universidade de mogi das cruzes margarida m.ª x.v. de...
TRANSCRIPT

UNIVERSIDADE DE MOGI DAS CRUZES MARGARIDA M.ª X.V. DE CARVALHO
DESENVOLVIMENTO DE DISPOSITIVO PARA MEDIR
ESPASTICIDADE DE MEMBROS SUPERIORES
Mogi das Cruzes, SP 2006

Livros Grátis
http://www.livrosgratis.com.br
Milhares de livros grátis para download.

UNIVERSIDADE DE MOGI DAS CRUZES MARGARIDA M.ª X. V. DE CARVALHO
DESENVOLVIMENTO DE DISPOSITIVO PARA MEDIR ESPASTICIDADE DE MEMBROS SUPERIORES
Dissertação apresentada à Comissão de pós-graduação da Universidade de Mogi das Cruzes para obtenção do título de Mestre em Engenharia Biomédica.
Orientadora: Profª. Dr.ª Annie France Frère Slaets
Mogi das Cruzes, SP
2006

FICHA CATALOGRÁFICA Universidade de Mogi das Cruzes - Biblioteca Central
Carvalho, Margarida Maria Xavier Vieira de
Desenvolvimento de dispositivo para medir espasticidade de membros superiores / Margarida Maria Xavier Vieira de Carvalho. -- 2006.
77 f. Dissertação (Mestrado em Engenharia Biomédica) -
Universidade de Mogi das Cruzes, 2006. Área de concentração: Instrumentação Biomédica Orientador : Prof. Drª Annie France Frère Slaets
1. Espasticidade 2. Instrumentação médica 3. Avaliação da articulação do cotovelo 4. Avaliação computadorizada
CDD 616.74

DEDICATÓRIA
À meu esposo Rubens e meus filhos Guilherme, Renan e Fábio, pela
compreensão nos momentos de ausência, pelo amor carinho e atenção dedicada.
À minha mãe Maria Henriqueta que sempre me incentivou nas minhas
decisões e sempre acreditou no meu êxito.
AGRADECIMENTOS
À minha orientadora Prof. Dr.ª Annie France Frère pela paciência e
dedicação, pois sem ela este trabalho não seria possível. Muito obrigada.
Ao colega Flávio Cezar Amate pelo empenho em ajudar e pela dedicação,
muitas vezes deixando seu trabalho para colaborar com o meu. Agradeço de
coração.
A Andréia M. D. Lima pelos ensinamentos no computador. Aprendi muita
coisa.
Ao Eliaquim Santiago, pela colaboração na confecção do eletrogoniômetro.
Ao coordenador do curso de fisioterapia César Augusto Calônego e à
coordenadora de estágio Silvia Boschi, pela permissão do uso da clínica para
aplicação dos testes e pelo apoio.
A Silvia M. dos Santos pelo empréstimo de seus livros, pelo apoio em todas
as horas e pela sua amizade, pelas horas tristes e felizes que passamos juntas.
Ao Terigi Augusto Scardovelli, Maria Lúcia Nana Ebisawa, Jacqueline L.S.G.
Almeida pelas dicas no computador e ao Núcio Theodoro pela atenção dispensada.
Aos pacientes que se dispuseram a participar dos testes e ao carinho que têm
por mim.
A Belmira Cunha pela companhia e a Alba Nélide Guimarães dos Santos pelo
companheirismo durante nossa jornada no mestrado.
E a todos que colaboraram direta ou indiretamente.
A FAEP- Fundação de Amparo ao Ensino e Pesquisa pela bolsa concedida. Que Deus abençoe a todos!

RESUMO
Existem vários métodos para se medir a espasticidade, porém de forma subjetiva. O mais usado é a escala de Ashworth que utiliza uma graduação de 0 a 4, sendo 0 tônus normal e 4 espasticidade grave. Entretanto é uma medida dependente do observador portanto subjetiva que pode não ser sempre fidedigna. Para ter uma avaliação mais fidedigna foi desenvolvido um dispositivo para medir a espasticidade dos músculos bíceps braquial, de uma forma objetiva. O dispositivo é constituído por duas hastes de alumínio interligadas por dobradiça na qual foi instalado um encoder ótico para medir deslocamento e velocidade. Um sensor, colocado entre a mão do terapeuta e o membro superior do paciente mede a força aplicada na extensão do cotovelo. O dispositivo foi aferido comparando, por métodos estatísticos a avaliação feita pelo terapeuta utilizando a escala de Ashworth e os dados simulados. A simulação foi realizada com faixas de elasticidades diferentes representando cada grau de espasticidade da escala de Ashworth. Foram realizados testes com 32 pacientes hemiplégicos com espasticidade instalada, sendo que a diferença entre os diagnósticos do fisioterapeuta e do dispositivo desenvolvido foi de 28,12%. A aquisição computadorizada dos dados referentes à velocidade e à força em função do deslocamento do membro superior afetado garantiu uma medida confiável e objetiva para graduar a espasticidade, possibilitando posteriormente verificar a eficácia das técnicas fisioterapêuticas. Palavras-chave: Espasticidade, Instrumentação médica, Avaliação da articulação do cotovelo, Avaliação computadorizada.

ABSTRACT There are several methods to measure spasticity, though they are executed in a subjective manner. The most utilized method is the Ashworth Scale, which uses a score from 0 to 4, with 0 demonstrating normal tone and 4 severe spasticity. However, this measurement depends on the observer, which consequently becomes subjective and not always reliable. With the objective of presenting a more accurate assessment, a device was developed to objectively measure spasticity of the biceps brachii. The device is comprised of two aluminum bars interconnected by hinges where an optical encoder was installed to measure displacement and velocity. A sensor, placed between the therapist’s hand and the patient’s superior limb measure the force applied during elbow extension. This device was tested comparing, with statistical methods, the assessment executed by the therapist along with the use of the Ashworth Scale, and the simulated results. Simulation was performed with different elastic bands that represented each degree of spasticity of the Ashworth Scale. This test was executed on 32 hemiplegic patients with fixed spasticity, and the differences between the therapist’s diagnosis and the developed device’s diagnosis were 28,12%. The computerized acquisition of data regarding velocity and force according to the affected superior limb dislocation guaranteed a reliable and objective measurement to graduate spasticity. This may subsequently make it possible to verify the efficiency of physiotherapeutic techniques.
Key-words: Spasticity, Medical instrumentation, Assessment of elbow joint,
Computerized assessment.
LISTA DE TABELAS
Tabela 1 - Relação entre resistência e peso após ajuste polinomial.............................39 Tabela 2 –Simulação grau 1 (theraband amarelo): velocidade, ângulo de abertura
máx., força máx., tempo máx., médias e desvios....................................................53 Tabela 3 – Simulação grau 1+ (Theraband vermelho): velocidade, ângulo de
abertura máx., força máx., tempo máx., médias e desvios .....................................53 Tabela 4 – Simulação grau 2 (Theraband roxo): velocidade., ângulo de abertura
máx., força máx., tempo máx., médias e desvios....................................................54 Tabela 5 – Simulação grau 3 (Theraband cinza): velocidade., ângulo de abertura
máx., força máx., tempo máx., médias e desvios....................................................54 Tabela 6 – Simulação grau 4 (Theraband laranja): velocidade., ângulo de abertura
máx., força máx., tempo máx., médias e desvios....................................................55 Tabela 8 – Força máxima com cada simulador e medidas (FM)..................................57 Tabela 9 – tabela de restrição .......................................................................................58 Tabela 10 – Graus de espasticidade detectados pelo fisioterapeuta e pelo programa
– velocidade normal ................................................................................................60 Tabela 11 - Diagrama de concordância para os testes com velocidade normal ..........62 Tabela 12- Avaliação manual dos pacientes feita por 4 avaliadores diferentes ............63 Tabela 13 – Graus de espasticidade detectados pelo fisioterapeuta e pelo programa
– velocidade aumentada .........................................................................................64 Tabela 14 - Diagrama de Concordância entre fisioterapeuta e o programa para os
testes com velocidade aumentada ..........................................................................65 Tabela 15- Graus de espasticidade com velocidade normal e aumentada dada pelo
dispositivo (D= dinimuição; A= aumento; P= permanência) ...................................66
LISTA DE ILUSTRAÇÕES Figura 1 Membro Superior com espasticidade flexora Cotovelo e punho .................17 Figura 2 Sistema motorizado para medir espasticidade de punho............................23 Figura 3 - Teste do Pêndulo ......................................................................................24 Figura 4 - Teste do Pêndulo para articulação do cotovelo. Paciente utilizando o
acessório do dispositivo durante o experimento..................................................26 Figura 5 - Desenho do sistema Conceitual................................................................27 Figura 6 - Disposição do sistema ..............................................................................28 Figura 7a - Dispositivo para medir a resistência ao movimento passivo, composto
por: transdutor de força e um eletrogoniometro flexível, que permite medir a força aplicada e a amplitude de movimento passivo. ...................................................32
Figura 7b - O avaliador abduz o úmero a 90º e flexiona totalmente o antebraço, em seguida o estende rapidamente ..........................................................................32
Figura 8 - Dispositivo composto por eletrogoniometro, sensor de força, circuito eletrônico e notebook. .........................................................................................36
Figura 9 - Dispositivo posicionado no membro superior de um voluntário. ...............36 Figura 10 - Diagramas de blocos do sistema para aquisição de deslocamento do
segmento, velocidade deste e força aplicada pelo fisioterapeuta. ...................37 Figura 11 - Tela com tabela e dois gráficos, um para ângulo x tempo e o outro para
força x tempo.......................................................................................................38 Figura 12 - Esquema da Calibração..........................................................................38 Figura 13 - Representa o braço mecânico com suas medidas..................................42 Figura 14 - Esboço do braço mecânico.....................................................................42 Figura 15 - Terapeuta executando o teste ................................................................43 Figura 17 – Gráfico Força x tempo para o simulador de grau 1 ................................46 Figura 18- Gráfico Ângulo de abertura x tempo para o simulador de grau 1+...........47 Figura 19 – Gráfico Força x tempo para o simulador de grau 1+ ..............................47 Figura 20 – Gráfico Ângulo de abertura x tempo para o simulador de grau 2...........48 Figura 21 – Gráfico Força x tempo para o simulador de grau 2 ................................49 Figura 22 – Gráfico Ângulo de abertura x tempo para o simulador de grau 3...........50 Figura 23 – Gráfico Força x tempo para o simulador de grau 3 ................................50 Figura 24 – Gráfico Ângulo de abertura x tempo para o simulador de grau 4...........51 Figura 25– Gráfico Força x tempo para o simulador de grau 4 .................................52 Figura 26- Gráfico de Dispersão Ângulo max. x Força max. x Tempo max ..............55 Figura 27 – Gráfico de dispersão em função da velocidade max., força máx. e tempo
máx......................................................................................................................56 Figura 28- Gráfico de repetibilidade Ângulo x Tempo ...............................................59 Figura 29- Gráfico de repetibilidade Ângulo x Tempo ...............................................59 Figura 30 -Gráfico de Dispersão dos Pacientes, Medida 1. ......................................61 Figura 31 – Gráfico de Dispersão dos Pacientes, Medida 2. ....................................65

SUMÁRIO
1 INTRODUÇÃO ......................................................................................................10
1.1 JUSTIFICATIVA ............................................................................................10 1.2 OBJETIVO.....................................................................................................11 1.3 APRESENTAÇÃO.........................................................................................11
2 CONCEITOS TEÓRICOS ASSOCIADOS AO PROJETO....................................13 2.1 A ESPASTICIDADE .........................................................................................13 2.2 DOENÇA VASCULAR ENCEFÁLICA OU ACIDENTE VASCULAR ENCEFÁLICO ........................................................................................................15 2.3 O COTOVELO..................................................................................................17
3 CONTEXTUALIZAÇÃO DO TRABALHO.............................................................19 3.1 ESCALAS ESPECÍFICAS PARA AVALIAÇÃO DA ESPASTICIDADE.............19 3.2 AVALIAÇÃO COM ELETROMIOGRAFIA (EMG).............................................21 3.3 DISPOSITIVOS COM AVALIAÇÃO DE RESISTÊNCIA AO MOVIMENTO......30
4 METODOLOGIA ....................................................................................................35 4.1 ETAPAS DO TRABALHO.................................................................................35 4.2 O DISPOSITIVO...............................................................................................35 4.3 O “SOFTWARE”...............................................................................................37 4.4 CALIBRAÇÃO DO SENSOR FSR....................................................................38 4.5 SUJEITOS DA PESQUISA...............................................................................40 4.6 TESTE DO DISPOSITIVO................................................................................41
4.6.1 Simulação da Espasticidade ......................................................................41 4.6.2 Protocolo para Teste do Dispositivo ...........................................................43
4.7 AVALIAÇÃO DO DISPOSITIVO.......................................................................44 4.7.1 Protocolo de Avaliação...............................................................................44
5 RESULTADOS......................................................................................................45
5.1 TESTES DE α X T E F X T PARA TODOS OS GRAUS COM OS “THERABANDS” ....................................................................................................45 5.2 DETERMINAÇÃO DOS VALORES MAIS SIGNIFICATIVOS...........................52 5.3 CALIBRAÇÃO ..................................................................................................58 5.4 TESTE DE REPETIBILIDADE COM O THERABAND ROXO..........................58 5.5 TESTES FEITOS COM OS PACIENTES.........................................................60 5.6 TESTE COM VELOCIDADE AUMENTADA.....................................................64
6 DISCUSSÃO.........................................................................................................68
7 CONCLUSÃO E SUGESTÕES PARA TRABALHOS FUTUROS.........................71
REFERÊNCIAS.........................................................................................................73
ANEXO I..............................................................................................................76
ANEXO II.............................................................................................................77

10
1 INTRODUÇÃO
1.1 JUSTIFICATIVA
A espasticidade é fácil de ser reconhecida, porém é um parâmetro difícil de se
quantificar, devido à complexidade de sua caracterização (SEHGAL e col. 1998).
Empiricamente na clínica neurológica são usadas para quantificação escalas de
medida, que apresentam resultados pouco confiáveis por serem subjetivas. Entre os
testes existem a escala de Espasmos musculares (Escores de tônus) e a escala
proposta por Lanza, entretanto a mais conhecida é a escala de Ashworth que gradua
a espasticidade de zero (tônus normal) até quatro (espasticidade grave). Outras
formas usadas são: a goniometria, testes de avaliação das habilidades do membro
superior, e dinamometria de preensão (LIANZA, 2001). Os resultados desses testes
dependem da prática do avaliador que os está aplicando. Desta forma, torna-se
difícil uma interpretação objetiva.
Existem métodos de avaliação que não dependem do julgamento do
avaliador, a saber, a Eletromiografia de Multicanais, que consiste na colocação de
eletrodos de superfície sobre o músculo selecionado, medindo a sua atividade
elétrica, porém não detectando se o músculo está espástico ou não, mas apenas se
está alterado ou com algum tipo de disfunção (DELISA, 2002).
O teste do Pêndulo utilizado para determinar o tônus muscular do quadríceps
pelo cálculo do índice de relaxamento, também é fidedigno (TEIXEIRA-SALMELA,
2002), porém só possibilita o registro da ação do quadríceps em membro inferior.
Tem se também a mensuração isocinética (DVIR, PANTURIN, 1993), realizada com
um aparelho da marca KinCon, porém de alto custo.
De acordo com Marchese e col. (2001) existem muitas formas para quantificar
espasticidade com ajuda de dispositivos motorizados e sensorizados para cotovelo,
joelho e tornozelo, porém seu uso é limitado pela dificuldade de utilização na prática,
provavelmente devido à complexidade no uso clínico dos instrumentos.
Em muitos locais de atendimento de fisioterapia neurológica a espasticidade é
classificada como leve, moderada ou grave. Entretanto, o que para alguns pode ser
moderada, para outros pode parecer grave. Isso pode ser encarado como um
problema, a partir do momento que não se tem uma exatidão de medida devido

11
principalmente a falta de resolução da escala de Ashworth1. Na fisioterapia é
importante poder contar com medições confiáveis, para comparar técnicas de
tratamento, avaliar se houve ou não redução da espasticidade antes e depois de sua
aplicação, ou mesmo após utilização de certos medicamentos e saber o quanto de
eficiência os movimentos do paciente apresentam.
1.2 OBJETIVO
O objetivo deste trabalho é desenvolver um dispositivo para avaliar a
espasticidade do músculo bíceps braquial de uma forma quantitativa, fácil de ser
realizada nas clínicas de reabilitação, e que principalmente proporcione resolução.
1.3 APRESENTAÇÃO
No primeiro capítulo de introdução são apresentadas a justificativa explicando
a importância de se medir a espasticidade e o objetivo do trabalho.
No segundo capítulo constam os conceitos teóricos associados ao projeto,
assim como noções da fisiologia da espasticidade e suas conseqüências, do
Acidente Vascular Encefálico com sua definição, causas e seqüelas, sendo uma das
principais, a espasticidade. É apresentada também uma descrição do cotovelo que é
uma das articulações mais envolvidas com a espasticidade, seu funcionamento
normal e amplitude de movimento.
Na contextualização do trabalho, são descritas as escalas específicas para
avaliação da espasticidade, a avaliação com eletromiografia tanto em membros
superiores quanto em membros inferiores. Também são apresentados dispositivos
para avaliação de resistência ao movimento utilizando eletrogoniometro e transdutor
de força.
No quarto capítulo é mostrada metodologia, o plano de trabalho com suas
etapas, são apresentados o método utilizado para a confecção do dispositivo; a
calibração do aparelho; o programa desenvolvido para processar os resultados; o
1 Resolução: é o menor acréscimo que pode ser medido com certeza, ou o menor incremento de entrada que gera uma saída perceptível e repetitiva.

12
público alvo a ser testado; o protocolo do teste, mostrando a forma como os
pacientes foram avaliados.
No quinto capítulo os resultados, no qual temos os testes feitos com o
“Theraband”, os testes de repetibilidade com o “Theraband” roxo, a calibração e os
testes feitos com os pacientes.
No sexto capitulo é apresentada a discussão.
No sétimo capitulo é apresentada a conclusão.
13
2 CONCEITOS TEÓRICOS ASSOCIADOS AO PROJETO
2.1 A ESPASTICIDADE
Para entender espasticidade é preciso primeiro definir tônus muscular, como
sendo o estado de leve tensão dos músculos esqueléticos, ou estado de prontidão
do músculo para reagir, que deve ser baixo o suficiente para permitir um movimento
e alto o suficiente para manter a postura, ou possibilitar o movimento contra a
gravidade (BOBATH, 2001).
A hipertonia muscular é caracterizada pelos seguintes sinais: aumento da
resistência do músculo ao estiramento, diminuição da resistência muscular após um
certo grau de estiramento, distribuição desigual no território muscular afetado
(CASALIS, 1990).
Existem dois tipos de hipertonia, que são: a plástica e a elástica. A plástica
corresponde à rigidez, enquanto a elástica, à espasticidade (BRITTON, 2000).
Na espasticidade, existe um aumento na resistência ao movimento passivo
brusco, devido à intensa contração dos músculos que normalmente a mobilizam, e
pela tendência à volta imediata para a posição original quando cessa a força imposta
externamente. A resposta é dependente da velocidade, e, quanto maior for o
alongamento ou amplitude de movimento, mais vigorosa será a resposta do músculo
espástico. A rigidez normalmente é constante e não depende da velocidade de um
estimulo de alongamento (O’SULLIVAN, 2004; LEVY, OLIVEIRA, 2003).
Uma definição bem aceita para espasticidade, é que é uma desordem motora
caracterizada por um aumento da resistência ao movimento passivo velocidade
dependente de alongamento, pela hiperexcitabilidade do reflexo miotático, com
exacerbação dos reflexos profundos e aumento do tônus muscular
(CHAPMAN,1982; KATRAK,1992; KATZ, 1989).
Existe espasticidade quando na lesão das estruturas inibidoras predominar a
ação das facilitadoras sobre o arco reflexo miotático, gerando um estado de
hipertonia (SANVITO, 2000). Este fato acontece devido a um desequilíbrio entre os
motoneurônios alfa e motoneurônios gama presentes nos cornos anteriores da
medula espinhal. Esses neurônios motores inervam as fibras musculares
esqueléticas. O motoneurônio alfa é responsável pela contração muscular, enquanto
14
o gama participa do controle da contração muscular (localizado no fuso muscular).
Na espasticidade, a lesão das vias supra espinhais inibitórias promove um aumento
na atividade dos neurônios motores gama, e, por isso, o músculo fica sensível ao
estiramento e há uma potencialização pré-sináptica dos motoneurônios alfa. Outro
fator relacionado com a espasticidade é uma alteração na inibição recíproca
realizada pelos neurônios internunciais (que fazem conexões uns com os outros e
diretamente com os neurônios motores anteriores) inibitórios, havendo uma
contração agonista-antagonista, aumentando a dificuldade dos movimentos
(CASALIS, 1990). O reflexo miotático (ou reflexo de estiramento), é a contração
brusca do músculo quando este é submetido a um estiramento rápido, o que vai
causar um estiramento de fusos neuromusculares (KOHN, 2000), tem por base o
arco reflexo. Na síndrome piramidal, os reflexos tornam-se exaltados porque os
motoneurônios tornam se hiperativos. Portanto, em condições normais alguns dos
tratos encefaloespinais exercem ação inibitória sobre o arco reflexo. A lesão desses
tratos ocasiona os denominados sinais de liberação piramidal, entre os quais a hiper-
reflexia é o mais marcante (NITRINI, 1999).
A espasticidade se desenvolve após lesão no Sistema Nervoso Central
(motoneurônio superior) que surge em indivíduos que foram acometidos por:
Acidente Vascular Encefálico (AVE), Paralisia Cerebral (PC), Traumatismo Raqui-
Medular (TRM), Traumatismo Crânio Encefálico (TCE), Esclerose Múltipla, entre
outras (LIANZA, 2001).
Clinicamente a espasticidade caracteriza-se por vários fenômenos que são:
nunca afeta um só músculo, envolvendo sempre grupos musculares; os músculos
espásticos são salientes na massa muscular e parecem muito firmes à palpação
devido à sua contração, que é geralmente forte e persistente; tentando se estirar
uma articulação, os músculos espásticos comportam se como uma mola, tendendo
sempre a retornar automaticamente à posição anterior. Quando se consegue
flexionar a articulação, a resistência muscular é de início muito forte, porém no final
cede de forma brusca (sinal de canivete); quando se tenta flexionar a articulação
lentamente, o músculo espástico cede também devagar, mas se a manobra é rápida
a resistência aumenta. Percutindo-se seu tendão para provocar um reflexo miotático
(ou de estiramento), o músculo contrai se mais intensa e rapidamente do que o
normal (hiper-reflexia), sendo essa uma das mais precoces manifestações da
espasticidade. Se a espasticidade é muito intensa, o estiramento mantido de um
15
músculo pode desencadear movimentos repetidos e regularmente rítmicos,
denominados clônus. A estimulação da borda externa da planta do pé de um
membro inferior espástico provoca a extensão lenta do primeiro dedo (sinal de
Babinski) (LEVY e OLIVEIRA, 2003).
A espasticidade afeta predominantemente os músculos antigravitacionais, isto
é, os flexores dos membros superiores e os extensores dos membros inferiores. Os
membros superiores possuem uma tendência em assumir uma postura flexionada
em pronação, e os membros inferiores geralmente ficam em extensão e adução,
porém isto não é regra (BRITTON, 2000).
A espasticidade é associada a alterações em fatores mecânicos, causando
atrofia por desuso. Desta forma, os músculos sofrem encurtamento com redução do
número de sarcômeros e aumento no conteúdo de colágeno. Alterações nas
propriedades viscoelásticas e tecido conjuntivo de músculos espásticos podem
contribuir para a restrição do movimento passivo. Essas mudanças levam ao
aumento da rigidez passiva da articulação (DELISA, 2002).
2.2 DOENÇA VASCULAR ENCEFÁLICA OU ACIDENTE VASCULAR ENCEFÁLICO
Entre as diversas lesões cerebrais que podem resultar em espasticidade,
pode-se citar o Acidente Vascular Encefálico (AVE) ou Doença Vascular Encefálica,
que segundo a Organização Mundial de Saúde é um sinal de rápido
desenvolvimento de perturbação focal da função cerebral, de suposta origem
vascular e com mais de 24 horas de duração (STOKES, 2000).
É considerado AVE, o surgimento rápido ou em forma de crise, de sintomas
neurológicos focais ou globais, podendo ocorrer devido a uma isquemia ou
hemorragia no cérebro ou a sua volta, como conseqüência de doenças dos vasos
sangüíneos cerebrais. Só é dado o diagnostico de AVE se o sujeito apresentar os
sintomas por mais de 24 horas. Se os sintomas duram menos de 24 horas é
considerado um Ataque Isquêmico Transitório (ROWLAND, 1997).
No Brasil, ocorrem aproximadamente 200.000 casos por ano e nos Estados
Unidos 400.000, sendo o número de óbitos 150.000. A faixa de idade com mais
ocorrência é a de 65 anos, porém, hoje em dia indivíduos mais jovens têm sido

16
acometidos em razão dos vários fatores de risco como contraceptivos orais, uso de
drogas, stress, alterações de pressão arterial devido a malformações cerebrais,
entre outras (TEIXEIRA e col., 2003).
O AVE pode ser classificado em isquêmico ou hemorrágico, sendo o tipo mais
freqüente o isquêmico com 80% dos casos. No AVE isquêmico ocorre uma
obstrução de uma das artérias importantes do cérebro decorrente do infarto cerebral
provocado por trombose ou embolia, encefalopatia hipertensiva com vaso espasmo,
oclusão venosa (nos estados de hipercoagulação e infecção), arterite, aneurisma
dissecante da aorta e lesão da carótida. Apenas 9% dos casos são do tipo
hemorrágico o qual é provocado pelo enfraquecimento das paredes arteriais
causando herniações ou microaneurisma que podem romper. Entre as causas tem-
se: hemorragia intracerebral hipertensiva, hemorragia subaracnóidea,
trombocitopenia, malformações arteriovenosas, neoplasias e aneurismas (STOKES,
2000; CHANDRASSOMA, 1993).
Clinicamente, diversos déficits são possíveis, como alterações no nível de
consciência e comprometimentos nas funções de sentidos, motricidade, cognição,
percepção e linguagem. As deficiências motoras são caracterizadas por paralisia, ou
plegia, e por ser em um hemicorpo é chamada de hemiplegia, ou por fraqueza que
é classificada como hemiparesia (O’SULLIVAN, 2004).
Os fatores de risco para o AVE são: hipertensão que é o fator mais
significante, cardiopatia isquêmica, diabetes mélitus, dieta rica em sal, pílula
anticoncepcional, tabagismo, consumo excessivo de álcool, idade avançada. Todos
esses fatores de risco levam a arteriosclerose e conseqüente AVE (DELISA, 2002;
RUMEL, 1993).
Logo após um AVE, os reflexos e os movimentos voluntários ficam deprimidos
e os músculos flácidos ou hipotônicos. Após alguns dias ou semanas os reflexos
começam a retornar e então se tornam hiperativos em um período de semanas a
meses. A espasticidade após o AVE inclui hipertonia dependente da velocidade,
hiper-reflexia tendinosa e clônus. Movimentos associados, ou sincinéticos, também
comuns na hemiplegia, são acompanhados de contração muscular no lado oposto
ou no outro membro do mesmo lado (DELISA, 2002).
17
2.3 O COTOVELO
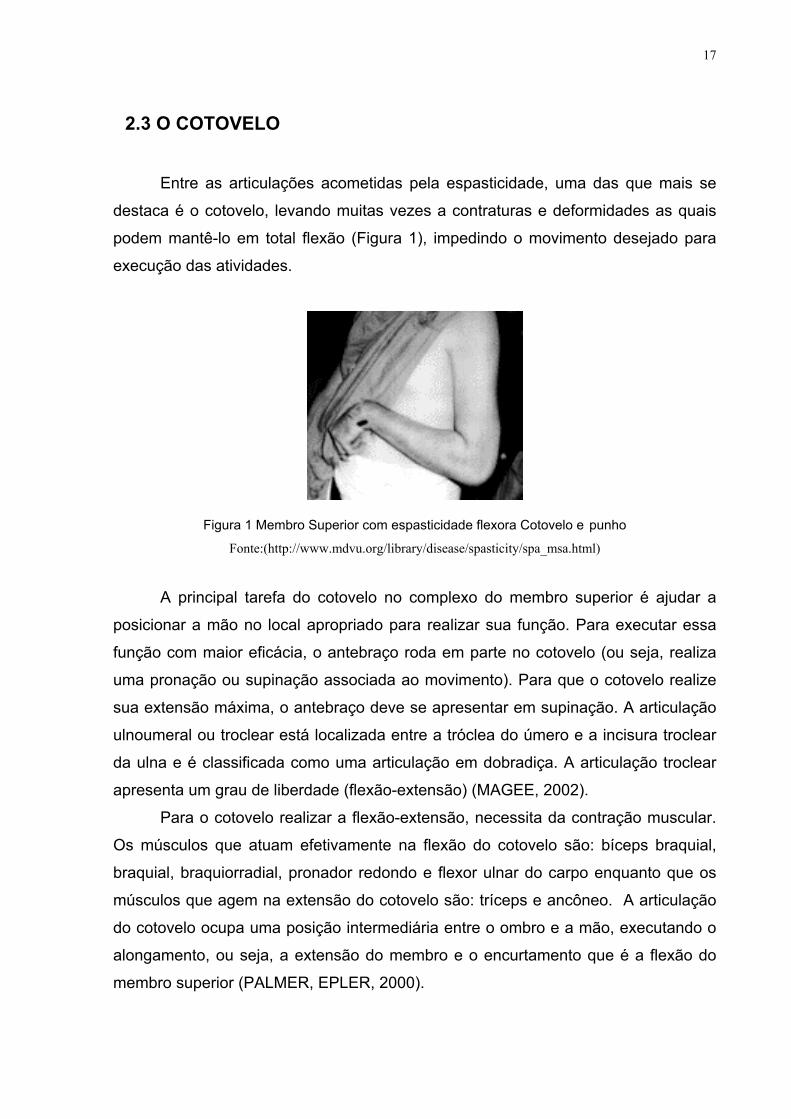
Entre as articulações acometidas pela espasticidade, uma das que mais se
destaca é o cotovelo, levando muitas vezes a contraturas e deformidades as quais
podem mantê-lo em total flexão (Figura 1), impedindo o movimento desejado para
execução das atividades.
Figura 1 Membro Superior com espasticidade flexora Cotovelo e punho
Fonte:(http://www.mdvu.org/library/disease/spasticity/spa_msa.html)
A principal tarefa do cotovelo no complexo do membro superior é ajudar a
posicionar a mão no local apropriado para realizar sua função. Para executar essa
função com maior eficácia, o antebraço roda em parte no cotovelo (ou seja, realiza
uma pronação ou supinação associada ao movimento). Para que o cotovelo realize
sua extensão máxima, o antebraço deve se apresentar em supinação. A articulação
ulnoumeral ou troclear está localizada entre a tróclea do úmero e a incisura troclear
da ulna e é classificada como uma articulação em dobradiça. A articulação troclear
apresenta um grau de liberdade (flexão-extensão) (MAGEE, 2002).
Para o cotovelo realizar a flexão-extensão, necessita da contração muscular.
Os músculos que atuam efetivamente na flexão do cotovelo são: bíceps braquial,
braquial, braquiorradial, pronador redondo e flexor ulnar do carpo enquanto que os
músculos que agem na extensão do cotovelo são: tríceps e ancôneo. A articulação
do cotovelo ocupa uma posição intermediária entre o ombro e a mão, executando o
alongamento, ou seja, a extensão do membro e o encurtamento que é a flexão do
membro superior (PALMER, EPLER, 2000).
18
A amplitude de movimento de flexão ocorre de 0º a 145º enquanto que a
extensão ocorre de 145º a 0 grau. Entretanto, o arco funcional de movimento é um
pouco menor, e a maioria das atividades pode ser desempenhada com flexão de 30
a 130°. Fatores que limitam a movimentação: contato das massas musculares na
face volar do braço e antebraço e contato do processo coronoide com a fossa
coronoide do úmero (DANIELS, WORTHINGHAN, 1981).

19
3 CONTEXTUALIZAÇÃO DO TRABALHO
3.1 ESCALAS ESPECÍFICAS PARA AVALIAÇÃO DA ESPASTICIDADE
Segundo O´Sullivan (2004), uma avaliação do tônus muscular busca identificar
a tensão de repouso e a reatividade dos músculos ao alongamento passivo. Na
espasticidade há um aumento na resistência ao movimento brusco. A resposta
produzida depende da velocidade com que este é executado, sendo que quanto
mais rápido for o movimento, mais vigorosa será a resposta do músculo espástico. A
espasticidade pode ser medida clinicamente pela estimativa do grau da resistência
encontrada quando uma articulação é movida em sua amplitude máxima, fazendo
com que grupos musculares sejam alongados.
A avaliação dos movimentos passivos mostra a reatividade dos músculos a
um estimulo de alongamento. Durante um teste de movimentos passivos, o
terapeuta deve manter contatos manuais firmes, movendo o membro numa
velocidade baixa e constante. Posteriormente quando são realizados movimentos
com maior velocidade intensifica-se a resposta e aumenta-se a qualidade da
resistência oferecida pelo músculo espástico. Um súbito afrouxamento é indicativo
do fenômeno de canivete.
De acordo com O´Sullivan (2004), as respostas devem ser pontuadas (após
uma série de movimentos e ensaio) e registradas através de um código padronizado,
apresentado a seguir:
0 Resposta ausente (flacidez)
1 Resposta reduzida (hipotonia)
2 Resposta normal
3 Resposta exagerada (hipertonia leve a moderada)
4 Resposta sustentada (hipertonia grave)
Estas avaliações permitem alguma medida objetiva do funcionamento, mas
propiciam apenas uma estimativa indireta do tônus.
Johnson (2002) relata que para executar o teste, o examinador estende
rapidamente a articulação a ser examinada, e julga subjetivamente a resistência ao
movimento.

20
Segundo Teixeira (1998), a avaliação pelo Escore de tônus muscular é
baseada em 3 considerações: a presença ou ausência de espasmos flexores ou
extensores, a impressão subjetiva do paciente e a avaliação subjetiva do grau de
espasticidade pelo avaliador, sendo que seus escores são totalmente subjetivos e
por isso um único avaliador deve fazer as mensurações, sendo elas:
0 Sem nenhum aumento do tônus
1 Leve aumento do tônus, quando se realiza a flexão e / ou extensão
2 Moderado aumento do tônus, quando se realiza a flexão e / ou a extensão
3 Grande aumento do tônus, mas o membro realiza a flexão ou extensão
4 Rigidez em flexão ou extensão.
Lianza (2001) também propõe uma escala onde classifica a espasticidade em
leve, moderada ou grave e possui uma graduação baseada no efeito da
espasticidade sobre a função a ser realizada, graduando este movimento ou
realização da função em 3 níveis:
1 Aumento do tônus percebido ao exame, porém não interfere na execução do
movimento ou da função.
2 A espasticidade é percebida ao exame e não interfere na execução do
movimento ou da função
3 A espasticidade impede a execução do movimento ou da função.
A escala de Ashworth foi criada em 1964 para que o mesmo pudesse avaliar
a espasticidade enquanto testava a eficácia de um medicamento chamado
Clarispodrol, em pacientes com Esclerose Múltipla. Ela foi modificada por Bohannon
e Smith em 1987, que usaram uma alteração, acrescentando mais uma graduação
entre os escores 1 e 2. Essa escala é especialmente utilizada após Acidente
Vascular Encefálico, para medir espasticidade em cotovelo, e foi validada pelos
próprios autores (TEIXEIRA, 1998; QUAGLIATO, 1998; LIANZA, 2001).
Escala original de Ashworth:
0 Nenhum aumento no tônus.
1 Aumento discreto no tônus dando um resistir quando o membro é movido em
flexão ou extensão.

21
2 Aumento mais marcado no tônus, mas o membro é facilmente movido.
3 Considerável aumento no tônus, movimento passivo é dificultado.
4 Membro rígido em flexão ou extensão.
A escala modificada de Ashworth é a escala mais utilizada na avaliação da
espasticidade. Sua aceitação é devida à sua confiabilidade e reprodutividade
interobservador. A avaliação é realizada pela movimentação passiva da extremidade
através da amplitude máxima de movimento para alongar determinados grupos
musculares, quantificando sua resistência ao movimento de forma rápida nas
diversas articulações.
A escala modificada de Ashworth considera (JOHNSON, 2002; BAKLEIT e
col., 2003):
0 Sem aumento do tônus
1 Leve aumento do tônus muscular, manifestando-se com um resistir e ceder ou
por mínima resistência no final da amplitude de movimento quando a parte
afetada é movida em flexão ou extensão.
1+ Leve aumento do tônus muscular, manifestando-se com uma resistência seguida
por mínima resistência por todo resto (menos da metade) da amplitude de
movimento.
2 Aumento mais acentuado no tônus muscular, durante a maior parte da amplitude
de movimento, mas com facilidade de se mover o segmento acometido.
3 Aumento considerável no tônus muscular, com dificuldade na movimentação
passiva.
4 O segmento acometido está rígido em flexão ou extensão.
3.2 AVALIAÇÃO COM ELETROMIOGRAFIA (EMG)
Outro método de avaliação é a Eletromiografia de Multicanais, onde são
colocados eletrodos de superfície sobre músculos selecionados e a atividade
eletromiografica é medida durante movimentos ativos ou passivos ou em resposta a
estímulos cutâneos. É útil para distinguir contratura de espasticidade de
antagonistas e para avaliar a resposta à terapia (DELISA, 2002).

22
Pereira e Araújo (2002) constataram que a eletromiografia tem se mostrado
um meio para avaliar os efeitos de drogas, procedimentos cirúrgicos e outras formas
de terapia, através da mensuração do potencial elétrico do músculo espástico.
È um método empregado para observação, análise e interpretação do
potencial bioelétrico no músculo, num movimento voluntário ou numa atividade
eletricamente induzida, ou, ainda, durante o repouso, pela captação do potencial
elétrico do tônus de base. A EMG pode também indicar não somente o começo e o
fim da atividade muscular, mas também algo sobre o número de unidades motoras
ativas e a freqüência com que disparam os potenciais. Ela é capaz de captar o
potencial elétrico do músculo em repouso e isto é possível porque, mesmo em
completo repouso, os músculos mantêm um tônus de base, embora nem sempre
haja atividade contrátil evidente.
No caso da eletromiografia de superfície a escolha do músculo para
experimento não pode ser aleatória, porque os eletrodos de superfície não detectam
sinais de músculos profundos nem seletivamente de músculos pequenos, já que os
sinais dos músculos adjacentes também são detectados.
Na maioria dos estudos da espasticidade, pode se notar certa preferência
pelo músculo bíceps braquial, por ser facilmente ativado com bom controle e boa
localização de eletrodos, os quais ficam bem acoplados, além de ser um músculo
comumente afetado. De acordo com Johnson (2002), existem dispositivos especificamente
desenvolvidos para mensurar a espasticidade usando EMG, um deles é o sistema
de oscilação motorizado, no qual um motor elétrico provoca alguns movimentos ou
oscilações das articulações. Existem duas formas de avaliação, um deslocamento
pode ser aplicado e a rigidez é medida (parecido com a escala de Ashworth), ou
então pode ser aplicada uma força e a freqüência de oscilação é medida. O mais
conhecido é o sistema motorizado desenvolvido por Walsh (1996) apud JOHSON
(2002), que realizou testes no punho de um paciente que segura uma haste ligada a
um motor elétrico (Figura 2). O motor produz flexão/extensão da articulação e a
resposta é avaliada pelo EMG. Usando este sistema, Walsh mostrou que a
capacidade para mensurar diferentes amplitudes e freqüências de oscilação
depende da associação da articulação que está com rigidez.

23
Figura 2 Sistema motorizado para medir espasticidade de punho
Fonte: WALSH, 1996 apud JOHNSON, 2002
Um teste simples de medida de espasticidade, é o teste do Pêndulo de
Wartenberg, apresentado por Teixeira-Salmela (2002) para determinar o tônus
muscular do quadríceps. O paciente é posicionado na maca com o membro a ser
testado pendente. Um eletrogoniômetro é acoplado na articulação do joelho e dois
eletrodos (EMG) são colocados no ventre do músculo reto femoral, para captar a
atividade elétrica. O teste consiste em elevar a perna do paciente até atingir a
posição horizontal, em completa extensão do joelho e então deixa-se a perna cair,
permitindo a oscilação livre da articulação. Dessa maneira a perna oscila livremente
sob a ação da gravidade enquanto no eletrogoniômetro as posições angulares em
função do tempo são gravadas. Uma articulação normal oscilaria cerca de seis
vezes, mas na presença de espasticidade o número de balanços é reduzido. O sinal
eletromiografico é captado, filtrado e digitalizado usando um computador.
Nessa pesquisa os autores utilizam o IR (índice de relaxamento) que é
definido como o quociente entre o valor de excursão angular máxima
correspondente ao primeiro balanceio e a diferença entre os ângulos de começo e
fim. O IR quantifica o grau em que os músculos extensores do joelho freiam o
movimento da articulação: quanto maior for este efeito menor será o IR.

24
Figura 3 - Teste do Pêndulo
Fonte: Teixeira, 1998
SCHIAFFINO e col. (2002) realizaram um trabalho semelhante utilizando um
goniômetro, uma unidade de registro e transferência de dados ao computador
portátil e um software especifico. O grau de espasticidade foi quantificado por meio
do índice de relaxamento normalizado (IRN), que se obtém dividindo o IR por uma
constante M. O valor de M depende do protocolo utilizado, da configuração do
sistema de medição e da idade dos sujeitos. O valor de M varia de 1.47 a 1.69. Um
IRN maior que 1 significa que o membro não é espástico, porém o IRN menor que 1
indica a presença de espasticidade. Segundo os autores, este é um teste fácil de ser
administrado, que requer pouca cooperação do paciente, e proporciona um
instrumento eficaz para avaliar as alterações de tônus muscular em indivíduos
espásticos.
Embora o teste do Pêndulo pareça ser uma técnica válida para medir
espasticidade no joelho, é difícil aplicá-lo em outras articulações ou em casos mais
severos de espasticidade (JOHNSON, 2002).
Entretanto um teste de Pêndulo para articulação do cotovelo foi desenvolvido
por LIN e col. (2003) que também tinham constatado as dificuldades de aplicação
desse tipo de teste na articulação do cotovelo. As dificuldades são principalmente
devidas a pequena inércia do antebraço e a postura desconfortável, pois os sujeitos
ficam em decúbito ventral com o braço estendido para fora da maca, e o teste é
iniciado com o cotovelo em extensão. Se o paciente estiver desconfortável, o
25
resultado pode não ser satisfatório, pois o bíceps com muita espasticidade fica muito
estirado no início do teste. Para resolver essas dificuldades LIN e col. (2003)
propuseram um dispositivo simples constituído por três partes: o sistema mecânico,
o eletromiógrafo, e o sistema de aquisição de dados. O sistema mecânico contém
uma haste, um peso, e um fixador para o punho. A haste foi conectada no meio da
maca (borda lateral) por uma junta rotacional. Um peso foi fixado a haste para
aumentar a inércia e contrabalançar o peso do antebraço. O fixador do punho foi
conectado à parte superior da haste por uma junta rotacional deslizante. Um
goniômetro elétrico mensurou o ângulo do cotovelo. Os sinais de EMG do bíceps e
tríceps braquial foram coletados com 2 pares de eletrodos e amplificados utilizando o
Polygraph 360 systemª. Todos os dados (o ângulo da articulação, e os sinais de
EMG) foram coletados durante 15 a 25 segundos, dependendo da duração do
balanço do pêndulo, e foram gravados num computador para análise posterior.
Os sujeitos foram posicionados em decúbito dorsal na maca (Figura 4). A
parte distal do antebraço e o punho foram fixados com uma faixa elástica. Os
eletrodos do EMG foram posicionados nos músculos bíceps e tríceps braquial. Para
que a haste permanecesse imóvel, sua parte superior foi conectada à maca por uma
corrente. O indivíduo ficava com o cotovelo em 130º de flexão, e repentinamente
essa corrente era liberada sem que o paciente fosse avisado, fazendo com que o
pêndulo se movesse. Após o movimento parar, determinado por inspeção visual, a
coleta de dados era encerrada. Durante o teste, os dados foram mostrados na tela
do computador em tempo real. Para análise dos testes Lin e col. (2003)
desenvolveram um modelo biomecânico de cotovelo para formular parâmetros para
quantificação. Nesse modelo foram verificados a rigidez muscular e o efeito da
gravidade. Durante o teste, conforme a espasticidade ficou maior, a magnitude e o
número de balanços diminuíram, assim como o tempo total do movimento do
pêndulo. O balanço tornou se mais assimétrico no final do deslocamento, não sendo
mais linear. Os autores recrutaram pacientes com espasticidade grau 1 a 3, evitando
os que tinham grau 4, para os quais o dispositivo não era adaptado.

26
Figura 4 - Teste do Pêndulo para articulação do cotovelo. Paciente utilizando o acessório do dispositivo durante o experimento
Fonte: LIN e col., 2003.
De acordo com Powers e Howley (2000), os fusos musculares são
responsáveis pelo fato de que o estiramento rápido dos músculos esqueléticos
ocasiona uma contração reflexa. Isso é denominado reflexo de estiramento, e ocorre
em todos os músculos.
Segundo Marchese e col. (2001), quando sujeitos com espasticidade são
testados, ocorre um reflexo de estiramento que causa uma diminuição da amplitude
das oscilações e, em alguns casos, uma inversão do movimento. Esse reflexo de
estiramento pode ser evidenciado pela atividade do EMG. O teste é quantificado
pelo índice de relaxamento, que é a relação entre o ângulo relativo à oscilação
máxima e o ângulo necessário para alcançar a posição de descanso.
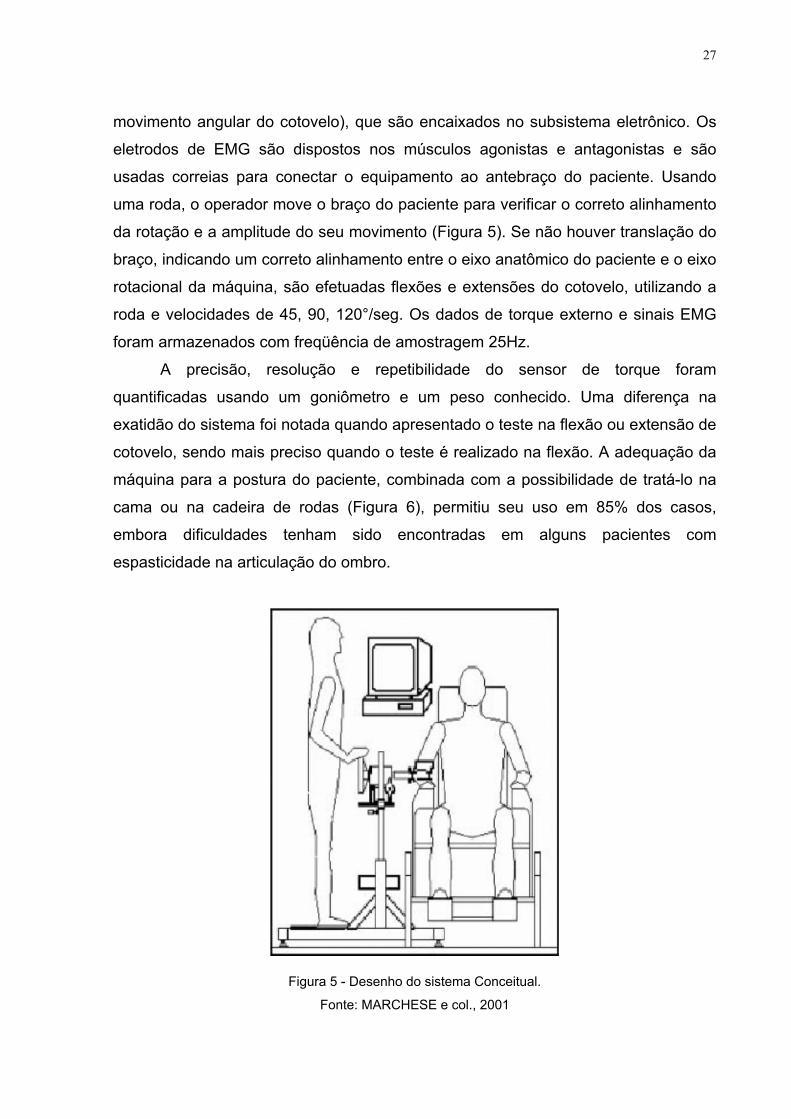
O autor estabeleceu um sistema de referência a partir das especificações
funcionais de diferentes posições normais e posturas anormais dos pacientes. O
teste é feito com o paciente sentado ou deitado em posição confortável com o
equipamento ajustado para alinhar o eixo anatômico do seu cotovelo com o eixo
rotacional do aparelho. O sistema é equipado com um sensor de torque (Strain gage,
para medir a resistência do paciente) e de um sensor angular (para medir o
27
movimento angular do cotovelo), que são encaixados no subsistema eletrônico. Os
eletrodos de EMG são dispostos nos músculos agonistas e antagonistas e são
usadas correias para conectar o equipamento ao antebraço do paciente. Usando
uma roda, o operador move o braço do paciente para verificar o correto alinhamento
da rotação e a amplitude do seu movimento (Figura 5). Se não houver translação do
braço, indicando um correto alinhamento entre o eixo anatômico do paciente e o eixo
rotacional da máquina, são efetuadas flexões e extensões do cotovelo, utilizando a
roda e velocidades de 45, 90, 120°/seg. Os dados de torque externo e sinais EMG
foram armazenados com freqüência de amostragem 25Hz.
A precisão, resolução e repetibilidade do sensor de torque foram
quantificadas usando um goniômetro e um peso conhecido. Uma diferença na
exatidão do sistema foi notada quando apresentado o teste na flexão ou extensão de
cotovelo, sendo mais preciso quando o teste é realizado na flexão. A adequação da
máquina para a postura do paciente, combinada com a possibilidade de tratá-lo na
cama ou na cadeira de rodas (Figura 6), permitiu seu uso em 85% dos casos,
embora dificuldades tenham sido encontradas em alguns pacientes com
espasticidade na articulação do ombro.
Figura 5 - Desenho do sistema Conceitual.
Fonte: MARCHESE e col., 2001

28
Figura 6 - Disposição do sistema
Fonte: MARCHESE e col., 2001.
Pereira e Araújo (2002) selecionaram dois grupos para estudo um com
sujeitos saudáveis, e o outro com pacientes com espasticidade. Nos dois grupos
foram medidas as atividades eletromiograficas no repouso, na contração voluntária
máxima e no reflexo do músculo bíceps braquial em ambos membros superiores, e
os eletrodos foram colocados sobre o ponto motor. O paciente foi posicionado em
decúbito dorsal e totalmente relaxado. Depois de achado o ponto motor através de
um gerador de pulsos, o aparelho foi ligado e programado na corrente pulsátil com
T=1 ms, sendo que a intensidade (mA) foi aumentada até obter a contração limiar do
músculo bíceps braquial. Para aquisição do sinal EMG na condição de contração
muscular, foi aplicada uma força manual oposta pelo examinador, no sentido da
extensão do antebraço, estando a articulação do cotovelo na posição final do arco
fisiológico de flexão, e o antebraço em supinação. Nessa condição foi adquirida a
contração voluntária máxima contra uma força contrária ao movimento provocada
pelo examinador. Logo após a contração voluntária máxima, foi feita a captação do
sinal EMG no instante do reflexo de estiramento do músculo, que foi induzido numa
ordem aleatória. Para aquisição do sinal EMG elicitado reflexamente, foi feita
percussão com um martelo apropriado, para a verificação de reflexos, sobre o
tendão do músculo bíceps braquial. Os dados foram enviados ao computador, e um
“software” especifico armazenou e imprimiu os dados colhidos. O mesmo
29
procedimento foi realizado no grupo com espasticidade, onde foram captados os
sinais de repouso, de contração muscular resistida e do reflexo bicipital tanto do lado
sadio quanto do lado lesado. Foram feitas análises estatísticas das diferentes
comparações desejadas (foi testada e analisada a curva de freqüência da
normalidade e o nível de significância p, pelo método estatístico Shapiro-Wilk).
Foram feitas comparações entre os dois grupos, no repouso, durante a contração
voluntária máxima e no reflexo bicipital. Os autores concluíram que existem
fortíssimas evidências de diferença de sinal EMG entre os grupos, entre os lados,
em todos os momentos da análise. Nos pacientes com hemiplegia espástica, a
comparação entre os lados lesado e sadio apresenta diferença estatisticamente
significativa em todas as condições de aquisição, sendo que a atividade EMG do
lado lesado foi maior ao repouso e ao reflexo e menor na contração voluntária
máxima.
Pisano e col.(2000) fizeram experimentos para verificar espasticidade em
flexores de punho, fazendo extensão do mesmo, em voluntários (grupo controle) e
pacientes pós-A.V.E, com diferentes graus de hipertonia. Os autores tinham os
seguintes objetivos: a) avaliar quantitativamente o aumento do tônus, b) correlatar o
índice biomecânico computado com a escala clínica convencional e medidas
neurofisiológicas, c) caracterizar os componentes intrínsecos e neurais do tônus
muscular em pacientes hemiparéticos. Eles utilizaram um mecanismo cujo torque
motor provoca um alongamento dos músculos flexores de punho em pacientes pós-
AVE, em velocidades constantes para avaliação de espasticidade, utilizando como
valores padrão os obtidos através da escala de Ashworth. Os parâmetros
neurofisiológicos analisados foram a razão Hmax/Mmax (reflexo de Hoffmann ou
reflexo H e resposta motora máxima ou resposta M), limiar de velocidade para o
reflexo de estiramento, latência do reflexo de estiramento e a resistência oferecida
pelo membro durante movimentos passivos e ativos. Os autores encontraram
diferenças estatisticamente significantes nos parâmetros analisados, que foram:
Hmax/Mmax, com valores maiores em indivíduos lesionados; o limiar de velocidade
para o reflexo de estiramento era menor nos pacientes e a latência do reflexo de
estiramento, ou seja, há presença de atividade elétrica mesmo depois do reflexo, o
que não ocorreu com indivíduos normais. O principal achado desse protocolo
experimental foi que a maior parte dos valores obtidos através da técnica
biomecânica foi também correlatada com a escala de Ashworth. Os parâmetros que
30
mostraram correlação significativa foram os obtidos através de testes mecânicos: o
limiar de velocidade para o reflexo de estiramento e a resistência oferecida durante a
movimentação passiva.
Segundo os autores, o dispositivo fornece quantificação objetiva da
espasticidade em contrapartida à escala clínica que depende necessariamente da
percepção do examinador.
3.3 DISPOSITIVOS COM AVALIAÇÃO DE RESISTÊNCIA AO MOVIMENTO
Dvir e Panturim (1993) citam que para medida da espasticidade usam-se
métodos instrumentais biomecânicos que avaliam a resistência quando uma
articulação é movida passivamente ao longo de sua amplitude de movimento, com o
paciente tentando relaxar. Estes esquemas podem ser divididos em: aqueles que
medem respostas quase estáticas, como é feito com o dinamômetro manual, e as
que medem respostas dinâmicas de velocidade controlada, feita pelo dinamômetro
isocinético. A espasticidade pode também ser avaliada cinéticamente com
eletrogoniômetro, analisando as variações no padrão de oscilações do segmento de
um membro em balanço livre sobre uma articulação proximal. Estes esquemas
medem o tônus muscular sobre uma articulação simples sob condições que podem
não prevalecer quando o desempenho de uma articulação funcional que envolve
mais que uma articulação simples é solicitada.
Pandyan (2001) realizou a mensuração biomecânica não invasiva da
resistência ao movimento passivo, para quantificar a espasticidade e analisar a
validade e confiabilidade da escala de Ashworth modificada, utilizando a articulação
do cotovelo. O sistema foi desenvolvido para ser portátil, não invasivo, simples e
seguro para uso em ambiente clínico em diferentes populações de pacientes, como
AVE, Esclerose Múltipla, TCE, etc., mas proporcionando mensurações quantitativas
e relevantes.
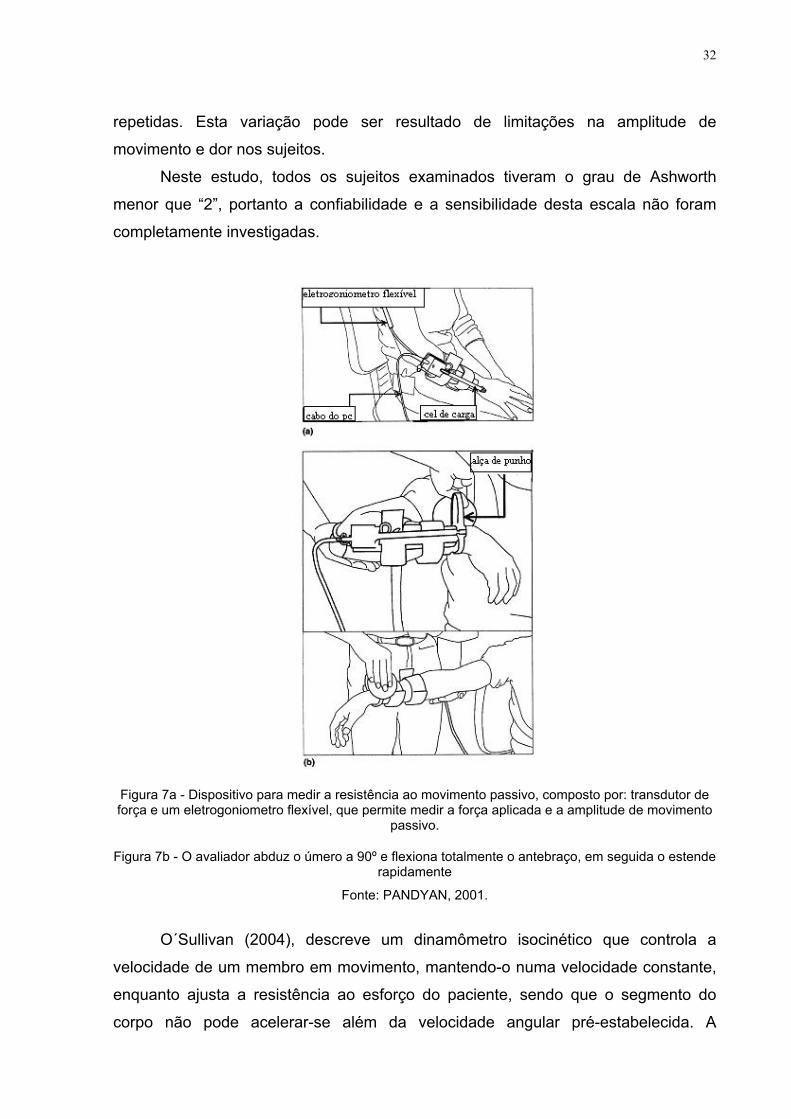
O sistema consiste de um transdutor de força e de um eletrogoniometro
flexível (Biometrics Ltd, Gwent, UK), permitindo a mensuração simultânea de força
aplicada e a movimentação passiva. Depois de fixar o dispositivo de mensuração ao
braço do sujeito, o avaliador abduz o úmero a 90º, então o cotovelo é flexionado

31
completamente e estendido rapidamente (Figura 7). Este procedimento é parecido
com o teste de Ashworth. O sinal do transdutor é enviado a um computador portátil.
A resistência ao movimento passivo é quantificada calculando a inclinação da curva
do gráfico de força aplicada, versus ângulo (amplitude do movimento) usando a
técnica de regressão linear. A velocidade (graus/s) foi calculada pelo deslocamento
em função do tempo. Um único avaliador testou a aplicabilidade clínica do sistema
de mensuração em pessoas que tiveram um AVE unilateral, causando
comprometimento no membro superior, uma semana após sua ocorrência. O
avaliador com a escala de Ashworth mediu a espasticidade através da resistência
ao movimento na articulação do cotovelo. Três medidas repetidas, separadas por um
intervalo de aproximadamente 5-15seg, foram realizadas para cada braço. A
principal medida foi feita pela escala de Ashworth, medida de resistência para o
movimento passivo, escala passiva de movimento e velocidade. O autor realizou
testes no membro superior comprometido e no não comprometido e, para verificar se
existia diferença significante entre as medidas, usou o teste-t. Também foram
usados o teste Tukey´s e a Análise de Variância para determinar se existiu diferença
significante entre as três medidas repetidas de resistência para o movimento passivo
e entre a diferença de pontuação da escala de Ashworth. A resistência para o
movimento passivo no braço comprometido foi classificada em três graus da escala
de Ashworth utilizando o processo de agrupamento de significância K. O Cohen´s
Kappa foi usado para associar a resistência ao movimento passivo com a escala de
Ashworth e para classificação de resistência ao movimento passivo usando o
processo de agrupamento.
Baseada na definição neurofisiológica, a resistência ao movimento passivo
deve aumentar quando a velocidade desse movimento é aumentada. Contudo, na
população do estudo de Pandyan (2001), os resultados não foram consistentes com
esta definição. De fato, quando a velocidade aumentou, a resistência ao movimento
passivo tendeu a diminuir. Na metade da população do estudo o grau de Ashworth
foi maior que “0”. Portanto, a associação entre a escala de Ashworth e a medida de
resistência ao movimento passivo em nível de cotovelo foi pobre. A escala de
Ashworth tem associações limitadas com essa medida e pode não considerar
exclusivamente a espasticidade. A velocidade do movimento passivo mostrou
variação significante entre os graus da escala de Ashworth e entre as medidas
32
repetidas. Esta variação pode ser resultado de limitações na amplitude de
movimento e dor nos sujeitos.
Neste estudo, todos os sujeitos examinados tiveram o grau de Ashworth
menor que “2”, portanto a confiabilidade e a sensibilidade desta escala não foram
completamente investigadas.
Figura 7a - Dispositivo para medir a resistência ao movimento passivo, composto por: transdutor de força e um eletrogoniometro flexível, que permite medir a força aplicada e a amplitude de movimento
passivo.
Figura 7b - O avaliador abduz o úmero a 90º e flexiona totalmente o antebraço, em seguida o estende rapidamente
Fonte: PANDYAN, 2001.
O´Sullivan (2004), descreve um dinamômetro isocinético que controla a
velocidade de um membro em movimento, mantendo-o numa velocidade constante,
enquanto ajusta a resistência ao esforço do paciente, sendo que o segmento do
corpo não pode acelerar-se além da velocidade angular pré-estabelecida. A
33
velocidade num dinamômetro isocinético Cybex II pode ser regulada na velocidade
de 0 a 300° por segundo, enquanto a faixa monitorada de produção de torque situa-
se entre 0 e 448 newton-metros. Seu uso durante uma avaliação do controle motor
permite ao terapeuta a monitoração de diversas características importantes do
desempenho, incluindo a produção de torque, amplitude de movimento ou arco de
excursão atingido, velocidade de desenvolvimento da tensão, e os intervalos de
tempo entre a ação recíproca dos músculos. Assim, o aparelho permite uma
avaliação quantitativa do controle de torque, sincronização e ação muscular
recíproca. Pacientes com deficiências neurológicas demonstraram um decréscimo
no desenvolvimento do torque, diminuição na excursão do membro, tempo
aumentado para o desenvolvimento do pico de torque, maiores intervalos de tempo
entre as contrações recíprocas e ou problemas no desenvolvimento do torque em
velocidades maiores.
Dvir e Panturim (1993) realizaram um trabalho para verificar a espasticidade
dos flexores e extensores do cotovelo, usando o modelo passivo do dinamômetro
isocinético KinCom. Os autores avaliaram o paciente sentado numa cadeira
especialmente construída com apoio de braço de altura ajustável. O antebraço do
paciente foi colocado paralelo ao segmento atuante do dinamômetro e o eixo do
cotovelo alinhado com o eixo do braço, o ombro fletido a 45° através da área de
movimento do cotovelo, o qual tinha uma amplitude de 90° de completa extensão
enquanto em supinação. O punho ficou apoiado no dinamômetro e imobilizado por
um cinto. A cadeira reclinada a 100°. O tônus dos extensores e flexores do cotovelo
foi medido alternadamente. O braço atuante do KinCom foi programado para mover
o cotovelo do paciente primeiro de extensão completa para 90° de flexão, depois foi
feito o movimento inverso, que alongou os flexores para extensão total. O intervalo
de tempo interdirecional foi de 15 a 20 segundos. Pacientes foram testados com 5
velocidades angulares diferentes: 200,120,90,60 e 30 graus/seg. Foi usado um
goniômetro simples, para mensuração do ângulo de flexão de cotovelo do membro
envolvido para verificar a taxa de reações associadas. O alcance da flexão do
cotovelo em repouso foi iniciado com o paciente sentado na cadeira, e seu braço
suspenso livremente ao longo do corpo, então, a medida foi feita. Quando o ângulo
de flexão ficou estável, foi medido pelo examinador, o ângulo do cotovelo. Para
análise dos dados (velocidade angular, tempo de teste) foi usado ANOVA de dois
fatores.
34
Quando os testes foram feitos manualmente, todos os pacientes
apresentaram espasticidade em ambos grupos musculares do cotovelo. A
mensuração instrumental da espasticidade revelou uma notável velocidade
dependente. Os autores comentam que a mensuração isocinética de espasticidade
proporciona uma dimensão quantitativa, exatidão, objetividade e compreensão mais
profunda deste fenômeno complexo, porém é essencial que haja uma padronização
do protocolo do teste. Em relação à dinamometria isocinética altamente sofisticada,
a goniometria manual parece ser, e na verdade é, primitiva.

35
4 METODOLOGIA
4.1 ETAPAS DO TRABALHO
- Para realizar este trabalho utilizamos um eletrogoniômetro desenvolvido
em pesquisa anterior no laboratório @ladim (Laboratório de Imagens
Médicas)
- Estudamos e implementamos um método de fixação apropriado para que
o eletrogoniômetro não se desloque durante o movimento
- Calibramos o sensor de Força FSR em função da força normalmente
exercida na avaliação da espasticidade
- Estudamos os métodos estatísticos, e quais os mais adequados para
avaliação dos resultados
- Realizamos testes na Clínica de Fisioterapia da Universidade de Mogi das
Cruzes, com pacientes hemiplégicos ou hemiparéticos que sofreram AVE
e apresentavam espasticidade. - Analisamos os dados obtidos com os métodos estatísticos.
4.2 O DISPOSITIVO
O dispositivo desenvolvido para esta pesquisa é composto por um
computador portátil do tipo Desknote ECS A900, um eletrogoniômetro, um sensor de
força FSR ligado a um circuito eletrônico e uma interface para aquisição dos dados
(Figura 8).

36
Figura 8 - Dispositivo composto por eletrogoniômetro, sensor de força, circuito eletrônico e notebook.
Figura 9 - Dispositivo posicionado no membro superior de um voluntário.
O eletrogoniômetro desenvolvido por Barreiro (2003) é composto por duas
hastes (H1 e H2) feitas de tubos de alumínio com 1,6 cm de diâmetro e comprimento
de 15cm, o que permite adaptá-las às diversas constituições morfológicas dos
pacientes. Uma dobradiça D1 interliga as duas hastes e permite que o dispositivo
tenha uma articulação de 0 a 320°.
Na dobradiça foi instalado um “encoder” ótico. A haste H2 quando
acompanha o deslocamento do antebraço movimenta o “encoder”
proporcionalmente ao grau de abertura.
A fixação do dispositivo no paciente a ser avaliado, foi feita com duas cintas
de velcro, as quais permitem ajustá-lo à diferentes tamanhos de braços (Figura 9).
37
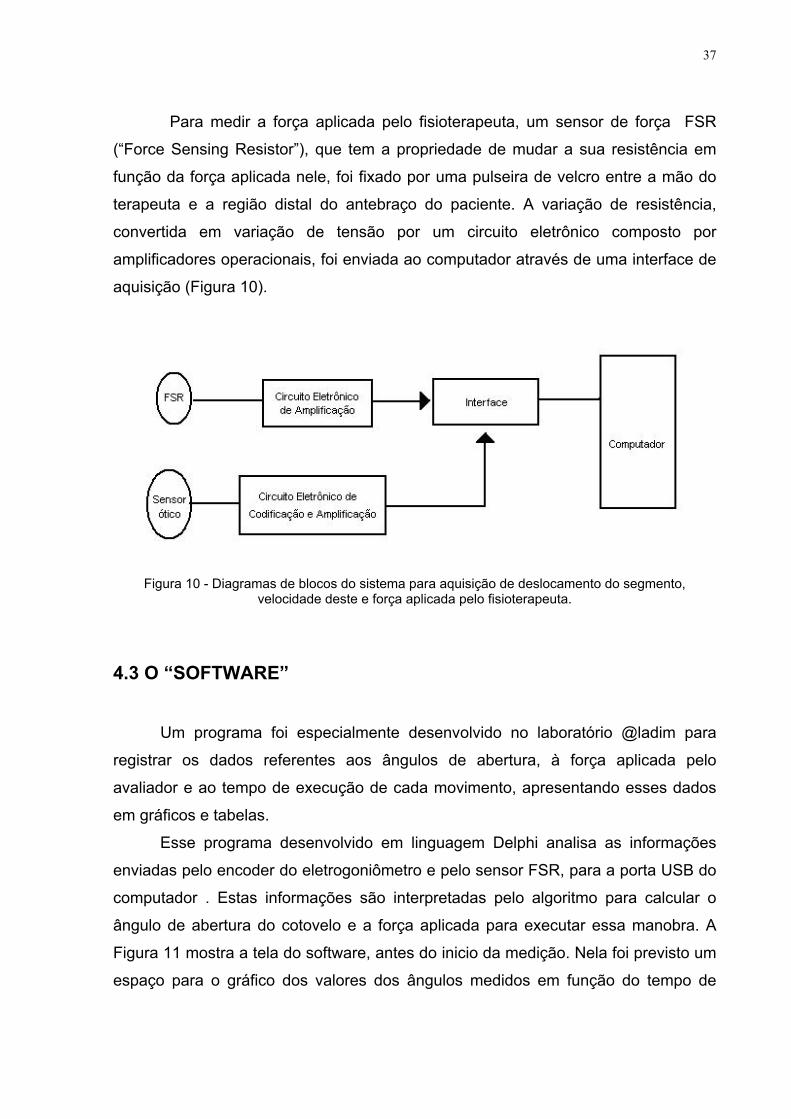
Para medir a força aplicada pelo fisioterapeuta, um sensor de força FSR
(“Force Sensing Resistor”), que tem a propriedade de mudar a sua resistência em
função da força aplicada nele, foi fixado por uma pulseira de velcro entre a mão do
terapeuta e a região distal do antebraço do paciente. A variação de resistência,
convertida em variação de tensão por um circuito eletrônico composto por
amplificadores operacionais, foi enviada ao computador através de uma interface de
aquisição (Figura 10).
Figura 10 - Diagramas de blocos do sistema para aquisição de deslocamento do segmento, velocidade deste e força aplicada pelo fisioterapeuta.
4.3 O “SOFTWARE”
Um programa foi especialmente desenvolvido no laboratório @ladim para
registrar os dados referentes aos ângulos de abertura, à força aplicada pelo
avaliador e ao tempo de execução de cada movimento, apresentando esses dados
em gráficos e tabelas. Esse programa desenvolvido em linguagem Delphi analisa as informações
enviadas pelo encoder do eletrogoniômetro e pelo sensor FSR, para a porta USB do
computador . Estas informações são interpretadas pelo algoritmo para calcular o
ângulo de abertura do cotovelo e a força aplicada para executar essa manobra. A
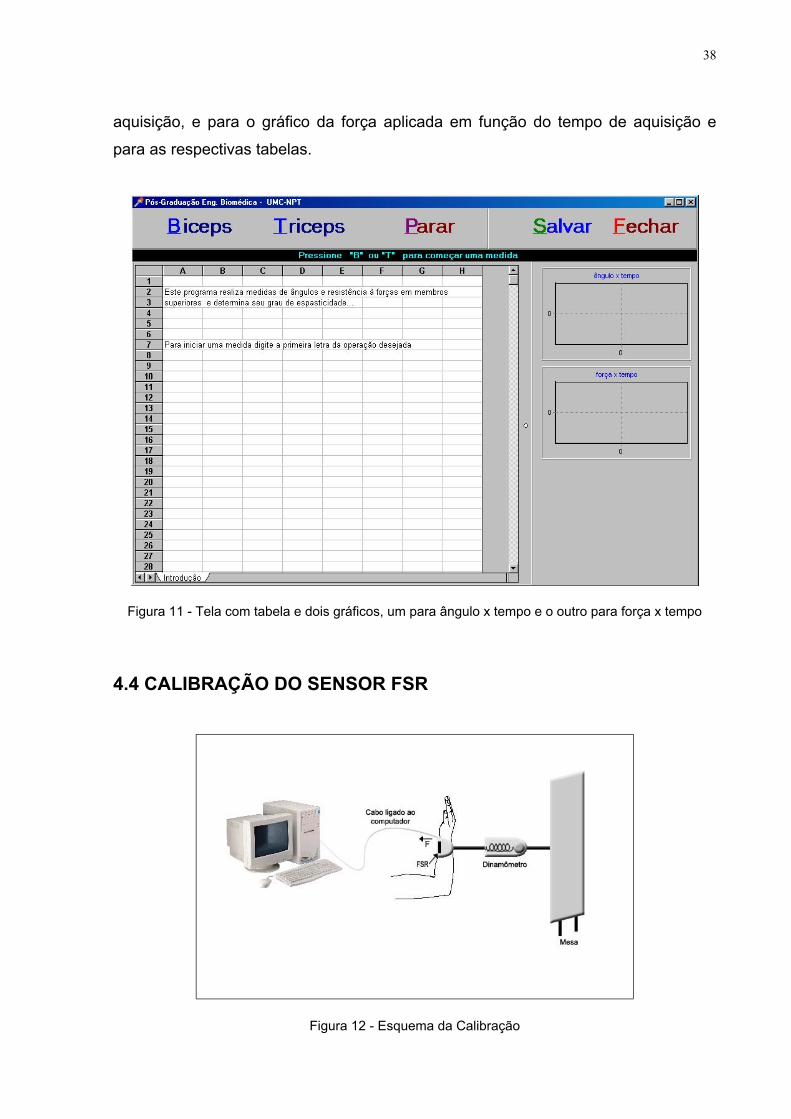
Figura 11 mostra a tela do software, antes do inicio da medição. Nela foi previsto um
espaço para o gráfico dos valores dos ângulos medidos em função do tempo de
38
aquisição, e para o gráfico da força aplicada em função do tempo de aquisição e
para as respectivas tabelas.
Figura 11 - Tela com tabela e dois gráficos, um para ângulo x tempo e o outro para força x tempo
4.4 CALIBRAÇÃO DO SENSOR FSR
Figura 12 - Esquema da Calibração

39
Para a calibração do sensor de força FSR foi utilizado um dinamômetro, que é
uma balança do tipo “hanging balance”, da marca Kern, modelo CH15K20, com
escalas de 0 a 15 Kg.
Na região anterior do punho de um voluntário foi colocado o sensor de força e
sobre o mesmo uma pulseira ligada a um dinamômetro que estava fixado a uma
mesa. O sensor FSR foi interligado ao computador através de uma interface (Figura
12).
O sujeito executou uma flexão do cotovelo vencendo a resistência da mola do
dinamômetro, obtendo-se dessa forma o peso correspondente a cada fase em que
era executado o movimento. Os valores mensurados pelo dinamômetro e pelo
sensor foram registrados ao mesmo tempo, obtendo-se valores de 500g até 9.700g
no dinamômetro e de 6 até 25 KΩ no sensor FSR.
Os dados foram lançados num gráfico, e foi realizado um ajuste Polinomial
(grau 2) para obtenção da curva de interpolação e os valores intermediários entre as
medidas realizadas (tabela 1).
Tabela 1 - Relação entre resistência e peso após ajuste polinomial
Sensor (KΩ) Peso(g)
6 610 7 1000 8 1300 9 1470
10 2000 11 2400 12 2620 13 2960 14 3600 15 4140 16 4640 17 5200 18 5600 19 6280 20 6670 21 7170 22 7870 23 8400 24 9350 25 10000

40
Como o encoder utilizado é do tipo incremental foi necessário iniciar o
dispositivo de uma forma pré-determinada para efetuar as medidas corretamente.
Para tanto deve-se ativar o programa em “Calibrar”, deixar as hastes do dispositivo
fechadas e depois abri-las em 180º.
4.5 SUJEITOS DA PESQUISA
Após aprovação do Comitê de Ética em Pesquisa da Universidade de Mogi
das Cruzes, de acordo com a resolução 196/196 do Conselho Nacional de Saúde,
foram selecionados para testar o dispositivo 32 pacientes portadores de hemiparesia
ou hemiplegia por seqüela de AVE. Todos os pacientes estavam em tratamento
fisioterápico na clínica-escola da Universidade de Mogi das Cruzes – UMC.
A amostra foi composta por pacientes adultos, sendo 15 do sexo masculino, e
17 do sexo feminino, com idade variando entre 22 e 76 anos (54,43 ± 12,76), com
tempo de lesão variando entre 8 meses a 7 anos (3,26 ± 1,94), sendo 14 com
hemiplegia à direita e 18 com hemiplegia à esquerda, visto que nesse período o
quadro já está totalmente instalado e a espasticidade já alcançou sua estabilidade
(Anexo I). Todos os pacientes faziam uso de medicação oral, principalmente anti-
hipertensivo, porém nenhum fazia uso de antiespasmódico ou miorrelaxante.
Critérios de inclusão:
- Pacientes portadores de AVE com espasticidade instalada.
- Pacientes que aceitaram participar da pesquisa, após assinar termo de
consentimento (Anexo II).
Critérios de exclusão:
- Pacientes com espasticidade associada a problemas ortopédicos.
- Pacientes que não tenham capacidade para entender o que está sendo
solicitado.
- Presença de dor à movimentação.
- Presença de clônus.

41
4.6 TESTE DO DISPOSITIVO
4.6.1 Simulação da Espasticidade
Para testar a repetibilidade e a sensibilidade do dispositivo desenvolvido, foi
simulada a resistência que seria oferecida por pacientes com espasticidade graus 1,
1+, 2, 3 e 4. Esse simulador é composto por um braço mecânico propositalmente
construído para o teste, e faixas da marca “Theraband” com diferentes resistências
e cores, sendo amarelo, vermelho, roxo, cinza e laranja. Foram determinadas
experimentalmente qual resistência e qual comprimento de cada faixa eram
necessárias para simular os graus de espasticidade. Com a resistência do “Thera-
Band” amarelo no comprimento de 20 e 30 cm foi possível representar o grau 1, a do
vermelho com 20 e 30 cm representou o grau 1+, o roxo com 20 e 30 cm
representou o grau 2, o cinza com 20 e 30 cm representou o grau 3, e o laranja com
20 cm dobrado ao meio representou o grau 4.
Foram feitas várias demarcações para modificar o comprimento de cada faixa
de theraband representando resistências diferentes da inicial, mas que podiam ser
identificadas como do mesmo grau da escala de Ashworth modificada.
Um braço mecânico (Fig.13), foi montado com 3 tubos de ferro para o
suporte, e um tubo em alumínio para simular o antebraço. O tubo (1) em alumínio
maciço, de 5 cm de diâmetro e 45cm de comprimento, foi conectado
transversalmente por uma braçadeira ao tubo de ferro (2) de 5,5cm de diâmetro e
61cm de comprimento. O tubo (2) foi fixado a um tubo móvel (3) de 5,5cm de
diâmetro, por outra braçadeira. O tubo (3) desliza no tubo (4) que tem 7,5cm de
diâmetro, permitindo uma altura total de 81,5cm. Um encaixe na parte inferior do
tubo 4 permitiu a fixação do mesmo, numa base de chumbo.
No tubo 1 foi fixada uma caixa em plástico rígido (5) com 6,5cm de
comprimento e 5cm de largura onde foi posicionado o sensor de força FSR. Na
braçadeira que articula o tubo 1 com o tubo 2, foi instalado o eletrogoniômetro.

42
5
1
2 3
4
Figura 13 - Representa o braço mecânico com suas medidas
theraband
Sensor FSR
Braço mecânico
eletrogoniometro
Figura 14 - Esboço do braço mecânico
Foram fixados os “Therabands” (um para cada teste), entre a parte superior
do tubo de alumínio e uma haste de chumbo (Figura 14).
43
4.6.2 Protocolo para Teste do Dispositivo
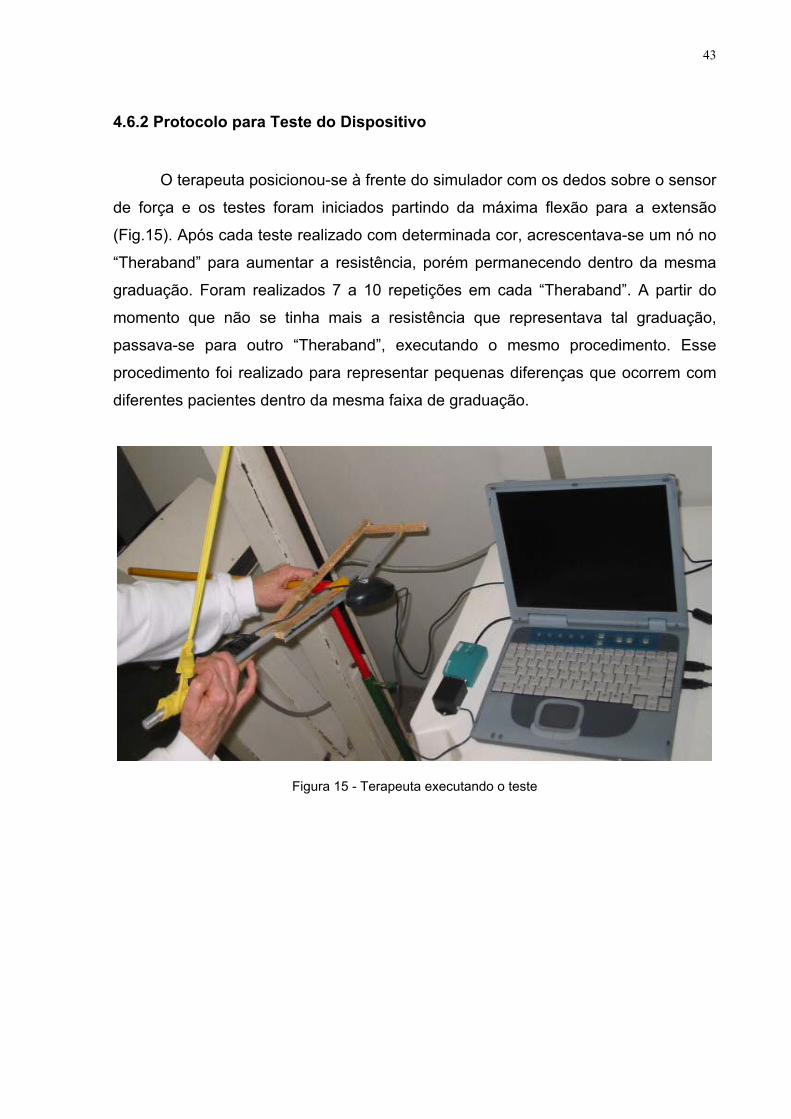
O terapeuta posicionou-se à frente do simulador com os dedos sobre o sensor
de força e os testes foram iniciados partindo da máxima flexão para a extensão
(Fig.15). Após cada teste realizado com determinada cor, acrescentava-se um nó no
“Theraband” para aumentar a resistência, porém permanecendo dentro da mesma
graduação. Foram realizados 7 a 10 repetições em cada “Theraband”. A partir do
momento que não se tinha mais a resistência que representava tal graduação,
passava-se para outro “Theraband”, executando o mesmo procedimento. Esse
procedimento foi realizado para representar pequenas diferenças que ocorrem com
diferentes pacientes dentro da mesma faixa de graduação.
Figura 15 - Terapeuta executando o teste

44
4.7 AVALIAÇÃO DO DISPOSITIVO
4.7.1 Protocolo de Avaliação
A avaliação manual foi feita por um fisioterapeuta experiente, com a escala de
Ashworth modificada. O paciente estava sentado em cadeira comum, com o membro
a ser avaliado apoiado por uma mão do terapeuta. Com a outra mão o fisioterapeuta
segurou o punho do paciente fazendo a extensão do cotovelo e a seguir anotou em
um papel a graduação obtida (avaliando a espasticidade em bíceps).
A avaliação instrumentada foi realizada junto com a avaliação manual, sendo
o sensor de força FSR colocado entre a mão do fisioterapeuta e a face média do
punho do paciente e o eletrogoniômetro fixado ao braço e antebraço
respectivamente pela fita de velcro com o eixo central do encoder ótico apoiado no
epicôndilo lateral do úmero do paciente.
A haste fixa do eletrogoniômetro foi colocada ao longo da linha média lateral
do úmero em linha com o acrômio e a haste móvel ao longo da linha média lateral do
rádio em linha com o processo estilóide do rádio.
Para iniciar o teste colocou-se o cotovelo do paciente em total flexão (em
torno de 40°, dependendo do diâmetro do braço do paciente), zerou-se as hastes e
então iniciou-se o movimento de extensão máxima, até 180° ( para tal teste,
considerou-se o braço em extensão a 180º, e o braço em flexão a mais ou menos
40º). Pediu-se ao paciente não opor-se ao movimento feito pelo examinador. Em
seguida foi feita a movimentação passiva do cotovelo.
Os testes foram realizados somente no membro superior afetado,
especificamente em bíceps braquial, sendo duas vezes em cada paciente, de inicio
em velocidade normal e posteriormente aumentando essa.

45
5 RESULTADOS
5.1 TESTES DE α x T e F x T PARA TODOS OS GRAUS COM OS “THERABANDS”
Os resultados dos testes realizados no laboratório @ladim com o braço
mecânico especialmente desenvolvido para esse fim e com os “Therabands”
amarelo, vermelho, roxo, cinza e laranja, são apresentados neste item em forma de
tabelas e gráficos.
Foram mensurados: a força (F) aplicada pelo terapeuta em função do
tempo(t) fig. 17, 19, 21,23, 25 e o ângulo(α) de abertura do braço também em função
do tempo(t) fig. 16, 18, 20, 22, 24.
Os resultados foram agrupados considerando o grau de espasticidade
simulado em cada theraband.
Figura 16 – Gráfico Ângulo de abertura x tempo para simulador de grau 1
46
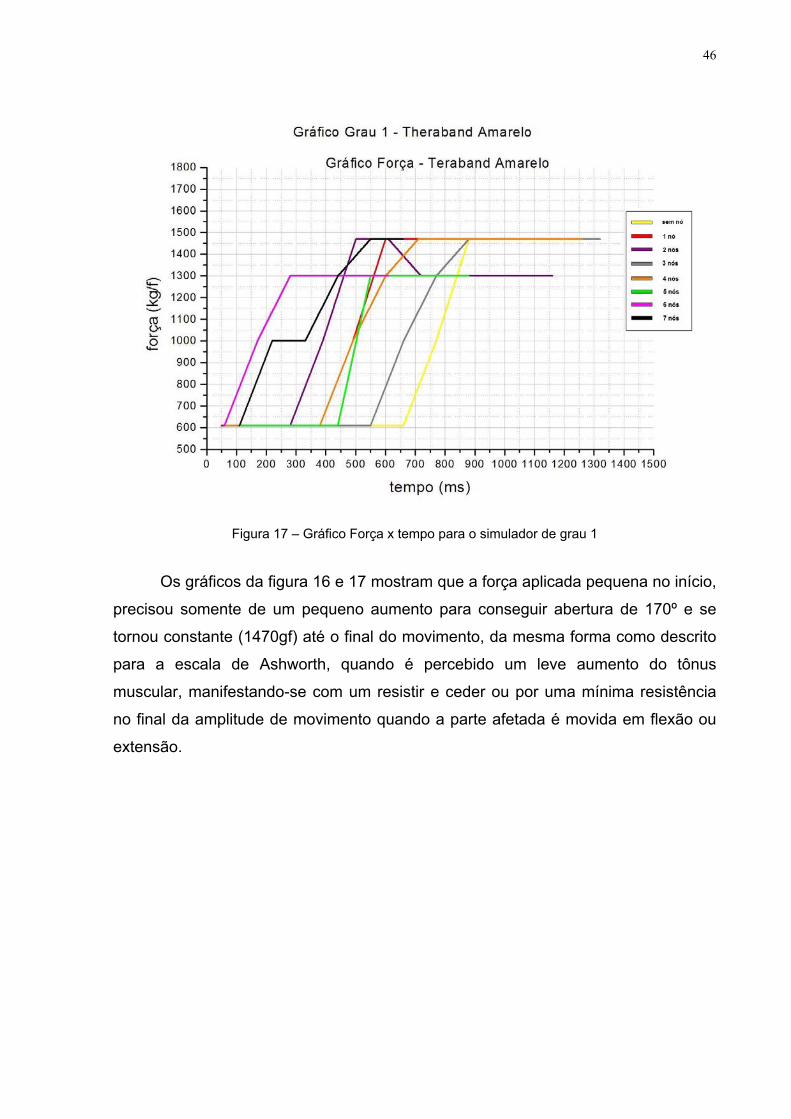
Figura 17 – Gráfico Força x tempo para o simulador de grau 1
Os gráficos da figura 16 e 17 mostram que a força aplicada pequena no início,
precisou somente de um pequeno aumento para conseguir abertura de 170º e se
tornou constante (1470gf) até o final do movimento, da mesma forma como descrito
para a escala de Ashworth, quando é percebido um leve aumento do tônus
muscular, manifestando-se com um resistir e ceder ou por uma mínima resistência
no final da amplitude de movimento quando a parte afetada é movida em flexão ou
extensão.

47
Figura 18- Gráfico Ângulo de abertura x tempo para o simulador de grau 1+
Figura 19 – Gráfico Força x tempo para o simulador de grau 1+

48
Nos gráficos da figura 18 e 19 relativos ao “Theraband” vermelho, pode se
observar que o braço mecânico estendeu um pouco mais devagar, até 120°. Entre
120º e 156° o movimento foi mais fácil (abertura mais rápida). A 156º resistiu mais,
com uma força aplicada de (2400gf). A escala de Ashworth diz que no grau 1+
ocorre um leve aumento do tônus muscular manifestando-se por resistir seguido por
resistência mínima no restante do movimento (menos da metade).
Figura 20 – Gráfico Ângulo de abertura x tempo para o simulador de grau 2
49
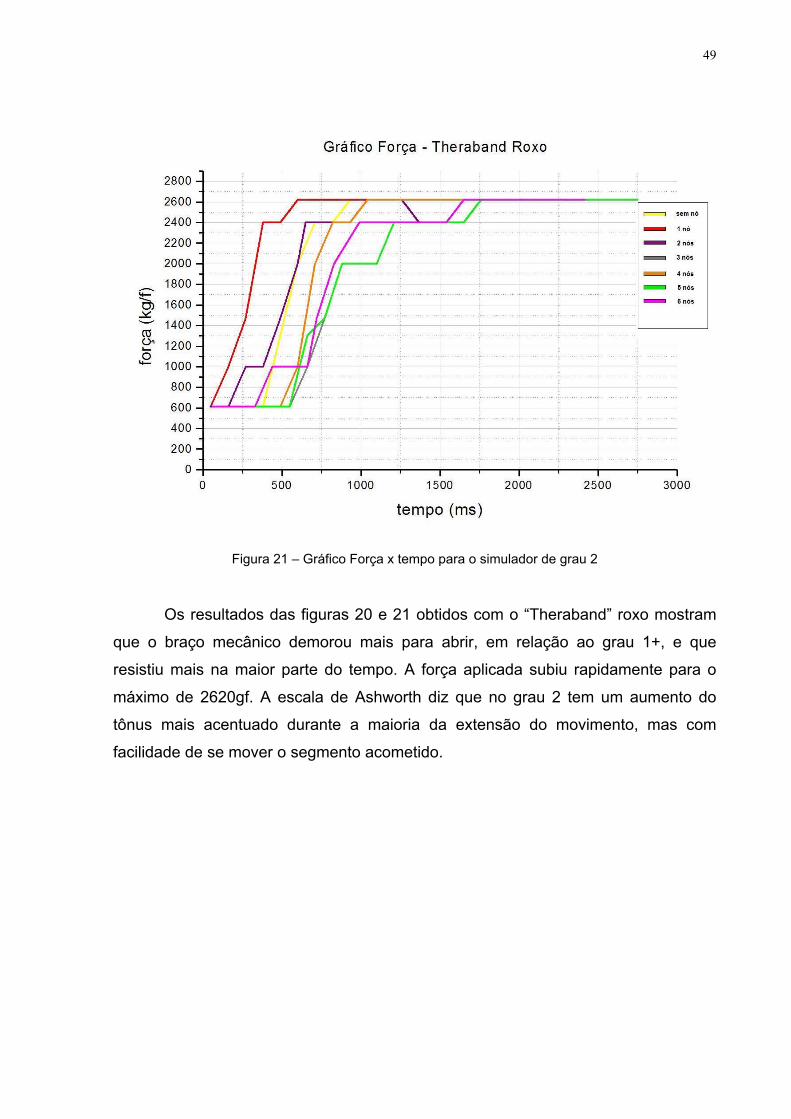
Figura 21 – Gráfico Força x tempo para o simulador de grau 2
Os resultados das figuras 20 e 21 obtidos com o “Theraband” roxo mostram
que o braço mecânico demorou mais para abrir, em relação ao grau 1+, e que
resistiu mais na maior parte do tempo. A força aplicada subiu rapidamente para o
máximo de 2620gf. A escala de Ashworth diz que no grau 2 tem um aumento do
tônus mais acentuado durante a maioria da extensão do movimento, mas com
facilidade de se mover o segmento acometido.

50
Figura 22 – Gráfico Ângulo de abertura x tempo para o simulador de grau 3
Figura 23 – Gráfico Força x tempo para o simulador de grau 3

51
Os gráficos das figuras 22 e 23 obtidos com o “Theraband” cinza mostram
que demorou mais para abrir o braço mecânico e que a força aplicada foi maior
desde o início, se tornando constante a 2960gf. A abertura total não foi possível. Na
escala de Ashworth o grau 3 corresponde a um aumento considerável do tônus
muscular com dificuldade na movimentação passiva.
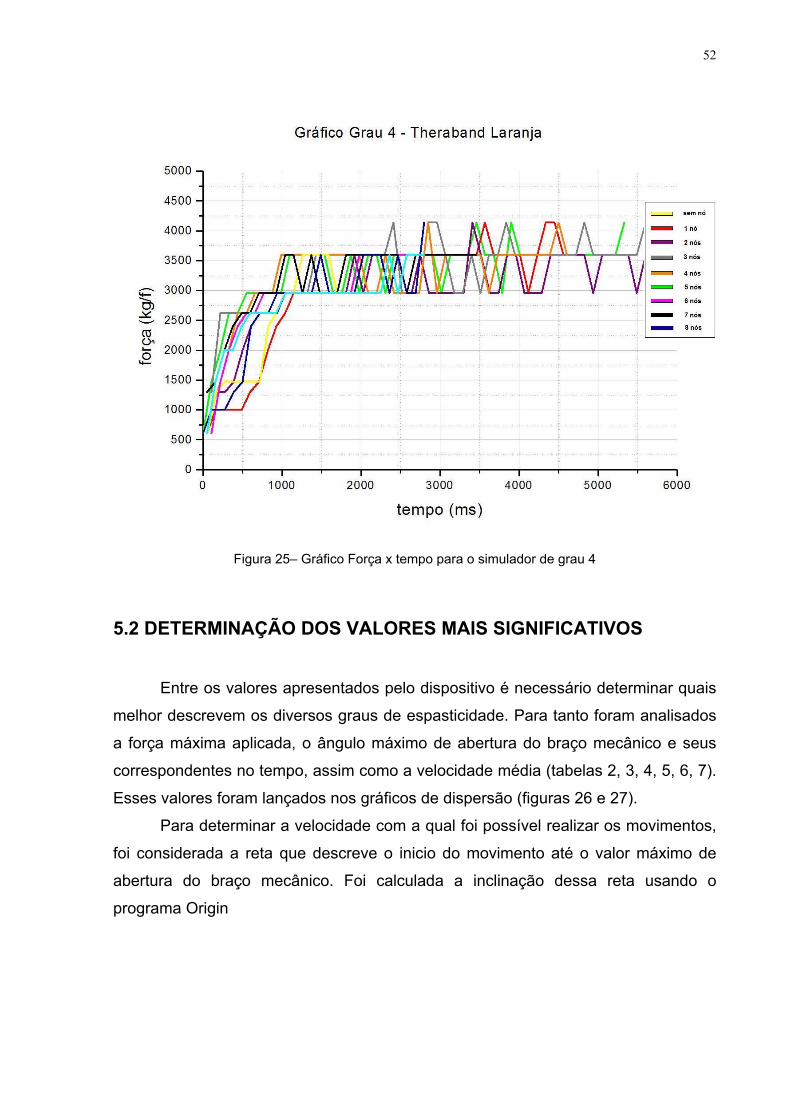
Figura 24 – Gráfico Ângulo de abertura x tempo para o simulador de grau 4
Os gráficos das figuras 24 e 25 obtidos com o “Theraband” laranja mostram
pouca abertura do braço mecânico. Essa abertura teve inicio em 84° indo até 126°,
mesmo com uma força aplicada grande chegando a picos altos, ou seja, 3600gf a
4100gf. Na escala de Ashworth modificada no grau 4 o segmento acometido está
rígido em flexão ou extensão. Sendo dessa forma difícil a sua movimentação.
52
Figura 25– Gráfico Força x tempo para o simulador de grau 4
5.2 DETERMINAÇÃO DOS VALORES MAIS SIGNIFICATIVOS
Entre os valores apresentados pelo dispositivo é necessário determinar quais
melhor descrevem os diversos graus de espasticidade. Para tanto foram analisados
a força máxima aplicada, o ângulo máximo de abertura do braço mecânico e seus
correspondentes no tempo, assim como a velocidade média (tabelas 2, 3, 4, 5, 6, 7).
Esses valores foram lançados nos gráficos de dispersão (figuras 26 e 27).
Para determinar a velocidade com a qual foi possível realizar os movimentos,
foi considerada a reta que descreve o inicio do movimento até o valor máximo de
abertura do braço mecânico. Foi calculada a inclinação dessa reta usando o
programa Origin

53
Tabela 2 –Simulação grau 1 (theraband amarelo): velocidade, ângulo de abertura máx., força máx., tempo máx., médias e desvios
Nó Velocidade ângulo Força tempo 1 0,12 124,23 1470 880 2 0,18 129,3 1470 1470 3 0,13 174,93 1300 720 4 0,17 131,83 1470 500 5 0,1 157,18 1470 880 6 0,13 157,18 1470 710 7 0,21 129,3 1300 550 8 0,24 83,66 1300 280 9 0,23 144,51 1470 550
Média 0,16 136,9 1413,333 726,7 Desvio padrão 0,051 26,132 726,667 337,861
Tabela 3 – Simulação grau 1+ (Theraband vermelho): velocidade, ângulo de abertura máx., força máx., tempo máx., médias e desvios
Nó velocidade ângulo força Tempo 1 0,15 156,86 2400 820 2 0,11 133,71 2000 770 3 0,14 180 2000 830 4 0,19 144 2000 600 5 0,15 169,71 2000 830 6 0,13 180 2000 820 7 0,17 141,43 2000 490 8 0,17 180 2000 880 9 0,15 169,71 2000 440 10 0,12 156,71 2400 380
Média 0,148 161,2 2080 686 Desvio padrão 0,024 17,273 168,654 189,161
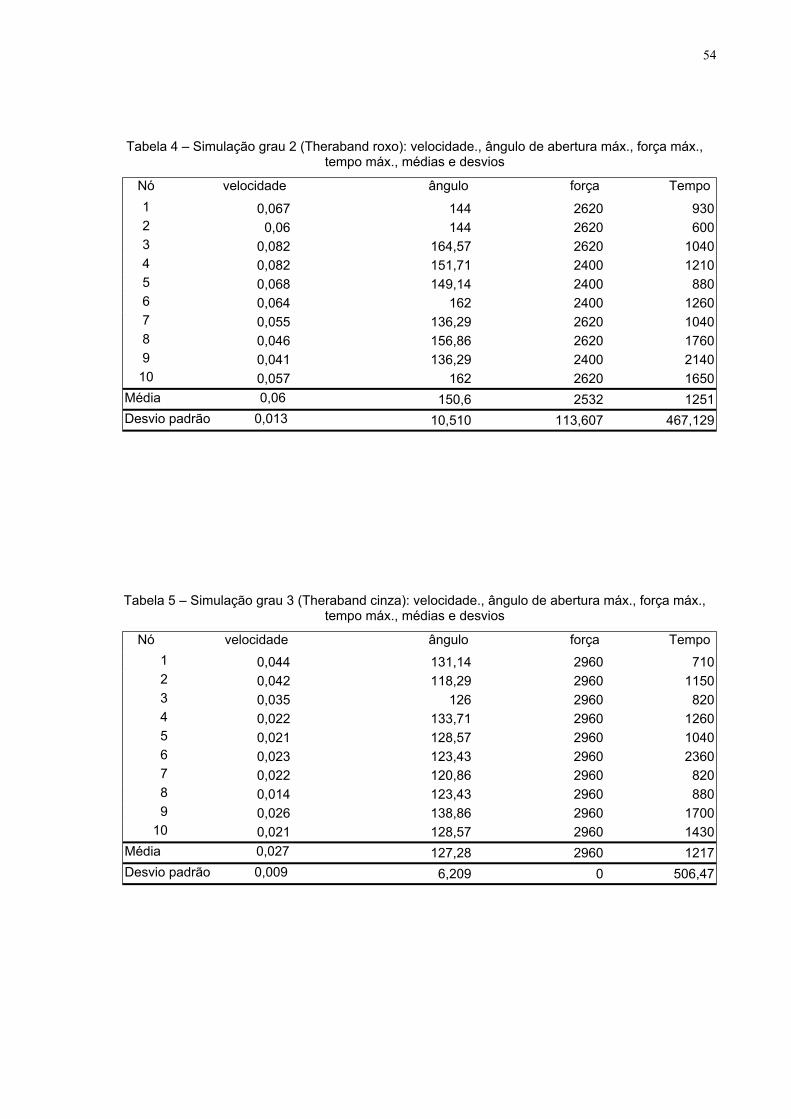
54
Tabela 4 – Simulação grau 2 (Theraband roxo): velocidade., ângulo de abertura máx., força máx., tempo máx., médias e desvios
Nó velocidade ângulo força Tempo 1 0,067 144 2620 930 2 0,06 144 2620 600 3 0,082 164,57 2620 1040 4 0,082 151,71 2400 1210 5 0,068 149,14 2400 880 6 0,064 162 2400 1260 7 0,055 136,29 2620 1040 8 0,046 156,86 2620 1760 9 0,041 136,29 2400 2140
10 0,057 162 2620 1650 Média 0,06 150,6 2532 1251 Desvio padrão 0,013 10,510 113,607 467,129
Tabela 5 – Simulação grau 3 (Theraband cinza): velocidade., ângulo de abertura máx., força máx., tempo máx., médias e desvios
Nó velocidade ângulo força Tempo 1 0,044 131,14 2960 710 2 0,042 118,29 2960 1150 3 0,035 126 2960 820 4 0,022 133,71 2960 1260 5 0,021 128,57 2960 1040 6 0,023 123,43 2960 2360 7 0,022 120,86 2960 820 8 0,014 123,43 2960 880 9 0,026 138,86 2960 1700
10 0,021 128,57 2960 1430 Média 0,027 127,28 2960 1217 Desvio padrão 0,009 6,209 0 506,47

55
Tabela 6 – Simulação grau 4 (Theraband laranja): velocidade., ângulo de abertura máx., força máx., tempo máx., médias e desvios
Nó velocidade ângulo força Tempo 1 0,005 126 3600 4010 2 0,014 123,43 3600 1810 3 0,003 115,74 3600 4400 4 0,002 115,71 3600 3950 5 0,007 126 3600 3070 6 0,023 108 3600 1260 8 0,008 115,71 3600 2690 9 0,015 123,43 4140 2800
10 0,011 118,29 3600 2580 Média 0,009 118,5 3654 2855 Desvio padrão 0,006 5,994 170,763 1025,987
Os valores obtidos para força máxima (F), ângulo máximo (α) e tempo
máximo (t) foram colhidos onde começava a estabilização da força aplicada no teste
de cada “Theraband”. Esses valores e os relativos a velocidade média foram
lançados no gráfico de dispersão das fig. 26 e 27. As cores correspondem às
classificações feitas com a escala de Ashworth modificada.
Figura 26- Gráfico de Dispersão Ângulo max. x Força max. x Tempo max

56
Figura 27 – Gráfico de dispersão em função da velocidade max., força máx. e tempo máx.
Pode se perceber analisando os dados das tabelas 2, 3, 4, 5, 6 que: a
velocidade média tem uma queda de 7,5% do grau 1 para 1+; do grau 1+ para o 2
uma queda de 59,5%; do grau 2 para o grau 3 uma que de 55% e do grau 3 para o
grau 4 uma queda de 67%.
Entretanto entre os graus 1 e 1+, a força máxima teve uma diferença de 47%;
entre o grau 1+ e 2 uma diferença de 21%; do grau 2 para o grau 3 uma diferença de
16% e do grau 3 para o grau 4 uma diferença de 44%.
No gráfico de dispersão da figura 26 foi verificado que os parâmetros f max., α
max., t max. separaram bem os resultados nos níveis 1, 3 e 4. Entretanto dois
valores pertencentes ao grau 1+ foram incluídos no grau 2. Portanto, para
discriminar melhor esses níveis, foi também calculada a velocidade média de cada
teste. Os valores da velocidade max. em função da força max. e tempo max. foram
lançados no gráfico de dispersão da figura 27, onde os graus 1+ e 2 podem ser
distintos por esse novo parâmetro.

57
A tabela 7 apresenta comparativamente as velocidades de execução de cada
teste, e a velocidade média para cada “Theraband” , enquanto que na tabela 8 são
apresentadas as forças de execução e a força média para cada “Theraband”.
Pode-se observar que quanto maior a resistência do “Theraband”, menor se
torna a velocidade de abertura do braço mecânico.
Tabela 7 – Velocidade de Execução das Medidas com cada simulador e medidas (VM)
NÓ THERABAND
Amarelo Vermelho Roxo Cinza Laranja 1 0,12 0,15 0,067 0,044 0,005 2 0,18 0,11 0,06 0,042 0,014 3 0,13 0,14 0,08 0,035 0,005 4 0,17 0,19 0,08 0,022 0,002 5 0,10 0,15 0,068 0,021 0,007 6 0,13 0,13 0,064 0,023 0,023 7 0,21 0,17 0,055 0,022 0,011 8 0,24 0,17 0,046 0,014 0,008 9 0,23 0,15 0,041 0,026 0,015
10 0,12 0,057 0,021 0,011 vm 0,16 0,14 0,06 0,02 0,009
Tabela 8 – Força máxima com cada simulador e medidas (FM)
NÓ THERABAND
Amarelo Vermelho Roxo Cinza Laranja 1 1470 2400 2620 2960 3600 2 1470 2000 2620 2960 3600 3 1300 2000 2620 2960 3600 4 1470 2000 2400 2960 3600 5 1470 2000 2400 2960 3600 6 1470 2000 2400 2960 3600 7 1300 2000 2620 2960 3600 8 1300 2000 2620 2960 3600 9 1470 2000 2400 2960 4140
10 2400 2620 2960 3600 Fm 1413,3 2080 2532 2960 3654
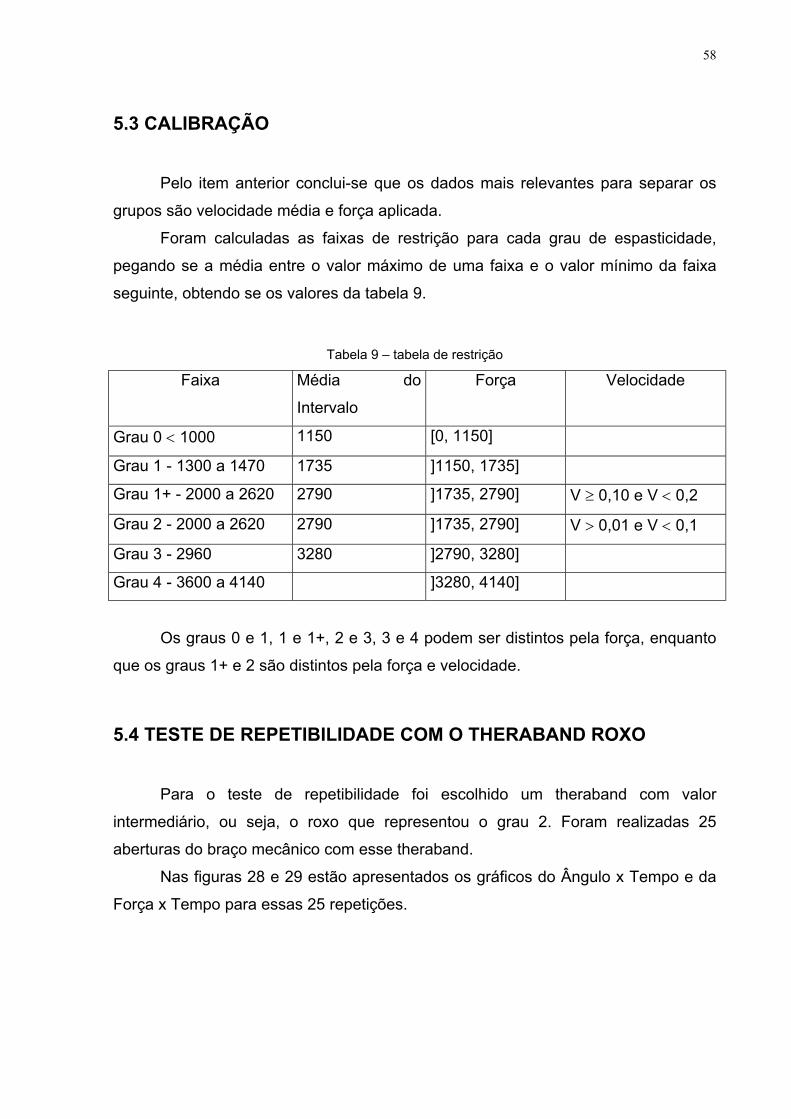
58
5.3 CALIBRAÇÃO
Pelo item anterior conclui-se que os dados mais relevantes para separar os
grupos são velocidade média e força aplicada.
Foram calculadas as faixas de restrição para cada grau de espasticidade,
pegando se a média entre o valor máximo de uma faixa e o valor mínimo da faixa
seguinte, obtendo se os valores da tabela 9.
Tabela 9 – tabela de restrição
Faixa Média do
Intervalo
Força Velocidade
Grau 0 < 1000 1150 [0, 1150]
Grau 1 - 1300 a 1470 1735 ]1150, 1735]
Grau 1+ - 2000 a 2620 2790 ]1735, 2790] V ≥ 0,10 e V < 0,2
Grau 2 - 2000 a 2620 2790 ]1735, 2790] V > 0,01 e V < 0,1
Grau 3 - 2960 3280 ]2790, 3280]
Grau 4 - 3600 a 4140 ]3280, 4140]
Os graus 0 e 1, 1 e 1+, 2 e 3, 3 e 4 podem ser distintos pela força, enquanto
que os graus 1+ e 2 são distintos pela força e velocidade.
5.4 TESTE DE REPETIBILIDADE COM O THERABAND ROXO
Para o teste de repetibilidade foi escolhido um theraband com valor
intermediário, ou seja, o roxo que representou o grau 2. Foram realizadas 25
aberturas do braço mecânico com esse theraband.
Nas figuras 28 e 29 estão apresentados os gráficos do Ângulo x Tempo e da
Força x Tempo para essas 25 repetições.

59
Figura 28- Gráfico de repetibilidade Ângulo x Tempo
Figura 29- Gráfico de repetibilidade Ângulo x Tempo

60
Pode se observar através desses gráficos que as medições têm o mesmo
comportamento com variações em torno de 250 ms. Essas variações são irrisórias
porém existem devido ao fato dos testes serem realizados manualmente pelo
avaliador.
5.5 TESTES FEITOS COM OS PACIENTES
Na tabela 10 estão apresentados os valores dos graus de espasticidade,
detectados pelo fisioterapeuta, os graus indicados pelo programa e o erro (F) ou
acerto (V) quando o teste é realizado com velocidade normal.
Tabela 10 – Graus de espasticidade detectados pelo fisioterapeuta e pelo programa – velocidade normal
Pacientes Grau de espast. dado pelo fisioterapeuta
Grau de espast. pelo programa Diferença
1 1 1+ F 2 2 2 V 3 1 1 V 4 2 2 V 5 1 1 V 6 1+ 1+ V 7 1 1+ F 8 2 2 V 9 4 4 V 10 2 3 F 11 2 3 F 12 1 1+ F 13 3 3 V 14 1+ 1+ V 15 4 4 V 16 2 2 V 17 1+ 1 F 18 1+ 2 V 19 1+ 2 V 20 1 1 V 21 1+ 2 V 22 1+ 1 F 23 2 2 V 24 1 1 V 25 2 2 V 26 2 2 V 27 1+ 1+ V 28 3 4 F 29 1+ 1+ V 30 1 1+ F 31 1 1 V 32 4 4 V
Porcentagem de Falsos 28,12%
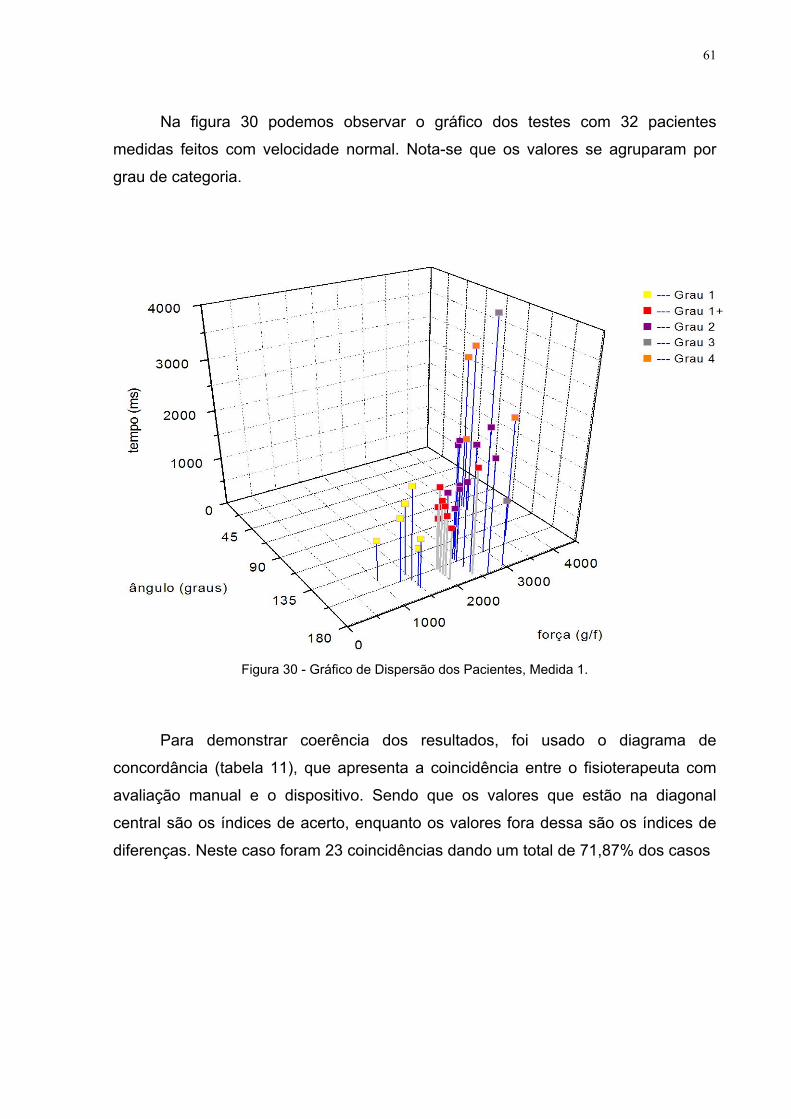
61
Na figura 30 podemos observar o gráfico dos testes com 32 pacientes
medidas feitos com velocidade normal. Nota-se que os valores se agruparam por
grau de categoria.
Figura 30 - Gráfico de Dispersão dos Pacientes, Medida 1.
Para demonstrar coerência dos resultados, foi usado o diagrama de
concordância (tabela 11), que apresenta a coincidência entre o fisioterapeuta com
avaliação manual e o dispositivo. Sendo que os valores que estão na diagonal
central são os índices de acerto, enquanto os valores fora dessa são os índices de
diferenças. Neste caso foram 23 coincidências dando um total de 71,87% dos casos
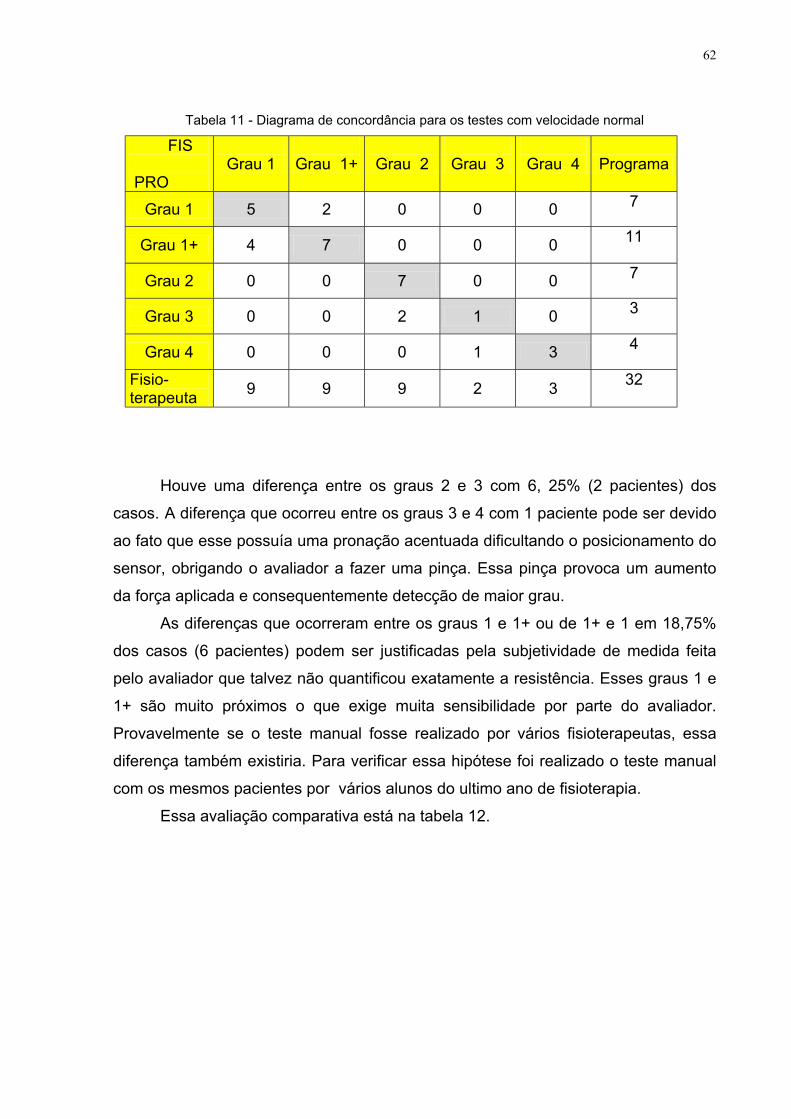
62
Tabela 11 - Diagrama de concordância para os testes com velocidade normal
FIS
PRO
Grau 1
Grau 1+
Grau 2
Grau 3
Grau 4 Programa
Grau 1 5 2 0 0 0 7
Grau 1+ 4 7 0 0 0 11
Grau 2 0 0 7 0 0 7
Grau 3 0 0 2 1 0 3
Grau 4 0 0 0 1 3 4
Fisio- terapeuta 9 9 9 2 3 32
Houve uma diferença entre os graus 2 e 3 com 6, 25% (2 pacientes) dos
casos. A diferença que ocorreu entre os graus 3 e 4 com 1 paciente pode ser devido
ao fato que esse possuía uma pronação acentuada dificultando o posicionamento do
sensor, obrigando o avaliador a fazer uma pinça. Essa pinça provoca um aumento
da força aplicada e consequentemente detecção de maior grau.
As diferenças que ocorreram entre os graus 1 e 1+ ou de 1+ e 1 em 18,75%
dos casos (6 pacientes) podem ser justificadas pela subjetividade de medida feita
pelo avaliador que talvez não quantificou exatamente a resistência. Esses graus 1 e
1+ são muito próximos o que exige muita sensibilidade por parte do avaliador.
Provavelmente se o teste manual fosse realizado por vários fisioterapeutas, essa
diferença também existiria. Para verificar essa hipótese foi realizado o teste manual
com os mesmos pacientes por vários alunos do ultimo ano de fisioterapia.
Essa avaliação comparativa está na tabela 12.
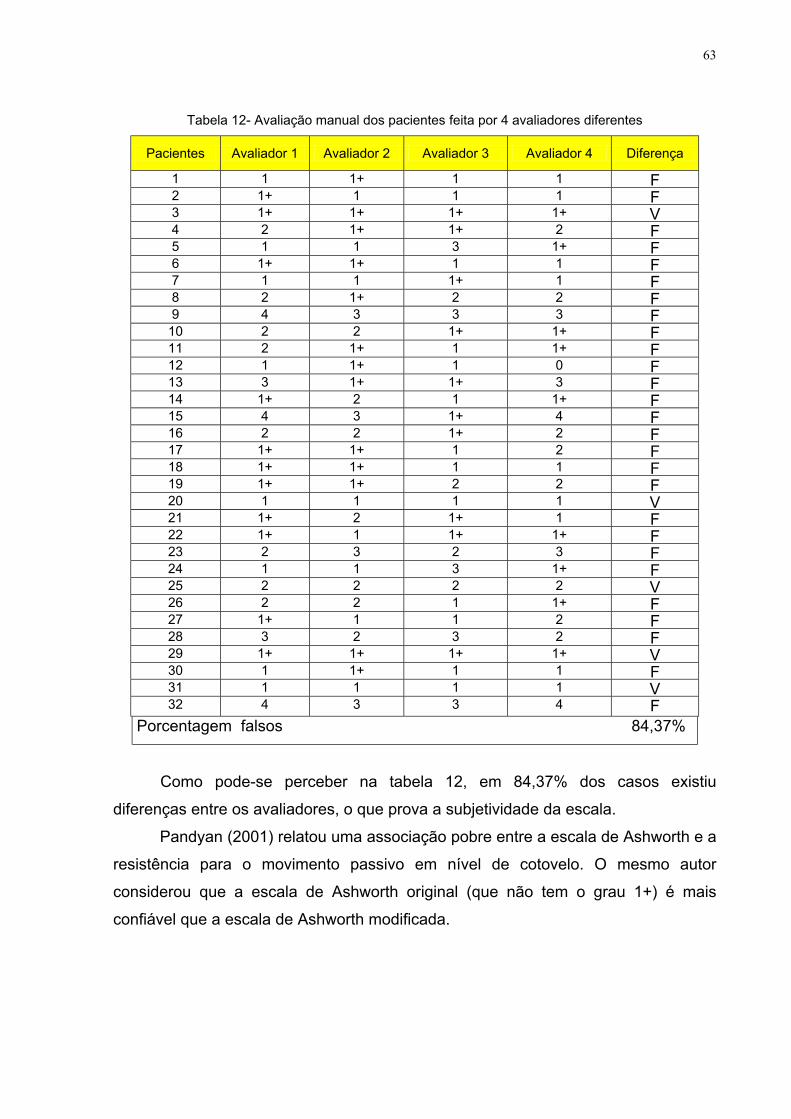
63
Tabela 12- Avaliação manual dos pacientes feita por 4 avaliadores diferentes
Pacientes Avaliador 1 Avaliador 2 Avaliador 3 Avaliador 4 Diferença
1 1 1+ 1 1 F 2 1+ 1 1 1 F 3 1+ 1+ 1+ 1+ V 4 2 1+ 1+ 2 F 5 1 1 3 1+ F 6 1+ 1+ 1 1 F 7 1 1 1+ 1 F 8 2 1+ 2 2 F 9 4 3 3 3 F
10 2 2 1+ 1+ F 11 2 1+ 1 1+ F 12 1 1+ 1 0 F 13 3 1+ 1+ 3 F 14 1+ 2 1 1+ F 15 4 3 1+ 4 F 16 2 2 1+ 2 F 17 1+ 1+ 1 2 F 18 1+ 1+ 1 1 F 19 1+ 1+ 2 2 F 20 1 1 1 1 V 21 1+ 2 1+ 1 F 22 1+ 1 1+ 1+ F 23 2 3 2 3 F 24 1 1 3 1+ F 25 2 2 2 2 V 26 2 2 1 1+ F 27 1+ 1 1 2 F 28 3 2 3 2 F 29 1+ 1+ 1+ 1+ V 30 1 1+ 1 1 F 31 1 1 1 1 V 32 4 3 3 4 F
Porcentagem falsos 84,37%
Como pode-se perceber na tabela 12, em 84,37% dos casos existiu
diferenças entre os avaliadores, o que prova a subjetividade da escala.
Pandyan (2001) relatou uma associação pobre entre a escala de Ashworth e a
resistência para o movimento passivo em nível de cotovelo. O mesmo autor
considerou que a escala de Ashworth original (que não tem o grau 1+) é mais
confiável que a escala de Ashworth modificada.

64
5.6 TESTE COM VELOCIDADE AUMENTADA
Os testes com pacientes também foram realizados com velocidade
aumentada tabela 13. De acordo com a literatura a espasticidade deveria ser maior
nos últimos testes, por ser velocidade dependente.
Tabela 13 – Graus de espasticidade detectados pelo fisioterapeuta e pelo programa – velocidade aumentada
Pacientes Grau de espast. dado pelo fisioterapeuta
Grau de espast. pelo programa Erro
1 1 1 V 2 1+ 1+ V 3 1+ 1+ V 4 2 3 F 5 1 1 V 6 1+ 1+ V 7 1 1+ F 8 2 2 V 9 4 4 V
10 2 3 F 11 2 2 V 12 1 1 V 13 3 3 V 14 1+ 2 V 15 4 3 F 16 2 2 V 17 1+ 2 F 18 1+ 2 V 19 1+ 2 V 20 1 1 V 21 1+ 1+ V 22 1+ 2 F 23 2 2 V 24 1 1 V 25 2 3 F 26 2 2 V 27 1+ 1+ V 28 3 4 F 29 1+ 2 V 30 1 2 F 31 1 1 V 32 4 4 V
Porcentagem de Falsos 28,12%
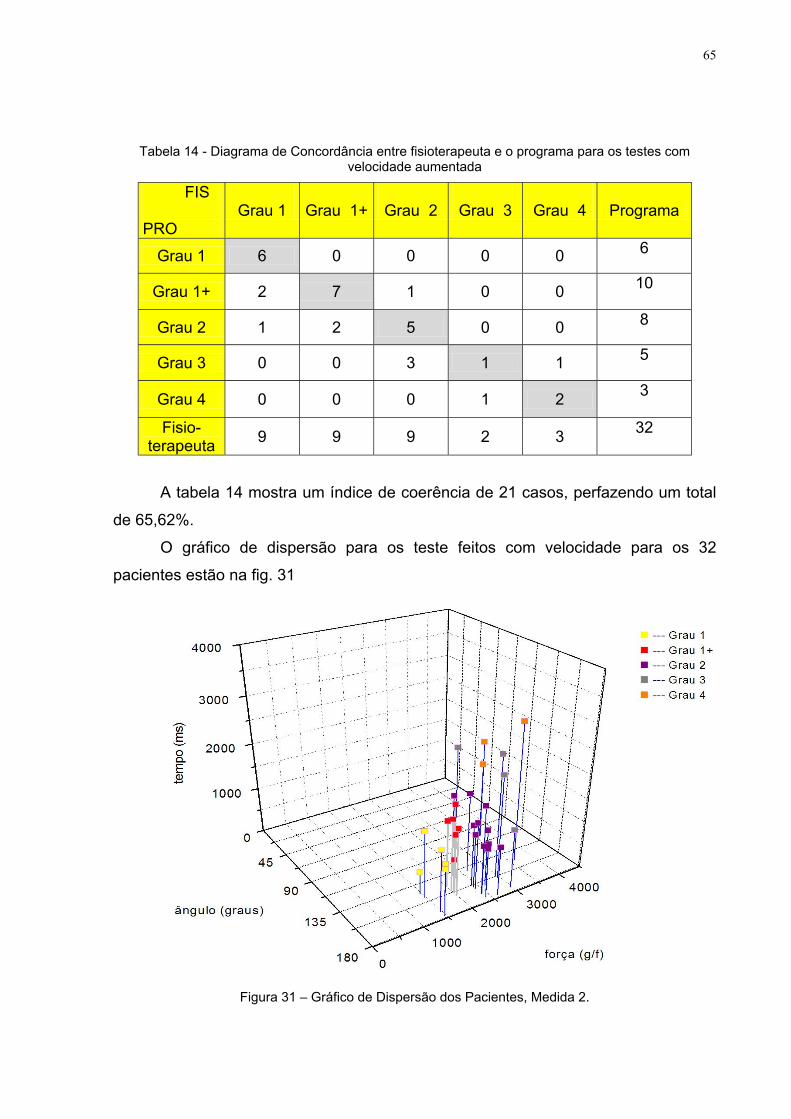
65
Tabela 14 - Diagrama de Concordância entre fisioterapeuta e o programa para os testes com velocidade aumentada
FIS
PRO
Grau 1
Grau 1+
Grau 2
Grau 3
Grau 4 Programa
Grau 1 6 0 0 0 0 6
Grau 1+ 2 7 1 0 0 10
Grau 2 1 2 5 0 0 8
Grau 3 0 0 3 1 1 5
Grau 4 0 0 0 1 2 3
Fisio-terapeuta 9 9 9 2 3 32
A tabela 14 mostra um índice de coerência de 21 casos, perfazendo um total
de 65,62%.
O gráfico de dispersão para os teste feitos com velocidade para os 32
pacientes estão na fig. 31
Figura 31 – Gráfico de Dispersão dos Pacientes, Medida 2.

66
Para verificar se a espasticidade aumentou com a velocidade dos testes, as
medições foram comparadas na tabela 15.
Tabela 15- Graus de espasticidade com velocidade normal e aumentada dada pelo dispositivo
(D= diminuição; A= aumento; P= permanência)
Pacientes Velocidade 1 Velocidade 2 concordância
1 1+ 1 D 2 2 1+ D 3 1 1+ A 4 2 3 A 5 1 1 P 6 1+ 1+ P 7 1+ 1+ P 8 2 2 P 9 4 4 P
10 3 3 P 11 3 2 D 12 1+ 1 D 13 3 3 P 14 1+ 2 A 15 4 3 D 16 2 2 P 17 1 2 A 18 2 2 P 19 2 2 P 20 1 1 P 21 2 1+ D 22 1 2 A 23 2 2 P 24 1 1 P 25 2 3 A 26 2 2 P 27 1+ 1+ P 28 4 4 P 29 1+ 2 A 30 1+ 2 A 31 1 1 P 32 4 4 P
Porcentagem de aumento 25% Porcentagem de diminuição 18,75% Porcentagem de permanência 56,25%
Na tabela 15 pode-se observar que quando se aumentou a velocidade, em
25% dos casos, a espasticidade aumentou, e permaneceu constante em 56,25%.
Portanto não foi possível comprovar a afirmação da literatura que diz que a
espasticidade é velocidade dependente. Em 18,75% dos casos (6 medidas) a
espasticidade diminuiu. Casalis (1990) cita que a diminuição da resistência muscular
67
após um certo grau de estiramento é causado pelo sinal do canivete. O sinal do
canivete é a contração muscular reflexa provocada pelo alongamento brusco do
músculo. Quando o estiramento é mantido, o examinador percebe a diminuição
brusca da resistência. Esse fenômeno pode ser desencadeado pela estimulação das
fibras aferentes II do fuso muscular durante o estiramento muscular prolongado.
Pandyan (2001) em seu estudo constatou que, quando a velocidade
aumentou, a resistência para o movimento passivo tendeu a diminuir, porém ele
avaliou pacientes com 1 semana de AVE, e geralmente nessa fase a espasticidade
não está instalada podendo realmente variar.
68
6 DISCUSSÃO
A espasticidade é um assunto que preocupa todos os profissionais da
reabilitação, tornando relevante o estudo de métodos e o desenvolvimento de
dispositivos adequados para poder mensurá-la.
O que na atualidade usa-se para medir espasticidade são escalas que nem
sempre mostram o verdadeiro grau da espasticidade, por serem subjetivas. Johnson
(2002) e Lianza (2001) citam que a mais utilizada é a escala modificada de
Ashworth.
Pandyan (2001) por sua vez comenta que pelo procedimento da avaliação é
possível apreciar a resistência que os músculos opõem passivamente ao movimento
e também a amplitude passiva do movimento. Na hipertonia, geralmente a amplitude
de movimento é menor que o normal, e a resistência oposta à realização do
movimento é maior.
Para Katz e Rymer (1989) os maiores problemas associados com a avaliação
da espasticidade resultam da variação da extensibilidade do músculo e da flutuação
dos graus da espasticidade, pois esta pode variar com a temperatura local, dor,
stress. Também quando o paciente está na fase inicial do AVE, a espasticidade
pode estar muito alterada pois está passando de uma hipotonia para uma hipertonia.
Pandyan (2001) cita em seu estudo que a resistência para o movimento
passivo não foi consistente com a definição neurofisiológica, pois quando a
velocidade aumentou, a resistência para o movimento passivo tendeu a diminuir.
Porém ele avaliou pacientes com uma semana de AVE e geralmente nessa fase a
espasticidade não está totalmente instalada podendo realmente variar, ou diminuir
após vários movimentos.
Neste estudo quando aumentou-se a velocidade, com o uso do dispositivo, 8
dos 32 pacientes (25%), tiveram o aumento da graduação. Esses pacientes já
tinham espasticidade instalada, o que explica que em muitos casos o aumento da
velocidade pode aumentar a resistência para o movimento passivo.
Pereira e Araújo (2002) citam que a eletromiografia tem se mostrado um meio
para avaliar os efeitos de drogas, procedimentos cirúrgicos e outras formas de
terapia, permitindo a mensuração do potencial elétrico do músculo espástico.

69
Portanto a eletromiografia é utilizada para verificação do potencial bioelétrico do
músculo, porém não serve para mensuração da espasticidade em si.
Em relação aos trabalhos semelhantes apresentados na literatura
especializada pode se destacar: o teste do pêndulo para quadríceps de Teixeira-
Salmela (2002) que por um lado é objetivo e fácil de ser administrado, mede apenas
espasticidade em um grupo muscular, que são os extensores do joelho.
O teste do pêndulo que segundo Johnson (2002) mostra-se inadequado para
medir espasticidade severa.
Marchese e cols. (2001) comentam em seu trabalho que testes preliminares
de seu aparelho mostraram um uso fácil, porém só permitiu seu uso em 85% dos
casos, e tiveram algumas dificuldades com alguns pacientes que apresentavam
espasticidade na articulação do ombro.
O modelo biomecânico de cotovelo de Lin e cols. (2003) foi desenvolvido
para usar o teste do pêndulo e formular parâmetros para quantificação. Nesse
experimento o autor cita que o dispositivo não pode ser utilizado em pacientes com
grau 4 por não ser possível adaptar o equipamento.
O dispositivo desenvolvido neste trabalho é de fácil utilização pelo
fisioterapeuta, não é caro pois utiliza um eletrogoniometro de baixo custo, sensor de
força e um computador normalmente disponível em qualquer ambiente clínico.
Também não necessita de cadeiras adaptáveis pois o paciente senta-se em cadeira
comum, e além disso, pode ser realizado com o paciente sentado em cadeira de
rodas. É também de fácil colocação no paciente, ficando difícil apenas, em alguns
casos em que a pronação do antebraço é muito acentuada. Houve dois casos em
que o sensor teve que ser reposicionado na região dorsal do punho ao invés de ser
colocado na região medial.
Outra vantagem do dispositivo é que após a instalação, as medidas são
obtidas imediatamente e o programa informa o grau detectado, na tela do
computador, sem necessidade de interpretação de gráficos e tabelas.
Foi possível avaliar 100% dos casos dos pacientes selecionados, gastando
uma média de 5 min. para cada teste.
Pandyan (2001) comenta que a velocidade do movimento passivo pode
variar quando as medidas são repetidas. E que essa variação pode ser resultado de
limitações na amplitude de movimento e dor (em ombro e cotovelo) em alguns
pacientes.

70
Neste estudo pode-se notar que as limitações geralmente aconteceram nos
casos em que o paciente apresentava grau 4, mas por uma modificação
viscoelástica, pouco uso e conseqüentemente limitação articular. Houve caso em
que o paciente apresentou uma pronação muito grande, inclusive dificultando o
posicionamento do sensor de força no momento de fazer o teste. O método
isocinético abordado por Dvir e Panturin (1993) é fidedigno, porém a acessibilidade à
população em geral se torna difícil, devido ao seu alto custo.
Com o dispositivo pode-se registrar cada momento, com seus respectivos
valores do movimento que estava sendo realizado, permitindo desta forma, detectar
mudanças na resistência muscular imposta pela espasticidade, as quais não seriam
possíveis quando realizadas somente com a escala de Ashworth modificada.
Foram realizados testes com os pacientes sendo, porém, necessário realizar
novos testes com vários fisioterapeutas utilizando o dispositivo.
71
7 CONCLUSÃO E SUGESTÕES PARA TRABALHOS FUTUROS
Hoje em dia torna-se necessário a quantificação dos comprometimentos
neurológicos, visto que está aumentando a necessidade de justificar os
procedimentos clínicos usados na rotina. Necessita-se de novas tecnologias para
promoção de segurança em sistemas de medidas, e em particular dispositivos que
mensurem a espasticidade de uma maneira menos subjetiva e mais precisa que a
escala de Ashworth atualmente utilizada.
O dispositivo desenvolvido proporcionou uma sensibilidade suficiente para
indicar as seis variações de resistência da escala de Ashworth modificada, mas de
modo não subjetivo.
È possível determinar valores padrões para calibrar o aparelho em função da
escala de Ashworth modificada, porém com resolução.
Os resultados indicam que o dispositivo é confiável, pois foram consistentes
tanto com os “Therabands” quanto com os pacientes, com diferenças entre o
diagnostico do fisioterapeuta e do aparelho menos que 28,12%. Os testes realizados
mostraram um uso fácil do dispositivo no ambiente clínico, pois os pacientes
sentados em cadeira comum, não referiram incômodo na hora da avaliação e
inclusive incentivaram o uso do dispositivo.
Certamente o dispositivo poderá auxiliar fisioterapeutas e pesquisadores no
processo de reabilitação por apresentar medidas seguras dando-lhes mais certeza
da aplicação de métodos de tratamento e seus resultados.
Espera-se com o dispositivo poder sanar erros de avaliações feitas somente
de forma manual.
SUGESTÕES PARA ESTUDOS FUTUROS:
• Fazer testes para outras articulações
• Estudar uma melhor adaptação do sensor de força em casos de pronação
acentuada do antebraço.
72
• Fazer um estudo que permita propor uma graduação diferente da escala
de Ashworth modificada para avaliar a espasticidade, baseada na Força
máxima e Velocidade média.
• Analisar o conceito velocidade dependente.

73
REFERÊNCIAS
BAKLEIT, A.M.O., e col. The relation between Ashworth scale scores and the excitability of the motor neurones in patients with post-stroke muscle spasticity. Journal of Neurology Neurosurgery and Psychiatry, v. 74, p.646-648, 2003. BARREIRO, M.S., e col. Goniometer based to computer. Rev. IEEE, v.4, p.3290-3293, 2003.
BOBATH, B. Hemiplegia em Adultos: Avaliação e Tratamento. São Paulo: Manole, 2001. BRITTON, T. C. Anormalidades do Tônus Muscular e do Movimento Involuntário In: Stokes, M. Neurologia para fisioterapeutas. São Paulo: Premier, 2000. CASALIS, M. E. P. Reabilitação/ Espasticidade. São Paulo: Atheneu, 1990. CHANDRASSOMA, P. Patologia Básica. Rio de Janeiro: Prentice Hall do Brasil, 1993. CHAPMAN C.E.; WIESENDANGER M. The physiological and anatomical basis of spasticity: a review. Physiother Can, v. 34 (3), p. 125-136, 1982. DANIELS, L.; WORTHINGHAM, C. Provas de Função Muscular. 4. ed. Rio de Janeiro: Interamericana, 1981. DELISA, Joel A.; GANS Bruce M. Tratado de Medicina de Reabilitação: Princípios e Prática. São Paulo: Manole, 2002. DVIR, Z.; PANTURIN, E. Measurement of Spasticity and Associated Reactions in Stroke Patients before and after physiotherapeutic intervention. Clinical Rehabilitation, v. 7, p. 15-21, 1993. JOHNSON, G.R. Outcome Measures of Spasticity. European Journal of Neurology, vol. 9, p.10-16, 2002. KATRAK P.; COLE A.; POULO C.; MCCAULEY J. Objective assessment of spasticity, strength and function with early exhibition of dantrolene sodium after cerebrovascular accident: a randomized double-blind controlled study. Arch Phys Med Rehabil, v.9, p. 73-74, 1992. KATZ, R.; RYMER W. Spastic hipertonia: mechanisms and measurement. Arch Phys Med Rehabil, v.70, p. 144-55, 1989. KOHN, A. F. Modulação de Reflexos Durante Ativação Muscular; In: AMADIO, A.C., BARBANTI, V.J., A Biodinâmica do Movimento Humano e Suas Relações Interdisciplinares, São Paulo: Estação Liberdade, 2000.

74
LEVY, J. A.; OLIVEIRA, A.S.B. Reabilitação em Doenças Neurológicas. São Paulo: Atheneu, 2003. LIANZA, S. Consenso Nacional sobre Espasticidade, Diretrizes para o Diagnóstico e Tratamento, São Paulo: SBMFR, 2001. LIN, C.C.; JU, M.S.; LIN, C.W. The Pendulum Test for Evaluating spasticity of the Elbow Joint. Arch Phys Med Rehabil, v. 84, p. 69-74, 2003. MAGEE, D.J. Avaliação Musculoesquelética. 3. ed. São Paulo: Manole, 2002. MARCHESE, S.S.; DI BELLA, P.; SESSA, E.; DONATO, S.; BRAMANTI, P. The spasticity evaluation test: A pilot study. Journal of Rehabilitation Research and Development, V.38, n. 1, p.93-100, 2001. MDVU - Movement Disorder Virtual University Disponível em: http://www.mdvu.org/library/disease/spasticity/spa_msa.html Acessado em: 17/03/2005 NITRINI, R.; BACHESCHI, L. A. A Neurologia que todo médico deve saber. 4. ed. São Paulo: Santos, 1999. O´SULLIVAN, S.B.; SCHMITZ, T.J. Fisioterapia: Avaliação e Tratamento, 4. ed., São Paulo: Manole, 2004. PALMER, M.L.; EPLER, M.E. Fundamentos da Técnica de Avaliação Musculoesquelética. 2. ed. Rio de Janeiro: Guanabara Koogan, 2000. PANDYAN, A. D.; JOHNSON, G.R. A review of the properties and limitatios of the Ashworth of the Ashworth and modified Ashworth scales as measures of spasticity. Clinical Rehabilitation, v. 13, p. 373-383, 1999. PANDYAN, A. D.; PRICE, C.I.M.; RODGERS, H.; BARNES, M.P.; JOHNSON, G.R. Biomechanical examination of a commonly used measure of spasticity. Clinical Biomechanics, v. 16, p. 859-865, 2001. PEREIRA, A. C.; ARAUJO, R.C. Estudo sobre a Eletromiografia de Superfície em Pacientes Portadores de Espasticidade. Revista Brasileira de Fisioterapia, v. 6, n. 3, p. 127-134, 2002. PISANO, F.; MISCIO, G.; DEL CONTE, C.; PIANCA, D.; CANDELORO, E.; COLOMBO, R. Quantitative measures of spasticity in post-stroke patients. Clinical Neurophysiology, v. 111, p. 1015-1022, 2000. POWERS, S.K.; HOWLEY, E.T. Fisiologia do Exercício. São Paulo: Manole, 2000. QUAGLIATO, E. M. A. B. Toxina Botulinica tipo A , Paralisia Cerebral-Aspectos Práticos. São Paulo: Mennon, 1998.

75
ROWLAND, L.P. Merrit Tratado de Neurologia. 9. ed. Rio de Janeiro: Guanabara Koogan, 1997. RUMEL, D.; RIEDEL, L. F.; LATORRE, M. R. D. O. col. Infarto do Miocárdio e Acidente Vascular Cerebral Associados à Alta Temperatura e Monóxido de Carbono em Área Metropolitana do Sudeste do Brasil. Rev. Saúde Pública, v. 27, n. 1, p. 15-22, 1993. SANVITO, W.L. Propedêutica Neurológica Básica. 6. ed. São Paulo: Atheneu, 2000. SCHIAFFINO, L.; SPAICH, E.; RUFINER, A.; ESCOBAR, S.; TABERNIG, C. Sistema para evaluación de la espasticidad muscular. Rev. Mexicana de Ingenieria Biomédica, v. XXXIII, n. 2, p.116-122, 2002. SEGHAL, N.; MCGUIRE, J.R.; ASHWORTH, B. Electrophysiologic Quantification of Spasticity. Phys.Rehabil.Clin., v.9, n. 4, p.949-979, 1998. STOKES, M. Neurologia para Fisioterapeutas. 3. ed., São Paulo: Premier, 2000. TEIXEIRA, E. e col. Terapia Ocupacional na Reabilitação Física. São Paulo: Roca, 2003. TEIXEIRA-SALMELA, L. F.; NADEAU, S.; OLNEY,S.J.; BROWNER, B. Pêndulo: um teste simples de medida de espasticidade. Acta Fisiátrica, v. 9, p. 63-70, 2002. TEIXEIRA-SALMELA, L. F.; OLNEY, S. J., BROWNE B. Mecanismos e Medidas da Espasticidade. Revista Fisioterapia Universidade São Paulo, v.5, n. 1, p. 4-19, São Paulo, 1998.
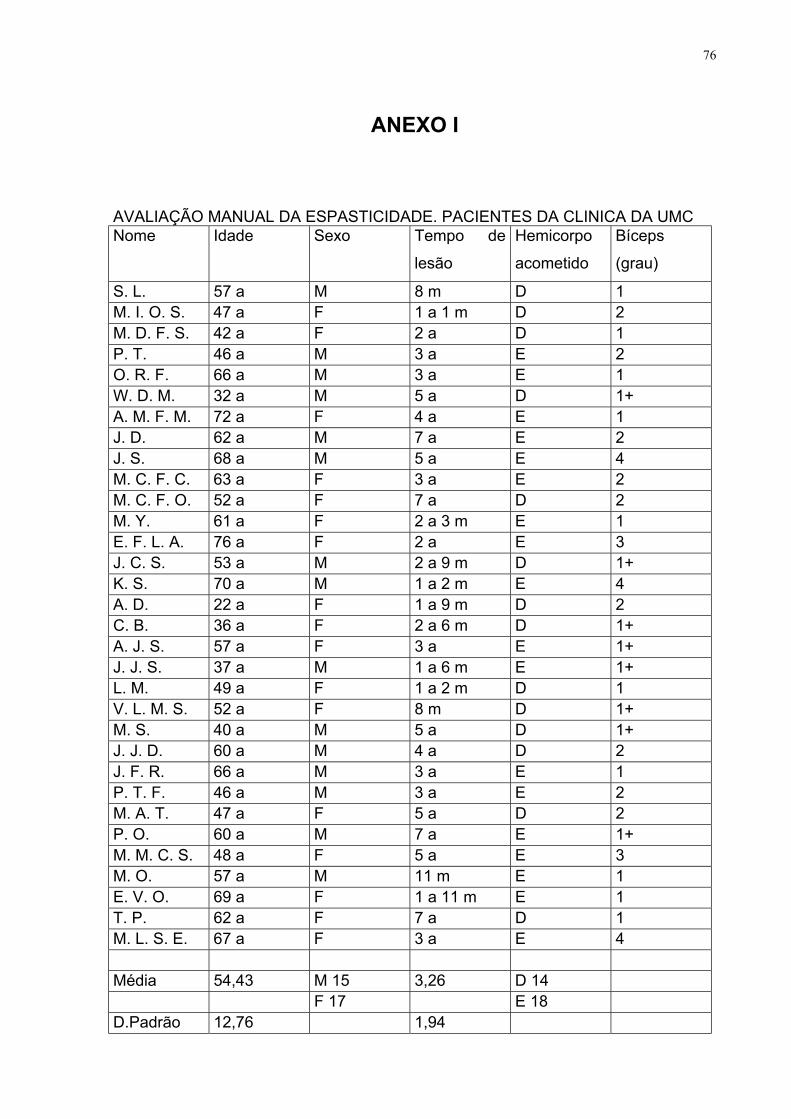
76
ANEXO I
AVALIAÇÃO MANUAL DA ESPASTICIDADE. PACIENTES DA CLINICA DA UMC Nome Idade Sexo Tempo de
lesão
Hemicorpo
acometido
Bíceps
(grau)
S. L. 57 a M 8 m D 1 M. I. O. S. 47 a F 1 a 1 m D 2 M. D. F. S. 42 a F 2 a D 1 P. T. 46 a M 3 a E 2 O. R. F. 66 a M 3 a E 1 W. D. M. 32 a M 5 a D 1+ A. M. F. M. 72 a F 4 a E 1 J. D. 62 a M 7 a E 2 J. S. 68 a M 5 a E 4 M. C. F. C. 63 a F 3 a E 2 M. C. F. O. 52 a F 7 a D 2 M. Y. 61 a F 2 a 3 m E 1 E. F. L. A. 76 a F 2 a E 3 J. C. S. 53 a M 2 a 9 m D 1+ K. S. 70 a M 1 a 2 m E 4 A. D. 22 a F 1 a 9 m D 2 C. B. 36 a F 2 a 6 m D 1+ A. J. S. 57 a F 3 a E 1+ J. J. S. 37 a M 1 a 6 m E 1+ L. M. 49 a F 1 a 2 m D 1 V. L. M. S. 52 a F 8 m D 1+ M. S. 40 a M 5 a D 1+ J. J. D. 60 a M 4 a D 2 J. F. R. 66 a M 3 a E 1 P. T. F. 46 a M 3 a E 2 M. A. T. 47 a F 5 a D 2 P. O. 60 a M 7 a E 1+ M. M. C. S. 48 a F 5 a E 3 M. O. 57 a M 11 m E 1 E. V. O. 69 a F 1 a 11 m E 1 T. P. 62 a F 7 a D 1 M. L. S. E. 67 a F 3 a E 4 Média 54,43 M 15 3,26 D 14 F 17 E 18 D.Padrão 12,76 1,94

77
ANEXO II
TERMO DE CONSENTIMENTO LIVRE E ESCLARECIDO Eu _______________________________________________________ autorizo a
fisioterapeuta e mestranda Margarida Maria Xavier Vieira de Carvalho a utilizar seu
equipamento para mensurar os movimentos do meu cotovelo e restrição destes pela
espasticidade. A avaliação será realizada sob a responsabilidade da pesquisadora e
sob a orientação da Profª. Dr.ª Annie France Frère Slaets, as quais se comprometem
a manter em sigilo a identidade dos participantes da pesquisa. Declaro também estar
ciente que o equipamento não é invasivo e não provoca dor e serve para obter
informações sobre a espasticidade do cotovelo.
___________________________________________
Assinatura do participante ou responsável
Margarida Maria Xavier Vieira de Carvalho
Rua Lázaro Pinto de Souza, 184 – Parque Santana, Mogi das Cruzes, SP.
Telefone de contato (11) 4727-7296
Livros Grátis( http://www.livrosgratis.com.br )
Milhares de Livros para Download: Baixar livros de AdministraçãoBaixar livros de AgronomiaBaixar livros de ArquiteturaBaixar livros de ArtesBaixar livros de AstronomiaBaixar livros de Biologia GeralBaixar livros de Ciência da ComputaçãoBaixar livros de Ciência da InformaçãoBaixar livros de Ciência PolíticaBaixar livros de Ciências da SaúdeBaixar livros de ComunicaçãoBaixar livros do Conselho Nacional de Educação - CNEBaixar livros de Defesa civilBaixar livros de DireitoBaixar livros de Direitos humanosBaixar livros de EconomiaBaixar livros de Economia DomésticaBaixar livros de EducaçãoBaixar livros de Educação - TrânsitoBaixar livros de Educação FísicaBaixar livros de Engenharia AeroespacialBaixar livros de FarmáciaBaixar livros de FilosofiaBaixar livros de FísicaBaixar livros de GeociênciasBaixar livros de GeografiaBaixar livros de HistóriaBaixar livros de Línguas

Baixar livros de LiteraturaBaixar livros de Literatura de CordelBaixar livros de Literatura InfantilBaixar livros de MatemáticaBaixar livros de MedicinaBaixar livros de Medicina VeterináriaBaixar livros de Meio AmbienteBaixar livros de MeteorologiaBaixar Monografias e TCCBaixar livros MultidisciplinarBaixar livros de MúsicaBaixar livros de PsicologiaBaixar livros de QuímicaBaixar livros de Saúde ColetivaBaixar livros de Serviço SocialBaixar livros de SociologiaBaixar livros de TeologiaBaixar livros de TrabalhoBaixar livros de Turismo