tópicos especiais em energia...
TRANSCRIPT

Tópicos Especiais em Energia Elétrica (Projeto de Inversores e Conversores CC-CC)
Aula 3.3
Projeto de Sistemas de Controle Linear
Prof. João Américo Vilela
Departamento de Engenharia Elétrica
Projeto de Inversores e Conversores CC-CC
Exemplo - Projeto do sistema de controle linear
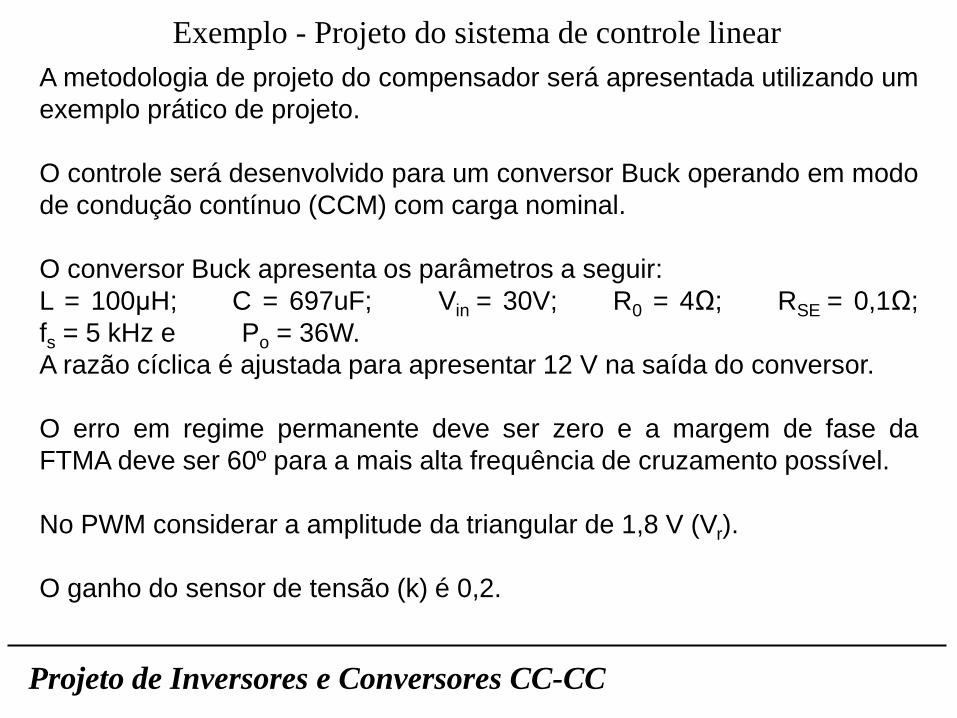
A metodologia de projeto do compensador será apresentada utilizando um
exemplo prático de projeto.
O controle será desenvolvido para um conversor Buck operando em modo
de condução contínuo (CCM) com carga nominal.
O conversor Buck apresenta os parâmetros a seguir:
L = 100μH; C = 697uF; Vin = 30V; R0 = 4Ω; RSE = 0,1Ω;
fs = 5 kHz e Po = 36W.
A razão cíclica é ajustada para apresentar 12 V na saída do conversor.
O erro em regime permanente deve ser zero e a margem de fase da
FTMA deve ser 60º para a mais alta frequência de cruzamento possível.
No PWM considerar a amplitude da triangular de 1,8 V (Vr).
O ganho do sensor de tensão (k) é 0,2.

Projeto de Inversores e Conversores CC-CC
Exemplo - Projeto do sistema de controle linear
A metodologia de projeto do compensador será apresentada utilizando um
exemplo prático de projeto.
O conversor Buck apresenta os
parâmetros a seguir:
L = 100μH; C = 697uF; Vin = 30V;
R0 = 4Ω; RSE = 0,1Ω; fs = 5 kHz e
Po = 36W.
A razão cíclica é ajustada para
apresentar 12 V na saída do
conversor.
No PWM considerar a amplitude da
triangular de 1,8 V (Vr).
O ganho do sensor de tensão (k) é
0,2.

Projeto de Inversores e Conversores CC-CC
Passo 1: Diagrama de Bode do conversor: vo(s) / d(s)
Exemplo - Projeto do sistema de controle linear
-20
0
20
40
Ma
gn
itu
de
(d
B)
102
103
104
-180
-135
-90
-45
0
Ph
ase
(d
eg
)
Bode Diagram
Frequency (Hz)

Projeto de Inversores e Conversores CC-CC
Passo 2: Escolher a frequência de corte em malha fechada desejada.
Quanto maior está frequência, melhor a resposta dinâmica do
sistema. No entanto, para evitar os efeitos do chaveamento sobre o sinal
de controle, tal frequência deve ser inferior a 1/5 da frequência de
chaveamento dos circuito de potência.
Exemplo - Projeto do sistema de controle linear
Para uma frequência de chaveamento de 5kHz o frequência de corte não
deve ser superio a 1kHz.
fc = 1kHz;
Projeto de Inversores e Conversores CC-CC
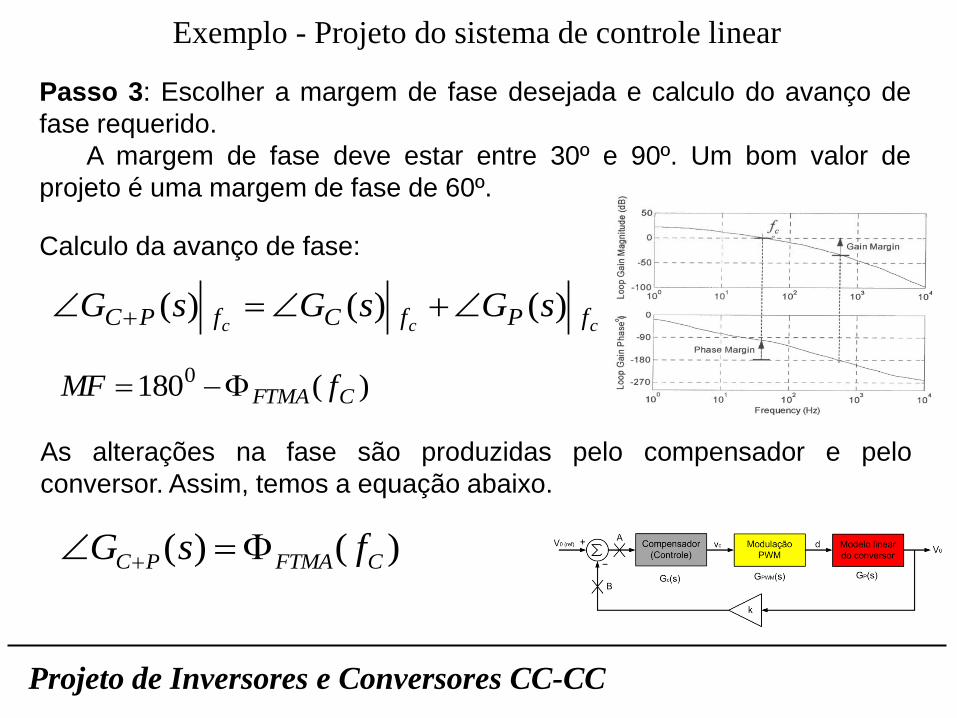
Passo 3: Escolher a margem de fase desejada e calculo do avanço de
fase requerido.
A margem de fase deve estar entre 30º e 90º. Um bom valor de
projeto é uma margem de fase de 60º.
Exemplo - Projeto do sistema de controle linear
)(1800CFTMA fMF
Calculo da avanço de fase:
ccc fPfCfPC sGsGsG )()()(
( ) ( )C P FTMA CG s f
As alterações na fase são produzidas pelo compensador e pelo
conversor. Assim, temos a equação abaixo.
Projeto de Inversores e Conversores CC-CC
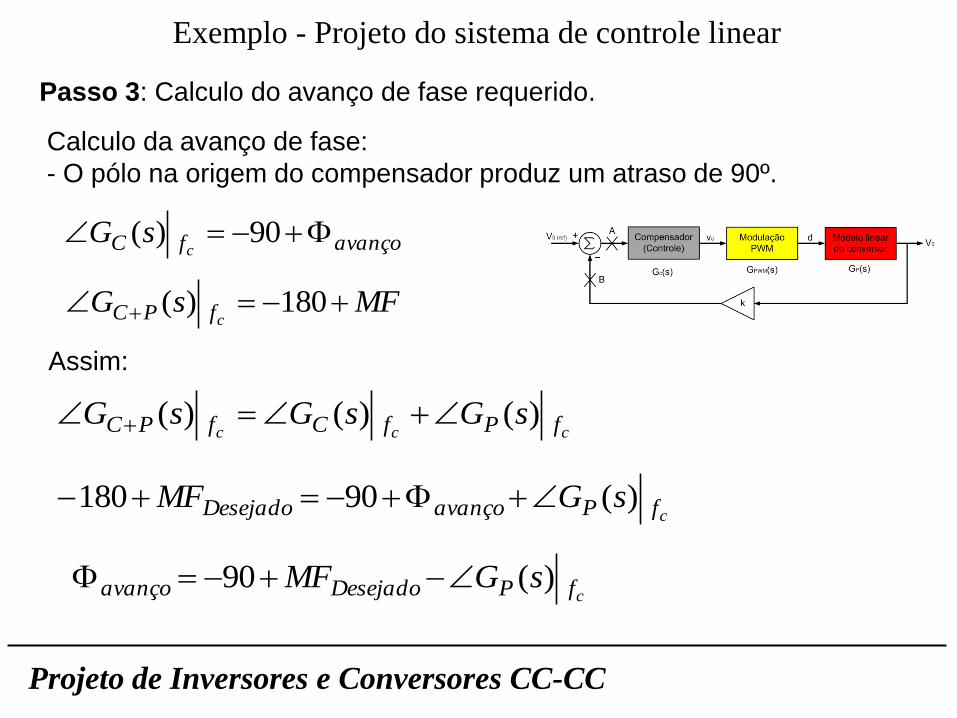
Passo 3: Calculo do avanço de fase requerido.
Exemplo - Projeto do sistema de controle linear
Calculo da avanço de fase:
- O pólo na origem do compensador produz um atraso de 90º.
avançofC csG 90)(
MFsGcfPC 180)(
Assim:
ccc fPfCfPC sGsGsG )()()(
cfPavançoDesejado sGMF )(90180
cfPDesejadoavanço sGMF )(90

Projeto de Inversores e Conversores CC-CC
Passo 3: Calculo do avanço de fase requerido.
A margem de fase deve estar entre 30º e 90º. Um bom valor de
projeto é uma margem de fase de 60º.
Exemplo - Projeto do sistema de controle linear
Para que a margem de fase seja de 60º o avanço de fase necessário é:
-20
0
20
40
Ma
gn
itu
de
(d
B)
102
103
104
-180
-135
-90
-45
0
Ph
ase
(d
eg
)
Bode Diagram
Frequency (Hz)
cfPDesejadoavanço sGMF )(90
)138(6090 avanço
0108avanço-138º
Para produzir o avanço de fase
requerido é necessário um
compensador tipo 3

Projeto de Inversores e Conversores CC-CC
Passo 4: Determinação do ganho do compensador.
Conhecida a frequência de corte e o ganho do sistema de potência
na frequência de corte (Gp(s)), o ganho do controle deve ser tal que leve,
nesta frequência, a um ganho unitário em malha fechada.
Exemplo - Projeto do sistema de controle linear
ksGsGsGsGcccc fPfPWMfCfFTMA )()()()(
1)( cf
FTMA sG
1)()()( ksGsGsGccc fPfPWMfC

Projeto de Inversores e Conversores CC-CC
Passo 4: Determinação do ganho do compensador.
Exemplo - Projeto do sistema de controle linear
-20
0
20
40
Ma
gn
itu
de
(d
B)
102
103
104
-180
-135
-90
-45
0
Ph
ase
(d
eg
)
Bode Diagram
Frequency (Hz)
24,67db Ganho do circuito de potência na
frequência de corte.
dbsGdBfP
c
67,24)(_
Considerando que a amplitude da triangular seja: 1,8 V (Vr).
556,08,1
11)(
rPWM
VsG
1,1710)( 2067,24 db
fPc
sG
))(log(20)(_ cc fPdBfP sGsG

Projeto de Inversores e Conversores CC-CC
Passo 4: Determinação do ganho do compensador.
Exemplo - Projeto do sistema de controle linear
1)()()( ksGsGsGccc fPfPWMfC
Assim:
12,01,17556,0)( cf
C sG 5263,0)( cf
C sG

Projeto de Inversores e Conversores CC-CC
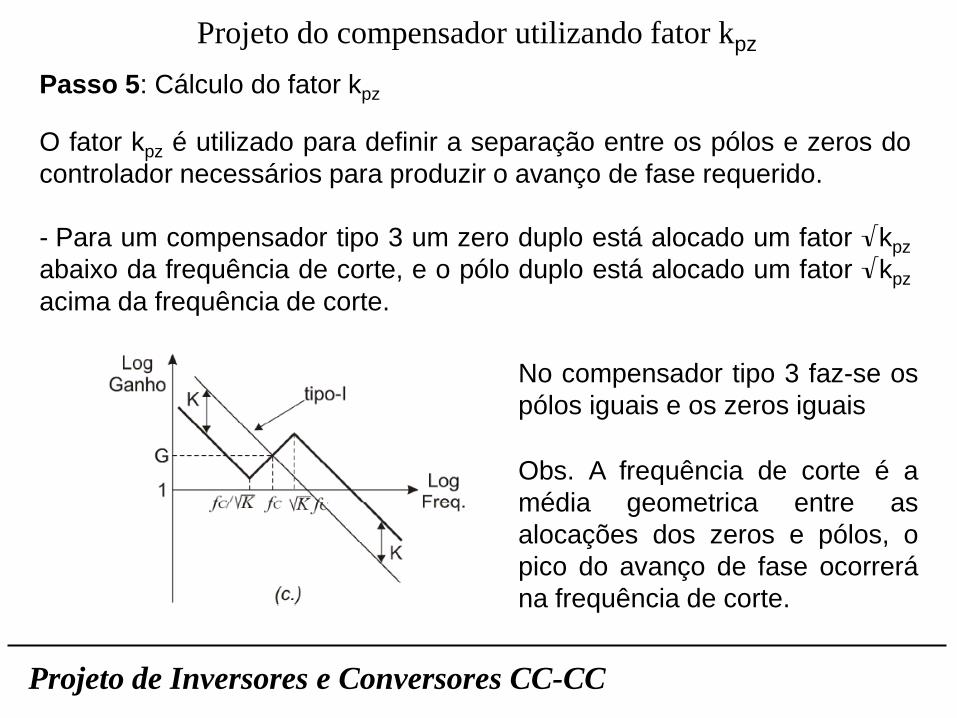
Projeto do compensador utilizando fator kpz
O fator kpz é utilizado para definir a separação entre os pólos e zeros do
controlador necessários para produzir o avanço de fase requerido.
- Para um compensador tipo integrador kpz vale sempre 1;
Passo 5: Cálculo do fator kpz

Projeto de Inversores e Conversores CC-CC
Projeto do compensador utilizando fator kpz
O fator kpz é utilizado para definir a separação entre os pólos e zeros do
controlador necessários para produzir o avanço de fase requerido.
- Para um compensador tipo 2 o zero é alocado um fator kpz abaixo da
frequência de corte, enquanto o pólo fica um fator kpz acima da frequência
de corte.
Passo 5: Cálculo do fator kpz
Projeto de Inversores e Conversores CC-CC
Projeto do compensador utilizando fator kpz
O fator kpz é utilizado para definir a separação entre os pólos e zeros do
controlador necessários para produzir o avanço de fase requerido.
- Para um compensador tipo 3 um zero duplo está alocado um fator √kpz
abaixo da frequência de corte, e o pólo duplo está alocado um fator √kpz
acima da frequência de corte.
Passo 5: Cálculo do fator kpz
Obs. A frequência de corte é a
média geometrica entre as
alocações dos zeros e pólos, o
pico do avanço de fase ocorrerá
na frequência de corte.
No compensador tipo 3 faz-se os
pólos iguais e os zeros iguais

Projeto de Inversores e Conversores CC-CC
Projeto do compensador utilizando fator kpz
Seja Ф o avanço de fase desejado.
Para um circuito tipo 2, o fator kpz é dado por:
42tgk
avanço
PZ
Para um circuito tipo 3, o fator kpz é dado por:
2
avanço
PZ44
tgk
Passo 5: Cálculo do fator kpz

Projeto de Inversores e Conversores CC-CC
Projeto do compensador utilizando fator kpz
Para um circuito tipo 3, o fator kpz é dado por:
220
avanço
PZ4
180
4
108tg
4
180
4tgk
Passo 5: Cálculo do fator kpz
47,9kPZ
Projeto de Inversores e Conversores CC-CC
Projeto do compensador utilizando fator kpz
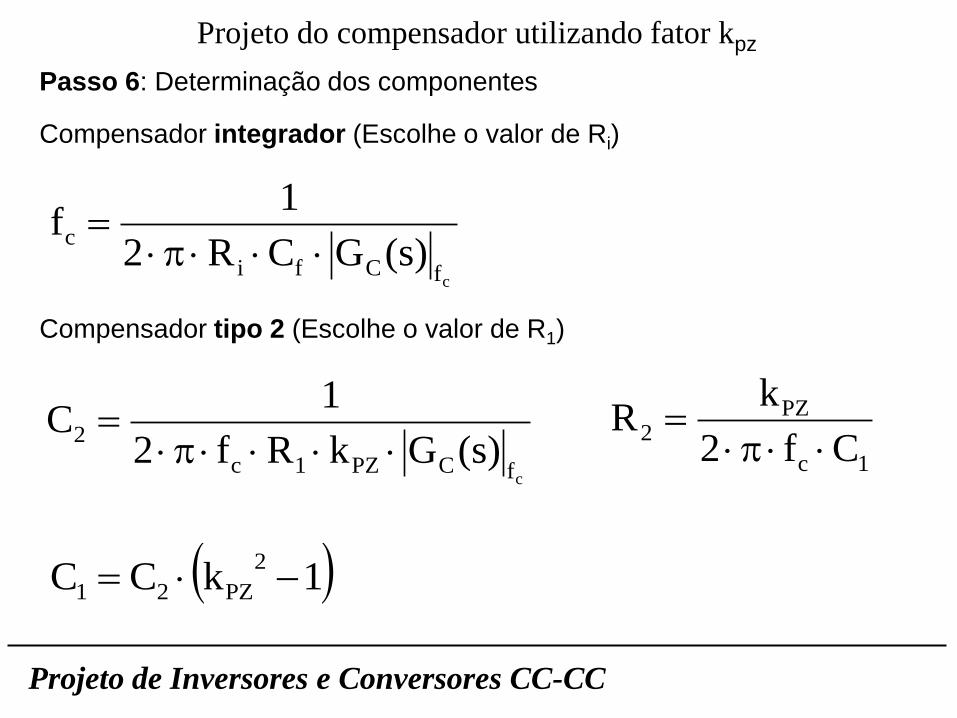
Compensador integrador (Escolhe o valor de Ri)
Passo 6: Determinação dos componentes
cfCfi
c)s(GCR2
1f
Compensador tipo 2 (Escolhe o valor de R1)
cfCPZ1c
2)s(GkRf2
1C
1kCC2
PZ21
1c
PZ2
Cf2
kR

Projeto de Inversores e Conversores CC-CC
Projeto do compensador utilizando fator kpz
Compensador tipo 3 (Escolhe o valor de R1)
Passo 6: Determinação dos componentes
cfC1c
2)s(GRf2
1C
1kCC PZ21
1c
PZ
2Cf2
kR
1k
RR
PZ
13
PZ3c
3kRf2
1C

Projeto de Inversores e Conversores CC-CC
Projeto do compensador utilizando fator kpz
Assumindo R1 = 100kΩ
Passo 6: Determinação dos componentes
cfC sGRf
C)(2
1
12
121 kCC
1
13
k
RR
kRfC
3
32
1
91002,35263,010012
1
kk
99 1041,25147,9103
kk
3,191041,2512
47,99
kk
8,11147,9
100
91038,447,98,1112
1
kk
2
12
kR
f C
Projeto de Inversores e Conversores CC-CC
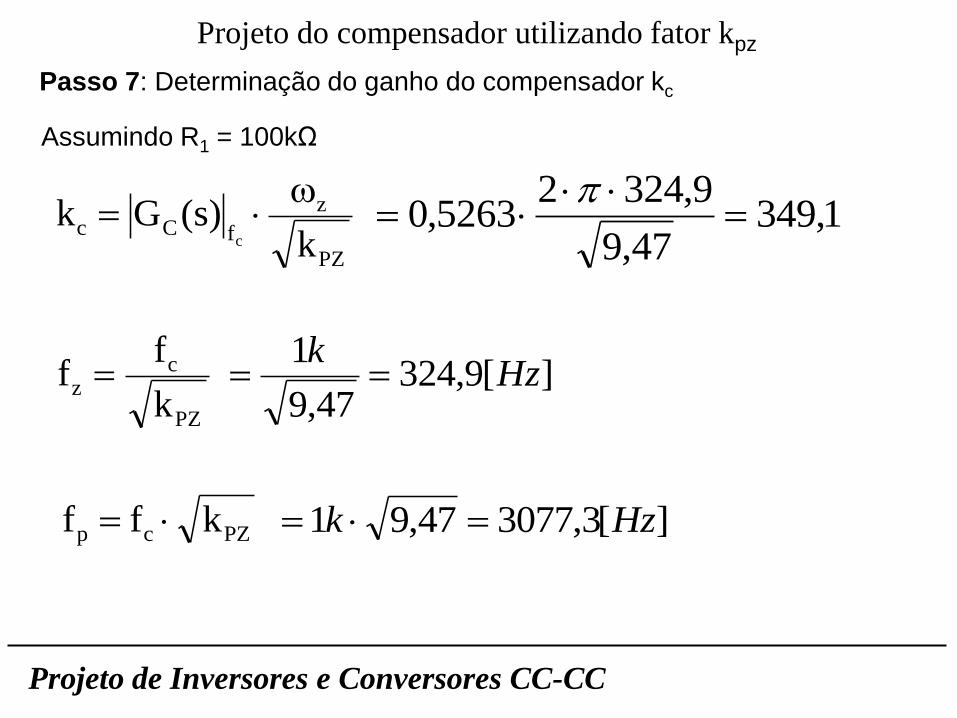
Projeto do compensador utilizando fator kpz
Assumindo R1 = 100kΩ
Passo 7: Determinação do ganho do compensador kc
PZ
z
fCck
)s(Gkc
1,349
47,9
9,32425263,0
PZ
cz
k
ff ][9,324
47,9
1Hz
k
PZcp kff ][3,307747,91 Hzk

Projeto do compensador utilizando fator kpz
Dados de projeto do compensador
R1 = 100kΩ; C2 = 3nF; C1 = 25,6nF; R2 = 19,1kΩ; R3 =11,8kΩ; C3 = 4,4nF;
Passo 6: Determinação dos componentes
Projeto de Inversores e Conversores CC-CC

Projeto de Inversores e Conversores CC-CC
Resposta em frequência do compensador.
Exemplo - Projeto do sistema de controle linear
Projeto de Inversores e Conversores CC-CC
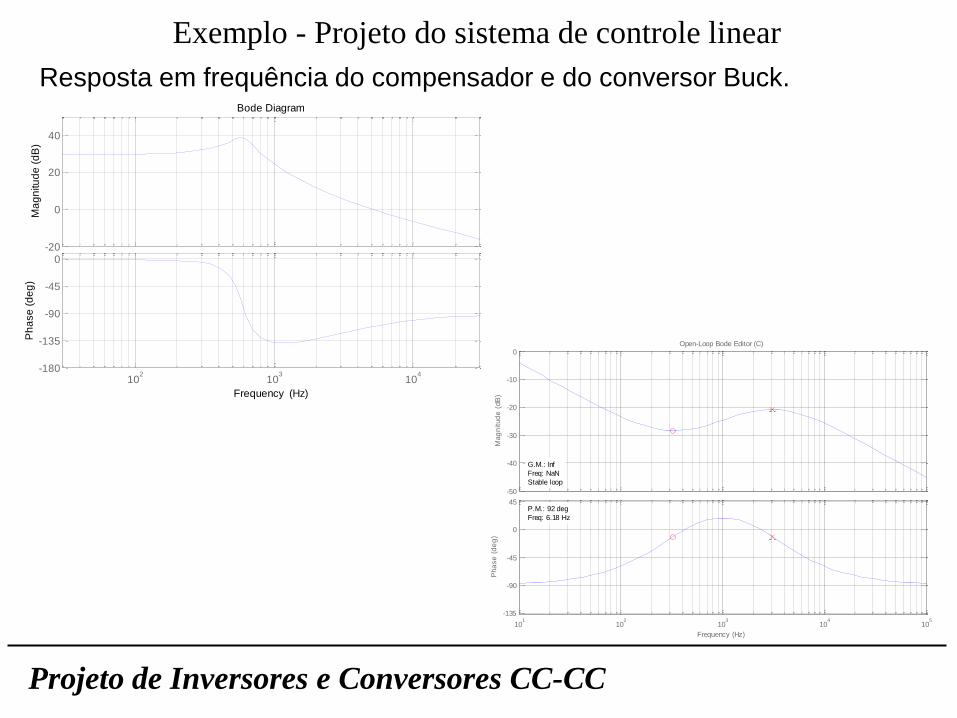
Resposta em frequência do compensador e do conversor Buck.
Exemplo - Projeto do sistema de controle linear
-50
-40
-30
-20
-10
0
G.M.: Inf
Freq: NaN
Stable loop
Mag
nitud
e (
dB
)
Open-Loop Bode Editor (C)
101
102
103
104
105
-135
-90
-45
0
45P.M.: 92 deg
Freq: 6.18 Hz
Pha
se
(d
eg
)
Frequency (Hz)
-20
0
20
40
Ma
gn
itu
de
(d
B)
102
103
104
-180
-135
-90
-45
0
Ph
ase
(d
eg
)
Bode Diagram
Frequency (Hz)

Projeto de Inversores e Conversores CC-CC
Resposta em frequência da FTMA do conversor Buck com compensador.
Exemplo - Projeto do sistema de controle linear
-80
-60
-40
-20
0
20
40
G.M.: Inf
Freq: Inf
Stable loop
Mag
nitud
e (
dB
)Open-Loop Bode Editor (C)
101
102
103
104
105
-180
-135
-90
-45
0
P.M.: 59.8 deg
Freq: 1e+003 Hz
Pha
se
(d
eg
)
Frequency (Hz)

Projeto de Inversores e Conversores CC-CC
Simulação do conversor
Exemplo - Projeto do sistema de controle linear
Projeto de Inversores e Conversores CC-CC
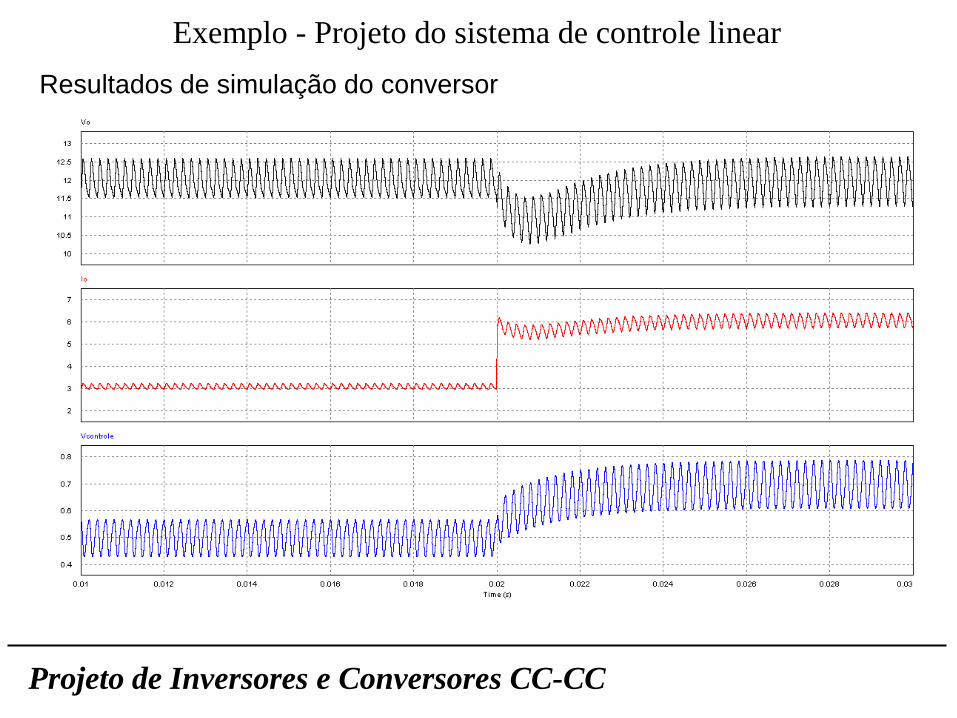
Resultados de simulação do conversor
Exemplo - Projeto do sistema de controle linear