecem maior e menor eficiência, entretanto, sem obter onde
estão ocorrendo as perdas de torque e potência. Ao quantificar o torque nas rodas motrizes,
utilizando um torsiômetro específico, torna-se possível avaliar de forma eficaz, qual é a
relação entre o torque de entrada e os demais parâmetros energéticos e de desempenho, como
6
tração líquida, coeficiente de tração, patinagem, velocidade, potência, entre outros. É
possível ainda, a determinação acurada da eficiência trativa, diretamente relacionada com o
tipo de superfície e características do rodado, sendo o parâmetro mais importante para avaliar
o desempenho geral de um trator.
Os equipamentos disponíveis no mercado utilizados com a
finalidade de medição de torque, denominados torquímetros, torsiômetros ou ainda
transdutores de torque, são utilizados para aplicações bastante específicas, atrelados a
mecanismos estáticos, sendo difícil adaptá-los às aplicações agrícolas dinâmicas. São de alto
custo de aquisição e com risco de danificações prematuras quando aplicado às máquinas
agrícolas, as quais são submetidas a condições adversas no campo.
O desenvolvimento de um torsiômetro para grandes demandas de
torque, propicia a realização de estudos complementares aos já realizados por diversos
pesquisadores, para melhor compreender os fenômenos ligados à transmissão e a capacidade
de tração dos tratores agrícolas, possibilitando comparar, com mais precisão, diferentes tipos
de sistemas mecânicos, transmissões, marchas ou velocidades, pneus e pressões de inflação,
distintas condições de superfície, entre outras que caracterizam e explicam o comportamento
dos tratores agrícolas em tração.
O objetivo deste trabalho foi desenvolver um sistema
eletromecânico, protótipo de um torsiômetro, a ser acoplado ao eixo e à roda motriz de
tratores agrícolas, para determinação do torque e da potência de entrada, e validação através
de ensaios de tração, com um trator agrícola de 89 kW, sobre pista de concreto e de solo
firme, variando marchas de trabalho, cargas na barra de tração e com a tração dianteira
auxiliar ligada e desligada.

7
REVISÃO BIBLIOGRÁFICA
2.1 Projeto de componentes e de máquinas agrícolas
De acordo com Back et al. (2008), um produto refere-se a um objeto
concebido, produzido industrialmente com características e funções, comercializado e
usado, de modo a atender aos desejos ou necessidades das pessoas e organizações. O autor
define novos produtos de acordo com a tipologia de projeto, podendo estes ser variantes dos
produtos existentes, inovativos ou criativos. Independente da tipologia de projeto, o
desenvolvimento de máquinas agrícolas passa por diversas etapas, incluindo o
desenvolvimento projetual, a construção de um protótipo e a concepção do produto no
mercado, de acordo com a necessidade de oferta e demanda.
A criação de um produto novo pode seguir algumas metodologias,
embora isso não aconteça frequentemente no mercado brasileiro (Romano, 2003). O autor
criou o Modelo de Referência para o Processo de Desenvolvimento de Máquinas Agrícolas
(MR-PDMA), que pode ser utilizado para gerenciar o projeto de máquinas neste setor. De
acordo com Romano (2003), a fase de projeto pode ser dividida em quatro subfases, sendo
elas, o projeto informacional, o projeto conceitual, o projeto preliminar e o projeto detalhado.
Embora de uso reduzido no meio científico, alguns autores têm utilizado de metodologias
para realização de projetos, semelhantes ao MR-PDMA.
Frabetti et al. (2011), no desenvolvimento e avaliação de uma
semeadora, projetaram o equipamento iniciando pela elaboração de uma lista de requisitos
que a máquina deveria atender, seguido do projeto conceitual do corpo da máquina e do
projeto detalhado de todas as partes e conjuntos, para posterior construção do protótipo. Por

8
fim, o trabalho foi concluído com a realização de ensaios em laboratório para avaliação do
desempenho do protótipo.
Já Albiero et al., (2011), elaboraram um projeto de uma máquina
para uso na agricultura familiar, mas não chegaram a construir o protótipo. Neste trabalho,
os autores iniciaram realizando estudos bibliográficos para o auxílio às tomadas de decisão
de forma simplificada, seguindo de cálculos e confecção de desenhos. Os pesquisadores
utilizaram de ferramentas de engenharia para o dimensionamento dos elementos
constituintes, e de desenhos detalhados dos elementos da máquina.
Outros estudos de projetos de máquinas são desenvolvidos no intuito
de buscar melhorias de produtos existentes. Volpato et al. (2005), utilizaram sistema CAD
(“computer-aided design”) e processo de otimização matemática no projeto de um cortador
de base para colhedora de cana-de-açúcar. Visando a obtenção de informações para
otimização do projeto, Alonso et al. (2006), realizaram ensaios em um protótipo fabricado
por terceiros, onde foram observados os parâmetros de funcionalidade e de segurança.
Segundo Reis e Forcellini (2002), a análise funcional é uma
ferramenta de projeto que tem como característica permitir uma formulação abstrata da
função do sistema técnico, o que a torna de grande utilidade no projeto de produtos e na
análise de produtos já existentes. Com a análise funcional, é possível identificar as várias
concepções e, dentro destas, quais as funções foram, ou estão sendo implementadas
adequadamente, tendo em vista as aplicações principais da máquina.
2.2 Motores de combustão interna ciclo Diesel
Atualmente, a maioria das máquinas agrícolas utilizam os motores
de combustão interna ciclo diesel como propulsores. De acordo com Stone (1999), os
motores a diesel apresentam eficiência superior aos motores de ignição por centelha (ciclo
Otto), e são mais recomendados para máquinas ou veículos que necessitam de força, tendo
em vista que são projetados para operar em baixas rotações, e assim proporcionam maior
torque.
Explica Mialhe (1996), que o rendimento do motor define a
eficiência com que o calor é transformado em trabalho. Assim, sob esse conceito de
indicador de eficiência, podem-se definir diversos rendimentos, a saber: rendimento
termomecânico ou global; rendimento térmico; rendimento mecânico; rendimento

9
volumétrico. O rendimento global expressa a eficiência total do motor, como conversor da
energia do combustível (potência teórica) em energia mecânica no volante (potência efetiva),
calculada de acordo com a potência de entrada e saída.
Para efeitos da avaliação energética de um determinado conjunto
motriz, a eficiência pode ser calculada em qualquer ponto onde se esteja medindo potência,
como na tomada de potência (TDP), eixos motrizes e barra de tração, similar aos trabalhos
realizados por Barbosa et al. (2008), Gabriel Filho et al. (2010) e Masiero (2010).
As principais informações relacionadas ao desempenho de um motor
de combustão interna e, consequentemente, ao desempenho da máquina que o utiliza, são as
curvas de torque e potência. No caso dos tratores agrícolas, a potência do motor fornece uma
prévia de sua capacidade de trabalho em campo (SOUZA FILHO, 2001).
O desempenho de motores Diesel, obtidos através das curvas de
torque, potência e consumo específico de combustível, tem sido avaliado em trabalhos
técnico-científicos (SCHLOSSER et al., 2004a; CASTELLANELLI et al., 2008;
MACHADO, 2008) e também a partir de ensaios dinamométricos mediante uso da TDP
(BARBOSA et al., 2008; NIETIEDT et al., 2011; FIORESE et al., 2012; RUSSINI, 2012).
2.2.1 Reserva de torque
Segundo Ferreira (2001), o torque motor é o momento de torção que
o virabrequim ou árvore de manivelas consegue produzir no motor. Este torque é variável,
de acordo com o tipo de motor, ou seja, é função do projeto deste. Já a reserva de torque é
uma característica que define a sua versatilidade, relacionada com a capacidade de aumentar
o torque à medida que ocorre a diminuição na rotação do motor, se adequando ao uso nas
tarefas agrícolas.
Para Mialhe (1996), a reserva de torque é calculada pelos valores
extremos de torque e de potência máxima, na chamada faixa de utilização do motor em plena
carga. Nesta faixa, o motor apresenta funcionamento estável, se autorregulando, e o cálculo
da reserva é realizado pela Equação 1.
Com a evolução dos motores, houve mudanças nas curvas de
desempenho, e hoje deve-se considerar que o cálculo também utilize a rotação nominal como
referência (rotação nominal é a rotação de trabalho fornecida pelo fabricante), tendo em vista
que em muitos casos a máxima potência não coincide com a rotação nominal. Neste caso, a

10
elevação da força que o trator será capaz de fazer é fornecida a partir da rotação de trabalho
(nominal), conforme Equação 2.
∆T = (Tmáx.
TPmáx− 1) . 100 (1)
∆T = (Tmáx.
TPn− 1) . 100 (2)
Onde:
∆T = Reserva de torque ou capacidade de sustentação (%)
Tmáx = Torque máximo (Nm)
TPmáx = Torque na rotação de potência máxima (Nm)
TPn = Torque na rotação nominal (potência nominal) (Nm)
Na Figura 1, observa-se as curvas de um motor agrícola atual e com
bom padrão tecnológico. Algumas indicações demonstram os principais parâmetros que são
relevantes quanto ao seu desempenho.
Figura 1. Curvas de potência e torque de um motor agrícola moderno de 190 cv.
Fonte: Adaptada de Fiorese et al. (2013).
300
400
500
600
700
800
900
100
110
120
130
140
150
160
170
180
190
200
1300 1400 1500 1600 1700 1800 1900 2000 2100 2150
Torq
ue
no
mo
tor
(Nm
)
Po
tên
cia
no
mo
tor
(cv)
rpm
cv motor Nm motor
Faixa de utilização, ∆T= 32,3%
Rotação de torque máximo
Rotação de potência máxima
Rotação nominal (de trabalho)
Faixa de rotação paraReserva de potência
11
As curvas de um motor são bastante utilizadas, pois em cada faixa
de rotação, o motor tem uma capacidade de gerar trabalho, sendo extrapolada para as rodas
motrizes e para os demais pontos de extração de potência (FIORESE et al., 2013).
2.3 Tratores agrícolas
A origem da palavra trator ou “tractor”, em primeiro lugar, remete a
algo que produz tração. Desde o começo da agricultura motorizada, trator se considera como
um veículo com motor próprio, aplicado na realização de tarefas agrícolas e dirigido à
substituição dos animais. Conforme já foi citada diversas vezes na bibliografia, o trator é a
principal fonte móvel de potência utilizada para realizar as diversas tarefas necessárias nos
processos de produção agrícola.
Segundo Schlosser (1997), o conceito de trator agrícola é descrito
como uma unidade móvel de potência composta por motor, transmissão, sistema de direção
e de sustentação, e componentes complementares, onde se acoplam implementos e máquinas
com diversas funções. A função prioritária dos tratores agrícolas desde sua concepção
inicial, segundo Márquez (2012), é de exercer esforços de tração sobre as máquinas que
realizam um determinado trabalho agrícola. Conforme o autor, em meados do começo do
século XX, o trator tinha como principal característica estrutural, o modelo contendo as rodas
motrizes traseiras e diretrizes dianteiras, com distribuição de massa estática nos eixos
traseiro e dianteiro em cerca de 70 e 30%, e motores de baixa potência.
Sintetizando a evolução dos tratores agrícolas, destaca-se o
incremento de potência nos motores, o emprego de pneumáticos (pneus agrícolas), e a
implantação do sistema de engate três pontos com controle automático de carga, junto com
a generalização da tração dianteira com rodas de diferentes tamanhos em cada eixo,
buscando melhorar a eficiência de tração. Sempre fora observado que o trator deve ser uma
máquina que atenda a versatilidade demandada por outras operações agrícolas, como
acionamento direto de máquinas, mecânica ou hidraulicamente, além de estar vinculado com
transporte em curta e média distância (MÁRQUEZ, 2012).
Segundo Silveira et al. (2008), no mercado existem diversos
modelos de tratores, e a escolha do agricultor no momento da compra, baseia-se na potência,
conforto, manutenção, facilidade de manobra e o preço de aquisição. Os autores afirmam

12
que o conhecimento da eficiência energética poderia ser mais um item a ser considerado em
sua seleção, apoiado em resultados de ensaios padronizados.
De acordo com Zoz e Grisso (2003), o principal ponto a ser
observado nos tratores agrícolas é o desempenho na barra de tração, definido pelo produto
entre a força desenvolvida e a velocidade de deslocamento. Este desempenho é influenciado,
entre outros fatores, pelo tipo construtivo do trator, podendo ser do tipo 4x2, 4x2 com tração
dianteira auxiliar (TDA), 4x4 ou com esteiras.
Os tratores agrícolas com TDA possuem uma ligação mecânica entre
os eixos, dianteiro e traseiro, com acionamento facultativo a cada operação. Em função do
menor diâmetro dos rodados dianteiros, estes possuem maior rotação e, quando conectados
(tração ligada), tem-se o avanço cinemático, de forma a permitir a velocidade periférica dos
quatro rodados aproximadamente iguais (LINARES et al., 2006).
Segundo Schlosser et al. (2004c), a relação cinemática entre os eixos
do trator depende da relação de transmissão, fixado pelo projeto do fabricante e dos raios
das rodas dianteira e traseira, que por sua vez podem ser alterados pelo usuário por meio da
troca dos pneus, pela variação da pressão de inflação ou pela variação da lastragem do trator.
A partir de estudos de campo, os autores constataram que com o aumento da relação
cinemática houve uma diminuição importante da eficiência em tração.
Yanai et al. (1999) avaliaram a eficiência do uso da TDA em solo
agrícola, e observaram redução da patinagem dos rodados e, influências significativas e
positivas para a velocidade de deslocamento e potência obtida na barra de tração, quando
utilizando a TDA ligada. Com o uso da TDA, o trator divide o esforço tratório em seus dois
eixos motrizes.
2.3.1 Transmissões dos tratores
Modificar simultaneamente o torque e a rotação que vem do motor é
a função específica das transmissões. De modo simplista, o caminho da transmissão, quando
o objetivo é realizar tração, passa pela embreagem, caixa de câmbio, diferencial, reduções
finais e por fim chega aos rodados, sob força tangencial aos pneus ou esteiras (LINARES,
2002).
O conjunto que compõe a transmissão é formado por elementos que
garantem a transferência da potência produzida no motor para os distintos mecanismos do

13
trator agrícola (MÁRQUEZ, 2004a). De acordo com Ribas et al. (2010), as transmissões
podem ser divididas, basicamente, em três categorias: mecânicas, hidrostáticas e
hidrodinâmicas.
Partindo da origem da geração de forças, nos motores Diesel, há uma
eficiência próxima a 35%, em virtude de apresentarem muitas perdas, principalmente por
calor e atrito (MÁRQUEZ, 2012; FIORESE et al., 2012). Considerando apenas a energia
disponível fornecida pelo motor, ainda há a necessidade de avaliar a eficiência da
transmissão, verificar quanto do torque e potência chega às rodas motrizes, e quanto deste é
efetivamente aproveitado para conversão em tração.
Considerando que o intervalo de velocidade de deslocamento de um
trator agrícola está entre 1 e 30 km h-1, as relações de transmissão variam entre valores de
mais de 500:1 até menos de 30:1, mostrando a complexidade do conjunto de transmissão do
trator (MÁRQUEZ, 2012). A multiplicação do torque é equivalente à redução da velocidade,
menos as perdas ocasionadas, principalmente por atrito. Segundo Márquez (2010), a perda
de potência varia para cada tipo de transmissão, e de modo geral, são maiores nas
transmissões hidrostáticas e menores nas mecânicas.
As perdas de potência tem sido alvo de estudos em muitos trabalhos
científicos nos últimos anos. A eficiência encontrada pode variar de 60 a 90%, dependendo
do desempenho do motor e das condições de operação em que o trator se encontra (RYU et
al., 2003). Em transmissões variáveis contínuas (CVT), as perdas podem ser ainda maiores
(RENIUS e VAHLENSIECK, 1996).
De modo geral, na transmissão do motor até a barra de tração,
ocorrem perdas que, dependendo das condições de operação (principalmente superfície de
apoio), distribuição de peso sobre as rodas motrizes e tipo de acoplamento, podem atingir
níveis bastante comprometedores (SILVEIRA et al., 2008), com aproveitamento de menos
de 60% (BOWERS, 1978; ASAE D497.4, 2003a; ASAE EP496,2, 2003b; ASABE D497.7,
2011a).
2.3.2 Distribuição de forças no trator
Em função de sua versatilidade e das adversidades do meio
operacional a que são submetidos os tratores agrícolas, muitos são os componentes atuantes
nos pontos de extração de potência e nos rodados. Para estudo das forças que influem no

14
equilíbrio, considera-se o trator como um corpo livre no espaço. Devido à ação da gravidade,
o trator está sujeito a uma força “W” denominada peso, cujo ponto de aplicação é o centro
de gravidade (CG). O equilíbrio estático é satisfeito com o surgimento das forças de reação
ao peso, representadas por R1 e R2, ou eixo traseiro e dianteiro respectivamente (MIALHE,
1980).
Para a condição dinâmica, ao termo “P(y/x)” dá-se o nome de
transferência de peso, decorrente do desenvolvimento de uma força de tração, e é um
fenômeno intrínseco de qualquer trator (MIALHE, 1980). Utilizam-se as Equações 3 e 4
para determinação das cargas dinâmicas nos rodados (R1 e R2).
R1 = W1 + (Py
x) (3)
R2 = W2 − (Py
x) (4)
Onde:
R1 = peso dinâmico traseiro (kN)
W1 = peso estático traseiro (kN)
P = força na barra de tração (kN)
y = altura da barra de tração (mm)
x = distância entre eixos (mm)
R2 = peso dinâmico dianteiro (kN)
W2 = peso estático dianteiro (kN)
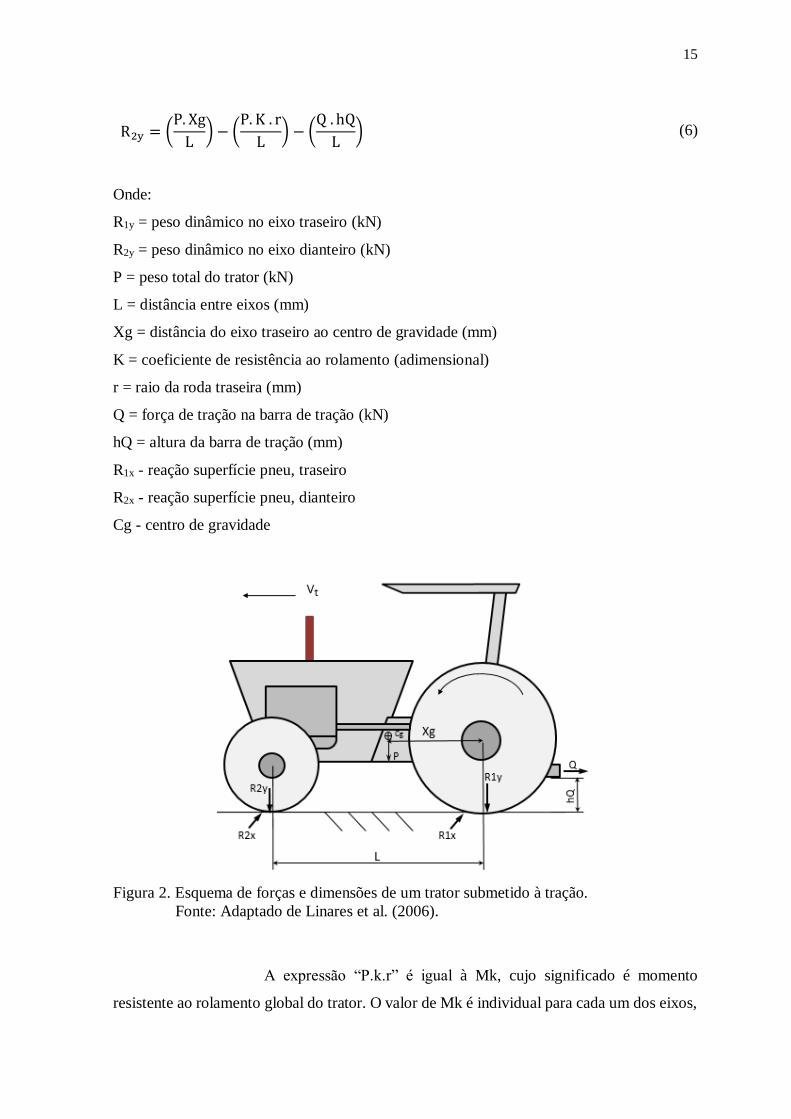
De forma teórica, a Figura 2 adaptada de Linares et al. (2006),
esquematiza as forças atuantes no trator quando submetido à tração, sendo influenciada por
todas as variáveis citadas anteriormente por Mialhe (1980), acrescentadas ao momento de
resistência ao rolamento (MK = P.K.r). Desta forma, os pesos dinâmicos do eixo traseiro e
dianteiro podem ser mais detalhadamente calculados pelas Equações 5 e 6, respectivamente.
R1y = (P. (L − Xg)
L) + (
P. K . r
L) + (
Q . hQ
L) (5)
15
R2y = (P. Xg
L) − (
P. K . r
L) − (
Q . hQ
L) (6)
Onde:
R1y = peso dinâmico no eixo traseiro (kN)
R2y = peso dinâmico no eixo dianteiro (kN)
P = peso total do trator (kN)
L = distância entre eixos (mm)
Xg = distância do eixo traseiro ao centro de gravidade (mm)
K = coeficiente de resistência ao rolamento (adimensional)
r = raio da roda traseira (mm)
Q = força de tração na barra de tração (kN)
hQ = altura da barra de tração (mm)
R1x - reação superfície pneu, traseiro
R2x - reação superfície pneu, dianteiro
Cg - centro de gravidade
Figura 2. Esquema de forças e dimensões de um trator submetido à tração.
Fonte: Adaptado de Linares et al. (2006).
A expressão “P.k.r” é igual à Mk, cujo significado é momento
resistente ao rolamento global do trator. O valor de Mk é individual para cada um dos eixos,

16
sendo: traseiros (Mk1); e eixos dianteiros (Mk2), logo, este valor para os tratores com simples
tração (4x2) é representado apenas pelos dados da roda traseira (Mk1).
As teorias sobre transferência de massa dos dois autores citados
anteriormente mostram que, na condição estática, há uma distribuição de massa entre os
rodados traseiros e dianteiros. Na condição dinâmica (trabalhando), há transferência de
massa para os rodados traseiros, sendo função da força de tração, diretamente ligado ao
torque aplicado às rodas (principalmente traseiras), e da quantidade de lastro nas rodas
dianteiras.
Ao avaliar o desempenho de um trator agrícola 4x2 TDA de 88 kW
em ensaios de tração, em três condições superficiais do solo e quatro velocidades de
deslocamento, Gabriel Filho et al. (2010), verificaram que houve variação significativa da
transferência de peso para as rodas traseiras, onde observaram interação entre os tratamentos
e as condições de solo.
2.3.3 Rodados motrizes e pneus agrícolas para tratores
O uso de rodas é, sem dúvida, o meio mais utilizado para resolver os
problemas de deslocamento terrestre, proporcionando sustentação, direcionamento e tração,
e referente ao uso de pneus, o amortecimento de impactos. No caso dos solos agrícolas, esse
deslocamento sofre maiores limitações, tendo em vista que os rodados se adaptam melhor
em superfícies rígidas ou indeformáveis (MÁRQUEZ, 2012).
O rodado pneumático é construído no formato de tubo circular, de
maneira que, ao se inflar com uma determinada pressão, resiste, dentro dos limites
permitidos de trabalho, às cargas nele aplicadas e às solicitações dinâmicas e estáticas que
agem sobre o mesmo (MIALHE, 1980; GOODYEAR, 2004).
Segundo a Associação Latino Americana de Pneus e Aros (ALAPA,
1994), existem três tipos distintos de configuração estrutural de pneus agrícolas para tração,
sendo: diagonal, radial e, baixa pressão e alta flutuação (BPAF). O mais comum é o de
construção diagonal, também conhecido como “convencional”. Vários trabalhos publicados
relatam que atualmente tem se difundido o uso dos pneus radiais devido à algumas
vantagens, porém, o número ainda é pequeno.
A capacidade de tração e fornecimento de potência utilizada para
desempenhar as operações agrícolas, depende, em parte, do tipo de dispositivo de tração.

17
Para os dispositivos pneumáticos, o tamanho, a pressão de inflação, a carga aplicada sobre
o eixo motriz, a transferência de peso, entre outros, interferem diretamente na capacidade de
tração do trator (ZOZ e GRISSO, 2003).
2.3.4 Deformação dos pneus e raio dos rodados
A deformação dos pneus bem como o raio dinâmico, em condições
operacionais de tração, são originados pela distribuição e transferência de massa sobre os
eixos, sendo estes dependentes da força de tração executada, da distância entre eixos, da
altura da barra de tração, massa total do trator, centro de gravidade, raio da roda traseira e
da resistência ao rolamento (MACMILLAN, 2002; LINARES et al., 2006), podendo ainda
acrescentar o tipo construtivo e pressão dos pneus. A Figura 3, adaptada de Macmillan
(2002), esquematiza as forças atuantes no trator quando submetido à tração e que necessitam
de estudos detalhados.
Figura 3. Esquema básico do torque transmitido do motor para as rodas motrizes. TM = torque do motor; T = torque no rodado motriz; TL = tração líquida ou força de tração; r = raio dinâmico
da roda, quando submetido a tração; TB = tração bruta ou força tangencial.
Mazetto et al. (2004), ao realizar estudos com três tipos construtivos
de pneus, inflados com pressões ideais, observaram que o pneu diagonal possui a menor
deformação elástica, quando comparado com pneu radial e BPAF. Segundo os autores, o
pneu diagonal submetido a cargas variadas sobre o solo, apresentou maior recalque,
influenciando na área de contato do pneu sobre o solo e consequentemente, quando em
condições operacionais, na resistência ao rolamento do trator e na compactação do solo.
P
TTMMotor
TB
TLr

18
Segundo Zoz e Grisso (2003), em pneus para tratores, considera-se
três raios: o raio carregado estático (slr), definido entre o eixo central e uma superfície rígida;
o raio de rolamento (rr) derivado a partir da circunferência de rolamento, e usado para
cálculos da velocidade; e o raio de torque (rt), utilizado efetivamente na tração bruta (GT ou
TB) e na resistência do movimento (MR). Ela não pode ser medida diretamente, mas pode
ser determinada através de cálculos.
Para um pneu agrícola corretamente inflado, o raio de rolamento é
cerca de 6% maior do que o raio estático carregado. Para cálculos de força ou momento, é
mais apropriado utilizar o raio estático carregado, e o raio de rolamento apenas para cálculos
de velocidade (ZOZ e GRISSO, 2003).
2.4 Teoria da tração
Com relação às forças atuantes e à predição da capacidade de tração
dos tratores agrícolas, muitos estudos já foram realizados, inicialmente, buscando
informações sobre características e condições da superfície trativa e a interação rodado-
superfície de apoio (ZOZ e BRIXIUS, 1979; BRIXIUS, 1987; WULFSOHN et al., 1988;
UPADHYAYA et al., 1993; LANÇAS, 1996; UPADHYAYA et al., 1997; GARCIANO et
al., 2010). Outros trabalhos vislumbrando conhecimentos acerca do tipo, pressão de inflação
e carga atuante sobre pneus (LANÇAS, 1996; NEUJAHR e SCHLOSSER, 2001; LOPES et
al., 2003; GABRIEL FILHO et al., 2010; SHINONE et al., 2010), também contribuem para
o entendimento do sistema trativo.
2.4.1 Interação rodado-superfície trativa
O desempenho operacional dos tratores agrícolas é dependente da
interação do pneu e da superfície de apoio ou de contato, tendo como parâmetros de maior
importância, a seleção do tipo de pneu, pressão de inflação e lastragem, em função das
diversas operações agrícolas (MAZETTO, 2005). Gabriel Filho et al. (2004) acrescentam
que além dos parâmetros citados, há de se considerar a condição superficial do solo, e que o
conjunto que envolve a interação rodado-solo ou rodado-superfície é bastante complexo.
Segundo Márquez (2012), na locomoção em superfícies não
pavimentadas, o solo sofre deformações que produzem fricções entre a roda e a superfície

19
de apoio, e necessitam de estudos específicos. Ao analisar esse problema em seu aspecto
geral, os fenômenos que se produzem na zona de contato, são consequência do afundamento
do terreno e que necessita de energia para o rompimento da superfície, além de deformações
muito grandes produzidas de forma instantânea. No caso do uso dos pneus, há uma melhoria
no comportamento da roda ao deslocar-se sobre o solo natural.
Focalizando na dinâmica do solo, Balastreire (1990) enfatiza várias
características mecânicas de importância para as relações solo-máquina, a saber: tensões no
solo e sua distribuição; deformações no solo e sua distribuição; relações tensão-deformação;
resistência do solo; escoamento do solo (cisalhamento, compressão, tração, fluxo plástico);
movimento do solo como corpo rígido (atrito, adesão, abrasão); e parâmetros compostos.
É sabido, que na superfície de apoio, existem muitos fatores que
influenciam no desenvolvimento de tração de uma máquina, podendo estes, reduzir o
desempenho dos tratores em tração (SORANSO, 2006; GABRIEL FILHO et al. 2010). A
redução da eficiência de tração em função das adversidades superficiais demonstra com
maior veemência a importância da interação rodado-superfície.
A patinagem é a denominação dada ao movimento relativo entre a
superfície da banda de rodagem e o solo. Segundo Gamero e Lanças (1996), a patinagem é
um fator determinante para que ocorra tração. Cordeiro (2000) enfatiza que o tipo de pneu,
a lastragem e a velocidade de deslocamento, alteram significativamente na interação e na
capacidade de tração do trator agrícola e consequentemente na conversão energética final.
Outro fator influente na interação rodado-solo é a resistência ao
rolamento ou resistência ao movimento, que tem como principais ocasionadores, a
deformação do solo e do próprio rodado, além do raio de rolamento e a inclinação do terreno.
Para Bekker (1969), a resistência ao rolamento é definida pela Equação 7.
Rs =T
ro− Fb (7)
Onde:
Rs = resistência ao rolamento (N)
T = torque de entrada = torque na roda motriz (Nm)
ro = raio de rolamento = raio deformado da roda (m)
Fb = tração líquida = força na barra de tração (N)

20
A resistência ao rolamento pode ser determinada matematicamente,
segundo Brixius (1987) e ASABE D497.7 (2011a), conforme Equação 8.
RR = Ft . [(1
Bn) + 0,04 + (
0,5 . Pat
√Bn)] (8)
Onde:
RR = resistência ao rolamento (kN)
Ft = força de tração (kN)
Pat = patinagem das rodas (%)
Bn = índice adimensional
De acordo com Linares et al. (2006), para o trator vencer a
resistência ao rolamento e para tracionar um determinado equipamento, o motor fornece um
torque às rodas, sendo transformado em força tangencial (tração bruta). Para os autores a
resistência ao rolamento pode ser expressa de acordo com a Equação 9.
Rtk = P.k (9)
Onde:
Rtk = resistência ao rolamento (kN)
P = massa do trator (kN)
k = coeficiente de resistência ao rolamento (adimensional)
A interação rodado-solo também tem influência no coeficiente de
tração, variável relacionada com o peso aderente sobre os rodados motrizes. A partir do
exposto na Tabela 1, Linares et al. (2006) apresentam o valor da resistência ao rolamento
equivalente a 2 e 5% da massa do trator, para pista de concreto e para solo firme,
respectivamente.
Gabriel Filho et al. (2010), ao realizarem ensaios de tração com um
trator agrícola 4x2 TDA, em distintas condições superficiais do solo, verificaram variação
significativa na resistência ao rolamento (calculada), e para a condição de solo firme, esta
21
foi equivalente a 3% do peso total do trator (0,03). No mesmo experimento, os autores
encontraram interação significativa entre a velocidade de deslocamento (marcha) e a
condição do solo, para diversas variáveis, incluindo a resistência ao rolamento e o coeficiente
de tração.
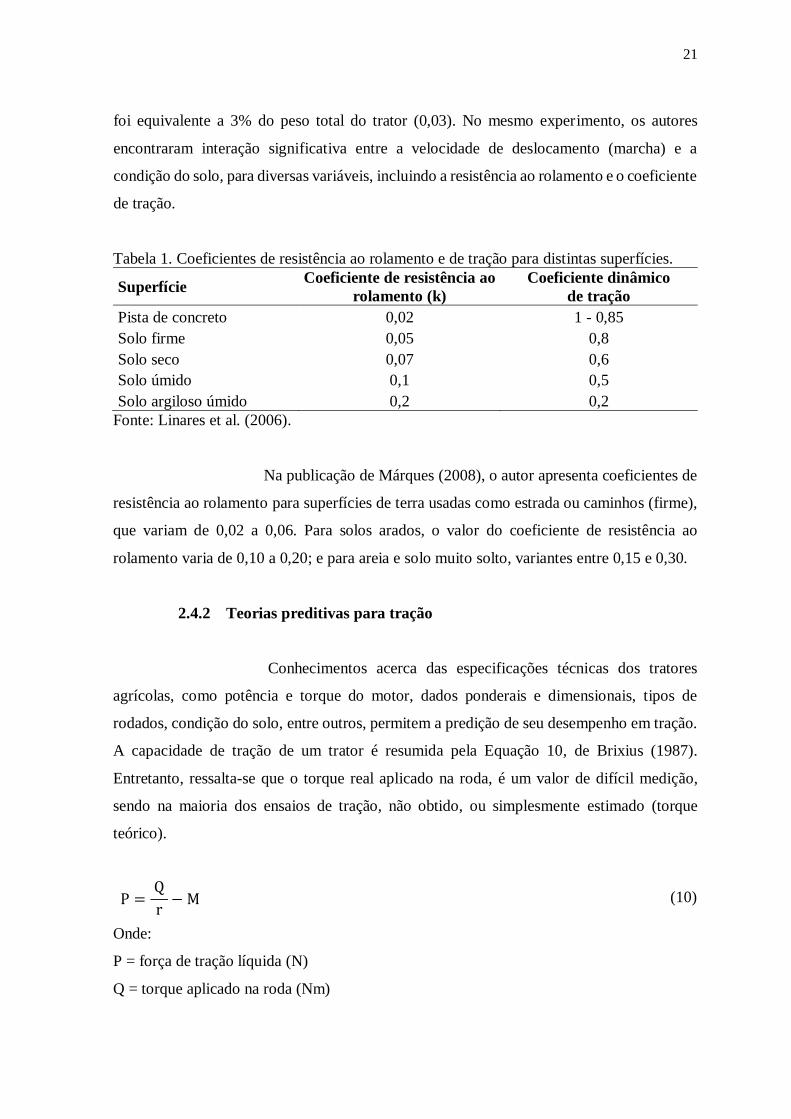
Tabela 1. Coeficientes de resistência ao rolamento e de tração para distintas superfícies.
Superfície Coeficiente de resistência ao
rolamento (k)
Coeficiente dinâmico
de tração
Pista de concreto 0,02 1 - 0,85
Solo firme 0,05 0,8
Solo seco 0,07 0,6
Solo úmido 0,1 0,5
Solo argiloso úmido 0,2 0,2
Fonte: Linares et al. (2006).
Na publicação de Márques (2008), o autor apresenta coeficientes de
resistência ao rolamento para superfícies de terra usadas como estrada ou caminhos (firme),
que variam de 0,02 a 0,06. Para solos arados, o valor do coeficiente de resistência ao
rolamento varia de 0,10 a 0,20; e para areia e solo muito solto, variantes entre 0,15 e 0,30.
2.4.2 Teorias preditivas para tração
Conhecimentos acerca das especificações técnicas dos tratores
agrícolas, como potência e torque do motor, dados ponderais e dimensionais, tipos de
rodados, condição do solo, entre outros, permitem a predição de seu desempenho em tração.
A capacidade de tração de um trator é resumida pela Equação 10, de Brixius (1987).
Entretanto, ressalta-se que o torque real aplicado na roda, é um valor de difícil medição,
sendo na maioria dos ensaios de tração, não obtido, ou simplesmente estimado (torque
teórico).
P = Q
r− M (10)
Onde:
P = força de tração líquida (N)
Q = torque aplicado na roda (Nm)

22
r = raio da roda (m)
M = resistência ao rolamento (N)
A Figura 4, de Zoz e Grisso (2003), esquematiza as dimensões e
forças atuantes em um rodado motriz, quando em deslocamento sobre solo agrícola. Estes
parâmetros são fundamentais dentro da teoria da tração.
Figura 4. Esquema básico da atuação de forças em um rodado sobre o solo.
Fonte: ZOZ e GRISSO (2003). W = massa estática; Wd = massa dinâmica; slr = raio estático carregado (entende-se por raio da roda apoiada
à superfície, parada); rr = raio de rolamento; rt = raio do torque; Va = velocidade real; T = torque no eixo; GT
= tração bruta; NT = tração líquida; MR = resistência ao rolamento; ω = velocidade angular; ev = deslocamento
vertical; eh = deslocamento horizontal.
Zoz (1970) publicou um trabalho na reunião anual da Sociedade
Americana de Engenheiros Agrícolas, no qual foi apresentado metodologias com equações
para prever o desempenho do trator em campo. O trabalho foi publicado novamente dois
anos seguintes (ZOZ, 1972) e atualizado em 1987 (ZOZ, 1987).
As clássicas teorias preditivas para tração são a Cn, Bn e MN,
amplamente utilizadas por pesquisadores da área. Na primeira teoria, de Wismer e Luth
(1972), também publicado em 1973 (Wismer e Luth, 1973) e em 1974 (Wismer e Luth,
1974), a relação entre solo e veículo é determinada por um parâmetro denominado Número
Característico da Roda (Cn), o qual reúne valores dos três elementos principais: solo,
23
informado pelo índice de cone; veículo, com o peso dinâmico; e o pneu, com as medidas
características, permitindo assim as simulações. A teoria Bn, de Brixius (1975), e a teoria
MN, de Gee-Clough et al. (1977), são baseadas na teoria anterior, em ensaios realizados pela
Companhia Deere e em outros centros de investigação, e buscam o aprimoramento dos
modelos, no intuito de melhorar a precisão das simulações (SCHLOSSER et al., 2004c).
Brixius (1987) publicou um artigo com revisões ao trabalho de Wismer e Luth (1972) e de
Brixius (1975), com objetivo de melhorar as predições do desempenho de tratores em tração,
e aumentar a amplitude de utilização em solos agrícolas.
Sharma e Pandey (1997) investigaram o comportamento de pneus
agrícolas para tração, realizado em duas etapas, sendo uma com ensaios, utilizando um
equipamento para ensaios individuais de rodados (single wheel tester) munido de um
transdutor de torque, e outra a partir da modelagem matemática. A relação entre o torque
calculado e o torque obtido foi de 96%.
No Brasil, as teorias anteriormente citadas, já foram utilizadas em
pesquisas (ACUNA et al., 1995; SCHLOSSER et al., 2004c; SANTOS et al., 2011), com o
objetivo de comparação de dados teóricos e experimentais, ou, no intuito de validar o
comportamento destas teorias para os solos de algumas regiões do Brasil.
Acuna et al. (1995), após comparações de dados experimentais com
valores simulados pela teoria de Wismer e Luth (1972), verificaram uma correlação de 74%
entre os valores observados e calculados para a variável força de tração, o que para os
autores, indica que a equação é adequada para estimar a força na barra de tração de tratores
agrícolas de pneu em trabalhos agrícolas.
Os autores Schlosser et al. (2004c) buscaram o desempenho das três
teorias clássicas de simulação, mediante simulações matemáticas, obtenção de dados em
campo com um trator 4x2, e a comparação de ambos. Verificaram que a teoria Cn possui
uma faixa de utilização mais restrita do que as teorias Bn e MN, sendo o índice de cone a
variável que determina essas condições de uso. Concluem que, as teorias, são ferramentas
bastante úteis na simulação do comportamento do trator agrícola e que, trabalhos sobre
teorias de predição devem ter continuidade.
Santos et al. (2011), buscando a validação das teorias Cn, Bn e MN,
para operação de escarificação sobre solo argiloso, com simulações e ensaios de campo,
observaram que as teorias foram significativamente diferentes dos resultados obtidos em
campo, para os parâmetros força de tração e patinagem, demonstrando tendências de

24
superestimação, ocasionando um dimensionamento do trator, superior ao realmente
necessário para operação de escarificação.
Segundo Dwyer e Heigho (1984), em seus estudos, as relações
empíricas desenvolvidas com base na resistência à penetração, não proporcionaram uma boa
previsão do desempenho dos pneus para tração mais largos, mas foi satisfatório para
conjuntos mais estreitos (13.6-38) e duplos.
Os resultados dos autores, abordados neste tópico, demonstram a
importância das teorias preditivas para tração, entretanto, expõe a necessidade do
aprofundamento de estudos para as condições de nosso país, tanto em simulações
matemáticas quanto em ensaios de campo e em pista, com equipamentos e sensores que
propiciem resultados mais precisos.
2.4.3 Eficiência trativa
A eficiência trativa, descrita por alguns autores como eficiência
tratória ou eficiência de tração, é a razão entre a potência de saída na barra de tração e a
potência nos eixos motrizes (DWYER e HEIGHO, 1984; BALASTREIRE, 1990;
UPADHYAYA e WULFSOHN, 1990; ZOZ e GRISSO, 2003; TIWARI et al., 2010).
Na Figura 5, estão plotadas curvas que representam a resultante das
forças aproveitadas e perdidas, principalmente pela redução do espaço percorrido
(patinagem) e pela resistência ao rolamento (ZOZ e GRISSO, 2003). Neste caso, a principal
informação a ser buscada, em um sistema onde a tração é a principal variável, é justamente
a eficiência trativa (TE), que pode ser calculada pela Equação 11.
TE =Potencia de saída
Potência de entrada=
NT. Va
Potência no eixo=
NT. Va
GT. Vt (11)
Onde (para Equação 11 e Figura 5):
TE = eficiência trativa (adimensional)
NT = tração líquida (N)
NTR = relação de tração líquida (adimensional)
GT = tração bruta (N)
GTR = relação de tração bruta (adimensional)

25
Va = velocidade real (m s-1)
Vt = velocidade teórica (m s-1)
Figura 5. Coeficientes da tração em função da patinagem das rodas motrizes.
Fonte: Adaptado de Zoz e Grisso (2003).
Upadhyaya (1989) propôs as Equações 12 e 13 para o cálculo da
eficiência trativa. A ASABE (2011a), através da norma D497.7, apresenta a Equação 14.
TE =Po
Pi. 100 =
NT. Va
T. ω. 100 (12)
TE =
NTWT
r. W
(1 − i). 100 =CTL
CTB− (1 − i). 100 (13)
TE = (1 − S) NT
GT (14)
Onde:
TE = eficiência trativa (%)
Po = potência líquida de saída na roda (kW)
Pi = potência bruta de entrada na roda (kW)
NT = tração líquida (N)
GT = tração bruta (N)
Va = velocidade de translação da roda (m s-1)
Relação de Velocidade (va/vt)
Relação de Tração (NTR/GTR)
Relação de Tração Líquida
Relação de tração bruta
Relação de resistência ao rolamento (GTR-NTR)
Eficiência Trativa
Redução do deslocamento (patinagem %)
Rel
açã
o d
e D
esem
pen
ho
da
Tra
ção

26
T = torque na roda (Nm)
ω = velocidade angular da roda (rad s-1)
W = carga dinâmica sobre o rodado (N)
r = raio dinâmico do rodado (m)
CTL = coeficiente de tração líquida (adimensional)
CTB = coeficiente de tração bruta (adimensional)
i = patinagem (decimal)
S = patinagem (decimal)
Devido à falta de equipamentos para determinação da potência de
saída nos eixos motrizes, Acuna et al., (1995) calcularam a eficiência trativa como o
quociente entre a potência na barra de tração e a potência na TDP. Já Schlosser et al. (2004b)
determinaram a eficiência de tração através de índices da eficiência da transmissão, da
resistência ao rolamento e da patinagem, conforme a Equação 15.
ηBT = ηt .ηk .ηδ (15)
Onde:
ηBT = eficiência de tração
ηt = índice de eficiência da transmissão
ηk = índice de eficiência da resistência ao rolamento
ηδ = índice da eficiência da patinagem
Segundo a norma ASAE EP496.2 (2003b), para um trator operar
com máxima eficiência de tração, a patinagem do rodado motriz deve estar entre 4 e 8% para
superfície de concreto, 8 e 10% em solos não mobilizados ou firmes, 11 e 13% em solos
mobilizados e 14 e 16% em solos soltos ou arenosos. Esses valores são diretrizes teóricas
para muitos trabalhos científicos de campo, nos quais, são buscadas essas condições para se
obter os melhores resultados. Corrêa et al. (1999) relatam que o índice de 10% de patinagem
situa-se na faixa de obtenção de máxima eficiência trativa em algumas condições de solo
agrícola.

27
Acuna et al. (1995), utilizando-se de um trator 4x2 TDA, verificaram
eficiência trativa na ordem de 80% para a condição de solo preparado e não preparado,
entretanto, os autores a consideram como relativa a potência na TDP.
Estudos realizados em outros países mostram que, em suas
respectivas condições de solo, a eficiência trativa apresentou os melhores índices, nas
condições de tração em que a patinagem ficou entre 5 e 10% (BRIXIUS, 1987; WULFSOHN
et al., 1988; UPADHYAYA et al., 1989; LANÇAS, 1996; UPADHYAYA et al., 1997;
ELWALEED et al., 2006). Os resultados destes trabalhos foram encontrados em
experimentos muito específicos, em laboratório ou com equipamentos adaptados para
medição das variáveis desejáveis. Serão de grande importância para incorporação de
conhecimentos e para comparativos aos resultados encontrados nesta pesquisa; porém,
buscando-se os resultados ligados às condições brasileiras.
Teorias desenvolvidas por Zoz e Brixius (1979), para condição de
pista de concreto, mostraram que a máxima eficiência trativa foi encontrada com patinagens
entre 2 e 4% (e em alguns casos com 6 %). O limite de eficiência trativa observado ficou em
torno de 94%. A curva de máxima eficiência trativa (entre 90 e 95%) ficou entre os
coeficientes de tração dinâmicos de 0,25 e 0,60 (aproximadamente).
No que diz respeito ao uso de diferentes tipos construtivos de pneus,
Lanças (1996), em ensaios com equipamento para ensaio individual de rodados, verificou
que a pressão de inflação usual dos pneus radiais (mais baixa que para os diagonais),
apresentou melhores resultados nos coeficientes de tração líquida e bruta e na eficiência
trativa, em função da carga no rodado. Nas conclusões apresentadas por Lanças (1996), o
mesmo descreve que não houve diferença significativa entre os modelos de pneus radiais
avaliados.
Em síntese, nos ensaios realizados por Lanças (1996) em solos
agrícolas, a patinagem que representou os melhores resultados de eficiência trativa (TE),
compreendia a faixa percentual entre 5 e 10%. Foram obtidos os seguintes valores para
máxima TE: para o efeito da pressão de inflação dos pneus, entre 70 e 90%; para o efeito da
carga vertical no pneu, cerca de 70%; para o efeito do tipo de solo, encontrou-se a TE
máxima situada entre 70 e 80%; com relação ao efeito da condição do solo (firme ou solto),
entre 70 e 80%; e para o efeito do teor de água no solo, entre 70 e 75%. Na média geral foi
obtido a TE máxima de 71,1% com patinagem de 8,3%.

28
Nagaoka (2001), a partir de ensaios realizados com um equipamento
para ensaio dinâmico de rodado agrícola individual, desenvolvido pelo próprio autor,
observou médias de eficiência trativa de 64 e 66%, utilizando pneu diagonal e radial,
respectivamente, para a condição de solo mobilizado.
Dwyer e Heigho (1984), avaliando diferentes conjuntos de pneus
diagonais, ensaiados de forma individual e sobre variadas condições do solo, verificaram
que a eficiência trativa máxima foi na ordem 85%, e que pneus de menores larguras
obtiveram melhor desempenho para uma mesma carga.
Gabriel Filho et al. (2004) avaliaram o desempenho operacional de
um trator agrícola em operação de escarificação sobre solo agrícola com diferentes tipos de
cobertura vegetal, e concluíram que a maior quantidade de matéria seca na superfície do
solo, aumentou os índices de patinagem e, assim, diminuiu a eficiência de tração. Os
resultados do experimento mostraram uma eficiência trativa na ordem de 72%, devendo ser
observado que o trator permaneceu com a TDA desligada durante os ensaios e a eficiência
trativa foi obtida através de cálculos matemáticos sugeridos por Wismer e Luth (1973).
Em ensaios de tração com um trator 4x2 TDA, para três condições
de solo, quatro velocidades (quatro marchas) e utilizando-se de procedimentos teóricos de
Brixius (1987) e da ASAE D497.4 (ASAE, 1999) para determinação da eficiência de tração,
Gabriel Filho et al. (2010), encontraram eficiência trativa de 75%, 84% e 89%, para as
condições de solo mobilizado, solo firme com cobertura vegetal e solo firme sem cobertura
vegetal, respectivamente. Nos resultados apresentados pelos autores verificou-se que a
eficiência trativa (calculada por equações) não apresentou diferenças significativas entre as
quatro marchas avaliadas.
2.5 Ensaios de tratores e rodados
Os ensaios constituem importantes etapas no desenvolvimento de
máquinas agrícolas, tendo em vista principalmente, os intensos esforços a que são
submetidas. Segundo Alonso et al. (2006), testar e ensaiar máquinas agrícolas consiste,
fundamentalmente, em obter informações visando uma tomada de decisão. Na realização de
ensaios são avaliadas inúmeras variáveis, as quais são expressas em valores e grandezas das
mais diversas ordens, resultantes de medidas e avaliações (MIALHE, 1996).

29
O estudo do desempenho de um trator tem sido abordado em
aspectos práticos e experimentais, de forma que este é operado sob condições descritas em
normas de ensaio e seu rendimento medido e registrado. Um desempenho similar pode ser
esperado de outro trator de mesmo modelo, quando ensaiado sob condições similares, ou de
um modelo diferente, desde que sejam proporcionadas condições apropriadas, minimizando
quaisquer diferenças (MACMILLAN, 2002).
Silva e Benez (1997), relatam que o monitoramento do desempenho
do trator objetiva otimizar a eficiência de utilização do combustível, no intuito de maximizar
a quantidade de trabalho produzido por unidade de energia consumida. Os tratores agrícolas
têm seu desempenho avaliado pela força e potência desenvolvida na barra de tração, torque
e potência desenvolvida na tomada de potência (TDP), eficiência de tração, patinagem das
rodas motrizes e consumo de combustível.
O conhecimento da capacidade de desempenho do trator, permite aos
fabricantes desenvolverem produtos mais eficientes, de tal forma que os usuários obtenham
melhor proveito das características operacionais dessa máquina (GABRIEL FILHO et al.,
2008), e os ensaios são o principal meio para obtenção de conhecimentos acerca da máquina
avaliada.
Para conhecer a eficiência energética e comparar os diversos
modelos de tratores, é necessário basear-se em ensaios normalizados, que sejam executados
de forma padrão para todos os modelos. Os únicos ensaios realizados na maioria das estações
mundiais são estabelecidos pelos códigos OECD (SILVEIRA et al., 2008).
2.5.1 Ensaios dinamométricos
O dinamômetro consiste em um equipamento que tem por função a
geração de uma carga resistente para o motor utilizado. A execução do trabalho baseia-se
em ensaios com rigor avaliativo, utilizando-se de métodos laboratoriais sobre bancada
dinamométrica como instrumento principal na geração dos dados necessários (NIETIEDT,
2010).
De acordo com Stone (1999), o dinamômetro é o item mais
importante num banco de provas de motores, e é utilizado para medir a potência, o torque e
o consumo específico de combustível de um motor. O uso de dinamômetros para avaliação
de desempenho pode ser utilizado diretamente no volante do motor, ou com o uso da TDP

30
dos tratores agrícolas. Atualmente as normas nacionais que podem ser seguidas são a NBR
ISO 1585 (ABNT, 1996) que é bastante usual pelos fabricantes para ensaios de motores, e a
NBR 13400 (ABNT, 1995) para ensaio da TDP.
Um dos principais objetivos de se utilizar a dinamometria é analisar
a eficiência da conversão energética química de combustíveis em energia mecânica, na
forma de potência. Para Soranso (2006), essa conversão de energia influi no rendimento
global do trator, considerando inclusive todas as perdas no motor.
Os ensaios vinculados ao desempenho do motor com o uso de
dinamometria denotam significativa importância, pois a partir destes se tem conhecimentos
sobre a capacidade do motor em gerar torque e potência, atrelado ao fato de que quanto maior
o valor destas duas variáveis, maior poderá ser a capacidade de se produzir tração. Russini
(2012) enfatiza que os ensaios dinamométricos podem substituir os ensaios de campo e em
pista.
Dentre os principais parâmetros avaliados em ensaios
dinamométricos, sendo que algumas normas de ensaio consideram obrigatório (OECD,
2012), destaca-se a determinação de potência, consumo específico de combustível e energia
específica. Para o caso da potência utiliza-se a Equação 16, já conceituada na bibliografia.
P =T . n
973,76 . 9,81 (16)
Onde:
P = potência no eixo do motor, eixo da TDP ou eixo da roda (kW)
T = torque no eixo (Nm)
n = rotação no eixo (rpm)
973,76 e 9,81 = constantes para conversão de unidades
2.5.2 Ensaios de tração
Operações agrícolas, principal atividade a que são submetidos os
tratores, impreterivelmente são executadas em superfícies com pouca aderência, geralmente
em solos mobilizados ou com cobertura vegetal, sendo que em ambas as condições, na

31
interface solo-pneu, há perdas de potência devido à patinagem do rodado motriz (MIALHE,
1996; SOUZA FILHO, 2001; GABRIEL FILHO et al., 2004; CORTEZ et al., 2009).
Segundo Souza Filho (2001), o estudo de desempenho de tratores
agrícolas em campo é uma tarefa bastante complexa, pois a quantidade de variáveis a serem
controladas e analisadas é muito grande, e o conjunto mecânico possui diversos pontos que
devem ser monitorados, seja por instrumentação ou metodologias específicas de controle.
Atualmente com o auxílio da informática, as informações podem ser coletadas de forma
direta e precisa, além de serem rapidamente obtidas e armazenadas.
O rendimento na barra de tração (potência na BT dividida pela
potência do motor) é frequentemente usado para avaliar tratores, porém, considerando que a
potência é uma função de velocidade e força na barra de tração, pode-se afirmar que o
rendimento na barra de tração descreve em parte a habilidade de um trator para tracionar, já
que o rendimento máximo é o critério de desempenho mais útil para tratores agrícolas
(LILJEDAHL, et al., 1996).
A potência desenvolvida por um veículo automotriz, é função da
força de tração e da velocidade de deslocamento (linear), calculada pela Equação 17 e 18,
adaptadas de Lopes et al. (2005); Serrano (2007); Gabriel Filho et al. (2010); Márquez
(2012).
PBT = FT . V (17)
Onde:
PBT = potência (kW)
FT ou TL = força de tração ou tração líquida (kN)
V = velocidade (m s-1)
PBT =FT . V
270 (18)
Onde:
PBT = potência (cv)
FT ou TL = força de tração ou tração líquida (kgf)
V= velocidade (km h-1)

32
Usualmente nos ensaios de tração em superfície padrão, a patinagem
é limitada no máximo a 15% (ZOZ e BRIXIUS, 1979; CENEA, 1985; OECD, 2012). Acima
deste limite há muitas perdas de potência, em função da redução da velocidade de avanço do
trator (MÁRQUEZ, 2012), além de haver dispêndio energético desnecessário e desgaste
prematuro de pneus e demais componentes do trator. A patinagem pode ser determinada pela
Equação 19, ou conforme ASAE (2003b) pela equação 20. Nas duas equações o resultado é
o mesmo.
Pat =N1 − N0
N1. 100 (19)
Onde:
Pat = patinagem (%)
N0 = número de voltas das rodas motrizes sem carga para uma distância padrão
N1 = número de voltas das rodas motrizes com carga para uma distância padrão
100 = constante para expressar o valor em percentual
Pat =An − A1
An. 100 (20)
Onde:
An = espaço percorrido por volta da roda motriz sem carga (m)
A1 = espaço percorrido por volta da roda motriz com carga (m)
Uma forma de comparar o desempenho de tratores agrícolas
distintos, seja pelo tamanho, marca, modelo ou qualquer outra característica que os diferem,
é pelo coeficiente de tração, podendo ser coeficiente de tração bruta (CTB), coeficiente de
tração líquida dinâmico (CTL) ou coeficiente de tração líquida estático (CTLe),
respectivamente determinados pelas equações 21 e 22, conforme Upadhyaya et al., (1989)
(também utilizada por Lanças, 1996), e pela Equação 23 (adaptada de Zoz e Grisso, 2003).

33
CTB =T
r. W=
GT
W (21)
Onde:
CTB = coeficiente de tração bruta (adimensional)
GT ou TB = tração bruta ou força tangencial (kN)
W = massa dinâmica aderente sobre o eixo (pneus) (kN). A massa dinâmica aderente quando
utilizando tratores 4x2, é a massa estática sobre o eixo ou rodados traseiros mais a
transferência de massa sobre estes. Quando utilizar tratores com TDA ou 4x4 (desde que
estejam com a tração ligada), a massa aderente é a massa total do trator.
T = torque no eixo dos rodados motrizes (kN.m)
r = raio dinâmico do rodado (m)
CTL =NT
W (22)
Onde:
CTL = coeficiente de tração líquida dinâmico (adimensional)
NT ou TL = tração líquida na barra de tração (kN)
W = massa dinâmica aderente sobre o eixo (kN)
CTLe =NT
We (23)
Onde:
CTLe = coeficiente de tração líquida estático (adimensional). Para tratores com TDA ou 4X4
(desde que estejam com a tração ligada) o CTLe é o mesmo que CTL.
NT ou TL = tração líquida na barra de tração (kN)
We = massa estática do trator (kN)
2.5.3 Ensaios de rodados e de torque
No ano de 1986 foi construído no Agricultural and Biological
Engineering Department, na University of California (UC), Davis, California, um

34
equipamento para avaliação individual de rodados de tratores agrícolas. Denominado de
Unique, Mobile, Single Wheel Traction Testing Machine (SWT), o sistema media a
velocidade de deslocamento, rotação da roda, força de tração, carregamento vertical e o
torque aplicado à roda (UPADHYAYA et al., 1986). O equipamento que, segundo os
autores, poderia ser utilizado para distintas condições do solo, incluindo as condições
naturais, detinha grande utilidade para avaliações relativas à interação solo e pneus e, para
determinação da eficiência trativa. Outros trabalhos na mesma linha de pesquisa foram
desenvolvidos por Shmulevich et al. (1996), Kawase et al. (2006) e Way et al. (2009).
Nagaoka (2001) desenvolveu um equipamento para ensaio dinâmico
de rodado agrícola individual, cujo acoplamento era dado através dos três pontos de um trator
agrícola, e o acionamento dos mecanismos ativos através da TDP (Figura 6). O torque era
obtido através de um torsiômetro comercial, acoplando entre a TDP do trator e a transmissão
do equipamento.
Figura 6. Equipamento para ensaio dinâmico de rodado agrícola individual desenvolvido por
Nagaoka (2001).
Outros pesquisadores desenvolveram trabalhos para obtenção de
dados sobre o torque nos eixos motrizes, em condições dinâmicas e estáticas, como Khalid
e Stan (1981) com tratores 4x4 de pequeno porte para aplicações especiais; Culshaw (1988)
com o trator na condição estática e os eixos acoplados em dinamômetro; Miszczak (2005)
com máquinas específicas de preparo de solo; Elwaleed et al. (2006) com equipamentos
específicos em laboratório; Yamakawa e Watanabe (2006) com veículo elétrico e;
Yamakawa et al. (2007) e Senatore e Sandu (2011) com veículos fora de estrada (off-road).
Acoplamento
ao trator (três pontos e TDP)
Rodado individual
para ensaio
Rodados para
transporte do equipamento

35
Shmulevich e Osetinskya (2003), do Instituto de Tecnologia de
Israel (“Israel Institute of Technology”) realizaram ensaios de rodados sobre pista de
concreto, utilizando um equipamento específico, acoplado e acionado hidraulicamente por
um trator. O equipamento de ensaios estava equipado com sensores (transdutores) para
avaliação do desempenho do rodado, incluindo força de tração líquida e torque no eixo. Os
resultados mostraram grande precisão entre o torque medido no eixo versus a força de tração
líquida, com excelente ajuste linear (R2 = 0,998).
Procedimentos normalizados para medir o torque e potência dos
eixos das rodas motrizes são estabelecidos pela norma ISO 789-7:1991 (ABNT, 2014b).
Segundo Márquez (2012), o procedimento de ensaio consiste em unir todas as rodas motrizes
do trator a dinamômetros, que possam medir o torque que chega a cada roda nas relações de
transmissão que representam velocidades entre 3 e 16 km h-1. O procedimento consiste em
aumentar o torque absorvido nos eixos até que se atinja o torque máximo do motor,
semelhante aos ensaios realizados diretamente no motor e que possuem várias normas de
ensaios (SAE J1995, 1995; ABNT NBR ISO 1585, 1996; ISO 14396, 2002, entre outras), e
na TDP que também são normalizados (ABNT NBR 13400, 1995; OECD - Code 2, 2012;
ABNT NBR ISO 789-1, 2014a).
Embora sejam desenvolvidos equipamentos específicos para
avaliações de rodados individuais e sistemas de tração, e que possibilitem a medição de
torque como o de Upadhyaya et al. (1986) e os citados por Way et al (2009), ou pelos
procedimentos da norma ISO 789-7 de 1991 (ABNT, 2014b), ainda há informações que não
serão obtidas, pois são peculiares dos próprios tratores agrícolas. Ao avaliar-se o torque
diretamente nos eixos motrizes dos tratores e nas distintas operações de campo a que podem
ser submetidos, melhores serão as respostas sobre os fenômenos ligados à tração.
Thomas (2010) analisou o comportamento do torque do motor para
situações de campo, utilizando extensômetros de resistência elétrica, fixado ao eixo cardan
na saída do volante do motor do trator (Figura 7). O componente possui dimensões de cerca
de 35x18x12mm e massa de 13 gramas, e foi configurado para transferência de dados através
de um sistema digital de telemetria modelo TEL1-PCM-STG marca KMT.
Os trabalhos realizados por Thomas (2010) foram bastante úteis para
a verificação da demanda de torque do motor em trabalhos de campo. Segundo o autor, o
sistema mostrou eficácia para avaliação de conjuntos mecanizados, enfatizando que o
procedimento possui muitas potencialidades.

36
Figura 7. Componentes para medição do torque aplicado ao eixo cardan na saída do motor.
Fonte: Thomas (2010).
Métodos indiretos para determinação da potência disponível, e para
estimativa do desempenho em campo de tratores agrícolas, foram utilizados por Russini
(2012). O autor, através de dados obtidos em ensaios dinamométricos via TDP, executou
procedimentos de cálculos com metodologias conceituadas, para prever o desempenho de
um trator agrícola de rodas em pista e a campo, sem recorrer aos ensaios diretos. Ainda,
verificou elevado coeficiente de correlação entre a potência de tração observada em pista e
no campo, em relação à potência estimada.
Khalid e Smith (1981) estudaram a distribuição de torque de um
trator 4x4 para uso experimental. Os resultados mostraram que a relação de distribuição de
torque foi afetada pela posição do engate de tração, pela distribuição de peso estático, pelas
cargas verticais e horizontais na barra de tração e pelas condições do solo. A eficiência trativa
não foi afetada pela relação de distribuição de torque entre rodas dianteiras e traseiras.
Segundo Sharma e Pandey (1997), através de estudos com pneus
diagonais de tração, observaram que, para condição de superfícies duras (sem afundamento
do pneu), a carga por eixo, a deformação dos pneus, e o tamanho do pneu (largura e diâmetro)
afetam significativamente o requerimento de torque.
2.5.4 Instrumentação para aquisição de dados
Com o emprego de máquinas e implementos agrícolas, tornou-se
preocupação dos pesquisadores e empresas, a quantificação dos esforços atuantes, além do

37
consumo de combustível em função das características dos sistemas de produção. Desta
forma, o objetivo da instrumentação agrícola para realização de ensaios, é gerar informações
que possibilitem dimensionar e racionalizar o uso de conjuntos motomecanizados na
agricultura (SILVA et al., 1999).
Mantovani et al. (1999) enfatiza que o uso da instrumentação
eletrônica, permite uma grande capacidade de trabalho em razão da facilidade de
programação e operação da cadeia de medições. A partir dos dados coletados é possível obter
curvas de desempenho operacional do conjunto, e um relatório de avaliação completo, o qual
pode servir como recomendação para o usuário e para os fabricantes.
O desenvolvimento de uma instrumentação eletrônica através da
instalação de sensores, conectados a um sistema de aquisição, fornece dados referentes ao
desempenho do trator durante as operações, tendo-se assim dados suficientes para
caracterizar o desempenho desta máquina (RUSSINI, 2009).
Segundo Serrano (2007), um sistema de medição de parâmetros
físicos de desempenho de tratores agrícolas, depende fundamentalmente dos tipos de
sensores que o constitui. Os sistemas mais habituais, de concepção relativamente simples e
normalmente de custo reduzido, desenvolvidos à fácil adaptação em qualquer trator, nas
diversas condições de trabalho, têm como sensores: um radar (velocidade real), uma célula
de carga (força de tração), um medidor de fluxo (consumo de combustível) e sensores
magnéticos de proximidade (rotação e patinagem).

38
MATERIAL E MÉTODOS
A metodologia utilizada, bem como o material e recursos
empregados no trabalho, foi definida por pesquisas informacionais e pelo desenvolvimento
projetual, seguido da construção do protótipo (I), dos testes e ensaios preliminares (II), dos
ensaios em pistas para validação do equipamento (III) e da análise de dados (IV). A
nomenclatura utilizada no título “sistema eletromecânico para determinação do torque nas
rodas motrizes de tratores agrícolas” terá como sinônimo o substantivo torsiômetro. A Figura
8 sintetiza as fases de desenvolvimento do trabalho.
Figura 8. Fases de desenvolvimento do trabalho.
I
• Ensaios preliminaresII
• Ensaios para validaçãoIII
IV • Análise de dados
• Projeto

39
3.1 Fases de projeto do torsiômetro
O projeto seguiu a metodologia descrita por Romano (2003), que
sugere o atendimento de quatro fases para que o produto gerado tenha concepção adequada,
viabilidade, qualidade e desempenho satisfatório, sendo ainda útil para a organização
sequencial do projeto. As quatro fases são: projeto informacional, projeto conceitual, projeto
preliminar e projeto detalhado.
No projeto informacional, foram estabelecidos os fatores de
influência no projeto, a partir de pesquisas exploratórias, observando parâmetros mecânicos,
econômicos e outros conhecimentos específicos. Foram levadas em conta as características
funcionais, de segurança, de confiabilidade e de aparência, tanto dos tratores agrícolas
quanto do equipamento que foi desenvolvido.
Na segunda fase, no projeto conceitual, foi estabelecida a estrutura
funcional e concluída a concepção estrutural do torsiômetro, tendo ainda, o início dos
estudos voltados aos processos de fabricação.
Na fase de projeto preliminar, estabeleceu-se o leiaute final, com
determinação da viabilidade técnica e econômica. Foi criado um modelo virtual em sistema
CAE/CAD, com estabelecimento das dimensões, forma, massa, material e melhor processo
de fabricação. Obteve-se um protótipo virtual, onde foram realizadas simulações
computacionais para verificação da funcionalidade dos componentes, estudos de forma,
posicionamento e resistência. Esta fase foi concluída com a aprovação do modelo do leiaute
final, material, elaboração dos desenhos técnicos em 3D e 2D e o melhor processo de
fabricação de cada item.
A última fase, de projeto detalhado, destinou-se a construção física
do protótipo. Na sequência, o equipamento foi submetido a testes, ensaios de laboratório, e
ensaios de campo, no intuito de validar sua função, medir o torque. A construção do protótipo
permitiu a melhor compreensão da funcionalidade e demais características do torsiômetro,
incluindo sua otimização e melhorias de alguns componentes.
Devido à aplicação inicial, direcionada a tratores agrícolas, e com
fixação em local de alto nível de esforço, houve o desenvolvimento de um equipamento
altamente robusto, com toda estrutura mecânica produzida em aço, evitando ao máximo o
uso de junções e soldas. Por se tratar de um protótipo, e com aplicação inicial direcionada
exclusivamente à pesquisa, o equipamento foi estruturado para atender tratores de pequeno

40
e médio porte (até 90 kW), de maneira que possa receber adaptações conforme
peculiaridades de cada marca ou modelo. O princípio de funcionamento é por braço de
alavanca, com medição de força através de uma célula de carga e transmissão de sinal através
de um conector rotativo a base de vapor de mercúrio, montado no centro da roda.
3.2 Projeto e simulações virtuais
Em software específico para desenhos de engenharia (CAE/CAD), e
com auxílio de profissionais da área, foram elaborados os desenhos, simultaneamente às
simulações para verificação da resistência dos materiais utilizados e das dimensões adotadas,
de acordo com esforços pré-calculados para os diferentes pontos. As simulações foram
realizadas em função do torque máximo teórico disponível no eixo motriz.
3.3 Construção do torsiômetro (protótipo)
A confecção das peças foi realizada em parceria com empresas
especializadas em tornearia, usinagem e soldagem, utilizando-se de ferramentas de alta
precisão, e mantendo com eficiência as dimensões estabelecidas nos desenhos virtuais. O
material utilizado para a construção da parte mecânica foi selecionado em função dos
esforços teóricos calculados, pelo custo benefício e pela disponibilidade no mercado,
optando-se pelo aço AISI 1045.
De acordo com o manual de aços (GERDAU, 2003), pela
codificação dos aços segundo designação AISI/SAE, o tipo AISI 1045 é composto por aços-
carbono comuns, cuja composição química contém o percentual entre 0,43 - 0,50% de
Carbono, 0,60 e 0,90% de Manganês, máximo de 0,03% de Fósforo e o máximo 0,05% de
Enxofre.
Os rolamentos utilizados (2 unidades) foram adotados em função da
capacidade de carga e da qualidade do material. Utilizou-se de rolamentos cônicos de roletes,
tendo em vista que durante a montagem e nas aplicações do torsiômetro em campo, o
conjunto recebe cargas axiais e radiais. Trata-se do modelo 33020, com as seguintes
dimensões fornecidas pelo fabricante: 100 mm de diâmetro interno (d), 150 mm de diâmetro
externo (D), 39 mm de largura total e 224 kN de carga dinâmica máxima (C).

41
3.4 Trator utilizado
O trator utilizado era equipado de fábrica com tração dianteira
auxiliar (TDA), transmissão com câmbio sincronizado de 12 velocidades, distribuídos em 4
grupos (A, B, C, D) e 3 marchas (1, 2, 3) que variam a velocidade entre 2,2 e 29,6 km h-1 na
rotação nominal do motor (2300 rpm), conforme informação do fabricante. Na Tabela 2,
observa-se as principais características de catálogo do trator, e na Tabela 3 as informações
determinadas no Nempa.
Tabela 2. Características técnicas de catálogo do trator SLC/John Deere 6600.
Especificações do motor
Marca (modelo) John Deere (6059T)
Número de cilindros (cm3) 6 (5900)
Aspiração Turbo alimentado
Bomba injetora (Marca) Rotativa (Lucas)
Potência máxima (kW/cv) 89/121
Reserva de torque (%) 27
Rotação nominal (rpm) 2300
Especificações da transmissão
Denominação do cambio SyncroPlusTM
Tipo de cambio Engrenagens helicoidais
sincronizadas
N° de marchas 12 a frente e 4 a ré
Velocidades (km h-1) 2,2 a 29,6 @ 2300 rpm
Bloqueio do diferencial Eletrohidráulico
Embreagem Mecânica hidráulica
Tabela 3. Características técnicas e ponderais do trator determinadas no Nempa.
Informações do motor
Rotação máxima livre (rpm) 2450
Rotação de potência máxima (rpm) 2200
Rotação do motor equivalente a 540 na TDP (i) 2143/540 (3,969)
Características pondero dimensionais, em ordem de marcha* (sem lastro)
Altura da barra de tração (mm) 505
Massa estática total, kN (kg) 44,0 (4485)
Massa estática sobre eixo traseiro, kN (kg) % 27,6 (2815) 62,8%
Massa estática sobre eixo dianteiro, kN (kg) % 16,4 (1670) 37,2%
Avanço cinemático das rodas dianteiras (%) 1,50
Pneus traseiros - Modelo (pressão psi/kPa) 23.1-30 (18 psi/ 124,1 kPa)
Pneus dianteiros - Modelo (pressão psi/kPa) 14.9-26 (18 psi/ 124,1 kPa)
* pronto para o trabalho com todos os reservatórios abastecidos; i = relação de transmissão.

42
Na Tabela 4 encontram-se as dimensões dos rodados traseiros, os
quais eram de construção diagonal (convencional) modelo 23.1-30, para a condição estática
e sem lastro, na pressão de 124,2 kPa (18 psi).
Tabela 4. Dimensões dos rodados traseiros do trator para a condição estática.
Perímetro do rodado sem carga: mm (m) 5378 (5,38)
Diâmetro do rodado sem carga: mm (m) 1712 (1,71)
Raio estático sem carga: mm (m) 856 (0,86)
Raio estático carregado: mm (m) 810 (0,81)
Os valores da Tabela 5 foram usados como referência no projeto, em
função da máxima capacidade de tração teórica, e também ajudam a quantificar teoricamente
os esforços dinâmicos nos eixos motrizes, de acordo com a Equação 3 citada na revisão
bibliográfica (MIALHE, 1980; GABRIEL FILHO et al., 2004), para transferência de massa.
Tabela 5. Parâmetros técnicos e teóricos para determinação das forças atuantes no trator e
no torsiômetro para a condição sem lastro.
Massa total, kN 46,6
Força de tração máxima, kN (coeficiente de tração = 0,9) 41,9
Massa dinâmica traseira, kN (%) 37,0 (79,5)
Massa dinâmica dianteira, kN (%) 9,6 (20,5)
Tração bruta individual traseira, kN 16,7
Tração bruta individual dianteira, kN 4,3
Raio estático do rodado traseiro, m 0,81
Raio estático do rodado dianteiro, m 0,59
Torque teórico roda traseira, Nm 13.491
Torque teórico roda dianteira, Nm 2.534
Força teórica no braço de alavanca do
torsiômetro com 0,25 m e ângulo de 90°, kN 53,9
Força teórica na célula de carga do torsiômetro
com braço de alavanca de 0,25 m e ângulo (α)
de aplicação de forças em 53,17°, kN
43,1
Os cálculos são apenas teóricos, para auxiliar no dimensionamento
do torsiômetro, com valores utilizados para condições extremas, os quais não substituem a
medição por equipamentos calibrados, tendo em vista a alta diversidade que se encontra nos
solos agrícolas e nos ensaios de tração.

43
3.4.1 Ensaios de deformação dos pneus traseiros
Os rodados, em virtude da sua característica pneumática, possuem
elasticidade e apresentam deformação em função da carga vertical atuante sobre os mesmos.
Esta deformação, altera o raio dos rodados, em função da carga dinâmica (vertical) fornecida
pela transferência de massa sobre o eixo traseiro. O quociente entre o torque aplicado no
eixo, e o raio dinâmico do rodado resulta na tração bruta, e desta forma, a variação do raio
dinâmico tem influência na capacidade de tração do trator, e também tem influência no
cálculo da eficiência trativa.
No intuito de verificar a deformação elástica (conforme menciona
MAZETTO et al., 2004) dos pneus traseiros, modelo 23.1-30, utilizados no trator, foram
conduzidos ensaios com aplicações de cargas verticais controladas, utilizando uma prensa
hidráulica com controle computadorizado (Figura 9).
Figura 9. Pneu 23.1-30 montado na prensa hidráulica para ensaio de deformação vertical
sobre superfície rígida.
O pneu foi pressionado sobre superfície rígida (chapa de aço), com
controle da carga e registro da mesma. Os tratamentos utilizados foram 20 cargas verticais e
uma pressão de inflação de 124,1 kPa (18 psi), com três repetições. Foram adotadas 20 cargas
crescentes e equidistantes de 0 a 26,5 kN. A carga máxima definida (26,5 kN) refere-se a

44
máxima carga possível que o pneu poderá receber verticalmente em condição de máximo
lastreamento do trator, considerando a massa estática mais a transferência de massa.
Para determinação da deformação, foi utilizado um potenciômetro
eletrônico interligado ao sistema de aquisição de dados (Figura 10). Os resultados da
deformação vertical do pneu foram convertidos em uma reta e uma equação de regressão.
Figura 10. Detalhe do potenciômetro instalado na estrutura da prensa para determinação da
deformação vertical do pneu em função da carga.
O raio dinâmico dos pneus foi o resultado da subtração entre o raio
estático e a deformação observada, conforme Equação 24.
r = ro – def (24)
Onde:
r = raio dinâmico usado no cálculo da tração bruta (m ou mm)
ro = raio estático sem carga ou indeformado (m ou mm)
def = deformação do pneu (m ou mm)
Potenciômetro

45
3.4.2 Ensaios da tomada de potência (TDP) do trator em dinamômetro
Mediante uso da TDP, na configuração 540 rpm, foram
determinadas as curvas de torque e potência, com a alavanca de aceleração manual
totalmente acionada (rotação máxima). Foi utilizado um dinamômetro com frenagem
mecânica por atrito, modelo NEB 400 da fabricante Norte Americana AW (Figura 11). Além
do dinamômetro, foram utilizados os demais equipamentos e sensores para caracterização
do ensaio, monitorando assim: temperatura do óleo do motor (cárter); temperatura da água
do sistema de arrefecimento do motor; temperatura do combustível, na entrada e no retorno;
temperatura ambiente, umidade relativa do ar (UR) e pressão atmosférica; e sensores de
rotação. Utilizou-se ainda fluxômetros para determinação do consumo de combustível.
Maiores detalhes da instrumentação, ver o item 3.5.
Figura 11. Trator acoplado ao dinamômetro NEB400 para ensaios da TDP.
O torque e potência equivalentes no motor foram encontrados
considerando as perdas da transmissão de acordo com a norma EP496.2 da ASAE (2003b),
conforme ilustra a Figura 12. Foi utilizada esta norma para comparação em função do ano
de publicação ser próximo do ano de fabricação do trator (mais próxima disponível para
consulta), e conforme a norma adotou-se 13% de perdas na transmissão entre o motor e a
TDP.

46
Figura 12. Máximas potências no sistema mecânico de tratores agrícolas, segundo a norma
EP496.2 (ASAE, 2003b).
3.4.3 Relação de transmissão e tração bruta teórica do trator
A tração bruta teórica ou força tangencial nas rodas (TB) depende
do torque do motor (Tm), da relação de transmissão (i) e da eficiência na transmissão (ηt).
A relação de transmissão foi determinada para todas as marchas avante, com a utilização de
“encoder” (sensores de rotação) acoplados no centro dos rodados (traseiro e dianteiro), e um
tacômetro digital no volante do motor. Este método foi executado de forma estática, com o
trator suspenso por levantes hidráulicos, e com bloqueio do diferencial ligado (Figura 13).
Figura 13. Trator suspenso com as quatro rodas livres e com sensores acoplados nas rodas
para determinação da relação de transmissão de todas as marchas avante.
0,87 a 0,90 0,75 a 0,81
0,85 a 0,89
0,94 a 0,96
0,86 a 0,89
Potência liquida do motor
0,96 a 0,98
Transmissão
TDP
Barra de tração (BT)
Eixo
0,92 a 0,93
0,90 a 0,92
“Encoder”

47
A predição do torque de entrada nas rodas motrizes pode ser
considerada como o torque da TDP, multiplicado pela relação de transmissão equivalente
entre a TDP e o eixo, deduzindo-se as perdas na transmissão que, segundo a ASAE (2003b),
variam de 4 a 6% (conforme se verifica na Figura 12). Essa norma da ASAE é utilizada para
a previsão da potência, entretanto, considerando que não há perda de velocidade por
patinagem dentro da transmissão, as perdas até chegar ao eixo da roda são por perdas de
torque, em função principalmente pelo atrito interno entre as engrenagens, mancais e
rolamentos. Para estimar a tração bruta nos rodados, foi feito uso do torque encontrado na
TDP, e o raio estático carregado dos rodados traseiros (0,81 m), conforme recomenda Zoz e
Grisso (2003). O quociente entre o torque teórico de entrada nos eixos motrizes e o raio
estático carregado dos rodados, é considerado como a tração bruta (teórica), sendo esta,
responsável pela tração líquida, e pelo vencimento da resistência ao rolamento do trator.
3.5 Instrumentação utilizada para ensaios de tração
Para captação de dados no torsiômetro foi utilizado uma célula de
carga, confeccionada especialmente para as dimensões mecânicas estabelecidas. Adotou-se
o modelo cilíndrico DTS20T-especial, em aço, produzida pela MK controle, com as
dimensões de 100x56 mm (Figura 14), e cujas especificações estão na Tabela 6.
Figura 14. Célula de carga cilíndrica DTS20T-especial, montada nos suportes “U” para ser
acoplada no torsiômetro.
Os sinais emitidos pela célula de carga, que posteriormente são
convertidos em força (kgf ou kN), foram conduzidos por um conector elétrico rotativo a base
de mercúrio, modelo 430, produzido pela Mercotac®. O conector possui 4 polos, dois de 4A
e dois de 30A. Esse instrumento foi empregado devido à captação de sinal feita dentro da
Célula
de carga

48
roda, onde se tem movimento de rotação, necessitando de um conector com lado fixo e outro
com lado rotativo (Figura 15).
Tabela 6. Especificações da célula de carga utilizada no torsiômetro.
Características Especificação
Marca/Modelo MK Controle/DTS-20T
Capacidade 196,2 kN (20.000 kgf)
Sentido de trabalho Tração e compressão
Alimentação* 10 a 15 Vcc
Sinal de saída 2mV/V +-10%
Sobrecarga admissível 1,50 x F.E.
Não linearidade 0,03%
Rosca M30
Altura 100 mm
Diâmetro maior 56 mm
*Durante os ensaios utilizou-se 12 Vcc com estabilizador de tensão.
Figura 15. Conector rotativo com esquema básico de funcionamento.
Fonte: Mercotac® (2013).
A calibração da célula de carga no sentido de compressão, já ligada
ao conector rotativo e com a interface de coleta de dados, foi feita mediante uso de uma
prensa hidráulica marca EMIC, munida de uma célula de carga aferida. A calibração do

49
torsiômetro montado no eixo foi feita com auxílio de um macaco hidráulico e com uma
célula de carga aferida, acoplada entre o macaco e uma extremidade da roda (Figura 16).
Figura 16. Calibração do torsiômetro com uso de macaco hidráulico.
Para obtenção da rotação no eixo, e da patinagem, foi instalado um
“encoder” (sensor de pulso), marca S&E, modelo E2A1A de 60 pulsos por volta, acoplado
no centro da roda traseira direita (Figura 17). Ao obter a rotação do lado direito, foi possível
calcular a potência desenvolvida no eixo traseiro, tendo em vista que o diferencial
permaneceu bloqueado durante os ensaios, e desta forma, a rotação das duas rodas eram
iguais. Outros dois sensores idênticos foram instalados no centro das duas rodas dianteiras
(eixo com diferencial autoblocante), porém, foi utilizado apenas para obtenção da
Força na célula de carga
em ângulo reto (Fccr)
Braço de torque reto (bT)
Torque real: T = Fccr x bT
Torque no torsiômetro (calculado):
T = Fcc x b x sen 53,17°
Força na célula de carga
do torsiômetro (Fcc)
Braço de torque do
torsiômetro (b)

50
patinagem. A rotação do motor foi determinada através da captação de dados por um
‘encoder” similar (marca S&E, modelo E2A1A), adaptado para 2 pulsos por volta, acoplado
na TDP do trator.
Figura 17. Sensor instalado na roda traseira direita para determinação da rotação do eixo
traseiro.
Para determinação do consumo horário de combustível (diesel),
foram utilizados dois fluxômetros modelo OVAL M-III LSF41L0-M2, sendo um instalado
na entrada de combustível antes da bomba injetora e outro no retorno para o tanque,
antecedidos por um filtro de combustível e um sensor de temperatura.
Semelhante ao ensaio da TDP em dinamômetro monitorou-se a
temperatura do óleo do cárter utilizando um sensor do tipo termopar. Para obtenção da
temperatura da água do sistema de arrefecimento do motor e da temperatura do combustível,
foram utilizados sensores do tipo pt100. Detalhes do esquema de ligação e da posição dos
instrumentos utilizados são mostrados na Figura 18 e na Figura 19.
A temperatura ambiente e umidade relativa do ar (UR) foram obtidas
no banco de dados da estação meteorológica da FCA/UNESP. A pressão atmosférica foi
registrada com um barômetro digital, modelo Impac PCE-THB 38. A célula de carga
utilizada para medição da tração líquida está descrita no item relacionado à UMEB (3.6).

51
Figura 18. Vista lateral do esquema de ligação da instrumentação utilizada no trator.
Figura 19. Vista superior do esquema de montagem da instrumentação utilizada em cada
posição do trator.
Célula de carga(força de tração)
Central de ligação dos
sensores
Motor
pt 100
(Temp. da água e combustível)
fluxômetro
(consumo de combustível)
Termopar(Temp. do óleo do motor)
Encoder
(patinagem)
Encoder
(patinagem)
Célula de
carga e
conector
rotativo
(torque)
Encoder
(patinagem)
(rotação do eixo)
Encoder(rotação TDP/MOTOR)

52
3.6 Unidade Móvel para Ensaio na Barra de Tração - UMEB
Os ensaios de tração têm necessidade de utilização de um freio para
aplicar cargas controladas na barra de tração, podendo assim, encontrar o desempenho de
cada marcha de trabalho e em diferentes cargas. O NEMPA possui a Unidade Móvel de
Ensaios na Barra de Tração (UMEB), descrita por Gabriel Filho et al. (2008), munida de seis
rodados com freios pneumáticos, controlados manualmente ou por computador, para
aplicação da carga desejada na barra de tração do trator, em concreto ou em qualquer
superfície de solo. Na Tabela 7, encontram-se maiores informações dos itens principais que
compõem a UMEB, os quais prestam auxílio durante os ensaios; e na Figura 20 a UMEB
acoplada ao trator sobre pista de concreto.
Tabela 7. Descrição dos equipamentos e sensores instalados na UMEB, utilizados para o
controle variável da carga imposta na barra de tração.
Item/sensor Descrição
Sistema de aquisição de dados
Para captar e registrar os dados de ensaio: Interface
eletrônica para conexão dos cabos dos sensores e um
computador portátil com software para controle e
registro de dados.
Sensor de força Para determinar a força tração (tração líquida): tipo
célula de carga marca Lider capacidade de trabalho entre
0 e 100 kN, instalada entre o trator e a UMEB.
Roda odométrica
Para determinar a distância percorrida e a velocidade real
de deslocamento: rodado pneumático, com “encoder”
marca S&E modelo E2A1A de 60 pulsos por volta,
acoplado ao centro do eixo da roda odométrica.
Sistema de frenagem
Para aplicação de carga resistente ao trator: Freio
pneumático, com controle de carga ajustável e
capacidade de frenagem de até 80 kN
(aproximadamente).
Regulador de pressão
(Válvula eletrônica pneumática)
Para controle da carga na barra de tração: Pressão
máxima de 800 kPa (8 bar), marca Festo, modelo VPPE-
3-1/5-6-010, conectada no sistema de frenagem
pneumático através de mangueiras e conectada no
computador portátil através de cabo elétrico.

53
Figura 20. Trator instrumentado acoplado a UMEB através da barra de tração.
3.7 Ensaios para validação do torsiômetro
Os ensaios para validação do torsiômetro foram realizados nas pistas
do NEMPA. O trabalho foi dividido em quatro etapas, a fim de facilitar a condução dos
ensaios e a análise dos resultados. Dentro de cada condição, utilizou-se os tratamentos de
carga na barra de tração (ou tração líquida - TL). Cada uma das etapas foi separada em
função da condição do ensaio e descrita como: (1) fator marcha (velocidade de
deslocamento); (2) fator TDA ligada e desligada; (3) fator superfície trativa; e (4) obtenção
das máximas eficiências, melhor detalhados dos tópicos 3.7.3 a 3.7.6.
3.7.1 Pistas de ensaio
Foram utilizadas as pistas de concreto e de solo firme do NEMPA,
localizadas na Fazenda Experimental Lageado da FCA/UNESP, em Botucatu-SP. A pista de
concreto (coordenadas: 22°50’18.47”S e 48°25’22.21”O) estava disposta na forma de duas
retas paralelas, cada uma com 200 metros de comprimento e 4 metros de largura. Os
extremos apresentam formato elipsoidal para permitir as manobras (Figura 21). A pista de
solo firme (coordenadas: 22°50’21.27”S e 48°25’18.30”O) possuía as dimensões de 400 m
de comprimento por 30 m de largura, com estrutura superficial e subsuperficial compactada,
e superfície sem palhada e nivelada por uma lamina agrícola (Figura 22). O solo é
classificado como Nitossolo Vermelho Distroférrico com textura argilosa (superior a 50%

54
de argila), de acordo com a EMBRAPA (1999). O teor de água do solo nos ensaios era de
9,11%.
Figura 21. Vista aérea da pista de concreto utilizada nos ensaios de tração.
Figura 22. Pista de solo firme utilizada para os ensaios de tração.
3.7.2 Marchas ensaiadas e rotação de trabalho do trator
As marchas utilizadas para os ensaios foram selecionadas em função
da frequência de utilização em atividades de campo, as quais compreendem velocidades de
deslocamento do trator dentro de uma ampla faixa de utilização nas diversas operações
agrícolas (são mais usuais). O Código 2 (“Code 2”) da OECD (2012), também preconiza
ensaio detalhado da marcha mais próxima de 7,5 km h-1.

55
Para os ensaios de tração em pista, foi adotada a máxima rotação do
motor, seguindo a recomendação do Código 2 da OECD (2012), obtendo, nesta condição o
máximo desempenho do trator, e de forma padronizada. Utilizou-se a rotação de arranque
máxima (2450 rpm) e coletou-se a rotação final com sensores de pulso ligado na TDP, em
cada parcela de ensaio de 25 m.
3.7.3 Delineamento experimental para o fator marcha
A primeira etapa dos ensaios com o torsiômetro foi realizada sobre
pista de concreto, e com a TDA desligada, com delineamento inteiramente casualizado
(DIC), avaliando os fatores marcha (três velocidades) e oito cargas na BT, com cinco
repetições (Tabela 8), totalizando 120 unidades experimentais.
O delineamento adotado (DIC) é utilizado em experimentos onde as
unidades experimentais são uniformes ou homogêneas, e a variação entre as unidades
experimentais é irrelevante (STORCK et al., 2004). Neste caso, compreende-se que material
(trator, pista de ensaio, pneus, entre outros) e ambiente não possuem variações relevantes.
As cargas adotadas na barra de tração (TL) variaram de 4 em 4 kN,
partindo de 4 kN até 30 kN, e assim permitiram a construção de curvas comparativas para
todas as condições. A carga máxima de 30 kN, foi utilizada em função de ser o limite de
tração com cerca de 15% de patinagem, conforme recomenda a OECD (2012).
Tabela 8. Fatores de avaliação com o conjunto trator-UMEB ensaiados sobre pista de
concreto e com a TDA desligada.
-----------------------------------------Fatores de avaliação-----------------------------------------
Marcha Carga (kN)
B1 (5 km h-1) 4, 8, 12, 16, 20, 24, 28 e 30
B2 (7 km h-1) 4, 8, 12, 16, 20, 24, 28 e 30
C1 (8 km h-1) 4, 8, 12, 16, 20, 24, 28 e 30
3.7.4 Delineamento experimental para o fator TDA ligada e desligada
A segunda etapa dos ensaios com o torsiômetro, também foi
realizada sobre pista de concreto. Adotou-se o delineamento inteiramente casualizado (DIC),
atendendo as premissas de experimentação recomendadas por Storck et al. (2004); foram
avaliados os fatores: TDA ligada e desligada; e oito cargas na barra de tração (Tabela 9).

56
Utilizou-se apenas uma marcha (B2) e foram feitas cinco repetições cada tratamento,
totalizando 80 unidades experimentais.
Tabela 9. Fatores de avaliação com o conjunto trator-UMEB ensaiados sobre pista de
concreto e com a TDA ligada e desligada.
------------------------------------------Fatores de avaliação-----------------------------------------
-
TDA Marcha Carga (kN)
Ligada B2 (7 km h-1) 4, 8, 12, 16, 20, 24, 28 e 30
Desligada B2 (7 km h-1) 4, 8, 12, 16, 20, 24, 28 e 30
3.7.5 Delineamento experimental para o fator superfície trativa
Para o fator superfície, foi usado o delineamento inteiramente
casualizado em esquema de faixas, similar ao experimento realizado por Gabriel Filho et al.
(2010). As faixas foram definidas pelas condições superficiais, sendo: pista de concreto e
pista de solo firme sem cobertura vegetal. Os tratamentos foram definidos por duas
superfícies e sete cargas na BT (Tabela 10). Foram realizadas cinco repetições para pista de
concreto e seis repetições para pista de solo firme, totalizando 77 unidades experimentais.
Utilizou-se apenas uma marcha (B2) e a TDA ligada.
Tabela 10. Fatores de avaliação com o conjunto trator-UMEB ensaiados sobre pista de
concreto e pista de solo firme com a TDA ligada.
------------------------------------------Fatores de avaliação-----------------------------------------
-
Superfície Marcha Carga (kN)
Concreto B2 (7 km h-1) 4, 8, 12, 16, 20, 24 e 28
Solo firme B2 (7 km h-1) 4, 8, 12, 16, 20, 24 e 28
3.7.6 Obtenção das máximas eficiências
A fim de obter os máximos valores de eficiência, foi feita a
comparação das potências obtidas na barra de tração, no eixo traseiro e na TDP. Além das
marchas citadas anteriormente, acrescentou-se a marcha B3 (9 km h-1), a fim de melhor
explorar a faixa de rotação de maior potência do motor (em pista de concreto).
Foram aproveitados os resultados obtidos das marchas B1, B2 e C1
(itens 3.7.3 a 3.7.5) mais os resultados encontrados com a marcha B3. Neste item, a soma
57
das unidades experimentais para obtenção das máximas eficiências (pista de concreto)
resultaram de: quatro marchas, oito cargas para a condição de TDA desligada, e nove cargas
para condição de TDA ligada, com cinco repetições, totalizando 340 observações. Os
resultados obtidos foram comparados com a ASAE EP496.2 (2003b) e ASABE D497.7
(2011a).
3.7.7 Parâmetros avaliados e procedimento de cálculos
Os parâmetros avaliados nos ensaios de pista foram: torque no eixo
traseiro (TET), tração bruta (TB), tração líquida (TL), potência no eixo traseiro (PET),
potência na barra de tração (PBT), coeficiente de tração líquida dinâmico (CTL), coeficiente
de tração bruta (CTB), patinagem (Pat), e eficiência trativa (ET). As equações utilizadas para
cada parâmetro podem ser localizadas no texto conforme as identificações que se seguem:
TET (Equação 25); TB (Equação 26); TL (Medida diretamente por uma célula de carga);
PET (Equação 16); PBT (Equação 17); CTL (Equação 22); CTB (Equação 21); Pat (Equação
19); e ET (Equação 14).
A análise estatística foi realizada conforme descrição de Storck et al.
(2004), que recomenda usar regressões quando se tem tratamentos quantitativos, e assim
procurar a equação que expresse matematicamente o comportamento dos tratamentos.
Através de um programa computacional para análise estatística, procedeu a análise de
variância (ANAVA), bem como testes de regressões (P≥5%), conforme modelo de melhor
ajuste.
Os gráficos foram elaborados com uso de planilha eletrônica e as
equações, coeficiente de variação (CV), coeficiente de determinação (R2) e nível de
significância, inseridos manualmente dentro dos gráficos de acordo com a análise estatística.

58
RESULTADOS E DISCUSSÃO
4.1 Resultados do projeto (virtual)
Antes da construção do protótipo do torsiômetro, iniciando por
buscas informacionais e indo até a concepção do leiaute final, foram obtidos os desenhos
técnicos, os quais são a base para o entendimento do funcionamento do equipamento. Na
Figura 23 observa-se os desenhos em 3D dos componentes principais, projetados no intuito
de receber o torque do eixo traseiro e transferir para a roda, permitindo a montagem de
mecanismos para medição do torque.
A tipologia do projeto pode ser classificada de acordo com Back et
al. (2008), como inovativo ou criativo, pois não é variação de nenhum outro modelo existente
no mercado e que seja utilizado para determinação de torque em eixos de rodados motrizes.
Os itens “b” e “d” mostrados na Figura 23 também exercem a função
de mancal, para alojamento e fixação dos dois rolamentos utilizados. A fixação dos
rolamentos foi feita através da capa ou anel externo dos mesmos. O eixo principal (item “a”)
foi utilizado para apoio e fixação do anel interno dos rolamentos, mantendo-os sem folgas.
Os componentes menores foram utilizados para montagem junto aos
componentes principais. A montagem virtual, representando a estrutura final do torsiômetro,
pode ser compreendida observando a Figura 24.

59
Figura 23. Desenhos dos principais componentes mecânicos do torsiômetro.
c) Porcas M100 e M80
para fixação no eixo (a)
f) Suporte para travamento
da célula de carga
i) Rolamento
a) Eixo principal para ser acoplado
ao eixo original do trator
b) Flange e mancal interno
para fixação na roda
d) Flange e mancal externo, e
suporte para braço de alavanca
e) Braço de alavanca para
fixação à flange (d) e a roda
g) Braço de alavanca móvel
h) Suporte para fixação
da célula de carga
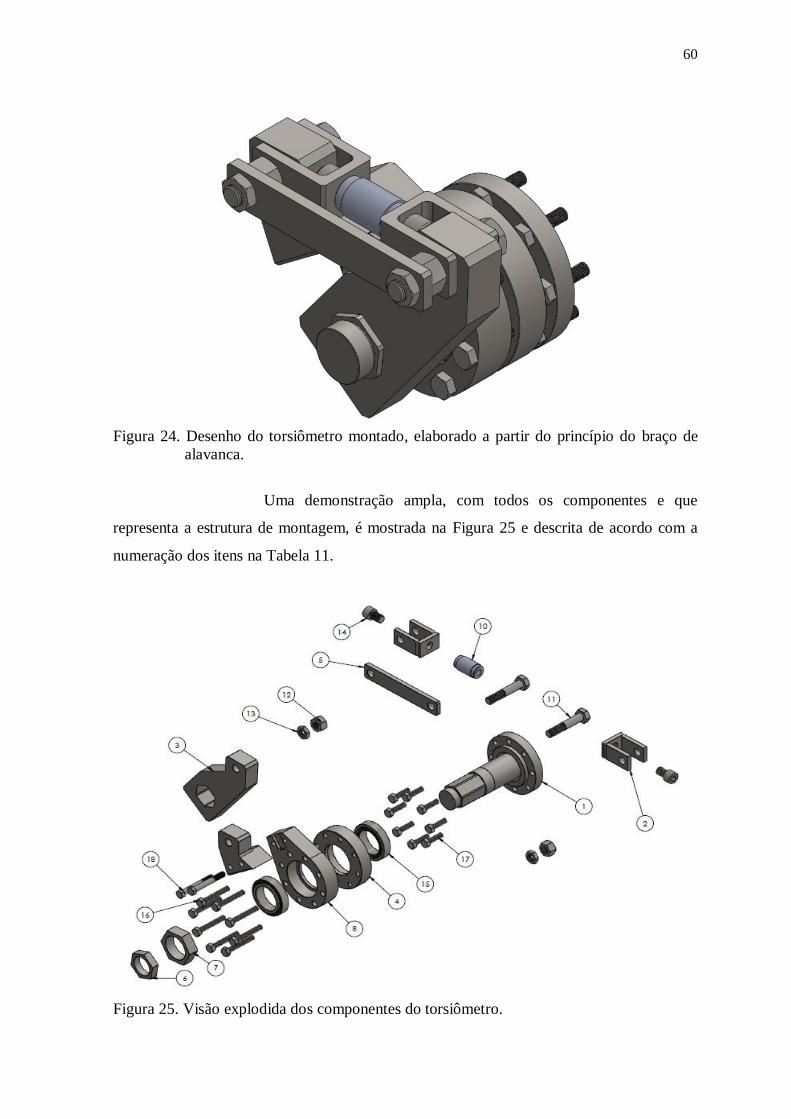
60
Figura 24. Desenho do torsiômetro montado, elaborado a partir do princípio do braço de
alavanca.
Uma demonstração ampla, com todos os componentes e que
representa a estrutura de montagem, é mostrada na Figura 25 e descrita de acordo com a
numeração dos itens na Tabela 11.
Figura 25. Visão explodida dos componentes do torsiômetro.

61
Tabela 11. Descrição e quantidade dos itens que compõem o torsiômetro.
N° do item Descrição Quantidade
1 Eixo e flange principal 1
2 Suporte "U" para fixação da célula de carga 2
3 Braço de alavanca móvel 1
4 Flange e mancal interno 1
5 Suporte para travamento da célula de carga* 1
6 Porca M80 1
7 Porca M100 1
8 Flange e mancal externo 1
9 Braço para fixação à flange e mancal externo 1
10 Célula de carga 1
11 Parafuso M30 x 3,5 x 160 2
12 Porca M30 x 3,5 2
13 Contra porca M30 x 3,5 2
14 Parafuso M30 x 3,5 x 45 2
15 Rolamentos de rolos cônicos 2
16 Parafuso 3/4" - 16 x 5" 8
17 Parafuso 3/4" - 16 x 2 3/4" 8
18 Parafuso M20 x 2,5 x 150 2
* Utilizado quando não estiver em ensaio, para proteção da célula de carga.
Na Figura 26 e na Figura 27, podem ser visualizadas as principais
dimensões e ângulos do torsiômetro. Na Figura 28 tem-se a representação em plano
cartesiano do formato geométrico da atuação de forças no torsiômetro ao centro da roda.
Figura 26. Vista lateral do sistema montado, detalhando dimensões e ângulos (dimensões
em mm).

62
Figura 27. Representação da atuação de forças no torsiômetro ao centro da roda motriz. T = torque na roda motriz traseira (Nm); FTorc. = força no braço do torsiômetro com ângulo reto (N); FCC = força
na célula de carga (N); r = raio estático carregado do rodado (m); TB = tração bruta (força tangencial à
superfície) (N); θ = 36,83°;α = 53,17°.
Figura 28. Representação em plano cartesiano do formato geométrico que representa a
atuação de forças no torsiômetro ao centro da roda motriz.
73,67
α α
FTorc.FCC
T
θ
r
TB

63
Ao se fazer uma análise isolada, baseada no formato geométrico e
nos ângulos e dimensões formados pelos componentes do torsiômetro, consegue-se explicar
a atuação de forças com base nas teorias trigonométricas. Visualizando as duas figuras
anteriores e com base no formato geométrico, nas dimensões e nos ângulos, consegue-se
calcular a proporção de forças que a célula de carga irá receber (FCC), e na sequência
consegue-se calcular o torque real no eixo e a tração bruta (TB). Assim, pelas regras
matemáticas da trigonometria têm-se as seguintes expressões:
Pitágoras: a2 = b2 + c2
Logo: 2502 = b2 + 1502 b = 200 mm
Seno = cateto oposto/hipotenusa
Logo: Seno = 200/250 = 0,8
Pela mesma teoria: Seno α = Seno 53,17° = 0,8 ou,
Cosseno θ = Cosseno 36,83° = 0,8
Por estas expressões, evidencia-se que a equação para o cálculo do
torque de saída no eixo motriz (torque obtido pelo torsiômetro), deve ser calculado pela
Equação 25. Já para o cálculo da tração bruta (TB) utiliza-se a Equação 26.
T = FCC. b. senα = FCC. 0,250 . 0,8 = FCC . 0,2 (25)
Onde:
T = torque (kN.m) (pode ser representado por “TET”: torque no eixo traseiro)
FCC = força na célula de carga obtida pelo sistema de aquisição de dados (kN)
b = comprimento do braço de alavanca (m)
senα = seno do ângulo alfa (α = 53,17°)
TB = T
r (26)
Onde:
TB = Tração bruta (kN)
T ou TET = Torque no eixo traseiro (kN.m)
r = raio dinâmico do rodado traseiro (m)

64
4.1.1 Custo de desenvolvimento do torsiômetro
O custo foi separado em custos efetivos registrados e custos
estimados, conforme detalha a Tabela 12.
Tabela 12. Custo de todos os itens envolvidos no desenvolvimento e fabricação do
torsiômetro.
Item Valor (R$)
------------------------------------- Custos efetivos registrados -------------------------------------
Serviços terceirizados em CAE/CAD 650,00
Material e fabricação 9.000,00
Rolamentos 770,00
Parafusos e porcas principais 333,40
Célula de carga + postagem 2.006,00
Conector rotativo + postagem 1.964,89
Sistema de aquisição de dados 1.000,00
Outros - Espaçador de bitola, arruelas, parafusos, entre outros de pequeno
valor e que foram identificados após a construção do torsiômetro. 291,34
Subtotal (R$) 16.015,63
------------------------------------- Outros custos (estimados)-------------------------------------
Estimativa de custo para o desenvolvimento do projeto e simulações virtuais,
obtidos com auxílio de profissionais de engenharia (100 horas/homem). 5000,00
Estimativa de custos relacionados ao acompanhamento do projeto
hora/homem (500 horas/homem). 5800,00
Subtotal (R$) 10.800,00
Total (R$) 26.815,00
O custo efetivo registrado pode ser separado em três partes: material
(Aço AISI 1045) e prestação de serviços (na FCA/UNESP e em empresas parceiras) em
tornearia, usinagem e soldagem; aquisição de periféricos (rolamentos, parafusos, porcas e
demais); e aquisição de instrumentos eletrônicos (célula de carga, conectores e sistema de
aquisição de dados).
4.2 Resultados construtivos do torsiômetro
Os componentes metálicos foram construídos com equipamentos de
usinagem, manuais e com controle computadorizado, permitindo a obtenção correta das
dimensões projetadas e excelente acabamento (Figura 29).

65
Figura 29. Peças usinadas e rolamentos aguardando montagem. (Descrição dos itens: ver numeração e Tabela 11 na página 61).
Da Figura 30 a Figura 34, observa-se com maiores detalhes os
componentes do torsiômetro e da montagem no trator. Ressalta-se que após a montagem,
ajustou-se a bitola traseira para que as duas rodas ficassem equidistantes em relação ao centro
do trator.
Figura 30. Detalhe do acoplamento entre a flange do eixo traseiro esquerdo do trator, e a
flange do eixo do torsiômetro.
1
3
34
2
2
5
6
7 8
9
15
15

66
Figura 31. Detalhe do acoplamento e a parte central da roda montado entre as flanges.
Figura 32. Centro da roda preso axialmente entre as flanges interna e externa através dos
rolamentos e da porca M100.

67
Figura 33. Aperto final da porca M100, aplicando carga axial na flange interna e externa e
no rolamento interno e rolamento externo.
Figura 34. Torsiômetro com a parte mecânica e eletrônica montadas no rodado traseiro
esquerdo, de forma completa, e pronto para os ensaios.
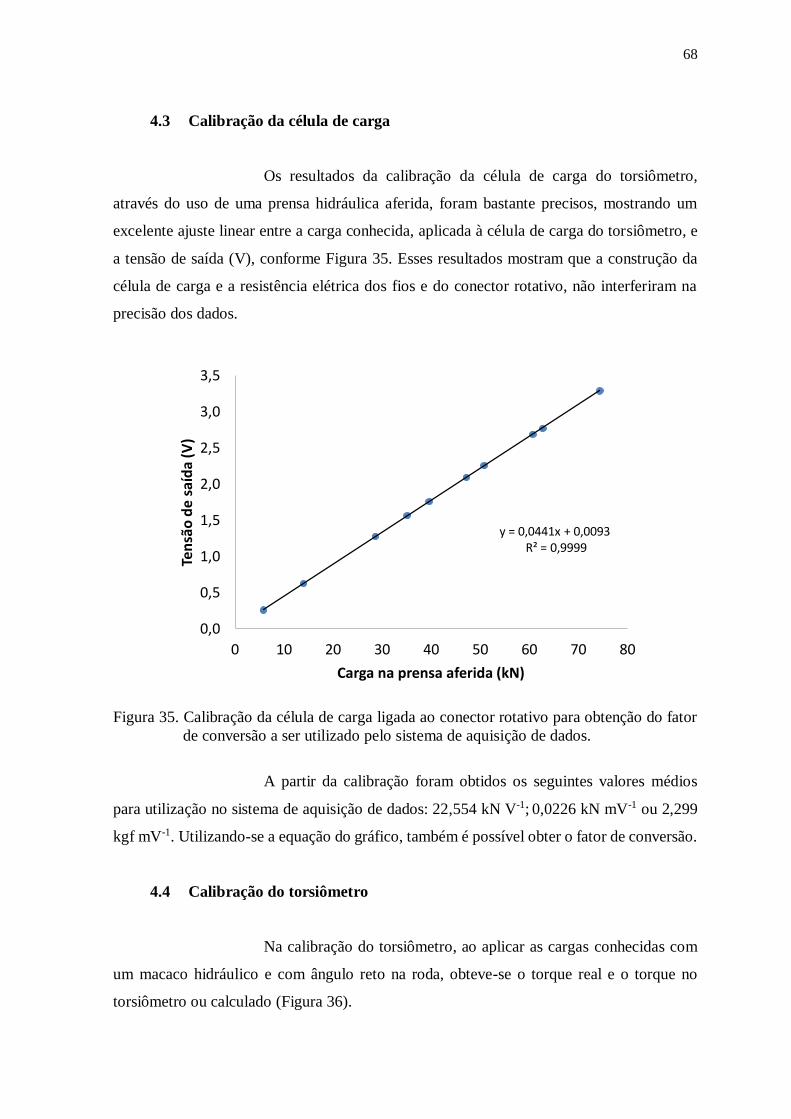
68
4.3 Calibração da célula de carga
Os resultados da calibração da célula de carga do torsiômetro,
através do uso de uma prensa hidráulica aferida, foram bastante precisos, mostrando um
excelente ajuste linear entre a carga conhecida, aplicada à célula de carga do torsiômetro, e
a tensão de saída (V), conforme Figura 35. Esses resultados mostram que a construção da
célula de carga e a resistência elétrica dos fios e do conector rotativo, não interferiram na
precisão dos dados.
Figura 35. Calibração da célula de carga ligada ao conector rotativo para obtenção do fator
de conversão a ser utilizado pelo sistema de aquisição de dados.
A partir da calibração foram obtidos os seguintes valores médios
para utilização no sistema de aquisição de dados: 22,554 kN V-1; 0,0226 kN mV-1 ou 2,299
kgf mV-1. Utilizando-se a equação do gráfico, também é possível obter o fator de conversão.
4.4 Calibração do torsiômetro
Na calibração do torsiômetro, ao aplicar as cargas conhecidas com
um macaco hidráulico e com ângulo reto na roda, obteve-se o torque real e o torque no
torsiômetro ou calculado (Figura 36).
y = 0,0441x + 0,0093R² = 0,9999
0,0
0,5
1,0
1,5
2,0
2,5
3,0
3,5
0 10 20 30 40 50 60 70 80
Ten
são
de
sa
ída
(V
)
Carga na prensa aferida (kN)

69
Figura 36. Resultados da calibração do torsiômetro com duas retas, sendo uma com o torque
real (conhecido) aplicado na roda, e outra com o torque calculado obtido pelo
produto entre força da célula de carga do torsiômetro (Fcc), do braço de alavanca
do torsiômetro e o seno do ângulo de torque (Sen 53,17°).
O torque no torsiômetro foi obtido pela Equação 25 do item 4.1, e
comparado com o torque real. Houve proximidade entre as duas retas de torque (real e
calculado), mostrando que a equação utilizada está correta.
4.5 Resultados dos ensaios preliminares
4.5.1 Deformação vertical dos pneus traseiros
Foi possível determinar o raio dinâmico, considerando a
transferência de massa para os rodados traseiros e a partir da quantificação da deformação
do pneu obtida nos ensaios com a prensa hidráulica. O comportamento da deformação do
pneu sobre superfície rígida, para a pressão utilizada (124,1 kPa) foi linear, conforme o ajuste
da regressão e equação vistas na Figura 37, considerando a carga sobre apenas um pneu
(individual).
Torque real = torque aplicado na roda com macaco hidráulico.Torque calculado = torque obtido a partir da Equação 25.
0
1000
2000
3000
4000
5000
6000
7000
0 2 4 6 8 10 12 14 16 18 20
Torq
ue
(Nm
)
Força no macaco hidráulico (kN)
Torque calculado Torque real

70
Figura 37. Deformação vertical em função da carga atuante sobre o pneu (individual) para
pressão de insuflagem de 124,1 kPa.
Na Tabela 13 observa-se os valores referente à massa dinâmica
traseira, total (nos dois pneus) e individual (apenas um pneu); a deformação obtida conforme
a equação de regressão; e o raio dinâmico utilizado para o cálculo da tração bruta. Os
resultados mostram uma baixa deformação do pneu e uma pequena alteração no raio
dinâmico. Mazetto et al. (2004), também observou que os pneus convencionais (diagonais)
possuem pouca deformação elástica.
Tabela 13. Massa dinâmica traseira, deformação, e raio dinâmico dos rodados em função da
tração líquida.
Tração líquida
(kN)
Massa dinâmica
traseira (kN)*
Massa dinâmica
traseira individual (kN)
Deformação
(mm)**
raio dinâ-
mico
(m)
4 29,89 14,95 47,46 0,81
8 30,62 15,31 48,43 0,81
12 31,36 15,68 49,41 0,81
16 32,09 16,05 50,39 0,81
20 32,81 16,41 51,34 0,80
24 33,62 16,81 52,42 0,80
28 34,32 17,16 53,34 0,80
30 34,91 17,46 54,14 0,80 *Calculada em função da massa estática traseira, da tração líquida, da altura da barra de tração e da distância entre eixos (Equação 3);** Deformação em relação ao raio estático sem carga = 856 mm (0,86 m).
y = 2,6621x + 7,668R² = 0,9949
0
10
20
30
40
50
60
70
80
90
100
0 2 4 6 8 10 12 14 16 18 20 22 24 26 28
Def
orm
açã
o v
erti
cal (
mm
)
Carga vertical individual (kN)
124,1 kPa

71
Comparando o raio sem carga (0,86 m), e o raio estático carregado
(0,81 m), observa-se que a diferença entre ambos fica próxima a 6%, concordando com o
valor citado por Zoz e Grisso (2003).
4.5.2 Ensaio dinamométrico via TDP
Na Figura 38 tem-se as curvas de torque, potência e consumo horário
obtidas em ensaio dinamométrico do trator mediante uso da TDP na configuração 540 rpm.
Figura 38. Curvas de consumo, potência e torque na TDP obtidas nos ensaios
dinamométricos.
A potência máxima na TDP foi de 71 kW a 2200 rpm e a potência
na rotação nominal (2300 rpm) foi de 65,7 kW. Os valores equivalentes para o motor, foram
calculados levando-se em consideração um aumento de 13% para compensar as perdas na
transmissão, conforme ASAE EP496.2 (2003b) mostrado na Figura 12. O torque máximo
no motor foi de 461 Nm na rotação de 1400 rpm, indicando que nesta condição, o torque nos
eixos motrizes também será maior e consequentemente, maior será a capacidade de tração.
A potência máxima equivalente do motor (81,6 kW @ 2200 rpm) ficou abaixo da potência
de catálogo, indicada como 89 kW (121 cv). A curva de torque e potência foi utilizada para
cálculos teóricos no tópico a seguir.
0
200
400
600
800
1000
1200
1400
1600
1800
0
10
20
30
40
50
60
70
80
1400 1600 1800 2000 2200 2400To
rqu
e n
a TD
P (
Nm
)
Po
tên
cia
na
TDP
(kW
)C
on
sum
o h
orá
rio
(L
h-1
)
rotação no motor (rpm)
Potência (kW) Consumo horário (L/h) Torque (Nm)

72
4.5.3 Relação de transmissão e tração bruta e líquida teórica do trator
Como descrito no item material e métodos, a relação de transmissão
foi determinada para estimar a transferência de torque até os eixos, e consequentemente a
tração bruta nos rodados e tração líquida na barra de tração. Na Tabela 14 estão tabulados os
valores encontrados nas relações de transmissão para as quatro marchas avaliadas no trator,
entre a TDP e os eixos motrizes, e entre o motor e os eixos motrizes, além das velocidades
teóricas do trator na rotação nominal. Vale ressaltar que as velocidades teóricas estão de
acordo com os valores fornecidos pelo fabricante.
Tabela 14. Relação de transmissão e velocidade teórica para as marchas avaliadas.
TDP - Tomada de potência; RT – roda traseira; RD – roda dianteira;
A norma EP496.2 da ASAE (2003b), estima que a potência nos eixos
motrizes pode variar entre 4 a 6% a menos que a potência encontrada na TDP. Considerando
tratar-se de uma transmissão mecânica (sem patinagem das engrenagens), a perda de torque
é equivalente à perda de potência, ou seja, cerca de 5%. Para estimar o torque no eixo e a
tração líquida, adotou-se uma eficiência média de 95% entre os resultados encontrados na
TDP e os valores teóricos nos eixos motrizes, e uma resistência ao rolamento de 2% em
relação à massa total.
Como é observado na Tabela 15, o trator possui os valores de tração
bruta e líquida teóricos, mais altos para as marchas de menor velocidade, e que são limitados
em função do coeficiente de tração máximo. Nestes casos, a tração bruta e também a tração
líquida, ficam limitadas a máxima aderência que os rodados irão ter sobre a superfície de
apoio.
Marcha Relação de transmissão (i) Velocidade teórica
km h-1 @ 2300 rpm
TDP/RT TDP/RD Motor/RT Motor/RD RD/RT RT RD
B1 37,71 27,91 149,9 110,9 1,35 4,6 4,6
B2 27,09 19,97 107,7 79,4 1,36 6,4 6,4
C1 23,20 17,14 92,2 68,1 1,35 7,4 7,5
B3 20,46 15,17 81,3 60,3 1,35 8,4 8,5

73
Tabela 15. Relação de transmissão, torque e tração bruta e líquida teórica para as marchas
avaliadas do trator, na rotação nominal do motor.
Torque na TDP @ 2300 rpm = 1085 Nm
Eficiência entre TDP e eixos motrizes = 95%
Marcha i TDP/RT Torque teórico
nos eixos (kN.m) Tração bruta teórica
@ 2300 rpm
Tração líquida teórica
@ 2300 rpm
kN kgf kN kgf
B1 37,71 38,87 48,0 4891 47,1 4796
B2 27,09 27,92 34,5 3514 33,5 3419
C1 23,20 23,91 29,5 3009 28,6 2914
B3 20,46 21,09 26,0 2654 25,1 2559
i – relação de transmissão; TDP – tomada de potência; RT – roda traseira;
4.5.4 Primeiros ensaios de tração e obtenção de torque pelo torsiômetro
Antes de dar início aos ensaios de tração em pista, tomou-se o
cuidado de testar a parte mecânica e eletrônica do protótipo, já montado no trator e na
condição estática em laboratório, sobre superfície de alta aderência (concreto). Através da
barra de tração fez-se o acoplamento do trator de ensaios a outro trator de maior tamanho,
utilizando uma barra metálica que visava travar o conjunto (Figura 39). Com o trator travado
e utilizando-se da menor marcha (A1) e baixa rotação do motor, manteve-se os rodados
patinando durante alguns segundos (velocidade de deslocamento zero), aplicando assim a
máxima carga possível no torsiômetro.
Figura 39. Trator travado com torsiômetro montado, para teste estático de resistência e
funcionalidade executando tração com velocidade de deslocamento zero.

74
Um segundo teste, visando verificar se não haveria alteração na
mobilidade do trator, bem como se haveria necessidade de alguma correção ou adaptação,
foi realizado em campo, em área plana coberta com capim brachiária e com o trator acoplado
através da barra de tração a uma plaina niveladora (Figura 40).
Figura 40. Teste de campo para verificar a mobilidade do trator e funcionalidade da parte
mecânica do torsiômetro.
Figura 41. Histograma da distribuição obtida nas medições de torque no eixo traseiro.
0
10
20
30
40
50
60
70
80
90
100
5000 5250 5500 5750 6000 6250 6500 6750
Nú
mer
o d
e p
on
tos
cole
tad
os
Torque (Nm)

75
Após o segundo teste, foram realizados ensaios de tração
objetivando a coleta de dados, para assim verificar a funcionalidade do conjunto completo
em situações de campo. Na Figura 41, tem-se o histograma da distribuição do número de
pontos coletados para cada faixa de torque. O comportamento do gráfico foi similar com os
resultados publicados por Way (2009) e Thomas (2010).
4.6 Resultados dos ensaios de tração em pista
4.6.1 Fator marcha (velocidade de deslocamento)
Os resultados apresentados foram ajustados por regressões. Dentro
das figuras (gráficos), são apresentadas as equações da regressão, o coeficiente de variação
(CV), o nível de significância, sendo P≥5% representado por “*” e P≥1% representado por
“**”, e por fim, o coeficiente de determinação (R2) que indica o ajuste das regressões (linhas
de tendências). Para o fator marcha, os ensaios foram realizados com a TDA desligada.
4.6.1.1 Torque e potência
A seguir, da Figura 42 até a Figura 44, serão apresentados os
gráficos que representam a linearidade entre o torque obtido no eixo traseiro do trator (TET)
e as variáveis, tração líquida (TL) e tração bruta (TB), que por sua vez foi calculada a partir
do próprio torque. O torque (TET) e a potência no eixo (PET), apresentados ao longo dos
resultados, referem-se ao valor obtido com o torsiômetro no eixo da roda traseira esquerda,
multiplicado por dois, que assim representa o valor das duas rodas motrizes.

76
Figura 42. Tração bruta (TB) e líquida (TL) em função do torque no eixo para marcha B1.
Figura 43. Tração bruta (TB) e líquida (TL) em função do torque no eixo para marcha B2.
y**= 1,2497x - 0,0888CV(%) = 1,38 R² = 0,9999
y**= 1,2669x - 1,2834CV(%)= 0,91 R² = 0,9998
0
5
10
15
20
25
30
35
0 5 10 15 20 25 30
TB e
TL
(kN
)
Torque no eixo (kN.m)
TB (marcha B1) TL (marcha B1)
y** = 1,2495x - 0,0878CV(%) = 1,34 R² = 0,9999
y** = 1,2819x - 1,4732CV(%)= 0,92 R² = 0,9999
0
5
10
15
20
25
30
35
0 5 10 15 20 25 30
TB e
TL
(kN
)
Torque no eixo (kN.m)
TB (marcha B2) TL (marcha B2)

77
Figura 44. Tração bruta (TB) e líquida (TL) em função do torque no eixo para marcha C1.
A partir da observação das três Figuras anteriores, consegue-se
afirmar que a medição do torque no eixo traseiro está dentro do esperado, já que houve
linearidade entre os torques obtidos e as variáveis TL e TB, uma vez que são diretamente
dependentes do torque aplicado ao eixo motriz. Resultados semelhantes foram encontrados
por Shmulevich e Osetinskya (2003), pesquisadores que avaliaram um rodado equipado com
torsiômetro, de forma individual e sobre pista de concreto. A TB foi calculada a partir do
próprio torque, e assim resultou em coeficientes de determinação (R2) igual a 0,9999.
Tabela 16. Valores médios dos tratamentos e obtidos nos ensaios, para tração líquida, tração
bruta e resistência ao rolamento para três marchas.
Marcha TL - Tratamento
(kN)
TL - Real
(kN)
TB
kN
Diferença
TB-TL (kN)
Resistência ao
rolamento (%)
B1 (5 km h-1) 17,75 17,61 18,54 0,94 2,0
B2 (7 km h-1) 17,75 17,54 18,45 0,90 1,9
C1 (8 km h-1) 17,75 17,53 18,27 0,74 1,6
Média geral 17,75 17,56 18,42 0,86 1,8
TL – tração líquida; TB – Tração bruta; RR – Resistência ao rolamento.
A diferença média entre a TB e a TL para as três marchas, foi de 0,86
kN, equivalente a 1,8% da massa total do trator (Tabela 16). Esta diferença representa a
resistência ao rolamento, e está próxima de 2%, valor tido como referência na bibliografia
y** = 1,2501x - 0,0939CV(%) = 1,17 R² = 0,9999
y** = 1,2976x - 1,5354CV(%) = 0,78 R² = 0,9998
0
5
10
15
20
25
30
35
0 5 10 15 20 25 30
TB e
TL
(kN
)
Torque no eixo (kN.m)
TB (marcha C1) TL (marcha C1)

78
(LINARES et al., 2006; MÁRQUES, 2008; e GABRIEL FILHO et al., 2010). As Figuras
45, 46 e 47, mostram o comportamento da potência no eixo (PET) e na barra de tração (PBT)
em função da patinagem dos rodados motrizes.
Figura 45. Potência no eixo traseiro (PET) e na barra de tração (PBT) em função da
patinagem para a marcha B1.
Figura 46. Potência no eixo traseiro (PET) e na barra de tração (PBT) em função da
patinagem para a marcha B2.
Y** = - 0,1907x2 + 5,4989x + 1,8470CV(%)= 1,38 R² = 0,9996
Y** = -0,2070x2 + 5,3756x + 0,5380CV(%)= 1,52 R² = 0,9990
0
5
10
15
20
25
30
35
40
45
0 2 4 6 8 10 12 14 16
PET
e P
BT
(kW
)
Patinagem (%)
PET (marcha B1) PBT (marcha B1)
Y** = -0,3148x2 + 8,3712x + 0,0936CV(%) = 1,20 R² = 0,9967
Y** = -0,3367x2 + 8,2794x - 1,9625CV(%) = 0,92 R² = 0,9949
0
10
20
30
40
50
60
0 2 4 6 8 10 12 14 16
PET
e P
BT
(kW
)
Patinagem (%)
PET (marcha B2) PBT (marcha B2)

79
Figura 47. Potência no eixo traseiro (PET) e na barra de tração (PBT) em função da
patinagem para a marcha C1.
As Figuras que comparam a potência no eixo (PET) e na barra de
tração (PBT) em função da patinagem, apresentam um comportamento em que há um maior
afastamento entre as curvas (com ajuste quadrático), para os valores mais altos de patinagem.
Este afastamento é obtido devido à redução da velocidade de avanço do trator e
consequentemente da redução de potência na barra de tração, conforme relata Márquez
(2012). Como era de se esperar, para as três marchas a potência no eixo foi sempre maior
que a potência na barra de tração, ficando a menor diferença entre os valores das duas curvas,
entre 8 e 9% (eficiência de 91 e 92%) em conformidade com a ASAE EP496.2 (2003b).
4.6.1.2 Coeficiente de tração líquida (CTL)
Uma forma de comparar tratores ou configurações de tratores é a
partir de seu coeficiente de tração, que é determinado a partir da força de tração executada
(TL) e da massa aderente à superfície de apoio. Desta forma, a partir da massa dinâmica e
dos valores dos tratamentos adotados como cargas na barra de tração, de 4, 8, 12, 16, 20, 24,
28 e 30 kN, converteu-se em valores de coeficientes de tração líquida dinâmicos (CTL),
permitindo melhores comparações com dados da bibliografia. Na Figura 48 e Figura 49,
Y** = -0,3784x2 + 9,7204x - 0,2340CV(%) = 1,20 R² = 0,9982
Y** = -0,3998x2 + 9,6242x - 2,5103CV(%) = 0,69 R² = 0,9973
0
10
20
30
40
50
60
70
0 2 4 6 8 10 12 14 16
PET
e P
BT
(kW
)
Patinagem (%)
PET (marcha C1) PBT (marcha C1)

80
estão expostos os gráficos com as regressões que representam o comportamento das
variáveis respostas: potência no eixo traseiro (PET) e potência na barra de tração (PBT).
Figura 48. Potência no eixo traseiro (PET) em função do coeficiente de tração líquida para
as três marchas.
Figura 49. Potência na barra de tração (PBT) em função do coeficiente de tração líquida para
as três marchas.
B1: y** = 46,1478x + 0,3354CV(%) = 1,38 R² = 0,9983
B2: y** = 62,3161x + 1,0128CV(%) = 1,20 R² = 0,9990
C1: y** = -28,0497x3 + 41,8914x2 +52,2845x + 3,6268CV(%) = 1,20 R² = 0,9998
0
10
20
30
40
50
60
70
0,0 0,1 0,2 0,3 0,4 0,5 0,6 0,7 0,8 0,9 1,0
PET
(kW
)
CTL (adimensional)
B1 (5 km/h) B2 (7 km/h) C1 (8 km/h)
B1: y** = 39,9481x + 0,5705CV(%) = 1,52 R² = 0,9941
B2: y** = 56,0308x + 0,5327CV(%) = 0,62 R² = 0,9967
C1: y** = -53,6745x3 + 65,4374x2 + 44,9317x + 1,7050CV(%) = 0,69 R² = 0,9994
0
10
20
30
40
50
60
0,0 0,1 0,2 0,3 0,4 0,5 0,6 0,7 0,8 0,9 1,0
PB
T (
kW)
CTL (adimensional)
B1 (5 km/h) B2 (7 km/h) C1 (8 km/h)

81
A potência no eixo e na barra de tração foi maior conforme o
aumento do coeficiente de tração líquida (CTL), e também aumenta nas marchas de maior
velocidade de deslocamento, com ajuste linear crescente para as marchas B1 e B2, e cúbica
com tendência de redução para a marcha de maior velocidade (C1). Comportamento similar
é encontrado na publicação de Márquez (2012).
4.6.1.3 Eficiência trativa (ET)
A eficiência trativa (ET) será apresentada como variável resposta
em função da patinagem dos rodados motrizes (Pat), do coeficiente de tração líquida
dinâmico (CTL) e do coeficiente de tração bruta (CTB). A equação utilizada foi da ASABE
(2011a): ET=TL/TB.(1-Pat).
A patinagem onde houve detecção dos maiores valores de ET, foi
de 4,3% para as marchas B1 e B2, e de 4,4% para a marcha C1 (Figura 50).
Figura 50. Eficiência trativa para três marchas, em pista de concreto, e em função da
patinagem dos rodados motrizes.
Os valores de patinagem onde se obteve maior ET ficaram dentro
do recomendado pela ASAE EP496.2 (2003b) e ASABE D497.7 (2011b), que é de 4 a 8%,
e concordam com Zoz e Grisso (2003), que apontam maior ET com patinagem entre 4 e 6%
para tratores de pneus sobre pista de concreto.
0,70
0,73
0,76
0,79
0,82
0,85
0,88
0,91
0,94
0 2 4 6 8 10 12 14 16 18
ET (
adim
ensi
on
al)
Patinagem (%)
B1 (5 km/h) B2 (7 km/h) C1 (8 km/h)

82
Quanto ao máximo valor da ET encontrado neste trabalho (0,91),
os resultados foram similares com os valores apresentados nas divulgações da ASAE
(2003b) (0,92 a 0,93) e Zoz e Grisso (2003) (0,91).
Os valores da eficiência trativa máxima, da média geral, e da
respectiva patinagem, não diferiram estatisticamente entre as três marchas utilizadas (Tabela
17). Os resultados são similares com relatos de Gabriel Filho et al. (2010), que utilizando
cálculos a partir de teorias conhecidas (clássicas), não observou diferença significativa da
eficiência trativa em função da alteração das marchas.
Tabela 17. Valores da patinagem, do coeficiente de tração líquida (CTL) e bruta (CTB) na
condição de máxima eficiência trativa, e para média geral, em função da marcha
utilizada.
Valores para eficiência trativa máxima
Marcha CTL CTB Patinagem (%) Eficiência trativa
B1 0,49 0,52 4,3a 0,91a
B2 0,49 0,52 4,3a 0,90a
C1 0,49 0,52 4,4a 0,90a
Valores para média geral
B1 0,53 0,56 6,2a 0,86a
B2 0,53 0,56 6,1a 0,86a
C1 0,53 0,55 6,1a 0,87a
Médias com letras iguais na coluna não diferem entre si pelo teste de Tukey (P > 0,05).
Na Figura 51, observa-se as curvas ajustadas da ET em função do
coeficiente de tração líquida (CTL). Os resultados corroboram com Zoz e Brixius (1979),
que relatam melhores resultados de ET, entre os coeficientes de tração dinâmicos de 0,25 e
0,6 (aproximadamente). Os valores encontrados ficaram próximos do recomendado por Zoz
e Grisso (2003), que apontam como média geral, os picos de ET com o CTL de 0,4.
Para os resultados da ET em função do coeficiente de tração bruta
(CTB) (Figura 52), o ajuste das curvas foi semelhante com os valores obtidos na Figura 51,
compreendendo os melhores resultados entre 0,4 e 0,7 (aproximadamente).

83
Figura 51. Eficiência trativa em função do coeficiente de tração líquida para três marchas.
Figura 52. Eficiência trativa em função do coeficiente de tração bruta para três marchas.
Zoz e Grisso (2003), em sua publicação sobre desempenho de
tratores agrícolas em tração, mostram curvas onde a ET maior, é obtida com o CTB de 0,52;
exatamente no mesmo valor encontrado neste trabalho. A faixa compreendida entre 0,4 e 0,7
B1: y* = -2,1036x4 + 4,5171x3 – 4,1479x2 + 1,8490x + 0,5866CV(%) = 1,38 R² = 0,9988
B2: y** = -6,2009x4 + 13,4798x3 – 10,8843x2 + 3,8731x + 0,3848CV(%) = 1,97 R² = 0,9971
C1: y** = -4,0845x4 +9,2176x3 – 7,8547x2 + 2,9950x + 0,4722CV(%) = 1,20 R² = 0,9969
0,70
0,75
0,80
0,85
0,90
0,95
0,0 0,1 0,2 0,3 0,4 0,5 0,6 0,7 0,8 0,9 1,0
ET (
adim
ensi
on
al)
CTL (adimensional)
B1 (5 km/h) B2 (7 km/h) C1 (8 km/h)
B1: Y** = -3,0189x4 + 6,7684x3 – 6,1362x2 + 2,6339x + 0,4651CV(%)= 1,38 R² = 0,9980
B2: Y** = -8,2192x4 + 18,6159x3 – 15,5964x2 + 5,7312x + 0,1176CV(%)= 2,21 R² = 0,9956
C1: Y** = -4,7901x4 + 11,0007x3 – 9,5441x2 + 3,7146x + 0,3553CV(%)= 1,20 R² = 0,9953
0,70
0,75
0,80
0,85
0,90
0,95
0,0 0,1 0,2 0,3 0,4 0,5 0,6 0,7 0,8 0,9 1,0
ET (
adim
ensi
on
al)
CTB (adimensional)
B1 (5 km/h) B2 (7 km/h) C1 (8 km/h)

84
de CTB, onde se tem as melhores eficiências, também são confirmadas por Zoz e Grisso
(2003).
A potência desenvolvida no eixo traseiro apresentou ajustes nas
curvas (Figura 53) que mostraram maior obtenção de potência para uma mesma rotação do
motor, nas marchas de maior velocidade. As curvas são confirmadas por Márquez (2012), o
qual menciona que em relações mais curtas (menores velocidades) as perdas são maiores.
Zoz e Grisso (2003), também mencionam que marchas superiores apresentam uma maior
produção de potência, seja na entrada do eixo, ou na barra de tração do trator.
A curva de potência no eixo para a marcha C1 (Figura 53) possui um
comportamento com a mesma tendência obtida na curva de potência da TDP, e que já era
esperado, tendo em vista que a maior potência ficou próximo de 2200 rpm.
Figura 53. Potência obtida no eixo traseiro do trator para as três marchas sobre pista de
concreto e com a TDA desligada em função da rotação do motor.
4.6.2 Fator TDA ligada e desligada
Os ensaios realizados em pista de concreto, para o fator tração
dianteira auxiliar (TDA), foram tratados como ligada e desligada, e utilizou-se das mesmas
cargas do fator marcha. Foram realizadas cinco repetições com a marcha B2 (7 km h-1), a
qual é bastante usual em operações agrícolas.
Y** = -0,00099x2 + 4,2809x - 4546,1CV(%) = 1,38 R² = 0,9964
Y** = -0,0006x2 + 2,4579x – 2411,22CV(%) = 1,20 R² = 0,9978
Y** = -0,0019x2 + 8,4939x – 9556,9CV(%) = 1,20 R² = 0,9906
0
10
20
30
40
50
60
70
2250 2300 2350 2400 2450
PET
(kW
)
Rotação do motor (rpm)
B1 (5 km/h) B2 (7 km/h) C1 (8 km/h)

85
4.6.2.1 Torque e potência
Avaliando o torque e a potência no eixo traseiro, através da
observação da Figura 54 e Figura 55, fica nítida a redução da demanda de esforço no eixo
traseiro para a condição onde houve o uso da TDA (C-TDA).
Figura 54. Torque no eixo traseiro do trator em função da tração líquida (TL), para a
condição de TDA ligada (C-TDA) e desligada (S-TDA) com a marcha B2.
Figura 55. Potência no eixo traseiro do trator em função da tração líquida (TL), para a
condição de TDA ligada (C-TDA) e desligada (S-TDA) com a marcha B2.
Y** = 0,5897x - 1,7337CV(%)= 3,06 R² = 0,990
Y** = 0,7797x + 1,1547CV(%) = 1,34 R² = 0,9999
0
5
10
15
20
25
30
0 2 4 6 8 10 12 14 16 18 20 22 24 26 28 30 32
Torq
ue
no
eix
o (
kN.m
)
TL (kN)
Marcha B2 C-TDA Marcha B2 S-TDA
Y** = 1,3234x - 3,5538CV(%) = 3,05 R² = 0,9920
Y** = 1,7369x + 3,4946CV(%) = 1,20 R² = 0,9995
0
10
20
30
40
50
60
0 2 4 6 8 10 12 14 16 18 20 22 24 26 28 30 32
Po
tên
cia
no
eix
o (
kW)
TL (kN)
Marcha B2 C-TDA Marcha B2 S-TDA

86
A diferença de torque e potência entre as duas condições (com e sem
uso da TDA), está associada evidentemente, ao uso do eixo dianteiro para auxiliar na
execução da tração líquida (TL). Conforme Yanai et al. (1999), nessa condição o trator
divide o esforço tratório em seus dois eixos motrizes. As variáveis torque e potência no eixo,
mostraram ajuste linear em relação à tração líquida (TL).
Comparando o torque no eixo traseiro, entre as duas situações (TDA
ligada e desligada), é possível verificar, como demonstrado na Tabela 18, as reduções
percentuais da demanda de torque no eixo traseiro para executar a TL imposta à barra de
tração.
Tabela 18. Torques obtidos no eixo traseiro do trator (TET) em função da tração líquida (TL)
e da tração dianteira auxiliar (TDA) ligada (C-TDA) e desligada (S-TDA) e
redução percentual do torque obtido com a TDA ligada para a marcha B2.
TL S-TDA TL C-TDA TET S-TDA TET C-TDA Redução de TET
(kN) (kN) (kN.m)1 (kN.m)2 C-TDA (%)*
4,0 3,9 4,25 1,23 71,2
7,9 7,9 7,19 3,10 56,9
11,8 11,8 10,36 4,88 52,9
15,7 15,7 13,38 7,19 46,3
19,6 19,6 16,62 8,85 46,7
23,6 23,6 19,59 12,05 38,5
27,6 27,5 22,58 14,58 35,4
30,2 30,5 24,69 16,98 31,2
* Redução do torque no eixo traseiro (TET) com a TDA ligada (C-TDA) = (1 - 2/1) x 100
Nas cargas menores (TL menor) abaixo de 16 kN, observa-se uma
redução do torque aplicado à roda traseira, maior que 50% (Figura 56), ou seja, mais da
metade do torque necessário para fazer a TL está sendo fornecido pelas rodas dianteiras.
Esse comportamento se deve ao avanço cinemático das rodas dianteiras, que nesta condição
era equivalente a 1,5%, e portanto, possuem velocidade periférica dos rodados 1,5% maior
que as rodas traseiras. Já nas cargas maiores, o percentual de torque passa a ser maior nas
rodas traseiras, equivalendo a cerca de 70% para a maior carga (30 kN).

87
Figura 56. Redução do torque no eixo traseiro em função da tração líquida, utilizando a TDA
ligada, comparativamente ao torque com a TDA desligada.
4.6.3 Fator superfície trativa
Ao realizar um comparativo entre as duas superfícies trativas (de
apoio) que foram avaliadas, pista de concreto e de solo firme, observa-se nos resultados
expressos nos gráficos (Figura 57 e Figura 58), que o torque e a potência no eixo traseiro em
função da tração líquida na barra de tração, foi maior em solo firme do que em concreto e
ambas as curvas com ajuste linear crescente. Esse resultado se deve ao fato de haver uma
maior resistência ao rolamento na condição de solo firme, conforme indica Zoz e Grisso
(2003); Linares et al. (2006); e Gabriel Filho et al. (2010), demandando assim, maiores
potências para manutenção da mesma carga na barra de tração.
y = -1,3378x + 70,849R² = 0,9411
0
10
20
30
40
50
60
70
80
0 4 8 12 16 20 24 28 32
Red
uçã
o d
e to
rqu
e (%
)
Tração líquida (kN)
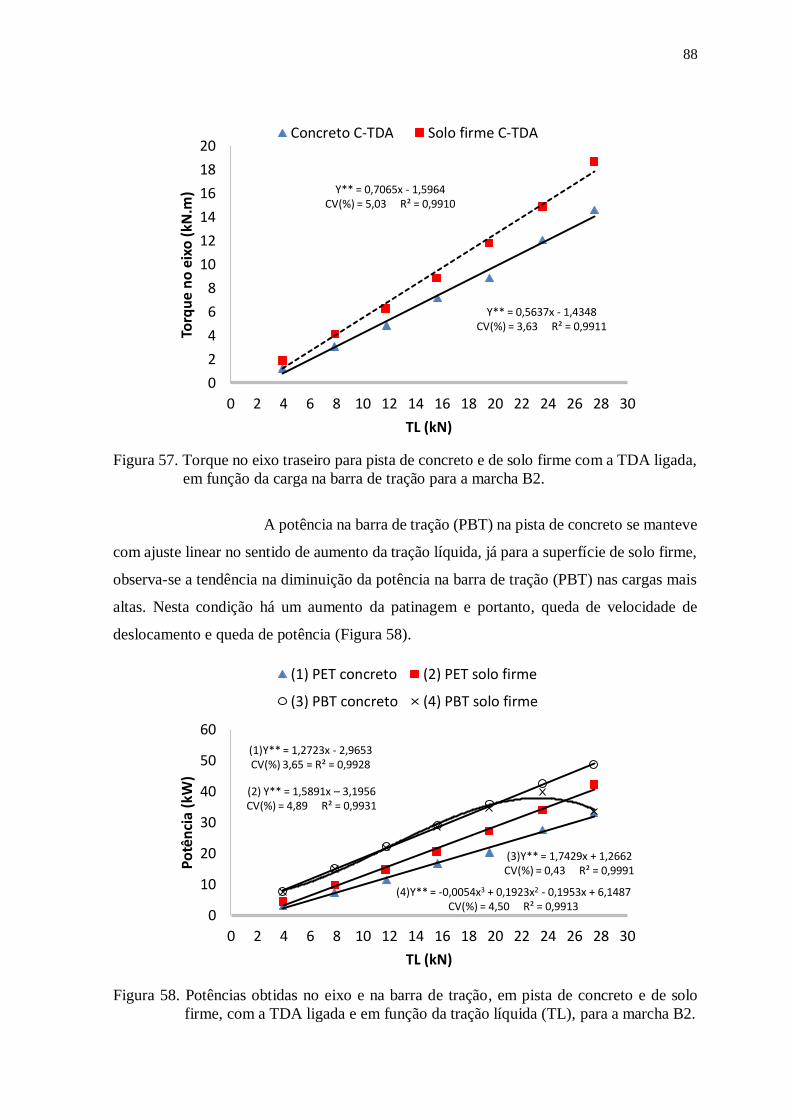
88
Figura 57. Torque no eixo traseiro para pista de concreto e de solo firme com a TDA ligada,
em função da carga na barra de tração para a marcha B2.
A potência na barra de tração (PBT) na pista de concreto se manteve
com ajuste linear no sentido de aumento da tração líquida, já para a superfície de solo firme,
observa-se a tendência na diminuição da potência na barra de tração (PBT) nas cargas mais
altas. Nesta condição há um aumento da patinagem e portanto, queda de velocidade de
deslocamento e queda de potência (Figura 58).
Figura 58. Potências obtidas no eixo e na barra de tração, em pista de concreto e de solo
firme, com a TDA ligada e em função da tração líquida (TL), para a marcha B2.
Y** = 0,5637x - 1,4348CV(%) = 3,63 R² = 0,9911
Y** = 0,7065x - 1,5964CV(%) = 5,03 R² = 0,9910
0
2
4
6
8
10
12
14
16
18
20
0 2 4 6 8 10 12 14 16 18 20 22 24 26 28 30
Torq
ue
no
eix
o (
kN.m
)
TL (kN)
Concreto C-TDA Solo firme C-TDA
(1)Y** = 1,2723x - 2,9653CV(%) 3,65 = R² = 0,9928
(2) Y** = 1,5891x – 3,1956CV(%) = 4,89 R² = 0,9931
(3)Y** = 1,7429x + 1,2662CV(%) = 0,43 R² = 0,9991
(4)Y** = -0,0054x3 + 0,1923x2 - 0,1953x + 6,1487CV(%) = 4,50 R² = 0,9913
0
10
20
30
40
50
60
0 2 4 6 8 10 12 14 16 18 20 22 24 26 28 30
Po
tên
cia
(kW
)
TL (kN)
(1) PET concreto (2) PET solo firme
(3) PBT concreto (4) PBT solo firme

89
4.6.4 Máximas potências e eficiência
Ao longo dos ensaios, preliminares e de tração para validação,
determinou-se as máximas potências na TDP, no eixo traseiro e na barra de tração. Além das
três marchas avaliadas anteriormente, foi incluída em ensaio a marcha B3, de maior
velocidade (9 km h-1), a fim de explorar uma faixa de rotação do motor que desenvolvesse
maior potência. Os resultados de máximas potências estão na Tabela 19.
Tabela 19. Máximas potências encontradas, na TDP (PTDP), no eixo traseiro (PET) e na
barra de tração (PBT) para quatro marchas.
Marcha
B1 B2 C1 B3
-------------------------------------------- S-TDA --------------------------------------------
PTDP (kW) 71,0
PET (kW) 41,2 55,6 62,2 67,2
PBT (kW) 34,1 47,5 54,5 58,1
-------------------------------------------- C-TDA --------------------------------------------
B1 B2 C1 B3
PTDP (kW) 71,0
PET (kW) 28,3 38,2 44,3 43,6
PBT (kW) 38,2 52,8 59,6 61,9
S-TDA: Sem tração dianteira (desligada); C-TDA: Com tração dianteira (ligada).
A partir dos valores de máxima potência, permite-se comparar e
calcular a eficiência entre a TDP, eixo traseiro e a barra de tração. Os resultados encontrados
(Tabela 20) são confirmados pela ASAE (2003b) e ASABE (2011a), mostrando que as
condições dos ensaios (Material e métodos) foram adequadas aos objetivos propostos.
Tabela 20. Máximas eficiências encontradas, considerando as máximas potências obtidas na
tomada de potência (PTDP), no eixo traseiro (PET), e na barra de tração (PBT).
PET/PTDP PBT/PET PBT/PTDP
0,95 0,92 0,88
Os resultados obtidos permitiram a validação do torsiômetro para
medição de torque e potência. Para explorar melhor as potencialidades do equipamento em
trabalhos futuros, recomenda-se a avaliação de diferentes tipos e pressões de inflação de
pneus, diferentes variações do avanço cinemático das rodas dianteiras, um número maior de
marchas, diferentes rotações de arranque do motor, ensaios em solo mobilizado e com

90
cobertura vegetal, ensaios em superfícies com diferentes declividades (lateral e
longitudinal), e alterações na lastragem do trator.
Recomenda-se ainda, a avaliação da demanda de torque e eficiência
trativa, em operações de campo, comparando sistemas tracionados pelos três pontos do trator
e pela barra de tração, podendo também, variar a altura da barra de tração. O
desenvolvimento de um torsiômetro para uso nas rodas dianteiras também é recomendado,
permitindo a obtenção de dados de forma mais completa.
O uso do torsiômetro em outros tratores é possível, desde que se
façam adaptações adequadas para o acoplamento entre o eixo e a roda, e não seja utilizado
em tratores de mais de 90 kW ou com massa total maior que 60 kN. Tratores de diferentes
tamanhos e diferentes tipos de transmissão poderão ser ensaiados, no intuito de entender
melhor o comportamento destes e suas respectivas transmissões quando submetidos à tração.

91
CONCLUSÕES
O projeto foi adequado, o protótipo mostrou-se funcional e o custo
ficou abaixo dos equipamentos disponíveis no mercado e que são possíveis de serem
adaptados em eixos motrizes de tratores agrícolas.
Observou-se linearidade entre o torque obtido no eixo motriz traseiro
e a tração líquida. A tração bruta apresentou comportamento dentro do esperado,
apresentando valor médio 1,8% superior à tração líquida.
A máxima eficiência trativa foi de 91%, em condição de pista de
concreto, com 4,3% de patinagem e coeficiente de tração líquida de 0,49. Não houve
diferença significativa entre as marchas ensaiadas para a eficiência trativa.
A distribuição de torque entre os eixos depende da carga na barra de
tração (tração líquida -TL). Na carga mais alta, a distribuição de torque foi de
aproximadamente 70% para o eixo traseiro e de 30% no eixo dianteiro.
Houve maior demanda de torque nos eixos motrizes para superfície
de solo firme, quando comparada com pista de concreto.
A relação entre as máximas potências encontradas (eficiência) foi de
95% entre a potência no eixo traseiro e a potência na TDP, 92% entre a potência na barra de
tração e a potência no eixo traseiro, e 88% entre a potência na barra de tração e a potência
na TDP.
Os resultados dos ensaios se enquadram dentro de valores tidos
como referência, e portanto, torna o torsiômetro válido, destacando que é possível utilizá-lo
para a avaliação de tratores agrícolas nas mais diversas condições operacionais.

92
REFERÊNCIAS BIBLIOGRÁFICAS
ACUNA, R. R. D. et al. Comparação do coeficiente de tração e da eficiência tratória de um
trator agrícola obtidos pela equação de Wismer e Luth e por ensaios de campo. Pesquisa
agropecuária brasileira, Brasília, DF, v. 30, n. 4, p. 523-530, abr. 1995.
ALBIERO, D.; MACIEL, A. J. S.; GAMERO, C. A. Desenvolvimento e projeto de
colhedora de babaçu (Orbignya phalerata Mart.) para agricultura familiar nas regiões de
matas de transição da Amazônia. Acta Amazonica, Manaus, v. 41 n. 1, p. 57-68, mar./maio,
2011.
ALONÇO, A. S. et al. Avaliação técnica de uma máquina para a correção de microrrelevo
do solo de áreas destinadas ao cultivo de arroz irrigado. Ciência Rural, Santa Maria, v.36,
n.5, set./out., 2006.
AMERICAN SOCIETY OF AGRICULTURAL AND BIOLOGICAL ENGINEERS.
ASAE D497.7: agricultural machinery management data. In: ______. ASAE Standards. St.
Joseph, 2011a. 8 p.
AMERICAN SOCIETY OF AGRICULTURAL AND BIOLOGICAL ENGINEERS.
ASAE EP496.3: agricultural machinery management. In: ______. ASAE Standards. St.
Joseph, 2011b. 7 p.
AMERICAN SOCIETY OF AGRICULTURAL ENGINEERS. ASAE D497.4: agricultural
machinery management data. In:______. ASAE Standards. St. Joseph, 1999. p. 359-366.
AMERICAN SOCIETY OF AGRICULTURAL ENGINEERS. ASAE D497.4: agricultural
machinery management data. In:______. ASAE Standards. St. Joseph, 2003a. p. 372-380.
AMERICAN SOCIETY OF AGRICULTURAL ENGINEERS. ASAE EP496.2:
agricultural machinery management. In: ______. ASAE Standards. St. Joseph, 2003b. p.
366-372.
ASSOCIAÇÃO BRASILEIRA DE NORMAS TÉCNICAS. ABNT Catálogo: ABNT NBR
ISO 789-1:2014 - Tratores agrícolas - Procedimentos de ensaio
Parte 1: Ensaios de potência para a tomada de potência. 2014a. Disponível em:
<http://www.abntcatalogo.com.br/norma.aspx?ID=311074>. Acesso em: 30 mar. 2014.
ASSOCIAÇÃO BRASILEIRA DE NORMAS TÉCNICAS. ABNT Catálogo: ISO 789-
7:1991 - Agricultural tractors -- Test procedures-- Part 7: Axle power determination. 2014b.
Disponível em: <http://www.abntcatalogo.com.br/norma.aspx?ID=16105>. Acesso em: 27
fev. 2014.
ASSOCIAÇÃO BRASILEIRA DE NORMAS TÉCNICAS. NBR 13400: tratores agrícolas:
determinação do desempenho na tomada de potência: método de ensaio. Rio de Janeiro,
1995. 7 p.
ASSOCIAÇÃO BRASILEIRA DE NORMAS TÉCNICAS. NBR 7811: tratores agrícolas:
características e posição da barra de tração: método de ensaio. Rio de Janeiro, 1993. 3 p.

93
ASSOCIAÇÃO BRASILEIRA DE NORMAS TÉCNICAS. NBR ISO 1585: veículos
rodoviários: código de ensaio de motores: potência líquida efetiva. Rio de Janeiro, 1996. 26
p.
ASSOCIAÇÃO BRASILEIRA DE NORMAS TÉCNICAS. NBR ISO 730: tratores
agrícolas de rodas: engate traseiro de três pontos: categorias 1 N, 1, 2 N, 2, 3 N, 3, 4 N e 4.
Rio de Janeiro, 2011. 16 p.
ASSOCIAÇÃO BRASILEIRA DE NORMAS TÉCNICAS. Normalização. São Paulo,
2013. Disponível em: <http://www.abnt.org.br/m3.asp?cod_pagina=931>. Acesso em: 11
mar. 2013.
ASSOCIAÇÃO LATINO AMERICANA DE PNEUS E AROS. Livro de normas técnicas.
São Paulo, 1994. 108 p.
BACK, N. et al. Projeto integrado de produtos: planejamento, concepção e modelagem.
Barueri: Manole, 2008. 601 p.
BALASTREIRE, L. A. Máquinas agrícolas. São Paulo: Manole, 1990. 307 p.
BARBOSA, R. L. et al. Desempenho comparativo de um motor de ciclo diesel utilizando
diesel e misturas de biodiesel. Ciência e Agrotecnologia, Lavras, v. 32, n. 5, p. 1588-1593,
set./out. 2008.
BEKKER, M. G. Off-the-road locomotion: the mechanics of vehicle mobility. Ann Arbor:
The Univ. Michigan Press, 1969. 220 p.
BOWERS, W. Matching equipment to big tractors for efficient field-operations. In: ASAE
INTERNATIONAL MEETING, 1978, Logan - Utah. ASAE Paper, 78-1034... Logan: Utah
State University, 1978. p. 1-8.
BRIXIUS, W. W. Traction prediction equations for bias ply tires. ASAE Paper. St. Joseph,
n. 87-1622, p. 1-9, 1987.
CASTELLANELLI, M. et al. Desempenho de motor ciclo diesel em bancada dinamométrica
utilizando misturas diesel/biodiesel. Engenharia Agrícola, Jaboticabal, v. 28, n. 1, p. 145-
153, jan./mar. 2008.
CENTRO NACIONAL DE ENGENHARIA AGRÍCOLA. Ensaio CENEA. Sorocaba:
Ministério da Agricultura/CENEA, 1985.
CORDEIRO, M. A. L. Desempenho de um trator agrícola em função do pneu, da
lastragem e da velocidade de deslocamento. 2000. 153 f. Tese (Doutorado em
Agronomia)- Universidade Estadual Paulista, Botucatu, 2000.
CORRÊA, I. M. et al. Técnicas de determinação da patinagem das rodas motrizes de
tratores agrícolas. Campinas: Instituto Agronômico, 1999. 15 p. (Boletim Técnico, 179).
CORTEZ, J. W. et al. Desempenho do trator agrícola no manejo da cultura de cobertura e

94
pressão de inflação do pneu da semeadora. Engenharia Agrícola, Jaboticabal, v. 29, n. 1,
p. 72-80, jan./mar. 2009.
CULSHAW, D. Tractor performance testing on axle dynamometers: choice of torque
settings and interpretation of results. Journal of Terramechanics, Oxford, v. 25, n. 2, p.
103-110, 1988.
DWYER, M. J; HEIGHO, D. P. The Tractive Performance of Some Large Tractor Drive
Wheel Tyres compared with Dual Wheels. Journal Agricultural Engineering Research,
Silsoe-Bedfordshire, v. 29, p. 43-50, 1984.
ELWALEED, A. K. et al. Net traction ratio prediction for high-lug agricultural tyre.
Journal of Terramechanics, Oxford, v. 43, p. 119-139, 2006.
EMBRAPA. Centro Nacional de Pesquisa de Solos. Sistema brasileiro de classificação de
solos. Rio de Janeiro: Embrapa, 1999. 412 p.
FERREIRA, M. Reserva de torque. Cultivar Máquinas, Pelotas, n. 4, p. 5-5, jul./ago. 2001.
FIORESE, D. A. et al. Desempenho de um motor de trator agrícola em bancada
dinamométrica com biodiesel de óleo de frango e misturas binárias com óleo diesel. Ciência
Rural, Santa Maria, v. 42, n. 4, p. 660-666, abr. 2012.
FIORESE, D. A. et al. Rotação de trabalho. Agriworld, Bragança Paulista, v. 4, n. 11, p. 32-
39, jan./mar. 2013.
FRABETTI, D. R. et al. Desenvolvimento e avaliação do desempenho de uma semeadora
puncionadora para plantio direto de milho. Revista Brasileira de Engenharia Agrícola e
Ambiental, Campina Grande, v. 15, n. 2, p. 199-204, 2011.
GABRIEL FILHO, A. et al. Desempenho de trator agrícola em três superfícies de solo e
quatro velocidades de deslocamento. Engenharia Agrícola e Ambiental, Campina Grande,
v. 14, n. 3, p. 333-339, 2010.
GABRIEL FILHO, A. et al. Desempenho de um trator operando em solo com diferentes
tipos de cobertura vegetal. Engenharia Agrícola, Jaboticabal, v. 24, n. 3, p. 781-789,
set./dez 2004.
GABRIEL FILHO, A. et al. UMEB: Unidade Móvel Para Ensaio da Barra de Tração.
Engenharia Agrícola, Jaboticabal, v. 28, n. 4, p. 782-789, out./dez. 2008.
GAMERO, C. A.; LANÇAS, K. P. Ensaio e certificação das máquinas de mobilização
periódica do solo. In: MIALHE, L. G. Máquinas agrícolas: ensaio e certificação.
Piracicaba: CNPq-PADCT/TIB FEALQ, 1996. p. 463-514.
GARCIA, O.; BRUNETTI, F. Motores de combustão interna. 2. ed. São Paulo: 1992. 367
p.
GARCIANO, L. O.; UPADHYAYA, S. K.; JONES, R. A. Measurement of soil parameters

95
useful in predicting tractive ability of off-road vehicles using an instrumented portable
device. Journal of Terramechanics, Oxford, v. 47, p. 295-305, jul. 2010.
GEE-CLOUGH, D.; MCALLISTER, M.; EVERNDEN, D. W. Tractive performance of
drive tyres. Journal of Agricultural Engineering Research, London, v. 22, n. 4, p. 373-
404, 1977.
GERDAU. Manual de aços. São Paulo: Gerdau, 2003. 107 p.
GOODYEAR. Pneus agrícolas. Goodyear: São Paulo, 2004. 1 CD-ROM.
INTERNATIONAL ORGANIZATION FOR STANDARDIZATION. ISO 14396:
reciprocating internal combustion engines: determination and method for the measurement
of engine power. Genebra, 2002. Disponível em:
<http://www.iso.org/iso/home/store/catalogue_tc/catalogue_detail.htm?csnumber=32909>.
Acesso em: 02 out. 2012.
KAWASE, Y. NAKASHIMA, H. OIDA, A. An indoor traction measurement system for
agricultural tires. Journal of Terramechanics, Oxford, n. 43, p. 317-327, 2006.
KHALID, M; SMITH, J. L. Axle torque distributions in 4WD tractors. Journal of
Terramechanics, Oxford, v. 18, n. 3, p. 157-167, 1981.
LANÇAS, K. P. Desempenho operacional de pneus radiais em função da pressão de
inflação, da lastragem e do deslisamento das rodas de tratores agrícolas. 1996. 170 f.
Tese (Livre Docência)-Universidade Estadual Paulista, Botucatu, 1996.
LILJEDAHL, J. B. et al. Tractors and their power units. 4. ed. St. Joseph: ASAE, 1996.
463 p.
LINARES, P. Como entender as transmissões. Revista Cultivar Máquinas, Pelotas, n. 12,
maio/jun., 2002.
LINARES, P.; CATALÁN, H.; MÉNDEZ, V. Teoria de la tracción de tractores agrícolas.
2. ed. Madrid: Universidad Politécnica de Madrid, 2006. 215 p.
LOPES, A. et al. Consumo de combustível de um trator em função do tipo de pneu, da
lastragem e da velocidade de trabalho. Revista Brasileira de Engenharia Agrícola e
Ambiental, Campina Grande, v. 7, n. 2, p. 382-386, maio/ago. 2003.
LOPES, A. et al. Desempenho de um trator em função do tipo de pneu, da lastragem e da
velocidade de trabalho. Ciência Rural, Santa Maria, v. 35, n. 2, p. 366-370, mar./abr. 2005.
MACHADO, P. R. M. Ésteres combustíveis em motor de ciclo diesel sob condições de
pré-aquecimento e variação no avanço de injeção. 2008. 142 f. Tese (Doutorado em
Engenharia Agrícola)-Universidade Federal de Santa Maria, Santa Maria, 2008.
MACMILLAN, R. H. The mechanics of tractor: implement performance. Melbourne:
University of Melbourne, 2002. 165 p.
96
MANTOVANI, E. C.; LEPLATOIS, M.; INAMASSU, R. Y. Automação do processo de
avaliação do desempenho de tratores e implementos em campo. Pesquisa Agropecuária
Brasileira, Brasília, DF, v. 34, n. 7, p. 1241-46, jul. 1999.
MÁRQUES, L. Metodologia para cálculo rápido das dimensões de pneus de tratores
agrícolas. Engenharia Agrícola, Jaboticabal, v. 28, n. 3, p. 590-603, jul./set. 2008.
MÁRQUEZ, L. Curso de tratores agrícolas. Santa Maria: Universidade Federal de Santa
Maria, 2010.
MÁRQUEZ, L. Las transmisiones: el escalonamiento de las marchas. Agrotécnica, Madrid,
n. 10, p. 55-62, 2004.
MÁRQUEZ, L. Las transmissiones: el secreto de las cajas sin escalones (CVT).
Agrotécnica, Madrid, n. 11, p. 35-41, 2004.
MÁRQUEZ, L. Solo Tractor ’90. Madrid: Laboreo, 1990. 194 p.
MÁRQUEZ, L. Tractores Agrícolas: Tecnologias y utilización. Madrid: B&h Editores,
2012. 844 p.
MASIERO, F. C. Determinação do rendimento na barra de tração de tratores agrícolas
com tração dianteira auxiliar (4x2 TDA). 2010. 79 f. Dissertação (Mestrado em
Agronomia/Energia na Agricultura)-Universidade Estadual Paulista, Faculdade de Ciências
Agronômicas, Botucatu, 2010.
MAZETTO, F. R. et al. Avaliação das áreas de contato de pneus agrícolas em função das
cargas e pressões de inflação em superfície rígida. Energia na Agricultura, Botucatu, v.
20, n. 4, p. 20-35, 2005.
MAZETTO, F. R. et al. Avaliação do contato pneu-solo em três modelos de pneus agrícolas.
Engenharia Agrícola, Jaboticabal, v. 24, n. 3, p. 750-757, 2004.
MERCOTAC. Conectores elétricos rotativos. São Paulo: Grupo C+ tecnologia, 2013.
Disponível em: <http://www.ctecnologia.com.br/Download/folder_mercotac.pdf>. Acesso
em 12 fev. 2013.
MIALHE, L. G. Máquinas agrícolas: ensaios e certificações. Piracicaba: CNPq-
PADCT/TIB-FEALQ, 1996. 722 p.
MIALHE, L. G. Máquinas motoras na agricultura. São Paulo: Editora da Universidade
de São Paulo, 1980. v. 2, 367 p.
MISZCZAK, M. A torque evaluation for a rotary subsoiler. Soil & Tillage Research,
Amsterdam, v. 84, p. 175-183, 2005.
NAGAOKA, A. K. Desenvolvimento e avaliação do desempenho de um equipamento
para ensaio dinâmico de rodado agrícola individual. 2001. 209 f. Tese (Doutorado em
Agronomia/Energia na Agricultura) - Universidade Estadual Paulista, Faculdade de Ciências

97
Agronômicas, Botucatu, 2001.
NEUJAR, E. B.; SCHLOSSER, J. F. comportamento de pneus agrícolas radiais e diagonais
em relação à tração. Engenharia Agrícola, Jaboticabal, v. 21, n. 2, p. 180-189, 2001.
NIETIEDT, G. H. et al. Desempenho de motor de injeção direta sob misturas de biodiesel
metílico de soja. Ciência Rural, Santa Maria, v. 41, n. 7, jul. 2011.
NIETO, M. A. et al. Mecânica do automóvel: a revolução do Diesel. Penha: Ed. Século
Futuro Ltda, 1988. 75 p.
ORGANISATION FOR ECONOMIC CO-OPERATION AND DEVELOPMENT. Code 2:
OECD standard code for the official testing of agricultural and forestry tractor performance.
2012. 90 p.
ORTIZ-CAÑAVATE, J. Características técnicas de los tractores agrícolas. Vida Rural,
Lisboa, n. 6, p. 32-34, 1994.
REIS, Â. V.; FORCELLINI, F. A. Functional analysis in the evaluation of four concepts of
planters. Ciência Rural, Santa Maria, v. 32, n. 6, p. 969-975, 2002.
RENIUS, K. T.; VAHLENSIECK, B. Wirkungsgrade stufenloser traktor-fahrantriebe
(Efficiency of Continuously Variable Transmissions (CVT) for tractors). Landtechnik,
Dusseldorf, v. 51, n. 5, p. 248–249, 1996.
RIBAS, R. L. et al. Transmissões presentes em tratores agrícolas no Brasil. Ciência Rural,
Santa Maria, v. 40, n. 10, p. 2206-2209, out. 2010.
ROMANO, L. N. Modelo de referência para o processo de desenvolvimento de
máquinas agrícolas. 2003. 266 f. Tese (Doutorado em Engenharia Mecânica)-Universidade
Federal de Santa Catarina, Florianópolis, 2003.
RUSSINI, A. Estimativa do desempenho de tratores agrícolas em campo e pista a partir
do ensaio dinamométrico. 2012. 142 f. Tese (Doutorado em Engenharia Agrícola)-
Universidade Federal de Santa Maria, Santa Maria, 2012.
RUSSINI, A. Projeto, construção e teste de instrumentação eletrônica para avaliação
do desempenho de tratores agrícolas. 2009. 141 f. Dissertação (Mestrado em Engenharia
Agrícola)-Universidade Federal de Santa Maria, Santa Maria, 2009.
RYU, I. H.; KIM, D. C.; KIM, K. U. Power efficiency characteristics of a tractor drive train.
Transactions of the ASAE, St. Joseph, v. 46, n. 6, p. 1481-1486, 2003.
SANTOS, P. M. et al. Validação de teorias de simulação para operações com escarificadores
em solo argiloso no planalto do Estado do Rio Grande do Sul, Brasil. Ciência Rural, Santa
Maria, v. 41, n.1, p. 120-126, jan. 2011.
SCHLOSSER, J. F. et al. Comportamento de um motor de ignição por compressão
trabalhando com óleo diesel e gás natural. Engenharia Agrícola, Jaboticabal, v. 24, n. 3, p.

98
736-744, set./dez. 2004a.
SCHLOSSER, J. F. Tratores agrícolas: módulo 2. Santa Maria: Universidade Federal de
Santa Maria, 1997. 64 p.
SCHLOSSER, J. F.; LINARES, P.; MÁRQUEZ, L. Influência do avanço cinemático das
rodas dianteiras sobre a eficiência em tração de tratores com quatro rodas motrizes não
isodiamétricas. Ciência Rural, Santa Maria, v. 34, n. 6, p. 1801-1805, nov./dez. 2004b.
SCHLOSSER, J. F.; LINARES, P.; SOUZA FILHO, E. G. S. Desempenho de três teorias
de simulação do comportamento de um trator agrícola em tração. Engenharia Agrícola,
Jaboticabal, v. 24, n. 3, p. 720-726, set./dez. 2004c.
SENATORE, C.; SANDU, C. Torque distribution influence on tractive efficiency and
mobility of off-road wheeled vehicles. Journal of Terramechanics, Oxford, v. 48, p. 372-
383, 2011.
SERRANO, J. M. P. R. Desempenho de tratores agrícolas em tração. Pesquisa
Agropecuária Brasileira, Brasília, DF, v. 42, n. 7, p. 1021-1027, jul. 2007.
SHARMA, A. K.; PANDEY, K. P. Modelling power requirement for traction tyres with zero
sinkage. Journal of Terramechanics, Oxford, v. 34, n. 1, p. 13-21, 1997.
SHINONE, H. et al. Experimental analysis of tread pattern effects on tire tractive
performance on sand using an indoor traction measurement system with forced-slip
mechanism. Engineering in Agriculture, Environment and Food, v. 3, n. 2, p. 61-66,
2010.
SHMULEVICH, I.; OSETINSKY, A. Traction performance of a pushed/pulled drive wheel.
Journal of Terramechanics, Oxford, v. 40, p. 35-50, 2003.
SHMULEVICH, I.; RONAI, D.; WOLF, D. A New Field Single Wheel Tester. Journal of
Terramechanics, Oxford, v. 33, n. 3, p. 133-141, 1996.
SILVEIRA, G. M.; SIERRA, J. G.; CAÑAVATE, J. O. Classificação dos tratores agrícolas
de pneus em função de sua eficiência energética, Engenharia na Agricultura, Viçosa, v.
16, n. 2, p. 208-214, abr./jun. 2008.
SOCIETY OF AUTOMOTIVE ENGINEERS. SAE J1995: engine power test code: spark
ignition and compression ignition: gross power rating. Warrendale, 1995. 14 p.
SORANSO, A. M. Desempenho de um trator agrícola utilizando biodiesel destilado
etílico e metílico. 2006. 68 f. Dissertação (Mestrado em Engenharia Agrícola)-Universidade
Estadual do Paraná, Cascavel, 2006.
SOUZA FILHO, E. G. Avaliação de teorias de predição do comportamento de tratores
agrícolas. 2001. 153 f. Dissertação (Mestrado em Engenharia Agrícola)-Universidade
Federal de Santa Maria, Santa Maria, 2001.

99
STONE, R. Introduction to Internal Combustion Engines. 2nd Ed., New York: Ed. of
SAE, 1999. 574 p.
STORCK, L.; LOPES, S. J.; LÚCIO, D. A. Experimentação II. Santa Maria: Centro de
Ciências Rurais - UFSM, 2004. 205 p.
THOMAS, C. A. K. Análise de veículos para atividades agrícolas por meio do consumo
de combustível e torque na tomada de potência. 2010. 133 f. Tese (Doutorado em
Engenharia)-Universidade Federal do Rio Grande do Sul, Porto Alegre, 2010.
TIWARI, V. K.; PANDEY, K. P.; SHARMA, A. K. Development of a tyre traction testing
facility. Journal of Terramechanics, Oxford, n. 46, p. 293-298, 2009.
UPADHYAYA, S. K. et al. Semi-empirical traction prediction equations based on relevant
soil parameters. Journal of Terramechanics, Oxford, v. 34, n. 3, p. 141-154, 1997.
UPADHYAYA, S. K.; WULFSOHN, D.; GLANCEY, J. L. Development of a Unique,
Mobile, Single Wheel Traction Testing Machine. Transation of the ASAE, St. Joseph, v.
29. n. 5, p. 1243-1246, sep./oct. 1986.
UPADHYAYA, S. K.; WULFSOHN. D.; JUBBAL, G. Traction prediction equations for
radial ply tyres. Journal of Terramechanics, Oxford, v. 26, n. 2, p. 149-175, 1989.
UPADHYAYA, S. K.; WULFSOHN, D.; MEHLSCHAU, J. An instrumented device to
obtain traction related parameters. Journal of Terramechanics, Oxford, v. 30, n. 1, p. 1-20,
1993.
VOLPATO, C. E. S. et al. Projeto de um cortador de base para colhedora de cana-de-açúcar
utilizando otimização matemática. Engenharia Agrícola, Jaboticabal, v. 25, n. 3, p. 758-
767, set./dez. 2005.
WAY, T. R. Three single wheel machines for traction and soil compaction research.
Agricultural Engineering International: the CIGR Ejournal Manuscript, Auburn, v. 11, n.
1534, p. 1-24, Dec. 2009.
WISMER, R. D.; LUTH, H. J. Off-road traction prediction for wheeled vehicles. Journal of
Terramechanics, Oxford, v. 10, n. 1, p. 49-61, 1973.
WISMER, R. D.; LUTH, H. J. Off-road traction prediction for wheeled vehicles.
Transactions of the ASAE, St. Joseph, v. 17, n. 1, p. 8-14, 1974.
WISMER, R. D.; LUTH, H. J. Off-road traction prediction of wheeled vehicles. ASAE
paper, v. 72, n. 619, 15 p., 1972.
WULFSOHN, D; UPADHYAYA, S. K.; CHANCELLOR, W. J. Tractive characteristics of
radial ply and bias ply tyres in a california soil. Journal of Terramechanics, Oxford, v. 25,
n. 2, p. 111-134, 1988.
YAMAKAWA, J.; KOJIMA, A.; WATANABE, K. A method of torque control for
100
independent wheel drive vehicles on rough terrain. Journal of Terramechanics, Oxford, v.
44, p. 371-381, 2007.
YAMAKAWA, J.; WATANABE, A. K. K. A method of torque control for independent
wheel drive vehicles on rough terrain. Journal of Terramechanics, Oxford, v. 43, 269-285,
2006.
YANAI, K. et al. Desempenho operacional de trator com e sem o acionamento da tração
dianteira auxiliar. Pesquisa Agropecuária Brasileira, Brasília, DF, v. 34, n. 8, p. 1427-1434,
ago. 1999.
ZOZ, F. M. Predicting Tractor Field Performance (Updated). WINTER MEETING
AMERICAN SOCIETY OF AGRICULTURAL ENGINEERS. Paper NO. 87-1623...
Chicago: ASAE, 1987. p. 1-16.
ZOZ, F. M. Predicting tractor field performance. ANNUAL MEETING OF THE
AMERICAN SOCIETY OF AGRICULTURAL ENGINEERS. Paper NO. 87-1623…
Minneapolis: ASAE, 1970.
ZOZ, F. M. Predicting tractor field performance. Transactions of the ASAE, St. Joseph, v.
15. n. 2, p. 249-255, 1972.
ZOZ, F. M.; BRIXIUS, W. W. Traction prediction for agricultural tires on concrete.
SUMMER MEETING OF ASAE AND CSAE. PAPER NO., 79-1046…Winnipeg: ASAE,
1979, p. 1-6.
ZOZ, F. M.; GRISSO, R. D. Traction and tractor performance. Louisville: ASAE, 2003.
46 p.

101
APÊNDICE

102
APÊNDICE 1. Desenhos detalhados do eixo principal do torsiômetro.

103
APÊNDICE 2. Desenhos detalhados da flange interna para fixação na roda.
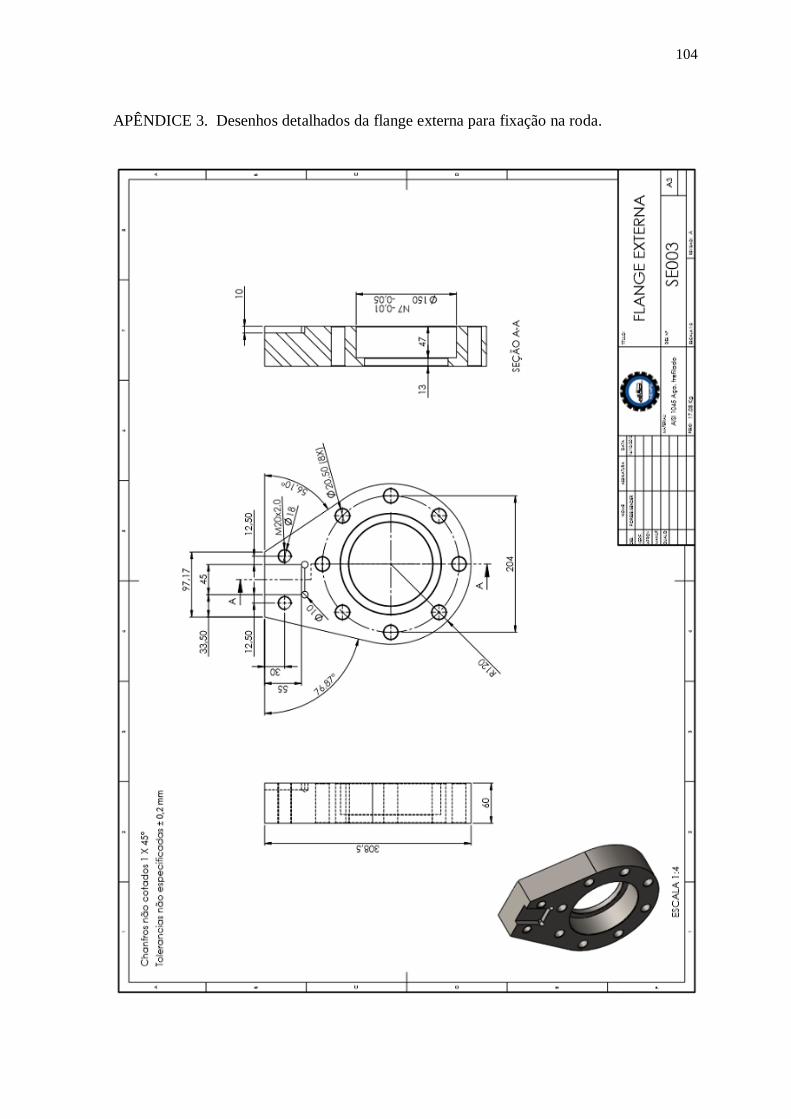
104
APÊNDICE 3. Desenhos detalhados da flange externa para fixação na roda.

105
APÊNDICE 4. Desenhos detalhados do braço de alavanca móvel.

106
APÊNDICE 5. Desenhos detalhados da base para apoio da célula de carga.

107
APÊNDICE 6. Desenhos detalhados da chapa fixadora para transporte.

108
APÊNDICE 7. Desenhos detalhados da porca M80.

109
APÊNDICE 8. Desenhos detalhados da porca M100.

110
APÊNDICE 9. Desenhos detalhados da chapa lateral para suporte da célula de carga.

111
APÊNDICE 10. Desenhos detalhados do braço da flange externa.

112
APÊNDICE 11. Desenhos detalhados do suporte da célula de carga montado.

113
APÊNDICE 12. Desenhos detalhados do torsiômetro, montado e em corte.

114
APÊNDICE 13. Desenhos detalhados em 3D do torsiômetro explodido.

115
APÊNDICE 14. Simulação em software específico para posterior usinagem.

116
APÊNDICE 15. Resultados da simulação da força torcional limite aplicado ao eixo.