um mancal magnÉtico ativo com quatro polos e … · mudança de referência no eixo...
TRANSCRIPT

1
PROGRAMA FRANCISCO EDUARDO MOURÃO SABOYA DE
PÓS-GRADUAÇÃO EM ENGENHARIA MECÂNICA
ESCOLA DE ENGENHARIA
UNIVERSIDADE FEDERAL FLUMINENSE
UM MANCAL MAGNÉTICO ATIVO COM QUATRO
POLOS E FLUXOS ACOPLADOS UTILIZANDO UM
MOTOR BIFÁSICO COM ENROLAMENTOS
DISTRIBUÍDOS
CHRISTIAN MUTOMBO TSHIZUBU
ORIENTADOR: JOSÉ ANDRÉS SANTISTEBAN, DSc.

2

3

4

5

6

7
RESUMO
As estruturas convencionais dos mancais magnéticos ativos para levitar rotores
dispõem de oito polos operando de maneira que o fluxo magnético atravessa
simultaneamente dois polos adjacentes. Neste trabalho, uma estrutura eletromagnética
diferente é proposta a qual é baseada na estrutura dos motores mancais com enrolamentos
divididos, alimentada por correntes elétricas alternadas. No presente caso, como o objetivo é
apenas gerar forças radiais, os enrolamentos são alimentados por correntes elétricas contínuas
formando um fluxo magnético com quatro polos equivalentes. Para testar essa abordagem,
um motor de indução convencional foi utilizado e seu rotor foi modificado apropriadamente.
Foi também implementada para o teste uma bancada de trabalho com sensores de posição,
condicionadores de sinais e um sistema de desenvolvimento baseado em Microcontrolador.
Resultados experimentais mostram a efetividade da abordagem proposta quando o rotor está
submetido a carregamento radial e mudanças em degrau nas referências de deslocamento.
Palavras-Chave: Rotor, Fluxo Magnético, Forças Radiais, Motor de indução,
Microcontrolador.

8
ABSTRACT
The conventional structures of active magnetic bearings for rotors have eight poles
operating in such a way that two adjacent poles share the same magnetic flux. In this work, a
different electromagnetic structure is presented which is based on a bearingless motor with
split windings, supplied by alternate electrical currents. In this case, as the purpose is to
generate only radial forces, the windings are supplied by continuous currents forming a
magnetic flux with four equivalent poles. To test this approach, a conventional induction
motor was used and its rotor was appropriately modified. Even more, a workbench consisting
of displacement sensors, signal conditioners and a development system based on a
Microcontroller was implemented. Experimental results show the effectiveness of this
approach when the rotor is submitted to radial load and step changes of displacement
references.
Keywords: Rotor, Magnetic Flux, Radial Forces, Induction Motor, Microcontroller.

9
SUMÁRIO
Lista de Figuras ..........................................................................................................................i
Lista de Tabelas .......................................................................................................................iv
Lista de Símbolos .....................................................................................................................iv
Capítulo 1. Introdução...........................................................................................................19
Capítulo 2. Objetivo e Metodologia......................................................................................23
Capítulo 3. Mancal Magnético..............................................................................................24
3.1. Métodos de levitação magnética.......................................................................................24
3.1.1. Levitação Eletrodinâmica (EDL).....................................................................25
3.1.2. Levitação Supercondutora (SML)....................................................................25
3.1.3. Levitação Eletromagnética (EML)...................................................................27
3.2. Estrutura do mancal magnético.........................................................................................27
3.3. Circuito Magnético...........................................................................................................29
3.3.1. Circuito magnético do protótipo......................................................................33
Capítulo 4. Dinâmica do Sistema..........................................................................................37
Capítulo 5. Controle Proporcional-Integral-Derivativo.....................................................44
Capítulo 6. Bancada de Trabalho.........................................................................................48
6.1. Motor bifásico modificado................................................................................................49
6.2. Unidade dos sensores de deslocamento............................................................................50

10
6.3. Microcontrolador..............................................................................................................51
6.4. Eletrônica..........................................................................................................................54
6.5. Fontes de corrente.............................................................................................................59
6.6. Fontes de tensão................................................................................................................63
Capítulo 7. Simulações Numéricas.......................................................................................65
Capítulo 8. Resultados Experimentais.................................................................................79
Conclusões e Considerações Futuras...................................................................................82
Referências Bibliográficas.....................................................................................................83
Anexos ....................................................................................................................................88
A. Cálculo da matriz de indutância e das Forças magnéticas..................................................88
B. Código do controlador na Linguagem C do Arduino........................................................106
C. Desenho técnico do rotor...................................................................................................110
D. Folha de especificação do sensor de corrente parasita......................................................111
E. Mapeamento dos pinos do chip ATMEGA2560...............................................................117
F. Folhas de dados dos circuitos integrados LM324, DAC0800 e TL074CN.......................118
F.1. Amplificador operacional LM324......................................................................118
F.2. Conversor Digital Analógico DAC0800............................................................124
F.3. Amplificador Operacional TL074CN.................................................................131
G. Diagramas das placas fonte de corrente............................................................................137
H. Folha de dados do sensor de corrente LTS 15-NP............................................................140

11
Lista de Figuras
Figura 1. Classificação dos mancais magnéticos.....................................................................20
Figure 2. Controle simplificado de levitação de um mancal magnético.................................21
Figura 3. Comparação força de levitação e força de arraste em função da velocidade.........25
Figura 4. (a) Elemento torcido convencional com guia-anel. Uma peça em forma de C é
acoplada ao anel imóvel pela qual passa o fio. (b) Mancal supercondutor como elemento
torcido. O anel magnético é rotacionado pelo fio que se enrola em volta do eixo...............26
Figura 5. Transrapid...........................................................................................................27
Figura 6. Configuração de um motor com três mancais magnéticos: dois radiais e um axial.28
Figura 7. Densidade de Fluxo no Entre-ferro. (a) estável (b) instável..................................29
Figura 8. Modelo de mancal magnético de núcleo em forma de C.......................................29
Figura 9. Circuito magnético equivalente............................................................................30
Figura 10. Energias magnéticas...........................................................................................32
Figura 11. Energias magnéticas com relação linear.............................................................32
Figura 12. Arranjo dos enrolamentos do motor de 4 pólos..................................................34
Figura 13. Circuito magnético equivalente do protótipo.....................................................34
Figura 14. Protótipo do rotor com seus principais componentes........................................37
Figura 15. Protótipo proposto por [27]....................................................................................38
Figura 16. Deslocamentos lineares e angulares do rotor......................................................39
Figura 17. (a) Arranjo das bobinas no estator do motor (Velandia, 2005). (b) Estator com
quatro polos concentrados....................................................................................................40
Figura 18. Diagrama de bloco da expressão (4.17).............................................................42
Figura 19. Diagrama de blocos da expressão (4.18)............................................................43
Figura 20. Controlador PID................................................................................................44
12
Figura 21. Curva da resposta em degrau unitário de um sistema com controlador PID
projetado com Ziegler-Nichols (a) Tempo de subida (b) Porcentagem de Overshoot (c)
Tempo de acomodação (d) Erro estacionário.......................................................................46
Figura 22. Bancada de trabalho. (a) Motor bifásico modificado (b) Unidade dos sensores (c)
Microcontroladores (d) Componentes eletrônicos (d) Fontes de corrente (e) Fontes de
corrente...............................................................................................................................48
Figura 23. Diagrama da bancada de trabalho......................................................................49
Figura 24. Rotor do motor (a) antes acima (b) depois abaixo..............................................50
Figura 25. Unidade dos sensores multiNCDT 100..............................................................51
Figura 26. Calibração manual dos sensores de corrente parasita.........................................51
Figura 27. Microcontroladores Arduino (a) do fabricante SaintSmart à esquerda (b) do
fabricante Arduino CC à direita..........................................................................................52
Figura 28. Componentes eletrônicos soldados numa placa de fenolite. (a)LM324 (b)
DAC0800 (c)TL074CN (d) Resistores de 4,7k – 10k – 14,1k.............................................55
Figura 29. Operação do LM324..........................................................................................55
Figura 30. Condicionamento do erro de posição.................................................................56
Figura 31. Conversor DAC0800 de 8 bits...........................................................................56
Figura 32. DAC0800 com conexão Bipolar........................................................................57
Figura 33. Operação do TL074CN.....................................................................................58
Figura 34. Fontes de corrente do eixo x (acima) e eixo y (abaixo). (a) Capacitor PT12BJ-26
0,01113 100VDCAXIAL0.8 (b) Sensor de corrente LEM LTS 15-NP (c) Driver SEMIKRON
SKHI 20 OPA (d) Mini Fonte SEMIKRON PS2................................................................59
Figura 35. Driver SEMIKRON 20 OPA.............................................................................60
Figura 36. Sensor de corrente LTS 15-NP..........................................................................61
Figura 37. Tensão de saída-Corrente nominal primária do sensor de corrente...................62

13
Figura 38. Circuito interno simplificado do driver SKHI 20 OPA.......................................62
Figura 39. Gate Top e Gate Bottom de um driver disparados..............................................63
Figura 40. Fontes de potência com osciloscópios. (a) fonte de ± 15 V (b) fonte de -6 V, +12
V e +5 V (c) fonte de 13,8 V (d) fonte de ± 15 V (e) osciloscópios.....................................64
Figura 41. Protoboard com as fontes de +12 V, + 5V e -12 V............................................64
Figura 42. Diagrama de bloco do sistema com controlador PID..........................................65
Figura 43. Lugar de Raízes da expressão (4.18)..................................................................66
Figura 44. Lugar de Raízes da função de transferência Gpc................................................67
Figura 45. Sintonização dos parâmetros do PID.................................................................68
Figura 46. Resposta rápida do sistema...............................................................................69
Figura 47. Resposta média do sistema................................................................................69
Figura 48. Resposta lenta do sistema..................................................................................70
Figura 49. Correntes de controle e de bias............................................................................71
Figura 50. Força magnética 𝐹𝑥 (𝑁), representada pelo eixo 𝑧, contra 𝛿𝑥 (𝑚) 𝑒 𝑑𝑖 (𝐴)..........72
Figura 51. Força magnética 𝐹𝑥 (𝑁) com 𝐼𝑏𝑥 = 1 𝐴 e 𝐼𝑏𝑦 = 0,9𝐴...........................................73
Figura 52. Força magnética 𝐹𝑥 (𝑁) com 𝐼𝑏𝑥 = 1 𝐴 e 𝐼𝑏𝑦 = 1,5 𝐴..........................................73
Figura 53. Força magnética 𝐹𝑥 (𝑁) com 𝐼𝑏𝑥 = 0,9 𝐴 e 𝐼𝑏𝑦 = 1 𝐴..........................................74
Figura 54. Força magnética 𝐹𝑥 (𝑁) com 𝐼𝑏𝑥 = 1,5 𝐴 e 𝐼𝑏𝑦 = 1 𝐴..........................................74
Figura 55. Força magnética 𝐹𝑥 (𝑁), representada pelo eixo vertical contra 𝑑𝑖 (𝐴) com
𝛿𝑥 = 0 𝑚..................................................................................................................................75
Figura 56. Meia representação da Força magnética 𝐹𝑥 (𝑁), representada pelo eixo vertical
contra 𝑑𝑖 (𝐴), eixo horizontal com 𝛿𝑥 = 0 𝑚.........................................................................75

14
Figura 57. Força magnética 𝐹𝑥 (𝑁), representada pelo eixo vertical contra 𝑑𝑥 (𝑚) com
𝑑𝑖 = 0 𝐴...................................................................................................................................76
Figura 58. Meia representação da Força magnética 𝐹𝑥 (𝑁), representada pelo eixo vertical
contra 𝛿𝑥 (𝑚), eixo horizontal com 𝑑𝑖 = 0 𝐴.........................................................................76
Figura 59. Distribuição do fluxo magnético no estator de enrolamentos distribuídos............77
Figura 60. Distribuição do fluxo magnético no estator de enrolamentos concentrados..........78
Figura 61. Eixos 𝑥 (traço amarelo) e 𝑦 (traço azul) centralizados em 2V...............................80
Figura 62. Mudança de referência no eixo 𝑥 (amarelo-esquerda) e no eixo 𝑦 (azul-direita)..80
Figura 63. Teste da carga contra corrente................................................................................81
Figura 64. Carga (gf) contra corrente total (A) nas bobinas 1-2 e 5-6 com carga e 5-6..........81

15
Lista de Tabelas
Tabela 1. Especificações do motor..........................................................................................50
Tabela 2. Pinos do Arduino Mega 2560 com funções especiais..............................................53
Tabela 3. Características internas dos microcontroladores do SaintSmart e Arduino CC.......53
Tabela 4. Operação do DAC0800 em conexão Bipolar...........................................................58
Tabela 5. Corrente nominal primária em função da conexão recomendada............................61
Tabela 6. Ajuste dos parâmetros do PID..................................................................................79

16
Lista de Símbolos
𝑓 Força resultante magnética
𝑊 Energia do campo magnético
𝛿𝑠 Deslocamento virtual
𝑥1, 𝑥2, 𝑦1, 𝑦2 Graus de liberdade de rotor ou deslocamentos linear do rotor
𝑧 Grau de liberdade do rotor ou eixo de rotação do rotor
𝜔 Velocidade de rotação do rotor
𝑙 Espessura do núcleo C
𝐿 Comprimento do núcleo = 𝑙1 + 𝑙2 + 𝑙3
𝑅 Relutância magnética
𝑙𝑐𝑓 (𝑙1, 𝑙2, 𝑙3) Comprimento do caminho de fluxo magnético
µ𝑝𝑚 Permeabilidade magnética do material
𝑆 Área da seção transversal do caminho do fluxo magnético.
𝑁 Número de enrolamento em torno do núcleo C
𝑖 Corrente que atravessa cada enrolamento do núcleo C
𝑅𝐶, 𝑅𝐼 e 𝑅𝑔 Relutâncias magnéticas do núcleo C, I e do entre-ferro “𝑔 − 𝑥”.
µ𝑜 Permeabilidade magnética no vazio, no valor de 4𝜋10−7H / m, e
µ𝑟 Permeabilidade relativa (µ𝑝𝑚 = µ𝑜µ𝑟).
𝛹 Fluxo magnético equivalente
𝐵 Densidade de fluxo magnético no entre-ferro

17
𝜆 Enlace de fluxo
𝐿𝑖𝑛 Indutância magnética
𝐹 Força magnética entre os núcleos C e I com características não lineares
𝑊𝑚′ Co-energia magnética
𝐿𝑖𝑛𝑜 Indutância magnética nominal
𝑊𝑒 Energia magnética armazenada
𝐹𝑒 Força magnética ao longo de um eixo do motor
ℎ Qualquer deslocamento ao longo dos eixos 𝑥 − 𝑦 (𝑥1, 𝑥2, 𝑦1𝑜𝑢 𝑦2)
[𝜆] Vetor de fluxos enlaçados
[𝑖] Vetor coluna de correntes da fase A, de dimensão 4 x 1
[𝐿(ℎ)] Matriz de indutâncias, simétrica não diagonal de dimensão 4 x 4
ℎ𝑜 Entreferro nominal quando o rotor encontra-se perfeitamente alinhado
𝑅𝑒𝑞 Relutância magnética equivalente do motor;
𝑅ℎ(𝑦1,𝑦2,𝑥1 𝑜𝑢 𝑥2)Relutância magnética em qualquer deslocamento ao longo dos eixos 𝑥 −
𝑦 (𝑥1, 𝑥2, 𝑦1𝑜𝑢 𝑦2)
𝛿𝑥 e 𝛿𝑦 Deslocamentos infinitesimais do rotor ao longo dos eixos
𝑥 − 𝑦 (𝑥1, 𝑥2, 𝑦1𝑜𝑢 𝑦2)
𝐴, 𝐴𝑏 ¼ da área longitudinal do estator;
[𝑖]𝑇 Transposta do vetor de corrente
𝐹𝑥 e 𝐹𝑦 Forças magnéticas ao longo dos eixos 𝑥 − 𝑦 considerando os deslocamentos
infinitesimais 𝛿𝑥 e 𝛿𝑦
𝑚 Massa do rotor

18
�̈�(𝑡) e �̈�(𝑡) Acelerações do rotor ao longo dos eixos 𝑥 − 𝑦
𝑃𝑦(𝑡) e 𝑃𝑥(𝑡) Torques externos
𝛼 e 𝛽 Deslocamentos angulares do rotor em torno do eixo x e y respectivamente
𝐼𝑥 = 𝐼𝑦 = 𝑖. O momento de inércia I é calculado em relação ao ponto de contato entre a
extremidade inferior do rotor e o rolamento auto compensador.
𝑤𝑟 Velocidade angular do rotor em torno do eixo z.
�̇�(𝑡), �̇�(𝑡), �̈�(𝑡), �̈�(𝑡) Velocidades e acelelrações angulares em torno dos eixos 𝑥 − 𝑦
𝐼𝑧 Momento de inércia em torno do eixo 𝑧
𝒛, �̇�, �̈� Vetores das deslocamentos, velocidades e acelerações angulares
𝒆 Vetor dos torques externos
𝐼 e 𝐺 Matrizes de inércia e giroscópica respectivamente.
𝑏 Coordenada do estator em relação ao ponto de contato do rolamento auto
compensador com o rotor.
𝑘𝑏 e 𝑘𝑖 Constantes de posição e de corrente
𝒛𝒃 Vetor deslocamento linear do rotor na cota b do mancal magnético
𝒖 Vetor de correntes das duas direções
𝒛𝒄, 𝒛�̇�, 𝒛�̈� Vetores deslocamento, velocidade e aceleração lineares do rotor na cota c do
mancal magnético
𝐺𝑟 Matriz giroscópica inércial ou matriz de amortecimento
𝐾𝑧𝑟 Matriz de rigidez
𝐾𝑢𝑟 Matriz das entradas
𝑘𝑝, 𝑘𝑑 , 𝑘𝑖, 𝑇𝑑 , 𝑇𝑖 Parâmetros do controlador PID

19
𝑈𝑥 Subamplificador operacional
𝑖𝑇𝑥 Corrente total
𝐼𝑏 Corrente de bias
𝑑𝑖 Corrente diferencial
𝐺𝑝 Função de transferência da planta, sistema
𝜎 Eixo real do Lugar de Raízes
𝐺𝑐 Função de transferência do controlador PID
𝐺𝑝𝑐 Função de transferência da malha aberta
𝑝𝑑 Polo dominante do Lugar de Raízes da malha aberta
𝑘 Ganho do Lugar correspondente ao polo dominante
𝐺𝑐𝑓 Função de transferência do controlador PID final
𝑖𝑦1, 𝑖𝑦2, 𝑖𝑥1, 𝑖𝑥2 Componentes do vetor de corrente
𝑑𝑖𝑥, 𝑑𝑖𝑦 Correntes diferenciais nos eixos 𝑥 e 𝑦
𝛿𝑥, 𝛿𝑦 Deslocamentos infinitesimais nos eixos 𝑥 e 𝑦
𝑝1,2 Polos da planta, do sistema
𝐼𝑏𝑥, 𝐼𝑏𝑦 Correntes de bias nos eixos 𝑥 e 𝑦
20
Capítulo 1
Introdução e Objetivo
1.1. Introdução
As tecnologias relacionadas aos mancais magnéticos vêm sendo desenvolvidas desde a
década dos 80 ao mesmo tempo, que os sistemas de controle para motores elétricos de
corrente alternada (CA). Questões relacionadas à manutenção dos mancais mecânicos
convencionais submetidos a esforços em alta velocidade e altas potências foram algumas das
principais razões do desenvolvimento dessa nova tecnologia [1].
Em [2], os mancais magnéticos são classificados em dois principais grupos de acordo em
como a força magnética é calculada, Figure 1. No primeiro grupo, a força magnética é obtida
diretamente da variação da energia do campo magnético do entreferro. A força gerada atua
perpendicularmente a superfície do material com alta permeabilidade magnética µ. Esse tipo
de força é chamado de Força de Relutância ou Força de Maxwell. Do outro lado, no segundo
grupo a força gerada atua perpendicularmente a um fio condutor no qual a corrente elétrica
esteja circulando. Essa força magnética é denominada de Força de Lorentz, a qual é
comumente aplicada às maquinas elétricas rotativas. Nesse trabalho, apenas Forças de
Maxwell são consideradas.

21
Figura 1. Classificação dos mancais magnéticos [2]
Dessa forma, a força resultante pode ser obtida a partir da energia magnética pelo princípio
do trabalho virtual [2]:
𝑓 =𝛿𝑊
𝛿𝑠 , (1.1)
onde W é a energia do campo magnético e δs é o deslocamento virtual.
Nesta Dissertação, devido ao acoplamento entre as duas direções ortogonais “x” e “y”, a
força magnética equivalente é função dos parâmetros de ambas as direções:
𝐹𝑥(𝑦) = 𝑓(ℎ𝑜 , 𝑑𝑥, 𝑑𝑦, 𝑖𝑥1, 𝑖𝑥2, 𝑖𝑦1, 𝑖𝑦2) (1.2)
onde,
ℎ𝑜 é entreferro nominal;
𝑑𝑥 e 𝑑𝑦 são os deslocamentos infinitesimais do rotor dentro do estator;

22
𝑖𝑥1, 𝑖𝑥2, 𝑖𝑦1 𝑒 𝑖𝑦2 são as correntes totais nas duas direções ortogonais.
A Figura 2 mostra um exemplo simplificado do controle de levitação vertical de um mancal
magnético. Para atingir uma real levitação, a força magnética atuando sobre o rotor deve ser
controlada apropriadamente de modo que o rotor se mantenha num estado de levitação
estável. Para atingir essa meta, o sistema precisa de um sistema de controle ativo de maneira
a adaptar o campo magnético ao movimento do rotor [2].
Figura 2. Controle simplificado de levitação de um mancal magnético
Nos dias atuais, sistemas de controle bem estabelecidos na indústria são os principais
componentes do sistema do mancal magnético, que garante a efetividade de sua operação. O
controlador mais utilizado na indústria é o Proporcional-Integral-Derivativo ou PID, pela sua
fácil implementação e baixo custo. Em cada malha de controle (loop), é calculado o erro de
posição do sistema, que é a diferença entre o valor de referência, set point e o valor medido
pelos sensores; e o PID tenta diminuir esse erro mudando as correntes de referência do
mancal magnético [3]. Como mencionado em inúmeras referências, a resposta transitória do
sistema de posicionamento depende dos parâmetros elétricos e magnéticos do mancal
magnético, e também do modelo mecânico do rotor e seus carregamentos de radial. Ainda
mais, o modelo real do mancal eletromagnético é na verdade não linear. Diante desses
fatores, diversas alternativas de controladores e suas optimizações foram reportados na
literatura.
Por exemplo, em [3] se mostra como o erro de saída depende da dinâmica do processo. O
processo de controle é dinâmico, isto é, o mesmo pode variar dependendo da dinâmica do

23
sistema. Essa dependência leva a projetar controladores adaptativos e novos sistemas de
optimização de seus parâmetros.
Para se ter uma ideia da ampla variedade de técnicas alternativas aplicadas a sistemas não
lineares, como o caso do Mancal Magnético Ativo, podem ser mencionados as encontradas
em [4] a [11] referindo a controladores PD adaptativos, controladores otimizados
inteligentes, Gaussianos, Nebulosos, controladores por modo deslizante, etc. No Brasil,
alguns grupos de pesquisa em mancais magnéticos e máquinas sem mancais têm gerado
diversas contribuições na forma de Dissertações de Mestrado e Teses de Doutorado.
Nesta Dissertação, será tomada como referência a estrutura eletromagnética denominada
motor-mancal com enrolamentos divididos [a], [b], [c] para ser explorado como mancal
magnético ativo alternativo às configurações convencionais. A apresentação analítica,
resultados de simulação e alguns resultados experimentais formam parte desta Dissertação.
1.2. Objetivo
O objetivo deste trabalho foi avaliar a possibilidade de utilizar a estrutura de um motor
elétrico convencional para construir um mancal magnético ativo. Com isto, os custos de
fabricação da estrutura convencional de oito pólos pretenderam ser reduzidos, uma vez que
estes custos ficariam limitados aos necessários para realizar alterações no rotor.

24
Capítulo 2
O Mancal Magnético
Nesse capitulo, uma visão geral sobre o mancal magnético é apresentada, cobrindo os
motivos por trás do seu desenvolvimento, o princípio de funcionamento, as forças magnéticas
que causam a levitação magnética, os diferentes tipos de mancal magnético e suas aplicações.
Os mancais magnéticos começaram a ser desenvolvidos no meado do ano 1980
impulsionados pelas amplas áreas de aplicação dos motores de corrente alternada (CA).
Como se sabe, os motores CA possuem mais vantagens em comparação com os motores de
corrente contínua (CC): alto desempenho, baixo custo do motor e da manutenção, alta
velocidade de rotação, rendimento elevado para carga média e carga máxima, peso leve e
estrutura simples [1]. Entretanto a aplicação do motor em alta velocidade leva a questões
ligadas à vida útil e à lubrificação. Isto é importante no caso de meios críticos como
ambientes radioativo e farmacêutico, o espaço sideral e na medicina, onde a aplicação mais
direta é no coração artificial. Para essas áreas em particular, a aplicação de mancal magnético
mostra-se a melhor e única alternativa [1].
3.1. Métodos de levitação magnética
Até o presente momento três métodos de levitação são utilizados na indústria: mecânica,
elétrica e magnética. A levitação mecânica utiliza forças pneumáticas, técnica explorada no
hovercraft, e forças aerodinâmicas, técnica explorada em aviões. A levitação elétrica se
baseia no efeito que acontece ao colocar frente a frente duas cargas elétricas com a mesma
polaridade. Já os métodos de levitação magnética dependem da intensidade de um campo
magnético [12].
Os métodos de levitação magnética são subdivididos em três grupos [13]:

25
3.1.1. Levitação Eletrodinâmica (EDL)
A EDL necessita obrigatoriamente da presença de um campo magnético nas proximidades de
um material condutor. Quando um material magnético se movimenta em relação a um
material condutor (lâmina de alumínio, por exemplo), correntes parasitas são induzidas no
material condutor. Essas correntes, por sua vez, gerarão outro campo magnético o qual, pela
lei de Lenz, irá se opôr ao campo criado pelo material magnético. A interação entre estes dois
campos gerará uma pressão magnética e, por conseguinte aparecerá uma força repulsiva no
material magnético.
Existe também outra força contraria ao movimento do material magnético (força de arrasto).
Ela é causada pelas perdas ôhmicas na lâmina condutora. A força de levitação aumenta com a
velocidade, enquanto a de arraste favoravelmente diminui [12], Figura 3.
Figura 3. Comparação força de levitação e força de arraste em função da velocidade [12]
Exemplos da aplicação desse método foram apresentados em [14], [15] e [16] e na Figura 4
abaixo.
(0,0)

26
Figura 4.
3.1.2. Levitação Supercondutora (SML)
Este tipo de levitação baseia-se no efeito Meissner de exclusão de campo magnético do
interior dos supercondutores. No caso dos supercondutores do tipo II, esta exclusão é parcial,
o que diminui a força de levitação, mas conduz à estabilidade da levitação devido ao efeito
chamado de pinning [17]. Este fenômeno pôde ser explorado a partir do final do século XX
com o advento de novos materiais magnéticos e pastilhas supercondutoras de alta
temperatura crítica, que se tornam supercondutores a temperaturas muito mais elevadas do
que os supercondutores convencionais. Os novos supercondutores de alta temperatura crítica
podem ser resfriados com nitrogênio liquido (temperatura de ebulição -196˚C) enquanto que
os supercondutores convencionais precisam se resfriados com hélio liquido (temperatura de
ebulição -269˚C), o que torna o custo de refrigeração proibitivo para aplicações industriais. A
título de exemplo de aplicação, os autores da referência [18] investigaram a aplicação de um
mancal magnético supercondutor como elemento torcido em máquinas têxteis, Figura 5. É
demostrado que em movimento rotativo o anel do imã permanente não altera a configuração
do campo magnético no interior do supercondutor, a aplicação de mancal magnético
supercondutor reduz consideravelmente os problemas de fricção induzindo a geração de calor
e desgaste mecânico, entre outras características que foram investigadas.
27
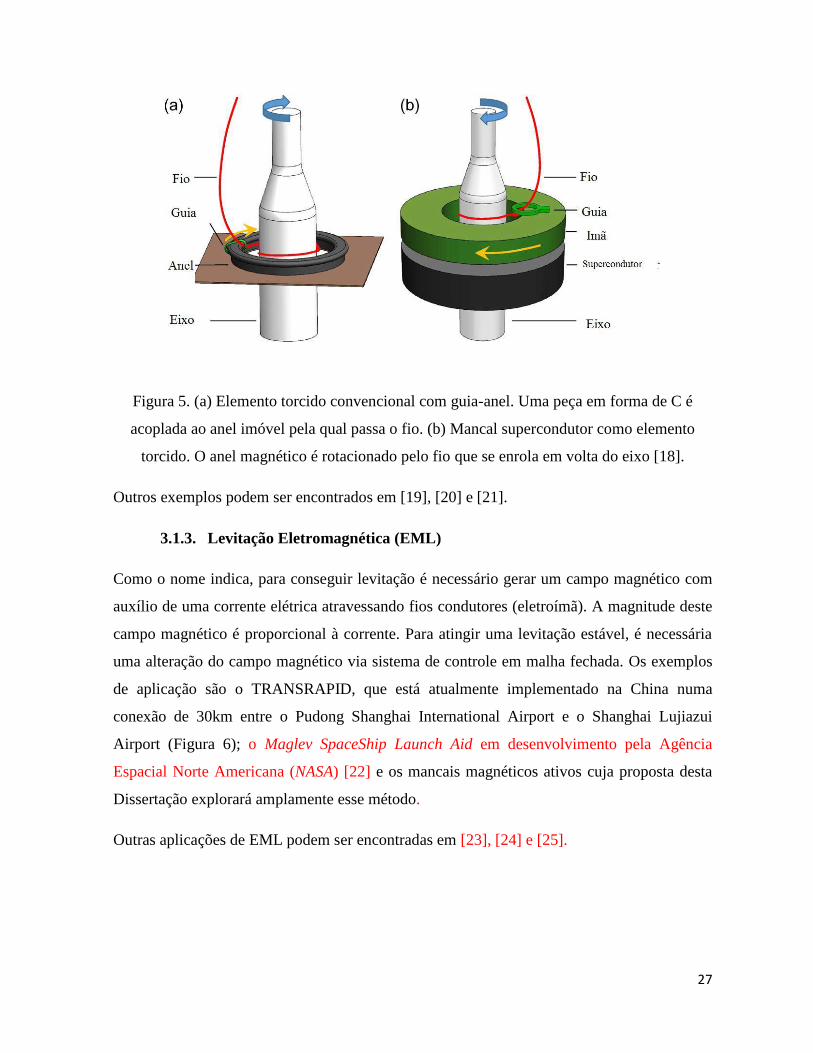
Figura 5. (a) Elemento torcido convencional com guia-anel. Uma peça em forma de C é
acoplada ao anel imóvel pela qual passa o fio. (b) Mancal supercondutor como elemento
torcido. O anel magnético é rotacionado pelo fio que se enrola em volta do eixo [18].
Outros exemplos podem ser encontrados em [19], [20] e [21].
3.1.3. Levitação Eletromagnética (EML)
Como o nome indica, para conseguir levitação é necessário gerar um campo magnético com
auxílio de uma corrente elétrica atravessando fios condutores (eletroímã). A magnitude deste
campo magnético é proporcional à corrente. Para atingir uma levitação estável, é necessária
uma alteração do campo magnético via sistema de controle em malha fechada. Os exemplos
de aplicação são o TRANSRAPID, que está atualmente implementado na China numa
conexão de 30km entre o Pudong Shanghai International Airport e o Shanghai Lujiazui
Airport (Figura 6); o Maglev SpaceShip Launch Aid em desenvolvimento pela Agência
Espacial Norte Americana (NASA) [22] e os mancais magnéticos ativos cuja proposta desta
Dissertação explorará amplamente esse método.
Outras aplicações de EML podem ser encontradas em [23], [24] e [25].

28
Figura 6. Transrapid [26]
3.2. Estrutura do mancal magnético
A Figura 7 apresenta a configuração de um motor com três mancais magnéticos, dois
mancais radiais e um mancal axial. Os dois mancais magnéticos radiais geram as forças
magnéticas radiais para o posicionamento radial do rotor. Uma realimentação negativa do
sistema de controle assegura esse posicionamento, pois a própria posição central radial do
rotor é um ponto instável. A estrutura da Figura 6 possui seis graus de liberdade: 𝑥1, 𝑦1, 𝑥2,
𝑦2, 𝑧 e 𝜔, sendo que este último representa a velocidade de rotação
do rotor em torno do eixo 𝑧.

29
Figura 7. Configuração de um motor com três mancais magnéticos: dois radiais e um axial
[1]
Um mancal magnético radial possui oito bobinas no estator, que geram quatro forças radiais.
A corrente na bobina do estator é regulada por um inversor monofásico. No caso do mancal
magnético axial existem dois inversores monofásicos, pois há duas bobinas. O motor é
responsável por gerar o torque em torno do eixo 𝑧. Um inversor trifásico é conectado aos
terminais do motor. O inversor fornece frequência e tensão variáveis em função da
velocidade de rotação 𝜔 e do torque [1].
Para explicar a dependência da força magnética em relação à posição do rotor, na Figura 7
um rotor centralizado é mostrado. O rotor e o estator são simultaneamente magnetizados por
quatro pólos na seguinte ordem: Norte-Sul-Norte-Sul. Forças eletromagnéticas são geradas
no entreferro, isto é, no gap entre o estator e o rotor para manter o rotor na posição central.
Na Figura 8 (a), a densidade de fluxo no entreferro é igual nos quatro pólos magnéticos.
Fisicamente isto equivale a dizer que o rotor está centralizado. O somatório das forças
eletromagnéticas nas duas direções é nulo. Entretanto, na Figura 7 (b), com o rotor deslocado
à direita, observe-se que a densidade de fluxo no pólo Norte na extrema direta é maior que o

30
resto. Este desbalanceamento causa o aparecimento de uma força eletromagnética atuando
sobre o rotor [1].
Figura 8. Densidade de Fluxo no Entre-ferro. (a) estável (b) instável. [1]
Pode se dizer que na presença de campo magnético instável, existirá força magnética radial.
Entretanto, essa força é altamente instável à medida que o rotor se move no sentido do polo
com maior densidade de fluxo.
3.3. Circuito Magnético
A seguir serão descritas as relações eletromagnéticas utilizando a estrutura da Figura 9. O
núcleo em forma de C possui uma espessura 𝑙 com um comprimento 𝐿, e suspende
magneticamente um núcleo em formato de I.
Figura 9. Modelo de mancal magnético de núcleo em forma de C [1].

31
O circuito magnético apresentado é amplamente abordado em [1].
A relutância magnética é definida como sendo:
𝑅 = 𝑙𝑐𝑓
µ𝑝𝑚𝑆 (3.1)
Em que,
𝑙𝑐𝑓 é o comprimento do caminho de fluxo magnético;
µ𝑝𝑚 é a permeabilidade magnética do material, e
𝑆 é a área da seção transversal do caminho do fluxo magnético.
Em termos da força magneto-motriz, do fluxo magnético e da relutância, o circuito
magnético pode ser tratado como um circuito elétrico de corrente contínua, em que a força
magneto-motriz Ni é a voltagem, o fluxo magnético Ψ é a corrente e as relutâncias 𝑅𝐶 , 𝑅𝐼 , 𝑅𝑔
são as resistências, (Figura 10).
Figura 10. Circuito magnético equivalente [1].
Na Figura 10, a voltagem é representada por 𝑁𝑖 gerada pela corrente no enrolamento. 𝑅𝐶, 𝑅𝐼
e 𝑅𝑔 são respectivamente as relutâncias magnéticas do núcleo C, I e da variação do entreferro
“𝑔 − 𝑥”.
𝑅𝑔 =𝑔−𝑥
µ𝑜𝑤𝑙 (3.2)

32
𝑅𝐶 =2𝑙1+𝑙2
µ𝑜µ𝑟𝑤𝑙 (3.3)
𝑅𝐼 =𝑙3
µ𝑜µ𝑟𝑤𝑙 (3.4)
Em que,
µ𝑜 é a permeabilidade magnética no vazio, no valor de 4𝜋10−7H / m;
µ𝑟 é permeabilidade relativa (µ𝑝𝑚 = µ𝑜µ𝑟);
𝑔 é o entreferro nominal;
𝑙1, 𝑙2, 𝑙3 são os comprimentos do caminho percorrido pelo fluxo magnético;
𝑤 é a largura do núcleo em C.
A permeabilidade relativa de um núcleo de ferro está na ordem de 1000-10.000, muito
superior à do ar que é aproximadamente 1. Isto faz com que a relutância do núcleo de ferro
seja desconsiderada nos cálculos do fluxo magnético equivalente [1].
O fluxo magnético equivalente é então dado por
𝛹 = 𝑁𝑖
2𝑅𝑔=
𝑁𝑖
2
µ𝑜𝜔𝑙
𝑔−𝑥 (3.5)
Com a expressão, pode-se determinar a densidade de fluxo magnético no entreferro
𝐵 = 𝛹
𝜔𝑙=
𝑁
2
µ𝑜𝑖
𝑔−𝑥 (3.6)
O enlace de fluxo 𝜆 da bobina é definido como o produto entre o número de espiras N e do
fluxo magnético atravessando a bobina:
𝜆 =𝑁2𝑖
2
µ𝑜𝜔𝑙
𝑔−𝑥 (3.7)
O enlace de fluxo é relacionado com a indutância magnética através da expressão:

33
𝐿𝑖𝑛 = 𝜆
𝑖=
𝑁2
2
µ𝑜𝜔𝑙
𝑔−𝑥 (3.8)
A força magnética pode ser derivada a partir da energia magnética armazenada, Figura 11, no
sistema ou da densidade de fluxo magnético no entreferro.
Figura 11. Energia e Coenergia magnéticas em materiais [1]
Se impuser um deslocamento 𝛿𝑥 ao núcleo em forma de I, o trabalho realizado é a mudança
da coenergia magnética do sistema, 𝑊𝑚′ .
𝐹 = 𝜕𝑊𝑚
′
𝜕𝑥 (3.9)
A expressão (3.9) representa a força magnética entre os núcleos C e I com características não
lineares. Assumindo neste instante que o gráfico da Figura 10 apresenta uma relação linear
entre 𝜆 e 𝑖, Figura 12, a coenergia magnética pode ser expressa com o sendo:
𝑊𝑚′ = ∫ 𝐿𝑖𝑛𝑖𝑑𝑖
𝑖
0=
1
2𝐿𝑖𝑛𝑖2 (3.10)

34
Figura 12. Energias magnéticas com relação linear [1].
Inserindo (3.10) em (3.9), obtém-se:
𝐹 = 𝜕𝑊𝑚
′
𝜕𝑥=
𝜕𝐿𝑖𝑛
𝜕𝑥 𝑖2
2 (3.11)
De (3.8), observe-se que se o deslocamento 𝑥 for menor comparado com o comprimento do
entreferro, a seguinte expansão é aplicável
1
𝑔−𝑥=
1
𝑔
1
(1− 𝑥
𝑔 )
=1
𝑔(1 +
𝑥
𝑔+ ⋯+
𝑥𝑛
𝑔𝑛) (3.12)
Em que 𝑛 é um inteiro positivo.
Considerando apenas os dois primeiros termos da expansão, a indutância é aproximada
como sendo:
𝐿𝑖𝑛 ≈𝑁2µ𝑜𝜔𝑙
2𝑔(1 +
𝑥
𝑔) ≈ 𝐿𝑖𝑛𝑜 (1 +
𝑥
𝑔) (3.13)
A derivada parcial de (3.13) em relação à 𝑥 é
𝜕𝐿𝑖𝑛
𝜕𝑥=
𝐿𝑖𝑛𝑜
𝑔 (3.14)
Introduzindo (3.14) em (3.11), obtém-se a expressão da força a partir da coenergia
magnética.
𝐹 ≈ 𝐿𝑖𝑛𝑜
𝑔
𝑖2
2 (3.15)

35
3.3.1. Circuito magnético do protótipo
Essa seção aborda os mesmos pontos discutidos anteriormente, entretanto os componentes
estarão expressos em forma de vetores e matrizes. A abordagem e as equações estão
ilustradas e discutidas detalhadamente em [26].
As Figuras 13 e 14 a seguir mostram a disposição dos enrolamentos de um motor bifásico
com 8 polos. Na Figura 13, se mostra um motor com enrolamentos distribuídos, o motor em
estudo. Na Figura 14, os enrolamentos são concentrados, que corresponde à versão
simplificada da Figura 13. Para ambos os casos, a Fase B foi considerada desligada.
Figura 13. Arranjo das bobinas no estator do motor com enrolamentos distribuídos [29].

36
Figura 14. Arranjo simplificado das bobinas no estator do motor com enrolamentos
concentrados [27].
Desta forma, sobram apenas os 4 enrolamentos da Fase A, os que foram empregados para
controlar a posição radial do rotor [26], Figura 15.
Figura 15. Arranjo simplificado das bobinas no estator do motor com 4 polos e enrolamentos
concentrados[27].
37
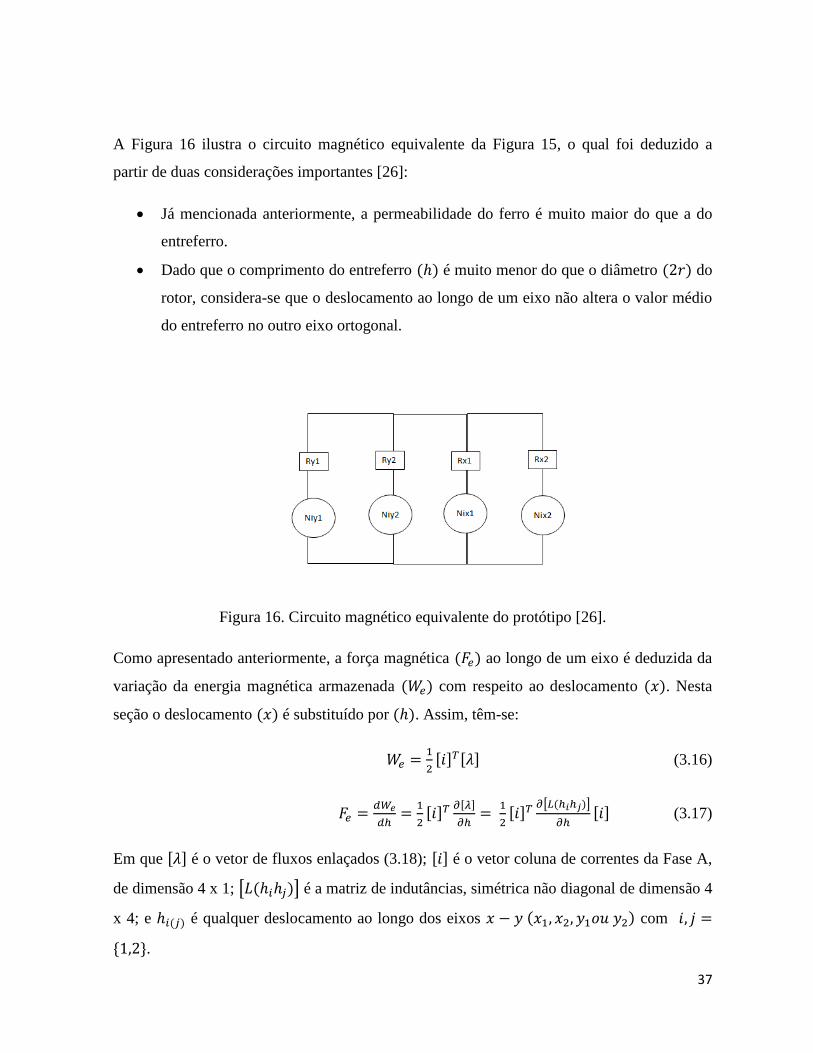
A Figura 16 ilustra o circuito magnético equivalente da Figura 15, o qual foi deduzido a
partir de duas considerações importantes [26]:
Já mencionada anteriormente, a permeabilidade do ferro é muito maior do que a do
entreferro.
Dado que o comprimento do entreferro (ℎ) é muito menor do que o diâmetro (2𝑟) do
rotor, considera-se que o deslocamento ao longo de um eixo não altera o valor médio
do entreferro no outro eixo ortogonal.
Figura 16. Circuito magnético equivalente do protótipo [26].
Como apresentado anteriormente, a força magnética (𝐹𝑒) ao longo de um eixo é deduzida da
variação da energia magnética armazenada (𝑊𝑒) com respeito ao deslocamento (𝑥). Nesta
seção o deslocamento (𝑥) é substituído por (ℎ). Assim, têm-se:
𝑊𝑒 =1
2[𝑖]𝑇[𝜆] (3.16)
𝐹𝑒 =𝑑𝑊𝑒
𝑑ℎ=
1
2[𝑖]𝑇
𝜕[𝜆]
𝜕ℎ=
1
2[𝑖]𝑇
𝜕[𝐿(ℎ𝑖ℎ𝑗)]
𝜕ℎ[𝑖] (3.17)
Em que [𝜆] é o vetor de fluxos enlaçados (3.18); [𝑖] é o vetor coluna de correntes da Fase A,
de dimensão 4 x 1; [𝐿(ℎ𝑖ℎ𝑗)] é a matriz de indutâncias, simétrica não diagonal de dimensão 4
x 4; e ℎ𝑖(𝑗) é qualquer deslocamento ao longo dos eixos 𝑥 − 𝑦 (𝑥1, 𝑥2, 𝑦1𝑜𝑢 𝑦2) com 𝑖, 𝑗 =
{1,2}.

38
O desenvolvimento que leva até a expressão (3.18) é amplamente abordado por [26].
[ 𝜆𝑦1
𝜆𝑦2
𝜆𝑥1
𝜆𝑥2]
= [𝐿(ℎ𝑖ℎ𝑗)][𝑖] =
[
1
𝑅𝑦1−
𝑅𝑒𝑞
𝑅𝑦12 −
𝑅𝑒𝑞
𝑅𝑦1𝑅𝑦2−
𝑅𝑒𝑞
𝑅𝑦1𝑅𝑥1−
𝑅𝑒𝑞
𝑅𝑦1𝑅𝑥2
−𝑅𝑒𝑞
𝑅𝑦2𝑅𝑦1
1
𝑅𝑦2−
𝑅𝑒𝑞
𝑅𝑦22 −
𝑅𝑒𝑞
𝑅𝑦2𝑅𝑥1−
𝑅𝑒𝑞
𝑅𝑦2𝑅𝑥2
−𝑅𝑒𝑞
𝑅𝑥1𝑅𝑦1−
𝑅𝑒𝑞
𝑅𝑥1𝑅𝑦2
1
𝑅𝑥1−
𝑅𝑒𝑞
𝑅𝑥12 −
𝑅𝑒𝑞
𝑅𝑥1𝑅𝑥2
−𝑅𝑒𝑞
𝑅𝑥2𝑅𝑦1−
𝑅𝑒𝑞
𝑅𝑥2𝑅𝑦2−
𝑅𝑒𝑞
𝑅𝑥2𝑅𝑥1
1
𝑅𝑥2−
𝑅𝑒𝑞
𝑅𝑥22 ]
[
𝑖𝑦1
𝑖𝑦2
𝑖𝑥1
𝑖𝑥2
] (3.18)
Em que
1
𝑅𝑒𝑞=
1
𝑅𝑦1+
1
𝑅𝑦2+
1
𝑅𝑥1+
1
𝑅𝑥2
𝑅ℎ(𝑦1,𝑦2,𝑥1 𝑜𝑢 𝑥2) =ℎ(𝑦1, 𝑦2, 𝑥1 𝑜𝑢 𝑥2)
µ𝑜𝐴
É importante neste ponto ressaltar o seguinte: em [26] as derivadas da matriz de indutância
foram feitas considerando o rotor como centralizado, isto é, os deslocamentos infinitesimais
𝛿𝑥 e 𝛿𝑦 como nulos. Entretanto no desenvolvimento a seguir, esses deslocamentos foram
considerados como não nulos. Como isso, têm-se:
𝑦1 = 𝑦 = ℎ𝑜 + 𝛿𝑦;
𝑦2 = (2 ∗ ℎ𝑜 − 𝑦) = ℎ𝑜 − 𝛿𝑦;
𝑥1 = 𝑥 = ℎ𝑜 + 𝛿𝑥;
𝑥2 = (2 ∗ ℎ𝑜 − 𝑥) = ℎ𝑜 − 𝛿𝑥,
onde ℎ𝑜 é o entreferro nominal quando o rotor encontra-se perfeitamente alinhado, isto é
concêntrico com o estator. Note-se que 0 < ( 𝑦 𝑜𝑢 𝑥) < 2ℎ𝑜.
Com essas considerações, podem-se determinar os componentes da matriz de indutância
𝐿(ℎ𝑖ℎ𝑗), cujo cálculo de todos os componentes e os respectivos gráficos encontram-se no
AnexoA. A expressão (3.19) ilustra o primeiro termo dessa matriz, no qual se observa que
este é função de ambos os deslocamentos:

39
𝐿11 = µ𝑜𝐴𝑁2 [1
𝑦−
1
2ℎ𝑜(𝑦2
𝑥(2ℎ𝑜−𝑥)+
𝑦
(2ℎ𝑜−𝑦))] (3.19)
Tomando a derivada da matriz 𝐿(ℎ) com respeito à 𝑥 𝑒 𝑦, e realizando o produto dessa
matriz derivada com o vetor de corrente [𝑖] e sua transposta [𝑖]𝑇, obtém-se a força magnética
equivalente ao longo dos eixos 𝑥 𝑒 𝑦 como:
𝐹𝑥 = −(𝛬) ∗ (𝛩)−1 (3.20)
𝐹𝑦 = −(𝛤) ∗ (𝛩)−1 (3.21)
onde,
𝛬 = (𝐴𝑁2µ𝑜(𝑖𝑦2𝑦 − 𝑖𝑦1𝑦 − 𝑖𝑥2𝑥 + 𝑖𝑥1𝑥 + 2ℎ𝑜𝑖𝑦1 − 2ℎ𝑜𝑖𝑥1)(𝑖𝑥2𝑦
2 − 𝑖𝑥1𝑦2 − 𝑖𝑦2𝑥𝑦 − 𝑖𝑦1𝑥𝑦 −
ℎ𝑜𝑖𝑦2𝑦 + ℎ𝑜𝑖𝑦1𝑦 − 2ℎ𝑜𝑖𝑥2𝑦 + 2ℎ𝑜𝑖𝑥1𝑦 + 2ℎ𝑜𝑖𝑦1𝑥 − ℎ𝑜𝑖𝑥2𝑥 − ℎ𝑜𝑖𝑥1𝑥 − 2ℎ𝑜2𝑖𝑦1 + 2ℎ𝑜
2𝑖𝑥1)
𝛤 =(𝐴𝑁2µ𝑜(𝑖𝑦2𝑦 − 𝑖𝑦1𝑦 − 𝑖𝑥2𝑥 + 𝑖𝑥1𝑥 + 2ℎ𝑜𝑖𝑦1 − 2ℎ𝑜𝑖𝑥1)(𝑖𝑥2𝑥𝑦 − 𝑖𝑥1𝑥𝑦 − ℎ𝑜𝑖𝑦2𝑦 − ℎ𝑜𝑖𝑦1𝑦 +
2ℎ𝑜𝑖𝑥1𝑦 + 𝑖𝑦2𝑥2 − 𝑖𝑦1𝑥
2 − 2ℎ𝑜𝑖𝑦2𝑥 + 2ℎ𝑜𝑖𝑦1𝑥 − ℎ𝑜𝑖𝑥2𝑥 + ℎ𝑜𝑖𝑥1𝑥 + 2ℎ𝑜2𝑖𝑦1 − 2ℎ𝑜
2𝑖𝑥1)
𝛩 = (2ℎ𝑜(𝑦2 − 2ℎ𝑜𝑦 + 𝑥2 − 2ℎ𝑜𝑥)2)
Como se observa, as forças magnéticas dependem dos deslocamentos 𝛿𝑥 e 𝛿𝑦 do rotor. Por
esse motivo, ela é mais comprida do que aquela determinada em [26]. O cálculo das
expressões das forças magnéticas ao longo dos eixos foi executado com a ajuda do software
WXMAXIMA e encontra-se no Anexo A.

40
Capítulo 4
Dinâmica do Sistema
A dinâmica do rotor rígido suportado por mancais magnéticos foi amplamente
abordada e discutida por [2]. Esta dinâmica tem uma grande importância do ponto de visto
prático. Pois sua resolução permite entender questões relacionadas a fenômenos que
influenciam diretamente na operação técnica do rotor. Entre esses fenômenos, podem se citar
interações não conservativas da força de fluidos com o rotor em turbo máquinas e selos,
forças de processamento em máquinas ferramentas, assim como forças eletromagnéticas em
equipamentos elétricos [2].
A dinâmica do rotor utilizado neste experimento segue aquela abordada por [12], que é
mancal em rotor vertical. Essa abordagem difere apenas daquela em [2] pela posição do rotor
e pelo número de mancais magnéticos, nesse caso um apenas com mancal mecânico na
extremidade inferior. A Figura 17 ilustra o protótipo do rotor com seus principais
componentes.

41
Figura 17. Protótipo do rotor com seus principais componentes
Este protótipo foi desenvolvido e estudado com diferentes configurações para pesquisas
reportadas em [26] - [27]. A configuração proposta por [27] constituiu de dois mancais-
motores radiais e um mancal axial supercondutor, Figura 18.
Figura 18. Protótipo proposto por [27].
A seguir é apresentado o modelo matemático abordado em [12] que estabelece as equações
de movimento do rotor rígido. O modelo matemático apresenta o caso geral em que existem
velocidade de rotação e desbalanceamento. Em seguida as equações de movimento são
simplificadas para o caso particular estudado, sem rotação e sem desbalanceamento
mecânico.
Com o rotor operando na posição vertical, a segunda lei de Newton aplicada ao rotor fornece
as expressões:
𝑚�̈�(𝑡) = 𝐹𝑥(𝑡) 𝑒 𝑚�̈�(𝑡) = 𝐹𝑦(𝑡) (4.1)
𝐼𝑦�̈�(𝑡) − 𝜔𝑟𝐼𝑧�̇�(𝑡) = 𝑃𝑦(𝑡) (4.2)
𝐼𝑦�̈�(𝑡) + 𝜔𝑟𝐼𝑧�̇�(𝑡) = 𝑃𝑥(𝑡) (4.3)

42
em que 𝐹𝑥(𝑡), 𝐹𝑦(𝑡), 𝑃𝑦(𝑡) e 𝑃𝑥(𝑡) são as forças e os torques externos ao ponto de contato do
rotor com o mancal mecânico (rolamento auto compensador) nas direções y e x. Os
parâmetros α e β são os deslocamentos angulares do rotor em torno do eixo x e y
respectivamente, como ilustrado na Figura 19.
FALTAR MUDAR A FIGURA 19
Figura 19. Deslocamentos lineares e angulares do rotor.
𝜔𝑟 é a velocidade angular do rotor em torno do eixo z. À medida que se aumenta a
velocidade de rotação, surge um acoplamento nas duas direções x e y, denominado de efeito
giroscópico [28]. Esse efeito pode ser identificado nas segundas parcelas do lado esquerdo
das equações (4.2) e (4.3), onde aparece 𝜔𝑟.
A simetria do rotor garante que os momentos de inércia de massa 𝐼𝑥 = 𝐼𝑦 = 𝐼. O momento
de inércia I é calculado em relação ao ponto de contato entre a extremidade inferior do rotor e
o rolamento auto compensador. As expressões (4.2) e (4.3) podem ser reescritas como sendo:
𝐼�̈�(𝑡) − 𝜔𝑟𝐼𝑧�̇�(𝑡) = 𝑃𝑦(𝑡) (4.4)
𝐼�̈�(𝑡) + 𝜔𝑟𝐼𝑧�̇�(𝑡) = 𝑃𝑥(𝑡) (4.5)
Definem-se os vetores 𝒛 dos deslocamentos angulares e 𝒆 dos torques externos a fim de
expressar as equações (4.4) e (4.5) na forma vetorial:
x, α
y, β
z

43
𝒛 = [𝛽 −𝛼]𝑇 (4.6)
𝒆 = [𝑃𝑦 −𝑃𝑥]𝑇 (4.7)
Introduzindo as expressões (4.6) e (4.7) nas (4.4) e (4.5) e escrevendo as últimas na forma
vetorial, tem-se:
𝐼�̈�(𝑡) + 𝐺�̇�(𝑡) = 𝒆(𝑡) (4.8)
Onde 𝐼 e 𝐺 são as matrizes de inércia e giroscópica, respectivamente.
𝐼 = [𝐼 00 𝐼
] e 𝐺 = 𝑤𝑟𝐼𝑧 [0 1
−1 0]
Os torques externos 𝑃𝑥(𝑡) e 𝑃𝑦(𝑡) são causados pelas forças magnéticas 𝐹𝑥(𝑡) e 𝐹𝑦(𝑡) em
relação ao ponto de articulação e são dados por:
𝑃𝑥 = −𝐹𝑦 𝑏 𝑐𝑜𝑠 𝛼, 𝑃𝑦 = 𝐹𝑥 𝑏 𝑐𝑜𝑠 𝛽 (4.9)
Para fim de simplificação, a variável tempo (𝑡) é omitida das expressões.
Como o rotor opera praticamente na posição vertical, os efeitos da gravidade sobre a
dinâmica podem ser desprezados [12]. A Figura 20 ilustra a distribuição de fluxos
magnéticos para o caso de uma estrutura com pólos concentrados.
Figura 20. Estator com quatro polos concentrados [28]

44
Essa configuração, denominada de mancal magnético Tipo II, mostra-se mais rígida do que a
configuração convencional de enrolamentos com oito polos pelos seguintes fatos [28]:
As constantes de posição e de corrente 𝑘𝑏 e 𝑘𝑖 são duas vezes maiores que as
constantes de posição e de corrente na configuração convencional:
𝑘𝑏 =2µ𝑜𝐴𝑏𝑛𝑏
2𝑖𝑏2
ℎ3 e 𝑘𝑖 =
2µ𝑜𝐴𝑏𝑛𝑏2𝑖𝑏
ℎ2 (4.10)
A área 𝐴𝑏 do estator pode ter um valor duas vezes maior ou ainda superior que na
configuração convencional de oito polos.
O número de enrolamentos 𝑛𝑏 pode ter um valor maior que na configuração
convencional.
Uma análise por Elementos Finitos (FEM), reportada em [29], referida à Figura 20, mostra
que a excitação de corrente na forma diferencial numa direção não afeta o fluxo magnético na
direção ortogonal.
Voltando à expressão (4.7), note-se que sendo os ângulos α e β muito pequenos então cos α =
cos β = 1. Desta forma obtém-se uma nova expressão para (4.7):
𝒆 = [𝑃𝑦
−𝑃𝑥] = 𝑏 [
𝐹𝑥
𝐹𝑦] = 𝑏 𝑘𝑏 𝒛𝒃 + 𝑏 𝑘𝑖𝒖 (4.11)
Em que, 𝒛𝒃 = [𝑥𝑏 𝑦𝑏]𝑇representa o vetor deslocamento linear do rotor na cota b do mancal
magnético, e 𝒖 = [𝑖𝑥 𝑖𝑦]𝑇 é o vetor de corrente das duas direções x e y.
Os componentes do vetor deslocamento angular 𝒛 e do vetor deslocamento linear 𝒛𝒃 são
relacionados pelas expressões:
𝑠𝑒𝑛 𝛽 = 𝛽 = 𝑥𝑏
𝑏 e 𝑠𝑒𝑛 𝛼 = 𝛼 = −
𝑦𝑏
𝑏 (4.12)
Introduzindo (4.12) no vetor deslocamento linear 𝒛𝒃, obtém-se:
𝒛𝒃 = [𝑥𝑏
𝑦𝑏] = 𝑏 [
𝛽−𝛼
] = 𝑏 𝒛 (4.13)
Essa modificação permite reescrever (4.11) em função de (4.13):

45
𝒆 = 𝑏2 𝑘𝑏 𝒛 + 𝑏 𝑘𝑖𝒖 (4.14)
Com (4.14), a expressão (4.8) pode ser reescrita em função do vetor de deslocamento angular
𝒛 como:
𝐼�̈� + 𝐺�̇� − 𝑏2 𝑘𝑏 𝒛 = 𝑏 𝑘𝑖𝒖 (4.15)
A expressão (4.15) necessita ser rebatida na cota c do sensor a fim de se obter uma equação
em termos de grandezas diretamente mensuráveis e controláveis. Para isso, introduz-se um
novo vetor 𝒛𝒄 = [𝑥𝑐 𝑦𝑐]𝑇, que é o vetor de deslocamentos medidos pelos sensores. Esse
vetor 𝒛𝒄 também está relacionado com o vetor deslocamento angular 𝒛 através da expressão:
𝒛𝒄 = [𝑥𝑐
𝑦𝑐] = 𝑐 [
𝛽−𝛼
] = 𝑐 𝒛 (4.16)
Introduzindo (4.16) em (4.15), obtém-se a equação de movimento do rotor na forma vetorial
em função de parâmetros mensuráveis e controláveis, cujo diagrama de blocos está ilustrado
na Figura 21.
𝒛�̈� + 𝐺𝑟𝒛�̇� − 𝐾𝑧𝑟 𝒛𝒄 = 𝐾𝑢𝑟𝒖, (4.17)
onde os coeficientes matriciais são dados por
𝐺𝑟 = 𝐼−1𝐺, 𝐾𝑧𝑟 = 𝑏2 𝑘𝑏 𝐼−1, 𝐾𝑢𝑟 = 𝑏 𝑐 𝑘𝑖 𝐼
−1

46
Figura 21. Diagrama de blocos do modelo dinâmico (4.17).
Se o rotor encontra-se em baixa rotação, o efeito giroscópico fica desprezível. Desta forma, a
equação (4.17) se reduz a um sistema de equações totalmente desacopladas (4.18) cujo
diagrama de blocos está representado pela Figura 22.
𝒛�̈� − 𝐾𝑧𝑟 𝒛𝒄 = 𝐾𝑢𝑟𝒖 (4.18)
Figura 22. Diagrama de blocos do modelo dinâmico (4.18)

47
A posição radial do rotor precisa ser mantida constante, mesmo em presença de distúrbios.
Para isso o mancal magnético necessita de um sistema de controle ativo para resolver essa
questão. Sendo o protótipo em estudo um sistema desacoplado, este admite um projeto
simples baseado em técnicas clássicas de controle [12].
Neste tipo de sistema podem ser aplicadas a cada variável independente, nesse caso aos eixos
x e y, os métodos de projeto simples já comprovados na literatura: controlador Proporcional-
Derivativo e controlador Proporcional-Integral-Derivativo [12],[23]; controlador deslizante
[30]; PID adaptativo [31] e Redes Neurais [32], etc.

48
Capítulo 4
Controlador Proporcional-Integral-Derivativo
A estratégia de controle escolhida neste experimento é utilizar o controlador
Proporcional-Integral-Derivativo (PID) por sua maior popularidade em relação a outros
sistemas de controle, Figura 23. Em particular, quando o modelo matemático da planta não é
bem conhecido, o controlador PID se mostra mais versátil [33].
Figura 23. Controlador PID [3]
Quando o modelo matemático do sistema pode ser obtido, é possível aplicar diversas técnicas
para determinar os parâmetros do controlador (𝑘𝑝, 𝑘𝑑 e 𝑘𝑖) que irão impor as especificações
do regime transitório e do regime permanente ao sistema em malha fechada. Entretanto,
quando esse modelo for muito complexo e não puder ser obtido, então uma abordagem
experimental para determinar esses parâmetros se faz necessário [33]. Essa abordagem
experimental é mais conhecida com o método de sintonia dos parâmetros do PID, e envolve a
seleção dos parâmetros que satisfazem um desempenho desejado.
Existem diversos métodos de sintonia na literatura, que podem ser reagrupados em duas
categorias [34]:

49
Métodos em malha fechada: referem-se a métodos que fazem a sintonia do
controlador de modo automático quando a planta opera em malha fechada. Entre eles,
têm-se: Ziegler-Nichols, Ziegler-Nichols modificado, Tyreuz-Luyben e Oscilação
amortecida.
Métodos em malha aberta: referem-se a métodos que fazem a sintonia do controlador
de modo manual quando a planta opera em malha fechada. Entre eles: Ziegler-
Nichols em malha aberta, Chien-Hrones-Reswich, Cohen e Coon, Fertik, Ciancone-
Marline, Controle Interno do Modelo e Critério do Erro Mínimo.
A função de transferência do controlador PID, Figura 20, é dada por
𝐺𝑐 = 𝑘𝑝 +𝑘𝑖
𝑠+ 𝑘𝑑𝑠 = 𝑘𝑝(1 +
1
𝑇𝑖𝑠+ 𝑇𝑑𝑠), (5.1)
onde,
𝑘𝑝 é o ganho proporcional;
𝑘𝑖 e 𝑇𝑖 são o ganho e o tempo integral, e
𝑘𝑑 e 𝑇𝑑 são o ganho e o tempo derivativo.
A seguir são descritas as características dos parâmetros do controlador PID citados acima
[35]:
O ganho proporcional 𝑘𝑝 afeta apenas o erro, ou seja, neste caso a diferença entre a
referência de posição e a posição medida pelos sensores. Esse ganho determina a taxa
de resposta de saída para o sinal de erro de modo que aumentando o ganho 𝑘𝑝 irá
aumentar a velocidade da resposta do sistema de controle. No entanto, se o ganho
proporcional é muito grande, a variável de processo poderá a oscilar até atingir uma
região de instabilidade.
O ganho integral 𝑘𝑖 soma o termo de erro ao longo do tempo fazendo com que a
resposta integral aumente a menos que o erro seja zero. O efeito do ganho 𝑘𝑖 é
conduzir o erro do estado estacionário para zero. No controlador PID implementado

50
nesse experimento, foi adicionado ao ramo integral à ferramenta “anti-windup”. Essa
ferramenta permite que a ação integral seja detenida antes de saturar a saída.
O ganho derivativo 𝑘𝑑 permite que a saída seja proporcional à taxa de variação da
variável de processo. Aumentar o parâmetro do tempo derivativo 𝑇𝑑 fará com que o
sistema de controle reaja mais fortemente às mudanças no parâmetro de erro
aumentando a velocidade da resposta global de controle do sistema. Na prática, os
sistemas de controle utilizam o tempo derivativo 𝑇𝑑 muito pequeno, pois a derivada
de resposta é muito sensível ao ruído no sinal da variável de processo. Se o sinal de
realimentação do sensor é ruidoso ou se a taxa de malha de controle é muito lenta, a
derivada de resposta pode tornar o sistema de controle instável.
A Figura 24 ilustra a curva de resposta ao degrau unitário de um sistema com controlador
PID projetado com a regra de sintonia de Ziegler-Nichols e suas características.
Figura 24. Curva da resposta em degrau unitário de um sistema com controlador PID
projetado com o método de Ziegler-Nichols (a) Tempo de subida (b) Porcentagem de
Overshoot (c) Tempo de acomodação (d) Erro estacionário [33].
O tempo de subida é o tempo que o sistema leva para ir de 10 % a 90 % do valor final. A
porcentagem de Overshoot é o valor que a variável de processo ultrapassa o valor final,
a
c
b
d

51
expresso como uma porcentagem do valor final. O tempo de acomodação é o tempo
necessário para a variável de processo chegar dentro de uma determinada porcentagem (5 %)
do valor final. O erro estacionário é a diferença entre o valor de referência e as variáveis de
processo [35].
Neste experimento a escolha dos parâmetros foi feita usando métodos de sintonia off-line [3],
primeiramente o método do Lugar de Raízes, cujo projeto encontra-se no Anexo I e em
seguida um ajuste manual dependendo do comportamento do rotor. O ajuste manual foi
realizado dentro do código da plataforma Arduino, Anexo B, necessitando a cada tentativa o
desligamento de todo o sistema.

52
Capítulo 5
Bancada de Trabalho
A bancada de trabalho, Figura 25, é composta por seis unidades: o motor bifásico
modificado, a unidade dos sensores, os microcontroladores, os componentes eletrônicos, as
fontes de tensão e as fontes de corrente.
Figura 25. Bancada de trabalho. (a) Motor bifásico modificado (b) Unidade dos sensores (c)
Microcontroladores (d) Componentes eletrônicos auxiliares (e) Fontes de corrente (f) Fontes
de tensão
a
c e
b
f
d

53
A bancada de trabalho é representada de forma simplificada através do diagrama abaixo,
Figura 26. As fontes de tensão alimentam simultaneamente todas as outras unidades. Os
deslocamentos do rotor são lidos pelos sensores de deslocamento e enviados para o
microcontrolador através de dois componentes eletrônicos, LM324. O sinal de saída do
microcontrolador, a corrente de referência de controle, atravessa dois componentes
eletrônicos, DAC 0800 e TL074CN, e segue para a fonte de corrente. Na fonte de corrente, a
corrente de referência final resulta da soma da corrente de controle com a corrente de bias,
que segue para o motor.
Figura 26. Diagrama da bancada de trabalho
6.1. Motor bifásico modificado
O motor utilizado neste experimente foi um motor convencional bifásico, facilmente
encontrado no mercado, de quatro polos cujo rotor foi modificado para atender a condição do
experimento, Figura 27 (b). Essa condição é a não indução de corrente no rotor.

54
(a)
(b)
Figura 27. Rotor do motor (a) antes e (b) depois da adaptação
Para atender a essa condição a “Fase B” foi mantida desligada e a “Fase A” é apenas
utilizada para posicionar o rotor. O rotor foi modificado para dispensar a gaiola de esquilo. O
desenho técnico do rotor com todas suas dimensões encontra-se no anexo C. A Tabela 1
apresenta as especificações do motor.
Tabela 1. Especificações do motor [29]
6.2. Unidade dos sensores de deslocamento
Os sensores de posição utilizados são sensores de corrente parasita multiNCDT 100 da
Micro-Epsilon, Figura 28. Esse modelo de sensor avalia a distância de um alvo feito de um
material ferromagnético. Essa distância é proporcional a um sinal elétrico linear produzido

55
pela mudança de impedância na bobina interna do sensor. A faixa de medição do sensor é de
0 a 2 mm com offset 0,2 mm para saída entre 0 a 10 V/ 10 mA. Acima dessa faixa de
medição, a relação afastamento-tensão não é mais linear.
Figura 28. Unidade dos sensores multiNCDT 100
Na Figura 29 se mostra a resposta experimental para medir os deslocamentos ao longo do
eixo X, utilizando 4 sensores. Nota-se que as respostas estão dentro da faixa do fabricante,
Anexo D.
Figura 29. Calibração manual dos sensores de corrente parasita [36]
A folha de especificações dos sensores encontram-se no Anexo C.
6.3. Microcontrolador

56
O microcontrolador utilizado é o Arduino Mega 2560 pelo seu preço acessível e sua
facilidade de ser encontrado no mercado. Possui 54 pinos de entradas e saídas digitais, dos
quais 15 podem ser utilizados como saídas Pulse Width Modulation (PWM), 16 entradas
analógicas, 4 portas seriais, um oscilador de 16MHz, uma entrada In-Circuit Serial
Programming (ICSP) e um bottom de reset [37]. A folha de dados com o mapeamento dos
pinos encontra-se no Anexo E.
Alguns pinos do Arduino Mega 2560 possuem funções especiais, Tabela 2.
Nesse experimento foram utilizados dois microcontroladores de fabricantes distintos:
Arduino CC e SaintSmart, devido ao tempo de execução da rotina de interrupção do código
de controle, Figura 30.
Figura 30. Microcontroladores Arduino (a) do fabricante SaintSmart à esquerda (b) do
fabricante Arduino CC à direita
O microcontrolador do fabricante SaintSmart é um clone do modelo do Arduino CC. Como
pode se verificar os dois microcontroladores são iguais externamente e internamente, Tabela
3.

57
Tabela 2. Pinos do Arduino Mega 2560 com funções especiais. SPI – Serial Peripheral
Interface. LED – Light Emitting Diode. TWI – MISO – Master In Slave Out. MOSI – Master
Out Slave In. SS – Slave Select. SDA – Data Line. SCL – Clock Line. RX – Pino recebendo
dados. TX – Pino transmitido dados.
Tabela 3. Características internas dos microcontroladores do SaintSmart e Arduino CC
[37][38]

58
6.4. Eletrônica Auxiliar
A eletrônica é formada por um grupo de componentes eletrônicos, entre eles: quatro
amplificadores operacionais (LM324 e TL074CN), dois conversores digitais analógicos
(DAC0800) e uma série de resistores (4,7k – 10k e 14,1k), Figura 31. Esses componentes
atuam em série com os sensores, os microcontrontroladores e as fontes de corrente e são
soldados em placas de fenolite.

59
Figura 31. Componentes eletrônicos soldados numa placa de fenolite. (a)LM324 (b)
DAC0800 (c)TL074CN (d) Resistores de 4,7k – 10k – 14,1k.
Existe um par de cada circuito integrado (CI) que corresponde ao sinal vindo de e enviado
para os eixos 𝑥 e 𝑦.
O CI LM324 recebe os sinais de posição de rotor vindo dos sensores, gerar o erro de posição
que varia de -2 V a 2 V, o condiciona para se manter na faixa de 0 a 4 V e, em seguida, o
encaminha para o microcontrolador, Figura 32.
Figura 32. Operação do LM324.
b
a
d
c

60
O condicionamento foi realizado devido a que o erro de posição possui uma parcela negativa
que não poderá ser interpretado pelo microcontrolador. Para contornar essa questão, é
adicionado um potenciômetro com uma tensão de 2 V a fim de deslocar o gráfico do erro de
posição para cima, Figura 33.
Figura 33. Condicionamento do erro de posição
O DAC0800 converte a sinal digital de 8 bits da corrente de controle saindo do
microcontrolador em sinal analógico, Figura 34. De acordo com a folha de dados do
fabricante, existem diferentes formas de se conectar resistores ao DAC0800 a fim de obter
diferentes resultados dependendo da polaridade da tensão de trabalho desejado.
Figura 34. Conversor DAC0800 de 8 bits [39].
As conexões podem ser:

61
Negativa Unipolar quando se quer apenas trabalhar com tensões negativas;
Bipolar quando a tensão varia do negativo para o positivo;
Binário Simétrico com Offset;
Saída Positiva com Baixa Impedância;
Saída Negativa com Baixa Impedância;
Operação com Referência Pulsada;
Interface com diversas famílias lógicas;
Referências Bipolares Acomodadas;
Medição do Tempo de Acomodação;
Tempo de conversão de 2 μs com conversor analógico digital de 8 bits.
Essas conexões estão ilustradas no Anexo E. A conexão feita nesse experimento é a Bipolar,
Figura 35.
Figura 35. DAC0800 com conexão Bipolar [39].
A particularidade dessa conexão é que os resistores das saídas 2 e 4 do DAC0800 necessitam
ter o mesmo valor, no caso 10k, e o dobro do valor do resistor de RREF(com valor de 4,7k). A
tensão de referência VREF é conectada também as saídas 2 e 4. A Tabela 4 ilustra os
diferentes valores de tensão que podem ser obtidos em função dos bits de entrada. No
experimento foi utilizado apenas a saída 2, a anti-tensão 𝐸𝑜̅̅ ̅. Durante o experimento, foi
observado que o valor digital que corresponde a uma corrente de controle igual a zero é
10001110 ou 142, diferente do valor de 0111111 ou 127 conforme a Tabela. Isto se deve a
calibração manual dos sensores.

62
Tabela 4. Operação do DAC0800 em conexão Bipolar [39]
O TL074CN realiza o somatório da corrente de controle com a corrente de bias, Figura 33.
Pode se observar nesta Figura 36 que a tensão que provem do DAC0800, correspondendo ao
sinal da corrente, siga dois caminhos (U1-U2) e (U1-U3). Ux corresponde ao
subamplificador operacional interno do TL074CN. O que ocorre é apenas a mudança de sinal
da tensão no caminho U1-U3 para obter-se a corrente total 𝑖𝑇2 = 𝑖𝑜 − 𝛿𝑖 na saída 14 do
TL074CN, enquanto na saída 8 teremos 𝑖𝑇1 = 𝑖𝑜 + 𝛿𝑖. Notar que a corrente de bias vindo
do potenciômetro, POT na Figura 33 é negativa, e que a corrente de controle na saída 1 na
Figura é positiva.
As folhas de dados técnicos dos três circuitos integrados encontram-se no Anexo F.
Figura 36. Operação do TL074CN

63
6.5. Fontes de corrente
A fonte de corrente é parte da eletrônica, mas é abordada separadamente devido ao sua
estrutura, Figura 37. Ela é composta por duas placas que controlam cada eixo separadamente.
Antes de seguir para as bobinas, a corrente passa por diversos componentes eletrônicos onde
é condicionado. Entre esses componentes, temos:
Driver SEMIKRON SKHI 20 OPA, Figura 38(a);
Varistor V510LA40A;
Diodo IN4007;
Mini Fonte SEMIKRON PS2, Figura 38(b);
Temporizador CI 555;
Amplificador Operacional LM324;
Flip-Flop 7474;
Comparador LM710;
Transistor IGBT GB15B60KD;
Sensor de corrente LEM LTS 15-NP, Figura 39;
Capacitor PT12BJ-26 0,01113 100VDCAXIAL0.8.
Figura 37. Fontes de corrente do eixo x (acima) e eixo y (abaixo). (a) Capacitor
PT12BJ-26 0,01113 100VDCAXIAL0.8 (b) Sensor de corrente LEM LTS 15-NP (c)
Driver SEMIKRON SKHI 20 OPA (d) Mini Fonte SEMIKRON PS2.
a
b
c
d
D

64
A exceção do Capacitor PT12BJ-26 e da mini fonte SEMIKRON PS2, todos os outros
componentes eletrônicos encontram-se em pares, pois para um eixo uma placa controla as
duas correntes totais 𝑖𝑇1 e 𝑖𝑇2. No anexo G pode ser encontrado o diagrama eletrônico das
placas.
Figura 38. (a) Driver SEMIKRON 20 OPA acima (b) Mini Fonte SKHI PS2 abaixo
O sensor de corrente LTS 15-NP é instalado diretamente no caminho da corrente que vai para
as bobinas, Figura 36. O fabricante do sensor é a LEM, empresa especializada em medição
de sinais elétricos. O número “15” refere-se à corrente nominal primária de alimentação de
±15 A.

65
Figura 39. Sensor de corrente LTS 15-NP
O sensor possui 6 pinos, dos quais os pinos 1 e 4 correspondem a entrada e saída de corrente
respectivamente. Dependendo do tipo de conexão feita entre os pinos, a corrente nominal
primária de alimentação pode variar, Tabela 5, Anexo H.
Tabela 5. Corrente nominal primária em função da conexão recomendada [40]
Número de
turnos primários
Corrente nominal
primária rms IPN
[A]
Tensão de saída
nominal VOUT [V]
Resistência
primária
RP [mΩ]
Indutância de
inserção primária
LP [μH]
Conexões recomendadas
1 ± 15 2,5 ± 0,625 0,18 0,013
2 ± 7,5 2,5 ± 0,625 0,81 0,05
3 ± 5 2,5 ± 0,625 0,12 0,12
Nas placas, os pinos do sensor foram soldados conforme o caso 3 em vermelho. A tensão de
saída e a corrente nominal primária têm uma relação linear cujo zero de corrente, caso em
que nenhuma corrente esteja atravessando as bobinas, corresponde a uma tensão de saída de
2,5 V, Figura 40.

66
Figura 40. Tensão de saída-Corrente nominal primária do sensor de corrente [40].
O driver SKHI 20 OPA dispara os transistores IGBT em meia ponte H no circuito das
bobinas. O dispositivo é alimentado simultaneamente por uma tensão primária contínua (+15
V) e tensões alternadas, Figura 41. Para permitir que as duas chaves IGBT disparassem ao
mesmo tempo, as duas pontas do jumper 2 foram soldadas conforme especificação do
fabricante.
Figura 41. Circuito interno simplificado do driver SKHI 20 OPA [41].
A mini fonte SEMIKRON PS2 alimenta os dois drivers SKHI 20 OPA com tensões
alternadas, Figura 38. Essas tensões alternadas são necessárias para disparar os gates e
emissors das chaves IGBT, Figura 42. A tensão de alimentação da mini fonte é de +15 V.

67
Figura 42. Gate Top e Gate Bottom de um driver disparados.
6.6. Fontes de tensão
Elas são formadas por um conjunto de quatro fontes que alimentação todo o sistema, Figura
43:
Duas fontes de tensão de +13,8V que alimentam o circuito das bobinas. Essas fontes
são completamente isoladas das outras;
Uma fonte de alimentação que fornece tensões de -6V, +12V e +5V. Essas fontes são
responsáveis por fornecer tensões à maior parte dos circuitos das placas.
Duas fontes de -15V e +15V sendo que uma dessas fontes é responsável por fornecer
tensões necessárias para alimentar os drivers SKHI 20 OPA das placas e à mini fonte
PS2. A segunda fonte alimenta parte dos circuitos integrados da aquisição e
processamento de dados, isto é, a unidade dos sensores e a eletrônica.
Uma fonte com tensões de -12V, +5V e +12V saindo diretamente do Protoboard,
Figura 44. A tensão de 5V alimenta o microcontrolador, enquanto as tensões de -12V
e +12V alimentam parte dos circuitos da eletrônica.

68
Figura 43. Fontes de potência com osciloscópios. (a) fonte de ± 15 V (b) fonte de -6 V, +12
V e +5 V (c) fonte de 13,8 V (d) fonte de ± 15 V (e) osciloscópios.
Figura 44. Protoboard com as fontes de +12 V, + 5V e -12 V
c
a
d b
e

69
Capítulo 6
Simulações Numéricas
Nesse capitulo são apresentados os resultados das simulações numéricas a partir das
expressões (3.20) e (4.18) apenas no eixo 𝑥. Primeiramente é feita uma simulação da
expressão (4.18) na interface Simulink do Matlab usando os parâmetros do PID determinadas
pelo método de Lugar de Raízes, e em seguida é feito uma melhoria desses parâmetros
utilizando a ferramenta “Tuning PID parameters” do próprio software.
Usando outra ferramenta matemática,WXMAXIMA, a expressão (3.20) é simulada
considerando o deslocamento infinitesimal 𝛿𝑥 do rotor. A simulação permite observar o
comportamento real da força magnética no eixo 𝑥 quando o rotor se desloca sobre o mesmo.
6.1. Implementação do controlador PID no MATLAB
A Figura 45 ilustra o diagrama de bloco da expressão (4.18) com um controlador PID. Os
valores referentes a essa expressão são 𝑏 = 0,280 𝑚; 𝑐 = 0,430𝑚; 𝑘𝑥 = 29347,19𝑁
𝑚; 𝑘𝑖 =
29,35 𝑁
𝐴 𝑒 𝐽 = 0,0282 𝑘𝑔𝑚².
Figura 45. Diagrama de bloco do sistema com controlador PID

70
Como mostrado no apêndice I, o controlador PID final foi definido como:
𝐺𝑐𝑓 =15 (𝑠+50)(𝑠+10)
𝑠 (7.3)
Da expressão (7.3), os parâmetros do controlador são obtidos 𝑘𝑝 = 900; 𝑘𝐼𝑛 =
7500 𝐻𝑧 𝑒 𝑘𝑑 = 15𝑠.
Em seguida é feita uma sintonização dos parâmetros do controlador dentro do bloco do
controlador, Figura 46.
Figura 46. Sintonização dos parâmetros do PID
A sintonização forneceu diferentes valores para os parâmetros do PID, Figuras 47, 48 e 49.
Essas Figuras comparam as respostas do sistema quando se usam os parâmetros do PID
determinados pelo método de Lugar de Raízes e aqueles determinados pela sintonização. O
gráfico azul representa a resposta do sistema com os parâmetros do Lugar de Raízes e o
gráfico vermelho a resposta com os parâmetros sintonizados.

71
MODIFICAR EIXO DO TEMPO DAS FIGURAS
Figura 47. Resposta lenta do sistema
Figura 48. Resposta média do sistema.

72
Figura 49. Resposta rápida do sistema
Como pode ser visto nas Figuras 47, 48 e 49, o controlador PID projetado pelo Lugar de
Raízes (7.3) cumpre perfeitamente sua função.
7.1. Cálculo da força magnética no WXMAXIMA
Retomando as considerações feitas para derivar a expressão da indutância em relação ao eixo
𝑥:
𝑥 = ℎ𝑜 + 𝛿𝑥 (7.1)
0 < 𝑥 < 2ℎ𝑜 (7.2)
Introduzindo (7.1) em (7.2), tem-se:
0 < ℎ𝑜 + 𝛿𝑥 < 2ℎ𝑜 (7.3)
−ℎ𝑜 < 𝛿𝑥 < ℎ𝑜 (7.4)
Observe-se que o valor do deslocamento infinitesimal 𝛿𝑥 varia dentro do limite do entreferro
nominal. Neste experimento o entreferro nominal quando o rotor está concêntrico com o
estator é de 1 mm.
73
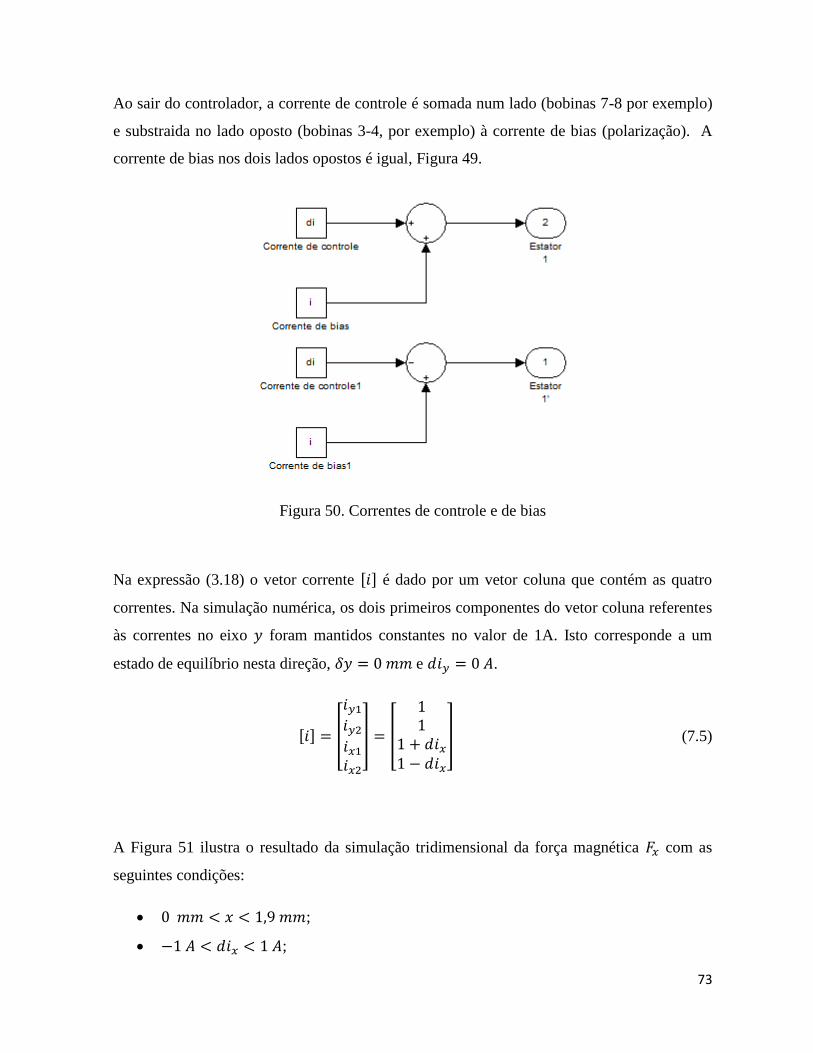
Ao sair do controlador, a corrente de controle é somada num lado (bobinas 7-8 por exemplo)
e substraida no lado oposto (bobinas 3-4, por exemplo) à corrente de bias (polarização). A
corrente de bias nos dois lados opostos é igual, Figura 49.
Figura 50. Correntes de controle e de bias
Na expressão (3.18) o vetor corrente [𝑖] é dado por um vetor coluna que contém as quatro
correntes. Na simulação numérica, os dois primeiros componentes do vetor coluna referentes
às correntes no eixo 𝑦 foram mantidos constantes no valor de 1A. Isto corresponde a um
estado de equilíbrio nesta direção, 𝛿𝑦 = 0 𝑚𝑚 e 𝑑𝑖𝑦 = 0 𝐴.
[𝑖] = [
𝑖𝑦1
𝑖𝑦2
𝑖𝑥1
𝑖𝑥2
] = [
11
1 + 𝑑𝑖𝑥1 − 𝑑𝑖𝑥
] (7.5)
A Figura 51 ilustra o resultado da simulação tridimensional da força magnética 𝐹𝑥 com as
seguintes condições:
0 𝑚𝑚 < 𝑥 < 1,9 𝑚𝑚;
−1 𝐴 < 𝑑𝑖𝑥 < 1 𝐴;

74
Rotor em equilíbrio no eixo 𝑦, 𝑦 = 0 𝑚𝑚 e 𝑑𝑖𝑦 = 0 𝐴.
Figura 51. Força magnética 𝐹𝑥 (𝑁), representada pelo eixo 𝑧, contra 𝛿𝑥 (𝑚) 𝑒 𝑑𝑖 (𝐴).
O gráfico tridimensional apresenta um resultado esperado, no qual a força magnética deve
aumentar num conjunto de bobina (7-8, por exemplo) e diminuir no lado oposto (3-4, por
exemplo) quando o gráfico é visto em vista bidimensional 𝑧 contra 𝛿𝑥. A mesma conclusão
pode ser estendida em vista bidimensional 𝑧 contra 𝑑𝑖, na qual a força magnética aumenta ou
diminui com o quadrado da corrente [2].
7.1.1. Cálculo dos coeficientes 𝒌𝒙 e 𝒌𝒊
Usando o gráfico tridimensional, são plotados dois gráficos que simulam a condição de
equilíbrio no eixo 𝑥, Figuras 56 e 58. Os gráficos são utilizados para determinar os
verdadeiros valores dos coeficientes 𝑘𝑥 e 𝑘𝑖.
A Figura 57 ilustra a meia representação da Figura 55, na qual é traçada uma linha de
tendência que passa próximo de alguns pontos da curva 𝐹𝑥 (𝑁). O coeficiente linear da reta
traçada representa o valor do coeficiente 𝑘𝑖.

75
Figura 56. Força magnética 𝐹𝑥 (𝑁), representada pelo eixo vertical contra 𝑑𝑖 (𝐴) com
𝛿𝑥 = 0 𝑚
Figura 57. Meia representação da Força magnética 𝐹𝑥 (𝑁), representada pelo eixo
vertical contra 𝑑𝑖 (𝐴), eixo horizontal com
𝛿𝑥 = 0 𝑚
A linha de tendência forneceu como coeficiente linear um valor m igual a -29,35. Como
mencionado acima, esse valor é o próprio coeficiente 𝐾(4)𝑖 = 29,35 𝑁/𝐴.

76
A Figura 59 ilustra a meia representação da Figura 58, na qual é traçada uma linha de
tendência que passa próximo de alguns pontos da curva 𝐹𝑥 (𝑁). O coeficiente linear da reta
traçada representa o valor do coeficiente 𝑘𝑥.
Figura 58. Força magnética 𝐹𝑥 (𝑁), representada pelo eixo vertical contra 𝑑𝑥 (𝑚)
com 𝑑𝑖 = 0 𝐴
Figura 59. Meia representação da Força magnética 𝐹𝑥 (𝑁), representada pelo eixo
vertical contra 𝛿𝑥 (𝑚), eixo horizontal com 𝑑𝑖 = 0 𝐴
A linha de tendência fornece um valor de coeficiente linear igual a 29273 N/m. Entretanto,
essa linha não passa por nenhum ponto da região linear. Traçando uma reta que passa pelos

77
pontos de coordenadas (0,0010 m; 0 N) e (0,0011 m; 2,96 N) próximos a origem, pode se
determinar o valor aproximado do coeficiente linear da região linear, (7.6).
𝑚 = 𝐾(4)𝑥 = (2,96−0)
(0,0011−0,0010)= 29642,88 𝑁/𝑚 (7.6)
A partir dos dados da Tabela 1 no capitulo 6, as constantes de posição e de corrente foram
determinadas. Observando na Tabela 6, vê-se que as constantes obtidas pelos dados do motor
usando a (4.10) não se afastam dos calculados graficamente.
Tabela 6. Comparação das constantes Ki e Kx
Constantes Dados do motor (Tabela 1) Gráficos
K(4)i 29,35 N/A 29,35 N/A
K(4)x 29347,19 N/m 29642,88 N/m
Agora, considerando uma estrutura de 8 polos com as mesmas características do motor em
estudo, mas com área polar igual a metade da área polar da estrutura de 4 polos, pode se
verificar a expressão (4.10), no qual [29] concluiu que as constantes Ki e Kx da estrutura de 4
polos são duas vezes maiores que as de 8 polos.
As Figuras ilustram a força magnética em estrutura de 8 polos, considerando o rotor
centralizado em x = 1mm (Fig. ) e em seguida sem controle di = 0 A (Fig. )

78
Figura 56. Força magnética 𝐹𝑥 (𝑁) em estrutura de 8 polos, representada pelo eixo
vertical contra 𝑑𝑖 (𝐴) com 𝑥 = 1 𝑚𝑚
Figura 58. Força magnética 𝐹𝑥 (𝑁) em estrutura de 8 polos, representada pelo eixo
vertical contra 𝑑𝑥 (𝑚) com 𝑑𝑖 = 0 𝐴
Executando o mesmo procedimento feito anteriormente para obter Ki e Kx, chegam-se aos
seguintes resultados para a estrutura de 8 polos :
𝐾(8)𝑖 = 6,78𝑁
𝐴
𝐾(8)𝑥 = 6917,66𝑁
𝑚 (7.7)
Comparando os valores obtidos graficamente da Tabela 6 com os em (7.7), obtêm-se:

79
𝐾(4)𝑖
𝐾(8)𝑖= 4,32
𝐾(4)𝑥
𝐾(8)𝑥= 4,29 (7.8)
As relações (7.8) mostram que as constantes de K(4)i e K(4)x são de fato superior as
constantes K(8)i e K(8)x, mas por ordem maior (4 vezes) de que mencionado por [29].
Uma comparação da distribuição do fluxo magnético entre o protótipo com enrolamentos
distribuídos em estudo e o proposto por [28] foi também efetuada com o auxilio do software
FEMM 4.2, Figuras 60 e 61.
Figura 60. Distribuição do fluxo magnético no estator de enrolamentos distribuidos

80
Figura 61. Distribuição do fluxo magnético no estator de enrolamentos concentrados
Analisando as Figuras 60 e 61, com auxílio do simulador, percebe-se que a força magnética
resultante no estator com enrolamentos distribuídos é maior do que a obtida com o estator de
enrolamentos concentrados, o que confirma o previsto analiticamente na referência [29].

81
Capítulo 8
Resultados Experimentais
A efetividade do controlador projetado foi verificada utilizando dois
microcontroladores Arduino Mega 2560 dos fabricantes Arduino e Saint Smart. Seguindos os
passos dos métodos tradicionais dos controladores digitais [42] foi deduzida a equação de
diferença do controlador analógico e escrito na linguagem C, Anexo E. A frequência
amostragem é de 2kHz.
Durante os experimentos, foi necessário realizar alguns ajustes dos parâmetros do
controlador PID, Tabela 6. Todos os ajustes foram feitos off-line.
Tabela 6. Ajuste dos parâmetros do PID
Ajuste dos parâmetros do PID
DPA
Matlab Tuning Parâmetros
experimentais
Parâmetros Ambos
eixos
Ambos eixos
x-axis y-axis
Resposta lenta Resposta
media
Resposta
rapida
𝑘𝑝 900 1236 1,7x104 1,7x10
6 2,13 2,13
𝑘𝑖 7500 5x103 6x10
5 6,5x10
8 12,31 12,31
𝑘𝑑 15 4 41 408 0,03 0,03
Nas Figuras 61 e 62 abaixo, a faixa de deslocamento dos eixos x e y é de -1 mm a 1 mm, que
corresponde respectivamente a 0 e 4V no osciloscópio. Os deslocamentos do eixo x e do eixo
y são representados respectivamente pelos traços amarelo e azul, respectivamente. As
correntes de bias foram de 2,0 A no eixo x e 2,4 A no eixo y. Cada divisão representa um
deslocamento de 1 mm ou 2 V.

82
Figura 61. Eixos 𝑥 (traço amarelo) e 𝑦 (traço azul) centralizados em 2V.
Figura 62. Mudança de referência no eixo 𝑥 (amarelo-esquerda) e no eixo 𝑦 (azul-direita).
Devido às imperfeições no alinhamento dos sensores de deslocamento, foi observado durante
os testes que os valores de referência para centralizar os eixos x e y foram diferentes.
Um teste de carga contra corrente foi em seguida realizado para determinar verificar a relação
linear entre a força magnética e a corrente. O teste consistiu em amarar ao rotor centralizado
um conjunto de porca e parafusos num eixo, o eixo y nesse caso. O conjunto é deixado em
balanço, a corrente é medida nas bobinas e, em seguida a carga é aumentada, Figura 63.
A Figura 64 ilustra os resultados desse teste. Como esperado a corrente nas bobinas 5-6 nas
quais foram aplicadas a carga diminui, enquanto a corrente nas bobinas opostas 1-2 aumenta.

83
Figura 63. Teste da carga contra corrente.
Figura 64. Carga (gf) contra corrente total (A) nas bobinas 1-2 e 5-6 com carga e 5-6

84
Conclusão e Considerações Futuras
Foi mostrado experimentalmente que a estrutura de enrolamentos distribuídos próprias de um
motor de corrente alternada, cumpre com seu objetivo de substituir a estrutura de
enrolamentos concentrados usual com mancais magnéticos ativos. Os testes realizados em
laboratório mostraram a aplicabilidade do motor convencional bifásico modificado para ser
utilizado como mancal magnético. Os controladores utilizados são economicamente
acessíveis e práticos para teste em laboratório acadêmico, entretanto para uma aplicação
industrial há necessidade de se utilizar controladores mais sofisticados, economicamente
mais caros e mais rápidos. O principal motivo para essa necessidade é o tempo de resposta, e
o ajuste da referência e dos parâmetros do controlador PID, se o mesmo for utilizado em
operação. Durante o teste em laboratório, esses ajustes foram feitos off-line. Numa aplicação
industrial, esse tipo de ajuste não é permitido.

85
Referências Bibliográficas
[1] A. Chiba, T. Fukao, O. Ichikawa, M. Oshima, M. Takemoto, D. G. Dorrell,
“Magnetic Bearings and Bearingless Drives”, 1st ed, Ed. Elsevier, 2005.
[2] G. Schweitzer, H. Bleuer, A. Traxler, “Active Magnetic Bearings – Basic, Properties
and Applications of Active Magnetic Bearings”, Ed. Vdf Hochschulverlag AG an der ETH
Zürich, 1994.
[3] F. Kudlačák, T. Krajčovič, “Error Behaviour in PID Control System with Dynamic
Processes”, IEEE Conference Publications, pp.141–144, Sept 2016.
[4] X. Yuan, Y. Song, Z. Jia , “Adaptive PD Approach For Semi-Active Suspension
Control of High Speed Trains”, 12th World Congress on Intelligent Control and Automation,
pp. 2672-2676, June 2016.
[5] C. Gu, X. Wang, T. Sheng, “An Improved Direct-Self Control Method for High-
Speed Permanent Magnet Synchronous Motor”, pp 2502-2057, August 2015
[6] S. A. Fandakli, H. I. Okumus , “Antenna Azimuth Position Control with PID, Fuzzy
Logic and Sliding Mode Controllers”, 2016 International Symposium on lNnovations in
Intelligent SysTems and Applications, pp. 1-5, Aug. 2016.
[7] J. Sergey, S. Sergei, Y. Andrey, “Comparative Analysis of Iteative LQR and
Adaptive PD Controllers for a Lower Limb Exoskeleton”, The 6th Annual IEEE International
Conference on Cyber Technology in Automation, Control and Intelligent Systems, June
2016, pp 239 - 244, June 2016.
[8] W. Tong, Z. Lin, “Continuous Closed-Loop Control Method based on Intelligent
Adaptive PID Algoritm in the Walking Guidance System for the Blind”, The 6th Annual
IEEE International Conference on Cyber Technology in Automation, Control and Intelligent
Systems, June 2016, pp 518-523, June 2016.

86
[9] Y. Furukawa, F. Kurokawa, I. Colak, “Digital PID Based Two-Compensator for DC-
DC Converter”, 2015 IEEE International Telecommunications Energy Conference
(INTELEC), pp 1-4, October 2015.
[10] Y-S. Wang, N. Matni, “Localized LQG Optimal Control for Large-Scale Systems”,
2016 American Control Conference (ACC), pp 1954-1961, July 2016.
[11] P. K. Agarwal, S. Chand, “Fuzzy Logic Control of Four-Pole Active Magnetic
Bearing System”, International Journal of Modelling, Identification and Control, Vol 12, No
4 , pp 395 – 411 , 2011.
[12] R. M. Stephan, F. C. Pinto, A. C. Gomes, J. A. Santisteban, A. O. Salazar, "Mancais
magnéticos - Mecatrônica sem atrito", Editora Ciência Moderna, 2013.
[13] R. M. Stephan, O. J. Machado, I. Forain, R. de Andrade Jr. “Experiências de levitação
magnética”. Congresso Brasileiro de Automação, pp 309-12, 2002.
[14] V. Kluyskens, C. Dumont, B. Dehez, “ Description of an electrodynamic self-bearing
permanent magnet machine ”, IEEE Transactions on Magnetics, Vol 53, Issue 1, 2017.
[15] J. Van Verdeghem, C. Dumont, V. Kluyskens, and B. Dehez, “Linear State-Space
Representation of the Axial Dynamics of Electrodynamic Thrust Bearings”, IEEE
Transactions on Magnetics, Vol 52, No.10, October 2016.
[16] C. Dumont, V. Kluyskens, B. Dehez, “Linear State-Space Representation of
Heteropolar Electrodynamic Bearings With Radial Magnetic Field”, IEEE Transactions on
Magnetics, Vol 52, No.1, January 2016.
[17] S. I. Yoo, M. J. Kramer, R. W. McCallum, “Superconductivity and Flux Pinning in
Nd1+xBa2-xCu3O7+δ”, IEEE Transactions on Applied Superconductivity , Vol 3, No 1, pp
1232 -1235, March 1993
[18] M. Sparing, M. Hossain, D. Berger, A. Berger, A. Abdkader, G. Fuchs, C. Cherif, L.
Schultz, “Superconducting Magnetic Bearing as Twist Element in Textile Machines”, IEEE
Transactions on Applied Superconductivity, Vol. 25, No. 3, June 205, pp 1-4.

87
[19] L. Quéval, G. G. Sotelo, Y. Kharmiz, D. H. N. Dias, F. Sass, V. R. Zermeño, R.
Gottkehaskamp, “Optimization of the Superconducting Linear Magnetic Bearing of a Maglev
Vehicle”, IEEE Transactios on Applied Superconductivity, Vol. 26, No. 3, pp 1 -5, April
2016.
[20] T. Matsumura, H. Kataza, S. Utsunomiya, R. Yamamoto, M. Hazumi, N. Katayama,
“Design and Performance of a Prototype Polarization Modulator Rotational System for Use
in Space Using a Superconducting Magnetic Bearing”, Vol. 26, No. 3, pg 1-4, April 2016.
[21] H. Gotanda, R. Amano, T.Sugiura, “Mode Coupling of a Flexible Rotor Supported by
a Superconducting Magnetic Bearing Due to the Nonlinearity of Electromagnetic Force”,
IEEE Transactios on Applied Superconductivity, Vol. 21, No. 3, pp 1481-1484, June 2011.
[22] J-H Jeong, C-W. Ha, J. Lim, J-Y Choi, “Analysis and Control of the Electromagnetic
Coupling Effect of the Levitation and Guidance Systems for a Semi-High Speed MAGLEV
using a Magnetic Equivalent Circuit”, IEEE Transactions on Magnetics, Vol. 52, No. 7, July
2016.
[23] C. Tshizubu, J.A.Santisteban, “A Simple PID Controller for a Magnetic Bearing with
Four Poles and Interconnected Magnetic Flux”, submitted to the 6th
International Symposium
on Advanced Control of Industrial Processes (AdCONIP 2017) in 2016, accepted.
[24] M. A. Akram, I. Haider, H-U-R. Khalid, “Sliding Mode Control for Electromagnetic
Levitation System Based on Feedback Linearization”, 2015 Pattern Recognition Association
of South Africa and Robotics and Mechatronics International Conference, November 2015
[25] ThyssenKrupp Transprapid, www.transrapid.de, site acessado em novembro 2016.
[26] J.A. Santisteban, “Estudo da Influência da Carga Torsional sobre o Posicionamento
Radial de um Motor-Mancal”, D.Sc. Tese, COPEE-UFRJ, 1999.
[27] D. F. B. David, “Levitação de Rotor por Mancais-motores Radiais Magnéticos e
Mancal Axial Supercondutor Auto-Estável”, D. Sc. Tese, COPPE-UFRJ, 2000.
[28] Teoria do giroscopio,
http://imagem.casadasciencias.org/online/36849199/23_giroscopio-teoria.htm , site acessado

88
em abril de 2017.CONSULTAR MERIAM E LIVRO DO PROFESSOR MANCAL
MAGNÉTICO
[29] D. David, J.A. Santisteban and A.C. Del Nero Gomes, “Interconnected Four Poles
Magnetic Bearings Simulations and Testing”, Proceedings of the 14th International
Symposium on Magnetic Bearings (ISMB14), pp. 30-35, August 2014.
[30] E. F. R. Velandia, “Uma Contribuição à Modelagem e Controle do Motor de Indução
Suportado Magneticamente”, Ph. D. dissertation, Universidade Federal Fluminense, Niterói,
RJ, 2005
[31] Y. Fang-Chen, Z. Dian-Hua, H. Tian-yi, Z. Yu-Cheng, “Decoupling Control based on
Sliding Mode Controller for Looper System”,
[32] Y. Wang, T. Chain, L. Zhai, “Nonlinear Multiple Models Adaptive Decoupling PID
Control based on Generalized Predictive Control”, Proceedings of the 7th Asian Control
Conference, August 2009.
[33] L. Zhai, T. Chai, Y. Shi, « Nonlinear Multivariable Decoupling PID Control Using
Neural Networks », IEEE, 2005.
[34] K. Ogata, “Engenharia de Controle Moderno”, 4ª ed, Ed. Pearson Prentice Hall, 2003.
[35] M. Shahroki, A. Zomorrodi, “Comparison of PID Controller Tuning Methods”,
[36] National Instruments, www.ni.com, site acessado em novembro 2016.
[37] Micro-Epsilon, www.micro-epsilon.com, acessado no site do fabricante em novembro
de 2016.
[38] Arduino, www.arduino.cc, acessado no site do fabricante em novembro 2016.
[39] SaintSmart, www.saintsmart.com, acessado no site do fabricante em novembro 2016.
[40] Texas Instruments, www.ti.com, site acessado em novembro 2016.
[41] Europower Components, www.europowercomponents.com, site acessado em
novembro 2016.

89
[42] Mikrocontroller, www.mikrocontroller.net, site acessado em novembro 2016.
[43] K.J. Astrom, T.Haggund, “Automatic tuning of PID controllers”, Instruments Society
of America, 1988.

90
Anexos
A. DETERMINAÇÃO DOS COMPONENTES DA MATRIZ DE INDUTÂNCIA
/* [wxMaxima: comment start ]
CÁLCULO DA MATRIZ DE INDUTÂNCIA
[wxMaxima: comment end ] */
/* [wxMaxima: comment start ]
1. CÁLCULO DAS RELUTÂNCIAS MAGNÉTICAS
[wxMaxima: comment end ] */
/* [wxMaxima: input start ] */
A:u*A1;
R1:y/A;
R2:(2*ho-y)/A;
R3: x/A;
R4:(2*ho-x)/A;
Geq: 1/R1+1/R2+1/R3+1/R4;
Req :1/Geq;
(A)A1*u
(R1)y/(A1*u)
(R2)(2*ho-y)/(A1*u)
(R3)x/(A1*u)

91
(R4)(2*ho-x)/(A1*u)
(Geq)(A1*u)/y+(A1*u)/(2*ho-y)+(A1*u)/x+(A1*u)/(2*ho-x)
(Req)1/((A1*u)/y+(A1*u)/(2*ho-y)+(A1*u)/x+(A1*u)/(2*ho-x))
/* [wxMaxima: input end ] */
/* [wxMaxima: comment start ]
2. CÁLCULO DOS COMPONENTES DA MATRIZ DE INDUTÂNCIAS
[wxMaxima: comment end ] */
/* [wxMaxima: input start ] */
L11:N^2*((1/R1)-(Req/((R1)^2)));
L12:-N^2*(Req/(R1*R2));
L13:-N^2*(Req/(R1*R3));
L14:-N^2*(Req/(R1*R4));
L21:L12;
L22: N^2*((1/R2)-(Req/((R2)^2)));
L23: -N^2*(Req/(R2*R3));
L24:-N^2*(Req/(R2*R4));
L31: L13;
L32: L23;
L33: N^2*((1/R3)-(Req/((R3)^2)));
L34: -N^2*(Req/(R3*R4));
L41:L14;
L42:L24;
L43:L34;

92
L44: N^2*((1/R4)-(Req/((R4)^2)));
(L11)N^2*((A1*u)/y-(A1^2*u^2)/(((A1*u)/y+(A1*u)/(2*ho-y)+(A1*u)/x+(A1*u)/(2*ho-
x))*y^2))
(L12)-(A1^2*N^2*u^2)/(((A1*u)/y+(A1*u)/(2*ho-y)+(A1*u)/x+(A1*u)/(2*ho-x))*(2*ho-
y)*y)
(L13)-(A1^2*N^2*u^2)/(x*((A1*u)/y+(A1*u)/(2*ho-y)+(A1*u)/x+(A1*u)/(2*ho-x))*y)
(L14)-(A1^2*N^2*u^2)/((2*ho-x)*((A1*u)/y+(A1*u)/(2*ho-y)+(A1*u)/x+(A1*u)/(2*ho-
x))*y)
(L21)-(A1^2*N^2*u^2)/(((A1*u)/y+(A1*u)/(2*ho-y)+(A1*u)/x+(A1*u)/(2*ho-x))*(2*ho-
y)*y)
(L22)N^2*((A1*u)/(2*ho-y)-(A1^2*u^2)/(((A1*u)/y+(A1*u)/(2*ho-
y)+(A1*u)/x+(A1*u)/(2*ho-x))*(2*ho-y)^2))
(L23)-(A1^2*N^2*u^2)/(x*((A1*u)/y+(A1*u)/(2*ho-y)+(A1*u)/x+(A1*u)/(2*ho-x))*(2*ho-
y))
(L24)-(A1^2*N^2*u^2)/((2*ho-x)*((A1*u)/y+(A1*u)/(2*ho-y)+(A1*u)/x+(A1*u)/(2*ho-
x))*(2*ho-y))
(L31)-(A1^2*N^2*u^2)/(x*((A1*u)/y+(A1*u)/(2*ho-y)+(A1*u)/x+(A1*u)/(2*ho-x))*y)
(L32)-(A1^2*N^2*u^2)/(x*((A1*u)/y+(A1*u)/(2*ho-y)+(A1*u)/x+(A1*u)/(2*ho-x))*(2*ho-
y))
(L33)N^2*((A1*u)/x-(A1^2*u^2)/(x^2*((A1*u)/y+(A1*u)/(2*ho-
y)+(A1*u)/x+(A1*u)/(2*ho-x))))
(L34)-(A1^2*N^2*u^2)/((2*ho-x)*x*((A1*u)/y+(A1*u)/(2*ho-y)+(A1*u)/x+(A1*u)/(2*ho-
x)))
(L41)-(A1^2*N^2*u^2)/((2*ho-x)*((A1*u)/y+(A1*u)/(2*ho-y)+(A1*u)/x+(A1*u)/(2*ho-
x))*y)
(L42)-(A1^2*N^2*u^2)/((2*ho-x)*((A1*u)/y+(A1*u)/(2*ho-y)+(A1*u)/x+(A1*u)/(2*ho-
x))*(2*ho-y))

93
(L43)-(A1^2*N^2*u^2)/((2*ho-x)*x*((A1*u)/y+(A1*u)/(2*ho-y)+(A1*u)/x+(A1*u)/(2*ho-
x)))
(L44)N^2*((A1*u)/(2*ho-x)-(A1^2*u^2)/((2*ho-x)^2*((A1*u)/y+(A1*u)/(2*ho-
y)+(A1*u)/x+(A1*u)/(2*ho-x))))
/* [wxMaxima: input end ] */
/* [wxMaxima: comment start ]
3. CÁLCULO DA MATRIZ DE INDUTÂNCIA
[wxMaxima: comment end ] */
/* [wxMaxima: input start ] */
L: matrix(
[L11,L12,L13,L14],
[L21,L22,L23,L24],
[L31,L32,L33,L34],
[L41,L42,L43,L44]
);
(L)
matrix([N^2*((A1*u)/y-(A1^2*u^2)/(((A1*u)/y+(A1*u)/(2*ho-y)+(A1*u)/x+(A1*u)/(2*ho-
x))*y^2)),-(A1^2*N^2*u^2)/(((A1*u)/y+(A1*u)/(2*ho-y)+(A1*u)/x+(A1*u)/(2*ho-
x))*(2*ho-y)*y),-(A1^2*N^2*u^2)/(x*((A1*u)/y+(A1*u)/(2*ho-
y)+(A1*u)/x+(A1*u)/(2*ho-x))*y),-(A1^2*N^2*u^2)/((2*ho-x)*((A1*u)/y+(A1*u)/(2*ho-
y)+(A1*u)/x+(A1*u)/(2*ho-x))*y)],[-(A1^2*N^2*u^2)/(((A1*u)/y+(A1*u)/(2*ho-
y)+(A1*u)/x+(A1*u)/(2*ho-x))*(2*ho-y)*y),N^2*((A1*u)/(2*ho-y)-
(A1^2*u^2)/(((A1*u)/y+(A1*u)/(2*ho-y)+(A1*u)/x+(A1*u)/(2*ho-x))*(2*ho-y)^2)),-
(A1^2*N^2*u^2)/(x*((A1*u)/y+(A1*u)/(2*ho-y)+(A1*u)/x+(A1*u)/(2*ho-x))*(2*ho-y)),-
(A1^2*N^2*u^2)/((2*ho-x)*((A1*u)/y+(A1*u)/(2*ho-y)+(A1*u)/x+(A1*u)/(2*ho-
x))*(2*ho-y))],[-(A1^2*N^2*u^2)/(x*((A1*u)/y+(A1*u)/(2*ho-y)+(A1*u)/x+(A1*u)/(2*ho-
x))*y),-(A1^2*N^2*u^2)/(x*((A1*u)/y+(A1*u)/(2*ho-y)+(A1*u)/x+(A1*u)/(2*ho-

94
x))*(2*ho-y)),N^2*((A1*u)/x-(A1^2*u^2)/(x^2*((A1*u)/y+(A1*u)/(2*ho-
y)+(A1*u)/x+(A1*u)/(2*ho-x)))),-(A1^2*N^2*u^2)/((2*ho-x)*x*((A1*u)/y+(A1*u)/(2*ho-
y)+(A1*u)/x+(A1*u)/(2*ho-x)))],[-(A1^2*N^2*u^2)/((2*ho-x)*((A1*u)/y+(A1*u)/(2*ho-
y)+(A1*u)/x+(A1*u)/(2*ho-x))*y),-(A1^2*N^2*u^2)/((2*ho-x)*((A1*u)/y+(A1*u)/(2*ho-
y)+(A1*u)/x+(A1*u)/(2*ho-x))*(2*ho-y)),-(A1^2*N^2*u^2)/((2*ho-
x)*x*((A1*u)/y+(A1*u)/(2*ho-y)+(A1*u)/x+(A1*u)/(2*ho-x))),N^2*((A1*u)/(2*ho-x)-
(A1^2*u^2)/((2*ho-x)^2*((A1*u)/y+(A1*u)/(2*ho-y)+(A1*u)/x+(A1*u)/(2*ho-x))))])
/* [wxMaxima: input end ] */
/* [wxMaxima: comment start ]
4. CÁLCULO DAS DERIVAS DOS COMPONENTES DA MATRIZ DE INDUTÂNCIAS
EM RELAÇÃO A Y.
[wxMaxima: comment end ] */
/* [wxMaxima: input start ] */
Y11:diff(L11,y,1);
Y12:diff(L12,y,1);
Y13:diff(L13,y,1);
Y14:diff(L14,y,1);
Y21:Y12;
Y22:diff(L22,y,1);
Y23:diff(L23,y,1);
Y24:diff(L24,y,1);
Y31:Y13;
Y32:Y23;
Y33:diff(L33,y,1);
Y34:diff(L34,y,1);

95
Y41:Y14;
Y42:Y24;
Y43:Y34;
Y44:diff(L44,y,1);
(Y11)N^2*((A1^2*u^2*((A1*u)/(2*ho-y)^2-(A1*u)/y^2))/(((A1*u)/y+(A1*u)/(2*ho-
y)+(A1*u)/x+(A1*u)/(2*ho-x))^2*y^2)-
(A1*u)/y^2+(2*A1^2*u^2)/(((A1*u)/y+(A1*u)/(2*ho-y)+(A1*u)/x+(A1*u)/(2*ho-x))*y^3))
(Y12)(A1^2*N^2*u^2*((A1*u)/(2*ho-y)^2-(A1*u)/y^2))/(((A1*u)/y+(A1*u)/(2*ho-
y)+(A1*u)/x+(A1*u)/(2*ho-x))^2*(2*ho-y)*y)-(A1^2*N^2*u^2)/(((A1*u)/y+(A1*u)/(2*ho-
y)+(A1*u)/x+(A1*u)/(2*ho-x))*(2*ho-y)^2*y)+
(A1^2*N^2*u^2)/(((A1*u)/y+(A1*u)/(2*ho-y)+(A1*u)/x+(A1*u)/(2*ho-x))*(2*ho-y)*y^2)
(Y13)(A1^2*N^2*u^2*((A1*u)/(2*ho-y)^2-(A1*u)/y^2))/(x*((A1*u)/y+(A1*u)/(2*ho-
y)+(A1*u)/x+(A1*u)/(2*ho-x))^2*y)+(A1^2*N^2*u^2)/(x*((A1*u)/y+(A1*u)/(2*ho-
y)+(A1*u)/x+(A1*u)/(2*ho-x))*y^2)
(Y14)(A1^2*N^2*u^2*((A1*u)/(2*ho-y)^2-(A1*u)/y^2))/((2*ho-
x)*((A1*u)/y+(A1*u)/(2*ho-y)+(A1*u)/x+(A1*u)/(2*ho-x))^2*y)+(A1^2*N^2*u^2)/((2*ho-
x)*((A1*u)/y+(A1*u)/(2*ho-y)+(A1*u)/x+(A1*u)/(2*ho-x))*y^2)
(Y21)(A1^2*N^2*u^2*((A1*u)/(2*ho-y)^2-(A1*u)/y^2))/(((A1*u)/y+(A1*u)/(2*ho-
y)+(A1*u)/x+(A1*u)/(2*ho-x))^2*(2*ho-y)*y)-(A1^2*N^2*u^2)/(((A1*u)/y+(A1*u)/(2*ho-
y)+(A1*u)/x+(A1*u)/(2*ho-x))*(2*ho-y)^2*y)+
(A1^2*N^2*u^2)/(((A1*u)/y+(A1*u)/(2*ho-y)+(A1*u)/x+(A1*u)/(2*ho-x))*(2*ho-y)*y^2)
(Y22)N^2*((A1^2*u^2*((A1*u)/(2*ho-y)^2-(A1*u)/y^2))/(((A1*u)/y+(A1*u)/(2*ho-
y)+(A1*u)/x+(A1*u)/(2*ho-x))^2*(2*ho-y)^2)+(A1*u)/(2*ho-y)^2-
(2*A1^2*u^2)/(((A1*u)/y+(A1*u)/(2*ho-y)+(A1*u)/x+(A1*u)/(2*ho-x))*(2*ho-y)^3))
(Y23)(A1^2*N^2*u^2*((A1*u)/(2*ho-y)^2-(A1*u)/y^2))/(x*((A1*u)/y+(A1*u)/(2*ho-
y)+(A1*u)/x+(A1*u)/(2*ho-x))^2*(2*ho-y))-(A1^2*N^2*u^2)/(x*((A1*u)/y+(A1*u)/(2*ho-
y)+(A1*u)/x+(A1*u)/(2*ho-x))*(2*ho-y)^2)
(Y24)(A1^2*N^2*u^2*((A1*u)/(2*ho-y)^2-(A1*u)/y^2))/((2*ho-
x)*((A1*u)/y+(A1*u)/(2*ho-y)+(A1*u)/x+(A1*u)/(2*ho-x))^2*(2*ho-y))-
(A1^2*N^2*u^2)/((2*ho-x)*((A1*u)/y+(A1*u)/(2*ho-y)+(A1*u)/x+(A1*u)/(2*ho-
x))*(2*ho-y)^2)

96
(Y31)(A1^2*N^2*u^2*((A1*u)/(2*ho-y)^2-(A1*u)/y^2))/(x*((A1*u)/y+(A1*u)/(2*ho-
y)+(A1*u)/x+(A1*u)/(2*ho-x))^2*y)+(A1^2*N^2*u^2)/(x*((A1*u)/y+(A1*u)/(2*ho-
y)+(A1*u)/x+(A1*u)/(2*ho-x))*y^2)
(Y32)(A1^2*N^2*u^2*((A1*u)/(2*ho-y)^2-(A1*u)/y^2))/(x*((A1*u)/y+(A1*u)/(2*ho-
y)+(A1*u)/x+(A1*u)/(2*ho-x))^2*(2*ho-y))-(A1^2*N^2*u^2)/(x*((A1*u)/y+(A1*u)/(2*ho-
y)+(A1*u)/x+(A1*u)/(2*ho-x))*(2*ho-y)^2)
(Y33)(A1^2*N^2*u^2*((A1*u)/(2*ho-y)^2-(A1*u)/y^2))/(x^2*((A1*u)/y+(A1*u)/(2*ho-
y)+(A1*u)/x+(A1*u)/(2*ho-x))^2)
(Y34)(A1^2*N^2*u^2*((A1*u)/(2*ho-y)^2-(A1*u)/y^2))/((2*ho-
x)*x*((A1*u)/y+(A1*u)/(2*ho-y)+(A1*u)/x+(A1*u)/(2*ho-x))^2)
(Y41)(A1^2*N^2*u^2*((A1*u)/(2*ho-y)^2-(A1*u)/y^2))/((2*ho-
x)*((A1*u)/y+(A1*u)/(2*ho-y)+(A1*u)/x+(A1*u)/(2*ho-x))^2*y)+(A1^2*N^2*u^2)/((2*ho-
x)*((A1*u)/y+(A1*u)/(2*ho-y)+(A1*u)/x+(A1*u)/(2*ho-x))*y^2)
(Y42)(A1^2*N^2*u^2*((A1*u)/(2*ho-y)^2-(A1*u)/y^2))/((2*ho-
x)*((A1*u)/y+(A1*u)/(2*ho-y)+(A1*u)/x+(A1*u)/(2*ho-x))^2*(2*ho-y))-
(A1^2*N^2*u^2)/((2*ho-x)*((A1*u)/y+(A1*u)/(2*ho-y)+(A1*u)/x+(A1*u)/(2*ho-
x))*(2*ho-y)^2)
(Y43)(A1^2*N^2*u^2*((A1*u)/(2*ho-y)^2-(A1*u)/y^2))/((2*ho-
x)*x*((A1*u)/y+(A1*u)/(2*ho-y)+(A1*u)/x+(A1*u)/(2*ho-x))^2)
(Y44)(A1^2*N^2*u^2*((A1*u)/(2*ho-y)^2-(A1*u)/y^2))/((2*ho-
x)^2*((A1*u)/y+(A1*u)/(2*ho-y)+(A1*u)/x+(A1*u)/(2*ho-x))^2)
/* [wxMaxima: input end ] */
/* [wxMaxima: comment start ]
5. CÁLCULO DE MATRIZ DERIVADA DE INDUTÂNCIA
[wxMaxima: comment end ] */
/* [wxMaxima: input start ] */
Y: matrix(
[Y11,Y12,Y13,Y14],

97
[Y21,Y22,Y23,Y24],
[Y31,Y32,Y33,Y34],
[Y41,Y42,Y43,Y44]
);
(Y)
matrix([N^2*((A1^2*u^2*((A1*u)/(2*ho-y)^2-(A1*u)/y^2))/(((A1*u)/y+(A1*u)/(2*ho-
y)+(A1*u)/x+(A1*u)/(2*ho-x))^2*y^2)-
(A1*u)/y^2+(2*A1^2*u^2)/(((A1*u)/y+(A1*u)/(2*ho-y)+(A1*u)/x+(A1*u)/(2*ho-
x))*y^3)),(A1^2*N^2*u^2*((A1*u)/(2*ho-y)^2-(A1*u)/y^2))/(((A1*u)/y+(A1*u)/(2*ho-
y)+(A1*u)/x+(A1*u)/(2*ho-x))^2*(2*ho-y)*y)-(A1^2*N^2*u^2)/(((A1*u)/y+(A1*u)/(2*ho-
y)+(A1*u)/x+(A1*u)/(2*ho-x))*(2*ho-y)^2*y)+(A1^2*N^2*u^2)/(((A1*u)/y+(A1*u)/(2*ho-
y)+(A1*u)/x+(A1*u)/(2*ho-x))*(2*ho-y)*y^2),(A1^2*N^2*u^2*((A1*u)/(2*ho-y)^2-
(A1*u)/y^2))/(x*((A1*u)/y+(A1*u)/(2*ho-y)+(A1*u)/x+(A1*u)/(2*ho-
x))^2*y)+(A1^2*N^2*u^2)/(x*((A1*u)/y+(A1*u)/(2*ho-y)+(A1*u)/x+(A1*u)/(2*ho-
x))*y^2),(A1^2*N^2*u^2*((A1*u)/(2*ho-y)^2-(A1*u)/y^2))/((2*ho-
x)*((A1*u)/y+(A1*u)/(2*ho-y)+(A1*u)/x+(A1*u)/(2*ho-x))^2*y)+(A1^2*N^2*u^2)/((2*ho-
x)*((A1*u)/y+(A1*u)/(2*ho-y)+(A1*u)/x+(A1*u)/(2*ho-
x))*y^2)],[(A1^2*N^2*u^2*((A1*u)/(2*ho-y)^2-(A1*u)/y^2))/(((A1*u)/y+(A1*u)/(2*ho-
y)+(A1*u)/x+(A1*u)/(2*ho-x))^2*(2*ho-y)*y)-(A1^2*N^2*u^2)/(((A1*u)/y+(A1*u)/(2*ho-
y)+(A1*u)/x+(A1*u)/(2*ho-x))*(2*ho-y)^2*y)+(A1^2*N^2*u^2)/(((A1*u)/y+(A1*u)/(2*ho-
y)+(A1*u)/x+(A1*u)/(2*ho-x))*(2*ho-y)*y^2),N^2*((A1^2*u^2*((A1*u)/(2*ho-y)^2-
(A1*u)/y^2))/(((A1*u)/y+(A1*u)/(2*ho-y)+(A1*u)/x+(A1*u)/(2*ho-x))^2*(2*ho-
y)^2)+(A1*u)/(2*ho-y)^2-(2*A1^2*u^2)/(((A1*u)/y+(A1*u)/(2*ho-
y)+(A1*u)/x+(A1*u)/(2*ho-x))*(2*ho-y)^3)),(A1^2*N^2*u^2*((A1*u)/(2*ho-y)^2-
(A1*u)/y^2))/(x*((A1*u)/y+(A1*u)/(2*ho-y)+(A1*u)/x+(A1*u)/(2*ho-x))^2*(2*ho-y))-
(A1^2*N^2*u^2)/(x*((A1*u)/y+(A1*u)/(2*ho-y)+(A1*u)/x+(A1*u)/(2*ho-x))*(2*ho-
y)^2),(A1^2*N^2*u^2*((A1*u)/(2*ho-y)^2-(A1*u)/y^2))/((2*ho-
x)*((A1*u)/y+(A1*u)/(2*ho-y)+(A1*u)/x+(A1*u)/(2*ho-x))^2*(2*ho-y))-
(A1^2*N^2*u^2)/((2*ho-x)*((A1*u)/y+(A1*u)/(2*ho-y)+(A1*u)/x+(A1*u)/(2*ho-
x))*(2*ho-y)^2)],[(A1^2*N^2*u^2*((A1*u)/(2*ho-y)^2-
(A1*u)/y^2))/(x*((A1*u)/y+(A1*u)/(2*ho-y)+(A1*u)/x+(A1*u)/(2*ho-
x))^2*y)+(A1^2*N^2*u^2)/(x*((A1*u)/y+(A1*u)/(2*ho-y)+(A1*u)/x+(A1*u)/(2*ho-
x))*y^2),(A1^2*N^2*u^2*((A1*u)/(2*ho-y)^2-(A1*u)/y^2))/(x*((A1*u)/y+(A1*u)/(2*ho-
y)+(A1*u)/x+(A1*u)/(2*ho-x))^2*(2*ho-y))-(A1^2*N^2*u^2)/(x*((A1*u)/y+(A1*u)/(2*ho-
y)+(A1*u)/x+(A1*u)/(2*ho-x))*(2*ho-y)^2),(A1^2*N^2*u^2*((A1*u)/(2*ho-y)^2-
(A1*u)/y^2))/(x^2*((A1*u)/y+(A1*u)/(2*ho-y)+(A1*u)/x+(A1*u)/(2*ho-

98
x))^2),(A1^2*N^2*u^2*((A1*u)/(2*ho-y)^2-(A1*u)/y^2))/((2*ho-
x)*x*((A1*u)/y+(A1*u)/(2*ho-y)+(A1*u)/x+(A1*u)/(2*ho-
x))^2)],[(A1^2*N^2*u^2*((A1*u)/(2*ho-y)^2-(A1*u)/y^2))/((2*ho-
x)*((A1*u)/y+(A1*u)/(2*ho-y)+(A1*u)/x+(A1*u)/(2*ho-x))^2*y)+(A1^2*N^2*u^2)/((2*ho-
x)*((A1*u)/y+(A1*u)/(2*ho-y)+(A1*u)/x+(A1*u)/(2*ho-
x))*y^2),(A1^2*N^2*u^2*((A1*u)/(2*ho-y)^2-(A1*u)/y^2))/((2*ho-
x)*((A1*u)/y+(A1*u)/(2*ho-y)+(A1*u)/x+(A1*u)/(2*ho-x))^2*(2*ho-y))-
(A1^2*N^2*u^2)/((2*ho-x)*((A1*u)/y+(A1*u)/(2*ho-y)+(A1*u)/x+(A1*u)/(2*ho-
x))*(2*ho-y)^2),(A1^2*N^2*u^2*((A1*u)/(2*ho-y)^2-(A1*u)/y^2))/((2*ho-
x)*x*((A1*u)/y+(A1*u)/(2*ho-y)+(A1*u)/x+(A1*u)/(2*ho-
x))^2),(A1^2*N^2*u^2*((A1*u)/(2*ho-y)^2-(A1*u)/y^2))/((2*ho-
x)^2*((A1*u)/y+(A1*u)/(2*ho-y)+(A1*u)/x+(A1*u)/(2*ho-x))^2)])
/* [wxMaxima: input end ] */
/* [wxMaxima: input start ] */
YD:factor(%o42);
matrix([-(A1*N^2*u*(y-2*ho)*(ho*y+x^2-2*ho*x-2*ho^2))/(ho*(y^2-2*ho*y+x^2-
2*ho*x)^2),(A1*N^2*u*x*(x-2*ho)*(y-ho))/(ho*(y^2-2*ho*y+x^2-2*ho*x)^2),-
(A1*N^2*u*(x-2*ho)*(y^2-4*ho*y-x^2+2*ho*x+4*ho^2))/(2*ho*(y^2-2*ho*y+x^2-
2*ho*x)^2),(A1*N^2*u*x*(y^2-4*ho*y-x^2+2*ho*x+4*ho^2))/(2*ho*(y^2-2*ho*y+x^2-
2*ho*x)^2)],[(A1*N^2*u*x*(x-2*ho)*(y-ho))/(ho*(y^2-2*ho*y+x^2-
2*ho*x)^2),(A1*N^2*u*y*(ho*y-x^2+2*ho*x))/(ho*(y^2-2*ho*y+x^2-
2*ho*x)^2),(A1*N^2*u*(x-2*ho)*(y^2-x^2+2*ho*x))/(2*ho*(y^2-2*ho*y+x^2-
2*ho*x)^2),-(A1*N^2*u*x*(y^2-x^2+2*ho*x))/(2*ho*(y^2-2*ho*y+x^2-2*ho*x)^2)],[-
(A1*N^2*u*(x-2*ho)*(y^2-4*ho*y-x^2+2*ho*x+4*ho^2))/(2*ho*(y^2-2*ho*y+x^2-
2*ho*x)^2),(A1*N^2*u*(x-2*ho)*(y^2-x^2+2*ho*x))/(2*ho*(y^2-2*ho*y+x^2-
2*ho*x)^2),(A1*N^2*u*(x-2*ho)^2*(y-ho))/(ho*(y^2-2*ho*y+x^2-2*ho*x)^2),-
(A1*N^2*u*x*(x-2*ho)*(y-ho))/(ho*(y^2-2*ho*y+x^2-2*ho*x)^2)],[(A1*N^2*u*x*(y^2-
4*ho*y-x^2+2*ho*x+4*ho^2))/(2*ho*(y^2-2*ho*y+x^2-2*ho*x)^2),-(A1*N^2*u*x*(y^2-
x^2+2*ho*x))/(2*ho*(y^2-2*ho*y+x^2-2*ho*x)^2),-(A1*N^2*u*x*(x-2*ho)*(y-
ho))/(ho*(y^2-2*ho*y+x^2-2*ho*x)^2),(A1*N^2*u*x^2*(y-ho))/(ho*(y^2-2*ho*y+x^2-
2*ho*x)^2)])
/* [wxMaxima: input end ] */
99
/* [wxMaxima: comment start ]
6. CÁLCULO DA FORÇA MAGNÉTICA FY
[wxMaxima: comment end ] */
/* [wxMaxima: input start ] */
I: matrix(
[iy1],
[iy2],
[ix1],
[ix2]
);
/* [wxMaxima: input end ] */
/* [wxMaxima: input start ] */
IT:transpose(I);
matrix([iy1,iy2,ix1,ix2])
/* [wxMaxima: input end ] */
/* [wxMaxima: input start ] */
J:IT.YD;
matrix([-(A1*N^2*ix1*u*(x-2*ho)*(y^2-4*ho*y-x^2+2*ho*x+4*ho^2))/(2*ho*(y^2-
2*ho*y+x^2-2*ho*x)^2)+(A1*N^2*ix2*u*x*(y^2-4*ho*y-
x^2+2*ho*x+4*ho^2))/(2*ho*(y^2-2*ho*y+x^2-2*ho*x)^2)-(A1*N^2*iy1*u*(y-
2*ho)*(ho*y+x^2-2*ho*x-2*ho^2))/(ho*(y^2-2*ho*y+x^2-
2*ho*x)^2)+(A1*N^2*iy2*u*x*(x-2*ho)*(y-ho))/(ho*(y^2-2*ho*y+x^2-

100
2*ho*x)^2),(A1*N^2*ix1*u*(x-2*ho)*(y^2-x^2+2*ho*x))/(2*ho*(y^2-2*ho*y+x^2-
2*ho*x)^2)-(A1*N^2*ix2*u*x*(y^2-x^2+2*ho*x))/(2*ho*(y^2-2*ho*y+x^2-
2*ho*x)^2)+(A1*N^2*iy2*u*y*(ho*y-x^2+2*ho*x))/(ho*(y^2-2*ho*y+x^2-
2*ho*x)^2)+(A1*N^2*iy1*u*x*(x-2*ho)*(y-ho))/(ho*(y^2-2*ho*y+x^2-2*ho*x)^2),-
(A1*N^2*iy1*u*(x-2*ho)*(y^2-4*ho*y-x^2+2*ho*x+4*ho^2))/(2*ho*(y^2-2*ho*y+x^2-
2*ho*x)^2)+(A1*N^2*iy2*u*(x-2*ho)*(y^2-x^2+2*ho*x))/(2*ho*(y^2-2*ho*y+x^2-
2*ho*x)^2)+(A1*N^2*ix1*u*(x-2*ho)^2*(y-ho))/(ho*(y^2-2*ho*y+x^2-2*ho*x)^2)-
(A1*N^2*ix2*u*x*(x-2*ho)*(y-ho))/(ho*(y^2-2*ho*y+x^2-
2*ho*x)^2),(A1*N^2*iy1*u*x*(y^2-4*ho*y-x^2+2*ho*x+4*ho^2))/(2*ho*(y^2-
2*ho*y+x^2-2*ho*x)^2)-(A1*N^2*iy2*u*x*(y^2-x^2+2*ho*x))/(2*ho*(y^2-2*ho*y+x^2-
2*ho*x)^2)+(A1*N^2*ix2*u*x^2*(y-ho))/(ho*(y^2-2*ho*y+x^2-2*ho*x)^2)-
(A1*N^2*ix1*u*x*(x-2*ho)*(y-ho))/(ho*(y^2-2*ho*y+x^2-2*ho*x)^2)])
/* [wxMaxima: input end ] */
/* [wxMaxima: input start ] */
M:J.I;
(M)ix1*(-(A1*N^2*iy1*u*(x-2*ho)*(y^2-4*ho*y-x^2+2*ho*x+4*ho^2))/(2*ho*(y^2-
2*ho*y+x^2-2*ho*x)^2)+
(A1*N^2*iy2*u*(x-2*ho)*(y^2-x^2+2*ho*x))/(2*ho*(y^2-2*ho*y+x^2-
2*ho*x)^2)+(A1*N^2*ix1*u*(x-2*ho)^2*(y-ho))/(ho*(y^2-2*ho*y+x^2-2*ho*x)^2)-
(A1*N^2*ix2*u*x*(x-2*ho)*(y-ho))/(ho*(y^2-2*ho*y+x^2-2*ho*x)^2))+iy1*(-
(A1*N^2*ix1*u*(x-2*ho)*(y^2-4*ho*y-x^2+2*ho*x+4*ho^2))/(2*ho*(y^2-2*ho*y+x^2-
2*ho*x)^2)+
(A1*N^2*ix2*u*x*(y^2-4*ho*y-x^2+2*ho*x+4*ho^2))/(2*ho*(y^2-2*ho*y+x^2-
2*ho*x)^2)-
(A1*N^2*iy1*u*(y-2*ho)*(ho*y+x^2-2*ho*x-2*ho^2))/(ho*(y^2-2*ho*y+x^2-
2*ho*x)^2)+(A1*N^2*iy2*u*x*(x-2*ho)*(y-ho))/(ho*(y^2-2*ho*y+x^2-2*ho*x)^2))+ix2*(
(A1*N^2*iy1*u*x*(y^2-4*ho*y-x^2+2*ho*x+4*ho^2))/(2*ho*(y^2-2*ho*y+x^2-
2*ho*x)^2)-(A1*N^2*iy2*u*x*(y^2-x^2+2*ho*x))/(2*ho*(y^2-2*ho*y+x^2-2*ho*x)^2)+
(A1*N^2*ix2*u*x^2*(y-ho))/(ho*(y^2-2*ho*y+x^2-2*ho*x)^2)-(A1*N^2*ix1*u*x*(x-
2*ho)*(y-ho))/(ho*(y^2-2*ho*y+x^2-2*ho*x)^2))+iy2*(

101
(A1*N^2*ix1*u*(x-2*ho)*(y^2-x^2+2*ho*x))/(2*ho*(y^2-2*ho*y+x^2-2*ho*x)^2)-
(A1*N^2*ix2*u*x*(y^2-x^2+2*ho*x))/(2*ho*(y^2-2*ho*y+x^2-2*ho*x)^2)+
(A1*N^2*iy2*u*y*(ho*y-x^2+2*ho*x))/(ho*(y^2-2*ho*y+x^2-
2*ho*x)^2)+(A1*N^2*iy1*u*x*(x-2*ho)*(y-ho))/(ho*(y^2-2*ho*y+x^2-2*ho*x)^2))
/* [wxMaxima: input end ] */
/* [wxMaxima: input start ] */
Fy:0.5*M;
(Fy)0.5*(ix1*(-(A1*N^2*iy1*u*(x-2*ho)*(y^2-4*ho*y-x^2+2*ho*x+4*ho^2))/(2*ho*(y^2-
2*ho*y+x^2-2*ho*x)^2)+
(A1*N^2*iy2*u*(x-2*ho)*(y^2-x^2+2*ho*x))/(2*ho*(y^2-2*ho*y+x^2-
2*ho*x)^2)+(A1*N^2*ix1*u*(x-2*ho)^2*(y-ho))/(ho*(y^2-2*ho*y+x^2-2*ho*x)^2)-
(A1*N^2*ix2*u*x*(x-2*ho)*(y-ho))/(ho*(y^2-2*ho*y+x^2-2*ho*x)^2))+iy1*(-
(A1*N^2*ix1*u*(x-2*ho)*(y^2-4*ho*y-x^2+2*ho*x+4*ho^2))/(2*ho*(y^2-2*ho*y+x^2-
2*ho*x)^2)+
(A1*N^2*ix2*u*x*(y^2-4*ho*y-x^2+2*ho*x+4*ho^2))/(2*ho*(y^2-2*ho*y+x^2-
2*ho*x)^2)-
(A1*N^2*iy1*u*(y-2*ho)*(ho*y+x^2-2*ho*x-2*ho^2))/(ho*(y^2-2*ho*y+x^2-
2*ho*x)^2)+(A1*N^2*iy2*u*x*(x-2*ho)*(y-ho))/(ho*(y^2-2*ho*y+x^2-2*ho*x)^2))+ix2*(
(A1*N^2*iy1*u*x*(y^2-4*ho*y-x^2+2*ho*x+4*ho^2))/(2*ho*(y^2-2*ho*y+x^2-
2*ho*x)^2)-(A1*N^2*iy2*u*x*(y^2-x^2+2*ho*x))/(2*ho*(y^2-2*ho*y+x^2-2*ho*x)^2)+
(A1*N^2*ix2*u*x^2*(y-ho))/(ho*(y^2-2*ho*y+x^2-2*ho*x)^2)-(A1*N^2*ix1*u*x*(x-
2*ho)*(y-ho))/(ho*(y^2-2*ho*y+x^2-2*ho*x)^2))+iy2*(
(A1*N^2*ix1*u*(x-2*ho)*(y^2-x^2+2*ho*x))/(2*ho*(y^2-2*ho*y+x^2-2*ho*x)^2)-
(A1*N^2*ix2*u*x*(y^2-x^2+2*ho*x))/(2*ho*(y^2-2*ho*y+x^2-2*ho*x)^2)+
(A1*N^2*iy2*u*y*(ho*y-x^2+2*ho*x))/(ho*(y^2-2*ho*y+x^2-
2*ho*x)^2)+(A1*N^2*iy1*u*x*(x-2*ho)*(y-ho))/(ho*(y^2-2*ho*y+x^2-2*ho*x)^2)))
/* [wxMaxima: input end ] */

102
/* [wxMaxima: input start ] */
factor(Fy);
(%o58) -(A1*N^2*u*(iy2*y-iy1*y-ix2*x+ix1*x+2*ho*iy1-2*ho*ix1)*(ix2*x*y-ix1*
x*y-ho*iy2*y-ho*iy1*y+2*ho*ix1*y+iy2*x^2-iy1*x^2-2*ho*iy2*x+2*ho*iy1*x-ho*ix2*
x+ho*ix1*x+2*ho^2*iy1-2*ho^2*ix1))/(2*ho*(y^2-2*ho*y+x^2-2*ho*x)^2)
/* [wxMaxima: input end ] */
/* [wxMaxima: comment start ]
7.CÁLCULO DAS DERIVAS DOS COMPONENTES DA MATRIZ DE INDUTÂNCIAS
EM RELAÇÃO A X.
[wxMaxima: comment end ] */
/* [wxMaxima: input start ] */
X11:diff(L11,x,1);
X12:diff(L12,x,1);
X13:diff(L13,x,1);
X14:diff(L14,x,1);
X21:X12;
X22:diff(L22,x,1);
X23:diff(L23,x,1);
X24:diff(L24,x,1);
X31:X13;
X32:X23;
X33:diff(L33,x,1);

103
X34:diff(L34,x,1);
X41:X14;
X42:X24;
X43:X34;
X44:diff(L44,x,1);
(X11)(A1^2*N^2*u^2*((A1*u)/(2*ho-x)^2-(A1*u)/x^2))/(((A1*u)/y+(A1*u)/(2*ho-
y)+(A1*u)/x+(A1*u)/(2*ho-x))^2*y^2)
(X12)(A1^2*N^2*u^2*((A1*u)/(2*ho-x)^2-(A1*u)/x^2))/(((A1*u)/y+(A1*u)/(2*ho-
y)+(A1*u)/x+(A1*u)/(2*ho-x))^2*(2*ho-y)*y)
(X13)(A1^2*N^2*u^2)/(x^2*((A1*u)/y+(A1*u)/(2*ho-y)+(A1*u)/x+(A1*u)/(2*ho-
x))*y)+(A1^2*N^2*u^2*((A1*u)/(2*ho-x)^2-(A1*u)/x^2))/(x*((A1*u)/y+(A1*u)/(2*ho-
y)+(A1*u)/x+(A1*u)/(2*ho-x))^2*y)
(X14)(A1^2*N^2*u^2*((A1*u)/(2*ho-x)^2-(A1*u)/x^2))/((2*ho-
x)*((A1*u)/y+(A1*u)/(2*ho-y)+(A1*u)/x+(A1*u)/(2*ho-x))^2*y)-
(A1^2*N^2*u^2)/((2*ho-x)^2*((A1*u)/y+(A1*u)/(2*ho-y)+(A1*u)/x+(A1*u)/(2*ho-x))*y)
(X21)(A1^2*N^2*u^2*((A1*u)/(2*ho-x)^2-(A1*u)/x^2))/(((A1*u)/y+(A1*u)/(2*ho-
y)+(A1*u)/x+(A1*u)/(2*ho-x))^2*(2*ho-y)*y)
(X22)(A1^2*N^2*u^2*((A1*u)/(2*ho-x)^2-(A1*u)/x^2))/(((A1*u)/y+(A1*u)/(2*ho-
y)+(A1*u)/x+(A1*u)/(2*ho-x))^2*(2*ho-y)^2)
(X23)(A1^2*N^2*u^2)/(x^2*((A1*u)/y+(A1*u)/(2*ho-y)+(A1*u)/x+(A1*u)/(2*ho-
x))*(2*ho-y))+
(A1^2*N^2*u^2*((A1*u)/(2*ho-x)^2-(A1*u)/x^2))/(x*((A1*u)/y+(A1*u)/(2*ho-
y)+(A1*u)/x+(A1*u)/(2*ho-x))^2*(2*ho-y))
(X24)(A1^2*N^2*u^2*((A1*u)/(2*ho-x)^2-(A1*u)/x^2))/((2*ho-
x)*((A1*u)/y+(A1*u)/(2*ho-y)+(A1*u)/x+(A1*u)/(2*ho-x))^2*(2*ho-y))-
(A1^2*N^2*u^2)/((2*ho-x)^2*((A1*u)/y+(A1*u)/(2*ho-y)+(A1*u)/x+(A1*u)/(2*ho-
x))*(2*ho-y))

104
(X31)(A1^2*N^2*u^2)/(x^2*((A1*u)/y+(A1*u)/(2*ho-y)+(A1*u)/x+(A1*u)/(2*ho-
x))*y)+(A1^2*N^2*u^2*((A1*u)/(2*ho-x)^2-(A1*u)/x^2))/(x*((A1*u)/y+(A1*u)/(2*ho-
y)+(A1*u)/x+(A1*u)/(2*ho-x))^2*y)
(X32)(A1^2*N^2*u^2)/(x^2*((A1*u)/y+(A1*u)/(2*ho-y)+(A1*u)/x+(A1*u)/(2*ho-
x))*(2*ho-y))+
(A1^2*N^2*u^2*((A1*u)/(2*ho-x)^2-(A1*u)/x^2))/(x*((A1*u)/y+(A1*u)/(2*ho-
y)+(A1*u)/x+(A1*u)/(2*ho-x))^2*(2*ho-y))
(X33)N^2*
((2*A1^2*u^2)/(x^3*((A1*u)/y+(A1*u)/(2*ho-y)+(A1*u)/x+(A1*u)/(2*ho-
x)))+(A1^2*u^2*((A1*u)/(2*ho-x)^2-(A1*u)/x^2))/(x^2*((A1*u)/y+(A1*u)/(2*ho-
y)+(A1*u)/x+(A1*u)/(2*ho-x))^2)-(A1*u)/x^2)
(X34)-(A1^2*N^2*u^2)/((2*ho-x)^2*x*((A1*u)/y+(A1*u)/(2*ho-
y)+(A1*u)/x+(A1*u)/(2*ho-x)))+
(A1^2*N^2*u^2)/((2*ho-x)*x^2*((A1*u)/y+(A1*u)/(2*ho-y)+(A1*u)/x+(A1*u)/(2*ho-x)))+
(A1^2*N^2*u^2*((A1*u)/(2*ho-x)^2-(A1*u)/x^2))/((2*ho-x)*x*((A1*u)/y+(A1*u)/(2*ho-
y)+(A1*u)/x+(A1*u)/(2*ho-x))^2)
(X41)(A1^2*N^2*u^2*((A1*u)/(2*ho-x)^2-(A1*u)/x^2))/((2*ho-
x)*((A1*u)/y+(A1*u)/(2*ho-y)+(A1*u)/x+(A1*u)/(2*ho-x))^2*y)-
(A1^2*N^2*u^2)/((2*ho-x)^2*((A1*u)/y+(A1*u)/(2*ho-y)+(A1*u)/x+(A1*u)/(2*ho-x))*y)
(X42)(A1^2*N^2*u^2*((A1*u)/(2*ho-x)^2-(A1*u)/x^2))/((2*ho-
x)*((A1*u)/y+(A1*u)/(2*ho-y)+(A1*u)/x+(A1*u)/(2*ho-x))^2*(2*ho-y))-
(A1^2*N^2*u^2)/((2*ho-x)^2*((A1*u)/y+(A1*u)/(2*ho-y)+(A1*u)/x+(A1*u)/(2*ho-
x))*(2*ho-y))
(X43)-(A1^2*N^2*u^2)/((2*ho-x)^2*x*((A1*u)/y+(A1*u)/(2*ho-
y)+(A1*u)/x+(A1*u)/(2*ho-x)))+
(A1^2*N^2*u^2)/((2*ho-x)*x^2*((A1*u)/y+(A1*u)/(2*ho-y)+(A1*u)/x+(A1*u)/(2*ho-x)))+
(A1^2*N^2*u^2*((A1*u)/(2*ho-x)^2-(A1*u)/x^2))/((2*ho-x)*x*((A1*u)/y+(A1*u)/(2*ho-
y)+(A1*u)/x+(A1*u)/(2*ho-x))^2)
(X44)N^2*(-(2*A1^2*u^2)/((2*ho-x)^3*((A1*u)/y+(A1*u)/(2*ho-
y)+(A1*u)/x+(A1*u)/(2*ho-x)))+

105
(A1^2*u^2*((A1*u)/(2*ho-x)^2-(A1*u)/x^2))/((2*ho-x)^2*((A1*u)/y+(A1*u)/(2*ho-
y)+(A1*u)/x+(A1*u)/(2*ho-x))^2)+(A1*u)/(2*ho-x)^2)
/* [wxMaxima: input end ] */
/* [wxMaxima: comment start ]
8. CÁLCULO DA MATRIZ DERIVADA DAS INDUTÂNCIAS
[wxMaxima: comment end ] */
/* [wxMaxima: input start ] */
X: matrix(
[X11,X12,X13,X14],
[X21,X22,X23,X24],
[X31,X32,X33,X34],
[X41,X42,X43,X44]
);
matrix([(A1^2*N^2*u^2*((A1*u)/(2*ho-x)^2-(A1*u)/x^2))/(((A1*u)/y+(A1*u)/(2*ho-
y)+(A1*u)/x+(A1*u)/(2*ho-x))^2*y^2),(A1^2*N^2*u^2*((A1*u)/(2*ho-x)^2-
(A1*u)/x^2))/(((A1*u)/y+(A1*u)/(2*ho-y)+(A1*u)/x+(A1*u)/(2*ho-x))^2*(2*ho-
y)*y),(A1^2*N^2*u^2)/(x^2*((A1*u)/y+(A1*u)/(2*ho-y)+(A1*u)/x+(A1*u)/(2*ho-
x))*y)+(A1^2*N^2*u^2*((A1*u)/(2*ho-x)^2-(A1*u)/x^2))/(x*((A1*u)/y+(A1*u)/(2*ho-
y)+(A1*u)/x+(A1*u)/(2*ho-x))^2*y),(A1^2*N^2*u^2*((A1*u)/(2*ho-x)^2-
(A1*u)/x^2))/((2*ho-x)*((A1*u)/y+(A1*u)/(2*ho-y)+(A1*u)/x+(A1*u)/(2*ho-x))^2*y)-
(A1^2*N^2*u^2)/((2*ho-x)^2*((A1*u)/y+(A1*u)/(2*ho-y)+(A1*u)/x+(A1*u)/(2*ho-
x))*y)],[(A1^2*N^2*u^2*((A1*u)/(2*ho-x)^2-(A1*u)/x^2))/(((A1*u)/y+(A1*u)/(2*ho-
y)+(A1*u)/x+(A1*u)/(2*ho-x))^2*(2*ho-y)*y),(A1^2*N^2*u^2*((A1*u)/(2*ho-x)^2-
(A1*u)/x^2))/(((A1*u)/y+(A1*u)/(2*ho-y)+(A1*u)/x+(A1*u)/(2*ho-x))^2*(2*ho-
y)^2),(A1^2*N^2*u^2)/(x^2*((A1*u)/y+(A1*u)/(2*ho-y)+(A1*u)/x+(A1*u)/(2*ho-
x))*(2*ho-y))+(A1^2*N^2*u^2*((A1*u)/(2*ho-x)^2-
(A1*u)/x^2))/(x*((A1*u)/y+(A1*u)/(2*ho-y)+(A1*u)/x+(A1*u)/(2*ho-x))^2*(2*ho-
y)),(A1^2*N^2*u^2*((A1*u)/(2*ho-x)^2-(A1*u)/x^2))/((2*ho-x)*((A1*u)/y+(A1*u)/(2*ho-
y)+(A1*u)/x+(A1*u)/(2*ho-x))^2*(2*ho-y))-(A1^2*N^2*u^2)/((2*ho-
x)^2*((A1*u)/y+(A1*u)/(2*ho-y)+(A1*u)/x+(A1*u)/(2*ho-x))*(2*ho-

106
y))],[(A1^2*N^2*u^2)/(x^2*((A1*u)/y+(A1*u)/(2*ho-y)+(A1*u)/x+(A1*u)/(2*ho-
x))*y)+(A1^2*N^2*u^2*((A1*u)/(2*ho-x)^2-(A1*u)/x^2))/(x*((A1*u)/y+(A1*u)/(2*ho-
y)+(A1*u)/x+(A1*u)/(2*ho-x))^2*y),(A1^2*N^2*u^2)/(x^2*((A1*u)/y+(A1*u)/(2*ho-
y)+(A1*u)/x+(A1*u)/(2*ho-x))*(2*ho-y))+(A1^2*N^2*u^2*((A1*u)/(2*ho-x)^2-
(A1*u)/x^2))/(x*((A1*u)/y+(A1*u)/(2*ho-y)+(A1*u)/x+(A1*u)/(2*ho-x))^2*(2*ho-
y)),N^2*((2*A1^2*u^2)/(x^3*((A1*u)/y+(A1*u)/(2*ho-y)+(A1*u)/x+(A1*u)/(2*ho-
x)))+(A1^2*u^2*((A1*u)/(2*ho-x)^2-(A1*u)/x^2))/(x^2*((A1*u)/y+(A1*u)/(2*ho-
y)+(A1*u)/x+(A1*u)/(2*ho-x))^2)-(A1*u)/x^2),-(A1^2*N^2*u^2)/((2*ho-
x)^2*x*((A1*u)/y+(A1*u)/(2*ho-y)+(A1*u)/x+(A1*u)/(2*ho-x)))+(A1^2*N^2*u^2)/((2*ho-
x)*x^2*((A1*u)/y+(A1*u)/(2*ho-y)+(A1*u)/x+(A1*u)/(2*ho-
x)))+(A1^2*N^2*u^2*((A1*u)/(2*ho-x)^2-(A1*u)/x^2))/((2*ho-
x)*x*((A1*u)/y+(A1*u)/(2*ho-y)+(A1*u)/x+(A1*u)/(2*ho-
x))^2)],[(A1^2*N^2*u^2*((A1*u)/(2*ho-x)^2-(A1*u)/x^2))/((2*ho-
x)*((A1*u)/y+(A1*u)/(2*ho-y)+(A1*u)/x+(A1*u)/(2*ho-x))^2*y)-(A1^2*N^2*u^2)/((2*ho-
x)^2*((A1*u)/y+(A1*u)/(2*ho-y)+(A1*u)/x+(A1*u)/(2*ho-
x))*y),(A1^2*N^2*u^2*((A1*u)/(2*ho-x)^2-(A1*u)/x^2))/((2*ho-
x)*((A1*u)/y+(A1*u)/(2*ho-y)+(A1*u)/x+(A1*u)/(2*ho-x))^2*(2*ho-y))-
(A1^2*N^2*u^2)/((2*ho-x)^2*((A1*u)/y+(A1*u)/(2*ho-y)+(A1*u)/x+(A1*u)/(2*ho-
x))*(2*ho-y)),-(A1^2*N^2*u^2)/((2*ho-x)^2*x*((A1*u)/y+(A1*u)/(2*ho-
y)+(A1*u)/x+(A1*u)/(2*ho-x)))+(A1^2*N^2*u^2)/((2*ho-x)*x^2*((A1*u)/y+(A1*u)/(2*ho-
y)+(A1*u)/x+(A1*u)/(2*ho-x)))+(A1^2*N^2*u^2*((A1*u)/(2*ho-x)^2-
(A1*u)/x^2))/((2*ho-x)*x*((A1*u)/y+(A1*u)/(2*ho-y)+(A1*u)/x+(A1*u)/(2*ho-
x))^2),N^2*(-(2*A1^2*u^2)/((2*ho-x)^3*((A1*u)/y+(A1*u)/(2*ho-
y)+(A1*u)/x+(A1*u)/(2*ho-x)))+(A1^2*u^2*((A1*u)/(2*ho-x)^2-(A1*u)/x^2))/((2*ho-
x)^2*((A1*u)/y+(A1*u)/(2*ho-y)+(A1*u)/x+(A1*u)/(2*ho-x))^2)+(A1*u)/(2*ho-x)^2)])
/* [wxMaxima: input end ] */
/* [wxMaxima: input start ] */
XD:factor(X);
matrix([(A1*N^2*u*(x-ho)*(y-2*ho)^2)/(ho*(y^2-2*ho*y+x^2-2*ho*x)^2),-
(A1*N^2*u*(x-ho)*y*(y-2*ho))/(ho*(y^2-2*ho*y+x^2-2*ho*x)^2),(A1*N^2*u*(y-
2*ho)*(y^2-2*ho*y-x^2+4*ho*x-4*ho^2))/(2*ho*(y^2-2*ho*y+x^2-2*ho*x)^2),-
(A1*N^2*u*(y-2*ho)*(y^2-2*ho*y-x^2))/(2*ho*(y^2-2*ho*y+x^2-2*ho*x)^2)],[-
(A1*N^2*u*(x-ho)*y*(y-2*ho))/(ho*(y^2-2*ho*y+x^2-2*ho*x)^2),(A1*N^2*u*(x-
ho)*y^2)/(ho*(y^2-2*ho*y+x^2-2*ho*x)^2),-(A1*N^2*u*y*(y^2-2*ho*y-x^2+4*ho*x-
4*ho^2))/(2*ho*(y^2-2*ho*y+x^2-2*ho*x)^2),(A1*N^2*u*y*(y^2-2*ho*y-
x^2))/(2*ho*(y^2-2*ho*y+x^2-2*ho*x)^2)],[(A1*N^2*u*(y-2*ho)*(y^2-2*ho*y-

107
x^2+4*ho*x-4*ho^2))/(2*ho*(y^2-2*ho*y+x^2-2*ho*x)^2),-(A1*N^2*u*y*(y^2-2*ho*y-
x^2+4*ho*x-4*ho^2))/(2*ho*(y^2-2*ho*y+x^2-2*ho*x)^2),-(A1*N^2*u*(x-2*ho)*(y^2-
2*ho*y+ho*x-2*ho^2))/(ho*(y^2-2*ho*y+x^2-2*ho*x)^2),(A1*N^2*u*(x-ho)*y*(y-
2*ho))/(ho*(y^2-2*ho*y+x^2-2*ho*x)^2)],[-(A1*N^2*u*(y-2*ho)*(y^2-2*ho*y-
x^2))/(2*ho*(y^2-2*ho*y+x^2-2*ho*x)^2),(A1*N^2*u*y*(y^2-2*ho*y-x^2))/(2*ho*(y^2-
2*ho*y+x^2-2*ho*x)^2),(A1*N^2*u*(x-ho)*y*(y-2*ho))/(ho*(y^2-2*ho*y+x^2-
2*ho*x)^2),-(A1*N^2*u*x*(y^2-2*ho*y-ho*x))/(ho*(y^2-2*ho*y+x^2-2*ho*x)^2)])
/* [wxMaxima: input end ] */
/* [wxMaxima: comment start ]
9. CÁLCULO DA FORÇA MAGNÉTICA FX
[wxMaxima: comment end ] */
/* [wxMaxima: input start ] */
W:IT.XD;
matrix([(A1*N^2*iy1*u*(x-ho)*(y-2*ho)^2)/(ho*(y^2-2*ho*y+x^2-
2*ho*x)^2)+(A1*N^2*ix1*u*(y-2*ho)*(y^2-2*ho*y-x^2+4*ho*x-4*ho^2))/(2*ho*(y^2-
2*ho*y+x^2-2*ho*x)^2)-(A1*N^2*ix2*u*(y-2*ho)*(y^2-2*ho*y-x^2))/(2*ho*(y^2-
2*ho*y+x^2-2*ho*x)^2)-(A1*N^2*iy2*u*(x-ho)*y*(y-2*ho))/(ho*(y^2-2*ho*y+x^2-
2*ho*x)^2),-(A1*N^2*ix1*u*y*(y^2-2*ho*y-x^2+4*ho*x-4*ho^2))/(2*ho*(y^2-
2*ho*y+x^2-2*ho*x)^2)+(A1*N^2*ix2*u*y*(y^2-2*ho*y-x^2))/(2*ho*(y^2-2*ho*y+x^2-
2*ho*x)^2)+(A1*N^2*iy2*u*(x-ho)*y^2)/(ho*(y^2-2*ho*y+x^2-2*ho*x)^2)-
(A1*N^2*iy1*u*(x-ho)*y*(y-2*ho))/(ho*(y^2-2*ho*y+x^2-
2*ho*x)^2),(A1*N^2*iy1*u*(y-2*ho)*(y^2-2*ho*y-x^2+4*ho*x-4*ho^2))/(2*ho*(y^2-
2*ho*y+x^2-2*ho*x)^2)-(A1*N^2*iy2*u*y*(y^2-2*ho*y-x^2+4*ho*x-
4*ho^2))/(2*ho*(y^2-2*ho*y+x^2-2*ho*x)^2)-(A1*N^2*ix1*u*(x-2*ho)*(y^2-
2*ho*y+ho*x-2*ho^2))/(ho*(y^2-2*ho*y+x^2-2*ho*x)^2)+(A1*N^2*ix2*u*(x-ho)*y*(y-
2*ho))/(ho*(y^2-2*ho*y+x^2-2*ho*x)^2),-(A1*N^2*iy1*u*(y-2*ho)*(y^2-2*ho*y-
x^2))/(2*ho*(y^2-2*ho*y+x^2-2*ho*x)^2)+(A1*N^2*iy2*u*y*(y^2-2*ho*y-
x^2))/(2*ho*(y^2-2*ho*y+x^2-2*ho*x)^2)-(A1*N^2*ix2*u*x*(y^2-2*ho*y-
ho*x))/(ho*(y^2-2*ho*y+x^2-2*ho*x)^2)+(A1*N^2*ix1*u*(x-ho)*y*(y-2*ho))/(ho*(y^2-
2*ho*y+x^2-2*ho*x)^2)])
/* [wxMaxima: input end ] */
/* [wxMaxima: input start ] */

108
R:W.I;
(R)iy1*((A1*N^2*iy1*u*(x-ho)*(y-2*ho)^2)/(ho*(y^2-2*ho*y+x^2-2*ho*x)^2)+
(A1*N^2*ix1*u*(y-2*ho)*(y^2-2*ho*y-x^2+4*ho*x-4*ho^2))/(2*ho*(y^2-2*ho*y+x^2-
2*ho*x)^2)-(A1*N^2*ix2*u*(y-2*ho)*(y^2-2*ho*y-x^2))/(2*ho*(y^2-2*ho*y+x^2-
2*ho*x)^2)
-(A1*N^2*iy2*u*(x-ho)*y*(y-2*ho))/(ho*(y^2-2*ho*y+x^2-2*ho*x)^2))+ix1*(
(A1*N^2*iy1*u*(y-2*ho)*(y^2-2*ho*y-x^2+4*ho*x-4*ho^2))/(2*ho*(y^2-2*ho*y+x^2-
2*ho*x)^2)-
(A1*N^2*iy2*u*y*(y^2-2*ho*y-x^2+4*ho*x-4*ho^2))/(2*ho*(y^2-2*ho*y+x^2-
2*ho*x)^2)-
(A1*N^2*ix1*u*(x-2*ho)*(y^2-2*ho*y+ho*x-2*ho^2))/(ho*(y^2-2*ho*y+x^2-
2*ho*x)^2)+(A1*N^2*ix2*u*(x-ho)*y*(y-2*ho))/(ho*(y^2-2*ho*y+x^2-
2*ho*x)^2))+iy2*(-
(A1*N^2*ix1*u*y*(y^2-2*ho*y-x^2+4*ho*x-4*ho^2))/(2*ho*(y^2-2*ho*y+x^2-
2*ho*x)^2)+(A1*N^2*ix2*u*y*(y^2-2*ho*y-x^2))/(2*ho*(y^2-2*ho*y+x^2-2*ho*x)^2)+
(A1*N^2*iy2*u*(x-ho)*y^2)/(ho*(y^2-2*ho*y+x^2-2*ho*x)^2)-(A1*N^2*iy1*u*(x-
ho)*y*(y-2*ho))/(ho*(y^2-2*ho*y+x^2-2*ho*x)^2))+ix2*(-
(A1*N^2*iy1*u*(y-2*ho)*(y^2-2*ho*y-x^2))/(2*ho*(y^2-2*ho*y+x^2-
2*ho*x)^2)+(A1*N^2*iy2*u*y*(y^2-2*ho*y-x^2))/(2*ho*(y^2-2*ho*y+x^2-2*ho*x)^2)-
(A1*N^2*ix2*u*x*(y^2-2*ho*y-ho*x))/(ho*(y^2-2*ho*y+x^2-
2*ho*x)^2)+(A1*N^2*ix1*u*(x-ho)*y*(y-2*ho))/(ho*(y^2-2*ho*y+x^2-2*ho*x)^2))
/* [wxMaxima: input end ] */
/* [wxMaxima: input start ] */
Fx:0.5*R;
(Fx)0.5*(iy1*((A1*N^2*iy1*u*(x-ho)*(y-2*ho)^2)/(ho*(y^2-2*ho*y+x^2-2*ho*x)^2)+
(A1*N^2*ix1*u*(y-2*ho)*(y^2-2*ho*y-x^2+4*ho*x-4*ho^2))/(2*ho*(y^2-2*ho*y+x^2-
2*ho*x)^2)-(A1*N^2*ix2*u*(y-2*ho)*(y^2-2*ho*y-x^2))/(2*ho*(y^2-2*ho*y+x^2-
2*ho*x)^2)
-(A1*N^2*iy2*u*(x-ho)*y*(y-2*ho))/(ho*(y^2-2*ho*y+x^2-2*ho*x)^2))+ix1*(

109
(A1*N^2*iy1*u*(y-2*ho)*(y^2-2*ho*y-x^2+4*ho*x-4*ho^2))/(2*ho*(y^2-2*ho*y+x^2-
2*ho*x)^2)-
(A1*N^2*iy2*u*y*(y^2-2*ho*y-x^2+4*ho*x-4*ho^2))/(2*ho*(y^2-2*ho*y+x^2-
2*ho*x)^2)-
(A1*N^2*ix1*u*(x-2*ho)*(y^2-2*ho*y+ho*x-2*ho^2))/(ho*(y^2-2*ho*y+x^2-
2*ho*x)^2)+(A1*N^2*ix2*u*(x-ho)*y*(y-2*ho))/(ho*(y^2-2*ho*y+x^2-
2*ho*x)^2))+iy2*(-
(A1*N^2*ix1*u*y*(y^2-2*ho*y-x^2+4*ho*x-4*ho^2))/(2*ho*(y^2-2*ho*y+x^2-
2*ho*x)^2)+(A1*N^2*ix2*u*y*(y^2-2*ho*y-x^2))/(2*ho*(y^2-2*ho*y+x^2-2*ho*x)^2)+
(A1*N^2*iy2*u*(x-ho)*y^2)/(ho*(y^2-2*ho*y+x^2-2*ho*x)^2)-(A1*N^2*iy1*u*(x-
ho)*y*(y-2*ho))/(ho*(y^2-2*ho*y+x^2-2*ho*x)^2))+ix2*(-
(A1*N^2*iy1*u*(y-2*ho)*(y^2-2*ho*y-x^2))/(2*ho*(y^2-2*ho*y+x^2-
2*ho*x)^2)+(A1*N^2*iy2*u*y*(y^2-2*ho*y-x^2))/(2*ho*(y^2-2*ho*y+x^2-2*ho*x)^2)-
(A1*N^2*ix2*u*x*(y^2-2*ho*y-ho*x))/(ho*(y^2-2*ho*y+x^2-
2*ho*x)^2)+(A1*N^2*ix1*u*(x-ho)*y*(y-2*ho))/(ho*(y^2-2*ho*y+x^2-2*ho*x)^2)))
/* [wxMaxima: input end ] */
/* [wxMaxima: input start ] */
factor(Fx);
(A1*N^2*u*(iy2*y-iy1*y-ix2*x+ix1*x+2*ho*iy1-2*ho*ix1)*(ix2*y^2-ix1*y^2
+iy2*x*y-iy1*x*y-ho*iy2*y+ho*iy1*y-2*ho*ix2*y+2*ho*ix1*y+2*ho*iy1*x-ho*ix2*x
-ho*ix1*x-2*ho^2*iy1+2*ho^2*ix1))/(2*ho*(y^2-2*ho*y+x^2-2*ho*x)^2)
/* [wxMaxima: input end ] */
B. CÓDIGO DO CONTROLADOR NA LINGUAGEM C DO ARDUINO
Codigo de controle no eixo X
// Controle discreto modificado

110
#include <TimerOne.h>
//Entrada e saída do controlador
int Iauxx;
int Iauyy;
int ekx = A15;
int eky = A14;
float eVx;
float eVy;
float eVx1;
float eVy1;
float eVx2;
float eVy2;
float ukx;
float uky;
float ukx1;
float uky1;
float ukx2;
float uky2;
//Parâmteros do controlador//
float kp = 2.13;//16.57;
float ki = 12.31; //30.18;
float kd = 0.03; //1.00;// float kp = 16.5671;float ki = 45.1830; float kd = 1.5061;
int lePin = 12;
float udk;
float udk1;
float uik;
float uik1;
float upk;
float utk;
int pert = 7;
int ref = 210;
int mud1;
int mud2;
int ref1;
// Variação dos parâmetros de controlador//

111
float Ts = 0.0005;
//Novos parâmetros do controlador PD & PID//
float c1;
float c2;
float c3;
float alfa;
//PARÃMETROS DO ANTI-WINDUP//
float kt = 0.75;
float vik;
float mk;
float mk1;
void setup() {
pinMode(ekx, INPUT);
pinMode(eky, INPUT);
pinMode(12, OUTPUT);
pinMode (7, INPUT);
pinMode(11, INPUT);
DDRA = B11111111;
DDRL = B11111111;
//TEMPO DE INICIALIZAÇÃO DA INTERRUPÇÃO//
Timer1.initialize(500);
Timer1.attachInterrupt(magnetic);
}
void loop() {
//PORTA = 142;
//CÁLCULO DOS NOVOS PARÂMETROS DO CONTROLADOR PID COM FILTRO//
alfa = (10 * kp) / kd;
c1 = 1 / (alfa * Ts + 1);
c2 = (alfa * kd ) * c1;
c3 = (ki * Ts) / 2;
}
void magnetic(){

112
digitalWrite(12,HIGH);
// INICIO DA OPERAÇÃO DO CONTROLADOR PID COM ANTI-WINDUP NO EIXO X
//
pert = digitalRead(7);
if (pert == HIGH){
eVx = analogRead(ekx) - 100;
}
if (pert == LOW) {
eVx = analogRead(ekx) - 430;
}
//CÁLCULOS DOS COEFICIENTES UPK, UDK & UIK DO PID
mk = eVx - kt * (uik - vik);
upk= kp * eVx;
udk = c1 * udk1 + c2* (eVx - eVx1);
uik = uik1 + c3 * (mk + mk1);
// CÁLCULO DA CORRENTE DIFERENCIAL
utk = upk + udk + vik;
if (utk > 64) {
PORTA = 206;//NÃO USAR PORTL do ARDUINO SAINTSMART. MSB PAROU DE
FUNCIONAR//
vik = 64;
}
else if (utk < -64){
PORTA = 78; //NÃO USAR PORTL do ARDUINO SAINTSMART. MSB PAROU DE
FUNCIONAR//
vik = -64;
}
else {
Iauxx = utk + 142;
PORTA = Iauxx; //NÃO USAR PORTL do ARDUINO SAINTSMART. MSB PAROU
DE FUNCIONAR//
vik = utk;
}
eVx1 = eVx;
113
udk1 = udk;
uik1 = uik;
mk1 = mk;
//ref = ref1;
//fim da OPERAÇÃO DO CONTROLADOR PID COM ANTI-WINDUP NO EIXO X //
digitalWrite(12,LOW);
}

114
C. DESENHO TÉCNICO DO ROTOR

115
D. DIAGRAMAS DA FONTE DE CORRENTE

116

117

118
E. PROJETO DO CONTROLADOR POR LUGAR DE RAIZES
%Projeto de controle por lugar de Raizes%
>> %planta a ser controlada%
>> b =0.28;
>> c=0.43;
>> ki=29.35;
>> kx=29347.19;
>> num=[ki*b*c];
>> Ixx = 0.0282;
>> den=[Ixx 0 -kx*b*b];
>> sys=tf(num,den)
Transfer function:
3.534
-----------------
0.0282 s^2 – 2301
figure
>> sysf=feedback(sys,2000)
Transfer function:
3.534
-----------------
0.0282 s^2 + 4767
>> step(sysf)

119
>> %alocação de polos e zeros do controlador%
>> z=[-50 -10];
>> p=[0];
>> k=1;
>> sysc=zpk(z,p,k)
Zero/pole/gain:
(s+50) (s+10)
-------------
s
>> % sistema em malha aberta%
sysma=sys*sysc
Zero/pole/gain:
125.3099 (s+50) (s+10)
----------------------
s (s-285.6) (s+285.6)
>> rlocus(sysma)

120
rlocfind(sysma)
Select a point in the graphics window
selected_point =
-13.7441 +16.9565i
ans =
25.2142
>> syscf=25.2142*sysc
Zero/pole/gain:
25.2142 (s+50) (s+10)
---------------------
s
>> sysmaf=sys*syscf
Zero/pole/gain:
3159.5896 (s+50) (s+10)
-----------------------
s (s-285.6) (s+285.6)
>> % sistema em malha fechada%
>> sysmf=feedback(sysmaf,2000)
Zero/pole/gain:
3159.5896 (s+50) (s+10)

121
------------------------------
(s+6.319e006) (s+49.98) (s+10)
>> figure
>> step(sysmf)