universidade estadual paulista - feis.unesp.br · transformador, em curto-circuito e com uma carga...
TRANSCRIPT

UNIVERSIDADE ESTADUAL PAULISTA Campus de Ilha Solteira
Faculdade de Engenharia de Ilha Solteira
Denise Janini Charantola
Representação de Linhas de Transmissão Monofásicas por Meio
de Variáveis de Estado: Comparação das Soluções
Numérica e Analítica
Ilha Solteira (SP) 2007

DENISE JANINI CHARANTOLA
Representação de Linhas de Transmissão Monofásicas por Meio
de Variáveis de Estado: Comparação das Soluções
Numérica e Analítica
Orientador: Prof. Dr. Sérgio Kurokawa
Dissertação apresentada à Faculdade de Engenharia, UNESP – Campus de Ilha Solteira, para obtenção do título de Mestre em Engenharia Elétrica – Área de Conhecimento: Sistemas Elétricos de Potência.
Ilha Solteira (SP) 2007

FICHA CATALOGRÁFICA Elaborada pela Seção Técnica de Aquisição e Tratamento da Informação/Serviço Técnico de Biblioteca e Documentação da UNESP-Ilha Solteira
Charantola, Denise Janini C469r Representação de linhas de transmissão monofásicas por meio de variáveis de estado : comparação das soluções numérica e analítica / Denise Janini Charantola. – Ilha Solteira : [s.n.], 2007 99 p. : il. Dissertação (mestrado) - Universidade Estadual Paulista. Faculdade de Engenharia de Ilha Solteira. Área de conhecimento: Sistemas Elétricos de Potência , 2007 Orientador: Sérgio Kurokawa Bibliografia: p. 97-99 1. Energia elétrica – Transmissão. 2. Equações diferenciais lineares – Soluções numéricas. 3. Equação da diferença. 4. Equações de estado. 5. Homogeneização (Equações diferenciais).


Dedico este trabalho ao meu esposo Humberto Charantola, aos meus pais, José Carlos Janini e Maria Alice Cabral Janini, a minha sogra Lilamar Charantola, aos meus irmãos, cunhados e cunhadas.

Agradecimentos
A vida não é vivida isoladamente. O ser humano, o ser-aí-no-mundo, o ser com
outros, dificilmente realiza algo sozinho, dificilmente concretiza seus sonhos sem uma
companhia. Temos a necessidade de viver com os outros e ser também necessário a ele. Esse
espírito gera compromisso entre pessoas que, embora não formais norteiam nossos afetos e
relacionamentos durante período de tempo, às vezes por toda a vida, compartilhando idéias e
ideais. Assim, este estudo não é só meu. Muitas foram as pessoas que me acompanharam
nessa caminhada, que se envolveram na minha idéia e no meu desejo. Da mais diferentes
maneiras e cada uma a seu modo, cada pessoa que passou pela minha vida está aqui incluída.
Como bem diz o poema.
“Muitas pessoas por minha vida passaram
e comigo suas vidas partilharam…
(…) Assim como amei, fui amada
e assim como tenho um pouco de cada um
um pouco de mim também foi levada.”
A todas pessoas que estiveram comigo e as que permanecem ao meu lado, o meu
agradecimento do fundo do coração.
Especialmente que agradecer:
• Aos meus pais, José Carlos e Maria Alice e a minha sogra Lilamar, a minha
irmã Ana Maria e a minha sobrinha Ana Beatriz, pelo amor incondicional
que dedicam a mim e também por todo incentivo que me dão.

• Ao meu marido, Humberto Charantola, que com paciência e amor me apoiou
nesta empreitada que exige dedicação e tempo.
• Ao meu orientador, pela cordialidade que tratou desse trabalho. O Sérgio
Kurokawa foi impecável na seriedade e no desempenho das tarefas
acadêmicas e seu apoio foi um estímulo e sinal de amizade.
• Aos Professores Afonso José do Prado, Luiz Fernando Bovolato e Dilson
Amâncio Alves, pela disposição para participar da banca, bem como por seus
questionamentos e contribuições na etapa da defasa.
• Aos professores Edison Righetto e Marcelo do Departamento de Matemática,
pelas contribuições imprescindíveis para realização deste trabalho.
• A todos os docentes, funcionários do Departamento de Engenharia Elétrica.
• Aos meus colegas de trabalho, Carolina Goulart de Carvalho, Rodrigo Serra
Daltin, Alessandra Bonato Altran, Elisângela Mansano, Silvio, Daniele,
Rangel, Mariellen, Meire, Elson, Rogério, Mara Lopes.

Os caminhos estão em nós! Toda estrada começa em nós! A felicidade existe a partir de nós! O destino: somos nós… … plenificados!
(JOAMAR Z. NAZARETH)

RESUMO
Este trabalho teve por objetivo realizar um estudo da representação das linhas de
transmissão monofásica por meio de variáveis de estado, utilizando a cascata de circuitos π.
Inicialmente, desenvolveu-se a equação diferencial da linha de transmissão, cujos parâmetros
são uniformemente distribuídos ao longo da linha. Em seguida, realizou-se um estudo
referente ao desenvolvimento das equações de estado para uma linha monofásica,
representada por meio de uma quantidade genérica de circuitos π. Para a resolução dessas
equações de estado, utilizou-se a fórmula de Heun ou regra do trapézio para transformar as
soluções das equações do estado em equações algébricas. Desenvolveu-se uma solução
analítica das equações de estado que representam uma linha monofásica, utilizando o método
da diagonalização que exige a determinação da matriz transformação de similaridade e a
resolução do sistema de equações lineares de primeira ordem desacopladas. São apresentados
resultados referentes à energização de uma linha de transmissão aberta, aberta e com
transformador, em curto-circuito e com uma carga resistiva, utilizando o método numérico e o
método analítico. As simulações foram realizadas no ambiente Matlab e os resultados obtidos
foram comparados com os resultados obtidos com a utilização do aplicativo Microtran.
Palavra chave: Transitórios eletromagnéticos, domínio do tempo, linhas de transmissão,
método analítico, método numérico.

ABSTRACT
The work had as aim to realize a representation learning of the one-phase
transmission lines though of variable of condition, utilizing a π circuits escales. Initially was
developed the diffential equation of the transmission lines whose are parameter uniformly
disposal along the line. Next step were done a learning referring developing of condition
equation was utilized Heun formula or trapeze rule to transform the solution of the
compaction equation in algebrical equation. Was developed a analytical solution of the
condition equation to present a one-phase line utilizing the cornerwise action method that
require the determination of the matrix transformation of the similarity and the formulas of
system resolution unconnected. Are presented results referring the energy action over a open
transition line, open and with a transformer in circuit breaker and with a resistible load,
utilizing a numeric method and the analytical method. The simulation were done in Matlab
environment and the results obtained were compared with the results obtained using a
Microtan method.
Keywords: Electromagnetic transients, time domain, transmission line, analytical method,
numeric method.

LISTA DE FIGURAS
Figura 2.1 – Linha de transmissão de comprimento d.............................................................. 8 Figura 2.2 – Elemento diferencial de uma linha monofásica................................................... 8 Figura 2.3 – Circuito elétrico que representa o elemento diferencial da linha.........................9 Figura 2.4 – Ramo AB do circuito.......................................................................................... 10 Figura 3.1 – Linha de transmissão monofásica de comprimento d.........................................18 Figura 4.1 – Linha com uma carga......................................................................................... 24 Figura 4.2 – Energização da linha com extremidade B aberta............................................... 25 Figura 4.3 – Propagação da tensão, ao longo da linha em aberto, antes da reflexão.............. 26 Figura 4.4 – Distribuição da tensão ao longo da linha em aberto........................................... 26 Figura 4.5 – Propagação da tensão, ao longo da linha em aberto, após da reflexão............... 27 Figura 4.6 – Propagação da corrente, ao longo da linha em aberto, antes da reflexão........... 27 Figura 4.7 – Distribuição da corrente ao longo da linha em aberto........................................ 27 Figura 4.8 – Propagação da corrente, ao longo da linha em aberto, após da reflexão............ 28 Figura 4.9 – Energização da linha em carga igual a Zc...........................................................28 Figura 4.10 – Propagação da tensão, ao longo da linha conectada a uma carga Zc, antes da
reflexão............................................................................................................... 29 Figura 4.11 – Distribuição da tensão ao longo da linha conectada a uma carga Zc................. 29 Figura 4.12 – Propagação da corrente, ao longo da linha conectada a uma carga Zc, antes da
reflexão............................................................................................................... 30 Figura 4.13 – Distribuição da corrente ao longo da linha conectada a uma carga Zc.............. 30 Figura 4.14 – Energização da linha em curto-circuito.............................................................. 31 Figura 4.15 – Propagação da tensão, ao longo da linha em curto-circuito, antes da reflexão.. 31 Figura 4.16 – Distribuição da tensão ao longo da linha em curto-circuito.............................. 32 Figura 4.17 – Propagação da tensão, ao longo da linha em curto-circuito, após da reflexão.. 32 Figura 4.18 – Propagação da corrente, ao longo da linha em curto-circuito, antes da
reflexão............................................................................................................... 32 Figura 4.19 – Distribuição da corrente, ao longo da linha. em curto-circuito.......................... 33 Figura 4.20 – Propagação da corrente, ao longo da linha em curto-circuito, após a reflexão.. 33 Figura 5.1 – Linha representada por meio de uma cascata de n circuitos π........................... 36 Figura 5.2 – Circuito π com efeito da freqüência................................................................... 37 Figura 5.3 – Linha representada por meio de uma cascata de n circuitos π........................... 38 Figura 5.4 – Linha de transmissão monofásica com extremidade B em aberto......................39 Figura 5.5 – Linha representada por meio de um único circuito π......................................... 39 Figura 5.6 – Linha representada por meio de 2 circuitos π.................................................... 42 Figura 5.7 – Linha representada por meio de 3 circuitos π.................................................... 45 Figura 5.8 – Linha de transmissão monofásica com extremidade em curto-circuito............. 52 Figura 5.9 – Linha representada por meio de uma cascata de n circuitos π com
extremidade em curto-circuito............................................................................ 52

Figura 5.10 – Dois últimos circuitos da cascata π que representa a linha em curto-circuito....53 Figura 5.11 – Linha de transmissão monofásica, alimentada uma carga resistiva................... 56 Figura 5.12 – Linha representada por meio de uma cascata de n circuitos π
alimentada por uma carga resistiva..................................................................... 56 Figura 5.13 – Dois últimos circuitos π da cascata que representa uma linha
conectada a uma resistência de valor Zc............................................................. 57 Figura 5.14 – Linha de transmissão monofásica alimentando um transformador em vazio..... 61 Figura 5.15 – Linha representada por meio de uma cascata de n circuitos π
alimentando um transformador em vazio........................................................... 61 Figura 5.16 – Dois últimos circuitos π da cascata que representa uma linha
alimentando um transformador em vazio........................................................... 62 Figura 6.1 – Função y’(t) aproximada por uma função de primeiro grau f(t)........................ 67 Figura 7.1 – Energização da linha em aberto.......................................................................... 80 Figura 7.2 – Tensão no terminal B da linha em aberto, obtida a partir do
modelo numérico................................................................................................ 81 Figura 7.3 – Tensão no terminal B da linha em aberto, obtida a partir do
modelo analítico.................................................................................................. 81 Figura 7.4 – Energização da linha que alimenta um transformador em vazio....................... 82 Figura 7.5 – Tensão no terminal B da linha alimentando um transformador,
obtida a partir do modelo numérico.................................................................... 82 Figura 7.6 – Tensão no terminal B da linha alimentando um transformador,
obtida a partir do modelo analítico..................................................................... 83 Figura 7.7 – Energização da linha em curto-circuito............................................................. 84 Figura 7.8 – Corrente no terminal B da linha alimentando um transformador,
obtida a partir do modelo numérico.................................................................... 84 Figura 7.9 – Corrente no terminal B da linha alimentando um transformador,
obtida a partir do modelo analítico..................................................................... 85 Figura 7.10 – Energização da linha conectada a uma resistência de valor igual a Zc.............. 86 Figura 7.11 – Tensão no terminal B da linha conectada a uma carga Zc,
obtida a partir do modelo numérico................................................................... 86 Figura 7.12 – Tensão no terminal B da linha conectada a uma carga Zc,
obtida a partir do modelo analítico..................................................................... 87 Figura 7.13 – Perfil da distribuição da tensão, ao longo da linha em aberto,
antes da reflexão................................................................................................. 88 Figura 7.14 – Perfil da distribuição da tensão, ao longo da linha em aberto,
após a reflexão.................................................................................................... 88 Figura 7.15 – Energização da linha que alimenta um transformador em vazio........................ 89 Figura 7.16 – Tensão no final da linha, obtido por meio do método numérico,
para h = 0.05µs (curva 1), h = 1µs (curva 2)...................................................... 90 Figura 7.17 – Tensão no final da linha, obtido por meio do método analítico,
para h = 0.05µs (curva 1), h = 1µs (curva 2)...................................................... 90 Figura 7.18 – Tensão no terminal B da linha em aberto, utilizando o modelo proposto
e o Microtran...................................................................................................... 91 Figura 7.19 – Tensão no terminal B da linha em aberto com transformador,
utilizando o modelo proposto e o Microtran...................................................... 92 Figura 7.20 – Corrente no terminal B da linha em curto-circuito, utilizando o
modelo proposto e o Microtran.......................................................................... 92 Figura 7.21 – Tensão no terminal B da linha conectada a uma carga resistiva, utilizando o
modelo proposto e o Microtran.......................................................................... 93

SUMÁRIO
1 INTRODUÇÃO............................................................................................................................................ 1
1.1 ASPECTOS GERAIS DO SISITEMA DE TRANSMISSÃO BRASILEIRO.................................. 1
1.2 MODELOS DE LINHAS DE TRANSMISSÃO...............................................................................3
1.3 MODELOS NUMÉRICOS E MODELOS ANALÍTICOS...............................................................5
2 EQUAÇÕES DIFERENCIAIS DAS LINHAS DE TRANSMISSÃO...................................................... 7
2.1 INTRODUÇÃO................................................................................................................................ 7
2.2 EQUAÇÕES DIFERENCIAIS DE UMA LINHA DE TRANSMISSÃO
MONOFÁSICA ESCRITA NO DOMÍNIO DO TEMPO................................................................7
2.3 EQUAÇÕES DIFERENCIAIS DE UMA LINHA DE TRANSMISSÃO
MONOFÁSICA ESCRITA NO DOMÍNIO DA FREQÜÊNCIA 13
2.4 CONCLUSÃO.................................................................................................................................15
3 SOLUÇÕES DA EQUAÇÕES DIFERENCIAIS DA LINHA DE TRANSMISSÃO........................... 17
3.1 INTRODUÇÃO...............................................................................................................................17
3.2 SOLUÇÕES DAS EQUAÇÕES DIFERENCIAIS NO DOMÍNIO DA FREQÜÊNCIA.............. 17
3.3 EQUAÇÃO DA LINHA NO DOMÍNIO DO TEMPO...................................................................19
3.4 CONCLUSÃO.................................................................................................................................21
4 ANÁLISE QUALITATIVA DA PROPAGAÇÃO DE ONDAS NAS LINHAS DE
TRANSMISSÃO...........................................................................................................................................22
4.1 INTRODUÇÃO...............................................................................................................................22
4.2 EQUAÇÕES DE UMA LINHA DE TRANSMISSÃO NO DOMÍNIO DO TEMPO................... 22
4.3 ANÁLISE DAS CORRENTES E TENSÕES NA LINHA.............................................................24
4.3.1 Energização da linha em aberto.......................................................................................... 25
4.3.2 Energização da linha que alimenta uma carga de valor...................................................... 28
4.3.3 Energização da linha em curto-circuito...............................................................................30
4.4 CONCLUSÃO................................................................................................................................ 33

5 REPRESENTAÇÃO DA LINHA POR MEIO DE VARIÁVEIS DE ESTADO................................... 35
5.1 INTRODUÇÃO...............................................................................................................................35
5.2 REPRESENTAÇÃO DE UMA LINHA POR MEIO DE UMA CASCATA
DE CIRCUITO π........................................................................................................ 36
5.3 DESCRIÇÃO DAS CORRENTES E TENSÕES POR MEIO DE
VARIÁVEIS DE ESTADO..............................................................................................................38
5.3.1 Matrizes de estado para a linha aberta.................................................................................39
5.3.2 Matrizes de estado para a linha em curto-circuito...............................................................52
5.3.3 Matrizes de estado para a linha que alimenta uma carga de valor igual a
sua impedância característica..............................................................................................56
5.3.4 Matrizes de estado para a linha conectada a um transformador em vazio.......................... 61
5.4 CONCLUSÃO................................................................................................................................. 65
6 SOLUÇÃO DAS EQUAÇÕES DE ESTADO........................................................................................... 66
6.1 INTRODUÇÃO...............................................................................................................................66
6.2 RESOLUÇÃO DA EQUAÇÃO DE ESTADO POR MEIO DE MÉTODO NUMÉRICO............ 66
6.3 RESOLUÇÃO DA EQUAÇÃO DE ESTADO POR MEIO DE MÉTODO ANALÍTICO............ 69
6.3.1 Obtenção da solução analítica utilizando o método da diagonalização da matriz A.......... 70
6.3.3 Método dos coeficientes indeterminados............................................................................ 75
6.3.4 Método da variação dos parâmetros....................................................................................77
6.4 CONCLUSÃO.................................................................................................................................78
7 APLICAÇÃO DO MÉTODO PROPOSTO...............................................................................................79
7.1 INTRODUÇÃO...............................................................................................................................79
7.2 DESCRIÇÃO DA LINHA DE TRANSMISSÃO............................................................................79
7.3 ENERGIZAÇÃO DA LINHA EM ABERTO.................................................................................80
7.4 ENERGIZAÇÃO DA LINHA ALIMENTANDO UM TRANSFORMADOR EM VAZIO.......... 82
7.5 ENERGIZAÇÃO DA LINHA EM CURTO-CIRCUITO............................................................... 83
7.6 ENERGIZAÇÃO DA LINHA CONECTADA A UMA CARGA IGUAL A
SUA IMPEDÂNCIA CARACTERÍSTICA.....................................................................................85
7.7 VISUALIZAÇÃO DA PROPAGAÇÃO DE ONDAS DA LINHA................................................87
7.8 ANÁLISE DA SENSIBILIDADE DO MODELO EM RELAÇÃO AO
PASSO DE CÁLCULO....................................................................................................................89
7.9 COMPARAÇÃO DOS RESULTADOS OBTIDOS COM O MODELO PROPOSTO E
COM OS RESULTADOS OBTIDOS COM O MICROTRAN.......................................................91
7.10 CONCLUSÃO..................................................................................................................................93
8 CONCLUSÕES..........................................................................................................................................95
REFERÊNCIAS.......................................................................................................................................97

1
1 INTRODUÇÃO
1.1 ASPECTOS GERAIS DO SISTEMA DE TRANSMISSÃO BRASILEIRO
A primeira linha de transmissão de que se tem registro no Brasil foi construída por
volta de 1883, na cidade de Diamantina, Minas Gerais. Essa linha transportava energia gerada
em uma usina hidroelétrica, constituída de duas rodas d’água e dois dínamos Gramme, a uma
distância de 2 km, aproximadamente. A energia transmitida por meio dessa linha acionava
bombas hidráulicas em uma mina de diamantes. Consta que era a linha mais longa do mundo,
na época. Em 1901, com a entrada em serviço da central Hidroelétrica de Santana do
Parnaíba, a então The San Paulo Tramway Light and Power Co. Ltd. construiu as primeiras
linhas de seus sistemas de 40 kV. Em 1914, com a entrada em serviço da Usina Hidroelétrica
de Utupararanga, a mesma empresa introduziu o padrão 88 kV. Esse padrão de tensão foi, em
seguida, adotado pela Companhia Paulista de Estradas de Ferro, Estrada de Ferro Sorocabana
e, por meio desta, pela USELPA, que futuramente viria a integrar o sistema CESP. Entre 1945
e 1947, construiu-se a primeira linha de 230 kV no Brasil, com um comprimento aproximado
de 330 km. Essa linha, destinada a interligar os sistemas Rio Light e São Paulo Light, operava
inicialmente em 170 kV, passando, em 1950, a operar com 230 kV. Foi também a primeira
interligação de dois importantes sistemas realizada no Brasil. Vieram, a partir daí, em rápida
sucessão, linhas de 230 kV do sistema da Cia. Hidroelétrica de São Francisco, 161 e 345 kV

2
da CEMIG e FURNAS, 460 kV da CESP, as linhas de 500 kV de FURNAS e 800 kV do
sistema Itaipu (FUCHS, 1977).
Atualmente, de acordo com (ONS, 2006), a rede básica de transmissão
compreende tensões entre 230 kV a 750 kV, atinge uma extensão de 80.022 km, engloba 815
circuitos de transmissão, contando com uma capacidade de transformação de 178.447 MVA,
em 321 subestações distribuídas. A Figura 1.1 mostra um esquema do sistema de transmissão
brasileiro (CTEEP, 2006).
Figura 1.1 – Mapa do SIN – Sistema de Transmissão
3
O sistema elétrico brasileiro, mostrado na Figura 1.1, apresenta como
particularidade grandes extensões de linhas de transmissão e um parque produtor de geração
predominantemente hidráulico. O mercado consumidor (47,2 milhões de unidades)
concentra-se nas regiões Sul e Sudeste, as mais industrializadas. A região Norte é atendida de
forma intensiva por pequenas centrais geradoras, a maioria termelétricas, movidas a óleo
diesel (ONS, 2006).
Verifica-se que, no Brasil, grande parte das linhas que constituem o Sistema
Interligado Nacional são linhas de 440 kV, 345 kV, 230 kV, 138 kV (circuito duplo) e 88 kV
(circuito duplo) (CETEEP, 2006).
1.2 MODELOS DE LINHAS DE TRANSMISSÃO
Os modelos de linhas de transmissão de energia elétrica podem ser desenvolvidos
no domínio do tempo ou no domínio da freqüência. No entanto, o sistema elétrico, no qual as
linhas de transmissão estão inseridas, possui diversos elementos cujas características não
permitem que os mesmos sejam representados como sendo elementos lineares, dificultando,
deste modo, a representação do sistema elétrico no domínio da freqüência (MARTI, 1988).
Uma outra vantagem dos modelos que representam a linha diretamente no domínio do tempo
é que os mesmos são facilmente implementados em programas computacionais que realizam
simulações de transitórios eletromagnéticos em sistemas de potência.
Um dos primeiros modelos a representar a linha de transmissão diretamente no
domínio do tempo foi desenvolvido por H. W. Dommel e baseou-se no método das
características ou método de Bergeron e consiste em combinar o método das características
com o método numérico de integração trapezoidal, resultando em um algoritmo que é capaz
de simular transitórios eletromagnéticos em redes cujos parâmetros são discretos ou

4
distribuídos (DOMMEL, 1969). Este algoritmo sofreu sucessivas evoluções e atualmente é
conhecido como EMTP (DOMMEL, 1986).
Em situações em que se deseja simular a propagação de ondas eletromagnéticas
resultantes de operações de manobras e chaveamento realizadas nas linhas de transmissão,
pode-se representar a mesma como sendo uma cascata de circuitos π. Nesse modelo,
considera-se a linha como sendo uma grande quantidade de pequenos segmentos de linha e
que cada um dos pequenos segmentos é representado por um circuito π constituído de
resistores, indutores e capacitores. O efeito da freqüência sobre os parâmetros longitudinais é
sintetizado por meio de uma associação série e paralela de resistores e indutores que resultam
em uma resistência e uma indutância, variáveis em função da freqüência (TAVARES, 1999).
Esse modelo, que é desenvolvido diretamente no domínio do tempo, é então implementado
em softwares do tipo EMTP.
Devido ao fato de que programas do tipo EMTP não são de fácil utilização
(NELMS, 1989) diversos autores (NELMS, 1989; MAMIS, 2002; MAMIS, 2003; MÁCIAS,
2005) sugerem descrever as correntes e tensões na cascata de circuitos π por meio de
variáveis de estado. As equações de estado são então transformadas em equações de
diferenças e podem ser resolvidas utilizando qualquer linguagem computacional.
A representação da linha por meio de variáveis de estado pode ser utilizada no
ensino de conceitos básicos de propagação de ondas em linhas de transmissão (NELMS,
1989), na análise da distribuição de correntes e tensões ao longo da linha (MAMIS, 2002) e
na simulação de transitórios eletromagnéticos em linhas de transmissão que tenham elementos
não lineares (MAMIS, 2003).

5
1.3 MODELOS NUMÉRICOS E MODELOS ANALÍTICOS
Na análise de sistemas de energia elétrica, freqüentemente surge a necessidade de
realizar simulações computacionais, considerando os transitórios eletromagnéticos e também
os transitórios eletromecânicos. Nessas situações, é necessário utilizar um programa que
simule o transitório eletromagnético e um outro programa que analise a estabilidade do
sistema.
O intercâmbio entre programas que simulam transitórios eletromagnéticos e que
simulam o regime permanente é, teoricamente, possível, mas, nem sempre, viável. Essa
inviabilidade ocorre porque um determinado componente do sistema a ser simulado possui
diferentes representações nos programas de cálculo transitórios eletromagnéticos, nos
programas de cálculos de transitórios eletromecânicos e nos programas de simulações em
regime permanente. Essas diferenças de modelos de um mesmo componente podem resultar
em resultados de simulações irreais, quando utiliza programas diferentes de maneira
interligada.
Um exemplo típico de componente que apresenta diferentes modelos para
diferentes situações é a linha de transmissão de energia elétrica. O modelo de linha e o passo
de cálculo que, geralmente, são utilizados em programas de simulações de transitórios
eletromecânicos não são adequados para representar a linha em estudos de transitórios
eletromagnéticos. Portanto, utilizando-se os dois programas em conjunto, podem ocorrer
oscilações numéricas quando se muda de um programa para o outro.
Para eliminar os problemas de oscilações numéricas devido ao uso de diferentes
modelos para os diferentes passos de cálculo e, conseqüentemente, diferentes programas, está
sendo proposto o desenvolvimento de um modelo único para representar linhas de
transmissão em situações em que sejam necessárias as simulações de transitórios de origens

6
eletromagnéticas e, também, de origens eletromecânicas. Nessas situações, a linha seria
representada por meio de um modelo analítico, que é livre de oscilações numéricas,
independentemente do passo de cálculo que é utilizado.
O modelo desenvolvido consiste em obter as soluções analíticas das equações de
estado que descrevem as correntes e tensões, ao longo da linha no domínio do tempo. A linha
é representada por meio de uma cascata de circuitos π e, em seguida, são obtidas as matrizes
de estado dessa cascata. A eficácia do modelo desenvolvido é comprovada por meio da
comparação de resultados obtidos com os resultados associados, obtidos a partir de um
programa do tipo EMTP.

7
2 EQUAÇÕES DIFERENCIAIS DAS LINHAS DE TRANSMISSÃO
2.1 INTRODUÇÃO
As linhas de transmissão são caracterizadas por sua capacidade de conduzir a
energia eletromagnética, limitando esta energia à proximidade da própria linha de
transmissão. Uma análise rigorosa desse problema exigiria uma aplicação das equações de
Maxwell nos problemas de campo (HAYT, 1983). Entretanto, um exame das equações de
Maxwell pode demonstrar que, em certas condições, pode ser usada uma aproximação muito
mais simples, que consiste em representar um elemento diferencial da linha por elementos
discretos de circuito, conforme será mostrado neste capítulo.
2.2 EQUAÇÕES DIFERENCIAIS DE UMA LINHA DE TRANSMISSÃO
MONOFÁSICA ESCRITA NO DOMÍNIO DO TEMPO
Qualquer distúrbio em uma linha de transmissão, tal como uma descarga
atmosférica, ou uma interrupção das condições de regime permanente, dá origem a ondas
viajantes, que se propagam no sentido das extremidades da linha, onde são refletidas e
transmitidas. Durante a propagação, ao longo da linha, as ondas viajantes são atenuadas e
distorcidas até serem totalmente extintas (NAIDU, 1985).

8
Para determinar as equações que descrevem uma linha, considera-se o caso
simples de um circuito monofásico com dois condutores, onde um dos condutores está a uma
altura h da superfície do solo, e o outro condutor é a sua imagem que fica a uma profundidade
h da mesma superfície.
A Figura 2.1 mostra uma representação da linha de transmissão monofásica de
comprimento d, descrita anteriormente.
Condutor
Superfície do solo
Condutor imagem
h
h
Figura 2.1 – Linha de transmissão monofásica de comprimento d.
Tomando um elemento diferencial da linha mostrada na Figura 2.1, obtém-se o
sistema mostrado na Figura 2.2.
i(x,t) i(x,t)+∆i(x,t)
v(x,t) v(x,t)+∆v(x,t)
x x+∆x
Figura 2.2 – Elemento diferencial de uma linha monofásica

9
Na Figura 2.2, os termos v(x,t) e i(x,t) são, respectivamente, a tensão e a corrente
na posição x da linha no instante de tempo t. Os termos ∆v(x,t) e ∆i(x,t) são as variações
sofridas pela tensão e pela corrente.
Considerando que os parâmetros longitudinais e transversais de uma linha de
transmissão são uniformemente distribuídos ao longo do comprimento, o elemento diferencial
mostrado na Figura 2.2 pode ser representado por meio do seguinte circuito (CHIPMAN,
1972); (GREENWOOD, 1977).
i(x,t)+∆i(x,t)
G∆x
Malha 1
2∆xL
2∆xR
2∆xR
2∆xL
i(x,t)
v(x,t)
Figura 2.3 – Circuito elétrico qu
No circuito mostrado na Figura
indutância longitudinais da linha por unid
respectivamente, a condutância e a cap
comprimento. Os termos v(x,t) e i(x,t) são, r
da linha no instante de tempo t. Os termo
tensão e pela corrente.
Observando a malha externa do
Lei de Kirchhoff para tensão (IRWIN, 2000
A
B
iAB
C∆
e repres
2.3, R e
ade de
acitância
espectiv
s ∆v(x,t
circuito
), obtém
x
Malha 2
enta o elem
L são, res
comprimen
transversa
amente, a t
) e ∆i(x,t)
apresentad
-se:
v(x,t)+∆v(x,t)
ento diferencial da linha.
pectivamente, a resistência e a
to. Os elementos G e C são,
is da linha por unidade de
ensão e a corrente na posição x
são as variações sofridas pela
o na Figura 2.3 e aplicando a

10
0)t,x(v)t,x(vt
)t,x(i2xL
t)t,x(i
2xL)t,x(i
2xR)t,x(i
2xR
t)t,x(i
2xL)t,x(i
2xR)t,x(v
=∆+−∂
∆∂∆−
∂∂∆
−∆∆
+∆
−∂
∂∆−
∆−
2.1
Manipulando a equação 2.1, obtém-se:
⎟⎠⎞
⎜⎝⎛
∂∆∂
+∆∆
−⎟⎠⎞
⎜⎝⎛
∂∂
+∆−=∆t
)t,x(iL)t,x(iR2x
t)t,x(iL)t,x(iRx)t,x(v 2.2
Para encontrar a equação da corrente, basta observar a Figura 2.4 que mostra, em
detalhe, o ramo AB do circuito da Figura 2.3.
A i(x,t)+∆i(x,t) i(x,t)
xC ∆vAB(x,t)
iAB
i1
xG ∆
i2
B
Figura 2.4 – Ramo AB do circuito
Aplicando a Lei de Kirchhoff para corrente (IRWIN, 2000) no nó A da Figura 2.4,
tem-se:
))t,x(i)t,x(i(i)t,x(i AB ∆++= 2.3
Manipulando a equação 2.3, tem-se:
)t,x(iiAB ∆−= 2.4
Observando a Figura 2.4, verifica-se que a corrente iAB pode ser escrita como
sendo:
21AB iii += 2.5

11
Na Figura 2.4, observa-se também que é a corrente na capacitância transversal
do elemento diferencial da linha. Desse modo, a tensão pode ser escrita como
sendo:
1i
)t,x(vAB
dtixC
1)t,x(v 1AB ∫∆= 2.6
A partir da equação 2.6, obtém-se:
t)t,x(vxCi AB
1 ∂∂
∆= 2.7
Considerando que é a corrente na condutância transversal do elemento
diferencial da linha, pode-se expressar a tensão por:
2i
)t,x(vAB
2AB ixG
1)t,x(v∆
= 2.8
Da equação 2.8, tem-se:
)t,x(vxGi AB2 ∆= 2.9
Substituindo as equações 2.4, 2.7 e 2.9 em 2.5, obtém-se:
)t,x(vxGt
)t,x(vxC)t,x(i ABAB ∆+∂
∂∆=∆− 2.10
Da malha 1 da Figura 2.3, tem-se:
t)t,x(i
2xL)t,x(i
2xR)t,x(v)t,x(vAB ∂
∂∆−
∆−= 2.11
Substituindo a equação 2.11 na equação 2.10, obtém-se:
⎟⎟⎠
⎞⎜⎜⎝
⎛∂
∂++
∂∂
+∂
∂∆+⎟⎟
⎠
⎞⎜⎜⎝
⎛∂
∂+∆−=∆
t)t,x(i
GL)t,x(iGRt
)t,x(iCL
t)t,x(i
CR2x
t)t,x(v
C)t,x(vGx)t,x(i2
22
2.12

12
Substituindo a equação 2.12 na equação 2.2, obtém-se:
⎥⎦
⎤⎟⎟⎠
⎞⎜⎜⎝
⎛∂
∂++
∂∂
+∂
∂∆
+⎢⎣
⎡⎟⎟⎠
⎞⎜⎜⎝
⎛⎟⎠⎞
⎜⎝⎛
∂∂
+∆−∂∂
+∆
−⎟⎠⎞
⎜⎝⎛
∂∂
+∆−=∆
t)t,x(iGL)t,x(iGR
t)t,x(iCL
t)t,x(iCR
2x
t)t,x(vC)t,x(vGx
tLR
2x
t)t,x(iL)t,x(iRx)t,x(v
2
22 2.13
A função , mostrada na equação 2.13, pode ser aproximada por uma série
de Taylor (SWOKOWSKI, 1995). Utilizando os dois primeiros termos da série para
representar a função tem-se:
)t,x(v∆
)t,x(v∆
22
2
xx
)t,x(v21x
x)t,x(v)t,x(v ∆
∂∂
+∆∂
∂=∆ 2.14
Igualando as equações 2.13 e 2.14, dividindo o resultado por e, em seguida,
calculando o limite da equação resultante quando
x∆
0x →∆ , tem-se:
t)t,x(iL)t,x(iR
x)t,x(v
∂∂
+=∂
∂− 2.15
Analogamente, a função )t,x(i∆ da equação 2.12 pode ser aproximada pelos dois
primeiros termos da série de Taylor. Desse modo, obtém-se:
22
2
xx
)t,x(i21x
x)t,x(i)t,x(i ∆
∂∂
+∆∂
∂=∆ 2.16
Igualando as equações 2.12 e 2.16, dividindo por x∆ e, em seguida, calculando o
limite da equação resultante quando 0x →∆ , tem-se:
t)t,x(vC)t,x(vG
x)t,x(i
∂∂
+=∂
∂− 2.17
As equações 2.15 e 2.17 são as equações diferencias de primeira ordem que
descrevem o comportamento das correntes e tensões em uma linha monofásica no domínio do
tempo.

13
Derivando a equação 2.15 em relação à x, tem-se:
tx)t,x(iL
x)t,x(iR
x)t,x(v 2
2
2
∂∂∂
+∂
∂=
∂∂
− 2.18
Substituindo a equação 2.17 na equação 2.18, obtém-se:
2
2
2
2
t)t,x(vCL
t)t,x(v)GLCR()t,x(vGR
x)t,x(v
∂∂
+∂
∂++=
∂∂ 2.19
Derivando a equação 2.17, em relação à x, tem-se:
tx)t,x(vL
x)t,x(vG
x)t,x(i 2
2
2
∂∂∂
+∂
∂=
∂∂
− 2.20
Substituindo a equação 2.15, na equação 2.20, obtém-se:
2
2
2
2
t)t,x(iCL
t)t,x(i)GLCR()t,x(iGR
x)t,x(i
∂∂
+∂
∂++=
∂∂ 2.21
As equações 2.19 e 2.21 são as equações diferenciais de segunda ordem que
descrevem o comportamento das correntes e tensões em uma linha de transmissão. Equações
desse tipo são conhecidas como equações de ondas, cujas soluções representam ondas que
podem viajar ao longo de uma linha com velocidade v. Estas equações são também
denominadas equações de ondas viajantes ou progressivas e também como equações da
telegrafia (FUCHS, 1979).
2.3 EQUAÇÕES DIFERENCIAIS DE UMA LINHA DE TRANSMISSÃO
MONOFÁSICA ESCRITA NO DOMÍNIO DA FREQÜÊNCIA
Para obterem-se as equações diferencias de uma linha de transmissão monofásica
no domínio da freqüência, aplica-se a transformada de Laplace (STRUM, 1971) e (OGATA,

14
1993) nas equações diferencias de primeira ordem, mostradas nas equações 2.15 e 2.17,
obtêm-se:
)s,x(VCs)s,x(VGx
)s,x(I+=
∂∂
− 2.22
)s,x(ILs)s,x(IRx
)s,x(V+=
∂∂
− 2.23
Substituindo nas equações 2.22 e 2.23, têm-se: ω= js
),x(VCj),x(VGx
),x(Iωω+ω=
∂ω∂
− 2.24
),x(ILj),x(IRx
),x(Vωω+ω=
∂ω∂
− 2.25
Desse modo, as equações diferenciais de primeira ordem da linha no domínio da
freqüência serão escritas como sendo:
),x(V)(Yx
),x(Iωω=
∂ω∂
− 2.26
),x(I)(Zx
),x(Vωω=
∂ω∂
− 2.27
Nas equações 2.26 e 2.27, I(x,ω) e V(x,ω) são, respectivamente, a corrente e a
tensão em uma posição x da linha no domínio da freqüência Y(ω) e Z(ω) são,
respectivamente, a impedância longitudinal e a admitância transversal da linha por unidade de
comprimento. Os elementos Z(ω) e Y(ω) são escritos como sendo:
LjR)(Z ω+=ω 2.28
CjG)(Y ω+=ω 2.29

15
Nas equações 2.28 e 2.29, R, L, G, C são, respectivamente, a resistência, a
indutância, a condutância e a capacitância por unidade de comprimento da linha. O termo ω
corresponde à freqüência angular.
Derivando as equações 2.26 e 2.27 em relação a x, obtêm-se:
x),x(I)(Z
x),x(V
2
2
∂ω∂
ω=∂
ω∂− 2.30
x),x(V)(Y
x),x(I
2
2
∂ω∂
ω=∂
ω∂− 2.31
Substituindo as equações 2.26 e 2.27 nas equações 2.30 e 2.31, respectivamente, e
fazendo as devidas manipulações, obtêm-se:
),x(I)(Y)(Zx
),x(I2
2
ωωω=∂
ω∂ 2.32
),x(V)(Y)(Zx
),x(V2
2
ωωω=∂
ω∂ 2.33
As equações 2.32 e 2.33 são as equações diferenciais de segunda ordem de uma
linha de transmissão monofásica escritas no domínio da freqüência.
2.4 CONCLUSÃO
Neste capítulo, mostrou-se que as equações diferenciais que descrevem o
comportamento das correntes e tensões, ao longo de uma linha de transmissão monofásica,
podem ser obtidas a partir de um elemento diferencial da linha, aplicando as teorias de
circuitos elétricos. Verifica-se, por meio das equações diferenciais, que as correntes e tensões
em uma linha de transmissão, possuem natureza ondulatória, ou seja, comportam-se como

16
ondas que se propagam ao longo da linha. Foram mostradas as equações diferenciais da linha
escrita no domínio do tempo e no domínio da freqüência.

17
3 SOLUÇÕES DAS EQUAÇÕES DIFERENCIAIS DA LINHA DE TRANSMISSÃO
3.1 INTRODUÇÃO
Neste capítulo, serão mostradas as soluções das equações diferenciais da linha de
transmissão. Serão apresentadas as soluções no domínio do tempo e no domínio da
freqüência.
A solução no domínio da freqüência é genérica e pode ser aplicada para qualquer
condição da linha, considerando os parâmetros fixos e/ou variáveis em função da freqüência.
A solução no domínio do tempo é determinada analiticamente somente para o
caso de linhas sem perdas. Para o caso de linhas com perdas, pode-se obter a solução no
domínio do tempo, a partir da solução no domínio da freqüência. Para isso, devem ser
utilizadas técnicas de transformadas inversas.
3.2 SOLUÇÕES DAS EQUAÇÕES DIFERENCIAIS NO DOMÍNIO DA
FREQÜÊNCIA
Considere uma linha de transmissão monofásica de comprimento d, conforme
mostra a Figura 3.1.

18
B IA(ω) IB(ω) A
solo
VB(ω) VA(ω)
Figura 3.1 –Linha de transmissão monofásica de comprimento d.
Na Figura 3.1, IA(ω) e IB(ω) são as correntes longitudinais da linha nos terminais
A e B, respectivamente, enquanto que VA(ω) e VB(ω) são as tensões nestes terminais. As
correntes IA(ω) e IB(ω) e as tensões VA(ω) e VB(ω) estão no domínio da freqüência.
No capítulo 2, foi mostrado que as equações diferenciais que descrevem as
correntes e tensões no domínio da freqüência, em uma linha monofásica, são escritas como
sendo:
),x(V)(Y)x(
),x(Iωω=
∂ω∂
− 3.1
),x(I)(Z)x(
),x(Vωω=
∂ω∂
− 3.2
As funções que relacionam as correntes e tensões nos terminais da linha mostrada
na Figura 3.1 no domínio da freqüência, podem ser obtidas a partir das equações 3.1 e 3.2.
Nesse caso, em particular, as soluções são obtida como sendo (BUDNER, 1970):
)d)((senh)(I)(Z)d)(cosh()(V)(V BCBA ωγωω−ωγω=ω 3.3
)d)((senh)(Z)(V)d)(cosh()(I)(I
C
BBA ωγ
ωω
+ωγω−=ω 3.4
Nas equações 3.3 e 3.4, o termo γ )(ω é a função de propagação e Zc )(ω é a
impedância característica da linha. Os elementos γ )(ω e Zc )(ω são escritos como sendo

19
(CHIPMAN, 1972):
)(Y)(Z)( ωω=ωγ 3.5
)(Y)(Z)(ZC ω
ω=ω 3.6
Nas equações 3.5 e 3.6, Z(ω) e Y(ω) são, respectivamente, a impedância
longitudinal e a admitância transversal da linha por unidade de comprimento.
A vantagem das soluções apresentadas pelas equações 3.3 e 3.4 é que estas
soluções são “exatas”, pois se baseiam nas equações exatas da linha, sendo, portanto, um
“modelo exato”. No entanto, sua aplicação é bem restrita, pois, quando se estuda o sistema
elétrico como um todo, deve-se considerar a presença de elementos não lineares e também as
mudanças de configurações de rede (tais como faltas, abertura e fechamento de disjuntores,
etc.) que não são facilmente representadas no domínio da freqüência. Uma outra desvantagem
desse modelo é que os programas computacionais que realizam simulações de transitórios
eletromagnéticos em sistemas elétricos de potência são geralmente descritos diretamente no
domínio do tempo, sendo então necessário que a linha seja representada no domínio do
tempo.
3.3 EQUAÇÕES DA LINHA NO DOMÍNIO DO TEMPO
As equações que descrevem as correntes e tensões nos terminais da linha no
domínio do tempo podem ser obtidas a partir da aplicação das transformadas inversas de
Laplace nas equações 3.3 e 3.4 (BUDNER, 1970).
Manipulando as equações 3.3 e 3.4, obtêm-se:

20
)(V)d)((senh)(Z
1)(V)d)((coth)(Z
1)(I Bc
Ac
A ωωγω
−ωωγω
=ω 3.7
)(V)d)((senh)(Z
1)(V)d)((coth)(Z
1)(I Ac
Bc
B ωωγω
−ωωγω
=ω 3.8
As equações 3.7 e 3.8 podem ser escritas, de maneira simplificada, como sendo:
)(V)(y)(V)(y)(I BABAAAA ωω+ωω=ω 3.9
)(V)(y)(V)(y)(I BBBABAB ωω+ωω=ω 3.10
Nas equações 3.9 e 3.10, as grandezas IA(ω), IB(ω), VA(ω) e VB(ω) são,
respectivamente, as correntes e tensões nos extremos da linha no domínio da freqüência e os
termos yAA )(ω , yBB )(ω , yAB )(ω e yBA )(ω são:
)d)((coth)(Z
1)(y)(yc
BBAA ωγω
=ω=ω 3.11
)d)((senh)(Z1)(y)(y
cBAAB ωγω
−=ω=ω 3.12
Para se obter as correntes e tensões nos terminais A e B da linha, a partir das
equações 3.3 e 3.4, é necessário o uso de integrais de convolução (KREYSZIG, 1992);
(BUDNER, 1970).
Desse modo, utilizando o conceito de integrais de convolução, obtêm-se:
∫∫∞
∞−
∞
∞−
λλλ−+λλλ−= d)(v)t(yd)(v)t(y)t(i BABAAAA 3.13
∫∫∞
∞−
∞
∞−
λλλ−+λλλ−= d)(v)t(yd)(v)t(y)t(i BBBABAB 3.14
Nas equações 3.13 e 3.14, as grandezas iA(t), iB(t), vA(λ) e vB(λ) são as correntes e
tensões nos extremos da linha no domínio do tempo e os termos yAA(t-λ), yBB(t-λ), yAB(t-λ) e

21
yBA(t-λ) são, respectivamente, as transformadas inversas de Laplace das funções yAA(ω),
yBB(ω), yAB(ω) e yBA(ω) (SPIEGEL, 1971).
A obtenção das correntes e tensões nos terminais da linha por meio de integrais de
convolução é um processo bastante complexo, pois as funções yAA(t-λ), yBB(t-λ), yAB(t-λ) e
yBA(t-λ) dificilmente podem ser expressas na forma analítica.
3.4 CONCLUSÃO
Este capítulo explorou a solução das equações diferenciais de uma linha de
transmissão monofásica no domínio do tempo e no domínio da freqüência.
O caso mais simples é uma linha sem perdas cujos parâmetros sejam
independentes da freqüência sendo, provavelmente, a única situação em que as equações
diferenciais possuem uma solução analítica simples.
Para o caso de linhas com perdas, foram deduzidas as soluções da linha no
domínio do tempo por meio do uso de integrais de convolução, utilizando técnicas de
transformadas inversas. Não se obteve tal solução, pois no uso de integrais de convolução há
funções que dificilmente são expressas de forma analítica.
22
4 ANÁLISE QUALITATIVA DA PROPAGAÇÃO DE ONDAS NAS LINHAS DE
TRANSMISSÃO
4.1 INTRODUÇÃO
Neste capítulo, será feita uma análise qualitativa do comportamento das correntes
e tensões, no domínio do tempo, em uma linha de transmissão submetida a diversas
condições. A análise será feita com base na solução das equações diferenciais de uma linha
ideal (sem perdas).
Essa análise será usada futuramente para aferir o desempenho dos modelos
computacionais desenvolvidos.
4.2 EQUAÇÕES DE UMA LINHA DE TRANSMISSÃO NO DOMÍNIO DO TEMPO
Para o caso de uma linha sem perdas, as funções que relacionam as correntes e
tensões em função do tempo, obtidas a partir das equações 2.15 e 2.17, (HEDMAN, 1983)
são:
)xLCt(u)xLCt(B)xLCt(u)xLCt(A)t,x(v +++−−= 4.1
)xLCt(u)xLCt(E)xLCt(u)xLCt(D)t,x(i +++−−= 4.2

23
As equações 4.1 e 4.2 representam duas ondas viajantes, sendo que a função
)xLCt(u)xLCt(A −− representa uma onda propagando-se na direção progressiva e a
função )xLCt(u)xLCt(B ++ representa uma onda de propagação regressiva. Assim,
pares de ondas de tensão e de corrente propagam-se nas direções positivas e negativas
(HEDMAN, 1983).
As ondas viajantes em componentes diretas e inversas da tensão e da corrente no
terminal B da linha, podem ser escritas da seguinte forma:
rfT vvv += 4.3
rfT iii += 4.4
As equações 4.3 e 4.4 são correspondentes às equações 4.1 e 4.2 onde f é a onda
refletida e r é a onda incidente.
Considerando Zc como sendo a impedância característica da linha de transmissão,
têm-se:
fcf iZv = 4.5
rcr iZv −= 4.6
Uma solução simultânea das equações 4.3 a 4.6, levando em consideração o tipo
de carga que está conectada no terminal da linha, resultará em um conjunto de condições de
contorno que irão mostrar, de maneira qualitativa, como se comportam as ondas que se
propagam na linha de transmissão.

24
4.3 ANÁLISE DAS CORRENTES E TENSÕES NA LINHA
Considere uma linha de transmissão monofásica em que em um dos terminais é
conectada uma fonte de tensão constante v e no outro terminal é conectada uma resistência R,
conforme mostra a Figura 4.1.
v vT R
iT A B i
soloFigura 4.1 – Linha com uma carga R.
Na Figura 4.1, a relação entre a tensão vT e a corrente iT é dada por:
TT iRv = 4.7
Considerando as equações 4.3 e 4.7, podem-se encontrar as seguintes relações
(HEDMAN, 1983):
fc
cr v
ZRZR
v+−
= 4.8
fc
cr i
ZRRZ
i+−
= 4.9
Nas equações 4.8 e 4.9, Zc, vr, vf, ir, if são, respectivamente, a impedância
característica da linha de transmissão, a onda de tensão refletida ou reversa, a onda de tensão
incidente ou direta, a onda da corrente refletida ou reversa, a onda da corrente incidente ou
direta. Estas equações podem ser utilizadas para uma análise qualitativa da propagação das
ondas na linha. Será feita a análise das correntes e tensões na linha, durante o processo de
energização da mesma, em 3 situações distintas:

25
• Energização da linha em aberto;
• Energização da linha conectada a uma carga Zc;
• Energização da linha em curto-circuito;
4.3.1 Energização da linha em aberto
A Figura 4.2 mostra uma linha de comprimento d que é alimentada por meio de
uma fonte de tensão contínua v.
v
iS
A B solo
Figura 4.2 – Energização da linha com extremidade aberta.
Na linha mostrada na Figura 4.2, pode se considerar que no terminal B da mesma
existe uma carga resistiva cujo valor tende a um valor infinito ( ∞→R ). Nessas condições, as
equações 4.8 e 4.9 tornam-se:
fr vv = 4.10
fr ii −= 4.11
Portanto, a tensão e a corrente no terminal B da linha serão escritas como sendo:
fT v2v = 4.12
0iii ffT =−= 4.13

26
A equação 4.12 mostra que a tensão no terminal B da linha é o dobro do valor da
tensão que incide neste terminal enquanto, conforme mostra a equação 4.13, a corrente no
terminal B da linha é nula.
A Figura 4.3 mostra a onda de tensão propagando-se ao longo da linha em aberto,
em um instante qualquer, antes de ocorrer a primeira reflexão no terminal B da mesma.
vf
v
V
x
B A
Figura 4.3 – Propagação da tensão, ao longo da linha em aberto, antes da reflexão
A Figura 4.4 mostra a distribuição da tensão ao longo da linha em aberto, no
instante em que a onda de tensão alcança o terminal B da linha.
V
v
x
B A
Figura 4.4 – Distribuição da tensão ao longo da linha em aberto
Ao encontrar o terminal B em aberto, a onda de tensão terá o seu valor duplicado,
de acordo com a equação 4.12, e começará a propagar-se em direção ao terminal A, conforme
mostra a figura 4.5.

27
v
2v
vr
A B
V
x
Figura 4.5 – Propagação da tensão ao longo da linha em aberto, após a reflexão
A Figura 4.6 mostra a onda de corrente propagando ao longo da linha em aberto,
em um instante qualquer, antes de ocorrer a reflexão no terminal B da mesma.
I
if
i
x B A
Figura 4.6 – Propagação da corrente ao longo da linha em aberto, antes da reflexão
A Figura 4.7 mostra a distribuição da corrente ao longo da linha em aberto, no
instante em que a onda de corrente alcança o terminal B da linha.
I
i
x B A
Figura 4.7 – Distribuição da corrente ao longo da linha em aberto
28
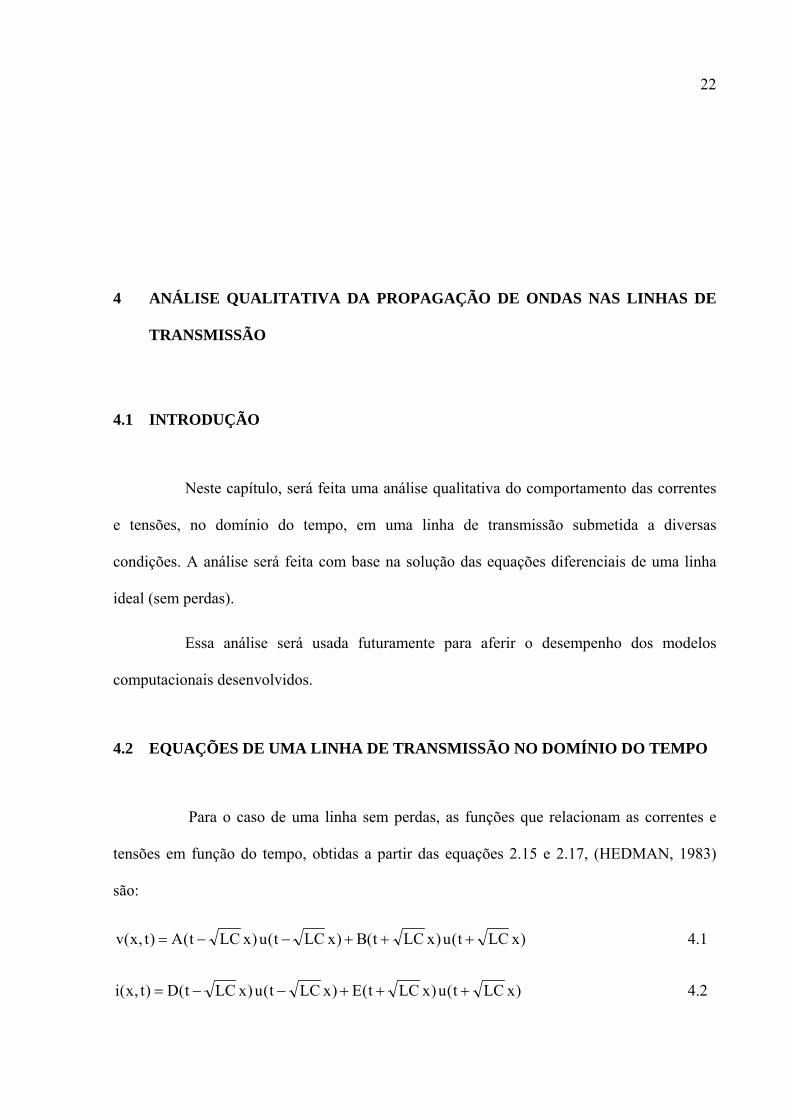
Ao encontrar o terminal B em aberto, a onda de corrente resultante terá o seu
valor anulado, de acordo com a equação 4.13, e começará a propagar-se em direção ao
terminal A, conforme mostra a figura 4.8.
I
ir
i
x B A
Figura 4.8 – Propagação da corrente ao longo da linha em aberto, após a reflexão
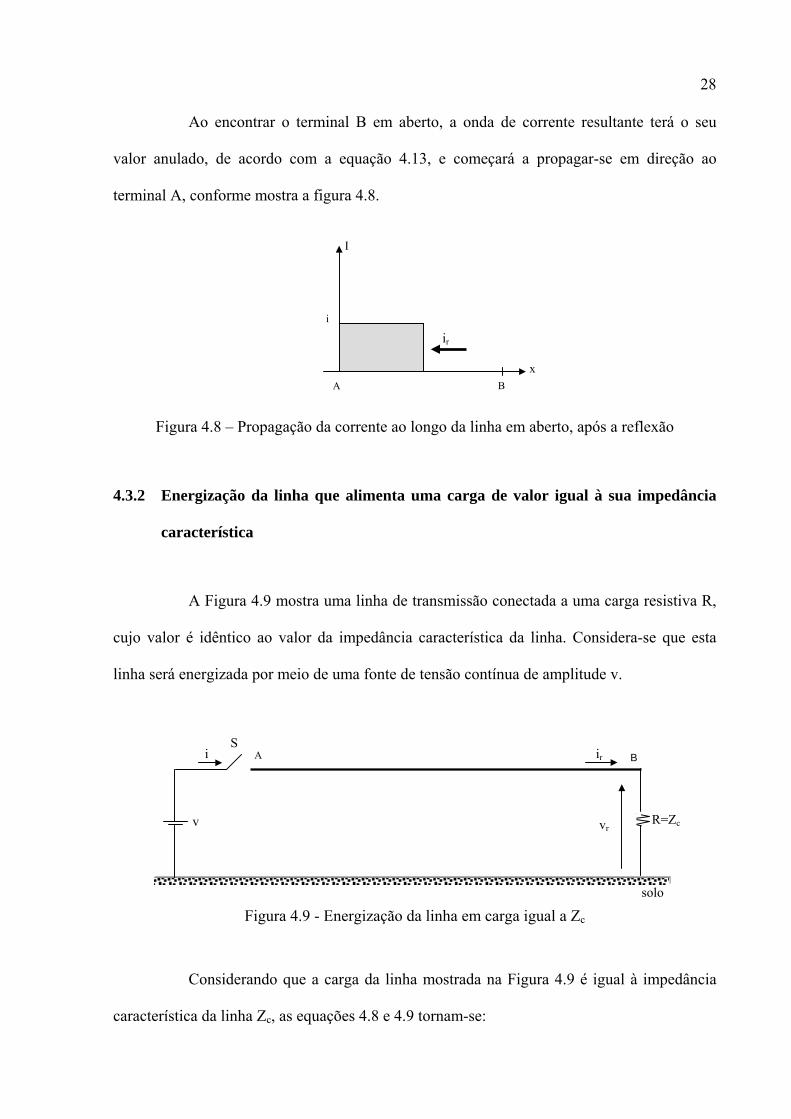
4.3.2 Energização da linha que alimenta uma carga de valor igual à sua impedância
característica
A Figura 4.9 mostra uma linha de transmissão conectada a uma carga resistiva R,
cujo valor é idêntico ao valor da impedância característica da linha. Considera-se que esta
linha será energizada por meio de uma fonte de tensão contínua de amplitude v.
B A
v vr
ir iS
R=Zc
solo
Figura 4.9 - Energização da linha em carga igual a Zc
Considerando que a carga da linha mostrada na Figura 4.9 é igual à impedância
característica da linha Zc, as equações 4.8 e 4.9 tornam-se:

29
0vr = 4.14
0ir = 4.15
Portanto, a tensão e corrente no terminal B da linha serão escritas como sendo:
fT vv = 4.16
fT ii = 4.17
A partir das equações 4.14 a 4.17, observa-se que, quando se conecta na linha uma
impedância de valor igual ao valor da impedância característica da mesma, não ocorrerá
reflexão das ondas de corrente e tensão junto ao terminal de carga da linha (FUCHS, 1979).
A Figura 4.10 mostra a propagação da onda de tensão ao longo da linha conectada
a uma carga Zc, em um instante qualquer, antes de ocorrer a reflexão no terminal B da mesma.
vf
v
V
x
B A
Figura 4.10 – Propagação da tensão ao longo da linha conectada a uma carga Zc,
antes da reflexão
A Figura 4.11 mostra a distribuição da tensão ao longo da linha conectada a uma
carga Zc, no instante em que a onda de tensão alcança o terminal B da linha. V
v
x B A
Figura 4.11– Distribuição da tensão ao longo da linha conectada a uma carga Zc

30
A Figura 4.11 mostra que a onda de tensão propaga-se até o terminal B da linha
conectada a uma carga Zc, mas não sofre reflexões neste terminal.
A Figura 4.12 mostra a propagação da onda de corrente ao longo da linha
conectada a uma carga Zc, em um instante qualquer, antes de ocorrer a reflexão no terminal B
da mesma.
if
i
I
x
B A
Figura 4.12 – Propagação da corrente ao longo da linha conectada a uma carga Zc, antes da
reflexão
A Figura 4.13 mostra a distribuição da corrente ao longo da linha conectada a uma
carga Zc, no instante em que a onda de corrente alcança o terminal B da linha. I
i
x B A
Figura 4.13 – Distribuição da corrente ao longo da linha conectada a uma carga Zc
A Figura 4.13 mostra que a onda de corrente propaga-se até o terminal B da linha
conectada a uma carga Zc, mas não sofre reflexões neste terminal.
4.3.3 Energização da linha em curto-circuito
A Figura 4.14 mostra uma linha de transmissão em curto-circuito alimentada por
meio de uma fonte de tensão contínua v.

31
B A
v
iS
Figura 4.14 – Energização da linha em curto-circuito
O fato da linha da figura 4.14 estar em curto-circuito é equivalente a ter u
R=0 conectada ao terminal B da mesma. Desse modo, as equações 4.8 e 4.9 tornam-s
fr vv −=
fr ii =
Portanto, a tensão e corrente no terminal B da linha em curto-circu
escritas como sendo:
0vT =
fT i2i =
As equações 4.18 e 4.20 mostram que a tensão refletida é igual ao
tensão incidente, anulando a tensão no terminal B da linha.
A Figura 4.15 mostra a propagação da onda de tensão ao longo da
curto-circuito, em um instante qualquer, antes de ocorrer a reflexão no terminal B da
vf
v
V
x
B A
Figura 4.15 – Propagação da tensão ao longo da linha em curto-circuito , antes da r
solo
ma carga
e:
4.18
4.19
ito serão
4.20
4.21
oposto da
linha em
mesma.
eflexão

32
A Figura 4.16 mostra a distribuição da tensão ao longo da linha em curto-circuito,
no instante em que a onda de tensão alcança o terminal B da linha.
V
v
x
B A
Figura 4.16 – Distribuição da tensão ao longo da linha em curto-circuito
Após o curto-circuito no terminal B, a onda de tensão refletida anula a tensão
incidente. Desse modo, a tensão ao longo da linha começa a anular-se, conforme mostra a
Figura 4.17.
vf
v
V
x B A
Figura 4.17 – Propagação da tensão ao longo da linha em curto-circuito, após a reflexão
A Figura 4.18 mostra a propagação da onda de corrente ao longo da linha em
curto-circuito, em um instante qualquer, antes de ocorrer a reflexão no terminal B da mesma.
if
i
I
x B A
Figura 4.18 – Propagação da corrente ao longo da linha em curto-circuito, antes da reflexão

33
A Figura 4.19 mostra a distribuição da corrente ao longo da linha em
curto-circuito, no instante em que a onda de corrente alcança o terminal B da linha.
I
i
x B A
Figura 4.19 – Distribuição da corrente ao longo da linha em curto-circuito
Ao encontrar o terminal B em curto-circuito, a onda da corrente terá o seu valor
duplicado, de acordo com a equação 4.21, e começará a propagar-se em direção ao terminal
A, conforme mostra a figura 4.20.
i
2i
ir
A B
I
x
Figura 4.20 – Propagação da corrente ao longo da linha em curto-circuito, após a reflexão
4.4 CONCLUSÕES
Neste capítulo, foi feita uma análise qualitativa do comportamento das ondas de
corrente e tensão ao longo de uma linha considerando diversas condições de carga para a
mesma.
Verificou-se que duas ondas de tensão propagam-se, simultaneamente, em
sentidos opostos ao longo da linha. Portanto, para determinar a tensão em um ponto qualquer

34
da linha, em um determinado instante de tempo, deve-se levar em conta a superposição das
duas ondas de tensão. O mesmo raciocínio deve ser aplicado para a corrente ao longo da
linha.

35
5 REPRESENTAÇÃO DA LINHA POR MEIO DE VARIÁVEIS DE ESTADO
5.1 INTRODUÇÃO
Verificou-se, em capítulos anteriores, que a solução das equações diferenciais de
uma linha de transmissão são, de modo geral, de difícil obtenção, quando se levam em
consideração as perdas da linha.
Uma vez que as perdas desempenham um papel importante no comportamento da
linha e, geralmente, não podem ser desprezadas, diversos modelos foram propostos para a
linha com perdas. Esses modelos não são representações exatas da linha, mas, sim,
representações aproximadas.
Um modelo bastante utilizado para uma linha de transmissão é o que considera a
mesma como sendo constituída por uma grande quantidade de circuitos π conectados em
cascata. Esse modelo permite que sejam levadas em consideração as perdas, o efeito da
freqüência e o efeito corona (NELMS, et al. 1989), (MACÍAS et al. 2005) e (TAVARES et al.
1999).
Neste capítulo, será mostrada a representação da linha por meio de uma cascata de
circuitos π, bem como as técnicas de obtenção das correntes e tensões na linha utilizando o
modelo proposto.

36
5.2 REPRESENTAÇÃO DE UMA LINHA POR MEIO DE UMA CASCATA DE
CIRCUITOS π.
Sabe-se que uma linha de transmissão de comprimento d pode ser representada, de
maneira aproximada e obedecendo a uma série de restrições, como sendo uma cascata de n
circuitos π (NELMES et al. 1989), conforme mostra a Figura 5.1.
G 2
C 2
R L
G C
R L
G C G C G 2
C 2
L R
Figura 5.1 – Linha representada por meio de uma cascata de n circuitos π.
Na Figura 5.1, os parâmetros R e L são, respectivamente, a resistência e a
indutância longitudinais de cada segmento de linha representado por um único circuito π. Os
parâmetros G e C são, respectivamente, a condutância e a capacitância do segmento de linha.
Os parâmetros R, L, G e C são escritos como sendo:
ndRR ′= 5.1
ndLL ′= 5.2
ndGG ′= 5.3
ndCC ′= 5.4
Na equação 5.1, 5.2, 5.3 e 5.4 os termos R são os parâmetros da
linha, por unidade de comprimento.
', L', C ' e G'

37
O modelo mostrado na Figura 5.1 não leva em conta o efeito da freqüência sobre
os parâmetros longitudinais da linha. No entanto, esse efeito pode ser inserido no modelo, se o
mesmo for sintetizado por meio de associações série e paralela de resistores e indutores. A
Figura 5.2 mostra um circuito π utilizado para representar um segmento de linha,
considerando o efeito da freqüência sobre os parâmetros longitudinais (TAVARES, 1999).
R1
L1
R2
L2
Rm
Lm
R0 L0
G2
G 2
C 2
C 2
Figura 5.2 –Circuito π com o efeito da freqüência.
Portanto, pode-se utilizar uma grande quantidade de circuitos π, do tipo mostrado
na Figura 5.2, para representar uma linha em que seja considerado o efeito da freqüência
sobre os parâmetros longitudinais da mesma.
Os modelos mostrados na Figuras 5.1 e 5.2 fornecem as correntes e tensões da
linha diretamente no domínio do tempo, sem o uso de integrais de convolução, e podem ser
facilmente implementados em programas do tipo EMTP.
Devido ao fato de que programas do tipo EMTP não são de fácil utilização
(NELMES et al. 1989), diversos autores (NELMES et al. 1989); (MAMIS et al. 2002);
(MAMIS, 2003); (MAMIS et al. 2005) sugerem descrever as correntes e tensões na cascata de
circuitos π por meio de variáveis de estado. As equações de estado são, então, transformadas
em equações de diferenças e podem ser resolvidas utilizando qualquer linguagem
computacional.

38
A representação da linha por meio de variáveis de estado pode ser utilizada no
ensino de conceitos básicos de propagação de ondas em linhas de transmissão (NELMES et
al. 1989), na análise da distribuição de correntes e tensões ao longo da linha (MAMIS et al.
2002) e na simulação de transitórios eletromagnéticos em linhas de transmissão que tenham
elementos não lineares (MAMIS; 2003).
5.3 DESCRIÇÃO DAS CORRENTES E TENSÕES POR MEIO DE VARIÁVEIS DE
ESTADO.
Considere uma linha de transmissão de comprimento d, representada por meio de
n circuitos π, conforme mostra a Figura 5.3.
G 2
C 2
R
G C G C G C G 2
C 2
L L RLR
Figura 5.3 – Linha representada por meio de uma cascata de n circuitos π.
A corrente longitudinal e a tensão transversal da linha representada por uma
cascata de circuitos π, mostrada na Figura 5.3, podem ser escritas na forma de equações de
estado, ou seja, (NELMES et al. 1989)e (MACÍAS et al. 2005):
)t(u]B[]X[]A[]X[ +=•
5.5
Na equação 5.5, [X] é o vetor com as variáveis de estado, enquanto que [A] e [B]
são as matrizes de estado do circuito mostrado na Figura 5.3.
Nos próximos itens, serão mostradas as matrizes de estado de uma linha
representada por meio de uma cascata de circuitos π. Serão mostradas as matrizes de estado

39
da linha em aberto, da linha em curto e da linha conectada a uma carga com valor idêntico ao
valor da impedância característica da linha. Não será levado em consideração o efeito da
freqüência sobre os parâmetros longitudinais da linha.
5.3.1 Matrizes de estado para a linha aberta
Considere uma linha monofásica de comprimento d, alimentada por uma fonte de
tensão u(t) e com o terminal aberto, conforme mostra a Figura 5.4.
A B S
u(t)
Figura 5.4 – Linha de transmissão monofásica com extremi
Desconsiderando o efeito da freqüência sobre os parâme
mostrada na Figura 5.4 e representando-a por meio de um único ci
mostrado na Figura 5.5.
i1(t) R L
u(t)
i1(t)AB
G2
C 2
G 2
C 2
A
B
Figura 5.5 – Linha representada por meio de um únic
solo
dade B em aberto.
tros longitudinais da linha
rcuito π, tem-se o circuito
v1(t)
o circuito π

40
No circuito externo da Figura 5.5, tem-se:
0)t(vdt
)t(idL)t(iR)t(u 11
1 =−−− 5.6
Manipulando a equação 5.6, obtém-se:
)t(uL1)t(v
L1)t(i
LR
dt)t(di
111 +−−= 5.7
Fazendo dt
)t(di)t(i 11 =•
, a equação 5.7 pode ser escrita como sendo:
)t(uL1)t(v
L1)t(i
LR)t(i 111 +−−=
•
5.8
Denominando de ig(t) e ic(t) as correntes na condutância e na capacitância,
respectivamente, do ramo AB, tem-se:
)t(i)t(i)t(i cgAB1 += 5.9
A relação entre a tensão v1(t) e a corrente ig é definida por:
)t(v2G)t(i 1g = 5.10
A relação entre a tensão v1(t) e a corrente ic é definida por:
)t(d))t(i)t(i(C2)t(v
t
0gAB11 ∫ −= 5.11
Derivando a equação 5.11 em relação ao tempo, obtém-se:
))t(i)t(i(C2
dt)t(dv
gAB11 −= 5.12
Fazendo dt
)t(dv)t(v 11 =
•
, a equação 5.12, pode ser escrita como sendo:

41
))t(i)t(i(C2)t(v gAB11 −=
•
5.13
Substituindo a equação 5.10 em 5.13, tem-se:
)t(vCG)t(i
C2)t(v 111 −=
•
5.14
Definindo a corrente i1(t) e a tensão v1(t) como sendo variáveis de estado, pode-se
descrever o sistema mostrado na Figura 5.5 sob a forma de equações de estado. Desse modo,
as equações 5.8 e 5.14 podem ser escritas sob a forma de equações de estado, ou seja,
(NELMES et al. 1989) e (MACÍAS et al. 2005):
)t(u]B[]X[]A[]X[ +=•
5.15
Sendo:
T
11 )t(v)t(i]x[ ⎥⎦⎤
⎢⎣⎡=
•••
5.16
T
11 )t(v)t(i]x[ ⎥⎦⎤
⎢⎣⎡= 5.17
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
−
−−=
CG
C2
L1
LR
]A[ 5.18
T
0L1]B[ ⎥⎦
⎤⎢⎣⎡= 5.19
As equações de 5.16 a 5.19 constituem as equações de estado da linha aberta,
representada por meio de um único circuito π.

42
Desconsiderando o efeito da freqüência sobre os parâmetros longitudinais da linha
mostrada na Figura 5.4 e representando-a por meio de 2 circuitos π, tem-se o circuito
mostrado na Figura 5.6.
u(t)
i1(t)
G2
C 2
R L A
B
G C
C
G 2
C 2
Malha 2 D
i2(t)
i1(t)AB i2(t)CD
LR
v2(t) v1(t)
Malha 1
Figura 5.6 – Linha representada por meio de 2 circuitos π
Da malha 1 da Figura 5.6, tem-se:
0)t(vdt
)t(idL)t(iR)t(u 11
1 =−−− 5.20
Manipulando a equação 5.20, obtém-se:
)t(uL1)t(v
L1)t(i
LR
dt)t(di
111 +−−= 5.21
Fazendo dt
)t(di)t(i 11 =•
, a equação 5.21 pode ser escrita como sendo:
)t(uL1)t(v
L1)t(i
LR)t(i 111 +−−=
•
5.22
Da malha 2 da Figura 5.6, tem-se:
0)t(vdt
)t(idL)t(iR)t(v 22
21 =−−− 5.23
Manipulando a equação 5.23, obtém-se:
)t(vL1)t(v
L1)t(i
LR
dt)t(di
1222 +−−= 5.24

43
Fazendo dt
)t(di)t(i 22 =•
, a equação 5.24 pode ser escrita como sendo:
)t(vL1)t(v
L1)t(i
LR)t(i 1222 +−−=
•
5.25
Denominando de ig(t) e ic(t) as correntes na condutância e na capacitância,
respectivamente, do ramo AB, tem-se:
)t(i)t(i)t(i cgAB1 += 5.26
A corrente i1(t), mostrada na equação 5.26, pode ser escrita também como sendo:
)t(i)t(i)t(i 21AB1 −= 5.27
A relação entre a tensão v1(t) e a corrente ig(t) é definida por:
)t(vG)t(i 1g = 5.28
A relação entre a tensão v1(t) e a corrente ic(t) é definida por:
)t(d))t(i)t(i(C1)t(v
t
0gAB11 ∫ −= 5.29
Derivando a equação 5.29 em relação ao tempo, obtém-se:
))t(i)t(i(C1
dt)t(dv
gAB11 −= 5.30
Fazendo dt
)t(dv)t(v 11 =
•
, a equação 5.30 pode ser escrita como sendo:
))t(i)t(i(C1)t(v gAB11 −=
•
5.31
Substituindo as equações 5.27 e 5.28 na equação 5.31, tem-se:
)t(vCG)t(i
C1)t(i
C1)t(v 1211 −−=
•
5.32

44
Denominando de ig(t) e ic(t) as correntes na condutância e na capacitância,
respectivamente, do ramo CD, tem-se:
)t(i)t(i)t(i cgCD2 += 5.33
A relação entre a tensão v2(t) e a corrente ig(t) é definida por:
)t(v2G)t(i 2g = 5.34
A relação entre a tensão v2(t) e a corrente ic(t) é definida por:
)t(d))t(i)t(i(C2)t(v
t
0gCD22 ∫ −= 5.35
Derivando a equação 5.35 em relação ao tempo, obtém-se:
))t(i)t(i(C2
dt)t(dv
gCD22 −= 5.36
Fazendo dt
)t(dv)t(v 22 =
•
, a equação 5.36 pode ser escrita como sendo:
))t(i)t(i(C2)t(v gCD22 −=
•
5.37
Substituindo a equação 5.34 em 5.37, tem-se:
)t(vCG)t(i
C2)t(v 222 −=
•
5.38
Definindo as correntes i1(t) e i2(t) e as tensões v1(t) e v2(t) como sendo variáveis
de estado, pode-se descrever o sistema mostrado na Figura 5.4 sob a forma de equações de
estado. Desse modo, as equações 5.22, 5.25, 5.32 e 5.38 podem ser escritas sob a forma de
equações de estado, ou seja:
)t(u]B[]x[]A[]x[ +=•
5.39
45
Sendo:
T
2211 )t(v)t(i)t(v)t(i]x[ ⎥⎦⎤
⎢⎣⎡=
•••••
5.40
T
2211 )t(v)t(i)t(v)t(i]x[ ⎥⎦⎤
⎢⎣⎡= 5.41
⎥⎥⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢⎢⎢
⎣
⎡
−
−−
−−
−−
=
CG
C2
L1
LR
L1
C1
CG
C1
L1
LR
]A[ 5.42
T
000L1]B[ ⎥⎦
⎤⎢⎣⎡= 5.43
As equações de 5.40 a 5.43 constituem as equações de estado da linha aberta,
representada por meio de dois circuitos.
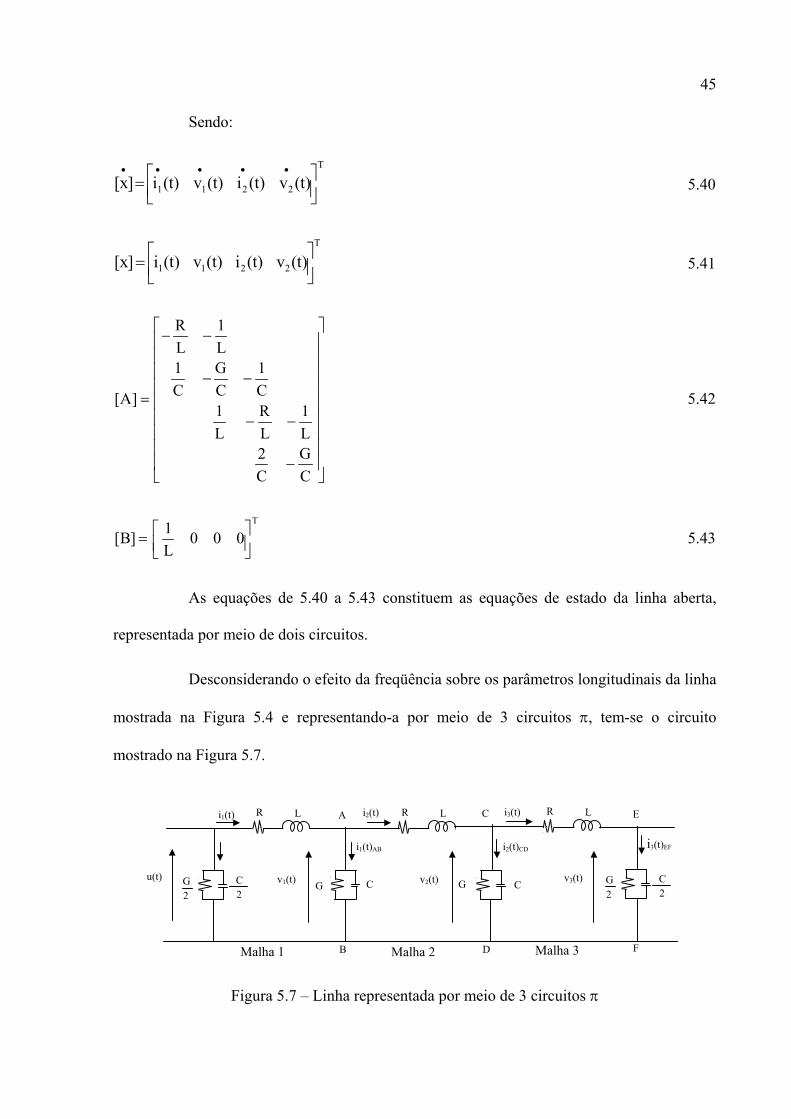
Desconsiderando o efeito da freqüência sobre os parâmetros longitudinais da linha
mostrada na Figura 5.4 e representando-a por meio de 3 circuitos π, tem-se o circuito
mostrado na Figura 5.7.
u(t)
R L R L E R L i3(t) i2(t) i1(t) C A
G 2
C 2
G C G 2
C 2
G C v3(t) v1(t) v2(t)
i3(t)EFi2(t)CDi1(t)AB
Malha 3 Malha 2Malha 1 F D B
Figura 5.7 – Linha representada por meio de 3 circuitos π

46
Da malha 1 da Figura 5.7, tem-se:
0)t(vdt
)t(idL)t(iR)t(u 11
1 =−−− 5.44
Manipulando a equação 5.44, obtém-se:
)t(uL1)t(v
L1)t(i
LR
dt)t(di
111 +−−= 5.45
Fazendo dt
)t(di)t(i 11 =•
, a equação 5.45 pode ser escrita como sendo:
)t(uL1)t(v
L1)t(i
LR)t(i 111 +−−=
•
5.46
Da malha 2 da Figura 5.7, tem-se:
0)t(vdt
)t(idL)t(iR)t(v 22
21 =−−− 5.47
Manipulando a equação 5.47, obtém-se:
)t(vL1)t(v
L1)t(i
LR
dt)t(di
1222 +−−= 5.48
Fazendo dt
)t(di)t(i 22 =
•
, a equação 5.48 pode ser escrita como sendo:
)t(vL1)t(v
L1)t(i
LR)t(i 1222 +−−=
•
5.49
Da malha 3 da Figura 5.7, tem-se:
0)t(vdt
)t(idL)t(iR)t(v 3
332 =−−− 5.50
Manipulando a equação 5.50, obtém-se:
)t(vL1)t(v
L1)t(i
LR
dt)t(di
2333 +−−= 5.51

47
Fazendo dt
)t(di)t(i 3
3 =•
, a equação 5.51 pode ser escrita como sendo:
)t(vL1)t(v
L1)t(i
LR)t(i 2333 +−−=
•
5.52
Denominando de ig(t) e ic(t) as correntes na condutância e na capacitância,
respectivamente, do ramo AB, tem-se:
)t(i)t(i)t(i cgAB1 += 5.53
A corrente i1(t)AB mostrada na equação 5.53, pode ser escrita também como sendo:
)t(i)t(i)t(i 21AB1 −= 5.54
A relação entre a tensão v1(t) e a corrente ig(t) é definida por:
)t(vG)t(i 1g = 5.55
A relação entre a tensão v1(t) e a corrente ic(t) é definida por:
)t(d))t(i)t(i(C1)t(v
t
0gAB11 ∫ −= 5.56
Derivando a equação 5.56 em relação ao tempo, obtém-se:
))t(i)t(i(C1
dt)t(dv
gAB11 −= 5.57
Fazendo dt
)t(dv)t(v 11 =
•
, a equação 5.57 pode ser escrita como sendo:
))t(i)t(i(C1)t(v gAB11 −=
•
5.58
Substituindo as equações 5.54 e 5.55 em 5.58, tem-se:
)t(vCG)t(i
C1)t(i
C1)t(v 1211 −−=
•
5.59
48
Denominando de ig(t) e ic(t) as correntes na condutância e na capacitância,
respectivamente, do ramo CD, tem-se:
)t(i)t(i)t(i cgCD2 += 5.60
A corrente i2(t)CD mostrada na equação 5.60, pode ser escrita também como sendo:
)t(i)t(i)t(i 32CD2 −= 5.61
A relação entre a tensão v2(t) e a corrente ig(t) é definida por:
)t(vG)t(i 2g = 5.62
A relação entre a tensão v2(t) e a corrente ic(t) é definida por:
)t(d))t(i)t(i(C1)t(v
t
0gCD22 ∫ −= 5.63
Derivando a equação 5.63 em relação ao tempo, obtém-se:
))t(i)t(i(C1
dt)t(dv
gCD22 −= 5.64
Fazendo dt
)t(dv)t(v 22 =
•
, a equação 5.64 pode ser escrita como sendo:
))t(i)t(i(C1)t(v gCD22 −=
•
5.65
Substituindo as equações 5.61 e 5.62 em 5.65, tem-se:
)t(vCG)t(i
C1)t(i
C1)t(v 2322 −−=
•
5.66
Denominando de ig(t) e ic(t) as correntes na condutância e na capacitância,
respectivamente, do ramo EF, tem-se:
)t(i)t(i)t(i cgEF3 += 5.67

49
A relação entre a tensão v3(t) e a corrente ig(t) é definida por:
)t(v2G)t(i 3g = 5.68
A relação entre a tensão v3(t) e a corrente ic(t) é definida por:
)t(d))t(i)t(i(C2)t(v
t
0gEF33 ∫ −= 5.69
Derivando a equação 5.69 em relação ao tempo, obtém-se:
))t(i)t(i(C2
dt)t(dv
gEF33 −= 5.70
Fazendo dt
)t(dv)t(v 3
3 =•
, a equação 5.70 pode ser escrita como sendo:
))t(i)t(i(C2)t(v gEF33 −=
•
5.71
Substituindo a equação 5.68 na equação 5.71, tem-se:
)t(vCG)t(i
C2)t(v 333 −=
•
5.72
Definindo as correntes i1(t), i2(t), i3(t) e as tensões v1(t), v2(t), v3(t) como sendo
variáveis de estado, pode-se descrever o sistema mostrado na Figura 5.7 sob a forma de
equações de estado. Desse modo, as equações 5.46, 5.49, 5.52, 5.59, 5.66 e 5.72 podem ser
escritas sob a forma de equações de estado, ou seja:
)t(u]B[]x[]A[]x[ +=•
5.73
Sendo:
T
332211 )t(v)t(i)t(v)t(i)t(v)t(i]x[ ⎥⎦⎤
⎢⎣⎡=
•••••••
5.74

50
T
332211 )t(v)t(i)t(v)t(i)t(v)t(i]x[ ⎥⎦⎤
⎢⎣⎡= 5.75
⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢
⎣
⎡
−
−−
−−
−−
−−
−−
=
CG
C2
L1
LR
L1
C1
CG
C1
L1
LR
L1
C1
CG
C1
L1
LR
]A[ 5.76
T
00000L1]B[ ⎥⎦
⎤⎢⎣⎡= 5.77
As equações de 5.75 a 5.77 constituem as equações de estado da linha aberta,
representada por meio de três circuitos π.
Com base na representação da linha utilizando 1, 2 e 3 circuitos π, pode-se
generalizar esta representação para uma linha representada por meio de n circuitos π,
conectados em cascata. Desse modo, se a linha de comprimento d é representada por meio de
n circuitos π, as matrizes de estado [A] e [B] dessa linha serão escritas como sendo:
⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢
⎣
⎡
−
−−
−−
−−
=
CG
C2
L1
LR
L1
C1
CG
C1
L1
LR
]A[OOO
5.78

51
T
0000L1]B[ ⎥⎦
⎤⎢⎣⎡= K 5.79
Analogamente, podem-se escrever os vetores ] como sendo: ]x[ e x[•
T
)n()n(2211 )t(v)t(i)t(v)t(i)t(v)t(i]x[ ⎥⎦⎤
⎢⎣⎡=
•••••••
L 5.80
T
)n()n(2211 )t(v)t(i)t(v)t(i)t(v)t(i]x[ ⎥⎦⎤
⎢⎣⎡= L 5.81
As equações de 5.78 a 5.81 mostram que, quando uma linha de transmissão em
aberto é representada por meio de uma cascata de n circuitos π, a matriz de estado [A] dessa
linha é uma matriz tridiagonal de dimensão 2n. A matriz de estado [B] possui dimensão
. Verifica-se, também, que as matrizes [A] e [B] podem ser montadas por inspeção, pois
as mesmas obedecem a uma regra de formação. Em um circuito de n circuitos π, a matriz A é
quadrada e possui dimensão 2n. Os elementos da superdiagonal (elementos A(2n,2n+1))
alternam entre
1n2 ×
⎟⎠⎞
⎜⎝⎛−
L1 e ⎟
⎠⎞
⎜⎝⎛−
C1 . Os elementos na subdiagonal (elementos A(2n, 2n-1))
alternam entre ⎟⎠⎞
⎜⎝⎛
L1 e ⎟
⎠⎞
⎜⎝⎛
C1 . Os elementos da diagonal principal alternam entre ⎟
⎠⎞
⎜⎝⎛−
LR e
⎟⎠⎞
⎜⎝⎛−
CG . O último elemento da subdiagonal será ⎟
⎠⎞
⎜⎝⎛
C2 .
A matriz B possui uma única coluna com elementos onde o primeiro elemento
é
n2
⎟⎠⎞
⎜⎝⎛
L1 e os outros elementos são nulos.
Assim, tem-se a descrição sob a forma de variáveis de estado de uma linha de
transmissão aberta.

52
5.3.2 Matrizes de estado para a linha em curto-circuito
Considere uma linha monofásica de comprimento d, alimentada por uma fonte de
tensão u(t) e com o terminal B em curto-circuito, conforme mostra a Figura 5.8.
u(t)
Figura 5.8 – Linha de
Desconsiderand
mostrada na Figura 5.8 e
obtém-se:
G 2
C 2
R L
G
Figura 5.9 – Linh
Observando a F
e a mesma torna-se idêntic
primeiros (n-1) circuitos π
obter as matrizes de esta
elemento π da cascata.
A
transmissão monofásica com extremidade B
o o efeito da freqüência sobre os parâmetro
, representando-a por meio de uma cas
C
R L
G C G
a representada por meio de uma cascata de
com extremidade B em curto-circuito.
igura 5.9, verifica-se que se o último circu
a à Figura 5.1. Portanto, as equações de cor
serão idênticas às equações da linha em ab
do da linha em curto-circuito, basta anal
B
solo
em curto-circuito.
s longitudinais da linha
cata de n circuitos π,
L
C
R
n circuitos π
ito π é desconsiderado,
rentes e tensões para os
erto. Desse modo, para
isar somente o último

53
A Figura 5.10 mostra os dois últimos circuitos π da cascata que representa a linha
em curto-circuito.
i(n-1)(t)
v(n-1)(t)
A
C
i(n-1)(t)AB
v(n)(t) v(n-2)(t) 2
i(n-2)(t)
G 2
C
R i(n)(t) R LL C
Figura 5.10 – Dois últimos circuitos da casca
Do circuito π, à esquerda do ramo A
0)t(vdt
)t(idL)t(iR)t(v )1n(
)1n()1n()2n( =−−− −
−−−
Manipulando a equação 5.82, obtém
t(vL1)t(v
L1)t(i
LR
dt)t(di
)2n()1n()1n()1n(
−−−− +−−=
Fazendo dt
)t(di)t(i )1n(
)1n(−
−
•
= , a equa
)t(vL1)t(v
L1)t(i
LR)t(i )2n()1n()1n()1n( −−−−
•
+−−=
Do circuito π, à esquerda do ramo C
0dt
)t(idL)t(iR)t(v )n(
)n()1n( =−−−
Manipulando a equação 5.85, obtém
)t(vL1)t(i
LR
dt)t(di
)1n()n()n(
−+−=
G
D B
ta π que representa a linha em curto-circuito
B, na Figura 5.10, tem-se:
5.82
-se:
) 5.83
ção 5.83 pode ser escrita como sendo:
5.84
D, na Figura 5.10, tem-se:
5.85
-se:
5.86

54
Fazendo dt
)t(di)t(i )n(
)n( =•
, a equação 5.86 pode ser escrita como sendo:
)t(vL1)t(i
LR)t(i )1n()n()n( −
•
+−= 5.87
Denominando de ig(t) e ic(t) as correntes na condutância e na capacitância,
respectivamente, do ramo AB, tem-se:
)t(i)t(i)t(i cgAB)1n( +=− 5.88
A corrente , mostrada na equação 5.88, pode ser escrita também como
sendo:
AB)1n( )t(i −
)t(i)t(i)t(i )n()1n(AB)1n( −= −− 5.89
A relação entre a tensão v(n-1)(t) e a corrente ig(t) é definida por:
)t(vG)t(i )1n(g −= 5.90
A relação entre a tensão v(n-1)(t) e a corrente ic(t) é definida por:
)t(d))t(i)t(i(C1)t(v
t
0gAB)1n()1n( ∫ −= −− 5.91
Derivando a equação 5.91 em relação ao tempo, obtém-se:
))t(i)t(i(C1
dt)t(dv
gAB)1n()1n( −= −
− 5.92
Fazendo dt
)t(dv)t(v )1n(
)1n(−
−
•
= , a equação 5.92 pode ser escrita como sendo:
))t(i)t(i(C1)t(v gAB)1n()1n( −= −−
•
5.93
Substituindo as equações 5.89 e 5.90 em 5.93, tem-se:

55
)t(vCG)t(i
C1)t(i
C1)t(v )1n()n()1n()1n( −−−
•
−−= 5.94
As equações de 5.79 até 5.91 mostram que, quando se utiliza uma cascata de n
circuitos π para se representar uma linha em curto, considerando como variáveis de estado as
correntes nos indutores e as tensões nos capacitores, obtêm-se n equações de corrente e (n-1)
equações de tensão, pois a tensão na capacitância do último circuito π é nula. Portanto, o
sistema será descrito por (2n-1) variáveis de estado. Conseqüentemente, a matriz [A] terá
dimensão , e a matriz [B] terá dimensão )1n2()1n2( −×− 1)1n2( ×− .
Com base no desenvolvimento realizado no item 5.3.1 e com base também nas
equações 5.79 até 5.91, pode-se dizer que as matrizes [A] e [B] de uma linha monofásica em
curto, representada por uma cascata de n circuitos π, são escritas como sendo:
⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢
⎣
⎡
−
−−
−−
−−
=
LR
L1
C1
CG
C1
C1
CG
C1
L1
LR
]A[OOO
5.95
T
0000L1]B[ ⎥⎦
⎤⎢⎣⎡= L 5.96
Analogamente, podem-se escrever os vetores ] como sendo: ]x[ e x[•
T
)n()1n(2211 )t(i)t(v)t(v)t(i)t(v)t(i]x[ ⎥⎦⎤
⎢⎣⎡=
••
−
•••••
L 5.97

56
T
)n()1n(2211 )t(i)t(v)t(v)t(i)t(v)t(i]x[ ⎥⎦⎤
⎢⎣⎡= −L 5.98
5.3.3 Matrizes de estado para a linha que alimenta uma carga de valor igual à sua
impedância característica
A Figura 5.11 mostra uma linha de transmissão conectada a uma resistência cujo
valor é idêntico ao valor da impedância característica Zc dessa linha.
A B S
Rr=ZCu(t)
solo Figura 5.11 – Linha de transmissão monofásica, alimentada por uma carga resistiva
Representando a linha mostrada na Figura 5.11, por meio de uma cascata de n
circuitos π, obtém-se:
G 2
C 2
R L
G C
R L
G C C2
G2
Rr = Zc
L R
Figura 5.12 – Linha representada por meio de uma cascata de n circuitos π,
alimentada por uma carga resistiva.
Observando a Figura 5.12, verifica-se que, se o último circuito π é
desconsiderado, a mesma torna-se idêntica à Figura 5.1. Portanto, as equações de correntes e
tensões para os primeiros (n-1) circuitos π serão idênticas às equações da linha em aberto.

57
Desse modo, para obter as matrizes de estado da linha que alimenta uma carga de valor
idêntico ao valor da impedância característica Zc da linha, basta analisar somente o último
elemento π da cascata.
A Figura 5.13 mostra os dois últimos circuitos π da cascata que representa a linha
que alimenta uma carga de valor idêntico ao valor de sua impedância característica Zc.
Rr = Zc
i(n-1)(t)
I(n-2)(t)
G 2
v(n-2)(t) C 2
L A
B
G C
R L
G2
D
I(n-1)(t)AB
v(n)(t) v(n-1)(t) C 2
In(t)CD
R i(n)(t) ir(t) C
Figura 5.13 – Dois últimos circuitos π da cascata que representa uma linha
conectada a uma resistência de valor Zc.
Do circuito π, à esquerda do ramo AB, na Figura 5.13, tem-se:
0)t(vdt
)t(idL)t(iR)t(v )1n(
)1n()1n()2n( =−−− −
−−− 5.99
Manipulando a equação 5.99, obtém-se:
)t(vL1)t(v
L1)t(i
LR
dt)t(di
)2n()1n()1n()1n(
−−−− +−−= 5.100
Fazendo dt
)t(di)t(i )1n(
)1n(−
−
•
= , a equação 5.100 pode ser escrita como sendo:
)t(vL1)t(v
L1)t(i
LR)t(i )2n()1n()1n()1n( −−−−
•
+−−= 5.101
Do circuito π, à esquerda do ramo CD, na Figura 5.13, tem-se:
0)t(vdt
)t(idL)t(iR)t(v )n(
)n()n()1n( =−−−− 5.102

58
Manipulando a equação 5.102, obtém-se:
)t(vL1)t(v
L1)t(i
LR
dt)t(di
)1n()n()n()n(
−+−−= 5.103
Fazendo dt
)t(di)t(i )n(
)n( =•
, a equação 5.103 pode ser escrita como sendo:
)t(vL1)t(v
L1)t(i
LR)t(i )1n()n()n()n( −
•
+−−= 5.104
Denominando de ig(t) e ic(t) as correntes na condutância e na capacitância,
respectivamente, do ramo AB, tem-se:
)t(i)t(i)t(i cgAB)1n( +=− 5.105
A corrente mostrada na equação 5.105 pode ser escrita também como
sendo:
AB)1n( )t(i −
)t(i)t(i)t(i )n()1n(AB)1n( −= −− 5.106
A relação entre a tensão v(n-1)(t) e a corrente ig(t) é definida por:
)t(vG)t(i )1n(g −= 5.107
A relação entre a tensão v(n-1)(t) e a corrente ic(t) é definida por:
)t(d))t(i)t(i(C1)t(v
t
0gAB)1n()1n( ∫ −= −− 5.108
Derivando a equação 5.108 em relação ao tempo, obtém-se:
))t(i)t(i(C1
dt)t(dv
gAB)1n()1n( −= −
− 5.109
Fazendo dt
)t(dv)t(v )1n(
)1n(−
−
•
= , a equação 5.109 pode ser escrita como sendo:

59
))t(i)t(i(C1)t(v gAB)1n()1n( −= −−
•
5.110
Substituindo as equações 5.106 e 5.107 em 5.110, tem-se:
)t(vCG)t(i
C1)t(i
C1)t(v )1n()n()1n()1n( −−−
•
−−= 5.111
Denominando de ig(t) e ic(t) as correntes na condutância e na capacitância,
respectivamente, do ramo CD, tem-se:
)t(i)t(i)t(i cgCD)n( += 5.112
A relação entre a tensão v(n)(t) e a corrente ig(t) é definida por:
)t(v2G)t(i )n(g = 5.113
A relação entre a tensão v(n)(t) e a corrente ic(t) é definida por:
dt)t(vd
C2)t(i )n(
c = 5.114
Tem-se que:
cgCD)n(r ii)t(i)t(i −−= 5.115
A tensão é definida por: )t(v )n(
rr)n( iR)t(v = 5.116
Substituindo a equação 5.115 na equação 5.116, tem-se:
⎟⎟⎠
⎞⎜⎜⎝
⎛−−=
dt)t(vd
2C)t(v
2G)t(iR)t(v )n(
)n()n(r)n( 5.117
Manipulando a equação 5.117, tem-se:

60
)t(vCG
CR2)t(i
2C
dt)t(vd
)n(r
)n()n(
⎟⎟⎠
⎞⎜⎜⎝
⎛−−+= 5.118
Fazendo dt
)t(dv)t(v )n(
)n( =•
, a equação 5.118 pode ser escrita como sendo:
)t(vCG
CR2)t(i
2C)t(v )n(
r)n()n( ⎟⎟
⎠
⎞⎜⎜⎝
⎛−−+=
•
5.119
Portanto, se a linha de comprimento d é representada por meio de n circuitos π, as
matrizes de estado [A] e [B] dessa linha serão escritas como sendo:
⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢
⎣
⎡
⎟⎟⎠
⎞⎜⎜⎝
⎛−−
−−
−−
−−
=
CG
CR2
C2
L1
LR
L1
C1
CG
C1
L1
LR
]A[
r
OOO 5.120
T
0000L1]B[ ⎥⎦
⎤⎢⎣⎡= L 5.121
Analogamente, podem-se escrever os vetores ] como sendo: ]x[ e x[•
T
)n()n(2211 )t(v)t(i)t(v)t(i)t(v)t(i]x[ ⎥⎦⎤
⎢⎣⎡=
•••••••
L 5.122
T
)n()n(2211 )t(v)t(i)t(v)t(i)t(v)t(i]x[ ⎥⎦⎤
⎢⎣⎡= L 5.123

61
5.3.4 Matrizes de estado para a linha conectada a um transformador em vazio
A Figura 5.14 mostra uma linha de transmissão alimentando um transformador em
vazio.
Figura 5.14 – Linha de transmissão monofásica alimentando um transformador em vazio
Representando a linha mostrada na Figura 5.14, por meio de uma cascata de n
circuitos π, obtém-se:
2
A B S
u(t) CT
solo
R
C 2
R L
C
R L
C C 2
G2
L
CT
e
pr
ob
so
qu
G
Figura 5.15 –
Observando
a mesma torna-se idê
imeiros (n-1) circuito
ter as matrizes de es
mente o último elem
A Figura 5
e alimenta um transf
G
Linha representada
alimentando um
a Figura 5.15, veri
ntica à Figura 5.1. P
s π serão idênticas
tado da linha que al
ento π da cascata.
.16 mostra os dois ú
ormador em vazio.
G
por meio de uma cascata de n circuitos π
transformador em vazio
fica-se que se o último circuito π é desconsiderado,
ortanto, as equações de correntes e tensões para os
às equações da linha em aberto. Desse modo, para
imenta um transformador em vazio, basta analisar
ltimos circuitos π da cascata que representa a linha

62
i(n-1)(t)
i(n-2)(t)
v(n-2)(t) G 2
C 2
L A
G C
L
G 2
C 2
v(n-1)(t) v(n)(t)
i(n-1)(t)ABin(t)CD
C i(n)(t) R R CT
D B
Figura 5.16 – Dois últimos circuitos π de uma cascata que representa uma linha alimentando um transformador em vazio
Do circuito π, à esquerda do ramo AB, na Figura 5.16, tem-se:
0)t(vdt
)t(idL)t(iR)t(v )1n(
)1n()1n()2n( =−−− −
−−− 5.124
Manipulando a equação 5.124, obtém-se:
)t(vL1)t(v
L1)t(i
LR
dt)t(di
)2n()1n()1n()1n(
−−−− +−−= 5.125
Fazendo dt
)t(di)t(i )1n(
)1n(−
−
•
= , a equação 5.125 pode ser escrita como sendo:
)t(vL1)t(v
L1)t(i
LR)t(i )2n()1n()1n()1n( −−−−
•
+−−= 5.126
Do circuito π, à esquerda do ramo CD, na Figura 5.16, tem-se:
0)t(vdt
)t(idL)t(iR)t(v )n(
)n()n()1n( =−−−− 5.127
Manipulando a equação 5.127, obtém-se:
)t(vL1)t(v
L1)t(i
LR
dt)t(di
)1n()n()n()n(
−+−−= 5.128
Fazendo dt
)t(di)t(i )n(
)n( =•
, a equação 5.128 pode ser escrita como sendo:

63
)t(vL1)t(v
L1)t(i
LR)t(i )1n()n()n()n( −
•
+−−= 5.129
Denominando de ig(t) e ic(t) as correntes na condutância e na capacitância,
respectivamente, do ramo AB, tem-se:
)t(i)t(i)t(i cgAB)1n( +=− 5.130
A corrente , mostrada na equação 5.130, pode ser escrita também como
sendo:
AB)1n( )t(i −
)t(i)t(i)t(i )n()1n(AB)1n( −= −− 5.131
A relação entre a tensão v(n-1)(t) e a corrente ig(t) é definida por:
)t(vG)t(i )1n(g −= 5.132
A relação entre a tensão v(n-1)(t) e a corrente ic(t) é definida por:
)t(d))t(i)t(i(C1)t(v
t
0gAB)1n()1n( ∫ −= −− 5.133
Derivando a equação 5.133 em relação ao tempo, obtém-se:
))t(i)t(i(C1
dt)t(dv
gAB)1n()1n( −= −
− 5.134
Fazendo dt
)t(dv)t(v )1n(
)1n(−
−
•
= , a equação 5.134 pode ser escrita como sendo:
))t(i)t(i(C1)t(v gAB)1n()1n( −= −−
•
5.135
Substituindo as equações 5.131 e 5.132 em 5.135, tem-se:
)t(vCG)t(i
C1)t(i
C1)t(v )1n()n()1n()1n( −−−
•
−−= 5.136

64
Denominando de ig(t) e ic(t) as correntes na condutância e na capacitância,
respectivamente, do ramo CD, tem-se:
)t(i)t(i)t(i cgCD)n( += 5.137
A relação entre a tensão v(n)(t) e a corrente ig(t) é definida por:
)t(v2G)t(i )n(g = 5.138
A relação entre a tensão v(n)(t) e a corrente ic(t) é definida por:
)t(d))t(i)t(i(C2C
2)t(vt
0gCD)n(
T)n( ∫ −
+= 5.139
Derivando a equação 5.139 em relação ao tempo, obtém-se:
))t(i)t(i(C2C
2dt
)t(dvgCD)n(
T
)n( −+
= 5.140
Fazendodt
)t(dv)t(v )n(
)n( =•
, a equação 5.140 pode ser escrita como sendo:
))t(i)t(i(C2C
2)t(v gCD)n(T
)n( −+
=•
5.141
Substituindo a equação 5.138 em 5.141, tem-se:
)t(vC2C
G)t(iC2C
2)t(v )n(T
)n(T
)n(+
−+
=•
5.142
Portanto, se a linha de comprimento d é representada por meio de n circuitos π, as
matrizes de estado [A] e [B] dessa linha serão escritas como sendo:
65
⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢
⎣
⎡
+−
+
−−
−−
−−
=
TT C2CG
C2C2
L1
LR
L1
C1
CG
C1
L1
LR
]A[OOO
5.143
T
0000L1]B[ ⎥⎦
⎤⎢⎣⎡= L 5.144
Analogamente, podem-se escrever os vetores ] como sendo: ]x[ e x[•
T
)n()n(2211 )t(v)t(i)t(v)t(i)t(v)t(i]x[ ⎥⎦⎤
⎢⎣⎡=
•••••••
L 5.145
T
)n()n(2211 )t(v)t(i)t(v)t(i)t(v)t(i]x[ ⎥⎦⎤
⎢⎣⎡= L 5.146
5.4 CONCLUSÃO
Neste capítulo, o modelo apresentado fornece resultados diretamente no domínio
no tempo e permite analisar as correntes e tensões ao longo da linha. A precisão do modelo
aumenta à medida que aumenta a quantidade de circuitos π que representa a linha.
Foram deduzidas as equações de estado para uma linha monofásica, representada
por meio de uma cascata contendo uma quantidade genérica de circuitos π é com uma carga
conectada no terminal da mesma.

66
6 SOLUÇÃO DAS EQUAÇÕES DE ESTADO
6.1 INTRODUÇÃO
Neste capítulo, serão mostrados métodos numéricos e analíticos que podem ser
utilizados para se obter as soluções das equações de estado do capítulo 5.
A utilização dos métodos numéricos tem a finalidade de conseguir uma
aproximação da solução exata de uma equação diferencial. Para isso, utiliza-se a fórmula de
Heun ou regra do trapézio, para transformar as soluções das equações do estado em equações
algébricas. Com os métodos analíticos, consegue-se a solução exata de uma equação
diferencial e, para isso, utiliza-se a diagonalização da matriz dos coeficientes para obter essa
solução (BOYCE, 1994).
6.2 RESOLUÇÃO DA EQUAÇÃO DE ESTADO POR MEIO DE MÉTODO
NÚMERICO
O sistema de estado pode ser resolvido por meio de métodos numéricos. Como
exemplos de métodos numéricos de resolução de equações diferenciais, podem-se citar:
Método de Euler, Fórmula de Heun (regra do trapézio) e o Método de Runge-Kutta (BOYCE,

67
1994), (EDWARDS et al. 1995). Neste trabalho, será utilizada a Fórmula de Heun, para obter
a integração numérica das equações de estado que representam a linha de transmissão.
A fórmula de Heun consiste em aproximar a área abaixo da função a ser integrada
como sendo igual à área abaixo de uma função de primeiro grau, conforme mostra a figura
6.1.
y’(tk+1)
y’(tk)
tk+1tk t
f(t)
y’(t)
Figura 6.1 – Função y’(t) aproximada por uma função de primeiro grau f(t)
Na figura 6.1 a área A1 abaixo da função y’(t) e a área A2 abaixo da função f(t), no
intervalo [tk, tk+1], podem ser calculadas como sendo:
)t(y)t(y)t(d)t('yA k1k
t
t1
1k
k
−== +∫+
6.1
[ h)t('y)t('y21)t(d)t(fA 1kk
t
t2
1k
k++== ∫
+ ] 6.2
Na equação 6.2, h é o passo de cálculo, definido como sendo:
k1k tth −= + 6.3
Aproximando-se a área A1 pela área A2, obtém-se:

68
[ )t('y)t('yh21)t(y)t(y 1kkk1k ++ +=− ] 6.4
A equação 6.4 é a fórmula de Heun, utilizada para obter a solução da equação
diferencial y’(t) no instante tk.
Considere-se o sistema do tipo:
)t(u]B[]x[]A[]x[ +=•
6.5
onde
)]t('x[)t(d]x[d)]t(x[ ==
•
6.6
Aplicando a Fórmula de Heun no sistema de estado, tem-se:
)])t(x[)]t(x([h21)]t(x[)]t(x[ 1kkk1k +
••
+ +=− 6.7
Substituindo a equação 6.5 em 6.7, obtém-se:
))t(u]B[)]t(x[]A[)]t(u[]B[)]t(x[]A([h21)]t(x[)]t(x[ 1k1kkkk1k +++ ++++= 6.8
Manipulando a equação 6.8, obtém-se:
)t(u]B[2h)t(u]B[
2h)]t(x[]A[
2h)]t(x[)]t(x[]A[
2h)]t[(x 1kkkk1k1k +++ +++=− 6.9
Na equação 6.9, colocando os termos em evidência, obtém-se:
[ )t(u)t(u]B[2h)]t(x[]A[
2hI)]t(x[]A[
2hI 1kkk1k ++ ++⎥⎦
⎤⎢⎣⎡ +=⎥⎦
⎤⎢⎣⎡ − ] 6.10
Escrevendo a equação 6.10 na forma de sistema, tem-se:
[ ⎟⎟⎠
⎞⎜⎜⎝
⎛++⎥⎦
⎤⎢⎣⎡ +⎥⎦
⎤⎢⎣⎡ ⋅−= +
−
+ )t(u)t(u]B[2h)]t(x[]A[
2hI]A[
2hI)]t(x[ 1kkk
1
1k ] 6.11

69
A equação 6.11 representa a solução da equação de estado, por meio do método
de integração trapezoidal.
6.3 RESOLUÇÃO DA EQUAÇÃO DE ESTADO POR MEIO DE MÉTODO
ANALÍTICO
As equações de estado para uma linha monofásica representada por meio de uma
cascata contendo uma quantidade genérica de circuitos π, podem ser escritas sob a forma de
um sistema não-homogêneo:
)t(u]B[]x[]A[]x[ +=•
6.12
Na equação 6.12, [X] é o vetor de estados que possui dimensão ((2n) x 1)), [A] é
uma matriz quadrada que possui dimensão ((2n) x (2n)) e [B] é uma matriz coluna que possui
dimensão ((2n) x 1). A função u(t) é a entrada que será aplicada no sistema. O vetor [X] é
denominado vetor de estado, enquanto que as matrizes [A] e [B] são denominadas matrizes de
estado. O vetor é a derivada do vetor em relação ao tempo. •
]X[ ]X[
A solução geral do sistema não-homogêneo 6.12 pode exprimir-se como
(BOYCE, 1994):
)t(bxcxcx )n2()1( n1 +++= K 6.13
Na equação 6.13, )n2()1( xcxcx n1h ++= K é a solução geral do sistema
homogêneo que expressa uma combinação linear das soluções de um conjunto fundamental
de soluções e é uma solução particular do sistema não-homogêneo. )n2()1( x,,x K )t(bx p =
Para encontrar uma solução particular do sistema não-homogêneo, existem vários
procedimentos que são:

70
• Método da diagonalização da matriz A;
• Método dos coeficientes indeterminados;
• Método da variação dos parâmetros;
O método a ser utilizado neste trabalho para obter a solução analítica das equações
de estado que representam a linha de transmissão, é a diagonalização da matriz A.
6.3.1 Obtenção da solução analítica utilizando o método da diagonalização da matriz A
Conforme verificado no capítulo 5, o sistema de estado é um sistema acoplado,
pois a matriz A não é uma matriz diagonal. No entanto, a matriz A pode ser transformada em
uma matriz diagonal por meio do uso de uma transformação de similaridade. Ou seja,
transformando-o em um sistema equivalente desacoplado, no qual cada equação contém uma
única incógnita (BOYCE, 1994) e (CHEN, 1984).
Considere a seguinte transformação:
]y][T[]x[ = 6.14
Na equação 6.14, a matriz [T] é uma matriz cujas colunas são os autovetores
associados com os autovalores da matriz [A] que possui dimensão ((2n) x (2n)), e [y] é um
vetor que possui dimensão ((2n) x 1).
Ou seja:
[ ]⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
=
)n2)(n2(2)n2(1)n2(
)n2(11211
TTT
TTT
TK
M
K
6.15

71
[ ]⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
=
)n2(
1
y
yy M 6.16
Substituindo a equação 6.14 em 6.12, tem-se:
)t(u]B[]y][T][A[]y[]T[ +=•
6.17
Multiplicando a equação 6.17 por [T]-1, obtém-se:
)t(u]B[]T[]y][T][A[]T[]y[]T[]T[ 111 −−•
− += 6.18
A equação 6.18 pode ser escrita como:
]G[]y[][]y[ +λ=•
6.19
Na equação 6.19, [λ] é uma matriz diagonal onde os elementos da diagonal
principal são os autovalores da matriz [A] e [ ] [ ] [ ] )t(uBTG 1−= .
A matriz [λ] e [G] possuem os seguintes elementos:
⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢
⎣
⎡
λ
λλ
=λ
)n2(
2
1
][O
6.20
⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢
⎣
⎡
=
)n2(
2
1
g
gg
]G[M
6.21
A equação 6.19 é um sistema de 2n equações diferenciais desacopladas em
y1(t),K ,y(2n)(t). Portanto, as 2n equações diferenciais podem ser resolvidas separadamente.
Em forma escalar, a equação 6.19 tem o formato:

72
kkkk G)t(y)t(y +λ=•
6.22
k = 1,K , 2n
Reescrevendo a equação 6.22, tem-se:
kkkk G)t(y
dtdy
+λ= 6.23
Dividindo ambos os lados da equação 6.23 por kλ :
k
kkk
k
k G)t(ydt
dyλ
+λ=
λ 6.24
Multiplicando ambos os lados da equação 6.24 por dtkλ , tem-se:
⎟⎟⎠
⎞⎜⎜⎝
⎛λ
+λ=k
kkkk
G)t(ydtdy 6.25
Dividindo ambos os lados da equação 6.25 por ⎟⎟⎠
⎞⎜⎜⎝
⎛λ
+k
kk
G)t(y , tem-se:
⎟⎟⎠
⎞⎜⎜⎝
⎛λ
+=λ
k
kk
kk G
)t(y
dydt 6.26
Primitivando ambos os lados da equação 6.26, tem-se:
⎟⎟⎠
⎞⎜⎜⎝
⎛λ
+=+λk
kkk
G)t(ylnCt 6.27
Utilizando a definição de logaritmo natural, tem-se:
k
kk
tk
G)t(yeC k
λ+=λ 6.28
k
ktkk
GeC)t(y k
λ−= λ 6.29

73
Na equação 6.29, os Ck são constantes arbitrárias.
Considerando t = 0 e yk(t) = 0 na equação, tem-se:
k
k)o(k
GeC0 k
λ−= λ 6.30
k
kk
GC0
λ−= 6.31
k
kk
GC
λ= 6.32
Substituindo a equação 6.32 em 6.29, tem-se:
k
kt
k
kk
Ge
G)t(y k
λ−
λ= λ 6.33
Colocando k
kGλ
da equação 6.33 em evidência, tem-se:
( 1eG
)t(y t
k
kk
k −λ
= λ ) 6.34
Portanto, yk(t) para k = 1,K , 2n pode ser escrito da seguinte forma:
( )
( )
( ) ⎥⎥⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢⎢⎢
⎣
⎡
−λ
−λ
−λ
=
λ
λ
λ
1eG
1eG
1eG
)t(y
t
)n2(
)n2(
t
2
2
t
1
1
k
)n2(
2
1
M
6.35
Substituindo as equações 6.15 e 6.16 em 6.14, tem-se:

74
[ ]⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
⋅⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
=
)n2(
1
)n2)(n2(2)n2(1)n2(
)n2(11211
y
y
TTT
TTT
x M
K
M
K
6.36
Desenvolvendo a equação 6.36, tem-se.
)n2()n2)(n2(22)n2(11)n2()n2(
)n2()n2(12121111
yTyTyTx
yTyTyTx
+++=
+++=
K
M
K
6.37
Substituindo a equação 6.35, na última equação do sistema 6.37, tem-se:
( ) ( ) ( ⎟⎟⎠
⎞⎜⎜⎝
⎛−
λ++⎟⎟
⎠
⎞⎜⎜⎝
⎛−
λ+⎟⎟
⎠
⎞⎜⎜⎝
⎛−
λ= λλλ 1e
GT1e
GT1e
GTx t
)n2(
)n2()n2)(n2(
t
2
22)n2(
t
1
11)n2()n2(
)n2(21 K ) 6.38
Reescrevendo a equação 6.38 na forma genérica, tem-se:
( )1eG
Tx t
j
jn2
1jj)n2()n2(
j −λ
= λ
=∑ 6.39
Testes preliminares, realizados com a matriz [A] da linha que será analisada neste
trabalho, mostraram que os elementos da matriz [ ]λ são autovalores complexos, que
aparecem aos pares conjugados ( jjj biaz ±= ), e seus correspondentes autovetores são
também complexos conjugados.
Sendo assim, tem-se:
jjj
jj)n2( dic
GT ±=
λ 6.40
Na equação 6.40, são valores reais. jc e jd
Portanto, tem-se:
( )( )1edicx t)bia(n2
1jjj)n2(
jj −+= ±
=∑ 6.41

75
Utilizando a fórmula de Euler (BOYCE, 1994), sabe-se que:
( )t(senbi)t(bcosee jjtat)bia( jjj +=± ) 6.42
Substituindo a equação 6.42 em 6.41, tem-se:
( ) ( )[ ]1)t(senbi)t(bcosedicx jjta
n2
1jjj)n2(
j −++= ∑=
6.43
Desenvolvendo a equação 6.43, obtém-se:
( )[ ] ( )[ ]jjjjjta
n2
1jjjjjj
ta)n2( d)t(bcosd)t(bsenceic)t(bsend)t(bcoscex jj −++−−= ∑
=
6.44
Tomando a parte real e imaginária da equação 6.44 como sendo as soluções
linearmente independentes procuradas, tem-se:
( jjjjjta
1 c)t(bsend)t(bcosce)t(P j −−= )
)
6.45
( jjjjjta
2 d)t(bcosd)t(bsence)t(P j −+= 6.46
Desse modo, é possível mostrar a solução geral da última equação no sistema
6.37, que é dada por:
)t(P)t(Px 2j
n2
1j1j)n2( β+α= ∑
=
6.47
Na equação 6.47, os termos jα e jβ são constantes arbitrárias; os termos P1(t)
P2(t) são soluções reais.
6.3.2 Método dos coeficientes indeterminados
O método dos coeficientes indeterminados é usualmente empregado em
problemas com a equação homogênea de coeficientes constantes e com o termo
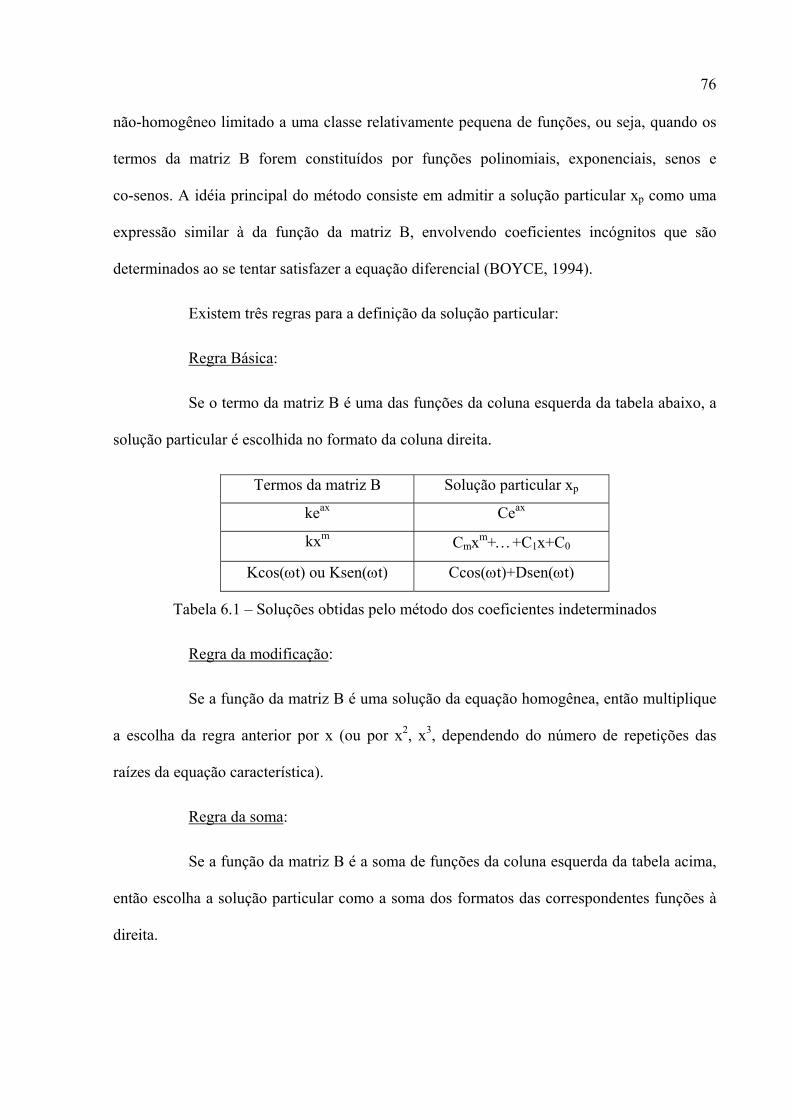
76
não-homogêneo limitado a uma classe relativamente pequena de funções, ou seja, quando os
termos da matriz B forem constituídos por funções polinomiais, exponenciais, senos e
co-senos. A idéia principal do método consiste em admitir a solução particular xp como uma
expressão similar à da função da matriz B, envolvendo coeficientes incógnitos que são
determinados ao se tentar satisfazer a equação diferencial (BOYCE, 1994).
Existem três regras para a definição da solução particular:
Regra Básica:
Se o termo da matriz B é uma das funções da coluna esquerda da tabela abaixo, a
solução particular é escolhida no formato da coluna direita.
Termos da matriz B Solução particular xp
keax Ceax
kxm Cmxm+…+C1x+C0
Kcos(ωt) ou Ksen(ωt) Ccos(ωt)+Dsen(ωt)
Tabela 6.1 – Soluções obtidas pelo método dos coeficientes indeterminados
Regra da modificação:
Se a função da matriz B é uma solução da equação homogênea, então multiplique
a escolha da regra anterior por x (ou por x2, x3, dependendo do número de repetições das
raízes da equação característica).
Regra da soma:
Se a função da matriz B é a soma de funções da coluna esquerda da tabela acima,
então escolha a solução particular como a soma dos formatos das correspondentes funções à
direita.

77
6.3.3 Método da variação dos parâmetros
Este método foi desenvolvido por Lagrange, e completa o método dos coeficientes
indeterminados. A principal vantagem do método da variação dos parâmetros é ser um
método geral. Em princípio, pelo menos, pode ser aplicado a qualquer equação e não exige
hipóteses detalhadas sobre a forma da solução.
Usa-se o método da variação de parâmetros, a fim de construir uma solução
particular, e daí uma solução geral, para a equação não homogênea.
A idéia básica do método da variação de parâmetros é substituir as constantes c da
equação 6.13 por funções vetoriais , a fim de determinar essas funções de modo que a
equação resultante seja uma solução da equação não-homogênea (BOYCE, 1994).
)t(v
A solução geral do sistema homogêneo xh é dada por:
)t(v)t(x Ψ= 6.48
Derivando x, dado pela equação 6.48, e exigindo que a equação 6.12 seja
satisfeita, obtém-se:
)t(u]B[)t(v)t(]A[)t(v)t()t(v)t( '' +Ψ=Ψ+Ψ 6.49
Uma vez que é uma matriz fundamental, ; portanto, a
equação 6.49 reduz-se a:
)t(Ψ )t(]A[)t( ' Ψ=Ψ
)t(u]B[)t(v)t( ' =Ψ 6.50
Sabe-se que é não-singular, então existe, logo obtém-se: )t(Ψ )t(1−Ψ
)t(u]B)[t()t(v 1' −Ψ= 6.51

78
Assim, para , pode-se escolher qualquer vetor da classe que obedece à
equação 6.51; esses vetores são determinados a menos de uma constante(vetorial) aditiva
arbitrária; então, simboliza-se por:
)t(v
)t(v
c)t(d)t(u]B)[t()t(v 1' +Ψ= ∫− 6.52
Onde o vetor constante c é arbitrário. Finalmente, a substituição de , na
equação 6.49, leva à solução x do sistema 6.12:
)t(v
)t(d)t(u]B)[t()t(c)t(x 1∫
−ΨΨ+Ψ= 6.53
Uma vez que c é arbitrário, qualquer condição inicial num ponto pode ser
conseguida por uma escolha apropriada de c. Portanto, toda solução geral do sistema 6.12 está
contida na equação 6.53.
0tt =
6.4 CONCLUSÃO
As soluções das equações de estado foram obtidas com a utilização de métodos
numéricos e analíticos.
O método numérico tem a finalidade de conseguir uma aproximação da solução
exata de uma equação diferencial utilizando o método de integração trapezoidal.
O método analítico obtém uma solução exata da equação diferencial utilizando o
método da diagonalização da matriz A.

79
7 APLICAÇÃO DO MODELO PROPOSTO
7.1 INTRODUÇÃO
Neste capítulo, a técnica de variáveis de estado será utilizada para representar uma
linha monofásica. O modelo proposto será utilizado para simular a energização da linha,
considerando a mesma em aberta, em curto-circuito e em carga. Nesse caso será considerado
que a carga possui o mesmo comportamento apresentado pela impedância característica da
linha. Serão mostrados resultados obtidos a partir da solução numérica e da solução analítica
das equações de estado.
7.2 DESCRIÇÃO DA LINHA DE TRANSMISSÃO
Considerou-se uma linha de transmissão monofásica de 10 km de comprimento
que será energizada por meio de uma fonte de tensão constante de 20 kV. Essa linha será
representada por meio de uma cascata de 100 circuitos π.
A cascata de circuitos π será descrita por meio de variáveis de estado, conforme
mostrado no capítulo 5. As tensões e correntes na linha serão obtidas por meio da solução
numérica (método de integração trapezoidal) e por meio da solução analítica das equações de
estado, que neste trabalho serão evoluídas no ambiente MATLAB.

80
A Tabela 7.1 mostra os valores dos parâmetros da linha mostrada na Figura 7.1.
Considerou-se que os parâmetros longitudinais da mesma podem ser considerados constantes
(MACÍAS et al. 2005).
Parâmetro valor
L 1x10-3 H/km
G 0,556x10-6 S/km
C 11,11x10-9 F/km
R 0,05 Ω/km
Tabela 7.1 – Valores dos parâmetros da linha de transmissão
7.3 ENERGIZAÇÃO DA LINHA EM ABERTO
A Figura 7.1 mostra uma representação da linha monofásica com um dos
terminais em aberto, energizada por uma fonte de tensão constante de 20 kV. A chave S1 é
fechada no tempo t =0.
S1
B A
u(t)= 20 kV
solo
Figura 7.1 – Energização da linha em aberto
A Figura 7.2 mostra a tensão no terminal B da linha em aberto, obtida por meio da
solução numérica das equações de estado, considerando um passo de cálculo h = 0,05 µs.

81
Tens
ão n
o te
rmin
al B
da
linha
(kV
)
Tempo (µs)
Figura 7.2 – Tensão no terminal B da linha em aberto, obtida a partir do modelo numérico
A Figura 7.3 mostra a tensão no terminal B da linha, obtida por meio da solução
analítica das equações de estado, considerando um passo de cálculo h = 0,05 µs.
Tens
ão n
o te
rmin
al B
da
linha
(kV
)
Tempo (µs)
Figura 7.3 – Tensão no terminal B da linha em aberto, obtida a partir do modelo analítico
Nas figuras 7.2 e 7.3, observa-se que a tensão no terminal B da linha em aberto
atinge, aproximadamente, duas vezes o valor da tensão da fonte, que é o resultado esperado de
acordo com o capítulo 4.
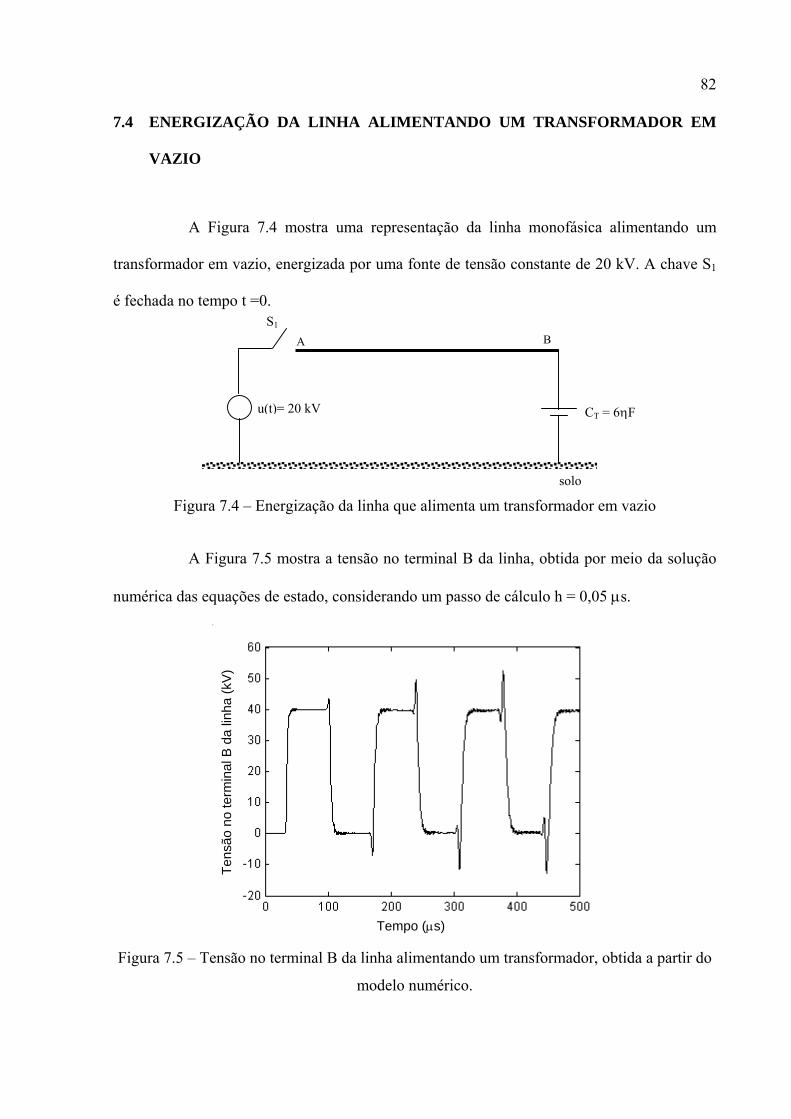
82
7.4 ENERGIZAÇÃO DA LINHA ALIMENTANDO UM TRANSFORMADOR EM
VAZIO
A Figura 7.4 mostra uma representação da linha monofásica alimentando um
transformador em vazio, energizada por uma fonte de tensão constante de 20 kV. A chave S1
é fechada no tempo t =0.
S1
B A
CT = 6ηF u(t)= 20 kV
solo
Figura 7.4 – Energização da linha que alimenta um transformador em vazio
A Figura 7.5 mostra a tensão no terminal B da linha, obtida por meio da solução
numérica das equações de estado, considerando um passo de cálculo h = 0,05 µs.
Tens
ão n
o te
rmin
al B
da
linha
(kV
)
Tempo (µs)
Figura 7.5 – Tensão no terminal B da linha alimentando um transformador, obtida a partir do
modelo numérico.

83
Na figura 7.5, observa-se que a tensão no terminal B da linha atinge,
aproximadamente, duas vezes o valor da tensão da fonte, que é o resultado esperado, de
acordo com o capítulo 4. Observa-se que a presença do transformador diminui as oscilações
presentes na tensão terminal B da linha.
A Figura 7.6 mostra a tensão no terminal B da linha, obtida por meio da solução
analítica das equações de estado, considerando um passo de cálculo h = 0,05 µs.
Tens
ão n
o te
rmin
al B
da
linha
(kV
)
Tempo (µs)
Figura 7.6 – Tensão no terminal B da linha alimentando um transformador, obtida a partir do
modelo analítico.
Na Figura 7.6, a tensão no terminal B da linha possui o comportamento análogo
ao verificado na Figura 7.5.
7.5 ENERGIZAÇÃO DA LINHA EM CURTO-CIRCUITO
A Figura 7.7 mostra uma representação da linha monofásica com um dos
terminais em curto-circuito, energizada por uma fonte de tensão constante de 20 kV. A chave
S1 é fechada no tempo t =0.

84
S1
V
B A
Figura
A Figura 7.8 mo
numérica das equações de e
Cor
rent
e no
term
inal
B d
a lin
ha (k
A)
Figura 7.8 – Corrente no ter
Observa-se, na
de tempo para percorrer a li
respeitando o tempo necess
linha.. Este resultado está de
u(t)= 20 k
solo
7.7 – Energização da linha em curto-circuito
stra a corrente no terminal B da linha obtida por meio da solução
stado, considerando um passo de cálculo h = 0,05 µs.
Tempo (µs)
minal B da linha alimentando um transformador, obtida a partir do
modelo numérico
Figura 7.8, que a corrente necessita de um determinado intervalo
nha. Em seguida, essa corrente começa aumentar, sucessivamente,
ário, para que a mesma propague-se de um terminal ao outro da
acordo com o que se encontra descrito no capítulo 4.

85
A Figura 7.9 mostra a corrente no terminal B da linha, obtida por meio da solução
analítica das equações de estado, considerando um passo de cálculo h = 0,05 µs.
Cor
rent
e no
term
inal
B d
a lin
ha (k
A)
Tempo (µs)
Figura 7.9 – Corrente no terminal B da linha alimentando um transformador, obtida a partir do
modelo analítico
Na Figura 7.9, a corrente no terminal B da linha possui o comportamento análogo
ao verificado na Figura 7.8.
7.6 ENERGIZAÇÃO DA LINHA CONECTADA A UMA CARGA IGUAL À SUA
IMPEDÂNCIA CARACTERÍSTICA
De acordo com o capítulo 3, sabe-se que a impedância característica da linha é
dada por:
YZ)(ZC =ω 7.1
Na equação 7.1, Z é a impedância longitudinal da linha e Y, a admitância
transversal.

86
Substituindo os dados da linha, mostrados na tabela 7.1, calculou-se a impedância
característica da linha, em uma faixa de freqüência compreendida entre 10 Hz e 1 MHz.
Constatou-se que essa linha possui uma impedância característica . Portanto, a
impedância característica da linha pode ser representada por uma resistência de 300 Ω.
Ω300Zc ≅
A Figura 7.10 mostra uma representação da linha monofásica, alimentando uma
carga resistiva de 300 Ω, que corresponde ao valor da impedância característica dessa linha.
A B
Zc=300 Ω u(t) = 20 kV
S1
solo
Figura 7.10 – Energização da linha conectada a uma resistência de valor igual a Zc
A Figura 7.11 mostra a tensão no terminal B da linha, obtida por meio da solução
numérica das equações de estado, considerando um passo de cálculo h = 0,05 µs.
Tens
ão n
o te
rmin
al B
da
linha
(kV
)
Tempo (µs)
Figura 7.11 – Tensão no terminal B da linha conectada a uma carga Zc, obtida a partir do
modelo numérico

87
Na figura 7.11, observa-se que a tensão necessita de um determinado intervalo de
tempo para percorrer a linha. Em seguida, essa tensão atinge o valor da tensão da fonte, mas
não sofre reflexões.
A Figura 7.12 mostra a tensão no terminal B da linha, obtida por meio da solução
analítica das equações de estado, considerando um passo de cálculo h = 0,05 µs.
Tens
ão n
o te
rmin
al B
da
linha
(kV
)
Tempo (µs)
Figura 7.12 – Tensão no terminal B da linha conectada a uma carga Zc, obtida a partir do
modelo analítico
Na Figura 7.12, a tensão no terminal B da linha possui o comportamento análogo
ao verificado na Figura 7.11.
7.7 VISUALIZAÇÃO DA PROPAGAÇÃO DE ONDAS DA LINHA
Mostra-se uma análise qualitativa do comportamento das ondas que se propagam
na linha de transmissão em aberto. Tal análise me realizada por meio da solução numérica das
equações de estado, considerando um passo de cálculo h=0,05µs.
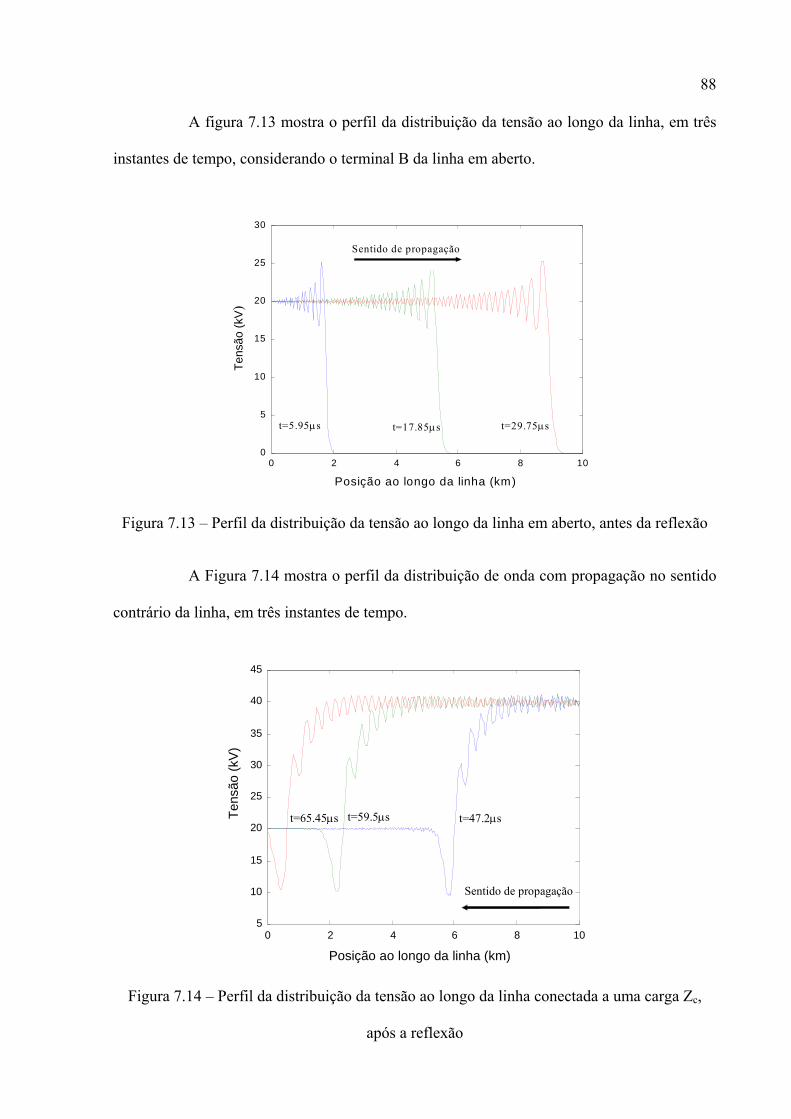
88
A figura 7.13 mostra o perfil da distribuição da tensão ao longo da linha, em três
instantes de tempo, considerando o terminal B da linha em aberto.
0 2 4 6 8 10 0
5
10
15
20
25
30 Te
nsão
(kV
)
Posição ao longo da linha (km)
Sentido de propagação
t=5.95µs t=17.85µs t=29.75µs
Figura 7.13 – Perfil da distribuição da tensão ao longo da linha em aberto, antes da reflexão
A Figura 7.14 mostra o perfil da distribuição de onda com propagação no sentido
contrário da linha, em três instantes de tempo.
0 2 4 6 8 10 5
10
15
20
25
30
35
40
45
Posição ao longo da linha (km)
Tens
ão (k
V)
Sentido de propagação
t=65.45µs t=59.5µs t=47.2µs
Figura 7.14 – Perfil da distribuição da tensão ao longo da linha conectada a uma carga Zc,
após a reflexão

89
Na Figura 7.14, a onda de tensão terá o seu valor duplicado, de acordo com o
capítulo 4, e começará a propagar-se em direção ao terminal A.
7.8 ANÁLISE DA SENSIBILIDADE DOS MODELOS EM RELAÇÃO AO PASSO
DE CÁLCULO
Sabe-se que os métodos numéricos de solução de equações diferenciais são
sensíveis ao passo de cálculo utilizado na evolução das mesmas. Neste tópico, faz-se uma
análise da sensibilidade do modelo numérico e do modelo analítico, em relação ao passo de
cálculo. Serão considerados os passos de cálculo h = 0,05µs e h = 1µs.
A Figura 7.15 mostra uma representação da linha monofásica, alimentando um
transformador em vazio, energizada por uma fonte de tensão constante de 20 kV. A chave S1
é fechada no tempo t =0.
S1 A
CT = 6ηF
B
u(t)= 20 kV
solo
Figura 7.15 – Energização da linha que alimenta um transformador em vazio
A Figura 7.16 mostra a tensão no terminal B da linha, obtida por meio da solução
numérica das equações de estado, considerando os dois passos de cálculo.

90
Tens
ão n
o te
rmin
al B
da
linha
(kV
)
Tempo (µs)
Figura 7.16 – Tensão no terminal B da linha, obtido por meio do método numérico, para
h=0.05µs (curva 1),h = 1µs (curva 2).
A figura 7.16 mostra que os resultados obtidos com os passos de cálculo
e são bastante diferentes. Desse modo, conclui-se que o modelo
numérico é sensível à variação do passo de cálculo.
sµ05,0h = sµ1h =
A Figura 7.17 mostra a tensão no terminal B da linha, obtida por meio da solução
analítica das equações de estado, considerando os dois passos de cálculo.
Tens
ão n
o te
rmin
al B
da
linha
(kV
)
Tempo (µs)
Figura 7.17 – Tensão no terminal B da linha, obtido por meio do método analítico, para
h = 0. 05µs(curva 1), h = 1µs(curva 2)

91
A Figura 7.17 mostra que os resultados obtidos com os passos de cálculo
e são bastante semelhantes. Desse modo, conclui-se que o modelo
analítico é menos sensível à variação do passo de cálculo.
sµ05,0h = sµ1h =
7.9 COMPARAÇÃO DOS RESULTADOS OBTIDOS COM O MODELO
PROPOSTO E COM OS RESULTADOS OBTIDOS COM O MICROTRAN
Para certificar-se de que as soluções analíticas das equações de estado foram
obtidas corretamente, as respostas obtidas com as mesmas foram comparadas com as
respostas obtidas com o Microtran, que é um software bastante utilizado para simulações de
transitórios eletromagnéticos em sistema de potência.
A comparação é feita para a linha em aberto, aberto com transformador, em
curto-circuito e com uma carga resistiva, considerando o passo de cálculo de h = 0,05µs.
Na figura 7.18, mostra-se a tensão no terminal B da linha em aberto, obtida por
meio da solução analítica das equações de estado.
Tens
ão n
o te
rmin
al B
da
linha
(kV
)
Tempo (µs)
Figura 7.18 – Tensão no terminal B da linha em aberto utilizando o modelo proposto e o
Microtran.

92
Na figura 7.19, mostra-se a tensão no terminal B da linha em aberto alimentando
um transformador, obtida por meio da solução analítica das equações de estado.
Tens
ão n
o te
rmin
al B
da
linha
(kV
)
Tempo (µs)
Figura 7.19 – Tensão no terminal B da linha em aberto alimentando um transformador
utilizando o modelo proposto e o Microtran.
Na figura 7.20, mostra-se a tensão no terminal B da linha em curto-circuito, obtida
por meio da solução analítica das equações de estado.
Cor
rent
e no
term
inal
B d
a lin
ha
Tempo (µs)
Figura 7.20 – Corrente no terminal B da linha em curto-circuito utilizando o modelo
proposto e o Microtran.

93
Na figura 7.21, mostra-se a tensão no terminal B da linha conectada a uma carga
resistiva Tal tensão foi obtida por meio da solução analítica das equações de estado e pelo
EMTP.
Tens
ão n
o te
rmin
al B
da
linha
(kV
)
Tempo (µs)
Figura 7.21 – Tensão no terminal B da linha conectada a uma carga resistiva utilizando o
modelo proposto e o Microtran.
As Figuras 7.18, 7.19, 7.20 e 7.21 mostram que os resultados obtidos com o
Matlab são praticamente idênticos aos resultados obtidos com o Microtran, quando utilizado
para a energização a linha.
7.10 CONCLUSÃO
Neste capítulo, foram apresentados resultados referentes à energização de uma
linha, considerando a mesma aberta, em curto-circuito e em carga, utilizando a solução
numérica e analítica das equações de estado.
Os resultados obtidos mostram que o modelo analítico é menos sensível à
variação do passo de cálculo.

94
Como resultados obtidos com o Matlab são praticamente idênticos aos resultados
obtidos com o Microtran, conclui-se que o modelo proposto possui um bom desempenho
quando é utilizado para simular a energização da linha.

95
8 CONCLUSÕES
Nesse trabalho, foi mostrada a representação de linhas de transmissão
monofásicas por meio de variáveis de estado.
Apresentaram-se as equações diferenciais que descrevem o comportamento das
correntes e tensões ao longo de uma linha de transmissão monofásica, no domínio do tempo e
no domínio da freqüência, sendo que essas equações podem ser obtidas a partir de um
elemento diferencial ao qual são aplicadas as teorias de circuitos elétricos.
Foram mostradas as soluções das equações diferenciais de uma linha de
transmissão monofásica no domínio do tempo e no domínio da freqüência. A solução, no
domínio da freqüência, é genérica e pode ser aplicada para qualquer condição da linha,
considerando os parâmetros fixos ou variáveis em função da freqüência. A solução, no
domínio do tempo, é determinada analiticamente somente para o caso de linhas sem perdas.
Para o caso de linhas com perdas, pode-se obter a solução no domínio do tempo a partir da
solução no domínio da freqüência. Para isso, devem-se utilizar técnicas de transformadas
inversas.
Foi feita uma análise qualitativa do comportamento das correntes e tensões ao
longo da linha durante o processo de energização da linha em aberto, conectada a uma carga
Zc e em curto-circuito.

96
Representou-se a linha de transmissão monofásica por meio de variáveis de
estado, utilizando o modelo de linha constituída por uma grande quantidade de circuitos π
conectados em cascata. O modelo fornece resultados diretamente no domínio no tempo e
permite analisar as correntes e tensões ao longo da linha.
Foram deduzidas as equações de estado para uma linha monofásica representada
por meio de uma cascata e contendo uma quantidade genérica de circuitos π. As soluções das
equações de estado foram obtidas com a utilização de métodos numéricos, que têm a
finalidade de conseguir uma aproximação da solução exata de uma equação diferencial, e
métodos analíticos, que obtêm uma solução exata da equação diferencial.
O modelo proposto foi utilizado para simular a energização da linha, considerando
a mesma em aberto, em curto-circuito e em carga. Foi considerado que a carga possuía o
mesmo valor apresentado pela impedância característica da linha. Os resultados foram
obtidos, a partir da solução numérica e da solução analítica das equações de estado.
Verificou-se que o modelo analítico é livre de oscilações numéricas, independentemente do
passo de cálculo utilizado. Ou seja, é menos sensível à variação do passo de cálculo.
Para comprovar a eficácia do modelo, foram feitas comparações dos resultados
obtidos pela solução analítica com os mesmos resultados obtidos a partir de um programa do
tipo EMTP. Conclui-se que o modelo proposto possui um bom desempenho.

97
REFERÊNCIAS
BUDNER, A., Introduction of frequency-dependent line parameters into an electromagnetic transients program, IEEE Trans. Power App. And Systems, vol. PAS-89, no 1, pp. 88-97, jan. 1970.
BOYCE, W. E., DIPRIMA, R. C., Equações diferenciais elementares e problemas de valores de contorno. 5º edição, Editora Guanabara Koogan S.A., Rio de Janeiro, RJ, 1994.
CHEN, C. T., Linear system theory and design. New York, USA: Holt, Rinehart and Winston, 1984.
CHIPMAN, R. A., Teoria e problemas de linhas de transmissão. Ed. McGraw-Hill do Brasil, São Paulo, 1972.
CTEEP., Companhia de Transmissão de Energia Elétrica Paulista. Disponível em <http://www.cteep.com.br/setor_sistemas_intro.shtml> Acesso em 19 jul. 2006.
DOMMEL, H.W., Digital computer solution of electromagnetic transients in single and multiphase networks, IEEE Trans. On Power App. And Systems, vol. PAS-88(4), pp. 388-399, 1969.
DOMMEL, H.W., EMTP - theory book, Vancouver, 1986.
EDWARDS JR, C. H., PENNY, D. E., Equações diferenciais elementares e problemas de valores de contorno. 3º edição, Editora Prentice Hall do Brasil LTDA., Rio de Janeiro, RJ, 1995.
FUCHS, R.D., Transmissão de Energia Elétrica: Linhas Aéreas; teoria das Linhas em Regime Permanente, 2a edição, Editora livros Técnicos e Científicos, Rio de Janeiro, RJ, 1979.
GREENWOOD, A., Electrical transients in power systems, Ed. John Wiley & Sons, Inc., 1977.
HAYT JR, W. H., Eletromagnetismo, 3ª Edição, Ed. Livros Técnicos e científicos S.A. Rio de Janeiro, RJ, 1983.

98
HEDMAN, D. E., Teorias das linhas de transmissão-II, Vol. 2 e 3, 2ª Edição, Edições UFSM, Santa Maria-RS, 1983.
IRWIN, J. D., Análise de circuito em engenharia, 4ª Edição, Editora Makron Books do Brasil, São Paulo, SP, 2000, pág 22.
KREYSZIG, I. E., Advanced engineering mathematics, 8th ed., J. Wiley, New York 1999.
MACÍAS, J. A. R., EXPÓSITO, A. G., SOLER, A. B., A comparison of techniques for state-space. Transient analysis of transmission lines, IEEE Trans. on Power Delivery, vol. 20, no 2, pp. 894-903, april. 2005.
MAMIS, M.S., Computation of electromagnetic transients on transmission lines with nonlinear components, IEE. Proc. General Transmission and Distribution, vol. 150, no 2, pp 200-203, march 2003.
MAMIS, M.S., MERAL, M.E., State-space modeling and analysis of fault arcs, Electric Power Systems Research 76, pp 46-51, april 2005
MAMIS, M.S., NACAROGLU, A., Transient voltage and current distributions on transmission lines, IEEE. Proc. General Transmission and Distribution, vol.149, no 6, pp 705-712, november, 2002.
MARTI, J.R., Accurate modeling of frequency-dependent transmission line in electromagnetic transient simulations, IEEE Trans. Power App. and Systems, vol. PAS-101, no 1, pp. 147-155, jan.1982.
MARTI, J.R., Simulation of transients in underground cables with frequency-dependent modal transformation matrices, IEEE Trans. On Power Delivery, vol.3(3), pp. 1099-1110, jul.1988.
NAIDU, S.R., Transitórios Eletromagnéticos em Sistemas de Potência, Ed. Grafset, Campina-Grande, 1985.
NELMS, R.M.; SHEBLE, G.B.; NEWTON, S. R.; GRIGSBY, L.L., Using a personal computer to teach power system transients, IEEE Trans. on Power Systems, vol. 4, no 3, pp 1293-1297, august 1989.
OGATA, K., Engenharia de Controle Moderno, 2º Edição, Editora Prentice Hall do Brasil LTDA., Rio de Janeiro, RJ, 1993.
ONS. Operador Nacional do Sistema Elétrico. Disponível em <http://www.ons.org.br>. Acesso em 7 jul. 2006.
SPIEGEL, M. R., Transformadas de Laplace. São Paulo, Ed. McGraw-Hill, 1971.
STRUM, R. D., Equações Diferencias: Solução pela Transformada de Laplace, Ed. Ao Livro Técnico, Rio de Janeiro, 1971.
SWOKOWSKI, E.W., Cálculo com Geometria Analítica, Ed. Makron do Brasil, São Paulo, Vol. 2, 1995.

99
TAVARES, M. C.; PISSOLATO, J.; PORTELA, M. C., Quasi-modes multiphase transmission line model, Electric Power Systems Research, no 49, pp. 159-167, 1999.